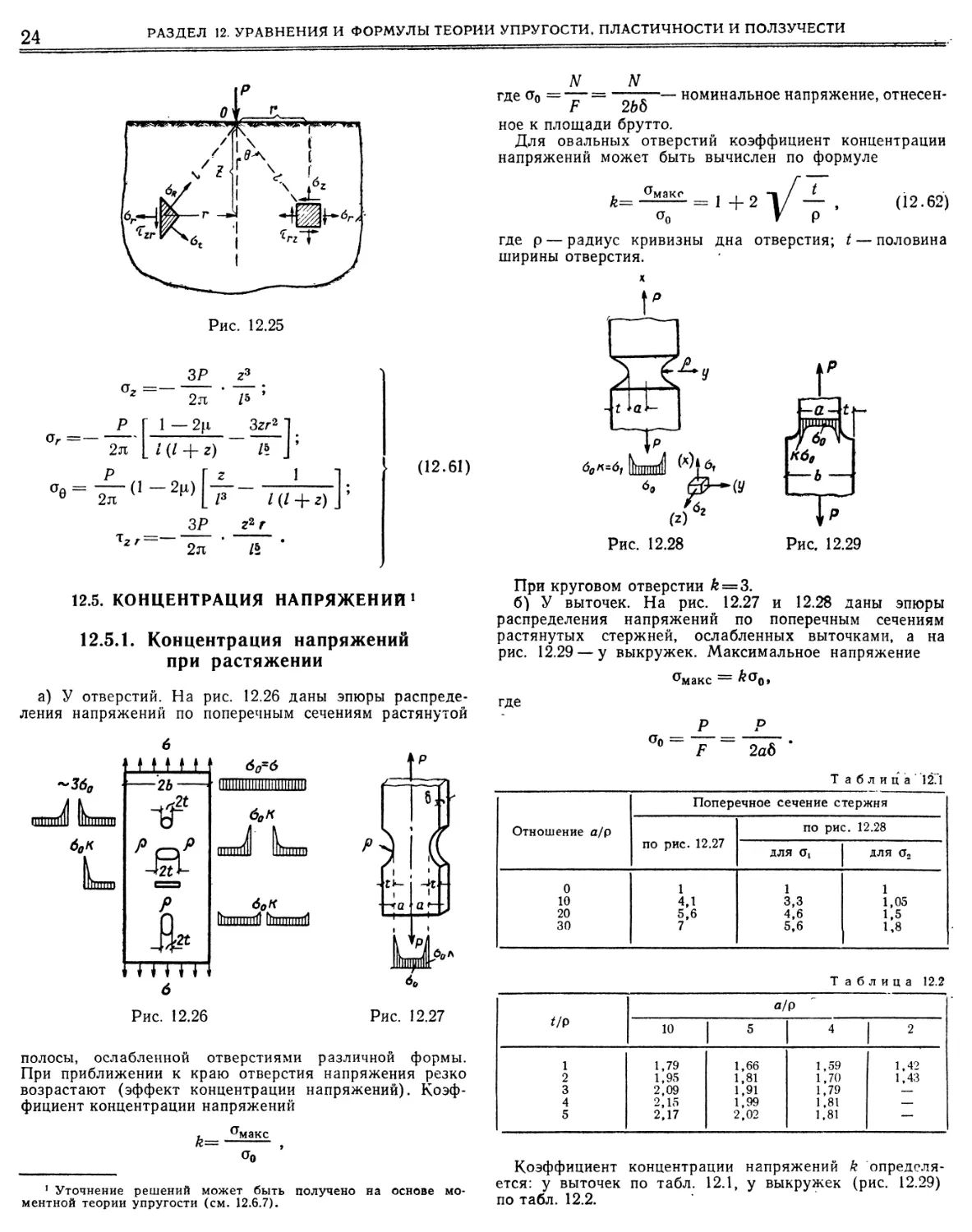
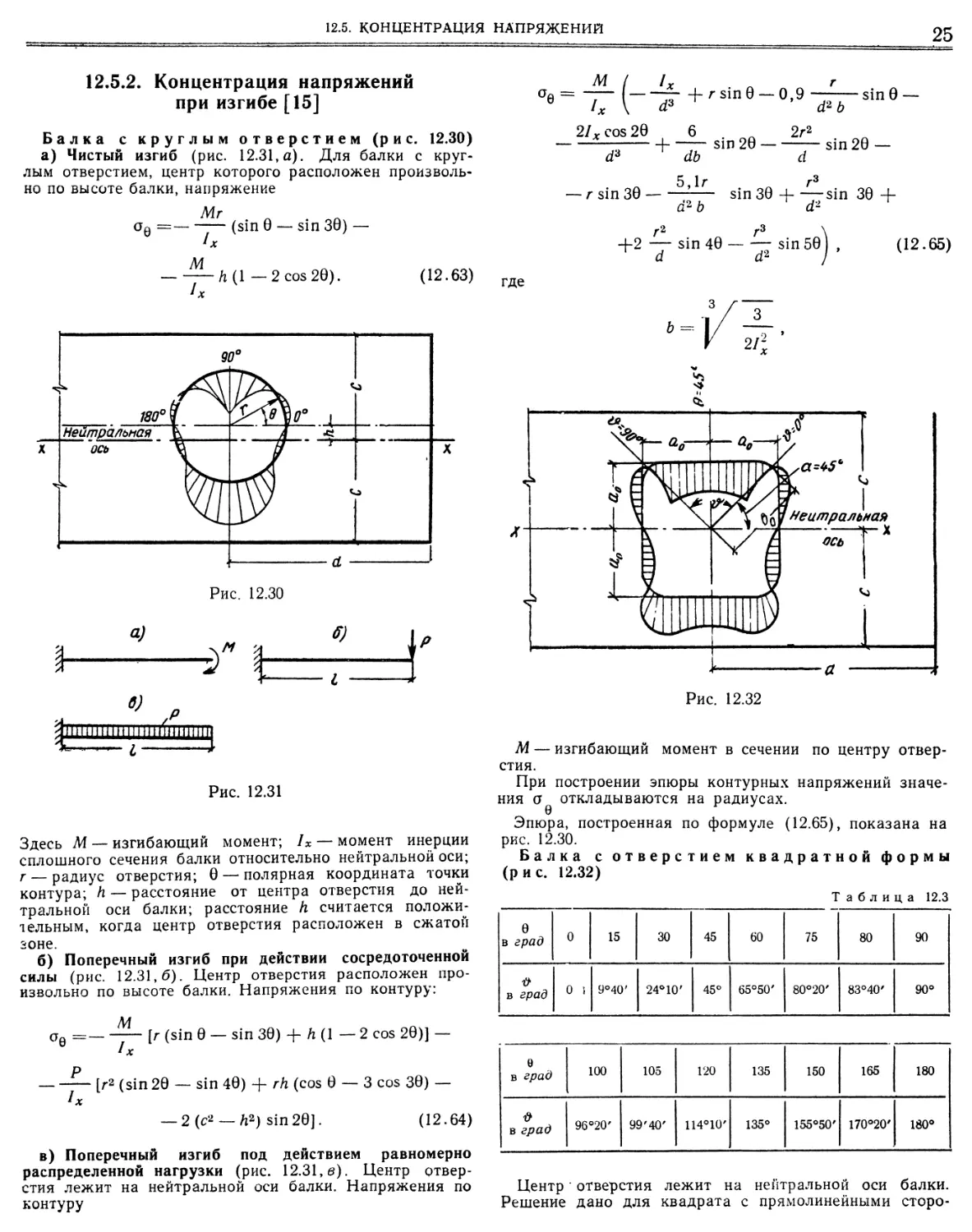
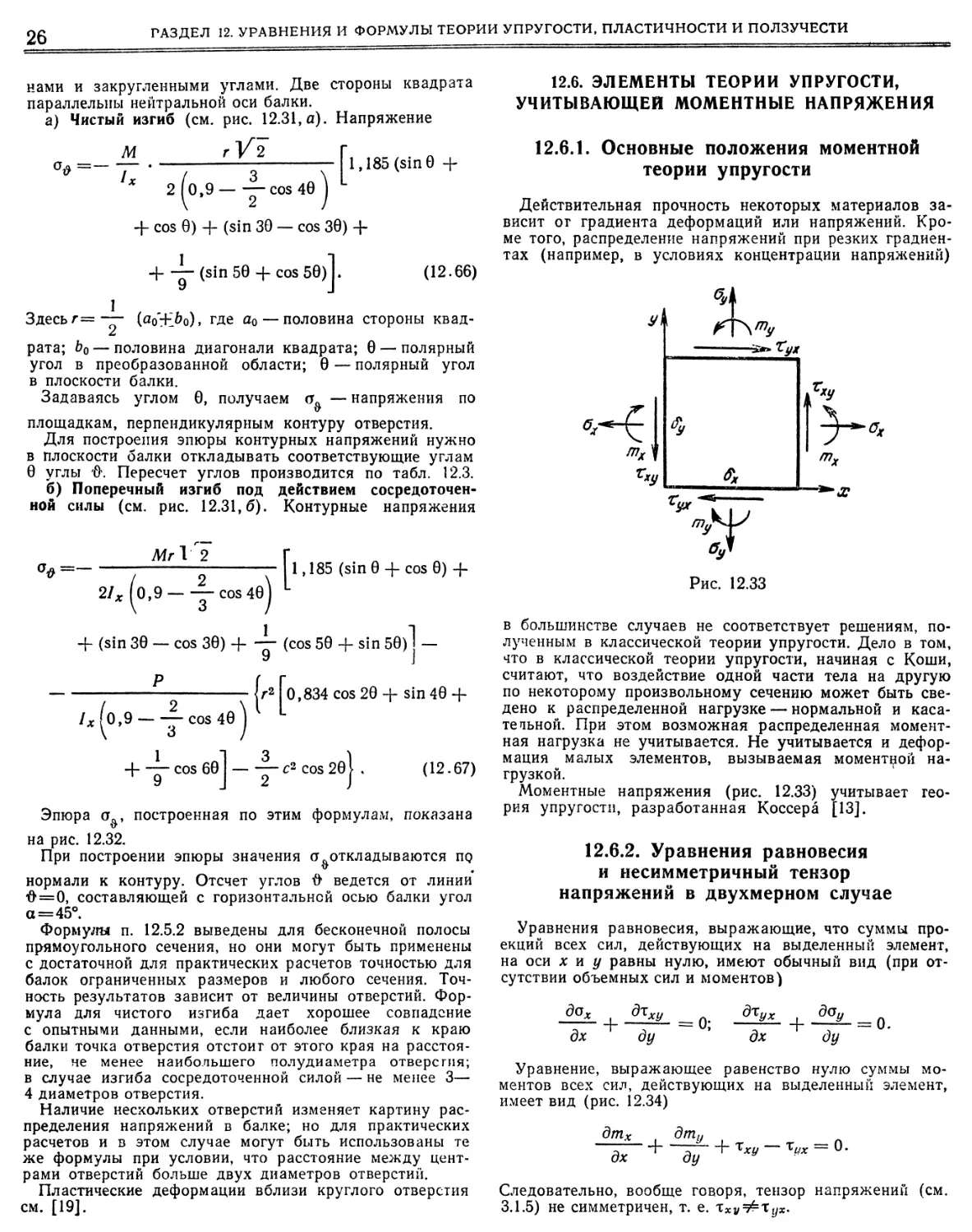
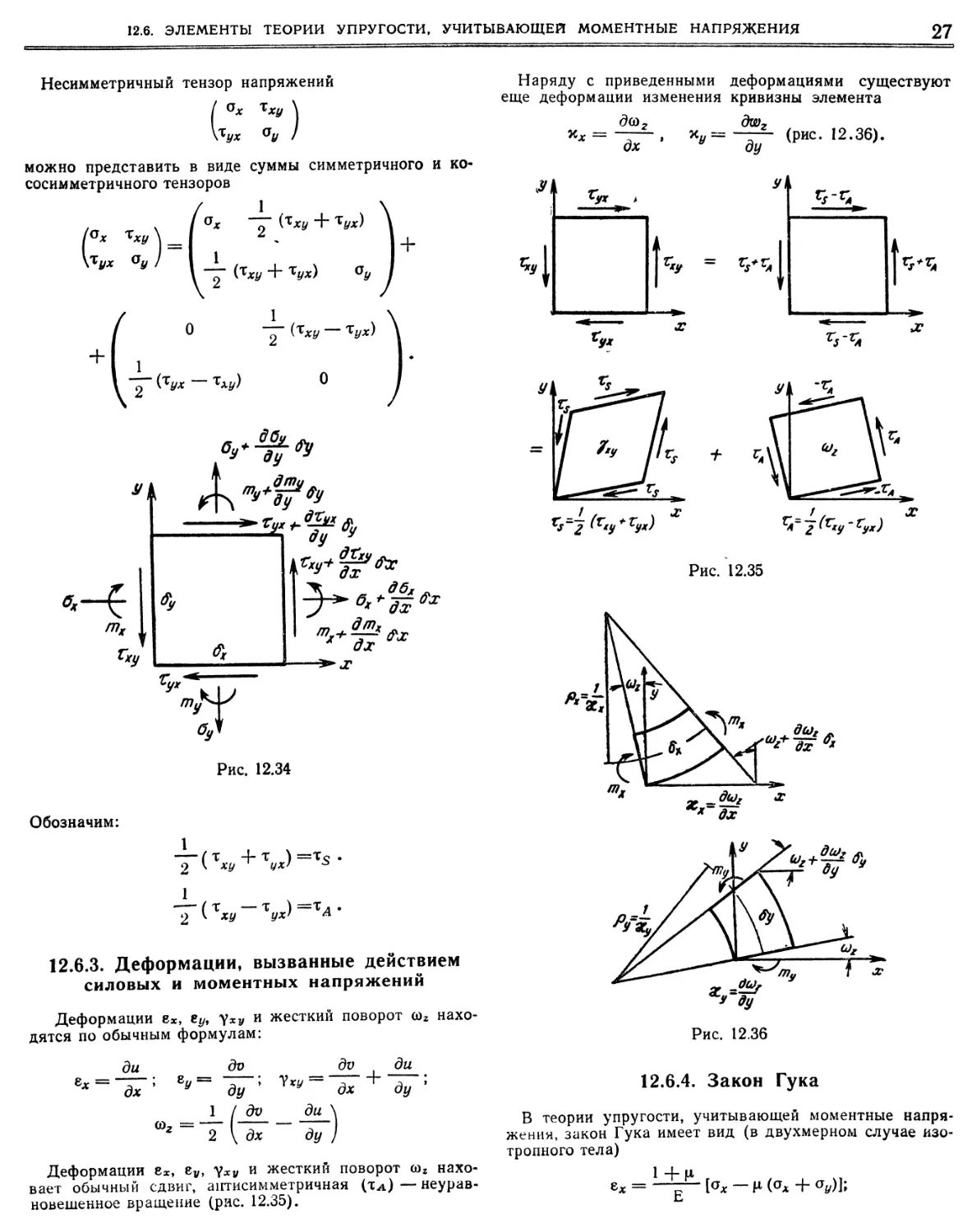
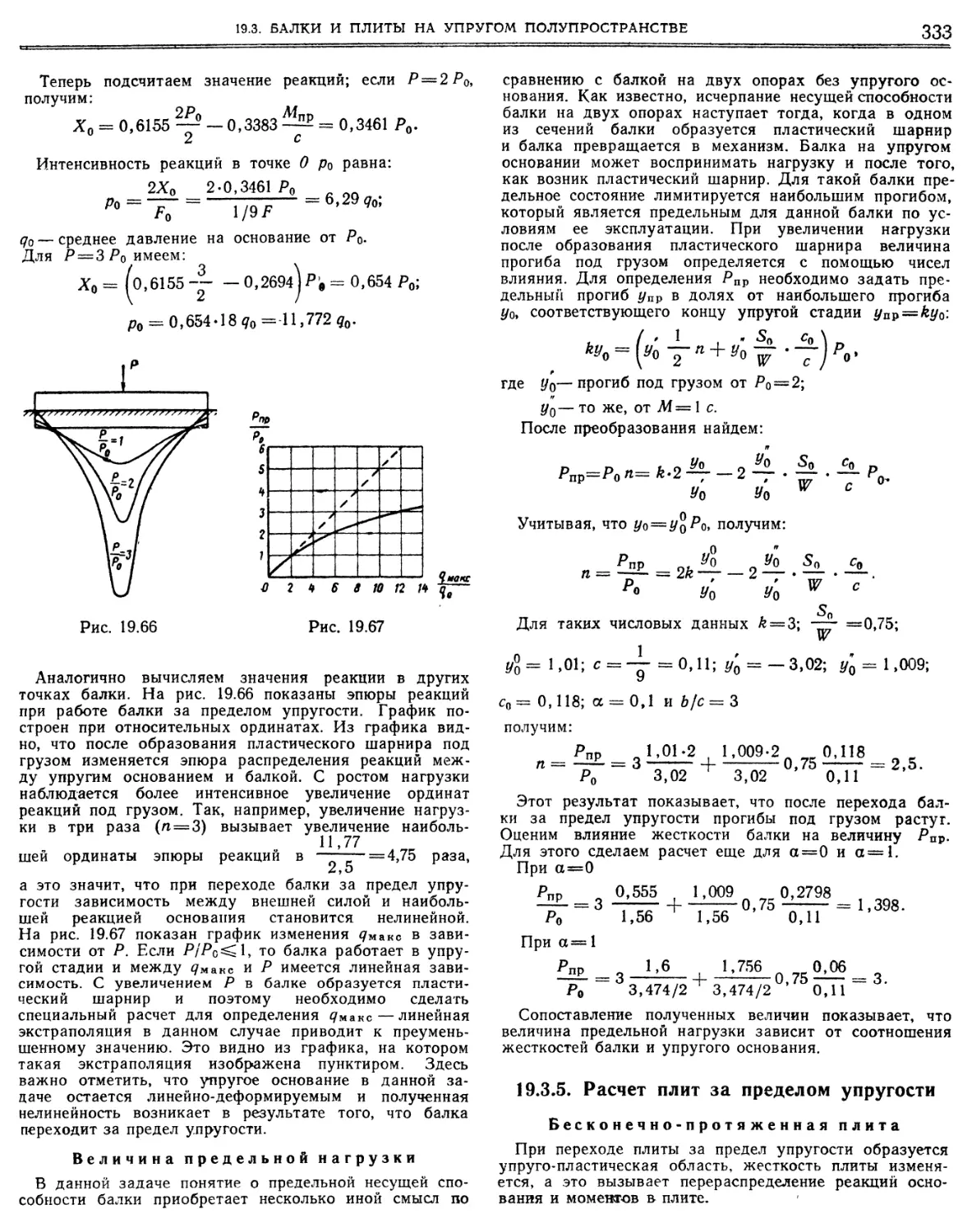
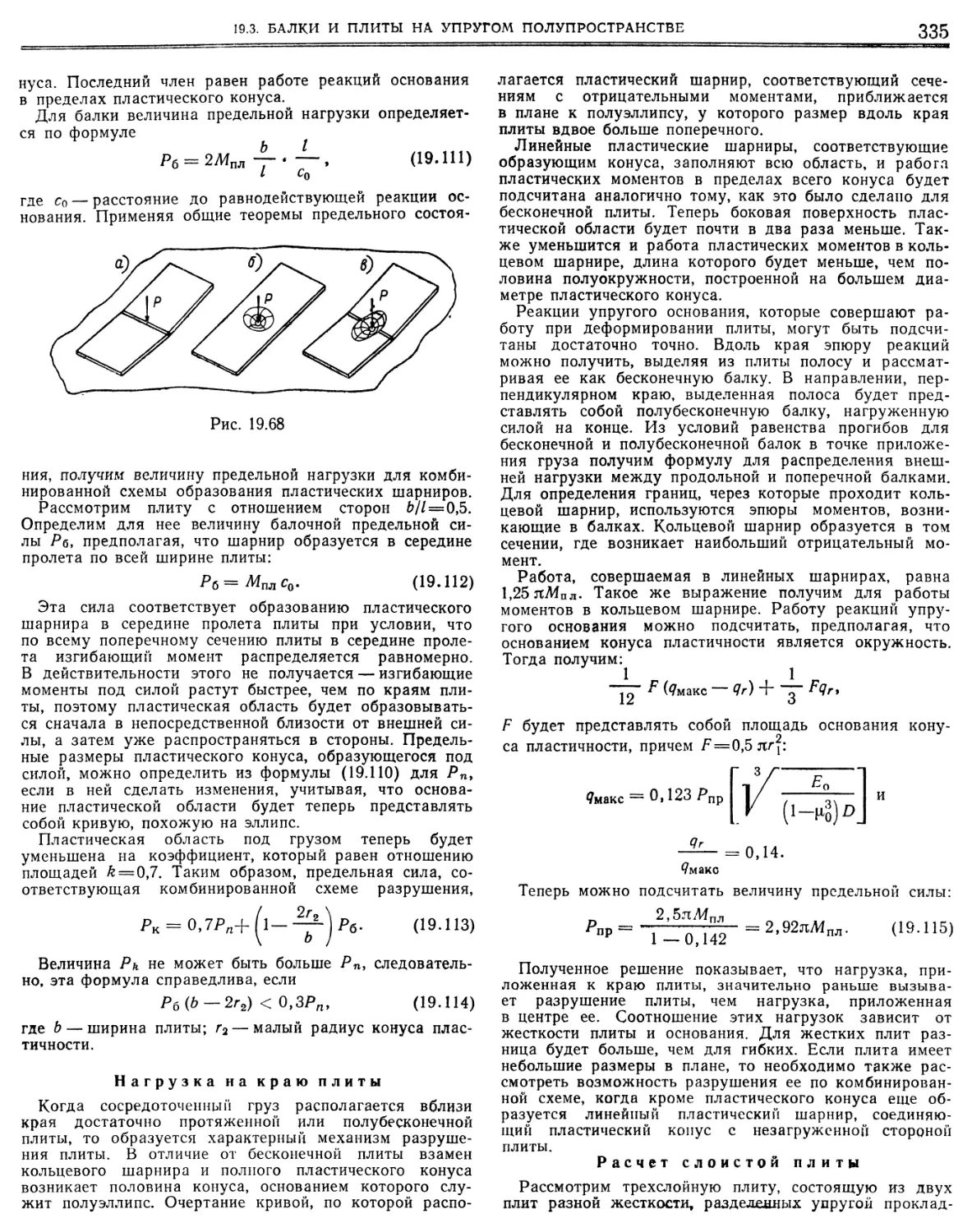
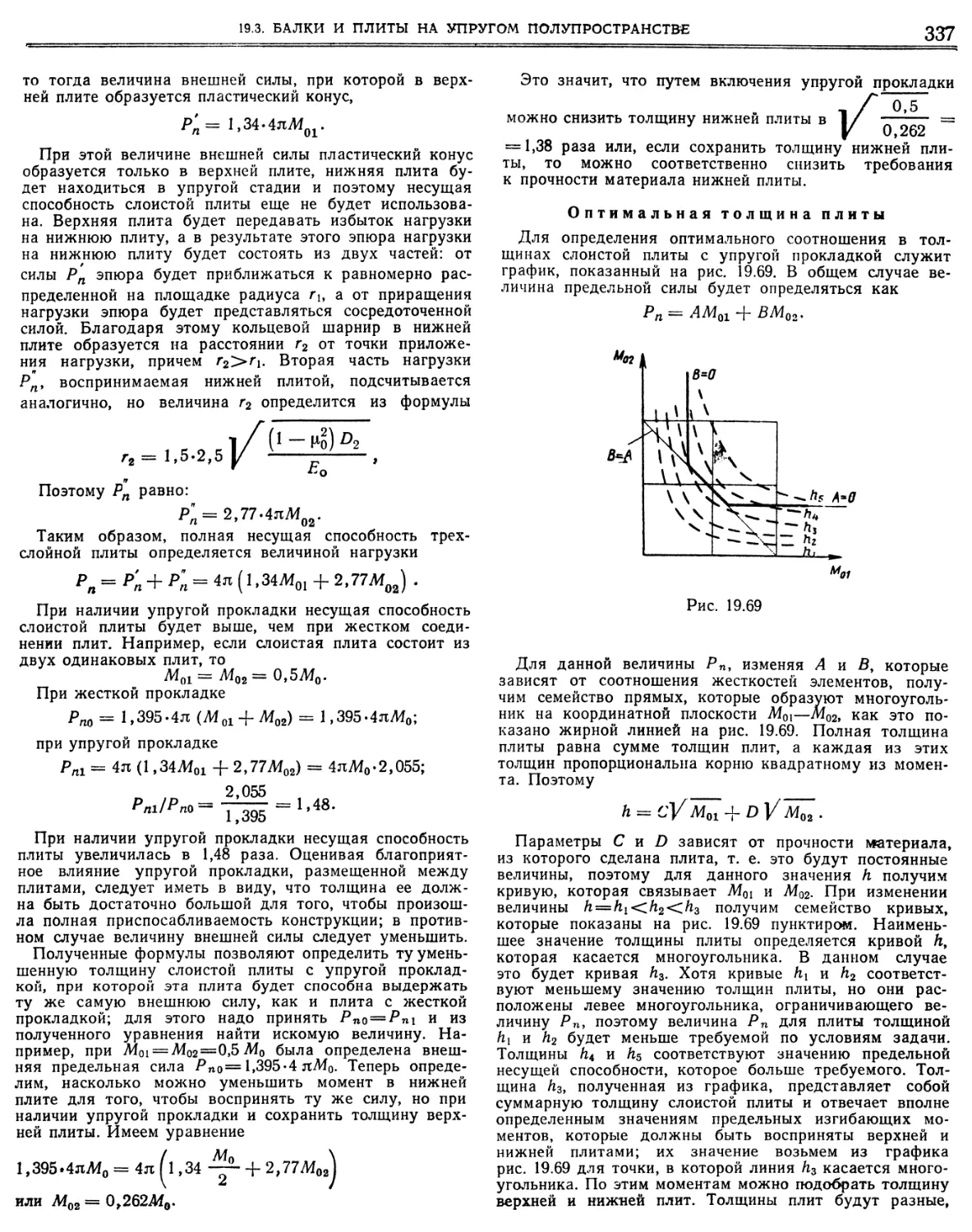
/













































































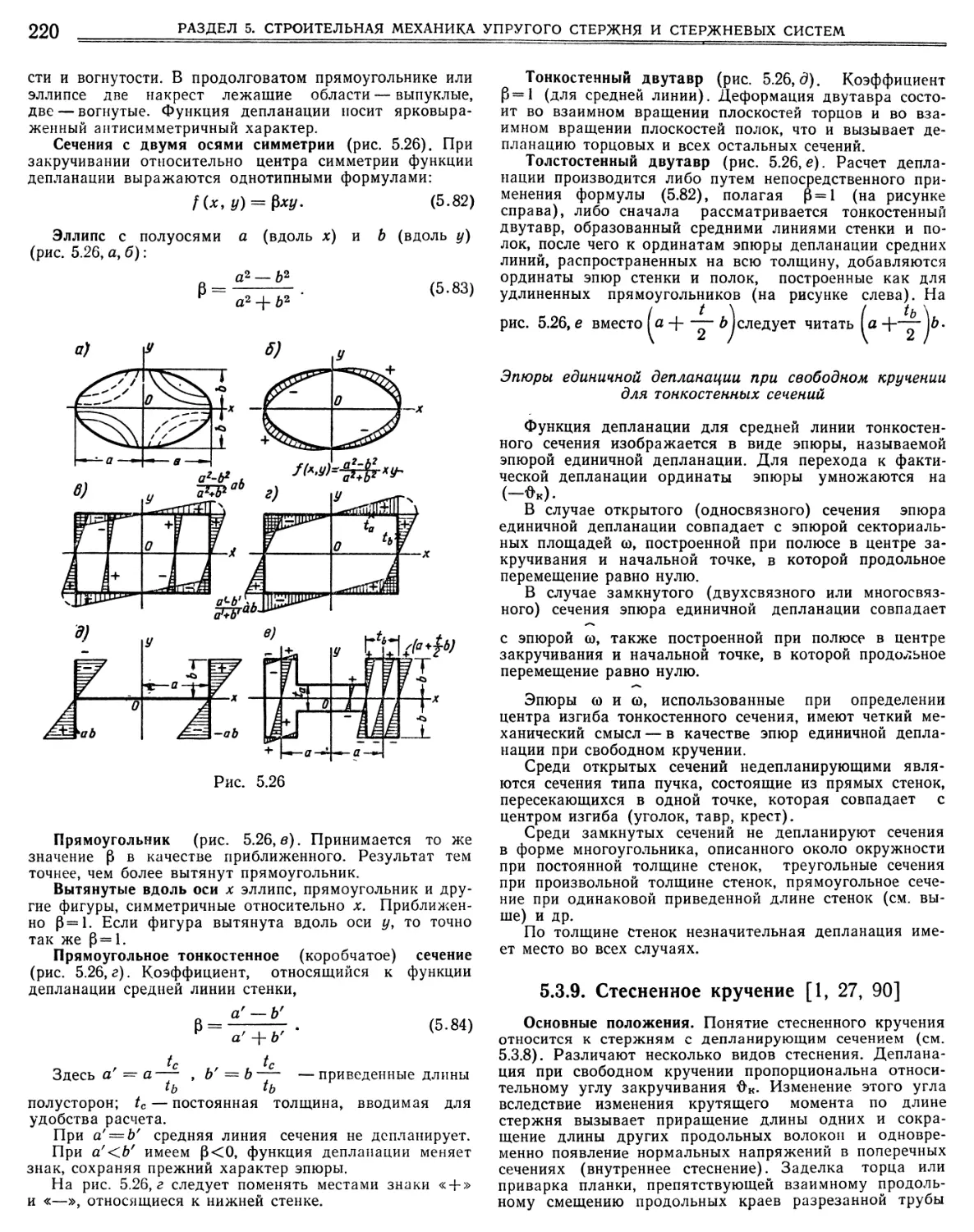



















































































































































































































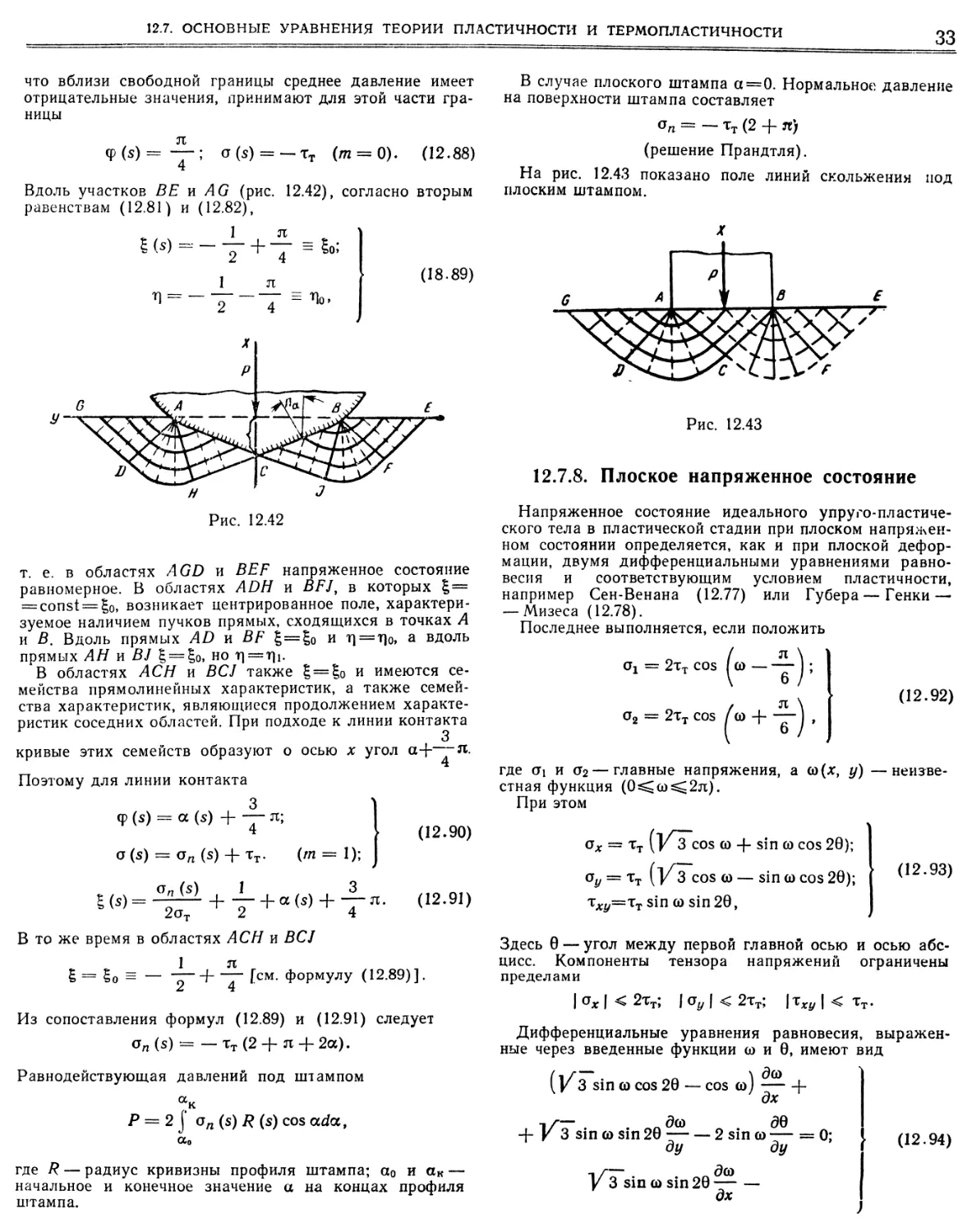















































































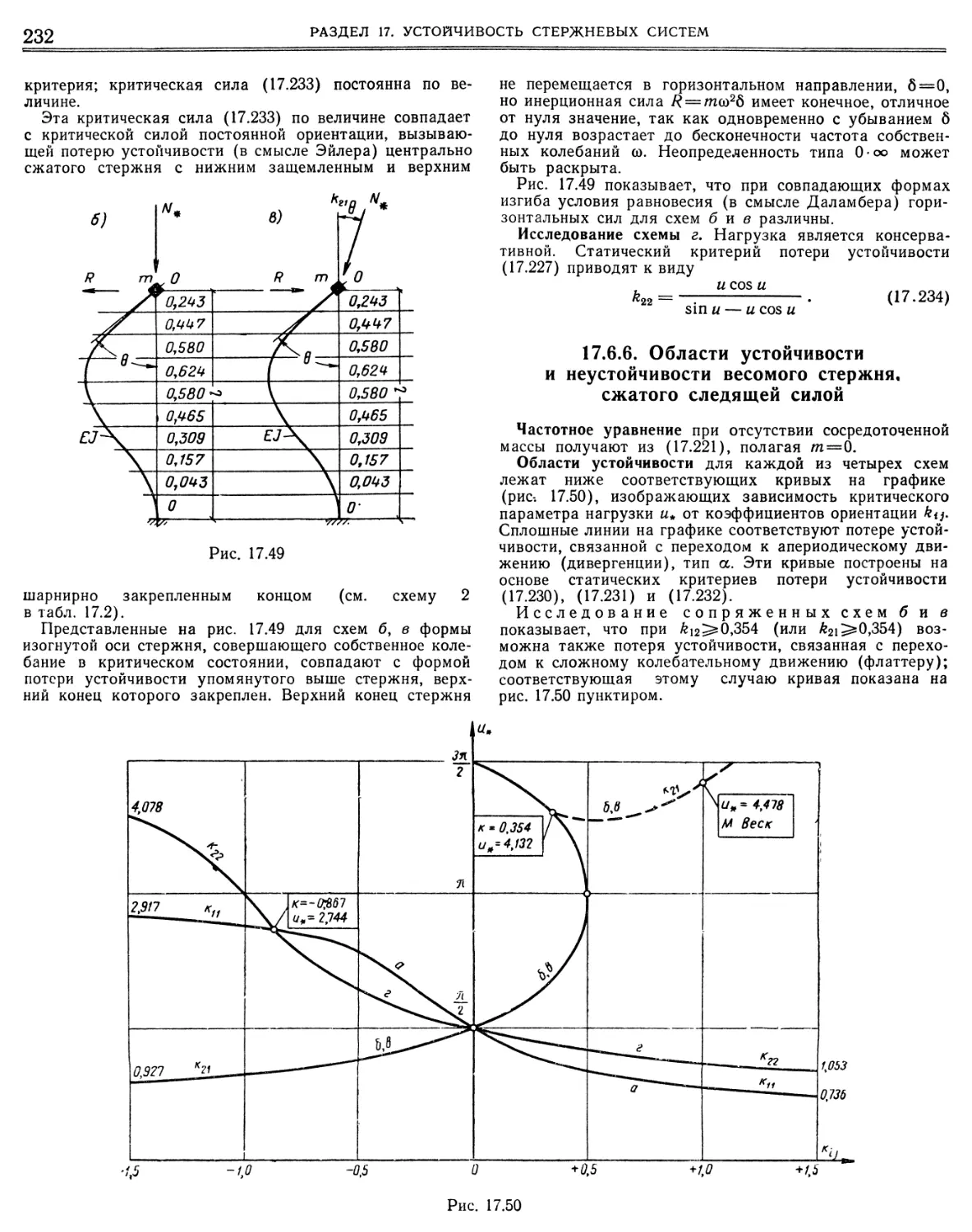

















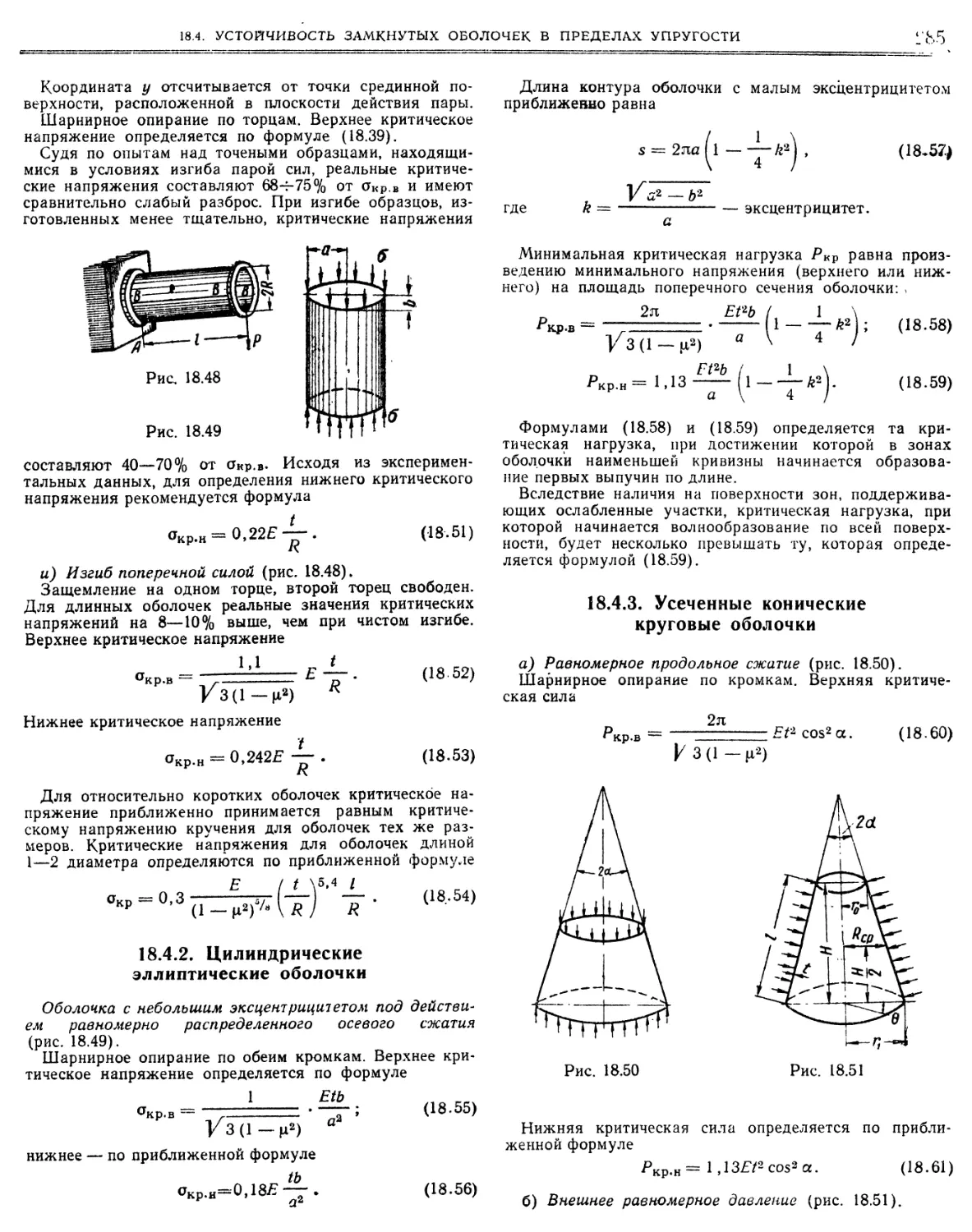





































Similar




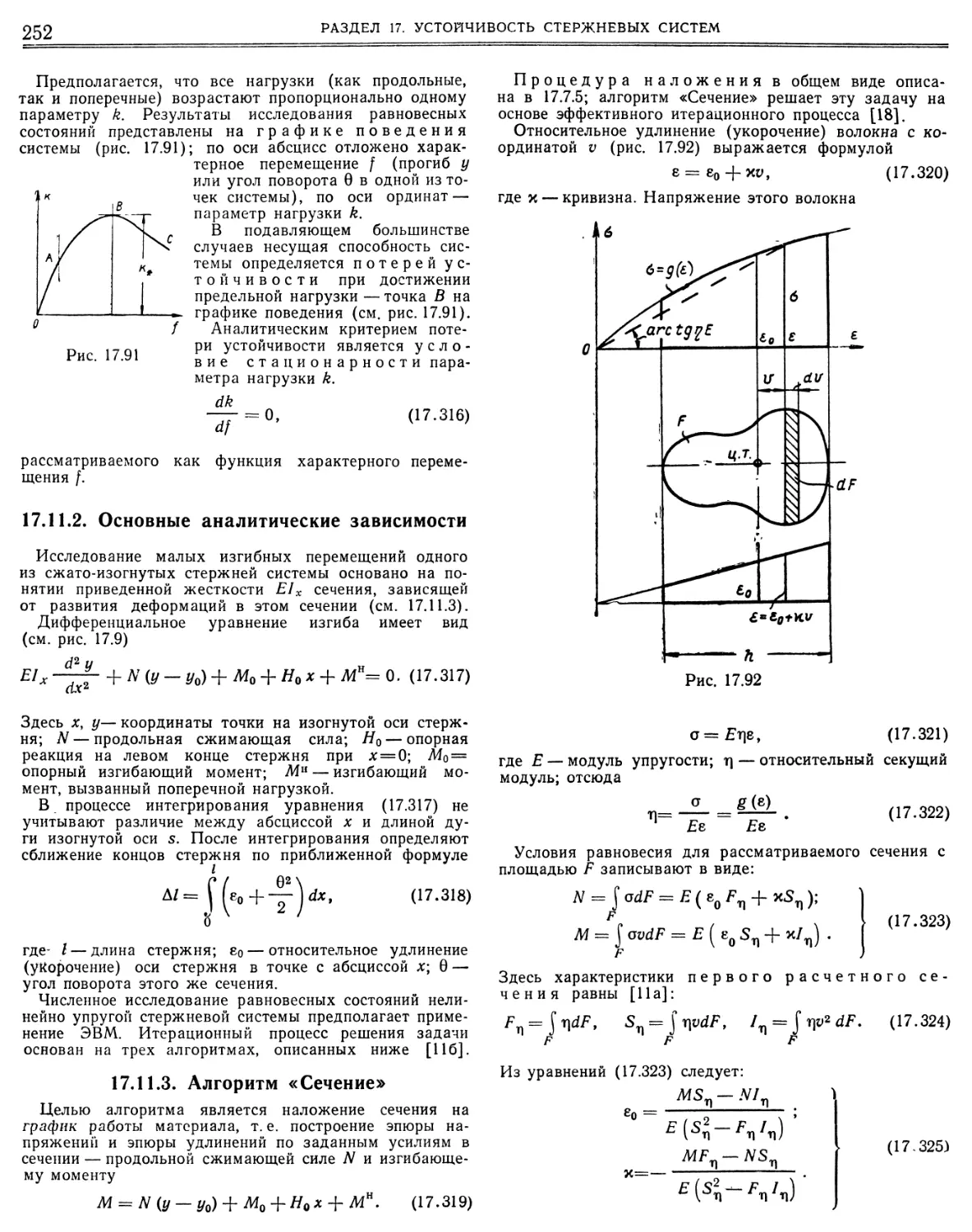
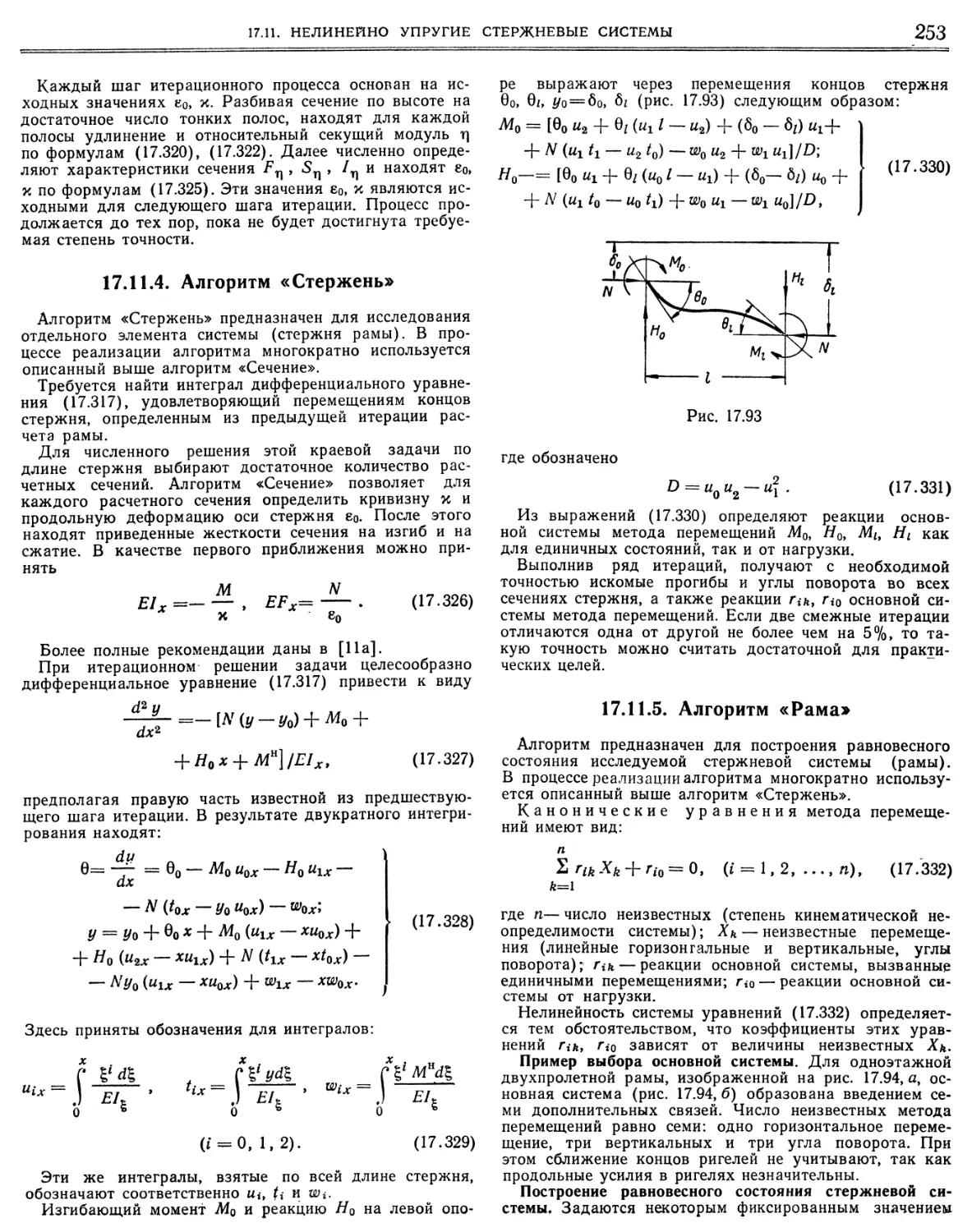
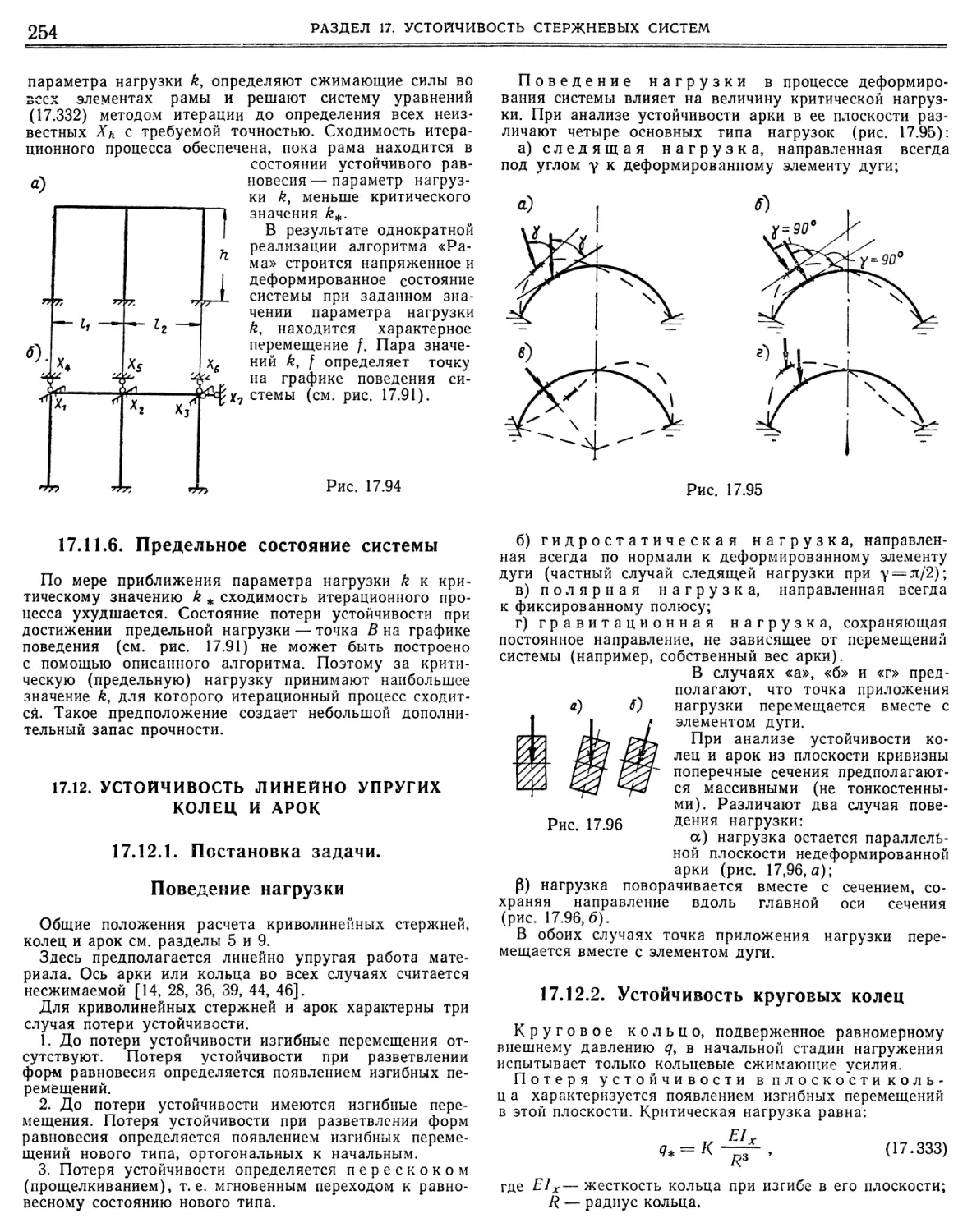
Text
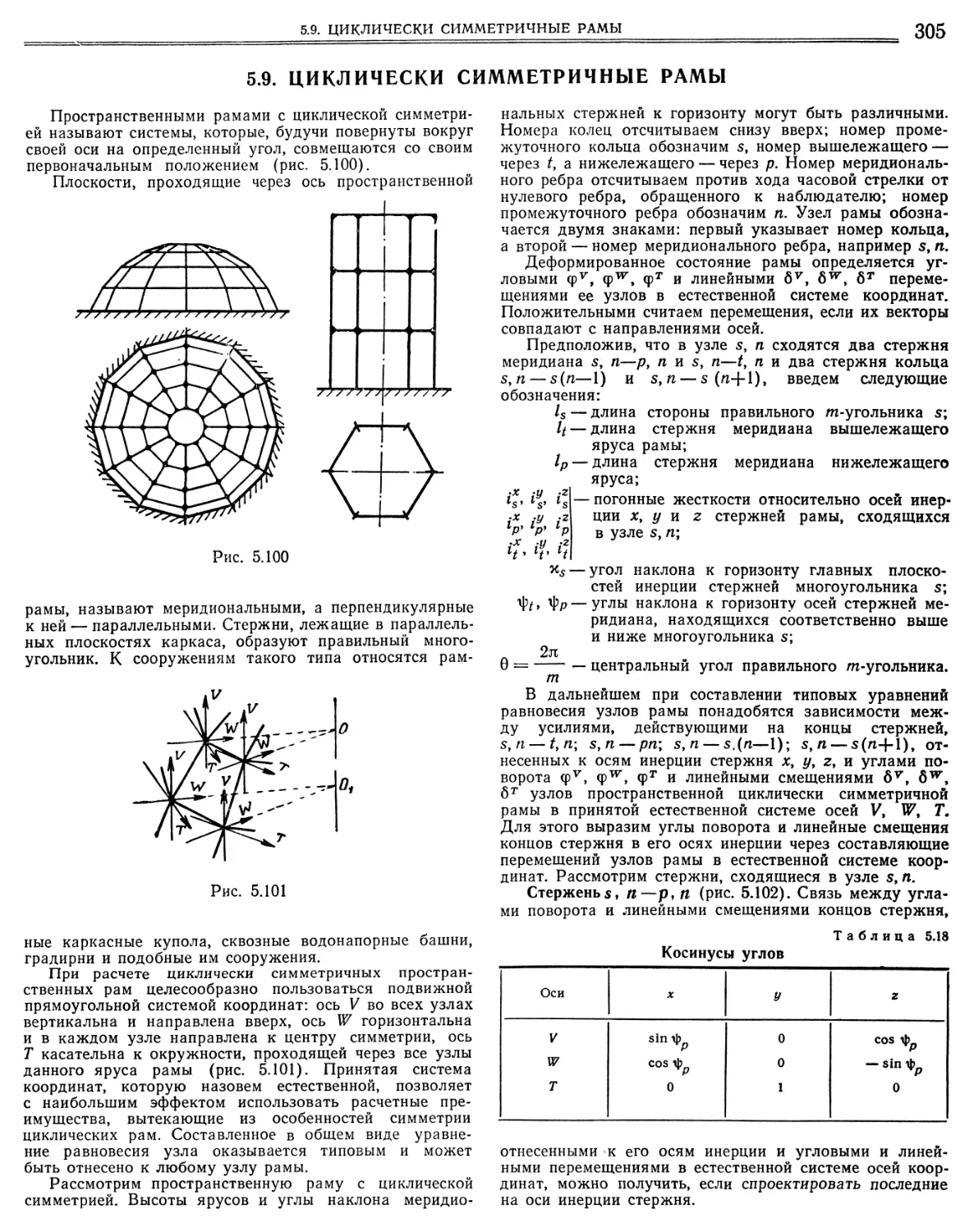
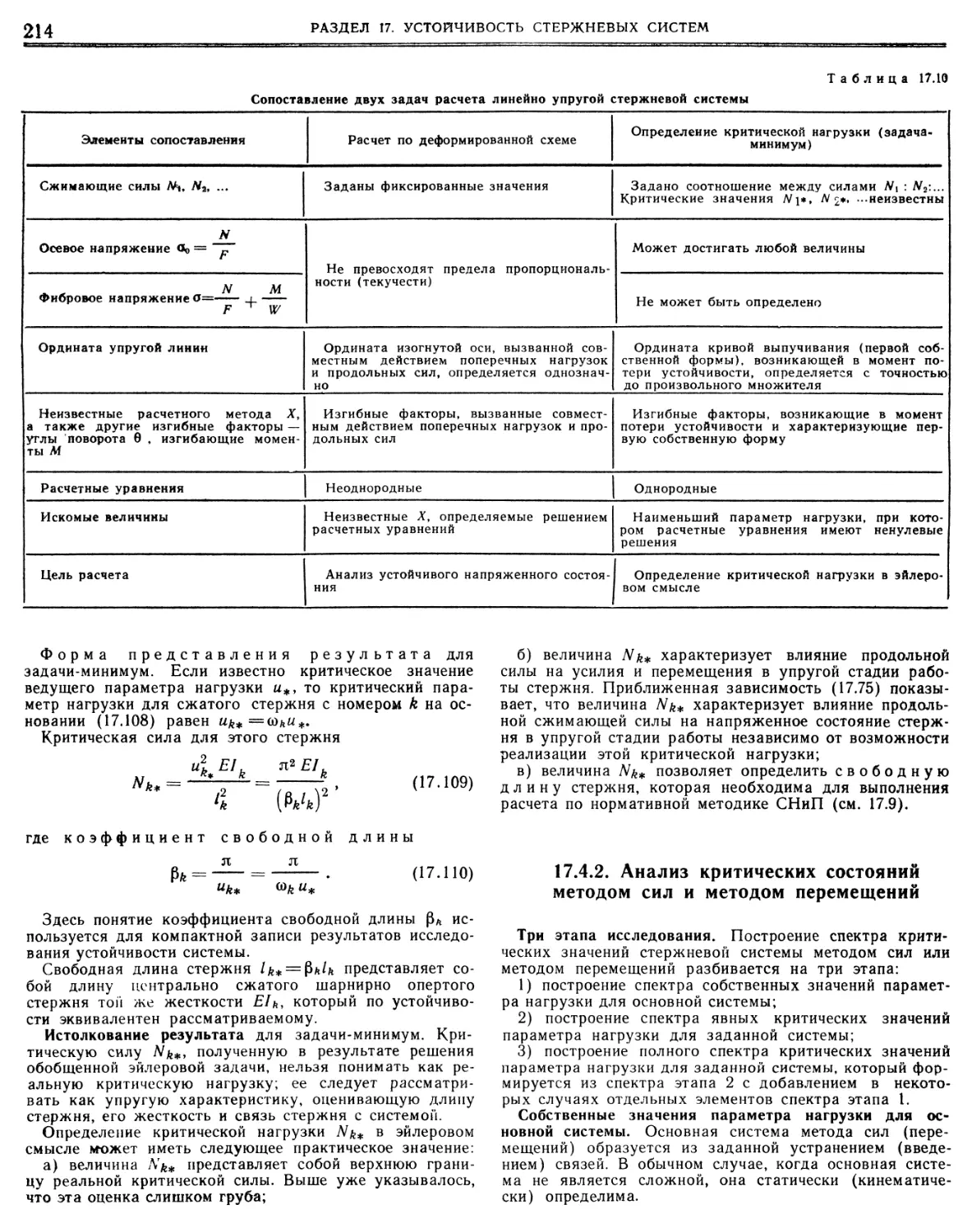
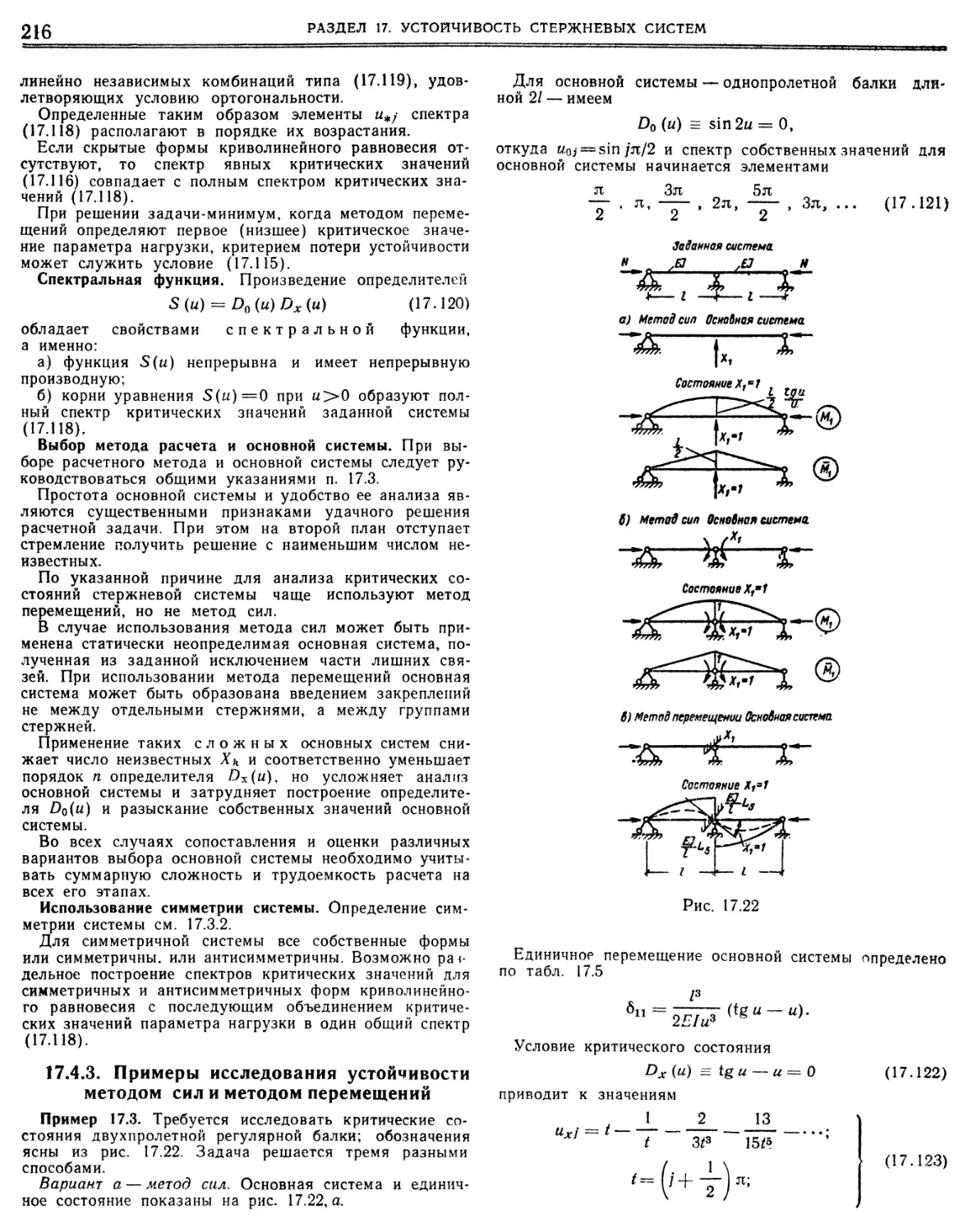
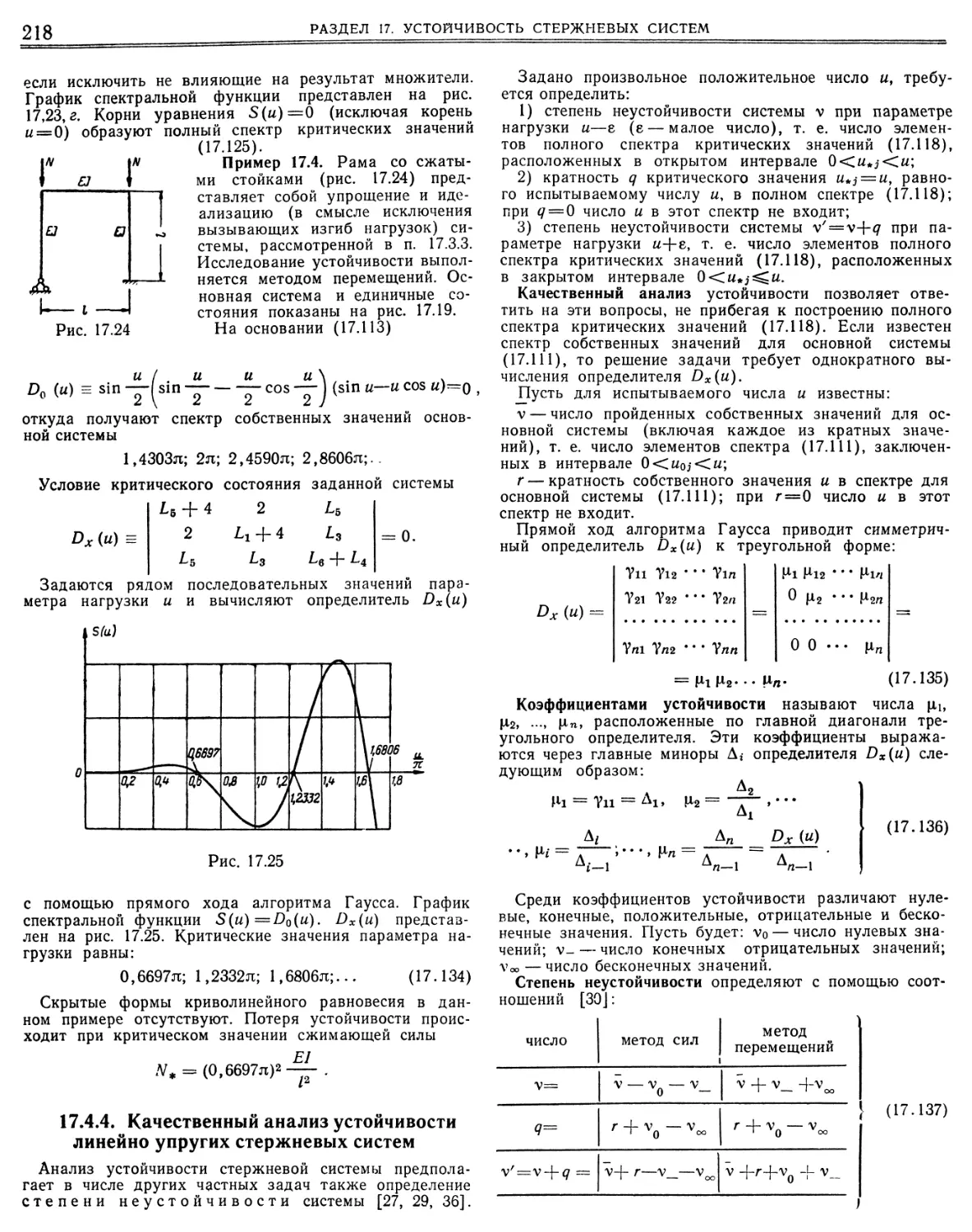
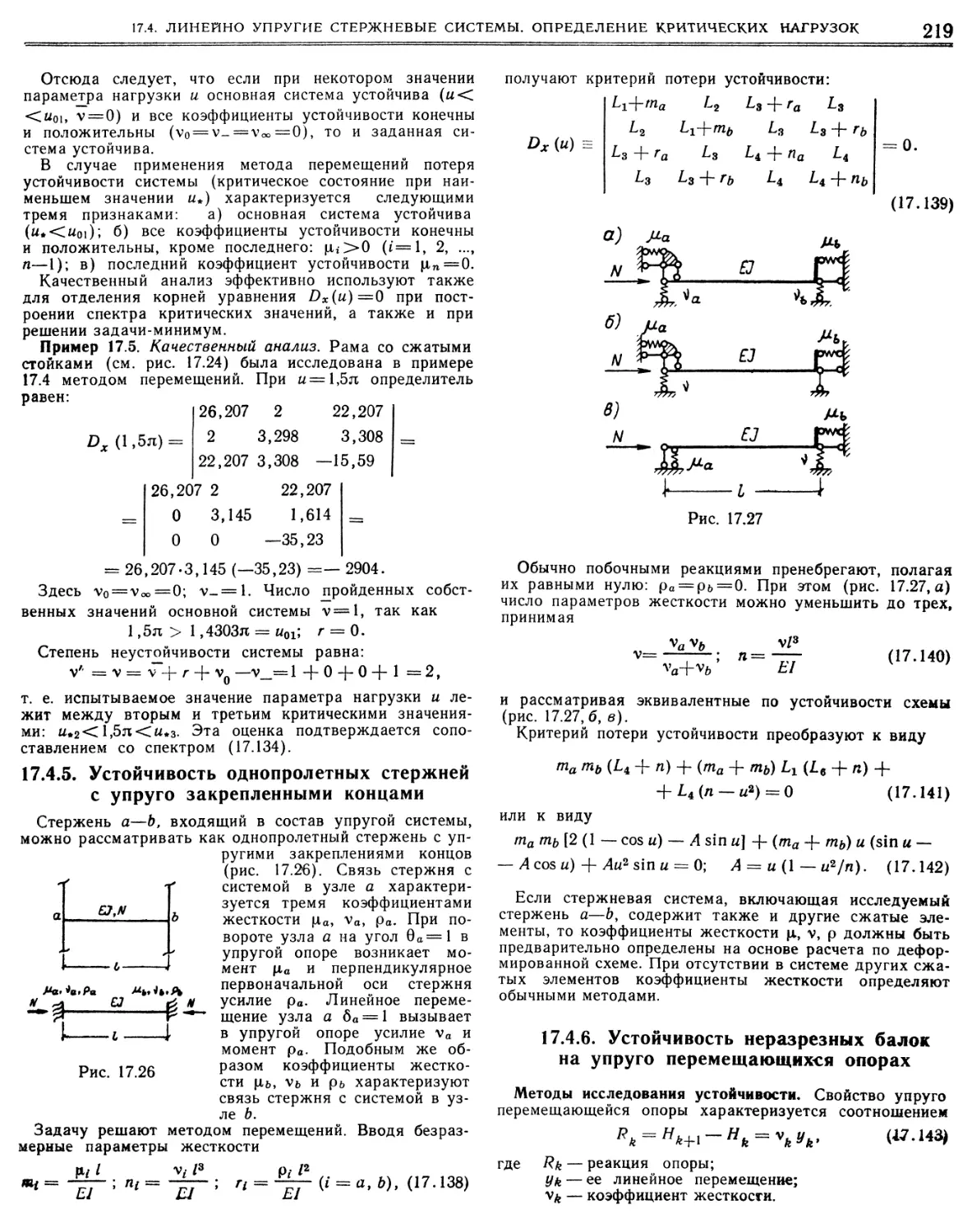
СПРАВОЧНИК ПРОЕКТИРОВЩИКА
ПРОМЫШЛЕННЫХ, жилых И ОБЩЕСТВЕННЫХ ЗДАНИЙ И СООРУЖЕНИЙ
РАСЧЕТНО-ТЕОРЕТИЧЕСКИЙ
Под редакцией д-ра техн. наук, проф. А. А. УМАНСКОГО
Рассмотрено и одобрено
Центральным научно-исследовательским институтом строительных конструкций
им. В. А. Кучеренко
ИЗДАНИЕ ВТОРОЕ, ПЕРЕРАБОТАННОЕ И ДОПОЛНЕННОЕ В ДВУХ КНИГАХ
КНИГА 1
ИЗДАТЕЛЬСТВО ЛИТЕРАТУРЫ ПО СТРОИТЕЛЬСТВУ Москва — 1972
УДК 624.04(031)
Справочник проектировщика промышленных, жилых и общественнх зданий и сооружений. Расчетно-теоретический. В 2-х кн. Кн. I. Под ред. А. А. У майского. Изд. 2-е, перераб. и доп. М., Стройиздат, 1972. 609 с.
В книге содержатся справочные данные по математике, строительной механике стержней и стержневых систем. Освещены вопросы применения ЭВМ, матричных методов расчета. Даны таблицы для расчета балок, рам, арок и колец. Уделено внимание материалам для строительных конструкций и нормативам расчета.
Предназначена для проектировщиков, научных работников и студентов вузов.
Табл. 183, ил. 452, список лит. 482 назв.
РЕДАКЦИОННЫЙ СОВЕТ СПРАВОЧНИКА
Б. М. Броуде, д-р техн. наук; А. В. Геммерлинг, д-р техн. наук, проф.; Б. Г. Коренев, д-р техн. наук, проф.; Н, В. Никитин, д-р техн. наук; С. В. Полякову д-р техн. наук, проф.; А. Р. Ржаницын, д-р техн. наук, проф.; А. Ф. Смирнов, д-р техн. наук, проф.; Р. И. Трепененков, канд. техн. наук, доц.; А. А. У минский, д-р техн. наук, проф.
АВТОРЫ
В. Л. Агамиров, д-р техн. наук; А. Я. Александров, д-р техн. наук, проф.; С. А. Алексеев, д-р техн. наук, проф.; М. X. Ахметзянов, д-р техн. наук; М. С. Бернштейн, канд. техн. наук, доц.; Д. В. Вайнберг, д-р техн. наук, проф.; Я. М. Варвак, д-р техн. наук, проф.; М. С. Волчегорский, инж.; А. С. Вольмир, д-р техн. наук, проф.; А. В.рммерлинг,А-р техн. наук, проф.; В. Б. Геронимусу канд. техн. наук, доц.; И. Я. Гольденблат, д-р техн. наук, проф.; Ю. Я. Григорьев, канд. техн. наук, доц.; В. М. Даревский, д-р физ.-мат. наук, проф.; С. 3. Динкевич, канд. техн. наук; О. М. Иванов, д-р техн. наук, проф.5
A. Г. Инмерман, канд. техн. наук; К А. Китовер, канд. техн. наук, доц.; Г. К. Клейн, д-р техн. наук, проф.; Л. В. Клепикову канд. техн. наук; А. Я. Коданев, канд. техн. наук, доц.; В. А. Копнову канд. техн. наук, доц.; Б. Г. Кореневу д-р техн. наук, проф.; Э. Н. Кузнецову д-р техн. наук; С. Д. Лейтесу канд. техн. наук; Я. А. Лукашу д-р техн. наук, проф.; Я. Б. Лъвину д-р техн. наук, проф.; Р. Н. Мацелинскийу канд. техн. наук; И. Е. Милейковскийу др техн. наук, проф.; А. Б. Моргаевскийу д-р техн. наук, проф.;
B. В. Новицкий, д-р техн. наук, проф.; В. А. Отставнову канд. техн. наук; К. Д. Панферову канд. техн.
наук; Л. Н. Пицкельу канд. техн. наук; 1 Г. А. Попова], канд. техн. наук, доц.; А. М. Проценкоу канд. техн. наук, доц.; О. Я. Родинко, инж; С. А. Семенцов, д-р техн. наук, проф.; А. Я. Синицыну д-р техн.
наук, проф.; С. М. СойбельмаНу канд. техн. наук; В. И. Сысоеву канд. техн. наук; С. В. Тарановскийу д-р
техн. наук, проф; И. И. Трапезину д-р техн. наук, проф.; М. Н. Трогун, инж.; А. И. Тюленев, канд.
техн. наук, доц.; А. А. Уманскийу д-р техн. наук, проф.; А. П. Филину д-р техн. наук,
проф.; В. Г. Чернашкину канд. техн, наук; Г. М. Чувикину д-р техн. наук; В. Г. Чудновский, д-р техн. наук, проф.; Д. Л. Шапиро, канд. техн. наук.
Рецензенты
М. С. Бернштейну канд. техн, наук; А. Г. Иммермащ канд. техн. наук; Р. Р. Матевосян, д-р техн. наук;
В. Я. ПастушихиНу д-р техн. наук, проф.; А. А. Петропавловский, д-р техн. наук, проф.; Р. А. Резников, канд. техн. наук; А. Г. Раздольский, инж.; М. Я. Сканавиу канд. физ.-мат. наук, доц.; Р. Г. Шишкин, инж.
Научные редакторы
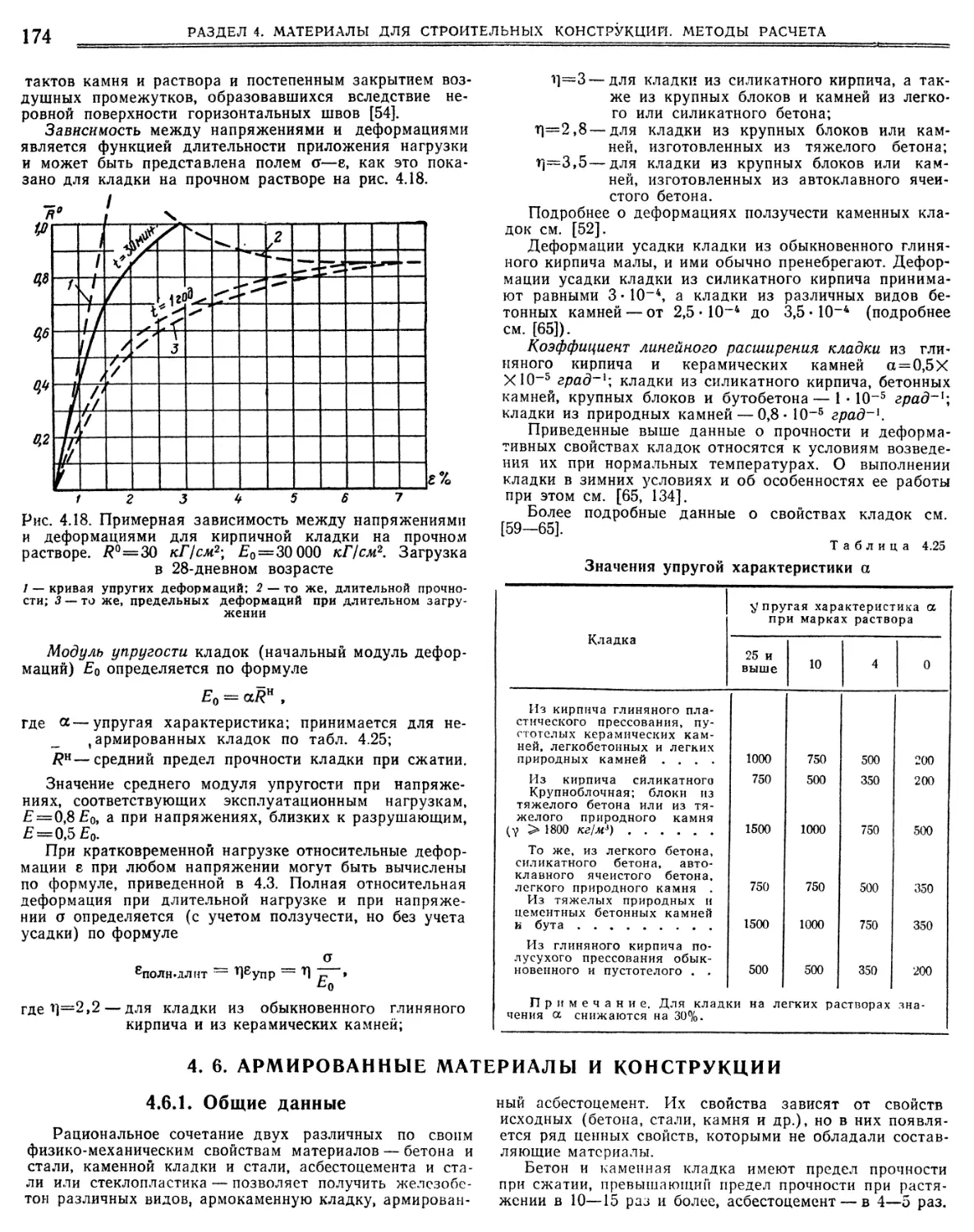
Я. Я. Вайсфельду доц.; Б. Ф. Васильеву инж.; Б. Я. Вольфсон, канд. техн. наук; Р. Ф. Габбасов, канд. техн. наук, доц.; Г. Я. Зубареву канд. техн. наук; А. Г. Иммерману канд техн. наук; Я. В. Киселевау канд. техн. наук, доц.; М. В. Малышеву д-р техн. наук; В. Я. Пастушихину д-р техн. наук, проф.; М. И. РейтмаНу канд. техн. наук; О. Я. Родинко, инж.; Ю. М. Стругацкий, канд. техн. наук; А. Я. Цейтлину д-р техн. наук; В. М. Шусторович% канд. техн. наук; редактор по унификации канд. техн. наук, доц. Р. Я. Трепененков.
ОГЛАВЛЕНИЕ
Предисловие к первому изданию Предисловие ко второму изданию РАЗДЕЛ 1 МАТЕМАТИКА
В. М. Даревский
1.1. Алгебра
1.1.1. Степени и корни 1.1.2. Логарифмы •. 1.1.3. Прогрессии 1.1.4. Факториал • • •
1.1.5. Соединения 1.1.6. Бином Ньютона .1.1.7. Определители (детерминанты) 1.1.8. Линейные уравнения. 1.1.9. Уравнения высших степеней 1.1.10. Приближенное решение уравнений.
1.2. Геометрия.,. .1.2.1. Плоские фигуры .1.2.2. Тела. • » •, 1.3. Тригонометрия 1.3.1. Измерение углов
1.3.2. Тригонометрические функции. « .1.3.3. Тригонометрические функции от суммы и разности углов, кратных углов и половинного угла .1.3.4. Квадраты и кубы синуса и косинуса. 1.3.5. Приведение к виду, удобному для логарифмирования
1.3.6Ч Зависимости между тригонометрическими функциями трех углов а р и -у, сумма которых равна 180°
1.3.7. Зависимости между обратными тригонометрическими функциями •. ».
1.3.8. Формулы, применяемые при решении треугольников
1.3.9. Гиперболические функции «•••«»•»
1.4. Аналитическая геометрия „ »
1.4.1. Точка на плоскости
1.4.2.
1.4.3.
1.4.4.
Парабола 4 V » «
1.4.5.
Эллипс и гипербола. «
. .1.4.6.
Построение конических сечений.
4 4 4.
1.4.7.
Цепная линия. Циклоида. Спираль.
1.4.8.
Точка в пространстве • ,.. • « •
1.4.9.
1.4.10. Прямая в пространстве. с. •
1.4.11. Поверхности второго порядка.
1.5. Дифференциальная геометрия 1.5.1. Плоские кривые « »••
1.5.2. Пространственные кривые а «. 9. 1.5.3. Поверхности.»
1.6. Дифференциальное исчисление 1.61. Функция, предел, непрерывность «.•»• в
1.6.2. Производная и дифференциал
1.6.3. Раскрытие неопределенностей 1.6.4. Исследование функций 1.6.5. Функция двух переменных. «
Л.7. Интегральное исчисление. 1.7.1. Неопределенный интеграл, •,
1.7.2. Интегрирование рациональных функций 1.7.3. Интегрирование иррациональных функций,.
Стр.
1.7.4. Интегрирование трансцендентных функций » « 38
1.7.5. Определенный интеграл 40
1.7.6. Кратные интегралы %., »,.♦. 41
1.7.7. Криволинейные интегралы „ 42
1.8. Ряды 42
1.8.1. Числовые ряды »•«•«••.••.»». 42
1.8.2. Степенные ряды.♦.« 43
1.8.3. Разложение функций в степенные ряды. 43
1.9. Дифференциальные уравнения 45
1.9.1. Основные понятия •.«»• 45
1.9.2. Уравнения первого порядка. 46
1.9.3. Уравнения второго порядка 46
1.9.4. Линейные уравнения второго порядка.,. 47
1.9.5. Линейные уравнения высших порядков с Постоянными коэффициентами 47
1.9.6. Метод начальных параметров 48
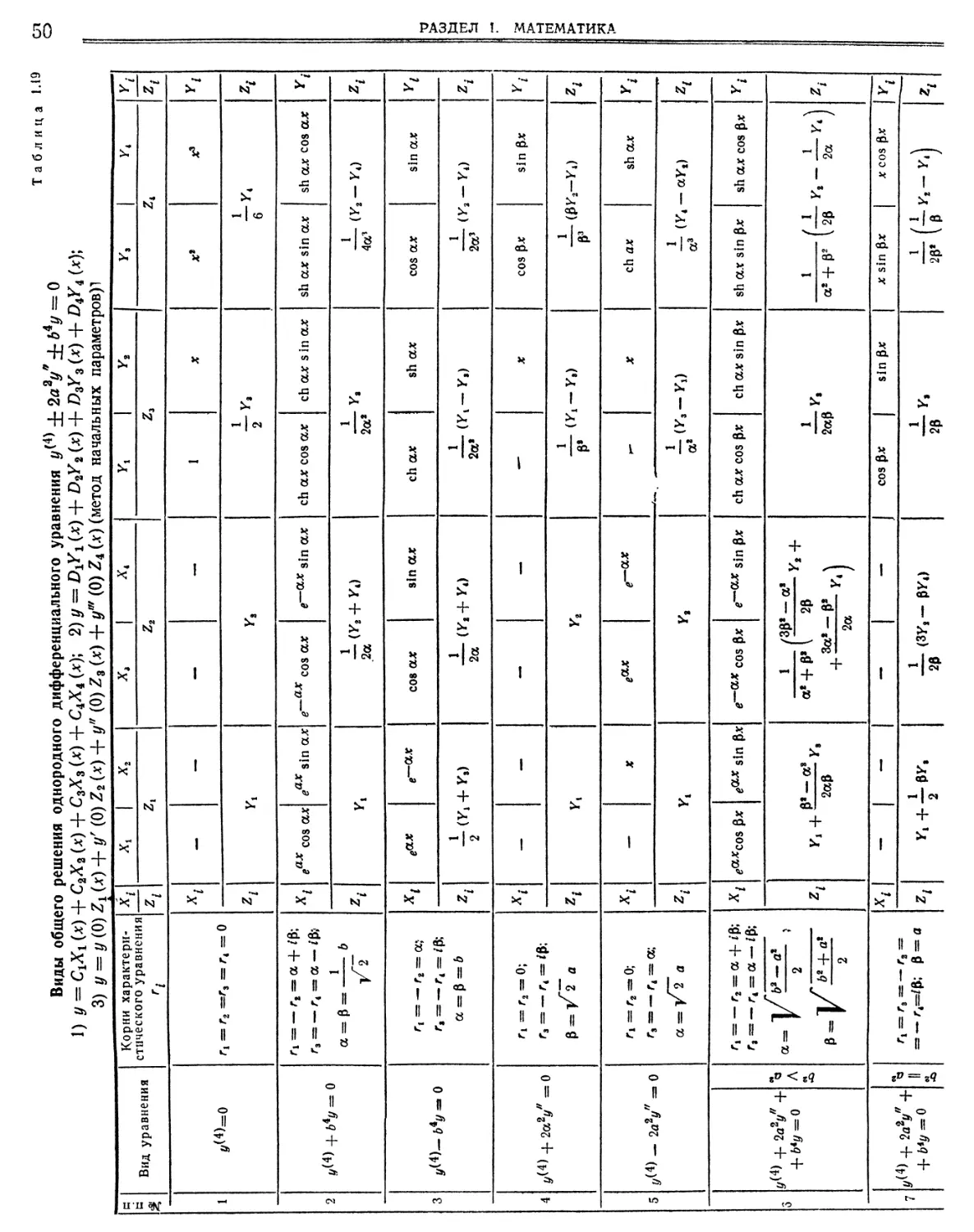
1.9.7. Общие решения дифференциального уравнения
четвертого порядка с биквадратным характеристическим уравнением (А. И. Тюленев) 49
1.9.8. Приближенные методы 49
1.9.9. Уравнения математической физики 53
1.10. Функции комплексной переменной. „ „. 55
1.10.1. Комплексные числа «••.%.»«, 55
1.10.2. Комплексные функции 55
1.10.3. Конформные отображения V 4 56
1.11. Вариационное исчисление 57
1.11.1. Общие Сведения, » •».•.«»« « » 57
1.11.2. Основные случаи • 57
1.11.3. Прямые методы 57
1.12. Разностное исчисление. 58
1.12.1. Определение разностей ».,. 58
1.12.2. Разностные уравнения., 59
1.13. Интегральные уравнения, 59
1 13.1. Уравнения Фредгольма • «. 59
1.13.2. Уравнения Вольтерра второго ряда. 60
1.13.3. Уравнения Абеля 60
1.13.4. Сингулярные уравнения. ® . 0. 61
1.14. Специальные функции 61
1.14.1. Полиномы Лежандра » в » • 61
1.14.2. Полиномы Чебышева »»..»« 61
1.14.3. Гамма-функция. й в, е .». 62
1.14.4. Функция Бесселя 8 а . 62
1.15. Операционное исчисление 62
1.15.1. Преобразование Лапласа 62
1.15.2. Применение операционного исчисления. 63
1.16. Векторное и тензорное исчисления. 64
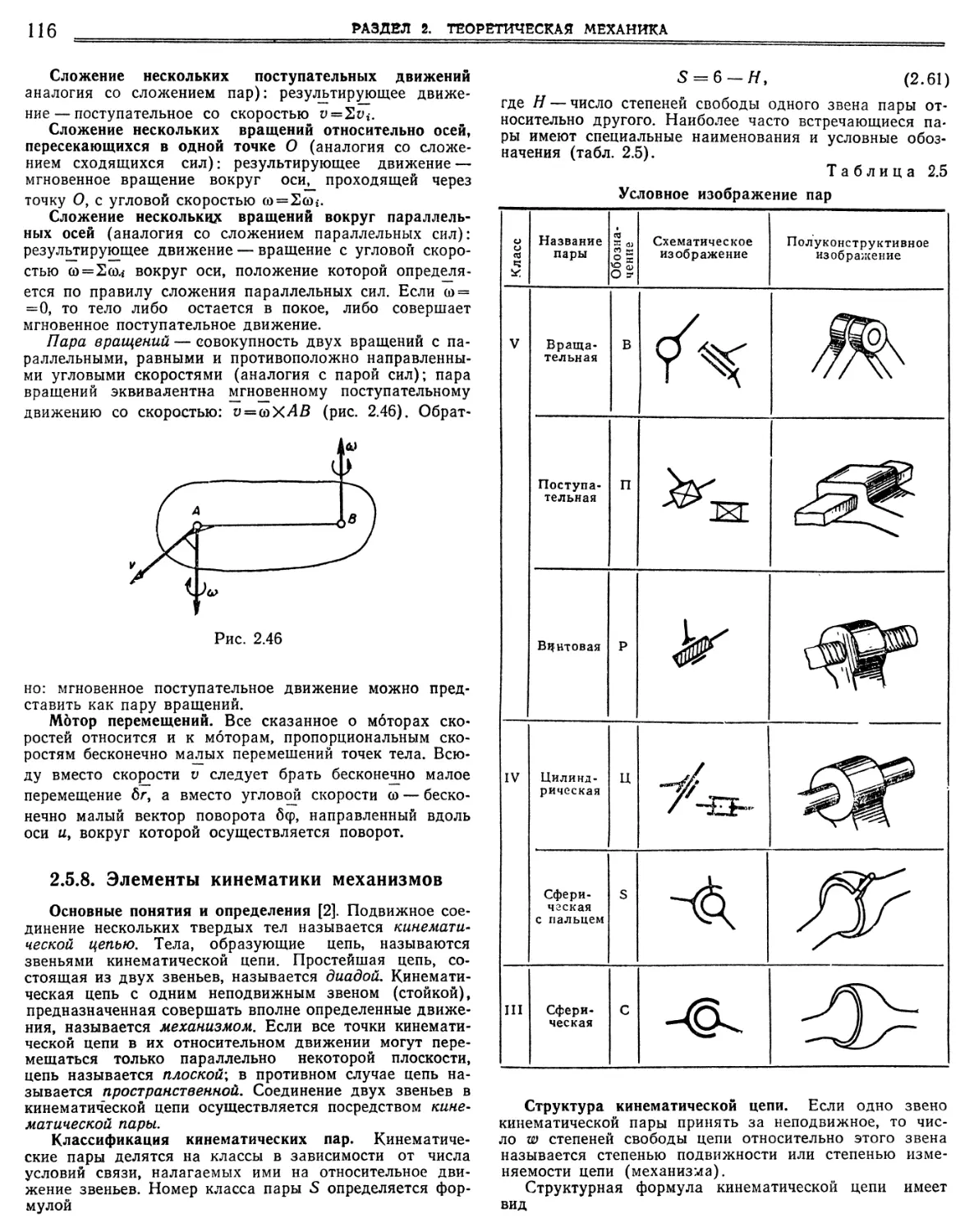
1.16.1. Векторная алгебра • 64
1.16.2. Векторный анализ «. е 64
1.16.3. Тензоры . а е. а. 65
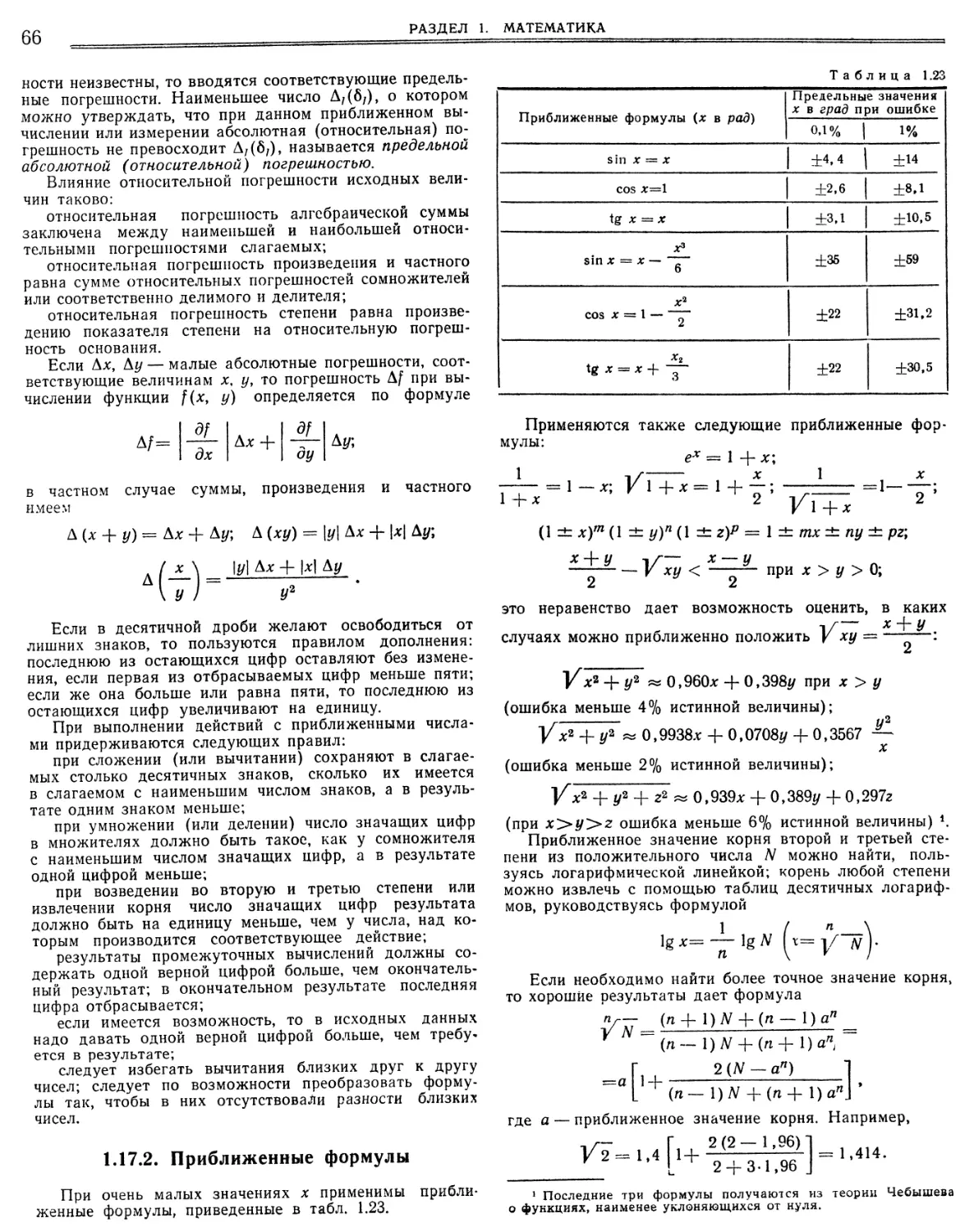
1.17. Приближенные вычисления 65
1.17.1. Общие положения,. 65
1.17.2. Приближенные формулы, 66
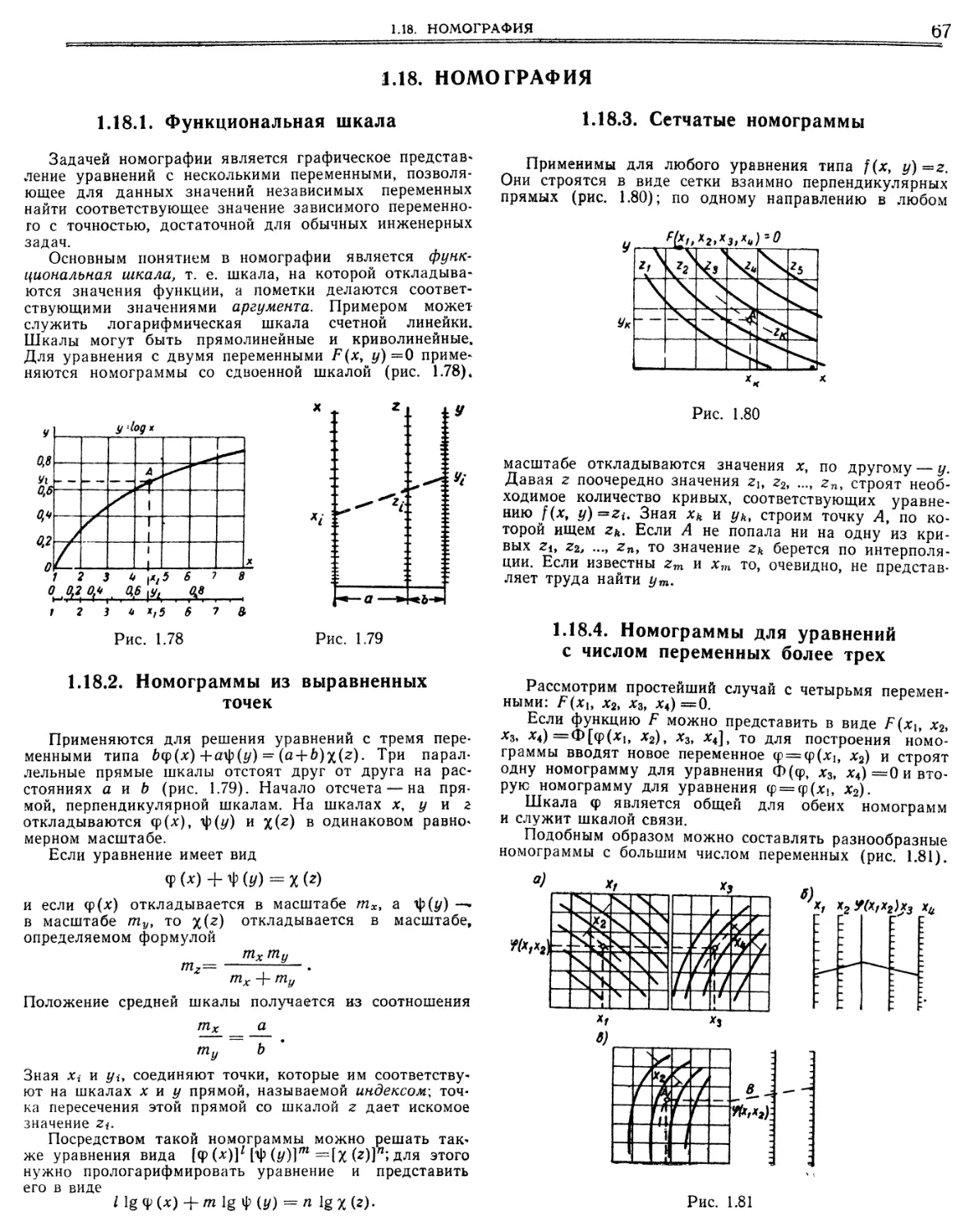
1.18. Номография 67
1.18.1. Функциональная шкала 67
1.18.2. Номограммы Из выравненных точек. с. 67
1.18.3. Сетчатые номограммы 67
Стр.
9
10
11
11
11
12
12
12
12
12
13
14
15
16
16
17
19
19
19
20
21
21
21
21
22
22
23
23
24
24
24
25
25
26
26
27
27
27
28
28
29
31
33
33
33
35
35
35
36
36
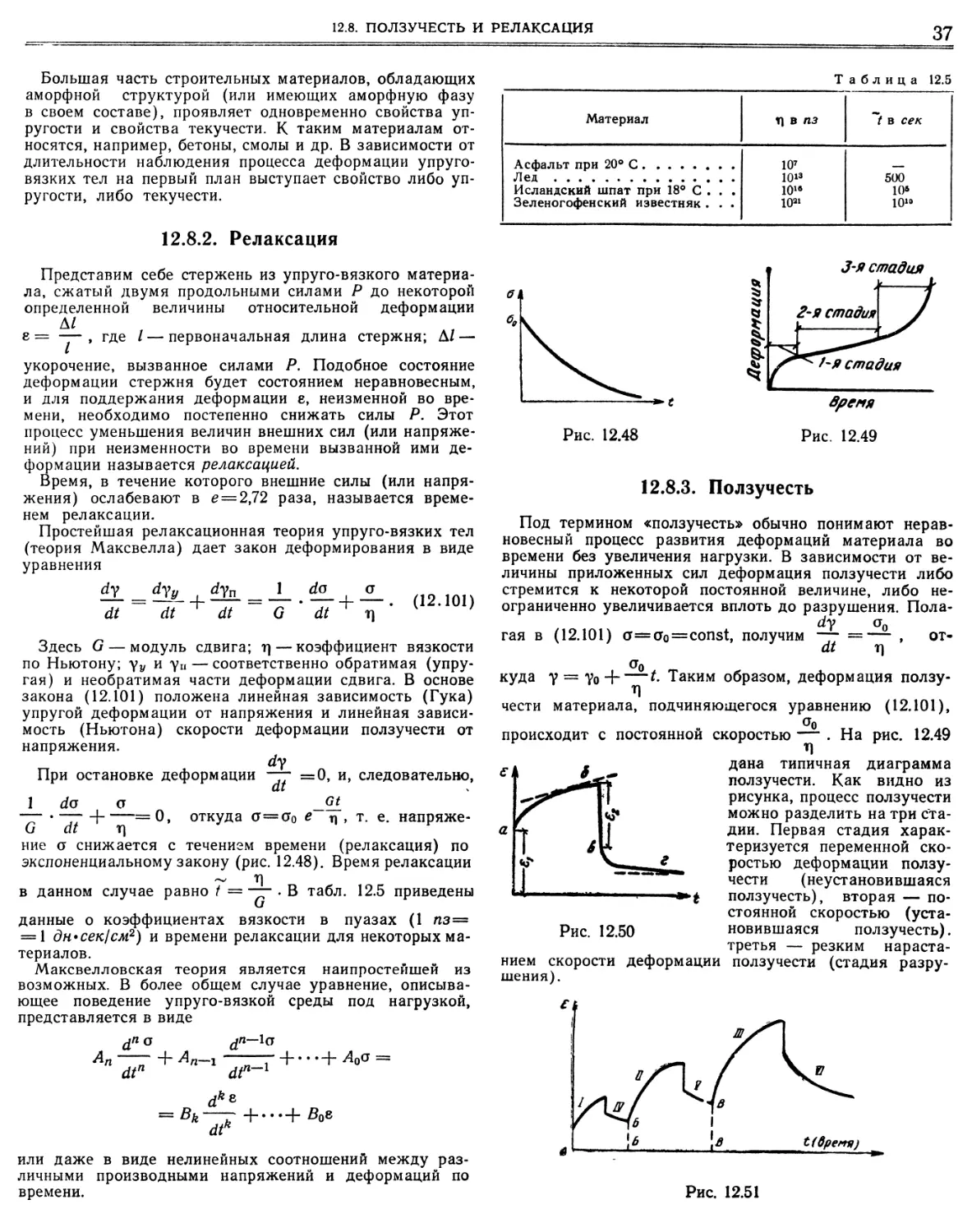
37
37
4
ОГЛАВЛЕНИЕ
Стр.
1.18.4. Номограммы для уравнений с числом перемен ных более трех 1.19. Приближенное представление функций.
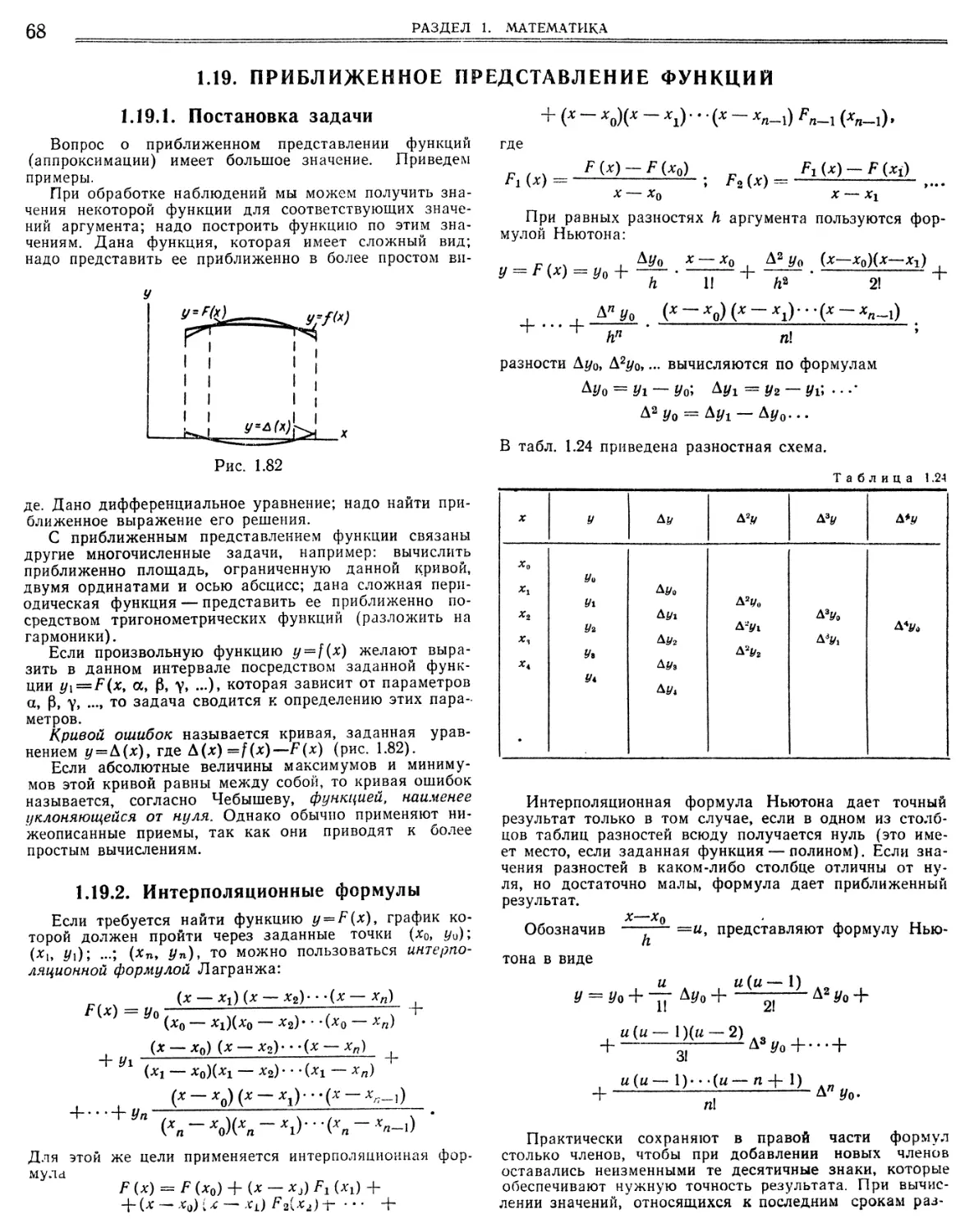
1.19.1. Постановка задачи.
1.19.2. Интерполяционные формулы 1.19.3. Приближение функций по методу наименьших
квадратов.
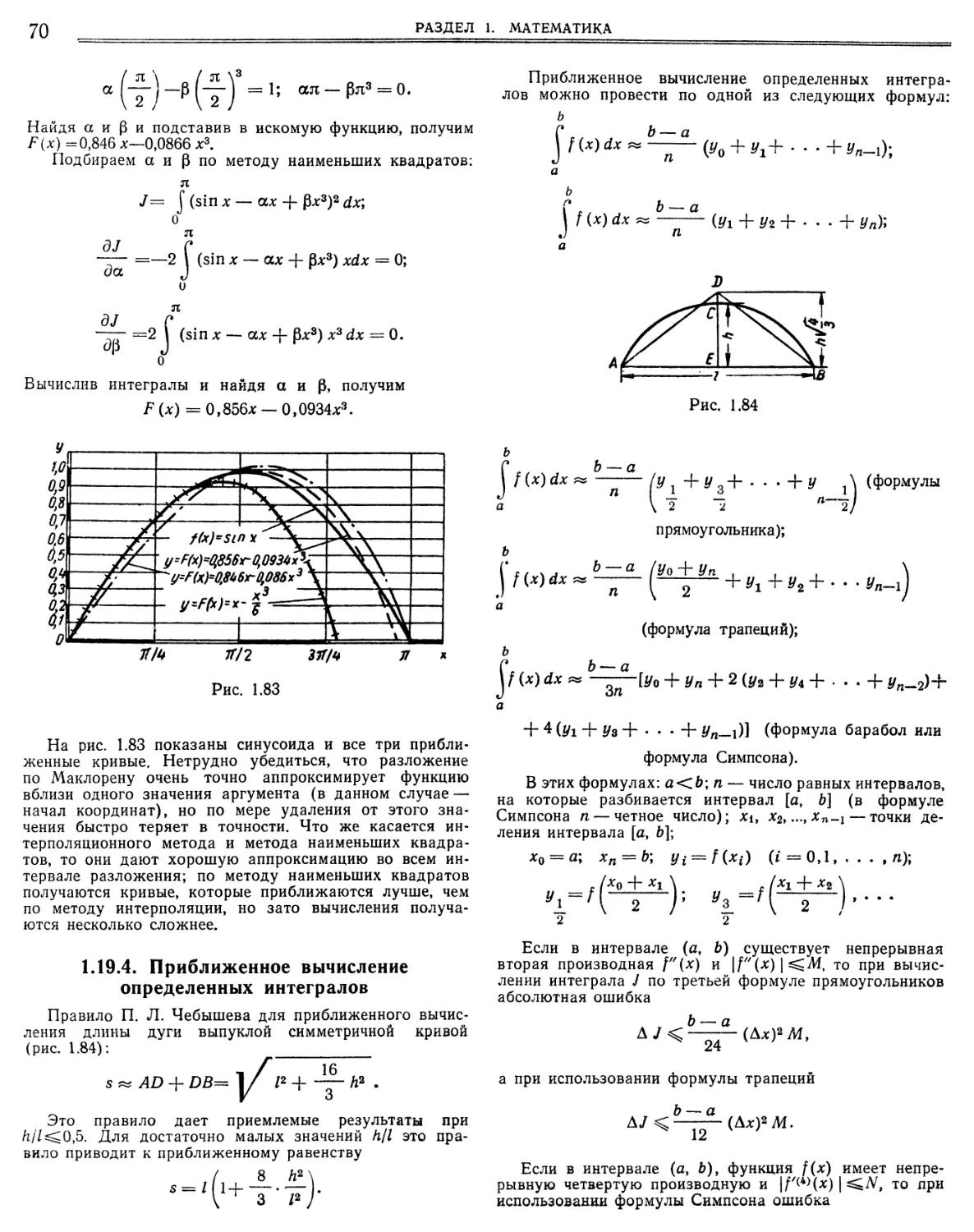
1.19.4. Приближенное вычисление определенных интег ралов
1.20. Ряды Фурье.
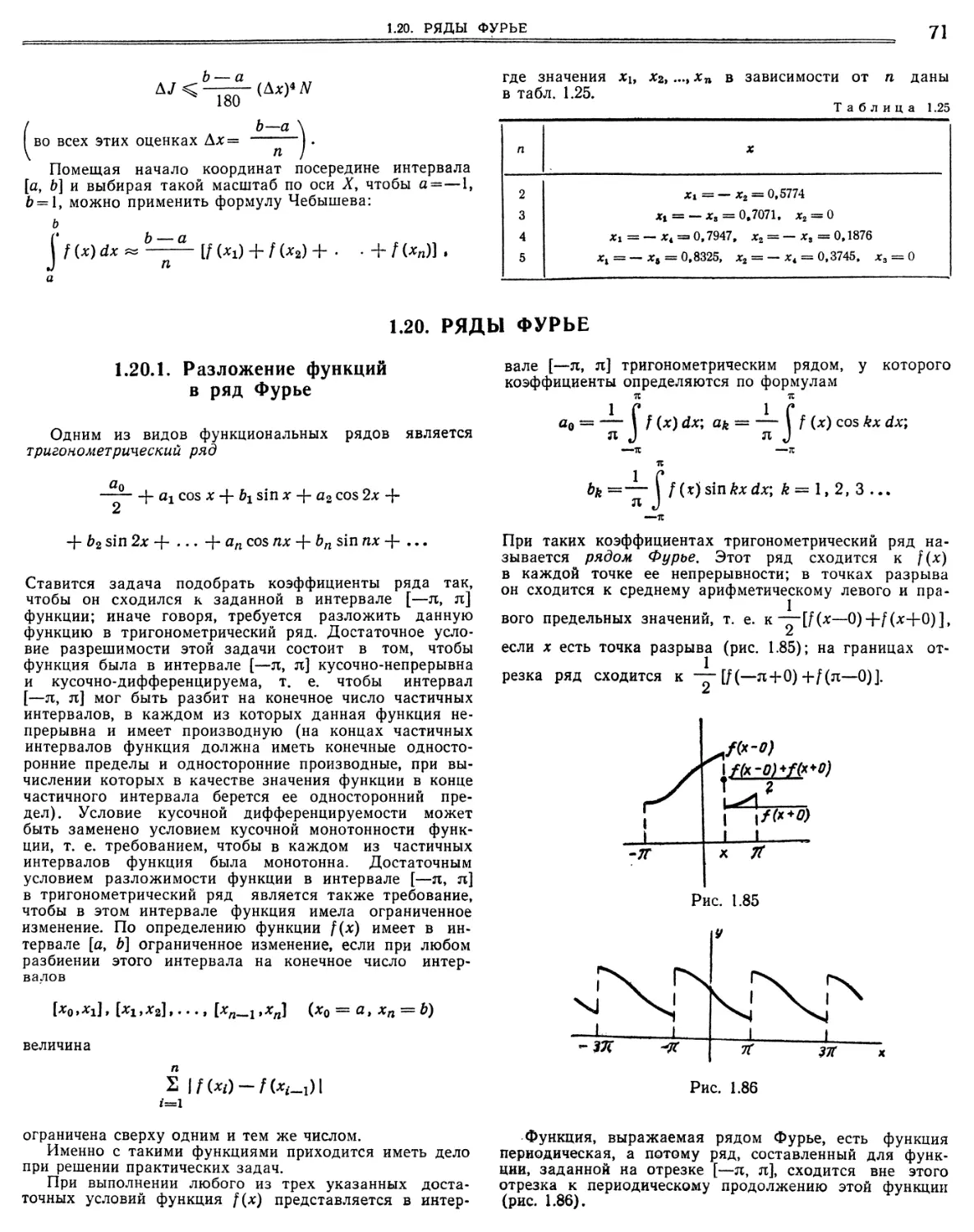
1.20.1. Разложение функций в ряд Фурье.
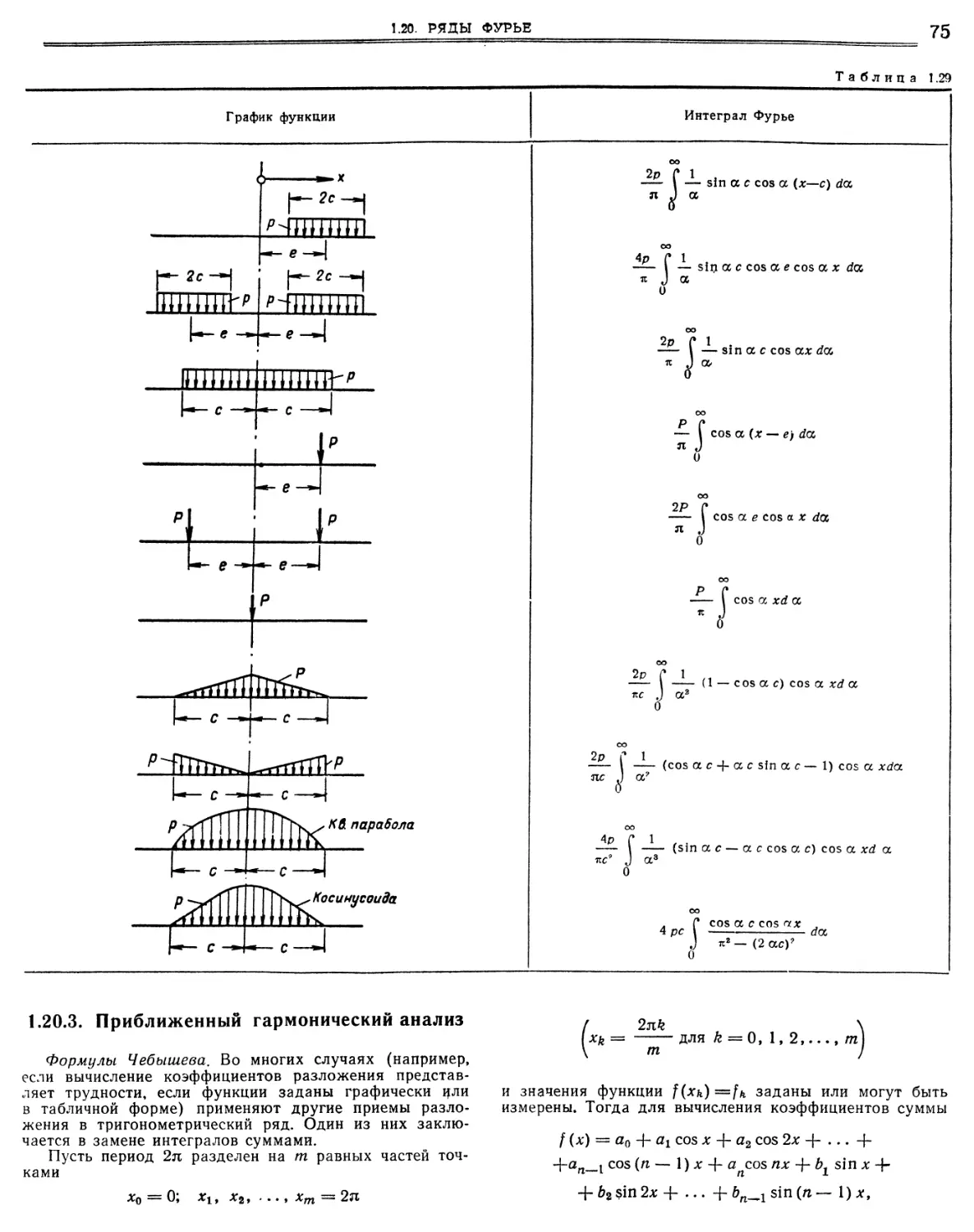
1.20.2. Интеграл Фурье.
1.20.3. Приближенный гармонический анализ
1.21. Теория вероятностей.
1.21.1. События и вероятность
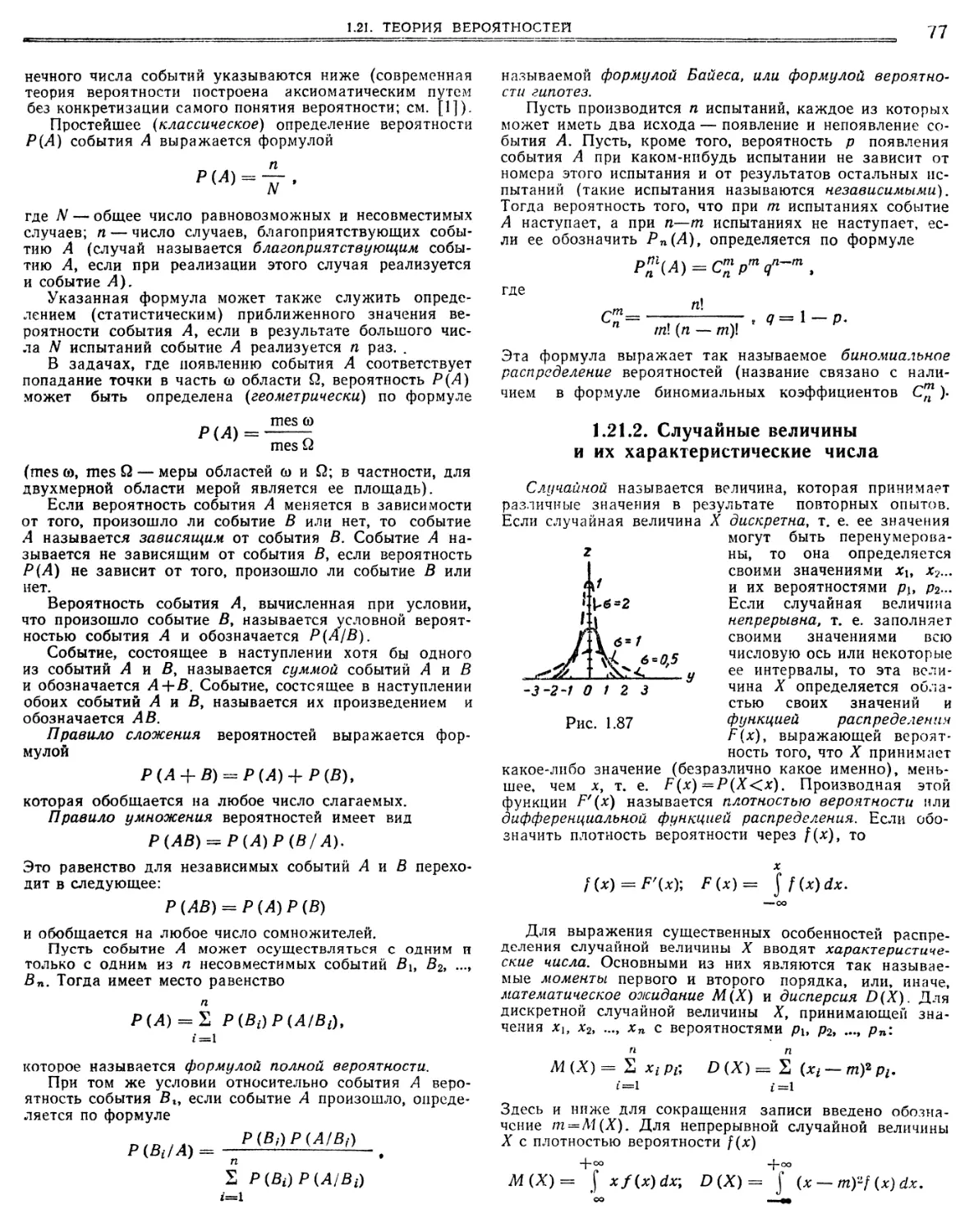
1.21.2. Случайные величины и их характеристические
числа • •
1.21.3. Задача математической стаагистики. • • •
1.21.4. Основы теории корреляции.••••
1.22. Основные сведения о линейном программиро
вании (А. М. Проценко) 1.22.1. Задача математического программирования
1.22.2. Формулировка задач линейного программирова
ния. 1.22.3. Двойственные задачи линейного программирова
ния., 1.22.4. Преобразования задач к различным формам
1.22.5. Вычислительные методы 1.23. Основы применения электронных цифровых
вычислительных машин (А. П. Филин
С. 3. Динкевич) 1.23.1. Некоторые принципы действия ЭЦВМ.
1.23.2. Краткое описание устройства ЭЦВМ.
1.23.3. Особенности решения задач на ЭЦВМ. « •
1.23.4. Некоторые приемы программирования.
1.23.5. Автоматизация программирования. Алгоритмиче ские языки, АЛГОЛ—60
1.23.6. Некоторые рекомендации по использованию ЭЦВМ
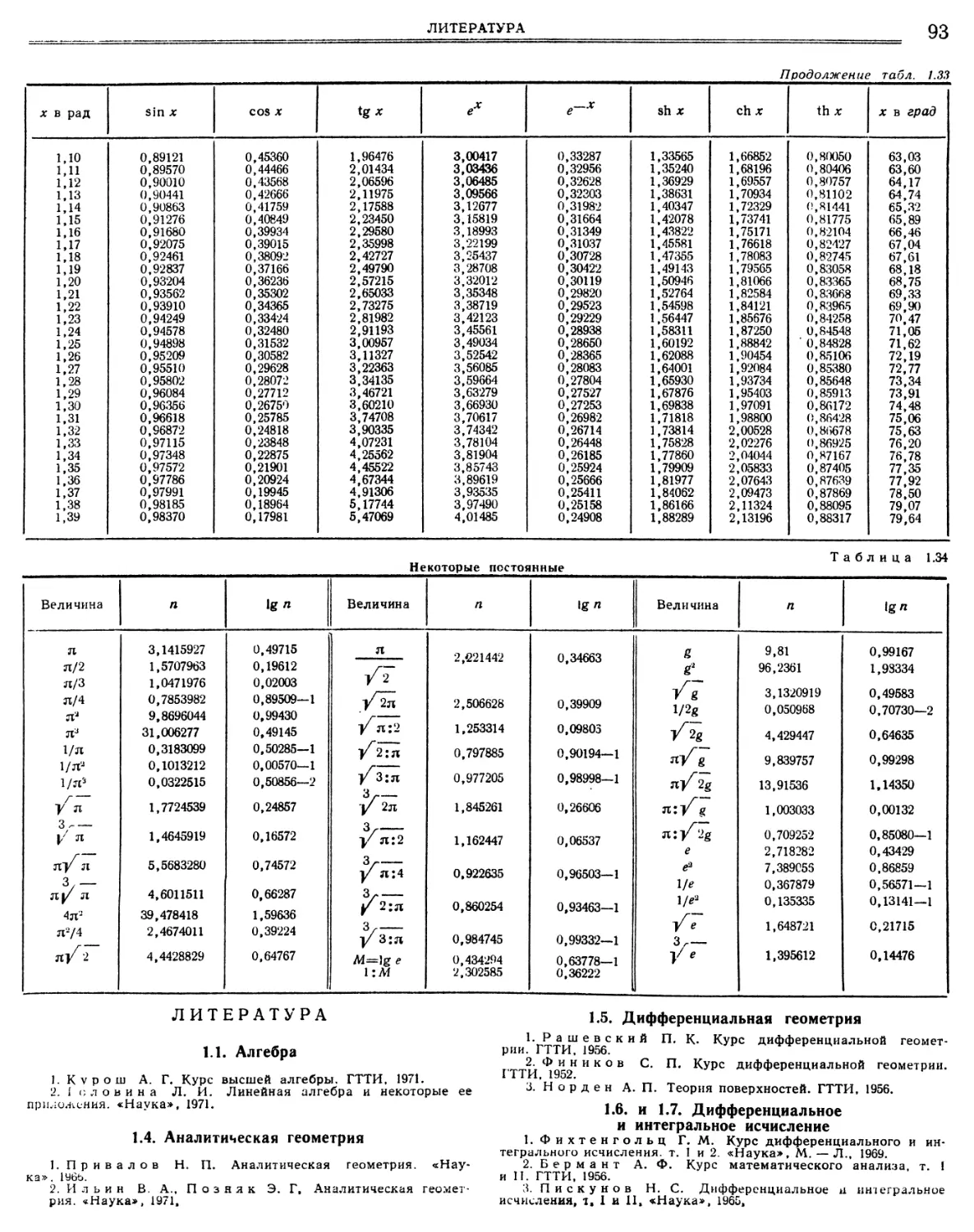
1.24. Таблицы элементарных функций. •.
Литература : РАЗДЕЛ 2
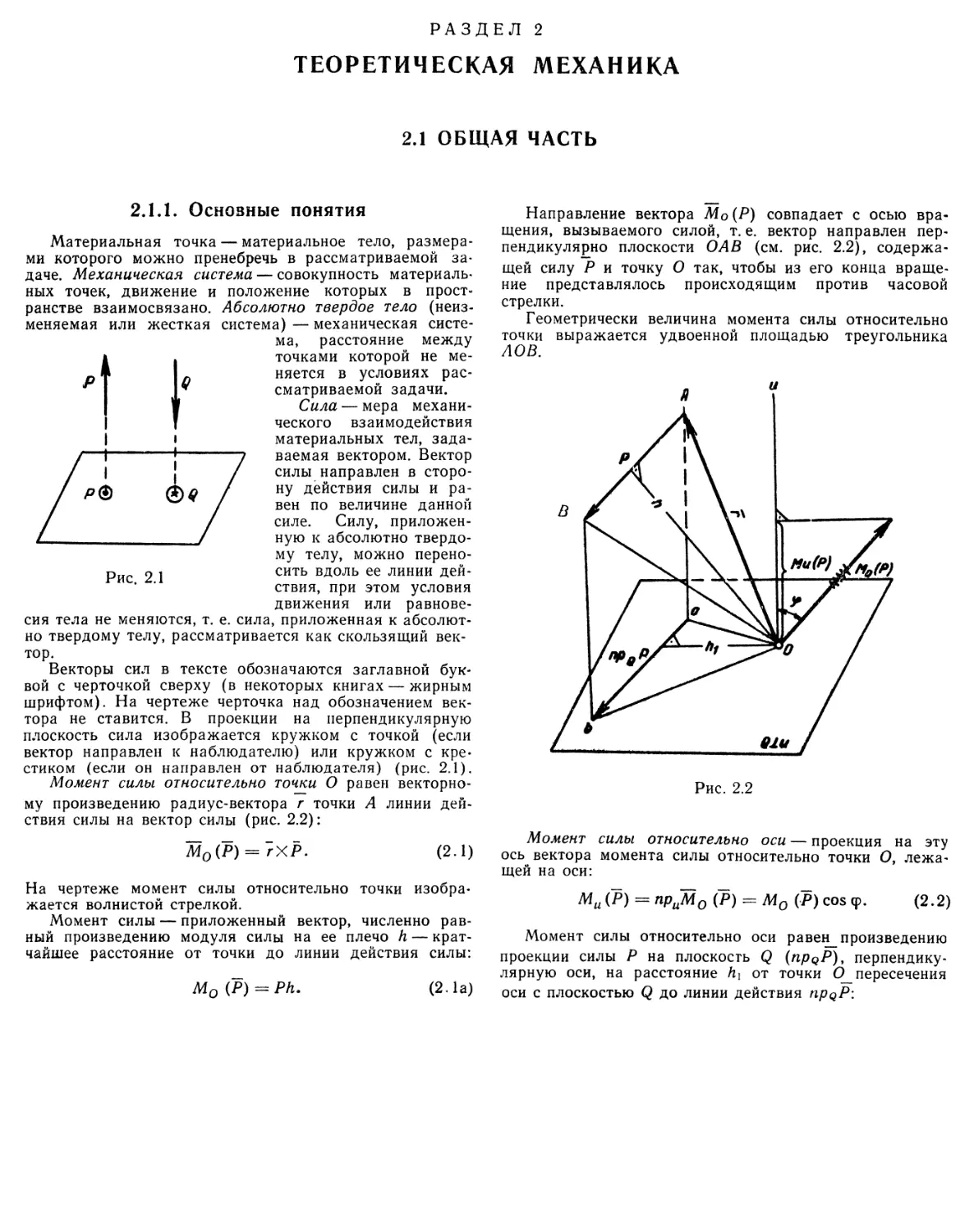
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА Т. Л. Попова
2.1. Общая часть 2.1.1. Основные понятия ». 2.1.2. Основные законы. • 2.1.3. Системы единиц измерения.
2.2. Геометрическая статика
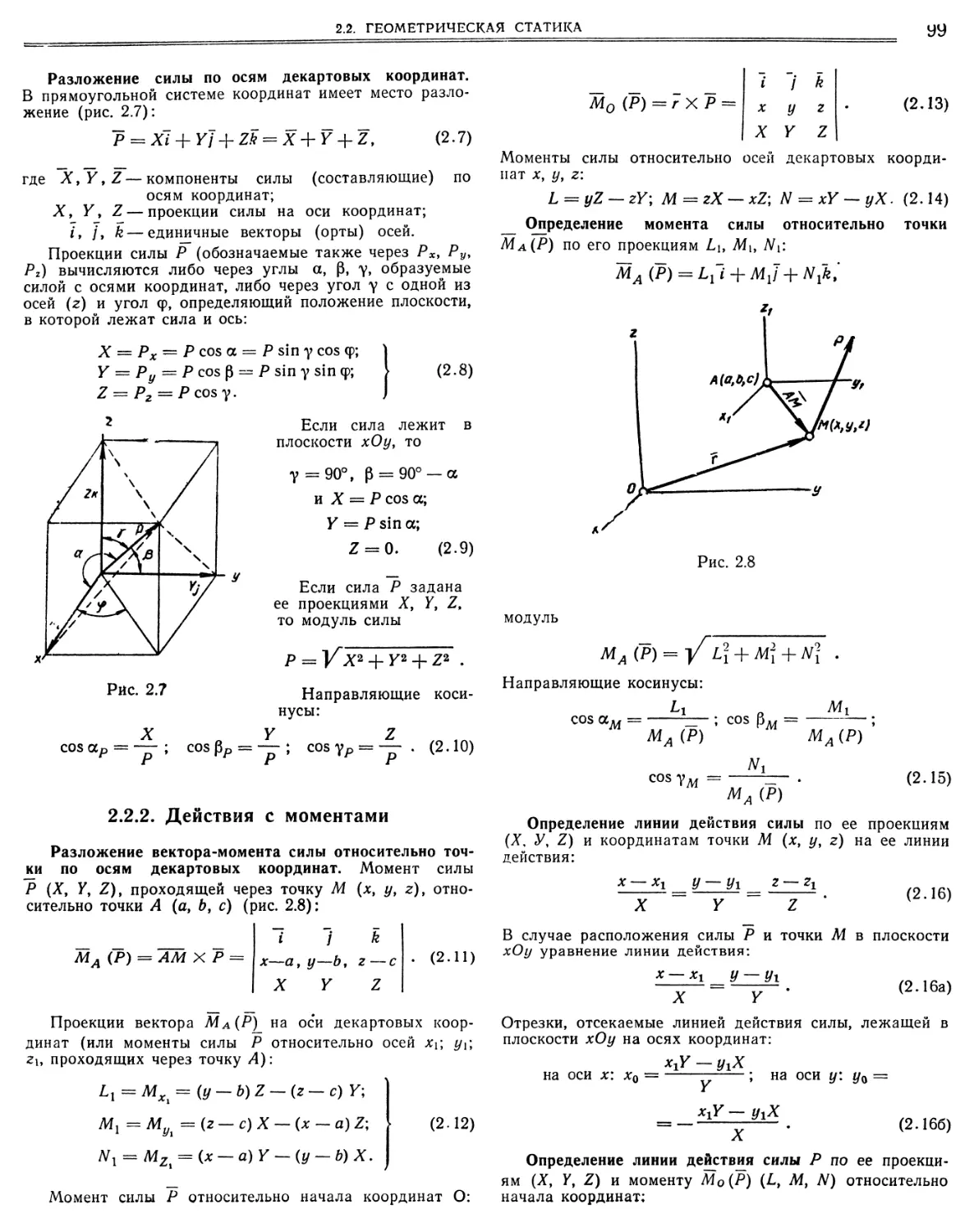
2.2.1. Действия с силами
2.2.2. Действия с моментами
2.2.3. Произвольная система сил
2.2.4. Частные случаи расположения сил .2.2.5. Условия равновесия тел и систем тел. .
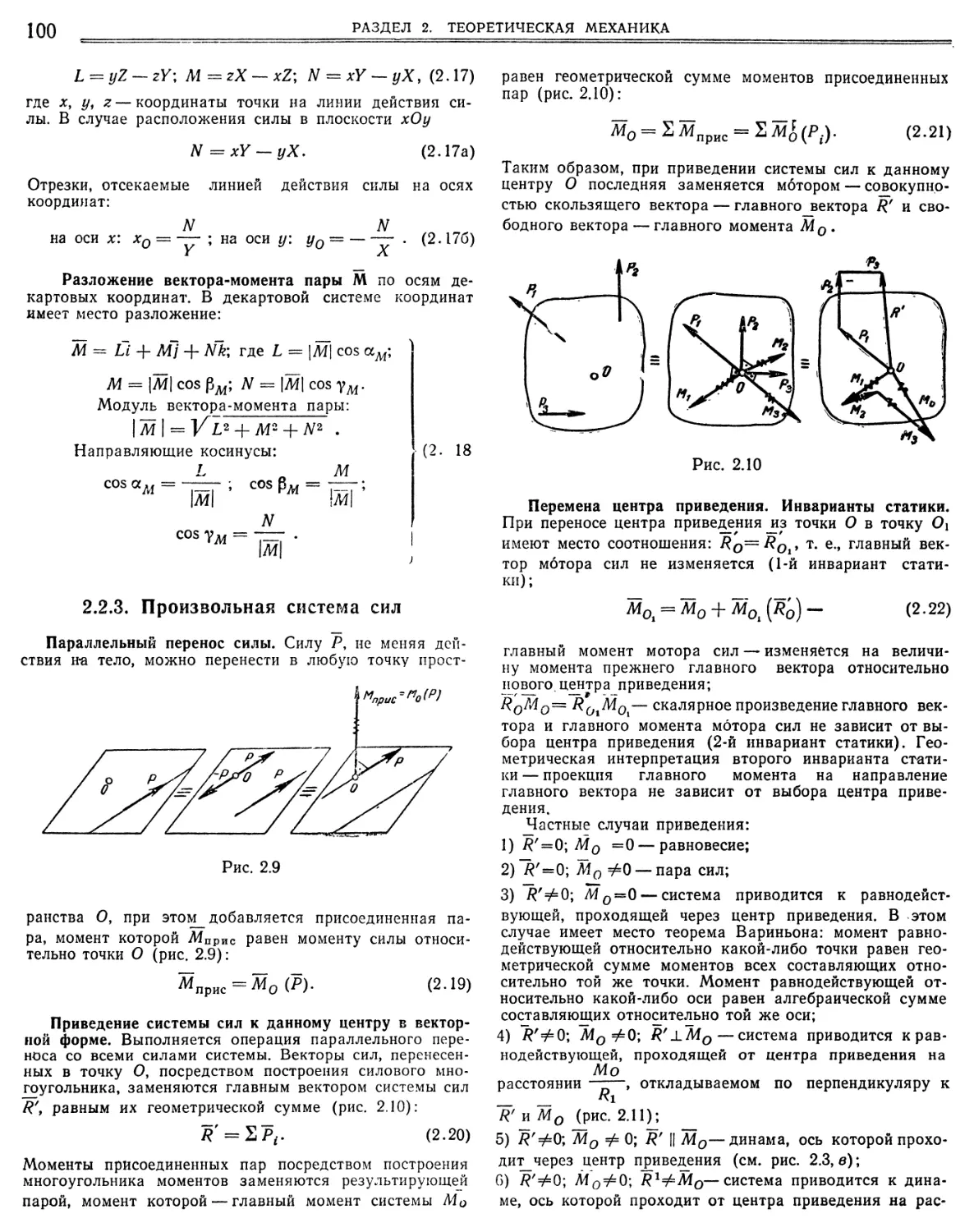
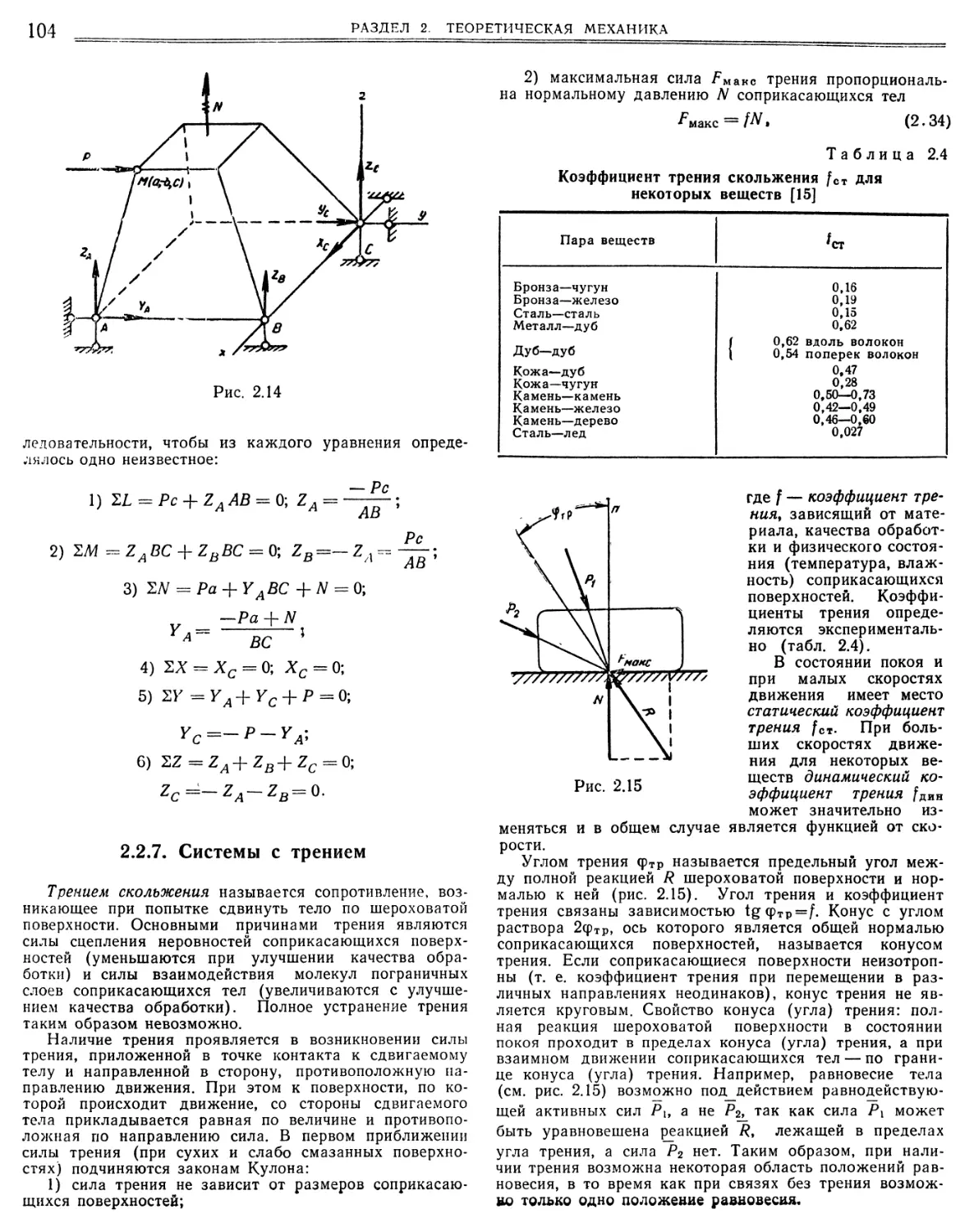
2.2.6. Правила прикрепления твердого тела 2.2.7. Системы с трением •
2.2.8. Центр масс 2.3. Графические приемы 2.3.1. Применение графических методов к решению не которых частных задач.
2.3.2. Определение усилий в стержнях плоской статически определимой фермы ••«я»»
2.4. Кинематика точки 2.4.1. Задание движения точки •
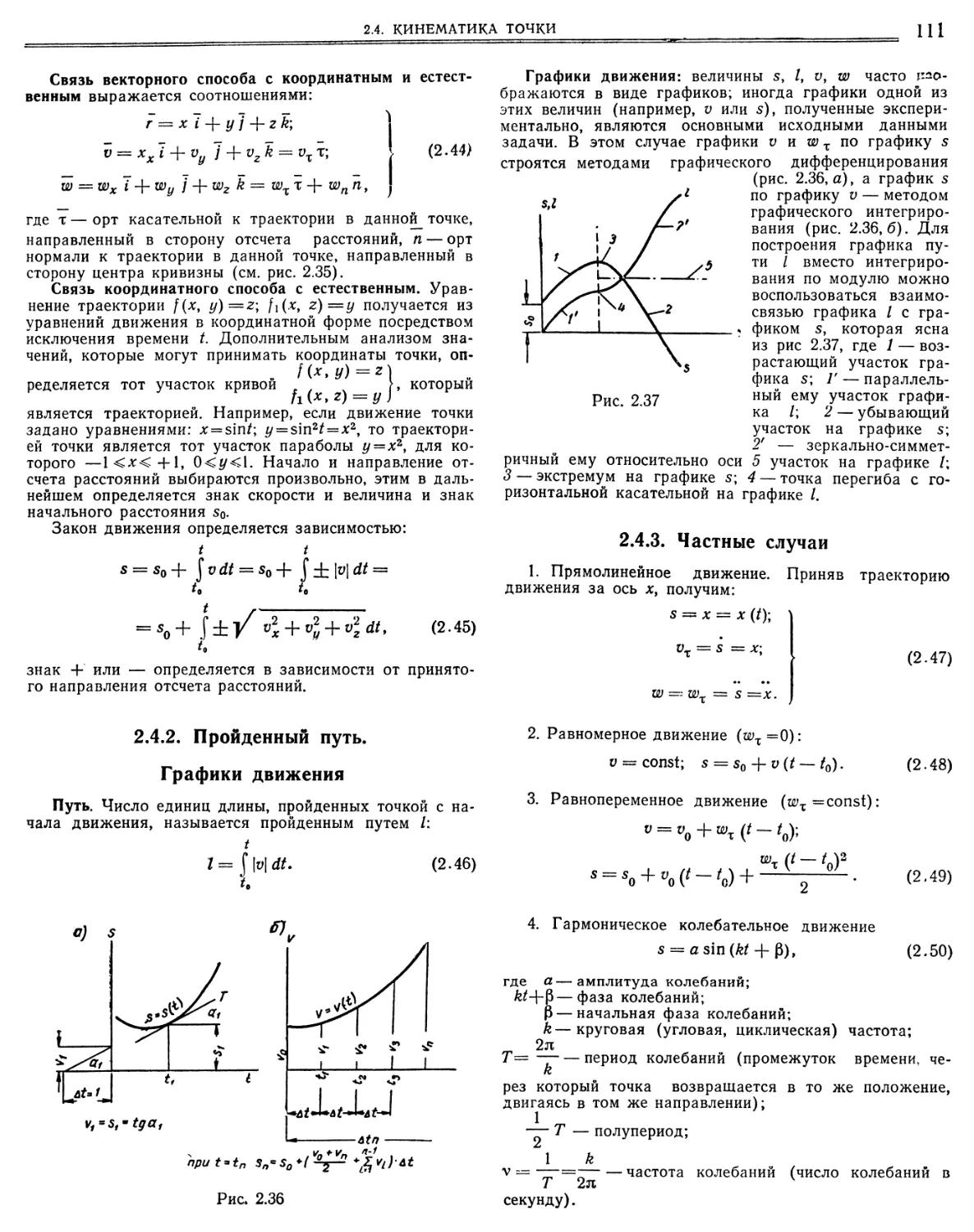
2.4.2. Пройденный путь. Графики движения м
2.4.3. Частные случаи,.••••««
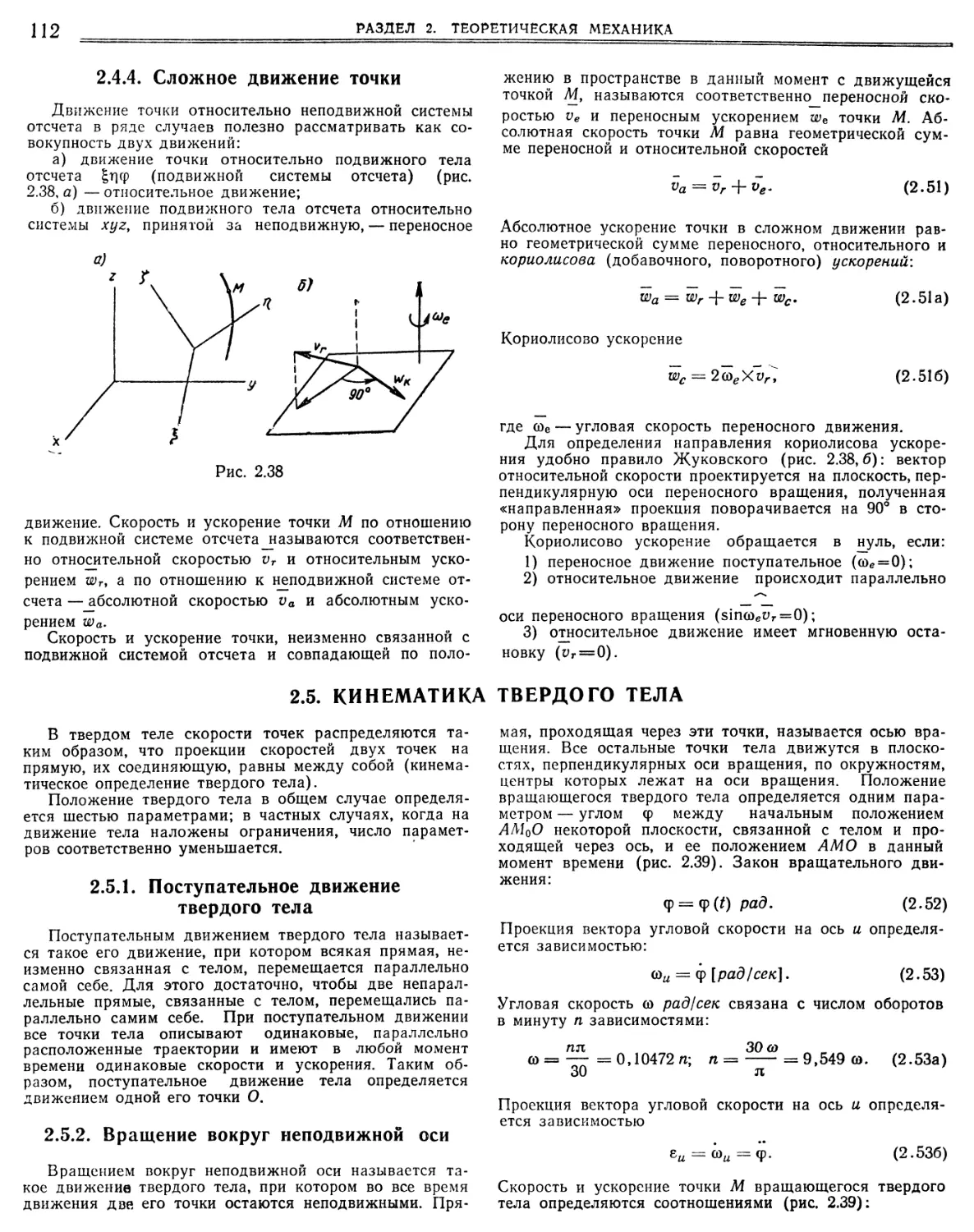
2.4.4. Сложное движение точки „•»«
2.5. Кинематика твердого тела 2.5.1. Поступательное движение твердого тела
2.5.2, Вращение вокруг неподвижной оси.
67
68 68
70
71
71
74
75
76
76
77
78
79
79
79
80
81
81
82
82
84
90
91 93
95
97
97
98
98
99
100 101 102 102
104
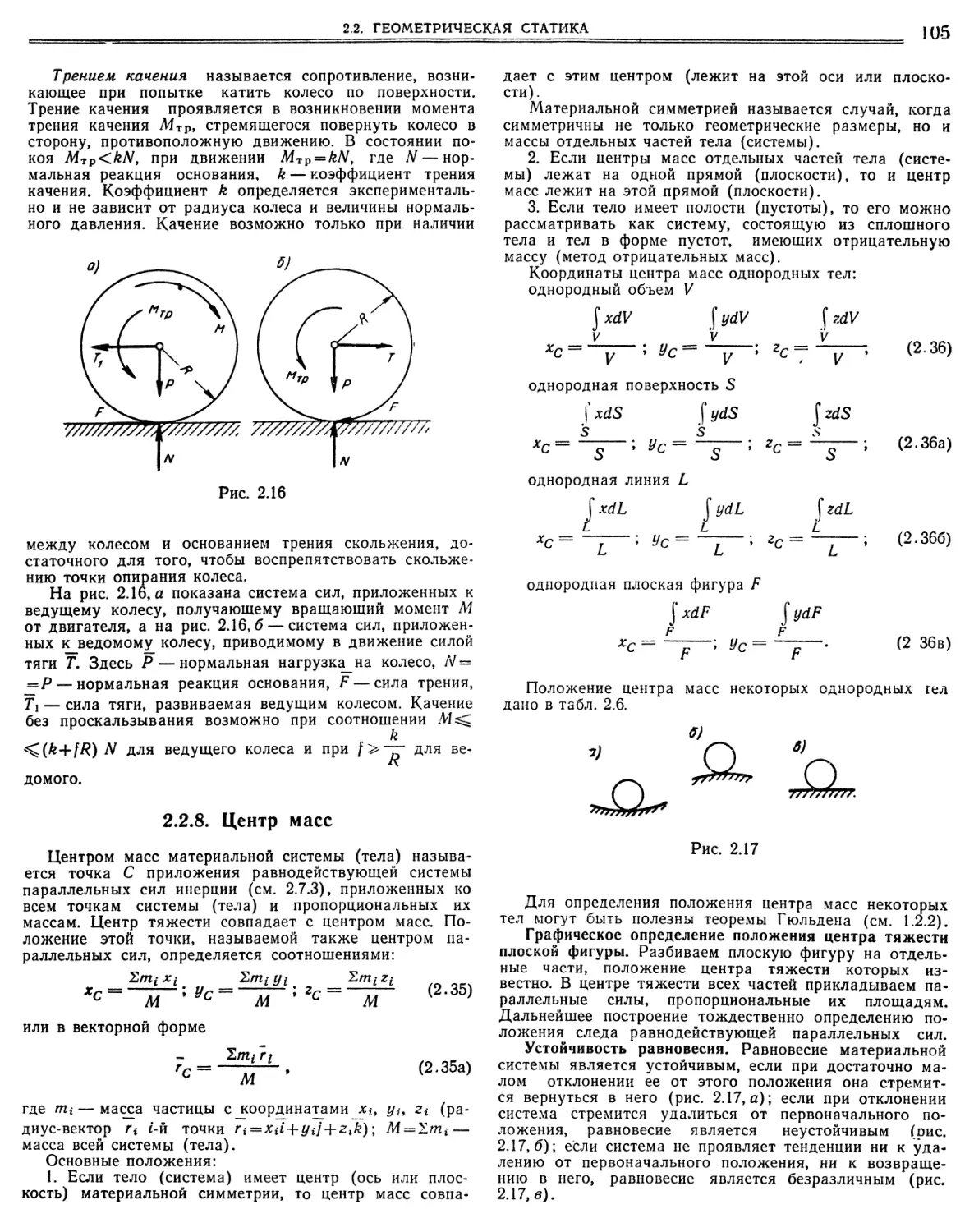
105
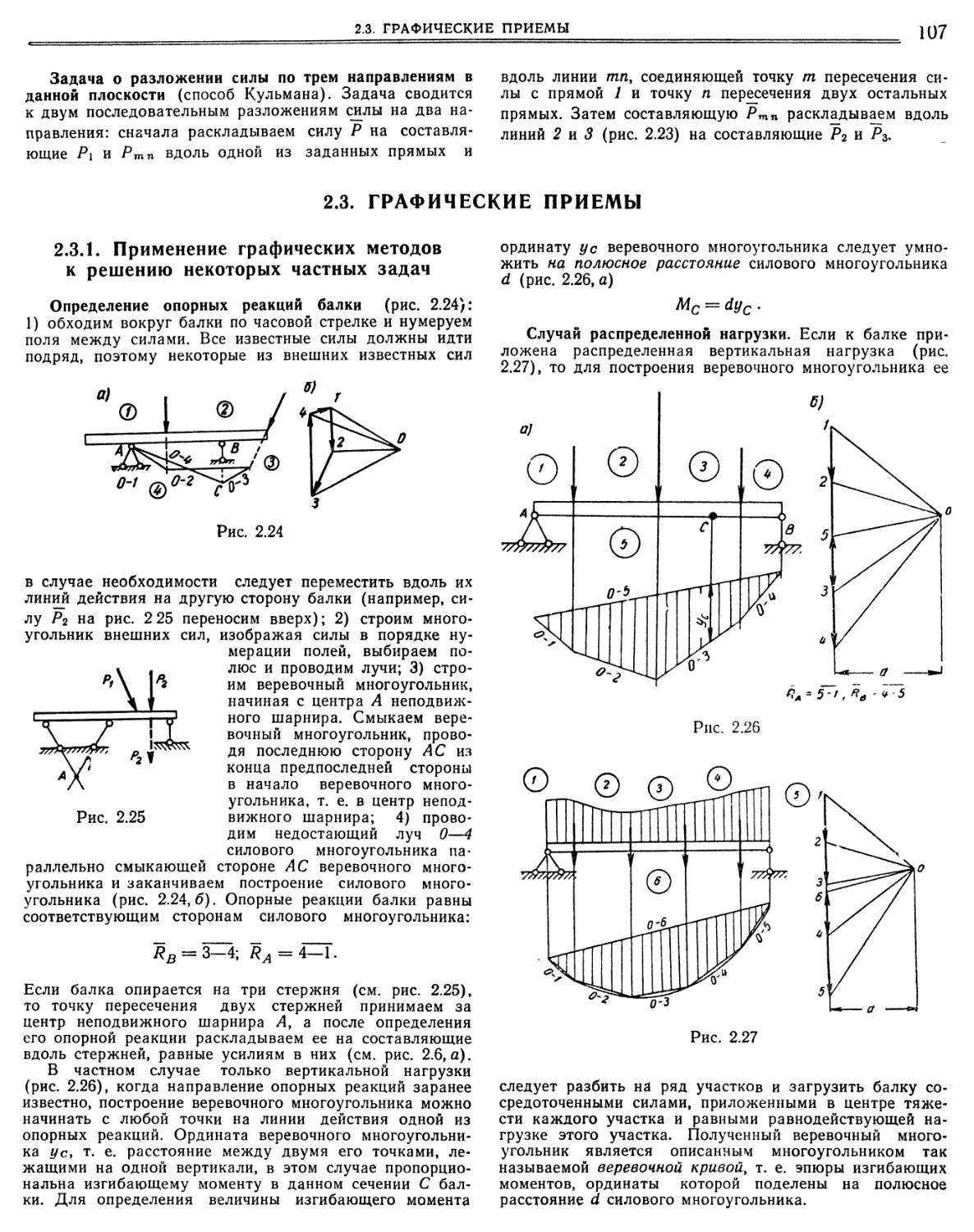
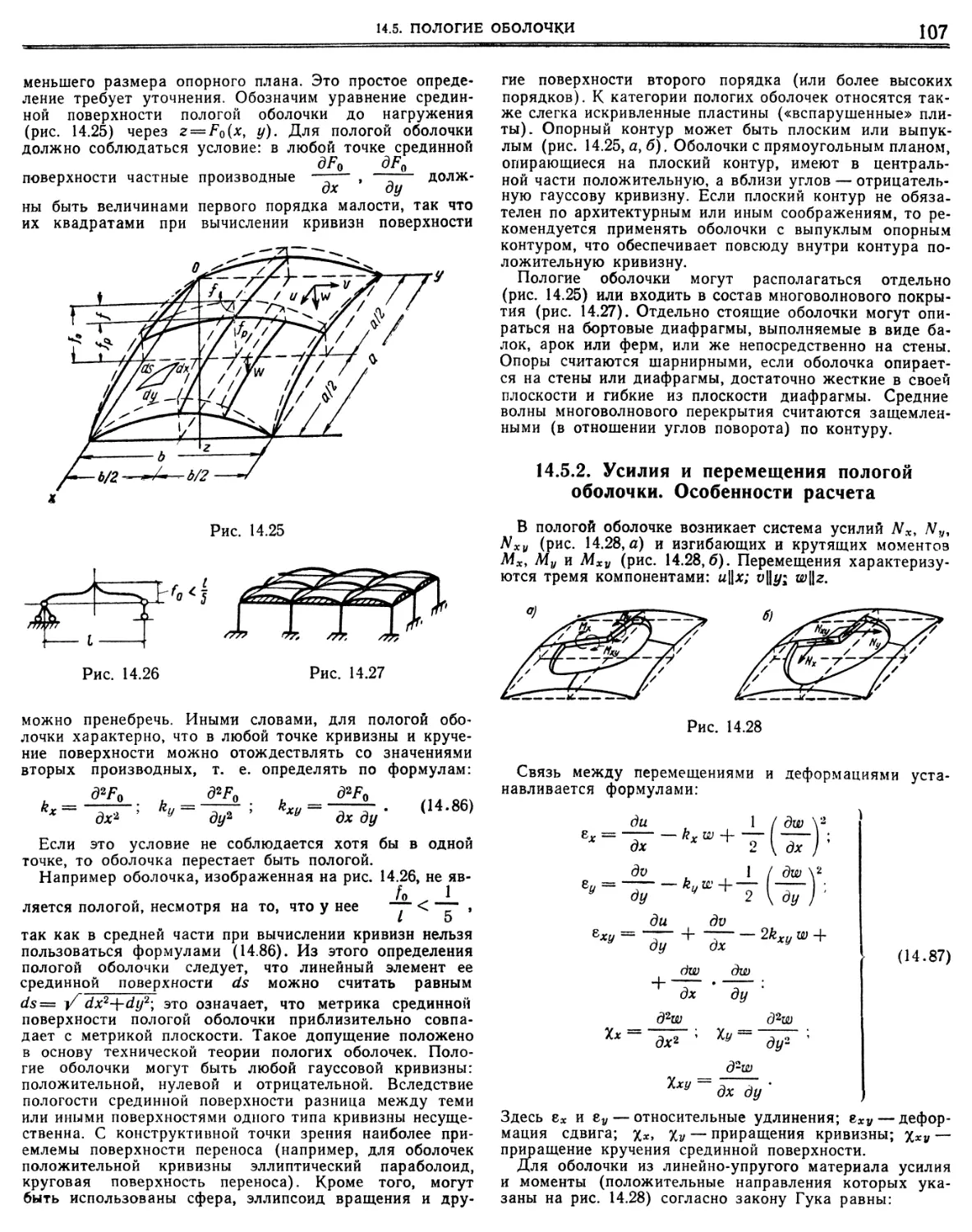
107
107
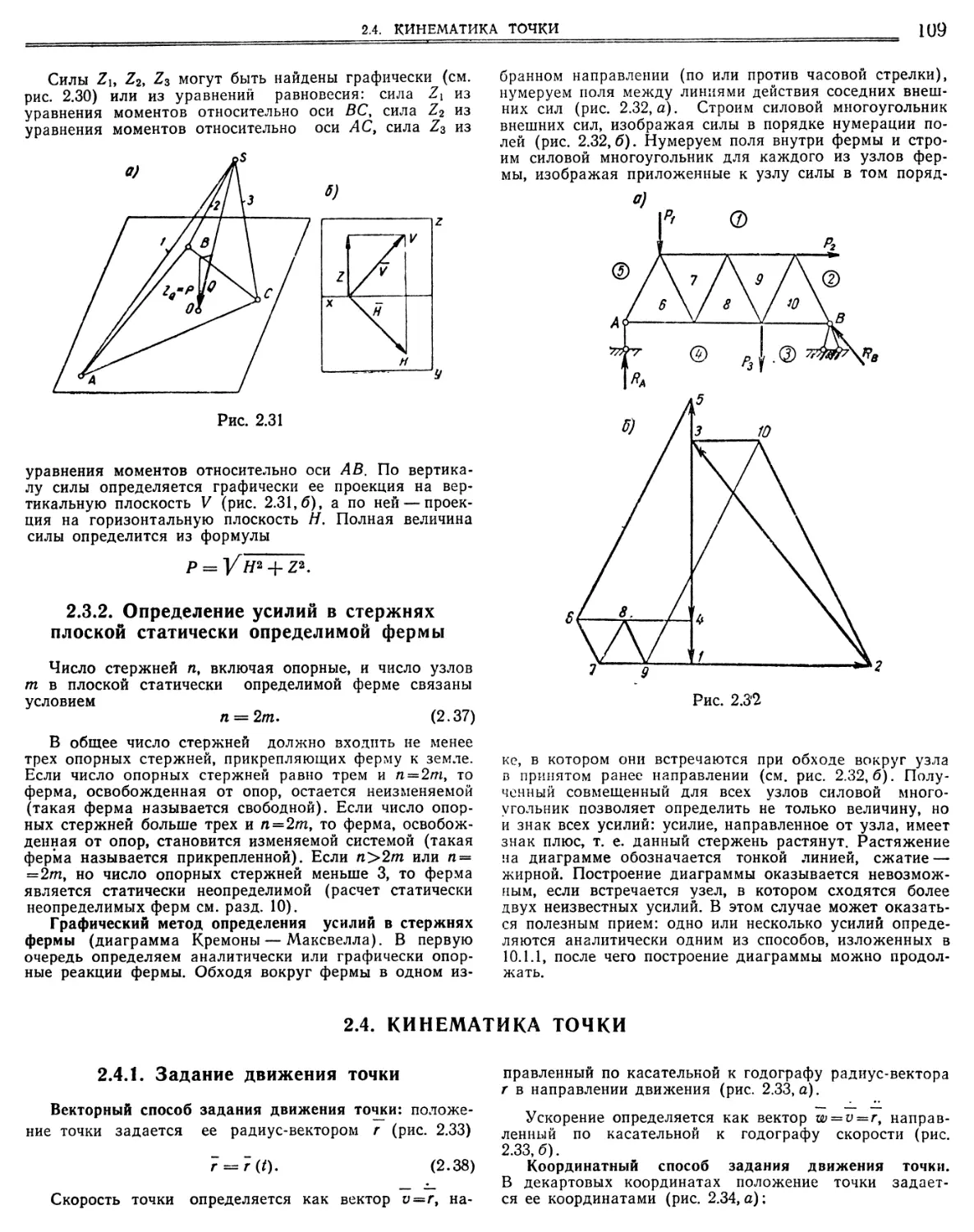
109
109
111
111
112
112
112
112
2.5.3. Винтовое движение
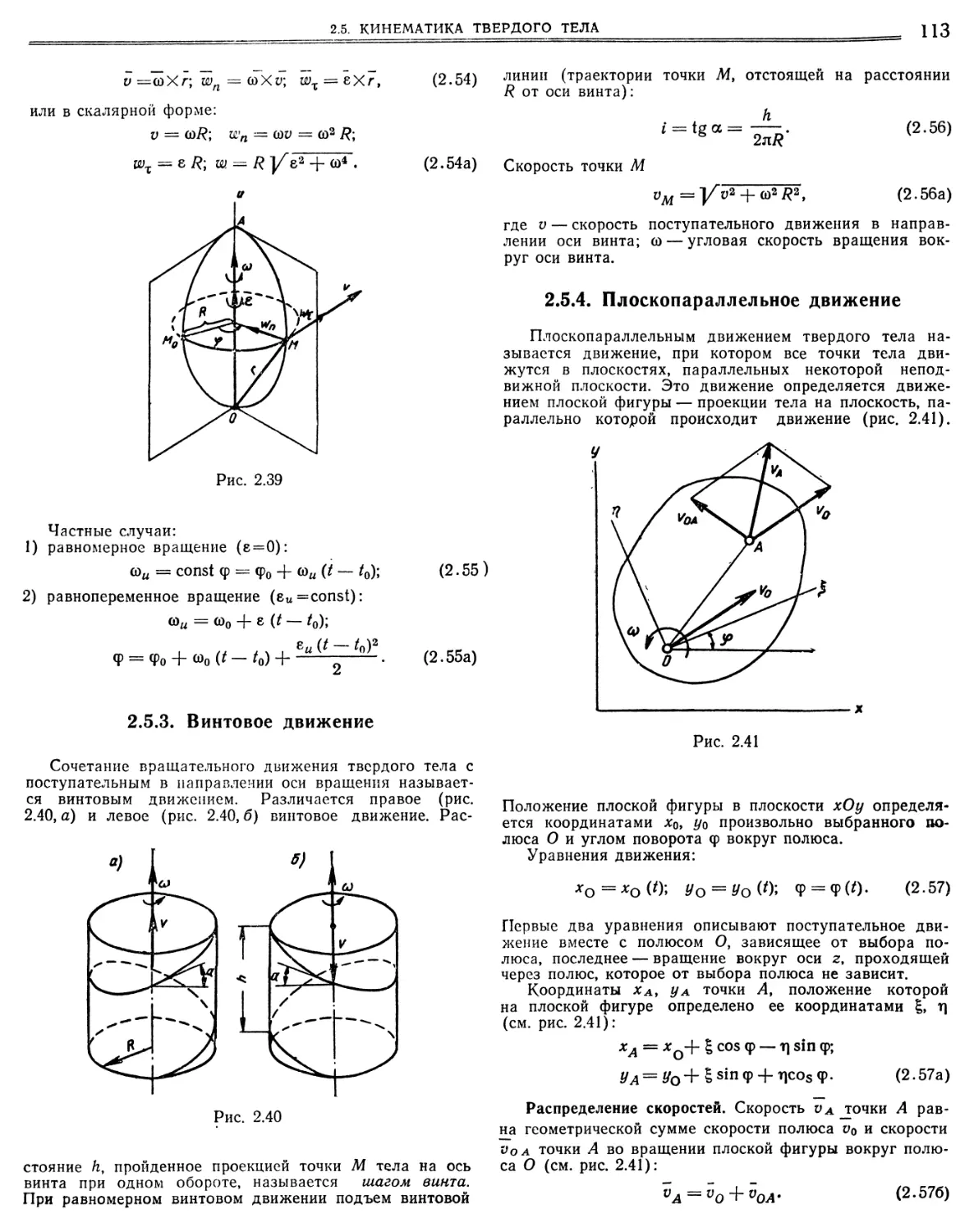
2.5.4. Плоско-параллельное движение 2.5.5. Сферическое движение тела 2.5.6. Общий случай движения твердого тела.
2.5.7. Сложение мгновенных движений твердого тел
2.5.8. Элементы кинематики механизмов „ л „
2.6. Динамика точки 2.6.1. Дифференциальные уравнения движения ма
риальной точки .6.2. Интегрирование дифференциальных уравнении
Интегрирование движения точки
2.6.3. Частные случаи интегрирования
2.6.4. Относительное движение точки
2.7. Динамика системы 2.7.1. Основные понятия динамики.
2.7.2. Основные теоремы динамики 2.7.3. Кинетостатика. Принцип Даламбера.
2.8. Динамика твердого тела 2.8.1. Теория моментов инерции.»».
2.8.2. Вращательное движение твердого тела.
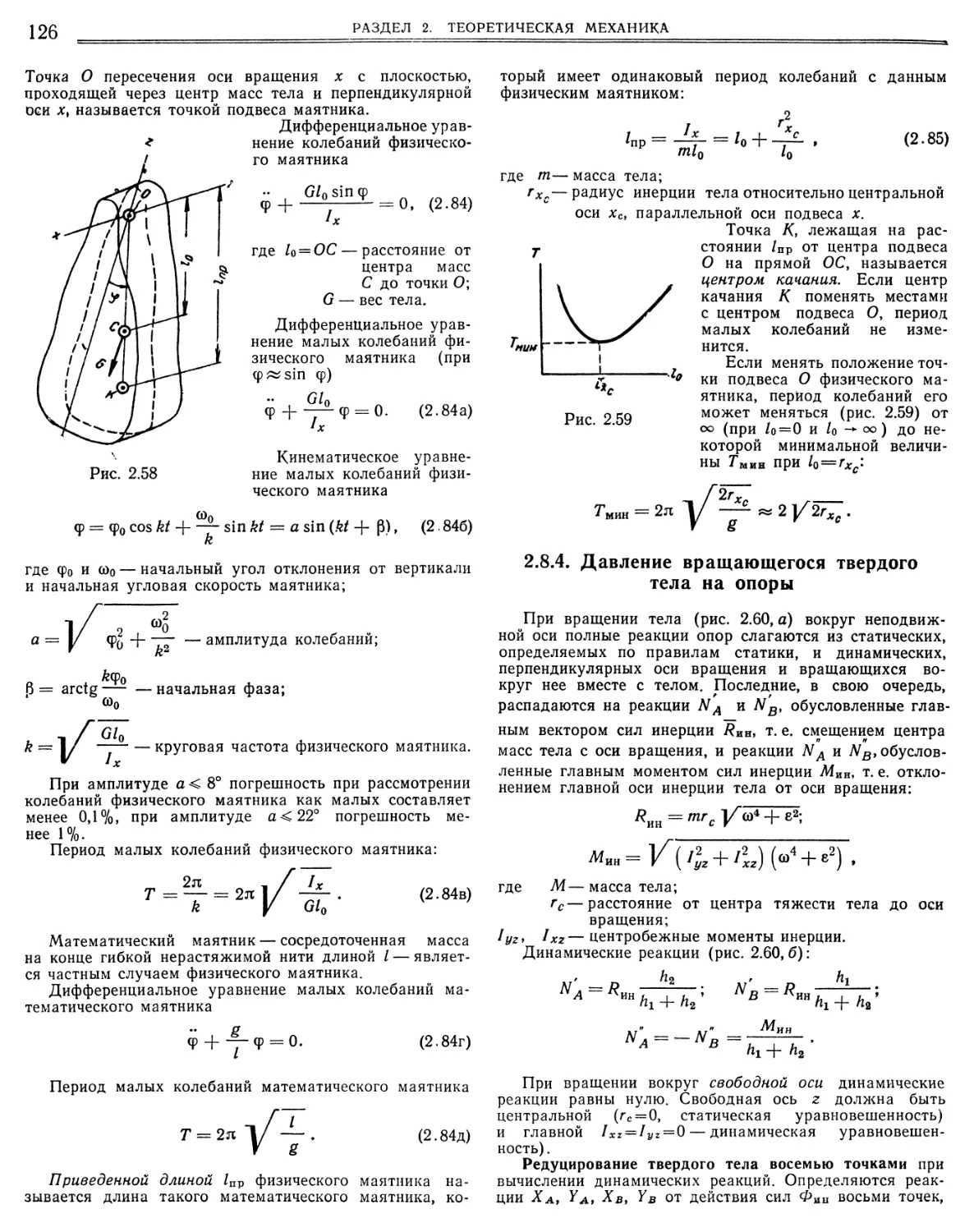
2.8.3. Физический и математический маятник.
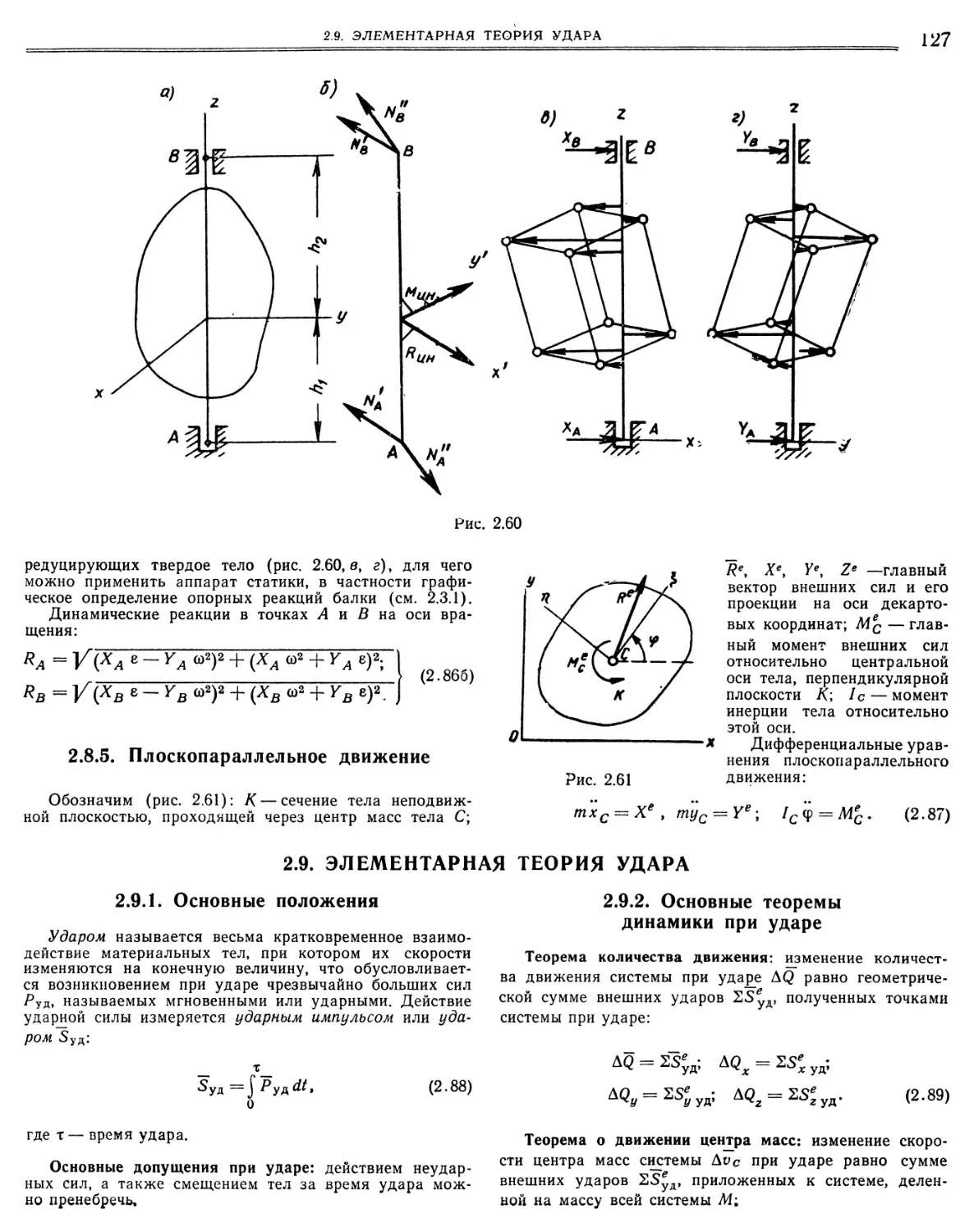
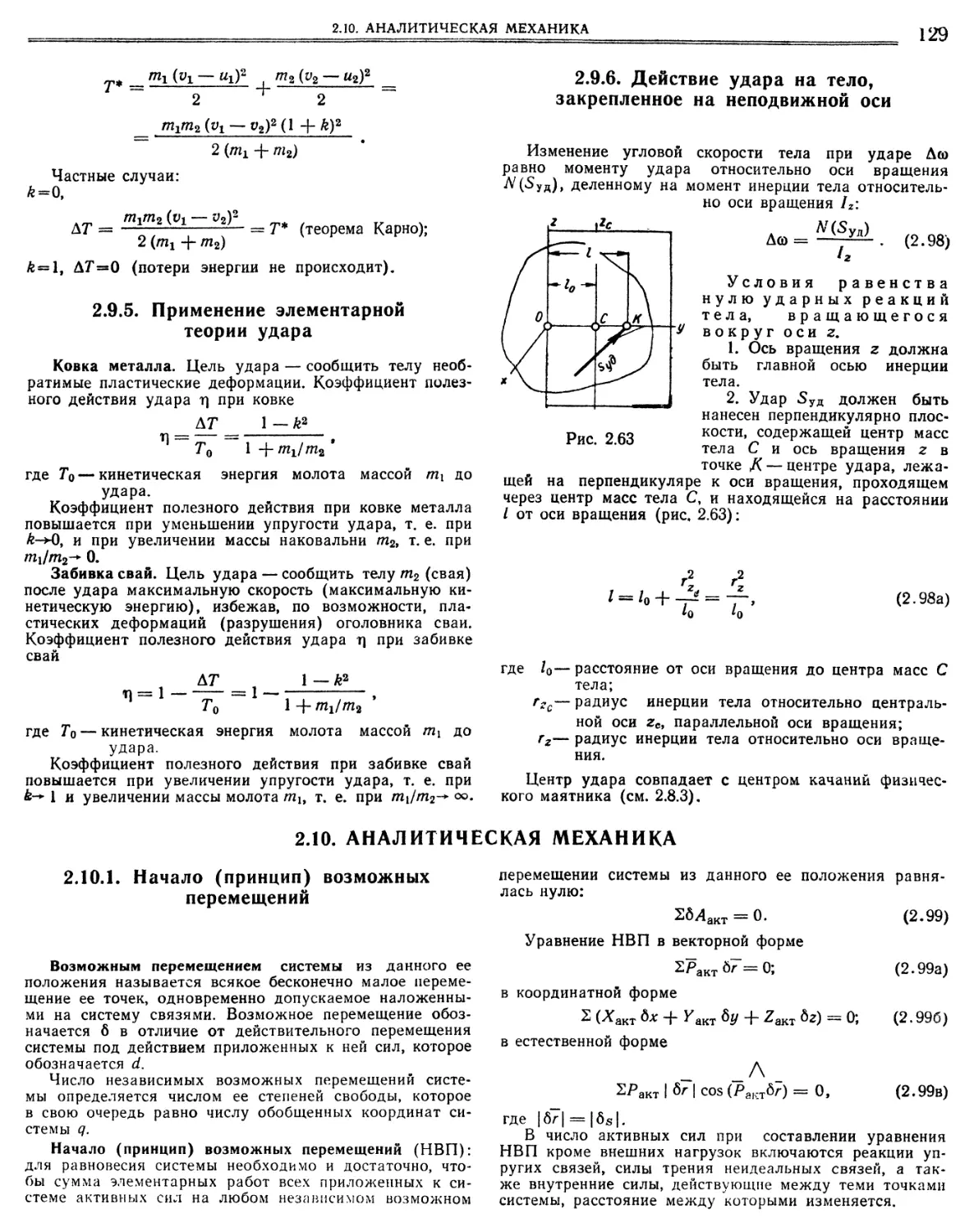
2.8.4. Давление вращающегося твердого тела на опоры
2.8.5. Плоско-параллельное движение, А.
2.9. Элементарная теория удара.
2.9.1. Основные положения 2.9 2. Основные теоремы динамики при ударе.
2.9.3. Удар тела о неподвижную поверхность.
2.9.4. Прямой центральный удар двух тел.
2.9.5. Применение элементарной теории удара.
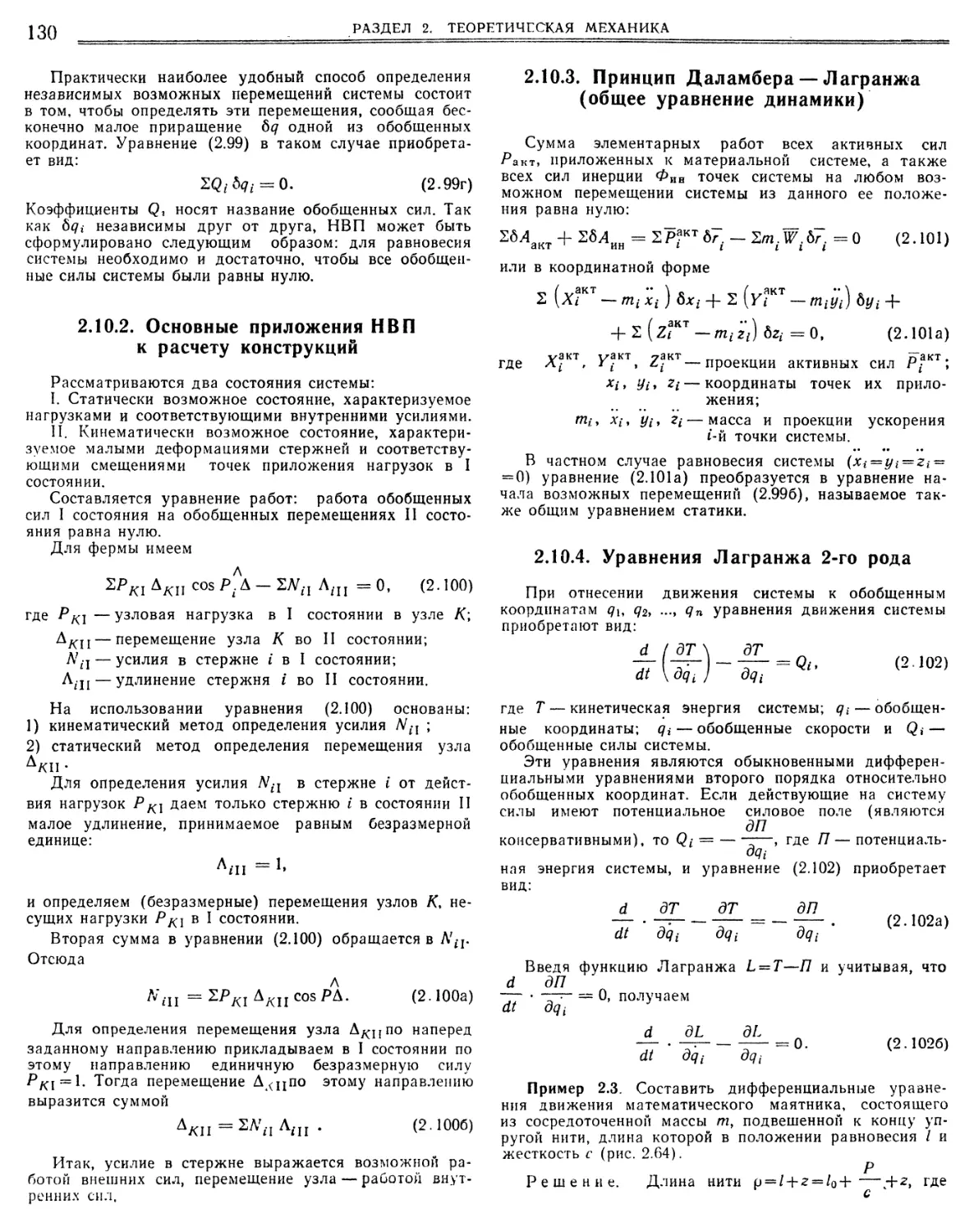
2.9.6. Действие удара на тело, закрепленное на непод вижной оси
82 2.10. Аналитическая механика
2.10.1. Начало (принцип) возможных перемещений
2.10.2. Основные приложения НВП к расчету конструкций
2.10.3. Принцип Даламбера—Лагранжа (общее уравне
ние динамики) ,.2.10.4. Уравнения Лагранжа 2-го рода •,.»
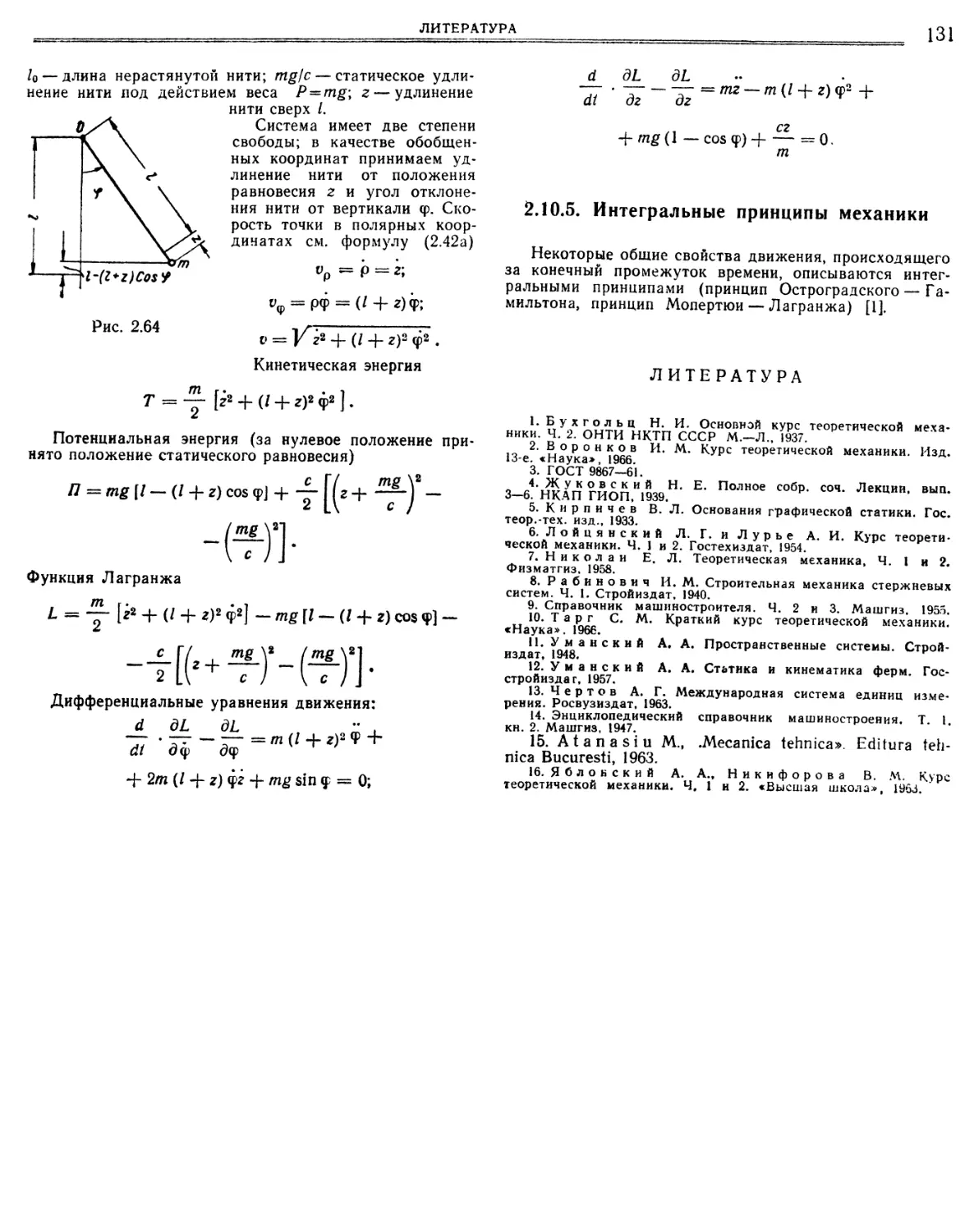
2.10.5. Интегральные принципы механики.
И. И. Трапезин
упругих
Стр.
ИЗ
113
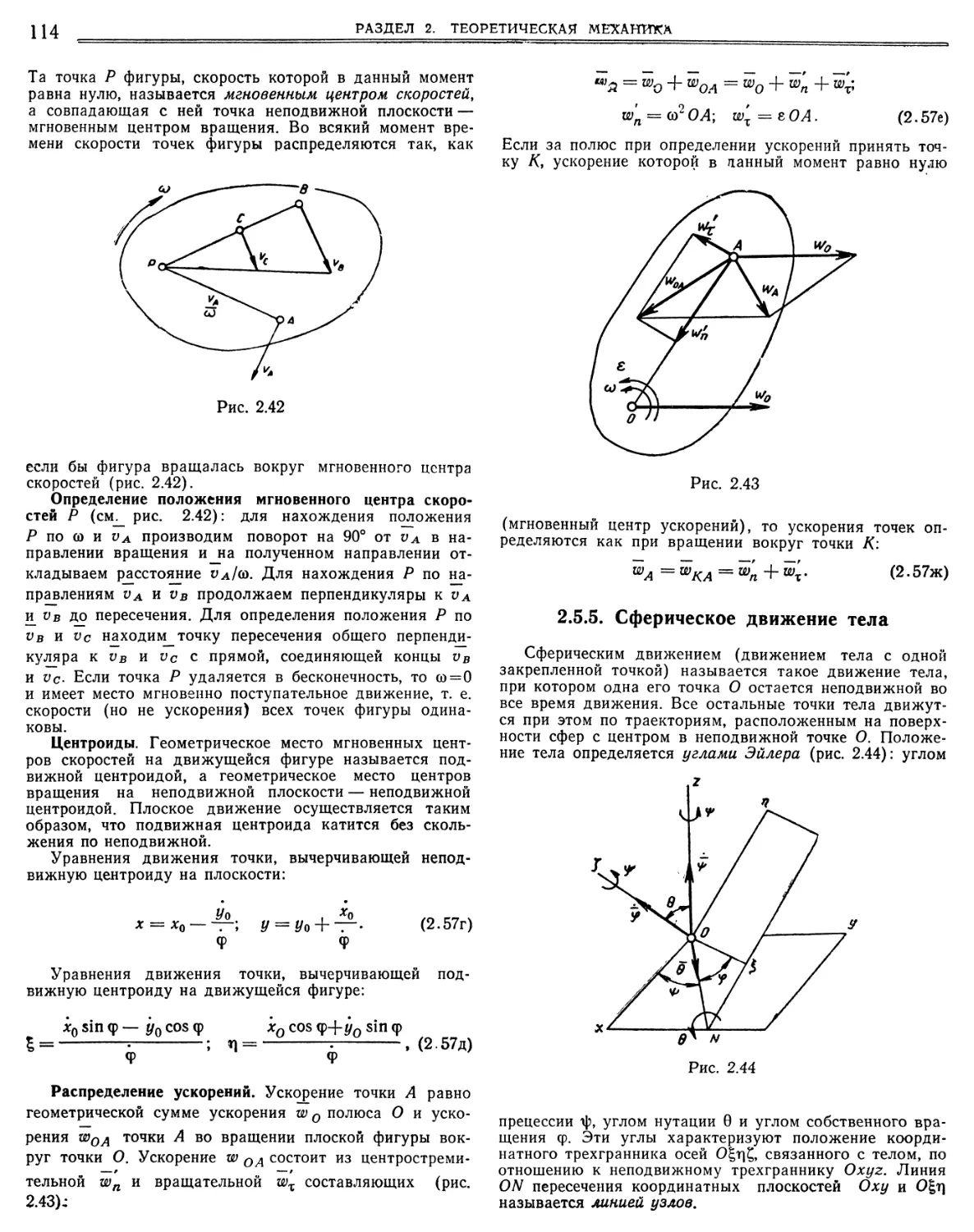
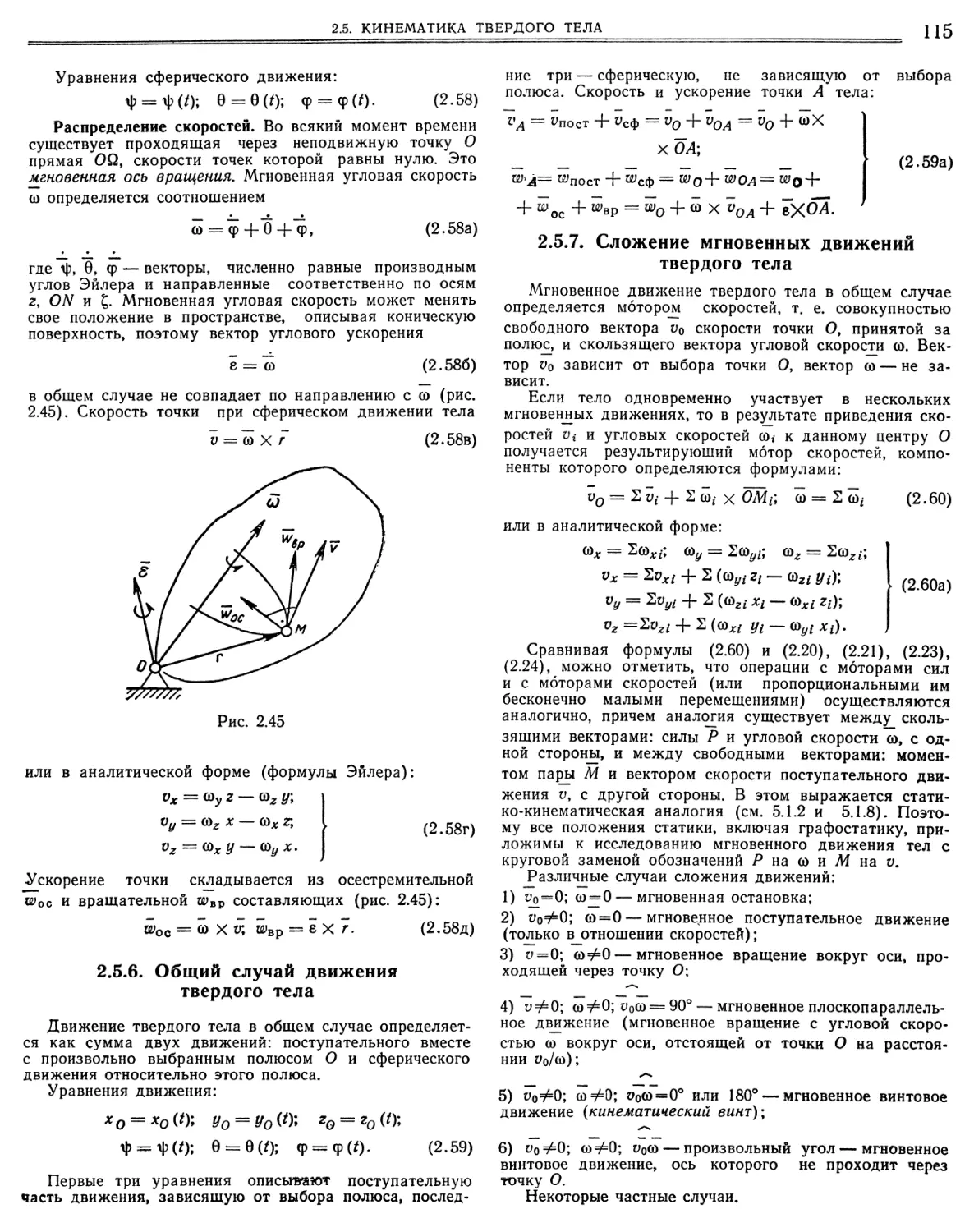
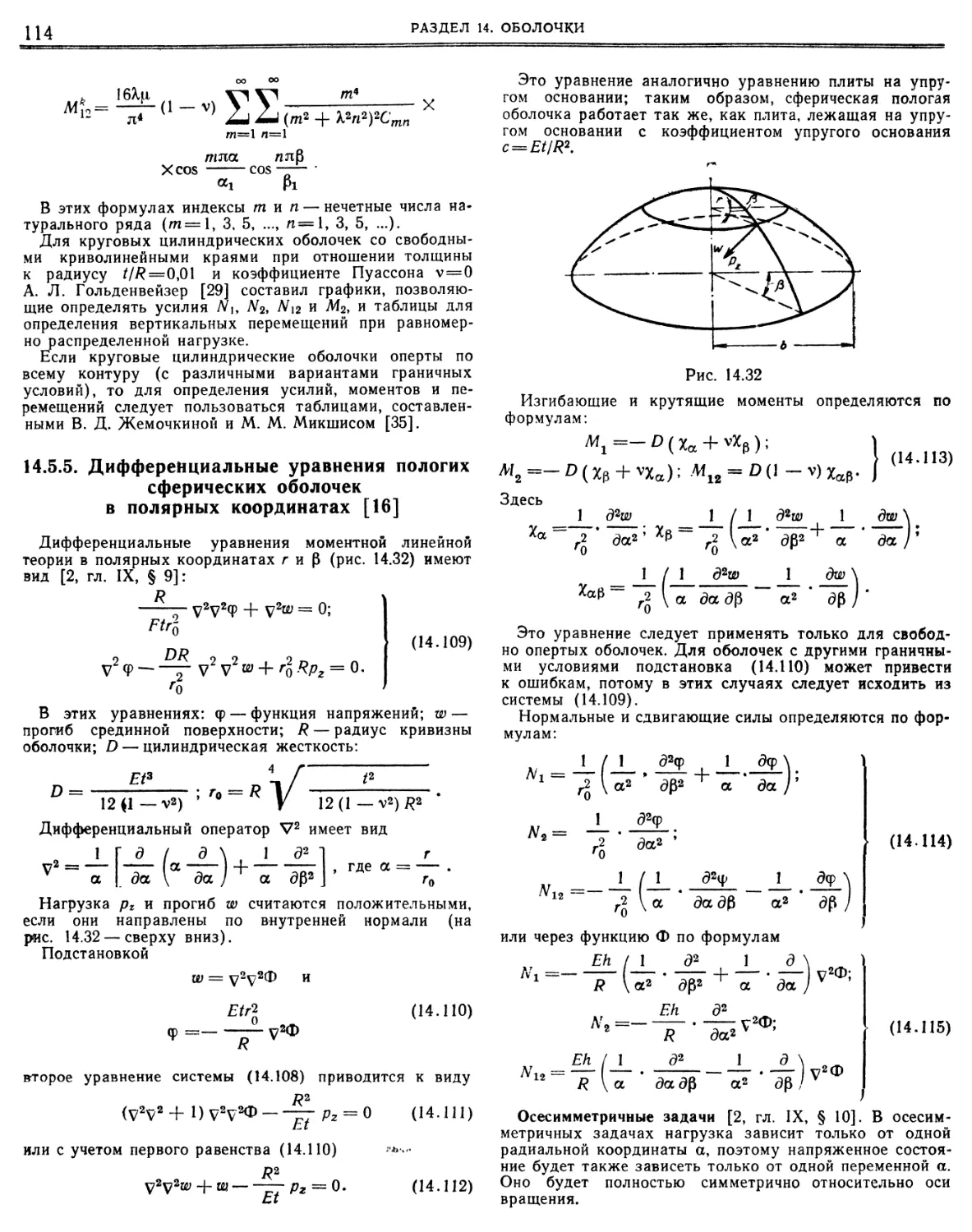
114
115
115
116
117
117
118 118 118
119
119
121
122
122
122
125
125
126 127
127
127
127
128 128 129
129
129
139
130
130
130
131
Литература 13
РАЗДЕЛ з
НАПРЯЖЕНИЯ, ДЕФОРМАЦИИ, ПРОЧНОСТЬ МАТЕРИАЛОВ
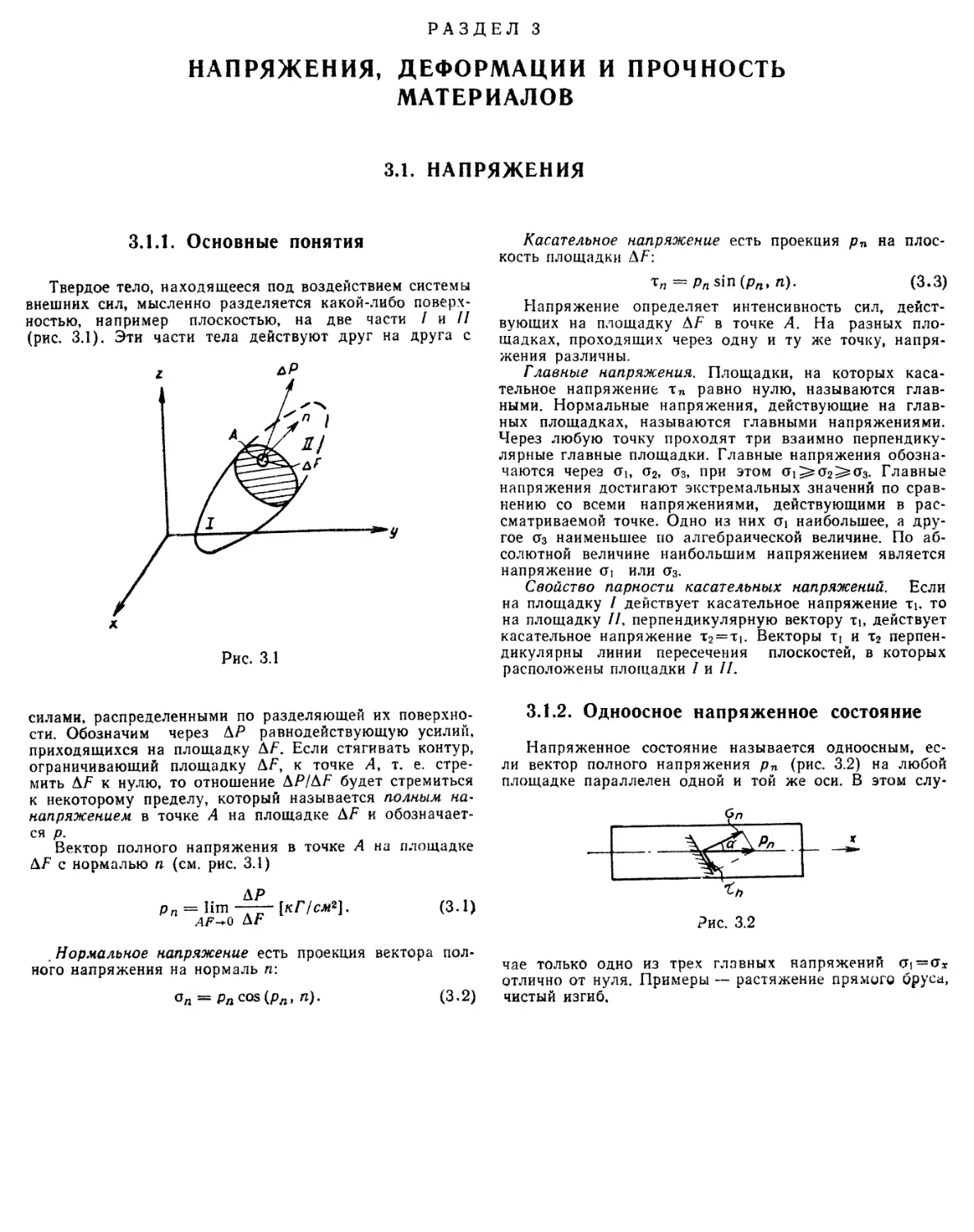
3.1. Напряжения 3.1.1. Основные понятия. 3.1.2. Одноосное напряженное состояние.
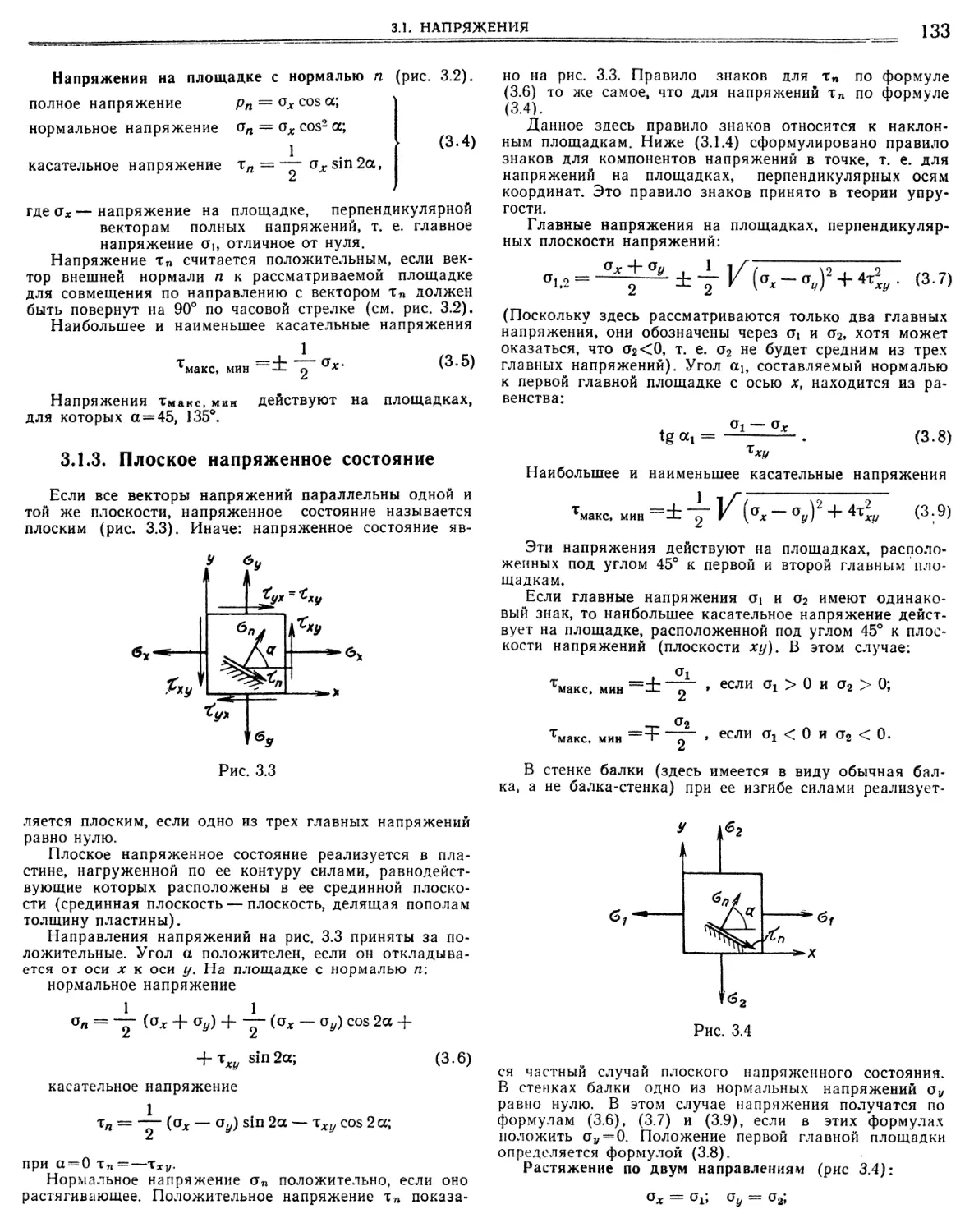
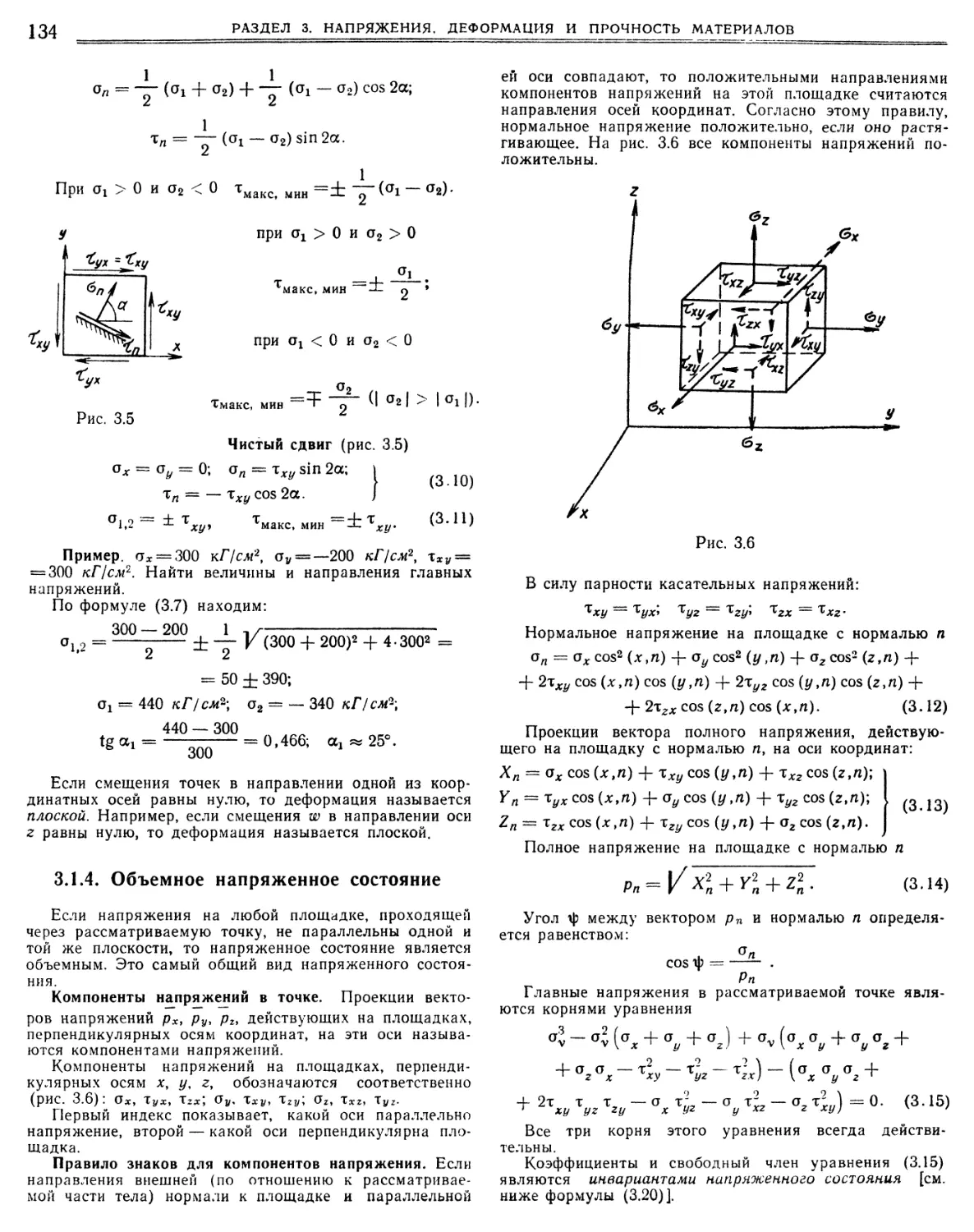
3.1.3. Плоское напряженное состояние 3.1.4. Объемное напряженное состояние 3.1.5. Преобразование компонентов напряжения к но
вым осям координат 3.1.6. Интенсивность напряжений в данной точке
3.1.7. Круги Мора ■
3.2. Деформации., 3.2.1. Компоненты деформаций
3.2.2. Определение деформаций и величин главных уд
линений по удлинениям в трех направлениях случае плоской деформации « • «
3.2.3. Интенсивность деформаций. - •
3.3. Зависимости между напряжениями и дефор
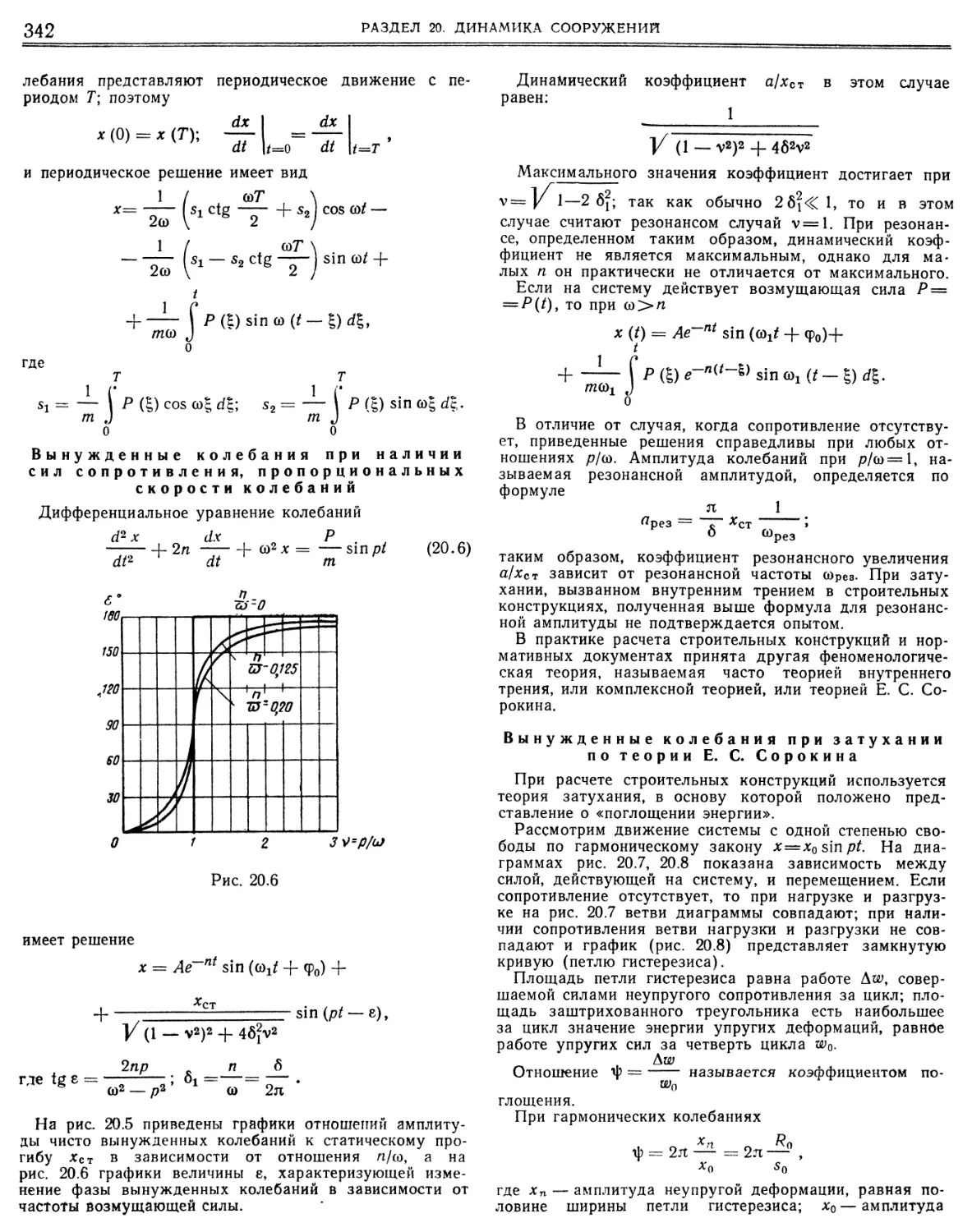
мациями в пределах упругости.,
3.3.1. Закон Гука для изотропного тела • • •
3.3.2. Закон Гука для анизотропного тела «.
3.3.3. Плоскость симметрии в отношении свойств
3.3.4. Ортотропное упругое тело
3.3.5. Потенциальная энергия упругого тела.
3.4. Связь между напряжениями и деформациями
за пределами упругости. 3.4.1. Условия пластичности
132
132
132
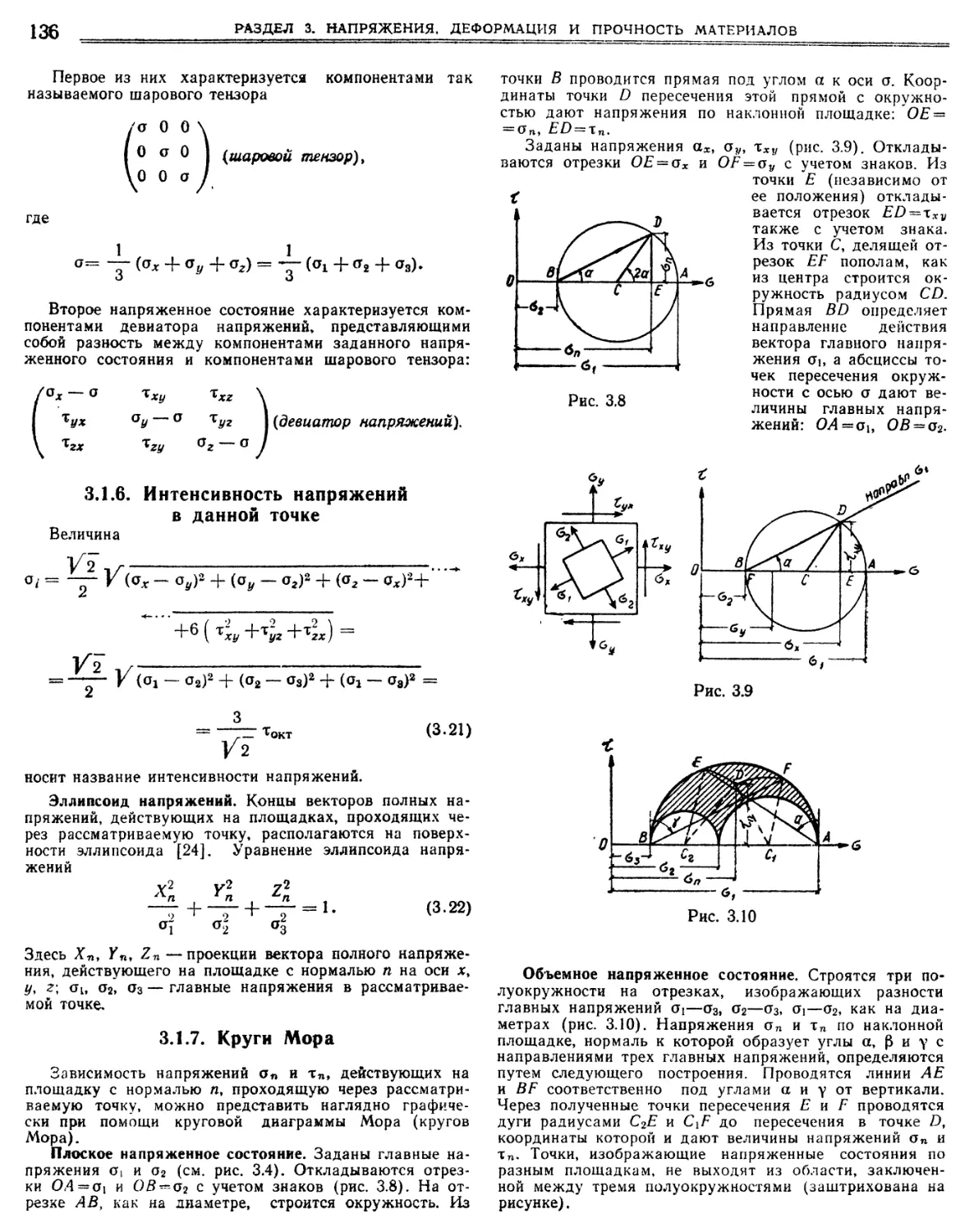
135
13 4
135
136
136
137
137
137
138
138
140
140
140
141
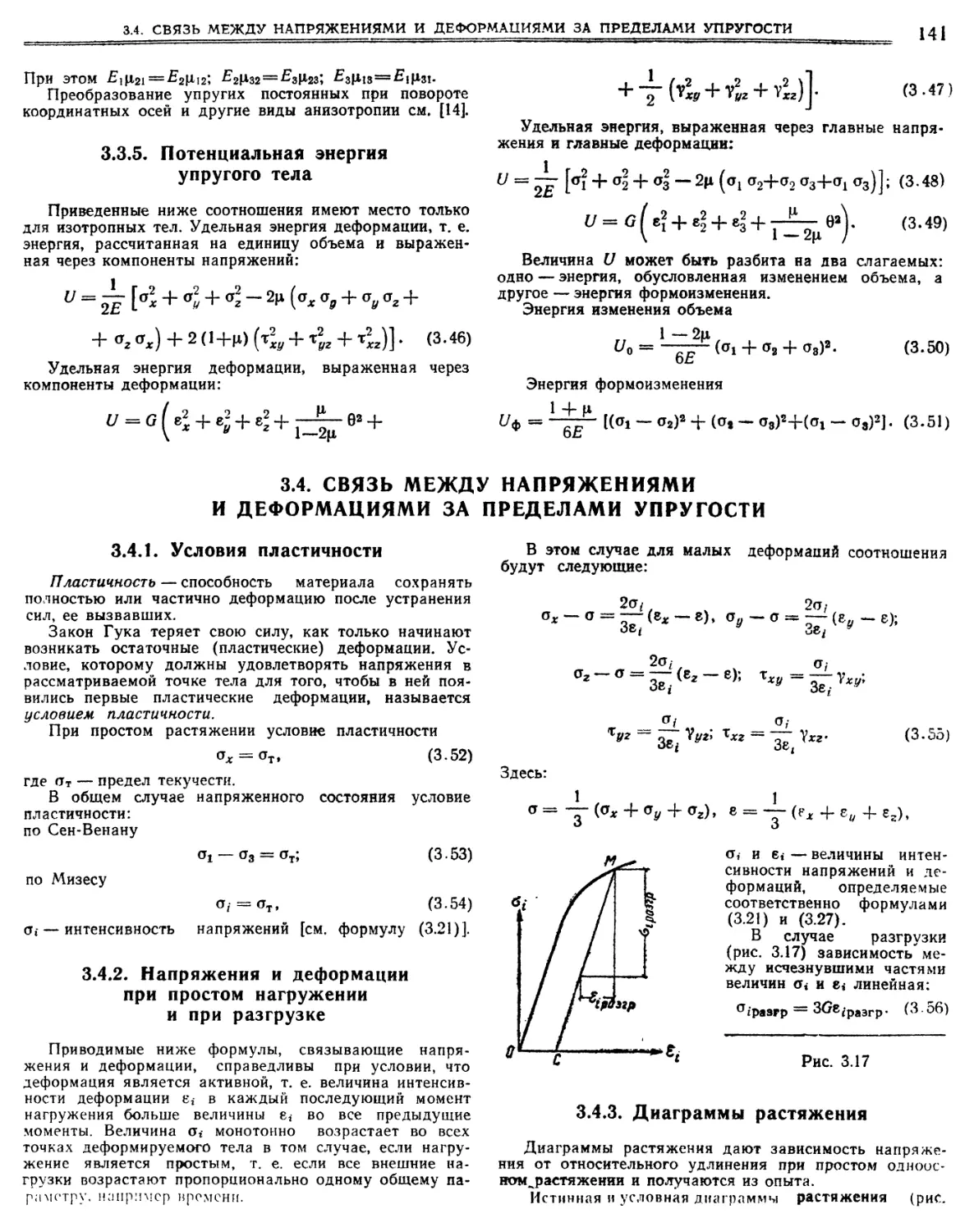
141
Ш
ОГЛАВЛЕНИЕ
5
Стр.
3.4.2. Напряжения и деформации при простом нагруже
нии и при разгрузке. „ 3.4.3. Диаграммы растяжения
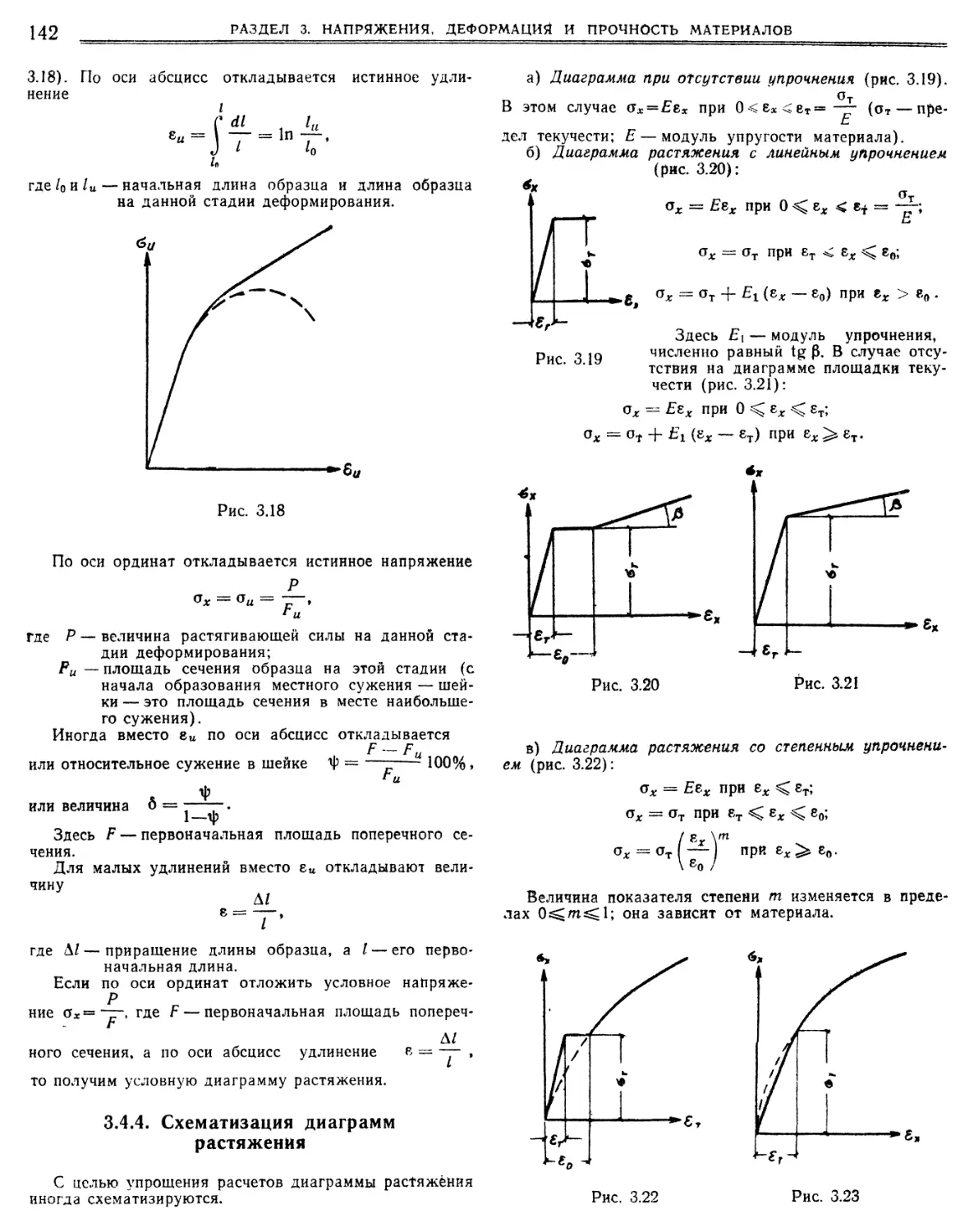
3.4.4. Схематизация диаграмм растяжения.
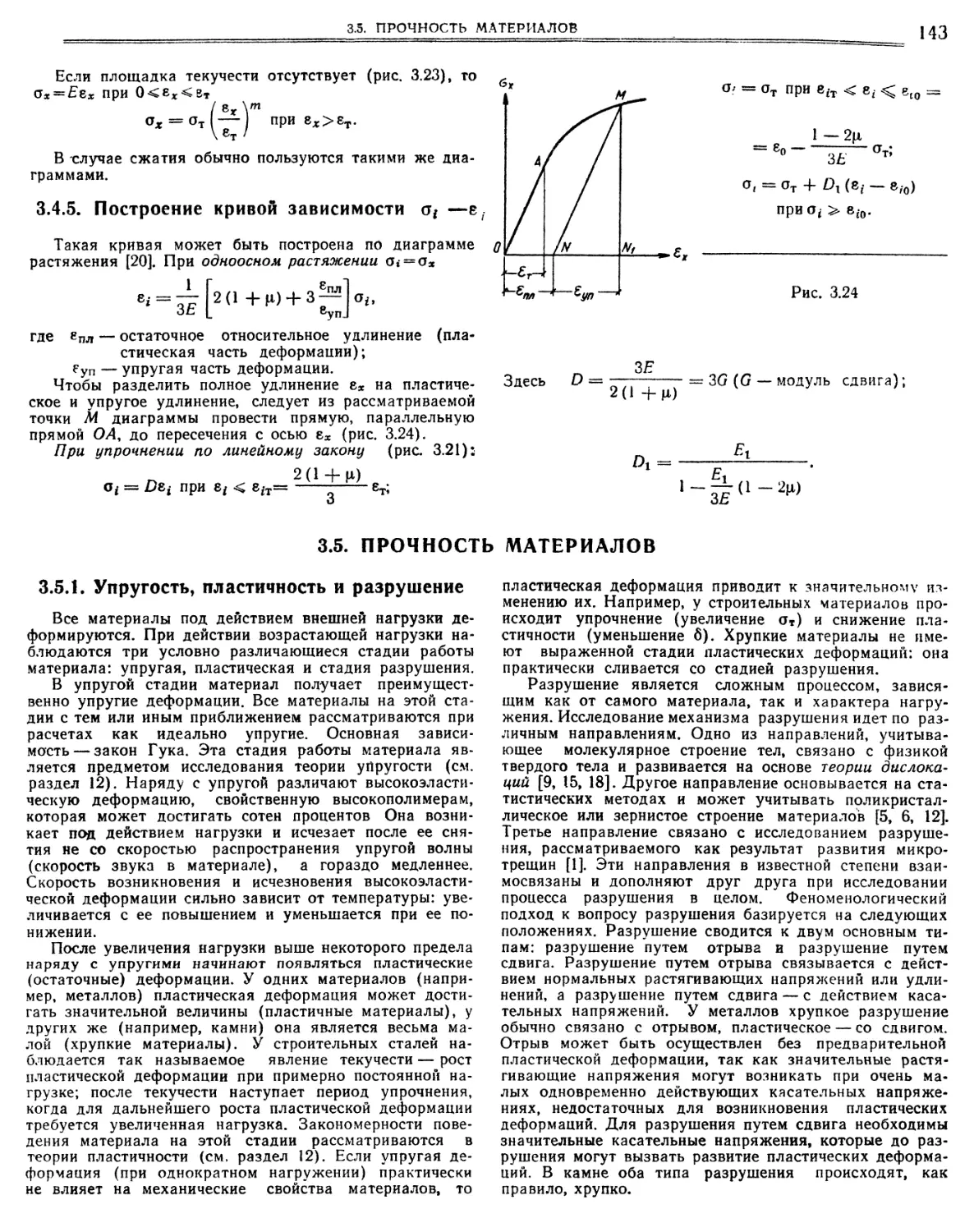
3.4.5. Построение кривой зависимости о—8 ,.3.5. Прочность материалов (А. И. Коданев)
3.5.1. Упругость, пластичность и разрушение.
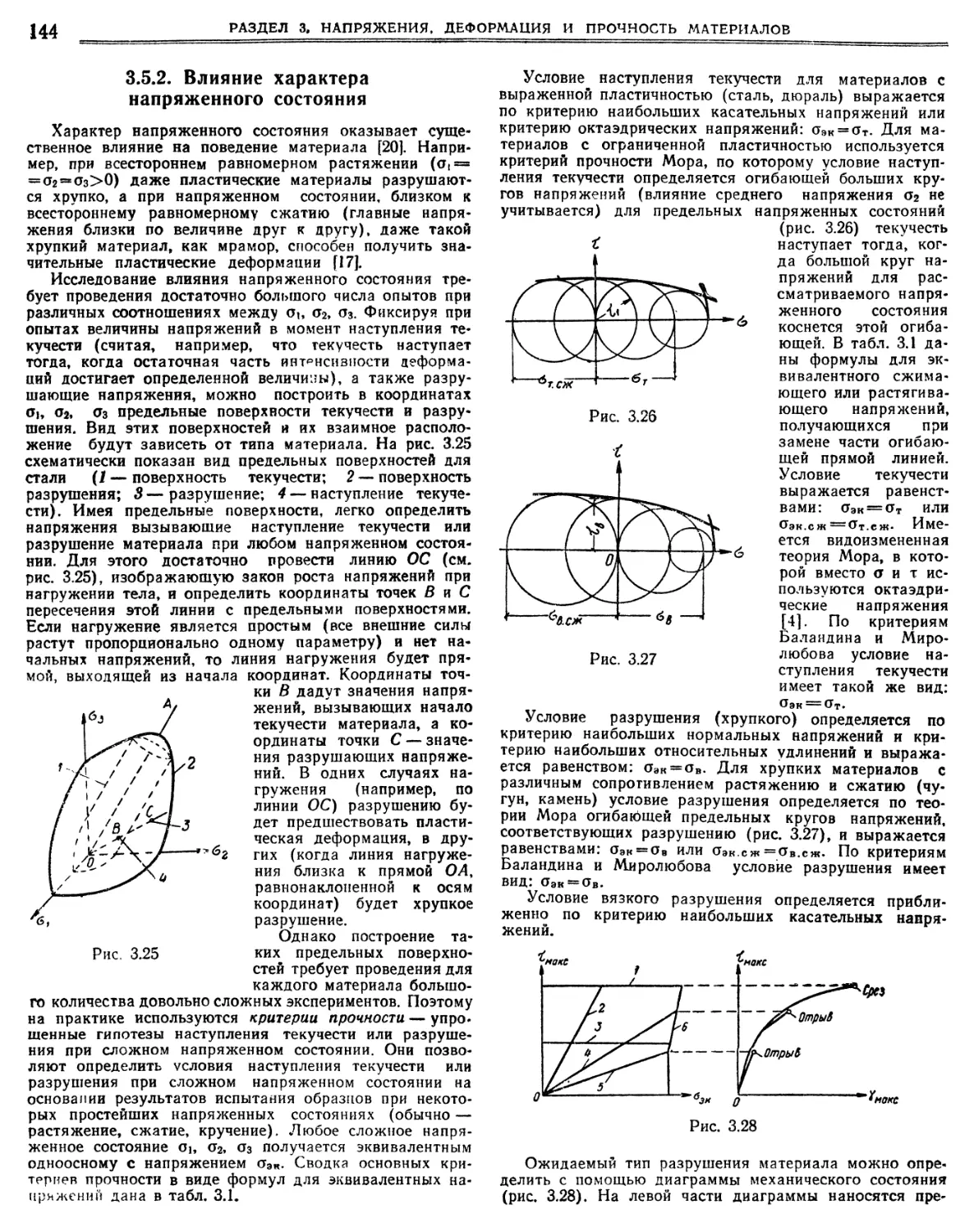
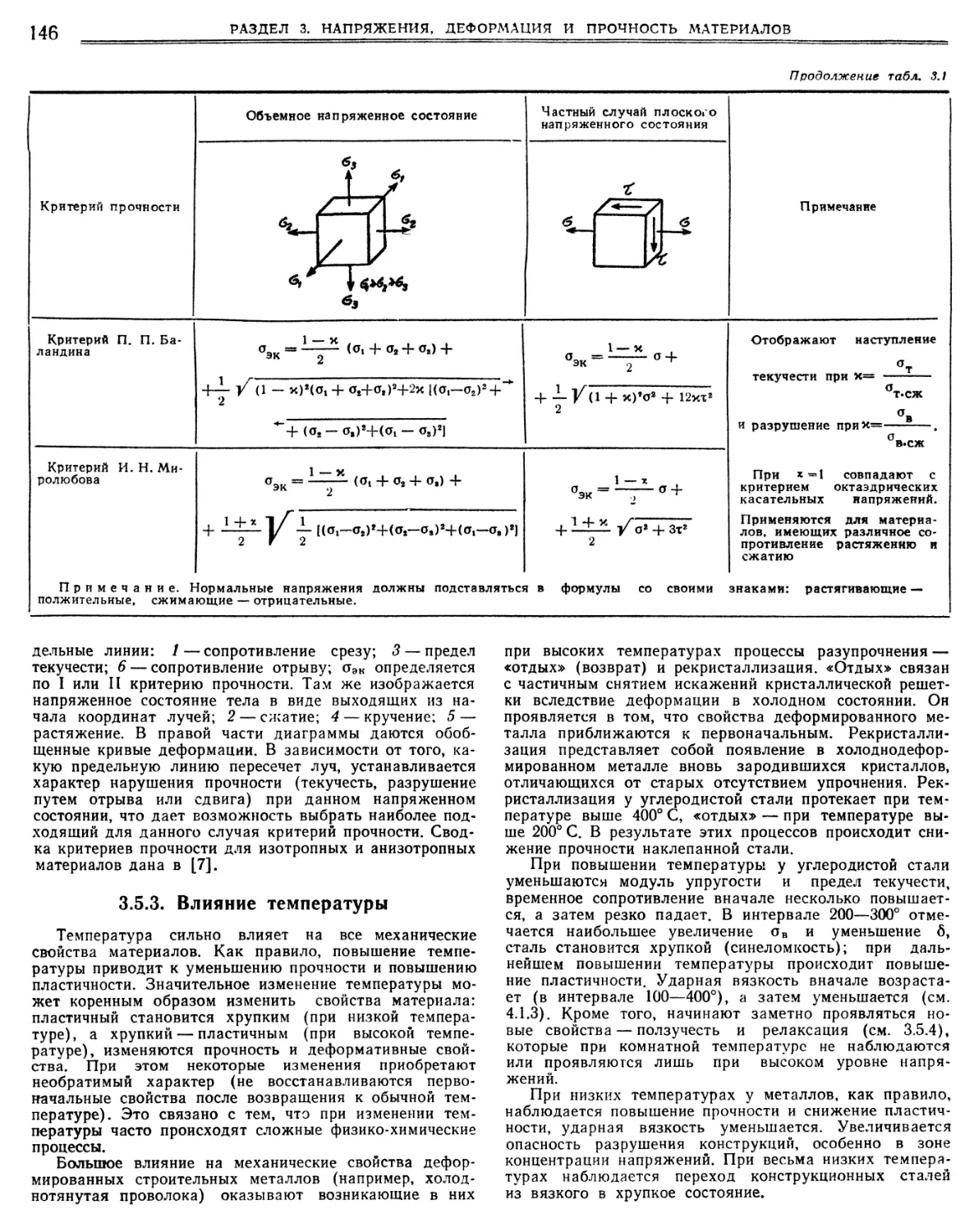
3.5.2. Влияние характера напряженного состояния
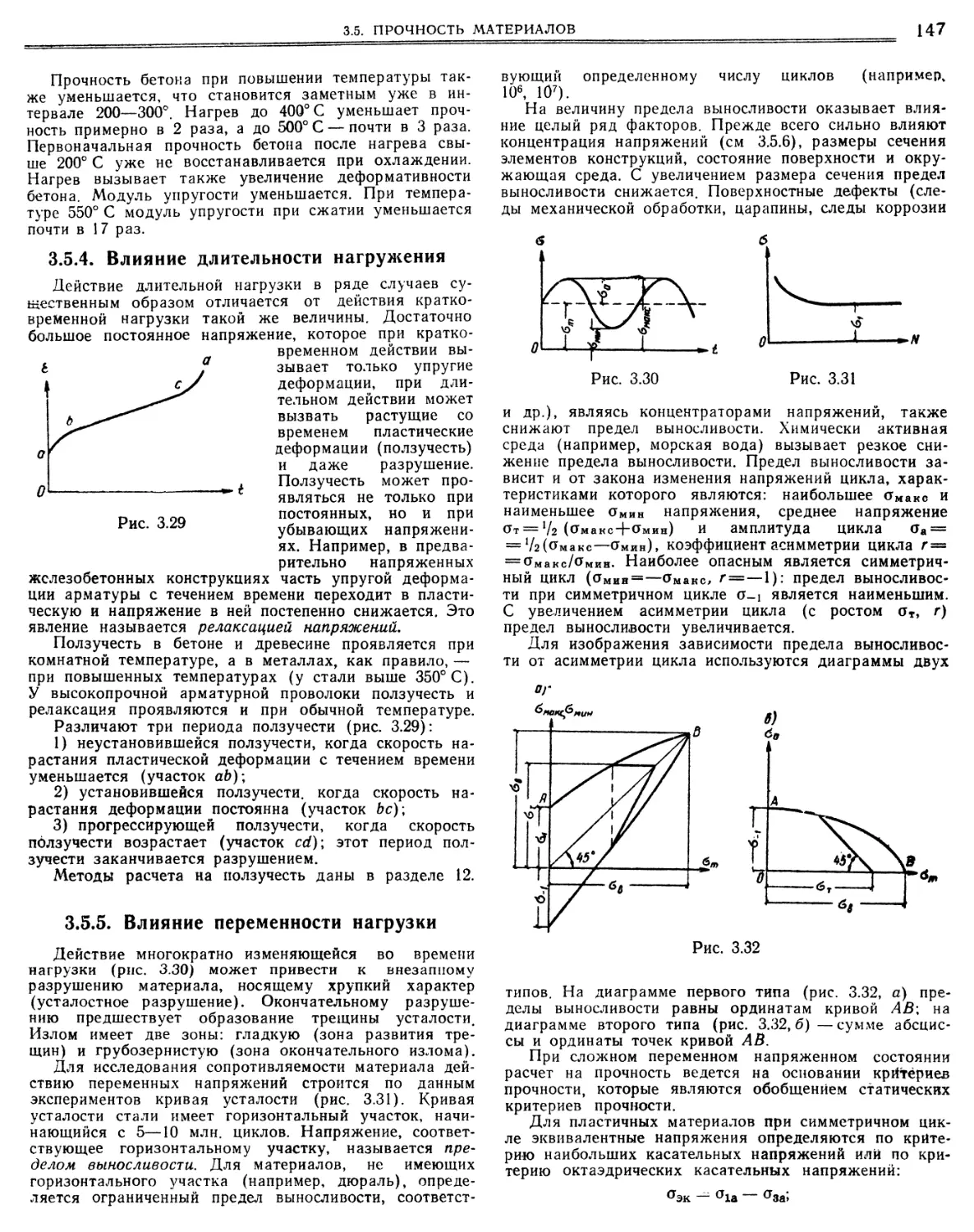
3.5.3. Влияние температуры. 3.5.4. Влияние длительности нагружения • .
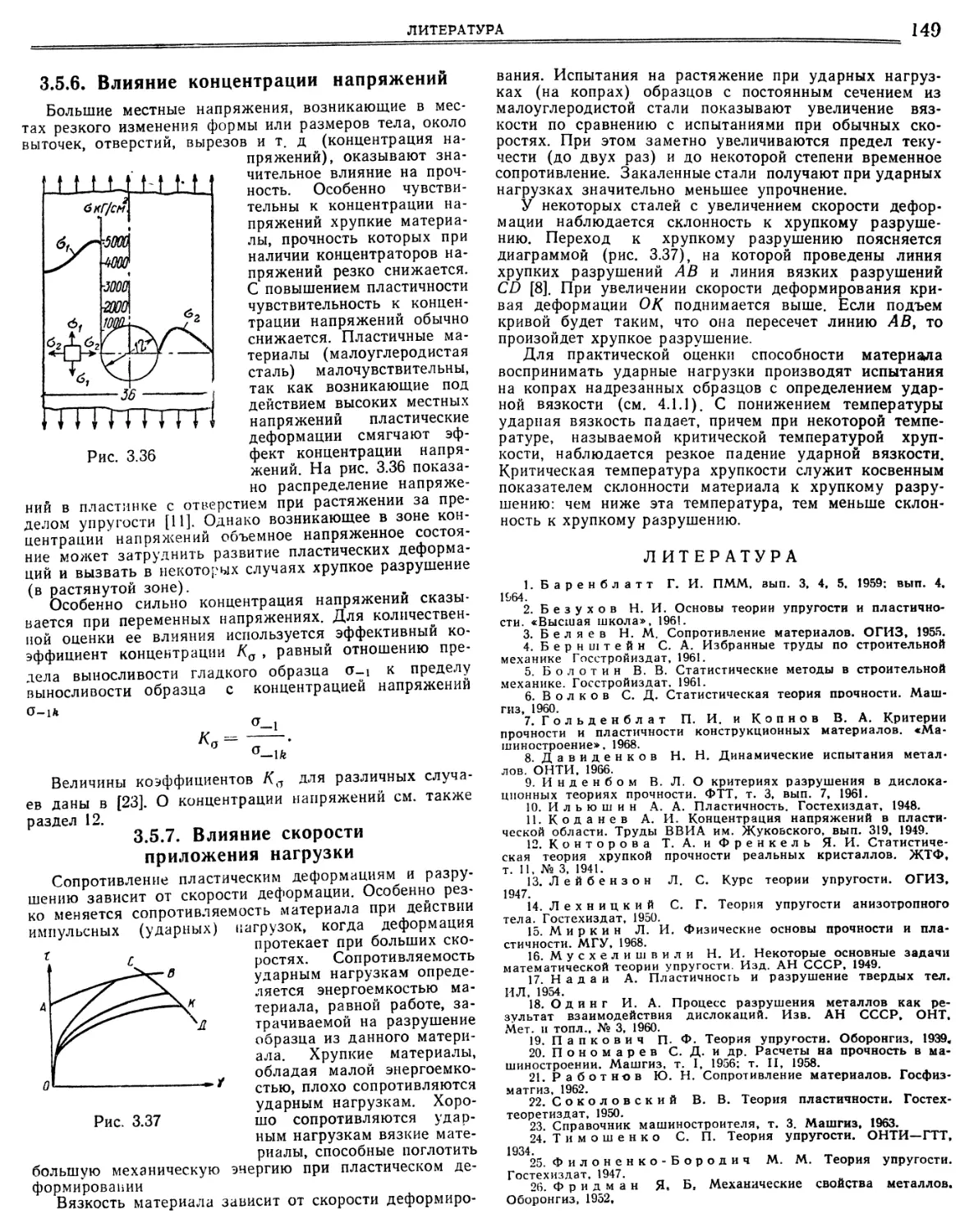
3.5.5. Влияние переменности нагрузки.»
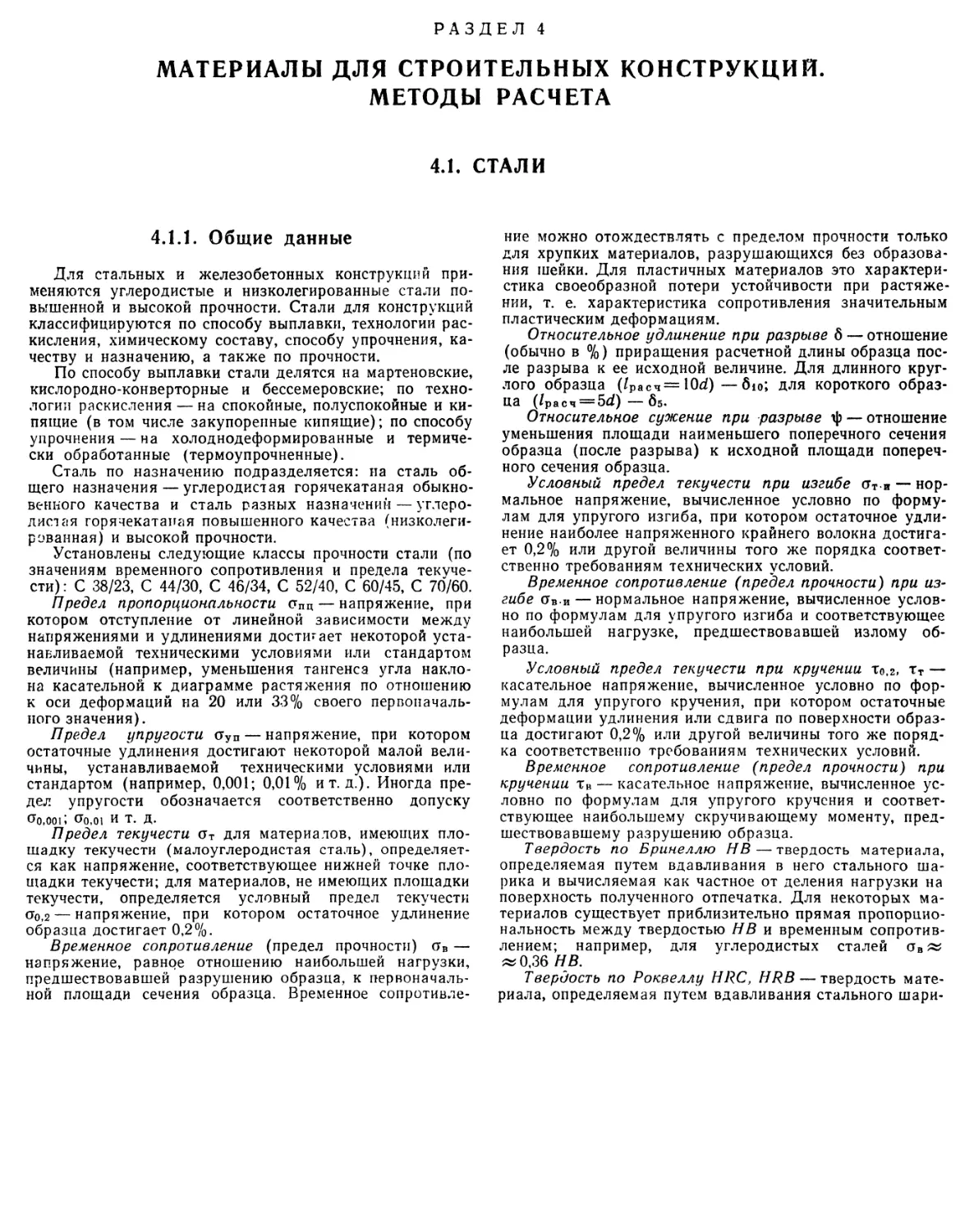
3.5.0. Влияние концентрации напряжений.
3.5.7. Влияние скорости приложения нагрузки
Литература
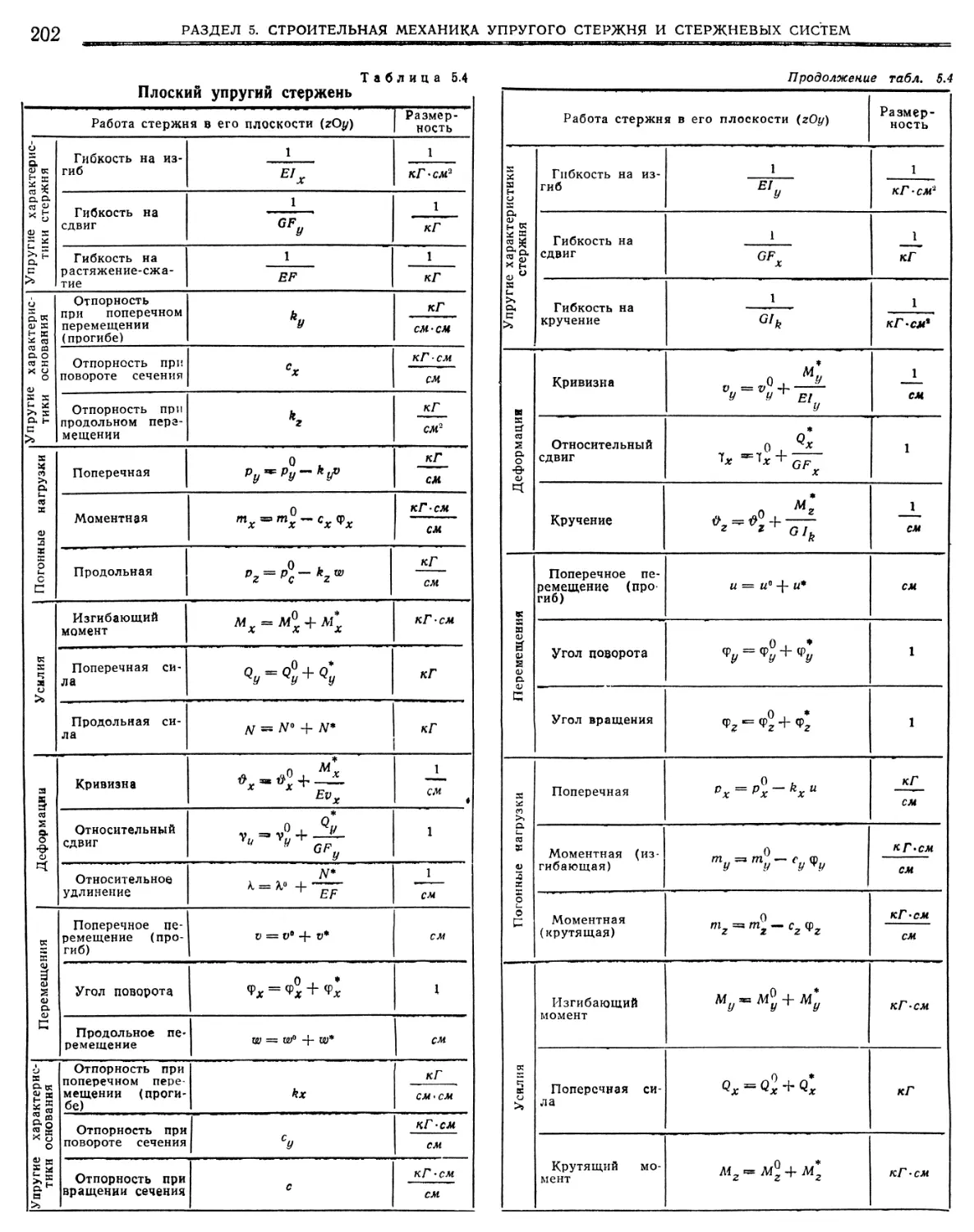
5.1. Основные положения технической теории стер жня •
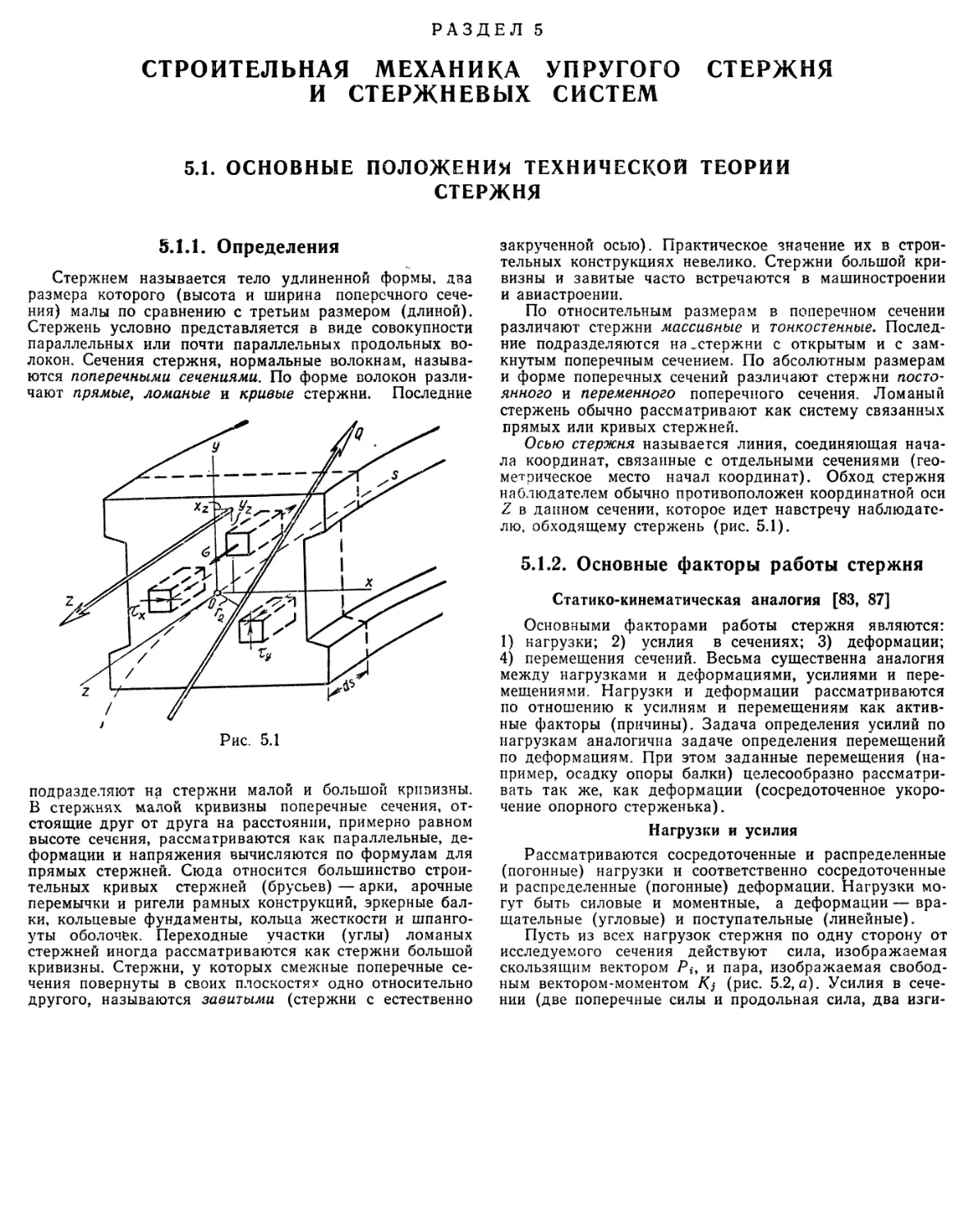
5.1.1. Определения
5.1.2. Основные факторы работы стержня. Статико-ки
нематическая аналогия., » 5.1.3. Интегральные соотношения между напряжениями и усилиями в поперечных сечениях « » .5.1.4. Соответствующие силы и перемещения, усилия
сосредоточенные деформации 5.1.5. Начальная, температурная и упругая распреде ленные деформации
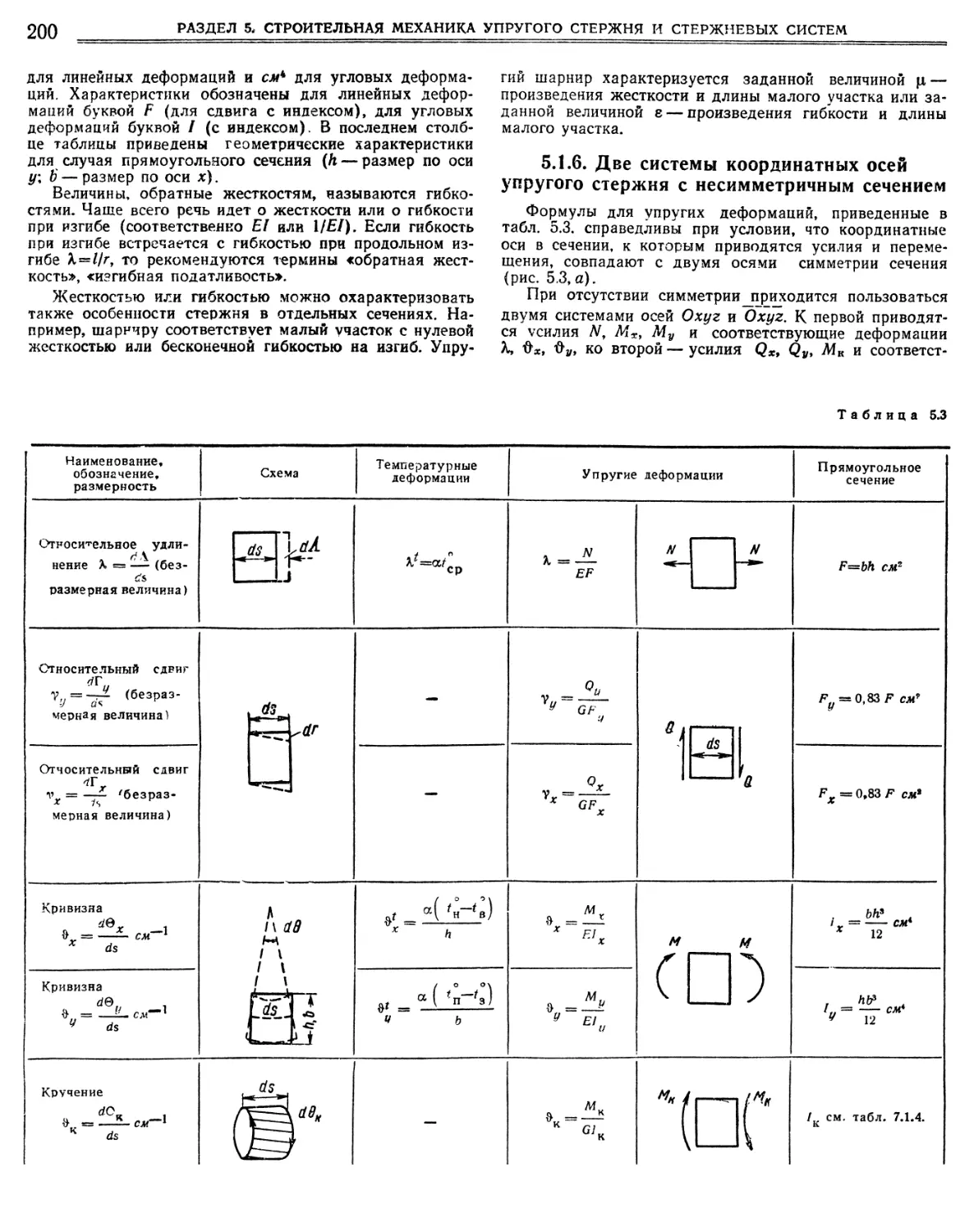
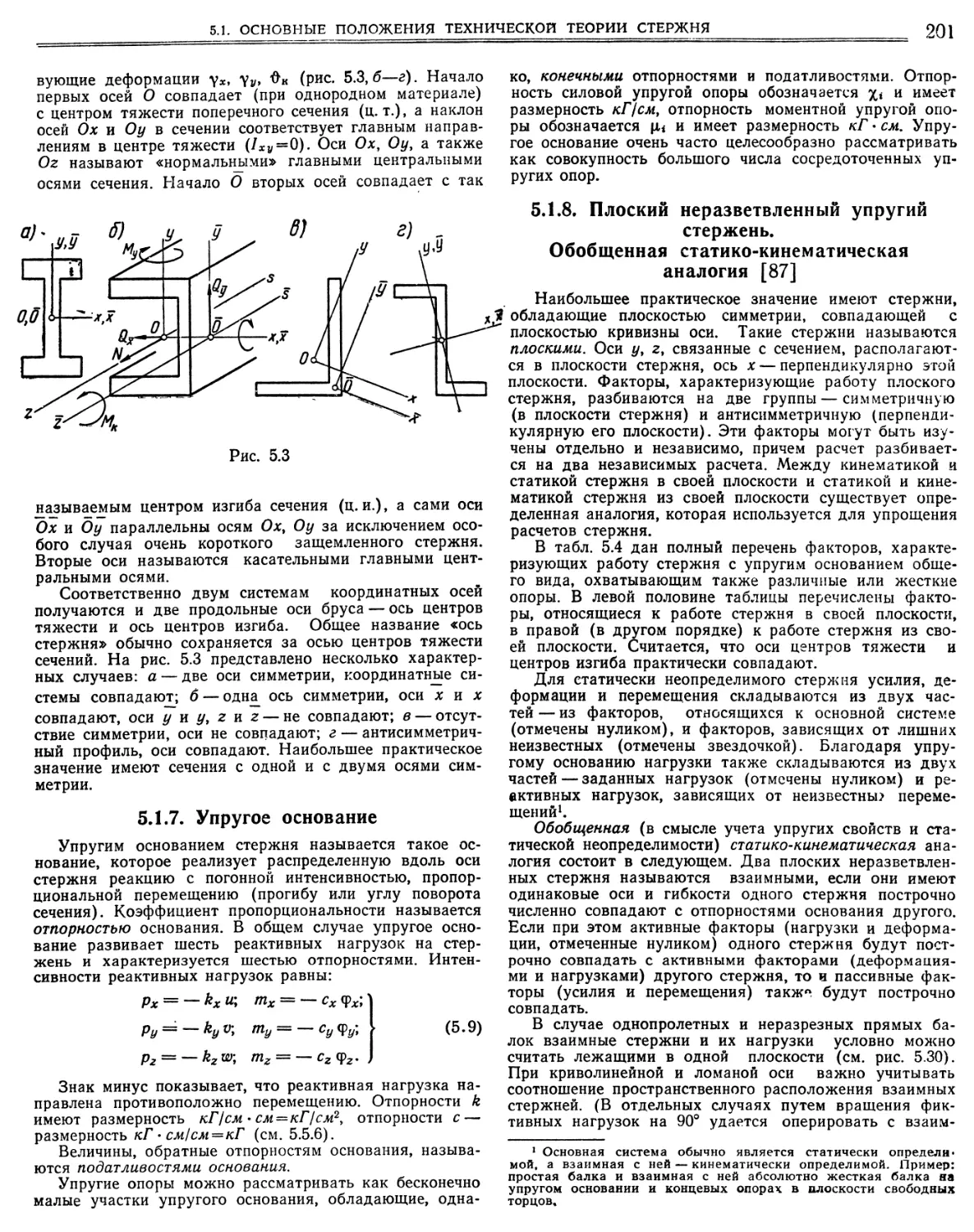
5.1.6. Две системы координатных осей упругого стерж ня с несимметричным сечением ••••»•»
5.1.7. Упругое основание 5.1.8. Плоский неразветвленный упругий стержень Обобщенная статико-кинематическая аналогия
141
141
142
143
143
143
144
146
147 147 149 149
149
РАЗДЕЛ 4
МАТЕРИАЛЫ ДЛЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИИ. МЕТОДЫ РАСЧЕТА
Ю. М. Иванов, Л. В. Клепиков, В. А. Отставное, К. В. Панферов, Л. Н. Пицкель, С. А. Семенцов,
С. В. Тарановский, В. Г. Чернашкин
4.1. Стали (В. Г. Чернашкин). 150
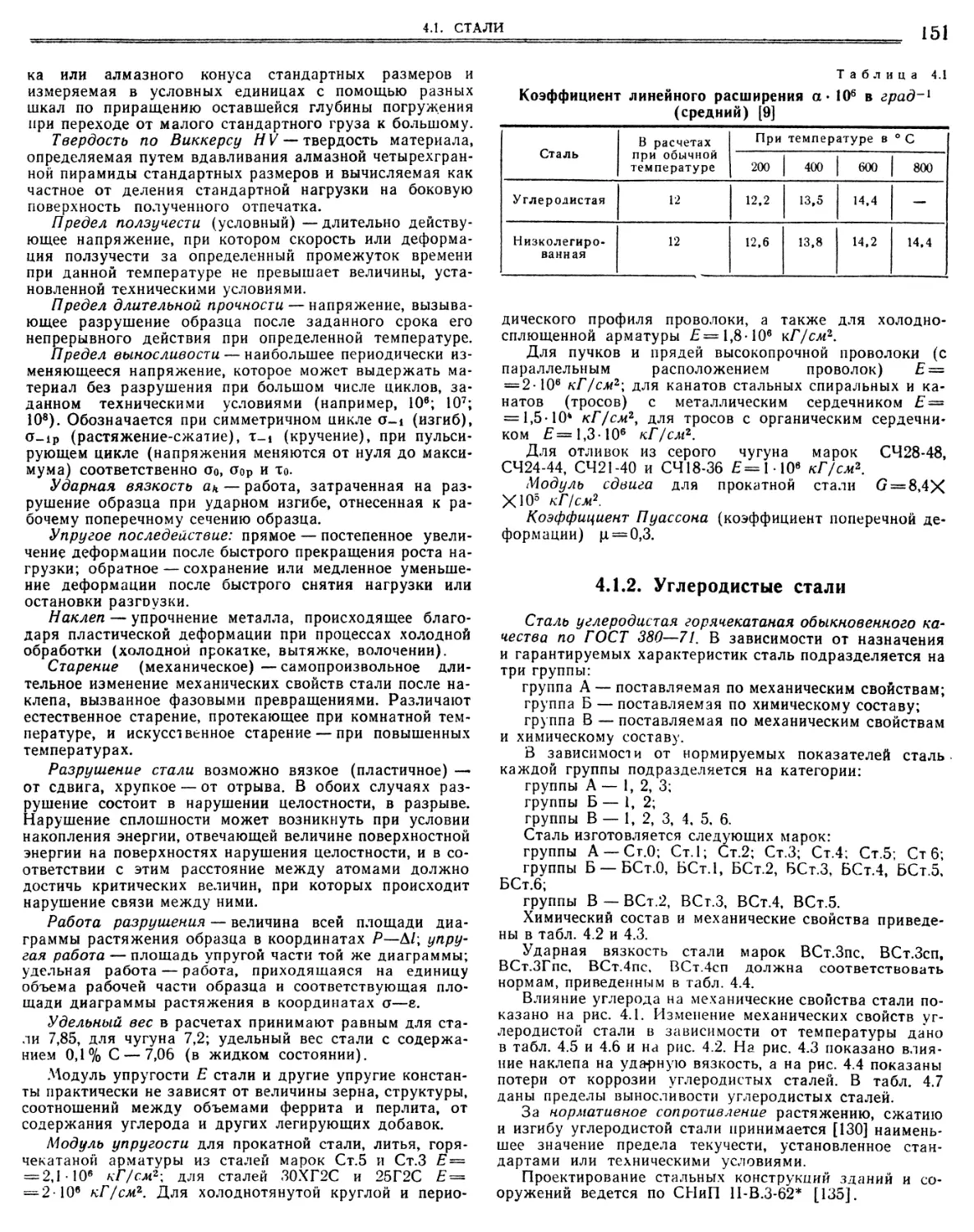
4.1.1. Общие данные 150
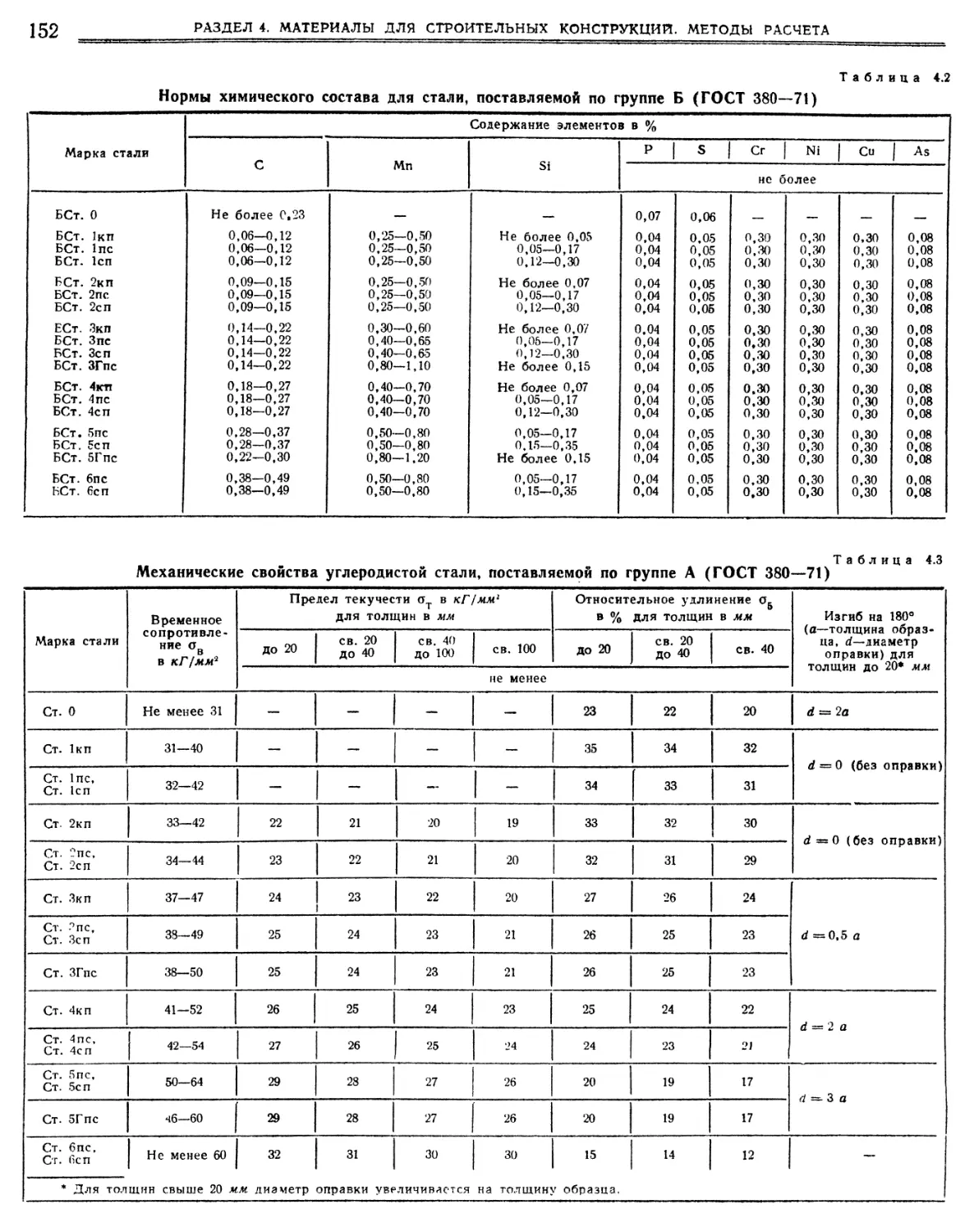
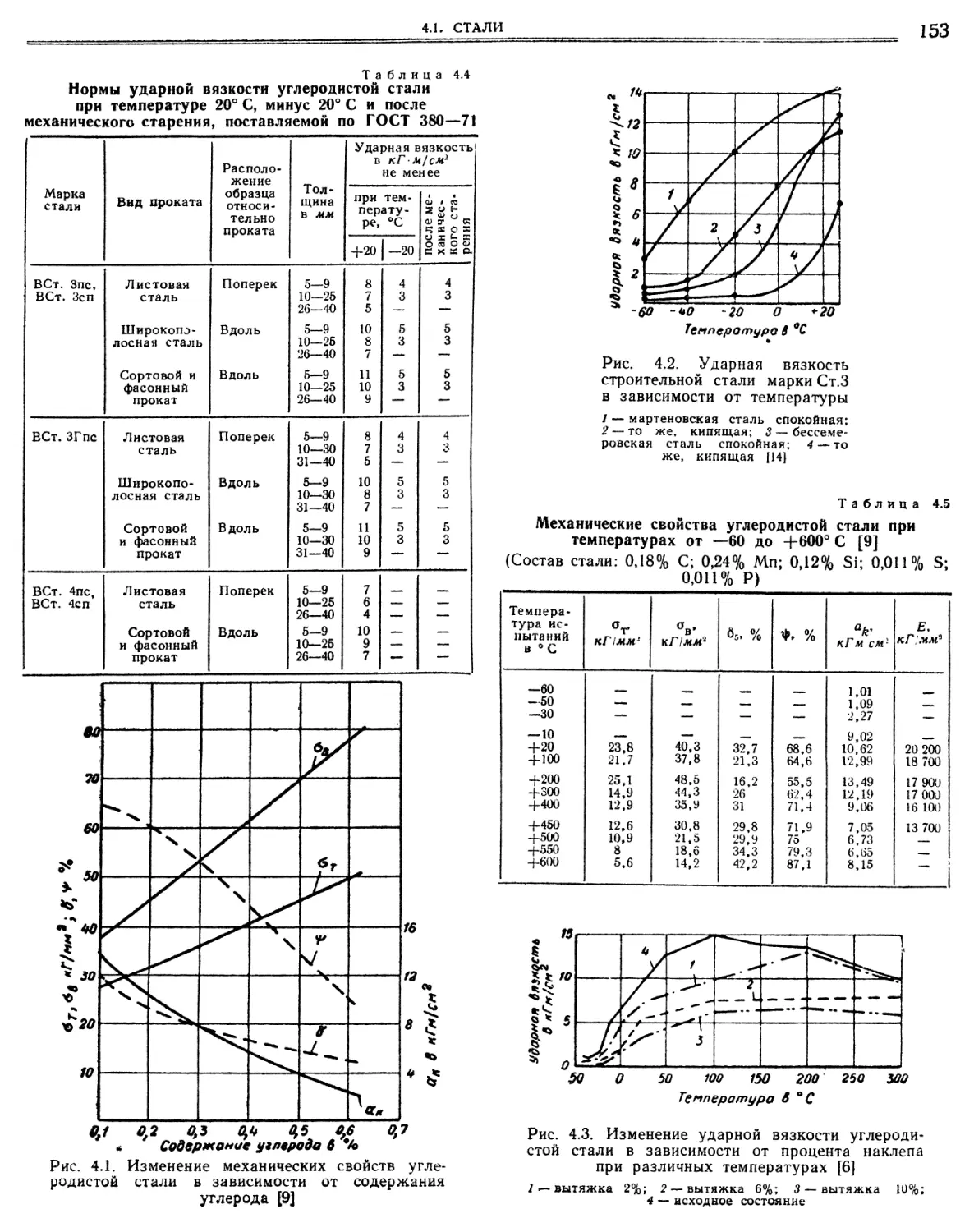
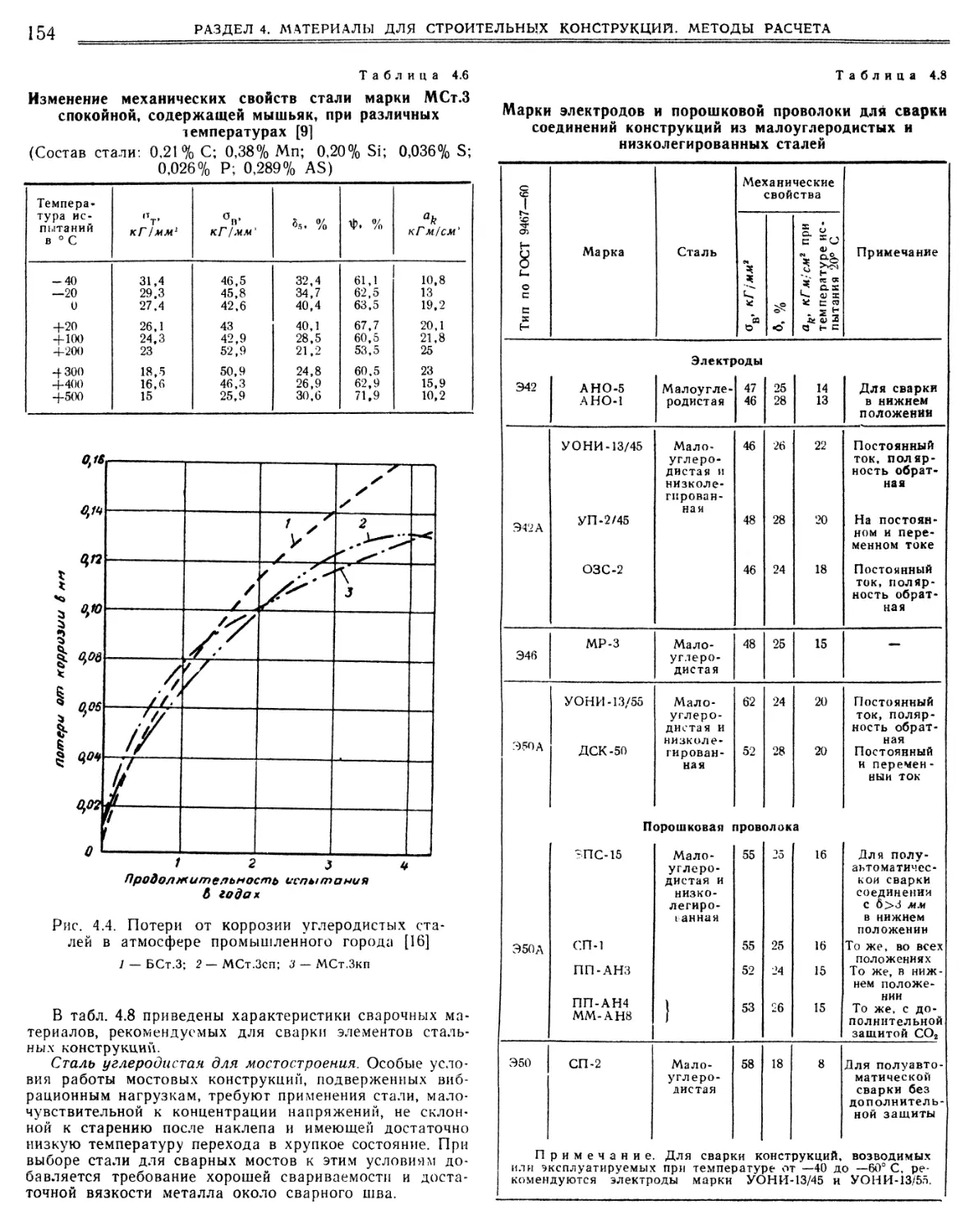
4.1.2 Углеродистые стали.,. 7., 151
4.1.3. Стали низколегированные и высокой прочности. 155
4.1.4. Сталь для арматуры железобетонных конструкций 160
4.2. Алюминиевые сплавы (С. В. Тарановский). ► 161
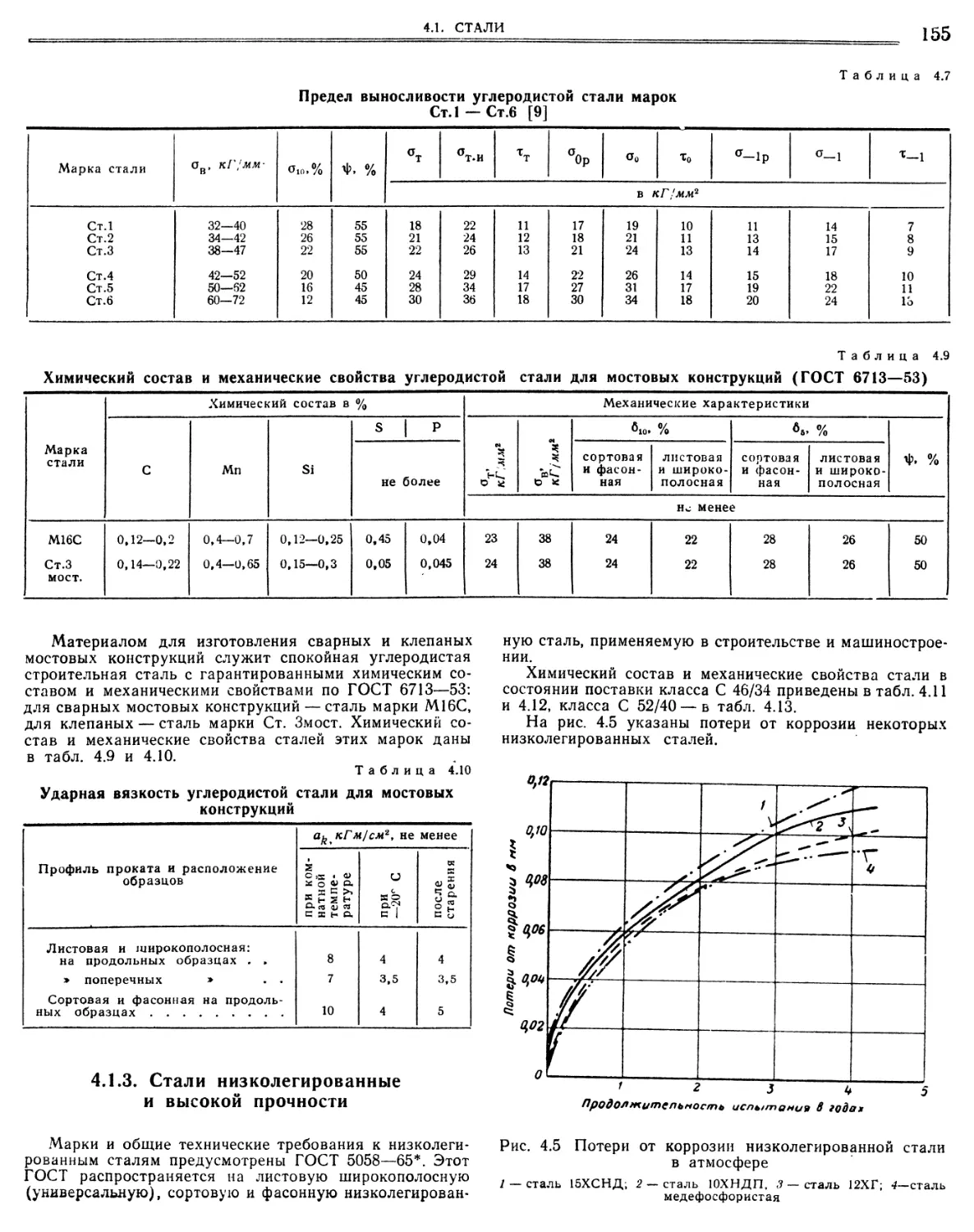
4.3. Бетон (С. А. Семенцов) 165
4.4. Каменные материалы и растворы 170
4.5. Каменная кладка 172
4.6. Армированные материалы (Л. Н. Пицкель). 174
4.6.1. Общие данные »»•«•.»». 174
4.6.2. Железобетон. 175
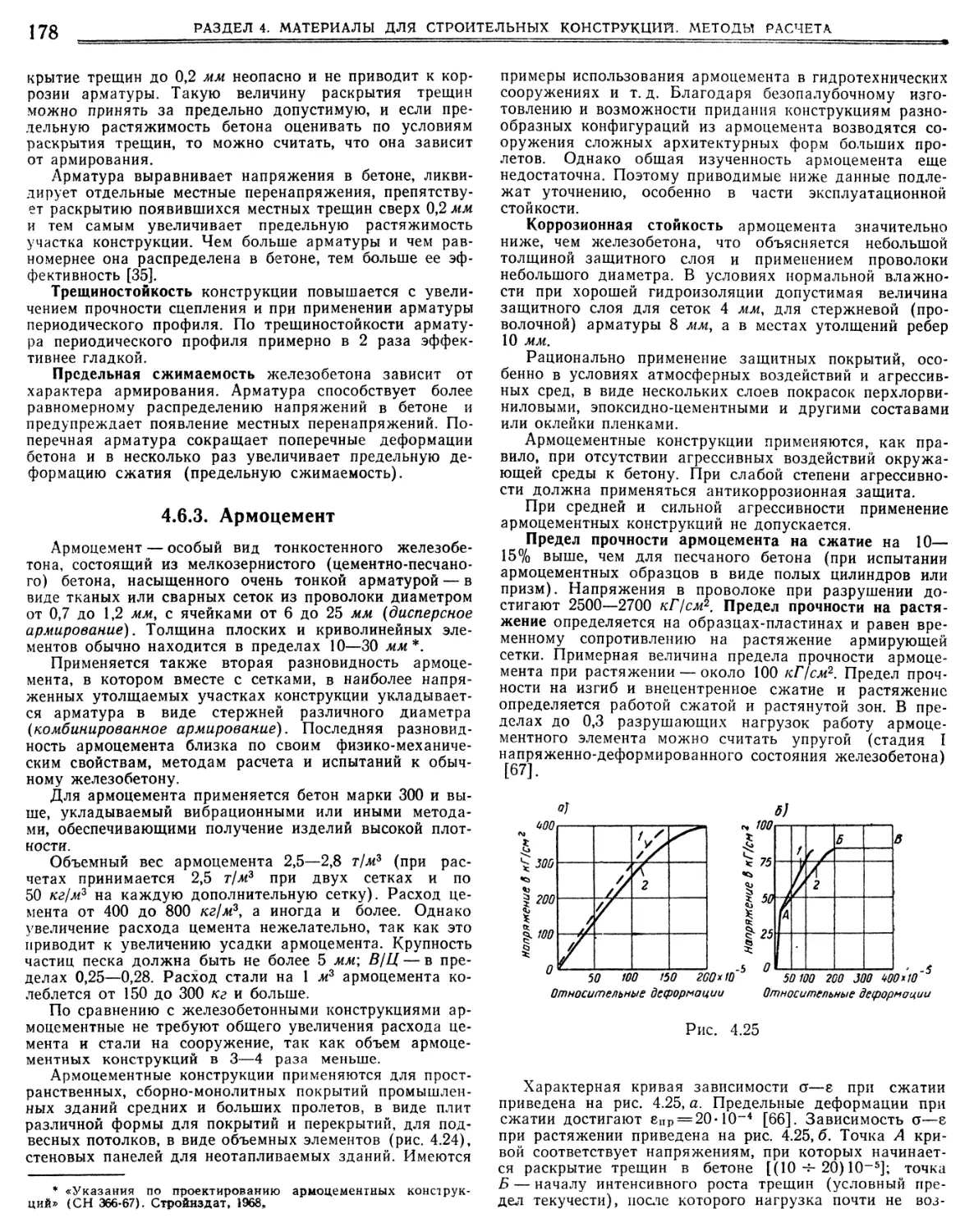
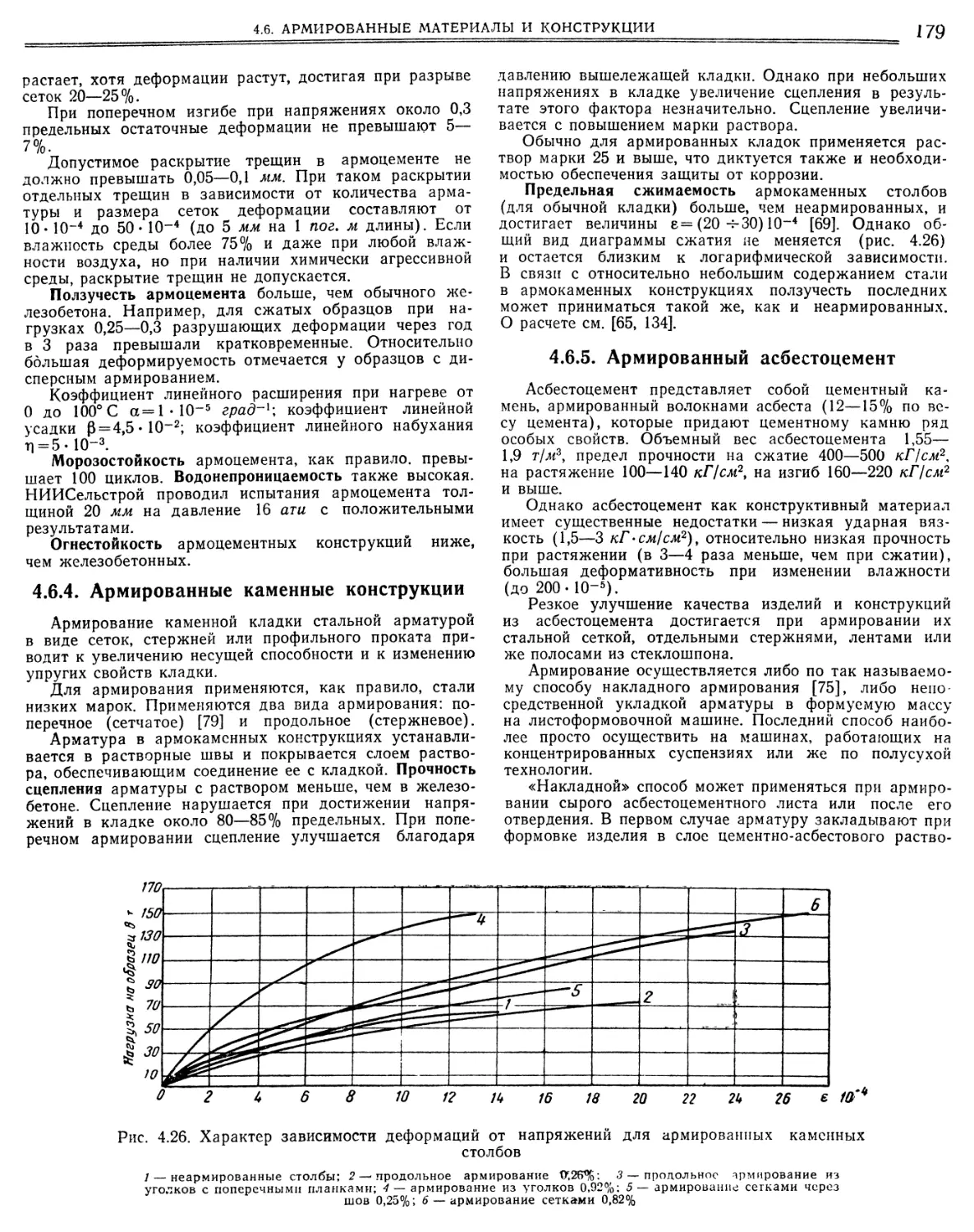
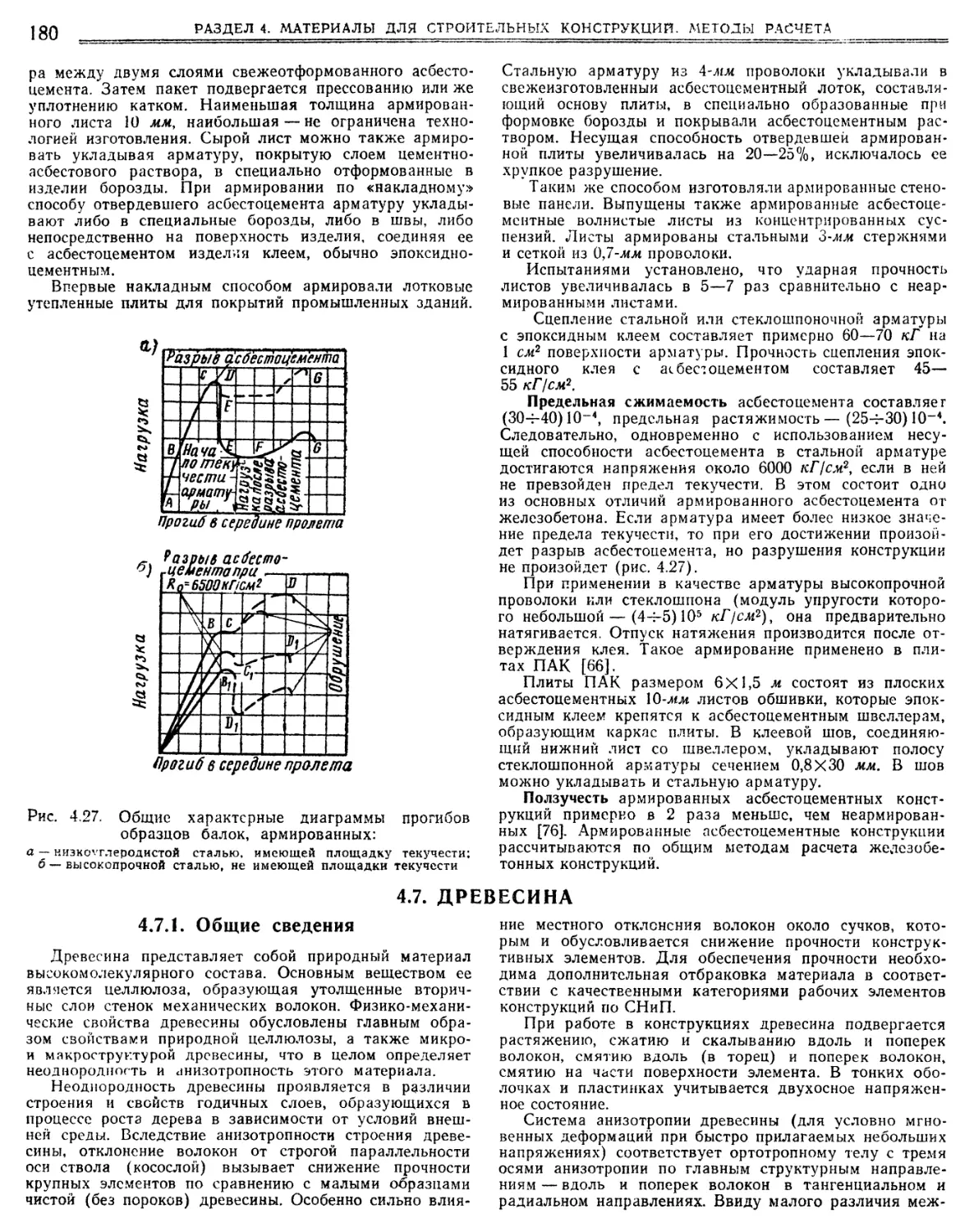
4.6.3 Армоцемёнт „ 178
4.6.4. Армированные каменные конструкции 179
4.6.5. Армированный асбестоцемент.«.•»•» 179
4.7. Древесина (Ю. М. Иванов) 130
4.7.1. Общие сведения •»»»«»»••»•« 180
4.7.2. Механические свойства 181
4.8. Пластмассы (К. В. Панферов) 182
4.9. Методы расчета конструкций (Л. В. Клепиков,
В. А. Отставное). 190
Литература 193
РАЗДЕЛ 5
СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ А. А. Уманский
196
196
196
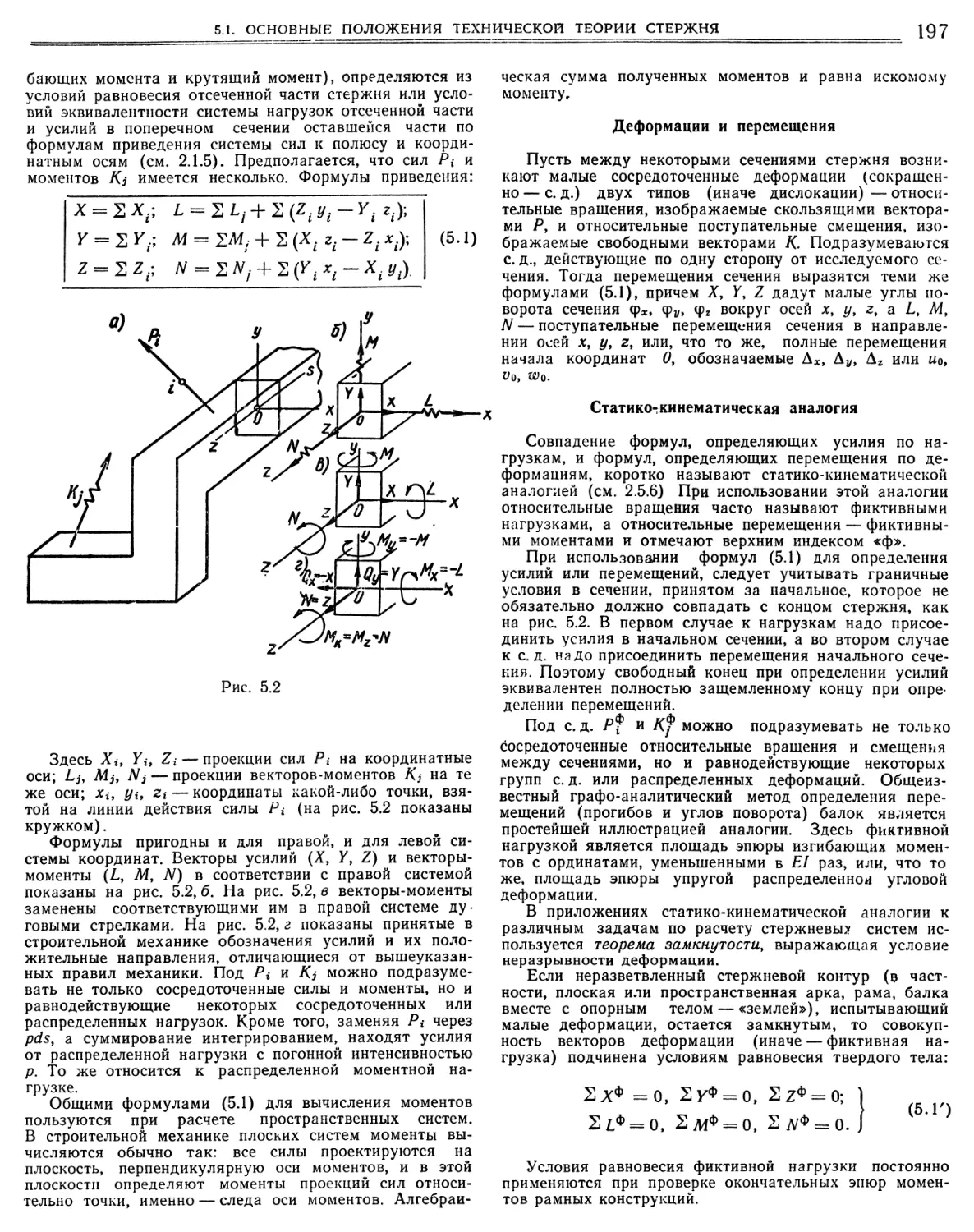
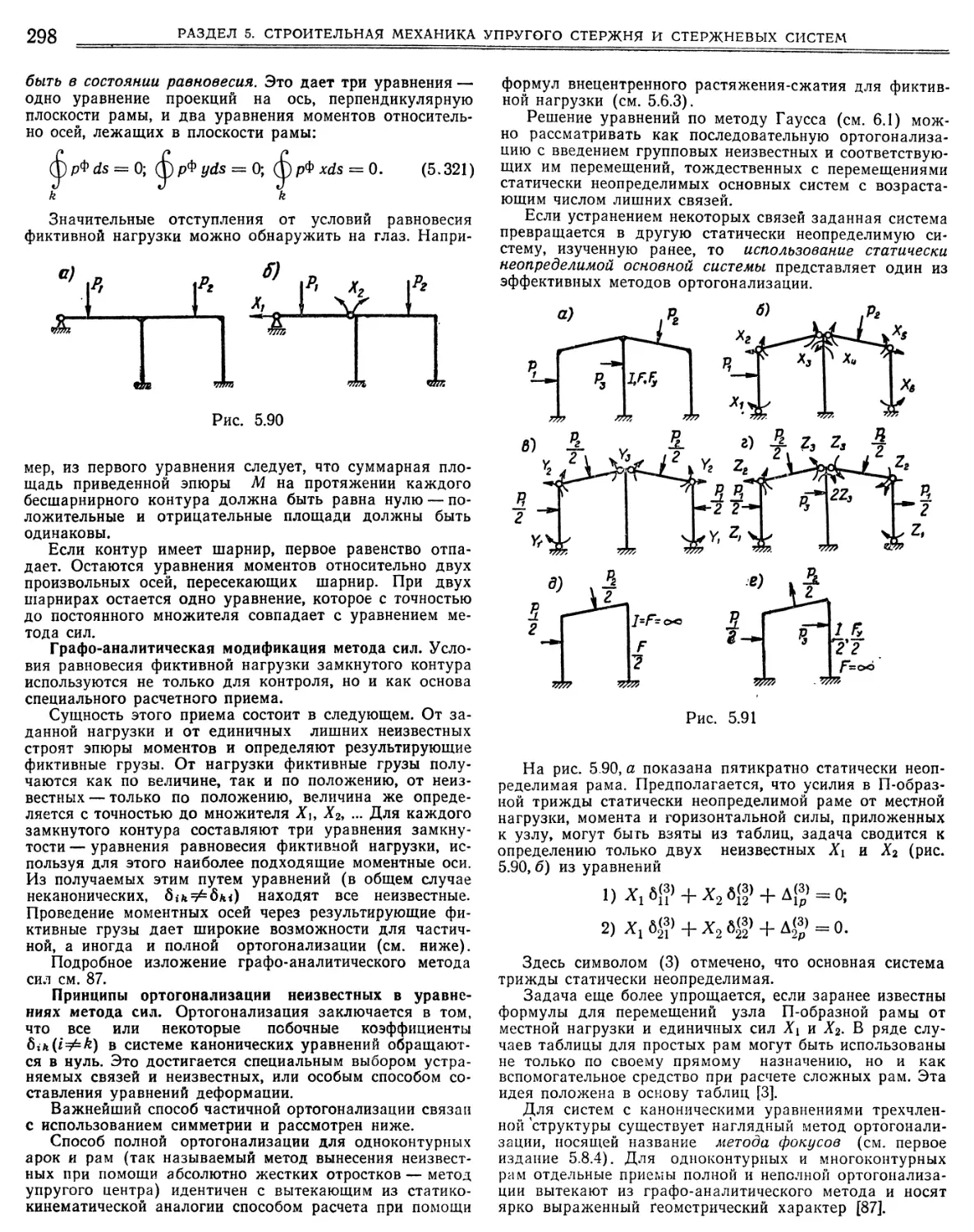
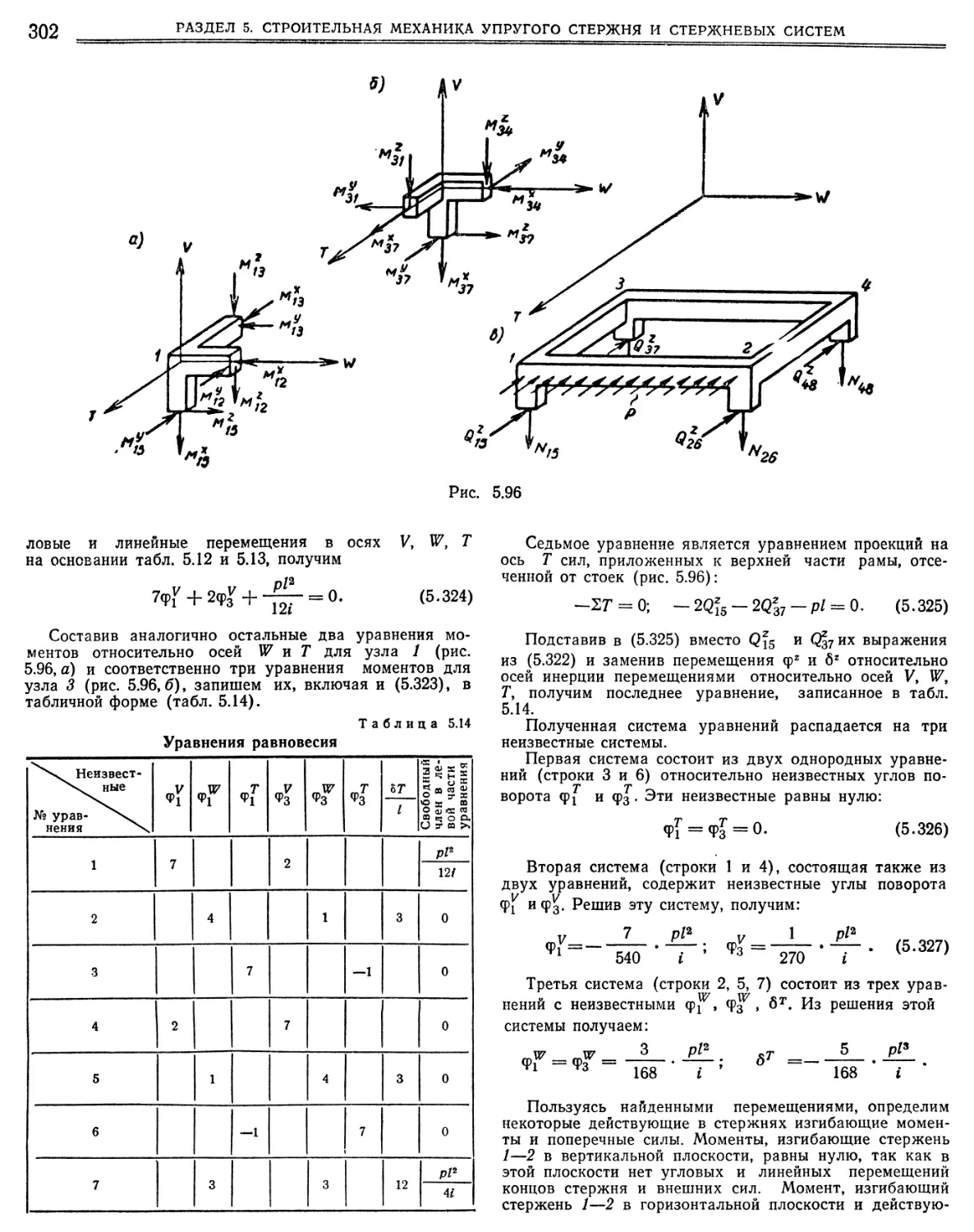
198
198
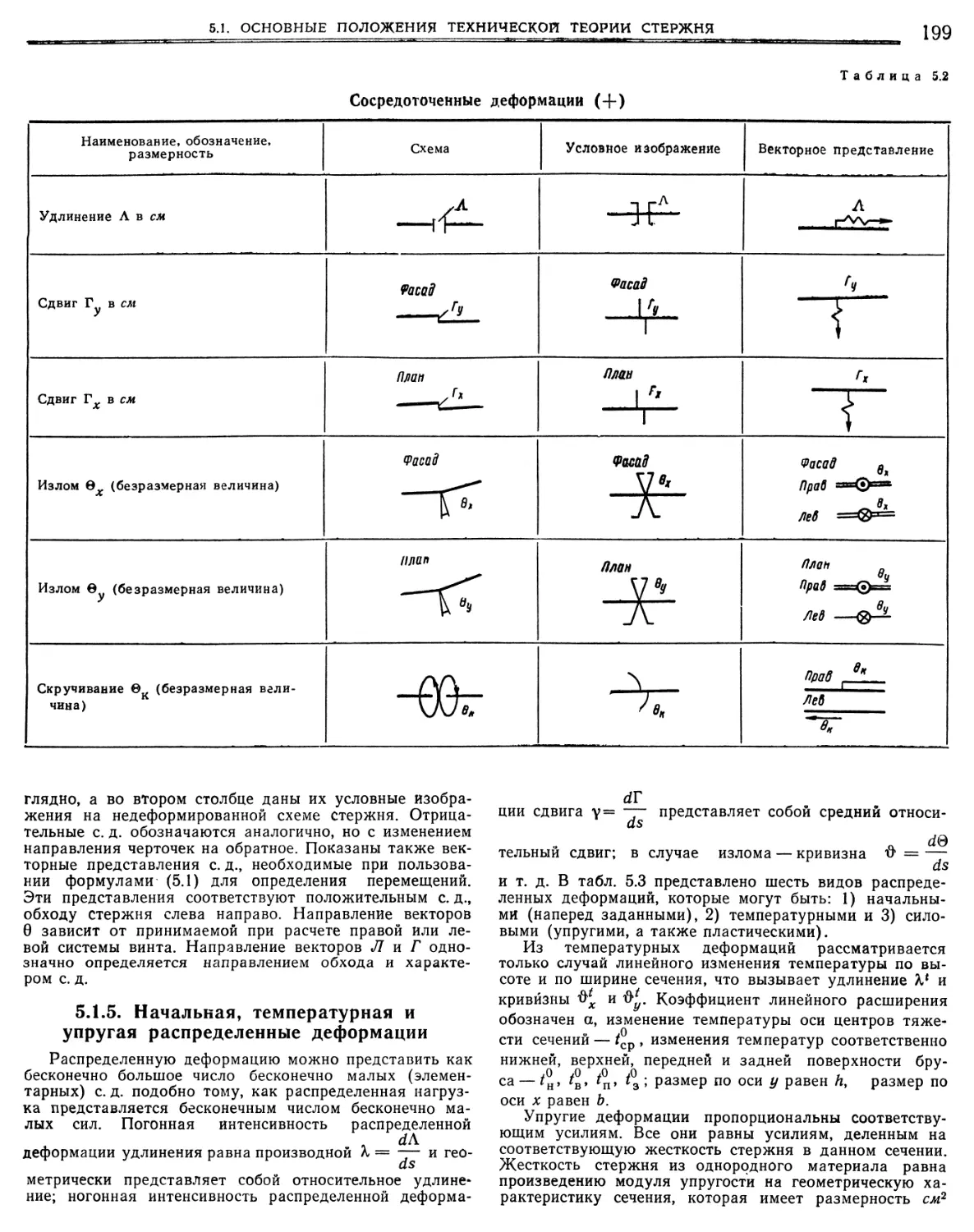
199
200 200
201
Стр.
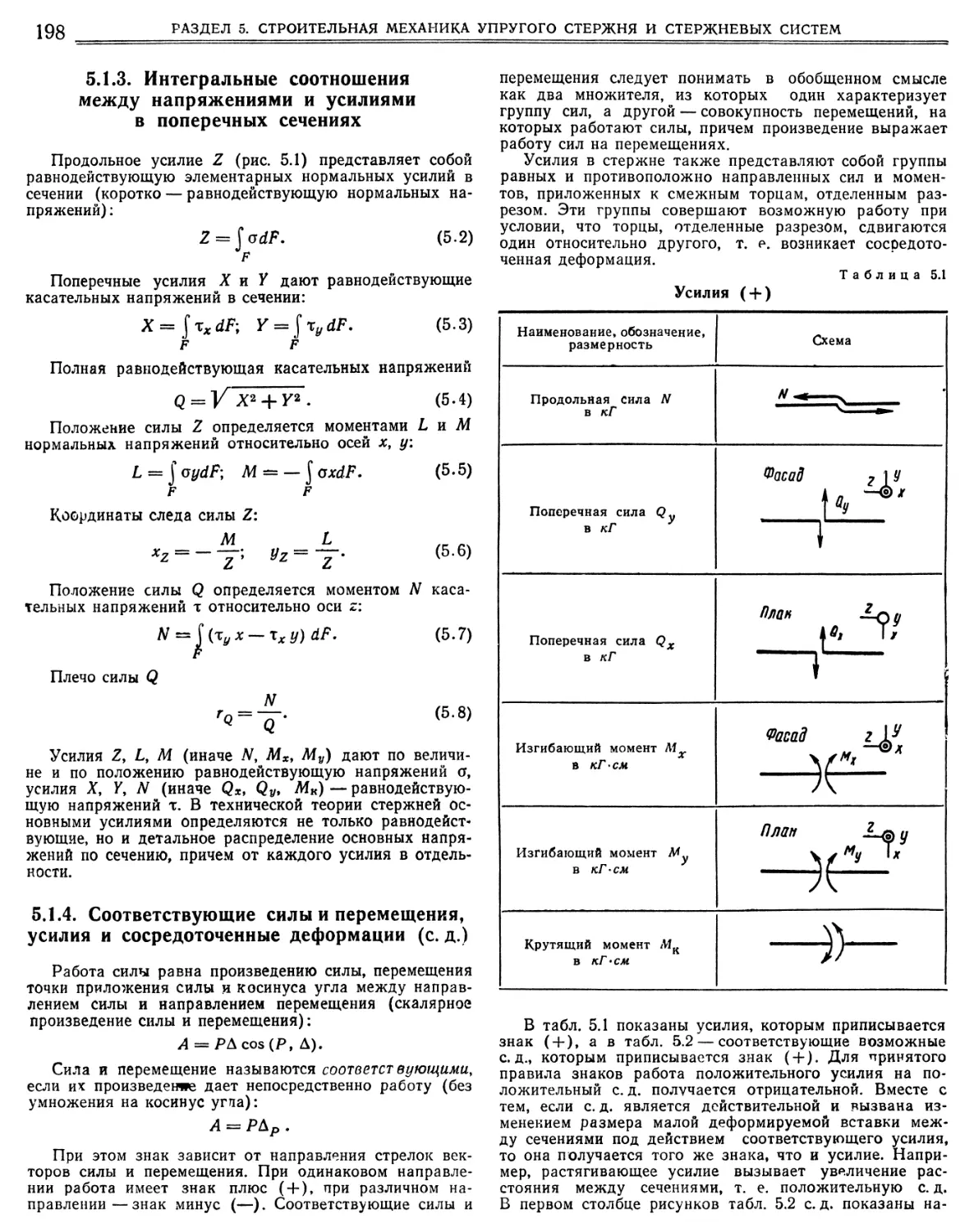
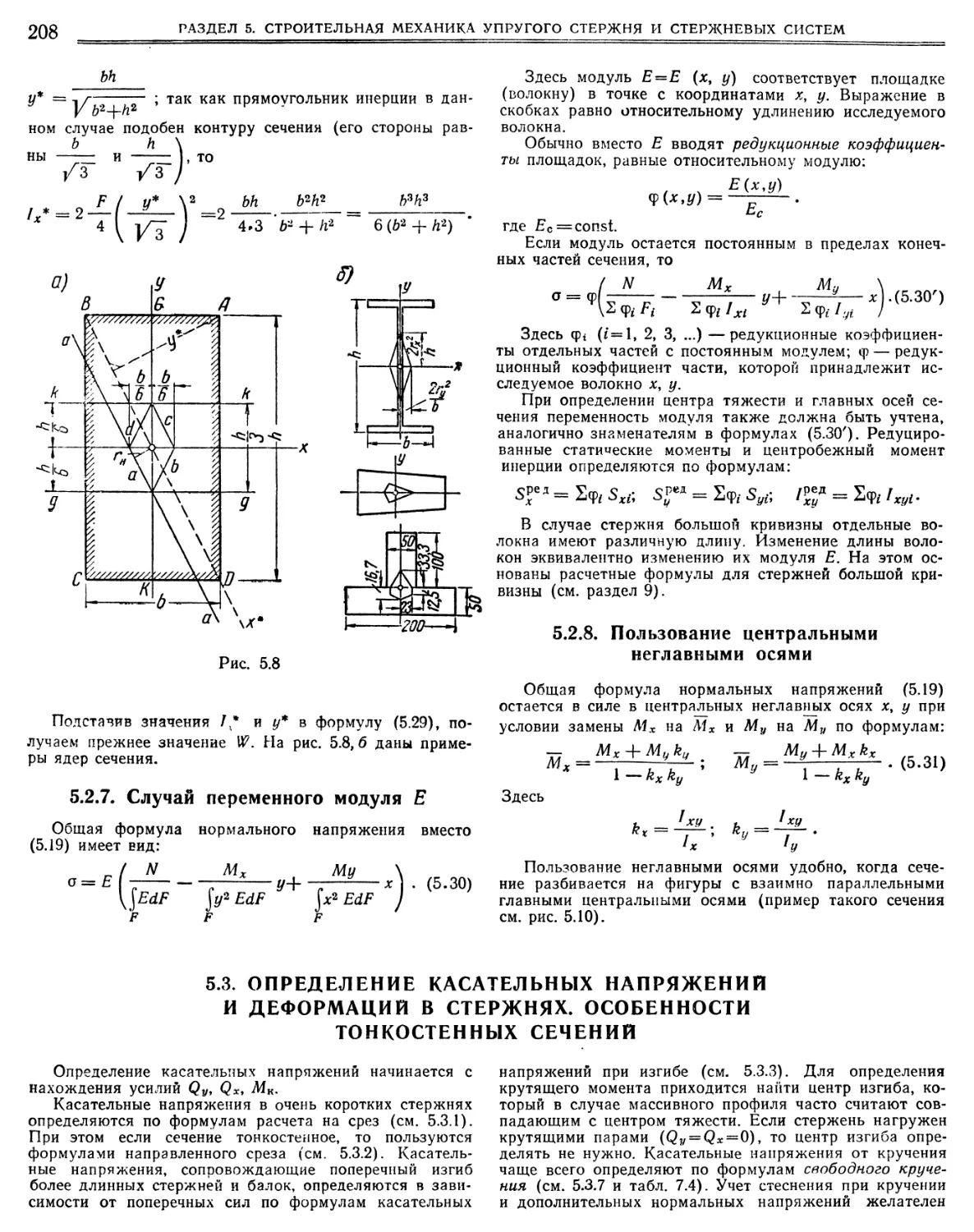
5.2. Определение нормальных напряжений. 5 203
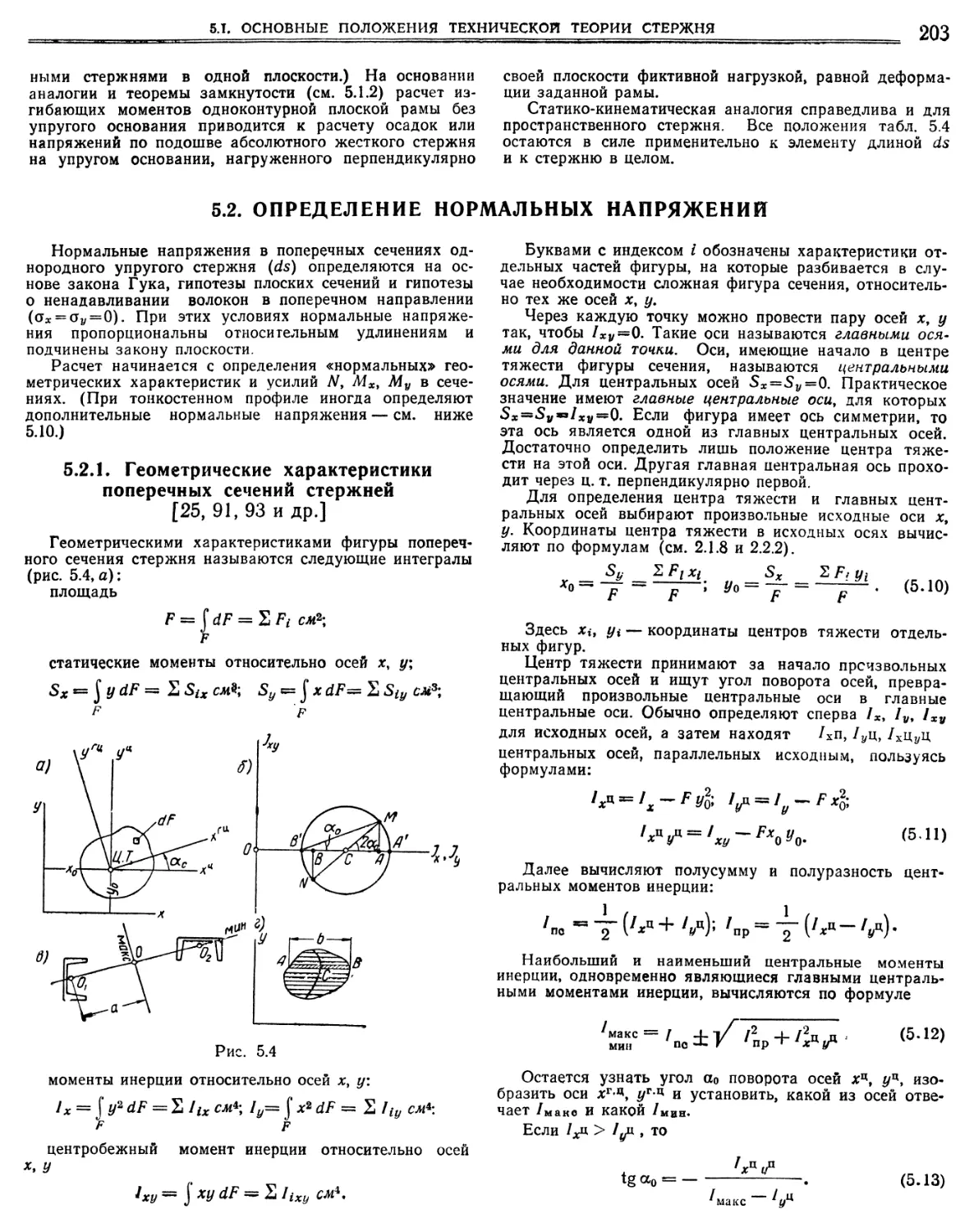
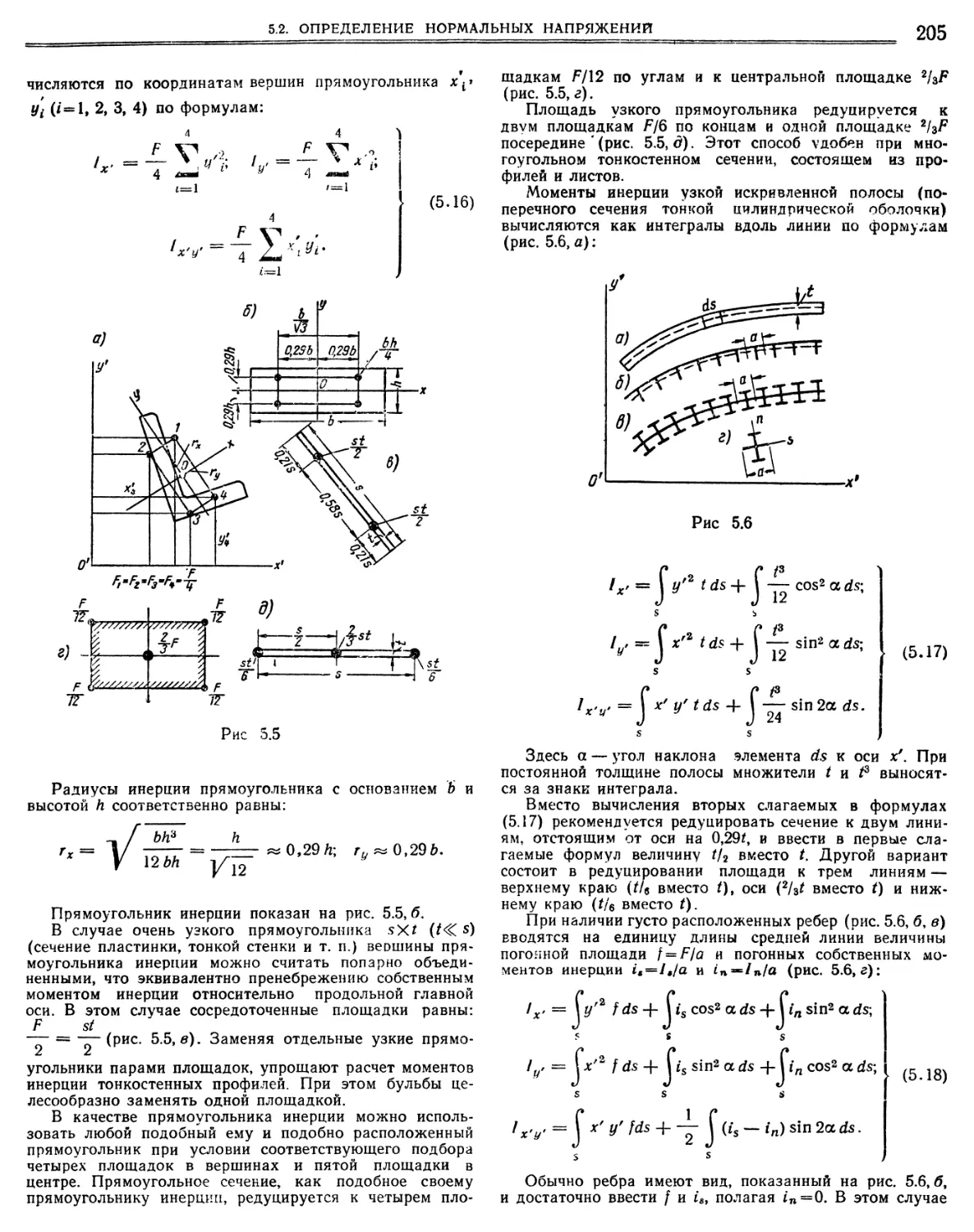
5.2.1. Геометрические характеристики поперечных сечений стержней 203
5.2.2. Определение моментов инерции относительно исходных осей 204
5.2.3. Редуцирование площадей при вычислении моментов инерции 2С4
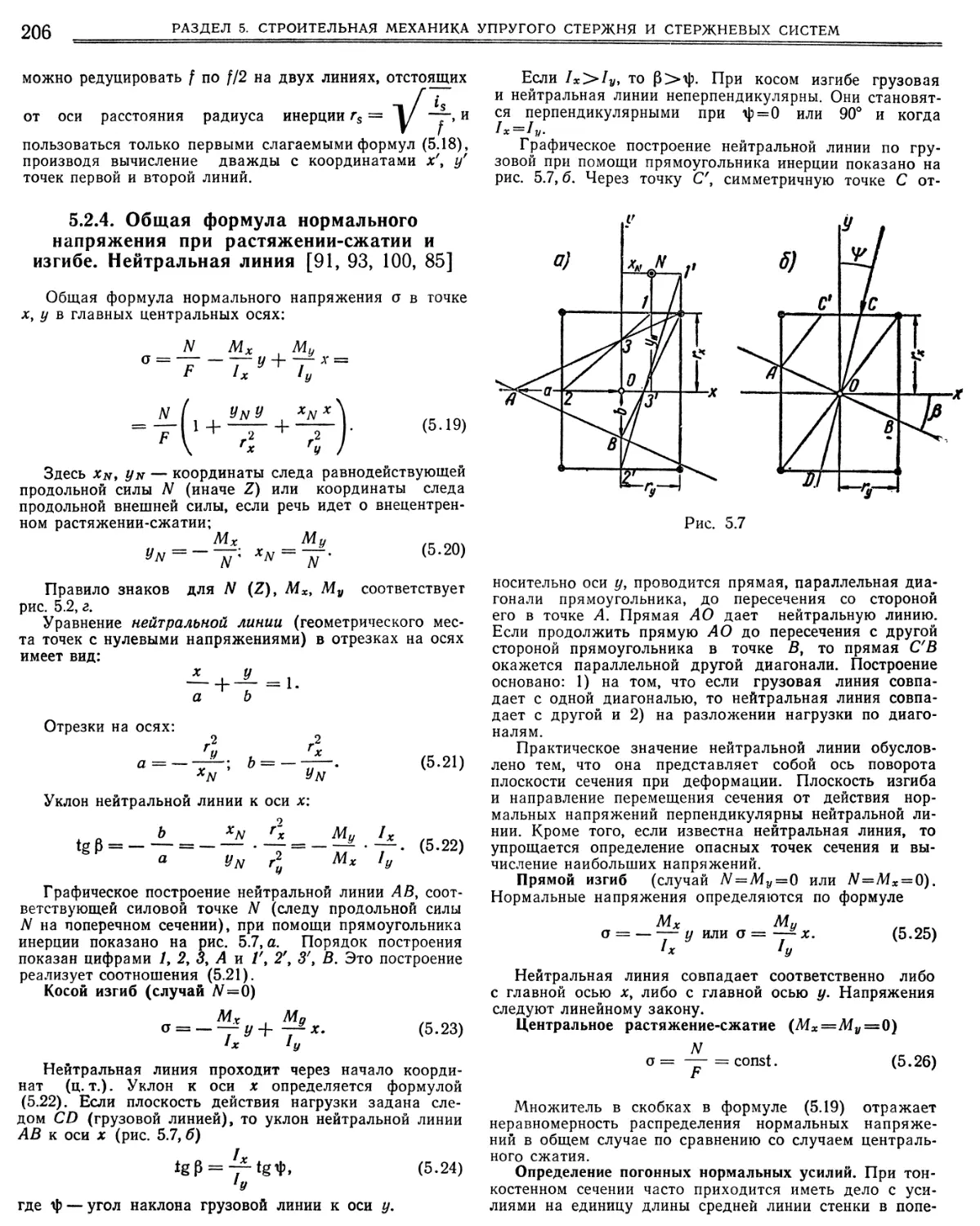
5.2.4. Общая формула нормального напряжения при
растяжении-сжатии и изгибе. Нейтральная линия 206
5.2.5. Максимальные нормальные напряжения • 207
5.2.6. Ядро сечения 207
5.2.7. Случай переменного модуля Е ». 208
5.2.8. Пользование центральными неглавными осями. 208
5.3. Определение касательных напряжений и де¬
формаций в стержнях. Особенности тонкостенных сечений 208
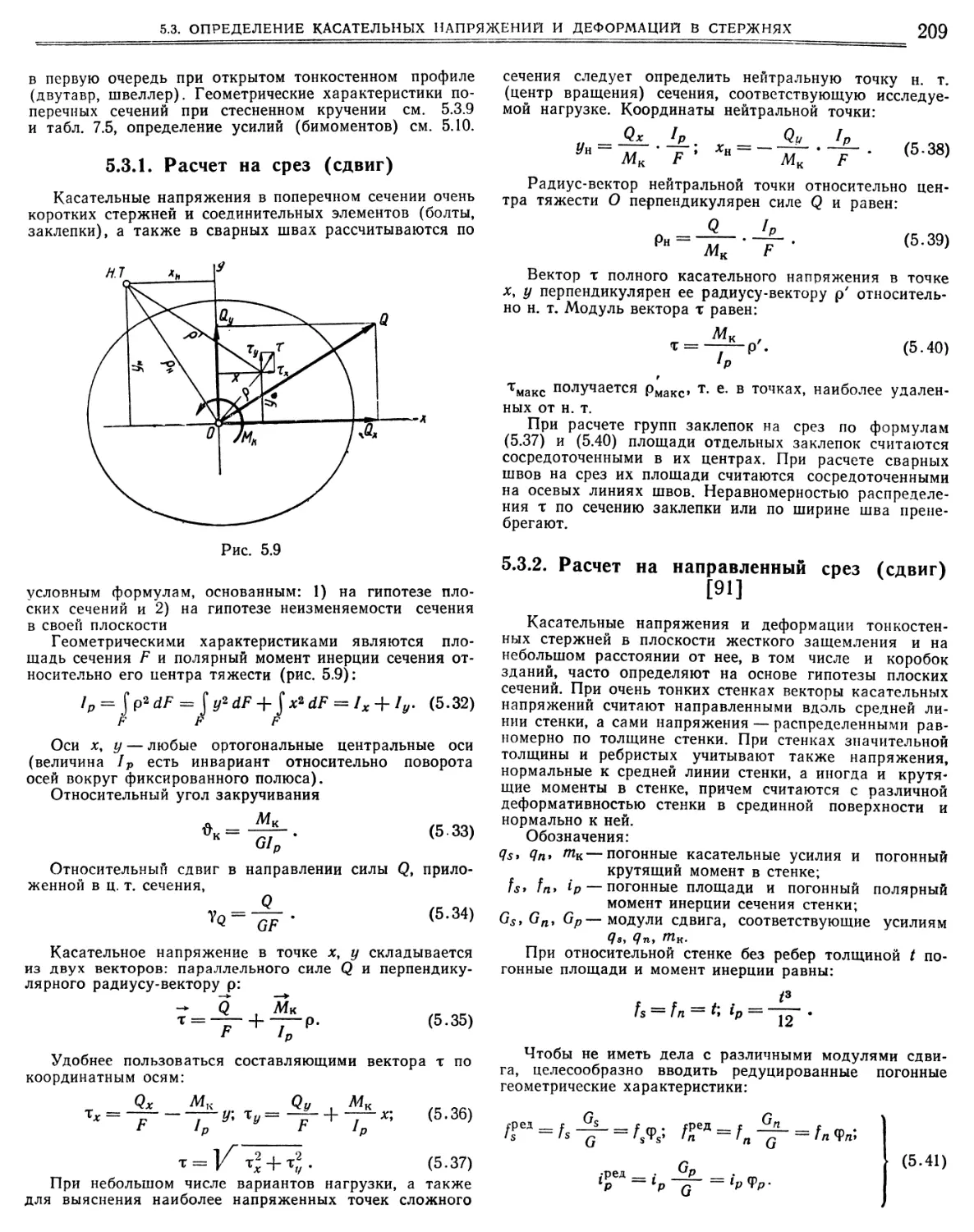
6.3.1. Расчет на срез (сдвиг) 209
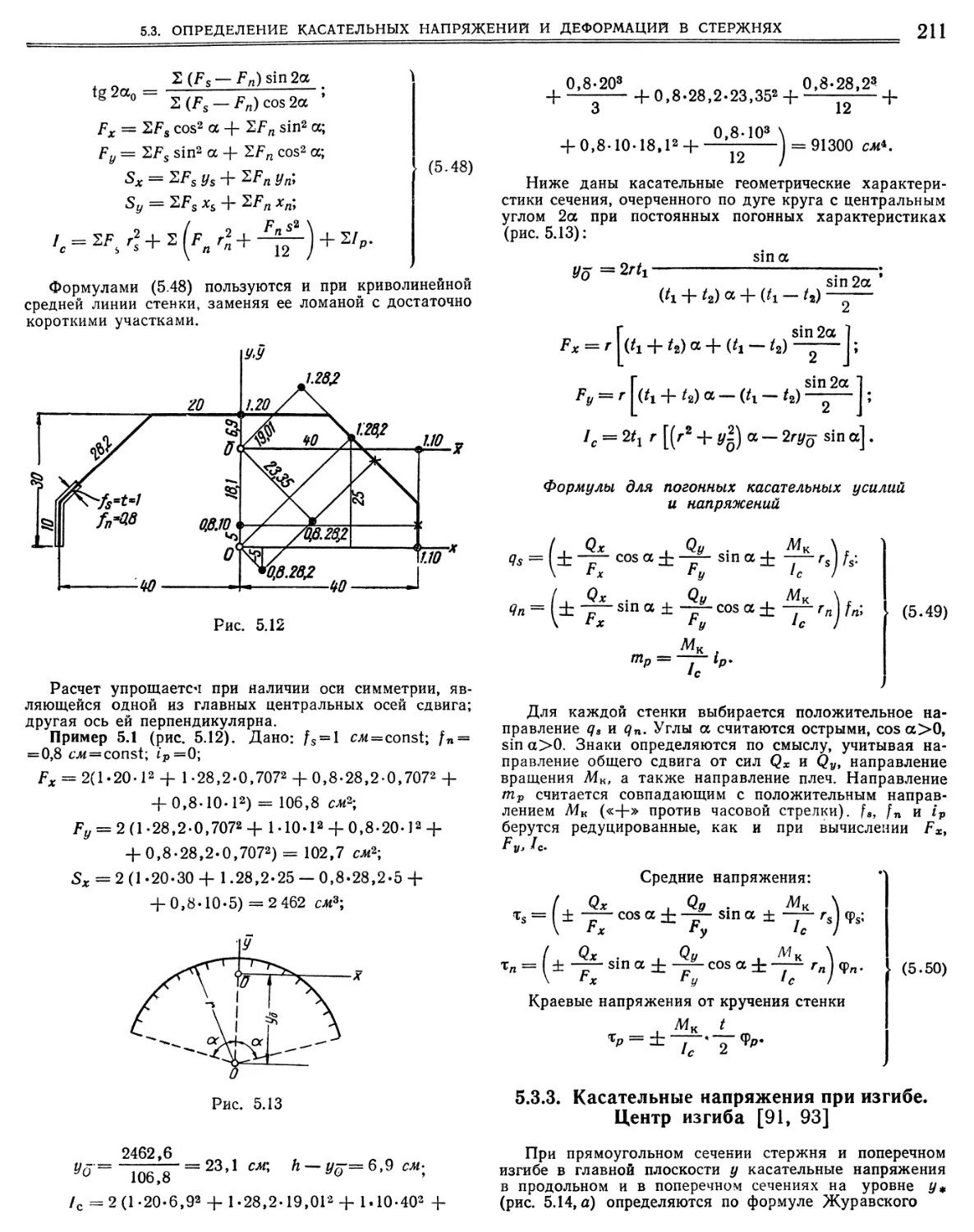
5.3.2. Расчет на направленный срез (сдвиг). . ♦ 209
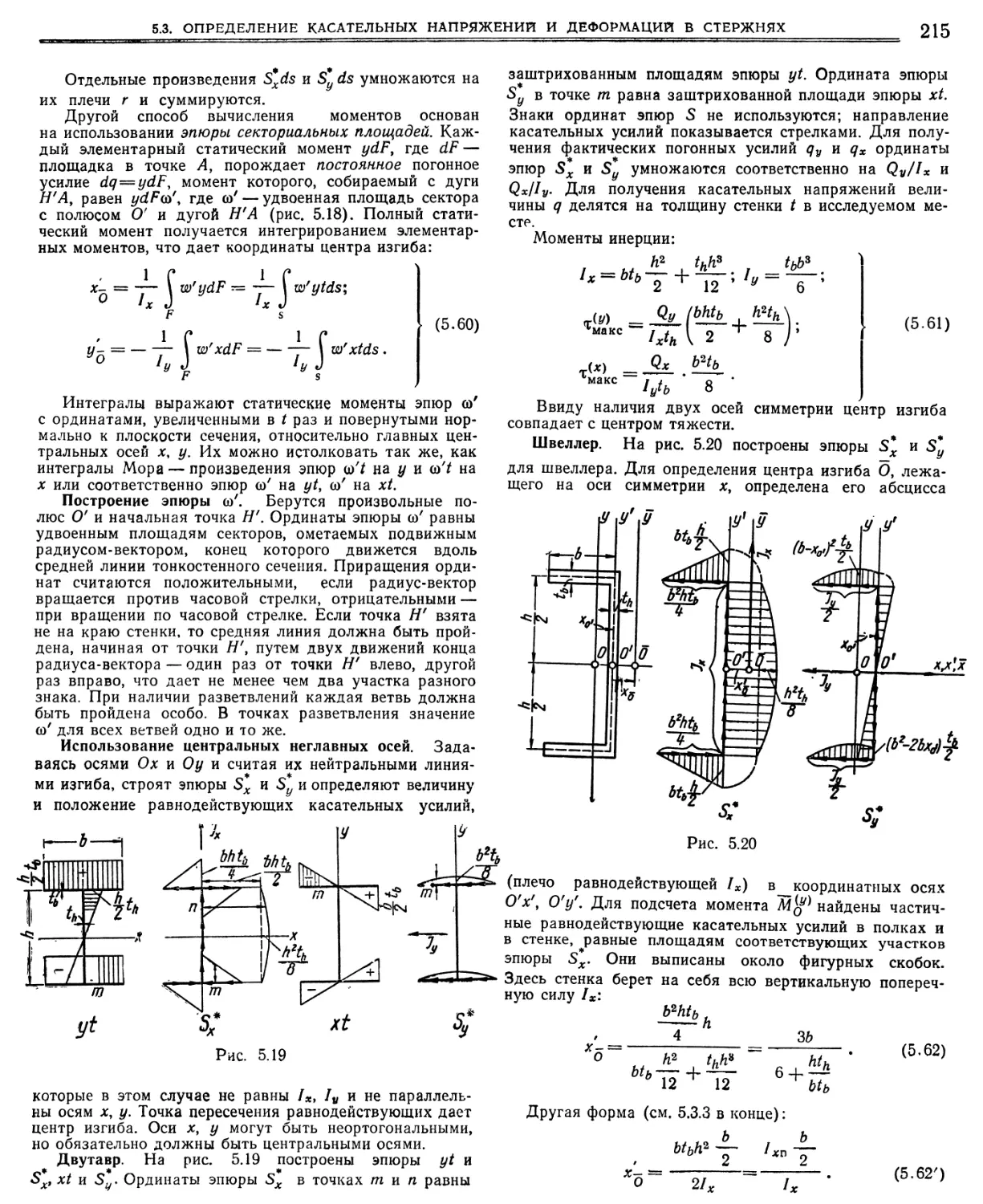
5.3.3. Касательные напряжения при изгибе. Центр изги-
ба « 211
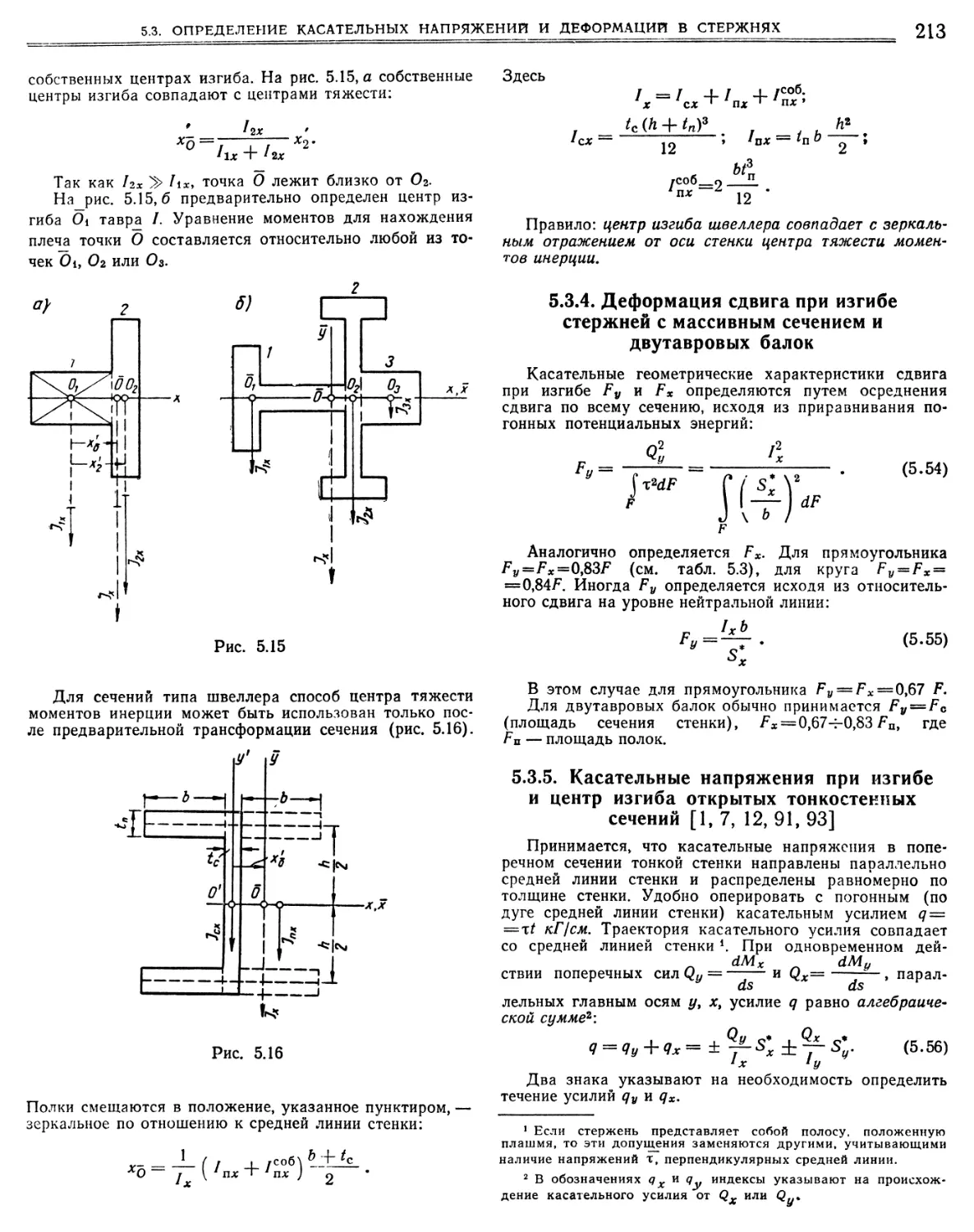
5.3.4. Деформации сдвига при изгибе стержней с массивным сечением и двутавровых балок. 213
5.3.5. Касательные напряжения при изгибе и центр изгиба открытых тонкостенных сечений. „ „ 213
5.3.6. Касательные напряжения при изгибе и центр изгиба замкнутых тонкостенных сечекий. 216
5.3.7. Касательные напряжения и относительный угол
закручивания при свободном кручении. Геометрические характеристики.•.■•• 219
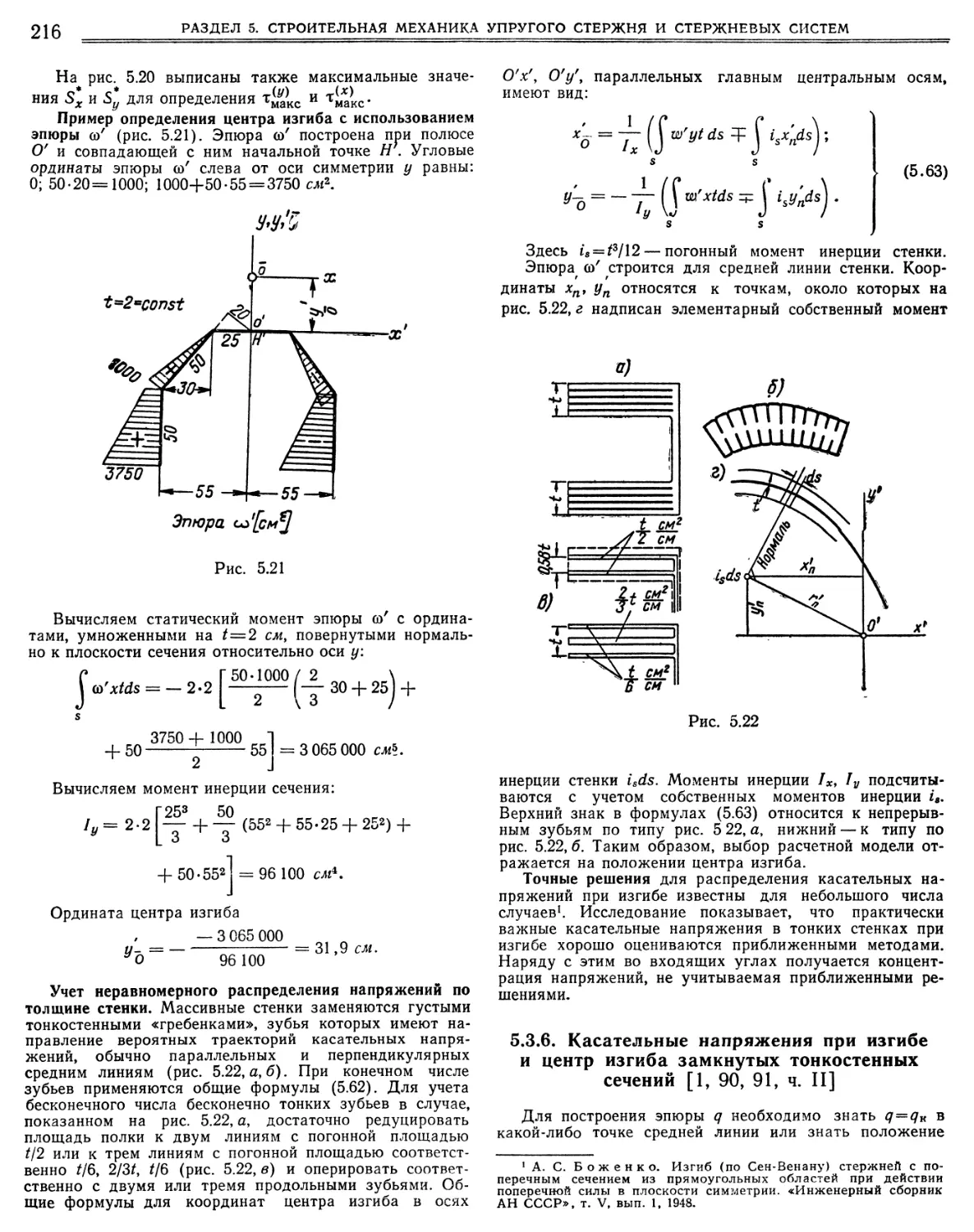
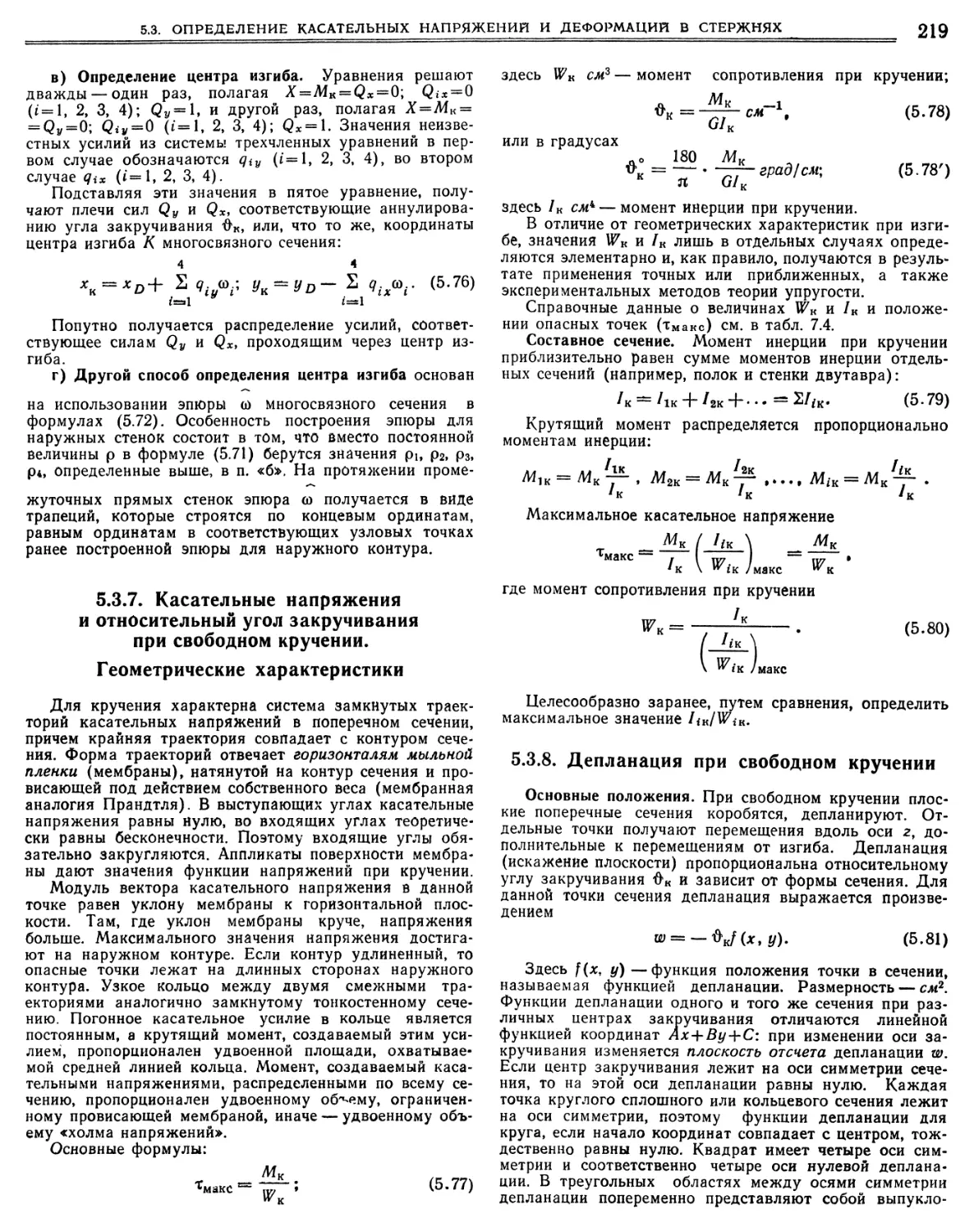
5.3.8. Депланация при свободном кручении « • « • 219
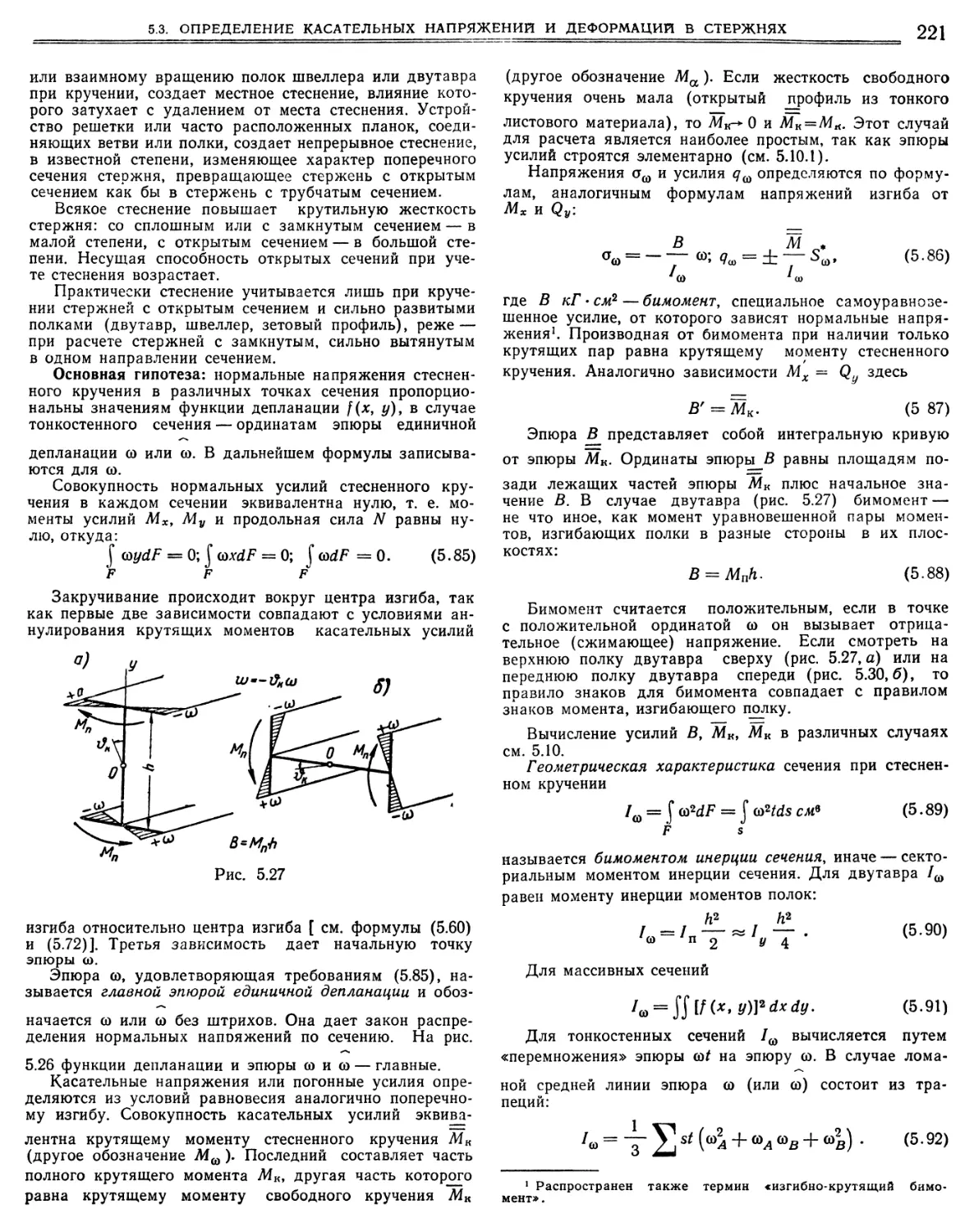
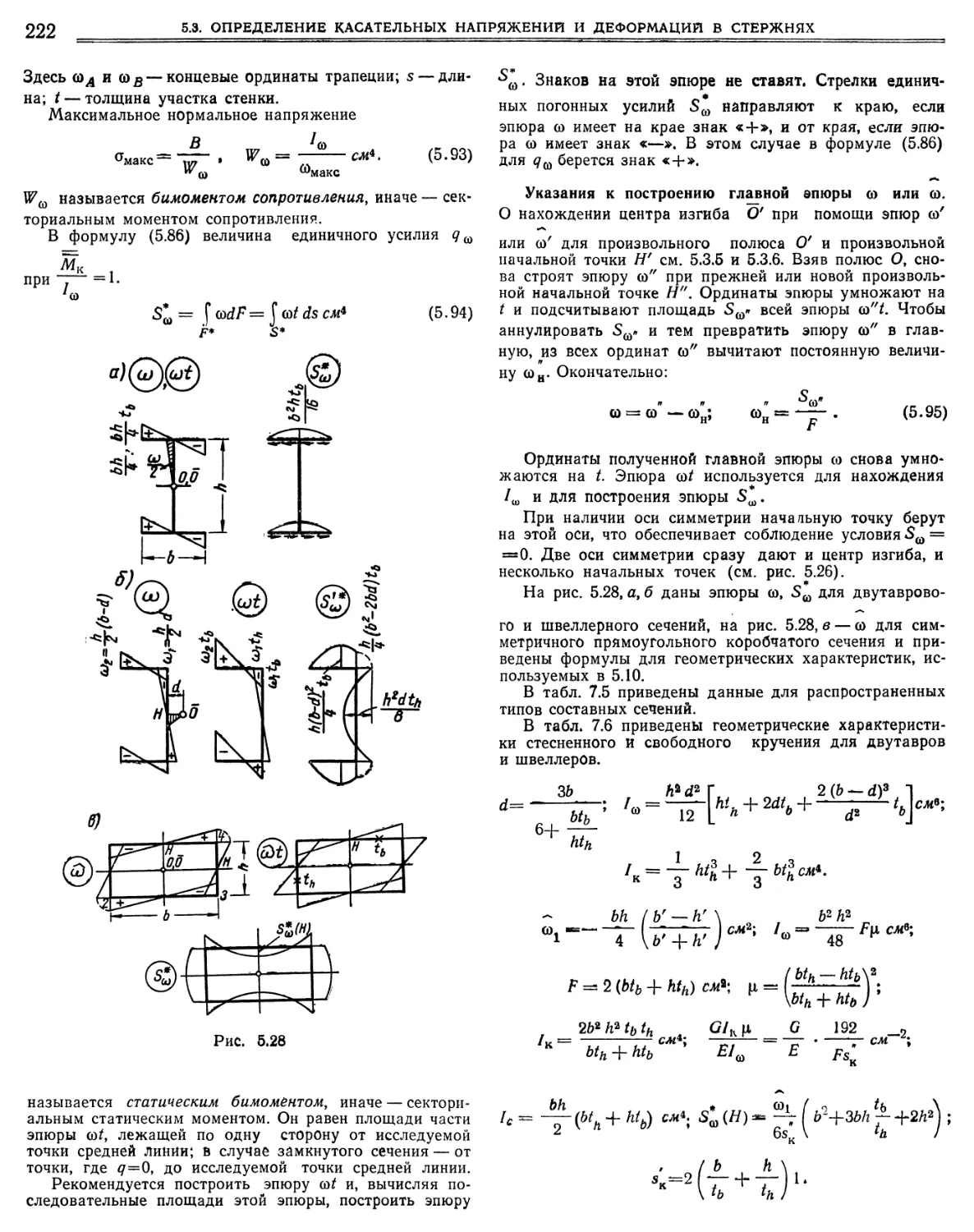
5.3.9. Стесненное кручение - 220
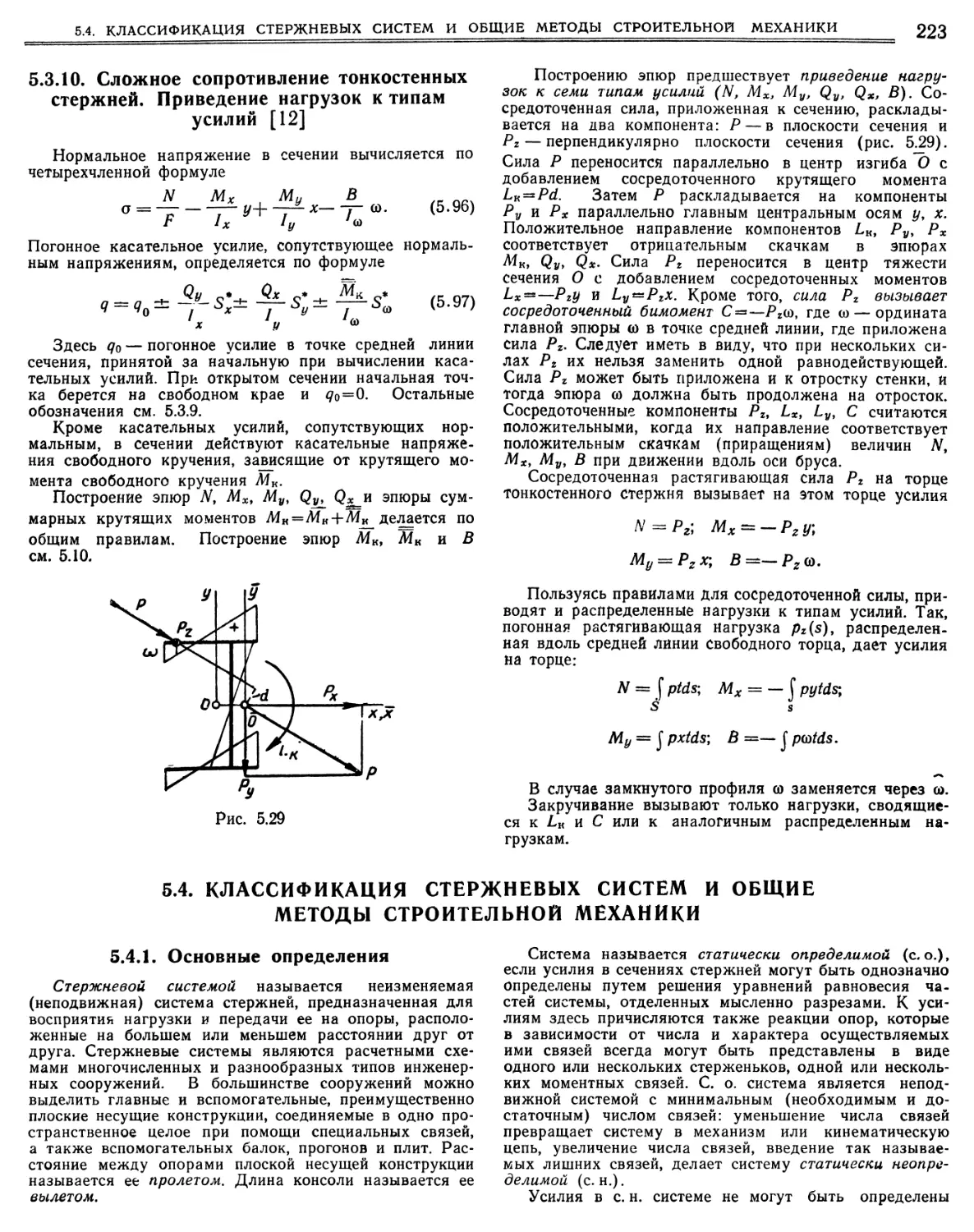
5.3.10. Сложное сопротивление тонкостенных стержней.
Приведение нагрузок к типам усилий.,., 223
5.4. Классификация стержневых систем и общие
методы строительной механики 223
5.4.1. Основные определения •••••••••• 223
5.4.2. Виды систем 224
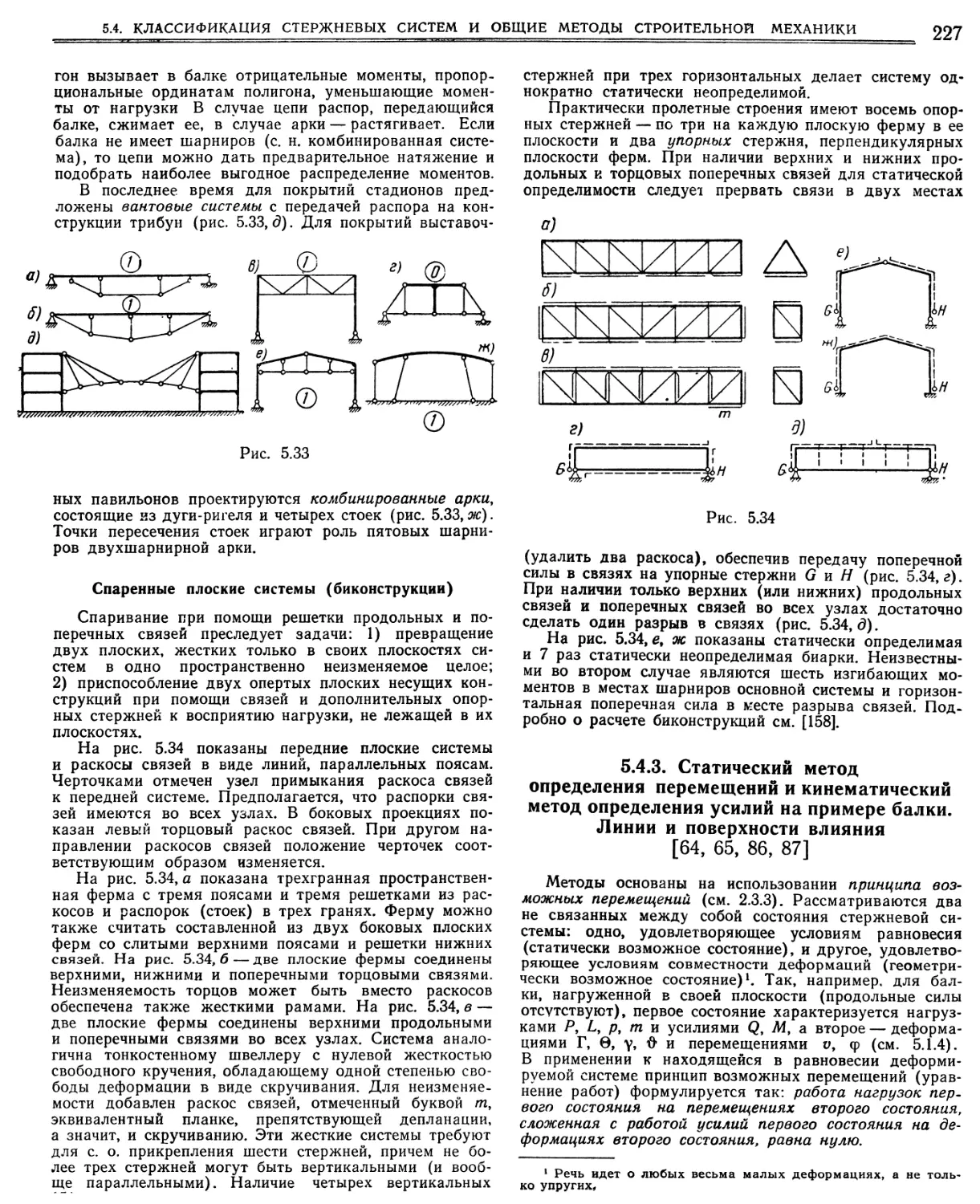
5.4.3. Статический метод определения перемещений
и кинематический метод определения усилий на примере балки. Линии и поверхности влияния 227
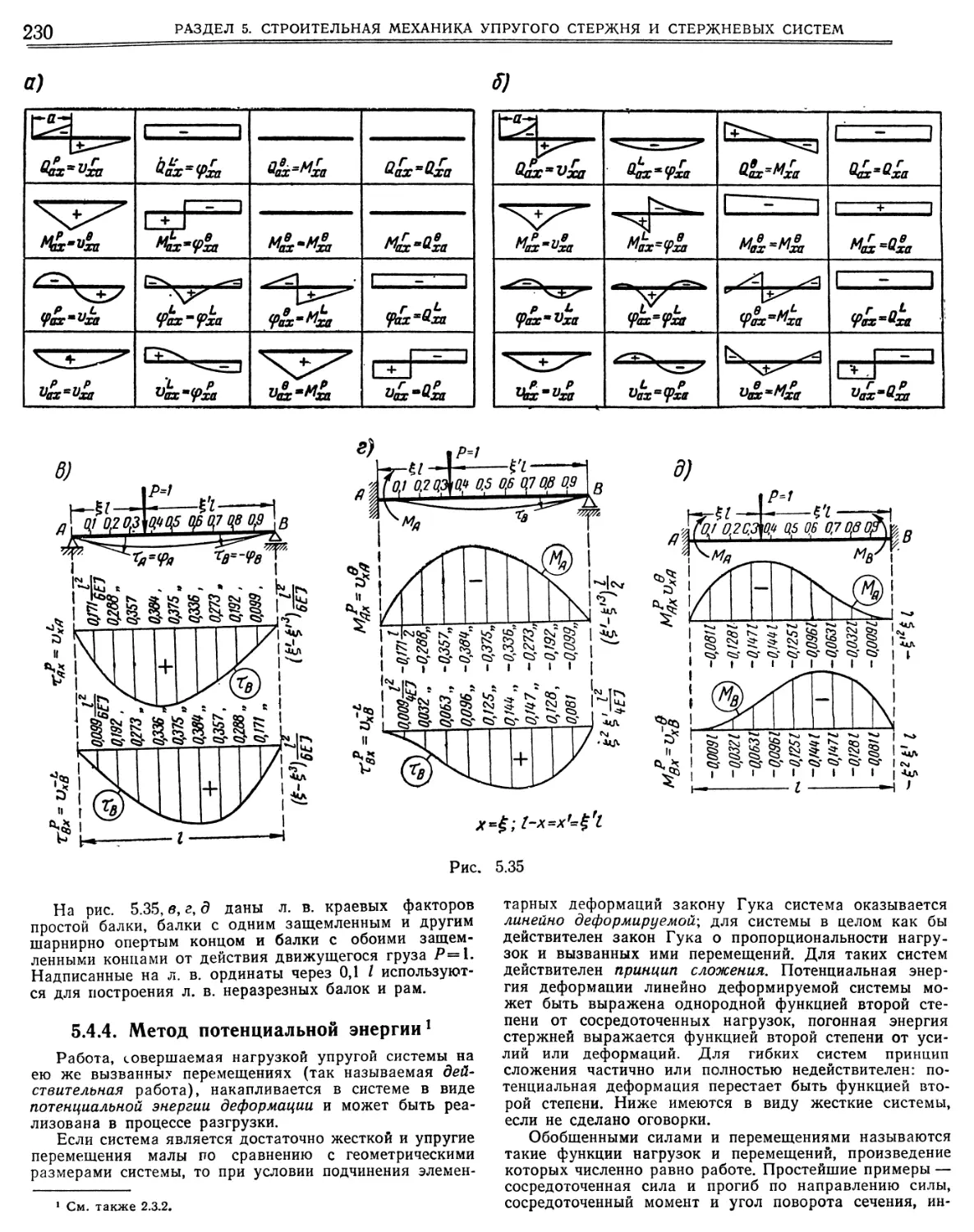
5.4.4. Метод потенциальной энергии 230
5.5. Балки 233
5.5.1. Определение усилий и перемещений и построение
г г л эпюр в балках по методу начальных параметров 233
5.5.2. Абсолютно жесткая балка на упругом основании
и обыкновенная балка с защемленными концами 240
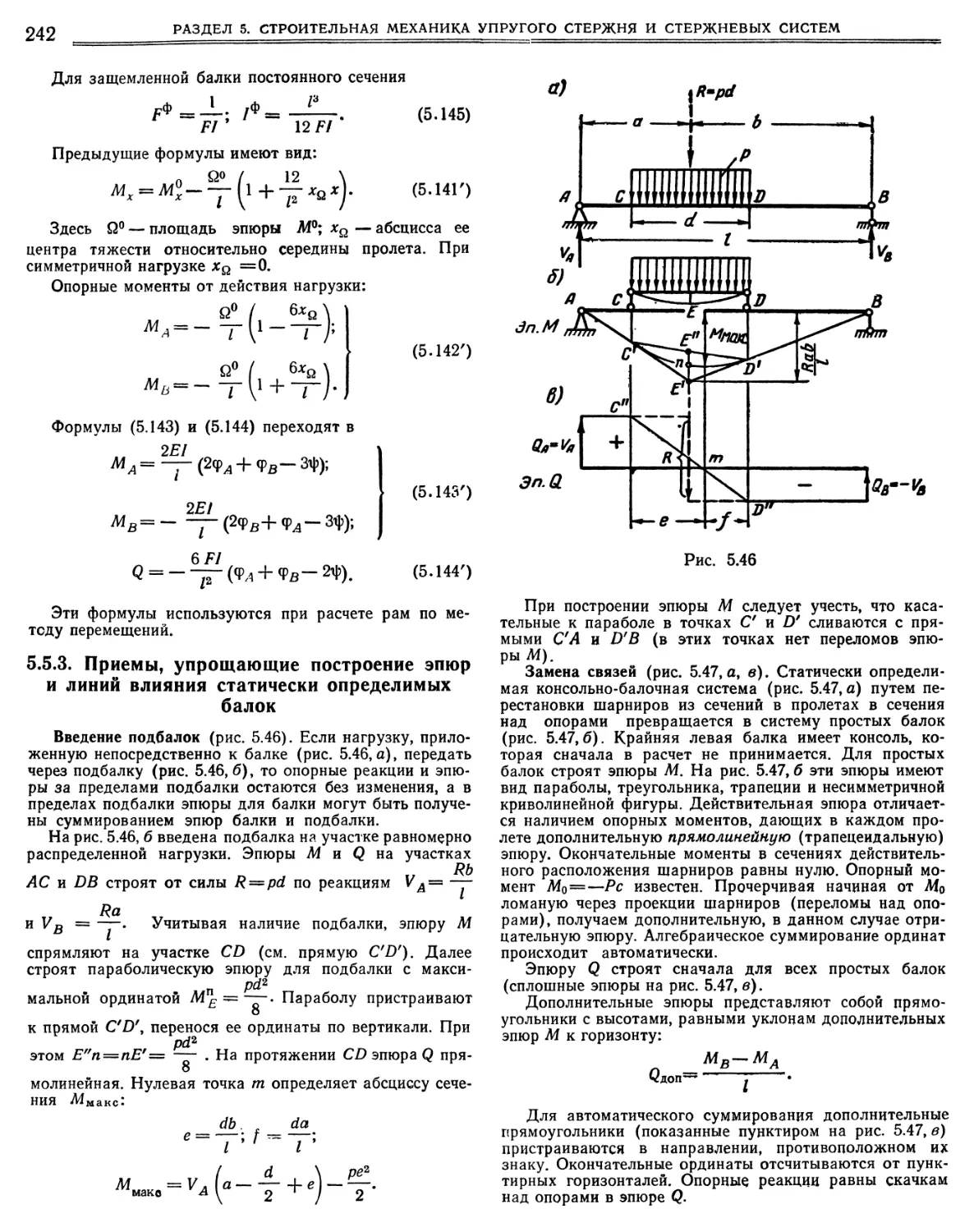
5.5.3. Приемы, упрощающие построение эпюр и линий
влияния статически определимых балок. 242
5.5.4. Равнопролетные неразрезные балки на жестких
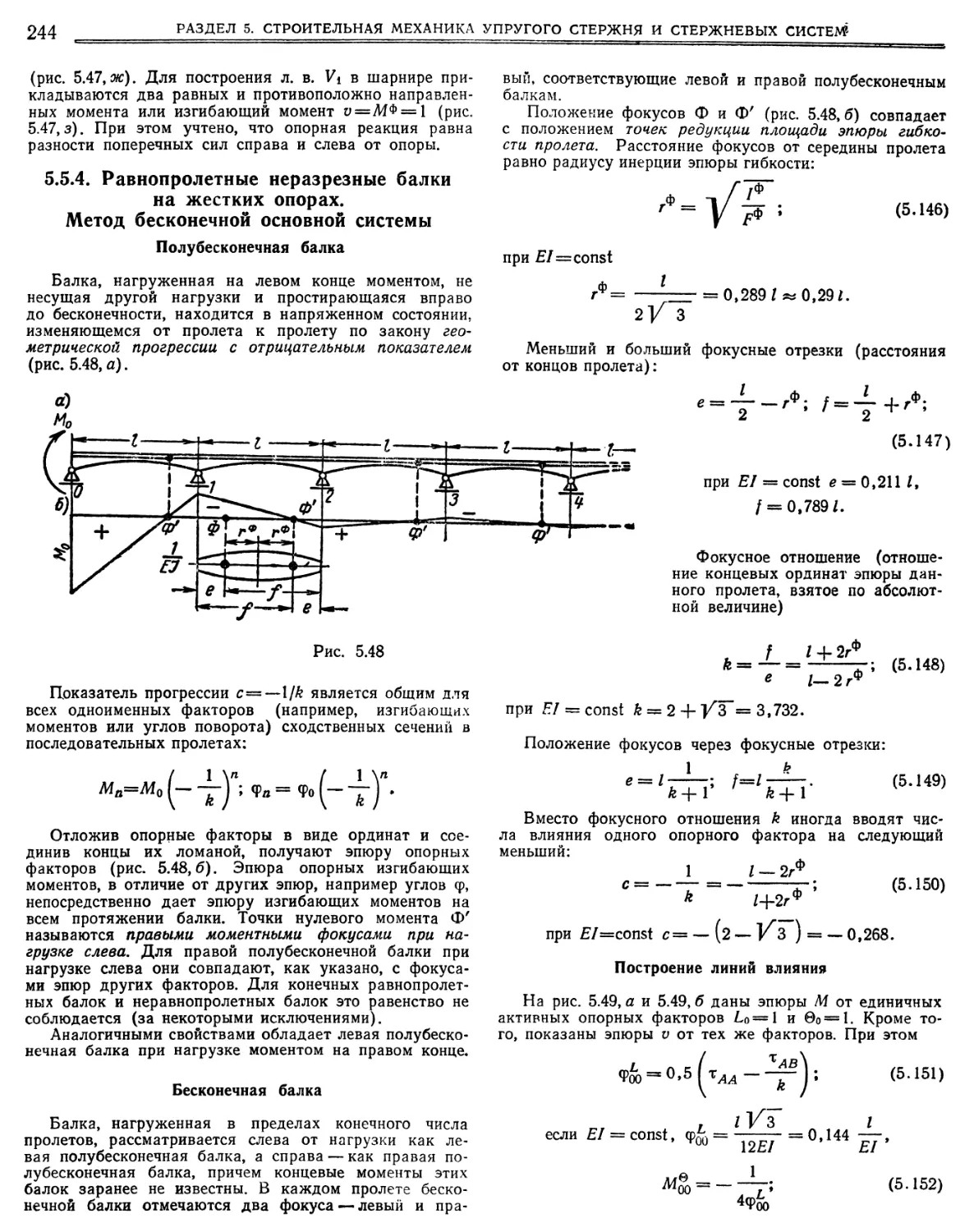
опорах. Метод бесконечной основной системы. 244
Б.5.5. Равнопролетные неразрезные балки постоянного
гечения ва УНРУГ° оседающих опорах. 246
ее 5 5алка на Упругом (винклеровском) основании. 249
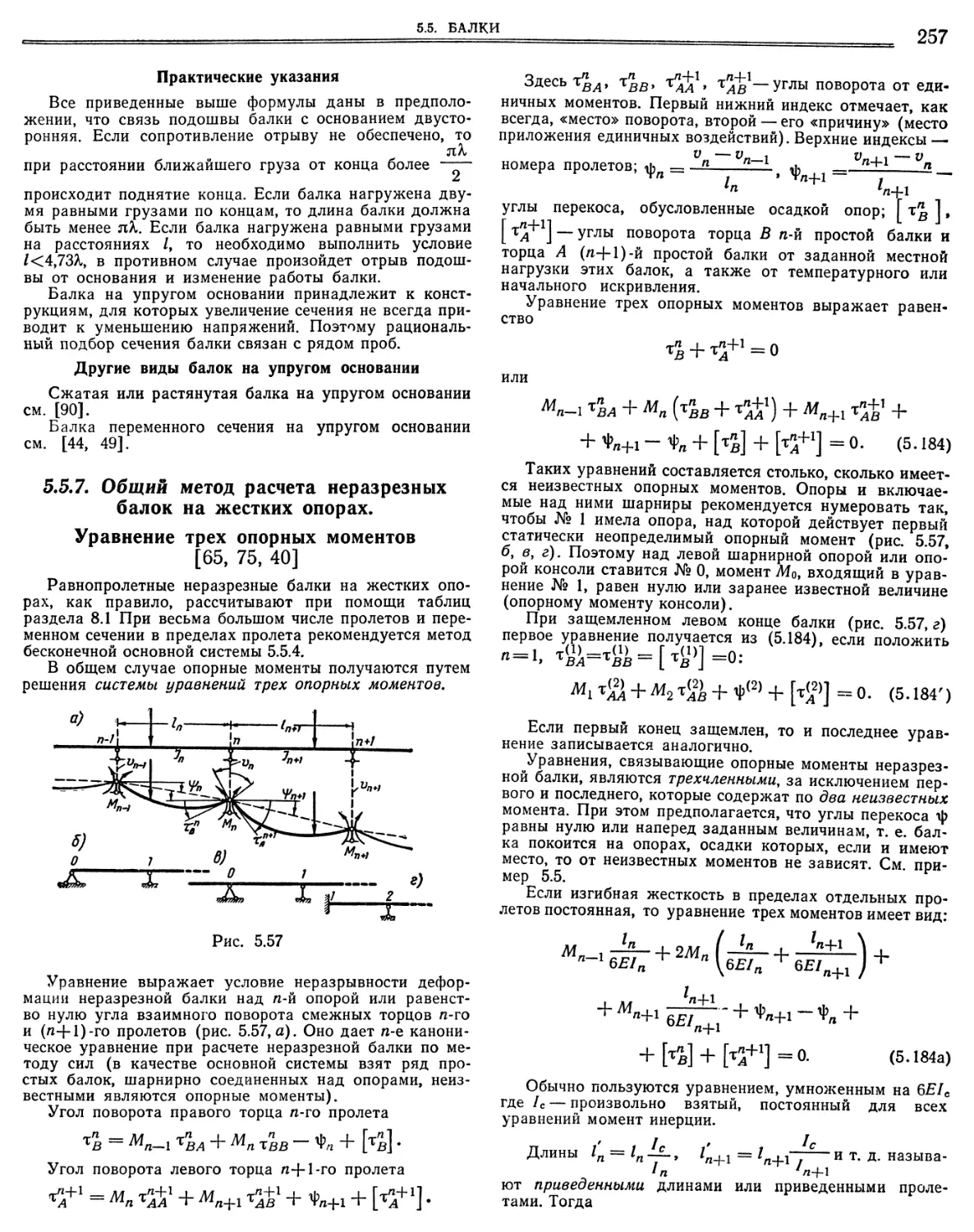
5.5.7. Общий метод расчета неразрезных балок на же-
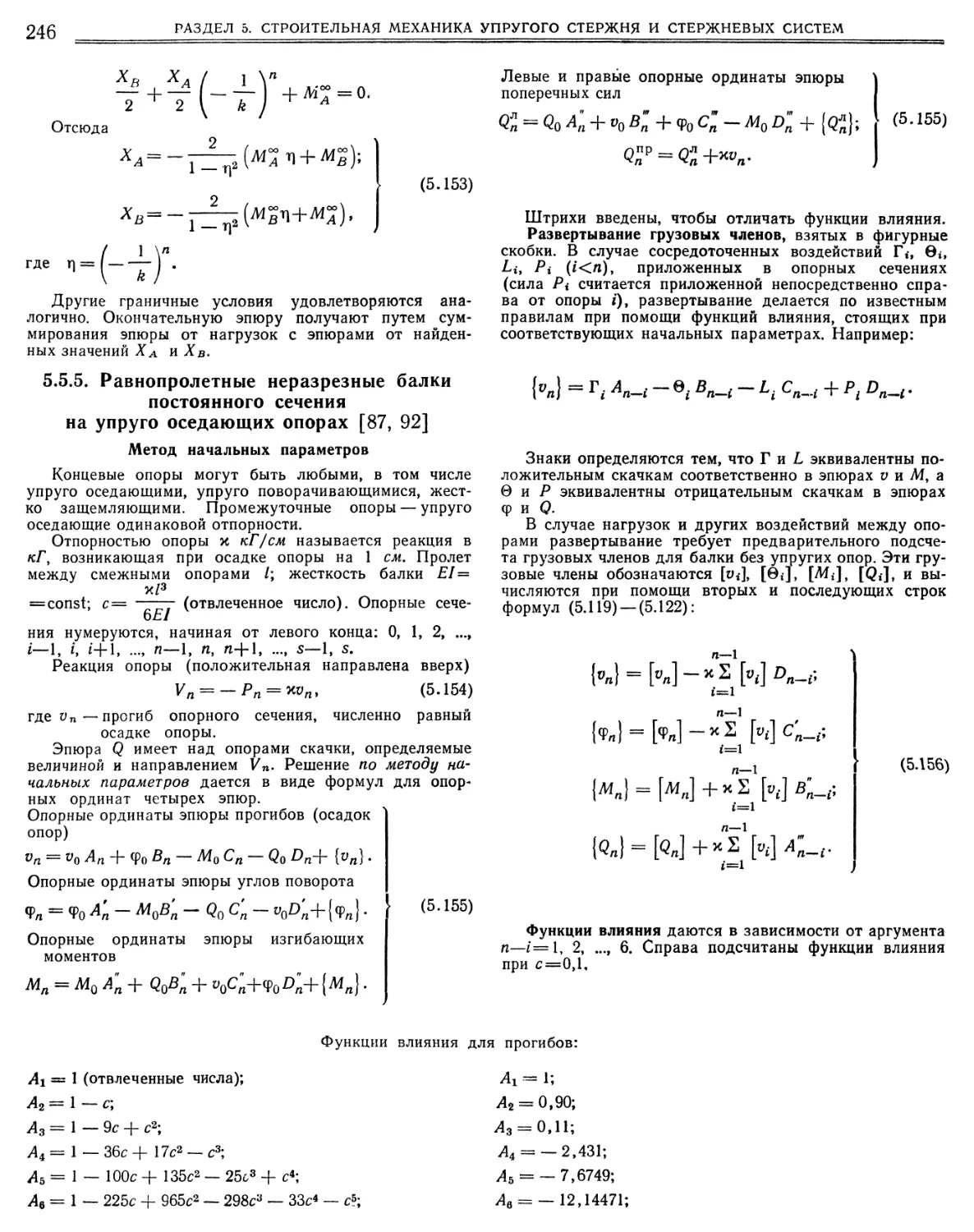
с с о стких опорах. Уравнение трех опорных моментов 257
5.5.8. Решение системы уравнений трех моментов и общих трехчленных уравнений 258
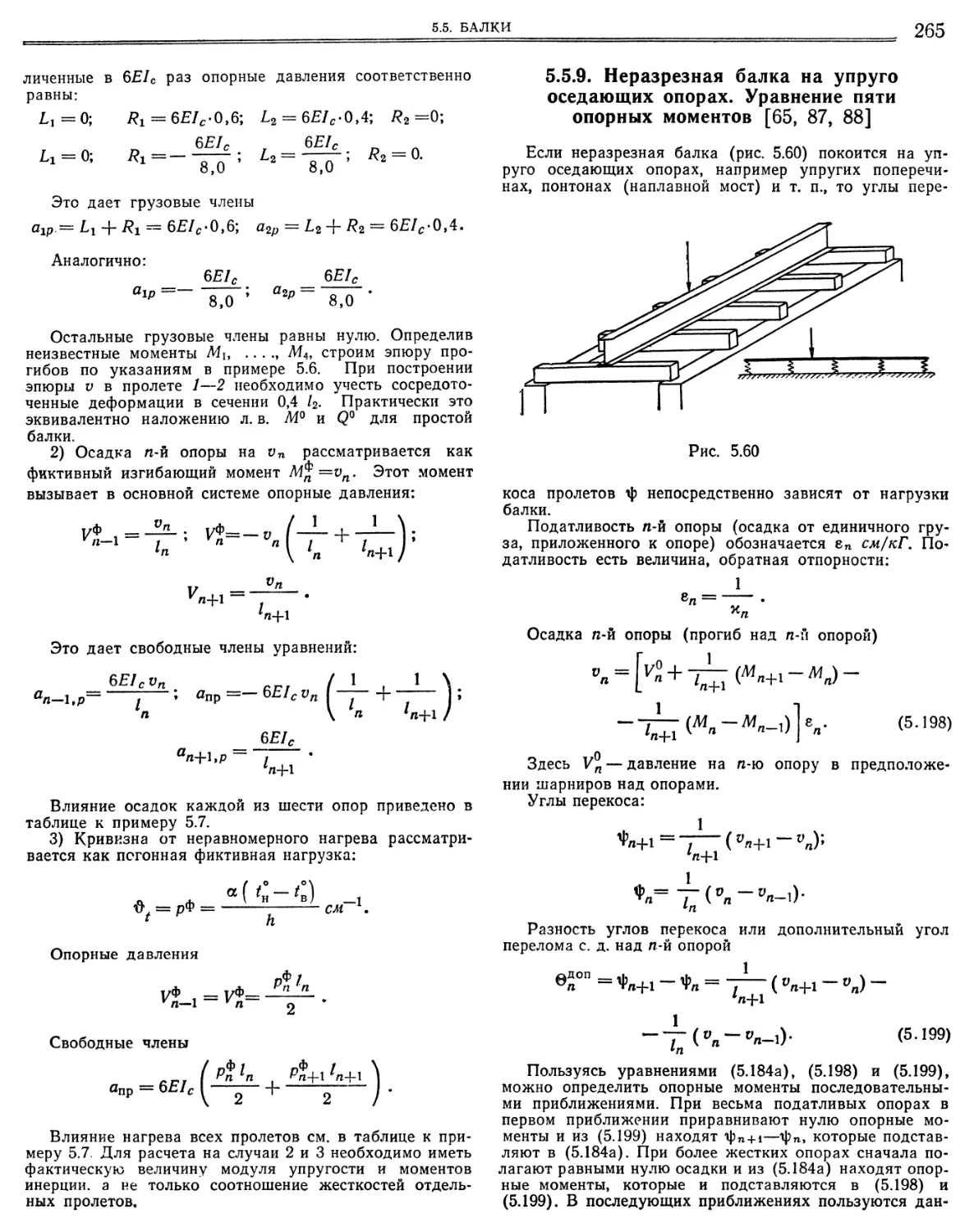
5.5.9. Неразрезная балка на упруго оседающих опорах.
Уравнение пяти опорных моментов 265
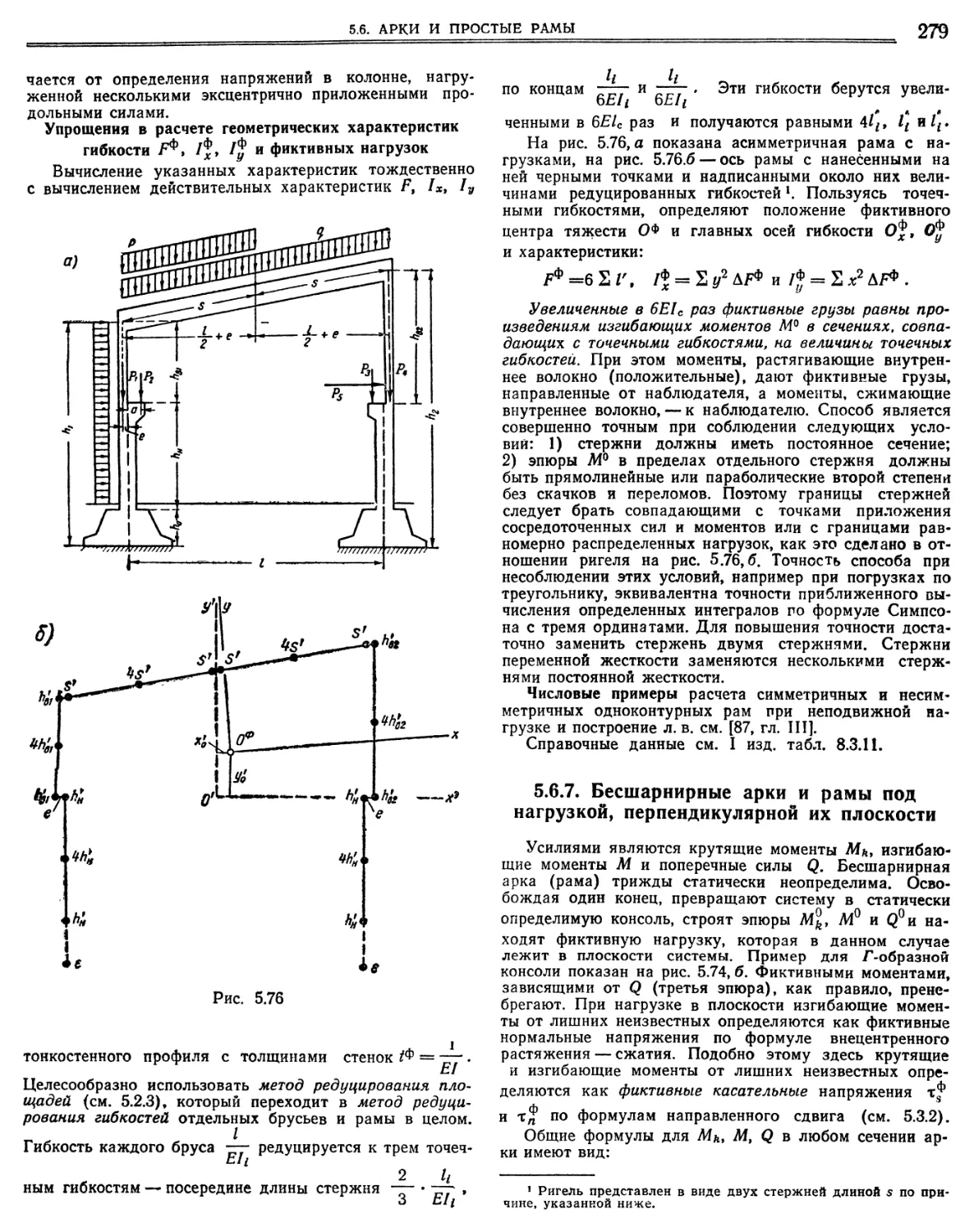
5.6. Арки и простые рамы., 266
5.6.1. Общие положения 266
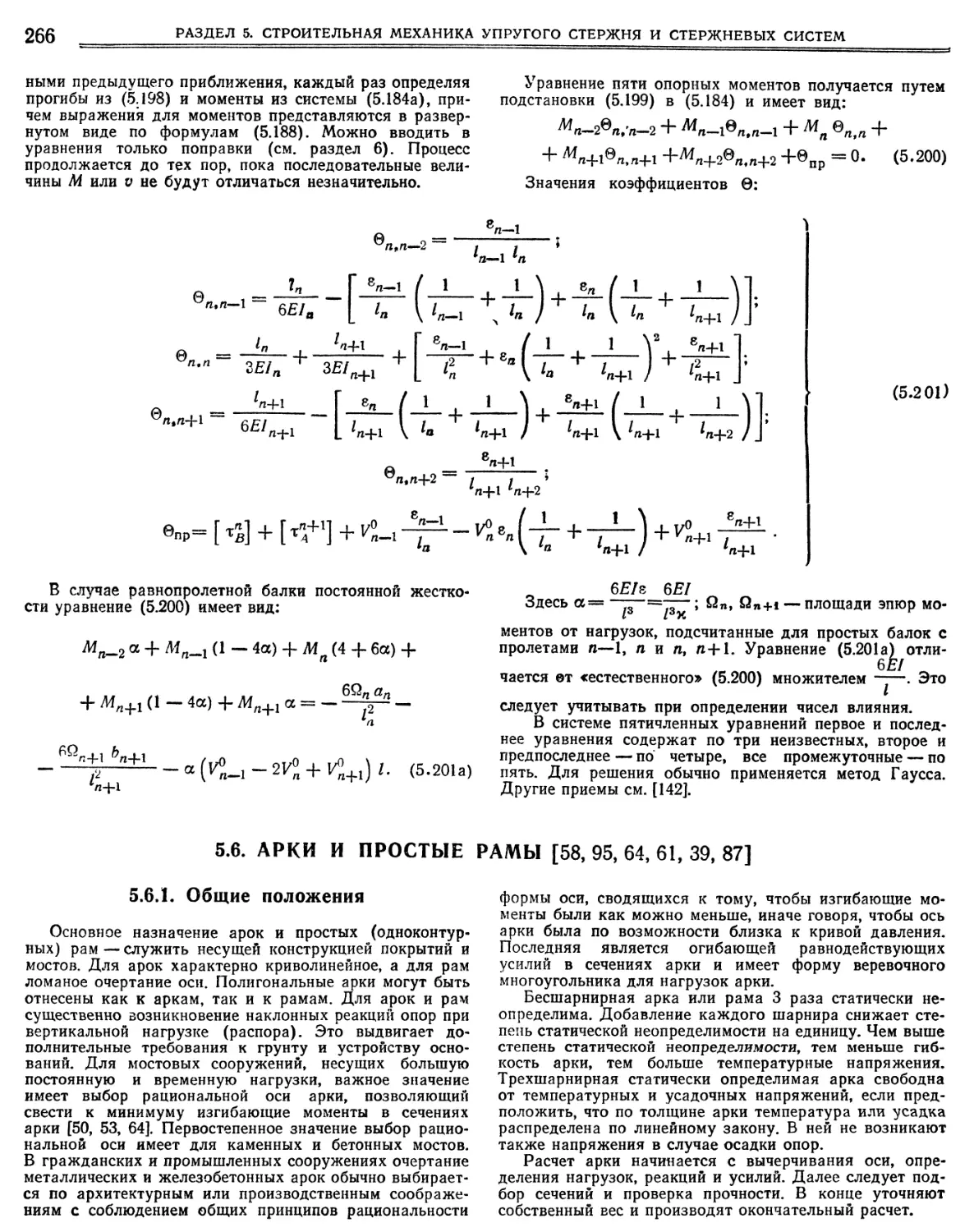
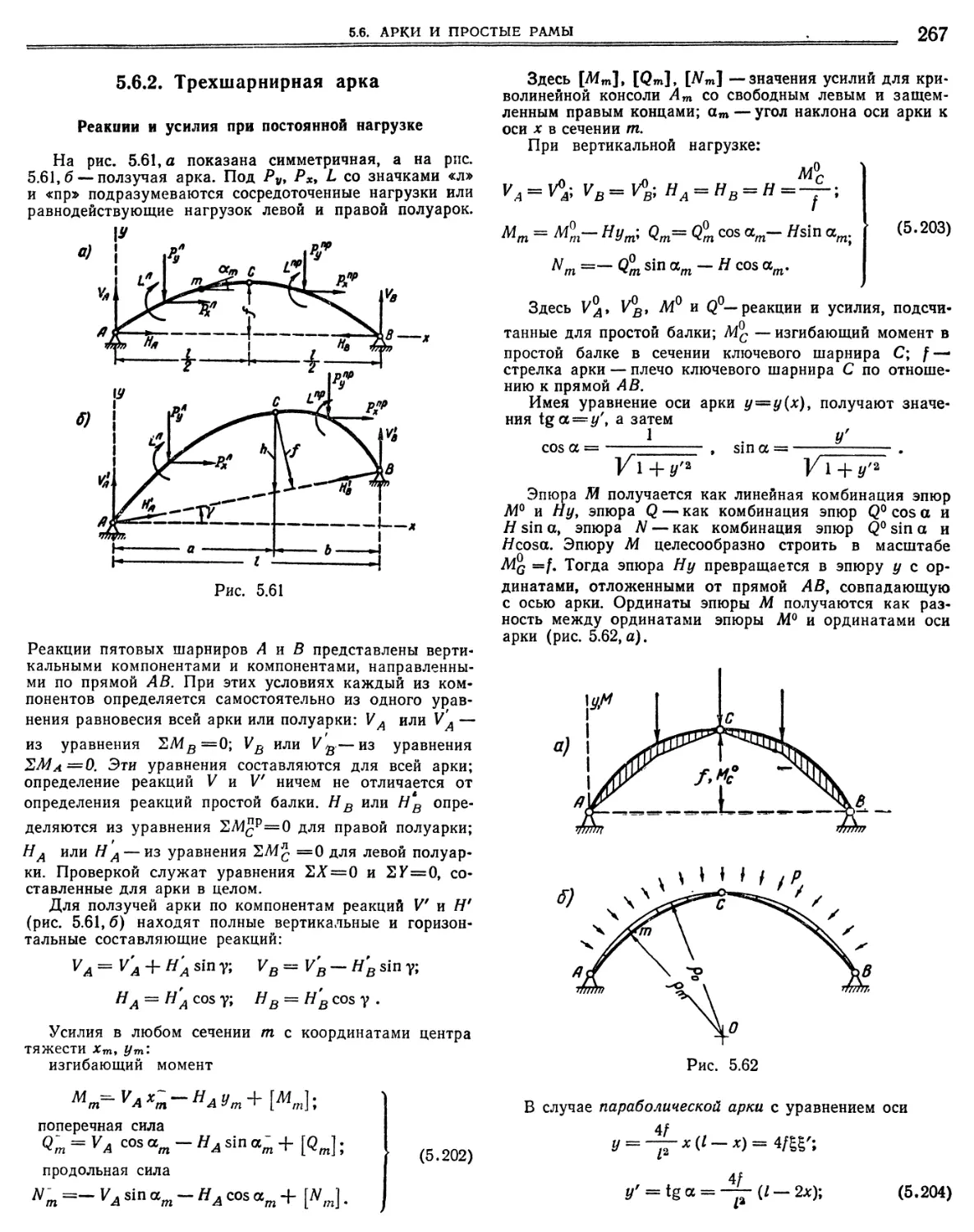
5.6.2. Трехшарнирная арка 267
5.6.3. Статически неопределимые арки .,». 270
5.6.4. Двухшарнирная арка. 273
5.6.5. Упрощенный расчет двухшарнирных и бесшар-
нирных параболических арок 274
5.6.6. Одноконтурные (простые) рамы 276
5.6.7. Бесшарнирные арки и рамы под нагрузкой, перпендикулярной их плоское ги 279
5.7. Сложные рамы
5.7.1. Классификация методов «,
5.7.2 Расчет рам по методу трех и четырех моментов
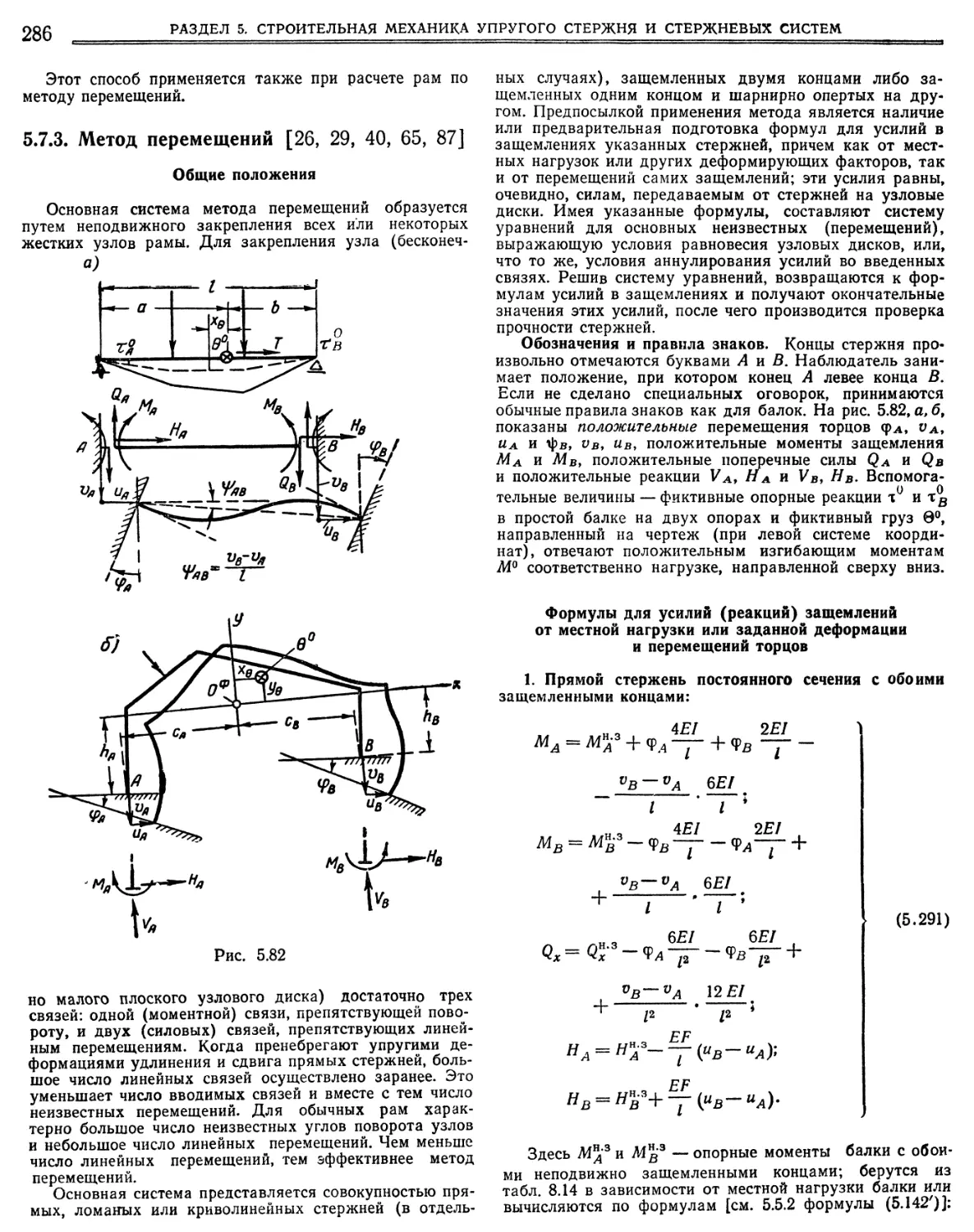
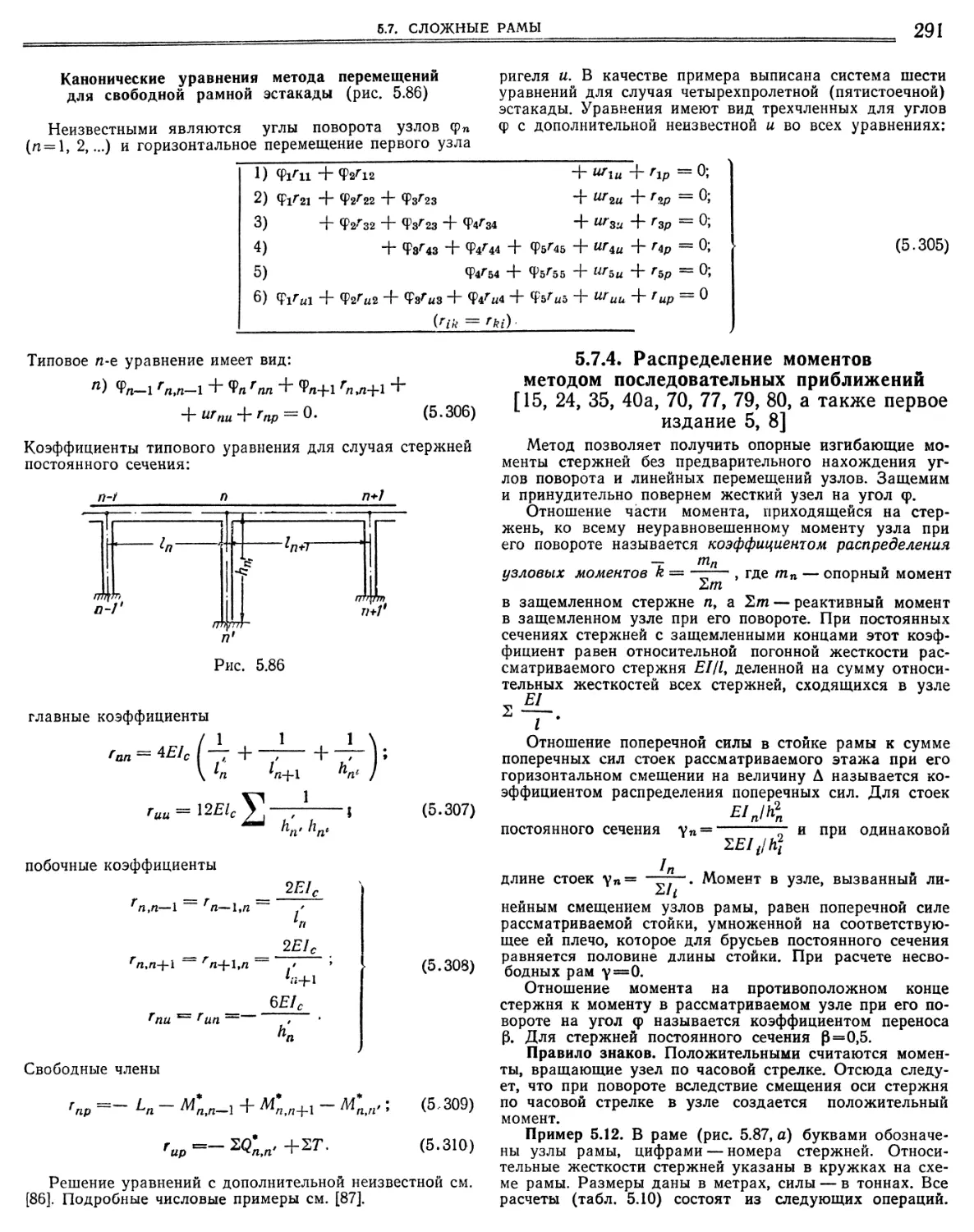
5.7.3. Метод перемещений. 5.7.4. Распределение моменгсв методом последователь¬
ных приближений (М. С. Сойбельман, Н. Н. Трогун) 5.7.5. Метод сил
280
280
281
286
291
295
6
ОГЛАВЛЕНИЕ
Стр.
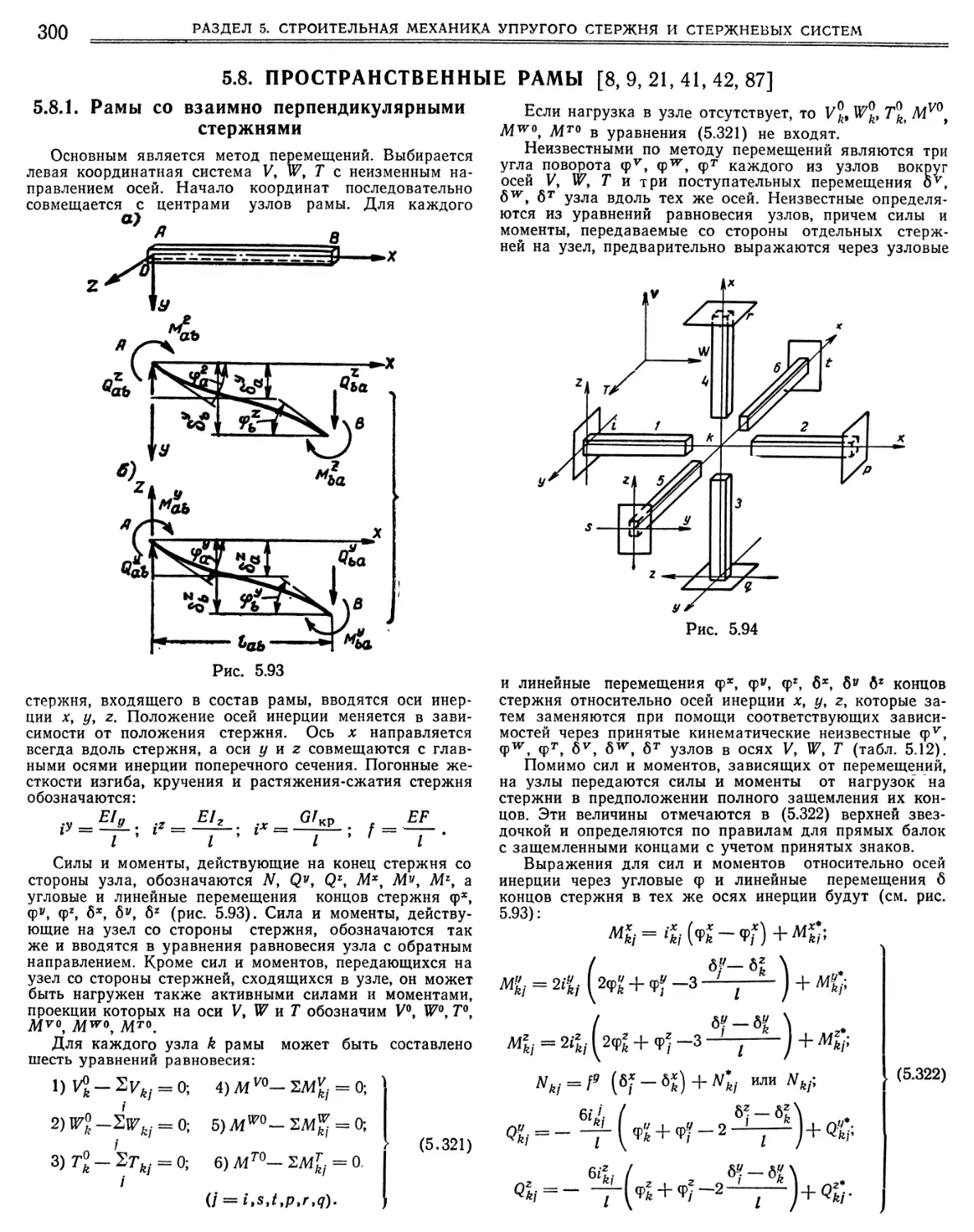
5.8. Пространственные рамы (В. Г. Чудновский) зоо
5.8.1. Рамы с взаимно перпендикулярными стержнями 300
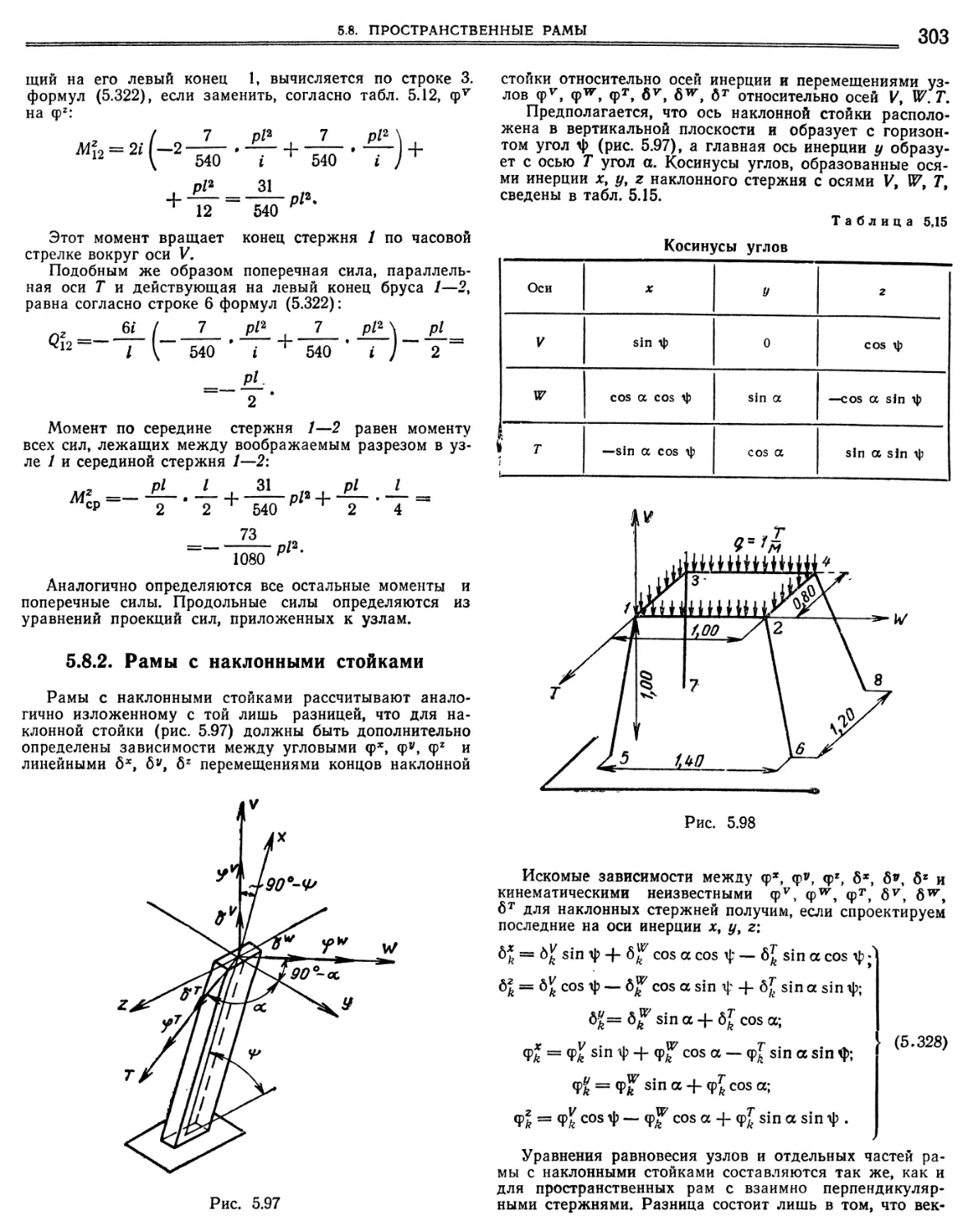
5.8.2. Рамы с наклонными стойками.«»»«»»■ 303
5.9. Циклические симметричные рамы.,. . 305
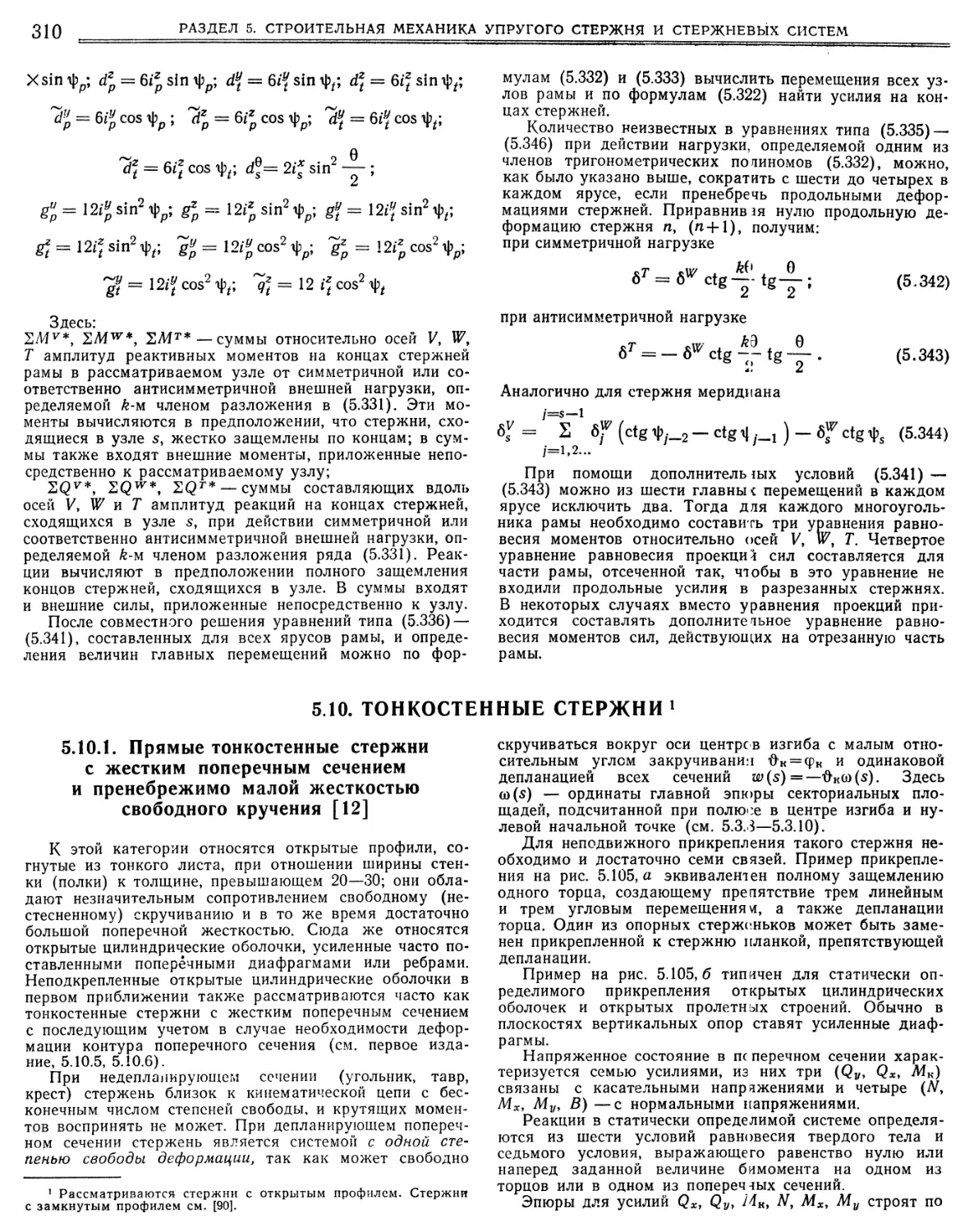
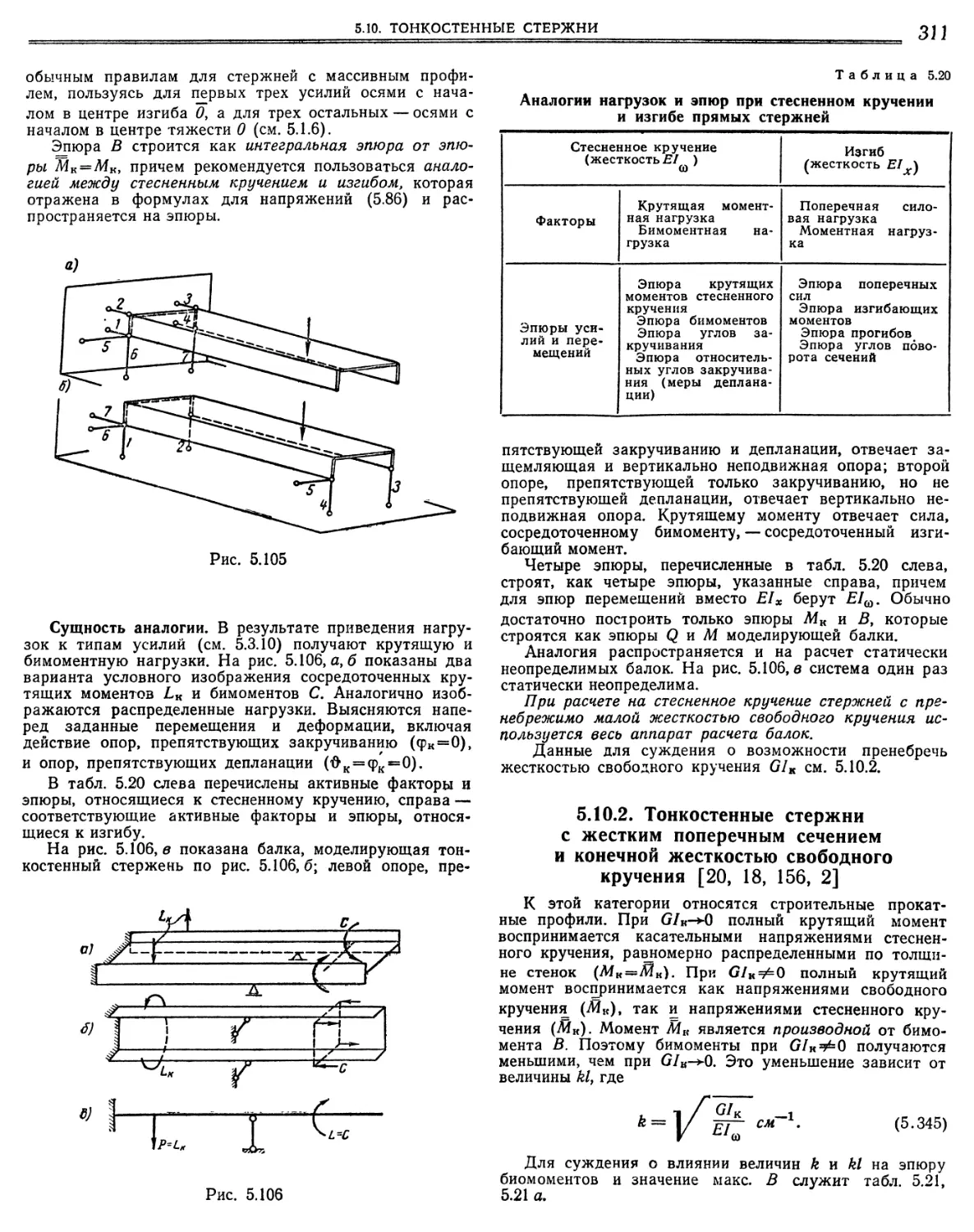
5.10. Тонкостенные стержни (А. А. Уманский). зю
6.10.1. Прямые тонкостенные стержни с жестким попе¬
речным сечением и пренебрежимо малой жесткостью свободного кручения. 310
5.10.2. Тонкостенные стержни с жестким поперечным се¬
чением и конечной жесткостью свободного кручения 311
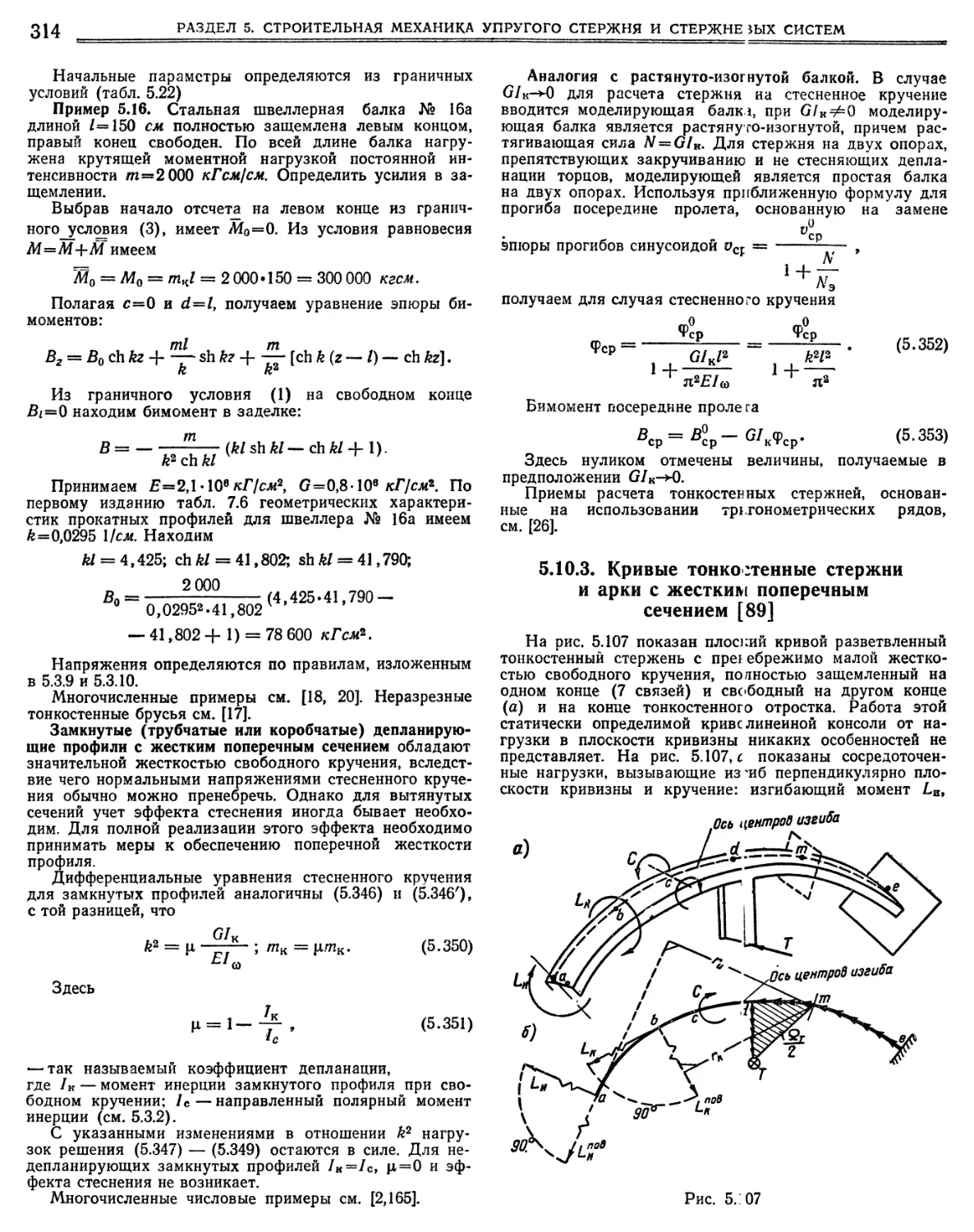
5 10.3. Кривые тонкостенные стержни и арки с жестким
поперечным сечением.«.«.я,». 314
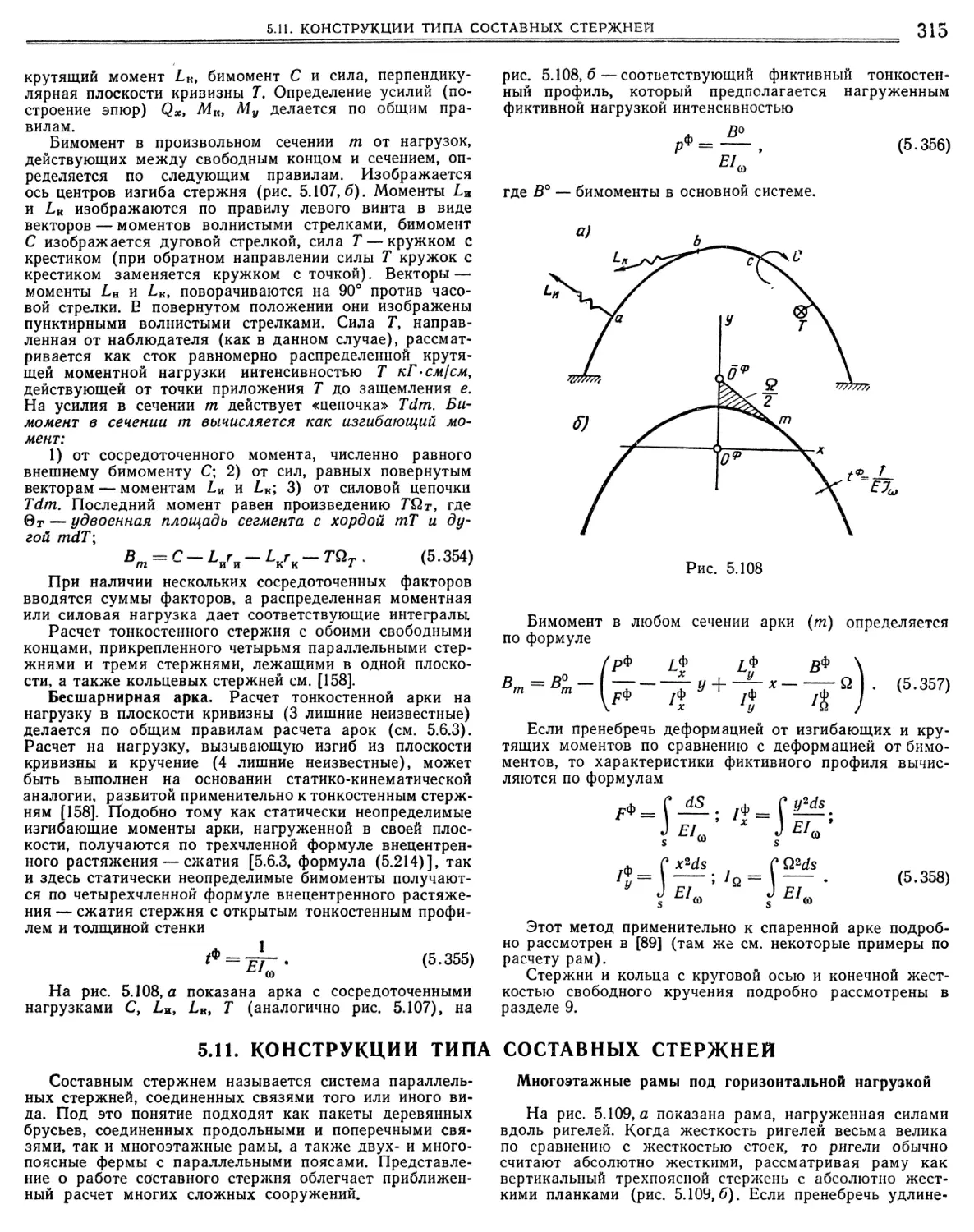
5.11. Конструкции типа составных стержней. 315
5.12. О расчете стержневых систем на ЭВМ
(О. Н. Родинко) 318
Литература,. 320
РАЗДЕЛ 6
ЧИСЛЕННЫЕ МЕТОДЫ ЛИНЕЙНОЙ АЛГЕБРЫ. МАТРИЦЫ В СТРОИТЕЛЬНОЙ МЕХАНИКЕ СТЕРЖНЕВЫХ СИСТЕМ
А. Я. Филин, С. 3. Динкевин
6.1. Некоторые сведения из теории матриц. 322
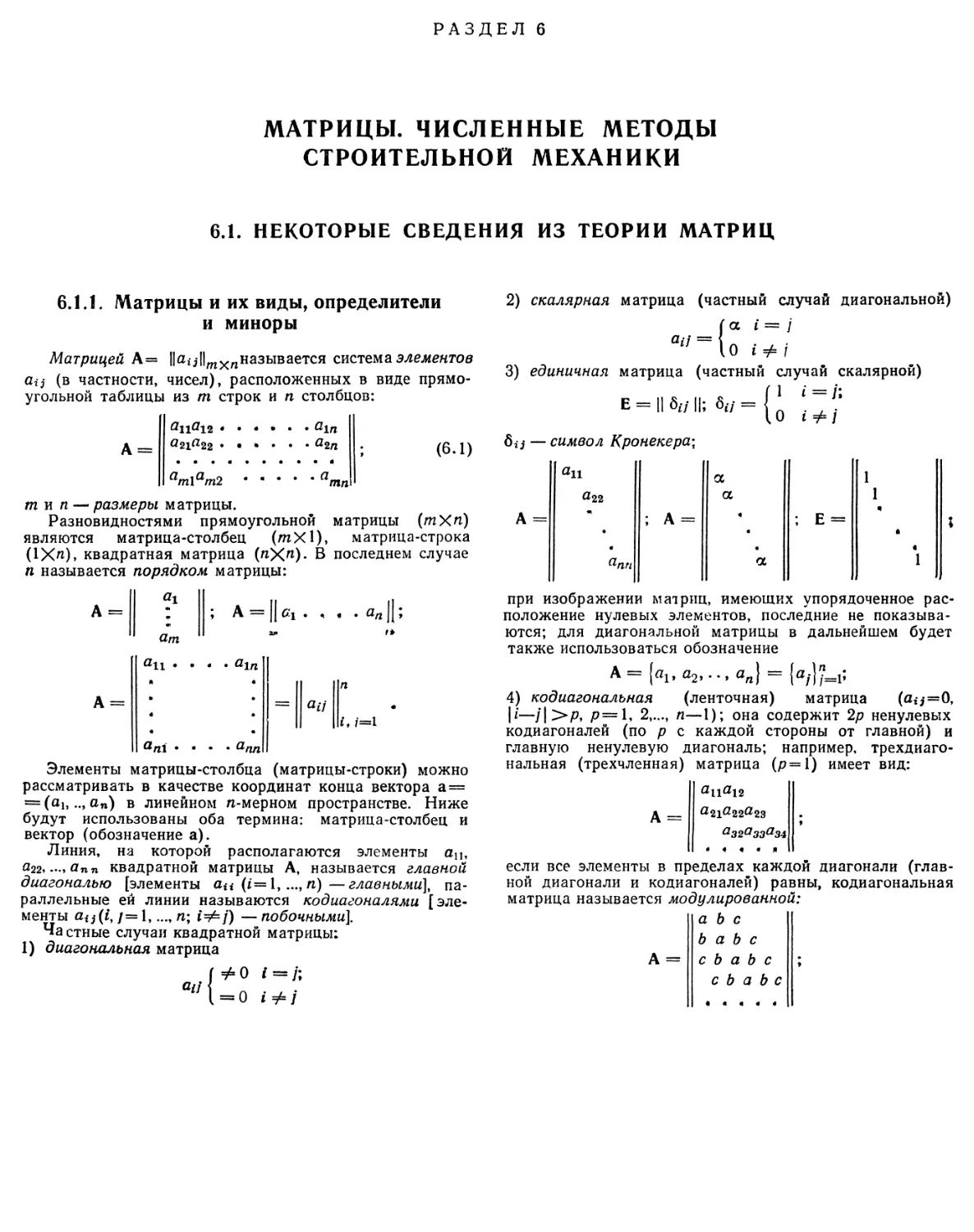
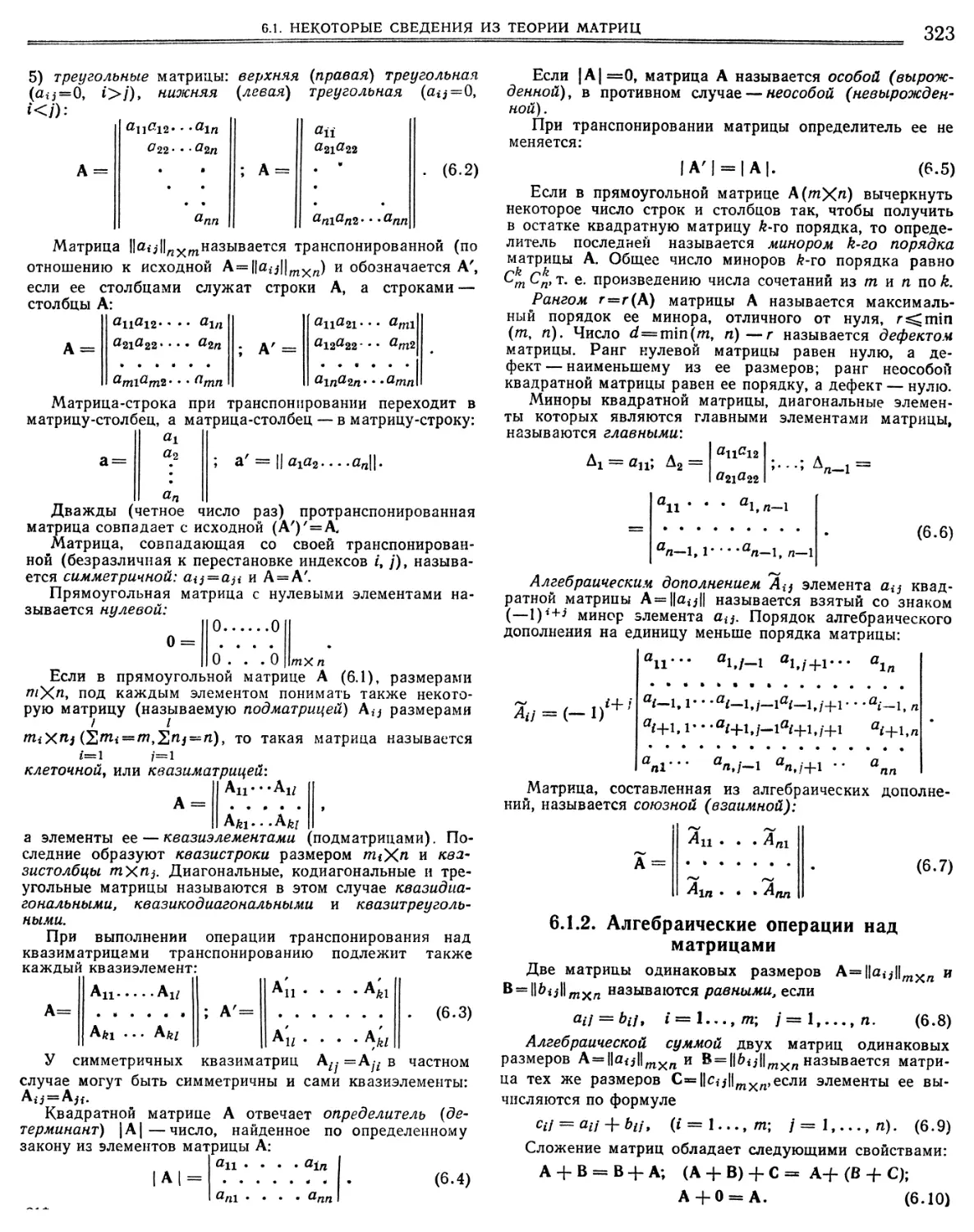
6.1.1. Матрицы и их виды, определители и миноры « « 322
6.1.2. Алгебраические операции над матрицами. « 323
6.1.3. Обратная матрица. Ортогональная матрица « « 325
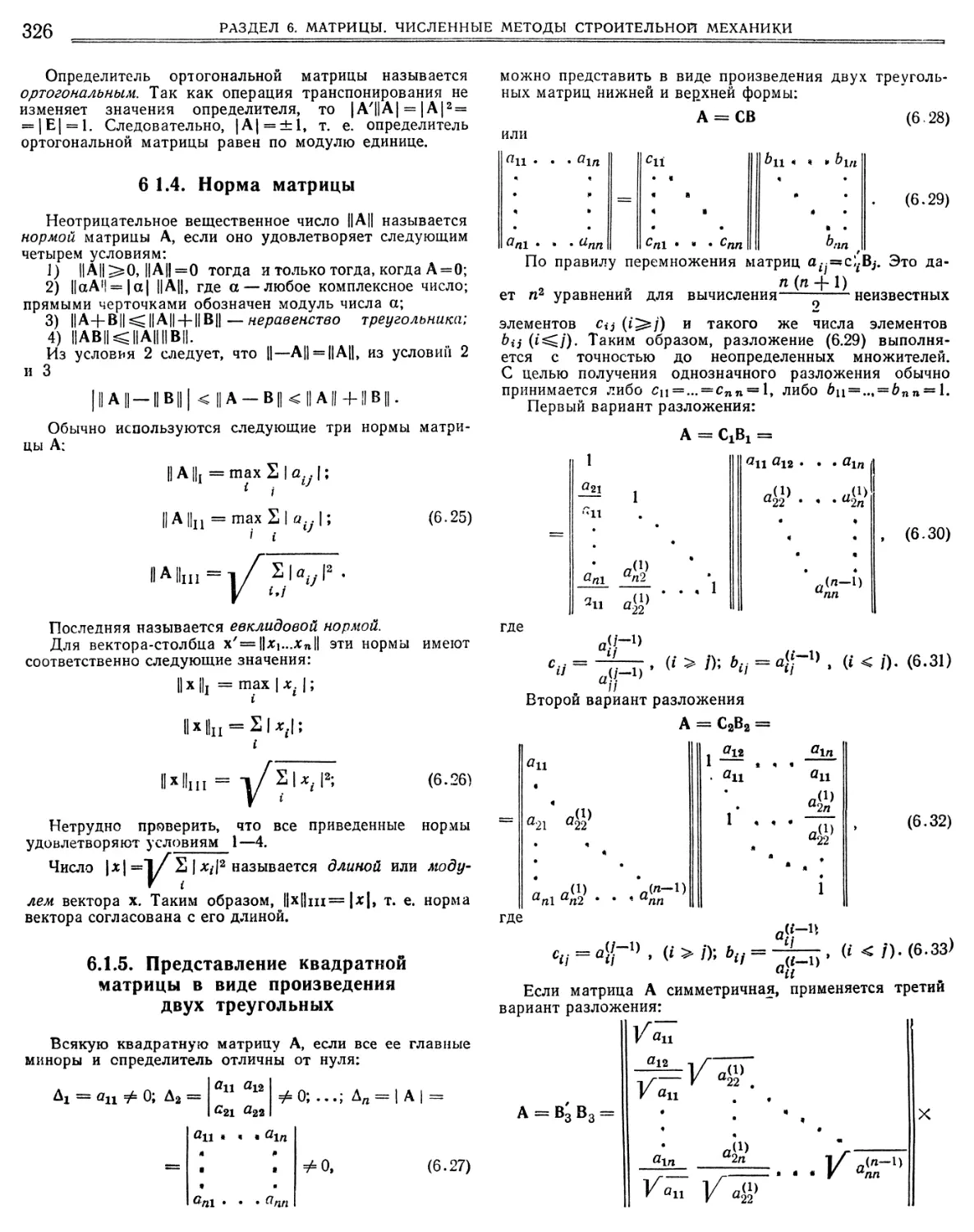
6.1.4. Норма матрицы 326
6.1.5. Представление квадратной матрицы в виде произведения двух треугольных 326
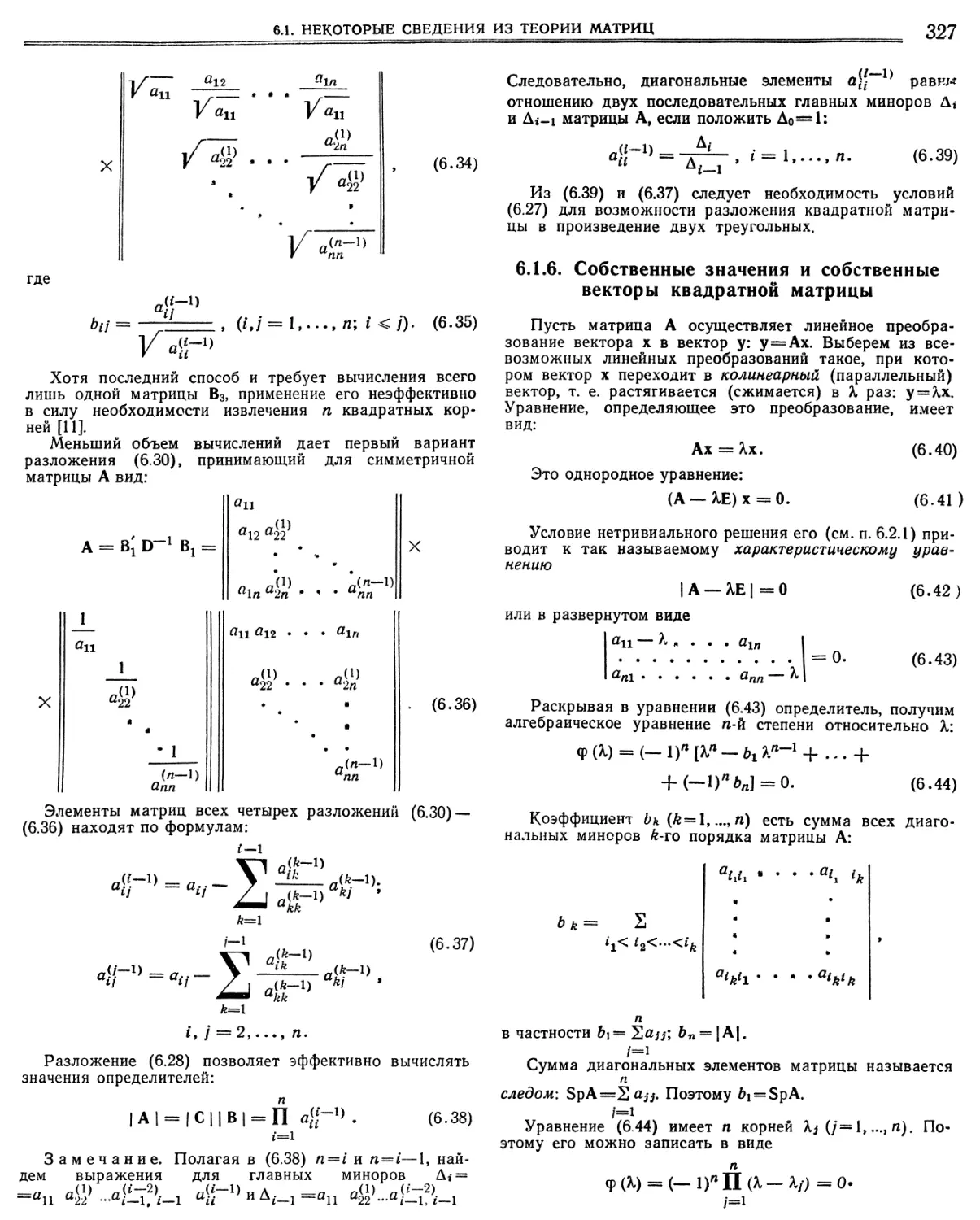
6.1.6. Собственные значения и собственные векторы
квадратной матрицы. 327
6.1.7. Квадратичная форма. Пучок квадратичных форм 329
6.2. Некоторые сведения по численным методам
линейной алгебры 332
6.2.1. Общие вопросы решения систем линейных алгебраических уравнений 332
6.2.2. Метод исключений «го»»». 332
6.2.3. Схемы обращения матрицы, использующие разложение ее на треугольные множители 334
6.2.4. Итерационные методы решения систем уравнений 335
6.2.Ь. Об устойчивости решения систем линейных алгебраических уравнений. 337
6.2.6. О методах решения проблемы собственных значений 337
6.3. Матрицы в статике стержневых систем. • 338
6.3.1. Матрицы податливостей и жесткостей. Потенциальная энергия »«•.«•.•.« 338
6.3.2. Механическая интерпретация гауссовой схемы метода исключений 339
6.5.3. Матричная форма метода сил ». • « « % « 340
6.3.4. Матричные формы метода перемещений • •. • 343
6.3.5. Матричная форма смешанного метода , ч • « 345
6.4. Матрицы в теории колебаний и устойчивости
стержневых систем 345
6 4.1. Свободные колебания систем с конечным числом
степеней свободы..•.«..» 345
6.4.2. Вынужденные колебания консервативной дискретной системы 347
6.4.3. Свободные колебания и статическая устойчивость
статически (кинематически) неопределимых стержневых систем с бесконечным числом степеней свободы 4. 347
6.4.4. Вычиочение реактивных усилий ««•»«»». 354
Литература 354
Стр.
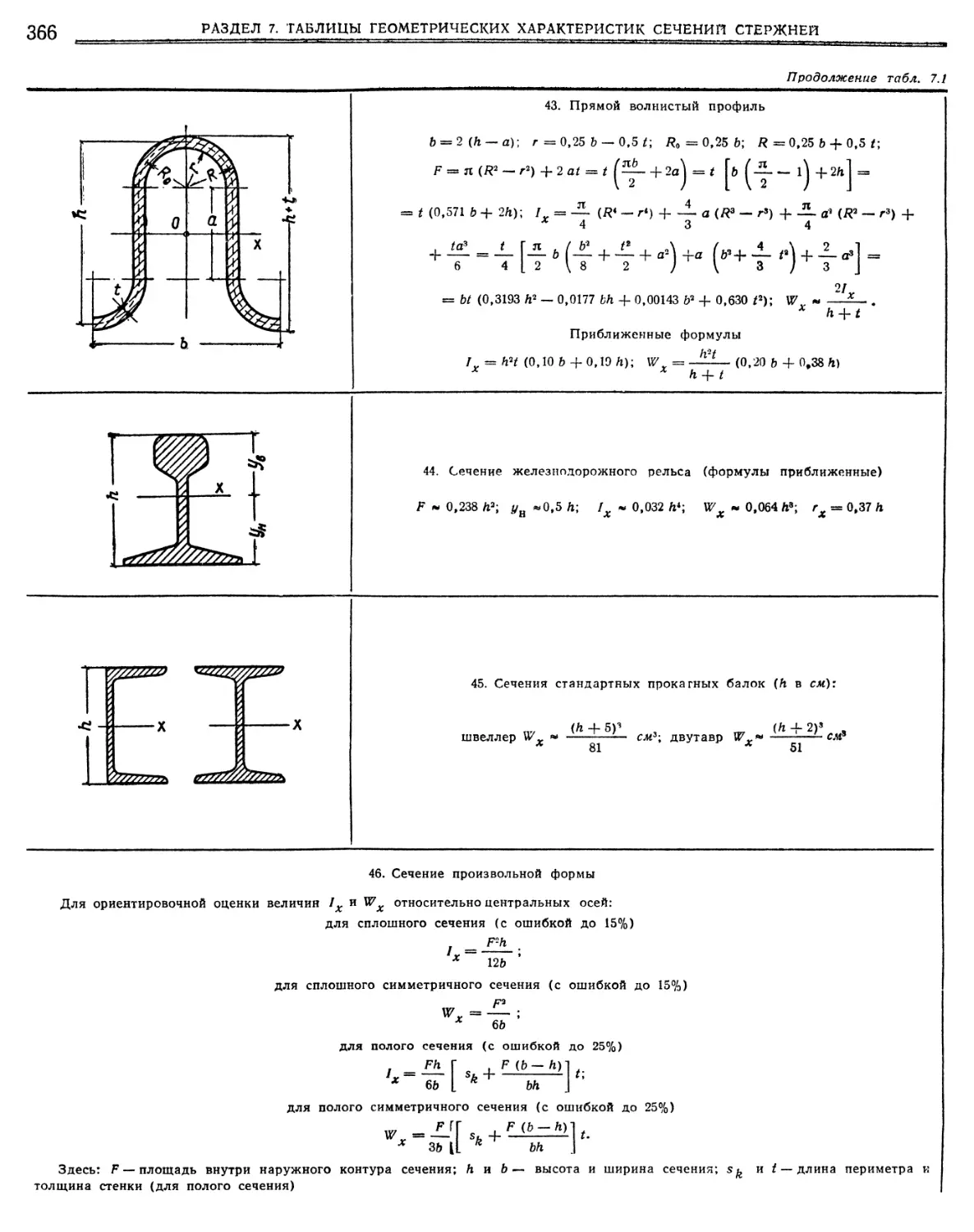
РАЗДЕЛ 7
ТАБЛИЦЫ ГЕОМЕТРИЧЕСКИХ ХАРАКТЕРИСТИК СЕЧЕНИИ СТЕРЖНЕЙ
В, В. Новицкий
7.1. Геометрические характеристики при растяже-
нии — сжатии и изгибе.
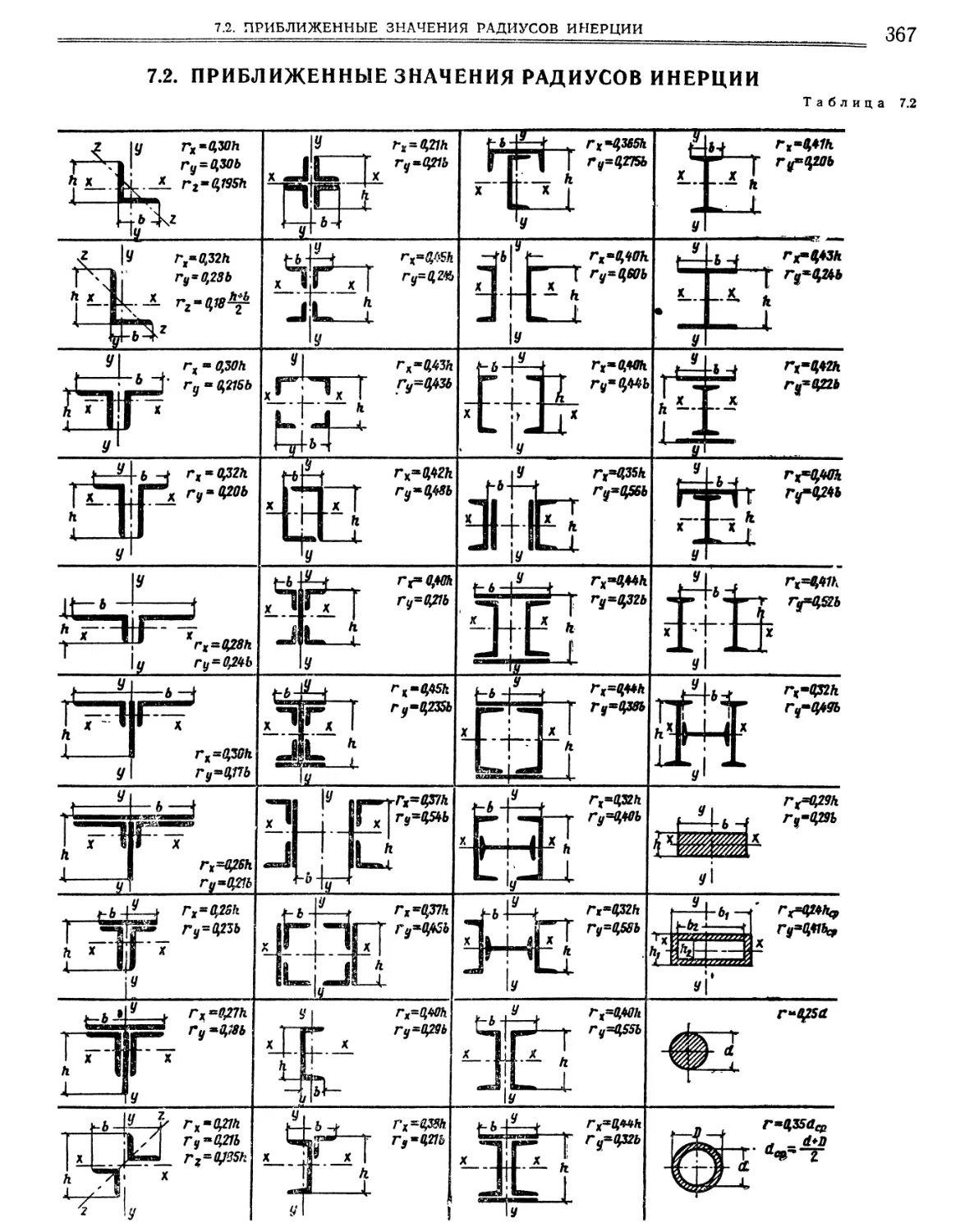
7.2. Приближенные значения радиусов инерции.
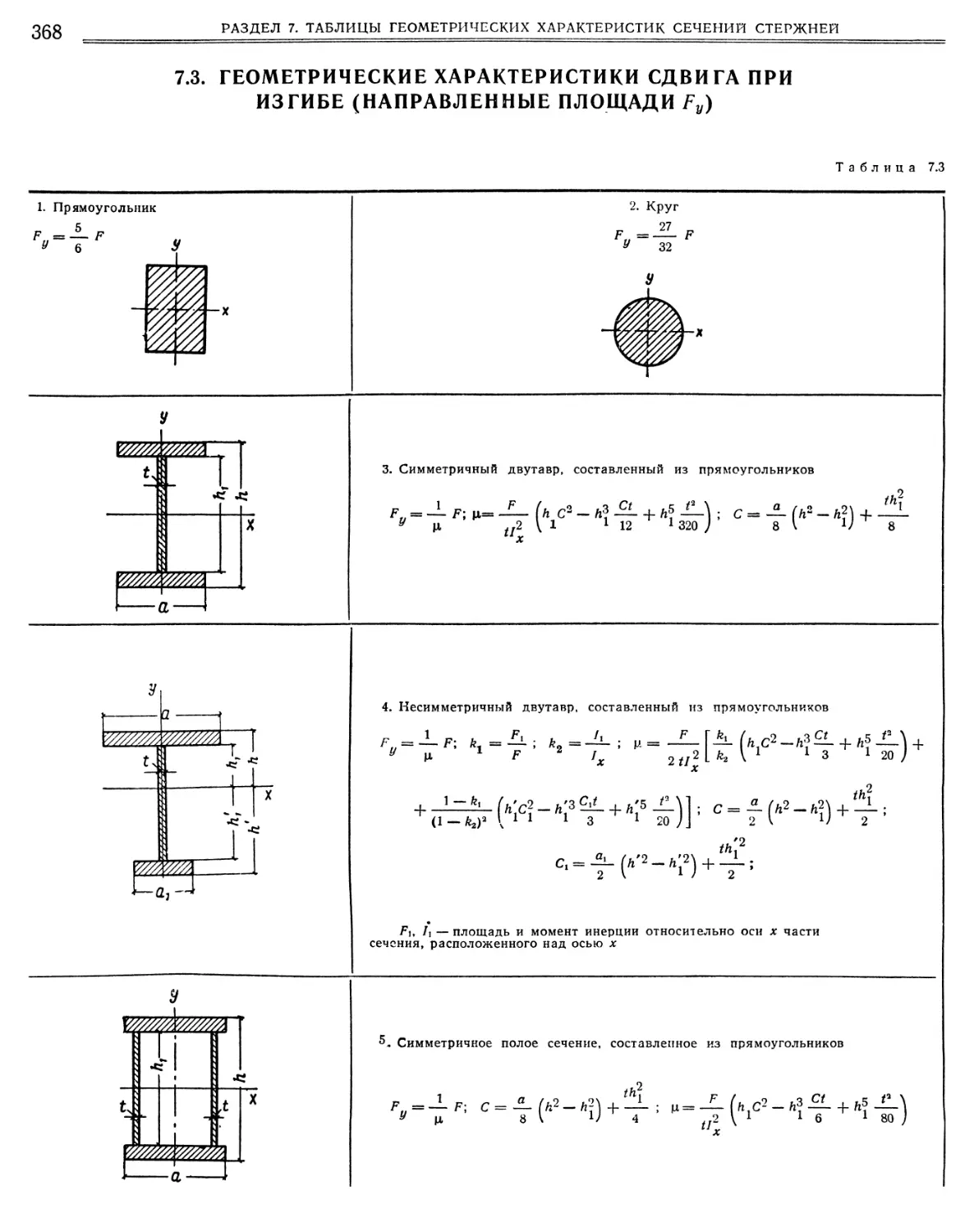
7.3. Геометрические характеристики сдвига при из гибе (направленные площади Гу).
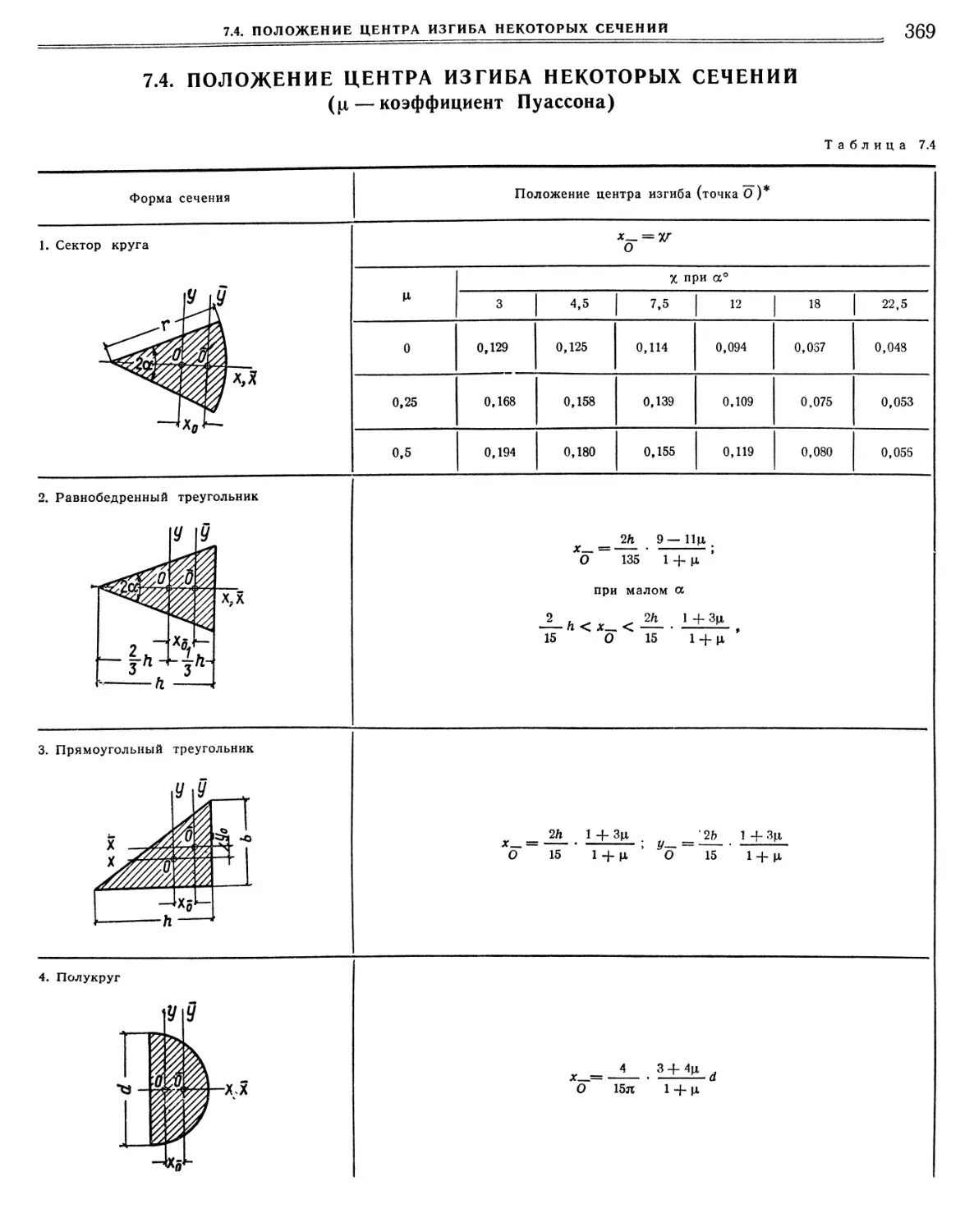
7.4. Положение центра изгиба некоторых сечений (р, — коэффициент Пуассона).
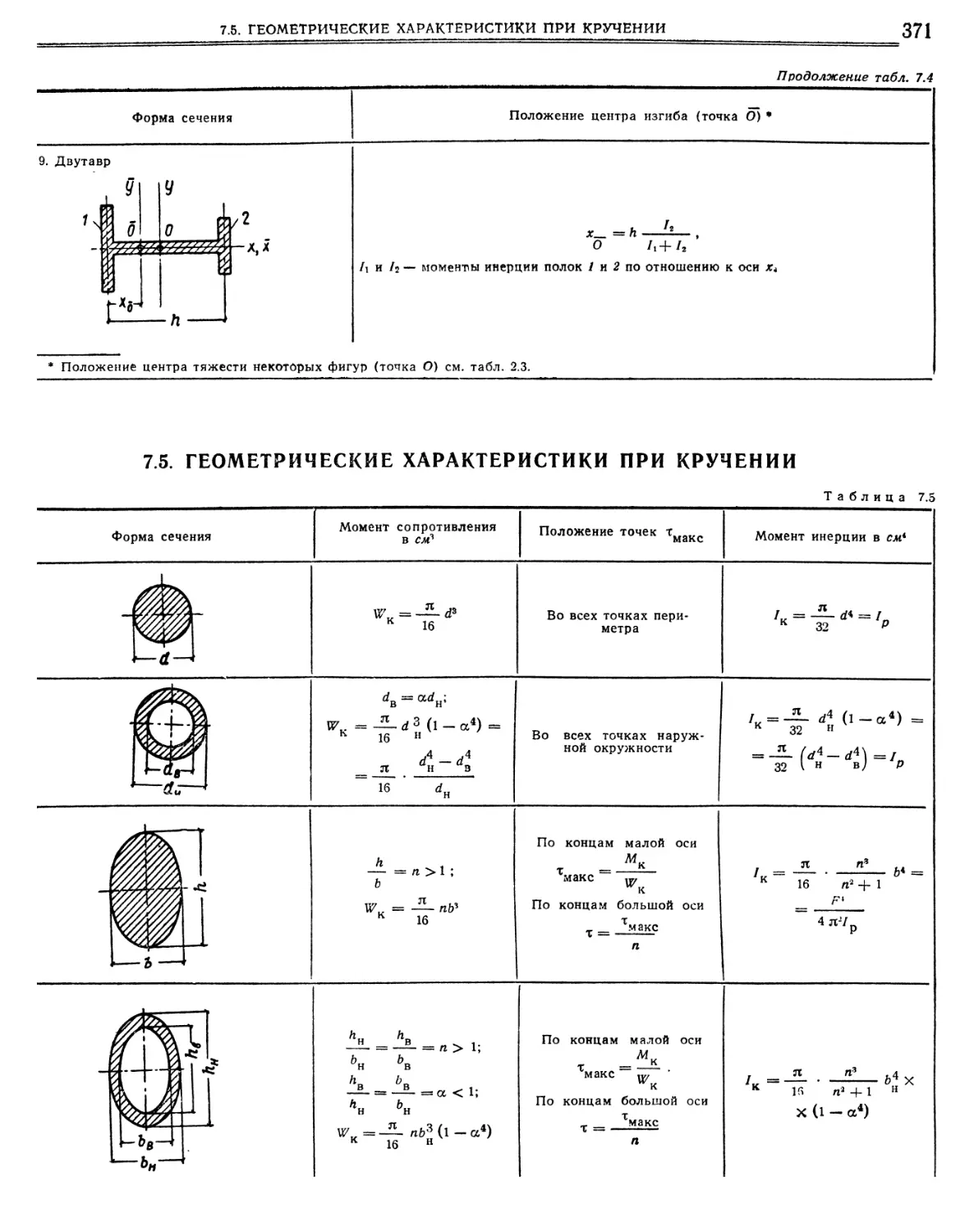
7.5. Геометрические характеристики при кручении
Литература. •. 356
367
368
369
371
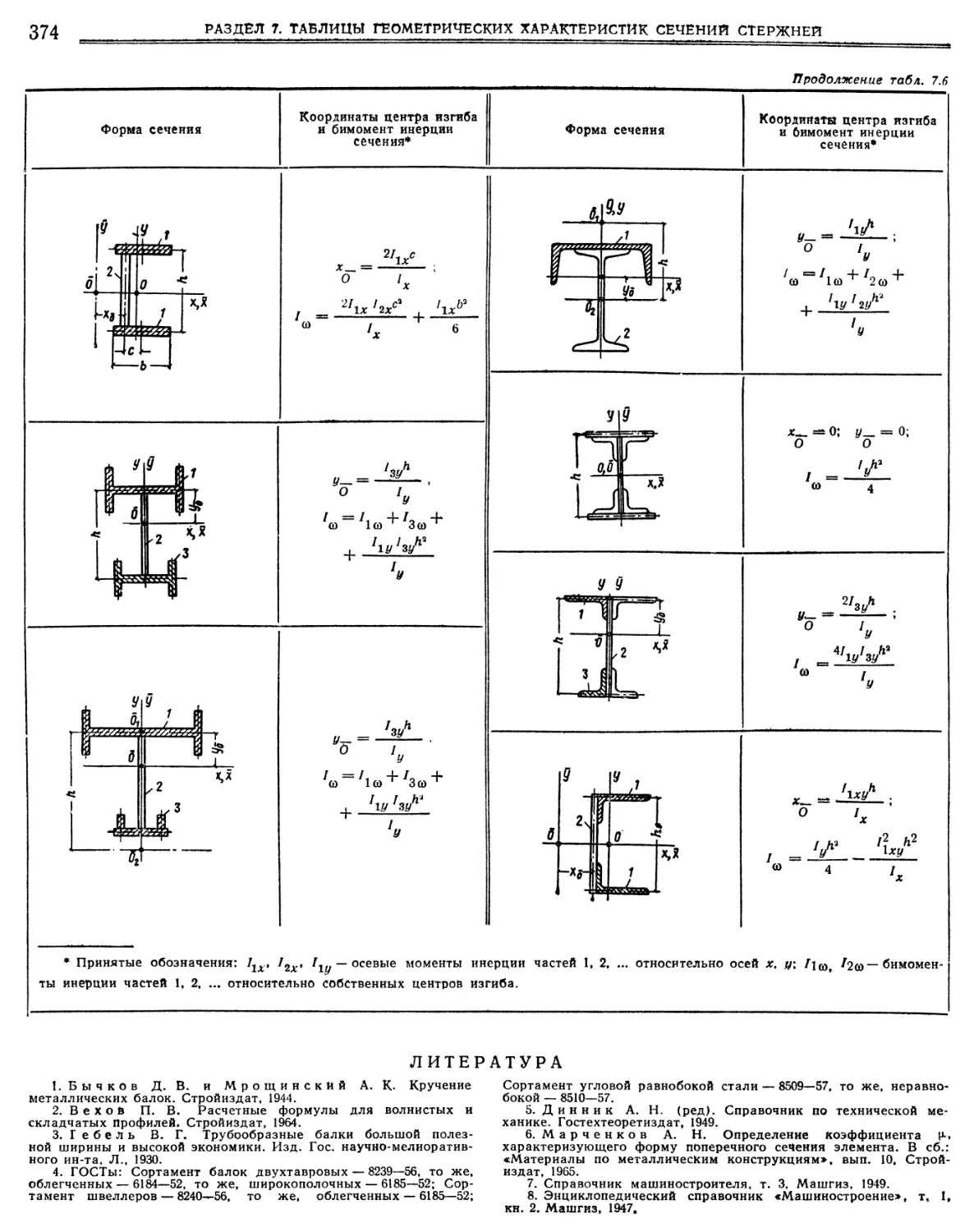
374
РАЗДЕЛ 8
ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
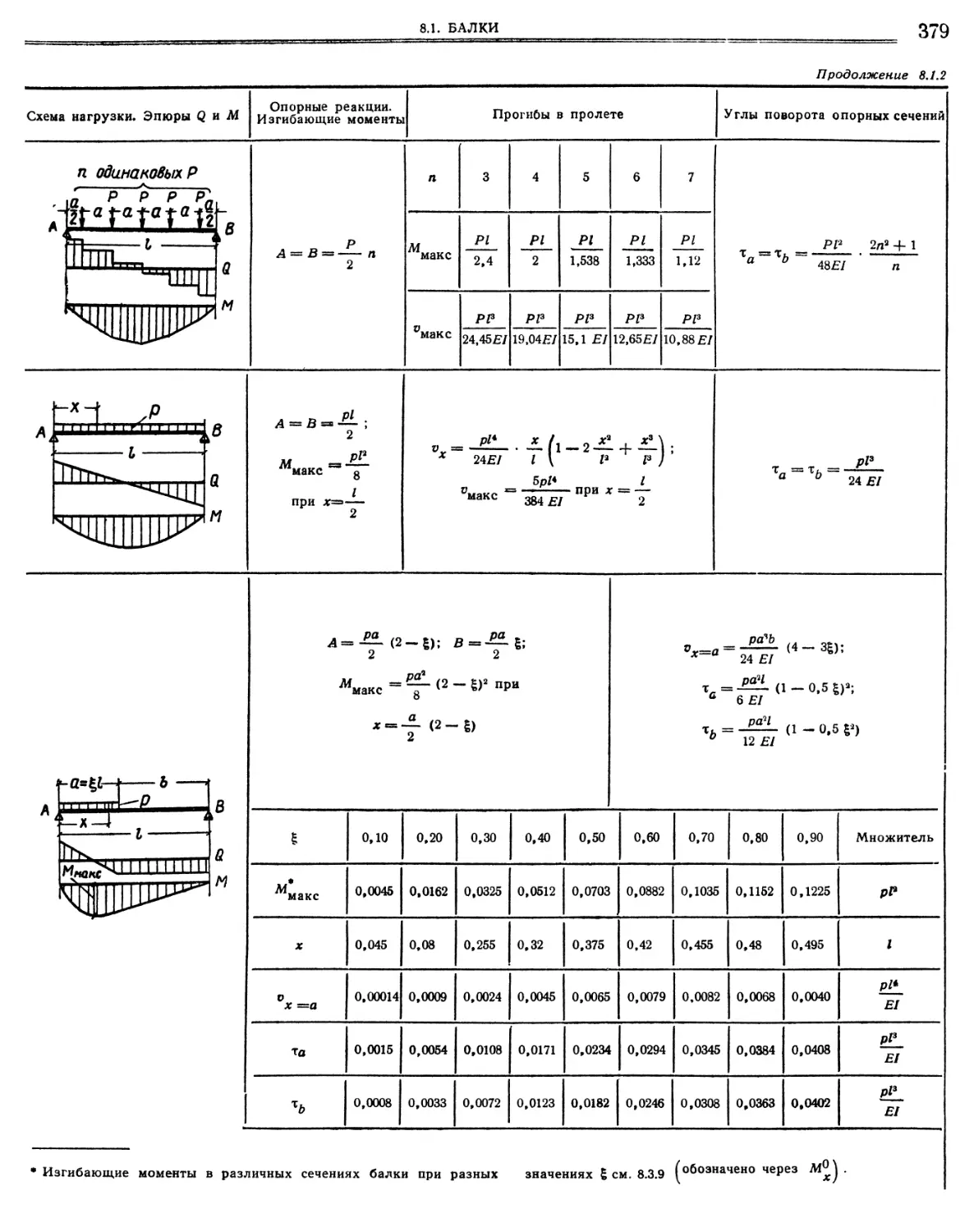
М. С. Волчегорский, Д. Л. Шапиро 8.1. Балки 8.1.1.
8.1.2.
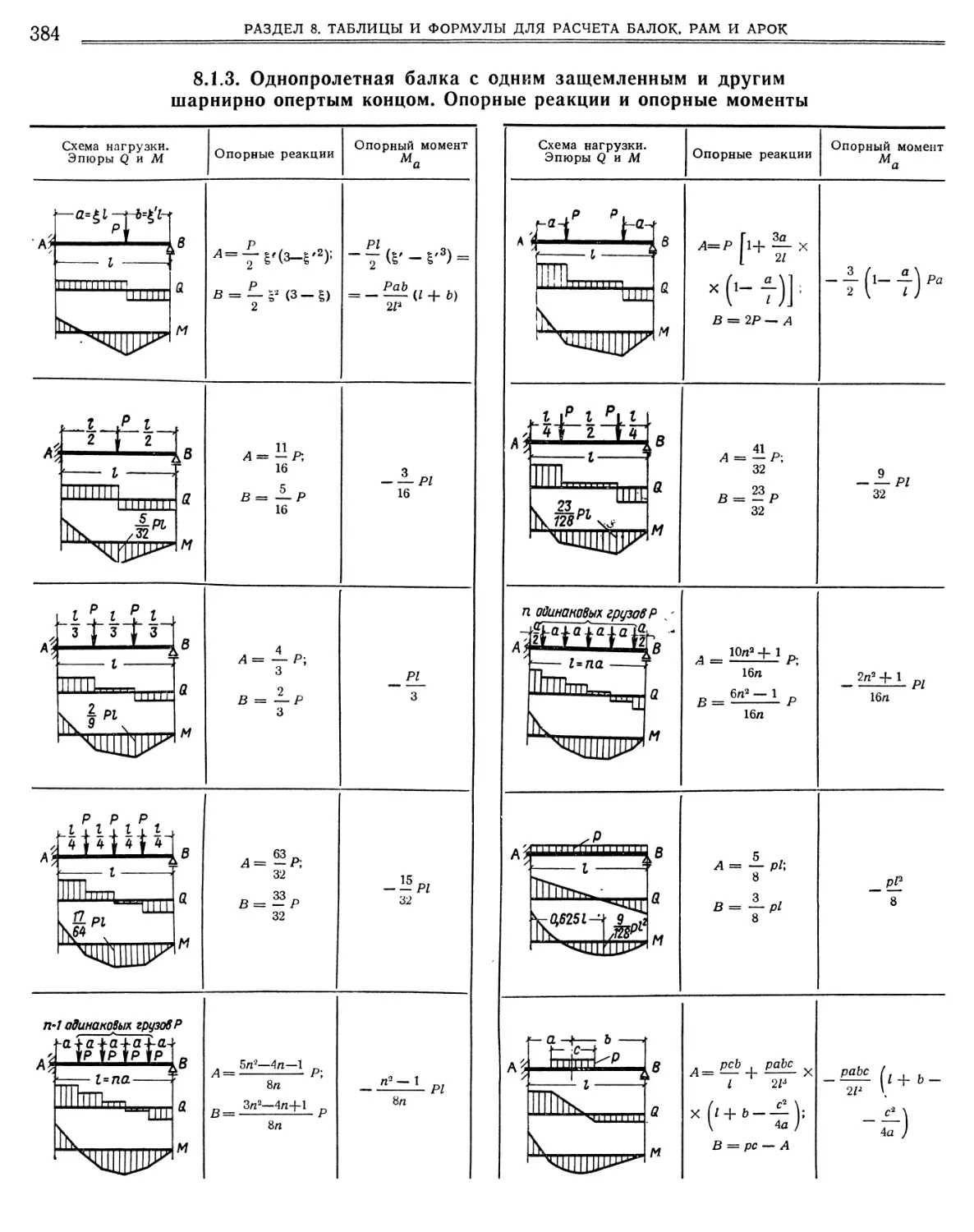
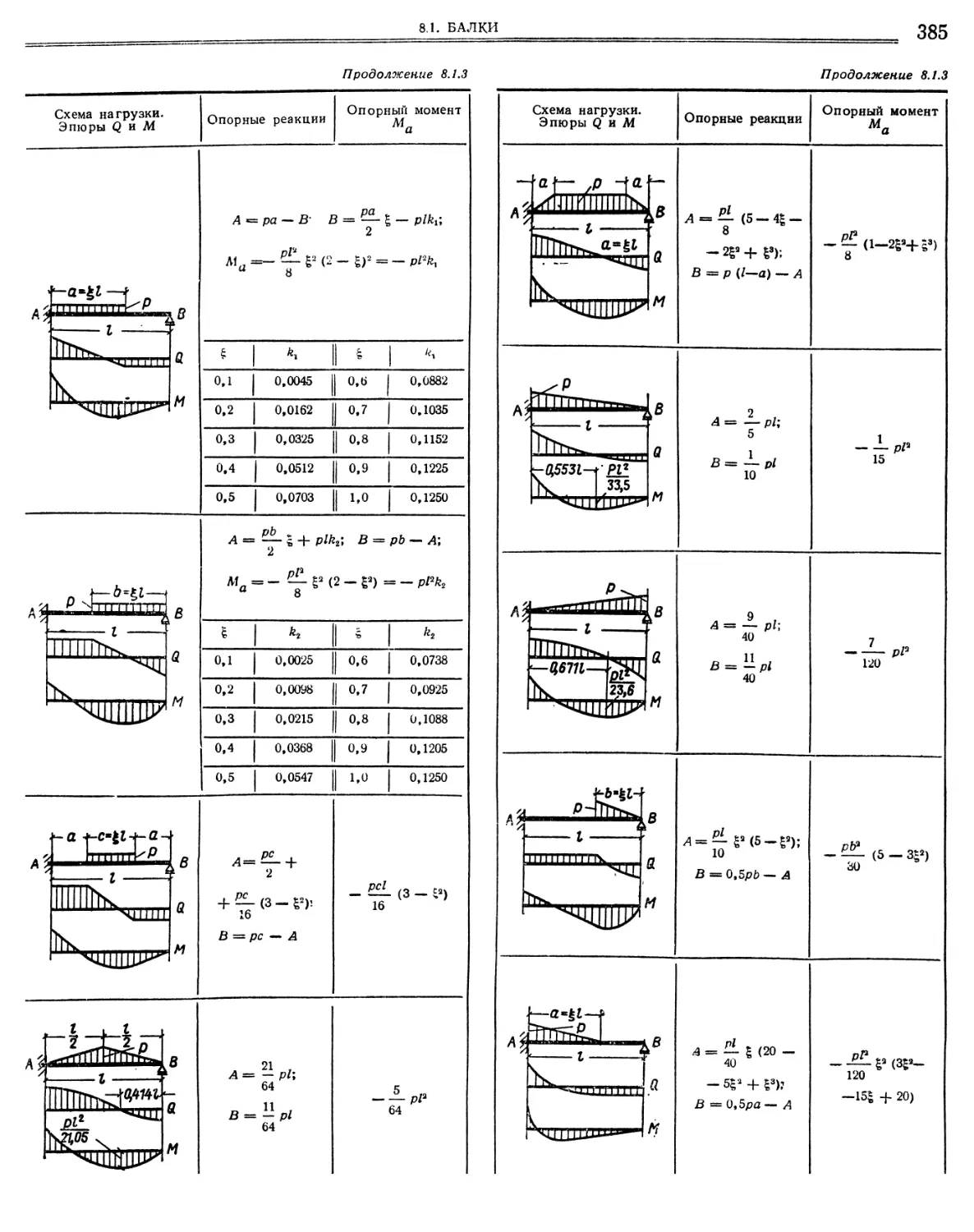
8.1.3.
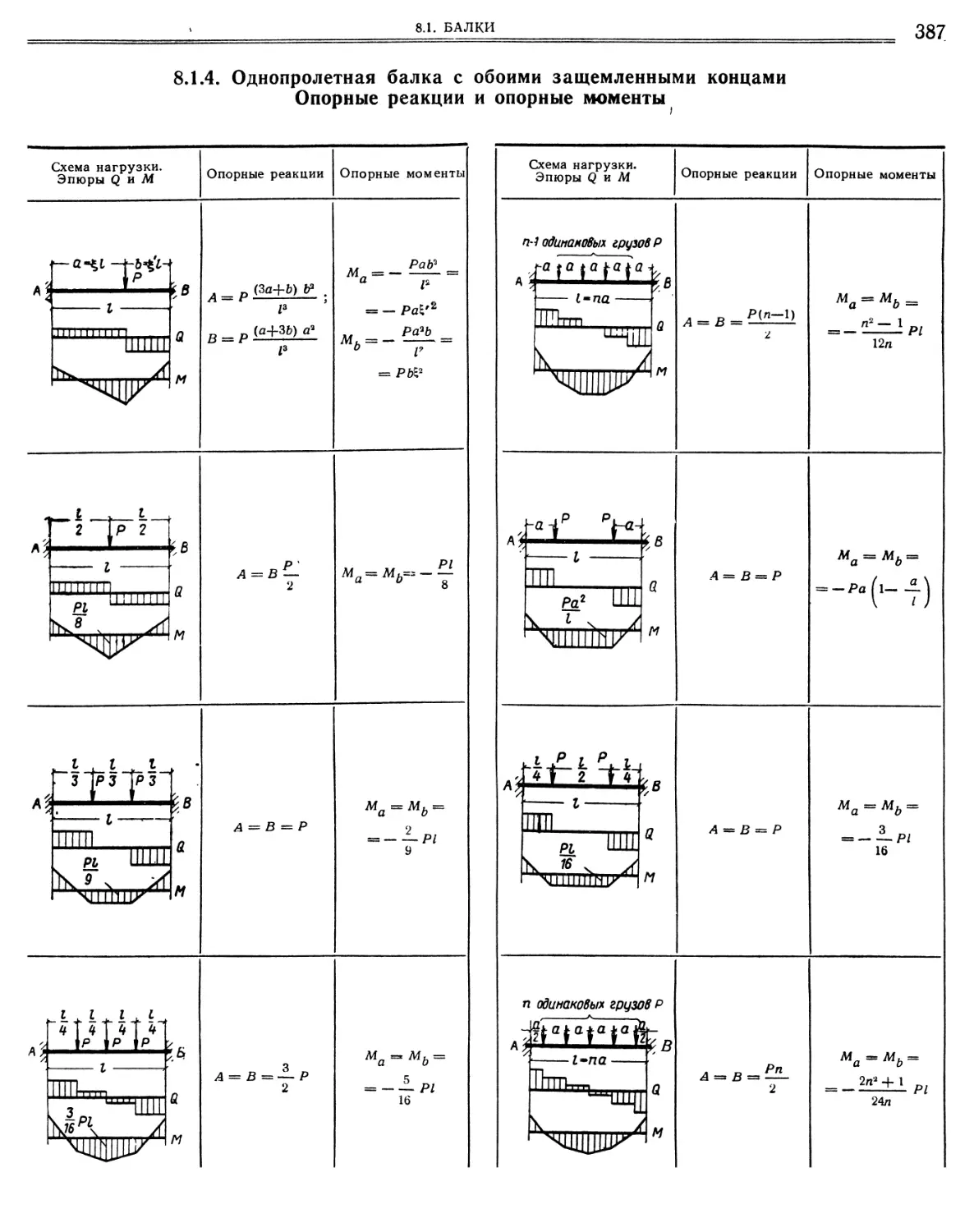
8.1.6.
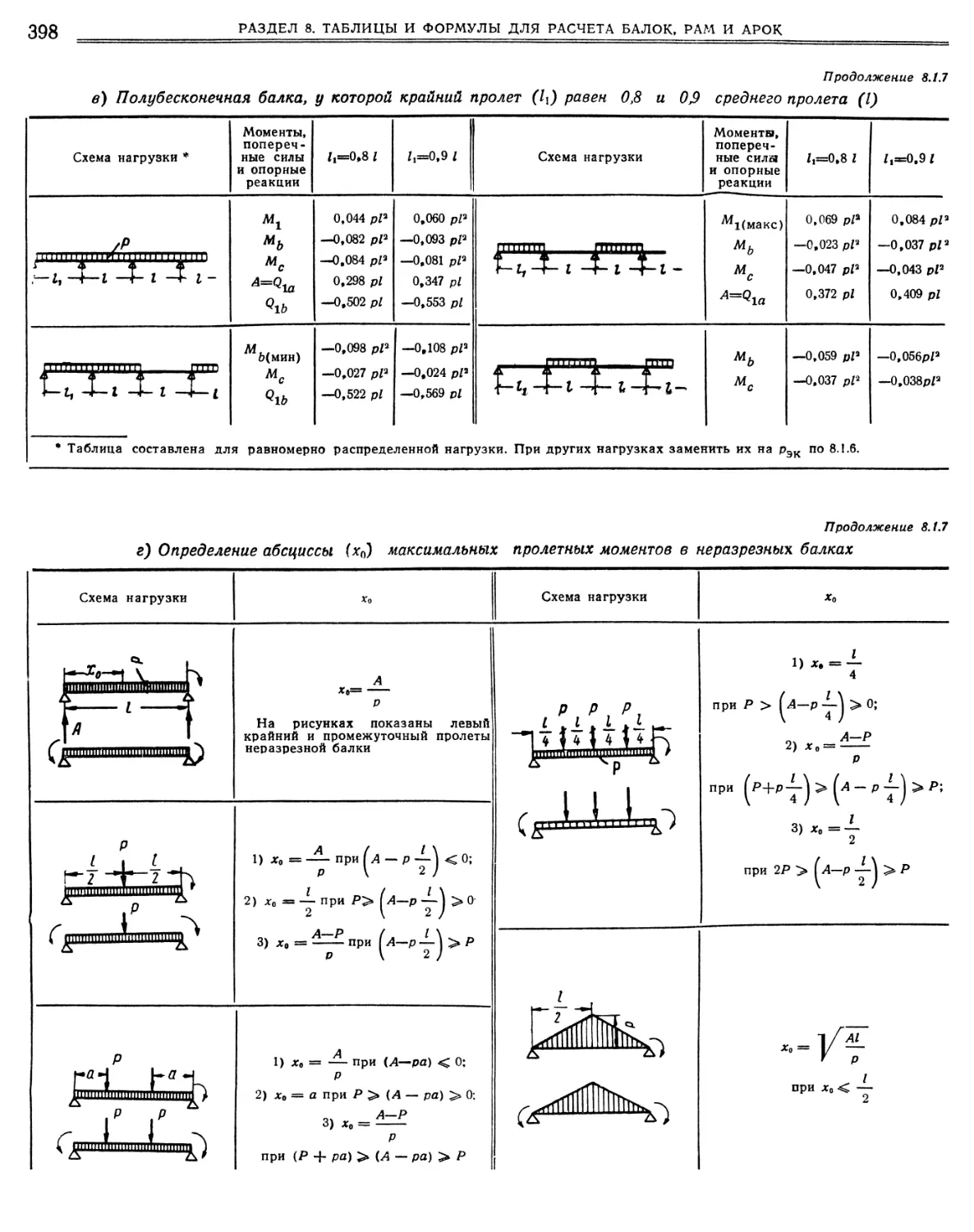
8.1.7.
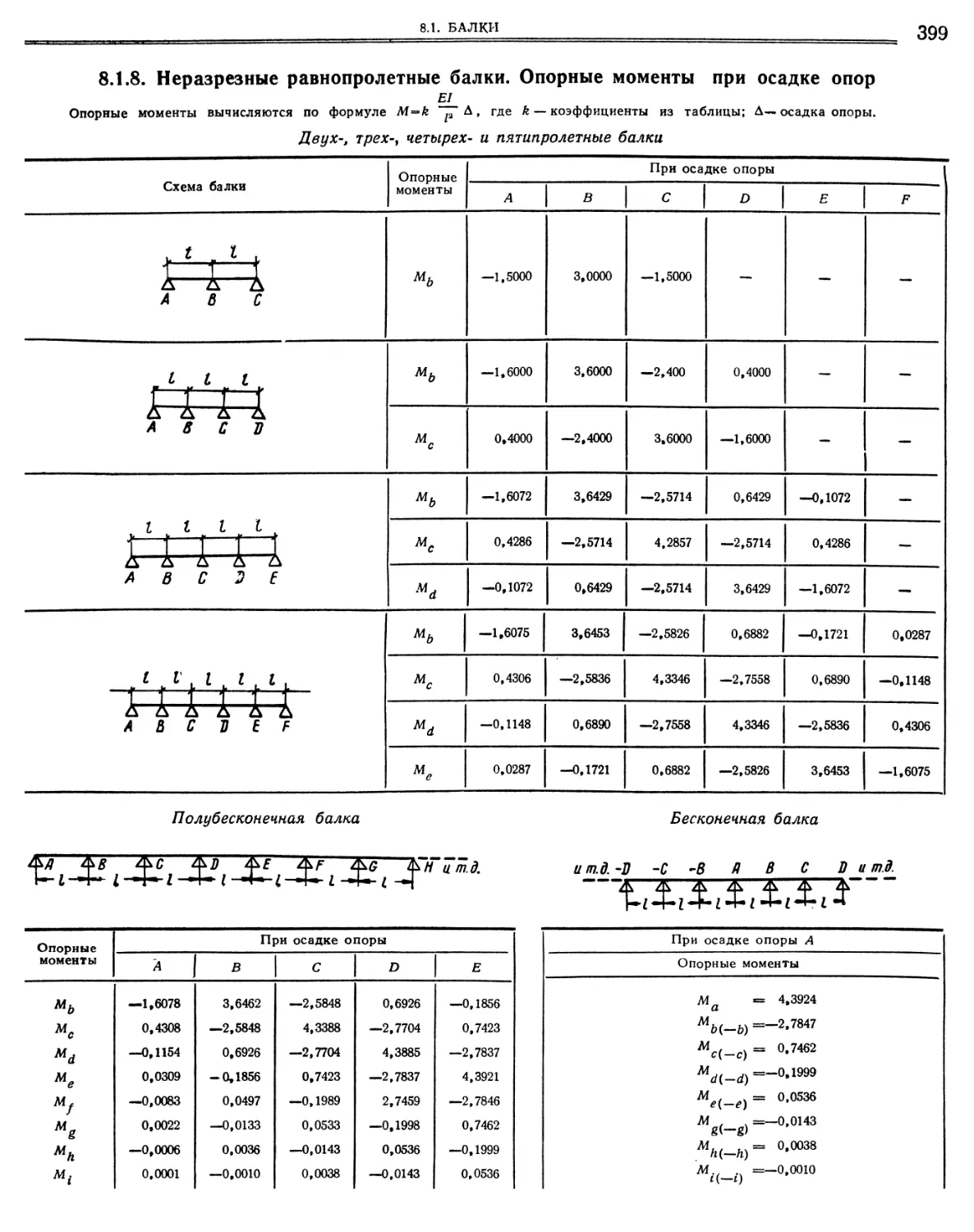
8.1.8.
8.1
8.1
8.1
8.1.
8.1
8.1
8.1
8.1
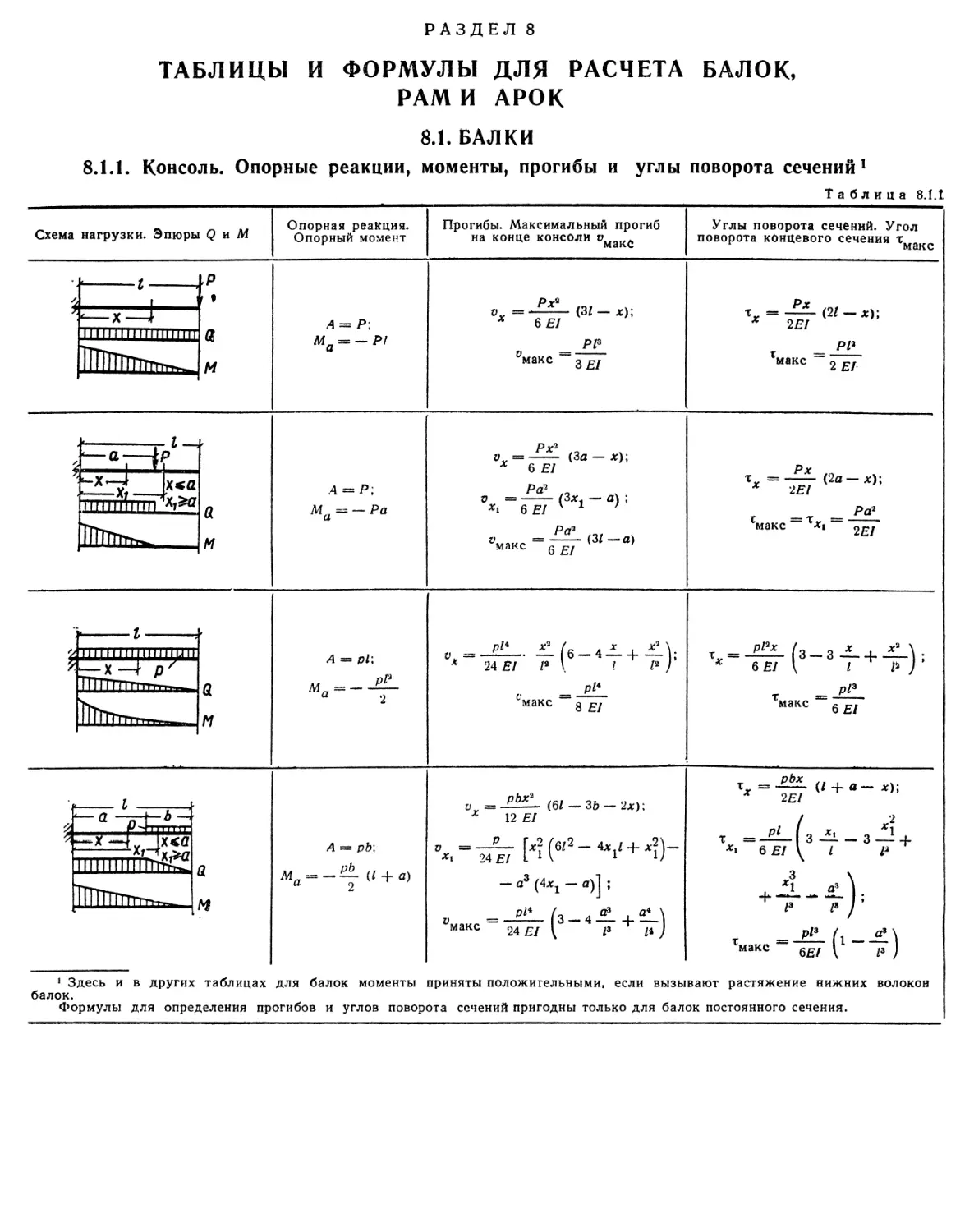
Консоль. Опорные реакции, моменты, прогибы
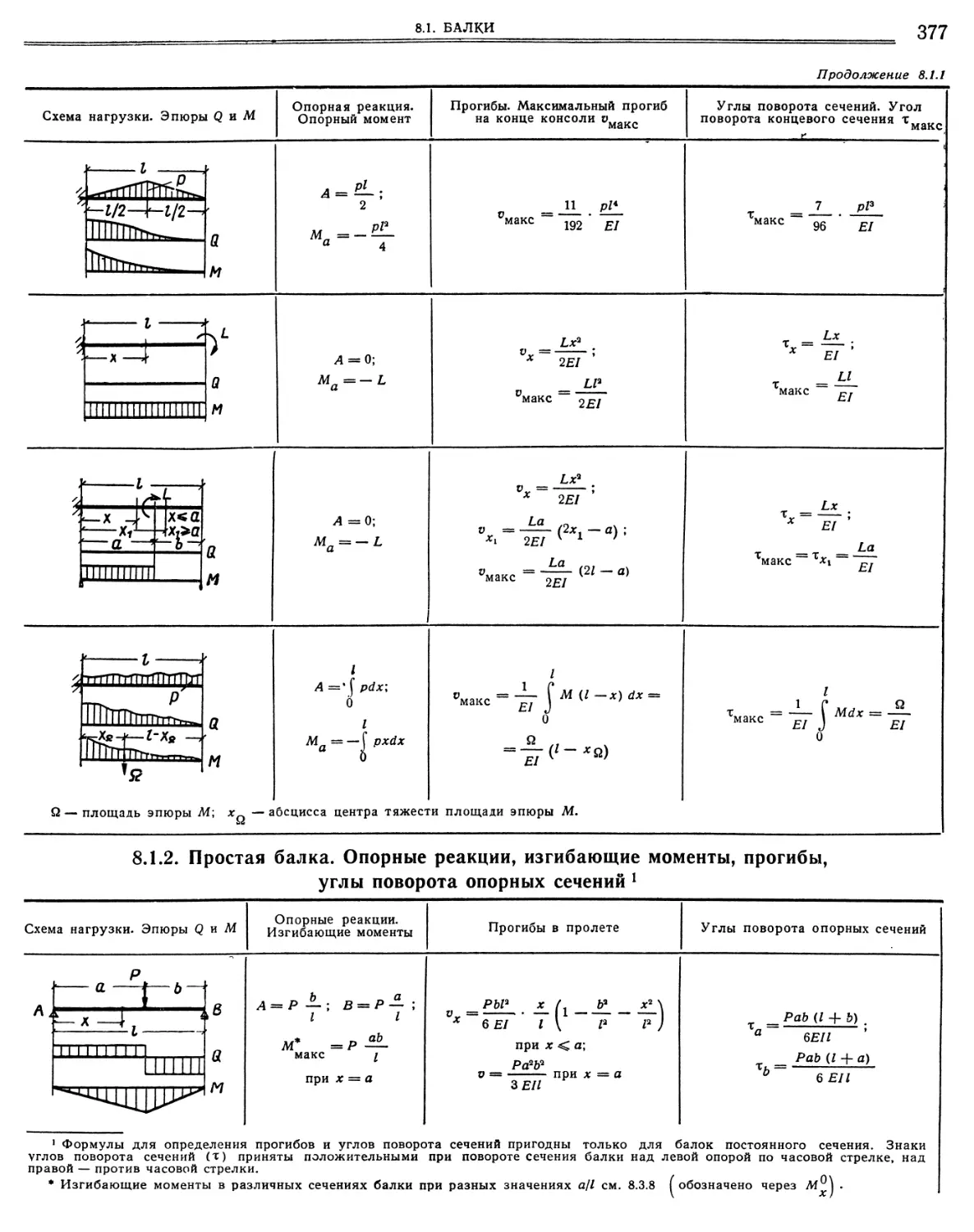
и углы поворота сечений Простая балка. Опорные реакции, изгибающие моменты, прогибы, углы поворота опорных сечений Однопролетная балка с одним защемленным и другим шарнирно опертым концом. Опорные реакции и опорные моменты .4. Однопролетная балка с обоими защемленными концами. Опорные реакции и опорные моменты
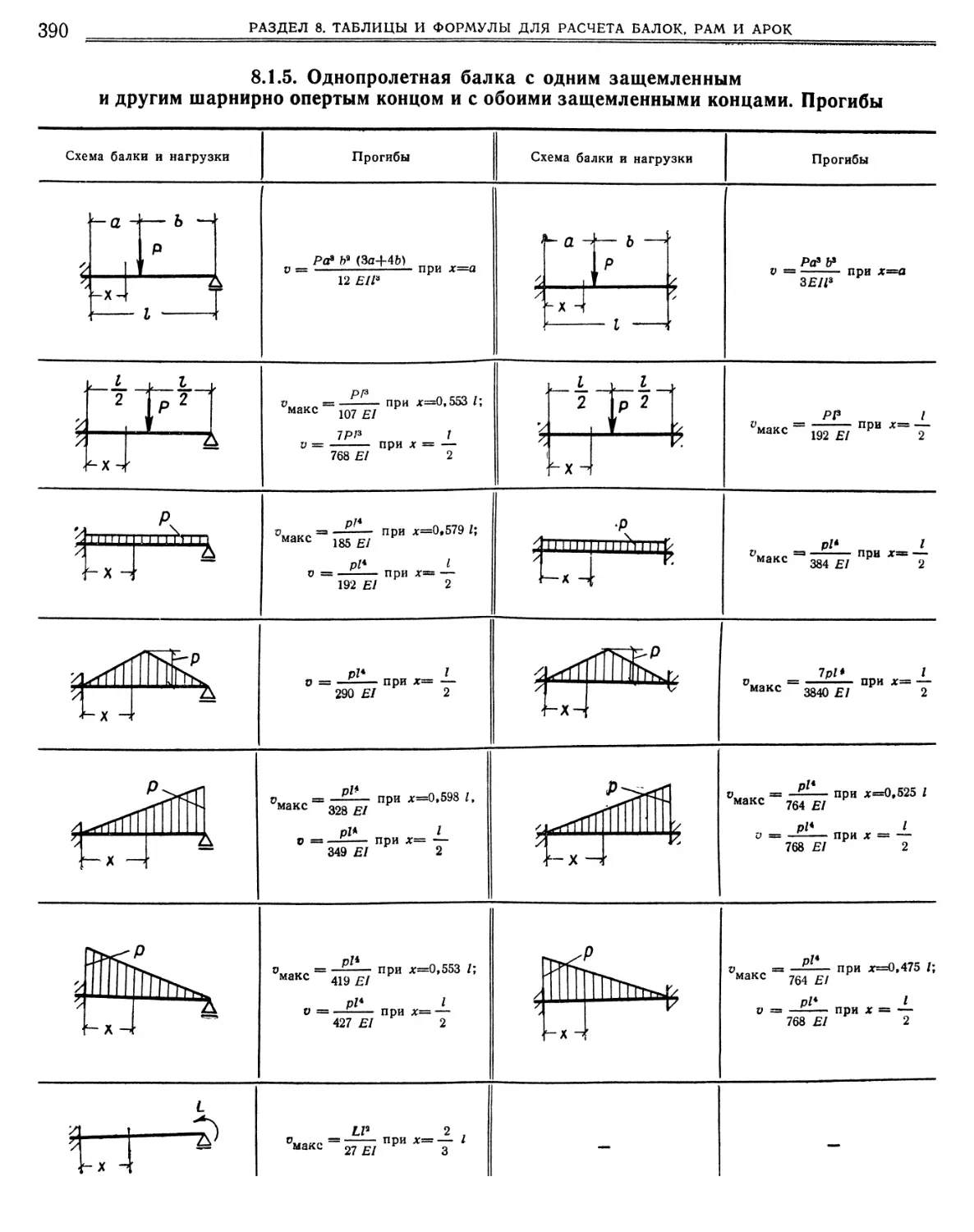
.5. Однопролетная балка с одним защемленным и другим шарнирно опертым концом и с обоими защемленными концами. Прогибы.
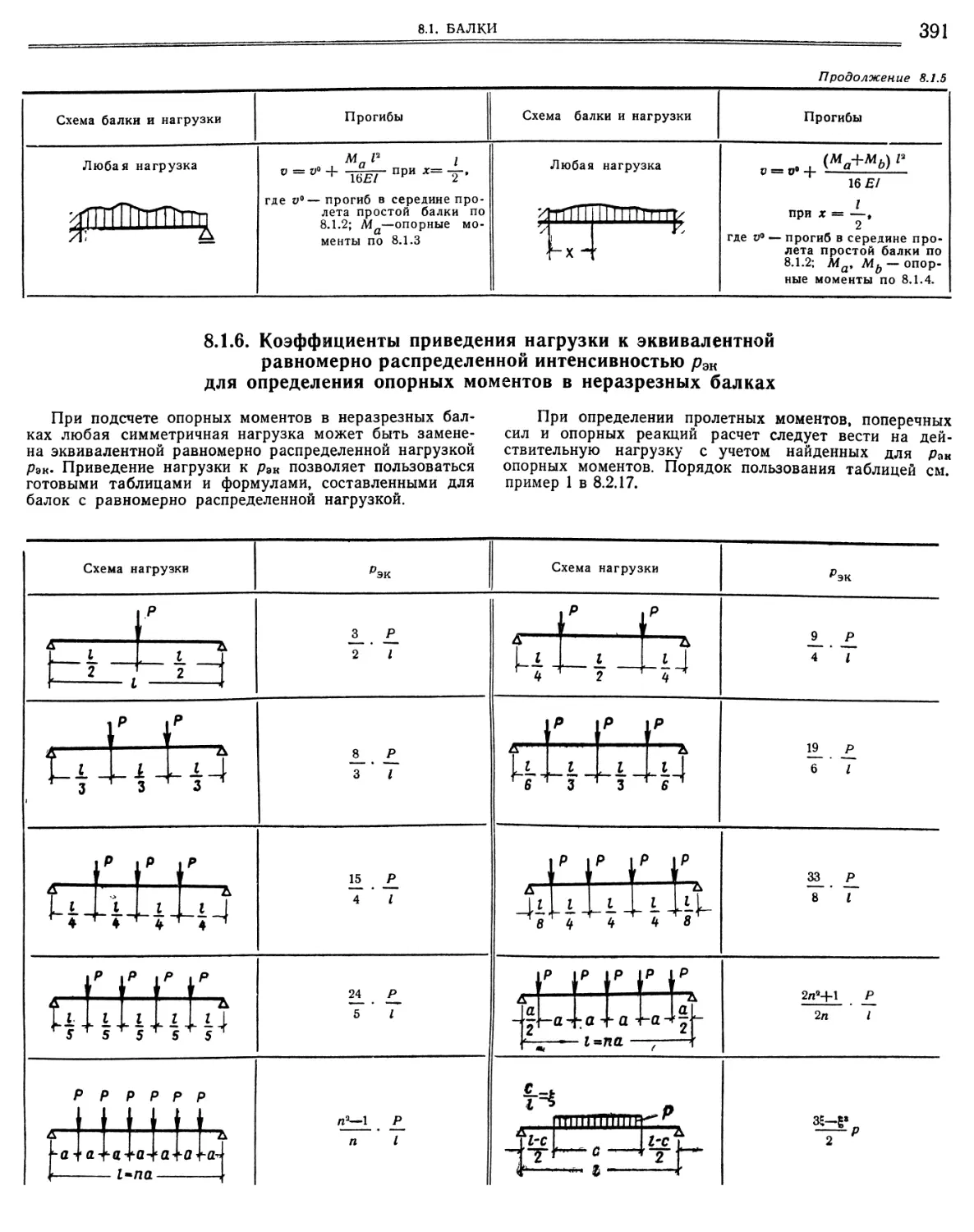
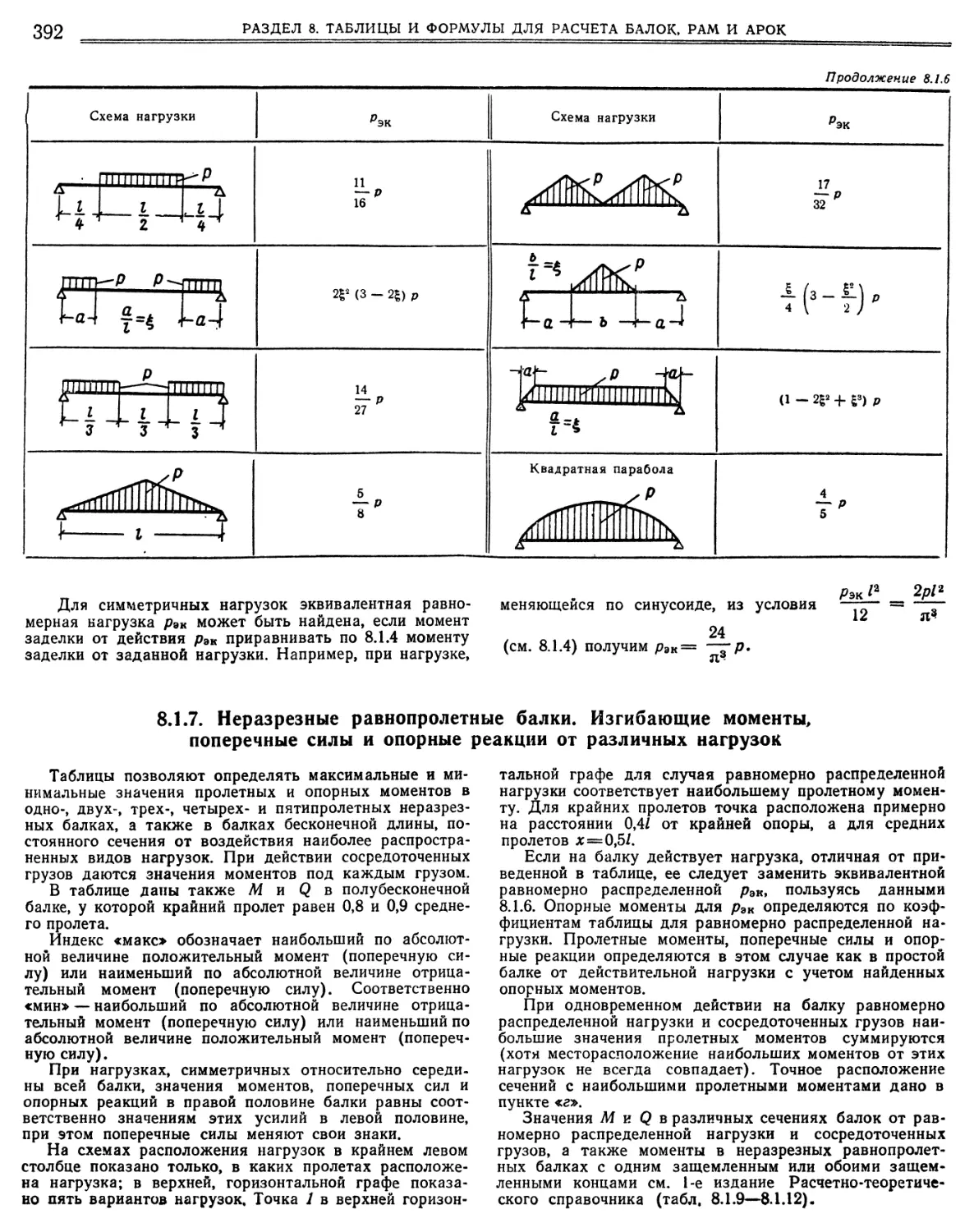
Коэффициенты приведения нагрузки к эквивалентной равномерно распределенной интенсивностью рэк для определения опорных моментов в неразрезных балках
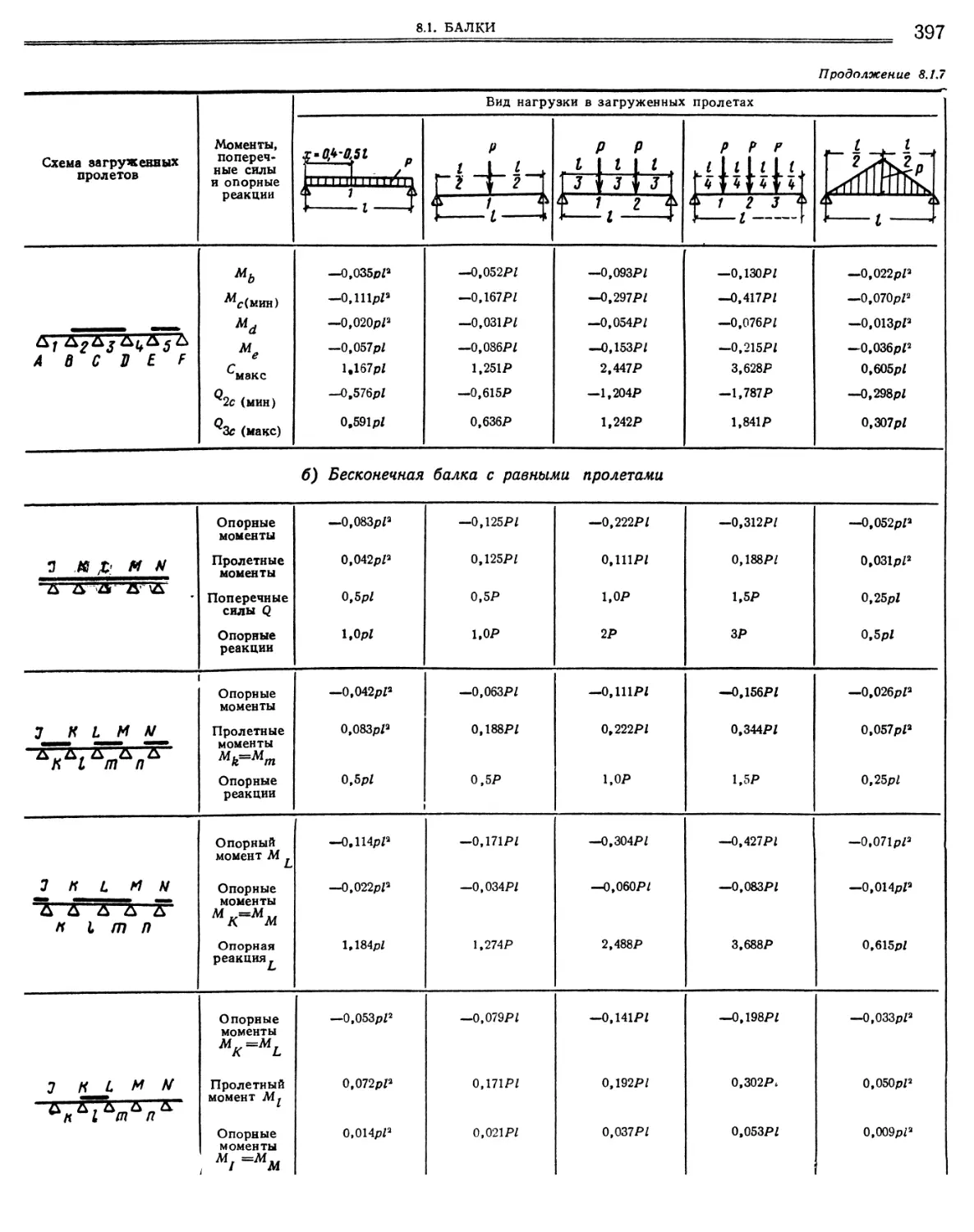
Неразрезные равнопролетные балки. Изгибающие моменты, поперечные силы и опорные реакции от различных нагрузок
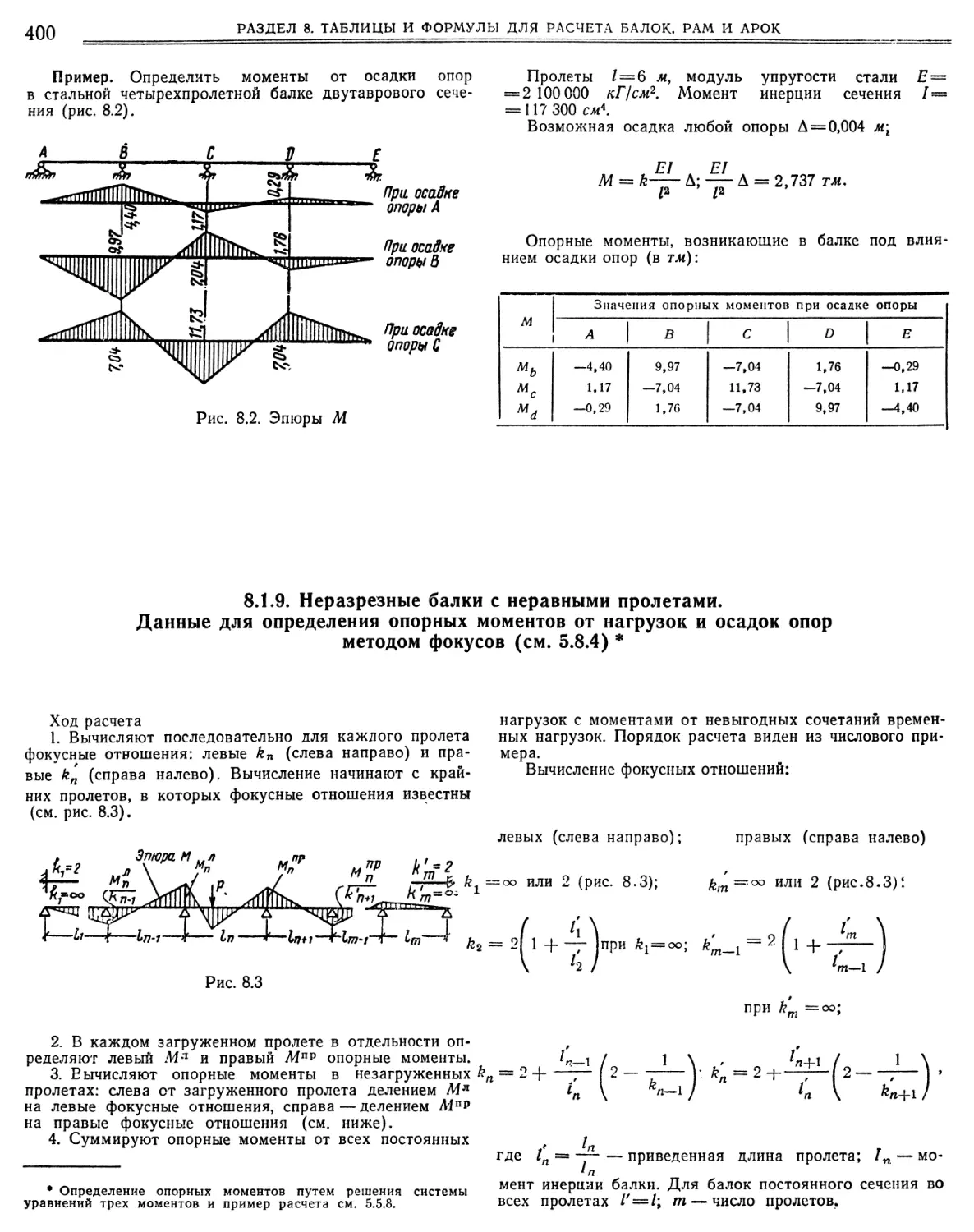
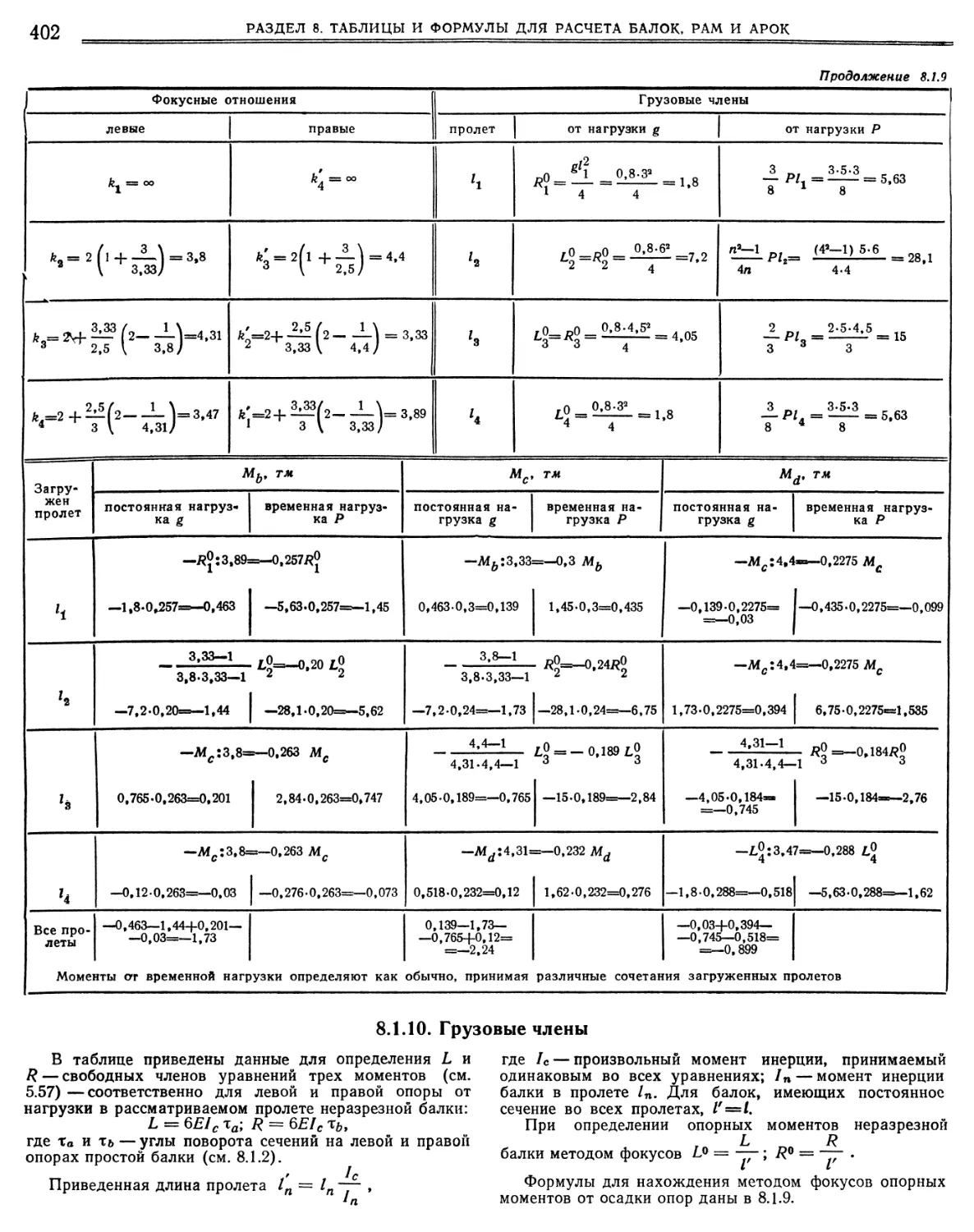
Неразрезные равнопролетные балки. Опорные моменты при осадке опор Неразрезные балки с неравными пролетами. Данные для определения опорных моментов от нагрузок и осадок опор методом фокусов, «.
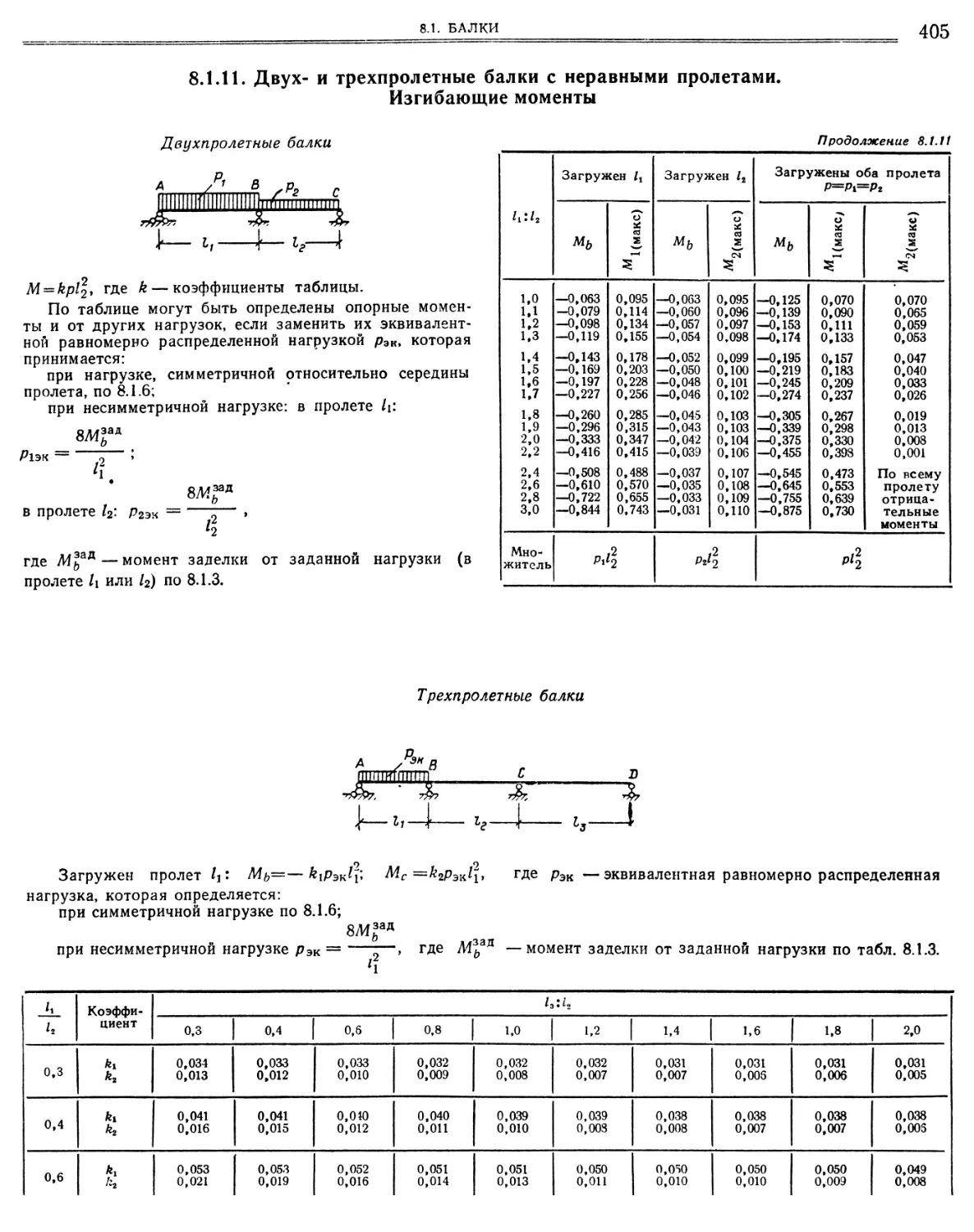
10. Грузовые члены. • • .11. Двух- и трехпролетные балки с неравными пролетами, Изгибающие моменты.
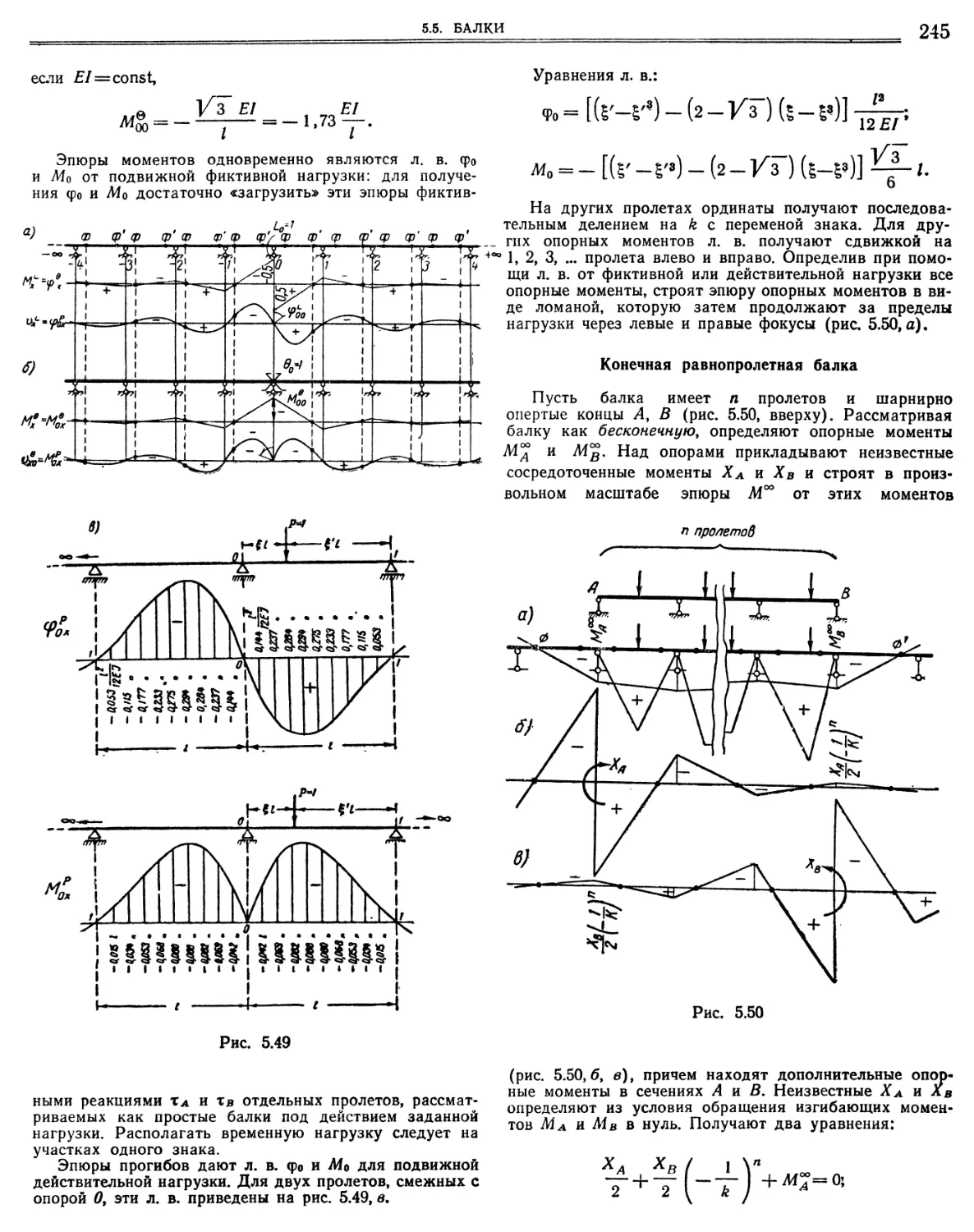
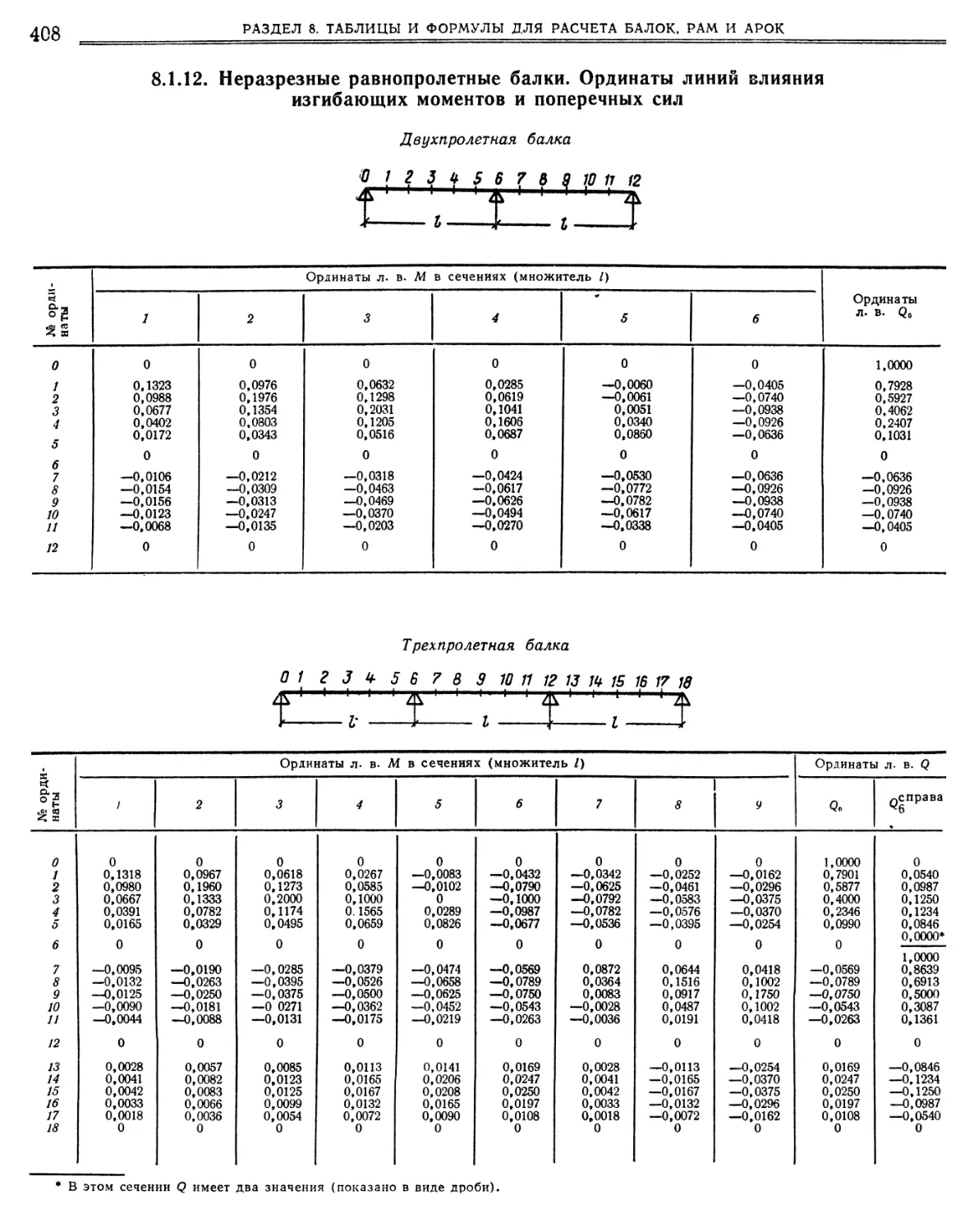
12. Неразрезные равнопролетные балки. Ординаты линий влияния изгибающих моментов и поперечных сил
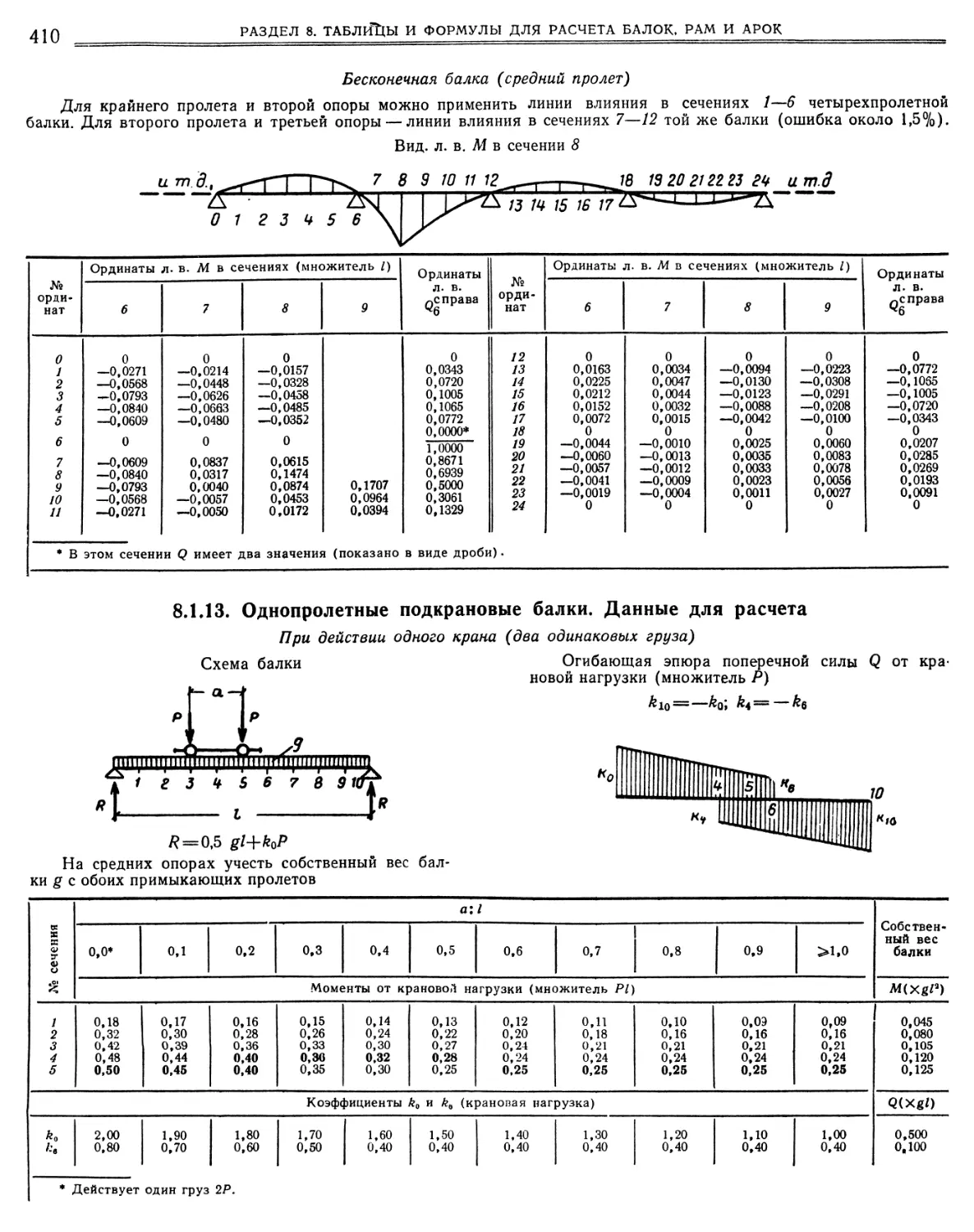
13. Однопролетные подкрановые балки. Данные для расчета
.14. Перекрытия с перекрестными балками (кессонные перекрытия). Данные для расчета.
Схемы распределения нагрузки в перекрестных балках (412). Нагрузки и изгибающие моменты в перекрестных балках при квадратных в плане перекрытиях (413).
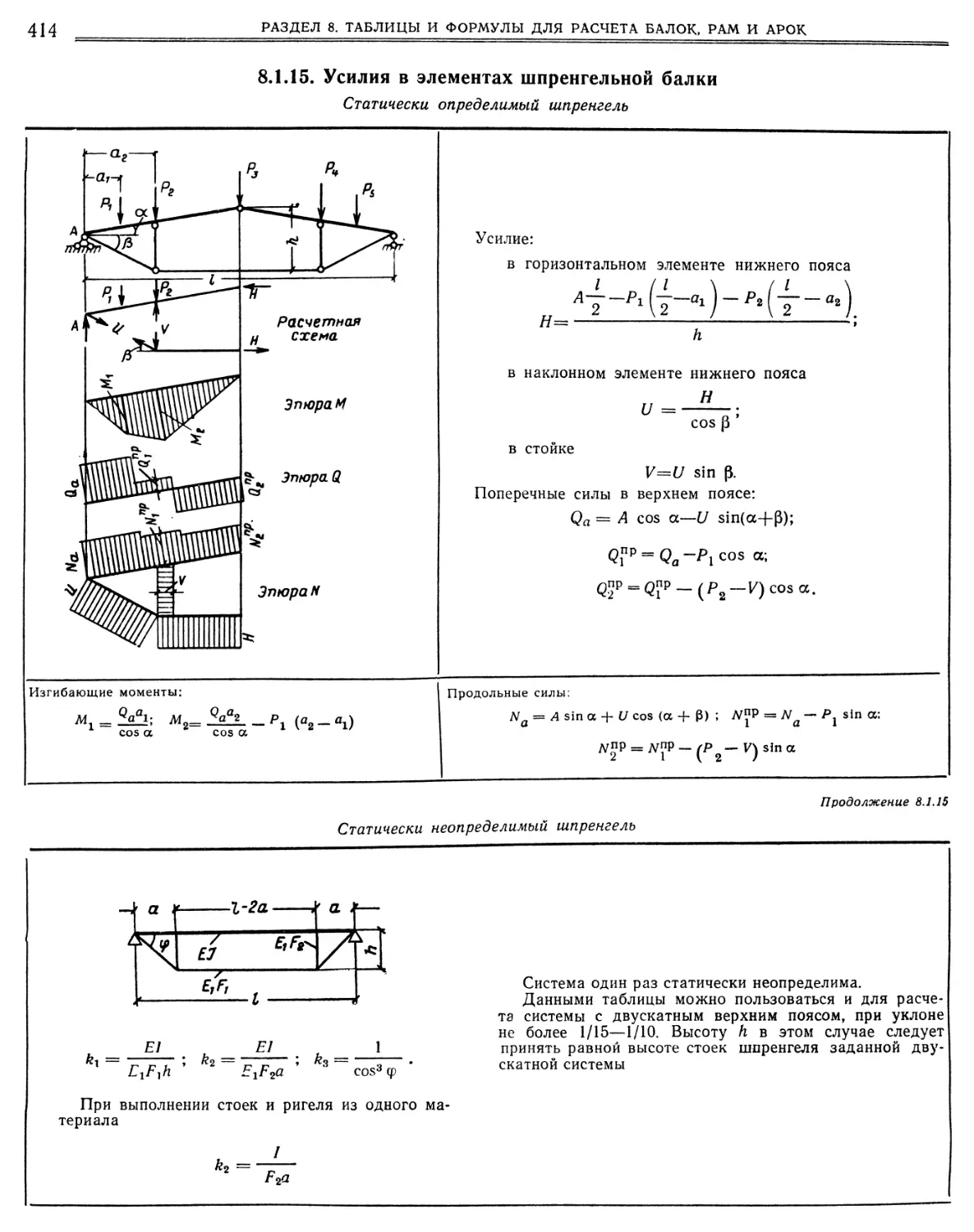
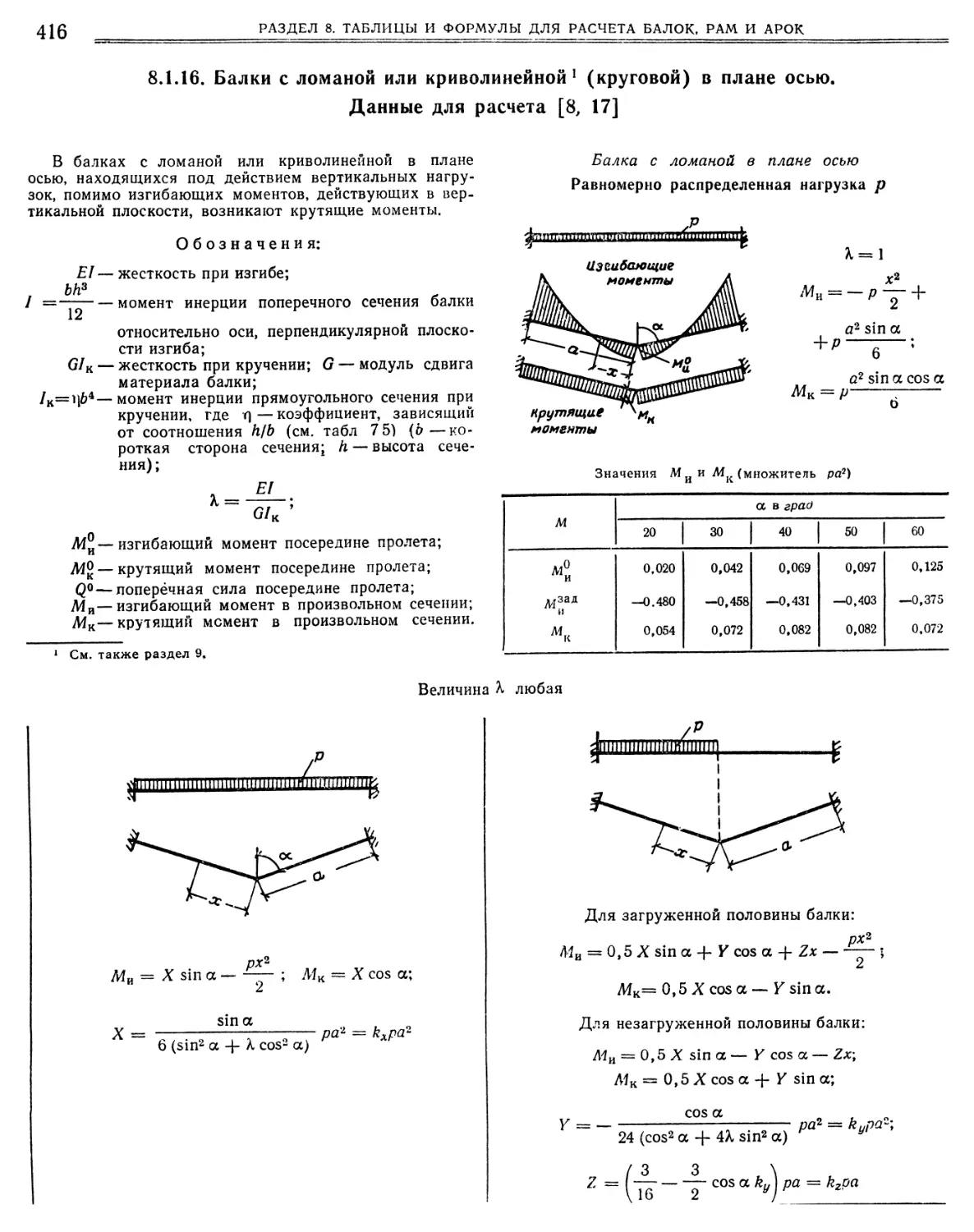
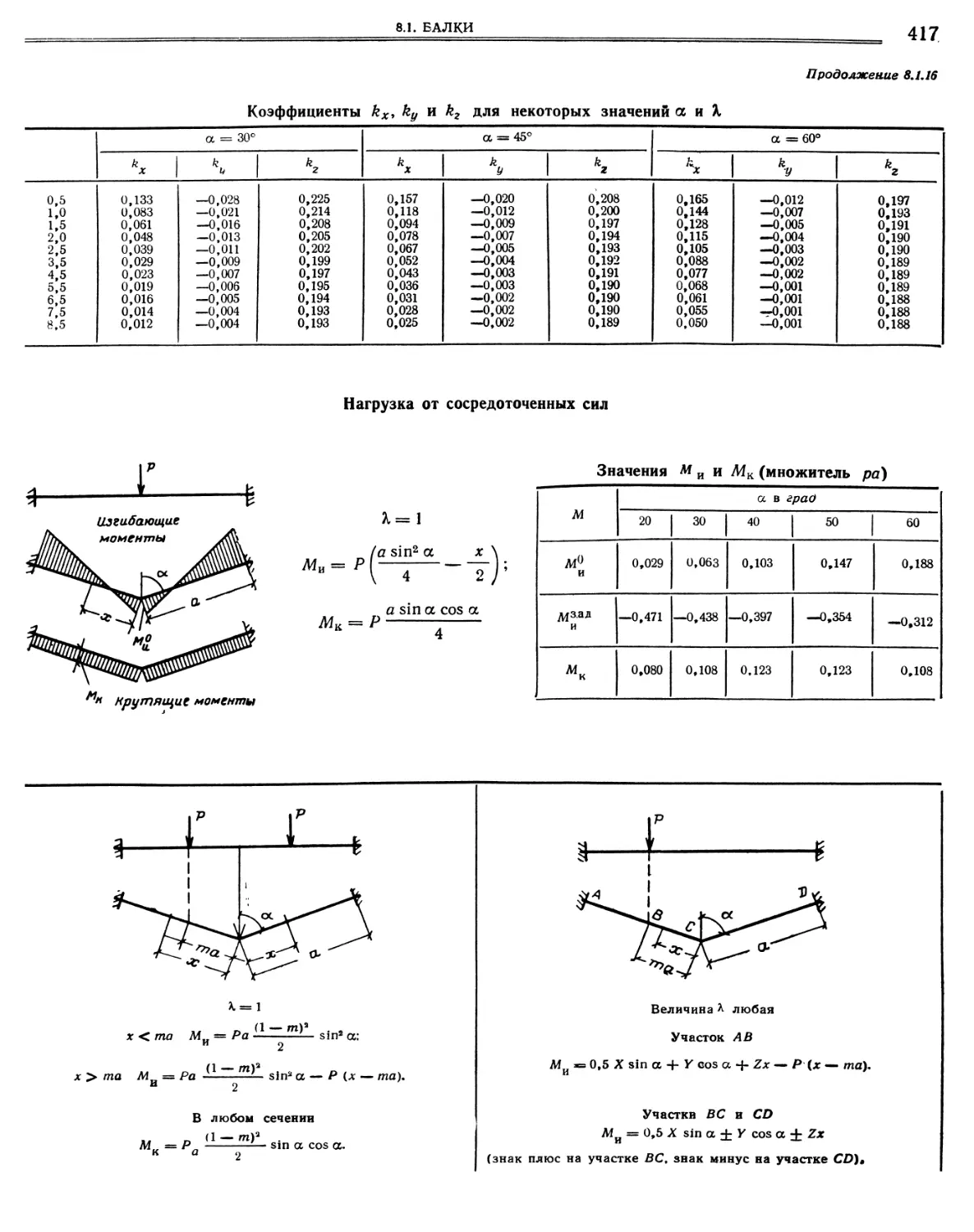
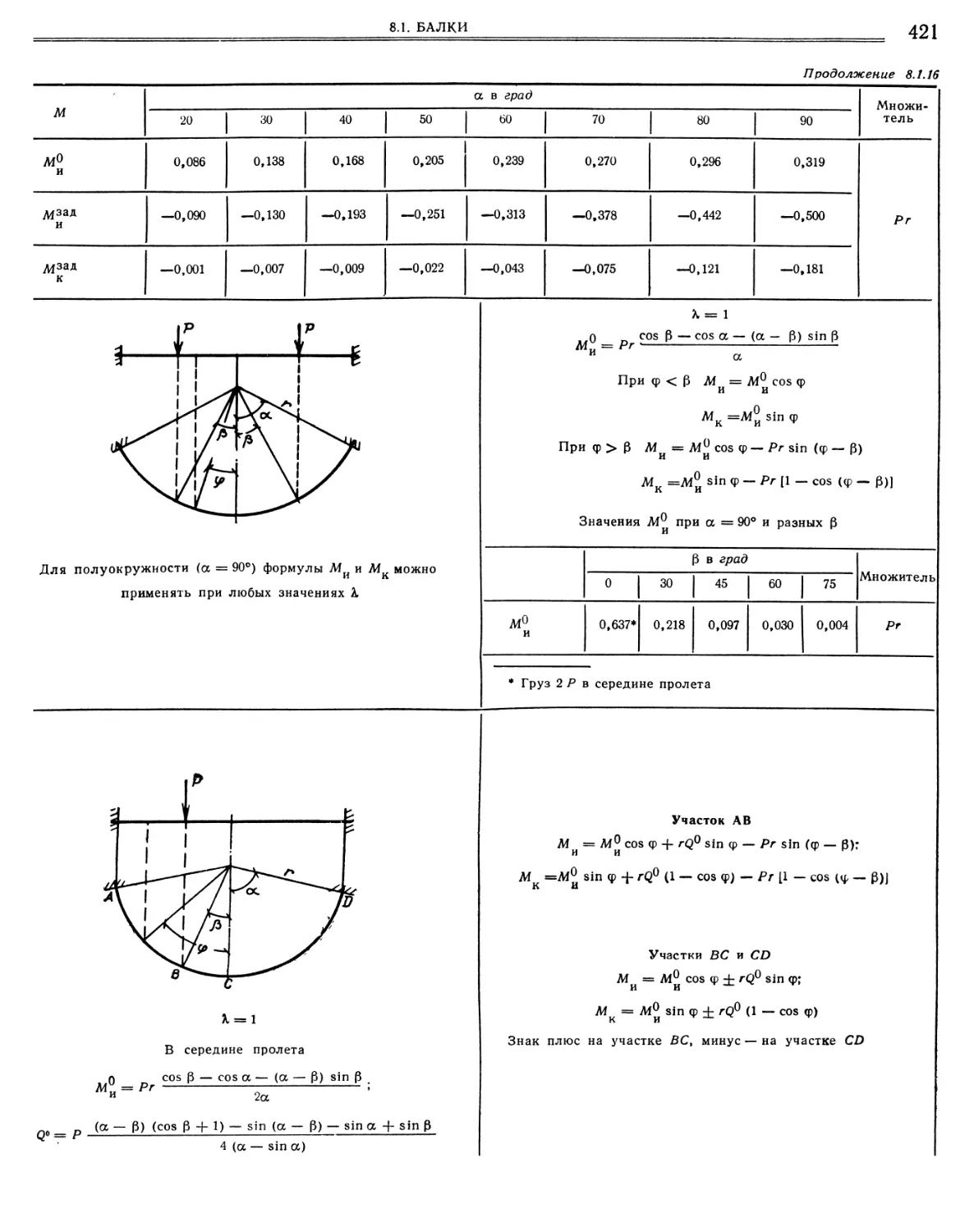
.15. Усилия в элементах шпренгельной балки • • ..16. Балки с ломаной или криволинейной (круговой) в плане осью. Данные для расчета Балка с ломаной в плане осью (416). Балка с изогнутой в плане по дуге круга осью (419),
.9.
375
375
377
384
387
390
391
392
399
400 402
405
408
410
412
414
416
ОГЛАВЛЕНИЕ
7
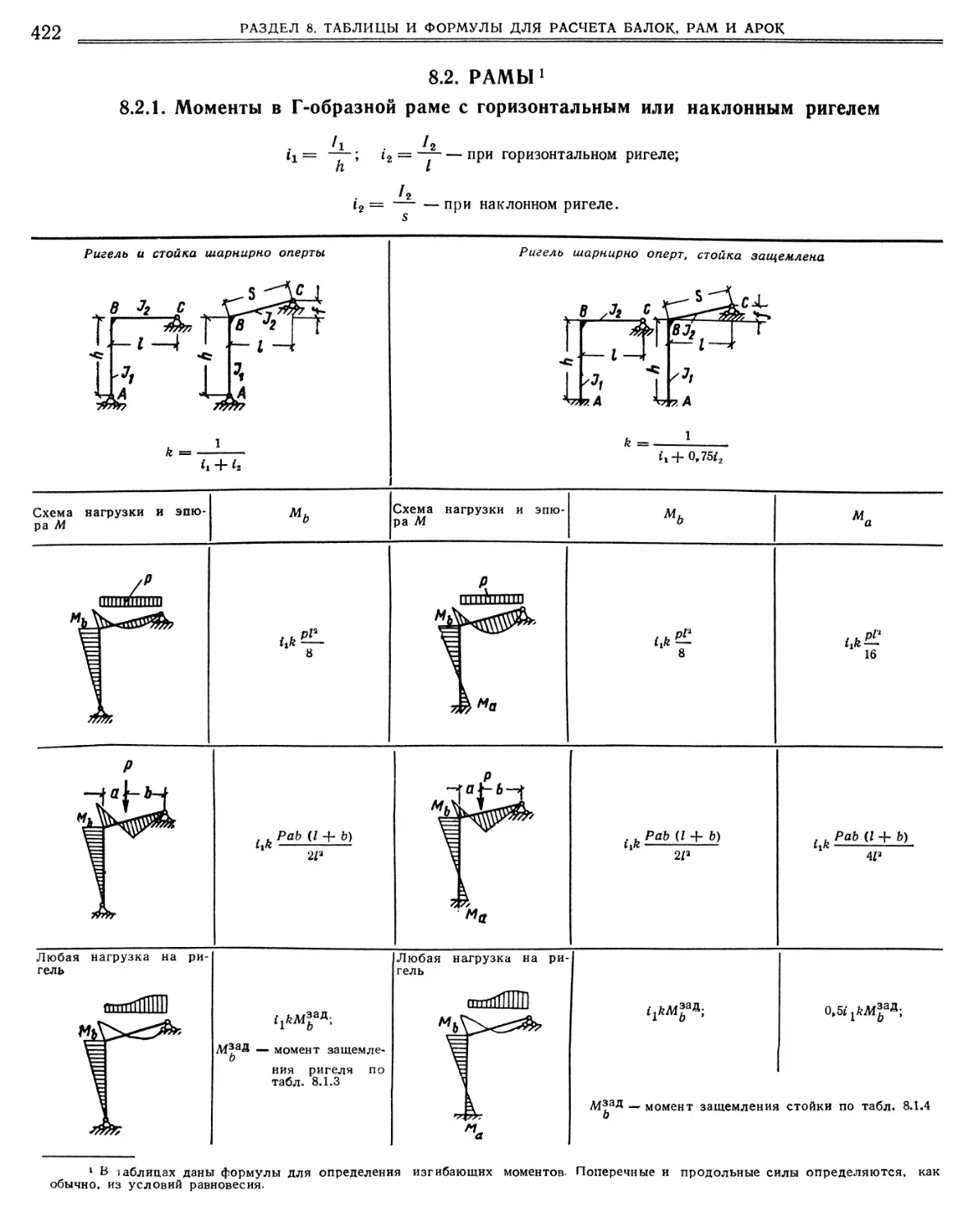
8.2. Рамы. 5 г . г.
8.2.1. Моменты в Г-образной раме с горизонтальным
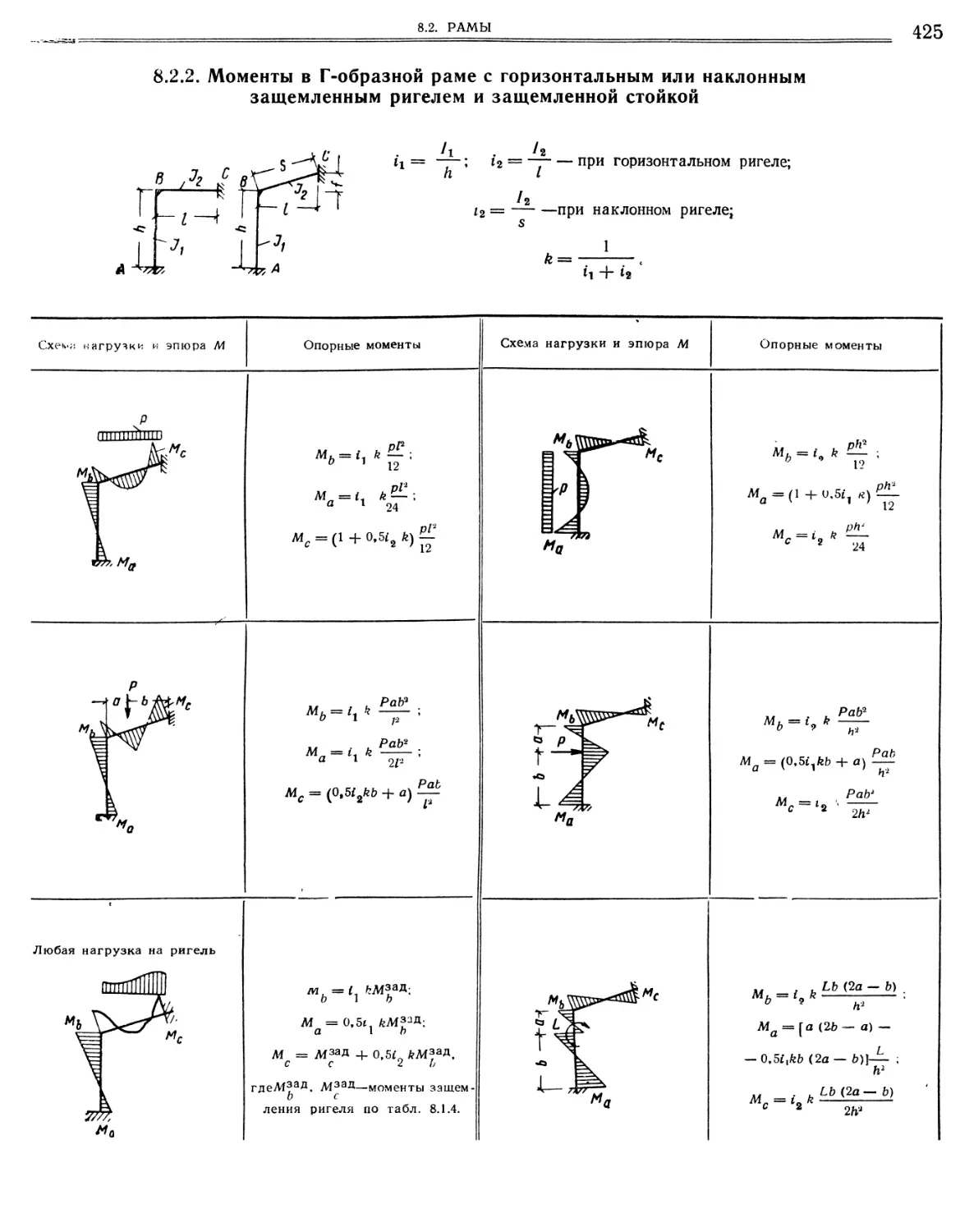
или наклонным ригелем. 8.2.2. Моменты в Г-образной раме с горизонтальным
или наклонным защемленным ригелем и защем¬
ленной стойкой
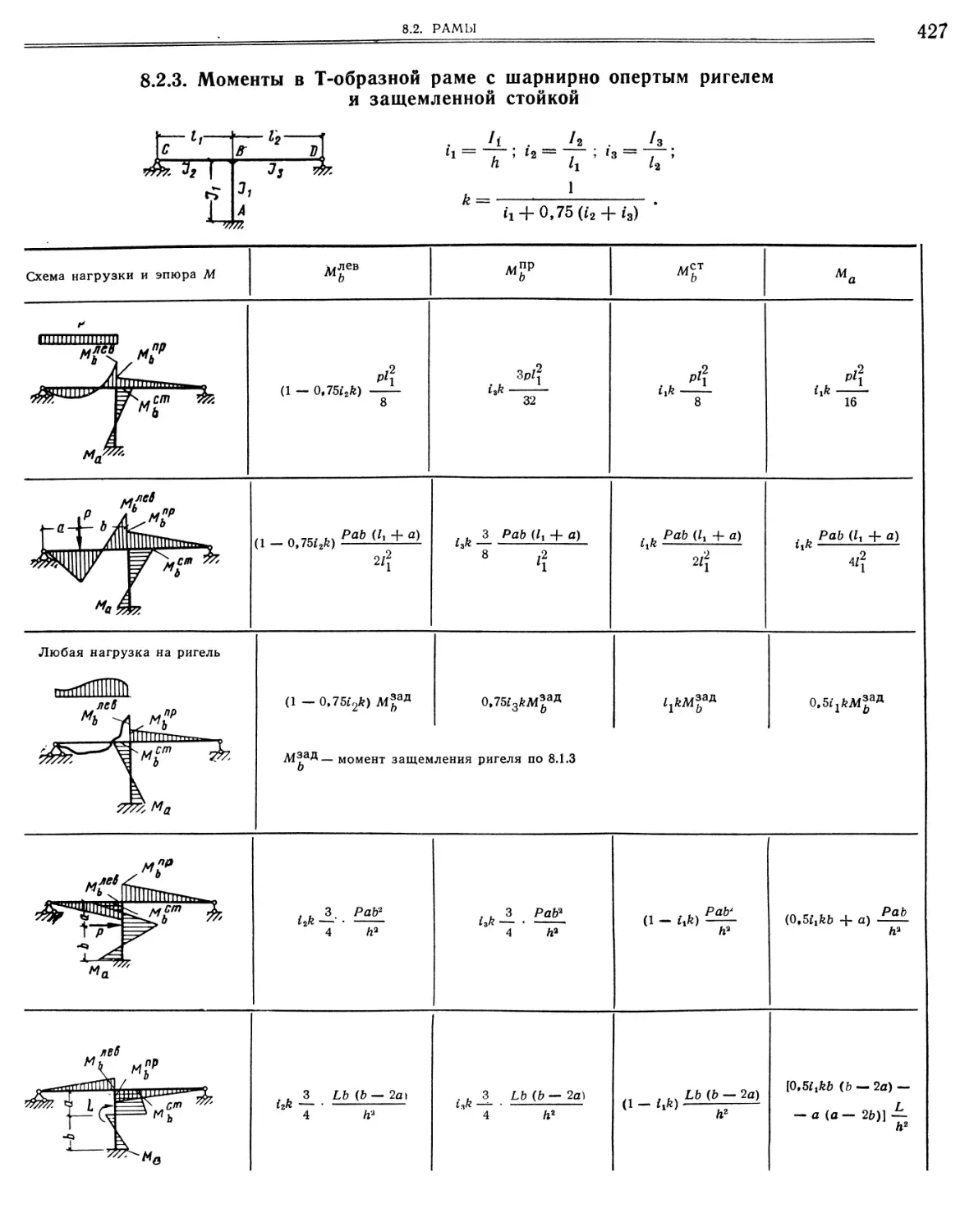
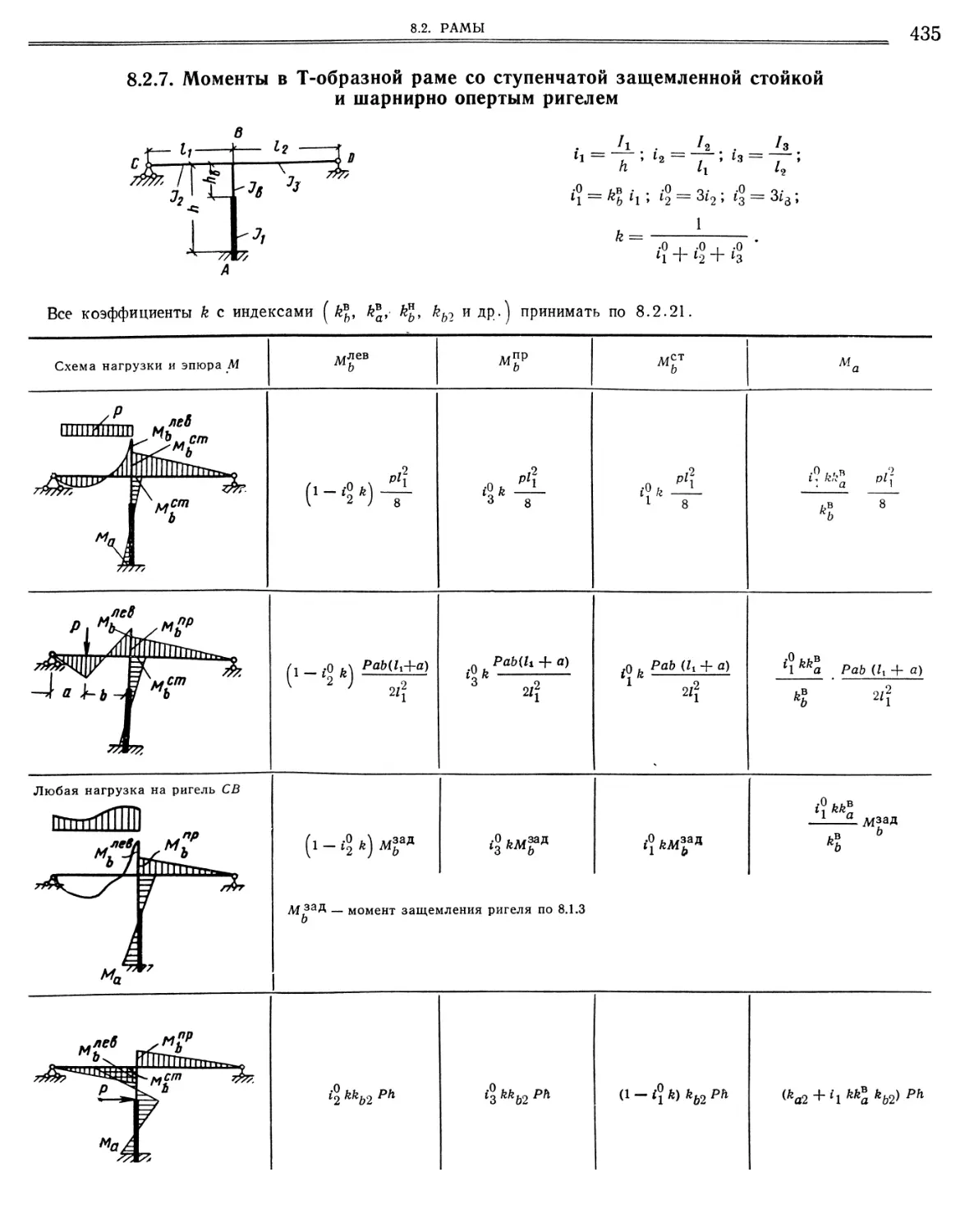
8.2.3. Моменты в Т-образной раме с шарнирно опертым ригелем и защемленной стойкой.»»•»
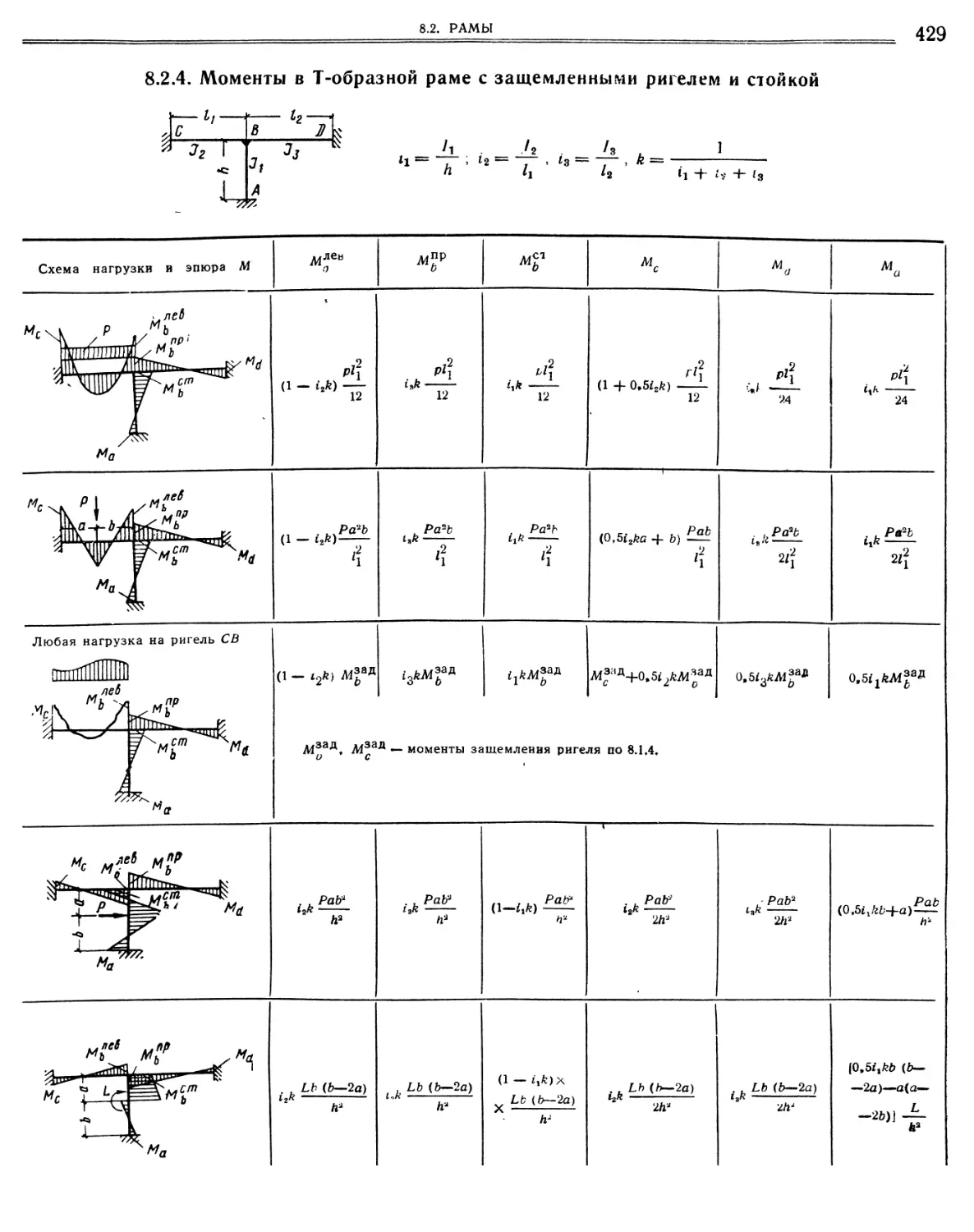
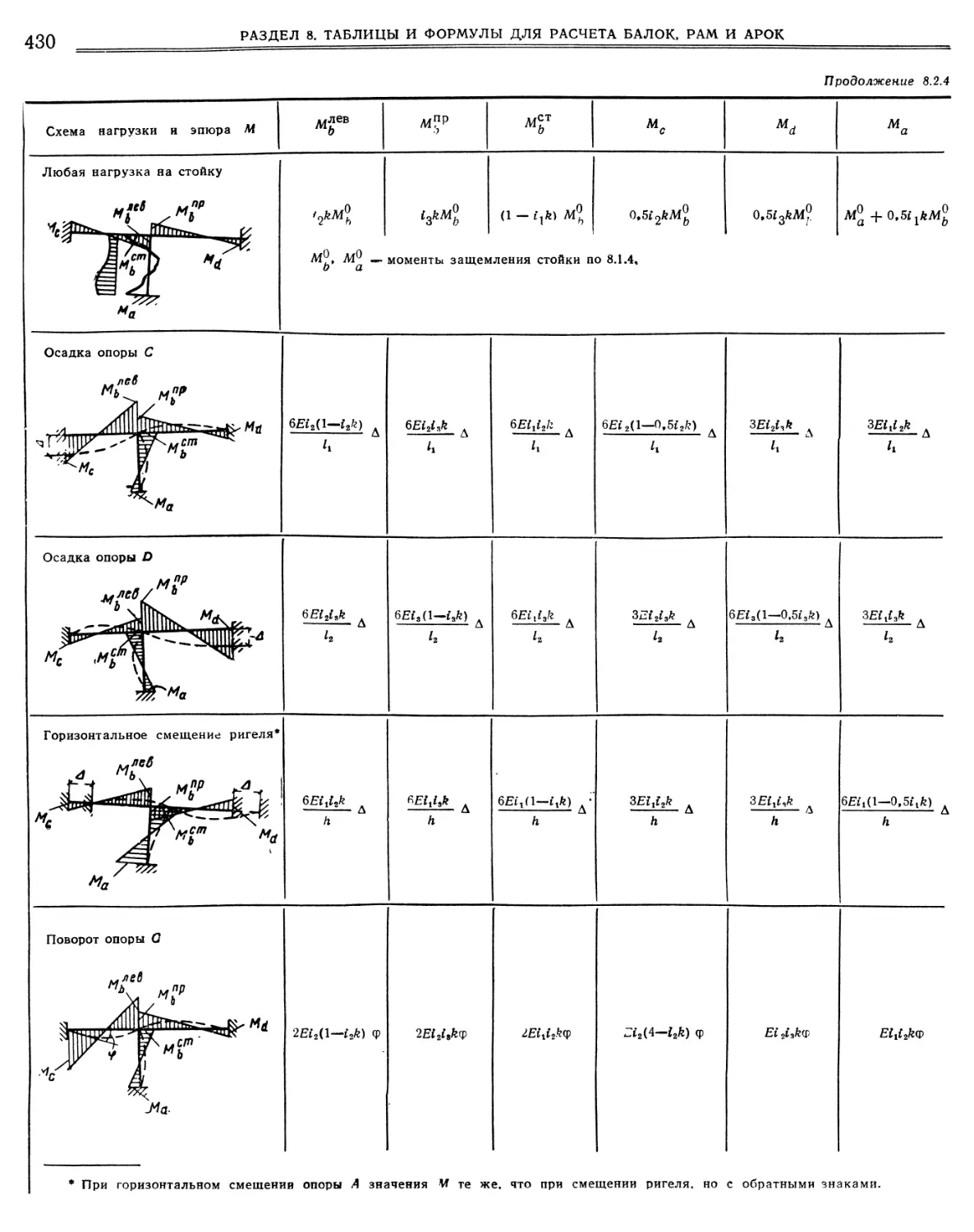
8.2.4. Моменты в Т-образной раме с защемленными ригелем и стойкой » . « »
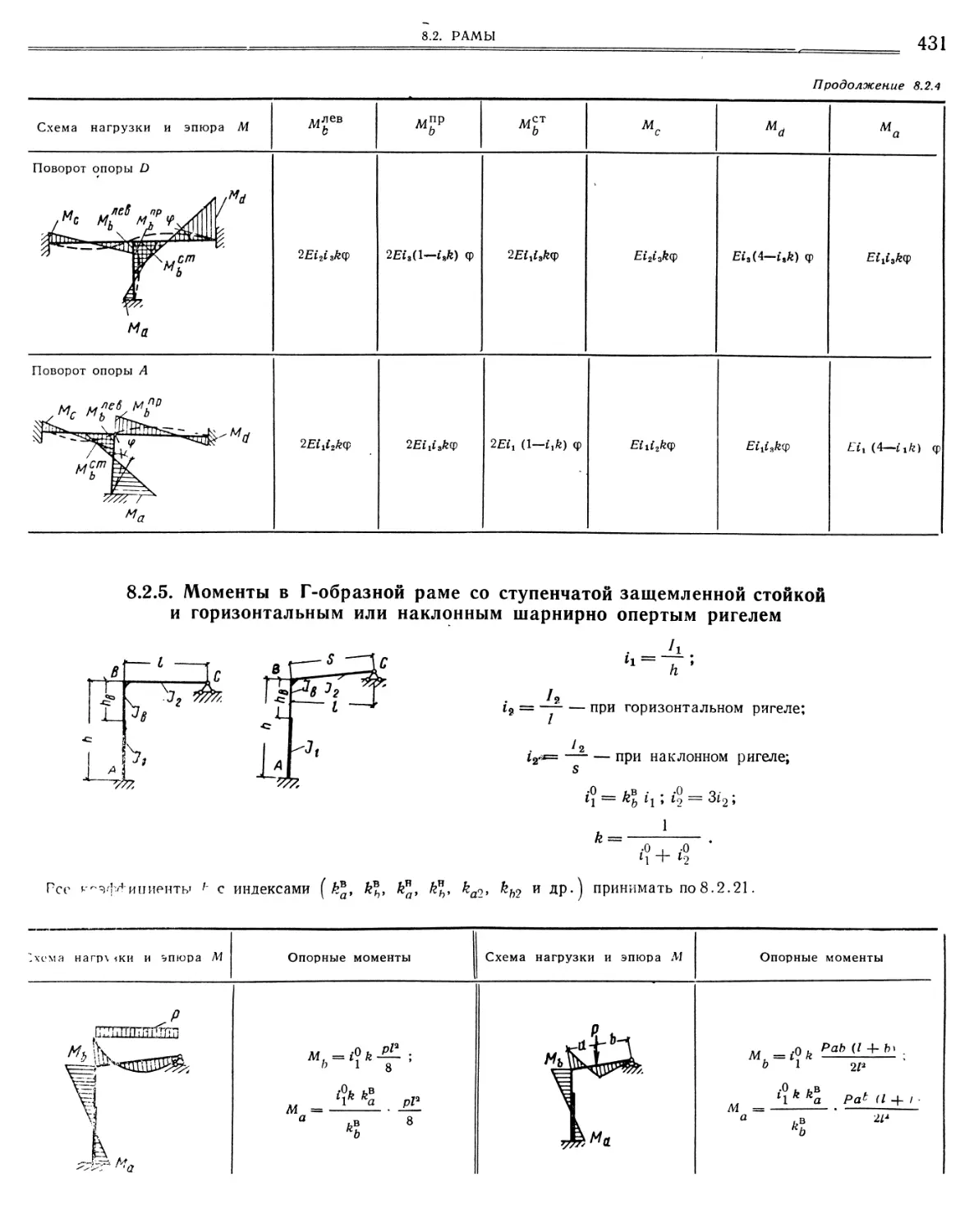
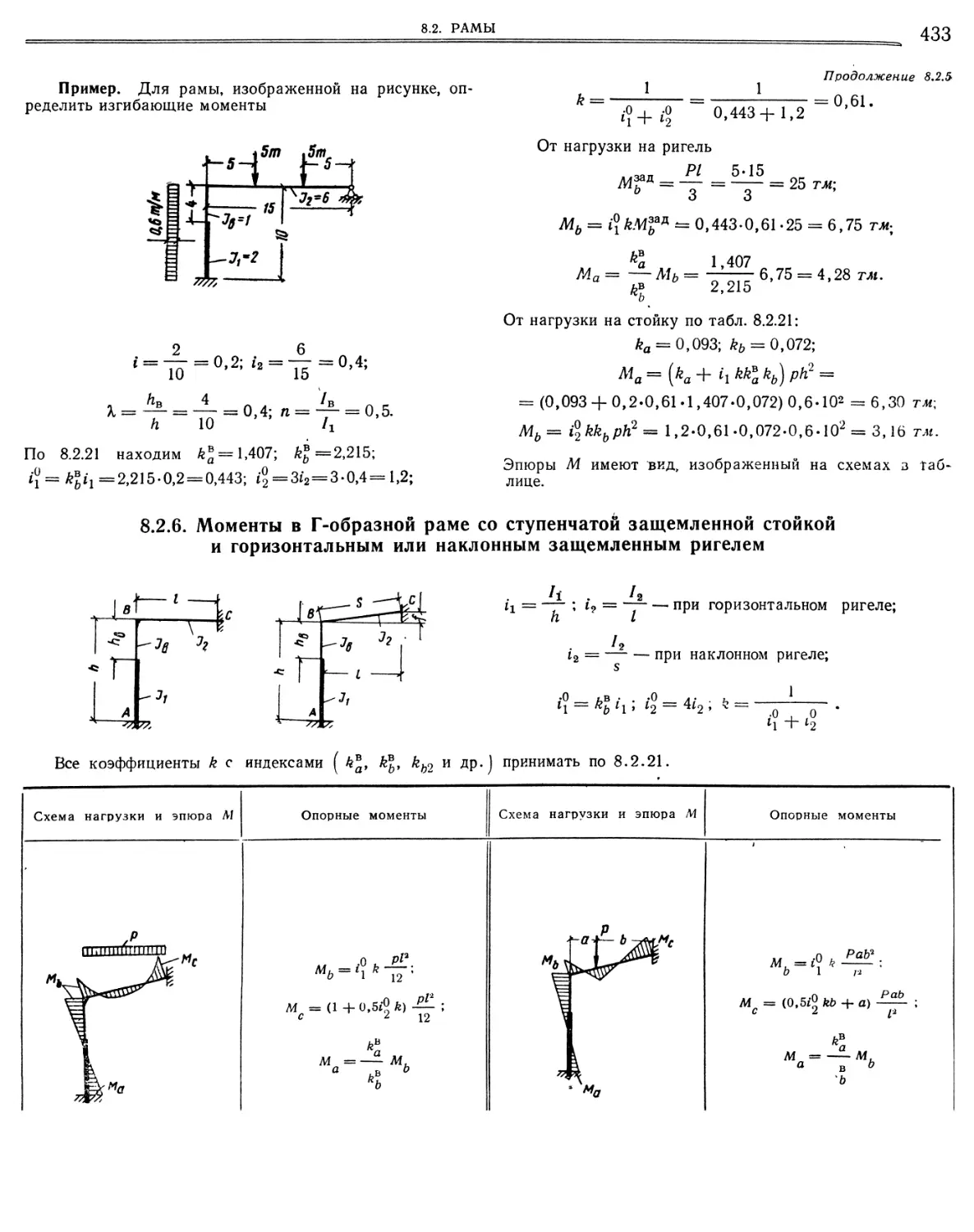
8.2.5. Моменты в Г-образной раме со ступенчатой защемленной стойкой и горизонтальным или наклонным шарнирно опертым ригелем 8.2.6. Моменты в Г-образной раме со ступенчатой защемленной стойкой и горизонтальным или наклонным защемленным ригелем 8.2.7. Моменты в Т-образной раме со ступенчатой защемленной стойкой и шарнирно опертым ригелем
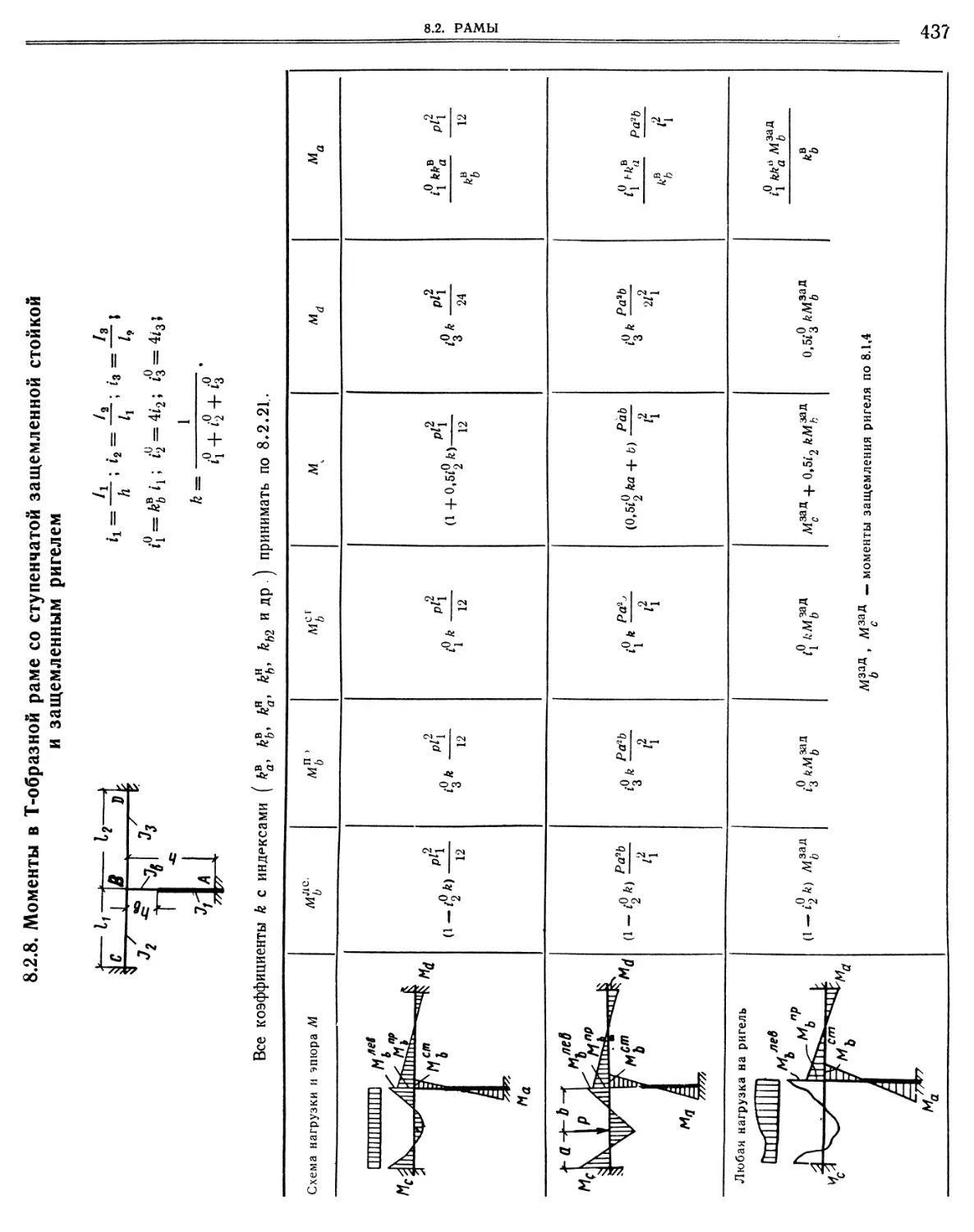
8 2.8. Моменты в Т-образной раме со ступенчатой защемленной стойкой и защемленным ригелем.
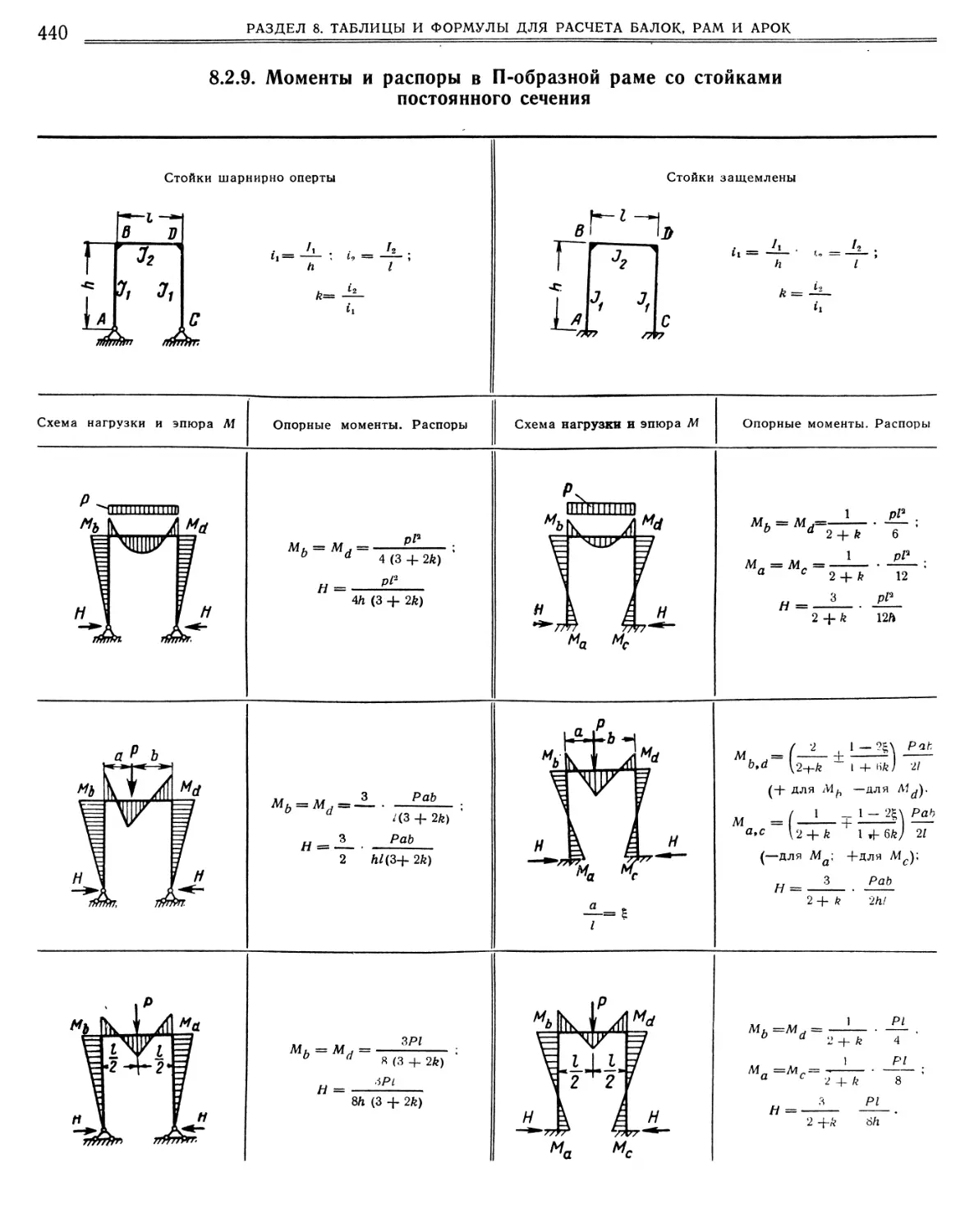
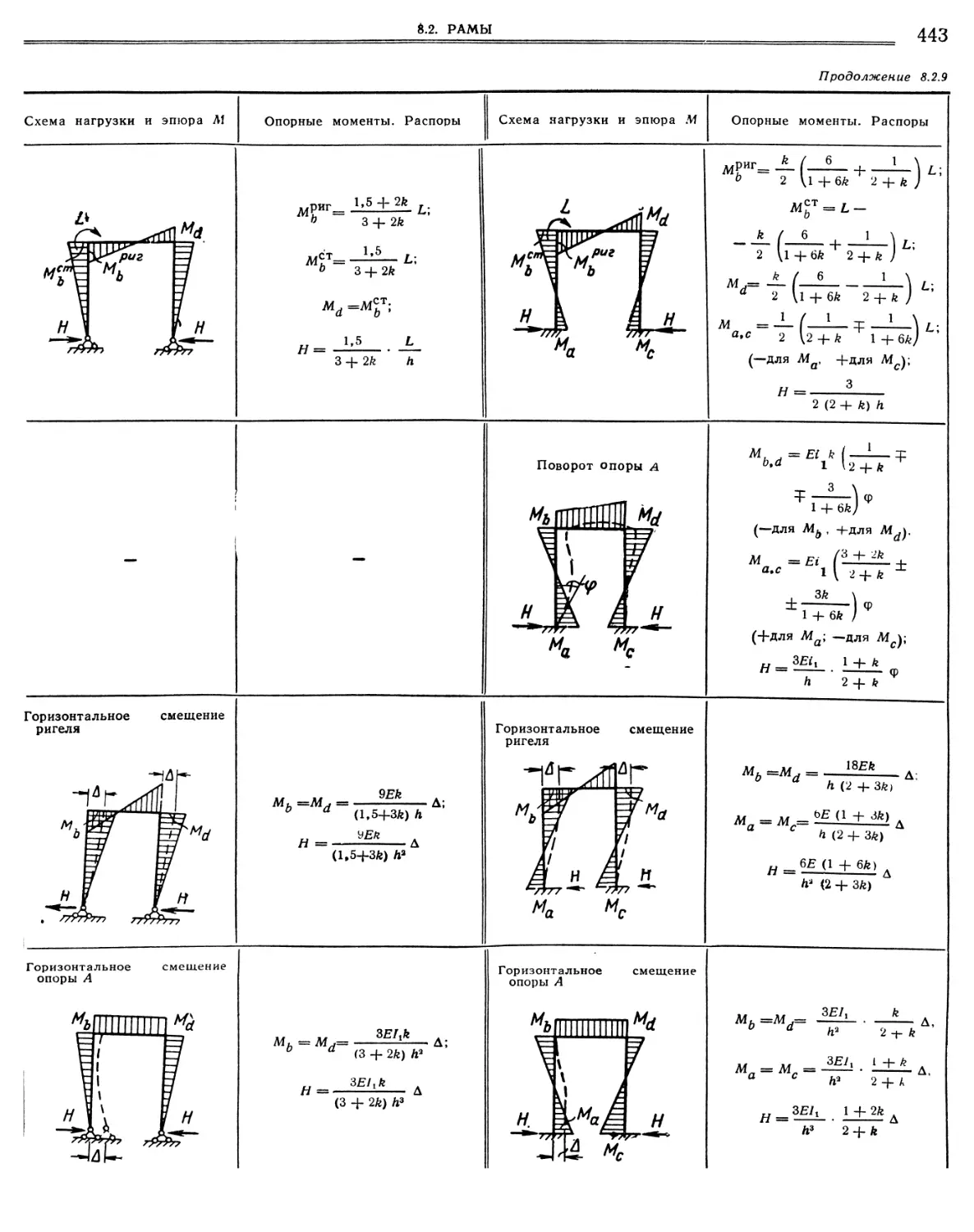
8.2.9. Моменты и распоры в П-образной раме со стойками постоянного сечения., Стойки шарнирно оперты. Стойки защемлены „.
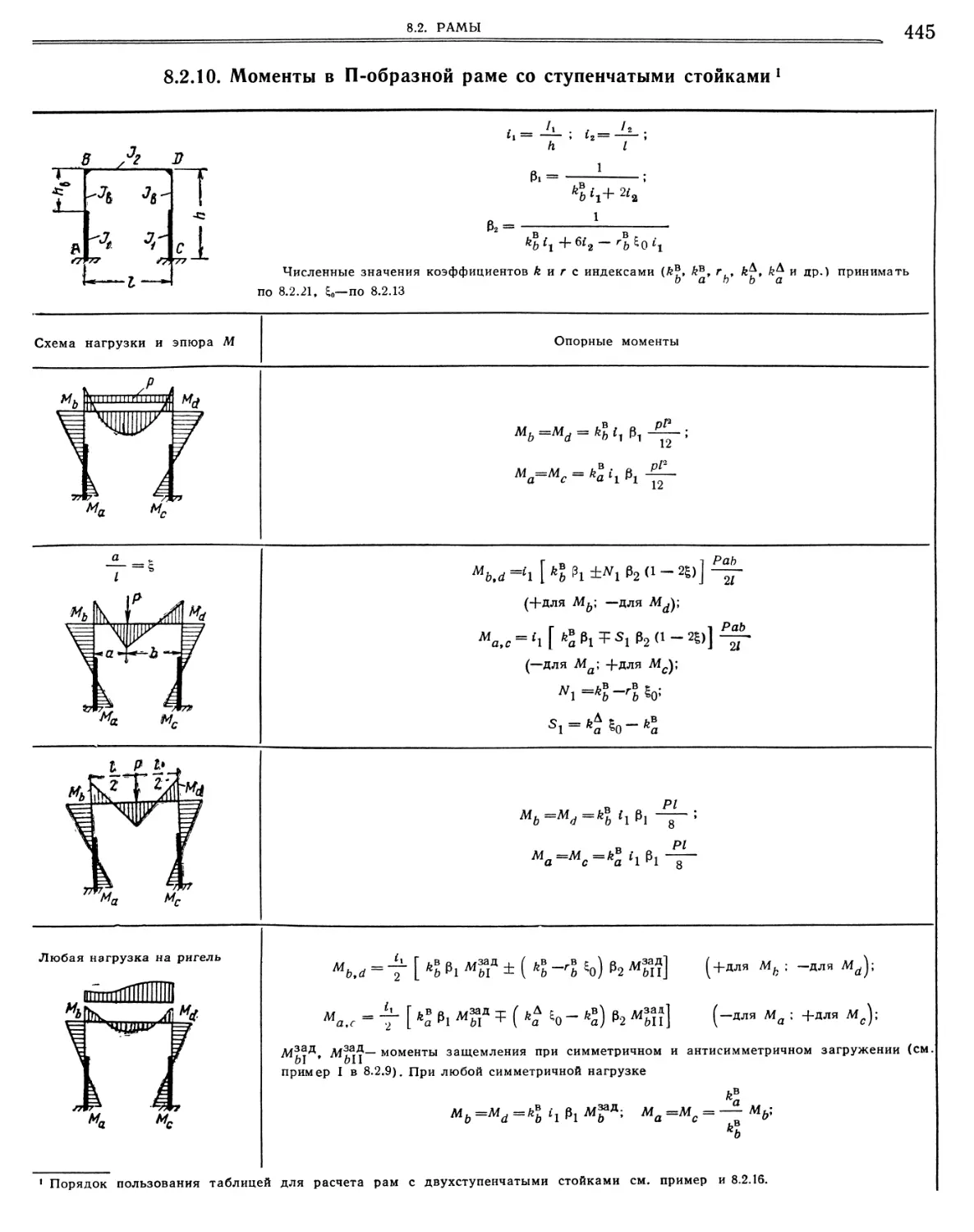
8.2.Ю. Моменты в П-образной раме со ступенчатыми стойками
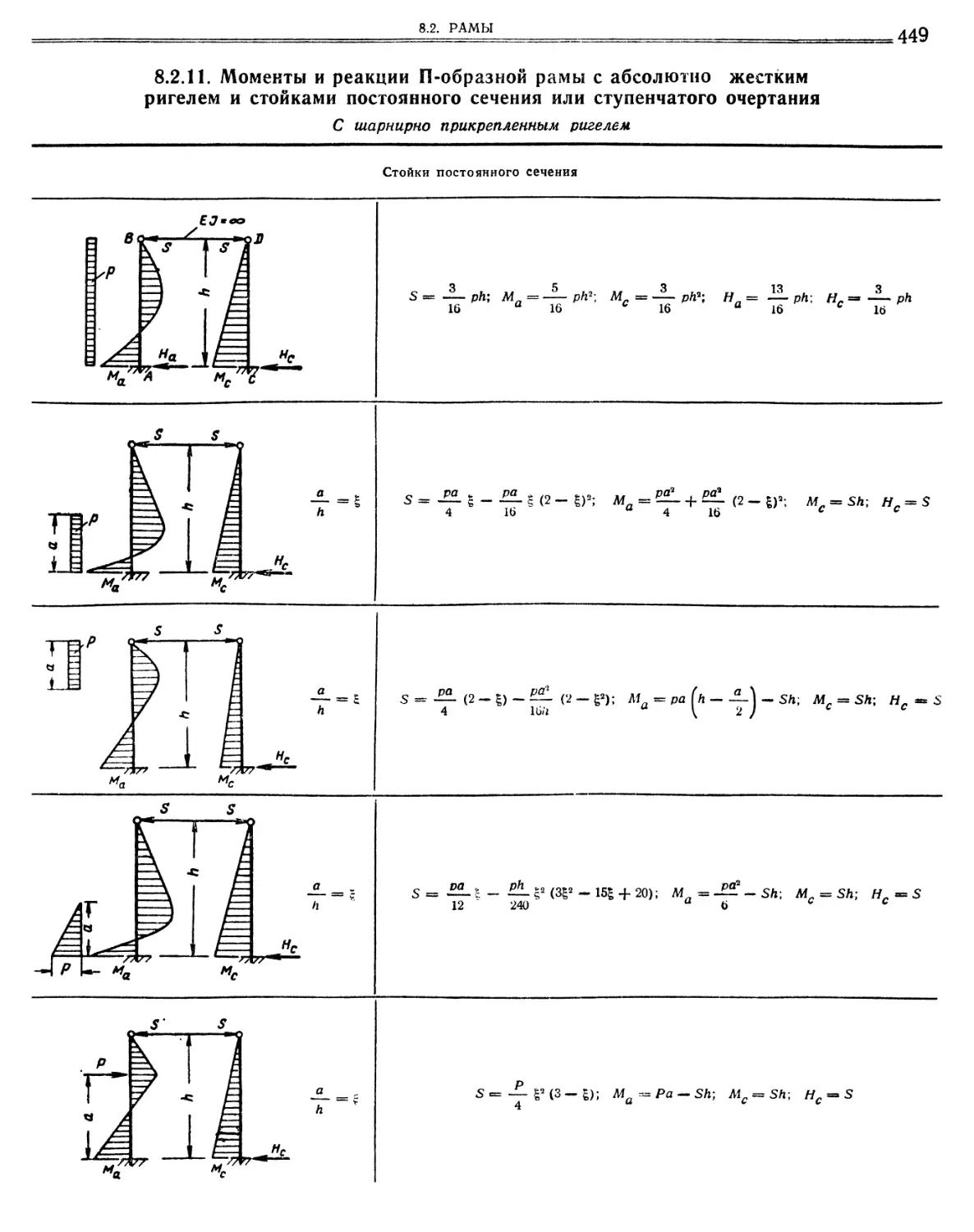
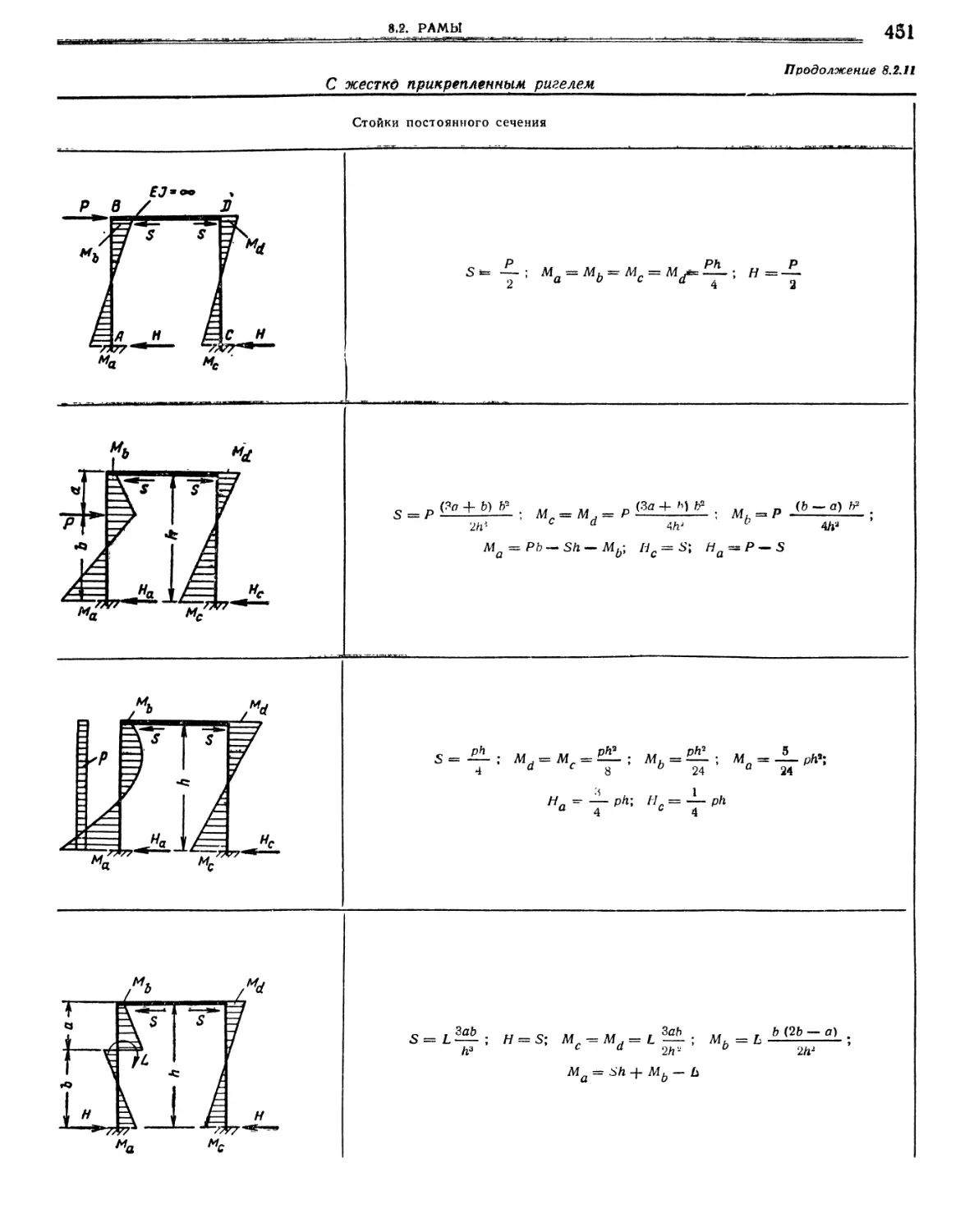
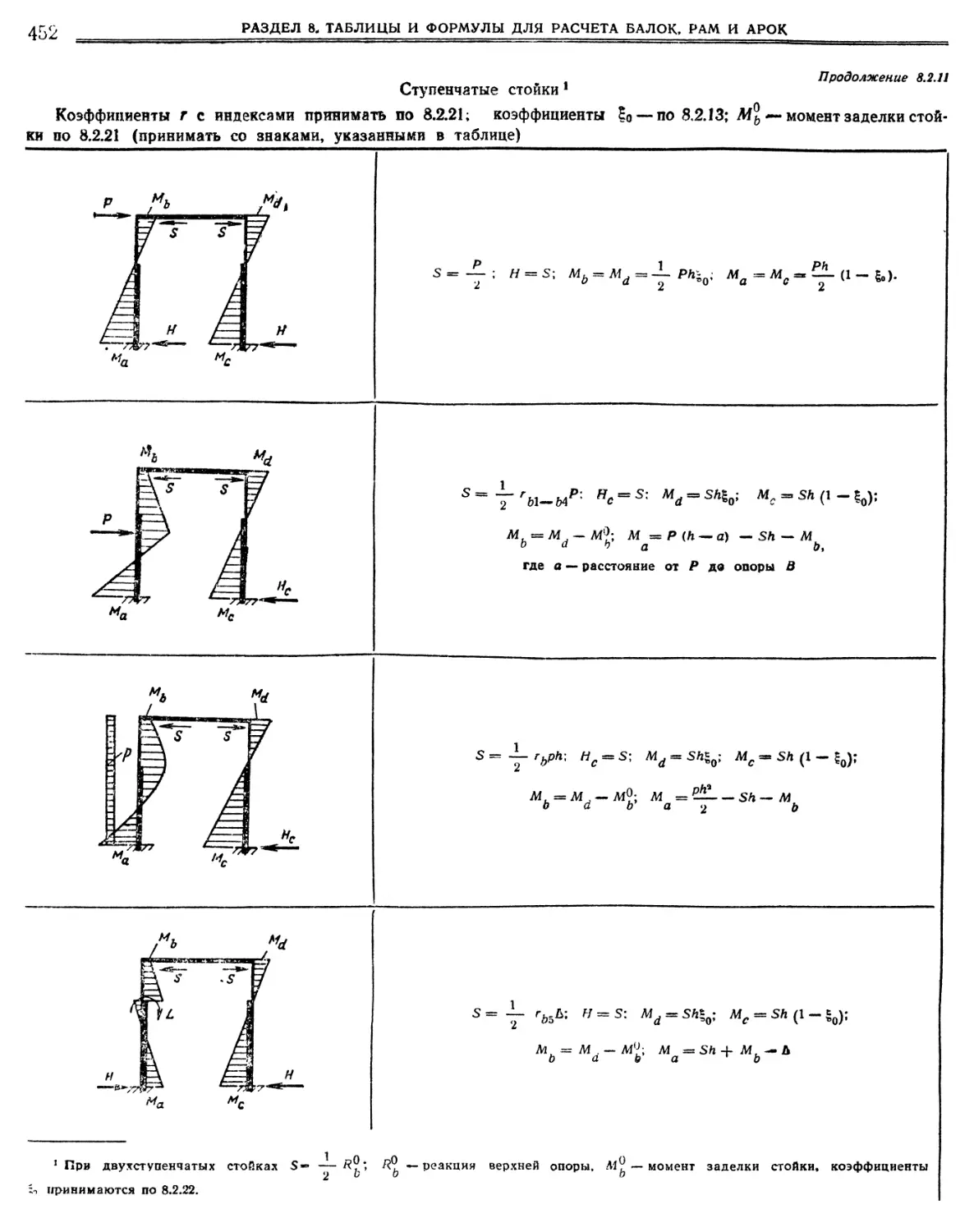
8.2.11. Моменты и реакции П-образной рамы с абсолютно жестким ригелем и стойками постоянного
сечения или ступенчатого очертания С шарнирно прикрепленным ригелем (449). С жестко прикрепленным ригелем (451).
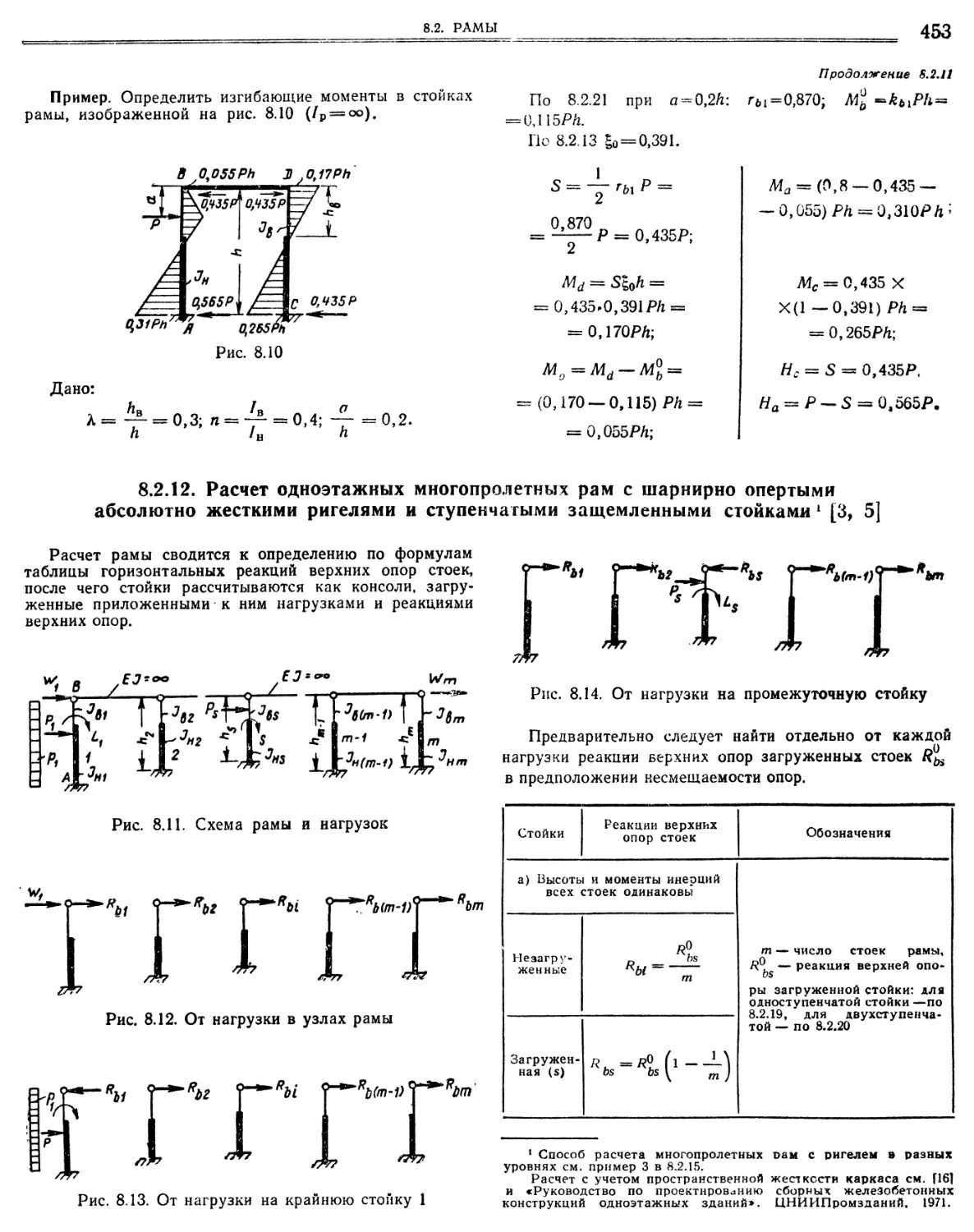
82.12. Расчет одноэтажных многопролетных рам с шарнирно опертыми абсолютно жесткими ригелями и ступенчатыми защемленными стойками. « «
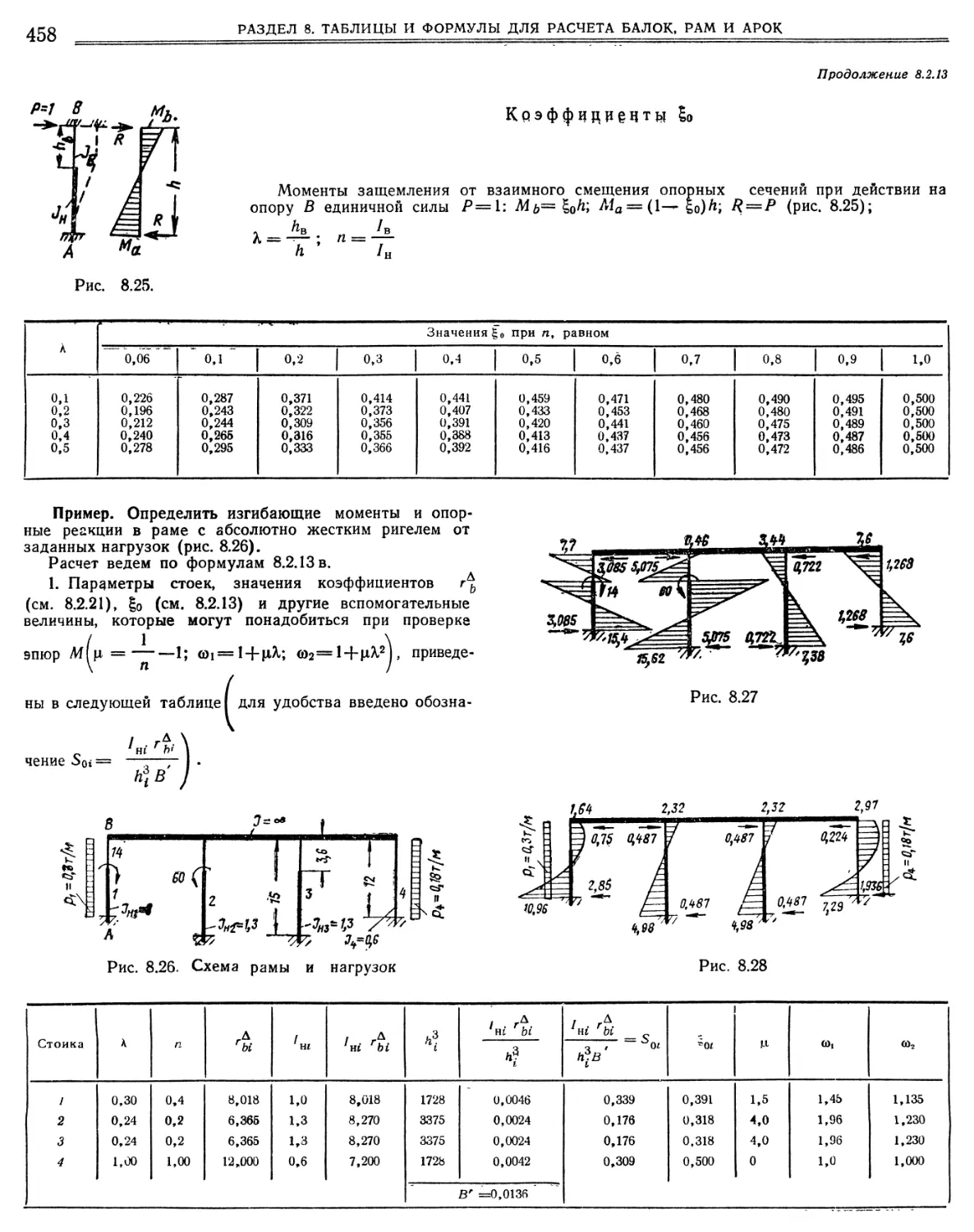
8.2.13. Расчет одноэтажных многопролетных рам с абсолютно жесткими ригелями и ступенчатыми защемленными стойками
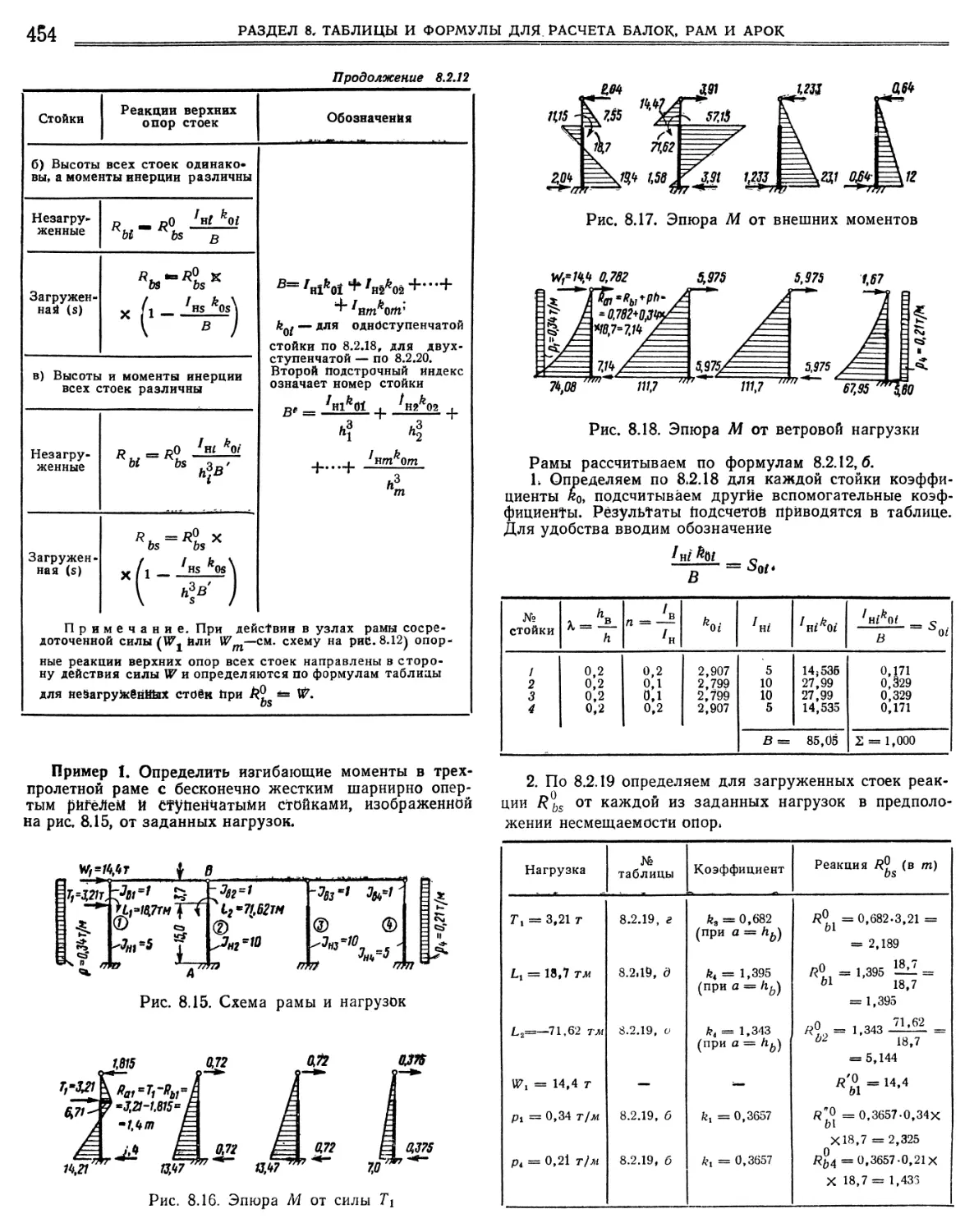
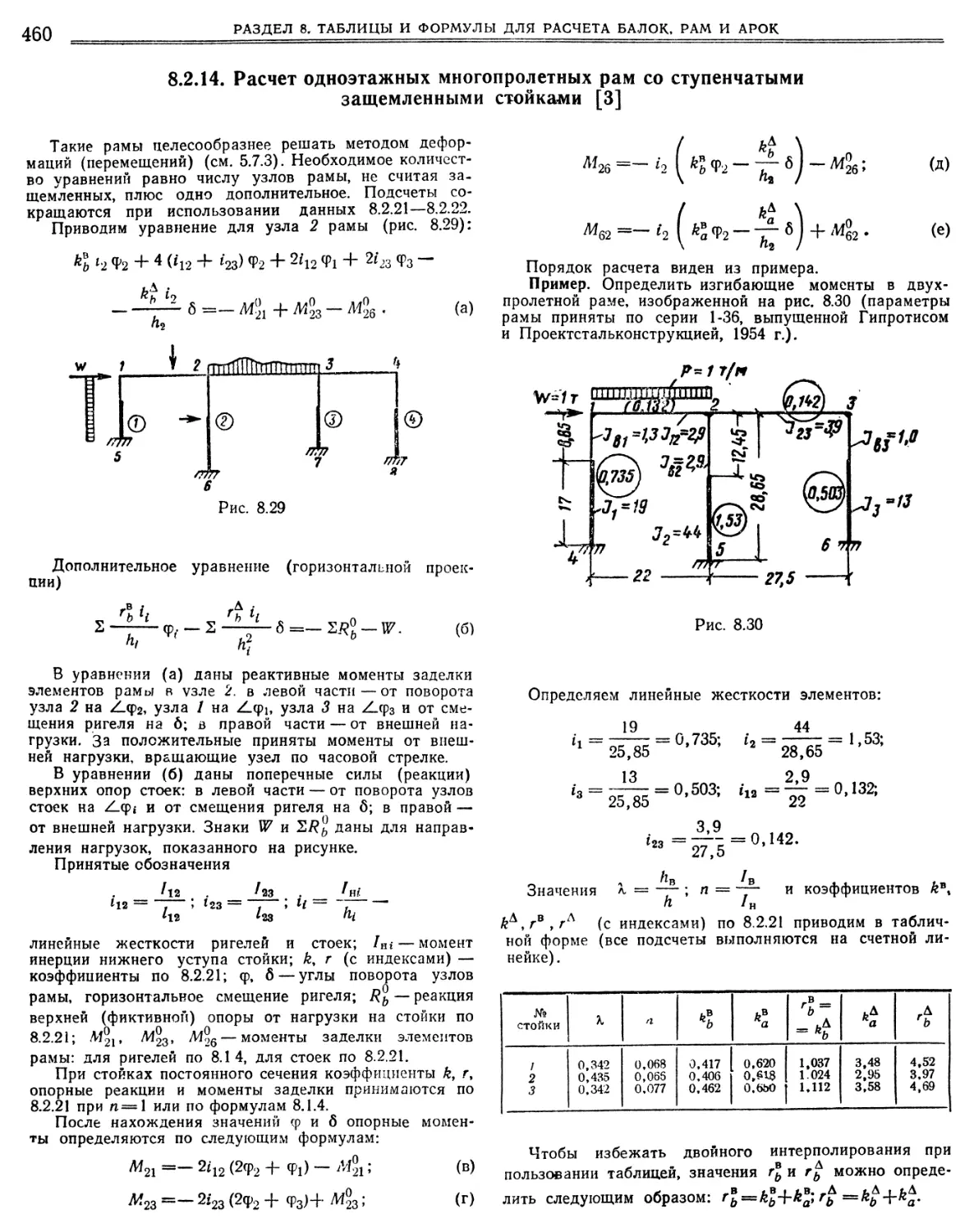
8.2.14. Расчет одноэтажных миогопролетных рам со ступенчатыми защемленными стойками .«•••
8.2.15. Примеры расчета сложных одноэтажных рам методом расчленения с применением таблиц готовых формул
8.2.16. Рамы со стойками, имеющими два уступа (двух¬
ступенчатые). Указания по расчету с использованием таблиц. ».».
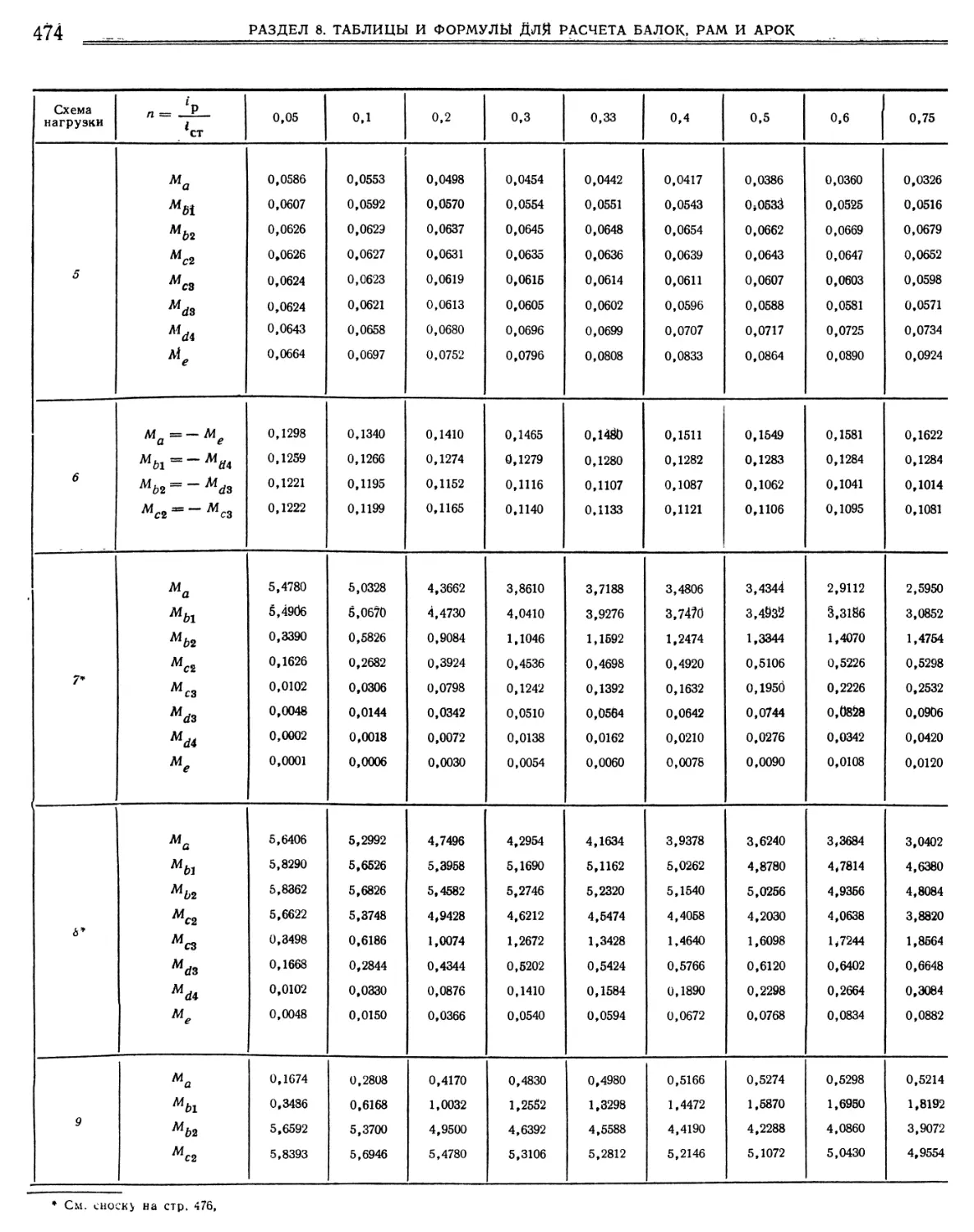
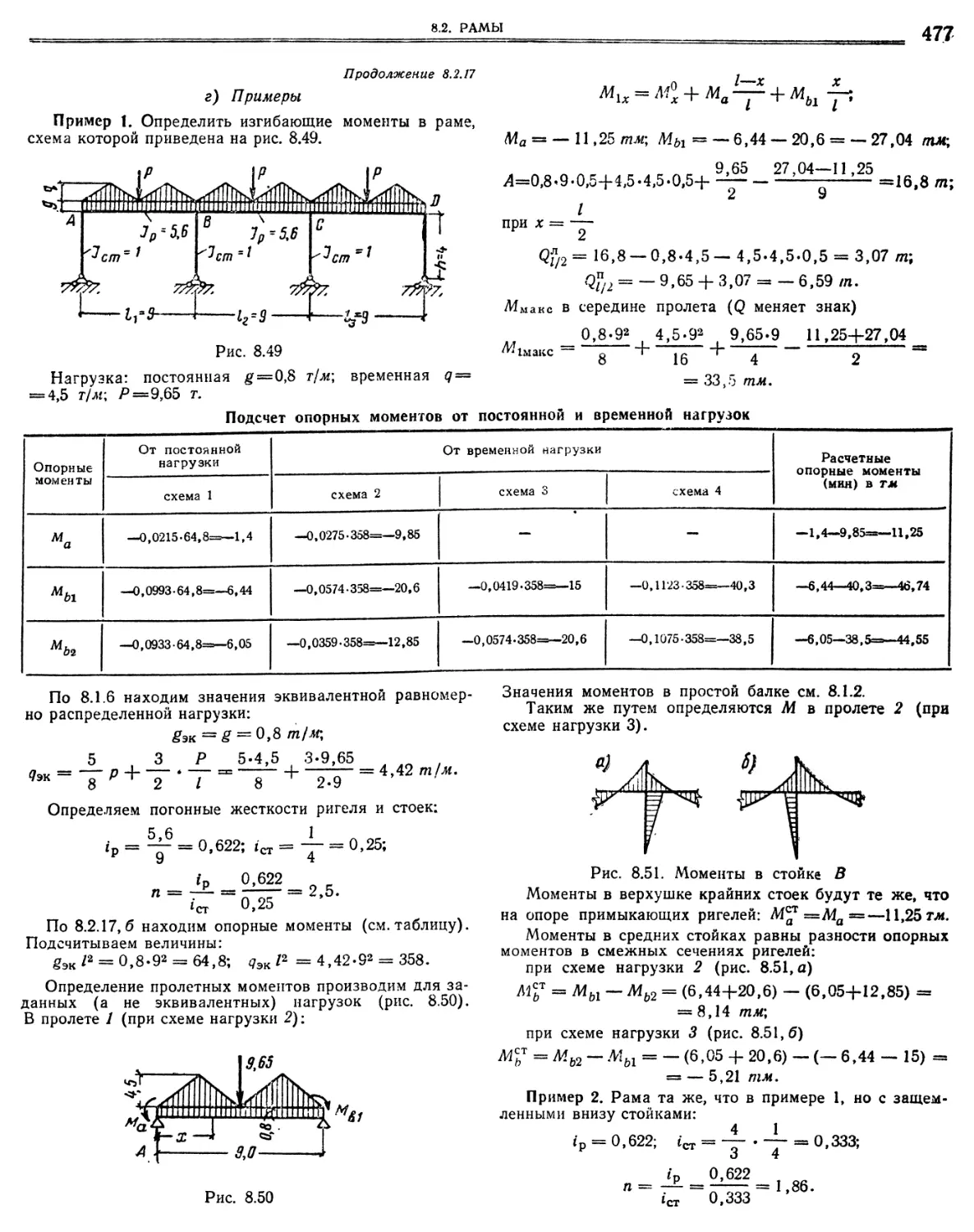
8.2.17. Многопролетные одноэтажные и многоэтажные рамы, Изгибающие моменты от вертикальной, горизонтальной нагрузок и осадок опор. а) Двухпролетные рамы (468). б) Трехпролетные рамы (470). в) Четырехпролетные рамы (472) г) Примеры (477)
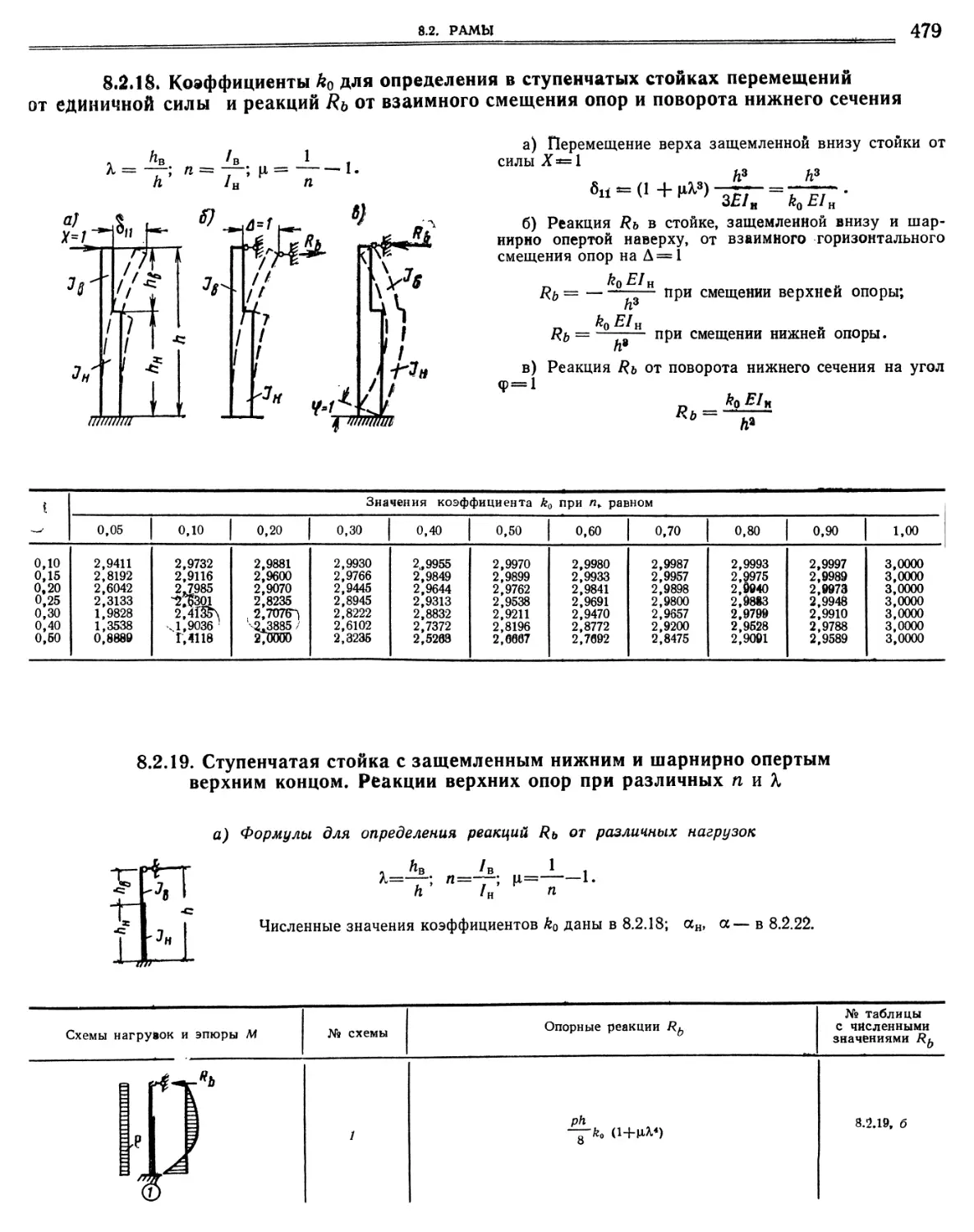
8.2.18. Коэффициенты к0 для определения в ступенчатых стойках перемещений от единичной силы и реакций Я от взаимного смещения опор и поворота нижнего сечения
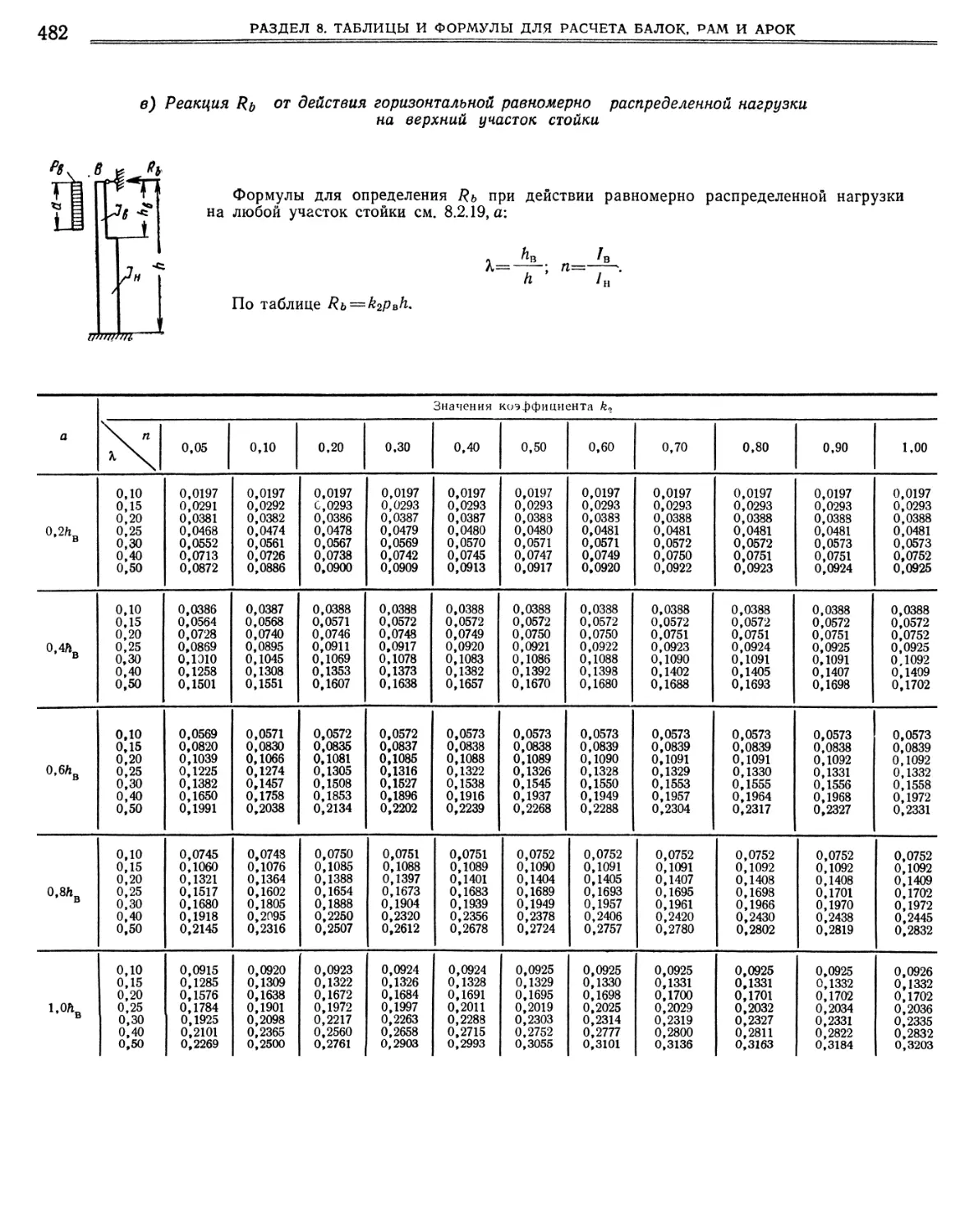
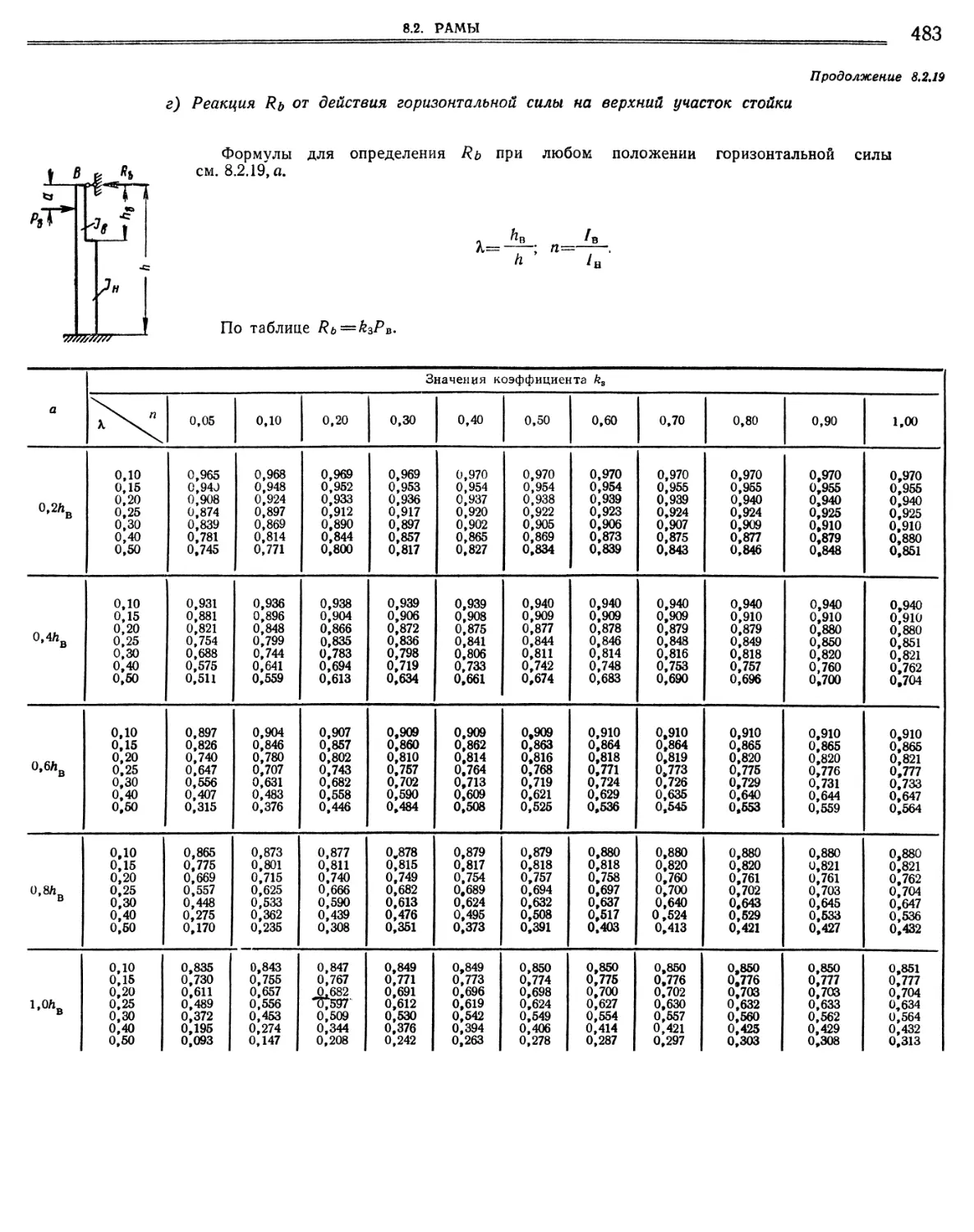
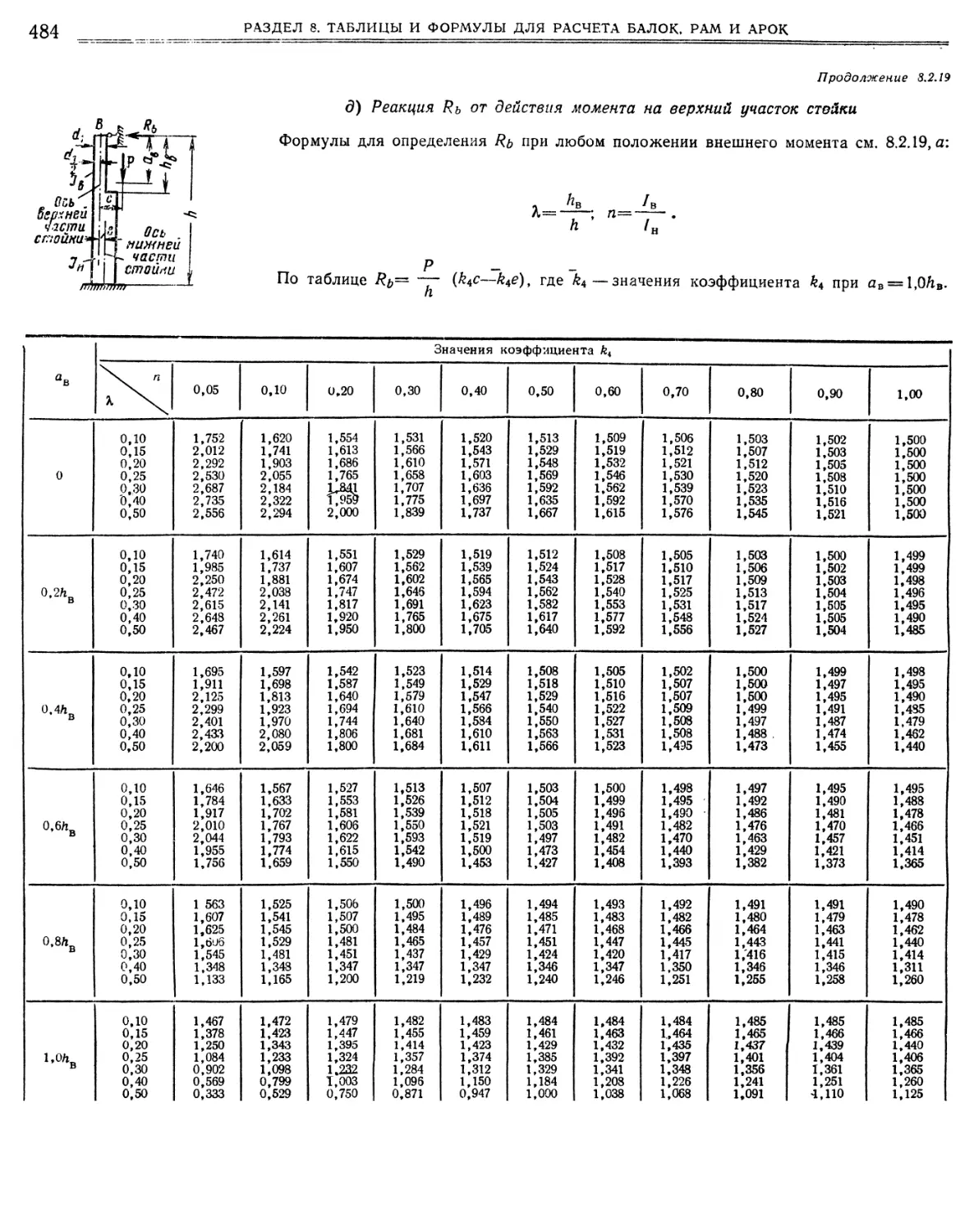
8.2.19. Ступенчатая стойка с защемленным нижним и шарнирно опертым верхним концом. Реакции
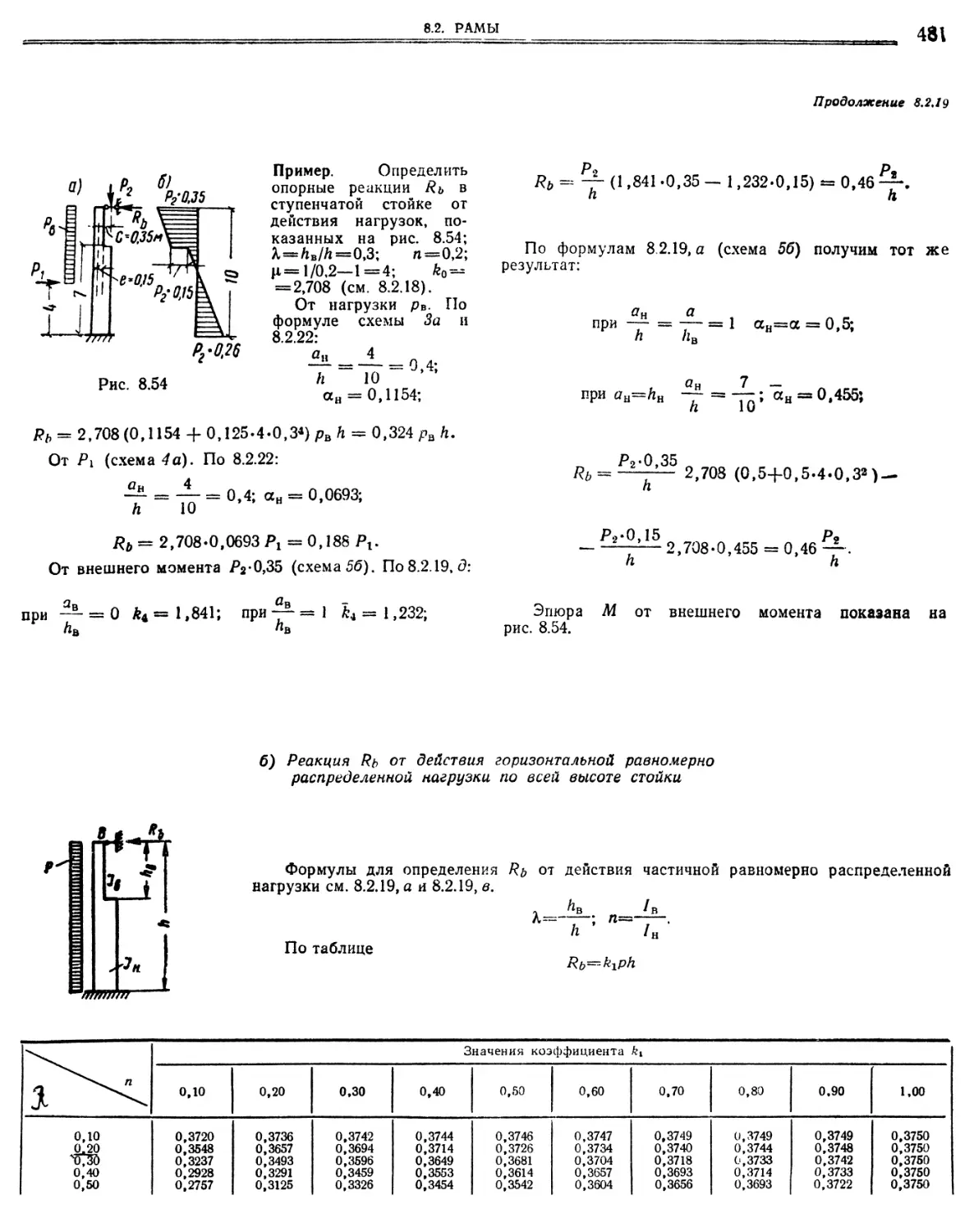
верхних опор при различных п и А, а) Формулы для определения реакций Я от различных нагрузок (479). б) Реакция Я от действия горизонтальной равномерно распределенной нагрузки по всей высоте стойки (481). в) Реакция Я от действия горизонтальной равномерно распределенной нагрузки на верхний участок стойки (482). г) Реакция Я от действия горизонтальной силы на верхний участок стойки (483). д) Реакция Я от действия момента на верхний участок стойки (484).
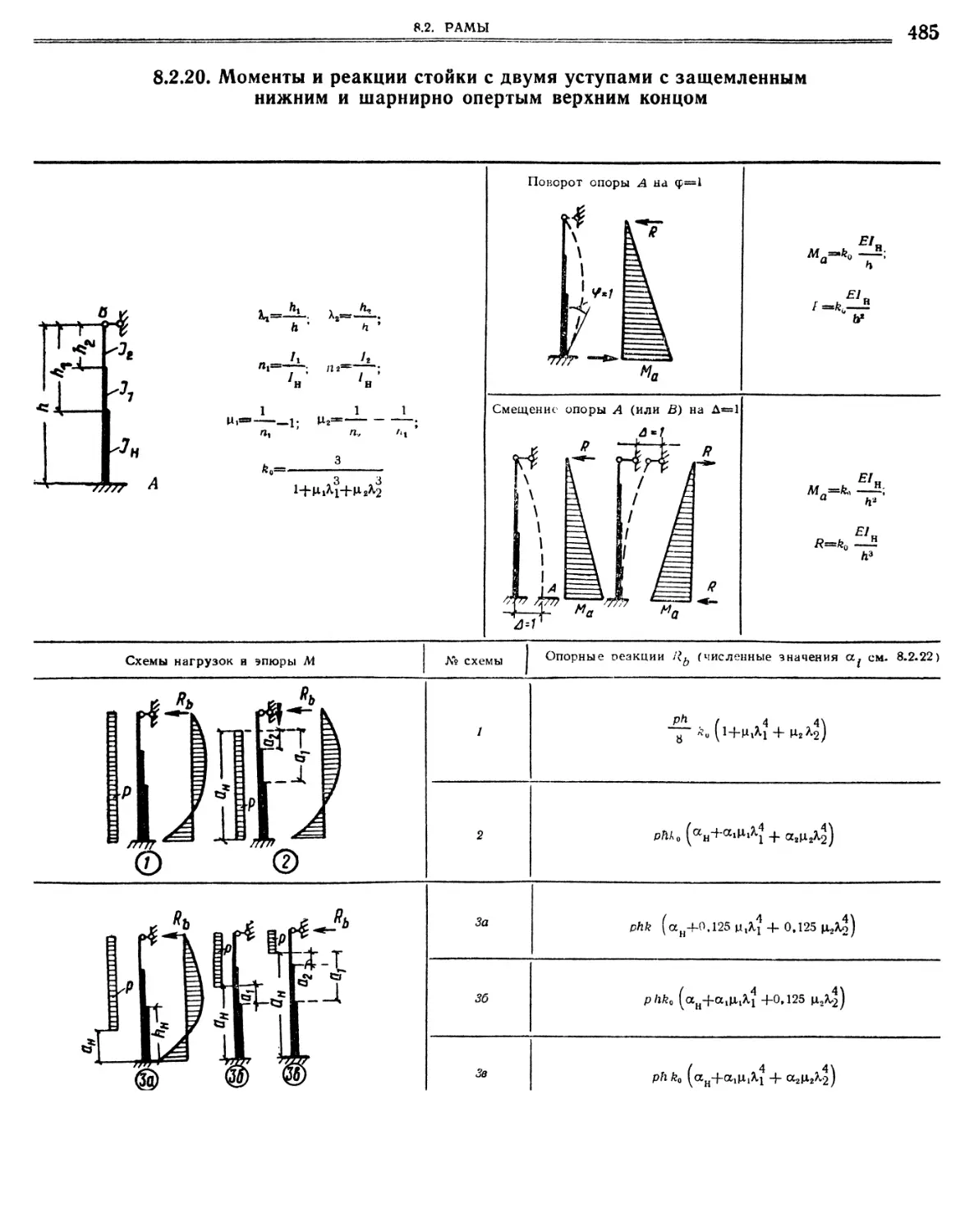
8.2.20. Моменты и реакции стойки с двумя уступами с защемленным нижним и шарнирно опертым верхним концом
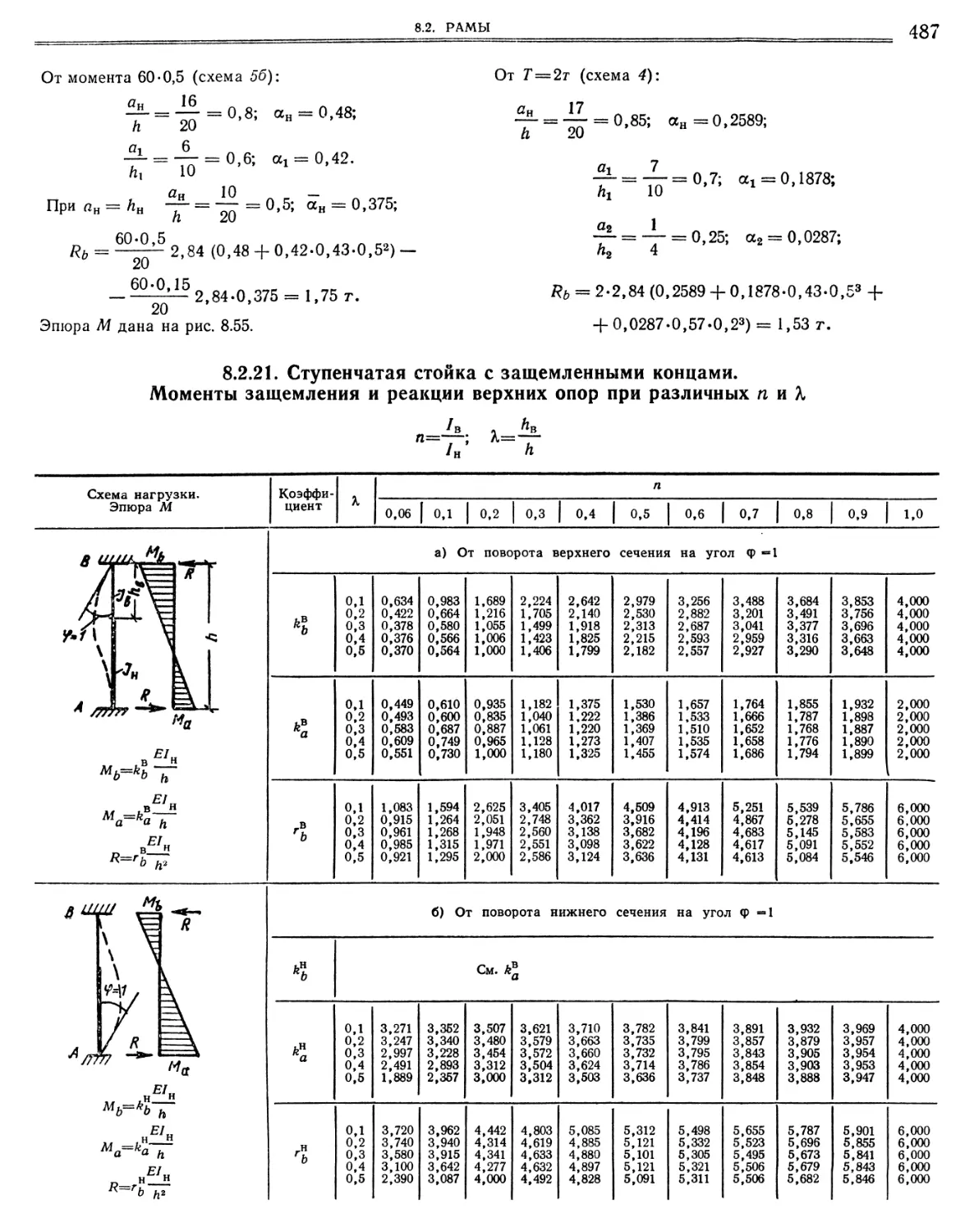
8.2.21 Ступенчатая стойка с защемленными концами.
Моменты защемления и реакции верхних опор при различных п и %.
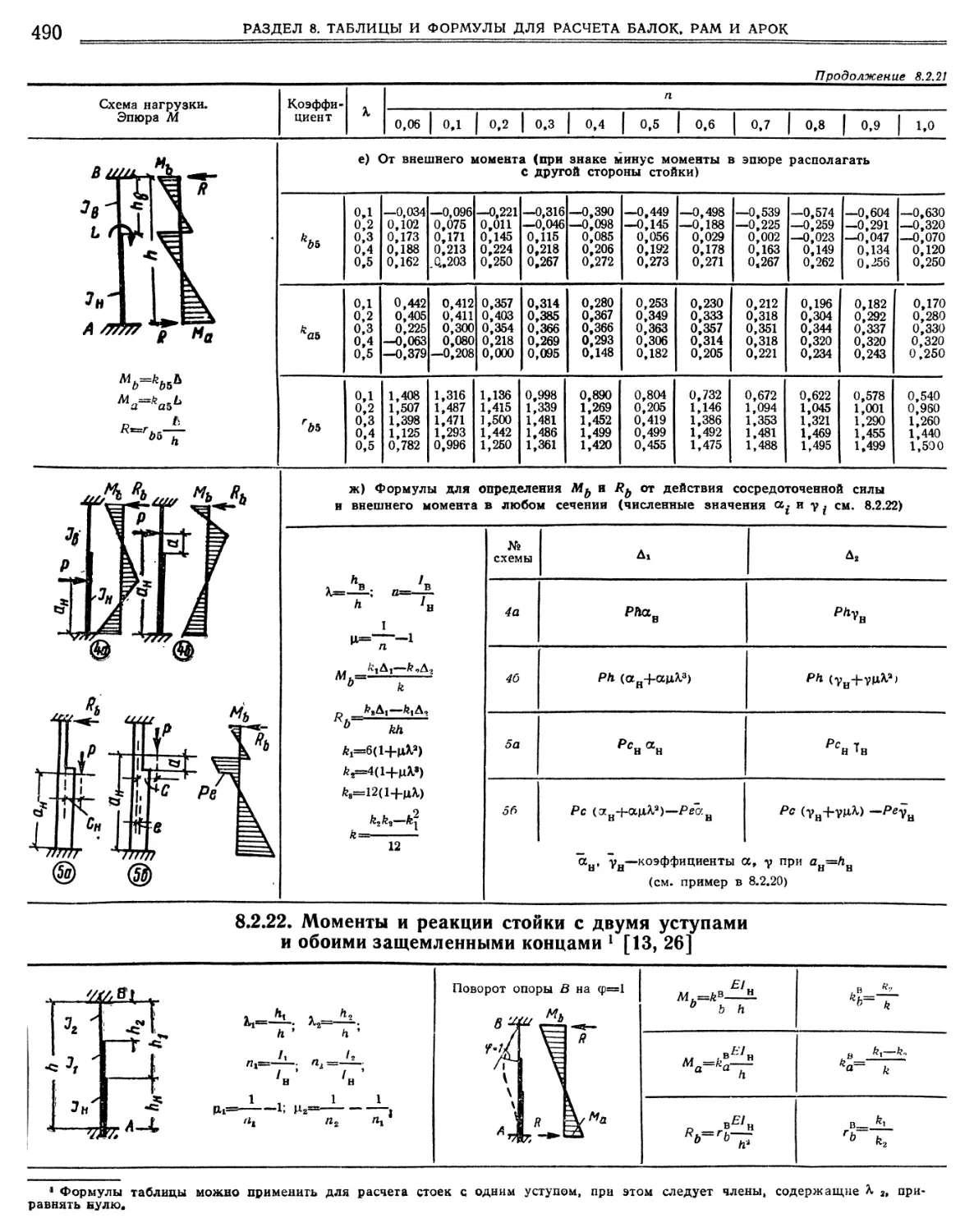
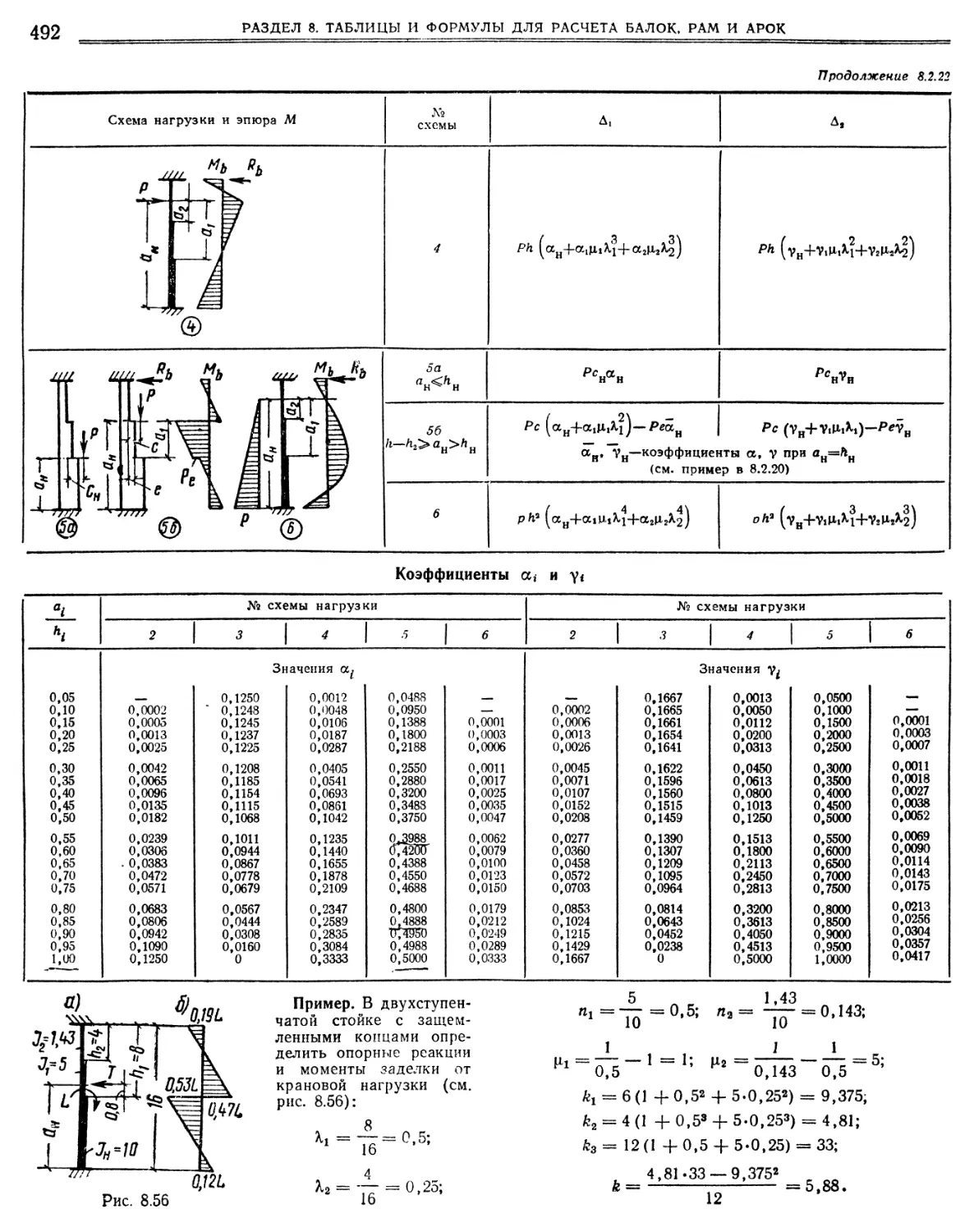
8.2.22 Моменты и реакции стойки с двумя уступами и
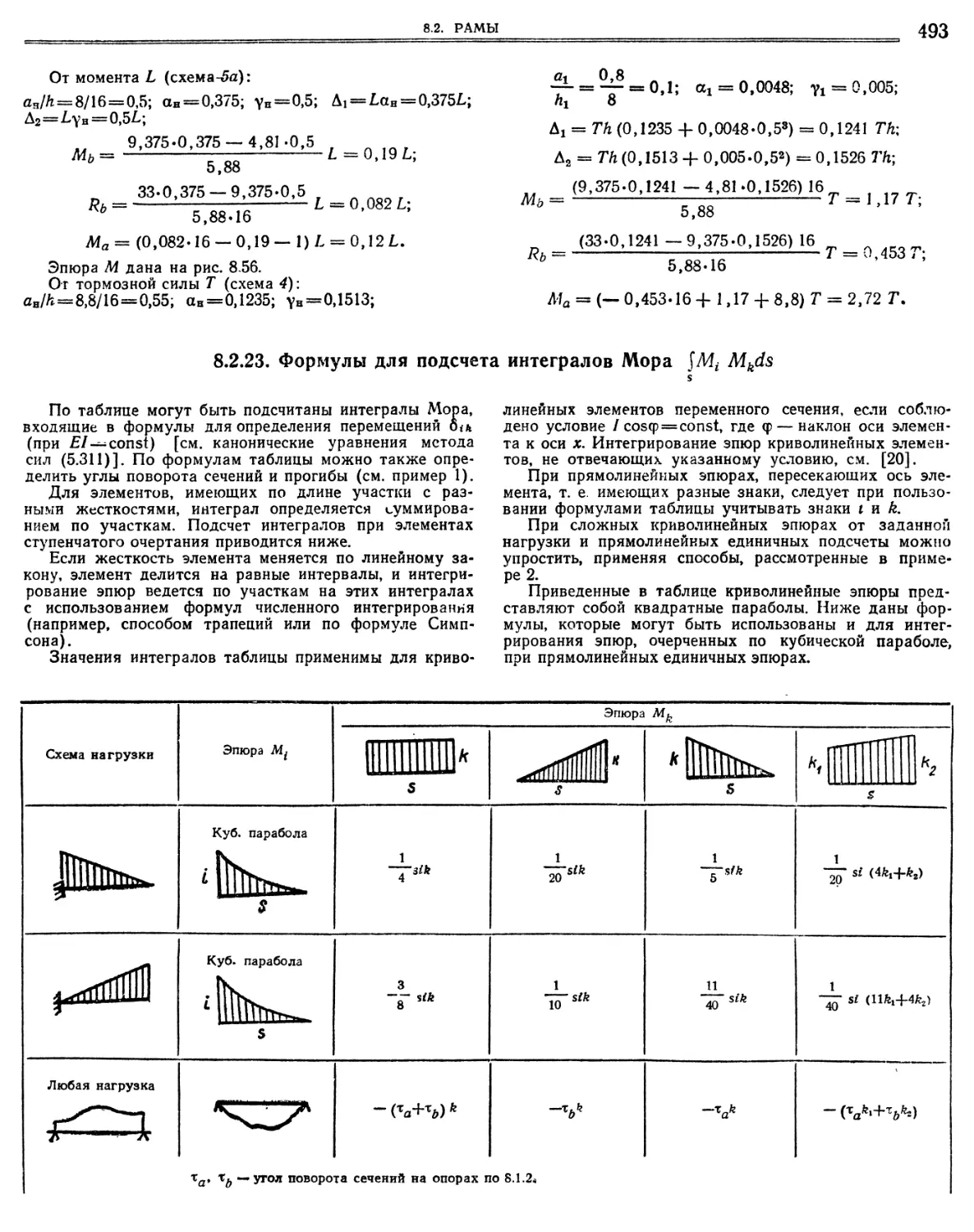
обоими защемленными концами .8.2.23. Формулы для подсчета интегралов Мора « 8 •
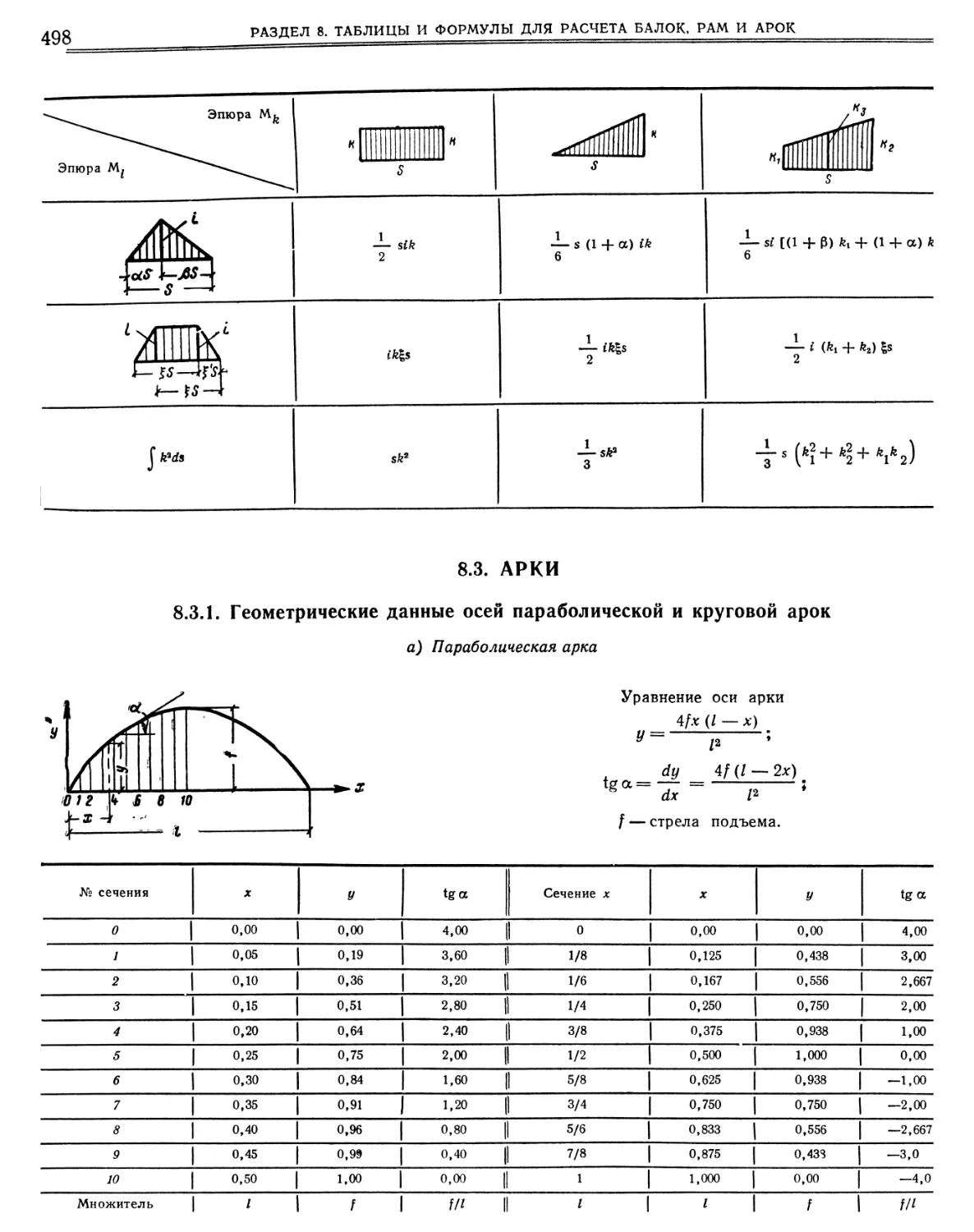
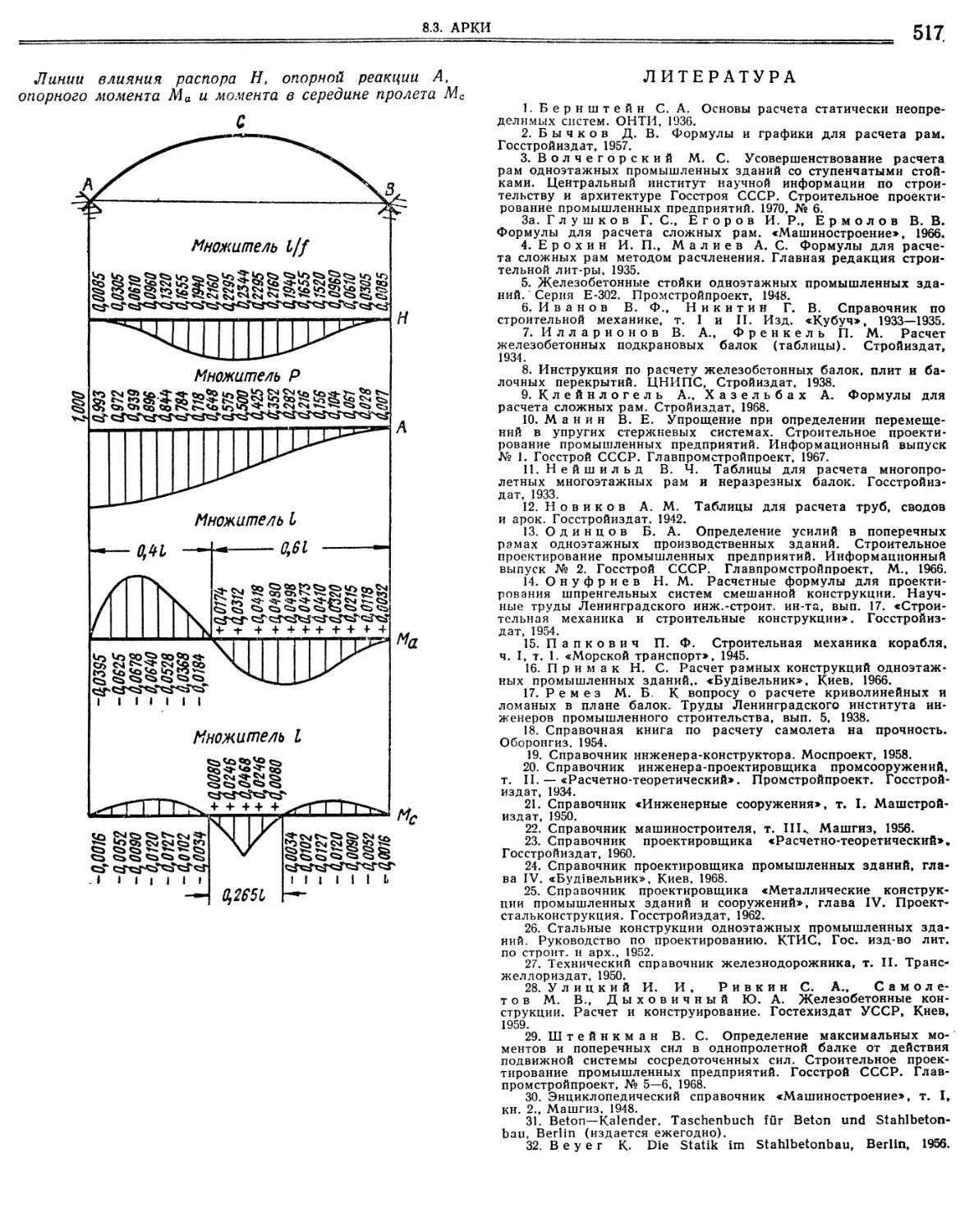
8.3. Арки г 8.3.1 Геометрические данные осей параболической и
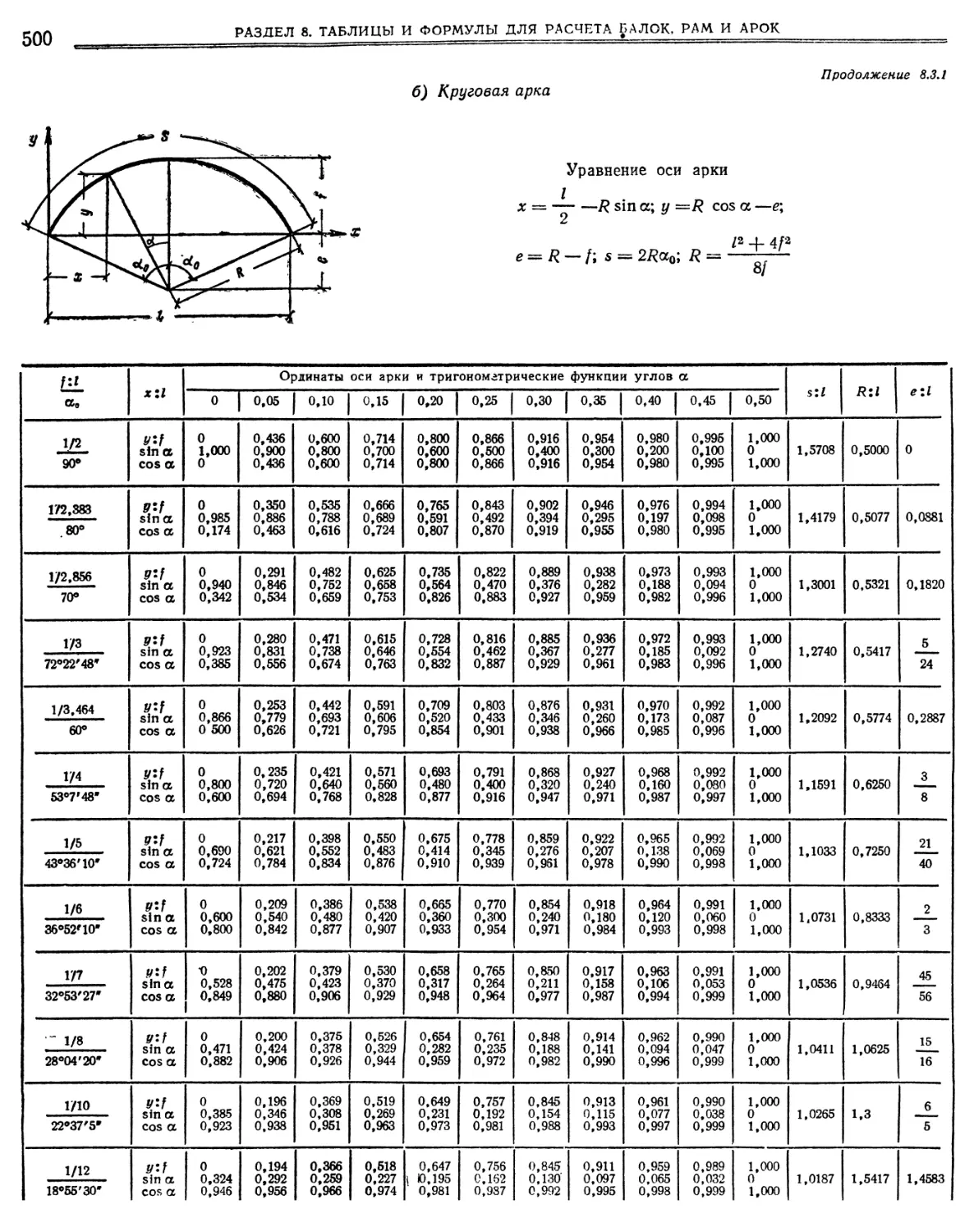
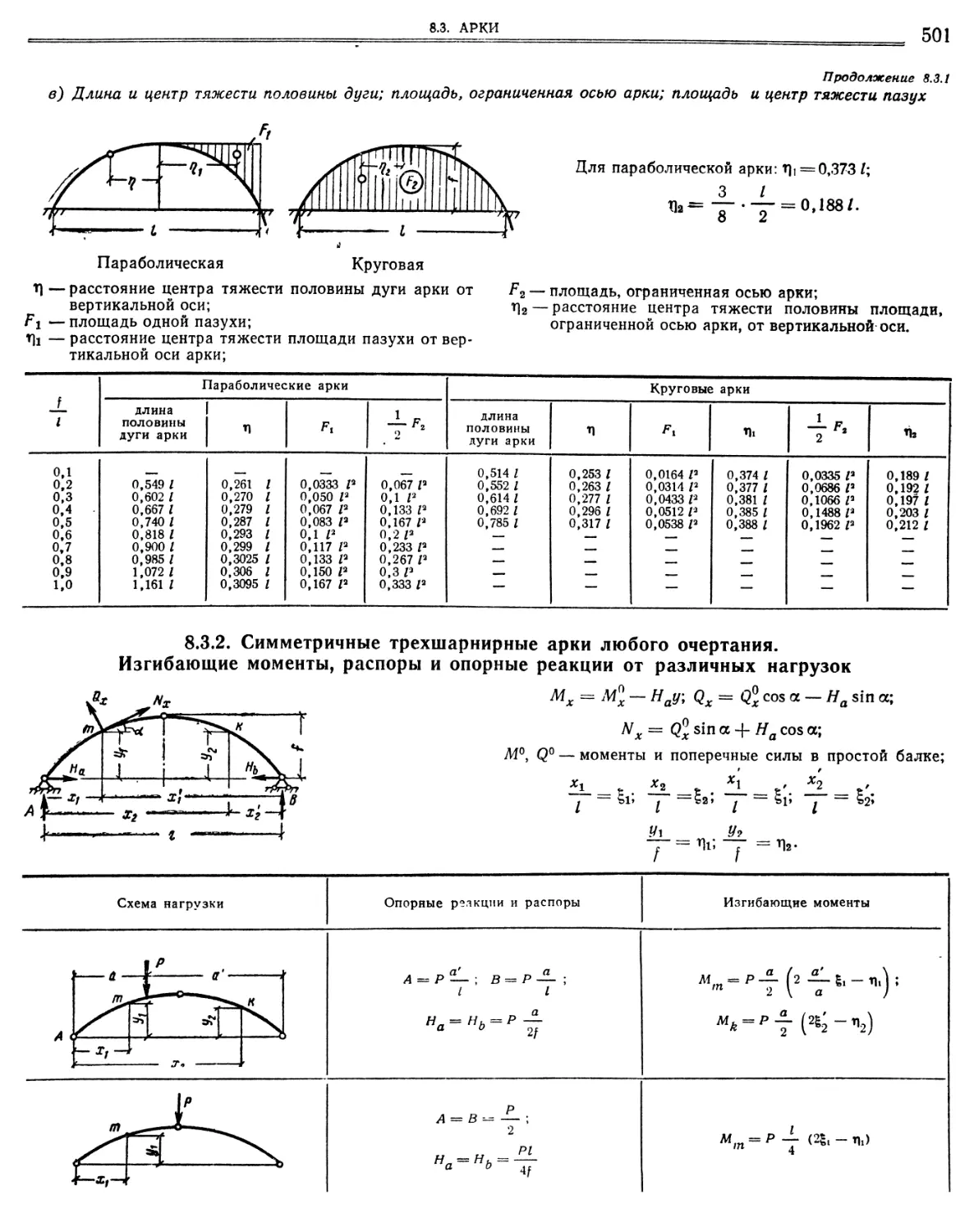
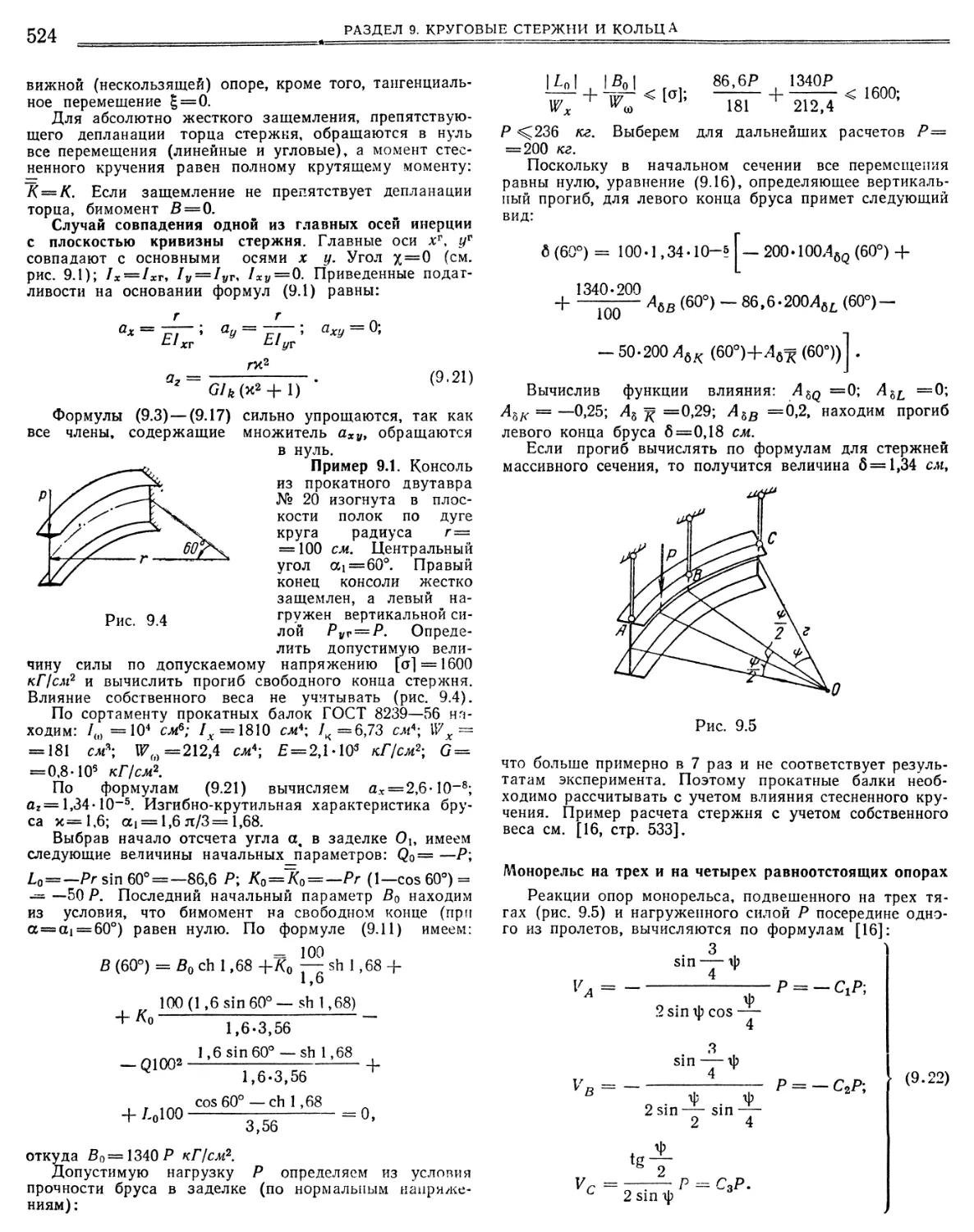
круговой арок а) Параболическая арка (498). б) Круговая арка (500). в) Длина и центр тяжести половины дуги
8.3.2. Симметричные трехшарнирные арки любого очертания. Изгибающие моменты, распоры и опорные реакции от различных нагрузок
Стр.
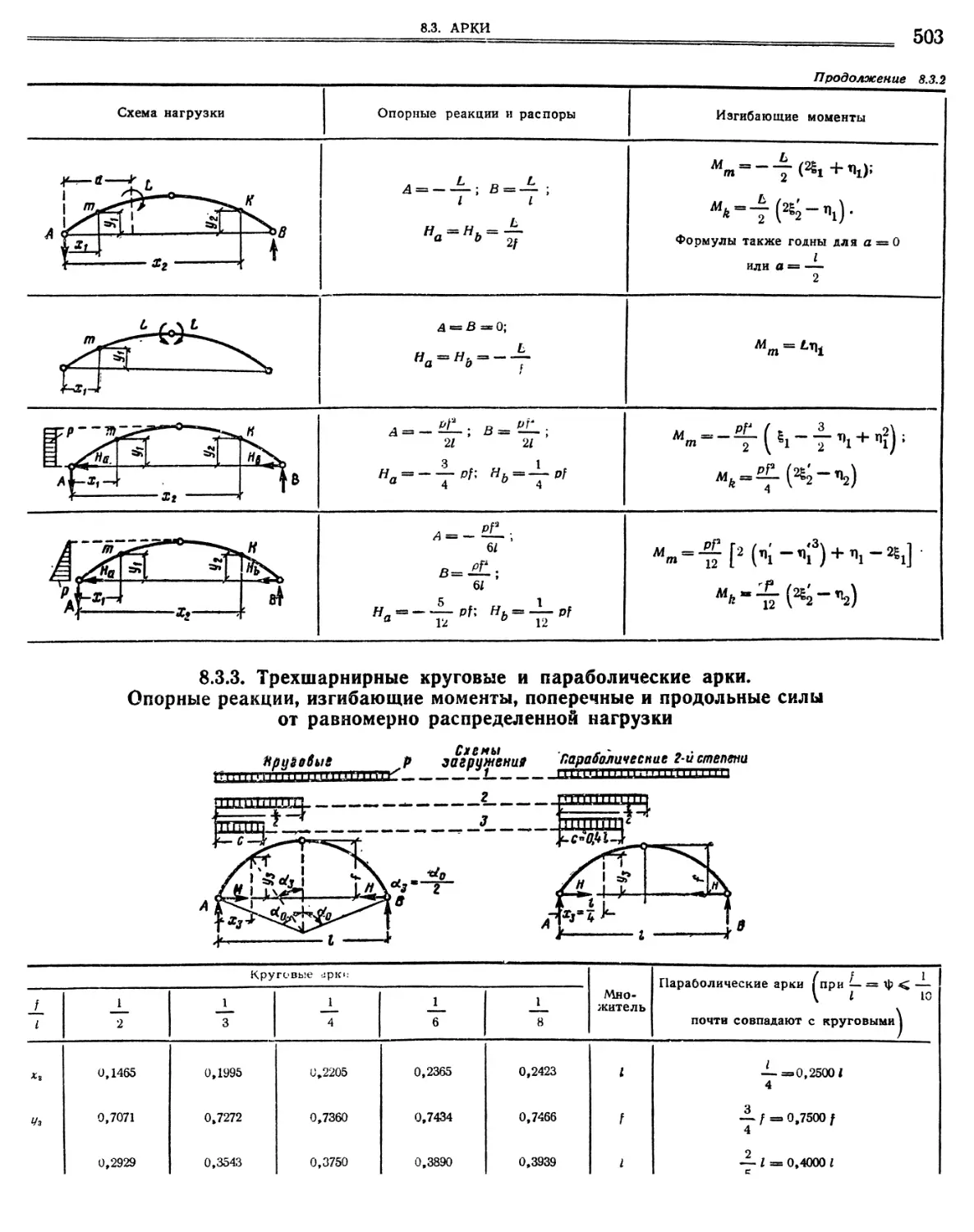
8.3.3. Трехшарнирные круговые и параболические арки.
Опорные реакции, изгибающие моменты, поперечные и продольные силы от равномерно распределенной нагрузки ?,.''•••• 503
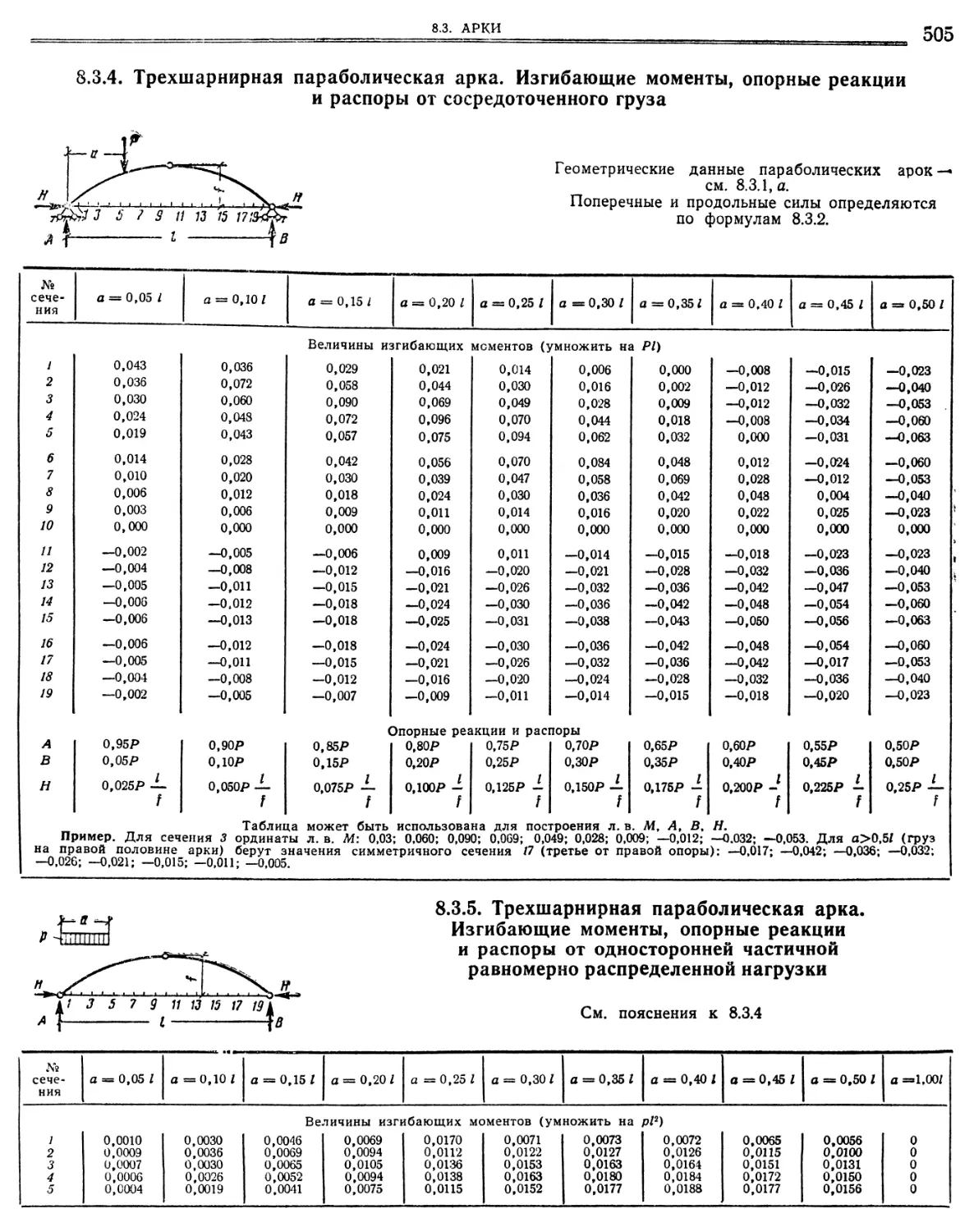
8.3.4. Трехшарнирная параболическая арка. Изгибаю¬
щие моменты, опорные реакции и распоры от сосредоточенного груза «.•».«•' 505
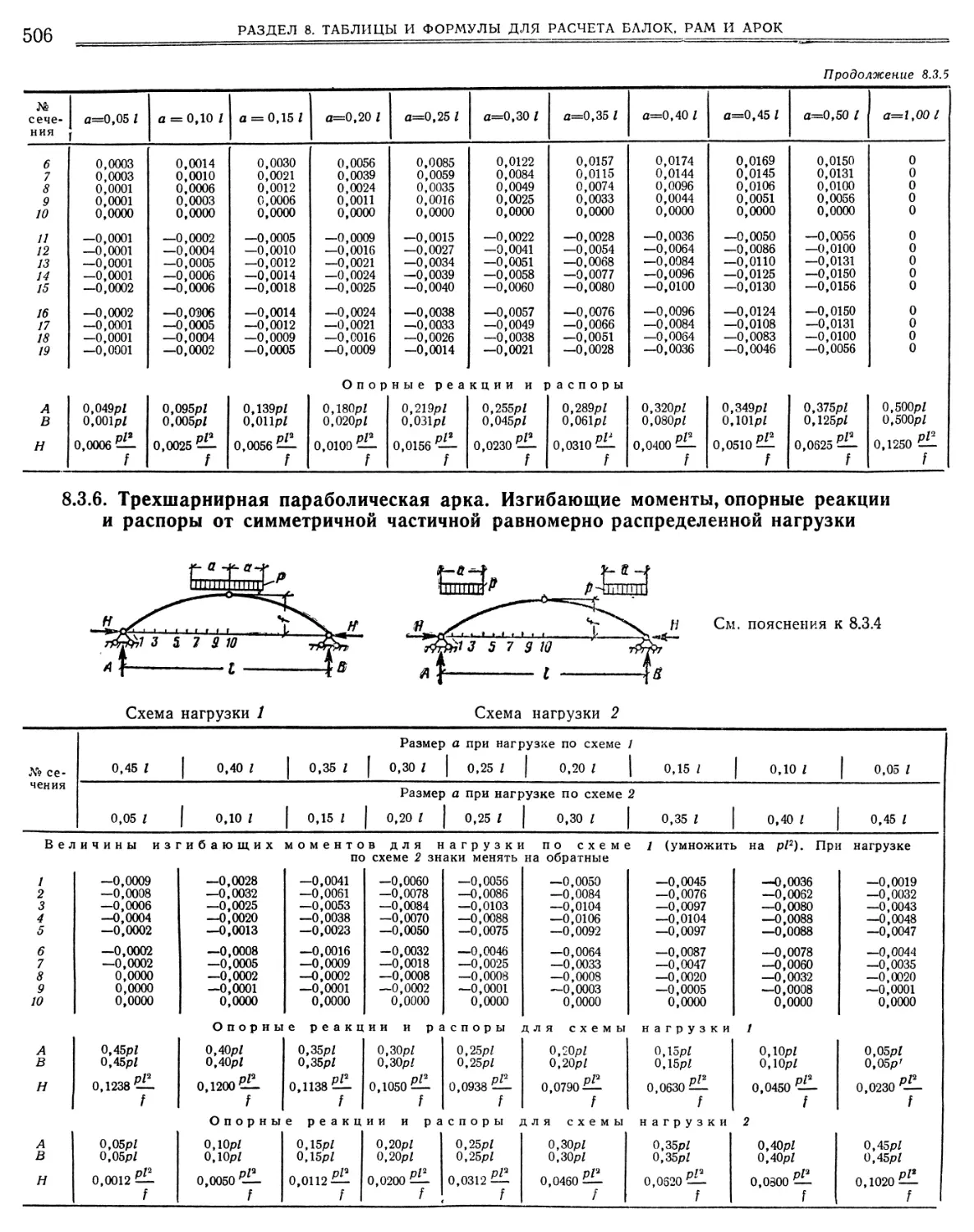
8.3.5. Трехшарнирная параболическая арка Изгибаю¬
щие моменты, опорные реакции и распоры от односторонней частичной равномерно распределенной нагрузки 505
8.3.6. Трехшарнирная параболическая арка Изгибаю¬
щие моменты, опорные реакции и распоры от симметричной частичной равномерно распределенной нагрузки 506
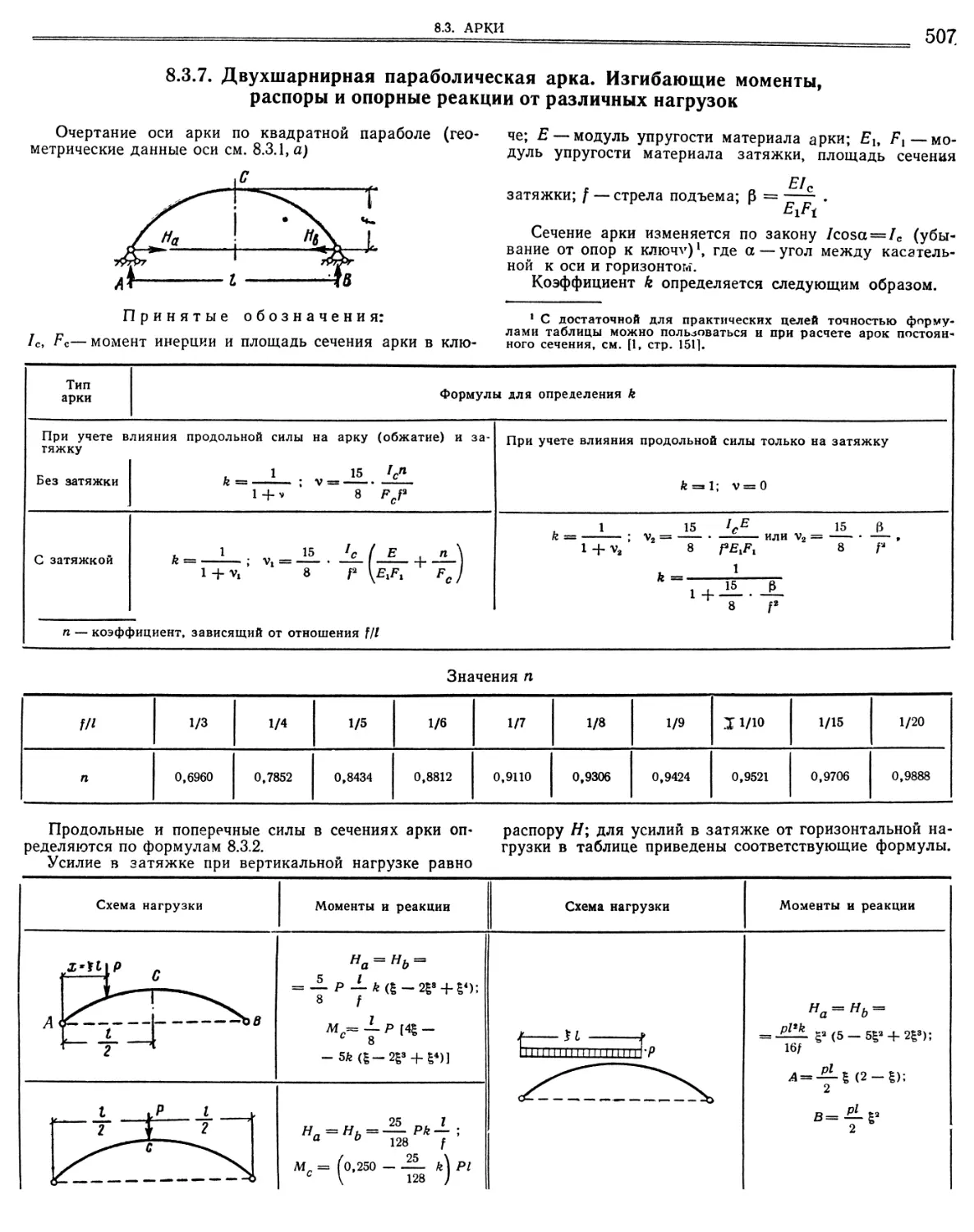
8.3.7. Двухшарнирная параболическая арка. Изгибаю¬
щие моменты, распоры и опорные реакции от различных нагрузок 507
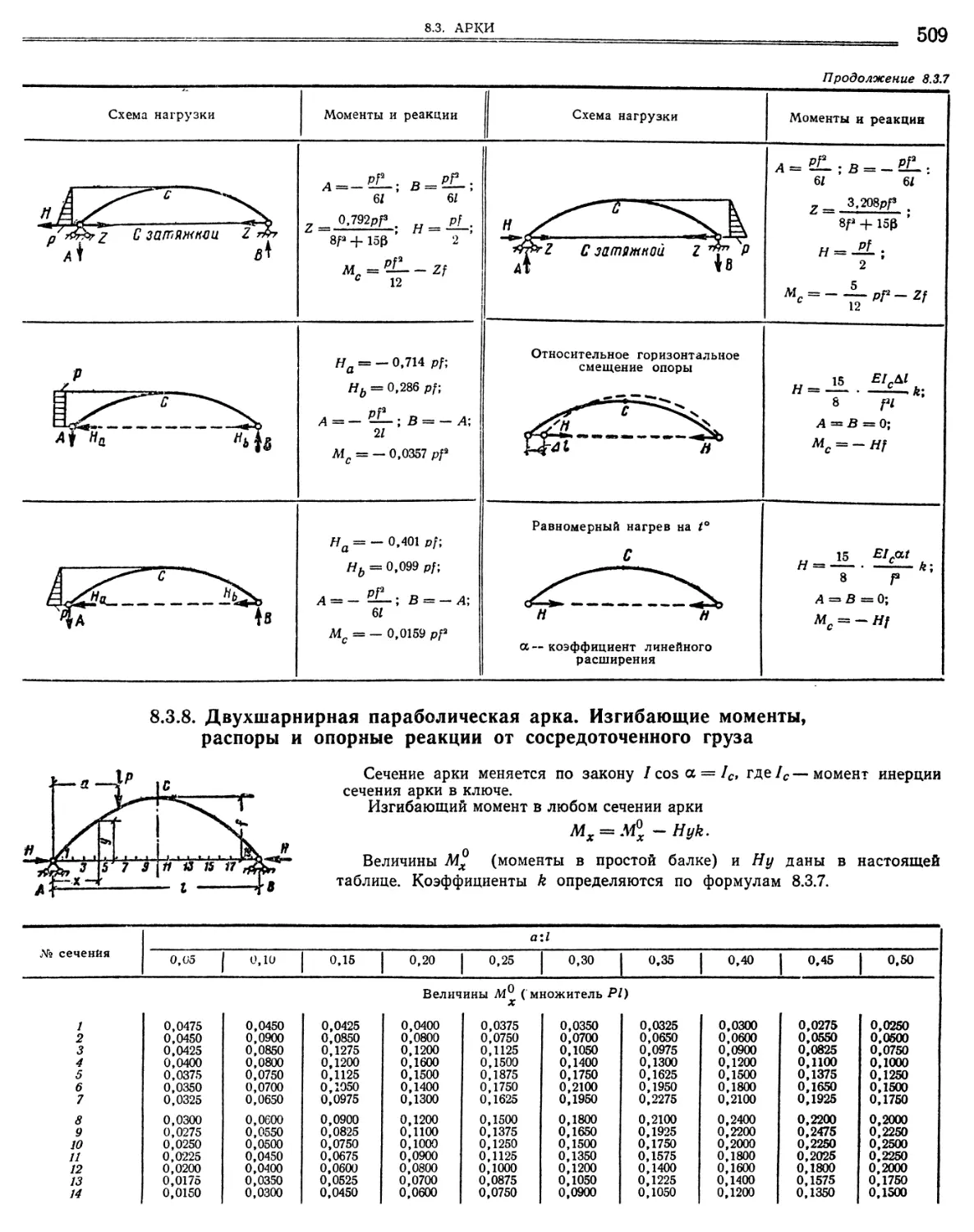
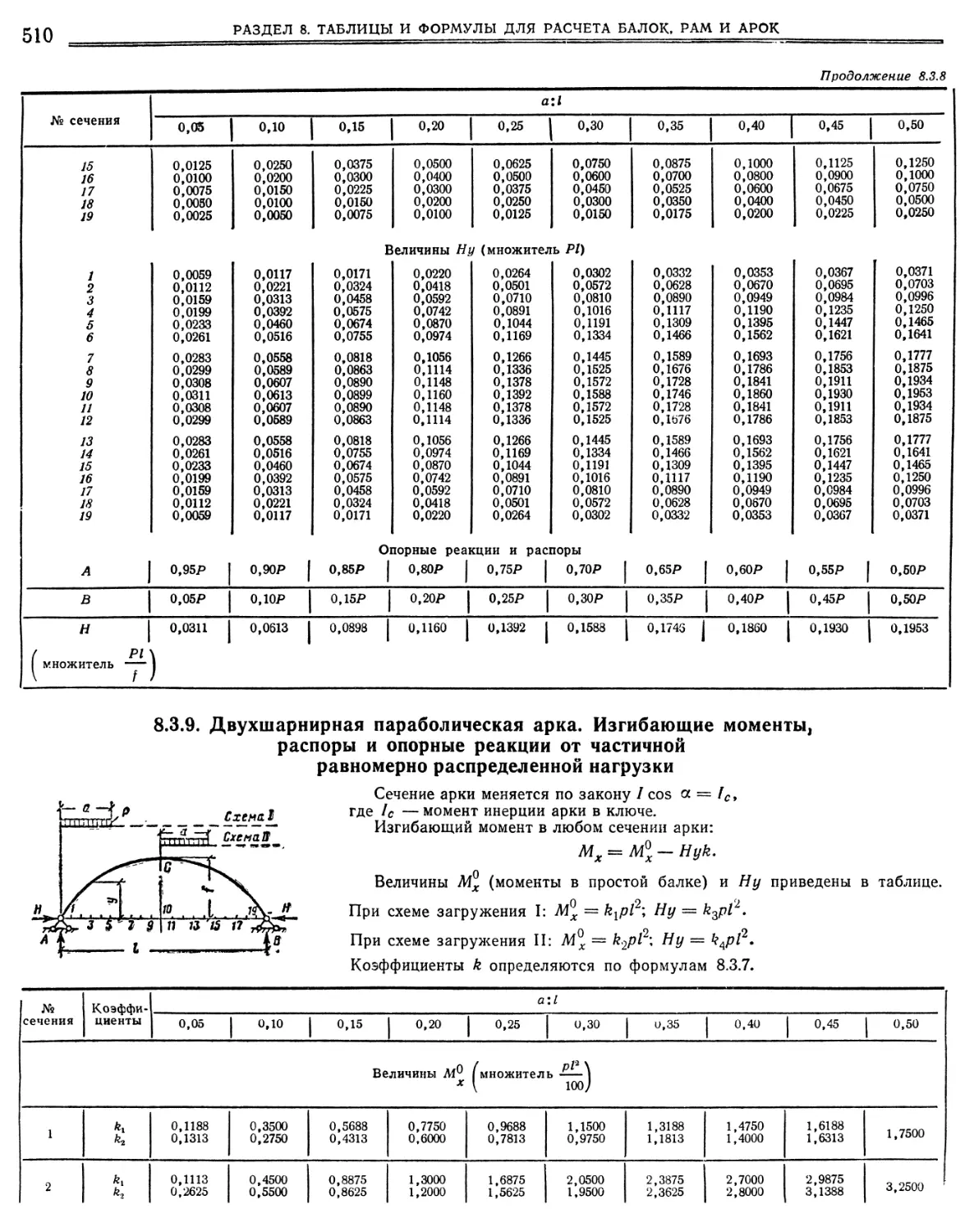
8.3.8. Двухшарнирная параболическая арка. Изгибаю¬
щие моменты, распоры и опорные реакции от сосредоточенного груза.«..«» 509
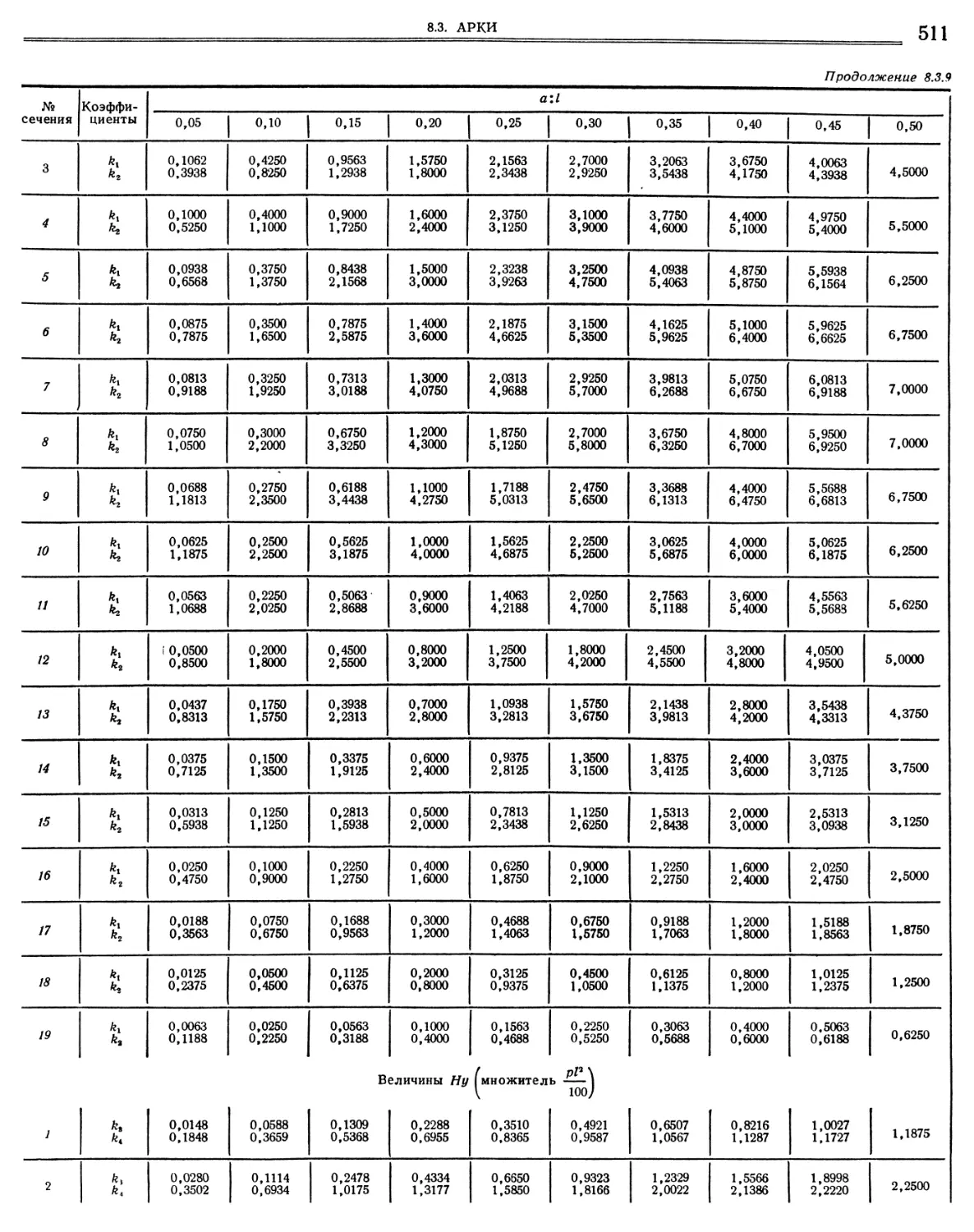
8.3.9. Двухшарнирная параболическая арка. Изгибаю¬
щие моменты, распоры и опорные реакции от частичной равномерно распределенной нагрузки. • 510
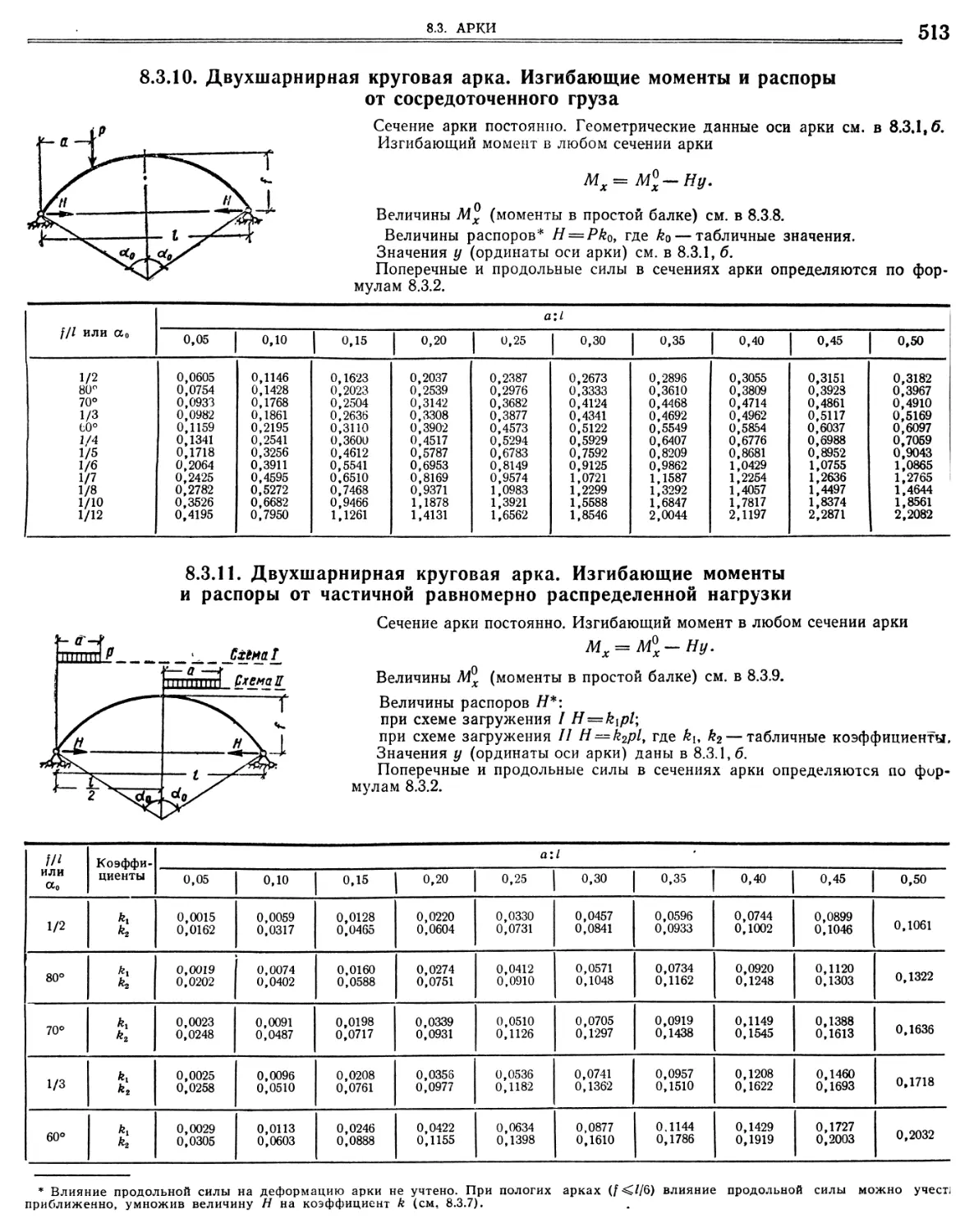
8.3.10. Двухшарнирная круговая арка. Изгибающие моменты и распоры от сосредоточенного груза. 513
8.3.11. Двухшарнирная круговая арка. Изгибающие мо¬
менты и распоры от частичной равномерно распределенной нагрузки 513
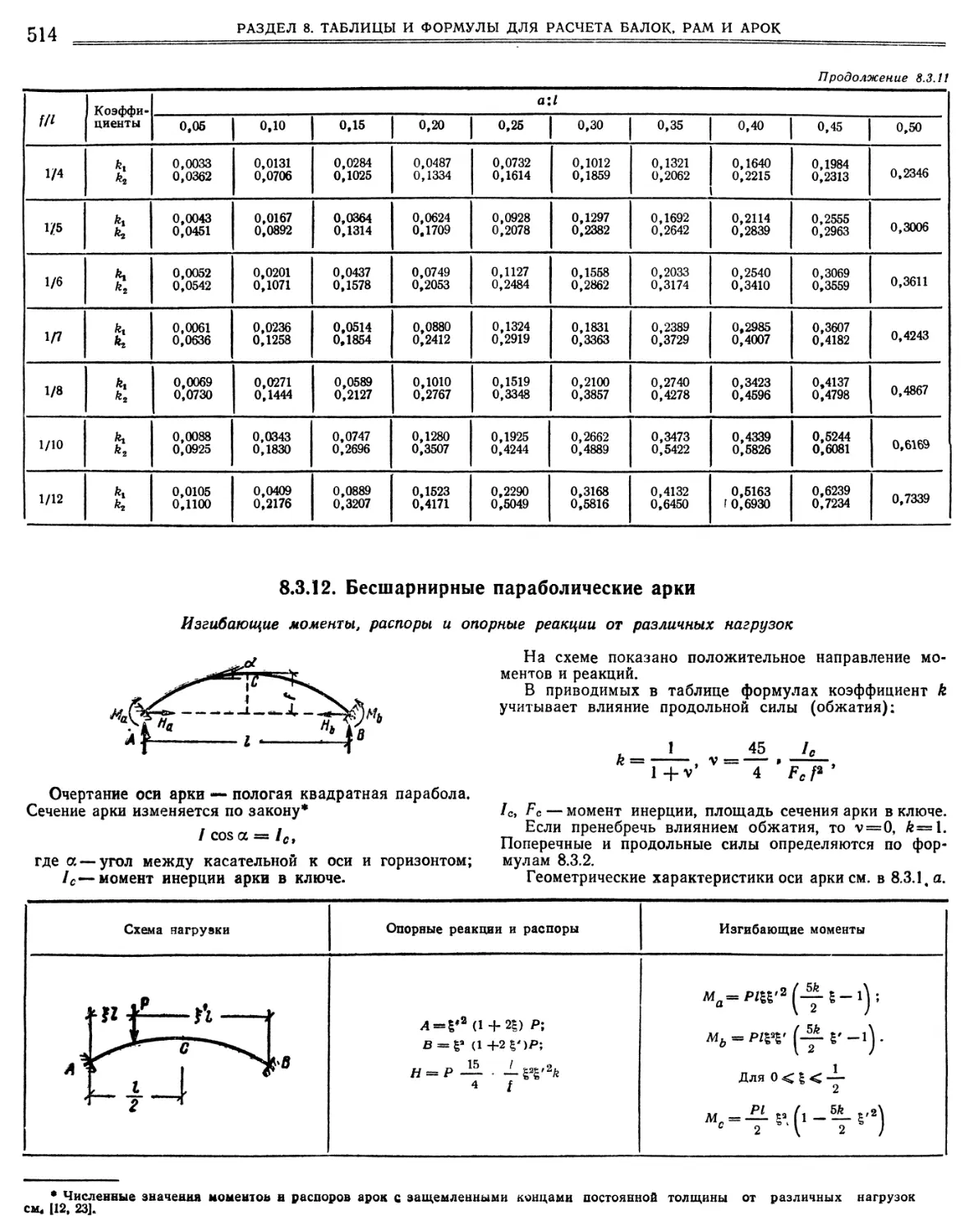
8.3.12. Бесшарнирные параболические арки. Изгибаю¬
щие моменты, распоры и опорные реакции от различных нагрузок ••.•••••••« 514
Литература 517
РА6ДЕЛ 9
СТЕРЖНИ, ОЧЕРЧЕННЫЕ ПО ДУГЕ КРУГА,
И КРУГОВЫЕ КОЛЬЦА
Ю. Я. Григорьев
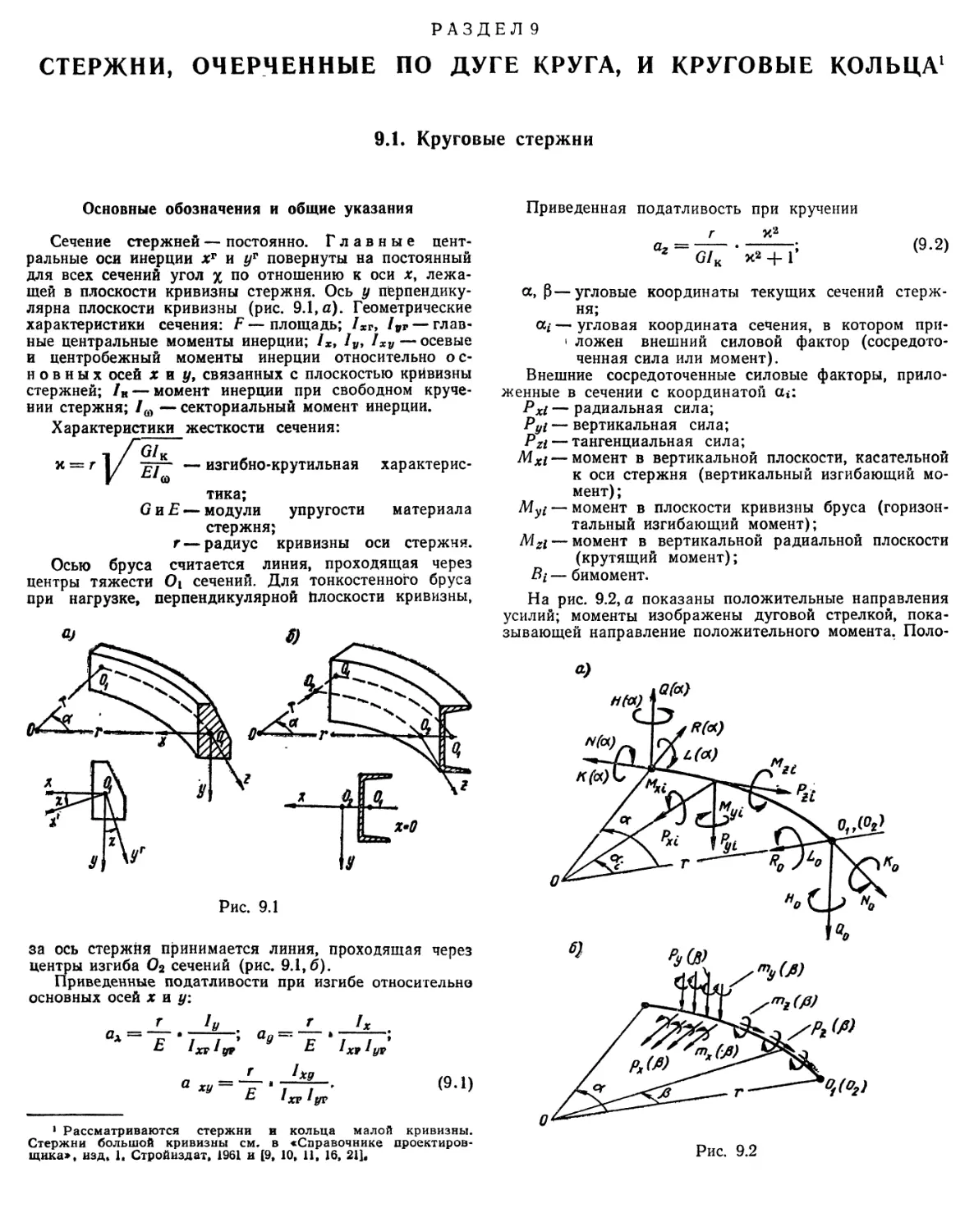
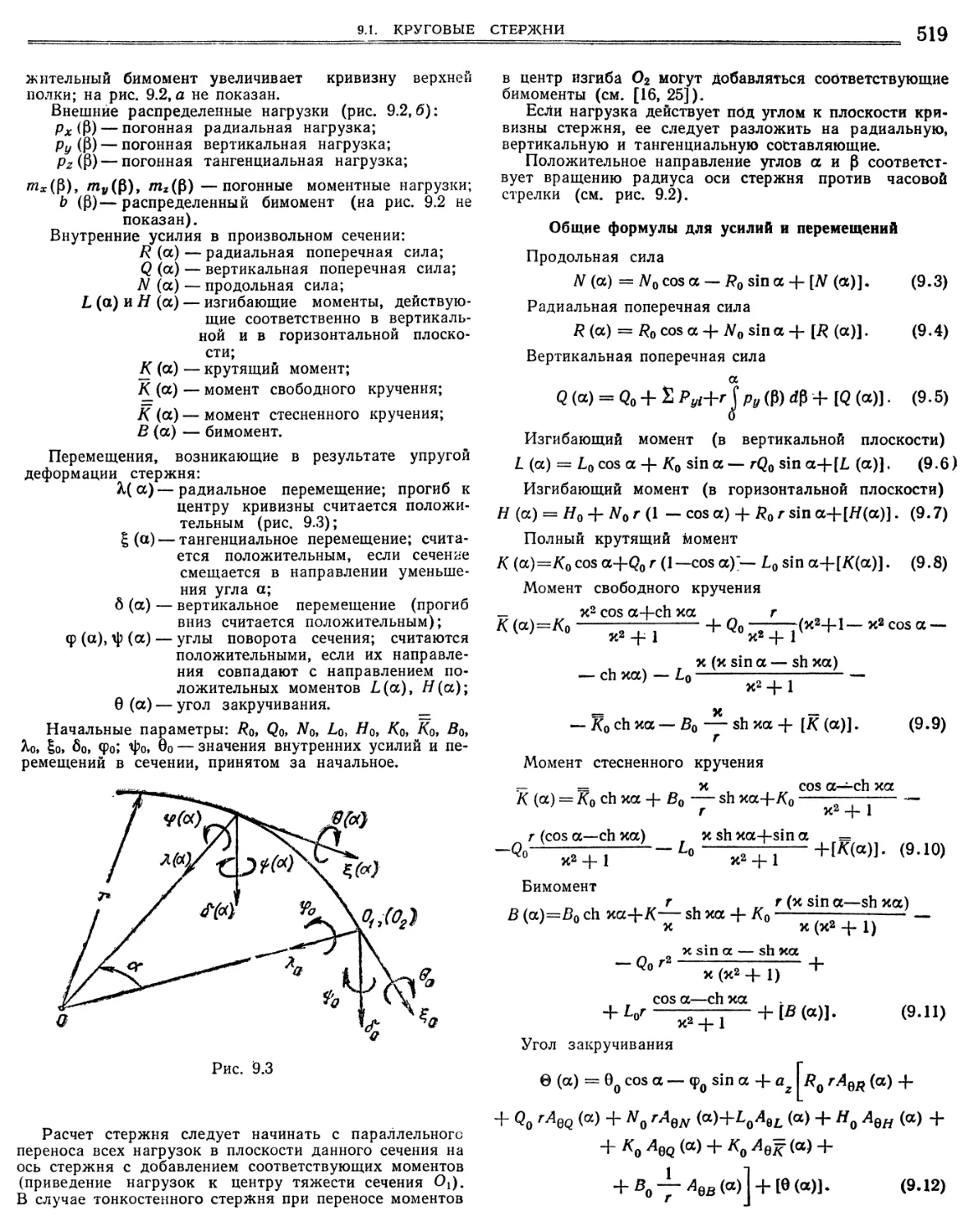
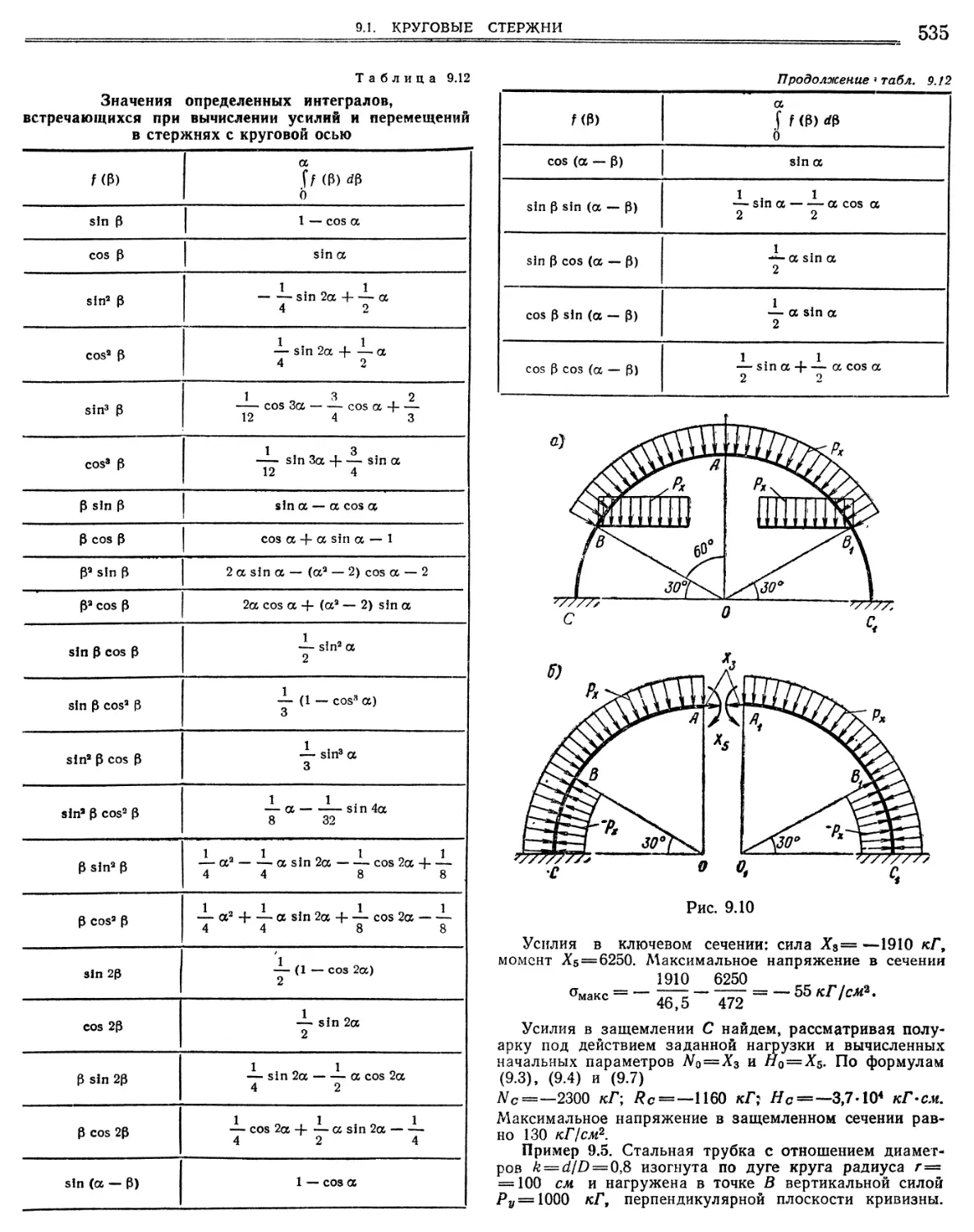
9.1. Круговые стержни. ;. г г 518
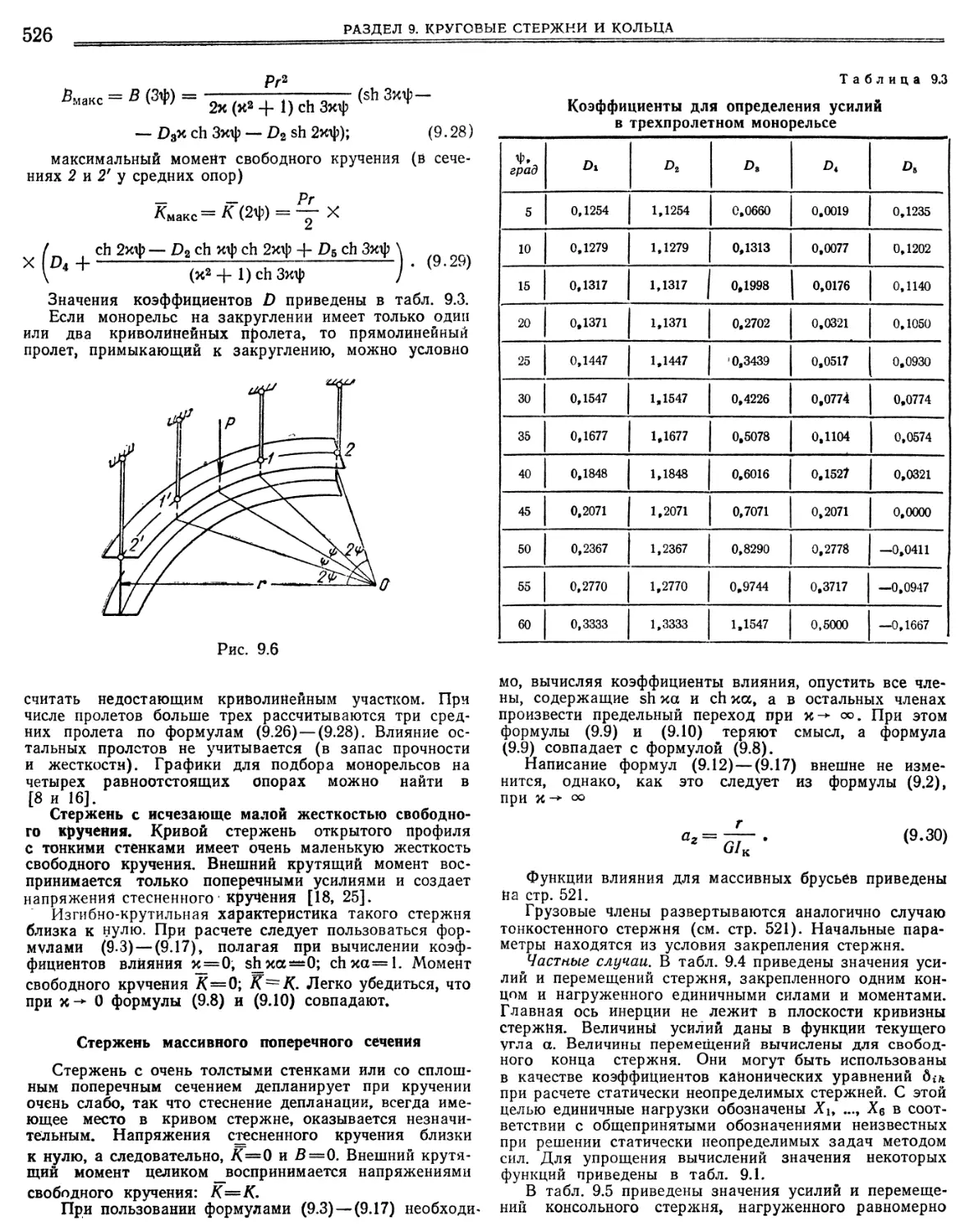
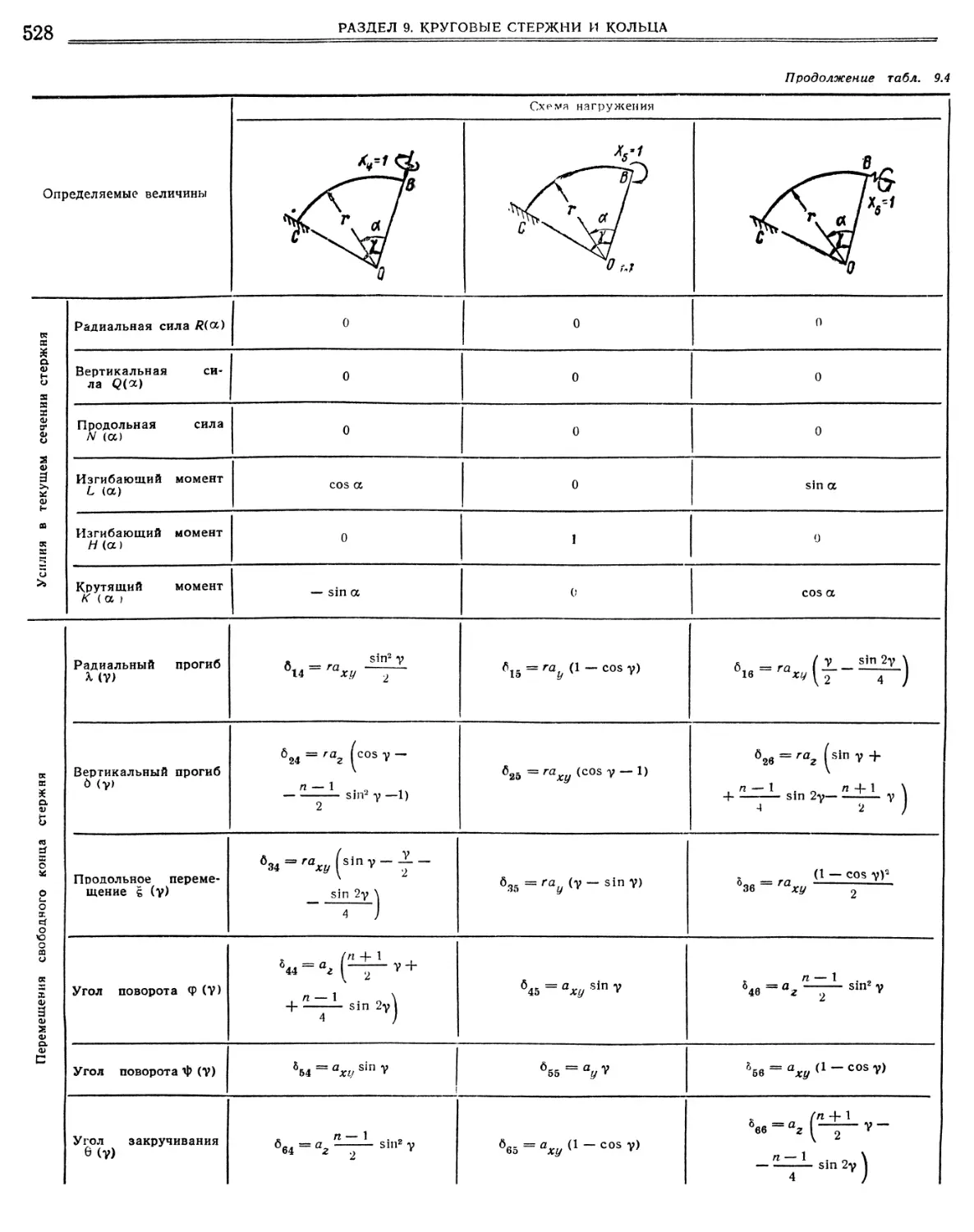
Основные обозначения и общие указания (стр. 518). Общие формулы для усилий и перемещений (519). Монорельс на трех и на четырех равноотстоящих опорах (стр. 524). Стержень массивного поперечного сечения (стр. 526). Усилия в ключевом сечении тонкостенного стержня, защемленного двумя концами и нагруженного перпендикулярно плоскости кривизны (арочная балка, эркер) (стр. 532). Массивный стержень, защемленный двумя концами (стр. 537).
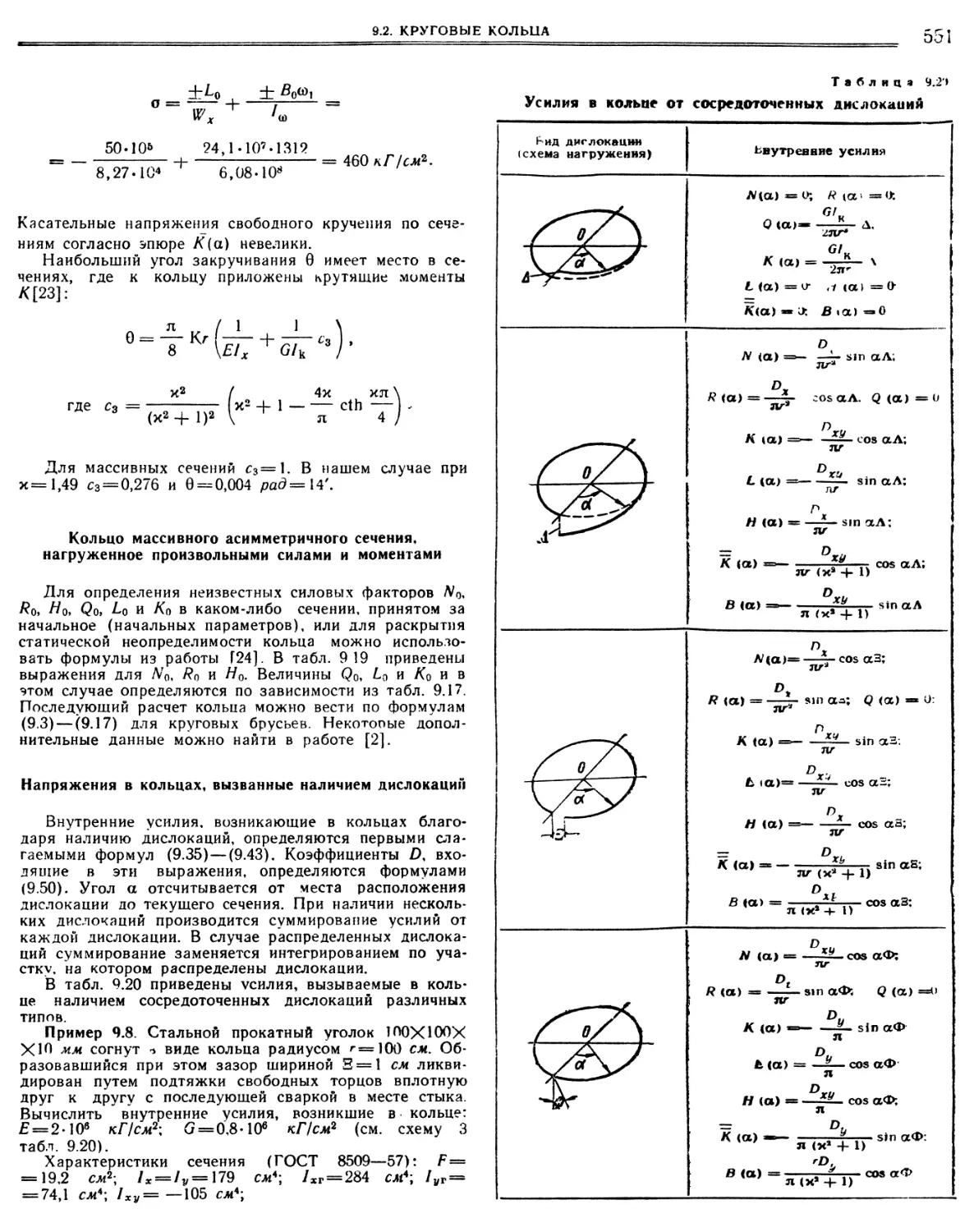
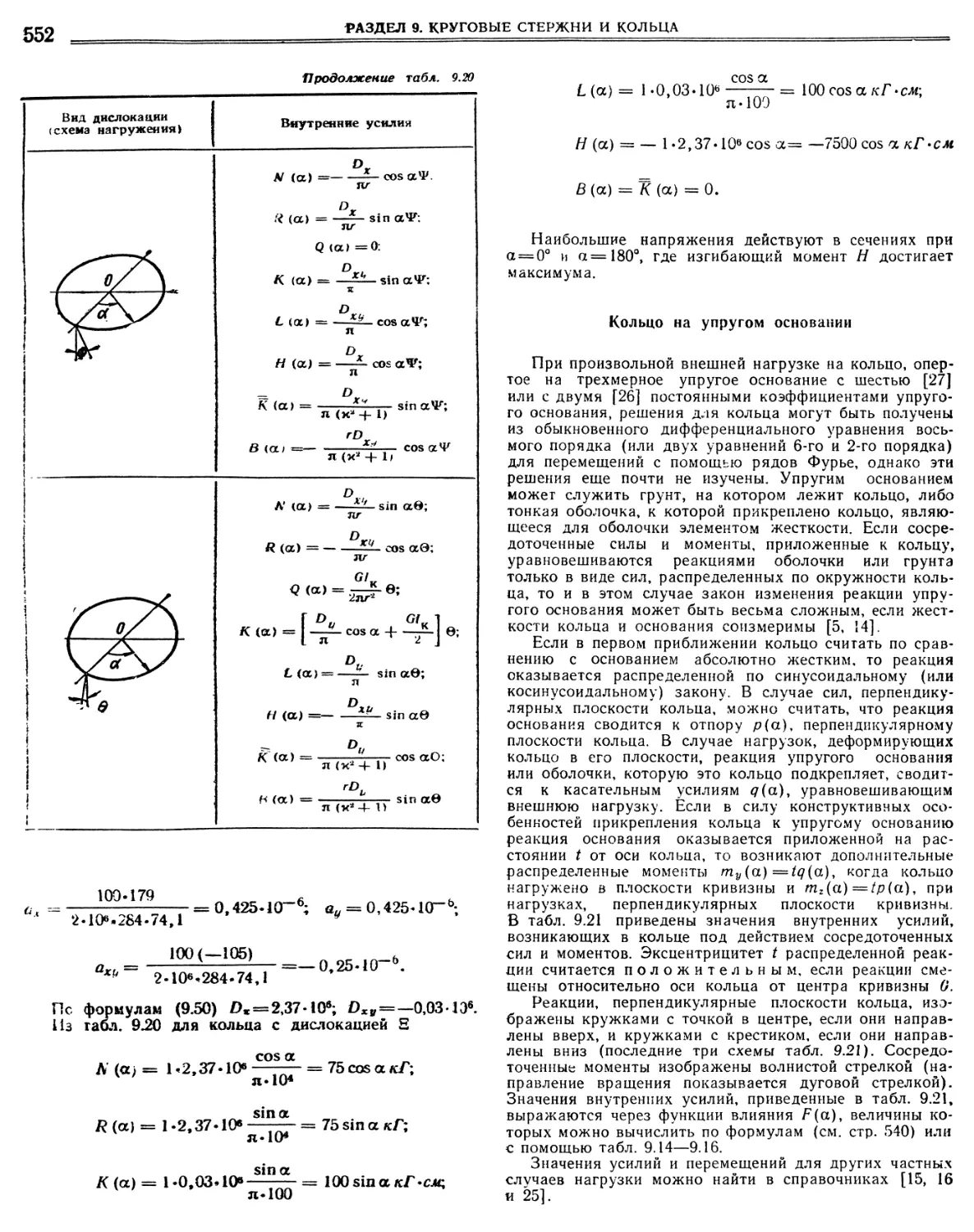
9.2. Круговые кольца 538
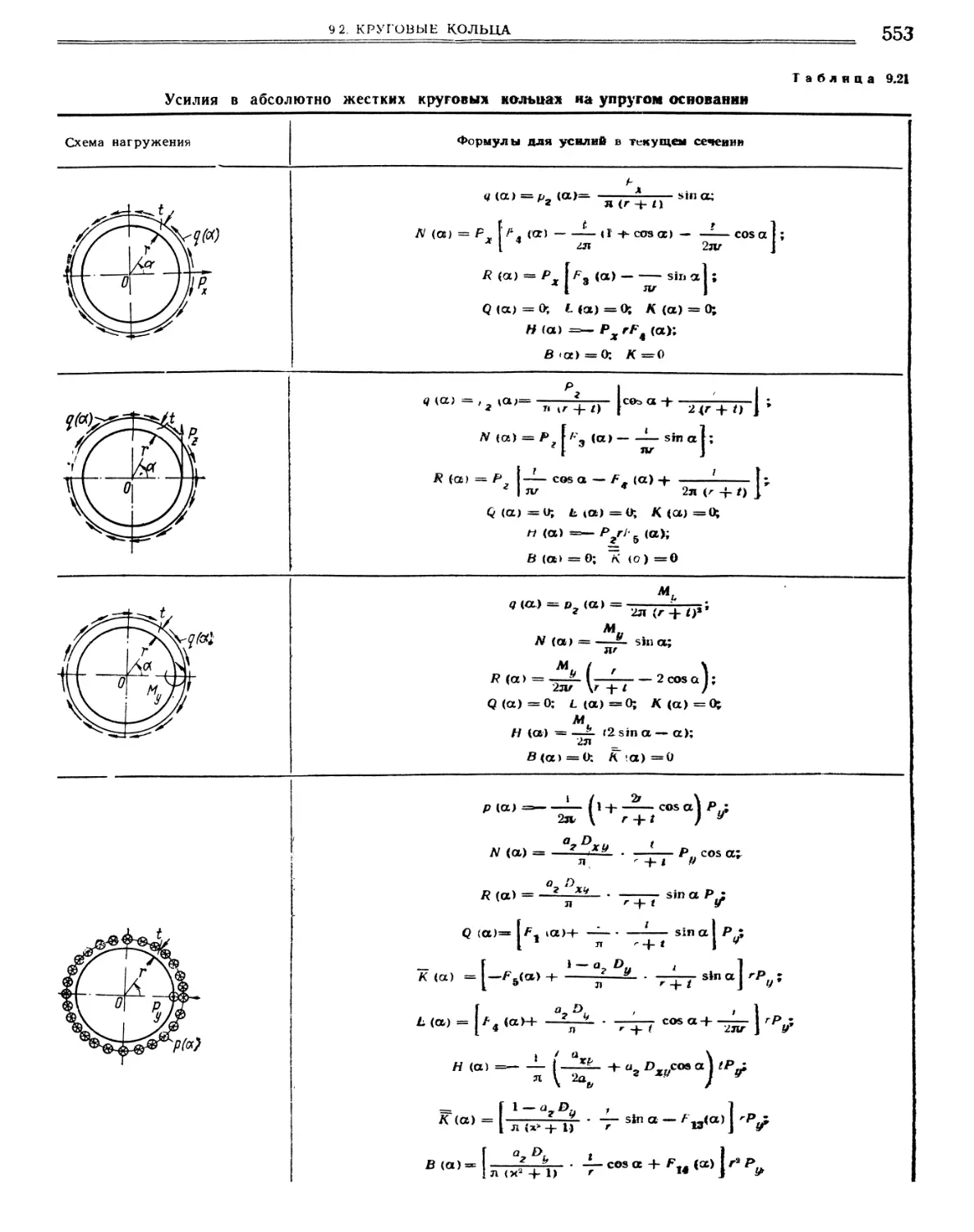
Общие формулы для определения усилий и перемещений колец, нагруженных сосредоточенными силовыми факторами (стр. 53). Кольцо с тонкостенным или массивным сечением, нагруженное силами и моментами перпендикулярно плоскости кривизны (стр. 551). Кольцо массивного асимметричного сечения, нагруженное произвольными силами и моментами (стр. 551). Напряжение в кольцах, вызванное наличием сосредоточенных деформаций (стр. 551). Кольцо на упругом основании (стр. 552).
Литература 555
РАЗДЕЛ 10 ФЕРМЫ
А. Г. Иммерман
10.1. Плоские фермы . 556
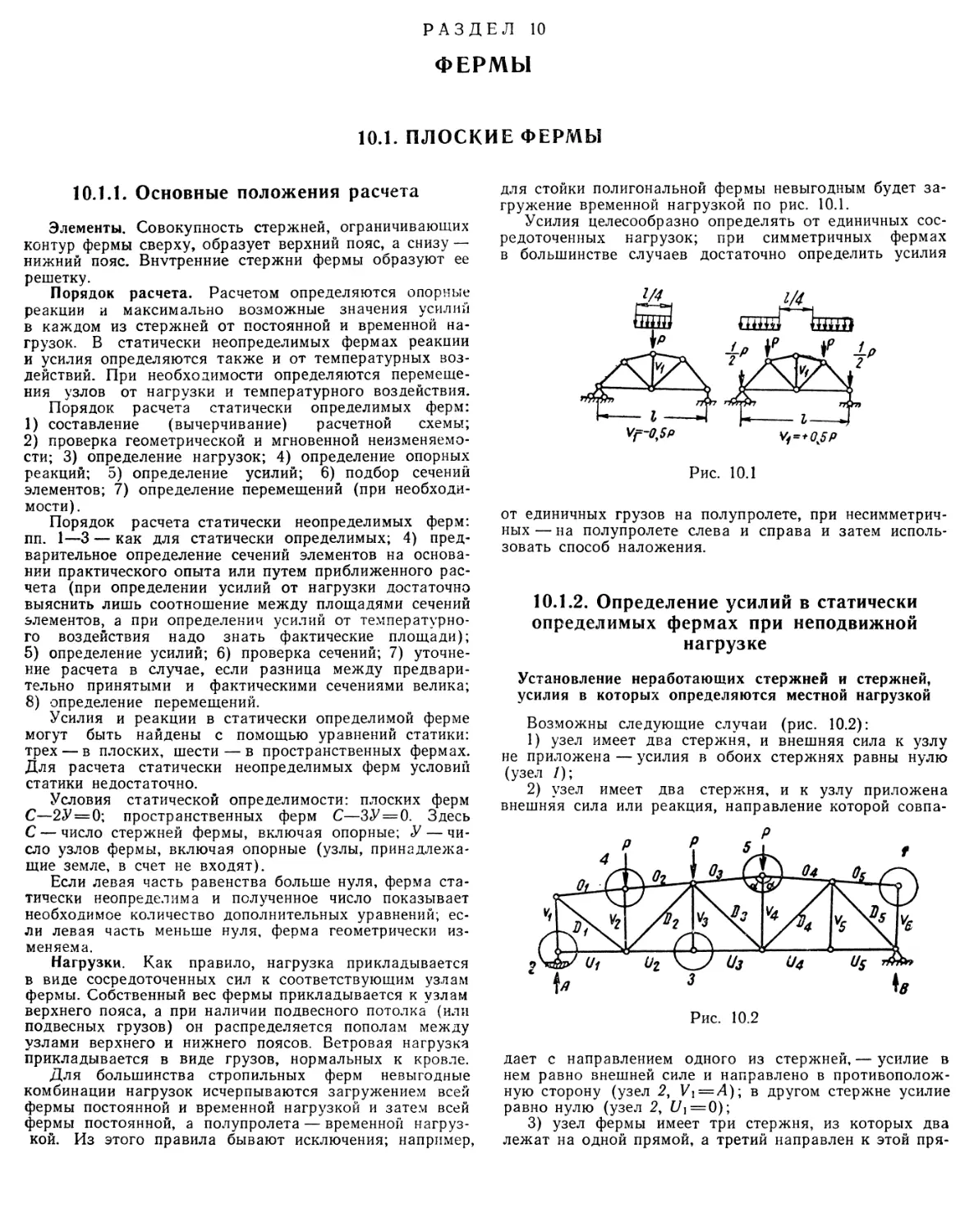
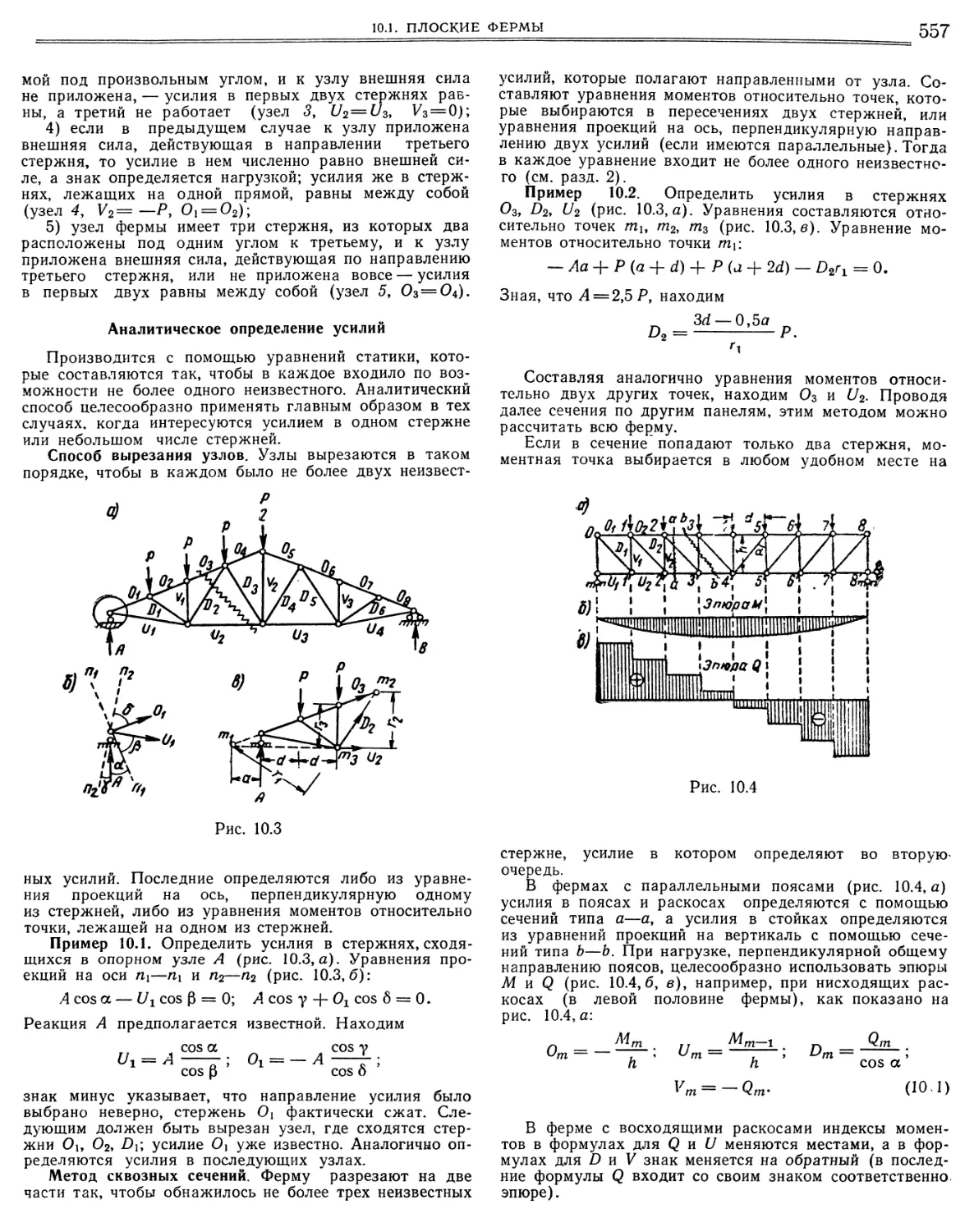
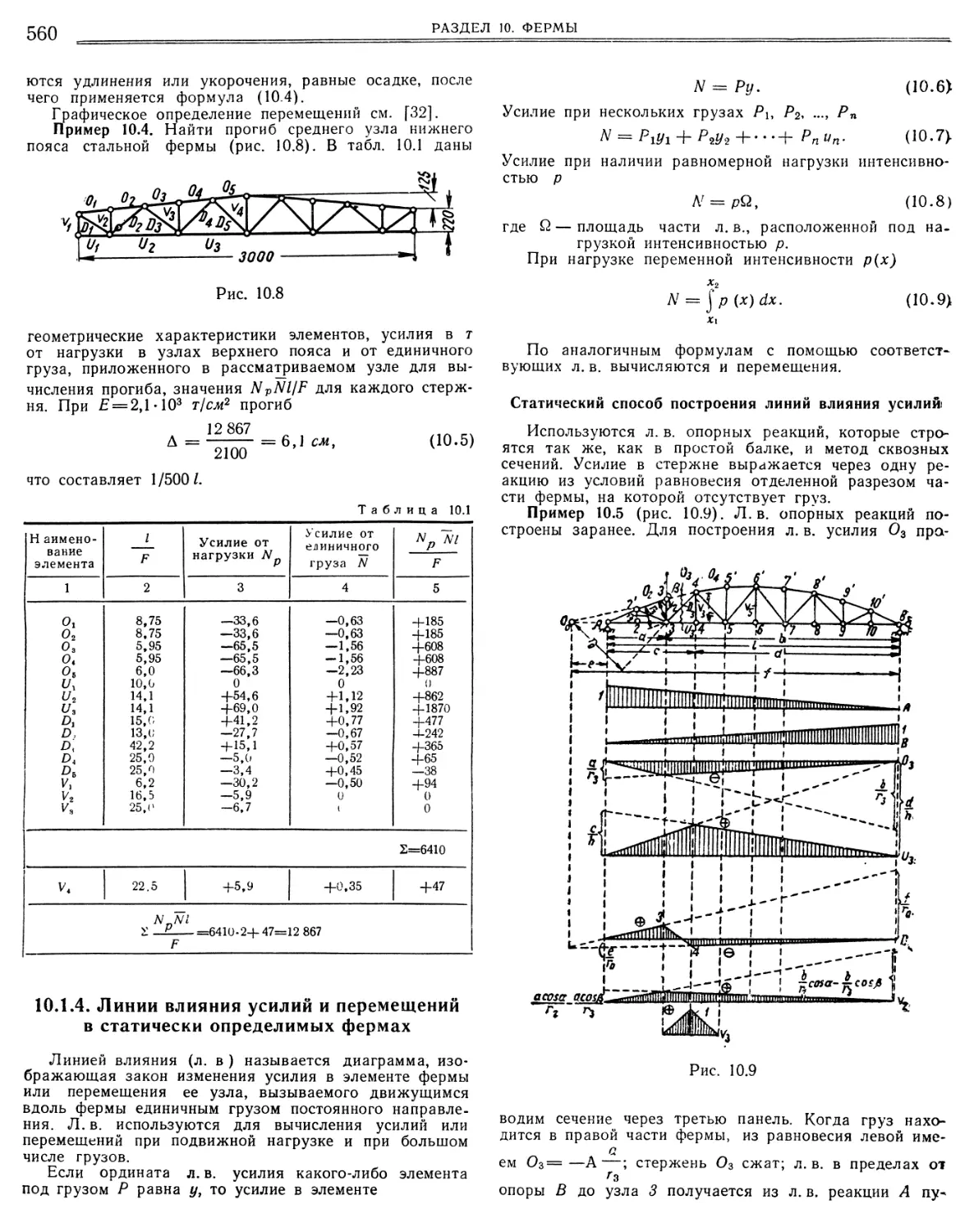
10.1.1. Основные положения расчета 556
10.1.2. Определение усилий в статически определимых
при неподвижной нагрузке а „ 555
Установление неработающих стержней и стерж¬
ней, усилия в которых определяются местной нагрузкой (556)- Аналитическое определение усилий (557). Графическое определение усилий (558). Расчет ферм на внеузловую нагрузку (558). Расчет ферм с криволинейным поясом (558). Расчет составных ферм (558). Способ замены стержней (558). Тонкостенные фермы [311 (558). Распорные и комбинированные фермы (559).,
Стр.
422
422
425
427
429
431
433
435
437
440
440
445
449
453
456
460
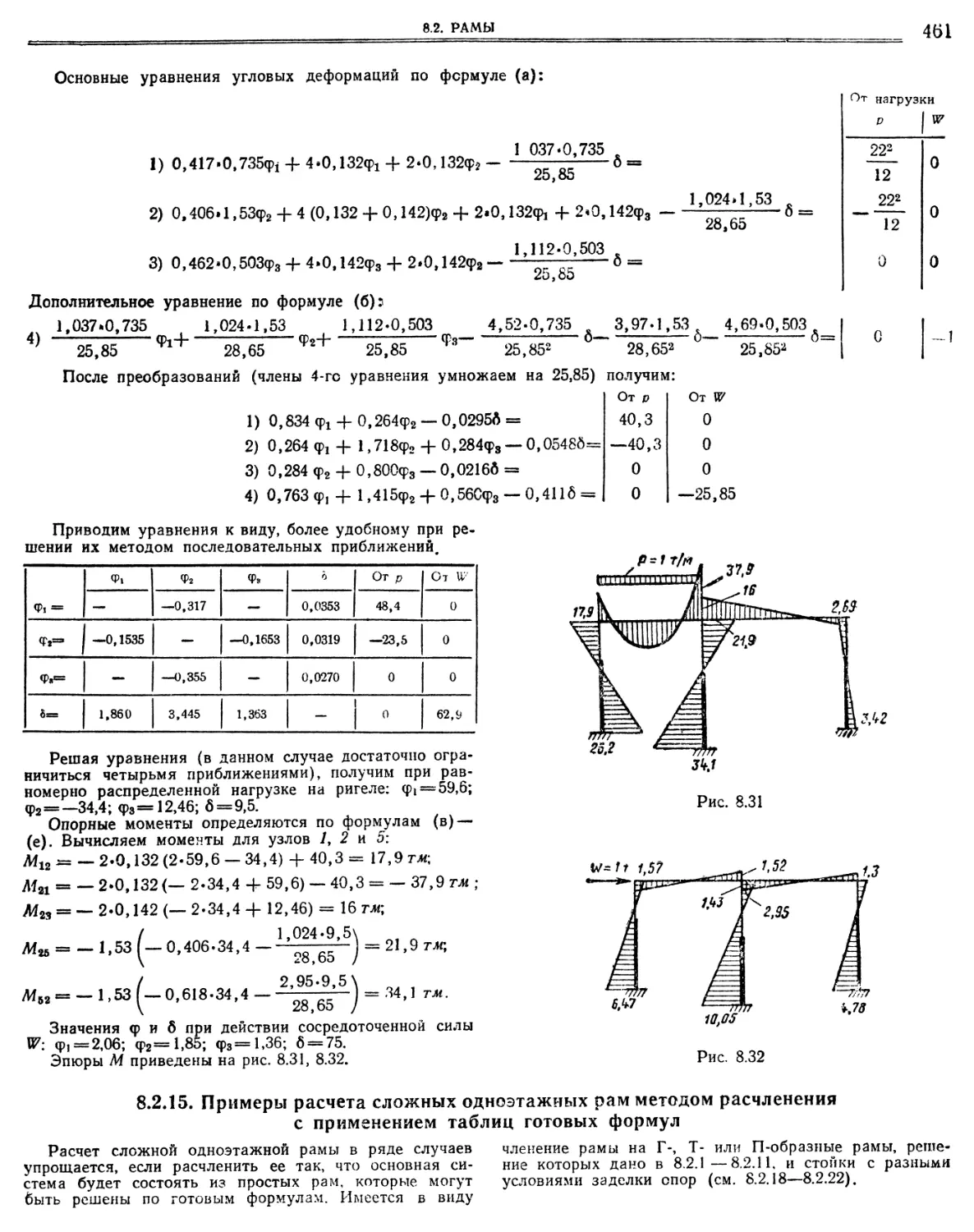
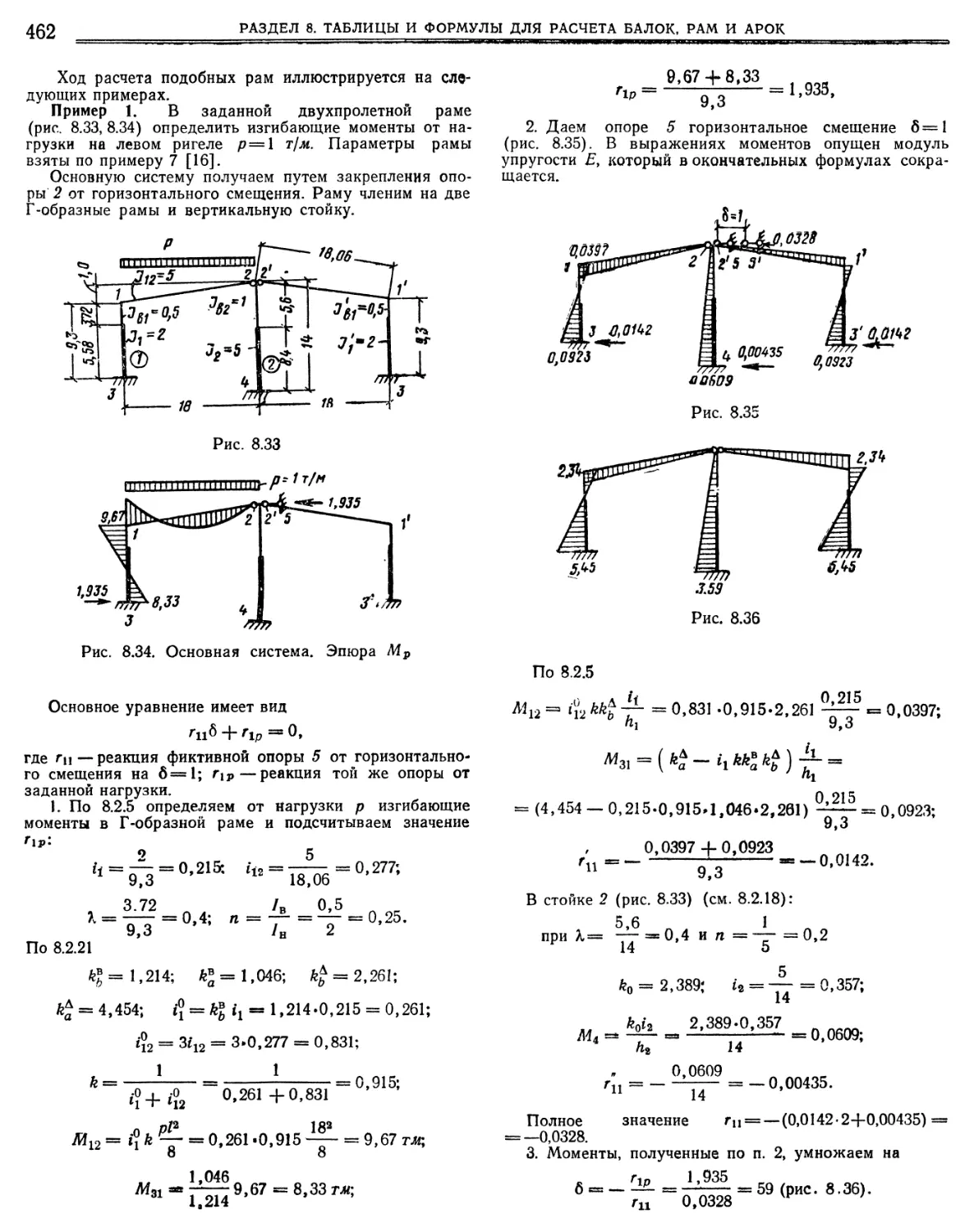
461
467
467
479
479
485
487
490
493
498
501
501
8
ОГЛАВЛЕНИЕ
Стр.
10.1.3. Перемещения узлов статически определимых
ферм 559
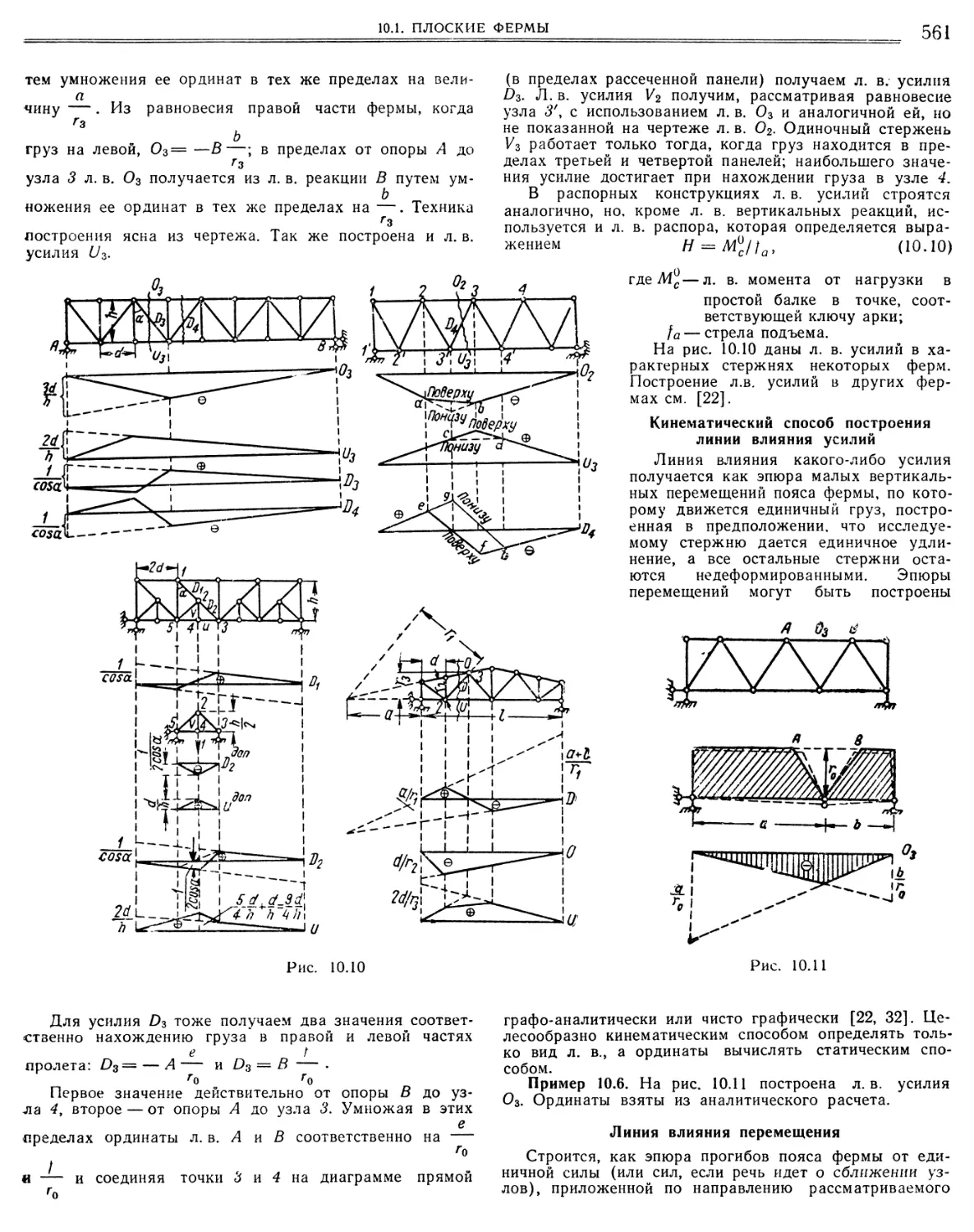
10.1.4. Линии влияния усилий и перемещений в статически определимых фермах 560
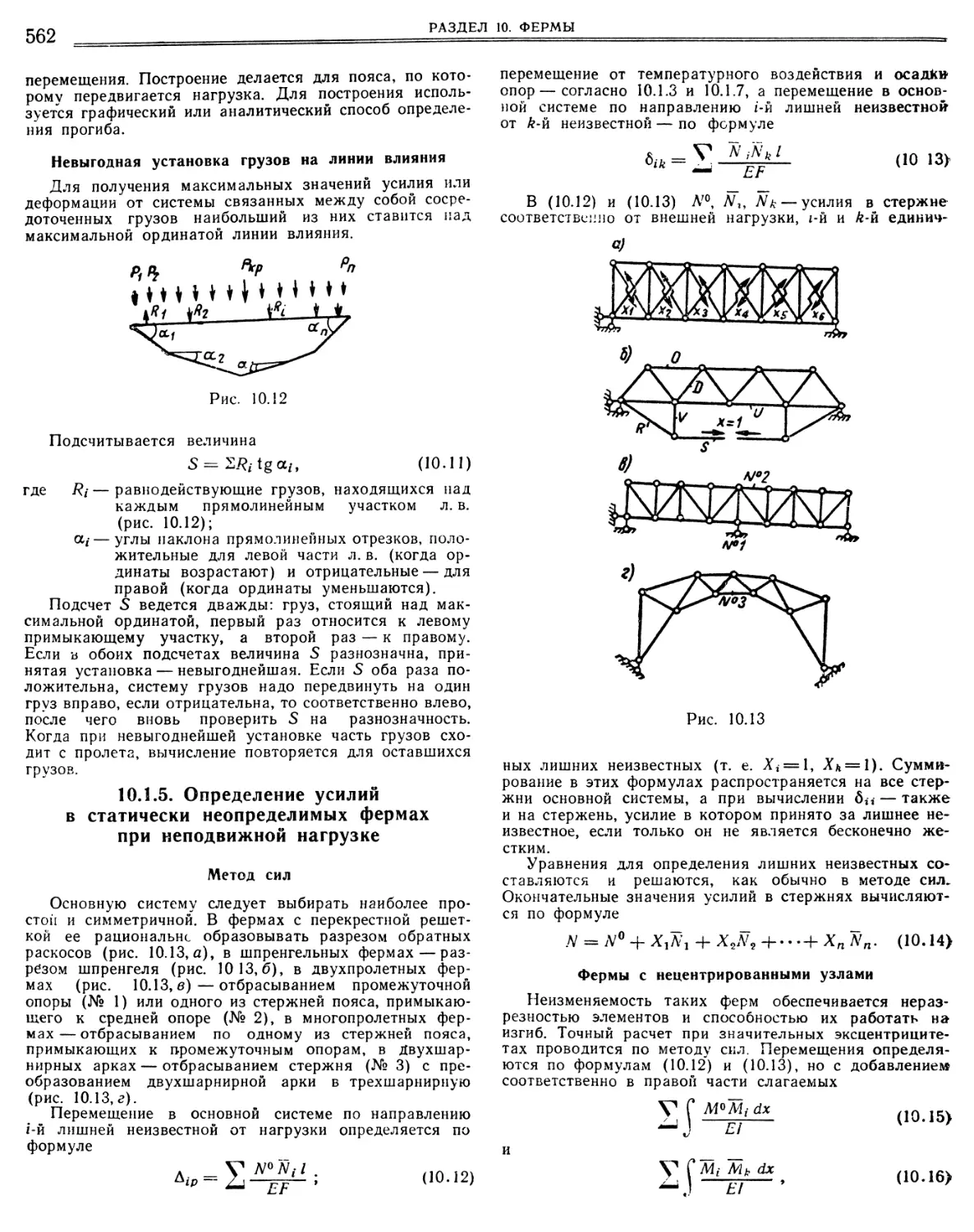
Статический способ построения линий влияния усилий (560). Кинематический способ построения линий влияния усилий (561). Линия влияния перемещения (561). Невыгодная установка грузов на линии влияния (562).
10.1.5. Определение усилий в статически неопределимых фермах при неподвижной нагрузке. 562
Метод сил (562). Фермы с нецентрированными узлами (562). Учет защемления ферм, жестко связанных с колоннами (563). Работа «нулевых» стержней (563).
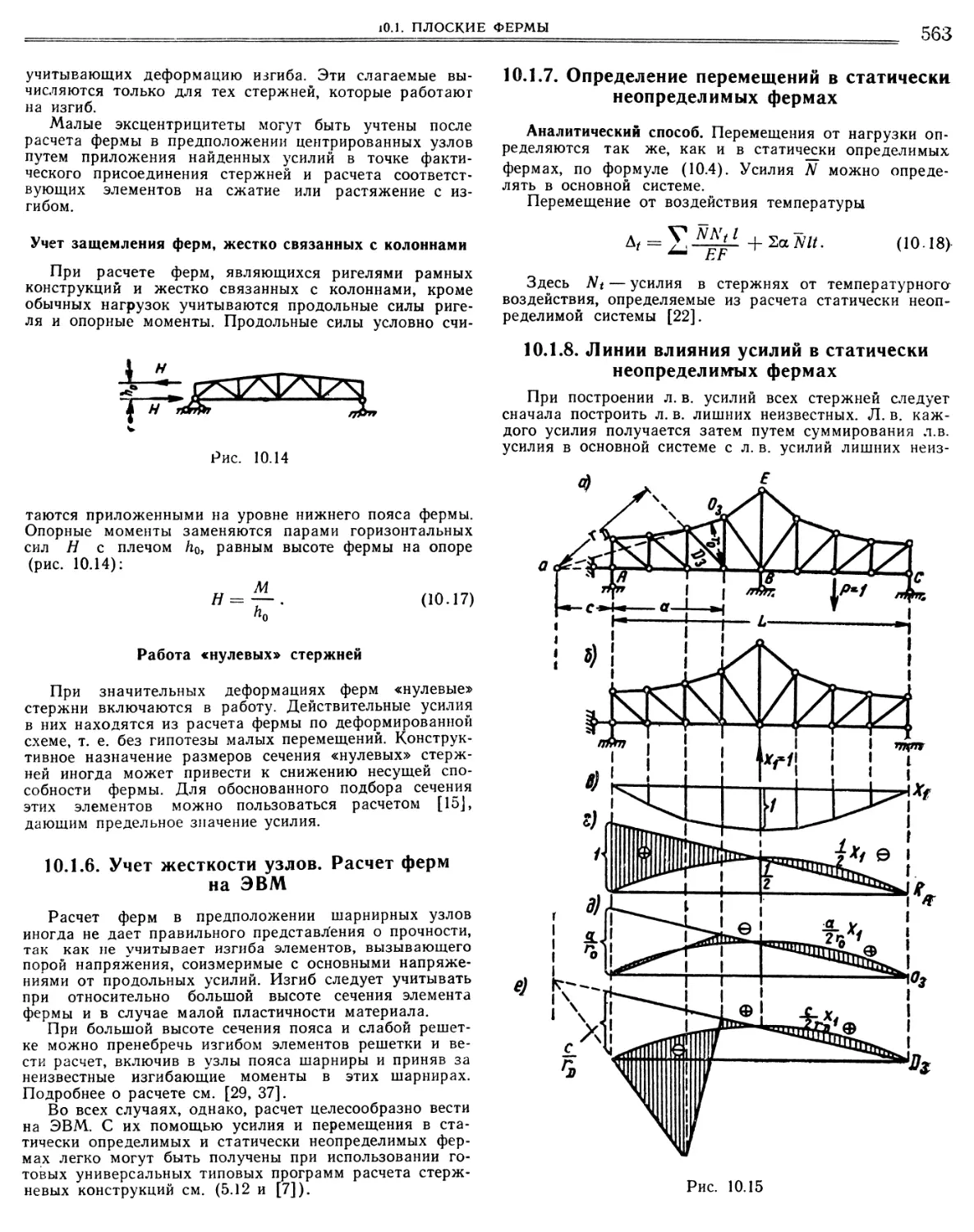
10.1.6. Учет жесткости узлов. Расчет ферм на ЭВМ - 563
10.1.7. Определение перемещений в статически неопределимых фермах 563
10.1.8. Линии влияния усилий в статически неопределимых фермах. 563
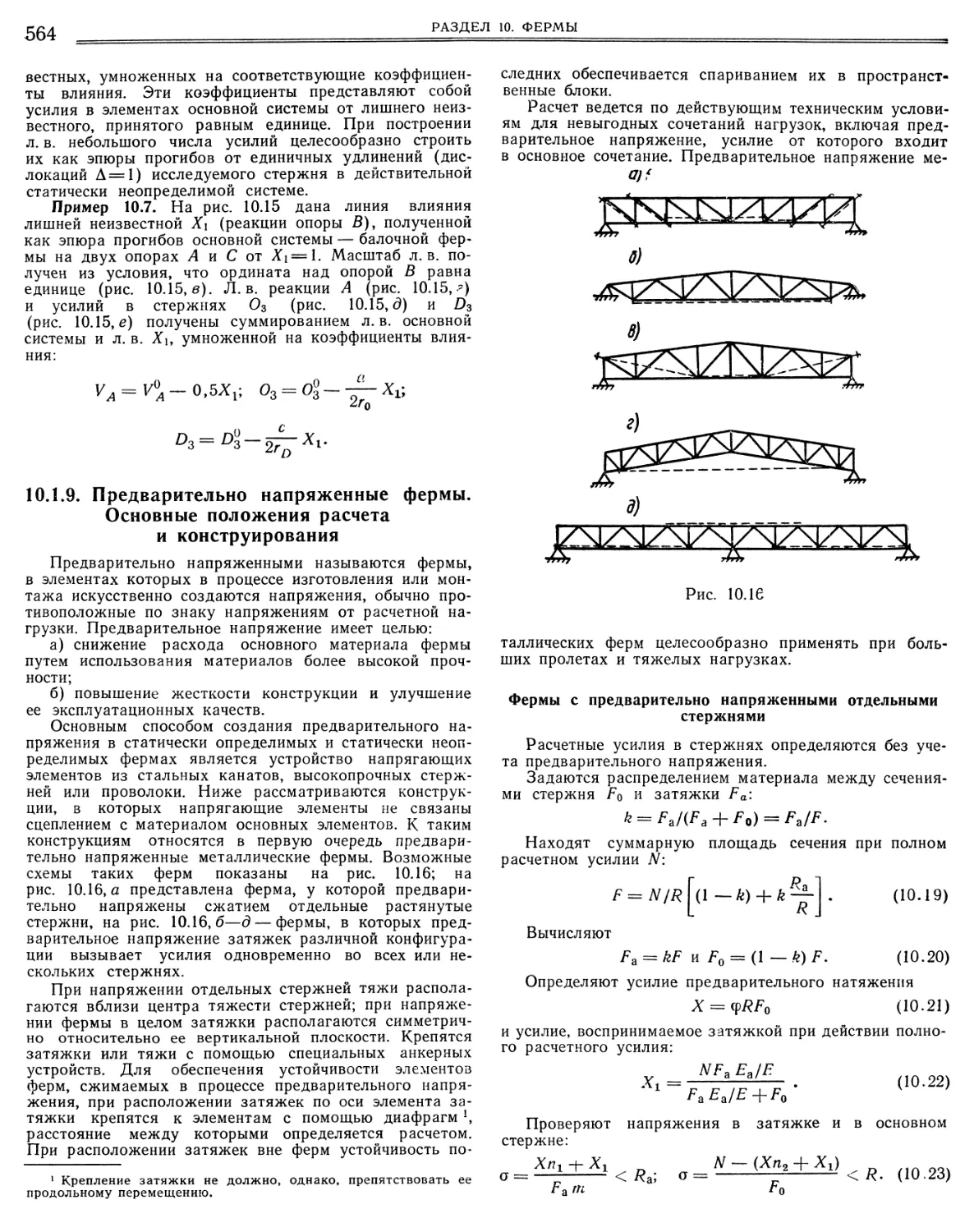
10.1.9. Предварительно напряженные фермы. Основные
положения расчета и конструирования. 564
Фермы с предварительно напряженными отдельными стержнями (564). Предварительно напряженные фермы с затяжками (565).
10.1.10. Отыскание оптимальных ферм.»•«««• 566
10.2. Пространственные фермы 566
10.2.1. Основные положения образования и расчета «. 566
10.2.2. Общие методы определения усилий 566
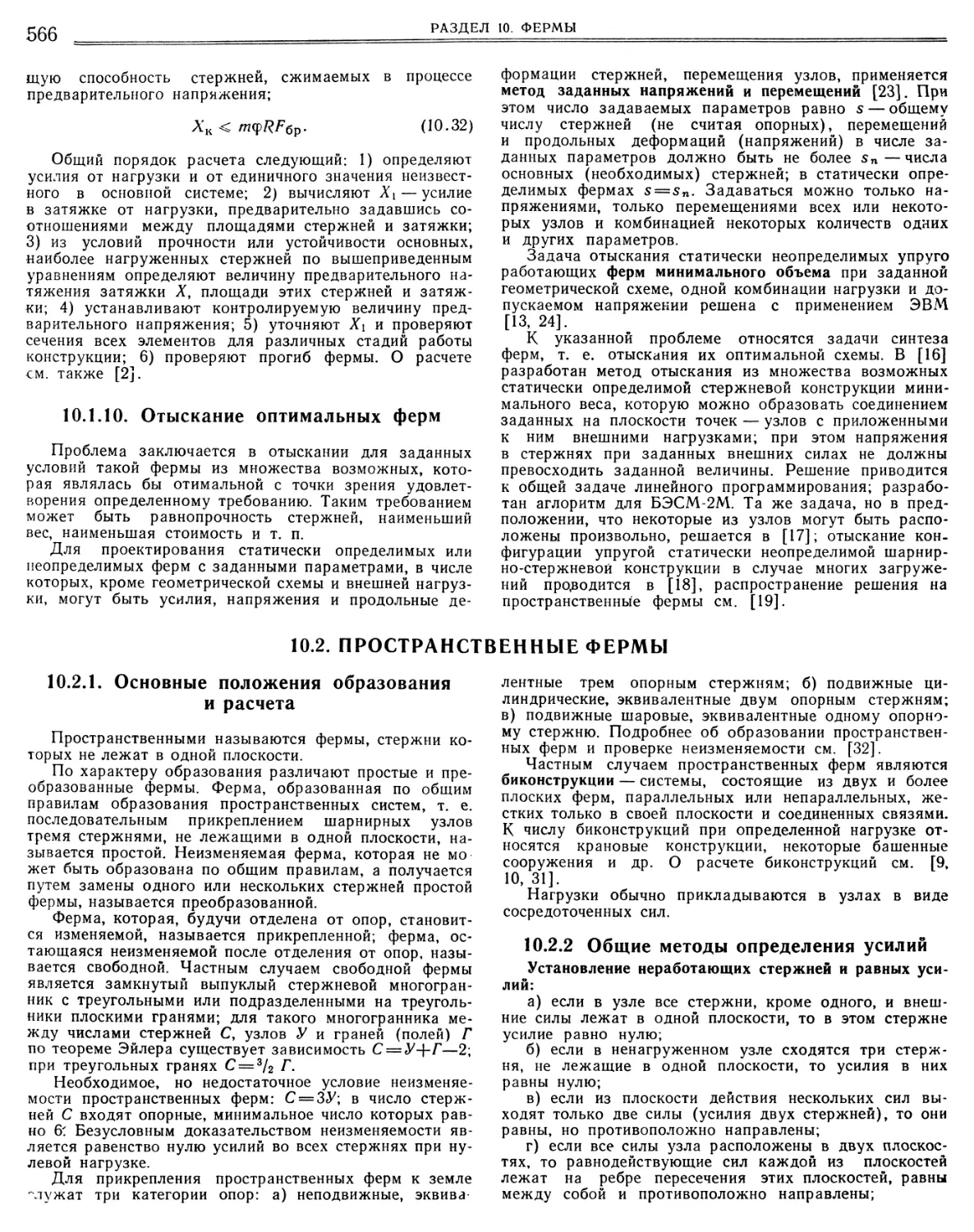
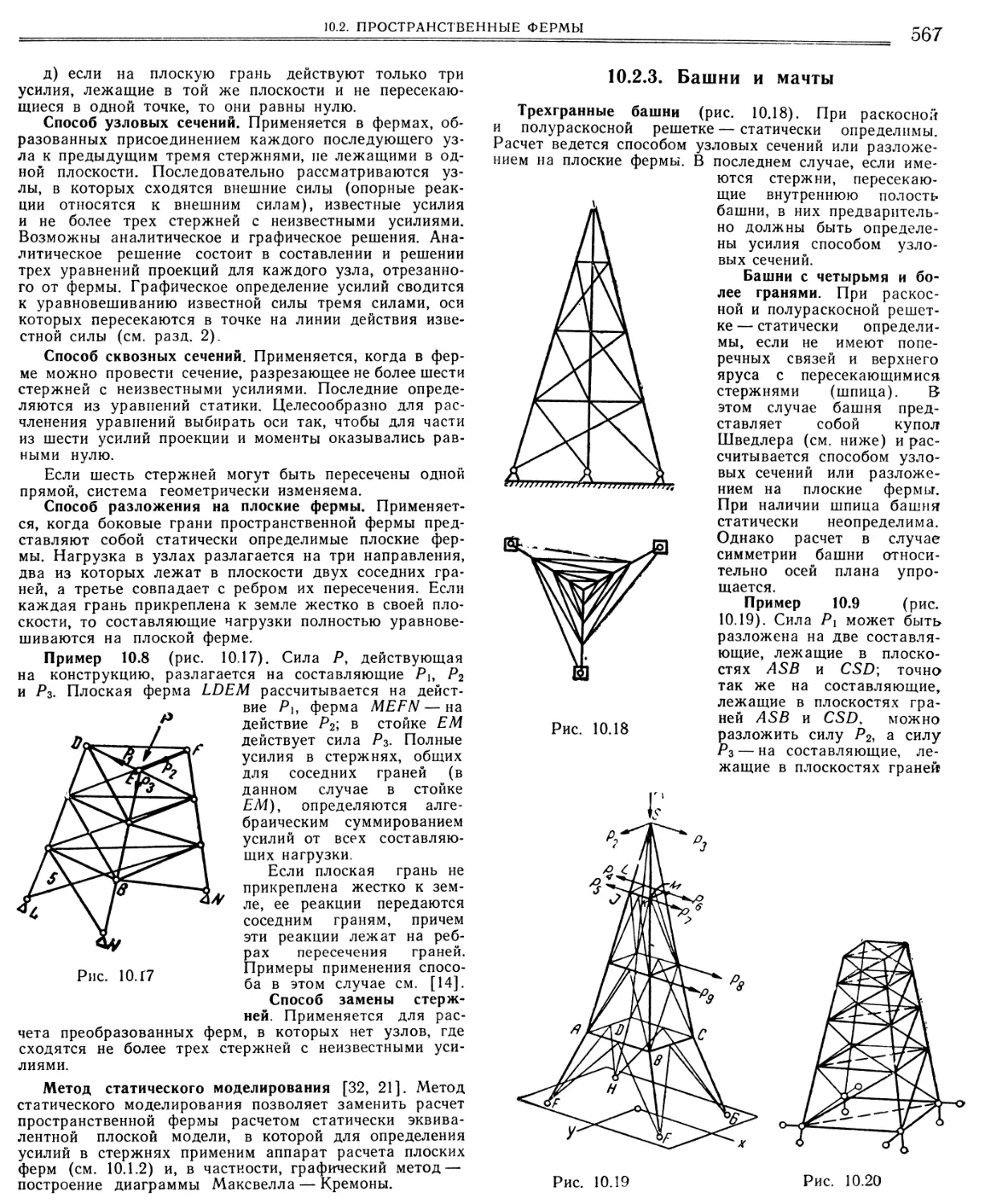
10.2.3. Башни и мачты. 567
10.2.4. Стержневые пластины — структурные конструкции ш. « 568
10.2.5. Стержневые купола. „. 569
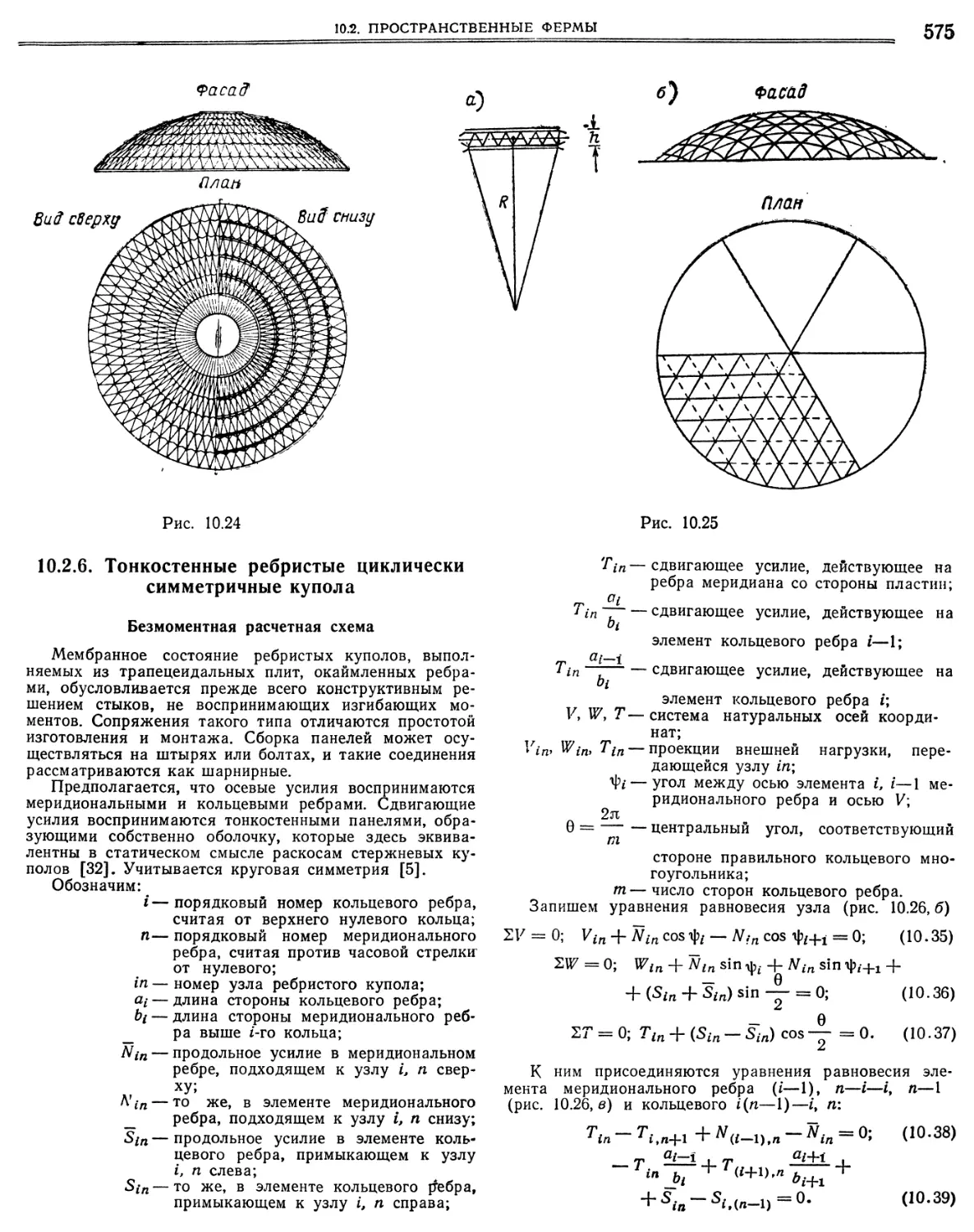
10.2.6. Тонкостенные ребристые циклически симметричные купола (В. Г. Чудновский)..«.» 575
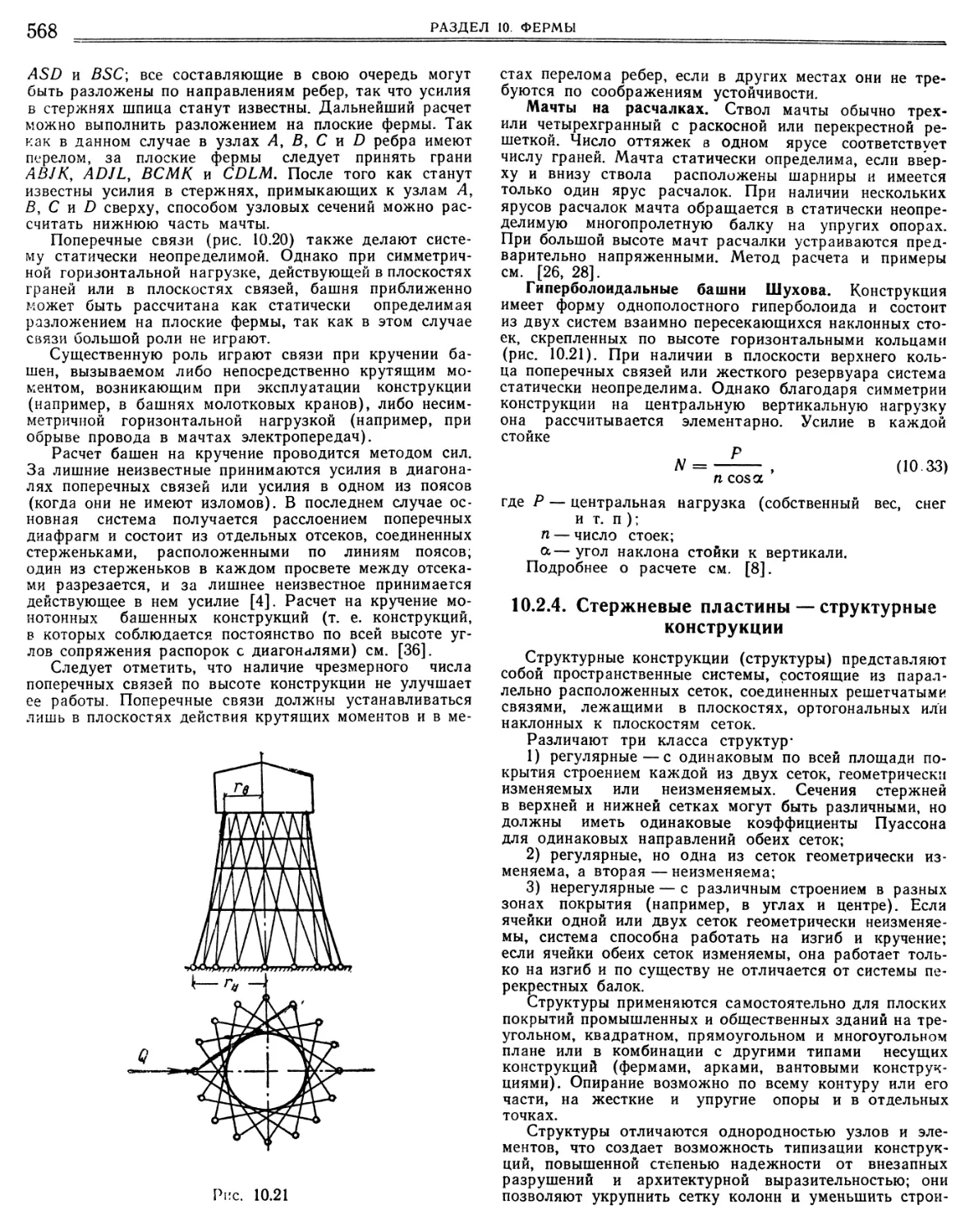
Безмоментная расчетная схема (575)
Литература 677
Стр.
РАЗДЕЛ 11
ВАНТОВЫЕ И ПНЕВМАТИЧЕСКИЕ КОНСТРУКЦИИ
С. А. Алексеев, Э. Н. Кузнецов, Р. Н. Мацелинский
11.1. Гибкие нити (Р. Н. Мацелинский).
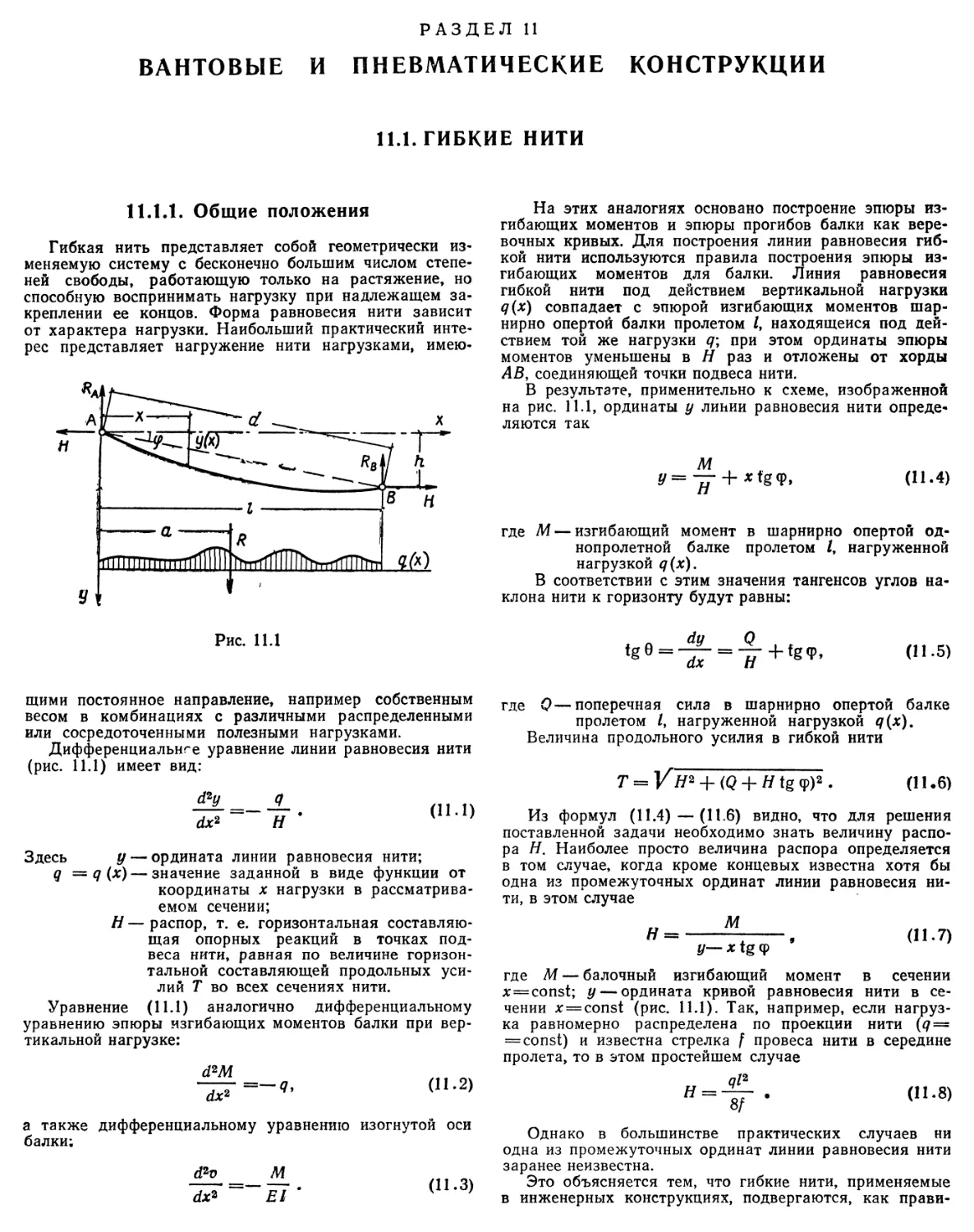
11.1.1. Общие сведения,.
11.1.2. Определение величины распора нерастяжимой
нити.
11.1.3. Определение распора упругой нити.
11.1.4. Вычисление длины нити 11.1.5. Расчет струны
579
579
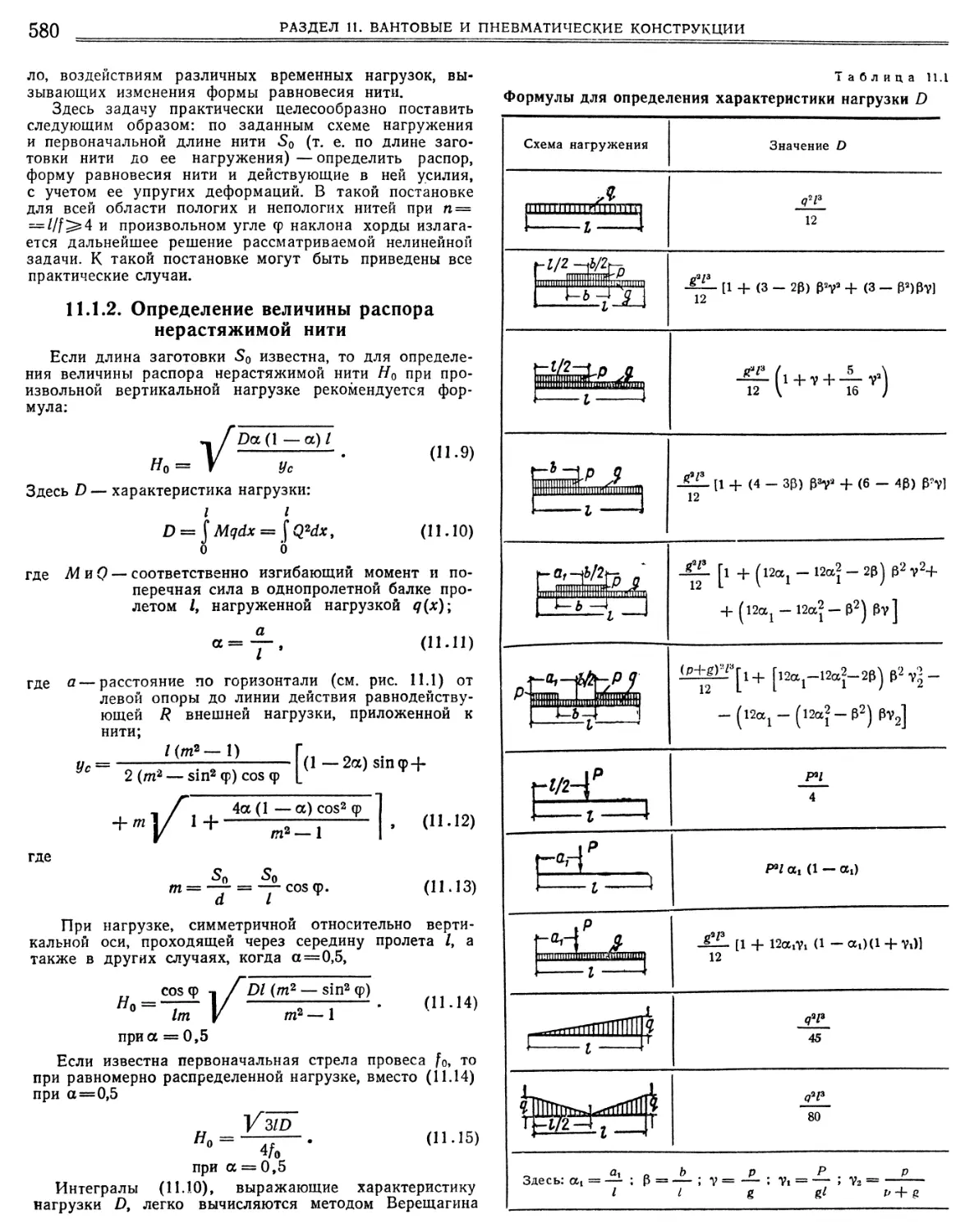
580
581
581
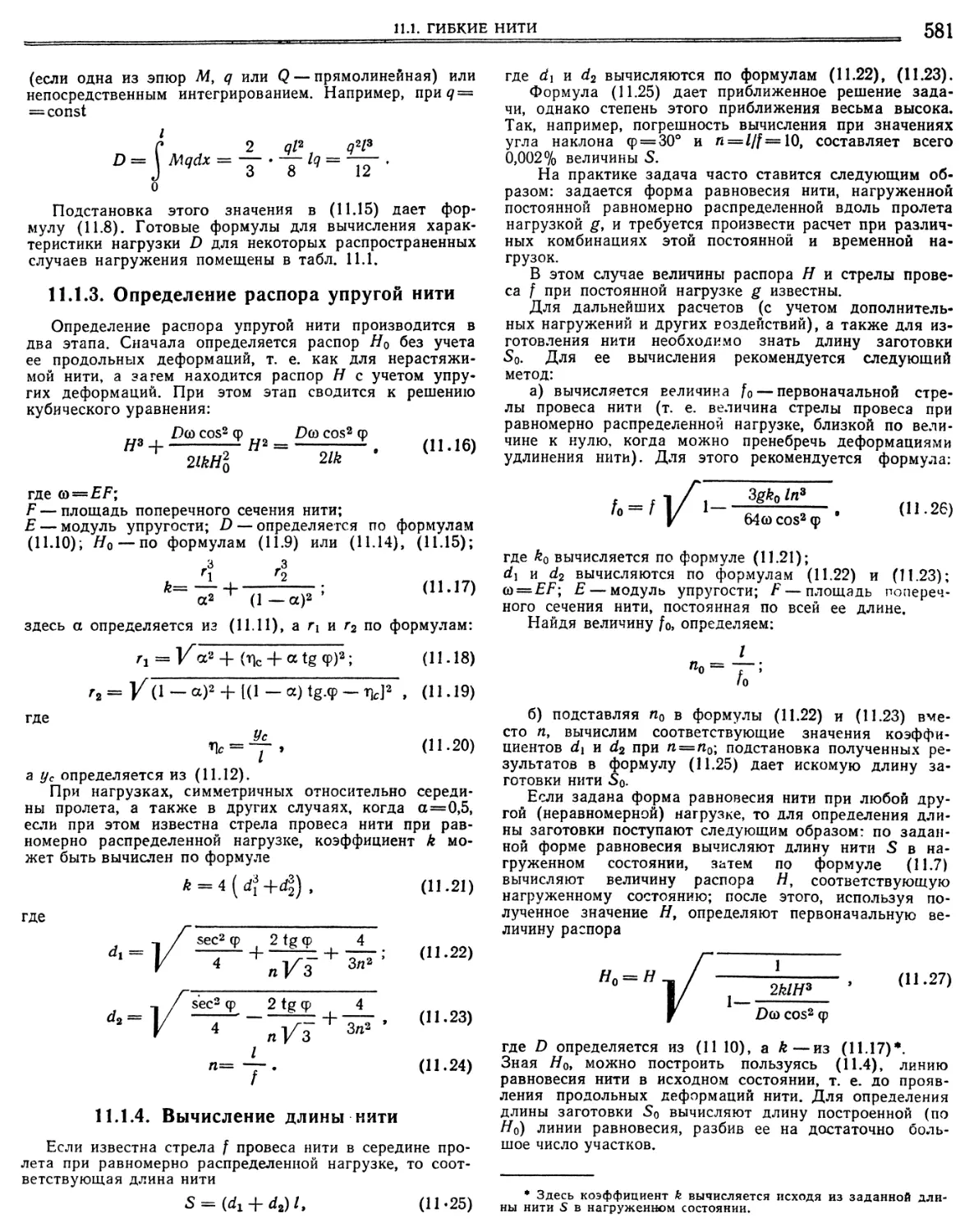
582
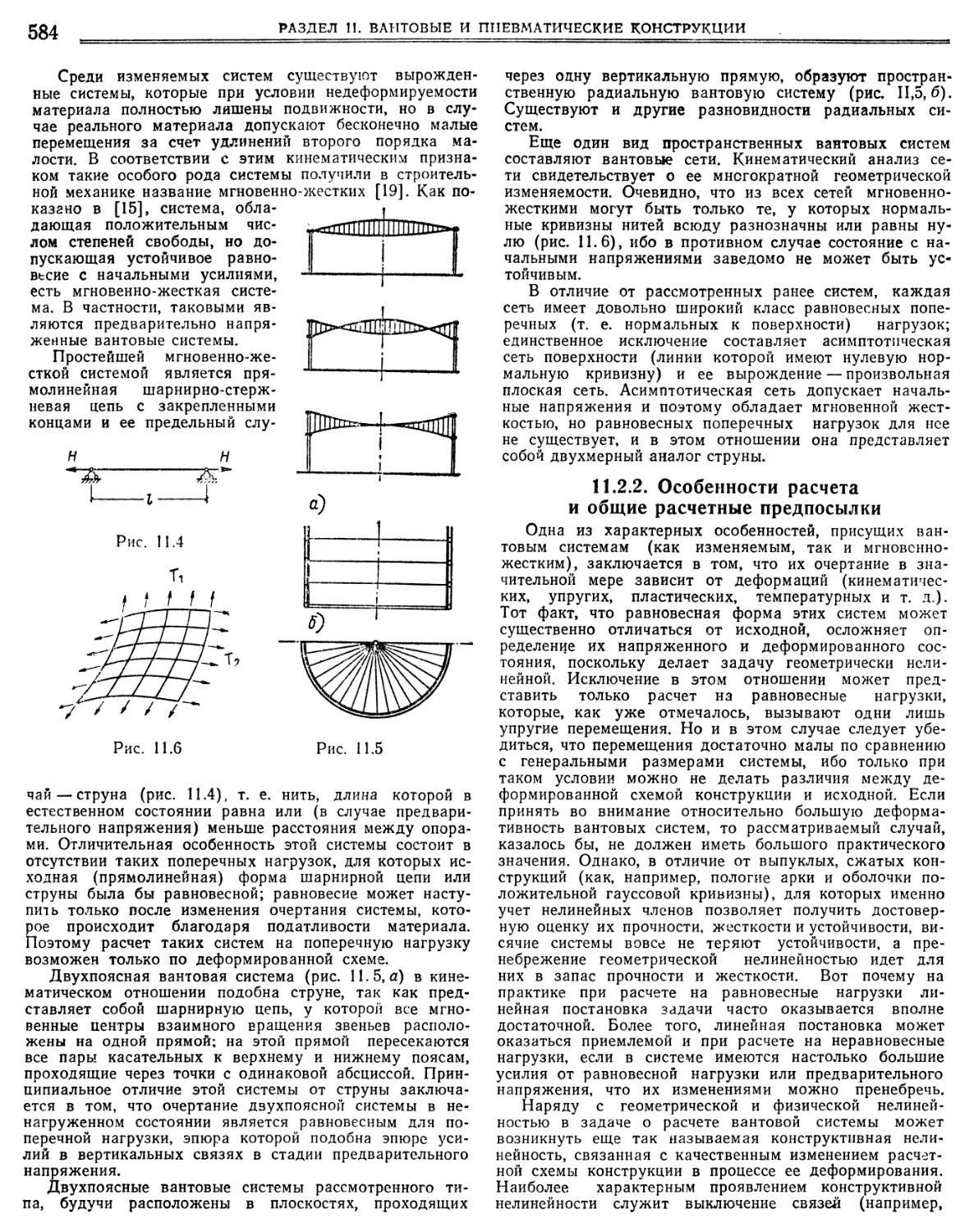
11.2. Вантовые системы (3. Н. Кузнецов). 583
11.2.1. Общие сведения 583
11.2.2. Особенности расчета и общие расчетные предпосылки „ 584
112 3. Двухпоясные вантовые системы ••..,« 585
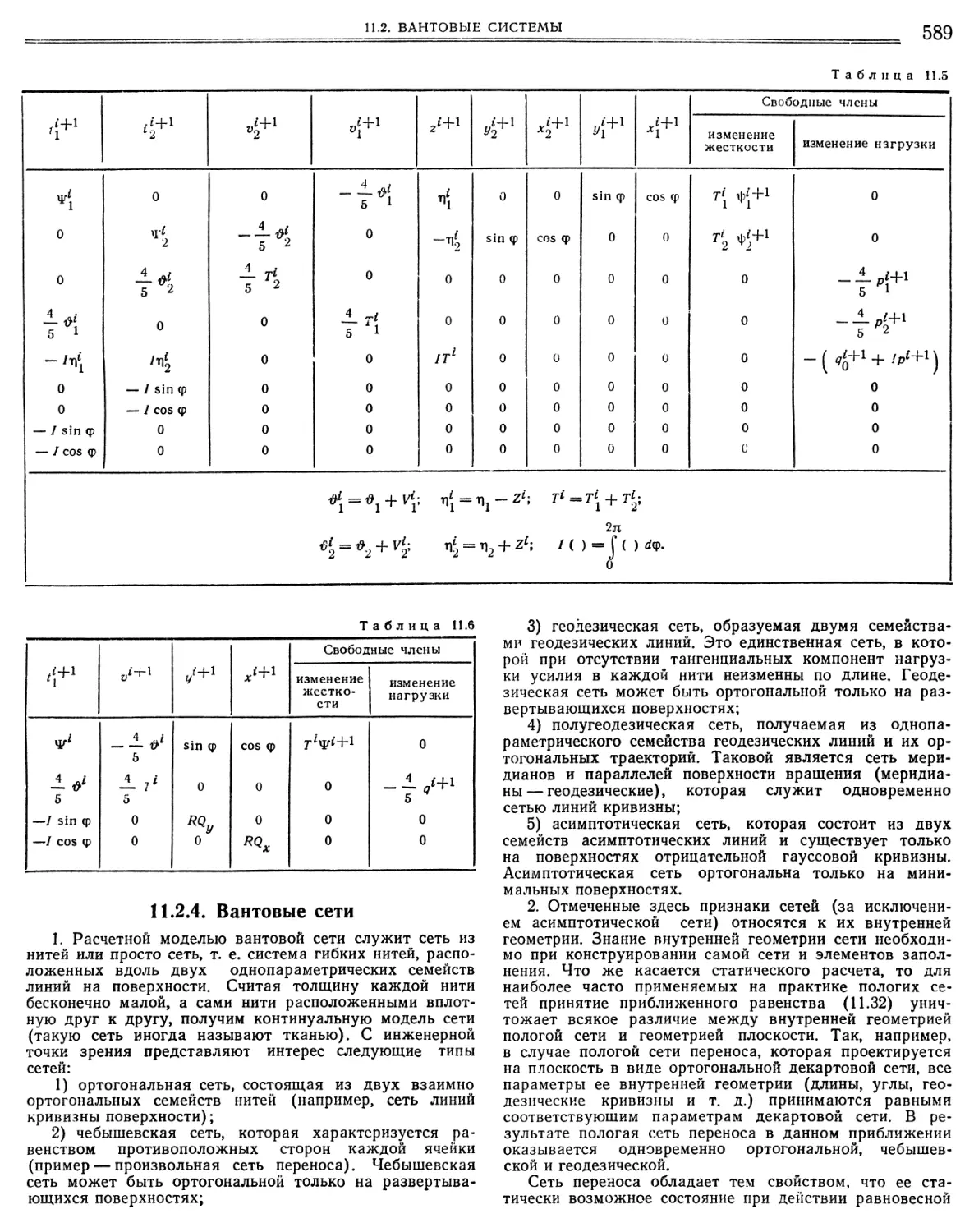
11.2 4. Вантовые сети 589
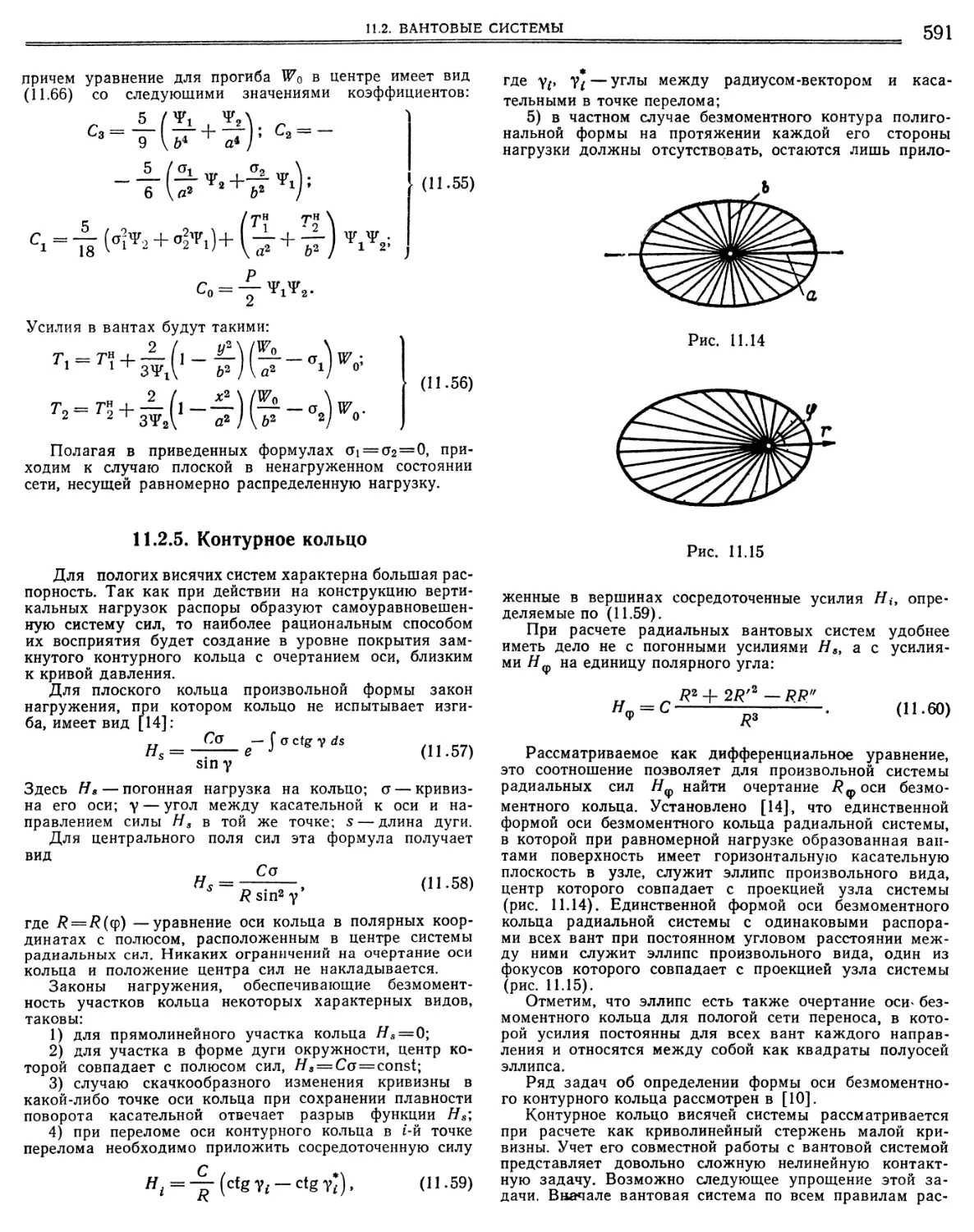
11.2.5. Контурное кольцо • • 591
11.3. Пневматические конструкции (С. А. Алексеев) 593
11.3.1. Основные сведения . 593
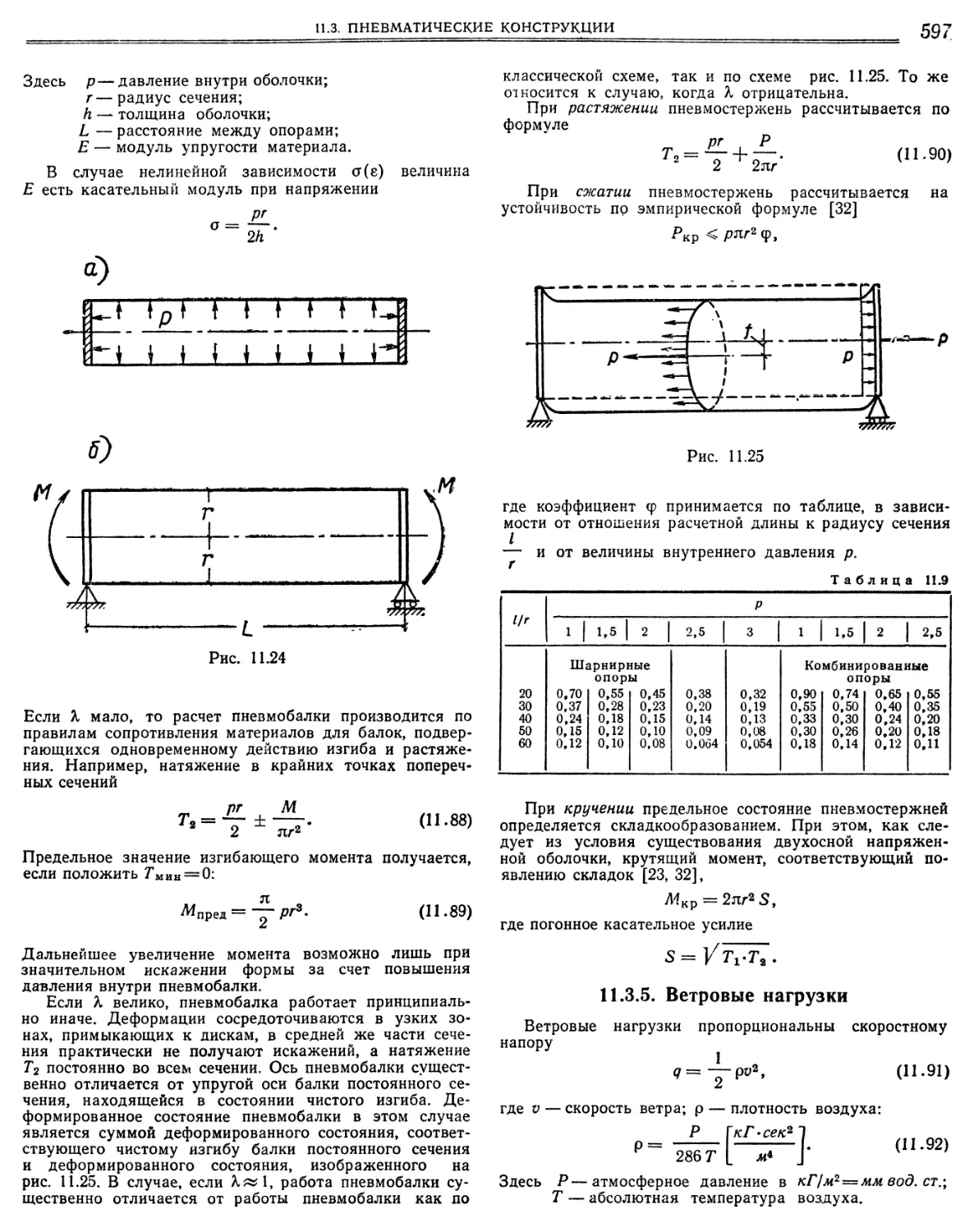
11.3.2. Особенности расчета пневматических конструкций 593
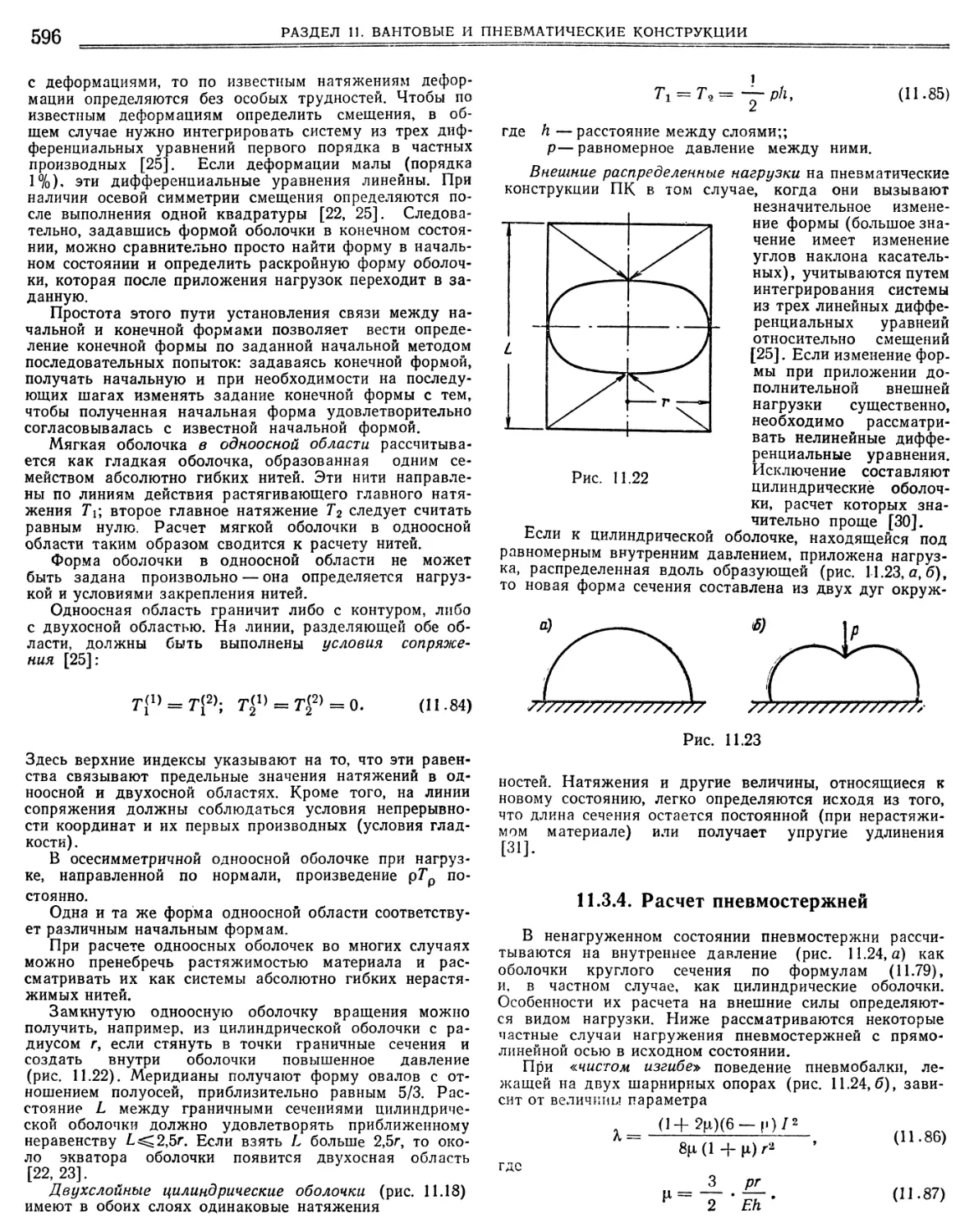
11.3.3. Расчет мягких оболочек » « 594
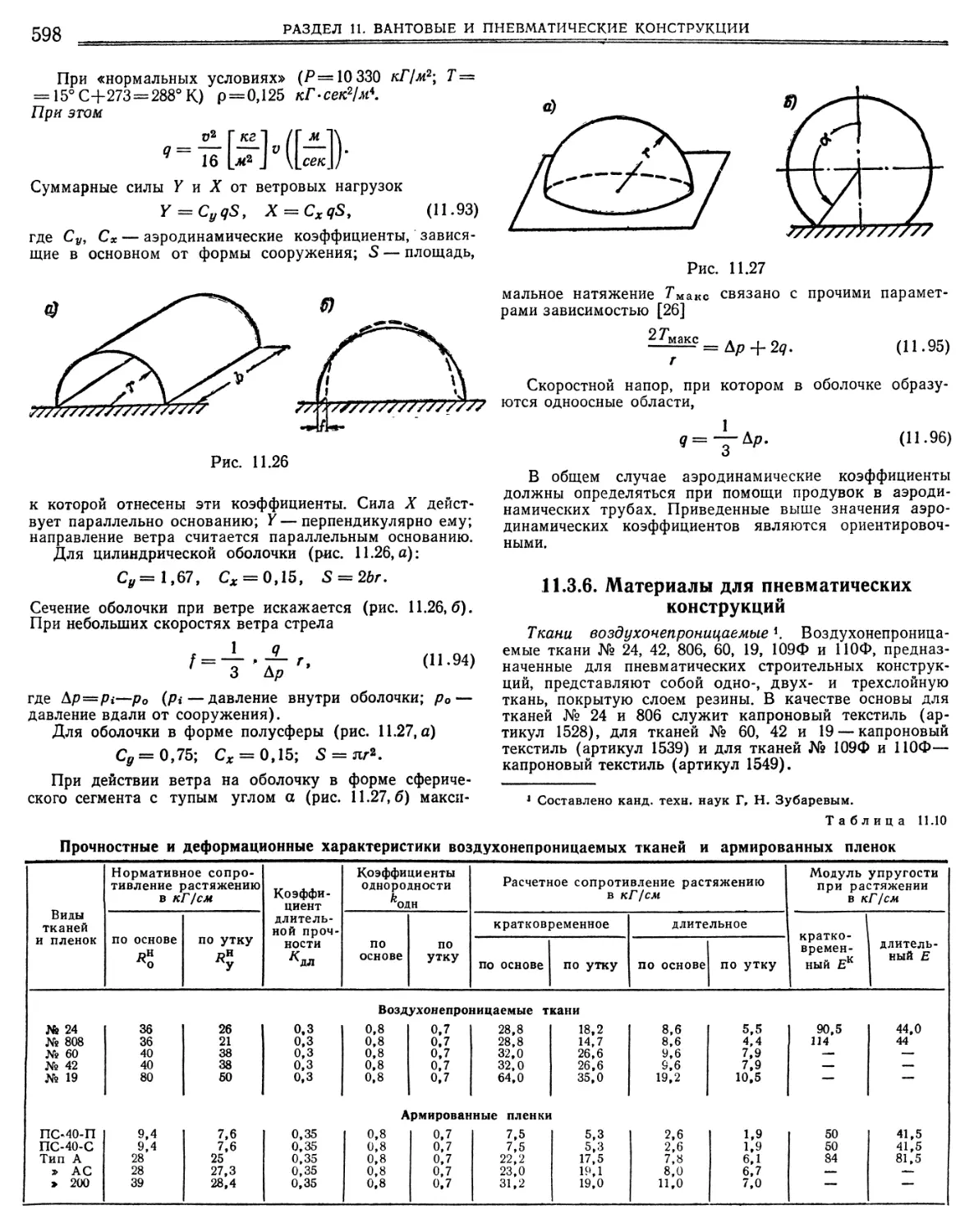
11.3.4. Расчет пневмостержней.»»»•«»••» 596
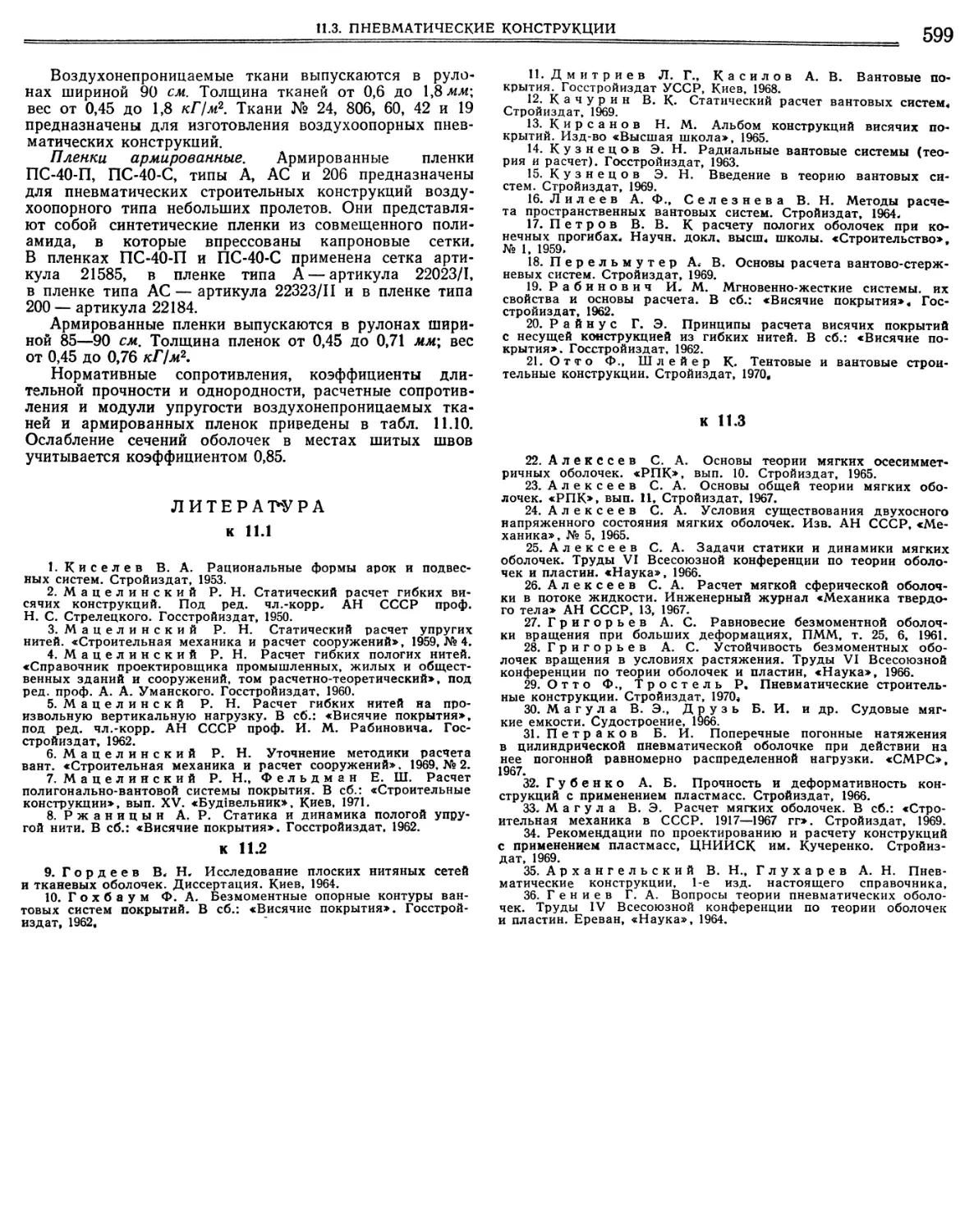
11.3.5. Ветровые нагрузки 597
11.3.6. Материалы для пневматических конструкций
(Г. Н. Зубарев) • , 598
Литература 599
ПРЕДИСЛОВИЕ К ПЕРВОМУ ИЗДАНИЮ
Расчетно-теоретический том «Справочника проектировщика» содержит результативные формулы современных методов расчета конструкций на прочность, жесткость и устойчивость, а также необходимые сведения по элементарной и высшей математике, теоретической механике и числовые таблицы функций, входящих в более сложные расчетные формулы, нормы нагрузок и габариты. Данные, связанные с подбором сечений элементов из конкретных материалов, за некоторыми исключениями, отнесены к конструктивным томам «Справочника проектировщика» и в данный том не включены. Наряду с этим в настоящем томе справочника помещен раздел, посвященный механическим свойствам важнейших строительных материалов; это должно дать возможность проектировщику, пользующемуся схематизированными расчетными методами, скорректировать в случае надобности свои расчеты на основе учета действительных свойств материалов, исходя из работы конструкции в упругой или упруго-пластической стадии.
По характеру изложения данный справочник близок к Расчетно-теоретическому тому «Справочника инженера-проектировщика», изданному в 1934 г. и до сих пор пользующемуся заслуженной популярностью у проектировщиков.
Перед коллективом авторов нового справочника была поставлена задача отразить результаты быстрого поступательного движения советской строительной техники и науки о прочности, содействовать внедрению новых прогрессивных методов расчета, разработанных за последние десятилетия в научно-исследовательских институтах, вузах и проектных организациях, привлекая также результаты, полученные в других отраслях промышленности — машиностроении, авиастроении, судостроении. Решение этой задачи привело к полной перестройке и расширению программы справочника по сравнению с предшествующим, к устранению нескольких, редко используемых, разделов и к более широкому применению метода ссылок — рекомендаций взамен изло¬
жения деталей вопроса. При этом большую помощь авторам оказал вышедший в 1957 г. обзорный труд «Строительная механика в СССР», содержащий исчерпывающие библиографические данные по методам расчета сооружений.
При распределении объема учтены важнейшие новые направления и тенденции строительной техники. Значительное внимание уделено тонкостенным конструкциям, плитам и оболочкам. Индустриализация строительства, широкое применение сборного железобетона потребовали более подробных данных по расчету равнопролетных конструкций, брусьев и арок, очерченных по дуге круга. Важное значение, которое приобрели в настоящее время предварительно напряженные конструкции, получило отражение в более широкой разработке расчета стержневых систем на действие наперед заданных деформаций. Прогрессирующее применение легких сплавов в строительстве привело к необходимости расширить разделы, посвященные устойчивости и расчету конструкций по деформированной схеме. Большое внимание уделено практическим вопросам теории пластичности и ползучести, позволяющим более обоснованно применять принятые в СССР методы расчета конструкций по расчетным предельным состояниям.
Основное назначение данного справочника — помочь в работе инженерам-строителям, проектирующим промышленные и гражданские здания и сооружения. Наряду с этим справочник может быть использован инженерами-конструкторами и расчетчиками другого профиля, а также студентами, аспирантами и преподавателями вузов.
Все замечания и пожелания относительно содержания справочника просим направлять в адрес издательства: Москва, Кузнецкий мост, 9, Стройиздат.
А. А. Уманский
1 Строительная механика в СССР. 1917—1957, под редакцией чл.-корр. АН СССР, действ, чл. АСиА СССР И. М. Рабиновича, М., Госстройиздат, 1957.
ПРЕДИСЛОВИЕ КО ВТОРОМУ ИЗДАНИЮ
При составлении второго издания Справочника мы воспользовались советом многих читателей — разделить содержащийся в Справочнике обширный материал на две книги, облегчив тем самым пользование им.
В первую книгу вошли разделы:
1. Математика
2. Теоретическая механика
3. Напряжения, деформации, прочность материалов
4. Материалы для строительных конструкций. Методы расчета
5. Строительная механика упругого стержня и стержневых систем
6. Численные методы линейной алгебры. Матрицы в строительной механике стержневых систем
7. Таблицы геометрических характеристик сечений стержней
8. Таблицы и формулы для расчета балок, рам и арок
9. Стержни, очерченные по дуге круга, и кру говые кольца
10. Фермы
11. Вантовые и пневматические конструкции
Во вторую книгу вошли разделы:
12. Уравнения и формулы теории упругости, пластичности и ползучести
13. Упругие тонкие пластины (плиты и балки-стены)
14. Оболочки
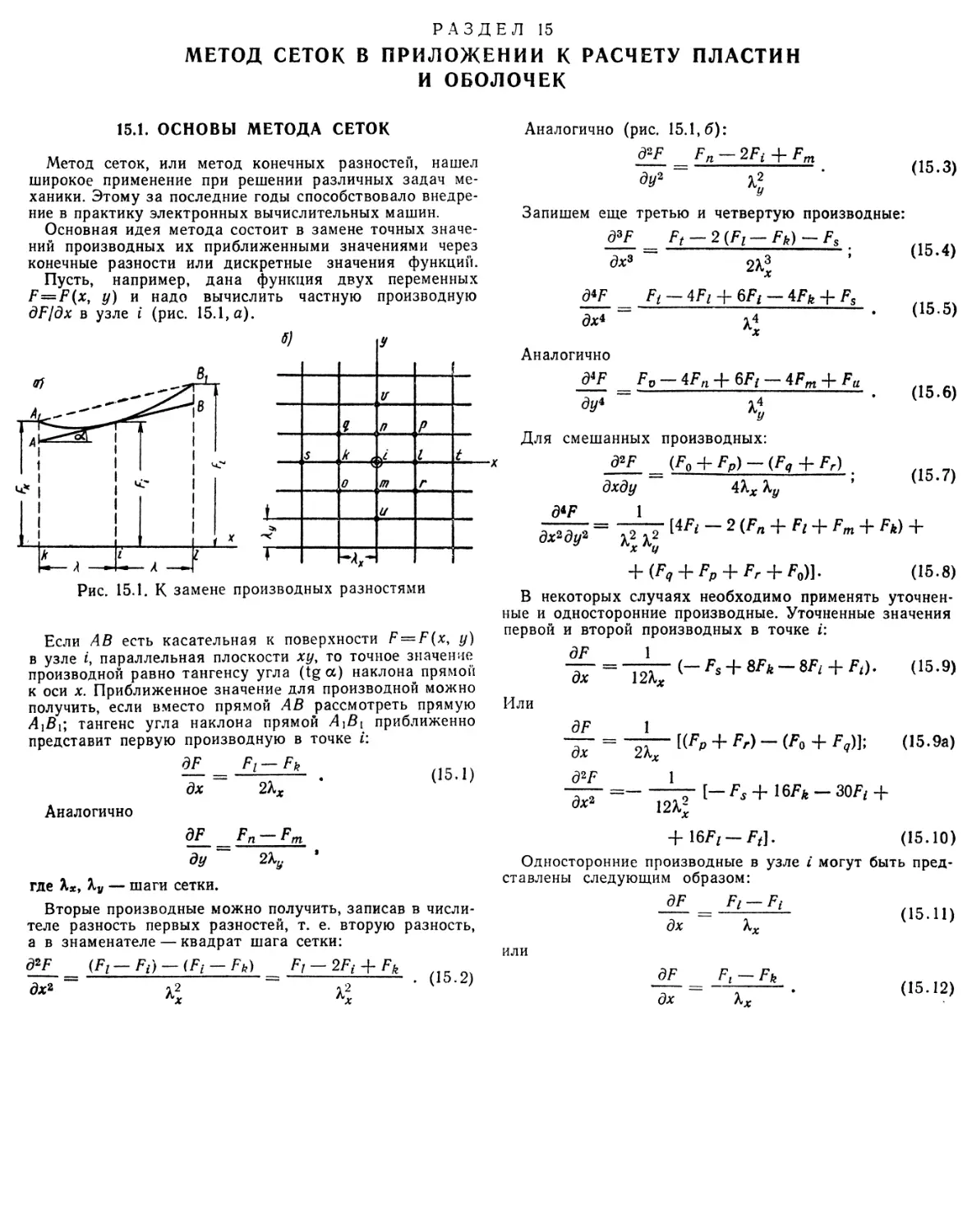
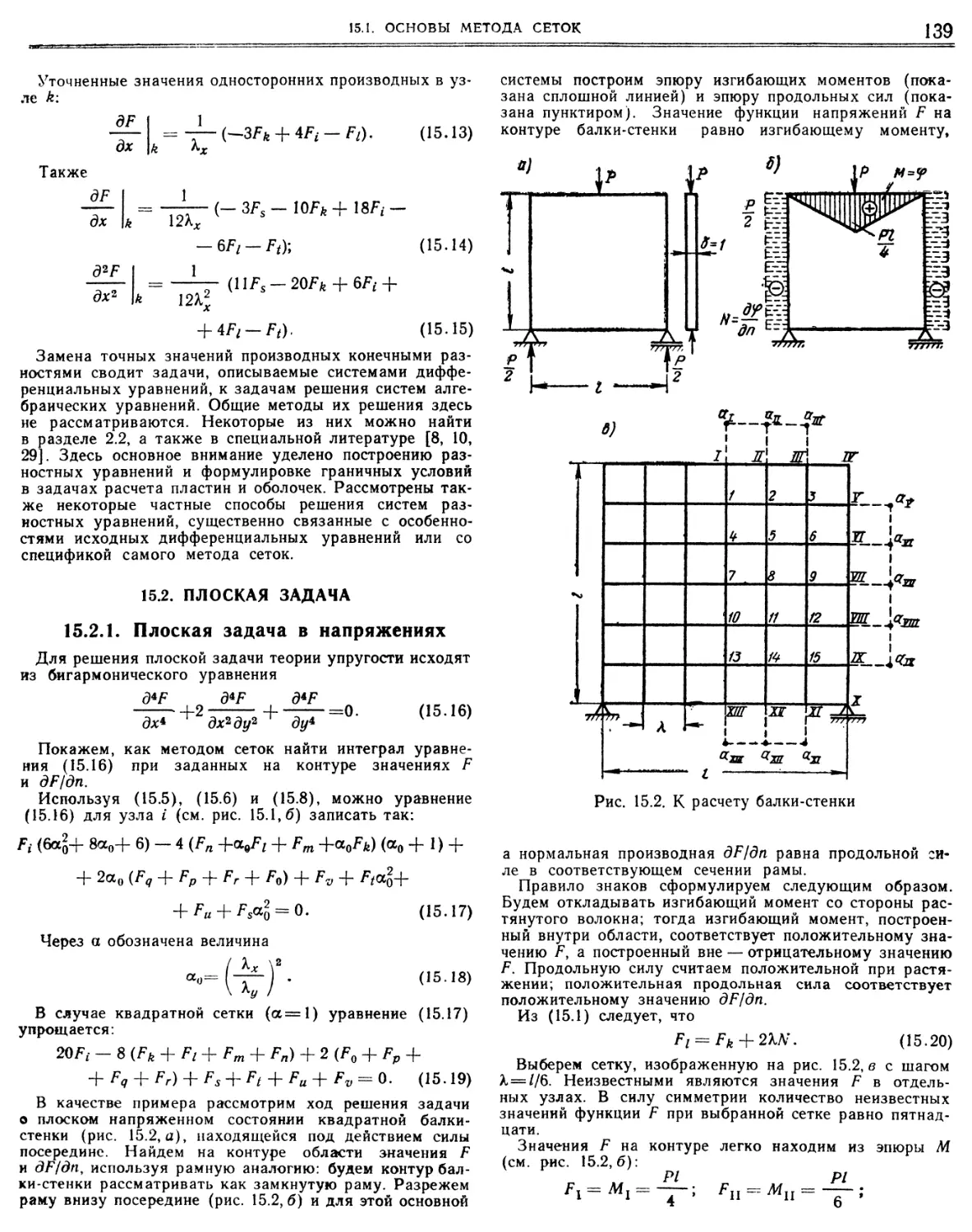
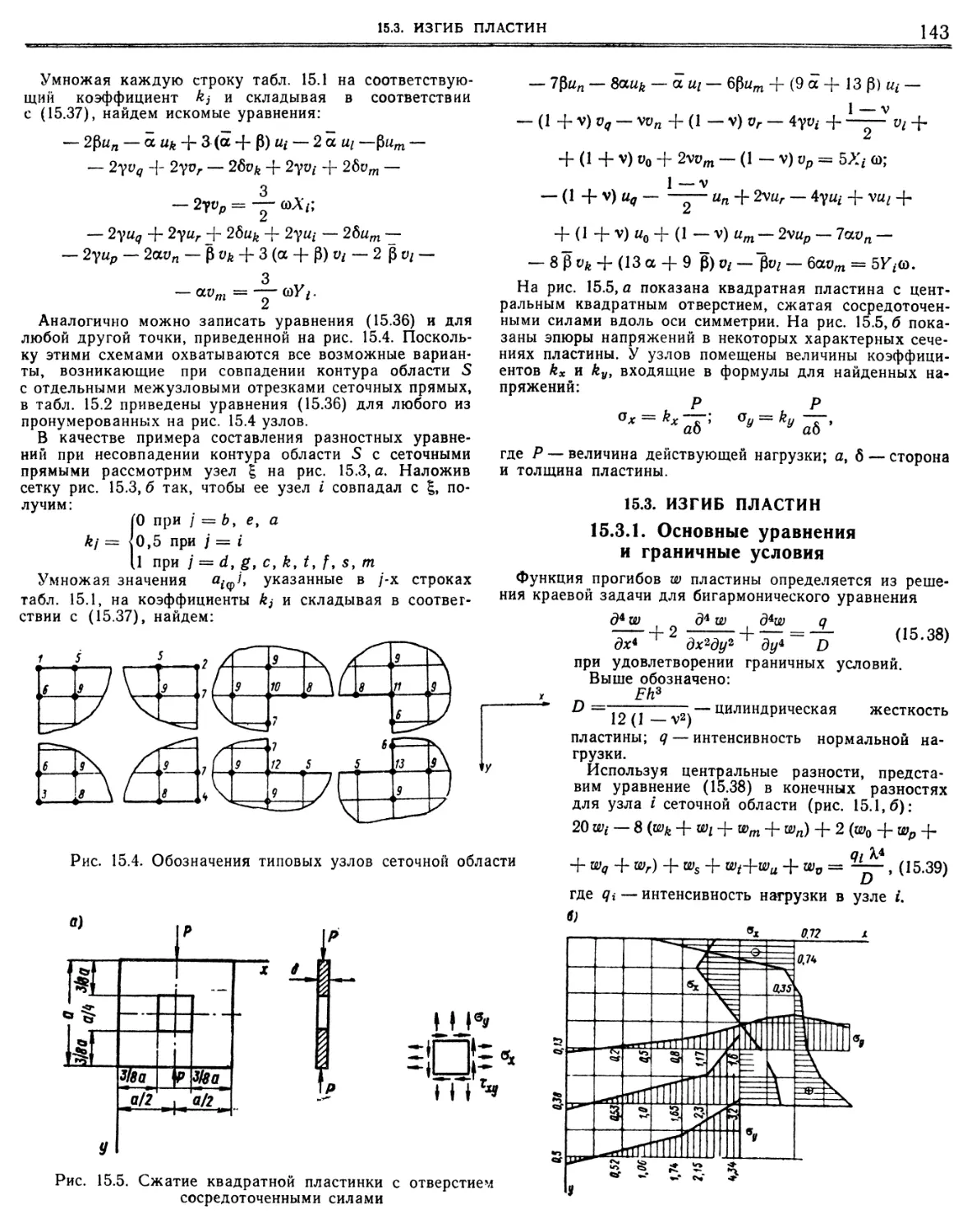
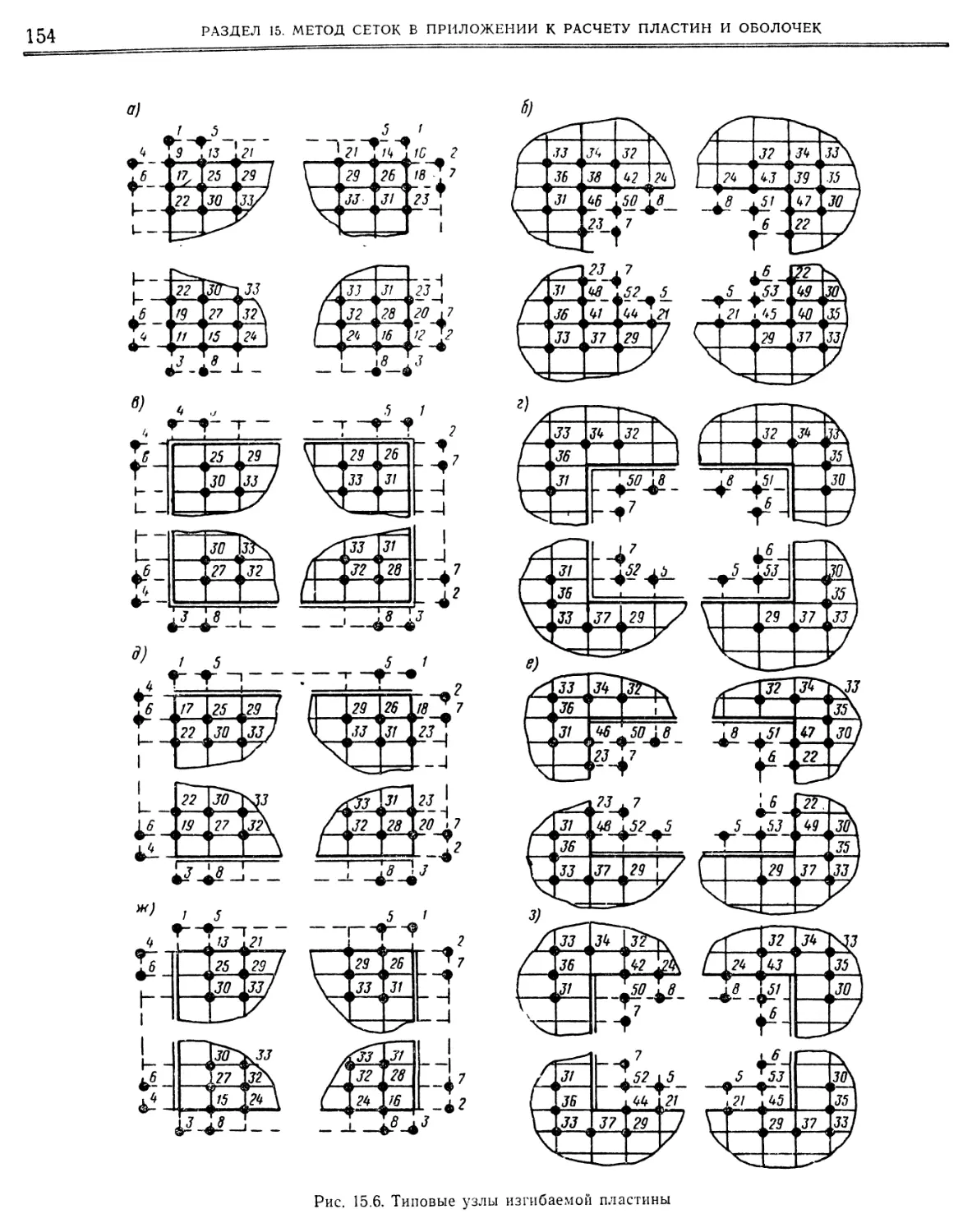
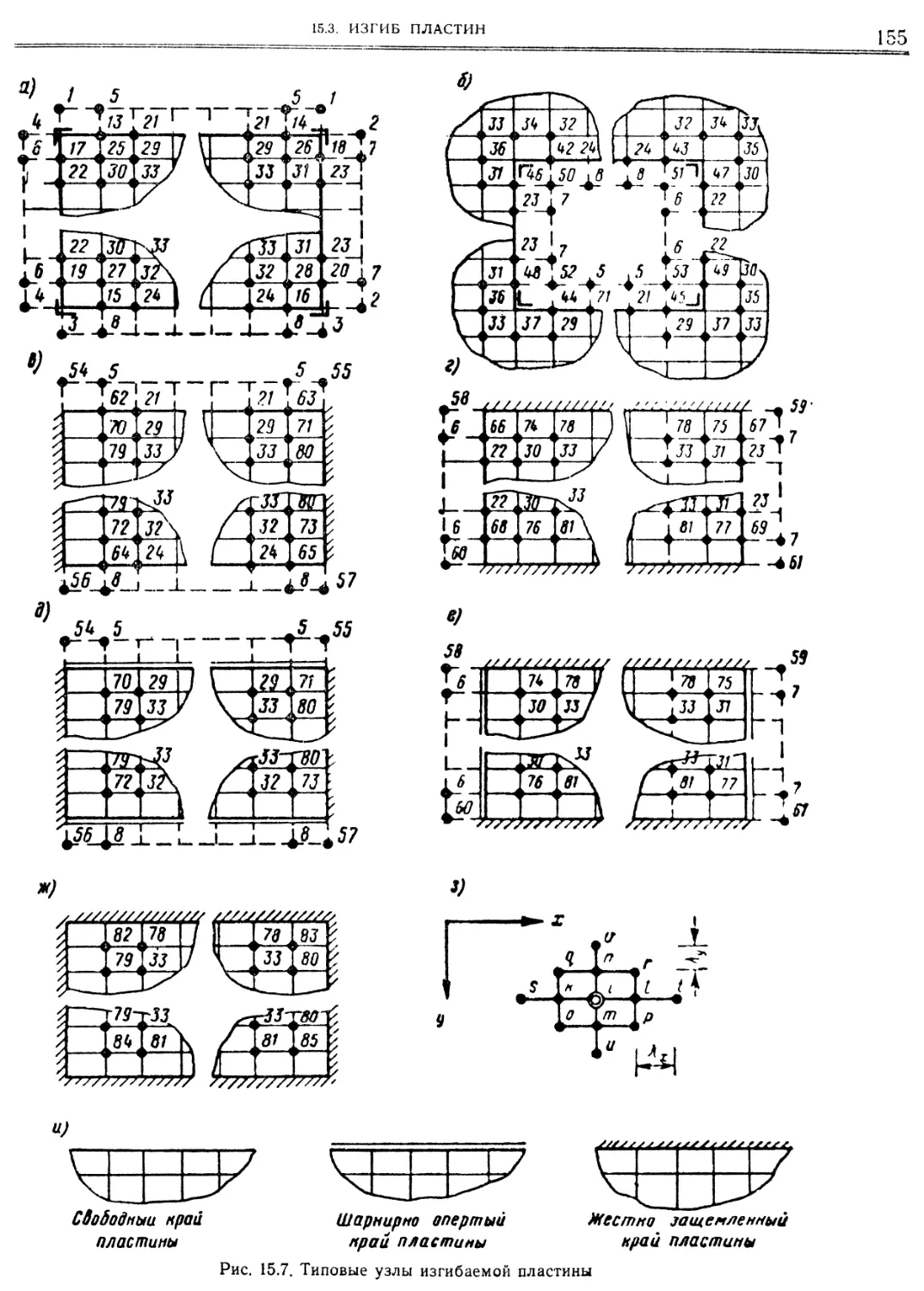
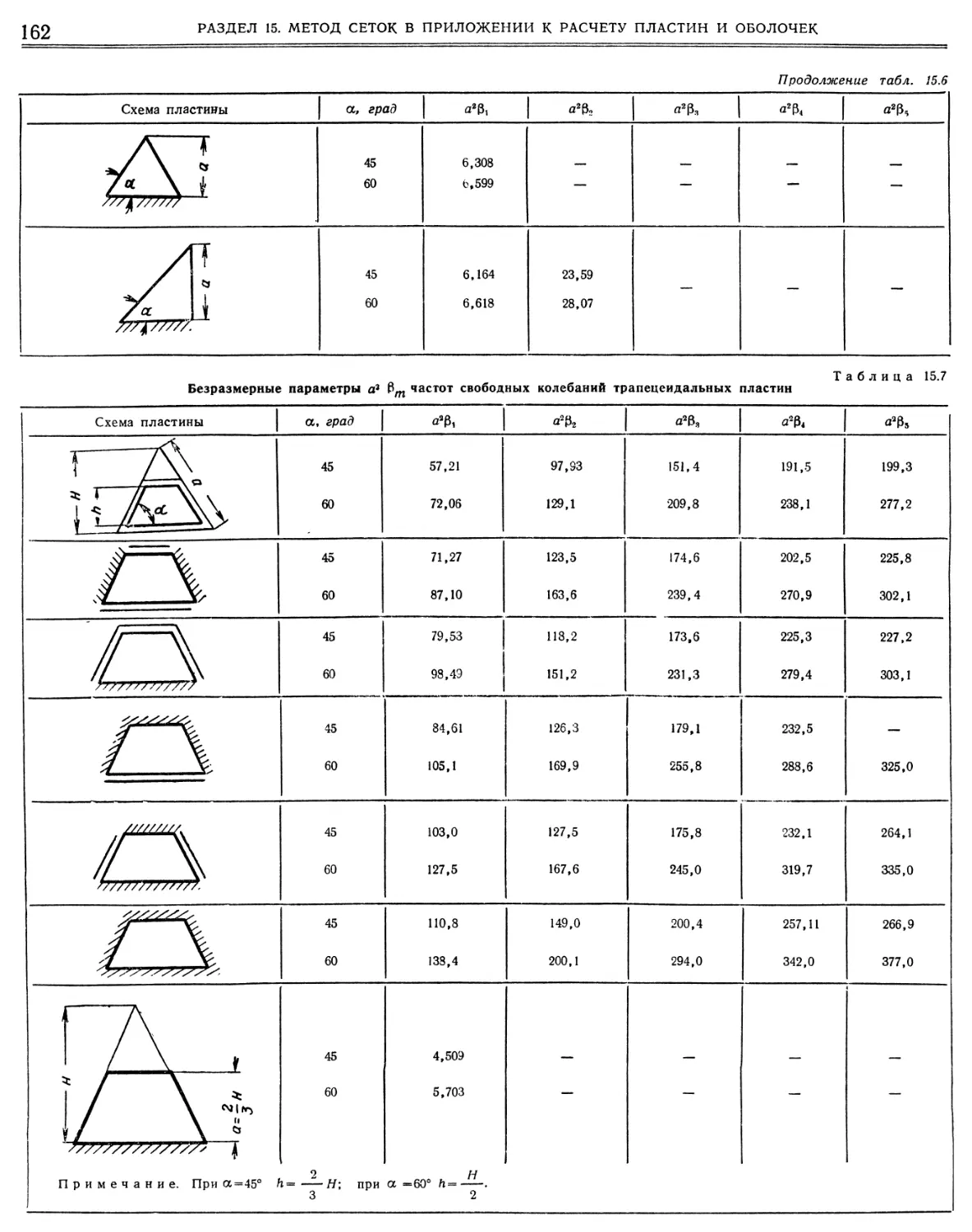
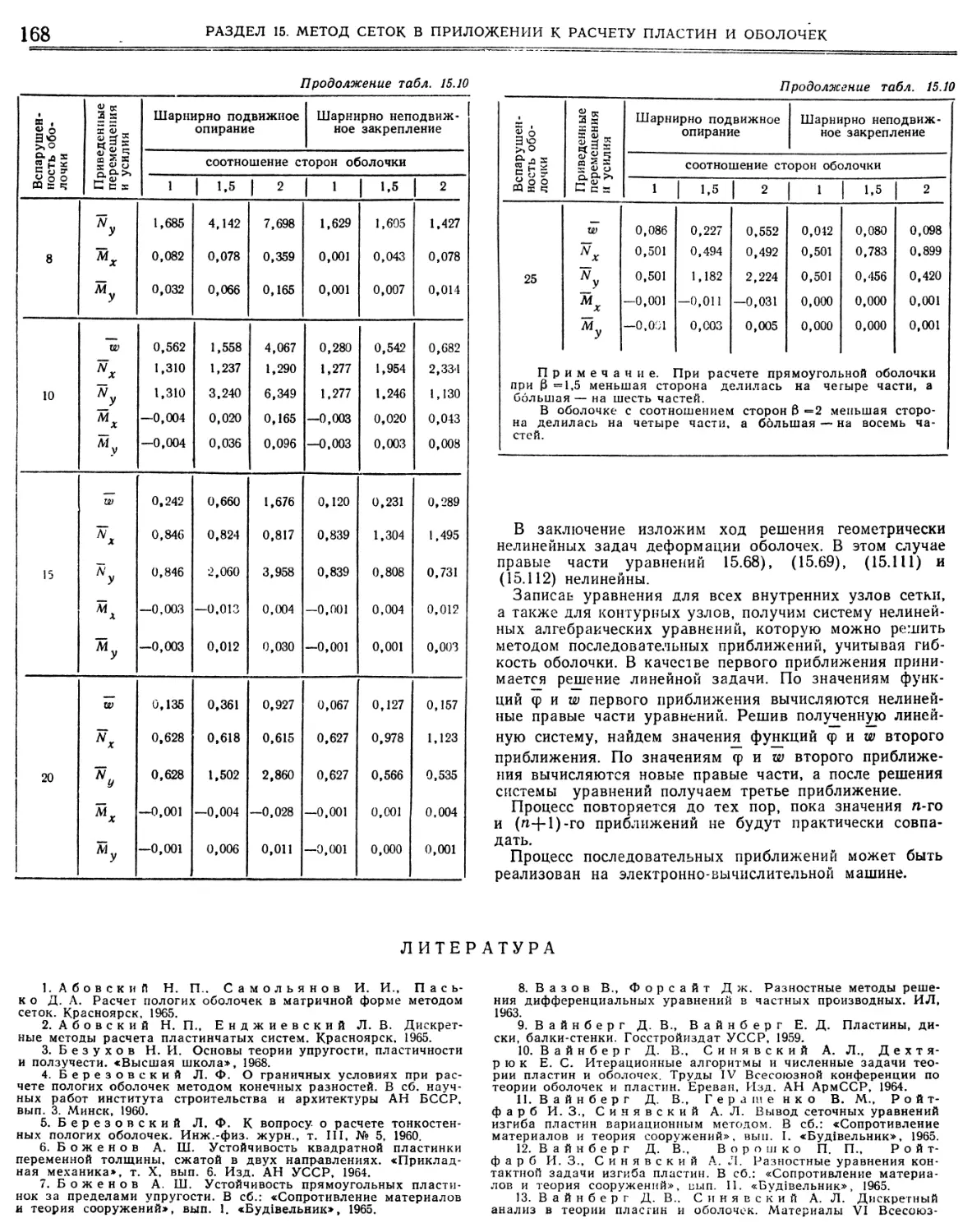
15. Метод сеток в приложении к расчету пластин и оболочек
16. Моделирование
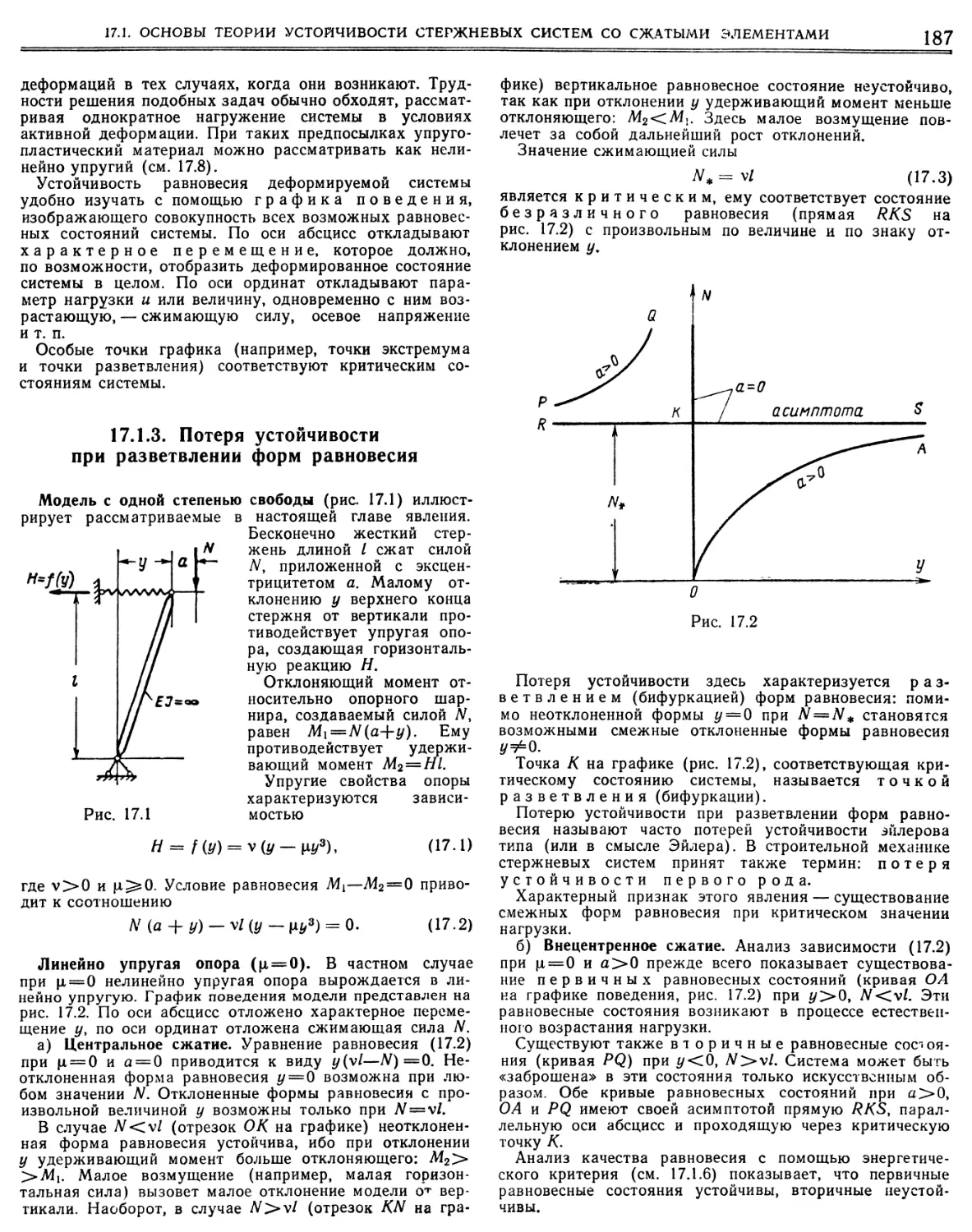
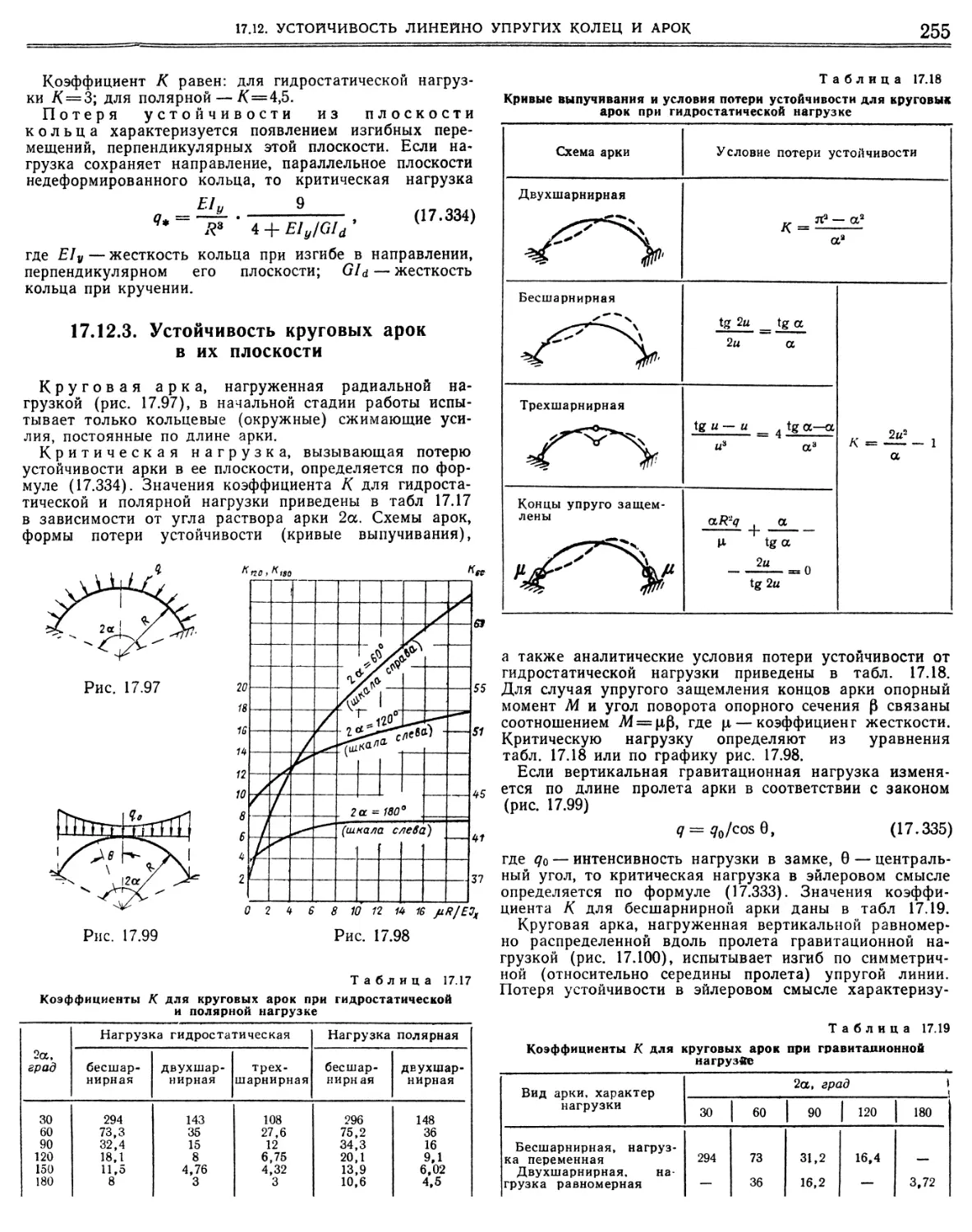
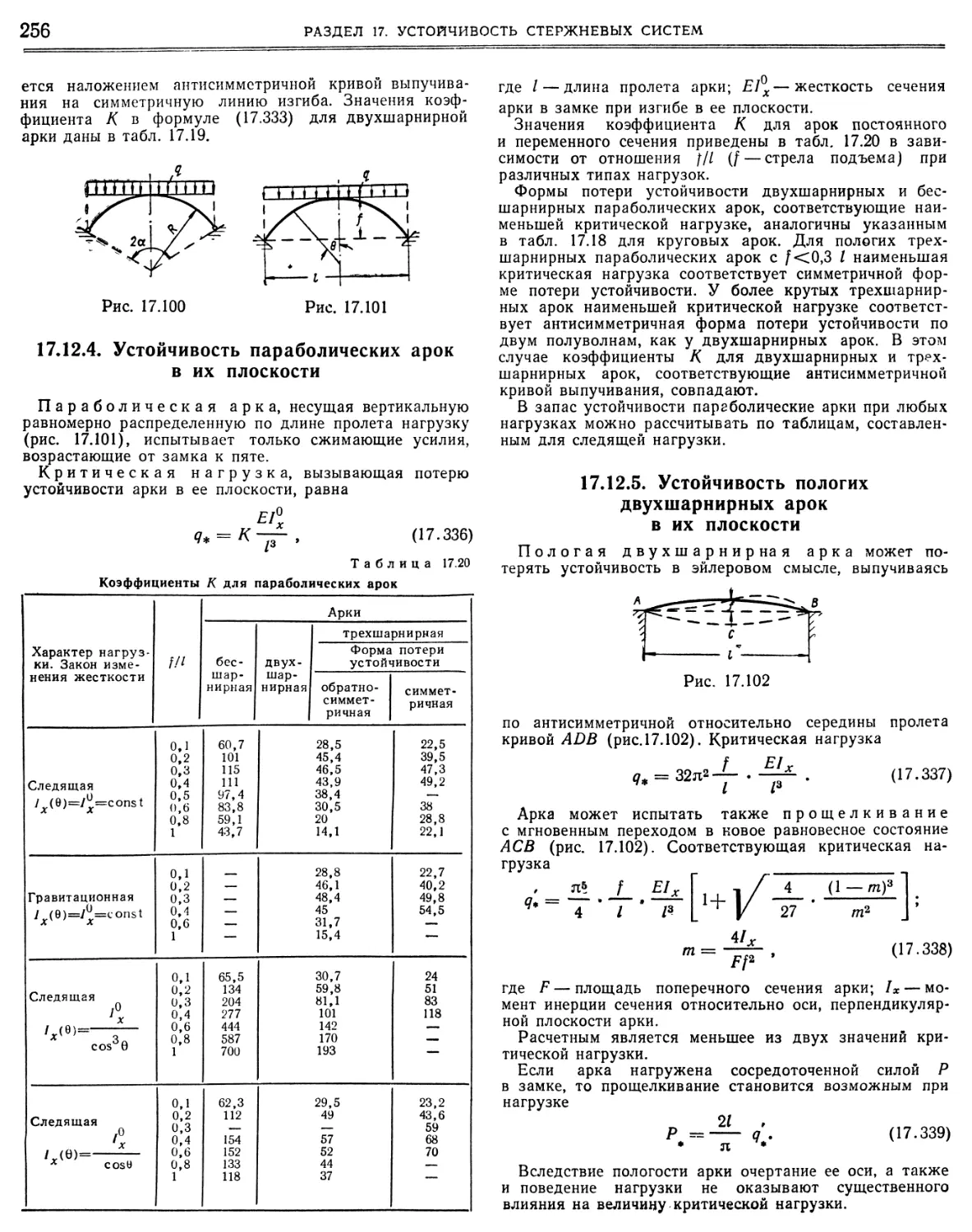
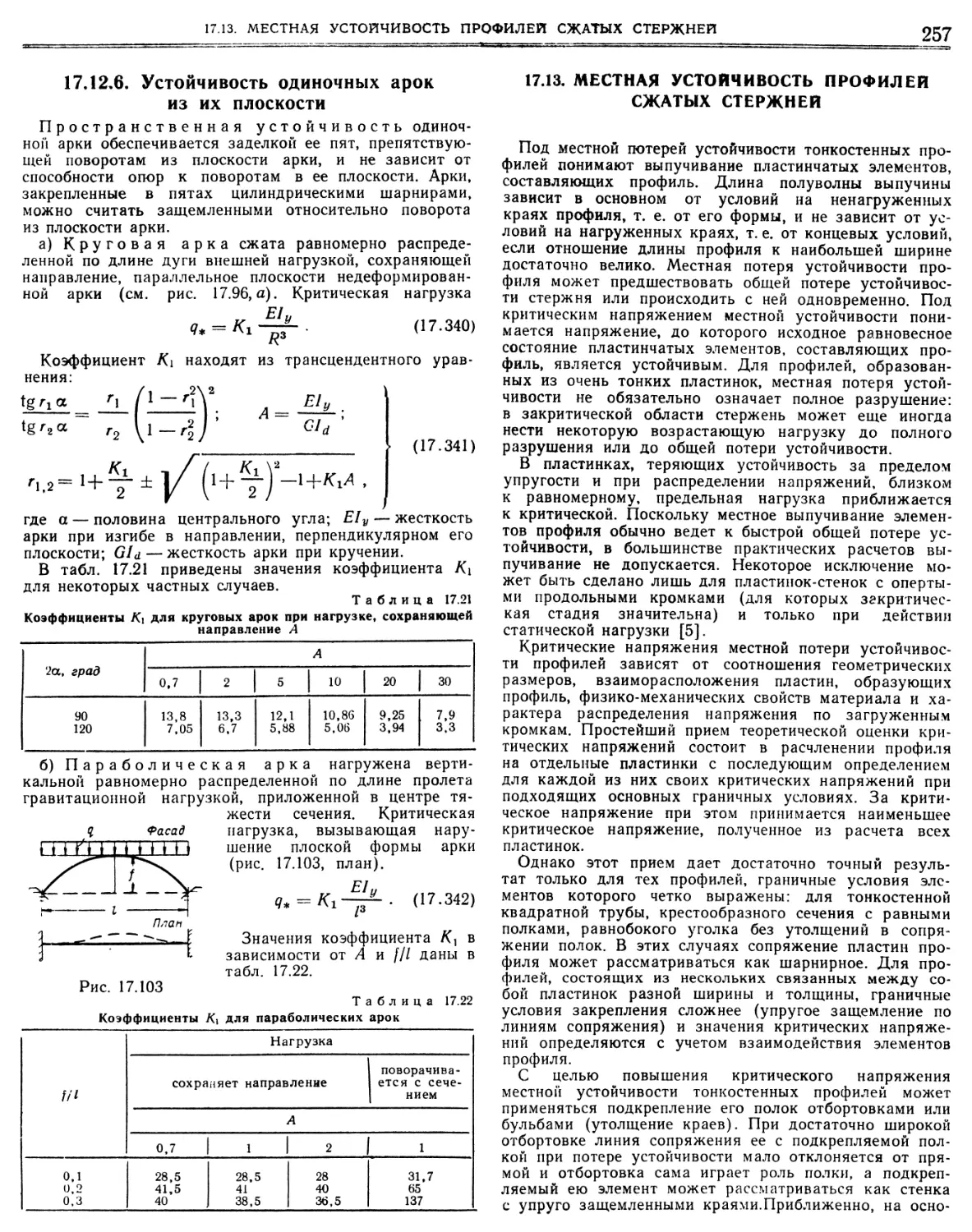
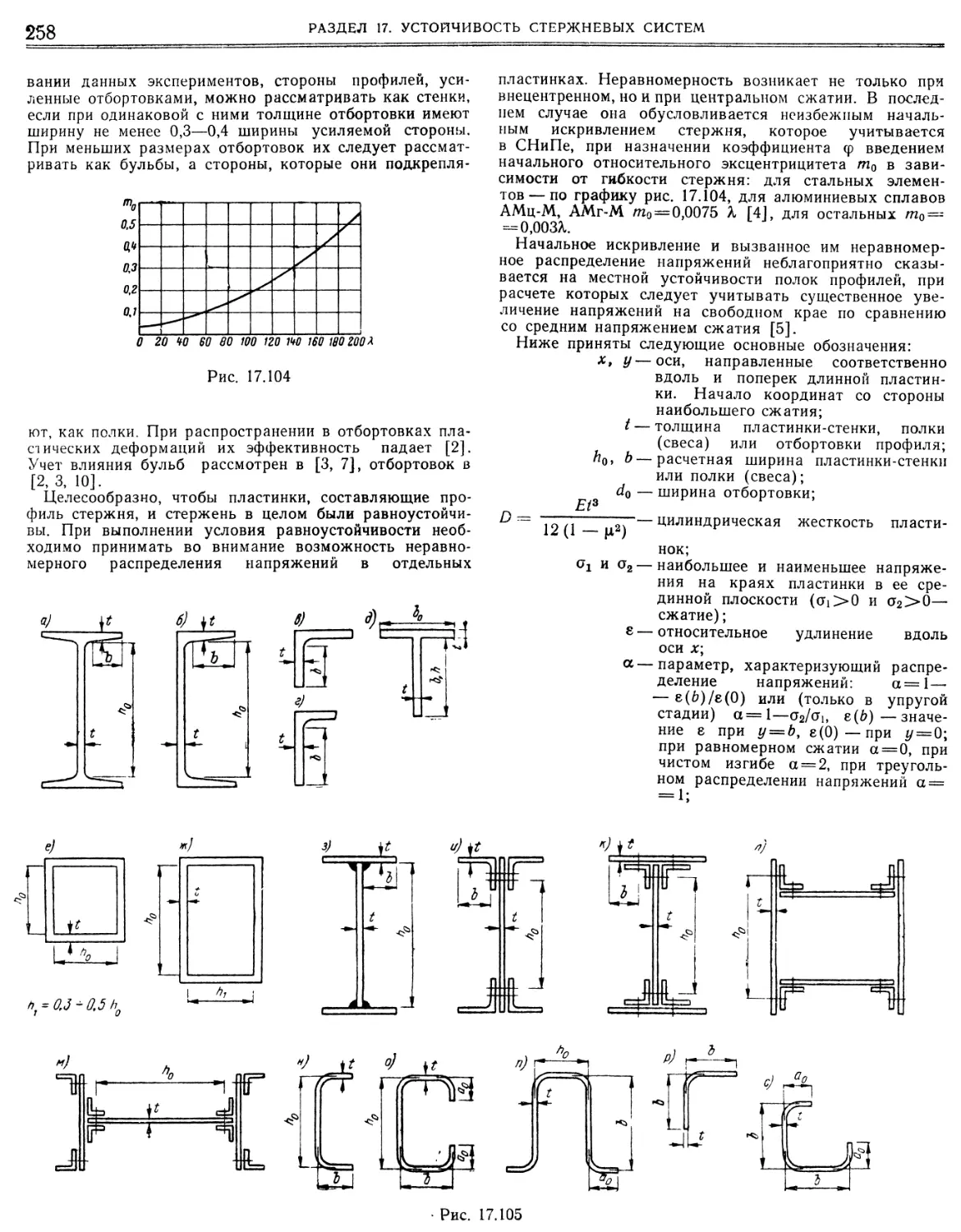
17. Устойчивость стержневых систем
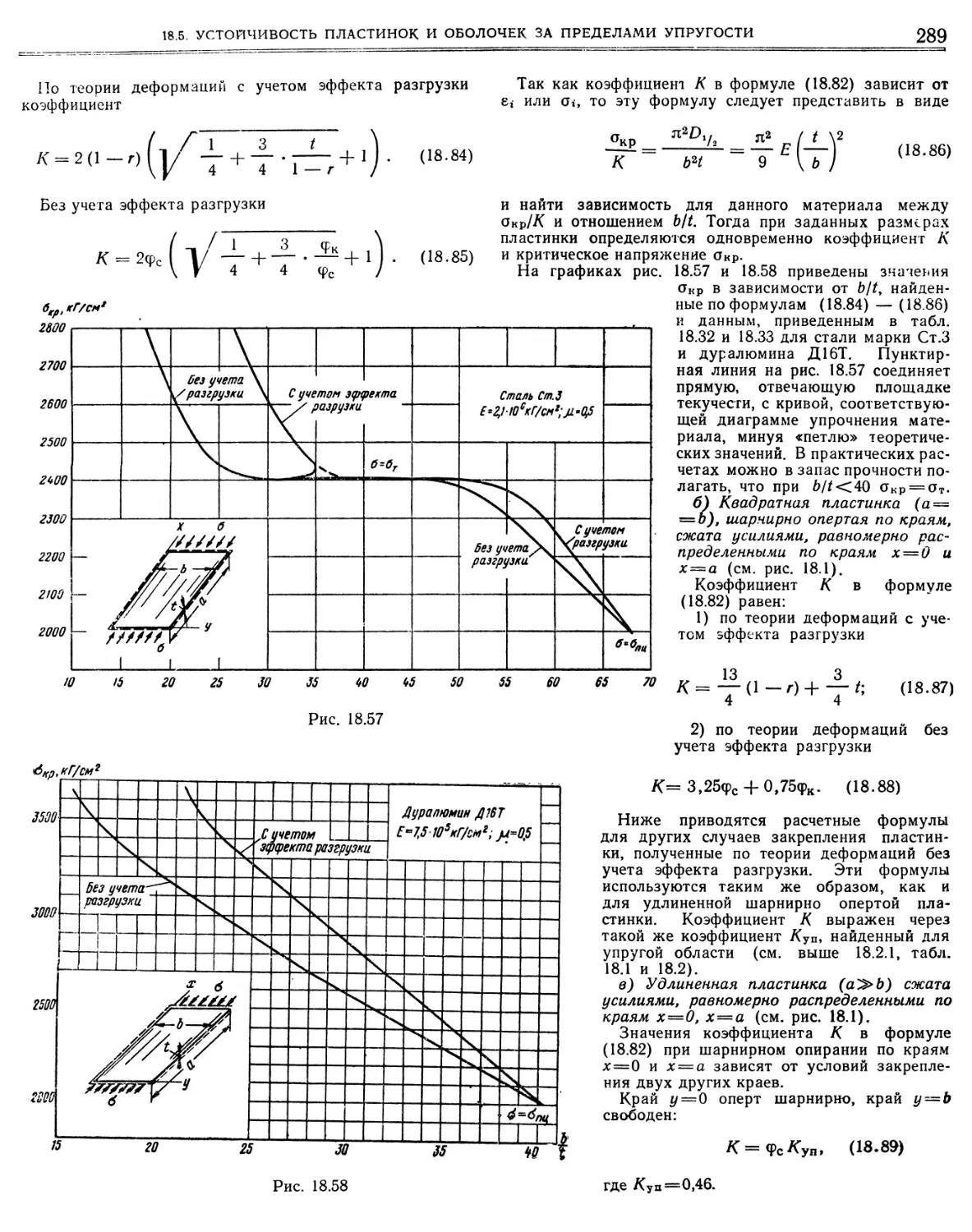
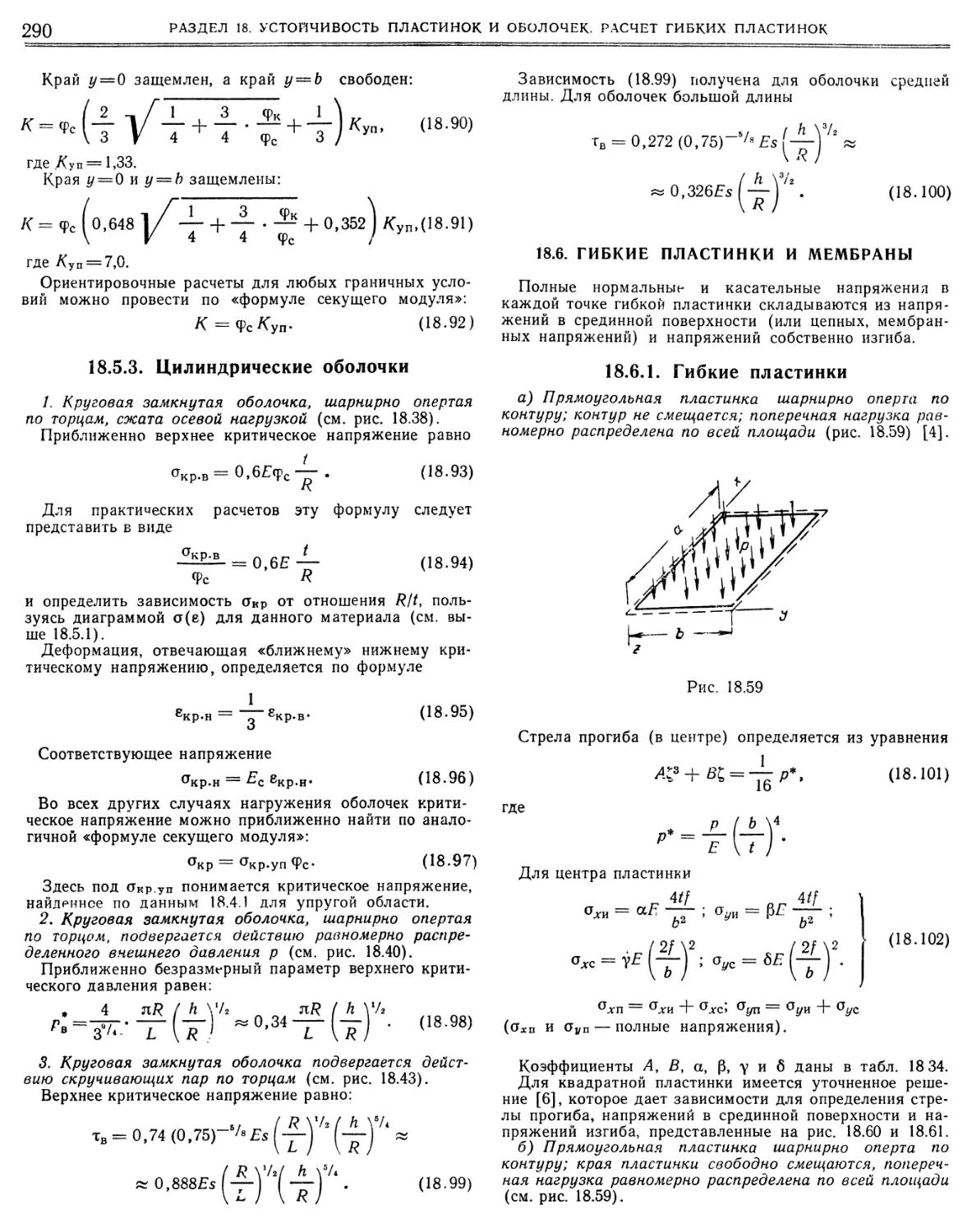
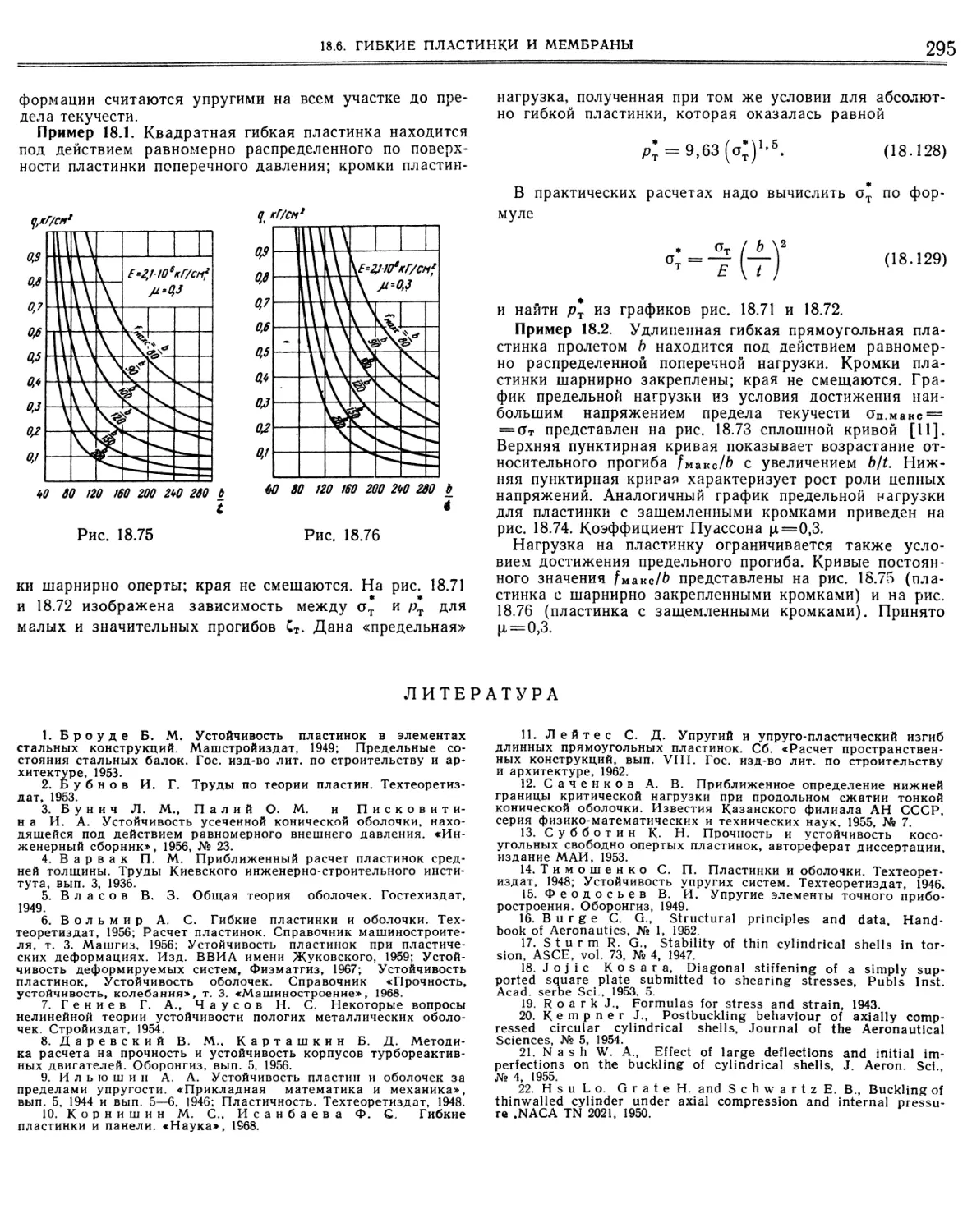
18. Устойчивость пластинок и оболочек. Расчет гибких пластинок.
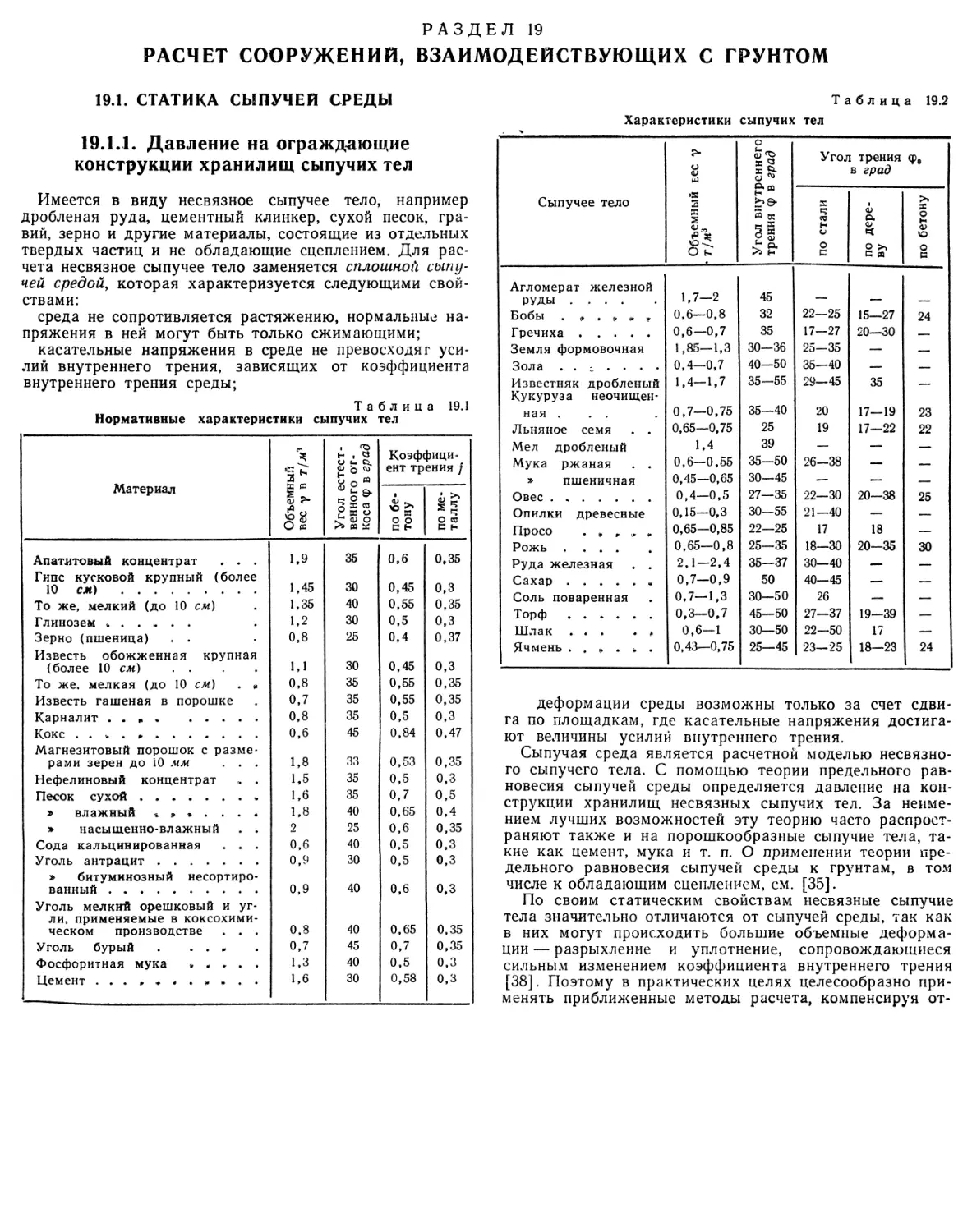
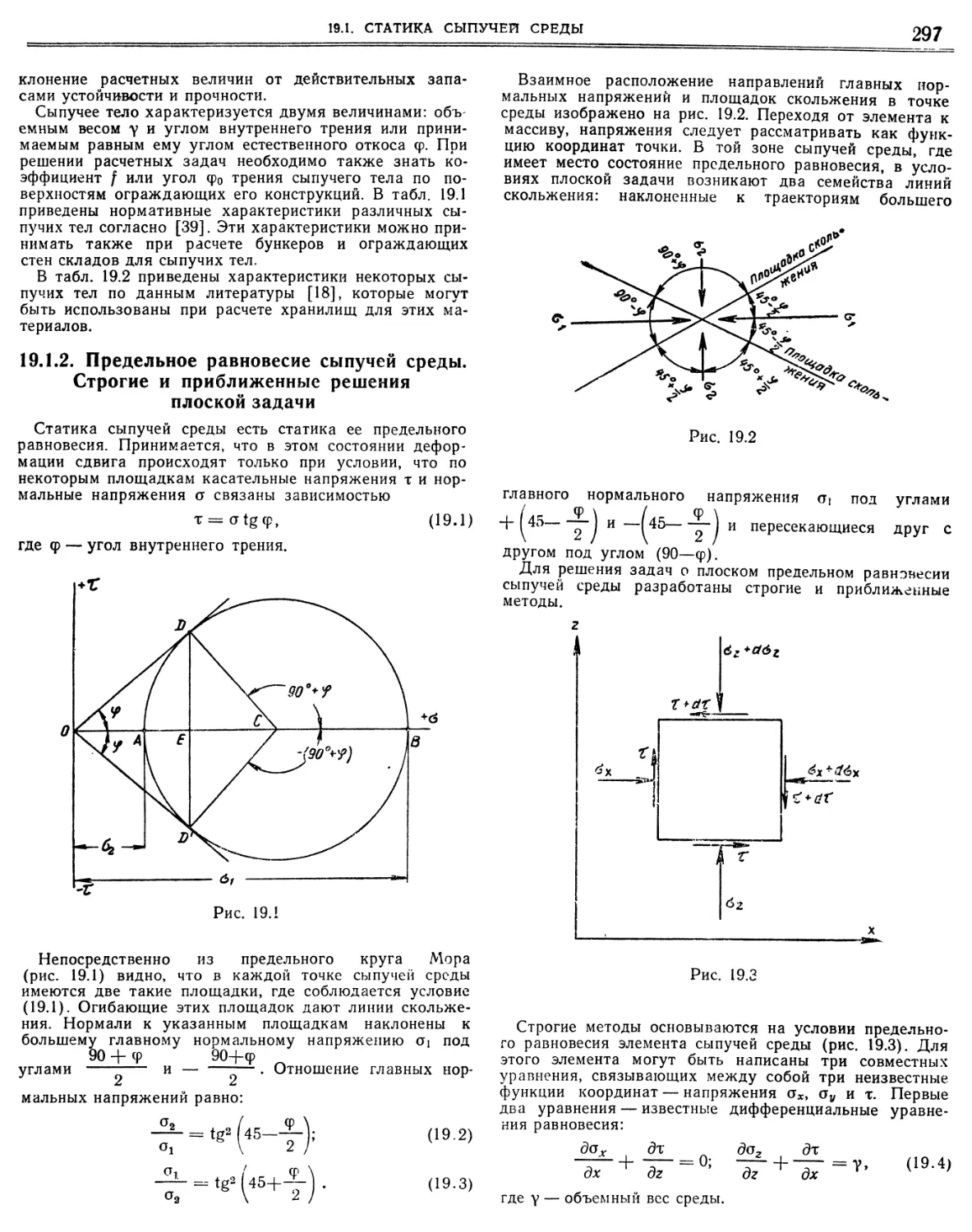
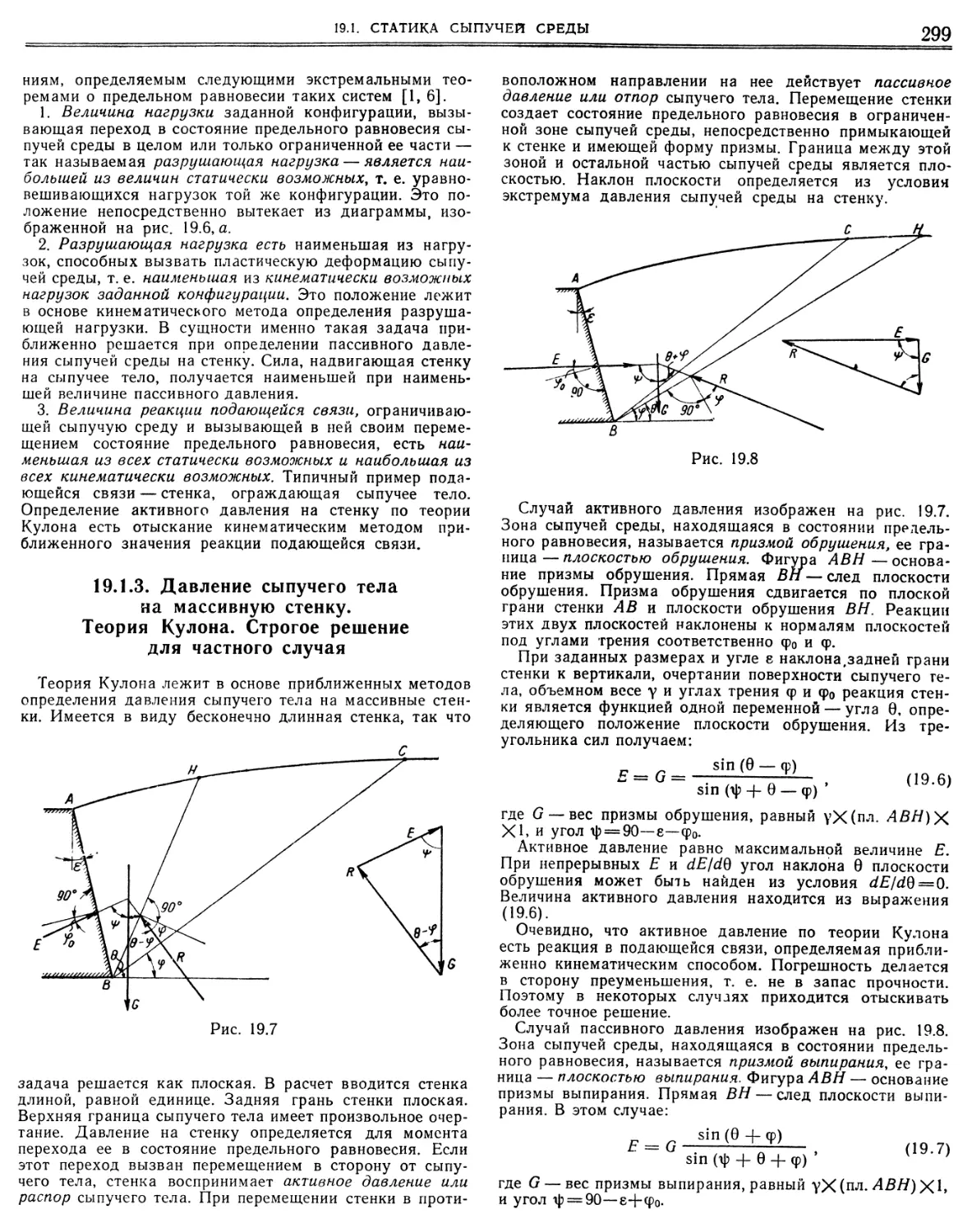
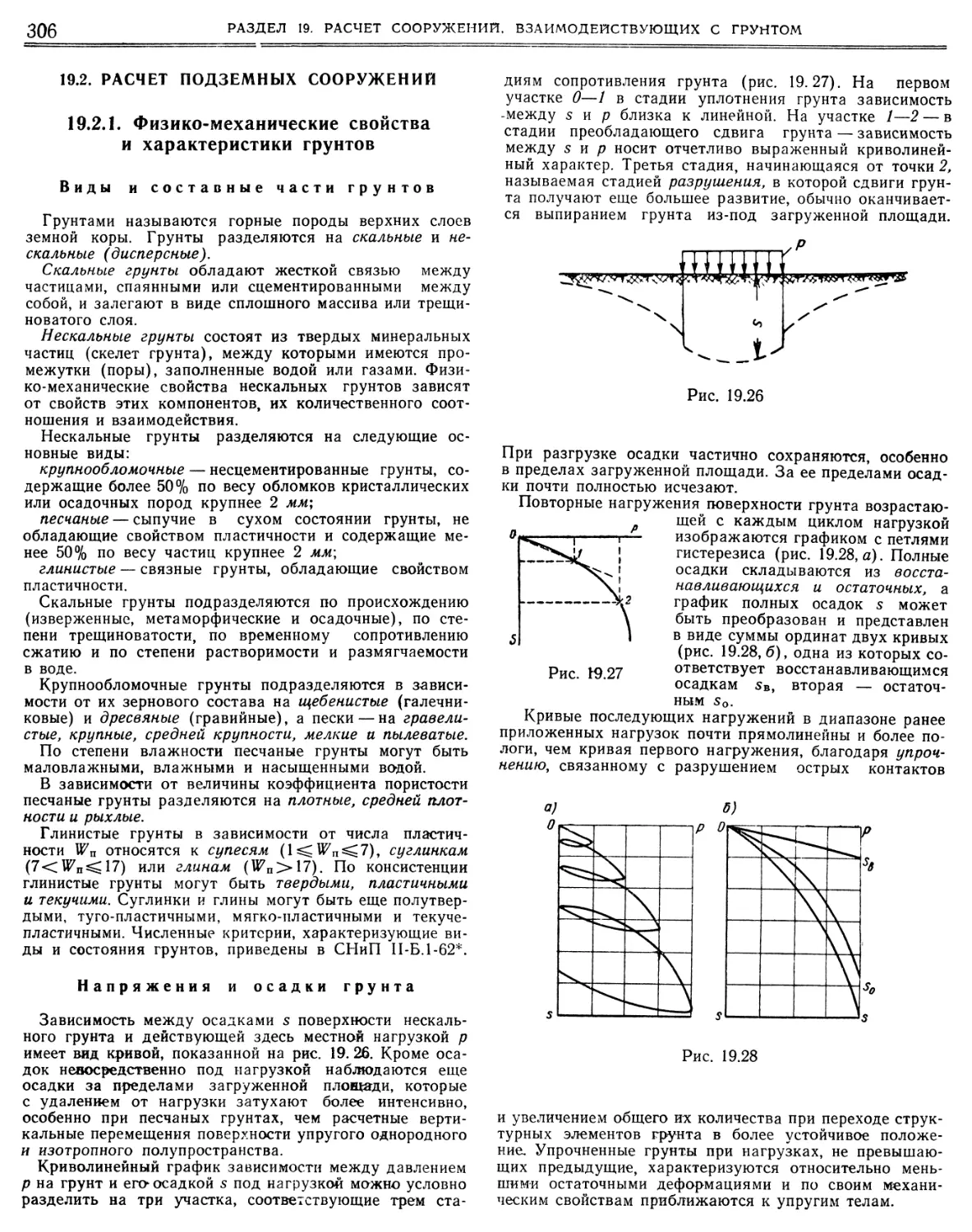
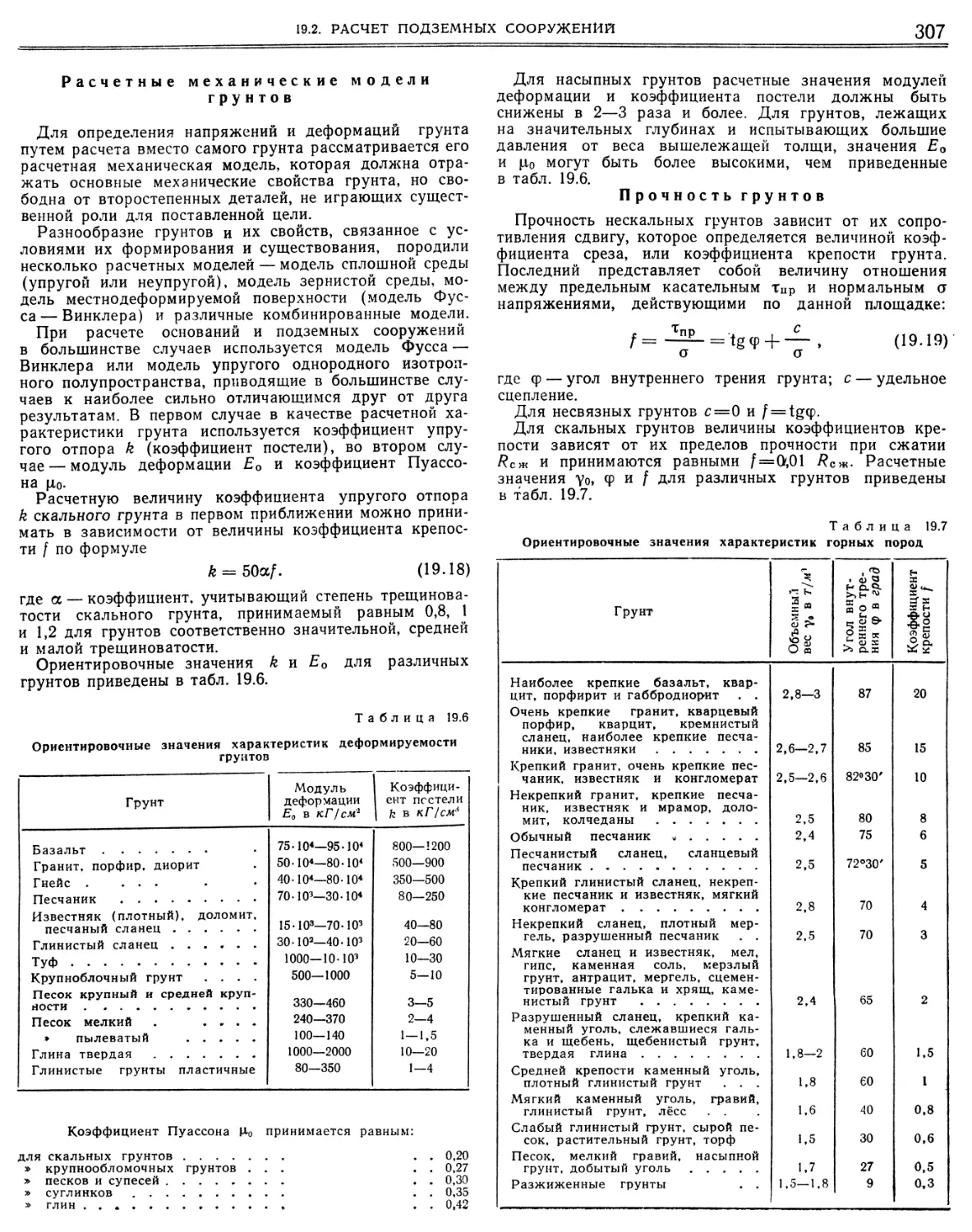
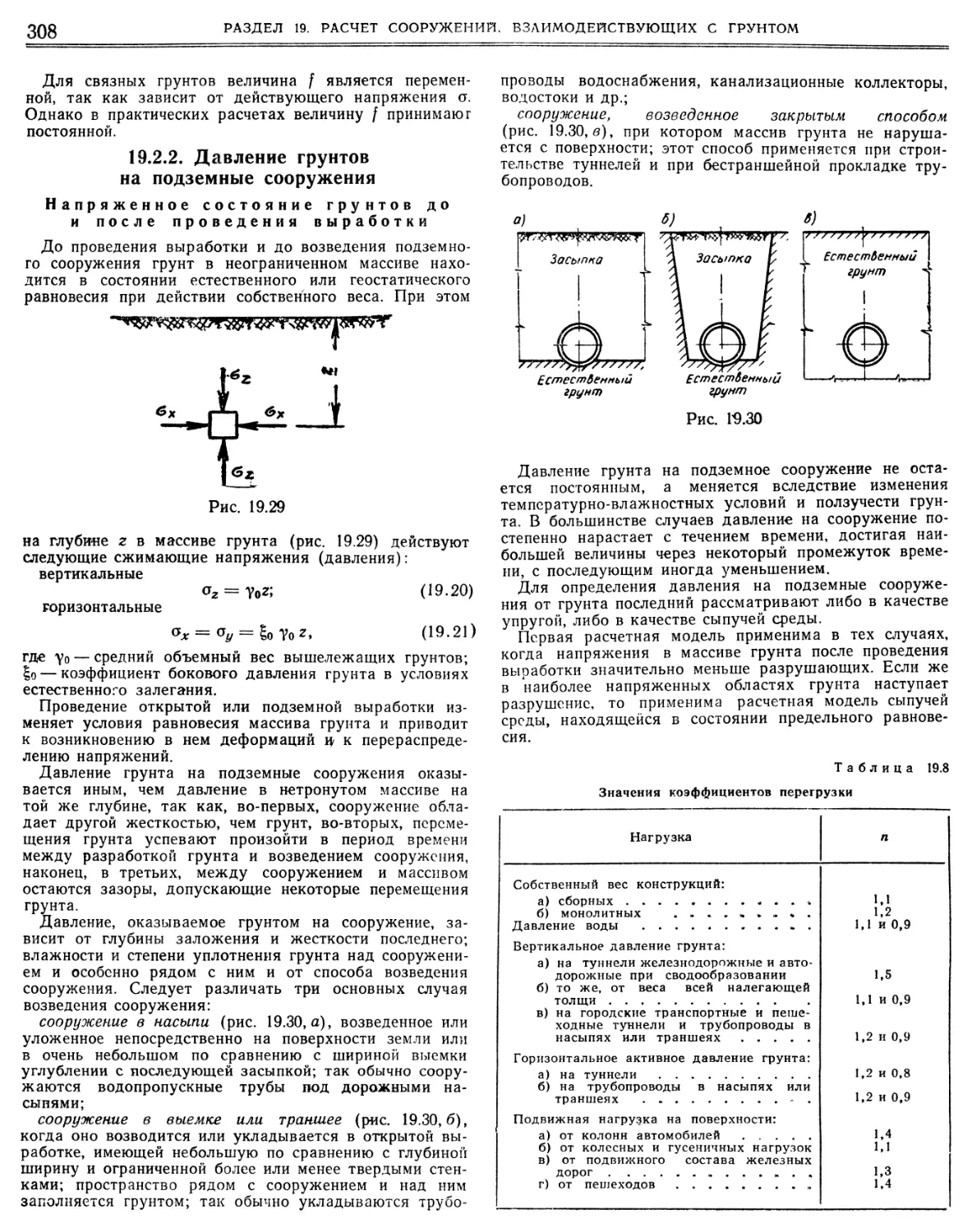
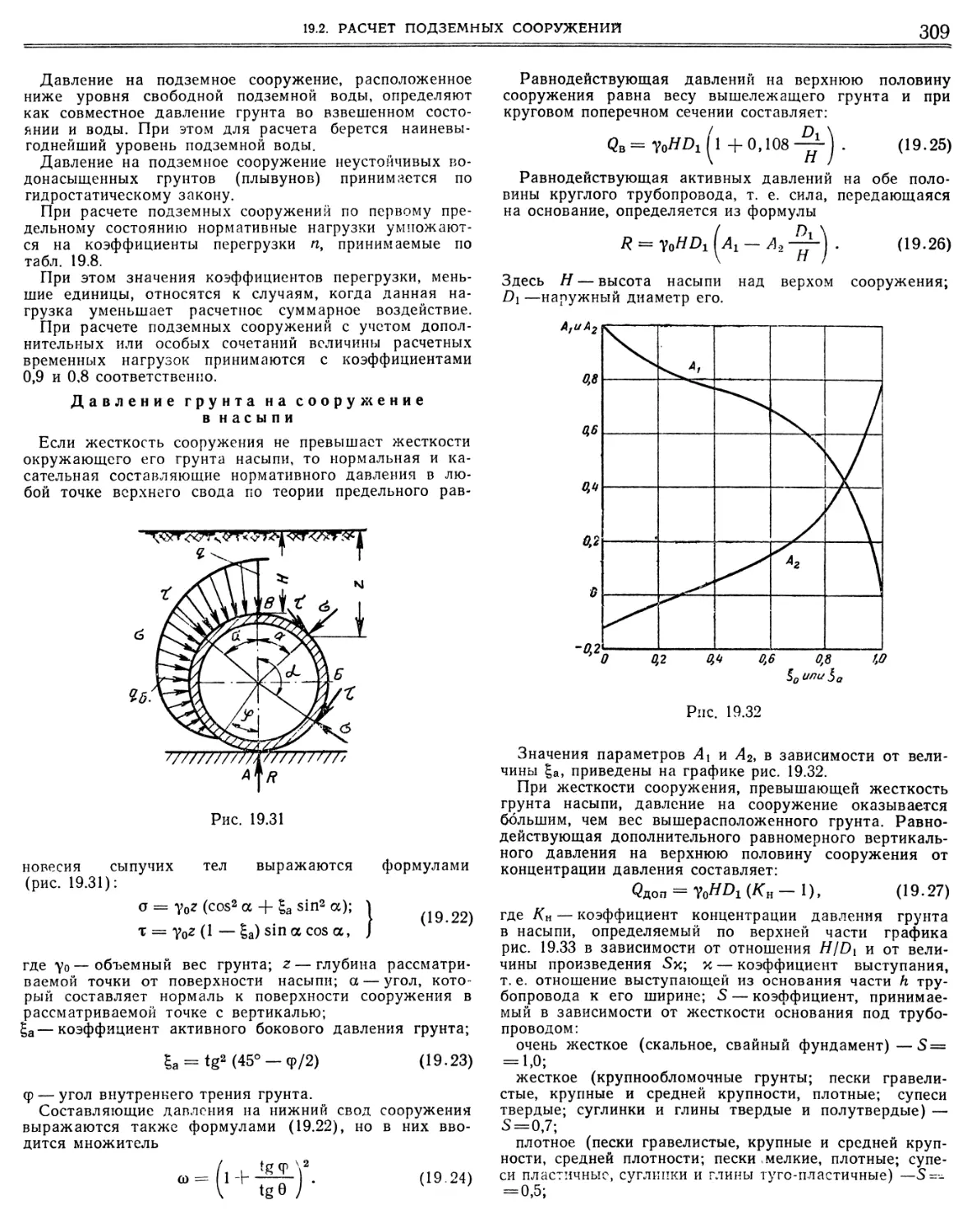
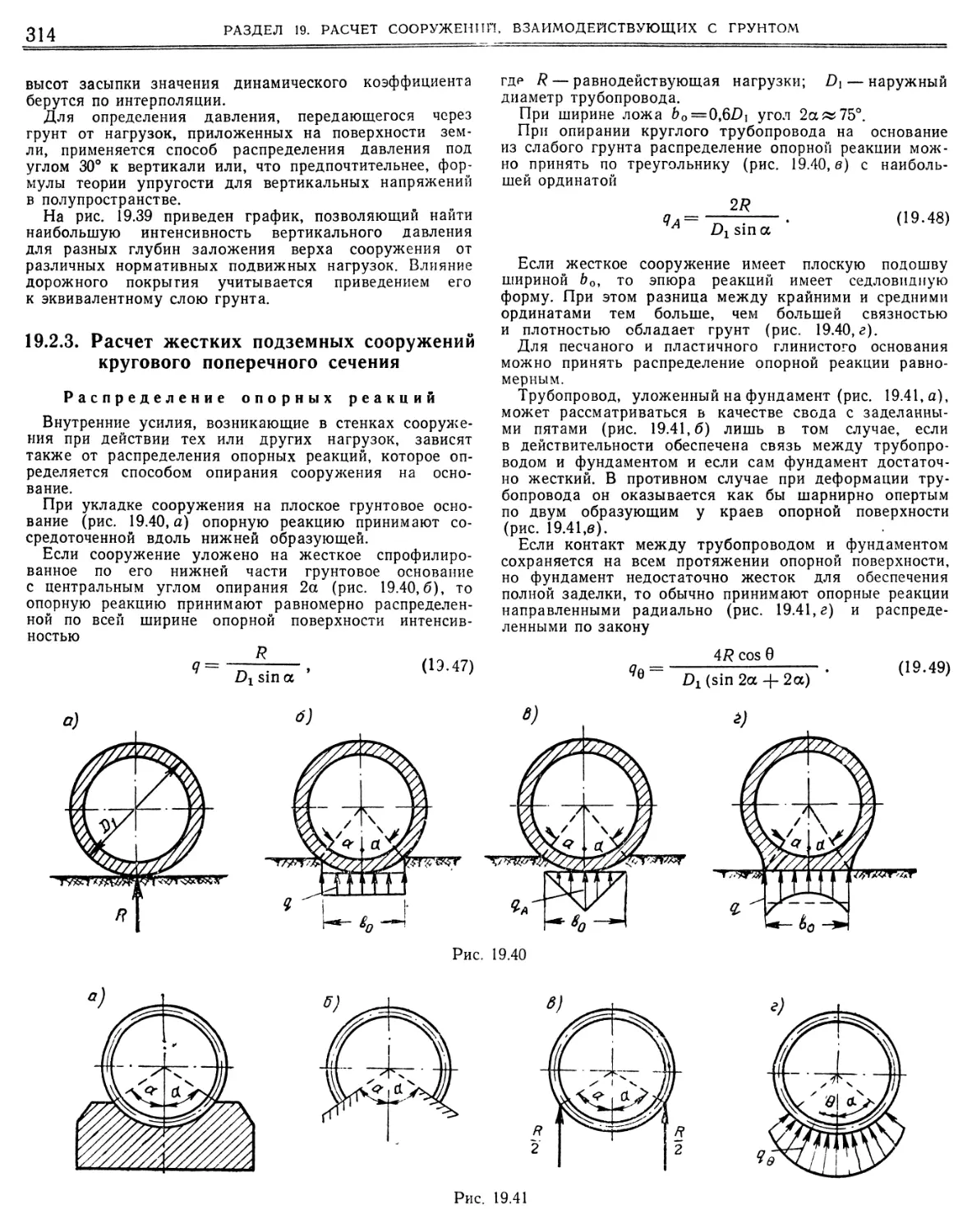
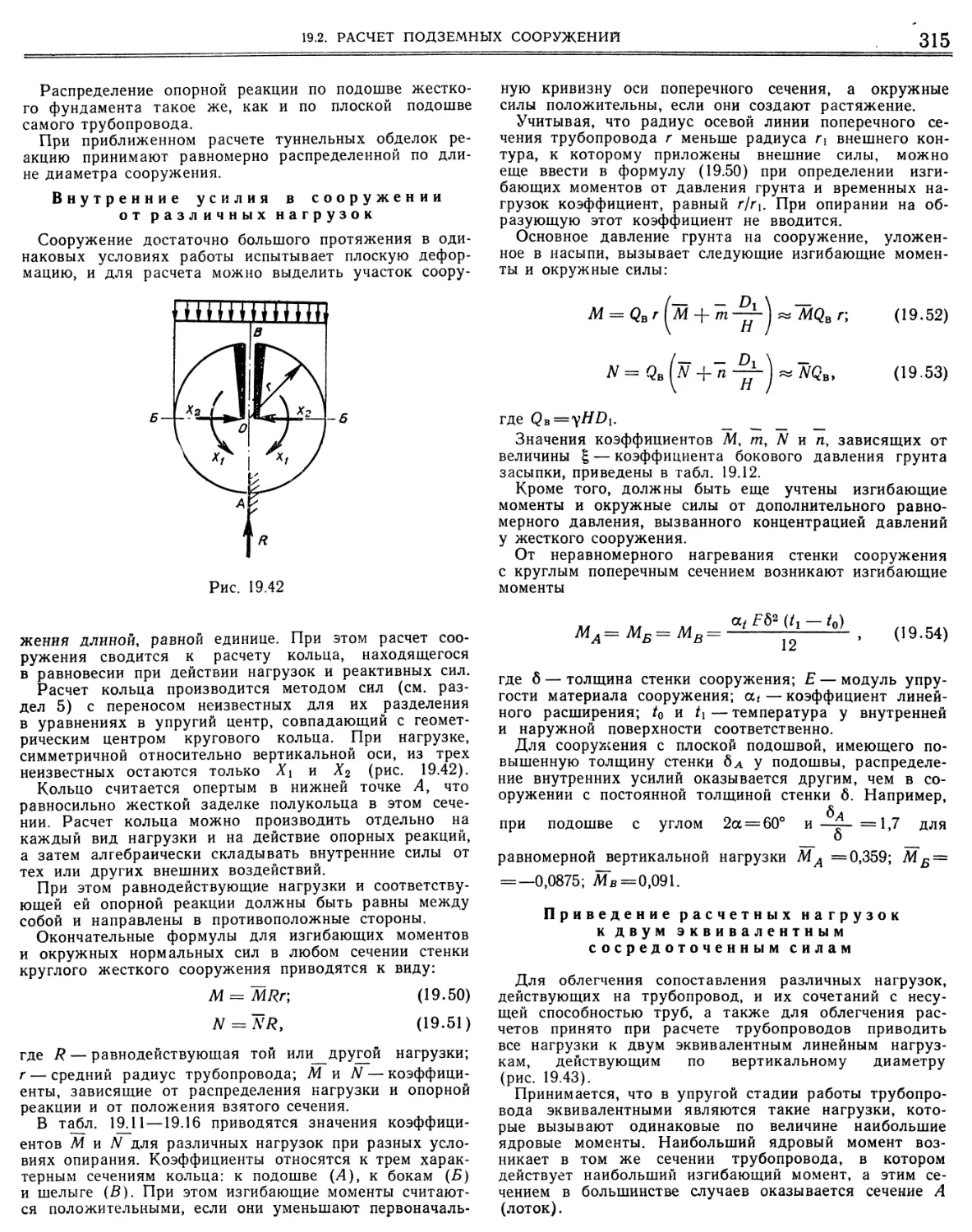
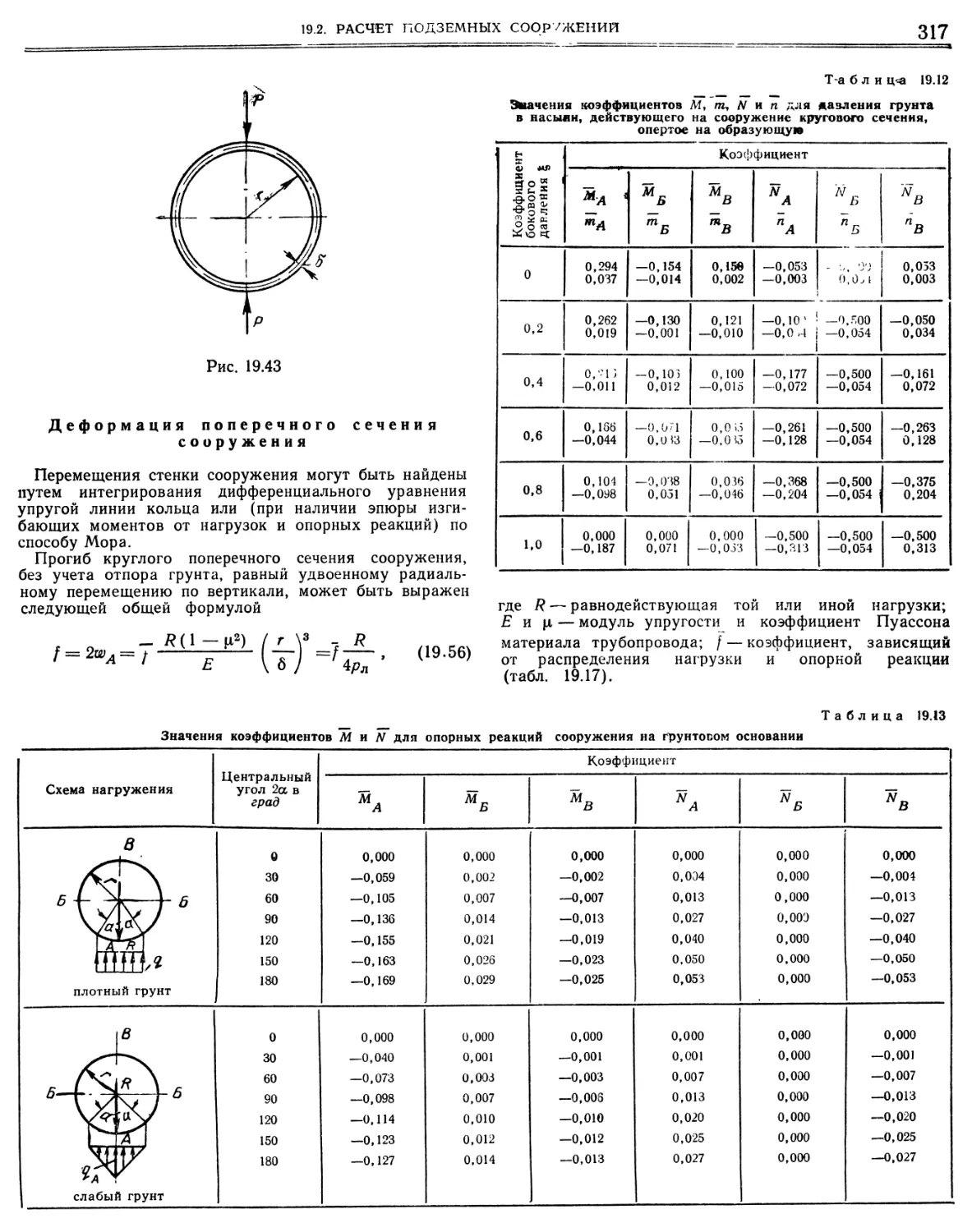
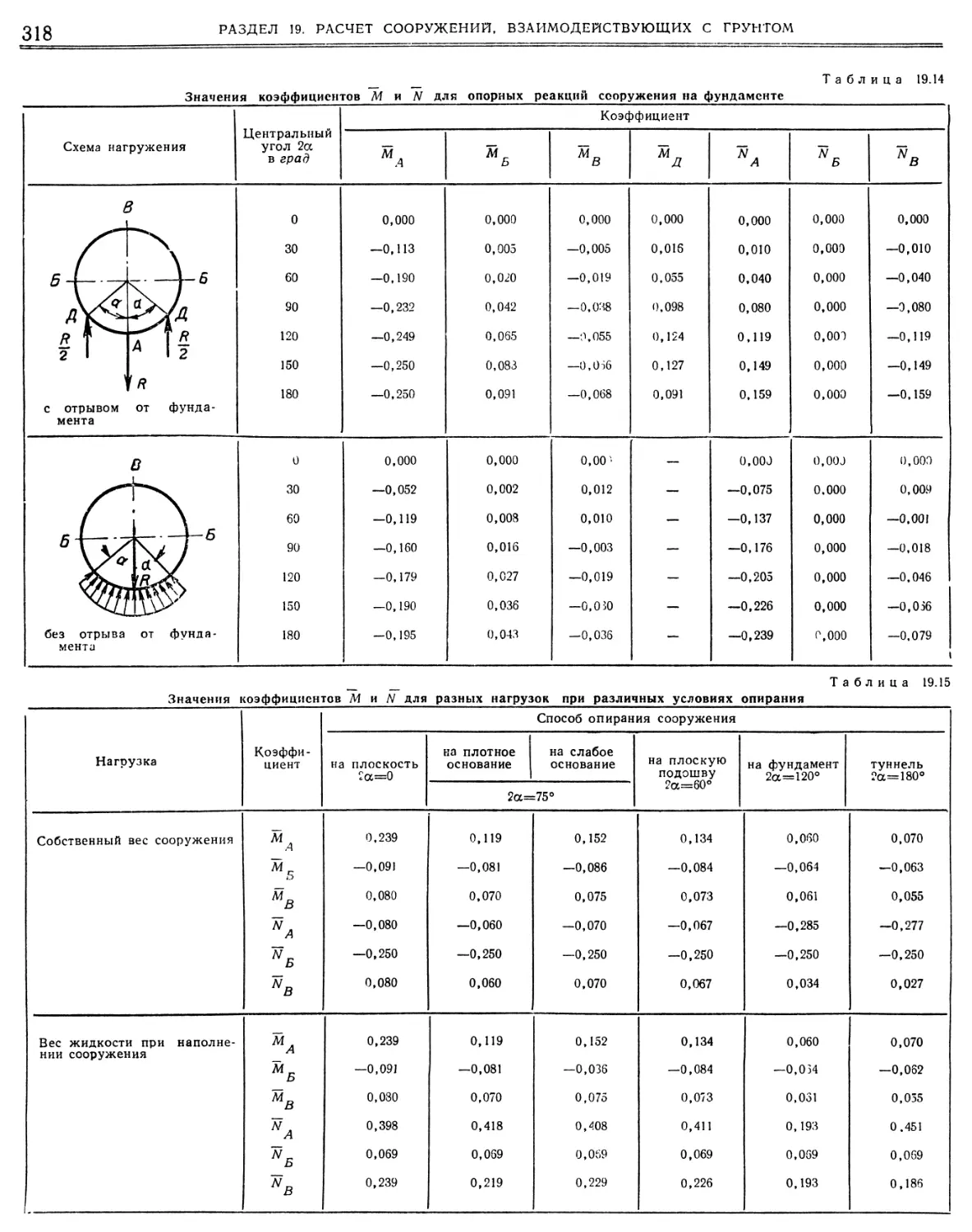
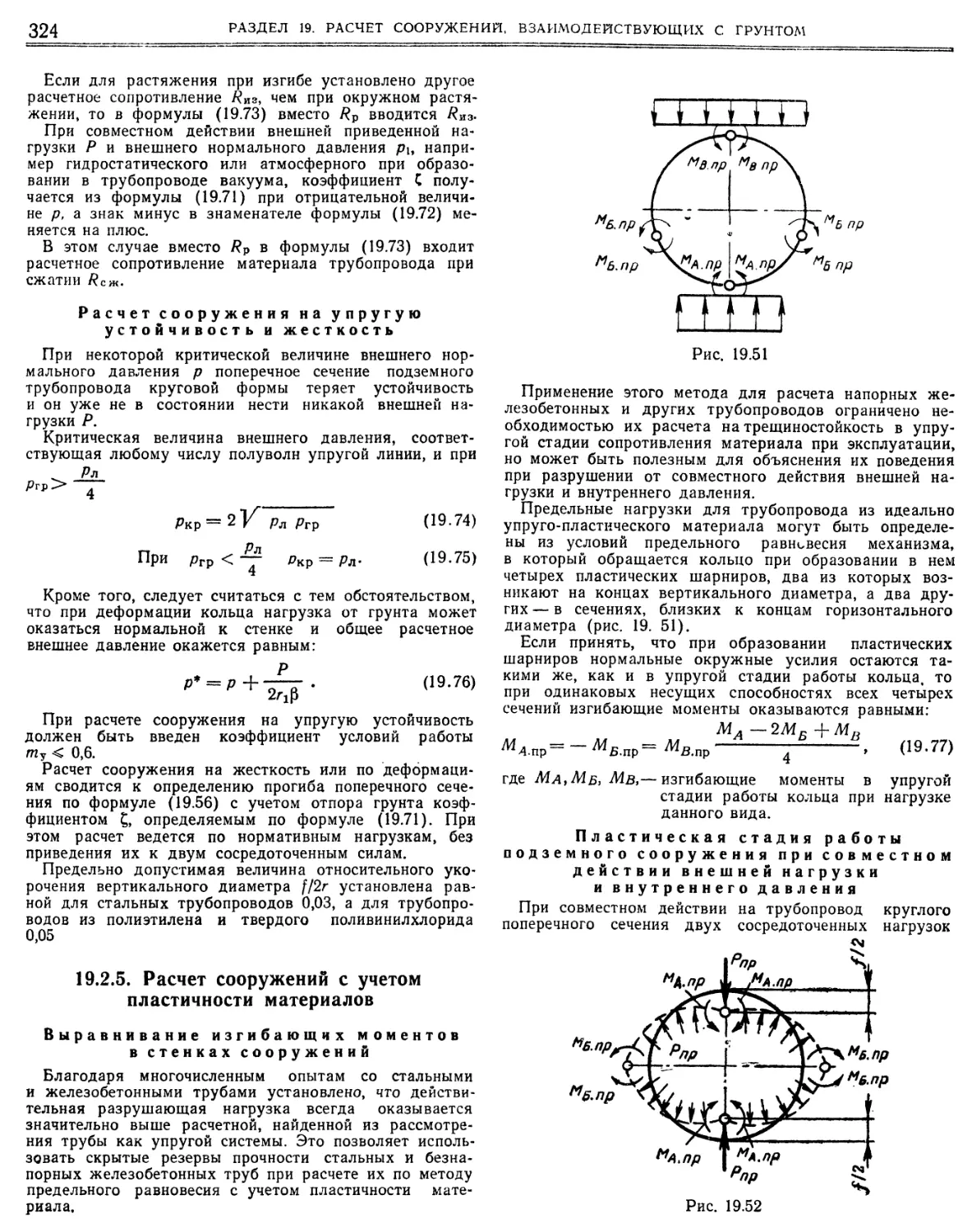
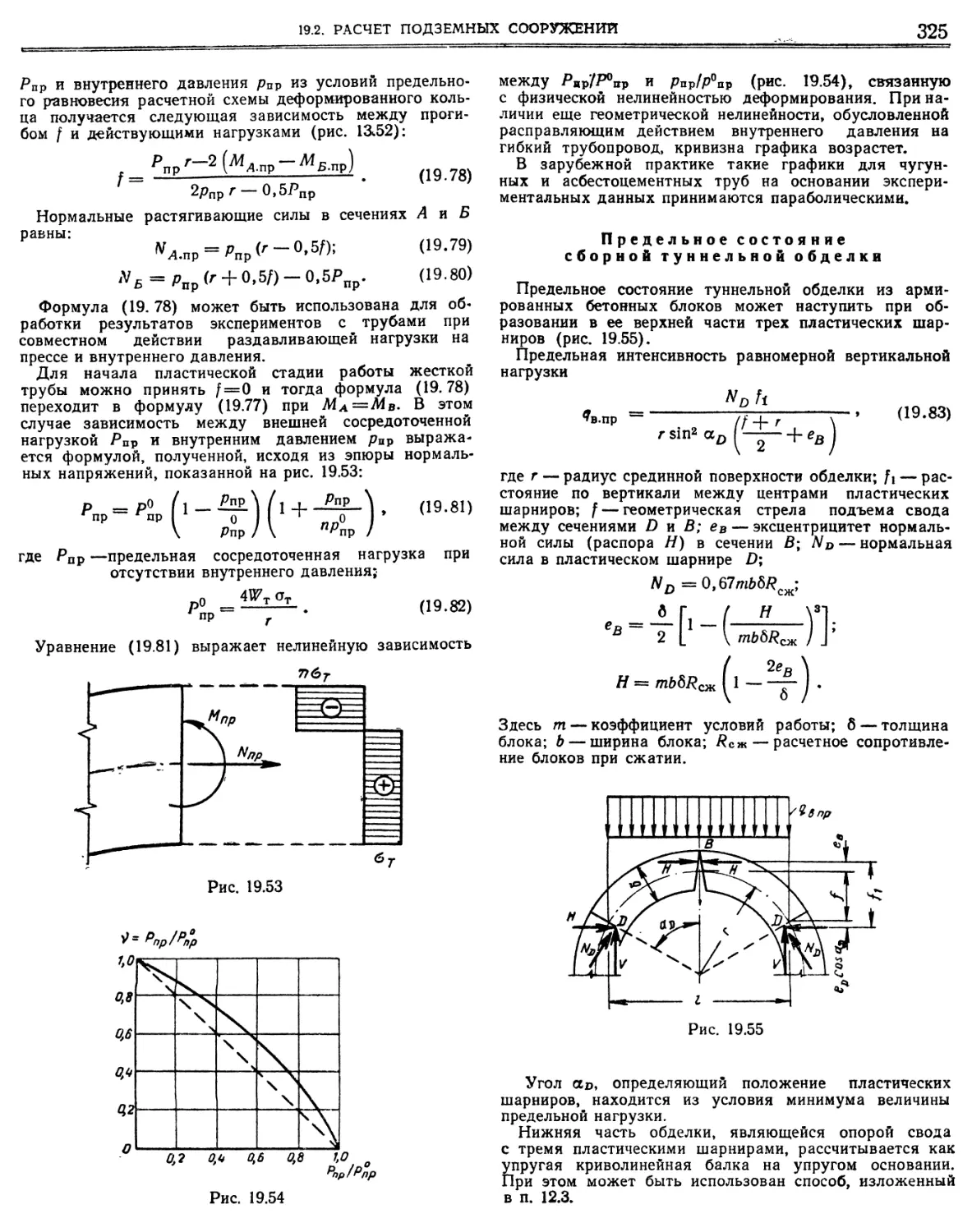
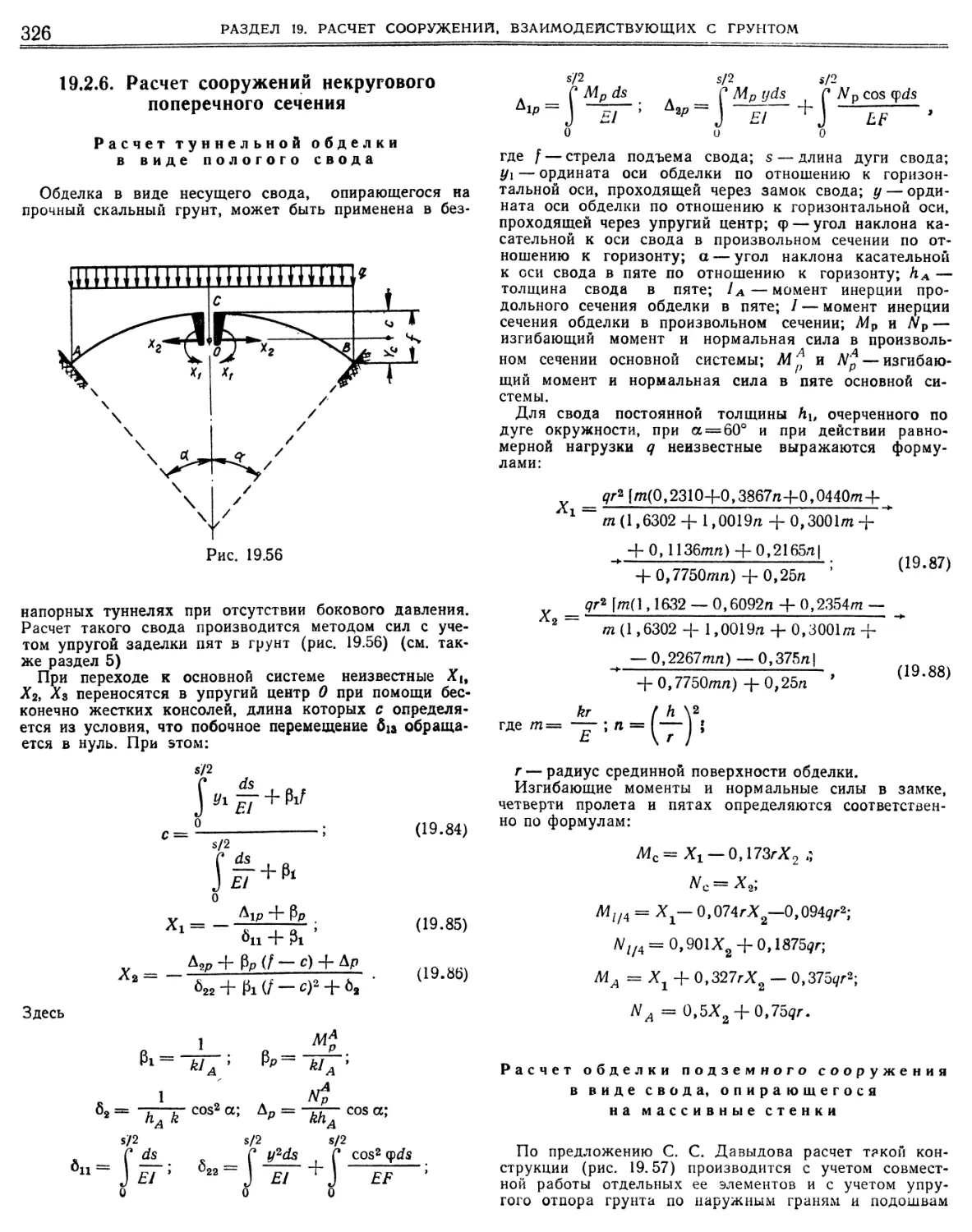
19. Расчет сооружений, взаимодействующих с грунтом
20. Динамика сооружений
21. Расчет конструкций (стержневых, пластинок и оболочек) по предельному равновесию и учет ползучести
Первая книга, наряду со Строительными нормами и правилами (СНиП), а также со специализированными томами «Справочника проектировщика», должна удовлетворять практическую потребность инженеров, занятых расчетом прежде всего стержневых конструкций. Вторая книга предназначена для инженеров, решающих более сложные задачи, в частности, по расчету оболочек.
Разделы 6, И, 15, 16 —новые, написанные специально для второго издания. Разделы 17 и 21 коренным образом переработаны по сравнению с соответствующими разделами первого издания. Остальные разделы переработаны частично и дополнены краткими сведениями
о расчетных методах, развитых в последнее десятилетие.
Раздел «Нормы нагрузок и габаритов» исключен, как дублирующий официальные нормативные издания.
РАЗДЕЛ 1
МАТЕМАТИКА1
1.1. АЛГЕБРА
1.11. Степени и корни
Степень числа а определяется при п натуральном равенством апаа. а, где число множителей равно п.
Корень степени п определяется равенством а) а. При положительном рациональном гтп (т, п —
п г натуральные числа) принимается аг — у ат,
Если V — положительное иррациональное число, то ау определяется как такое действительное число а, для которого выполняется условие
арааЧ, когда а 1,
или
аяаар, когда 0а1 при любых положительных рациональных р, ?, между которыми заключено V, рх17 (можно доказать, что такое число существует и единственно). Если а 1, принимается х 1.
При любом положительном п по определению ап 10 1 иа'?1, если аф0.
1Ъи любых показателях справедливы следующие формулы:
атап атп ат:ап атп (ат)п ■■
Птп.
(аЪ)т ат Ьп
ч ‘77 К
(т)
тп п п п п п. п л Уа У'7; У7-УТ УаЬ;
V? ь
т Формулы сокращенного умножения и деления:
(а ± Ь) а ± 2аЬ
(а ± Ь) а»± 3аЧ За6±63;
(а Ь) (а — Ь) а2 — Ь2;
(а ± Ь) (а2 ТаЬ 62) а8 ± 6;
ап — Ьп
. вп-1а'-2Н'в”-3г-
.а6п-2'
4-121
0-[“6
2Л 21 а —О
а2л—а2"-16--а2п—2 Ь2 Ь2п;
• ь
а2л’1—а2"-2а2л—3 6 -
ь2л-1
1 Матрицы и решение линейных уравнений см. в разд. 6,
Примечание. В приведенных формулах предполагается, что знаменатели отличны от нуля, а иррациональные величины являются действительными числами.
1.1.2. Логарифмы
Если где а0 и аФ, то показатель п назы¬
вается логарифмом числа N при основании а, обозначение: поVN. Всякое положительное число имеет логарифм.
Основные формулы:
I 0; 1оа а 1;
1о§а N2) о%а N1 1оа Ы2;
1°г « 1о N1 — 1о§а А
1о§а () 1о8а 1о%а N 1одв АГ.
к
Широко используются две системы логарифмов: десятичные, для них основанием служит число 10 (обозначение 1); натуральные, для них основанием слулшт число е (обозначение 1п Ы),
е Нт 1—V 2,71828.
П--оо П При основании а1 имеют место следующие свойства:
большему числу соответствует больший логарифм;
логарифмы чисел, меньших единицы, отрицательны; логарифмы чисел, больших единицы, положительны;
1оа N -► оо при N -■ оо;
1о« N -■ — оо при N - 0.
График логарифмической функции при а 1 дан на рис. 1.1.
Десятичный логарифм числа состоит из целой части,
12
РАЗДЕЛ 1. МАТЕМАТИКА
называемой характеристикой, и дробной части, называемой мантиссой. Характеристика числа, большего единицы, на единицу меньше числа его цифр, стоящих левее запятой; характеристика числа, меньшего единицы, отрицательна и равна по модулю, т. е. по абсолютному значению числу нулей, стоящих левее первой значащей цифры, включая нуль целых. Например, характеристика логарифма числа 25,3 равна 1, а числа 0,00253 равна —3. Мантиссы десятичных логарифмов см. [1.23.3]. Натуральные логарифмы даны в табл. 1.33.
Логарифмы числа при двух различных основаниях связаны соотношением
оь N
в частности, 1оь а 1оа Ь — 1;
число 11оЬ называется модулем перехода от основания а к основанию Ь. Между десятичными и натуральными логарифмами существует соотношение:
1п N -г— « 2,302591§ Ы;
1§е 1п 10
во факториала (л1)— п (я1). Понятие факториала распространяется на число 0, а именно: принимают 0 1; при этом остается в силе основное свойство: (01) 0(01). При больших п приближенные значения факториалов могут быть найдены с практически достаточной точностью по формуле Стирлинга:
п.
] 2.
ЯП
(т )’■
1.1.3. Прогрессии
Арифметической прогрессией называется последовательность чисел, в которой каждое последующее число получается прибавлением к предыдущему одного и того же числа называемого разностью прогрессии. Геометрической прогрессией называется последовательность чисел, в которой каждое последующее число получается умножением предыдущего на одно и то же число 7, называемое знаменателем прогрессии. Числа аи а2. образующие прогрессию, называются ее членами.
Формулы для п-то члена прогрессий: арифметической апа--й(п—1); геометрической ап а'1п1.
Формулы для суммы п членов прогрессий: арифметической
8п (а1 ап) — [21 1(п— 1)] —;
геометрической
_ апЯ — а 1 _ а1 (9я— )
- д-1
Если модуль знаменателя геометрической прогрессии менее единицы (71), то прогрессия называется убывающей. Если при этом число членов безгранично возрастает (п-оо), то
Д1
5 Нш 8п .П--оо 1 — Ц
1.1.4. Факториал
Факториал натурального числа п обозначается п и определяется равенством п — 1 2. п. Основное свойст-
1.1.5. Соединения
Группы элементов, отличающиеся одна от другой или порядком этих элементов, или самими элементами, называются соединениями.
Размещениями из п элементов по т при т п называются соединения, из которых каждое содержит т элементов из заданных п и которые различаются или самими элементами, или их порядком. Число размещений из п элементов по т:
А’? п (п - 1) (п - 2). •.[п - (т - 1)]
Перестановками из п элементов называются соединения, из которых каждое содержит все п элементов и которые различаются только порядком элементов. Число перестановок из п элементов:
Р„ Л" п.
Сочетаниями из п элементов по пг при тп называются соединения, из которых каждое содержит т элементов из заданных п и которые различаются, по крайней мере, одним элементом. Число сочетания из п элементов по т:
ст _ _ п(п-1)-[п — (т— 1)] _ п
п Рт т т (п—т)
Свойство сочетаний:
О-
пт гп—т Гт гт I гт 1
сл — сп сп — л—1 "Г п—1 •
Вместо обозначения С„ используется также символ
1.1.6. Бином Ньютона
При п натуральном
(а Ь)п ап С а"-1 Ь С ап2 Ь2
. СкпапкЬк1 1-Ьп.
Свойства биномиальных коэффициентов: коэффициенты членов, равноотстоящих от концов, равны между собой;
сумма всех коэффициентов равна 2П; сумма коэффициентов членов, стоящих на нечетных местах, равна сумме коэффициентов членов, стоящих на четных местах.
Формула бинома может быть распространена на отрицательные и дробные показатели; при этом получается в правой части равенства бесконечный ряд (см. 1.8.2).
1.1.7. Определители (детерминанты)
Определителем второго порядка называется выралвение Оу образованное из четырех величин (элементов),
1.1. АЛГЕБРА
13
расположенных в квадратную таблицу, и определяемое Пример 1.1:
по формуле
0ц
012
013
0ц
012
0ц а22 — 012 021»
021
022
03
021
022
031
082
038
0ц Ац 012 А12 о. 13 Л13
иирсдслшслсш 1Ь1 V 1шрдла
Д образованное из п2 величин (элементов), расположенных в квадратную таблицу
02 023
021
023
013
021
022
— 012
032 033 1
031
038
031
032
011
012
01П
021
022 ‘
02 п
011
а ту
апп
и определяемое следующим образом: О равно алгебраической сумме п членов, каждый из которых является произведением п элементов определителя, взятых по одному из каждой строки и каждого столбца; произведение берется со знаком плюс или минус в зависимости от того, четно или нечетно число инверсий в перестановке из вторых индексов перемножаемых элементов, если первые индексы расположены в возрастающем порядке (в перестановке числа I и составляют инверсию, если , но стоит в этой перестановке после ). Например, для определителя третьего порядка
ап
Вычисление определителя я-го порядка требует вычисления п определителей порядка п—1. Можно, однако, пользуясь свойствами определителей, свести задачу к вычислению лишь одного определителя порядка п—I; с этой целью преобразуют данный определитель так, чтобы в какой-либо строке (или столбце) обратились в нуль все элементы, кроме одного.
Пример 1.2:
3
6
—3 —2
—2
4
О
—3
Обратим в нули элементы второго столбца, для чего умножим элементы первой строки на 2 и прибавим их ко второй строке; затем умножим элементы первой строки на —1,5 и прибавим их к четвертой строке (от этих операций определитель не изменит своей величины):
011
012
013
3
—2
1
5
021
022
023
— 011 022 033 — 0Ц 0?3 032012 023 031 —
12
—3
0
0
4
1
9
4
031
032
033
— 012 021 033 013 021 032—013 а22 а31
—6,5
0
5,5
—5,5
число слагаемых равно 3, т. е. 6; первые индексы следуют в порядке 1, 2, 3; во вторых индексах имеется шесть перестановок; в первом слагаемом нет инверсий, во втором есть одна инверсия (32), в третьем — две инверсии (21 и 31) и т. д.
Свойства определителей:
1) при замене строк столбцами величина определителя не меняется;
2) при перестановке двух столбцов или строк определитель меняет знак;
3) определитель с двумя одинаковыми столбцами (или строками) равен нулю;
4) множитель, общий для элементов некоторого столбца или строки, можно вынести за знак определителя;
5) величина определителя не изменится, если к элементам некоторого столбца или строки прибавить элементы параллельного столбца или строки, предварительно умножив эти последние на один и тот же произвольный множитель I.
Вычисление определителя можно свести к вычислению определителей порядка на единицу ниже. Назовем минором элемента ал определитель, получаемый вычеркиванием -й строки и к-го столбца данного определителя. Назовем адъюнктой (или алгебраическим дополнением) элемента 0 его минор, умноженный на (—); обозначим адъюнкту элемента агк через Лл. Тогда справедливы равенства:
О ац Ац а 12 А • • 0п А1П;
в — а1 к Ац? 4- а2к Аъь Н 1 О-пк Апь,
т. е. определитель равен сумме произведений элементов какой-нибудь строки (или столбца) на их алгебраические дополнения. Эти равенства называются разложениями определителя соответственно по элементам -й строки и -го столбца.
Теперь разложим определитель по элементам второго столбца:
0 (_1)12.(_2).
12 4 9
-3 1 4
6,5 5,5 -5,5
остается вычислить определитель третьего порядка.
В теории линейных дифференциальных уравнений с постоянными коэффициентами находит применение следующий определитель, называемый определителем Вандермонда и вычисляемый по формуле
1
х2
А
х2
(х2—X)) Хц—хх)-.хп—хх) (дгз— 2) (а ““ г) (хп хп— 1).
Необходимым и достаточным условием неравенства этого определителя нулю является отсутствие одинаковых чисел в последовательности хи х2, хп.
1.1.8. Линейные уравнения
Дана система трех линейных уравнений: аи х а12 у а13 г Ьг; а21 х а22 У 4“ 23 2 — 2
031 X 4" 032 У 033 2 Ь3.
Обозначим определитель, составленный из коэффициентов при неизвестных, через 5, а определитель, получен¬
14
РАЗДЕЛ I, МАТЕМАТИКА
ный заменой -го столбца определителя столбцом свободных членов, через 11, 2, 3:
11
«12
13
А
12
13
21
«22
23
; о»
6
22
23
31
32
33
32
33
и
13
°11
12
21
2
23
; Л,
22
2
81
3
33
31
32
3
1)2
Если ОФ 0, то имеется единственное решение:
й
о ’
О
Если 00, но хотя бы один из определителей Ои Оз отличен от нуля, то корней нет, система несовместна.
Если 0—0 и )1 020з0, то система либо несовместна, либо неопределенна (имеет бесконечное множество корней). Система несовместна тогда, когда все миноры определителя Г равны нулю, а хотя бы один определитель второго порядка из таблицы
11 12 13
21 22 23 2
31 а32 33 Ъ3
не равен нулю. Система неопределенна в двух случаях:
1) если хотя бы один из миноров определителя О не равен нулю; тогда система сводится к двум уравнениям, из коэффициентов которых образован такой минор;
2) если все определители второго порядка из указанной таблицы равны нулю; тогда система сводится к одному уравнению.
Если свободные члены равны нулю (12«0), то система уравнений называется однородной. В этом случае 152Оз0, ©днако несовместность невозможна, поскольку система имеет нулевые корни ху 20, каковы бы ни были коэффициенты уравнения; если ОфО, то имеются только нулевые корни; если 00, то имеется бесчисленное множество корней.
Приведенные рассуждения распространяются на системы линейных уравнений с числом неизвестных, отличным от трех.
Определители применяются для исследования линейных уравнений. Что касается вычисления корней, то при большом числе неизвестных пользуются приближенными методами (см. раздел 6). В настоящее время применение счетных машин дает возможность решать (и притом достаточно быстро) системы линейных уравнений с большим числом неизвестных.
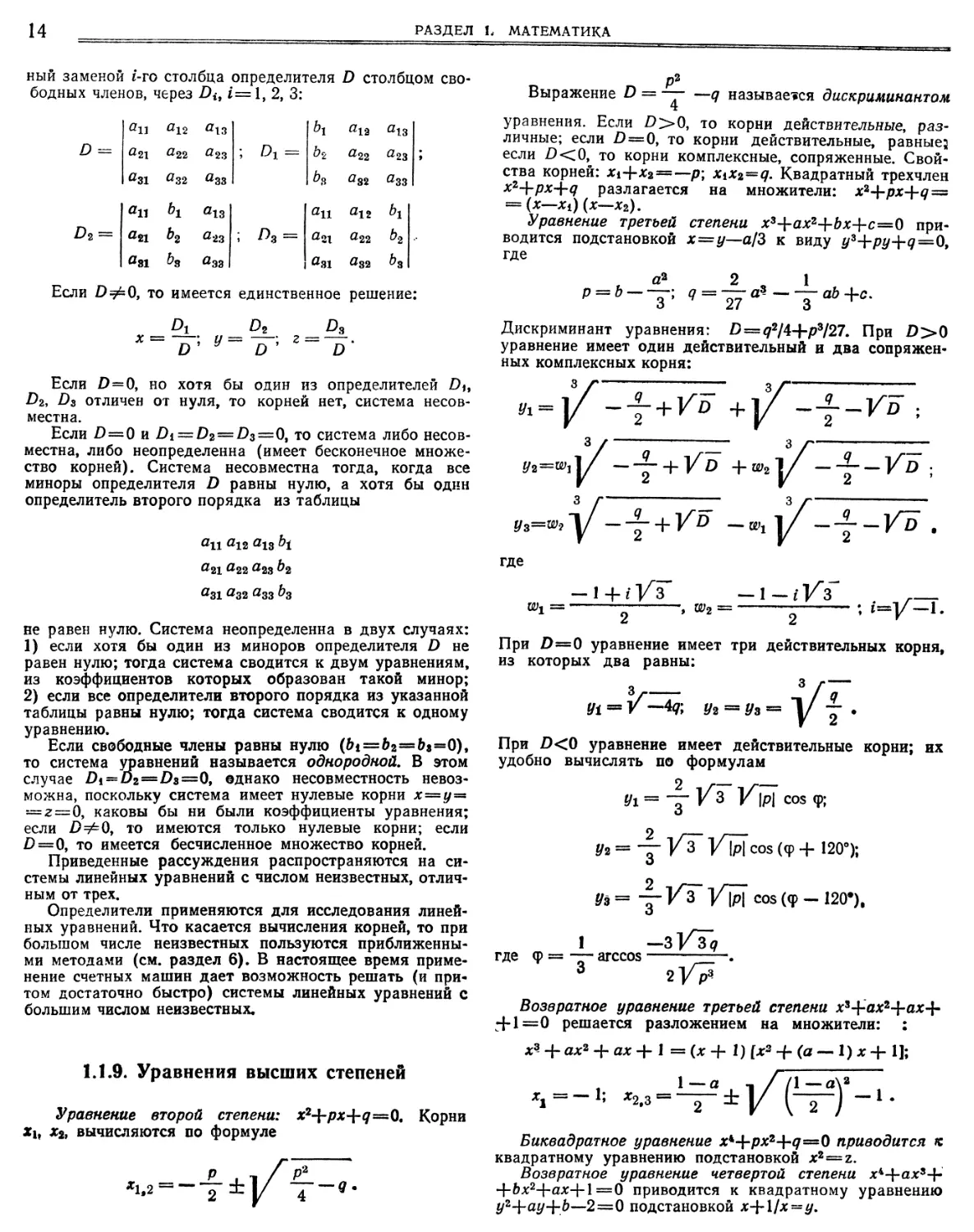
1.1.9. Уравнения высших степеней
Уравнение второй степени: х2рхд0. Корни XI, х% вычисляются по формуле
р 1 р2 1,2 ±у Х-9
Выражение О — —д называемся дискриминантом
уравнения. Если то корни действительные, раз¬
личные; если )0, то корни действительные, равные? если то корни комплексные, сопряженные. Свой¬
ства корней: 12—р; хъ—д. Квадратный трехчлен х2--рхЯ разлагается на множители: лса-
(—Хх) (х—х2).
Уравнение третьей степени х3ах2Ьхс0 приводится подстановкой ху—а1% к виду угруд О, где
, а2 2 о 1
р 6_—; 9 _аэ__а6с
Дискриминант уравнения: 0д24р127. При )0
уравнение имеет один действительный и два сопряженных комплексных корня:
]"-у-Ко ;
УО щ'Г — — Ко ;
т Г "У “ Ко.
Уз
где
щ •
-1 гКз
щ:
2 ' 2
При 1)0 уравнение имеет три действительных корня, из которых два равны:
з
У1
При )0 уравнение имеет действительные корни; их удобно вычислять по формулам
Ух “7“ К3 Vр соз ф;
«2 — Кз Кр[ соз (р 120°);
й Т 008 (р I20’)•
где ф — агссоз
3
—зУТд
2]
Возвратное уравнение третьей степени хах2ах -(-10 решается разложением на множители: :
хз ах2 ах 1 (Х 1)[х2 (а_т1)хц;
2.3 ± ] -1-
Биквадратное уравнение хрх2д0 приводится к квадратному уравнению подстановкой 2г.
Возвратное уравнение четвертой степени х4--ах8-Ь2адс10 приводится к квадратному уравнению 2.—20 подстановкой х1х—у.
1.1. АЛГЕБРА
15
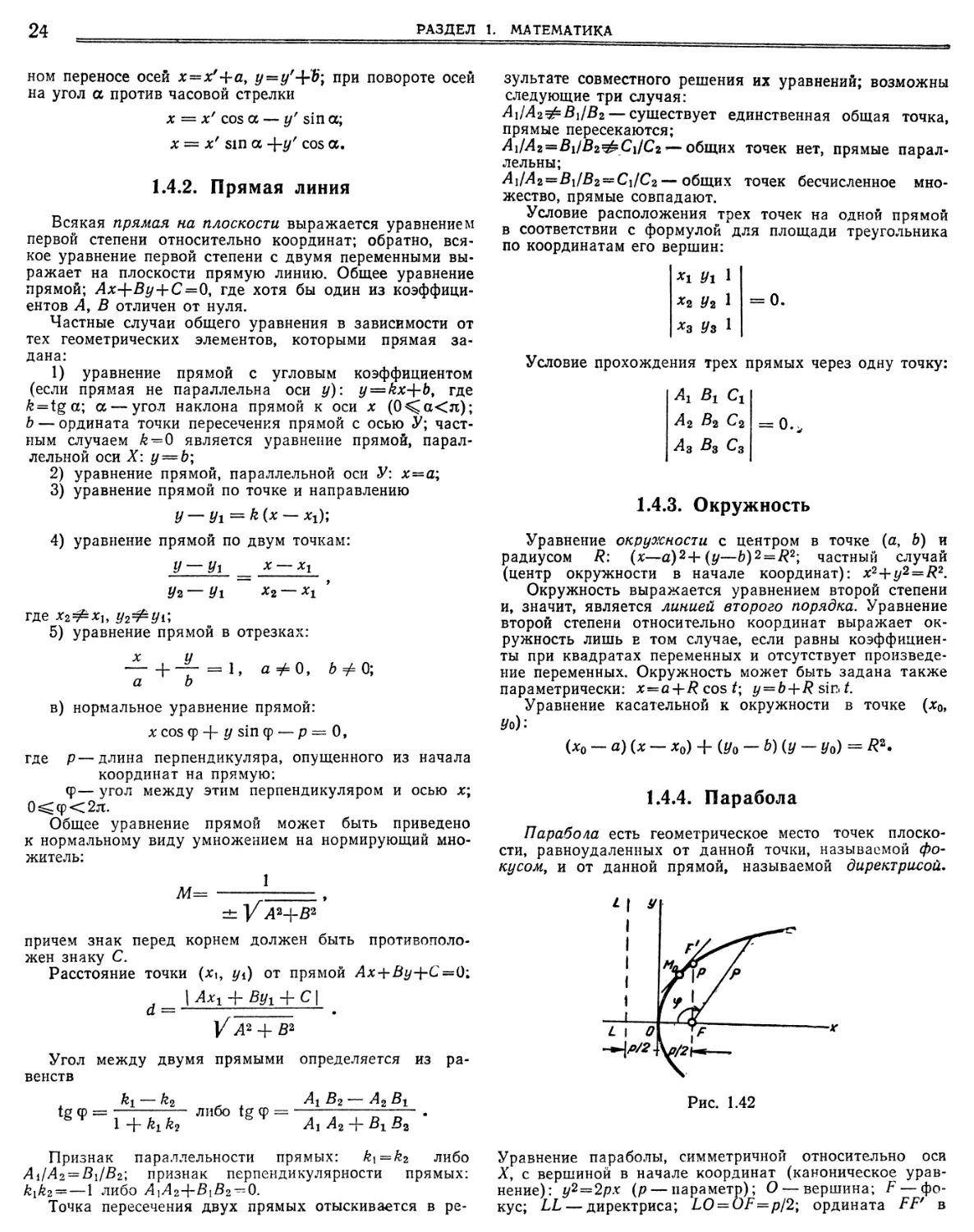
Другие уравнения четвертой степени, хотя и могут быть решены по общей формуле в радикалах, в практических приложениях при численных коэффициентах решаются приближенными методами. Корни уравнений общего вида более высоких степеней отыскиваются также приближенными методами.
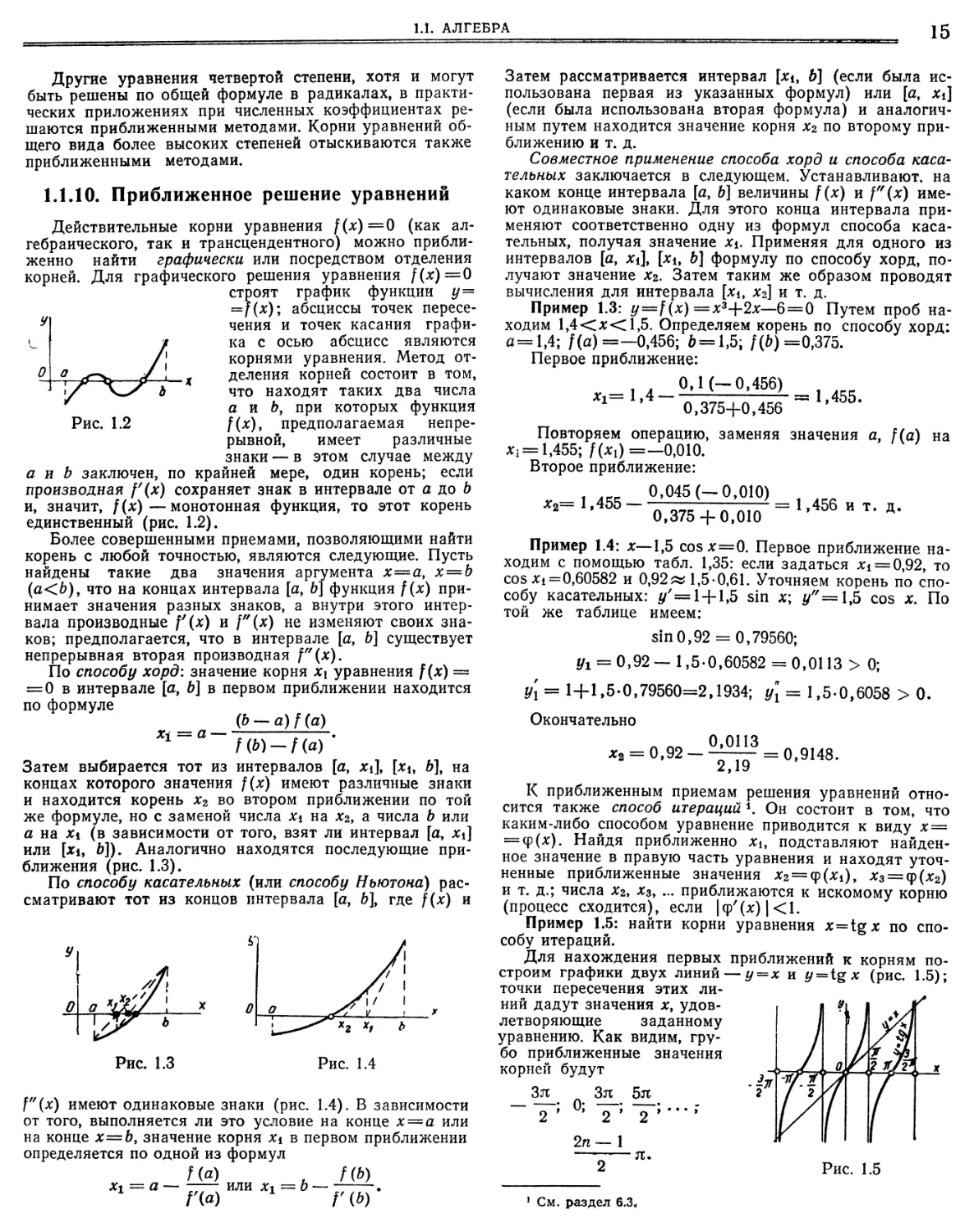
1.1.10. Приближенное решение уравнений
Действительные корни уравнения (х)0 (как алгебраического, так и трансцендентного) можно приближенно найти графически или посредством отделения корней. Для графического решения уравнения ()0 строят график функции у —(х); абсциссы точек пересечения и точек касания графика с осью абсцисс являются корнями уравнения. Метод отделения корней состоит в том, что находят таких два числа а и Ьу при которых функция (), предполагаемая непрерывной, имеет различные знаки — в этом случае между а и Ь заключен, по крайней мере, один корень; если производная '(х) сохраняет знак в интервале от а до Ь
и, значит, (х)—монотонная функция, то этот корень единственный (рис. 1.2).
Более совершенными приемами, позволяющими найти корень с любой точностью, являются следующие. Пусть найдены такие два значения аргумента х—ау х — Ь (аЬ), что на концах интервала [а, Ь] функция (х) принимает значения разных знаков, а внутри этого интервала производные '(х) и "(х) не изменяют своих знаков; предполагается, что в интервале [а, Ь] существует непрерывная вторая производная "().
По способу хорд: значение корня Х уравнения () 0 в интервале [а, Ь] в первом приближении находится по формуле
Рис. 1.2
хг а-
(Ь — а) (а)
ПЬ)-Па)
Затем выбирается тот из интервалов [а, хЦу [.Х, Ь]у на концах которого значения (х) имеют различные знаки и находится корень х2 во втором приближении по той же формуле, но с заменой числа х на х2у а числа Ь или а на Х (в зависимости от того, взят ли интервал [а, х] или [.%, 6]). Аналогично находятся последующие приближения (рис. 1.3).
По способу касательных (или способу Ньютона) рассматривают тот из концов интервала [а, Ь где (х) и
"(х) имеют одинаковые знаки (рис. 1.4). В зависимости от того, выполняется ли это условие на конце ха или на конце хЬ, значение корня Х в первом приближении определяется по одной из формул
На), (Ь)
хх а — или хг — Ь- —
Затем рассматривается интервал [х Ь] (если была использована первая из указанных формул) или [ау х (если была использована вторая формула) и аналогичным путем находится значение корня х2 по второму приближению и т. д.
Совместное применение способа хорд и способа касательных заключается в следующем. Устанавливают, на каком конце интервала [а, Ь] величины (х) и "(х) имеют одинаковые знаки. Для этого конца интервала применяют соответственно одну из формул способа касательных, получая значение XI. Применяя для одного из интервалов [а, Х1], [х±, Ь] формулу по способу хорд, получают значение х2. Затем таким же образом проводят вычисления для интервала [хи х2] и т. д.
Пример 1.3: у(х) х32х—60 Путем проб находим 1,4х1,5. Определяем корень по способу хорд: а 1,4; (а) —0,456; Ь 1,5; ЦЬ) 0,375.
Первое приближение:
, 0,1 (—0,456)
1— ’ 0,3750,456 ’455‘
Повторяем операцию, заменяя значения а, На) на 1,455;(,)—0,010.
Второе приближение:
, 0,045 (—0,010)
2 1 ’455 0,375 0,010 1 456 и т. д.
Пример 1.4: х—1,5 соз0. Первое приближение находим с помощью табл. 1,35: если задаться дс1 0,92, то С0510,60582 и 0,92» 1,5 0,61. Уточняем корень по способу касательных: у' 1 1,5 зт ; '1,5 соз х. По той же таблице имеем:
зт 0,92 0,79560;
Ух 0,92 — 1,50,60582 0,0113 0;
У 11,5-0,795602,1934; у 1,5-0,6058 0.
Окончательно
0,0113
2 0,92 -
2,19
0,9148.
К приближенным приемам решения уравнений относится также способ итераций . Он состоит в том, что каким-либо способом уравнение приводится к виду х р(). Найдя приближенно х1у подставляют найденное значение в правую часть уравнения и находят уточненные приближенные значения х2 ф(л:1), х3 р(х2) и т. д.; числа х2у ХзУ. приближаются к искомому корню (процесс сходится), если р'()1-
Пример 1.5: найти корни уравнения х%х по способу итераций.
Для нахождения первых приближений к корням построим графики двух линий — у—х и у 1%х (рис. 1.5); точки пересечения этих линий дадут значения ху удовлетворяющие заданному уравнению. Как видим, грубо приближенные значения корней будут
Зя Зя 5тс
2 9 °’ 2’ 1Г; ‘ ;
2п — 1
'«)
Г V)
1 См. раздел 6.3
16
РАЗДЕЛ 1. МАТЕМАТИКА
Учтя, что (1дх)'5ес2х1, перепишем уравнение
_ Зя
в следующем виде: хагсх%х. Положим х0—-, тогда
Зя
хх агс§ — 4,5033 (см. табл. 1.36);
х2 агс( хг агс 4,5033 4,4938; х3 агс1 х2 агс1§ 4,4938 4,4935.
Нетрудно убедиться, что подстановка значения х 4,4935 в заданное уравнение хЬ%х обращает его в тождество (в пределах заданной точности).
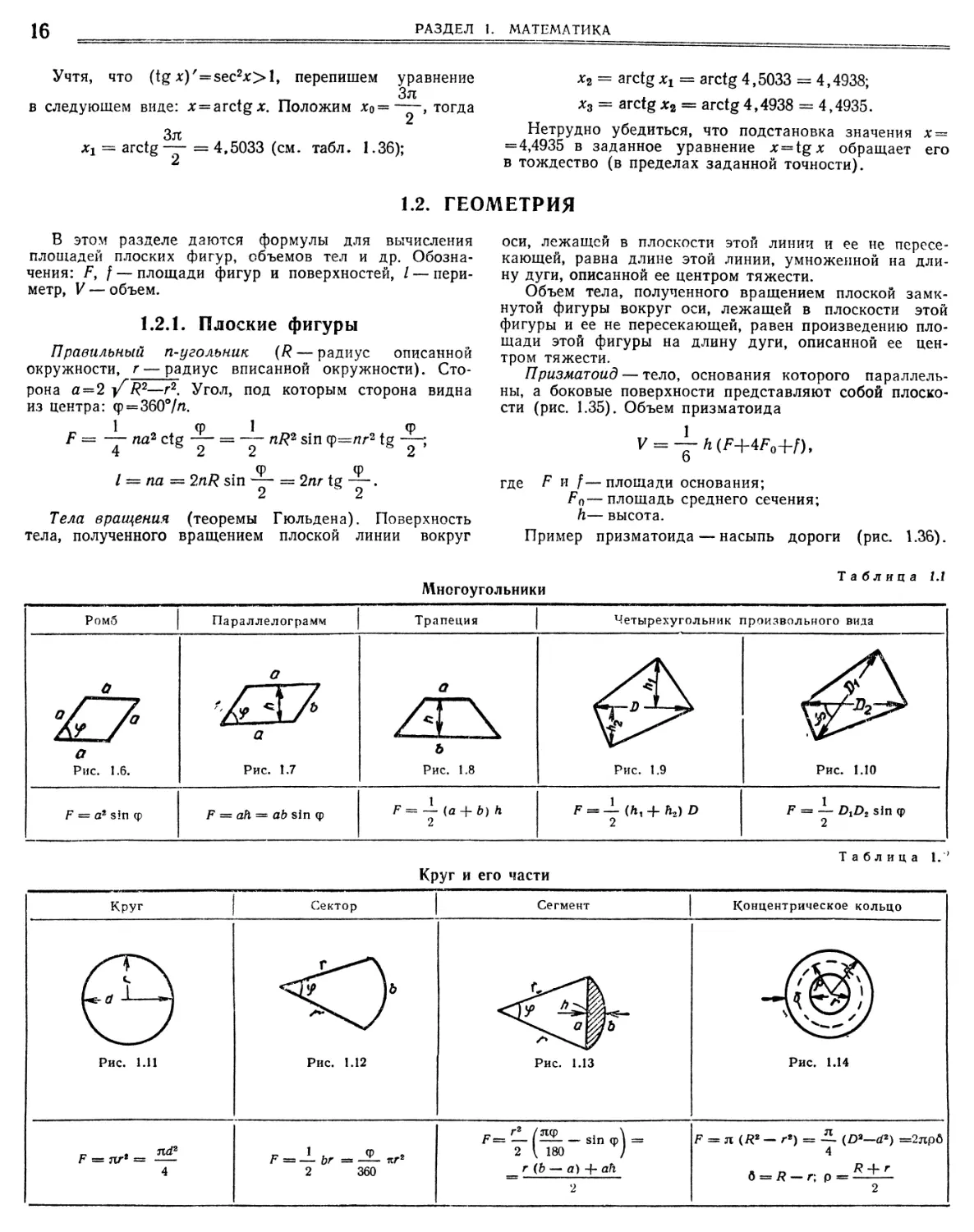
1.2. ГЕОМЕТРИЯ
В этом разделе даются формулы для вычисления
площадей плоских фигур, объемов тел и др. Обозна¬
чения: Ру — площади фигур и поверхностей, — периметр, V — объем.
1.2.1. Плоские фигуры
Правильный п-угольник (? — радиус описанной окружности, г — радиус вписанной окружности). Сторона а—2 ?2—г2. Угол, под которым сторона видна
из центра: р 360°М.
1 Ф 1 Ф
Р — па2 с§ —— пК2 51 п ф7г2;
Ф Ф
па 2пЯ 51П — 2пг —.
2 2
Тела вращения (теоремы Гюльдена). Поверхность тела, полученного вращением плоской линии вокруг
оси, лежащей в плоскости этой линии и ее не пересекающей, равна длине этой линии, умноженной на длину дуги, описанной ее центром тяжести.
Объем тела, полученного вращением плоской замкнутой фигуры вокруг оси, лежащей в плоскости этой фигуры и ее не пересекающей, равен произведению площади этой фигуры на длину дуги, описанной ее центром тяжести.
Призматоид — тело, основания которого параллельны, а боковые поверхности представляют собой плоскости (рис. 1.35). Объем призматоида
где Р и —площади основания;
Ро—площадь среднего сечения; к— высота.
Пример призматоида — насыпь дороги (рис. 1.36).
Многоугольники
Таблица 1Л
Ромб I
Параллелограмм
Трапеция
Четырехугольник произвольного вида
2Г7
а
Рис. 1.6.
О
'? У‘
а
Рис. 1.7
Т
Ь
Рис. 1.8
Рис. 1.9
Рис. 1.10
Р а2 зп ф
Р аН — аЬ з1п р
Р — (а 4- Ь) Н
2
Р — (Л, йг О
2
Р — — 51п ф 2
Таблица 1.'
Круг и его части
Круг
Сектор
Сегмент
Концентрическое кольцо
©
о
о
Л.
-)
Рис. 1.11
Рис. 1.12
Рис. 1.13
Рис. 1.14
с-
р ЯГ 4
р в Л Ьг -2- г2 2 360
Г-Т.1-зт ф
2 V 180 )
г (Ь — а) аН
2
р я (Я2 — г) -5. (о—а2) 2яр6
4
— К — г ; р - -
2
1.2. ГЕОМЕТРИЯ
17
Площади, ограниченные кривыми второго порядка
Таблица 1.3
Эллипс
Эллиптический сегмент
Гиперболический сегмент
Параболический сегмент
1 1 аг Ьг
2 У2 г а2 Ь2
уг — 2 рх
Рис. 1.17
Рис. 1.18
Р яаЬ,
а — Н 1.
Р аЬ агееоз с (а—п)
а 2
Р — — с (а 4 к) —►
2
— аЬ АгсЬ
а »
Примечание к табл. 1.3. Для параболы по формуле Чебышева приближенно: » I 14 ■ ; точно; I
3 с?
V
Р — аН 3
16 Л2
41 п (г -
1
0,5с
12
, где г 4 —.
Значение 5 в зависимости от 1а
Таблица 1.4
Ьа
1 °-1 1
0,2 0,3
0,4
0,5
I °’6 I
Г 0,7
0,8
0.9
1
4,0640
4,2020 4,3860
4,6016
4,8412
5,1054
5,3824
5,6723
5,9732
1.2.2. Тела Тела, ограниченные плоскостями
Таблица 1.5
Прямая призма
Треугольная усеченная призма
Пирамида
Усеченная пирамида
а
Рис. 1.19
Рис. 1.20
Рис. 1.21
Рис. 1.22
V РН
У (а Ь с) Р 3
V — РН 3
У -1 й (р 1
-7 ['Г]
18
РАЗДЕЛ I. МАТЕМАТИКА
Цилиндр и конус
Таблица 1.6
Цилиндр с параллельными основаниями
Прямой круговой цилиндр
Усеченней прямой круговой цилиндр
Прямой круговой конус
Прямой круговой усеченный конус
Г
СО
к—4
1ю
ш
Рис. 1.23
Рис. 1.24
Рис. 1.25
Рис. 1.26
Рис. 1.27
Л — кратчайшее расстояние между основаниями
и Нг — наименьшее и наибольшее расстояния между контурами оснований
Л-2 Н
р --(Я 0:
2
- (Я - г) Н
У РН
V пг2Н; Р% 2пгН;
у 4-яг (й, А2): 2
V — ягй; 3
у — ф г‘Кг);
3
Р2 2яг (г -- к)
Рх яг (Л4 Л2)
рх — пг1 — пг г2 -- Я2
2 яр
Шар и его части
Таблица 1.7
Шар
Шаровой сегмент
Шаровой пояс
Шаровой сектор
Рис. 1.28
Рис. 1.29
т2А
Л
Рис. 1.31
а 2г
а2 Н (2г—Н)
аг Н (2г — Н)
V — яг3 4,189 3
Я 0,5236 4»
У — (За Н1)
_«51Саг —л
з
V — (3 а2 ЗЬ2 2) 6
г 4 тег2 яа2
Р 2 ягН — я (а2 Л)
р — 71Г (2Н а)
1. ТРИГОНОМЕТРИЯ
19
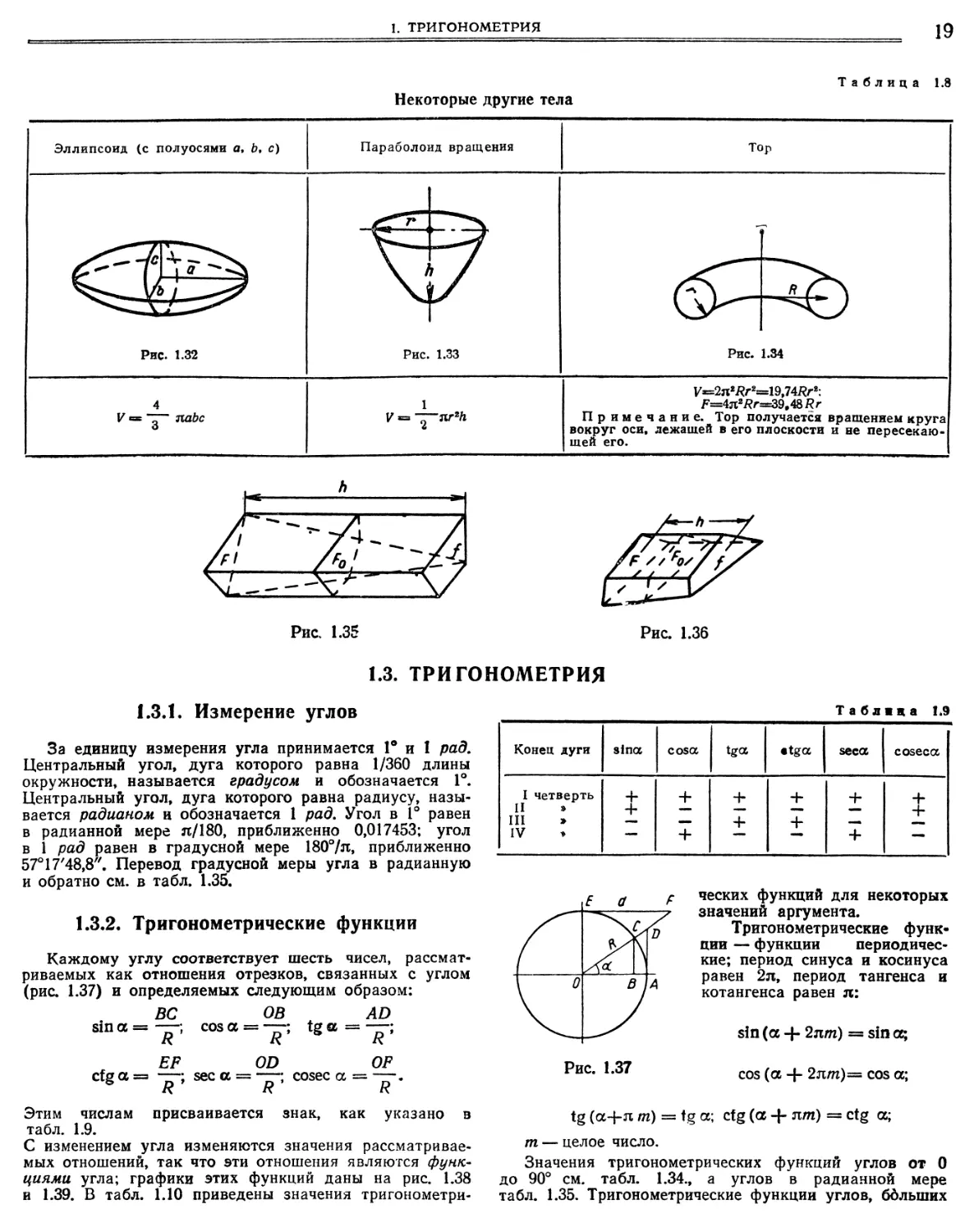
Таблица 1.8
Некоторые другие тела
Эллипсоид (с полуосями о, Ь, с)
Параболоид вращения
Тор
Рис. 1.32
ГГ
Рис. 1.33
Рис.
1.34
4
V в паЬс
1
V ЯггН
У2я2Яг219,74Я'2:
’4я2г39,48 г Примечание. Тор получается вращением круга вокруг оси, лежащей в его плоскости и не пересекающей его.
1.3. ТРИГОНОМЕТРИЯ
1.3.1. Измерение углов
За единицу измерения угла принимается Iе и 1 рад.
Центральный угол, дуга которого равна 1360 длины окружности, называется градусом и обозначается 1°.
Центральный угол, дуга которого равна радиусу, называется радианом и обозначается 1 рад. Угол в 1° равен в радианной мере я180, приближенно 0,017453; угол в 1 рад равен в градусной мере 180°я, приближенно 57°17'48,8". Перевод градусной меры угла в радианную и обратно см. в табл. 1.35.
1.3.2. Тригонометрические функции
Каждому углу соответствует шесть чисел, рассматриваемых как отношения отрезков, связанных с углом (рис. 1.37) и определяемых следующим образом:
ВС ОБ АО
ап«Т, СОЗ
ЕР ОЭ ОР
а —: зес а —; созес а —.
6 ? Я
Этим числам присваивается знак, как указано в табл. 1.9.
С изменением угла изменяются значения рассматриваемых отношений, так что эти отношения являются функциями угла; графики этих функций даны на рис. 1.38 и 1.39. В табл. 1.10 приведены значения тригонометри-
Таблаща 1.9
Конец дуги
зпа
соза
зееа
созеса
I четверть
II »
—
—
—
—
-ь
III »
—
4
—
IV
ческих функций для некоторых значений аргумента.
Тригонометрические функции — функции периодические; период синуса и косинуса равен 2л, период тангенса и котангенса равен я:
зп (а 2пт) зт ос;
соз (а 2яп) соз а;
(ая т) ♦§ а; сд (а пт) с§ а; т — целое число.
Значения тригонометрических функций углов от 0 до 90° см. табл. 1.34., а углов в радианной мере табл. 1.35. Тригонометрические функции углов, ббльших
20
РАЗДЕЛ 1. МАТЕМАТИКА
Таблица 1.10
Угол в град
0
90
180
270
360
30
45
60
Угол в рад
0,0000
— «1,5708 2
я «3,1416
Я« 4,7124
2
2я« 6,2832
— «0,5236
6
— «0,7854 4
— «1,0472 3
31П а
0
1
0
—1
0
— 0,5000 2
уТ
- 0,7071
2
Уг
0,8660
2
соз а
1
0
—1
0
1
уТ
0,8660
2
уТ
0,7071
2
— 0,5000
2
1да
0
°о
0
--со
0
Уг
1 0,5774
3
1
V3 1,7321
с§ а
0
±°о
0
11 оо
-3 1,7321
1
0,5774
3
Знак ± со означает, что 1а(или а) стремится к 00 при стремлении угла к соответствующему значению, указанному в таблице; верхний знак относится к углам, меньшим рассматриваемого, нижний знак—к углам, большим рассматриваемого.
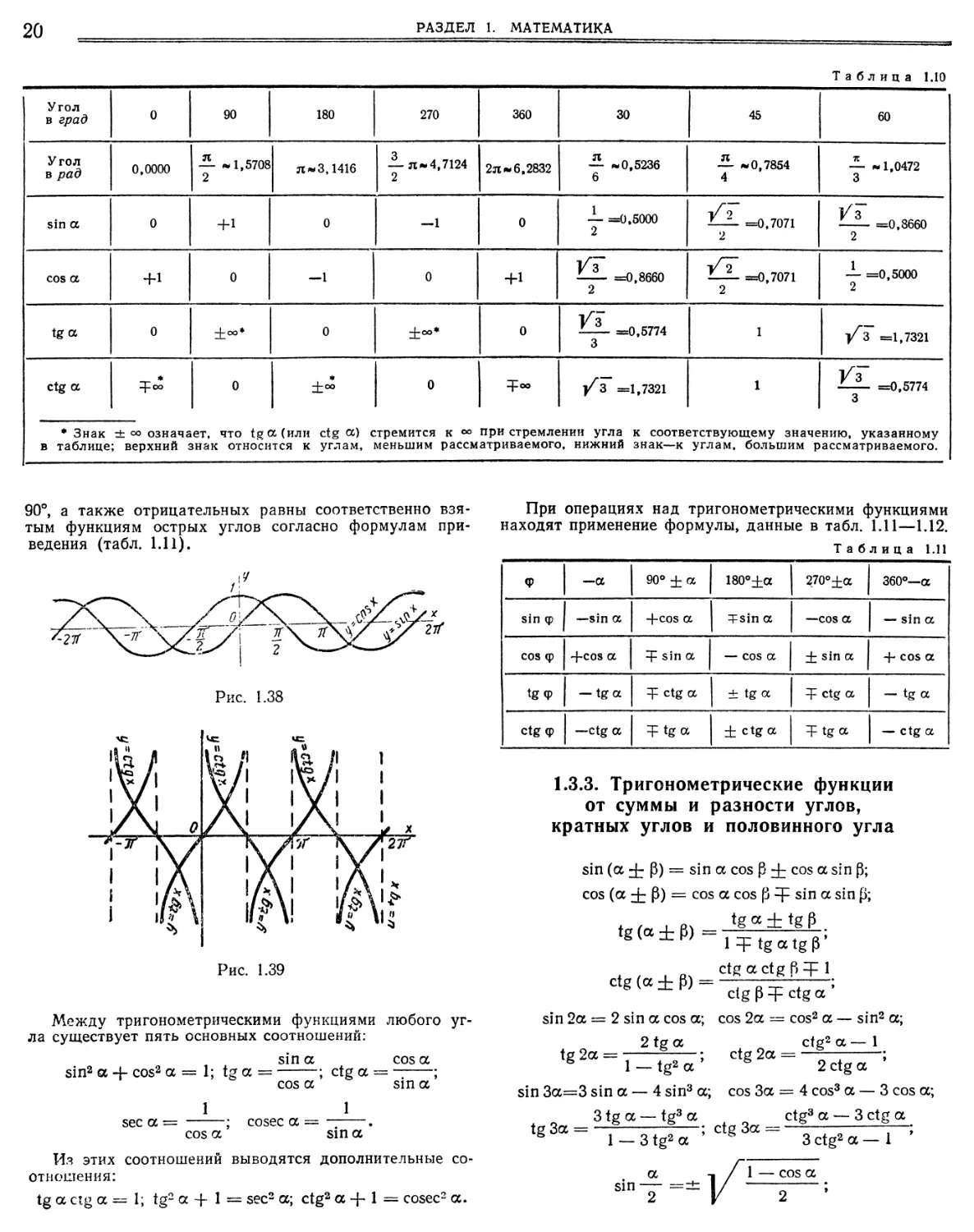
90°, а также отрицательных равны соответственно взятым функциям острых углов согласно формулам приведения (табл. 1.11).
Рис. 1.38
Рис. 1.39
Между тригонометрическими функциями любого угла существует пять основных соотношений:
зш а соз а
зш2 а 4- соз2 а 1; I? а ; сд а ;
соз а 51П а
1 1
зес а ; созес а —.
соз а 31П а
Из этих соотношений выводятся дополнительные соотношения:
а а — 1; а 1 зес2 а; с§2 а 1 созес2 а.
При операциях над тригонометрическими функциями находят применение формулы, данные в табл. 1.11—1.12.
Таблица 1.11
Ф
—а
90° ± а
180°±а
270°±а
360°—а
з1п ф
—зш а
-4-соз а
3зт а
—соз а
— зп а
соз ф
4-соз а
§ш а
— соз а
± з1п а
4- соз а
2Ф
а
± а
Т сд а
— а
Сф
—а
± а
-Р а
— с а
1.3.3. Тригонометрические функции от суммы и разности углов, кратных углов и половинного угла
зш (а Р) зш а соз р соз а зш Р; соз (а Р) соз а соз р зш а з1п р;
а ± Р 1 Т а Р’
сасРТ 1
в(«±Р ■
I
§ (« ± Р)
с(§ Р Т а ’
зш 2а 2 31 п а соз а; соз 2а соз2 а — зш2 а;
21?а се2 а — 1
2а ——; с§ 2а —— ;
1 — 1§2 а 2 с§ а
зш 3а3 зш а — 4 зш3 а; соз За 4 соз3 а — 3 соз а;
3ос — а с3 а — 3 с а
1е За — §—; сд За — —;
ё 1 — 31§2 а ’ ё 3 с§2 а — 1
31П
1 — соз а
1.3. ТРИГОНОМЕТРИЯ
21
а 1 сое а
созТ± —— ;
а зт а 1 — соз а -»
2 14- со5 а зт а — 1 — соз а
а 5Ш а
— — 2 1 — соз а
1 соз а
1 4- соз а
-» 1 4- С05 а У 1 — соз а
а
21е.т
а
31П а
соз а
118-
12
Знаки перед радикалами берутся в зависимости от того, к какой четверти относится угол а2.
1.3,4. Квадраты и кубы синуса и косинуса
зт2 а ■
1 — соз 2а
соз2 а
1 соз 2а
зт3 а :
3 зт а — зт За
соз а -
3 соз а соз За
1.3.6. Зависимости между тригонометрическими функциями трех углов
а, р и у, сумма которых равна 180°
51 п а зт р зт у 4 соз соз соз ;
а р у
ЗШ а 4- 31П 6 — 51П у 4 51П 31П СОЗ I
г 2 2 2
а В V
соз а соз Р соз у — 4 зш — зт зт — 4- 1;
а р V соз а соз Р — соз V 4 соз — соз — зт — — 1; т н г 2 2 2’
зш2 а зт2 р зт2 у - 2 соз а соз Р соз у 4 2;
зт2 а 51П2 Р — зт2 у — 2 зт а зт р соз у;
зт 2а зт 2р з1п 2у 4 зт а 31П р 31П у;
зт 2а 4 зш 2р — 5т 2у — 4 соз а соз Р зт у;
2 а § Р 1§ у а (д р у;
а р у а р V
с8 — св у 6 с8 — с»е — с' —;
с§ а с р с1 а у с1 р с У 1 •
1.3.5. Приведение к виду, удобному для логарифмирования
В порядке упрощения тригонометрических выражений нередко полезно преобразование сумм и разностей в произзедения:
• г . а Р а—Р 51П а 51П Р 2 зт —-— соз —-—;
а Р. а — 51П а — 51П Р 2 СОЗ 51П 2
а Р а — р соз а соз Р 2 соз —-— соз —-—
а р. р — а соз а — соз Р 2 51 п —-— зт —-—;
а — Р
51 п (а ± Р) соз а соз Р 51 п (р :± а)
а — с§ р .,51П а 51П р
зт2 а — 31 п2 р соз2 р — соз2 а зт (а 4- р) зт (а — р); соз2 а — зт2 р соз2 Р — зт2 а соз (а 4- Р) соз (а — р); соз (а — Р) — соз (а Р) 2 зт а зт Р; соз (а — р) соз (а р) 2 соз а соз Р; зт (а р) зт (а — Р) 2 5т а соз Р;
соз а 51П а 12 зт (45° 4- а);
соз а — 51П а У 2 соз (45° а).
1.3.7. Зависимости между обратными тригонометрическими функциями
Таблица 1.12
Тригономет¬
рические
функции
Обратные тригонометричес-' кие функции
Область изменения х и у
X 51П У
X — соз у х 1% у X — с8 у
агсзп х у—агссоз х 1агс1 х уагсс х
— 1дг1; — .У “
2 2
— 1 х 1; л у 0 я л
— солгоо; У 2 2
— 00 оо; Л у 0
зш и агссоз У1 — и2 агс — и
У —и2
— — агссоз и:
2
агссоз а агсзт УI — и2 агс§ л
— — агсзт и:
2
и
агс1 агсзт - агссоз -
У—и2
У и2
УI и2
1
агсс1е —: и
22
РАЗДЕЛ 1. МАТЕМАТИКА
агсвш и 3: агсзш V агс5Ш и 11 — V2 ±: V V1 — и2) агссоз (]" 1 — «2]Л — у2 ио ); агссоз и 3 агссоз V агсзш (у ] 1 — и2 11 — а2) агссоз (из 1 — и2 — у2) ;
V
агс(я и ь агс о агсе, •
1 ио
1.3.8. Формулы, применяемые при решении треугольников (рис. 1.40)
а р у 180°;
51П (« р) 51П у; соз (а Р) — соз у;
. а Р V
зт —-— соз —;
2 2
аР.V
соз 31 п —;
2 2
Ьс
Рис. 1.40
На Ь зт V с зт р —1К
(Я — радиус описанного круга). Теорема синусов:
а Ь с
2Я.
зт а 31 п р зш V Теорема косинусов:
а2 62 с2 — 2Ъс соз а (Ъ с)2 —
— 4Ьс соз2 — Ь — с)2 4Ьс зт2 —.
Формулы для площади
1 1,. а2 31П Р зт V
Г — аНа — — аЬ зт у 1 —
2 а 2 г 2зта
аЬс
1Г
22 ЗШ а 31П Р ЗШ у :
Ур(р — а)(р — Ь)(р — с) рг
(г— радиус вписанного круга).
Соотношения в прямоугольном треугольнике:
а с зт а; Ь с соз а; а Ъ а; Ь а с а;
с Ь с — а
а2 Ь2 с2; ?
2 ’
г ■
с — гипотенуза; а и Ь — катеты; а — угол, противолежащий катету а).
Между элементами треугольника можно установить также дифференциальные зависимости, вытекающие из приведенных выше формул.
В прямоугольном треугольнике
айа ЬйЬ сйс
2 а
: айЬ ——— йа.
йа йс
с1 айа; йа ■
а с
зш 2 а
В косоугольном треугольнике
йа йр йу 0;
йа йЬ йс
— —• с айа —- — се с1 уАу;
а Ь с
айа (Ь — с соз а) йЬ с — Ь соз а) йс Ьс зт айа; с соз Р йа айу — зт у йЬ зт Р йс.
Эти формулы можно считать практически точными, если дифференциалы сторон йа йЬ, йс, а также углов йа, сф, йу будут соответственно заменены малыми приращениями Да, Д6, Дс и Да, Др, Ду.
Теорема тангенсов:
а Ь а — Ь
Формулы Мольвейде;
р — У
С05 —
Ь с а
СОЗ •
Ь —с
31П-
Р —V
а а а
31 п — соз —
2 2
Выражение углов треугольника через его стороны:
т-:
(р — Ь)(р — с) Р(Р — о)
Ьс
Урр— а)(Р — Ь)(Р — о),
где
1 а Р у
Р— (а 6 с)«4С08— соз — соз —
1.3.9. Гиперболические функции
Некоторую аналогию с тригонометрическими функциями представляют гиперболические функции. Тригонометрические функции имеют аргументом угол; можно было бы, однако, считать аргументом площадь кругового сектора с центральным углом, равным 2х. Аналогично этому можно рассмотреть гиперболический сектор и, приняв его тощадь за аргумент, дать геометрическое определение гиперболических функций. Можно также определить эти функции аналитически следующими равенствами:
зЬ х
сЬ х
ех е
сЬ л;
2
е е-х
ех
ех
е —е
Между четырьмя функциями имеются три основных соотношения:
сЬ3 х — зЬ2 х 1; 1Ь х
зЬ х сЬ х
сШ л:
сЬ х зЬ х
1.4. АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ
23
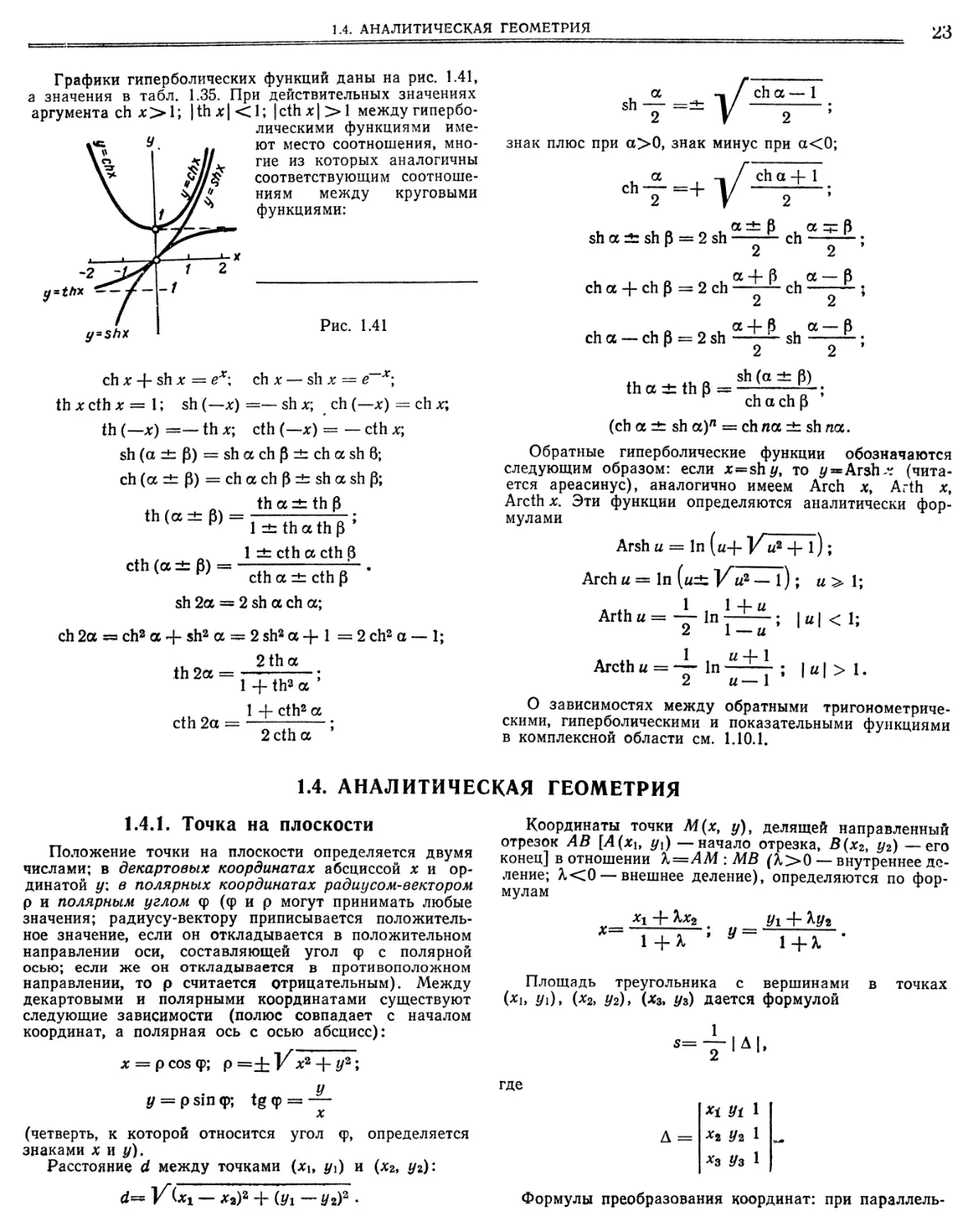
Графики гиперболических функций даны на рис. 1.41, а значения в табл. 1.35. При действительных значениях аргумента сЬ 1; Ш х 1; сЬ х 1 между гиперболическими функциями имеют место соотношения, многие из которых аналогичны соответствующим соотношениям между круговыми функциями:
Рис. 1.41
сЬ х зЬ х ех сЬ х — зЬ х ех;
1Ь х сЬ х 1; зЬ (—х) — зЬ х; сН (—х) сЬ х; (Ь (—х) — х; сЬ (—х) — — с(Ь х; зЬ (а Р) зЬ а сЬ Р гЬ: сЬ а зЬ 6; сЬ (а ± Р) сЬ а сЬ Р гь зЬ а зЬ Р;
а Ь р
1Ь (а ± р) с1Ь (а Р)
1 ЫЬ а Й1Р 1 :±: сЬ а с1Ъ 6
с1Ь а : сЬ р зЬ 2а 2 зЬ а сЬ а;
сЬ 2а 5я сЬ2 а «Ь2 а 2 зЬ2 а 1 2 сЬ2 а — 1; 21Ь а
1Ь 2а
с1Ь 2а
1 1Ь2 а
1 сЬ2 а 2сЬ а
зЬ
а - Г сЬ а — 1
2 V 2 ;
О, знак минус пр
а - сЬ а
2 V 2
знак плюс при а0, знак минус при а0; сЬ
зЬ а ±: зЬ Р 2 зЬ — сЬ —- ;
М 2 2
сЬ а сЬ Р 2 сЬ ——- сЬ - — ;
н 2 2
а4- В а — В
сЬ а — сЬ р 2 зЬ —зЬ к 2 2
1Ь а 1Ь р
зЬ (а ± Р)
сЬасЬр (сЬ а зЬ а)п сЬ яа зЬ па.
Обратные гиперболические функции обозначаются следующим образом: если хзЪу, то АгзЪл' (читается ареасинус), аналогично имеем АгсН х Аг1Ь х, АгсШ х. Эти функции определяются аналитически формулами
АгзЬ и 1п (и У и2 1);
АгсЬ и 1п (и У и2 — 1); и 1;
Аг4Ьи -у и 1;
д 1 и --1
АгсЬ и — — 1п ; и 1.
2 и— 1
О зависимостях между обратными тригонометрическими, гиперболическими и показательными функциями в комплексной области см. 1.10.1.
1.4. АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ
1.4.1. Точка на плоскости
Положение точки на плоскости определяется двумя числами; в декартовых координатах абсциссой х и ординатой у: в полярных координатах радиусом-вектором р и полярным углом ср (р и р могут принимать любые значения; радиусу-вектору приписывается положительное значение, если он откладывается в положительном направлении оси, составляющей угол р с полярной осью; если же он откладывается в противоположном направлении, то р считается отрицательным). Между декартовыми и полярными координатами существуют следующие зависимости (полюс совпадает с началом координат, а полярная ось с осью абсцисс):
х — р соз р; р Ух2 у2;
у р зш р; ф
(четверть, к которой относится угол ср, определяется знаками хну).
Расстояние 4 между точками (хь у) и (2, уг):
Координаты точки М(х, у), делящей направленный отрезок АВ [А(хь ух) — начало отрезка, В(х2у у2) — его конец] в отношении КАМ : МБ (Я0 — внутреннее деление; КО-внешнее деление), определяются по формулам
х
Х %х2 1 %
Уг Ь Ъ-Уъ 1к
Площадь треугольника с вершинами (ь У) (2, У2) (з, Уг) дается формулой
-Т1А.
в точках
где
А
Н У± 1 х2 у2 1 з Уз 1
Формулы преобразования координат: при параллель-
24
РАЗДЕЛ 1. МАТЕМАТИКА
ном переносе осей хх'а, уу'Ь; при повороте осей на угол а против часовой стрелки
х х' соз а — у' зш а;
х х' зш а г' соз а.
1.4.2. Прямая линия
Всякая прямая на плоскости выражается уравнением первой степени относительно координат; обратно, всякое уравнение первой степени с двумя переменными выражает на плоскости прямую линию. Общее уравнение
прямой; АхВуС0, где хотя бы один из коэффициентов Л, В отличен от нуля.
Частные случаи общего уравнения в зависимости от тех геометрических элементов, которыми прямая задана:
1) уравнение прямой с угловым коэффициентом (если прямая не параллельна оси у): укхЬ, где
а — угол наклона прямой к оси х (ОаСя); Ь — ордината точки пересечения прямой с осью У; частным случаем 60 является уравнение прямой, параллельной оси X: у — Ь
2) уравнение прямой, параллельной оси У: х—а;
3) уравнение прямой по точке и направлению
У — У к(х — хгу,
4) уравнение прямой по двум точкам:
У — У1 х — хг
У 2— У г
х2 — х1
где х2фхи у2Фуу,
5) уравнение прямой в отрезках:
х
а
1, а Ф 0, 670;
в) нормальное уравнение прямой:
X СОЗ ф у 31П ф — Р— 0,
где р—длина перпендикуляра, опущенного из начала координат на прямую:
Ф— угол между этим перпендикуляром и осью х; 0гф2:п;.
Общее уравнение прямой может быть приведено к нормальному виду умножением на нормирующий множитель:
АГ
1
причем знак перед корнем должен быть противоположен знаку С.
Расстояние точки (1, у) от прямой АхВу--С0; I Ахг Вух С
У А В2
Угол между двумя прямыми определяется из равенств
V
к2 А± В2 А2 Вг
:’-гтмГлибо18Ф- »,»,
Признак параллельности прямых: кк2 либо
Л1Л2 Я12; признак перпендикулярности прямых: кк2——1 либо ААгВВг — 0.
Точка пересечения двух прямых отыскивается в ре¬
зультате совместного решения их уравнений; возможны следующие три случая:
А1А2фВ1В2 — существует единственная общая точка, прямые пересекаются;
АхАгВВгфСхСгобщш точек нет, прямые параллельны;
Л1Л2—В1В2 — С1С2 — общих точек бесчисленное множество, прямые совпадают.
Условие расположения трех точек на одной прямой в соответствии с формулой для площади треугольника по координатам его вершин:
0.
Условие прохождения трех прямых через одну точку:
А1 Вх Сх А2 В2 С2 —
Аз В С3
1.4.3. Окружность
Уравнение окружности с центром в точке (а, Ь) и радиусом Я: (х—а)2(у—Ь) 2Я2; частный случай
(центр окружности в начале координат): х2у2Я2.
Окружность выражается уравнением второй степени
и, значит, является линией второго порядка. Уравнение второй степени относительно координат выражает окружность лишь в том случае, если равны коэффициенты при квадратах переменных и отсутствует произведение переменных. Окружность может быть задана также параметрически: хаКс05; у Ь Я
Уравнение касательной к окружности в точке (х0, У о):
(х0 — а) (х — 0) (Уо — Ь)(у — у0) К2.
1.4.4. Парабола
Парабола есть геометрическое место точек плоскости, равноудаленных от данной точки, называемой фокусом, и от данной прямой, называемой директрисой.
Уравнение параболы, симметричной относительно оси X, с вершиной в начале координат (каноническое уравнение): у22рх (р — параметр); О — вершина; Р — фокус; X —директриса; Ю ОРр12; ордината РР' в
1.4. АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ
25
фокусе равна р (рис. 1.42). Полярное уравнение (Р полюс, г О — полярная ось);
1 соз ф
Прямая, параллельная оси X, является диаметром параболы; диаметр параболы делит пополам хорды, параллельные касательной, проведенной в точке пересечения параболы с диаметром. Если угловой коэффициент хорд равен к, то уравнение соответствующего диаметра есть у рк.
Уравнение касательной в точке М0(х), уо):
УУо Р(х х0).
Уравнение нормали в точке (0, Уо)
У — Уо — — (х — х0).
Р
Радиус кривизны в точке (х0; Уо)
(Р 2«)3
2р
где р — полярный радиус.
Эволюта параболы (геометрическое место центров кривизны параболы) —полукубическая парабола:
Уравнение параболы с осью симметрии, параллельной оси У:
у ах2 Ьх с,
Пример; уравнение параболической арки (рис. 1.43) 4
н
Вершина параболы у—ахЬхс находится в точке Ь Аас — Ь2 2а ’ 4а
если а0, парабола направлена вогнутостью вверх, если а0 — вогнутостью вниз.
1.4.5. Эллипс и гипербола
Эллипс (гипербола) есть геометрическое место точек плоскости, сумма (разность) расстояний которых от двух данных точек есть величина постоянная. В приведенных ниже формулах и равенствах верхние знаки
относятся к эллипсу (рис. 1.44), нижние — к гиперболе (рис. 1.45); оси симметрии совпадают с осями координат.
Каноническое уравнение
г2
У2_
Ь2
1.
Фокусные расстояния ОР, ОР2 и эксцентрицитет е:
ОР — ОР 2 — с — а2 Ь2; е —;
а
для эллипса е1, для гиперболы е1.
Уравнения касательной и нормали в точке (о, у о):
хх0
а2
УУо Ь2
Ь2х 0
У—У о
Уравнение равнобочной гиперболы (а—Ь): относительно осей симметрия х%—у2а%; относительно асимптот ху—а2 2.
Радиус кривизны в точке (х0, Уо):
2
(х у1 у.
■ а2Ъ2 — -- —.
V а4
Полярное уравнение (полюс в левом фокусе): Р
1 6 соз ф ’
где р —. а
Геометрическим местом середин параллельных хорд конического сечения служит прямая линия, называемая диаметром. Два диаметра называются сопряженными, если каждый из них делит пополам хорды, параллельные другому. Угловые коэффициенты сопряженных диа-
Ь2
метров удовлетворяют соотношению кк' цг—.
а2
Приближенное значение длины эллипса:
Уравнения в параметрической форме: эллипса ха соз 1 у —Ь зт гиперболы х—а зес у Ь
1.4.6. Построение конических сечений
Построение эллипса по полуосям а и Ь (рис. 1.46). Из центра О описывают окружности радиусами а и Ь из точек пересечения А и В произвольного луча с окружностями проводят прямые, параллельные координатным осям (из А параллельно оси X, из В параллельно
26
РАЗДЕЛ 1. МАТЕМАТИКА
оси У); точка пересечения С этих прямых есть точка эллипса. Имеется другой прием построения эллипса (этот прием дает возможность сконструировать эллиптический циркуль): если отрезок длиной аЬ движется так, что его концы скользят по осям декартовых координат, то точка й опишет эллипс с центром в начале координат (рис. 1.47).
1.4.7. Цепная линия. Циклоида. Спираль
Цепная линия (рис. 1.51) является линией провиса-
ния гибкой нерастяжимой нити, закрепленной на концах; ее уравнение
сЬ •
Рис. 151
Рис. 1.52
Построение параболы по вершине О, оси ОХ и точке М: проводят ОАЛ.ОХ, АМОХ, делят ОА и АМ на одно и то же число равных частей (рис. 1.48); получен¬
ные точки нумеруют, как указано на чертеже. Из точек на ОА проводят параллели оси ОХ, каждую точку на АМ соединяют с О прямыми — пересечение этих прямых с соответствующими параллелями даст точки параболы.
Построение параболы по вершине О, оси X и точкам М, и М2, лежащим на параболе: проводят ОУА.ОХ, ОА и ОВ — произвольные прямые (рис. 1.49); через
и М2 проводят параллели к ОХ и ОУ, причем между ОХ и О А, а также между ОУ и ОВ образуются трапеции, в которых СО и ЕР — диагонали; параллельно последним в каждом из углов АОХ и ВОУ проводят зигзагообразную линию; полученные точки на ОХ и ОУ являются абсциссами и ординатами параболы.
Построение гиперболы по полуосям ап Ь (рис. 1.50): из центра О списывают окружности радиусами а и Ь. Проводят произвольный луч, а также касательные к окружностям в точках С и Ь; находят пересечение К и Ь первой касательной с лучом и второй касательной с осью х; из найденных точек проводят прямые, параллельные осям, — точка их пересечения М является точкой гиперболы.
Радиус кривизны гу2а длина 5азЬ —.
Циклоида — кривая, описываемая точкой окружности, катящейся без скольжения по прямой (рис. 1.52); ее уравнение
х — а (а — 51па); у а (I — соз а).
Длина одной арки циклоиды: — 8а; площадь, ограниченная одной аркой и осью X: Р — Ъпа1.
Спирали и их уравнения: архимедова р аср
(рис. 1.53); гиперболическая раф (рис. 1.54), логарифмическая р — ае (рис. 1.55), где а0.
л "
1 г
о
X
Рис. 1.56
1.4.8. Точка в пространстве
Положение точки в пространстве можно определить тремя декартовыми координатами: абсциссой ху ординатой у у аппликатой г (рис. 1.56). Расстояние с1 между
Цилиндрические и сферические координаты см. 1.7.6.
1.4. АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ
27
двумя точками (хь уи г) и (х2, у2, г2) (рис. 1.57) определяется по формуле
А 'V (1 — х2)2 (Уг — УчУ (г1 — 2г)8»
1.4.9. Плоскость
Всякая плоскость задается уравнением первой степени относительно текущих координат; обратно, всякое уравнение первой степени с тремя переменными определяет плоскость. Общее уравнение плоскости:
Ах Ву Сг0 О,
где хотя бы один из коэффициентов Л, В, С отличен от нуля.
Применяются различные частные случаи общего уравнения в зависимости от тех геометрических элементов, которыми плоскость задана.
1. Уравнение плоскости, проходящей через три данные точки:
X — 1 У У1 г — гх
2 — 1 У 2 Уг 2 —
Хз — 1 Уз — Уг гз — 21
2. Уравнение плоскости в отрезках:
0.
х у
— а о
— 1 с
(а, Ь, с — величины направленных отрезков, отсекаемых плоскостью на осях координат).
3. Нормальное уравнение плоскости:
х соз а У соз Р г соз у — р 0
(а, р, у — направляющие углы перпендикуляра, опущенного из начала координат на плоскость, так что соз2 асоз2р соз2 у 1; р — длина этого перпендикуляра).
Расстояние й точки (х0, у0, го) от плоскости Ах Ву--Сг
Ах0 -- Ву0 4 Сг0 Р
V А2 В2 С2
Угол ф между двумя плоскостями определяется из
равенства
Л1Л2 “Н В1В2 -- С1С2
СОЗ ф —.
V А в с V а в с
Условие параллельности двух плоскостей: АхА2 Б1В2С1С2; условие перпендикулярности: Ла-
"ВВ2СС2—0.
1.4.10, Прямая в пространстве
Прямая в пространстве задается как линия пересечения двух плоскостей:
АХ - Ву -- Сх2 -- г А%х -- ВУ -■ С22 02 0.
Если выбрать плоскости, проектирующие прямую на координатные плоскости, то получим канонические уравнения прямой:
х — а у — Ь г —с
I т п
где (а, 6, с) — данная на прямой точка; , п, п — проекции на оси координат какого-либо вектора, параллельного данной прямой; числа , т, п пропорциональны направляющим косинусам прямой:
I
соз а ■ ± VI2 т2 л т
соз р
соз у
±У12 т2 п2 ’
п ] т2 Я2
(знак перед корнями может быть взят любой, но одинаковый во всех трех равенствах; а, р, у — углы между прямой и осями координат).
Угол ф между двумя прямыми отыскивается из равенства
соз ф соз аг соз а2 соз рх соз р2 соз уг соз у2.
Условие параллельности двух прямых: 1112тх1т2— п?. Условие перпендикулярности: 12п1п2я1п2
—0.
Условие параллельности прямой и плоскости: Л БтСм0. Условие перпендикулярности прямой и плоскости: А1В1т Сп.
1.4.11. Поверхности второго порядка
Уравнение сферы с центром в точке (а, Ь, с) и радиусом Я;
(х - в») (у - 6)3 (г — с)2 ф.
28
РАЗДЕЛ 1. МАТЕМАТИКА
Канонические уравнения поверхностей второго порядка. Эллипсоид (рис. 1.58):
2 у2 г2
— — — 1. а2 Ь2 с2
Однополостный гиперболоид (рис. 1.59):
х у г а Ь с
1.
Двухполосгкый гиперболоид (рис. 1.60):
у2 г3
Ь2 с2
Эллиптический параболоид (рис. 1.61):
хл
а2 62
Гиперболический параболоид (рис. 1.62):
а2 Ь2
Конус второго порядка (рис. 1.63):
62
--0.
Рис. 1.62
Рис. 1.63
Эллиптический цилиндр (рис. 1.64): х2 у2
Рис. 1.С6
Рис. 1.65
Гиперболический цилиндр (рис. 1.65): х2 у2
рвв1'
Параболический цилиндр (рис. 1.66): у сх2.
1.5. ДИФФЕРЕНЦИАЛЬНАЯ ГЕОМЕТРИЯ
1.5.1. Плоские кривые
2 2 - Г 2
6?5 — у хг Уь сН, йв — Р2 р' и?ф.
Угол а между осью X и касательной (рис. 1.67) определяется по одной из формул
Крива на плоскости может быть задана в декартовых координатах одним уравнением Р(х, у) 0 или у — (), а также двумя уравнениями (), уу((), где I — переменная величина, называемая параметром. В частности, в качестве параметра может быть выбрана длина дуги 5 между фиксированной (начальной) и текущей точками кривой; тогда хдс(5), уу8). В полярных координатах кривая определяется уравнением
р?(р)-
Для дифференциала длины дуги аз справедливы равенства
йв —- Vйх2 йу2; йз — У1 -- у'2йх;
йу
йх
соз а -
йх
йз
зш а ■
йУ
йз
Касательная считается направленной в сторону возрастания х (первая формула) или в сторону возраста-
Рис. 1.68
1.5, ДИФФЕРЕНЦИАЛЬНАЯ ГЕОМЕТРИЯ
29
ния 5 (вторая и третья формулы). Для угла ф между касательной и полярным радиусом (рис. 1.68) имеем
йр рйц й(р
соз ур — —-; 51П-—; г) р—.
йя й йр
Уравнения касательной и нормали к кривой в ее точке приведены в табл. 1.13.
Таблица 1.13
Геометрические
элементы
Уравнения линии
в основном виде У1 (х)
в параметрическом виде (О; УУ и)
Уравнение касательной
У — Уо — У' (о)Х Х( — х0),
Уравнение нормали
Длина подкасательной РТ (рис. 1.69)
Длина поднормали РЫ
(У—Уо) У' (о)
Х0 — X
у — у») х' у' (0) (х — 0)
КУ Уо) У' Ю ' Но) (х0 — X)
у0:у' (х, )
IУоУ' (аг0)
УоХ' (0):у' (0)
Iуу' о):х' (0)
Длина дуги 5
5 у'2йх
Хх
; 1 V 1 У( й1 к
Радиус кривизны Н и координаты Т) центра кривизны линии
ГС-. (1У'2),г
(1у,2)у'
6 —п
гу
11Г
п (У',)’‘
X' у" — Xя у'
х' уп—х" у'
„у-(. «'г)
У х' у"—х" у
Дуга кривой называется вогнутой (выпуклой), если она лежит выше (ниже) касательной в любой точке этой дуги. Точка, отделяющая вогнутый участок кривой от ее выпуклого участка, называется точкой перегиба. Если кривая задана уравнением уНх) и Для всех значений х из данного интервала у"0 (у 0), то дуга кривой, соответствующая данному интервалу, вогнута (выпукла).
Точка перегиба М(х0, у0) кривой у—у(х) находится на основании какого-либо из двух условий:
1) У"(хо) 0 (или при хХо функция у(х) не имеет конечной второй производной), а при переходе через значение х0 величина у”(х) изменяет знак;
2) у"(хо) 0, а наинизшая из производных у' у(1УК.которая при ххо отлична от нуля, имеет нечетный порядок.
Кривизной линии в точке М называется величина
0
С Пт мм
ММг
где 0— угол между направленными касательными в
V-»
точках М, Мг данной линии, а ММ 1 —длина дуги.
Величина 1С называется радиусом кривизны.
Пусть через точку М линии проведена в сторону ее вогнутости нормаль; точка С нормали, находящаяся на расстоянии от М, называется центром кривизны линии (соответствующим точке М). Формулы для определения радиуса кривизны и координат центра кривизны даны в табл. 1.13.
Эволюта кривой — геометрическое место ее центров кривизны (рис 1.70); исходная кривая по отношению
к своей эволюте называется эволъвентной (инволютой, разверткой). Касательные к эволюте являются нормалями к эвольвенте; длина дуги между двумя точками эволюты равна разности радиусов кривизны в соответствующих точках эвольвенты. Эти свойства позволяют рассматривать эвольвенту как кривую, получающуюся из эволюты разматыванием натянутой на нее нити. Если координаты г любой точки эволюты заданы как функции дуги 5 эволюты, то уравнение эвольвенты находится из соотношений
— (5 — з0)- ; 9 Т — (5 — 50).
Здесь «о—значение параметра 5 для точки эволюты,
где начинается развертывание кривой.
Огибающей называется линия, касающаяся в каждой своей точке какой-либо из кривых семейства (» Уу Р) —0, зависящего от одного параметра ру и имеющая точку касания с каждой кривой этого семейства. Уравнение огибающеи находится в результате исключения р из двух уравнений:
дР(х, у, р)
- 0; Р(х,у,р) 0.
Ортогональной траекторией семейства кривых Р(х, у, р) 0 называется линия, пересекающая все кривые этого семейства под прямым углом. Для получения дифференциального уравнения ортогональной траектории исключают р из уравнений
йу дР дР
а: д7’ о.
йх
1.5.2. Пространственные кривые
Кривая в пространстве может быть задана как пересечение двух поверхностей Рхху у, г)0, Р2(х, у,
г) 0 или в параметрическом виде тремя уравнениями (0 УУ(0» г г() ( — параметр). Кривая может быть определена также одним векторным уравнением
_ г (0 х() Г--уЦ)ТгЦ)к9
где г—радиус-вектор произвольной точки кривой;
, к — единичные векторы в направлении осей X, У, I.
30
РАЗДЕЛ 1. МАТЕМАТИКА
Дифференциал длины дуги йз и длина дуги 5 определяются по формулам
Таблица 1.14
йз Уйх йуЛ
VI
()’()’•
и
(фиксированное значение соответствует начальной
точке дуги; конечной точке дуги соответствует произвольное значение ).
Если параметром является длина дуги 5, т. е. если хл:(5), уу(з), 22(5), то для углов а, р, V между касательной к кривой в точке (, у г) и осями координат Х,У,2 имеют место соотношения соз а1x1(15, соз йу)йз, соз 7йгйз.
Плоскость, проходящая через точку М пространственной линии и перпендикулярная касательной в точке М, называется нормальной плоскостью. Плоскость, проведенная через три точки кривой М, Ми Щ, при и М2-М стремится принять положение плоскости, которая называется соприкасающейся плоскостью к кривой в точке М. Плоскость проходящая через точку М и перпендикулярная нормальной и соприкасающейся плоскостям, называется спрямляющей плоскостью.
У' '
2' Хг
хг у'
; пг
; п
уП гп
гп х"
х" уп
Рис. 1.71
Три указанные плоскости образуют так называемый сопровождающий трехгранник пространственной линии (рис. 1.71). Его элементы даны в табл. 1.14. В этой таблице х,у,г координаты вершины М трехгранника; X, У, 2 — текущие координаты элемента трехгранника;
1
производные берутся по параметру I и вычисляются при значении соответствующем точке М (х, у, г).
Нормаль к кривой, лежащая в соприкасающейся плоскости (линия пересечения нормальной и соприкасающейся плоскостей), называется главной нормалью. Нормаль, лежащая в спрямляющей плоскости (линия пересечения нормальной и спрямляющей плоскостей), называется бинормалью.
Единичный вектор касательной % определяется равенством
•?1 -7- — ' («) Гу' () г' (5) к.
аз
Элементы Трехгранника
Уравнения
Нормальная плоскость
хХ—х)у' (У-у)гг (2 — 2) 0
Соприкасающаяся
плоскость
(X - х) т (У — у) п (2 - 2) 0
Спрямляющая
плоскость
Х—х У—у 2—2 X у' 2;
1 т п
0
Касательная
Х—х У—у 2—2 Хг у 2'
Главная нормаль
Х — х У —у 2 — 2 у' 2'1 12' Х' IX' у' т п 1 п 1 1 1 т
Бинормаль
X — х У — у 2 — 2
1 т п
Кривизной пространственной линии в точке М называется величина
Атх
йхг
йз
ММг
К — Пт мм
где Л? — приращение вектора Т1 при переходе от точки М к точке М±.
Кривизну можно определить по формуле
К Vх"2 (5) у"2 (5) 22 (5).
Радиус кривизны определяется как величина, 6братная К, ? 1С. Точка С, лежащая на главной нормали к кривой в точке М, для которой назы¬
вается Центром кривизны (направление от С к М соответствует вогнутости кривой). Координаты ха, у с, %о центра кривизны, соответствующего точке М (х, у, г) кривой, определяются по формулам
хс « X Я2" (5); ус « у Ву” (5); гс г К2г" (5).
Круг в соприкасающейся плоскости, описанный радиусом из центра кривизны, называется кругом кривизны:, или соприкасающимся кругом.
Кручением кривой в ее точке М называется величина
АР,
.1
ммг
Т а» ± Пт мг-м
где Л61—приращение единичного вектора бинормали р при переходе от точки М к точке (знак минус берется, если направление век¬
тора
4г
йз
совпадает с направлением парал-
1.5. ДИФФЕРЕНЦИАЛЬНАЯ ГЕОМЕТРИЯ
31
с
лельного ему вектора
а знак плюс
в противоположном случае). Кручение можно определить по формуле
х' (5) у' (5) г' (5)
Т № х" (5) у" (8) г" (5)
X’" (5) у’" (5) г'" (5)
Для плоских кривых Т0.
Пример 1.6. Винтовая линия: асозф; й31Пф; гсф, где а — радиус цилиндра; ф — угол поворота прямой; с — коэффициент пропорциональности.
Шаг винта к — 2пс подъем винта
к
2 па
где а — угол между касательной к кривой и плоскостью ХУ.
Длина дуги
соз а
длина дуги одного витка 2я агсг.
Кривизна в произвольной точке
5 с2 ф —
кручение
К
Т
а2 с2
а2 с2
1.5.3. Поверхности
Поверхность может быть задана одним уравнением Ф (х» У» ) — 0. (I)
или
(И)
а также в параметрическом виде тремя уравнениями
х х(а, Р); уу(а, Р); г г(а, р), (III)
где а, р — параметры. Эти уравнения можно заменить одним векторным уравнением
г (а, Р) (а, Р) 7 у (а, р) 7 г (а, Р) Ъ, (IV)
где г — радиус-вектор точки поверхности.
Линия на поверхности, заданной параметрически, дается этими же уравнениями, если аир — функции одного параметра. Линии асопз1, рсопз1 образуют на поверхности сеть криволинейных координат. Квадрат дифференциала длины Дуги линии на поверхности можно представить в виде
№ Ох2 йу йг Ей а2 2 РйаЛ р Ой р2,
где
дх
да
дх ду ар да
дг 2 Эа дг
ар-
— коэффициенты Гаусса.
Выражение Ес1а22Рс1ас1--Ос12 называется первой квадратичной формой поверхности.
Если поверхность задана уравнением (I) или (II), то уравнение касательной плоскости соответственно
будет
Фх(Х-х) Ф'и(У-у) Ф1(2-г) 0
г-г ?х(Х-х) Г'у(У-у).
Если же поверхность задана уравнениями (III) или уравнением (IV), то уравнение касательной плоскости
Х — х У — у2 — г » ' ха У а га
0,
л
где М (х, у, г) — точка касания; Х У, 2 — текущие координаты касательной плоскости.
Уравнение нормали к поверхности, заданной уравнением (I), имеет вид
Х—х у — у
ф„
ф.
Дифференциал площади поверхности йо определяется по формуле
ао(ф;)-1 ф;2ф;2ф;2 11 С у ааУ ил» а° - КеО —Я йшф.
_ Пусть поверхность задана уравнением (IV), а ть т2 —единичные векторы (орты), касательные к линиям а(Р»сопз1), Р(а»сопз1) и направленные в стороны возрастания параметров а, Д, (ть т совпадают по направлению с векторами га, р). Обозначим через п еди ничный вектор нормали к поверхности направленный в каждой ее точке так, что орты Т1, ?2, п образуют правую систему.
Рассмотрим какую-либо линию 1и проведенную на поверхности через ее точку Ми Пусть С — кривизна линии в точке Ми а V —единичный вектор главной нормали к этой линии в точке Ми направленный в сторону вогнутости линии. Проекция вектора кривизны Кч на направление вектора п в точке М4 называется нормальной кривизной линии в точке М. Линия на поверхности, у которой в каждой точке нормальная кривизна равна нулю, называется асимптотической линией.
Если через точку М1 поверхности провести нормальное сечение (плоскостью, проходящей через нормаль к поверхности в точке М1), то получится плоская линия, у которой в точке вектор главной нормали V совпадает с вектором п или противоположен ему. Поэтому кривизна нормального сечения совпадает или отличается только знаком от нормальной кривизны Кп этого сечения. Величина Кп определяется по формуле
_ 2 Мйаиф Мра
- Ейа» 2 Рай р Ой р»
32
РАЗДЕЛ 1. МАТЕМАТИКА
где
ха У а а
ь У ео -? рду 7;а
У У
хаа Уаа 2аа
ха Уа га
м Vво -1-2 [7;?'р] 7;р
3 У 3
ха Уа(3 аЗ
ха Уа га
кУео-й [?«Гэ]?ээ
3 У гз
зз 33 233
Выражение называется второй
квадратичной формой поверхности. Знак величины Кп определяется знаком второй квадратичной формы (поскольку первая квадратичная форма равна с1з2 и, следовательно, положительна).
Центр кривизны наклонного сечения поверхности совпадает с проекцией на его плоскость центра кривизны нормального сечения, имеющего общую касательную с наклонным сечением. Если Я — радиус кривизны нормального сечения, то радиус кривизны р наклонного сечения можно определить из равенства р ?созХ ХК п), где V — единичный вектор главной нормали линии, образованной наклонным сечениема п — единичный вектор нормали к поверхности (V и л берутся в той точке поверхности, через которую проведены оба сечения).
Среди всевозможных нормальных сечений поверхности, проходящих через ее точку М, имеются два сечения, образованных взаимно перпендикулярными плоскостями, для которых Кп принимает наибольшее и наименьшее значения. Эти два сечения называются главными нормальными сечениями, а соответствующие им значения Кп называются главными кривизнами поверхности и обозначаются Ки Кг. Величины ?1 1(ь Нг 12 называются главными радиусами кривизны поверхности. Величины Ки Кг находятся как корни квадратного уравнения
(ЕО — Р2) К2 (2РМ — ЕИ — ОЦК ЬМ — М2 0.
Направления касательных к главным нормальным сечениям поверхности называются главными направлениями на поверхности. Линия на поверхности, в каждой точке которой касательная имеет главное направление, называется линией кривизны. Через каждую точку поверхности проходят две взаимно ортогональные линии кривизны. Поэтому удобно выбирать криволинейные координаты а, р так, чтобы линии а, р были бы лиииями кривизны. Величины
н,±(К, Кг-±(±±);
1
называется средней и гауссовой (полной) кривизнами поверхности.
Точка поверхности, в которой К и Кг имеют одинаковые знаки (С0) называется эллиптической', в этой точке Ькт — М20. В более частном случае, когда в
точке поверхности ККг эта точка называется омбилической, а когда (1 С20—точкой уплощения. Точ] поверхности, в которой К± и Кг имеют разные знаки (С0), называется гиперболической; в этой точке ЬЫ — Л720. Точка, в которой одна из величин Ки Кг равна нулю (К0), называется параболической; в ней 1Л — М20.
Через каждую точку поверхности в любом направлении проходит геодезическая линия, которая определяется тем, что в каждой ее точке главная нормаль этой линии совпадает с нормалью к поверхности. Геодезическая линия на поверхности обладает свойством прямой линии на плоскости: из всевозможных линий на поверхности, проходящих через две произвольные точки, кратчайшую дугу, соединяющую эти точки, имеет геодезическая линия.
Многие строительные конструкции имеют очертания поверхностей вращения или поверхностей перекоса.
Поверхность вращения образуется вращением плоской линии (образующей или меридиана) вокруг оси. Линия пересечения поверхности вращения с плоскостью, перпендикулярной оси вращения, есть окружность, называемая параллелью. Пусть ось вращения принята за координатную ось 2. Если меридиан, расположенный в плоскости Х02', задан уравнениями хх(а)у г—г (а), где а — длина дуги меридиана, отсчитываемая от выбранной начальной точки, то сама поверхность т ;епия определяется уравнениями хК(а) со (а) 51П р, г—7уа). В этих уравнениях: Я(а) х(а) — радиус параллели, проходящей через точку М (х, у, г) данной поверхности, ар — угол между плоскостью Х02. и плоскостью, проходящей через ось 7. и точку М. Когда поверхность вращения задана указанными уравнениями, имеем
аз2 Жх2 Я (а) сф2;
Е 1, Р0, С Д(а).
Поверхностью переноса называется поверхность, описываемая линией (производящей), которая перемещается в пространстве, оставаясь параллельной самой себе (два положения линии называются параллельными, если одно из них получается из другого в результате смещения каждой точки линии на один и тот же вектор — вектор переноса). При перемещении производящей любая ее фиксированная точка М0 вычерчивает линию. Поэтому можно считать, что производящая, перемещаясь в пространстве, опирается своей точкой М0 па некоторую линию, называемую направляющей.
Пусть
г а (а) ах (а) яг (а) а2 (а) к
ь (Р) ьх (Р)7 ьу (р) " Ьг (Р) Ъ
— векторные уравнения соответственно производящей п направляющей поверхности переноса. Тогда уравнение самой поверхности переноса с точностью до постоянного вектора будет
7Н_(а)6(р)
или в другом виде
7 х(а, р)7у(а, р)7 г(а, Р)й,
где х (а, Р) а (а) 6(Р). У («. Р) аи (а) ьу (Р) г(а, Р) аг(а) МР).
1.6. ДИФФЕРЕНЦИАЛЬНОЕ ИСЧИСЛЕНИЕ
33
1.6. ДИФФЕРЕНЦИАЛЬНОЕ ИСЧИСЛЕНИЕ
1.6.1. Функция, предел, непрерывность
Если каждому рассматриваемому значению одной переменной соответствует определенное значение другой переменной, то вторая переменная есть функция первой. Совокупность рассматриваемых значений аргумента называется областью определения (или областью существования) функции.
Если существует такое число А, от которого функция отличается сколь угодно мало в достаточно малой окрестности точки а, т. е. если (х)—Ае при всех значениях хфау для которых х—а6, где е— как угодно малое произвольное положительное число, а 6 — положительное число, зависящее от е, то говорят, что функция имеет в точке а предел, равный А; обозначение: Пт () А. Понятие предела вводится и для
х-а
случая, когда ((х)—Ае при достаточно больших по абсолютной величине значениях аргумента; обозначение: Пт (х)А и Пт (х)А. К этому случаю от-
Х---оо Х-—оо
носится понятие предела последовательности, т. е. функции, определенной лишь для натуральных значений аргумента. Функция, которая стремится к пределу, равному нулю, называется бесконечно малой.
При вычислении пределов применяются теоремы
о пределах.
1. Предел постоянной величины: Пт аа.
2. Предел алгебраической суммы нескольких функций и(х), V (),., ш(х) каждая из которых имеет предел в точке а:
Пт (и ± в.±до) Пт и ± Пту. Пт до.
х-а х-а х-а х-а
3. Предел произведения нескольких функций, каждая из которых имеет предел в точке а:
Пт (ш).до) Пт и Пт р.Пт до. х-а х-а х-а х--а
4. Предел отношения двух функций, каждая из которых имеет предел в точке а, причем предел знаменателя отличен от нуля:
Пт и
,. и х-а
Пт — .х-а V Пт V х-а
5. Если х (х) (х) и Пт (х) Пт 2 (х) Л,
х-а х-а
Пт и А. х-а
Некоторые пределы:
51П X
Пт — 0; Пт
оо п х-0 х
Пт (1 —') Пт (1--а)а е
х±оо х а-0
Пт (1 —) ер.
-±со V X
Предел, к которому стремится функция, когда х стремится к а, принимая только значения, меньшие
(большие) ау называется левым (правым) пределом функции в точке а.
Если для любого положительного числа М существует такое положительное число б, что при всех значениях хфа, для которых х—аб, выполняется условие (л;)М, то говорят, что функция (х) стремится к бесконечному пределу при х-а; обозначение Пт (х) оо. х-а
Функция (х) называется непрерывной в точке а, если она определена в этой точке и в некоторой ее
окрестности и если Пт() (а), т. е. если значение
х-а
функции в точке а является пределом функции, когда х стремится к а. Из этого определения следует, что если функция непрерывна, то бесконечно малому приращению аргумента Ах соответствует бесконечно малое приращение функции Ау:1тАу-0. Элементарные
д-о
функции непрерывны в каждой точке, где они существуют. Точки, в которых функция не является непрерывной, носит название точек разрыва.
Если в точке а функция имеет конечные, но различные левый и правый пределы, или если эти пределы одинаковые, но в точке а функция не определена или имеет значение, отличное от указанных пределов, то точка а называется точкой разрыва первого рода. Все прочие точки разрыва называются точками разрыва второго рода. К ним, в частности, относятся точки, в которых функция имеет бесконечный левый или правый предел. На рис. 1.72 показана функция, имеющая две точки разрыва а и с первого рода (в точке с функция не определена) и точку разрыва Ь второго рода (в этой точке левый и правые пределы функции бесконечны).
1.6.2. Производная и дифференциал
Производной функции у1(х) называется функция (х)у равная пределу отношения приращения функции (х) к приращению аргумента, когда последнее произвольным образом стремится к нулю:
. (х Ах) — (()
' (х) Пт,
дя-о Ах
где Ах — приращение аргумента х.
Производная функция у обозначается также через у'
и А.
йх
Если функция у — 1(х) изображается кривой в декартовых координатах, то у' при рассматриваемом значении аргумента выражает угловой коэффициент каса-
34
РАЗДЕЛ 1. МАТЕМАТИКА
тельной к кривой в соответствующей точке, т. е. у' 1а, где а — угол наклона касательной к оси X. Производная имеет не только геометрическое толкование, она выражает скорость изменения функции относительно аргумента, например скорость движения, интенсивность нагрузки, силу тока, теплоемкость и т. п.
Если функция имеет в рассматриваемой точке производную, то она в этой точке непрерывна; таким образом, непрерывность является необходимым условием существования производной, но это условие не является достаточным, так как непрерывность не гарантирует существования производной.
Общие правила дифференцирования (а — константа, и и V — функции от х) см. в табл. 1.15.
Таблица 1.15
У
У'
У
У
аи
аи'
—, 00 V
уи'—ш)’
V2
«1" •••"
иги2
Н Р (и), где и—и (х)
ар аи а и ах
ию
-
-
Производные основных элементарных функций приведены в табл. 1.16.
Пусть в окрестности фиксированной точки х при переходе от этой точки к любой другой точке х--кх приращение А у функции у(х) можно представить в виде Ау—Акхакх, где А—постоянное (соответствующее фиксированному значению х), а а — бесконечно малая величина при Д-0; тогда величина Ах называется дифференциалом функции у в точке х.
Дифференциал функции есть главная часть ее приращения, пропорциональная приращению независимого переменного.
Если функция у(х) имеет в данной точке х дифференциал, то она имеет в этой точке производную у' и наоборот, причем А —у'. Дифференциал независимого переменного х равен по определению приращению А. Дифференциалы величин у их обозначаются через с1у и йх. Дифференциал функции выражается формулой йу—у'йх.
Дифференциал йу эквивалентен приращению функции А у, т. е.
1 аУ Ь
Ьт —- 1; д-о А у
поэтому при малых приращениях Ах можно пользоваться приближенным равенством йуу.
Производная от производной называется второй производной от данной функции; вообще производной порядка п называется производная от производной порядка п—1; обозначения: у", у"., у либо й2у й3у йпу
йх2 йх3 ’ йхп Аналогично определяются дифференциалы высших порядков; обозначения: й2у, йгу., йпу. Формула для дифференциала порядка п: йп у—у йхп. В табл. 1.17 приведены производные порядка п для некоторых функций, а также для произведения двух функций.
Таблица 1.16
У'
ах--Ь
хп
уп—1
Ух
2 У х
п п У хп1
ах 1п а
1п х
12а х
1
х 1п а
- 81шт
1
СОЗ2
х
У1—дг3
У 1-х
агся
агсс х
1
1
11 X
сЬ х
сЬ х
зЪ х
сЬ2 х
АгсЬ х
х
АгзЪ х
V1
V- 1
АгШ х
1 — х2
АгсШ х
— х1
Таблица 1.17
У
уП)
У
у(п)
ех
еХ
екх екх
1п X
ЗШ X
31П
соз X
( ЪП
соз 2 )
хт
гп (т — 1). (т—л1) X Ххтп
иу
и(п) у ип 1) ип 2) . и'
В последней формуле табл. 1.17 правая часть получается, если разложить (и V)п по правилу бинома Ньютона и заменить степени производными соответствующих порядков, причем — и, V)) —V.
1.6. ДИФФЕРЕНЦИАЛЬНОЕ ИСЧИСЛЕНИЕ
35
1.6.3. Раскрытие неопределенностей
Может случиться, что вычисление пределов приводит к «неопределенностям» вида
_0_
О ’
Если (х)
Л П. 1 °
; 0 оо; оо — оо; 0 ; оо, 1
4(х)
’М)
, причем числитель и знаменатель
стремятся при х-а (или при;е--±оо) оба к нулю или оба к бесконечности (неопределенность вида 00 или оооо ), то неопределенность может быть раскрыта по правилу Лопиталя:
фМ р'()
Ьш Ьт ха (х) х-»а Ф'()
(дг-оо)
если выполнены условия: 1) в некоторой окрестности точки ха, за исключением, быть может, самой этой точки (или вне некоторой окрестности точки х0, если --гЬоо), функции ф(), г)(я) имеют конечные производные, причем 'ф'М Ф0 2) отношение производных ф' (х), г(лО стремится к конечному или бесконечному пределу при х а (или х- оо).
Когда отношение производных не имеет предела, то отношение функции все же может иметь предел, но его надо находить каким-либо иным способом.
Если (х)—у(х)]р(х), причем при х - а (или при -оо), один из множителей стремится к нулю, а другой — к бесконечности (неопределенность вида 0- оо), то задача сводится к предыдущему случаю посредством преобразования произведения в частное:
1
«Р(Ж) Ф():
Если (х)р(х)—г)(), причем при х- а (или при х- •32 оо), обе функции стремятся к бесконечности одного и того же знака (неопределенность вида оо — оо), то полагают
1 1 “() —ГТ» »()
фМ
Ч()
о
а. Функция может иметь экстремум (т. е. максимум или минимум) лишь в такой точке, где производная либо равна нулю, либо не существует (необходимое условие). Функция действительно имеет в такой точке экстремум, если при переходе через испытуемое значение (соответствующем увеличению х) производная меняет знак (достаточное условие), а именно: если производная переходит от положительного значения к отрицательному, то функция имеет максимум; если от отрицательного к положительному, то функция имеет минимум.
В точке, в которой у'0 и существуют производные высших порядков, можно применить другое достаточное условие, а именно: если
' (а) 0, Г (а) 0 (я-1) (а) 0, " (а) 0,
то, если п — четное число, функция имеет максимум при (а)0 и минимум при (а) 0; если п — нечетное число, то экстремума нет в испытуемой точке, — функция возрастает при (а) 0 и убывает при (п) (а) 0.
1.6.5. Функция двух переменных
Понятие функции двух переменных, а также понятия ее предела и непрерывности устанавливаются аналогично тому, как это делается для функции одного переменного. Частные производные функции г[(х, у) определяются равенствами
дг
дх
. Д
11Ш Дл;-0 АХ
дг
ду
1 • У
Ьш
Ау
после чего получается неопределенность вида (х)яв »(-«).
' иx)V(x)
Если (х) 'ф()ф(л;) при х-а (или при хоо) принимает одну из форм 0°, оо °, 100, то логарифмируют функцию и ищут сначала Нш 1п (х) по выше-
х-а
указанным правилам, а затем Пт(л:).
х-а
1.6.4. Исследование функций
Функция называется возрастающей в некоторой точке, если ее значение в этой точке больше, чем в левой части некоторой окрестности этой точки, и меньше, чем в правой части. Аналогично определяется убывание функции в точке. Достаточные признаки возрастания и убывания: если производная в испытуемой точке положительна, то функция возрастает; если производная отрицательна, то функция убывает.
Функция имеет максимум (минимум) в точке х — а, если ее значение в этой точке больше (меньше), чем значения в других точках некоторой окрестности точки
где Ахг и Ауг — частные приращения функции, получаемые ею, когда изменяется лишь один из аргументов. Частные производные по каждому переменному отыскиваются по правилам, известным для функции одного аргумента, поскольку другой аргумент остается постоянным. Частные дифференциалы выражаются формулами
йхг — ах, йуг йу, где йх Ах, йу Ау.
Полное приращение функции: Аг—[(х--Ах; уАу) — —(» У)• Пусть в окрестности фиксированной точки (х, у) при переходе от нее к любой другой точке (х--Ах, уАу) пблное приращение Аг функции г:Кх У) можно представить в виде
Аг ААх ВАу -- аАх ЗДг,
где А и В — постоянные (соответствующие фиксированной точке), а а, р — бесконечно малые при Ах, Дг-0; тогда величина ААхВАу называется полным дифференциалом функции г в точке (, у) и обозначается через йг. Полный дифференциал функции г есть часть ее полного приращения Дг, линейная относительно приращений Ах, Ау независимых переменных. При малых А, Ау верно приближенное равенство йгжАг.
Из существования полного дифференциала следует существование частных производных, причем
дг дг
А —, в —,
дх ду
поэтому
йг:
дг
дх
дг
У
йу.
Достаточное условие существования полного дифференциала йг в точке (х, у): функция г имеет в окрестточки (х, у) частные производные дгдх, дгду,
36
РАЗДЕЛ 1. МАТЕМАТИКА
непрерывные в самой точке (х, у). Функция, имеющая в данной точке полный дифференциал, называется дифференцируемой в этой точке.
Производные высших порядков определяются так же, как для функции одного переменного. Производных второго порядка имеется четыре:
д2г д2г д2г д2г дх2 ’ дхду дудх ’ ду2 но если смешанные производные непрерывны, то они не
Э22
зависят от порядка дифференцирования, т. е. д2г
дхду
дудх
так что остается лишь три различных произ¬
водных. Различных производных третьего порядка оказывается четыре:
д3г д3г д3г д3г
дх ’ дх2ду ’ дхду2 9 ду3
Вообще различных производных порядка п имеется п 1. Если г(и, V), где и р(х, у), у'ф(л:, у), т. е. если г есть сюжная функция от х, у, причем все эти функции дифференцируемы в рассматриваемой точке, то частные производные отыскиваются по формулам
дг
дг
ди
, 1
дг
до
дх
ди
дх
"Г
до
‘д7;
дг
дг
ди
_1_ -
дг
до
ду
ди
ду
"Г
до
ду
(«,
о), где
и ф(0
» о
Ф(0, '
Если 2
есть сложная функция одного аргумента то производная от 2 по отыскивается по формуле
йг дг йи дг с1о
й( ди й1 до й1
Из формулы для полного дифференциала видно, что
йг Р (х, у)йх (2(х, у)1у,
дг дг
г, ((х, у) .дх ду
где (, у)
Однако не всякое выражение такого вида является полным дифференциалом некоторой функции, но лишь такое, в котором выполняется условие дРдуд(1дх.
Функция (дг, у) имеет максимум или минимум в точке (хи ух)у если в этой точке выполняются условия
д?(хУ) д(, у)
Их ду :
Гд2Пх, у) I2 д21(х,у) д2Пх,у) _ дхду ]
дх2
ду2
0.
При этом частные производные
д2 д2 дх2 И ду2
имеют одинаковые знаки: если обе они отрицательны, функция имеет максимум; если обе они положительны, функция имеет минимум. Функция двух переменных может иметь экстремум и в такой точке, где частные производные не существуют.
Если требуется найти максимум или минимум функции (х, у), причем х и у связаны соотношением ф(» у)— 0, то вводится неопределенный множитель % и рассматривается экстремум функции Р(х, у, К) — —1(ху)--кф(, У), так что для определения экстремальных точек и К имеются три уравнения:
дР дР
— 0; — 0; ф 0, дх ду
причем эти равенства выражают лишь необходимые условия максимума или минимума.
Можно установить понятие функции также трех и более переменных, ее частных производных и дифференциалов. Полный дифференциал функции трех переменных выражается формулой
ди ди, ди,
йи —- йх —— йу -т— йг. дх ду дг
Выражение вида Р(х, у, г)йх--((х, у, г)йу) --?(, у, г)йг лишь в том случае является полным дифференциалом некоторой функции, если выполняются условия
дР д0_ д0_ дР дР дР
ду дх дг ду дх дг
1.7. ИНТЕГРАЛЬНОЕ ИСЧИСЛЕНИЕ
1.7.1. Неопределенный интеграл
Первообразной от данной функции называется функция, производная которой равна данной функции, т. е. Р(х) есть первообразная от (х), если Р'(х) (). Если функция непрерывна в замкнутом интервале, то она имеет первообразную в каждой точке этого интервала и притом не одну, а бесчисленное множество, но все они отличаются одна от другой лишь той или иной постоянной. Общее выражение первообразной функции от (), т. е. а функция вида Р(х)--С, где С—произвольная постоянная, называется неопределенным интегралом и обозначается так: §(х)йх. Таким образом, §(х)йх — Р(х)С, если Р'(х) ().
Свойства неопределенного интеграла выражены следующими равенствами, в которых и и о — функции от х, а — постоянная:
аийх—а и йг,
§(ио)йх и йх 1о йх;
ийо — ио — ойи (интегрирование по частям);
(х) ах ]■ Нф (у)) Ф' (у) йу, х Ф (У) (способ подстановки);
д Гг 4 7 Г дХ’ а) 1
(дифференцирование под знаком интеграла); формула справедлива, если [(х, а) и а(х, а) непрерывны как функции двух переменных х и а.
Ниже приводятся основные формулы интегрирования функций, получаемые обращением формул дифференцирования функций, а также некоторые обобщения основных формул.
Основные формулы интегрирования:
хЧх Л— С,пф- 1; п1
1.7. ИНТЕГРАЛЬНОЕ ИСЧИСЛЕНИЕ
37
Г 1п С;
■ех С;
П
е-Чх .
С а
I ахйх-— е,
Л 1па
81 п хйх — соз х С; соз хйх зш х С;
Г -- -с§ С;
31П2 X
Г 8x С;
СОЗX
зЬ х йх сЬ х С;
сЬ хйх Ъх С;
—гт— — С1Ь С;'
зЬ2 х
‘ С;
сЬ2 х
С ах
I ——; агс§ х С — агсс1§ дг Сх; Л 1 -
I
йх
1“ 1
I
; агсзт х С — агссоз х
етх йх — етх С; т
зш тх йх — — — соз тх 4- С; т
соз тхйх — зш тх С; т
С йх 1 х л 1 I ——- — агс1§ — С — — агсс(§ — Сг;
а2 4“ я а а а
йх х х
— агсзт — 4- С —• агссоз— С.
Г йх_
У-
I
йх
1
(а 4- дх)2 Ь (а 4- Ьх)
С
1ггЬ'агс,8(' V )с’
если аЬ 0;
I
йх
• Ьх2
ХпУ±Ьх_ с
2 ]аЬ УаЪ — Ьх 1 (
—цг АгШ I х I — I 4- С, если аЬ 0; 1 пк У а )
I.
У 1
I а 4- I 1 л:
1п —1 4- С — Аг(Ь — 4- С,
2а а — х ] а а
В последующих формулах введено обозначение
а 4- 2Ъх 4- сх2 — X; А ас — Ь2
1 Ь 4- сх
—з агс(§ — 4- С при А 0;
у д у д
1
2 К—А 1
111
— д 4_ 4- с
4- С
4
Аг(Ь — 4- С при А 0;
У—д У—д 1
4- С при А 0;
Ь 4” сх
Г _йх 1 Ь 4- сх (2р — 3) с Г йх
3 X? 2Д(р — 1)' Хр1 2Д(р — 1)3 Хр1 (а 4- х) йх
I
X 2 с
(а 4-Р1) йх
хр ;
1пХ
ас — Ь С йх
Ир
«С — рб
2с (р — 1) Х9-1 Г йх )
Г х"2”1 (а ЬхГ йх Л 1 Ьх)п1 т п)Ъ
1а2 — х'
1.7.2. Интегрирование рациональных функций
Интегрирование дробно-рациональных функций выполняется посредством предварительного разложения подынтегральной функции на сумму многочлена и элементарных дробей, после чего интегрирование всегда выполнимо в элементарных функциях. Ниже приводятся интегралы от некоторых дробно-рациональных функций:
йх 1
"7“ 1п I С1 4“ Ьх I 4С'г
(га — 1) а
(т 4 п)Ь па
4 г
5
-Л-’"
(а 4- Ьх)п йх
хт а 4- Ьх)п т п
(а -- Ьх)п-1 йх С
1.7.3. Интегрирование иррациональных функций
Интегралы от иррациональных функций в общем случае не выражаются в элементарных функциях. Ниже приводятся интегралы от некоторых иррациональных функций
2
ь
4 Ьх
1
а 4- Ьх йх У а Ьх)3 4- С; йх 2 лг —
— У а 4- Ьх 4- С;
У а 4- Ьх
38
РАЗДЕЛ 1. МАТЕМАТИКА
§,Уа Ь.4х--(ъ-уУе Ьх)3 0, у; Ух'1 ±«: С;
г— --(Ьх- 2а)Уа Ьх С; Уа Ьх 36'
йх
Ьх
(указание: применить подстановку у аЪх)
йх
Г
Са Ьх) 1а --Ьх (указание: применить подстановку
у У а Ьх);
Г Л
3 утг;
• —з агсзш
- Ь2 ]Л
(,у, 6)
ф(, а Ьх)
V-
• йх,
I С;
где и ф — целые функции (указание: применить подстановку
Уа Ьх).
В последующих формулах введено обозначение
У а 26л; сх2 X; ас — 62 Д;
1пб сх Ус X С при с 0;
К
1
—АгзЬ —-г С ПРИ с0, А 0;
Ус У д
1 Ь сх
— АгсЬ — С при с 0, Д 0;
Ус У-А
1. Ь сх
агезт — С при с 0;
( У-,
(а Р)Ьг _ р ас-рЬ С йх_
X с 1 „ -1-.
I
хт йх
хтхХ
тс
Уь
с '] X (т — 1) а
тс
хт"2йх
X
хт-1йх.
I-
(2т — 1)6
тс
аХ 4 а2х2. 4 апхП
X
йх
У х± а
( V а- — х2 йх — У а — х2
,) 2
]2 ± а2 Ас Ух2 —а2 ±
— агезт — 4- С; 2 2
±-у 1п ( 1Л:2±а2)С;
6 сх ас — Ь2 ( с?
I
1“-
(а х) йх (ар — Ьа) -- (Ьр — са) х
2 с Х ”'Г_1Т' С:
X3
(62 — ас) X
С.
1.7.4. Интегрирование трансцендентных функций
Интегралы от трансцендентных функций в общем случае не выражаются в элементарных функциях. Ниже приводятся интегралы от некоторых трансцендентных функций:
хп ех йх — ех [хп — пхп1 п(п— 1) хп2 —
. С— 1)ЛШ] С;
1п хйх х 1п х — х С;
(1п х)п йх—п (пх)п — п (1п х)п1 йх С, п Ф — 1;
С УП1
I хп 1п хйх 1п х -
л 1
(п I)2
- С, пф — 1;
I
С 1пх 1.
I —-Лс — (1пл:)а С;
(1п х)п
йх ■■
4— (1п х)пх С, п — 1;
С йх
(А) Ахх А2х2 . 4- Ап_1хп 1) X А ——
(указание: для определения постоянных А0, Ль Л2, Лп-ь Л дифференцируем обе части равенства и сравниваем коэффициенты):
п 1 Г йх
— 1п 1п х I С;
1пл;
С 1 1
I 81 п2 х йх — — — 81П 2х 4- — х С;
4 2 Г 1 1
СОЗ2 X йх — — 51П 2х X С
1”
I
81П тх соз пх йх соз (т — п) х
51П тх йх соз тх йх —
4 2
соз тх
т 81 п тх
С
2 (т — п)
С;
гп
соз (т п) х 2 (т п)
С,
1.7. ИНТЕГРАЛЬНОЕ ИСЧИСЛЕНИЕ
39
I
I
51П (т— п) X 51П (т п)х %
ЗШ тх 3111 пх — “ТГ7 ГГ" "Г"
2 (т — п) 2 (т п)
С у тФ п
51П (т — п) X ( 51П (т п) х 1
соз тх соз пх йх — 7 ; 2 (т — п) 2 (т п)
С, тф ±п л: л: — 1п ] соз лг С;
с§ хйх — 1п 51П л: С;
Г йх
51 п С йх ___ вЪх Г йх ) сЬх
1п
-т
2АгШ (ех) С;
2агс1§ (ех) С;
С;
" С;
С йх 1 соз х С йх
1 — С05 X
I51
Г 1п I (2 X С;
51П X СОЗ X
«8т с;
51П X СОЗ X йх — 51П2 X С,
у 51ПЛ X йХ С05п
х зш" 1х, п 1
п
хйх С;
Хйх ПХС05П. созп—2 А С;
п
2 С, п Ф 1;
с1 хйх — с(§п 2 я 1;
Г йх соз л:
3 51Пг X (п — 1) 51ПЛ гл:
п — 2 С йх
“Ь II «—9 п ф I;
п — 1 51 п х
51П X
(п— 1)соз"“1л'
л-г:
Г
С05Я Л
п — 2 С йх Г" п—2 С 9 п Ф 1;
п — 1 соз х
. п (,. 51П1 X СОЗ1
зшр,г соз хйх —
Р Я
7— 1 Р 7
С05 2хл:
51ПР ЬгСОЗ-1, Р— 1 Гс,-пР—2 7 _ "; ■ 51 п х со5 дл: С;
1
р ? р д
5тгрх совд хйх —
51П РХ СОЗ1
р— 1
I
Р — Я — 2 С I о
— -— зт р х со57 хйх С;
51X С0Я _ 5пР х со .Я — 1
д — р 2 (
• — л 310 X С05 42
т 51П л:с(х — хт С05 л: т хт1 соз С;
хт СОЗ Хт 51П X — т
151Пдг С;
I
у а2 — 62
агс§
(Лт7'гх
т)
X — I С, если а2 Ь2;
1
1п х
С
Кб2 — а2
Ь -(- асоз х УЬ2 — а2 т х а Ъ соб х
2
Кб2 —а2
■ Аг(Ь
(] Ь- У Ь а
X
х 8“2’) С’ если “г 2;
Г соб хйх х а С йх
3 а Ь со5 х Ь Ъ ) а Ь С05 х Су
С 51П хйх 1
I — — Г 1п а Ь соз С;
а Ь со5 х Ь '
4
С А Вс05 X 4- С51П X С й(р
. йх А ——————— -1-.
а Ь соз х с зт х а р соз ф
С соз ф й ф
(В соз а С зт а) —
а р соз ф
, гл. Г 51Пфф
— (В 51П а — С со5 а) С,
а р соб ф
если принять Ь — р С05 а, с — р 5Ш а; х — а ф; 1
азтЬх — ЬсоЬх „ Л еах 51 п Ьхйх еах С;
а2 Ь2
40
РАЗДЕЛ 1. МАТЕМАТИКА
I
а С05 Ьх Ь 31П Ьх
еах соз Ьхйх — еах С;
а2 Ь2
агсзт хйх X агсзт х У1 — х'1 С; агссоз хйх х агссоз х — У1 — х2 С;
I I I
С 1
I зт х сЬ х йх — (зт х зЬ х — соз х сЬ х) С;
агс§ хйх х агс§ — — 1п (1 х2) С; агсс§ хйх х агсс1§ х 1п (1 х2) С; зт л' вЬ хйх — (зт х сЬ х — соз х зЬ х) С;
соз х сЪ х йх — — (соз х зЬ х 31П х сЬ х) С;
соз х 1 х йх — (соз хсЪх 1пх зЬ х) С;
зЬ Ьх йх 1
а2 2 31 п ах сЪ Ьх йх
(Ь зт ах сЬ Ьх — а соз ах зЬ Ьх) С;
1
а2 Ь2 зЬ Ьх йх
1
(Ь 31 п ах зЬ Ьх — а соз ах зЬ Ьх) С;
а2, -
соз ах сЬ Ьх йх
1
— (Ь соз ах сЬ Ьх азт ах зЬ Ьх) С;
а2 Ь2
(Ь соз ах зЬ Ьх а зт ах сЬ Ьх) С.
1.7.5. Определенный интеграл %
Определенным интегралом функции ((х) на отрезке [а, Ь] называется предел интегральной суммы вида
П
2 1(1ОД», когда длина наибольшего из частичных нн1 1
тервалов стремится к нулю, т. е.
ь п
Г (х) йх Пш Е (1,) Да;.; х х ;
максД.0г1 4 " 1 1 1 ‘ ‘
Ах. х.— х. хп а, х —Ь.
I I I—1’ 0 П
Если функция непрерывна на отрезке [а, Ь то определенный интеграл существует. Имеет место формула Ньютона — Лейбница:
§ [ (х) йх — Р (Ь) — Р (а), где Р'х)(х). а
Средним значением функции () на отрезке [а, Ь] называется отношение
Ь
I [ (X) йх а Ь — а ;
если функция 1(х) непрерывна на этом отрезке, то существует такое значение , а%Ь, что
Ь
(•«) йх
(6) -т •
Ь — а
Определенным интегралом могут быть выражены площадь плоской фигуры, длина плоской кривой, объем тела вращения и площадь поверхности вращения вокруг одной из осей координат, равнодействующая нагрузки, действующей на балку, момент этой нагрузки, момент инерции поперечного сечения балки, работа силы, длина пути, количество тепла и т. п.
Понятие определенного интеграла можно распространить на случай бесконечного интервала, а также на случай разрыва непрерывности подынтегральной функции. Такие интегралы называются несобственными. Если функция непрерывна и задана при ахоо, то
4-00 Ь
Г ?(х)йх Пт (х)йх
I а
если этот предел (конечный) существует, в этом случае говорят: несобственный интеграл существует (сходится); если конечного предела нет» то несобственный интеграл не существует (расходится). Аналогично
Ь Ь
() йх Пт () йх.
Если функция задана на конечном отрезке и имеет разрыв в точке с этого отрезка, то несобственный ин-
ь
теграл §(х)йх определяется формулой а
Ь с—а Ь
Г (х) йх Пт ( (х) йх Пт 1 (х) йх;
а а сЭ
если оба предела существуют при аир, стремящихся к нулю независимо друг от друга, то интеграл сходится; если же хотя бы один из пределов не существует, то интеграл расходится. Может случиться, что интеграл расходится, но существует предел
Пт
ос—“-“0
]■
этот предел называется главным значением интеграла. Значения некоторых определенных интегралов:
1
йх я '
х2 85 4 ;
О 1
I оо
Г.-—-Г—
) а2 а2
1.7. ИНТЕГРАЛЬНОЕ ИСЧИСЛЕНИЕ
41
оо
I
йх
а Ьх2 2уаЬ
Vаь 00
[7
йх
а Ьх2 а 62 4 VаЬ
V аЬ
VаЬ
йх
Г йх_
)
Ьх2 2 ]"Ь
С зтл: я,
йх — — при Ъ 0;
3 х 2
1% Ьх я
— х т;
л: 2
00
1
0
оо
, 6 0;
О
оо
Л У л ;
о
ОО
1
е а22 йх —
У я 2 а
еахйх
п
, а 0, л — натуральное число;
Г х”-1.) х
йх я
л: 1 зш пк
, 0 л 1;
ЗШ Ьх йх —
а2 Ь2
, а 0;
00
1
е ах соз Ьх йх —
т » я 0;
а2 Ь2
ТС тс
Т Т
зш х йх соз х йх 1;
соз2 хйх —
51 п2 с? с»и Л ,I; О
тс “
1-3-5.(2п— 1) л
2-4-6.2от 2 ’
2-4-6.2т
Г 31П2т"1 х йх Г соз21 хйх — 3-5-7. (2т1)
о о
ОО ОО
зт (а;2) с? соз (х2) йх — ;
:я.
Встречаются определенные интегралы, в которых подынтегральная функция (, а) и пределы интегрирования а (а), Ь( а) зависят от параметра а. Пусть при аааг функции а (а), Ь( а) непрерывны и Ла(а), Ь(а)В; если в прямоугольной области енссаг функции (х, а) и а(х, а) непрерывны (как функции двух независимых переменных х, а), то при значениях а из интервала аааг имеем
Ь( а) Ь( а)
± Цх, а)1х т-0х
а(а) а( а)
йЬ йа
№. а)г — Да а)Г •
Если а и 6 не зависят от параметра а, то последние два слагаемых обращаются в нуль.
1.7.6. Кратные интегралы
Аналогично определенному интегралу двойные и тройные интегралы определяются как пределы интегральных сумм:
п
Нх, у) Лт Нш 2 (,-, Ч)Лг,-,
макс"" '
где (,у)— функция, заданная в плоской области С; макс—наибольший из диаметров частичных областей, на которые разбита область С;
А О— площадь 1-й частичной области, а 5. —
координаты произвольной точки в этой области.
Аналогично
п
1Я » У• г Нт Е (1г, »1г, ?,-) ДV,.
о макс"’ ■
где (х, у, г) — функция, заданная в пространственной
области О.
Если подынтегральная функция непрерывна в области интегрирования (эта область считается замкнутой, т. е. рассматривается вместе со своей границей), то интегралы существуют.
Вычисление двойного (тройного) интеграла при некоторых ограничениях, налагаемых на границу области, сводится к вычислению двух (трех) определенных интегралов:
Ь ([,()
]](• У)йо-Цйх (х, у)йу;
С а (Ы)
42
РАЗДЕЛ 1. МАТЕМАТИКА
Ьс Фг() Ф(
33] Дх, у, 2) (х9у,г)йг,
‘6 О ф1 (л) 'Ы»)
где линии х а, , ф1() Фг() ограничивают область С или проекцию на плоскость ХОУ области О (если имеется в виду тройной интеграл), а г гн(, у), г2(ху у) —поверхности, ограничивающие область О.
Вычисление интегралов во многих случаях упрощается посредством замены переменных. Если х и у связаны с новыми переменными и и V соотношениями х Ф(«, V), у (иу у), то
(, у)йхйу Л [ф(«, у), ф(и, у)] йийхг,
Я
с
где
Д (. у)
О (и, V)
д
%
да
дх
до
ду
ду
Г) (и, )
(определитель Якоби).
Геометрически замена переменных может быть истолкована как преобразование координат: тогда модуль определит еля Якоби выражает коэффициент искажения элемента площади при переходе от системы (ху у) к системе (и, V). Например, при переходе к полярным координатам ( рсозф, р51Пф) имеем у)
р;
С05 ф — р 51П ф 0(р,ф) 51П ф рСОЗф
У)Лхс1у Г [р С05 ф, р51Пф]ррф.
С С
Аналогично истолковывается замена переменных в тройном интеграле. При переходе, например, от декартовых координат к сферическим ( р зш 0 со ф, р 5111 О 51П ф, грсоз0) имеем
1 Э(х, у, г)
0(р, 0,ф)
51П 0 С05 ф р С05 0 С05 ф —р 51П 9 51П ф ЗШ 0 51П ф р С05 0 51П ф р 51П 0 С05 ф
С05 0 — р 1П 0 О
р2 51П 0.
1.7.7. Криволинейные интегралы
Криволинейный интеграл определяется так же, как предел интегральной суммы, причем функция предполагается заданной на отрезке линии, плоской или пространственной. Различают криволинейные интегралы по дуге, координатам и составной:
по дуге
П
[ (х, у, г)йз Пт Б ПЬ, Ы АГ.
АВ макс А5.-0 11
по координатам
п
Цх, у, г)ёх Пт Е (г, п, I,) Дхг;
АВ макс г-1
аналогично ( Цх,у,г)(1у и ( (х,у,г)с1г;
Ав Ав
составной
Р (х, у, г)йх 0, (х, г, г) йу-- Р(х, у, г) йг.
АВ
Вычисление криволинейных интегралов сводится к вычислению определенных интегралов.
Составной интеграл не зависит от формы кривой, а только от положения точек А и В при том и только том условии, если подынтегральное выражение является полным дифференциалом некоторой функции, т. е. если
дР__дО_, _д0_
ду дх дг
дЯ д дР
ду ’ дх дг
В случае плоской кривой должно выполняться лишь одно равенство:
дР __д0_
ду дх
Можно, наконец, установить понятие поверхностного интеграла для функции, данной на куске некоторой поверхности. Между интегралами различных видов (двойным, тройным, криволинейным, поверхностным) имеются зависимости, выраженные теоремами Грина, Остроградского — Гаусса, Стокса.
1.8. РЯДЫ
1.8.1. Числовые ряды
Пусть дана бесконечная последовательность чисел ии и2,., ип,. Выражение а1и2-К.ип-К. называется числовым рядом. Выражение, определяющее ип как функцию номера п, называется общим членом ряда; п-й частичной суммой ряда называется сумма первых его п членов, 8п «1«2.мп. Ряд называется сходящимся, если существует конечный предел 5 Птпзп, а число
П— со
5 называется суммой ряда; если же Пт зп бесконечен
п-- СО
или не существует, ряд называется расходящимся.
Исследование ряда на сходимость путем непосредственного исследования 5П удается далеко не всегда, так
что требуются косвенные признаки, называемые признаками сходимости.
Необходимый признак: если ряд сходится, то его общий член ип стремится к нулю при г-оо. Этот признак недостаточен, т. е. если общий член ряда стремится к нулю, то сходимость ряда еще не установлена. Достаточный признак расходимости ряда: общий член его не стремится к нулю.
Для рядов, члены которых положительны, имеется несколько достаточных признаков; здесь даются некоторые из них.
Признак, основанный на сравнении рядов: если и---и2-.--ип. и У1-1-У2-Н"-1-уп-Н. числовые ряды с положительными членами и, начиная с некоторого значения пу выполняется условие ипVп то сходимость вто¬
1.8. РЯДЫ
43
рого ряда влечет за собой сходимость первого, а расходимость первого влечет за собой расходимость второго.
ип--1,
Признак сходимости Даламбера: если пт —К
п-оо ип
то ряд сходится при кС I и расходится при к 1; при к 1 вопрос остается открытым.
Признак сходимости Коши: если Пт ип ку то
П—оо
ряд сходится при кС. 1 и расходится при к при 1 вопрос остается открытым.
Интегральный признак сходимости: ряд с общим членом ип (п) сходится, если несобственный интеграл
-рОО
1(х)с1х сходится, и расходится, если этот интеграл
а
расходится (а — произвольное число; (х)—непрерывная положительная убывающая функция в интервале
ахС оо).
Ряд называется знакопеременным, если он содержит бесконечное множество как положительных, так и отрицательных членов. Знакопеременный ряд называется знакочередующимся, если за каждым положительным членом следует отрицательный и за каждым отрицательным следует положительный. Для знакочередующихся рядов имеется достаточный признак сходимости Лейбница: если в знакочередующемся ряде члены убывают по абсолютной величине и общий член стремится к нулю, то ряд сходится. Для общего случая знакопеременных рядов имеется следующий достаточный признак; если сходится ряд из абсолютных величин членов данного ряда, то сходится и данный ряд; в этом случае сходимость называют абсолютной. Приведенный признак не является необходимым, т. е. из сходимости знакопеременного ряда не следует сходимость ряда из абсолютных величин. Сходимость знакопеременного ряда называется условной, если этот ряд сходится, а ряд, составленный из абсолютных величин его членов, расходится. Абсолютно сходящиеся ряды обладают тем свойством, что над ними можно совершать операции, аналогичные операциям над конечными суммами, некоторые из этих операций к условно сходящимся рядам не применимы.
1.8.2. Степенные ряды
Выражение и (х) иг(х) .-Ьип (я) ., где функции их), и2(х),., ип(х),. образуют бесконечную последовательность функций, называется функциональным рядом. Ряд сходится в точке х — Хо, если сходится числовой ряд и±(х0) и2(хо)-Ь"Ип(о)-К. Совокупность точек сходимости называется областью сходимости функционального ряда. Так как каждой точке области сходимости соответствует определенное число (сумма соответствующего числового ряда), то функциональный ряд выражает некоторую функцию в области сходимости; эта функция называется суммой ряда. Обозначения:
8п (х) иг (х) и2 (х) Н Ь ип (х)
8 (х) и± (х) ы2 (Н -ип(х)- Если для любого 80 может быть найдено такое натуральное число N. общее для всех ху лежащих в области сходимости, что ()—5п(л;)е при то ряд
со
2 и1(х) называется равномерно сходящимся в данной
г 1
области; если такого числа N не существует, то ряд сходится в области неравномерно. Сумма ряда из непре¬
рывных функций, равномерно сходящегося в некоторой области, есть функция непрерывная в этой области.
Равномерно сходящийся в интервале [а, Ь] ряд
и(х)--иг(х) .ип(х) . (х), у которого члены являются непрерывными на отрезке [а, Ь] функциями, можно почленно интегрировать в пределах от а до Ь, т. е. ряд, полученный в результате интегрирования, сходится и
Ь Ь Ь
(() ах [« (х) ах 1 и2 (х) ах а а "а
Ъ
- ип (х) йх • • •
а
Если члены сходящегося на отрезке [а, Ь] ряда
их)--игх) -К.Ип ()— () имеют в интервале [а, Ь] конечные производные и если ряд, составленный из этих производных их ()и2 ().■Ьип () — Рав" номерно сходится в интервале [а, Ь], то исходный ряд можно почленно дифференцировать в интервале а, Ь], т. е. в этом интервале ('() и1(х)--и2(х).’-ип(х).
Одним из видов функциональных рядов является степенной ряд аоа1л'а22.апЛ-., где а0, аи., ап,. — заданная последовательность чисел. В зависимости от коэффициентов ряда указанного вида могут иметь место лишь следующие три случая: 1) ряд сходится только при х0; 2) ряд абсолютно сходится при всех значениях х; 3) ряд абсолютно сходится внутри некоторого интервала с центром в нуле и расходится вне его. Такой интервал называется интервалом сходимости степенного ряда, а полудлина этого интервала — радиусом сходимости.
Степенной ряд обладает свойством равномерной сходимости, так что его сумма есть непрерывная функция, и он допускает почленное интегрирование и дифференцирование в любом интервале, внутреннем по отношению к интервалу сходимости; выражаемая им функция имеет производные любых порядков в области сходимости.
1.8.3. Разложение функций в степенные ряды
Если в некоторой окрестности точки х — а функция 1(х) имеет конечные производные '(х), Г(х),.
(« )(), то для каждого значения х из этой окрестности справедлива формула Тейлора:
() («) Г (а) Г («)••• где а’Е)х или В частном случае, когда а 0,
эта формула называется формулой Маклорена.
Если последний член в формуле Тейлора (остаточный член) стремится к нулю при оо, то в данной окрестности точки х — а функция (х) может быть представлена рядом Тейлора (при а — 0 он называется рядсм Маклорена):
) (о)-Ь '(в) Г а) -[ 1-
44
РАЗДЕЛ 1.
МАТЕМАТИКА
В частности, такое представление функции ?(х) справедливо, если в рассматриваемой окрестности точки ха выполняется условие
I (х) I М СОП5?
при любом натуральном п (М не зависит от п). Это есть достаточное условие для того, чтобы остаточный член в формуле Тейлора стремился к нулю.
Степенные ряды дают возможность заменить данную функцию приближенно равной ей суммой некоторого числа первых членов ряда, т. е. многочленом; для приложений важны ряды, сходящиеся быстро, т. е. такие, в которых сумма небольшого числа первых членов дает приближение с желаемой точностью. Ниже приводятся некоторые из примечательных степенных рядов.
Биномиальный ряд
_ т т(т — 1)
(1 Г1 —
. т(т — 1)(т —2),
» 3 1 3
х2
с интервалом сходимости — 1л;1. При т натуральном ряд превращается в многочлен степени т (разложение бинома Ньютона). При тО ряд сходится также на границах интервала сходимости, т. е. при ±1; при —т0 ряд сходится на правой границе и расходится на левой; при т—1 ряд расходится на обеих границах.
Частные случаи биномиального ряда:
—— 1 Т х х2 Т х3 Ч 1 ±х
(убывающая геометрическая прогрессия);
Пм 1-
1-1-3-5
1-1 1-1-3
X — X2 X3 —
2-4 2-4-6
1
УТ-
2-4-6-9
1
2
1-3 0 1-3-5,
х 4- — х- — х3
2-4 2-4-6
13-5-7 2-4-6.8
х —
п т
У(Х)т 1 х п
т(т — п)(т — 2 п) п-2п-Ъп т п
тт — п) п-2п
тт п)
х
У( х)т
т (т -р- п)(т 2п)
п»2п-3п
п-2п
х3 •
’ X -
Ряды для некоторых трансцендентных функций: х 1п а (х п а)2
е" , Т7Г1Г- — °° °°; е,ит (1 Л)'« _1Л _1
поо- п ) 1 2 3
н 2,71828;
1п (1 х) х — —■ —
х
— Ч, — 1 1;
4
V 2 -3
1п (1 — л:) — д: — — — — 2 3
— —, — 1 х 1.
Последние два ряда сходятся медленно, а потому неудобны для вычисления логарифмов; кроме того, при значениях х из интервала сходимости этих рядов (—1,1) получаются лишь логарифмы чисел, меньших единицы. Вычитая последний ряд из предыдущего, получаем более быстро сходящийся ряд:
. 1 х I х? хъ.
,-Н'тт-
1
принимает любые положи-
причем величина N—
1—х
тельные значения, когда х изменяется в интервале (—1,1). Таким образом, для любого N0 имеем
1п АГ
N
N — 13
1 [Ы — 15 1
-- — ( -1, N 0;
5 уУ 1 ]
3 д5
81П х — х— — — — — Ч, — оо х со;
X2 X Xе
со® д, 1 — — — — • х3 2хъ 17х7
Ъхх7ы'и ■
— оо х со; 62л?
32-5-7 33-5-7-9
-Тх
п
т
1, 1-3 1-3-5,
аг«1п — х» —• дг» . -.;
— 1 д: 1;
3 д-б 7
агс? х — х — — — — — • • •; — 1 л: 1;
1, у „ч х3 х5 х7
х—(е-е ) Г Г-
— оо х оо;
1.9. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
45
Некоторые специальные ряды, встречающиеся в тео- • _ о — 4- — — 02 —-4-_
рии балок на упругом основании (интервал сходимости ' 21 31 51 Ы
—оол:оо): 7
Л у12 03 —. в
сЬ соз л: 1 22 — 24 — 2е — 7 ’
со П
у 2 уб уЮ 77 тг уЯ у уЗ
Ь л: зш х — 2 — 2® — -(- 25 —— — 27 Т7 Н е соз 7.2 2 соз —— • —- 1 — — 2 — —
2 6 10 14 4 п 11 31
'3 х5 д-7 д.9 пО
сЬдгмпд: х2 р-22 -1- _2 24
— 23 — — 22 —4-23— 4- 24 — Ч •
ж» х’’, х9 41 51 71 8
зЬ х соя х — х 2 — 22 — -■(- 21 — 2 — ••
д-5 д;9 б С05 X 1 -— 2 — 2- -"
— (сЬ X Ш X 4- зЬ X С05 х) X — 22 — 24 — — 4
у5 у7 у8
1 -4- 23 — — 23 —— 24 —— Та"1""' 51 71 81
1 -7 д;11 2 дЗ 14
— (сЬл-81Пл; — Ь л; соз л:) — — 2-— 24 — — е-дг(соз д; 31П х) 1 — 2 — 2п- — — 2- — —
4 31 71 111 21 3 41
г15
ов _—. ло хн ло 7 4 л:8
2ш -2'-бГ-2,Т 21'8Г-
со п
VI 9 пп Хп X2 X3 у у 2 у4
31ПДГ 2 8ШТ”яГ“Х я" "зГ" е (со8-5Ш) 1-2— 2—-2 —
я1
92 51 “ 6Г 71 ' ' “ 5 г" 6 ‘ 81
уб уб у7 у5 у« у8
22 — 23 — — 23 — -) 23 — 23 — 4- 21 — 1.9. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
1.9.1. Основные понятия
Уравнение называется дифференциальным, если оно содержит какую-либо производную от неизвестной (искомой) функции (или дифференциал от этой функции). Если искомая функция зависит от одного аргумента, то дифференциальное уравнение называется обыкновенным; если же искомая функция зависит от нескольких аргументов, то дифференциальное уравнение называется уравнением в частных производных. Порядком дифференциального уравнения называется порядок наивысшей производной от неизвестной функции, входящей в уравнение. Решением дифференциального уравнения называется функция, которая, будучи подставлена вместо неизвестной функции в уравнение, обращает его в тождество; приемы отыскания решений называются интегрированием уравнения. График решения обыкновенного дифференциального уравнения называется интегральной кривой. Дифференциальные уравнения допускают бесконечное множество решений (решение обыкновенного дифференциального уравнения может зависеть от нескольких произвольных постоянных, а решение уравнения в частных производных — от нескольких произвольных функций).
В задачах, приводящих к дифференциальным уравнениям, на искомую функцию накладываются дополнительные условия, называемые начальными и граничными. При этих условиях искомое решение может оказаться единственным. Для обыкновенного дифференциального
уравнения я-го порядка начальные условия состоят в том, чтобы в заданной точке хяо неизвестная функция у и ее производные у у",., уп принимали заданные значения у0, о—» УцП1). Отыскание решения уравнения, удовлетворяющего заданным начальным условиям, называется задачей Коши. Если на концах интервала (о, х±) заданы те или иные из величин у, у., то такие условия (общим числом п) являются граничными, а отыскание решения, удовлетворяющего этим условиям, называется краевой задачей.
Достаточным условием того, чтобы уравнение уп,
— Нх УУ' — (?г-1)) имело единственное решение, удовлетворяющее начальным условиям у(х0)уо, у'(х0) (хо)УоП1) является непрерывность функции 1(х,уу.1уп-т) и ее частных производных по аргументам у, у., п-1) в окрестности точки (о,
Уо’Уо Решение дифференциального уравнения, зависящее от произвольных постоянных, число которых равно порядку уравнения и значения которых можно выбрать так, чтобы удовлетворить начальным условиям, допускающим единственное решение, называется общим решением дифференциального уравнения. Геометрически оно изображается семейством интегральных кривых. Любое решение дифференциального уравнения, зависящее только от аргумента, можно назвать частным решением. Если в общем решении дать определенные значения произвольным постоянным, то получится частное решение.
46
РАЗДЕЛ 1. МАТЕМАТИКА
Если частное или общее решение получено в виде неявной функции, то оно называется интегралом уравнения (частным или общим).
Обратимся к обыкновенному дифференциальному уравнению первого порядка. Точка (о, уъ) называется особой точкой по отношению к указанному уравнению, если через нее не проходит ни одна интегральная кривая этого уравнения или проходят по меньшей мере две интегральные кривые. Решение дифференциального уравнения называется особым, если соответствующая ему интегральная кривая состоит только из особых точек (через каждую точку этой кривой проходит по меньшей мере еще одна интегральная кривая). Особое решение, вообще говоря, не получается из общего решения ни при каких значениях произвольных постоянных; его график является огибающей семейства интегральных кривых, соответствующих общему решению.
1.9.2. Уравнения первого порядка
Уравнения с разделяющимися переменными. Если дифференциальное уравнение приводится к виду ц(х)йхр(у)йу, то общее решение в явном или неявном виде найдется из уравнения
I ср(х) йх [(у)йу С.
Здесь и ниже (пп. 1.9.2—1.9.4) символ неопределенного интеграла используется для обозначения какой-либо первообразной от подынтегральной функции.
Уравнение в полных дифференциалах. Если уравнение приводится к виду Р(ху у)ах--()(х, у)йу 0, причем дР дС
— —, то общий интеграл будет ду дх
Р(х,у)ах (х,у)—-ах4у сг
ИЛИ
2(х, у) ах (, у)— д0' Ау Ах с.
Однородное дифференциальное уравнение у' •
Подстановка у—х1 приводит это уравнение к уравнению с разделяющимися переменными.
Линейное дифференциальное уравнение у'р(х)у 7()0 имеет общее решение
У е-1 [с — 9 ()Л рх)ах ах].
Дифференциальное уравнение Бернулли у' Р(х)у ч(х)уп 0, пф 1
подстановкой 2,п приводится к линейному.
Дифференциальное уравнение Клеро у—ху'(уг) имеет общее решение уСх(С), изображаемое семейством прямых. Особый интеграл уравнения Клеро выражает огибающую этого семейства и получается исключением постоянной С из уравнений
ди
уСх Г(С), —• л: Г (С) О,
что приводит к уравнениям огибающей в параметрической форме
— '(«): у —«'(“) («).
где и — переменный параметр.
1.9.3. Уравнения второго порядка
Уравнение вида у"—1(х).
Общий интеграл
У йх () йх Сгх -- С2;
отсюда интегрированием по частям получаем
У х (х) йх — (х) йх Сх -■ С
или
х
у [(-0(0 И С,х Со.
6
Эта формула, в частности, выражает зависимость между изгибающим моментом М и нагрузкой р на балку:
йШ Г
— П МС?0х М0-(х-)ра)М,
о
где М0 — изгибающий момент, а (2о — перерезывающая сила в сечении балки х0.
Для случая дифференциального уравнения л-го порядка у(п)[(х) результат обобщается следующим образом:
х
у —) (-Оя-,(ОЛ С0 С1
О
Ч я"-1.
Уравнение вида у"(у).
Общий интеграл
Г —— с2.
3 уСг 2Ну)Ау
Уравнение вида у"—Ну')
Полагаем у'—г, у"—г'; тогда
Эти равенства дают решение в параметрической форме (г-параметр); исключив из этих уравнений г, получим решение в форме Р (х, у, Сь С2) 0.
Уравнение вида у"(х%у').
Положив у'2, получаем дифференциальное уравнение первого порядка: г'(г,х), интегрирование которого дает 2 как функцию от х и С4; затем получим
у г () йх 4- Са.
Уравнение вида у"—(у, у').
йг
Полагая у'—г, у"%—, получаем дифференциальУ
ное уравнение первого порядка, интегрирование которого дает 2 как функцию от у и затем получим
Г а.
X— ТГ “Ь 2
1.9. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
47
1.9.4. Линейные уравнения второго порядка
У" Р (х) У' Я М У р (X).
Это уравнение —неоднородное линейное; если Р(х) 0, то уравнение называется однородным линейным.
Общее решение неоднородного уравнения равно сумме общего решения однородного уравнения и какоголибо частного решения неоднородного уравнения. Общее решение однородного уравнения имеет вид у—
— Схух 4- С22, где Си Сг — постоянные; у и Уг — линейно независимые решения уравнения (две функции называются линейно независимыми, если их отношение не является постоянной). Такие решения у и у2 образуют так называемую фундаментальную систему решений.
Если известно только одно частное решение однородного уравнения уи то другое находится по формуле
С
у 2 О 1 —— ах,
где С — постоянная.
Если коэффициенты р(х), д(х) и Р(х) разлагаются в сходящиеся ряды по степеням х—х0 в некоторой окрестности точки хо, то решения ищут также в форме рядов по степеням х—о, сходящихся в той же окрестности. Коэффициенты разложения находятся приравниванием коэффициентов при одинаковых степенях разности X—Хо.
Задача отыскания решений однородного уравнения значительно упрощается, если коэффициенты дифференциального уравнения постоянны:
аоУ" ауу' а Р (х),
где До, аи аг— данные числа. Решения уравнения зависят от корней характеристического уравнения ак2-а1--а0 0. В табл. 1.18 даны результаты в зависимости от дискриминанта
В — а— 4 а0а2-
Т а б л и д а 1.18
В табл. 1.18 функция ф(х) есть частное решение неоднородного уравнения; оно может быть найдено по способу неопределенных коэффициентов, если правая
часть дифференциального уравнения имеет следующую структуру:
р (х) еах [Рх (дг) соз р Р2 х) 51 п рх],
где Р(х) и Р2(х) —многочлены.
В общем же случае применяют вариацию произвольных постоянных, а именно: заменяют постоянные С± и С2 функциями С(х) и С2(х); производные этих функций должны удовлетворять системе алгебраических линейных уравнений:
С1 у2 с2у2 0;
У 2 У2 Р ()•
Найдя Сг и С2, получают
1 () 1 (х) йх 4
2 (■) 2 () йх “Ь 2»
где и Ог — произвольные постоянные.
Уравнение вида ху"хр(х)у'д(х)уЪ в том случае, если р(х) и я(х) разлагается в сходящиеся ряды по степеням х, имеет решение
у хк (а0 ахх Н ),
где к определяется из уравнения
— 1) Р (0) 6 7 (0) 0,
а коэффициенты а0 Яь ••• находят методом неопределенных коэффициентов.
Пример 1.7. Уравнение Эйлера:
х2уп агху' а 0.
В этом случае
к (й — 1) 4 о,]к -- а2 — 0, и решение имеет вид
у С2х.
Пример 1.8. Уравнение Бесселя:
х2у” ху' (х2 — у)у 0.
Для к получается
к(к — 1) к — у0, откуда к±у. Два решения имеют вид
оо оо
Ух хУ 2 ар хР; у2 хг-У 2 архР. рО р о
Определение ар с помощью метода неопределенных коэффициентов приводит к функциям Бесселя (см. 1.14.4).
1.9.5. Линейные уравнения высших порядков с постоянными коэффициентами
Интегрирование линейных дифференциальных уравнений связано с понятием линейной независимости функций. Функции у 1, у2у уп называются линейно зависимыми в данном интервале изменения аргумента х, если в этом интервале выполняется тождество Су±-4-С22.4-С71п0, где (2 —постоянные,
из которых хоть одна отлична от нуля. Если же в данном интервале изменения х указанное тождество выпол¬
й 0
Л — 0
Я 0
- а, У7;
2 ад
ах
V—о
2а0 ;
Р ± я1
к, 2«
- в, -УЪ
2а»
у — СеЪх-4- Сг ф (х)
УСг -т-С2х) ех 4 Ф (х)
у еРх (Сг зш дх 44- С2 соз дх) 4- ф (х) еРх соз дх И2) 4-
4-Ф (х)-
48
РАЗДЕЛ 1. МАТЕМАТИКА
няется только тогда, когда все постоянные Си С2,., Сп равны нулю, то функции уи Уг Уп называются линейно независимыми в данном интервале.
Необходимое условие линейной зависимости функции: если функции уи Уг, Уп линейно зависимы в данном интервале изменения аргумента, то определитель Вронского (вронскиан)
Ф(УиУг,-,Уп)
Уг
Уг
У 2
У1 У 2
Уп
Уп
Лп-ц
тождественно равен нулю в этом интервале. Отсюда: если УР(у 1, уг., Уп)Ф0, то функции линейно независимы в этом интервале (достаточное условие линейной независимости функций).
Пусть дано линейное неоднородное дифференциальное уравнение с постоянными коэффициентами ао аь., ап:
а0 у(п) ах Н Ь ап у Р (х).
Общее решение имеет вид
У СгУг --С2у2- Ь Сп уп у;
здесь Си С2, Сп—произвольные постоянные; уи У2., уп — линейно независимые решения соответствующего однородного уравнения (система таких решений называется фундаментальной); у — какое-либо частное решение данного неоднородного уравнения.
Для отыскания уи Уг, Уп следует найти корни характеристического уравнения:
«о гп аг г”-1 Н ап 0.
Простому действительному корню гт соответствует
Т %
решение однородного уравнения ут — е т •
Действительному корню гт кратности к соответствуют решения
ГХ
Уте т
ГГ
Ут1 хе т »•••
к—1 гх х е т.
Ут :
Чтк еаХ-пХ,
Утк-ч хеахт рх Ут2к-х ■
.к—1 „тх •
ЗШ Рлг.
Пример 1.9. Уравнение изгиба балки на упругом основании
у Ь4у 0.
Характеристическое уравнение 0 имеет корни
гг — Г2 а ф; г3 — а — ф; а р —— ;
V
отсюда получаем
ух — еах соз ах; у2 — еах зш ах; у3 еах соз ах; у4 еах зт а.
Общее решение однородного уравнения У — СУ С2у2 С3у3 Ст.
Для нахождения частного решения у неоднородного уравнения либо применяют способ неопределенных коэффициентов, если правая часть имеет структуру, указанную выше (см. 1.9.4), либо пользуются вариацией произвольных постоянных. При этом в общем случае частное решение у ищут в форме
У “ 1 (х) Уг IСп (х) уп.
Производные С,- (х) определяют из системы алгебраических линейных уравнений, определитель которой есть определитель Вронского, отличный от нуля в силу линейной независимости решений у и У г, Уп:
У 1 Ь У2 С2 Н— • Уп Сп — 0;
УС Л- У )Су-— • уп Сп — 0;
• • •
Если гю—а1 (комплексный корень), то имеется и сопряженный корень гта—ф; этой паре корней соответствуют
Ут еах соз (к; ут1 еа5т х.
Если гт ар — комплексный корень кратности к, то имеется и сопряженный корень гт — а—ф той же кратности к этой паре корней соответствуют решения
Ут ехх соз рдс, ут1 хеах соз ?х Утк
хк1 еах соз рлг.
У[п2) С -2) С'2 • • • у(пп2) С'п 0;
уп" С[ г"-1» С'2 • • • у(пп1) с; Р(х),
имея С,- (х) находят интегрированием СДдс).
Наряду с методом вариации произвольных постоянных применяется «символический метод» [1.11.1].
1.9.6. Метод начальных параметров
Преобразование общего решения. Пусть дано, например, обыкновенное линейное дифференциальное уравнение второго порядка без правой части Ру", у у, лг) 0 и найдено его общее решение, содержащее две произвольные постоянные:
У(х) С1У1(х) С2У2(х);
здесь У(х) и У2(х) —линейно независимые частные решения уравнения, образующие фундаментальную систему. Дифференцируя, находим
у (х)Сг У[ (х)С2У'2(х).
При я0 имеем
0(О) С1К1 (0) С2К2 (0); у 0) СхУ'0(0) С2У’20).
Эти два уравнения решаются относительно С1 и С2:
Сг сп у (0) с12 у' (0);
С2 с21 у (0) с22 у' (0).
Подставив эти выражения в общее решение, получаем его в виде
у(х)у (0) (х) у' (0) г2 (х).
1.9. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
49
Произвольные величины у(0), у'(0) называются начальными параметрами, а %1(х), 22(х) —функциями влияния. Функции влияния 2,1, 2ч, представляют собой линейные комбинации частных решений:
2 (х) сп У± (х) с12 У2 (х)
2% (х) 21 (л:) С22 У2 (х) •
Аналогично для уравнения четвертого порядка
у(х) у (0) (х) у' (0) 22 (X) у" (0) 23 (х)
у'"(0)24(х).
Частное решение неоднородного уравнения может быть получено методом развертывания общего решения однородного уравнения (см. 5.5.6).
1.9.7. Общие решения дифференциального уравнения четвертого порядка с биквадратным характеристическим уравнением
Большое число задач строительной механики, относящихся к прямым упругим стержням постоянного сечения, приводится к дифференциальным уравнениям указанного вида с постоянными коэффициентами. Имея общий интеграл однородного уравнения, содержащий четыре произвольных постоянных, можно получить частные решения, отвечающие произвольной правой части, используя метод вариации постоянных или метод начальных параметров.
В табл. 1.19 для частных случаев уравнения у± ±2а2у"±:Ь4у0 даны формулы линейно независимых частных решений, образующих общий интеграл однородного уравнения. Эти частные решения даны в трех вариантах в виде функций аргументов ах и рл;, где а и ф — действительная и мнимая части корней характеристических (биквадратных) уравнений.
Уравнения табл. 1.19 соответствуют: — простой балке постоянного сечения; 2 — балке на упругом основании; 3 — колебаниям балки; 4 — сжато-изогнутой балке и колебаниям упругой системы с одной степенью свободы;
5 — растянуто-изогнутой балке, стесненному кручению тонкостенного стержня, составной балке из двух стержней; 6—13 — статическим и динамическим задачам для балок с двумя упругими характеристиками самой балки и ее основания и т. д. Эти же уравнения находят применение в теории цилиндрических оболочек.
1.9.8. Приближенные методы
где N — постоянная. Тогда последовательность функций (последовательных приближений)
X
УМУо Цх, уа)йх, уг(х)у0
(. Ух) йх,.,уп (х) у0 (лг, уп_х) ёх,.
х0 х0
сходится в некоторой окрестности точки хх0 к функции у (х), которая является решением данного дифференциального уравнения и удовлетворяет поставленному начальному условию. Останавливаясь на одной из функций Уп(х) указанной последовательности, получают при достаточной большом п приближенное решение с требуемой точностью.
Метод рядов. Допустим, что нужно найти решение уравнения у'(х, у)у удовлетворяющее начальному условию у(х0)уо. При некоторых ограничениях, накладываемых на функцию (х9 у), эту задачу можно решить следующим образом. Подставляя в правую часть уравнения вместо х, у их начальные значения Хо, уо, получаем у'(х0). Затем, последовательно дифференцируя уравнение и заменяя в правой части х, у, у. их начальными значениями, определяем шаг за шагом у”0
п т «гг
0 (о)» Уо У (о)» — • Это позволяет представить решение у в виде ряда Тейлора (см. 1.8.2). Указанный метод применим к уравнению любого порядка, разрешенному относительно старшей производной, если решается задача Коши.
Численное интегрирование. Требуется найти решение уравнения у"[(х, у, у'), удовлетворяющее начальным данным уу0,у 0о при %. Берут ряд последовательных значений хи х2,., хп аргумента х с постоянным приращением Аххп1—хп и вычисляют значения функции У, У2 — Уп и ее Производной у[, у2,., уп, соответствующие этим значениям аргумента, следующим образом. Сначала вычисляют
Уо — ? (о Уо Уо) У Уо Уо У Уо Уо А;
затем
• г ' . Уо У
01 (» Ух, 01); 0100 2 Ах
и находят более точно первое приближение:
00 01
01 00 ■
Ах.
Метод последовательных приближений. Пусть требуется найти решение уравнения '(, у), удовлетворяющее условию: 000 при х х0. Вместо данного уравнения можно написать
X
у 0о-1- ]7(» у) ах.
о
Положим, что в некоторой прямоугольной области изменения ху у с центром в точке (о, у о) функция (, у) непрерывна и удовлетворяет условию Липшица:
(х, У1) — Цх, Уг)МУ1 — Уг,
Затем все действия с уже найденными величинами повторяют до получения требуемой точности, переходя от п-го приближения к г1-му следующим образом:
Уп ?хп Уп у'п)’ Уп1»Уп УпЬх
Упг Уп Уп д-.
Уп. Г[хп1. Уп1.),
Уп Уп--
1 В настоящее время с появлением электронных счетных машин развиваются специальные методы приближенного интегрирования дифференциальных уравнений.
Уп--1 Уп 1 2
Уп Уп
Ах;
Ах.
Виды общего решения однородного дифференциального уравнения у ± 2а3у" Чг Ьу О
1) у СгХг (х) С2Х2 (х) С3Х3 (х) С4Х4 (х) 2 )у (х) 02К2 (х) 03У3 (х) -- В4У4 (х);
3) у у (0) 1 у () у' (0) 2г х) У" (0) 2Ъ (х) уш (0) 1Х (х) (метод начальных параметров)
50
РАЗДЕЛ . МАТЕМАТИКА
Продолжение табл 1.19
1.9. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ д
X
еа
н
оа
«а
'згк
о- са 1
СО.
м
аа
ос.
I
N
12 «5
й
в «
V
I
и
«5
«»»?
1
л
•ии »лг
N
ьГ
2
•§
К
а
Ч.
7 г
»гЯ
-в
I
.
8
I
Г
СО
8
сч
I
8
II
С
I
II о С Н
I 8 1[
С
II
? »
8
л
°г
1
I
X
'Г I
I
V "в"
в «Г II II 1? С I I К II
4
8
г %Ч
I
Г
N
ь 8
N
8
8 II II
я
О
ъ
1
чГ
-О
а
II
8
II
СО.
8 «а
11
I. «
I ‘
в
II
«з
V
58» -° I
II 8
I
а® в
с а»
52
РАЗДЕЛ 1. МАТЕМАТИКА
Приближенные методы решения краевых задач. Пусть дано дифференциальное уравнение, обыкновенное или в частных производных Ь(хю)М, где Ь(м)—дифференциальный оператор от неизвестной функции от, М — заданная функция от независимых переменных. Положим, что поставлена краевая задача: найти решение указанного дифференциального уравнения в области удовлетворяющее заданным однородным граничным условиям на границе области. Весьма общим приближенным методом решения этой задачи является обобщенный метод Галеркина. Он состоит в следующем.
Выбираем две системы функций: фь ф2,.; г1, 'фг,. подчиненные следующим требованиям. Функции фь р2,. удовлетворяют заданным граничным условиям и взятые в любом конечном числе являются линейно независимыми; система фь фг,. полна в пространстве Ь2 функций с интегрируемым квадратом. Это означает, что каждая функция из Ь2 может быть с любой точностью аппроксимирована полиномом а1ЯЭ1а2‘ф2.-Ьал,фп ПРИ достаточно большом п (такое требование эквивалентно условию, чтобы не существовало ненулевой функции из А ортогональной к каждой функции фп); см. [1.20.6]. Если ищется решение ип, приближенное в «среднем» в том или ином смысле, то соответственным образом следует трактовать полноту выбираемой системы функций; см. [1.9.10]—[1.9.12].
Приближенное решение шп поставленной краевой задачи ищется в виде
хюп — А1 Фх -Ь Л2 Фг - Ап Фп-
Постоянные коэффициенты Аи А2,., Ап определяются из условия, чтобы выражение ,(шп)—М было ортогонально к каждой из функций фь ф2, ф«. Это приво¬
дит к уравнениям
[ [I (доЛ) — М] ф с?о 0 (к 1, 2,., л), й
т. е. получается линейная алгебраическая система относительно коэффициентов Ас
п
И (ф) ф с?со ( МЦьс1(й (к — 1,2,., п).
1—1 Й й
Таким образом, решение краевой задач[и по излагаемому методу сводится к решению указанной системы для А.
Из этого метода как частные случаи получаются другие приближенные методы решения краевых задач. Этот метод тесно связан с так называемыми вариационными методами (его частные формы при некоторых условиях приводят к тем же уравнениям, что и вариационные методы).
а) При фь ф получается метод Галеркина (или, как его еще называют, метод Бубнова — Галеркина). В этом случае система уравнений для Л» принимает вид
П
2 Л Ь (ф) ф Мф й® (к 1,2,.,
1 й а
г).
ратов. Последний состоит в том, что коэффициенты Лгв выражении и)п определяются из условия, что они обращают в минимум интеграл
П
]■[( Б Ат) — м]24е. й 11
Тогда для Л получаются уравнения д]
—- 0 (1 1,2,., п),
оА
которые совпадают с вышеуказанными общими уравнениями для Л при фь 1(фь).
Пример 1.10. Рассмотрим прямоугольную пластинку (рис. 1.73), защемленную по всему контуру и находящуюся под действием равномерной нагрузки кГсм2. Уравнение для прогиба пластинки:
д4до д 5"»
—2аРис. 1.73
д4ю д4ш
— 2.
дх4 дх2ду2 ду4
где ш — прогиб пластинки;
й—цилиндрическая жесткость пластинки при изгибе.
Граничные условия задачи: при лс±а и у±6
дш дно — — 0. дх ду
Для приближенного решения задачи задаемся линейно независимой системой функций, удовлетворяющих граничным условиям:
Ф1 (х2 — я2)2 (у2 — 62)2; ф2 (х2 — а2)2 (у2 — Ь2)3;
Фз (2— я2)3 (У2 — Ь2)2 и т. д.,
так что
Ш А1 (х2—а2)2 (у2 — 62)2Л2 (л:2 — а2)2 (у2 — Ь2)34- • •
Для первого приближения ограничимся первым слагаемым, положив ф1 ф1; получим
а Ь
(а4 (х — а"-)- (у—Ь)Ц
—а —Ь
дх
Ч
. пд(х-аГ(Уг-Ь°-) 1. 2
д [(.г2—а2)2 (—2)2]
ду а Ь
-И
] (X2 -
д2)2 (у2 62)2 йХ йу Метод Галеркина часто приводит к довольно точному результату даже при небольшом п (см. пример 1.10). Для задач, в которых решение т приводит к минимуму некоторого функционала, этот метод эквивалентен вариационному методу Ритца (см. 1.11.3).
б) При фЛ(фА), где Л — какой-либо подходящим образом выбранный оператор, получается метод моментов. В частности, при ф .(фь) он совпадает с методом наименьших кваб-
Ал
(2 _ а2)2 (у2 _ Ь2) ах (1у, 7(7
128 4 — а2 Ь2
-
7д
128й4 —а2 62 а)0
• (х%—а2)2 (г2—2)2.
1.9. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
Максимальный прогиб квадратной пластинки
Яа4
“’макс 0.0213 0
По точному решению получается
аа4
макс 0,0202-.
д2ю д2и)
Атт 2В
дх2
где А, В, С — функции от х и у. Особенно важен случай, когда линейно относительно до, дшдх, дхюду в этом случае уравнение называется линейным.
Характеристиками уравнения называются интегральные кривые обыкновенного дифференциального уравнения
йу
йх
Б±Ув2 — АС
Могут иметь место три случая:
В2—АС0 — уравнение имеет два семейства действительных характеристик и называется уравнением гиперболического типа;
В2—АС 0 — уравнение имеет одно семейство действительных характеристик и называется уравнением параболического типа;
В2—АС0 — уравнение не имеет действительных характеристик и называется уравнением эллиптического типа.
Если общие интегралы дифференциального уравнения характеристик имеют вид ер(х, у)и, г)(х, у)о, то, приняв и и V за новые независимые переменные, можно привести уравнение к каноническому виду: для уравнения гиперболического типа
д2ю [ ди) ди)
для уравнения параболического типа
д2и) ( ди) ди)
4- Р и, V, до, —, —
ди2 ди до
для уравнения эллиптического типа
:0;
здесь
д2ю д2и) ( ди) ди)
-Т7Г Р (6, Л» ю. “ГГ V- 10; дс2 дг)2 д 11
5 И 1Г, г 1(и— V).
Особенно часто встречаются следующие частные случаи рассматриваемого здесь дифференциального уравнения второго порядка:
уравнение распространения колебаний в однородной среде
уравнение теплопроводности ди) д2и)
И а д;
распространения электрического тока по
уравнение
проводу
д2и) ди)
а2Ьы
д2ш
сю
1.9.9. Уравнения математической физики
Во многих приложениях приходится иметь дело с дифференциальным уравнением, которое в случае двух независимых переменных имеет вид
д2до ( ди) ди)
дхду С1Х’У'т''д)°'
уравнение теории потенциала
д» д
Аю 4лр (х, у); А — Т-: дх2 ду2
(уравнение Пуассона). При р 0 это уравнение называется уравнением Лапласа, или гармоническим уравнением.
Часто приходится встречаться также с уравнениями более высоких порядков:
уравнение поперечных колебаний балки
д2и) д2 Г д2ш
где ?(«:)—масса балки на единицу длины; 1(х) мент инерции поперечного сечения балки; уравнение изгиба пластинок
• мо-
ДА
д, „ д ДА — 2 4- —,
дх4 дх2ду2 ду4
д2до
д2до
где у)—поверхностная нагрузка; й — цилиндрическая жесткость пластинки.
Уравнение плоской задачи теории упругости (бигар моническое уравнение)
Д Дф 0.
Определяемая дифференциальным уравнением математической физики функция и) должна удовлетворять заданным условиям на границе области интегрирования
О и в начальный момент времени; эти условия называются граничными и начальными условиями; им должно удовлетворять решение уравнения. Наиболее часто встречаются следующие начальные и граничные условия:
в начальный момент времени 0 даны значения искомой функции ю(х, ) и ее производной по и
ди)
на границе области Й [ (.), у у(з)] задана искомая функция и)(х, у):
и) ф (5)
или производная искомой функции по направлению нормали к границе:
ди)
При интегрировании линейных уравнений применяются следующие приемы.
Метод Фурье (метод разделения переменных) используется для решения линейных уравнений всех трех вышеуказанных типов. Изложим его, обратившись к задаче о свободных колебаниях закрепленной на концах струны. Полагая, что струна расположена на оси X, имеем для прогиба струны до(, ) — время) уравне-
нение гиперболического типа:
д2и) д2и)
54
РАЗДЕЛ I. МАТЕМАТИКА
Нужно найти решение этого уравнения, удовлетворяющее граничным условиям а(0, )та(1, )0(л;0, х1—концевые точки струны) и начальным условиям
[дш
ш(х, 0)[(х), I— I ф() где ?(х), р(х)-за-
данные функции. Метод Фурье состоит в следующем. Ищется частное решение уравнения колебаний в виде ы Х(х)Т(1). При подстановке этого выражения в указанное уравнение переменные разделяются, т. е. приходим к уравнению
X" Т"
X аЧ
где с — постоянная. Нетривиальное решение, удовлетворяющее граничным условиям, получается лишь при с —к2(кФ0). Тогда
X" к2Х 0; Т" каТ 0.
Отсюда
X А соз кх А2 зш кх; Т Вг соз ка1 В2 зш ка1.
пп
Из граничных условий следует Л 10, 6 —у (п
1, 2,.). Таким образом, получается частное решение уравнения колебаний
( ппа 4, ппа . пп юпХпТп 1а„соз -у- 1 Ьпт— Лет — ,
удовлетворяющее при любых значениях констант ап, Ьп граничным условиям. Поскольку уравнение колебаний линейно и однородно, его решением будет также ряд
оо
( ппа ппа пп
ш 2 ('ап соз ” I Ьп 31П — п 31П — X
П1
(при условии, что его можно два раза почленно дифференцировать). Коэффициенты ап, Ьп находятся из на-
ппа
чальных условий. Из них следует, что ап, долж¬
ны быть коэффициентами Фурье (см. 1.20.1) соответственно для функций (х), ср() при их разложении в ряды по синусам, т. е.
2 С г ппх 1 2 Г, ппх,
ап — I () зш —• йх, Ьп I ф (х) зш —•йх.
I ппа,) I
о о
Метод Римана применяется для решения следующей задачи. Дано линейное уравнение гиперболического типа:
д2и да ди
———а(х, у) — Ь(х,у) — с(х,у)и р(х, у)
дх ду дх ду
и задана линия уравнением у[(х), причем '(х)Ф0.
Ищется решение и указанного уравнения такое, что веды ди
личины и, —, — принимают на линии I заданные знадх ду
чения. Метод состоит в том, что определение
значения искомой функции и в произвольной точке
М (хо, уо) сводится к отысканию вспомогательной функ¬
ции и(х, уу Хо, уо) (функции Римана), которая должна удовлетворять уравнению
д2у д (аи) д (Ьи)
— — 4- си—0
дхду дх ду
и условиям л
9
V (х0, у, х0, ув) ехр [ а („, у) ау,
У
X
0(х, Уо, х6, у0) ехр Ь(х,уо)ах.
Если функция V найдена, то
“ (о Уо) -у (ио)А -у (иъ)в
АВ
- [т (°г -“Ю Нау Я роах1у-
ААМВ
Здесь АВ — дуга линии , причем ордината точки А равна уо, а абсцисса точки В равна Хо.
В частном случае, когда а — Ь — с—0, функция Римана 21, а в случае, когда а 6 0, с сопз1, имеем
V У0 (2 Ус (х0 — х) (у0 — у),
где о — функция Бесселя (см. 1.14.4).
Метод Грина. Пусть требуется найти функцию а, которая внутри области Д ограниченной замкнутой линией С, удовлетворяет уравнению эллиптического типа:
д2и д2и ди, ди
ах'у)Ь(х'у)с(х’ упх-»-
а на контуре С принимает заданные значения. Для решения этой задачи ищется функция Грина 6(х, у, , у а), удовлетворяющая «сопряженному» уравнению
дЮ дЮ д(аО) д(ЬО) _ дх2 ду2 дх ду ™
и имеющая вид
о (ху у, х0, Уо) V (х, у) пг V (х, у).
Здесь (ло, уо) — произвольная внутренняя точка области й 1)(ху у), У(х, у) —функции непрерывные вместе со своими первыми и вторыми частными производными в области Д причем
у (Хо, Уо) — и Г — У(X — Х0Я (у — Уо)2-
Кроме того, функция С(х, у, Хо, о) должна равняться нулю на контуре С. Если такая функция найдена, то значение искомой функции и в точке (о, уо) определяется по формуле
“ (о о
С й
где йСйп — производная функции О по направлению внутренней нормали к контуру С.
1.10. ФУНКЦИИ комплексной ПЕРЕМЕННОЙ
00
1.10. ФУНКЦИИ КОМПЛЕКСНОЙ ПЕРЕМЕННОЙ
1.10.1. Комплексные числа
Комплексным числом г называется пара действительных чисел а и Ьу следующих одно за другим в указанном порядке. Если Ь следует за а, то г—(а, Ь). Два комплексных числа г—(а, г2 — (а2, Ь2) считаются равными тогда и только тогда, когда а1 — а2, Ь Ь2. Число (а, 0) считается равным действительному числу а, т. е. (а, 0)а. Число (О, Ь) называется чисто мнимым числом и обозначается 6, т. е. (О, Ъ)1Ь; (0, 1) — мнимая единица.
Для комплексных чисел устанавливаются операции сложения и умножения с помощью следующих равенств. Пусть 2(01, Ь1), г2(а2, Ь2), тогда 2422 (я1а2, 12), (определение суммы), 2122 (а1й2—6162, Я12а21) (определение произведения).
Вычитание и деление определяются как операции, обратные сложению и умножению. Произведение п одинаковых множителей г называется п-й степенью 2, гп. Ко-
п __
рень г-й степени из комплексного числа -'г определяется как такое число ги что 2 2.
На основании указанных определений каждое комплексное число 2 (а, Ъ) можно представить в виде г —
— а--1Ьу причем 1г ——1, 1 У—1. Число а называется действительной частью комплексного числа г— (а, 6) а6, а 6 — мнимой частью г. Для а и Ь установлены обозначения: а Кег, 6 Зтг. Число а—г7?_называется сопряженным числу гаШ и обозначается 2, га—1Ь.
Полагая а гсозф, 6 г81Пф, можно представить комплексное число 2 а6 в виде г г(соз фзт ф); величины г и ф определяются через а и Ь по формулам
т а2--Ъ2 ; сое ф —: зт ф — —.
г г
Число г называется модулем комплексного числа 2, г2 — нормой; ф — аргументом. С помощью показательной функции комплексного переменного (см. 1.10.2) комплексное число 2 представляется в виде г — ге
Основные формулы:
ах Ьг I — а2 Ь2[, если ах а2 и Ъх Ь2;
(а1 0 гЬ (а2 2 0 (а1 2) (1 Ь2) V,
(ах Ьь) (а2 Ь 20 (аг а2 — Ьг Ъ2) (аг Ь2 а2 Ьх) ; а 1 I 2 62 2 1 — 2
а2 Ь2 I
I
а2 Ь2
_2, а2 а2 I 2
;4Х
(а Ы) (а — Ы) — а2 62;
.2 . 3 •,.—1 ч
1; 14п1 ,-4"2 — 1;
Л3 -«;
1", 1 -М п— я 26л
Лп П
СОЗ ф I 51П ф
(формулы Эйлера);
У2
л 2 кл
(6 5 0, 1,2,
СОЗ Ф — I 51П Ф
СОЗ ф
е1Ц е
: п — 1); е1
2 21
1 : (С05 ф I 51П ф) — С05 ф — I 51П ф;
Гг (С05 ф I 51П ф) Т2 (С05 1) I 51 П Т)) гг Г2 [С05 (Ф Ф) ± I 51П (ф Ф)];
ГХ (С05 ф I 51П ф): Г2 (С05 ± I 51П ))
[С05 (ф -
Ао
(соб ф 151П ф)я — соб шр 15Ш дф (формула Моавра); (а Ы)п [г (С05 Ф ± I 51П ф)]л — Гп (С05 Пф I 51П дф)];
2кл
V а Ы
п — У г
ф--2кл ф -
С05 п п
(ф — в радианах, 6 0, 1,2,.,г — 1);
51П IX I 5Ь х; С05 IX сЬ Х
м д-; сд IX — I сЬ х
сЬ IX — С05 х; 5Ь IX — I 51П Х
1Ь ьх 1х; сЬ 1х — — I с1% х;
'2кя.
П г У-1
п- 2кп 2 кл
у 1 со5 — -- г’ 8п — п п
(261) я (261).я
I 51П П П
(6 0,1, 2,.,г— 1).
С05 -
1.10.2. Комплексные функции
Если в комплексной плоскости задана область О, каждой точке которой 2 соответствует комплексное число до иш, то ш называют функцией от 2, до
— [(г). Для функций комплексного переменного вводят понятие дифференцируемости: функция г) дифференцируема в точке 2, если существует
Пг Н)-Дг)
Пт •
г-0
н
независимо от того, по какому пути комплексная величина Н стремится к нулю; этот предел называется производной и обозначается 'г).
Необходимые условия дифференцируемости функции (г) —ию в точке г — х--1у (условия Коши—Римана) состоят в том, что в точке (х, у) существуют частные производные функции и, V и выполняются равенства
ди дV ди до
дх ду ду
дх
Эти условия являются также достаточными для того, чтобы функция (2)«у была дифференцируема в точке 2 хй, если функции и, V непрерывны в точке (х, у). Функция ((г), дифференцируемая в точке 2, называется моногенной в этой точке.
Однозначная функция (г) называется аналитической в области С, если она дифференцируема в каждой точке этой области. Функция (г) называется аналитической в точке 2, если она аналитическая в некоторой окрестности точки 2. Действительная и мнимая части аналитической функции (2)иу удовлетворяют уравнению Лапласа, т. е.
д2и д2и д2У д2а
дх2 ду2 дх2 ду2
56
РАЗДЕЛ 1. МАТЕМАТИКА
Функция (г), аналитическая в точке го, может быть представлена в некоторой окрестности этой точки степенным рядом
ОО
(г) 2 с„(г — г0)п. я0
С другой стороны, степенной ряд указанного вида в своем круге сходимости определяет аналитическую функцию.
Таким способом определяются (задаются), в частности, функции:
2 22 2П ег1Т Т--
г3 г5 г2п1
5пг 2_
г2 г4 г2п
с05г1__ __.
Интеграл функции комплексной переменной (г)
— вдоль дуги с определяется так:
1Нг)0г Нш Е (к)гш-гк).
с макс2й —1_'0 к1
Вычисление интеграла производится при помощи формулы
С (г) йг и йх — V ау г и Йг к йх.
с с с
Если внутри и на границе области, ограниченной замкнутым контуром с, (г) —однозначная аналитическая функция, то [(2)2 0 (теорема Коши). Если С с
лежит на контуре с, а 2 — внутри области, то
(г) 2?й' ] (интегРал Коши).
Формула для п-й производной
2т) (С — г)'
г«-
1.10.3. Конформные отображения
Аналитическая функция при отображении сохраняет углы и переводит бесконечно малый треугольник в подобный ему с коэффициентом подобия '(г). Приводим некоторые конформные отображения.
_ аг Ь
Дробно-линейная функция хю преобразует
сг -- а
совокупность кругов и прямых плоскости 2 в совокупность кругов и прямых плоскости до. Две точки, удов-
аг Ь
летворяющие условию 2 остаются непод¬
вижными.
Линейная функция х) — аг--Ь, где а — гедает сдвиг на 6, поворот на угол р и растяжение в г раз. Точки Ь
и оо неподвижны.
1 — а
Инверсия до12. Точка г с полярными координатами (г, ф) переходит в точку с координатами (1 г, ср). Точки 2 1 и 2 —1 —неподвижны:
ДО — 2 ,2
где а — действительное число, отображает круги 121 сопз1 плоскости 2 на конфокальные эллипсы плоскости до, если 121 Фа, а круг га—на участок и2а.
Функция до 2п, где п0 целое вещественное число, отображает всю плоскость г на я-кратную плоскость Римана, состоящую из п частей; точка до0 есть п-кратная точка разветвления.
Функция до 21а, где а — действительное число, отображает область угла я,а, вершина которого лежит в точке 2 0 и одна из сторон которого лежит на положительной оси Ху на верхнюю полуплоскость (до0), а соответствующий сектор единичного круга — на верхний полукруг до 4 V1—и2-
Функция до 1п(22—1). Прямые м сопз1, у сопз плоскости до, параллельные осям, являются отображениями конфокальных лемнискат с фокусами лг±1 и равнобочных гипербол, проходящих через те же точки. Функция
‘ С (С-а,)®-1 (С -. К—в)»-1 Сг
Пример 1.11. Найти гармоническую (удовлетворяющую уравнению Лапласа) в круге радиуса ? функцию по ее значениям на окружности.
Считая в интеграле Коши контур с кругом и перейдя к полярным координатам, найдем
2л
1 С Ке 2
(г)а (0)4- — — и (?, 6) 20 (формула Шварца).
2л Яе1в — г
Отделив вещественную часть, получим 2л
Я2—г2
а — 2?г соз (0 — Ф) 4- г‘
«(?, 0)20.
(формула Кристоффеля — Шварца) отображает верхнюю полуплоскость С на внутреннюю область многоугольника; здесь а-я — положительные значения внутренних углов многоугольника; аи Дг — а« — действительные числа, расположенные в порядке возрастания;
20, С, С — комплексные постоянные.
Функция
СI КС1
(г — а)2 (г — о)2
отображает верхнюю полуплоскость 2, на внешнюю область многоугольника с внешними углами агл;.
1.11. ВАРИАЦИОННОЕ.ИСЧИСЛЕНИЕ
57
1.11. ВАРИАЦИОННОЕ ИСЧИСЛЕНИЕ
1.11.1. Общие сведения
Задачей вариационного исчисления является отыскание экстремума функционала. Если каждой функции у(х) из некоторого класса функций соответствует определенное значение величины и, то и называется функционалом, зависящим от у(х); [у(х)—аргумент функционала)]; это записывается так: и — и[у(х)]. Аналогично определяется функционал, зависящий от нескольких функций, и функционал, зависящий от функций нескольких независимых переменных. Важным примером функционала является интеграл
I [У (•)] ] Р(х,у(х), у' (х)) ах.
Функции у(х) [линии у — у(х)], которые рассматриваются при отыскании экстремума функционала и[у(х)] (они определяются условиями решаемой задачи), называются допустимыми функциями (линиями). Если значение функционала и при у уо(х) больше (меньше), чем его значение при всех других допустимых функциях у(х), достаточно близких к уо(х), то по определению функционал и имеет максимум (минимум) при у уо(х). Функции уо(), У(х) [линии у — уо(х)у у — у(х)] считаются близкими, если мала величина у(х)—уох) (близость нулевого порядка).
Пусть у(х), у(х)—две допустимые функции, т. е. два допустимых значения аргумента функционала. Разность у(х)—у(х) называется приращением, или вариацией аргумента функционала по отношению к его рассматриваемому значению у у(х). Она обозначается через б у, 6уу1(х)—у(х). Вариацией функционала
д
и[у(х)] называется величина Ьи—-• и[у(х) аб]а0
Если при у уо(х) функционал и — и[у(х)] имеет экстремум, то его вариация Ьи при ууо(х) (предполагается, что она существует) равна нулю, 6а 0. Для вышеуказанного функционала 1[у(х)] необходимое условие экстремума 670 приводит к уравнению Эйлера:
или в развернутом виде
Ру Ху' Руу' У Ру'у' У
Этому уравнению должна удовлетворять функция у(х), реализующая экстремум функционала 1[у(х)]. Поскольку уравнение Эйлера — второго порядка, его интегральные кривые образуют семейство у у(х, Сь С2), зависящее от двух параметров — произвольных постоянных Сь С2. Эти кривые называются экстремалями. Пусть по отношению к функционалу 1[у(х)] решается вариационная задача с «неподвижными границами», когда на концах интервала [ху х2] допустимые линии у — у(х) должны иметь заданные ординаты: у(Х)—уи У(Х2)У2- В этом случае экстремум функционала 1[у(х)] (если он существует) реализуется экстремалью, удовлетворяющей указанным граничным условиям.
В случае, когда решается вариационная задача для 1[У(Х)] с «подвижной границей» (или границами), т. е. когда на конце интервала [х, х2] (пусть для определенности на одном конце х х2) ординаты допустимых линий произвольны, то экстремум функционала 1[у(х)]
(если он существует) реализуется экстремалью, для которой выполняется «естественное граничное условие»:
у')хх2 0
Таким образом, указанные вариационные задачи сводятся к решению соответствующего дифференциального уравнения при тех или иных граничных условиях. То же самое имеет место по отношению к некоторым более сложным вариационным задачам.
Много задач строительной механики и теории упругости можно привести к задачам вариационного исчисления, а эти последние решить точно (классический пример: решение Эйлера об устойчивости прямолинейного стержня, к концам которого приложены сжимающие силы) или приближенно (используя так называемые прямые методы вариационного исчисления и их обобщения, в частности энергетический метод, метод Бубнова — Галеркина и др.).
1.11.2. Основные случаи
Для основных случаев вариационных проблем решения путем приведения к дифференциальным уравнениям даны в табл. 1.20.
Пример 1.12. Найти критическую силу Р для стержня длиной , шарнирно опертого по концам.
Потенциальную энергию стержня можно выразить так:
Требование минимума V дает уравнение
д __а д_ _
ду 2Е 2 ) ах ду' 277 2 ) °'
При Е1 сопз1 имеем Р
у" у о; (о) 0() о.
д2 Е
откуда находим Ркр—. При Е1 переменной уравнение получается сложнее и решение его затруднительно. В этом случае применяют метод Ритца (см. 1.11.3).
1.11.3. Прямые методы
Если интегрирование дифференциальных уравнений затруднительно, прибегают к прямым методам вариационного исчисления. Сущность их заключается в следующем. Задаются видом искомой функции так, чтобы она удовлетворяла граничным условиям и содержала некоторое количество постоянных параметров. Последние подбирают так, чтобы обратить в минимум искомый функционал. Чаще всего применяют метод Ритца.
Пусть требуется найти функцию у, реализующую миь
нимум интеграла Ф У У' у")х и удовлетво-
а
ряющую заданным граничным условиям. Искомой функцией задаемся в виде у а1и1х)--а2и2х).апип(х),
58
РАЗДЕЛ 1. МАТЕМАТИКА
Таблица 1.20
Основной случай
2
Р (х, у, у') йх, 1
у (4) а,
У (Хо) Ь
б
р р, о— дифференциальное уравнение второго
у йх
порядка относительно у при условиях: у (хх) а,
У (х2) — Ь
Случай, когда под интегралом содержится вторая производная У"
хг
71 Р (х, у, у уп) йх, х%
у(х1) а, у (х2) — Ь,
У' (Хг) С, У (Х2) а
й йг
Ри Рц 4 Ри" 0— дифференциальное уравнение
у йх йх2 четвертого порядка относительно у при условиях:
у(хх)а, у(х2)Ь, у’ (х,) с, у' (х2) й
Случай двух искомых функций
х2
3 — Р (х, у, у', г, г') йх, хг
у (,) а, у (дг2) Ь. г (г) с, г (х2) й
Р„ — Ри 0, Р — Р2г — 0—система двух диффе-
у йх у 2 йх ренциальных уравнений второго порядка относительно у и 2 при условиях:
уЫа, у(х2)Ь, г(х1) с, г(х2)й
Случай искомой функции, зависящей от двух переменных х, и
I] р (х у и их’ иу) аху при условии прохождения поверхности ии (х, у) через заданную кривую
Р. — Р„ — Р., 0— уравнение в частных произ-
и дх их ду иУ водных второго порядка относительно и при условии: и должно проходить через заданную кривую
Условный экстремум
У Р (х, у, г, у’, г') йх Х
при условии Н(х, у, 2) 0
и граничных УСЛОВИЯХ
(Ф р 4. кН); Н (х, у, г) 0
—- система трех уравнений относительно трех неизвестных функций у (х), г (х), Я (х)
где их), иг(х),., ип(х)—последовательность функций, которые в интервале [а, Ь] линейно независимы, имеют непрерывные вторые производные и удовлетворяют граничным условиям. Подставив это выражение в интеграл Ф, потребуем, чтобы получившаяся после интегрирования функция Ф Ф(аь а2, ап) приняла экстремальное значение. Это дает систему уравнении дФ
— 0, 1—1, 2,., г, из которых определяются все даь
йг.
Пример 1.13. Найти прогиб консольной балки длиной , нагруженной равномерной нагрузкой д. Задача сводится к отысканию функции, обращающей в минимум потенциальную энергию балки:
V Е1у" — ду йх.
о
сюда находим
Задаемся упругой линией в виде у а1—созу-; ходим
(-■)
дУ 32
Условие — 0 дает а —- • — да Е1 я4
мальное значение прогиба при :
Макси-
макс — 0,1194
ЕГ
1 ?4
что отличается от точного значения — • — на 4,5%.
8 -
Заметим, что в методе Ритца можно не удовлетворять силовым граничным условиям.
1.12. РАЗНОСТНОЕ ИСЧИСЛЕНИЕ
1.12.1. Определение разностей
Конечные разности в инженерно-строительных расчетах встречаются при приближенном интегрировании дифференциальных уравнений (например, при расчете балок-стенок), при использовании интерполяционных формул, при расчете статически неопределимых систем (в частности, уравнение трех моментов есть уравнение в конечных разностях) и в ряде других случаев. Диф¬
ференциалы заменяют приближенно конечными разностями.
Разность двух значений функции х), т. е. (яД)— —(х), называется конечной разностью первого порядка или просто разностью и обозначается через Д (х), Д() — (хАх)—(х). Точно так же Дд-1-Дх) 1 (х--2Ах)—(хАх). Если Ах — бесконечно малая величина, то Д() есть величина эквивалентная й(х).
Разностью второго порядка называется разность от
1.13. ИНТЕГРАЛЬНЫЕ УРАВНЕНИЯ
59
разности первого порядка:
Д2 (х) А [А (х)] А (х Ах) - А (х)
(х 2Ах) - 2 (х Ах) (х).
Аналогичную формулу можно составить для разности п-го порядка:
А" () ( пАх) — --?[х (п—1)Ах]
п(п — 1) ’ Ь2
1
Их (г-2) Ах] (-1 )п1(х).
Формула для приращенного значения функции
(х пАх) (х) — А (х)
дг () • • • А" ()•
1-2
Приложение конечных разностей в теории интерполирования см. 1.19.2.
1.12.2. Разностные уравнения
Уравнения строительной механики часто преобразуют так, что Ах1; обозначим еще для краткости (х) Ух (х-Н) ух1 и т. д. Уравнение
Гх,Ух,Ухи., Ухт) О
называется уравнением в конечных разностях, или разностным уравнением. Уравнение
Ухт х Ухт— 1 Н Ух
называется линейным разностным уравнением порядка т. Известное уравнение трех моментов
Мх_г ,_ тх (,_ 1Х) м,11Х
относится к этому типу.
Общее решение линейного разностного уравнения складывается из общего решения этого уравнения при Ьх — 0и частного решения этого уравнения при заданном ,. В случае, когда уравнение имеет постоянные коэффициенты и правая часть его есть также постоянная величина, АХА, ВХ В,., Кх — КУ его ре¬
шение имеет вид
Ух 1 н—1 С0,
корни характеристического уравне-
Лт Вт-1.с о
где 1ь г,.
ни я;
(имеется в виду случай, когда все корни простые и действительные). Постоянная С0 равна,
А В-. ( Постоянные Су Сг,., Ст определяются из дополнительных условий (начальных и др.).
1.13. ИНТЕГРАЛЬНЫЕ УРАВНЕНИЯ
Уравнение, в котором под знаком интеграла содержится неизвестная функция, называется интегральным. Это уравнение называется линейным, если неизвестная функция входит в него линейно. Если в линейное интегральное уравнение неизвестная функция входит только под знаком интеграла, то уравнение называется линейным интегральным уравнением первого рода; в противном случае — второго рода.
Линейное интегральное уравнение первого или второго рода называется уравнением Фредгольма, если интеграл, под знаком которого содержится неизвестная функция, имеет постоянные пределы; если же верхний предел этого интеграла переменный, то уравнение называется уравнением Вольтерра.
К интегральным уравнениям приводятся задачи, в которых значение искомой величины в той или иной точке зависит от совокупности значений этой величины в других точках некоторой области. Эта зависимость обычно выражается с помощью определенного интеграла. В качестве примера укажем, что перемещение одной точки соприкосновения балки с упругим основанием, на котором она находится, зависит от совокупности перемещений всех других точек ее соприкосновения, вследствие чего определение этих перемещений сводится к решению некоторого интегрального уравнения.
В строительных задачах интегральные уравнения используются в различных вопросах теории упругости, теории колебаний и др.
1.13.1. Уравнения Фредгольма
Интегральное уравнение Фредгольма первого рода имеет вид
ь
() К(х,)ч()Ы.
а
Уравнение Фредгольма второго рода записывается так:
ь
(х) чх)-1К(х, )Ф()«.
а
где Ф(х) — искомая функция;
К(ху )—ядро уравнения — непрерывная функция в прямоугольнике ах,
А, — постоянный параметр; а у Ь — постоянные пределы интегрирования. Значения Я, при которых однородное уравнение Ь
фх)л] С(, Оф(0И имеет решения, отличные от а
нуля, называются собственными значениями ядра К(х, ) или интегрального уравнения, а соответствующие решения ф(х)—собственными функциями ядра. При этих значениях X неоднородное уравнение имеет решение в том и только в том случае, если
о,
а
60
РАЗДЕЛ 1. МАТЕМАТИКА
где 'ф(х) —любое решение уравнения Ь
() ХК(,х)У(1)сИ-,
это уравнение, отличающееся от данного тем, что в ядре переменная интегрирования и параметр поменялись местами, называется сопряженным. При других значениях X неоднородное уравнение всегда имеет решение.
Методы решения однородного уравнения. Если ядро
Ь
симметрично, т. е. К(х, )—К(I, х) и]С2(, ?)°° т0
а
собственное значение и собственную функцию, удовлетвоь
ряющую условию у2(х)с1х 1, можно найти методом а
последовательных приближений (итераций): этим методом определяются в результате п-то приближения неизвестные функции фп(л:) и соответствующие ей собственные значения параметров Хп по формулам
Ъ 1
Р„ () I к (х, о ф„_1 (0 аь ф1 (X) ;
К ();
р2п1 (х) ах
Функция
Ко(х, 0 К (, 0-
оо
Г (х, ,Х) 2 т-'Кт(х, I)
т—1
называется резольвентой неоднородного уравнения. С помощью резольвенты решение представляется в виде ь
у(х) ХН0Г(х, 1Л)Ш 1(х). а
Если ядро вырождено, т. е.
п
К(х 02 а()М0
11
то решение имеет вид
п
У (х) (х) % 2 са (х);
11
Сг определяется из системы алгебраических уравнений п
с — X 2 а1кСк и I 1, 2,. -., п,
к—1
где
ь ь
а[к Ъ( (0 ак () аь и Ъ1 (0 (0 Л. а а
Аппроксимируя заданное ядро вырожденным, получим приближенное решение интегрального уравнения.
Если ядро К(х, 0 непрерывно и симметрично и известны все собственные значения Хг и собственные функции уг(х) ядра, то при любом несобственном значении X решение имеет вид
СО
П
() () % Ф, (X),
11 и
где
при п оо имеем: фп() -► ф() Хп(х) X. Если Яо — наименьшее собственное значение ядра, а у(х)—соответствующая собственная функция, то величина
ЬЬ
К (X, 5) Ф (х) ф (5) йх а а
Ь
при условии ] у2 (х) йх 1 достигает максимума, рава
_1_
Г
Методы решения неоднородного уравнения. В общем случае решение имеет вид
оо Ъ
() ()2 ьт]Ктх.)Ц1)аь
т—1 а Ь
Кт X, 0 1 кт_х (X, 5) К («, 0 йч
,- ф;(0(0 И.
а
1.13.2. Уравнения Вольтерра второго ряда
X
и () () а. _[ К (х, 1)и(1)ар,
а
здесь заданы: нижний предел а сопз1; параметр X; ядро К(х, 1)Ф0, действительное и непрерывное в прямоугольнике ахЬ, а?Ь; функция (х) действительная и непрерывная в интервале
Решение выражается равномерно и абсолютно сходящимся для всех X рядом
ОО
и(х) 2 Хтит(х),
т0
где
и0 (х) (х); их (х) К (х, I) и0 (0 Н а
х
итг (х) С (, 1)ит(()а1. а
Это уравнение не обладает собственными значениями.
1.13.3. Уравнения Абеля
(х) Г ———— 0 1.
Неизвестная функция и(х) определяется по формуле
и(х) ■■
51П лл й (' (I) й1
д йх.]х-г)
1-ц
1.14. СПЕЦИАЛЬНЫЕ ФУНКЦИИ
61
а также
и(х)
(0) с гт 1 ь'
(а2 — Ь2) ш ( — а)1-т ( — Р)
X
1.13.4. Сингулярные уравнения
Если ядро интегрального уравнения К(х, () не ограничено при ахЬ, но главное значение интеграла
ь
]((, )у()сН (см. 1.7.5) в правой части этого урав-
а
нения существует, то уравнение называется сингулярным. Некоторые сингулярные уравнения имеют решение в замкнутой форме.
Уравнение вида 2л
1
2л
й (0
здесь С — постоянная,
1 1 оЪ а -- Ь
т —т- 1п ; 0 аг 2я;
2 ш а — Ь а — Ь
аир — начало и конец контура и Уравнение 1
а
р (0 1пй ()(-а
а)
2 п
при условии ()0 имеет общее решение
имеет решение
1 2Г (
и(5) — — ()с —— Ш С я 1а2 — X [ 31
1 Г Г (0 Уа2 —
с
(С — произвольная постоянная).
Уравнение вида
Ь С Ф (о)
аф () -- — йа (5)
Я1,) а —5
I
(где а, Ь — постоянные, а2—Ь2Ф0, I —замкнутый контур) имеет решение
«. ь Г ко г
] тгт«-
Если контур незамкнутый, то общее решение уравнения имеет вид
где
р(0й.
Если () —постоянная величина, то
Р
Р(х)
я а2 — х2
1 К этому уравнению приводит задача о вдавливании в упругую полуплоскость жесткого штампа длиной 2 а; Дх) — функция. характеризующая очертание штампа и зависящая от упругих постоянных основания (см. С. П. Тимошенко. Теория упругости. ОНТИ, Л. — М., 1937; И. Я. Ш т а е р м а н. Контактная задача теории упругости. Гостехтеоретиздат, М. — Л., 1949),
1.14. СПЕЦИАЛЬНЫЕ ФУНКЦИИ
1.14.1. Полиномы Лежандра
Определение:
Рп (х) —
1 4пЦх— 1)"]
2 Пп
ахп
Основные свойства: Рп(х) удовлетворяют уравнению (1 — х2) у" — 2ху’ я (п -- 1) 0;
(я 1) Рп1 (2л 1) хРа — пРп_1,
(ж2-1 )Рпп(хРп-Рп_1)-,
0, т Ф- п;
2т 1
(т я).
1.14.2. Полиномы Чебышева
Определение:
() —С03 (пагссоз дс). п ' 2п
Основные свойства: Тп(х) удовлетворяют уравнению (1 — х2) у" — ху' п2у 0;
Тп — хТпТп-1 °
при п 2 Г — яГ Г0 —
62
РАЗДЕЛ 1. МАТЕМАТИКА
йх
Г Тп(х)Тт(х) ±1 VI-
О, тф п; п
г2г—1
(т — п).
функция второго рода порядка V:
„, -. -V (х) соз цх—1 (х)
Уу (х) — Ьгп —— —.
5Ш [IX
Из всех полиномов степени п с коэффициентом при Функции Бесселя удовлетворяют уравнению Бесселя:
старшем члене, равном единице, Тп(х) наименее уклоняется от нуля в интервале —
У' ху' (х2 — V2) у 0.
1.14.3. Гамма-функция
Определение:
ОО
Г(д:1)) ?е1М.
о
Основные свойства: при хп, где п — натуральное
число,
Г (п 1) Ь2-3.п п Г(1)-Г(), Г (д) Г (1 — х) — ——.
51П ПХ
График функции Г(%) дан на рис. 1.74.
1.14.4. Функции Бесселя1
Функция первого рода порядка V:
№
(«.2
к 0
ж Г2Й
к Г (1 У ) ’
Рис. 1.74
Общее решение имеет вид (если V — не целое число)
3 (х) с_у(х);
при п (п — целое)
Сп(х) С2Уп(х).
Основные свойства:
У ] ;
V 1 Г " V-- „ V 1 Эти функции называются также цилиндрическими функциями; отдельным видам их присвоены разные наименования; см. литературу [1.14.3 и 1.14.5]. В этих монографиях изложены свойства Бесселевых функций и методы их вычисления.
А,-
Л?—1 •
1.15. ОПЕРАЦИОННОЕ ИСЧИСЛЕНИЕ
1.15.1. Преобразование Лапласа
Таблица 1.21
Преобразованием Лапласа функции [(х) называется переход от (х) к функции
Р(р)§ ерх(х)йх.
О
Обратное преобразование дается формулой Меллина
С--1 о
()
— Г
2 л
С—а
ерх Р (р) йр.
Функция (х) называется оригиналом, функция Р(р) — ее изобраоюением. В табл. 1.21 приведены основные свойства преобразования Лапласа.
При применении операционного исчисления к задачам техники приходится находить оригинал по изображению. Основные изображения и оригиналы даны в табл. 1.22.
Оригинал
Изображение
Их)
Р(Р)
а(х)
аР (р)
■и
Р ар)
йх
Их)
Р [Г (р) - Г (0)1
йп
йх
Их)
'•['«-2-г]
к0
,и±
Ь а
Л
I
() йх
п (х -1) и (6)
Г(р)
— р, р) р, р)
1.16. ОПЕРАЦИОННОЕ ИСЧИСЛЕНИЕ
53
Изображение
ар
1
л
р«-Н
пЛ'т— 1
е—ар
р а
р(р)
ра
ра — а3
р» — а1
р — а
р2 — а2
Р Ь
р д)2 в
(Р 6)2 а3
Р )п
р а)»
р 4“ 4а
р 4а
р4 4- 4а
Таблица 1.22
Оригинал
Г (1 — п)
-11-
2 Г дг
1 — е
1 л—ах
8п ах
сЬ ах
зЬ ах
е Ъх С08 ах
еЬх 8,-п ах
хп—1 е—ах (я-1)
2а
У4 (ах) (сЬ ах зп ах — — бЬ ах соз ах)
1
У3 (ад:) в зЬ ах зп ах
У г (ах) — (сЬ ах зт ах 44- зЬ ах соз ах)
Ух (ах) — сЪ ах соз ах
1.152. Применение операционного исчисления
Применение операционного исчисления к решению дифференциальных уравнений сводит интегрирование к алгебраическим преобразованиям. Пусть требуется найти решение уравнения
йпу
йхп Нл0 Ч)-
Применив преобразования Лапласа, получим
(Р агРа1 -ап)У(р) Р(р) Ф (р), где Р(р) —изображение функции (х),
Ф (Р) (Р0„-1 •• Р%)
Й1 (РУп-гН ЬРП“Ч) • -ап-1Р Ю
а у к — значение к-й производной от Цх) при л;0. Полагая Ьп(р)рпа1рп1.ап, получим
У(р)
?(р) ф(р) Ьп (Р)
Разложив дробь на простейшие и пользуясь таблицей оригиналов, найдем решение, зависящее от п постоянных, у0, У уп-1. Применение метода удобно, если все
«0 и ф(р)0.
Пример 1.14. Расчет балки на упругом основании. Исходное уравнение
Применяем преобразование Лапласа:
1(р) р4 4а; ?(р)
С(Р) Е1 ’
(?(р) — изображение функции ?(х);
ф (р) УоР4 У1Р3 уф2 зр;
р4 р3
К (р) Уо 01
4а4 Г4'1 р 4а« Е1 (р 4а)
Пользуясь третьей и седьмой строками табл. 1.21 и четырьмя последними строками табл. 1.22, получаем оригинал:
У У0У1 (“) У1У2 (ах) Ч Ь
2(Р)
Уц(ах - а1)д(1) й%.
64
РАЗДЕЛ 1. МАТЕМАТИКА
1.16. ВЕКТОРНОЕ И ТЕНЗОРНОЕ ИСЧИСЛЕНИЯ
1.16.1. Векторная алгебра
Величина, определяемая только числовым значением, называется скалярной величиной, или скаляром. Величина, определяемая числовым значением и направлением в пространстве, называется векторной величиной. Она изображается геометрически отрезком, длина которого (в принятой единице масштаба) и направление совпадают с числовым значением и направлением векторной
Ь-ок ЛЬ
Рис. 1.75
Рис. 1.77
Рис. 1.76
величины. Такой «направленный» отрезок (отрезок, имеющий определенную длину и определенное направление в пространстве) называется вектором. Длина вектора называется его модулем. Обычно вектор обозначается буквой с верхней черточкой.
Сумма нескольких векторов определяется вектором, замыкающим ломаную, составленную из векторов-слагаемых. Частные случаи: сумма трех векторов изображается диагональю параллелепипеда (рис. 1.75), сумма двух векторов изображается диагональю параллелограмма (рис. 1.76).
Разность векторов а и Ь определяется как вектор с оторый, будучи сложен с вектором Ь, дает вектор а: а—Ь с, если с--Ь а. _
Произведением скаляра а и вектора а называется вектор с аа, направление которого совпадает с а при а0 и противоположно ему при а0, а модуль равен произведению модуля вектора а на абсолютную величину числа а. __ _
Скалярным произведением векторов а и Ь [обозначается аЬ или (аЬ)] называется скаляр, определенный по формуле
аЬ а 11Ъ соз ф, где ф — угол между направлениями векторов а и Ь.
Векторньш произведением векторов а_и Ь (обозначается аХЬ или_[аЬ]) называется вектор с, модуль которого равен я6 5111 ф, где ф — угол между векторами, направление перпендикулярно плоскости векторов а, Ь ивритом так, чтобы после совмещения начал векторов а, Ъ и_с кратчайший поворот от а к Ь, если смотреть с конца с, казался совершаемым против часовой стрелки (рис. 1.77).
Свойства произведений векторов:_
аЬ Ъа; а (аЬ) (аа) Ъ
а (Ь с) — аЬ ас аХЬ ——(ЬХа); а (аХЬ) (аа)ХЬ; аХ(Ь с) ахЪ аХс.
Вектор а может быть задан тремя скалярными величинами аХу ау, аг — его проекциями на координатные оси. Координатными ортами называются векторы с модулем, равным единице, направленные вдоль положительных направлений осей X, они обозначаются
соответственно г, , к. Вектор а может быть представлен в виде
а ах1 ау агк.
Скалярное и векторное произведения могут быть представлены в координатной форме следующим образом: если
а ЯдЛ ау 1 аг Ь
ь ьх1 ь„]ьгк,
ТО
аЬ ахЬх ау Ьу
I к
о? Ь?
аХЬ—
их и,у 2
Ьх Ьу Ьг
1.16.2. Векторный анализ
Если каждому значению скалярного аргумента I в некоторой области соответствует определенный вектор а, то имеем векторную функцию а (7) скалярного аргумента I. Такая функция определена, если заданы три скалярные функции я(0 Яу(0 я (0- Производная век¬
торной функции а' — ■
йа
йГ
определяется как
йах
и является вектором с проекциями ——
ас
Правила дифференцирования векторов: й - _ йа йЬ
0 (а ) 41
й1
Да
Пт до
йа2
’ 4.1 (и-
й. -ч йи - 1а
-скалярная функция аргумента );
сГь а
йа -
Ъ а ■
й1
йа
йЬ
- йЬ
а йЬ
Вектор V, зависящий от положения точки С? в пространстве, называется векторной функцией точки, р у((2). Функция и определяется заданием векторное аргумента г, определяющего положение точки Су у(г) есть векторная функция векторного аргумента. Криволинейный интеграл от функции V (г) вдоль пути АВ определяется формулой
Если
V (г) йг — Пт 2 VI А г. АВ макс1Д':-о »
V Vx Ъу у Vг к,
1.17. ПРИБЛИЖЕННЫЕ ВЫЧИСЛЕНИЯ
65
то
1
V (г) йг ( 'ох йх уу йу %)г йг. в лв
Интеграл в правой части есть обычный криволинейный интеграл вдоль пути АВ. Криволинейный интеграл, взятый по замкнутому контуру, называется циркуляцией вектора.
Градиентом скалярной функции и(х, у, г) называется вектор, направленный по нормали к поверхности и(х, у,
г)сопз1 (поверхности уровня) в сторону возрастания и и модуль которого равен производной от и по направлению нормали; обозначение: гас1 и. Свойства градиента:
ди - ди -г ди -
§гай с 0; гас1 (их и2) — §гас1 их §гас1 и2;
Га3 (иХи2) 1 2га( и2 2 бга и1'
Дивергенция векторной функции V является скаляром, вычисляемым по формуле
- дух у до2
Й1У V — —2- —.
дх ду дг
Свойства дивергенции:
Иу с 0; сКу (»х г) сПу VI с51 V у2;
(Ну (Ш)) И Шу V V §Г2с 11-
Ротор (вихрь) векторной функции V есть вектор, вычисляемый по формуле
дьг дъ'и- (дьх дV2го( 0 -г5- Ь, (Г"“-Т2“)
ду дг ) дг дх ]
( дУу дх
-Ц-тг-тг)-
дх)х -
гой системе прямоугольных декартовых координат с базисом е2, координаты вектора а будут
з
а1 2 а а 0 1, 2,3),
к1 _'Л _
где а.к соз ( е, ек).
Это позволяет определить вектор как совокупность трех величин йг (1, 2, 3), которые определены в каждой системе декартовых координат и при переходе от одной из этих систем к другой преобразуются по указанным формулам. При таком определении вектора а назовем его тензором (аффинным ортогональным тензором) первого ранга а г (по числу индексов в этом обозначении).
Обобщением данного определения вектора является понятие тензора второго ранга. Если в каждой системе прямоугольных декартовых координат определена совокупность величин аХк (, е 1, 2, 3), которые при переходе от системы координат с базисом е, е2, е3 к системе координат с базисом ее2 преобразуются по формулам
з
4 а1такпатп «,к 1,2,3).
т,п1
Свойства ротора:
го с 0; го (уА ьг2) — го го у2; го (иь) и го V цгайиХо.
1.16.3. Тензоры
Пусть вектор а задан своими координатами а и аг, аз
в системе декартовых координат с базисом е±, е3 (ей ?2, е° — орты, направленные по осям координат). В дру¬
то совокупность величин а%ь называется аффинным ортогональным тензором второго ранга (но числу входящих в это обозначение индексов).
Аналогично можно определить тензоры третьего, четвертого и т. д. рангов (и не только в трехмерном пространстве, но и в пространстве любого числа измерений).
Тензор второго ранга можно представить в форме
11 12 1з]
21 22 231.
31 32 331
Тензор называется симметричным, если аан, и кососимметричным, если агк — —а,.
Всякий тензор второго ранга может быть представлен в виде суммы симметричного и кососимметричного тензоров по формуле
1 1
аМ — 2 (аи “Ь а) “Ь (аи — )»
Совокупность девяти компонентов напряжения ах, оу о2, Ъху—Тух, Тхг—Тгху тугт2у образует симметричный тензор второго ранга — тензор напряжений
Ох
Хху
тхг
Т'ух
Оу
Чу 2
Т2
°У
1.17. ПРИБЛИЖЕННЫЕ ВЫЧИСЛЕНИЯ
1.17.1. Общие положения
Для вычислений применяют логарифмические линейки, таблицы логарифмов, степеней, корней и специальных функций, арифмометры, номограммы. В настоящее время широко используются для различного рода трудоемких расчетов и решения сложных уравнений быстродействующие электронные вычислительные машины (ЭВМ). При выполнении инженерных вычислений надо
отдавать себе отчет в необходимой для каждого отдельного случая точности и сообразно этому составлять расчетные схемы и выбирать вспомогательные средства.
Если некоторая величина А имеет своим приближенным значением число а, то абсолютной погрешностью Д числа а называется абсолютная величина разности чисел А и а, ДЛ—а. Неточность вычислений или измерений лучше характеризуется относительной погрешностью 6 Да. Так как абсолютная и относительная погреш¬
66
РАЗДЕЛ 1. МАТЕМАТИКА
ности неизвестны, то вводятся соответствующие предельные погрешности. Наименьшее число А(б), о котором можно утверждать, что при данном приближенном вычислении или измерении абсолютная (относительная) погрешность не превосходит Д(б), называется предельной абсолютной (относительной) погрешностью.
Влияние относительной погрешности исходных величин таково:
относительная погрешность алгебраической суммы заключена между наименьшей и наибольшей относительными погрешностями слагаемых;
относительная погрешность произведения и частного равна сумме относительных погрешностей сомножителей или соответственно делимого и делителя;
относительная погрешность степени равна произведению показателя степени на относительную погрешность основания.
Если А, А у — малые абсолютные погрешности, соответствующие величинам х, у, то погрешность А при вычислении функции х, у) определяется по формуле
Таблица 1.23
А
М-
дх
Ах
Л-
ду
Д у.
■(т)-
в частном случае суммы, произведения и частного
имеем
д (х у) Ах Ду; Д (ху) у Ах х Ду;
№1 Ах 11 А у У2
Если в десятичной дроби желают освободиться от
лишних знаков, то пользуются правилом дополнения: последнюю из остающихся цифр оставляют без изменения, если первая из отбрасываемых цифр меньше пяти; если же она больше или равна пяти, то последнюю из остающихся цифр увеличивают на единицу.
При выполнении действий с приближенными числами придерживаются следующих правил:
при сложении (или вычитании) сохраняют в слагаемых столько десятичных знаков, сколько их имеется в слагаемом с наименьшим числом знаков, а в результате одним знаком меньше;
при умножении (или делении) число значащих цифр в множителях должно быть такое, как у сомножителя с наименьшим числом значащих цифр, а в результате одной цифрой меньше;
при возведении во вторую и третью степени или извлечении корня число значащих цифр результата должно быть на единицу меньше, чем у числа, над которым производится соответствующее действие;
результаты промежуточных вычислений должны содержать одной верной цифрой больше, чем окончательный результат; в окончательном результате последняя цифра отбрасывается;
если имеется возможность, то в исходных данных надо давать одной верной цифрой больше, чем требуется в результате;
следует избегать вычитания близких друг к другу чисел; следует по возможности преобразовать формулы так, чтобы в них отсутствовали разности близких чисел.
1.17.2. Приближенные формулы
При очень малых значениях х применимы приближенные формулы, приведенные в табл. 1.23.
Приближенные формулы (х в рад)
Предельные значения х в град при ошибке
0.1%
1%
5П1 X X
1 ±4-4 1
±14
соз х—1
±2.6
±8.1
х х
±з л I
±10,5
X3
51П X X — —■ О
±35
±59
X2
СОЗ X Я 1 —
±22
±31,2
х2
X —
±22
±30,5
Применяются также следующие приближенные формулы:
ех 1 х;
1х 2 уц_ 2
(1 ±)т(1 ± у)п( 1 г)Р 1 х У л Г - х — У
—-— — У ху —
■ X
: пу рг
при х у 0;
это неравенство дает возможность оценить, в каких случаях можно приближенно положить ху —-
1Гх2 у2 « 0,960 0,398у при х у (ошибка меньше 4% истинной величины);
У х у « 0,9938 0,0708у 0,3567 (ошибка меньше 2% истинной величины);
УX у г2 « 0,939х 0,389у 0,297г
(при хуг ошибка меньше 6% истинной величины) .
Приближенное значение корня второй и третьей степени из положительного числа N можно найти, пользуясь логарифмической линейкой; корень любой степени можно извлечь с помощью таблиц десятичных логарифмов, руководствуясь формулой
18 п18 ы (1 )'
Если необходимо найти более точное значение корня, то хорошие результаты дает формула
"г_ (п 1) (гс — 1)а”
У (п1)Ы (п1)ап,
-[
•:
2(Ы — ап)
10"] ’
(л-1)ЛГ(л 1),
где а — приближенное значение корня. Например,
1 Последние три формулы получаются из теории Чебышева о функциях, наименее уклоняющихся от нуля.
1.18. НОМОГРАФИЯ
67
1.18. НОМОГРАФИЯ
1.18.1. Функциональная шкала
Задачей номографии является графическое представление уравнений с несколькими переменными, позволяющее для данных значений независимых переменных найти соответствующее значение зависимого переменного с точностью, достаточной для обычных инженерных задач.
Основным понятием в номографии является функциональная шкала, т. е. шкала, на которой откладываются значения функции, а пометки делаются соответствующими значениями аргумента. Примером может служить логарифмическая шкала счетной линейки. Шкалы могут быть прямолинейные и криволинейные. Для уравнения с двумя переменными Р(ху у)— 0 применяются номограммы со сдвоенной шкалой (рис. 1.78)
1.18.3. Сетчатые номограммы
Применимы для любого уравнения типа (х, у) г. Они строятся в виде сетки взаимно перпендикулярных прямых (рис. 1.80); по одному направлению в любом
У к
.л
- у
%
Ч?
5
ч
—
N
1
N
Рис. 1.78
-а —
Рис. 1.79
1.18.2. Номограммы из выравненных точек
Применяются для решения уравнений с тремя переменными типа Ьц)(х) Л-а(у) - (а Ь)%(г). Три параллельные прямые шкалы отстоят друг от друга на расстояниях а и Ь (рис. 1.79). Начало отсчета — на прямой, перпендикулярной шкалам. На шкалах х, у и г откладываются ф(), “ф() и х(г) в одинаковом равно мерном масштабе.
Если уравнение имеет вид
ф () т (У) X (г)
и если ф(я) откладывается в масштабе тх а 'ф(у) в масштабе ту, то %(г) откладывается в масштабе, определяемом формулой
тхту тг —.
тх шу
Положение средней шкалы получается из соотношения тх _ а ту Ь
Зная и угУ соединяют точки, которые им соответствуют на шкалах х и у прямой, называемой индексом; точ ка пересечения этой прямой со шкалой г дает искомое значение г.
Посредством такой номограммы можно решать так же уравнения вида [ф С)]'15 (У)]т “IX ()]л; для этого нужно прологарифмировать уравнение и представить его в виде
ф () « 1е Ф (у) п 1§ х (2).
Рис. 1.80
масштабе откладываются значения х, по другому — у. Давая г поочередно значения 2Ь г2,., гп, строят необходимое количество кривых, соответствующих уравнению (, у) 2г. Зная Хь и гд, строим точку Л, по которой ищем гк. Если Л не попала ни на одну из кривых г,., 2П, то значение берется по интерполя¬
ции. Если известны гт и хт то, очевидно, не представляет труда найти ут.
1.18.4. Номограммы для уравнений с числом переменных более трех
Рассмотрим простейший случай с четырьмя переменными: Р(хи х2, 3, 4)0.
Если функцию Р можно представить в виде Р(хи хъ Хг,.4)Ф[ф(хь х2), 3, х4], то для построения номограммы вводят новое переменное ф ф(д;1, х2) и строят одну номограмму для уравнения Ф(ф, х3, х4) 0 и вторую номограмму для уравнения Ф Ф(ь х2).
Шкала ф является общей для обеих номограмм и служит шкалой связи.
Подобным образом можно составлять разнообразные номограммы с большим числом переменных (рис. 1.81).
х, х2 У(х,х2)х3 хи
б)
N
у
Ху
г
с
п
—
1
1
1
«4
■ т
Рис. 1.81
68
РАЗДЕЛ 1. МАТЕМАТИКА
1.19. ПРИБЛИЖЕННОЕ ПРЕДСТАВЛЕНИЕ ФУНКЦИЙ
1.19.1. Постановка задачи
Вопрос о приближенном представлении функций (аппроксимации) имеет большое значение. Приведем примеры.
При обработке наблюдений мы можем получить значения некоторой функции для соответствующих значений аргумента; надо построить функцию по этим значениям. Дана функция, которая имеет сложный вид; надо представить ее приближенно в более простом вн-
(X — Х0) (х — Х2)- - •( — х„) ( — 0)(1 — Х2) ‘ ‘ (1 — Хп)
(■ХХ0) Хг.-)
Хп-Хо)ХпХ1У '(Хп-Хп-)
Для этой же цели применяется интерполяционная формула
Рх) Р (х0) (х — X)) Рх (хг) -ь (х — х0) I — а) 1" • • 4-
де. Дано дифференциальное уравнение; надо найти приближенное выражение его решения.
С приближенным представлением функции связаны другие многочисленные задачи, например: вычислить
приближенно площадь, ограниченную данной кривой, двумя ординатами и осью абсцисс; дана сложная периодическая функция — представить ее приближенно посредством тригонометрических функций (разложить на гармоники).
Если произвольную функцию у((х) желают выразить в данном интервале посредством заданной функции у—Р(х, а, Р, V» •••) которая зависит от параметров а, Р, V» —» то задача сводится к определению этих параметров.
Кривой ошибок называется кривая, заданная уравнением у—Д(х), где А(х)—((х)—Р(х) (рис. 1.82).
Если абсолютные величины максимумов и минимумов этой кривой равны между собой, то кривая ошибок называется, согласно Чебышеву, функцией, наименее уклоняющейся от нуля. Однако обычно применяют нижеописанные приемы, так как они приводят к более простым вычислениям.
1.19.2. Интерполяционные формулы
Если требуется найти функцию у Р(х), график которой должен пройти через заданные точки (х0 уо); (Х, У) (Хп, Уп), то можно пользоваться интерполяционной формулой Лагранжа:
_ (х — )( — «)•••( — хп)
(0 — Хх)(Хц — Х2) • я(хо Хп)
(Х Хо)(Х х1) ’ “ (Х ХП—) рп—1
где
-'.(«.
X х0 х Х
При равных разностях Н аргумента пользуются формулой Ньютона:
а-Р1х-и,Уо.х-хо,У» (х-х0)(х-хг) У-Р(х)-У 0 А • , А, • 2 Апо ( о) ( х) •••(■ хп—г)
А" п
разности Лго, Д2го. вычисляются по формулам Д»о г1 — го; Д1 г —гъ ••••
Да 10 Дух — Д0- • •
В табл. 1.24 приведена разностная схема.
Таблица 1.24
X
У
А У
Д
ДУ
Д у
х0
Уо
А Уо
Ух
У
3Уо
Уг
Д-1
А уц
Уг
Д Ух
Уь
Д2Р2
4
Дз
Уа
Д4
•
Интерполяционная формула Ньютона дает точный результат только в том случае, если в одном из столбцов таблиц разностей всюду получается нуль (это имеет место, если заданная функция — полином). Если значения разностей в каком-либо столбце отличны от нуля, но достаточно малы, формула дает приближенный результат.
X—Х0
Обозначив —;— —и, представляют формулу Нью-
Н
тона в виде
ц и(и — П
г «о — Д«» ■■ 2 Д2у0
и(и-)(«-2)
Д3 У а Н Н
31
п
Практически сохраняют в правой части формул столько членов, чтобы при добавлении новых членов оставались неизменными те десятичные знаки, которые обеспечивают нужную точность результата. При вычислении значений, относящихся к последним срокам раз¬
1.19. ПРИБЛИЖЕННОЕ ПРЕДСТАВЛЕНИЕ ФУНКЦИЙ
ностной схемы, применяется вторая интерполяционная формула Ньютона:
V V (V 1) д„
У У„ "77 Уп—1 Уп—2
'л ■ 11
у(у 1) (р 2) 3
2
Д3 Уп-г ■
где
х — хп
0.
Формула Стирлинга:
Д0 Ау_т
у »-.
(ц 1)и (ц— 1) А3У-1 А3 У-‘
3 2 (и1)«(в-1)
аН ' "■
и (и2 — )•••[«» — (п— 1)2] (2л)
Д2Л
-у Д30 — Д4о4-
1 Д0-1
Дуп
I Д3 0_2 Д3 У_
3
Д6 у—з д5 4 •••
)■
Г («.) ± (л- ■ • »_,• ■ •);
_1_ Д3 У—2 Д3 У-1 ' 2
зо Д5 У-з Д6 У-2
5
: -
)-
Х — Х0
где и —;— и разности соответствуют случаю, когда п
заданы значения функций 2, ух, У0, уг у2.-
для значений аргумента
.д_2лг0 — 2Л; х_1 х0- Н;
х0; х1 — х0 А; х2 А'о 2Л.
В формулу входят значения функции у, примыкающие с обеих сторон к уо; поэтому эта формула применяется, когда аппроксимирующая функция должна давать достаточно точные результаты для значения х близко к значению Хо, лежащему в средней части разностной схемы.
Между разностями и производными имеются приводимые здесь зависимости.
Из формулы Ньютона получаем
Г (-«о) — ■— (дго — Д2 Уо
Г(хо) (д2 Уо - А3 Уо Д4 Уо -
5 137 - — Ьу0 Л« 40 Н );
Г (0) —■ (а3 Уо -2- А4 У о
7 15. А5 Уо )
Из формулы Стирлинга получаем
1.19.3. Приближение функций по методу наименьших квадратов
Идея этого метода заключается в том, что заданная функция (х) аппроксимируется функцией Р(х, а, 3,.), у которой параметры а, р,. подбираются так, чтобы интеграл
Ь
][(х)-Р(х,а, р,.)]ЗДх
получил минимальное значение. Это приводит к таким уравнениям для определения коэффициентов а, (3,.
А]±-
да
и
—2 [ () — Р (х, а, Р,.
др(х,а,.)
)) ах 0;
дР (х, а, р.)
0Р
Можно указать на соответствие между методами аппроксимации функций и методами строительной механики. Аппроксимации по методу функций, наименее уклоняющихся от нуля, соответствует расчет брусьев по предельному состоянию (выравнивание моментов); методу наименьших квадратов — расчет по началу наименьшей работы; методу интерполяции — способ превращения многопролетной статически неопределимой балки в статически определимую введением дополнительных шарниров (фиксирование точек с нулевыми моментами ). Различные методы аппроксимации дают различную точность.
Пример 1.15. Дана функция ((х) зт х. Требуется представить ее приближенно в интервале (0, л) попосредством полинома
Р (х, а, р) ах — р3.
Разлагая зш х в ряд Маклорена и ограничиваясь первыми двумя членами разложения, получаем приближенно
х3
51 п х — х — — х — 0,167л:3.
о
Подбираем аир так, чтобы кривая у ах—рл:3 имела с кривой зт общие точки (0, 0), (я, 0)э
1 См. И. - Я. Ш т а е р м а н. Современные методы аппрокси мадии. Известия ОТН АН СССР, № I, 1У39.
70
РАЗДЕЛ 1. МАТЕМАТИКА
а()-р(т)3 1; ая-рл3 0-
Найдя а и Р и подставив в искомую функцию, получим Г (х) 0,846 х—0,0866 х3.
Подбираем а и р по методу наименьших квадратов:
Я
Г (зш х — ах р3)2 йх
о
л
и.
да
М-
—2 (зш х — ах р3) хйх — 0;
о я
2 (зш х — ах рх8) х3 йх 0.
Вычислив интегралы и найдя аир, получим р (х) 0,856 — 0,0934а:3.
Приближенное вычисление определенных интегралов можно провести по одной из следующих формул: ь
• -УП-0;
а
Ь
С, Ь — а
() йх « - (ух у2 . уп);
Рис. 1.83
На рис. 1.83 показаны синусоида и все три приближенные кривые. Нетрудно убедиться, что разложение по Маклорену очень точно аппроксимирует функцию вблизи одного значения аргумента (в данном случае — начал координат), но по мере удаления от этого значения быстро теряет в точности. Что же касается интерполяционного метода и метода наименьших квадратов, то они дают хорошую аппроксимацию во всем интервале разложения; по методу наименьших квадратов получаются кривые, которые приближаются лучше, чем по методу интерполяции, но зато вычисления получаются несколько сложнее.
1.19.4. Приближенное вычисление определенных интегралов
Правило П. Л. Чебышева для приближенного вычисления длины дуги выпуклой симметричной кривой (рис. 1.84):
16
Это правило дает приемлемые результаты при 0,5. Для достаточно малых значений это правило приводит к приближенному равенству
8 Л2'
С ь — а
I Цх)йх « —-— у 1 3. у (формулы
а Т 1 п)
прямоугольника);
] П)Ах » Ь— УП У1У2. ■ Уп а
(формула трапеций);
ь
С Ь — а
(х) йх « • • • Уп
а
4 (Уг у3 . уп_] (формула барабол или
формула Симпсона).
В этих формулах: а,Ь; п — число равных интервалов, на которые разбивается интервал [а, Ь] (в формуле Симпсона п — четное число); хи Х2,.Ухп-— точки деления интервала [а, Ь]
Хо — а; хп Ь (,•) ( 0,1,., л);
Г (Х0 Х1 с (Х1 2 1 ( 2 •'.-'—Г- )■■■■
2 2
Если в интервале (а, Ь) существует непрерывная вторая производная "() и "():М, то при вычислении интеграла У по третьей формуле прямоугольников абсолютная ошибка
А р(А)2М,
а при использовании формулы трапеций
Д(А х)М.
Если в интервале (а, 6), функция (х) имеет непрерывную четвертую производную и Г(4() то при использовании формулы Симпсона ошибка
1.20. РЯДЫ ФУРЬЕ
71
Ь — а
(А)4 N
180 '
Ь— а
во всех этих оценках Ах 1.
п I
Помещая начало координат посередине интервала [а, Ь] и выбирая такой масштаб по оси X, чтобы а——1, Ь 1, можно применить формулу Чебышева:
ь
(х) йх « - — [ (хх) (х2) . • (л)].
п
а
где значения Хи х%,.»в зависимости от п даны в табл. 1.25.
Таблица 1.25
п
X
2
Х1 — х2 0,5774
3
хх — — хя 0,7071, х2 0
4
Хг — хк » 0,7947, х2 — 3 0,1876
5
хх — хь 0,8325, х2 — 0,3745, хъ 0
1.20. РЯДЫ ФУРЬЕ
1.20.1. Разложение функций в ряд Фурье
Одним из видов функциональных рядов является тригонометрический ряд
До
2
аг соз х Ъх 51П х а2 соз 2х
Ь2 51П 2х . ап СОЗ ПХ Ьп ЗШ пх .Ставится задача подобрать коэффициенты ряда так, чтобы он сходился к заданной в интервале [—л, я] функции; иначе говоря, требуется разложить данную функцию в тригонометрический ряд. Достаточное условие разрешимости этой задачи состоит в том, чтобы функция была в интервале [—я, я] кусочно-непрерывна и кусочно-дифференцируема, т. е. чтобы интервал [—я, я] мог быть разбит на конечное число частичных интервалов, в каждом из которых данная функция непрерывна и имеет производную (на концах частичных интервалов функция должна иметь конечные односторонние пределы и односторонние производные, при вычислении которых в качестве значения функции в конце частичного интервала берется ее односторонний предел). Условие кусочной дифференцируемости может быть заменено условием кусочной монотонности функции, т. е. требованием, чтобы в каждом из частичных интервалов функция была монотонна. Достаточным условием разложимости функции в интервале [—я, я] в тригонометрический ряд является также требование, чтобы в этом интервале функция имела ограниченное изменение. По определению функции (х) имеет в интервале [а, Ь] ограниченное изменение, если при любом разбиении этого интервала на конечное число интервалов
[0,1]. [„_,Хп] (х0 а, хп Ь)
величина
вале [—я, я] тригонометрическим рядом, у которого коэффициенты определяются по формулам
1С 7С
а0 (х) йх; аъ (х) соз кх йх;
—'ТС —ТС
ТС
Ь — “() ыпкхйх; к 1, 2, 3.
—ТС
При таких коэффициентах тригонометрический ряд называется рядом Фурье. Этот ряд сходится к (х) в каждой точке ее непрерывности; в точках разрыва он сходится к среднему арифметическому левого и правого предельных значений, т. е. к—[(х—0) (0)], если х есть точка разрыва (рис. 1.85); на границах отрезка ряд сходится к — [(—я0)(я—0)].
-тг
Л
Рис. 1.85
2 1
11
ограничена сверху одним и тем же числом.
Именно с такими функциями приходится иметь дело при решении практических задач.
При выполнении любого из трех указанных достаточных условий функция () представляется в интер-
Функция, выражаемая рядом Фурье, есть функция периодическая, а потому ряд, составленный для функции, заданной на отрезке [—я, я], сходится вне этого отрезка к периодическому продолжению этой функции (рис. 1.86).
72
РАЗДЕЛ 1. МАТЕМАТИКА
Таблица 1.26
(х) Ь при 0 х я;
() — Ь при я х 2я;
,. „ ЛЬ 1 51П X. 51П Ъх 8П 5х,
(х) Н я V 1 3 5 )
1
1
Ьп Г 0
1
1
Ь 1 1 1
[ () х при 0 х 2л;
Г(Х)-Я 2(51пх 'ш2х п3х .V
л
0 2К
М)— приО “ ;
Я 2
?Ь (я — х) я
(х) — при X Я]
Я 2
() — (—) —( п):
., ч 8 51П X зп Зх, 51П 5х
Пх) Ь я2 I2 3? 52 ;
А
У
опт,гя
() х при 0 х я;
(х) 2л — х при я х 2л;
. г Я 4 С05 X. СОЗ Ъх, СОЗ О,
() 1
я 1 1? 3? 5” ;
ы
IV"
1
1 1С 21С
1 (х) при 0 х а;
а
(х) Ь при а д: я — а;
., % Ь (я — х)
х) — при я — а х я;
а
М) -(—)- М 4- я);
[ (х) Г — 51П а зп д: 51п За з1п Зд: -—— зШ 5а зтп 5х 4- • - 1
ли I2 3й 5г
к
У
пЛ
г а5Г
(
1 х
(х) — х (л — х) при 0 х я;
(— х) — () при — я х 0;
8 31П X, 51П Зд:, 31П ох.
(Х) — ь —— н— 1
я 1? з2 52 ;
-я
Р
я
о '
Если рядом Фурье представляется функция (х)у заданная в произвольном интервале [а, а2я] длиной 2л, то коэффициенты ряда ао, а, Ьь (коэффициенты Фурье) можно определить по указанным формулам, в которых пределы интегрирования заменены на а и а 2я. Вообще, поскольку в формулах для а0, аь, Ьь стоят функции с периодом 2я, интегрирование можно проводить по любому интервалу с длиной 2я.
Ряд Фурье может быть использован для приближенного представления функции, а именно: функция
1(х) заменяется приближенно равной ей суммой 5П() первых нескольких членов ряда Фурье:
ао
I (X) « 8п (X) “у аг С05 X Ьг 51П х
4- Я2 008 2 51П 2х 4- • • • 4- Оп 008 пх 4" Ьп 51П пх.
Выражение 8п(х), где ао, а, Ьь являются коэффициентами Фурье функции Цх)у по сравнению с другими выражениями такого же вида с тем же значением п, но с другими коэффициентами, приводит к минимальному
среднему квадратичному отклонению «() от ()» которое определяется как
7Г
V ()-»()]•.
ТС
В зависимости от рода симметрии функции возможны некоторые упрощения. Если функция четная, т. е. (—•) (). то
тс
Яо (),
о
ТС
а —(х)сокхйх 6 О (к 1,2,3.)
о
1.20. РЯДЫ ФУРЬЕ
73
Таблица 1.27
График функции
Г'
-1 2сГ ЩТОгР.
е —1
ГПТП- [ТШ 1
-» 2с I» ' -■ 2с Ч 2с 1-
11ПИГПТ
» 2с -
НГгГпЩ
Р,'Р
Оь
■г_
л.
4-
г I
гггпТГГГТГГггтттг
шеГП
(ШТПТЙГТТт
Оь.
Кб. парабола
КО. парабола
Ряд Фурье
рс
-Т-Е4- 8п “и СС03 ап (х-е)
Л Л
2рс. 4р Г1 1
—— , —— 51П а„ с соз а ?соз аИ д:
я я, а„ 4 " п
2р V 1
, зп а„ с соз а„
С ап п п
• Х°05 “«(-е)
Я, 2Р1
7, соз а е соз а„ д;
Ь Я —1 Л Р I 1
—?г соз а дг
2 ?12 « п
р 4р I
—гг соз « х
2 л
Р ■— У -Ц- (—1)л1С05 а
3 А.» а2 п
32р V 1
«1
X.3
• (— 1) СОЗ (X X
сс3 п
1.2.3.
1.2.3.
1.2.3.
1.2.3.
1.2.3.
1.3.5.
1.3.5.
1,3.5.
Таблица
1.2?
График функции
Ряд Фурье
п
Г
-е-
— е-1
НгТТПТШ1
"Р
ппттпшт
'Р
ТП
1р 1
1
ф.-
р
-е —
ЙТгп
1-АЩЦ
Ур 1
яТТГЛЛГ
р
ЩГ
а _ пл п к
ХЛ 1
я 2 %5Ш ас 51П аг '5,п а,г
Р, 27 1
г “Г 7 — 51П а„
2 Ъ А(хп п
р 2р VI 1
у — 81П а х
2 А, а Л
Не. у У (_,)«
Я оь
5п га дт
1, 2. 3.
1, 3, 5.
1, 3. 5.
1, 2, 3.
1, 2, 3.
1, 2, 3.
74
РАЗДЕЛ I; МАТЕМАТИКА
и функция разлагается в ряд до рринусаад. Ерли функция нечетная, т. е. (—х) «—(я), то
Ьк
2 Г
— (х)ткх(1х (к — 1,2,3.)
л
о
и функция разлагается в ряд по синусам. Если функция удовлетворяет условию (хл)—(х), т. е. кривая, относящаяся к половине отрезка длиной 2л, является зеркальным отражением другой половины кривой, то
°2к
(я) соз (2к 1) хйх
() зш (2к-- ) х(1г,
а1к Ь2к 0.
Функция может быть задана не только на отрезке длиной 2я, но также на отрезке любой длины 21. Если она на этом отрезке удовлетворяет приведенным выше условиям, то она разложима в ряд Фурье следующего вида:
а0 лх лх 2лх
1(Х) а1 соз -у- Ьг 51 п -у- 4- а2 соз ——
2ях
I
клх. кл х
. 4- ак сое Ьк 51П -
I
I
причем коэффициенты ряда вычисляются по формулам Г 1 Г, кпх
а0 — (х) ах, (х) со5 —7- ах,
I
Ьк
—I
. кпх.
() 51п —-— ах.
В табл. 1.26 даны разложения некоторых функций. Тригонометрический ряд можно записать и в таком виде:
оо
ИХ) «о 2 Я 5111 ф,
г-1
где
2 с2
Ьк
Ф :
Ряд Фурье функции () сходится тем скорее, чем более гладкой является функция. Если функция (х) и ее производные '(х), 1"х),., 1к1Цх) всюду непрерывны, а (Л)() допускает лишь точки разрыва 1-го рода в конечном числе, то коэффициенты Фурье ап, Ьп функции () будут
(т)
обозначается такая величина, что
Символом о
р. о 0 при р- о©.
Разложение в тригонометрический ряд называют гармоническим анализом, а тригонометрические функции, входящие в этот ряд, — гармониками. Вычисление по составляющим гармоникам называется гармоническим синтезом.
При расчетах конструкций часто приходится разлагать в ряд Фурье различные функции, заданные графиками, и прежде всего изображающие нагрузку. В табл. 1.27 и 1.28 даны разложения для некоторых функций, характерных для нагрузок, в том числе и ряды, соответствующие сосредоточенным силам.
1.20.2. Интеграл Фурье
Если функция (х) на любом конечном интервале удовлетворяет условиям, указанным в 1.20.1, и если при этом сходится интеграл
ОО
Цх) ах,
— ОО
то справедлива формула (интеграл Фурье)
ОО ОО
пх)1Ы1е1ах аи Iеш а
—оо оо оо
— аи () соз и ( — х) а1.
О —оо
Если ?(х)—четная функция, то справедливы соотношения
оо
2 С
(х) — — § (и) соз их ах, л о
где
(и) [ (?) С05 и1а1
(косинус — преобразование Фурье).
Если 1(х) —нечетная функция, то
оо
2 С
() — I (и) 51 п их ах,
я о
где
2 (и) Г (0 зш и1аЬ
(синус — преобразование Фурье).
В табл. 1.29 по аналогий с табл. 1.27 и 1.28 представлены в виде интеграла Фурье некоторые функции, характерные для нагрузок1
1 Табл. 1.27, 1.28 и 1.29 взяты из книги Ве1оп—Ка1еп1ег, 1955,
ч. II, Уеп У. Егпзг.
1.20. РЯДЫ ФУРЬЕ
75
Таблица 1.29
Интеграл Фурье
• зп а с соз а (х—с) йа
оо
4р С 1,
I — 1ц а с соз а е соз а х йа
«у 06
О
оо
2р ( 1.
— I —зш а с соз ах йа '
ОО
— I соз а (дг — е йа п
О
СО
2 Р Г
со5 а (
я
о
оо
ч
оо
соз а хйа
2р Г 1
(1 — соз а с) соз а хй а
2 р Г 1
(соз а с а с зп а с — 1) соз а хйа
пс
4р Г 1,.
(зш ас — ас соз а с) соз а хй а
Л а3
0
оо
. Г соз а с соз ах.
4 рс Л тс2 — (2 ас)?
График функции
— гс—
ШИШГ'
.ШБШИ.
1—«—
—в—1
ШИШ
тпни-
с —
-1
р
"1
р
е—-
Р
Т1Гггг
Г
Л-
дгсггтТТТУ7.,.
СЛ парабола
7-Т
:-1
1.20.3. Приближенный гармонический анализ
Формулы Чебышева. Во многих случаях (например, если вычисление коэффициентов разложения представляет трудности, если функции заданы графически цли в табличной форме) применяют другие приемы разложения в тригонометрический ряд. Один из них заключается в замене интегралов суммами.
Пусть период 2л разделен на га равных частей точками
х0 — 0, Х, д?2, • • •» Хщ 2п
V т для 0, 1, 2,.,
и значения функции (хк)1ь. заданы или могут быть измерены. Тогда для вычисления коэффициентов суммы
(х) а0 4- ах соз х а2 соз 2х .
а,г—I соз (п — 1) 4 асоз пх Ь± зш х
Ъ% 51П 2х 4- • • • 51П (п 1) X,
76
РАЗДЕЛ 1. МАТЕМАТИКА
содержащей 2п коэффициентов, при т—2п можно пользоваться следующими формулами:
т т
та0 2 Е У, тап 2 (— )к к—1 к
т
тар 2 й соз рхь, р — 1,2,., я — 1;
г1
т
тЬр 2 2 г 51П рг, р 1,2,., г—1 г1
(формулы Чебышева — Бесселя).
Формулы по методу наименьших квадратов. При т2п, т. е. когда число измерений превышает число коэффициентов, следующие формулы дают наилучшее приближение по методу наименьших квадратов:
та0 2 Е У, тар 2 соз рдг;
6 л
тЬр Е 51П рх к 1,2,., т;
к
р 1, 2,., п; т 2п
Если ограничиться первыми тремя гармониками и если не требуется большая точность, можно вычислить коэффициенты разложения по следующей схеме:
(х) — а0 01 соз х а2 соз 2х а3 соз 3 4
Ьх зш х Ъ2 51П 2х Ь3 зш 3;
а0 — (о 12 • • • 4 ю47п У
з 7Г (о — 2 4 — б в — ю);
о
(1 — з б — : э — и);
Ь (з — э) 4- 63;
а, (о — в) — а3;
2 “7”(о 3 б — Ы»
4
1.21. ТЕОРИЯ
1.21.1. События и вероятность
В теории вероятностей событием называется результат опыта, осуществляемого при заданных условиях. Событие называется достоверным, если оно неизбежно происходит при данных условиях. Если же при данных условиях событие заведомо не может произойти, то оно называется невозможным. Событие называется случайным, если при данных условиях оно может произойти, а может и не произойти. Для оценки возможности реа-
где
-т
Для вычисления Ь2 разделим период 2я не на 12 частей, как для вычисления других коэффициентов, а на 8 равных частей, допуская, что соответствующие значения
можно снять с графика; тогда
2 — (1— 7з 4 б — 7) ♦
Пример 1.16. Найти приближенную формулу для тригонометрического ряда, представляющего наблюдения, приведенные в табл. 1.30.
Таблица 1.30
о
Гг 1
и
.
1 и
ь
2,714
3,042
2,134
1,273
0,788
0,495
и
ь 1
п 1
1 и
1 » 1
и
0,370
0,540
0,191
—0,357
—0,437
0,767
Пользуясь приведенными выше формулами, находим
11
а° "пГ 2] 11 ’50017 0,960:
к—0
а3 0,271; 63 0,100; 0,915;
а1 0,901; а2 — 0,542.
Построив график функции (х) и сняв с него ординаты 1и Ы в 7, получим 42гг—з45-7 2,36, откуда Ь20,59 (приближенно).
Таким образом, приближенная формула для искомого ряда Фурье будет
() 0,96 0,90 соз х 0,54 соэ 2х 4- 0,27 соз Зх 4-
-- 0,92 зш х 4- 0,59 зш 2х 4- 0,10 зш Зх.
Гармонический анализ и синтез можно производить посредством приборов (гармонических анализаторов и синтезаторов).
ВЕРОЯТНОСТЕЙ
лизации случайного события каждому событию ставится в соответствие некоторое число, называемое вероятностью.
Вероятность невозможного события принимается равной нулю; вероятность достоверного события считается равной единице. Вероятность любого случайного события заключается между нулем и единицей. Она может определяться различным образом для разных классов задач, но в согласии с правилами (аксиомами) сложения и умножения вероятностей, которые для ко-
1.21. ТЕОРИЯ ВЕРОЯТНОСТЕЙ
77
нечного числа событий указываются ниже (современная теория вероятности построена аксиоматическим путем без конкретизации самого понятия вероятности; см. [1]).
Простейшее (классическое) определение вероятности Р(А) события А выражается формулой
п
Р(Л) -,
где N — общее число равновозможных и несовместимых случаев; п — число случаев, благоприятствующих событию А (случай называется благоприятствующим событию Ау если при реализации этого случая реализуется и событие А).
Указанная формула может также служить определением (статистическим) приближенного значения вероятности события А у если в результате большого числа N испытаний событие А реализуется п раз.
В задачах, где появлению события А соответствует попадание точки в часть о области О, вероятность Р(А) может быть определена (геометрически) по формуле
Р (А)
тез со тез □
(тез со, тез — меры областей со и в частности, для двухмерной области мерой является ее площадь).
Если вероятность события А меняется в зависимости от того, произошло ли событие В или нет, то событие А называется зависящим от события В. Событие А называется не зависящим от события Ву если вероятность Р(А) не зависит от того, произошло ли событие В или нет.
Вероятность события Ау вычисленная при условии, что произошло событие Ву называется условной вероятностью события А и обозначается Р(АВ).
Событие, состоящее в наступлении хотя бы одного из событий А и Ву называется суммой событий А и В и обозначается ЛВ. Событие, состоящее в наступлении обоих событий Л и В, называется их произведением и обозначается АВ.
Правило сложения вероятностей выражается формулой
Р(А В) Р(А) Р(В),
которая обобщается на любое число слагаемых. Правило умножения вероятностей имеет вид
Р(АВ) Р(А)Р(ВЛ).
Это равенство для независимых событий А к В переходит в следующее:
Р (АВ) Р (Л) Р (В)
и обобщается на любое число сомножителей.
Пусть событие Л может осуществляться с одним и только с одним из п несовместимых событий Вь В2у., Вп. Тогда имеет место равенство
П
Р(Л) Е Р(В1)Р(АВ1),
11
которое называется формулой полной вероятности.
При том же условии относительно события А вероятность события Вг, если событие Л произошло, определяется по формуле
кам,- Р(3Р,А1В1).
п
2 Р (В) Р (АВд 11
называемой формулой Байеса, или формулой вероятности гипотез.
Пусть производится п испытаний, каждое из которых может иметь два исхода — появление и непоявление события Л. Пусть, кроме того, вероятность р появления события Л при каком-нибудь испытании не зависит от номера этого испытания и от результатов остальных испытаний (такие испытания называются независимыми). Тогда вероятность того, что при пг испытаниях событие Л наступает, а при п—пг испытаниях не наступает, если ее обозначить Рп(А), определяется по формуле
Р™(А)С™ртГ-т
где
С’,„„-,»)
Эта формула выражает так называемое биномиальное распределение вероятностей (название связано с наличием в формуле биномиальных коэффициентов С™ )•
1.21.2. Случайные величины и их характеристические числа
Случайной называется величина, которая принимает различные значения в результате повторных опытов. Если случайная величина X дискретна, т. е. ее значения
могут быть перенумерованы, то она определяется своими значениями Ху х2. и их вероятностями ри ?2. Если случайная величина непрерывна, т. е. заполняет своими значениями всю числовую ось или некоторые ее интервалы, то эта величина X определяется областью своих значений и функцией распределения Р(х), выражающей вероятность того, что X принимает какое-либо значение (безразлично какое именно), меньшее, чем Ху т. е. Р(х)Р(Хх). Производная этой функции Р'(х) называется плотностью вероятности или дифференциальной функцией распределения. Если обозначить плотность вероятности через (), то
(х) Р'(х) Р(х) (х)йх.
Для выражения существенных особенностей распределения случайной величины X вводят характеристические числа. Основными из них являются так называемые моменты первого и второго порядка, или, иначе, математическое ооюидание М(Х) и дисперсия й(Х). Для дискретной случайной величины Ху принимающей значения Х, х2,., хп с вероятностями ри р2, Р»:
п п
М (X) 2 XI рс, О (X) Е XI — пг)2 рь.
1 1 11
Здесь и ниже для сокращения записи введено обозначение т — А (X). Для непрерывной случайной величины X с плотностью вероятности (х)
--оо —оо
М(Х) х(х)ах; С(Х) (х — т)-[(х)с1х.
-3-2-1 0 12 Рис. 1.87
78
РАЗДЕЛ 1. МАТЕМАТИКА
Корень квадратный из дисперсии называется средним квадратичным отклонением (или стандартом) и обозначается а, т. е.
а V Г (X).
При изучении непрерывных случайных величин широко используется нормальное распределение (или распределение Гаусса), характеризуемое плотностью вероятности
. _(—т)2
() —
а у 2л
2 о2
Этой плотности () соответствует функция распределения
Р(х)
2л
(х—т)
2а
йх.
При нормальном распределении математическое ожидание и среднее квадратичное отклонение (стандарт) оказываются соответственно равными числами т и йг из формулы для (д:).,При т —О, а1 получается нормированная случайная величина X, для которой М(Х)0, й(Х) и
«)
1 2 л
2
Эти функции табулированы (интеграл во втором равенстве называется интегралом вероятности, или интегралом Гаусса).
Важное значение в теории вероятности имеет закон больших чисел. В простейшем варианте (теорема Я. Бернулли) он формулируется следующим образом.
Пусть п — число наступлений события Л в N независимых испытаниях, а р — вероятность наступления события А в каждом из испытаний. Тогда для любого фиксированного сколь угодно малого числа е0 имеем
Нш Р
АГ-
Плотность вероятности (х, у) для (X, У) определяется как предел отношения вероятности попадания случайной величины в бесконечно малый прямоугольник, примыкающий к точке (х, у), к площади этого прямоугольника. Тогда
д2Г (ху у) Г С
НХУ) д'ду—: Р(х,у)— Кх,у)йх4у.
ОО —оо
Составляющие X и У двухмерной случайной величины могут быть либо независимыми друг от друга, либо находиться в некоторой зависимости. Необходимое и достаточное условие их независимости выражается равенством
Пх. У)к(х) 2 (У)-
Для двухмерной величины с независящими составляющими нормальное распределение характеризуется следующей плотностью вероятности (х, у):
(х-тх) (9-т у)
1
2с.,
2лох о.
У
Если для случайной величины Хя выполняется равенство Пт Р ( X — Л е ) 1, то говорят, что Хх схо-
N-00 п
дится к Л по вероятности. Теорему Я. Бернулли можно сформулировать так: частота пШ события Л сходится по вероятности к вероятности р этого события в каждом испытании.
Наряду с одномерными случайными величинами, которые определяются значениями одной переменной, встречаются величины, определяемые значениями двух и более переменных. Для двухмерной случайной величины (X, У) вводится функция распределения Р(ху у), выражающая вероятность того, что составляющие случайные величины X и У принимают значения, соответственно меньшие, чем х и уу т. е.
Г (х, у) Р (X х9 V у).
Входящие в это равенство постоянные тХу ту оказываются равными математическим ожиданиям составляющих X, У, а ох оу — их средним квадратичным отклонениям (стандартам).
1.21.3. Задача математической статистики
Основная задача математической статистики состоит в установлении распределения реальной случайной величины или ее числовых характеристик по наблюденным значениям этой величины, причем используя не всю совокупность возможных значений (генеральную совокупность), а лишь часть ее — выборку.
Для решения этой задачи делается предположение о структуре искомого распределения. Иногда это удается по теоретическим соображениям, а иногда — по расположению на чертеже точек, отображающих наблюденные значения случайной величины, число которых должно быть достаточно большим для применимости закона больших чисел. Если, например, ожидается нормальное распределение, то искомых параметров два: математическое ожидание т и среднее квадратичное отклонение сг.Задача ставится не об отыскании точных значений параметров, а лишь об их вероятных значениях. С этой целью задаются достаточной (для рассматриваемой практической проблемы) вероятностью, называемой доверительной, и находят интервал, называемый доверительным, покрывающий значения искомого параметра. При этом используют эмпирические параметры, вычисленные по наблюденным значениям случайной величины.
По нахождении параметров устанавливают плотность вероятности согласно заранее сделанному предположению о ее структуре. В более ответственных случаях требуется сверх того проверка полученного распределения в целом, что осуществляется с помощью так называемых критериев согласия.
В настоящее время статистические методы широко используются при решении многих технических вопросов. В частности, эти методы используются в строительной механике при исследовании: устойчивости конст¬
рукций с учетом возможных отклонений задаваемых ус¬
1.22. ОСНОВНЫЕ СВЕДЕНИЯ О ЛИНЕЙНОМ ПРОГРАММИРОВАНИИ
79
ловий от реальных; колебаний упругих систем под действием случайных нагрузок; накопления повреждений в результате различных случайных обстоятельств и т. д.
1.21.4. Основы теории корреляции
Нередко наблюдаются случайные величины, между которыми имеется некоторая зависимость. Например, прочность бетона как-то зависит от количества воды, вводимой в бетонную смесь; однако прочность зависит также от соотношения между количествами цемента и заполнителей, так что при данном количестве воды возможны различные прочности. Зависимость такого рода не функциональная, поскольку каждому значению аргумента соответствует некоторое распределение другой переменной; эта зависимость статистическая.
Допустим, что в табл. 1.31 приведены численные результаты наблюдений над двумя переменными: в ней даны значения обеих переменных и числа появлений соответствующих пар значений.
Таблица 1.31
Хх Х2.
• к
Ул
1ц П21.
. пп.
•Пк1
п(ух)
Уг
П12 П22 ’
. п12.
Я2
П(У2)
•
•
• •
; ;
Ч "2
]пк)
ь
"и пи •
♦ • • •
,.па.
■пы %
я()
п(хг) П(Хг).
,.п(хь)
п
По такой таблице могут быть вычислены различные числовые характеристики, используемые в формулах и уравнениях теории корреляции. Например, полные средние значения обеих переменных 0, уо отыскиваются по формулам о 2 XI п (х); Уо У; п (У).
11 11
Непосредственное изучение статистической таблицы может дать лищь поверхностное представление о зависимости между обеими переменными (даже в пределах наблюденной выборки). Лучшее представление может дать сопоставление средних значений одной величины со всеми значениями другой. Такая зависимость называется корреляционной. О структуре этой зависимости первоначально судят по отображению статистической таблицы на чертеже.
Нередко оказывается, что построенные точки группируются вдоль некоторой прямой, так что искомую связь предполагают линейной. Тогда ищут функцию в форме у—ахЬ и подбирают коэффициенты по способу наименьших квадратов, причем оказывается, что искомая прямая проходит через точку (х0, у0). Линейное уравнение приводят к виду у—Уо рух(х—0), называемому уравнением регрессии у на х; здесь р2(лгг-—х0)
2 Ц (Уг—Уо)пцпох и вычисляется по статистической таблице.
Полезно (даже, если по физическому смыслу переменные неравноправны) составить также уравнение регрессии х на у: взаимное расположение обеих прямых дает довольно ясное представление о тесноте линейной зависимости. Для уточнения тесноты образуют выражение, симметричное относительно обеих переменных и называемое коэффициентом корреляции
Е (х1 — х0)(У; — Уо)пц .
г .ПОхОу
При 0 линейной корреляции нет (прямые параллельны координатным осям); при г 1 имеется функциональная зависимость (прямые совпадают); при 0 С г 1 есть линейная корреляционная зависимость; с возрастанием г теснота связи возрастает.
При г 0,4 считают линейную связь слабой и ищут другую связ, о структуре которой заключают по расположению точек, отображающих статистическую таблицу. И в этом случае подбирают коэффициенты намеченной связи по способу наименьших квадратов и проверяют тесноту связи по корреляционному отношению, получаемому из той же статистической таблицы.
1.22. ОСНОВНЫЕ СВЕДЕНИЯ О ЛИНЕЙНОМ ПРОГРАММИРОВАНИИ1
1.22.1. Задача математического программирования
Экстремальное (максимальное или минимальное) значение функции (х)—((хи х2., хп), зависящей от п переменных Хг (1, 2,., л), если на эти переменные не наложено никаких ограничений, определяется из решения п в общем случае нелинейных уравнений
--0 «1,2 п). (1)
0X1
Решение такой системы единственно тогда, когда матрица, составленная из вторых частных производных Их) д2Нх)№хгдХ, имеет отличный от нуля определитель (ранг равен п).
Точка , удовлетворяющая системе (1), есть точка безусловного экстремума и является точкой максимума (минимума), если матрица Ь(х) строго отрицательно (положительно) определенная.
Определение экстремального значения ((х) при дополнительных условиях
(2)
и при условии, ЧТО ранг матрицы дьдхг меньше п, сводится к определению безусловного экстремума функции Лагранжа
1 Автор п. 1.22. А. М. Проценко
А(хЛ) Нх) 2 'Фк(х)-
к1
(3)
80
РАЗДЕЛ 1. МАТЕМАТИКА
Значения множителей Лагранжа Ки (6 1, 2, т) выбираются так, чтобы уравнения (2) выполнялись. Значения (, Я), удовлетворяющие (2) и доставляющие (3) экстремальное значение, называются координатами седловой точки функции Лагранжа, а х есть точка условного экстремума функции (х) при условиях (2).
Задача математического программирования — определение максимального значения функции Цх) при ограничениях типа (2) и дополнительных ограничениях в виде неравенств
8у(х) О (V 1, 2,., 5). (4)
Такие ограничения вносят существенные качественные изменения в задачу и решение х, доставляющее (х) максимальное значение и удовлетворяющее условиям (2) и (3), называется оптимальным планом задачи.
Наиболее широко исследованы задачи, когда все функции (х), 'фь(х) и (х) (выпуклые. Выпуклость некоторой функции Р(х) определяется условием Р(Хх' (—%)х") ;%Рх') (—Х)Р(х") (0Х1). Частные случаем является линейность всех функций и .В таком случае определение максимума (х) при линейных ограничениях (2) и (3) является задачей линейного программирования.
1.22.2. Формулировка задач линейного программирования
Естественной формой задачи линейного программирования является задача об определении максимума линейной целевой функции, обычно называемой линейной формой,
() с1х1 4- с2х2 Ч спхп (5)
при соблюдении т линейных равенств и 5 шнейных неравенств
Ьпх ЬХ2х2 • • • Ьхп хп р1 - 0;
(6)
Ьт Х1 Ьт2 х2 • • • Ьтп Хп )
111 0122 •••-(- а1 П ХП “1“ П 0)
(7)
П2Х2 • • • а8П Хп 0. ]
Значения Хг (1 1, 2,., г), удовлетворяющие всем условиям (0) и (7), называются допустимыми решениями. Значения х (1, 2,., л), являющиеся допустимыми и сообщающие форме (5) максимальное значение, ча.’ываются оптимальным планом задачи.
Уравнения (6) при тСп задают (п—т) -мерное линейное многообразие в я-мерном пространстве неизвестных Хг. Это будет только в том случае, если ранг мтгпчцы В, составленной из коэффициентов уравнений (С), максимальным и равен т
П12 • •
.ь1п
В —
2122 •
‘ • 2п
ЪмФтъ •
• • тп
Неравенства (7) определяют в п-мерном пространстве неизвестных я выпуклый многогранник. Неравенство
а1Л Х1 ао2 Х2 1" ач П хп Ч. 0
называется жестким, если выполнение какой-то группы неравенств из остальных неравенств (7) превращает (8) в строгое равенство. В противном случае неравенство (8) называется нежестким. Например, неравенство —ха0 будет жестким, если х—а0, и неравенство —ха0 будет нежестким, если х—Ь 0 при 6а.
Неравенство (8) несовместно с остальными неравенствами (7), если среди всех л:0, удовлетворяющих
5—1 неравенству (7), нет х удовлетворяющего (8). В противном случае неравенство (8) совместно с остальными неравенствами (7).
Многогранник, описанный условиями — неравенствами (7), является выпуклым телом (г-мерным выпуклым телом), если ранг матрицы Л, составленной из коэффициентов при неизвестных в неравенствах, равен мин (5, п) и среди неравенств (7) нет жестких. Другими словами, если существуют некоторые значения х (г 1, 2, п), при которых все неравенства (7) явля¬
ются строгими,
аЦ Х1 аЬ2 х2 Н ь аЬп х°п Ч 0 (’ 2
то многогранник — выпуклое тело. В двухмерном пространстве (на плоскости) многогранник (7) — плоский многоугольник. В трехмерном пространстве это многогранник в обычном понимании. В пространствах большей размерности многогранник (7) — обобщенное понятие, перенесенное из трехмерного представления.
Система неравенств —Х—х2—.—п10, ХгО (1, 2,., п) выделяет п-мерную пирамиду с основанием в виде гиперповерхности, наклоненной под одинаковыми углами ко всем координатным осям, вершиной в начале координат (х 0) и длиной каждого ребра, равной единице. Такой многогранник называется симплексом.
Сечение многогранника, определенного условиями (7), линейным многообразием, заданным уравнениями (6), есть множество допустимых решений задачи, которое в свою очередь есть выпуклый (п—т) — мерный многогранник. Координаты вершин этого многогранника называются множеством опорных планов задачи. Оптимальный план находится в этом множестве.
Векторно-матричная формулировка задачи. Вводятся следующие векторы и матрицы: х(х, х2,., хп)' — вектор неизвестных, с(си с2,., сп)'— вектор цен (термин из экономической трактовки задачи) или вектор коэффициентов целевой функции, (ь 2— вектор в неравенствах и р(рь Р2,Рт)' — вектор в равенствах. Так же вводятся матрицы: В размером тХп, составленная из коэффициентов при неизвестных в уравнениях (6) и Л размером зХп, составленная из коэффициентов при неизвестных в неравенствах (7). Символ (') означает транспонирование вектора или матрицы. В таких обозначениях задача о максимуме (5) при ограничениях (6) и (7) записывается в весьма компактной форме
Вх р — 0, Ах I 0, с'х - макс. (9)
Нормальная форма задачи. В такой форме среди 5 неравенств (7) имеются условия неотрицательности всех переменных, которые выделяются в отдельную группу условий
X О ИЛИ XI 0 (1 — 1,2 л).
1.22. ОСНОВНЫЕ СВЕДЕНИЯ О ЛИНЕЙНОМ ПРОГРАММИРОВАНИИ
81
В нормальной форме отсутствуют уравнения (6), а задача формулируется только с помощью ограничений — неравенств
Ах 1 0, х 0, с'х- макс. (10)
Здесь матрица А не включает условия х0.
Условие х20 задает так называемые несвободные переменные в отличие от задачи (9), где все переменные свободные, т. е. ограничений по знаку нет.
Каноническая форма задачи. В этой форме ограничения записаны только в виде равенств для несвободных переменных
Вх р 0, х 0, с'х - макс. (11)
Переход от нормальной формы к канонической возможен введением дополнительных 5 переменных хпз ( 1, 2,., 5) —по числу неравенств в нормальной форме, и расширением матрицы Л на 5 столбцов присоединением единичной матрицы размером 5X5
1112 • •
- 1гг —1
0.
. 0
ВА,
- Е
2122 • •
• 2 п 0
—1.
. 0
5152 • •
. а5П 0
0.
.-1
Считая новые переменные (я5) -мерным вектором х—(хи х2, Хпв)', приходим к канонической форме
задачи (11), в которой следует считать р .
Смешанная форма задачи. Эта форма содержит в качестве ограничений равенства и неравенства и отличается от естественной формы тем, что все переменные несвободные
Вх--р — 0, Л 0, х 0, с'х- макс.
Определение минимума целевой функции. В тех случаях когда вместо максимума линейной формы (5) требуется определить минимум, тогда вводится обратная по знаку целевая функция Р(х) ——()—с'х, для которой определяется максимальное значение. В этом случае — мин (—с'х) макс (с'х) при одних и тех же ограничениях задачи.
1.22.3. Двойственные задачи линейного программирования
Естественной формулировке прямой задачи (9) соответствует двойственная задача с т--8 переменными — по числу равенств и неравенств прямой задачи. Целесообразно эти переменные разделить на две группы и («1, 2» ••• ит)' — т-мерный вектор (по числу равенств) и-0(г1, ь2,. V,)'— 5-мерный вектор (гю числу неравенств прямой задачи). Целевой функцией двойственной задачи является линейная форма
г (и, V) р'и — ('V р р2и2 - 1-ртит —
— — (13)
Ограничения двойственной задачи следующие
В'и — Л'а с 0, V 0. (14)
Здесь переменные и (1, 2, т) являются свободными, а переменные о 0 (1, 2,., 5)—несвободными.
Если х— оптимальный план прямой задачи, а и и V — оптимальный план двойственной задачи, то
() 2 (и 9 V).
Нормальной форме прямой задачи соответствует двойственная задача, заключающаяся в определении минимума линейной формы
2 () — ('V (15)
при ограничениях только в виде неравенств
— А'V -- с 0 (16)
несвободных переменных о0 (0, 1, 2,., 5).
Здесь число неизвестных 5 равно числу неравенств в прямой задаче, а число ограничений — неравенств равно числу неизвестных в прямой задаче. Для оптимальных планов прямой и двойственной задач равенство целевых функций будет:
() г(о).
Канонической форме прямой задачи соответствует задача на минимум линейной формы
г (и) — р'и (17)
при ограничениях — неравенствах
В'и с0 (18)
и всех свободных переменных их ( 1, 2, т).
Для оптимальных планов обеих задач равенство целевых функций
[(х)г(и).
1.22.4. Преобразования задач к различным формам
Практически во всех случаях задача линейного программирования должна быть приведена к нормальной, канонической или смешанной форме при несвободных переменных. Это необходимо в тех случаях, когда предусматривается решение задачи с помощью ЭВМ.
Естественная форма задачи может быть приведена к канонической посредством перехода к двойственной задаче (13), (14) с последующим преобразованием свободных переменных по одному из приведенных ниже приемов.
Заменой переменных уМхи где Мг — достаточно большие положительные числа, можно обеспечить выполнение условий Уг О (у0) и, учитывая, что —Мг (1, 2,., л), получается следующая смешанная форма задачи с несвободными переменными уг0 (1, 2,., п).
Ву Р — 0, Ау--1 0, у 0, с'у с0- макс, (19) где р р — Вт, 11 —Ат, с0 — с'т, т (Мг, А1о,., Мп)'.
Здесь число неизвестных не изменяется, однако если Мг—достаточно большие числа, то оптимальный план может быть определен с большой погрешностью.
Удвоение числа переменных. Каждая переменная Хг заменяется разностью двух неотрицательных переменных хгх ь—х1 или в векторной форме х х—х. В этом случае задача (9) записывается
Вх — Вх р 0, Ах — Ах 1 0, (20)
х 0, х 0, с' — с'х - макс.
Такой метод приводит к удвоению числа переменных, а в вычислительном плане предъявляет повышенные требования к точности всех вычислений.
82
РАЗДЕЛ 1. МАТЕМАТИКА
Введение дополнительной переменной хюО и переход к новым переменным по правилу 4 Ха;, уп1 тю приводит к новым (я1) переменным, на которые можно наложить требования неотрицательности УгО (г 1, 2,.,п1).
Преобразованная задача выглядит следующим образом:
Ву р 0, Ау 0, у 0, 7'и-» макс (21)
Здесь В и А соответственно матрицы тХ(«1) и 5Х(я1), образованные из матриц В и Л по правилу
В 11 В, Ь , А А у а ,где Ь(Ь), Ь2,.,Ьт)' и а(аи а2,., а6)'— векторы размерности т и 5 соответственно и являются дополнительными столбцами в матрицах В и Л п
Ь — Б Ь1 ( 1, 2,., т),
11
п
ау—’Еа1 ( 1,2,., з).
«1
Компоненты этих векторов являются суммой всех элементов строк матриц В и Л, взятых с обратным знаком. Вектор с имеет размерность п4-1
Оптимальный план преобразованной задачи связан с оптимальным планом исходной задачи следующим образом:
— у'п1 ( 1, 2,.,
Такой прием выгодно применять, когда ожидается, что в оптимальном плане исходной задачи все переменные принимают значения одного порядка.
1.22.5. Вычислительные методы
Как правило, решение задач линейного программирования возможно только с помощью ЭВМ. Для этой цели для ЭВМ разработаны стандартные программы решения задачи линейного программирования. Практически все стандартные программы ориентированы на несвободные переменные и на какую-нибудь стандартную форму задачи — нормальную, каноническую и реже смешанную. Поэтому переход от естественной формы к стандартной практически всегда необходим.
Вычислительные методы отличаются по своей организации и используют различные модификации задачи. Большинство стандартных программ построено на симплекс-методе или его модификациях. Эти методы являются конечными, так как позволяют за конечное число вычислительных этапов получить оптимальный план задачи, если он существует, или установить несовместность условий задачи или установить, что целевая функция неограниченна. Решение задачи линейного программирования ручными методами нерационально.
1.23. ОСНОВЫ ПРИМЕНЕНИЯ ЭЛЕКТРОННЫХ ЦИФРОВЫХ ВЫЧИСЛИТЕЛЬНЫХ МАШИН1
В зависимости от способа представления информации электронные вычислительные машины подразделяются на машины дискретного и непрерывного действия. Ни¬
1 Пользуясь данными настоящего раздела, следует учитывать быстроту развития этой отрасли знаний. Еще недавно в отечественной практике использовались главным образом вычислительные машины первого поколения (на электронных лампах); программирование выполнялось вручную на языке машины, причем составитель или потребитель программы непосредственно работал за пультом машины. Информация об этой системе составляет основное содержание раздела. На смену машинам такого рода пришли машины второго поколения (на полупроводниках). С моментом их появления совпало начало автоматизации программирования. Программа составляется на специальном алгоритмическом языке и с помощью трансляторов автоматически переводится с этого языка на язык машины. Работа на таких машинах второго поколения выполняется, как правило, в пакетном режиме: программы объединяются в пакет и специальный оператор пропускает их последовательно одну за другой. При этом составитель и потребитель программы уже непосредственно с машиной не общаются. Пакетный режим работы существенно повышает к. п. д. вычислительной машины.
Для машин третьего поколения характерна работа в режиме с разделением времени, когда одновременно решается несколько задач: поочередно для одной выполняется счет, для другой — обмен информацией между различными устройствами машины.
Потребитель программы снова получает возможность непосредственно общаться с машиной в режиме диалога, работая за ее пультом. При этом пультов (терминальных устройств) уже множество, и они, будучи соединенными с машиной каналами связи, могут быть удалены от нее на тысячи километров.
Одновременно с машинами существенному совершенствованию подвергаются алгоритмические языки — они становятся ближе к человеческому.
Многие из упомянутых вопросов не нашли освещения в данном разделе. Вместе с тем в настоящее время отпали некоторые проблемы, характерные для периода ручного программирования. Для читателя, незнакомого с вычислительными машинами и программированием, приводимая здесь информация будет полезной — без нее труднее уяснить современное состояние вопроса.
же рассматриваются основы применения электронных машин дискретного действия.
Универсальные электронные цифровые вычислительные машины (ЭЦВМ) с программным управлением предназначены для решения сложных математических, логических и экономических задач. Отличительными их особенностями являются универсальность, автоматизм работы, быстродействие, программное управление. Последнее означает, что все операции, выполняемые ЭЦВМ для преобразования исходных данных в конечный результат, осуществляются по определенной программе, составленной заранее и вводимой в машину вместе с исходными данными; под программой подразумевается последовательность приказов (команд) на выполнение тех или иных операций.
1.23.1. Некоторые принципы действия ЭЦВМ
Системы счисления. Конструкция ЭЦВМ и процесс программирования тесно связаны с системами счисления. Системы счисления подразделяются на позиционные, в которых каждая цифра принимает различное значение в зависимости от занимаемой ею позиции в последовательности цифр, образующей число, и непозиционные (например, римская система). Любое число в позиционной системе счисления с основанием р представляется в виде
N апр п • • • - агр а0р°
а—1 Р 1 • • • а—тр т,
1,23. ОСНОВЫ ПРИМЕНЕНИЯ ЭЛЕКТРОННЫХ ЦИФРОВЫХ ВЫЧИСЛИТЕЛЬНЫХ МАШИН
ГД6 йп йп — Ь ••• тп цифры 7-й системы счисления; число различных цифр равно основанию системы р.
В подавляющем большинстве случаев в современных ЭЦВМ используется двоичная система счисления (в отечественной машине «Проминь» используется десятичная система счисления).
В качестве промежуточного звена для записи программ на бланках для ЭЦВМ с двоичной системой счисления используется восьмеричная система счисления.
Фиксированная и плавающая запятая. При использовании ЭЦВМ применяются две формы представления чисел: с фиксированной и плавающей запятой. Первая форма представления чисел предусматривает строго определенное положение запятой относительно старшего разряда. В большинстве машин, работающих в форме с фиксированной запятой, последняя располагается перед старшим разрядом; поэтому числа с фиксированной запятой являются правильными дробями 01 и изображаются в машине следующим образом: 0а, где
0 — знак числа, а — его абсолютное значение. Если 1, вводятся специальные масштабные множители
N
1М, такие, что —- 1.
М
Изображение числа в форме с плавающей запятой имеет вид: Мт?п, где р — основание системы счисления; т — мантисса числа; п — его порядок. Если мантисса числа представляет собой правильную дробь с первой значащей цифрой, расположенной в старшем разряде, то такая форма записи числа с плавающей запятой называется нормализованной. Мантиссы нормализованных чисел удовлетворяют неравенству 1 ргп. 1, т. е. для десятичных чисел 110т1, а для двоичных 12т1. Таким образом, старшая цифра мантиссы нормализованного двоичного числа равна единице, и процесс нормализации состоит в сдвиге разрядов мантиссы влево с одновременным уменьшением порядка до тех пор, пока в старшем разряде мантиссы не окажется единица. Все арифметические операции для машин, работающих в форме с плавающей запятой, совершаются над нормализованными числами. Числа в форме с плавающей запятой представляются в машине в виде
01 л02т, где 01 — знак порядка; п — порядок; 02 — знак мантиссы (самого числа); т — мантисса (у разных ЭЦВМ мантисса, порядок и их знаки могут быть размещены в ячейке в различной последовательности относительно друг друга).
Для изображения числа в каждой ЭЦВМ отводится конечное число разрядов. Пусть для изображения мантиссы т и порядка п в разрядной сетке отведено соответственно х и V разрядов. Тогда диапазон представимых в машине нормализованных чисел определяется неравенством
2“2У N (1 — 2-1) 2У—,
Диапазон чисел с фиксированной запятой, представимых в машине, значительно уже. Пусть о и т — количество разрядов, отводимых для изображения целой и дробной частей, тогда
2-т N 2° — 2_т.
Так как в большинстве машин, работающих в форме с фиксированной запятой, а0, то
2_т ЛП 1 — 2х.
Например, разрядная сетка машины «Минск-22», работающей в обеих формах, равна 37; величины р, V и т равны соответственно 28, 6 и 36. Поэтому для машины
«Минск-22» диапазон представления чисел в форме с плавающей запятой (нормализованных) составляет 2-64 (1—228) 263, а в форме с фиксированной за¬
пятой —236 А 1—2-36.
Большинство современных ЭЦВМ работает в обеих формах — с фиксированной и плавающей запятой.
Из приведенных выше неравенств следует, что для всякой ЭЦВМ существует максимальное по абсолютной величине число, представимое в машине. Всякое большее (по абсолютной величине) число является машинной бесконечностью, и появление его в процессе вычислений вызывает переполнение разрядной сетки и аварийный останов (АВОСТ) машины, предусмотренный на этот случай. С другой стороны, из тех же неравенств следует, что для каждой ЭЦВМ в окрестности нуля существует некоторый интервал чисел, называемый областью машинных нулей; машинный нуль может быть положительным и отрицательным.
Ячейки оперативной памяти машины. Вся вводимая в машину информация (исходные данные и команды программы), а также промежуточные и конечные результаты размещаются в специальных запоминающих устройствах машины: оперативном и внешнем.
Оперативное запоминающее устройство машины (оперативная память — ОП) содержит определенное число ячеек. Все ячейки занумерованы; порядковый номер ячейки называется ее адресом. Для машин, работающих в двоичной системе, ячейки памяти занумерованы в восьмеричной системе счисления.
Число ячеек оперативной памяти (емкость ОП) является одним из основных параметров машины; обычно оно равно степени числа два (211, 212 и т. д.). При записи в ячейку числа (команды) старое содержимое ее автоматически стирается, при выборке информации из ячейки содержимое ее сохраняется. Ячейки состоят из разрядов, каждый из которых предназначен для записи одной цифры. Совокупность разрядов ячейки оперативной памяти называется разрядной сеткой машины.
Команды. Строение команды. Адресность машины. Работа ЭЦВМ состоит в выполнении в некоторой заданной последовательности определенного числа машинных операций, выполняемых по специальным приказам— командам. Все машинные операции занумерованы числами натурального ряда. Номер операции называется ее кодом (код операции — КОП). Каждая ЭЦВМ может выполнять конечное число различных операций, которым соответствует совокупность команд, именуемая системой команд: последняя различна для разных машин. Команды состоят из двух основных частей: кодовой, содержащей КОП, и адресной, содержащей адреса тех объектов, над которыми выполняется операция. По числу адресов, записываемых в одной команде, ЭЦВМ подразделяются в основном на три типа: одноадресные (например, ЭЦВМ серии «Урал», БЭСМ-6), двухадресные (например, «Минск-22») и трехадресные (например, М-220). Принципиальный вид
соответственно:
КОП Л
коп Аг А2 коп А1Аш А,
Число разрядов ячейки, отводимых для записи адреса и кода операции, согласуется с емкостью оперативной памяти и числом команд ЭЦВМ.
Порядок выполнения и виды команд. Решение задачи на ЭЦВМ выполняется автоматически: команды
программы в определенной последовательности передаются из памяти машины в устройство управления, расшифровываются и направляются в виде специальных сигналов в различные устройства машины, которые на
84
РАЗДЕЛ 1. МАТЕМАТИКА
основании этих сигналов выполняют соответствующие операции.
Различают два типа машин: со свободным и заданным порядком выполнения команд. В ЭЦВМ со свободным порядком выполнения команд в каждой команде указывается адрес следующей выполняемой команды, т. е. адрес ячейки Памяти, в которой хранится следующая команда. В ЭЦВМ с заданным (естественным) порядком выполнения команд адрес следующей команды, как правило, образуется из адреса очередной команды путем прибавления к нему единицы. Когда же возникает необходимость нарушить естественный порядок выполнения команд, переход к следующей команде осуществляется специальной командой перехода. Все отечественные и большинство зарубежных ЭЦВМ относятся к этому типу.
Операции (команды), выполняемые ЭЦВМ, можно разделить на четыре основные группы: арифметические операции, логические операции и операции с параметрами, операции изменения команд, операции управления.
К арифметическим операциям относятся: сложение, вычитание, умножение и деление чисел. В некоторых ЭЦВМ имеются операции вычисления модулей, а также сложные операции: У х, 1 , зт ху х, ех и т. п.
Логические операции и операции с параметрами включают логическое умножение (выделение части команды или числа), логическое сложение (формирование команды или числа из нескольких частей), отрицание равнозначности (сложение по модулю 2), циклическое сложение, сдвиг и т. п.
Операциями изменения команд являются сложение и вычитание команд, изменение команд на величину индексного регистра и т. п.
Наконец, к операциям управления относятся: останов, условный останов, а также ряд операций сравнения и перехода (передачи управления). При выполнении команды безусловного перехода нарушается естественный порядок выполнения команд — совершается переход к команде, адрес которой указан в адресной части команды безусловного перехода. Команда условного перехода осуществляет передачу управления лишь при выполнении определенного условия. К операциям управления относят также очень важные в работе ЭЦВМ операции печати, обращения к внешним запоминающим устройствам и т. п.
Рис. 1.88
1.23.2. Краткое описание устройства ЭЦВМ
ЭЦВМ состоит из следующих основных устройств: устройств ввода, запоминающих устройств (ЗУ), арифметического устройства (АУ), устройства управления (УУ), устройств вывода (рис. 1.88).
Устройства ввода и вывода. Исходная информация и программа вводятся в машину с перфокарт (ПК), перфоленты (ПЛ) или непосредственным набором кодов на клавиатуре пульта управления. Скорость ввода информации с перфолент 50—2000 кодовсек, с перфокарт 300—700 карт(мин, с помощью клавиатуры 0 кодовмин. Последний способ ввода применяется в машинах «Проминь» и «Мир», а в служебных целях используется во всех ЭЦВМ. Для ввода информации в ЭЦВМ может быть также использована магнитная лента (МЛ), однако запись информации на МЛ предварительно производится с помощью самой ЭЦВМ с какого-либо другого носителя (ПК или ПЛ).
Результаты вычислений выдаются машиной на перфокарты, перфоленту, а также на узкую бумажную ленту в цифровой форме. Широкое применение получило алфавитно-цифровое печатающее устройство (АЦПУ). Для оформления результатов счета на ЭЦВМ могут быть также использованы чертежно-графические автоматы, подключаемые непосредственно к машине или работающие от промежуточного носителя информации (магнитная лента или перфолента).
Запоминающие устройства машины ЗУ предназначены для хранения исходной информации, промежуточных и конечных результатов, а также самой программы. В современных ЭЦВМ используется два вида запоминающих устройств: оперативное и внешнее. В зависимости от мощности машины объем оперативного запоминающего устройства (ОЗУ) может быть самым разнообразным: от нескольких сотен до сотен тысяч ячеек. Основными характеристиками ОЗУ являются его емкость и время выборки из ОЗУ содержимого одной ячейки (от времени выборки в основном зависит быстродействие машины). Выборку из ОЗУ можно осуществлять из отдельных ячеек в любой последовательности.
Внешние запоминающие устройства выполняются на магнитных барабанах (МБ), магнитных дисках (МД) или магнитных лентах (МЛ). Во всех этих устройствах время считывания одного числа значительно превышает время выборки из ОП.
Арифметическое устройство (АУ) предназначено для выполнения операций над кодами. В арифметическое устройство из оперативной памяти поступают исходные числа, а из устройства управления — указания, какую операцию необходимо выполнить. Результат из АУ поступает в память машины по указанному адресу. Скорость выполнения операций в серийных ЭЦВМ колеблется от нескольких сотен до миллиона операций в секунду. Однако уже существуют машины, выполняющие до 100 миллионов операций в секунду.
Устройство управления (УУ) предназначено для последовательной выборки команд и управления работой всех устройств машины. К устройству управления относится пульт ЭЦВМ, предназначенный для пуска и останова машины, контроля за работой, ремонтных и специальных (например, отладочных) работ.
Магнитные
барабаны
Маенитные
ленты
■ ■ I
Устройство
ввода
Устройство в ов о да
Основные технические характеристики некоторых отечественных ЭЦВМ
1,23. ОСНОВЫ ПРИМЕНЕНИЯ ЭЛЕКТРОННЫХ ЦИФРОВЫХ ВЫЧИСЛИТЕЛЬНЫХ МАШИН
85
Примечание
Возможно подключение до 136 внешних устройств
Имеет экран — устройство отображения на 1024 символа и вывод на пишущую машинку
Имеет долговременное запоминающее устройство на 16384 символа и вывод на пишущую машинку Ввод с пульта (10 чиселмин)
а 1ЧНИТПЕ1Ч винэтпэгсевс ччгвтпоггц
88Й§§§83 888 8 88 3 3 33 2 3
хвх я чхэонтпом ввмэв1гдэ1хоц
52Й8°°88Й2 ?88 2 З4' Ч “1 “Л ".
СО О о
(«пит х я мойхэ ояхзэьиггоя) чхвьэи 0Амос1иш вн егоагчя чхэойомэ
400
400
400
400
400
400
400
300
400
400
400
(НГт Т Я ИОСГХЭ ОЯХЭЭНИ1ГОМ)
чхвьэи 01ЛмеХ вн вяоягаа чхэойонэ
1200
1200
1200
1200
1200
900
1200
1200
10 симвсек 10 симвсек
7 симвсек 7 симвсек
7 симвсек
(идэ х я мойхэ оахээьи1гоя) гахнэггофйэи вГоя1чаВ1Гоая чхэойомэ
100020
150080
100080
100080
10080
100020
150080
80080
80020
1500— 1500—
70080
1010
1
1
1
(яяиг х я хсвм ояхээьшгоя) хйемофйэи вхгоапавгоаа чхэойолэ
700100
700100
700100
120100
700100
120100
700110
700110
700110
400100
400100
700100
600120
300100
Форма представления чисел
уох
-впвв ионнвяос1иэниф э
Кет
9
»
»
Есть
Нет
Есть
9
9
9
9
9
Нет
уохвпве уэп01вяв1ги о
А
И
эяэьв а
аоявс1евс1 х1чньиоа1Г оахээьшго1
48
45
45
45
45
39 48 24 24
40
40
48
37
37
37
12
12
36
36
5(десятичных)
5 (десятичных)
1
Внешние запоминающие устройства
на магнитных лентах
(иээ х я а01гэ оахээь -игом) внэидо чхэойояэ
10 000 10 000 10 000
3 000 5 000
400 14 С00 28 000 28 000
2000 2 000
4 000
10 000
2500 2 500
(а01ГЭ ояхээьшгоя) МХНЭ1Г Н0Н1Г0 чхэонмэ
1 000 000 4 000 000 4 000 000 75 000 1 000 000 30 000 1 000 000 1 000 000 1 000 000
100 000 100 ООО 318 000
4 000 000
100 000 100 000
уэгэхииомвн оя
-ХЭЭНИ1Г0М Э0НЧ1ГВЯШЭМВМ
гГгнО ОО О II II II СО М ММ -11 II 1
на магнитных барабанах
(эМЭ X я Я01ГЭ оахээь -И1Г0М) внэюдо чхэойояэ
50 000 17 003 17 000
6 400 12 000 800 30 ОШ 6ЭООО 60 000
3 000
3 ООП
4 40с
(ао1го оахэ -эьиггоя) чхэониэ ввЪпдо
512000 192 000 65 536 12300 65536 12388 1 440000 1 440000 1440000
65 536 16 384
120 СШ
1
(МЭЭНВ 0ЯХЭЭНИ1Г0М) ихвювп рон -аихвс1эио чаэомюэ ввнчи-вюиэмем
32 768 32 768 16 384 4 096 8 192 2 048 524 288 65 536 16 384
2 048
2 048 32 768
65 536
8 192 4 096
8 192 4 096
2 048 1024
480
200
ЧХЭОНЭЭЙЯу
1
3
3
3
3
3
1
1
1
2
2
2
АЛГОЛ
»
2
2
1
1
иээио я
(ИИНЭ1ГЭИЫЧЯ чхэойояэ ВВН1ГЭС1Э
Ошюоооооюм ЮЮО О ЮЮ СЧСМ
0С-4СЧСЧЧ.-1Ю—' сч со
Название
ЭЦВМ
БЭСМ-6
М-222
М-220А
М-20
БЭСМ-4 БЭСМ-2М «Урал -16» «Урал -14» «Урал-11»
«Урал-4
«•Урал-2
«Раздан-3
Минск-32»
«Минск-22» ♦Минск-2»
«Мир-2» «Мир-1»
«Наири-2»
«Наири»
кПроминь -2» сПроминь»
ЭЦВМ снята с производства.
86
РАЗДЕЛ 1. МАТЕМАТИКА
В большинстве ЭЦВМ многие машинные операции, в частности все арифметические, вырабатывают управляющий сигнал со, равный 1 или 0 и характеризующий некоторые признаки результата операции, например знак. Значение величины со является тем условием, которое определяет передачу управления той или иной команде по команде условного перехода.
Таким образом, между устройством управления и арифметическим устройством имеются два вида связи:
а) прямая (управляющая) —УУ выдает команды, которые выполняет АУ; б) обратная (информационная) — АУ — выдает УУ управляющий сигнал со, определяющий выбор той или иной команды. Кроме сигнала со выдается сигнал переполнения разрядной сетки р, сопровождаемый остановом машины.
Основные характеристики некоторых серийных отечественных ЭЦВМ представлены в табл. 1.32.
1.23.3. Особенности решения задач на ЭЦВМ
Порядок решения задач на ЭЦВМ. Решение задач на ЭЦВМ включает следующие основные этапы:
1) выбор или разработку алгоритма;
2) программирование, т. е. процесс разработки предписания (программы) для реализации на данной машине принятого алгоритма;
3) отладку программы на машине, т. е. устранение ошибок, допущенных в процессе разработки алгоритма и программы;
4) составление инструкции, т. е. необходимых сведений об алгоритме, о способе задания исходной информации, о работе за пультом и о технике расшифровки конечных результатов;
5) автоматическое решение задачи на машине;
6) обработку результатов счета.
Разработка алгоритма. Под алгоритмом решения задачи понимается точное, общепонятное предписание, определяющее процесс преобразования исходных данных в искомый результат. Основой для построения алгоритма служат обычно методы вычислительной математики. Однако при выборе численного метода на основе соображений надежности, быстроты сходимости, обеспечения требуемой точности, простоты вычислительной схемы и т. д. учитывают также следующие особенности ЭЦВМ:
а) высокую скорость выполнения операций над кодами, хранящимися в оперативной памяти;
б) относительно низкую скорость ввода исходных данных и вывода результатов;
в) ограниченную емкость оперативной памяти при большей емкости внешних запоминающих устройств;
г) относительно низкую скорость обмена между отдельными видами памяти;
д) ограниченную представимость чисел, в ряде случаев приводящую к необходимости вычислений с удвоенной точностью и к масштабированию числовой информации;
е) возможность случайных сбоев в процессе работы машины и необходимость контроля вычислений.
К алгоритму предъявляется требование минимальной связности. Это означает, что общий алгоритм решения должен распадаться на фрагменты, которые необходимо по возможности сделать автономными с тем, чтобы превратить всю их совокупность в последовательную цепочку и использовать результаты предыдущего звена как исходную информацию для последующего.
При решении на ЭЦВМ многих задач строительной механики возникает ряд специфических задач. К ним относятся, например, задание информации о конфигу¬
рации сооружения, машинное построение основной системы, особенно при использовании сложных основных систем, формирование систем канонических уравнений и т. п. Эти задачи и целый ряд им подобных составляют содержание новой для строительной механики проблемы — проблемы формализации решения.
Все алгоритмы должны удовлетворять требованию формализации. Решению этой проблемы посвящено большое число работ.
Программирование. Сущность программирования состоит в представлении алгоритма в виде последовательности элементарных операций (команд), выполняемых электронной машиной. Процесс составления программы включает:
1) разработку логической схемы;
2) запись программы в содержательных обозначениях или относительных адресах;
3) распределение памяти машины;
4) присвоение командам, константам и ячейкам рабочих массивов истинных адресов (кодирование).
Поскольку при работе машины возможны случайные сбои, в программе должен быть предусмотрен кроме реализации алгоритма контроль правильности вычислений. Программа также должна обеспечивать ввод исходных данных и вывод результатов, обмен информацией между различными видами памяти, останов машины и т. д.
Различают два основных метода программирования: непосредственное (ручное) и автоматическое. При ручном программировании вся работа, начиная с разработки общей схемы-программы и кончая кодированием, выполняется непосредственно программистом. При автоматическом программировании программист составляет только схему программы и записывает ее специальным образом. Вся же техническая работа, связанная с составлением программы и кодированием ее, выполняется программным способом.
С целью облегчения программирования перед написанием программы составляется ее логическая схема в форме блок-схемы или операторной схемы. Блок-схема программы представляет собой графическое изображение последовательности выполняемых вычислений в виде набора прямоугольников и кружков (блоков), соединенных стрелками. Каждый блок — это часть программы, осуществляющая определенную логически законченную процедуру, например счет по формуле, проверку логического условия и т. п. Разбивка программы на блоки достаточно произвольна.
В больших, сложных в логическом отношении программах первоначально составляется укрупненная блоксхема, элементы которой (обобщенные блоки) в свою очередь представляются в виде блок-схем. Блочная структура программы обладает следующими достоинствами:
1) при написании программы каждый блок программируется отдельно;
2) разбиение программы на блоки позволяет при небольшом изменении (уточнении) задания ограничиться переделкой одного или нескольких блоков, не затрагивая остальной части программы;
3) блочная структура облегчает отладку программы, позволяя вести ее независимо (поблочно) и делая более обозримой всю программу;
4) программа, составленная из блоков, обладает большей гибкостью, ибо одни и те же блоки могут использоваться в разных частях программы.
Другой формой изображения логической схемы программы является операторная схема. При операторном методе программирования логическая схема представ¬
1.23. ОСНОВЫ ПРИМЕНЕНИЯ ЭЛЕКТРОННЫХ ЦИФРОВЫХ ВЫЧИСЛИТЕЛЬНЫХ МАШИН
87
ляется последовательностью записанных слева направо операторов — символов групп команд, объединенных по определенному признаку. В тех случаях, когда порядок записи операторов в схеме не соответствует порядку их выполнения, применяют специальные знаки перехода. В отличие от блоков все операторы имеют четкое функциональное назначение (арифметические и логические операторы, операторы переадресации, восстановления, записи и т. д.) и строятся по определенным правилам. Преимуществом операторного метода является возможность формального преобразования логических схем программ по определенным законам.
После составления логической схемы программы осуществляется программирование в содержательных обозначениях (предложение А. Л. Брудно) или в относительных (буквенно-числовых) адресах.
По окончании составления всей программы (или одного из ее обобщенных блоков) производится подсчет команд, констант, рабочих ячеек и числовых массивов и осуществляется распределение памяти машины, т. е. всем этим элементам отводятся определенные места в запоминающем устройстве, после чего производится кодирование программы.
В основе программирования лежит принцип оптимизации (оптимальный объем программы, оптимальное загружение памяти, оптимальное машинное время и т.п.).
Методы программного контроля. Ошибки, возникающие при решении задач с помощью ЭЦВМ, подразделяются на две категории: ошибки, не зависящие от машины, и ошибки, связанные с машиной.
К первой категории относятся ошибки программирования и кодирования (устраняются в процессе отладки), ошибки оператора при работе за пультом (для их предотвращения каждая программа снабжается инструкцией, содержащей указания о работе за пультом машины), ошибки перфорации (исключаются при перфорации в две «руки» с последующей сверкой на контрольно-считывающем устройстве) и т. д.
Ошибки второй категории (машинные) делятся на систематические и случайные. Систематические ошибки связаны с неисправностью машин (устранение и предотвращение их — задача обслуживающего персонала). Случайные ошибки (сбои) вызываются различного рода внешними помехами. Возможность сбоев не препятствует решению задачи, но требует контроля правильности работы ЭЦВМ.
В некоторых машинах имеются специальные устройства, осуществляющие так называемый приборный (схемный) контроль. Ниже рассматриваются способы программного контроля, предусматриваемого при программировании задачи.
1. Контроль ввода осуществляется двумя способами. Первый способ, применяемый преимущественно для программ, состоит в проверке совпадения контрольной суммы (вычисляемой машиной в процессе ввода) с известным ее значением 2, вводимым в машину вместе с программой. Второй способ контроля главным образом исходных данных предусматривает двойной ввод исходной информации и заключается в проверке совпадения значений контрольных сумм, получаемых при каждом вводе: 2122. Этот способ освобождает от предварительного вычисления значения контрольной суммы, однако он исключает лишь возможность случайных ошибок.
2. Контроль обмена. При обмене информацией между различными запоминающими устройствами машины возможны три' вида ошибок: ошибки при записи во внешние запоминающие устройства, ошибки при считывании в оперативную память и, наконец, искажение ин¬
формации в процессе хранения ее на магнитных барабанах, лентах или дисках.
Для устранения первых двух видов ошибок обмен информацией сопровождается двукратным вычислением контрольных сумм с последующей их сверкой. Для предотвращения ошибок, связанных с возможностью искажения информации во время хранения ее во внешней памяти, запись информации на МБ, МЛ или диски сопровождается засылкой туда же значения контрольной суммы 2. Она используется в дальнейшем для контроля при считывании.
3. Контроль правильности работы машины в процессе вычислений. Двойной счет с контрольным суммированием позволяет исключить случайные ошибки в процессе вычислений: считается, что получены правильные результаты, если они повторены на машине дважды.
Повторный счет с обновлением оперативной памяти используется при решении задач большой продолжительности. Программа и весь числовой материал засылаются во внешние запоминающие устройства машины и перед каждым счетом считываются в оперативную память. Этот способ позволяет выявить искажения в программе, возникающие вследствие случайного сбоя. Достоинство его состоит также в возможности прервать работу в любой момент времени с последующим возобновлением.
4. Включение тестов в решение задачи. В случае многовариантных задач в решение периодически включается отладочный вариант исходных данных, для которого известны результаты ручного счета. Сравнение может вестись автоматически (по 2) и визуально путем выдачи результатов на печать,
5. Контроль выдачи результатов осуществляется в процессе наладки машины с помощью тест-программ печати и вывода на перфоратор, а в отдельных случаях в процессе решения задачи — путем повторения печати результатов
Отладка программы на машине производится с целью выявления и исправления ошибок, допущенных при разработке алгоритма в процессе программирования. Первоначальная отладка ведется по блокам (автономная отладка). При этом в первую очередь обычно отлаживаются арифметические блоки. Каждый арифметический блок желательно оканчивать отладочной печатью. На печать выводятся исходные данные, промежуточные и окончательные результаты.
После автономной отладки приступают к отладке логической структуры всей программы (комплексная отладка). Комплексная отладка включает проверку правильности передачи управления от блока к блоку и правильность обмена информацией между блоками. Информация, доставляемая комплексной отладкой, обычно столь велика, что на практике ее получают лишь для отдельных узловых точек программы.
Пульт управления ЭЦВМ содержит систему устройств, позволяющих использовать при отладке программы ряд эффективных приемов: останов по записи, чтению и адресу, занесение с пульта команд и констант,’ передачу управления с пульта, наконец, работу в режиме одиночных команд и т. д. Использование всех этих возможностей сильно сокращает календарное время отладки, хотя и увеличивает относительно непродуктивное время работы машины.
В целях упрощения отладки составлено большое число специальных программ отладки (СПО). Они позволяют вести узловую отладку и отладку методом прокрутки, когда за работой программы ведется непрерывное наблюдение с выдачей информации о работе каждой команды.
88
РАЗДЕЛ . МАТЕМАТИКА
1.23.4. Некоторые приемы программирования
Описываемые ниже приемы программирования далеко не исчерпывают всех возможностей, заложенных в системах команд современных ЭЦВМ, и представляют собой лишь отдельные примеры для демонстрации этих возможностей.
Логические разветвления в программах. Программирование математических формул, т. е. написание системы выполняемых последовательно команд арифметических и логических операций, является обязательным элементом почти всякой программы и представляет собой достаточно простую задачу. Однако при решении подавляющего большинства задач обычно на некоторой стадии (стадиях) вычислений естественный порядок выполнения команд должен быть нарушен. Если изменение порядка выполнения команд не связано с некоторыми условиями, вырабатывающимися в процессе решения, то переход к очередной операции выполняется командой безусловного перехода. Значительно чаще условие перехода зависит от величины некоторого промежуточного результата. В этих случаях используется команда условного перехода, а сама программа называется разветвляющейся.
Примером разветвляющейся программы может служить программа решения квадратного уравнения ах2- Ьхс0. При положительном значении дискриминанта корни определяются по формуле хт± Ур, при отрицательном — по формуле
х т ± 11— р, где т — —,
с
р — т2 — —.
а
Блок-схема программы решения квадратного уравнения показана на рис. 1.89. Здесь блок А — вычисление л и р блок Р2 — распределение управления; в зависимости от знака р блок Л3 — вычисление вещественных корней х — тЬ VР блок Л4 — вычисление комплексных корней х — т±1у —р блок 5 — останов машины («стоп»).
Циклы. Возможность многократного использования одних и тех же команд (циклов) в программах является основным фактором, обеспечивающим решение на ЭЦВМ сложных задач. Использование циклов основано на особенности устройства ЭЦВМ, заключающейся в принципе адресности: в командах машины указываются не числа, а их адреса. Над адресами команд можно выполнять арифметические операции (в форме с фиксированной запятой). Различают два принципиальных вида циклов-
а) цикл с заданной кратностью (заданным числом повторений), известной из условий задачи или устанавливаемой программным путем к началу выполнения цикла;
б) цикл с неизвестной кратностью.
Циклы с заданной кратностью обычно организуются с помощью счетчика циклов — специально отводимой ячейки оперативной памяти. Цикл повторяется до тех пор, пока в счетчике циклов не будет накоплена заданная величина.
Здесь и далее в целях упрощения показывается не вся программа решения задачи, а лишь основной фрагмент ее. Напомним, что полная программа включает ввод в машину программы и исходных данных, перевод исходных данных из десятичного вида в двоичный (10--2), решение, перевод результатов из двоичного вида в десятичный (2- 10), вывод результатов на печать.
I
Восстановление
, I П
Циклическая часть программы
Ш
Изменение счетчика цикла
Проверка окончания
Рис. 1.89
Рис. 1.90
I
Вычисления
Ж
Проверка окончания
Рис. 1.91
Для многократного использования циклической программы счетчик циклов необходимо восстановить (привести в исходное положение). Операцию восстановления счетчика циклов практически удобнее помещать перед циклической программой. Принципиальная блок-схема самовосстанавливающейся циклической программы показана на рис. 1.90. Во многих ЭЦВМ имеются специальный регистр-счетчик циклов или специальные команды, существенно облегчающие организацию циклических программ.
Примером цикла с неизвестным числом повторений является итерационный цикл. Пусть требуется методом итераций решить уравнение (х) — —х0 с заданной величиной погрешности е. Вычисления организуются ПО формуле Х 41-1) и продолжаютются до тех пор, пока не выполнится условие
Хг—Х — 11 8. ПрИНЦИ-
пиальная блок-схема итерационного цикла показана на рис. 1.91.
Метод подпрограмм. Использование стандартных подпрограмм. При составлении программ часто встречаются повторяющиеся участки.
Рис. 1.92
1,23. ОСНОВЫ ПРИМЕНЕНИЯ ЭЛЕКТРОННЫХ ЦИФРОВЫХ ВЫЧИСЛИТЕЛЬНЫХ МАШИН
89
С целью уменьшения общего объема программы и упрощения программирования они выделяются в некоторую подпрограмму, размещаемую, например, после основной программы (рис. 1.92). Разбиение программы на основную и подпрограмму требует специальной организации входа в подпрограмму и выхода из нее, а также занесения исходных данных для работы подпрограммы. Вход в подпрограмму выполняется командой безусловного перехода. Выход из подпрограммы можно осуществить с помощью ячейки возврата, в которую перед входом в подпрограмму засылается константа возврата на основную программу. В этом случае в последней команде подпрограммы записывается команда безусловного перехода на ячейку возврата, тогда управление на нее передается естественным путем к концу работы подпрограммы.
Во многих ЭЦВМ в системе команд предусмотрена специальная организация выхода из подпрограммы. Если машина имеет два счетчика команд (например, БЭСМ-2М), то при использовании для основной программы первого счетчика, а для подпрограммы второго вход в подпрограмму выполняется командой безусловного перехода с автоматическим остановом первого счетчика и включением второго, а выход из подпрограммы — также командой безусловного перехода, при которой вновь включается первый счетчик с того адреса, на котором он был прерван. Машины, снабженные одним счетчиком (например, «Урал»), в большинстве случаев содержат команду безусловного перехода с возвратом, в процессе выполнения которой управление передается на вход в подпрограмму, а в ячейку возврата автоматически засылается команда возврата на основную программу.
Исходная информация для подпрограммы (аргументы подпрограммы) задается в стандартных ячейках, с которыми работает подпрограмма; результаты вычислений по подпрограмме также выдаются ею в стандартные ячейки.
Решение задач на ЭЦВМ сопровождается накоплением и систематизацией не только приемов программа рования, но также и самих программ (или их фрагментов), представляющих интерес при решении многих задач. Такие программы (подпрограммы) получили наименование стандартных (СП); к составлению их предъявляется ряд требований, преследующих основную цель — эффективное их использование. Стандартные программы (подпрограммы) образуют библиотеку станОартных программ (СП), включающую СП решения некоторых общематематических задач и вычисления некоторых функций, СП обслуживания и т. п. Каждая ЭЦВМ обычно снабжается БСП еще на стадии разработки машины.
На практике нашли широкое применение интерпре• тирующие и компилирующие программы. Использование их позволяет размещать СП в любом месте оперативной памяти, а также предельно упростить обращение к СП.
1.23.5. Автоматизация программирования. Алгоритмические языки, АЛ ГОЛ-бО
Под автоматизацией программирования понимается автоматизация разработки программы по ее логической схеме. Автоматизация программирования развивается по двум основным направлениям: использование библиотеки стандартных программ (метод БСП) и составление программ заносов с помощью программирующих программ (метод ПП), называемых обычно транслято¬
рами. При реализации метода ПП логическая схема формируемой программы составляется на входном языке машины, в качестве которого используются различные алгоритмические языки. Получаемая с помощью ПП программа подлежит отладке, выполняемой обычно также автоматически.
Развитие вычислительной техники потребовало для единого, гибкого и однозначного описания алгоритмов создания специальных алгоритмических языков. АЛ ГОЛ-60, ФОРТРАН, КОБОЛ, АЛГЭК, КОМИТ и др. Алгоритмические языки создавались как универсальные входные языки, удобные для изложения алгоритмов, благодаря чему они оказались хорошим средством обмена информацией. Значительную часть наиболее удачных сторон ранее известных языков программирования, предназначенных для изложения научно-технических задач, сконцентрировал в себе язык АЛ ГОЛ-бО, принятый на Международной парижской конференции. АЛГОЛ-бО является живым, развивающимся языком. О степени его распространения свидетельствует тот факт, что в отечественных ЭЦВМ серии «Мир» этот язык заложен (в несколько измененном виде) непосредственно в логику машины.
Для различных целей использования предусмотрено три уровня языка: эталонный (базисный) язык, язык публикаций1 и язык конкретного представления (применение эталонного языка к конкретной ЭЦВМ).
В формальном описании языка АЛГОЛ-бО принята специальная символика — метаязык Бэкуса, использующий металингвистические формулы. Как" и обычные математические формулы, они содержат левую и правую части, соединенные символом (: :), имеющим смысл «равно по определениюх. Металингвистические формулы строятся с использованием операций перечисления (для определения более сложных понятий через более простые) и (или) построения определяющего выражения по составлению (для рекурсивных определений, в которых определяемое понятие само участвует в определении). Примером металингвистической формулы, использующей операцию перечисления, может служить формула
цифра :: 0 1 23456789.
Здесь цифра — определяемое понятие, вертикальная черта — символ операции перечисления (операции ИЛИ).
Металингвистическая формула с использованием рекурсивного определения имеет, например, такой вид:
целое без знака :: —
цифра целое без знака цифра
Из этой формулы следует, что целым числом без знака является как отдельная цифра, так и любая последовательность цифр.
Ниже кратко излагаются2 основные понятия языка АЛГОЛ-бО. Законченное описание алгоритма называется в языке АЛГОЛ-бО программой. Программа обычно представляет собой блок. Всякий блок, будь-то вся программа или только ее часть, состоит из описаний и операторов. Описания помещаются в начале блока, операторы — за ними. Описания служат для характеристики встречающихся в данном блоке переменных и других объектов (переключателей и процедур). Все объекты, используемые в программе, должны быть описаны. Сами по себе описания не предписывают каких-
1 Многие авторы предпочитают использовать в публикациях эталонный язык (прим. ред.).
2 Это изложение заимствовано из работы С. С. Лаврова.
90
РАЗДЕЛ 1. МАТЕМАТИКА
либо действий в программе; операторы, напротив, являются указаниями о выполнении определенных действий. Описания и операторы можно рассматривать как отдельные предложения языка. После каждого такого предложения ставится точка с запятой. Операторы бывают следующих типов.
Оператор присваивания вызывает вычисление значения некоторого выражения и приписывание этого значения одной или нескольким переменным.
Оператор перехода прерывает естественный порядок выполнения операторов и указывает, какой из операторов программы должен выполняться следующим. Чтобы такое указание было возможным, перед операторами могут ставиться метки, к которым и адресуются операторы перехода. Иногда оператор перехода указывает нужную метку не непосредственно, а путем обращения к описанию переключателя. Описание переключателя задает действия, которые нужно произвести для выбора такой метки.
Условный оператор проверяет, выполняются ли в данный момент работы программы некоторые условия, и в зависимости от результатов проверки заставляет работать один из входящих в его состав операторов.
Оператор цикла заставляет входящий в его состав внутренний оператор выполняться несколько раз, причем перед каждым выполнением некоторой переменной присваивается новое значение.
Оператор процедуры служит для обращения к соответствующему описанию процедуры. Он заставляет выполняться оператор, входящий в состав описания процедуры и называемый телом процедуры. Предварительно оператор процедуры для некоторых переменных, фигурирующих в теле процедуры и называемых формальными параметрами процедуры, либо задает начальные значения, либо указывает, какими выражениями эти переменные должны быть заменены.
Несколько операторов любого вида и в произвольном количестве могут быть объединены в один составной оператор. Для этого их заключают в операторные скобки (начало, конец). В начале составного оператора могут быть помещены описания, в этом случае он превращается в блок.
Описания, включенные в блок, имеют силу только внутри данного блока. Описывать в каждом блоке следует лишь те объекты, которые используются только в этом блоке. Наряду с описанными в начале блока объектами в нем можно использовать другие объекты, описанные в охватывающих его блоках.
Операторы и описания строятся из более мелких единиц, называемых выражениями, которые по определенным правилам соединяются между собой специальными символами — ограничителями. В качестве ограничителей используются: во-первых, знаки арифметических и логических операций, знаки равенства и неравенств, скобки и небольшое количество специально введенных знаков; во-вторых, ряд вспомогательных слов, выделяемых в рукописном и машинописном тексте подчеркиванием, а в печатном тексте полужирным шрифтом. Эти же символы служат и для конструирования выражений.
Для построения выражений используются преимущественно символы первой группы, т. е. знаки, тогда как операторы и описания строятся из отдельных выражений с помощью главным образом символов второго типа — выделенных слов. Благодаря этому выражения имеют почти обычный в математике вид, а запись оператора также оказывается довольно наглядной.
Выражения строятся из первичных выражений, к ко¬
торым относятся числа, переменные, указатели функций и логические значения. Числа записываются в десятичной системе счисления. Для обозначения переменных и для некоторых других целей служат идентификаторы. Идентификаторами могут быть просто буквы, как, например, Л, % п, х, а также группы букв или букв и цифр, но начинающиеся обязательно с буквы, например
зш, ехр, «12, 1п1ега1, х7аЫ.
Кроме скалярных величин переменными считаются также компоненты массивов. Такие переменные изображаются идентификаторами, снабженными индексами. Идентификатор должен быть одним и тем же для любой компоненты данного массива. В качестве индексов могут использоваться любые арифметические выражения. Значения этих выражений определяют место компоненты в массиве. Указатель функции также изображается идентификатором, за которым в скобках следует список аргументов, от которых должна быть вычислена данная функция. Способ вычисления значения функции задается описанием процедуры специального
вида. Указатель функции служит для обращения к этому описанию.
Переменные и функции могут быть различных типов: целые, вещественные и логические. Типы задаются описанием переменных и определяют свойства значений этих переменных. Переменные типов целый и вещественный могут принимать соответственно целые или вещественные числовые значения, а переменные типа логический — одно из двух логических значений: истина или ложь.
В качестве иллюстрации изложенного рассматривается описание на языке АЛГОЛ-бО элементарной задачи строительной механики — вычисления изгибающего момента в каждой точке через 0,1 в однопролетной балке длиной со сплошной равномерно распределенной нагрузкой 7 (рис. 1.93).
1. Описание на эталонном языке:
ЪеП аггау М[0 : 10]; геа1 ; те§га1 ;
?ог :0 ер 1 ипШ 10 (1о;
М []: (7X1 2X1X0.1 Х(1 —Х0Л)2; епй.
2. Описание на принятом в части отечественной литературы языке публикаций:
начало массив М [0:10]; вещественный 7, ; целый г, для :0 шаг 1 до 10 цикл м [I] ?Х1 2ХХ0.1Х(1 — Х0.1)2; конец
1.23.6. Некоторые рекомендации по использованию ЭЦВМ
Для решения различных задач на ЭЦВМ в СССР создано большое количество универсальных и специализированных программ. Поэтому при необходимости выполнения каких-либо машинных расчетов в большинстве случаев бывает достаточно найти соответствующую программу, изучить правила подготовки исходных данных и произвести счет на машине. Накопление готовых программ и алгоритмов осуществляется по различным отраслям специально выделенными головными организациями. В строительной отрасли такой организацией
ншшшшшшшшшши
Ж А
Рис. 1.93
1.24. ТАБЛИЦЫ ЭЛЕМЕНТАРНЫХ ФУНКЦИЙ
91
является институт Гипротис (Москва), на который возложены накопление и публикация «Отраслевого фонда алгоритмов и программ по строительству», аннотированного каталога публикуемых программ и др. При решении многих задач могут быть использованы также алгоритмы, публикуемые в изданиях Вычислительного центра Академии наук СССР и др.
Иногда, особенно при решении задач небольшого объема, бывает проще не искать готовую программу, а составить ее вновь. Такой случай особенно типичен при использовании малых ЭЦВМ («Мир», «Наири», «Проминь»). Хотя для этих машин составлено множест во программ, большинство применяющих эти ЭЦВМ организаций в основном пользуется собственными программами. Это объясняется, в частности, тем, что программирование для малых ЭЦВМ отличается относительной простотой (разумеется, при соблюдении необходимых ограничений на объем задач). Здесь же следует отметить, что небольшие габариты, простота обслуживания и относительно низкая стоимость малых ЭЦВМ позволяют иметь их в каждой проектной организации.
При решении задач по готовым программам возможны два случая: а) решение задачи не требует инженерной подготовки и б) решение задачи требует ин¬
женерной подготовки. В первом случае подготовка исходных данных является элементарной операцией и выполняется по достаточно простым правилам, изложенным в инструкции к программе. Характерным примером таких программ являются, например, программы решения систем линейных алгебраических уравнений.
Во втором случае подготовка исходных данных часто может оказаться серьезной задачей, требующей глубоких знаний конструкций, строительной механики и т. д. Это относится, в частности, ко многим универсальным программам расчета стержневых систем.
С целью унификации исходных данных к программам строительного проектирования разработан специальный язык ВХОД, применение которого позволяет избежать изучения правил подготовки исходных данных к каждой конкретной программе. Расчетчику будет достаточно изучить диалект языка ВХОД, непосредственно относящийся к интересующей его области (например, расчет стержневых систем, расчет железобетонных конструкций и т.д.). Расшифровка записи на языке ВХОД осуществляется транслятором, который автоматически превращает ее в исходные данные к конкретной программе. Далее эта программа автоматически вступает в работу, осуществляя счет и выдачу результатов.
1.24. Таблицы элементарных функций
Тригонометрические, показательные и гиперболические функции (аргумент в радианах и градусах)
Таблица 1.33
X в рад
зт х
соз X
г
зЬ х
сЪ X
Ш х
х в град
0,00
0,00000
1,00000
0,00000
1,00000
1,00000
0,00000
1,00000
0,00000
0,00
0,01
0,01000
0,99995
0,01000
1,01005
0,99005
0,01000
1,00005
0,01000
0,57
0,02
0,02000
0,99980
0,02000
1,02020
0,98020
0,02000
1,00020
0,02000
1,15
0,03
0,03000
0,99955
0,03001
1,03045
0,97045
0,03000
1,00045
0,02000
1,72
0,04
0,03999
0,99920
0,04002
1,04081
0,96079
0,04001
1,00080
0,03998
2,29
0,05
0,04998
0,99875
0,05004
1,05127
0,95123
0,05002
1,00125
0,04996
2,86
0,06
0,05996
0,99820
0,06007
1,06184
0,94176
0,06004
1,00180
0,05993
3,44
0,07
0,06994
0,99755
0,07011
1,07251
0,93239
0,07004
1,00245
0,06989
4,01
0,08
0,07991
0,99680
0,08017
1,08329
0,92312
0,08009
1,00320
0,07983
4,58
0,09
0,08988
0,99595
0,09024
1,09417
0,91393
0,09012
1,00405
0,08976
5,16
0,10
0,09983
0,99500
0,10033
1,10517
0,90484
0,10017
1,00500
0,09967
5,73
0,11
0,10978
0,99396
0,11045
1,11628
0,89583
0,11022
1,00606
0,10956
6,30
0,12
0,11971
0,99281
0,12058
1,12750
0,88692
0,12029
1,00721
0,11943
6,88
0,13
0,12963
0,99156
0,13074
1,13883
0,87810
0,13037
1,00846
0,12927
7,45
0,14
0,13954
0,99022
0,14092
1,15027
0,86936
0,14046
1,00982
0,13909
8,02
0,15
0,14944
0,98877
0,15114
1,16183
0,86071
0,15056
1,01127
0,14889
8,59
0,16
0,15932
0,98723
0,16138
1,17351
0,85214
0,16068
1,01284
0,15865
9,17
0,17
0,16918
0,98558
0,17166
1,18530
0,84366
0,17082
1,01448
0,16838
9,74
0,18
0,17903
0,98384
0,18197
1,19722
0,83527
0,18097
1,01624
0,17808
10,31
0,19
0,18886
0,98200
0,19232
1,20925
0,82696
0,19115
1,01810
0,18775
10,89
0,20
0,19867
0,98007
0,20271
1,22140
0,81873
0,20134
1,02007
0,19738
11,45
0,21
0,20846
0,97803
0,21314
1,23368
0,81058
0,21155
1,02213
0,20697
12,03
0,22
0,21823
0,97590
0,22362
1,24608
0,80252
0,22178
1,02430
0,21652
12,61
0,23
0,22798
0,97367
0,23414
1,25860
0,79453
0,23203
1,02657
0,22603
13,18
0,24
0,23770
0,97134
0,24472
1,27125
0,78663
0,24231
1.02894
0,23550
13,75
0,25
0,24740
0,96891
0,25534
1,28403
0,77880
0,25261
1,03141
0,24492
14,32
0,26
0,25708
0,96639
0,26602
1,29693
0,77105
0,26294
1,03399
0,25430
14,90
0,27
0,26673
0,96377
0,27676
1,30996
0,76338
0,27329
1,03667
0,26362
15,47
0,28
0,27636
0,96106
0,28755
1,32213
0,75578
0,28367
1,03946
0,27291
16,04
0,29
0,28595
0,95824
0,29841
1,33643
0,74826
0,29408
1,04235
0,28213
16,62
0,30
0,29552
0,95534
0,30934
1,34986
0,74082
0,30452
1,04534
0,29131
17,19
0,31
0,30506
0,95233
0,32033
1,36343
0,73345
0,31499
1,04844
0,30044
17,76
0,32
0,31457
0,94924
0,33139
1,37713
0,72615
0,32549
1,05164
0,30951
18,33
0,33
0,32404
0,94604
0,34252
1,39097
0,71892
0,33602
1,05495
0,31852
18,91
0,34
0,33349
0,94275
0,35374
1,40495
0,71177
0,34659
1,05835
0,32748
19,48
0,35
0,34290
0,93937
0,36503
1,41907
0,70469
0,35719
1,06188
0,33638
20,05
0,36
0,35227
0,93590
0,37640
1,43333
0,69768
0,36783
1,06550
0,34521
20,63
0,37
0,36162
0,93233
0,38786
1,44773
0,69073
0,37850
1,06923
0,35339
21,20
0,38
0,37092
0,92866
0,39941
1,46228
0,68386
0,38921
1,07307
0,36271
21,77
0,39
0,38019
0,92491
0,41105
1,47698
0,67706
0,39996
1,07702
0,37136
22,35
92
РАЗДЕЛ 1. МАТЕМАТИКА
Продолжение табл. 1.33
х в рад
5Ш X
соз л
ьЬ х
сЬ х
Ш ;
х в град
0,40
0,38942
0,92106
0,42279
1,49182
0,67032
0,41075
1,08107
0,37995
22,92
0,41
0,39861
0,91712
0,43463
1,50682
0,66365
0,42158
1,08523
0,38847
23,49
0,42
0,40776
0,91309
0,44657
1,52196
0,65705
0,43246
1,08950
0,39693
24,06
0,43
0,41687
0,90897
0,45862
1,53726
0,65051
0,44337
1,09388
0,40532
24,64
0,44
0,42594
0,90475
0,47078
1,55271
0,64404
0,45434
1,09837
0,41364
25,21
0,45
0,43497
0,90045
0,48306
1,56831
0,63763
0,46534
1,10297
0,42190
25,78
0,46
0,44395
0,89605
0,49545
1,58407
0,63128
0,47640
1,10768
0,43008
26,36
0,47
0,45289
0,89157
0,50797
1,59999
0,62500
0,48750
1,11250
0,43820
26,93
0,48
0,46178
0,88699
0,58061
1,61607
0,61878
0,49865
1,11743
0,44624
27,50
0,49
0,47063
0,88233
0,53399
1,63232
0,61263
0,50984
1,12247
0,45422
28,07
0,50
0,47943
0,87758
0,54630
1,64872
0,60653
0,52110
1,12763
0,46212
28,65
0,51
0,48818
0,87274
0,55936
1,66529
0,60050
0,53240
1,13289
0,46995
29,22
0,52
0,49688
0,86782
0,57256
1,68203
0,59452
0,54375
1,13827
0,47770
29,79
0,53
0,50553
0,86281
0,58592
1,68893
0,58860
0,55516
1,14377
0,48538
30,37
0,54
0,51414
0,85771
0,59943
1,71601
0,58275
0,56663
1,14938
0,49299
30,94
0,55
0,52269
0,85252
0,61311
1,73325
0,57695
0,57815
1,15510
0,50052
31,51
0,56
0,53119
0,84726
0,62695
1,75067
0,57121
0,58973
1,16094
0,50798
32,09
0,57
0,53963
0,84190
0,64097
1,76827
0,56553
0,60137
1,16690
0,51536
32,66
0,58
0,54802
0,83646
0,65517
1,78604
0,55990
0,61307
1,17297
0,52267
33,23
0,59
0,55636
0,83094
0,66956
1,80399
0,55433
0,62483
1,17916
0,52990
33,80
0,60
0,56464
0,82534
0,68414
1,82212
0,54881
0,63665
1,18547
0,53705
34,38
0,61
0,57287
0,81965
0,69892
1,84043
0,54335
0,64854
1,19189
0,54413
34,95
0,62
0,53104
0,81388
0,71391
1,85893
0,53794
0,66049
1,19844
0,55113
35,52
0,63
0,58914
0,80803
0,72911
1,87761
0,53259
0,67251
1,20510
0,55805
36,10
0,64
0,59720
0,80210
0,74454
1,89648
0,52729
0,68459
1,21189
0,56490
36,67
0,65
0,60590
0,79608
0,76020
1,91554
0,52205
0,69675
1,21879
0,57167
37,24
0,66
0,61312
0,78999
0,77610
1,93479
0,51685
0,70897
1,22582
0,57836
37,82
0,67
0,62099
0,78382
0,79225
1,95424
0,51171
0,72126
1,23297
0,58498
38,39
0,68
0,62879
0,77757
0,80866
1,97388
0,40662
0,733о3
1,24025
0,59152
38,96
0,69
0,63654
0,77125
0,82534
1,99372
0,50158
'-',74607
1,24765
0,59793
39,53
0,70
0,64422
0,76484
0,84229
2,01375
0,49659
0,75853
1,25517
0,60437
40,11
0,71
0,65183
0,75836
0,85953
2,03399
0,49164
0,77117
1,26282
0,61068
40,68
0,72
0,65938
0,75181
0,87707
2,05443
0,48675
0,78384
1,27069
0,61691
41,25
0,73
0,66687
0,74517
0,89492
2,07508
0,48191
0,79659
1,27849
0,62307
41,83
0,74
0,67429
0,73847
0,91309
2,09594
0,47711
0,80941
1,28652
0,62915
42,40
0,75
0,68164
0,73169
0,93160
2,11700
0,47237
0,82232
1,29468
0,63515
42,97
0,76
0,68892
0,72484
0,95045
2,13828
0,46767
0,83530
1,30297
0,64108
43,54
0,77
0,69614
0,71791
0,96997
2,15977
0,46301
0,84838
1,31139
0,64693
44,12
0,78
0,70328
0,71091
0,98926
2,18147
0,45841
0,86153
1,31994
0,65271
44,69
0,79
0,71035
0,70385
1,00925
2,20340
0,45384
0,87478
1,32862
0,65841
45,26
0,80
0,71736
0,69671
1,02964
2,22554
0,44933
0,88811
1,33743
0,66404
45,84
0,81
0,72429
0,68550
1,05048
2,24791
Ч), 44486
0,90152
1,34638
0,66959
46,41
0,82
0,73115
0,68222
1,07171
2,27050
0,44043
0,91503
1,35547
0,67507
46,98
0,83
0,73793
0,07488
1,09343
2,29332
0,43605
0,92863
1,36468
0,68048
47,56
0,84
0,74464
0,66746
1,11563
2,31637
0,43171
0,94233
1,37404
0,68581
48,13
0,85
0,75128
0,65998
1,13833
2,33965
0,42741
0,96612
1,38353
0,69107
48,70
0,86
0,75784
0,65244
1,16156
2,36316
0,42316
0,97000
1,39316
0,69626
49,27
0,87
0,76433
0,64483
1,18532
2,38691
0,41895
0,98398
1,40293
0,70137
49,85
0,88
0,77074
0,63715
1,20966
2,41090
0,41478
0,99806
1,41284
0,70642
50,42
0,89
0,77707
0,62941
1,23460
2,43513
0,4106о
1,01224
1,42289
0,71139
50,99
0,90
0,78333
0,62161
1,26016
2,45960
0,40657
1,02652
1,43309
0,71630
51,57
0,91
0,78950
0,61675
1,28637
2,48432
0,40252
1,04090
1,44342
0,72113
52,14
0,92
0,79560
0,60582
1,31326
2,50929
0,39852
1,05539
1,45390
0,72590
52,71
0,93
0,80162
0,59783
1,34087
2,53451
0,39455
1,06998
1,46453
0,73059
53,29
0,94
0,80756
0,58979
1,36923
2,55998
0,39063
1,08488
1,47530
0,73522
53,86
0,95
0,81342
0,58168
1,39838
2,58571
0,38674
1,09948
1,48623
0,73978
54,43
0,96
0,81919
0,57352
1,42836
2,61170
0,38289
1,11440
1,49729
0,74428
55,00
0,97
0,82489
0,56530
1,45920
2,63794
0,37908
1,1294-3
1,50851
0,74870
55,58
0,98
0,83050
0,55702
1,49095
2,66446
0,37531
1,14457
1,519Ь8
0,75307
56,15
0,99
0,83603
0,54859
1,52368
2,69123
0,37158
1,15983
1,53141
0,75736
56,72
1,00
0,84147
0,54030
1,55741
2,71828
0,36788
1,17520
1,54308
0,76159
57,30
1,01
0,84683
0,53186
1,59221
2,74560
0,36422
1,19069
1,55491
0,76576
57,87
1,02
0,85211
0,52337
1,02813
2,77319
0,36059
1,20630
1,55689
0,76987
58,44
1,03
0,85730
0,51482
1,66524
2,80107
0,35701
1,22203
1,57904
0,77391
59,01
1,04
0,86240
0,50622
1,70361
2,82922
0,35345
1,23788
1,59134
0,77789
59,59
1,05
0,86742
0,49757
1,74332
2,85765
0,34994
1,25386
1,60379
0,78181
60,16
1,06
0,87236
0,48887
1,78442
2,88637
0,34646
1,26996
1,61641
0,78566
60,73
1,07
0,87720
0,48012
1,82703
‘2,91538
0,34301
1,28619
1,62919
0,78946
61,31
1,08
0,88196
0,47133
1,87122
2,94468
0,33960
1,30254
1,64214
0,79320
61,88
1,09
0,88653
0,46241)
1,91709
2,97427
0,33622
1,31903
1,65525
0,79688
62,45
ЛИТЕРАТУРА
93
Продолжение табл. 1.33
X в рад
зш X
С 08 X
Г
зЬ х
сЬ х
х
х в град
1,10
0,89121
0,45360
1,96476
3,00417
0,33287
1,33565
1,66852
0,80050
63,03
1Д1
0,89570
0,44466
2,01434
3,03436
0,32956
1,35240
1,68196
0,80406
63,60
1.12
0,90010
0,43568
2,06596
3,06485
0,32628
1,36929
1,69557
0,80757
64,17
1,13
0,90441
0,42666
2,11975
3,09566
0,32303
1,38631
1,70934
0,81102
64,74
1,14
0,90863
0,41759
2,17588
3,12677
0,31982
1,40347
1,72329
0,81441
65,32
1,15
0,91276
0,40849
2,23450
3,15819
0,31664
1,42078
1,73741
0,81775
65,89
1,16
0,91680
0,39934
2,29580
3,18993
0,31349
1,43822
1,75171
0,82104
66,46
1,17
0,92075
0,39015
2,35998
3,22199
0,31037
1,45581
1,76618
0,82427
67,04
1,18
0,92461
0,38092
2,42727
3,25437
0,30728
1,47355
1,78083
0,82745
67,61
1,19
0,92837
0,37166
2,49790
3,28708
0,30422
1,49143
1,79565
0,83058
68,18
1,20
0,93204
0,36236
2,57215
3,32012
0,30119
1,50946
1,81066
0,83365
68,75
1,21
0,93562
0,35302
2,65033
3,35348
0,29820
1,52764
1,82584
0,83668
69,33
1,22
0,93910
0,34365
2,73275
3,38719
0,29523
1,54598
1,84121
0,83965
69,90
1,23
0,94249
0,33424
2,81982
3,42123
0,29229
1,56447
1,85676
0,84258
70,47
1,24
0,94578
0,32480
2,91193
3,45561
0,28938
1,58311
1,87250
0,84548
71,05
1,25
0,94898
0,31532
3,00967
3,49034
0,28650
1,60192
1,88842
‘ 0,84828
71,62
1,26
0,95209
0,30582
3,11327
3,52542
0,28365
1,62088
1,90454
0,85106
72,19
1,27
0,95510
0,29628
3,22363
3,56085
0,28083
1,64001
1,92084
0,85380
72,77
1,28
0,95802
0,28072
3,34135
3,59664
0,27804
1,65930
1,93734
0,85648
73,34
1,29
0,96084
0,27712
3,46721
3,63279
0,27527
1,67876
1,95403
0,85913
73,91
1,30
0,96356
0,26750
3,60210
3,66930
0,27253
1,69838
1,97091
0,86172
74,48
1,31
0,96618
0,25785
3,74708
3,70617
0,26982
1,71818
1,98800
0,86428
75,06
1,32
0,96872
0,24818
3,90335
3,74342
0,26714
1,73814
2,00528
0,86678
75,63
1,33
0,97115
0,23848
4,07231
3,78104
0,26448
1,75828
2,02276
0,86925
76,20
1,34
0,97348
0,22875
4,25562
3,81904
0,26185
1,77860
2,04044
0,87167
76,78
1,35
0,97572
0,21901
4,45522
3,85743
0,25924
1,79909
2,05833
0,87405
77,35
1,36
0,97786
0,20924
4,67344
3,89619
0,25666
1,81977
2,07643
0,87639
77,92
1,37
0,97991
0,19945
4,91306
3,93535
0,25411
1,84062
2,09473
0,87869
78,50
1,38
0,98185
0,18964
5,17744
3,97490
0,25158
1,86166
2,11324
0,88095
79,07
1,39
0,98370
0,17981
5,47069
4,01485
0,24908
1,88289
2,13196
0,88317
79,64
Таблица 1.34
Некоторые постоянные Величина
п
1е «
Величина
п
18 л
Величина
п
18 п
Я
3,1415927
0,49715
я
2,021442
0,34663
Я
9,81
0,99167
Я2
1,5707963
0,19612
ут
ё
96,2361
1,93334
я3
1,0471976
0,02003
V 12«
314
Яа
0,7853982
9,8696044
0,89509—1 0,99430
уя
- я:2
2,506628
0,39909
3,1320919
0,050968
0,49583
0,70730—2
я:3
31,006277
0,49145
1,253314
0,09803
V 2
4,429447
0,64635
1Я
1ла
0,3183099
0,1013212
0,50285—1
0,00570—1
2-я V 3:л
з 0,797885
0,90194—1
лУ
9,839757
0,99298
1Я3
0,0322515
0,50856—2
0,977205
0,98998-1
ЯЛ2
13,91536
1,14350
У я
1,7724539
0,24857
2л
1,845261
0,26606
я:" §
1,003033
0,00132
3- — я
1,4645919
0,16572
1,162447
0,06537
я:Л2
0,709252
0,85080—1
Я" я
е
2,718282
0,43429
5,5683280
0,74572
0,922635
0,96503—1
е3
7,389055
0,86859
я у л 4л-
1е
0,367879
0,56571—1
4,6011511
39,478418
0,66287
1,59636
3 у 2:я
0,860254
0,93463—1
1е2
Г
3— Vе
0,135335
0,13141—1
я24
2,4674011
0,39224
2 г у 3:я
0,984745
0,99332—1
1,648721
0,21715
Я" 2
4,4428829
0,64767
М—)§• в
им
0,434294
2,302585
0,63778—1
0,36222
1,395612
0,14476
ЛИТЕРАТУРА
1.1. Алгебра
1. Курош А. Г. Курс высшей алгебры. ГТТИ, 1971.
2. 1 о л о в и н а Л. И. Линейная алгебра и некоторые ее приложения. «Наука», 1971.
1.4. Аналитическая геометрия
1. Привалов Н. П. Аналитическая геометрия. «Наука». 1УбЬ.
2. И л ь и н В. А., П о з н я к Э. Г, Аналитическая геометрия. «Наука», 1971,
1.5. Дифференциальная геометрия
1. Р ашевский П. К. Курс дифференциальной геометрии. ГТТИ, 1956.
2. Фиников С. П. Курс дифференциальной геометрии. Г ТТИ, 1952.
3. Норден А. П. Теория поверхностей. ГТТИ, 1956.
1.6. и 1.7. Дифференциальное и интегральное исчисление
1. Фихтенгольц Г. М. Курс дифференциального и интегрального исчисления, т. 1 и 2. «Наука», М. — Л., 1969.
2. Б е р м а н т А. Ф. Курс математического анализа, т. I и II. ГТТИ, 1956.
3. П и с к у н о в Н. С. Дифференциальное а интегральное исчисления, 1, 1 и II, «Наука», 1965,
94
РАЗДЕЛ 1. МАТЕМАТИКА
1.9. Дифференциальные уравнения
1. Степанов В. В. Курс дифференциальных уравнений. Физматгиз, 1958.
2. Эльсгольц Л. Э. Дифференциальные уравнения и вариационное исчисление. «Наука», 1965.
3. К а м к е Э. Справочник по обыкновенным дифференциальным уравнениям. «Наука», 1971.
4. Карман Т. и Био М. Математические методы в инженерном деле. ГТТИ, М. — Л., 1956.
5. А р а м а н о в и ч И. Г., Левин В. И. Уравнения ма¬
тематической физики. «Наука», 1964.
6. Т и х о н о в А. Н., Самарский А. А. Уравнения математической физики. ГТТИ, 1953.
7. К о ш л я к о в Н. С. и др. Дифференциальные уравнения математической физики. Физматгиз, 1967.
8. М и х л и н С. Г. Прямые методы в математической фи¬
зике. ГТТИ, М. — Л., 1956.
1.10. Функции комплексной переменной
1. Привалов И. И. Введение в теорию функций комплексного переменного. «Наука», 1962.
2. Лаврентьев М. А. Конформные отображения. ГТТИ, М. — Л., 1946.
3. Ф у к с Б. А. и Шабат Б. В. Функции комплексного переменного и некоторые их приложения. «Наука», 1964.
4. Лаврентьев М. А. и Шабат Б. В. Методы теории функции комплексного переменного. «Наука», 1965.
5. Свешников А. Г., Тихонов А. Н. Теория функции комплексной переменной. «Наука», 1967.
1.11. Вариационное исчисление
1. Смирнов В. И. Курс высшей математики, т. IV. Физматгиз, 1958.
2. Эльсгольц Л. Э. Вариационное исчисление. ГТТИ, М. — Л., 1958.
3. М и х л и н С. Г. Вариационные методы в математической физике. «Наука», 1970.
1.12. Разностное исчисление
1. Б лей х Ф. и Мелан Е. Уравнения в конечных разностях статики сооружений. ОНТИ, Харьков, 1936.
2. П а н о в Д. Ю. Справочник по численному решению дифференциальных уравнений в частных производных. ГТТИ, М. — Л., 1951.
3. К а н т о р о в и ч Л. В., Крылов В. И. Приближенные методы высшего анализа. ГТТИ. 1949.
4. Самарский А. А. Введение в теорию разностных схем. «Наука», 1971.
1.13. Интегральные уравнения
1. Смирнов В. И. Курс высшей математики, т. IV. Физматгиз, 1958.
2. Справочная математическая библиотека. Интегральные уравнения, «Наука», 1968.
3. Справочная математическая библиотека. Приближенные методы решения дифференциальных и интегральных уравнений. «Наука», 1965.
1.14. Специальные функции
1. Смирнов В. И. Курс высшей математики, т. III. Физматгиз, 1958.
2. Л е б е д е в Н. Н. Специальные функции и их приложения. ГТТИ, 1953.
3. Справочная математическая библиотека. Высшие трансцендентные функции. «Наука», 1965.
4. Коренев Б. Г. Введение в теорию бесселевых функций. «Наука», 1971.
1.15. Операционное исчисление
1. Лурье А. И. Операционное исчисление и его приложения к задачам механики. ГТТИ, 1950.
2. Диткин В. А. и Прудников А. П. Операционное исчисление. «Высшая школа», 1966.
3. К а р с л о у Г. и Егер Д. Операционные методы в прикладной математике. ИЛ., 1948.
1.16. Векторное и тензорное исчисление
1. Кочин Н. Е. Векторное исчисление и начала тензорного исчисления. «Наука», 1965.
2. Кильчевский Н. А. Элементы тензорного исчисления и его приложения к механике. ГТТИ, М. — Л., 1954.
3. А к и в и с М. А., Гольдберг В. В. Тензорное исчисление. «Наука», 1969.
4. Сокольников И. Тензорный анализ. «Наука», 1971.
1.18. Номография
1. Невский Б. А. Справочная книга по номографии. ГТТИ, М. — Л., 1953.
2, П е н т к о в с к и й М. В. Номография. ГТТИ, 1949.
1.19. Приближенное представление функций
1. Милн В. Э. Численный анализ. ИЛ. 1951.
2. X е м м и н г Р. В. Численные методы. «Наука», 1972.
1.20. Ряды Фурье
1. Джексон Д. Ряды Фурье и ортогональные полиномы. ИЛ., 1948.
2. Т о л с т о в Г. П. Ряды Фурье. ГТТИ, М. — Л., 1951.
3. Харди Г. X. и Рогози некий В. В. Ряды Фурье.
Физматгиз, 1952.
1.21. Теория вероятностей
1. Гнеденко Б. В. Курс теории вероятностей. Физматгиз, 1961.
2. Г н у р м а н В. Е. Введение в теорию вероятностей и математическую статистику. «Высшая школа», 1966.
3. Дунин-Барковский И. В. и Смирнов Н. В. Краткий курс математической статистики для технических приложений. Физматгиз, 1959.
4. У и л к с С. Математическая статистика. «Наука», 1967.
5. Б о л о т и н В. В. Статистические методы в строительной
механике. Госстройиздат, 1961.
1.22. Основные сведения о линейном программировании
1. Зуховский С. И., Авдеев Л. И. Линейное и выпуклое программирование. «Наука», 1967.
2. Ю д и н Д. Б., Г о л ь ш т е й н Е. Г. Линейное и выпуклое программирование (теория и конечные методы). Физматгиз, 1967.
3. Ю д и н Д. Б., Гольштейн Е. Г. Линейное программирование (теория, методы и приложения). Физматгиз, 1969.
1.23. Основы применения электронных цифровых вычислительных машин (ЭЦВМ)
1. Алгоритмы. Сборник под общей редакцией М. И. Агеева. ВЦ АН СССР, М. (публикуется нерегулярно с 1966 г.).
2. Алгоритмы и алгоритмические языки. Сборник. ВЦ АН СССР, М. (публикуется нерегулярно с 1967 г.).
3. Базилевич В. Л., Базилевич Л. В. Системы команд и программирование для БЭСМ-2. «Судостроение», Л., 1964.
4. Б р у д н о А. Л. Программирование в содержательных обозначениях. «Наука», 1965.
5. Г у т е р Р. С. и др. Программирование и вычислительная математика. «Наука», 1965.
• 6. Дондошанский В. К. Расчет колебаний упругих
систем на электронных вычислительных машинах. «Машиностроение», М.—Л., 1965.
7. Дукарский О. М., Лавитман В. С. Расчет рам на электронных машинах. Стройиздат, 1965.
8. Зуховицкий С. И., Авдеева В. И. Линейное и выпуклое программирование. Физматгиз, 1964.
9. К а б у л о в В. К. Алгоритмизация в теории упругости и деформационной теории пластичности. Изд. Уз. ССР, Ташкент, 1966.
10. К и т о в А. И., Криницкий Н. А. Электронные цифровые машины и программирование. Физматгиз, 1961.
11. Китов А. И. Программирование информационно-логических задач. «Советское радио», 1967.
12. Л а в р о в С. С. Универсальный язык программирования, «Наука». 1964.
13. Р е з н и к о в Р. А. Решение задач строительной механики на ЭЦМ, 2-е изд. Стройиздат, 1971.
14. С м и р н о в А. Ф. и др. Расчет сооружений с применением вычислительных машин. Стройиздат, 1964.
15. Современные методы расчета сложных статически неопределимых систем (составление, общая редакция и дополнения А. П. Филина). Судпромгиз, Л., 1961.
16. С о с и с П. М. Алгоритмический язык АЛГОЛ-бО и его применение в строительной механике. «Буд1вельник», Киев, 1965.
17. Справочно-методическое пособие по применению вычислительной техники при проектировании строительных конструкций, 2-е изд. Гипротис, 1969.
18. Филин А. П. Матрицы в статике стержневых систем. Стройиздат, 1967.
19. Язык «ВХОД» для описания исходной информации к расчетам на ЭВМ. Высшие инженерные курсы Госстроя СССР, 1969.
20. Информация (пер. с англ. под ред. и с предисловием А. В. Шилейко). «Мир», 1968.
1.24. Математические таблицы
1. Рыжик И. М., Град штейн. Таблицы интегралов, сумм рядов и произведений. ГТТИ, М.—Л., 1951.
2. Я н к е Е. и др. Специальные функции, формулы, графики, таблицы. «Наука», 1964.
3. Бронштейн И. Н., Семендяев К. А. Справочник по математике для инженеров и учащихся втузов. «Наука», 1964.
4. Справочник проектировщика. Расчетно-теоретический. Государственное издательство литературы по строительству, архитектуре и строительным материалам, 1961. Раздел 1.
РАЗДЕЛ 2
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
2.1 ОБЩАЯ ЧАСТЬ
2.1.1. Основные понятия
Материальная точка — материальное тело, размерами которого можно пренебречь в рассматриваемой задаче. Механическая система — совокупность материальных точек, движение и положение которых в пространстве взаимосвязано. Абсолютно твердое тело (неизменяемая или жесткая система) — механическая система, расстояние между точками которой не меняется в условиях рассматриваемой задачи.
Сила — мера механического взаимодействия материальных тел, задаваемая вектором. Вектор силы направлен в сторону действия силы и равен по величине данной силе. Силу, приложенную к абсолютно твердому телу, можно переносить вдоль ее линии действия, при этом условия движения или равновесия тела не меняются, т. е. сила, приложенная к абсолютно твердому телу, рассматривается как скользящий вектор.
Векторы сил в тексте обозначаются заглавной буквой с черточкой сверху (в некоторых книгах — жирным шрифтом). На чертеже черточка над обозначением вектора не ставится. В проекции на перпендикулярную плоскость сила изображается кружком с точкой (если вектор направлен к наблюдателю) или кружком с крестиком (если он направлен от наблюдателя) (рис. 2.1).
Момент силы относительно точки О равен векторному произведению радиус-вектора г точки А линии действия силы на вектор силы (рис. 2.2):
М0(Р) гХР.
На чертеже момент силы относительно точки изображается волнистой стрелкой.
Момент силы — приложенный вектор, численно равный произведению модуля силы на ее плечо Н — кратчайшее расстояние от точки до линии действия силы:
Направление вектора Мо(Р) совпадает с осью вращения, вызываемого силой, т. е. вектор направлен перпендикулярно плоскости ОАВ (см. рис. 2.2), содержащей силу Р и точку О так, чтобы из его конца вращение представлялось происходящим против часовой стрелки.
Геометрически величина момента силы относительно точки выражается удвоенной площадью треугольника ЛОВ.
(2.1)
М0 (Р) РН.
(2.1а)
Момент силы относительно оси — проекция на эту ось вектора момента силы относительно точки О, лежащей на оси:
Ми (Р) пРиМ0 (Р) М0 (?) 005 Ф (22)
Момент силы относительно оси равен произведению проекции силы Р на плоскость С (прР), перпендикулярную оси, на расстояние Н от точки О пересечения оси с плоскостью 2 до линии действия прР:
96
РАЗДЕЛ 2. ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
ми (Р) ±прйРНу (2.3)
Геометрическая величина момента силы относительно оси выражается удвоенной площадью треугольника ОаЪ (см. рис. 2.2.).
Момент силы относительно оси имеет знак , если из конца оси вращение, вызываемое силой, представляется происходящим против часовой стрелки. Момент силы относительно оси равен нулю, если сила и ось компланарны, т. е. сила параллельна оси или пересека ет ее.
Момент силы относительно точки (оси) характеризует способность силы сообщать телу вращательное движение вокруг данной точки (оси).
Парой сил называется силовое воздействие, вызывающее вращение твердого тела. Пара сил является простейшим силовым воздействием и не может быть заменена одной силой. Пара_сил характеризуется вектором — моментом пары М (имеющим размерность сила «длина), направленным параллельно оси вращения, вызываемого парой, так чтобы это вращение из конца вектора момента представлялось происходящим против часовой стрелки. Пара сил может быть представлена в виде двух одинаковых антипараллельных сил Р9 лежащих в плоскости, перпендикулярной моменту пары, и расположенных таким образом, чтобы вызываемое ими вращение с конца вектора момента пары представлялось происходящим против часовой стрелки (рис. 2.3,а). Силы Р связаны с моментом пары М соотношениями:
М 7 ХР; М РН, (2.4)
где Н — плечо пары (расстояние между линиями действия сил пары).
Пара без изменения ее действия на абсолютно твердое тело может быть перенесена в любую точку пространства, т. е. момент пары является свободным вектором. Момент пары изображается на пространственном чертеже волнистой стрелкой, а на плоском (если плоскость проекций перпендикулярна направлению вектора момента) — дугообразной стрелкой, указывающей направление вращения, вызываемого парой (см. рис. 2.3, а).
Пары с равными моментами эквивалентны.
Мотор сил (наиболее общий образ силового воздействия)— совокупность вектора силы Р и вектора мо мента пары М (рис. 2.3,6). Мотор сил, компоненты ко¬
торого коллипеарны, называется динамическим винтом (динама, силовой винт) (рис. 2.3, в).
Системы сил — совокупности силовых воздействий, приложенных к абсолютно твердому телу. Системы сил, оказывающие одинаковое действие на движение (или равновесие) тела, — эквивалентны Равнодействующая — сила, эквивалентная системе сил.
Внешние силы (Ре) — силы, действующие на точки механической системы со стороны тел, не входящих в систему.
Внутренние силы (Р1) — силы взаимодействия между точками системы. Внутренние силы попарно равны,
Рис. 2.4
противоположны по направлению и имеют общую линию действия.
Связи — факторы, ограничивающие свободу перемещения материальных тел в пространстве.
Реакция связи — сила (пара, мотор сил), с которой связь действует на тело. В отличие от реакций связей все остальные силы, действующие на тело, называются активными силами. Реакция связи без трения направлена в сторону, противоположную тому перемещению, которому связь препятствует, и составляет 90° с тем перемещением, которое связь допускает. Если связь препятствует поступательному перемещению тела, то ее реакция — сила, если связь препятствует повороту тела., то ее реакция — пара сил.
2.1. ОБЩАЯ ЧАСТЬ
97
Некоторые виды связей: односторонние или неудерживающие связи: гладкая поверхность (рис. 2.4, а);
гладкая линия или точка (рис. 2.4,6, в), гибкая нерастяжимая нить (рис. 2.4, г) — эти связи допускают все перемещения, кроме перемещения в направлении г — определена_ линия действия и направление силы реакции связи 2.
Двусторонние или удерживающие связи: подвижный шарнир (рис. 2.4, д), жесткий неде'формируемый стержень (рис. 2.4, е) — связи допускают любое перемещение, кроме поступательного вдоль оси г — определена только линия действия силы реакции связи; плоский шарнир (рис. 2.4, ж) — допускает поворот вокруг оси
шарнира; сферический шарнир (рис. 2.4, з) — допускает поворот вокруг любой оси, проходящей через центр шарнира — определена точка приложения силы реакции связи.
Защемление или жесткая заделка (рис. 2.4, и, к)— возможность перемещения тела исключается — характер связи определяет возникновение не только сил реакций связей, но и реактивных моментов.
Все виды связей могут быть осуществлены комбинацией некоторого числа стержней. Например, защемление может быть осуществлено посредством трех стержней на плоскости или шести стержней в пространстве (рис. 2.4, л, м).
Скорость точки — вектор V, величина которого равна быстроте изменения положения точки в пространстве, а направление совпадает с направлением движения точки в данный момент.
Ускорение точки — быстрота изменения скорости точки в данный момент времени. Ускорение характеризуется вектором до (применяется также обозначение а),
(IV
равным производной от скорости по времени в данный момент. _
Угловая скорость со вращения твердого тела вокруг мгновенной оси и (быстрота изменения угла поворота) — скользящий вектор, направленный вдоль оси вращения так, чтобы, глядя из его конца, вращение представлялось происходящим против часовой стрелки (рис. 2.5). _
Угловое ускорение е (быстрота изменения угловой скорости с_течением времени) — вектор, равный произ4(0
водной —— от угловой скорости по времени в данный ш
момент (см. рис. 2.5).
2.1.2. Основные законы
Законы механики справедливы для макротел, движущихся со скоростями, малыми по сравнению со скоростью света.
Закон инерции (1-й закон Ньютона): материальная точка, изолированная от действия других материальных тел (изолированная от действия сил), движется прямо линейно и равномерно. Системы отсчета, в которых соблюдается этот закон, называются инерциальньши.
Закон изменения движения (2-й закон Ньютона). Ускорение материальной точки пропорционально приложенной к точке силе Р и направлено в сторону действия силы:
тш Я, (2.5)
где т — масса точки (мера инерции точки, мера инерции твердого тела при поступательном движении).
Масса точки т связана с ее весом С зависимостью
С
т — —, ё
где §—ускорение силы тяжести ( 9,80665 мсек2 59,81 мсек2 для средней широты).
Закон действия и противодействия (3-й закон Ньютона). Силы взаимодействия двух тел всегда равны по величине, противоположны по направлению и имеют общую линию действия.
2.1.3. Системы единиц измерения
В основе измерения всех механических величин лежат три единицы, являющиеся основными; через них могут быть выражены все прочие единицы, называемые производными. По выбору основных единиц различаются системы единиц (табл. 2.1). В настоящее время согласно ГОСТ 9867—61 установлено, что система СИ должна применяться как предпочтительная во всех областях науки, техники, народного хозяйства, а также при преподавании. Во всей технической литературе в области строительства до настоящего времени используется техническая система единиц. В табл. 2.2 приведены размерности физических величин механики в системах технической и СИ и формулы перехода от технических единиц к единицам системы СИ.
Таблица 2.1
Системы единиц измерения
Наименование системы единиц измерения
Основные единицы измерения и их сокращенное обозначение
длина
время
масса сила
Интернациональная —СИ (МК)
Техническая Система СОЗ
В последую обозначается кГ.
метр (ж) метр (м)
сантиметр
(см)
щих раздел
секунда
(сек)
секунда
(сек)
секунда
(сек)
[ах Справоч
килограмм (кг)
грамм (г) ника килог]
килограммсила (кГ)
э а мм-сил а
Рис. 2.5
98
РАЗДЕЛ 2. ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
Таблица 2.2
Система единиц механики
Название величины
Единица измерения, ее обозначение и размерность
Техническая единица,
и ее обозначение
в системе СИ
в технической системе
выраженная в единицах системы СИ
Длина
метр (м)
метр (м)
Время
секунда (сек)
секунда (сек)
-
Масса т
килограмм (кг)
техническая единица массы (т.е.м.) сек2
1 т.е.м. кг м
1 т. е. м. 9,81 кГ
Сила
ч, 1 кГм
ньютон (я) 1 н 1 сек?
килограмм-сила (кГ)
1 кГ 9,81 н
Давление
ньютон на квадратный метр (нм2)
килограмм на квадратный метр (кГм2)
1 кГм2 9,81 нм2
Скорость V
метр на секунду (м1сек)
метр на секунду (мсек)
Ускорение ш (а)
метр на секунду в квадрате (мсек2)
метр на секунду в квадрате (мсек2)
Угловая скорость со
радиан на секунду (радсек) или (рад'Сек1)
падиан на секунду (радсек) или ( рад • сес-1)
Угловое ускорение е
радиан на секунду в квадрате (радсек2) или (рад• сек 2)
радиан на секунду в квадрате (радсек2) или (рад-сек2)
—
Частота V
герц (оборот на секунду) (гц)
герц (оборот на секунду) (гц)
—
Работа А и энергия
джоуль (дж) 1 дж « 1 кГм21сек2
килограммометр (кГм)
1 кГм 9,81 джоулей
Мощность N
ватт (вт) 1 вт — 1 кГм2секъ
килограммометр на секунду (кГмсек)
1 кГмсек 9,81 вт
Количество движения 2 и импульс силы 5
1 Н'Сек — 1 кГмсек
кГ'Сек
1 кГ сек 9,81 Н'Сек
Момент количества движения (кинетический момент) К
кГм
н-М'сек
сек
кГ м • сек
1 кГм-сек — 9,81 н-м-сек
Момент инерции
кГ 'М2
т. е. м. ’М2 кГм сек2
1 кГм-сек2 9,81 кГ-м2
Обозначается любой заглавной латинской буквой (чаще Р, С). Обозначается любой прописной латинской буквой (чаще р, д).
2.2. ГЕОМЕТРИЧЕСКАЯ СТАТИКА
2.2.1. Действия с силами
Правило параллелограмма сил. Равнодействующая двух сил, приложенных к одной точке, изображается
диагональю параллелограмма, построенного на этих силах, как на сторонах (рис. 2.6, а). Величина равнодействующей может быть определена из тригонометрических соотношений:
9 V р] 005 (а ■,) ;
— Ь- . (2.6,
51П (а Р) 81Па 51Пр
С помощью параллелограмма сил могут быть выполне¬
ны обратные_задачи: а) разложение силы Я на две составляющие Р и Рг, направление которых задано (рис.
2.6, а); б) разложение силы Я на две составляющие, величина которых задана (рис. 2.6,6); в) разложение силы Я на две составляющие, направление одной из которых и величина другой заданы (рис. 2.6, в). В случаях бив задача имеет два решения.
2.2. ГЕОМЕТРИЧЕСКАЯ СТАТИКА
У9
Разложение силы по осям декартовых координат.
В прямоугольной системе координат имеет место разложение (рис. 2.7):
р х1У12Ь х 7 г, (2.7)
где Х,У,2—компоненты силы (составляющие) по осям координат;
Ху У у 2— проекции силы на оси координат;
» к— единичные векторы (орты) осей. Проекции силы Р (обозначаемые также через Рх, Ру Рг) вычисляются либо через углы а, р, у, образуемые силой с осями координат, либо через угол у с одной из осей (г) и угол р, определяющий положение плоскости, в которой лежат сила и ось:
X Рх — Р соз а Р зш у соз р; У
2 Рг Р соз у 2
: Ру р СОЗ р Р 31П у 31П р;
(2.8)
МА (Р) АМ X Р
I к
х—а у у—Ьу г —с X У 2
Проекции вектора МА(Р)_ на оси декартовых координат (или моменты силы Р относительно осей х у 2Ь проходящих через точку А) :
МХх (у - Ь) 2 - (г - с) У; М1 М1Л (г — с) X — (х - а) 2
Мх М (х — а)У (у Ь) X.
Момент силы Р относительно начала координат О:
I к
X у г
X У 2
(2.13)
Моменты силы относительно осей декартовых координат Ху Уу 2
I у2 — гУ; М гХ — х2; N хУ — уХ. (2.14) _ Определение момента силы относительно точки
МА(Р) по его проекциям ,ь Ми
мА (Р) ь11 м17ы1Ц
Если сила лежит в плоскости хОуу то
у 90°, р 90° — а и X Р соз а;
У Р 81П а;
2 0. (2.9)
Если сила Р задана ее проекциями Ху У, 2, то модуль силы
Р Ух2 У 22 ■
Направляющие косинусы:
X У 2
созар — ; созрр —; совур —. (2.10)
2.2.2. Действия с моментами
Разложение вектора-момента силы относительно точки по осям декартовых координат. Момент силы Р (Ху У у 2) у проходящей через точку М (ху у у г), относительно точки А (а, Ьу с) (рис. 2.8):
модуль
МА (р) У м ы
Направляющие косинусы:
соз а
•м •
; соз м —
Мг
МА (Р) МА (Р)
М,
СОЗ ум
МА (Р)
(2.15)
Определение линии действия силы по ее проекциям (X, У, 2) и координатам точки М (х, уу г) на ее линии действия:
х — хг у —у 1 г — гх
X У 2
(2.16)
(2.11)
В случае расположения силы Р и точки М в плоскости хОу уравнение линии действия:
х Х у У
X У
(2.16а)
Отрезки, отсекаемые линией действия силы, лежащей в плоскости хОу на осях координат:
(2.12)
1 У — угХ
на оси х: х0 — ; на оси у: у0
XIУ — УгХ
(2.166)
Определение линии действия силы Р по ее проекциям (X, У у 2) и моменту М0(Р) (Ь, Му А) относительно начала координат;
100
РАЗДЕЛ 2. ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
Ь у2 — гУ МгХ — х2 N — хУ — уХ, (2.17)
где х, у, г— координаты точки на линии действия силы. В случае расположения силы в плоскости хОу
равен геометрической сумме моментов присоединенных пар (рис. 2.10):
N хУ — уХ.
(2.17а)
ранства О, при этом_ добавляется присоединенная пара, момент которой МПрис равен моменту силы относительно точки О (рис. 2.9):
прис М0 (Р).
(2.19)
Приведение системы сил к данному центру в векторной форме. Выполняется операция параллельного переноса со всеми силами системы. Векторы сил, перенесенных в точку О, посредством построения силового многоугольника, заменяются главным вектором системы сил равным их геометрической сумме (рис. 2.10):
(2.20)
Моменты присоединенных пар посредством построения многоугольника моментов заменяются результирующей парой, момент которой — главный момент системы М0
м0 %мприс ЪмЬ(Р.).
(2.21)
Отрезки, отсекаемые линией действия силы на осях координат:
N N
на оси : х0 — ; на оси у: у0 — —. (2.176) У А
Разложение вектора-момента пары М по осям декартовых координат. В декартовой системе координат имеет место разложение:
М — Ы Щ ТУг; где Ь М соз ам;
М Л? С08 м; N М соз ум.
Модуль вектора-момента пары:
М УЪ М- №.
Направляющие косинусы: (2. 18
I. М
т ; "‘СиГ
2.2.3. Произвольная система сил
Параллельный перенос силы. Силу Р, не меняя действия на тело, можно перенести в любую точку прост-
Таким образом, при приведении системы сил к данному центру О последняя заменяется мотором — совокупностью скользящего вектора — главного_вектора ?' и свободного вектора — главного момента М 0.
Перемена центра приведения. Инварианты статики.
При переносе центра приведения з точки О в точку 0 имеют место соотношения: т е» главный век¬
тор мотора сил не изменяется (1-й инвариант статики);
М0М0 М01(Щ- (2.22)
главный момент мотора сил — изменяется на величину момента прежнего главного вектора относительно нового, центра приведения;
омо — скалярное произведение главного век¬
тора и главного момента мотора сил не зависит от выбора центра приведения (2-й инвариант статики). Геометрическая интерпретация второго инварианта статики — проекция главного момента на направление главного вектора не зависит от выбора центра приведения.
_Частные случаи приведения:
1) Н'—0М0 0 — равновесие;
2) ?'0; М0 Ф0— пара сил;
3) К'ф0 М 00 — система приводится к равнодействующей, проходящей через центр приведения. В этом случае имеет место теорема Вариньона: момент равнодействующей относительно какой-либо точки равен геометрической сумме моментов всех составляющих относительно той же точки. Момент равнодействующей относительно какой-либо оси равен алгебраической сумме составляющих относительно той же оси;
4) 7?'ф0; М0ф0; ?'±М0 — система приводится к равнодействующей, проходящей от центра приведения на
Мо
расстоянии ——, откладываемом по перпендикуляру к
Я7 и м0 (рис. 2.11);
5) Я'фО; М0 Ф 0; ?' II М0—динама, ось которой проходит_через центр приведения (см. рис. 2.3, в);
0) Я'Ф0 М0Ф0; НгфМ0—система приводится к динаме, ось которой проходит от центра приведения на рас-
2.2. ГЕОМЕТРИЧЕСКАЯ СТАТИКА
101
М051П (М0') стоянии ;, откладываемом по перпенди-
куляру к ?' и М 0 (рис. 2.12).
Приведение системы сил к центру в аналитической форме.
модуль:
Определение главного вектора системы: проекции на оси координат:
модуль
м0 V Ь2 М2
направляющие косинусы:
1 „ М
;млГ; СОвуМ
соз а
Мг
N
М о 1
угол между Р' и М0 :
соз (?' М0 )
Хк I У о М г о N
Я' МГ
(2.24а
(2.246)
(2.25)
линия действия равнодействующей при соз (К'Мо) — 0:
у2,% — гУ гХ% — х2 хУ — уХ 0, (2.26)
где х, у, г — координаты точки на линии действия равнодействующей: __ _
уравнение центральной оси динамы (при соз (Я'М0) ф 0):
гя) М — (гХ хЕн)
X
Ы-(хУ'к-уХ'н)
г'о
где ху уу г — координаты точки на оси динамы; определение момента динамы:
М1М0сов (Р' М0)
условия приведения системы сил к паре: XX 2У 22 0;
(2.27)
(2.28)
(2.29)
Р ] (Х)2 (Уну ()2 ; (2.23а)
направляющие косинусы:
х'к У'я
соз ая, —; соз рд, — ; соз ун.
Р'
Определение главного момента системы: проекции на оси координат:
(2.236)
условия приведения системы сил к равнодействующей:
хь у'я м г'ны о. (2.зо)
2.2.4. Частные случаи расположения сил
Сходящиеся силы (линии действия всех сил пересекаются в точке О). Приняв точку О за центр приведения, получаем:
Ь М N 0; М0 0. (2.31)
Система приводится к равнодействующей Р 2Р, проходящей через точку О схода сил, ее модуль и направляющие косинусы определяются по формулам (2.23). Векторное условие равновесия сходящихся сил
2Р, 0.
(2.31а)
где
I 21 (Р,); М Ш (Р); N 2 (Р;), (2.24)
(Р0 УI 2 - — г,- К,;
М(Р,) г1Х1-х2с,
N (РЛ 1 У1 Система пар. ХК—УК—2К0. Главный вектор системы равен нулю. Система приводится к паре
М 2ЛЬ
(2.32)
Проекции модуля и направляющие косинусы векторамомента М определяются по формулам (2.24).
102
РАЗДЕЛ 2. ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
Векторное условие равновесия
2М 0. (2.32а)
Плоская система сил. Приняв плоскость действия сил за плоскость хОу, получаем
22 21 (Р() 2М (Р() 0.
Главный вектор системы лежит в плоскости хОу, а
главный момент направлен вдоль оси г. Проекции глав¬
ного вектора на осях х и у главного момента на ось г определяются по формулам (2.23) и (2.24). Векторные условия равновесия плоскости системы сил:
Я' 0, N 0. (2.33)
2.2.5. Условия равновесия тел и систем тел
Равновесие двух сил: две силы образуют уравновешенную систему, если они равны по величине, противоположны по направлению и имеют общую линию действия.
Равновесие трех сил: три силы, лежащие в одной
плоскости, образуют уравновешенную систему, если их линии действия пересекаются в одной точке и на этих силах, как на сторонах, можно построить замкнутый силовой треугольник.
Равновесие произвольной системы сил имеет место, если главный вектор системы и ее главный момент относительно произвольного полюса О равны нулю.
Этим векторным уравнениям равновесия соответствуют шесть аналитических уравнений равновесия. В том случае, когда на расположение сил наложены какиелибо ограничения, число аналитических уравнений равновесия уменьшается. В табл. 2.3 приведены аналитические уравнения равновесия (и их варианты) для различных случаев расположения сил.
Равновесие твердого тела осуществляется, если к нему приложена уравновешенная система сил.
Равновесие изменяемой (деформируемой) системы под действием сил можно рассматривать как равновесие абсолютно твердого тела, форма которого тождественна форме изменяемой системы после деформации (аксиома об отвердевании).
Равновесие системы тел (совокупности тел, соединенных друг с другом и с землей связями). Общее число уравнений равновесия для системы тел равно числу уравнений для каждого из тел в отдельности, умноженному на число тел системы. В общее число уравнений могут входить уравнения системы в целом, имеющие то отличие, что в них не входят внутренние силы.
Понятие о статически определимых и статически неопределимых задачах (системах). Если число независимых уравнений равновесия для данной системы тел равно числу неизвестных в задаче, система статически определима. Если число уравнений равновесия для данной системы меньше числа неизвестных в задаче — система статически неопределима, т. е. задача не может быть решена методами статики. Если число т уравнений статики больше числа п неизвестных в задаче — система изменяема и может находиться в равновесии только при такой нагрузке, при которой т—п уравнений равновесия обращаются в тождества. При решении подобной задачи в первую очередь необходимо проверить: обращаются ли при данной нагрузке т—п уравнений в тождества. Если число неизвестных в задаче равно числу оставшихся уравнений — система находится в равновесии.
При составлении уравнений равновесия следует стремиться посредством рационального выбора осей (и моментных точек для плоской задачи) расчленить систему уравнений на отдельные уравнения с одним неизвестным каждое. Для этой цели можно использовать варианты условий равновесия, приведенные в табл. 2.3.
2.2.6. Правила прикрепления твердого тела
Свободное твердое тело обладает шестью степенями свободы перемещения. Для прикрепления твердого тела к земле необходимо и достаточно иметь шесть связей, каждая из которых устраняет одну степень свободы, например шесть стержней.
При правильном расположении связей одновременно устраняется подвижность тела (геометрическая изменяемость системы) и обеспечивается статическая определимость системы. При неправильном расположении связей некоторые перемещения оказываются неустраненными, а для устранения других перемещений используется излишнее число связей. Поэтому при оценке возможности решения конкретной задачи методами статики необходимо кроме сравнения общего числа неизвестных и общего числа уравнений статики для задачи произвести также проверку правильности расположения связей.
Если связи расположены неправильно, то при составлении уравнений равновесия определитель Ь системы (см. 1.1.7) обращается в нуль и решение задачи становится невозможным.
О прикреплении тел см. [12, 15].
Различаются мгновенная и конечная изменяемость системы. Изменяемость, исчезающая при бесконечно малом смещении тела, называется мгновенной. Например, прикрепление балки, показанное на рис. 2.13, а, допускает бесконечно малое перемещение б по горизонтали; при этом опорные стержни перестают быть параллельными и изменяемость исчезает. Прикрепление балки по рис. 2.13,6 допускает конечное перемещение А, так как опорные стержни остаются параллельными. Такая изменяемость называется конечной.
Пример 2.1. Определить опорные реакции в точках прикрепления Л, В и С твердого тела, нагруженного силой Р и парой сил с моментом N (рис. 2.14).
Решение. Тело находится в равновесии под действием системы сил, произвольно расположенных в пространстве. Неизвестными в данной задаче являются составляющие опорных реакций Уа, %в, Хс, Ус, %с. Число неизвестных (6) равно числу уравнений равновесия для произвольной системы сил в пространстве (6). Уравнения равновесия следует составлять в такой пос-
2.2. ГЕОМЕТРИЧЕСКАЯ СТАТИКА
103
Таблица 2.3
Варианты аналитических уравнений равновесия
Особенности расположения сил
Число
уравнений
Варианты уравнений равновесия
Система сил, лежащих на одной прямой
1. Си
1
1лы расположены в одной плоскости 2Р. 0
Система сходящихся сил (О—точка схода)
2
1) XX • 0; 2 0;
2) 2Х. 0; ЯМД1 — 0, где АО не перпендикулярен оси х;
3) 2М4 « 0; 2М5 0, где АВО — ломаная
Система параллельных сил
2
1) 2Х. 0; ЪМА1 0, где Р.;
2) 0; где АВ не перпендикулярен Р
Система пар
1
2М. 0
Произвольная плоская система сил
Система сходящихся сил (О — точка схода)
3
2.
(указаны только 3
1) 2Х. 0; 2У. 0; 2МЛ 0;
2) 2Х 0; 2М- 0; 2М 0, где АВ не перпендикулярен оси х
3) 0; 2М 0; 2М 0, где АВС — ломаная
Силы расположены в пространстве
наиболее употребительные варианты уравнений)
1) 2Х. 0; 2К. 0; 22. 0;
2) 2Мц 0; 2Мт1 0; Шп1 0,
где , т, п — произвольные оси, отвечающие условию: через точку О нельзя провести прямую, пересекающую все три оси
Система параллельных сил
3
1) 2X 0; 2М. 0; 2М. 0, где хР
2) Ши 0; 2Мт1 0; 2МШ 0,
где , т, п — оси, не пересекающиеся в одной точке, не параллельные силам и не все параллельные между собой
Система пар
3
2Ь. 0; 2М. 0; 2М. 0
Произвольная система сил
6
1) 2Х 0; НУ 0; 22 0;
21, 0; 2М 0; Ш 0;
2) 2 0; 2У 0; 21, 0;
2М 0; 2М 0; 2Мг 0,
где — ось, не проходящая через начало координат и не параллельная оси 2;
3) 22 0; 21, 0; 2М 0;
2 0; ИМ, 0; 2М 0,
1 т
где , т — оси, не лежащие обе в плоскости хОу;
4) 2 0; ЕМт 0; 2 0;
2М 0; 2М 0; 2Л1 0.
где оси должны отвечать тем же требованиям, что и стержни, прикрепляющие твердое тело (см. 2.2.6)
104
РАЗДЕЛ 2. ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
2) максимальная сила •'макс трения пропорциональна нормальному давлению N соприкасающихся тел
Рис. 2.14
ледовательности, чтобы из каждого уравнения определялось одно неизвестное:
1) Рс гА АВ 0; 1А •
— Рс АВ
Рс
2) 2мгАвс гввс о; гв-гл —;
3) 2У Ра N 0;
-Ра У
4) ЕХ Хс 0; Хс 0;
5) 2У КлГс Я0;
6) 22
2 с — % д 2В0.
2.2.7. Системы с трением
Трением скольжения называется сопротивление, возникающее при попытке сдвинуть тело по шероховатой поверхности. Основными причинами трения являются силы сцепления неровностей соприкасающихся поверхностей (уменьшаются при улучшении качества обработки) и силы взаимодействия молекул пограничных слоев соприкасающихся тел (увеличиваются с улучшением качества обработки). Полное устранение трения таким образом невозможно.
Наличие трения проявляется в возникновении силы трения, приложенной в точке контакта к сдвигаемому телу и направленной в сторону, противоположную направлению движения. При этом к поверхности, по которой происходит движение, со стороны сдвигаемого тела прикладывается равная по величине и противоположная по направлению сила. В первом приближении силы трения (при сухих и слабо смазанных поверхностях) подчиняются законам Кулона:
1) сила трения не зависит от размеров соприкасающихся поверхностей;
(2.34)
Таблица 2.4
Коэффициент трения скольжения ст для некоторых веществ [15]
Пара веществ
ст
Бронза—чугун
0,16
Бронза—железо
0,19
Сталь—сталь
0,15
Металл—дуб
0,62
Дуб—дуб
Г 0,62 вдоль волокон
0,54 поперек волокон
Кожа—дуб
0,47
Кожа—чугун
0,28
Камень—камень
0,50—0,73
Камень—железо
0,42—0,49
Камень—дерево
0,46—0,60
Сталь—лед
0,027
где — коэффициент трения, зависящий от материала, качества обработки и физического состояния (температура, влажность) соприкасающихся поверхностей. Коэффициенты трения определяются экспериментально (табл. 2.4).
В состоянии покоя и при малых скоростях движения имеет место статический коэффициент трения и. При больших скоростях движения для некоторых веществ динамический коэффициент трения [ЛЯП может значительно изменяться и в общем случае является функцией от скорости.
Углом трения фТр называется предельный угол между полной реакцией Я шероховатой поверхности и нормалью к ней (рис. 2.15). Угол трения и коэффициент трения связаны зависимостью 1фтр. Конус с углом раствора 2срТр, ось которого является общей нормалью
соприкасающихся поверхностей, называется конусом
трения. Если соприкасающиеся поверхности неизотропны (т. е. коэффициент трения при перемещении в различных направлениях неодинаков), конус трения не является круговым. Свойство конуса (угла) трения: полная реакция шероховатой поверхности в состоянии покоя проходит в пределах конуса (угла) трения, а при взаимном движении соприкасающихся тел — по границе конуса (угла) трения. Например, равновесие тела (см. рис. 2.15) возможно под_действием равнодействующей активных сил Рь а не Рг, так как сила Р может быть уравновешена реакцией ?, лежащей в пределах угла трения, а сила Р2 нет. Таким образом, при наличии трения возможна некоторая область положений равновесия, в то время как при связях без трения возможно только одно положение равновесия.
2.2. ГЕОМЕТРИЧЕСКАЯ СТАТИКА
105
Трением качения называется сопротивление, возникающее при попытке катить колесо по поверхности. Трение качения проявляется в возникновении момента трения качения Лтр, стремящегося повернуть колесо в сторону, противоположную движению. В состоянии покоя М?ркЫ, при движении Мт — кЫ, где N— нормальная реакция основания, к — коэффициент трения качения. Коэффициент к определяется экспериментально и не зависит от радиуса колеса и величины нормального давления. Качение возможно только при наличии
между колесом и основанием трения скольжения, достаточного для того, чтобы воспрепятствовать скольжению точки опирания колеса.
На рис. 2.16, а показана система сил, приложенных к ведущему колесу, получающему вращающий момент М от двигателя, а на рис. 2.16,6 — система сил, приложенных к ведомому колесу, приводимому в движение силой тяги Т, Здесь Р — нормальная нагрузка_на колесо, N —Р — нормальная реакция основания, Р— сила трения, Т — сила тяги, развиваемая ведущим колесом. Качение без проскальзывания возможно при соотношении
к
(?) N для ведущего колеса и при для ве-
?
домого.
2.2.8. Центр масс
Центром масс материальной системы (тела) называется точка С приложения равнодействующей системы параллельных сил инерции (см. 2.7.3), приложенных ко всем точкам системы (тела) и пропорциональных их массам. Центр тяжести совпадает с центром масс. Положение этой точки, называемой также центром параллельных сил, определяется соотношениями:
; УС
Ъпц у I
м 9
г г — ■
М
или в векторной форме
(2.35)
(2,35а)
где гпг — масса частицы с координатами _х1у уг» (радиус-вектор -й точки МЪШх —
масса всей системы (тела).
Основные положения:
1. Если тело (система) имеет центр (ось или плоскость) материальной симметрии, то центр масс совпа¬
дает с этим центром (лежит на этой оси или плоскости).
Материальной симметрией называется случай, когда симметричны не только геометрические размеры, но и массы отдельных частей тела (системы).
2. Если центры масс отдельных частей тела (системы) лежат на одной прямой (плоскости), то и центр масс лежит на этой прямой (плоскости).
3. Если тело имеет полости (пустоты), то его можно рассматривать как систему, состоящую из сплошного тела и тел в форме пустот, имеющих отрицательную массу (метод отрицательных масс).
Координаты центра масс однородных тел:
однородный объем V
х4У С уОУ ?ЛУ
V V V
хп —— ; ус ; гс (2 36)
V ° V
однородная поверхность 5 хй8 [ уЛЗ
хс Ус -
Iх1
243
3
Г гсИ
Ус-
с I I
однородная плоская фигура Р
гС —
уйР
Ус
(2.36а)
(2.366)
(2 36в)
Положение центра масс некоторых однородных гел дано в табл. 2.6.
А ”п
Рис. 2.17
Для определения положения центра масс некоторых тел могут быть полезны теоремы Гюльдена (см. 1.2.2).
Графическое определение положения центра тяжести плоской фигуры. Разбиваем плоскую фигуру на отдельные части, положение центра тяжести которых известно. В центре тяжести всех частей прикладываем параллельные силы, пропорциональные их площадям. Дальнейшее построение тождественно определению положения следа равнодействующей параллельных сил.
Устойчивость равновесия. Равновесие материальной системы является устойчивым, если при достаточно малом отклонении ее от этого положения она стремится вернуться в него (рис. 2.17, а); если при отклонении система стремится удалиться от первоначального положения, равновесие является неустойчивым (иис. 2.17,6); если система не проявляет тенденции ни к удалению от первоначального положения, ни к возвращению в него, равновесие является безразличным (рис. 2.17, в).
106
РАЗДЕЛ 2. ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
Принцип Торичелли: если при малом отклонении системы от положения равновесия ее центр тяжести повышается — равновесие устойчиво, если понижается — неустойчиво, если остается на прежнем уровне — безразлично.
Устойчивость на опрокидывание. В предельный момент перед опрокидыванием тело балансирует, опираясь на точку (линию), вокруг которой происходит опрокидывание. Определяется момент сил, вызывающих опрокидывание, Л40Пр и момент сил, удерживающих от оп-
Особенности силового и веревочного многоугольников в частных случаях
1. Система сил приводится к равнодействующей. Силовой многоугольник незамкнут, крайние стороны веревочного многоугольника пересекаются (см. рис. 2.19). Равнодействующая равна замыкающей стороне —5 силового многоугольника и проходит через точку т пересечения крайних сторон веревочного многоугольника. Если крайние стороны веревочного многоугольника пере-
р- — 'У77У
77
Рис. 2.18
рокидывания, Мул. Отношение Муд к М0пр называется коэффициентом устойчивости на опрокидывание опр.
Пример 2.2. Для плотины, изображенной на рис. 2.18, опрокидывание возможно поворотом вокруг ребра О. Коэффициент устойчивости на опрокидывание:
опр —
М
уд
м,
опр
РвЬв-- Рз Ь3
где Яв — давление воды; Р3 — давление земли; 0 — вес плотины.
Веревочный многоугольник —- построение, сводящее плоскую систему из п сил к двум силам, направленным вдоль крайних сторон веревочного многоугольника и равным крайним лучам силового многоугольника.
Порядок построения: 1) нумеруем поля, т. е. участки плоскости между линиями действия соседних сил (рис. 2.19,а); 2) строим силовой многоугольник (рис. 2.19,6), обозначая начало и конец каждой силы номерами полей, границей которых она является; 3) выбираем полюс 0 и проводим лучи силового многоугольника
1—0, 2—0 и т. д., соединяя его вершины с полюсом;
4) строим веревочный многоугольник, начиная с произвольной точки в поле 1 и проводя сторону 0—1 в поле параллельно одноименному лучу силового многоугольника, сторону 0—2 в поле 2 и т. д., кончая стороной 0—5 в поле 5 (см. рис. 2.19, а).
Оч
Рис. 2.20
6
секаются за пределами чертежа, равнодействующую можно определить дополнительным построением, смысл которого ясен из рис. 2.20.
2. Система приводится к паре. Силовой многоугольник замкнут, крайние стороны веревочного многоугольника параллельны. Момент результирующей пары равен произведению луча 1—0 (он же 0—5) силового многоугольника на расстояние Н между параллельными сторонами веревочного многоугольника (рис. 2.21).
3. Система находится в равновесии. Силовой многоугольник замкнут, веревочный многоугольник сомкнут (т. е. его крайние стороны совпадают) (рис. 2.22).
2.3. ГРАФИЧЕСКИЕ ПРИЕМЫ
107
Задача о разложении силы по трем направлениям в данной плоскости (способ Кульмана). Задача сводится к двум последовательным разложениям силы на два направления: сначала раскладываем силу Р на составляющие Р и Ртп вдоль одной из заданных прямых и
вдоль линии тп, соединяющей точку т пересечения силы с прямой 1 и точку п пересечения двух остальных прямых. Затем составляющую Ртп раскладываем вдоль линий 2 и 3 (рис. 2.23) на составляющие Р2 и Я3.
2.3. ГРАФИЧЕСКИЕ ПРИЕМЫ
2.3.1. Применение графических методов к решению некоторых частных задач
Определение опорных реакций балки (рис. 2.24):
1) обходим вокруг балки по часовой стрелке и нумеруем поля между силами. Все известные силы должны идти подряд, поэтому некоторые из внешних известных сил
О)
®
0
©
Рис. 2.24
ординату ус веревочного многоугольника следует умножить на полюсное расстояние силового многоугольника й (рис. 2.26, а)
мс Аус ■
Случай распределенной нагрузки. Если к балке приложена распределенная вертикальная нагрузка (рис. 2.27), то для построения веревочного многоугольника ее
в случае необходимости следует переместить вдоль их линий действия на другую сторону балки (например, силу Р2 на рис. 2 25 переносим вверх); 2) строим многоугольник внешних сил, изображая силы в порядке нумерации полей, выбираем полюс и проводим лучи; 3) строим веревочный многоугольник, начиная с центра А неподвижного шарнира. Смыкаем веревочный многоугольник, проводя последнюю сторону АС из конца предпоследней стороны в начало веревочного многоугольника, т. е. в центр неподвижного шарнира; 4) проводим недостающий луч 0—4 силового многоугольника па раллельно смыкающей стороне АС веревочного многоугольника и заканчиваем построение силового многоугольника (рис. 2.24,6). Опорные реакции балки равны соответствующим сторонам силового многоугольника:
к в 34; КА 4—К
Если балка опирается на три стержня (см. рис. 2.25), то точку пересечения двух стержней принимаем за центр неподвижного шарнира А, а после определения его опорной реакции раскладываем ее на составляющие вдоль стержней, равные усилиям в них (см. рис. 2.6, а).
В частном случае только вертикальной нагрузки (рис. 2.26), когда направление опорных реакций заранее известно, построение веревочного многоугольника можно начинать с любой точки на линии действия одной из опорных реакций. Ордината веревочного многоугольника ус, т. е. расстояние между двумя его точками, лежащими на одной вертикали, в этом случае пропорциональна изгибающему моменту в данном сечении С балки. Для определения величины изгибающего момента
Рис. 2.26
следует разбить на ряд участков и загрузить балку сосредоточенными силами, приложенными в центре тяжести каждого участка и равными равнодействующей нагрузке этого участка. Полученный веревочный многоугольник является описанным многоугольником так называемой веревочной кривой, т. е. эпюры изгибающих моментов, ординаты которой поделены на полюсное расстояние й силового многоугольника.
108
РАЗДЕЛ 2. ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
Определение опорных реакций трехшарнирной арки.
Одним нз возможных приемов решения является определение реакций от действия нагрузки на каждую из полуарок в отдельности (при этом опорная реакция незагруженной полуарки проходит через ключевой шарнир С). Например, при определении опорных реакций
от действия силы Р и Я2 (рис. 2.28) строим два веревочных многоугольника Лк1 и Впт и два силовых многоугольника 1—2—4' и 2—3—4" (рис. 2.28,6). Окончательные значения реакций определяются графическим суммированием, для чего строится параллелограмм Г—4—4'—,2 (рис. 2.28,6): КА4—1 Кв3—4.
Многоугольником давлений называется построение, показывающее положение линии действия равнодействующей внутренних усилий ?вн на каждом участке оси арки (линия АрдВ на рис. 2.28, а). В поле : ?вн ?а т. е. стороне 4—1 силового многоугольника (см 2.28,6), в поле_2: вн-На Р4—2, в поле 3: ?вн лЛ -Р2в 4—3. В соответствии с этим стороны многоугольника давлений параллельны соответствующим сторонам силового многоугольника Ар4—1 рд4—2;
цВ4—3. Многоугольник давлений используется для определения внутренних усилий в поперечном сечении арки: проекции вектора ?вн на нормаль и касательную к оси арки в данной точке дают соответственно значения поперечного () и продольного N усилия в поперечном сечении арки, а произведение ?вн на расстояние от данной точки на оси арки до соответствующей стороны многоугольника давлений дает значение изгибающего момента в данном сечении.
Определение линии действия равнодействующей пространственной системы параллельных сил. Пусть силы параллельны оси г.
На плоскости хОу, перпендикулярной силам (рис. 2.29,о), их положение определяется следами Си С2 и т. д. Приложим в следах силы, равные данным и направленные параллельно оси у, и определим линию действия их равнодействующей АС с помощью силового (рис. 2.29,6) и веревочного многоугольника. Повернем затем все силы на 90°, т. е. направим их параллельно оси х и определим линию действия их равнодействующей ВС (при этом стороны второго веревочного многоугольника проводятся перпендикулярно одноименным сторонам первого).
Точка С пересечения прямых АС и ВС является следом равнодействующей пространственной системы параллельных сил.
Если силовой многоугольник окажется замкнутым, а
веревочные сомкнутыми, система приводится к паре. Для определения момента пары находим момент М равнодействующей сил, параллельных оси ху и момент М2 равнодействующей сил, параллельных оси у. Полный момент системы определится как
М Мг1 М2 7-
Разложение силы на три параллельных направления в пространстве (рис. 2.30).
о)
Пусть точка О — след силы Р на плоскости, перпендикулярной силе, а точки Л, В и С — следы направлений, на которые требуется разложить силу. Задача сводится к двум последовательным разложениям силы на две параллельные составляющие. Сначала раскладываем силу на составляющие Рс и Рк (К — точка пересечения прямых АВ и ОС), затем силу Рк на составляющие РА и Рв. При графическом определении составляющих силе Р придается произвольное направление на плоскости чертежа. Смысл графических построений ясен из чертежа.
Разложение силы на три направления в пространстве.
Дана сила (2 и направления , 2, 3, пересекающиеся в одной точке (рис. 2.31, а). Определение вертикальных составляющих (вертикалов) искомых сил эк¬
вивалентно разобранной выше (рис. 2.30)_задаче о разложении силы Р, равной вертикалу силы и приложенной в точке О на три параллельные составляющие в точках Л, В и С (где О, А, В, С — соответственно точки пересечения силы и направлений , 2 и 3 с горизонтальной плоскостью).
2.4. КИНЕМАТИКА ТОЧКИ
109
Силы 2Ь 22, 2% могут быть найдены графически (см. рис. 2.30) или из уравнений равновесия: сила 1 из уравнения моментов относительно оси ВСУ сила из уравнения моментов относительно оси ЛС, сила 2з из
бранном направлении (по или против часовой стрелки), нумеруем поля между линиями действия соседних внешних сил (рис. 2.32, а). Строим силовой многоугольник внешних сил, изображая силы в порядке нумерации полей (рис. 2.32,6). Нумеруем поля внутри фермы и строим силовой многоугольник для каждого из узлов фермы, изображая приложенные к узлу силы в том поряд-
уравнения моментов относительно оси АВ. По вертикалу силы определяется графически ее проекция на вертикальную плоскость V (рис. 2.31,6), а по ней — проекция на горизонтальную плоскость И. Полная величина силы определится из формулы
р Ут г.
2.3.2. Определение усилий в стержнях плоской статически определимой фермы
Число стержней я, включая опорные, и число узлов т в плоской статически определимой ферме связаны условием
п 2т. (2.37)
В общее число стержней должно входить не менее трех опорных стержней, прикрепляющих ферму к земле. Если число опорных стержней равно трем и г 2т, то ферма, освобожденная от опор, остается неизменяемой (такая ферма называется свободной). Если число опорных стержней больше трех и л2т, то ферма, освобожденная от опор, становится изменяемой системой (такая ферма называется прикрепленной). Если п2т или я 2т, но число опорных стержней меньше 3, то ферма является статически неопределимой (расчет статически неопределимых ферм см. разд. 10).
Графический метод определения усилий в стержнях фермы (диаграмма Кремоны — Максвелла). В первую очередь определяем аналитически или графически опорные реакции фермы. Обходя вокруг фермы в одном из¬
ке, в котором они встречаются при обходе вокруг узла в принятом ранее направлении (см. рис. 2.32,6). Полученный совмещенный для всех узлов силовой многоугольник позволяет определить не только величину, но и знак всех усилий: усилие, направленное от узла, имеет знак плюс, т. е. данный стержень растянут. Растяжение на диаграмме обозначается тонкой линией, сжатие — жирной. Построение диаграммы оказывается невозможным, если встречается узел, в котором сходятся более двух неизвестных усилий. В этом случае может оказаться полезным прием: одно или несколько усилий определяются аналитически одним из способов, изложенных в
10.1.1, после чего построение диаграммы можно продолжать.
2.4. КИНЕМАТИКА ТОЧКИ
2.4.1. Задание движения точки
Векторный способ задания движения точки: положение точки задается ее радиус-вектором г (рис. 2.33)
7 7(1). (2.38)
Скорость точки определяется как вектор уг, на¬
правленный по касательной к годографу радиус-вектора г в направлении движения (рис. 2.33, а).
Ускорение определяется как вектор ад у г, направленный по касательной к годографу скорости (рис. 2.33, б).
Координатный способ задания движения точки.
В декартовых координатах положение точки задается ее координатами (рис. 2.34,а);
110
РАЗДЕЛ 2. ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
Рис. 2.33
(); у у() 2 гЦ). (2.39)
Скорость точки определяется ее проекциями на оси координат:
0 ; °г г
модуль скорости:
0 У 02 02 0:
направляющие косинусы:
Х)х
соз а —; соз Р
V V
V
соз у ■
Ускорение определяется его проекциями на оси координат:
хюх — г)х — х ту уу— у до г Vг г;
модуль ускорения:
хю до т2у ит2',
направляющие косинусы:
шх п го и
соз а —; соз Р —; до до
соз у
ш
Движение точки в плоскости может быть задано также и в полярных координатах (рис. 2.34,6):
г г( 0; ф ф(0- (2.42)
Скорость точки определяется ее составляющими:
«V п »ф ■ ф; о у’ С.2 1.2. Ускорение точки определяется составляющими:
иг — г — г ф2; доф гф 2г ф; (2.426)
модуль ускорения:
модуль скорости:
(2.42а)
до -
■■ V а(2
Ф
(2.42в)
Естественный способ задания движения точки. Задается:
а) траектория движения,
т. е. линия в пространстве, с точками которой последовательно совмещается в своем движении исследуемая точка: с траекторией связана естественная система координат, показанная на рис. 2,35, где С — соприкасающаяся плос¬
кость, Т — касательная, N — главная нормаль и В — бинормаль к траектории в той ее точке, в которой находится движущаяся точка М в данный момент, т, п — орты осей Т и
б) начало 0 и направление (, —) отсчета расстояний вдоль траектории;
в) закон движения 55(0 определяющий расстояние 5 от начала отсчета расстояний до положения точки в данный момент (дуговую координату точки).
Скорость точки определяется своей проекцией на касательную:
(2.40)
1т5,
(2.43)
имеющий знак «» в том случае, когда движение происходит в направлении отсчета расстояний.
Ускорение определяется своими проекциями на оси естественных координат: нормальное ускорение
п2
р
(2.43а)
где р — радиус кривизны траектории в данной точке; касательное ускорение
(2.41)
Полное ускорение
до до п-4-ДОхт.
(2.436)
(2.43в)
Нормальное ускорение определяет изменение скорости по направлению, а касательное — по величине.
Модуль ускорения:
1
»?•
(2.43г)
2.4. КИНЕМАТИКА ТОЧКИ
111
Связь векторного способа с координатным и естественным выражается соотношениями:
г х I у] г к;
V — хх 1 оу ог к — ут т; (2.44)
ш тх 1 хюу тг к тх шпп,
где т — орт касательной к траектории в данной_ точке, направленный в сторону отсчета расстояний, п — орт нормали к траектории в данной точке, направленный в сторону центра кривизны (см. рис. 2.35).
Связь координатного способа с естественным. Уравнение траектории (х, у)—г ((х, г)у получается из уравнений движения в координатной форме посредством исключения времени I. Дополнительным анализом значений, которые могут принимать координаты точки, оп-
(х,у) г]
ределяется тот участок кривои
;)■
который
х (. г) У.
является траекторией. Например, если движение точки задано уравнениями: х5т; у — пЧ х2у то траекторией точки является тот участок параболы у—х2, для которого —01. Начало и направление отсчета расстояний выбираются произвольно, этим в дальнейшем определяется знак скорости и величина и знак начального расстояния 50.
Закон движения определяется зависимостью: г г
5 о ] 5о ± М
и
«о I± °1 4 4 и, (2.45)
0
знак -К или — определяется в зависимости от принятого направления отсчета расстояний.
Графики движения: величины 5, , V, т часто изображаются в виде графиков; иногда графики одной из этих величин (например, V или 5), полученные экспериментально, являются основными исходными данными задачи. В этом случае графики V и т т по графику 5 строятся методами графического дифференцирования
(рис. 2.36, а), а график 5 по графику V — методом графического интегрирования (рис. 2.36,6). Для построения графика пути I вместо интегрирования по модулю можно воспользоваться взаимосвязью графика I с графиком 5, которая ясна из рис 2.37, где 1 — возрастающий участок графика 5; Г — параллельный ему участок графика ; 2 — убывающий
участок на графике 5; 2' — зеркально-симметричный ему относительно оси 5 участок на графике ; 2 — экстремум на графике з 4 — точка перегиба с горизонтальной касательной на графике .
2.4.3. Частные случаи
1. Прямолинейное движение. Приняв траекторию движения за ось х, получим:
5 х х ();
Ох 5
(2.47)
2.4.2. Пройденный путь.
Графики движения
Путь. Число единиц длины, пройденных точкой с начала движения, называется пройденным путем :
1 (2.46)
и
2. Равномерное движение (шт0):
0 сопз; 5 50-Ьу( — 0)- (2.48)
3. Равнопеременное движение (штсопз1):
V V0Щ-0)■
®т ( 1о)-
8 5о М'-'с) 5 • (249)
4. Гармоническое колебательное движение
5 а зт (Ы р),
(2.50)
Рис. 2.36
где а—амплитуда колебаний;
Ш--—фаза колебаний;
р — начальная фаза колебаний; к—круговая (угловая, циклическая) частота;
2 я
Т-— — период колебаний (промежуток времени, чек
рез который точка возвращается в то же положение, двигаясь в том же направлении);
— Т — полупериод;
1 к
V — — частота колебаний (число колебаний в
2я
секунду).
112
РАЗДЕЛ 2. ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
2.4.4. Сложное движение точки
Движение точки относительно неподвижной системы отсчета в ряде случаев полезно рассматривать как совокупность двух движений:
а) движение точки относительно подвижного тела отсчета г]ср (подвижной системы отсчета) (рис. 2.38, а) — относительное движение;
б) движение подвижного тела отсчета относительно системы хуг, принятой за неподвижную, — переносное
о)
движение. Скорость и ускорение точки М по отношению к подвижной системе отсчета_называются соответственно относительной скоростью иг и относительным ускорением о»г, а по отношению к неподвижной системе отсчета —абсолютной скоростью уа и абсолютным ускорением ТЮа.
Скорость и ускорение точки, неизменно связанной с подвижной системой отсчета и совпадающей по поло¬
жению в пространстве в данный момент с движущейся точкой Му называются соответственно переносной скоростью ие и переносным ускорением точки М. Абсолютная скорость точки М равна геометрической сумме переносной и относительной скоростей
Уа — У г Н“
(2.51)
Абсолютное ускорение точки в сложном движении равно геометрической сумме переносного, относительного и кориолисова (добавочного, поворотного) ускорений:
Юа «V ие исКориолисово ускорение
шс 2соХУо
(2.51а)
(2.516)
где сое — угловая скорость переносного движения.
Для определения направления кориолисова ускорения удобно правило Жуковского (рис. 2.38,6): вектор относительной скорости проектируется на плоскость, перпендикулярную оси переносного вращения, полученная «направленная» проекция поворачивается на 90° в сторону переносного вращения.
Кориолисово ускорение обращается в нуль, если:
1) переносное движение поступательное (сое0);
2) относительное движение происходит параллельно
оси переносного вращения (5то)е0г0);
3) относительное движение имеет мгновенную остановку (аг0).
2.5. КИНЕМАТИКА
В твердом теле скорости точек распределяются таким образом, что проекции скоростей двух точек на прямую, их соединяющую, равны между собой (кинематическое определение твердого тела).
Положение твердого тела в общем случае определяется шестью параметрами; в частных случаях, когда на движение тела наложены ограничения, число параметров соответственно уменьшается.
2.5.1. Поступательное движение твердого тела
Поступательным движением твердого тела называется такое его движение, при котором всякая прямая, неизменно связанная с телом, перемещается параллельно самой себе. Для этого достаточно, чтобы две непараллельные прямые, связанные с телом, перемещались параллельно самим себе. При поступательном движении все точки тела описывают одинаковые, параллельно расположенные траектории и имеют в любой момент времени одинаковые скорости и ускорения. Таким образом, поступательное движение тела определяется движением одной его точки О.
2.5.2. Вращение вокруг неподвижной оси
Вращением вокруг неподвижной оси называется такое движение твердого тела, при котором во все время движения две его точки остаются неподвижными. Пря-
ТВЕРДОГО ТЕЛА
мая, проходящая через эти точки, называется осью вращения. Все остальные точки тела движутся в плоскостях, перпендикулярных оси вращения, по окружностям, центры которых лежат на оси вращения. Положение вращающегося твердого тела определяется одним параметром — углом ф между начальным положением АМ0О некоторой плоскости, связанной с телом и проходящей через ось, и ее положением АМО в данный момент времени (рис. 2.39). Закон вращательного движения:
ф ф (I) рад. (2.52)
Проекция вектора угловой скорости на ось и определяется зависимостью:
©и Ф [Расек], (2.53)
Угловая скорость со радсек связана с числом оборотов в минуту п зависимостями:
пп 30 со
со — 0,10472 я; п — 9,549 со. (2.53а)
30 я
Проекция вектора угловой скорости на ось и определяется зависимостью
ги — Ф- (2.536)
Скорость и ускорение точки М вращающегося твердого
тела определяются соотношениями (рис. 2.39):
2.5. КИНЕМАТИКА ТВЕРДОГО ТЕЛА
113
V а)Хг; шп — соXV; шх еХг,
или в скалярной форме:
х) о; ш'п о)у со2 ?;
(2.54) линии (траектории точки М, отстоящей на расстоянии от оси винта):
ад'
8 ?; ш уе2 (о4.
(2.54а) Скорость точки М
Частные случаи:
1) равномерное вращение (е0):
сои сопз ф фо (и ( — У;
2) равнопеременное вращение (еисоп51):
и е ( — о);
8И ( — о)8
ф Фо со0 (-Ц ■
2.5.3. Винтовое движение
Сочетание вращательного движения твердого тела с поступательным в направлении оси вращения называется винтовым движением. Различается правое (рис. 2.40, а) и левое (рис. 2.40, б) винтовое движение. Рас-
Рис. 2.40
стояние к, пройденное проекцией точки М тела на ось винта при одном обороте, называется шагом винта. При равномерном винтовом движении подъем винтовой
%'го2 ®г?2,
(2.56)
(2.56а)
где V — скорость поступательного движения в направлении оси винта; со — угловая скорость вращения вокруг оси винта.
2.5.4. Плоскопараллельное движение
Плоскопараллельным движением твердого тела называется движение, при котором все точки тела движутся в плоскостях, параллельных некоторой неподвижной плоскости. Это движение определяется движением плоской фигуры — проекции тела на плоскость, параллельно которой происходит движение (рис. 2.41).
(2.55)
(2.55а)
Рис. 2.41
Положение плоской фигуры в плоскости хОу определяется координатами х0, Уо произвольно выбранного полюса О и углом поворота ср вокруг полюса.
Уравнения движения:
оо(0; У о Уо (0; ф ф(0- (2-57)
Первые два уравнения описывают поступательное движение вместе с полюсом О, зависящее от выбора полюса, последнее — вращение вокруг оси г, проходящей через полюс, которое от выбора полюса не зависит.
Координаты хА, Уа точки Л, положение которой на плоской фигуре определено ее координатами 6, ц (см. рис. 2.41):
ХА 0 соз ф — г] 51П ф; У А Уо ь 5п Ф ЛС05 ф-
(2.57а)
Распределение скоростей. Скорость Ра_точки А равна геометрической сумме скорости полюса Vо и скорости ’Ооа точки А во вращении плоской фигуры вокруг полюса О (см. рис. 2.41):
0А 00 оа-
(2.576)
114
РАЗДЕЛ 2. ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
Та точка Р фигуры, скорость которой в данный момент равна нулю, называется мгновенным центром скоростей, а совпадающая с ней точка неподвижной плоскости — мгновенным центром вращения. Во всякий момент времени скорости точек фигуры распределяются так, как
Рис. 2.42
если бы фигура вращалась вокруг мгновенного центра скоростей (рис. 2.42).
Определение положения мгновенного центра скоростей Р (см_ рис. 2.42): для нахождения положения Р по о и у а производим поворот на 90° от Ул в направлении вращения и_на полученном направлении откладываем расстояние уао. Для нахождения Р по направлениям и продолжаем перпендикуляры к и Ув до пересечения. Для определения положения Р по Vв и Vс находим_точку пересечения общего перпендикуляра к Vв и Vс с прямой, соединяющей КОНЦЫ Vв и Vс Если точка Р удаляется в бесконечность, то со0 и имеет место мгновенно поступательное движение, т. е. скорости (но не ускорения) всех точек фигуры одинаковы.
Центроиды. Геометрическое место мгновенных центров скоростей на движущейся фигуре называется подвижной центроидой, а геометрическое место центров вращения на неподвижной плоскости — неподвижной центроидой. Плоское движение осуществляется таким образом, что подвижная центроида катится без скольжения по неподвижной.
Уравнения движения точки, вычерчивающей неподвижную центроиду на плоскости:
„ —У Уо Г- (2.57г)
Ф Ф
Уравнения движения точки, вычерчивающей подвижную центроиду на движущейся фигуре:
Хл Ш р — 0л СОЗ ф хп СОЗ ф0 51П ф
1 ; «1 — .(2.57л)
ф ф
Распределение ускорений. Ускорение точки А равно геометрической сумме ускорения хю 0 полюса О и ускорения ш0А точки А во вращении плоской фигуры вокруг точки О. Ускорение ш ол состоит из центростремительной шп и вращательной шх составляющих (рис. 2.43);
и0 Ш0А ш0 и)'п а»;-
тп со2 О А; щ е О А. (2.57е)
Если за полюс при определении ускорений принять точку С, ускорение которой в данный момент равно нулю
(мгновенный центр ускорений), то ускорения точек определяются как при вращении вокруг точки К:
“'л ™КА щ. (2.57Ж)
2.5.5. Сферическое движение тела
Сферическим движением (движением тела с одной закрепленной точкой) называется такое движение тела, при котором одна его точка О остается неподвижной во все время движения. Все остальные точки тела движутся при этом по траекториям, расположенным на поверхности сфер с центром в неподвижной точке О. Положение тела определяется углами Эйлера (рис. 2.44): углом
прецессии ф, углом нутации 0 и углом собственного вращения ф. Эти углы характеризуют положение координатного трехгранника осей 0т, связанного с телом, по отношению к неподвижному трехграннику Охуг. Линия ОМ пересечения координатных плоскостей Оху и 0т] называется линией узлов.
2.5. КИНЕМАТИКА ТВЕРДОГО ТЕЛА
115
Уравнения сферического движения:
ф г(); 0 0 (); ф р(). (2.58)
Распределение скоростей. Во всякий момент времени существует проходящая через неподвижную точку О прямая 0, скорости точек которой равны нулю. Это мгновенная ось вращения. Мгновенная угловая скорость со определяется соотношением
СО :
Ф е Ф.
(2.58а)
где г?, 0, ф — векторы, численно равные производным углов Эйлера и направленные соответственно по осям 2, ОМ и Мгновенная угловая скорость может менять свое положение в пространстве, описывая коническую поверхность, поэтому вектор углового ускорения
е со (2.586)
в общем случае не совпадает по направлению с со (рис. 2.45). Скорость точки при сферическом движении тела
СО X Г
или в аналитической форме (формулы Эйлера):
Vx соуг —у;
Уу — гХ 0 (2 58г)
°г х у — (йуХ.
Ускорение точки соадывается из осестремительной шос и вращательной швр составляющих (рис. 2.45):
аос © X хг, швр ех7. (2.58д)
2.5.6. Общий случай движения твердого тела
Движение твердого тела в общем случае определяется как сумма двух движений: поступательного вместе
с произвольно выбранным полюсом О и сферического
движения относительно этого полюса.
Уравнения движения:
х о Х0 (У, у о у о (0; г0 г0 ((у, ф ф(0; 0 0(0; Р ф(0-
(2.59)
Первые три уравнения описывают поступательную часть движения, зависящую от выбора полюса, послед-
0Уос вр :
(2.59а)
(2.58в)
ние три — сферическую, не зависящую от выбора полюса. Скорость и ускорение точки А тела:
1'а Упост Vсф у0 Ъ0А Ъ0 -Ь ©X
X О А;
а'А пост Сф ш0иОАм 0
: ш0 ш х Ъ0А еХОЛ.
2.5.7. Сложение мгновенных движений твердого тела
Мгновенное движение твердого тела в общем случае определяется мотором скоростей, т. е. совокупностью свободного вектора а скорости точки О, принятой за полюс, и скользящего вектора угловой скорости со. Вектор Ро зависит от выбора точки О, вектор со — не зависит.
Если тело одновременно участвует в нескольких мгновенных движениях, то в результате приведения скоростей V и угловых скоростей со к данному центру О получается результирующий мотор скоростей, ненты которого определяются формулами:
V0 2 VI 2 со х 0М[ со 2 со или в аналитической форме:
компо-
(2.60)
со
2со
СО и 2С0,
'У
(2.60а)
V — 20 2 (С0у 2 — С0г у)
Iу - 2у1 2 (ш21- XI — ох1 г,-);
Vг 2 2 (ах у1 — (оУ1 х().
Сравнивая формулы (2.60) и (2.20), (2.21), (2.23), (2.24), можно отметить, что операции с моторами сил и с моторами скоростей (или пропорциональными им бесконечно малыми перемещениями) осуществляются аналогично, причем аналогия существует между скользящими векторами: силы Р и угловой скорости со, с одной стороны, и между свободными векторами: моментом пары М и вектором скорости поступательного движения у, с другой стороны. В этом выражается статико-кинематическая аналогия (см. 5.1.2 и 5.1.8). Поэтому все положения статики, включая графостатику, приложимы к исследованию мгновенного движения тел с круговой заменой обозначений Р на со и М на у. различные случаи сложения движений:
1) 0; со0— мгновенная остановка;
2) о0ф0 со0 — мгновенное поступательное движение (тлько вотношении скоростей);
3) V0 соО—мгновенное вращение вокруг оси, проходящей через точку О;
4) V ф 0; со 0; у0со 90° — мгновенное плоскопараллельное движение (мгновенное вращение с угловой скоростью со вокруг оси, отстоящей от точки О на расстоянии Уосо);
5) Ро0; со фд; оо(о—0° или 180° — мгновенное винтовое движение (кинематический винт);
6) о0ф0; ыфО; и0со— произвольный угол—мгновенное винтовое движение, ось которого не проходит через точку О.
Некоторые частные случаи.
116
РАЗДЕЛ 2. ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
Сложение нескольких поступательных движений
аналогия со сложением пар): результирующее движение— поступательное со скоростью V'2,V.
Сложение нескольких вращений относительно осей, пересекающихся в одной точке О (аналогия со сложением сходящихся сил): результирующее движение — мгновенное вращение вокруг оси_ проходящей через точку О, с угловой скоростью СО 2 СО г
Сложение нескольким вращений вокруг параллельных осей (аналогия со сложением параллельных сил): результирующее движение — вращение с угловой скоростью со2ох вокруг оси, положение которой определяется по правилу сложения параллельных сил. Если со 0, то тело либо остается в покое, либо совершает мгновенное поступательное движение.
Пара вращений — совокупность двух вращений с параллельными, равными и противоположно направленными угловыми скоростями (аналогия с парой сил); пара вращений эквивалентна мгновенному поступательному движению со скоростью: асоХАВ (рис. 2.46). Обрат¬
но: мгновенное поступательное движение можно представить как пару вращений.
Мотор перемещений. Все сказанное о моторах скоростей относится и к моторам, пропорциональным скоростям бесконечно малых перемещений точек тела. Всюду вместо скорости V следует брать бесконечно малое перемещение 6г, а вместо угловой скорости со — бесконечно малый вектор поворота 5ф, направленный вдоль оси и вокруг которой осуществляется поворот.
2.5.8. Элементы кинематики механизмов
Основные понятия и определения [2]. Подвижное соединение нескольких твердых тел называется кинематической цепью. Тела, образующие цепь, называются звеньями кинематической цепи. Простейшая цепь, состоящая из двух звеньев, называется диадой. Кинематическая цепь с одним неподвижным звеном (стойкой), предназначенная совершать вполне определенные движения, называется механизмом. Если все точки кинематической цепи в их относительном движении могут перемещаться только параллельно некоторой плоскости, цепь называется плоской; в противном случае цепь называется пространственной. Соединение двух звеньев в кинематической цепи осуществляется посредством кинематической пары.
Классификация кинематических пар. Кинематические пары делятся на классы в зависимости от числа условий связи, налагаемых ими на относительное движение звеньев. Номер класса пары 5 определяется формулой
8 6 —Н, (2.61)
где Н — число степеней свободы одного звена пары относительно другого. Наиболее часто встречающиеся пары имеют специальные наименования и условные обозначения (табл. 2.5).
Таблица 2.5
Условное изображение пар
Класс I
Название
пары
Обозна¬
чение
Схематическое
изображение
Полуконструктивное
изображение
V
Враща¬
тельная
В
м
Поступа¬
тельная
П
т
Винтовая
Р
У'
IV
Цилинд¬
рическая
Ц
Сферическая с пальцем
5
-А
Яг
III
Сфери¬
ческая
С
Структура кинематической цепи. Если одно звено кинематической пары принять за неподвижное, то число ш степеней свободы цепи относительно этого звена называется степенью подвижности или степенью изменяемости цепи (механизма).
Структурная формула кинематической цепи имеет вид
2.6. ДИНАМИКА ТОЧКИ
117
до 6л — 5рб — 44 — Зр3 — 2р2 — (2.61а)
где п — число подвижных звеньев, рг — число пар -го класса. Эта формула имеет место для цепей нулевого семейства, т. е. для таких, на движение звеньев которых не наложено каких-либо общих ограничений; в противном случае уменьшаются коэффициенты при всех членах правой части. Так, для плоских цепей (формула Чебышева)
до 3г — 2р5 — р4. (2.616)
Мгновенные центры и угловые скорости относительного вращения звеньев кинематической цепи. При всяком бесконечно малом перемещении трех звеньев плоской кинематической цепи , т и п центры их взаимного поворота Рш, Ры, Рт п лежат на одной прямой, аналогично точкам приложения двух параллельных сил и их равнодействующей (теорема Аронгольда—Кеннеди) (рис. 2.47). При всяком бесконечно малом перемещении
XI
т
Г
I
Ьп
трех звеньев пространственной цепи оси их взаимного вращения гт, гп, гтп пересекают под прямым углом одну и ту же прямую (теорема И. М. Рабиновича). Здесь имеется аналогия с определением равнодействующей или уравновешиванием двух перекрещивающихся сил в пространстве.
Планы скоростей. Графическое определение скоростей точек плоской кинематической цепи производится
построением _плана скоростей (рис. 2.48,6). Если известна скорость Vа точки А звена АВ и направление скорости у в другой его точки В, то для построения плана скоростей откладываем от произвольно выбранного по-
люса_о отрезок оа, равный в принятом масштабе скорости Vа, далее через точку о проводим прямую, параллельную в, а через точку а—прямую, перпендикулярную АВ. Фигура оаЬу выражающая графически зависимость Ув Уа Уав, представляет собой полярный план скоростей звена АВ. Геометрически полярный план скоростей представляет собой фигуру, подобную звену АВ и повернутую относительно него на 90° в направлении мгновенного вращения звена. Полюс о плана скоростей соответствует мгновенному центру скоростей Р звена А В. Чтобы найти скорость любой точки С звена А В, следует найти подобно расположенную точку с на плане скоростей и соединить ее с полюсом о; ис ос. Коэффициентом подобия плана скоростей по отношению к звену является мгновенная угловая скорость звена со.
Планы скоростей звеньев кинематической цепи строят последовательно, переходя от звена к звену.
Неполярный план АСВВА нормальных (или повернутых) скоростей точек звена АВС можно получить поворотом на 90° скоростей точек звена (рис. 2.48, а).
Приведенное построение сохраняет силу и для бесконечно малых перемещений.
2.6. ДИНАМИКА ТОЧКИ
2.6.1. Дифференциальные уравнения движения материальной точки
Векторная форма (2-й закон Ньютона):
тт Р. (2.62)
Координатная форма (2-й закон Ньютона в проекциях
на оси декартовых координат):
тх — Х ту У; тг — 2. (2.62а)
Естественная (эйлерова) форма (2-й закон Ньютона
в проекциях на оси естественных координат):
V2
тю% — то — Рх '» тшп т — Рл; (2.626)
™®врв
где У, г—координаты точки массой т;
X у У у 2 — проекции действующей на точку силы (или равнодействующей действующих на точку сил) Р на оси декартовых координат;
Р% Рп Рв — проекции силы Р на оси естественных координат: касательную Г, главную
нормаль N и бинормаль В (см. рис. 2.35).
Если точка является несвободной (на движение точки наложены связи), в число действующих на точку сил включаются реакции связей.
Силы, входящие в правую часть дифференциальных уравнений движения, в общем случае могут являться функциями от времени скорости V и координат х, у% г точки.
118
РАЗДЕЛ 2. ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
2.6.2. Интегрирование дифференциальных уравнений движения точки
Для определения уравнений движения точки (см. 2.4.1) двукратно интегрируют дифференциальные уравнения движения в координатной форме. Постоянные интегрирования определяются из начальных условий: при 1 1о, х х0, у—уоу 2 г0, хХо, уУо, г—г0.
2.6.3. Частные случаи интегрирования
1. Правая часть дифференциального уравнения есть функция времени (например, действие поля переменного тока на заряженную частицу) Р—Р(() :
(
тх Р(0; х — Гя(0К 1(0 ,; т и
х I к (0 и о ( — 0) 0-
л
2. Правая часть дифференциального уравнения есть функция скорости (например, сила сопротивления вязкой среды) РР (V):
тх т-- Р(х); аг
разделяем переменные и интегрируем: х -(И; о ПМ-Г1(хо)
РЫ
с помощью алгебраических преобразований выражаем х через и
х — г — о)»
интегрируя по получаем I
х 2 — о) о-
3. Правая часть дифференциального уравнения есть функция перемещения (например, реакция упругой связи, сила всемирного тяготения) Р Р(х):
йх
тх т р (лг); ш
йх
умножая обе части на йх и замечая, что х по_ лучим:
X X
тх й х Р (х) йх и ] тх йх Р (х) йх;
Х0 Хо
интегрируя, получим:
2 2
отсюда
г 1-- [1 (х) - и („)] и (х),
разделяем переменные и интегрируем:
х I
(о
с помощью алгебраических преобразований получаем окончательно
М0-
Интегрирование дифференциального уравнения движения точки в частном случае действия реакции упругой связи РУпр —сх см. в рзделе XXIV.
2.6.4. Относительное движение точки1
Движение точки относительно подвижной системы отсчета описывается дифференциальными уравнениями относительного движения.
Дифференциальное уравнение относительного движения точки:
ттг — Р — гте — тЬ0 Р Фе Фс, (2.63)
где Фе—тт)е— переносная сила инерции (о силах __ инерции см. 2.7.3);
Фс—тшс —2т(оеХ V — кориолисова сила
инерции.
Дифференциальные уравнения относительного движения точки в координатной форме:
тхг X X™ XIя ; туг У У™ У%н; тгг 2 2“н 2”н.
(2.63а)
Из уравнений (2.63) и (2.63а) следует, что относительное движение точки можно изучать как движение относительно неподвижной системы отсчета, если к числу действующих на точку сил добавить переносную и кориолисову силу инерции.
В случае относительного покоя (уг0, дог0) уравнение (2.63) приобретает вид:
0 Р Фе
(2.636)
т. е. приложенные к точке силы и переносная сила инерции образуют уравновешенную систему сил.
В случае движения относительно инерционной системы отсчета, т. е. системы отсчета, движущейся поступательно, прямолинейно и равномерно, уравнение (2.63) приобретает вид:
тхюг — Р,
(2.63в)
не отличающийся от (2.62). Таким образом, никакие наблюдения в инерциальной системе отсчета не позволяют установить факта ее равномерного прямолинейного движения (принцип относительности классической механики).
1 См. также 2.4.4.
2.7. ДИНАМИКА СИСТЕМЫ
119
2.7. ДИНАМИКА СИСТЕМЫ 2.7.1. Основные понятия динамики
Количеством движения (3 материальной точки массой т, движущейся со скоростью а, называется вектор тгГ (рис. 2.49). Количеством движения ‘-й точки системы называется вектор (2тг. __
Количество движения механической системы есть
сумма векторов количеств движения ее точек:
ф 2 2, 2 т. V. Мус, (2.64)
где М—масса всей системы;
Vс — скорость центра масс системы.
Количество движения системы в ее движении относительно центра масс равно нулю.
Проекция вектора количества движения на оси декартовых координат: для точки
х тг9 3у ту; Сг тг; для системы
(2х 2 т. х. Мхс ; 2 т. у ;
2г 2 тг гг -
Импульс силы. Элементарным импульсом й силы Р называется величина
I I к
К гХ(2 х у г. (2.66)
Рд: 0.у 0.г
Моментом количества движения системы относительно центра О называется сумма векторов моментов количества движения всех точек системы относительно того же центра:
К 2 УС,- 2(2.66а)
Проекции вектора момента количества движения на оси декартовых координат (моменты количества движения относительно осей декартовых координат): для точки
Кхгп (уг — уг); Кд т(хг — хг); Кг т (ху — ху);
для системы
К у 2 КУ 2 т( (х г1 — х( г);
(г иг2т.(
Кинетической энергией точки называется скалярная величина:
(2.666)
Т
тог
(2.67)
Кинетической энергией системы называется сумма кинетических энергий ее точек:
„2
(2.64а)
Т 2 Ть 2
пгг)г ° 2-
(2.67')
(2.65)
2 ' 2
где М — масса всей системы;
ис — скорость центра масс системы;
Г1 — скорость -й точки системы в движении относительно центра масс системы.
Кинетическая энергия твердого тела:
Импульсом силы 5 за конечный промежуток времени А —и называется вектор
- г-
5 РИ. (2.65а)
Импульс суммы сил равен геометрической сумме импульсов каждой из сил в отдельности.
Проекции импульса сил на оси декартовых координат:
Л я2
5 Г Х01-. 8у Г У01; Зг Г 201. (2.656)
I, I, I,
Моментом количества движения К точки А относительно некоторого центра О называется вектор, равный векторному произведению радиуса-вектора г точки А на вектор ее количества движения (2 (рис. 2.49) з
Т
М,о
г СО
(2.67а)
где М — масса тела;
ос — скорость его центра масс; са— угловая скорость тела;
1С — момент инерции тела относительно мгновенной оси вращения, проходящей через центр масс тела С (см. 2.8.1).
Кинетическая энергия тела в частных случаях: при поступательном движении
Ми 2
при вращении вокруг оси г
(2.676)
(2.67в)
120
РАЗДЕЛ 2. ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
Работа. Элементарной работой б А силы Я на бесконечно малом перемещении йг точки ее приложения называется скалярное произведение векторов Р и йг:
6Л Рйг. (2.68)
Здесь знак б следует понимать как обозначение бесконечно малой величины, а не как знак полного дифференциала, так как работа в общем случае не является полным дифференциалом.
Элементарная работа в координатной форме:
б А Хйх Уйу Ыг, (2.68а )
где X, У, 2.— проекции силы на оси декартовых координат;
х, у у г— координаты точки приложения силы; йх, йу, йг — проекции элементарного перемещения точки приложения силы на оси декартовых координат.
Элементарная работа силы в естественной форме:
б А — Р соз а йз, (2.686).
где йз —элементарное перемещение точки вдоль траектории; а — угол между силой и элементарным перемещением йз. __
Элементарная работа силы Ру приложенной к твердому телу, вращающемуся вокруг неподвижной оси и:
6Л Ми (Р) йу. (2.68в)
Элементарная работа мотора _сил Р, М на моторе элементарных перемещений йг йу:
ЬА Рйг'Мйу (2.68г)
или в координатной форме:
б Л Хйх Уйу Ыг Ш Мйр Яйу, (2.68д)
где с?ср — элементарный угол поворота, представленный в виде вектора, отложенного вдоль оси поворота; йа, й, йу — элементарные углы Со?а поворота вокруг осей коорди¬
нат х, у, г (или проекции вектора йр на оси координат).
Элементарная работа, выраженная через обобщенные координаты системы. Если положение точек системы можно полностью определить поРис. 2.50 средством некоторого числа к
независимых параметров 71, 72, Я к, то эти параметры называются обобщенными
координатами системы. Перемещения всех точек системы определяются как функции элементарных приращений обобщенных координат системы 7, и элементарная работа сил получает вид:
б Л Ох с?71 2 йЯ2 • • • 01 йдп. (2.68е)
Коэффициенты ф при приращениях обобщенных координат носят название обобщенных сил системы.
Работа силы Р на конечном перемещении точки ее приложения выражается криволинейным интегралом, взятым по перемещению МЫ:
А б Л [ Р соз айз — ( (Хйх Уйу Ыг). (2.68ж) 'мы 'мы
Работа суммы сил равна алгебраической сумме работ, совершаемых каждой из сил в отдельности.
Графически работа изображается площадью графика Р соз а(5) (рис. 2.50).
Работа некоторых_видов сил:
1) сила тяжести Рпг§ (рис. 2.51, а) производит работу только на вертикальной составляющей перемещения:
Л —• пг§ (г2 —
) 2
Рис. 2.51
2) сила всемирного тяготения Р——кг2 (рис. 2.51,6) (г — расстояние между центрами тяготеющих масс) производит работу при изменении расстояния г между тяготеющими массами:
Г2 Г1)
3) реакция упругой связи ЯУпр—с%у пропорциональная перемещению % точки приложения и направленная в сторону, противоположную перемещению, производит работу:
(х_Х)5
4) работа силы трения всегда отрицательна:
Р
А— Ртр йз
н
5) работа реакций идеальных связей на любом перемещении, допускаемом_ связями, равна нулю;
6) внутренние силы Р1 производят работу на взаимном сближении или удалении точек системы (рис. 2.51,в):
А1 гр1йх,
где х — расстояние между точками системы.
Особенность работы сил в потенциальном силовом поле. Потенциальная энергия. Силовым полем называется область пространства, в которой проявляется действие силы. Потенциальным называется такое силовое поле, в котором сила есть функция положения точки, причем имеется функция положения точки координат С(х, у, г), называемая потенциалом и связанная с проекциями действующей силы зависимостью:
Х -- У- 7 -
дх ’ ду ’ дг '
2.7. ДИНАМИКА СИСТЕМЫ
121
В потенциальном силовом поле можно выделить эквипотенциальные поверхности, в точках которых I соп1.
Свойства потенциального силового поля:
1) элементарная работа силы равна полному дифференциалу функции V:
Р дЦ дЦ
6А Хбх Убу 2,йг — 6х — 6у
дх ду
дЦ
■(“ 6х 61 дг
2) работа сичы на конечном перемещении зависит только от разности потенциалов начальной 1 и конечной 12 точек:
А —г,
3) работа силы на перемещении между двумя точками эквипотенциальной поверхности, а также на замкнутом перемещении равна нулю;
4) в потенциальном силовом поле справедлив закон сохранения механической энергии: сумма потенциальной П и кинетической Т энергии точки есть величина постоянная:
Г соП5. (2.69)
Потенциальной энергией П называется работа, совершаемая силой при переходе тела из данной точки с потенциалом V на поверхность, условно принятую за поверхность нулевого потенциала Vо:
п ц0 — и.
Из числа рассмотренных выше сил потенциальным силовым полем обладает сила тяжести (V — —пг§г), сила
тяготения (Скг), реакция упругой связи
й2
2.7.2. Основные теоремы динамики
Теорема количества движения (в дифференциальной форме).
1. Для точки: производная от количества движения точки по времени равна равнодействующей приложенных к точке сил ?:
60 - — Я-2Р, 61
(2 70)
или в координатной форме:
0-Х хг V V. 0-У
■- Хп 2Л;
сИ
г
61
(2.70а)
2. Для системы: производная от количества движе ния системы по времени равна главному вектору Не внешних сил системы (векторной сумме внешних сил Ре, приложенных к системе):
ас КеЪРе,
и
или в координатной форме:
60.x V ле.
(2.706)
61
: хея 2Х";
60г
61
61
22 Г
Л-
(2.70в)
Теорема импульсов (теорема количества движения в конечной форме).
1. Для точки: изменение количества движения точки за конечный промежуток времени равно сумме импульсов, приложенных к точке сил (или импульсу равнодействующей приложенных к точке сил)
(2-(11 23 2 Л ри.
(2.70г)
)
70д)
(2.70ж)
или в координатной форме:
Оъх 1 0.2у у — 25
Саг — 0.1г
2. Для системы: изменение количества движения системы за конечный промежуток времени равно сумме импульсов внешних сил:
С?2 — 2 3е, (2.70е)
или в координатной форме:
®2х ®1х “ ®2у ®1у у’
2г-иЩ-
Следствия: при отсутствии внешних сил количество движения системы есть величина постоянная; если внешние силы системы перпендикулярны некоторой оси, то проекция количества движения на эту ось есть величина постоянная.
Теорема о моменте количества движения
1. Для точки:
Производная по времени от момента количества движения точки относительно некоторого центра (оси) равна сумме моментов приложенных к точке сил относительно того же центра (оси):
.-т йКх_ йКу
- 2 Л0;
ДО
61
6Кг
6(
2М.
61
2М;
(2.71)
2. Для системы:
Производная по времени от момента количества движения системы относительно некоторого центра (оси) равна сумме моментов внешних сил системы относительно того же центра (оси):
ф-т
6Кг
61
(2.71а)
Следствия: если внешние силы системы не дают момента относительно данного центра (оси), то момент количества движения системы относительно этого центра (оси) есть величина постоянная.
Если силы, приложенные к точке, не дают момента относительно данного центра, то момент количества движения точки относительно этого центра есть величина постоянная и точка описывает плоскую траекторию.
Теорема о кинетической энергии
1. Для точки: изменение кинетической энергии точки на конечном ее перемещении равно работе приложенных к ней активных сил (касательные составляющие
122
РАЗДЕЛ 2. ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
реакций неидеальных связей включаются в число активных сил):
Тг — Г2 2 Аакт 2] Ракт соз а Ла. (2.72)
51
Для случая относительного движения: изменение
кинетической энергии точки при относительном движении равно работе приложенных к ней активных сил и переносной силы инерции (см. 2.63):
Т2 — Тх 2 Лакт 2 Аеин. (2.72а)
2. Для системы: изменение кинетической энергии системы на некотором перемещении ее точек равно работе приложенных к ней внешних активных сил и внутренних сил, приложенных к точкам системы, расстояние между которыми меняется:
(2.726)
Если система неизменяема (твердое тело), то 240 и изменение кинетической энергии равно работе только внешних активных сил.
Теорема о движении центра масс механической системы. Центр масс механической системы движется как точка, масса которой равна массе всей системы М2тг, к которой приложены все внешние силы системы:
МЪс2Ре, (2.73)
или в координатной форме:
Мхс 2Хе; мЦс 2Уе; Мгс 22% (2.73а)
где хюс хс, Ус» — ускорение центра масс и его про¬
екции на оси декартовых коорди-
__ нат;
Ре у Xе, Vе, 2е—внешняя сила и ее проекции на оси декартовых координат.
Теорема импульсов для системы, выраженная через движение центра масс.
— у
Мг'с2 — МVС1 28е или VС2 — VС1 (2.74)
Изменение скорости центра масс системы за конечный промежуток времени равно импульсу внешних сил системы за тот же промежуток времени, деленному на массу всей системы.
2.7.3. Кинетостатика
Принцип Даламбера
Силой инерции Фин материальной точки называется сила, направленная в сторону, противоположную ускорению точки, и равная:
Фин —т и). (рис. 2.52
Силы инерции точек механической системы образуют систему сил инерции.
Система сил инерции может _быть заменена главным вектором Яин и главным моментом Мян сил инерции. Главный вектор сил инерции системы равен по величине массе М системы, умноженной на ускорение центра масс шс, и направлен в сторону, противоположную аус. Главный момент сил инерции относительно центра масс системы МИН равен:
МИН — 2 7 X ТП1
где Г1—радиус-вектор -й точки системы относительно центра масс;
—масса -й точки; хю?1 — ускорение -й точки системы в ее движении относительно центра масс.
Принцип Даламбера. Если к числу сил, действующих на механическую систему (точку), добавить силы инерции, то образуется уравновешенная система сил, для которой могут быть составлены уравнения равновесия статики (см. табл. 2.3), носящие в этом случае название уравнений кинетостатики системы (точки).
2.8. ДИНАМИКА ТВЕРДОГО ТЕЛА
2.8.1. Теория моментов инерции
Моментом инерции тела относительно точки, оси или плоскости называется сумма произведений массы точек.тела тг- на квадраты их расстояний гг- до точки, оси или плоскости:
2т. г — г2 д.т. (2.76)
Момент инерции тела относительно оси является мерой инерции тела во вращательном движении вокруг этой оси.
Момент инерции тела может быть также выражен через массу М тела и его радиус инерции г:
I — Мг2у гдег1 —. (2.76а)
У М
Моменты инерции относительно осей, плоскостей и начала декартовых координат.
Осевые моменты инерции:
1х (У2 г2) ат; 1у (х г”) йт;
1г (г У2) йт. (2.766)
Моменты инерции относительно плоскостей координат:
'хОу г2 1х0г у2 йт Iу0г х2 4т. (2.76в)
Момент инерции относительно начала координат (полярный момент инерции):
0 I (2 Уг г2)йт■ (2- 76г)
2.8. ДИНАМИКА ТВЕРДОГО ТЕЛА
123
Таблица 2.6 Моменты инерции некоторых тел
Продолжение табл. 2.6
Фигура или тело
Осевые моменты инерции
1х.1у Гг — тХ
V ррКг г)
при Г
9 ' з
1г у- (3К-ну.
_Й_ (4К - й)
С 4 ’ (3Я —й)
т?8
Центробежные моменты инерции
1ху §хуат; 1хг _[ гйя; 1уг ггйт. (2.76д)
Связь между осевыми, плоскостными и полярным моментами инерции:
хОг
уОг
(2.77)
Значения осевых моментов инерции некоторых геометрических тел приведены в табл. 2.6.
Изменение моментов инерции при перемене осей
Момент инерции 1Щ относительно оси параллельной данной оси и (рис. 2.53):
'« « М (? — I2) „ Ма2 — Ша1, (2.77а)
где 1и — момент инерции тела относительно оси и;
Ц1г)—расстояние от оси и (от оси и) до параллельной им оси ис, проходящей через центр масс тела;
а — расстояние между осями и я щ.
Если ось и центральная ( 0), то
И1 ц М02, (2.776)
124
РАЗДЕЛ 2. ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
т. е. для любой группы параллеьлрых осей момент инерции относительно центральной оси наименьший.
Момент инерции 1и относительно оси и, составляющей углы а, Р, у с осями декартовых координат х, у, г (рис. 2.54):
1и — 1х 0082 а 1у С052 р 1г С052 у —
— 2 (Iху соз а соз р 4- 1хг 008 а С08 У
соз Р соз 7) (2.77в)
Оси х, уу г главные, если
1Ху I хг — 1уг — О
Рис. 2.53 Рис. 2.54
Момент инерции относительно оси и, составляющей углы а, р, у с главными осями инерции ху у, г:
1и 1Х соз2 а 1у соз2 Р г соз2 -у. (2 77г)
Изменение "центробежных моментов инерции при параллельном переносе осей:
I ху — 1 хсус Ь Мхс ус, (2.77д)
где 1хсус —центробежный момент инерции относительно центральных осей хСу ус, параллельных осям х, у;
М— масса тела;
с Ус—координаты центра масс в системе осей у.
Изменение центробежного момента инерции при повороте осей х, у вокруг оси г на угол а в положение Ху (рис. 2.55):
2'
1хт ху соз 2а (, — 1у) 8ш 2 а. (2.77е)
Определение положения главных осей инерции. Ось
материальной симметрии тела — главная ось инерции тела.
Если плоскость хОг является плоскостью материальной симметрии тела, то любая из осей у — главная ось инерции тела.
Если положение одной из главных осей 2ГЛ известно, то положение двух других осей хтл и уГЛ определяется поворотом осей х и у вокруг оси 2ГЛ на угол р
ф — агс§ -9.- • (2-78)
1у 1Х
Эллипсоид и параллелепипед инерции. Эллипсоидом инерции называется эллипсоид, оси симметрии которого совпадают с главными центральными осями тела хгл, утЛу 2.тлу а полуоси ах, ау а2 равны соответственно:
[,1 хЧт ч I У24т
х-ГуОгу м ау-гх0г-у м ’
] гЫт М •
где гуог, гхог, гхоу — радиусы инерции тела относительно главных плоскостей инерции.
Параллелепипедом инерции называется параллелепипед, описанный вокруг эллипсоида инерции и имеющий с ним общие оси симметрии (рис. 2.56).
Рис. 2.56
Редуцирование (замена с целью упрощения расчета) твердого тела сосредоточенными массами. При вычислении осевых, плоскостных, центрооежных и полярных моментов инерции тело массой М можно редуцировать восемью сосредоточенными массами М8, расположенными в вершинах параллелепипеда инерции. Моменты инерции относительно любых осей, плоскостей, полюсов вычисляются по координатам вершин параллелепипеда инерции Х, угу г (1, 2,., 8) по формулам:
2.8. ДИНАМИКА ТВЕРДОГО ТЕЛА
125
1Х т ( у ):
1 1
11
7т2у):
1—
-тЕ
1
8
1 VI 2
7л:Ог ;
хОх
11
_ V л 'у° 8 2 “
11
1
ед- 8
8
1 — 1
м
г г (у
8 тш±
11
8
г _ V уг 8 2ш1У121'
11
Экспериментальное определение моментов инерции
1. Определение моментов инерции тел вращения с использованием дифференциального, уравнения вращения — формулы (2.82).
Исследуемое тело закрепляется на горизонтальной оси ху совпадающей с его осью симметрии, и приводится во вращение вокруг нее с помощью груза Ру прикрепленного к гибкой нити, навернутой на исследуемое тело (рис. 2.57), при этом замеряется время опускания груза на высоту к. Для исключения влияния трения в точках закрепления тела на оси х опыт производится несколько раз при разных значениях веса груза Р. При двух опытах с грузами Р и Р2
(Р1-Р2Ж2
(1-1)
2ЙЯ
2 Н
(-т)
2. Экспериментальное определение моментов инерции тел посредством изучения колебаний физического маятника (см. 2.8.3).
Исследуемое тело закрепляют на горизонтальной оси х (нецентральной) и замеряют период малых ко-
(2.80)
Рис. 2.57
лебаний около этой оси Т. Момент инерции относительно оси х определится по формуле
Т2
I 4я2Р10 ’
где Р — вес тела; 0 — расстояние от оси вращения до центра масс С тела.
2.8.2. Вращательное движение твердого тела1
Момент количества движения твердого тела относительно оси вращения:
К(2.81)
Дифференциальное уравнение вращения твердого тела относительно неподвижной оси
1г ф — 1г ©2 — 2 вг — Ые,
(2.82)
где Ые — момент внешних сил, приложенных к твердому телу, относительно оси вращения.
Изменение угловой скорости тела за конечный промежуток времени
А(Зе)
со2 (ох , (2.83)
2
где А(5е)—момент импульса внешних сил относительно оси вращения.
2.8.3. Физический и математический маятник
Физическим маятником называется твердое тело, шарнирно закрепленное на горизонтальной оси и движущееся под действием силы тяжести (рис. 2.58).
1 Ось вращения обозначена г,
126
РАЗДЕЛ 2. ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
Точка О пересечения оси вращения х с плоскостью, проходящей через центр масс тела и перпендикулярной оси х называется точкой подвеса маятника.
Дифференциальное урав нение колебаний физическо¬
го маятника
61п 51П ф
Ф —V — - 0, (2.84)
х
где 1о ОС — расстояние от центра масс С до точки О;
О — вес тела.
Дифференциальное уравнение малых колебаний физического маятника (при
ф«31П ф)
Оо
Ф ф 0. (2.84а)
Кинематическое уравнение малых колебаний физического маятника
ф ф0 соз Ы — зш Ы а зш (Ы р), (2 846)
к
где ф0 и со0 — начальный угол отклонения от вертикали и начальная угловая скорость маятника;
9 ш0
Фо ТГ — амплитуда колебаний; к2
агсд
йфо ' С00
■ начальная фаза;
круговая частота физического маятника.
При амплитуде а 8° погрешность при рассмотрении колебаний физического маятника как малых составляет менее 0,1%, при амплитуде а 22° погрешность менее 1%.
Период малых колебаний физического маятника:
™ 2я, 1Х
Т — — 2я 1 -7-. к у 610
(2.84в)
Математический маятник — сосредоточенная масса на конце гибкой нерастяжимой нити длиной — является частным случаем физического маятника.
Дифференциальное уравнение малых колебаний математического маятника
8
р — ф 0.
(2.84г)
Период малых колебаний математического маятника Г 2яТ—. (2.84д)
Приведенной длиной пр физического маятника называется длина такого математического маятника, ко¬
торый имеет одинаковый период колебаний с данным физическим маятником:
— 1 х I хс
пр ; 0 г — »
гп1
о
(2.85)
I
Рис. 2.59
где пг— масса тела;
гхс—радиус инерции тела относительно центральной оси хс, параллельной оси подвеса х.
Точка К, лежащая на раст стоянии пр от центра подвеса
О на прямой ОС, называется центром качания. Если центр качания К поменять местами с центром подвеса О, период малых колебаний не изменится.
Если менять положение точки подвеса О физического маятника, период колебаний его может меняться (рис. 2.59) от
оо (при о0 и 0 - оо) до некоторой минимальной величины Гмин при 1огХс:
Гмин 2я 2 уа.
2.8.4. Давление вращающегося твердого тела на опоры
При вращении тела (рис. 2.60, а) вокруг неподвижной оси полные реакции опор слагаются из статических, определяемых по правилам статики, и динамических, перпендикулярных оси вращения и вращающихся вокруг нее вместе с телом. Последние, в свою очередь, распадаются на реакции NА и Nв, обусловленные главным вектором сил инерции ?Ин, т. е. смещением центра масс тела с оси вращения, и реакции NА и УУд, обусловленные главным моментом сил инерции МИн, т. е. отклонением главной оси инерции тела от оси вращения:
Я„н тгС У“ е
МИЯУ (4 4) (а4 е2),
где М—масса тела;
гс—расстояние от центра тяжести тела до оси вращения;
1уг хг—центробежные моменты инерции. Динамические реакции (рис. 2.60,6):
дг' _ о — дг' П.
Л Я Ам
1 -4-
МИ
11 Н2
При вращении вокруг свободной оси динамические реакции равны нулю. Свободная ось 2 должна быть центральной (гс 0, статическая уравновешенность) и главной I хг — 1Уг0 — динамическая уравновешен¬
ность).
Редуцирование твердого тела восемью точками при
вычислении динамических реакций. Определяются реакции ХА, У а, %в У в от действия сил Фиы восьми точек,
2.9. ЭЛЕМЕНТАРНАЯ ТЕОРИЯ УДАРА
127
редуцирующих твердое тело (рис. 2.60, в, г), для чего можно применить аппарат статики, в частности графическое определение опорных реакций балки (см. 2.3.1).
Динамические реакции в точках Л и В на оси вращения:
А УХА 8 - “2)2 (ХА Ш2 Кл 8)2.
Кв У(ХВ е - Ув 0)2)2 (Хд 0)2 Кв в).
(2.866)
2.8.5. Плоскопараллельное движение
Обозначим (рис. 2.61): К — сечение тела неподвижной плоскостью, проходящей через центр масс тела С;
Рис. 2.61
Ке, Xе, Vе, 2е —главный вектор внешних сил и его проекции на оси декартовых координат; Мес —главный момент внешних сил относительно центральной оси тела, перпендикулярной плоскости К; 1с — момент инерции тела относительно этой оси.
Дифференциальные уравнения плоскопараллельного движения:
тх,
. тус — Vе; сф М. (2.87)
2.9. ЭЛЕМЕНТАРНАЯ ТЕОРИЯ УДАРА
2.9.1. Основные положения
Ударом называется весьма кратковременное взаимодействие материальных тел, при котором их скорости изменяются на конечную величину, что обусловливается возникновением при ударе чрезвычайно больших сил Руд, называемых мгновенными или ударными. Действие ударной силы измеряется ударным импульсом или ударом 5УД:
т
Зуд § РудМ (2• 88)
о
2.9.2. Основные теоремы динамики при ударе
Теорема количества движения: изменение количества движения системы при ударе АО равно геометрической сумме внешних ударов 25уД, полученных точками системы при ударе:
Д 2Йд; Дг, 25'уд;
Д 2уд: Агг 25уд- (2.89)
где т— время удара.
Основные допущения при ударе: действием неударных сил, а также смещением тел за время удара можно пренебречь.
Теорема о движении центра масс: изменение скорости центра масс системы А у с при ударе равно сумме внешних ударов 25уД, приложенных к системе, деленной на массу всей системы М;
128
РАЗДЕЛ 2. ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
А Уг
25
уд
м
Дд:с
УД.
М
У уд.
Агг
25
г уд
(2.90)
М с Л
Теорема моментов количества движения: изменение при ударе момента количества движения системы относительно точки (оси) равно сумме моментов внешних ударов относительно той же точки (оси):
(2.91)
дк0 2м 05уД); д, 2'М5уд);
Д 2Ж,(5;д); ДКг 2Лг(д).
2.9.3. Удар тела о неподвижную поверхность
Прямой центральный удар. Центр масс тела до удара лежит на общей нормали п тела и неподвижной поверхности, скорость V тела до удара направлена по этой
нормали (рис. 2.62, а). Ударной силой является мгновенная нормальная реакция поверхности Ауд. Удар разделяется на две фазы:
первая фаза: от момента прикосновения тела к поверхности до момента полной остановки тела в деформированном состоянии. Ударный импульс за время первой фазы:
Рис. 2.62
УД ] уд о
ту,
(2.92)
где т—масса тела;
0Т—длительность фазы;
вторая фаза: от конца первой фазы до момента, когда тело, частично восстановившее под действием упругих сил свою форму, отделяется от неподвижной поверхности со скоростью и. Ударный импульс за время второй фазы
х,
где
и 5 уД имеет место соотношение
уд
■"УД
к,
Н
(2.92а)
(2.93)
где к — коэффициент восстановления (определяется экспериментально для каждой пары веществ, из которых изготовлены соударяющиеся тела).
Экспериментальное определение коэффициента восстановления. Шарик из испытуемого вещества роняют с высоты Н без начальной скорости на плиту из того же вещества и замеряют высоту отскока к
Предельные случаи: к 0 — неупругий удар (вторая фаза удара отсутствует); к — 1 — абсолютно упругий удар (тело после удара полностью восстанавливает свою скорость и форму).
Для реальных веществ 01. Например, для стали 59, для слоновой кости 8э, для стекла 15Дб.
Косой удар тела о неподвижную поверхность. Скорость тела до удара V направлена под углом падения а к общей нормали п тела и поверхности (рис. 2.62,6). После удара тело отскакивает от неподвижной поверхности со скоростью и под углом отражения 3 к общей нормали к.
Между скоростями и и V и между углами а и (3 имеет место соотношение:
л 1 —
§ 3 —г— § к
и 1Ка2 [(1 — А,)2 — А’2] зт2 а,
(2.94)
где А, — коэффициент мгновенного трения, определяемый экспериментально (часто полагают А,0).
2.9.4. Прямой центральный удар двух тел
Скорости тел Ь и о2 До удара направлены по их общей нормали, проходящей через их центры масс. Различают две фазы удара:
первая фаза: от момента соприкосновения тел до момента, когда все точки соударяющихся тел приобретут общую скорость и и оба тела получат максимальную деформацию. Скорость и в конце фазы:
нт1Е1±тл (2 95)
т1 т2
где гп — масса первого тела; т2— масса второго тела;
вторая фаза: с момента окончания первой фазы до того момента, когда тела под действием упругих сил частично восстановят свою форму, приобретут разные скорости и и и2 и разъединятся. Скорости тел после удара:
т2
тг т2 т
(1 к) (о201);
тх т2
(1 )(?-2)-
(2.95а)
Т1Т—длительность фазы; т— длительность удара.
Для скоростей и и о, а также для импульсов 5уд
5уд — —
Полный ударный импульс, полученный каждым из тел при ударе:
т1 т2
где знак минус берется для первого тела, а знак плюс для второго.
Кинетическая энергия, потерянная при ударе. При
ударе часть кинетической энергии ударяющихся тел ДТ теряется, т. е. переходит в немеханические формы:
лг-Ьг1г’-
п1п2
2 (тг т2)
■(ох-о.РО—). (2.96)
где Т — кинетическая энергия потерянных скоростей VI—и и о2—и2:
2.10. АНАЛИТИЧЕСКАЯ МЕХАНИКА
129
т, _ ТП (»1 — “12 т% (2 — «г)г _
2 2
тхт2 (о1 — р2)2 (1 й)2
2 (7Л ш2)
Частные случаи: к0,
ДГ 7 (теорема Карно);
2 (т, тг)
1, ДГ—0 (потери энергии не происходит).
2.9.5. Применение элементарной теории удара
Ковка металла. Цель удара — сообщить телу необратимые пластические деформации. Коэффициент полезного действия удара 14 при ковке
АТ 1 — к2
Т0 1 тх1 Шч
где Т0 — кинетическая энергия молота массой тх до удара.
Коэффициент полезного действия при ковке металла повышается при уменьшении упругости удара, т. е. при 6-й), и при увеличении массы наковальни т2, т. е. при т1т2— 0.
Забивка свай. Цель удара — сообщить телу т2 (свая) после удара максимальную скорость (максимальную кинетическую энергию), избежав, по возможности, пластических деформаций (разрушения) оголовника сваи. Коэффициент полезного действия удара ц при забивке свай
1 АТ 1 ч1_—1.
1 о
1—к2
1 пг1т2
где То — кинетическая энергия молота массой тх до
удара.
Коэффициент полезного действия при забивке свай повышается при увеличении упругости удара, т. е. при
1 и увеличении массы молота ти т. е. при тгпг- оо.
2.9.6. Действие удара на тело, закрепленное на неподвижной оси
Изменение угловой скорости тела при ударе Ао равно моменту удара относительно оси вращения •Чуд)» деленному на момент инерции тела относительно оси вращения 2:
(уд)
Г 1
А©
(2.98)
Условия равенства нулю ударных реакций тела, вращающегося вокруг оси г.
1. Ось вращения г должна быть главной осью инерции тела.
2. Удар 5УД должен быть нанесен перпендикулярно плос-
Рис 2 63 кости, содержащей центр масс
тела С и ось вращения г в точке Л — центре удара, лежащей на перпендикуляре к оси вращения, проходящем через центр масс тела С, и находящейся на расстоянии от оси вращения (рис. 2.63):
г2 г2 -• - 7-.
(2.98а)
где 0—расстояние от оси вращения до центра масс С
тела;
с— радиус инерции тела относительно центральной оси 2С, параллельной оси вращения; гг— радиус инерции тела относительно оси вращения.
Центр удара совпадает с центром качаний физического маятника (см. 2.8.3).
2.10. АНАЛИТИЧЕСКАЯ МЕХАНИКА
2.10.1. Начало (принцип) возможных перемещений
Возможным перемещением системы из данного ее положения называется всякое бесконечно малое перемещение ее точек, одновременно допускаемое наложенными на систему связями. Возможное перемещение обозначается б в отличие от действительного перемещения системы под действием приложенных к ней сил, которое обозначается к.
Число независимых возможных перемещений системы определяется числом ее степеней свободы, которое в свою очередь равно числу обобщенных координат системы ц.
Начало (принцип) возможных перемещений (НВП):
для равновесия системы необходимо и достаточно, чтобы сумма элементарных работ всех приложенных к системе активных сил на любом независимом возможном
перемещении системы из данного ее положения равнялась нулю:
2б4акх 0. (2.99)
Уравнение НВП в векторной форме
2РактбГ0; (2.99а)
в координатной форме
2 (Хакх Ьх Какт Ьу 2акт Ьг) 0; (2.996)
в естественной форме
_д
2Ракт I бг I СОЗ (Раь:А) 0, (2.99в)
где бг б8.
В число активных сил при составлении уравнения
НВП кроме внешних нагрузок включаются реакции уп¬
ругих связей, силы трения неидеальных связей, а также внутренние силы, действующие между теми точками системы, расстояние между которыми изменяется.
130
РАЗДЕЛ 2. ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
Практически наиболее удобный способ определения независимых возможных перемещений системы состоит в том, чтобы определять эти перемещения, сообщая бесконечно малое приращение 6? одной из обобщенных координат. Уравнение (2.99) в таком случае приобретает вид:
22ц 0.
(2.99г)
Коэффициенты 2 носят название обобщенных сил. Так как независимы друг от друга, НВП может быть сформулировано следующим образом: для равновесия системы необходимо и достаточно, чтобы все обобщенные силы системы были равны нулю.
2.10.2. Основные приложения НВП к расчету конструкций
Рассматриваются два состояния системы:
I. Статически возможное состояние, характеризуемое нагрузками и соответствующими внутренними усилиями.
II. Кинематически возможное состояние, характеризуемое малыми деформациями стержней и соответствующими смещениями точек приложения нагрузок в I состоянии.
Составляется уравнение работ: работа обобщенных
сил I состояния на обобщенных перемещениях И состояния равна нулю.
Для фермы имеем
К1 с0§ РI И Ю0)
где Р—узловая нагрузка в I состоянии в узле К; АШ — перемещение узла К во II состоянии;
Л'п — усилия в стержне I в I состоянии;
Луц — удлинение стержня I во II состоянии.
На использовании уравнения (2.100) основаны:
1) кинематический метод определения усилия Nп ;
2) статический метод определения перемещения узла
•
Для определения усилия в стержне I от действия нагрузок Рдаем только стержню в состоянии II малое удлинение, принимаемое равным безразмерной единице:
Лш 1.
и определяем (безразмерные) перемещения узлов С, несущих нагрузки РXI в I состоянии.
Вторая сумма в уравнении (2.100) обращается в Nц. Отсюда
Л ш _ 2РК1
Л
С05 Р А.
(2.100а)
2.10.3. Принцип Даламбера — Лагранжа (общее уравнение динамики)
Сумма элементарных работ всех активных сил Ракт» приложенных к материальной системе, а также всех сил инерции Фин точек системы на любом возможном перемещении системы из данного ее положения равна нулю:
2бЛакт 2бЛин 2КТ 2т Ж 67. 0 (2.101)
или в координатной форме
2 (хГТ — тс х( ) 2 (И"" — «(,) Ьу1
2 (2кт — тгг) бг, 0, (2.101а)
где Х1КТ. У]к 2?кт-проекции активных сил Я?кт;
Х1 У1» — координаты точек их прило¬
жения;
ть У1 — масса и проекции ускорения
1-й точки системы.
В частном случае равновесия системы (Хгуг — г1 — 0) уравнение (2.101а) преобразуется в уравнение начала возможных перемещений (2.996), называемое также общим уравнением статики.
2.10.4. Уравнения Лагранжа 2-го рода
При отнесении движения системы к обобщенным координатам Я2.» Яп уравнения движения системы приобретают вид:
4 ( дТ дТ
12 '»2'
где Т — кинетическая энергия системы; — обобщенные координаты; 7 — обобщенные скорости и С?,— обобщенные силы системы.
Эти уравнения являются обыкновенными дифференциальными уравнениями второго порядка относительно обобщенных координат. Если действующие на систему силы имеют потенциальное силовое поле (являются
дП
консервативными), то С? — ——, где П— потенциаль-
I
ная энергия системы, и уравнение (2.102) приобретает вид:
й дТ дТ дП
—.-г- —. (2.102а)
Ш 017,-
Введя функцию Лагранжа Ь — Т—П и учитывая, что Х дП
— • — — 0, получаем (И дд1
Для определения перемещения узла Д1по наперед заданному направлению прикладываем в I состоянии по этому направлению единичную безразмерную силу Рк 1. Тогда перемещение Д4цПО этому направлению выразится суммой
ЛКИ2Л'пЛШ • (2.1006)
Итак, усилие в стержне выражается возможной работой внешних сил, перемещение узла — работой внутренних сил,
_й_
дд I
д1
(2.1026)
Пример 2.3. Составить дифференциальные уравнения движения математического маятника, состоящего из сосредоточенной массы т, подвешенной к концу упругой нити, длина которой в положении равновесия и жесткость с (рис. 2.64).
Р
Решение. Длина нити р — 2 0—, 2, где
ЛИТЕРАТУРА
131
о — длина нерастянутой нити; т§с — статическое удлинение нити под действием веса Рт г — удлинение нити сверх .
Система имеет две степени свободы; в качестве обобщенных координат принимаем удлинение нити от положения равновесия г и угол отклонения нити от вертикали р. Скорость точки в полярных координатах см. формулу (2.42а)
т
2
‘'ф РФ 0 г)ф;
V Угг (.1 г)2 р2. Кинетическая энергия
[г8 ( г)2 ф2 ].
Потенциальная энергия (за нулевое положение принято положение статического равновесия)
П те [ — ( -I- г) соз р)
г
Функция Лагранжа т
Т
I — [г2 4- ( -1- г)2 р2] — т§ II — ( г) соз р) —
Дифференциальные уравнения движения:
а д1 дЬ, -,
— • — — — т (I 4- г)2 Ф й1 дф дф
2т(1 г) рг т% 1П ф 0;
й дЬ дЬ
а ■ъ-тг-т1г)у2
т§ (1 — соз ф) — 0.
т
2.10.5. Интегральные принципы механики
Некоторые общие свойства движения, происходящего за конечный промежуток времени, описываются интегральными принципами (принцип Остроградского — Гамильтона, принцип Мопертюи — Лагранжа) [1].
ЛИТЕРАТУРА
1. Бухгольц Н. И. Основной курс теоретической механики. Ч. 2. ОНТИ НКТП СССР м.-л. 1937. ™ческои меха о м- К-УР0 теоретической механики. Изд.
10'С. ПаукЗ, 1966.
3. ГОСТ 9867—61.
3-64'нкдп ГИОП.И1939.Н' Е’ Полное собр‘ со4- Лекции, вып.
5. К и р п и ч е в В. Л. Основания графической статики. Гос. теор.-тех. изд., 1933.
6 Л о й ц я н с к иЙ Л. Г. и Лурье А. И. Курс теоретической механики. Ч. 1 и 2. Гостехиздат, 1954.
7. Н и к о л а и Е. Л. Теоретическая механика, Ч. 1 и 2 Физматгиз, 1958.
8. Рабинович И. М. Строительная механика стержневых систем. Ч. 1. Стройиздат, 1940.
9. Справочник машиностроителя. Ч. 2 и 3. Машгиз. 1955.
10. Та р г С. М. Краткий курс теоретической механики. «Наука». 1966.
Уманский Пространственные системы. Строй¬
издат, 1948.
12. Уманский А. А. Статика и кинематика ферм. Гос-
стройиздаг, 1957. н
13. Чертов А. Г. Международная система единиц изме рения. Росвузиздат, 1963.
14. Энциклопедический справочник машиностроения. Т I
кн. 2. Машгиз, 1947. 15. А1апа51и М.,.Месашса 1еЬт'са». ЕсШига еЬшса ВисигезИ, 1963.
16. Я б л о к с к и й А. А., Никифорова В. м. Курс теоретической механики. Ч. 1 и 2. «Высшая школа», 1963.
РАЗДЕЛ 3
НАПРЯЖЕНИЯ, ДЕФОРМАЦИИ И ПРОЧНОСТЬ МАТЕРИАЛОВ
3.1. НАПРЯЖЕНИЯ
3.1.1. Основные понятия
Твердое тело, находящееся под воздействием системы внешних сил, мысленно разделяется какой-либо поверхностью, например плоскостью, на две части и (рис. 3.1). Эти части тела действуют друг на друга с
Рис. 3.1
Касательное напряжение есть проекция рп на плоскость площадки АР:
т„ рпПрп% п). (3.3)
Напряжение определяет интенсивность сил, действующих на площадку АР в точке А. На разных площадках, проходящих через одну и ту же точку, напряжения различны.
Главные напряжения. Площадки, на которых касательное напряжение тп равно нулю, называются главными. Нормальные напряжения, действующие на главных площадках, называются главными напряжениями. Через любую точку проходят три взаимно перпендикулярные главные площадки. Главные напряжения обозначаются через 0ь о2, 73, при этом аагОз. Главные напряжения достигают экстремальных значений по сравнению со всеми напряжениями, действующими в рассматриваемой точке. Одно из них наибольшее, а другое аз наименьшее по алгебраической величине. По абсолютной величине наибольшим напряжением является напряжение а или т3.
Свойство парности касательных напряжений. Если на площадку действует касательное напряжение ть то на площадку , перпендикулярную вектору ть действует касательное напряжение т2 т1. Векторы и т2 перпендикулярны линии пересечения плоскостей, в которых расположены площадки и .
силами, распределенными по разделяющей их поверхности. Обозначим через АР равнодействующую усилий, приходящихся на площадку АР. Если стягивать контур, ограничивающий площадку АР, к точке Л, т. е. стремить АР к нулю, то отношение АРАР будет стремиться к некоторому пределу, который называется полным нанапряжением в точке А на площадке АР и обозначается р.
Вектор полного напряжения в точке А на площадке АР с нормалью п (см. рис. 3.1)
рп Пт
АР
АР-»о АР
[кГсм2].
3.1.2. Одноосное напряженное состояние
Напряженное состояние называется одноосным, если вектор полного напряжения рп (рис. 3.2) на любой площадке параллелен одной и той же оси. В этом слу-
(3.1)
Нормальное напряжение есть проекция вектора полного напряжения на нормаль п: чае только одно «3 тРех главных напряжении 7,т
отлично от нуля. Примеры — растяжение прямого оруса, зп рп соз (рп, п). (3.2) чистый изгиб.
3.1. НАПРЯЖЕНИЯ
133
Напряжения на площадке с нормалью п (рис. 3.2).
полное напряжение рп °х С08 а»
нормальное напряжение оп ох соз2 а;
I (3.4)
касательное напряжение тЛ — ох зт 2а,
где Ох — напряжение на площадке, перпендикулярной векторам полных напряжений, т. е. главное напряжение аь отличное от нуля.
Напряжение тп считается положительным, если вектор внешней нормали п к рассматриваемой площадке для совмещения по направлению с вектором тп должен быть повернут на 90° по часовой стрелке (см. рис. 3.2). Наибольшее и наименьшее касательные напряжения
макс, мин 1Ь 2 (35)
Напряжения Тмакс, мин действуют на площадках, для которых а45, 135°.
3.1.3. Плоское напряженное состояние
Если все векторы напряжений параллельны одной и той же плоскости, напряженное состояние называется плоским (рис. 3.3). Иначе: напряженное состояние яв¬
но на рис. 3.3. Правило знаков для тп по формуле (3.6) то же самое, что для напряжений тЛ по формуле (3.4).
Данное здесь правило знаков относится к наклонным площадкам. Ниже (3.1.4) сформулировано правило знаков для компонентов напряжений в точке, т. е. для напряжений на площадках, перпендикулярных осям координат. Это правило знаков принято в теории упругости.
Главные напряжения на площадках, перпендикулярных плоскости напряжений:
«1.2 ± Т У К ' а«У 4Х% ■ 3' 7
(Поскольку здесь рассматриваются только два главных напряжения, они обозначены через Т1 и х2, хотя может оказаться, что т20, т. е. т2 не будет средним из трех главных напряжений). Угол аь составляемый нормалью к первой главной площадке с осью х, находится из равенства;
04 —— ох
а. —. (3.8)
ху
Наибольшее и наименьшее касательные напряжения
тмакс, мин 2 ( °уУ ху (39)
Эти напряжения действуют на площадках, расположенных под углом 45° к первой и второй главным площадкам.
Если главные напряжения а и а2 имеют одинаковый знак, то наибольшее касательное напряжение действует на площадке, расположенной под углом 45° к плоскости напряжений (плоскости ху). В этом случае:
тмакс, мин : если 0 и 0;
-т- 2
тмакс, мин — если °1 0 И СГ2 0.
В стенке балки (здесь имеется в виду обычная балка, а не балка-стенка) при ее изгибе силами реалнзует-
ляется плоским, если одно из трех главных напряжений равно нулю.
Плоское напряженное состояние реализуется в пластине, нагруженной по ее контуру силами, равнодействующие которых расположены в ее срединной плоскости (срединная плоскость — плоскость, делящая пополам толщину пластины).
Направления напряжений на рис. 3.3 приняты за положительные. Угол а положителен, если он откладывается от оси х к оси у. На площадке с нормалью п: нормальное напряжение
1 1
„ -у (°Х °у)— (О — Оу) соз 2а
тху 51 п 2а; (3.6)
касательное напряжение
тп (ах — оу) зт 2а — тху соз 2 а;
при а 0 тп—
Нормальное напряжение ап положительно, если оно растягивающее. Положительное напряжение тп показа¬
ся частный случай плоского напряженного состояния. В стейках балки одно из нормальных напряжений зу равно нулю. В этом случае напряжения получатся по формулам (3.6), (3.7) и (3.9), если в этих формулах положить оу 0. Положение первой главной площадки определяется формулой (3.8).
Растяжение по двум направлениям (рис ЗА):
ох о, о у о2;
134
РАЗДЕЛ 3. НАПРЯЖЕНИЯ. ДЕФОРМАЦИЯ И ПРОЧНОСТЬ МАТЕРИАЛОВ
07 2 (а1 а2) 2 008
1
т„ — (ох — а2) зш 2а.
1
При ог 0 и а2 0 тмакс мин ± — (ах — а2).
при ах 0 и т2 О
I ± '
при ах 0 и о2 О
Рис. 3.5
Тмакс, мин
Чистый сдвиг (рис. 3.5)
О у 0; Стл т51п2а; I
т„ — тсоз 2а. (3.10)
0, 0 ± Т
ху
"макс, мин
±Т (3.11)
ху '
Пример. ах 300 к Гсм2, оу ——200 кГсм2, хху — 300 кГсм2. Найти величины и направления главных напряжений.
По формуле (3.7) находим:
300 — 200 1 т г о12 ± — У (300 200)2 4-3002
50 ± 390; ох 440 кГсм2 о2 — — 340 кГсм2
440 — 300
а1 '
300
Если смещения точек в направлении одной из координатных осей равны нулю, то деформация называется плоской. Например, если смещения до в направлении оси
2 равны нулю, то деформация называется плоской.
3.1.4. Объемное напряженное состояние
Если напряжения на любой площадке, проходящей через рассматриваемую точку, не параллельны одной и той же плоскости, то напряженное состояние является объемным. Это самый общий вид напряженного состояния.
Компоненты напряжений в точке. Проекции векторов напряжений рх, РУ, р2 действующих на площадках, перпендикулярных осям координат, на эти оси называются компонентами напряжений.
Компоненты напряжений на площадках, перпендикулярных осям х, у, г, обозначаются соответственно
(рИС. 3.6) Ох, Тух, Тгх Оу, Тху, Тгу Ог, Тхг, Туг-
Первый индекс показывает, какой оси параллельно напряжение, второй — какой оси перпендикулярна площадка.
Правило знаков для компонентов напряжения. Если направления внешней (по отношению к рассматриваемой части тела) нормали к площадке и параллельной
ей оси совпадают, то положительными направлениями компонентов напряжений на этой площадке считаются направления осей координат. Согласно этому правилу, нормальное напряжение положительно, если оно растягивающее. На рис. 3.6 все компоненты напряжений положительны.
Рис. 3.6
В силу парности касательных напряжений:
ЪХу — ух' уг Т'гу Т'гх хг-
Нормальное напряжение на площадке с нормалью п
°п — °х соз2 (» п) о у соз2 (у,п) о г со§2 (гп)
2тху соз (х,п) соз (у,п) 2ту2 соз (у,п) соз (г,п)
2тг соз (г,я) соз (х,п). (3.12)
Проекции вектора полного напряжения, действующего на площадку с нормалью п, на оси координат:
Хп ах соз (х,п) тху соз (у,п) %хг соз (г,п);
Уп тух соз (х,п) оу соз (у,п) туг соз (г,п);
%п тгх СОЗ (х, п) -- тгу соз (у,п) о2 соз (2, п).
Полное напряжение на площадке с нормалью п
(3.13)
Рп V Х2а VI 21.
(3.14)
Угол яэ между вектором рп и нормалью п определяется равенством:
оп
соз ф .Рп
Главные напряжения в рассматриваемой точке являются корнями уравнения
о. — (о —(— о 4- о 1 о», (о о 1— о о -I-
V V V 1 у 1 г 1 V V 4 1 у г '
— ь —.и у. у.
4- 2т т т -
' ху уг гу
■ о Т' — о тх уг у хг
Все три корня этого уравнения всегда действительны.
Коэффициенты и свободный член уравнения (3.15) являются инвариантами напряженного состояния [см. ниже форхмулы (3.20)].
3.1. НАПРЯЖЕНИЯ
135
Косинусы углов, которые составляет нормаль пх к главной площадке номера V (л?1, 2, 3) с осями х, у, 2 (направляющие косинусы нормали пх ), определяются из
системы уравнений:
(а — о„) соз (.яу) хх соз (у,я„)
тс°8(г,пу) 0; хух соз (х.п„) (ау — о„) соз (у,яу)
тсоз (г,Яу) °; (3.16)
Хгх соз [х,пу) хгу соз [у,яу) 4 (ог — ау) соз (г,яу) О, соз4 (,пу) соз2(у,яу) соз2 (г,лу) 1.
Из первых трех уравнений этой системы независимыми являются только два.
Октаэдрические напряжения —
напряжения, действующие на площадке, равнонаклоненной к трем главным площадкам (октаэдрической площадке) (рис. 3.7):
охт (а1 аз)1
Экстремальные значения касательных напряжений:
т, ■
Т2
О 2 — СТ3
(3 18)
Наибольшее напряжение Т] действует на площадке, перпендикулярной второй главной площадке и наклоненной к первой и третьей главным площадкам под углами 45°.
3.1.5. Преобразование компонентов напряжения к новым осям координат
Косинусы углов, которые составляют новые оси координат х у', г' с осями х, у, 2, заданы таблицей:
Оси
К
1
г
х'
и
т,
ч'
и
т.г
п.
г'
и
тч
п
Рис. 3.7
Компоненты напряжения в осях у г': ох, оу,. связаны с компонентами напряжения в осях х, у, г соотношениями:
ох , т[ ог п, Чхху , т, 2тг т, п, 2хг 1%
о 1 --оц т ог я 2хху 1.2 т, 2т т, п2 2ххг 2 я2;
Ц
V
«V °г т1 аг «3 2 V к т3 2 V Щ "з 2тл 3 пг:
уг'
уг'
хг Ххг'
V' к I, а„ т1 т2 0г п1 п2 Хху ( V г 1г тх) V (тх П2 ОТ2 "1) Тг, («1 1) ■
V' 1г 1з °у тг тз пг пз (1% тз з т2) V (т яз тз 'г)Тг (я, 'зз ')
V' “ °х 11 13 а„т1 т3 °гп1 П3 Ту ( 1г тЬ 13 тх) V "з «Я "1) Тгж(Л1 'з П3
(3.19)
Инварианты напряженного состояния. Пусть ох, ау,., Ххг—компоненты напряжений в рассматриваемой точке в осях х, у, г и ох,оу,тг —компоненты
напряжений в той же точке в осях у г Величины:
ах а1 аг ах'ач' аг °1 °г °у
°хОу о„ °г ог 0х - т1и -хг-ххвх. ау, 0,. 02.0г. 0Х, О1 (Тг о2 О3 -- О3 Ох;
°.с % °г Т»г -% гх °г °х' V °г' 2Т'У. Тг'' 2 2 V' Ъ'х'
-о» т;
а1а2а3
(3.20)
сохраняют при переходе от одной системы декартовых координат (х, у, г) к другой (х уг') неизменное значение; они инвариантны по отношению к преобразованию прямоугольных прямолинейных координат.
Шаровой тензор и девиатор напряжений. Напряженное состояние, заданное компонентами напряжения (тензора напряжений)
ух 1
тд:у °у гу I (тензор напряжений)
хг туг г У
может быть разложено на два напряженных состояния.
136
РАЗДЕЛ 3. НАПРЯЖЕНИЯ, ДЕФОРМАЦИЯ И ПРОЧНОСТЬ МАТЕРИАЛОВ
Первое из них характеризуется компонентами так называемого шарового тензора
(шаровой тензор),
где
•у(° 0ог) -(01г, о,).
Второе напряженное состояние характеризуется компонентами девиатора напряжений» представляющими собой разность между компонентами заданного напряженного состояния и компонентами шарового тензора:
0 —о
Т'Ху ?хг
Тух
о у — а т у2
гх
0
1
N
и
(девиатор напряжений).
3.1.6. Интенсивность напряжений в данной точке
Величина
ТГ2 ————
— V (Х — О у)2 а у — ог) 2 (а2 — а)24- У2
( Тху Туг Т2)
У (а — с2)2 (а2 — а3)2 (ог «
точки В проводится прямая под углом а к оси а. Координаты точки О пересечения этой прямой с окружностью дают напряжения по наклонной площадке: ОЕ оп, ЕО — Тп.
Заданы напряжения ах, оу, хху (рис. 3.9). Откладываются отрезки ОЕ — ах и ОР — оу с учетом знаков. Из
точки Е (независимо от
X ее положения) отклады¬
вается отрезок ЕйТху также с учетом знака. Из точки С, делящей отрезок ЕР пополам, как из центра строится окружность радиусом СХ Прямая Вй определяет направление действия вектора главного напряжения оь а абсциссы точек пересечения окружности с осью а дают величины главных напряжений: ОА — ои ОВ-о2.
Рис. 3.9
(3.21)
носит название интенсивности напряжений.
Эллипсоид напряжений. Концы векторов полных напряжений, действующих на площадках, проходящих через рассматриваемую точку, располагаются на поверхности эллипсоида [24]. Уравнение эллипсоида напряжений
Т
1.
(3.22)
1
Здесь Хп, Уп, %п—проекции вектора полного напряжения, действующего на площадке с нормалью п на оси х, У г; аь а2, аз — главные напряжения в рассматриваемой точке.
3.1.7. Круги Мора
Зависимость напряжений оп и тп, действующих на площадку с нормалью п, проходящую через рассматриваемую точку, можно представить наглядно графически при помощи круговой диаграммы Мора (кругов Мора).
Плоское напряженное состояние. Заданы главные напряжения о и о2 (см. рис. 3.4). Откладываются отрезки 0,4 01 и О?— Ог с учетом знаков (рис. 3.8). На отрезке АВ, как на диаметре, строится окружность. Из
Объемное напряженное состояние. Строятся три полуокружности на отрезках, изображающих разности главных напряжений 0—сг3 а2—а3, 0—а2, как на диаметрах (рис. 3.10). Напряжения оп и тп по наклонной площадке, нормаль к которой образует углы а, р и у с направлениями трех главных напряжений, определяются путем следующего построения. Проводятся линии АЕ и ВР соответственно под углами а и у от вертикали. Через полученные точки пересечения Е и Р проводятся дуги радиусами С2Е и СР до пересечения в точке координаты которой и дают величины напряжений оп и тп. Точки, изображающие напряженные состояния по разным площадкам, не выходят из области, заключенной между тремя полуокружностями (заштрихована на рисунке).
3.2. ДЕФОРМАЦИИ
137
3.2. ДЕФОРМАЦИИ
Приведенные ниже соотношения справедливы при условии малых перемещений и деформаций.
3.2.1. Компоненты деформаций
В рассматриваемой точке ех, еу и ег — относительные удлинения (укорочения) линейных элементов, параллельных до деформации соответственно осям х, у иг; Уху, ууг и уХг — угловые деформации (относительные сдвиги)1. Например, величина ууг равна изменению пря-
С
?и—Ц-Лах
У
X
г
И)
Цуг
Рис. 3.11
мого угла между элементами йу и Аг, параллельными до деформации осями у и г (рис. 3.11). Величины уху, Ууг, Ухг считаются положительными при уменьшении прямых углов в результате деформации.
Компоненты деформации связаны с перемещениями а, V, рассматриваемой точки по осям координат х, у, г соотношениями:
дт
дГ;
дV
Уху-
ди
дV
'' "дГ; Еу
ду
;
дV ди
дна
дх ду
Ууг
У
дю
ди
Ухг —
а7
дГ
(3.23)
Относительное удлинение з направлении элемента йгу составляющего с осями х, у, г углы а, р, у:
ег е соз2 а 4- соз2 р 4- е2 соз2 у 4- уху соз а соз 3 4-
4- уу2 соз Р соз у 4- Ухг соз а соз у. (3.24)
Изменение (в результате деформации) угла между двумя взаимно перпендикулярными направлениями г и г2
г2 2е 008 а со8 а2 2соз рх соз р2 44- 2е соз соз у2 4- уху (соз ах соз р2 4- соз а2 соз 4-
4- Уу2 (соз Р, соз 72 4- соз р2 соз 71)
Ухг (соз а соз 72 4 соз а2 соз уг). (3.25)
Здесь а и а2, р1 и р2, у и уг — углы направлений г 1 и г2 соответственно с осями х, у и г.
Главные направления деформаций в рассматриваемой точке — три таких взаимно перпендикулярных направления, углы между которыми в результате деформации не изменяются. Линейные деформации по главным направлениям называются главными деформациями или главными удлинениями. Главные деформации обозначаются через 81, е2, е3; при этом ег- е2 ' 83.
Величины главных удлинений 1, 2, 3) суть корни уравнения
•4 — ( 8 у 8г) 4 " 8г -
4 ( Уху хг) 8г
['
еу Чхг Ьг УХу)
8 8 — г х
— I е 8 8 4” 7 V V — ( 8 V 4-
‘ и 4 Уху ]уг хг л уг
0.
(3.26)
Угловые деформации (относительные сдвиги) часто обо-
Коэффициенты и свободный член уравнения (3.26) являются инвариантами деформированного состояния.
Инварианты деформированного состояния при преобразовании координат можно получить по формулам (3.20), если в эти формулы вместо ах, аУ, а2 поставить 8, еу, е2, а вместо хху, туг, тгх поставить
1 1 1
— Уху, —у у г, [см. 11.1.2 выражение (11.6)].
3.2.2. Определение деформаций и величин главных удлинений по удлинениям в трех направлениях в случае плоской деформации
При экспериментальном исследовании напряженного состояния, имеющего место в точке поверхности детали, на нее наклеиваются тензодатчики, с помощью которых измеряются удлинения в окрестности этой точки в трех направлениях. Ниже приводятся формулы, с помощью которых, зная три замеренных удлинения, можно найти компоненты деформаций 8Х, еу и и главные удлинения, а в дальнейшем с помощью закона Гука определить компоненты напряжений и главные напряжения.
Оси х, у расположены в плоскости деформаций или в плоскости напряжений.
138
РАЗДЕЛ 3. НАПРЯЖЕНИЯ. ДЕФОРМАЦИЯ И ПРОЧНОСТЬ МАТЕРИАЛОВ
а) Заданы величины ех гу, 845 (645 — удлинение в направлении под углом 45° к оси х) (рис. 3.12):
Уху 2 е45 — (е еу);
I 2 «1.2 -7 ( V — У( %-845)2( 8у-е«)2;
2 (8, — гх) _ _, я
§ Ф1 — ; Та — Ф1 „ •
Уху Углы наклона ф и ф2 направлений главных удлинений к оси х положительны, если они отсчитываются от оси х против часовой стрелки.
Рис. 3.13
С) Заданы ех, ебо, Б120 (рис. 3.13):
2. _[
3
2
Уху “ — (е60 €120
V з
V 2
®1.2- з (е ев0 Е120)-
У(8д; — ево)а (ех — е18э)2 4" (8«0 — с12о)2 •
2 (ег 8д;) я
«8 ф ; Фа Ф1 — •
Уху в) Заданы е, еи, е„, где ех — удлинение по оси х
еи — удлинение в направлении оси и, расположенной в плоскости ху и составляющей угол а] с осью х
—удлинение в направлении оси у, расположенной в плоскости ху и составляющей угол аг с осью х.
Удлинение в направлении оси у, составляющей угол в 90° с осью х, найдется по формуле
1
— (ги зш 2а2 — гх зш 20) 4-
51 п 51 п а2 зт (аг — а2) ?х с°5 «1 соз а2 51 п — а8)
51 п ах 51 п а2 51 п (о — а2) Деформации сдвига
_ ер 51 п2 ах — ги зш2 а2 4ху зш ах зт а2 зт (а, — а2)
ех (соз2 51 п2 а2 — зт2 ал соз2 а2)
51 п зт а2 зт (ах — а2)
3.2.3. Интенсивность деформаций
Интенсивностью деформаций называется величина
У 2
У
е з I 8'2 гу —Е2 8х Е2
(в — е2)2 (е2 — 83)2 (ех — е8)2. (3.27)
Относительное изменение объема
0 вд. -- у -- г — 8Х -- 82 -- Сд. (3.2)
3.3. ЗАВИСИМОСТИ МЕЖДУ НАПРЯЖЕНИЯМИ И ДЕФОРМАЦИЯМИ В ПРЕДЕЛАХ УПРУГОСТИ
3.3.1. Закон Гука для изотропного тела
Упругость — свойство тела восстанавливать свои первоначальные размеры и форму после удаления внешних нагрузок. Тело остается упругим, пока напряжения
в нем не превысили некоторых определенных значений. Тело называется изотропным упругим телом, если его упругие свойства по всем направлениям одинаковы.
Модули упругости для изотропного материала и связь между ними.
Е — модуль продольной упругости;
3.3. ЗАВИСИМОСТИ МЕЖДУ НАПРЯЖЕНИЯМИ И ДЕФОРМАЦИЯМИ В ПРЕДЕЛАХ УПРУГОСТИ
139
О — модуль сдвига. Размерность модулей Е и О:
сила
площадь
М, — коэффициент Пуассона (число отвлеченное); К — объемный модуль;
с_ Е _ 2 1 и
3(1 —2ц) 3 I—2ц
Одноосное растяжение (рис. 3.14):
Я X ®Х
ех — ; е у — г — цвх [л —— ;
(3.29)
Плоское напряженное состояние ((Уг Тгх — Тгу—0)
вх (рис. 3.15).
Компоненты деформаций:
9
Б
1
°Х — (х Ъу Уху
(3-30)
Рис. 3.14
Относительное изменение объема
6
К ’
где
4-
(3.31)
Компоненты напряжений:
Хху — ХУ'
Плоская деформация (ггухгууг0) (рис. 3.16).
Компоненты деформаций:
1 р,
ъх —((1 — Ц) а, — №у]
1 ЪУ р ((1 — Н) — №хЪ
(3. 33)
Относительное изменение объема П И) (°х )
0
3С
Компоненты напряжений: Е
(1Ц)(1 — 2(х) Е
[(1 — х) Еу 4- цр.и]:
[(1 — х) 84- це];
У (1 Ч- И) (1 — 2ц)
ог ц (а, ву) ххи — Оуху.
(3.34)
(3.35)
140
РАЗДЕЛ 3. НАПРЯЖЕНИЯ, ДЕФОРМАЦИЯ И ПРОЧНОСТЬ МАТЕРИАЛОВ
Объемное напряженное состояние (рис. 3.6) Компоненты деформации:
[о — И (оу аг)1:
[оу — ц (ах аг)];
ег — [о —р.(а о„)]; (3.36)
Уху-
1хц
о ’
Ухг
Ууг
Х2
ьуг.
о ;
Относительное изменение объема
о 1
0 е е9 ег —, где а — (охстаг). (3.37)
Компоненты напряжений:
ох хе -- 208 о у Я.0 208;
“Н 2С?82; буху'у
У2
СУдг1 хг
(3.38)
1«,Е
(1 -Ьх)(1 — 2х)
• коэффициент Ляме.
Иная форма выражений для нормальных компонентов напряжений:
ах — о 20 (е — е): оу — ст 2О (Ву — е); о2 — а 20 (е2 — 8).
(3.39)
мации ац, из которых только 21 различны [13]. Компоненты напряжений, выраженные через деформации:
°х — п гх Агг у 13 Л14 Уху-
15 1в Ухг
Ъу — Л21 х А22 8 --. -ЬЛгв Ухг
%Х2 — А(Ц х Ь 62 гу При этом АцАц.
• • 68 Ухг
(3.42)
3.3.3. Плоскость симметрии в отношении упругих свойств
Если через каждую точку тела можно провести плоскость, обладающую тем свойством, что любые два направления, симметричные относительно этой плоскости, эквивалентны в отношении упругих свойств, уравнения (3.41) и (3.42) упрощаются. В частности, когда ось г перпендикулярна плоскости симметрии:
гх — 11 °х “Н 12 ®у 213 °г 14 Уху
Еу а21 22 Г 23 Н" 24 Уху.
ег а31 ох а32 о у а33 ог--ам уху
Уу41 °Х’аА2 °у 43 а2 44 Уху Ууг 55 55 Ту? ■■ 56 т2;
Ухг — вб Тиг 4- вб Ъхг-
(3.43)
Здесь е— (ех еу е).
Зависимость между интенсивностью напряжений ог« и интенсивностью деформаций е:
о( Ъ6гь, (3.40)
(Н и е — см. формулы (3.21) и (3.27).
3.3.2. Закон Гука для анизотропного тела
Анизотропное упругое тело обладает различными упругими свойствами по различным направлениям. В общем случае анизотропии закон Гука в декартовой системе координат имеет вид:
вха110Х'--а12Оу--а13ага14х;
Еу—а2а х--аУ2Р у)г •••»•»• Тдсг (3.41)
тгб1зб2(7 • «»»'•«»• 66 ъхг, ;
При этом ацац.
Уравнения (3.41) содержат 36 коэффициентов дефор-
Коэффициенты а[Ъалеа2ь а2 35зв 45 46 0.
3.3.4. Ортотропное упругое тело
Если через каждую точку проходят три взаимно перпендикулярные плоскости упругой симметрии, то тело называется ортотропным. Направив оси координат перпендикулярно плоскостям симметрии, получим:
11 12 13 ®г
Ъу Д21 22 4" а23 г
8г а31 а32 •“ 33 аг‘
Ухи °44 65 Удтг 36 бв Тд;2.
При этом ац — ац.
Выражая упругие постоянные через так называемые
(3.44)
технические постоянные, можно придать иной вид:
8г — „ —
121 2 °У
а
М12, ®у
Ел х Ег
соотношениям (3.44) МЗ
р пъ
__ М32 а.
Мтз
М23 Т2
Ухи
Ууг-
'■у г
-12 23 13
Здесь Еь Еь Е — модули продольной
гости;
(712, 02я 13 — модули сдвига;
М121 М-21. Х1з, [Х31, [.12з 132 — коэффициенты Пуассона.
(3.45)
упру-
3.4. СВЯЗЬ МЕЖДУ НАПРЯЖЕНИЯМИ И ДЕФОРМАЦИЯМИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ
141
ПрИ ЭТОМ 121212; 232 323; 3118 131-
Преобразование упругих постоянных при повороте координатных осей и другие виды анизотропии см. [14].
3.3.5. Потенциальная энергия упругого тела
Приведенные ниже соотношения имеют место только для изотропных тел. Удельная энергия деформации, т. е. энергия, рассчитанная на единицу объема и выраженная через компоненты напряжений:
и К а1 ('а °9 °У аг
аг от,) 2 (1 ц) (г2хд хг хУ]. (3.46)
Удельная энергия деформации, выраженная через компоненты деформации:
--у2ху У1г У1г)]- (3.47)
Удельная энергия, выраженная через главные напряжения и главные деформации:
и [«1 °2 ®3 — 2» (°1 а2°2 аЗ1 %)]; (3-48)
V в е (3.49)
Величина I) может быть разбита на два слагаемых: одно — энергия, обусловленная изменением объема, а другое — энергия формоизменения.
Энергия изменения объема
1 —2ц
Оо « (1 а, а8)2. (3.50)
Энергия формоизменения Уф Г- [(«1 - (а. - о,)(»1 - о,)]. (3.51)
3.4. СВЯЗЬ МЕЖДУ НАПРЯЖЕНИЯМИ И ДЕФОРМАЦИЯМИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ
3.4.1. Условия пластичности
Пластичность — способность материала сохранять полностью или частично деформацию после устранения сил, ее вызвавших.
Закон Гука теряет свою силу, как только начинают возникать остаточные (пластические) деформации. Условие, которому должны удовлетворять напряжения в рассматриваемой точке тела для того, чтобы в ней появились первые пластические деформации, называется условием пластичности.
При простом растяжении условие пластичности
а ах, (3.52)
где ат — предел текучести.
В общем случае напряженного состояния условие пластичности: по Сен-Венану
1 — 03 сгт; (3.53)
по Мизесу
°7 ат» (3.54)
а — интенсивность напряжений [см. формулу (3.21)].
3.4.2. Напряжения и деформации при простом нагружении и при разгрузке
Приводимые ниже формулы, связывающие напряжения и деформации, справедливы при условии, что деформация является активной, т. е. величина интенсивности деформации ег- в каждый последующий момент нагружения больше величины е во все предыдущие моменты. Величина а монотонно возрастает во всех точках деформируемого тела в том случае, если нагружение является простым, т. е. если все внешние нагрузки возрастают пропорционально одному общему параметру. например времени.
В этом случае для малых деформаций соотношения будут следующие:
2сг, 2а
2а
Зв
Зб
(е2 — е); х: Ууг Ххг
ху Зе, о,
Уху
Зе,
Ухг-
(3.55)
Здесь:
а, и е — величины интенсивности напряжений и деформаций, определяемые соответственно формулами (3.21) и (3.27).
В случае разгрузки (рис. 3.17) зависимость" между исчезнувшими частями величин 5х и линейная:
афазгр — 3(8раэгр. (Зоб)
Рис. 3.17
3.4.3. Диаграммы растяжения
Диаграммы растяжения дают зависимость напряжения от относительного удлинения при простом одноосиомраетяжении и получаются из опыта.
Истинная и условная диаграммы растяжения (рис.
142
РАЗДЕЛ 3. НАПРЯЖЕНИЯ, ДЕФОРМАЦИЙ И ПРОЧНОСТЬ МАТЕРИАЛОВ
3.18). По оси абсцисс откладывается истинное удлинение
I
. Г" I. '■
'■“Зт-1"-;;’
гдео и и — начальная длина образца и длина образца на данной стадии деформирования.
или величина
б:
1-и
а) Диаграмма при отсутствии упрочнения (рис. 3.19).
от
В этом случае тх—Еех при 0еет— — (от— предел текучести; Е — модуль упругости материала).
б) Диаграмма растяжения с линейным упрочнением (рис. 3.20):
ат
ех Еех при 0 ех е —;
Е
ох — ат при ет е0;
1 (х — е0) При гх г0.
Здесь Е1 — модуль упрочнения, Рис 3 19 численно равный р. В случае отсутствия на диаграмме площадки текучести (рис. 3.21):
ах Егх при 0 ех ет;
°х (в — ет) при ех ет.
Рис. 3.18
По оси ординат откладывается истинное напряжение
Р
ох — аи —,
и
где Р — величина растягивающей силы на данной стадии деформирования;
Ри — площадь сечения образца на этой стадии (с начала образования местного сужения — шейки — это площадь сечения в месте наибольшего сужения).
Иногда вместо еи по оси абсцисс откладывается
р ?и
или относительное сужение в шейке — 100%,
Здесь Р — первоначальная площадь поперечного сечения.
Для малых удлинений вместо еи откладывают величину
М
8 ,где А—приращение длины образца, а I — его первоначальная длина.
Если по оси ординат отложить условное наПряже-
Р
ние ох—, где г — первоначальная площадь попереч-
Г
А
ного сечения, а по оси абсцисс удлинение в —, то получим условную диаграмму растяжения.
3.4.4. Схематизация диаграмм растяжения
С целью упрощения расчетов диаграммы растяжения иногда схематизируются.
в) Диаграмма растяжения со степенным упрочнением (рис. 3.22):
ах Еех при ех ет; ох — ат при 8Т ех е0;
т
прй х 8ф.
Величина показателя степени т изменяется в пределах 0т1; она зависит от материала.
€т
3.5. ПРОЧНОСТЬ МАТЕРИАЛОВ
143
Ох — Еъх при 0ехет
(вх т
0х011Г) пРи 88т-
В случае сжатия обычно пользуются такими же диаграммами.
3.4.5. Построение кривой зависимости а —е,
Такая кривая может быть построена по диаграмме растяжения [20]. При одноосном растяжении 0г0х
2 (1 Ц) 3 ■
Епл1 т
где епл — остаточное относительное удлинение (пластическая часть деформации); руп — упругая часть деформации.
Чтобы разделить полное удлинение ех на пластическое и упругое удлинение, следует из рассматриваемой точки М диаграммы провести прямую, параллельную прямой О А, до пересечения с осью е (рис. 3.24).
При упрочнении по линейному закону (рис. 3.21):
2(1 1)
о йг1 при ет ет;
Здесь О
3 Е
2(1 й)
Ох
ф ат при е(т е, еео
1 — 2ц
а, от О, (8,- — е,0) при 0( » 8,0.
Рис. 3.24
3О (О — модуль сдвига);
Е,
3.5. ПРОЧНОСТЬ МАТЕРИАЛОВ
3.5.1. Упругость, пластичность и разрушение
Все материалы под действием внешней нагрузки деформируются. При действии возрастающей нагрузки наблюдаются три условно различающиеся стадии работы материала: упругая, пластическая и стадия разрушения.
В упругой стадии материал получает преимущественно упругие деформации. Все материалы на этой стадии с тем или иным приближением рассматриваются при расчетах как идеально упругие. Основная зависимость— закон Гука. Эта стадия работы материала является предметом исследования теории упругости (см. раздел 12). Наряду с упругой различают высокоэластическую деформацию, свойственную высокополимерам, которая может достигать сотен процентов Она возникает под действием нагрузки и исчезает после ее снятия не со скоростью распространения упругой волны (скорость звука в материале), а гораздо медленнее. Скорость возникновения и исчезновения высокоэластической деформации сильно зависит от температуры: увеличивается с ее повышением и уменьшается при ее понижении.
После увеличения нагрузки выше некоторого предела наряду с упругими начинают появляться пластические (остаточные) деформации. У одних материалов (например, металлов) пластическая деформация может достигать значительной величины (пластичные материалы), у других же (например, камни) она является весьма малой (хрупкие материалы). У строительных сталей наблюдается так называемое явление текучести — рост пластической деформации при примерно постоянной нагрузке; после текучести наступает период упрочнения, когда для дальнейшего роста пластической деформации требуется увеличенная нагрузка. Закономерности поведения материала на этой стадии рассматриваются в теории пластичности (см, раздел 12). Если упругая деформация (при однократном нагружении) практически не влияет на механические свойства материалов, то
пластическая деформация приводит к значительному изменению их. Например, у строительных материалов происходит упрочнение (увеличение ат) и снижение пластичности (уменьшение 6). Хрупкие материалы не имеют выраженной стадии пластических деформаций: она практически сливается со стадией разрушения.
Разрушение является сложным процессом, зависящим как от самого материала, так и характера нагружения. Исследование механизма разрушения идет по различным направлениям. Одно из направлений, учитывающее молекулярное строение тел, связано с физикой твердого тела и развивается на основе теории дислокаций [9, 15, 18]. Другое направление основывается на статистических методах и может учитывать поликристаллическое или зернистое строение материалов [5, 6, 12]. Третье направление связано с исследованием разрушения, рассматриваемого как результат развития микротрещин [1]. Эти направления в известной степени взаимосвязаны и дополняют друг друга при исследовании процесса разрушения в целом. Феноменологический подход к вопросу разрушения базируется на следующих положениях. Разрушение сводится к двум основным типам: разрушение путем отрыва и разрушение путем сдвига. Разрушение путем отрыва связывается с действием нормальных растягивающих напряжений или удлинений, а разрушение путем сдвига — с действием касательных напряжений. У металлов хрупкое разрушение обычно связано с отрывом, пластическое — со сдвигом. Отрыв может быть осуществлен без предварительной пластической деформации, так как значительные растягивающие напряжения могут возникать при очень малых одновременно действующих касательных напряжениях, недостаточных для возникновения пластических деформаций. Для разрушения путем сдвига необходимы значительные касательные напряжения, которые до разрушения могут вызвать развитие пластических деформаций. В камне оба типа разрушения происходят, как правило, хрупко.
144
РАЗДЕЛ 3, НАПРЯЖЕНИЯ, ДЕФОРМАЦИЯ И ПРОЧНОСТЬ МАТЕРИАЛОВ
3.5.2. Влияние характера напряженного состояния
Характер напряженного состояния оказывает существенное влияние на поведение материала [20]. Например, при всестороннем равномерном растяжении (01 а2газ0) даже пластические материалы разрушаются хрупко, а при напряженном состоянии, близком к всестороннему равномерному сжатию (главные напряжения близки по величине друг к другу), даже такой хрупкий материал, как мрамор, способен получить значительные пластические деформации [17].
Исследование влияния напряженного состояния требует проведения достаточно большого числа опытов при различных соотношениях между Оь аг, 0з. Фиксируя при опытах величины напряжений в момент наступления текучести (считая, например, что текучесть наступает тогда, когда остаточная часть интенсивности деформаций достигает определенной величины), а также разрушающие напряжения, можно построить в координатах Ои 02. 0з предельные поверхности текучести и разрушения. Вид этих поверхностей и их взаимное расположение будут зависеть от типа материала. На рис. 3.25 схематически показан вид предельных поверхностей для стали (1 — поверхность текучести; 2 — поверхность разрушения; 3—разрушение; 4 — наступление текучести). Имея предельные поверхности, легко определить напряжения вызывающие наступление текучести или разрушение материала при любом напряженном состоянии. Для этого достаточно провести линию ОС (см. рис. 3.25), изображающую закон роста напряжений при нагружений тела, и определить координаты точек В и С пересечения этой линии с предельными поверхностями. Если нагружение является простым (все внешние силы растут пропорционально одному параметру) и нет начальных напряжений, то линия нагружения будет прямой, выходящей из начала координат. Координаты точки В дадут значения напряжений, вызывающих начало текучести материала, а координаты точки С — значения разрушающих напряжений. В одних случаях нагружения (например, по линии ОС) разрушению будет предшествовать пластическая деформация, в других (когда линия нагружения близка к прямой ОА% равнонаклоненной к осям координат) будет хрупкое разрушение.
Однако построение таких предельных поверхностей требует проведения для каждого материала большого количества довольно сложных экспериментов. Поэтому на практике используются критерии прочности — упрошенные гипотезы наступления текучести или разрушения при сложном напряженном состоянии. Они позволяют определить условия наступления текучести или
разрушения при сложном напряженном состоянии на
основании результатов испытания образцов при некоторых простейших напряженных состояниях (обычно — растяжение, сжатие, кручение). Любое сложное напряженное состояние Оь 02 0з получается эквивалентным одноосному с напряжением 0Э«. Сводка основных критериев прочности в виде формул для эквивалентных напряжений дана в табл. 3.1.
Условие наступления текучести для материалов с выраженной пластичностью (сталь, дюраль) выражается по критерию наибольших касательных напряжений или критерию октаэдрических напряжений: 7эк сгт. Для материалов с ограниченной пластичностью используется критерий прочности Мора, по которому условие наступления текучести определяется огибающей больших кругов напряжений (влияние среднего напряжения а2 не учитывается) для предельных напряженных состояний
(рис. 3.26) текучесть наступает тогда, когда большой круг напряжений для рассматриваемого напряженного состояния коснется этой огибающей. В табл. 3.1 даны формулы для эквивалентного сжимающего или растягивающего напряжений, получающихся при замене части огибающей прямой линией. Условие текучести выражается равенствами: 0эк 0т или
0эк.с ж 0т.с ж Имеется видоизмененная теория Мора, в которой вместо 0 и т используются октаэдрические напряжения [4]. По критериям Баландина и Миролюбова условие наступления текучести имеет такой же вид:
0эк 0т»
Условие разрушения (хрупкого) определяется по критерию наибольших нормальных напряжений и критерию наибольших относительных удлинений и выражается равенством: Оэк — Ов. Для хрупких материалов с
различным сопротивлением растяжению и сжатию (чу¬
гун, камень) условие разрушения определяется по теории Мора огибающей предельных кругов напряжений, соответствующих разрушению (рис. 3.27), и выражается равенствами: Оэк — Ов или 0эк.сж — 0в.сж. По критериям Баландина и Миролюбова условие разрушения имеет вид: 0эк0в»
Условие вязкого разрушения определяется приближенно по критерию наибольших касательных напряжений.
Ожидаемый тип разрушения материала можно определить с помощью диаграммы механического состояния (рис. 3.28). На левой части диаграммы наносятся пре-
Рис. 3.26 1
Рис. 3.27
3.5. ПРОЧНОСТЬ МАТЕРИАЛОВ
145
Формулы эквивалентных напряжений по различным критериям прочности
Таблица 3.1
Объемное напряженное состояние
Критерий прочности
6з
5
7(
Г
1
Частный случай плоского напряженного состояния
Л
Критерий наибольших нормальных напряжений (I критерий прочности)
Критерий наибольших относительных удлинений (II критерий прочности)
0эК 7х-11("г 1з)
1 — и, 0э — °
1 М
V-
Примечание
Отображают разрушение пугем отрыва (разрушение связывается с действием нормальных растягивающих напряжений или удлинений)
Критерий наибольших касательных напряжений (III критерий прочности)
Оэк о 4т
Отображает наступление текучести или разрушение путем сдвига для материалов, одинаково сопротивляющихся растяжению и сжатию
Критерий октаэдрических касательных напряжений (IV критерий прочности)
1
оэк а- 3т2
Отображает наступление текучести. Применяется для пластичных материалов, имеющих одинаковый предел текучести при растяжении и сжатии
Критерий Мора (приведение к эквивалентному растяжению)
4-
Отображает наступление
текучести при я
"т- тт
или х и разруше¬
ние при х г
или х ■
Критерий Мора (приведение к экви валентному сжатию)
т-сж
°ЭК-СЖ стз
Отображает наступление о,
текучести при X — разрушение при X
Применяется для материалов, имеющих разное сопротивление растяжению и сжатию
146
РАЗДЕЛ 3. НАПРЯЖЕНИЯ, ДЕФОРМАЦИЯ И ПРОЧНОСТЬ МАТЕРИАЛОВ
Продолжение табл. 3.1
Критерий прочности
Объемное напряженное состояние
А?
5
г
Частный случай плоского напряженного состояния
О-
Примечание
Критерий П. П. Баландина
— (о, а2 0,)
— 1(1 - х)(о» о,а,)22х 1(а,—о2)2Н
" (о2 — 0,)-На» — о»)2]
— У И 12хх
2
Критерий И. Н. Миролюбова
0и — 0»)
— [(0»-02)Ч-(а-а,)Н(01-0,)2]
2 Г 2
1 — х
0
—— о Зт2
2
Отображают наступление ст
текучести при х
и разрушение прих
т«сж
0»
В.СЖ
При х—1 совпадают с критерием октаэдрических касательных напряжений.
Применяются для материалов, имеющих различное сопротивление растяжению и сжатию
Примечание. Нормальные напряжения должны подставляться в формулы со своими знаками: растягивающие —
полжительные, сжимающие — отрицательные.
дельные линии: 1 — сопротивление срезу; 3 — предел
текучести; 6 — сопротивление отрыву; сгэк определяется по I или И критерию прочности. Там же изображается напряженное состояние тела в виде выходящих из начала координат лучей; 2 — сжатие; 4 — кручение; 5 — растяжение. В правой части диаграммы даются обобщенные кривые деформации. В зависимости от того, какую предельную линию пересечет луч, устанавливается характер нарушения прочности (текучесть, разрушение путем отрыва или сдвига) при данном напряженном состоянии, что дает возможность выбрать наиболее подходящий для данного случая критерий прочности. Сводка критериев прочности для изотропных и анизотропных материалов дана в [7].
3.5.3. Влияние температуры
Температура сильно влияет на все механические свойства материалов. Как правило, повышение температуры приводит к уменьшению прочности и повышению пластичности. Значительное изменение температуры может коренным образом изменить свойства материала: пластичный становится хрупким (при низкой температуре), а хрупкий — пластичным (при высокой температуре), изменяются прочность и деформативные свойства. При этом некоторые изменения приобретают необратимый характер (не восстанавливаются первоначальные свойства после возвращения к обычной температуре). Это связано с тем, что при изменении температуры часто происходят сложные физико-химические процессы.
Большое влияние на механические свойства деформированных строительных металлов (например, холоднотянутая проволока) оказывают возникающие в них
при высоких температурах процессы разупрочнения — «отдых» (возврат) и рекристаллизация. «Отдых» связан с частичным снятием искажений кристаллической решетки вследствие деформации в холодном состоянии. Он проявляется в том, что свойства деформированного металла приближаются к первоначальным. Рекристаллизация представляет собой появление в холоднодеформированном металле вновь зародившихся кристаллов, отличающихся от старых отсутствием упрочнения. Рекристаллизация у углеродистой стали протекает при температуре выше 400° С, «отдых» — при температуре выше 200° С. В результате этих процессов происходит снижение прочности наклепанной стали.
При повышении температуры у углеродистой стали уменьшаются модуль упругости и предел текучести, временное сопротивление вначале несколько повышается, а затем резко падает. В интервале 200—300° отмечается наибольшее увеличение ов и уменьшение 6, сталь становится хрупкой (синеломкость); при дальнейшем повышении температуры происходит повышение пластичности. Ударная вязкость вначале возрастает (в интервале 100—400°), а затем уменьшается (см. 4.1.3). Кроме того, начинают заметно проявляться новые свойства — ползучесть и релаксация (см. 3.5.4), которые при комнатной температуре не наблюдаются или проявляются лишь при высоком уровне напряжений.
При низких температурах у металлов, как правило, наблюдается повышение прочности и снижение пластичности, ударная вязкость уменьшается. Увеличивается опасность разрушения конструкций, особенно в зоне концентрации напряжений. При весьма низких температурах наблюдается переход конструкционных сталей из вязкого в хрупкое состояние.
3.5. ПРОЧНОСТЬ МАТЕРИАЛОВ
147
Прочность бетона при повышении температуры также уменьшается, что становится заметным уже в интервале 200—300°. Нагрев до 400° С уменьшает прочность примерно в 2 раза, а до 500° С — почти в 3 раза. Первоначальная прочность бетона после нагрева свыше 200° С уже не восстанавливается при охлаждении. Нагрев вызывает также увеличение деформативности бетона. Модуль упругости уменьшается. При температуре 550° С модуль упругости при сжатии уменьшается почти в 17 раз.
3.5.4. Влияние длительности нагружения
Действие длительной нагрузки в ряде случаев существенным образом отличается от действия кратковременной нагрузки такой же величины. Достаточно большое постоянное напряжение, которое при кратковременном действии вызывает только упругие деформации, при длительном действии может вызвать растущие со временем пластические деформации (ползучесть) и даже разрушение. Ползучесть может проявляться не только при постоянных, но и при убывающих напряжениях. Например, в предварительно напряженных железобетонных конструкциях часть упругой деформации арматуры с течением времени переходит в пластическую и напряжение в ней постепенно снижается. Это явление называется релаксацией напряжений.
Ползучесть в бетоне и древесине проявляется при комнатной температуре, а в металлах, как правило, — при повышенных температурах (у стали выше 350° С). У высокопрочной арматурной проволоки ползучесть и релаксация проявляются и при обычной температуре.
Различают три периода ползучести (рис. 3.29):
1) неустановившейся ползучести, когда скорость нарастания пластической деформации с течением времени уменьшается (участок аЬ);
2) установившейся ползучести, когда скорость нарастания деформации постоянна (участок Ьс)
3) прогрессирующей ползучести, когда скорость ползучести возрастает (участок сй) этот период ползучести заканчивается разрушением.
Методы расчета на ползучесть даны в разделе 12.
3.5.5. Влияние переменности нагрузки
Действие многократно изменяющейся во времени нагрузки (рис. 3.30) может привести к внезапному разрушению материала, носящему хрупкий характер (усталостное разрушение). Окончательному разрушению предшествует образование трещины усталости. Излом имеет две зоны: гладкую (зона развития трещин) и грубозернистую (зона окончательного излома).
Для исследования сопротивляемости материала действию переменных напряжений строится по данным экспериментов кривая усталости (рис. 3.31). Кривая усталости стали имеет горизонтальный участок, начинающийся с 5—10 млн. циклов. Напряжение, соответствующее горизонтальному участку, называется пределом выносливости. Для материалов, не имеющих горизонтального участка (например, дюраль), определяется ограниченный предел выносливости, соответст¬
вующий определенному числу циклов (например, 106, Ю7).
На величину предела выносливости оказывает влияние целый ряд факторов. Прежде всего сильно влияют концентрация напряжений (см 3.5.6), размеры сечения элементов конструкций, состояние поверхности и окружающая среда. С увеличением размера сечения предел выносливости снижается. Поверхностные дефекты (следы механической обработки, царапины, следы коррозии
6
V©
Л-
Рис. 3.31
и др.), являясь концентраторами напряжений, также снижают предел выносливости. Химически активная среда (например, морская вода) вызывает резкое снижение предела выносливости. Предел выносливости зависит и от закона изменения напряжений цикла, характеристиками которого являются: наибольшее тМакс и наименьшее амин напряжения, среднее напряжение 07 72 (амаксамин) и амплитуда цикла та 72(сгМакс—Омин), коэффициент асимметрии цикла г ТмаксТмин. Наиболее опасным является симметричный цикл (амин35—егмакс, г—1)-' предел выносливости при симметричном цикле о является наименьшим. С увеличением асимметрии цикла (с ростом ат, г) предел выносливости увеличивается.
Для изображения зависимости предела выносливости от асимметрии цикла используются диаграммы двух
ог
типов. На диаграмме первого типа (рис. 3.32, а) пределы выносливости равны ординатам кривой АВ на диаграмме второго типа (рис. 3.32,6)—сумме абсциссы и ординаты точек кривой АВ.
При сложном переменном напряженном состоянии расчет на прочность ведется на основании критериев прочности, которые являются обобщением статических критериев прочности.
Для пластичных материалов при симметричном цикле эквивалентные напряжения определяются по критерию наибольших касательных напряжений илй по критерию октаэдрических касательных напряжений:
148
РАЗДЕЛ 3. НАПРЯЖЕНИЯ. ДЕФОРМАЦИЯ И ПРОЧНОСТЬ МАТЕРИАЛОВ
аэк , ' V(а1а—а2а)2 4" (а2а — °3а)2(°а—за)3»
У 2
где Т1а, У2а, Оза — амплитуды главных напряжений.
Коэффициент запаса прочности определяется по формуле
При совместном растяжении и кручении или изгибе и кручении
где т_х — предел выносливости при кручении; оа, та— амплитуда напряжений.
Запас прочности в этом случае определяется по
формуле
о ат
где
1
При несимметричном цикле частные запасы прочности п0 и пх определяются на основании схематизированной диаграммы (рис. 3.33):
о т_
пп ■
—1
где ат, тт — средние напряжения цикла;
2о-1“ао
2т
—1 '
а 1 — т
—1
—1
у 0± ы1
■■ а,
где —число циклов с амплитудой ст;
— число циклов, необходимое для разрушения при напряжении а (рис. 3.34); а—число, зависящее от материала и режима изменения нагрузки (определяется на основании экспериментов; при отсутствии данных принимают а1).
Рис. 3.34
Кривая усталости в логарифмических координатах схематизируется (рис. 3.35). Схематизированной кривой соответствует аналитическая зависимость
от N0 0,
где — предел выносливости;
Ао — число циклов, соответствующее перелому кривой усталости либо базе испытаний (тогда а-1 будет ограниченным пределом выносливости, соответствующим базе 0). При изгибе стальных образцов без концентрации напряжений т9ч-18, Ао (1—4) 106, с концентрацией напряжений т—6-4-10, 0 (1-гг4) 106.
Используя эту зависимость, условие разрушения можно представить в следующем виде:
1
о:
0о До пределы выносливости при пульсирующих циклах (напряжения меняются от нуля до максимума).
Для малопластичных и хрупких материалов эквивалентные напряжения определяются по критерию прочности Мора
0эк °1в Иза
где
Расчет на прочность с учетом концентрации напряжений, масштабного фактора и состояния поверхности дан в [23].
При действии на конструкцию переменных напряжений с изменяющейся во времени амплитудой условие разрушения от усталости определяется на основе линейного суммирования повреждений, которое записывается следующим образом:
При суммировании принимаются во внимание только напряжения а_1.
Методы определения запаса прочности при различных режимах изменения нагрузки даны в [23].
В ряде случаев на конструкцию действуют нагрузки, сравнительно медленно изменяющиеся во времени (частота в пределах 60 циклов в 1 мин.). Если эти нагрузки повторяются многократно, то возможно разрушение конструкции, носящее усталостный характер. Подобные нагрузки называются повторно статическими. Способность материала конструкции сопротивляться разрушению при повторно статических нагрузках называется статической выносливостью. Исследования показывают, что при повторно статических нагрузках разрушение наступает при существенно меньшем числе циклов, чем при переменных нагрузках, повторяющихся с большой частотой. Кривая статической выносливости в координатах а, N проходит ниже усталостной криной, получаемой при более высоких частотах изменения нагрузки. При расчете конструкций, работающих в условиях повторно статических нагрузок, также используется метод суммирования повреждений, однако при этом следует исходить из кривой статической выносливости. При использовании кривой усталости, полученной при высоких частотах повторения нагрузки, будут получаться необоснованно высокие сроки службы конструкции.
ЛИТЕРАТУРА 149
3.5.6, Влияние концентрации напряжений
Большие местные напряжения, возникающие в местах резкого изменения формы или размеров тела, около выточек, отверстий, вырезов и т. д (концентрация напряжений), оказывают значительное влияние на прочность. Особенно чувствительны к концентрации напряжений хрупкие материалы, прочность которых при наличии концентраторов напряжений резко снижается. С повышением пластичности чувствительность к концентрации напряжений обычно снижается. Пластичные материалы (малоуглеродистая сталь) малочувствительны, так как возникающие под действием высоких местных напряжений пластические деформации смягчают эффект концентрации напряжений. На рис. 3.36 показано распределение напряжений в пластинке с отверстием при растяжении за пределом упругости [11]. Однако возникающее в зоне концентрации напряжений объемное напряженное состояние может затруднить развитие пластических деформаций и вызвать в некоторых случаях хрупкое разрушение (в растянутой зоне).
Особенно сильно концентрация напряжении сказывается при переменных напряжениях. Для количественной оценки ее влияния используется эффективный коэффициент концентрации Ка, равный отношению предела выносливости гладкого образца 0-1 к пределу выносливости образца с концентрацией напряжении 0-1
О
К-
Величины коэффициентов для различных случаев даны в [23]. О концентрации напряжений см. также раздел 12.
3.5.7. Влияние скорости приложения нагрузки
Сопротивление пластическим деформациям и разрушению зависит от скорости деформации. Особенно резко меняется сопротивляемость материала при действий импульсных (ударных) нагрузок, когда деформация
протекает при больших скоростях. Сопротивляемость ударным нагрузкам определяется энергоемкостью материала, равной работе, затрачиваемой на разрушение образца из данного материала. Хрупкие материалы, обладая малой энергоемкостью, плохо сопротивляются ударным нагрузкам. Хорошо сопротивляются ударным нагрузкам вязкие материалы, способные поглотить большую механическую энергию при пластическом деформировании
Вязкость материала зависит от скорости деформиро¬
вания. Испытания на растяжение при ударных нагрузках (на копрах) образцов с постоянным сечением из малоуглеродистой стали показывают увеличение вязкости по сравнению с испытаниями при обычных скоростях. При этом заметно увеличиваются предел текучести (до двух раз) и до некоторой степени временное сопротивление. Закаленные стали получают при ударных нагрузках значительно меньшее упрочнение.
У некоторых сталей с увеличением скорости деформации наблюдается склонность к хрупкому разрушению. Переход к хрупкому разрушению поясняется диаграммой (рис. 3.37), на которой проведены линия хрупких разрушений АВ и линия вязких разрушений Сй [8]. При увеличении скорости деформирования кривая деформации ОС поднимается выше. Если подъем кривой будет таким, что она пересечет линию АВ% то произойдет хрупкое разрушение.
Для практической оценки способности материала воспринимать ударные нагрузки производят испытания на копрах надрезанных образцов с определением ударной вязкости (см. 4.1.1). С понижением температуры ударная вязкость падает, причем при некоторой температуре, называемой критической температурой хрупкости, наблюдается резкое падение ударной вязкости. Критическая температура хрупкости служит косвенным показателем склонности материала к хрупкому разрушению: чем ниже эта температура, тем меньше склонность к хрупкому разрушению.
ЛИТЕРАТУРА
1. Баренблатт Г. И. ПММ, вып. 3, 4, 5, 1959; вып. 4.
1Ш.
2. Безухов Н. И. Основы теории упругости и пластичности. «Высшая школа», 196.
3. Беляев Н. М. Сопротивление материалов. ОГИЗ, 1955.
4. Бернштейн С. А. Избранные труды по строительной механике Госстройиздат, 1961.
5. Болотин В. В. Статистические методы в строительной механике. Госстройиздат. 1961.
6. В о л к о в С. Д. Статистическая теория прочности. Машгиз, 1960.
7. Гольденблат П. И. и Копнов В. А. Критерии прочности и пластичности конструкционных материалов. «Машиностроение», 1968.
8. Давиденков Н. Н. Динамические испытания металлов. ОНТИ, 1966.
9. Инденбом В. Л. О критериях разрушения в дислокационных теориях прочности. ФТТ, т. 3, вып. 7, 1961.
10. И л ь ю ш и н А. А. Пластичность. Гостехиздат, 1948.
11. Код а не в А. И. Концентрация напряжений в пластической области. Труды ВВИА им. Жуковского, вып. 319, 1949.
12. Конторова Т. А. и Френкель Я. И. Статистическая теория хрупкой прочности реальных кристаллов. ЖТФ, т. 11, № 3, 1941.
13. Л е й б е н з о н Л. С. Курс теории упругости. ОГИЗ. 1947.
14. Л е х н и ц к и й С. Г. Теория упругости анизотропного тела. Гостехиздат, 1950.
15. Мирки н Л. И. Физические основы прочности и пластичности. МГУ, 1968.
16. Мусхелишвили Н. И. Некоторые основные задачи математической теории упругости. Изд. АН СССР, 1949.
17. Н а д а и А. Пластичность и разрушение твердых тел. ИЛ, 1954.
18. О д и н г И. А. Процесс разрушения металлов как результат взаимодействия дислокаций. Изв. АН СССР, ОНТ. Мет. и топл., № 3, 1960.
19. Папкович П. Ф. Теория упругости. Оборонгиз, 1939,
20. П о н о м а р е в С. Д. и др. Расчеты на прочность в машиностроении. Машгиз, т. I, 1956; т. II, 1958.
21. Работнов Ю. Н. Сопротивление материалов. Госфиз-
матгиз, 1962. 22. С о к о л о в с к и й В. В. Теория пластичности. Гостехтеоретиздат, 1950.
23. Справочник машиностроителя, т. 3. Машгиз, 1963.
24. Т и м о ш е н к о С. П. Теория упругости. ОНТИ—ГТТ,
1934
25. Филоненко-Бородич М. М. Теория упругости. Гостехиздат, 1947.
26. Ф р и д м а н Я. Б, Механические свойства металлов. Оборонгиз, 1952,
РАЗДЕЛ 4
МАТЕРИАЛЫ ДЛЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ. МЕТОДЫ РАСЧЕТА
4.1. СТАЛИ
4.1.1. Общие данные
Для стальных и железобетонных конструкций применяются углеродистые и низколегированные стали повышенной и высокой прочности. Стали для конструкций классифицируются по способу выплавки, технологии раскисления, химическому составу, способу упрочнения, качеству и назначению, а также по прочности.
По способу выплавки стали делятся на мартеновские, кислородно-конверторные и бессемеровские; по технологии раскисления — на спокойные, полуспокойные и кипящие (в том числе закупоренные кипящие); по способу упрочнения — на холоднодеформированные и термически обработанные (термоупрочненные).
Сталь по назначению подразделяется: на сталь общего назначения — углеродистая горячекатаная обыкновенного качества и сталь разных назначений — углеродистая горячекатаная повышенного качества (низколегированная) и высокой прочности.
Установлены следующие классы прочности стали (по значениям временного сопротивления и предела текучести) : С 3823, С 4430, С 4634, С 5240, С 6045, С 70760.
Предел пропорциональности аПц — напряжение, при котором отступление от линейной зависимости между напряжениями и удлинениями достигает некоторой устанавливаемой техническими условиями или стандартом величины (например, уменьшения тангенса угла наклона касательной к диаграмме растяжения по отношению к оси деформаций на 20 или 33% своего первоначального значения).
Предел упругости 7уп — напряжение, при котором остаточные удлинения достигают некоторой малой величины, устанавливаемой техническими условиями или стандартом (например, 0,001; 0,01% и т. д.). Иногда предел упругости обозначается соответственно допуску СГо.ООЬ 00,01 И т. д.
Предел текучести гт для материалов, имеющих площадку текучести (малоуглеродистая сталь), определяется как напряжение, соответствующее нижней точке площадки текучести; для материалов, не имеющих площадки текучести, определяется условный предел текучести во,2 — напряжение, при котором остаточное удлинение образца достигает 0,2%.
Временное сопротивление (предел прочности) огв — напряжение, равное отношению наибольшей нагрузки, предшествовавшей разрушению образца, к первоначальной площади сечения образца. Временное сопротивле¬
ние можно отождествлять с пределом прочности только для хрупких материалов, разрушающихся без образования шейки. Для пластичных материалов это характеристика своеобразной потери устойчивости при растяжении, т. е. характеристика сопротивления значительным пластическим деформациям.
Относительное удлинение при разрыве б — отношение (обычно в %) приращения расчетной длины образца после разрыва к ее исходной величине. Для длинного круглого образца (Расч10й()—6ю; для короткого образца (расч 54) — б5.
Относительное сужение при разрыве ф — отношение уменьшения площади наименьшего поперечного сечения образца (после разрыва) к исходной площади поперечного сечения образца.
Условный предел текучести при изгибе сгт и — нормальное напряжение, вычисленное условно по формулам для упругого изгиба, при котором остаточное удлинение наиболее напряженного крайнего волокна достигает 0,2% или другой величины того же порядка соответственно требованиям технических условий.
Временное сопротивление (предел прочности) при изгибе (Тв и — нормальное напряжение, вычисленное условно по формулам для упругого изгиба и соответствующее наибольшей нагрузке, предшествовавшей излому образца.
Условный предел текучести при кручении То.г, тт — касательное напряжение, вычисленное условно по формулам для упругого кручения, при котором остаточные деформации удлинения или сдвига по поверхности образца достигают 0,2% или другой величины того же порядка соответственно требованиям технических условий.
Временное сопротивление (предел прочности) при кручении тв — касательное напряжение, вычисленное условно по формулам для упругого кручения и соответствующее наибольшему скручивающему моменту, предшествовавшему разрушению образца.
Твердость по Бринеллю НВ — твердость материала, определяемая путем вдавливания в него стального шарика и вычисляемая как частное от деления нагрузки на поверхность полученного отпечатка. Для некоторых материалов существует приблизительно прямая пропорциональность между твердостью НВ и временным сопротивлением; например, для углеродистых сталей ав« «0,36 НВ.
Твердость по Роквеллу НРС, НРВ — твердость материала, определяемая путем вдавливания стального шари¬
4.1. СТАЛИ
151
ка или алмазного конуса стандартных размеров и измеряемая в условных единицах с помощью разных шкал по приращению оставшейся глубины погружения при переходе от малого стандартного груза к большому.
Твердость по Виккерсу НУ — твердость материала, определяемая путем вдавливания алмазной четырехгранной пирамиды стандартных размеров и вычисляемая как частное от деления стандартной нагрузки на боковую поверхность полученного отпечатка.
Предел ползучести (условный) —длительно действующее напряжение, при котором скорость или деформация ползучести за определенный промежуток времени при данной температуре не превышает величины, установленной техническими условиями.
Предел длительной прочности — напряжение, вызывающее разрушение образца после заданного срока его непрерывного действия при определенной температуре.
Предел выносливости — наибольшее периодически изменяющееся напряжение, которое может выдержать материал без разрушения при большом числе циклов, заданном техническими условиями (например, 10е; 107; 108). Обозначается при симметричном цикле а-1 (изгиб), сг_1р (растяжение-сжатие), т_1 (кручение), при пульсирующем цикле (напряжения меняются от нуля до максимума) соответственно Со, сгор и то.
Ударная вязкость а — работа, затраченная на разрушение образца при ударном изгибе, отнесенная к рабочему поперечному сечению образца.
Упругое последействие: прямое — постепенное увеличение деформации после быстрого прекращения роста нагрузки; обратное — сохранение или медленное уменьшение деформации после быстрого снятия нагрузки или остановки разгоузки.
Наклеп — упрочнение металла, происходящее благодаря пластической деформации при процессах холодной обработки (холодной прокатке, вытяжке, волочении).
Старение (механическое) —самопроизвольное длительное изменение механических свойств стали после наклепа, вызванное фазовыми превращениями. Различают естественное старение, протекающее при комнатной температуре, и искусственное старение — при повышенных температурах.
Разрушение стали возможно вязкое (пластичное) — от сдвига, хрупкое — от отрыва. В обоих случаях разрушение состоит в нарушении целостности, в разрыве. Нарушение сплошности может возникнуть при условии накопления энергии, отвечающей величине поверхностной энергии на поверхностях нарушения целостности, и в соответствии с этим расстояние между атомами должно достичь критических величин, при которых происходит нарушение связи между ними.
Работа разрушения — величина всей площади диаграммы растяжения образца в координатах Р—А; упругая работа — площадь упругой части той же диаграммы; удельная работа — работа, приходящаяся на единицу объема рабочей части образца и соответствующая площади диаграммы растяжения в координатах а—е.
Удельный вес в расчетах принимают равным для стали 7,85, для чугуна 7,2; удельный вес стали с содержанием 0,1% С — 7,06 (в жидком состоянии).
Модуль упругости Е стали и другие упругие константы практически не зависят от величины зерна, структуры, соотношений между объемами феррита и перлита, от содержания углерода и других легирующих добавок.
Модуль упругости для прокатной стали, литья, горячекатаной арматуры из сталей марок Ст.5 и Ст.З Е 2,1 106 кГсм2; для сталей 30ХГ2С и 25Г2С Е 2-10е кГсм2. Для холоднотянутой круглой и перио-
Таблица 4.1
Коэффициент линейного расширения а 10б в град1 (средний) [9]
Сталь
В расчетах при обычной температуре
При температуре в ° С
8
тГ
1 8 I м
Углеродистая
12
12,2
13,5
14,4
-
Низколегиро¬
ванная
12
12,6
13,8
14,2
14,4
дического профиля проволоки, а также для холодносплющенной арматуры Е— 1,8-10е кГсм1.
Для пучков и прядей высокопрочной проволоки (с параллельным расположением проволок) Е
2 -106 кГсм2 для канатов стальных спиральных и канатов (тросов) с металлическим сердечником Е 1,5-104 кГсм2, для тросов с органическим сердечником 1,3 10е кГсм2.
Для отливок из серого чугуна марок СЧ28-48, СЧ24-44, СЧ21-40 и СЧ18-36 ЕЫ0в кГсм2.
Модуль сдвига для прокатной стали (? 8,4Х
XI О5 кГсм2.
Коэффициент Пуассона (коэффициент поперечной деформации) р, 0,3.
4.1.2. Углеродистые стали
Сталь углеродистая горячекатаная обыкновенного качества по ГОСТ 380—71. В зависимости от назначения и гарантируемых характеристик сталь подразделяется на три группы:
группа А — поставляемая по механическим свойствам; группа Б — поставляемая по химическому составу; группа В — поставляемая по механическим свойствам и химическому составу.
В зависимости от нормируемых показателей сталь каждой группы подразделяется на категории: группы А — 1, 2, 3; группы Б — 1, 2; группы В — 1,2, 3, 4, 5, 6.
Сталь изготовляется следующих марок: группы А —Сг.0; Ст.1; Ст.2; Ст.З; Ст.4; Ст.5; Ст 6; группы Б — БСт.0, ЬСт.1, БСт.2, БСт.З, БСт.4, БСт.5, БСт.6;
группы В — ВСт.2, ВСт.З, ВСт.4, ВСт.5.
Химический состав и механические свойства приведены в табл. 4.2 и 4.3.
Ударная вязкость стали марок ВСт.Зпс, ВСт.Зсп, ВСт.ЗГпс, ВСт.4пс, ВСт.4сп должна соответствовать нормам, приведенным в табл. 4.4.
Влияние углерода на механические свойства стали показано на рис. 4.1. Изменение механических свойств углеродистой стали в зависимости от температуры дано в табл. 4.5 и 4.6 и на рис. 4.2. На рис. 4.3 показано влияние наклепа на ударную вязкость, а на рис. 4.4 показаны потери от коррозии углеродистых сталей. В табл. 4.7 даны пределы выносливости углеродистых сталей.
За нормативное сопротивление растяжению, сжатию и изгибу углеродистой стали принимается [130] наименьшее значение предела текучести, установленное стандартами или техническими условиями.
Проектирование стальных конструкций зданий и сооружений ведется по СНиП И-В.3-62 [135].
152
РАЗДЕЛ 4. МАТЕРИАЛЫ ДЛЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИИ. МЕТОДЫ РАСЧЕТА
Таблица 4.2
Нормы химического состава для стали, поставляемой по группе Б (ГОСТ 380—71)
Марка стали
Содержание элементов в %
С
Мп
51
Р 1
5 1
1 Сг N1 не более
I Си
Аз
БСт. 0
Не более 0,23
0,07
0,06
_
_
БСт. 1кп
0,06—0,12
0,25—0,50
Не более 0,05
0,04
0,05
0,30
0,30
0,30
0,08
БСт. 1пс
0,06—0,12
0,25—0,50
0,05—0,17
0,04
0,05
0,30
0,30
0,30
0,08
БСт. 1сп
0,06—0,12
0,25—0,50
0,12—0,30
0,04
0,05
0,30
0,30
0,30
0,08
БСт. 2кп
0,09—0,15
0,25—0,50
Не более 0,07
0,04
о,а5
0,30
0,30
0,30
0,08
БСт. 2пс
0,09—0,15
0,25—0,50
0,05—0,17
0,04
0,05
0,30
0,30
0,30
0,08
БСт. 2сп
0,09—0,15
0,25—0,50
0,12—0,30
0,04
0,05
0,30
0,30
0,30
0,08
ЕСт. Зкп
0,14—0,22
0,30—0,60
Не более 0,07
0,04
0,05
0,30
0,30
0,30
0,08
БСт. Зпс
0,14—0,22
0,40—0,65
0,05—0,17
0,04
0,05
0,30
0,30
0,30
0,08
БСт. Зсп
0,14—0,22
0,40—0,65
0,12—0,30
0,04
0,05
0,30
0,30
0,30
0,08
БСт. ЗГпс
0,14—0,22
0,80—1,10
Не более 0,15
0,04
0,05
0,30
0,30
0,30
0,08
БСт. 4шт
0,18—0,27
0,40—0,70
Не более 0,07
0,04
0,05
0,30
0,30
0,30
0,08
БСт. 4пс
0,18—0,27
0.40-0,70
0,05—0,17
0,04
0,05
0,30
0,30
0,30
0,08
БСт. 4сп
0,18—0,27
0,40—0,70
0,12—0,30
0,04
0,05
0,30
0,30
0,30
0,08
БСт. Бпс
0,28—0,37
0,50—0,80
0,05—0,17
0,04
0,05
0,30
0,30
0,30
0,08
БСт. 5сп
0,28—0,37
0,50—0,80
ОД 5—0,35
0,04
0,05
0,30
0,30
0,30
0.08
БСт. 5Гпс
0,22—0,30
0,80—1,20
Не более 0,15
0,04
0,05
0,30
0,30
0,30
0,08
БСт. бпс
0,38—0,49
0,50—0,80
0,05—0,17
0,04
0,05
0,30
0,30
0,30
0,08
ЬСт. 6с п
0,38—0,49
0,50—0,80
0,15—0,35
0,04
0,05
0,30
0,30
0,30
0,08
Таблица 4.3
Механические свойства углеродистой стали, поставляемой по группе А (ГОСТ 380—71)
Марка стали
Временное сопротивление ов в кГмм2
Предел текучести тт в кГмм1 для толщин в мм
Относительное удлинение 05 в % для толщин в мм
Изгиб на 180° (а—толщина образца, 4—диаметр оправки) для толщин до 20 мм
До 20
св. 20 до 40
св. 40 до 100
св. 100
до 20
св. 20 до 40
св. 40
не менее
Ст. 0
Не менее 31
-
-
-
-
23
22
20
2 2 а
Ст. 1кп
31—40
-
-
-
-
35
34
32
4 0 (без оправки)
Ст. 1пс, Ст. 1сп
32—42
-
-
-
-
34
33
31
Ст. 2кп
33—42
22
21
20
19
33
32
30
4 « 0 (без оправки)
Ст. _пс. Ст. 2сп
34—44
23
22
21
20
32
31
29
Ст. Зкп
37—47
24
23
22
20
27
26
24
40,5 а
Ст. -°пс, Ст. Зсп
38—49
25
24
23
21
26
25
23
Ст. ЗГпс
38—50
25
24
23
21
26
25
23
Ст. 4кп
41—52
26
25
24
23
25
24
22
4 2 а
Ст. 4пс, Ст. 4с п
42—54
27
26
25
24
24
23
21
Ст. Бпс, Ст. 5с п
50—64
29
28
27
26
20
19
17
А — 3 а
Ст. 5Гпс
46—60
29
28
27
26
20
19
17
Ст. бпс, Ст. 6с п
Не менее 60 32
31 30 30
15 14 12
-
Для толщин свыше 20 мм диаметр оправки увеличивается на толщину образца.
4.1» СТАЛИ
153
Таблица 4.4 Нормы ударной вязкости углеродистой стали при температуре 20° С, минус 20° С и после механического старения, поставляемой по ГОСТ 380—71
Марка
стали
Вид проката
Располо¬
жение
образца
относи¬
тельно
проката
Толщина в мм
Ударная е в кГ • л не ме
при температуре, °С
»язкость
1СМх
нее
сз 2 о Н
О» о О) э «
Г? о я у ас г: О со О
С х а: с.
-1-20
—20
ВСт. Зпс,
Листовая
Поперек
5—9
8
4
4
ВСт. Зсп
сталь
10—25
7
3
3
26—40
5
—
—
Широкопо¬
Вдоль
5—9
10
5
5
лосная сталь
10—26
8
3
3
26—40
7
—
—
Сортовой и
Вдоль
5—9
И
5
5
фасонный
10—25
10
3
3
прокат
26—40
9
ВСт. ЗГпс
Листовая
Поперек
5—9
8
4
4
сталь
10—30
7
3
3
31—40
5
—
—
Широкопо¬
Вдоль
5—9
10
5
5
лосная сталь
10—30
8
3
3
31—40
7
—
—
Сортовой
Вдоль
5—9
11
5
5
и фасонный
10—30
10
3
3
прокат
31—40
9
ВСт. 4пс,
Листовая
Поперек
5—9
7
ВСт. 4сп
сталь
10—25
6
—
—
26—40
4
—
—
Сортовой
Вдоль
5-9
10
—
—
и фасонный
10-26
9
—
—
прокат
26—40
7
0,1 0,2 0,3 ци Ц5 0,6
« Содержание углерода б %
Рис. 4.1. Изменение механических свойств углеродистой стали в зависимости от содержания углерода [9]
2
А
У
-во -ио
20 О Температура в °С
►20
Рис. 4.2. Ударная вязкость строительной стали марки Ст.З в зависимости от температуры
1 — мартеновская сталь спокойная;
2 — то же. кипящая; 3 — бессемеровская сталь спокойная; 4 — то
же, кипящая [14]
Таблица 4.5
Механические свойства углеродистой стали при температурах от —60 до 4-600° С [9]
(Состав стали: 0,18% С; 0,24% Мп; 0,12% 51; 0,011% 5; 0,011% Р)
Температура испытаний в °С
ат,
кГмм-
V
к Гмм2
«5. %
%
ак' кГм см -
Е, кПмм9
—60
_
1,01
-50
—
1,09
—30
—
—
—
—
2,27
—
— 10
—
9,02
23,8
40,3
32,7
68,6
10,62
20 200
100
21,7
37,8
21,3
64,6
12,99
18 700
200
25,1
48,5
16,2
55,5
13,49
17 900
300
14,9
‘14,3
26
62,4
12,19
17 000
400
12,9
35,У
31
71,4
9,06
16 100
450
12,6
30,8
29,8
71,9
7,05
13 700
500
10,9
21,5
29,9
75
6,73
550
8
18,6
34,3
79,3
6,65
600
5,6
14,2
42,2
87,1
8,15
- 1
50 ЮО 150 200 250 500
Температура 6 ® С
Рис. 4.3. Изменение ударной вязкости углеродистой стали в зависимости от процента наклепа при различных температурах [6]
— вытяжка 2%; 2 — вытяжка 6%; 3 — вытяжка 10%;
4 — исходное состояние
154
РАЗДЕЛ 4. МАТЕРИАЛЫ ДЛЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИИ. МЕТОДЫ РАСЧЕТА
Таблица 4.6
Изменение механических свойств стали марки МСт.З спокойной, содержащей мышьяк, при различных температурах [91
(Состав стали: 0,21% С; 0,38% Мп; 0,20% 51; 0,036% 5; 0,026% Р; 0,289% А5)
Температура испытаний в ° С
‘V
кГмм1
°п’ к Гмм ’
8. %
%
Ч
к Гмсм‘
-40
31,4
46,5
32,4
61,1
10,8
—20
29,3
45,8
34,7
62,5
13
0
27.4
42,6
40,4
63,5
19,2
20
26,1
43
40,1
67,7
20,1
100
24,3
42,9
28,5
60,5
21,8
200
23
52,9
21,2
53,5
25
4 300
18,5
50,9
24,8
60,5
23
400
16,6
46,3
26,9
62,9
15,9
500
15
25,9
30,6
71,9
10,2
0,16
0,14
X
X
ч
3
I
I
I
о,п
о,ю
0,02
У
У
V'
2 •
.
Л
5
1
"У
А
Л-
1 2 з и
Продолжительность испытания б года.
Рис. 4.4. Потери от коррозии углеродистых сталей в атмосфере промышленного города [16]
1 — БСт.З; 2 — МСт.Зсп; 3 — МСт.Зкп
В табл. 4.8 приведены характеристики сварочных материалов, рекомендуемых для сварки элементов стальных конструкций.
Сталь углеродистая для мостостроения. Особые условия работы мостовых конструкций, подверженных вибрационным нагрузкам, требуют применения стали, малочувствительной к концентрации напряжений, не склонной к старению после наклепа и имеющей достаточно низкую температуру перехода в хрупкое состояние. При выборе стали для сварных мостов к этим условиям добавляется требование хорошей свариваемости и достаточной вязкости металла около сварного шва.
Таблица 4.8
Марки электродов и порошковой проволоки для сварки соединений конструкций из малоуглеродистых и низколегированных сталей
I
г-
5?
о
н
8
и
Марка
Сталь
Механические
свойства
с
ф
с «с «
ах
-«« О) I
С «5
. 2
Хй с 2
о ь с
Примечание
Электроды
Э42
АНО-5
АНО-1
Малоугле¬
родистая
47
25
342 А
У ОНИ-1345
УП-245
03 С-2
Малоуглеродистая н низколегированная
46
48
46
Э46
МР-3
Мало¬
углеро¬
дистая
48
•26
28
14
13
Для сварки в нижнем положении
20
18
25
15
Постоянный ток, полярность обратная
На постоянном и переменном токе
Постоянный ток, полярность обратная
350 А
У ОНИ-1355
ДСК-50
Малоуглеродистая и низколегированная
62
52
24
28
20
20
Э50А
'ПС-15
Порошковая проволока
Малоуглеродистая и низколегированная
СП-1
ПП-АНЗ
ПП-АН4
ММ-АН8
Э50
СП-2
55
25
16
55
25
16
52
24
15
53
26
15
Мало-
углеро-
Постоянный ток, полярность обратная Постоянный и переменный ток
Для полуавтоматическом сварки соединении с 63 мм в нижнем положении То же, во всех положениях То же, в нижнем положении
То же, с дополнительной зашитой С02
58
Для полуавтоматической сварки без дополнитель ной защиты
Примечание. Для сварки конструкций, возводимых
или эксплуатируемых при температуре от —40 до —60° С, рекомендуются электроды марки УОНИ-1345 и УОНИ-1355.
4.1. СТАЛИ
155
Предел выносливости углеродистой стали марок Ст.1 — Ст.6 [9]
Марка стали
Ов, кГмм-
0ю,%
%
Ст
°т-и
тт
°0р
Оо
То
-1р
-1
в кГ'мм2
Ст.1
32—40
28
55
18
22
11
17
19
10
11
14
7
Ст.2
34—42
26
55
21
24
12
18
21
11
13
15
8
Ст.З
38-47
22
55
22
26
13
21
24
13
14
17
9
Ст.4
42—52
20
50
24
29
14
22
26
14
15
18
10
Ст.5
50—62
16
45
28
34
17
27
31
17
19
22
11
Ст.6
60—72
12
45
30
36
18
30
34
18
20
24
1о
Таблица 4.9
Химический состав и механические свойства углеродистой стали для мостовых конструкций (ГОСТ 6713—53)
Химический состав в
%
Механические характеристики
5 1
1 Р
«10.
%
%
Марка
стали
С
Мп
31
не более
«И'
и С
О
сортовая и фасонная
листовая и широкополосная
сортовая и фасонная
листовая и широкополосная
ч. %
не менее
М16С
0,12—0,2
0,4—0,7
0,12—0,25
0,45
0,04
23
38
24
22
28
26
50
Ст.З
мост.
0,14—0,22
0,4—0,65
0,15—0,3
0,05
0,045
24
38
24
22
28
26
50
Материалом для изготовления сварных и клепаных мостовых конструкций служит спокойная углеродистая строительная сталь с гарантированными химическим составом и механическими свойствами по ГОСТ 6713—53: для сварных мостовых конструкций — сталь марки М16С, для клепаных — сталь марки Ст. Змост. Химический состав и механические свойства сталей этих марок даны в табл. 4.9 и 4.10.
Таблица 4.10
Ударная вязкость углеродистой стали для мостовых конструкций
4.1.3. Стали низколегированные и высокой прочности
ную сталь, применяемую в строительстве и машиностроении.
Химический состав и механические свойства стали в состоянии поставки класса С 4634 приведены в табл. 4.11 и 4.12, класса С 5240 — в табл. 4.13.
На рис. 4.5 указаны потери от коррозии некоторых низколегированных сталей.
0,12
Профиль проката и расположение образцов
кГмсм2, не
менее
0,10
1 °° 3
при комнатной температуре
О
с 1
после
старения
Щ
Листовая и широкополосная:
%
на продольных образцах.
8
4
4
о
» поперечных ».
7
3,5
3,5
Сортовая и фасонная на продоль¬
1
ных образцах 10
4
5
С;
0,02
-
1
V
уС
X
ЦТ
-г
■ У
(
Продолжительность исльтони9 в годаж
Марки и общие технические требования к низколегированным сталям предусмотрены ГОСТ 5058—65. Этот ГОСТ распространяется на листовую широкополосную (универсальную), сортовую и фасонную низколегирован-
Рис. 4.5 Потери от коррозии низколегированной стали в атмосфере
— сталь 15ХСНД; 2 — сталь 10ХНДП, 3— сталь 12ХГ; 4—сталь медефосфористая
156
РАЗДЕЛ 4. МАТЕРИАЛЫ ДЛЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ. МЕТОДЫ РАСЧЕТА
Таблица 4.11
Нормы химического состава для низколегированной стали (по ГОСТ 5058—65)
Химический состав в %
Марка стали
51
Мп
Сг
N1
Си
не более
А. Сталь для металлических конструкций
14Г
0.12—0,18
0,17—0,37
0,7—1
0,3
0,3
0,3
19Г
0,16—0,22
0,17—0,37
0,8—1,15
0,3
0.3
0,3
09Г2
0.12
0,17-0,37
1,4—1,8
0,3
0,3
0,3
14Г2
0,12—0,18
0,17—0,37
1.2—1,6
0,3
0,3
0,3
18Г2
0,14—0,2
0,25—0,55
1.2—1,6
0,3
0,3
0,3
12ГС
0,09—0,15
0,5—0,8
0,8—1,2
03
0.3
0,3
16ГС
0,12—0,18
0,4—0,7
0.9—1,2
0,3
0,3
0,3
17ГС
0,14—0,2
0,4—0,6
1—1,4
0,3
0,3
0,3
09Г2С
0,12
0,5—0,8
1,3—1,7
0,3
0,3
0,3
10Г2С1
0,12
0,9—1,2
1,3—1,65
0,3
0,3
0,3
15ГФ
0,12—0,18
0,17—0,37
0,9—1,2
0,3
0,3
0,3
(ванадий 0,05—0,1)
14ХГС
0,11—0,16
0,4—0,7
0.9—1,3
0,5—0,8
0,3
0,3
15.ХСНД
0,12—0,18
0,4—0,7
0,4—0,7
0,6—0,9
0,3—0,6
0,2—0,4
10ХСНД
0,12
0,8—1,1
0,5—0,8
0,6—0,9
0,5—0,8
0,4—0,65
Б. С
таль для армировг
шия железобетонн:
ых конструкция
35ГС
0,3—0,37
0,6—0,9
0.8—1,2
0,3
0,3
0,3
18Г2
0,14—0,23
0,6—0,9
1.2—1,6
0.3
0,3
0,3
25Г2С
0.2—0,29
0,6—0,9
1.2—1,6
0,3
0,3
0,3
20ХГ2Ц
0,19—0,26
0,4—0,7
1,5—1,9
0,9—1,2
0,3
0,3
(цирконий 0,07—0,14)
80С
0,74—0,82
0,6—1
0.5-0,8
0,3
0,3
0,3
В обозначении марок стали двузна
шые цифры слева
указывают прибли
зительное соде
ржание углерода в сотых долях
процента. Буквы обозначают: Г — марганец, С — кремний,
X — хром, Н — никель, Д — медь, Ц — цирконий, Ф — ванадий;
цифры после букв указывают приблизительное процентное содержание соответствующего элемента в целых единицах.
4.1. СТАЛИ
157
Таблица 4.12
Механические свойства низколегированной стали (ГОСТ 5058—65)
Марка стали
Толщина проката в мм
Механические свойства
Испытание на загиб в холодном состоянии:
С—толщина оправки; а—толщина проката; —диаметр стержня
при растяжении
Ударная вязкость а в кГмсм2 при температуре в °С
временное сопротивление разрыву а в кГмм
предел текучести о
т
в кГмм
относитель¬
ное
удлинение
66 в %
20
—40
-70
не менее
А. Сталь для
металлических
конструкций
14Г
4—10
46
29
21
3.5
180° С2а
19Г
4—10
48
32
22
—
3.5
—
180° С—2а
4—20
45
31
21
3
__
180° С—2а
09Г2
21—32
45
30
21
—
4
—
(
4—10
47
34
21
3,5
_.
180° С2а
14Г2
11—32
46
33
21
—
3
—-
18Г2
8—10
52
36
21
4
180° С2а
12ГС
4—10
47
32
26
—
—
180° Са
(
4—10
50
33
21
_
4
3
180° С2а
11—20
49
32
21
6
3
2,5
21—32
48
30
21
6
3
2,5
16ГС “
аз—60
47
29
21
6
3
2,5
—
Свыше 60
1
до 160
46
28
21
6
3
2.5
—
г
4—10
52
35
23
4,5
180° С2а
17ГС
11—20
50
34
23
—
3,5
—
4—10
50
35
21
—
4
3,5
180° С—2а
11—20
48
33
21
6
3,5
3
21—32
47
31
21
6
3,5
3
09Г2С
33—60
46
29
21
6
3,5
3
.
61—80
45
28
21
6
3,5
3
Свыше 80
до 160
44
27
21
6
3,5
3
—
(
4—10
52
38
21
—
4
3
180е С—2а
11—20
51
36
21
6
3
2.5
21—32
50
35
21
6
з
2,5
10Г2С1
33—60
48
34
21
6
3
2,5
Свыше 60
1
до 160
46
32
21
6
3
2,5
—
(
4—10
52
38
21
4
—
180° С2а
15ГФ
11—20
52
36
21
3
—
1
21—32
48
34
21
—
3
—
—
14ХГС
4—10
ТО
35
22
-
4
-
180° С2а
15ХСНД
4—32
50
35
21
-
3
3
180° С2а
(
4—10
54
40
19
5
180° С2а
11—15
54
40
19
—
4
3
180° С2а
10ХСНД
16—32
54
40
19
—
5
3
180° С—2а
1
33—40
52
40
19
5
3
Б. Ста;
1Ь для армиро
гания железобе
тонных конструкций
35ГС
6—40
60
40
14
-
-
-
90° с—га
6—9
60
40
14
■
_
90° С—34
18Г2С
40—90
50
30
14
—
—
—
—
25Г2С
6—10
60
40
14
90° сза
20ХГ2Ц
10—32
90
60
6
—
—
—
45е С—54
80С
10—18
90
60
6
—
—
—
45° С5а
158
РАЗДЕЛ 4. МАТЕРИАЛЫ ДЛЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ. МЕТОДЫ РАСЧЕТА
Таблица 4.13
Механические свойства сталей классов С 5240, С 6045, С 7060, С 8575
Механические
свойства
Ударная вязкость аь
Класс стали (условное
Марка
стали
Вид проката
ГОСТ или ТУ
ю
03
н
СО
к
н
о
си
п
Ю „ К И
н о о
с §5 21
к
1
я°
в кГмсм при температуре испытания в °С
Состояние
поставки
обозна¬
чение)
о
а,
с
а
л:
5
3
:
о» Ч я
и я о. н с о
« а О я «
ас а с а
0.0 ® ч ю
I ЭИНЭН 1ГЭ1ИЭ0Н10
—40
—60
о
н
не менее
Сталь повышенной прочности
С 5240
15Г2СФ
10Г2С1
10ХСНД
14Г2
Листовая
Листовая, сортовая, фасонная, широкополосная универсальная)
Листовая,
широкопо¬
лосная
ЧМТУ
ЦНИИЧМ
ЧМТУ
1389-65 (В-23)
551-61
ЦНИИЧМ ГОСТ 5058—65
ЧМТУ
ЦНИИЧМ
551-61
4—32
4—32
4—40
4—50
40
40
40
40
55
54
52
55
18
19
19
19
3
(—70°)
Горячекатаная
Термообработанная (закалка отпуск)
Горячекатаная
Термообрабо-
тайная
Сталь высокой прочности
С 6045
16Г2АФ
То же
ЧМТУ 1-45-67
4—60
45
60
20
4
3
15Г2АФпс
г
То же
4—60
45
60
20
4
3
15ХСНД
Листовая
ГОСТ 5058—65
10—32
50
60
17
4
3
(-70°)
15ХГ2СФР
»
ЧМТУ
1389-65 (В-23)
ЦНИИЧМ
4—20
50
65
15
3
-
15Г2СФ
»
То же
8—32
50
60
17
5
—
С 7060
14ГСМФР
ЧМТУ 1-45-67
4—40
60
70
12
3
-
12ХГ2СФМР
ЧМТУ 1339-65 ЦНИИЧМ
4—20
60
80
13
3
-
С 8575
15ХГ2СФМР
»
ЧМТУ.389-65 ЦНИИЧМ
'
8—32
70
85
12
4
То же
Термообработанная (закалка отпуск)
Горячекатаная
Термообработанная (закалка отпуск)
Нормализован¬
ная
Горячекатаная
Термообработанная (закалка отпуск)
Примечание. Класс стали с буквой Р означает, что сталь разупрочняется при сварке.
Химический состав и механические свойства сталей повышенной и высокой прочности, применяемых в строительстве за границей
4.1. СТАЛИ
159
Примечание
Все виды проката
1 1
Листы, пластины,
; стержни
1
1
Термически обработана. Все виды проката, кроме широкополочного двутавра
Лист, пластина, стержень
1 1
Механические свойства
относительное удлинение 6 в Уо
8 III
1 1 1
ГМ
1 1 13 1 «2
1 1 2
2
20
17—18
25,2
18
1 1
временное сопротивление св в кГмм1
гч СТ
тГ 'Г 'У
Ю
ГМ Г 1
ю юоо ю
ш
? 83 И 1 3
о Г«-
СО юою СО
74
66,6
65—80
73
64,5
71,8
70
73,7—95
84,5
81—94
83
77
80
97,8
116
к е е:
:
н м
Ю Ю СО 00 сч со со ос
Г1 гм О
тг тг
г ш 1п пт 'л ю © гг гг гг ГГ
56
53
50
57
57,8
61,8
65
63,4—70,4
71,1
70
71,4
65
70
89,2
111
Химический состав в %
другие
элементы
1 111
0.12У
Н 1 1 §2 1 12 00“ о
1 N 1 82 ОО
1 1
1й 113 82 -
о оо °
1 1
Мо
1 111
0,1
1 1 11 1 ««
о о о
1 1
-о о о о
0,15
00'О р1-'тгСО О-'-Г
сТо ооооо'оо
1 1
Г-1 СЧ — -м
©©“о©
б
1 III
1 1 1
1
1 1 1 II 0Г.'Г 1
о -» о
ю
4- I 1
1 1
115 II и)
1 1
2
1 III
10
1
1 11II12
о«—« о
1
4,-1 1
0,56
2.05 0,31
2,0—
2,25
1.5
1 1
6
1 III
‘О
1 1
о
1 11111 II
1 «К 1
о°
ю
'о-
0,48
0,5—
0,2
1,4-2
0,6
1 1 т Г'- 1Г Г-
о о осГ
а
1 1 1 1
1 1 1
1»,35
0,04
1 I '
0,05
0,015
0,018
0,04
0,04
0,15
0,04
0,03
2 с о о
с5
51 1 1
1 1 1
0,13—
0,33
0,45
0,45
0,35-
0,5
0,45
0,55
1 ®. 1
О
ш СО
о" о"
0,3
0,705
0,23
0,5—
0,8
0,20—
0,35
0,7
0,15
0,55
1 1
1Г X ЮОО
О ООО
Мп
1 ш
III
о
1.4
1 1
СО Сь 1 1 00 ОО • Ю СО 00 —0. 0,5—
0,9
0,5—
0,7
т
сг ю
0,57
1.5
0,9
0,5—
0,7
0,4—
0,7
0,8
0,8
1,2
1 1
Ю г. ю Г
о" о" О О
а
0,28
0,22
2,.„8222
О 00000
о
1 см
5о- 1
О) 01 ОО
0,15
0,15
0,17
0,2
0,12—
0,2
0,16
2,1
0,16
со со о о
1
[
Марка стали
А-36
А-50 А-55 В5СУ-55
А-50 В5СУ-6Э 1 В-121С
А-353
А-65 ВСУ-65 ВН46К РВ70 Н5В55
51-50Т
ТЕЫ-60
ю
г-
© сс с Ш й 1
2 -я
2
Асиг 5065 Марганцемолибденовая
Никельмолибденобористая Диаллой 590 1)55Т-1
Ы-А-ХТКА-100 555-10Э
Н-А-ХТРА-ЮЭ Н-А-ХТКА-90 2Н-1Л 1га
§ щ ос о: н н 2 2
Страна,
произво¬
дящая
сталь
США
»
»
»
Франция
США
»
ФРГ
»
»
Австрия
Япония
США
ФРГ
»
Англия
»
Япония
США
»
»
Япония
»
США
»
сЮЭЭ в
И1ГВ1Э ВИН
-вмифиээв1Гл
С 3823 С 4634
С 5240
С 6045
С 6045
С 6045
С 7060
С 8575
160
РАЗДБЛ 4. МАТЕРИАЛЫ ДЛЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ. МЕТОДЫ РАСЧЕТА
Механические свойства сталей высокой прочности (классов С 6045—С 8575) даны в табл. 4.13.
За нормативное сопротивление низколегированных сталей и сталей высокой прочности принимается меньшая из двух величин: наименьший предел текучести или наименьшее временное сопротивление разрыву, умноженное на коэффициент условий работы материала 0,8. Проектирование конструкций из низколегированных сталей ведется по СНиП П-В.3-62 [135], из сталей высокой прочности — по СН 347-66 [1]. Конструкции, работающие при низких температурах (от —40 до —60°С), проектируют по СН 363-66 [15].
В табл. 4.14 даны характеристики основных марок сталей, применяемых за рубежом.
К классам А-П, А-Ш и А-1У относится сталь периодического профиля по ГОСТ 5781—61, она представляет собой круглые стержни с выступами, идущими по трехзаходной винтовой линии, с двумя продольными ребрами. Основные характеристики стержневой арматуры даны в табл. 4.15.
Высокопрочная проволока. Для армирования предварительно напряженных железобетонных конструкций применяется также высокопрочная проволока круглая и периодического профиля по ГОСТ 7348—63, ГОСТ 8480—63 (табл. 4.16).
Таблица 4.16
Основные характеристики сталей для проволочной арматуры [10]
4.1.4. Сталь для арматуры железобетонных конструкций
Сталь арматурная стержневая. По условиям применения стержневая арматура может быть ненапрягаемой (класс А-1, А-Н, А-Ш) — для обычных и предварительно напряженных конструкций и напрягаемой (класс А-IV, А-Шв) для предварительно напряженных конструкций.
Таблица 4.15
Основные характеристики сталей для стержневой арматуры [10] Клас с
Вид
Нормативное сопротивление Я" в кГмм2 (по пределу текучести)
Модуль упругости в кГсм
о
Горячекатаная
А-1
Сталь марки Ст.З, ГОСТ
380—71; 9543—60; 5781-61.
24
2,1
А-П
Сталь марок Ст.5 и Ст.ЗГпс
ГОСТ 380—71; 9543—60,
5781—61 30
2,1
А-Ш
Сталь марок 25Г2С и 35ГС,
ГОСТ 5058—65; 5781—61
40
2
А-1 V
Сталь марок 20ХГ2Ц, 80С и
др., ГОСТ 5058—65; 5781—61
60
2
Упрочненная вытяжкой
А-Пв
Сталь класса А-П; уп¬
рочненная вытяжкой до
45 кГ;мм2 при удлинении не
более 5,5% 45
2,1
То же, с удлинением 5,5%
без контроля усилий.
45
2,1
А-Н1в
Сталь класса А-Ш, уп¬
рочненная вытяжкой до
55 кГмл12 при удлинении не
более 3.5% для 25Г2С и 4,5%
для 35ГС 55
2
То же, с удлинением 3,5
или 4,5, но без контроля уд¬
линений. с.
55
2
0)
Класс
Вид
Нормативное
сопротивлени
?Ц в кГ 1мм2
Модуль упру кГсм
ГОСТИ В 10е
Проволока стальная кру¬
глая для предварительно
напряженных железобетон¬
ных конструкций (ГОСТ
В-11
7348—63) диаметром:
152
144
Ъ мм. 4 »,.
136
1,8
128
7 » 120
8 ».
112
То же, периодического
профиля (ГОСТ 8480—63)
диаметром:
3 мм. 144
Вр-11
4 » 136
5 . 128
6 120
1,8
7 » 112
8 » 104
Семипрополочные пряди
П-7
диаметром:
136
9 мм 12 » с- 128
1.8
15 » 120
Рис. 4.6. Изменение механических свойств высокопрочной проволоки диаметром 5 мм (ГОСТ 7348—63)
а — временное сопротивление (); предел текучести (2); предел упругости (3); б — модуль упругости
4.2. АЛЮМИНИЕВЫЕ СПЛАВЫ
151
Рис. 4.7. Ползучесть высокопрочной проволоки при температуре 18° С. Состав: 0,70% С; 0,48% Мп; 0,16% 1; 0,036% 5, 0,022% Р
Марки стали, как указано в стандартах, устанавливаются заводом-изготовителем; требования к пройолоке предъявляются лишь по механическим свойствам.
На рис. 4.6—4.9 показаны изменения механических свойств проволоки при нагреве, данные о ползучести и релаксации напряжений.
Рис. 4.8. Релаксация высокопрочной проволоки при температуре 18° С. Состав: 0,70% С; 0,48% Мп; 0,16% 5; 0,036% 3; 0,022% Р
4.2. АЛЮМИНИЕВЫЕ СПЛАВЫ
Общие сведения. Особенности алюминиевого сплава как строительного материала: малый удельный вес, составляющий около 2,7 Гсм3, т. е. примерно в 3 раза меньше, чем у стали; широкие пределы изменения прочностных характеристик и высокая относительная прочность некоторых сплавов; повышенная коррозионная стойкость ряда сплавов; сравнительно низкое значение модуля продольной упругости — в среднем 710 000 кГсм2, т. е. в 3 раза меньше, чем у стали; пониженное по сравнению со сталью значение предела выносливости (усталости); высокая технологичность, определяемая возможностью получения с металлургических заводов полуфабрикатов необходимой формы и размеров; трудность получения равнопрочных сварных соединений при применении сплавов с высокими показателями прочности; необходимость бережного обращения с полуфабрикатами, изделиями и конструкциями на всех стадиях хранения, изготовления, перевозки, монтажа и эксплуатации; возможность придания поверхности алюминиевых элементов качеств, обеспечивающих архитектурную выразительность, путем полирования, анодирования, эмалирования и т. д.; высокая отражательная способность; сохранение прочностных характеристик при низких температурах; отсутствие искрообразования; отсутствие магнитных качеств.
Из перечисленных особенностей основными являются: легкость, коррозионная стойкость и технологичность. Основной недостаток — высокая в настоящее время стоимость полуфабрикатов и конструкций, что приводит к технико-экономической целесообразности применения алюминиевых сплавов только при особых условиях компоновки зданий или сооружений, строительства и эксплуатации. Примером могут служить: конструкции, в которых собственный вес составляет значительную часть суммарной нагрузки (например, конструкции покрытий большепролетных зданий, панели стен и покрытий) и его уменьшение обеспечивает облегчение несущих конструк¬
ций; здания, возводимые в отдаленных и труднодоступных районах, предназначаемые для эксплуатации в агрессивных средах, возводимые в районах высокой сейсмичности; фасады и интерьеры зданий; подвижные, сборно-разборные конструкции; монтажное оборудование и приспособления.
Конструкции и элементы из алюминиевых сплавов удачно сочетаются с другими строительными материалами: сталью, пластмассами, стеклом, деревом и т. д.
Алюминиевые сплавы делятся на деформируемые, допускающие прокат и прессование, и литые. Деформируемые алюминиевые сплавы, являющиеся основным материалом для строительных конструкций, делятся на упрочняемые и неупрочняемые термической обработкой. Термическая обработка осуществляется путем закалки и последующего старения (естественного при комнатной температуре или искусственного при нагреве) и приводит к повышению прочностных показателей сплавов и снижению их пластичности. Повышение прочностных показателей сплавов, не упрочненных термической обработкой, может достигаться с помощью наклепа (деформирования в холодном состоянии).
Чистый и технический алюминий обладает высокой пластичностью, но низкой прочностью, поэтому эти материалы применяются в ненагруженных или малонагруженных конструкциях.
Алюминиевые сплавы определяются: группой (системой) в зависимости от основных легирующих компонентов, маркой сплава и его состоянием. К числу состояний относятся: отожженное (мягкое), обозначаемое буквой М; полунагартованное — П; закаленное и естественно состаренное — Т; закаленное и искусственно состаренное — Т1.
Расчет алюминиевых1 конструкций в значительной
1 Под алюминиевыми подразумеваются конструкции из алюминиевых сплавов и из технического алюминия.
162
РАЗДЕЛ 4. МАТЕРИАЛЫ ДЛЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ. МЕТОДЫ РАСЧЕТА
Таблица 4.17
Алюминиевые сплавы для строительства (СНиП И-В.5-64)
Марка и состояние сплава
Легирующие компоненты в %
Механические свойства
Группа сплава
маг¬
ний
мар¬
ганец
кремний
цинк
медь
прочие
кГммг
0О,2, кГ)мм9
V
кГмм2
в. %
яв,
кГмм
А.
Деформируемые сплавы для элементов конструкций
Алюминий технический
АД1-М
-
—
-
-
-
Сумма примесей 0,7 %
8
3
5,5
35
25
Алюминий—марганец
АМц-М
1—1,6
10
5
8
20
30
АМц-П
15
12
-
10
40
АМг2-М
1,8—
2,8
0,2—
0,6
-
-
-
-
17
8
12
16
45
АМгЗ-М
3,2—
3,8
0,3—
0,6
0,5— 0,8
-
-
-
20
10
-
15
-
Алюминий—магний (магналии)
АМг2-П
АМгЗ-П
2—2,8 3,2—3,8
0,2—
0,6
0,3—0,6
0,5—0,8
-
-
-
24
20
15
4
60
АМг5-М
4,8—
5,8
0,5—
0,8
-
-
-
Титан
0,02—0,1
27
12
-
15
65
АМгб-М
5,8—
6,8
0,5—
0,8
; -
-
-
Титан
0,02—0,1
32
16
-
15
-
АМг61-М
6,1
0,7
-
-
-
40
24
-
11
-
А Д31-Т
0,4—
0,3—0,7
17
8
-
20
-
АД31-Т1
0,9
20
15
15
8
80
АД 33-Т
0,8—
0,4—0,8
0,15—
Хром
0,15—0,35
23
12
15
8
-
АДЗЗ-Т1
1,2
0,4
27
24
15
10
Алюминий —магний-кремний
АД35-Т
0,8—
0,5—
0,8—1,2
26
13
-
-
-
АД35-Т1
1,4
0,9
30
28
-
10
30
АВ-М
12
-
8
30
30
АВ-Т
0,45—
0,9
0,15—
0,35
0,5—1,2
-
0,1—
0,5
-
20
12
16
18
65
АВ-Т1
30
28
21
10
95
Алюминий—цинк— магний
В92-Т
3,75
0,8
-
2,75
—
Титан
0,2
36
20
-
20
-
Алюминий—медьмагний (дюралюмин)
Д1-Т
0,4— 0,8
0,4—
0,8
-
3,8— 4,8
-
38
20
-
12
95
Д16-Т
1,2—
1,8
0,3—
0,9
-
-
3,8—
4,9
-
44
30
27
10
105
Алюминий—цинк— магний—медь
В95-Т1
1,8—
2,8
0,2-
0,6
-
5—7
1,4—2
Хром
0,1—0,25
52
44
40
6
150
Алюминий—медь— магний
Д18-Т
Б. Деформируемые сплавы
1 °2“ 1 1 1 0,5 — 1 1 —
для заклепок и болтов 2,2—3 — 30
17
19
24
70
В65-Т
1 0,15— 1 0,3
1 0,31 0,5
1 3,9— 1 4,5
40
1 — 1
25
20
4.2. АЛЮМИНИЕВЫЕ СПЛАВЫ
163
Продолжение табл. 4.1?
Марка и состояние сплава
Легирующие компоненты в %
Механические свойства
Группа сплава
маг¬
ний
мар¬
ганец
кремний
цинк
медь
прочие
кГмм2
а0,2»
кГммг
V
кГмм2
а. %
НВ, кГмм2
Алюминий—цинк— магний—медь
В94-Т1
1,2-
1,6
-
-
5,9—
6,8
1,8—
2,4
Титан
0,02—0,08
52
44
29
15
150
Алюминий—магний
АЛ-8
1 9,5— 1 11,5
В. Сплавы для литых деталей
28
1 23
1 И
70
Г. Сплавы для сварных соединений
По СНиП И-В.5-64. Проволока сварочная из алюминия и алюминиевых сплавов принимается по ГОСТ 7871—63
Марганец или хром в том же количестве.
Данные — ориентировочные.
мере сходен с расчетом стальных конструкций. Однако пониженный модуль продольной упругости алюминиевых сплавов приводит к необходимости выбора систем, в которых эти особенности не являются недостатком, например мембранные и висячие конструкции, а также системы, обеспечивающие относительно небольшие прогибы, — неразрезные, рамные, арочные и т. д. Большое внимание должно быть обращено на обеспечение общей и местной устойчивости.
По назначению алюминиевые конструкции делятся на следующие три группы: ограждающие, например оконные переплеты, витражи, подвесные потолки; совмещающие несущие и ограждающие функции, например панели стен и покрытий, пространственные конструкции покрытий; несущие.
Механические свойства алюминиевых сплавов определяются их химическим составом, состоянием (обработкой), видом и размерами полуфабрикатов, наличием или отсутствием плакировки и т. д. Поэтому приведенные в табл. 4.17 данные о химическом составе и механических характеристиках приняты с некоторым осреднением по сравнению с данными СНиП П-Е.5-64 [137]. Диаграммы растяжения и сжатия разных алюминиевых сплавов сравнительно мало отличаются друг от друга, однако в отличие от стали у них отсутствует площадка текучести; за условный предел текучести сплавов принимается обычно напряжение при относительном остаточном удлинении 0,2 7о.
Химический состав и механические характеристики алюминиевых сплавов для строительства, включенных в СНиП И-В.5-64, приведены в табл. 4.17.
Перечисленные в табл. 4.17 алюминиевые сплавы предназначаются:
для ограждающих конструкций — АД1-М, АМц-М, АМг-М и АД31-Т; эти сплавы отличаются высокой коррозионной стойкостью и технологичностью;
для конструкций, совмещающих несущие и ограждающие функции (в зависимости от необходимой прочности и коррозионной стойкости) —АМц-М, АМц-П, АМг-М, АМг-П, АМг5-М, АД31-Т, АД31-Т1, АДЗЗ-Т, АДЗЗ-Т1, АД35-Т, АВ-М, АВ-Т; эти сплавы отличаются высокими или средними показателями коррозионной стойкости и технологичности;
для несущих сварных конструкций — АМг5-М, АМгб-М, АМг61-М, АДЗЗ-Т 1, АВ-Т1, В92-Т; сплав АВ-Т1 по условиям коррозионной стойкости должен применяться с содержанием меди до 0,1%;
для несущих клепаных и болтовых конструкций — те
же сплавы, что и для несущих сварных конструкций с добавлением сплавов Д1-Т, Д16-Т и В95-Т1; однако последние три сплава обладают пониженной коррозионной стойкостью.
Помимо перечисленных СНиП И-В.5-64 предусматривает применение при соответствующем обосновании и других марок и состояний алюминиевых сплавов.
Для заклепок и болтов помимо указанных в табл. 4.17 могут применяться сплавы АД1-М (нагартованные заклепки), АМц, АМг5п-М (здесь индексом «п» обозначен сплав для изготовления проволоки и прутков), АМг, АДЗЗ-Т 1, АВ-Т1 и др.
За нормативное сопротивление деформируемых алюминиевых сплавов растяжению, сжатию и изгибу принимается меньшая из двух величин: 0,7 наименьшего временного сопротивления разрыву, установленного стандартами или техническими условиями, или условный предел текучести, соответствующий напряжению при относительном остаточном удлинении 0,2%.
Ударная вязкость алюминиевых сплавов меняется в пределах от 1 кГмсм2 (В95-Т1) до 9 кГмсм2. Данные по пределу выносливости (усталости) приведены в СНиП И-В.5-64.
Коэффициент линейного расширения алюминиевых сплавов а23-10_6 град _1, т. е. примерно вдвое больше, чем у стали. Однако температурные напряжения в алюминиевых конструкциях ниже, чем в стальных конструкциях, в связи с более низким значением Е. Модуль сдвига (5270 000 кГсм2.
Приводимые в СНиП Н-В.5-64 расчетные сопротивления соответствуют температуре металла от —40 до --50° С. При понижении температуры от —40 до —70° С расчетные сопротивления не меняются.
При повышении температуры сверх 50 и до 100° С к расчетным сопротивлениям вводятся понижающие коэффициенты 0,8—0,95 в зависимости от марки сплава и условий работы конструкций. При температуре свыше 100° С должны приниматься еще более низкие значения коэффициентов или использоваться теплопрочные алюминиевые сплавы.
Соединения алюминиевых элементов. Широкие пределы изменения системы, марок и состояний алюминиевых сплавов, а также толщин соединяемых элементов приводят к необходимости использования большого количества видов соединений: сварных, клепаных, болтовых, клеевых и др. В алюминиевых конструкциях применяются различные виды сварки, основными из которых являются:
164
РАЗДЕЛ 4. МАТЕРИАЛЫ ДЛЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ. МЕТОДЫ РАСЧЕТА
а) механизированная (автоматическая или полуавтоматическая) или ручная электродуговая сварка в защитной среде инертных газов с применением неплавящегося вольфрамового электрода и присадочной проволоки;
б) механизированная электродуговая сварка в защитной среде инертных газов с применением плавящегося электрода;
в) электрическая контактная сварка.
Применение сварки в струе инертного газа (обычно аргона) препятствует образованию оксидной пленки.
В качестве электродного и присадочного материала применяются: в конструкциях из сплавов АД1, АМц — проволока из того же сплава; в конструкциях из магналиев — проволока из основного металла или магналия с более высоким (по сравнению с основным металлом) содержанием магния; в конструкциях из сплавов системы алюминий — магний — кремний — проволока из сплавов особого состава; в конструкциях из сплавов В92 — проволока из того же сплава или из сплава особого состава.
Под влиянием нагрева при сварке наблюдается разупрочнение основного металла, особенно сплавов, упрочненных термической обработкой. Это приводит практически к отказу от сварки таких сплавов, как дюралюмин ь: Д1-Т и Д16-Т, а также сплава В95-Т1 и учету значительного разупрочнения, особенно для сплавов системы алюминий — магний — кремний.
Электрическая контактная сварка применяется для соединения тонкостенных элементов.
Заклепочные соединения в алюминиевых конструкциях выполняются с применением холодных заклепок из материалов более пластичных (по сравнению с основным материалом), чем алюминиевые сплавы, обычно той же системы.
Болты в соединениях алюминиевых конструкций применяются:
а) повышенной и нормальной точности, выполненные из алюминия и стали;
б) болты с обжимными кольцами (лок-болты), состоящие из закладного стержня с головкой, выполняемого из алюминиевого сплава средней и высокой прочности, и замыкающей части (обжимного кольца) из алюминиевых сплавов повышенной пластичности;
в) высокопрочные стальные болты.
Во избежание контактной коррозии стальные болты небходимо оцинковывать.
Клеевые соединения могут применяться как самостоятельно, так и в сочетании со сварными и болтовыми соединениями. Помимо этого клеевые соединения применяются в трехслойных конструкциях, например при соединении среднего слоя из пластмасс и наружных слоев из алюминиевых сплавов.
Полуфабрикаты (профили) для конструкций. Алюминиевые полуфабрикаты поставляются металлургическими заводами в виде гладких и профилированных листов, плит, прутков, профилей, труб, поковок, штамповок и проволоки. Гладкие листы небольшой толщины могут поставляться в рулонах.
Алюминиевые полуфабрикаты в ряде случаев выполняются тонкостенными, что определяется высокой коррозионной стойкостью и технологичностью. Согласно СНиП П-В.5-64 минимальная толщина листов и стенок профиля для несущих конструкций допускается 1,5—
3 мм; для конструкций, ограждающих и совмещающих несущие и ограждающие функции, толщина не лимитируется.
Прессованные профили изготовляются различного поперечного сечения: сплошные и полые (замкнутые профили); прессованные профили с утолщениями (бульбами)
и отбортовками; сплошные профили для поясов трехгранных конструкций; профили с очертанием, приспособленным для присоединения стекла, и т. д.
Размеры поперечного сечения прессованного профиля (диаметр описанного круга) определяются диаметром цилиндра пресса, который равен обычно 320 мм, а в отдельных случаях 530 мм и более.
Коррозионная стойкость. Высокая коррозионная стойкость алюминиевых сплавов определяется образованием на их поверхности тонкой окисной пленки, которая препятствует дальнейшему прониканию кислорода и сильно замедляет процесс окисления. При этом коррозия алюминиевых сплавов имеет затухающий во времени характер. Коррозия алюминиевых сплавов может вызываться как химическими, так и электрохимическими реакциями.
Химические реакции возникают обычно под влиянием кислот с водородным показателем рН 4,8 или под влиянием щелочей с рН9,5. При этом коррозия алюминия, например газовая, может быть и при отсутствии влаги. Электрохимическая коррозия может проявляться при контакте металлов с разными потенциалами и при наличии электролита, а также при контакте алюминиевых сплавов с некоторыми неметаллическими материалами из-за содержания агрессивных веществ, например щелочей, в бетоне.
Коррозионная стойкость алюминиевых сплавов и конструкций из этих материалов зависит от: характера и степени агрессивности среды; системы, марок и состояния сплава; формы элементов и конструкций; вида контактов с другими материалами и т. д.
По отношению к алюминиевым сплавам химические элементы могут быть неагрессивными, агрессивными при определенных условиях и агрессивными.
К числу неагрессивных элементов и соединений относятся: водород, аргон, кислород, озон, жидкий кислород, сера, азот, углерод, сернистый газ, сероводород, аммиак, мочевина и др.
К числу элементов и соединений, агрессивность которых зависит от концентрации, влажности, температуры и других условий, относятся кислоты: сернистая, серная, азотная, угольная, борная, фосфорная и др.
Агрессивными по отношению к алюминиевым элементам и соединениям являются фтор, хлор, бром, йод, соляная кислота, мышьяковистая кислота, карбонат калия (поташ), карбонат натрия( сода) и др.
Наибольшей коррозионной стойкостью обладают чистый алюминий; технический алюминий АД1 с малым количеством примесей; сплав алюминий — марганец; магналии с относительно невысоким содержанием магния (до 4—5%); сплавы систем алюминий — магний — кремний (при отсутствии меди или ограниченным ее содержанием до 0,1%); сплав В92-Т.
Невысокой коррозионной стойкостью обладают сплавы Д1-Т, Д16-Т и В95-Т1.
Наклеп обычно несколько снижает коррозионную стойкость алюминиевых сплавов, неупрочняемых термической обработкой. Термическая обработка снижает коррозионную стойкость.
Выбор марок и состояний алюминиевых сплавов должен увязываться с условиями эксплуатации. Например, при применении алюминиевых конструкций в приморской среде рекомендуются сплавы системы алюминий — магний (магналии) и должны исключаться сплавы, содержащие медь. В целях повышения коррозионной стойкости следует избегать труднодоступных для осмотра и очистки мест, а также мест скопления воды и пыли.
В целях исключения контактной коррозии следует применять долговечные прокладки (СНиП И-В.5-64).
4.3 БЕТОН
1Ь5
Коррозионная стойкость алюминиевых сплавов может быть в необходимых случаях повышена в результате:
а) применения покрытий (плакирования) листов, например, чистым алюминием во время прокатки листового материала, что сопряжено, однако, с небольшим снижением показателей прочности; при этом плакирование яв¬
ляется обязательным для листов из дюралюминов и сплава В95-Т1;
б) анодирования, как повышающего коррозионную стойкость, так и улучшающего архитектурные качества конструкций;
в) применения лакокрасочных покрытий.
4.3. БЕТОН
Общие сведения. Бетон — искусственный каменный материал; состоит из цементного камня (или камня, образующегося из других вяжущих материалов), тяжелых или легких заполнителей (гравия, щебня, керамзита, шлака, песка и пр.), пор и капилляров, заполненных воздухом и водой в жидкой и газообразной фазе.
Основные виды бетонов:
а) цементный бетон, изготовленный из смеси портландцемента или цемента других видов, заполнителей и воды;
б) силикатный бетон, изготовленный из смеси извести, воды, тонкомолотой добавки (молотого кварцевого песка, доменного гранулированного шлака и др.), песка и других заполнителей; силикатный бетон применяется преимущественно в изделиях, твердеющих в автоклаве;
в) ячеистый бетон, имеющий равномерно распределенные поры с размерами до 3 мм, изготовленный из смеси вяжущего (цементного, известкового), тонкодисперсного компонента (например, молотого песка) и порообразователя.
По объемному весу бетоны подразделяются:
а) на обыкновенные (тяжелые) — с объемным весом более 1800 до 2500 кгм3; изготовляются с тяжелыми заполнителями (обычно с гравием и щебнем тяжелых горных пород);
б) легкие — с объемным весом 600—1800 кгм3; к ним относятся бетоны с легкими заполнителями (керамзитом, шлаком, пемзой) и ячеистые бетоны.
Кроме указанных существуют особо тяжелые цементные бетоны с объемным весом более 2500 кгм, применяемые для специальных защитных сооружений, и особо легкие теплоизоляционные бетоны с объемным весом менее 500 кгм3.
Более подробную классификацию бетонов см. [311.
Прочность (так же, как деформации и другие свойства) в значительной степени зависит от соотношений и свойств входящих в состав бетона материалов, методов укладки и обработки смеси, возраста к моменту загружения, размеров бетонного элемента, температуры и влажности среды, в которой находится бетон, и др.
Обобщенные данные о прочности и деформациях бетона в зависимости от различных факторов, а также о методах испытания, приведены в [23, 24, 26, 27, 29, 30, 32].
Прочность образцов бетона при сжатии зависит от абсолютных и относительных (отношение высоты образца Л к его толщине й) размеров образца. Это объясняется действием возникающих при сжатии сил трения между поверхностями образца и плит пресса. Эти силы препятствуют поперечным деформациям и увеличивают разрушающую нагрузку. Влияние сил трения тем больше, чем меньше отношение кй. Например, для образцов, имеющих одинаковые размеры в плане, но разную высоту, при кй — 0,5 разрушающая нагрузка составляет от 1,5 ЯКуб до 2,5 Ркуб, а при кй 4 — от 0,75 Якуб до 0,95 Ркуб, где ЯКуб — разрушающая нагрузка для куба (кй 1). Влияние сил трения изменяется также с изменением абсолютных размеров образцов — кубов бетона.
Правила изготовления, условия хранения и методы испытания образцов бетсна различных видов см. [25, 26, 27,33].
Прочность бетона в конструкциях близка к прочности бетона, получаемой при испытании призмы, с отношением кй 4—8. Предел прочности при сжатии призмы сечением 20X20 см и высотой 80 см называется призменной прочностью ?Пр. Она может быть вычислена, пользуясь формулами (а) и (б), с подстановкой в них вместо нормативных сопротивлений — пределов прочности бетона.
При сжатии бетона образуются микротрещины (разрывы), обнаруживаемые с помощью тензометрических, ультразвуковых и других методов испытания при сравнительно небольших напряжениях %г, равных для очень слабых бетонов 0,3—0,4 пр, а для очень прочных 0,65— 0,75 ?Пр [24]. Видимые трещины появляются при напряжениях, превышающих 0,7 ?Пр.
Влияние длительности приложения нагрузки на прочность зависит главным образом от величины напряжений. Если напряжения в бетоне меньше ?т, то длительное приложение нагрузки не уменьшает (а по некоторым данным немного увеличивает) предел прочности бетона по сравнению с бетоном, не подвергавшимся длительному загружению и испытанным в том же возрасте. Если же напряжения превышают длительное сопротивление бетона ?дл 0,8 ?пр, то длительное действие нагрузки вызывает его разрушение.
Повторное приложение нагрузки при большом количестве циклов загружения приводит к разрушению, если максимальное напряжение при этой нагрузке превышает ?т, т. е. для прочных и высокопрочных бетонов больше 0,5—0,75 цр.
Различные факторы по-разному влияют на прочность бетона при сжатии ?11р, растяжении Яр и срезе ?ср, поэтому соотношения между этими показателями прочности бетона изменяются в широких пределах. Отношение ?пр?р находится для разных бетонов в пределах от 5 до 16, причем обычно (но не обязательно) увеличивается с повышением марки бетона.
Сопротивление бетона растяжению при изгибе при соизмеримых размерах образцов [35] ?р.и 1,84-2,2 ?р; при этом ?р.и вычисляется по условной (для упругопластических тел) формуле сопротивления материалов ?р.и М : ПР. При изгибе бетон разрушается в растянутой зоне. Разрушение бетона в сжатой зоне возможно только в железобетонных балках.
Сопротивление бетона марок 100—300 срезу Ср 0,18-0,27 ?пр при длине площадок среза порядка 15— 20 см; в среднем ?Ср0,22 ?нР. Подробнее о сопротивлении и методах испытания бетона при растяжении и изгибе см. [30, 35].
Проектные марки бетона по прочности на сжатие и по прочности на растяжение являются характеристиками прочности бетона, назначаемыми при проектировании. Нормами установлены следующие проектные марки бетона по прочности на сжатие ?: 15, 25, 35, 50, 75, 100, 150, 200, 300, 400, 600, 800. Марки 15—75 относятся только к бетонам на пористых заполнителях, а
166
РАЗДЕЛ 4. МАТЕРИАЛЫ ДЛЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ. МЕТОДЫ РАСЧЕТА
марки 400—800 — только к тяжелым бетонам.
Соответствие фактической прочности бетона его проектной марке должно устанавливаться испытанием кубов бетона; при оценке результатов испытаний следует учитывать не только средние пределы прочности бетона, но и его коэффициенты изменчивости.
Нормативная кубиковая прочность бетона при сжатии Кн назначается с учетом изменчивости прочности бетона и принимается равной
(1-2Г»),
где Су — нормативное значение коэффициента изменчивости, равное для тяжелого бетона и бетона на легких заполнителях 0,135, а для автоклавного ячеистого цементного бетона сР — 0,18. Нормативная призменная прочность бетона определяется по формулам:
для тяжелых бетонов и бетонов на пористых заполнителях:
?н
—0,8 — 0,0001 Я 0,75, (а)
для ячеистых бетонов
Зависимость е и а не однозначна и может быть представлена полем а—е. Пример такой зависимости при сжатии тяжелого бетона (с постоянной скоростью загру-
6
Рис. 4.9. Зависимость деформаций от напряжений
-- 0,95 — 0,0005 Н- (б)
Расчетное сопротивление бетона определяется делением его нормативной призменной прочности на коэффициенты безопасности. Коэффициенты безопасности при сжатии Сб.с при расчете по 1-й группе предельных состояний принимаются равными для тяжелых бетонов и бетонов на пористых заполнителях Хб.с 1,20, а для ячеистых автоклавных цементных бетонов Сб.с 1,50. Нормативные и расчетные сопротивления бетонов различных видов см. в соответствующей главе СНиП.
Деформации. Зависимость между напряжениями а и деформациями е для бетона различна при разной скорости, длительности или повторяемости процессов загрузки и разгрузки. При очень быстром («мгновенном») загружении бетон ведет себя как идеально упругое тело. Однако при обычной в лабораторных условиях длительности испытаний (от нескольких минут до одного часа) и тем более при длительной загрузке бетона в элементах конструкций он должен рассматриваться как упругопластический материал. Пластические, необратимые деформации происходят вследствие сдвига в гелевой структуре цементного камня и на контактах между заполнителем и цементным камнем. При напряжениях, превышающих ?т (см. выше), развиваются квазипластические деформации, вызванные процессом микроразрушения бетона.
Полная относительная деформация еПОлн бетона без учета усадки может быть выражена формулой
еполн еупр Ь еп»
где 8уПр — упругая относительная деформация, соответствующая очень быстрому росту нагрузки; ви — деформация ползучести, возникающая при длительном загружении (в том числе в течение многих лет); деформация ползучести состоит из обратимой (упругое последействие) и необратимой частей.
жения) показан на рис. 4.9 (по данным [41]). Поле а—8 ограничено кривыми: 1 — упругих деформаций; 2—предельных деформаций при длительном загружении;
3 — пределов прочности бетона при длительном загружении (длительной прочности).
Деформации сжатия бетона при кратковременном загружении. Существующие нормативные документы устанавливают зависимость между а и е, соответствующую кратковременному загружению, длительность которого не регламентирована, но обычно не превышает 30 мин.
Диаграмма о — 8 при постоянной скорости роста деформаций показана на рис. 4.10. Кривая деформаций имеет нисходящий участок, соответствующий падению нагрузки.
Вследствие разнообразия свойств бетонов, влияния размеров образцов, влияния влажности бетона, зависимости деформаций от скорости нагружения и условности измерения предельной деформации, предшествующей разрушению, результаты экспериментальных данных разных исследователей различны, особенно в части определения предельной величины деформации.
Для установления связи между напряжениями и деформациями вводят величины (рис. 4.10): Е0 — модуль упругости (начальный модуль деформаций); Ес — средний (секущий) модуль деформаций; Ек— касательный модуль.
Приближенно Ек и 8 можно определять по формуле Л. И. Онищика:
Е“-Е"('-гтк;
Значения начальных модулей упругости при сжатии бетона Е0 — Е равны отношению нормального напря-
4.3. БЕТОН
167
Рис. 4.10. Зависимость напряжений от деформаций при кратковременном загружении и определение модулей Ео, Ес и Еи
Таблица 4.18
Начальные модули упругости тяжелого бетона при сжатии, Е в кгссм2
Проектные марки по прочности на сжатие
150
5
О
СО
о
О
400
600
800
200 000
240 000 290 000
330 000
350 000
400 000
Т а б л и а а 4.19
Начальные модули упругости ячеистого автоклавного цементного бетона при сжатии, Еб в кгссм2
Проектные марки по прочности на
сжатие
15
25 35
50
1 75
1 «0 1
150
12 000
17 000 25 000
38 000
оО 000
1 75 000
100 000
жения а к относительной деформации е при величине а0,2?Пр.
Значения Еб для тяжелых бетонов и автоклавных цементных ячеистых бетонов приведены в табл. 4.18 и 4.19. Для бетонов на пористых заполнителях начальный модуль упругости при сжатии определяется по формуле
Деформации сжатия бетона при прерывных и повторных кратковременных нагрузках. На рис. 4. 11 показана диаграмма сжатия бетона при прерывной (ступенчатой) нагрузке и одинаковой длительности выдерживания
где модуль упругости Еб и прочность бетона ? в кгссм2, а объемный вес у в гж3.
Через Еб по формулам, приведенным в СНиП И-В.1-72 [133], выражается жесткость В бетонных и железобетонных элементов, принимаемая при расчете деформаций и колебаний конструкций. Средний модуль деформаций бетона при значениях напряжений, близких к расчетным сопротивлениям, можно принимать равным: с0,85 Е б.
Доля упругой части еуПр полной деформации уменьшается с ростом напряжений. При напряжениях о г0,5 ?пр упругая деформация составляет обычно более 0,8 полной деформации.
Предельные деформации еПр при кратковременном сжатии бетона, соответствующие ?цр, обычно составляют от 0,8 до 2,2 ммм для разных видов бетона. При всестороннем сжатии бетона можно получить очень большие предельные деформации, порядка 10 ммм и более.
Коэффициенты поперечного расширения тяжелого бетона при напряжениях т0,5-т-0,6 ?пр обычно находятся в пределах и0,14-0,2. При напряжениях более 0,6 Пр коэффициент ц быстро возрастает и при напряжениях 0,9 — 0,95 Пр — 0,5. Согласно [130] при отсутствии опытных данных принимается для тяжелого и легкого бетона м- 0,15, для ячеистого бетона ц 0,2. При одноосном сжатии объем бетона при высоких напряжениях начинает постепенно увеличиваться по сравнению с объемом, соответствующим более низким напряжениям, и к моменту разрушения превышает первоначальный объем, что объясняется развитием микротрещин внутри массы бетона,
г?
X
I
г
Рис. 4.11. Зависимость между деформациями и напряжениями при прерывной нагрузке и одинаковой длительности выдерживания каждой ступени нагрузки
каждой ступени нагрузки. После каждой ступени нагрузки на диаграмме отмечена горизонтальная площадка, длина которой зависит от длительности и величины нагрузки. С течением времени развитие деформаций прекращается тем быстрее, чем меньше напряжение а. При очень больших напряжениях, близких к ?Пр, деформация развивается непрерывно, сначала при постоянной, а затем и при уменьшающейся нагрузке.
При повторных нагружениях и загрузках постепенно увеличиваются остаточные деформации, а кривая разгрузки и нагрузки выпрямляется, если напряжения не превышают предела выносливости бетона. После нескольких циклов нагрузки и разгрузки бетон начинает работать, как идеально упругое тело (рис. 4. 12, а). Если же напряжения превышают предел выносливости, то кривые нагрузки после ряда циклов нагружения остаются искривленными, и при продолжении таких испытаний происходит разрушение бетона.
168
РАЗДЕЛ 4. МАТЕРИАЛЫ ДЛЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ, МЕТОДЫ РАСЧЕТА
На рис. 4.12,6 (первый иикл загрузки и разгрузки) видно, что в процессе разгрузки до нулевых напряжений исчезает упругая часть деформаций еуПр. С течением времени после разгрузки постепенно исчезает еще небольшая часть деформации еупр (деформация упругого последействия). Остальная часть деформации е0ст является необратимой (остаточной).
Физические явления» происходящие в бетоне при повторных нагружениях, близки к возникающим при очень
о)
Рис. 4.12. Диаграмма деформаций бетона при повторных нагружениях
а — при напряжении, меньшем предала ьыноеливост и; б — при первом цикле загружения
Рас 4.13. Номограмма И. И. Улицкого для определения теристшш ползучести
длительном приложении нагрузки. Поэтому, если напряжения при повторных нагрузках не превышают то можно ожидать, что с увеличением количества циклов загружения полные деформации бетона достигнут предельных полных деформаций с учетом ползучести бетона (см. ниже).
Деформации при растяжении и сдвиге бетона мало исследованы. При длительном приложении нагрузки обнаруживаются пластические деформации растяжения, преимущественно при высоких напряжениях в бетоне. Более подробные данные о деформациях бетона при растяжении см. [35].
Согласно [130] модули упругости при растяжении принимаются теми же, что и при сжатии.
Предельная деформация бетона при растяжении примерно в 10 раз меньше, чем при сжатии, и составляет от 0,07 до 0,2 ммм. Растяжимость бетона в большой степени зависит от вида заполнителя. Для легких бетонов на щебне из туфа Г. Д. Цискрели [35] получил величину предельной деформации при растяжении от 0,16 до 0,3 мм)м.
Согласно [130] при отсутствии опытных данных разрешается принимать модуль сдвига бетона С?б —0,4 Е.
Деформация ползучести при сжатии бетона наблюдается даже при сравнительно небольших напряжениях: если напряжения не чрезмерно велики, эти деформации с течением времени затухают. Затухание деформаций объясняется, с одной стороны, постепенным перераспределением напряжений в бетоне от высокопластичной гелевой составляющей на значительно более жесткие заполнитель и цементный сросток, а с другой — уменьшением по мере твердения бетона количества геля в последнем.
Деформации ползучести, в том числе и предельная (соответствующая -►оо), зависят от многих факторов. Возраст бетона в момент нагружения влияет особенно сильно в первый период времени после нагружения и в меньшей степени в дальнейшем. С течением времени устанавливается одинаковая скорость деформации бетона, нагруженного в разных возрастах. При относительно небольших напряжениях, не превышающих 0,5 ?Пр, деформации ползучести за определенный промежуток времени действия нагрузки, а также и предельные приблизительно пропорциональны величине действующего постоянного напряжения. При напряжениях более 0,5 ?иг зависимость между предельной деформацией ползучести и напряжением нелинейна: предельная
деформация растет быстрее напряжения, Например, при а 0,6?Пр предельная деформация может быть в два раза больше, чем при о 0,5 пр.
Существенно влияют и размеры сечения испытываемых образцов. По опытам [39] деформация ползучести через 500 дней для образцов диаметром 15 см была на 60% больше, чем для образцов диаметром 25 см. Влияют на деформации ползучести также вид применяемого цемента, состав бетона, вид заполнителя, влажность бетона и среда, в которой он находится.
Ползучесть при напряжениях, не превышающих 0,5 Пр, характеризуют так называемой мерой ползучести с (в см21кГ), равной относитель¬
лредельнон харак-
4.3. БЕТОН
169
ной деформации ползучести при напряжении 1 кГсм2. Мера ползучести является функцией времени и увеличивается с длительностью приложения нагрузки.
Иногда ползучесть определяют не мерой ползучести, а так называемой характеристикой р, равной отношению деформации ползучести еп к упругой деформации еУпр:
Ф ;
Упр
Г
Г
О 45 1
гН(
т
те иди кГсм- в Ш
трасте
Нагружен 63кГсм2 6Возрасте ?вдн. (
иШ—
-—
—] 1 г-1 1 .гг, Йлъппгтр Змее. -
1
V
нагру
тен цкл
Я гг и
Л
у
I
У
Нагружен 42пГсм2 6 Возрасте 26дн
—’
■•л
ЩЦ
жен Ъ2к
гсд
ъзраепч
Змее.,
л
;г
чт
’шен 2Н
Гсмдк
возраст
’е 2вдн -
Н
х1'
500, 700
Дн
2
1
Рис. 4.14. Деформации ползучести [39, 40]. Образцы-цилиндры —10 см, НЗЪ см. Состав бетона 1:5 по весу. ВЦ0,Ь9
Зависимость между мерой и характеристикой ползучести определяется формулой
с — Ф,.
Деформация ползучести может определяться по формуле
г пред
у
где
1, время, отсчитываемое от момента изготовления бетона, в годах; х—«возраст бетона в момент нагружения в годах; а—напряжение в кГсм2 (т0,5 Пр).
Формула дает хорошие результаты для тяжелых бетонов при коэффициентах т1,5 и п — 2.
По экспериментальным данным [40], соответствующим длительности нагружения бетонных образцов до 7— 10 лет, была установлена предельная мера ползучести в зависимости от вида применяемого цемента — от 0,007 до 0,018 ммм. Согласно [38, 39] предельная мера пол¬
зучести составляла для образцов из тяжелого бетона на портландцементе, загруженных в возрасте 28 дней, 0,017—0,018 ммм, а загруженных в возрасте 90 дней, 0,015—0,016 ммм.
Деформация ползучести развивается в основном в течение первых двух лет после нагружения бетона; через год достигает 65—75%, а через 2 года—80—90% величины предельной деформации. На рис. 4.14 показаны деформации ползучести бетона по опытам [39, 40].
Усадка бетона происходит вследствие изменений объема гелевой структуры, вызванных постепенным испарением избыточной воды и поглощением ее зернами цемента при 1идратации. При обезвоживании гель уплотняется, причем остающаяся в гелевой структуре вода стягивает частицы геля [36]. Усадку бетона вызывают также химические процессы, происходящие при его твердении.
В первые дни твердения бетона при быстром процессе кристаллообразования и вследствие влияния экзотермии возможно некоторое увеличение объема бетона.
В последующем происходят описанные выше процессы, вызывающие усадку бетона. Скорость усадки уменьшается с течением времени, но прекращение ее иногда наблюдается только через несколько лет.
Исследования [22] показали, что при достаточно высокой влажности бетона высыхание его, связанное с удалением свободной воды из крупных пор, не вызывает усадки. По достижении некоторой «критической» влажности бетона начинается удаление влаги из гелевой структуры и происходит усадка.
Величина «критической» влажности в опытах [22] для тяжелого бетона находилась в пределах 1—2%. По другим данным усадка начинается при более высокой влажности бетона. Опыты, проведенные над небольшими образцами затвердевшего бетона, показывают, что его усадка составляет обычно от 0,2 до 0,4 ммм, достигая в некоторых случаях 0,7 ммм (для бетонов, имевших в начале измерений возраст несколько дней).
При увлажнении происходит увеличение объема бетона (набухание). Оно начинается также после достижения некоторой «критической» влажности. Деформации набухания (отнесенные к 1% влажности бетона) значительно меньше деформаций усадки.
Подробнее о деформациях усадки и набухания и методах их определения см. [22, 133].
Коэффициент линейного температурного расширения а не является устойчивой величиной и зависит от вида и состава бетона, вида заполнителя и пр.
Величина ш, при изменении температуры конструкции от —50° С до 50° С, принимается в пределах ог 0,7 10“5 в зависимости от вида и состава бетона, если влажность бетона близка к условиям естественного воздушно-сухого хранения. При более высокой влажности аг принимается от 1 -10—5 до 1,5 105 — при отрицательных температурах и увеличивается на 0,1 -10“ — при положительных температурах.
д
170
РАЗДЕЛ 4. МАТЕРИАЛЫ ДЛЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ. МЕТОДЫ РАСЧЕТА
4.4. КАМЕННЫЕ МАТЕРИАЛЫ И РАСТВОРЫ
Общие сведения. Каменные материалы подразделяются по своему происхождению на искусственные и природные. К искусственным камням относится обыкновенный, пустотелый и пористый (обожженный) кирпич, пустотелые керамические камни, силикатный кирпич, крупные и обыкновенные сплошные и пустотелые бетонные и легкобетонные камни, камни из ячеистых бетонов, сырцовые каменные материалы (сырцовый кирпич, са-
Рис. 4.15. Виды современных искусственных каменных материалов
а — кирпич сплошной; б — кирпич пустотелый пластического прессования; в — то же, сухого прессования; г — пустотелые керамические камни; д — бетонные камни сплошные; е — то же, пустотелые с щелевидными пустотами; ж — крупные блоки легкобетонные сплошные
ман) и др. Наиболее распространенные типы современных искусственных каменных материалов показаны на рис. 4.15.
Природные камни подразделяются на камни правильной и неправильной формы. Камни правильной формы применяются для кладки стен и облицовки. Камни для кладки стен выпиливают из мягких горных пород (с пределом прочности от 4 до 100—150 кГсм2) — вулканических туфов, мягких известняков (типа инкерманского в Крыму), известняков-ракушечников. Плиты и камни для облицовки изготовляют распиловкой или раскалыванием (с последующей обработкой поверхностей) из гранита, диорита, базальта, лабрадорита, известняка, песчаника, мрамора и других изверженных, метаморфических и осадочных пород. Камень неправильной формы
(бут рваный, бут постелистый, плитняковый бут) получают из местных горных пород всех видов, но преимущественно из известняка.
Растворы для каменных кладок подразделяются:
а) по объемному весу в сухом состоянии — на обыкновенные (тяжелые) с объемным весом 1500 кгм3 и легкие с объемным весом менее 1500 кгм2 б) по виду вяжущих — на цементные, известковые и смешанные (цементно-известковые, цементно-глиняные). Для зимней кладки применяются растворы с противоморозными добавками — нитритом натрия, поташом и др.
Более подробные данные о каменных материалах и растворах см. [65].
Прочность. Методику испытаний каменных материалов определяет ГОСТ 8462—62 [49]. Основной вид испытания — испытание на сжатие, на основании которого устанавливается марка камня.
Прочность на изгиб определяется только для кирпича высотой 65 и 88 мм (рис. 4.15).
Испытания на осевое растяжение и на срез ГОСТом не предусматриваются.
Марки камня, принимаемые при проектировании и характеризующие предел прочности камня на сжатие в кГсм2, установлены следующие: 4, 7, 10, 15, 25, 35, 50, 75, 100, 125, 150, 200, 300, 400, 500, 600, 800 и 1000.
Природные камни одной и той же горной породы отличаются большим разнообразием механических свойств, различных не только для камня разных карьеров или разных участков одного и того же карьера, но даже
Таблица 4.20
Пределы прочности на сжатие и марки природных камней из различных горных пород
Материал
Объемный вес в кгм3
Предел прочности в кГсм2
Наиболее
распро¬
странен¬
от
до
ные марки камней
Известняк плотный, прочный 2000—2600
150
2000
200, 300,
Известняк малой прочности (мягкий, пильный) типа инкерманского.
1800—2000
30
150
400, 600 35, 50, 75,
2500—2800
1000
3000
100
1000
Песчаник.
2100—2800
100
2000
300. 400,
Гранит.
2500—2800
1000
3200
500, 600, 800 1000
Сиениг.
2500—2900
1500
2000
1000
Диабаз. к.
3000
2000
4000
1000
Базальт.
2700—3300
1000
4000
1000
Вулканические туфы:
артикский (Армянская ССР).
900—1500
35
150
35, 75, 100
тедзамский (Грузинская ССР).
1200
50
150
50, 75, 100
Известняки - ракушечники:
крымский желтый (евпаторийский).
900—1200
4
15
4, 7, 10
крымский белый (керченский)
1200—1400
7
25
7, 10, 15
одесский
1100—1300
7
15
7, 10, 15
молдавский.
1400—1600
15
50
15, 25
бакинский:
пористый
1300—1400
7
15
7, 10, 15
более плотный
1500—2000
25
150
35. 50, 75,
100, 150
4 4. КАМЁМЯЫЕ МАТЕРИАЛЫ И РАСТВОРЫ
171
одного и того же пласта породы. Особенно неоднородны осадочные породы.
В табл. 4.20 приведены пределы прочности на сжатие камня наиболее распространенных горных пород [44, 55—58].
При увлажнении осадочные породы теряют часть своей прочности. Так, коэффициент потери прочности при увлажнении плотных известняков равен обычно 0,85—0,65, а мягких известняков — 0,70—0,50. Песчаники в зависимости от содержания в них глины могут терять еще большую часть прочности (до 70%). Допускается применение камней, имеющих коэффициент потери прочности не ниже 0,6. Увлажнение изверженных пород практически не снижает их прочности.
Установленные ГОСТами [42, 43, 46—48] марки различных видов кирпича, керамических и бетонных камней приведены в табл. 4.21. В табл. 4.22 даны соотношения между пределами прочности образцов кирпича при различных испытаниях.
Таблица 4.21
Марки искусственных каменных материалов
Материал
Марки, установленные ГОСТом и нормами
Кирпич:
глиняный обыкновенный.
200,
150,
125,
100,
75, 50
силикатный -
200,
150,
125,
100,
75
глиняный пустотелый пла¬
150,
125,
100,
СП
50
стического прессования.
то же, полусухого прессова¬
100,
75,
60
ния
шлаковый.••••••
75,
50,
25
Камни:
керамические пустотелые
150,
125,
100,
75,
50
пластического прессования.
бетонные, легкобетонные и
из ячеистого бетона (вклю¬
чая крупные блоки):
сплошные из обыкновенных
тяжелых бетонов. «,
200,
150,
125,
100,
75, 50
то же, пустотелые. .100,
75,
50,
35
сплошные из легких бетонов
100,
75,
50,
35
и силикатные автоклавные.
то же, пустотелые.
75,
50,
35,
25
сплошные из особо легких
100,
75,
35
бетонов, «. „ • 1.
50,
Сырцовый кирпич, саман и т. п.
15,
10,
7,
4
Т а б л и ц а 4.22
Отношение пределов прочности кирпича при изгибе, растяжении и срезе к пределу прочности при сжатии, определяемому стандартным испытанием [60]
Испытание
Пределы колебаний относительной прочности
Средняя относительная прочность
Изгиб •••••••••
Растяжение •••••••
Срез «»••••■•••
1
0,09—0,36
0,02—0,1
0,13—0,33
1
0,2
0,06
0,2
Прочность кладки из кирпича высотой 65 или 88 мм в значительной степени зависит не только от его сопротивления сжатию, но и от других показателей прочности, в частности от сопротивления растяжению и изги-
. Поэтому ГОСТами [10, 111 установлены для каждой
марки кирпича также и требования к прочности прп изгибе, приведенные для основных видов кирпича в табл. 4.23.
Пределы прочности бетонных камней при сжатии, изгибе, растяжении и срезе определяются прочностью бетона, из которого они изготовлены.
Таблица 4.23 Средние значения предела прочности глиняного и силикатного кирпича при изгибе в кГсм2
Марка кирпича
200
150
125
100
75
Предел прочности при изгибе (среднее) в кГсм2
34
28
25
22
18
Марки раствора, принимаемые при проектировании и характеризующие предел прочности на сжатие стандартных образцов по ГОСТ 5802—66 [45] в возрасте 28 дней (для монтажных швов кладки из панелей и крупных блоков и для ручной кладки), установлены следующие: 4, 10, 25, 50, 75, 100, 150 и 200.
О назначении марок см. [65].
Деформации. Деформации природных камней исследованы сравнительно мало. По испытаниям [51] гранит достаточно близок по своим механическим свойствам к идеально упругим материалам. При напряжении 0,8 разрушающего упругие деформации гранита составляли 85% общей деформации.
Для гранита с пределом прочности 1100 кГсм2 при (Т0,81 (где 1 — предел прочности образца при сжатии) модуль упругости Е450 000 кГсм2, секущий модуль (средний модуль полных кратковременных деформаций) Ес 375 000 кГсм2, полная деформация сжатия 0,2 ммм, коэффициент поперечного расширения и 0,08-0,15.
По данным [50], для известняков с пределом прочности 500—1000 кГсм2 предельные деформации сжатия составляют от 1,4 до 3,4 ммм при максимальной упругой деформации 0,7—2,4 ммм. Секущий модуль для известняков Ес 180 000—315 000 кГсм2. Коэффициент поперечного расширения ц0,2 ч-0,3 при о0,6?1; при больших напряжениях ц,0,3-т-0,4.
Деформации обожженного кирпича [54] примерно пропорциональны напряжениям. Модуль упругости кирпича пластического прессования, определяемый по деформациям кубиков или призм, вырезанных из кирпича, Е — 200-5-12007?. Более низкие значения Е получаются для образцов меньшей плотности (меньшего объемного веса), имеющих трещины, и слабообожженных.
Модуль упругости кирпича полусухого прессования при сжатии в направлении прессования Е300-?-400?и а в направлении, перпендикулярном направлению прессования, Е — 80 н-120?1.
Зависимость между напряжениями и деформациями силикатного кирпича криволинейна. Его упругие свойства зависят в значительной степени от плотности кирпича. По экспериментальным данным, при о—0,4? секущий модуль упругости силикатного кирпича Ес350-т-
-т-1200 ?,.
Коэффициент поперечного расширения кирпича
ц0,08-г-0,12.
Предельная деформация сжатия керамических камней [53] при ?1 150 -5-300 кГсм2 составляет от 1,1 до
3 ммм. Отношение предельной деформации сжатия к предельной деформации растяжения изменяется от 9 до
172
РАЗДЕЛ 4. МАТЕРИАЛЫ ДЛЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ. МЕТОДЫ РАСЧЕТА
15 (большая цифра — для более прочной керамики). Пластические деформации составляют от 10 до 25% полной величины деформации. Секущий модуль керамики при У?200-т-330 кГсм2 50 ООО-г-80 ООО кГсм2. Коэффициент поперечного расширения при а 0,5?1 равен ц0,1; с ростом напряжений ц увеличивается, достигая к моменту разрушения р,0,25.
О деформациях раствора см. [54].
Деформации ползучести обожженного кирпича пластического прессования [52] незначительны и составляют в возрасте 180 дней при а 0,55?1 около 0,12 ммм. Деформации ползучести силикатного кирпича в том же возрасте при о0,3?1 равны 0,59 ммм.
Усадочные деформации глиняного обожженного кирпича при увлажнении и сушке незначительны и в зависимости от степени обжига и пористости кирпича находятся в пределах от 0,01 до 0,06 ммм. Усадка силикатного кирпича, согласно требованиям английского стандарта, может составлять 0,25—0,35 ммм.
Коэффициенты линейного расширения каменных материалов [32]
гранит., известняк сланцы кирпич.
0,.8 10—5 0,910—5 1,010-5 0,45-10-2
4.5. КАМЕННАЯ КЛАДКА
Прочность. Каменная кладка хорошо сопротивляется сжатию и относительно плохо — растяжению. Сопротивление кладки растяжению зависит от сцепления раствора с камнем, которое определяется рядом факторов и колеблется в широких пределах. Проектная прочность сцепления может быть обеспечена только при условии соблюдения ряда специальных производственных мероприятий. Поэтому каменные стены и столбы проектируют таким образом, чтобы эксцентрицитет не превышал 0,45г, где Н высота сечения; при этом в расчете не учитывают сопротивление кладки растяжению, и внутреннее продольное усилие уравновешивается напряжениями одной лишь сжатой зоны.
Вследствие местных неровностей и неодинаковой плотности раствора в швах при сжатии кладки камни испытывают, кроме напряжений сжатия, также напряжения изгиба и среза. Если модуль упругости камня больше, чем раствора, то в поперечном направлении в камне возникают напряжения растяжения, а в растворе — сжатия. Вертикальные швы кладки вследствие слабого сцепления раствора с камнем могут рассматриваться как узкие вертикальные щели, у концов которых возникает концентрация напряжений. Таким образом, при сжатии кладки ее элементы находятся в весьма сложном напряженном состоянии, что является причиной значительной разницы между прочностью кладки и составляющих ее камня и раствора. Например, прочность кирпичной кладки на самом прочном растворе составляет обычно лишь 35—40% прочности кирпича. Наибольшее влияние на прочность кладки имеют:
а) прочность камня; увеличение предела прочности камня при сжатии в 2 раза повышает прочность кладки в 1,6—1,8 раза; прочность кирпичной кладки, кроме того, зависит в очень большой степени от сопротивления кирпича изгибу и срезу;
б) размеры камня; чем больше высота камня, тем больше момент сопротивления его сечения и, следовательно, тем меньше влияние сопротивления камня изгибу и срезу; с увеличением высоты камня прочность кладки, при прочих равных условиях, существенно повышается (рис. 4.16);
в) форма камня; в кладке из камней неправильной формы при сжатии очень велики местные концентрации напряжений и, кроме того, уменьшается сопротивление кладки сдвигу по плохо перевязанным сечениям; поэтому, например, кладка из рваного бутового камня высокой прочности даже на прочном растворе имеет предел прочности, равный лишь,2—6% прочности камня;
г) наличие пустот в камне; кладка из пустотелых камней, как правило, слабее кладки из сплошных камней при одинаковой прочности камня вследствие нерав¬
номерного распределения напряжений в кладке; степень этого уменьшения прочности зависит от формы и расположения пустот в кладке и для кладки из оптимальных типов пустотелых камней может быть минимальной;
ЯкГсм
Рис. 4.16. Зависимость между пределом прочности кладки ?° и раствора К.2 (прочность камня ? 1 100 кГсм2)
— кирпичная кладка; 2 — кладка из сплошных бетонных камней; 3 — кладка из пустотелых бетонных камней; 4 — кладка из крупных блоков из тяжелого бетона;
5 — то же, из легкого бетона; 6 — кладка из рваного бута
д) прочность раствора (см. рис. 4.16); ее влияние значительно и тем больше, чем меньше высота камня; увеличение прочности раствора с 4 до 100 кГсм2 повышает прочность обычной кирпичной кладки в 1,8—2 раза; имеет существенное значение также плотность раствора; применение пористых, сильносжимаемых растворов (например, на легких заполнителях) понижает прочность кладки на 10—30%;
е) качество кладки; неровная поверхность и неодинаковая плотность.раствора в горизонтальных швах, плохое заполнение швов и т. п. значительно уменьшают прочность кладки; если принять за 100% установленный нормами средний предел прочности ручной кирпичной
4.5. КАМЕННАЯ КЛАДКА
173
кладки при обычном ее качестве, то при более низком качестве прочность кладки составляет всего лишь 80_85оуо а при очень высоком — 150—160%; вибрирование кирпичной кладки значительно улучшает заполнение швов, что является одной из причин большого повышения прочности виброкирпичной кладки по сравнению с обычной; применение жестких, трудноукладываемых растворов ухудшает качество швов и понижает прочность кладки на 10—15%;
ж) перевязка кладки; имеет весьма существенное значение при внецентренном приложении нагрузок, при действии горизонтальных нагрузок (например, сейсмических), при зимних кладках, выложенных методом замораживания и пр.;
з) сцепление раствора с камнем; имеет решающее значение в случаях, когда кладка работает на растяжение или на изгиб.
Наиболее вероятные (ожидаемые) пределы прочности при сжатии кладки среднего качества приведены в табл. 4.24. Они вычислены по формуле Л. И. Онищика [65], которая связывает прочность кладки с прочностями камня и раствора.
Таблица 4.24
Пределы прочности при сжатии каменных кладок ?°
Кладка
Марка
камня
Значения ?о при прочности раствора в кГсм а
100
50
25
Кирпичная на тяжелых
150
45
35
30
растворах с добавлением
100
35
30
25
извести или глины
75
30
25
22
Из сплошных бетонных
100
45
40
35
камней при высоте ряда
75
37
32
29
кладки 200—300 мм
50
30
25
23
Крупноблочная; блоки из
150
77
77
74
тяжелого бетона
100
54
54
51
То же, из легкого бетона
75
42
42
41
50
29
29
28
Из рваного бута
400
30
23
16
200
22
17
13
Примечание. Пределы прочности бутовой кладки
указаны для возраста 3 мес., 28-й день.
для остальных кладок — на
Вибрированная кладка кирпичных панелей может иметь прочность б 1,7—2 раза более высокую, чем прочность обычной кладки из тех же материалов.
Влияние длительности приложения нагрузки на сопротивление кладки сжатию зависит от величины напряжений. Длительное сопротивление дЛ сжатию ориентировочно равно: для кирпичной кладки на растворах марок 50 и выше — 0,8?°, марок 10 и 25 — 0,7?°, для кладок на известковом растворе — 0,6?°. При напряжениях адЛ кладка может нести нагрузку неограниченное время. При напряжениях 0,2? а?дл прочность
кладки с течением времени даже несколько повышается (на 5—15%) в результате ее уплотнения под нагрузкой.
Сцепление раствора с кладкой зависит от прочности и усадки раствора, скорости поглощения камнем воды, чистоты поверхности камня, температуры и влажности воздуха, при которых твердеет кладка, содержания примесей в камне и растворе. Различают нормальное (к плоскости контакта раствора и камня) и касательное сцепление.
Осевое растяжение и растяжение при изгибе возможно по неперевязанным сечениям, например по горизонтальному шву (рис. 4.17,а), и по перевязанным, например по ступенчатым или плоским вертикальным сечениям (рис. 4.17,6). Сопротивление растяжению по непере-
□айЭ
I
Рис. 4.17. Растяжные кладки
л - неперевязанных сечений; о — перевязанных сечений; 1 — ступенчатое сечение; 2 плоское сечение
вязанному сечению зависит исключительно от величины нормального сцепления, а сопротивление по перевязанным сечениям — главным образом от величины касательного сцепления, а иногда, при малой прочности камня, от его сопоотивления растяжению.
Подробные данные о сцеплении и сопротивлении кладки растяжению и изгибу приведены в [62, 651, а расчетные сопротивления при сжатии и других видах напряженного состояния — в [134].
При расчете каменных конструкций, работающих в обычных условиях, разрешается учитывать только растяжение по перевязанным сечениям (например, при расчете силосных башен); сопротивление кладки по неперевязанным сечениям принимается в расчет только при действии сейсмических нагрузок.
Во всех случаях, когда прочность конструкции обеспечивается ее сопротивлением растяжению, должны приниматься специальные меры при производстве работ, обеспечивающие надежное сцепление.
В обычных условиях растяжение при изгибе по неперевязанным сечениям учитывается только при расчете на внецентренное сжатие при больших эксцентрицитетах; в этом случае расчет растянутой зоны, с учетом растяжения, является лишь условным методом ограничения раскрытия горизонтальных швов (трещин).
Деформации. Кладка является упруго-пластическим телом. Характер зависимости между деформациями и напряжениями для кладки тот же, что и для бетонов (см. 4.3); изменяются лишь числовые значения характеристик.
Абсолютная деформация кладки при сжатии значительно превышает суммарную деформацию рядов кирпича и горизонтальных растворных швов, образующих кладку. Это объясняется смятием раствора в зонах кон¬
174
РАЗДЕЛ 4. МАТЕРИАЛЫ ДЛЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ. МЕТОДЫ РАСЧЕТА
тактов камня и раствора и постепенным закрытием воздушных промежутков, образовавшихся вследствие неровной поверхности горизонтальных швов [54].
Зависимость между напряжениями и деформациями является функцией длительности приложения нагрузки и может быть представлена полем о—е, как это показано для кладки на прочном растворе на рис. 4.18.
Рис. 4.18. Примерная зависимость между напряжениями и деформациями для кирпичной кладки на прочном растворе. ?°30 кГсм2 Ео30 000 кГсм2. Загрузка в 28-дневном возрасте
— кривая упругих деформаций; 2 — то же, длительной прочности; 3 — то же, предельных деформаций при длительном загружении
Модуль упругости кладок (начальный модуль деформаций) Ео определяется по формуле
Е0 ан,
где а—упругая характеристика; принимается для не_, армированных кладок по табл. 4.25;
н—средний предел прочности кладки при сжатии.
Значение среднего модуля упругости при напряжениях, соответствующих эксплуатационным нагрузкам, Е—0,8Ео, а при напряжениях, близких к разрушающим, Е0,5 Ео.
При кратковременной нагрузке относительные деформации е при любом напряжении могут быть вычислены по формуле, приведенной в 4.3. Полная относительная деформация при длительной нагрузке и при напряжении о определяется (с учетом ползучести, но без учета усадки) по формуле
т
еПОЛН.ДЛИТ “ Леупр Л 7т
0
где Л—2,2 — для кладки из обыкновенного глиняного кирпича и из керамических камней;
т)3—для кладки из силикатного кирпича, а также из крупных блоков и камней из легкого или силикатного бетона;
Т)2,8 — для кладки из крупных блоков или камней, изготовленных из тяжелого бетона;
Т3,5—для кладки из крупных блоков или камней, изготовленных из автоклавного ячеистого бетона.
Подробнее о деформациях ползучести каменных кладок см. [52].
Деформации усадки кладки из обыкновенного глиняного кирпича малы, и ими обычно пренебрегают. Деформации усадки кладки из силикатного кирпича принимают равными 3104, а кладки из различных видов бетонных камней — от 2,5 • 104 до 3,5 • 10-4 (подробнее см. [65]).
Коэффициент линейного расширения кладки из глиняного кирпича и керамических камней а0,5Х ХЮ-5 град1; кладки из силикатного кирпича, бетонных камней, крупных блоков и бутобетона — 1 • 10“5 град1; кладки из природных камней — 0,8- 105 градК
Приведенные выше данные о прочности и деформативных свойствах кладок относятся к условиям возведения их при нормальных температурах. О выполнении кладки в зимних условиях и об особенностях ее работы при этом см. [65, 134].
Более подробные данные о свойствах кладок см. [59—65].
Т а б л и ц а 4.25
Значения упругой характеристики а
Кладка
упругая характеристика а при марках раствора
25 и выше
10
4
0
Из кирпича глиняного пластического прессования, пустотелых керамических камней, легкобетонных и легких природных камней.
1000
750
500
200
Из кирпича силикатного
750
500
350
200
Крупноблочная; блоки из тяжелого бетона или из тяжелого природного камня (V 1800 кгм3) 1500
1000
750
500
То же, из легкого бетона, силикатного бетона, автоклавного ячеистого бетона, легкого природного камня.
750
750
500
350
Из тяжелых природных и цементных бетонных камней и бута 1500
1000
750
350
Из глиняного кирпича полусухого прессования обыкновенного и пустотелого.
500
500
350
200
Примечание. Для кладки на легких растворах
зна-
чения а снижаются на 30%.
4. 6. АРМИРОВАННЫЕ МАТЕРИАЛЫ И КОНСТРУКЦИИ
4.6.1. Общие данные
Рациональное сочетание двух различных по своим физико-механическим свойствам материалов — бетона и стали, каменной кладки и стали, асбестоцемента и стали или стеклопластика — позволяет получить железобетон различных видов, армокаменную кладку, армирован¬
ный асбестоцемент. Их свойства зависят от свойств исходных (бетона, стали, камня и др.), но в них появляется ряд ценных свойств, которыми не обладали составляющие материалы.
Бетон и каменная кладка имеют предел прочности при сжатии, превышающий предел прочности при растяжении в 10—15 раз и более, асбестоцемент — в 4—5 раз.
4.6. АРМИРОВАННЫЕ МАТЕРИАЛЫ И КОНСТРУКЦИИ
175
Использование высокой прочности при сжатии этих материалов в элементах конструкций, работающих на изгь.б или внецентренное сжатие, при значительных эксцентрицитетах возможно только при усилении растянутой зоны сечения арматурой.
Если обычная бетонная или каменная балка при появлении трещин в растянутой зоне разрушается, то при армировании растянутой зоны, несмотря на наличие трещин в бетоне или в кладке, несущая способность балки такого же сечения не исчерпана и нагрузка может возрасти во много раз.
В железобетонной или армокаменной сжатой колон не достижение предела текучести в арматуре еще не оз начает исчерпания ее несущей способности. Армированные конструкции, таким образом, обеспечивают и более рациональное использование стали. В армированном элементе арматура всех видов, кроме того, надежно защищена от механических повреждений и коррозии.
Соединение бетона, кладки или асбестоцемента со стальной арматурой обеспечивается силами сцепления между этими материалами; малая разница в величине коэффициентов линейного расширения этих материалов практически исключает внутренние напряжения при изменении температуры.
Работа конструкций из армированных материалов более сложна, чем работа конструкций из неармированных материалов; этим обусловлен и более сложный метод их расчета.
Для армированного элемента не может быть принято каких-либо постоянных модулей зависимости напряжение — деформация.
В зависимости от назначения конструкции и величины нагрузки для различных напряженно-деформированных состояний принимаются различные предпосылки для расчета, установленные в основном эмпирическим путем.
Единых методов испытаний армированных материалов не установлено. Оценка их прочности может производиться на основании оценки свойств исходных материалов: бетона, стали, каменной кладки, раствора, асбестоцемента, стеклопластика. Прочность, жесткость и трещиностойкость изделий, изготовляемых промышленными методами из армированных материалов, оценивается испытаниями этих изделий по соответствующим ГОСТам и техническим условиям.
4.6.2. Железобетон
Подробные сведения о железобетоне см. в [77], дан» ные об арматуре и бетоне — в 4.1 и 4.3, о расчете — в [77, 133].
Железобетонные конструкции, в которых отсутствуют искусственно созданные начальные напряжения, называются обычными. Если в процессе изготовления или возведения железобетонных конструкций в них искусственно создаются начальные напряжения, то эти конструкции называются предварительно напряженными.
Начальные напряжения создаются предварительно растянутой арматурой. Арматура подвергается растяжению либо до укладки бетона в опалубку, либо после установки ее в каналах или по поверхности отвердевшего бетона отдельного элемента, либо же после сборки конструкции. Иногда предварительно напряженные элементы сами используются в качестве арматуры при образовании более мощных железобетонных элементов.
Стадии напряженно-деформированного состояния. В процессе нагружения железобетонный элемент испытывает последовательно различные состояния, которые условно разделяются на три стадии.
На рис. 4.19 показаны примерные кривые прогибов середины железобетонной 2 и бетонной 1 балок, на рис. 4.20 — эпюры напряжений в различных стадиях.
В начале загружения (стадия , рис. 4.12) напряжения в сжатой и растянутой зонах сечения балки находятся в линейной зависимости от деформаций, эпюры
Рис. 4.19
напряжений также линейные, деформации носят упругий характер. По этой стадии проводится расчет жесткости бетонных или слабо армированных элементов, в которых при эксплуатационной нагрузке нет трещин в растянутой зоне. Напряжения в растянутой арматуре
Стадия 1
не превышают 200—300 кГсм2. При дальнейшем увеличении нагрузки эпюра напряжений искривляется и, когда напряжения в растянутой зоне достигают предела прочности, наступает стадия 1а. Бетонная балка в этой стадии разрушается.
По стадии 1а ведут проверку на образование трещин в изгибаемых элементах и определяют их жесткость до момента появления трещин.
В стадии II в растянутой зоне образуются трещины, и все усилия растянутой зоны воспринимаются арматурой. На участках между трещинами сцепление бетона с арматурой не нарушается, и бетон здесь продолжает работать на растяжение. Наибольшие напряжения в ар¬
176
РАЗДЕЛ 4. МАТЕРИАЛЫ ДЛЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ. МЕТОДЫ РАСЧЕТА
матуре возникают в местах образования трещин, наименьшие — в средней части участка между трещинами. Между нагрузкой на балку и прогибами (см. рис. 4.19) в стадии II существует криволинейная зависимость — прогибы растут быстрее нагрузки.
В стадии Па напряжения в растянутой арматуре достигают предела текучести. Напряжения в сжатой зоне бетона еще не достигают предела прочности бетона на сжатие при изгибе. Вследствие текучести арматуры и увеличения плеча внутренней пары нагрузки в стадии Па может еще несколько возрастать — до достижения в сжатой зоне бетона предела прочности его на сжатие при изгибе, что характеризует уже стадию III — разрушение.
В этой стадии деформации ползучести распространяются на значительную часть сжатой зоны сечения, эпюра нормальных напряжений резко искривляется. Напряжения сжатой арматуры достигают значения предельного сопротивления, напряжения растянутой арматуры равны или менее величины предельного сопротивления.
По стадии ведется расчет по второму и третьему предельным состояниям, а также определяются усилия в статически неопределимых системах с учетом их перераспределения, вызванного пластическими деформациями.‘По стадии III ведется расчет по первому предельному состоянию, при этом криволинейную эпюру сжатия бетона допускается заменять прямоугольной.
Полностью сжатые или растянутые сечения составляют частные случаи рассмотренного выше напряженнодеформированного состояния. В полностью сжатых сечениях могут быть лишь I и III стадии, в полностью растянутых — все три стадии.
Если арматуру балки натянуть и создать в бетоне предварительные напряжения сжатия, то при изгибе такой балки трещины в растянутой зоне появятся только после исчерпания предварительного напряжения сжатия и достижения бетоном предельного удлинения. До этого момента, если в сжатом бетоне не появились пластические деформации, конструкция будет работать по стадии , т. е. балка будет деформироваться упруго. После появления трещин эффект предварительного напряжения не сказывается.
Сцепление стальной арматуры с бетоном обеспечивает совместную их работу. Сцепление определяется:
1) механическим зацеплением неровностей на поверхности арматуры за бетон — трением стержня о бетон под действием давления от усадки; 2) собственно сцеплением или «склеиванием» поверхности стержня с бетоном. Установлено (особенно при применении арматуры периодического профиля или другой арматуры с негладкой поверхностью), что решающее значение имеет первый из указанных факторов [71], хотя многие исследователи и считали (основываясь на испытаниях гладкой арматуры), что собственно сцепление имеет не меньшее значение.
Сцепление зависит от вида поверхности арматуры, состава и свойств бетона, способа хранения конструкций в раннем возрасте, расположения арматуры в сечении, длительности и характера прилагаемой нагрузки и некоторых других причин. Сцепление относительно выше при арматуре периодического профиля и при архматуре меньшего диаметра; при круглой стали — на 20— 25% больше, чем при стали квадратного сечения; наименьшее — при полосовой стали. Сцепление значительно повышается при поперечных хомутах и сварных каркасах. Сцепление в конструкциях при статической нагрузке колеблется от 5 до 100 кГсм2, а при пульсирующей нагрузке нижний предел составляет иногда 2—3 кГсм2, Сцепление круглых стальных стержней обычно колеблет¬
ся от 25 до 40 кГсм2 для бетона марки 100 и выше. Стандартных испытаний на сцепление нет. При испытании на выдергивание напряжение сцепления распределяется неравномерно по длине стержня (рис. 4.21).
Приведенные численные значения сцепления выражают не максимальное значение (Сц, см. рис. 4.21),
. Рсч
Ясц.ср
Рис. 4.21
а средние величины в предположении равномерного распределения напряжений сцепления по длине стержня. Усилие, требующееся для выдергивания стержня, почти не возрастает при увеличении длины заделки сверх 25—30 диаметров. Сцепление стальной арматуры с бетоном близко по величине к пределу прочности бетона при сдвиге, который равен примерно 15 предела прочности при сжатии (это отношение уменьшается с повышением марки бетона). Сцепление растет с возрастом бетона.
Усадка в железобетонных конструкциях протекает несколько иначе, чем в бетонных, вследствие влияния арматуры. При усадке бетона часть усилий, возникающих в бетоне, арматура принимает на себя. Напряжения в арматуре от усадки бетона могут достигать 600— 700 кГсм2 и более. По длине стержня напряжения от усадки распределяются неравномерно — в середине длины стержня оно примерно в 2 раза выше, чем у концов.
Усадка в железобетоне зависит не только от состава бетона, но и от количества и расположения арматурных стержней, а также от условий начального хранения.
При хранении образцов в воде наблюдается противоположное явление — разбухание железобетона.
На рис. 4.22 приведены примерные данные о нарастании усадки и разбухания со временем для бетонного и железобетонного образцов. Усадка железобетонных образцов почти в 2 раза меньше бетонных.
В армированном сечении напряжения от усадки и разбухания в бетоне концентрируются вблизи стержней арматуры. Радиус взаимодействия арматуры с бетоном принимается обычно равным 3—4 диаметрам арматуры.
ммГм
Рис. 4.22
4.6. АРМИРОВАННЫЕ МАТЕРИАЛЫ И КОНСТРУКЦИИ
177
В элементах железобетонных конструкций усадка приводит к появлению напряжений двух видов: во-первых, в арматуре и бетоне возникают напряжения, обусловленные внутренней статической неопределимостью каждого элемента [32]; во-вторых, возникают напряжения, обусловленные линейными и угловыми деформациями отдельных элементов вследствие статической неопределимости конструкции в целом. Последние определяются методами строительной механики, как и температурные напряжения.
Следует учитывать отрицательное действие усадки при изгибе и растяжении, так как она ускоряет появление трещин в бетоне, увеличивая в нем растягивающие напряжения. В сжатых элементах усадка разгружает бе тон и нагружает арматуру, обычно недогруженную.
Согласно [133] коэффициент линейного расширения тяжелого бетона при нагреве от 0 до 100° С а 1 • 10-5 град1; коэффициент линейной усадки Р 3 10“2; коэффициент линейного набухания г)5 103.
Армирование бетона приводит к уменьшению ползучести вследствие того, что арматура деформируется упруго и тем задерживает деформации ползучести бетона. Конечная деформация ползучести в железобетонных конструкциях может все же достигать значительных величин (превышать упругую в два раза и более) [74], и в некоторых случаях ее надо учитывать.
Ползучесть зависит от возраста бетона к моменту нагружения. Раннее нагружение резко увеличивает ползучесть (рис. 4.23). Ползучесть значительно уменьшается при повышении марки бетона.
Уменьшение ползучести достигается не только применением специальных цементов и соответствующим подбором составов бетона, но и конструктивными мерами.
Для предварительно напряженных железобетонных конструкций ползучесть может быть значительно уменьшена [70], если арматуре предварительно даются напряжения в течение короткого срока (несколько дней) на
5
ОЗ,
рса
СП7
Т(
'1н.
Г
—7
“ШШ"
Г
30 60 90 ПО 150 ПО ЕЮ
Время с момента изготовления в днях
Рис. 4.23
10% больше требующихся по расчету. При повышенной влажности и пониженной температуре ползучесть прекращается. Приближенный расчет на ползучесть приведен в [78].
Предельное удлинение бетона при растяжении (предельная растяжимость) ер1 • 10“4 и не зависит от количества арматуры и характера армирования. Однако многочисленными опытами установлено, что такая оценка предельной растяжимости является неточной, так как размеры и расположение трещин в бетоне зависят о г величины и характера армирования.
Установлено [72, 73], что в большинстве случаев рас¬
Л
Рис. 4.24
178
РАЗДЕЛ 4. МАТЕРИАЛЫ ДЛЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ. МЕТОДЫ РАСЧЕТА
крытие трещин до 0,2 мм неопасно и не приводит к коррозии арматуры. Такую величину раскрытия трещин можно принять за предельно допустимую, и если предельную растяжимость бетона оценивать по условиям раскрытия трещин, то можно считать, что она зависит от армирования.
Арматура выравнивает напряжения в бетоне, ликвидирует отдельные местные перенапряжения, препятствует раскрытию появившихся местных трещин сверх 0,2 мм и тем самым увеличивает предельную растяжимость участка конструкции. Чем больше арматуры и чем равномернее она распределена в бетоне, тем больше ее эффективность [35].
Трещиностойкость конструкции повышается с увеличением прочности сцепления и при применении арматуры периодического профиля. По трещиностойкости арматура периодического профиля примерно в 2 раза эффективнее гладкой.
Предельная сжимаемость железобетона зависит от характера армирования. Арматура способствует более равномерному распределению напряжений в бетоне и предупреждает появление местных перенапряжений. Поперечная арматура сокращает поперечные деформации бетона и в несколько раз увеличивает предельную деформацию сжатия (предельную сжимаемость).
4.6.3. Армоцемент
Армоцемент — особый вид тонкостенного железобетона, состоящий из мелкозернистого (цементно-песчаного) бетона, насыщенного очень тонкой арматурой — в виде тканых или сварных сеток из проволоки диаметром от 0,7 до 1,2 мм, с ячейками от 6 до 25 мм (дисперсное армирование). Толщина плоских и криволинейных элементов обычно находится в пределах 10—30 мм.
Применяется также вторая разновидность армоцемента, в котором вместе с сетками, в наиболее напряженных утолщаемых участках конструкции укладывается арматура в виде стержней различного диаметра (комбинированное армирование). Последняя разновидность армоцемента близка по своим физико-механическим свойствам, методам расчета и испытаний к обычному железобетону.
Для армоцемента применяется бетон марки 300 и выше, укладываемый вибрационными или иными методами, обеспечивающими получение изделий высокой плотности.
Объемный вес армоцемента 2,5—2,8 тж3 (при расчетах принимается 2,5 тм3 при двух сетках и по 50 кгм3 на каждую дополнительную сетку). Расход цемента от 400 до 800 кгм3, а иногда и более. Однако увеличение расхода цемента нежелательно, так как это приводит к увеличению усадки армоцемента. Крупность частиц песка должна быть не более 5 мм; ВЦ — в пределах 0,25—0,28. Расход стали на 1 м3 армоцемента колеблется от 150 до 300 кг и больше.
По сравнению с железобетонными конструкциями армоцементные не требуют общего увеличения расхода цемента и стали на сооружение, так как объем армоцементных конструкций в 3—4 раза меньше.
Армоцементные конструкции применяются для пространственных, сборно-монолитных покрытий промышленных зданий средних и больших пролетов, в виде плит различной формы для покрытий и перекрытий, для подвесных потолков, в виде объемных элементов (рис. 4.24), стеновых панелей для неотапливаемых зданий. Имеются
«Указания по проектированию армоцементных конструкций» (СН 366-67). Стройиздат, 1968
примеры использования армоцемента в гидротехнических сооружениях и т. д. Благодаря безопалубочному изготовлению и возможности придания конструкциям разнообразных конфигураций из армоцемента возводятся сооружения сложных архитектурных форм больших пролетов. Однако общая изученность армоцемента еще недостаточна. Поэтому приводимые ниже данные подлежат уточнению, особенно в части эксплуатационной стойкости.
Коррозионная стойкость армоцемента значительно ниже, чем железобетона, что объясняется небольшой толщиной защитного слоя и примененивхм проволоки небольшого диаметра. В условиях нормальной влажности при хорошей гидроизоляции допустимая величина защитного слоя для сеток 4 мм, для стержневой (проволочной) арматуры 8 мм, а в местах утолщений ребер 10 мм.
Рационально применение защитных покрытий, особенно в условиях атмосферных воздействий и агрессивных сред, в виде нескольких слоев покрасок перхлорвиниловыми, эпоксидно-цементными и другими составами или оклейки пленками.
Армоцементные конструкции применяются, как правило, при отсутствии агрессивных воздействий окружающей среды к бетону. При слабой степени агрессивности должна применяться антикоррозионная защита.
При средней и сильной агрессивности применение армоцементных конструкций не допускается.
Предел прочности армоцемента на сжатие на 10— 15% выше, чем для песчаного бетона (при испытании армоцементных образцов в виде полых цилиндров или призм). Напряжения в проволоке при разрушении достигают 2500—2700 кГсм2. Предел прочности на растяжение определяется на образцах-пластинах и равен временному сопротивлению на растяжение армирующей сетки. Примерная величина предела прочности армоцемента при растяжении — около 100 кГсм2. Предел прочности на изгиб и внецентренное сжатие и растяжение определяется работой сжатой и растянутой зон. В пределах до 0,3 разрушающих нагрузок работу армоцементного элемента можно считать упругой (стадия I напряженно-деформированного состояния железобетона) [67].
Относительные деформации Относитепьные деформации
Рис. 4.25
Характерная кривая зависимости сг—8 при сжатии приведена на рис. 4.25, а. Предельные деформации при сжатии достигают еир 2010“4 [66]. Зависимость а—е при растяжении приведена на рис. 4.25, б. Точка А кривой соответствует напряжениям, при которых начинается раскрытие трещин в бетоне [(10 -г- 20) 10-5]; точка Б — началу интенсивного роста трещин (условный предел текучести), после которого нагрузка почти не воз¬
4.6. АРМИРОВАННЫЕ МАТЕРИАЛЫ И КОНСТРУКЦИИ
179
растает, хотя деформации растут, достигая при разрыве сеток 20—25 %.
При поперечном изгибе при напряжениях около 0,3 предельных остаточные деформации не превышают 5— 7%.
Допустимое раскрытие трещин в армоцементе не должно превышать 0,05—0,1 мм. При таком раскрытии отдельных трещин в зависимости от количества арматуры и размера сеток деформации составляют от 10 104 до 50 10-4 (до 5 мм на 1 пог. м длины). Если влажность среды более 75% и даже при любой влажности воздуха, но при наличии химически агрессивной среды, раскрытие трещин не допускается.
Ползучесть армоцемента больше, чем обычного железобетона. Например, для сжатых образцов при нагрузках 0,25—0,3 разрушающих деформации через год в 3 раза превышали кратковременные. Относительно большая деформируемость отмечается у образцов с дисперсным армированием.
Коэффициент линейного расширения при нагреве от
0 до 100° С а1-105 градх коэффициент линейной усадки (34,5-10”2; коэффициент линейного набухания г 5 • 10“3.
Морозостойкость армоцемента, как правило, превышает 100 циклов. Водонепроницаемость также высокая. НИИСельстрой проводил испытания армоцемента толщиной 20 мм на давление 16 ати с положительными результатами.
Огнестойкость армоцементных конструкций ниже, чем железобетонных.
4.6.4. Армированные каменные конструкции
Армирование каменной кладки стальной арматурой в виде сеток, стержней или профильного проката приводит к увеличению несущей способности и к изменению упругих свойств кладки.
Для армирования применяются, как правило, стали низких марок. Применяются два вида армирования: поперечное (сетчатое) [79] и продольное (стержневое).
Арматура в армокаменных конструкциях устанавливается в растворные швы и покрывается слоем раствора, обеспечивающим соединение ее с кладкой. Прочность сцепления арматуры с раствором меньше, чем в железобетоне. Сцепление нарушается при достижении напряжений в кладке около 80—85% предельных. При поперечном армировании сцепление улучшается благодаря
давлению вышележащей кладки. Однако при небольших напряжениях в кладке увеличение сцепления в результате этого фактора незначительно. Сцепление увеличивается с повышением марки раствора.
Обычно для армированных кладок применяется раствор марки 25 и выше, что диктуется также и необходимостью обеспечения защиты от коррозии.
Предельная сжимаемость армокаменных столбов (для обычной кладки) больше, чем неармированных, и достигает величины е (20 -ьЗО) 104 [69]. Однако общий вид диаграммы сжатия не меняется (рис. 4.26) и остается близким к логарифмической зависимости. В связи с относительно небольшим содержанием стали в армокаменных конструкциях ползучесть последних может приниматься такой же, как и неармированных.
О расчете см. [65, 134].
4.6.5. Армированный асбестоцемент
Асбестоцемент представляет собой цементный камень, армированный волокнами асбеста (12—15% по весу цемента), которые придают цементному камню ряд особых свойств. Объемный вес асбестоцемента 1,55— 1,9 гл3, предел прочности на сжатие 400—500 кГсм2, на растяжение 100—140 кГсм2, на изгиб 160—220 кГсм2 и выше.
Однако асбестоцемент как конструктивный материал имеет существенные недостатки — низкая ударная вязкость (1,5—3 кГ•смсм2), относительно низкая прочность при растяжении (в 3—4 раза меньше, чем при сжатии), большая деформативность при изменении влажности (до 200 • 10-5).
Резкое улучшение качества изделий и конструкций из асбестоцемента достигается при армировании их стальной сеткой, отдельными стержнями, лентами или же полосами из стеклошпона.
Армирование осуществляется либо по так называемому способу накладного армирования [75], либо непосредственной укладкой арматуры в формуемую массу на листоформовочной машине. Последний способ наиболее просто осуществить на машинах, работающих на концентрированных суспензиях или же по полусухой технологии.
«Накладной» способ может применяться при армировании сырого асбестоцементного листа или после его отвердения. В первом случае арматуру закладывают при формовке изделия в слое цементно-асбестового раство¬
Рис. 4.26. Характер зависимости деформаций от напряжений для армированных каменных
столбов
_ нормированные столбы; 2 — продольное армирование ХУ,26%: 3 —- продольное армирование из
уголков с поперечными планками; 4 — армирование из уголков 0,92%; 5— армирование сетками через шов 0,25%; 6 — армирование сетками 0,82%
180
РАЗДЕЛ 4. МАТЕРИАЛЫ ДЛЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ. МЕТОДЫ РАСЧЕТА
ра между двумя слоями свежеотформованного асбестоцемента. Затем пакет подвергается прессованию или же уплотнению катком. Наименьшая толщина армированного листа 10 мм, наибольшая — не ограничена технологией изготовления. Сырой лист можно также армировать укладывая арматуру, покрытую слоем цементноасбестового раствора, в специально отформованные в изделии борозды. При армировании по «накладному» способу отвердевшего асбестоцемента арматуру укладывают либо в специальные борозды, либо в швы, либо непосредственно на поверхность изделия, соединяя ее с асбестоцементом изделия клеем, обычно эпоксидноцементным.
Впервые накладным способом армировали лотковые утепленные плиты для покрытий промышленных зданий.
а;
§
N
Разрыв О.
сб'естоцемента
СА
'О
1
6
п
г_р
Г
4
На
ча
р]у
ъ
%
л о тещ чести -
а о ил т и-
Г
ры.
1
Прогиб в сереЬине пролета
- Разрыв асйесто°) гЦементапри,—
Прогиб в середине пролета
Рис. 4.27. Общие характерные диаграммы прогибов образцов балок, армированных: а — кизкслтлеродистой сталью, имеющей площадку текучести: 6 — высокопрочной сталью, не имеющей площадки текучести
Стальную арматуру из 4-мм проволоки укладывали в свежеизготовленныи асбестоцементный лоток, составляющий основу плиты, в специально образованные при формовке борозды и покрывали асбестоцементным раствором. Несущая способность отвердевшей армированной плиты увеличивалась на 20—25%, исключалось ее хрупкое разрушение.
Таким же способом изготовляли армированные стеновые панели. Выпущены также армированные асбестоцементные волнистые листы из концентрированных суспензий. Листы армированы стальными о-мм стержнями и сеткой из 0,7-мм проволоки.
Испытаниями установлено, что ударная прочность листов увеличивалась в 5—7 раз сравнительно с неармированными листами.
Сцепление стальной или стеклошпоночной арматуры с эпоксидным клеем составляет примерно 60—70 кГ на
1 см2 поверхности арматуры. Прочность сцепления эпоксидного клея с асбестоцементом составляет 45— 55 кГ1см2.
Предельная сжимаемость асбестоцемента составляет (304-40) 10-4, предельная растяжимость—(25-30) 10-4. Следовательно, одновременно с использованием несущей способности асбестоцемента в стальной арматуре достигаются напряжения около 6000 кГсм2, если в ней не превзойден предел текучести. В этом состоит одно из основных отличий армированного асбестоцемента от железобетона. Если арматура имеет более низкое значение предела текучести, то при его достижении произойдет разрыв асбестоцемента, но разрушения конструкции не произойдет (рис. 4.27).
При применении в качестве арматуры высокопрочной проволоки или стеклошпона (модуль упругости которого небольшой — (4—5) 105 кГсм2), она предварительно натягивается. Отпуск натяжения производится после отверждения клея. Такое армирование применено в плитах ПАК [66].
Плиты ПАК размером 6X1,5 м состоят из плоских асбестоцементных 10-лш листов обшивки, которые эпоксидным клеем крепятся к асбестоцементным швеллерам, образующим каркас плиты. В клеевой шов, соединяющий нижний лист со швеллером, укладывают полосу стеклошпонной арматуры сечением 0,8X30 мм. В шов можно укладывать и стальную арматуру.
Ползучесть аршрованиых асбестоцементных конструкций примерно в 2 раза меньше, чем неармированных [76]. Армированные асбестоцементные конструкции рассчитываются по общим методам расчета железобетонных конструкций.
4.7. ДРЕВЕСИНА
4.7.1. Общие сведения
Древесина представляет собой природный материал высокомолекулярного состава. Основным веществом ее является целлюлоза, образующая утолщенные вторичные слои стенок механических волокон. Физико-механические свойства древесины обусловлены главным образом свойствами природной целлюлозы, а также микрои макроструктурой древесины, что в целом определяет неоднородность и анизотропность этого материала.
Неоднородность древесины проявляется в различии строения и свойств годичных слоев, образующихся в процессе роста дерева в зависимости от условий внешней среды. Вследствие анизотропности строения древесины, отклонение волокон от строгой параллельности оси ствола (косослой) вызывает снижение прочности крупных элементов по сравнению с малыми образцами чистой (без пороков) древесины. Особенно сильно влия¬
ние местного отклонения волокон около сучков, которым и обусловливается снижение прочности конструктивных элементов. Для обеспечения прочности необходима дополнительная отбраковка материала в соответствии с качественными категориями рабочих элементов конструкций по СНиП.
При работе в конструкциях древесина подвергается растяжению, сжатию и скалыванию вдоль и поперек волокон, смятию вдоль (в торец) и поперек волокон, смятию на части поверхности элемента. В тонких оболочках и пластинках учитывается двухосное напряженное состояние.
Система анизотропии древесины (для условно мгновенных деформаций при быстро прилагаемых небольших напряжениях) соответствует ортотропному телу с тремя осями анизотропии по главным структурным направлениям — вдоль и поперек волокон в тангенциальном и радиальном направлениях. Ввиду малого различия меж¬
4.7. ДРЕВЕСИНА
181
ду упругими характеристиками по двум последним направлениям, может быть принята трасверсальная анизотропия древесины с главной осью вдоль волокон.
Поведение древесины при механических воздействиях характеризуется довольно высоким модулем условно мгновенной деформации порядка ЫО5 кГсм2 (вдоль волокон), равновесным модулем эластической деформации, соответствующим деформации упругого последействия при выдерживании образца под постоянной нагрузкой до затухания деформации, порядка 5• 105 кГсм2 и " небольшой задержанной остаточной деформацией (в I области деформирования, см. 4.7.2), восстанавливаемой набуханием. По сравнению с древесиной длительный модуль упругости древесностружечной плиты весьма мал — всего 4-103—5-105 кГсм2 (при изгибе).
Коэффициент поглощения энергии колебаний древесины г) 0,07-4-0,12; он не зависит от скорости деформации и числа циклов (до предела выносливости); при расчетах конструкций принимают 0,304-0,35.
Механические показатели древесины изменяются с плотностью (прямая линейная связь) и снижаются с повышением влажности (до гигроскопической точки
— 30%) и температуры; стандартные показатели приводятся к влажности 15% и температуре 4-20°С. Влажностные деформации хвойной древесины составляют 8% в тангенциальном, 3,5—4% в радиальном и менее
1 % в продольном направлениях (при изменении влажности от 0 до 30%). Древесные материалы, изготовляемые с подпрессовкой, дают при увлажнении увеличенное разбухание, например древесностружечные плиты до 16—22% (по толщине). Температурные деформации древесины имеют порядок (3,5-г-5) 10“5 поперек волокон и 4-10—6 вдоль волокон на 1°С. Коэффициент теплопроводности воздушно-сухой древесины принимают 0,15 ккалм • ч • град.
Древесина — диэлектрик, обладает электроизолирующими свойствами и немагнитна. Химический состав древесины обусловливает ее долговечность в атмосфере ряда цехов с химически агрессивной средой. В необходимых случаях древесину защищают в конструкциях от гниения и возгорания [109].
Основными преимуществами деревянных конструкций является малый вес и удобство транспортирования, экономия металла, увеличенные сроки службы в условиях химически агрессивной среды [112] и высокая сейсмостойкость. Склеивание современными водостойкими синтетическими клеями позволяет получать необходимые размеры и формы поперечных сечений элементов требуемой длины, использовать короткомерный пиломатериал со стыкованием по длине на зубчатом соединении, выгодно располагая его в поперченом сечении элементов. С применением современных деревянных клееных конструкций в последнее время осуществлены арочные покрытия пролетом 100 му купольные покрытия диаметром 62 м. Основными областями эффективного применения деревянных клееных конструкций являются покрытия производственных, сельскохозяйственных, общественных, учебных, спортивных зданий, промышленных зданий и сооружений с химически агрессивной средой, строительство автодорожных мостов, морских сооружений, градирен, шахтных сооружений, строительство на Крайнем Севере, в необжитых и лесоизбыточных районах, строительство в сейсмических районах.
4.7.2. Механические свойства
Древесина обнаруживает эластические деформации, называемые ползучестью. К эластическим деформациям
относятся в I области деформирования упругое последействие и приращение деформаций (остаточных) при колебаниях влажности и температуры, а во II области — вынужденные эластические деформации воздушно-сухой древесины (преимущественно остаточные) и высокоэластические деформации набухшей древесины (примерно на Уз остаточные).
Развитие эластической деформации (в отличие от мгновенно устанавливающейся упругой, обусловленной изменением междучастичных расстояний), связано с релаксационными процессами, происходящими в целлюлозе под действием теплового движения; скорость этих процессов характеризуется временем релаксации. Проявление эластических свойств зависит от скорости вынужденной деформации. Если продолжительность силового воздействия сравнима с временем релаксации и скорость вынужденной деформации мала, эластические свойства проявляются полностью; если скорость вынужденной деформации велика, эластические свойства проявляются частично. Поэтому при быстро прилагаемом кратковременном силовом воздействии (сейсмические, ударные, ветровые нагрузки) деформации древесины уменьшаются, а сопротивление растет. Предел прочности зависит от скорости нагружения и определяется из испытаний, проводимых со стандартной скоростью малых образцов чистой (без пороков) древесины. Наименьшее сопротивление длительной нагрузке древесины в конструкциях принимается равным около 0,5 предела прочности при кратковременном испытании; наименьшее сопротивление фанеры определяется длительной прочностью древесины продольных шпонов. Дрс весностружечные плиты длительным сопротивлением не обладают (незатухающая ползучесть при минимальных напряжениях).
Время релаксации зависит от температуры, которая оказывает влияние на показатели механических свойств древесины; однако благодаря высокой ориентации макромолекул целлюлозы древесина не имеет температуры хрупкости. При увлажнении до 30% и набухании деформации древесины увеличиваются, и сопротивление ее снижается.
Для древесины характерны две области деформирования, границей которых является напряжение —
предел пластического течения, представляющий собой предел вынужденной эластичности воздушно-сухой древесины и начало появления высокоэластических деформаций набухшей древесины. На величину а1_1 указывает влияние скорость нагружения. В воздушно-сухой древесине под действием напряжений аа1_ц происходит нарастание остаточных деформаций, которые называются задержанными (т. е. невозвратившимися вследствие большого времени релаксации) эластическими деформациями; накопление этих деформаций не является показателем приближающегося разрушения. Одновременно с развитием остаточных деформаций происходит некоторое снижение модуля упругости, проявляющееся также при последующих нагружениях ниже а1_ц. В насыщенной водой набухшей древесине под действием напряжений 0Х_цпоявляются большие высокоэластические деформации, достигающие, например, при равномерном сжатии вдоль волокон величины 10% и более.
Две области деформирования отчетливо проявляются под повторной статической и пульсирующей нагрузкой: в I области древесина характеризуется постоянным модулем упругости и прочным сопротивлением при числе циклов 30 000 и более, т. е. ведет себя упруго; это позволяет принимать упругую работу древесины при расче¬
182
РАЗДЕЛ 4. МАТЕРИАЛЫ ДЛЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ. МЕТОДЫ РАСЧЕТА
те конструкций на эксплуатационную статическую, а также импульсную нагрузку. Во II области при действии усилия вдоль волокон происходит ускоренное разрушение древесины.
Основными характеристиками полимерных материалов и древесины, как природного полимера, являются длительная прочность и деформации ползучести. При расчете деревянных конструкций по методу предельных состояний исходными для определения расчетных сопротивлений древесины являются минимальные вероятные пределы прочности, принимаемые за нормативные сопротивления. Деля последние на коэффициент безопасности по материалу, учитывающий влияние пороков древесины, масштабного фактора и длительности действия нагрузки, получают расчетные сопротивления. Расчетный модуль упругости древесины вдоль волокон принимается одинаковым при сжатии, растяжении и изгибе и равным ЫО5 кГсм для нормальных температурно-влажностных условий службы конструкций.
В несущих конструкциях применяется древесина хвойных пород, преимущественно сосна и ель. Показатели физико-механических свойств древесины пород СССР
приведены в табл. 4.26. Сопротивление местному смятию древесины поперек волокон характеризуется условным пределом прочности, составляющим в среднем для сосны 29—43, пихты 23—32; лиственницы 56—86, дуба 84—49 и березы 60—47 кГсм2. Более подробные данные об этих показателях см. [89], а о стандартных испытаниях [84].
Древесина обнаруживает значительную анизотропию сопротивления — соотношение крайних величин пределов прочности по главным осям анизотропии (вдоль и поперек волокон) составляет (для малых образцов) при растяжении 1 : У15: Узо и при сжатии (по всей площади образца) 1 : 7ю У20. Вместе с тем при различны видах напряженного состояния характер и работа раз рушения древесины сильно различаются. При концентрации напряжений появляется хрупкое разрушение, происходящее с отрывом поперек волокон и скалыванием при малой работе разрушения: например, растянутый стержень с местным ослаблением разрушается с образованием продольных трещин, касательных к контуру ослабления; сопротивление клеевого соединения сдвигу полностью используется лишь при отсутствии или восприятии отрывающих усилий.
Задачей конструирования в дереве (выбор схемы конструкции и вида соединения элементов) является обеспечение достаточного запаса работы деформации пластического характера при потере несущей способности, исключая возможность хрупкого разрушения, а также устранение влияния на работу конструкции деформаций древесины поперек волокон, при минимальной трудоемкости изготовления и быстром монтаже конструкции; известными преимуществами в этом отношении обладают статически неопределимые системы.
Повышения несущей способности достигают в клееных конструкциях, в которых материал используется лучше: возможно удаление крупных местных пороков (сучков) со склеиванием на зубчатом соединении, помещение более прочной древесины в растянутую зону клееных изгибаемых элементов. Современные синтетические клеи и технология склеивания обеспечивают долговечность конструкций. С их помощью получают эффективные сочетания древесины с другими конструктивными материалами — алюминием, асбестоцементом, пластмассами (например, панели асбестоцементные с деревянным клееным каркасом, фанерные со средним слоем из пенопласта).
Ярко выраженная анизотропия сопротивления древесины несколько сглаживается в фанере с взаимно перпендикулярным расположением шпонов, имеющей соотношение максимального (вдоль волокон в рубашках) и минимального (под углом 45® к волокнам в рубашках) пределов прочности при растяжении около 1 : 0,4-0,5; в специальной фанере, склеенной с поворотом соседних шпонов на углы меньшие 90®, это соотношение может быть еще улучшено.
Улучшение механических показателей натуральной древесины может быть достигнуто путем ее модификации полимерами (повышение плотности, прочности, химической стойкости, исключение большой деформативности в набухшем состоянии, снижение формоизменяемости при увлажнении).
Т а б л и ц а 4.26
Прочность и деформативность древесины основных пород в СССР (средние показатели для стандартных образцов при влажности 15%)
Временное сопротивление в кГсм9
Порода
ы
ю
ю
5
и
ас
-а
ч
о
Скалывание вдоль волокон
(район произрастания)
о
О
ю
Я
г
ю
О
Сжатие вдоль волокон
т
3
X
гг
о
о.
а
с
о
С
Растяжение В; волокон
в радиальной плоскости
в тангенциальной плос кости
Вариационный коэффициент в %
10
13
15
20
21
19
Береза обыкновенная (За¬
680
460
917
—
86
99
падная Сибирь)
461
Бук кавказский
680
938
1291
99
131
Дуб (Украинская ССР)
720
535
916
—
—
118
Ель обыкновенная (Север
490
428
747
1295
62
65
европейской части СССР)
Лиственница сибирская
650
553
964
1186
93
85
(Восточная Сибирь)
Осина (Украинская ССР)
520
401
817
1330
63
87
Пихта кавказская
470
391
722
1118
77
82
Сосна обыкновенная (Цен¬
520
439
793
1150
69
73
тральные районы европейской части СССР)
Тополь белый (европей¬
460
308
533
860
54
71
ская часть СССР)
4.8. ПЛАСТМАССЫ
Общие сведения. Пластмассы — материалы на основе высокомолекулярных веществ (полимеров). Помимо полимеров пластмассы, как правило, содержат и другие компоненты: пластификаторы, наполнители и т. п. На¬
личие полимеров в составе пластмасс обусловливает ряд специфических свойств этих материалов.
Пластмассы подразделяются на термопластичные, изготовляемые на основе линейных полимеров, и термо¬
4.8. ПЛАСТМАССЫ
183
реактивные — на основе полимеров с пространственной структурой. Первые при нагревании приобретают пластичность, а при охлаждении вновь возвращаются в исходное состояние; вторые, будучи отверждены, при нагревании не переходят в пластическое состояние.
К пластмассам, применяемым в строительных конструкциях, относятся стеклопластики, оргстекло, винипласты, пенопласты, сотопласты, древесные пластики, синтетические клеи и др.
К строительным конструкциям с применением пластмасс относятся: трехслойные конструкции (плоские панели, складки, оболочки, своды и т. п.) с обшивками из высокопрочных листовых материалов (металла, асбестоцемента, фанеры, стеклопластика) и средним слоем из пенопласта или согопласта; трехслойные конструкции с ребристым средним слоем; однослойные и многослойные светопрозрачные элементы ограждений (панели, купола, волнистые листы) из полиэфирного стеклопластика, оргстекла и винипласта, пневматические (надувные) и тентовые конструкции из воздухонепроницаемых тканей и пленок.
Применение пластмасс в конструкциях наиболее целесообразно в «случаях, когда необходимо уменьшить вес конструкций: при строительстве в районах вечномерзлых грунтов, просадочных грунтов, на подрабатываемых территориях, когда надо сократить объем транспортных и строительно-монтажных работ, особенно при строительстве в отдаленных и труднодоступных районах, когда требуется облегчить монтаж и демонтаж сборно-разборных конструкций и уменьшить мощность подъемно-транспортного оборудования. Целесообразно, применение конструкций с использованием пластмасс для повышения надежности сооружений при их эксплуатации в агрессивных средах, районах высокой сейсмичности, а также для исключения влияния магнитных свойств строительных конструкций и возможности искрообразования. Подробнее о применении конструкций из пластмасс см. [114, 116].
Стеклопластиковые материалы применяются в основном четырех видов: 1) стеклопластик на полиэфирном связующем и рубленом стекловолокне (со светопропусканием до 80%), выпускаемый в виде волнистых (с продольной и поперечной волной) и плоских листов толщиной 1,5—2,5 мм и используемый в светопрозрачных конструкциях; 2) стеклопластик конструкционный КАСТ-В на модифицированном феноло-формальдегидном связующем и стеклоткани, выпускаемый в виде листов и плит толщиной 0,5—35 мм и применяемый для обшивок трехслойных панелей, в том числе для работы в химически агрессивных средах; 3) стеклопластик листовой СВАМ на эпоксидно-фенольном связующем и непрерывном ориентированном стекловолокне, выпускаемый в виде листов толщиной 1—30 мм и применяемый для изготовления особо прочных вспомогательных изделий и деталей; 4) стеклопластиковый прессовочный материал АГ-4 (марок В и С) на модифицированном феноло-формальдегидном связующем и рубленом или непрерывном ориентированном стекловолокне, выпускаемый в виде брикетов и лент и используемый для изготовления вспомогательных конструкционных деталей для химически агрессивных сред (гайки, болты, подкладки и т. п.).
Органическое стекло (оргстекло, полиметилметакрилат), представляющее собой пластифицированный полимер метилового эфира метакриловой кислоты, используется в строительных конструкциях в виде листов и блоков толщиной 0,8—35 мм для создания светопрозрачных ограждающих конструкций (купольные элементы и волнистые листы). Достоинствами оргстекла являются вы¬
сокая светопрозрачность (до 90%) и способность пропускать до 73% ультрафиолетовых лучей. В строительных конструкциях применяется стекло органическое авиационное (сорта специальное, А, В) и поделочное (сорта ПА и ПБ).
Винипласт листовой, представляющий собой, как правило, непластифицированную поливинилхлоридную композицию, применяется в виде листов толщиной 2— 20 мм марки ВП (прозрачный) для светопрозрачных ограждающих конструкций (купольные элементы и волнистые листы) и марки ВН (непрозрачный) для обшивки панелей, перегородок и подвесных потолков.
Группа древесных пластиков включает пластмассы, исходной составляющей которых является переработанная тем или иным способом древесина — природный полимер. Эти материалы для своего изготовления требуют сравнительно небольшого количества добавок — синтетических смол.
Пластики древеснослоистые (сорта ДСП-Б, ДСП-В) изготовляются из листов лущеного березового, липового или букового шпона, пропитанных и склеенных между собой под давлением смолами резольного типа. В пластике ДСП-Б каждые 5—20 слоев с параллельным направлением волокон чередуются с одним слоем, в котором направление волокон перпендикулярно направлению их в смежных слоях. В пластике ДСП-В волокна во всех смежных слоях взаимно перпендикулярны. Пластики в виде листов и плит толщиной 1—60 мм применяются в качестве обрамляющих ребер трехслойных панелей, обшивок подвесных потолков и внутренних обшивок панелей покрытий и стен.
Фанера бакелизированная (марок ФБС, ФБСВ) изготовляется из листов березового шпона, пропитанных и склеенных феноло-формальдегидными спирто- и водорастворимыми смолами марок СБС-1, СКС-1, С-1, СЛФ, СКФ, СКБ. Фанера клееная березовая (марки ФСФ, сорта ВВВ) изготовляется из березового шпона, склеенного феноло-формальдегидными клеями (смолами) марок С-35, С-45, СЛФ. Оба вида фанеры используются для изготовления обрамления трехслойных панелей и для их обшивок.
Плиты древесностружечные марок ПС-1, ПТ-1, ПС-3, ПТ-3 изготовляются на феноло-формальдегидных, мочевино-меламиновых и мочевино-формальдегидных смолах. Плиты толщиной 10—25 мм используются для внутренних обшивок панелей покрытий, обшивок перегородок и подвесных потолков.
Плиты древесноволокнистые (сверхтвердые и твердые) изготовляются из древесных волокон, пропитанных водостойкими смолами и маслами. Эти плиты толщиной 3—8 мм применяются в качестве среднего слоя трехслойных панелей (в виде сот) и обшивок панелей, перегородок, подвесных потолков, внутренних обшивок панелей покрытий и стен.
Все древесностружечные и древесноволокнистые плиты, применяемые как конструкционный материал, должны быть антисептированы.
Пенопласты, используемые в качестве среднего слоя трехслойных конструкций, изготовляются на основе полистирольных, поливинилхлоридных, фенольных и других полимерных композиций.
Полимерные композиции могут вспениваться как в отдельных формах, так и непосредственно в полости строительных конструкций.
По технологическому признаку пенопласты подразделяются на беспрессовые и прессовые. К беспрессовым относятся полистирольные пенопласты марок ПСБ, ПСБ-С (самозатухающий), ПСБт, ПСБ-Ст (самозатухающий) и феноло-формальдегидные марок ФРП-1 и
184
РАЗДЕЛ 4. МАТЕРИАЛЫ ДЛЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИИ. МЕТОДЫ РАСЧЕТА
ФЛ1. Прессовыми пенопластами являются полистирольные —марок ПС-1, ПС-4 и др., поливинилхлоридные ПХВ-1 и др.
Полистирольные пенопласты беспрессовые изготовляются из суспензионного полистирола, а прессовые — из эмульсионного полистирола. Беспрессовые полистирольные пенопласты ПСБт и ПСБ-Ст изготовляются на месте по методу теплового удара или в поле ТВЧ.
Винильный пенопласт ПХВ-1 изготовляется из поливинилхлоридной смолы. Феноло-формальдегидные пенопласты ФРП-1 и ФЛ-1 изготовляются на основе резольных смол марок ФРВ-1 и ВИАМ-Б.
Объемный вес пенопластов, используемых в строительных конструкциях, составляет: ПСБ, ПСБ-С — 20— 40 кгм3; ПСБт, ПСБ-Ст — 20—60 кгм3; ПС-1— 100 кгм; ПС-4 — 40 кгм3; ПХВ-1 — 70—100 кгм3; ФРП-1, ФЛ-1 — 60—100 кгм3.
В качестве среднего слоя применяются также сотопласты на основе хлопчатобумажной ткани крафтбумаги и изоляционно-пропиточной бумаги. Пропитка сотопластов осуществляется феноло-формальдегидной или карбамидной смолами и антипиренами. Сотопласты могут заполняться теплоизолирующими материалами и вспученным перлитом, вермикулитом или мипорой.
Основным видом соединения конструкций с применением пластмасс является склеивание. Клеевые сопряжения дают возможность соединять разнородные материалы, уменьшать вес изделий, обеспечивают коррозионную стойкость и герметичность швов и т. д.
При выборе клея надо прежде всего иметь в виду, что для разных конструкций требуются клеи различной прочности. Так, для плит покрытий, испытывающих воздействие относительно больших нагрузок, необходимо использовать более прочные клеи, чем для навесных стеновых панелей. Выбор клеев зависит также и от комбинации склеиваемых материалов.
При изготовлении (склеивании) конструкций применяются клеи: эпоксидные, дифенольные, каучуковые, полиэфирные и феноло-формальдегидиые.
Клеи на основе эпоксидных смол имеют хорошую адгезию почти ко всем материалам, отверждаются практически без усадки и не содержат летучих растворителей, обладают хорошими зазорозаполняющими качествами и допускают относительно большую толщину шва, весьма прочны, водостойки, удовлетворительно ведут себя при старении. К недостаткам этих клеев следует отнести их относительно низкую теплостойкость и жесткость большинства марок этих клеев.
Каучуковые клеи обладают эластичностью, что повышает прочность при неравномерном отрыве и позволяет склеивать материалы с разными коэффициентами усадки и расширения при действии температуры и влаги. В связи с этим основной областью применения каучуковых клеев являются конструкции, испытывающие при эксплуатации усилия неравномерного отрыва, в частности, алюминиевые панели со средним слоем из пенопластов.
Полиэфирные клеи наиболее широко применяют для склеивания конструкционных элементов из светопрозрачных полиэфирных стеклопластиков. Отвержденные клеи обладают высокой прочностью при сдвиге, устойчивы к действию агрессивных сред и атмосферных факторов. Недостатком ряда полиэфирных клеев является их неблагоприятное воздействие на некоторые склеиваемые материалы, а также усадка, приводящая к возникновению значительных внутренних напряжений.
Механические свойства. Каждый из упомянутых выше видов полимерных материалов включает большое количество разновидностей, обладающих значительным
разнообразием физико-механических и других свойств. В этом проявляется одно из основных достоинств синтетических полимерных материалов, состоящее в том, что, комбинируя исходные компоненты и технологию, можно получать пластмассы, принадлежащие к одному виду, но обладающие большой, заранее заданной вариацией механических свойств.
Всем пластмассам в значительной степени свойственна зависимость механических характеристик от времени. В связи с этим их механические свойства должны характеризоваться не только кратковременными, но и длительными показателями.
Величины, характеризующие основные механические и физические показатели пластмасс, перспективных для применения в строительных конструкциях, приведены в табл. 4.27. Кратковременные прочностные показатели при основных видах напряженного состояния представлены нормативными сопротивлениями н, определенными как пределы прочности в соответствии с требованиями технических условий. Расчетные сопротивления пластмасс для конструкций, защищенных от увлажнения, нагревания и агрессивных воздействий, представлены расчетными кратковременными сопротивлениями Нн и расчетными длительными сопротивлениями Я, полученными при нормальных температурно-влажностных условиях.
Показатели деформационных характеристик пластмасс также подразделяются на кратковременные и длительные. Кратковременные модули упругости и сдвига (Гк и Ск) определены из кратковременных статических испытаний малых образцов при нормальных температурно-влажностных условиях. Таким образом, эти величины представляют собой модули упругости и сдвига в обычной трактовке этих терминов. Длительные модули упругости и сдвига (Е и 6) определены из длительных статических испытаний малых образцов при нормальных температурно-влажностных условиях и при напряжениях, примерно равных расчетным сопротивлениям.
Расчет конструкций на сочетания, включающие только кратковременные (с расчетным периодом действия до I суток) нагрузки и воздействия, ведется по кратковременным расчетным сопротивлениям Як и кратковременным модулям упругости Ен. По длительным расчетным сопротивлениям Я и длительным модулям упругости Е рассчитываются конструкции на сочетания, включающие только постоянные и временные длительные нагрузки и воздействия. Подробное подразделение нагрузок и расчетных сопротивлений является специфическим для расчета конструкций с применением пластмасс и имеет своей целью учет особенностей изменения механических свойств полимерных материалов в зависимости от времени.
Механические свойства стеклопластиков определяются прежде всего свойствами стекловолокна, обладающего по сравнению со связующим во много раз большими прочностью и модулем упругости. Применяя стекловолокно, различное по химическому составу (с разным содержанием щелочных окислов), и варьируя количество и расположение стекловолокна в материале, можно получить стеклопластики, обладающие различными механическими и другими свойствами. Вид и процентное содержание второго компонента смолы также оказывают большое влияние на свойства стеклопластиков. Связующее в стеклопластиках кроме защитных функций выполняет роль достаточно прочной и жесткой среды, способной перераспределять и уравновешивать неравномерные усилия, возникающие в массе элементарных стекловолокон. Последнее обстоятельство особенно важно для тех видов стеклопластиков, в которых стеклово-
4.8. ПЛАСТМАССЫ
185
Таблица 4.27
Нормативные и расчетные характеристики, кратковременные и длительные модули упругости, коэффициенты
Пуассона и линейного расширения
Прочностные характеристики
Деформационные
характеристики
о
-о
О.
Пластмассы
нормативные сопротивления в кГсм"
расчетные сопротивления в кГсмг
модуль упругости в кГмм2
модуль
сдвига в кГсм
3.
СО
а
о
о
о
«0
»
С
О
о
X
«г
0
X
к
X
х х
ас
х о
ОС
ф
се
растя женне
р
изгиб
и
сжа¬
тие
с
срез
СКР
.
03
о «
Ж 3
х
2
а:
л
ч
о.
II
х
2
X
л
«5
V
н
№
«
К
Ж
о
- к х.
3 Й
о: •в
Н
о в а
Си ОС
?
и
Л
ж
н
с:
О
(Г
й
а
о
р
с
ср
н X ад О. V X
I
ь в п в а « г
Н
Ж
3
Стеклопласты, оргстекло, винипласт
Стеклопластик полиэфирный листовой (МРТУ 6-11-13469).
600
1300
900
450
360
780
540
270
60 000
30 000
0,4
25
150
150
150
90
Стеклотекстолит КАСТ-В (ГОСТ 10292—-62)
2300
1200
950
700
1720
900
710
525
240 000
190 000
0,15
10
1100
550
450
300
Стеклопластик СВАМ
4500
7000
4000
1500
3370
5250
3000
1125
285 000
240 000
0,13
10
(СТУ 12249—61).
1600
2500
1400
500
Стеклопластик прессовочный АГ-4:
марка В (ГОСТ 14087—62). .800
1200
1000
600
900
750
013
10
360
540
600
марка С. « » « » •
5000
2500
2000
3750
1875
1500
180 000
150 000
0,13
10
2200
1100
900
Стекло органическое (ГОСТ 10657—63).
650
1000
800
600
410
750
600
450
28 000
14 000
150
250
200
140
Винипласт листовой:
ВН — непрозрачный.
550
1000
760
400
380
700
525
280
28 000
16 000
140
200
140
85
ВП — прозрачный (ГОСТ 9639—61). •
500
900
750
400
350
630
525
280
28 000
16 000
130
180
140
85
Пластики
древеснослоистые
ДСП-Б толщиной 15—
2200
2600
1550
140
1650
1950
1160
105
300 000
150 000
60 мм ♦
1090
1300
800
70
ДСП-В толщиной 15—
1100
1500
1200
130
825
1125
900
97 )
60 мм 450
600
470
70 1
180 000
70 000
—
—
ДСПБ толщиной 3— 12 нм (ГОСТ 8697—5Ы.
1400
1900
1500
165
1050
1425
1125
124
560
60
600
80 '
Плиты
древесноволокнистые
Сверхтвердые ш •.
300
500
300
170
150
300(225)
150
120(24)
50 000
12 500
20 000
5 000
60
100(75)
40
50(10)
Твердые (ГОСТ 4598— 60) « » •
200
400
200
120
120
240(142)
120
90(13)
30 000
7 500
14 000 V
50
100(60)
30
35(5)
3500
Плиты
древесностружечные
Марки ПС-1, ПС-3 при объемном весе 500— 650 кгм3:
120
170
170
72
102
102
25 000
10 000
группа А • э » • •
29
30
25
группа Б
90
130
130
54
78
78
20 000
8 000
21
23
19
186
РАЗДЕЛ 4. МАТЕРИАЛЫ ДЛЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ. МЕТОДЫ РАСЧЕТА
Прочностные характеристики
Деформационные
характеристики
нормативные сопротивления в кГ(смг
расчетные сопротивления в кГсмг
модуль упругости в кГмм2
модуль сдвига в кГсм2
Пластмассы
к
Ъ
X
к в о
5
со
а: « ОС
2?
ос
растя¬
жение
«р
изгиб
рК
и
сжа¬
тие
с
срез
ср
. О
11
в
3
X
л
«?
сх 2, в 11
3
X
аз
4
Ф
ск
н
V О.
а ос
н
с3
а
3
«
4
Си
о
и
ср
н X
РЗ х
а. и х. г
н
к
н
са в О. о
а 2
н
X
«О
Марки ПТ-1, ПТ-3 при объемном весе 650— 8 )0 кгмг:
150 1
215
215
90
129
129
25 000
10 000
группа А • » р • •
36
39
32
группа Б
(ГОСТ 10632— 63 и ГОСТ 10637—63).
120
170
170
72
102
102
20 000
8 000
29
30
25
Пенопласты
Полистирольный марки Г1СБ объемным весом в кгмг (ТУ 50-64):
20 ч » • г • Ь » •
0,7
0,7
0,7
0,3
0,3
0,3
70
20
25
10
0,15
0,15
0,15
40 •••«»•
1.5
1,5
1,2
0,9
0,9
0,72
120
40
40
15
0,3
0,3
0,2
То же, марки ПСБт объемным весом в кгж3: 20 «•••••» •
0,7
0,7
0,7
0,42
0,15
-
0,3
0,15
0,42
0,15
70
20
25
10
40
2
-
2
1,5
1,2
0,4
-
1.2
0,4
0,9
0,3
150
50
50
20
з
з
2,8
1.8
1,8
1,7
250
85
100
50
60.%••»»»
0,6
0,6
0,5
То же, марки ПС-1 объемным весом (СТУ 9-91-61) 100 кгм3.
18,5
з
9,5
13
5,6
6 6
750
200
200
110
3,4
1.6
1.8
То же, марки ПС-4 объемным весом (СТУ 9-92-61) 40 кгмг.
4
2
2
2,8
1.4
1.4
120
40
80
40
0,8
0,5
0,5
П ол ихлорвин иловы й марки ПХВ-1 объемным весом (СТУ 9-90-61) 100 кгм3
16
,5
7,3
И
5,2
5,1
600
200
200
110
3,0
1,5
1.4
Фенольные пенопласты марок ФРП-1, ФЛ-1 объемным весом 60 кгм3
1,2
1,6
1
0,72
0,96
0,6
100
40
70
30
0.2
0,3
0,2
Сотопласты
На основе хлопчатобумажной ткани объемным весом 140 кгл3,.,.
40
18
28
12,6
1 000
450
360
7
3,1
800
На основе крафт-бумаги объемным йесом 90 кгм?. . „ .10
6
7
4,2
140
110
1.6
1
450
360
На основе изоляционно-пропиточной бумаги при объемном весе
0,7
2,1
0,49
130
110
90
30 кгм3
—
—
3
0,5
0,12
160
Продолжение табл. 4.27
С
Коэффициент линейного расширения
4.8. ПЛАСТМАССЫ
187
Продолжение табл. 4.27
Прочностные характеристики
Деформационные
характеристики
о
«а
Си
Пластмассы
нормативные сопротивления в кГсм
расчетные сопротивления в кГсм2
модуль упругости в кГмм2
модуль сдвига в кГсм4
3.
се
С
8
О
СО
с
О
и
о
X
«
а
1?
й
в
X
о
Я 8
ОС
Я О 0
а
5
X О
ОС
растя¬
жение
р
изгиб
Як
Н1Л
сжа¬
тие
«с
срез
СР
о.
• . ц
о
«
2
ас
л
Ч
ш в 11
«с
2
аз
л
ч
н
X
X
г
Коэффициент ширения а 10"
И
«ка
а
О
я
и
л
38
Н
СО
я
о
«
О)
Си
о
Р
«н
с
ср
5
а х
ех
х 2
н
5
44
н а
(0 X
о, Ц
Н
Я
1
5
Клеи
Эпоксидные клеи (при склеивании алюминия с алюминием) марок: ЭПЦ-1 « • • ■ •
400
270
220
148
35 000
10 500
12 500
3 700
0,4
34
65
45
К 153
500
250
275
137
35 000
10 500
12 500
3 700
0,4
40
80
40
К-139,
350
240
192
132
25 000
2 900
9 000
900
0,4
27
19
К-147. в,.
300
180
165
99
1 000
150
330
50
0,5
28
15
Каучуковые клеи (при склеивании алюминия с пенопластами ПС-1, ПС-4, ПХВ-1) марок 88-Н, 88-НП, КС-1.
10
10
3,5
3,5
90
9
30
з
0,5
0,4
0,4
То же (при склеивании алюминия с ДВП)
30
50
10,5
17,5
90
о
30
о
0.5
марок 88Н, 88-НП, КС-1
2
3,5
У
о
Эпоксидный клей (при склеивании алюминия с
120
100
66
55
35 000
10 500
12 500
3 700
0,4
34
ДВП) марки ЭПЦ-1.
20
16
Эпоксидные клеи (при склеивании асбестоцемента с асбестоцементом) марок:
ЭПЦ-1.
20
11
35 000
10 500
12 500
3 700
0,4
34
48
К 153 « « « « •
20
11
35 000
10 500
12 500
3 700
0,4
40
4,8
Дифенольный клей (при склеивании асбестоцемента с асбестоцементом) марки ДТ-1.
20
8
22 000
6 600
8000
2 400
0,4
52
4,8
Дифенольные клеи (при склеивании асбестоцемента с асбестоцементом) марок:
ЛТ-1 - - - -
10
8
4
3,2
22 000
6 600
8 000
2400
0,4
52
1
0,75
ДТ-3 •.
10
з
4
3.2
1 000
200
330
66
0,5
63
1
0,75
Полиэфирный клей (при склеивании стеклопластика со стеклопластиком) марки ПН-1.
220
120
121
66
40 000
12 000
14 000
4300
0.4
34
36
20
Расчетные характеристики определяются прочностью склеиваемых материалов.
188
РАЗДЕЛ 4. МАТЕРИАЛЫ ДЛЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ МГТОДЫ РАСЧЕТА
локно лишено механической связи (например, переплетения) и совместная работа отдельных, зачастую хаотически расположенных волокон полностью зависит от адгезионных и механических свойств связующего. Для всех стеклопластиков временной фактор оказывает большее влияние на прочностные, чем на деформационные показатели.
Для полиэфирных стеклопластиков в табл. 4.27 нормативные и расчетные сопротивления при сдвиге даны в направлении, перпендикулярном плоскости листа; для стеклотекстолита КАСТ-В эти показатели при всех видах напряженного состояния приведены для усилий, действующих в направлении основы стеклоткани при толщине материала до 7 мм для стеклопластиков СВАМ и АГ-4 все эти показатели даны для соотношения продольных и поперечных стекловолокон, равного 1:1, для усилий действующих в направлении стекловолокон.
Для древеснослоистых пластиков помимо влияния направления расположения шпонов достаточно четко выявилось влияние толщины материала: более тонкие плиты ДСП-В имеют при всех видах напряженного состояния более высокие нормативные сопротивления.
Для древесноволокнистых плит характерны более высокие показатели прочностных свойств при изгибе по сравнению с растяжением и сжатием, а также весьма значительное влияние времени на деформационные характеристики.
Прочностные свойства древесностружечных плит всех используемых в строительных конструкциях видов довольно близки при основных видах напряженного состояния. Влияние временного фактора больше сказывается на прочности, чем на деформативности.
Механические показатели пенопластов зависят от химической природы полимеров, составляющих их основу, от ячеистой структуры и способа изготовления. Чем выше прочность исходного полимера, тем более высокие показатели следует ожидать у пенопласта. С повышением объемного веса прочность и жесткость пенопластов, как правило, возрастает. Однородность, регулярность ячеистой структуры, свободной от случайных пустот и пор, является необходимым условием для получения конструкционных пенопластов. Степень замкнутости ячеистой структуры обусловливает показатели деформативности, влаго- и водопоглощения и теплоизоляционные характеристики пенопластов. Пенопласты на основе полистирола и поливинилхлорида имеют закрыто-ячеистую структуру. Для фенольных пенопластов характерна открыто-ячеистая структура. Для всех видов пенопластов влияние временного фактора на прочностные и деформационные свойства весьма значительно.
В сотопластах, имеющих вид пчелиных сот, материал располагается наиболее экономично. Объемный вес и прочностные характеристики сотопластов, а также другие их свойства зависят от материала сот, размеров ячейки, вида и количества пропитывающей смолы. Приведенные в табл. 4.27 нормативные и расчетные сопротивления и модули упругости и сдвига сотопластов разных видов даны для материалов с расстоянием между параллельными сторонами шестигранника ячейки сот, равным 12 мм площади брутто материала, без исключения пустот. Фактор времени оказывает большое влияние на прочностные характеристики и сравнительно мало отражается на деформационных показателях.
Нормативные и расчетные сопротивления клеевых соединений в табл. 4.27 даны (исходя из специфики их работы) только для случая равномерного отрыва (столбцы 3 и 7) и сдвига. В таблице отсутствуют расчетные характеристики тех клеевых соединений, для которых
долговечность определяется не прочностью клеевого шва, а прочностью слабейшего из склеиваемых материалов. Подобное положение наблюдается при склеивании алюминия с пенопластами ПСБ, ПСБт, ПХВ-1, ПС-1, ПС-4 эпоксидными клеями К-153, К-147, К-134 и с пенопластами ПСБ и ПСБт каучуковыми клеями 88-Н, 88-НП, КС-1, а также алюминия с крафт-бумажным со топластом эпоксидными клеями ЭПЦ-1, К-153, К-147, К-139 и дифенольным клеем ДТ-1, когда прочность соединения определяется расчетными характеристиками пенопластов и сотопласта. При склеивании асбестоцемента с пенопластами ПС-4, ПСБ, ПСБт дифенольными клеями ДТ-1, ДТ-3 и с пенопластом ФРП-1 каучуковыми клеями 88-Н, 88-НП, КС-1, а также с сотами из ДВП и с сотопластом на основе крафт-бумаги эпоксидными клеями ЭПЦ-1, К-153 и дифенольным клеем ДТ-1 прочность клеевых соединений определяется расчетными сопротивлениями слабейших из склеиваемых материалов. Аналогичное положение при склеивании полиэфирного стеклопластика с пенопластами ПСБ,. ПСБт, ПХВ-1, ПС-1, Г1С-4 и сотопластом на основе крафт-бумаги феноло-формальдегидным клеем КБ-3.
Эпоксидные клеи К-147 и К-134, пластифицированные добавками каучука в больших количествах, обладают пониженной жесткостью. В зависимости от содержания эластомера — тиокола — значительно снижается жесткость и дифенольных клеев. Весьма низкой жесткостью обладают все каучуковые клеи. Введение в клеи эластомеров относительно мало отражается на прочностных свойствах клеев.
Более подробные данные о прочности и деформативности пластмасс [115, 117], о расчете и проектировании конструкций — [119, 120].
Факторы, влияющие на механические свойства. На прочностные и деформационные свойства пластмасс существенное влияние оказывают температурно-влажностные, атмосферные, химически агрессивные и другие факторы. Поскольку отдельные виды пластмасс значительно отличаются составом компонентов, микро- и макростроением, технологией изготовления и т. д., то влияние отдельных факторов проявляется для разных видов материалов в различной степени.
Так, механические свойства термопластов — оргстекла, винипласта, некоторых видов пенопластов весьма чувствительны к изменениям температуры и в то же время мало зависят от влажностных факторов. На механические свойства древесноволокнистых и древесностружечных плит решающее влияние оказывает влажностное состояние, а изменение температуры в пределах обычных эксплуатационных режимов не имеет сущест венного влияния. Сотопласты на основе пропитанной смолами хлопчатобумажной ткани достаточно хорошо противостоят влажностным воздействиям, в то время как сотопласты на бумажной основе чувствительны и к повышению влажности воздуха. Подобная избирательная чувствительность разных видов пластмасс к отдельным факторам учитывается при назначении пластмасс для применения в тех или иных конструкциях.
Коэффициенты условий работы, на которые следует умножать расчетные сопротивления и модули упругости пластмасс, длительное время эксплуатируемых в условиях повышенных температур и влажностей, приведены в табл. 4.28.
Коэффициенты условий работы при повышенных температурах и влажностях для модулей упругости, не совпадающие по величине с соответствующими коэффициентами для расчетных сопротивлений, даны в скобках. При одновременном воздействии влажностных и температурных факторов коэффициенты условий работы еле-
4.8. ПЛАСТМАССЫ
189
Таблица 4.28
Коэффициенты условий работы пластмасс в конструкциях, эксплуатируемых при повышенных температурах и
влажностях
Материал
Температура в °С
При длительном увлажнении в воде
При длительном пребывании в условиях повышенной влажности воздуха (порядка 90 % относительной влажности)
40
60
Стеклопластик полиэфирный листовой:
при сжатии и растяжении 0,6
—
0,5
0,75
при изгибе 0,4
—
0,5
0,75
Стеклопластики КАСТ-В, СВАМ, АГ-4 0,85
0,65
0,7
0,85
Стекло органическое.
0,7(0,75)
0,4(0,6)
0,8
0,95
Винипласт листовой 0,5(0,55)
0,3(0,45)
0,9
0,95
Пластики древеснослоистые марки:
ДСП-Б 0,8(0,7)
0,75(0,6)
—
ДСП-В 0,95(0,7)
0,95(0,55)
—
Древесноволокнистые плиты:
сверхтвердые —
—
—
0,5
твердые —
—
—
0,4
—
—
—
0,7
Пенопласт марок:
ПСБ. ПСБ-С, ПСБт, ПСБ-Ст, ПС4, ПС-1.
0,8
0,6(0,5)
—
ПХВ-1 0,8
0,5(0,4)
—
ФРП-1, ФЛ-1 0,85
0,7
—
—
Сотопласты на основе крафт-бумаги и изоляционно-пропиточ-
—
—
—
0,5(0,б)
дует перемножать. Эксплуатация винипласта при температуре ниже —10° С не рекомендуется вследствие повышения хрупкости материала.
Коэффициенты условий работы клеевых соединений при сдвиге приведены в табл. 4.29 как для повышенных, так и для пониженных температур, поскольку для ряда клеев расчетные сопротивления при отрицательных температурах понижаются вследствие увеличения концентрации напряжений. Для соединений алюминия с пенопластами на эпоксидных клеях ЭПЦ-1 и К-153 и асбестоцемента с асбестоцементом на клее ДТ-1 температурные коэффициенты условий работы при сдвиге и равномерном отрыве принимаются по склеиваемым ма-
Таблица 4.29
Коэффициенты условий работы клеевых соединений при различных температурах при сдвиге
Температура в °С
Эпоксидные клеи
Дифенольные
клеи
Каучу¬
ковые
клеи
ЭПЦ-1
К-153
К-147
К-134
ДТ-1
ДТ-3
КС-1, 88-Н, 88-НП
—40
0,5
0,8
1.0
1,2
1,3
1,2
0,5
—20
0,7
0.8
1,0
1,5
1,1
1,0
0,8
4-20
1.0
1,0
1.0
1,0
1,0
1,0
1,0
40
0,5
0,9
0,8
0,7
1,0
0,7
0,2
80
0,3
0,4
0,5
0,5
10
0,5
0,1
териалам и поэтому в табл. 4.30 не вошли; коэффициент условия работы для каучуковых клеев принят не ири 80, а при 60° С.
Из эпоксидных клеев наиболее низкие коэффициенты условий работы при крайних значениях температуры имеет жесткий клей ЭПЦ-1, не содержащий пластификатора. Остальные марки эпоксидных клеев и дифе-
нольные клеи, содержащие в разных количествах пластификаторы, имеют при крайних температурах более высокие коэффициенты. Каучуковые клеи плохо работают при повышенных температурах.
Таблица 4.30.
Коэффициенты условий работы стеклопластиков, эксплуатируемых в атмосферных условиях
Расчетные
сопротивления
Модули упругости и сдвига
Материал
в районах средней полосы
в южных районах
в районах средней полосы
в южных районах
Фенольный стеклотекстолит КАСТ-В
0,7
0,7
0,8
0,8
Стеклопластик полиэфирный листовой
0,75
0,65
0,85
0,8
Стойкость пластмасс в отношении атмосферного старения различна. Полиэфирные стеклопластики, изготовленные, как правило, с недостаточно отвержденным связующим, претерпевают при воздействии атмосферных факторов изменения, связанные как со старением стеклопластиков, так и с дополнительным отверждением полиэфирной смолы. Процесс старения ведет к снижению механических свойств, дополнительное отверждение связующего приводит к значительному повышению модуля упругости и в меньшей степени к повышению предела прочности.
Развитие процессов старения в фенольном стеклотекстолите КАСТ-В протекает более монотонно и проявляется в систематическом снижении начальных значений предела прочности и модуля упругости. Кроме того, исследования позволили выявить зависимость интен¬
190
РАЗДЕЛ 4. МАТЕРИАЛЫ ДЛЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ. МЕТОДЫ РАСЧЕТА
сивности развития процессов старения и, следовательно, снижения механических свойств от толщины материала и величины действующих напряжений.
В табл. 4.30 даны коэффициенты условий работы стеклопластиков, эксплуатируемых в атмосферных условиях.
Коэффициенты включают влияние периодического увлажнения и нагрева в процессе эксплуатации стеклопластиков и даны для материалов толщиной 2—7 мм. В случае применения материалов толщиной 1—2 мм приведенные коэффициенты умножаются на 0,8, а при толщинах, меньших 1 мм, — на 0,6,
4.9. МЕТОДЫ РАСЧЕТА КОНСТРУКЦИЙ
В 1955 г. в СССР был введен единый для всех строительных конструкций метод расчета по предельным состояниям, в котором получили дальнейшее развитие прогрессивные идеи расчета по разрушающим нагрузкам (учет пластических свойств материалов), а единый коэффициент запаса заменен системой частных коэффициентов (перегрузки, однородности и условий работы), учитывающих конкретные условия возведения и эксплуатации конструкций и характер внешних воздействий. Это позволило более правильно оценивать надежность конструкций и способствовало проектированию более равнопрочных и в целом более экономичных сооружений.
При разработке в 1959—1962 гг. новой редакции Строительных норм и правил принципиальные основы метода расчета по предельным состояниям были сохранены, однако отдельные его положения получили некоторые изменения. Были уточнены определение предельного состояния, нормативных сопротивлений материалов, классификация и определение нагрузок, порядок учета нагрузок в разных сочетаниях, упрощено написание формул расчета и др.
В последние годы все шире признается, что статистическая природа параметров, определяющих поведение конструкций, должна в возможно более полной форме находить отражение в нормах проектирования различных сооружений. Об этом свидетельствуют рекомендации по принципам расчета конструкций, разработанные при участии советских специалистов международными организациями (Европейский комитет по бетону, Международный Совет по строительству, Международная организация по стандартизации), а также новые нормы проектирования стран — членов СЭВ. В связи с очередным пересмотром строительных норм и правил в 1970—1972 гг. получил дальнейшее развитие и метод расчета по предельным состояниям, регламентируемый отечественными нормативными документами [130].
Предельным является такое состояние, при котором несущие конструкции или основания перестают удовлетворять заданным эксплуатационным требованиям или требованиям, предъявляемым к ним при возведении. Нарушение эксплуатационной надежности не обязательно связано с разрушением конструкции, оно может быть обусловлено и затруднениями в использовании сооружения, вызывающими необходимость ремонта, усиления или замены конструкций; поэтому при анализе надежности важна комплексная оценка таких факторов, как условия эксплуатации, ее продолжительность, ответственность сооружения, тяжесть последствий возникновения предельного состояния, экономические требования и т. д. Таким образом, используя в расчете представление о предельном состоянии как о пределе эксплуатационной способности сооружения, можно более обоснованно определять условия, обеспечивающие при проектировании требуемую надежность несущих конструкций и оснований.
Строительные нормы и правила различают две группы предельных состояний:
первая — по потере несущей способности или непригодности к эксплуатации;
вторая — по непригодности к нормальной эксплуатации.
К предельным состояниям первой группы относятся: потеря устойчивости формы; потеря устойчивости положения; хрупкое, вязкое, усталостное или иного характера разрушение; разрушение под совместным воздейст-
220 200
180 160
1
Iя
8 120
I
8 100
5
80
« 60 «0 го о
о)
1,
1;:
N
1
и.
•1.
1
«-♦
V
ч
б)
10 20 X 0 50 ВО 70 80 9
Частота события (X х)8 %
40
3
ч X I
•» го 1 № I 12
' 8 4
а
11,
1,
1
1
1.
"1
"Ч
Ю 20 30 40 50 60 70 80 90 Ш
Частота событии (У у) 6 %
Рис. 4.28. Статистические функции распределения
а — годовых максимумов веса снегового покрова земли (на защищенном от воздействия ветра участке); б—скорости ветра на открытой равнинной местности (по метеорологическим данным за 20 лет при четырех наблюдениях в сутки)
4.9. МЕТОДЫ РАСЧЕТА КОНСТРУКЦИЙ
191
вием силовых факторов и неблагоприятных влияний внешней среды; качественное изменение конфигурации, резонансные колебания, а также другие состояния, при которых возникает необходимость прекращения эксплуатации (в результате текучести материала, сдвигов в соединениях, ползучести или чрезмерного раскрытия трещин).
К предельным состояниям второй группы относятся состояния, затрудняющие нормальную эксплуатацию конструкций и оснований или снижающие долговечность их вследствие появления недопустимых перемещений (прогибов, осадок, углов поворота), колебаний, трещин и т. п. При этом нормальной считается эксплуатация, осуществляемая (без ограничений) в соответствии с предусмотренными в нормах или заданиях на проектирование технологическими или бытовыми условиями.
Расчет по предельным состояниям имеет целью предотвратить наступление предельных состояний при эксплуатации в течение всего срока службы конструкции, здания или сооружения, а также при их возведении. Поэтому основное требование норм расчета состоит в том, чтобы величины усилий, напряжений, деформаций, перемещений, раскрытия трещин или величины от других факторов и воздействий не превышали соответствующих предельных значений, устанавливаемых нормами проектирования конструкций и оснований зданий и сооружений различного назначения.
Важнейшими факторами, от правильности учета которых при проектировании зависит эксплуатационная надежность сооружений, являются нагрузки и воздействия, механические и другие свойства материалов и грунтов, а также условия эксплуатации и особенности работы конструкций и оснований.
При расчете по предельным состояниям устанавливаются два значения нагрузок: нормативные и расчетные.
Основной характеристикой нагрузок и воздействий являются их нормативные величины, принимаемые:
для постоянных нагрузок — по проектным значениям геометрических и конструктивных параметров и по нормативным значениям объемного веса материалов;
для технологических (от оборудования, складируемых материалов, обстановки, людей и т. п.) и монтажных нагрузок—по наибольшим значениям для предусмотренных условий нормальной эксплуатации или строительства;
для атмосферных нагрузок и воздействий — по средним из ежегодных неблагоприятных значений или по неблагоприятным значениям, соответствующим определенному периоду их повторения или превышения;
для динамических нагрузок от машин — по среднестатистическим значениям параметров, определяющих динамические нагрузки.
Возможное отклонение нагрузок в неблагоприятную (большую или меньшую) сторону от их нормативных значений вследствие изменчивости нагрузок или случайных отступлений от условий нормальной эксплуатации учитывается коэффициентами перегрузки п, устанавливаемыми с учетом назначения зданий и сооружений и условий их эксплуатации.
Коэффициенты п для расчетов по каждому виду предельных состояний устанавливаются нормами нагрузок или нормами проектирования конструкций; нагрузка, равная произведению нормативной нагрузки на коэффициент перегрузки, называется расчетной нагрузкой.
Коэффициенты перегрузки к весу конструкций и технологическим нагрузкам определяются с учетом имеющихся данных о возможных отклонениях фактического веса конструкции и оборудования от нормативного
вследствие неточности подсчета проектного веса, изменчивости размеров конструкции и объемного веса материалов и нарушения условий нормальной эксплуатации оборудования (например, подъем груза, превышающего номинальную грузоподъемность крана). При определении коэффициентов перегрузки для снеговых и ветро-
о)
««а
I
1
V
Л.
—V
У
у
ч
19 21 23 25 27 29 31 33 35 37 39 М
Предел текучести б к Гмм2
б)
I
-Л.
1
-V
у_
У
✓
ч
130 150 170 190 210 230 250 270 290 310 330 350 Предел прочности при сжатии 6 кУсм2
Рис. 4.29. Гистограммы распределения
а — предела текучести стали марки Ст.З (по результатам испытаний 6000 образцов); 6 — пределы прочности при сжатии бетонных кубов марки 200 (по результатам испытаний 3700 образцов)
вых нагрузок используются результаты многолетних метеорологических наблюдений за весом снегового покрова и скоростью ветра (рис. 4.28, а, б); при этом вначале определяется уровень расчетной нагрузки, соответствующий некоторому заранее выбранному числу лет, в течение которого наблюдается в среднем одно превышение нагрузки (или соответствующий некоторой заданной вероятности, оцениваемой по относительной частоте случаев превышения), а коэффициент перегрузки вычисляется как отношение этого уровня к нормативной нагрузке.
Однако при нормировании коэффициентов перегрузки имеющаяся статистическая информация часто оказывается недостаточной. В таких случаях используется опыт строительства и эксплуатации сооружений и ана¬
192
РАЗДЕЛ 4. МАТЕРИАЛЫ ДЛЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ. МЕТОДЫ РАСЧЕТА
лиз действительных условий загружения. Например, при нормировании коэффициента перегрузки для снеговой нагрузки учитывалось, что вес снегового покрова на покрытиях зданий (в среднем на всей площади покрытия) меньше, чем на земле, вследствие сдувания снега ветром, подтаивания снега на отапливаемых зданиях и влияния других факторов; принималось также во внимание, что при появлении в отдельные годы нагрузок, близких к расчетным, возможна очистка покрытия от снега.
Нормированные коэффициенты перегрузки больше единицы, но для постоянной нагрузки, когда она может быть разгружающей, предусматривается п 1. Значения нормативных нагрузок и коэффициентов перегрузки см. [131].
В отличие от постоянных временные нагрузки вводятся в расчет только в тех случаях, когда их воздействие неблагоприятно; при этом расчетные сочетания временных нагрузок составляются с учетом продолжительности действия их наибольших значений (по этому признаку временные нагрузки различаются: длительно действующие, кратковременные и особые).
В зависимости от состава учитываемых нагрузок и воздействий различают: а) основные сочетания, составляемые из постоянных, длительных и кратковременных нагрузок и воздействий и б) особые сочетания, составляемые из постоянных, длительных, некоторых кратковременных и одной из особых нагрузок (воздействий).
При расчете конструкций на основные сочетания постоянные и длительные временные нагрузки учитываются без снижения; величины кратковременных нагрузок умножаются на коэффициенты сочетаний пс (меньше единицы), учитывающие, что вероятность одновременного достижения расчетных величин двух и более кратковременных нагрузок меньше вероятности достижения расчетного значения одной кратковременной нагрузкой. Для особого сочетания указанное обстоятельство учитывается на основе оценки вероятности возникновения и учитываемой величины особого воздействия.
Сопротивление строительных материалов силовым воздействиям характеризуется при расчете по предельным состояниям двумя показателями: нормативными и расчетными сопротивлениями.
Основными параметрами сопротивления материалов силовым воздействиям являются нормативные сопротивления ?н, устанавливаемые с учетом условий контроля и статистической изменчивости сопротивлений. Величина нормативного сопротивления материала в ряде случаев (например, для металла, бетона) принимается равной величине контрольной или браковочной характеристики, устанавливаемой ГОСТами. Нормативные сопротивления материалов, контроль которых не регламентируется государственными стандартами (например, сопротивление срезу, смятию и др.), устанавливаются в функции от контролируемых сопротивлений путем применения переходных коэффициентов. Обеспеченность значений нормативных сопротивлений материалов принимается не менее 0,95.
Кроме нормативных сопротивлений, устанавливаются и другие нормативные характеристики материалов (объемная масса, модули упругости, коэффициенты сцепления, трения, ползучести, усадки и др.).
Несущая способность оснований фундаментов зависит от ряда свойств грунтов. В соответствии с этим в качестве их основных параметров, определяющих несущую способность и деформации оснований фундаментов, принимаются нормативные значения прочностных и деформационных характеристик грунтов (угла внутреннего трения, удельного сцепления, модуля деформаций,
сопротивлений одноосному сжатию и сдвигу скальных и мерзлых грунтов и т.п.). При этом за нормативные значения указанных характеристик принимаются их среднестатистические значения, устанавливаемые на основе данных инженерных изысканий (для проектируемого объекта) или по результатам массовых испытаний.
Вследствие изменчивости механических свойств материалов (см. рис. 4.29) и проведении при их приемке только выборочных испытаний не исключена возможность изготовления конструкций из материалов с пониженными сопротивлениями (по отношению к нормативным). Сопротивление материала в конструкции может отличаться от нормативного, получаемого путем испытания стандартных образцов, также вследствие масштабного фактора, неполного соответствия условий работы материала в конструкции условиям его работы в образцах и вследствие ряда других обстоятельств нестатистического характера. Аналогичным образом реальная несущая способность (или деформации) оснований фундаментов может отличаться от их несущей способности, определяемой по нормативным значениям прочностных характеристик грунтов.
Принимая во внимание указанное, с целью обеспечения требуемой надежности конструкций и оснований к нормативным значениям сопротивлений (и другим характеристикам) материалов и грунтов вводятся в виде делителя коэффициенты безопасности по материалу и грунту к (более единицы). Получаемые таким путем расчетные сопротивления материала В. (расчетные характеристики грунта) называются расчетными сопротивлениями (характеристиками) и устанавливаются нормами проектирования. Для удобства и упрощения расчета в расчетные сопротивления материалов (расчетные характеристики грунта) в необходимых случаях вводятся коэффициенты условий работы т и коэффициенты надежности кп (см. ниже).
Установленные в нормах расчетные сопротивления материалов определены с учетом указанных обстоятельств. Так, расчетные сопротивления для стали учитывают не только статистическую изменчивость ее механических свойств, но и изменчивость размеров сечений (в соответствии с установленными допусками), для кладки — качество кладки, зависящее от навыков каменщика, и т. п. (см. также 4.1—4.8).
Для расчета деревянных конструкций устанавливаются нормативное временное сопротивление и длительное сопротивление, соответствующее воздействию нагрузок в течение нескольки месяцев. Нормативное временное сопротивление принято как вероятное минимальное значение, полученное по результатам испытаний малых образцов чистой (без пороков) древесины; нормативное длительное сопротивление, установленное на основе испытания образцов при длительном нагружении, составляет 2з нормативного временного сопротивления. Коэффициент безопасности по материалу (древесины) учитывает главным образом ее неоднородность в элементах крупных размеров (масштабный фактор) и влияние пороков.
Коэффициенты условий работы пг установлены на основе анализа условий эксплуатации сооружений и изучения действительного поведения материалов, соединений, элементов и конструкций под нагрузкой. Ими учитываются не отражаемые в расчетах прямым путем влияния: температуры, влажности и агрессивности среды, длительности воздействия, его многократной повторяемости и т. д.; приближенности расчетных схем и принятых в расчетах предпосылок; перераспределения силовых факторов и деформаций.
Степень ответственности и капитальности зданий и
ЛИТЕРАТУРА
193
сооружений, а также значимость последствий наступления тех или иных предельных состояний учитываются в необходимых случаях коэффициентами надежности кв. Эти коэффициенты вводятся в расчет также при недостаточной изученности действительной работы и предельных состояний отдельных видов конструкций и оснований. На коэффициенты Ьв делятся предельные значения несущей способности, расчетные сопротивления, допустимые (нормированные) деформации, величины раскрытия трещин, г в некоторых случаях на них умножаются величины расчетных нагрузок, усилий или иных воздействий.
Наиболее полное использование прочностных свойств материалов достигается при расчете по предельным состояниям первой группы в случае, когда усилия от внешних воздействий и несущая способность сечений определяются с учетом неупругих деформаций материалов. Однако методы определения усилий с учетом пластических деформаций материалов разработаны в на¬
стоящее время применительно лишь к отдельным конструкциям, и поэтому при расчете статически неопределимых систем в большинстве случаев усилия от нагрузок и воздействий определяются в предположении упругой работы конструкций. При определенных условиях перераспределение усилий вследствие неупругих деформаций учитывается в железобетонных конструкциях (плиты, неразрезные балки, рамы и т.п.), в стальных неразрезных балках постоянного сечения и каркасах одноэтажных промышленных зданий.
Учет пластических деформаций при определении расчетной несущей способности сечения наиболее полно представлен в нормах проектирования железобетонных и каменных конструкций. В стальных конструкциях пластическая стадия работы материала учитывается при расчете на устойчивость, и с определенными ограничениями, при -подборе сечений балок и проверке прочности стержней в некоторых случаях сложного сопротивления (изгиб с растяжением или сжатием).
ЛИТЕРАТУРА
4.1. Стали для строительных конструкций
1. Временные указания по проектированию стальных конструкций из стали высокой прочности (СН 347-66). Стройиздат,
1967.
2. ГОСТ 380—71. Сталь углеродистая обыкновенная качества. Марки и общие технические требования.
3. ГОСТ 5058—65. Сталь низколегированная конструкционная. Марки и общие технические требования.
4. ГОСТ 6713—53. Сталь углеродистая горячекатаная для мостостроения.
5. ГОСТ 7348—63. Проволока стальная круглая для армирования предварительно напряженных железобетонных конструкций. ГОСТ 8480—63. Проволока стальная периодического профиля для армирования предварительно напряженных железобетонных конструкций.
6. К у р а е в В. В., Чернашкин В. Г. Строительные стали. Стройиздат, 1941.
7. Л е й к и н И. М., Чернашкин В. Г. Низколегированные строительные стали. Металлургиздат. 1952.
8. Л и в ш и ц Б. Г. Физические свойства металлов и сплавов. Машгиз, 1959.
9. Металловедение и термическая обработка (справочник) т. II. Металлургиздат, 1962.
10. Р а т ц Э. Г. Железобетон с электротермическим натяжением арматуры. Стройиздат, 1967.
11. СНиП 1-В. 12-62. Металлы и металлические изделия. Госстройиздат, 1962.
12. Стрелецкий Н. С., Гениев А. Н., Белен я Е. Н. и др. Металлические конструкции. Госстройиздат, 1961.
13. С т р е л е ц к и й Н. С., Б е л е н я Е. Н. и др. Металлические конструкции. Специальный курс. Стройиздат, 1965.
14. Труды Научно-технического общества черной металлургии, т. VI. Металлургиздат, 1956.
15. Указания по проектированию, изготовлению и монтажу строительных конструкций, предназначенных для эксплуатации в условиях низких температур (СН 363-66). Стройиздат, 1967.
16. Чернашкин В. Г. и др. Исследования по стальным конструкциям. Госстройиздат, 1957
См. также [130, 1351.
4.2. Алюминиевые сплавы для строительства
17. ГОСТ 4784—65. Сплавы алюминиевые деформируемые. Марки.
18. ГОСТ 12592—67. Листы конструкционные из алюминия и алюминиевых сплавов.
19. ГОСТ 8617—68. Профили прессованные из алюминия и алюминиевых сплавов. Технические требования.
20. Строительные конструкции из алюминиевых сплавов. Сборники ЦНИИСК. Под ред. С. В. Тарановского. Стройиздат, 1962, 1963 и 1967. Под ред. С. В. Тарановского и В. И. Трофимова. Стройиздат, 1970.
21. П о п о в С. А. Алюминиевые строительные конструкции. «Высшая школа», 1969.
См. также [13, 130, 137].
4.3. Бетон
22. Александровский С. В. Расчет бетонных и железобетонных конструкций на температурные и влажностные воздействия (с учетом ползучести). Стройиздат, 1966.
23. Александровский С. В., Таль К. Э. Основные физико-механические свойства бетона. Справочник проектировщика. «Сборные железобетонные конструкции», глава 2. Госстройиздат, 1959.
24. Берг О. Я. Физические основы теории прочности бетона и железобетона. Госстройиздат, 1961.
25. ГОСТ 8462—62. Материалы стеновые и облицовочные. Методы определения пределов прочности при сжатии и изгибе.
26. ГОСТ Ю180—67. Бетон тяжелый. Методы определения прочности.
27. ГОСТ 11050—64. Бетон легкий на пористых заполнителях. Методы определения прочности и объемного веса.
28. ГОСТ 12852—67. Бетон ячеистый. Методы испытаний.
29. Л е р м и т Р. Проблемы технологии бетона. Госстройиздат, 1959.
30. С к р а м т а е в Б. Г., Л е щ и н с к и й М. Н. Испытание прочности бетона. Стройиздат, 1964.
31. СНиП I В.3-62. Бетоны на неорганических вяжущих и заполнителях. Госстройиздат, 1962.
32. Указания по проектированию конструкций из тяжелого силикатного бетона (СН 165-68). Госстройиздат, 1968.
33. Указания по проектированию конструкций из ячеистых бетонов СН 287 65. Стройиздат, 1965.
34. Временные указания по проектированию конструкций из силикальцита (СН 259-63). Госстройиздат, 1963.
35. Цискрели Г. Д. Сопротивление растяжению неармированных и армированных бетонов. Госстройиздат, 1954.
36. Ш е й к и н А. Е. К вопросу прочности, упругости и пластичности бетона. Труды МИИТ, вып. 69. Трансжелдориздат, 1946.
37. СотИё Еигорееп ди Вё1оп. КесоттепсШюпз ргаИчиез ипШёез роиг 1е са1си1 е ехесиКоп дез оиугаез еп Ъё1оп агтё
38. Б а V I 8 К., Э а V I з Н., Вгошп Е. Р1аз«с Поу апд уЫите сЬапе о? сопсгее. А5ТМ РгосеесНпз. уо1. 37, р. II,
39. Э а V1 8 К., О а V з Н., НашШоп.1. Р1а51с Поу апд уо1ите сЬапее о? сопсгее ипйег зизЫпед згезз. А5ТМ Ргосеедтз, уо1. 34, р. II, 1934.
40. С1апу111е XV., ТНошаз Р. О. 51иНез т ге1погсе1 сопсгее. Оераг1теп1 оГ 5с1епШс апд 1пс1изпа1 КезеагсЬ, ТесЬп1са1 рарег, № 21, Ьопёоп 1939.
41. Ма1ег1а1ргй1ип§зат1 Шг газ Ваиезеп дег ТесНЫзсЬеп НосЬзсЬиЫе. МйпсЬеп. Айз ипзегеп РогзсЬип§загЬеИеп. ВепсМ 50, ОегетЬег 1963.
См. также [60, 78, 130, 133].
4.4. Каменные материалы и растворы
42. ГОСТ 530—71. Кирпич глиняный обыкновенный.
43. ГОСТ 379—69. Кирпич силикатный.
44. ГОСТ 4001—66. Камни стеновые из известняков и туфов.
45. ГОСТ 5802—66. Растворы строительные. Методы испытания.
194
РАЗДЕЛ 4. МАТЕРИАЛЫ ДЛЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИИ. МЕТОДЫ РАСЧЕТА
46. ГОСТ 6328—55. Камни керамические пустотелые, стеновые, пластического прессования.
47. ГОСТ 6928—54. Камни шлакобетонные и бетонные обыкновенные.
48. ГОСТ 7484—69. Кирпич и камни керамические лицевые.
49. ГОСТ 8462—62. Материалы стеновые и облицовочные. Методы определения пределов прочности при сжатии и изгибе.
50. Мельникова Н. В. Основные строительные свойства подмосковных известняков. Изд. отдела техн. информ. НИИ по строительству Минстроя РСФСР, 1958.
51. Мохов 3. С. Упругие свойства некоторых видов горных каменных пород. В сб.: «Исследования строительных материалов и вопросы строительной механики». Гострансиздат, 1955.
52. П о л я к о в С. В. Длительное сжатие кирпичной кладки. Госстройиздат, 1959.
53. Р о х л и н И. А. Расчет керамических конструкций. Киев, Госстройиздат, 1956.
54. С е м е н ц о в С. А. Некоторые особенности деформаций кирпичной кладки при сжатии и изгибе. В сб.: «Исследования по каменным конструкциям». Под ред. Л. И. Онищика. Стройиздат, 1949.
55. С е м е н ц о в С. А. Строительные свойства подмосковных облицовочных известняков. В сб.: «Исследования. Каменные конструкции». Госстройиздат, 1955.
56. С к р а м т а е в Б. Г. и др. Строительные материалы. Госстройиздат, 1953
57. Строительство из естественных каменных материалов. Сборник ВНИТО строителей. Госстройиздат. 1961.
58. С у б б о т к и н М. И. Строительные свойства крымскою известняка-ракушечника. В сб.: «Исследования. Каменные конструкции». Госстройиздат, 1955.
См. также [60, 65, 130, 134].
4.5. Каменная кладка
59. Д м и т р и е в А. С. С е м е н ц о в С. А. Каменные и армокэменные конструкции. Госстройиздат, 1965.
60. О н и щ и к Л. И. Прочность и устойчивость каменных конструкций. ОНТИ, 1937.
61 О н и щ и к Л. И, Каменные конструкции. Стройиздат, 1939.
62. П о л я к о в С. В. Сцепление в кирпичной кладке. Стройиздат, 1949.
63. П о л я к о в С. В. и Ф а л е в и ч Б. Н. Проектирование каменных и крупнопанельных конструкций. Стройиздат, 1966.
64. Семенцов С. А. Каменные конструкции. Госстройиздат, 1955.
65. Справочник проектировщика. Том «Каменные конструкции». Стройиздат, 1968.
См. также [52, 54. 130, 134].
4.6. Армированные материалы и конструкции
66. Асташкевичер А. П. Асбестоцементная крупнопанельная плита, армированная стеклопластиком, для утепленных покрытий. В сб.: «Производство и применение асбестоцемента». Магнитогорск, 1966.
67. Б о р о в с к и й Т. В., П о к р а с Л. Н. Армоцементные конструкции. Киев, Буд1вельник, 1965.
68. Б у ш к о в В. А. Железобетонные конструкции. Стройиздат, 1941.
6®. Исследование каменных конструкций. Сборник ЦНИИПС. Госстройиздат, 1950.
70. Л е о н г а р д т Ф. Напряженно-армированный железобетон. Госстройиздат, 1957.
71. М и х а Й л о в К. В. Проволочная арматура для предварительно напряженного железобетона. Стройиздат, 1964.
72. М у р а ш о в В. И. Трещиноустойчивость, жесткость й прочность железобетонных конструкций. Машстройиздат, 1950.
73. НИИпути и строительства НКПС. Опытно-теоретические исследования железобетонных конструкций. Трансжелдориздат, 1940.
74. П а с т е р н а к П. Л. и др. Железобетонные конструкции. Госстройиздат, 1961.
75. П и ц к е л ь Л. Н. Армированный асбестоцемент. В сб.: «Исследования. Каменные конструкции». НИИ по строительству. Госстройиздат, 1955.
76. П и ц к е л ь Л. Н. Асбестоцементные лотковые плиты. Госстройиздат, 1952.
77. Справочник проектировщика. Сборник «Железобетонные конструкций». Госстройиздат, 1959.
78. Расчет бетонных и железобетонных арочных и комбинированных конструкций с учетом длительных процессов. Гостехиздэт УССР, 1950.
79. Экспериментальное исследование каменных конструкций. Сботшик ЦНИИ ПС. Стройиздат, 1939.
См. также [32, 35, 130, 133, 134, 138].
4.7. Древесина
80. Б е л я н к и н Ф. П., Я цен ко В. Ф. Деформ ативность и сопротивляемость древесины как упруго-вязко-пластичного тела. Изд. АН УССР, 1957.
81. Богданович А. Ф. Деревянные конструкции. Раздел III, стр. 152—309 в книге: Митропольский, Овечкин, Алешинский, Богданович. Строительные конструкции. Гострансжелдориздат, 1958.
82. Б о г д а н о в и ч А. Ф. Исследование соединений деревянных конструкций на нагелях под действием статической и пульсирующей нагрузок. Труды МИИТ, вып. 77. Трансжелдориздат, 1952.
83. Быковский В. Н. Сопротивление материалов во времени с учетом статистических факторов. Госстройиздат, 1958.
84. ГОСТ 11484—65, ГОСТ 11499—65, ГОСТ 11602—65. Древесина. Методы физико-механических испытаний.
85. ГОСТ 8697—63, ГОСТ 8698—63. Пластики древесные.
86. ГОСТ 11539—65. Фанера бакелизированная.
87. ГОСТ 102—49. Фанера березовая.
88. ГОСТ 3916—65. Фанера клееная.
89. Древесина. Показатели физико-механических свойств. Руководящие технич. материалы. Комитет стандартов. М., 1962.
90. Иванов Ю. М. О предельных состояниях деревянных элементов, соединений и конструкций. Стройиздат, 1947.
91. Иванов Ю. М. Предел пластического течения древесины. Стройиздат, 1948.
92. И в а н о в Ю. М. Эластическая деформация древесины. Коллоидный журнал, т. 19, вып. 3, 293, 1957.
93. И в а н о в Ю. М., Линьков И. М. Прогрессивные решения клееных деревянных конструкций. «Сельское строительство», 1971, № 7.
94. Индустриальные деревянные конструкции. Примеры проектирования. Под ред. Г. Г. Карлсена. Стройиздат, 1967.
95. Инструкция по изготовлению клееных деревянных конструкций. ЦНИИСК, 1971.
96. Инструкция по испытанию деревянных конструкций. ЦНИИСК, 1971.
97. К а р л с е н Г. Г., Большаков В. В., К а г а н М. Е., Свенцицкий Г. В. Курс деревянных конструкций. Госстройиздат, 1962.
98. Конструкции из дерева и пластмасс. Под ред. В. А. Иванова. Киев, 1970.
99. Л е о н т ь е в Н. Л, Упругие деформации древесины. Гослесбумиздат, 1952.
100. Методы физико-механических испытаний модифицированной древесины. ЦНИИСК, 1971.
101. М и т и н с к и Й А. Н. Упругие постоянные древесины как ортотропного материала. Труды Лесотехнической академии им. С М. Кирова, № 63, 1948.
102. Отрешко А. И. Инженерные конструкции. «Колос».
1968.
103. Рекомендации по контролю качества клеевых соединений деревянных строительных конструкций и деталей. Стройиздат, М., 1971.
104. Рекомендации по повышению долговечности деревянных конструкций в птицеводческих и животноводческих зданиях. ЦНИИСК, ЦНИИЭПсельстрой, 1971.
105. Саму йлло В. И., Соболев Ю. С. К вопросу
о постоянных упругости древесины. Труды МЛТИ, 8, 1958.
106. С в е и ц и ц к и й Г. В. Деревянные конструкции (состояние и перспективы развития). Госстройиздат, 1962.
107. СНиП 1-В. 13-62. Лесные материалы, изделия и конструкции из древесины.
108. СНиП П-В 4-71 Деревянные конструкции. Нормы проектирования.
109. СНиП 1П-В.7-69. Деревянные конструкции. Правила производства и приемки работ.
110. Сорокин Е. С. Динамический расчет несущих конструкций зданий. Госстройиздат, М., 1956.
111. Справочник проектировщика. Деревянные конструкции. Под ред. А. И. Отрешко. Госстройиздат, 1957.
112. Указания по применению деревянных конструкций в условиях химически агрессивной среды. Стройиздат, 1966.
ИЗ. X рул ев В. М. Оценка долговечности клеевых соединений при контрольных испытаниях клееных изделий из древесины. Труды I Всесоюзной конференции по клеям и технологии склеивания. Таллин. 1966.
См. также [130, 136].
4.8. Пластмассы, применяемые в строительных конструкциях
114. Губенко А. Б. Строительные конструкции с применением пластмасс. Стройиздат, 1970.
115. Исследования конструктивных пластмасс и строительных конструкций на их основе. Под ред. А. Б. Губенко. Госстройиздат, 1962г
ЛИТЕРАТУРА
195
116. Клятве Г. Я. Несущие конструкции из пластмасс (зарубежный опыт). Стройиздат, 1965.
117. Прочность и деформативность конструкций с применением пластмасс. Стройиздат, 1966.
113. Технология изготовления клееных панелей из пластмасс, алюминия, асбестоцемента и бетона. Под ред. А. Б. Губенко. Госстройиздат, 1963.
119. Указания по проектированию и расчету строительных конструкций с применением пластмасс. Госстройиздат, 1963.
120. Рекомендации по проектированию и расчету конструкций с применением пластмасс. Стройиздат, М., 1969,
См. также [94].
4.9. Методы расчета конструкций
121. Балдин В. А., Гольденблат И. И., Коч е нов В. М. и др. Расчет строительных конструкций по предельным состояниям. Под ред. В. М. Келдыша. Госстройиздат, 1951.
122. Болотин В. В. Статистические методы в строительной механике. Изд. 2-е. Стройиздат, 1965.
123. Келдыш В. М. и Гольденблат И. И. Некоторые вопросы метода предельного состояния, вып. II. Стройиздат, 1949.
124. Нормы и технические условия проектирования деревянных конструкций (НиТУ 2-47).
125. Нормы и технические условия проектирования железобетонных конструкций (НиТУ 3-49),
126. Нормы и технические условия проектирования бетонных конструкций (НиТУ 4-49).
127. Нормы проектирования каменных и армокаменных конструкций (Н 7-49).
126. Нормы и технические условия проектирования стальных конструкций (НиТУ 1-46).
129. Ржаницын А. Р. Расчет сооружений с учетом пластических свойств материалов. Госстройиздат, 1954.
130. СНиП П-А.10-71. Строительные конструкции и основания. Основные положения проектирования.
131. СНиП П-А.11-72. Нагрузки и воздействия. Нормы проектирования.
132. СНиП П-Б.1-62. Основания зданий и сооружений. Нормы проектирования.
133. СНиП II-В. 1-62. Бетонные и железобетонные конструкции. Нормы проектирования.
134. СНиП 11-В.2-62. Каменные и армокаменные конструкции. Нормы проектирования.
135. СНиП П-В.3-62. Стальные конструкции. Нормы проектирования.
136. СНиП П-В.4-62. Деревянные конструкции. Нормы проектирования.
137. СНиП П-В.5-64. Алюминиевые конструкции. Нормы проектирования.
138. Стрелецкий Н. С. Основы статистического учета коэффициента запаса прочности сооружений. Стройиздат, 1947.
РАЗДЕЛ 5
СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
5.1. ОСНОВНЫЕ ПОЛОЖЕНИИ ТЕХНИЧЕСКОЙ ТЕОРИИ
СТЕРЖНЯ
5.1.1. Определения
Стержнем называется тело удлиненной формы, два размера которого (высота и ширина поперечного сечения) малы по сравнению с третьим размером (длиной). Стержень условно представляется в виде совокупности параллельных или почти параллельных продольных волокон. Сечения стержня, нормальные волокнам, называются поперечными сечениями. По форме волокон различают прямые, ломаные и кривые стержни. Последние
Рис. 5.1
подразделяют на стержни малой и большой кривизны. В стержнях малой кривизны поперечные сечения, отстоящие друг от друга на расстоянии, примерно равном высоте сечения, рассматриваются как параллельные, деформации и напряжения вычисляются по формулам для прямых стержней. Сюда относится большинство строительных кривых стержней (брусьев) — арки, арочные перемычки и ригели рамных конструкций, эркерные балки, кольцевые фундаменты, кольца жесткости и шпангоуты оболочек. Переходные участки (углы) ломаных стержней иногда рассматриваются как стержни большой кривизны. Стержни, у которых смежные поперечные сечения повернуты в своих плоскостях одно относительно другого, называются завитыми (стержни с естественно
закрученной осью). Практическое значение их в строительных конструкциях невелико. Стержни большой кривизны и завитые часто встречаются в машиностроении и авиастроении.
По относительным размерам в поперечном сечении различают стержни массивные и тонкостенные. Последние подразделяются на „стержни с открытым и с замкнутым поперечным сечением. По абсолютным размерам и форме поперечных сечений различают стержни постаянного и переменного поперечного сечения. Ломаный стержень обычно рассматривают как систему связанных прямых или кривых стержней.
Осью стержня называется линия, соединяющая начала координат, связанные с отдельными сечениями (геометрическое место начал координат). Обход стержня наблюдателем обычно противоположен координатной оси I в данном сечении, которое идет навстречу наблюдателю, обходящему стержень (рис. 5.1).
5.1.2. Основные факторы работы стержня
Статико-кинематическая аналогия [83, 87]
Основными факторами работы стержня являются:
1) нагрузки; 2) усилия в сечениях; 3) деформации; 4) перемещения сечений. Весьма существенна аналогия между нагрузками и деформациями, усилиями и перемещениями. Нагрузки и деформации рассматриваются по отношению к усилиям и перемещениям как активные факторы (причины). Задача определения усилий по нагрузкам аналогична задаче определения перемещений по деформациям. При этом заданные перемещения (например, осадку опоры балки) целесообразно рассматривать так же, как деформации (сосредоточенное укорочение опорного стерженька).
Нагрузки и усилия
Рассматриваются сосредоточенные и распределенные (погонные) нагрузки и соответственно сосредоточенные и распределенные (погонные) деформации. Нагрузки могут быть силовые и моментные, а деформации — вращательные (угловые) и поступательные (линейные).
Пусть из всех нагрузок стержня по одну сторону от исследуемого сечения действуют сила, изображаемая скользящим вектором , и пара, изображаемая свободным вектором-моментом К; (рис. 5.2, а). Усилия в сечении (две поперечные силы и продольная сила, два изги¬
5.1. ОСНОВНЫЕ ПОЛОЖЕНИЯ ТЕХНИЧЕСКОЙ ТЕОРИИ СТЕРЖНЯ
197
бающих момента и крутящий момент), определяются из условий равновесия отсеченной части стержня или условий эквивалентности системы нагрузок отсеченной части и усилий в поперечном сечении оставшейся части по формулам приведения системы сил к полюсу и координатным осям (см. 2.1.5). Предполагается, что сил Р и моментов Кз имеется несколько. Формулы приведения:
Х 2.; Ь 2(2. у.-У, г.);
К 2К.; М 1М 2(Х1г1-21х1); 2 22.; N ъи Ъ(У1х.-Х.у11
(5.1)
У-
X 1
у0
У,
х гУ
о
1.
сЬмГм
Здесь Хи У и 2%— проекции сил Р, на координатные оси; М), N3— проекции векторов-моментов Кз на те же оси; х, уи г — координаты какой-либо точки, взятой на линии действия силы Р (на рис. 5.2 показаны кружком).
Формулы пригодны и для правой, и для левой системы координат. Векторы усилий (X, К, 2) и векторымоменты (, Му ТУ) в соответствии с правой системой показаны на рис. 5.2, б. На рис. 5.2, в векторы-моменты заменены соответствующими им в правой системе дуговыми стрелками. На рис. 5.2, г показаны принятые в строительной механике обозначения усилий и их положительные направления, отличающиеся от вышеуказанных правил механики. Под Р» и К? можно подразумевать не только сосредоточенные силы и моменты, но и равнодействующие некоторых сосредоточенных или распределенных нагрузок. Кроме того, заменяя Р% через рйз, а суммирование интегрированием, находят усилия от распределенной нагрузки с погонной интенсивностью р. То же относится к распределенной моментной нагрузке.
Общими формулами (5.1) для вычисления моментов пользуются при расчете пространственных систем. В строительной механике плоских систем моменты вычисляются обычно так: все силы проектируются на
плоскость, перпендикулярную оси моментов, и в этой плоскости определяют моменты проекций сил относительно точки, именно — следа оси моментов. Алгебраи¬
ческая сумма полученных моментов и равна искомому моменту.
Деформации и перемещения
Пусть между некоторыми сечениями стержня возникают малые сосредоточенные деформации (сокращенно — с. д.) двух типов (иначе дислокации) — относительные вращения, изображаемые скользящими векторами Р, и относительные поступательные смещения, изображаемые свободными векторами К. Подразумеваются с. д., действующие по одну сторону от исследуемого сечения. Тогда перемещения сечения выразятся теми же формулами (5.1), причем X, У, 2 дадут малые углы поворота сечения рж, фу, (р вокруг осей х, у, г, а М, N — поступательные перемещения сечения в направлении осей х, у, г, или, что то же, полные перемещения начала координат 0, обозначаемые Ах, Ау, Дг или ио, 00, ДОо.
Статико-кинематическая аналогия
Совпадение формул, определяющих усилия по нагрузкам, и формул, определяющих перемещения по деформациям, коротко называют статико-кинематической аналогией (см. 2.5.6) При использовании этой аналогии относительные вращения часто называют фиктивными нагрузками, а относительные перемещения — фиктивными моментами и отмечают верхним индексом «ф».
При использовании формул (5.1) для определения усилий или перемещений, следует учитывать граничные условия в сечении, принятом за начальное, которое не обязательно должно совпадать с концом стержня, как на рис. 5.2. В первом случае к нагрузкам надо присоединить усилия в начальном сечении, а во втором случае к с. д. надо присоединить перемещения начального сечения. Поэтому свободный конец при определении усилий эквивалентен полностью защемленному концу при определении перемещений.
Под с. д. Р? и С можно подразумевать не только сосредоточенные относительные вращения и смещения между сечениями, но и равнодействующие некоторых групп с. д. или распределенных деформаций. Общеизвестный графо-аналитический метод определения перемещений (прогибов и углов поворота) балок является простейшей иллюстрацией аналогии. Здесь фиктивной нагрузкой является площадь эпюры изгибающих моментов с ординатами, уменьшенными в Е1 раз, или, что то же, площадь эпюры упругой распределенной угловой деформации.
В приложениях статико-кинематической аналогии к различным задачам по расчету стержневые систем используется теорема замкнутости, выражающая условие неразрывности деформации.
Если неразветвленный стержневой контур (в частности, плоская или пространственная арка, рама, балка вместе с опорным телом — «землей»), испытывающий малые деформации, остается замкнутым, то совокупность векторов деформации (иначе — фиктивная нагрузка) подчинена условиям равновесия твердого тела:
2ф 0, 2 уФ 0, Е2ф 0;
2.ф 0, 2мф 0. 2 ЛГФ
(5. Г)
Условия равновесия фиктивной нагрузки постоянно применяются при проверке окончательных эпюр моментов рамных конструкций.
198
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
5.1.3. Интегральные соотношения между напряжениями и усилиями в поперечных сечениях
Продольное усилие 2 (рис. 5.1) представляет собой равнодействующую элементарных нормальных усилий в сечении (коротко — равнодействующую нормальных напряжений) :
2о4Р. (5.2)
Р
Поперечные усилия X и У дают равнодействующие касательных напряжений в сечении:
ХГтхйР У хуйР. (5.3)
Р Р
Полная равнодействующая касательных напряжений
1 У Х У. (5.4)
Положение силы 2 определяется моментами Ь ъ М
нормальных напряжений относительно осей х, у:
1 оуйР М — — ох1.Р. (5.5)
Р Р
Координаты следа силы 2:
М г
У2 у- 5-6)
Положение силы (? определяется моментом N каса¬
тельных напряжений т относительно оси г:
N (ту х — хх у) йР. (5.7)
Плечо силы 2
Усилия 2, I, М (иначе Мх, Му) дают по величи¬
не и по положению равнодействующую напряжений а, усилия Ху Уу N (иначе (Эх, (2у, Мк) — равнодействующую напряжений т. В технической теории стержней основными усилиями определяются не только равнодействующие, но и детальное распределение основных напряжений по сечению, причем от каждого усилия в отдельности.
5.1.4. Соответствующие силы и перемещения, усилия и сосредоточенные деформации (с. д.)
Работа силы равна произведению силы, перемещения точки приложения силы и косинуса угла между направлением силы и направлением перемещения (скалярное произведение силы и перемещения):
А РА соз (Р, А).
Сила и перемещение называются соответст вующими, если их произведена дает непосредственно работу (без умножения на косинус угла):
А РАр.
При этом знак зависит от направления стрелок векторов силы и перемещения. При одинаковом направлении работа имеет знак плюс ( ), при различном направлении— знак минус (—). Соответствующие силы и
перемещения следует понимать в обобщенном смысле как два множителя, из которых один характеризует группу сил, а другой — совокупность перемещений, на которых работают силы, причем произведение выражает работу сил на перемещениях.
Усилия в стержне также представляют собой группы равных и противоположно направленных сил и моментов, приложенных к смежным торцам, отделенным разрезом. Эти группы совершают возможную работу при условии, что торцы, отделенные разрезом, сдвигаются один относительно другого, т. е. возникает сосредоточенная деформация.
Таблица 5.1
Усилия ( )
Наименование, обозначение, размерность
Схема
Продольная сила N в кГ
■
Поперечная сила фу в кГ
Фасад ? ] У
—г ■
Поперечная сила в кГ
План и I
1
Изгибающий момент Мх в кГ см
Фасад г)У
Изгибающий момент Му в кГ •см
План Ф У
Крутящий момент Мк в кГ-см
—3)—
В табл. 5.1 показаны усилия, которым приписывается знак ( ), а в табл. 5.2 — соответствующие возможные с. д., которым приписывается знак (). Для принятого правила знаков работа положительного усилия на положительный с. д. получается отрицательной. Вместе с тем, если с. д. является действительной и вызвана изменением размера малой деформируемой вставки между сечениями под действием соответствующего усилия, то она получается того же знака, что и усилие. Например, растягивающее усилие вызывает увеличение расстояния между сечениями, т. е. положительную с. д. В первом столбце рисунков табл. 5.2 с. д. показаны на¬
5.1. ОСНОВНЫЕ ПОЛОЖЕНИЯ ТЕХНИЧЕСКОЙ ТЕОРИИ СТЕРЖНЯ
199
Таблица 5.2
Сосредоточенные деформации ()
Наименование, обозначение, размерность
Схема
Условное изображение
Векторное представление
Удлинение Л в см
А
Сдвиг Гу в см
Расой
Фасад
гч
"
Сдвиг Гд. в см
План
ж
План
гх
Фасад
Фасад
Фасад
Излом 8 (безразмерная величина)
-5Р-
Лев 0
Излом ву (безразмерная величина)
плап
"ТС
План
-к
План
п д
Лев —
Скручивание ©к (безразмерная величина)
“Шг
.
Прав в
т
"ИГ
глядно, а во втором столбце даны их условные изображения на недеформированной схеме стержня. Отрицательные с. д. обозначаются аналогично, но с изменением направления черточек на обратное. Показаны также векторные представления с. д., необходимые при пользовании формулами (5.1) для определения перемещений. Эти представления соответствуют положительным с. д., обходу стержня слева направо. Направление векторов
0 зависит от принимаемой при расчете правой или левой системы винта. Направление векторов Л и Г однозначно определяется направлением обхода и характером с. д.
5.1.5. Начальная, температурная и упругая распределенные деформации
Распределенную деформацию можно представить как бесконечно большое число бесконечно малых (элементарных) с. д. подобно тому, как распределенная нагрузка представляется бесконечным числом бесконечно малых сил. Погонная интенсивность распределенной
. йХ
деформации удлинения равна производной А, ■— и гео-
аз
метрически представляет собой относительное удлинение; ногонная интенсивность распределенной деформа-
аг
ции сдвига Т представляет собой средний относи28
о, №
тельный сдвиг; в случае излома — кривизна ‘и’ —
с1з
и т. д. В табл. 5.3 представлено шесть видов распределенных деформаций, которые могут быть: 1) начальными (наперед заданными), 2) температурными и 3) силовыми (упругими, а также пластическими).
Из температурных деформаций рассматривается только случай линейного изменения температуры по высоте и по ширине сечения, что вызывает удлинение к1 и кривизны О и 'д'у. Коэффициент линейного расширения обозначен а, изменение температуры оси центров тяжести сечений — » изменения температур соответственно
нижней, верхней, передней и задней поверхности бруса — » размер по оси у равен Л, размер по
оси х равен Ъ.
Упругие деформации пропорциональны соответствующим усилиям. Все они равны усилиям, деленным на соответствующую жесткость стержня в данном сечении. Жесткость стержня из однородного материала равна произведению модуля упругости на геометрическую характеристику сечения, которая имеет размерность см2
200
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
для линейных деформаций и смк для угловых деформаций. Характеристики обозначены для линейных деформаций буквой Р (для сдвига с индексом), для угловых деформаций буквой (с индексом). В последнем столбце таблицы приведены геометрические характеристики для случая прямоугольного сечения (Н — размер по оси у; Ь — размер по оси х).
Величины, обратные жесткостям, называются гибкостями. Чаше всего речь идет о жесткости или о гибкости при изгибе (соответственно ЕI или 1 Е1). Если гибкость при изгибе встречается с гибкостью при продольном изгибе то рекомендуются термины «обратная жест¬
кость», «изгибная податливость».
Жесткостью или гибкостью можно охарактеризовать также особенности стержня в отдельных сечениях. Например, шарнчру соответствует малый участок с нулевой жесткостью или бесконечной гибкостью на изгиб. Упру¬
гий шарнир характеризуется заданной величиной ц — произведения жесткости и длины малого участка или заданной величиной е — произведения гибкости и длины малого участка.
5.1.6. Две системы координатных осей упругого стержня с несимметричным сечением
Формулы для упругих деформаций, приведенные в табл. 5.3. справедливы при условии, что координатные оси в сечении, к которым приводятся усилия и перемещения, совпадают с двумя осями симметрии сечения (рис. 5.3,а).
При отсутствии симметрии_приходится пользоваться двумя системами осей Охуг и Охуг. К первой приводятся усилия N. Мх, Му и соответствующие деформации К Ф, Оу, ко второй — усилия 2х, ?у, Мк и соответст-
Таблица 5.3
Наименование,
обозначение,
размерность
Схема
Температурные
деформации
Упругие деформации
Прямоугольное
сечение
Относительное удлинение л — — (без-
С'б
размерная величина)
у, а к 1л
А,
ср
К -
ЕР
Р—ЬИ см
Относительный сдвиг
у, —Д (безраз-
У ас
мерная величина)
Относительней сдвиг 4Гх
ух -р- 'безразмерная величина)
аг
Уу СР
й
Уг -
СР„
«0,83 см9
Кривизна
йвх 1
г СМ 1
х 48
Кривизна
А а в
ЬЦ I I
I
а(
м,
ЕК
т
л
•сГ
и
а ( п-э)
_ МУ Ьу Е.
М М
его
ьн».
„ см4
12
у 12
Кручение
ас.
йз
йВ.
3
01.
'(□Г
„ см. табл. 7.1.4.
5.1. ОСНОВНЫЕ ПОЛОЖЕНИЯ ТЕХНИЧЕСКОЙ ТЕОРИИ СТЕРЖНЯ
201
вующие деформации ух, у у, (рис. 5.3,6—г). Начало
первых осей О совпадает (при однородном материале) с центром тяжести поперечного сечения (ц. т.), а наклон осей Ох и Оу в сечении соответствует главным направлениям в центре тяжести (ху—0). Оси Ох, Оу, а также Ох называют «нормальными» главными центральными осями сечения. Начало О вторых осей совпадает с так
°-аЛ •
Рис. 5.3
называемым центром изгиба сечения (ц. и.), а сами оси Ъх и Оу параллельны осям Ох, Оу за исключением особого случая очень короткого защемленного стержня. Вторые оси называются касательными главными центральными осями.
Соответственно двум системам координатных осей получаются и две продольные оси бруса — ось центров тяжести и ось центров изгиба. Общее название «ось стержня» обычно сохраняется за осью центров тяжести сечений. На рис. 5.3 представлено несколько характерных случаев: а — две оси симметрии, координатные системы совпадают; 6 — одна ось симметрии, оси х и х совпадают, оси у и у, г и г — не совпадают; в — отсутствие симметрии, оси не совпадают; г — антисимметричный профиль, оси совпадают. Наибольшее практическое значение имеют сечения с одной и с двумя осями симметрии.
5.1.7. Упругое основание
Упругим основанием стержня называется такое основание, которое реализует распределенную вдоль оси стержня реакцию с погонной интенсивностью, пропорциональной перемещению (прогибу или углу поворота сечения). Коэффициент пропорциональности называется отпорностью основания. В общем случае упругое основание развивает шесть реактивных нагрузок на стержень и характеризуется шестью отпорностями. Интенсивности реактивных нагрузок равны:
— кхщ
Рх-
тх сх Ф;
Ру—ЬуЧ ту — Су ру; Р2 — к2 Щ тг — сг срг.
(5.9)
Знак минус показывает, что реактивная нагрузка направлена противоположно перемещению. Отпорности к имеют размерность кГсм • смкГсм2, отпорности с — размерность кГ • смсмкГ (см. 5.5.6).
Величины, обратные отпорностям основания, называются податливостями основания.
Упругие опоры можно рассматривать как бесконечно малые участки упругого основания, обладающие, одна¬
ко, конечными отпорностями и податливостями. Отпорность силовой упругой опоры обозначается и имеет размерность кГсму отпорность моментной упругой опоры обозначается ц и имеет размерность кГ • см. Упругое основание очень часто целесообразно рассматривать как совокупность большого числа сосредоточенных упругих опор.
5.1.8. Плоский неразветвленный упругий стержень.
Обобщенная статико-кинематическая аналогия [87]
Наибольшее практическое значение имеют стержни, Я обладающие плоскостью симметрии, совпадающей с плоскостью кривизны оси. Такие стержни называются плоскими. Оси у, г, связанные с сечением, располагаются в плоскости стержня, ось х — перпендикулярно этой плоскости. Факторы, характеризующие работу плоского стержня, разбиваются на две группы — симметричную (в плоскости стержня) и антисимметричную (перпендикулярную его плоскости). Эти факторы могут быть изучены отдельно и независимо, причем расчет разбивается на два независимых расчета. Между кинематикой и статикой стержня в своей плоскости и статикой и кинематикой стержня из своей плоскости существует определенная аналогия, которая используется для упрощения расчетов стержня.
В табл. 5.4 дан полный перечень факторов, характеризующих работу стержня с упругим основанием общего вида, охватывающим также различные или жесткие опоры. В левой половине таблицы перечислены факторы, относящиеся к работе стержня в своей плоскости, в правой (в другом порядке) к работе стержня из своей плоскости. Считается, что оси центров тяжести и центров изгиба практически совпадают.
Для статически неопределимого стержня усилия, деформации и перемещения складываются из двух частей — из факторов, относящихся к основной системе (отмечены нуликом), и факторов, зависящих от лишних неизвестных (отмечены звездочкой). Благодаря упругому основанию нагрузки также складываются из двух частей — заданных нагрузок (отмечены нуликом) и реактивных нагрузок, зависящих от неизвестны? перемещений1.
Обобщенная (в смысле учета упругих свойств и статической неопределимости) статико-кинематическая аналогия состоит в следующем. Два плоских неразветвленных стержня называются взаимными, если они имеют одинаковые оси и гибкости одного стержня построчно численно совпадают с отпорностями основания другого. Если при этом активные факторы (нагрузки и деформации, отмеченные нуликом) одного стержня будут построчно совпадать с активными факторами (деформациями и нагрузками) другого стержня, то и пассивные факторы (усилия и перемещения) такжл. будут построчно совпадать.
В случае однопролетных и неразрезных прямых балок взаимные стержни и их нагрузки условно можно считать лежащими в одной плоскости (см. рис. 5.30). При криволинейной и ломаной оси важно учитывать соотношение пространственного расположения взаимных стержней. (В отдельных случаях путем вращения фиктивных нагрузок на 90° удается оперировать с взаим-
1 Основная система обычно является статически определи мой, а взаимная с ней — кинематически определимой. Пример: простая балка и взаимная с ней абсолютно жесткая балка на упругом основании и концевых опорах в плоскости свободных торцов.
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
Таблица 5.4
Плоский упругий стержень
Работа стержня в его плоскости (гОу)
Размер¬
ность
Упругие характеристики стержня
Гибкость на изгиб
1
1
Е1х
кГ'СМ2
Гибкость на сдвиг
1
1
СР
У
кГ
Гибкость на растяжение-сжатие
1
1
ЕР
кГ
Упругие характеристики основания
Отпорность при поперечном перемещении (прогибе)
кУ
кГ
см-см
Отпорность при повороте сечения
сх
кГ см см
Отпорность при продольном перемещении
кг
кГ
см'2
Погонные нагрузки
Поперечная
0. ру я"в РУ к У0
кГ
СН
Моментная
тх 53 тх сх х
кГ-см
см
Продольная
Рг р0С-к2а’
кГ
см
Усилия
Изгибающий
момент
мх м°х
кГ-см
Поперечная сила
кГ
Продольная сила
дг №
кГ
Деформации
Кривизна
П г
Еих
1
СМ
Относительный
сдвиг
V »т° __
уч уУ Гр СРУ
1
Относительное
удлинение
л
К ЕР
1
см
Перемещения 1
Поперечное перемещение (прогиб)
V V0 V
см
Угол поворота
Ф Ф° Ф
Продольное пе ремещение
ДО ; С0° ОД
см
Упругие характеристики основания
Отпорность при поперечном перемещении (прогибе)
кх
кГ
СМ'СМ
Отпорность при повороте сечения
СУ
кГ-см
см
Отпорность при вращении сечения
с
кГ -см см
Продолжение табл. 5.4
Работа стержня в его плоскости (гОу)
Упругие характеристики стержня
Гибкость на изгиб
1
1
в,у
кГ • см1
Гибкость на сдвиг
1
Срх
1
кГ
Гибкость на кручение
1
1
кГ-см
Деформации
Кривизна
о,
1
см
Относительный
сдвиг
Т ОРх
1
Кручение
. м
50-- 2 01ь
1
см
Перемещения
Поперечное перемещение (прогиб)
и — и и
см
Угол поворота
1
Угол вращения
0
Фг Фг фг
1
Погонные нагрузки
Поперечная
”хрх-кхи
кГ
см
Моментная (изгибающая)
ту т1-еУ%
кГ-см
см
Моментная
(крутящая)
тг т® — сг Фг
кГ-см
см
Усилия
Изгибающий
момент
мм°ум;
кГ-см
Поперечная сила
кГ
Крутящий момент
м2 м м2
кГ-см
5.Т. ОСНОВНЫЕ ПОЛОЖЕНИЯ ТЕХНИЧЕСКОЙ ТЕОРИИ СТЕРЖНЯ
203
ными стержнями в одной плоскости.) На основании аналогии и теоремы замкнутости (см. 5.1.2) расчет изгибающих моментов одноконтурной плоской рамы без упругого основания приводится к расчету осадок или напряжений по подошве абсолютного жесткого стержня на упругом основании, нагруженного перпендикулярно
своей плоскости фиктивной нагрузкой, равной деформации заданной рамы.
Статико-кинематическая аналогия справедлива и для пространственного стержня. Все положения табл. 5.4 остаются в силе применительно к элементу длиной с1з и к стержню в целом.
5.2. ОПРЕДЕЛЕНИЕ НОРМАЛЬНЫХ НАПРЯЖЕНИЙ
Нормальные напряжения в поперечных сечениях однородного упругого стержня (йз) определяются на основе закона Гука, гипотезы плоских сечений и гипотезы
о ненадавливании волокон в поперечном направлении (ох — Оу—0). При этих условиях нормальные напряжения пропорциональны относительным удлинениям и подчинены закону плоскости.
Расчет начинается с определения «нормальных» геометрических характеристик и усилий N, Мх, Му в сечениях. (При тонкостенном профиле иногда определяют дополнительные нормальные напряжения — см. ниже
5.10.)
5.2.1. Геометрические характеристики поперечных сечений стержней [25, 91, 93 и др.]
Геометрическими характеристиками фигуры поперечного сечения стержня называются следующие интегралы (рис. 5.4,а): площадь
р ар 2 р смъ
статические моменты относительно осей х, у;
§х у йР Е см; йР Е см3;
х, у
Рис. 5.4
моменты инерции относительно осей х, у:
I х — Г У2 йР Ъ 11х см; 1у Г ж ар 2 (у см: р Р
центробежный момент инерции относительно осей
Буквами с индексом I обозначены характеристики отдельных частей фигуры, на которые разбивается в случае необходимости сложная фигура сечения, относительно тех же осей х, у.
Через каждую точку можно провести пару осей ху у так, чтобы 1ху—0. Такие оси называются главными осями для данной точки. Оси, имеющие начало в центре тяжести фигуры сечения, называются центральными осями. Для центральных осей 5Ж5У0. Практическое значение имеют главные центральные оси, для которых 5жг5у»»хуг0. Если фигура имеет ось симметрии, то эта ось является одной из главных центральных осей. Достаточно определить лишь положение центра тяжести на этой оси. Другая главная центральная ось проходит через ц. т. перпендикулярно первой.
Для определения центра тяжести и главных центральных осей выбирают произвольные исходные оси х9 у. Координаты центра тяжести в исходных осях вычисляют по формулам (см. 2.1.8 и 2.2.2).
8и 2 Рг XI 8Х _.
(5.10)
2 р1 XI
. х 2 У1
, Уо р р
Здесь хи Ух — координаты центров тяжести отдельных фигур.
Центр тяжести принимают за начало произвольных центральных осей и ищут угол поворота осей, превращающий произвольные центральные оси в главные центральные оси. Обычно определяют сперва , „, 1ху для исходных осей, а затем находят хп, 1Уц, хЦуЦ
центральных осей, параллельных исходным, пользуясь формулами:
1 1х-Ру1 1р1у-Р%,
„Ц,Д —Рх„ 1п
х V Ху 0 У0
(5.11)
Далее вычисляют полусумму и полуразность центральных моментов инерции:
п, - у (7п V); 7пР у ('«- V).
Наибольший и наименьший центральные моменты инерции, одновременно являющиеся главными центральными моментами инерции, вычисляются по формуле
макс -4-" 2 -4- 2д д (5.12)
мин по г 'пр744 '
Остается узнать угол а0 поворота осей х уц, изобразить оси хГ , у- и установить, какой из осей отвечает макс И какой мин.
Если д уЧ, то
хУ — ху ав— I, 1ху
см
«о —
цип
■ V
(5.13)
204
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
Если же дД 1уч, то
а0 ■
К.
(5.13')
В первом случае макс отвечает оси хгц, во втором— оси гг ц. Угол а0 отсчитывается от оси х или у против часовой стрелки. Расположение осей х у должно соответствовать правой системе.
Вместо угла ао иногда определяют угол 2ао, пользуясь формулой
1ё 2а0 и-. (5.13")
1ха1уа
Круг Мора1. Формулы (5.12)—(5.13") реализуются графически (рис. 5.4,6). На оси абсцисс откладываются в выбранном масштабе 1 см«т» см отрезки ОЛ ц, ОВ—1) ди по ординатам Ш—1хп уп и ВМ -Нхц уЦ определяются точки М и N. Прямая МЫ пересекает ось в точке С, являющейся центром круга, абсцисса которого равна п с. Радиус круга равен
V
др д уО. Отрезки:
Г) Л — — Г.Ц.
7 макс 1 х
гп’ __ г.ц
'мин 1у
Угол А7В'Л'ао, угол МСА 2ао.
Случай, когда главные оси несимметричного сечения определяются сразу. 1) Если сечение состоит из двух одинаковых фигур, повернутых относительно друг друга на 90° (рис. 5.4, в), то одна из главных осей соединяет центры тяжести 0 и О% фигур, а другая перпендикулярна ей в центре тяжести О, очевидно, делящем отрезок 002 пополам:
МИН IX Iу 1 р
макс 2Лр,
где 1% и у — площадь и главные центральные моменты инерции одной фигуры; р—полярный момент инерции одной фигуры. 2) Если сечение состоит из двух (неравных) фигур, каждая из которых имеет одинаковые по величине моменты инерции ху (например, из квадрата и круга, причем меньшая площадь может быть отрицательной), то одна из главных осей соединяет центры тяжести фигур.
5.2.2. Определение моментов инерции относительно исходных осей
Обычно сечение удается разбить на отдельные фигуры, для которых положение главных центральных осей и величины геометрических характеристик заранее известны из таблиц или легко определяются. Используются формулы перехода от главных центральных осей х, у к произвольным у
IХ'—РУо-1 х соз2а зш2 а
‘ х' д х — ' и
1 у'—Рх1 х 51П2а соз2 а
, Р
х V 1 х0у0
1х-1и
51П 2а
— зш 2а;]
ху
,,51п2а;[ (5.14)
4- соз 2а. I 1 ху 1
Здесь ХоУ у о — координаты нового начала в старых осях или старого начала в новых осях; а — угол между осями х и х'. Слагаемые правее вертикальной черты относятся к случаю, когда оси ху у центральные, но не главные и, следовательно, 1ХуФ0. Включение этих слагаемых дает общие формулы перехода от центральных осей к произвольным. При а0 получаются формулы перехода к параллельным осям.
В общем случае сечения с криволинейным контуром пользуются приемами точного или приближенного вычисления двойных интегралов. Разбив сечение на узкие полоски, параллельные оси х (рис. 5 4, г), имеем:
1хьухау, -(4 —я)»-
У У
§ьзау§ьсау; 'у1Ьхс усйу'
Здесь Ь, хА, Хв, хс должны быть выражены в функции от у либо должны задаваться численно (при приближенном вычислении интегралов). Применяется также графический метод веревочного многоугольника [170].
Круг Мора (рис. 5.4, б) дает возможность определить моменты инерции относительно произвольно наклоненных осей по главным моментам инерции. Откладывают ОЛ'ж, ОБ'у и проводят окружность с центром в
Вг А
середине отрезка В'А' и с радиусом ——. Проведя
В'М под заданным углом а, определяют точку М и диаметрально противоположную ей точку N. Абсциссы ОА и ОВ точек М и N дают 1Х» и 1уординаты АМ и ВN соответственно 4'1х'у' и —Ак'у' Напоминается, что в 5.2.1 отрезок АМ был равен не ц, а —цц
5.2.3. Редуцирование площадей при вычислении моментов инерции [85,4]
Редуцированием (приведением) называется замена площади Р фигуры несколькими сосредоточенными площадками. При вычислении статических моментов заменяют площадь одной площадкой, равной Р, сосредоточенной в центре тяжести фигуры. При вычислении осевых и центробежных моментов инерции заменяют площадь Р четырьмя площадками, равными каждая Р4 и расположенными в вершинах прямоугольника инерции. Оси симметрии прямоугольника инерции совпадают с главными центральными осями , у фигуры; координаты вершин его равны радиусам инерции:
см, (5.15)
Сравни 3.1.7.
причем ординаты вершин равны ±гх, а абсциссы вершин равны ±гу (рис. 5.5, а).
Приблизительные значения радиусов инерции для некоторых сечений см. табл. 7.2.
Эллипсом инерции называется эллипс с полуосями гу и гх, вписанный в прямоугольник инерции.
Моменты инерции относительно любых осей х у' вы-
5.2. ОПРЕДЕЛЕНИЕ НОРМАЛЬНЫХ НАПРЯЖЕНИЙ
205
числяются по координатам вершин прямоугольника х у (1, 2, 3, 4) по формулам:
4 4
р V,■, р V ■•»
(1
(1
V - ■
х'У 4
(5.16)
]г—I—1
фгтг--_
"Ь- 6
Рис 5.5
Радиусы инерции прямоугольника с основанием Ь и высотой Н соответственно равны:
л [ ьк н Т% V »2 ЬНу
0,29 Н;
0,29 Ь.
щадкам 712 по углам и к центральной площадке 2зР (рис. 5.5, г).
Площадь узкого прямоугольника редуцируется к двум площадкам Р6 по концам и одной площадке 21зР посередине ' (рис. 5,5, д). Этот способ удобен при многоугольном тонкостенном сечении, состоящем из профилей и листов.
Моменты инерции узкой искривленной полосы (поперечного сечения тонкой цилиндрической оболочки) вычисляются как интегралы вдоль линии по формулам (рис. 5.6, а):
соз2 а
(5.17)
Прямоугольник инерции показан на рис. 5.5, б„
В случае очень узкого прямоугольника ( 5)
(сечение пластинки, тонкой стенки и т. п.) вершины прямоугольника инерции можно считать попарно объединенными, что эквивалентно пренебрежению собственным моментом инерции относительно продольной главной оси. В этом случае сосредоточенные площадки равны: Р 8(
— — (рис. 5.5, в). Заменяя отдельные узкие прямоугольники парами площадок, упрощают расчет моментов инерции тонкостенных профилей. При этом бульбы целесообразно заменять одной площадкой.
В качестве прямоугольника инерции можно использовать любой подобный ему и подобно расположенный прямоугольник при условии соответствующего подбора четырех площадок в вершинах и пятой площадки в центре. Прямоугольное сечение, как подобное своему прямоугольнику инерции, редуцируется к четырем пло-
1у, г х'2 1(1 -1— зш а й8
5 1хи' — х' у' гав 4- - 51П 2а аз.
Здесь а — угол наклона элемента й к оси х'. При постоянной толщине полосы множители ( и выносятся за знаки интеграла.
Вхместо вычисления вторых слагаемых в формулах
(5.17) рекомендуется редуцировать сечение к двум линиям, отстоящим от оси на 0,29, и ввести в первые слагаемые формул величину (2 вместо . Другой вариант состоит в редуцировании площади к трем линиям — верхнему краю (? вместо 0. оси (23 вместо 0 и нижнему краю (Iв вместо )-
При наличии густо расположенных ребер (рис. 5.6, б, в) вводятся на единицу длины средней линии величины погонной площади Ра и погонных собственных моментов инерции 191,а и 1пж1па (рис. 5.6, г):
х У'2 0052 а 5п2 а 5‘»
5 8 §
1иг '2 аз ’5 51 п2 ааз г0052 а
5 5 1 х'у ' у' № (5 — ‘п) 8'П 2а 0з.
3 5
Обычно ребра имеют вид, показанный на рис. 5.6, б, и достаточно ввести и 8, полагая ‘п0. В этом случае
(5.18)
206
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
можно редуцировать по 12 на двух линиях, отстоящих
-■т"
от оси расстояния радиуса инерции г5
пользоваться только первыми слагаемыми формул (5.18), производя вычисление дважды с координатами х у' точек первой и второй линий.
Если у, то Рф. При косом изгибе грузовая и нейтральная линии неперпендикулярны. Они становятся перпендикулярными при 0 или 90° и когда
I х—1 у.
Графическое построение нейтральной линии по грузовой при помощи прямоугольника инерции показано на рис. 5.7, б. Через точку С', симметричную точке С от-
5.2.4. Общая формула нормального напряжения при растяжении-сжатии и изгибе. Нейтральная линия [91, 93, 100, 85]
Общая формула нормального напряжения а в точке х, у в главных центральных осях:
N Р
(5.19)
Здесь XN, — координаты следа равнодействующей продольной силы N (иначе 2.) или координаты следа продольной внешней силы, если речь идет о внецентренном растяжении-сжатии;
мх,
Му
7-у
1X
— х1у
УNУ
ХИХ
Мх
хм
Му
' N
(5.20)
Правило знаков для N (2), Мх, Му соответствует рис. 5.2, г.
Уравнение нейтральной линии (геометрического места точек с нулевыми напряжениями) в отрезках на осях имеет вид:
х У
а Ь
Отрезки на осях:
Уы
Уклон нейтральной линии к оси х:
Ь
Р — — ■
а
У N
Му
мх
Ь.
1и
(5.22)
Графическое построение нейтральной линии АВУ соответствующей силовой точке N (следу продольной силы N на поперечном сечении), при помощи прямоугольника инерции показано на рис. 5.7, а. Порядок построения показан цифрами , 2У 3, А и 2 3 В. Это построение реализует соотношения (5.21).
Косой изгиб (случай N0)
Мх
М0
о — — и 4- —- х. I 1
1х у
(5.23)
Нейтральная линия проходит через начало координат (ц.т.). Уклон к оси х определяется формулой (5.22). Если плоскость действия нагрузки задана следом СИ (грузовой линией), то уклон нейтральной линии АВ к оси х (рис. 5.7, б)
У
где -ф — угол наклона грузовой линии к оси у.
(5.24)
носительно оси у, проводится прямая, параллельная диагонали прямоугольника, до пересечения со стороной его в точке А. Прямая АО дает нейтральную линию. Если продолжить прямую Л О до пересечения с другой стороной прямоугольника в точке В, то прямая СВ окажется параллельной другой диагонали. Построение основано: 1) на том, что если грузовая линия совпадает с одной диагональю, то нейтральная линия совпадает с другой и 2) на разложении нагрузки по диагоналям.
Практическое значение нейтральной линии обусловлено тем, что она представляет собой ось поворота
плоскости сечения при деформации. Плоскость изгиба
и направление перемещения сечения от действия нормальных напряжений перпендикулярны нейтральной линии. Кроме того, если известна нейтральная линия, то упрощается определение опасных точек сечения и вычисление наибольших напряжений.
Прямой изгиб (случай NМУ 0 или АМх 0). Нормальные напряжения определяются по формуле
Мх Му „ „
о — — у или а —■- х. (5.25)
х у
Нейтральная линия совпадает соответственно либо с главной осью х, либо с главной осью у. Напряжения следуют линейному закону.
Центральное растяжение-сжатие (МхМу0)
N
о — сопз. (5.26)
Множитель в скобках в формуле (5.19) отражает неравномерность распределения нормальных напряжений в общем случае по сравнению со случаем центрального сжатия.
Определение погонных нормальных усилий. При тонкостенном сечении часто приходится иметь дело с усилиями на единицу длины средней линии стенки в попе-
5.2 ОПРЕДЕЛЕНИЕ НОРМАЛЬНЫХ НАПРЯЖЕНИЙ
207
речном сечении — погонной нормальной силой п кГсм, погонным моментом, изгибающим стенку относительно средней линии, т6 кГсмсму реже — погонным моментом, изгибающим стенку относительно нормали к средней линии, тп кГ-смсм. Векторы моментов т9 направлены вдоль Аз, векторы моментов тп — вдоль нормали к йз.
м.
для круга
, I N М
п Т-1
Мх соз а И „51 па’
М„
У — х
По
т„ (
I
Мх 51П а Му соз а
К Т„
, М_
амакс — ГС »
где
Величины РХ я у приводятся в таблицах сортамента и справочной таблице 7.1.
Для прямоугольника
ЬН _ №
(5.27)
Здесь уя — координаты средней линии в главных
центральных осях Ох, Оу. Обозначения , «, п — см. 5.2.3; а — угол элемента йз средней линии с осью Ох.
5.2.5. Максимальные нормальные напряжения
Напряжение аМако получается в одной из точек наружного контура (чаще всего в угловой точке), наиболее удаленных одновременно от оси х и от оси у. Среди этих точек надо выбрать такую, для которой напряжения от Мх и Му имеют одинаковый знак с напряжением от N. Если известна нейтральная линия, то опасная точка определяется сразу, как точка, наиболее удаленная от нейтральной линии, т. е. имеющая наибольшее плечо (длину перпендикуляра) относительно нейтральной линии. В общем случае аМакс вычисляют по общей трехчленной формуле (5.19), подставляя координаты опасной точки.
Общая одночленная формула имеет вид:
М — изгибающий момент; № — момент сопротивления.
Формула (5.28) применяется во всех случаях однотипно, для чего достаточно под изгибающим моментом подразумевать момент, подсчитанный относительно нейтральной линии, а под моментом сопротивления — величину
, (5.29)
гм4ко
— момент инерции относительно нейтральной линии;
гмакс—плечо опасной точки относительно нейтральной линии.
При прямом изгибе в плоскости уОг:
Ммх, В71Р, СМ3.
макс
При прямом изгибе в плоскости хОг
м Му, V? см.
При косом изгибе (N0) и в общем случае приходится определять нейтральную линию и момент сопротивления относительно нейтральной линии, что, как правило, сложнее, чем пользование общей формулой (5.19).
Однако если приходится исследовать влияние большого числа нагрузок на напряжение в определенной опасной точке, то целесообразно пользоваться одночленной формулой (5.28). При этом строится одна специальная нейтральная линия; считается, что в опасной точке действует сила, нормальная к сечению [см. форму лы (5.21)]. Момент сопротивления вычисляется по формуле
1‘
(5.29')
(5.28)
Здесь гн — плечо специальной нейтральной линии относительно центра тяжести сечения; 1Х — момент инерции относительно центральной оси х параллельной специальной нейтральной линии; у'— ордината исследуемой точки в осях х у'. При пользовании этим способом нет необходимости вычислять усилия N. Мх, Му. Достаточно найти момент односторонних сил относительно специальной нейтральной линии. По существу дела мы пользуемся здесь поверхностью влияния (инфлюентой) для нормального напряжения.
5.2.6. Ядро сечения [100 и др.]
Ядром сечения называется замкнутый контур, из которого не должен выходить след продольной силы (силовая точка), чтобы в сечении не возникали напряжения разного знака. Ядро сечения используется для оценки рациональности проектирования каменных столбов, стен и сводов.
Построение ядра упрощается применением теоремы: если силовая точка перемещается вдоль прямой (силовой прямой), то соответствующие нейтральные линии вращаются вокруг точки; эта точка совпадает с силовой точкой, для которой нейтральной линией является прежняя силовая прямая.
Поэтому ядро можно строить как систему силовых точек, для которых стороны сечения являются нейтральными линиями, либо как систему нейтральных линий для силовых точек, совпадающих с вершинами сечения. В обоих случаях используются формулы (5.21).
Фигура сечения должна быть выпуклой. В противном случае выбираются вершины, принадлежащие выпуклому наружному многоугольнику, и ядро строится для него.
Пользуясь сторонами ядра, упрощают определение напряжений в вершинах сечения (см. 5.2.5). Моменты Му вычисляемые относительно нейтральных линий, называют ядровыми моментами.
На рис. 5.8, а показано прямоугольное сечение ЬхН и его ядро, имеющее форму ромба с диагоналями Ь3 (шириной) и Н3 (высотой). Вершины сечения и стороны ядра отмечены большими и малыми буквами. Сторона а совпадает с нейтральной линией для вершины А. Момент сопротивления для точки А
6 ’
«7 Рга ЬН 4 '
6 V ь н?
_см3;
208
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
у ; так как ПРЯМ0УГ0ЛЬНИК инерции в дан¬
ном случае подобен контуру сечения (его стороны рав¬
ны
1г — 2
, то
2
ЬН
ЬЧ3
4.3 Ь- Л2 6 (62 А2)
5)
I—■ О—
_
V
К
Подставив значения I н у в формулу (5.29), получаем прежнее значение №. На рис. 5.8,6 даны примеры ядер сечения.
5.2.7. Случаи переменного модуля Е
Общая формула нормального напряжения вместо (5.19) имеет вид:
Мх Му У _ (5-30)
ЕйР _[г2 Еар Гхз 2йР
Р Р Р
Здесь модуль Е—Е (х, у) соответствует площадке (волокну) в точке с координатами х у. Выражение в скобках равно относительному удлинению исследуемого волокна.
Обычно вместо Е вводят редукционные коэффициенты площадок, равные относительному модулю:
Е(х,у)
Р (,) —“ •
с
где Ес соп1.
Если модуль остается постоянным в пределах конечных частей сечения, то
гФ(-
N
Мх
у-
-(5-30'
1 фг: :Л
2 Фг р1 2 фг 1х1 2 Фг:
Здесь фг (1, 2, 3,.) —редукционные коэффициенты отдельных частей с постоянным модулем; ф — редукционный коэффициент части, которой принадлежит исследуемое волокно х, у.
При определении центра тяжести и главных осей сечения переменность модуля также должна быть учтена, аналогично знаменателям в формулах (5.30'). Редуцированные статические моменты и центробежный момент инерции определяются по формулам:
5Рд ЕФ5; 1ху1.
В случае стержня большой кривизны отдельные волокна имеют различную длииу. Изменение длины волокон эквивалентно изменению их модуля Е. На этом основаны расчетные формулы для стержней большой кривизны (см. раздел 9).
5.2.8. Пользование центральными неглавными осями
Общая формула нормальных напряжений (5.19) остается в силе в центральных неглавных осях ху у при условии замены Мх на Мх и Му на Му по формулам:
Му Мхкх
Здесь
дТ Мх-Мукц
Х 1-кхку
Ми
1 — кхку
(5.31)
«
1 хд
I»
Пользование неглавными осями удобно, когда сечение разбивается на фигуры с взаимно параллельными главными центральными осями (пример такого сечения см. рис. 5.10).
5.3. ОПРЕДЕЛЕНИЕ КАСАТЕЛЬНЫХ НАПРЯЖЕНИИ И ДЕФОРМАЦИЙ В СТЕРЖНЯХ. ОСОБЕННОСТИ ТОНКОСТЕННЫХ СЕЧЕНИЙ
Определение касательных напряжений начинается с нахождения усилий 0_Уу (?х, Мн.
Касательные напряжения в очень коротких стержнях определяются по формулам расчета на срез (см. 5.3.1). При этом если сечение тонкостенное, то пользуются формулами направленного среза (см. 5.3.2). Касательные напряжения, сопровождающие поперечный изгиб более длинных стержней и балок, определяются в зависимости от поперечных сил по формулам касательных
напряжений при изгибе (см. 5.3.3). Для определения крутящего момента приходится найти центр изгиба, который в случае массивного профиля часто считают совпадающим с центром тяжести. Если стержень нагружен крутящими парами (2У 2х 0), то центр изгиба определять не нужно. Касательные напряжения от кручения чаще всего определяют по формулам свободного кручения (см. 5.3.7 и табл. 7.4). Учет стеснения при кручении и дополнительных нормальных напряжений желателен
5.3. ОПРЕДЕЛЕНИЕ КАСАТЕЛЬНЫХ НАПРЯЖЕНИЙ И ДЕФОРМАЦИЙ В СТЕРЖНЯХ
209
в первую очередь при открытом тонкостенном профиле (двутавр, швеллер). Геометрические характеристики поперечных сечений при стесненном кручении см. 5.3.9 и табл. 7.5, определение усилий (бимоментов) см. 5.10.
5.3.1. Расчет на срез (сдвиг)
Касательные напряжения в поперечном сечении очень коротких стержней и соединительных элементов (болты, заклепки), а также в сварных швах рассчитываются по
условным формулам, основанным: 1) на гипотезе плоских сечений и 2) на гипотезе неизменяемости сечения в своей плоскости
Геометрическими характеристиками являются площадь сечения Р и полярный момент инерции сечения относительно его центра тяжести (рис. 5.9):
1Р у0Р хаг 1у. (5.32)
Оси дс, у — любые ортогональные центральные оси (величина 1Р есть инвариант относительно поворота осей вокруг фиксированного полюса).
Относительный угол закручивания
(5 33)
01 р
Относительный сдвиг в направлении силы (, приложенной в ц. т. сечения,
Т« -г- (6.34)
Касательное напряжение в точке ху у складывается из двух векторов: параллельного силе 2 и перпендикулярного радиусу-вектору р:
- Э, Мк
т—Г 17'’-
(5.35)
Удобнее пользоваться составляющими вектора т по координатным осям:
X мк _ (У
. мк Р’ , Х;
(5.36)
т т2.
(5.37)
При небольшом числе вариантов нагрузки, а также для выяснения наиболее напряженных точек сложного
сечения следует определить нейтральную точку н. т. (центр вращения) сечения, соответствующую исследуемой нагрузке. Координаты нейтральной точки:
Ун
Хи 7Г"- в-»
Ох
мк"р ' мк р
Радиус-вектор нейтральной точки относительно центра тяжести О перпендикулярен силе 2 и равен:
Рн
Ми
(5.39)
Вектор т полного касательного напряжения в точке х, у перпендикулярен ее радиусу-вектору р' относительно н. т. Модуль вектора т равен:
Мк,
—— Р- (5.40)
1Р
тмакс получается рмакс, т. е. в точках, наиболее удаленных от н. т.
При расчете групп заклепок на срез по формулам (5.37) и (5.40) площади отдельных заклепок считаются сосредоточенными в их центрах. При расчете сварных швов на срез их площади считаются сосредоточенными на осевых линиях швов. Неравномерностью распределения т по сечению заклепки или по ширине шва пренебрегают.
5.3.2. Расчет на направленный срез (сдвиг) [91]
Касательные напряжения и деформации тонкостенных стержней в плоскости жесткого защемления и на небольшом расстоянии от нее, в том числе и коробок зданий, часто определяют на основе гипотезы плоских сечений. При очень тонких стенках векторы касательных напряжений считают направленными вдоль средней линии стенки, а сами напряжения — распределенными равномерно по толщине стенки. При стенках значительной толщины и ребристых учитывают также напряжения, нормальные к средней линии стенки, а иногда и крутящие моменты в стенке, причем считаются с различной деформативностью стенки в срединной поверхности и нормально к ней.
Обозначения:
Я э Яп тк — погонные касательные усилия и погонный крутящий момент в стенке;
8 ?п — погонные площади и погонный полярный
момент инерции сечения стенки;
6п, Ор—модули сдвига, соответствующие усилиям
Яв, Яп, к«
При относительной стенке без ребер толщиной погонные площади и момент инерции равны:
з п Ь р •
Чтобы не иметь дела с различными модулями сдвига, целесообразно вводить редуцированные погонные геометрические характеристики:
Г 8ф5; Гд -77- (п рл;
,-ред _ I. 1Р 1Р
1р Ч’р-
(5.41)
210
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
Здесь О—постоянный модуль;
Ф8, фя, (рр— редукционные коэффициенты.
В дальнейшем верхний индекс «ред» опускается. Относительные сдвиги стержня и относительный угол закручивания в главных центральных осях Охуг (см. 5.1.6):
(5-42)
0РХ
ОРп
01г
Редуцированные геометрические характеристики Рх и Ру называются направленными площадями; с — на-
1--4-—з,—-
Рис. 5.10
правленным полярным моментом инерции сечения. При 08 0п 0р сопз1: имеем РХРУР; ср.
Если стержень образован взаимно перпендикулярными стенками или плитами, то сечение состоит из прямоугольников с взаимно параллельными или перпендикулярными средними линиями. Главные оси сдвига х, у имеют тот же наклон — на рис. 5.10 одна из них горизонтальна, другая вертикальна. Изображая направленные площади Р8и5 и Рпп8 горизонтальными и вертикальными векторами, получаем Рх как равнодействующую горизонтальных векторов, а Ру как равнодействующую вертикальных:
Рх 15 Р2П Р38 Р4П
ру Рщ Р8 Рзп Р •
Точка пересечения равнодействующих дает центр сдвига О и положение главных центральных осей сдвига х, у. Направленный полярный момент инерции вычисляется как сумма моментов инерции направленных площадей относительно осей х и у:
С1
у ■
4)'’.(й4)
35 (у. ?4п 4 ) 11
1Г ) ( -) рп (§ )
Р, (4 •
В общем случае берут произвольные ортогональные оси ху' и вычисляют величину
2а0
— л) 5'п 2а' 0
5 (5 — л) соз 2а' 0
(5.43)
откуда определяют угол а0 (проще всего графически). На этот угол поворачивают исходные оси. В полученных главных осях сдвига х, у вычисляют направленные площади:
Рх соз2 а 5 аз 1 зш3 а ёз;
5 5
Ру 151П2 а 5 йз 1 соз2 а п йз
ш 8
и направленные статические моменты:
Уз I 1 Уп п А
8
I х ”1“ IХп
(5.44)
(5.45)
Здесь через х8, у8 и хп, Уп обозначены координаты точек, возле которых на рис. 5.11, а надписаны величины элементарных площадок 1йз и п1з. _
Координаты центра сдвига (ц.с. или О):
•о7г-; УдГ- (5-46)
Гу Г х
Перенеся параллельно главные оси так, чтобы начало их совпадало с центром сдвига, _получают систему главных центральных осей сдвига Оху. Ось г нормальна к площади сечения.
Рис. 5.11
После этого определяют плечи г, и г« и вычисляют
направленный полярный момент инерции:
«о1Л и 1 г1 и 1 ьС5.47)
8
Если сечение состоит из ряда прямоугольников (плоские стенки), интегрирование заменяется суммированием (рис. 5.11,6). Обозначив азРЛ1 пзРп'% р®?5» находим:
5.3. ОПРЕДЕЛЕНИЕ КАСАТЕЛЬНЫХ НАПРЯЖЕНИЙ И ДЕФОРМАЦИЙ В СТЕРЖНЯХ
211
2 (Р — Рп) 51 п 2а 2 (,.-,.)«»
рх 2Р8 соз2 а 1Рп 51П2 а;
Ру 2,Р5 зш2 а ЪРп соз2 а;
х 2-§ У Ч” 2'л уп
5у — 2Р3 х 2Рп хп
, 2ру 2(рпгп -1г) 2
р-
(5.48)
Формулами (5.48) пользуются и при криволинейной средней линии стенки, заменяя ее ломаной с достаточно короткими участками.
Расчет упрощается при наличии оси симметрии, являющейся одной из главных центральных осей сдвига; другая ось ей перпендикулярна.
Пример 5.1 (рис. 5.12). Дано: 5 1 слсопз1; я 0,8 б'лсопз; р0;
Рх 2(1 -20 I2 1 28,2»0,7072 0,8-28,2-0,7072
0,8-10 I2) 106,8 см2;
Ру 2(128,20,7072 110.12 0,820 12
0,828,2«0,7072) 102,7 см2;
8Х 2(120.30 1.28,2.25 — 0,8.28,25
0,8105) 2 462 см3;
Рис. 5.13
У о "'
2462,6
23,1 см; к — у 6,9 см•
106,8
с 2 (1206,92 128,2 19,012 Ь10402
0,8-203 0,828,23
-1- 0,828,223,352 ——-—-—
0,81018,I2-
0,8103 12
12
91300 см.
Ниже даны касательные геометрические характеристики сечения, очерченного по дуге круга с центральным углом 2а при постоянных погонных характеристиках (рис. 5.13):
У О 27х -
51Па
(1 2) а “Ь (1 — 2)
зш2а
: 1 2) а (1 — 2) Ру — г (2) а — (г — 2)
81п2а
2
зт2а
]•
С 2(1 г [(г «')« — 2гУо 8Ш а].
Формулы для погонных касательных усилий и напряжений
I 0.x 0и Мк Яз (± — соз а ± -у- 81П а ±—г -_( '
Яп
± 4г”5'п « ± соз а±гп I
» - •С
(5.49)
Для каждой стенки выбирается положительное направление и ?п. Углы а считаются острыми, соз а0, 81П а0. Знаки определяются по смыслу, учитывая направление общего сдвига от сил 2 и ФУ, направление вращения Мк, а также направление плеч. Направление тр считается совпадающим с положительным направлением Мк («» против часовой стрелки). (8, п и Р берутся редуцированные, как и при вычислении Рх,
РУ с
Средние напряжения:
( 0х Од • Мк
т5 ± — соза±— зта ± — гр8;
( 2х ■ С)и Мк
т„ ± -у- 5Ша±-— соза±-у— г„1рп. (5.50)
Краевые напряжения от кручения стенки Мк I
Р±'Т%'
5.3.3. Касательные напряжения при изгибе.
Центр изгиба [91, 93]
При прямоугольном сечении стержня и поперечном изгибе в главной плоскости у касательные напряжения в продольном и в поперечном сечениях на уровне у (рис. 5.14, а) определяются по формуле Журавского
212
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
у,
1хЬ
Ь2г3
12
6(?
Ьг3
I2
4
■— поперечная сила в главной плоско-
Рис. 5.14
сечения, относительно нейтральной линии — главной центральной оси х. Эпюра т по высоте сечения имеп вид параболы с максимальной ординатой на уровне нейтральной линии (рис. 5.14,а справа):
__Л
Тмакс “2 ’ Ьк
О
.,5-.
Формула Журавского применяется и в случае непрямоугольного, удлиненного вдоль оси у сечения (рис. 5.14,6). Постоянная ширина Ь в этом случае заменяется через Ь — ширину на уровне продольного сечения:
Стержень с поперечным сечением, удлиненным вдоль оси ху мысленно разрезается на вертикальные пластинки толщиной 1 см и высотой Н(х) (рис. 5.14, в). Касательное напряжение на уровне у изменяется по ширине стержня:
(4-4
(5.52)
(5.51)
Максимальное касательное напряжение на уровне нейтральной линии
макс
сти Оу; 8Х — статический момент части поперечного сечения, лежащего по одну сторону от следа продольного
Поперечная сила, отнесенная к 1 см ширины сечения,
.
кЫх.
Поперечная сила делится между отдельными пластинками пропорционально их моментам инерции относительно оси х.
Равнодействующая касательных усилий в сечениях отдельных пластинок определяет положение центра изгиба О — точки, через которую должна проходить поперечная сила, чтобы изгиб не сопровождался закручиванием. Абсцисса центра изгиба
к3хЛх _ь кЫх
(5.53)
Положения центра изгиба некоторых сечений см. табл. 7.5.
Центр изгиба получается как центр тяжести приведенного сечения с высотами, равными кубам высот заданного сечения.
Более точная формула теории упругости:
хо — хо I
2и 1 4-
1 3-
кк'Ых НЧх
где к' — тангенс угла наклона контурной линии к оси х;
л— коэффициент Пуассона.
Приближенная формула теории упругости для удлиненного сечения:
п 1 Зц
х0х0 Со¬
общая формула теории упругости для координат центра изгиба в главных центральных осях х, у:
07 §?(х,у)ус1Р: Уо— --Нх,у)хаР
Здесь (х, у) —функция лепланации при изгибе. На-
а2 — Ъ%
пример, для эллипса (х,у) — —— ху.
а2 4- Ь2
В табл. 7.5 даны ординаты центра изгиба некоторых сечений с одной осью симметрии.
Составное сечение с общей осью симметрии х отдельных сечений (рис. 5.15). Общий центр изгиба
О лежит на оси симметрии и определяется как центр тяжести моментов инерции Л, гх,., приложенных в
5.3. ОПРЕДЕЛЕНИЕ КАСАТЕЛЬНЫХ НАПРЯЖЕНИЙ И ДЕФОРМАЦИЙ В СТЕРЖНЯХ
213
собственных центрах изгиба. На рис. 5.15, а собственные центры изгиба совпадают с центрами тяжести:
хд,
2-
1гх 2х
Так как 2 1, точка О лежит близко от 02.
На рис. 5.15,6 предварительно определен центр изгиба 04 тавра . Уравнение моментов для нахождения плеча точки О составляется относительно любой из точек Ои Ог или 03.
Здесь
?СХ X сх ' пх (с (Ь 1п)3
12
, ы
С: 2
пх 12
5 1вх — Ь
п
Правило: центр изгиба швеллера совпадает с зеркальным отражением от оси стенки центра тяжести моментов инерции.
а
6)
О,
-о-?
□
021 03 "Т
I
I
(и
Рис. 5.15
]
5.3.4. Деформация сдвига при изгибе стержней с массивным сечением и двутавровых балок
Касательные геометрические характеристики сдвига при изгибе Ру и Рх определяются путем осреднения сдвига по всему сечению, исходя из приравнивания погонных потенциальных энергий:
2
учР
№
(5.54)
йР
Аналогично определяется Рх. Для прямоугольника РуРх—0,83Р (см. табл. 5.3), для круга Ру Рх 0,84Р. Иногда Ру определяется исходя из относительного сдвига на уровне нейтральной линии:
I х Ь
■V • (555)
Для сечений типа швеллера способ центра тяжести моментов инерции может быть использован только после предварительной трансформации сечения (рис. 5.16).
€Е
Е
в
п
I
I
Г-±Г:3-1 1 1
Рис. 5.16
Полки смещаются в положение, указанное пунктиром, зеркальное по отношению к средней линии стенки:
— Г -I- соб, —
хО г 1 п 1 пх )
1 х
2
В этом случае для прямоугольника Ру — Рх — 0,67 Р. Для двутавровых балок обычно принимается РУР0 (площадь сечения стенки), Рх0,674-0,83 Ра, где Рп — площадь полок.
5.3.5. Касательные напряжения при изгибе и центр изгиба открытых тонкостенных сечений [1, 7, 12, 91, 93]
Принимается, что касательные напряжения в поперечном сечении тонкой стенки направлены параллельно средней линии стенки и распределены равномерно по толщине стенки. Удобно оперировать с погонным (по дуге средней линии стенки) касательным усилием 7 т кГсм. Траектория касательного усилия совпадает со средней линией стенки4. При одновременном дей¬
ствии поперечных сил 0,у
1МХ
хми
парал-
йз йз
лельных главным осям у, х, усилие 7 равно алгебраической сумме1:
I. У О I Фх о
ЯЯу Чх—± 7 ± Г
1X 1у
Два знака указывают на необходимость определить течение усилий щу и дх.
(5.56)
1 Если стержень представляет собой полосу, положенную плашмя, то эти допущения заменяются другими, учитывающими наличие напряжений т, перпендикулярных средней линии.
2 В обозначениях Ях И Я, индексы указывают на происхож¬
дение касательного усилия от ф- или ф
У
214
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
Течение в поперечном сечении (см. рис. 5.18) определяется по направлению усилия в продольном сечении из условия равновесия отрезка стержня длиной лежащего по одну сторону от продольного сечения. Это усилие уравновешивает приращение нормальных сил, зависящее от направления силы (2. На рис. 5.17 усилие в продольном сечении направлено слева направо, поэтому в поперечном сечении (по закону парности) оно направлено вверх. Течение д в стенке таких профилей, как
двутавр или швеллер, сразу выясняется по направлению силы (2, а в полках — исходя из непрерывности «потока» усилий 7. Например, на рис. 5.17 стрелки усилий 7 направлены вверх, а в нижней полке от ее свободных краев, где ?0, — к стенке.
Эпюры 7У и 7 строят единичные, принимая (2У11Х 1 и (2х1у 1, а затем умножают ординаты на значения (2У1Х и Ординаты единичных эпюр рав¬
ны величинам 5 и 5 —статическим моментам части поперечного сечения, лежащей по одну сторону от следа продольного сечения относительно главных центральных осей х, у:
•; уйР у11
Р 8
., (5.57)
8у Г хйР ( хЫз.
Р з
Построение эпюр состоит в последовательном вычислении их ординат, начиная от свободного края, исходя из определения этих ординат как статических моментов. По другому способу строятся вспомогательные эпюры у и затем у, соответственно х и х1. Ординаты эпюр 5 и 5 равны площадям односторонних частей эпюр у1 и х1 (считая от свободного края). Знаки на эпюрах 5 и 3у не ставятся, но стрелками указывается течение единичных усилий.
Равнодействующая единичных усилий 5 равна I х а равнодействующая единичных усилий 5 равна Они получаются как геометрические суммы частных равнодействующих, равных площадям эпюр 5 и 5, или по правилам вычисления моментов инерции при условии пренебрежения собственными моментами инерции стенок относительно средней линии. Кроме того, х и 1У определяются как статические моменты эпюр у1 и х, повер-
Рис, 5.18
нутых нормально к плоскости сечения, относительно осей X, у:
1Х УУ хх (5.58)
5 Центр изгиба. Так называется точка в сечении, через которую проходит поперечная сила (, вызывающая изгиб без закручивания. При двоякосимметричном сечении ц. и. совпадает с ц. т. При одной оси симметрии ц. и. лежит на ней, но не совпадает с ц. т. Центр изгиба является началом координат О второй системы координатных осей бруса ОхуОху, Центр изгиба определяется как точка пересечения равнодействующих касательных усилий изгиба, соответствующих поперечным силам С2у и (?х либо двум_другим случаям изгиба. Положение равнодействующих (У 1Х и СХ—1У определяется их плечами относительно произвольного полюса О'. Плечи равнодействующих одновременно являются координатами центра изгиба в системе координат 0'х'у'0ху. Искомые плечи-координаты равны моментам касательных усилий 8Х и 8у относительно полюса О', деленным на модули равнодействующих и 1У:
х- ± 15 г- ± у- 15 Ов. (5.59)
5 У
5.3. ОПРЕДЕЛЕНИЕ КАСАТЕЛЬНЫХ НАПРЯЖЕНИИ И ДЕФОРМАЦИЙ В СТЕРЖНЯХ
215
Отдельные произведения 8йз и 8 йз умножаются на их плечи г и суммируются.
Другой способ вычисления моментов основан на использовании эпюры векториальных площадей. Каждый элементарный статический момент уйР, где йР — площадка в точке Л, порождает постоянное погонное усилие йц—уйР, момент которого, собираемый с дуги 'Л, равен уйРы'. где со' — удвоенная площадь сектора с полюсом О' и дугой Н'А (рис. 5.18). Полный статический момент получается интегрированием элементарных моментов, что дает координаты центра изгиба:
х- у- Г гу'уйР у— Г ю'уШ;
О х и х
Р 5
у- — у- Г ю'хйР — —— Г ю' хШз.
(5.60)
Интегралы выражают статические моменты эпюр со' с ординатами, увеличенными в раз и повернутыми нормально к плоскости сечения, относительно главных центральных осей х, у. Их можно истолковать так же, как интегралы Мора — произведения эпюр о»' на у и со 7 на х или соответственно эпюр со' на у1 со' на х1.
Построение эпюры со'. Берутся произвольные полюс О' и начальная точка Н'. Ординаты эпюры со' равны удвоенным площадям секторов, ометаемых подвижным радиусом-вектором, конец которого движется вдоль средней линии тонкостенного сечения. Приращения ординат считаются положительными, если радиус-вектор вращается против часовой стрелки, отрицательными — при вращении по часовой стрелке. Если точка Н' взята не на краю стенки, то средняя линия должна быть пройдена, начиная от точки ', путем двух движений конца радиуса-вектора — один раз от точки Я' влево, другой раз вправо, что дает не менее чем два участка разного знака. При наличии разветвлений каждая ветвь должна быть пройдена особо. В точках разветвления значение со' для всех ветвей одно и то же.
Использование центральных неглавных осей. Задаваясь осями Ох и Оу и считая их нейтральными линиями изгиба, строят эпюры 5 и 8у и определяют величину и положение равнодействующих касательных усилий,
•пттттпз
ННУНГ
Г %
Г
,11V
у
'п
X-
77
77
хЬ
заштрихованным площадям эпюры у. Ордината эпюры 8у в точке пг равна заштрихованной площади эпюры х1. Знаки ординат эпюр 5 не используются; направление касательных усилий показывается стрелками. Для получения фактических погонных усилий цу и цх ординаты эпюр 5 и 8у умножаются соответственно на СУ1Х и ЭУ. Для получения касательных напряжений величины (7 делятся на толщину стенки в исследуемом месте.
Моменты инерции:
Л2
М - Л. • 7 (ьЬЗ.
1Х ЫЬ— —,1у —.
ЛУ)
0у-(ь А V
•
Ьк
8 )'
т().
(5.61)
(ЪЫь 2
ЬЧь 1уь 8
Ввиду наличия двух осей симметрии центр изгиба совпадает с центром тяжести.
Швеллер. На рис. 5.20 построены эпюры 5 и 5
для швеллера. Для определения центра изгиба О, лежащего на оси симметрии х, определена его абсцисса
с
У
Рис. 5.19
(плечо равнодействующей 1Х) в_координатиых осях 0'х О'у'. Для подсчета момента найдены частичные равнодействующие касательных усилий в полках и в стенке, равные площадям соответствующих участков эпюры 5. Они выписаны около фигурных скобок.
Здесь стенка берет на себя всю вертикальную поперечную силу :
ЛШан
4 ЗЬ
Х0
которые в этом случае не равны , 1У и не параллельны осям ху у. Точка пересечения равнодействующих дает центр изгиба. Оси х, у могут быть неортогональными, но обязательно должны быть центральными осями.
Двутавр. На рис. 5.19 построены эпюры у и 8Х, х1 и 8у. Ординаты эпюры 8Х в точках тип равны
12 12
6
Ыь
(5.62)
Другая форма (см. 5.3.3 в конце):
ЫЬН2 -у
п 2
2,
(5.62')
216
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
На рис. 5.20 выписаны также максимальные значе-
(у)
Лх)
ния 5 и 5у для определения такс и макс.
Пример определения центра изгиба с использованием эпюры со' (рис. 5.21). Эпюра со' построена при полюсе О' и совпадающей с ним начальной точке Н. Угловые ординаты эпюры со' слева от оси симметрии у равны: 0; 50-201000; 10005055 3750 см
М'5
Рис. 5.21
Вычисляем статический момент эпюры со' с ординатами, умноженными на 12 см, повернутыми нормально к плоскости сечения относительно оси у:
С Г 50-1000 2 л
ъ'хШ - 2-2 I (— 30 25)
3750 1000 _ 50 — 55
■]-
3 065000 см5.
Вычисляем момент инерции сечения:
Г253 50
1у 2-2 I ■— — (552 55.25 25)
50-552
96 100 смК
Ордината центра изгиба
— 3 065 000
У0
96100
31,9 см.
Учет неравномерного распределения напряжений по толщине стенки. Массивные стенки заменяются густыми тонкостенными «гребенками», зубья которых имеют направление вероятных траекторий касательных напряжений, обычно параллельных и перпендикулярных средним линиям (рис. 5.22, а, б). При конечном числе зубьев применяются общие формулы (5.62). Для учета бесконечного числа бесконечно тонких зубьев в случае, показанном на рис. 5.22, а, достаточно редуцировать площадь полки к двум линиям с погонной площадью 2 или к трем линиям с погонной площадью соответственно ?6, 237, 6 (рис. 5.22, в) и оперировать соответственно с двумя или тремя продольными зубьями. Общие формулы для координат центра изгиба в осях
0'х 0'у параллельных главным центральным осям, имеют вид:
хо 7(] ™'у( Т ;
5 8
у-о -у- ([ш'хШ 5у).
(5.63)
Здесь 1в 312 — погонный момент инерции стенки. Эпюра со' строится для средней линии стенки. Координаты хп, уп относятся к точкам, около которых на рис. 5.22, г надписан элементарный собственный момент
инерции стенки Моменты инерции , 1У подсчитываются с учетом собственных моментов инерции «. Верхний знак в формулах (5.63) относится к непрерывным зубьям по типу рис. 5 22, а, нижний — к типу по рис. 5.22,6. Таким образом, выбор расчетной модели отражается на положении центра изгиба.
Точные решения для распределения касательных напряжений при изгибе известны для небольшого числа случаев1. Исследование показывает, что практически важные касательные напряжения в тонких стенках при изгибе хорошо оцениваются приближенными методами. Наряду с этим во входящих углах получается концентрация напряжений, не учитываемая приближенными решениями.
5.3.6. Касательные напряжения при изгибе и центр изгиба замкнутых тонкостенных сечений [1, 90, 91, ч. II]
Для построения эпюры 7 необходимо знать 7в какой-либо точке средней линии или знать положение
1 А. С. Боженко. Изгиб (по Сен-Венану) стержней с по¬
перечным сечением из прямоугольных областей при действии поперечной силы в плоскости симметрии. «Инженерный сборник АН СССР», т. V, вып. 1, 1948.
5.3. ОПРЕДЕЛЕНИЕ КАСАТЕЛЬНЫХ НАПРЯЖЕНИЙ И ДЕФОРМАЦИЙ В СТЕРЖНЯХ
217
точки, в которой 70. Если сечение имеет ось симметрии (у) и сила 2У лежит на этой оси, то в точках средней линии, лежащих на оси у, касательное усилие равно нулю. Построение эпюры Яу в случае прямоугольного симметричного замкнутого сечения выполняется для
двух полусечений от действия как для швеллеров
(рис. 5.23, а). Центр изгиба лежит на оси симметрии.
В общем случае яЯЯуЯх, где я— погонное усилие в воображаемом разрезе, Яу и я определяются по формуле (5.56). Для нахождения я используется уравнение моментов относительно центра изгиба й сечения с разрезом. Так как усилия я у и я относительно
Максимальное касательное напряжение т _ Як. Мк Мк "
•кмин
'МИН шкмик
Н7К (окмин
шк
где
и
®?с
Здесь с — произвольно взятая постоянная толщина;
■ приведенный периметр средней линии
- периметр средней
десь 1с — нрс
■§та-]
сечения; при ?сопз с; 5к5к" линии.
Центр изгиба. По первому способу замкнутое сечение разрезается в произвольной точке и определяется центр изгиба й разрезанного сечения. В случае замкнутого сечения силы 2У и (?, приложенные в точке Д вызывают закручивание. Их переносят параллельно, так чтобы дополнительные крутящие моменты аннулировали закручивание. Это дает следующие плечи переноса (рис. 5.23, в):
■ йв
Ь
6-
А
т
«г
шкс
—
Мк
(5.70)
й момента не дают, то крутящий момент поперечных сил относительно й приравнивается моменту постоянных усилий, равных усилию в разрезе як:
ф ЯхГк Мк; якдк Мк;
Мк
Як — • (5.64)
(Ок
Здесь Ок — удвоенная площадь фигуры, ограниченной замкнутой средней линией сечения. Величина сок не зависит от положения точки моментов. При (дУ (2х—0 формула (5.64) дает величину усилия при кручении я« (рис. 5.23, б).
Касательное напряжение при кручении определяется по формуле Бредта, вытекающей из (5.64):
у-у- (5-65)
% (ОкГ
Точка пересечения сил С±у и 3 в их новом положении дает центр изгиба С, который, как правило, расположен внутри контура (если он выпуклый), что избавляет от выбора знаков. Интегралы в формулах (5.70) вычисляются как площади эпюр 5 и 5 с ординатами, уменьшенными в I раз.
Второй способ основан на использовании эпюры со', связанной с эпюрой со', относящейся к разрезанному
контуру. Переход от эпюры со' к эпюре о выражается формулой
со' со' — р5'.
(5.71)
(5.66)
где мр к кмин (5.67)
— момент сопротивления замкнутого тонкостенного сечения при кручении.
Относительный угол закручивания при замкнутом сечении выражается общей формулой
(5-68)
При кручении, когда 7 сопз1, а Мк
(5.69)
Ординаты эпюры со' получаются путем вычитания из ординат эпюры со' произведения постоянной длины рсок5к, называемой средним радиусом, на приведенную длину дуги средней линии 5'. Эпюра ю' строится при произвольном полюсе О' и произвольной начальной точке Я', которая совмещается с разрезом. Произвол в выборе О и Н отмечается штрихом при со и со. Этот штрих не следует смешивать с обозначением при-
ведения дуги й с1з.
Координаты центра изгиба в осях О'х'у', параллельных главным центральным осям Оху, выражаются аналогично (5.60):
х'о у- ()о'уШ (5.72)
Наглядное построение эпюры со' (рис. 5.24). Строится эпюра со' при совмещенных полюсе О', начальной точке Н' и разрезе (рис. 5.24,а). Вдоль оси абсцисс откладывается развертка приведенного периметра, в соответствующих точках которой откладываются ординаты со' (рис. 5.24, в). Конец последней ординаты " сое¬
218
РАЗДЕЛ б, СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
диняется прямой с исходной начальной точкой Я'. Уклон прямой Н'Н" к оси абсцисс равен рсок5к. Ординаты эпюры со', отсчитанные от наклонной прямой Н'Н",
равны искомым ординатам со'. Эпюра со' показана на рис. 5.24, б. В этом примере принято 1с 1 см.
Рис. 5.24
Многосвязное сечение (рис. 5.25). Расчет ведется при помощи стандартной системы п1 уравнений, где п — число ячеек. В случае четырех ячеек система имеет вид:
1) — Я282
2) — Я82 4" Я282 — Яг823
3) — Я2823 Яз53 — ?4534
4) — Яг8гл 4 9 454
1 ' -ф.
площади ячеек; 12, 34— приведенные ширины про¬
межуточных стенок.
Свободные члены первых четырех уравнений равны площадям эпюр д и д в пределах отдельных ячеек, причем ординаты эпюр разделены на соответствующее значение и умножены на ?ссоп51::
1у § Ч°У у ф я1 У (« 1. 2, 3, 4).
I I
Эпюры д® и д®х строят для 'разрезанного профиля (основной системы) от поперечных сил С1У и 2х. При вычислении площадей эпюр их ординатам приписывается знак плюс ( ), если погонное усилие имеет то же направление, что 7, т. е. вращает данную ячейку против часовой стрелки. Поэтому в пределах промежуточных стенок одна и та же величина д° входит в смежные свободные члены с различными знаками. (?у и (?х — поперечные силы, параллельные главным цент ральным осям Оху Хв, Уп — координаты центра изгиба В разрезанного сечения (основной системы); хэ, уэ — плечи сил и (?х (см. рис. 5.25); Мк — крутящий момент, не связанный с поперечными силами (2У и (х.
Первые четыре уравнения выражают условия неразрывности деформаций — отсутствие взаимных смещений вдоль продольных краев ячеек в разрезах; последнее уравнение — условие равновесия или условие эквивалентности крутящих моментов усилий и нагрузок.
а) Общий случай. Заданы (у, (?, Мм. Составляя и решая уравнения, определяют неизвестные усилия д (1, 2, 3, 4) и величину Х 61 сФк. Строят окончательную эпюру д суммируя эпюры д® и д® с постоянными
в пределах своих ячеек эпюрами 71, 72, 7з, Яь-
б) Расчет на кручение. Задан момент Мк. В уравнениях полагают (2У 2зс 0; 2гу 0»0 (1 1, 2, 3, 4). Единственный не равный нулю свободный член — в пятом уравнении (Мк). Принимая сначала Х—, решают первые четыре трехчленных уравнения (они отделены чертами) и получают значения ди Я2, Яг, д обозначенные для этого случая рь рг, Рз» р4 (размерность их — см). Действительные значения неизвестных усилий
— (%1у (21Х 0;
— Х©а (2у 4“ 0.гх “ О»
— Х(о3 зу Оз — 0;
— Хсо4 0,ьх — 0;
5) Я1®1 4" Я2Щ 4“ Яв®8 4" 44
% (Х0 — Хо) (У Я — У о) Мк‘ (5-73
Здесь д, д2, Яг, Яь — неизвестные погонные касательные усилия в разрезах ячеек; ХС1ск — увеличенный в 01 с раз (с — произвольная, вводимая для удобства расчета толщина) относительный угол закручивания; 1, 2» 5з 54 —приведенные периметры ячеек: 5.
йз ( 1, 2, 3, 4), со2, со3, со4 — удвоенные
7г Хрг(« 1,2,3,4).
Подставляя ?,- в пятое уравнение, определяют:
V М«
4
Е
(1
(5.74)
откуда
Мк
осЕр,о),.
Мк
Ок
Значения неизвестных усилий
мк
7
4
2 рО), 11
р. (1.2, 3,4).
(5.75)
(5.75')
При одной ячейке формула (5.75) совпадает с формулой (5.64), р сок5к.
Промежуточными стенками при расчете на кручение часто пренебрегают.
5.3. ОПРЕДЕЛЕНИЕ КАСАТЕЛЬНЫХ НАПРЯЖЕНИИ И ДЕФОРМАЦИЙ В СТЕРЖНЯХ
219
в) Определение центра изгиба. Уравнения решают
дважды — один раз, полагая ХМк ф0; (2гх0
(1 1, 2, 3, 4); 0У 1, и другой раз, полагая ХМК 2У0; 00 (1 1, 2, 3, 4); 2 1. Значения неизвестных усилий из системы трехчленных уравнений в первом случае обозначаются (1, 2, 3, 4), во втором случае (1, 2, 3, 4).
Подставляя эти значения в пятое уравнение, получают плечи сил 0.у и ?, соответствующие аннулированию угла закручивания Фк, или, что то же, координаты центра изгиба К многосвязного сечения:
4 4
К V), 2 9,•«,•• (5-76)
Попутно получается распределение усилий, соответствующее силам (у и (Эх, проходящим через центр изгиба.
г) Другой способ определения центра изгиба основан
на использовании эпюры а) многосвязного сечения в формулах (5.72). Особенность построения эпюры для наружных стенок состоит в том, что вместо постоянной величины р в формуле (5.71) берутся значения рь р2, рз. р4, определенные выше, в п. «б». На протяжении промежуточных прямых стенок эпюра со получается в виде трапеций, которые строятся по концевым ординатам, равным ординатам в соответствующих узловых точках ранее построенной эпюры для наружного контура.
5.3.7. Касательные напряжения и относительный угол закручивания при свободном кручении.
Геометрические характеристики
Для кручения характерна система замкнутых траекторий касательных напряжений в поперечном сечении, причем крайняя траектория совпадает с контуром сечения. Форма траекторий отвечает горизонталям мыльной пленки (мембраны), натянутой на контур сечения и провисающей под действием собственного веса (мембранная аналогия Прандтля). В выступающих углах касательные напряжения равны нулю, во входящих углах теоретически равны бесконечности. Поэтому входящие углы обязательно закругляются. Аппликаты поверхности мембраны дают значения функции напряжений при кручении.
Модуль вектора касательного напряжения в данной точке равен уклону мембраны к горизонтальной плоскости. Там, где уклон мембраны круче, напряжения больше. Максимального значения напряжения достигают на наружном контуре. Если контур удлиненный, то опасные точки лежат на длинных сторонах наружного контура. Узкое кольцо между двумя смежными траекториями аналогично замкнутому тонкостенному сечению. Погонное касательное усилие в кольце является постоянным, а крутящий момент, создаваемый этим усилием, пропорционален удвоенной площади, охватываемой средней линией кольца. Момент, создаваемый касательными напряжениями, распределенными по всему сечению, пропорционален удвоенному общему, ограниченному провисающей мембраной, иначе — удвоенному объему «холма напряжений».
Основные формулы:
максв (5.77)
здесь и?к см3 — момент сопротивления при кручении;
к -г-сн (5.78)
01 к
или в градусах
-о 180 Мк
Ф —. ——градсм; (5.78')
п 0к 9
здесь к смк — момент инерции при кручении.
В отличие от геометрических характеристик при изгибе, значения №к и к лишь в отдельных случаях определяются элементарно и, как правило, получаются в результате применения точных или приближенных, а также экспериментальных методов теорий упругости.
Справочные данные о величинах №к и к и положении опасных точек (тМакс) см. в табл. 7.4.
Составное сечение. Момент инерции при кручении приблизительно равен сумме моментов инерции отдельных сечений (например, полок и стенки двутавра):
1К 2К • • — 2к. (5.79)
Крутящий момент распределяется пропорционально
моментам инерции:
М1к м-, мгк мк м1к мк-.
1К 'к ‘К.
Максимальное касательное напряжение
Мк Мк
макс к I ;макс- «7К •
где момент сопротивления при кручении
Целесообразно заранее, путем сравнения, определить
максимальное значение к№к.
5.3.8. Депланация при свободном кручении
Основные положения. При свободном кручении плоские поперечные сечения коробятся, депланируют. Отдельные точки получают перемещения вдоль оси 2, дополнительные к перемещениям от изгиба. Депланация (искажение плоскости) пропорциональна относительному углу закручивания Фк и зависит от формы сечения. Для данной точки сечения депланация выражается произведением
— у). (5.81)
Здесь (х, у) —функция положения точки в сечении, называемая функцией депланации. Размерность — см2. Функции депланации одного и того же сечения при различных центрах закручивания отличаются линейной функцией координат АхВуС: при изменении оси закручивания изменяется плоскость отсчета депланации т. Если центр закручивания лежит на оси симметрии сечения, то на этой оси депланации равны нулю. Каждая точка круглого сплошного или кольцевого сечения лежит на оси симметрии, поэтому функции депланации для круга, если начало координат совпадает с центром, тождественно равны нулю. Квадрат имеет четыре оси симметрии и соответственно четыре оси нулевой депланации. В треугольных областях между осями симметрии депланации попеременно представляют собой выпукло-
220
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
сти и вогнутости. В продолговатом прямоугольнике или эллипсе две накрест лежащие области — выпуклые, две — вогнутые. Функция депланации носит ярковыраженный антисимметричный характер.
Сечения с двумя осями симметрии (рис. 5.26). При закручивании относительно центра симметрии функции депланации выражаются однотипными формулами:
(, у) ху. (5.82)
Эллипс с полуосями а (вдоль х) и Ъ (вдоль у) (рис. 5.26, а, б):
а2 — Ь2
6 . (5.83)
Н а2 Ь2
о)
Ц]
с
—а ——
-■— в ——
аг-Ь„
о 1
I
Рис. 5.26
Прямоугольник (рис. 5.26,в). Принимается то же значение Р в качестве приближенного. Результат тем точнее, чем более вытянут прямоугольник.
Вытянутые вдоль оси х эллипс, прямоугольник и другие фигуры, симметричные относительно х. Приближенно Р1. Если фигура вытянута вдоль оси у, то точно так же Р1.
Прямоугольное тонкостенное (коробчатое) сечение (рис. 5.26, г). Коэффициент, относящийся к функции депланации средней линии стенки,
а' — Ь'
Р ТГТТГ • (5-84)
а' Ь' :Ь-С
— приведенные длины
Здесь а' — а—,6' _
Ь
полусторон; 1С — постоянная толщина, вводимая для удобства расчета.
При а' — Ь' средняя линия сечения не депланирует. При а'Ь' имеем Р0, функция депланации меняет знак, сохраняя прежний характер эпюры.
На рис. 5.26, г следует поменять местами знаки « » и «—», относящиеся к нижней стенке.
Тонкостенный двутавр (рис. 5.26, д). Коэффициент Р1 (для средней линии). Деформация двутавра состоит во взаимном вращении плоскостей торцов и во взаимном вращении плоскостей полок, что и вызывает депланацию торцовых и всех остальных сечений.
Толстостенный двутавр (рис. 5.26, е). Расчет депланации производится либо путем непосредственного применения формулы (5.82), полагая р 1 (на рисунке справа), либо сначала рассматривается тонкостенный двутавр, образованный средними линиями стенки и полок, после чего к ординатам эпюры депланации средних линий, распространенных на всю толщину, добавляются ординаты эпюр стенки и полок, построенные как для удлиненных прямоугольников (на рисунке слева). На
рис. 5.26, е вместо — следует читать
Эпюры единичной депланации при свободном кручении для тонкостенных сечений
Функция депланации для средней линии тонкостенного сечения изображается в виде эпюры, называемой эпюрой единичной депланации. Для перехода к фактической депланации ординаты эпюры умножаются на (—Ок).
В случае открытого (односвязного) сечения эпюра единичной депланации совпадает с эпюрой секториальных площадей со, построенной при полюсе в центре закручивания и начальной точке, в которой продольное перемещение равно нулю.
В случае замкнутого (двухсвязного или многосвязного) сечения эпюра единичной депланации совпадает
с эпюрой со, также построенной при полюсе в центре закручивания и начальной точке, в которой продольное перемещение равно нулю.
Эпюры со и со, использованные при определении центра изгиба тонкостенного сечения, имеют четкий механический смысл — в качестве эпюр единичной депланации при свободном кручении.
Среди открытых сечений недепланирующими являются сечения типа пучка, состоящие из прямых стенок, пересекающихся в одной точке, которая совпадает с центром изгиба (уголок, тавр, крест).
Среди замкнутых сечений не депланируют сечения в форме многоугольника, описанного около окружности при постоянной толщине стенок, треугольные сечения при произвольной толщине стенок, прямоугольное сечение при одинаковой приведенной длине стенок (см. выше) и др.
По толщине стенок незначительная депланация имеет место во всех случаях.
5.3.9. Стесненное кручение [1, 27, 90]
Основные положения. Понятие стесненного кручения относится к стержням с депланирующим сечением (см. 5.3.8). Различают несколько видов стеснения. Депланация при свободном кручении пропорциональна относительному углу закручивания Ок. Изменение этого угла вследствие изменения крутящего момента по длине стержня вызывает приращение длины одних и сокращение длины других продольных волокон и одновременно появление нормальных напряжений в поперечных сечениях (внутреннее стеснение). Заделка торца или приварка планки, препятствующей взаимному продольному смещению продольных краев разрезанной трубы
5.3. ОПРЕДЕЛЕНИЕ КАСАТЕЛЬНЫХ НАПРЯЖЕНИЙ И ДЕФОРМАЦИИ В СТЕРЖНЯХ
221
или взаимному вращению полок швеллера или двутавра при кручении, создает местное стеснение, влияние которого затухает с удалением от места стеснения. Устройство решетки или часто расположенных планок, соединяющих ветви или полки, создает непрерывное стеснение, в известной степени, изменяющее характер поперечного сечения стержня, превращающее стержень с открытым сечением как бы в стержень с трубчатым сечением.
Всякое стеснение повышает крутильную жесткость стержня: со сплошным или с замкнутым сечением — в малой степени, с открытым сечением — в большой степени. Несущая способность открытых сечений при учете стеснения возрастает.
Практически стеснение учитывается лишь при кручении стержней с открытым сечением и сильно развитыми полками (двутавр, швеллер, зетовый профиль), реже — при расчете стержней с замкнутым, сильно вытянутым в одном направлении сечением.
Основная гипотеза: нормальные напряжения стесненного кручения в различных точках сечения пропорциональны значениям функции депланации Цх, у), в случае тонкостенного сечения — ординатам эпюры единичной
депланации со или со. В дальнейшем формулы записываются для со.
Совокупность нормальных усилий стесненного кручения в каждом сечении эквивалентна нулю, т. е. моменты усилий МХу Му и продольная сила N равны нулю, откуда:
щйР 0; сохйР 0; ШР 0. (5.85)
Р Р Р
Закручивание происходит вокруг центра изгиба, так как первые две зависимости совпадают с условиями аннулирования крутящих моментов касательных усилий
изгиба относительно центра изгиба [ см. формулы (5.60) и (5.72)]. Третья зависимость дает начальную точку эпюры со.
Эпюра со, удовлетворяющая требованиям (5.85), называется главной эпюрой единичной депланации и обозначается со или со без штрихов. Она дает закон распределения нормальных напряжений по сечению. На рис.
5.26 функции депланации и эпюры со и со — главные.
Касательные напряжения или погонные усилия определяются из условий равновесия аналогично поперечному изгибу. Совокупность касательных усилий эквивалентна крутящему моменту стесненного кручения Мк (другое обозначение ). Последний составляет часть полного крутящего момента Мк, другая часть которого равна крутящему моменту свободного кручения Мк
(другое обозначение Ма). Если жесткость свободного кручения очень мала (открытый профиль из тонкого
листового материала), то Мк-0 и МКМ«. Этот случай для расчета является наиболее простым, так как эпюры усилий строятся элементарно (см. 5.10.1).
Напряжения и усилия определяются по формулам, аналогичным формулам напряжений изгиба от Мх и 2У:
В
ю;
-5
± О»
(5.86)
где В кГ •см2 — бимомент, специальное самоуравнозешенное усилие, от которого зависят нормальные напряжения1. Производная от бимомента при наличии только крутящих пар равна крутящему моменту стесненного кручения. Аналогично зависимости Мх ()у здесь
В' ЖК. (5 87)
Эпюра В представляет собой интегральную кривую от эпюры Мк. Ординаты эпюры_В равны площадям позади лежащих частей эпюры Мк плюс начальное значение В. В случае двутавра (рис. 5.27) бимомент — не что иное, как момент уравновешенной пары моментов, изгибающих полки в разные стороны в их плоскостях:
В МпН- (5.88)
Бимомент считается положительным, если в точке с положительной ординатой со он вызывает отрицательное (сжимающее) напряжение. Если смотреть на верхнюю полку двутавра сверху (рис. 5.27, а) или на переднюю полку двутавра спереди (рис. 5.30,6), то правило знаков для бимомента совпадает с правилом знаков момента, изгибающего полку.
Вычисление усилий В, МКу Мк в различных случаях см. 5.10.
Геометрическая характеристика сечения при стесненном кручении
1а С ШР см (5.89)
Р 5
называется бимоментом инерции сечения, иначе — секториальным моментом инерции сечения. Для двутавра ш равен моменту инерции моментов полок:
Н2 Н2
, А. • (5.90)
ю п 2
Для массивных сечений
У 4
0 Ц1Пх,у)]йх1у.
(5.91)
Для тонкостенных сечений 1Ф вычисляется путем «перемножения» эпюры со? на эпюру со. В случае ломаной средней линии эпюра со (или со) состоит из трапеций:
.92)
1 Распространен также термин «изгибно-крутящий бимомент».
222
5.3. ОПРЕДЕЛЕНИЕ КАСАТЕЛЬНЫХ НАПРЯЖЕНИЙ И ДЕФОРМАЦИЙ В СТЕРЖНЯХ
Здесь (йА и — концевые ординаты трапеции; 5 — длина; — толщина участка стенки.
Максимальное нормальное напряжение
омяк. -ГГ-. СМ. (5.93)
' макс
называется бимоментом сопротивления, иначе — секториальным моментом сопротивления.
В формулу (5.86) величина единичного усилия д
Мк
при
1.
5 со йз см4
г 8
(5.94)
с
«м
5)
и
(ш)
т4 -:к
" - э- з1К э
N
1Ь
Л
про
Г
3-
«.I
«I»
7
V
Знаков на этой эпюре не ставят. Стрелки единичных погонных усилий 5 направляют к краю, если эпюра со имеет на крае знак «», и от края, если эпюра со имеет знак «—». В этом случае в формуле (5.86) для д(,) берется знак « ».
Указания к построению главной эпюры со или со.
0 нахождений центра изгиба О' при помощи зпюр со'
или со' для произвольного полюса О' и произвольной начальной точки Я' см. 5.3.5 и 5.3.6. Взяв полюс О, снова строят эпюру со" при прежней или новой произвольной начальной точке Я". Ординаты эпюры умножают на
1 и подсчитывают площадь всей эпюры со". Чтобы аннулировать и тем превратить эпюру со" в главную, из всех ординат со" вычитают постоянную величину со Окончательно:
" с псч
со — со — сои; со„ -у. (5.95)
Ординаты полученной главной эпюры со снова умножаются на . Эпюра со используется для нахождения ш и для построения эпюры 5.
При наличии оси симметрии начальную точку берут на этой оси, что обеспечивает соблюдение условия 5 0. Две оси симметрии сразу дают и центр изгиба, и несколько начальных точек (см. рис. 5.26).
На рис. 5.28, а, б даны эпюры со, 5 для двутаврового и швеллерного сечений, на рис. 5.28, в — со для симметричного прямоугольного коробчатого сечения и приведены формулы для геометрических характеристик, используемых в 5.10.
В табл. 7.5 приведены данные для распространенных типов составных сечений.
В табл. 7.6 приведены геометрические характеристики стесненного и свободного кручения для двутавров и швеллеров.
3 Ь
Ыь
12
27®.
1.
" ч
мн
1 АЗ, 2
,
Ль
з Ын у
Ь а 1
с
V 1
«гм
л
V
1
И
СМ2 ,
2Д2
48
Рис. 6.26
_ 26» 1ь (н 4. ОцЦ _ л 192
к Ь1к Ыъ °М ’ Е1Ы Е р3‘
.,-2.
называется статическим бимоментом, иначе — секториальным статическим моментом. Он равен площади части эпюры со, лежащей по одну сторону от исследуемой точки средней линии; в случае замкнутого сечения — от точки, где д—0, до исследуемой точки средней линии.
Рекомендуется построить эпюру со и, вычисляя последовательные площади этой эпюры, построить эпюру
“ТГ (Ь(п ыь) смК, (Я) “ ( Ш 2А) ;
6«к 1Ь ( Ь Н
5.4. КЛАССИФИКАЦИЯ СТЕРЖНЕВЫХ СИСТЕМ И ОБЩИЕ МЕТОДЫ СТРОИТЕЛЬНОЙ МЕХАНИКИ
223
5.3.10. Сложное сопротивление тонкостенных стержней. Приведение нагрузок к типам усилий [12]
Нормальное напряжение в сечении вычисляется по четырехчленной формуле
о М
М
Т—ГУ-к-—- (5.96)
Г 1Х 1у ■)
Погонное касательное усилие, сопутствующее нормальным напряжениям, определяется по формуле
л
(5.97)
X у
Здесь 7о — погонное усилие в точке средней линии сечения, принятой за начальную при вычислении касательных усилий. При открытом сечении начальная точка берется на свободном крае и 7о0. Остальные обозначения см. 5.3.9.
Кроме касательных усилий, сопутствующих нормальным, в сечений действуют касательные напряжения свободного кручения, зависящие от крутящего момента свободного кручения Мк.
Построение эпюр УУ, Мх, Му, 0 0 и эпюры суммарных крутящих моментов МнМкделается по общим правилам. Построение эпюр Мк, Мк и В см. 5.10.
Построению эпюр предшествует приведение нагрузок к семи типам усилий (Ы, МХ) Му, (у, Э, В). Сосредоточенная сила, приложенная к сечению, раскладывается на два компонента: Р — в плоскости сечения и Рг — перпендикулярно плоскости сечения (рис. 5.29). Сила Р переносится параллельно в центр изгиба О с добавлением сосредоточенного крутящего момента ЬКР(1. Затем Р раскладывается на компоненты Ру и Рх параллельно главным центральным осям у, х. Положительное направление компонентов Ьк, Ру, Рх соответствует отрицательным скачкам в эпюрах Мк, Оуу Ох. Сила Рг переносится в центр тяжести сечения О с добавлением сосредоточенных моментов Ьх—Р%у и ЬуРгХ. Кроме того, сила Рг вызывает сосредоточенный бимомент С—Рго, где со— ордината главной эпюры со в точке средней линии, где приложена сила Рг. Следует иметь в виду, что при нескольких силах Рг их нельзя заменить одной равнодействующей. Сила Рг может быть приложена и к отростку стенки, и тогда эпюра со должна быть продолжена на отросток. Сосредоточенные компоненты Рг, х, Ьу, С считаются положительными, когда их направление соответствует положительным скачкам (приращениям) величин Ы, Мх, Му, В при движении вдоль оси бруса.
Сосредоточенная растягивающая сила Рг на торце тонкостенного стержня вызывает на этом торце усилия
NРг; Мх — РгУ
Му — РгХ В —— Рг о.
Пользуясь правилами для сосредоточенной силы, приводят и распределенные нагрузки к типам усилий. Так, погонная растягивающая нагрузка рг(з), распределенная вдоль средней линии свободного торца, дает усилия на торце:
N [ рШ;
5
Мх
В случае замкнутого профиля со заменяется через со. Закручивание вызывают только нагрузки, сводящиеся к Ьк и С или к аналогичным распределенным нагрузкам.
5.4. КЛАССИФИКАЦИЯ СТЕРЖНЕВЫХ СИСТЕМ И ОБЩИЕ МЕТОДЫ СТРОИТЕЛЬНОЙ МЕХАНИКИ
5.4.1. Основные определения
Стержневой системой называется неизменяемая (неподвижная) система стержней, предназначенная для восприятия нагрузки и передачи ее на опоры, расположенные на большем или меньшем расстоянии друг от друга. Стержневые системы являются расчетными схемами многочисленных и разнообразных типов инженерных сооружений. В большинстве сооружений можно выделить главные и вспомогательные, преимущественно плоские несущие конструкции, соединяемые в одно пространственное целое при помощи специальных связей, а также вспомогательных балок, прогонов и плит. Расстояние между опорами плоской несущей конструкции называется ее пролетом. Длина консоли называется ее вылетом.
Система называется статически определимой (с. о.), если усилия в сечениях стержней могут быть однозначно определены путем решения уравнений равновесия частей системы, отделенных мысленно разрезами. К усилиям здесь причисляются также реакции опор, которые в зависимости от числа и характера осуществляемых ими связей всегда могут быть представлены в виде одного или нескольких стерженьков, одной или нескольких моментных связей. С. о. система является неподвижной системой с минимальным (необходимым и достаточным) числом связей: уменьшение числа связей превращает систему в механизм или кинематическую цепь, увеличение числа связей, введение так называемых лишних связей, делает систему статически неопределимой (с. н.).
Усилия в с. н. системе не могут быть определены
224
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
из одних только уравнений равновесия, так как число независимых усилий превышает число независимых уравнений равновесия на число лишних связей. Например, если неизменяемый плоский диск прикреплен к другому диск четырьмя стержнями, то усилия в стержнях не могут быть определены из трех уравнений равновесия диска — одного уравнения не хватает. Если хотя бы одним из усилий системы можно задаться произвольно и получить конечные значения остальных усилий из уравнений равновесия, то система является статически неопределимой. Возможность напряженного состояния при отсутствии нагрузки служит признаком статической неопределимости системы. Если в системе с минимальным числом связей, которая должна быть статически определимой, также обнаруживается возможность самонапряжеиного состояния, то система является мгновенно изменяемой и практически непригодной. Примеры: вырожденная трехшарнирная арка с шарнирами на одном уровне, соединение трех дисков тремя парами параллельных стержней или стержней, взаимно пересекающихся в трех точках, лежащих на одной прямой, и т. п. В мгновенно изменяемой системе возможны перемещения при практически нулевых деформациях, при некоторых нагрузках возникают огромные усилия.
Основное отличие с. о. системы от с. н. системы состоит в том, что в первой любые малые деформации стержней являются возможными, нестесненными и независимыми. С, о. ферму можно собрать при любых малых ошибках в длинах стержней, но дать стержням предварительное натяжение невозможно. Усилия в с. о. системе при заданной схеме и нагрузке не зависят ни от размеров сечений, ни от деформативных свойств материала. В с. н. системе, наоборот, малые деформации (например, температурные) вызывают усилия, на чем, в частности, основана возможность использования предварительного натяжения для регулирования напряжений. Малые заданные деформации с. н. системы возможны только совместно с некоторыми дополнительными (в частности, упругими) деформациями: если считать стержни не деформирующимися от усилий, то дать с. н. системе местные деформации невозможно. При ошибках в длинах стержней собрать с. н. ферму можно только при условии обжатия или вытяжки всех или некоторых стержней. Усилия в с. н. системе в общем случае зависят от размеров сечений и свойств материала.
Здесь имеются в виду температурные деформации, при которых сечения остаются плоскими, что соответствует плоскому закону распределения температуры по сечению. При другом законе возникают температурные напряжения, не учитываемые технической теорией стержней.
Основной системой называется система, положенная в основу расчета заданной системы. Это понятие применяется как при с. о., так и при с. н. системе. В первом случае основная система отличается от заданной расположением связей: преобразованная с. о. система рассматривается как простейшая основная система с переставленными связями. Пример: трехшарнирную
арку заменяют балкой путем выключения ключевого шарнира и перерезания одного из горизонтальных опорных стерженьков. Усилие в этом стерженьке подбирается из условия аннулирования изгибающего момента в ключе (метод замены связей). В случае с. н. конструкции основная система может быть: а) статически определимой, получаемой путем устранения (перерезания) всех лишних связей; неизвестные усилия в лишних связях определяются из условий аннулирования перемещений по направлениям лишних связей
(метод сил); б) статически неопределимой с меньшим числом лишних связей, чем заданная система; метод тот же, но с меньшим числом неизвестных усилий;
в) статически неопределимой с большим числом связей; неизвестными являются перемещения по направлению дополнительных связей (метод перемещений);
г) смешанной — полученной из заданной системы путем устранения одних и введения других связей; пример: свободная рамная эстакада превращается в «ферму» путем включения шарниров во всех узлах и введения горизонтального опорного стерженька на уровне ригеля, препятствующего смещению ригеля (смешанный метод).
Основная гипотеза расчета достаточно жестких стержневых систем — принцип сложения действия сил и малых деформаций. Так как система предполагается жесткой, геометрическая конфигурация меняется незначительно, то усилия и перемещения определяются как суммы усилий и перемещений, найденных в результате рассмотрения раздельного действия факторов на основную систему. В случае более гибкой системы иногда приходится вести расчет по деформированной схеме (см. раздел 16), когда принцип сложения действия сил частично или полностью нарушается (последнее при очень гибких конструкциях типа пружин, см. [105]).
При расчете с. н. упругих систем на основе принципа сложения действий нахождение лишних неизвестных (усилий, перемещений) приводит к составлению и решению системы линейных алгебраических уравнений, число которых равно числу неизвестных, иначе — степени неопределимости системы. Если неизвестными являются усилия или реакции (метод сил) и выбирается с. о. основная система, то говорят о степени статической неопределимости. Если неизвестными являются перемещения или деформации связей, то говорят о степени кинематической неопределимости.
5.4.2. Виды систем [26, 40, 61, 64, 65, 84, 89].
Балки
Балкой называется стержень, работающий преимущественно на изгиб.
На рис. 5.30, а показаны однопролетные с. о. балки — простая балка, консоль и балка с одним шарнирно опертым и другим защемленным в отношении поворота и свободным в отношении поступательного перемещения концом. Последний тип опирания характеризует работу половины простой балки двойного пролета при симметричной нагрузке. Первая и третья балки на рис. 5.30, а могут иметь консоли.
На рис. 5.30, б показаны с. н. балки: однократно с. н. балка с одним защемленным и другим шарнирноопертым концом, однократно с. н. балка с одним полностью защемленным и другим защемленным в отношении поворота и свободным в отношении поступательного перемещения концом и дважды с. н. балка с обоими защемленными концами (один из концов сохраняет продольную подвижность).
На рис. 5.30, в, г, д показаны многопролетные балки. Все опоры, за исключением одной, — продольно подвижные. Это делает балку статически определимой для продольных сил и освобождает ее от температурных напряжений при равномерном нагреве независимо от того, является ли балка в целом статически определимой или статически неопределимой.
На рис. 5.30, в — с. о. система простых балок; на рис. 5.30, г — с. о. многопролетная шарнирно-консольная балка, на рис. 5.30, д — с. н. неразрезная балка. Обычно в качестве основной системы принимается с. о.
5.4. КЛАССИФИКАЦИЯ СТЕРЖНЕВЫХ СИСТЕМ И ОБЩИЕ МЕТОДЫ СТРОИТЕЛЬНОЙ МЕХАНИКИ
_ 225
балка по рис. 5.30. в. Лишние неизвестные — опорные моменты. Число их равно числу включаемых шарниров. Цель применения шарнирно-консольных и иеразрезных балок взамен простых — уменьшение расчетных моментов главным образом от постоянной нагрузки, упрощение конструкции опор.
На рис. 5.30, а', б', в', г' д' показаны взаимные (иначе— фиктивные, моделирующие) абсолютно же-
н1пп1тгпт
X
"X ЗГ
6)
1ГП11I I II ) Гп тттпДгп 111111111
г)х. 1Г ЗГ
? 1111 11 П 111 1111 у 11 П 11 у ГТЧ III ГГГГIIII ПГД 111111 111 ГТТгР
и IIII I [ 1ШГ1 УТр
д)% з)
XI Г'1'мутт
Т. X
Рис. 5.30
сткие балки на упругом основании, делающие более наглядным определение перемещений с. о. балок и усилий с. н. балок на основе статико-кинематической аналогии. Опоре соответствует шарнир взаимной балки, шарниру — опора, защемлению при повороте — опора, допускающая свободное вертикальное смещение, и, наоборот, полному защемлению конца соответствует свободный конец, свободному концу — полностью защемленный. Гибкости балки при изгибе соответствует отпорность упругого основания 1 Е1—к. Степени статической неопределимости балки соответствует степень кинематической неопределимости балки взаимной, и наоборот. При пользовании взаимной балкой для определения прогибов с. о. балки по так называемому графо-аналитическому методу упругое основание можно не изображать, так как реакция его не возникает. При определении опорных моментов с. н. балок необходимо учесть упругое основание взаимной балки.
Кроме жестких опор и защемлений и идеальных шарниров, встречаются упруго оседающие и упруго поворачивающиеся опоры. Во взаимных балках им соответствуют взаимные опоры соответствующей отпорности (см. 5.1.8, табл. 5.4). Для перекрестных балок и балочных клеток (ростверков) статико-кинематическая аналогия имеет меньшее практическое значение. Здесь важнее аналогия с работой ортотропных пластинок.
Арки
Аркой называется кривой брус, обращенный выпуклостью кверху, имеющий по концам неподвижные опоры, обычно расположенные на одном уровне. Для арок характерны наклонные, обращенные внутрь реакции при вертикальной нагрузке. Горизонтальная составляющая опорной реакции называется распором. Иногда одну из
опор устраивают продольно подвижной, а распор воспринимают затяжкой. Основными усилиями в арке являются сжимающие продольные силы, приложенные с большим или меньшим эксцентрицитетом. При рационально выбранном очертании оси арки эксцентрицитеты имеют минимальное значение, и арка работает в более выгодных условиях.
Рациональная ось арки в первом приближении, когда изменение формы оси от действия нагрузки не учитывается, совпадает с эпюрой моментов балки того же пролета — с ординатами, умноженными на произвольное число. При нагрузке, равномерно распределенной вдоль горизонтальной проекции арки, рациональная ось представляет собой параболу второй степени. Распор арки обратно пропорционален ее высоте (стреле подъема).
Арки конструируются статически определимые и статически неопределимые. С. о. трехшарнирные арки требуют устройства специальных шарниров. Бесшарнирная арка (трижды статически неопределимая при нагрузке в плоскости кривизны) весьма чувствительна к изменению температуры. Промежуточное место занимает один раз статически неопределимая двухшарнирная арка. Одношарнирная арка (дважды статически неопределимая) применяется редко. В процессе производства работ возможны различные типы напряженного состояния арки, отличные от ее работы в законченном виде. Иногда одиночная арка работает на нагрузку, перпендикулярную плоскости кривизны. Подобная нагрузка для эркерных балок является основной нагрузкой. Степень статической неопределимости арки под такой нагрузкой зависит от числа шарниров, оси которых лежат в плоскости кривизны. При трех шарнирах арка статически определима.
На рис. 5.31 в левом столбце показаны схемы арок и расположение шарниров при работе арки в плоскости кривизны. Степень статической неопределимости помечена числами в кружках. Нижние шарниры А и В обычно совпадают с торцами тела арки и называются пятовыми шарнирами, верхний шарнир С — ключевым шарниром. Шарниры Л, В, С не должны лежать на од-
226
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
ной прямой. При построении схем взаимных абсолютно жестких стержней на упругом основании (см. 5.1.8) защемления пят отбрасываются, а шарниры заменяются опорными стержнями вдоль осей шарниров. Трехшарнирной арке соответствует стержень на трех опорах Л,
В, С; бесшарнирной арке — стержень, опертый только на упругое основание.
В правом столбце рис. 5 31 показаны варианты расположения шарниров при работе арки перпендикулярно ее плоскости. Оси шарниров а, Ь, с не должны пересекаться в одной точке, оси шарниров а, Ь не должны сливаться. Здесь взаимные стержни оперты на упругое основание и опорные стержни а, Ь, с — в своей плоскости.
Рамы
Рамой называется система стержней, жестко соединенных в узлах. Обычно рамы состоят из горизонтальных ригелей (балок или пологих арок, иногда ломаного очертания) и вертикальных стоек (колонн) и могут перекрывать один или несколько пролетов, иметь один или несколько этажей.
а) 6)
в)
г)
®п ®п
Многопролетные и многоэтажные рамы, как правило, многократно статически неопределимы. С. о. схемы используются для предварительных расчетов, а также в качестве основных систем при расчете с. н. рам по методу сил. Для превращения плоской и нагруженной в своей плоскости рамы в статически определимую в каждый замкнутый контур включают три шарнира. Сквозные узловые шарниры эквивалентны стольким простым шарнирам, сколько стержней сходится в узле, минус единица. Кроме того, основные системы образуют путем проведения сквозных разрезов, что рассматривается как ликвидация трех связей в плоскости или шести связей в пространстве путем замены шарнирно неподвижных опор шарнирно подвижными и т. п.
На рис. 5.32, а, б, в показаны простые рамы, эстакады и многоэтажные («этажерочные») рамы как статически определимые, так и статически неопределимые. Степень статической неопределимости отмечена цифрами в кружках. Она равна утроенному числу контуров минус число простых шарниров.
На рис. 5.32, г — многопролетная многоэтажная рама. Как правило, расчет таких рам ведется методом перемещений, эффективность которого обусловлена пренебрежением упругими деформациями удлинения и сдвига. Число неизвестных углов поворота жестких узлов равно числу узлов (20), число неизвестных линейных перемещений равно числу ригелей (5), общая степень кинематической неопределимости, равная 25 (отмечена цифрой в квадратике), меньше степени статической неопределимости (45). Для анализа многоклеточных рам полезной оказывается аналогия с работой ортотропных балок-стенок.
При расчете рам большую роль играет учет симметрии, позволяющий разделить систему уравнений деформации или равновесия на независимые группы и тем облегчить трудоемкий процесс решения большого числа совместных уравнений.
Фермы
Фермой называется стержневая система, остающаяся неизменяемой, если все стержни считать шарнирно соединенными в узлах. При узловой нагрузке в стержнях фермы возникают только продольные (осевые) усилия. Для фермы характерны треугольные поля. Неизменяемость фермы носит геометрический характер, связанный с неизменяемостью плоской сети треугольников при сохранении длин их сторон и с неизменяемостью выпуклых многогранников с плоскими гранями при сохранении фигур граней в своих плоскостях (теорема Коши).
Простейшие с. о фермы образуются последовательным присоединением узлов двумя стержнями (плоские фермы) и последовательным присоединением узлов тремя стержнями (пространственные фермы).
Преобразованные с. о. фермы (в том числе и представляющие жесткое целое, прикрепленные стержнями к земле) получаются путем замены (перестановки) стержней простейших ферм. Таким способом, например, легко преобразовать ферму-консоль в балочную ферму (одна перестановка) и в трехшарнирную арочную ферму (две перестановки).
Работа плоской фермы имеет много общих черт с работой тонкостенной балки двутаврового профиля. Для удлиненных пространственных трех- и четырехгранных ферм пролетных строений, башен и стрел кранов и мачт электропередач существенна аналогия с тонкостенными стержнями открытого или замкнутого профиля. Более сложные пространственные фермы типа купольных и цилиндрических покрытий имеют своим аналогом безмоментные оболочки. Анализ ферм часто упрощается при замене раскосов решетки тонкой стенкой в предположении, что между стенкой и окаймляющими стержнями (пояса и стойки) возникают только сдвигающие усилия. В отдельных случаях тонкостенные фермы имеют самостоятельное значение, помимо использования их как расчетной модели (см. [10, 158, 167]).
С. н. фермы с лишними опорными связями подразделяются на те же типы, что и балки, арки и рамы. Внутренние с. н. фермы (например, с перекрестными раскосами) в настоящее время встречаются редко. Подробно о расчете ферм см. раздел 10.
Комбинированные системы
Эти системы (рис. 5.33) содержат стержни, работающие на все виды усилий, и стержни, работающие только на продольную силу. Сюда же относятся вантовые системы со стержнями из тросов, работающих только на растяжение. К простым комбинированным системам относятся балки со шпренгелями и подкосами (рис. 5.33, а), рамы с подкосами, заменяющими жесткие узлы, рамы с решетчатым ригелем (рис. 5.33, в) и сплошными стойками и, наоборот, со сплошным ригелем и решетчатыми стойками и т. п. Для более сложных комбинированных систем характерно наличие жесткой балки и шарнирно-стержневого полигона (цепи или гибкой арки), соединенного с балкой стержнями (рис. 5.33, г) (см. 5.11.2). Цепь или арка имеет самостоятельные опоры, воспринимающие распор, либо передает свой распор балке (рис. 5.33,6). В обоих случаях стержневой поли¬
5.4. КЛАССИФИКАЦИЯ СТЕРЖНЕВЫХ СИСТЕМ И ОБЩИЕ МЕТОДЫ СТРОИТЕЛЬНОЙ МЕХАНИКИ
227
гон вызывает в балке отрицательные моменты, пропорциональные ординатам полигона, уменьшающие моменты от нагрузки В случае цепи распор, передающийся балке, сжимает ее, в случае арки — растягивает. Если балка не имеет шарниров (с. н. комбинированная система), то цепи можно дать предварительное натяжение и подобрать наиболее выгодное распределение моментов.
В последнее время для покрытий стадионов предложены вантовые системы с передачей распора на конструкции трибун (рис. 5.33, д). Для покрытий выставоч-
Я) ®. ю ®
д)
К7Гч71
©
Рис. 5.33
ных павильонов проектируются комбинированные арки, состоящие из дуги-ригеля и четырех стоек (рис. 5.33,ж). Точки пересечения стоек играют роль пятовых шарниров двухшарнирной арки.
Спаренные плоские системы (биконструкции)
Спаривание при помощи решетки продольных и поперечных связей преследует задачи: 1) превращение двух плоских, жестких только в своих плоскостях систем в одно пространственно неизменяемое целое;
2) приспособление двух опертых плоских несущих конструкций при помощи связей и дополнительных опорных стержней к восприятию нагрузки, не лежащей в их плоскостях.
На рис. 5.34 показаны передние плоские системы и раскосы связей в виде линий, параллельных поясам. Черточками отмечен узел примыкания раскоса связей к передней системе. Предполагается, что распорки связей имеются во всех узлах. В боковых проекциях показан левый торцовый раскос связей. При другом направлении раскосов связей положение черточек соответствующим образом изменяется.
На рис. 5.34, а показана трехгранная пространственная ферма с тремя поясами и тремя решетками из раскосов и распорок (стоек) в трех гранях. Ферму можно также считать составленной из двух боковых плоских ферм со слитыми верхними поясами и решетки нижних связей. На рис. 5.34,6—две плоские фермы соединены верхними, нижними и поперечными торцовыми связями. Неизменяемость торцов может быть вместо раскосов обеспечена также жесткими рамами. На рис. 5.34, в — две плоские фермы соединены верхними продольными и поперечными связями во всех узлах. Система аналогична тонкостенному швеллеру с нулевой жесткостью свободного кручения, обладающему одной степенью свободы деформации в виде скручивания. Для неизменяемости добавлен раскос связей, отмеченный буквой т, эквивалентный планке, препятствующей депланации, а значит, и скручиванию. Эти жесткие системы требуют для с. о. прикрепления шести стержней, причем не более трех стержней могут быть вертикальными (и вообще параллельными). Наличие четырех вертикальных
стержней при трех горизонтальных делает систему однократно статически неопределимой.
Практически пролетные строения имеют восемь опорных стержней — по три на каждую плоскую ферму в ее плоскости и два упорных стержня, перпендикулярных плоскости ферм. При наличии верхних и нижних продольных и торцовых поперечных связей для статической определимости следует прервать связи в двух местах
О)
б)
г)
р—
Рис. 5.34
(удалить два раскоса), обеспечив передачу поперечной силы в связях на упорные стержни С и Я (рис. 5.34, г). При наличии только верхних (или нижних) продольных связей и поперечных связей во всех узлах достаточно сделать один разрыв в связях (рис. 5.34, д).
На рис. 5.34, е, ж показаны статически определимая и 7 раз статически неопределимая биарки. Неизвестными во втором случае являются шесть изгибающих моментов в местах шарниров основной системы и горизонтальная поперечная сила в месте разрыва связей. Подробно о расчете биконструкций см. [158].
5.4.3. Статический метод определения перемещений и кинематический метод определения усилий на примере балки. Линии и поверхности влияния
[64, 65, 86, 87]
Методы основаны на использовании принципа возможных перемещений (см. 2.3.3). Рассматриваются два не связанных между собой состояния стержневой системы: одно, удовлетворяющее условиям равновесия (статически возможное состояние), и другое, удовлетворяющее условиям совместности деформаций (геометрически возможное состояние)1. Так, например, для балки, нагруженной в своей плоскости (продольные силы отсутствуют), первое состояние характеризуется нагрузками Р, Ц р, т и усилиями 0, М, а второе — деформациями Г, 0, у, д и перемещениями о, ф (см. 5.1.4). В применении к находящейся в равновесии деформируемой системе принцип возможных перемещений (уравнение работ) формулируется так: работа нагрузок первого состояния на перемещениях второго состояния, сложенная с работой усилий первого состояния на деформациях второго состояния, равна нулю.
1 Речь идет о любых весьма малых деформациях, а не только упругих.
228
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
Уравнение работ для балки или балочной системы после переноса работы усилий в правую часть и изменения порядка множителей имеет вид:
Е Р1 Vй Е Ь1 ФП 1 р1 Vй йз т1 фп йз —
8 3
2 0П М1 2 Гп (Э1 ]■ п М10 1 т11 сг1 йв. (5.98) 8
Порядок сомножителей в правой части взят соответствующим статико-кинематической аналогии с левой частью.
В случае системы общего вида добавляются слагаемые, выражающие работу продольных и крутящих усилий на соответствующих деформациях.
Статический метод определения перемещений в статически определимой системе
Деформации предполагаются известными или заранее определенными по усилиям, если речь идет о силовых деформациях. Например, для произвольно нагруженной
М
упругой балки должны быть построены эпюры О— •
Ы
и У— Т— • Деформированное состояние балки прини-
СмР у
мается за второе состояние. Первое состояние, вспомогательное, подбирается так, чтобы левая часть уравнения (5.98) была равна искомому перемещению. Если требуется найти прогиб V в определенном сечении, то система нагружается приложенной в этом сечении единственной силой Р, равной безразмерной единице. Усилия от этой воображаемой вспомогательной нагрузки (так называемые единичные усилия) обозначим М и (. Тогда
и Ебл7 ЕГ2 ]' ЫйШ чЪйз. (5.99)
8 5
Если сосредоточенные деформации (с. д.) отсутствуют (0ГО) и определяется упругий прогиб, то
(5.100)
8 8
Это частный случай формулы Максвелла — Мора для балки.
Этими же формулами определяется угол поворота сечения ф, но во вспомогательном состоянии вместо
Р— 1 берется -1 (сосредоточенный момент, численно равный безразмерной единице). Размерность усилий
определяется размерностью вспомогательной нагрузки. Для фермы формула Максвелла — Мора принимает вид (см. 10.1.4):
V мГ
(5ло°')
Кинематический метод определения усилий в статически определимой системе
Известные нагрузки и неизвестное усилие относят к первому состоянию. Во втором, вспомогательном состоянии задаются единственной с. д., равной безразмерной единице, соответствующей искомому усилию.
Если требуется найти изгибающий момент М, то берут 01 в исследуемом сечении; если ищут ф, то берут Г—1
(единичный безразмерный сдвиг). Из геометрических (кинематических) соображений определяют перемещения во вспомогательном состоянии по направлениям нагрузок действительного состояния. Эти «единичные» перемещения обозначают V, р,. Искомое усилие
М Е Ря Е 1ф--1 1жр5. (5.101)
8
Усилие равно работе нагрузок на перемещениях, вызванных единичной дислокацией, соответствующей искомому усилию.
На кинематическом методе основано построение так называемых линий влияния (л. в.) в широком смысле слова — обобщенных перемещений, позволяющих найти некоторое усилие (или другой фактор) для определенного класса нагрузок. Например, л. в. усилия в каком-нибудь стержне фермы для узловых нагрузок произвольного направления является совокупность векторов — полных перемещений узлов от единичного безразмерного удлинения А 1 того стержня, усилие в котором разыскивается. При вертикальных нагрузках л. в. усилия является совокупность векторов вертикальных перемещений. В обоих случаях задача решается построением диаграммы перемещений или плана скоростей.
Статический метод определения перемещений и кинематический метод определения усилий применимы и для упругих с. н. систем, поскольку перемещения являются достаточно малыми, а значит, системы подчинены принципу сложения действия сил малых деформаций.
Здесь единичные усилия М, р,. не могут быть определены из одних только условий равновесия, так же как и единичные перемещения р, ф,. не могут быть найдены только из геометрических соображений, поскольку с. д. вызывают упругие деформации всей системы. Для с. н. систем целесообразно пользоваться обобщенной теоремой о взаимности работ, охватывающей все особенности напряженного и деформированного состояния произвольной упругой системы.
Обобщенная теорема о взаимности работ активных факторов, действующих на упругую систему
Активными факторами называются нагрузки (сосредоточенные и распределенные) и наперед заданные деформации (сосредоточенные — с. д. и распределенные, например, температурные). Силовые упругие распределенные деформации также могут быть отнесены к активным факторам, если они подсчитаны для системы с меньшим числом связей, например для с. о. основной системы. При введении упругих деформаций в качестве активных факторов породившие их нагрузки в уравнение не включаются.
Рассматриваются два состояния упругой системы. Активные факторы, усилия и перемещения (пассивные факторы) первого состояния отмечаются индексом I, второго состояния — индексом II. Для балочной системы
2 р1 п 2 О ф11 С р1 с-11 а5 Ф" аа
2вглп 2г1 ?п д1лпл ]У ЭПЛ
8 8
— Е Рп V1 Е Ь11 Ф1 рп V1 йз (п11 ф1 йз
5 5
2 0й М-Ь2 г" сг ф" М1аз 1V11 (5.102)
5 5
5.4. КЛАССИФИКАЦИЯ СТЕРЖНЕВЫХ СИСТЕМ И ОБЩИЕ МЕТОДЫ СТРОИТЕЛЬНОЙ МЕХАНИКИ
229
Прр наличии продольных и крутящих усилий и деформаций соответствующие слагаемые добавляются по аналогии. Для фермы теорема записывается так:
X Р1 А11 ЕЛ111 2 Ри А1 2Л11 Ы1.
(5.103)
Здесь А — перемещение узла, к которому приложена сила Р.
Формулы для перемещения в упругой с. н. системе
Второе состояние — действительное, первое состояние— вспомогательное, Я1 1 (безразмерная). Опуская индекс II для активных факторов действительного состояния и вводя черту для единичных пассивных факторов вспомогательного состояния, записываем:
V 2 Ру 2 1 рийз--1 туй5
5 5
ЕвМ ЕГС§М уО5. (5.104)
Перемещение равно сумме «произведений» активных факторов действительного состояния на соответствующие пассивные факторы (ординаты эпюр) единичного вспомогательного состояния. Вычисление по этой формуле оправдано при массовых расчетах или при условии, что значения а, ф (эпюры единичных прогибов и углов поворота) известны из таблиц или определяются другим способом например путем интегрирования уравнения изгиба балки, методом аналогий.
В общем случае упругая деформация от нагрузок Р,
I, ру т, подсчитанная для основной системы, рассматривается как активный фактор, первая строка в (5.104) отпадает:
М° — с э°
МЛ8 4
5
Е1
ОРи
(5.
(5.105)
ч-
ММй8
Е1
соа°08
) вру '
Здесь Му 0 — усилия_в действительной системе со всеми лишними связями, М°, С2° — усилия в основной системе от единичной силы по направлению искомого перемещения.
Вообще перемещение может быть получено путем «перемножения» действительной и вспомогательной
эпюр, построенных для двух систем, при условии, что в совокупности в обеих системах содержатся все связи заданной с. н системы. Отдельные связи могут и повторяться. Обе эпюры могут быть построены для заданной системы.
Формулы для усилия в с. и. системе
Первое состояние — действительное, второе состояние— вспомогательное, вп 1. Опуская индекс I для активных факторов действительного состояния и вводя двойную черту для пассивных факторов вспомогательного, записываем:
М 2 Ря ЕI, Ф рЫз ] гщй
Е 6Л? Е _[ Шйз 1 -ЩЛз. (5.107)
5 Первая строка может быть опущена, но тогда в качестве активного фактора должна быть учтена упругая
деформация основной системы:
м ЕеЖ Ег Шла 1 уЪав
5 с М° Г 0°
(5.107')
Если с. д., а также температурные и начальные распределенные деформации отсутствуют, то
С М° — С М—МЬ
0я 7Г3'
ОРу
(5.107")
Здесь М° и 3° — усилия в с. о. основной системе от заданных нагрузок либо с. н. системе с меньшим числом связей, чем исследуемая; й и у — температурная и начальная деформации. Если в Г'д,,у0, то
(5ло5,)
8
Подчеркивается, что эпюры М, С? берутся для действительной системы со всеми лишними неизвестными.
При определении упругого перемещения в с. н. системе из (5.98) с учетом того, что первое (вспомогательное) состояние должно удовлетворять только условиям равновесия, получается другая весьма важная формула:
(5 106)
Практическое использование формул (5.105) —
(5.107"), дающих перемещения и усилия от произвольных нагрузок, требует предварительного определения единичных усилий М, ? или Ж, 0” в с. н. системе, что представляет собой более простую задачу, чем определение усилий от сложной нагрузки.
Теоремы о взаимности единичных перемещений и усилий
Оставляя по одному единичному активному фактору в I и II состоянии упругой системы, из (5.102) получают ряд равенств, связывающих пассивные факторы и являющихся основой построения л. в. как эпюр. Для балок (два перемещения и два усилия в сечении) число таких равенств равно 16. В общем случае стержневой системы с массивными стержнями (шесть перемещений и шесть усилий в сечении) — 144.
Абсцисса неподвижного сечения балки обозначается а, абсцисса произвольного сечения х; означает
величину () в сечении а от действия активного фактора Р 1 в сечении х; xа означает 2 в сечении х от действия активного фактора Р— 1 в сечении а. Линия влияния имеет нижние индексы аху эпюра имеет нижние индексы ха.
На рис. 5.35, а, б показан вид л. в. — эпюр для простой балки и балки с защемленными концами и выписаны теоремы взаимности, дающие связь между л. в. и эпюрами. Все скачки и все приращения тангенсов углов наклона численно равны единице. Для простой балки характерно прямолинейное очертание ветвей л. в. усилий от действия сил и моментов и нулевые ординаты тех же л. в. от действия движущихся с. д.
230
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
а)
1 - 1
г
ах“Рха
ахМха
ахйха
_
Ми'Уха
1—
Махж(Рха
й
а
г 1
Чж-Рха
9ахяМха
фахвха
Чог'Чиг
ахя(Рха
УахяМха
1
8)
га
П“" “__.1
ОахУха
ахж(Рха
Чах-Мха
Г-ч 1 1
МахжУха
Махсрха
Мах ха
1 т
Г" ' - ‘ 1
рах9Ъха
Рах?ха
Рхмха
9ахаха
ХТЧ
—
Цасшгха
ихМха
ГГ —л
Уахшха
• о 5 Ьг сг »Г"
РЦЕЗ
§ су к г%
а
п
V?
1 «ид
14
На рис. 5.35, в, г, д даны л. в. краевых факторов простой балки, балки с одним защемленным и другим шарнирно опертым концом и балки с обоими защемленными концами от действия движущегося груза Р I. Надписанные на л. в. ординаты через 0,1 используются для построения л. в. неразрезных балок и рам.
5.4.4. Метод потенциальной энергии1
Работа, совершаемая нагрузкой упругой системы на ею же вызванные перемещениях (так называемая действительная работа), накапливается в системе в виде потенциальной энергии деформации и может быть реализована в процессе разгрузки.
Если система является достаточно жесткой и упругие перемещения малы по сравнению с геометрическими размерами системы, то при условии подчинения элемен¬
1 См. также 2.3.2.
тарных деформаций закону Гука система оказывается линейно деформируемой; для системы в целом как бы действителен закон Гука о пропорциональности нагрузок и вызванных ими перемещений. Для таких систем действителен принцип сложения. Потенциальная энергия деформации линейно деформируемой системы может быть выражена однородной функцией второй степени от сосредоточенных нагрузок, погонная энергия стержней выражается функцией второй степени от усилий или деформаций. Для гибких систем принцип сложения частично или полностью недействителен: потенциальная деформация перестает быть функцией второй степени. Ниже имеются в виду жесткие системы, если не сделано оговорки.
Обобщенными силами и перемещениями называются такие функции нагрузок и перемещений, произведение которых численно равно работе. Простейшие примеры — сосредоточенная сила и прогиб по направлению силы, сосредоточенный момент и угол поворота сечения, ин-
5.4. КЛАССИФИКАЦИЯ СТЕРЖНЕВЫХ СИСТЕМ И ОБЩИЕ МЕТОДЫ СТРОИТЕЛЬНОЙ МЕХАНИКИ
231
тенсивность равномерно распределенной нагрузки и площадь эпюры прогибов балки на протяжении нагрузки и т. п.
Выражение энергии деформации через обобщенные силы и обобщенные перемещения
Условно рассматривается балка, нагруженная тремя силами (рис. 5.36,а). При большем числе сил, а также при распределенной нагрузке формулы развертываются по аналогии:
У — Р Дх — Р2 Аг Рз А3. (5.108)
Выражение энергии деформации через силы и единичные перемещения
(податливости системы см. рис. 5.36,6, в, г)
1
1
1
_1_ Г, ± Г 1 Г
2 ЕР 2 ) ОРу 2
__ Гл, Гм, С
2 0к 2 ] Е1у 2
Е1
ОРх
Интегрирование распространяется на все стержни системы.
Если отдельные стержни имеют упругое основание с силовой отпорностью к в моментной отпорностью с, то к энергии добавляются члены вида:
1 С (рРеакт)2 1 Г (тРеакт)2
ТУ 'Т]1-Г-- (5.110')
5 5
В случае расчета статически неопределимой системы (или при определении перемещений) усилия выражаются суммами усилий в основной системе от заданных нагрузок и от неизвестных (или воображаемых) сил, например
М А1р 4" Ах Х% А12 --• •
Здесь Мх есть усилие М от А1, М2— усилие М от Х2— и т. д.
Теорема Кастильяно
Частная производная от энергии деформации, выраженной через независимые силы, взятая по силе, равна перемещению по направлению этой силы:
ди ди ди -4,; -4, Ж-4,. (5.111)
Силы являются независимыми, если каждую из них можно варьировать, сохраняя величины остальных неизменными.
Пример:
—— Р2 22 Р1 21 Рз 23 2
ОР2
Формула для упругого перемещения, вытекающая из теоремы Кастильяно
ЧР:
ди (р, Х() Г N.
дХь 3 Е
р_
ЕР
1хр
1Х
дN
дХь
дМх
дХ(
Г-Зв.-8ьлГ.й
ОР, 4Х, I.
с1з
-
(5.112)
“ Р ьи у Р1 б22 у Р «зз ’
Р Р2 12 Р2 Рз 23 3 Р 13 №• Ю9)
При ЭТОМ
12 21» 23 “ 32» 13 ЗТ
Практически значения б заранее не известны, поэтому 0 выражают через усилия.
Выражение энергии деформации стержневой системы через усилия
' йз 1 Г О1 йз Г МЛз
- I— - (5.110)
Практическое использование теоремы Кастильяно для определения перемещений приводит к операциям, тождественным с операциями при использовании формулы Максвелла — Мора [см. (5.100) и 5.7.4, формула (5.312)]. Здесь также приходится рассмотреть действительное в воображаемое (вспомогательное) состояние системы от нагрузки обобщенной силой А 1 по направлению искомого перемещения и т. д.
Теорема о минимуме энергии деформации
Дана статически неопределимая система. Выбирается неизменяемая с. •. или с. н. основная система. Последняя нагружается заданными нагрузками и лишними неизвестными Хи Аг, Х,.
Теорема утверждает, что, если лишние связи не получают наперед заданных деформаций, то неизвестные Хи Аг, А3,. имеют величину, обращающую потенциальную энергию деформации в минимум.
Реализуя условия экстремума, получают канонические уравнения метода силз
: 0, или Ях 6и 4-
ди (Р,ХиХ2,Хз) дХ±
4 Х2 6г Хз 613 -4- Л1р 0;
ди (р,х1ух2,х з)
дх2
0, или Хг 621 4-
4“ Хг 22 -8 23 2р 01 ди (Р,хъхъ, Х3)
дХ«
• 0, или Хг 631
4“ Х% 32 633 А8р 0.
(5.113)
232
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
Обычно сразу пишут уравнения в развернутом виде, а затем вычисляют коэффициенты и свободные члены.
Случай заданных (температурных или начальных) деформаций
Теорема Кастильяно и теорема о минимуме потенциальной энергии деформации форма тьно остаются в силе, если заменить V через —Г, где Т — работа
усилий на заданных деформациях X, у»»
Т — ] ЫЫз — (у уу 1 — Мх х йз —• • •
5 5 5
Наперед заданные деформации могут быть также сосредоточенными (т. е. являться дислокациями).
В случае осадок опор неразрезной балки
Т — 2 У А,.
Здесь V — реакция опоры; А — осадка опоры.
Выражение энергии деформации через перемещения или дислокации
Энергия выражается через силы и вызванные ими перемещения по формуле (5.108). Здесь же перемещения А рассматриваются как заданные осадки опор или дислокации в опорных стерженьках, а силы — как реакции опор или усилия опорных стерженьков (рис. 5.37,а).
Непосредственно через перемещения энергия выражается в виде:
1
А3Р33-
(5.114)
Здесь Яц представляет собой реакцию опоры 1 от ее осадки А1 —1, когда осадки опор 2 и 3 равны нулю (рис 5.37,6). Соответственно Р и Я33 равны
реакциям опор 2 и 3 при
А
а) Аг А3
М лг.,ТРг 'рз
" 5 т
Гзз
Рис. 5.37
гих перемещениях, вызванных другой групповой силой, равна нулю. При нагрузке системы подобными групповыми силами энергия деформации выражается в виде суммы квадратов [так как 6126236310, члены, содержащие произведения сил в выражении (5.109), пропадают]. Если принять неизвестные с. н. системы в виде ортогональных групповых сил, канонические уравнения получаются с разделенными неизвестными, и совместного решения уравнений не требуется. В общем случае, однако, определение ортогональных групповых сил по сложности не отличается от решения системы канонических уравнений. В частных случаях (наличие симметрии; система, содержащая один замкнутый контур) ортогонализация упрощается.
Общий прием определения ортогональных групповых сил состоит в обращении матрицы коэффициентов 6.
Теорема о частных производных энергии деформации по с. д. Частная производная от энергии деформации по осадке опоры (с. д.) равна опорной реакции (усилию):
дУ(А1 А„.) дА 1
(5.114')
Д10, Д21, Д30 и
д1д20, Д31 (рис.
5.37, ей г). Расчет эквивалентен нахождению обратной матрицы канонических уравнений трехкратно с. н. неразрезной балки с неизвестными реакциями Я2 —
Х2, Я3Х3.
Величины Яц, Я22, Я33 — главные коэффициенты обратной матрицы. С механической точки зрения они представляют собой отпорности
трижды с. н. системы по отношению к осадкам опор. Следует заметить, что осадка опоры вызывает не только реакцию споры 1 (Яц), но и реакции опор 2 и 3 (соответственно Я21 и Я31).
При этом Я12Я21; Я2зЯз2; Я13Я31 (теорема взаимности реакций).
Групповые обобщенные силы. Как указано, силы Р, Я2, Я3 рассматриваются как обобщенные силы, частным случаем которых являются сосредоточенные силы. Групповой силой называется совокупность обобщенных сил, связанных определенным соотношением компонентов; она характеризуется одним параметром, например величиной одной из сил группы.
Групповые силы (Яц, Я2ь Я31), (Я22, Я12, Я32), (Я33, Я13, Я23) обладают важным свойством ортогональности. Это значит, что работа одной из групповых сил на упру¬
Случай, когда помимо с. д. действуют нагрузки. Теорема о частных производных остается в силе, если заменить энергию деформации так называемой полной энергией
Э — II — Т,
где Т — работа нагрузок на перемещениях, вызванных дислокациями.
Теорема об экстремуме полной энергии
Дана упругая система, например простая балка, несущая нагрузку р (рис. 5.38, а). Система дополнена воображаемыми лишними связями, в данном случае — промежуточными опорами , 2, 3, которым даны принудительные перемещения Аь А2, Аз, не зависящие от нагрузки р. Действительные значения перемещений Аь Д2, Аз, которые реализуются в отсутствие лишних опор, отвечают экстремуму полной энергии.
Разумеется, величины Д Д2, А3 могут быть найдены непосредственно из рассмотрения системы без дополнительно введенных связей. Однако теорема играет важнейшую роль в приближенных (вариационных) методах расчета, являясь основой вариационного принципа Лагранжа, метода Ритца — Тимошенко и др.
Пример балки при сложном изгибе. Рассматривается балка на упругом основании с отпорностью ку нагруженная поперечной нагрузкой р и растягивающей силой N.
Потенциальная энергия деформации
I I
1 Г М2V V 1 Г ] — Е1 I —- ах — ко0х.
2, и2 у 2
-г йг Т 3
Рис. 5.38
5.4. КЛАССИФИКАЦИЯ СТЕРЖНЕВЫХ СИСТЕМ И ОБЩИЕ МЕТОДЫ СТРОИТЕЛЬНОЙ МЕХАНИКИ
233
Работа нагрузок
Трийх-Ы
йу
йх
йх.
Полная потенциальная энергия системы
э-1 т [е Ш)’ (ТН -
о (5.115)
Здесь у у(х) — прогиб, удовлетворяющий граничным условиям, но не зависящий от р.
Этот прогиб становится действительным прогибом, если Э приобретает экстремальное значение, т. е. вариация 63 при любых вариациях прогиба у обращается в нуль.
Рассматривая Э как функционал
I
Э §Р(х,о,о', о")йх,
составляем уравнение Эйлера:
йР й дР й2 эр
— - — о
йу
йх ду'
йх2 ду"
Это дает дифференциальное уравнение сложного изгиба балки в виде:
йV й2 у Е1-» к0р-
Интегрирование уравнения с удовлетворением граничным условиям балки дает уравнение изогнутой оси (эпюры прогибов) балки.
Приближенный метод Ритца—Тимошенко состоит в том, что прогиб аппроксимируется в виде ряда, каждый член которого удовлетворяет граничным условиям и пропорционален неизвестному параметру Ас
уп « Аг А2 Ц2 Л3 Фз Н— • Ап Фп (5.116) Ф Ф()—так называемые координаты функции.
Подставляя этот ряд в выражение полной энергии (5.115), варьируя энергию отдельно по каждому параметру и приравнивая вариации нулю, получаем систему уравнений:
дЦ л дЦ дЦ
зга- °; 17Г°; •••; 17” 0- (5.116')
дАг дН 2 дАп
Решая эти уравнения, находим Ль Л2, Ап.
Случай нелинейно деформируемой системы, когда энергия деформации не есть функция второй степени от нагрузок
При криволинейном законе деформирования, например показанном на рис. 5.38, б, соответствующем связи между нагрузкой Р и перемещением узла, прикрепленного почти вытянутыми в одну прямую стержнями (рис. 5.38, в), следует уточнить понятие энергии деформации.
Обычно под V понимают вертикально заштрихованную площадь АОЛ (рис. 5.38,6):
V § раА.
(5.117)
Однако, если выразить эту площадь через Р и взять производную дЦдР, то она не окажется равной А. Как показал Энгессер, в этом случае следует взять площадь РОЛ, заштрихованную горизонтально. «Дополнительная» энергия, выражаемая этой площадью,
Р
Я _[МР — РА — и. (5.117')
0
при дифференцировании дает соответствующее перемещение
дЯ
дР
■ А.
(5.117")
При прямолинейной диаграмме деформирования иЯ и применение теоремы Кастильяно осложнения не вызывает.
5.5. БАЛКИ
5.5.1. Определение усилий и перемещений и построение эпюр в балках по методу начальных параметров [86, 18]
Общие положения
Усилия О и М определяют с целью расчета балки на прочность, а эпюры фи М строят с целью выяснения опасных сечений. Перемещения у (обычно только 0Макс) определяют с целью расчета балки на жесткость, а эпюры у и ф строят главным образом от действия единичных факторов — в качестве л. в. усилий.
В практической работе целесообразно пользоваться в первую очередь готовыми табличными данными (см. 8.1.1) или универсальными формулами усилий и перемещений (уравнениями эпюр), полученными путем интегрирования системы дифференциальных уравнений равновесия и совместности деформаций по методу начальных параметров.
Уравнения равновесия Уравнения совместности
й0_
йх
— р ко;
— т0, — сф.
йу
йх
йо
йх
? Ф
М
Е1
ОРи
(5.118)
Уравнения (5.118) (дифференциальные зависимости изгиба) написаны с учетом силовой и моментной реакций упругого основания, моментной нагрузки и деформации сдвига. Обозначения и правила знаков см. 5.1.4, 5.1.5, 5.1.7. Балка называется обыкновенной, если упругое основание отсутствует, 0.
Следует подчеркнуть, что ф — угол (малый) поворота сечения. Угол наклона касательной к изогнутой оси к горизонту равен йуйх. Эти два угла равны, когда деформация сдвига не учитывается, что практически всегда имеет место.
234
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
Начальными параметрами Оо, М0, р0, 1о называются ординаты эпюр (?, М, ф, V в сечении балки О, принятом за начальное Уравнения эпюр, написанные в функции абсциссы исследуемого сечения, характеризуют влияние начальных параметров и активных факторов (нагрузок и наперед заданных деформаций), действующих на участке О—ху т. е. от начального до исследуемого сечения с абсциссой х. Никакие факторы, действующие левее начала О и правее сечения х, в уравнения не входят. Множители при начальных параметрах и активных факторах называются функциями влияния: они выражают влияние активного фактора в сечении и (Оих) на пассивный фактор (ординату эпюры) в сечении х. Важнейшая особенность метода состоит в том, что влияние начальных параметров и однотипных с ними сосредоточенных факторов выражается одними и теми же функциями влияния, но с изменением аргумента: вместо «плеча» х вводится плечо х—и, где и — абсцисса фактора.
В случае однопролетной балки начало О следует выбирать в сечении, где два из четырех параметров заранее известны. Два других определяются из условий в другом сечении, где снова два параметра известны. Обычно начало совмещают с левым концом балки. Тогда:
при свободном конце: 1) 0о0; 2) Мо0; при шарнирно опертом конце: 1) Мо0; 2) Уо0; при защемленном конце: 1) фоО; 2) Уо0; при свободно смещающемся, но неповорачивающемся конце: 1) (2о0; 2) фо0.
Аналогично в зависимости от конструкции выражаются условия на другом конце балки.
Совмещение начала с левым концом и использование граничных условий на правом конце не являются обязательными. В случае симметрии балки и нагрузки начало выбирают посередине пролета. Для многопролетных с. о. балок используются условия в сечениях опор и шарниров; для с. и. балок — условия над промежуточными опорами и т. д.
Уравнение каждой из эпюр выписывается в виде четырех столбцов соответственно числу начальных параметров. Первая строка содержит влияние начальных параметров, вторая — сосредоточенных факторов, третья и последующие — распределенных факторов. Учитывая свойства функций влияния и принцип суммирования действия сил и малых деформаций по первой строке, всегда можно получить вторую и третью. В некоторых случаях число столбцов сокращается.
Обыкновенная балка постоянного сечения
Уравнения эпюр 0, М, ф содержат сокращенное число столбцов. Влияние факторов, распределенных равномерно и по линейному закону (эпюра нагрузки — треугольник), дается в развернутом виде, причем предполагается, что сечение х лежит в пределах нагрузки или иного распределенного фактора (на рис. 5.39 под р и
тт
р' следует подразумевать также и факторы т и т у и у', О и О'). Уравнения эпюр ( и М выражают общеизвестный порядок определения поперечной силы и изгибающего момента от нагрузок, действующих левее сечения х.
Если исследуемое сечение х лежит правее конца й нагрузки р (рис. 5.40), то сначала определяют величины (Эй, Ма, ф, Vа, а затем, приняв сечение й за начальное, выражают (±х, Мх, фх, ох (принцип переноса начала).
Другой способ состоит в продолжении нагрузки до сечения х и в вычитании той нагрузки, которая при этом оказалась добавленной на участке (х—с1). При исполь-
-х-и.
'ив — -х-иг
-х-с -
П5Г1
-Кг
--
-г-
—х-с,
ГАГ-(— п
Рис. 5.39
Уравнение эпюры С
0.x — о — х
— Ер —
о
—р(х — с) —
р‘
. (х-Сг)
— Г р (и) йи. о
(5.119)
Уравнение эпюры М Мх М0 Оо х
21 -ЪР(х-ир)
т(х — с) — р
(х - с)
, (х-сг) х Сх)3
т 2 -Р 6 т(и)с1и — р (и) (х — и) йи. о о
(5.120)
5.5. БАЛКИ
235
Уравнение эпюры р Р Фо
М0
Е1
-2
0
О
— § (X — с)
(хС1)Л
2
X
— Ъ(и)1и о
Уравнение эпюры V Ох Щ ф0 х
X
— т
(х — с)2 2 Е1 (х — сх)3 6Я
2Е1 Р Р
2Я
( - С)3
6Я (-сх)4 24 Е1
X
т (и)(х — и) йи
(5.121)
-М0
х»
2Е
ЕГ -Е0(л;-Ые) ЕР['
0 0 о о
( — ир)3 (х — ир)
6 Е1
V
У(х — с)
, (х—с1)
(х-су
(-с)
ОРи
_Ь, (-С1)3 6
т'
2Ш
Лх-сг)
I 120 Е1 6 0РУ
(и)х — и) Ли
х X
— 1 ти)(х — и)йи -р(и)
(х — «)а (х — и) 6 Е1
(5.122)
визны [это сделано в формуле (5.123)]. Исключение со-
зованни последней строки уравнений эпюр величина ( ставляют сравнительно короткие балки с тонкой стенкой
о (5--6). В этом случае принимается РУРС? (пло-
разбивается на ряд интегралов по числу участков с од- щадь стенки), ним и тем же законом изменения нагрузки. ”
Как правило, влиянием деформации сдвига на прогиб можно пренебречь по сравнению с влиянием кри-
Для случая, показанного на рис. 5.40:
,№ -ег)2
Оо — Р № — с) — р'
МХ М0 2оХ — — [( — С)2 — (х —2)2]—
- X- [(х-с1Г-(х-41)-3(с11-с1)(х-с11П о
Ф1 %-Мо-(3.4 -[и-
— с)3 — (х — Л)3]-
[(X — Сг) — (х —
24 Е
Ох «о Ро — м о — — 2 о —
(5.123)
236
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
■[(-
(5.123)
24Е1 1'" ' ' л ’ 120Я
- с - (х - аг) - 5 № - сг)(х - а].
Пример использования уравнений эпюр. Найти начальные параметры 20 и М0 и опорные реакции Х и Х2 ( вверх) трехпролетной неразрезной балки постоянного сечения с защемленными концами, находящейся под действием сплошной нагрузки, распределенной по закону треугольника с уклоном р' (рис. 5.41, а).
ЛЬ
ю
Для нахождения неизвестных составляем четыре уравнения, определяемые условиями закрепления:
прогиб в сечении 1 по формуле (5.122) равен нулю:
а
11
М° 2Е1 6Е1 Р' 120Е1
прогиб в сечении 2 равен нулю:
И „ (Ь ЬГ
— М0 —— Уо
0;
2 Е1
6 Е1
(1 2)6
120 Е1
0;
(а)
(б)
прогиб в концевом сечении 3 равен нулю:
-М о
2 2 Е1
— о
3
6Е1
3
6Е1
РГ
-Хл
5 120 Е1
(2 3)3 6 Е1
0;
(в)
угол поворота в концевом сечении 3 по формуле (5.121) равен нулю:
I
2 ( )2
1г
— х2 4- Р' 2 2Е1 24Е1
0.
(г)
Все уравнения можно сократить на Е1. Решив полученную систему уравнений, найдем (Зо и М0, Хг и Х2, а следовательно, будем иметь все необходимые данные для построения эпюр 3, М, р, V по формулам (5.119) — (5.122).
Линия влияния изгибающего момента Мх строится как эпюра прогибов от единичной с. д. 0г 1 в сечении (рис. 5.41,6). Для использования формулы (5.122) надо определить Оо, Хи Х2, для чего решить систему уравнений (а) — (г), заменив в них грузовые члены соответственно величинами: 0; —(1-И2—«0;—(—и»); — 1. Это следует из вторых строк уравнений (5.122) и (5.121), в которых содержится слагаемое, выражающее влияние 0 на у и фх. При построении эпюры учитываются начальные параметры (2о, М0, нагрузки Х1 и Х2 и с. д.
©г1.
Линия влияния реакции Х (рис. 5.41, в) строится на основании следующих соображений. Положительная реакция эквивалентна сжимающему усилию в опорном стержне. Следовательно, л. в. совпадает с эпюрой прогибов от действия единичной с. д. укорочения в опорном стержне (Л1—1). При этом прогиб балки в сечении 1 будет положительным (направлен вниз), о 1. Для построения эпюры прогибов следует найти ?0, М0, XI, Х2% для чего в уравнениях (а)—(г) отбрасывают все грузовые члены, одновременно заменив нуль в правой части уравнения (б) на единицу. Затем эпюра строится по общим правилам от найденных начальных параметров и нагрузок и Х2.
Обыкновенная балка переменного сечения
Уравнения эпюр Э и М остаются, естественно, без изменения такими же, как для балки постоянного сечения.
Уравнение эпюры ф:
— О
Ф Фо
X
-Ее
о
— в1 (х — с)
, (х — С,)г
Л
-I
X
х—и
О
_-Ф 2 -‘:1
-ЗоФ ЕР5_„-
О
р_
2
4 К
—ф ■ 1- 2 ’х-с
(5.124)
5.5. БАЛКИ
237
Для вычисления функций влияния строят эпюру гибкости балки (рис. 5.42). Функции влияния пред-
Е1
ставляют собой моменты я-го порядка участка эпюры с основанием х—и относительно оси, совпадающей с начальной ординатой участка. Для первой строки (5.124) и0, и моменты вычисляются относительно оси у, проходящей через начало.
Для моментов первых пяти порядков приняты обозначения отдельными буквами, подчеркивающими (для первых трех) геометрический смысл этих интегралов, известный из теории моментов инерции площадей:
X X
П-и К-1 - С.-1] -
и и
площадь эпюры гибкостей на участке х—и;
М"±и (5 - и) 5_и [к-1] -
статический момент этой площади относительна вертикальной оси, совпадающей с сечением а;
Мх±и I '“ “2 4-и ['Г"1 ■ СМ] -
и
момент инерции той же площади относительно прежней оси;
Мх±и 1 - “)3 Кх-и [“ СЛ2] -
и
момент третьего порядка при тех же условиях;
Мх-и I • «)4 1х-и [«_1 -СЛр-СЛ?] -
и
момент четвертого порядка.
Здесь 5 — вспомогательная переменная абсцисса;
Значок «ф» отмечает, что геометрические элементы являются фиктивными, их размерность отличается от размерности площади, статического момента и т.д.
В уравнении (5.121) опущены индексы абсцисс сосредоточенных факторов, как очевидные. Например, вместо написано
При Ясопз участок эпюры — прямоугольник:
Ы
рФ ф -
х—и Е1 хи
ф (-ц3. и _ хи зЕ1 ’ хи ”
( —ц)
2 Е1 1 (х — ц)4 4 Е1 5
подстановка этих значений в выражение (5.124) дает формулу (5.121).
Для сечения х правее распределенной нагрузки (см. рис. 5.40)
Ф, %-Л«0У-г05-- (ф_с - Ф_д)
У (5.125)
внение эпюры
VI
0о
“Ь Фо х
мйЪ%
-?о(
ф-рф)
о
X
— Ев(л: — и)
0
-Ъх-и
0
(
0
_и-г1_и)
1
- (хс)2 2
-ы_
рсВ'
у — 2
6
т'
-Гх-с 2 Х °1
р'-- 4-
-С1 2 -С1)
X
Н- у (и) с1и —
X
• ] Ф (и)(х — и) йи
X л
— т (и)8_и аи
I р(и) (?
К 4
Ф _ рФ 1 Ли х—и 1 х—и) ии‘
V ' V ' ' «•—•
0 0 о о
238
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
Обозначенные жирными буквами моменты Р, 5, относятся к эпюре гибкостей при сдвиге “ттг.
Ог у
Отмеченные «шапкой» величины представляют так
называемые комоменты п-го порядка участка эпюры-гт-
Ы
с основанием х—и, легко выражаемые через моменты:
М«1а (х-и)Мп--М
М(х'1и -(-«) Р-и - ;
М?1« (-«) 5_ы - _„ _„ ; (5-127)
Мх х-и) _„ - К_и К_и;
М1Ц (-«) К_а - Г_и.
При ЕСОП81
ф ' дг—и
Е1п (п 1) ( - «)
6Е1 2
• с
» 1ух—и (X —
2Е1
12Я
Для нагрузки по рис. 5.40 (х1)
° °о (Род:-Мо-
Р -у - I, -
-З-с,).,] (5.128)
Пример 5.2 (рис. 5.43). Найти прогиб посередине пролета стальной балки, нагруженной равномерной нагрузкой р1 тм на левом полупролете. Моменты инерции сечений с 1,5-10”2 м4, 1,2-10”2 л4.
;и —ч
р 77М
1
1
■Щ- —Г— Л
«V»
с
♦
♦ Эпюра
— -6,0 Рис. 5.43
Начало поместим на левом конце. Тогда М00; Vо 0; 2оУа определится из условия М0; отсюда 2о
3 р1
т-т375Г’
Неизвестный начальный параметр ф0 определяется из условия 010;
®, ф„ I - Чо ? (,ф - ки,ы) 0- ()
Для вычисления комоментов построена эпюра гибкости с ординатами, увеличенными в Е1С раз, — эпюра
(с).
ф ф _ ф -у- (1,25-102 — 0,25-8 0,25.2) —
— — (1,25-10» — 0,25-8» 0,25.2»)
3
550 — 374,7 175,3 л3;
К I I — К? 374,7-10 — (1,25-10 —
— 0,25-8» 0,25-2) 877 л;
у О 25-5? - 0.25-3?) - 4".255-
— 0,25-3) 66 м.
Подстановка в уравнение () дает:
1 25,2
Фо-10 - 3,75 175,3 1 — (877 - 66) 0; ф0 —.
Л 111 с
Искомый прогиб
Е1С о05 25,2-5 - 3.75 (1 -5 0.25-22) -
]1-[у(Ь5» 0,25-2») 68;
12 21,5-Ю-5 л 2,15 мм.
-"(1-53 0,25-2»)
- —(1-5 0,25-2)
68
"0,51
2,1-10 -1,5-10“
«Графо-аналитический» метод определения перемещений в обыкновенных балках
Этим методом, являющимся следствием статикокинематической аналогии, следует пользоваться, когда под рукой нет справочных таблиц или развернутых формул метода начальных параметров.
Уравнения эпюр С н М для случая распределенных нагрузок переменной интенсивности рр(и) и пгт(и):
х х
Мх М0 2о х тйи — р (х — и) йи.
(5.129)
5.5. БАЛКИ
239
Уравнения эпюр р и V:
Ф — Фо •
X
М
Е1
йи-
X
■I
М
Е1
- (х — и) йи.
(5.130)
Эти эпюры тождественны эпюрам фиктивных поперечных сил 2 и фиктивных изгибающих моментов МФ, если под интенсивностями фиктивных нагрузок понимать приведенные ординаты действительных эпюр М и :
ь М ф (
рф. тФ
У
а начальные перемещения заменить начальными фиктивными усилиями:
Ф0 ; Уравнения эпюр р и о записываются в виде:
Рйи-,
X X
М 0 ] тфс1и — рф (х — и) йи.
(5.130')
Фиктивная нагрузка считается приложенной к фиктивной балке. В случае простой балки действительная и фиктивная балки совпадают. Вообще же свободному концу одной балки соответствует жесткое защемление другой, шарниру одной балки — опора другой. Фиктивная балка является частным случаем взаимной балки, имеющей упругое основание (см. 5.4.3). После определения фиктивной нагрузки и установления опор и шарниров фиктивной балки задача построения эпюр ф и о сводится к построению эпюр С и М.
Отметим, что эпюра прогибов простой балки от сдвига имеет форму действительной эпюры моментов балки в измененном масштабе.
Обычно влиянием деформации сдвига пренебрегают (упФ0). Если при этом Е1 сопз, то принимают рФМ (фиктивная нагрузка совпадает с эпюрой М). Перемещения р и V получаются увеличенными в Е1 раз. Если задана не нагрузка действительной балки, а погонная интенсивность угловой деформации от неравномерного нагрева О, то рФ'б,«.
Концевые углы поворота сечений простои балки как фиктивные реакции
Для этих углов (рис, 5,44) принимается специальное правило знаков и специальные обозначения. Углы поворота сечений р считаются положительными при повороте по часовой стрелке. Левый концевой угол поворота обозначается %л (или тв) и также считается положи¬
тельным при повороте по часовой стрелке, а правый обозначается тв (или Хь) и считается положительным при повороте против часовой стрелки. Углы та и %в равны фиктивным реакциям (рис. 5.44,а):
— —. М% фа -Фв -? у --—
(5.131)
Т»В Т86
ь Т. ‘В 1 Г Рис. 5.44
Здесь К — равнодействующая фиктивной нагрузки; а, Ь — плечи равнодействующей относительно опор.
Й
При Е1сопв1 ?Ф где О — площадь эпюры М.
Концевые углы поворота от опорных моментов (рис. 5.44, б):
МА 1%
МАФА
ТАА р
ХВВ — 2
Мв'Ъв
Мав
ХАВ ’р
ТВА" р
(5.132)
Здесь 1%. % — моменты инерции площади эпюры
гибкости относительно опорных вертикалей. Величина
— комомент, аналог центробежного момента инерции; для параллельных осей, совпадающих с концевыми вертикалями,
1ав (5 - 5) (1 - I1) • (5.133)
Здесь 5, 5 — статические моменты площади эпюры гибкости относительно опорных вертикалей.
При Е1сопз
Ма1
МВ1
%АА ЗЕ1 ’
%вв 3 Е1 ’
МВ1
Ма1
%лв 6Е1 ’
%ВА 6Е1 ‘
(5.132')
240
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
Очень часто под тлл, т в в и ХавТва понимают концевые углы поворота от единичных моментов Ма 1 или Мв 1. Первый индекс отмечает место перемещения, второй—вызвавшую его причину.
Концевые углы поворота вызываются также перекосом оси балки вследствие неодинаковых осадок опор на иА и яв.
Угол перекоса обозначается ф и считается положительным при повороте оси балки по часовой стрелке. Этот угол равен постоянному по длине балки углу поворота сечений р:
Ф —-— фв соП5;
т, ф; тв—гэ.
Формулы концевых углов используются при расчете неразрезных балок и рам. Если рассматривать осадки опор как фиктивные опорные моменты VА
М% то угол перекоса совпадает с фиктивной по-
. м-м
перечной силой .5.5.2. Абсолютно жесткая балка на упругом основании и обыкновенная балка с защемленными концами [153]
Уравнения эпюр
Если прогибы упруго опертой балки от ее упругого искривления весьма малы по сравнению с осадками, то тело балки можно рассматривать как абсолютно жесткое. К расчету таких балок сводится расчет общей прочности понтонов, паромов и дебаркадеров и других прямостенных плавучих сооружений, а также коротких и жестких ленточных фундаментов, опертых на грунт, рассматриваемый как винклеровское упругое основание. Использование статико-кинематической аналогии с абсолютно жесткой балкой упрощает расчет обыкновенных балок с защемленными концами.
Уравнение эпюры р
Фх фо
X
-Е 0-
0
— О (л- — с) —
_г(-1)2 (5.134)
2
Уравнение эпюры V (осадок) Х)х Фо х
X х
Е Г — Е® (х — и0)
о о
У (и) Ли — Г ъ (и) (х — и) йи.
о о
Уравнение эпюры О (5.136)
(5.135)
Ях — Со
0 Рх
Фо —
X
- Ер
0
Ег Рх_и 0
- 1в5ж_„-
0
— Р (х-сд
у8х—с
0
— 2 Х_С1 —
И 2
у'
т7-
Ъ'
2 хс'
X X
— р(и)(х—и) у (и)Зх_ийи
X
3х_и0и.
0
Уравнение эпюры М (5.137)
мхмо %х
% (хрх)
X X
Е — Е р (х—и 0 0
р) 2г 5_н-
0
X л
_Ев -р V х—и х—и)
0
--т(х—с) —р.(хс)
- (т
т, -.’ р, (-,’
(и -1., )■
б Х—Сх 2 Х—Сх)
XX X X
-Ьт(и)4и—Ыи)(х—и)аиу(и) х_и—р хйи-
0 0 0 0
В последних двух формулах величины Т7, 5, , К — моменты площади погонной отпорности оснований при
осадке к — ку кГсм2 [см. 5.1.7, формулы (5.9)]; 5, , С,
— соответственно комоменты этой площади; Р, 3, I — моменты площади отпорности при повороте с.
Сопоставление формул (5.134) — (5.137) с (5.119), (5.120), (5.124), (5.126) показывает, что вторая группа формул непосредственно следует из первой на основе обобщенной статико-кинематической аналогии (см. 5.1.8). Обыкновенная упругая балка и абсолютно жесткая балка на упругом основании представляют собой взаимные брусья. Примеры см. на рис. 5.30, а, а б, б'; в, в' и т. д.
5.5. БАЛКИ
241
Абсолютно жесткие балки со свободными концами на упругом основании
Отпорность основания (погонная) пропорциональна некоторому коэффициенту, характеризующему упругие свойства основания, и ширине подошвы балки в данном сечении. Отпорности выражаются произведениями
к к0Ъ; с с0Ь. (5.138)
Здесь ко кГ си3 — коэффициент отпорности при осадке; Со кГсм — коэффициент отпорности при повороте.
Обычно, принимают со0. Значения ко см. ниже —
5.5.6, табл. 5.5. В случае плавающей балки (понтон) по закону Архимеда ко равно удельному весу воды: к0у 1 тм0,001 кГсм3. Для песчаного основания ко 0,5 -т-5 кГсм3.
Если рассматривается практически наиболее важный случай силовой нагрузки, наперед заданные деформации отсутствуют, то напряжения по подошве балки а и одновременно осадки V определяются по формуле внецентренного сжатия:
? М ах
°х — “ТГ т Ъ (5-139)
г I к0
Здесь Р, I — геометрические характеристики подошвы балки, рассматриваемой как симметричное сечение некоторого бруса. При постоянной ширине Ьсопз
Ы3 '-1.
При желании учесть отпорность при повороте к величине добавляется величина Р
ко
Угол поворота балки вычисляется по формуле
М
ф — СОП5. к0
Этими же формулами можно воспользоваться при произвольно заданных законах изменения погонных отпорностей к и с, положив ко, с0 1. В этом случае под Р и следует понимать геометрические характеристики площади эпюры к. Добавка к для учета отпорности с равна Р (площади эпюры).
Обыкновенные балки с защемленными концами
На основе статико-кинематической аналогии построение эпюры М балки с защемленными концами сводится к построению эпюры о вдоль подошвы взаимной абсолютно жесткой балки со свободными концами.
Уравнение эпюры М записывается в виде:
МЛ
м(х)- (5Л41) Первое слагаемое — изгибающий момент от заданных нагрузок в основной системе, в данном случае простой балке. Второе слагаемое — изгибающий момент от лишних неизвестных (опорных моментов или иных двух лишних неизвестных, например 0 и М в любом сечении). Второе слагаемое определяется как напряжение от внецентрепного сжатия подошвы взаимной бал ки фиктивной нагрузкой. Подошва имеет в каждом се-
Ь —, где — — гибкость действиЕ1 Е1
тельной балки. На рис. 5.45, а эпюра гибкости " Для
Ем
чении ширину
наглядности изображена симметричной относительно
оси х.
Для векторов фиктивных нагрузок используется левая система координат.
Опорные моменты для случая, когда основная система взята в виде простой балки:
мф
рф
уф °А
мф
7ф св
(5.142)
УСгГГ11111П111ШШЬ Ья
(5.140)
Рис. 5.45
При построении л. в. изгибающего момента нагрузкой взаимной балки явится с. д. 01 или, что то же, фиктивный груз Я 1 в исследуемом сечении.
На рис. 5.45, б показано определение опорных моментов от принужденных поворотов защемлений на углы сра и фв и осадок опор на Ул и Уд. Соответствующая взаимная балка дана внизу. Угол фл соответствует отрицательной дислокации 0а, угол фв—положительной, поэтому вектор фл должен быть направлен вверх, вектор фв — вниз (на рис. 5.45 направление этих векторов следует изменить на противоположное). Осадки вниз соответствуют отрицательным опорным моментам:
М
(, 1 V ( САСВ 1
1-чфф уФв_7Ф——ф-у—
ф СА
м
( САСВ 1 ( СВ.
1— Ф4 Ф — рф )—ЧВ 7ФугФ 1
0 В-0 А
,Ф св-
(5.143)
)
Поперечная сила 2
МВ-МА
Фв
Ф СА уф Св
°В-°А
Ф
(5.144)
242
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
Для защемленной балки постоянного сечения
рф —• ф Р ’ 12 Р
Предыдущие формулы имеют вид:
Мг
(5.145)
п й° I 12 . М°Х-Т1 — хах]. (5.14Г)
Здесь 0 — площадь эпюры М°; — абсцисса ее
центра тяжести относительно середины пролета. При симметричной нагрузке х 0.
Опорные моменты от действия нагрузки:
М
М
(5.142')
Формулы (5.143) в (5.144) переходят в
м 2Е1 М,
2 Е1
Мв — — (2рв Фл — Щ)'
6 Р1
2 — — (ЯА Фв— Щ.
(5.143')
(5.144')
и Ув
На
Т
I
Учитывая наличие подбалки, эпюру М
спрямляют на участке Сй (см. прямую С'й'). Далее строят параболическую эпюру для подбалки с макси-
мальной ординатой —. Параболу пристраивают
8
к прямой СО перенося ее ординаты по вертикали. При ра(2
этом Е"ппЕ' —. На протяжении Сй эпюра (? пря8
молинейная. Нулевая точка т определяет абсциссу сечения Л1Макс:
йЪ. р йа
ет;тт:
м.
Эти формулы используются при расчете рам по методу перемещений.
5.5.3. Приемы, упрощающие построение эпюр и линий влияния статически определимых балок
Введение подбалок (рис. 5.46). Если нагрузку, приложенную непосредственно к балке (рис. 5.46,а), передать через подбалку (рис. 5.46,6), то опорные реакции и эпюры за пределами подбалки остаются без изменения, а в пределах подбалки эпюры для балки могут быть получены суммированием эпюр балки и подбалки.
На рис. 5.46, б введена подбалка на участке равномерно распределенной нагрузки. Эпюры М и на участках
КЬ
АС и йВ строят от силы Ярй по реакциям VА —
При построении эпюры М следует учесть, что касательные к параболе в точках С' и О сливаются с прямыми С'А и В'В (в этих точках нет переломов эпюры М).
Замена связей (рис. 5.47, а, в). Статически определимая консольно-балочная система (рис. 5.47, а) путем перестановки шарниров из сечений в пролетах в сечения над опорами превращается в систему простых балок (рис. 5.47,6). Крайняя левая балка имеет консоль, которая сначала в расчет не принимается. Для простых балок строят эпюры М. На рис. 5.47,6 эти эпюры имеют вид параболы, треугольника, трапеции и несимметричной криволинейной фигуры. Действительная эпюра отличается наличием опорных моментов, дающих в каждом пролете дополнительную прямолинейную (трапецеидальную) эпюру. Окончательные моменты в сечениях действительного расположения шарниров равны нулю. Опорный момент М0—Рс известен. Прочерчивая начиная от Мо ломаную через проекции шарниров (переломы над опорами), получаем дополнительную, в данном случае отрицательную эпюру. Алгебраическое суммирование ординат происходит автоматически.
Эпюру (3 строят сначала для всех простых балок (сплошные эпюры на рис. 5.47, в).
Дополнительные эпюры представляют собой прямоугольники с высотами, равными уклонам дополнительных эпюр М к горизонту:
Одоп5
мв-мА
I
Для автоматического суммирования дополнительные прямоугольники (показанные пунктиром на рис. 5.47, в) пристраиваются в направлении, противоположном их знаку. Окончательные ординаты отсчитываются от пунктирных горизонталей. Опорные реакции равны скачкам над опорами в эпюре 0.
5.5. БАЛКИ
243
Рис. 5.47
Построение линий влияния кинематическим методом осуществляется без применения или с применением взаимной (фиктивной) балки.
На рис. 5.47, г показана л. в. опорной реакции Уи совпадающая с эпюрой вертикальных перемещений V от действия укорочения опорного стержня № 1 на А1. Отложена ордината 11 1, далее через ее конец прочерчена прямая —, затем 1—0 и 11—111. Нулевые точки ломаной 0 и 2 соответствуют опорам, точки перелома и II — шарнирам. Во взаимной балке опорам заданной балки соответствуют шарниры, шарнирам — опоры, свободному концу — заделка, заделке —- свобод¬
ный конец. Взаимная балка — абсолютно жесткая, опертая на упругое основание (рис. 5.47, ?). Нагрузкой взаимной балки р является погонная угловая деформация О заданной балки. Для статически определимых балок упругое основание взаимной балки никакой роли не играет и может быть отброшено. При этом взаимная балка называется обычно фиктивной балкой. Эпюра вертикальных перемещений заданной балки строится как эпюра изгибающих моментов фиктивной балки от фиктивной нагрузки. Для построения л. в. М в исследуемом сечении прикладывается груз ©рф«»1 (рИс. 5.47,в). Для построения л. в. О поиклалывается мпмрнт Г Ф 1
244
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
(рис. 5.47,ж). Для построения л. в. в шарнире прикладываются два равных и противоположно направленных момента или изгибающий момент уМФ 1 (рис. 5.47, з). При этом учтено, что опорная реакция равна разности поперечных сил справа и слева от опоры.
5.5.4. Равнопролетные неразрезные балки на жестких опорах.
Метод бесконечной основной системы
Полубесконечная балка
Балка, нагруженная на левом конце моментом, не несущая другой нагрузки и простирающаяся вправо до бесконечности, находится в напряженном состоянии, изменяющемся от пролета к пролету по закону геометрической прогрессии с отрицательным показателем (рис. 5.48, а).
а)
вый, соответствующие левой и правой полубесконечным
балкам.
Положение фокусов ФиФ' (рис. 5.48,5) совпадает с положением точек редукции площади эпюры гибкости пролета. Расстояние фокусов от середины пролета равно радиусу инерции эпюры гибкости:
(5.146)
при Е1сопз
гф — 0,289 I «0,291.
2 3
Меньший и больший фокусные отрезки (расстояния от концов пролета):
-Т- '-Т
(5.147)
при Е1 соп§1 е 0,211 , 0,789.
Фокусное отношение (отношение концевых ординат эпюры данного пролета, взятое по абсолютной величине)
Показатель прогрессии с —1к является общим для всех одноименных факторов (например, изгибающих моментов или углов поворота) сходственных сечений в последовательных пролетах:
мам0(- т)П;т)П'
Отложив опорные факторы в виде ординат и соединив концы их ломаной, получают эпюру опорных факторов (рис. 5.48,6). Эпюра опорных изгибающих моментов, в отличие от других эпюр, например углов р, непосредственно дает эпюру изгибающих моментов на всем протяжении балки. Точки нулевого момента Ф' называются правыми моментными фокусами при нагрузке слева. Для правой полубесконечной балки при нагрузке слева они совпадают, как указано, с фокусами эпюр других факторов. Для конечных равнопролетных балок и неравнопролетных балок это равенство не соблюдается (за некоторыми исключениями).
Аналогичными свойствами обладает левая полубесконечная балка при нагрузке моментом на правом конце.
Бесконечная балка
Балка, нагруженная в пределах конечного числа пролетов, рассматривается слева от нагрузки как левая полубесконечная балка, а справа — как правая полубесконечная балка, причем концевые моменты этих балок заранее не известны. В каждом пролете бесконечной балки отмечаются два фокуса —левый и пра¬
•
.Ф
• 2 г
Ф ’
(5.148)
при Е сопз к 2 3 3,732.
Положение фокусов через фокусные отрезки:
‘-'гтт '-'гН (5М9)
Вместо фокусного отношения к иногда вводят числа влияния одного опорного фактора на следующий меньший:
— 2г
.Ф
2г
Ф ’
(5.150)
при Есопз с— — (2 — Уз ) — 0,268.
Построение линий влияния
На рис. 5.49, а и 5.49, б даны эпюры М от единичных активных опорных факторов Ы 1 и Оо 1. Кроме того, показаны эпюры V от тех же факторов. При этом
(5.151)
, I Уз I
если Е1 соп1, (р0 0,144 —,
-
1
Фоо
(5.152)
5.5. БАЛКИ
245
если соп51,
Уз Е Е1_
I ' I
Уравнения л. в.:
Фо [(г-1'?) - (2 - Г) (1 -1?)]
а
Эпюры моментов одновременно являются л. в. фо и Мо от подвижной фиктивной нагрузки: для получения фо и Мо достаточно «загрузить» эти эпюры фиктив-
12 Е'
Уз
Л0 -[('-1'8)-(2-Кз )(-)]
На других пролетах ординаты получают последовательным делением на к с переменой знака. Для дру__ гих опорных моментов л. в. получают сдвижкой на 400 1, 2, 3,. пролета влево и вправо. Определив при помощи л. в. от фиктивной или действительной нагрузки все опорные моменты, строят эпюру опорных моментов в виде ломаной, которую затем продолжают за пределы нагрузки через левые и правые фокусы (рис. 5.50, а).
Конечная равнопролетная балка
Пусть балка имеет п пролетов и шарнирно опертые концы Л, В (рис. 5.50, вверху). Рассматривая балку как бесконечную, определяют опорные моменты М и Мд. Над опорами прикладывают неизвестные сосредоточенные моменты Ха и Хв и строят в произвольном масштабе эпюры М°° от этих моментов
Рис. 5.49
ными реакциями та и хв отдельных пролетов, рассматриваемых как простые балки под действием заданной нагрузки. Располагать временную нагрузку следует на участках одного знака.
Эпюры прогибов дают л. в. фо и Мо для подвижной действительной нагрузки. Для двух пролетов, смежных с опорой 0, эти л. в. приведены на рис. 5.49, в.
п пролетов
(рис. 5.50,6, в), причем находят дополнительные опорные моменты в сечениях А и В. Неизвестные Ха и Хв определяют из условия обращения изгибающих моментов Ма и Мв в нуль. Получают два уравнения:
А хв 1 л
тт(-т)0
246
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
Отсюда
ХВ ХА I 1 л
тт (-г) °-
где
-КГ-
1-т
Другие граничные условия удовлетворяются аналогично. Окончательную эпюру получают путем суммирования эпюры от нагрузок с эпюрами от найденных значений ХА и Хв.
5.5.5. Равнопролетные неразрезные балки постоянного сечения на упруго оседающих опорах [87, 92]
Метод начальных параметров
Концевые опоры могут быть любыми, в том числе упруго оседающими, упруго поворачивающимися, жестко защемляющими. Промежуточные опоры — упруго оседающие одинаковой отпорности.
Отпорностью опоры х кГсм называется реакция в кГ, возникающая при осадке опоры на 1 см. Пролет между смежными опорами ; жесткость балки Е1 и3
соп; с
6Е1
(отвлеченное число). Опорные сече¬
ния нумеруются, начиная от левого конца: 0, 1, 2,
1, , 11,., я—1, п, п,., 5—1, 5.
Реакция опоры (положительная направлена вверх)
— Р„ х»п,
Левые и правые опорные ординаты эпюры
поперечных сил
Оо К О0 К Ро с’- м0 й"п [Эд[; ?„пр Гп™п.
(5.155)
(5.153)
Штрихи введены, чтобы отличать функции влияния.
Развертывание грузовых членов, взятых в фигурные скобки. В случае сосредоточенных воздействий Г,-, 0», Ей Р% (Кп) приложенных в опорных сечениях (сила Рх считается приложенной непосредственно справа от опоры ), развертывание делается по известным правилам при помощи функций влияния, стоящих при соответствующих начальных параметрах. Например:
°л — Г» Ап-1 — Вп- — Сп- Р1 ®п-1-
Знаки определяются тем, что Г и I эквивалентны положительным скачкам соответственно в эпюрах V и Му а
0 и Р эквивалентны отрицательным скачкам в эпюрах Ф и (?.
В случае нагрузок и других воздействий между опорами развертывание требует предварительного подсчета грузовых членов для балки без упругих опор. Эти грузовые члены обозначаются [о], [в], [Мг], [0,], и вычисляются при помощи вторых и последующих строк формул (5.119) — (5.122):
п—1
(5.154)
где уп—прогиб опорного сечения, численно равный осадке опоры.
Эпюра С? имеет над опорами скачки, определяемые величиной и направлением Уп. Решение по методу начальных параметров дается в виде формул для опорных ординат четырех эпюр.
Опорные ординаты эпюры прогибов (осадок опор)
Уо Ап Фо вп — М0Сп — 2о йп »„.
Опорные ординаты эпюры углов поворота
Ч‘п %А'п-М0в'п-0С'п-»0О'п ф„. (5-155)
Опорные ординаты эпюры изгибающих моментов
Мп М0 Ап Вп г0Слф01яЛ1л.
Функции влияния для прогибов:
Ы ы-ды °п-1
Ы Ы Ы С’п-с К) К] В"п-1
з„ [(з„]хе1и а;_г
(5Л56)
Функции влияния даются в зависимости от аргумента п—1, 2,., 6. Справа подсчитаны функции влияния при с0,1.
А 1 1 (отвлеченные числа);
Ах - 1;
А% 1 — с;
Аг 0,90;
Ад —• 1 9С “— с2;
Аз 0,11;
А4 1 — 36с 17с2 — с3;
у44 — 2,431;
А 1 — 100с 135с2 — 25с3 с;
Л5 — 7,6749;
Аь — 1 — 225с 965с2 — 298са — 33с4 — с?;
Ав — 12,14471:
5.5. БАЛКИ
247
Вг I (размерность см); В — I;
В2 1(2 — с); В2 — 1,9;
В3 1(3 — 10с с2); В3 2,01;
В4 (4 — 46с 18с2 — с3); А, — 0.42Н;
Вь (5 — 146с 153с2 — 26с3 с); Въ — 8,09591
В6 I (6 — 371 с 848с2 — 324с3 34с' — с?); В6 — 22,940611;
С3 —г— (9 — 12с с2); С3 7,81
(16 —68с 20с2 —с3); С4 9,399
с5 (25 - 260с 191с2 - 28с3 с); Съ 0,8821 5
:б тт- (36 - 777с 1192с2 - 378с3 36с - с»); Сб - 30,15441 2
2Е1
2
2Я
2
2Е
2
2Е
2
2Е1
2
2Е1
3
6Я
3
6Я
3
6Е
3
6Е
3
6 Е1
3
-Ь.
1 2Е1 ’
2
(4 — с); С2 3,9
2Д ’ 2 2Е1 ? 2
2Я ’ а 2Е1
2Е1
А
1 6Я ’
3
6Е
(27 — 16с с2); 3 25,41
(64 — 118с 24с2 — с3); Я4 52,439
(125 — 560с 273с2 — 32с3 с4); 05 71,6981
6Я ’ 3 6Е : 3
6Е
ТрГ (216 2Шс 2000с2 "" 492с3 40с4 35,21199 ——.
ос (эЕ1
I3
При вычислениях можно произвести замену
л3 л4
5
лб
Функции влияния для углов поворота; (отвлеченные числа); л[ 1;
— Зс; Л'2 0,7;
— 18с Зс2; 4 - 0,77;
— 60с 42с2 — Зс3; — — 4,583;
— 150с 285с2 — 66с3 Зс4; Л5 — 112 157;
— 315с 1308с2 — 702с3 90с4 — Зс5; А'6 — 18,11303;
В (размерность см х.кГ 1. В, ——;
Ы Е1
В'2(2-1,5сУ, В'1(85__;
248
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
В'з (3 — 12с 1,5 с2);
в; 1.815--;
В (4 - 51с 24с2 - 1,5с3);
в; 0,8615 — ;
В'5 -4г (5 — 156с 187,5 с2 — 36 с3 1,5с4); Е
В'5 8,76085--;
В’6-г (6 — 388,5с 984с2 — 420с3 48с4 — 1,5с5); — 23,425215 —, Е1 Е1
Функции с'п.
совпадают с функциями Сп_
1 0 (размерность см"_1);
00;
е 3 С °2— ;
о; 0,3--;
о; -(5-с);
о;1,47у;
-у- (14 — 1 Зсс2);
3,813-р
Оз -у- (30 —81с 21 с2 — с3);
Од 6,6327--;
о _
Г6 — (55 — 341с 212с2 — 29с3 с4);
Од 6,89757 -у-.
Функции влияния для изгибающих моменте
Ап—1 — п—1 — ®п—(
Сх— 0 (размерность к Г);
с;0;
С х;
С2 х;
1
со
II
ч?
С3 2,9х;
С4 х1 (6 — 11 с с2);
С4 4,91х;
С5 х (10 — 57с 19с2 — с3);
Сд 4,489 х;
Сд х (15 — 203с 172с2 — 27 с3 с4);
С' —3,6069 х.
0 (размерность кГсм)
О,' 05
щ х2;
2 х2;
о; х2(4-с);
©3 3,9 х2;
С4 хг2(10— 12с с2);
1)4 8,81 х2;
й5 х2 (20 — 69с 20 с2 — с3);
Г5 13.299Х2
Од х2 (35 — 272с 192с2 — 28с3 с4);
6 9,6921 х2.
Функции влияния для поперечных сил
А’п-1 Ап-1
в" О,
В,” 0;
Во х;
Д х;
В3 х(2 с);
Вд 1,9 х;
5.5. БАЛКИ
249
в1 И (3 — Юс с2);
■с3);
В5 х (4 — 46с 4- 18с В"6 х (5 — 146с 153с2 — 26с3 с4);
Сп—1 — кег, Оп__[ — Вп— см 1.
Пример 5.3. Четырехпролетная балка с пролетами 4 м оперта на промежуточные равноупругие опоры и 30 Тм отпорность концевых опор Хо Х4 50 Тм. Построить эпюру моментов от нагрузки р (рис. 5.51), Е2107 Тм2; 16-105 м
В4 2,01 х;
В"ъ — 0,421 х; В1 — 8,0959 к;
Вычисляем:
хз
С6Е “
30-4
- Г 1
6-2-107.16-ИГ5 ““ '
Начальные параметры: М00; Рохо0о; Уо; фо. Уравнения для определения неизвестных начальных параметров: 1) ЛЦ0; 2) ?4——-Х404.
») х0 % В4 »0 С Фо К) °»
или
[50 (—1,684) 589,2] р0 4228,8 (М4 0;
Х0 °0 4 °0 4 Фо 4 4
— 4 (»о А4 Фо б„ — х0 о0 С4) _ и4 у4,
ИЛИ
00 [50 (—2,431) 60,3 50(—2,431) — 50-50-0,1748] р„ [589,2 50 (—1,684)] ?4 50 о4 0, откуда
о0 -0,0001753 М4) 0,00147 34 0,00147-50 »4; Фо “ — 0,0002154 Л4 — 0,0001753 ?4
0,0001753-50 »4.
В данном случае:
4 [Л14] х V [ V.] В1_, -р —-'П
1
(3 — 2)4 24 Е1
30р-
• 1 — 31,6р;
30
Р14 24Б з
1 — 7,9р;
К К]-ХЕМ С4-'р
(4 — 21)
-30
р4
24Е
тЧ
(1
2 4
ё 3
24Е
4.0,1
-),о,
053р.
32-102 24-32-102
Подставляя находим:
у0 0,002178р; р0 0,005886р;
Со -0,2089р. М0 0;
отсюда:
Мх — 0,1089р- 4 — 0,4356р;
М3 — 0,1089р-1,9-4 — 0,002178р-30-4
0,005886р. 30-42 2,616р;
М3 — 0,1089р-2,01 -4 — 0,002178р-2,9-30-4
0,005886р-3,9-30-4 — р 4,83р; Л4 0.
Этими ординатами определяется ломаная эпюра, являющаяся окончательной в пролетах 0—1 и 1—2. В пролетах 2—3 и 3—4 к сторонам ломаной прибавляются параболические эпюры от местной равномерно распределенной нагрузки. Имея эпюру моментов, можно получить эпюру ( и реакции, а по ним и прогибы (осадки) опорных сечений. На рис. 5.51 показана также л. в. М%х построенная как эпюра прогибов от Ва 1.
Подробные таблицы для расчета по методу начальных параметров см. [93]. Случай упруго оседающих й упруго вращающихся опор см. [157]. Балки перемен[154] С6ЧеНИЯ На УПРУГИХ 0П0Рах различных типов см.
Бесконечная и полубесконечная балки
Расчет конечных равнопролетных балок по таблицам для бесконечных балок см. первое издание, стр. 245— 246 и табл. 8.1.19, 8.1.20.
5.5.6. Балка на упругом (винклеровском) основании
[86, 43, 44, 75]
Общие данные
Предполагается, что сплошное основание развивает погонную реакцию, пропорциональную прогибу (осадке) и направленную противоположно прогибу:
250
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
Рреакт (5.161)
Здесь к кГсм2 — отпорность основания при осадке. Величина к зависит от характера основания.
Отпорность грунтового основания в первом приближении принимается равной произведению коэффициента отпорности (коэффициента постели) к0 (табл. 5.5) на ширину подошвы балки Ь:
к к0Ь. (5.162)
Таблица 5.5 Ориентировочные значения к0
Таблица 5.6
Гиперболо-круговые функции
Материал основания
к0, кГсм3
Плывун, песок свеженасыпанный, глина мокрая, размягченная Песок слежавшийся, балластный, гравий насыпной, глина влажная Песок, гравий, плотно слежавшийся, щебень,
глина малой влажности, « Песчано-глинистый грунт, искусственно уплотненный, глина твердая • «••••.«•» Мягкая скала (известняк, песчаник). •.
0,1—0,5
0,5—5
5—10
10—20
20—100
В настоящее время интенсивно развивается также представление о грунте как основании с двумя коэффициентами отпорности, лучше представляющем физические свойства грунта, и соответствующая теория балки [99 и 100]. Расчет балок, опертых на грунт, представляемый в виде упругой полуплоскости или полупространства, см. раздел 19.
В случае плавающей балки коэффициент отпорности равен удельному весу воды: к0у1 Тм или
0,001 кГсм3.
Если основанием служит большое число сближенных поперечных балок или поперечин, опертых на грунт, то
к ——, где б — податливость (перемещение от единична
ной нагрузки) поперечины, а — расстояние между осями поперечин.
Вырезанная вдоль образующей из цилиндрической оболочки при осесимметричной нагрузке элементарная балка-полоска по характеру работы является балкой на упругом основании.
Если Е1сопз, ксопз, отпорность при повороте
с 0, - 0, система уравнений равновесия и совОРу
местности деформаций (5.118) принимает вид:
ао ау м
—— _ р Ь; — — О — — йх йх Е
(5.163)
ам ао
—— Э т; — ф 1. (5.164)
ах ах
и приводится к одному дифференциальному уравнению четвертого порядка для прогиба или к аналогичному уравнению для изгибающего момента:
Ео™ ко
тм
IV
М
Е1
-0. (5.165)
Характеристикой балки называется длина АЕ1
см.
(5.166)
о
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1.0
1,1
1,2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
2,0
2,1
2.2
2.3
2.4
2.5
2.6
2.7
2.8
2.9
3.0
3.1
3.2
3.3
3.4
3.5
3.6
3.7
3.8
3.9
4.0
4.1
4.2
4.3
4.4
4.5
4.6
4.7
4.8
4.9
5.0
6.1
5.2
5.3
5.4
5.5
5.6
5.7
5.8
5.9
6,0
6,1
6,2
6.3
6.4
6.5
Ах
вх
°х
1
1,0000
0,9997
0
0,1000
0,2000
0
0,0050
0,0200
0
0,00015
0,00135
0,9987
0,9957
0,9895
0,2999
0,39965
0,49895
0,0450
0,0800
0,1248
0,0045
0,0107
0,0208
0,9784
0,9600
0,9318
0,59745
0,6944
0,7891
0,17975
0,24435
0,31855
0,0360
0,0571
0,08515
0,8931
0,8337
0,7568
0,88035
0,96675
1,04645
0,40205
0,49445
0,59515
0,1211
0,1657
0,2203
0,6561
0,5272
0,3556
1,1173
1,1767
1,22165
0,70345
0,81825
0,9383
0,28515
0,3612
0,4490
0,1664
— 0,0753
— 0,3644
1,24855
1,2535
1,2319
1,06195
1,18725
1,3118
0,5490
0,66145
0,7864
— 0,7060
— 1,1049
— 1,5656
1,17885
1,0888
0,95575
1,4326
1,54635
1,64895
0,9237
1,0727
1,2325
— 2,0923
— 2,6882 — 3,3562
0,7735
0,5351
0,23345
1,73585
1,8018
1,84075
1,4019
1,57905
1,7614
— 4,0976
— 4,9128
— 5,8003
— 0,1386
— 0,5885
— 1,1236
1,8461
1,81045
1,72555
1,94605
2,12925
2,3065
— 6,7565
— 7,7759
— 8,8471
— 1,7599
— 2,4770
— 3,3079
1,58265
1,3721
1,08375
2,47245
2,6208
2,7443
— 9,9669 —11,1119 —12,2656
— 4,24845
— 5,30225
— 6,47105
0,70685 0,2303 — 0,3574
2,8346
2,8823
2,8769
—13,4048
—14,5008
—15,5198
— 7,7549
— 9,15065 —10,65245
— 1,0678
— 1,9121
— 2,9014
2,80675
2,6589
2,4195
—16,4218 —17,1622 —17,6875
—12,25075
—13,9315
—15,67605
— 4,04585
— 5,35435
— 6,8343
2,0735
1,60485
0,9969
—17,9387
—17,8498
—17,3472
—17,45985
—19,25235
—21,0160
— 8,4909 —10,3265 —12,3404
0,2321
— 0,7073
— 1,8392
—16,3505
—14,7722
—12,5180
—22,70545
—24,26685
—25,63725
—14,52735
—16,8773
—19,37425
— 3,1812
— 4,7501
— 6,5615
— 9,4890
— 5,5791
— 0,6812
—26,74465
—27,50565
—27,8274
—21,9959
—24,71165
—27,4823
— 8,6290 —10,9638 —13,57315
5,3164
12,5239
21,0504
—27,60515
—26,72385
—25,05645
—30,2589
—32,9814
—35,57745
—16,4604
—19,6232
—23,0525
30,9997
42,4661
55,5317
—22,46605
—18,8057
—13,9201
—37,96185
—40,0350
—41,68225
—26,7317
—30,6346
—34,72455
70,2637
86,7044
104,8687
— 7,6440 0,19005 9,75435
—42,77265
43,15925
—42,67745
—38,9524
—43,2557
—47,5556
124,7352
146,2448
169,2837
21,2199
34,7564
50,5203
—41,14535
—38,32395
—34,1198
—51,75625
—55,74285
—59,38045
193,6813
219,2004
245,5231
68,65775
89,29465
112,5249
—28,2116
—20,3042
—10,2356
—62,5106
—64,9518
-66.3981
272,2487
298,8909
324,7861
138,4120
166,9722
198,1637
2,28885
17,5862
35,77125
—66,91745
—65,9486
—63,31045
5.5. БАЛКИ
251
Продолжение табл. 5.6
Продолжение табл. 5.7
Ах
6,6
349,2554
231,88005
57,2528
—58,6895
6,7
371,4244
267,9374
82,2255
—51,74295
6,8
390,2974
306,0558
110,9037
—42,11895
6.9
404,7145
347,34985
143,4927
—30,1819
7,0
413,3762
386,80715
180,1191
—13,2842
7,1
414,8263
428,2849
220,87175
6,7296
7,2
407,4216
469,4772
265,76635
31,02805
7,3
389,3783
509,41565
314,72645
60,0189
7,4
358,7306
546,93425
367,56875
94,1019
7,5
313,3700
580,67095
423,9858
133,6506
7,6
251,0334
609,0402
483,5233
179 00345
7,7
169,3472
630,22945
545,5557
230,44115
7,8
65,8475
642,1835
609,25955
288,16805
7,9
— 62,0375
642,58715
673,6057
352,3123
8,0
— 216,8647
628,8779
737,31005
422,8713
8,1
— 401,1674
598,23435
798,81785
499,7008
8,2
— 617,4142
547,5808
856,28775
582,49745
8,3
— 867,9091
478,5993
907,5542
670,7544
8,4
—1154,6587
372,78655
950,11575
763,7226
8,5
—1479,3701
241,41355
981,0984
860,3917
8,6
—1843,2880
75,6088
997,25265
959,44835
8,7
—2247,0402
— 128,58235
994,93765
1059,2289
8,8
—2690,4845
— 375,1167
970,1255
1156,18385
8,9
—3172,6917
— 667,9794
918,36635
1252,35606
9,0
—3691,4815
—1010,87995
834,8607
1340,3007
9,1
—4243,5551
—1407,3690
714,40845
1418,0930
9,2
—4824,0587
—1860,5365
551,49275
1481,76105
9,3
—5426,5154
—2372,94855
340,3091
1526,7834
9,4
—6042,3167
—2946,2708
74,8875
1548,0229
9,5
—6660,9594
—3581,47555
—250,9985
1539,7669
Отношение 1Х называется приведенной длиной балки, хХ% называется приведенной абсциссой.
Уравнения эпюр
Общее решение по методу начальных параметров в виде уравнений четырех эпюр дается в гиперболо-круговых функциях Л, В, С, О (функции Крылова):
Ах А () сЬ 1 соз
Вх В() -у (сЬ I зп зЬ соз 6).
(5.167)
Таблица 5.7
Затухающие функции
«“Т
"х
ух
Х7
X
0
1
1
0
1
0,1
0,9003
0,8100
0,0903
0,9906
0,2
0,8024
0,6398
0,1627
0,9651
0,3
0,7078
0,4888
0,2189
0,9267
0,4
0,6174
0,3564
0,2610
0,8784
0,5
0,5323
0,2414
0,2968
0,8231
0,6
0,4529
0,1430
0,3099
0,7628
0,7
0,3798
0,0599
0,3699
0,6997
0,8
0,3131
—0,0993
0,3223
0,6353
0,9
0,2527
—0,0658
0,3185
0,5712
1,0
0,1987
—0,1169
0,3096
0,5083
1,1
0,1509
—0,1458
0,2967
0,4476
х
X
цх
Ух
1,2
0,1091
—0,1716
0,2807
0,3898
1,3
0,0729
—0,1897
0,2626
0,3355
1,4
0,0419
—0,2011
0,2430
0,2849
1,5
0,0158
-0,2068
0,2226
0,2384
1.6
—0,0059
—0,2077
0,2018
0,1960
1,7
—0,0236
—0,2046
0,1812
0,1576
1.8
—0,0376
—0,1985
0,1610
0,1234
1,9
—0,0484
—0,1899
0,1415
0,0932
2,0
—0,0563
—0,1793
0,1230
0,0667
2,1
—0,0619
—0,1676
0,1057
0,0438
2,2
—0,0652
—0,1547
0,0895
0,0244
2,3
—0,0668
—0,1416
0,0748
0,0080
2,4
—0,0669
—0,1268
0,0613
—0,0056
2,5
—0,0658
—0,1149
0,0492
—0,0166
2,6
—0,0637
—0,1020
0,0383
—0,0254
2,7
—0,0668
—0,0895
0,0287
—0,0320
2,8
—0,0573
—0,0777
0,0204
—0,0369
2,9
—0,0534
—0,0666
0,0132
—0,0403
3,0
—0,0493
—0,0563
0,0021
—0,0422
3,1
—0,0450
—0,0469
0,0019
—0,0431
3,2
—0,0407
—0,0383
—0,0024
—0,0431
3,3
—0,0365
—0,0306
—0,0058
—0,0422
3,4
—0,0323
—0,0238
—0,0085
—0,0408
3,5
—0,0283
—0,0177
—0,0166
—0,0388
3,6
—0,0245
—0,0124
—0,0121
—0,0366
3,7
—0,0210
—0,0079
—0,0131
—0,0341
3,8
—0,0177
—0,0040
—0,0137
—0,0314
3,9
—0,0147
—0,0008
—0,0140
-0,0286
4,0
—0,0120
0,0019
—0,0139
—0,0258
4,1
—0,0096
0,0040
—0,0136
—0,0231
4,2
—0,0074
0,0057
—0,0131
—0,0204
4,3
—0,0055
0,0070
—0,0125
—0,0179
4,4
—0,0038
0,0079
—0,0117
—0,0155
4,5
—0,0023
0,0085
—0,0108
—0,0132
4,6
—0,0012
0,0089
—0,0100
—0,0111
4,7
—0,0001
0,0090
—0,0091
—0,0092
4,8
0,0007
0,0089
—0,0082
—0,0075
4,9
0,0014
0.0087
—0,0073
—0,0059
5,0
0,0019
0,0084
—0,0065
—0,0046
5,1
0,0023
0.0080
—0,0057
—0,0033
5,2
0,0026
0,0075
—0,0049
—0,0023
5,3
0,0028
0,0069
—0,0042
—0,0014
5,4
0,0029
0.0064
—0,0035
—0,0006
5,5
0,0029
0,0058
—0,0029
0,0000
5,6
0,0029
0,0052
—0,0029
0,0005
5,7
0,0028
0,0046
—0,0018
0,0009
5,8
0,0027
0,0041
—0,0014
0,0013
5,9
0,0026
0,0036
—0,0010
0,0015
6,0
0,0024
0,0031
—0,0007
0,0017
6,1
0,0022
0,0026
—0,0004
0,0018
6,2
0,0020
0,0022
—0,0002
0,0019
6,3
0,0019
0,0018
0,0001
0,0019
6,4
0,0017
0,0015
0,0002
0,0018
6,5
0,0018
0,0012
0,0003
0,0018
6,6
0,0015
0,0009
0,0004
0,0017
6,7
0,0013
0,0006
0,0005
0,0016
6,8
0,0011
0,0004
0,0006
0,0015
6,9
0,0010
0,0002
0,0006
0,0014
7,0
0,0007
0,0001
0,0006
0,0013
7,1
0,0006
—0,0000
0,0006
0,0012
7,2
0,0005
—0,0001
0,0006
0,0011
7,3
0,0004
—0,0002
0,0006
0,0009
7,4
0,0003
—0,0003
0,0006
0,0008
7,5
0,0002
—0,0003
0,0005
0,0007
7,6
0,0002
—0,0003
0,0005
0,0007
7,7
0,0002
—0,0004
0,0005
0,0006
7,8
0,0001
—0,0004
0,0005
0,0005
7,9
0,0001
—0,0004
0,0004
0,0004
8,0
0,0001
—0,0004
0,0004
0,0003
252
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
Формулы дифференцирования функций:
С С () — зЬ 31П 5;
Ох О (1) “ (сЪ 6 81П I — зЬ I соз I). 4
(5.168)
,-1»
л -'Х
Я
авх 1
йх
йСх
йх
тв:
йх
йВх
х Ах'
йх
Сх.
(5.169)
Функции даны в табл. 5.7. Более подробную таблицу (аргумент через 0,01) см. первое изд. п. 8.4.1. Уравнение эпюры прогибов (эпюры напряжений по подошве, уменьшенной в ко раз).
Обозначения нагрузок и дислокаций в формулах (5.170) — (5.173) соответствуют рис. 5.39:
Уо Ах Яф0 Вх
X
Е
■м0сх
X3 - Е1 V Ах-и ®Вх-и аиг тСх-ии Р°х-гАи-
(5.170)
Уравнение эпюры углов поворота (эпюры тангенсов углов наклона эпюры напряжений, уменьшенной в ко раз):
ф — Фо Ах Мо Вх 1 о Сх X
-2 9- тг II “«- -гг 2рс— -т 2го—-
0 0 0 0
а а й а
Ах-и аиЁГ§ тВх-и 17“ РСх-иаи У°х-иаи-
(5.171)
Уравнение эпюры изгибающих моментов:
Мх — М0 Ах 4 Що 4 уо Сх --кХ3 фо Ох 4- 2 ЬАх_и —Я 2 РВх_и 4- кХ 2 ГСх_и -Ш 2 ы
0 0 0 0
а (I а а
4- тАх__ийи — Я рВх_ийи --кХ21 С ®х—и и
(5.172)
Уравнение эпюры поперечных сил:
x — Яо Ах 4 кХх)о Вх 4 к№ фо Сх А?о
РАх_и кХ
Г-г
о
Вх_и - кХ
й
4 Г
— рАх_иЛи кХ уВ г_п 1и — кХ ■дСх_и1и— тОх_и4и.
(5.173)
5.5. БАЛКИ
253
Интегралы третьих строк раскрываются следующим образом. Функции внешних воздействий р, т, Ф, у обозначим в общем виде через («) и ее производную — через У (и).
Интегралы берутся по частям:
й а а
Ки)Ах_ийи-%[(и) Вх_и ,-х[ [ (и) Вх_и] ас -1 ' (и) Вх_иЛи.
Точно так же получим:
«) -%[[ (и) Сх_и]“с -1Г («) Сх_иЛи);
С С
I («) с_нА, -Ц[(«)-]'' (и) 0,_н«;
С с
й а
(и) Ох-и ли ([ (ы) Л„_ц] Г (и) Л.
(5.174)
)
Для случая прямоугольной эпюры воздействий(и) соп51,'(и) 0 (например, равномерно распределенная нагрузка) интеграл в скобках отпадает (см. рис. 5.40):
а
еАх_и «- [вх_и]4с §к (вх_с - вх_й)-
I 8х—и — 8 [х—и]с 8 (ж—с х—о)'
С
а
§Сх_и Ли -§Х [йх_Хс 1х-с - пх-а)
С
а
еОх-иОи -■ X [Ах_илс - ± Я (А-А).
С
Если воздействие распределено по закону треугольника с основанием (й—с) и уклоном §1, то (и) §1(и—с), '(и) 1сопз1 и формулы будут:
й
§1 (и с) Ах__и йи — цх% [А, (Сх_с х—й) № с) »
с
а
1 (и с) х—и 32 (°х-с ®х—й ) № с) й] »
с
й
(и с) Сх—и 1 х—с х—й) “Ь с) х—]»
с
а
1 (и с) х—и и “ с ) (5.175)
(5.176)
Однопролетная балка
Два других определяются из условий на другом Начало при произвольной нагрузке помещают, как конце: правило, на левом конце. При симметричной нагрузке и 1) при свободном конце Ф 0; М 0;
симметричных опорных условиях — посередине пролета. 2) при шарнирно опертом М0; о 0;
Два из четырех начальных параметров заранее известны. 3) при жестко заделанном р0; у0;
254
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
4) при неповорачивающемся, но допускающем смещение ф0; 00.
Начальные параметры однопролетной балки всегда получаются путем решения двух уравнений с двумя неизвестными. Для балки с обоими свободными концами эти уравнения имеют вид:
к№ С1Ро кВ1 °0 [3] °
откуда
к0
_1_
фо кХа
%Р1 [(?,] - С [Мг с в1о1
с-в1о1
Формулы для других граничных условий см. первое издание табл. 8.4.2.
Пример 5.4 (рис. 5.52). Пролет балки 20 м. Ширина постели Ь 1,25 м. Модуль упругости балки (бетон) Д10в Тм2. Момент инерции сечения балки
0,256 ле4. Коэффициент отпорности основания ко 3,2 кГсм3 200 Тм3. Нагрузки: 1 10 Г, Р2 15 7 р2 Тпог. м. Абсциссы « 5 м, м212 м, с—6 му й 16 м.
Вычисляем:
Е0,256- 10е Тл2; к к0Ь а 200-1,25 4 000 Гж2. Характеристика
4Е 4-0,256-10'
-УТТ 4 000 “
4 м.
Составляем выражения свободных членов в формулах (5.177):
а
[Л] - ярх В,_и1 - ХР2 В,_щ - Хр в,_и аи
- - хр2 _ Я „ (С,_с - С [_,)■,
[г] — 1 А(1—и.) 2 -ы, (В1—с — В1-а)-
Выписываем нужные значения функций, входящих в формулы (5.177), и свободные члены
(5.177)
Отре¬
зок
Длина в м
Приведенная абсцисса %
А ()
В ()
с (1)
о (1)
20
5
—25,05645
—35,57745
—23,0525
—
15
3,75
—1774552
—14,79715
—
—«2
8
2
— 1,5656
0,95575
—
—с
14
3,5
—
—10,65245
— 2,9014
1—й
4
1
0,96675
0,49445
Вычисляем:
[Л20] — 4-10 (— 14,79715) — 4-15 (0,95575) — — 42-2 (— 2,9014 — 0,49445) 643,2 Тм [Э20] — ю (— 17,4552) — 15 (— 1,5656) —
— 42 (— 10,65245 — 0,96675) 291 Т;
С 20 20 20 :
4000-42
Фо —
По формулам (5.177):
1 4 (—23,0525) 291,0—(—35,57745)643,2 _
688.15 — 0,00008973 м;
1 (—25,05645)643,2—4(—35,57745)291,0
688.15 0,0001436.
4000-43
По формуле (5.172) выражаем момент в сечении с абсциссой х2:
0,5 2 0,5 ф0 0,5 1 0,51—щ
0,5
— р% Д0,5—иаи
с
причем по формуле (5.174)
0,5
1 В0.Ы—и А, (0,5—с С0) 0,5—с
Напряжение грунта, равное прогибу, умноженному на коэффициент отпорности основания,
а0,5 — 0 У0,5 — ко (0 А),5 ф0 0,5 0,5
X3 X3 г Е1 10,5- Р ) 0,51-иаи)
с
0,5
Г Л.
А),5—и — — (Л05_с — 1).
5.5. БАЛКИ
Отыскиваем значения функций:
Отре¬
зок
Длина в м
Приведенная абсцисса
А (1)
в (1)
с (1)
0(1)
0,5
10
2,5
—4,9128
—0,5885
1,81045
2,12925 ’
0,51—щ
5
1,25
—
1,1486
—
0,32175
0,51—с
4
1
0,8337
0,49445
Подставляем найденные выше величины Уо и ро и значения функций:
М05 4000-42 (— 0,00008973) 1,81045
4000•43•0,ООО1436•2,12925 — 410-1,1486 —
— 242-0,49445 6,11 Тм;
ооы 3200 [— 0,00008973 (— 4,9128)
и
43
4-0,0001436 (—0,5885) 10 0,32175—
7 0,256-106
44 2 1
—. — (0,8337— 1)
0,256-106 4 3,16 Гл2 0,316 кГсм2.
Для определения опасных сечений следует построить эпюру напряжений грунта и эпюру поперечных сил. Нулевые точки эпюры Ц указывают сечение с относительно наибольшими и наименьшими моментами. На рис. 5.53 даны эпюры коъу к0р, М и (.
Свойства балки со свободными концами. Балка, нагруженная сплошной нагрузкой, распределенной по закону прямой линии рхро--р'х, ведет себя как абсолютно жесткая: эпюра осадок представляет собой прямую Vx-- (рор'х), а напряжение по подошве равно
ох — (рор'х). Усилия во всех сечениях равны нулю. Ь
Балка, нагруженная на конце силой или парой, деформируется в зависимости от ее приведенной длины. На рис. 5.53 и 5.54 показаны эпюры осадок от 1 и Р 1, одновременно являющиеся л. в. начального угла поворота фо и начальной осадки (прогиба) При
— 3 4 балка практически не отличается от полу-
Л
бесконечной.
Если расстояние от конца нагрузки до конца балки превосходит (3-г- 4) Я, то балку в направлении этого конца можно рассматривать как бесконечную. Если расстояния от концов нагрузки до ближайших концов балки превосходят с каждой стороны (3 -г- 4) то балка рассматривается как бесконечная в обе стороны.
Бесконечная двусторонняя балка
Балка имеет свою систему функций, выражающих влияние сосредоточенных факторов Ру Ь, 0, Г на усилия и перемещения сечений, расположенных вправо и влево от фактора.
На рис. 5.55 показаны эпюры V, ф, ЛГ, ( от фактора Р, действующего в нулевом сечении.
Рис. 5.55
Функции влияния (затухающие) даны в табл. 5.7.
ТХ Т(1) С05
Их — У (I) е (соз § — 31п );
V V Е) - 81п 6; ' (5'
урх и? () (зт С05 ). -
256
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
Формулы дифференцирования: йТх 1 _ Шх
йх с(V.
йх
ах к х' ах Xх
(5.179)
Пусть балка загружена сосредоточенными факторами Р, Ь, 0, Г, равномерной р и треугольной р' нагрузками на участках от хс до хй. Для сечений правее всех нагрузок получаем следующие уравнения эпюр.
Уравнение эпюры прогибов:
1 X X2 К3
" ГБ Г™ “ 7'- 171 [-Г т-]-
(5.180)
Уравнение эпюры углов поворота:
Фл 0 2 Тх-и 1 4 Е Цх-и Р 4Е[ Ух-и Г 2Х х-и
- Р (х_с К-а) Р' [Я- (Тх-с Тх-4) (Л-с) •
(5.181)
Уравнение эпюры изгибающих моментов:
1 X Е1 Е1
мх 1—тх_и р — их_и - г — ух_и-0 — -
Я. X2 Г х 1
-Р— Ух_с - ух_а) р'-[- (У х-с - ,_) -(а-с) ух_
(5.182)
Уравнение эпюры поперечных сил:
Е1
П1
? — р — тх,— г — их и © — ух и — — нг. —
чх 2 х—и дз х—и • да х—и 2 хи
-р(их-с-ц) р' -7- р (ух_с-ух_а)■ (а-с)их_й.
(5.183)
Если нагрузка расположена правее сечения, то ее действие также необходимо учесть. Действие сосредоточенных факторов выражается теми же формулами, но с переменой знака, когда симметричный фактор (Р, 0) влияет на антисимметричный [0(), р()] или антисимметричный фактор (А, Г) влияет на симметричный [А(х), »()].
737777Г Г777 ГГ77
Я
Уа
г'
1
Полубесконечная балка
Формулы для правой полубесконечной балки при различных граничных условиях на левом конце см. 1 изд, табл. 8.4.4 и 8.4.5.
Использование бесконечной балки для расчета конечных балок
(Метод компенсирующих нагрузок) [67, 69, 153]
Рассчитывают балку, предполагая, что слева и справа от фактических концов А и В она простирается до бесконечности. При этом получают МА, Фа и Мв, фв, пользуясь I изд. табл. 8.4.3 и формулами (5.182) и (5.183). Вводят неизвестные силы У А и У в, моменты 2А и 2а (рис. 5.56), подбираемые так, чтобы удовлетворить дей-
Рис. 5.56
ствительным граничным условиям в А и В. При свободных концах усилия М и Э непосредственно справа от А и слева от В должны быть равны нулю. Это дает четыре уравнения для определения четырех неизвестных. Целесообразно преобразовать нагрузку в симметричную и антисимметричную. Уравнения образуют две независимые группы по два уравнения с двумя неизвестными, соответственно У а У в, 2. а —2В и У а —У в, 2. А—2 в. Метод целесообразно применять в том случае, когда решение в начальных параметрах приводит к операциям с большими значениями функций Ау В, С, О и результаты получаются как малые разности больших величин.
5.5. БАЛКИ
257
Практические указания
Все приведенные выше формулы даны в предположении, что связь подошвы балки с основанием двусторонняя. Если сопротивление отрыву не обеспечено, то
31X
при расстоянии ближайшего груза от конца более
происходит поднятие конца. Если балка нагружена двумя равными грузами по концам, то длина балки должна быть менее пк. Если балка нагружена равными грузами на расстояниях , то необходимо выполнить условие 4,73Я, в противном случае произойдет отрыв подошвы от основания и изменение работы балки.
Балка на упругом основании принадлежит к конструкциям, для которых увеличение сечения не всегда приводит к уменьшению напряжений. Поэтому рациональный подбор сечения балки связан с рядом проб.
Другие виды балок на упругом основании
Сжатая или растянутая балка на упругом основании см. [90].
Балка переменного сечения на упругом основании см. [44, 49].
5.5.7. Общий метод расчета неразрезных балок на жестких опорах.
Уравнение трех опорных моментов
[65, 75, 40]
Равнопролетные неразрезные балки на жестких опорах, как правило, рассчитывают при помощи таблиц раздела 8.1 При весьма большом числе пролетов и переменном сечении в пределах пролета рекомендуется метод бесконечной основной системы 5.5.4.
В общем случае опорные моменты получаются путем решения системы уравнений трех опорных моментов.
Рис. 5.57
Уравнение выражает условие неразрывности деформации неразрезной балки над п-й опорой или равенство нулю угла взаимного поворота смежных торцов п-го и (п1)-го пролетов (рис. 5.57, а). Оно дает п-е каноническое уравнение при расчете неразрезной балки по методу сил (в качестве основной системы взят ряд простых балок, шарнирно соединенных над опорами, неизвестными являются опорные моменты).
Угол поворота правого торца я-го пролета
тв Мп хпвв [т"].
Угол поворота левого торца я--1-го пролета А' Мп АА Мп1 Т"1 Ц„1 [т"'].
Здесь — углы поворота от еди-
ничных моментов. Первый нижний индекс отмечает, как всегда, «место» поворота, второй — его «причину» (место приложения единичных воздействий). Верхние индексы —
V — V, л 1)„ I 1 — V
номера пролетов; , ф — п п П 1
углы перекоса, обусловленные осадкой опор; Г т% 1, Г п4-11 ■
[ТА — углы поворота торца В п-й простой балки и
торца А (п 1)-й простой балки от заданной местной нагрузки этих балок, а также от температурного или начального искривления.
Уравнение трех опорных моментов выражает равенство
т" 1П' о
или
Мп-1 ХВА Мп ХВВ ЛЛ1) Мп1 Тлв'
%1 -% [гпв] [т-Н] о. (5.184)
Таких уравнений составляется столько, сколько имеется неизвестных опорных моментов. Опоры и включаемые над ними шарниры рекомендуется нумеровать так, чтобы № 1 имела опора, над которой действует первый статически неопределимый опорный момент (рис. 5.57,
б, в, г). Поэтому над левой шарнирной опорой или опорой консоли ставится № 0, момент Мо, входящий в уравнение № 1, равен нулю или заранее известной величине (опорному моменту консоли).
При защемленном левом конце балки (рис. 5.57, г) первое уравнение получается из (5.184), если положить
п1, ттК]0:
М1 %АА М2 ТАВ Ч(2) [Л] 0- (5.184')
Если первый конец защемлен, то и последнее уравнение записывается аналогично.
Уравнения, связывающие опорные моменты неразрезной балки, являются трехчленными, за исключением первого и последнего, которые содержат по два неизвестных момента. При этом предполагается, что углы перекоса оЬ равны нулю или наперед заданным величинам, т. е. балка покоится на опорах, осадки которых, если и имеют место, то от неизвестных моментов не зависят. См пример 5.5.
Если изгибная жесткость в пределах отдельных пролетов постоянная, то уравнение трех моментов имеет вид:
Мп16егГГ1' '-п
К] [т"] 0. (5.184а)
Обычно пользуются уравнением, умноженным на 6Е1е где с — произвольно взятый, постоянный для всех уравнений момент инерции.
Длины 1п 1п А-, 1п1 л1“' ° и т. д. называ-
п п1
ют приведенными длинами или приведенными пролетами. Тогда
258
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
1'п 2 Мп (; С1) Мп11'пх
-%) 6Е1С [4] [1])0.(5. 1846)
Отсюда автоматически получаются первое и последнее уравнения в случае концевых защемлений. Достаточно положить соответствующее '0.
Если соп51: на всем протяжении неразрезной балки, штрихи опускаются. Если моменты инерции сечений в отдельных пролетах пропорциональны пролетам, соп1, то уравнение будет
ма_ 1 Шп Мп1 (фя - %)
-ЁР-[][,]°. (5.184в)
Другие обозначения свободных членов:
1) [ хй ] тл,л—1 [ т11] тп,л1:
2)6ЕС[] 1я; 6,БС [х"1]?„; (5.185)
3) 6ЕС [ т" ]0; 6Е1С [ т"1] С0.
Величины т, Ь и Я берутся из табл. 8.1.3.
Для балок с вутами уравнение трех моментов записывается в виде
Мп 1'„ аь 2Мп 1'п ЬЬ См и
Л1л__1 1п (а1, 6Е1 с ( ’Фл) 2 Рп 1п 1п
Система уравнений
1) Хг аи Х 02 агр — 0;
2) Х% Я21 Х% 022 X 3 й23 а2р Ф
(5 187) 3) Х2 О32 4" з Дзз А4 О34 ар 0;
4) Хз а43 Х4 а44 Х5 а45“ ар
5) Х4 «54 5 а65 аЬр 0.
Цепные зависимости для величин с, Л, с', Л':
Сверху вниз Рп
2 ' 4.
Ы1 л--1 га ■
0.
(5.186)
Здесь Рп, Рп1—сосредоточенные нагрузки в я-м и (я4-1)-м пролетах; рп Рп1 — интенсивности сплошных равномерно распределенных нагрузок в тех же пролетах. Таблицы коэффициентов I см. первое издание табл. 8.1.18.
Коэффициенты для балок, высота прямоугольного сечения которых изменяется по линейному закону, а также для стоек ступенчатого сечения см. табл. 8.3.5, 8.3.7—8.3.10 и 8.3.12—8.3.16.
В общем случае балок переменного сечения для вычисления коэффициентов т в уравнении (5.184) используются формулы (5.131) — (5.133) или метод начальных параметров.
5.5.8. Решение системы уравнений трех моментов и общих трехчленных уравнений [86, 110]
Аналитический способ
Трехчленные уравнения являются важной категорией канонических (т. е. обладающих взаимностью коэффициентов а—акг) уравнений строительной механики. Здесь даются расчетные формулы, основанные на встречном исключении неизвестных, в развернутом виде для случая пяти уравнений с пятью неизвестными. При другом числе уравнений и неизвестных решение записывается по аналогии.
Решение 01р 2С21 Х г
ап а12 С21
Х2-
Хз-
4-
А1С12 а2р' А3СП _ °21 С12 °22 в23 С32 А2 С23 а3р А4 С43
Г ’
а32 Г23 а33 а34 С43 3 С34 а4р С54
°43С34а44 °45С54
Л4 45 Ч а5р
(5.188)
1Э.хо; Д12
ап
г
л
«21
С12 —
Лх а1р;
С21 “
, У
°22 °23 С32
Й2§
Л2 а2р Л1 с12;
С 1 — "“",
а32
С23
а22 а21 12
32
•
°33 “Ьа34 с43
34
Л3 Озр Л2 с23;
а43
С34 33 “Г а32 23
°43
г
а44 а45 с54
46 —
45
44 43 с34
Л 4 4р 4 Лз С34.
1 ■
н
ч о
дб4.
Дб5 с; 1оа'
64 45 аЪЪ
Снизу вверх
Л 2 а2р “Ь С32
3 —с3р “Ь 4 с43
4 “а4р "Ь 5 С54 5 а5р •
(5.190')
5.5, БАЛКИ
259
Рис. 5.58
Штрихи при коэффициентах с введены с целью подчеркнуть неравенство сп__Х пфсп п_1,
Коэффициенты с связаны с так называемыми фокусными отношениями
1
10п :
с»-ип
1
1
(5,191)
Графический способ
На рис. 5.58, а дано графическое определение знаменателей общего решения (5.188) (утолщенные отрезки Вп Сп) и на рис. 5.58, б — числителей (утолщенные отрезки М'№) по так называемому методу делителей или методу перекрестных фокусов [153].
Для построения эпюры знаменателей на вертикалях , ,., V в порядке непрерывного зигзага откладывают коэффициенты уравнений:
1) ВС1ац‘, С[) 042, 2) А2В2 2181 121 ВъСзаъз С212а2з; 3) ЛзВза82Д2з; ВС3аа и т. д. Проведя прямую В4у42, находят точку 012, проведя прямые 01612 и В2А3, находят точку 623 и аналогично — точки С34 и О45. Идя обратно от точки Сз, определяют точки С54, С?43, О32, О21. Точки С? называют делителями или перекрестными фокусами. Последний термин обусловлен следующим: если расстояния Мч,жду вертикалями взять равными пролетам неразрывной балки, то перекрестные фокусы О будут совпадать с зеркальными отображениями действительных фокусов Л
Построение эпюры числителей. Откладываются свободные члены М11а1р, и т. д., за¬
тем проводятся диагонали Мг, Ы2М3 и т. д. На эти диагонали проектируются делители О. Через делители проводятся ломаные ММ’аММз и Ы5 3 Утолщенные отрезки между ломаными равны искомым числителям в дробях (5.188).
При достаточно большом размере чертежа (например, равного по размеру писчему листу) графический способ дает хорошую точность.
Определение чисел влияния
Для построения л. в. и обследования влияния различных нагрузок используются числа влия
ния.
Числом (коэффициентом) влияния называется значение неизвестной Хи получаемое в предположении, что свободный член акр равен единице, а все остальные свободные члены равны нулю. Матрица чисел влияния системы п уравнений содержит п2 членов и называется обратной матрицей по отношению к матрице пг коэффициентов а(к. Числа влияния вида Ьц (при ), расположенные на главной диагонали, подобно главным коэффициентам ац называются главными числами влияния, все остальные числа вида ЬыЦфк) — побочными. При канонических уравнениях (ааы) побочные числа влияния также обладают свойством взаимности:
— Ьь.
Для получения главных чисел влияния системы трехчленных уравнений (5.187) достаточно в общем решении (5.188) заменить все числители единицей:
Ьи - ; • (5.192)
Одновременно с общим решением для заданных значений свободных членов получаются и все главные числа влияния.
Подсчитав главные числа влияния, определяют все побочные числа, пользуясь табл. 5.8.
Контрольные равенства:
Ьу
Ь1к — °к6 7 — Т»
2 С21
22
Ьоо
Ьц
65
23
—7- и т. д;
с32
Сх2 с23 С34 ?45
9 I Гл
С21 °32 с43 с54
(5.193)
(5.194)
Механический смысл воздействия, соответствующего единичному свободному члену ар 1 при остальных ну
См, 1.1,9.
260
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
Таблица 5.8
Определение чисел влияния системы трехчленных уравнений
№
1
Ь2 22С1 2
2 Ь2 ЪХхС2
31 21С32
Ьъ—Ь 2ЬС12
Ь29 —ЬазС2 з
32 22С32
Ь41 ЪСх з 42 32С43 48 8343 44
14 гР2 15—21С2
Ь24—8423
34—'ЪцС 84
25—ЗЬС23
35 4634
51 41СБ4
52—43С54
Ьь—ЬАгсЪ4.
64 44С64
48—ВБС46
левых свободных членах, состоит в приложении над '-й опорой неразрезной балки с. д. в« 1. Числа влияния равны опорным моментам от этой с. д. Эпюра моментов от ©г 1 совпадает с л. в. опорного момента М для фиктивной нагрузки. Эпюра прогибов от © 1 совпадает с л. в. для действительной нагрузки. Имеются в виду натуральные числа влияния, полученные для исходной системы уравнений. Если же операции производятся с системой уравнений, полученной из исходной путем умножения на некоторый множитель, например 6Е1Су то числа влияния должны быть подсчитаны не от а,-р 1, а от агР6Е1с.
Построение л. в. усилий (Э« и Ми в промежуточных сечениях неразрезной балки и л. в. реакций Уп
Л. в. строят либо на основании принципа сложения — путем суммирования л. в., построенных для простых балок (основной системы), с л. в. опорных моментов, предварительно умноженных на коэффициенты, выражающие влияние этих моментов на исследуемое усилие или реакцию, либо непосредственно как эпюры прогибов от с. д.
Усилия (и и Ми в пролете п—1, п зависят от опорных моментов Мп-1 и Мп. Реакция (давление на опору) зависит от моментов Мп-и Мп и Мп
2и 0« у- (Мп - М„_,);
М
п
и М°а — Мп_ 1 — Мп;
п п
(5.195)
(5.196)
V Г у п
‘л1
(М»1-Мп)
-т(Мп-Мп_1).
(5.197)
нуликом,
Здесь первые слагаемые, отмеченные выражают л. в. для основной системы.
По способу непосредственного построения эпюры прогибов сначала вычисляются опорные моменты от соответствующих сосредоточенных деформаций Ги, ©и (см. 5.4.3). Затем строится эпюра моментов, а по ней — эпюра прогибов.
Первый способ удобен при серийном построении л. в., второй — при построении небольшого числа л. в.
Пример 5.5. Схема пятипролетной неразрезной балки и ее нагрузки показана на рис 5.59. Построить эпюру М от действия постоянной нагрузки и определить опорные моменты для двух случаев расположения временной нагрузки, дающих наибольшие положительные моменты соответственно в нечетных и четных пролетах балки. Соотношение моментов инерции Л : : з • и • : 53 : 4 : 2 : 1 : 4.
Таблица нагрузок
Пролет
Постоянная
Временная
распределенная §, Тпог. м
сосредоточенная О, Т
распределенная р, Тпог. м
сосредоточенная Р, Т
1
512
С 18
р12,8
Рх2
2
§21» 2
С?2б,5
р22,1
Р2Ю
3
§з3
С з9
Рз4
Рз13
4
§40,3
—
р' 12
—
5
§63,2
—
Рв4»5
-
Приведенные длины пролетов (принимается с4)
; , -г- 6,5— 8,67 л; С 8 -7- 8 м;
1 1г 3 4
з10лг, 4 16 л; 1'5 — 10 м.
Система уравнений трех опорных моментов (5.184,6) с учетом обозначений (5.185) (вторая строка) имеет вид;
ЗЗ.ЗЗАГх 8М2 Ьг 1 0;
8 Мг 36Л2 10М3 и 2 0;
ЮМ2 52 М3 16Л44 Я3 0;
16М3 52 М4 13 Д4 0
Попролетное вычисление компонентов свободных (грузовых) членов для постоянной и двух вариантов временной нагрузки дано в таблице к примеру 5.5.
Полученная в численном виде система трехчленных уравнений сопоставляется с (5.187). Решение для каждой группы свободных членов разыскивается в виде (5.188). С этой целью при помощи цепных зависимостей (5.189) и (5.189') определяются величины с и с':
8
С 2 —— ПГ1 —— 0,24;
33,33
10
34 36 — 80,24 16
52—100,294
—0,294;
—0,326;
5.5. БАЛКИ
261
Оч, 1 «
1 §Чедгг;- § Ч '«Е: § 8 - 111111
1зУГЛеГГТк Е§§-Е§. §?§о - N1 г е 3" л ":
У су Съ' «5Г
Рис. 5.59
262
РАЗДЕЛ 5- СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
С43 0,308;
10
°32
21 ’
52— 16-0,308 8
— 0,213; — 0,236.
36—10-0,213
По величинам с при помощи формулы (5.190), определяются величины А; по величинам с' — величины А' для каждой группы грузовых членов.
Для постоянной нагрузки:
Ах 1 027;
А2 901,3 — 1 027-0,24 654,3;
А3 696,7 — 654,3-0,294 504,7;
А 1139,2;
А'3 696,7 — 1139,2-0,308 345,7;
А'2 901,3 — 345,70,213 827,8.
Значения неизвестных для постоянной нагрузки: 1027 827,8(—0,236)
Мг-.
33,33 — 8-0,236
831
■ 26,46 Тм;
М2 -
М,-
31,45
- 1027-0,24 901,3 — 345,70,213 —8-0,24 36 — 10-0,213 580,8
_'зП96_“ 18’2 ТЖ’
-654,3-0,294 696,7 — 1139,2-0,308
—10-0,294 52 — 16-0,308 153,7 44,13
-504,7-0,326 1139,2 -16-0,326 52 975,7
• —3,48 Тле,
М. —■
46,78
— 20,85 Тм.
Числа влияния определяют по формуле (5.192) и табл. 58. Главные числа влияния равны величинам, обратным знаменателям общих выражений для неизвестных. Например:
Ьи —,Л_ —0,0318 -318-104;
022 _
31,45
1
31,96
— 313-104и т. д
Таблица (матрица) чисел влияния, увеличенных в 104 раз
№
1
2
3
4
1
—318
75,1
—16,0
4,92
2
75,1
—313
66,6
—20,55
3
—16,0
66,6
—227
69,8
4
4,92
—20,55
69,8
—214
На рис. 5.59 зпюра Ме’ получена путем алгебраического суммирования эпюр М° для основной системы
%
простых балок с эпюрой М от лишних неизвестных — опорных моментов.
Аналогично определяются опорные моменты для вариантов временной нагрузки. При этом пересчета значений с и с', а также знаменателей выражений для неизвестных не требуется. Пересчитываются только величины А и А а также числители выражений для неизвестных. Этим путем определено:
I вариант: М1——19,0 Тм; М2—9,18 Тм; М3 —
—1,18 Тм ; М4—21,3 Тм;
II вариант: Л1—-21,65 Тм; М2—18,5 Тм; Л13
—3,14 Тм; М4—8,29 Тм.
Пример 5.6. Для той же балки определить числа влияния и построить л. в. опорных моментов М1 и АЬ, усилий Моа12 и 2о,Л и опорной реакции Ух.
Числа влияния дают значение неизвестной непосредственно по грузовым членам, минуя определение величины А и А'. Например:
М% 01 р 21 а2р 22 а3р 23 "Ь 24 “
(-1027-75,1 901,3313 — 696,7-66,6
1139,2-20,55) 10-4 — 18,2 Тм.
Эпюра М с опорными ординатами, равными числам влияния, дает л. в. для подвижной фиктивной нагрузки (см. пунктирную эпюру на рис. 5.59, совмещенную
с л. в. М2). Если фиктивная нагрузка приведена к опор¬
ным сечениям, то вычисление ее действия (установка на л. в.) совпадает с вычислением М2 по грузовым членам и числам влияния (см. выше).
Л. в. М2 для подвижной действительной нагрузки строят как эпюру прогибов от пунктирной эпюры моментов. Общее выражение прогиба от опорных моментов простой балки в сечении с относительной абсциссой
и 0, — и
5 — или ч' —
имеет вид
МА12 « мв12
Для отдельных пролетов при построении л. в. М2 это дает:
пролет 1
6 Е1С
оЯ —Ь
12
г2(?-1з) ;2 ; (1-Г)
6 Ех
75,1 • 10“4 • 6,5 • 8,67 (- 3);
пролет 2
75,Ы04-8-8 ( %' - I'’) -313-10-4-8.8 (-Б3);
5.6. БАЛКИ
263
Таблица грузовых членов (к примеру 5,6)
Постоянная нагрузка
Временная нагрузка
формула
2 ® У св К
к а: з- ю ю
грузовые члены в Тм
формула
I вариант
числовое
значение
грузовые
члены
Р1 1. 2 4 18Р1'1»1
707,0
о РХ »' 15 а, '
1 4 2 16 2 2 2
1. "2 ,5
2 4 2 16 2 2 2
0
0
Р. о 4 '38Р3'3'3
рз, ч 4,3 8Р388
494.0
494.0
0
Ъ -Р в
0
32 4 4 4
«4 - '4Ч
1125,0
II вариант
числовое
значение
грузовые
члены
«1 1
1 1
ЧТа1 1х 1
483,2
12
о”°22 72
16
йа II
— ■
’2 2 Л.15 Г 1 '
— 12Тб°1212
Ьх-Рх 1027
543,8
543,8
й I2
в3 3. 3
•
«а 1
1.22 901,3
357,5
357,5
Я-
4 4 ' 32
«4 4
4 Я9 4 4 4
54 1,. 5
18"ЬЯ8 696.7
339,2
339,2
% 15
ья
1139,2
800,0
ЬгЯг 707,0
1-2Яо 494,0
1Я» 494,0
й.о
8,5
868,5
480,0
480,0
868,5
2Я2 868,5
480,0
М-Я4 480,0
Примечание. Попарное равенство грузовых членов от временной нагрузки связано с симметрией нагрузки в пролетах.
пролет 3
пролет 4
пролет 5
о3)—313-10“4-5.10 (?' — '3) 4-66,6-10—45«10 ( — 3);
о4,66.6-10—-4.16 (' — '3) —
— 20,55-10-4-16( — ё3);
Цб) _ 20,55.10_4-Ю-10(-'3).
На рис. 5.59 показаны построенные таким образом л. в. Л и М2.
Л. в. усилий в промежуточном сечении 0,42, ' 0,6 12 построены по формулам:
0.4, «, 0.6М, 0,4 М2;
О _ Оо, мш-мх
40,41, Чо,412 "Г 80
Л. в. Л° и 0° для простой балки пролетом 12 показаны на рис. 5.59 пунктиром; главные ординаты их даны в скобках.
Л. в. Ух построена по формуле
1'.-,'-'и.(-5Х -5т)м-
Л. в. V? для пары простых балок 0—1 и 1—2 показана пунктиром.
Пример 5.7. Найти грузовые члены для деформационных воздействий на балку: 1) при построении л. в. М0 41г и Зо,42 как эпюр прогибов от с. д. РФ 1 и ГФ 1; 2) при осадках опор № 0, 1, 2, 3, 4, 5 соответственно на Vо, 2, з, 4» ъъ 3) при неравномерном нагреве балки на (нижние волокна) и (верхние волокна).
Свободные члены во всех случаях определяются как опорные давления смежных пролетов от фиктивных нагрузок:
“пр 6Е1С ( Т" т(‘1) 1п хя.
1)С. д. ©1 рассматривается как фиктивный груз РФ 1, с. д. Г1 — как фиктивный момент Х,Ф 1. ве-
Таблица грузовых членов (к примеру 5.7)
264
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
4эь-
X
X
•0
• -?й СО гг Ф
4
г
I со
4г
а1
со О
«8
1
о I »
— I 00
О “Э
о
х
еч
О
©
ос
Ь]
1
“Гг
? г
-Ж
§3.
« о ° с О о
„—„
ч-
о Ю
о
ч
й
х
3
7
1
ГТ
Ш1-
кр
§
«I
_ о
а О со
•010
сх
•©•гг
о.
•©•со
'©'СО
о.
•0м
СХ
•©•«-и
сх.
Гг
V
Т1
а
и
V
«д
10-
• эн
3 « о,
3°
о§
ей
§3
СО10 2
5 2 о§
Ш1,
ТсМ''
I4'
О 5 «
3 2. й я°
О.0 X
Я
5.5. БАЛКИ
265
личенные в 6Е1С раз опорные давления соответственно равны:
110; Яг вЕ0,6; 12 6Яс-0,4; Я2 0;
1 0; :
6ЯС
8,0 ’
6Е1С
8,0
2 0.
Это дает грузовые члены йр — Ч" ” 6С‘0,6; й2р — Ь%-- Я2 Е1С'0,4.
Аналогично:
а1р
6 Е1С 8,0 ;
а2р — '
6 Ес 8,0
Остальные грузовые члены равны нулю. Определив неизвестные моменты Ми., М4, строим эпюру прогибов по указаниям в примере 5.6. При построении эпюры V в пролете 1—2 необходимо учесть сосредоточенные деформации в сечении 0,4 2. Практически это эквивалентно наложению л. в. М° и С?0 для простой балки.
2) Осадка п-й опоры на г;п рассматривается как фиктивный изгибающий момент М —Vп. Этот момент вызывает в основной системе опорные давления:
уФ _. ——V
к 1—1 1 ' у п л ' I
1п я ыг
К1-
Ы
Это дает свободные члены уравнений:
ШсХ)" «р ( 1 1 V
1.р“ дпр —— 6: 1,
л4-1 6ЕГ
«я1,р - I
«4-1
Влияние осадок каждой из шести опор приведено в таблице к примеру 5.7.
3) Кривизна от неравномерного нагрева рассматривается как погонная фиктивная нагрузка:
, Ф «К-О рФ — см
Опорные давления
тФ, — уФ—
у п—1 у п
Свободные члены
_ Рпп Рп1п--
«пр 6Е1е (— 2 •
Влияние нагрева всех пролетов см. в таблице к примеру 5.7. Для расчета на случаи 2 и 3 необходимо иметь фактическую величину модуля упругости и моментов инерции, а не только соотношение жесткостей отдельных пролетов.
5.5.9. Неразрезная балка на упруго оседающих опорах. Уравнение пяти опорных моментов [65, 87, 88]
Если неразрезная балка (рис. 5.60) покоится на упруго оседающих опорах, например упругих поперечинах, понтонах (наплавной мост) и т. п., то углы пере¬
коса пролетов ф непосредственно зависят от нагрузки балки.
Податливость п-й опоры (осадка от единичного груза, приложенного к опоре) обозначается еп смкГ. Податливость есть величина, обратная отпорности:
1
е«—•
Осадка я-й опоры (прогиб над п-и опорой)
°п [Уп 1Г1(Мп1-Мп)-
ТЛМп-Мп-0- (5.198)
Здесь У®п — давление на л-ю опору в предположении шарниров над опорами.
Углы перекоса:
Ь1Т—(п1-п)’
1п1
Vе
1п
Разность углов перекоса или дополнительный угол перелома с. д. над п-й опорой
Фп-ц - « -г— (» - »„) -
л1
1
-Тпп-'п-'У
(5.199)
Пользуясь уравнениями (5.184а), (5.198) и (5.199), можно определить опорные моменты последовательными приближениями. При весьма податливых опорах в первом приближении приравнивают нулю опорные моменты и из (5.199) находят фп1—фп, которые подставляют в (5.184а). При более жестких опорах сначала полагают равными нулю осадки и из (5.184а) находят опорные моменты, которые и подставляются в (5.198) и (5.199). В последующих приближениях пользуются дан¬
266
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
ными предыдущего приближения, каждый раз определяя прогибы из (5.198) и моменты из системы (5.184а), причем выражения для моментов представляются в развернутом виде по формулам (5.188). Можно вводить в уравнения только поправки (см. раздел 6). Процесс продолжается до тех пор, пока последовательные величины М или V не будут отличаться незначительно.
Уравнение пяти опорных моментов получается путем подстановки (5.199) в (5.184) и имеет вид:
Ма-2%,'п-2 Мп-1%,п-1 Мп вп,п
МП1®«,п1 Мп2®п,п2 впр 0. (5.200)
Значения коэффициентов 0:
я—1
7л„я—2 '
я,я—1 '
1п
3 Е1а
1п1
В1. [ , 1. ) С ( 1, „1)
_[Ч“)"57];
ля-Н
6Е1
л-
[т (-Г Г-) -7“-(-Г--Г-)
1п1 1л л-4-1 Л1 1п1 1п2 ]
®я,я4-2
вл--1
впр- [ '• (гтЧ
В случае равнопролетной балки постоянной жесткости уравнение (5.200) имеет вид:
я—2 а "Ь я—1 (1 а) “Ь боб)
(5.201)
ап
я-Н
1
-аК_,-2 К°п1). (5.201а)
6Е8 6Е
Здесь а ; я, Оп —• площади эпюр мо¬
ментов от нагрузок, подсчитанные для простых балок с пролетами п—1, пип, д1. Уравнение (5.201а) отливе
чается ет «естественного» (5.200) множителем ——. Это
следует учитывать при определении чисел влияния.
В системе пятичленных уравнений первое и последнее уравнения содержат по три неизвестных, второе и предпоследнее — по четыре, все промежуточные — по пять. Для решения обычно применяется метод Гаусса. Другие приемы см. [142].
5.6. АРКИ И ПРОСТЫЕ РАМЫ [58, 95, 64, 61, 39, 87]
5.6.1. Общие положения
Основное назначение арок и простых (одноконтурных) рам — служить несущей конструкцией покрытий и мостов. Для арок характерно криволинейное, а для рам ломаное очертание оси. Полигональные арки могут быть отнесены как к аркам, так и к рамам. Для арок и рам существенно возникновение наклонных реакций опор при вертикальной нагрузке (распора). Это выдвигает дополнительные требования к грунту и устройству оснований. Для мостовых сооружений, несущих большую постоянную и временную нагрузки, важное значение имеет выбор рациональной оси арки, позволяющий свести к минимуму изгибающие моменты в сечениях арки [50, 53, 64]. Первостепенное значение выбор рациональной оси имеет для каменных и бетонных мостов. В гражданских и промышленных сооружениях очертание металлических и железобетонных арок обычно выбирается по архитектурным или производственным соображениям с соблюдением общих принципов рациональности
формы оси, сводящихся к тому, чтобы изгибающие моменты были как можно меньше, иначе говоря, чтобы ось арки была по возможности близка к кривой давления. Последняя является огибающей равнодействующих усилий в сечениях арки и имеет форму веревочного многоугольника для нагрузок арки.
Бесшарнирная арка или рама 3 раза статически неопределима. Добавление каждого шарнира снижает степень статической неопределимости на единицу. Чем выше степень статической неопределимости, тем меньше гибкость арки, тем больше температурные напряжения. Трехшарнирная статически определимая арка свободна от температурных и усадочных напряжений, если предположить, что по толщине арки температура или усадка распределена по линейному закону. В ней не возникают также напряжения в случае осадки опор.
Расчет арки начинается с вычерчивания оси, определения нагрузок, реакций и усилий. Далее следует подбор сечений и проверка прочности. В конце уточняют собственный вес и производят окончательный расчет.
5.6. АРКИ И ПРОСТЫЕ РАМЫ
267
5.6.2. Трехшарнирная арка
Реакиии и усилия при постоянной нагрузке
На рис. 5.61, а показана симметричная, а на рис. 5.61,6 — ползучая арка. Под Ру Рх, со значками «л» и «пр» подразумеваются сосредоточенные нагрузки или равнодействующие нагрузок левой и правой полуарок.
Мт-УАХт-НАутМт). поперечная сила
3ш УА с08 «» - НА 81п ат [Эт] ; продольная сила Мщ УА 5П «т - НА с03 «т [Л'т] •
(5.202)
Здесь [Мт], [От], [т] — значения усилий для криволинейной консоли Ат со свободным левым и защемленным правым концами; ат — угол наклона оси арки к оси х в сечении т.
При вертикальной нагрузке:
Л М°с
Ул-'Ъ НА НВ Н — ;
Ст(ЭшС08ат-Я51пат;
Мт М1-Нут; »т -
Н соз а„
(5.203)
Здесь М° и 0°—реакции и усилия, подсчи¬
танные для простой балки; М®с — изгибающий момент в простой балке в сечении ключевого шарнира С; — стрелка арки — плечо ключевого шарнира С по отношению к прямой А В.
Имея уравнение оси арки уу(х), получают значения 1да', а затем
1. »'
соз а ————, зш а -
УI У'2
УТ1
Реакции пятовых шарниров А и В представлены вертикальными компонентами и компонентами, направленными по прямой АВ. При этих условиях каждый из компонентов определяется самостоятельно из одного уравнения равновесия всей арки или полуарки: VА или У'А — из уравнения 2М50; Ув или V%—из уравнения 2Ма0. Эти уравнения составляются для всей арки; определение реакций V и V ничем не отличается от определения реакций простой балки. Нв или Нв определяются из уравнения ЕУИ2Р0 для правой полуарки; НА или НА — из уравнения 0 для левой полуарки. Проверкой служат уравнения 2ЛГ0 и 2У0, составленные для арки в целом.
Для ползучей арки по компонентам реакций V' и Н (рис. 5.61, б) находят полные вертикальные и горизонтальные составляющие реакций:
У А Япг; УвУв-Нвв ту;
НА Н А с05 Т. НВ н 'в 005 V •
Усилия в любом сечении т с координатами центра тяжести хт, ут:
изгибающий момент
Эпюра М получается как линейная комбинация эпюр М° и Нуу эпюра С — как комбинация эпюр 0° соз а и Н зш а, эпюра N — как комбинация эпюр 2° зш а и Нсоза. Эпюру М целесообразно строить в масштабе Тогда эпюра Ну превращается в эпюру у с ординатами, отложенными от прямой АВ, совпадающую с осью арки. Ординаты эпюры М получаются как разность между ординатами эпюры М° и ординатами оси арки (рис. 5.62,а).
В случае параболической арки с уравнением оси
У --х(1 — х) 456';
«' §« -у (-2);
(5.204)
268
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
при равномерно распределенной нагрузке получается параболическая эпюра М° и прямолинейная эпюра 2°:
МО ± х (I - х) Ц'; 2° -- ( — 2х). (5.205)
I х
Здесь 5;5'—-—; ординаты эпюр М и О обращаются в нуль. Арка работает во всех сечениях на центральное сжатие. При этом:
р1_
2
Н
8
N — Н соз а
р12
811 4§2 а
(5.206)
Для пологой арки приближенно можно принять —Я. Фактически в параболической арке при равномерной нагрузке возникают небольшие моменты вследствие изменения формы арки в связи с обжатием оси.
При равномерном и нормальном к оси арки давлении р кГпог.см длины оси изгибающий момент Мт и рав¬
нодействующее усилие Ят V п
по формулам:
вычисляются
Мпг о ( Ро ”Ь Рщ)» РРп
(5.207)
Здесь ро — радиус так называемого узлового круга [95]. В случае трехшарнирной арки узловой круг проходит через три шарнира арки; рт — радиус-вектор исследуемого сечения т (рис. 5.62,6). Усилие Ят перпендикулярно рт. Путем разложения Кт по направлениям сечения и нормали к нему определяют фт и Лт. В случае круговой арки моменты и поперечные силы равны нулю.
Графическое определение реакций арки см. 2.1.5 и 2.2.2. Построение кривой давления (многоугольника равнодействующих усилий) см. [119, 120].
Данные для построения эпюр в различных случаях нагружения см. табл. 8.2.2—8.2.6. Данные для вычисления ординат оси см. табл. 8.2.1.
Кинематический метод (рис. 5.64). Л. в. Мт, От,
N„1 усилий в сечении т строят как эпюры вертикальных перемещений соответственно от единичных с. д. ©т 1, Гт 1, Лщ 1. На основе статико-кинематической аналогии арка моделируется кривым стержнем (брусом) со свободными торцами и тремя опорными стержнями в местах шарниров, перпендикулярными плоскости кри-
1"
1 • Множитель уп
Мпотитвль зСпосщ
МнотителЬ соз т
Рис. 5.63
Линии влияния
Л. в. Уа и Ув не отличаются от л. в. для простой балки (рис. 5.63). Л. в. Я совпадает с л. в. Мс, но с ординатами, уменьшенными в раз (средняя ордината надписана на рис. 5.63). Л. в. усилий строят на основе формул (5.203), преобразованных к виду:
М,
?ш8па„№с,8а;-я);
Мт -со5ат(0татН).
(5.208)
Сначала строят л. в. Я, которая без изменений входит в другие л. в. С ней алгебраически суммируют балочные л. в. М®т и умноженные на соответствующие коэффициенты. Затем все ординаты умножают на множитель, стоящий перед скобками. Этот же способ применяется в случае двухшарнирной арки.
визны. Так как моделирующий брус и опорные стержни абсолютно жесткие и обеспечивают неподвижность (ки нематическую определимость системы), упругого осно вания можно не вводить. На рис. 5.64 а, б, в в точках А В, С вместо шарниров теперь подразумеваются опоры Используется система левого винта. От с. д. ©т (фиктивного груза, перпендикулярного плоскости черте жа) возникают фиктивные реакции опорных стержней Та, тв, тс, уравновешивающие 0т 1 (рис. 5.64, а). Из уравнений моментов относительно прямой АВ
_ ®п Ут 1 Ут
тс Реакции та и тв теперь определяются из уравнений 2М0 и 2М0 относительно вертикальных осей (в плоскости оси арки), проходящих через хв и тА. Найдя та и имея тс, строят эпюру односторонних (типа изгибающих) моментов относительно вертикальных
1 Их нельзя просто назвать изгибающими, так как верти» кальные оси не лежат в плоскости сечений бруса.
5.6. АРКИ И ПРОСТЫЕ РАМЫ
269
осей (т. е. осей, параллельных подвижной силе Р) Практически задача сводится к построению эпюры изгибающих моментов для горизонтальной балки — проекции по рис. 5.64, а' от фиктивных сил ЯФ 0т 1 (вниз)
, ут
и —- (вверх). Л. в. совпадающая с эпюрой
Аналогично
Vт, имеет вид двух треугольников, строят л. в. (т и Nгпу прикладывая к моделирующему брусу с. д. Гт 1 и Л1 (рис. 5.64, б, в). В этом слу-
51 п ат
чае из 2Л4лв0 в С получаются реакции тс ——
и соответственно тс — -
Балка-проекция нагру¬
жается в первом случае сосредоточенным фиктивным
, ъ « тА
моментом соз ат и силои V% ——, во втором
—зтат и силой Ус — (рис. 5.64,6', в'). Эпюры моментов балки-проекции дают искомые л. в. 2т и Nт.
Указания об использовании л. в. Л. в. используются наиболее широко при расчете мостовых арок. Помимо усилий, отнесенных к центрам тяжести сечений здесь применяются также ядровые моменты и л. в. ядровых моментов. Момент относительно нижней ядровой точки дает величину нормального напряжения в крайнем верхнем волокне, момент относительно верхней ядровой точки— в крайнем нижнем волокне (см. 5.2.6). Л. в. ядровых моментов строят по тем же правилам, что и л. в. изгибающих моментов, вводя вместо хт, Ут соответствующие координаты ядровых точек.
Указания о невыгодном загружении трехшарнирных арок временной нагрузкой см. табл. 8.2.3.
Эпюры углов поворота и прогибов арки
Эти эпюры для любой арки строят как эпюры фиктивных поперечных сил и изгибающих моментов балки-проекции, нагруженной соответствующими сосредоточенными и распределенными фиктивными нагрузками. По сравнению с построением л. в. трехшарнирной арки здесь в общем случае добавляются фиктивные распределенные нагрузки: силовая (р) и моментная (т). Уравнение эпюры углов поворота
Рд: (3 2о —2рф-рф«. (5.209)
Уравнение эпюры прогибов
Vx М М xФ-ЪрФ(x-ир)
о о
х х
тФ« — рФ(х — и)йи. (5.210)
Сосредоточенные фиктивные нагрузки выражаются через с. д. арки:
Р в; Аф Гсоза— Лзша; (5.211)
распределенные фиктивные нагрузки — через деформации и усилия арки:
М
г Ф соз ат
рф.
соз а Е1 соз а
п у — К а
N
ОРи
ЕР
■1а. (5.212)
Построение эпюр, перемещений для арки сводится к тем же операциям, что и для балки. Если соза0 сопз и положить а 1д асрсопз1, то речь идет о балке постоянного сечения.
В случае трехшарнирной арки угол взаимного поворота сечений в ключевом шарнире (фиктивная реакция ТСС —®с) вводится в уравнение прогибов (5.210) как сила —тс. Как и выше, при построении ин-
флюент, тс определяется из уравнения моментов фиктивных нагрузок арки относительно оси АВ.
Общее выражение угла относительно г0 поворота в ключе трехшарнирной арки
тс — ес -у- вУ 2 Г 5‘П “ А соз а
у йз 1 у зт а й ] соз а д,8
8 5
г
I
м
Е1
у й
ОР«,
• 31 п а
[[р с05 а5)• (5.213)
270
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
Из этой суммы выбираются нужные слагаемые. Например, в случае воздействия температуры вводятся только члены, содержащие О и Я, причем а („ 1В)
_ агср. Остальные члены полагают "сеч
равными нулю.
Эпюры прогибов арок строят для назначения строительного подъема, для уточнения расчета путем введения деформированной оси, при построении л. в. прогиба ключевого шарнира трехшарнирной арки и главным образом при построении л. в. усилий в статически неопределимых арках. Каждая из этих л. в. получается как эпюра прогибов некоторой балки или, что то же, как эпюра моментов некоторой фиктивной балки.
5.6.3. Статически неопределимые арки
Универсальные формулы для усилий [87]
Расчет арок часто ведется методом сил с использованием упругого центра (вынесения неизвестных при помощи абсолютно жестких консолей). Пользуясь этим решением, получают приводимые ниже формулы, позволяющие представить результат в компактной и наглядной форме. Эти формулы получаются также непосредственно на основе статико-кинематической аналогии.
Формулы охватывают определение изгибающих моментов, поперечных и продольных сил в любом сечении бесшарнирной (трижды статически неопределимой), одношариирной (дважды статически неопределимой) и двухшарнирной (однажды статически неопределимой) упругих арок от действия силовых и деформационных факторов (температуры, дислокаций) с учетом деформаций от изгиба, поперечных и продольных сил.
Обычно расчет ведется на действие сил (нагрузок). Предварительно выбирается основная статически определимая система, например в виде криволинейной балки, трехшарнирной арки или в случае бесшарнирной арки — в виде двух консолей, отделенных сквозным разрезом в каком-либо сечении арки (чаще всего в ключе). Усилия в основной системе обозначаются М°, 0°, №. Усилия от действия лишних связей (статически неопределимые усилия) обозначаются М, (, Если расчет ведется только на действие сосредоточенных или распределенных деформаций (например, для построения л. в. или на воздействие температуры), то устанавливать основную систему нет необходимости, так как усилия получаются независимо от основной системы.
Усилия в сечении бесшарнирной арки произвольного очертания (х, у— координаты центра тяжести сечения в главных центральных осях эпюры гибкости арки):
( Р I I
Г У (5.214)
-(■
4? .соз а — —— 51П а N N 4-N № —
Х9у1Х,у1У1Х,у ( ф ,ф
-(Г51па -Гс08а 1- (5.216)
Здесь а — угол наклона касательной оси арки в сечении к оси х (угол отсчитывается против часовой стрелки от положительного направления оси х к касательной).
Статически неопределимая часть усилия М (взятая в' скобки) выражается как фиктивное нормальное напряжение при сжатии с изгибом (внецентренном сжатии), а статически неопределимые части усилий ( и N — как уклоны плоскости фиктивных нормальных напряжений вдоль осей у их (или как повороты этой плоскости из горизонтального положения относительно осей х и у).
Характеристики фиктивного профиля
Фиктивный профиль может быть представлен как поперечное сечение тонкостенного стержня или как план подошвы ленточного фундамента. Средняя линия профиля совпадает с осью арки. Профиль характеризуется погонной (вдоль средней линии) площадью (шириной)
, погонным собственным моментом инерции
относительно средней линии Iи погонным собственным моментом инерции средней линии
относительно нормали к
ОРи
Фиктивная площадь (гибкость)
"-Иг-1
5 8
Фиктивные осевые моменты инерции:
У2 I с°з2 а 8п2 а
5 5 Ф 2ФЛ ]■ зп2аЙ5 ]" Фсо2а.
(5.217)
(5.218)
Центр тяжести площади фиктивного профиля (центр гибкости) определяется по общим правилам нахождения центра тяжести площади:
Уо —
5Ф
§у№ й8
рФ
рФ
о :
5
]Ф Ли
РФ
РФ
(5.219)
Наклон главных центральных осей (в случае отсутствия симметрии, что является редким исключением) также определяется по общим правилам:
1§ 2ао
2Ф
ху
Ф Ф
1у 1х
(5.220)
Здесь фиктивный центробежный момент инерции
xуф а -у (Ф — »Ф) 1П 2а ав. (5.221)
Ф
Лху
(5.215)
Если пренебречь деформациями сдвига и удлинения, то 0 и определение характеристик . у»
5.6. АРКИ И ПРОСТЫЕ РАМЫ
271
ничем не отличается от случая тонкостенного профиля
с толщиной стенки Ф-—(см. рамы) или случая ленЫ
точного фундамента на чисто винклеровском упругом основании (без учета отпорности при повороте и кручении).
Определение факторов Р
На рис. 5.65, а показана (в левой системе) с. д. 40 (излом оси) в виде скользящего вектора, направленного за чертеж, а также с. д. Г (сдвиг) и 4-Л (удлинение) — в виде свободных векторов-моментов. На рис. 5.65, б даны соответствующие фиктивная сила рФ0 и фиктивные моменты и ЬФ. Моменты в формулах (5.214) — (5.216) считаются положительными при вращении вокруг оси по часовой стрелке. При переносе вектора 0 в центр добавляются моменты ь вув и Ьу —0хе. Проектируя векторы-моменты Л и Г на оси х, у, получаем в соответствии с правилом левого винта моменты, вращающие как показано на рис. 5.65, б:
,Ф Л соз а 4- Г 51П а,
Лша-
■ Г соз а.
При наличии нескольких с. д., а также распределенной деформации, в том числе и упругой:
Р — Е 0 Оз Л° №0в
Ь 5
ь Е уе Е Л соз а 4- Е Г 51П а 4-
4- ®у йв 4- ] X соз айв 4-1 V 5п а4-
5 8 8
№
гм г
Ыа
С 2°
со8айв 1-— зтайв;
Ьг Ору
— Е 0лг0 4- Е А 51П а — Е Г соз а —
— х йв 4-1X зш а йв — у соз а йв —
5 5 8
с М« С № СОо
ОЛ,
соз айв.
(5.222)
Выбирая отсюда нужные слагаемые, получают значения Ф, .Ф, I для любого случая. Например, для построения л. в. М, С2, М, как эпюр прогибов, берут соответственно 0 1, Г1 или Л1, все остальные члены полагают равными нулю. В случае равномерного нагрева беру г слагаемое, содержащее к, полагают А,а (а — коэффициент линейного расширения), все остальные члены отбрасывают. При расчете на действие нагрузки предварительно определяют усилия М°, 2°, № в основной системе и вычисляют соответствующие интегралы, содержащие эти усилия. Остальные слагаемые отбрасывают:
Определение опорных моментов и опорных реакций
Координаты центров тяжести левого и правого опорных сечений в главных центральных осях эпюры гибкости по абсолютной величине обозначаются через с а. На и.Св, Л А,
Опорные моменты равны:
рф
гф
МВ М°В МВ М°В.
Р___Ак '
рф ф в ф °в
(5.223)
Опорные реакции, параллельные осям ху у и направленные одинаково с ними;
IФ
т — уО I —Е— у иО.
УА-УА ф» УВ- В ф1
У У
[ ф
(5.224)
Если за основную систему принята шарнирно опертая по концам криволинейная балка с пролетом, параллельным оси х, то Н°В -0. При наличии сим¬
метрии сасв 12.
При вертикальной нагрузке —.
Равномерно распределенная вертикальная нагрузка. При очертании оси по параболе второй степени в предположении недеформируемости арки от действия продольной силы изгибающие моменты и поперечные силы равны нулю так же, как и в случае трехшарнирной арки. Учет обжатия арки дает дополнительные моменты, которые иногда приходится учитывать.
Равномерное нормальное давление. Так же как и в случае трехшарнирной арки, изгибающие моменты получаются при помощи узлового круга по формуле (5.207),
272
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
Рис. 5.66
Радиус узлового круга и координаты его центра в главных центральных осях гибкости арки вычисляются по формулам:
Ро
ГР У рф • х°
2
(5.225)
Уо
21
Здесь р у ху2 — радиус-вектор точки оси; ро равен полярному радиусу инерции площади гибкости рамы. Центр узлового круга лежит на оси симметрии арки. При выводе этих формул деформации сдвига и удлинения не учтены, см. [95].
В случае круговой арки центр узлового круга совпадает с центром осевого круга.
Данные для расчета двухшарнирных и бесшарнирных параболических арок см. табл. 8.2.7—8.2.11.
Линии влияния усилий в бесшарнирной арке
Л. в. усилий М, (?, N в любом сечении арок строят как эпюры прогибов от с. д. в 1, Г1, Л1 в том же сечении. Этим способом можно построить все л. в., необходимые для расчета на прочность. Достаточно построить л. в. для лишних неизвестных, число которых равно степени статической неопределимости системы, остальные л. в. можно получить как линейные комбинации л. в., построенных для статически определимой (основной) системы и л. в. лишних неизвестных.
Бесшарнирная арка трижды статически неопределима. Достаточно построить три л. в. На рис. 5.66, а, б, в даны л. в.: 1) изгибающих моментов МА, Мв, Мс (основная система — трехшарнирная арка); 2) усилий М0,
Оо, Ао в сечении О абсолютно жесткой петли, мысленно
присоединенной к двум торцам, отделенным разрезом по оси симметрии (основная система — две консоли); 3) усилий М0, 2о, N0 в сечении О мысленно введенной абсолютно жесткой балки, заменяющей пятовые защемления (устои) арки (основная система — криволинейная балка на двух опорах).
Л. в. строят по уравнению (5.210) исходя из граничных условий 2лМд0, дФЛ10 (свободные концы фиктивной балки). С. д. задаются, а распределенные фиктивные нагрузки определяют по усилиям М, (?, N от с. д., пользуясь формулами (5.214) — (5.216). Эти усилия наиболее просто определяются для вариантов 1 и 2, так как координаты уе и угол а обращаются в нуль. Преимущество варианта I состоит в том, что все л. в. МА, Мв, Мс непосредственно используются для расчетов прочности.
Под номером 4 показан также вид л. в. Мт, 2т, Nт Л. в. Vа см. табл. 8.2.11 в конце.
Данные для построения л. в. параболических бесшарнирных арок см. табл. 8.2.11.
Использование общих формул для расчета однои двухшарнирной арок
Одношарнирная арка двукратно, а двухшарнирная арка однократно статически неопределимы. На рис. 5.67 показаны три арки и надписана степень их статической неопределимости. Шарнир рассматривается как элемент арки с бесконечной большой гибкостью на изгиб. Шар-
5.6. АРКИ И ПРОСТЫЕ РАМЫ
273
ниру арки отвечает жесткая опора взаимного бруса.
Центр гибкости совпадает с шарниром, гибкость арки
р Ф оо.
При наличии двух шарниров не только Р оо, но также 1у— 00 поскольку ось х соединяет шарниры.
Формулы (5.214) — (5.216) для бесшарнирной арки (рис. 5.67, а) справедливы и для одношарнирной арки, если принять Р оо, и для двухшарнирной, если принять рФ — 1 оо. В первом случае главные центральные оси имеют началом шарнир (рис. 5.67.6), во втором случае практически существенна только ось х, пересекающие оба шарнира (рис. 5.67, в). Формулы для определения усилий и реакций соответственно упрощаются. Характеристика гибкости бесшарнирной арки Р9 %, используются при расчете одно- и двухшарнирной арки путем перехода к новым осям.
Упруго защемленная арка
Упруго-податливые опоры рассматриваются как короткие вертикальные продолжения тела арки с сосредоточенными характеристиками гибкости.
Податливостью опоры называется ее перемещение, соответствующее единичной силе. Податливость опоры А при действии момента обозначается Р% ХкГсм, при действии опорного давления СМ1КГУ при действии распора 1%п смкГ. Аналогично — для опоры В с переменой индекса А на В. Предполагается, что податливости опор заранее определены. Величины РУ Р% 5, 5»
4л» %п учитываются в качестве сосредоточенных характеристик гибкости при вычислении Р 9 , .
В остальном метод определения усилий М, (?, N остается без изменений.
5.6.4. Двухшарнирная арка
Отличают двухшарнирные арки без затяжки (рис. 5.68, а) и с затяжкой, которая может лежать на уровне пятовых шарниров или быть повышенной
О)
— I Рис. 5.68
(рис. 5.68,6). Согласно 5.6.3, общее решение для трехкратно статически неопределимой арки с защемленными пятами пригодно и для однократно статически неопределимой двухшарнирной арки. Достаточно считать осью х прямую АВ и принять Рф1 оо.
На основании (5.214)
Мху Мху-—у. (5.226)
X
Ю ЮЛО
1% определяется по формуле (5.218), причем интегрирование ведется по дуге АВ определяется по формуле (5.222). При наличии затяжки к величине следует
прибавить податливость затяжки ———, а к величине
3
Ьх —относящиеся к затяжке слагаемые:
-Л.-].'-
Обычно в качестве основной системы выбирают криволинейную балку, получаемую путем перерезания опорного стерженька В (рис. 5.68, а) или самой затяжки (рис. 5.68,6). При этом дЯо. Усилие Нв или Н называется распором и считается положительным при направлении, указанном на рис. 5.68 (сжатие для опорного стерженька, растяжение для затяжки). Общая формула для распора
ЯВЯ —. (5.227)
Х
В обозначениях метода сил эта формула имеет вид: 1 —Л1 рбц. Очевидно,
х ?х 11
Расчет начинается с определения распора Н. Дальнейший расчет не отличается от расчета трехшарнирной арки. О расчете на равномерную вертикальную и гидростатическую нагрузки см. 5.6.2. Данные для расчета усилий в параболических двухшарнирных арках см табл. 8.2.7—8.2.10.
Л. в. распора Н получается как эпюра вертикальных прогибов арки от действия единичной дислокации Л2 1. При этом
Я -. (5.228)
Эпюра М от Н совпадает по форме с осью арки, эпюры () и N совпадают с эпюрами зш а и соз а. Соответствующая эпюра упругих прогибов, получаемая по
274
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
уравнению (5.210), в отличие от треугольной л. в. распора трехшарнирной арки, имеет вид плавной кривой.
Л. в. усилий Мт, (Зт, Мт получаются путем комбинирования л. в. Не л. в. 2, при помощи формул (5.208). На рис. 5.69 показаны две л. в. (ср. с рис. 5.63).
Непосредственное построение л. в. усилий Мту 2т, Ыт кинематическим методом сводится к построению эпюр прогиба от действия единичных с. д.
От 1 Г т — 1 у Ат — 1 в сечении т. Для этого также используется уравнение (5.210).
Данные для построения л. в. параболических двухшарнирных арок см. табл. 8.2.8.
5.6.5. Упрощенный расчет двухшарнирных и бесшарнирных параболических арок
Расчет параболической арки упрощается и сводится к использованию готовых формул, если момент инерции сечения следует закону
1 ——, (5.229)
соз а
где с — момент инерции в ключе.
Для указанных законов гибкость получается равной:
8 I
С й С йх I
‘6•“,
О о
что соответствует гибкости балки пролетом I с постоянным моментом инерции сечений равным с.
Статический момент гибкости относительно оси х' и расстояние центра гибкости относительно этой оси:
-№-№-т- ■«
Уо рф
■Т'-
(5.238)
Дальнейшие упрощения получаются, если наряду с допущением соз ас пренебречь деформациями удлинения и сдвига, положив ЕЕ — ОЕу оо.
Моменты инерции гибкости:
1% -7Г '-гг-, (5.239) 4
15 Е1С и ЗЕ1С
45 ' Е1е’
14
,
ХУ ШС
(5.240)
(5.242)
(5.243)
Фиктивные грузы и фиктивные моменты, а следовательно, и фиктивные реакции хл и тв и абсциссы фиктивных грузов вычисляются как для простой балки пролетом I и жесткостью Е1С. Табл. 8.1.3 пригодны и для параболической арки. Фиктивные моменты относительно горизонтальных осей вычисляются по формулам:
Рис. 5.70
Ф
их1
С М° у' йв 1 Г,
—ж)1’
Уравнение оси арки в осях х'у' (рис. 5.70)
у'гх’(1-х') Ш'- (5-230)
2
Тангенс наклона касательной к оси х
-у- 1 — (5.231)
Тангенс и косинус угла наклона в пятовом сечении:
1§а44ц, (5.232)
1
соз аА
где [I
(5.233)
(5.234)
Е1С I2
М° х' (1 — х')йх'
4
Е1С12
0,5
1 -НН
—0,51
х2 йх.
(5.244)
(5.245)
Толщина арки в пяте при прямоугольном сечении
НА нс 11 16 ц2. (5.235)
где Не — толщина в ключе.
Входящие сюда интегралы вычисляются как несложные комбинации статических моментов и моментов инерции эпюр М° относительно вертикальных осей у' или у. Эпюры М° строят как для простой балки, откладывая ординаты по вертикали.
Вместо величин фиктивных моментов и удобно пользоваться координатами фиктивного груза Рф, ординатой уе и абсциссой. Имея их, определяют
4 -рф Ув -рф хв-
Частные случаи нагрузок. 1) Вертикальная сила Р на расстоянии и —и от опор.
Ммаксй' (рис, 5.70).
6.6. АРКИ И ПРОСТЫЕ РАМЫ
275
Фиктивный груз
Р1У
2 Е1С
Абсцисса фиктивного груза хд цисса силы Р. Ордината фиктивного груза
4 --[12(1ЗГ) 1'’(13)];
(5 246)
Хр а
——, где Хр — абс-
3
У в Ув
Если сила Р приложена вдоль оси у, то
(5.247)
(5.248)
Р1
■мзко 4
оФ-
р2
8Е, ’
2) Равномерно распределенная сплошная вертикальная нагрузка р кГ на 1 гог. м
РбЕ'
проекции арки.
макс §
2Е1С
2ЕС 55 12 р-Р?-(
ра1 Ц' (1) ра3 Щ
6Е,
24Е1С
рф
00
00— 2 ’ _ А,
рФ 00-Н© — 3 •
Частный случай — нагрузка занимает левый полупролет:
с 0, й — -
рФ __
хв1’’ хв'
1 4 5
_рР_.
24 Е ’
_ _г_ 16
г Т;
(5.252)
4) Равномерный нагрев или охлаждение на ±°.
Результирующий фиктивный груз равен нулю. Поэтому фиктивные моменты при помощи координат фиктивного груза выразить нельзя. В данном случае
аН°; Ф 0.
(5.253)
Ув Ув • (5.249)
3) Нагрузка, равномерно распределенная на части пролета а — от х'—с до х'—й.
(5.250)
(5.251)
Равномерный нагрев эквивалентен перемещению опоры внутрь по горизонтали на величину или ив ——а.
Учет обжатия
Влиянием деформаций сдвига пренебрегают во всех случаях, за исключением каменных и бетонных мостов большого пролета. Учет деформаций удлинения (коротко— обжатия) приводит к уменьшению распора и увеличению изгибающих моментов. Для пологих арок обжатие учитывается при вычиеении величины и не учитывается при вычислении 1у и грузовых членов На величины Р и РФ ни сдвиг, ни обжатие вообще не влияют.
С учетом обжатия
ТА. С сов2 айв
Iх х “Ь 2р (5.254)
5
Здесь через 7 обозначено значение 1% без учета обжатия [см. формулу (5.240)].
р.
Для упрощения выкладок принимается Р
где Рс — площадь сечения арки в ключе. соз2 аЛ
соз х
I-
ЕР
№Рс
1со52 4
п1
(5.255)
Значения п следующие:
1
14
15
16
17
18
19
110
115
120
п
0,785
0,843
0,881
0,911
0,931
0,942
0,952
0,971
0,999
Для пологих арок принимают п—1. Формуле (5.254) придают вид;
1% 7 (1 п); V . (5.256)
ЕР I
Для бесшарнирной арки
I5-257
276
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
Для двухшарнирной арки
8 2
Е1С
(5.258)
259)
15_ _[с_
8 ' Рс П‘
Для двухшарнирной арки с затяжкой
_ Л. (Л., -Ёк_ «
4,3 82 " Е3Р3) '
Здесь Е3, Рз — модуль упругости материала и площадь сечения затяжки.
Готовые формулы для различных случаев нагружения и построения л. в. параболических арок см. таблицы раздела 8.2.
5.6.6. Одноконтурные (простые) рамы
[65, 87, 40]
П-образные и замкнутые рамы рассчитываются на основе общих приемов расчета арок с теми упрощениями, которые вытекают из ломаного очертания оси. В первую очередь эти упрощения связаны с возможностью во всех случаях пренебречь упругими перемещениями от удлинения и сдвига по сравнению с перемещениями от изгиба.
Статически определимые рамы
Статически определимые рамы чаще всего встречаются в качестве основных систем при расчете статически неопределимых рам. Статически определимые рамы мо-
Рис. 5.71
гут быть типа ломаной консоли, ломаной балки на двух опорах или трехшарнирной рамы. Определение усилий (построение эпюр) консоли начинается от свободного конца; определение перемещений — от защемленного конца, который в фиктивной конструкции выступает как свободный конец. В случае ломаной балки сперва необходимо определить реакцию хотя бы одной из опор. При определении перемещений — соответственно фиктивную реакцию (угол поворота). На рис. 5.71 даны эпюры М для ломаной балки от действия горизонтальной силы.
Трехшарнирная рама рассчитывается по правилам, указанным в 5.6.2. Расчет по методу замены связей показан на рис. 5.72. Сначала рама заменяется другой
статически определимой (основной) системой, более удобной в смысле простоты построения эпюры Му в данном случае — двумя стойками, защемленными нижним концом, и шарнирно опертым на их верхние концы ригелем. Строят эпюру моментов М° для основной системы (рис. 5.72, а). Затем вводят неизвестные дополни¬
тельные реакции (или другие усилия) Мл, Уа и Я а, которые подбирают так, чтобы окончательные изгибающие моменты в трех шарнирах Л, В, С были равны нулю. Момент Ма определяется сразу: 1) Ма ——М;
реакции VА и НА найдутся из условий: 2) VаХс— -НАус Мс0; 3) УаХв—НаУвМЪ 0.
Дополнительные моменты от МА, VА НА подчинены закону плоскости. Это дает возможность построить окончательную эпюру М графически (рис. 5.72,6). Продолжают ось ригеля до пересечения с прямой А'В' в точке И. Проводят прямую ЪС что дает трапецеидальную эпюру от опорных моментов ригеля. Точки Е и Р соединяют с точками А' и В'. Окончательная эпюра заштрихована. Общее правило: строят статически возможную эпюру М°, откладывая ее аппликаты перпендикулярно плоскости рамы, затем срезают аппликаты новой начальной плоскостью так, чтобы окончательные моменты в шарнирах были равны нулю (известны три точки, через которые проходит эта плоскость). Аппликаты, отсчитанные ог новой начальной плоскости, откладывают в плоскости рамы в виде ординат от осей стержней и получают окончательную эпюру моментов.
Пример 5.8 (рис. 5.73,а). Плоская ломаная консоль нагружена в своей плоскости равномерно распределенной нагрузкой. Построена эпюра М, ординаты которой отложены от растянутого волокна. Интенсивность фик-
М
тивной нагрузки в каждом сечении равна —.
Е1
Не прибегая к изображению фиктивной конструкции (консоли, защемленной правым концом и нагруженной
5.6. АРКИ И ПРОСТЫЕ РАМЫ
277
фиктивной нагрузкой перпендикулярно своей плоскости), определяем результирующие фиктивные грузы. Они равны площадям эпюр моментов, разделенным на Е1, и расположены в точках оси, соответствующих центрам
р2 к
тяжести эпюр. Груз ©1 - действует посередине
стойки Л, груз 02
р2 8
2 Е1к
действует на расстоянии
2-3 Е18
54 от жесткого узла. Векторы фиктивных грузов направляют в соответствии с правилом левого винта: если
а)
шшннииншшш
Активные фиктивные грузы равны:
01
1
2
р2
р2 5
Е1
3
5
32
4 8Е1
1 5
ЁГ ‘ Т
р12
16
— ■
р2 5
32 Е1 1
03
р2 5
32 Е1
Для определения горизонтального перемещения правой опоры можно фиктивных реакций в шарнирах А
1Р1_
„_Р1 г,.Р1И I. РЬ. Р1
Х)т1 т1ш итщ
б)
Р1
Р
777
РШ
т г—
5Гнг
-ЕШ, 1ъ. ыг I, Р Р1
' 62Е7п 3 2С7[ 316Г„Гп
Рис. 5.74
М — положительный при обходе контура по часовой стрелке, то груз направляется от наблюдателя, если отрицательный — то к наблюдателю. В данном случае моменты отрицательные на всем протяжении консоли, поэтому грузы 01 и 02 направлены к наблюдателю. Прогиб в направлении оси у равен моменту фиктивной нагрузки относительно этой оси. Вектор момента (а значит, и прогиб) откладывается в такую сторону, глядя с которой, увидим вращение по часовой стрелке:
3, р2 к р12 к
V 01 02—
4 2 Е б Е18
— I(вниз).
Угол поворота правого конца
Р © 02
р2 к р12 5
2 Е1Н
6 Е1Я
(по часовой стрелке).
и В не определять. Перемещение ив равно моменту фиктивных грузов относительно оси АВ:
к_
'г 2 '43
5 р2 зк
"96 ’
ЕЛ
-(вправо).
Прогиб в коньке определяется после нахождения хл. Так как вертикальное перемещение шарнира В равно нулю, то момент фиктивных грузов относительно вертикальной оси, проведенной через В, равен нулю:
1
1 0;
г л
3
64
р12 8 Е1
Пример 5.9 (рис. 5.73,6). Ломаная балка несет на левой половине равномерно распределенную нагрузку. Ординаты эпюры М здесь отложены от сжатого волокна. Так как изгибающие моменты всюду положительные, фиктивные грузы направлены от наблюдателя (за чертеж) и изображены кружками с крестиками.
Вертикальный прогиб конька равен моменту односторонних фиктивных грузов относительно вертикальной оси, проведенной через конек:
I
I
I
384
р12 8 Е1
(вниз).
278
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
Прогиб конька равен фиктивному изгибающему моменту посередине пролета горизонтальной балки проекции от действия фиктивной нагрузки, определенной для ломаной балки.
Пример 5.10. На рис. 5.74, а показана Г-образная консоль, нагруженная в своей плоскости силой Р, построены эпюры М, ( и найдены фиктивные нагрузки, равные площадям соответствующих эпюр, деленным на жесткости; на рис. 5.74, б — та же консоль, нагруженная перпендикулярно своей плоскости (см. ниже 5.6.7). В обоих случаях даны величины прогиба конца консоли по направлению силы Р с учетом всех деформаций.
Статически неопределимые рамы
Как и в случае арки, изгибающие моменты от действия лишних неизвестных получаются по формуле сжатия с изгибом или, что то же, по формуле внецентренного сжатия фиктивного профиля фиктивной нагрузкой. Формула для полного изгибающего момента в точке , у по варианту внецентренного сжатия имеет вид:
Положение центра гибкости:
М'
Х,У
2 0ге Ф
у-
2 0л
уФ
У
Здесь
Здесь
•ф 2 к' 2е.
' и. Е1‘
к А—; е ——
‘к «о ‘а
где ко — коэффициент отпорности основания; 1а — момент инерции подошвы фундамента.
Обычно поворотом фундамента пренебрегают, стойка считается жестка защемленной, е0.
2А'й
• 2еЛ —-1 - к' к — 2ей; «3
, 5
уо рф
.(5.260)
Мх у—изгибающий момент в основной системе;
МХ'У—изгибающий момент от лишних неизвестных; р, , I — геометрические характеристики гибкости рамы;
0 — фиктивные грузы, получаемые как площади эпюр М° с ординатами, уменьшенными в Е1 раз;
© У в — координаты фиктивных грузов.
Для перехода к формуле (5.214) достаточно подставить
Ев Рф; Т,вув Ь% 20-%-.
Определив изгибающие моменты в трех сечениях (обычно пятовые моменты и момент в коньке), находят усилия N п ( в этих сечениях, пользуясь уравнениями равновесия рамы в целом и одной из полурам аналогично определению реакций в трехшарнирной арке.
При расчетах следует пользоваться табл. 8.3.11.
Последовательность расчета выясняется на примере.
Пример рамы с параболическим ригелем (рис. 5.75). За единичную жесткость принимается величина Е1С в ключевом сечении.
Гибкость рамы складывается из гибкости ригеля, гибкости двух стоек и податливостей оснований стоек при повороте. Находим эти величины, увеличенные в Е1С раз:
Моменты инерции гибкости: 3
I Р_ (к' в) Р 12 2
1% г Н2 К А2 2еЛ2;
Основная система получается путем включения шарнира в левом опорном узле ригеля и горизонтально подвижной шарнирной опоры в правом опорном узле ригеля.
Эпюру М ригеля при вертикальной нагрузке ригеля строят как для простой балки. Эпюра показана на рис. 5.75, внизу. Фиктивный груз и его координаты определяются по формулам (5.252):
(здесь уо берется с учетом его знака).
Эпюра м стойки получается в виде кубической пара й2
раболы с максимальной ординатой —7—. Фиктивный
6
груз и его координаты:
1 о I 3
©а1гг'А; У2тк Уо‘
Третий фиктивный груз приложен к левой пяте:
«3
р2к I.
3 т ; Узн Уо-
Подстановка этих данных в формулу (5.260) дает величины Мх,у во всех сечениях. Расчет ничем не отли-
5.6. АРКИ И ПРОСТЫЕ РАМЫ
279
чается от определения напряжений в колонне, нагруженной несколькими эксцентрично приложенными продольными силами.
Упрощения в расчете геометрических характеристик
гибкости , и фиктивных нагрузок
Вычисление указанных характеристик тождественно с вычислением действительных характеристик Р, , 1У
тонкостенного профиля с толщинами стенок ДО —.
Е1
Целесообразно использовать метод редуцирования площадей (см. 5.2.3), который переходит в метод редуцирования гибкостей отдельных брусьев и рамы в целом.
Гибкость каждого бруса — редуцируется к трем точечЕЦ
ным гибкостям — посередине длины стержня — • —,
3 Ец
по концам —т- и ГГГ Эти гибкости берутся увели6 Ец оЕц
ченными в Шс раз и получаются равными 4, и 1(.
На рис. 5.76, а показана асимметричная рама с нагрузками, на рис. 5.76.6 — ось рамы с нанесенными на ней черными точками и надписанными около них величинами редуцированных гибкостей1. Пользуясь точечными гибкостями, определяют положение фиктивного центра тяжести ОФ и главных осей гибкости Ох, О® и характеристики:
ф6 2 Г. 2 у2 и 2 X2 ДГ.
Увеличенные в 6Е1С раз фиктивные грузы равны произведениям изгибающих моментов М° в сечениях, совпадающих с точечными гибкостями, на величины точечных гибкостей. При этом моменты, растягивающие внутреннее волокно (положительные), дают фиктивные грузы, направленные от наблюдателя, а моменты, сжимающие внутреннее волокно, — к наблюдателю. Способ является совершенно точным при соблюдении следующих условий: 1) стержни должны иметь постоянное сечение; 2) эпюры Л1° в пределах отдельного стержня должны быть прямолинейные или параболические второй степени без скачков и переломов. Поэтому границы стержней следует брать совпадающими с точками приложения сосредоточенных сил и моментов или с границами равномерно распределенных нагрузок, как это сделано в отношении ригеля на рис. 5.76,6. Точность способа при несоблюдении этих условий, например при погрузках по треугольнику, эквивалентна точности приближенного вычисления определенных интегралов по формуле Симпсона с тремя ординатами. Для повышения точности достаточно заменить стержень двумя стержнями. Стержни переменной жесткости заменяются несколькими стержнями постоянной жесткости.
Числовые примеры расчета симметричных и несимметричных одноконтурных рам при неподвижной нагрузке и построение л. в. см. [87, гл. III].
Справочные данные см. I изд. табл. 8.3.11.
5.6.7. Бесшарнирные арки и рамы под нагрузкой, перпендикулярной их плоскости
Усилиями являются крутящие моменты М, изгибающие моменты М и поперечные силы 0. Бесшарнирная арка (рама) трижды статически неопределима. Освобождая один конец, превращают систему в статически определимую консоль, строят эпюры М° и С°и находят фиктивную нагрузку, которая в данном случае лежит в плоскости системы. Пример для Г-образной консоли показан на рис. 5.74, б. Фиктивными моментами, зависящими от ? (третья эпюра), как правило, пренебрегают. При нагрузке в плоскости изгибающие моменты от лишних неизвестных определяются как фиктивные нормальные напряжения по формуле внецентренного растяжения — сжатия. Подобно этому здесь крутящие и изгибающие моменты от лишних неизвестных определяются как фиктивные касательные напряжения и хп по формулам направленного сдвига (см. 5.3.2).
Общие формулы для Мк, М, ( в любом сечении арки имеют вид:
1 Ригель представлен в виде двух стержней длиной 5 по при¬
чине, указанной ниже.
280
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
М,
м1-
м°—[
рф рф Ьф '
—- соз —— зш — г
рфх рф ф,
м м° м
рф РФ —- зш а 4- —V соз а 4- г.
П П е)
1 (1о 1 С±
(5.261)
Нуликом отмечены усилия в основной системе от заданных нагрузок, звездочкой — от лишних неизвестных.
Геометрические характеристики — фиктивные направленные площади Р%, Рц и направленный полярный момент инерции вычисляются по формулам разкела 5.3.2, причем погонные величины соответственно равны:
01к
— • 1-Ф
(5.262)
(5.26Г)
Проекции равнодействующей фиктивной нагрузки на главные оси сдвига обозначены Рмомент относительно центра сдвига Сф обозначен. Знаки ± в формулах (5.261) показывают, что направления векторов и при вычислении скобок должны быть взяты по смыслу. Переход к усилиям (моментам М и АР) делается затем в соответствии с правилом левого винта, поскольку и для нахождения фиктивных грузов используется это правило.
5.7. СЛОЖНЫЕ РАМЫ [17, 29, 40а, 45, 65, 72, 76, 87]
5.7.1. Классификация методов
Расчет простой или сложной статически неопределимой стержневой системы, для которой нет готовых формул, начинается с расчета другой системы, отличающейся от заданной числом связей и называемой основной системой. Связей в основной системе может быть меньше или больше, чем в заданной, одни связи могут быть отброшены, а другие дополнительно введены. Важно, чтобы основную систему можно было рассчитать, пользуясь известными методами или справочными данными. Рассчитав основную систему от заданных силовых или деформационных воздействий (температуры), учитывают дополнительные воздействия, связанные с различием между заданной и основной системами.
Всякая отброшенная связь должна быть возмещена усилием в ней, некоторой силой или группой сил (такие силы называются групповыми, иногда — обобщенными), приложенной к основной системе, пропорциональной одному параметру, подобранной так, чтобы действительное (полное) перемещение по направлению отброшенной связи было равно нулю. Всякая дополнительно введенная связь должна быть возмещена принудительным перемещением по направлению этой связи (иначе с. д. связи), подобранным так, чтобы действительная реакция дополнительной связи была равна нулю. Этот подбор осуществляется в обоих случаях путем решения линейных алгебраических уравнений, составленных на основе принципа сложения действия сил и малых деформаций, верного для достаточно жестких упругих систем, перемещения в которых существенно малы по сравнению с геометрическими элементами.
В соответствии с тремя методами выбора основной системы и факторов, согласующих основную систему с действительной, или основных неизвестных различают три метода расчета:
а) метод сил, когда основные неизвестные являются усилиями;
б) метод перемещений, когда основные неизвестные являются перемещениями;
в) смешанный метод, когда одни неизвестные — усилия, другие — перемещения. Все шире внедряемый в расчет рам метод начальных параметров также относится к смешанному методу.
Таблица 5.9
Рекомендуемые методы для некоторых статически неопределимых систем
Система
Основной метод
Конкурирующий метод
Неразрезная балка на жестких или упругих опорах
Рамная эстакада (закрепленная)
Рамная эстакада (свободная) Однопролетная многоэтажная симметричная рама:
симметричная нагрузка
антисимметричная нагрузка Многопролетная многоэтажная рама
Арочно-рамная система без затяжки или с затяжкой Комбинированная система с большим числом стержней Ферма
Метод сил (метод уравнений трех или пяти моментов)
Метод перемещений
То же »
Метод сил
Метод перемещений с применением последовательных приближений
Метод сил
То же »
Метод сил (метод уравнений четырех моментов)
Смешанный балочный метод
Метод сил
Точное решение при помощи вычислительных машин
Метод перемещений, смешанный метод
Система уравнений метода сил выражает условия совместности деформаций частей действительной системы в местах устраненных связей. Система уравнений метода перемещений выражает условия равновесия частей действительной системы в местах введенных связей. Система уравнений смешанного метода состоит из двух групп уравнений, из которых одни выражают условия совместности деформаций, другие — условия равновесия.
Наиболее общим и распространенным методом является метод сил в его классическом аналитическом варианте, когда выбирается статически определимая основная система.
5.7. СЛОЖНЫЕ РАМЫ
281
1Р„ Рзн Р
М., Игз Ргз Мзг Мзц .г 1а Т Ы « с
I
М-Мп Н
и %Ч1Ь'
7о т ТГТЪШг
I
Л
сг
7,'
Рис. 5.77
Метод перемещений и смешанный метод применяются чаще всего для расчета многоконтурных рам при условии пренебрежения упругой деформацией от действия продольных и поперечных сил. Основными системами соответственно является совокупность жестко защемленных по концам балок или совокупность шарнирно соединенных простых балок (балочный метод).
Выбор метода диктуется стремлением по возможности уменьшить число совместно решаемых уравнений и этим снизить неизбежное накопление ошибок. Из двух балочных методов метод перемещений всегда требует решения меньшего числа уравнений. Однако уравнения смешанного балочного метода составляются проще, и, решая их, непосредственно получают усилия, необходимые для расчета на прочность. В табл. 5.9 даны рекомендуемые методы для некоторых типов сложных статически неопределимых систем.
Построение л. в. Независимо от метода расчета л. в. любого статического фактора, как всегда, может быть получена двумя способами: 1) как сумма л. в., построенной для основной системы, и л. в. основных неизвестных, умноженных на некоторые коэффициенты влияния;
2) как эпюра прогибов заданной системы от действия соответствующих с. д.
Первый способ применяется для серийного построения л. в., второй — для построения небольшого числа отдельных л. в.
5.7.2. Расчет рам по методу трех и четырех моментов [29]
Этот способ представляет собой применение метода сил и смешанного метода при основной системе в виде совокупности простых балок. Он близок к расчету многопролетной неразрезной балки. Порядок расчета и ос¬
новные зависимости, используемые при составлении уравнений, выясняются на примере четырехпролетной эстакады с консолью (рис. 5.77, а). Все узлы предполагаются жесткими. О — шарнирно неподвижная либо шарнирно подвижная опора. В первом случае эстакада называется закрепленной, во втором случае — свободной. В закрепленной эстакаде сила торможения передается на опору, что облегчает стойки, зато изгибные температурные напряжения в стойках (от удлинения ригеля) возрастают.
Закрепленная эстакада
Основная система образуется путем постановки шарниров по концам отдельных стержней (исключая консоль). Если в узле жестко соединено п стержней, то шарниров берется п—1. В данном случае целесообразно включить шарниры в ригель, непосредственно слева и справа от узлов. Шарниры включены также в нижнем защемлении стоек. Во всех шарнирах приложены неизвестные усилия в виде групп равных и противоположно направленных моментов (так называемые угловые моменты), отмеченные двумя индексами. Момент в шарнире 4 и внизу всех стоек отмечен одним индексом. Изгибающие моменты считаются положительными, если вызывают растяжение нижнего волокна ригеля и правого волокна стойки. Моменты вверху стоек получаются из условий равновесия моментов, действующих на жесткий узел:
п,п' Мп,п1 МПгп—1
1,1' 12 10» 2,2' 23 — 21»
3,3' 34 — -32» 4,4' — 4 4
(5.263)
282
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
Здесь М4 — опорный момент консоли. В данном -случае —Рс.
Поскольку имеется опорный стержень 0—0", основная система является неизменяемой и статически определимой. Эпюры моментов от заданных нагрузок строят как для системы простых балок.
Типовое уравнение, связывающее угловые моменты, выражает условие неразрывности деформаций для жесткого «угла», состоящего из двух стержней, например стержней Иг и кт (рис. 5.77,6). Оно содержит в общем случае четыре момента, а в частных случаях — три и два момента: к-е уравнение имеет вид
к) М1к 11к 2МЫ Чк 2Мкт 1кт Мтк 1кт
“ (« »т) “ Шс • (5-264)
Все обозначения соответствуют 5.5.7. Вторым индексом отмечается противоположный конец стержня.
При закрепленной раме углы перекоса ф равны нулю или наперед заданным величинам, вычисленным по осадкам опор или температурному удлинению ригеля или стоек. Поэтому число уравнений равно числу неизвестных усилий и весь расчет отвечает методу сил.
Обозначая длины стоек через Ний4 и углы перекоса стоек через фь ф4, получаем следующие уравнения.
Нижние защемления стоек (наблюдатель правее стойки):
угол 1': угол 2': угол 3': угол 4':
2М1.Н[ (М12 - М10) Н[ -6Е1С%;
2М2, Н2 (Л12з — М21) й2 : — 2' — 6.Ес Ф2»
2Му (-34 — 32) : — 3' — 6.Ес ф3;
2МГН’4(М4 РС) Н
■ — 4 — 6 Е1 с ф4.
(5.265)
Если стойки не нагружены и не перекашиваются, то моменты внизу стоек равны половине моментов вверху стоек с обратным знаком.
Ригель слева и справа от стоек (наблюдатель внутри угла):
угол 0—1—
гм» -2 [мп - мш) - Мх. Н
— 1ю — — 6Е1С — о);
угол 1'—1—2:
Му 2 12 ю) 1 12
12 1,1'— 12— 62ГДф12 Ф1);
угол 7—2—2':
12 12 — 2Л121 12 — 2 (Лз 21) 2 — М2 Ь2 — 21 2,2'-— 62:(г)2 ф2')
угол 2Г—2—3:
Щ' Ь-2 2 (23 21) 2 23 23
32 гз” 2,2' 23 6Е1 (23— Фг)
угол 2—3—3' — аналогично 1—2—2' с увеличением всех индексов на единицу; угол 3'—3—4 — аналогично 2'—2—3; угол 3—4—4':
34 34 2М4342 (М4 Рс) Н4 — М4 Н4
81 43 4,4' — 6ЯС (ф4 — 1).
Решение проводится вг следующем порядке. При помощи (5.265) выражают моменты внизу стоек через моменты вверху стоек, например:
Му -
1 ЯубЕ,%
— (М1Ч - М10) ; ;
2 л,
Ч
М2( —— 2 023’
м21)-
2' 6Е1с 1?2
(5.267)
и подставляют эти значения в (5.266). Уравнения для углов между элементами ригеля и стойками превращаются в трехчленные, содержащие только моменты ригеля. Эти уравнения решаются по правилам, указанным в 5.5.8. Обратной подстановкой в (5.267) находят моменты внизу стоек.
При незагруженных и неперекашивающихся стойках трехчленные уравнения получаются сразу из (5.266): достаточно зачеркнуть слагаемые, содержащие моменты внизу стоек, а при моментах вверху стоек [вида (.МХ2—Мю)] заменить множители к через
Имея моменты в ригеле, определяют поперечные силы в нем, а также продольные силы в стойках, например
М43 — Ми М32—М23
Лз Л-
34
1%
(5.268)
Величина N3 равна сумме давлений простых балок 2—3 и 3—4 от местной нагрузки на опору 3.
Вертикальные реакции в нижних защемлениях стоек равны продольным усилиям в стойках с добавлением собственного веса стоек.
Горизонтальные реакции
-М32 — М34 — М3г
и т. д. (5.269)
(5.266)
Имея эти реакции, определяют поперечные силы внизу и вверху стоек, например
Фз',33; Сз,з' Фз',з — Ра. (5.270)
Усилие в. опорном стержне 0—0" получается из уравнения проекции на ось стержня сил, действующих на отрезанный ригель (рис. 5.77, в):
Н 01' 4" 22' 3,3' "Ь 4,4' “Ь 34 с08 а (5.271)
Определив Я, находят продольные силы на всех участках ригеля. Например
(5.272)
5.7. СЛОЖНЫЕ РАМЫ
283
Свободная эстакада
Стержень 0—0" отсутствует, но мысленно вводится для образования геометрически неизменяемой основной системы. Дополнительной неизвестной является горизонтальное перемещение узла 0, обозначаемое а, или, что то же, воображаемое удлинение стержня 0—0". Дополнительное уравнение выражает условие равновесия горизонтальных сил, действующих на ригель без участия силы Я, или, что то же, условие аннулирования усилия в стержне 0—0".
Система упавнений (5.265)—(5.266) остается без изменений, но в углы перекоса стоек вносятся добавки, зависящие от перемещения и:
К
и
и
Нг
и
К
(5.273)
Здесь -ф0 — наперед заданные значения углов перекоса стоек, подсчитанные для основной системы.
Окончательные уравнения получаются трехчленными относительно моментов М, но каждое из них содержит также неизвестную и. Чтобы использовать простоту решения чисто трехчленных уравнений, рекомендуется сначала найти усилия от заданных нагрузок и температуры в предположении О, т. е. для закрепленной эстакады, и получить из уравнения (5.271) величину Н. Затем те же уравнения решаются в предположении, что все нагрузки и нагрев (охлаждение) отсутствуют, но и I. Это значит, что отличными от нуля свободными членами являются только углы перекоса стоек и они равны:
-7-; -7-; Ь -7-; Ф«в -7- • (5.274)
П «2 3 Л4
Имея усилия от а 1, определяют величину Н. Значение и равно:
(5.275)
Остается просуммировать усилия первого расчета с усилиями второго, предварительно умноженными на найденную величину и.
Аналогично ведется расчет при наличии двух (и большего числа) дополнительных неизвестных. При этом значения ии получаются из совместного решения уравнений, выражающих аннулирование усилий в дополнительных связях:
Н 11 «1 12 Иг 0; 2 г Н21 их И22 2 — о.
(5.276)
Простая балка переменного сечения как элемент основной системы
Концевые углы поворота выражаются формулами:
58 %В
ф ф I В Р
Ф А
Мс
(5.277)
а " р
Здесь 1°аУ% т°в У% — фиктивные реакции — концевые углы поворота от заданной местной нагрузки или
неравномерного нагрева. — моменты инерции эпю¬
ры гибкости относительно концевых осей у А и у в, перпендикулярных оси балки, д 35 —
I—1%— так называемый комомент инерции гибкости, выражаемый через статические моменты и моменты инерции эпюры гибкости относительно оси у а либо от-
3
носительно оси у в. При Есоп1 Ф Ф -
3Е1
Ф
ав
6 Е1
и получаем обычные формулы:
Ма1
хв тв ■
3 Е1 М.1
МВ1 6 Е1 МВ1
6Е1
ЪЕ1
Уравнение четырех моментов в случае стержней переменного сечения. Вместо (5.264) имеем
М1к
1%
.
2 Мк1 -Г- Мкт— МщЬ
1к Нк кт
кт
(5-278)
В случае балок с вутами используются формулы (5.264) с коэффициентами из табл. 8.1.18.
Ступенчатая стойка
(рис. 5.78)
Мысленно вводятся подбалки пролетом Ня и кв. Концевые углы поворота подбалок от местных нагрузок
Нтг
ра
р»
г
Рис. 5.78
в пределах их пролетов определяются как для балок постоянного сечения и обозначаются т, и т®,
Определяется опорное давление подбалок в точке С, равное УсУс •
Изгибающий момент в стойке в сечении С
А«о»(15 с)
(5.279)
284
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
Прогиб стойки в сечении С
М°г и и
х«ть,__д_ ил
СТ с-г ЗЕ у н -г в
Концевые углы поворота стойки:
т0тн, _МСК «С_
А А 6Е1„ К
МСНВ ис
'
. (5.280)
(5.281)
6 Ев Нв
Моменты инерции эпюры гибкости стойки:
А 3Е1В 3 Ев Е1„ ) ’
I3 Н 1 1 1вШа Ш7 ЁП) ’
Ф 1АВ —
г
Й7В
К
2
Е1 в 1
5в
(5.282)
Ломаная или криволинейная балка
Отдельные балки, составляющие основную систему, необязательно должны быть прямыми, они могут быть ломаными (рис. 5.79) и криволинейными. Их рассматри-
Рис. 5.79
вают как прямые балки, но с учетом влияния «продольной силы» (по существу — распора) на концевые углы поворота. Кроме того, учитывается влияние «удлинений» (упругого изменения пролета ломаной балки) на углы перекоса. При этом дополнительные уравнения будут зависеть не только от усилий, но и от линейных перемещений.
Формулы для концевых углов поворота и изменения пролета имеют вид:
Ф 1в
2
ф
1 АВ
4-М
2
М
а ан
ТНГ
X
АВ
Ф
1 НВ
■м
г Ф
1 НА
т%.
Здесь т° У ©° -р;
т “1 0-.; 4 ©%0;
—моменты инерции эпюры гибкости стержня относительно осей у а и у в
1%в— комомент инерции эпюры гибкости стержня вычисляется по формуле
1%А к нв —центробежные моменты гибкости относительно осей хн и у а либо ув (по абсолютной величине);
—момент инерции гибкости относительно оси Хн.
Рис. 5.80
При несимметричной форме оси ломаной балки для вычисления моментов и комоментов инерции гибкости следует применять метод редуцирования гибкости (см. 5.2.3). При симметричной форме можно получить все величины пересчетом исходя из значений Р®, , для главных осей (см. табл. 8.3.11). Формулы для вычисления величины и положения ©° см. также табл. 8.3.11. Для параболической балки см. также 5.6.5.
Использование формул ломаной балки для расчета рамы с защемленными пятами. Приравнивая та, тв и ив нулю, получают три уравнения, содержащих неизвестные опорные мохменты МА и Мв и распор Н рамы с защемленными концами. Этот способ, отвечающий методу сил, избавляет от нахождения центра и главных осей гибкости, но требует решения трех уравнений с тремя неизвестными.
Уравнение четырех моментов с учетом распоров
м(к
Миг
Н1к -(
А.
‘%л
Мкп
Нкп
л
Ф
1 кт,т
мт,-
кт
1кп
кк
г°к1 х°кт кт •
-
(5.284)
(5.283)
Здесь обозначения 1, 1кт,т соответствуют центробежным моментам инерции 1%А, для пролетов
г, кт.
Уравнение трех моментов для неразрезной балки с пролетами в виде параболических арок с затяжками
Уравнение имеет вид (рис. 5.80):,
1'п (1- «) [ 1'п (1- -у м„
5.7. СЛОЖНЫЕ РАМЫ
285
л1(1— д «х)]
Мл1 1п (1 — кп “ 1п — %П- (5-285)
Здесь коэффициенты к зависят от жесткостных характеристик арок и затяжек (см. 5.6.5 и табл. 8.2.7). Грузовые члены определяются по формулам:
, 1п1п2Нп I (5 286)
Яп Яп — 2Нп1 п-- 1п-
Таблицы для расчета трехпролетных рам см. [81а].
Зависимости между перемещениями и уравнения равновесия в сложных случаях
При параллельных стойках установление соотношений между зависимыми и независимыми линейными перемещениями узлов или, что то же, между углами перекоса стержней достигается весьма просто. Точно так же
Рис. 5.81
просто составляются уравнения равновесия ригелей горизонтальных и наклонных: достаточно взять ось проекций нормальной к стойкам. При непараллельных стойках решение этих задач осложняется. Рекомендуется определять соотношения между углами Ф исходя из условий замкнутости отдельных контуров скелета рамы, а уравнения равновесия составлять на основании начала возможных перемещений (кинематическим методом).
а) Для каждого замкнутого шарнирного контура, прикрепленного к земле углы перекоса нерастяжимых стержней подчинены двум уравнениям:
2фсоз (,) О, 2фсоз (,) 0. (5.287)
Оси х, у могут быть взяты произвольно.
Если стержни получают заданные удлинения Л, то в уравнения входят дополнительные члены:
2'фсо5(,л) 2Л51п(;,у)0; 5288)
2ф соз (1,у) 2А зш (1,у) 0.
Углы (, х) и (, у) отсчитываются от оси к стерж¬
ню против часовой стрелки.
Углы ф считаются положительными при вращении по часовой стрелке.
Для четырехугольного скелета (рис. 5.81, а) имеем два уравнения для трех углов. Это позволяет выразить два угла, например фгз, фз4, через третий Ф12. Целесообразно взять ось х перпендикулярной стержню 23, ось у — перпендикулярной стержню 34. Тогда в уравнениях пропадают соответственно ф2з и фз4 и сразу получаются выражения ф34 и ф23 через Ф12.
Другой способ в вершинах , 2, 3, 4 прикладывают четыре фиктивных груза (нормально к плоскости контура):
®1 — 12» ©2 'Фгз — 12» ©3 34 — 23» 4 — Фз4»
Эти фиктивные грузы должны быть в равновесии. Условие 200 удовлетворено. Остаются два уравнения моментов. Беря ось 23, находим зависимость 01)34
—'Ф12“7—и т. д. При наличии удлинений равновесие л4
соблюдается с учетом векторов-моментов А в плоскости контура.
Скелет на рис. 5.81,6 (без пунктирных опорных стержней) имеет три степени свободы при девяти стержнях и трех независимых замкнутых контурах. Выбирая произвольно три контура (другие варианты новых зависимостей не дадут), например 12 345, 5439867, 54 67, составляют, как указано, 3-26 уравнений, связывающих 9 углов перекоса. За независимые параметры принимают ф12, г)54, Фзэ. При этом оказывается, что 46 и -фб7 зависят только от ф54; яр2з и фз4 зависят от Ф12 И Ф45; 'фбв И г)89 зависят от ф12, Ф54, фзэ.
б) Для получения дополнительного уравнения равновесия, связывающего моменты с нагрузкой, выбирают в случае рис. 5.81, а состояние возможных перемещений, задаваясь углом гр2 (или перемещением узла 2) и считая стержни недеформируемыми. Уравнение работ нагрузок и моментов, также рассматриваемых как нагрузки, имеет вид:
ЪР(±р 2 (Мл — Мв ) ф 0, (5.289)
конкретно:
Р ('ФггЛ 'Фгз гг) (М12 —М21) Ф12
(М23 — М32) Ф23 (34 — М43) Ф34 0. (5.290)
Выражая ф23 и ф34 через ф12, как указано выше, и сокращая на ф12 (иначе говоря, принимая ф121), получают искомое уравнение равновесия.
В случае, показанном на рис. 5.81,6, таких уравнений составляют три, принимая в качестве возможных состояния:
1) Ф12 0, Ф54 фзэ 0; 2) Ф54 Ф- 0,
Ф12 Фзэ 0; 3) фзэ Ф о, ф12 Фб4 0.
286
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
Этот способ применяется также при расчете рам по методу перемещений.
5.7.3. Метод перемещений [26, 29, 40, 65, 87]
Общие положения
Основная система метода перемещений образуется путем неподвижного закрепления всех или некоторых жестких узлов рамы. Для закрепления узла (бесконечно
ных случаях), защемленных двумя концами либо защемленных одним концом и шарнирно опертых на другом. Предпосылкой применения метода является наличие или предварительная подготовка формул для усилий в защемлениях указанных стержней, причем как от местных нагрузок или других деформирующих факторов, так и от перемещений самих защемлений; эти усилия равны, очевидно, силам, передаваемым от стержней на узловые диски. Имея указанные формулы, составляют систему уравнений для основных неизвестных (перемещений), выражающую условия равновесия узловых дисков, или, что то же, условия аннулирования усилий во введенных связях. Решив систему уравнений, возвращаются к формулам усилий в защемлениях и получают окончательные значения этих усилий, после чего производится проверка прочности стержней.
Обозначения и правила знаков. Концы стержня произвольно отмечаются буквами А и В. Наблюдатель занимает положение, при котором конец А левее конца В. Если не сделано специальных оговорок, принимаются обычные правила знаков как для балок. На рис. 5.82, а, б, показаны положительные перемещения торцов ра, Ра, и а и фв, Vв, иВу положительные моменты защемления МА и Мв положительные поперечные силы Эа и 2 в и положительные реакции Vа, На и Ув, в. Вспомогательные величины — фиктивные опорные реакции 1° И 1% в простой балке на двух опорах и фиктивный груз 0°, направленный на чертеж (при левой системе координат), отвечают положительным изгибающим моментам М° соответственно нагрузке, направленной сверху вниз.
Формулы для усилий (реакций) защемлений от местной нагрузки или заданной деформации и перемещений торцов
1. Прямой стержень постоянного сечения с обоими
защемленными концами:
4 Е1 2 Е1
МА МА Ф.4 — Фв — -
— °А 6 Е
I ' I '
4 Е1 2 Е1
Мв Маё3 - ФВ— - Фл—
6 Е I
6 Е1
6Е1
но малого плоского узлового диска) достаточно трех связей: одной (моментной) связи, препятствующей повороту, и двух (силовых) связей, препятствующих линейным перемещениям. Когда пренебрегают упругими деформациями удлинения и сдвига прямых стержней, большое число линейных связей осуществлено заранее. Это уменьшает число вводимых связей и вместе с тем число неизвестных перемещений. Для обычных рам характерно большое число неизвестных углов поворота узлов и небольшое число линейных перемещений. Чем меньше число линейных перемещений, тем эффективнее метод перемещений.
Основная система представляется совокупностью прямых, ломаных или криволинейных стержней (в отдель-
12 Е
2 2 ЕР
(5.291)
На на- — “в-“аУ. ЕР
Нв Н«в» — (ив-иА).
Здесь М» и М™ — опорные моменты балки с обоими неподвижно защемленными концами; берутся из табл. 8.14 в зависимости от местной нагрузки балки или вычисляются по формулам [см. 5.5.2 формулы (5.142')]:
5.7. СЛОЖНЫЕ РАМЫ
287
м"-
г—Щх-)-
—т-м-» г-(.)
—2-т(К-Л).
Л1 АЛН 3 I ЗЕ Мл МЯ4а чл —
(5.292)
? гг-ч4
3Е1 Р
3 Е1 I
3 Е1 I
тБ т Здесь
(5.295')
0° — фиктивный груз (приведенная площадь эпюры э), кош реакции:
А0), концевые углы поворота и — фиктивные
ЗЕт°
а-з %
К3
I
_0.0 0°а в— •
I
■ ф — уГ0Л перекоса бруса ( по часовой
(?"‘3 — поперечная сила в сечении х балки с обоими неподвижно защемленными концами:
л 12Е1в°хъ 6 р, л
«"•3 - —т-5 - о0 - V К - 4)
стрелке);
3. Прямые стержни с вутами. Формулы и коэффициенты к ним см. первое издание табл. 8.1.18.
4. Общий случай прямого стержня переменного сечения. Ось х совпадает с осью стержня. Индекс у прн 1у опущен.
Моменты защемления:
з - 2
Л9-М«’3
'
I
(5.293)
Я”3, Н™—реакции защемлений, равные продольным силам в защемлениях (по абсолютной величине);
0 СА
Ф
°А °В
1
Ф ?Ф
■)-
»П — О А
‘М’
—т27'- (5,294) 0п1 вв_
в
СА св _1_
ф рф I
Здесь х — абсцисса сечения, в котором приложена продольная нагрузка Т, если она имеется.
Обычно упругой деформацией удлинения пренебрегают, силы Т переносятся в узлы, и формулы для НА и Нв не используют, за исключением случая, когда речь идет о затяжке.
2. Прямой стержень постоянного сечения с левым (Л) шарнирно опертым и правым (В) защемленным концом:
-Фв
Ф рФ
(5.296)
Поперечная сила в любом сечении:
М
3 Е1
Vв—V
А 3 Е —
I
3 Е
2Ж Й-Э-Фв —-
О в —V
А 3Е1 Р
о «Го, В - V А , -7-[ Фв ; ЗЕ т%
Здесь Л1о3 — ——2? э (2® -
М«
■М,
(5.295)
л-3
То же, при правом (В) шарнирно опертом и левом (Л) защемленном конце;
- 7Ф (Рл сл Фв - °в Од). (5.296')
Здесь РФ, Ф — гибкость и центральный момент инерции гибкости балки; с а, св — расстояния центра гибкости ОФ от концов А и В; 0° — результирующий фиктивный груз; ©—его абсцисса относительно ОФ (эксцентрицитет).
Формулы (5.296) охватывают и случай одного шарнирно опертого конца, например А. Тогда ОФ совпадает с А; РФ оо; члены, содержащие ф, отпадают. Если шарнирно оперт конец В, то ОФ совпадает с В; РФоо; отпадают члены, содержащие фв. Если один конец балки жестко защемлен, а другой вертикально подвижной,
288
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
но не поворачивающийся, то в (5.296) следует положить ф оо. Такой случай встречается при расчете симметричных рам с симметричной нагрузкой.
Пример 5.11. Определить фиктивную нагрузку от заданных воздействий и найти характеристики гибкости для ступенчатой стойки, показанной на рис. 5.78.
Фиктивная нагрузка представляется в виде двух грузов, по абсолютной величине равных фиктивным реакциям и приложенных в тех же сечениях А и В:
— ТА “ В
Величины тРА и даны формулами (5.281).
Приводить фиктивные грузы © и © к результирующему ©° нет необходимости, следует учесть действие каждого в отдельности.
Гибкость стойки
Е1 н т Е1В -
Координата центра вверх:
гибкости, считая от точки С
со —
2Е1В
2 Е1Н
Расстояние 0 от концов А и В:
САНн Со; СВК V Центральный момент инерции гибкости
Ф Ф —.рФс,.
Величина дана формулой (5.282).
5. Общий случай ломаного стержня переменного сечения (рис. 5.82,6). Моменты в защемлениях:
5
Ф
'у
-Рв
НВНА
Ф
1 X
ЬА СВ
ф
У
IФ
' X
ЬА
м,
У в гЕ
ф
У
’ ■
Ф
у
‘а ьв
СА ЬВ
ф х
ф
1У
— Ф В
“в«4 В-А
Нв И св. (5.297')
Ф
Л X
Ф
У
Координаты х, г фиктивного груза ©°, подсчитанного для шарнирно опертой балки, берутся в соответствии с их знаком.
Координаты защемлений сА, св, НА Нв берутся по абсолютной величине.
В случае симметрии используется табл. 8.3.11, содержащая геометрические характеристики гибкости для ряда простых рам и параболического ригеля.
Реакции защемлений:
(е°0 ф4 с4 фв св
У
-Яв Оа)’
УВ Л (0° Фл СА Фв СВ -
-Ов °а)
(5.298)
(5.297)
НА Н°А (®° У в Ф АНА- ф В НВ -
х
— иВ ыа)‘
НВ Н°В- (0%0 Рлйл-Фзйв-
X
-ив “л)-
Частные случаи. Если одна из опор, например А, является не защемляющей, а шарнирно неподвижной, то рФоо, центр гибкости ОФ переходит в А, слагаемые, содержащие фл, отпадают, Ма— 0. В остальном формулы (5.297)—(5.298) остаются в силе. Об использовании аналогичных формул см. 5.6.3. Особенность состоит здесь в учете перемещений опор, эквивалентных сосредоточенным деформациям в концевых сечениях.
Формулы (5.297) — (5.297') получены путем развертывания их первых строк. При этом учитывалось, что влияние концевых углов поворота и прогибов эквивалентно действию угловых и линейных с. д. в опорных сечениях, в свою очередь приводящихся к фиктивным грузам и фиктивным моментам.
Составление уравнений из условий равновесия
Число неизвестных углов ф равно числу жестких узлов рамы (не считая опорных, для которых углы ф равны нулю или рассматриваются как заданные, иногда буквенные, величины). Число неизвестных линейных перемещений узлов (обозначаемых гг, V или Д) при условии пренебрежения упругой деформацией удлинения равно числу степеней свободы шарнирного скелета рамы. Наличие непрямого стержня (ломаного или криволинейного ригеля), для которого удлинением хорды пренебречь нельзя, увеличивает число неизвестных линейных перемещений на единицу.
Каждое уравнение выражает условие равновесия в перемещениях и «соответствует» определенному неизвестному. Неизвестным углам ф соответствуют уравнения равновесия моментов, действующих на узлы. Неиз-
5.7. СЛОЖНЫЕ РАМЫ
289
вестным линейным перемещениям соответствуют уравнения равновесия проекций сил, действующих на узлы по направлению перемещений. Вместо уравнений равновесия узлов часто целесообразно пользоваться уравнением равновесия стержней или групп стержней. В особенности это относится к уравнениям проекций при нерастяжимых стержнях.
Чтобы использовать формулы для усилий в защемлениях А и В, каждый стержень рамы отмечается с одной стороны пунктиром, который рассматривается как нижняя сторона стержня (балки), если его привести в горизонтальное положение. Левому концу мысленно приписывается обозначение А, правому — В.
Угол поворота узла ф и внешний (заданный) момент Ьу действующий на узел, считают положительными при вращении по часовой стрелке. При составлении уравнения равновесия как внешних, так и внутренних (со стороны брусьев) моментов, действующих на узел, целесообразно (но не обязательно) писать со знаком плюс моменты, вращающие против часовой стрелки.
Уравнение равновесия моментов имеет вид:
2 — 2МВ — 1 0.
В раме в виде сростка п стержней (рис. 5.83, а) единственной неизвестной является угол поворота узла р. При нанесенных пунктирах моменты Мм, Мкь являются моментами типа Мв. Моменты Мь2, Мь3, Мы— типа МА. Соответственно эти группы моментов (при положительных знаках) вращают узел в разные стороны (рис. 5.83, а, внизу).
Подстановка в (5.299) значений Мы (1, 2, 4) и Мы (12, 5) в зависимости от характера опирания конца дает уравнение:
Ч4()3йгйг)]
2 м%', - 2 м', - ц о. (5.зоо)
Скобка с множителем 4 относится к стержням с защемленным концом , с множителем 3 — к стержням с шарнирно опертым концом . При подсчете моментов неподвижного защемления Мв э необходимо учитывать характер опирания другого конца.
Общая формула для ф:
1-2лП-3 2л“-3 Еук —_ (5.301)
с р —
(5.301')
Здесь ' -у- (индексы I, — прежние).
В раме на рис. 5.83, б три неизвестных: углы поворота узлов фз и ф4 и горизонтальное перемещение узла Из (равное поступательному перемещению ригеля), Со-
(5.299)
ставляются уравнения моментов для узлов 3 и 4 и уравнение проекций для ригеля 3—4:
23 0; 2Л14 0; 2з_4 0.
Соответствующие схемы действия положительных усилий на узлы и ригель показаны на рис. 5.83, б, внизу,
1) - М3-Ь Мз4 0;
2) — М42 — М4з -- 0.
Перемещение «з и силы, действующие на ригель, считаются положительными, если направлены слева направо.
При составлении уравнения равновесия ригеля (так называемого дополнительного уравнения) целесообразно вводить со знаком «» силы, действующие на ригель справа налево:
3) Фз1 0.42 — 46 — Т 0.
В уравнения 1), 2), 3) подставляются значения М и
О по формулам (5.291) — (5.295).
При этом неизвестная и входит в усилия стержней 13, 24 и 45 соответственно в виде 0130а; 0240в; 045—
Приведение подобных членов дает искомые уравнения для фз, ф4, и3.
Осадка опоры на заданную величину 01 получает отражение в величине М34, куда вводится 03401. Равномерный нагрев стоек дает 034—043 и потому на усилия не влияет. Равномерный нагрев ригеля дает «43 а°з4, что отражается на усилиях в стержнях 24 и 45.
Рама на рис. 5.84 при симметричной нагрузке содержит пять неизвестных и требует решения пяти уравнений. В общем виде эти уравнения и относящиеся к ним схемы нагружения узлов и риГёля показаны на рисунке. Усилия защемлений, выраженные через перемещения,
290
РАЗДЕЛ 5, СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
получаются по формулам (5.291) и (5.297) с привлечением геометрических характеристик гибкости параболического ригеля. Подробный числовой пример см. [87]. При шарнирных сопряжениях ригелей со стойками подобную раму проще рассчитывать методом сил.
При непараллельных стойках осложняется установление соотношений между зависимыми и независимыми перемещениями. Этот вопрос решается точно так же, как и при расчете рам по методу сил или смешанному, когда основной системой является совокупность шарнирно соединенных балок (см. 5.7.2).
уровне в пределах этажа, (рис. 5.85):
при вертикальных стойках
6 Е1С
12 Е1С
-1 Н'Н -2С’НВ Ето.
(5.303)
Здесь «сн», «в» — индексы жестких узлов, лежащих непосредственно ниже и выше разреза. Суммирование
Развернутые формулы для составления уравнений метода перемещений
Общий вид уравнения моментов в перемещениях для узла к при прямых стержнях постоянного сечения (см. рис. 5.83,а):
(5.302)
— 3Е1С “Г — 1ь -Ь 1,мкА'I — 2 мкВ — Емйв о.
Здесь к — индекс уравновешиваемого жесткого узла;
I — индекс смежного жесткого узла (1, 2, 3,.);
— индекс смежного шарнирного узла (1, 2, 3,.);
1' __ __±. 1ы
где
4ш '
1С — произвольный, общий для всего расчета рамы момент инерции;
Фь Ф—углы поворота исследуемого и смежных жестких узлов рамы ( по часовой стрелке);
угол перекоса стержня ( по часо-
вой стрелке);
I— внешний момент, нагружающий узел к ( по часовой стрелке);
М.—момент защемления стержня в узел к; МА —момент защемления в узел к конца стержня А, соответственно при защемлении и при шарнирном опирании конца В; кА,1 —момент защемления конца стержня В соответственно при защемлении и при шарнирном опирании конца А.
Рекомендуется оперировать с величинами перемещений, увеличенными в Е1е раз, т. е. Е1ср% Есф.
Общий вид уравнения проекций для части рамы, лежащей выше разреза, проведенного на произвольном
Рис. 5.85
распространяется на узлы всех стоек разрезанного
этажа;
Нг — приведенные длины стоек разрезанного этажа; ф—углы перекоса стоек; при отсутствии температурного нагрева все ф одного этажа равны и выносятся за знак суммы;
0Н.В— значение поперечной силы в стойке, неподвижно защемленной двумя концами, в месте разреза; знак определяется правилом, установленным для балок, причем считается: низ балки — концом Ау верх — концом В; обычно нагрузки стоек (например, давление ветра на крайнюю стойку) разносят на нижний и верхний ригели, что дает С?н в 0, и с местной нагрузкой стойки в общем расчете рамы не считаются;
2Г—сумма проекций нагрузок, приложенных выше разреза на горизонталь (нормаль к стойкам).
При стойках, шарнирно прикрепленных на одном конце и защемленных на другом, уравнение проекций имеет вид:
-5Хв2го-
(5.304)
Индекс ф опушен, так как безразлично, какой из двух узлов стойки прикреплен шарнирно, какой жестко, вычисляется для одношарнирной стойки.
Если одни стойки защемленные, а другие одношарнирные, то уравнение записывается в виде суммы уравнений (5.303) и (5.304).
6.7. СЛОЖНЫЕ РАМЫ
291
Канонические уравнения метода перемещений для свободной рамной эстакады (рис. 5.86)
Неизвестными являются углы поворота узлов срп (л 1, 2,.) и горизонтальное перемещение первого узла
ригеля и. В качестве примера выписана система шести уравнений для случая четырехпролетной (пятистоечной) эстакады. Уравнения имеют вид трехчленных для углов Ф с дополнительной неизвестной и во всех уравнениях:
1)
ЧУи
ЧУ 12
иги
г1р
0;
2)
ЧУ21
ЧУ 22
ЧУ 23
игш
гчр
0;
3)
ЧУ 32
ЧУ 23 ЧУ 34
«'за
гзр
0;
4)
ЧУ 43 ЧУ 44
ЧУ 45
иг4и
г4р
0;
5)
ЧУ 54
ЧУ5 5
игЬи
тьр
0;
6)
ЧУ«1
ЧУ «2
ЧУ из ЧУ «4
ЧУ иь
игии
г ир
0
(?1к гн)
(5.305)
Типовое п-е уравнение имеет вид:
п) Ф1—1 гп,п— 1 Фп гпп “I" Фя-и тпл-л
итпи гпр — 0 (5.306)
Коэффициенты типового уравнения для случая стержней постоянного сечения:
гн
7
7
д-'
1пт
Птптт
ТЫ'
п'
Рис. 5.86
главные коэффициенты
Г ап 4Е1с (—
-т— -г-)'
1п1 Лп
12Е1е-
(5.307)
побочные коэффициенты
гп,п—1 гп—1,я
2 Е1Г
гп,п1 гп--1,п :
п
2Е1С
1п1
6 Е1С
Свободные члены
Гпр - -« - 1 К,п1 - п’; (5 309)
Vе- п,п- 2Г- (5-3'0)
Решение уравнений с дополнительной неизвестной см. [86]. Подробные числовые примеры см. [87].
5.7.4. Распределение моментов методом последовательных приближений [15, 24, 35, 40а, 70, 77, 79, 80, а также первое издание 5, 8]
Метод позволяет получить опорные изгибающие моменты стержней без предварительного нахождения углов поворота и линейных перемещений узлов. Защемим и принудительно повернем жесткий узел на угол ф.
Отношение части момента, приходящейся на стержень, ко всему неуравновешенному моменту узла при его повороте называется коэффициентом распределения -г тп
узловых моментов я —, где тп — опорный момент
21т
в защемленном стержне я, а 2т — реактивный момент в защемленном узле при его повороте. При постоянных сечениях стержней с защемленными концами этот коэффициент равен относительной погонной жесткости рассматриваемого стержня Е1Ц деленной на сумму относительных жесткостей всех стержней, сходящихся в узле
Отношение поперечной силы в стойке рамы к сумме поперечных сил стоек рассматриваемого этажа при его горизонтальном смещении на величину А называется коэффициентом распределения поперечных сил. Для стоек
постоянного сечения V»
яХ
в при одинаковой
длине стоек уп
1Е1г1 Н]
Момент в узле, вызванный ли-
(5.308)
неиным смещением узлов рамы, равен поперечной силе рассматриваемой стойки, умноженной на соответствующее ей плечо, которое для брусьев постоянного сечения равняется половине длины стойки. При расчете несвободных рам 'у0.
Отношение момента на противоположном конце стержня к моменту в рассматриваемом узле при его повороте на угол ф называется коэффициентом переноса Р. Для стержней постоянного сечения р0,5.
Правило знаков. Положительными считаются моменты, вращающие узел по часовой стрелке. Отсюда следует, что при повороте вследствие смещения оси стержня по часовой стрелке в узле создается положительный момент.
Пример 5.12. В раме (рис. 5.87, а) буквами обозначены узлы рамы, цифрами — номера стержней. Относительные жесткости стержней указаны в кружках на схеме рамы. Размеры даны в метрах, силы — в тоннах. Все расчеты (табл. 5.10) состоят из следующих операций.
292
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
1,6Т Я
Рис. 5.87
Таблица 5 10
Таблица распределения моментов
Узлы
К
1
М
0
Н
Стержни
13
14
15
8
и 1
1 13
11
9
12
14
к
-
-
-
0,17
0,55
0,28
0,28
0,11
0,44
0,17
У
0,332
0,400
0,268
0,335
-
0,332
-
0,445
0,400
Строки
1
—
—
—
—
11,25
—
—11,25
—
5,00
_
2
9,00
10,80
7,20
5,00
—
9,00
—
6,67
—
10,80
3
—4,30
—13,88
—7,07
—3,14
—1,23
—4,94
—1,910
4
—3,53
—0,95
—0,49
—1,83
—1,57
—6,94
—0,12
—2,02
5
2,49
2,98
2,00
2,46
—
2,49
—
3,28
—
2798
6
—
—
—0,26
—0,85
—0,44
0,79
0,31
1,24
0,48
7
—0,22
0,24
—0,11
0,01
0,39
—0,42
0,11
—0,44
8
0,04
0,05
0,03
—
—
0,05
—
—
—
0706
У
—
—0,08
—0,25
—0,12
0.19
0,08
0,30
0,12
10
—0,06
0,06
—0,02
—0,01
0,09
—0,12
0,02
—0,21
11
0,01
0,01
0,01
0,02
—
0,01
—
0,03
—
0,02
12
—0,02
—0,06
—0,03
0,07
0,03
0,12
0.04
13
7,73
13,19
8,62
0,99
—4,88
1 3,89
—20,82 1
9,18
—0,92
12,59
5.7. СЛОЖНЫЕ РАМЫ
293
Продолжение табл. 5.19
Узлы
О
Е
Стержни
12 10
15
3
6
8
6
4 7 9
1
0,73
0,09
0,18
0,10
0,69
0,21
0,31
0,06
0,50
0,13
У
-
0,22
0,268
0,366
-
0,335
-
0,385
-
0,445
Строки
2
3
—5,00
—4,04
3,33
—0,50
7720
-0,99
1,17
—1,74
11,25
—12,02
5,00
—3,66
—11,25
—0,56
1739 —0,11
5,00
—0,90
6,67
—0,24
4
5
6
—2,47
—0,88
0,05
1,63
—0,11
2,00
—0,22
-1,05
0,88
0,01
—0,28
0,10
—2,15
2,46
0,03
—6,01
0,53
0,22
1,04
0,10
0,37
0,86
—4), 61
3,28
0,22
7
8 9
0,62
—0,42
—0,09 —0,10
0,04
—0,05
—0,07
0,03
—0,01
0,26
—0,06
—0,13 —0,02
0,05
0,11
0,10
0,03
0,03
—0,70
0,18
0,15
0,05
10
11
12
0,15 —0,12
—0,01 0,02 —0,02
0,01
—0,03
—0,03
0,05
—0,01
«0,04
0,03
—0,03
0,01
0,05
0,01
—0,13
0,02
0,04
0,03
13
—12,16
4,20
7,96
—0,80
—0,72
1,52
—17,15
2,86
4,70
9,59
Продолжение табл. 5.10
Узлы
1 Р
А
В
С
Стержни
7
5 10
1 3
1 1 2 1 4
2
5
к
0,84
0,05
0,11
0,83
0,17
0,35
0,56
0,09
0,92
0,08
У
—
0,248
0,22
-
0,366
-
-
0,385
-
0,248
Строки
2
3
—5,00
0,74
0779
0,04
3,33
0,10
11,25
—10,31
М7
—2,11
—11,25
П70
5,00
2,72
1,39
0,44
—5,00
з7в7
0,79
0,34
4
5
6
—0,45
—1,41
0,17
0,58
—0,08
—0,25
1,63
—0,19
0,85
—0,71
—0,87 0,88 —0,15
—5,16
0,78
1,94
1,25
—0,05
1,04
0,20
1,36
—1,80
0,02
0,58
—0,16
7
8 9
0,43
—0,27
—0,08
0,02
—0,02
—0,05
—0,03
0,39
—0,35
0,03
—0.07
—0,35
0,41
—0,90
0,65
0,05
0,04
0,10
0,62 —о7б5
—0,04 0 02 —0,05
10
11
12
0,09
—0,03
—0,02
—0,05
0,02
0,01
0,20
—0,17
—0,03
—0,17
0,15
—0,27
0,24
0,01
0,04
0,32
—0,29
—0,01
—0,02
13
—5,89
1,39 4,50 1,14 —1,14
—13,89
10,63
3,26
—1,46
1,46
294
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
1. Определение коэффициентов распределения узловых моментов:
е.13 кл_ял_,п 028; с,8 °17;
5 310 10
и— 10 —0,55;
18
10
ким 36 0»28»
А_
36
кН'9 — 0,11 и т. д.
2. Определение коэффициентов распределения поперечных сил:
Тг,13 Ус,13 °»332» У 1,14 УНЛ4 0Л
3
Т,15 “ "VЛ1,15 — 0,268; уа8 — у08
3 4 2
Ун,9 — Уе,9 д — 0,445; 710 — — 0,22;
Ь5 16
Уй.г-УА.г- 15 2 1
: 0,366;
16 ' 20,3
2
16
Те,4 — Ува
20,3
0,385;
Мр'Ю — N1 — 3,33 Т-м;
4
МА'3 М0,з 0,366.1,6— 1,17 Т-м;
4 5
МВЛ МЕ,4 0,386-1,6 1,39 Т-м; М.,5 Мр 0,79 Т-л.
0,256 Тс,5 Ур,ь — 0,248.
Полученные коэффициенты распределения вписаны в соответствующие строки табл. 5.10.
3. Начальные моменты защемления от вертикальных нагрузок определяются по известным формулам (см. 5.5.2), как для стержней с защемленными концами, и вписываются со своими знаками в строку 1 табл. 5.10:
0,11 ,11 МВр6 — МЕб
МАЛ — Мвл - 4,5-8 11,25 Т м;
12 ,12 МЕ1 — Мр 7 МВ'2
2
—МС2 5-4,5 — ЪТ-м.
4. Начальные моменты в узлах, вызванные горизонтальным смещением рамы, определяются умножением суммы поперечных сил в стойках рассматриваемого эта-
жа на множитель уп “т :
мКлз Щлз 0,332 (1,6 3,4 4) — 9 Т, ж;
14 МН14 0,4.9-3 10,8 Т-м; мм,15 Щ. 15 0,268-27 7,2 Т-м;
6
Мс 0,335 • 5 — 5 Т • л;
Е.9 ,9 6,67 Т-м;
Значения этих моментов вписаны в строку 2.
5. Начальные моменты, записанные в строках 1 и 2 табл. 5.10, образуют в узлах неуравновешенные узловые моменты, равные суммам опорных моментов стержней, сходящихся в рассматриваемых узлах. Эти неуравновешенные узловые моменты распределяются между брусьями, сходящимися в узле, путем умножения их значений на соответствующие коэффициенты распределения и записываются в строку 3 табл. 5.10 с изменением знака. В узле С: М0,8 — 0,17(11,2559) —4,3 Г.м; М0,„ —0,55 • 25,25—13,88 Т • м; Молз — 0,28 • 25,25 —7,07 Т 'М и так далее для всех узлов рамы.
На этом заканчивается первый цикл расчета.
6. Распределенные моменты переносим со своим знаком на противоположные концы стержней, умножив их на коэффициент переноса, который в рассматриваемом примере равен 0,5. Перенесенные моменты записываются в строку 4.
7. Перенесенные моменты (строка 4) и распределенные (строка 3) вызывают неуравновешенные поперечные силы в стойках каждого этажа, которые равняются:
для первого этажа
3,53 0,95 0,49 7,07 1,91 0,99
1 — б
Ф
— 2,46 Г;
—2,49 Т; для второго этажа 4,301,831,230,120,50—0,053,66 6
2,150,240,61—0,100,25
6
для третьего этажа
3
1,741,052,110,87-0,04—0,17-0,34-0,02
4
0,11 —0,22 — 0,44 0,05 4,5
— 1,19Т;
Умножая этажные неуравновешенные поперечные
К
силы на множитель уп
и меняя знак, получаем мо¬
менты в стержнях рамы, корректирующие линейное смещение узлов. Эти моменты записываются в строку 5. Для узла О:
ма,в 2,46-0,335— 2,46 Т-м,
М
С, 13
2,49-0,332— 2,49Т-м; для узла В;.4,5
МВ4 1,19-0,385— 1,04 Г-л и т.д.
5.7, СЛОЖНЫЕ РАМЫ
295
8. Перенесенные моменты (строка 4) и моменты, корректирующие линейное смещение рамы (строка 5), образуют неуравновешенные узловые моменты, которые (аналогично п. 5) распределяются между брусьями, сходящимися в узле, и записываются в строку 6.
На этом заканчивается второй цикл расчета.
9. Распределенные моменты (строка 6), умноженные на коэффициент переноса, равный 0,5, переносятся на противоположные концы стержней (строка 7).
10. Распределенные и перенесенные моменты (строки
6 и 7) вызывают неуравновешенные этажные поперечные силы. Эти поперечные силы корректируются моментами, определяемыми аналогично п. 7, которые записыются в строку 8.
И. Моменты строк 7 и 8 вновь создают неуравновешенные узловые моменты, которые распределяются по стержням и заносятся в строку 9.
На этом заканчивается третий цикл расчета.
12. Процесс приближений заканчивается на цикле, в котором как неуравновешенные этажные поперечные силы, так и моменты распределения являются малыми величинами, которые практически не отражаются на требуемой точности расчета. В рассматриваемом примере расчет обрывается на четвертом цикле.
13. Алгебраические суммы начальных моментов защемления со всеми распределенными, перенесенными и корректирующими поперечные этажные силы моментами, дают истинные опорные моменты стержней рамы.
Построенная по этим значениям эпюра моментов приведена на рис. 5.87, б.
В случае действия на раму горизонтальных распределенных нагрузок или сосредоточенных внеузловых сил последние заменяются узловыми сосредоточенными силами, равными соответствующим опорным реакциям стержней, взятым с обратными знаками. Кроме того, учитываются начальные моменты защемления в вертикальных брусьях, к которым приложена горизонтальная распределенная нагрузка.
При приложении к узлам рамы сосредоточенных моментов их следует распределять по стержням, сходящимся в рассматриваемом узле, с тем же знаком. Внешний узловой момент в состав расчетной таблицы не включается.
Расчет рам на действие неравномерной осадки опор, поворота опор, равномерного и неравномерного нагревов стержней выполняется в такой же табличной форме. При этом начальные моменты защемления в элементах основной системы рамы вычисляются для соответственно приложенных воздействий. В тех случаях, когда величины моментов защемлений зависят также от жесткости стержней (нагрев, осадка и поворот опор и др.), последние следует принимать в их истинных, а не относительных значениях.
5.7.5. Метод сил [65, 40]
Общие положения
Метод применяется для расчета плоских и простран ственных полигональных рам, шарнирный скелет которых обладает большим числом степеней свободы. Практически при двух степенях свободы метод сил уже заслуживает предпочтения перед другими методами. Кроме того, метод сил применяется во всех тех случаях, когда желательно учесть упругую деформацию от действия продольных и поперечных сил. Для комбинированных систем и ферм метод сил незаменим. Классическая форма метода сил сводит расчет к ряду закономерных опе¬
раций, которые описываются независимо от характера системы.
Из заданной конструкции устраняется столько связей, сколько необходимо для превращения ее в неизменяемую статически определимую основную систему. Действие устраненных связей заменяется соответствующими связям усилиями, иначе — лишними неизвестными. Число лишних неизвестных, равное числу устраненных связей, называется степенью статической неопределимасти системы.
В случае плоской бесшарнирной рамы степень статической неопределимости равна утроенному числу замкнутых контуров. Каждый шарнир в замкнутом контуре вносит одну степень свободы и, следовательно, уменьшает степень статической неопределимости на единицу. Иногда шарнир с общей цапфой относится одновременно к двум, трем или четырем контурам. В этом случае он играет роль соответственно двух, трех, четырех отдельных шарниров. При большом числе шарниров, когда имеются отдельные контуры, содержащие больше трех шарниров, необходим структурный анализ для установления геометрической неизменяемости системы.
Каждый сквозной разрез, нарушающий связность одного контура, уменьшает степень статической неопределимости на три.
Каждый стержень с шарнирами по концам увеличивает степень статической неопределимости на единицу, так как добавляет один контур (три связи) и два шарнира (две степени свободы).
Выбор основной системы. Составление и решение канонических уравнений
На рис. 5.88, а показана двухконтурная 6 раз статически неопределимая рама покрытия промышленного здания. Основная система (рис. 5.88,6) выбрана так, чтобы сохранить нижнее защемление стоек (колонн).
Рис. 5.88
Это облегчает построение эпюр от нагрузки стоек. Вместе с тем ломаные ригели в основной системе выступают в виде балок, нагруженных заданной нагрузкой, опорными моментами и распором.
Составляется система канонических уравнений метода сил, каждое из которых выражает мысль, что пере¬
296
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
мещение по направлению одной из устраненных связей от совместного действия на основную систему заданных нагрузок и лишних неизвестных равно нулю. Перемещение от заданной нагрузки (грузовой, или свободный член) ставится в конец.
Для частного случая четырех неизвестных система уравнений имеет вид
1) -212 313 414 1 р “
2) Хх Л2622 -Хз2з Х4624 А2р 0; Г5 311
3) -Х131 Х2632 ззз Х34 Ь 3р “ 0
4) Х2642 X3643 Х4644 А4Р 0
Формула (5.314) выражает так называемое правило Верещагина.
Если результирующая деформация приводится_к паре, то вместо р берется момент пары, а вместо Мгв — тангенс угла наклона прямолинейной эпюры М к оси абсцисс.
При прямолинейной единичной эпюре деформация может быть приведена к концевым сечениям. Вместо (5.314) получаем формулу Мюллер — Бреслау:
С Мр М.1 йз — -
3 Е— Ща Щв • (5.315)
Для вычисления свободных членов и коэффициентов строят эпюры усилий от заданной нагрузки Мр, Ыр, 2Р и от_единичных неизвестных, например от 1 1—эпюры Ми Фь от Х21 — эпюры М21_Ы2, и т. д.
На рис. 5.88,6 показаны эпюры М и М6. Практически каждая эпюра строится на отдельной схеме рамы.
Помимо заданной нагрузки могут быть даны также распределенные деформации — начальный изгиб, температурные удлинения и кривизна, а также сосредоточенные деформации (дислокации).
Для плоских систем свободные члены вычисляются по формуле Максвелла — Мора:
С мр м1 V,- аз, с 1р 2 ,3 ш 3 ёр ] ёр7
«ср А',- й
20 М 2Л N1 2Г2.
Коэффициенты вычисляются по формуле
ММьд.5 ( N[N(18
(5.312)
ЕР
I
ЯЯк
ОРи
(5.313)
Как правило, при расчете сложных рам упругой деформации сдвига при определении усилий пренебрегают всегда, упругой деформацией удлинения — во всех случаях, когда рама не имеет характера вытянутой в одном направлении балки (типа безраскосной фермы или
башни). __ При прямолинейных стержнях рамы эпюры М УУ, (2 — на протяжении одного стержня всегда прямолинейные, без переломов. Для этого случая интегралы выражаются произведением результирующей деформации на ординату единичной эпюры, например
Здесь ©;
1
8
-I
Мр М( йз
Е1
:врм
се 1
(5.314)
Мрйз
Р Е1 в сечении 0Р (рис 5.89, а).
М10 ордината эпюры М
Интеграл равен сумме произведений концевых углов поворота, подсчитанных как для простой балки (иначе— фиктивных реакций) на концевые ординаты эпюры Мг (рис. 5.89,6).
При Е1сопз, что является практически наиболее важным случаем, используется таблица формул для интегралов 8.3.20.
Кроме того, при вычислении по формуле (5.315) можно воспользоваться табл. 8.1.3, даюшей концевые углы поворота Та и Тв простой балки в забисимости от нагрузки. Преимущество этого способа состоит в том, что нет необходимости строить эпюру Мр, а достаточно знать нагрузку стержня и опорные моменты МАр и Мвр.
Найденные коэффициенты и свободные члены выписываются в матрицу:
N
Хх
х9
Варианты нагрузки ;
Л;р дн ле.
1
Кг
«1.
Кг
§14
V
Аи
А1в
2
21
§22
Кг
«24
V
д
Д2в
3
«и
5зз
5.4
дзр
СО
Д4©
4
§41
«4.
44
р
Д4 1
Д4в
Коэффициенты, симметричные относительно главной диагонали, в силу закона взаимности друг другу, равны: 6глбАг-. Главные коэффициенты всегда положительные.
Решение уравнений чаще всего выполняется по схеме Гаусса (см. 6.1), что приводит к преобразованию матрицы (5.316) к треугольному виду:
5.7. СЛОЖНЫЕ РАМЫ
297
N
Хг
°»1
О
О
о
Хз
Варианты нагрузки
Л0
5)
22
•8’
«14
Агр
Д1
Дв
5а)
24
4
6 2 34
4?
СО
Ю
Д4р
4?
При помощи треугольной матрицы неизвестные определяются в порядке, обратном их нумерации:
Хл-
Хз-
-
Х±-
а©
6з
9
а2
Зр
у
— Л4
6з5
у
61)
23
«в»
' А1)
22
р
«и'
-2
12
6(1
с24
13
х3-±3-х
Оц
14
6п
(5.318)
Д1Р
Л2 р
Л3р
л4р
Рп
Р12
р13
2
Р21
Р22
РгЗ
Р24
3
Рзт
Рз2
Рзз
Рз4
4
Р41
Р42
Р43
Р44
(5.319)
Коэффициенты треугольной матрицы, отмеченные верхним индексом, имеют четкий статический смысл: это перемещения однажды, дважды, трижды статически неопределимых основных систем, которые могут быть получены, если устранить не все лишние связи системы, а последовательно одну связь, затем две, затем три.
Решение производится столько раз, сколько задано вариантов нагрузки. При этом часть вычислений, приводящая к нахождению коэффициентов 6, 6(1, 6(2, 6(3, не повторяется, наново вычисляются лишь значения Хи Х2, Яз, Х± по формулам (5.318).
Для построения небольшого числа л. в. усилий или перемещений также проводится решение уравнений. Дадример, для построения л. в. изгибающего момента в сечении т рамы следует «нагрузить» систему с. д.
определить неизвестные А'ь Х2, Хз, Хь и затем: а) построить эпюру изгибающих моментов того пояса системы, по которому перемещается нагрузка (это будет л, в. от действия фиктивной нагрузки), и б) по этой эпюре моментов построить эпюру прогибов пояса (это будет л. в. от действия груза Р1).
Пример см. 5.5.8.
Если число вариантов нагрузки превосходит число неизвестных, а также при серийном построении л. в., когда целесообразно сначала построить л. в. всех неизвестных, следует определить так называемые числа, или коэффициенты влияния. Числа влияния (р»•) равны значениям неизвестных (Я), найденных при условии, что один из грузовых членов (Аь) равен единице, а остальные равны нулю. Матрица чисел влияния совпадает с так называемой обратной матрицей уравнений (см. 6.1.4):
Имея числа влияния, можно определить любое неизвестное при помощи зависимостей вида
1 Д1р Эи А 2р р12 А Зр р13 А4р р14;
Х2 Д1р р21 А2р р22 АзР р23 4р р24
и т. д.
Вычисление матрицы р значительно упрощается благодаря тому, что при условии имеет место
также взаимность чисел влияния;
Р Рг« (5.320)
Обычно при вычислениях этим свойством не пользуются, но оно служит для контроля.
Имея числа влияния, строят л. в. неизвестных, руководствуясь следующим простым правилом: л. в. неизвестной Хг совпадает с эпюрой основной системы, нагруженной неизвестными, равными числам влияния соответствующей 1-й строки.
При этом л. в. от действия фиктивной нагрузки совпадает с эпюрой изгибающих моментов, а л. в. от действительной нагрузки совпадает с эпюрой прогибов.
Определив неизвестные, строят окончательные эпюры усилий, что дает возможность произвести проверку прочности.
Специальные приемы упрощения и контроля расчета по методу сил
Принцип изменения основной системы [65]. Одну из трудоемких операций составляет построение грузовых эпюр и определение грузовых членов. Принцип изменения основной системы позволяет строить эпюры грузового состояния для основной системы, отличной от той, для которой строят эпюры единичных неизвестных (так называемые единичные эпюры). Например, для одноконтурной рамы в качестве основной системы можно взять трехшарнирную раму, неизвестными будут изгибающие моменты в шарнирах. Грузовую эпюру можно построить для основной системы в виде ломаной консоли. Мало того: для различных нагрузок можно пользоваться различными основными системами, важно лишь, чтобы грузовое состояние в целом было статически возможным (уравновешенным) при наличных связях.
Хотя величины лишних неизвестных при этом изменяются, но окончательные эпюры от совместного действия нагрузки и неизвестных остаются инвариантными и отвечают действительному состоянию системы.
Принцип равновесия фиктивной нагрузки замкнутого контура. После определения лишних неизвестных следует проконтролировать точность решения, воспользовавшись каким-либо условием совместности деформаций, отличным от выраженных в канонических уравнениях. Обычно этот контроль осуществляется после построения окончательной эпюры изгибающих моментов М.
Фиктивная нагрузка с погонной интенсивностью М
рФ —-—вдоль каждого бесшарнирного контура должна И
298
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
быть в состоянии равновесия. Это дает три уравнения — одно уравнение проекций на ось, перпендикулярную плоскости рамы, и два уравнения моментов относительно осей, лежащих в плоскости рамы:
()рФЛг 0; ()рф уйз 0; фрФ хёз 0. (5.321)
к к
Значительные отступления от условий равновесия фиктивной нагрузки можно обнаружить на глаз. Напри-
е)
а
б)
р,
Рис. 5.90
мер, из первого уравнения следует, что суммарная площадь приведенной эпюры М на протяжении каждого бесщарнирного контура должна быть равна нулю — положительные и отрицательные площади должны быть одинаковы.
Если контур имеет шарнир, первое равенство отпадает. Остаются уравнения моментов относительно двух произвольных осей, пересекающих шарнир. При двух шарнирах остается одно уравнение, которое с точностью до постоянного множителя совпадает с уравнением метода сил.
Графо-аналитическая модификация метода сил. Условия равновесия фиктивной нагрузки замкнутого контура используются не только для контроля, но и как основа специального расчетного приема.
Сущность этого приема состоит в следующем. От заданной нагрузки и от единичных лишних неизвестных строят эпюры моментов и определяют результирующие фиктивные грузы. От нагрузки фиктивные грузы полу чаются как по величине, так и по положению, от неиз вестных — только по положению, величина же опреде ляется с точностью до множителя Хи Х2у. Для каждого замкнутого контура составляют три уравнения замкну тости — уравнения равновесия фиктивной нагрузки, ис пользуя для этого наиболее подходящие моментные оси Из получаемых этим путем уравнений (в общем случае неканонических, 6 5 бы) находят все неизвестные. Проведение моментных осей через результирующие фи ктивные грузы дает широкие возможности для частич ной, а иногда и полной ортогонализации (см. ниже)
Подробное изложение графо-аналитического метода сил см. 87.
Принципы ортогонализации неизвестных в уравнениях метода сил. Ортогонализация заключается в том, что все или некоторые побочные коэффициенты Ъгк(1фЬ) в системе канонических уравнений обращаются в нуль. Это достигается специальным выбором устраняемых связей и неизвестных, или особым способом составления уравнений деформации.
Важнейший способ частичной ортогонализации связан с использованием симметрии и рассмотрен ниже.
Способ полной ортогонализации для одноконтурных арок и рам (так называемый метод вынесения неизвестных при помощи абсолютно жестких отростков — метод упругого центра) идентичен с вытекающим из статикокинематической аналогии способом расчета при помощи
формул внецентренного растяжения-сжатия для фиктивной нагрузки (см. 5.6.3).
Решение уравнений по методу Гаусса (см. 6.1) можно рассматривать как последовательную ортогонализацию с введением групповых неизвестных и соответствующих им перемещений, тождественных с перемещениями статически неопределимых основных систем с возрастающим числом лишних связей.
Если устранением некоторых связей заданная система превращается в другую статически неопределимую систему, изученную ранее, то использование статически неопределимой основной системы представляет один из эффективных методов ортогонализации.
б)
в) 4 У 4 г) Л г, 23 4
-4- -2 2-» Ч Р
2 7-
у???? Т777.
ж
г,
1Г оо
На рис. 5.90, а показана пятикратно статически неопределимая рама. Предполагается, что усилия в П-образной трижды статически неопределимой раме от местной нагрузки, момента и горизонтальной силы, приложенных к узлу, могут быть взяты из таблиц, задача сводится к
определению только двух неизвестных Х и Х2 (рис.
5.90, б) из уравнений
1) Хг Х2 Д 0;
2) Х Х ДО.
Здесь символом (3) отмечено, что основная система трижды статически неопределимая.
Задача еще более упрощается, если заранее известны формулы для перемещений узла П-образной рамы от местной нагрузки и единичных сил Хх и Х2. В ряде случаев таблицы для простых рам могут быть использованы не только по своему прямому назначению, но и как вспомогательное средство при расчете сложных рам. Эта идея положена в основу таблиц [3].
Для систем с каноническими уравнениями трехчленной структуры существует наглядный метод ортогонализации, носящей название метода фокусов (см. первое издание 5.8.4). Для одноконтурных и многоконтурных рам отдельные приемы полной и неполной ортогонализации вытекают из графо-аналитического метода и носят ярко выраженный геометрический характер [87].
5.7. СЛОЖНЫЕ РАМЫ
299
Практический недостаток большинства методов ортогонализации (по сравнению с последовательным выполнением операций метода сил в его классической форме) состоит в повышенных требованиях, предъявляемых к расчетчику в связи с более сложной и индивидуализированной программой расчетных операций.
ской средней стойки, жесткость на растяжение-сжатие равна бесконечности.
Многоэтажная рама при антисимметричной нагрузке
(рис. 5.92, а). Симметричные многоэтажные рамы при симметричной нагрузке рекомендуется рассчитывать методом перемещений, учитывая, что линейные перемещения узлов равны нулю, а углы поворота узлов по концам ригелей равны по величине и обратны по знаку. Получается система трехчленных уравнений для углов поворта (см. 5.5.8).
При антисимметричной нагрузке рама приводится к системе половинной ширины (рис. 5.92, б). Вдоль оси симметрии исходной рамы располагается нерастяжимая стержневая цепь, так что система приобретает характер комбинированной многошпренгельной вертикальной консоли.
Количество лишних неизвестных равно числу этажей. За лишние неизвестные могут быть приняты либо усилия в шпренгелях X (рис. 5.92, в), либо изгибающие моменты 2 посередине панелей стоек (поясов) (рис.
5.92, в). Эпюры моментов от Хп — и от 2П 1 показаны внизу рис.
5.92, в, г. В обоих случаях уравнения трехчленные вида
Хп-X бл.л-1 Хп дпп Ы-1
а 0,
' пр
Упрощение расчета симметричных рам. Основную систему симметричной рамы выбирают симметричной. На рис. 5.91, а показана двухконтурная рама. Основная система получена путем включения шести шарниров: четырех — внизу и вверху крайних стоек и двух — между левым и правым ригелями и средней стойкой (рис. 5.91, б).
На рис. 5.91, в, г показана замена неизвестных Хи. Х6 симметричными и антисимметричными группами, обозначенными соответственно Уь У2, Уз и 2, 22, 2Ъ. Все коэффициенты вида бУ 2 (1, 2, 3, к 1, 2, 3) рав-
V
ны нулю. Поэтому система шести канонических уравнений независимо от характера нагрузки распадается на две независимые группы по три уравнения: одна содержит неизвестные У, другая — неизвестные 2. Целесообразно сгруппировать не только неизвестные, но и нагрузку, как показано на рис. 5.91, в, г. Тогда расчет на симметричную и антисимметричную нагрузки сводится к расчету двух простых рам, показанных на рис. 5.91, д, е. Эти рамы отличаются своими правыми стойками, соответствующими средней стойке заданной рамы. На рис.
5.91, д эта стойка является бесконечно жесткой при изгибе и при сдвиге, жесткость же на продольную деформацию уменьшена вдвое. На рис. 5.91, е жесткость на изгиб и сдвиг составляет половину жесткости фактиче¬
причем побочные коэффициенты получаются отрицательными. При вычислении коэффициентов рекомендуется учитывать упругую деформацию удлинения стоек.
При вычислении грузовых членов АПр независимо от того, какой вариант основной системы выбран, можно пользоваться более простой основной системой по рис. 5.92, в, представляющей собой консоль с горизонтальными отростками. Это вытекает из принципа изменения основной системы (см. выше).
Для предварительных расчетов берут систему по рис. 5.92, г и полагают моменты 2 равными нулю, что дает возможность определить усилия во всех шпренгелях из уравнений равновесия моментов относительно шарниров. Практически указанным приближенным расчетом часто пользуются в качестве окончательного.
Для статически определимой этажерочной рамы с параллельными стойками при горизонтальных нагрузках эпюра моментов имеет характерный «пилообразный» вид (рис. 5.92,6). Для построения эпюры достаточно найти поперечные силы в шарнирах, что пояснено на рис.
5.92, е.
Поперечные силы в шарнирах стоек определяются из условий равновесия части рамы, расположенной выше разреза проведенного через два шарнира. Например:
Оз (1 г Р2 Яз).
Имея С2 и 2з, строят треугольные эпюры на стойках (рис. 5.92, е, внизу). Алгебраическая разность моментоЕ в узле стойки дает момент в узле ригеля.
300
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
5.8. ПРОСТРАНСТВЕННЫЕ РАМЫ [8,9,21,41,42,87]
5.8.1. Рамы со взаимно перпендикулярными стержнями
Основным является метод перемещений. Выбирается левая координатная система V, №, Т с неизменным направлением осей. Начало координат последовательно
стержня, входящего в состав рамы, вводятся оси инерции х, уу г. Положение осей инерции меняется в зависимости от положения стержня. Ось х направляется всегда вдоль стержня, а оси у и г совмещаются с главными осями инерции поперечного сечения. Погонные жесткости изгиба, кручения и растяжения-сжатия стержня обозначаются:
,у ;,г - Е1г.,х _ О'кр
1) -2 0
Г
2Г;. 0 3 )Г«-2гй 0
4 )ЛГ
5)Мт-ЪМ% 0
6) МТ0— 2М[;. 0.
(У ,5,,Р,Г,7).
(5.321)
Если нагрузка в узле отсутствует, то ИР®, 7
М°, Мго в уравнения (5.321) не входят.
Неизвестными по методу перемещений являются три угла поворота фг, фт каждого из узлов вокруг осей Уу №, Т и три поступательных перемещения Ог, б1', бг узла вдоль тех же осей. Неизвестные определяются из уравнений равновесия узлов, причем силы и моменты, передаваемые со стороны отдельных стержней на узел, предварительно выражаются через узловые
I I
Силы и моменты, действующие на конец стержня со стороны узла, обозначаются N. (у, (?2, Мху Му, Мгу а угловые и линейные перемещения концов стержня фж, Фу, ф2, 6х, 6уу б2 (рис. 5.93). Сила и моменты, действующие на узел со стороны стержня, обозначаются так же и вводятся в уравнения равновесия узла с обратным направлением. Кроме сил и моментов, передающихся на узел со стороны стержней, сходящихся в узле, он может быть нагружен также активными силами и моментами, проекции которых на оси V, V? к Т обозначим V0, №°, Г°, Му М™ Мто.
Для каждого узла к рамы может быть составлено шесть уравнений равновесия:
2М 0;
и линейные перемещения фж, ф», ф2, 6х, б у б2 концов стержня относительно осей инерции х, у, 2, которые затем заменяются при помощи соответствующих зависимостей через принятые кинематические неизвестные ф, Фт» 8» бт узлов в осях У, №у Т (табл. 5.12).
Помимо сил и моментов, зависящих от перемещений, на узлы передаются силы и моменты от нагрузок "на стержни в предположении полного защемления их концов. Эти величины отмечаются в (5.322) верхней звездочкой и определяются по правилам для прямых балок с защемленными концами с учетом принятых знаков.
Выражения для сил и моментов относительно осей инерции через угловые ф и линейные перемещения б концов стержня в тех же осях инерции будут (см. рис. 5.93):
К Щ, [Ы ф? -з —г—) Кп
щ
- 2‘ (
6?-б I
2Ф. Ф-3 ■)
;
-г(ррм
К ; (, «7 “С
0.% — — Фу 2 ‘
Г)
10;
кГ
(5.322)
5.8. ПРОСТРАНСТВЕННЫЕ РАМЫ
301
1,8,1,р,Г,Ч
Зависимость между угловыми и линейными перемещениями фх, ру, рг, 6х, Ьу, 6г кондов стержня, отнесенными к его осям инерции, и кинематическими неизвестными ру, фт, дУу б1”, бт узлов рамы легко получить, если спроектировать последние на оси инерции, воспользовавшись для этого значениями направляющих косинусов (табл. 5.11) для шести возможных положений стержней, образующих раму (рис. 5.94). Зависимости между этими перемещениями даны в табл. 5.12.
Таблица 5.11
Косинусы углов
Стержни
Ы и кр
кд и кг
кз и Ы
Оси
X
У 2
X
У
2
X
У
г
V
0
0
1
1
0
0
0
0
1
V?
1
0
0
0
0
—1
0
1
0
Т
0
1
0
0
1
0
1
0
0
Таблица 5.12
Зависимость между перемещениями концов стержня в осях инерции и перемещениями узлов рамы в осях
'-"■•Перемещения
Стержни
х
Ф
фу
Ф
6х
6У
5
Ы и кр
У?
Ф
т
ф
ФУ
кд и кг
т
ф
ЧV
—Ф
8Г
-а»'
кз и кЬ
т
ф
V
Ф
ФК
6Г
ьу
Пример 5.13. Определим моменты и поперечные силы, возникающие в элементах рамы, изображенной на рис. 5.95. На ригель 1—2 действует горизонтальная равномерно распределенная нагрузка интенсивностью р кГсм. Длина всех стержней и погонные жесткости ь на изгиб и кручение каждого элемента одинаковы. Благодаря защемлению стоек, в узлах 5, 6, 7, 8 отсутствуют угловые и линейные перемещения:
Ф« Ф« 6п С 6п 0 (" 5,6,7,8).
Пренебрегая упругим удлинением стержней и учитывая симметрию рамы и нагрузки, получим следующие зависимости для остальных перемещений узлов;
6Г 6Г Г 0; б®' 6 6 6 0;
6 6Т8ТдТ 8Т.
Фз — фУ; фГ ф7; Фз — фГ •
Таким образом, благодаря симметрии имеем всего семь неизвестных, из которых шесть — углы поворота узлов и одно — линейное перемещение (табл. 5.13).
1 У
7 Р
Рис. 5.95
Таблица неизвестных
Таблица 5.13
Узел
У
Ф
т
ф
6
ИР
5
т
Л
ф[
фГ
гг7
Ф1
0
0
бг
2
фГ
т
-Ф1
0
0
8Г
3
«У?
ф3
т
ф3
0
0
6Г
4
-Фз
ж
Фз
Г
Фз
0
0
6Г
V V
Ч1 — Ч2
И7 И7 т т
Ф1 Ф2 ; ф Ф2»
При расчетах обычно приходится пользоваться столькими уравнениями равновесия моментов в узлах, сколько неизвестных углов поворота и столькими уравнениями проекций, сколько имеется неизвестных линейных перемещений.
Для определения этих семи неизвестных перемещений составляем семь уравнений равновесия; из них по три уравнения равновесия моментов относительно осей V, Т узлов 1 и 3 (рис. 5,96, а и б) и одно уравнение проекций на ось Г сил, приложенных к отсеченной от стоек верхней части рамы (рис. 5.96, в).
Рассмотрим узел 1 (рис. 5.96,а). В нем сходятся стержни 1—2, 1—3 и 1—5. Этим стержням соответствуют стержни (или 5), кр (или 2) и М (или 6) на рис. 5.94. Векторы-моменты, действующие на узел 1 со стороны удаленных стержней, показаны на рис. 5.96, а. Спроектирсвав эти векторы-моменты на оси V, №, 7 получим три искомые уравнения равновесия моментов для узла . Так, например, уравнение равновесия моментов относительно оси V будет (рис. 5.96, а):
-Е Мх 0; М2и Мг13 МХ1Ъ 0. (5.323)
2,3,5
Подставив в (5.323) взамен изгибающих и крутящего моментов их выражения через угловые и линейные перемещения согласно 5.322 и заменив затем угловые и линейные перемещения в осях инерции х, у, г через уг¬
302
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
ловые и линейные перемещения в осях V, Т на основании табл. 5.12 и 5.13, получим
7фГ 2ф
12 ь
0.
(5.324)
Составив аналогично остальные два уравнения моментов относительно осей и Т для узла 1 (рис. 5.96, а) и соответственно три уравнения моментов для узла 3 (рис. 5.96,6), запишем их, включая и (5.323), в табличной форме (табл. 5.14).
Таблица 5.14
Уравнения равновесия
Седьмое уравнение является уравнением проекций на ось Т сил, приложенных к верхней части рамы, отсеченной от стоек (рис. 5.96):
—27 0; — 2Э5 — 227 — р1 0. (5.325)
Подставив в (5.325) вместо и 0%7 их выражения из (5.322) и заменив перемещения ф2 и 62 относительно осей инерции перемещениями относительно осей V, 47, Ту получим последнее уравнение, записанное в табл. 5.14.
Полученная система уравнений распадается на три неизвестные системы.
Первая система состоит из двух однородных уравнений (строки 3 и 6) относительно неизвестных углов поворота ф и фз. Эти неизвестные равны нулю:
ф[ Фз °-
(5.326)
Вторая система (строки 1 и 4), состоящая также из двух уравнений, содержит неизвестные углы поворота Ф ифз Решив эту систему, получим:
V 7 рР 11
Ф У — — ; Ф? . (5.327)
Т1 540 ь 43 270 I к
Третья система (строки 2, 5, 7) состоит из трех уравнений с неизвестными ф, Ф37, 6Г. Из решения этой системы получаем:
3 р1. бт _ Р
I
фГ фГ
168
168
Пользуясь найденными перемещениями, определим некоторые действующие в стержнях изгибающие моменты и поперечные силы. Моменты, изгибающие стержень 1—2 в вертикальной плоскости, равны нулю, так как в этой плоскости нет угловых и линейных перемещений концов стержня и внешних сил. Момент, изгибающий стержень 1—2 в горизонтальной плоскости и действую-
5.8. ПРОСТРАНСТВЕННЫЕ РАМЫ
303
щий на его левый конец 1, вычисляется по строке 3. формул (5.322), если заменить, согласно табл. 5.12, на ф2:
7
Л1?2 2П— 2—— •-— 12 540 (
31
540
540
Р1°-
рР
ь
Этот момент вращает конец стержня 1 по часовой стрелке вокруг оси V.
Подобным же образом поперечная сила, параллельная оси Т и действующая на левый конец бруса 1—2, равна согласно строке 6 формул (5.322):
7
®12 I 540 I
540
Р2 Р1 -
I ) 2
еЬ
2
Момент по середине стержня 1—2 равен моменту всех сил, лежащих между воображаемым разрезом в узлеи серединой стержня 1—2:
р1 1_, _31_
2 ' 2
М1Р-
540 73
р1 I р1 4-. — у 2 4
1080
рК
Аналогично определяются все остальные моменты и поперечные силы. Продольные силы определяются из уравнений проекций сил, приложенных к узлам.
5.8.2. Рамы с наклонными стойками
Рамы с наклонными стойками рассчитывают аналогично изложенному с той лишь разницей, что для наклонной стойки (рис. 5.97) должны быть дополнительно определены зависимости между угловыми рх, ру, ср2 и линейными 6Ж, 6, б2 перемещениями концов наклонной
стойки относительно осей инерции и перемещениями узлов фг, ф17, фт, 6У9 6, 6Т относительно осей V, Й? Т.
Предполагается, что ось наклонной стойки расположена в вертикальной плоскости и образует с горизонтом угол (рис. 5.97), а главная ось инерции у образует с осью Т угол а. Косинусы углов, образованные осями инерции , у, г наклонного стержня с осями V, Т, сведены в табл. 5.15.
Таблица 5Л5
Рис. 5.98
Искомые зависимости между ф, ф», ф, б, б, б и кинематическими неизвестными фу, ф, фг, 8У
6Т для наклонных стержней получим, если спроектируем последние на оси инерции х, у, г:
— б зш г 6 соз а соз ф — 6 зш а соз г?
Ь 6 соз гз —- 6 соз а зш зш а зш ф;
6 6 31П а 6 соз а;
Фк фк 5П Ф фГ с°3 а — ф 81П а 31П ф;
Фк фГ 8П а Фб с05 а
ф ф соз -ф — ф соз а ф зш а зш г).
Уравнения равновесия узлов и отдельных частей рамы с наклонными стойками составляются так же, как и для пространственных рам с взаимно перпендикулярными стержнями. Разница состоит лишь в том, что век-
(5.328)
304
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
торы-моменты и силы, действующие на конец наклонной стойки, не параллельны (или не перпендикулярны) осям V, IV, Т при проектировании на эти оси нужно множить их на соответствующие величины направляющих косинусов.
Пример 5.14. Рассчитаем раму с наклонными стойками, изображенную на рис. 5.98 при действии на ригели рамы вертикальной равномерно распределенной нагрузки интенсивностью д Тм. Рама сварена из труб
Рис. 5.99
одинакового поперечного сечения. Отношения погонных жесткостей для каждого из стержней рамы будут:
1:1,33:1,33.
Эти уравнения равновесия будут:
) 0; Мгп — Мг — М5зтг5 —
— М5 соз г) — 0;
2) ЕМ 0; М2 — — М5 соз а соз ф—
— Мъ зт а Мъ соз а зт г? 0; I 3) 2 0; Мух2 Мз М5 зт а соз -ф —
— М5 соз а — М5 зт а зт ур 0.
Таблица 5.16
Таблица неизвестных
Узлы
-Ч1
№
—
—
-7
о
о
о
о
Подставив в (5.329) вместо изгибающих и крутящих моментов их выражения через угловые и линейные перемещения согласно (5.322) и заменив после этого угловые перемещения относительно осей инерции х, у, г через угловые перемещения относительно осей V, №, Т на основании табл. 5.12 и 5.16 (для горизонтальных стержней), а также формулы (5.328) и табл. 5.16 (для наклонной стойки), получим уравнения равновесия (табл. 5.17).
Угол, образованный осью наклонной стойки с горизонтом, равен ?74°12, а угол между осью у и осью Г принят а45°.
Вследствие жесткой заделки концов стоек в узлах 5, 6, 7, 8 угловые и линейные перемещения отсутствуют:
(р Ф «р 6, 6П7 бг 0 (« 5,6,7,8).
Пренебрегая упругим удлинением стержней, на основании симметрии рамы и нагрузки получаем следующие зависимости между перемещениями узлов:
в»“в«в ° («1.2,3,4);
ФГ -Ф2 -фз фГ; фГ фГ -Фз'-фГ;
ф
т т т
- (й Фз -г
■Ф4-
Уравнения равновесия
Таблица 5.17
Неизвестные
№ уравнения
1
№
1
Т
Ч1
Свободные
члены
1
7,250
—0,770
0,770
0
2
—0,770
8,29
0,154
0,0533
Iх
3
0,770
0,154
7,620
0.0833
Iх
Из решения системы уравнений найдем: 0,000498
фГ-
ш 0,00618 Ф1 Следовательно, деформация рамы определяется всего тремя неизвестными углами поворота узлов (табл. 5.16). Для нахождения неизвестных, Ф1, р составляем три уравнения моментов узла 1 относительно осей V, Г, Т (рис. 5.99).
В этом узле сходятся стержни 1—2, 1—3 и 1—5. Векторы-моменты, действующие на узел 1 со стороны удаленных стержней показаны на рис. 5.99.
т 0,01087
Ф1 Вычисление изгибающих моментов и поперечных сил производится так же, как и при расчете рамы с взаимно перпендикулярными стержнями на основании зависимости (5.328), табл. 5.16 и формул (5.322) для наклонных стоек и на основании табл. 5.16 и 5.12 и формул (5.322) для ригелей.
5.9. ЦИКЛИЧЕСКИ СИММЕТРИЧНЫЕ РАМЫ
305
5.9. ЦИКЛИЧЕСКИ СИММЕТРИЧНЫЕ РАМЫ
Пространственными рамами с циклической симметрией называют системы, которые, будучи повернуты вокруг своей оси на определенный угол, совмещаются со своим первоначальным положением (рис. 5.100).
Плоскости, проходящие через ось пространственной
Рис. 5.100
рамы, называют меридиональными, а перпендикулярные к ней — параллельными. Стержни, лежащие в параллельных плоскостях каркаса, образуют правильный многоугольник. К сооружениям такого типа относятся рам-
Рис. 5.101
ные каркасные купола, сквозные водонапорные башни, градирни и подобные им сооружения.
При расчете циклически симметричных пространственных рам целесообразно пользоваться подвижной прямоугольной системой координат: ось V во всех узлах вертикальна и направлена вверх, ось УР горизонтальна и в каждом узле направлена к центру симметрии, ось Т касательна к окружности, проходящей через все узлы данного яруса рамы (рис. 5.101). Принятая система координат, которую назовем естественной, позволяет с наибольшим эффектом использовать расчетные преимущества, вытекающие из особенностей симметрии циклических рам. Составленное в общем виде уравнение равновесия узла оказывается типовым и может быть отнесено к любому узлу рамы.
Рассмотрим пространственную раму с циклической симметрией. Высоты ярусов и углы наклона меридио¬
нальных стержней к горизонту могут быть различными. Номера колец отсчитываем снизу вверх; номер промежуточного кольца обозначим 5, номер вышележащего — через I, а нижележащего — через р. Номер меридионального ребра отсчитываем против хода часовой стрелки от нулевого ребра, обращенного к наблюдателю; номер промежуточного ребра обозначим п. Узел рамы обозначается двумя знаками: первый указывает номер кольца, а второй — номер меридионального ребра, например 5, п.
Деформированное состояние рамы определяется угловыми ф, ср1', фт и линейными 6Г, 6, 6Г перемещениями ее узлов в естественной системе координат. Положительными считаем перемещения, если их векторы совпадают с направлениями осей.
Предположив, что в узле 5, п сходятся два стержня меридиана 5, п—р, л и 5, п—, п и два стержня кольца 5, п — 5 (п— 1) и 5, п — 5 (п1), введем следующие обозначения:
5 — длина стороны правильного т-угольника 5; — длина стержня меридиана вышележащего яруса рамы;
1р — длина стержня меридиана нижележащего яруса;
I — погонные жесткости относительно осей инер.2 ции х, у и г стержней рамы, сходящихся р в узле 5, п;
Iх 1У I2
Ч' Ч' Ч
Кз — угол наклона к горизонту главных плоскостей инерции стержней многоугольника 5;
Фр — углы наклона к горизонту осей стержней меридиана, находящихся соответственно выше и ниже многоугольника 5;
2л
в — центральный угол правильного т-угольника.
т
В дальнейшем при составлении типовых уравнений равновесия узлов рамы понадобятся зависимости между усилиями, действующими на концы стержней, 5, п — ,п 5, п — рп 5, п — 5.(л—1); 5, л — 5(л1), отнесенных к осям инерции стержня х, у, 2, и углами поворота ф, ф1, фт и линейными смещениями 6, б1’, 6Т узлов пространственной циклически симметричной рамы в принятой естественной системе осей V, Г. Для этого выразим углы поворота и линейные смещения концов стержня в его осях инерции через составляющие перемещений узлов рамы в естественной системе координат. Рассмотрим стержни, сходящиеся в узле 5, я.
Стержень5» п—р, п (рис. 5.102). Связь между углами поворота и линейными смещениями концов стержня,
Таблица 5.18
Косинусы углов
Iх 1У 18 15»
1Х, 1У
V V
Оси
X
У
2
V
зп яЬ Р
0
соз
IV
005
0
— 8Ш Ър
Т
0
1
0
отнесенными к его осям инерции и угловыми и линейными перемещениями в естественной системе осей координат, можно получить, если спроектировать последние на оси инерции стержня.
306 _
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
Г,У
Рис. 5.102
Косинусы углов, образованных осями инерции стержня 5, п — р п и натуральными осями координат (рис. 5.102), даны в табл. 5.18.
Проектируя на оси инерции х, у, г стержня 5, п — р, п векторы перемещений узлов з,п и р, п, получим:
Ьр.п 6Р.П з1п бр,л С08 V Ьу„ „ 6 „ соз 31 п
Рп
А7;»;
ФР,п фр.п 5'П % Фр.л « V Фр,Л фр.п ’
Фр.п —фр,л с03 Фр -Фл 5'п %’
п1Г
Эти зависимости остаются в силе и для узла р, п.
Стержень 8, п—п. Переходя к стержню 5, п—г, заметим, что достаточно в равенствах (5.330) заменить индекс р на 5 и индекс 5 на I.
Стержни кольца 8, п—§ (п1) и 8, п—8(п1). Для стержней многоугольника (рис. 5.103) косинусы углов между их осями инерции и осями координат приведены в табл. 5.19. У величин, имеющих разные знаки, верхний относится к стержню 5,п — з(п—1), а нижний — к 5, п — з(п1).
Таблица 5.19
Косинусы углов
Оси
X
У
2
V
0
— 5Ш X
СОЗ X
, • 0
е
0
V?
51П — СОЗ X соз — ЗШ X соз “ 2
2
2
0
. е
,. 0
Т
С 05 4- СОЗ X 51П 4- 31П X 51П 2
2
2
(5.330)
Спроектируем векторы перемещений узлов 5, п и 5, (п—1) на оси инерции х у, г стержня 5, п—5 п—1):
55.(л-1)±С(л-1) бГ,(л-1)с05 -7Г ’
в?,(«-1±6М»-1)С08 И «Мл-1)1п Х
8 I г • • в
хсоз — б',(„_1) зш н 31П —; 6Мя-1) ±бГ,(л-1) 5‘П Х ± бМл-1) 005 X
0 0 х соз — -61 соз к зш —;
ФМл-1) ±ФМл-1) 3‘П уФмл-1) 0052 ’
(л-1)-фГ,(П-1) з1пХФМл-1) С03 X
0, г.9
X соз — ±ф'1(п_1 соз х 31П — ;
Ф5,(л-1)Фмл-1) с05 - Фмл-1) 5»п X
0 т 0
0, х соз — ±ср
(5,331)
2 -1- 8, (л—1) 2
Эти зависимости остаются в силе и для узла з(п—1).
Расчет пространственных циклически симметричных рам от действия произвольной нагрузки встречает трудности из-за необходимости решения большого количества совместных уравнений. Задача в значительной степени упрощается, если представить нагрузку в виде тригонометрических рядов и полиномов.
Введем обозначения: пУ гТ
Рпу Р” Рп — вертикальная, радиальная и тангенциальная составляющие внешней сосредоточенной силы, приложенной к узлу з,п рамы.
5.9. ЦИКЛИЧЕСКИ СИММЕТРИЧНЫЕ РАМЫ
307
Каждая из этих величин, меняясь по произвольному закону, может быть для любого многоугольника 5 представлена конечным рядом вида
Р„ — Е соз кпд' Е 31П кпд;
Р% Е Р соз кпд Е РдГ 31П кпд; Ртп — Е Р 81 п кпд Е Р% соз кпд;
Е М 31 п кпд Е соз кпд;
М Е з1п кпд Е Мь соз кпд; Мтп Е М[ соз кпд Е М1 зш кпд.
(5.332)
где Р, Р, РдГ, Р,. — амплитудные значения составляющих сил, действующих на узлы рассматриваемого многоугольника рамы
Нагрузки, выражаемые первыми суммами в (5.332), симметричны относительно нулевого диаметра и вызывают симметричную деформацию рамы; нагрузки, выражаемые вторыми суммами, являясь антисимметричными относительно нулевого диаметра, вызывают антисимметричную деформацию системы.
При действии на циклически симметричную пространственную раму нагрузки, меняющейся в окружном направлении по гармоническому закону и симметричной относительно нулевого диаметра (радиальная и вертикальная нагрузка, изменяющаяся по закону косинуса, и тангенциальная — по закону синуса), кинематические и статические величины, относящиеся к узлам и меридиональным ребрам одного яруса, изменяются вдоль кольца по закону косинуса или синуса. К величинам, изменяющимся по закону косинуса, которые будем называть четными, относятся:
1) линейные радиальные и вертикальные перемещения узлов рамы;
2) углы поворота узлов относительно тангенциальной оси Т;
3) изгибающие моменты относительно оси Т и соответствующие им поперечные силы в меридиональных стержнях;
4) продольные усилия в меридиональных стержнях.
К величинам, изменяющимся по закону синуса, которые будем называть нечетными, относятся:
1) линейные перемещения узлов в тангенциальном направлении (вдоль оси Т);
2) углы поворота узлов рамы относительно вертикальной и радиальной осей;
3) крутящие моменты в меридиональных стержнях и изгибающие моменты в них, вектор которых лежит в меридиональной плоскости;
4) поперечные силы в меридиональных стержнях, направленные вдоль оси Т.
Четные величины отличаются от нечетных по простому признаку: прибавляется или отнимается для этих величин действие сил или перемещении, симметричных относительно нулевого диаметра кольца.
Если в выражениях, представляющих указанные выше составляющие внешней гармонической нагрузки, заменить косинус на синус, то во всех перечисленных выше зависимостях для перемещений косинусы заменяются синусами, а синусы — косинусами.
(5.333)
(5.334)
Для каждого многоугольника рамы при симметричной нагрузке можно записать:
Е зш кпд; фГ Е фГ зшАюв;
Ф Е фI соз кпд;
6 Е соз кпд;
6 — Е 6% соз кпд;
Ьтп Е 6 31 п кпд.
При действии антисимметричной нагрузки
Ф Е ф соз кпд; Ф Е ф]Г соз кпд; Ф„ Е ф 31 п кпд;
Езш кпд.
6 Е "8% 31П кпд; 6 Е соз кпд.
Выражения (5.333) и (5.334) дают возможность описать деформацию каждого многоугольника поперечника пространственной циклически симметричной рамы независимо от количества его узлов шестью перемещениями, которые назовем главными. Из них три фг, 6Г, в случае симметричной нагрузки и ф, ф, 6Г в случае антисимметричной_нагрузки относятся к нулевому узлу, а остальные три ф, ф, 6Т при симметричной и рг, Ъу, 75ж при антисимметричной нагрузках не связаны ни с каким узлом, если число сторон многоугольника не кратно четырем. Таким образом, при расчете пространственной циклически симметричной рамы на действие гармонической нагрузки число уравнений оказывается равным ушестеренному числу многоугольников рамы. Число независимых перемещений узлов рамы может быть уменьшено, если пренебречь, как это обычно принято, продольной деформацией стержней кольца и меридиана. Продольные усилия в стержнях меридиана могут быть также представлены в виде тригонометрических рядов
«г у «г соз к (п 0,5 0)
л('г1) ( 01М СОО.50 соз к (п 0,5) 0 соз 0,50
(5.335)
Здесь (01) к и (Л01) к — продольные усилия в стержне кольца между узлами 0 и 1 при симметричной и антисимметричной нагрузках, соответствующие 6-му члену разложения.
Представив в выражениях (5.330) и (5.331) перемещения в виде (5.333) и подставив полученные зависимости, а также выражения (5.331) для внешней нагрузки и (5.335) Для продольных усилий в уравнения (5.321), получим типовые уравнения равновесия узла рзмы в случае симметричной нагрузки. Для того чтобы составить типовые уравнения равновесия узла рамы при антисимметричной нагрузке, следует представить переме-
308
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
щения рядами (5.324), а затем полученные выражения для усилий на концах стержней подставлять в те же уравнения (5.321), в которых продольные усилия и узловые нагрузки будут представлены в антисимметричной форме. Ниже приводим типовые уравнения равновесия узлов пространственной циклически симметричной рамы при симметричной и антисимметричной нагрузках, полученные после проектирования усилий (5.322) для четырех стержней, сходящихся в узле 5, п на оси У, ПР, Т (рис. 5.104).
5,ЛГ
ы5.п -,р
Рис. 5.104
т Г ?р 4 126
-Чтг-т-2
0
-- СОЗ к) ЗШ — --
2. Уравнение равновесия моментов относительно
оси ИР;
2 0; а 2а (2 соз 60) соз —
—“фГ а1 фГ [ Ь1 ? 4 0 соз 60) 46 (2 соз 60) соз2 — р ±
12Ь е
±фГ ( 8п м8п 5п 005 — у 2
-у- 5Ш 60 СОЗ -у б5г р
(Я
1 й;
3а(1 соз Щ зт 0 —бГ б[ - 2 М 0.
1р н
(5.337)
3. Уравнение равновесия моментов относительно оси Г:
2 Мт 0; фф]7 2а зт Ш зш ±
±фГ ( ' — 26?) 51П 60 31П 0 р5г 2 [ Ь9р 6?
» (1 — соз 60) соз» 4- 26(2 — соз 60) зт2
и
(2 — соз 60) X
X зт-
Перед некоторыми неизвестными перемещениями стоят два знака: плюс и минус; верхние знаки относятся к случаю симметричной (четной) гармонической нагрузки, нижние — к антисимметричной (нечетной) нагрузке. Для сокращения записи индекс к при главных неизвестных ф и б, а также одинарные и двойные черточки над ними и другими величинами опущены.
1. Уравнение равновесия моментов относительно оси V:
2 МУ 0; «р [ 6 Ь? 46 (2 соз 60)] —
—Рр ср —УУ 4 ЧГ [а? а? 2(2 соз 60) соз-у —
—'Чрар —фГ ±ф[ 2а? зш кд 51 п ±
л-лУ6 • 12Ь? ■ ьо 0
±бд —- 31П к.% ± б — 31П Ш соз — —
в 1 ан
■тМ-г-т-
Г И 1 а9
— [-Г- — — За (1 — СОЗ 60) 31П 0 6 —■ —
6а а
— ву — тб5г — 31П 60 31па — — 2 Мт 0. (5.338)
Н "§ 2
4. Уравнение равновесия проекций сил на ось V:
6 а 2Ь а
2К 0; ±ф—-зш60±ф —з1п60со5—
Н 18 ? Ч 5
Ы2г
6р —б[ ■— — 2 Му 0. (5.336)
»Г в 4 »? в 1
1'гг-г-12т(1-“ад1”т]
ХъТь'[11 1
ьК 1 Ъ9 Ъ?
24-(1 -003 60) -6-бГ-
5 Ч Ч
(ьд ь9
— 8 3 -2- З1п 2фр 31П 2
5.9. ЦИКЛИЧЕСКИ СИММЕТРИЧНЫЕ РАМЫ
309
197 А
—(1 — соз 60) соз —
К 1
йу
6Г5п дУ ]2а™ 0
6®’ 51П ± 6 81П 60 ЗШ — I,
К
ЕРп
([( «‘и р ( ь? -Ь?) соз]
[(65 -бПзп % (ЪТ -ьУ)х
X соз зш —1 — 2 0. (5.339)
Если пренебречь продольной деформацией стержней рамы, то в уравнении (5.339) выражение, заключенное в двойные фигурные скобки, заменяется двучленом
—Л'р 31П фр 51П %.
где Ар, Ыг — продольные усилия в меридиональных стержнях зр и 5.
5. Уравнение равновесия проекций сил на ось V?:
2 П7 0; ф12 —зшбЗсоз—
5 5 2
6я? 9 т1 ап ?■'[-та 1 „ Й
—3 — (1 — СОЗ 60) 31П 0 — чтр — у] р Н
(К ? ЗузШуЯп 1
т]781п2ч,р ЬЧ Г в” вЧ
Ч 1_ 1р ч
Л р ч
-ь "1 Ь°
6а
—— (1 — соз 60) соз
2
5
■ (1 — соз 60) соз2
Если пренебречь продольной деформацией стержней, то в уравнении (5.340) выражение, заключенное в двойные фигурные скобки, заменяется трехчленом
0
—СОЗ % N1 СОЗ Ф ± 2Л01 31П —.
Здесь Ао1 — продольное усилие в стержне многоугольника, соединяющего узел 0 с узлом 1.
6. Уравнение равновесия проекций сил на ось Т:
2Г 0; _ __12-(1соз 60)
1р
-ффТфГ
1р Ч
1 П7 П4 Т6°? 0
С05 60)ЗШ 0 ф — —ф — ф5Г —ЗШ 60 ЗШ— :
‘Р
V О
±6 31П 60 ЗШ — Т
1
ЬТ ЗШ 60 ЗШ 0 б[
Г 6Ьг„ 66 246
г-т- -:
. а 0 1 Лг 66Р «г 66? _
5Ш Т]-6' —6'
126х г (
-бГ -7 —51- ЗШ 60 81П 0 [( б —б ) ЗШ Урр
( «Г -бр) соз грр] соз Е-- [( в' -б[) 5Ш
( 6 —б”7) соз соз ч
1 Л ( я"7 0 • 0 ——. 60 0 N
4 б5 соз — 31П — б' зш — соз — X
9. 0 ЕР8 т
Хсоз— зш— у--Ц —гсг47 0. (5.340)
X (1 соз 60) зш
«-3»
Если пренебречь продольной деформацией стержней рамы, то в уравнении (5.340) выражение, заключенное в двойные фигурные скобки, заменяется выражением
0 60 Лг012соз —18 —.
В уравнениях (5.335) — (5.340) приняты следующие обозначения:
аз (? — 1) 5п 2х; ар (»'р—К)8п 2%а?
(» — 4(7) зп 2%; 7 (I Я) зш 2фр;
( Я?) зш 2ф; 6» 2ф Ь% 2; 6 21% Ь
2ф 6 31П2 X I соз2 х; соз2 X (• зп2х; I 3П2 г)р М соз2фр; Ь?
I зт2 41 соз %; 6 1хр соз2 г)р 4( зп2 г)р;
б)1’ «7 СОЗ2 4% 31П2 С 1р 51П2 фр —
- 2ср С052 -фр; с' г51П2 —2соз2; соз2г)р—
— 2 зш21)р; "с? I? соз2 — 21г( 31П2; йар Ы9р X
310
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
Хзш 1)'р; с1гр Ыгр зп гу, Щ зш 1; а 6 зт гу,
1 6созя)р; "Зр 6»р соз гр; 61?С05;
0
6( СОЗ 1у ёв 2( 51П2 — ; ёир Щ 5‘П2 V 12(р зт2 Хрр; д.« 121» зт2 гу 12зт2; 12е соз2 г])р; 2соз2фр;
12 соз2 гу, 12 соз2 г
Здесь:
2МГ, 2Л1Т—суммы относительно осей V,
Г амплитуд реактивных моментов на концах стержней рамы в рассматриваемом узле от симметричной или соответственно антисимметричной внешней нагрузки, определяемой к-м членом разложения в (5.331). Эти моменты вычисляются в предположении, что стержни, сходящиеся в узле 5, жестко защемлены по концам; в суммы также входят внешние моменты, приложенные непосредственно к рассматриваемому узлу;
2(2Ж, 22Г — суммы составляющих вдоль осей У, № и Т амплитуд реакций на концах стержней, сходящихся в узле 5, при действии симметричной или соответственно антисимметричной внешней нагрузки, определяемой к-м членом разложения ряда (5.331). Реакции вычисляют в предположении полного защемления концов стержней, сходящихся в узле. В суммы входят и внешние силы, приложенные непосредственно к узлу.
После совместного решения уравнений типа (5.336) — (5.341), составленных для всех ярусов рамы, и определения величин главных перемещений можно по фор¬
мулам (5.332) и (5.333) вычислить перемещения всех узлов рамы и по формулам (5.322) найти усилия на концах стержней.
Количество неизвестных в уравнениях типа (5.335) — (5.346) при действии нагрузки, определяемой одним из членов тригонометрических полиномов (5.332), можно, как было указано выше, сократить с шести до четырех в каждом ярусе, если пренебречь продольными деформациями стержней. Приравнивая нулю продольную деформацию стержня п, (л1), получим: при симметричной нагрузке
,5.342,
при антисимметричной нагрузке
бг -бс18484- (5-343)
Аналогично для стержня меридиана
2 Ьу (с§ г,._2 - с8 г)) - 6 сб (5.344)
1,2.
При помощи дополнительных условий (5.341) — (5.343) можно из шести главны перемещений в каждом ярусе исключить два. Тогда для каждого многоугольника рамы необходимо составить три уравнения равновесия моментов относительно осей V, и?, Т. Четвертое уравнение равновесия проекций сил составляется для части рамы, отсеченной так, чтобы в это уравнение не входили продольные усилия в разрезанных стержнях. В некоторых случаях вместо уравнения проекций приходится составлять дополнительное уравнение равновесия моментов сил, действующих на отрезанную часть рамы.
5.10. ТОНКОСТЕННЫЕ СТЕРЖНИ 1
5.10.1. Прямые тонкостенные стержни с жестким поперечным сечением и пренебрежимо малой жесткостью свободного кручения [12]
К этой категории относятся открытые профили, согнутые из тонкого листа, при отношении ширины стенки (полки) к толщине, превышающем 20—30; они обладают незначительным сопротивлением свободному (нестесненному) скручиванию и в то же время достаточно большой поперечной жесткостью. Сюда же относятся открытые цилиндрические оболочки, усиленные часто поставленными поперечными диафрагмами или ребрами. Неподкрепленные открытые цилиндрические оболочки в первом приближении также рассматриваются часто как тонкостенные стержни с жестким поперечным сечением с последующим учетом в случае необходимости деформации контура поперечного сечения (см. первое издание, 5.10.5, 5.10.6).
При недеплалирующем сечении (угольник, тавр, крест) стержень близок к кинематической цепи с бесконечным числом степеней свободы, и крутящих моментов воспринять не может. При депланируюшем поперечном сечении стержень является системой с одной степенью свободы деформации, так как может свободно
1 Рассматриваются стержни с открытым профилем. Стержни с замкнутым профилем см. [90].
скручиваться вокруг оси центров изгиба с малым относительным углом закручивания ‘0,к фк и одинаковой депланацией всех сечений до()—Фксо(5). Здесь
о (5) — ординаты главной эпюры секториальных площадей, подсчитанной при полюсе в центре изгиба и нулевой начальной точке (см. 5.3.3—5.3.10).
Для неподвижного прикрепления такого стержня необходимо и достаточно семи связей. Пример прикрепления на рис. 5.105, а эквивалентен полному защемлению одного торца, создающему препятствие трем линейным и трем угловым перемещениям, а также депланации торца. Один из опорных стерженьков может быть заменен прикрепленной к стержню планкой, препятствующей депланации.
Пример на рис. 5.105,6 типичен для статически определимого прикрепления открытых цилиндрических оболочек и открытых пролетных строений. Обычно в плоскостях вертикальных опор ставят усиленные диафрагмы.
Напряженное состояние в пс перечном сечении характеризуется семью усилиями, из них три ((2У, МК)
связаны с касательными напряжениями и четыре (М, Мх, Му, В) —с нормальными напряжениями.
Реакции в статически определимой системе определяются из шести условий равновесия твердого тела и седьмого условия, выражающего равенство нулю или наперед заданной величине бимомента на одном из торцов или в одном из попереч-гых сечений.
Эпюры для усилий ?, 2У, Мк, Ы, Мх, Му строят по
5.10. ТОНКОСТЕННЫЕ СТЕРЖНИ
311
обычным правилам для стержней с массивным профилем, пользуясь для первых трех усилий осями с началом в центре изгиба 0, а для трех остальных — осями с началом в центре тяжести 0 (см. 5.1.6).
Эпюра В строится как интегральная эпюра от эпюры МКМк, причем рекомендуется пользоваться аналогией между стесненным кручением и изгибом, которая отражена в формулах для напряжений (5.86) и распространяется на эпюры.
Сущность аналогии. В результате приведения нагрузок к типам усилий (см. 5.3.10) получают крутящую и бимоментную нагрузки. На рис. 5.106, а, б показаны два варианта условного изображения сосредоточенных крутящих моментов Ьк и бимоментов С. Аналогично изображаются распределенные нагрузки. Выясняются наперед заданные перемещения и деформации, включая действие опор, препятствующих закручиванию (фкО), и опор, препятствующих депланации (Фкфк0).
В табл. 5.20 слева перечислены активные факторы и эпюры, относящиеся к стесненному кручению, справа — соответствующие активные факторы и эпюры, относящиеся к изгибу.
На рис. 5.106, в показана балка, моделирующая тонкостенный стержень по рис. 5.106,6; левой опоре, пре
-О-
6)
т
в 1“ 1
Таблица 5.20
Аналогии нагрузок и эпюр при стесненном кручении и изгибе прямых стержней
Стесненное кручение (жесткость Е )
Изгиб (жесткость Е1 )
Факторы
Крутящая моментная нагрузка Бимоментная нагрузка
Поперечная силовая нагрузка Моментная нагрузка
Эпюры усилий и перемещений
Эпюра крутящих моментов стесненного кручения Эпюра бимоментов Эпюра углов закручивания Эпюра относительных углов закручивания (меры депланации)
Эпюра поперечных сил
Эпюра изгибающих моментов Эпюра прогибов Эпюра углов поворота сечений
пятствующей закручиванию и депланации, отвечает защемляющая и вертикально неподвижная опора; второй опоре, препятствующей только закручиванию, но не препятствующей депланации, отвечает вертикально неподвижная опора. Крутящему моменту отвечает сила, сосредоточенному бимоменту, — сосредоточенный изгибающий момент.
Четыре эпюры, перечисленные в табл. 5.20 слева, строят, как четыре эпюры, указанные справа, причем для эпюр перемещений вместо Е1Х берут Е1(0. Обычно достаточно построить только эпюры Мк и В, которые строятся как эпюры С? и М моделирующей балки.
Аналогия распространяется и на расчет статически неопределимых балок. На рис. 5.106, в система один раз статически неопределима.
При расчете на стесненное кручение стержней с пренебрежимо малой жесткостью свободного кручения используется весь аппарат расчета балок.
Данные для суждения о возможности пренебречь жесткостью свободного кручения 01 к см. 5.10.2.
5.10.2. Тонкостенные стержни с жестким поперечным сечением и конечной жесткостью свободного кручения [20, 18, 156, 2]
К этой категории относятся строительные прокатные профили. При 01 к-0 полный крутящий момент воспринимается касательными напряжениями стесненного кручения, равномерно распределенными по толщине стенок (МкЛ?к). При 01КФ0 полный крутящий момент воспринимается как напряжениями свободного кручения (Мк), так и напряжениями стесненного кручения (Мк). Момент Мк является производной от бимомента В. Поэтому бимоменты при 01кф0 получаются меньшими, чем при Ск-0. Это уменьшение зависит от величины Ы, где
ь -.Ск 1
6 щ с ■
(5.345)
Рис. 5.106
Для суждения о влиянии величин к и Ы на эпюру биомоментов и значение макс. В служит табл. 5.21, 5.21 а.
312
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕЕЫХ СИСТЕМ
_ _ _ Таблица 5.21
Эпюры бимоментов [7]
Схема бруса и моделирующей балки
Эпюра бимоментов
Уравнение эпюры бимоментов
шах
Примечание
В (г)
-вы) сЬкг
сЬ к1
тахВ С; В (0) Са
а
В(г) -
г Ь к ( — г)
К и »
В (0) 1ка5;
я—
К СП КС
в (г) — тк [Ы 8Ь к (1 — г) —
тштт
сЬ Ы — сЬ Ы сЬ кг]
В (1) ткД 2
т п
В(г) В(0)8ЬМ'-г) §Ь к1
п -2)_. 81,г •
Б (0) или В ();
Пунктиром по¬
А'
казана эпюра В при 01К —0. Ординаты эпюры изгибающих моментов, моделирующей эпюру бимоментов, отложены от сжатого волокна
2 2
24 СЬ-Й.
2
п
——а4,
В (г) Лк_ к-
", а‘(т-г)"
тк ,и Ы
сЬ 2
8 5
сЪкг—сЪк Г— 2
. )
(2Й при 2 — ; 8 е 2
о К) — —_ 2 к
и к1 9
зЬ 2
Ц-ир
В(2)к_ 1-
Ч
Ы сЬ к
р
25Ь-«
2
-
В последовательном порядке даны схемы брусьев и моделирующих балок; эпюры ВМм0Д, причем пунктиром показана эпюра ВМмод при уравнение
эпюры В, выраженное через гиперболические функции зЬ кг и сЬ кг; значение макс. В, равное значению макс. В при Ск-0, умноженному но коэффициент а.
Значения коэффициентов аь., а8 приведены в табл. 5.21 а. Пользуясь данными для макс.В, можно произвести предварительную оценку влияния 01К на работу стержня.
Расчет при произвольной крутящей нагрузке выполняется путем интегрирования дифференциального уравнения стесненного кручения:
В" — кВ — тк (5.346)
или в форме
Здесь к2
ф'у-
- 2р
Е1,л
(5.346')
С]к
Е1,л
; тК — интенсивность распределения
крутящей моментной нагрузки; р — угол закручивания.
Общее решение дифференциального уравнения (5.345) или (5.346) по методу начальных параметров имеет вид (значок «к» опущен)
Шг т0 сЬ Н В0 к зЬ 1г [Мг];
зЬг
Вг Во сЪ кг [В2]
К,
Мг М2 — Мг 01 кр'
Л10 — В0к зЬ кг М0 (1 — сЬ кг) [Мг];
М
Вп
Фг Фо 2г, О— сЬкг)--
01 к
01 к
Мо_
01 к
кг — зЬ кг
-Ь [фЬ
(5.347)
При развертывании грузоных членов учитывается, что сосредоточенный момент Ьг в сечении дает
5.10. ТОНКОСТЕННЫЕ СТЕРЖНИ
313
К табл. 5.21 а
Коэффициенты аь.а для вычисления макс. В
ы
Ог
Ля
а.
о»
ав
0,0
1,0000
1,0000
1,0000
1,0000
1,0000
1,0000
1,0000
1,0000
0,1
0,9960
0,9972
0,9976
0,9992
0,9984
0,9996
0,9999
0,9995
0,2
0,9803
0,9869
0,9902
0,9966
0,9952
0,9984
0,9994
0,9988
0,3
0,9566
0,9710
0,9782
0,9926
0,9912
0,9980
0,9986
0,9974
0,4
0,9250
0,9499
0,9624
0,9868
0,9832
0,9968
0,9975
0,9952
0,5
0,8868
0,9242
0,9430
0,9796
0,9744
0,9948
0,9960
0,9926
0,6
0,8435
0,8951
0,9210
0,9710
0,9640
0,9928
0,9941
0,9894
о.
0,7967
0,8634
0,8970
0,9610
0,9512
0,9900
0,9920
0,9858
0,8
0,7477
0,8301
0,8716
0,9498
0,9376
0,9868
0,9896
0,9815
0,9
0,6977
0,7959
0,8456
0,9376
0,9224
0,9836
0,9868
0,9767
1,0
0,6480
0,7616
0,8194
0,9242
0,9056
0,9796
0,9838
0,9714
1.2
0,5522
0,6947
0,7676
0,8950
0,8696
0,9712
0,9768
0,9594
1.4
0,4649
0,6324
0,7188
0,8634
0,8296
0,9612
0,9688
0,9455
1,6
0,3880
0,5760
0,6740
0,8300
0,7880
0,9500
0,9599
0,9299
1,8
0,3218
0,5260
0,6334
0,7958
0,7464
0,9376
0,9498
0,9129
2,0
0,2658
0,4820
0,5970
0,7616
0,7040
0,9244
0,9390
0,8944
2,5
0,1631
0,3946
0,5214
0,6786
0,6024
0,8872
0,9093
0,8435
3,0
0,0993
0,3317
0,4632
0,6034
0,5112
0,8468
0,8764
0,7881
3,5
0,0603
0,2852
0,4170
0,5380
0,4328
0,8044
0,8415
0,7305
4.0
0,0366
0,2498
0,3792
0,4820
0,3672
0,7616
0,8061
0,6727
5,0
0,0135
0,2000
0,3210
0,3946
0,2680
0,6788
0,7363
0,5632
6,0
0,496-10“2
0,1667
0,2780
0,3316
0,2000
0,6036
0,6717
0,4670
7,0
0182-10 2
0,1429
0,2450
0,2852
0,1536
0,5380
0,6138
0,3861
8,0
0,671-Ю-"3
0,1251
0,2188
0,2498
0,1208
0,4820
0,5631
0,3199
9,0
0,247.10“3
0,1111
0,1976
0,2222
0,0968
0,4348
0,5187
0,2666
10,0
0,908- 1СГ4
0,1000
0,1800
0,2000
0,0790
0,3948
0,4801
0,2239
11,0
0,334-10 4
0,0909
0,1652
0,1818
0,0656
0,3608
0,4463
0,1893
12,0
0,123.104
0,0833
0,1528
0,1666
0,0553
0,3316
0,4170
0,1617
13,0
0,452.10§
0,0769
0,1420
0,1538
0,0472
0,3068
0,3905
0,1392
14,0
0,166.1(Г“®
0,0714
0,1326
0,1428
0,0407
0,2852
0,3673
0,1209
15,0
0,612-10““®
0,0667
0,1244
0,1334
0,0355
0,2664
0,3467
0,1058
скачок, равный только в эпюре Му в эпюре же М скачка нет (возникает только излом эпюры);
при г щ [М2] I сЬ к (г — щ);
[Вг] 4" и §Ь к (г — щ)
[ф]
[Мг] Ц [1 — сЬ к (г 1
к01К
Щ)]
Ц [к (г — щ) — зЬ к (г — а)].
(5.348)
Равномерно распределенная крутящая моментная нагрузка т на участке от г—с до гй. Общие формулы выписаны для случая г4; при сгс1 полагают йг при 02с полагают добавочные члены в квадратных скобках равными нулю:
г 1 пг
1г — [зЬ к (г — й) — зЬ к (г — с)]; к
[Вг] —■ [сЬ к (г — й) — сЬ А (г — с)];
(5.349)
(5.349)
[.Мг] — у- [(й-с)
зЬ к (г — й) — зЬ к (г — с)];
сЬ к (г — й) — сЬ к (г — с).
Таблица 5.22
Граничные условия
№
Граничные условия (для торца)
Математическое выражение
1
Отсутствие стеснения для депланации.
В — 0
2
Отсутствие стеснения для закручивания
мк-ьЖк о
3
Полное стеснение депланации а » а • •
4
То же, закручивания
Фк °
314
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕ ШХ СИСТЕМ
Начальные параметры определяются из граничных условий (табл. 5.22)
Пример 5.16. Стальная швеллерная балка № 16а длиной 150 см полностью защемлена левым концом, правый конец свободен. По всей длине балка нагружена крутящей моментной нагрузкой постоянной интенсивности т2 ООО кГсмсм. Определить усилия в защемлении.
Выбрав начало отсчета на левом конце из граничного_условия (3), имеет Ио0. Из условия равновесия Л1ММ имеем
М0 — М0 — тк1 2 000150 300 000 кгсм.
Полагая с0 и получаем уравнение эпюры бимоментов:
В2 В0 сЬ кг зЬ к? 77- [сЪ к (г — ) —- сЬ кг). к к2
Из граничного условия (1) на свободном конце В0 находим бимомент в заделке:
В —■
к2 сЬ Ш
(Ы зЬ Ы— сЬ Ы 1).
Принимаем Е—2,1« 10е кГсм2, 00,8-10® кГсм2. По первому изданию табл. 7.6 геометрических характеристик прокатных профилей для швеллера № 16а имеем к—0,0295 1 см. Находим
кI 4,425; сЬЫ 41,802; зЬ М 41,790;
2 000
в«-0,0:4.,ш14-425-41'790-
— 41,802 1) 78 600 кГсм2.
Напряжения определяются по правилам, изложенным в 5.3.9 и 5.3.10.
Многочисленные примеры см. [18, 20]. Неразрезные тонкостенные брусья см. [17].
Замкнутые (трубчатые или коробчатые) депланирующие профили с жестким поперечным сечением обладают значительной жесткостью свободного кручения, вследствие чего нормальными напряжениями стесненного кручения обычно можно пренебречь. Однако для вытянутых сечений учет эффекта стеснения иногда бывает необходим. Для полной реализации этого эффекта необходимо принимать меры к обеспечению поперечной жесткости профиля.
Дифференциальные уравнения стесненного кручения для замкнутых профилей аналогичны (5.346) и (5.346'), с той разницей, что
01 к
• И г., - ; тк хтк.
Здесь
Е1„
к
— так называемый коэффициент депланации, где к — момент инерции замкнутого профиля при свободном кручении; с — направленный полярный момент инерции (см. 5.3.2).
С указанными изменениями в отношении к2 нагрузок решения (5.347) — (5.349) остаются в силе. Для недепланирующих замкнутых профилей кс, ц0 и эффекта стеснения не возникает.
Многочисленные числовые примеры см. [2,165].
Аналогия с растянуто-изогнутой балкой. В случае 01 к-0 для расчета стержня на стесненное кручение вводится моделирующая балк., при 01Кф0 моделирующая балка является растянуто-изогнутой, причем растягивающая сила N—01К. Для стержня на двух опорах, препятствующих закручиванию и не стесняющих депланации торцов, моделирующей является простая балка на двух опорах. Используя приближенную формулу для прогиба посередине пролета, основанную на замене
эпюры прогибов синусоидой 0Ср
ср
1
А
Л'э
получаем для случая стесненного кручения
Фср :
ф;
’2Р
Фср
1
Ок2
(5.352)
л2Е1 ©
Бимомент посередине проле га
5срр-0кФср- (5.353)
Здесь нуликом отмечены величины, получаемые в предположении Ск-0.
Приемы расчета тонкостенных стержней, основанные на использовании тригонометрических рядов, см. [26].
5.10.3. Кривые тонкостенные стержни и арки с жестким поперечным сечением [89]
На рис. 5.107 показан плоский кривой разветвленный тонкостенный стержень с пренебрежимо малой жесткостью свободного кручения, полностью защемленный на одном конце (7 связей) и свободный на другом конце (а) и на конце тонкостенного отростка. Работа этой статически определимой кривс линеиной консоли от нагрузки в плоскости кривизны никаких особенностей не представляет. На рис. 5.107, с показаны сосредоточенные нагрузки, вызывающие излиб перпендикулярно плоскости кривизны и кручение: изгибающий момент 1я,
(5.350)
(5.351)
5.11. КОНСТРУКЦИИ ТИПА СОСТАВНЫХ СТЕРЖНЕЙ
315
крутящий момент Ьк, бимомент С и сила, перпендикулярная плоскости кривизны Т. Определение усилий (построение эпюр) 2, Мк, Му делается по общим правилам.
Бимомент в произвольном сечении т от нагрузок, действующих между свободным концом и сечением, определяется по следующим правилам. Изображается ось центров изгиба стержня (рис. 5.107,6). Моменты Ьж и Ьк изображаются по правилу левого винта в виде векторов — моментов волнистыми стрелками, бимомент С изображается дуговой стрелкой, сила Т — кружком с крестиком (при обратном направлении силы Т кружок с крестиком заменяется кружком сточкой). Векторы — моменты Ьш и Ьк, поворачиваются на 90° против часовой стрелки. В повернутом положении они изображены пунктирными волнистыми стрелками. Сила Г, направленная от наблюдателя (как в данном случае), рассматривается как сток равномерно распределенной крутящей моментной нагрузки интенсивностью Т кГ -смсм, действующей от точки приложения Т до защемления е. На усилия в сечении т действует «цепочка» Тйт. Бимомент в сечении т вычисляется как изгибающий момент:
1) от сосредоточенного момента, численно равного внешнему бимоменту С; 2) от сил, равных повернутым векторам — моментам Ьк и Ьк; 3) от силовой цепочки Тйт. Последний момент равен произведению Тт, где 0т — удвоенная площадь сегмента с хордой пгТ и дугой пгйТ;
Вт С-К'а-1к'к-™Т (8.354)
При наличии нескольких сосредоточенных факторов вводятся суммы факторов, а распределенная моментная или силовая нагрузка дает соответствующие интегралы
Расчет тонкостенного стержня с обоими свободными концами, прикрепленного четырьмя параллельными стержнями и тремя стержнями, лежащими в одной плоскости, а также кольцевых стержней см. [158].
Бесшарнирная арка. Расчет тонкостенной арки на нагрузку в плоскости кривизны (3 лишние неизвестные) делается по общим правилам расчета арок (см. 5.6.3). Расчет на нагрузку, вызывающую изгиб из плоскости кривизны и кручение (4 лишние неизвестные), может быть выполнен на основании статико-кинематической аналогии, развитой применительно к тонкостенным стержням [158]. Подобно тому как статически неопределимые изгибающие моменты арки, нагруженной в своей плоскости, получаются по трехчленной формуле внецентренного растяжения — сжатия [5.6.3, формула (5.214)], так и здесь статически неопределимые бимоменты получаются по четырехчленной формуле внецентренного растяжения — сжатия стержня с открытым тонкостенным профилем и толщиной стенки
1
Е1„,
рис. 5.108,6 — соответствующий фиктивный тонкостенный профиль, который предполагается нагруженным фиктивной нагрузкой интенсивностью
В0
(5.356)
Е1,л
рф
где В0 — бимоменты в основной системе.
Бимомент в любом сечении арки (пг) определяется по формуле
р Ф вф
я в° — —
I рФ
(5.355)
На рис. 5.108, а показана арка с сосредоточенными нагрузками С, Ьл Ьк, Т (аналогично рис. 5.107), на
Если пренебречь деформацией от изгибающих и крутящих моментов по сравнению с деформацией от бимоментов, то характеристики фиктивного профиля вычисляются по формулам
“ Ь'.'
,Л С хЧ«, С 0.4
1 ;а • (5.358)
I Е1. Этот метод применительно к спаренной арке подробно рассмотрен в [89] (там же см. некоторые примеры по расчету рам).
Стержни и кольца с круговой осью и конечной жесткостью свободного кручения подробно рассмотрены в разделе 9.
5.11. КОНСТРУКЦИИ ТИПА СОСТАВНЫХ СТЕРЖНЕЙ
Составным стержнем называется система параллельных стержней, соединенных связями того или иного вида. Под это понятие подходят как пакеты деревянных брусьев, соединенных продольными и поперечными связями, так и многоэтажные рамы, а также двух- и многопоясные фермы с параллельными поясами. Представление о работе составного стержня облегчает приближенный расчет многих сложных сооружений.
Многоэтажные рамы под горизонтальной нагрузкой
На рис. 5.109, а показана рама, нагруженная силами вдоль ригелей. Когда жесткость ригелей весьма велика по сравнению с жесткостью стоек, то ригели обычно считают абсолютно жесткими, рассматривая раму как вертикальный трехпоясной стержень с абсолютно жесткими планками (рис. 5.109,6). Если пренебречь удлине¬
316
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕНЫХ СИСТЕМ
ниями стоек, то точки перегиба стоек (нулевые точки моментов) лежат посередине высоты каждого этажа. Поперечная сила каждого этажа, равная сумме вышележащих нагрузок, распределяется между стойками этажа пропорционально их жесткостям Е1, что дает возможность построить эпюру моментов каждой стойки. Рассматривая далее каждый ригель как упругую неразрезную балку, нагруженную над опорами заданными
о)
7777
3
7Р
• -У
“2 ' (1-Ч)Р
Г •'
Ущ
?Р
_ л
(1-7)11
_
ж
№
л
--т
4
7
п1 V
П
77" 7777
Рис. 5.109
Подставляя Мр из 5.359, дифференцируя по и приравнивая производную нулю, находим (5.360):
2
Т)
•Л'? 1 р 2р йх
Ш
Мрйх
Е1
Входящие сюда интегралы относятся в данном случае только к стойкам и вычисляютс по правилам «перемножения эпюр» (см. 5.7.4).
а
Р
рз
а± с М ]§ ± Iс ± 02 7 7 02 Ж 12 72 32 д2 02
Р3
Р3
6)
Р
внешними сосредоточенными моментами от стоек, получают эпюры моментов ригелей.
Если, наоборот, ригели слабы по сравнению со стой ками, то в запас прочности для стоек пренебрегают из гибной жесткостью ригелей, рассматривая их как шар нирно прикрепленные распорки составного стержня обычно нерастяжимые (рис. 5.109, в). В предположении что жесткости стоек всех этажей для каждого этажа пропорциональны одним и тем же числам, например
Е1ц:Е121:Е131 Пхппъ ( 1, 2, 3,.6),
устанавливают, что нагрузки рамы распределяются между стойками пропорционально их жесткостям. Так же и эпюры моментов в стойках имеют ординаты, пропорциональные жесткостям стоек. В действительности ригели не являются ни абсолютно жесткими, ни шарнирно присоединенными к стойкам. Можно получить уточнение первого приближения, сочетая оба решения и исходя из принципа минимума потенциальной энергии. Обозначим изгибающие моменты от сил Р по первому варианту расчета через М1р, по второму варианту — через М2Р. Уточненные моменты берем в виде суммы:
Мр цМ1Р (1 — Т]) М2Р,
где
т) — неизвестное число, которое определяется из условия минимума энергии.
Энергия равна:
Мрйх
Е1
Ат
В
С
Р А.
.1
В
С
Л.
д 02 д2 О Рис. 5.110
д
д2 д2
(3.359)
Дальнейшее уточнение можег быть выполнено одним из известных методов (см., натример, 5.7.3.).
Многоэтажная многопролетная рама с равными прЪ летами. При соблюдении следующих условий: 1) всё промежуточные стойки в пределах этажа имеют одинаковую жесткость, а крайние стсйки — половинную жесткость; 2) каждый ригель имеет постоянную жесткость;
3) ригеля считаются нерастяжнмыми,— расчет на действие горизонтальной узловой нагрузки выполняется точно и сводится к расчету одной симметричной многоэтажной рамы, у которой жеггкость левой и правой стоек составляет половину жесткости промежуточных стоек заданной рамы. Схема замены трехпролетной рамы тремя однопролетными, нагруженными одной третью общей нагрузки, показана на рс. 5.110, а. Если поставленные условия полностью не удовлетворены, например, крайние стойки имеют такую же жесткость, как промел жуточные (рис. 5.110,6), то сначала заданная рама представляется в Еиде рамы, удовлетворяющей требованиям, и двух отдельных стэек. Заданные нагрузки приближенно распределяются между этой рамой и стойками, исходя из принципа минимума энергии, как указано выше: из каждой силы Р часть гР передается т раму, часть (1—г]) Р — на две стойки. Если обозначить через М1Р моменты от сил Р в раме (они определяются в соответствии с рис. 5.110, а), через Л42р— моменты от сил Р в стойках (определяются элементарно, как для консоли), то величина г найдется по формуле (5.360).
Каркасно-панельные системы [89, 90]
В первом приближении элементы каркаса считаются работающими только на продольные усилия, а силы вза¬
5.11. КОНСТРУКЦИИ ТИПА СОСТАВНЫХ СТЕРЖНЕЙ
317
имодействия между каркасом и отдельными панелями считаются сдвигающими (касательными). Каждая прямоугольная панель в сечениях, параллельных краям, работает только на одинаковые по величине касательные усилия, которые распределены вдоль сечения равномерно, т. е. как бесконечно малый элемент в условиях чистого сдвига. Это представление о работе панельной стены отвечает схеме тонкостенной фермы (см. 10.1.5)
На рис. 5.111,в показана четырежды статически неопределимая система. Е качестве лишних связей выбраны четыре панели и соответственно в качестве лишних неизвестных приняты четыре погонных касательных усилия Ль Х2, Аз, Х (рис. 5.111,г). Неизвестные определяются из четырех канонических уравнений метода сил. Свободные члены и коэффициенты уравнений вычисляются по формулам:
'®2-,
2-3
)
ф'
1
-
0
) Ей
7УГГ7У ; ут
з-ь
•у
Х1 •
ГП
[Ра
7777Я77
Чп
Рис. 5.111
при условии, что сосредоточенные нагрузки передаются только в узлах.
Степень статической неопределимости системы равна степени статической неопределимости фермы, у которой каждая панель заменена раскосом. Стена на рис. 5.111, а статически определима. Ее можно рассматривать как вертикальную консоль, защемленную нижним концом. Касательные усилия в панелях равны:
01—2
2—3 :
3
ь ;
?4—5
3—4 :
Зз—4
(5.362)
Первая сумма распространяется на все стержни, вторая — на все панели (Я — площадь панели, I — толщина панели). I
ЫрА (2 Ы1А Агв) Л’рв(2в м)] •
Составная балка с поясами, работающими на изгиб, и стенкой, работающей на сдвиг (рис. 5.112)
Расчет основан на следующих допущениях: 1) закон плоскости не имеет места для всего сечения, но остается в силе для поясов, 2) средняя стенка передает равномерные касательные усилия и создает связь между поясами по вертикали, обеспечивающую их одинаковый прогиб. Нормальных напряжений в поперечном сечении стенка не передает.
Расчет на поперечную нагрузку. Полные изгибающие моменты М° необходимо распределить между одинаковыми моментами обоих поясов и моментом М2Ы2к продольных сил поясов:
М° 2Мг М2.
Эпюра моментов М2 получается в результате интегрирования дифференциального уравнения:
• №М°.
(5.362)
Продольные усилия в стойках пропорциональны изгибающему моменту в консоли:
дост __ '
Ь
Продольные усилия в ригелях следуют закону треугольника с максимальным усилием, равным нагрузке Р.
Вообще интенсивность роста продольного усилия вдоль стержня каркаса равна разности погонных касательных усилий в панелях, примыкающих к стержню. Зная усилие ЫА на одном конце стержня А—В и касательные усилия в примыкающих панелях и 7П, можно сразу определить усилие на другом конце стержня (рис. 5.111, б):
ВЛ’4(?п-9т)Л (5.361)
Имея моменты ЛЬ, можно получить моменты продольные усилия в поясах, а также поперечные силы в стенке (?2М2, погонные касательные усилия в стенке дЯ2у а также прогибы балки V. Кроме того, прогибы могут быть получены путем интегрирования дифференциального уравнения
IV Л 9 " № Р°
„IV _ аЛ, _ __ Мо ±-. (5.363)
В этих уравнениях
Е — модуль упругости поясов;
х — собственный момент инерции одного пояса;
2 —-— — момент инерции составного стержня без
318
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖННВЫХ СИСТЕМ
учета собственных моментов инерции поясов;
к — расстояние между центрами тяжести сечения поясов;
—г 2х —полный момент инерции сечения составного стержня;
5 — модуль сдвига материала стенки;
Гу — эффективная площадь стенки при вычислении ее деформации сдвига. В данном случае Рукс.
Х лГ —. (5.364)
V 2 Е 12 ' ;
Балка является частным случаем многопоясного составного стержня с упруго деформируемыми связями сдвига и недеформируемыми поперечными связями. Решение для таких стержней охватывает и случаи составной балки.
5.12. О РАСЧЕТЕ СТЕРЖНЕВЫХ СИСТЕМ НА ЭВМ
В настоящее Ерем я в СССР для ЭВМ различных типов создано несколько сотен программ для расчета стержневых систем. Наиболее интересными среди них для проектировщика являются так называемые универсальные программы, которые могут быть использованы для расчета любых стержневых систем (в пределах ограничений, установленных программой) или же достаточно широких классов таких систем. Универсальные программы превратились в обычный «инструмент» для расчета и используются в десятках проектных организаций страны.
В качестве примера ниже даются краткие сведения о ряде универсальных программ для расчета стержневых систем на ЭВМ «Минск-22» и ЭВМ «Минск-32» в режиме совместимости с «Минск-22».
Система СМ-5 для автоматизации расчетов стержневых конструкций [104—107]
Система предназначена для статического и динамического расчета (в упругой линейной постановке) на ЭВМ «Минск-22» любых плоских стержневых систем со степенью статической неопределимости до 122. Как правило, расчет выполняется методом сил, но возможен также расчет смешанным методом. С помощью системы СМ-5 можно рассчитывать также некоторые типы пространственных конструкций, конструкции на упругом основании, конструкции с односторонними связями и некоторые другие типы нелинейно деформируемых систем.
В систему СМ-5 входят блоки динамического расчета, которые позволяют определять собственные частоты и формы колебаний, сейсмическую нагрузку, ветровую нагрузку с учетом пульсаций скоростного напора ветра, загружать линии влияния сейсмическими и ветровыми силами, рассчитывать сооружение на вибрационную нагрузку.
В системе автоматизированы все этапы расчета, кроме выбора основной системы, который осуществляет инженер, готовящий исходные данные для расчета. Подготовка исходных данных требует хорошего понимания работы рассчитываемой конструкции и знания строительной механики; в то же время от инженера не тре¬
буется знания программирования. Затраты времени на подготовку исходных данных в зависимости от сложности конструкции составляют от 2 до 25 ч (для особо сложных конструкций — до 50—60 ч). Время расчета на ЭВМ «Минск-22» составляет для стержневых систем различной сложности от 2 до 100 мин. Исходная расчетная схема конструкции готовится инженером-проектировщиком и имеет вид обычного задания на расчет вручную. На основе такой схемы инженер-расчетчик составляет исходные данные по форме, предусмотренной инструкцией к программе.
Основные результаты работы системы — прогибы и усилия в стержнях — печатаются на бумаге и записываются на заданные места магнитной ленты; в таком виде они могут быть использованы как исходные данные для работы других программ. Кроме того, в процессе счета для проверки правильности задания исходной информации с помощью программы ВИЗИР-1 и одной из программ серии КОНТУР [108] может быть получена перфолента с записью геометрической схемы сооружения; после ввода в устройство вывода графической информации получают эту схему в графическом виде. Та же схема может быть выдана по окончании счета по программе с указанием рассчитанных усилий.
Программа имеет ряд количественных ограничений. Основные из них: число неизвестных при произвольнрй основной системе ке более 122, при специальной основной системе, приводящей к кодиагональной матрице перемещений,— не более 127; общее число сил, действующих в основной системе (не считая так называемых вторичных сил), — до 320, число узлов — до 255, число различных величин сил — до 100.
Программа МАРСС-105 для расчета плоских и пространственных стержневых систем [109]
Программа реализует на ЭВМ «Минск-22» расчет плоских или пространственных стержневых конструкций по смешанному методу при специальном виде основной системы. За неизвестные усилия принимаются неизвестные метода сил в предположении, что все соединения системы жесткие (для этого предварительно накладываются связи на подвижные сочленения в любом месте
5.12. О РАСЧЕТЕ СТЕРЖНЕВЫХ СИСТЕМ НА ЭВМ
319
системы). За неизвестные перемещения принимаются перемещения по направлению наложенных на систему жестких связей. Кроме стержневых систем по программе можно рассчитывать некоторые плоские и пространственные континуальные системы типа балок на упругом основании, плит, оболочек, для чего необходимо произвести стержневую аппроксимацию сплошной конструкции.
Подготовка исходных данных для расчета по программе предельно упрощена, не требует специальйых знаний по программированию и в большинстве случаев может быть выполнена средним техническим персоналом, знакомым с основами строительной механики. Исходные данные содержат информацию о структуре стержневой системы, геометрических размерах, жесткостях стержней и внешних воздействиях на конструкцию. Формирование основной системы осуществляется автоматически.
Результатами расчета являются внутренние усилия (продольные и поперечные силы, крутящий и изгибающий моменты), в концевых поперечных сечениях каждого стержня. В программу включены те же блоки для расчета на динамические воздействия, что и в систему СМ-5, поэтому по МАРСС-105 можно получить все результаты для такого расчета, перечисленные в предыдущем пункте. Результаты выводятся либо на узкую бумажную ленту, либо в виде таблицы со словесными пояснениями — на широкую печать. Время решения задачи на ЭВМ зависит от параметров конструкции: числа стержней, степени статической неопределимости, количества внешних параметров, а также от характеристик основной системы, формируемой на ЭВМ. Обычно оно колеблется о г нескольких минут до 1,5—3 ч.
Основные ограничения программы: 1) пп1п2
500, где П — степень статической неопределимости системы в предположении, что все соединения стержней между собой и закрепления в опорных точках неподвижны; п2 — сумма степеней свободы всех подвижных сочленений; 2) число стержней не более 510; 3) число сил не более 180.
Программа СИДР-12 для статического и динамического расчета многоэтажных рам [110]
вычисляются усилия от сейсмической нагрузки; производится учет совместного действия нагрузок и подбор арматуры в элементах рамы. Основные количественные ограничения программы: число элементов до 256, число линейных смещений не более 50.
Исходные данные содержат информацию о жесткостях и длинах элементов рамы, о нагрузках на элементы, о структуре рамы, коэффициенты передачи и т. д. Предусмотрена возможность сокращенной записи информации при наличии регулярности в раме.
При расчете рамы в полном объеме программа выдает следующие результаты: матрицу единичных реакций, матрицу единичных перемещений, динамические характеристики рамы, результаты расчета рамы на отдельные загружения (перемещения, эпюры узловых моментов, продольных и поперечных сил), комбинации усилий в элементах, требуемую площадь арматуры и др.
Программа КАРРА-5 для расчета ортогональных плоских стержневых систем [111]
Программа КАРРА-5 использует метод перемещений и решает практически те же задачи, что и программа СИДР-12, но несколько отличается от нее по количественным характеристикам: число стержней не должно превышать 112, число неизвестных метода перемещений — 60, число стержней, для которых требуются значения эпюры М в промежуточных точках — 57. Информация для расчета должна содержать сведения о геометрической схеме рамы, длинах и жесткостях стержней, данные о нагрузках, а также некоторые дополнительные параметры. Результатом расчета по каждому загружеяию являются перемещения связей, эпюры моментов, поперечных и продольных сил (узловые значения), эпюры моментов в пяти промежуточных точках назначенных стержней. При расчете на сейсмические нагрузки печатаются периоды собственных колебаний рамы и сейсмические силы по первым трем тонам собственных колебаний. Кроме того, выдаются расчетные комбинации усилий, а для железобетонных элементов — площади продольного и поперечного армирования.
Программа предназначена для расчета на ЭВМ «Минск-22» плоских многоэтажных ортогональных рам с элементами постоянного и переменного сечения при наличии бесконечно жестких участков в узлах рамы. С помощью программы можно рассчитывать рамы как регулярные, так и нерегулярные (с пропущенными стержнями). Стержни могут быть закреплены в узлах рамы жестко, шарнирно, а также иметь любую податливость на поворот. Рама может иметь упруго-податливые опоры по любому заданному перемещению.
Статический расчет рам выполняется программой по методу распределения узловых моментов защемления. При расчете учитывается только изгибная жесткость, т. е. перемещение зависит только от первого члена формулы Масквелла — Мора (б йх). Можно
учесть интеграл от поперечных сил, вычисляя соответствующим образом жесткости элементов. Интеграл от продольных сил учесть при расчете нельзя. Программа осуществляет также динамический расчет рам на свободные колебания; учитывается динамическое воздействие пульсаций скоростного напора для ветровой нагрузки и
Приведенные выше примеры наглядно демонстрируют широкие возможности универсальных программ для расчета стержневых систем. Следует иметь в виду, что с развитием вычислительной техники, с увеличением объема памяти и быстродействия ЭВМ будут появляться все новые программы с возрастающими количественными характеристиками, использующие все более точные методы расчета. Использование ЭВМ позволяет сократить продолжительность расчетов, проводить многовариантный счет, осуществлять выбор наиболее рационального варианта конструкции. (См. также 1.23).
1 Для некоторых периодических изданий приняты сокращенные обозначения:
«Известия высших учебных заведений» — ИВУЗ; «Строительная механика и расчет сооружений» — СМРС «Исследования по теории сооружений» — ИТС «Расчет пространственных конструкций» — РПК Первое издание настоящего тома Справочника проектировщика — 1 изд.
320
РАЗДЕЛ 5. СТРОИТЕЛЬНАЯ МЕХАНИКА УПРУГОГО СТЕРЖНЯ И СТЕРЖНЕВЫХ СИСТЕМ
ЛИТЕРАТУРА1
1. Афанасьев А. М., Байков В. Т., Геммерл и н г А. В. и др. Сборник задач по расчету тонкостенных конструкций (под ред. А. А. Уманского). Оборонгиз, 1941.
2. Афанасьев А. М., Калинин Н. Т., М а рьин В. А. Основы строительной механики. Оборонгиз, 1951.
3. Безухов Н. И. Рамные конструкции. Расчет и конструирование. Гостехиздат, 1931.
4. Безухов Н. И., Г о л ь д е н б л а т И. И. и др. Теория сопротивления материалов. Ч. I и II. Академия
им. Ф. Э. Дзержинского, 1959.
5. Беляев Н. М. Сопротивление материалов. Физмат¬
гиз, 1962.
6. Биргер И. А., Ш о р р В. Ф., Шнейдерович Р. М. Расчет на прочность деталей машин. Машгиз, 1959.
7. Бычков Д. В. Строительная механика стержневых
тонкостенных конструкций. Стройиздат, 1962.
8. Вайнберг Д. В., Чудновский В. Г. Пространственные рамные каркасы инженерных сооружений. Гостехиздат Украины, 1948.
9. Вайнберг Д. В., Чудновский В. Г. Расчет пространственных рам. Стройиздат Украины, Киев, 1964.
10. В и н о к у р о в Л. П. Строительная механика стержневых систем. Ч. I—III. Изд. ХГУ, Харьков, 1960.
11. Винокуров Л. П. Деформирование бруса и механическое сопротивление материалов. ХИСИ, 1962.
12. В л а с о в В. 3. Тонкостенные упругие стержни. Физматгиз, 1958.
13. В л а с о в В. 3. Тонкостенные пространственные системы. Стройиздат, 1958.
14. Г а р е л к и н Б. Г. К расчету безраскосных ферм и
жестких рам. Собр. соч., т. 1, АН СССР, 1952.
15. Г а з а р я н А. Н., К а н а н о в Н. К. Распределение
моментов, 1-е изд. 5.8.1.
16. Г а с т е в В. А. Краткий курс сопротивления материалов. Физматгиз, 1959.
17. Г в о з д е в А. А. Общий метод расчета сложных статически неопределимых систем. МИ ИТ, 1927.
18. Г л у ш к о в Г С. Инженерные методы расчетов на прочность и жесткость. Маш., 1949.
19. Г л у ш к о в Г. С., К о п ы л е н к о. Сопротивление материалов. «Высшая школа».
20. Г о л ь н и к Э. Р. Расчет косоопертых тонкостенных стержней, РПК, вып. 10, 1965, вып. 11, 1967.
21. Горбунов Б. Н., Кротов Ю. В. Основы расчета пространственных рам. Стройиздат, 1936.
22. Горбунов Б. Н., Стрелецкая А. И. Теория рам из тонкостенных стержней. Гостехтеоретиздат. 1948.
23. Г о р б у н о в Б. Н., Стрельбицкая А. И. Расчет прочности тонкостенных стержневых систем. РПК вып. 1, 1950.
24. Г о ф м а н Ш. М. Расчет плоских и пространственных рам способом группового последовательного уравновешивания. Труды Института сооружений АН УзбССР, вып. 1, 1950.
25. Г р а ч С. А. Геометрические характеристики плоских сечений. «Мехтеп», Фрунзе, 1967.
26. Д а р к о в А. В., Кузнецов В. И. Статика сооружений. Трансжелдориздат, 1951.
27. Джанелидзе Г. Ю., Пановко Я. Г. Статика упругих тонкостенных стержней. Гостехтеоретиздат, 1948.
28. Д л у г а ч М. И. О расчете тонкостенных стержней, усиленных решеткой или планками. РПК, вып. 1, 1950.
29. Ж е м о ч к и н Б. Н. Расчет рам. Стройиздат, 1965.
30. 3 а в р и е в К. С. Расчет арочных мостов. Трансжелдориздат, 1956.
31. Изюм о в С. М., Кудрявцев И. Н., Олисов Б. А. Сборник задач по сопротивлению материалов. Стройиздат, 1940.
32. Каменцев П. А. и Дучинский Б. Н. Бесшарнирные арочные мосты. Транспечать, 1928.
33. Ка н С. Н. Прочность замкнутых и открытых цилиндрических оболочек. РПК, вып. 6, 1960.
34. К а н С. Н., Школьный П. А. Приближенный расчет тонкостенных брусьев и цилиндрических оболочек с открытым деформируемым сечением. 1 изд. 8.10.6.
35. К а н и Г. Расчет многоэтажных рам. Стройиздат, 1965.
36. К а ч у р и н В. К. Расчет бесшарнирных симметричных сводов. «Советская наука», 1942.
37. К и р п и ч е в В. Л. Лишние неизвестные в строительной механике. Гостехиздат, 1933.
38. К и с е л е в В. А. Балки и рамы на упругом основании. Стройиздат, 1936.
39. Киселев В. А. Рациональные формы арок и подвесных систем. Стройиздат, 1953.
40. К и с е л е в В. А. Строительная механика. Стройиздат, 1967.
40а. Киселев В. А. и др. Строительная механика в примерах и задачах. Стройиздат, 1968.
41. К л е й н Г» К. Применение способа распределения мо¬
ментов к расчету пространственных рам. Институт Моссовета, Сб. трудов, вып. 1, 1949.
42. К о г а н Л. А. Расчет пространственных рам по методу распределения моментов защемления. ИТС, вып. VI, 1954«
43. К о р н е в и ц Э. Ф., Эн дер Г. В. Формулы для расчета балок и плит на упругом основании. Стройиздат, 1932.
44. К Р ы л о в А. Н. О расчете балок на упругом основании. АН СССР, 1930.
44а. Кузьмин Н. Л., РекачВ. Г., Розенблат Г. И Сборник задач по теории сооружений, под ред. И. М. Рабиновича. Стройиздат, 1950.
45. К У т у к о в Б. Н. Расчет регулярных плоских систем и биконструкций методом бесконечной основной системы. РПК, вып. II, 1951.
46. К у л е ш о в Ю. И. О расчете составных балок учетом упругой и пластической деформации связей. Труды ЛПИ, № 5, 1949.
47. Л ь в и н Я. Б. Рациональные методы расчета многоэтажных рам на горизонтальную нагрузку. ИТС, вып. VIII, 1959.
48. М а л а м е н т Л. И. Расчет балочно-рамных систем без решения совместных уравнений. Труды Высшего военно-морского училища, 1955, № 8.
49. М а л и е в А. С. Балки на упругом основании с переменным по их длине коэффициентом постели. Труды ЛИСИ, вып. 6, 1938.
50. М и е к л а д з е Ш. Е. Некоторые задачи строительной механике. Гостехтеоретиздат, 1948.
51. Никифоров С. Н, Сопротивление материалов. Стройиздат, 1944.
52. Н о в и ц к и й В. В. Приближенные методы расчета на прочность замкнутых цилиндрических оболочек с неизменяемым контуром поперечного сечения. РПК, вып. IV, 1958.
53. О с и п о в В. П. Расчет балок на упругих опорах,
Стройиздат, 1957.
54. П а п к о в и ч П. Ф. Строительная механика корабля,
ч. I. Судпромгиз, 1947.
55. Пастернак П. Л. Исследование пространственной
работы монолитных железобетонных конструкций. МИСИ. Сб« трудов № 4, 1940.
56. П а с т е р н а к П, Л. Основы нового метода расчета
фундаментов на упругом основании при помощи двух коэффициентов постели. Стройиздат, 1954.
57. Перельштейн Н. Л. Приближенные методы расчета рам. Справочник инженера-проектировщика промсооружений, вып. II. Стройиздат, 1934.
58. П и к о в с к и й А. А. Основы теории арок. Трансжелдориздат, 1954.
59. П о н о м а р е в С. Д., Б и д е р м а н В. Л., Лихарев К. К. и др. Расчеты на прочность в машиностроении, т. I—III. Машгиз, 1956—1959.
60. Пратусевич Я. Л. Вариационные методы в строительной механике. Гостехтеоретиздат, 1948.
61. Прокофьев И. П. Теория сооружений, ч. I и 1Ь Трансжелдориздат, 1947.
62. Рабинович И. М, Строительная механика в СССР, 1917—1957. Стройиздат, 1957.
63. Рабинович И. М. Строительная механика в СССР, 1917—1967. Стройиздат, 1969.
64. Рабинович И. М. Курс строительной механики стержневых систем, ч. I. Статически определимые системы. Стройиздат, 1950.
65. Р а б и н о в и ч И. М. Курс строительной механики
стержневых систем, ч. II. Статически неопределимые системы.
Стройиздат, 1954.
66. Рабинович И. М. Основы строительной механики стержневых систем. Стройиздат, 1956.
67. Р а п п о п о р т Р. М. Статика тонкостенных стержней, составленных из ветвей, соединенных планками. РПК, вып. IV, 1958.
68. Ржаницын А. Р. Теория составных стержней строительных конструкций. Стройиздат, 1948.
69. Р ж а н и ц ы н А. Р. Расчет тонкостенных стержней
ступенчато-переменного сечения. ИТС, вып. V, 1951.
70. Р о г и ц к и й С. А. Расчет рам. Машгиз, 1948.
71. Рубин ин М. В. Руководство к практическим занятиям по сопротивлению материалов. Росвузиздат, 1963.
72. С е г а л ь А. И. Высотные сооружения. Расчет на прочность, жесткость и устойчивость. Стройиздат, 1949.
73. С е г а л ь А. И. Прочность и устойчивость судовых перекрытий. «Речной транспорт», 1955.
74. С м и р н о в А. Ф. и др. Сопротивление материалов. МПС, 1961, 1969.
75. С и м и н с к и й К. К Неразрезные балки, изд. КПИ,
1930.
76. С н и т к о Н. К- Строительная механика. «Высшая школа», 1966.
77. С н и т к о Н. К. Расчет рамных сооружений итерационными методами. Стройиздат, 1962,
ЛИТЕРАТУРА
321
78. С н и т к о И. К. Практические методы расчета статически неопределимых систем. Стройиздат, 1960.
79. С о й 6 е л ь м а н С. М., Т р о г у н М. Н. Примеры расчета сложных рам по методу распределения моментов. Стройиздат, 1965.
80. С о с и с П. М. Статически неопределимые системы, «Буд1вельник», Киев, 1968.
81. Сое и с П. М., X акало Б. П. Расчет неразрезных и перекрестных балок. Стройиздат УССР, 1958.
82. Т и м о ш е н к о С. П. Сопротивление материалов, ч. 1 и II. «Наука», 1960—1965.
83. Тимошенко С. П. История науки о сопротивлении материалов с краткими сведениями из теории упругости и теории сооружений. Техтеоретиздат, 1957.
84. У м а н с к и й А. А. Схемы инженерных сооружений. Изд. КПИ, 1930.
85. Уманский А. А. О редуцировании площадей при вычислении моментов инерции. СМРС, № 1, 1959.
86. У м а н с к и й А. А. Специальный курс строительной
механики, ч. I — «Балки переменного сечения. Балки на упругом основании. Решение уравнений. Справочные таблицы». Стройиздат, 1935.
87. У м а н с к и й А. А. Специальный курс строительной
механики, ч. II — «Многопролетные балки на упругих опорах. Плоские и пространственные рамы». Стройиздат, 1940.
88. У м а н с к и й А. А. Наплавные мосты. Трансжелдориздат, 1939.
89. У м а н с к и й А. А. Пространственные системы. Стройиздат, 1948.
90. У м а н с к и й А. А. Строительная механика самолета. Оборокгиз, 1961.
91. Уманский А. А., Воль мир А. С., Код а
н е в А. И. Курс сопротивления материалов, ч. 1 и II. Ака¬
демия им. Н. Е. Жуковского, 1953—1954.
92. У м а н с к и й А. А., К У т у к о в Б. Н. Расчет неразрезных наплавных мостов. РПК, вып. III, 1955.
93. Ф е о д о с ь е в В. И. Сопротивление материалов. «Наука», 1967.
94. Феодосьев В. И. Избранные задачи и вопросы по сопротивлению материалов. «Наука», 1967.
95. Ф и л и н А. П. Элементы теории арок. ЛИИ ПС, 1963.
96. Ф и л и н А. П., Соколова А. С. Строительная механика корабля, ч. I. «Речной транспорт», 1957,
97. Современные методы расчета сложных статически неопределимых систем. Под редакцией А. П. Филина. Судпромгиз, 1961.
98. Филоненко-Бородич М. М. Основы теории работы упругих сил в плоских системах. Техиздат, изд. 2-е, 1932,
99. Филоненко-Бородич М. М. Некоторые Приближенные теории упругого основания, «Ученые записки МГУ», вып. 46, 1940.
100. Филоненко-Бородич М. М., И з ю м о в С. М., Олисов Б. А. и др. Курс сопротивления материалов под общей редакцией Филоненко-Бородича М. М. Техтеоретиздат, ч. I и II, 1956.
Ю1.Хаяси Кейитн. Теория расчета балки на упругом основании в применении к фундаментостроению. Гостехиздат, 1930.
102. Ш а г и н П. П. Расчет многоярусных рам способом последовательного сопряжения. Стройиздат, 1954.
103. Ш а г и н П. П. Расчет сборных каркасно-панельных зданий. Стройиздат, 1959.
104. Система автоматизации расчетов стержневых конструкций (СМ-5). Отраслевой фонд алгоритмов и программ по строительству (ОФАП), вып. 1-99. М., Гипротис, 1969.
105. Инструкция к системе автоматизации расчетов стержневых конструкций (СМ-5), (ОФАП), вып. 1-98. М., Гипротис, 1969.
106. Программа автоматизации расчетов стержневых конструкций для ЭВМ «Минск-22» (СМ-5). Дополнение № 1 (ОФАП), вып. 1-122. М., Гипротис, 1У71.
107. Система автоматизации расчетов стержневых конструкций для ЭВМ «Минск-22» (СМ-5). Дополнение № 2. (Расчет стержневых систем на динамические воздействия), (ОФАП), вып, 1-131. М., Гипротис, 1971.
108. Вывод графической информации (программа КОНТУР-2), (ОФАП), вып. У-24, М., Гипротис 1970.
109. Инструкция по подготовке исходных данных для расчета плоских и пространственных стержневых систем по программе МАРСС-105, (ОФАП), вып. 1-129. М., Гипротис, 1971.
110. Инструкция по подготовке исходных данных для комплексной работы многоэтажных рам по программе СИДР-12, (ОФАП), вып. 1-138. М., Гипротис, 1971.
111. Инструкция к программе комплексного расчета плоских ортогональных стержневых систем методом перемещений для ЭВМ «Минск-22» (КАРРА-5), (ОФАП), вып. 1-136. М., Гипротис, 1971,
РАЗДЕЛ б
МАТРИЦЫ. ЧИСЛЕННЫЕ МЕТОДЫ СТРОИТЕЛЬНОЙ МЕХАНИКИ
6.1. НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ТЕОРИИ МАТРИЦ
6.1.1. Матрицы и их виды, определители и миноры
Матрицей А аатхпназывается система элементов йгз (в частности, чисел), расположенных в виде прямоугольной таблицы из т строк и п столбцов:
А
атат2 • - •
тп
(6.1)
тип — размеры матрицы.
Разновидностями прямоугольной матрицы (тХп) являются матрица-столбец (тХ 1), матрица-строка (1Хя), квадратная матрица (тгХгг). В последнем случае п называется порядком матрицы:
А
А
1
ат а11 •
ат
а к
а1 П
. ап
аа
и 1
Элементы матрицы-столбца (матрицы-строки) можно рассматривать в качестве координат конца вектора а (аь., ап) в линейном п-мерном пространстве. Ниже будут использованы оба термина: матрица-столбец и
вектор (обозначение а).
Линия, на которой располагаются элементы а1Ь а22,Япп квадратной матрицы А, называется главной диагональю [элементы ац ( I,п)—главными], параллельные ей линии называются кодиагоналями [элементы ац(1, 1,п; 1ф]') — побочными].
Частные случаи квадратной матрицы:
1) диагональная матрица
Ф 0 ;
Ф
С
2) скалярная матрица (частный случай диагональной)
(а
аа I о ф I
3) единичная матрица (частный случай скалярной)
Е 1111; 6,- Ц
б ц — символ Кронекера;
А
а11
ос
1
22
а
1
; А
«
; Е
Ч
•
•
•
•
•
апп
а
1
при изображении матриц, имеющих упорядоченное расположение нулевых элементов, последние не показываются; для диагональной матрицы в дальнейшем будет также использоваться обозначение
А ал
1» “2» »
4) кодиагональная (ленточная) матрица (ац0, 1—р, р1, 2,., п—1); она содержит 2р ненулевых кодиагоналей (по р с каждой стороны от главной) и главную ненулевую диагональ; например, трехдиагональная (трехчленная) матрица (р 1) имеет вид:
А
аа2 21-2223 а32а33а34
если все элементы в пределах каждой диагонали (главной диагонали и кодиагоналей) равны, кодиагональная матрица называется модулированной: а Ь с Ь а Ъ с А с Ь а Ь с с Ь а Ь с
6.1. НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ТЕОРИИ МАТРИЦ
323
5) треугольные матрицы: верхняя (правая) треугольная (ац0, ), нижняя (левая) треугольная (ац О, ):
А
• а1п
а
022- «
■ а2п
2122
•
Ш
; А
, •
апп
аП1ап2 • • • аПП
(6.2)
Матрица азпХтназывается транспонированной (по отношению к исходной А Наг5ЦтХг) и обозначается А', если ее столбцами служат строки А, а строками — столбцы А:
аиа12' •
. ап
а11а21 •
• • ат1
А
02122 •
. а2п
; А'
а12а22
• • т2
ат1атп2 •
• • Птп
аШа2п•
• •О'ГПП
Матрица-строка при транспонировании переходит в матрицу-столбец, а матрица-столбец — в матрицу-строку: ах
а' I
а
I а1а2 С1п
Дважды (четное число раз) протранспонированная матрица совпадает с исходной (А')'А,
Матрица, совпадающая со своей транспонированной (безразличная к перестановке индексов , ), называется симметричной: ацац и А А'.
Прямоугольная матрица с нулевыми элементами называется нулевой:
о.
.0
0.
'.о
ту. п
0
Если в прямоугольной матрице А (6.1), размерами 7Хя, под каждым элементом понимать также некоторую матрицу (называемую подматрицей) А, размерами
ШгУП ('Ятг — тП—, то такая матрица называется 11 1 клеточной, или квазиматрицей:
Ац« • •Ац А —. • •.
А.Аы
а элементы ее — квазиэлементами (подматрицами). Последние образуют квазистроки размером Ш'Хп и квазистолбцы пгхП]. Диагональные, ко диагональные и треугольные матрицы называются в этом случае квазидиагональными, квазикодиагональными и квазитреугольными.
При выполнении операции транспонирования над квазиматрицами транспонированию подлежит также каждый квазиэлемент:
А
Ац.
Ац • • •
• АЛ1
Ал.
• • А ы
А ц • • •
• А ы
. (6.3)
У симметричных квазиматриц кц Ау в частном случае могут быть симметричны и сами квазиэлементы:
Квадратной матрице А отвечает определитель (детерминант) Л — число, найденное по определенному закону из элементов матрицы А:
011. 01 п I
IАI (6.4)
апI. апп I
Если А0, матрица А называется особой (вырожденной), в противном случае — неособой (невырожденной).
При транспонировании матрицы определитель ее не меняется:
А' I А . (6.5)
Если в прямоугольной матрице А(тХя) вычеркнуть некоторое число строк и столбцов так, чтобы получить в остатке квадратную матрицу 6-го порядка, то определитель последней называется минором к-го порядка матрицы А. Общее число миноров к-то порядка равно Ст Сп, т. е. произведению числа сочетаний изшиппо.
Рангом гг(А) матрицы А называется максимальный порядок ее минора, отличного от нуля, ггтт (т, п). Число йхпп (т, п) —г называется дефектом матрицы. Ранг кулевой матрицы равен нулю, а дефект— наименьшему из ее размеров; ранг неособой квадратной матрицы равен ее порядку, а дефект — нулю.
Миноры квадратной матрицы, диагональные элементы которых являются главными элементами матрицы, называются главными:
а1а12
Д1 ап; Л2
а2122
1, П—1
-1
вл-1. 1 ал-1, п—1
(6.6)
Алгебраическим дополнением Ац элемента ац квадратной матрицы Аяи11 называется взятый со знаком (—1) минор элемента ац. Порядок алгебраического дополнения на единицу меньше порядка матрицы:
Аи
(-1)
ап.
а1,1“
ал
1 п
а1—1,1
"а1—1,-
-1а—1.1
‘ ' а1—1, п
-Л1.1
а л. п1
°п,1— 1
ап,1 •
а
пп
Матрица, составленная из алгебраических дополнений, называется союзной (взаимной):
(6.7)
Ац.
• • Ат
Аы •
Апп
6.1.2. Алгебраические операции над матрицами
Две матрицы одинаковых размеров АаЦтХл и в 11011 шхп называются равными, если
я7 I 1., п; 1,.,л. (6.8)
Алгебраической суммой двух матриц одинаковых размеров Аа,тХл и В,-тхл называется матрица тех же размеров С-»ктеХя,если элементы ее вычисляются по формуле
Си ац Ьц, (1 1.,т; 1,.,г). (6.9)
Сложение матриц обладает следующими свойствами: А В В А; (А В) С А (В С);
А 0 А. (6.10)
324
РАЗДЕЛ 6. МАТРИЦЫ. ЧИСЛЕННЫЕ МЕТОДЫ СТРОИТЕЛЬНО МЕХАНИКИ
Умножение матрицы на скаляр: В аА определяется условием
Ьц аац, ( 1,., т 1,., п), (6.11)
т. е. при умножении матрицы на скаляр каждый элемент ее умножается на этот скаляр.
Справедливы следующие свойства умножения матрица на скаляр:
(ос 3) А а А ЗА; а (А В) аА аВ; (6.12)
(а3) А а (РА) р (аА).
Умножение прямоугольных матриц: Ста —
Атр если
р
сц Е с1кЬм, (11,., т 1,., п), (6.13)
1
т. е. элемент сц матрицы С получается в результате перемножения с последующим сложением элементов е-й строки матрицы А и элементов -го столбца матрицы В.
Если обозначить через а; строки матрицы А, а через —столбцы матрицы В, то формула (6.13) принимает вид:
Ьх
СИ 1 Ь
(6.14)
1,.,т; 1,.,.,я Ьр
Из (6.13) и (6.14) следует, что умножать можно
лишь соответственные матрицы, т. е. такие, у которых
число столбцов первого сомножителя равно числу строк второго.
Умножение матриц подчиняется следующим законам:
а (АЗ) (аА) В А (аВ);
(А В) С АС ВС; (6.15)
С (А В) СА СВ.
Если имеют смысл произведения АВ и (АВ)О, то имеют смысл и произведения ВЭ и А (ВО). В этом случае справедливо (АВ)0А(В0).
Квадратную матрицу можно возводить в степень; ААА.А. при этом принимается, что А°Е.
Тг р а з
Произведение двух матриц может равняться нулевой матрице, даже если ни один из сомножителей не равен нулю. Например,
ПОП
02хз-
В этом проявляется своеобразие алгебры матриц (по сравнению с алгеброй чисел, где аЬ—0 тогда и только тогда, когда либо а0, либо 60).
Другая особенность алгебры матриц связана с некоммутативностью умножения. Пусть матрица А имеет размер лХя а матрица В — Согласно (6.13)
произведение АВ имеет смысл при условии р п, а произведение В А — при условии цт. Оба равенства независимы, и из справедливости одного из них не следует справедливость другого. Даже если рп и т% т. е. имеют смысл оба произведения АВ и В А, никак не следует их равенство. Например,
ац
0
ООО
а1
0
3
-о
О
01
-о
«о
Ьх ах. ап
Ьа'
•
11° • • • а„11
К
Ьпа 1 • • • Ьп в-п
т. е. а'Ъ есть матрица первого порядка — скаляр (произ-
П
введение а'Ь 22 аЬь называется скалярным произведек—1
нием векторов а Ь), в то время как Ьа'— квадратная матрица порядка п. Выражение АВ—ВА называется коммутатором.
Существует большой класс коммутирующих (перестановочных) матриц, для которых АВВА. Необходимым, хотя и не достаточным условием коммутации является равенство т — п — р—щ. Степени матрицы всегда коммутируют: АкА1 А1АА Ак1. Полагая 61, 0, получим АЕЕА А. Таким образом, единичная матрица Е в алгебре матриц аналогична единице в алгебре чисел.
Транспонирование произведения матриц обладает следующим свойством:
к к
Па, П.
11 1
(6.16)
в частности (АВ)В'А.
Определитель произведения квадратных матриц равен произведению определителей сомножителей:
Па,
11
— П I А , 11
(6. 17)
Ниже широко используются некоторые частные случаи перемножения матриц:
1) А3-
ац.,
• ап
Ьх
•
Ф
-
•
Ш
ап 1.,
■
• • °пп
' Ьп
• • • а-1ПЬ п апхЬх. аппЬп
2) ВА
Ьх
а1 • • • а1п
Ф
•
ш
•
' Ьп
ап1 • • • аГ1П
Ьгап,. • Ьхйщ Ьпст • • • Ьпапп
Ь
ф
Л
щ
■
9
ап
Ьп
апЬп
а'Ь аг,
3) АВ:
Диагональные матрицы являются коммутирующими;
Ьц « ». Ьщ
I Ь,22
1хл
Ьх „
4) а'В аг. «
ап II
Ьщ
ак Ьь;
п
п
V 1 Ьп И
2 аь Ькг •• к—1
. Нал Ькп к—1
6.1. НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ТЕОРИИ МАТРИЦ
325
5) Ах
Сц » • йп
ап апп
п
2 1к
•
к1
п
хп
пк %к
к—
лХ1
с,ц й
• ап
а1р
ш
•
•
•
»
•
—
•
•
•
•
ап1 •
Г
• апп
хп I
апр
• • а1п
Ьц ш
•
Ьп
сц •
с1п
Р
•
•
•
Ш
1
Р
1 •
•
апп
кап
Спп
«11
Ьп
С11
• •
1 •
• л
•
•
•
•
■
э
•
1
•
»
ап1
апп
Ьа . Ь
пп
СП1 «
• С
■пп
Ли
Ьц ♦ •
» Ьп
Сц я
ш
СШ
• •
ш
•
ш
•
•
—
•
ш
«
К
«
.
.
ш
а1 «
апа
1
’ Ь,гп
Са1
• спп
Ьп
ш Ш
Ът
С1
0
Й
а'Вс
II 01
Ш
• ап II
Щ
.
Ш
а
Ьп:
[
» I
Ъпт
ст
—афиСх . --аф1т ст
п т
ааЬп1с1- ап Ьат с„ — 2 Ев; Ьц с.
‘1 ;1
При тл
а'Вс 2 2а6с 2 щЬмсг, (6.19) «1 1 ,у1
8) а'Вс — и § » Сд
Ь1 II
1
«
•
.
Ьа
Сп
2 Ь( С1
11
(6.20)
6.1.3. Обратная матрица. Ортогональная матрица
Матрица А-1 называется обратной (по отношению к А), если
АА-1 А-1 А Е.
(6.21)
Отсюда следует, что систему линейных алгебраических уравнений2 1,я можно записать
?1
в матричной символике:
Ах ар (6.18)
или в развернутом виде 6)
Если рассматривать элементы матрицы-столбца как компоненты вектора в я-мерном пространстве, то любая матрица А осуществляет линейное преобразование вектора х в вектор у: уАх. Поэтому обратная матрица А'1 осуществляет обратное преобразование: А"1» —А-1АхЕхх, что и объясняет происхождение названия для матрицы А-1.
Обратная матрица для данной матрицы А единственна. Элементы обратной матрицы могут быть представлены в виде:
Ац
7
Яп1
А
1А
» 9 1
1 А
А
"
Ап
1 А
' ' А ’
(6.22)
где А, —алгебраические дополнения элементов вц,
т. е. элементы союзной матрицы А (6.7).
Однако на практике обращение матрицы А (вычисление А-1) не выполняется по приведенной формуле (см. п. 6.2.3).
Из (6.22) следует, что вырожденные (особые) матрицы ( А 0) не имеют обратных.
Обратные матрицы широко используются в практических вычислениях, например, при решении систем
уравнений:
Ах ар; х А”"1 ар.
Обращение матриц обладает следующими свойствами:
А1 ) 1 П А; (6.23)
1 1
(А-1 (А')-1; А Ч 1 1А .
Матрица А называется ортогональной, если А'А АА'Е.
(6.24)
Таким образом, для ортогональных матриц справедливо равенство А-А'.
Заметим, что матрица поворота осей координат, широко используемая в строительной механике, является ортогональной матрицей.
Особый интерес представляют симметричные ортогональные матрицы. Они совпадают со своей обратной матрицей. Например,
п 1
[ - IIсов а — 0.5)( —0,5) ■■■"■
у п 0,51 я 4- 0,5
I, 1, —, п.
326
РАЗДЕЛ 6. МАТРИЦЫ. ЧИСЛЕННЫЕ МЕТОДЫ СТРОИТЕЛЬНОЙ МЕХАНИКИ
Определитель ортогональной матрицы называется ортогональным. Так как операция транспонирования не изменяет значения определителя, то А'А А2 Е 1. Следовательно, А ±1, т. е. определитель ортогональной матрицы равен по модулю единице.
6 1.4. Норма матрицы
Неотрицательное вещественное число А называется нормой матрицы А, если оно удовлетворяет следующим четырем условиям:
1) IIА О, А 0 тогда и только тогда, когда А0;
2) аА — сх А, где а — любое комплексное число; прямыми черточками обозначен модуль числа а;
3) А В А 4- IIВ — неравенство треугольника;
4) АВАВ.
Из условия 2 следует, что —А —А, из условий 2 и 3
II А —1 В11 А — В А 1 В .
Обычно используются следующие три нормы матрицы А:
А , шах Е I а.у ;
1 1
А ц гпах Е I а( ;
1 I
»А1ш
Последняя называется евклидовой нормой.
Для вектора-столбца х1.д:п1 эти нормы имеют соответственно следующие значения:
IIх II, тах х. ;
В Пи
(6.26)
Нетрудно проверить, что все приведенные нормы удовлетворяют условиям 1—4.
Число х 2 л;2 называется длиной или моду¬
лем вектора х. Таким образом, хщ х, т. е. норма вектора согласована с его длиной.
6.1.5. Представление квадратной матрицы в виде произведения двух треугольных
Всякую квадратную матрицу А, если все ее главные миноры и определитель отличны от нуля:
ап а12
21 22 и « « йп
Дх — п 0; Аг
Ф 0;.; Дл А
ап 1
Ф 0,
(6.27)
можно представить в виде произведения двух треугольных матриц нижней и верхней формы:
А СВ (6 28)
или
(6.29)
По правилу перемножения матриц а?с)4.В;-. Это да-
п (п 1)
11 • •
• 11
си
Ьц щ ЫЬЫ
•
% •
•
4 й
• •
4 1
•
•
•
« •
1 •
11 • »
• апп
СП1 » • Спп
Ьцп
ет пл уравнении для вычисления-
■ неизвестных
элементов () и такого же числа элементов Ьц (1). Таким образом, разложение (6.29) выполняется с точностью до неопределенных множителей. С целью получения однозначного разложения обычно принимается либо сц . спп 1, либо Ьц ., — Ьпп 1.
Первый вариант разложения:
(6.25)
А С1В1
11 12
ап1
а22
а,
(1)
22
• 11 у»1 )
• а2п
а(п-1)
ПП
(6.30)
где
«Г4
. ( ); Ьц а‘—, (). (6.31)
Второй вариант разложения
А С2В2 —
11
Я(1
а22
ап ап2
12
11
Ч •
11 11 22
(6.32)
где
,(И
си а1 , (I ); Ъ:
Л-1)
, (I ).(6.33)
Если матрица А симметричная, применяется третий вариант разложения:
У .А — В3В3 —
11
а(1
2п
У 11 ]"
1а1
• у апп
X
6.1. НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ТЕОРИИ МАТРИЦ
327
X
к;
а12
11
V аи V аи
V «22
(1)
где
Ьи
«Г° V 41
Хотя последний способ и требует вычисления всего лишь одной матрицы В3, применение его неэффективно в силу необходимости извлечения п квадратных корней [11].
Меньший объем вычислений дает первый вариант разложения (6.30), принимающий для симметричной матрицы А вид:
X
А Вх О""1 Вх
_1_
Яп
1
«22
Он а2 а22
ап а2п ' • апп
X
(п-1) апп
11 а12
Л(1)
а22
а1п
л2п
я,
(п—1)
(6.36)
Элементы матриц всех четырех разложений (6.30)(6.36) находят по формулам:
I—1
д. ии ан
-1
к
4кгц к1
а(1-1) _ а _ лк _ а(к-1)
11 ч -г141 ’
(А—1).
ик1
(6.37)
к1
ь, 2,., г.
Разложение (6.28) позволяет эффективно вычислять значения определителей:
I А С 11 В П аЦ1. (6.38)
11
Замечание. Полагая в (6.38) п — 1 и п1—1, найдем выражения для главных миноров Д
«и ап 1г—1 аи 11 ид,_, ап а.
(1) а'-2)
22 •••“—1, г—1
Следовательно, диагональные элементы а 11 равкк отношению двух последовательных главных миноров Д и Д-1 матрицы А, если положить До:
(6.34)
(6.39)
V а(я_1)
У пп
(', 1 п; I ). (6.35)
Из (6.39) и (6.37) следует необходимость условий (6.27) для возможности разложения квадратной матрицы в произведение двух треугольных.
6.1.6. Собственные значения и собственные векторы квадратной матрицы
Пусть матрица А осуществляет линейное преобразование вектора х в вектор у: уАх. Выберем из всевозможных линейных преобразований такое, при котором вектор х переходит в колинеарный (параллельный) вектор, т. е. растягивается (сжимается) в X раз: уХх. Уравнение, определяющее это преобразование, имеет вид:
Ах Хх. (6.40)
Это однородное уравнение:
(А — ХЕ) х 0. (6.41)
Условие нетривиального решения его (см. п. 6.2.1) приводит к так называемому характеристическому уравнению
А — ЯЕ 0
или в развернутом виде аи — К.
ап
а1 П
0.
(6.42)
(6.43)
Раскрывая в уравнении (6.43) определитель, получим алгебраическое уравнение п-й степени относительно X:
Ф (Я) (- 1 )п [Хп - Ъх Хп1 .
(—1)пЬп] — 0. (6.44)
Коэффициент Ьк ( 1,., п) есть сумма всех диагональных миноров к-то порядка матрицы А:
Ь к— 2 1
’Нх
°к1
% к
' а1к'к
в частности 61 Ьп — А.
1
Сумма диагональных элементов матрицы называется
п
следом: 5рА2а. Поэтому 1 рА.
1
Уравнение (6.44) имеет п корней X Ц1 По¬
этому его можно записать в виде
Ф (Ц (— 1)"П (X— А) О1
328
РАЗДЕЛ 6. ЧИСЛЕННЫЕ МЕТОДЫ ЛИНЕЙНОЙ АЛГЕБРЫ
Раскрывая скобки, найдем, что
п п
61 2 Я; Ьп П А.. 1
Таким образом,
п
5рА 2 Я;
1
I А I П Я.
(6.45)
Корни Я называются собственными значениями (характеристическими числами) матрицы А, а векторы х?о, удовлетворяющие (6 40) при А, —Я—собственнши векторами матрицы А. Собственные векторы А в дальнейшем обозначаются через V. Совокупность собственных значений Я называется спектром матрицы.
Для определения вектора V (1,л) подставим собственное значение X) в систему (6.41). Согласно (6.42) одно из уравнений является линейной комбинацией остальных, и его нужно исключить. Пусть из системы (6.41) исключено г-е уравнение. Поделив оставшиеся уравнения на Vь и перенеся к-й столбец в правую часть, получим систему неоднородных уравнений (п—1)-го порядка:
(А — А Е)У а,
(6.46)
где
А
Сц.
С1,6—1
а1,М-1-’
1л
ак—1,1
аЬ—,к-
• ак—1,л
ак1,1“
ак--,к—1
ак,к'
• мк,п
ап"’ап
,к—1
ап,к•••
а
пп
а '■
а
к—1,к ск1,к
апк
V -
»1
Ч « • •
п
V,
„А I °1 Ч-и’1 41.1 %•
Тогда
1
(6.48
Будем считать далее, что собственные векторы у всегда нормированы в смысле (6.48).
Собственные векторы, отвечающие различным собственным значениям, взаимно ортогональны, т. е.
'. 1.,п; 1ф,
(6.49)
(6.47)
Решив систему (6.46), найдем вектор VТогда искомый собственный вектор у представляется в виде:
где 6 — символ Кронекера.
Предположим сначала, что все корни уравнения (6.44) простые (некратные). Тогда каждому собственному значению X) (—,., п) отвечает один собственный вектор У). Составим из векторов V матрицу V 111,., у„. Она называется фундаментальной (по отношению к А). Вследствие (6.49) это ортогональная матрица V-1 — V'.
Объединяя п векторных равенств Ау,—Ху
.,г), получим одно матричное: АУ УА, где А
— Я-1 —диагональная матрица собственных значений, называемая матрицей спектра. Полученное матричное равенство можно переписать в виде:
АУЛ (6.50)
или с учетом ортогональности матрицы V:
УАУ Л. (6.51)
Таким образом, матрица А с помощью фундаментальной матрицы V преобразуется к диагональному виду. Зто преобразование называется ортогональным. Перепишем (6.50) и (6.51) так:
А УЛУ1; А УЛУ'. (6.52)
Полученные выражения называются спектральным разложением матрицы А.
Обобщением ортогонального преобразования (6.51) является преобразование подобия
В 3-1А5,
(6.53)
где 8—любая неособая матрица. Матрицы В и А, связанные соотношением (6.53), называются подобными: ВА.
Отметим следующие свойства преобразования подобия:
51 (А В) § 3—1 АЗ 5_1В5; 31 (АВ) 8 (5—1АЗ) (5_1В5);
(6.54)
З-’Д-’З (8-1А5)1.
Таким образом, собственные векторы вычисляются с точностью до постоянного множителя (здесь V.). Для устранения неопределенности в качестве этого множителя обычно принимается множитель, нормирующий длину вектора (см. 6.1.3) к единице, т. е.
(Е I с» 12)‘г I V .
11
Обобщая последние два свойства, запишем для любого целого положительного или отрицательного числа к
5_1А 8 (3-1 АЗ). (6.55)
Подобные матрицы имеют одинаковые характеристические уравнения:
В — ХЕ ) I 3_1А5 — ЯЗ-1 ЕЗI I 3—,(А — АЕ) 31
15—11 А — .Е 31 ) А — ХЕI.
Поэтому у подобных матриц одинаковы одноименные собственные значения
Я(В)-Я(А), 1.Л, (6.56)
6.1. НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ТЕОРИИ МАТРИЦ
329
а также следы и определители
5р В 5р А; В [ А . (6.57)
Последние два равенства следуют из подстановки (6.56) в (6.45). Сопоставляя (6.53), (6.55) и (6.56), находим, что
Я,(А)-(А). 1 п. (6.58)
Установим связь между собственными векторами подобных матриц Пусть X] и — собственное значение и соответствующий ему собственный вектор матрицы А: Сделаем в этом равенстве линейное преобразование у 8и. Тогда А5и8и, откуда ЗАЗи» Таким образом, собственный вектор подобной матрицы В—З-АЗ равен и 5“1у, (1,., п).
В теории матриц доказывается теорема Гамильтона—Кели, согласно которой всякая матрица удовлетворяет своему характеристическому уравнению (6.44):
ф (А) А” — Ьг А"-1 •••(— 1)"Ь„Е 0. (6.59)
Из этой теоремы, в частности, следует, что матрица Ап является линейной комбинацией более низких степеней А. Соотношение (6.59) можно использовать для вычисления обратной матрицы А-1:
(6.60)
Замечание. При приведении матрицы А к диагональному виду Л посредством ортогонального преобразования (6.51) предполагалось, что все собственные значения X) матрицы А простые.
Пусть теперь собственное значение Яь, (6 1, 2,.,п) имеет кратность а и ему соответствует е (а) собственных векторов. В теории матриц доказывается, что в этом случае матрица А посредством преобразования подобия приводится к квазидиагональному виду (нормальной форме Жордана):
(6.61)
где
0
. 0
0
хк
. 0
0
к (к)
0 1
. 0
0
0 0
1
X
(6.62)
ек
При этом характеристическое уравнение (6.44) представляется в виде:
' т
Ф (Я) 3 - ХЕ I - (- 1 )п п (X - Хк)ек 0;
61
т
2 еь— п. к—
(6.63)
Множители (X—Хъ)еьу (61,., т) называются
элементарными делителями матрицы А.
Если все элементарные делители простые, матрица Жордана Л совпадает с матрицей спектра ЛХа1, причем Хь не обязательно простые. Кратные собственные значения выписываются в матрице спектра столько раз, какова их кратность.
Таким образом, спектральное разложение (6.52) справедливо как в случае простых собственных значений, так и в случае кратных, но при условии, что им отвечают простые элементарные делители.
Матрицы, для когорых справедливо спектральное разложение (6.52), называются матрицами простой структуры. К ним относятся, в частности, вещественные симметричные матрицы.
В строительной механике линейно-деформируемых систем матрицы перемещений и реакций являются симметричными вследствие теорем взаимности. Отметим следующие спектральные свойства вещественных симметричных матриц:
1) все собственные значения вещественные;
2) собственные векторы, отвечающие различным собственным значениям, взаимно ортогональны;
3) каждому собственному значению соответствует столько линейно независимых собственных векторов, какова его кратность.
В задачах строительной механики встречаются матрицы, для которых известны (или могут быть найдены) явные выражения для собственных значений и собственных векторов [12, 21]. Например, матрица реакций для замкнутой неразрезной балки на п равноотстоящих опорах имеет вид:
00
А
(6.64)
01 а0
Е1 Е1
где а0 4 —— ; аг 2 —-; Е1 — жесткость панели; I —
I
ее пролет.
Спектральное разложение матрицы А (6.64) известно [12]:
(6.65)
где
А 1110,
л -)?1; ро 2а с°5 ■
«О-ЧГ1-К К,-
. 2я 2л
ип СОЗ I] 4- 51 п 1 п п
2 я п
(6.66)
6.1.7. Квадратичная форма. Пучок квадратичных форм
Квадратичной формой от п переменных Х,., хп называется однородный полинохм второй степени:
Г(х) апх1. а,п11
П
аП1«1 •••„«« 2 й1]Х1Х (6-67
или в матричной форме [(см. 6.12) ахх • • а1п
( 111. ••• Хп I
ап1 • • • спп
причем ац—ац, т. е. матрица А — симметричная.
х'Ах, (6.68)
330
РАЗДЕЛ 6. ЧИСЛЕННЫЕ МЕТОДЫ ЛИНЕЙНОЙ АЛГЕБРЫ
Таким образом, каждая квадратичная форма определяет симметричную матрицу и обратно.
Определитель А называется дискриминантом квадратичной формы.
Пусть матрица В осуществляет линейное преобразование
х Ву. (6.69)
Тогда
(х) х'Ах у'В'АВу у' Су ц (у), (6.70)
где
С В'АВ. (6.71)
Матрица С — симметричная: С' В'А'(В')' В'АВ
С. Матрицы А и С, связанные соотношением (6.71),
называются конгруэнтными, они имеют одинаковые ранги. В дальнейшем, если это не оговорено, будем считать г —п.
Из всевозможных конгруэнтных преобразований квадратичной формы наибольший интерес представляет преобразование к каноническому виду (к сумме квадратов):
п
«У)У'СуЕ с1у21, (6.72)
11
т. е. такое, при котором матрица С является диагональной С с."_. Частным случаем канонического вида квадратичной формы (6.72) является чистая сумма квадратов:
п
Н (г) г'Ег Е г]. (6.73)
(1
Существует бесконечное множество способов приведения квадратичной формы к каноническому виду. Рассмотрим некоторые из них.
1. Метод Якоби. Воспользуемся разложением симметричной матрицы (6.36):
А в; О-1 Вх
Тогда
(х) х В О"-1 В1 х.
Сделаем линейное преобразование:
хВ-'Ру. (6.74)
Квадратичная форма (х) преобразуется в этом случае к каноническому виду:
(х) у' О (ВГ1)' в; О-1 В, ВГ1 Эу у' Оу. (6.75)
В силу (6.39)
Следовательно,
1 () 41) у] - д- у Г (6 • 76
11 «1
Таким образом, суть метода Якоби состоит в приведении матрицы А квадратичной формы х'Ах к треугольному виду В (6.36). При этом величины диагональных
элементов В1 являются коэффициентами при квадратах переменных гь.,уп (см. замечание 1 в п. 6.2.2).
2. Метод И. И. Гольденблата [8]. Пусть линейное преобразование координат квадратичной формы имеет вид:
X В1 у, (6.77)
где В3 — треугольная матрица разложения АВ3В3 (6.34).
Тогда
(х) х' Ах у' (в1)' АВ’у у'у. (6.78)
Поскольку объем вычислений при выполнении разложения (6.34) больший, чем при разложении (6.36), этот метод в практическом отношении уступает методу Якоби [И].
3. Метод ортогонального преобразования. Пусть спектральное разложение матрицы А имеет вид (6.52). Воспользуемся линейным преобразованием
х Уу, (6.79)
где V — фундаментальная матрица. Тогда
(х) х' Ах у' V'АУу у' А у
п
2 X. у(6.80)
11
Таким образом, в этом случае коэффициентами при квадратах координат являются собственные значения матрицы А.
По объему вычислений этот метод также уступает методу Якоби.
Выше было сделано предположение, что матрицы квадратичной формы невырожденные (гг). Пусть теперь ранг квадратичной формы (ранг матрицы квадратичной формы) гм. Тогда каноническое представление квадратичной формы (6.72) следует записать либо в ви-
Г
Де § (у) У'Су2сг?, либо в виде (6.72), учитывая при 1—1 1
этом, что часть коэффициентов сг- (число их равно дефекту матрицы йп—г) равна нулю.
В теории квадратичных ферм доказывается теорема, известная под названием «закон инерции квадратичной формы»: при приведении квадратичной формы к каноническому виду число положительных с и число отрицательных с квадратов не зависит от способа приведения.
Таким образом, закон инерции определяет два инварианта квадратичной формы: ранг г с--сп и сигна-
туру ас—с. Числа с и с называются положительным и — 4 —
отрицательным индексами инерции.
В задачах устойчивости и свободных колебаний линейных систем с конечным числом степеней свободы величина с, называемая степенью неустойчивости системы, играет важную роль [18, 26]. Поэтому определение отрицательного индекса инерции с является важной задачей в теориях устойчивости и динамики сооружений.
Из (6.80) следует, что с и с равны соответственно ■■ —
числу положительных и отрицательных собственных значений матрицы квадратичной формы. Однако вычисление собственных значений (использование ортогонального преобразования квадратичной формы) связано с большим объемом вычислений (см. п. 6.2.6).
6.2. НЕКОТОРЫЕ СВЕДЕНИЯ ПО ЧИСЛЕННЫМ МЕТОДАМ ЛИНЕИНОИ АЛГЕБРЫ
331
Из рассмотренных неортогональных преобразований квадратичной формы к каноническому виду наиболее эффективен метод Якоби. Из (6.76) следует теорема Якоби: с равно числу знакопостоянств, а с — числу
знакоперемен в ряду Якоби, составленном из последовательности главных миноров матрицы квадратичной формы До1, Аь Аг,Ап (6.27). Вычисление определителей требует большого числа операций, поэтому сформулируем теорему Якоби иначе: положительный с и отрицательный с индексы инерции квадратичной формы х'Ах
равны соответственно числу положительных и отрицательных коэффициентов а1 (1, п) разложения матрицы А (6.36):
I—1
Я.,
■2
к
акГх)
акк
Поэтому линейное преобразование х 11г
(6.85)
осуществляет приведение регулярного пучка к каноническому виду, т. е. одновременное приведение к каноническому виду обеих квадратичных форм:
х'Ах — Ххг Вх г'и'АОг — Хг' У ЕИх
п п
г'Лг — Хг'г 2 Х г2 — Я, 2 г2. (6.86)
1
Определение коэффициентов требует наименьшего объема вычислений, поэтому определение степени неустойчивости как числа отрицательных коэффициентов я]]""1 лежит в основе качественных методов теории устойчивости и свободных колебаний линейных систем.
Квадратичная форма называется положительно определенной, если при любых значениях вектора хо ее значения положительные, а при хо(о)о. При этом матрица квадратичной формы А также называется положительно определенной. Аналогично определяются отрицательно определенная и знакопеременная квадратичные формы и матрицы.
На основании закона инерции следует, что необходимым и достаточным условием положительной определенности квадратичной формы является положительность всех коэффициентов любого ее канонического представления (6.72). В частности, если все Яг(А)о или все главные миноры и определитель матрицы А положительны, то квадратичная форма положительно определена. Последнее условие известно как критерий Сильвестра.
Пучком квадратичных форм называется выражение вида:
(х) — Х2 (х) х'Ах — Ях'Вх, (6.82)
где X — параметр.
В дальнейшем рассматриваются только регулярные пучки, т. е. такие, в которых матрица В положительно определена. Уравнение
А — Я,В о (6.83)
называется характеристическим уравнением пучка (обобщенным характеристическим уравнением), а корни его X) — собственными значениями пучка. Каждому собственному значению X, отвечает главный вектор пучка и, такой, что
Аи X Ви или (А — Я В) и о, (6.84)
при этом матрица 11 иьип называется главной матрицей пучка. Поскольку главные векторы и7- определяются с точностью до постоянного множителя, удобно их выбирать так, чтобы и Ви 6г„ т. е. делать их В-ортонормированными. Тогда ЬГВЬЕ. Из уравнения
(6.84) в этом случае следует:
и'с Аи Ви, б,у. (. 1. • • • ■ п), т.еи'Аи Л‘Х1?1.
При этом положительно определенная форма х'Вх приводится к чистой сумме квадратов.
Чтобы построить матрицу II, представим положительно определенную матрицу В в виде В —УМУ', где М М'у71—матРпа спектра; У — фундаментальная матрица. Воспользуемся линейным преобразованием х УМ“12 у, тогда х'Ах—Лх'Вху'Су—Яу'у, где С — М”12УАУМ“"12—симметричная матрица. Представим матрицу С в виде С ДУЛУ'. Здесь Л”1 — матрица спектра; АУ — фундаментальная матрица. Положим теперь у ДУг, тогда х'Ах—А,х'Вх 2'Лг—Хг'г. Таким образом, х УМ12у— УМ—12 VIг. Используя
(6.85), получим:
и УМ’У. (6.87)
Замечание 1. Если матрица В не положительно определена, то, очевидно, не существует матрица М12 (Ц)-’2 в Поэтому к каноническому виду могут быть приведены только регулярные пучки.
Пусть собственные значения пучка занумерованы в порядке строгого неубывания Тогда
х'Ах г'Лг
Хг
х'Вх г'г
А 2 г2 » • • гп
_2 ( 2 _2 г1 г2-гп
кХп.
(6.88)
Для получения неравенств (6.88) достаточно предх'Ах
ставить
х'Вх
как координату центра л масс, располо¬
женных на расстояниях X от начала координат и имеющих веса г2 ( 1,., п).
х'Ах. х'Ах
Хг пип
х'Вх
и Хп шах ——— достигаются тольх Вх
ко на главных векторах пучка, соответствующих Хх и Хп. х'Ах
Далее, Хшш- при условии х'Ви1 .х'Ви_10
х'Вх
и Ятах
х'Ах
х'Вх
при х'Ви1 .х'Вип 0.
Можно показать [5], что из неравенств:
х'Ах х'Ах х'Ах
х'Вх
х'Вх
х'Вх
х'Ах х'Ах х'Ах
—-— следует
х'Вх
х Вх х Вх
Х( XI Я, I 1,.,л.
(6.89)
(6.90)
332
РАЗДЕЛ 6. МАТРИЦЫ. ЧИСЛЕННЫЕ МЕТОДЫ СТРОИТЕЛЬНОЙ МЕХАНИКИ
6.2. НЕКОТОРЫЕ СВЕДЕНИЯ ПО ЧИСЛЕННЫМ МЕТОДАМ ЛИНЕЙНОЙ АЛГЕБРЫ
6.2.1. Общие вопросы решения систем линейных алгебраических уравнений
Дана система линейных алгебраических уравнений: 111 • • • 1п хп а1р
(6.91)
••• аппхп а,
■пр
или сокращенно
Ах ар. (6.92)
Если все свободные члены равны нулю (ар 0), система называется однородной, в противном случае — неоднородной.
Если существуют такие значения для неизвестных , (11 п), которые удовлетворяют всем урав¬
нениям системы (6.91), то она совместна (в противном случае — несовместна), при этом матрица-столбец х называется решением, а компоненты ее х1 —корнями системы (6.91).
Две системы линейных алгебраических уравнений называются эквивалентными (равносильными), если каждое решение первой системы является решением второй, и обратно.
Если решение хх совместной системы (6.92) единственно, она называется определенной, если же число решении бесконечно, ее называют неопределенной.
Матрица
Ао — II ах,., ал, Зр —
ап.
. ап йр
аШ •
• апп апр
(6.93)
называется расширенной.
Согласно теореме Кронскера-Капелли, необходимым и достаточным условием совместности неоднородной системы гп уравнений с п неизвестными (системы тхп) является равенство рангов матрицы коэффициентов А и расширенной матрицы А0: га“А0г Ри этом если гп, система имеет единственное решение; если гп, система имеет бесконечное множество решений, причем п—г неизвестным можно давать произвольные значения, тогда оставшиеся г неизвестных найдутся по ним однозначно.
Если т — п и Ат0, единственное решение системы может быть определено по формуле Крамера:
1
а1Х- • •°1р вМ1 ' • -ап
а,.ащ 1 1 а ап
П,1—1 пр »
I 1,.,л.
Что касается однородных систем линейных алгебраических уравнений Ах0, то они всегда совместны, поскольку всегда существует тривиальное (нулевое) решение х0.
Необходимым и достаточным условием существования нетривиального решения однородной системы тхп является неравенство гя, откуда следует обычно ис¬
пользуемое для систем пХп условие нетривиального решения
I А 0. (6.94)
Достаточным условием существования нетривиального решения системы тУп является неравенство тп.
Практические (численные) методы решения систем линейных алгебраических уравнений являются одним из центральных объектов линейной алгебры.
Все численные методы решения систем линейных алгебраических уравнений можно разделить на два класса: прямые («точные») и приближенные (итерационные, релаксационные, вероятностные).
В прямых методах посредством конечного числа операций, зависящего от порядка системы уравнений, по строго определенной схеме в принципе могут быть найдены точные значения корней. Однако практически решение оказывается приближенным вследствие погрешностей счета.
В итерационных методах находятся приближенные значения корней системы, но с любой заданной степенью точности. Специфической особенностью итерационных методов являются вопросы сходимости и скорости сходимости решения.
Имеется большое число методов (например, метод минимальных итераций, метод сопряженных градиентов и т. д.), сочетающих свойства методов обоих классов. Как и в итерационных методах, здесь решение получается как минимум некоторого функционала, однако итерации обрываются не позднее я-го шага [4, 33].
Ниже рассматриваются некоторые простейшие численные методы решения систем линейных алгебраических уравнений и обращения матриц. Весьма полное освещение этих вопросов и богатую библиографию можно найти [3, 4, 30, 33].
6.2.2. Метод исключений
Идея метода состоит в последовательном исключении неизвестных из уравнений системы с целью получения эквивалентной системы треугольного (схема Гаусса) или диагонального (схема Жордана, схема оптимального исключения [4, 33]) вида, решение которой не вызывает затруднений.
Процесс преобразования исходной системы в эквивалентную называется прямым ходом, а решение новой системы — обратным ходом метода исключений.
Пусть дана система линейных алгебраических уравнений (6.91). Решение ее методом исключений может быть выполнено по разным вычислительным схемам.
Схема Гаусса. Прямой ход схемы Гаусса обеспечивает построение эквивалентной системы верхней треугольной формы. С этой целью каждое неизвестное Х(1 ,., п) исключается из всех уравнений системы
(6.91), начиная с (11)-го.
Так, на первом шаге неизвестное х, найденное из первого уравнения, исключается из всех последующих. Это приводит к системе:
а11 1 12 2 4" • • а1п ХП °1 р
7(1
г 22
х„ . а.
2р 1
ап2 л2
1)Х в(1)
пп а пр »
6.2. НЕКОТОРЫЕ СВЕДЕНИЯ ПО ЧИСЛЕННЫМ МЕТОДАМ ЛИНЕЙНОЙ АЛГЕБРЫ
333
Таблица 6.1
11
в12
13
а14
«
II Р
%
Д21
°22
в23
°24
°2р
%
1 2
31
°3
в.тз
°34
°3р
а3-
1
II
в41
°42
°44
а4о
“4р
4
° 1
И
12
13
14
и “ а1о
1
С21
II
(М
«г
Ь22
Ь33
Ь24
«2 а2р
У2
2
"31
С32
"зз 881
ьзз
Ь34
?? с
II
7'з
3
С4
С42
"43
С44 1
44
У4
Х 4
3
1
2
1
—4
3
—2
2
8
3
17 1
32
3
3
1
6
4
7
21 1
0
2
3
1
4
19
29
6
1
3
1
2
1
—4
3
-3
2
3
1
22
3
5
3
4
3
59 II
3 II
II
2
1
0
1
4
3
11
18
-1
2
7
19
1
313
1565
939
3
22
83
88
88
44
5
где
7(1). -И_
иИ
11
Нг
2, 2,р.
После последнего (п—1) -го шага исключения система уравнений принимает вид:
а1Х1 122 ••• 1 ПХП ару
х 4- -I— л(1а22 2 а2п хп “ а2р »
д(л—1) ___ (л—1)
“лл слр
I ■ 1,., Л.
Замечание 1. Выражение я,-””1 или более общее » (—1) может быть записано как отношение миноров:
(6.97)
ах 1
(6.95)
д к
щ • •
Яг
ап• • •аам
деляются по первой из формул (6.37). Коэффициенты называются ведущими гауссовыми коэффициентами.
Обратный ход Гаусса [решение системы (6.95)] выполняется по формуле:
(6.96)
М1
где Да — главный минор 6-го порядка.
Хотя на практике гауссовы коэффициенты и не вычисляются по формуле (6.97), она представляет определенный теоретический интерес (см. 6.3.2). Из нее, в частности, следует, что гауссово преобразование симметричной матрицы А к треугольной форме (6.95) обеспечивает приведение квадратичной формы х'Ах к каноническому виду по методу Якоби (см. 6.1.7). Таким образом, схема Гаусса является численным алгоритмом метода Якоби.
334
РАЗДЕЛ 6. МАТРИЦЫ. ЧИСЛЕННЫЕ МЕТОДЫ СТРОИТЕЛЬНОЙ МЕХАНИКИ
Матричная форма метода исключений. Если матрицу А системы уравнений Ахар представить в виде произведения треугольных матриц АСВ (6.28), то система примет вид: СВх ар. Обозначив уВх, получим два матричных уравнения
С„У"а' 6.98,
Ех-у
Поскольку каждое уравнение имеет треугольную форму, последовательное решение их не встречает затруднений, при этом первое уравнение (нижняя треугольная форма) решается сверху вниз: уи У2.»Уп, а второе (верхняя треугольная форма) —снизу вверх: хп, хп-1, Х.
Разложение А СВ и решение первой системы Су ар составляет прямой ход, а решение системы Вх у — обратный ход.
В 6.1.5 рассмотрены три варианта разложения А СВ, им соответствуют три вычислительные схемы метода исключений. Первые две носят название схемы Гаусса, третья — метод квадратных корней. По объему вычислений метод квадратных корней уступает схеме Гаусса [11], использующей разложение (6.36).
В табл. 6.1 представлена первая вычислительная схема.
Для проверки правильности вычислений составляется контрольный столбец свободных членов
11-
.хи
а1Р1
-а1 Р(
•
Ш
в
й
.
«
и
в
9
•
Щ
Ч
• 'Хп1
пХ1
апр1 •
пх
6.2.3. Схемы обращения матрицы, использующие разложение ее на треугольные множители
Первая схема обращения (см. 6.1.5)
А СВ; А”"1 В-1 С"1.
Если А -» симметричная матрица, то
А В' 0-гВ; А”1 В- (В-1)'.
(6.101)
(6.102)
Таким образом, обращение квадратной матрицы А сводится к обращению двух треугольных матриц С и В [(6.30), (6.32)] или одной треугольной матрицы В (6.36).
Пусть Ро — элементы матрицы В-1, а уг5 — элементы матрицы С-1, (, 1,., п). Они определяются по следующим формулам:
1
Р7 0; у и — —V сц
с1кУк]
к1
I Рг — Ы ЬкГ, Ы (6.103)
(6.99)
а(р — 2 О й(р, I — 1, • • ♦ уП
_и определяются соответствующие ему значения у и Хг (1,., п). В качестве контроля прямого и обратного хода используются равенства: п
у. 2 % у; х х 1, I 1,.,л. (6.100)
11
В 6.1.5 приведены необходимые и достаточные условия (6.27) возможности разложения А СВ. Очевидно, они же являются условиями применимости метода исключений. Если условия (6.27) выполняются но один из главных миноров мал, точность вычислений резко падает. Поэтому наиболее надежной является схема Гаусса с выбором главного элемента, отличающаяся от рассмотренной выше тем, что в качестве ведущего элемента на каждом шаге исключений (разложения АСВ) принимается максимальный по модулю (главный) элемент строки.
Замечание 2. Метод исключений позволяет одновременно решать систему уравнений с несколькими () столбцами свободных членов: АХАРэ где
Х
Выражения (6.103) получены из условий В-1В Е и СС Е. Из (6.103) следует, что матрицы В-1 и С-1 являются соответственно верхней и нижней треугольной матрицами.
Вторая схема обращения не требует вычисления матриц В1 и С-1. Она основана на том, что матрицы В и В-1 имеют верхнюю треугольную форму, а матрицы С и С-1 —нижнюю.
Элементы ац матрицы А-1 определяются из системы уравнений:
ВА-1 С-1 )
. (6.104)
А-1 С В-1 )
Если разложение АСВ было выполнено в виде
(6.30): АС1ВЬ то из первого уравнения (6.104) определяются а для 1, так как в этом случае уц известны: ПРИ а Из второго уравнения
(6.104) находятся ац для , поскольку при [50.
Таблица 6.2
Вх А—1Ср1
Ь11 Ъ12
.ь1п
а11 а12-“а1гг
1
• Ъ2П
а21 а22 ,(Х2п
21 1
’ ь„„
ПП
К1п2:-'-ПП
Уп П2-Л
А”"1 СВ1
'11
а12
а1л
'21
а22. •
•а2п
'П1
ая2
'Кп
'11 '12 1п 22 2п
1
а и — Е а к ок]
к1
1 П
аи Ь1Ь ак
аи — 2 ЬШ ак
ЬП к11
6.2. НЕКОТОРЫЕ СВЕДЕНИЯ ПО ЧИСЛЕННЫМ МЕТОДАМ ЛИНЕЙНОЙ АЛГЕБРЫ
335
Если разложение АСВ выполнено в виде (6.32), то из первого уравнения (6.104) определяются ац для 1], а из второго — а,- для 1.
В табл. 6.2 представлена схема обращения матрицы А, соответствующая разложению А по формуле (6.30). Вычисления ац необходимо начинать с аЯп 1пп.
Если матрица А — симметричная, ац — ац9 что упрощает схемы обращения.
Замечание 1. Обратные треугольные матрицы можно использовать для модификации матричной формы метода исключений [20]. Решение системы уравнений (6.98) можно искать в виде уСар; хВ1у.
Наконец, решение системы уравнений можно получить путем полного обращения матрицы коэффициентов:
X А-1 яр.
Эффективность той или иной схемы зависит от формы исходной системы, вида используемых вычислительных средств, а также от отношения я, где I — число столбцов свободных членов, а п — порядок системы.
Замечание 2. Рассмотренные вычислительные схемы решения систем уравнений и обращения матриц полностью применимы для клеточных матриц, если все диагональные квазиэлементы последних являются квадратными клетками. При этом, разумеется, операция деления должна быть заменена операцией умножения на обратную матрицу. Например, первая формула (6.37) примет в этом случае вид:
а,'-" - А„- 2 А—■ (лЦ-1)-
к—
Эти схемы получили название клеточных.
6.2.4. Итерационные методы решения систем уравнений
Итерационные методы позволяют получить решение не путем однократного выполнения вычислений в соответствии с определенным алгоритмом, что характерно для прямых методов, а посредством многократного последовательного выполнения вычислений по одной и той же схеме.
В теории итерационных методов сложными являются вопросы сходимости и скорости сходимости итерационного процесса построения решения. Однако для систем канонических уравнений методов сил или перемещений в силу симметрии и положительной определенности матрицы коэффициентов сходимость итерационного процесса может быть всегда обеспечена.
Схемы простой и ускоренной итерации. Система уравнений (6.91) записывается в виде:
1
0
• • • ь1п
2
21
0.ь2п
ЬП1
Ьп2 0
1
1 р
2
Ър
хп
пр
где
х Вх Ър,
и.— аМ л. с
Ьц — и ф )» Ь[р — —
аи о, ц
(6.105)
(6.106)
(6.107
Сущность метода простой итерации состоит в построении последовательности приближенных значений вектора х по формуле
х() Вх(А-1)__ьр, 61,2,. (6.108)
Если последовательность приближений хС0), х(1), х,. имеет предел хПшх(1), то этот предел является
кг оо
решением системы уравнений (6.106).
Итерационный процесс (6.108) можно ускорить. Определение последовательных приближений х(Л) в схеме ускоренной итерации (методе Зейделя) производится по формуле
(6.109)
где
0
21
0
ЬП1
П2
. о
0 Ь±2 •
•Ьщ
0
•2п
0
(6.110)
В развернутом виде система (6.109) записывается
°п кп 1Р
Ь2пХпкХ) Ь2р
Ь2, п
так:
ль-
2
■»).
21
х[
х(
Ь31
х»
х)
п
Ъп1
хк
Ьп2
х2
•
пр
(6.111)
Таким образом, сущность ускоренной итерации за-
■х приближений х[к
ключается в использовании кх1—1 ПРИ вычислении хкК
В качестве нулевого приближения х° в обеих схемах можно принимать произвольный вектор, включая нулевой. Однако чем точнее будет задан х°), тем меньше потребуется последовательных приближений.
Процесс повторяется до тех пор, пока модуль разности одноименных компонент двух последовательных приближений не окажется меньше наперед заданного малого числа е0.
Обе итерационные схемы являются самоисправляющимися: любая ошибка, допущенная в ходе вычислений, не влияет на конечный результат, а лишь отражается на числе итераций. Это следует из того, что вектор х0, при вычислении которого допущена ошибка, всегда можно рассматривать как начальное приближение х°).
336
РАЗДЕЛ 6. МАТРИЦЫ, ЧИСЛЕННЫЕ МЕТОДЫ СТРОИТЕЛЬНОЙ МЕХАНИКИ
«СхСр.
Связь между простой и ускоренной итерациями. Уравнение (6.109) можно записать в виде: (Е— Вх —
- В2х(-»)Ьр. Тогда ж-(Е—(Е-
—В 1)Ър и обозначения (Е— В1)-1В2С, (Е—В “ЬР «ср приводят к уравнению
(6.112)
Следовательно, итерация по Зенделю для системы
(6.106) равносильна простой игераии.и для системы (6.112).
Как правило, сходимость процесса Зейделя выше, чем процесса простой итерации. Однако возможны случаи, когда процесс простой итерации сходится, а процесс ускоренной итерации расходится.
Необходимым и достаточным условием сходимости процесса простой итерации (6.108) является условие X)(В) 1, (1,., п). Поскольку определение собственных значений матрицы связано с известными вычислительными трудностями (см. 6.2.6), можно показать, что достаточнее условие сходимости процесса простой итерации имеет вид В1, где ВЦ—любая норма [см. 6.1.4, формула (6.25)] матрицы В (6.108). Более того, процесс простой итерации сходится, если модули диагональных коэффициентов каждой строки (столбца) системы (6.91) превышают сумму модулей недиагональных элементов этой строки (столбца), т. е.
вц I 2 СЩ, I 1,., п
или
М
11
хА“,ар. Поэтому в качестве матрицы Н обычно принимают грубые приближения к А-1, например,
Н [—, (6.П4)
№1 Яаз Яш» )
Этот вид матрицы Н как раз и приводит к формулам (6.107). Существенно, что если А — симметричная и положительно определенная матрица, то процесс итерации для системы, приведенной с помощью матрицы Н (6.114) всегдэ сходится. Именно этот случай наблюдается в статике сооружений.
Для каждого нового столбца свободных членов все решение необходимо повторить заново. В этом основной недостаток итерационных методов.
Уточнение корней системы линейных уравнений. Итерационные методы позволяют уточнить решения систем уравнений, полученные прямыми методами и являющиеся приближенными из-за неизбежных погрешностей счета.
Пусть х°) — решение системы уравнений (6.91) каким-либо прямым методом, например, методом исключений. Оно принимается за нулевое приближение к точному решению х, и вычисляются соответствующие ему невязки нулевого приближения г°ар—Ах°. Точное решение определяется как сумма:
х х0)Ч-Е ;
11
(6.115)
1 а и I 21 ац , 1,., я.
11
и1)
Процесс Зейделя сходится тогда и только тогда, когда Я;(С) 1, (1, Я), где С« (Е—В,;- [см.
(6.112]. Достаточным условием сходимости процесса Зейделя является условие С1. Если матрица А системы уравнений (6.91) симметричная и положительно определенная, процесс ускоренной итерации сходится всегда.
Для улучшения сходимости процесса Зейделя уравнения в системе (6.111) следует располагать в порядке
П
возрастания величин И ц приняв за первое
71
уравнение то, в котором эта сумма минимальная. Чтобы сохранить при этом цикличность процесса, необходимо одновременно с перестановкой строк в системе уравнений переставлять и соответствующие столбцы в матрице коэффициентов.
Известны теоретические оценки необходимого числа итераций для получения заранее назначенной точности решения. Эти оценки, как правило, дают завышенные значения [10].
Приводящая матрица Н. Переход от системы (6.91) к (6.105), необходимый для построения итерационного процесса, в общем случае осуществляется с помощью приводящей матрицы Н;
Ах ар; НАх Нар; х Вх -Ь Ьр,
где
В Е — НА; Ьр Нар. (6.113)
Приводящая матрица Н назначается так, чтобы обеспечить сходимость итерационного процесса. Очевидно, идеальной матрицей Н была бы матрица А"1, поскольку в этом случае уравнение (6.106) принимало бы вид
где хго — решение тем же методом системы уравнений Ах)г-1).
Процесс итераций обрывается на некотором шаге т, когда выполняется условие гт)ео, где а — матрицастолбец, все элементы которой равны единице, а е0— величина допустимой погрешности.
Так как во всех итерациях матрица коэффициентов А остается неизменной, процесс уточнения решения х° сводится к дополнительным вычислениям, связанным лишь с новыми столбцами свободных членов.
Описанный процесс обычно сходится достаточно быстро, практически после двух-трех итераций корни системы удовлетворяют исходным уравнениям с точностью до трех — пяти знаков после запятой. Тем не менее может оказаться, что на некотором шаге невязки перестали уменьшаться. В этом случае вычисления необходимо повторить с удвоенной точностью.
Уточнение элементов обратной матрицы. Пусть одним из прямых методов найдено приближенное значение А1 обратной матрицы А”“1. Тогда невязки нулевого приближения будут -АА1. Уточнение элемен¬
тов обратной матрицы выполняется по формуле
А 158 А-Л 1 А—1 (Е ), (6.116)
где
Е — ААЦ1. (6.117)
Процесс уточнения (6.116) быстро сходится, так как К, Е — АА]-1 Е - АА (Е ,)
Е — (Е— К;—г) (Е ,_,)
2
• Ко-
6.2. НЕКОТОРЫЕ СВЕДЕНИЯ ПО ЧИСЛЕННЫМ МЕТОДАМ ЛИНЕЙНОЙ АЛГЕБРЫ
337
6.2.5. Об устойчивости решения систем линейных алгебраических уравнений
Одной из самых серьезных опасностей, встречающихся при решении систем линейных алгебраических уравнений и обращении матриц, является неустойчивость решения, состоящая в том, что при очень малых изменениях коэффициентов или свободных членов, вычисляемых во многих случаях достаточно приближенно, происходят существенные изменения в величинах неизвестных.
Действительно, пусть А и ар истинные значения коэффициентов системы уравнений и свободных членов, а АбА и ар6ар —близкие к ним и фактически используемые в расчете. Эго означает, что вместо системы уравнений Ах ар будет решена система (АЧ-бА)(х-бх) ар--бар.
Оценим погрешность решения бх. Раскрывая в последней системе скобки, найдем: (бА)х-н А6х бар. Откуда
6.118)
Тогда
бх
■1 А'
6А -Ь I) А-
,х • II хЦ
В силу исходного уравнения ЦАЦ хЦару. Следовательно,
И бар II бар д НМ II II Ир
Таким образом,
II бх
II А
ИI) Величина
ба„
-)•
р (А) ( А ЯII А—1 В
(6.120)
(6 12П
называется числом обусловленности, 1 р(А) оо. Чем ближе р(А) к единице, тем лучше обусловленность матрицы.
Отметим некоторые свойства р(А):
1) р (аА) р (А); р (Е) 1; 3) р (АВ) р (А) р (В).
Можно показать, что если матрица А симметричная, а ЦАЦ—евклидова норма, то число обусловленности (6.121) принимает вид:
Систему уравнений Ах ар или
11 • л Ш 1 а
IIХг II
ы
Ш Ш
«
4 Я
1
«
I а
«
ш
ап 1 мал аш,
II хп II
аар
— Д (6А) х А бар.
Если незначительные ошибки в элементах матрицы А порождают значительные изменения в элементах обратной матрицы А-1, погрешности решения могут оказаться большими. В связи с этим возникает проблема устойчивости решения системы линейных алгебраических уравнений.
Матрицы А”1, элементы которых существенно изменяются при малых изменениях элементов матриц А, называются неустойчивыми, а исходные матрицы А — плохо обусловленными.
Перейдем к нормам (см. 6.1.4). Равенство (6.118) примет при этом следующий вид:
бх А 1 6АII х II 1 А-1 6а„. (6.119)
-1IIII хл п, I »-1 II И.ЙМ_
можно трактовать как разложение вектора ар в евклидовом пространстве Еп в базисе векторов аь., а», а качестве которых принимаются столбцы матрицы А. Тогда числа хихп будут координатами вектора ар в этом базисе: хха .хпЪп—р.
Очевидно, чем «косоугольнее» система уравнений [чем больше число обусловленности (6.122)], т. е. чем резче отличаются векторы аь., а» от взаимно ортогональных, тем большие погрешности могут возникнуть при разложении вектсра ар в базисе аьап.
Если система векторов аь., ап очень косоугольна, целесообразно отказаться от тех предпосылок, которые ее породили. В строительной механике это эквивалентно переходу к новой основной системе. В связи с этим особенно желательны сложные статически (кинематически) неопределимые основные системы.
6.2.6. О методах решения проблемы собственных значений
Определение собственных значений и собственных векторов матрицы составляет содержание так называемой проблемы собственных значений. Причем, если собственные значения матрицы уже найдены, определение соответствующих им собственных векторов может быть сведено, например, к решению специальных систем уравнений (6.46), т. е. представляет более простую задачу.
Численные методы определения собственных значений и собственных векторов матрицы, так же как и методы решения систем линейных уравнений, подразделяются на два класса: прямые и итерационные.
Прямые методы включают развертывание характеристических определителей А—Я,Е в полином п-й степени ф(А) с последующим решением характеристического уравнения р(А)О (6 44) каким-либо из известных методов, например, методом Лобачевского — Греффе с цоследующим уточнением по схеме Горнера, методами скорейшего спуска и парабол и т. д. [3, 4, 10, 33].
В итерационных методах собственные значения определяют, минуя процедуру развертывания характеристического определителя в полином.
Прямые методы наиболее быстродействующие, однако они обладают существенным недостатком — почти все чувствительны к ошибкам округления. Итерационные методы менее чувствительны к ошибкам округления, зато гораздо более трудоемки.
В настоящее время в связи с использованием ЭЦВМ при решении полной проблемы собственных значений (отыскании всего дискретного спектра А? и всех собственных векторов V,-) широкое распространение получили две группы итерационных методов: методы вращений (якобиевы методы) и степенные.
Метод вращений предназначен для решения полной проблемы собственных значений вещественной симметричной матрицы и состоит в построении последовательности матриц, ортогонально-подобных исходной и имеющих монотонно убывающие суммы квадратов всех побочных элементов [4, 331.
Известно большое число степенных методов [4,331. Идея одного из них состоит в следующем. Матрицу А раскладывают в произведение треугольных матриц А
338
РАЗДЕЛ 6. МАТРИЦЫ. ЧИСЛЕННЫЕ МЕТОДЫ СТРОИТЕЛЬНОЙ МЕХАНИКИ
0 (6.30) и составляют последовательность АС1 С2В2,., АСь_1 СлВь. Можно показать, что матрицы Ак—С1АСк сходятся к квазитреугольной матрице
Ап А12.
• А1т
А22 • •
• А 2т
• ш
• •
Апт
подобной исходной матрице А, вследствие чего собственные значения обеих матриц совпадают (см. 6.1.6). Таким образом, решение полной проблемы собственных значений для произвольной матрицы А свелось к решению той же проблемы для квазиэлементов А,- (у 1,
А
т) сравнительно невысокого порядка матрицы А.
Ниже рассматриваются некоторые специальные методы развертывания характеристических уравнений в полином м-й степени [10].
Метод Леверрье. Пусть характеристическое уравнение (6.44) записано в виде:
ХЕ — А Хп р."-1 Н Н рп 0. (6.123)
Обозначим через сумму 6-х степеней корней уравп
нения (6.123): 8ь 2 X, (61,., п). Воспользуемся
1
формулой Ньютона [15], позволяющей выразить коэффициенты алгебраического уравнения (6.123) через суммы степеней его корней: к
Рк — — — рЯк-1, к п;р01. (6.124)
1-0
Воспользуемся равенством (6.58): Х](Ак) Хк (А),
1,., п. Суммируя обе части равенства по ', найдем, п
что 5рА2 (А) Следовательно, коэффициенты
характеристического уравнения можно искать по формуле Ньютона, записав ее в виде: к
рЗрА-', 61,.п (6.125)
0
Таким образом, задача сводится к последовательному вычислению п степеней матрицы А по формуле Ак
А-1А, 61,г, а также следов найденных степеней.
Если А(г) ак), то 5рА X.
1
6.3. МАТРИЦЫ В СТАТИКЕ
6.3.1. Матрицы податливостей и жесткостей. Потенциальная энергия
Пусть 5 — упругая механическая система (рис. 6.1), загруженная в точках 1, 2,., п силами Ри Рь • Рп. Прогибы системы в точках 1, 2, п определяются выражениями
п
щ 2 ц Р, I 1,., п (6.130)
1
Метод А. Н. Крылова основан на теореме Гамильтона— Кели (см. 6.1.6). Пусть характеристическое уравнение записано в виде (6.123). Тогда по теореме Гамильтона — Кели Ап р1Ап“ . р71 Е 0. Умножим обе части этого равенства на произвольный нетривиальный л-мерный вектор х°). Обозначая Айх(°) х(А, получим систему алгебраических уравнений
Р1х(п-' р2 хл-2 Н Ь рп х(0 хп. (6.126)
Решение ее и дает искомые коэффициенты (61, п). В качестве х°) удобно принять один из столбцов единичной матрицы Е. Если система (6.126) имеет не единственное решение, следует изменить начальный вектор х°).
Идея метода А. М. Данилевского состоит в приведении посредством преобразований подобия матрицы А к нормальному виду Фробениуса:
Р Рп— 1 Рп
О
О
«
«
о
Р
0 1. 0 0
• э • • 00. 1 0
Разлагая характеристический определитель
Р
Р2-
• -Рп-]
1 Рп
1
—я,
. о
0
Р — ЯЕ I
0
1.
. 0
0
0
0,
. 1
-X
по элементам первой строки, получим характеристическое уравнение в виде:
Хп — РгХ1""1 — 2 — • — Рп — 0-
Замечание. В ряде случаев требуется отыскать одно или несколько собственных значений матрицы.
Для определения Хшх удобно использовать неравенства П. Ф. Папковича:
сд2 ах 5рА. (6.129)
5рА
Эти же неравенства можно использовать для определения Хшт Построим вспомогательную матрицу В (5рА)Е—А [27]. Тогда Х,-(В) 5рА—А;(А). Следовательно, Ящ1п(А) 5рА—(В), и задача сводится к отысканию Хтах(В).
СТЕРЖНЕВЫХ СИСТЕМ
или в матричной форме
ет Рр, (6.131)
где (гз — перемещения по направлению I от Р] — 1, называемые коэффициентами влияния системы 5 или коэффициентами податливостей (упругих податливостей) системы 5, Р;;? 1—матрица податливостей.
По теореме Максвелла й.м, т. е. Р— симметричная матрица.
6.3. МАТРИЦЫ В СТАТИКЕ СТЕРЖНЕВЫХ СИСТЕМ
339
Потенциальная энергия системы 5 п п
п -у Р1Щ У] , Рс Р] -у Р'ГР (6.132)
является квадратичной формой сил Р и, как известно, положительна при любых рфО. Поэтому матрица Р положительно оппеделена и все ее главные миноры, вклю-
Дополняя эту систему уравнением (6.135), получим:
Я,
ц • •
• • Кк
1
«• •
• ' Кк
п 4 •
ьк и г
1 а и
0.
(6.136)
р.
чая и определитель, положительны (критерий Сильвестра).
В силу невырожденности матрицы Р существует обратное по отношению к (6.131) преобразование
р (лу. (6.133)
Матрица О Цц Р”"1 называется матрицей
жесткостей системы 5П, полученной из системы 5 введением связей по направлению., хюп. Элемент ее
— реакция в связи I от единичного перемещения связи .
В силу теоремы Рэлея О — симметричная матрица; это же следует из симметрии матрицы Р или из теоремы взаимности работ Бетти.
Соотношение (6.133) позволяет представить потенциальную энергию как квадратичную форму перемещений п
П -у]У]г,гою—№'0. (6.134)
1.11
6.3.2. Механическая интерпретация гауссовой схемы метода исключений
Выражение (6.130) можно рассматривать как систему линейных алгебраических уравнений Ррг для определения вектора сил р по известным перемещениям.
Пусть на систему 5 наложено к связей, препятствующих перемещениям точек 1, 2,., к.п—I. (рис. 6.2). Коэффициенты податливостей для оставшихся подвижных точек новой системы 5а пусть будут, (, к1,., п).
В то же время является перемещением точки системы 5, загруженной силой Я-, 1 и реакциями ?ь. Ян в точках 1,., к:
й? — 1 • " кк Вк 1ц Р1 —
п •••«» . 6-135)
Перемещения точек 1,., к при действии этой же совокупности сил равны нулю:
111 1 к 6 1 0:
Из условия нетривиального решения системы (6.136)
ц. •
• • ?1к
•
• 'кк
?к;
0
п •
?1к
"Я
следует:
к
Аг
Гп ,.
1к
(6.137)
Это выражение с точностью до обозначений совпадает с (6.97) для гауссовых коэффициентов к-то шага исключений.
Таким образом, каждый коэффициент к-то шага исключения по Гауссу есть перемещение точки I от силы Р, 1 в системе 5_«ь, полученной из исходной системы 5_п наложением к связей (метод сил).
Аналогично
— ё1 д
А к
11
«п • • •е
(6.138)
Поэтому каждый коэффициент 6-го шага исключений по Гауссу есть реакция в -й связи, вызванная перемещением -й связи на хю— в системе 5п-ь, полученной из исходной системы 5П снятием к связей (метод перемещений).
Пусть система 5 — неразрезная балка с п промежуточными жесткими опорами (рис. 6.3,а). Если при решении задачи методом сил за основную систему принять балку с шарнирами над промежуточными опорами, то преобразование канонических уравнений по схеме Гаусса (6.95)
(6.139)
I
«•
бц 612
дгр
бц б12
61 р
21 22 23
б2 р
Ш Ш « « я
«а
•
6„ 1 Ьпп
П,П— 1, ПП
К
в(«- П
пп
1)
пр
340
РАЗДЕЛ 6. МАТРИЦЫ. ЧИСЛЕННЫЕ МЕТОДЫ СТРОИТЕЛЬНОЙ МЕХАНИКИ
можно интерпретировать (рис. 6.3, б, в, г) как последовательное ожестчение основной системы т. е. по¬
строение минорантной последовательности систем: 5_п, 5_яь ••• 5—1.
можно трактовать (рис. 6.3, д, е, ж) как последовательное ослабление основной системы Яп, т. е. построение мажорантной последовательности систем: 5П, 5п-ь.,
1 2
шип
21
тттт
г0) я(1)
V27 о32
ип
д)
Если при решении задачи методом перемещений за основную систему принять балку с наложенными в премежуточных опорах моментными связями, то преобразование канонических уравнений по Гауссу
(6.140)
Г1 г12
Г1Р
Г11 Г12
Г1 р
Г21 г22 г23
Г2р
М) г(1)
22 23
М) I Г2р
••II
щ Я М д 1
Ш Я •
гп,п—1, гпп
гпр
г(«-1) 'ап
г(п-1) гпр
6.3.3. Матричная форма метода сил
Система канонических уравнений метода сил для упругой механической п раз статически неопределимой системы, загруженной совокупностями сил, имеет вид:
11
1 п
б,. 6
п 1 пп
X. X.
п1 П1
бЩ
•К
0
прг
ох ор-о,
(6.141)
(6142)
где
® [Х1 ‘ '
Каждое расчетное сечение пространственной рамы, составленной из призматических стержней, характеризуется шестью усилиями: Д]х, 2у Му, фж
Рис. 6.4
Пусть выделен незагруженный элемент к (рис. 6.4), условия равновесия его:
1Л„
ФхН, ®хк„’
МгК МгНГ
(6.143)
6.3. МАТРИЦЫ В СТАТИКЕ СТЕРЖНЕВЫХ СИСТЕМ
341
Выражения для коэффициентов системы канонических уравнений (6.141) имеют вид:
остаются постоянными. Тогда после интегрирования по каждому стержню коэффициент б будет:
11
Он РуН
Ен
1ь - -
н в,.
п) 7
НуН
и хм ЕхЬ ХНГ хЫ2ЕхуЩ
ОпРхн ' ЕНР°Н
ММ„; вьан
Н—1
2
, 'н 6'144 °УН‘ 2Ен xп ММ ®«ш (зЕЛ У
1н
уь
ч-1
к—
Мх1 МР3 %1 УР5 Му1МУ8
схН - - - '
4-М
Т7 "П, и
Мпк; М
Он РуН НуН
уЫ Ен 1уН уМ ум 2Ен 1уН
X
0x1 ХР%, Ы1 Мр к Мг1 МР5
X
йг%
2Е,1,Н 'И'°
Г (_1
ЗЕЛ У
Оц Рхн Ен Р% °н 1йк ) е, 1,.,я; 51,.,Ь (6.145)
Л'ыГЬг«.Гг-А
ЕнП
С0 й гЫ ан ]йн или в матричной форме
г'п;
т — число элементов (стержней) основной системы.
В качестве элементов основной системы принимаются все незагруженные стержни, а также участки между сосредоточенными нагрузками каждого загруженного стержня. Причем каждая распределенная нагрузка заменяется конечным числом сосредоточенных .
При таком способе построения основной системы только изгибающие моменты изменяются (по линейному закону) по длине элемента, все же остальные усилия Здесь:
1хН уН уН хН
Аналогично
й,у 2 ь'м Р„ЬЙ. 11
1р — Ь,„. Р у, Ь,
ии И. Нр 11 5
М.
гНф
Р А
ы
,%-мхпр% аУнР
Мукр хНр ‘Уцр’ МгНр’
Ен 3н
2Ен 3хН
I2
н
% 1н
%ЕН xн
ЗЕнхн Он РуН
к
1
Ен •ун
(М
А
11 1н
ЧЕн
3Е;г 1уН Он РхН
1н
ЕнРйн
1н
ОнЗдн
(?гЛ
(6.146)
(6.147)
(6.143)
(6.149)
[6.150)
Векторы Ьлг и Ьлр—суть усилия в сечении Н, (А —1,
., п) от Х] и внешней нагрузки Рв соответственно; Рл — матрица податливостей Л-го элемента.
Элементы Рд являются обобщенными перемещения-
угол поворота консоли 2 2
прогиб ее
Ен 1хН Г'Н уН
хг 1 I во втором (четвертом) — пером с щеми, соответствующими обобщенным силам Л1хл, Цун, 2ЕX2Еун)
Мун, (хь, Мн, Мгн. В первом (третьем) столбце распо- ния вызванные фул —1 (2л 1): угол поворота консоли
лагаются перемещения, вызванные Мхн 1 (Мул 1):
1 Вопросы членения системы рассмотрены в [37],
1н ( Ч
1 хН Р-Н зуг) и
I хН уИ
I, вызванные 2 2 ' 1.3
Л—( 5— )и прогиб ее с учетом сдвига —
Ь хНхН иН ЗЕнЗхН
342
РАЗДЕЛ 6. МАТРИЦЫ. ЧИСЛЕННЫЕ МЕТОДЫ СТРОИТЕЛЬНОЙ МЕХАНИКИ
1н
( -АД
ЗЕ 3уь бнхн) 1н
в пятом — абсолют-
РиН •уН
ное удлинение стержня
0» вызванное — 1, и, Енрн
1н
наконец, в шестом — угол закручивания стержня-, _ - - ЪнйП
вызванный Мгн — 1.
В формулах (6.144)—(6.146) и (6.150) Рхккх Р°н ; РуН % хх и ку —коэффициенты формы сечения; Р — площадь поперечного сечения элемента.
Если рама плоская, то при учете влияния на перемещения изгиба, сдвига и продольной деформации
ь;,.й;, д'4
ЬНр]хНр ®уНр Ыпрх 1;
(6.151)
Рн-
1н
1н
« ХН
2Рн хн
К
4 1н
ЪРк ЗхН
2Еь 3хН 6к Рук
к
(6.152)
Для плоской рамы без учета влияния сдвига и продольной деформации на перемещения
Ьй; К, 3,
Р(,
лгй. ЧуНЦ
II МНР 1к
. а,
укрв
а
Рн 3 хн x
Г
(6.153)
(6.154)
Наконец, для фермы (плоской или пространственной — безразлично)
ЬЬЧ Ч;РЛ-. (6.155)
В общем случае порядок матрицы Рн равен т, (а 1, 2, 3, 6). Выражения (6.147) и (6.148) можно за писать в виде:
. „1 р» И1ь
6,7ЬП-"Ьт,1 р
Рт
Ь; РЬ ;
т1
Р1
ч
к
Ьшр
Ч
ч
» Р
Ь.
5
ь
т;
от XI
тр8
Р
(6.158)
отхот
Тогда матрицы Ои принимают вид:
ь;рь-ь; рь„
Ьд 11’" ЬлРЬ,
Ь„РЬр1.Ь„РЬр?
Ьц • • ь1п
Ь1р1'"Ь1р1
1 I
; Вр
Ьт1 ‘ Ъщп
отхот
трх ’тР
РЬ1-Ь„ В'РВ; (6.159)
хр.Ь В'РВр, (6. 160)
(6.161)
(6.156)
Ь,- РЬ-, (6.157)
отХ 1
где
В
В — матрица усилий во всех расчетных сечениях от всех единичных неизвестных; Вр — матрица усилий во всех расчетных сечениях от всех I комбинаций внешней нагрузки; п — степень статической неопределимости (число отброшенных связей); т — общее число элементов (стержней) в системе; о — число усилий в расчетном сечении, принимаемое во внимание при раскрытии статической неопределимости (порядок матрицы Рл).
Решение системы (6.142) имеет вид:
X - О-1 Ор — (В'РВ)-1 (В'РВр), (6.162)
и матрица усилий в расчетных сечениях рассматриваемой статически неопределимой системы определяется по формуле
5ВрВХВр—В(В'РВ)-1 (В'РВр). (6.163)
При большом числе загружений в практических расчетах для последующего определения невыгодной комбинации расчетных усилий целесообразно первоначально рассчитать систему на единичные внешние воздействия, т. е. построить матрицы влияния.
В этом случае
Ор Р (В'РТЗр) Р, (6.164)
где 'р5л2хт — матрица свободных членов системы канонических уравнений метода_ сил, соответствую¬
щая единичным нагрузкам; Вр Ь7?5сттХТ— матрица усилий в расчетных сечениях от единичных значений внешних нагрузок; Р Итхг- —матрица внешних нагрузок; т — максимальное число силовых факторов по всем загружениям.
Тогда
3 [Вр — В (В' РВ)-1 (В'РВр)] Р ВР, (6.165)
где
ВВр — В(В'РВ)-1 (В'Р Вр). (6.166)
Перемещения статически неопределимой системы по любому направлению, заданному матрицей единичных
6.3. МАТРИЦЫ В СТАТИКЕ СТЕРЖНЕВЫХ СИСТЕМ
343
сил К, приложенных в направлении искомых перемещений (матрицей ортов), определяются выражением К'РЗ.
При определении перемещений, вызванных внешней нагрузкой, К Вр, и матрица искомых перемещений Пюо11.1 равна:
(6.167)
где
XV Вр Р5 ВрР В РРР,
РВрРВ ВрРВр_
-(в;рв)(в'рв) ‘(в'РВр). (6.168)
Квадратная матрица Р порядка I — матрица податливостей статически неопределимой системы (в то вре мя как Р — матрица податливостей всех элементов основной системы, взятых «россыпью»). Обратная матрица
0Р-1, очевидно, является матрицей жесткостей статически неопределимой системы.
Если в качестве К принять матрицу В, то выраже ние В'Р5 определяет перемещения, вызванные внешней нагрузкой по направлению отброшенных связей. Они, очевидно, равны нулю:
В'Р5 В'РВР [В'РВр — (В'РВ) (В'РВ)-1 (В'РВр)] X X Р ОР о.
Однако из-за погрешностей счета в действительности В'Р§ е(о), где е(о)—прямоугольная матрица (атХО малых величин.
В практических расчетах число усилий в расчетных сечениях, разыскиваемых в результате статического расчета (СГ1), может не совпадать с числом а. Например, при раскрытии статической неопределимости системы можно пренебречь влиянием продольных усилий N (в интеграле Мора), а при определении расчетных усилий найти и продольные усилия. В этом случае матрица 5 (6.163) вычисляется по формуле
5 в; ВХ [в; - В (В'РВ)-1 (В'РВР)]Р, (6.169)
где матрицы В и В аналогичны В и Вр, но имеют размеры 0пгХп и 0пгх1 соответственно; аа.
Замечание 1. Расчет на начальные деформации (изменение температурного режима, смещение опор, на чальные несовершенства) отличается от рассмотренного только матрицей свободных членов. При действии внешних сил Рр В'РВр В (РВр). Выражение в скобках определяет деформации отдельных элементов основной системы от внешней нагрузки. Поэтому при расчете на начальные деформации
Од В'Н, (6.170)
гдеН Л,д —матрица начальных деформаций
5 ОЛ д
системы.
Замечание 2. Полученное решение без каких-либо затруднений распространяется на случай использования сложной статически неопределимой основной системы [37]] Обращение к статически неопределимым основным системам становится неизбежным, когда степень статической неопределимости столь высока, что исходные матрицы не удается разместить в оперативной памяти ЭЦВМ
6.3.4. Матричные формы метода перемещений
Метод перемещений предназначен для расчета кинематически неопределимых систем, которые могут быть как статически неопределимыми, так и статически определимыми. Как правило, он применяется в первом случае.
В отличие от понятия статической неопределимости понятие кинематической неопределимости условно и степень кинематической неопределимости зависит от таких, например, факторов, как степень точности в определении перемещений, число узлов линейной аппроксимации криволинейных элементов, если таковая производится, и т. д.
Первый вариант матричных формул метода перемещений [37]. Система канонических уравнений для п раз кинематически неопределимой системы, загруженной I линейно независимыми внешними нагрузками, имеет вид:
К2 КрР 0, (6.171)
где К [г.—матрица коэффициентов системы канонических уравнений (матрица реакций);
— Нг1рПпх—матрица свободных членов, соответствующих единичным нагрузкам; Р — матрица нагрузок.
Элементы гц и определяются по формулам, аналогичным (6.144) и (6.145):
т I и
-т
1 0
ЕкЗхН
I Му? Му
цЧ
ЧЪ.
4- 1 Уг) ) йь (6.172)
ОнРхИ Еь р1 Онак
т
,2
Н— 0
Ен 3уН РхН
Мг1 Мгр5
йг.
(6.173)
Он аI
I, 1,._, п;_51,., I,
Здесь МХг ()уи МУ1, (Зхг, Nх, Мгг — усилия в элементах кинематически определимой основной системы, вызванные единичным неизвестным перемещением I;
СО со 02
мхр5 ЭуР5 МУРз, СХр5, Nр, М2р — усилия в элементах любой статически определимой системы, полученной из заданной, вызванные единичной внешней нагрузкой рв.
Аналогия в структурах элементов матриц перемещений и реакций позволяет написать для метода перемещений следующие выражения:
К С'РС; С'РСр, (6.174)
где С сотХп— матрица усилий во всех расчетных сечениях кинематически определимой основной системы от каждой из единичных неизвестных метода перемещений; Ср С1Р отХп — матрица усилий во всех расчетных сечениях статически определимой основной системы
344
РАЗДЕЛ 6. МАТРИЦЫ. ЧИСЛЕННЫЕ МЕТОДЫ СТРОИТЕЛЬНОЙ МЕХАНИКИ
(полученной из заданной), вызванных каждой из единичных внешних нагрузок; Р 111171—матрица податливостей отдельных элементов, уже использовавшаяся в методе сил.
Тогда
2 — (С'РС)-1 (С'РСр) Р: ' (6.175)
8 [Ср — С (С'РС)-1 (С' Р Ср)] Р СР. (6.176)
Матрица обобщенных перемещений соответствующая внешним нагрузкам, рассматриваемым как обобщенные силы, равна:
У с'р Р СрРСР РР, (6.177)
где
Р Ср РС Ср РСр — (СрРС) (СРС)-1 (С' РСр) (6.178)
— матрица податливостей всей системы [сравнить
с (6.168)1.
Как и в методе сил, в метод перемещений помимо матриц С и Ср следует вводить матрицы С’ и Ср.
Тогда
8 [С —С (С'РС)-1 (С' РСр)]Р. (6.179)
Второй вариант матричных формул — формулы Аргириса. Особенность матричных формул метода перемещений, предложенных Аргирисом [29], заключается в использовании матрицы жесткостей элементов стержневой
системы СР1 и всей системы СР-1. Формулы Арги-
Таблица 6.3
№
п.п.
Метод сил
Метод перемещений
1
Матрица внеш¬
Р
Матрица пере¬
них сил
мещений
2
Матрица подат¬
р о—1
Матрица жест¬
О Р—1
ливостей всей
костей всей кон¬
конструкции
струкции
3
Матрица пере¬
У
Матрица внеш¬
Р
мещений
них сил
4
Матрица усилий
5
Матрица дефор¬
V
в элементах кон¬
маций элементов
струкции
- 1
конструкции
5
Матрица подат¬
ра 1
Матрица жест¬
Ср—1
ливостей всех не-
костей всех не-
объединенных эле¬
объединенных
ментов конструк¬
элементов конст¬
ции
рукции
6
Матрица дефор¬
V
Матрица усилий
5
маций элементов
в элементах кон¬
конструкции
струкции
Таблица 6.4
Ль
п.п.
Метод сил
Метод перемещений
1
Система канонических уравнений (совместности перемещений)
ОХ -Ь ЭрР О
Система канонических уравнений (равновесия)
кг к-о
2
Матрица перемещений в статически определимой основной системе, вызванных единичными лишними неизвестными усилиями
О В'РВ
Матрица реакций в кинематически определимой основной системе, вызванных единичными лишними неизвестными перемещениями
А'ОА
3
Матрица перемещений в статически определимой основной системе, вызванных заданными единичными внешними силами
Матрица реакций в кинематически определимой основной системе, вызванных заданными единичными перемещениями
Л»А'С,
4
Матрица внутренних усилий в элементах конструкции в статически определимой основной системе, выэ ванных единичныхми лишними неизвестными усилиями
в
Матрица деформаций элементов конструкции в кинематически определимой ос новной системе, вызванных единичными лишними неизвестными перемещениями
А
5
Матрица внутренних усилий в элементах конструкции в статически определимой основной системе, вы званных заданными единичными внешними силами
ь
Матрица деформаций эле ментов конструкции в кинематически определимой основной системе, вызванных заданными единичными пе ремещениями
Кт
13)
б
Матрица неизвестных усилий
X - (В'РВГ”г(В'РВ)Р
Матрица неизвестных пе ремещений
г — (А'ОА) 1(А,ОА)У
7
Матрица усилий в элементах заданной статически неопределимой системы
Врр -4- ВХ
«[Вр - В(В'РВ) 1(В'РВр) ]Р
ВР
Матрица деформаций элементов заданной кинематически неопределимой системы
V -ь А2
[Аш-А(А'ОА)-"1(А'ОАйу)]У-
8
Матрица податливостей всей конструкции
Р ВрРВ "С'-1
Матрица жесткостей всей конструкции
О А' ОА "р“1 хю
9
Матрица обобщенных перемещений
II
г
Матрица обобщенных внешних сил
Р СУ
10
Матрица деформаций элементов статически неопределимой системы
V Р РВР
Матрица усилий в элементах кинематически неопределимой системы
ОУ ОАДУ
6.4. МАТРИЦЫ В ТЕОРИИ КОЛЕБАНИЙ И УСТОЙЧИВОСТИ СТЕРЖНЕВЫХ СИСТЕМ
34 5
риса построены на основе аналогии, наблюдающейся между методами сил и перемещений, которая является следствием симметрии вариационных принципов (принципа Кастильяно и принцип Лагранжа), служащих фундаментом рассматриваемых методов.
Определенному понятию и выражению в одном методе соответствует некоторое, также определенное понятие и выражение в другом. Это соответствие представлено в табл. 6.3. В табл. 6.4 приведены расчетные формулы обоих методов [37].
6.3.5. Матричная форма смешанного метода
Пусть при расчете стержневой системы в качестве неизвестных приняты как силы, так и перемещения. Уравнения совместности перемещений и равновесия, которыми в этом случае описывается система, являются каноническими уравнениями смешанного метода.
Как правило, применяется такая разновидность смешанного метода, когда силы, принятые в качестве неизвестных, относятся к одному множеству концевых сечений стержней, составляющих систему, а перемещения — к другому множеству. Пусть число неизвестных сил равно п 1, а неизвестных перемещений — Пг. Система канонических уравнений смешанного метода имеет в этом случае вид:
111 12
21 22
0
или с учетом (6.159), (6.160) и (6.174)
В'Р,В 012
X
Ь'РВр
К21 С'Р2С
2
С'Р2С р
Р О.
(6.180)
(6.181)
К21 — — 12»
причем
61.яН-1
1Я«2
12
Л»»ЛгМ
6 • пип1п2
(6.183)
Любой из ее элементов 6,, (1,., яг, щ1,., Я1Л2) можно найти по формуле где 5— уси¬
лие в состоянии Хх у соответствующее (с учетом знака) как обобщенная сила обобщенному перемещению г,1.
Введем матрицы:
К
В
;
к
; Р
р
с
’ хр
Рг
см
о
р
К21
; Р
Рг
(6.184)
а также матрицу
Т [(К'РК) - ь (К'РК)-1 ь]-1 [(К'РКр) —
- Ь (К'РК)-1 (К'РКр). (6.185)
Тогда решение системы уравнений (6.180) и усилия
в стержнях конструкции определяются соответственно по
формулам:
" Х1 _ТР; (6.186)
3
ВЙ
Iх
2 I
В
IIх
с
2
(К, —КТ)Р 5Р.
(6.187)
Матрицы В, Вр, Р и С, Ср, Р могут быть найдены аналогично тому, как это делается в методе сил и перемещений соответственно, так как в основной системе смешанного метода можно провести границу между подобластью, в которой усилия связаны с неизвестными метода сил X (подобласть X), и подобластью усилий, связанных с неизвестными метода перемещений 2 (подобласть 2).
Матрицы 012 и К21 связаны зависимостью
(6.182)
Матрица податливостей системы и матрица перемещений имеют соответственно вид: Р'Р5 и УРР.
Замечание. Помимо описанной выше традиционной формы смешанного метода возможно и множество других, в которых к одному и тому же концевому сечению стержня могут относиться некоторые из сил и некоторые из перемещений, принятые в качестве неизвестных.
Как известно (см., например, [37]), уравнения метода сил могут быть выведены из потенциала Кастильяно, а уравнения метода перемещений — из потенциала Лагранжа. И. И. Гольденблат [9] показал, что для системы, описываемой я обобщенными силами, можно записать 2П различных потенциалов, среди которых, разумеется, будут потенциалы Кастильяно и Лагранжа. Поэтому 2П —2 потенциалов порождают 2п —2 различных форм смешанного метода.
6.4. МАТРИЦЫ В ТЕОРИИ КОЛЕБАНИЙ И УСТОЙЧИВОСТИ СТЕРЖНЕВЫХ СИСТЕМ
6.4.1. Свободные колебания систем с конечным числом степеней свободы
Пусть упругая консервативная система 5 с я степенями свободы колеблется вблизи положения устойчивого равновесия и пусть отклонения системы от положения
л А С% Гп
МЙ1
равновесия заданы линейно независимыми обобщенными координатами ди., (рис. 6.5), а само положение равновесия соответствует нулевым значениям координат 71 . 7п о.
Потенциальная энергия системы 5 (с точностью до малых более высоких порядков) будет квадратичной формой обобщенных координат 71,., дп:
Мп
т4 т9
Рис. 6.5
ГТ 1 V 1 'А
П — 2 аиЬЬ Тц Аь
(6.188)
77П
1
а кинетическая энергия — квадратичной формой обобщенных скоростей:
346
РАЗДЕЛ 6. МАТРИЦЫ. ЧИСЛЕННЫЕ МЕТОДЫ СТРОИТЕЛЬНОЙ МЕХАНИКИ
Т 2 6«у7Л- ТЧ'ВЧ
(6.189)
1
где
Я ф2.
(6.195)
Условие нетривиального решения системы (6.194) является уравнением частот свободных колебаний дискретной системы
А — ЯВ О. (6.196)
Так как кинетическая энергия движущейся системы всегда положительна, матрица В положительно определена. Поэтому обобщенное характеристическое уравнение (6.196) можно свести к простому характеристическому уравнению
НХ — ЯЕ О, (6.197)
где Н4 В-А.
Так как рассматриваются колебания системы 5 около статически устойчивого положения равновесия, то потенциальная энергия системы также величина положительная, и матрица А положительно определена. Поэтому уравнение (6.196) может быть записано в виде
1
Н2— — Е
0,
(6.198)
где Нг А-1В.
Выражение (6.197) называется прямой формой характеристического уравнения, а (6.198)—обратной.
Замечание. 1. Обе формы характеристического уравнения могут быть построены на базе принципа Даламбера.
1. Метод сил. 0хйр0. Здесь О -1 —
матрица единичных перемещений; ср я у З1п(ф? а) — вектор обобщенных перемещений, соответствующий силам инерции х, как обобщенным силам; хМя
—р2 Му зш (рН-а)—вектор сил инерции сосредоточенных масс; М т,1 —матрица сосредоточенных масс. Сокращая на зш (фН-а), получим:
где В и А — симметричные матрицы инерции (масс) и жесткостей системы 5 соответственно, а ч и ч — векторы обобщенных координат и скоростей. Подстановка выражений (6.188) и (6.189) в уравнения движения
Лагранжа второго рода
й дТ дТ дП
—, 1,. я (6.190)
ш о 7 д7
приводит к дифференциальным уравнениям свободных колебаний системы 5:
п
(ьи Ч; ацЬ) 0 ‘ (6.191)
1
или в матричной форме
Вч Аа 0. (6.192)
Так как система 5 совершает гармонические колебания около положения равновесия, то подстановка
Ч у 51П (ф а), (6.193)
где V — вектор амплитуд колебаний п сосредоточенных масс; ф — частота свободных колебаний; а — начальная фаза, приводит к системе однородных уравнений
(А — А,В) у 0, (6.194)
V 0, (6.199)
откуда ОМ—— Е —0. Таким образом,
н2 ОМ
перемещении.
Р»—1
К2--Г р 0.
(6.200) Здесь Р
2. Метод
И''Г,1 —матрица единичных реакций; V зш (ф а) — вектор обобщенных перемещений;
гр Мц—ф2Му 51п(фа) —вектор сил инерции. Сокращая, как и ранее, на зш(фа), получим:
(м-'к—ХЕ) У0. (6.201)
Откуда М_1Я—АЕ0. Поэтому
нх м_1к
■Ги
т
(6.202)
Уравнения (6.199) и (6.201) несимметричные, однако легко симметризуются путем линейного преобразования
иМ у:
2 ОМ- Е и 0; КМ_ Т— Я.Е и0.
Поэтому спектральные свойства свободных колебаний дискретной системы 5 совпадают со спектральными свойствами симметричных матриц (см. 6.1.6). Причем условие ортогональности векторов принимает вид: п
2 т я VIII , где бгк — символ Кронекера. Это вы-
71
ражение может быть истолковано как равенство нулю работы сил инерции -й формы колебаний на перемещениях к-й формы.
Так как в положении устойчивого равновесия системы потенциальная энергия положительная, все собственные значения а следовательно, и собственные частоты
еру — У (1,., п) положительны.
Функция, описывающая -ю форму свободных колебаний (-ю гармонику) у имеет вид:
ц. зш (фу. I ау). (6.203)
Общее решение уравнения (6.192) получается наложением всех гармоник: п
Ч 2 V. зш (ф I а.). (6.204)
]1
Замечание 2. Выражение (6.203) может быть получено иным путем. Две квадратичные формы Пи Ту поскольку Т положительно определена, образуют регулярный пучок форм (см. 6.1.7), поэтому одним линейным преобразованием могут быть приведены к каноническому виду:
(6.205)
1
6.4. МАТРИЦЫ В ТЕОРИИ КОЛЕБАНИИ И УСТОЙЧИВОСТИ СТЕРЖНЕВЫХ СИСТЕМ
347
(6.206)
1
Система дифференциальных уравнений свободных колебаний (6.192) принимает канонический вид 5Л 0,
т. е. уравнения разделяются: 0, 1,., п. Решение этого уравнения и дает (6.203).
Замечание 3. Если интерпретировать уравнение (6.194) как уравнение регулярного пучка квадратичных
у'Ау
форм (6.84), то выражение становится функцией
Рэлея, а формула (6.88) — формулой Рэлея для определения собственных частот.
Если далее под изменением массы (инерции) системы понимать такое изменение ее физических параметров, при котором изменяется только кинетическая энергия, а под изменением жесткостей системы — такое изменение ее параметров, при котором изменяется только потенциальная энергия, из выражений (6.88) и (6.89) следует [6]:
1) при увеличении инерции (массы) системы, если не возрастает ее жесткость, частоты системы не увеличиваются, а по крайней мере, одна уменьшается;
2) при увеличении жесткости системы (например, наложение невесомой связи), если инерция не изменяется, частоты системы не уменьшаются, а по крайней мере, одна увеличивается.
6.4.2. Вынужденные колебания консервативной дискретной системы
Пусть на систему 5 действуют гармонические возмущающие силы Р зт(цН-Р),., Рп зт(цН-р), причем ц2фф?, 1,., п. Дифференциальные уравнения вынужденных колебаний в матричной форме имеют вид:
Вц Ач р зш № Р), (6.207)
где р —вектор амплитуд гармонической возмущающей нагрузки; х — частота возмущения; р— начальная фаза. Подстановка дузт(цР) приводит к системе неоднородных алгебраических уравнений.
(А — ц2 В) у р. (6.208)
Так как ц,25р? определитель системы А—ц2В0, поэтому решение ее может быть получено по формуле Крамера. Тогда
я (А — ц2В)-1 р з1п (ц( 0).
Решение системы (6.207) может быть также получено методом разложения по формам свободных колебаний (методом А. Н. Крылова).
Так как В невырожденная матрица, уравнение (6.208) можно записать в виде:
(6.209)
где
(Н — И2Е) У р»
Н В ’а; р В V
Воспользуемся спектральным разложением матрицы Н:Н УДУ”1, где А X,"1 — матрица спектра,
V — фундаментальная матрица. Тогда линейное преобразование У-1у; дУ1р (разложение векторов у и р по формам свободных колебаний) преобразует систему
(6.209) к диагональному виду:
(А — и2Е) §. (6.210)
В силу (6.195) А— и2 Е ср2— Ц2ув1, Поэтому 1
т Лй. Следовательно,
Ы-и2г
Ч VIзш (ц Р) Ир 51П № Р), (6.2 11)
где
(6.212)
и у——1у- У-М"»'
Ы-ц21 I 2ш1 Ф; — ц2
1
Таким образом -я компонента (1,. п) вектора ч имеет вид:
п
«Г “ ЧцР 8Ш (Ц Р)
VI о»» .,.: ГРпО Р).
Аи ф?— ц2
,1
(6.213)
6.4.3. Свободные колебания и статическая устойчивость статически (кинематически) неопределимых стержневых систем с бесконечным числом степеней свободы
Пусть 5 — линейная упругая статически (кинематически) неопределимая стержневая система с бесконечным числом степеней свободы. Пусть массы стержней равномерно распределены по их длине и стержни системы 5 (все или часть) находятся под действием стационарных осевых сжимающих сил.
Решение задачи о свободных колебаниях несжатой системы 51 может быть выполнено методами сил и перемещений. При использовании первого метода из системы 5 удаляется пх лишних связей, и условия совместности перемещений приводят к системе п% однородных канонических уравнений метода сил
Рх 0. (6.214)
При использовании второго метода на систему 5 накладывается п2 лишних связей, и условия равновесия дают систему однородных канонических уравнений метода перемещений
К20. (6.215)
При этом коэффициенты канонических уравнений и (амплитудные вибрационные перемещения и реакции) являются трансцендентными мероморфными функциями частотного параметра и и определяются из соответствующих дифференциальных уравнений изгибных или крутильных колебаний стержня как системы с бесконечным числом степеней свободы.
Пусть для простоты Я1г21.
348
РАЗДЕЛ 6. МАТРИЦЫ. ЧИСЛЕННЫЕ МЕТОДЫ СТРОИТЕЛЬНОЙ МЕХАНИКИ
Решение систем (6.214) и (6.215) позволяет определить величины частотных параметров ц° системы 1 и с пх помощью вычислить собственные частоты. Числа 1° называются собственными значениями системы 5Ь они образуют бесконечный дискретный спектр.
Устойчивость равновесия упругой системы 52, находящейся под действием осевых сжимающих сил, рассматривается в традиционной эйлеровой постановке, сводящей задачу устойчивости в математическом отношении к задаче о собственных значениях.
Допустим, что нагрузка на систему 52 пропорциональна квадрату некоторого параметра V, где V — параметр продольного изгиба, и пусть система 32 находится в состоянии устойчивого равновесия, имеющего неискривленпую прямолинейную форму. При монотонном возрастании параметра V (осевой нагрузки) при некотором его значении V0 наряду с неискривленной (невозмущенной) формой равновесия будут смежные искривленные (возмущенные) формы равновесия, т. е. происходит бифуркация (разветвление) форм равновесия. Такое состояние системы называется критическим состоянием, соответствующее ему значение параметра V0 — критическим, а величина нагрузки (силы)—критической нагрузкой (силой). Анализ бифуркационных точек (точек ветвления кривых равновесных состояний) и составляет суть задачи устойчивости в эйлеровой или статической постановке.
Упругая система 52 имеет бесконечно большое число бифуркационных точек и, следовательно, критических параметров V0. Последние образуют бесконечный дискретный спектр собственных значений системы 82. Отыскание значений V0 системы 2 выполняется методами сил или перемещений путем использования уравнений (6.214) и (6.215), в которых коэффициенты 6,- и гц (статические перемещения и реакции) являются функциями параметра продольного изгиба V.
Бифуркационная постановка задачи устойчивости упругой системы ставит ее в тесную связь с проблемой свободных колебаний системы 5Ь допуская общие методы решелия. Поэтому ниже рассматривается обобщающая задача собственных колебаний системы 5, элементы ко юрой подвержены действию консервативной системы сжимающих сил. Полагая при этом 0, получим задачу о свободных колебаниях несжатой системы 8и допуская О, получим задачу статической устойчивости системы 5г.
При решении обобщающей задачи канонические уравнения (6.214) и (6.215) сохраняют свой вид, а коэффициент ь: их становятся функциями обобщенного параметра (о. Параметр со равен либо х, либо V или выражается через них в зависимости от решаемой задачи:
где I — длина стержня (элемента основной системы); пг — интенсивность равномерно распределенной массы стержня; р — частота собственных колебаний; Р — внешняя осевая сила; Е1 — изгибная жесткость.
Хотя система 5 континуальна, при использовании уравнений (6.214) или (6.215) собственные формы ее описываются лишь конечным числом обобщенных сил (метод сил) или обобщенных перемещений (метод перемещений), поскольку векторы х и г конечномерны. При этом традиционно определяются лишь те значения со0, которые доставляют однородным уравнениям (6.214) или
На практике разыскивается лишь первый член спектра, так как ок определяет наименьшую критическую нагрузку (силу) для системы %2
(0.215) только нетривиальные решения, т. е. являются корнями детерминантных уравнений
О (со) 0 или К (о) 0. (6.217)
Однако возможны собственные формы (формы свободных колебаний или потери устойчивости), для которых все места снятия (метод сил) или наложения (метод перемещений) связей оказываются узловыми точками и, следовательно, не могут быть найдены из уравнений (6.217), так как им отвечают тривиальные векторы х 0 или 20. В этом случае собственные формы системы 5 совпадают с собственными формами ее основной системы (случай «ложной» основной системы [26]).
Назовем «скрытыми» собственные значения со0 (ц° или V0) и соответствующие им собственные формы системы 5, которые не улавливаются уравнениями (0.217) в отличие от «явных», определимых из этих уравнений.
Таким образом, чтобы не пропустить некоторых собственных частот или критических сил (некоторых значений со0 бесконечного дискретйого спектра) системы 5, помимо «явных» собственных значений необходимо разыскивать и «скрытые», если последние существуют.
Уравнения (6.217) являются трансцендентными мероморфиыми уравнениями. Они имеют бесконечное множество нулей (корней) и полюсов (точек разрыва второго рода). Решение этих уравнений обычно выполняется методом попыток (испытаний): отыскиваются значения со и Ш2, соответствующие разным знакам детерминанта О (со) или К(со), после чего интервал (со, сог) постепенно сужается. Такой_путь трудоемок и чреват ошибками: в интервале (ом, со2) может оказаться не меньший корень уравнения (6.217) или за корень может быть принят полюс, так как при переходе через полюс детерминантная функция также меняет знак.
Наиболее эффективен качественный метод испытаний, смысл которого состоит в том, что на каждом испытании устанавливается место параметра испытания со в спектре собственных значений со0, т. е. устанавливается число членов этого спектра, расположенных слева (точнее, не справа) от со.
При расчете систем с конечным числом степеней свободы этот метод опирается на теорему Лагранжа — Дирихле о минимуме общей потенциальной энергии системы в положении устойчивого равновесия. Поскольку потенциальная энергия системы может быть представлена в виде квадратичной формы, указанная теорема требует положительной определенности квадратичной формы П в положении устойчивого равновесия.
Если форму Я привести к каноническому виду
П
П (©) Щъ назвать коэффициенты а(() коэф-
1
фициентами устойчивости (а составленную из них последовательность
а1((о), а2 (©),., аа (со) (6.218)
— рядом устойчивости), то теорема Лагранжа — Дирих ле может быть сформулирована следующим образом: если в положении равновесия все коэффициенты устойчивости а,-(со) положительны, равновесие системы 5 устойчиво; если имеется хотя бы один отрицательный коэффициент устойчивости, равновесие неустойчиво.
Для определения места точки испытаний о в спектре собственных значений со0 континуальной системы 5 с учетом возможной «ложности» основной системы восполь-
Метод перемещений
6.4. МАТРИЦЫ В ТЕОРИИ КОЛЕБАНИЙ И УСТОЙЧИВОСТИ СТЕРЖНЕВЫХ СИСТЕМ
349
4 3 и С я 2
О
О'О
с г
о
«14-
О о И
II II а 5 :±
3 К со я 0
I"
ай у
3 о х и
Я о Х л 2
са
II
8
о
II
Оч
с
_ь.с
?•
I
ь
1
II
1
II
1
II
си
II
А
15:1
V
н
н-
• ,СО.
I I
в
II
ой.
4-
с
I
х «2. 11 1 ? • са 8
X
С1
X
II
■ I
в
са
о
а
3
н
II
II
аз
3
ю
Я 5 '
Продолжение табл. 6.5
350
РАЗДЕЛ 6. МАТРИЦЫ. ЧИСЛЕННЫЕ МЕТОДЫ СТРОИТЕЛЬНОЙ МЕХАНИКИ
6.4. МАТРИЦЫ В ТЕОРИИ КОЛЕБАНИЙ И УСТОЙЧИВОСТИ СТЕРЖНЕВЫХ СИСТЕМ
351
Продолжение табл. 6.5
22 РАЗДЕЛ 6. МАТРИЦЫ. ЧИСЛЕННЫЕ МЕТОДЫ СТРОИТЕЛЬНОЙ МЕХАНИКИ
II II «
Б Ь
,1 II II
О.
С
©о с я
'з
ге
х и
её
О 4»
О я
5
Р.
4)
Н
И
II
со.
II
8
о о
II II а,
II. II
Еза. -I- 55 II II
?■
во
18
а.
I
II
II
а
А
А
дз
•с
1
А А
Л
Л
о
а
о
X «0
со 1
•П
о
а.
и
а
73
1
0
1
А
о ч и
СN 2
а
1
СМ
"о
8
С4
л
о
3
С
с
4
1
А
I
А
I?
а со.
-
•Г
II
п-4
?•
ьо
II
® ?■
а.
о
о
II
о 3
X
И?
I 1
А 8
о ■
б В
со.
л
II
О
6.4. МАТРИЦЫ В ТЕОРИИ КОЛЕБАНИЙ И УСТОЙЧИВОСТИ СТЕРЖНЕВЫХ СИСТЕМ
353
354
РАЗДЕЛ 6. МАТРИЦЫ. ЧИСЛЕННЫЕ МЕТОДЫ СТРОИТЕЛЬНОЙ МЕХАНИКИ
зуемся критерием Я. Л. Нудельмана — Л. С, Ляховина [42, 43].
Пусть т4 — число нулевых; т2 —число конечных отрицательных и газ — число бесконечных членов в ряду устойчивости (6.218). Пусть далее 0 и к0— число собственных значений основной системы меньших со и равных соответственно. Тогда число собственных значений (о0 системы 5, меньших со и равных со, определяется соответственно выражениями:
I — 0 — тх — т2; к к0 тг — т3 (6.219)
при использовании метода сцл и выражениями
I 1'о тч 4- з к к0-- тг — т3 (6.220)
при использовании _метода перемещений.
В_интервале (оь со2) размещается 6(со2)-Н(со2)
6(со0—(ап) собственных значений со0 системы 5. Это
о
позволяет определить критическое значение соу для любого заданного номера ; с одновременным установлением кратности его в спектре системы 5.
Замечание 1. Чтобы воспользоваться критериями (6.219) —(6.220), необходимо знать собственные значения основной системы. С этой целью для каждого элемента основной системы вычисляются N собственных значений со 0 или V), где N — наибольший порядковый номер разыскиваемых со0 системы 5. Из полученной совокупности Ш значений со (— число основных элементов) выбираются с учетом кратности те значения со, которым соответствуют собственные формы, не вызывающие в основной системе метода сил перемещений по направлениям отброшенных связей, а в основной системе метода перемещений — реакций в наложенных связях.
Замечание 2. Из всех рассмотренных в 6.1.7 способов приведения квадратичной формы к каноническому виду метод Якоби требует наименьшего объема вычислений. Согласно (6.77) коэффициентами устойчивости в этом случае будут ведущие гауссовы коэффициенты а-1 (6.37). Чтобы для данной точки испытаний со построить ряд устойчивости (6.218), достаточно матрицу коэффициентов О (со) или К (со) привести к треугольному виду по схеме Гаусса.
Замечание 3. Практически вычисление нелинейных реакций г, (со) во многих случаях значительно проще, чем вычисление перемещений б-(со), поэтому ниже рассматривается только метод перемещений.
При расчете сложных стержневых систем, например пространственных рам, матрица К имеет высокий порядок, что чрезвычайно затрудняет расчет даже при использовании ЭЦВМ.
Р. Р, Матевосяном [18] предложено частичное приведение квадратичной формы к каноническому виду:
Р п
1 "1 А Ап 1 ж
д-т1",г'т Ъ Г(Г'‘г1’
11 МИ-1
строения последнего ряда необходимо матрицу построенную на базе сложной основной системы, привести к треугольному виду по схеме Гаусса.
которому соответствует преобразование К в К (6.221).
Им же показано, что это преобразование достигается автоматически при переходе от простой основной системы к сложной, элементы которой однажды кинематически неопределимы.
В этом случае ряд устойчивости (6.218) заменяется
А А
двумя рядами устойчивости: дополнительным Гц,., грр в неполным грир1, 72р2,. ГгТРХ). Для по¬
Р
А
гц
10
А
ГРР
Гр-Н,р-Н • ' гр1,п
• я
• р • •
Гп Гпп
к. к
(6.221)
Если элементы основной системы к раз кинематически
л
неопределимы, матрица К, характеризующая равновесные состояния элементов основной системы, становится
А
квазидиагональной с квазиэлементами Кн 6-го порядка. Для построения дополнительного ряда устойчивости в
А
этом случае необходимо каждый квазиэлемент Кн привести к треугольному виду по схеме Гаусса.
Замечание 4. Отличие качественного метода испытаний от метода испытаний по знаку определителя состоит в сущности в том, что в первом случае носителем искомой информации являются знаки п чисел (коэффициентов устойчивости), а во втором — знак одного числа — детерминанта (произведения коэффициентов устойчивости). Поэтому понятно, почему качественный метод дает полное решение задачи, в то время как испытания по знаку определителя могут привести к неправильным выводам.
6.4.4. Вычисление реактивных усилий
Реактивные усилия гг;(со) для стержней с различными условиями опирания [13] представлены в табл. 6.5. В работе [13] приведены соотношения между различными функциями, позволяющие во всех случаях ограничиться вычислением только шести функций а, (5, 6, е, у, ц, относящихся к защемленному стержню.
ЛИТЕРАТУРА
1. А р г и р и с Дж, Современные достижения в методах расчета конструкций с применением матриц. Пер. с англ. Под ред, А. Ф. Смирнова. Стройиздат, 1968.
2. Б е л л м а н Р. Введение в теорию матриц. «Наука», 1969.
3. Б е р е з и н И. С., Жидков Н. П. Методы вычислений, т. 1 и 2. Физматгиз, 1У60.
4. В о е в о д и н В. В. Численные методы алгебры. Теория и алюритмы. «Наука, 1966.
5. Г антмахер Ф. Р. Теория матриц. Изд. 2-е. «Наука», 1966.
6. Г а н т м а х е р Ф. Р., Крейн М. Г, Осцилляционные матрицы н ядра и малые колебания механических систем, М. — Л., ГТТИ, 1950.
7. Г е л ь ф а н д И. М. Лекции по линейной алгебре. Изд. 3-е, «Наука», 1965.
8. Г о л ь д е н б л а т И. И. Некоторые вопросы качественной теории устойчивости упругих систем. 8 сб.: «Проблемы устойчивости в строительной механике». Стройиздат, 1965.
ЛИТЕРАТУРА
355
9. Гольденблат И. И. Экстремальные й вариационные принципы в теории сооружений. В сб.: «Строительная механика в СССР. 1917—1957». Стройиздат, 1957.
10. Д е м и д о в и ч Б. П., Марон И. А. Основы вычислительной математики. Физматгиз, 1960.
11. Динке вич С. 3. Об эффективности метода квадратных корней. В сб.: «Вычислительная и организационная техника в строительстве и проектировании», Гипротис, 1967, № 1.
12. Д и н к е в и ч С. 3. Спектральная теория циклических матриц и расчет циклических конструкций. В сб.: «Расчет пространственных конструкций», вып. XIV. Стройиздат, 1971.
13. Динкевич С. 3., Краснопольская Н. Б. Построение матрицы статических и динамических реакций для стержня на упругих опорах и ее использование при расчете циклических и регулярных стержневых систем. В сб.: «Исследования по теории сооружений», вып. XVIII, Стройиздат, 1970.
14. Е ф и м о в Н. В., Розендорн Э. Р. Линейная алгебра и многомерная геометрия. «Наука», 1970.
15. К У Р о ш А. Г. Курс высшей алгебры. М. — Л., ГТТИ, 1946.
16. Л а н ц о ш К. Практические методы прикладного анализа. Физматгиз, 1960.
17. Мальцев А. И. Основы линейной алгебры. Изд. 3-е, «Наука», 1970.
18. М а т е в о с я н Р. Р. Устойчивость сложных стержневых систем (качественная теория). Госстройиздат, 1961.
19. М и ш и н а А. П., Проскуряков Н. В. Высшая алгебра (справочная математическая библиотека). «Наука», 1966.
20. Н а р е ц Л. К. Расчет статически неопределимых систем на малых вычислительных машинах. Госстройиздат, 1958.
21. Положи й Г. Н. Численное решение двумерных и трехмерных краевых задач математической физики и функции дискретного аргумента. Изд-во Киевского университета, 1962.
22. Применение электронных вычислительных машин в строительной механике. «Наукова думка», 1968.
23. Рабинович И. М. Курс строительной механики. Госстройиздат, ч. 1, 1950; ч. 2, 1954.
24. Расчет строительных конструкций с применением электронных машин. Сборник статей. Под ред. А. Ф. Смирнова. Стройиздат, 1964.
25. Р е з н и к о в Р. А. Решение задач строительной механи ки на ЭЦМ. Изд. 2-е. Стройиздат, 1971.
26. С м и р н о в А. Ф. Статическая и динамическая устойчивость сооружений. Трансжелдориздат, 1947.
27. С м и р н о в А. Ф. Устойчивость и колебания сооружений. Трансжелдориздат, 1958.
28. С м и р н о в А. Ф., Александров А. В., Шапошников Н. Н., Лащеников Б. Я. Расчет сооружений с применением вычислительных машин. Трансжелдориздат, 1965.
29. Современные проблемы расчета сложных статических неопределимых систем. Составление, общая редакция и дополнение А. П. Филина. Л., Судпромгиз, 1961.
30. Уилкинсон Дж. Алгебраическая проблема собственных значений. «Наука», 1970.
31. У м а н с к и й А. А. Пространственные системы. Госстройиздат, 1948.
32. У м а н с к и й А. А. Специальный курс строительной механики, ч. I, II. М. — Л., Госстройиздат, 1935, 1940.
33. Ф а д д е е в Д. К., Ф а д д е е в а В. Н. Вычислительные методы линейной алгебры. Изд. 2, «Наука», 1963.
34. Ф и л и н А. П. Расчет пространственных стержневых конструкций типа перекрестных связей и его применение к оболочкам при использовании электронных вычислительных машин. В сб.: «Исследования по строительной механике». Л., Труды ЛИИЖТ, вып. 190. 1962.
35. Ф и л и н А. П. Статика стержневых систем на основе элементарных положений функционального анализа. Известия АН СССР, «Механика и машиностроение», 1964, № 1.
36. Ф к л и н А. П. Алгоритм построения матрицы при расчете произвольных пространственных рамных (с жесткими контурами) систем методом сил. В сб.: «Строительная механика». Стройиздат, 1966.
37. Ф и л и н А. П. Матрицы в статике стержневых систем. М. — Л., Стройиздат, 1966.
38. Ф р е з е р Р., Дункан В., Коллар А. Теория матриц и ее приложения. ИЛ, 1950.
39. Ш а й к е в и ч В. Д. Матричный метод расчета регулярных стержневых систем. В сб.: «Расчет пространственных конструкций», вып. IV. Госстройиздат, 1958.
40. Шилов Г. Е. Математический анализ. Конечномерные линейные пространства. «Наука», 1969.
41. ЭЦВМ в строительной механике. Труды I Всесоюзного совещания по применению ЭЦВМ в строительной механике (Ленинград, 1963). М. — Л. Стройиздат, 1966.
42. Л я х о в и ч Л. С. Метод отделения критических сил и собственных частот упругих систем. Изд-во Томского университета, 1970.
43. Н у д е л ь м а н Я. Л., Л я х о в и ч Л. С. Уточнение критерия, определяющего место заданного числа в спектре собственных частот и критических сил упругих систем. В сб.: «Исследования по строительной механике». Труды Томского инж.-стр. ин-та, т. XIV. Изд-во Томского университета. 1968.
44. Р о з и н Л. А, Метод конечных элементов. «Энергия», 1971.
РАЗДЕЛ 7
ТАБЛИЦЫ ГЕОМЕТРИЧЕСКИХ ХАРАКТЕРИСТИК СЕЧЕНИЙ СТЕРЖНЕЙ
7.1. ГЕОМЕТРИЧЕСКИЕ ХАРАКТЕРИСТИКИ ПРИ РАСТЯЖЕНИИ-СЖАТИИ И ИЗГИБЕ
Таблица 7.1
у
II
Г
ц
1
ш
в
1
1. Квадрат
г
х У 12 12 х 3 3
1рй — — ; К' — ; г г - “ 0,289 а 6 в Х — Я х У У 1 л
г—]
6 6 6 12
2. Квадрат. Балка поставлена на ребро Р а2; Н — а V2 1,42 а; I — — ; № 47п » 0,118 а8.
У 12 12 х У
При срезке верхнего и нижнего углов можно достигнуть увеличения Максимальное значение
0,124 Л; ь — П
хсР 18
3. Полый квадрат
Р а9 (1 — а2); а -
0
т4 д27
-1 „ I т — (1-а) — (1 а2); 12 12
,—(4 —За3 —а4); № — (1 —а); г г 0,289 а V1 а3 12 X 6 у
Р ьн-, х 12 12
4. Прямоугольник Ь3Н 1 _ ЫУ РЬ,
12 12 ’ х' 3 3
— V' 3 “
' 1 х'у' 4 4 7дгж
й‘з1п3 а РйР з1па
Гр о — (Ь2 й2) — р0 12 12
48
_7г_
6
24
0,289 »; Гу 0,289 6
7.1. ГЕОМЕТРИЧЕСКИЕ ХАРАКТЕРИСТИКИ ПРИ РАСТЯЖЕНИИ-СЖАТИИ И ИЗГИБЕ
357
Продолжение табл. 7.1
6. Симметричный двутавр, составленный из прямоугольников
Р аН Ь (Я - Н); I — — (Я8 — Л3); „ — — (Я - Л);
12 12 12 12
И7 — (Я3 — й3) х 6 Я 6Я
— -Ь— (Я -I) у 6Ь в
7. Несимметричный двутавр, составленный из прямоугольников “I” а (н 4- в) Ь Всц 6 — а; В В — а;
а«2 В1ен 1 св(2Нсш)
2аН В1сИ Ь1св)
'Х ТВн-В1Лн Ч3- Мв)
8. Двутавр
Р аН 26 (? с); Ъ — — В — а)
2
'-7г[в»3-(4-ь41)]: -[в3«-й М3 (В4-°4)]: “б'т[ВЯЗ-Г(Л4-'‘1)]:
К' — Гв3(Н-й)Н-М1 — В‘-а)1. у 6В I 4 ]
Н — Нх( 1 Наклон скосов а для стандартных двутавров ос » —]
2 Ь 6 9. Равнобокий уголок И? Н -- (
’ 2 (2Н — О соз 45° "
7. -1- 2с4 — 2 (с — 0й — 2с 4- » где с ув соз 45°
358
РАЗДЕЛ 7. ТАБЛИЦЫ ГЕОМЕТРИЧЕСКИХ ХАРАКТЕРИСТИК СЕЧЕНИИ СТЕРЖНЕЙ
Продолжение табл. 7.1
Ы
зш
10. Неравнобокий уголок
'г [й-3 ь«1-ь 1••
_ ± Г, ф - хА3 3 _ й (. _ пз]. ЬЬМ±_ бйй
3 1 4' т а 1 й М 4 ) 4 (А 6Д)
1 '
5-]
У
я
ш
1
у),
А
1
Г
—6
“X
-л
11. Симметричный тавр, составленный из прямоугольников
Г (Б — Ь) а ЬН 8, (Б — Ь) — Ь — ;
2 2
2 Л3 1х, (В-Ь)- 6—;
о2
О
и г.Н — и : . — Л2 , — У. в’ ' в ' 7
В№
Кроме того, Э -77, где 0 берется из графика
аде
Ц60
№ 420'
Значения с1:Ь
7.1. ГЕОМЕТРИЧЕСКИЕ ХАРАКТЕРИСТИКИ ПРИ РАСТЯЖЕНИИ-СЖАТИИ И ИЗГИБЕ
359
Продолжение табл. 7.1
12. Узкая прямоугольная полоска таЬ __ Ш
• ', I — ’ 2 12 12
, Ц- (а2 аЬ б2) — (а3 оЬ »)
3 3
Р П уа ■■
У’
1л
1
-
--ч23
0
хг
-Г7
X
—А
13. Тонкостенный швеллер (4, 2 Ь, А)
Р ; 6, —5—: 6, б1±1-; й2 2,М,(2 Р);
2 р 2 Р
I I ОТ -., (6 I В) - №6 Э)., ЬП (1 2Р)
• 12 2 12 12(2 Р) ' у 3 2 (5
ЯМ18Й., -±У1, Г (6 р) .6. Р
3(2р)2 у ' 3 32р) 6 Ь(2 р)
й? - ’в_ -ЬН' (1 ?В) _02Р). _ ЬНХ (1 2р)
й 6, 3 3(2 р) Уг Ьг 3(1 Р)
_ ЬГ (1 2р)., _ П л 6 р. Ь 1 1 2Р _
У о ЗР ’ У 2 В Г 3
3(1 Р)(2 Р) х 2 Г (, Зр У 2 Р
1 2р
14. Симметричный тонкостенный двутавр (. 1% Л)
Р ; Р М, 2Ы, Ы, 2 р); 55 (6 р Л1 Ь х 12 12 (2 3)
Ю, _ ГЬ». _ ЫЦ. ТО (6 Р),
4- 6 6(2 Р) ’ 6 ™ 62Р) ’ У 3
РЬ г Н_ Л Г6 р. _ ___Ь 3(2 Р) : г 2 V 6 зр : ГУ 77
15. Симметричный тонкостенный тавр 1, 2 Ь, к).
Р И„Й ; й й_1±1_; А, ,, (1 Р);
,6 в 2 (1 Р) н 2(1Р)
1 1%(4 р) Р(4Р). ___ ЬЧ, _ У.
• 12 (1 р) 12 12 (1р)»’ 12 12 (1 р)
7х 4р Рй 4р. __ НН,_ 4 р
хъ Й„ 6 р 6 1 р хи к 6 ' 2 Р
РН Р(4 Р). 6 РЬ. й_ 1 Р (4Р)
6 (1 РИ2 Р)' и 6 6 (1 Р)’ 1р Г 12
Ь
Гу 1Г
360
РАЗДЕЛ 7. ТАБЛИЦЫ ГЕОМЕТРИЧЕСКИХ ХАРАКТЕРИСТИК СЕЧЕНИИ СТЕРЖНЕЙ
Продолжение табл. 7.1
16. Треугольник 7 ЬП’ »н 7й: "в-7 й» 7 (йа - ЬсР
ЫР _РН 36 18
__ ЫР _ РЬ? Л.» — ;
г ЛЬ(Ь'ЬаЬс) Г ЬаЬс)., ЙКЬс)
36 18 У' 12
ЬН (Н2 Ь2 4- Ь Ь Ь2) „,.,., в
У о а с с Р (аа “Ь с )
р0 36 36 ’
;ра (31н2 ь ь3с):
П7 Ш РН
гн — (для нижних волокон);
хн 12 6
ЬЪ?
24 12
3 2
. 0,2357 Н
17. Прямоугольный треугольник
Г±ЬЬ л—А; о — Л; Ь. — 6; 6. — 6;
2 н 3 в 3 1 3 2 3
_ ЬП3 _РП
х
36
18
_ ЬН 36
3
18
ЪН _ 72
_Я_
18
_ ьнз _ да ' 12 6
— ЬН - РЬ1 У' 12 6 ’
7, В 1
0 24 6
Рс2
_0 --(Л3ь2)——; С2 баА’;
ро 36 36 18
(Лг ЬЗ) й1:
РЛ 12 12 6
47 ™ м (для нижних волокон);
ЛН 12 6
ЬИ? РН. хв' 'для верхних волокон);
32
• 0.2357 Н
18. Трапеция
, 2Ьн
2 В 3 к 4- Ь
2 3 (Н в)
л ;
2 »Н6П
,лг
_ й3( 4ЬнЬв «’
36(ЬН ЙВ)
Л’(ЬН ЗЬв) да(Н ЗЙв)
3(„ йв) Л2 Сб2 4Ь Ь 62)
V н н в в;
НЬ н"в)
„
18 (Ь„ Ьв)2 А(36Н6В) №(36н 6в)
12
6 (Ьн Ьв)
(для нижних волокон); №хъ (для верхних волокон);
Н 1 2 (Ь2 4Ь Ь Ь2 У Н н В в
ЧЬн Ьв)
7.1. ГЕОМЕТРИЧЕСКИЕ ХАРАКТЕРИСТИКИ ПРИ РАСТЯЖЕНИИ-СЖАТИИ И ИЗГИБЕ
361
Продолжение табл. 7.1
19, Полый ромб
20. Правильный шестиугольник Р 0,866 е 2,698 Я; 1х1д 0,541 к♦ 0,06
х 0625 8 » 0,12 № у « 0,541 Я»:
гх гу 0,456 Я 0,263 й аДуГ
21. Правильный восьмиугольник
Р 0,828 г, 0,638 0,0547 ;
ХРх:№у 0,690 Я8 0,1095 Р; гх г д- 0,257 й
22. Правильный п-угольник
„ паг 1 _
— па2 с1§ а; Я
2 4
2 зш а
2 а
— (I2 а3) — (12 г» аа) - — (б?» — а)
96 48 24
23. Круг
1_ « 0,7854 Я; 1Х — « 0,05 х у б4
ГР0 21Х
зиР
4
32
тар
р 7 № — « 0,1 (Р;
х У 32
362
РАЗДЕЛ 7. ТАБЛИЦЫ ГЕОМЕТРИЧЕСКИХ ХАРАКТЕРИСТИК СЕЧЕНИИ СТЕРЖНЕЙ
25. Тонкое кольцо ( й) пйН
Р — лй1 11 у
0,3926 йН;
л ИН
И7 « - - - м 0,7853 йН к 0,353 О.
х у 4 х
26. Полукруг
па
8
лй4
7 0,00686 ё; , —— 0,025 4;
128
— 0,0238 2 (для верхних волокон) г 0,1323 4; г 0,252 й
х х4
27. Четверть круга. 0,7854 г2;
ув » 0,5756 г; 0,07135 г4; » 0,03843 г;
0,05489 г4, , — 0,01646 г4;
' у х'у'
яг г4
— « 0,19635 г4; 1 „ „ дг" 16 XV 8
28. Сечение бревна, отесанного сверху и снизу Ь — 0,866 й 1Х 0,039 44; 0,088 43; 1 0,223 4
7.1. ГЕОМЕТРИЧЕСКИЕ ХАРАКТЕРИСТИКИ ПРИ РАСТЯЖЕНИИ-СЖТИЙ И ИЗГИБЕ
363
Продолжение табл% 7.1
29. Сечение бревна, отесанного с четырех сторон
Н 0,866 й д, — 0,038 йА 47х 0,087 (Р; 0,234 4
30. Круговой сектор а; 5 2га (длина дуги АВ); 62г зп а (длина хорды АВ);
5г _ _ яг2а°. _ 2гЬ 2г вп а 38,20 г 81п а
га — ; х. — -— '
180°
за
Л — Ф
8аа
., г Ли 32 3па а Я (и 32 зп а
, «-СЁ;
у' Л Ж л
8а3
■
г з1п а
_ Ф. г _ г л 16зт2а" ж
с 2 Г 2а 2 Г 2а 9а3
Ф 2а — зп 2а; ф 2а зп 2а
31. Круговой сегмент 5 2га (длина дуги ЛБ); Ь2г зЁпа (цлина хорды А В);
г-;, -(4а-51п4а)-Л‘—Ч"8?,
2 Зф 16 9 2а — зп 2а
(1 3к соз а — 463) — (1 Зк соз а—42); , -II- (4а — зп 4а)
8 4 16
(1 3к соз а); ,. (12 а — 8зш2а 4- зп 4а) в
8 У 48
в г- (1 — к соз а) (1 — к соз а); ф 2а —- з1п 2а; к — - 5п а
8 4 Зф
32. Сектор кольца
Р-а-Н): «а -—
а з 8 —г а
8 9а ) 8
(Я4 — г4); ф2а —зт2а; ф 2а зт 2а
— (О2-а3); «„
33. Половина кольца
2 Ра Ог 4
х 0,00686 (О — 4) —
Зя Р 4
0,0177 Р22 (Р - й)
йй
яО4
128
(-)
364
РАЗДЕЛ 7. ТАБЛИЦЫ ГЕОМЕТРИЧЕСКИХ ХАРАКТЕРИСТИК СЕЧЕНИИ СТЕРЖНЕЙ
36. Полый эллипс Р±(аь-аы-, 1х (аЬ-а1Ь);
й Р6-06)
37. Тонкостенный эллипс (( а, 6)
7 Л (а4- Ь) 1 1 — ЬН (За Ь); — а3 (36 а);
4 64 64
— Ы (ЗаЬ); — И (ЗЪ а)
32 у 32
А 1Зд 6. г _а 1_±
г 4 Г а Ь у А У а
ЗЬ
Ь
38. Полое сечение в виде чечевицы р а 1 с1д2 а0 Ь0 с--; г 1--с12 ; 1Х г3 (ЛВ);
, гЦ (С й); А — а (2 4- соз 2а) — 2 зш — (4 соз а — соз — ;
У 2 2 )
В а (2 соз 2а) 2 зш — (4 соз а — соз — 3 зт 2а; С а — зш а;
2 V 2 )
О а 4- 5п а — з 1п 2а
7.1. ГЕОМЕТРИЧЕСКИЕ ХАРАКТЕРИСТИКИ ПРИ РАСТЯЖЕНИИ-СЖАТИИ И ИЗГИБЕ
365
Продолжение табл. 7. 7
Р
АаЪ
__ Яд 5
3 Ра?. 7
I „
39. Параболический сегмент
. 1 _ 16 а3Ь
15 ' “
32 аЬ
_ 4аЬ _ РУ х 1 5
175
12 Ра1 ш 4 а?Ь 175 У 7
105
11.
35
д2
15
Гб
5
6
ш -15- а?Ъ Га: И7 -2— аЬ -1— Ра
ин Ш5 ао 35 га’ умакс 35 35
40. Параболический треугольник я 1
- ии" л » —
- 1
7п2 4п 1
г. 2
№
-М
2 (2л 4- 1)
ЬА; 12 (Зл 1) (2л4- 1)з у (л 3) (л 2)2
Ьк8. _ Ь3А
3 (Зй 1) л •(- 3
41. Параболический треугольник Л [1 ; Р—— ЬН х. ■ п 1 Ь; у,
I Ь ) «4-1 2(Л 2) » ьу. 7 _ п(п34п 7)
(2г I)3 (Зл П ’ У 12 (л 2)3 (л 3)
2 л3
7' (л 1) (2л 1) (Зл 1)
ЬН I, У 3(л3)
2л 1 №Н
ЬгН
■ А;
42. Полукруглый волнистый профиль
Ь 2Н; г 0,5 (А — О 0,25 Ь — 0,5 ; Я « 0,5 (А 4-) 0,25 6 0,5 ;
Я0 0,5 (Я г) 0,5 А 0,25 Ь; Р я (Я3 — г3) яА 0,5 Ш 1,571 Ы 1х 0,25 я (Я4 — г) 0,125 яА (А2 2) 0,393 Ы (А2 4- 2)
21х
0,196 Ь (0,25 Ь3 4- 3); - 2-
А 4-
_я_ (Я - г) _ я (А2 4- а) 2 (А 4-О 4 (А 4-О
0,785 А
(А2 а)
(Л 4“ О
: 0,393 Ы
(0,25 У 4- ) (0,5 6 4-0
’-УЧг
366
РАЗДЕЛ 7. ТАБЛИЦЫ ГЕОМЕТРИЧЕСКИХ ХАРАКТЕРИСТИК СЕЧЕНИП СТЕРЖНЕЙ
Продолжение табл. 7.1
43. Прямой волнистый профиль
5 2 (к — а) г — 0,25 Ъ — 0,5 1 Д0 0,25 Ь Н 0,25 Ь 0,5 I;
Г л (К2-О 2Ш 1 ру2 б ("2"“ О 2Л]
I (0,571 Ь2Н); 1Х — (Л — г) — а (К3 — г5) — а’ (Л — г»)
тЧ[т(т('т'К']-
'К
6 (0,3193 Л2 — 0,0177 ЬН 0,00143 2 0,630 2); № «.
Л к 1
Приближенные формулы
1Х НЧ (0,10Ь 0,19Л); ХУх т— (0,20 5 4- 0,38 А)
44. Сечение железнодорожного рельса (формулы приближенные)
у
А
45. Сечения стандартных прокатных балок (к в см):
(к 4- 5)3, к-- 2)3 „
швеллер и » смъ двутавр » сар
х 81 51
46. Сечение произвольной формы
Для ориентировочной оценки величин Iх и №х относительно центральных осей:
для сплошного сечения (с ошибкой до 15%)
1Г'Н V
12Ь
для сплошного симметричного сечения (с ошибкой до 15%)
га
ЧУХ — ; х 6 Ь
для полого сечения (с ошибкой до 25%)
. Щ ■ 66 [
1ИЧНОГ
ЯТГ :зм1 5
ьн
для полого симметричного сечения (с ошибкой до 25%)
ьн
4“
ШИ
Ч'
Здесь: Р — площадь внутри наружного контура сечения; к и Ь — высота и ширина сечения; 5 и I — длина периметра и толщина стенки (для полого сечения)
7.2. ПРИБЛИЖЕННЫЕ ЗНАЧЕНИЯ РАДИУСОВ ИНЕРЦИИ
367
7.2. ПРИБЛИЖЕННЫЕ ЗНАЧЕНИЯ РАДИУСОВ ИНЕРЦИИ
Таблица 7.2
У Г «?30й т Х» Гуцзоь
л ж г«?»5Л
Цб 4ч
—к у ГХ-ЯЯ5Н. I ГЯЦП5Ь
2 А
У
4 N Г,-?32й
' Й; Гу 0,23 Ь
л х Гг-4»
гх0,Ш
'У»
Ж_д
Гкв,ЧОк
ГцвЦПЬ
гХ"4к
—1 [• Гу«4»4
Г, - 430л Г9ЦИ6Ь
х ВI ■ х
, г“' Йл,1 пг
ЬгН
-
•
. г,-цт.
"■ ГцшЩЪ
X
кх-
г,-цт
Гд'ЦШ
Ц-Ь -ч Г,-32Д 1 • Я”'х гу 0?0Ь
Г К ГужЦ48Ь
У Г435А
■‘т— ГуЦХЬ
л х-
I» г»
гх08Н
Гг0,Ш
ГуЦРЬ
-4- гх Ш гуцзгь
-
1
ГХМ,Ч1К
ГдЦЕЬ
X -
гЦЗвк
Г„ЦПЪ
гх-цт
Г УШ0,ТЗЬ
ы -ь- Г»А
рга—Г Г,-43»
в
а
гаь.
Г ушЦФ9Ь
ГХЦ?6Н
Гу(1Ь
--
е—
р х гоь
4
гКцт
—у ГуЩ40Ь
V
Ь—1-6 г9тЧ23Ь
ч
4 Д-Ч Лг«4ЯЛ Г гу«гз4
? Ж'
ЖГхНт
_ргг.
ЕТТШГ I 1
Гг-дагл
ГцЦ5Ь
•-Ьг
Гу’ЧфЬс,
»1
Г71
1Г
Ч Гх«?7Л “ Гу
У
ГХЦШ г у- 09 Ь
а I- гжут
1 Т Гу5Ь
гфа
а
_3 гх-«г?л
И Г,»«Й4
ГгЩВ5Ь
ь- гхдол
Г г3ж°ш
X У? х I
"78 л
-а
6-ц-ч-. г-цт
Ята25? г Гуф2Ь
-зе
Днмш»
I
г-цат
. л - лв
1т
Л
368
РАЗДЕЛ 7. ТАБЛИЦЫ ГЕОМЕТРИЧЕСКИХ ХАРАКТЕРИСТИК СЕЧЕНИИ СТЕРЖНЕЙ
7.3. ГЕОМЕТРИЧЕСКИЕ ХАРАКТЕРИСТИКИ СДВИГА ПРИ ИЗГИБЕ (НАПРАВЛЕННЫЕ ПЛОЩАДИ Ру)
Таблица 7.3
3. Симметричный двутавр, составленный из прямоугольников
Р„ — р; и -I— (н С2 - лЗ — Нъ — ; С — (Н2 - л?) —
у ц а2 V 1 1 12 1 320 ) 8 I 1 8
4. Несимметричный двутавр, составленный из прямоугольников
Р
■ „1,; Й1А; ц Г А. (й С - й» „5 у М 1 8 2 1 1- V 3 1 20 '
(1 — )2 1ч 1 1 1 3 1 20 Л 2 1 1) 2
'2
с, -г(л,2-й12) Т:
Л, Л — площадь и момент инерции относительно оси х части сечения, расположенного над осью х
шфшт
П
шшмт
Симметричное полое сечение, составленное из прямоугольников
7.4. ПОЛОЖЕНИЕ ЦЕНТРА ИЗГИБА НЕКОТОРЫХ СЕЧЕНИЙ
369
7.4. ПОЛОЖЕНИЕ ЦЕНТРА ИЗГИБА НЕКОТОРЫХ СЕЧЕНИИ (ц — коэффициент Пуассона)
Таблица 7.4
Форма сечения
Положение центра изгиба (точка О )
1. Сектор круга
х— %г О
0,25
0,5
% при а°
4,5
7,5
0,129
0,125
0,И4
0,168
0,158
0,194 0,180
0,094
18
22,5
0,057
0,139 0,109
0,155 0,119
0,075
0,080
0,048
0,053
0,056
2. Равнобедренный треугольник
_ 21 9 — 11ц,.
О 135 1 ц ’
при малом х
2 - 2г 1 Эр,
Л х, — ■
15 О 15 1 ц
3. Прямоугольный треугольник
4. Полукруг
Х0 15я
3 4ц
1 11
370
РАЗДЕЛ 7. ТАБЛИЦЫ ГЕОМЕТРИЧЕСКИХ ХАРАКТЕРИСТИК СЕЧЕНИЯ СТЕРЖНЕЙ
Продолжение табл. 7.4
Форма сечения
Положение центра изгиба (точка О)
5. Сегмент квадратной параболы
Удлиненный
АН 1-4-Зц
Н 35 О 35 1 м.
Укороченный
АН 1-Мц АН 1
35 1 М» О 35 14 М
6. Сектор тонкого кругового трубчатого сечения
х — 2г 71" С08 а "Ь 8п а
О (я — а) 4- зп а соз а
Для трубы с разрезом ( оь -0)
_ 2г О
7. Уголок (при Л)
Уо О
Ч —,
О
А
2
У0 2
У
д
Г1х ?гу ” главные центральные моменты инерции прямоугольника с размерами НХи
12х» 12у — то же, для прямоугольника с размерами 2 X
8. Швеллер (при НЪ I)
к
ху
Х° х
1Хц центробежный момент инерции половины сечения по отношению к осям х и у,
1Х — момент инерции полной площади по отношению к оси
Н2Н2(
При I 1 О А1 „
ху
7.5. ГЕОМЕТРИЧЕСКИЕ ХАРАКТЕРИСТИКИ ПРИ КРУЧЕНИИ
371
Продолжение табл. 7.4
Форма сечения
Положение центра изгиба (точка О)
9. Двутавр
д
У
к
15
о К
“Г
го
I
ж_Л '•.
—х,х
О Л 2
Л и 2 — моменты инерции полок и 2 по отношению к оси х
-Л Положение центра тяжести некоторых фигур (точка О) см. табл. 2.3.
7.5. ГЕОМЕТРИЧЕСКИЕ ХАРАКТЕРИСТИКИ ПРИ КРУЧЕНИИ
Таблица 7.5
Форма сечения
Момент сопротивления в см
Положение точек тв1
Момент инерции в см4
— Л-4
II
Во всех точках периметра
7к — 1 о 32 Р
бГи 1
‘в а‘н;
-5- 3(1 _ а4) к 16 11
Й4-а4
Я н В 16 йн
Во всех точках наружной окружности
372
РАЗДЕЛ 7. ТАБЛИЦЫ ГЕОМЕТРИЧЕСКИХ ХАРАКТЕРИСТИК СЕЧЕНИЙ СТЕРЖНЕЙ
Продолжение табл. 7.5
Форма сечения
Момент сопротивления в см3
Положение точек х
макс
Момент инерции в см
9
— а —
1
Л
XV к 0,208а3
Посередине сторон
х макс 0,208 а3
к 0,1404 а4
щ щ —6 —
1
-«С
к Л — п
1
Посередине длинных
СТ°Р°Н тмакс МккПосередине коротких сторон т Етмакс
В углах т 0
1
п
1
1,5
2
3
4
6
8
10
0,208
0,346
0,493
0,801
1,150
1,789
2,456
3,123
Т
0,1404
0,2936
0,4572
0,7899
1,1232
1,789
2,456
3,123
1
1,0
0,8588
0,7952
0,7533
0,7447
0,7426
0,7425
0,7425
-4
— л 4;
Ъ
У„ — (п — 0,63) Ь3 к 3
_к
ь
В точках длинных сторон, за исключением концов
тмакс Посередине коротких сторон х 0,7425 т„акс
В углах х 0
„ — (п — 0,63) Ы к 3
7.5. ГЕОМЕТРИЧЕСКИЕ ХАРАКТЕРИСТИКИ ПРИ СВОБОДНОМ КРУЧЕНИИ
373
Продолжение табл. 7.5
Форма сечения
Момент сопротивления в см3
Положение точек т
Момент инерции в см
_ 1
Н
4-
” 12
ь,-
■ь,
— 0,105
ь
Ь
В точках боковых сторон вблизи большего основания трапеции тмакс
В углах т О
К
1 Н ( Ь1 ь2) 12 Ьг — Ь2
-0,105 ( ЬЬ
Н ( Ь1 Ь1) Ьг (Ьг — Ьг)
I,
.0,21 —
Ьх Ь
Посередине длинной стороны тмакс
к
1 Н ( Ъ1 Ь1) 12 Ьг — Ь2
-0,21 Ь
Посередине сторон
V? 0,447 РЬ
Посередине сторон
0,520 РЬ1
Таблица 7.6
Координаты центра изгиба
Координаты центра изгиба
Форма сечения
и бимомент инерции
Форма сечения
и бимомент инерции
сечения
сечения
Г
ШШ
И
д I'
ш-
х,%
Л
л:_ 0; 0;
О О
1 .1
0 о
1у1ъу№
1 -
374
РАЗДЕЛ 7. ТАБЛИЦЫ ГЕОМЕТРИЧЕСКИХ ХАРАКТЕРИСТИК СЕЧЕНИЙ СТЕРЖНЕЙ
Продолжение табл. 7.6
Форма сечения
Координаты центра изгиба и бимомент инерции сечения
Форма сечения
Координаты центра изгиба и бимомент инерции сечения
2
3
X -
О
3 211х 4_,1хЬ
0) ‘
6
узун
У— —.
0 7
7о 71со 7За , 1У
V
У— —-—. 0
ю“1® Зю, 1У 73УН
У У
пит
« 0
1
'72 'и11'
У- -■
о
©в1а) 2(0
0; 0; о о
, -VI
(О 4
2,
4Уз
0
71И
ЬН-
© 4
? 2
Принятые обозначения: 11х, 2х, — осевые моменты инерции частей 1, 2,. относительно осей х, у 1а, 2©— бимоменты инерции частей 1, 2,. относительно собственных центров изгиба.
ЛИТЕРАТУРА
1. Бычков Д. В. и Мрощинскйй А. К- Кручение металлических балок. Стройиздат, 1944.
2. В е х о б П. В. Расчетные формулы для волнистых и складчатых Профилей. Стройиздат, 1964.
3. Г е б е л ь В. Г. Трубообразные балки большой полезной ширины и высокой экономики. Изд. Гос. научно-мелиоративного ин-та, Л., 1930.
4. ГОСТы: Сортамент балок двухтавровых — 8239—56, то же, облегченных — 6184—52, то же, широкополочных — 6185—52; Сортамент швеллеров — 8240—56, то же, облегченных — 6185—52;
Сортамент угловой равнобокой стали — 8509—57, то же, неравнобокой — 8510—57.
5. Д и н н и к А. Н. (ред). Справочник по технической механике. Гостехтеоретиздат, 1949.
6. Марченков А. Н. Определение Коэффициента и, характеризующего форму поперечного сечения элемента. В сб.: «Материалы по металлическим конструкциям», вып. 10, Стройиздат, 1965.
7. Справочник машиностроителя, т. 3, Машгиз, 1949.
8. Энциклопедический справочник «Машиностроение», т I, кн. 2. Машгиз, 1947,
РАЗДЕЛ 8
ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
8.1. БАЛКИ
8.1.1. Консоль. Опорные реакции, моменты, прогибы и углы поворота сечений1
Таблица 8.1.1
Схема нагрузки. Эпюры С? и М
Опорная реакция. Опорный момент
Прогибы. Максимальный прогиб на конце консоли
Углы поворота сечений. Угол поворота концевого сечения т
I] 11) 11111111 ггттпт
ТШТГПТТтгпт
м
А Р;
Рх 6 Е1
(31-х);
РР 3 Е1
х — (21 - д:); х 2Е1
— ра Тмакс - 2 Е1
1—а—кр
ТГГГИтМП
А — Р
М, — Ра
Рх2
(За — х);
х 6 Е
Ра'3 „
V (Зх, — а) ;
6 Е1 У 1 ’
■
Ра' 6 Е1
(31-а)
Рх
гх —- (2а-х) ; х 2Е1
Ра 2 Е1
X — Р7
ТИНшПМ.Итт
ТПТГТп 1111
А ?; М -
рР
р14 24 Я
Гб — 4 —V
3 г
р2 6 Я
р14 8 Б
6 Е
ь
-А -
ха
[хтчг
НПШНШИТГТ
ТПТШхгггш
(6 — ЗЬ — 2);
12 Е1
А р; рЬ
]х (б«2 _ 4 2)-
м и о)
а 2
24 Е
- а3 (4, - а)] ;
_ Р
макс 24 Е1
(—тт)
(3Т-31гн
— Л.
з » ’
6Е 3 1 Здесь и в других таблицах для балок моменты приняты положительными, если вызывают растяжение нижних волокон
балок.
Формулы для определения прогибов и углов поворота сечений пригодны только для балок постоянного сечения.
376
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.1.1
Схема нагрузки. Эпюры Ф и М
Опорная реакция. Опорный момент
Прогибы. Максимальный прогиб на конце консоли »макс
Углы поворота сечений. Угол поворота концевого сечення т
макс
1
__о.О о
%
—а—
ра2д:а е д:3 о (6 — 4 1 1 ;
И1111111 и
24 Е1 а а2
па2х ( х у-2
ШТТт ка
я
м
А — ра
м -2
V рд3 - (4г — а) ;
» 24 Е '
т В. [ 3 - 3 — ;
6 Е а а3 )
а 2
°мякс в —“— (4 — а)
МЗКС О А Г1 Т
Т — т —
макс , 6Е
п
24 Е1
и
р14 х3 1Л 1л л
г. - и 6
24 Е 1 1
Р
и — • — 10—10 -
х 120 Е 2
‘ X —
п
А — —
2
а— —
а 6
5— V, 2 з;
4 2 Р )
гтч
Ш
М
_ 1 Р1 гмакс 30 Е1
X рР
п
макс 24 Е
1
V р1" • 2 Г20 - 10
-Д-
д -- •
х 120 Е1 Р '
х _ рр. •'в-6
-—X 1
ТПТГГГГТптгггп—
т
а
АЛ
2
м -.1
т )■■
24 Е 'V 3 ) ’
Т -2-
а з
_ 11 р4 °макс 120 Е
макс • 8Е
VI
0-
(Р1 4 Рг)
(Зр, 4- р2)
ГПТММПШШШЛ
-Р1
п
1
» ■■ — 11 л Л п
2
Ма - (Ч
макс ( 1 2) 120 Е1
хмакс 24 Е
и
М
Р
')Т
X л 1иилчми шфсдслпю лап V. у м м у аиачспии п. У1 раипи-
мерной нагрузки РР по всей длине балки и треугольной нагрузки с максимумом на опоре р рг — Р
7
« 1-
X—25.;
о
— а —.
- Ъ
т
л з и р% иъ
тмакс-Тг1г(6'2-'1Ы Ь2)
ПИНпш
1ТТГ
М - 21а) а 6
V Г20 — 10 Ь
МЭКС 1 пл г™» 1 1 I
ИТПттг
кл
м«тс 120 Е V 1
Мстс 24 Е1
Л7
1
'л
рЧТТгть.
рЬ
А
'— а—к— Ъ :
2
и ЕИ(ь-ь±
макс 30 Е1 1 1 Р )
тмакс —— 6Р - 86( 36
макс 24Е
ШПИПиТгь
п
44 1м
ПШттттт
и.
М
М « - ( 2а) 6
8.1. БАЛКИ
377
Продолжение 8.1.1
Схема нагрузки. Эпюры 2 и М
Опорная реакция.
Опорный момент
Прогибы. Максимальный прогиб на конце консоли 0маи,„
Углы поворота сечений. Угол поворота концевого сечения т
дДДДГШТПТ -12—±-12ТТ[Штггъ-.—
маР—
а 4
11 р14
192 Е
96
Р3
Е
пп
Л 0;
1а
2Е
а
2Е
Е
и
Е1
А 0;
Еа.
Х)х
2 Е
1а
2 Е
(21
— -
Г.а
2Е
а);
21 - а)
Е
1а
Е1
штшщхг
у
ТШшттгг
;Хв- 1Хв —зг
I ШТфггг
А ‘ рслг; О
Ма — рхйх
е,1
тмаке е5Шг-и
—площадь эпюры М; лг —абсцисса центра тяжести площади эпюры Л1.
8.1.2. Простая балка. Опорные реакции, изгибающие моменты, прогибы, углы поворота опорных сечений 1
Схема нагрузки. Эпюры 2 и Л1
Опорные реакции. Изгибающие моменты
Прогибы в пролете
Углы поворота опорных сечений
А,Г
Р
а - I 6-
11ШШТ
м
л В — Р —
I I
М Р —
макс I
при х а
при х а; РаЪ
3 Е
при х — а
т РаМН-Ь). а 6Е
6 Е
1 Формулы для определения прогибов и углов поворота сечений пригодны только для балок постоянного сечения. Знаки углов поворота сечений (т) приняты положительными при повороте сечения балки над левой опорой по часовой стрелке, над правой — против часовой стрелки.
Изгибающие моменты в различных сечениях балки при разных значениях аЦ см. 8.3.8 обозначено через.
378
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.1.2
Схема нагрузки. Эпюры ( и М
Опорные реакции.
Изгибающие моменты
Прогибы в пролете
Углы поворота опорных сечений
А 1Р I г 1 ?1
х- ■ —1
Ш'1111
ЗШ 1111
Р_
2
Р1 макс 4
I
А В
А«,
при X -
и ’Х (ЗР — 4л:2) 48 Е1
при х — ;
2
РР
48Е
при X — 2
ка “ 1Ь 1
рр
16 Е1
I Р I I
ПТтТг
Л В Р;
Р1
М,
I 2,
при X I
3 3
— РР макс “ 28,17 Е1
при X — 2
РР
' 9 Е1
п-1 одинаковы грузов
7 р
'1а
— г
шьЧцц_ 'ЧЩ1Г
М
А В —
Р (п-1)
п
4
5
6
7
макс
Р1
2
Р1
1,67
Р1
1,33
Р1
1,17
Гмакс
РР
РР
РР
Р1 з
20,22 Е1
15,73 Е1
13,05 Е1
11,15Е
РР п9 — 1
24 Е1
хТ-
ха;
л Б Р;
М Ра макс
при хх — а (I — а)
0хГгаи-а)-хП-,
Ра
макс 24 Е1
ЗР — 4а2)
При Х1 3 2
4Дг_
А В — Р Р1
Рд:
96 Е
(92 — 16 д:2);
Чм т п 1
м,
3.
При А- 4 4
V -
Р
» 384 Е1
V
макс
[4В хх (-,)-■];
11 РР I
V1,аxг, ПрИ Х1 — ——
384 Е1
32
РР
Е1
8.1. БАЛКИ
379
Продолжение 8.1.2
Схема нагрузки. Эпюры и М
Опорные реакции.
Изгибающие моменты
Прогибы в пролете
Углы поворота опорных сечений
п одинаковых Р а р р„ра
;ггагагдт1
Л В п
2
Р1
2,4
РР
24,45Е1
Р1
2
Р1
1,538
РР
19,04 Е1
Р1 з
15,1 Е1
Р1
1,333
Р1
1,12
РР
12,65Е
РР
10,88 Е1
РР 2 гР 4- 1
48 Е п
Л
‘ 1
Тгтгг
Хтт,-гг
Л
А
М,
В ■ — ;
2
1
8 2
макс при »
24Е а Р )
5р1 I
°мяко в — при дг —
маке 384 2
24 Е1
2-Е); В -;
2 2
Л'макс (2- при
т.-йги-"'п’’;
°-5и
1
0,10
0,20
0,30
0,40
0,50
0,60
0,70
0,80
0,90
Множитель
макс
0,0045
0,0162
0,0325
0,0512
0,0703
0,0882
0,1035
0,1152
0,1225
рР
X
0,045
0,08
0,255
0.32
0,375
0,42
0,455
0,48
0,495
1
р
д? а
0,00014
0,0009
0,0024
0,0045
0,0065
0,0079
0,0082
0,0068
0,0040
В1±
Е1
та
0,0015
0,0054
0,0108
0,0171
0,0234
0,0294
0,0345
0,0384
0,0408
211 Е
ть
0,0008
0,0033
0,0072
0,0123
0,0182
0,0246
0,0308
0,0363
0,0402
Вг±.
Е1
I—X-
нЧИНТТП
Изгибающие моменты в различных сечениях балки при разных значениях 5 см. 8.3.9 обозначено через М®
380
РАЗДЕЛ 8, ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.1.2
8.1. БАЛКИ
381
Продолжение 8.1.2
Схема нагрузки. Эпюры фи М
Опорные реакции.
Изгибающие моменты
Прогибы в пролете
Углы поворота опорных сечений
А
Ммакс,
А (3 —а); 6
ь
6
м — I2 (з —
а
макс 18 5 V
м
«1?)
О ВЫ_ щ _ Х а.
360 Я
При а —
2
34
макс 128о Е
(-т)
рр
360 Е
_ р1э.
360Е
2 (32 — 15 4- 20); (10 - 3?)
при X
ПТПт»у
ЧШ1Л1
А В
мШЙ
р1
р11 12
при х — — 2
—еЛ_Ло±_1в
ШЕ1 I Р
т)
6,4
при х — ; 2
р14 I
— при х 120Е 2
5рР 192 Е1
и
Ьь,
ТПТг,
ЩЦ[
чщпгцИ"
4 В р-Ч-°) ;
2
рР__раI
макс 8 б
при — 2
."-(-т'
►V-)
при д: :
ТГГПз.—-чщд
чЧЩД]Ц1
4В-;
4
макс 0 I
при х — р1
°макс Ш24 ’ Е1
При X 2
т-т-Л.
а 768 Е
«ДВДТТту
4
ЧТттпг
а
н
1 В
4
М
Р?
макс
16
- 1
при л:
2
, Л2.г'
макс 3072 при х — 2
_ 5 р3
а Ь 256 Е1
382
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК. РАМ И АРОК
Продолжение 8.1.2
Схема нагрузки. Эпюры (2 и М
Опорные реакции.
Изгибающие моменты
Прогибы в пролете
Углы поворота опорных сечеций
ЛВ ;
4
макс -
при X —
2
3
640
р
Е1
при х «
2
Я? 64 Е1
глин IIIIIIИТТТ
Мпкс
ЩЩТЩТЖи
мшя
0,2
0,3
0,4
0,5
РЬ? 13,09
12,14
11,30 10,67
XII
0,555
0,545
0,536
0,6
0,7
0,8
0,9
рь12
9,93
0,528
0,520
9,36
0,514
рь11
3,87
0,508
V2
8,41
0,504
1,0
Р72
0,500
360Я
I
360 Е1
(8ра 7рь) ; (?'«
АРа Рь)1'-' В (ра2рь)И6;
0,0065 (ра рь) 1:Е1 при х (0,5 0,519) Квадратная парабола
т
ХШь
ггттыь-а
р1.
3
при X -
61
5760
р1к
Е1
при х — 2
Э0 Е1
Синусоида
ТШТТъЛЧ’»’
Ш
А В
— ; я
_ Рр
при х -
Р14 лЕ1
при х — 2
р3
ПЕ1
8.1. БАЛКИ
383
Продолжение 8.1.2
Схема нагрузки. Эпюры Р и М
Опорные реакции.
Изгибающие моменты
Прогибы в пролете
Углы поворота опорных сечений
Л —
В — Л;
М. с, — 0,5 2
3 Е1 16Е1
2 Е1 при X
(-)
макс 15,59 Е
а при х 0,4231
±1.
3 Е '
6 Е1
ха; х,а
и 111111 ИТИН-ПТ
М.; В-±;
Мх-
у
» — (23 Ь — х);
х 6 Я
«, 11-1(21х-За?-х2);
6ЕП V 1 1
ЬаЬ а — Ь
о — при х — а.
а 3 Е1 I
При а — Ь — 0,5 I
1.1
«с-ТО.ООв.
Знак минус при х— 0,289; плюс при 0,711
а__л_з-у
а 6Е I )
0 6 Е V
При а — Ь 0,51
и
ч-
— т. -
24Е
в. "1
11 II 1 I 1 1 2 1 II 1
—шгГПТШ
[Иъь
__ Ра2 с 3 Е
В пролете ЛВ
РаР Е1
при х 0,577
" а)•
гте Л,
“ 0,0642 макс 6 Е1 % -
Ра б Я Ра1
ЗЕ1
с
л —
ра3
2
и
в р
(«
V 2
м
мь
ра3 2
о -2- (4Г За).
24Е
В пролете АВ
, ра22
V
макс при дг
— 0,0321
Е1
т‘ Г?(а 0:
Ра2. т —• ——— ;
а 2Е1
г - 6 6 Я
При наличии р на всей длине балки прогиб на конце консоли
ра
24 Е1
[а2(43а) - з].
384
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
8.1,3. Однопролетная балка с одним защемленным и другим шарнирно опертым концом. Опорные реакции и опорные моменты
Схема нагрузки. Эпюры С1 и М
Опорные реакции
Опорный момент ма
•я
ПИ 11111111
1.1 ШИ
г,р г 2 2
I
шпш
IV 32 я
I Р I Р I 3 3"
ШШшхп
р р р
ь±гг,г,
4 4 4 4
ПШшц
ттпт
ЧШШР7
— Р1
1м» у
л-7 одинаковых, грузов Р
гтЩ
в
Л — Р; 16
В —Р 16
Л — Р;
3
32
■ а
В™Р
32
ГЛ2-
к
ЧЩЩЦГ
5г2—4г-1 „
Л Р;
8 г
Д Зла-4п1 8п
■ 7 (г -1'3)
РаЬ ' 21
и ь)
— р 16
Р_
3
15
Р1
г2 — 1
8 п
Р1
Схема нагрузки. Эпюры (2 и М
Опорные реакции
Опорный момент М„
Р Р
■о-Г Ьа-
К
тгттг
ЧПЩЩР
А—Р [1 — X
I 21
('-т)Г
В — 2Р — А
23т
К тп
7
л — Р
32
' а
в Н?р
32
М
п одинаковых грузов Р
1па
йшгггьт,,.
А в Р;
В
16л 6г2 — 1 16л
ТПтггг-
Г ЧЩД
[V
таз
М
А — — р1 8
В — р1 8
ан
штш2П
- ъ —. р
ТТПТгг
1
V.
Кгттгш
-т('-т)
Ра
— — Р
32
161
8
6
АрсЬраЪс_х
раЪс
1 21
212
а
V 4а )
м
В — рс — Л
Ь —
8.1. БАЛКИ
385
Продолжение 8.1.3
Схема нагрузки. Эпюры (% к М
Опорные реакции
Опорный момент Ма
-г
Тгт
к
АраВ- В — — I — р1кг;
2
Ма — Р— (2 - )“ р«,
0,1
0,0045
0,6
0,2
0,0162
0,7
0,3
0,0325
0,8
0,4
0,0512
0,9
0,5
0,0703
1,0
0,0882
0.1035
0,1152
0,1225
0,1250
ЬЧ1—
лг
- Р— 1М2 - V) рРкг
8
0,1
0,2
0,3
0,4
0,5
0,0025
0,6
0,0098
0,7
0,0215
0,8
0,0368
0,9
0,0547
0,0738
0,0925
0,1088
0,1205
0,1250
л?
'СЖ1
III й I
К
'VIIГГТГ
К
м
2
2(3-): 16
В рс — А
-е.(8-е)
16
АЗ3
тКгиш
,05 х
цЩПгН
А—рЦ
64
П, В — — р1 64
— рР
64
Продолжение 8.1.3
386
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.1.3
Схема нагрузки. Эпюры 2 и М
А
к
Ч1И1ГТГ
о,: м
Опорные реакции
Опорный момент М
А 20 -
40
- 15 45»):
В 0,Бра — А
_22_ (1й —
120
- 45 40)
л
пттттть.
а»
4 — I2 (10—2);
40
В 0,5рЬ — А
.111 120
6» (10—32)
Квадратная парабола
Рч
'ППЙ.
Л 0,433р; В 0,233р
10
Синусоида
ТТТТТт
Ж?
л
Я Я3
в р[ М.
я я3
Зр2
я3
•111111111111111
Ий,.
-■ЩЦЦ
А
в тт
Продолжение 8.1.3
Схема нагрузки. Эпюры (2 и Л1
Ъ071
ЬЦ5ТП
Опорные реакции
Опорный момент «
Л (2—ь2).
29
Б — Л
Поворот опоры Л
'ППИПШПМ
ТТТПТтт
л ЗЕ т.
А ф;
а
в_ ЗЕ
а
Осадка опоры В"1
шшгпмпми
Т1Т1Г1Т1тггт»
ЗЕ А
у А
Л Л
? т
3
в -12-
13
. м
Нагрев на Д° »
О о
о
I8
гшжшшшй
ДЦПШгеп м
л — в ЬбЕаД0 Ы
Любая нагрузка 1ГтгГГПтмщо
ТГГГПТтгг а
л
Мл 0 а
при Ь 0,577
ЗЕ
ЗЕ
А°.
1,5Еа —•
й
а — коэффициент линейного расширения
М
В в4- -р ;
Л°, Е° — опорные реакции простой балки
т-Е)
%а — угол поворота простой балки на опоре А (табл. 8.1.2)
При осадке опоры Л реакции и моменты имеют те же значения, что и при осадке опоры В, но с обратными знаками.
8.1. БАЛКИ
387
8.1.4. Однопролетная балка с обоими защемленными концами Опорные реакции и опорные моменты
Схема нагрузки. Эпюры 2 и М
а-1 --Ь«-
К_.
1 -
111111 1
]___
—А.,
М
Опорные реакции
А Р В Р
(ЗаЬ) б2 3
(аЗЬ)
13
А В —
А?
зТрзТрз
А
А В — Р
А В-
Опорные моменты
_ Роб2 I
— Рал
Ра'Ъ _
Г
РЬЕ2
м_ м.
а о
- — Р1
М АГ.
Р
16
Схема нагрузки. Эпюры С? и
Опорные реакции
Опорные моменты
одинаковых грузов Р
в
— 1-па
ПГЬш,
шг
Чцщр
м
[Г
ж
й пи
гй
а
м
♦ Г2 Г
-4
Ш
РЬ
_ шя
К « V
•цЧшшГ?н‘ц
ъ
а
м
, Рп-1)
2
л2 — 1
12л
Р
А В Р
А — В Р
п одинаковых грузов р.1
- г-па -
■ЬтшьпП[
■чщщри'
В
А В-
Рп
2
мм.
т)
.-®-и
16
Л4
2л2 4» 1 24л
Р
388
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.1.4
Продолжение 8.1.4
Схема нагрузки. Эпюры С± и М
Опорные реакции
Опорные моменты
А
м
А В
Р1
тЬя
рЦ
12
А
'тттштт
Ъ.в
а
м
рФ
Р1й
— р1 (кх-к2);
М_ — — ЕМЗ — 4 Е 1,5“)
— рРкг;
М, — — ез (1 — 0,75а2) — р Рк2
0,1
0,2
0,0044
0,0003
0,0151
0,0023
0,3
0,0290
0,0070
0,4
0,0437
0,0149
0,5
0,0573
0,0260
0,6
0,0684
0,0396
0,7
0,0764
0,0543
0,8
0,0811
0,0683
0,9
0,0830
0,0790
1.0
0,0833
0,0833
%
Шк
ХЕШ
-а
’ТОЧ11Ж
цщлИ
ъв
а
м
I
-?(—
-й)в_
ьу,
В — рс — А
А В
аЬ'2—
а р [
- — (2Ь - а) 1 12 ]
еь-
"а л% —е.
24
8.1. БАЛКИ
389
Продолжение 8.1.4
Схема нагрузки. Эпюры Р и М
Опорные реакции
Опорные моменты
ТТТГтт
Кв. парабола
ьтТттгъ.
Л-3—1
ТТТттг
Синусоида ■- х
ТШТГТТТг
Л Л7 ЩА
Р,-Р51П
1-а-7ЬьЛ
1'
1 гтттг
11111111 N11.
V
ли
А — — (10 —
20
-15283); В — 0,бра — А
М -
(10—
30
- 166
М6-1 (5 — 20
-4)
Ь''
Е11
15
АВР±
А — В
6,аЬ
3
61аЪ
Г
М„ М. а Ь
__ 2р1-
я3
Л (2а - Ь); а р
Мь (а - 26);
при а—, Ла0
т
Продолжение 8.1.4
Схема нагрузки. Эпюры ф и Л
Опорные реакции
Опорные моменты
Поворот опоры А
ТГТТттп-г
-Ч5Щ
Осадка опоры В
д 6Е
Л р;
3
6ЕУ
Т4
В —
т ЛЕ1
а - —
2Е1
мь —
А __ 12Я 3
в—
I3
Нагрев на А°
О О
'в н 0
- I -
ао
А В 0
М -
6ЕУ
м 6Е А
Д1 — д
о а
Е1 а
АГ
й
где а—коэффициент линейного расширения
Любая нагрузка
ТПТггт
лл°—
ВВ° •
М—М,
I
где 4°, В0— опорные реакции простой балки
2 Е1
Ча-ЧУ
2 Е1
мь-—х
Ч2ЧхаУ
где Тд, — углы п оворота простой балки (см. табл. 8.1.2)
390
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
8.1.5. Однопролетная балка с одним защемленным и другим шарнирно опертым концом и с обоими защемленными концами. Прогибы
Схема балки и нагрузки
Прогибы
Схема балки и нагрузки
Прогибы
‘-а
Ра8 Ь9 (За-МЬ)
V — при ха
12 Е11»
1
Ро»Ь
V — При
зЕи3
_ рр умакс “ ю7 Е1
7 Р3
при х0,553 I;
при х — 768 Е1 2
Р3 : ПрИ X— 192 Е1 2
» р1
' 185 Е1 р1А
при х0579 ;
при х — 192 Е1 2
4ш
Т.
4
Р
шдмир
р1 I
при —
384 Е1 2
8.1. БАЛКИ
391
Продолжение 8.1.5
Схема балки и нагрузки
Прогибы
Схема балки и нагрузки
Прогибы
Любая нагрузка
М-Р 1 ° 1ве ПРИ- 2-
где V0— прогиб в середине про лета простой балки по 8.1.2; Ма—опорные моменты по 8.1.3
Любая нагрузка 'ГТ'1Т1" ' 1
Р. (л‘а) р 16 Е
1
при X —,
2
где V9 — прогиб в середине пролета простой балки по 8.1.2; Ма, Мь — опорные моменты по 8.1.4.
8.1.6. Коэффициенты приведения нагрузки к эквивалентной равномерно распределенной интенсивностью рдК для определения опорных моментов в неразрезных балках
При подсчете опорных моментов в неразрезных балках любая симметричная нагрузка может быть заменена эквивалентной равномерно распределенной нагрузкой рэк. Приведение нагрузки к рэн позволяет пользоваться готовыми таблицами и формулами, составленными для балок с равномерно распределенной нагрузкой.
При определении пролетных моментов, поперечных сил и опорных реакций расчет следует вести на действительную нагрузку с учетом найденных для ран опорных моментов. Порядок пользования таблицей см. пример 1 в 8.2.17.
Схема нагрузки
рэк
Схема нагрузки
рэк
2
.
.р
_9_ Р 4
Г_1
-н
Ц
1
-г 2
А
-И
1
,Р
8_ _Р 3 1
Р
Я
19 р
6 Т
___ I
3
А
--Я
к-
3
1
3
. «—Д
’ г г
15 л
4 1
Г Г '4т.
33_ р 8 1
5 4 4 4 В
г г
Г
24 Р 5 1
хр
Р,
2п Р 2п 1
ыа.
Г 5 Т 5 5
лЫ
Д
Ла
Г »ц
-а 4:0 ,-а па
]«1
“а 2 ”
✓
Я Р Р э р р 1
п2—1 Р_ п 1
1
гтптптптр
Р
ЁР
2
— 1-па
IГ л
—
1-С
1г
392
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.1.6
Рэк I %р12
Для симметричных нагрузок эквивалентная равно- меняющейся по синусоиде, из условия —“
мерная нагрузка р9К может быть найдена, если момент 1 л
заделки от действия рэк приравнивать по 8.1.4 моменту ( 81 4. получим 0 __
заделки от заданной нагрузки. Например, при нагрузке, V • • • ; У и эк
8.1.7. Неразрезные равнопролетные балки. Изгибающие моменты, поперечные силы и опорные реакции от различных нагрузок
Таблицы позволяют определять максимальные и минимальные значения пролетных и опорных моментов в одно-, двух-, трех-, четырех- и пятипролетных неразрезных балках, а также в балках бесконечной длины, постоянного сечения от воздействия наиболее распространенных видов нагрузок. При действии сосредоточенных грузов даются значения моментов под каждым грузом.
В таблице даны также М и ( в полубесконечной балке, у которой крайний пролет равен 0,8 и 0,9 среднего пролета.
Индекс «макс» обозначает наибольший по абсолютной величине положительный момент (поперечную силу) или наименьший по абсолютной величине отрицательный момент (поперечную силу). Соответственно «мин» — наибольший по абсолютной величине отрицательный момент (поперечную силу) или наименьший по абсолютной величине положительный момент (поперечную силу).
При нагрузках, симметричных относительно середины всей балки, значения моментов, поперечных сил и опорных реакций в правой половине балки равны соответственно значениям этих усилий в левой половине, при этом поперечные силы меняют свои знаки.
На схемах расположения нагрузок в крайнем левом столбце показано только, в каких пролетах расположена нагрузка; в верхней, горизонтальной графе показано пять вариантов нагрузок, Точка 1 в верхней горизон¬
тальной графе для случая равномерно распределенной нагрузки соответствует наибольшему пролетному моменту. Для крайних пролетов точка расположена примерно на расстоянии 0,4 от крайней опоры, а для средних пролетов х0,5.
Если на балку действует нагрузка, отличная от приведенной в таблице, ее следует заменить эквивалентной равномерно распределенной рэк, пользуясь данными 8.1.6. Опорные моменты для рьк определяются по коэффициентам таблицы для равномерно распределенной нагрузки. Пролетные моменты, поперечные силы и опорные реакции определяются в этом случае как в простой балке от действительной нагрузки с учетом найденных опорных моментов.
При одновременном действии на балку равномерно распределенной нагрузки и сосредоточенных грузов наибольшие значения пролетных моментов суммируются (хотя месторасположение наибольших моментов от этих нагрузок не всегда совпадает). Точное расположение сечений с наибольшими пролетными моментами дано в пункте «г».
Значения М к в различных сечениях балок от равномерно распределенной нагрузки и сосредоточенных грузов, а также моменты в неразрезных равнопролетных балках с одним защемленным или обоими защемленными концами см. 1-е издание Расчетно-теоретического справочника (табл. 8.1.9—8.1.12).
8.1. БАЛКИ
393
На рис. 8.1 в подстрочных индексах моментов первая цифра означает пролет, вторая — место приложения груза, например М2 — момент в пролете 2 под грузом 1. При равномерно распределенной и треугольной
Мп мп Мь Мг1 % мс
Рис. 8.1. Условное обозначение моментов дано для нагрузки от двух сосредоточенных грузов
Продолжение 8.1.7
нагрузке вторая цифра (1) означает максимальный пролетный момент.
В обозначениях поперечных сил цифровой индекс означает пролет, а буквенный — опору, например Фзь: поперечная сила в пролете 2 вблизи опоры В.
Прогибы в середине загруженного пролета можно
„ МлМпр
определить по формуле 0о,5г 0° 771Г,—э где я0—
16 Е1
прогиб в середине пролета простой балки (см. 8.1.2); МЛ, Мпр—абсолютные значения моментов на левой и правой опорах данного пролета, определяемые по настоящей таблице. Численные значения прогибов равнопролетных балок от различных нагрузок см. [23, табл. 8.1.13].
а) Двух-, трех-, четырех- и пятипролетные балки
Схема загруженных пролетов
Моменты, поперечные силы и опорные реакции
Вид нагрузки в загруженных пролетах
х •ОУО.51
н-н-
I-
Р Р II М
Шт
ф г з А —г
А
I- I
-ж
В
с
Мн
М,г
6(мин)
макс
1Ь(мин)
0,070 р13
—0,125 рР 0,375 р1 1,250 р1 —0,625 р1
Двухпролетная балка 0,156 Р1
—0,188 Р1 0,313 Р 1,375 Р —0,688 Р
0,222 Р1
0,258 Р1
0,048 рР
0,111 Р1
0,265 Р1
—
—
0,023 Р1
—
—0,333 Р1
—0,469 Р1
—0.078 рР
0,667 Р
1,031 Р
0,172 р1
2,667 Р
3,938 Р
0,656 р1
—1,333 Р
—1,969 Р
—0,328 р1
ЛГ
"ТГ
в
■71
м м м мь
11 (макс)
12 (макс)
13 (макс)
1а(макс)
0,096 рР
—0,063 рР 0,438 р1
0,203 Р1
—0,094 Р1 0,406 Р
0,278 Р1 0,222 Р1
—0,167 Р1 0,833 Р
0,316 Р1 0,383 Р1 0,200 Р1 —0,234 Р1 1,266 Р
0,065 рР
—0,039 рР 0,211 р1
“7Г
В
М11 (мин)
М12(мин)
13 (мин) А
1 а (мин)
— —0,047 Р1
—0,063 р1 —0,094 Р
Трехпролетная балка
-0,056 Р1 —0,111 Р1
—0,167 Р
—0,059 Р1 —0,117 « —0,176 Р1 —0,234 Р
—0,018 р1г
0039 р1
ми
0,080 рР
0,175 Р1
0,244 Р1
0,281 Р1
0,054 рР
—
—
0,156 Р
0,313 Р
—
"и
—
—
—
0,094 Р
—
0,025 рР
0,100 Р1
0,067 Р
0,000
0,021 рР
М22
—
—
0,067 Р
0,125 Р
—
"ь
—0,100 рР
—0,150 Р1
—0,267 Р
—0,375 Р
—0,063 рР
а—1 а
0,400 р
0,350 Р
0,733 Р
1,125 Р
0,188 р
В
1,100 р1
1,150 Р
2,267 Р
3,375 Р
0,563 р1
1Ь
—0,600 р1
—0,650 Р
—1,267 Р
—1,875 Р
—0,313 р1
®2Ь ®2с
0,500 р1
0,500 Р
1,000 Р
1,500 Р
0,250 р1
394
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.1.7
Схема загруженных пролетов
Моменты, поперечные силы и опорные реакции
Вид нагрузки в загруженных пролетах
шрув.51
ГЗ
I __1_ I ? Т Г
р р
р р р
2 3
-I 11 (макс)
0,101 рР
0,213Р
0,289Р
0,328Р1
0,068ра
12 (макс)
—
0,244Р
0,406Р
-
13 (макс)
—
—
—
0.234Р
—
1 23
21 (мин)
—0,050ра
—0,075Р
—0,133Р
—0.188Р
—0,032рР
А в С Г
22 (мин)
-
—0,133Р
—0,188Р
-
МЬ
—0,050ра
—0,075Р1
—0,133Р
—0,188Р
—0,032ра
1 а (макс)
0,450р
0,425Р
0,867Р
1,313Р
0,219р
М
11 (мин)
-
—0,038Р1
—0,044Р
—0.047Р
—0,014ра
М2 (мин)
-
-
—0.089Р
—0.094Р
-
13 (мин)
—
—
—
—0.141Р
—
А, А 2ЪТ
21 (макс)
0,075рР
0.175Р
0,200Р
0,188Рг
0,052рГ
А В С 2?
22 (макс)
—
—
0,200Р1
0313Р
—
—0,050ра
—0,075Р
—0,133 Р1
—0,188Р
—0,032ра
1а(мин)
—0,050р
—0,075Р
—0,133 Р
—0,188Р
—0,032р1
Ми
Ь (мин)
—0,117ра
—0,175 Р1
—0,311Р
—0,438Р
-0,073рР
Мо
—0,033ра
—0,050Р1
—0,089Р
-0,125 Р1
—0,022рР
13
макс
1,200р
1,300Р
2,533Р
3,750Р
0,626р
А В С Ъ
16 (мин)
—0,617 р1
—0,675Р
—1.311Р
—1.937Р
-0,323р1
®2Ь (макс)
0,583р
0,625Р
1,222Р
1,813Р
0,303р
М1.,
Ь (макс)
Мс
®Ь (макс) ®2Ь (мин)
0,017ра —0,067рР 0,017р —0,083р
0,025Р —0.100Р 0,025Р —0,125Р
0,044Р —0,178Р 0,044Р —0,222Р
0,063Р —0,250Р 0,063Р —0,313Р
0,011ра —0,042ра 0,011р —0,053р
о а»а зЪ А В С V
1.
Четырехпролетная балка
М11 1
0,077рР
0,170 Р1
0,238Р
0.275Р
0,052рР
М12
-
—
0,143 Р1
0,299Р
—
М13
—
—
—
0.074Р
—
"и
0,037ра
0,116Р
0,079Р1
0,007Р
0,028ра
М22
—
—
0,111 Р1
0,165Р
—
-
—
—
0.074Р
—
А В С Ъ с
МЬ
—0,107 рР
—0.161Р
—0,286Р
—0,402Р
—0,067рР
-4 4 1 1 1 1 1 1 к-
Мс
—0,071 рР
—0,107Р
—0,190 Р
—0.268Р
—0,045ра
Ага
0,393р1
0,339Р
0,714Р
1,098Р
0,183р
В
1,143 р
1.214Р
2,381Р
3,536Р
0,590р
с
0,929р1
0,892Р
1,810Р
2,732Р
0,455р
?1 Ь
—0,607р1
—0,661Р
—1,286Р
—1,902Р
—0,317р
2 Ь
0,536р
0,554Р
1,095Р
1,634Р
0,273р
2С
—0,464р
—0.446Р
—0,905Р
—1,366Р
—0,228р1
8.1. БАЛКИ
395
Продолжение 8.1.7
Схема загруженных пролетов
Моменты, поперечные силы и опорные реакции
Вид нагрузки в загруженных пролетах
• ал 0. 51
р
I I I
Ш:
-V--
м,
11 (макс) 12 (макс) 13 (макс) 21 (мин) 22 (мин) 23 (мин) МЬ Мс
а (макс)
0,100л2
ЭЯ №'
—0,054рР —0,036рР 0446?
0,210Р
—0,067Р
—0,080Р —0,054Р 0,420Р
0,286Р
0,238Р
—0,127Р —0,111Р
—0,143Р —0,095Р 0.857Р
0.325Р 0,400Р 0,224Р -0.184Р —0,167Р —0.151Р —0,201 Р —0,134Р 1,299Р
0,067рР
-0,028р2
—0,034р3 —0,023р2 0,217р
А 23Ь
а а с л в
м
м
м
М;
м,
М,
»
Мс
А2
И (мин)
12 (мин)
13 (мин)
21 (макс)
[
22 (макс)
[
23 (макс)
1а (мин)
0,080р3
—0,054рР —О.ОЗбр2 —0,054р
—0.040Р
0,183Р
—0,080Р —0,054Р —0,080Р
—0,048Р —0.095Р
0,206Р 0,222Р
—0.143Р —0,095Р —0,143Р
—0, ОБОР —0.100Р 0,151Р 0.191Р 0»ЗЗЗР 0.224Р —0.201Р —0.134Р -0,201Р
—0,015р2
0,056р2
—0,034р2 —0,023рР —0,034р1
М
Ь (мин)
Д, Д? Д 3
лес Ъ С
1Ь (мин)
о
2Ь (макс)
—0,121р3 —0,018р2 —0,058р2 1,223р —0,621р 0,603р
—0,181Р —0,027Р —0,087Р 1.335Р —0.681Р 0,654Р
—0,321Р —0,048Р —0,155Р 2.595Р —1,321Р 1,274Р
—0,452Р —0,067Р —0.218Р 3,837Р —1,952Р 1,885Р
—0,076р3 -0,012рР —0,036рР 0,639р —0,326р 0,314р
г,
А В С В Е
мь м.
С (мин)
г
макс
2с(мин)
—0,036р2 —0,107ра 1,143р —0,571 р
—0.054Р —0,161Р 1.214Р —0.607Р
—0,095Р —0.286Р 2.381Р —1,191Р
—0.134Р —0,402Р 3,536Р —1,768Р
—0,023рР —0,067рР 0,589р —0,295р
Пятипролетная балка
М11
0,078рР
0,171Р
0,240Р
0,276Р
0,053р2
—
—
0,146Р
0.303Р'
-
"п
-
-
0.079Р
-
М21
0,033рР
0,112Р
0,076Р
0,005Р
0,026рР
М22
—
—
0,099Р
0.155Р
—
М23
—
—
—
0,054Р
—
0,046р2
0,132Р
0,123 Р
0.079Р
0,034р2
32
—
—
0,123Р
0.204Р
—
мь
—0,105р2
—0,158Р
—0,281 Р
—0.395Р
—0,066р3
НТГН
396
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.1.7
Схема загруженных пролетов
Моменты, поперечные силы и опорные реакции
Вид нагрузки в загруженных пролетах
±1:
Р V 11111
ж
мс
—0,079р2
—0,118Р
—0,211Р
—0,296Р1
—0,050р2
0,395р
0,342Р
0,719Р
1,105Р
0,185р
В
1,132р
1.198Р
2.351Р
3,494Р
0,582р
С
0,974р
0,960Р
1,930Р
2,901Р
0,484р
1Ь
—0,605р1
—0,658Р
—1,281Р
—1,895Р
—0,316р
0,526р
0,540Р
1,070Р
1,599Р
0,266р
®2С
—0,474р
—0,460Р
—0.930Р
—1,401Р
—0,234р
С
0,500р
0,500Р
1.000Р
1,500Р
0,250р
0,287Р
0,326Р1
0,240Р
0,401 Р1
—
0,227Р
—0.129Р
—0,185Р
—0,117Р
—0.173Р
—
—0,160Р
0,228Р1
0,227Р
0,228Р1
0,352Р
—0,140 Р
—0,197Р
—0,105Р
—0,148Р
0.860Р
1,303Р
мс
м
м
м.
%
Мс
11 (макс) Г12 (макс) 13 (макс) 21 (мин)
22 (мин)
г
23 (мин) 31 (макс) 32 (макс)
1 а (макс)
О.ЮОр2
0,086р2
-0,053рР -0,039рР 0,447р
0,211 Р1
—0,069Р1
0,191 Р1
—0,079Р1 —0,059Р1 0,421Р
0,068р2
—0,029ра
0,059р2
—0,033р2 —0,025рР 0,217р
А В С
И (мин) 12 (мин) 13 (мин)
М,
21 (макс)
0,079р2
М,
22 (макс)
М.
23 (макс)
М,
31 (мин)
32 (мин)
мь Мс
1а (мин)
—0,053р2 —0,039р2 —0,053р
—0,03ЭР
0.181Р
—0.059Р
—0,079Р —0,059Р —0,079Р
—0,047Р —0,094Р
0,205РЬ 0,216 Р1
—0,105 Р1 —0,105 Р1 —0,140 Р1 —0,105 Р1 —0,140 Р
—0,050Р —0.099Р —0.148Р 0.190Р 0,327Р 0,215 Р1 -0,148Р —0,148 Р —0,198Р —0,148Р —0,198Р
—0,015р2
0,055р2
0,025ра
—0,033р —0,025р2 —0,033р
м
I
Мс
ма
Ме
в.
Ь (мин)
1Ь (мин)
о
2Ъ (макс)
—0,120р2 —0,022рР —0,044рР —0,051 рР 1,218 Р1 —0,620р1 0,598р1
—0,179Р —0,032Р —0,066Р —0,077Р 1,327Р —0,679Р 0,647Р
—0,319Р —0,057Р —0,118Р —0,137 Р1 2.581Р —1.319Р 1,262Р
—0,449Р —0,081Р —0.166Р —0.193Р 3.816Р —1.949Р 1,867Р
—0,075р3 —0,014р2 —0,027рР —0,032рР 0,636р1 —0,325р1 0,311р
8.1. БАЛКИ
397
Продолжение 8.1.7
Схема загруженных пролетов
Моменты, поперечные силы и опорные реакции
Вид нагрузки в загруженных пролетах
Ъ-ОУОМ р
хпхшшшп
р
1-1 -4- Г? 2
? р ‘ 3 3
Р Р г 4 Т 4 у 4 Г V
Т
а 1 ь
л 1 и
1 г
Т т Т Тт
ь 1 г з ь
1111Дг - 1
1ШЬ
мь
—0,035р3
—0,052Р
—0,093Р
—0.130Р
—0,022р3
г(мин)
—0,111р3
—0Д67Р
—0,297Р
—0.417Р
—0,070р2
—0,020р2
—0,031 Р1
—0,054Р
—0,076Р
—0,013р3
Ме
—0,057р
—0,086Р
—0,153Р
—0,215 Р
—0,036р2
г
М8КС
1167р
1,251Р
2.447Р
3,628Р
0,605р
о
ч2с (мин)
—0,57Ьр
—0,615Р
—1.204Р
-1.787Р
—0,298р
(макс)
0,591 р
0,636Р
1,242Р
1.841Р
0,307р
б) Бесконечная балка с равными пролетами
Опорные
моменты
—0,083р3
—0,125 Р
—0,222Р
—0,312Р
—0,052ра
5
л
М А
Пролетные
моменты
0,042р3
0,125Р
0,111Р
0,188Р
0,031р2
-а
"Я5 Д
Поперечные силы (2
0,5р
0,5Р
1,0Р
1,5Р
0,25р
Опорные
реакции
1,0 Р1
1,0Р
2Р
3Р
0,5р
7 К I М V К I Ш П
1
Опорные
моменты
—0,042р3
—0,063Р
—0Д11Р
—0,156Р
—0,026р3
Пролетные
моменты
МкМт
0,083ра
0.188Р
0,222Р
0,344Р
0,057р8
Опорные
реакции
0,5 р
1
0,5 Р
1,0Р
1,5Р
0,25 р1
Опорный момент М
—0,1 Ир3
—0,171Р
—0,304Р
—0,427Р
-0,071 р3
Опорные
моменты
мКмм
—0,022р2
—0,034Р
—0,060Р
—0,083Р
—0,014р3
Опорная
реакция
1,18 4р
1.274Р
2.488Р
3.688Р
0,615р
Опорные
моменты
Мк-Мь
—0,053р2
—0,079Р
—0.141Р
—0,198 Р
—0,033р3
Пролетный момент Л1
0,072р2
0,171Р
0,192Р
0,302Р.
0,050р2
Опорные
моменты
( м, мм
0,014р2
0,021 Р
0,037Р
0.053Р
0,009ра
398
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.1.7
в) Полубесконечная балка, у которой крайний пролет (1) равен 0,8 и 0 среднего пролета (I)
Схема нагрузки
Моменты, поперечные СИЛЫ и опорные реакции
,0,8 1
,0.9 1
Схема нагрузки
Момента, поперечные сила и опорные реакции
,0,8 1
,Ю,9
р
М1
МЬ
мс
0,044 р3 —0,082 р3 —0.084 р2 0,298 р1 —0,502 р1
0,060 р3 —0,093 р3 —0,081 р3 0,347 р1 —0,553 р
1(макс) МЬ Мс А1 а
0,069 ра —0,023 ра —0,047 р3 0,372 р1
0,084 р3 —0,037 ра —0,043 р2 0,409 р1
—1, —■—1 —т- 1 -1 —
7-1,-4- 1 -4- 1 --1 -
м.,
Ь(мин)
Мс
1Ь
—0,098 р2 —0,027 р3 —0,522 р1
—0.108 р3 —0,024 ра —0,569 р
МЬ
Мс
—0,059 р3 —0,037 р2
-0,056р3 —0,038р3
СГХ1Х1-П
Таблица составлена для равномерно распределенной нагрузки. При других нагрузках заменить их на рэк по 8.1.6.
Продолжение 8.1.7
г) Определение абсциссы (0) максимальных пролетных моментов в неразрезных балках
Схема нагрузки
Схема нагрузки
х6—
Р
На рисунках показаны левый крайний и промежуточный пролеты неразрезной балки
Дшишиптп
г.
ИОППИИ II ПТПтГ
1) х0 при (а — Р -М 0; р 2;
2) х0 — при Р
2
А р
3) х0 при
р
р
1) х0 — при (А—ра) 0;
Р
2) Хо а при Р (А — ра) 0;
3) Хо —
Р
при (Р -Ь ра) (А — ра) Р
Р Р, Р. 1 ± 1 1,
1) Хо
при Р А—Р 0;
2) о —
Р
при Рр — р Р;
3) Х°
(-т)
при 2Р
р
тттттПТТПТггтт-
При „ 2
8.1. БАЛКИ
399
8.1.8. Неразрезные равнопролетные балки. Опорные моменты при осадке опор
Е1
Опорные моменты вычисляются по формуле Мк А, где к — коэффициенты из таблицы; А—осадка опоры.
Двух-, трех-, четырех- и пятипролетные балки
Схема балки
Опорные
моменты
При осадке опоры
Ми
-1,5000
3,0000
—1,5000
III
ян
А В С д
Ми
МЛ
-1,6000
3,6000
—2,400
0,4000
0,4000
—2,4000
3,6000
—1,6000
1111
Ми
—1,6072
3,6429 —2,5714 0,6429 —0,1072
Му,
0,4286
—2,5714
4,2857
МА
—0,1072
0,6429
—2,5714
—2,5714
0,4286
3,6429 —1,6072
ТТП 11
А В С д Е Г
Ми
м,
—1,6075
0,4306
3,6453 —2,5826
—2,5836
МА
—0,1148
МЛ
0,0287
0,6882
4,3346 —2,7558 0,6890
—0,1721 0,0287
0,6890 —2,7558 4,3346 —2,5836 0,4306
—0,1148
—0,1721
0,6882
—2,5826
3,6453
—1,6075
Полубесконечная балка
Бесконечная балка
и т.д. -Я -С -В Я В С д и т.д.
Опорные
моменты
При осадке опоры
А
В
С
Я
Е
мь
—1,6078
3,6462
—2,5848
0,6926
—0,1856
мс
0,4308
—2,5848
4,3388
—2,7704
0,7423
ма
—0,1154
0,6926
—2,7704
4,3885
—2,7837
Ме
0,0309
- 0,1856
0,7423
—2,7837
4,3921
м
—0,0083
0,0497
—0,1989
2,7459
—2,7846
0,0022
—0,0133
0,0533
—0,1998
0,7462
мн
—0,0006
0,0036
—0,0143
0,0536
—0,1999
м(
0,0001
—0,0010
0,0038
—0,0143
0,0536
При осадке опоры А
Опорные моменты
Ма « 4,3924 (-5) -2,7847
Мс-с) °’7462 -0,1999
ме(-е) °’0536
М,.—0,0143
б(—ё)
М., ьч 0,0038. Н(—Н)
М,ч —0,0010 1(—1)
400
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Пример. Определить моменты от осадки опор в стальной четырехпролетной балке двутаврового сечения (рис. 8.2).
При. осадке опоры А
'гщщШриу'
При осадив
%а0аасне
Пролеты 16 м, модуль упругости стали Е 2 100 000 кГсм2. Момент инерции сечения 1 117 300 см4.
Возможная осадка любой опоры А0,004 м
Е1 Е1 М к— А; —А 2,737 гл.
Опорные моменты, возникающие в балке под влиянием осадки опор (в тм):
Рис. 8.2. Эпюры М
м
Значения опорных моментов
при осадке опоры
а
В
1 С 1
1 °
Е
мь
Мс
ма
—4,40 1,17
—0,29
9,97
—7,04
1,76
—7,04
11,73
—7,04
1,76
—7,04
9,97
—0,29
1,17
—4,40
8.1.9. Неразрезные балки с неравными пролетами.
Данные для определения опорных моментов от нагрузок и осадок опор методом фокусов (см. 5.8.4)
Ход расчета
1. Вычисляют последовательно для каждого пролета фокусные отношения: левые кп (слева направо) и правые к'п (справа налево). Вычисление начинают с крайних пролетов, в которых фокусные отношения известны (см. рис. 8.3).
нагрузок с моментами от невыгодных сочетаний временных нагрузок. Порядок расчета виден из числового примера.
Вычисление фокусных отношений:
Эпюра М кйл
к -2
н™ к ъ
•СЗЗЗВЗЗзаавеш»
'-•4- Ьт— к
левых (слева направо); — оо или 2 (рис. 8.3);
1
1 — при х оо;
о
правых (справа налево) кт — °° или 2 (рис.8.3)‘.
Рис. 8.3
4-1 '21
1
К
т—1
при кт оо;
2. В каждом загруженном пролете в отдельности определяют левый Мл и правый Мпр опорные моменты. ] 1п 1 3. Еычисляют опорные моменты в незагруженных кп 2 —-— [ 2 — — ): кп 2 4-—;— 2 — —;— »
летах: слева от загруженного пролета делением Мл 1п 1) 1п кп)
пролетах: слева от загруженного пролета делением Мл на левые фокусные отношения, справа — делением МПр на правые фокусные отношения (см. ниже).
4. Суммируют опорные моменты от всех постоянных
Определение опорных моментов путем решения системы уравнений трех моментов и пример расчета см. 5.5.8.
— приведенная длина пролета; 1П — момент инерции балки. Для балок постоянного сечения во всех пролетах '; т — число пролетов.
8.1. БАЛКИ
401
Проверка: для фокусных отношений у каждой опоры всегда сохраняется условие
0,5.
кп—1
Наименование загруженного пролета; Характер нагрузки
Средний пролет (1п)1 несимметричная нагрузка
Опорные моменты:
Мл на левой опоре; Л4ПР на правой п п
Мл —
Ь° к' — ° п п п
Ми Р п
к к — 1 п п
Р° к —1° п п п
к к' —1 п п
Средний пролет; симметричная нагрузка
Мл — п
к —1
к к — 1 п п
Мп Р
к к — 1 п п
Г°;
П
Я0
п
Средний пролет; симметричная нагрузка; фокусные отношения к к п п
мл мпр _ 1 _ 1Р
п п 1-4-к. п
Крайний левый пролет (0; при шарнирном опирании 6 2°о
Крайний правый пролет (1т); при шарнирном опирании
к' оо
т
я°
Мл 0; МПР -
1 1 к' 1
М 12; МПР О
т % т,
Незагруженные проленты (загружен п-й пролет)
Слева от загруженного пролета
Мл
мл —;
П—1 и
К,
«п— 1 М
п—2 ’
л
п— 1
Кп—2
Справа от загруженного пролета
МПР
МПР, 2_;
кп1
Мп4-1
лпР
Мп2 -
л-Ь 2
Продолжение 8.1.9 Опорные моменты от осадки опор
При осадке опоры т на величину йт моменты на опорах определяются по формулам (рис. 8.4):
Опорные моменты в загруженном и незагруженных пролетах
6 Е1 6 ЕЛ
Грузовые коэффициенты: —— ха; ?° -у- тб,
где та и ть — углы поворота сечений над левой и правой опорами простой балки по табл. 8.1.2. Значения грузовых
коэффициентов определяются по табл. 8.1.10: Ь0——;
?° —. Например, для равномерно распределенной нар2
грузки 1°° ——.
"Я
1—и, Л—1„
ГГ X?
— — 'и1
о2
X
Рис. 8.4. Опорные моменты от осадки опоры
П1
( 1„ 1П1) ( кп 1пх к'пх )
кП1
Кп1
К -
1-1 м
‘Л - е
КР1 -
_±_Л
1 I " %Х I
В остальных пролетах моменты определяются как в незагруженных пролетах.
Пример. Определить опорные моменты в четырехпролетной балке, изображенной на рис. 8.5. Нагрузка: постоянная 0,8 тм временная Р 5 т.
3№3,Ъ
' ?
1гЗ
з,зз «,» зл7 I
13,33
' 13
Рис. 8.5
Привеленные длины пролетов: ;43; 2 б1,8 3,33; з 4,51,82,5.
402
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.1.9
Фокусные отношения
1 Грузовые члены
левые
правые
пролет
от нагрузки §
от нагрузки Р
8
II
к 1
_ 0.8.8» _
1 4 4
±Р,1 ±Н 5.63 8 1 8
‘•-г(1 й5)-л
-»(■ о) -м
,0Я0 м72 2 2 4
4’-15-6 28.1 4л 4-4
' 2 — (2 Ц 3,33
2 3,33 4,4
,0Л0 0.8- 405
о 3 4
2 2.5.4.5_и
3 3 3
й" 2 —(2 —3,89
1 3 3,33
4
1.9 0.8.32 4 4
3 3-5-3
— Р1 5,63
8 4 8
Загру¬
Мь тм
Мс, тм
Ма. тм
жен
пролет
постоянная нагруз ка
временная нагрузка Р
постоянная нагрузка §
временная нагрузка Р
постоянная нагрузка
временная нагрузка Р
ч
—Я°:3,89—0,257Д° -1,8-0257—0,463 —5,63.0,257—1,45
—Мь: 3,33 0,463-0,30,139
—0,3
1,45-0,30,435
—Мс:4,4®-0,2275 Мс
-0,139-0,2275 —0,435-0,2275—0,099 —0,03
3,33—1
1°-0,20 1.0 —28,1-0,20—5,62
—7
3,8—1
. 0г_024р0 -28,1-0,24—6,75
—Л1с: 4,4—0,2275 Мс 1,73-0,22750,394 6,75-0,22751,535
3,8-3,33—1 —7,2.0,20—1,44
3,8.3,33—1,2-0,24—1,73
»
• О О А 0150
4,0
4,4—1
— 0,189
—15-0189—2,84
—4,01
_ 4,31 1 о0— л 14МОо
0,765-0,2630,201
- тс
2,84.0,2630,747
4,31-4,4—1 5-0,189—0,765
4,31-4,4-
5-0,184.
-0,745
.1 У3
—15-0,184—2,76
'4
—Лс: 3,8—0,263 мс —0,12.0,263—0,03 —0,276-0,263—0,073
—М:4,31 0,518-0,2320,12
—0,232 Ма 1,62-0,2320,276
4
-1,8-0,288—0,518
7—0,288 1®
4
—5,63.0,288-1,62
Все пролеты
Моме
—0,463—1,440,201— —0,03—1,73
ты аг временной нагр
•узки определяют как
0,139—1,73—
—0,7650,12
—2,24
обычно, принимая
различные сочетай
—0,030,394—
—0,745—0,518
—0,899
[ия загруженных П1
полетов
8.1.10. Грузовые члены
В таблице приведены данные для определения Ь и ? — свободных членов уравнений трех моментов (см. 5.57) —соответственно для левой и правой опоры от нагрузки в рассматриваемом пролете неразрезной балки: Ь 6Е1 с %а 6Е1 с
где Те и ть—углы поворота сечений на левой и правой опорах простой балки (см. 8.1.2).
Приведенная длина пролета 1п 1п,
п
где с — произвольный момент инерции, принимаемый одинаковым во всех уравнениях; п — момент инерции балки в пролете «. Для балок, имеющих постоянное сечение во всех пролетах, '1.
При определении опорных моментов неразрезной
балки методом фокусов — —; ?° -р-.
Формулы для нахождения методом фокусов опорных моментов от осадки опор даны в 8.1.9.
8.1. БАЛКИ
403
Продолжение 8.1.10
Схема нагрузки
Грузовые члены
Схема нагрузки
Грузовые члены
п-1 одинаковых Р р р р р р Ь ила Ь
Ь™(1Ъ)-
в«1(н.в)
_ ри'
— РИ' з
« 2—1 ри•
4л
Р Р П одинокобых Р
1 1ла ЛЕ
1.Я РЦ' 16
ля Н±1 рп' 8 л
р2г
61
пптшиттп
ра2' (1—0,5 ЪУ; Я0,5 ра2 ' (1-0,5 3)
Множитель
1
0,10
0,20
0,30
0,40
0,50
0,60
0,70
0,80
0,90
Е_
0,0090
0,0324
0,0650
0,1024
0,1406
0,1764
0,2070
0,2304
0,2450
р1Н’
Я
0,0050
0,0196
0,0430 0,0736
0,1094
0,1476
0,1850
0,2176
0,2410
Схема нагрузки
Грузовые члены
Схема нагрузки
Грузовые члены
га '
1 пшшг
ь '
тгггат. и
ь
А
1 1
(3—2 а)
ь рЬсГ_ [4д(Ь) —сз1; 4
нрасГ 4Ь (а)__с2] 43
ьИ
8
60
Д— р3Г 15
404
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.1.10
Схема нагрузки
Грузовое члены
Схема нагрузки
Грузовые члены
(12 Г-45 40);
60
к роМ' (5—зЭ)
15
0.1-
Х. V (3’-15 20); 60
Д 2- а (10-31»)
60
гптттттШЯТ)?
1,Я — рР I
32
11 (аьУ
РР
“(7Ра8)
1 г
1
2
йяншИ
1 Квадратная парабола
1 Я — рР V
32
раг
ж
Т
1
"Кч
Д
1
—1
Синусоида
о2 Г 4
р31„3 г—
1.Д
брг2 г я3
.я — рг» г 128
-г-
Ге‘
м-—2
Осадка опоры на А 1.
1Я — рР Г 128
Т
.-' (1—З'2); Я1Г (1-32)
6Е1. ь —- Д; л I
кпп-шс-1
6 Яп1 —
, 1 6 Е1Г
“ 1Д; Я„д-1 -—— Д-
'я1 п1
Проставлять действительные длины пролетов, а не приведенные
8.1. БАЛКИ
405
8.1.11. Двух- и трехпролетные балки с неравными пролетами. Изгибающие моменты
Двухпролетные балки тМ11111Т(1111П1111110Гтм1гптттй
1 Ъо Продолжение 8.1.11
М кр1%, где к — коэффициенты таблицы. По таблице могут быть определены опорные моменты и от других нагрузок, если заменить их эквивалентной равномерно распределенной нагрузкой рэк, которая принимается: при нагрузке, симметричной относительно середины пролета, по 8.1.6;
при несимметричной нагрузке: в пролете 1:
8М3ьал
Р1ЭК —
в пролете 2 Р2ж —
8А?“Д
2
где Мад — момент заделки от заданной нагрузки (в пролете 1 или 2) по 8.1.3.
Загружен 1х
Загружен 1г
Загружены оба пролета РРхРг
о
и
сГ
о
Щ
Щ
Мь
СЗ
з
5Г
СО
сГ
5;
1,0
—0,063
0,095
—0,063
0,095
—0,125
0,070
0,070
1.1
-0,079
0,114
—0,060
0,096
—0,139
0,090
0,065
1,2
—0,098
0,134
—0,057
0,097
—0,153
0,111
0,059
1,3
—0,119
0,155
—0,054
0,098
—0,174
0,133
0,053
1,4
—0,143
0,178
—0,052
0,099
—0,195
0,157
0,047
1.5
—0,169
0,203
—0,050
0,100
—0,219
0,183
0,040
1.6
—0,197
0,228
—0,048
0,101
—0,245
0,209
0,033
1,7
—0,227
0,256
—0,046
0,102
—0,274
0,237
0,026
1,8
—0,260
0,285
—0,045
0,103
-0,305
0,267
0,019
1,9
—0,296
0,315
—0,043
0,103
—0,339
0,298
0,013
2,0
—0,333
0,347
—0,042
0,104
—0,375
0,330
0,008
2,2
—0,416
0,415
—0,039
0,106
—0,455
0,398
0,001
2,4
—0,508
0,488
—0,037
0,107
—0,545
0,473
По всему
2,6
—0,610
0,570
—0,035
0,108
—0,645
0,553
пролету
2,8
—0,722
0,655
—0,033
0,109
—0,755
0,639
отрица¬
3,0
—0,844
0,743
—0,031
0,110
—0,875
0,730
тельные
моменты
Мно¬
житель
рД
рг1
А
Трехпролетные балки
рэд
Загружен пролет: Мь——кхрэк1 Мс к2рэк11 где рэк —эквивалентная равномерно распределенная
нагрузка, которая определяется: при симметричной нагрузке по 8.1.6;
8Мад
при несимметричной нагрузке рэк —— гДе М3ьаа —момент заделки от заданной нагрузки по табл. 8.1.3.
Коэффи¬
циент
и
Мг
0,3
0,4
0,6
0,8
1,0
1.2
1.4
1,6
1.8
2,0
кх
0,034
0,033
0,033
0,032
0,032
0,032
0,031
0,031
0,031
0,031
0,3
кг
0,013
0,012
0,010
0,009
0,008
0,007
0,007
0,006
0,006
0,005
кх
0,041
0,041
0,0Ю
0,040
0,039
0,039
0,038
0,038
0,038
0,038
0,4
К
0,016
0,015
0,012
0,011
0,010
0,003
0,008
0,007
0,007
0,006
К
0,053
0,053
0,052
0,051
0,051
0,050
0,050
0,050
0,050
0,049
0,6
к2
0,021
0,019
0,016
0,014
0,013
0,011
0,010
0,010
0,009
0,008
406
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.1.11
1г
Коэффи¬
циент
1,1
А
0,3
0,4
0,6
0,8
1.0
1,2
1 М
1,6
1.8
2,0
кх
0,062
0,062
0,061
0,060
0,060
0,059
0,059
0,059
0,058
0,058
0,8
К
0,024
0,022
0,019
0,017
0,015
0,013
0,012
0,011
0,010
0,010
кх
0,069
0,069
0,068
0,067
0,067
0,066
0,066
0,066
0,065
0,065
1,0
К
0,027
0,024
0,021
0,019
0,017
0,015
0,014
0,013
0,012
0,011
кх
0,075
0,074
0,074
О.073
0,072
0,072
0,072
0,071
0,071
0,071
1.2
К
0,029
0,027
0,023
0,020
0,018
0,016
0,015
0,014
0,013
0,012
кх
0,079
0,079
0,078
0,078
0,077
0,077
0,076
0,076
0,076
0,076
1.4
кг
0,031
0,028
0,024
0,021
0,019
0,017
0,016
0,015
0,013
0,013
0,083
0,083
0,082
0,081
0,081
0,080
0,080-
0,080
0,080
0,079
1.6
К
0,032
0,029
0,026
0,023
0,020
0,018
0,017
0,015
0,014
0,013
кг
0,086
0,086
0,085
0,085
0,084
0,084
0,084
0,083
0,083
0,083
1,8
кг
0,033
0,031
0,027
0,023
0,021
0,019
0,017
0,016
0,015
0,014
кг
0,089
0,089
0,088
0,087
0,087
0,087
0,086
0,086
0,086
0,086
2,0
кг
0,034
0,032
0,028
0,024
0,022
0,020
0,018
0,017
0,015
0,014
Продолжение 8.1.11
Загружен пролет г: Мь—ЬгРжф, Мс—гРэкф Где Рэк—■ эквивалентная равномерно распределенная нагрузка по 8.1.6.
Коэффи¬
и
1г
и
циент
0,3
0.4
0,6
0,8
1.0
1.2
1,4
1,6
1.8
2,0
К
0,070
0,072
0,075
0,078
0,080
0,081
0,083
0,083
0,085
0,086
0,3
кг
0,070
0,064
0,055
0,048
0,043
0,038
0,035
0,031
0,030
0,027
К
0,064
0,066
0,069
0,072
0,073
0,075
0,076
0,077
0,079
0,079
0,4
кг
0,072
0,066
0,056
0,050
0,044
0,040
0,036
0,033
0,031
0,028
кг
0,055
0,057
0,060
0,062
0,063
0,064
0,066
0,067
0,068
0,069
0,6
кг
0,077
0,069
0,060
0,052
0,047
0,042
0,038
0,035
0,033
0,030
0,8
кг
0,048
0,050
0,052
0,054
0,056
0,057
0,058
0,059
0,060
0,061
кг
0,078
0,071
0,062
0,054
0,049
0,044
0,040
0,037
0,034
0,032
кг
0,043
0,044
0,047
0,048
0,050
0,051
0,052
0,053
0,054
0,054
1.0
К
0,080
0,074
0,064
0,056
0,050
0,045
0,041
0,038
0,035
0,033
1.2
кг
0,038
0,040
0,042
0,044
0,045
0,046
0,047
0,048
0,049
0,049
к2
0,082
0,075
0,065
0,057
0,051
0,046
0,042
0,039
0,036
0,033
кг
0,035
0,036
0,038
0,040
0,041
0,042
0,043
0,044
0,044
0,045
1.4
кг
0,082
0,077
0,066
0,058
0,052
0,047
0,043
0,040
0,037
0,034
8.1. БАЛКИ
407
Продолжение 8.1.11
»
Коэффи¬
1
32
2
циент
0,3
0,4
1 °-6 1
1 °-8
1 Ь°
1,2
1,4
1 1-6
1 Ь8
2,0
1,6
кх
0,032
0,033
0,035
0,037
0,038
0,038
0,039
0,040
0,041
0,041
к2
0,084
0,078
0,068
0,059
0,053
0,048
0,044
0,040
0,037
0,035
1,8
кг
0,030
0,031
0,033
0,034
0,035
0,036
0,036
0,037
0,038
0,038
К
0,085
0,078
0,067
0,060
0,054
0,049
0,044
0,041
0,038
0,035
кг
0,027
0,029
0,030
0,032
0,033
0,034
0,034
0,035
0,035
0,036
2,0
к2
0,086
0,079
0,069
0,061
0,055
0,049
0,045
0,041
0,038
0,036
Продолжение 8.1.11
А
V-
-г
-к 1 — Ър ]«-
Рэн
К
Загружен пролет к'-Мь ЬгРжФ Мс —,Ь2рэк1г, гДе Рэк —эквивалентная равномерно распределенная
нагрузка, которая определяется: при симметричной нагрузке по 8.1.6; при несимметричной нагрузке Рж —
8М3ьаД
, где М1ад—момент заделки от заданной нагрузки по 8.1.3,
и
Коэффи¬
циент
1 Лг
0,3
0,4
0,6
0,8
1,0
1,2
1 М
1.6
1.8
2,0
кг
0,013
0,016
0,021
0,024
0,027
0,029
0,031
0,032
0,033
0,034
0,3
К
0,034
0,041
0,053
0,062
0,069
0,075
0,079
0,083
0,086
0,089
кг
0,012
0,015
0,019
0,022
0,024
0,027
0,028
0,029
0,031
0,032
0,4
кг
0,033
0,041
0,053
0,062
0,069
0,074
0,079
0,083
0,086
0,089
кг
0,010
0,012
0,016
0,019
0,021
0,023
0,024
0,026
0,027
0,028
0,6
к2
0,033
0,040
0,052
0,061
0,068
0,074
0,078
0,082
0,085
0,088
кг
0,009
0,011
0,014
0,017
0,019
0,020
0,021
0,023
0,023
0,024
0,8
к2
0,032
0,040
0,051
0,060
0,067
0,073
0,078
0,081
0,085
0,087
кг
0,008
0,010
0,013
0,015
0,017
0,018
0,019
0,020
0,021
0,022
1,0
кг
0,032
0,039
0,051
0,060
0,067
0,072
0,077
0,081
0,084
0,087
кг
0,008
0,008
0,011
0,013
0,015
0,016
0,017
0,018
0,019
0,020
1,2
кг
0,032
0,039
0,050
0,059
0,066
0,072
0,077
0,080
0,084
0,087
кг
0,007
0,008
0,010
0,012
0,014
0,015
0,016
0,017
0,017
0,018
1,4
к2
0,031
0,038
0,050
0,059
0,066
0,072
0,076
0,080
0,084
0,085
кг
0,006
0,007
0,010
0,011
0,013
0,014
0,015
0,015
0,016
0,017
1,6
кг
0,031
0,038
0,050
0,059
0,066
0,071
0,076
0,080
0,083
0,086
кх
0,006
0,007
0,009
0,010
0,012
0,013
0,013
0,014
0,015
0,015
1,8
кг
0,031
0,038
0,050
0,058
0,065
0,071
0,076
0,080
0,083
0,083
кг
0,005
0,006
0,008
0,010
0,011
0,012
0,013
0,013
0,014
0,014
2,0
кг
0,031
0,038
0,049
0,058
0,065
0,071
0,076
0,079
0,083
0,086
408
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
8.1.12. Неразрезные равнопролетные балки. Ординаты линий влияния изгибающих моментов и поперечных сил
Двухпролетная балка
Ь I
№ ординаты
Ординаты л. в. М
в сечениях (множитель )
Ординаты л. в. 2о
1
2
3
4
5
б
0
0
0
0
0
0
0
1,0000
1
0,1323
0,0976
0,0632
0,0285
—0,0060
—0,0405
0,7928
2
0,0988
0,1976
0,1298
0,0619
—0,0061
—0,0740
0,5927
3
0,0677
0,1354
0,2031
0,1041
0,0051
—0,0938
0,4062
4
0,0402
0,0803
0,1205
0,1606
0,0340
—0,0926
0,2407
§
0,0172
0,0343
0,0516
0,0687
0,0860
—0,0636
0,1031
5
0
0
0
0
0
0
0
7
—0,0106
—0,0212
—0,0318
—0,0424
—0,0530
—0,0636
—0,0636
8
—0,0154
—0,0309
—0,0463
-0,0617
—0,0772
—0,0926
-0,0926
9
—0,0156
—0,0313
—0,0469
—0,0626
—0,0782
—0,0938
—0,0938
10
—0,0123
—0,0247
—0,0370
—0,0494
—0,0617
—0,0740
—0,0740
11
—0,0068
—0,0135
—0,0203
—0,0270
-0,0338
—0,0405
—0,0405
12
0
0
0
0
0
0
0
Трехпролетная балка
0 1 2 3 Ц- 5 6 7 8 9 10 11 12 13 Щ 15 16 17 1В
V
2
,
Ординаты л. в. М в сечениях (множитель )
Ординаты л. в. С
§
О. у.
1
2
3
4
5
6
7
8
9
2
дсправа
0
0
0
0
0
0
0
0
0
0
1,0000
0
1
0,1318
0,0967
0,0618
0,0267
—0,0083
—0,0432
—0,0342
—0,0252
—0,0162
0,7901
0,0540
2
0,0980
0,1960
0,1273
0,0585
—0,0102
—0,0790
—0,0625
—0,0461
—0,0296
0,5877
0,0987
3
0,0667
0,1333
0,2000
0,1000
0
—0,1000
—0,0792
—0,0583
—0,0375
0,4000
0,1250
4
0,0391
0,0782
0,1174
0.1565
0,0289
—0,0987
—0,0782
—0,0576
—0,0370
0,2346
0,1234
5
0,0165
0,0329
0,0495
0,0659
0,0826
—0,0677
—0,0536
—0,0395
—0,0254
0,0990
0,0846
0,0000
6
0
0
0
0
0
0
0
0
0
0
1,0000
7
—0,0095
—0,0190
—0,0285
—0,0379
—0,0474
—0,0569
0,0872
0,0644
0,0418
—0,0569
0,8639
8
—0,0132
—0,0263
—0,0395
—0,0526
—0,0658
—0,0789
0,0364
0,1516
0,1002
—0,0789
0,6913
9
—0,0125
—0,0250
—0,0375
—0,0500
—0,0625
—0,0750
0,0083
0,0917
0,1750
—0,0750
0,5000
10
—0,0090
—0,0181
—0 0271
—0,0362
—0,0452
—0,0543
—0,0028
0,0487
0,1002
—0,0543
0,3087
11
—0,0044
—0,0088
—0,0131
—0,0175
—0,0219
—0,0263
—0,0036
0,0191
0,0418
—0,0263
0,1361
12
0
0
0
0
0
0
0
0
0
0
0
13
0,0028
0,0057
0,0085
0,0113
0,0141
0,0169
0,0028
—0,0113
—0,0254
0,0169
—0,0846
14
0,0041
0,0082
0,0123
0,0165
0,0206
0,0247
0,0041
—0,0165
—0,0370
0,0247
—0,1234
15
0,0042
0,0083
0,0125
0,0167
0,0208
0,0250
0,0042
—0,0167
—0,0375
0,0250
—0,1250
16
0,0033
0,0066
0,0099
0,0132
0,0165
0,0197
0,0033
—0,0132
—0,0296
0,0197
—0,0987
17
0,0018
0,0036
0,0054
0,0072
0,0090
0,0108
0,0018
—0,0072
—0,0162
0,0108
—0,0540
18
0
0
0
0
0
0
0
0
0
0
0
В этом сечении С имеет два значения (показано в виде дроби).
8.1. БАЛКИ
409
Четырехпролетная балка
Продолжение 8.1.12
0 1 г 3 4 5 В 7 8 9 ю 11 12 13 П 15 16 17 18 19 20
Ж
Ч—I-
Ж-
-тГ—
"Ж"
21.2 2 24
Ординаты л.
в. М в сечениях (множитель )
Ординаты л. в. 2
оЯ
1
2
3
4
5
6
7
8
1
9
10
12
дсправа
0
0
0
0
0
0
0
0
0
0
0
0
0
1,0000
0
1
0,1318
0,0966
0,0617
0,0266
—0,0084
—0,0434
—0,0343
—0,0251
—0,0159
—0,0068
0,0024
0,0116
0,7899
0,0550
2
0,0979
0,1958
0,1271
0,0582
—0,0106
—0,0793
—0,0626
—0,0459
—0,0291
—0,0124
0,0044
0,0212
0,5874
0,1005
3
0,0666
0,1332
0,1998
0,0997
—0,0004
—0,1004
—0,0792
—0,0580
—0,0368
—0,0156
0,0056
0,0268
0,3996
0,1272
4
0,0391
0,0781
0,1172
0,1562
0,0285
—0,0992
—0,0782
—0,0573
—0,0364
—0,0154
0,0055
0,0265
0,2341
0,1257
5
0,0164
0,0328
0,0494
0,0657
0,0823
—0,0681
—0,0537
—0,0393
—0,0249
—0,0106
0,0038
0,0182
0,0986
0,0863
0,0000
6
0
0
0
0
0
0
0
0
0
0
0
0
0
1,0000
7
—0,0094
—0,0188
—0,0283
—0,0377
—0,0471
—0,0565
0,0872
0,0640
0,0411
0,0179
—0,0051
—0,0281
—0,0565
0,8617
8
—0,0130
—0,0260
—0,0390
—0,0520
—0,0650
—0,0780
0,0365
0,1509
0,0987
0,0464
—0,0059
-0,0582
—0,0780
0,6865
9
—0,0123
—0,0246
—0,0369
—0,0491
—0,0614
—0,0737
0,0085
0,0907
0,1730
0,0885
0,0041
—0,0804
—0,0737
0,4933
10
—0,0088
—0,0176
—0,0265
—0,0353
—0,0441
—0,0529
—0,0026
0,0477
0,0981
0,1483
0,0318
—0,0846
—0,0529
0,3016
и
—0,0042
—0,0084
—0,0127
—0,0169
—0,0211
—0,0253
—0,0035
0,0183
0,0403
0,0620
0,0340
—0,0610
—0,0253
0,1310
12
0
0
0
0
0
0
0
0
0
0
0
0
0
0
13
0,0026
0,0051
0,0077
0,0102
0,0128
0,0153
0,0026
—0,0101
—0,0229
—0,0356
—0,0483
—0,0610
0,0153
—0,0763
14
0,0035
0,0071
0,0106
0,0141
0,0177
0,0212
0,0036
—0,0141
—0,0317
—0,0493
—0,0670
—0,0846
0,0212
—0,1058
15
0,0034
0,0067
0,0101
0,0134
0,0168
0,0201
0,0034
—0,0134
—0,0302
—0,0469
—0,0630
—0,0804
0,0201
—0,1005
16
0,0024
0,0049
0,0073
0,0097
0,0121
0,0145
0,0024
—0,0097
—0,0218
-0,0339
—0,0461
—0,0582
0,0145
—0,0727
17
0,0012
0,0024
0,0035
0,0047
0,0059
0,0070
0,0012
—0,0047
—0,0106
—0,0164
—0,0223
—0,0281
0,0070
—0,0351
18
0
0
0
0
0
0
0
0
0
0
0
0
0
0
19
—0,0008
—0,0015
—0,0023
—0,0030
—0,0038
—0,0045
—0,0008
0,0030
0,0068
0,0106
0,0144
0,0182
—0,0045
0,0227
20
—0,0011
—0,0022
—0,0033
—0,0044
—0,0055
—0,0066
—0,0011
0,0044
0,0099
0,0154
0,0209
0,0265
—0,0066
0,0331
21
—0,0011
—0,0022
—0,0034
—0,0045
—0,0056
—0,0067
—0,0011
0,0045
0,0101
0,0156
0,0212
0,0268
—0,0067
0,0335
22
—0,0009
—0,0018
—0,0026
—0,0035
—0,0044
—0,0053
—0,0009
0,0035
0,0079
0,0123
0,0168
0,0212
—0,0058
0,0265
23
—0,0005
—0,0010
—0,0015
—0,0019
—0,0024
—0,0029
—0,0005
0,0019
0,0043
0,0068
0,0092
0,0116
—00029
0,0145
24
0
0
0
0
0
0
0
0
0
0
0
0
0
0
В этом сечении О имеет два значения (показано в виде дроби).
410
РАЗДЕЛ 8. ТАБЛРШЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК РАМ И АРОК
Бесконечная балка (средний пролет) Для крайнего пролета и второй опоры можно применить линии влияния в сечениях 1—6 четырехпролетной балки. Для второго пролета и третьей опоры — линии влияния в сечениях 7—12 той же балки (ошибка около 1,5%).
и тп. д.
0 1
2 3 Ч
5
Ординаты л. в. М в сечениях (множитель 1)
Ординаты
№
орди¬
нат
6
7
8
9
л. в. рСправа
0
0
0
0
0
1
—0,0271
—0,0214
—0,0157
0,0343
2
—0,0568
—0,0448
—0,0328
0,0720
3
-0,0793
—0,0626
—0,0458
0,1005
4
—0,0840
—0,0663
—0,0485
0,1065
5
—0,0609
—0,0480
—0,0352
0,0772
0,0000
6
0
0
0
1,0000
7
—0,0609
0,0837
0,0615
0,8671
8
—0,0840
0,0317
0,1474
0,6939
9
—0,0793
0,0040
0,0874
0,1707
0,5000
10
—0,0568
—0,0057
0,0453
0,0964
0,3061
и
-0,0271
—0,0050
0,0172
0,0394
0,1329
Вид. л. в. М в сечении 8 7 8 9 10 11 12
13 Ш 15 16 17
18 18 20 2122 23 24 ит д
Т №
орди¬
нат
Ординаты л- в. М в сечениях (множитель I)
Ординаты л. в.
.справа
?6
12
13
14
15
16
17
18
19
20 21 22
23
24
0
0,0163
0,0225
0,0212
0,0152
0,0072
0
—0,0044 —0,0060 —0,0057 —0,0041 —0,0019 0
0
0,0034
0,0047
0,0044
0,0032
0,0015
0
—0,0010
—0,0013
—0,0012
—0,0009
—0,0004
0
0
—0,0094
—0,0130
—0,0123
—0,0088
—0,0042
0
0,0025
0,0035
0,0033
0,0023
0,0011
0
0
—0,0223
—0,0308
—0,0291
—0,0208
—0,0100
0
0,0060
0,0083
0,0078
0,0056
0,0027
0
О
—0,0772 —0,1065 —0,1005 —0,0720 —0,0343 О
0,0207
0,0285
0,0269
0,0193
0,0091
О
В этом сечении ф имеет два значения (показано в виде дроби) •
8.1,13. Однопролетные подкрановые балки. Данные для расчета
При действии одного крана (два одинаковых груза)
Схема балки
Огибающая эпюра поперечной силы Я от крановой нагрузки (множитель Р)
10 —0‘, 4 — к
1ДВД111Л1»вйп1
К0,5 §1к0Р На средних опорах учесть собственный вес балки § с обоих примыкающих пролетов
а;
1
Собствен¬
№
X
X
ный вес
0
э-
ь
0,0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1,0
балки
Моменты от крановоД нагрузки (множитель Р1)
М(хеП
1
0,18
0,17
0,16
0,15
0,14
0,13
0,12
0,11
0,10
о.оэ
0,09
0,045
2
0,32
0,30
0,28
0,26
0,24
0,22
0,20
0,18
0,16
0,16
0,16
0,080
3
0,42
0,39
0,36
0,33
0,30
0,27
0,24
0,21
0,21
0,21
0,21
0,105
4
0,48
0,44
0,40
0,30
0,32
0,28
0,24
0,24
0,24
0,24
0,24
0,120
5
0,50
0,45
0,40
0,35
0,30
0,25
0,25
0,25
0,25
0,25
0,25
0,125
Коэффициенты к0 и к„ (кранопая нагрузка)
Я(Хё1)
к0
2,00
1,90
1,80
1,70
1,60
1,50
1,40
1,30
1,20
1,10
1,00
0,500
к
0,80
0,70
0,60
0,50
0,40
0,40
0,40
0,40
0,40
0,40
0,40
0,100
Действует один груз 2Р.
8.1. БАЛКИ
411
При действии двух кранов
Продолжение 8.1.13
(четыре одинаковых, попарно связанных груза) [29] Р Р Р Р
Находят по графику А (или В) номер невыгоднейшей схемы загружения и по формулам определяют Ммакс (или Семаке); хк — расстояние до критического груза, под которым момент максимален.
а6
График А (определение невыгоднейшей схемы
ДЛЯ М д4акс)
№
схе¬
мы
Схема загружения
IV
Р Р Р Р
хгхг
III
Р Р Р ь Ьга -1 ь
(31а-ЬГ а
11а
116
Р Р Ь ——1 а 1— 6
Р (21 — д)а 8
Р Р
Р (21—Ь) 8
Р1
4
аь
График В (определение невыгоднейшей схемы
ДЛЯ Омакс)
№
схемы
IV
Схема загружения
Р Р Р Р
Р [41 — (2а 4- 46)] I
111а
Р Р
- I —
Р [3 — (2а 4 Ь)] I
1116
Р Р Р
Р [Зг - (а 26)1 I
Р (21 — а)
I
116
Р (21 — Ь) I
412
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК. РАМ И АРОК
а 4 12
Пример. 12 м; 6 5 м; а4 л; Р20 т. При — — 0,8 и— — 2,4 по графику А невыгод¬
нейшим будет загружение по схеме .
1(3-12 4—5)2
Ми
1(3-12 4—5)2 1
12.12 "—'Г
12 5 — 4
90 тм; к — — —— 5,83 м.
По графику В наиболее невыгодна схема Ша С?макс
20 [3-12 — (2-4 5)] 12
38,33 г.
8.1.14. Перекрытия с перекрестными балками (кессонные перекрытия)
Данные для расчета [8, 19]
Схемы распределения нагрузки в перекрестных балках
Принятые обозначения:
Ри р2 — равномерно распределенные нагрузки, состоящие из собственного веса балки, плиты и временной нагрузки; постоянная нагрузка от плиты и временная нагрузка приняты в виде эквивалентной равномерно распределенной нагрузки, полученной из условия равенства прогибов:
для треугольной нагрузки рж — 05р;
для трапецеидальной нагрузки
I
Р1 Рэк1 "'балки»
Р2 “ Рэк2 Рбалки»
Рэк.1 — эквивалентная нагрузка для балок пролетом 1Х Рэк. % — для балок пролетом 1.
V
62
62
Т
'Зг
О
1
[
1, , дал к а 61
И р22р,Л ц-
Х -
30
«ч,
62
V
61
у.
'Зг
'Зг
1
«V
з,
1
1
X
1
СС
х
балка 61
1,302 р22 — 1,132
3,086м, 2,083
61
7г
т
м
52
-63
■ь
г- и №3 х о
ОО
Ш
бална 61
Г3
X «3 § '-О
ОС
тп 0,7273 ц 0,7238; тХх 0,5 хХ2 0,4545 р212 — 0,3239 рх1хц; ц, 4- тХ2 0,4545 (р212 — р111 и)
8.1. БАЛКИ
413
Продолжение 8.1.14
61 63 62
-V
5Х
А
М
61
и
г
балка 61
йз
г1
т 0,7273 ц 1,0774; тХ, 0,5 цХ2 0,3951 р212 —0,3239рх1хх пХ 51 0»3951 Рч-2, “ 04545 р1х
р-
- нагрузка на 1 м2 перекрытия
Схема перекрытия
Обозначение балки
Величина погонной нагрузки на балку (множитель р1)
Максимальный изгибающий момент (множитель р1Ь?)
Схема перекрытия
Обозначение балки
Величина погонной нагрузки на балку (множитель;)
Максимальный изгибающий момент (множитель р11)
■ь.
Г"
1.
Г
•о
Г
а
Ь
■ . »
Ъ— Ь
ъ — ъ
0,562
0,415
0,0703
0,0520
0,550
0,316
0,0686
0,0395
Ь—Ь
Ъ а
0,305
0,596
0,0382
0,0746
а — а
0,340
0,0425
Ь—Ь
0,302
0,0378
с — с
0,583
0,0729
Ь — Ь
0,635
0.523
0,293
0,0794
0.0654
0,0366
и с Ь а
а — а
0,311
0,0389
Ь—Ь
0,341
0,0427
с— с
0,308
0,0385
а —а
0,570
0,0713
414
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
8.1.15. Усилия в элементах шпренгельной балки
Статически определимый шпренгель
Эпюра N
Усилие:
в горизонтальном элементе нижнего пояса
Н
в наклонном элементе нижнего пояса соз р
в стойке
Уи 51П р.
Поперечные силы в верхнем поясе:
Л соз а—V З1п(аР);
1Р (1аР1 с05 а; дпр „ «пр _ (Рг —К) СОЗ а.
Изгибающие моменты:
М. 2°°; м2.У.?. _ Р, (о2 _ ал
соз а соз а
Продольные силы:
А 51П а V соз (а 4- Э) ; АР — Nа — Р зп а:
АГПР 2 3п а
Продолжение 8.1.15
Статически неопределимый шпренгель
1
Е1 Е1
• ?2 :
АЛЛ
ЕР%а
Система один раз статически неопределима.
Данными таблицы можно пользоваться и для расчета системы с двускатным верхним поясом, при уклоне не более 115—110. Высоту Н в этом случае следует принять равной высоте стоек шпренгеля заданной двускатной системы
При выполнении стоек и ригеля из одного материала
к2 ■
Р
8.1. БАЛКИ
415
Продолжение 8.1.15
ршш г—7
Н — АаР
Чц лУ
Н — Ар1
х а
х Р
Н АУр1
т
При а13 А
1,33 М, 1,33 кг 1§2ф 1,11 Л 0,67 кг
0,05
0,0334
0.05
0,00084
0,10
0,0560
0,10
0,00333
0,15
0,0971
0,15
0,00741
0.20
0,1260
0,20
0,01299
0,25
0,1519
0,25
0,01994
0,30
0.1740
0,30
0.02809
0,33
0.1852
0,33
0.03402
0,35
0,1912
0,35
0,03722
0.40
0,2037
0,40
0.04709
0.45
0,2112
0,45
0.05746
0,50
0,2137
0,50
0.06888
0,10
0,0224
0,20
0,04198
0,30
0,06172
0,35
0,06812
0,40
0,07998
0,50
0,09628
0,60
0,11018
0,70
0,12134
0,80
0,12950
0.90
0,13448
1.00
0,13616
При а4 А •
0,75 к 0,75 к2% р Л 0,75 кг
0,05
0,10
0.15
0,20
0,0280
0,0553
0,0810
0,1045
0,05
0,10
0,15
0,20
0,00070
0,00278
0,00619
0,01083
0,10 0,20 0,30 0,40
0,01710
0,03382
0,04978
0,06462
т
0,25
0,1250
0,25
0,01657
0,50
0,07796
0,30
0.1419
0,30
0,02324
0,60
0,08944
0,35
0,1550
0.35
0,03066
0,70
0,09872
0,40
0,1644
0,40
0,03864
0,80
0,10554
0,45
0,1700
0,45
0,04700
0,90
0,10970
0,50
0,1719
0,50
0,05555
1,00
0,11110
При а15 А
0,48 Мз 0.48 кг 1д2 ф 0,88 Н 0,72 кх
0,05
0,10
0,15
0,0239
0,0470
0,0686
ООО
сло§
0,00060
0,00237
0,00526
288
ООО
0,01412
0,02794
0,04116
0.20
0,0880
0,20
0,00918
0,40
0,05348
5
0,25
0,1045
0,25
0,01399
0,50
0,06460
0,30
0.1180
0.30
0,01955
0,60
0,07422
рррр
СЛ го ОСЛОСЛ
0.1285
0.1360
0.1405
0,1420
0,35
0,40
0,45
0.50
0,02571
0,03232
0.03923
0,04629
0,70
0,80
0,90
1,00
0,08206
0,08784
0,09138
0,09258
з
При а16 А кк3 к2 ф Ь 2,33 Н -- 2г,
0,05
0,0207
0,05
0,00052
0,10
0,01238
0,101
0.0407
0,10
0,00206
0.20
0,02450
0.15
0,0622
0,15
0,00463
0,30
0,03616
0,167
0,0690
0,167
0,00575
0,40
0,04706
0,20
0,0795
0,20
0,00820
0,50
0,05696
16
0,25
0,0935
0,25
0,01253
0,60
0,06562
0,30
0,1045
0,30
0,01748
0,667
0,07052
0,35
0,1135
0,35
0,02293
0,70
0,07276
0,40
0,1195
0,40
0,02876
0,80
0,07790
0,45
0,1230
0,45 1
0,03482
0,90
0,08098
0,50
0,1245
0,50
0,04101
1,00
0,08512
416
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
8.1.16. Балки с ломаной или криволинейной1 (круговой) в плане осью. Данные для расчета [8, 17]
В балках с ломаной или криволинейной в плане осью, находящихся под действием вертикальных нагрузок, помимо изгибающих моментов, действующих в вертикальной плоскости, возникают крутящие моменты.
Обозначения:
Е1 — жесткость при изгибе;
, ьнз
— момент инерции поперечного сечения балки
относительно оси, перпендикулярной плоскости изгиба;
01 к — жесткость при кручении; О — модуль сдвига материала балки;
к14—момент инерции прямоугольного сечения при кручении, где ц — коэффициент, зависящий от соотношения НЪ (см. табл 7 5) (о—короткая сторона сечения К — высота сечения);
61к
М®—изгибающий момент посередине пролета;
М2 — крутящий момент посередине пролета;
0°—поперёчная сила посередине пролета;
Мц—изгибающий момент в произвольном сечении;
Мк—крутящий момент в произвольном сечении.
См. также раздел 9»
Балка с ломаной в плане осью Равномерно распределенная нагрузка р
иДщшшшф
изгибающие
Ми — Р у "Ь
Р'
а2 зш а
Мк р-
а2 51 п а соз а
Значения М и и Мк (множитель ра2)
м
а в гряО
20
3°
1 40 1
50
60
Л1и
0,020
0,042
0,069
0,097
0,125
Мзад
-0.480
—0,458
—0,431
—0,403
—0,375
"к
0,054
0,072
0,082
0,082
0,072
Величина А, любая
рх2
МИ X зт а — —— ; Мк — X соз а;
X
5ша
6 (зт2 а X соз2 а)
ра кхра2
111111Й1111И1111
I
Для загруженной половины балки:
рх2
Ми 0,5 X зт а -- У соз а 2х —Мк 0,5 X соз а — У зт а.
Для незагруженной половины балки: МИ 0,5 X 51П а — У соз а — 2.х
У — —
МК 0,5 X соз а 4- У зт а; соз а
24 (соз2 а 4Я зт2 а)
3 3 2 — — — соз а кира — к, V16 2 7_ ра2 ьура"-.
8.1. БАЛКИ
417
Продолжение 8.1.16
Коэффициенты кх, ку и к2 для некоторых значений а и Я,
а 30°
а 45°
а — 60°
к I
к 1
К
к
к 1
к
к
к
к
1
1
2
X
У 1
г
X
У
г
0,5
0,133
—0,028
0,225
0,157
—0,020
0,208
0,165
—0,012
0,197
1,0
0,083
—0,021
0,214
0,118
—0,012
0,200
0,144
—0,007
0,193
1,5
0,061
—0,016
0,208
0,094
—0,009
0,197
0,128
—0,005
0,191
2,0
0,048
—0,013
0,205
0,078
—0,007
0,194
0,115
—0,004
0,190
2,5
0,039
—0,011
0,202
0,067
—0,005
0,193
0,105
—0,003
0,190
3,5
0,029
—0,009
0,199
0,052
—0,004
0,192
0,088
—0,002
0,189
4,5
0,023
—0,007
0,197
0,043
«“0,003
0,191
0,077
—0,002
0,189
5,5
0,019
—0,006
0,195
0,036
—0,003
0,190
0,068
—0,001
0,189
6,5
0,016
—0,005
0,194
0,031
—0,002
0,190
0,061
—0,001
0,188
7,5
0,014
—0,004
0,193
0,028
—0,002
0,190
0,055
-г0,001
0,188
8,5
0,012
—0,004
0,193
0,025
—0,002
0,189
0,050
—0,001
0,188
Нагрузка от сосредоточенных сил
Значения М и и МК (множитель ра)
1
(а 31 п2 а х Ма Р4 _Т);
жк -
а зш а соз а
М
а в граО
20
30
40
50
60
М°
И
0,029
0,063
0,103
0,147
0,188
мзяя
и
—0,471
—0,438
—0,397
—0,354
■—0,312
0,080
0,108
0.123
0,123
0,108
— 1
_ (1 — т)2.
х то М„ — Ра зш а:
и 2
х та — Ра з1па а — Р (а — та),
и 9
В любом сечении
, (1 — т)3
Мк Ра — зш а соз а.
Величина любая Участок Л В М 0,5 X з1п а К соз а 2х — Р (х — та).
Участки ВС и СО МИ 0,5 X зш а ± У соз а ± 2х
(знак плюс на участке ВС. знак минус на участке СО)»
418
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК. РАМ И АРОК
Величина А. любая х та М. X зп а
2 (8та а Я, соз2 а)
Продолжение 8.1.16
В любом сечении Мк 0,5 X соз а У зп а (знак минус на участке АС, плюс на
участке СО);
У (1 т)а соз а _ ра
2 (соз2 а 4А,зт2 а) 2 [2±__ (1 _ т)2 _ Л. соз а г 1 Р кР [4 2 у_ г
Коэффициенты кх, Ъу к2 для некоторых значений а и Я при т0,5
О
со
II
8
а 45°
а 60°
%
1 К
к
К
к,
( К
1 к
1 К
X
1 У
г
X
У
1 2
X
1 У
1 2
0,5
0,100
—0,043
0,213
0,118
—0,030
0,188
0,124
—0,018
0,170
1,0
0,062
—0,031
0,196
0,088
—0,018
0,175
0,108
—0,010
0,164
1,5
0,045
—0,024
0,188
0,071
—0,013
0,170
0,096
—0,007
0,161
2,0
0,036
—0,020
0,182
0,059
—0,010
0,167
0,087
—0,005
0,160
2,5
0,029
—0. '17
0,178
0,050
—0,008
0,165
0,079
—0,004
0,159
3,5
0,022
—0,013
0,173
0,039
—0,006
0,163
0,067
—0,003
0,158
4,5
0,017
—0,010
0,170
0,032
—0,005
0,161
0,058
—0,002
0,158
5,
0,014
—0,009
0,168
0,027
—0,004
0,160
0,051
—0,002
0,158
6,0
0,012
—0,008
0,166
0,024
—0,004
0,160
0,046
—0,002
0,157
7,5
0,011
—0,007
0,165
0,021
—0,003
0,159
0,041
—0,001
0,157
8,5
0,009
0,006
0,164
0,019
—0,003
0,159
0,038
—0,001
0,157
Пример. Определить М и ( в балке, изображенной на рис. 8.6, при значениях Я1 и Я3.
По таблице находим при сс 45°
к 1
Х 3
Множитель
X
0,088
0,045
Ра
У
—0,018
—0,007
Ра
2
0,175
0,164
Р
Приводим подсчеты при Х3.
На опоре А(ха):
М„ 0,5Х зш а У соз а 2а — Р (а — 0,5а)
(0,50,0450,708 — 0,0070,708 0,164) Ра —
— 0,5Ра — 0,325Ра;
МК 0,5Х соз а— У зта (0,50,045
0,007) 0,708Ра — 0,021 Ра,
Под грузом (х0,5а):
МИ 0,5Х зп а У соз а 4- 0,52а 0,093Ра; Мк 0,021 Ра;
Рис. 8.6
ев — Р — г 0,836Р; ?ПР —0,164Р. Посередине пролета (лт 0): долее __ о,5Х зш об -- У соз а 0,011 Ра Мр 0,5Х зш а — У соз а 0,021 Ра: М%ев 0,5 соз а — У зш а 0,021 Ра; МР г 0,5Х соз а У зш а 0,011 Ра. На опоре 0(ха): дзад _ о5Х зта — У соз а — 1а — 0,143Ра
8.1. БАЛКИ
419
Результаты подсчетов:
Продолжение 8.1.1в
Моменты и поперечные силы
Опора А
Под грузом
Сечение С
Опора )
Множи¬
тель
А. 3
X 1
со
н
•
II
со
II
II
00
II
Ми
—0,325
—0,282
0,093
0,106
0,011
0,021
0,018
0,044
—0,143
—0,131
Ра
мк
0,021
0,044
0,021
0,044
0,021
0,011
0,044
0,018
0,011
0,018
Ра
3
0,836
0,825
0,836 —0,164
0,825
—0,175
—0,164
—0,175
—0,164
—0,175
Р
Балка с изогнутой в плане по дуге круга осью Равномерно распределенная нагрузка
1Ш1Ъ1111111111Ш1ШШ Эпюра Ма
2 2 51П а — а соз а а
.П оэши. — и, сиз и. К Рг ( ; ];
МИ — соз ф — рг2 (1 — соз ф);
мк 51П ф — рг 2 (ф — 51П ф)
Значения Мц и Мк (множитель рг2)
М
а в град
20
30
40
50
60
70
80
90
о я
3
0,020
0,045
0,076
0,116
0,155
0,198
0,237
0,273
Лзад
и
—0,041
—0,096
—0,176
—0,284
—0,423
—0,591
—0,785
—1,000
мза д
к
—0,000
—0,001
—0,006
—0,019
—0,047
—0,096
—0,173
—0,297
420
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.1.16
Величина к любая
Ми 0,273рг соз р — рг2 (1 — соз ф);
Мк 0,273рг'1 51П ф — рг2 (ф — 51П ф).
В середине пролета (ф 0):
0,273рг2; М°0
Для загруженной половины балки:
МИ 0,137рг2 соз ф зш ф (У 4" %г) — Рг2 (1 — соз ф); 0,137рга зш ф — соз ф (У -Ь 2.г) 2г — рг3 (ф — 81П ф).
Для незагруженной половины балки:
МИ 0,137рг3 соз ф — зш ф (У -Ь 2г);
МК — 0,137рга зш ф соз ф (У 4- %г) — 2г.
Значения У и 2 при разных А,
К
0,5
1,0
2,0
3.5
5,5
7,5
Множи¬
тель
У
0,040
0,038
0,036
0,033
0,031
0,030
рг2
г
0,274
0,272
0,267
0,264
0,259
0,256
рг
Нагрузка от сосредоточенных сил
Эпюра
Ми — М® соь ф — 05 Рг зп ф;
Мк зш ф — 0,5Рг (1 — соз ф);
О 1 — соз а
М°иРг-
2а
8.1. БАЛКИ
421
Продолжение 8.1.16
м
а в град
Множи¬
20
30
40
1 50
1 60
1 70
80
90
тель
м°
и
0,086
0,138
0,168
0,205
0,239
0,270
0,296
0,319
Л1зад
и
—0,090
—0,130
—0,193
—0,251
—0,313
—0,378
—0,442
—0,500
Рг
дзад
к
—0,001
—0,007
—0,009
—0,022
—0,043
-0,075
—0,121
—0,181
Для полуокружности (а 90°) формулы и Мк можно применять при любых значениях к
X 1
рг ?05 3 — 005 °с — (а — 3) 51П 3
И ГУ
При ф 3 М М® соз ф и и
При ф 3 Ми МЛ СОЗ ф — Рг 31П (ф — 3),0,
МК 81п ф — Рг [1 — соз (ф — 3)]
Значения при а 90° и разных 3
3 в град
Множитель
0
30
45
60
75
М°
и
0,637
0,218
0,097
0,030
0,004
Рг
Груз 2 Р в середине пролета
(2° Р
X 1
В середине пролета
П со 3 — соз а — (а — 3) 8п 3
-Рг й ;
(а — 3) (соз 3 1) — 5ш (а — 3) — зт а зт 3
4 (а — зт а)
Участок АВ
М0 соз ф Г(2° 81П ф — Рг 1п (ф — 3)
М зт ф г0? (1 — с8 Ф) — Рт I1 соз (ф — 3)]
Участки ВС и СЭ
М А1° соз ф г2° зш ф; и и -1-
Мк Л1® зт ф ± гСр (1 — соз ф)
Знак плюс на участке ВС, минус — на участке Сй
422
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
8.2. РАМЫ 1
8.2.1. Моменты в Г-образной раме с горизонтальным или наклонным ригелем
и
I —; 2 — ПРИ горизонтальном ригеле;
2
2 — — при наклонном ригеле.
5
Ригель и стойка шарнирно оперты
1х Ь
Ригель шарнирно оперт, стойка защемлена
Ч--0,752
Схема нагрузки и эшо ра М
Ми
Схема нагрузки и эпюра М
1хк
рга
1к
1'кТ
16
1хк
РаЬ ( Ъ) 2ГЛ
.
. ь РаЬ (I Ъ) 1 2а
1Л
РаЬ (I Ь) 4 Р
Любая нагрузка на ригель
ттггПТПТГП
ншТЛ-
дзад _ МОМент защемле-
о
ния ригеля по табл. 8.1.3
Любая нагрузка на ри гель
дтггтгТТШП
0,51хкМ3ьа]
МаД — момент защемления стойки по табл. 8.1.4
о
1 В таблицах даны формулы для определения изгибающих моментов. Поперечные и продольные силы определяются, как
обычно, из условий равновесия.
8.2. РАМЫ
423
Породолжение 8.2.1
Схема нагрузки и эпю ра М
Ми
Схема нагрузки и эпюра М
Ми
М
Ьк
рк
77
"а
1гк?—
16
(1 0.5нЛ)
Е51
12
Г
12г
РаЪ к 4- Ь) 2 Ла
гЦ
•о»
х-4
4 Ла
(0,56 а) — Ла
Д (йа — ЗЬа) 2Ла
гЦ
а
ЗГ,Ь (2а — Ь)
4а
[а (2Ь — а) —
— 0.5цгЬ (2а — Ь)1 —
к'2
Любая нагрузка на стойку
А1
Любая нагрузка на стойку
12Ш°ь;
момент защемле-
М? —
ния стойки по 8.1.3
)
а
0,75 2 АгЛ1
М°а 0.5 кМ
М® Л0 - моменты защемления стойки по 8.1.4
Горизонтальное смеще ние опоры С
Горизонтальное смещение опоры С
ЗЕЫгк
Е1л1гк
ар
и (1 — 0,51хк). — А Ь
424
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.2.1
Схема нагрузки и эпюра М
М
Схема нагрузки и эпюра М
Ми
М„
Осадка опоры С
3ЕЫ2Ь а
д
I
при горизонтальном ригеле;
3Е1г1кГ) А Н1
при наклонном ригеле
Осадка опоры С
3 ЕЦгк
при горизонтальном ригеле;
Пх12к т 9?) д
2 М
при наклонном ригеле
3 Е1х1гк А
—. д
2 I
при горизонтальном ригеле;
3
— X
2
„ ЕЩгЬЩЪ-Ц)] д Н1
при наклонном ригеле
Равномерный нагрев на
а— коэффициент линейного расширения
ЪЕ1х1гк
Ы
(Р Л3) Ш
при горизонтальном ригеле;
(8з л) аИ
Л52
при наклонном ригеле
Шх (1х
Равномерный нагрев на Г
ъ
г"на
а— коэффициент линейного расширения
Е1%1гк
Ы
(3а4- 2Аа) Ш
при горизонтальном ригеле;
_3_ Е1х1гк 2 к
(353 2Л3) ш
при наклонном ригеле
№ 4
. Е1'к
2 Ы
4 21ХР) аг
при горизонтальном ригеле;
3
ЕЬхк
(«Л 4
2 М
4 329 4 252) Ш при наклонном ригеле
При осадке опоры А значения М те же, что при осадке опоры С, но с обратными знаками.
8.2. РАМЫ
425
8.2.2. Моменты в Г-образной раме с горизонтальным или наклонным защемленным ригелем и защемленной стойкой
Г, У-Г
и и:
1
х —; «2 г — ПРИ горизонтальном ригеле;
к I
12 — —при наклонном ригеле;
5
к ■
1
И Ь 2
Схем л нагрузки и эпюра М
Опорные моменты
Схема нагрузки и эпюра М
Опорные моменты
Р
МЧМ1И111Г11
Мь I к 2? ; ь 1 12
М а 1 24
М, (10,5
Ми
Р
Ме
0 ' ' 12
М 1а
Любая нагрузка на ригель
РаЬ2
РаЬ2
2-
"Г“(°Я2Ь а)Г
Г "
«О
1
Ма
мс
м. — 1Л кМ3Д;
Ь 1 6
М 0,5, ШД; а 1 Ь
М МзаД 4- 0,5 Ш?ад,
с с 2 1
гдеМ?аЯ, дзад—моменты защем6 с
ления ригеля по табл. 8.1.4.
Мп
Ми I. к
РаЬ2
(0,5гЬ 4- а)
РаЬ
Мь 1,кСЬ (2а-Ь ь л»
[а (2Ь — а) —
— 0,5,гЬ (2а — 6)]— ;
к2
м кЩ1
С 2 ш
426
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.2.2
Схема нагрузки и эпюра М
Опорные моменты
Любая нагрузка на стойку
МЬ-С2Ш°Ь'
М М° 0,51- ЬМ°и а а 1 Ь
М 0,51 кМ°и9
г 2 Ь
где Л0?» М® — моменты защемо а
ления стойки по табл. 8.1.4.
Поворот опоры С
Поворот опоры А
Мь 2И, 1к ф;
Ма ЕЧ мс аг(4-‘ 2 к)
МаЕ11 (4- 1 )Р»1 1,1
Горизонтальное смещение опоры С
. 6Е,
Н
Ма - (1 - 0.И, к) д-
М. 1Л 1а к — А
Схема, нагрузки и эпюра М
Опорные моменты
При горизонтальном ригеле:
МИ
б Е1хьгк
I
А;
М Ш. Д;
а,
м т2 (1 — 0,512к) д
При наклонном ригеле:
мь (н И д.
д [Н12к -- (2 д.
_ ЗЕг [г,й I (2 — 1„к) А
Равномерный нагрев на °
а — коэффициент линейного расширения
При горизонтальном ригеле: Ь
Ы
м 3Е_ а;
а М
ЯР
М (2№1хкГ—12кН2) а. с А
При наклонном ригеле:
М, (52 4- г-) а:
М
ЗЕ7,
г
ЗЯ,
г
(252 — I152 4,кН-) а.‘
М„ (2Л-4-4цеа — 1ок1г-) а
с 1
При 1 оризонтальном смещении опоры Л значения М те же, но с обратными знаками.
При осадке опоры А значения М те же, но с обратными знаками.
8.2. РАМЫ
427
8.2.3. Моменты в Т-образной раме с шарнирно опертым ригелем и защемленной стойкой
Ж
птгт
ил
2,
3 5И
• _ А • _ А • _ А
1 —, М2 —. 3 —,
к 1г 2
к -
1
11 0,75 (12 ■■ з)
Туф
ШТТтттт
у
Ъ
4 И?
зк _3 РаЬ 4 Ла
РаЬ
(0,5 нкЪ а)
РаЬ
к3
,. з ЬЬ Ь— 2а 12к — • 4 К1
ь
_3_ (6 — 2а)
4 Ь2
(1 - Ш
ЬЬ (Ъ — 2а) Н2
[0,516Ь (Ь — 2а) —
— а (а — 26)] — Н2
428
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК. РАМ И АРОК
Продолжение 8.2.3
• При горизонтальном смещении опоры А значения М те же, что при смешении ригеля, но с обратными знаками»
8.2. РАМЫ
429
8.2.4. Моменты в Т-образной раме с защемленными ригелем и стойкой
430
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.2.4
8.2. РАМЫ
431
Продолжение 8.2.4
Схема нагрузки и эпюра М
М"
м-р
МГ
м„
МА
Поворот опоры й
2Е1213кЦ)
2ЕШ—1як) ф
2Е1х1ъкц
Е121Лкр
Е1з(4—1,г) ф
Е1х1гку
Поворот опоры А
мс
мн
Мп
'2Е1,СгЬР
2ЕЬ113кр
2Еьх (1—1,г) ф
Е11гк
Е11 (4—Ьхк) ф
8.2.5. Моменты в Г-образной раме со ступенчатой защемленной стойкой и горизонтальным или наклонным шарнирно опертым ригелем
1
Л.
к
I§ — при горизонтальном ригеле;
2. — — при наклонном ригеле;
5
-
1° 4- 1°
Ч 2
Гсс чфиииенты ь с индексами ( 6®, 6®, 6", 6”, 6а2’ и ДР) принимать по8.2.21.
'хема нагр жи и эпюра Л4
Опорные моменты
Схема нагрузки и эпюра М
Опорные моменты
гГР
М. ;
6 1 8
мЛ
М.к РаЬ (1 Ь ; Ь 1 2
'Й
м __ 1°кк1 рР
.0 в 11 раь
1
' ч в
V
гв 2и
“ь
432
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.2.5
Схема нагрузки и эпюра М
Опорные моменты
Схема нагрузки и эпюра М
Опорные моменты
Любая нагрузка на ригель
йпШШШ
Мь кМ
зад. Ь •
Н кка
м ——— м д,
а - Ь
где Мад — момент защемле¬
ния ригеля по 8.1.3
Мъ 12 ккЬ °н2 : Ма — ( ка 11 кка кЬ )
М
а “ ( йа2 1 Ь2 ) РН
М
Мь г°2 Ш°ь ;
где МО М® — моменты защемм Ь а
ления стойки по табл. 8.2.21
Любая нагрузка на стойку
Мь 1°кМ0ь;
МаК ‘1 К К '
где М® мЧ — моменты защемо а
ления стойки по табл. 8.2.21
Поворот опоры А
МЬЕ1Х Ф;
Ма 1 ( к"а-Н к1кк1) Ч
Горизонтальное смещение опоры С
М I0 кк Д;
о 1 о 2
4 ( кА — 1Л ккв к ) -Д
а а а Ъ )
8.2. РАМЫ
433
Пример. Для рамы, изображенной на рисунке, определить изгибающие моменты
-.5»
'•7- I т. 1
( ± 0,2;Ь -0,4;
А;
Н 10 1г
0,5.
По 8.2.21 находим 1,407; Дг® 2,215;
Ц к 11 2,215 • 0,2 0,443; 1% 3123 - 0,4 1,2;
1° 4- г0 Н -■ 2
0,443 1,2
Продолжение 8.2.5 0,61.
От нагрузки на ригель
Дт25гл;
Мь кМа — 0,443-0,61 -25 6,75 тм-
ка 1,407
ма —мь
к» 2,215
6,75 4,28 тм.
От нагрузки на стойку по табл. 8.2.21: ка 0,093; кь 0,072;
Л1а(а ,АЛ»Л4)рЛ2
(0,093 0,2-0,61-1,407.0,072) 0,6-102 6,30 гл; И6 11ккьрН2 1,2-0,61-0,072-0,6-Ю2 3,16 тм.
Эпюры М имеют вид, изображенный на схемах в таблице.
8.2.6. Моменты в Г-образной раме со ступенчатой защемленной стойкой и горизонтальным или наклонным защемленным ригелем
Л8Р-тШ - 3 ■
П
к
„
1х ; 19 -у- — при горизонтальном ригеле;
; — — при наклонном ригеле;
2
Все коэффициенты к с индексами ( 6®, кь2 и др.] принимать по 8.2.21.
Схема нагрузки и эпюра А
Опорные моменты
Схема нагрузки и эпюра М
Опорные моменты
аЬ -яьч"с
м (1 0,5 Л) — ; с 2 12
Ь 1 а
М (0,50 кь а).
с л 1'2
I
Л?
м —— м.
а п Ь ь
Ъ
К
к1
м — м,
а в Ь
‘6
434
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Пппг)плжение 8.2.в
Схема нагрузки и эпюра М
Опорные моменты
Схема нагрузки и эпюра М
Опорные моменты
Любая нагрузка на ригель
ппттТТТТ
«6
Мс Мад 0,512 Шад ;
М М,
а д Ь
ьв
где МЗЗД, Мзад — моменты Ь с
защемления ригеля по 8.1.4
МЪ 2 ккърН '
Мс 0,ы']ккь рН2 ; мака ' 1 V рН2
мь 4 А’62 РЛ;
ма РН
Мь ;
Мс 0,512 ;
Ма -1
где м2; моменты защем-
Ь а
ления стойки по 8.2.21
МЪ 12 ккЬ5 «0,
Любая нагрузка на стойку
Поворот опоры С
Ма 'хМ1-
где ЛТ?, — моменты за-
Ь а
щемления стойки по 8.2.21
мь 2 Ег® йф:
Ме Е12 (4 - I® А) р;
а
кЬ
Поворот опоры А
Мс
Мь Е1Х 12 ф; Мс 0,5 ф:
Горизонтальное смещение опоры С
М Л И -2- А:
Ь 2 Ь
М 0,515 А;
с 2 Ь ь
М (д — гв Д
а а 1 а Ь да
8.2. РАМЫ
435
8.2.7. Моменты в Т-образной раме со ступенчатой защемленной стойкой и шарнирно опертым ригелем
Г- 1»—’
—"1
М1
Ч7
'с
и
• 1 • __ 2. 3
н —, ; н — г» н ;
я г 2
1 6 1 » 2 » гз З3»
к —
1 »2‘з
Все коэффициенты к с индексами ( к, 6®, к, кЬ2 и др.) принимать по 8.2.21.
436
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение в.2.7
8.2.8. Моменты в Т-образной раме со ступенчатой защемленной стойкой
и защемленным ригелем
8.2. РАМЫ
43?
00
II
О 00
о со
.
1
О М
р -«
Л
и-
Лзад дзад _ моменты защемления ригеля по 8.1,4
Схема нагрузки и эпюра М
438
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
моменты защемления стойки по 8.2.21
Схема нагрузки и эпюра М
8.2. РАМЫ
439
440
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
8.2.9. Моменты и распоры в П-образной раме со стойками постоянного сечения
Стойки шарнирно оперты
к
Стойки защемлены
в
г
-с:
1
-1
1
7Г7
А.
н
к •
Схема нагрузки и эпюра М
Опорные моменты. Распоры
Схема нагрузки и эпюра М Опорные моменты. Распоры
'ЧШППЕ
рР
И -
4 (3 4- 2к) рР
АН (3 4- 2к)
1
ь тг
рр.
2 к 6 1 рР
2 4-к 12
_3 рР
12 Ь
РаЬ
(3 -Ь 2к)
Раь
2 НЦ 3 2к)
М
(4- для —ДЛЯ Л).
_ 1 1 - 2 РаЬ
1с 2 к 1 6г 21
(—для Ма; 4-для Мс)
_3 РаЬ
2 к 2Л
Я ■
ТЁтТ) гпг)‘
мь-ма
и
ЗР
8 (3 4- 2к)
6Р1
8Л (3 4- 26)
_1 _Р
г 4
Р
2 4- к
2 4 -к
Р1
8Н
8,2. РАМЫ
441
Продолжение 8.2.9
Схема нагрузки и эпюра М
Любая нагрузка на ригель
Опорные моменты. Распоры
ииПШШ)
КА'
77?7777
1Ь
н
2 (3 2к) Ма
‘М
зад. Ь1 ’
21 (3 2к) Ь1
рде момент защемления
01
при симметричном загружении.
При симметричной нагрузке на ригель
Ми М, —
■ М'
гзад
- 2к
— момент защемления Ригеля по 8.1.4
Схема нагрузки и эпюра М
Любая нагрузка на ригель
Опорные моменты. Распоры
МЬ.й “ 2 МЬ1Л ±
±77ГТ- ( для Мь, —для Мд)
Т 2(16) МЬП (—для Ма; для мс);
где М%[Д
— моменты защемления при симметричном и антисимметричном загружении по 8.1.4
При симметричной нагрузке на ригель
М, М, —-—
ь л 2 Ь '
Ма МС 0.5 Мь
Любая нагрузка на стойку
Любая нагрузка на стойку
н°ьн
я°ьн
3 4 к 2 (3 2к)
АЛ0-
М.,
АА0 мь,
где М
2 (3 4- Щ
, — момент защемле-
Ъ Ь
ння и реакция опоры загруженной стойки по 8.13
. ± ( ЗК°ЬН-6М
Ь' 2 16
2
■)
(—ДЛЯ Мь; 4-для му, 0,5° Н- М1
М° 27Г6) ,.0
М1
2 (2к)
К°ьк п о 0
-4 Ма’
М.
0,5 Н°ЬП — М°Ь 2 (1 6) я°ьн
М
ь
2 (2 А) "Г 4 •
где Л1®, Л1®, — моменты за-
щемления и реакция опоры загруженной стойки по 8.1.4
6 3 к 32 к 6 5 к 32 к
6 5 к 3 2 к 8
нп рь. — нс
рН»
8
рН8 8 рг
Г-12 - __] Е51;
11 6 2] 24
(—Для М для
щ а 1 6к 2 к
2)
р?Р. 24
м 518 1 рЬ?
° 1 6г 2 24
1718е
166
рЬ
24
См. пример 1 в конце таблицы
См. пример 2 в конце таблицы.
442
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.2.9
Схема нагрузки и эпюра М
Опорные моменты. Распоры
Схема нагрузки и эпюра М
Опорные моменты. Распоры
-н
Р М
мьё-Л11521
Ъ'й 2 16г
мь 1 X
0 2
х 3 26-61 (2 -) рн, 32 6
1 х
а 2 х 3 26 61 (2-) рл. 3 2
н„ 1-1- V
РЛ
2
[II
326
326 61 (2-)
2 6. (—для Л1; для
х р 6 1 I за
26 1 66 (1 - ?)г 2»1Ь
2 I 2
3 к
1 б к
На РН с
яс ±±х с 2
:: 26 1 216 Г 2 к
мьмй
И -
РЛ
н
Мп
Мл
Рй;
2 (1 66)
м АГ —1 ЗА:— РН; а с 2 (1 66)
Н -
т?
мь м_г
"м"
(1 - I)
2
36-
[т
6 к
г]'
м _ 2 (1-НО - 1.5Ы (2-Е)
Ь 3 2к
м_Ь®Л±Ш1ИЬ;
а 3 2
п 1,5 Ц к (2 - )1 г (3 2к) к
Т-«
гт
3 У
-1»и «г.
2 к
(—для АГ; дляМ);
мв 212 а 2 1 - - • •
-6к 2 к
5)
3 1. 1 (2-3)
м.
1-1 ( 1
2 1 6Л )■
31-1
26
31 I.:
Я X
2
(1 — Е) (1 2Е6)
26
.2. РАМЫ
443
Продолжение 8.2.9
Схема нагрузки и эпюра Л
Опорные моменты. Распоры Схема нагрузки и эпюра М
Опорные моменты. Распоры
Л1риг I».5 ь 3 2 к
мст Ы_ и
ь 32 к 1,5
И
3 2 к Н
Ариг 5. —5, Ь]
Ь 2 VI 6к 2 4- к )
-т(г
6 1
6г 2 к
Ь
МсГ — (— —1 Ь
а 214-6г 2 к )
а’с 2 2 к 16к) ’
(—для Ма, 4-для Мс);
3
И -
2 (2 к) Н
Поворот опоры А
1
ь.а г 2 а
3
-Ч 16 к)
(—для М, и-для
М
Е1 ( ис 1
, 3 4- 2к
2 к
. Зк
±- Ф
1 6к )
(4“для Ма; —для Мсу, Н 3 1 4- Н 2 4-
Ф
Горизонтальное смещение ригеля
-1±Ж
мь ма „ -9- А;
(1,53г) Л
И — Д
(1,54-3г) Аа
. Г79П777 Г7У7?Г
Горизонтальное смещение ригеля
‘гжг
А,
АЛ дх 18Й
— Мд Д;
Л (2 4" 3г)
Ма м (1 Лк1 д
й (2 4- Щ
и _65 (1 6к)
Ы‘ 2 ЗА)
Мп
м„
Горизонтальное опоры А
смешение
3 ЕГгк
(3 4- 2к) №
н .Е,± д
(3 2к) Ь?
Горизонтальное смещение опоры А
АЛ АЛ ЗЕ1 к
МЬ мн — • Д,
0 й И? 2 к
М„ М„ . 1±±. Д
Н
Ла 2 4- А _ЪЕ1Х 1 26
Л3 2 4- к
444
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.2.9
Схема нагрузки и эпюра М
Опорные моменты. Распоры Схема нагрузки и эпюра М
Опорные моменты. Распоры
Вертикальное смещение опоры А
1-
Т“
Мг
ма
6Е7г
I2 1 6г
М Л4м.;
а с о
Н
12 Е1Х ' к Н1Х 1 б к
Нагрев на °
77777? УУ
3Е1г оЛ1
Н
Н2 32 к
3Е1Х аИ к
И?
3 2 к
а — коэффициент линейного расширения
Нагрев на 1°
мь ма
3Е, аИ
Н
г2 2 к
3Е аг 1 4- к
Н2 24-к
3Ег а 1 4- 2г
Л3
2 4- к
а — коэффициент линейного расширения
Пример 1. Определить опорные моменты в раме от частичной равномерно распределенной нагрузки на ригеле (рис. 8.7).
Находим значения моментов защемления ригеля от симметричной Ми антисимметричной нагрузки (формулы для схемы «любая нагрузка на ригель») по 8.1.4:
Л1мд '-(3-4,-52)
роР
--(1-0,75)
ра2
(3—25);
Лй? (3-41.52)-
- а — 0,75?) (3 _ 6 36).
О о
Для рамы с шарнирно опертыми стойками (опорные моменты от нагрузки II равны нулю) получим по 8.2.9:
м _ м _ 3 Р 3 _
'ь а 2 (3 2к) ' 6
3—21 ро
3 2 к ' 4
Для рамы с заделанными стойками:
3
ра2
Ч [ Г
а,с I
2_ 3-63§1 р_
2 к 2(16)] 6
3 — 2 _ 3 — 61 31
2 (2 к) 2(16).
а
пгптттй'
’С
®Г
1]ЦЦ1ш1 1шшш1
©Г
титш
Рис. 8.7
Пример 2. Определить узловые моменты в раме от треугольной нагрузки на стойку (рис. 8.8).
Для загруженной стойки в предположении защемления опор и их несмещаемости находим по 8.1.4:
о0 3_. М0 М0
Кь 20 ’ ь 30 ’ 0 20 ‘
По формулам для схемы «любая нагрузка на стойку» получим:
т
к (зя1н-т1_ „
мь.л- 2 V 1 6 2 к
)-
1
Ма
Мс
4 (1 6) 1
1
['24 (16) Г 1
] Рк
30(2 )] 2 ’
1 ■ 7 1 РН
40 ] 2 ’
30 (2 к) 1
[24 (1 6) 30(2 )
3 1 Рк 40] 2
8.2. РАМЫ
445
8.2.10. Моменты в П-образной раме со ступенчатыми стойками1
1 — Л. г 2.
Н ' I '
01
1
кЬ1
1
Численные значения коэффициентов к и г с индексами (6®, 6В, г, к и др.) принимать
о а о Ь а
по 8.2.21, Е0—по 8.2.13
е
М
,лН [? »1 ±Р21-21)]Г
(ДЛЯ —для АГ);
"а., чК 0-21)]-
(—для 4-для Мсу
»1 кьь «о:
51 а к1
ь р
МаМск111 Рг
Я
8
Р
Любая нагрузка на ригель
"с
м
6,Й Т- [ к1 Р1 ммд ± ( кь гь 'о) Р2 мш] (для мь ■ -для ма)’
,с Т [ « р1 ММД Т ( « а0 - г) Р'2 мш] Нля Ма : для Мо) М??д. моменты защемления при симметричном и антисимметричном загружении (см
Ы 011
пример I в 8.2.9). При любой симметричной нагрузке
кв
11 «Г мамс -5-м6;
кь
1 Порядок пользования таблицей для расчета рам с двухступенчатыми стойками см. пример и 8.2.16.
446
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.2.10
Схема нагрузки и эпюра М
Опорные моменты
р1 г
У?
"а
уда
с
МЪ,йЧ (злг2 э2 4 ь РрА2
(—для Мь 4-для Мйу,
ма “ 1" [ 52 0 - о) ка1 ( кь -м2 Рг)] а Р
Мс -Г [ 52 ( Ц) - 5 ( Ч 01 02)]:
2 ГЬ 0 ““ кЬ'
52 Д2 ?2 1 гь
с:
_1
Р
мь
7Г —Г7Т
ма мс
МЬй 2 (3з 2 ЙМ—Ь4 З1)
(—для Л1; для Му
Ма [ 53 0 ао) ка 1 ( кЬ1—Ь4 “3 Р2)] РЛ ка—а4РН;
Мс Т [ 53 ( - «о) - ■к1 '1 ( М-М 01 "з 02]] Рк-
N ',Л 6 —Ъ.л 3 Ы—М о Ь1—64
53 Л?3 Р2 Г6 г1 ГЫ—Ь4
Р ъ лй ЩМа
Щ
Ис
У
Мь Ма Щ 50 Э2ЯЛ;
« МС 7- [ 0, (I - 1оИ РЖ
1
,
ч А
Ф
г
2 ( 34 2 кЬЬ 1)
(—для М, 4для Ма);
М“ Т [ 54 I1 “ ?о) а 1 ( кЬ5 01 »А 02)] • Мс - -у- [ 54 (» - «о) -йа ‘1 ( М 01 4 02)]
Л?4“Г6в«о- ь6,
54 Л4 Р2 ГЬ 1 ГЬ5
Ма с
«Г '2 (3Э2 Р[) -'•
Мсьт - 2 (302 3,) 1.1
ма [ к ( 01 рг) е2 г ( о)]
М 2 [ “ Р2) Р2 ГЬ О .)] Ь
8.2. РАМЫ
447
Продолжение 8.2.10
Схема нагрузки и эпюра М
Опорные моменты
Поворот опоры А
мЬ,й 2 [ к1 01 3?2 ( к 0 -;)] ф;
(—для Мь для Мау,
Ма К - » 1г к1 3 - 32 ( Е0 -°)2 - к% (1 - Во)] р;
МС Т- Н2 1 Ч 1 Н 02 ( ка 0 - И)2 «(»- «о)] Ч
Горизонтальное смещение ригеля
"1М§
н.
М,
МЬ-МЛЫ2НкЬ-ЁГ
3.
11612
Осадка опоры Л
6Л, ,2е2(В-)Д;
Горизонтальное смещение опоры Л
Нагрев на Г
ял I А ьА :Л1 2 "1 Ъ
аЬ а 'г 1 о ь
«--(»“ 1 АЬ 1)
где а — коэффициент линейного расширения
Е1Х аН 2Л
448
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК. РАМ И АРОК
Продолжение 8.2.10
Схема нагрузки и эпюра М
Опорные моменты
Любая нагрузка на стойку
м,
« гг
иь.а-12 (отлр,)
(—для А1; для А1);
«“Т [К2'ь1) (»-«о)2 1 К »1-0 М] Ма:
"е-Т К-0 2 1 » )( - 6о) -5 1 « »1 0 Р2)]
где М® М®, Я® — моменты защемления и реакция опоры стойки: для одноступенчатых стоек по 8.2.21, для двухступенчатых по 8.2.22
При действии на стойку внешнего момента Ь (по часовой стрелке): член в квадратных скобках принимать со знаком
минус; М и АГ0 принимать со своими знаками (см. пример) по 8.2.21 или 8.2.22.
Пример. В П-образной раме с двухступенчатыми стойками определить изгибающие моменты от действия равномерно распределенной нагрузки на ригель и внешнего момента на стойку (рис. 8.9, а).
р1тм
6)°'™
Рис. 8.9
По 8.2.22 находим (см. также пример в 8.2.22):
481 л ™ в к1 9,375 Ь1— тг0,82; г® ---г 1,6;
5,87
5,87
ка гь Ч 1.6 0.82 0,78; кг 9,375 — °'284Моменты в узлах рамы определяем по 8.2.10
(1т
10
16
0,625; I® -у- 0,3;
Р.
1
Рг
0,820,625 •■ 20,3 1
0,90;
0,820,625 4- 60,3 — 1,60,2840,625
0,493.
От нагрузки на ригель. По формулам схемы «любая нагрузка на ригель» (при симметричной нагрузке):
242
мь Н К ?1 мьаЛ 0,6250,82-0,90— 22,1 тм;
ка 0,78
0м
22,1 21 тм.
От нагрузки на стойку. Величины опорных реакций и моментов заделки загруженной стойки при неподвижных опорах принимаем по данным примера в 8.2.22 (рис. 8.9, в): 20,082.; Л0,191; И“0,12.
По формулам схемы «любая нагрузка на стойку»з
Л'0 — (0,082.0,284-16 — 0,19)1, 0,182Л;
Мь 0,3(3.0,182.0,493 — 0,19-90) X 0,029.;
Мл 0,3 (3-0,182-0,493 0,19-90) . 0,132-;
Ма —0,5 [(0,182-0,493-1,6-0,625 0,082-16)(1 — — 0,284) 0,78-0,625 (0,19-0,90 — -0,182-0,493)] Д 0,12.;
Ма — 0,5 [1,4-0,716 0,486 (0,171 — 0,09)] Ь
— 0,12,—0,40,;
Мс 0,5 (1,4-0,716 — 0,486 (0,171 0,09)] . 0,437;.
При построении эпюры М (рис. 8.9, б) учитывалось, что за положительные приняты моменты, показанные на эпюре М в 8.2.10 для случая действия на стойку внешнего момента.
Проверка эпюрьПМ (см. пример 2 в 8.2.15). Проверку деформаций (равенство нулю приведенной плошали эпюры) производим по 8.2.23 (значения ц и Я, см пример в 8.2.22).
Для упрощения вычислений ломаную эпюру стойки АВ заменяем эквивалентной прямолинейной (см. способ III в примере 2 в 8.2.23):
Мк (—0,029—0,19) —0,219; М™ [0.4—
— (—0,12)]0,521 (рис. 89 г): ©, 111 1?—
в 140,55 • 0,25 2,75, со2 1 0,525 • 0,252 1,563
Приведенная плошадь эпюры равна (множитель Ь опущен):
16(0,52 0,219) 1,563 16.0,219-2,75
2-10
24(0,132 — 0,029)
2-7,2 16-0,132-2,75
10
10
16(0,437 4 132) 1,563
210
1,676 — 1,677 « 0.
8.2. РАМЫ
449
8.2.11. Моменты и реакции П-образиой рамы с абсолютно жестким ригелем и стойками постоянного сечения или ступенчатого очертания
С шарнирно прикрепленным ригелем Стойки постоянного сечения
А 4
У Ш
Я
О 1
41
Э Е 5 Е
Ег 1
"а
нс
7—
ш
16
рН2 Мс р№ На рН Ис рН
16
16
16
450
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК. РАМ И АРОК
Продолжение 8.2.11
Стойки постоянного сечения
5 3
5 0,751 (2-1) Ь — 8Н; Мс ЗН; Н 5
Ступенчатые стойки1
виды нагрузок
На стойки действует любая из приведей ных в 8.2.19 нагрузок
От сосредоточенной силы в узле Р»:
5 ; М Мг — РХН .2 а с 2 2
От других нагрузок:
А Нг 5 М АГК5Л;
2 Ь с с а а
Реакция верхней споры загруженной стойки в предположении несмешаемости ее опор по 8.2.19;
момент заделки консольной стойки от внешних нагрузой
При двухступенчатых стойках 5- где Я® — реакция верхней опоры стойки принимается по 8.2.20.
8.2. РАМЫ
431
С жестко прикрепленным ригелем
Стойки постоянного сечения
Продолжение 8.2Л
ЗаЪ. „ е. ЗаЪ. Ь (2Ъ — а)
31 ; И — 5; М, — м. С ; м, Ь I3 С а 22- 0 21-
Ма 67г Мь-Ь
452
РАЗДЕЛ 8, ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.2.11
Ступенчатые стойки 1 Коэффициенты г с индексами принимать по 8.2.21; коэффициенты ?о — по 8.2.13; м — момент заделки стойки по 8.2.21 (принимать со знаками, указанными в таблице)
Р,мъ V,
5"7- «-•
Ч
7
1 н н "с
Р
7
"а
Йь
8-'Ы-МР- НС 5' МаЫЪ0; Мс 5А(1-о): М М, — м°- М Р (Н — а) — 8Н — М
Ь а ь а Ьу
где а — расстояние от Р до опоры В
МЬ
ма »с
8 Нс 8’ М 5Л»0: Ч.-5Й (1 — 0); м,м, — м°- М —8Н — м
о а о а 2
' ' мс
1 Прв двухступенчатых стойках 5 Я?,
2 0
принимаются по 8.2.22.
"5: 5Л (1 - 5о);
МиМ. — М()- М 514- Л1. — А Ь а Ь а Ь
— реакция верхней опоры. Л1 — момент заделки стойки, коэффициенты
8.2. РАМЫ
453
Пример. Определить изгибающие моменты в стойках рамы, изображенной на рис. 8.10 (р °°).
В 0,055РН Л ;0,17РЬ
7
Дано:
0,2В5РН Рис. 8.10
А — 0,3; п -- 0,4; -77 0,2.
Продолжение 8.2.11 По 8.2.21 при а0,2к: гы0,870; М къРН
0,115 Рк
По 8.2.13 о 0,391.
1
?Ь Р
0,870
Р 0,435Р;
Ма 5Л
0,435-0,391РЛ 0.170РЛ;
м0 ма-м°ь
(0,170 — 0,115) РН 0.055ЯЛ;
Ма (0,8 — 0,435 —
— 0,055) РН 0,310» А ‘
Мс 0,435 X Х(1 —0,391) РН 0,265РЛ;
Нс 8 0,435Р, На Р — 5 0.565Р.
8.2.12. Расчет одноэтажных многопролетных рам с шарнирно опертыми абсолютно жесткими ригелями и ступенчатыми защемленными стойками [3, 5]
Расчет рамы сводится к определению по формулам таблицы горизонтальных реакций верхних опор стоек, после чего стойки рассчитываются как консоли, загруженные приложенными к ним нагрузками и реакциями верхних опор.
Рис. 8.11. Схема рамы и нагрузок
Т г Г гг
Рис. 8.12. От нагрузки в узлах рамы
г г г г
Рис. 8.13. От нагрузки на крайнюю стойку 1
прг г
Рис. 8.14. От нагрузки на промежуточную стойку
Предварительно следует найти отдельно от каждой нагрузки реакции верхних опор загруженных стоек в предположении кесмещаемости опор.
Ьт
Стойки
Реакции верхних опор стоек
а) Высоты и моменты инерций всех стоек одинаковы
Незагру¬
женные
Загруженная (5)
Ьв
Обозначения
т — число стоек рамы,
Я® — реакция верхней ОПО-
РЗ
ры загруженной стойки: для одноступенчатой стойки —по 8.2.19, для двухступенчатой — по 8.2.20
1 Способ расчета многопролетных сам с ригелем в разных уровнях см. пример 3 в 8.2.15.
Расчет с учетом пространственной жесткости каркаса см. Г161 и «Руководство по проектированию сборных железобетонных конструкций одноэтажных зданий». ЦНИИПромзданий, 1971.
454
РАЗДЕЛ 8, ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ. РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.2.12
Стойки
Реакции верхних опор стоек
Обозначения
б) Высоты всех стоек одинако вы, а моменты инерции различны
Незагру¬
женные
V'
Загруженная) (5)
х(1- 'т
В ги1ко ГН202 "
ЛмЛл
к0 — для одноступенчатой
стойки по 8.2.18, для двухступенчатой — по 8.2.20. Второй Подстрочный Яндекс означает номер стойки
Ве _ Н1кб НЛ)2
1,3 «.3 Н1 2
, 7нтот
171
в) Высоты и моменты инерции всех стоек различны
Незагру¬
женные
т_ 0 0 Ь1 Ь ну
Загруженная (8)
„ (л НЗ 05 1 )
Примечание. При дейсвии в узлах рамы сосредоточенной силы (1 Или И?т—см. схему на рие. 8.12) опорные реакции верхних опор всех стоек направлены в сторону действия силы РV и определяются по формулам таблицы
для нейагруенМЬй стоек йри
Пример I. Определить изгибающие моменты в трехпролетной раме с бесконечно жестким шарнирно опертым рйГёЛеМ И етуейатыми стойками, изображенной на рис, 8.15, от заданных нагрузок.
Гг т. §
и
П,Щ7тнТТ 1г'7,82т % ®
У ягЧО
ЯВ 777
''Знз'Ю-
Ф
Пг7
Рис. 8.15. Схема рамы и нагрузок
1815
Тг3ЬЙа1Т1ръг 7‘3,214,815-
П,21
0,72
0,72
0,12
0,72
Ш
4375
Щ7
13,Ь7
№ ДО
П15 -7,55 ' 57,15
23,1
Рис. 8.17. Эпюра М от внешних моментов
УгЩ 0,782
Т'%пыРЬш
5,975
5,975
Рис. 8.18. Эпюра М от ветровой нагрузки
Рамы рассчитываем по формулам 8.2.12,6.
1. Определяем по 8.2.18 для каждой стойки коэффициенты «о» подсчитываем другйе вспомогательные коэффициенты. Результаты йодсчетой приводятся в таблице. Для удобства вводим обозначение
н Ы
в 5о‘
№
стойки
II
а-»5-
'н
к01
'ш
тко 1
1н1к0( о В 01
0,2
0,2
2,907
5
14,536
0,171
2
0,2
ОД
2,799
10
27,99
0,329
3
0,2
0,1
2,799
10
27,99
0,329
4
0,2
0,2
2,907
5
14,535
0,171
В
85,05
2 1,000
2. По 8.2.19 определяем для загруженных стоек реакции К°Ь8 от каждой из заданных нагрузок в предположении несмещаемоси опор,
Рис. 8.16. Эпюра М от силы Т1
Нагрузка
№
таблицы
Коэффициент
Реакция Я® (в пг) 08
Тх 3,21 т
8.2.19, г
к9 0,682 (при а Нь)
0 0,682-3,21 Ы
2,189
Ц 18,7 тм
8.2,19, д
к, 1,395 (при а Нь)
П°.л 1,395 — Ы 18,7
1,395
2——71,62 тм
3.2.19, о
к, 1,343 (при а Нь)
0 1343 л’62 Ы 18,7 5,144
14,4 т
-
-
Я'О в 14,4
ы
рх 0,34 тм
8.2.19, б
кх 0,3657
Нп0 0,3657-0,34х
ы
р4 0,21 тм
8.2.19, б
кг 0,3657
Х18.7 2,325 4 0,3657-О,21 X X 18,7 1,433
8.2 РАМЫ
456
3. Подсчитываем величины реакций верхних опор (с учетом смещенйй опор) и изгибающие моменты, пользуясь данными §.2.12. Рекомендуется для каждой нагрузки показать на схемах рамы направления реакции верхних опор (см. рис. 8.11—8.14). За положительные приняты реакций верхних опор, действующие слева направо.
Реакции верхних опор
М.оменты заделки стоек
От тормозной нагрузки
д., - ?°, (х 8
Ь1 Ы V 01
— 2,1890,829 — 1,815 т;
Л(,2 ЛЫ502“2-189-0’329 0,720 г;
ПЬь 2,189-0,329 0,720 т;
ЛМ-ЛЫ504 2-189-0’т
« 0,375 Т
Г,—3,21 т (рис. 8.16)
И —1,815-18,7
3,21-15 « 14,21 тм, Ма2 0,720-18,7 13,47 тм;
Ма3 0,720-18,7 13,47 тм; —0,375-18,7 7 тм
От (фановой нагрузки: 1,1 — 18,7
—Д0.о Л1 — 1,395-0,829 —
Ы 01
— 5,144.0,171 — 2,04 т;
«Ь2°Ы802 (1“502)е 1,395-0,329 5,144.0,671
— 3,91 т;
оз «1-°2)
(1,395-—5,144) 0,329 — 1,233 т (1 395—5,144) 0,11
— 0,64 т
тм; .2—71,62 тм (рис. 8.17)
Ма1 — 2,04-18,7 18,7 «в — 19,4 тм;
Ма9 3,9118,7 — 71,62 — 1,58 тм;
Ма3— 1233-18,7
— 23,10 тм;
М„я — 0,64-18,7 — 12 тм
а4
От ветровой нагрузки: V?
р4“0,21 тм (
«м«;?501-л;?(,-50,)
Ь4 501 "" 14'40'171 2.325Х Х0,829 1,436-0,171 «0,782 г; КЪ2 14,42,325М36) 0,329 « 5,975 т;
5975 т
МКЛМ)501-
-Лм(1-504) (М.4
2,325) 0,171 — 1,430.0,829 «
1,67 т
1-14,4 т; Р1-0,34 т(м; рис. 8.18)
Ма1 о»78218»7
д 74У08 тм; Ма2 » 5,975-18,7 111,7 тм;
Ма8 111,7 тм;
Ма4 1,67-18,7
67,95 тм
Продолжение 8.2.12
Проверка эпюры М (см. прийер 2 в 8.2.15). Условия равновесия соблюдены. Условия деформации будут удовлетворены при равенстве прогиба верха всех стоек. Прогиб стоек можно определить из следующих выражений:
незагруженная стойка
01 Е1
загруженная стойка
8 НЬ
Знак плюс принимается в том случае, если реакция Кь направлена в сторону действия нагрузки (йайрймер, реакфш СТОек 1 и 4 при ветровой нагрузйё, см. эпюру М). Ниже приводятся подсчеты прогибов с?бек (умножены на Еп?) от действия тормозной силы в ветровой нагрузки.
№
стойки
При действии тормозной силы
При действии ветровой нагрузки
2,189—1.815 — ’ »0,0257 2,907-6
2.825 0,782 4 2.907-6
2, 3
0.72
0,0257
2,799-10
5’975 « 0,214 2,799-10
4
0.375
0,0258
2,Ю7-б
?1-67 0,214 2,90:-а
Пример 2. Показать ход расчета изображенной на рис. 8.19 рамы, у которой высота и моменты инерции стоек различны.
9Щ
Рис. 8.20
2Щ
1. Раму рассчитываем по формулам 8.2.12, в. Величины к0 принимаем по 8.2.18. Подсчеты значений вспомогательных величин приводятся в таблице.
456
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК. РАМ И АРОК
Продолжение 8.2.12
№
стойки
и
г А
'н
0
'н
Ж.З
Н1
мк01
1
0,20
0,25
2,926
10
29,26
3375
0,0087
0,269
2
0,15
0,20
2,960
20
59,20
8000
0,0074
0,228
3
0,167
0,25
2,954
15
44,31
5832
0,0076
0,234
4
0,20
0,25
2,926
10
29,26
3375
0,0087
0,269
В' 0,0324
2 1,000
2. Реакция верхней опоры загруженной стойки 1 в предположении несмещаемости опоры по 8.2.19,6:
К°ьг 0,374), Л,0,374 • 15р,5,611.
3. Реакции верхних опор (с учетом смещения опор) и изгибающие моменты:
Реакции верхних опор
Моменты заделки стоек
От равномерно распределение
Я — 0 1 — 5
Ы Ы V 01
— 5,61 -0,731 рЁ — 4,10 рг;
ой нагрузки рх (рис. 8. 20)
рн
Ма1 4.10 рЛ 2
- -4,10.16
« 51 рг;
Реакции верхних опор
Моменты заделки стоек
«Ь2 ЛМ502 5-6Ь0-228'’1 1,28 рг;
ЯЬз 5,61-0,234 рг 1,31 р 5,61-0,269 рг 1,51 р,
Ма2 » 1,28-20р1 25,6 р
Ма3 1.3Ы8 23,6 рг: Ма4 1,51-15 Р1 22.6 р,
Порядок подсчета реакций и моментов от других видов нагрузок см. пример 1.
8.2.13. Расчет одноэтажных многопролетных рам с абсолютно жесткими ригелями и ступенчатыми защемленными стойками [3]
Порядок расчета
1. Определяют отдельно от каждой нагрузки для верхних опор загруженных стоек реакции и моменты защемления М8 в предположении неподвижных опор: при одноступенчатых стойках — по 8.2.21, при двухступенчатых — по 8.2.22.
2. Подсчитывают по формулам настоящей таблицы (с учетом смещения опор) для верхних опор всех стоек реакции и моменты в зависимости от типа рамы.
Рис. 8.21. Схема рамы и нагрузки
Ъ(т • %Ъп
М А
МЪт[
т-1
Рис. 8.22. От нагрузки в узлах рамы
Лъг
Ъ(т-1) ЕГО
Рис. 8.23. От нагрузки на крайнюю стойку 1
Рис. 8.24. От нагрузки на промежуточную стойку
3. Стойки рамы рассчитывают как консоли, загруженные наверху реакциями, моментами (см. п. 2) и непосредственно приложенными к стойке нагрузками.
8.2. РАМЫ
457
Продолжение 4.2.13
Наименование стойки
Реакции н моменты в верхних опорах стоек
Обозначения
а) Высоты и моменты инерций всех стоек одинаковы
т—число стоек; К®, М? -«реакции и
Ь8 Ы
моменты защемления верхних опор загруженных стоек (в предположении несмё-
щаемости опор) и коэффициенты г А опре-
Ь
деляются: для одноступенчатых стоек — по 8.2.21, для двухступенчатых — по 8.2.22. Коэффициенты 0 для двухступенчатых стоек приведены в 8.2.22.
Второй подстрочный индекс обозначает номер стойки
Незагруженные стойки
рО
Я • ы т '
мы “ Йы1ын
Загруженная стойка (5)
Я. Я° А М ;
Ь Ы т)
М. — М
Ьв Ь Ы
б) Высоты всех стоек одинаковы, а моменты инерции различны
В — гд 4- И А
н1 Ы н2 ;?2 щп Ьт
Незагруженные стойки
гД
Ы Ы в
МЫ оЛ
Загруженная стойка (5)
гА
ЛГ-А» - Я»
Й5 6 0
в) Высоты и моменты инерции всех стоек различны
ГД ГА
е‘- н7' "7 •••• Й1 "2
1 к т Г Ьт
Незагруженное стойки
у. -Д
Загруженная стойка (5)
Примечания: 1. Пр всех стоек () направлень Значения этих реакций и м
2. В формулах принято, рис. 8.22—8.24). Если момен как и в незагруженных стой;
7 гь
м Л1° — Я? п п -Н
Ь Й5 Оз 5 3 '
НВ
и действии в узлах рамы сосредоточенной силы (1 или.1 в сторону действия силы XV, а опорные моменты имев юментов определяются по формулам незагруженных стоек,
что моменты верхней опоры загруженных и незагружен т верхней опоры загруженной стойки получится со знаком ках.
4
А»
т
см. рис. 8.22) реакции верхних опор эт направления, показанные на рисунке принимая №.
ных стоек обратны по направлению (см 1 минус, направление его будет такое же.
458
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК. РАМ И АРОК
Продолжение 8.2.13
РГ 8
?, ‘ 1-Г?
й
"ъ.
Л
"а
Рис. 8.25.
Крэффцциёцтн 1о
Моменты защемления от взаимного смещения опорных сечений при действии на опору В единичной силы Р 1: %0Н; А1а ( 1— о)Л; ЦР (рис. 8.25);
ла. пь.
н н
Значения Ё
о при г, равном
А
0,06
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1,0
0,1
0,226
0,287
0,371
0,414
0,441
0,459
0,471
0,480
0,490
0,495
0,500
0,2
0,196
0,243
0,322
0,373
0,407
0,433
0,453
0,468
0,480
0,491
0,500
0,3
0,212
0,244
0,309
0,356
0,391
0,420
0,441
0,460
0,475
0,489
0,500
0,4
0,240
0,266
0,316
0,355
0,388
0,413
0,437
0,456
0,473
0,487
0,500
0,5
0,278
0,295
0,333
0,366
0,392
0,416
0,437
0,456
0,472
0,486
0,500
Пример. Определить изгибающие моменты и опорные реакции в раме с абсолютно жестким ригелем от заданных нагрузок (рис. 8.26).
Расчет ведем по формулам 8.2.13 в.
1. Параметры стоек, значения коэффициентов (см. 8.2.21), §о (см. 8.2.13) и другие вспомогательные величины, которые могут понадобиться при проверке
эпюр
м(р— — 1; о11лА,; й21-Ь2У приведе¬
ны в следующей таблицедля удобства введено обозна-
гд
7ш
чение
нв
Н
II
®С
ж
К;
Рис. 8.26. Схема рамы и нагрузок
и
а
Стоика
А
'н
гД 'ш ГЫ
ч3
1 гД
т Ы
I
1т Ы 0
1
1
А
п
ГЫ
кь
о “" о В
01
со,
ю2
1
0,30
0,4
8,018
1,0
8,018
1728
0,0046
0,339
0,391
1,5
1,45
1,135
2
0,24
0,2
6,365
1,3
8,270
3375
0,0024
0,176
0,318
4,0
1,96
1,230
3
0,24
0,2
6,365
1,3
8,270
3375
0,0024
0,176
0,318
4,0
1,96
1,230
4
1,00
1,00
12,000
0,6
7,200
1728
0,0042
0,309
0,500
0
1,0
1,000
В' 0,0136
8.2. РАМЫ
459
2. Определяем по 8.2.21 реакции и моменты заделки верхних опор загруженных стоек (в предположений Неподвижных опор):
1,45214
- 14 тм; % 1,7 т;
М°Ь1 0,085-14 1,19 тм;
0 1,449-60
_2 60 тм Щ2 — 5,8 г;
15
м°ь2 0,065-60 3,9 тм; р, 0,3 тм; 0,47-0,3-12 1,69 т;
Продолжение 8.2,13
0,064.0,3-12® 2,76 тм; р4 0,18 тм; В°м 0,5.0,18-12 1,08 г; Лм д.0833.0,18.22 2,16 тм.
3. Прдрчитывзем ведичинь1 реакций и опорных моментов е учетом смещения. Зз цолржительны приняты: реакции ?, действующие сёра направо, ц моменты, вызывающие растяжение в правых волокнах стоек. Рекомендуется для сажддй нагрузки на схемах рамы показать направления реакций и моментов верхних опор (см. рис. 8.22—8.24).
Реакции верхних опор в т
Мрментья заде.дкц стоек в тм
От крановой нагрузки 2-1 1
Ы - М С 501) - «°Ь2 501 - 1’7'0-661 58Х
хо, 339 — 3,085;
%2 - «Ъ С - 502) «М 502 5-8'0'824 1-7'0’176 5075:
«ЬЗ Гм “ С) 503 »-7 " 5’8 0.176 - 0.722;
«Ы (Ы ») 504 (1’7 5’8 «"З09 1268
4 тм; 1,260 тм (рис. 8.27)
М., —Л® Д0 5 Н — Я® Н (0 —
Ы Ы Ь 01 01 1 Ь2 0101 1 V М
— 0)5 Н — М® (— 1,7 — 5,8) 0,3390,391.12 — 1,19 о) 01 01 1 Ы
— 7,7;
мг. (Я°ы — 5 § Н М0 (1,7—5,8) 0,176.0,318.154Ь2 V Ь1 Ь2) 02 02 2 Ь2 '
4 3,00,46;
МЬЗ - 03Л3 - - 0,722-0,318.15 - 3,44;
ЫЫ - - - 1,268.0,512 - 7,6
От ветровой нагрузки р0,3
? —Я?, 1 — 5 Я°5т - 1,69-0,661 1,08.0,339
Ы ы V 01 64 01
— 0,75;
Ь3 “ (« м) 502 (1’69 1-°8 °’176 О-487'
лЬ4 лы 504 - Ка с - 504) “ 1'"-0309 - 1’08-0'691
-0,224
: тм; р4—0,18 тм (рис. 8.28)
М № и) 501«оЛ -М°Ы 1-69
ХО,339-0,391-12 — 2,76 1,64;
МЫ - »ьг • 0.487,0,318-15 2,32;
Мы “ («И м) 504«04Л4« 4 «•» Ы») 0-309 X X 0,512 — 2,16 2,97
Порядок подсчета распоров в г и моментов за, Яа1 °’75 “ °’312 “ 2’85;
д2 «а3 °-48?;
— 0,224 — 0,18-12 — 1,936
аелки в тм стоек внизу (от ветровой нагрузки)
Маг 0»7512 164 0,3122.0,5 — 10,96;
Маъ МаЗ 0,487-15 2,32 - 4,98; Мы 0,224 42 2,97 — 0.18-12»,0,5 7,29
Проверка эпюры М (см. пример 2 в 8.2.15). Условиям деформаций эпюры будут удовлетворять, если приведенная площадь РПр эпюры М каждой стойки будет равна нулю.
Проверим эпюры стойки 3. По формулам ступенчатых стоек в 8.23 получим при крановой нагрузке на раму:
(Ма МЬ) Щ _ Мь (ог (7,38 3,44) 1,23 _ пр_ 2„ „ “ 2-1,3
3,44-1.96
— ; 5,125 — 5,175 — 0,05 ( 1 %).
1,3
Эпюры етоек от других нагрузок можно проверить по отношениям Ма : Мь, которые должны буть для незагруженной стойки равны между србр яри всех загружениях рэм. Эцюры стойки 3 этому условию отвечают (7,38 : 3,44 4,98 : 2?32).
Криволинейные или ломаные эпюры рекомендуется заменить прямолинейными эквивалентными (см. пример в 8.2.10) и проверку делать по приведенной выше формуле. Например, для стойки 2 при крановой нагрузке М°ь23,9 тм; 0,384-60 23 тм (см. 8.2.21,в);
М% 0,46—3,9—3,44; М% —15,62—(—23) 7,38 (прямолинейная эквивалентная эпюра получилась такой Же, как у стойки 3).
460
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
8.2.14. Расчет одноэтажных многопролетных рам со ступенчатыми защемленными стойками [3]
Такие рамы целесообразнее решать методом деформаций (перемещений) (см. 5.7.3). Необходимое количество уравнений равно числу узлов рамы, не считая защемленных, плюс одно дополнительное. Подсчеты сокращаются при использовании данных 8.2.21—8.2.22.
Приводим уравнение для узла 2 рамы (рис. 8.29):
Щ) 1'2 Ф2 4 (12 "Ь 2з) Ф2 212 Ф1 23 Фз
6-л4л4 -м°д.
(а)
V
© 7777
гтгтгШТггштац
©
7777
7777
7
1
©
Рис. 8.29
Дополнительное уравнение (горизонтальной проекции)
гь ч
’ъ Н
а - 2?;
(б)
М.
26
М,
62
(д)
(е)
Порядок расчета виден из примера.
Пример. Определить изгибающие моменты в двухпролетной раме, изображенной на рис. 8.30 (параметры рамы приняты по серии 1-36, выпущенной Гипротисом и Проектстальконструкцией, 1954 г.).
г шшд
1 Г»
4'
я 0
гг
5 тяг-
27,5
63 1,0
ЛГ13
6 7777
Рис. 8.30
В уравнении (а) даны реактивные моменты заделки элементов рамы в узле 2. в левой части — от поворота узла 2 на 2-фг, узла на фЬ узла 3 на Алръ и от смещения ригеля на 6; в правой части — от внешней нагрузки. За положительные приняты моменты от внешней нагрузки, вращающие узел по часовой стрелке.
В уравнении (б) даны поперечные силы (реакции) верхних опор стоек: в левой части — от поворота узлов стоек на _ф и от смещения ригеля на 6; в правой — от внешней нагрузки. Знаки ЧР и даны для направления нагрузок, показанного на рисунке.
Принятые обозначения
12 23. 1Ш
12 7 ; 2з , ; ч —, —
I12 23 щ
линейные жесткости ригелей и стоек; Нг — момент инерции нижнего уступа стойки; к, г (с индексами) — коэффициенты по 8.2.21; ф, б — углы поворота узлов рамы, горизонтальное смещение ригеля; — реакция верхней (фиктивной) опоры от нагрузки на стойки по 8.2.21; Л?21» М23, 26 — моменты заделки элементов
рамы: для ригелей по 8.14, для стоек по 8.2.21.
При стойках постоянного сечения коэффициенты к, г, опорные реакции и моменты заделки принимаются по 8.2.21 при 1 или по формулам 8.1.4.
После нахождения значений ф и б опорные моменты определяются по следующим формулам:
М21 — 212 (2ф2 • ф2) — М
о.
г0.
23»
Определяем линейные жесткости элементов: 19 44
0,735; 2:
1,53;
25,85 — "9 ’ 28,65
25 °’503: 22 0'132;
кз 25 0’142-
Значения
к
п —
и коэффициентов къ%
кА гв гл (с индексами) по 8.2.21 приводим в табличной форме (все подсчеты выполняются на счетной линейке).
№
стойки
%
а
1
•2
II 1-0 V» в
ла
0,342
0,068
0,417
0,620
1,037
3,48
4,52
2
0,435
0,065
0,406
013
1.024
2,95
3,97
3
0,342
0,077
0,462
0,650
1,112
3,58
4,69
(в)
(г)
Чтобы избежать двойного интерполирования при пользовании таблицей, значения г и можно определить следующим образом: к1к; кк.
8.2. РАМЫ
461
Основные уравнения угловых деформаций по формуле (а):
1) 0,4170,735Р1 4.0,132ф 20,132рг -
1 037.0,735 25,85
6
1,0241,53,
2) 0,406.1,53ф2 4 (0,132 0,142)ф2.0,132ф, 2.0,142ф3 — 6
28,65
3) 0,462-0,503ф3 40,142ф3 2.0,142ф2 — Дополнительное уравнение по формуле (б);
1,112-0,503
1,037.0,735 4) Р1
1,024-1,53 1,112-0,503
Фг ог о- Фз—
25,85 4,52-0,735
6
От
нагрузки
222
12
222
12
0
Ь-ЬЕ4;Вь.
4,690,503,
25,85 ТА ' 28,65 ’ 25,85 тв 25,852 28,652
После преобразований (члены 4-го уравнения умножаем на 25,85) получим:
25,85
От р
От
1) 0,834 фг 0,264фг — 0.0295Й
40,3
0
2) 0,264 ф, 1,718ф2 0,284ф3 —0,05486
—40,3
0
3) 0,284 ф2 0,800ф3 — 0,02166 »
0
0
4) 0,763 ф, 1,415фг 0,56Сф3 —0,4116
0
—25,85
Приводим уравнения к виду, более удобному при решении их методом последовательных приближений.
р,
ф»
ф2
Ф
6
От р
От VI7
—
—0,317
—
0,0353
48,4
0
Фг
—0,1535
-
—0,1653
0,0319
—23,5
0
Ф
—0,355
-
0,0270
0
0
а»
1,860
3,445
1,363
-
0
62,9
Решая уравнения (в данном случае достаточно ограничиться четырьмя приближениями), получим при равномерно распределенной нагрузке на ригеле: ф159,6; ф2—34,4; рз 12,46; 69,5.
Опорные моменты определяются по формулам (в) — (е). Вычисляем моменты для узлов 1, 2 и 5:
М12 — 20,132 (2-59,6 — 34,4) 40,3 17,9 тм
М21 — 20,132 (— 2-34,4 59,6) — 40,3 — 37,9 тм ; АГ23 — 2-0,142 (—2-34,4 12,46) 16 тм;
( 1,024-9,5 л1 Л
Л2б 1,53 ( — 0,406-34,4 21,9 тм;
Рис. 8.31
618-34,4-
2,95-9,5
,65 )
1 тм.
’ V ’’ 28,
Значения р и б при действии сосредоточенной силы V?: ф1 — 2,06; ф2 1,85; ф31,36; 6 75.
Эпюры М приведены на рис. 8.31, 8.32.
"77777 10,05
Рис. 8.32
8.2.15. Примеры расчета сложных одноэтажных рам методом расчленения с применением таблиц готовых формул
Расчет сложной одноэтажной рамы в ряде случаев упрощается, если расчленить ее так, что основная система будет состоять из простых рам, которые могут быть решены по готовым формулам. Имеется в виду
членение рамы на Г-, Т- или П-образные рамы, решение которых дано в 8.2.1—8.2.11, и стойки с разными условиями заделки опор (см. 8.2.18—8.2.22).
462
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Ход расчета подобных рам иллюстрируется на еле- 9,67 8,33
дующих примерах. г1р до — 1,935,
Пример 1. В заданной двухпролетной раме (рис. 8.33,8.34) определить изгибающие моменты от на- 2. Даем опоре 5 горизонтальное смещение 61
грузки на левом ригеле р 1 т)м. Параметры рамы (рис. 8.35). В выражениях моментов опущен модуль
взяты по примеру 7 [16]. упругости Еу который в окончательных формулах сокра-
Основную систему получаем путем закрепления опо- щается. ры 2 от горизонтального смещения. Раму членим на две Г-образные рамы и вертикальную стойку.
Рис. 8.35
Рис. 8.33
Основное уравнение имеет вид
гцб ггр О,
где г — реакция фиктивной опоры 5 от горизонтального смещения на 61; гхр—реакция той же опоры от заданной нагрузки.
1. По 8.2.5 определяем от нагрузки р изгибающие моменты в Г-образной раме и подсчитываем значение
г1 Р: -0.21 -0.277;
3.72 „ 0,5 л „
По 8.2.21
к 1,214; к 1,046; 2,261;
4,454; Щ — 1,214-0,215 0,261;
«12 312 3.0,277 0,831;
6
: 0,915;
,0(02 0,261 0,831
_ п2 1Я2
12 ? к V 0.261 ‘0,915 — 9,67 тм; 8 8
1,046
По 8.2.5
Рис. 8.36
Мп кк у- 0,831.0,915.2,261 0,0397;
У р О
Л31 К-‘'1 кккь)-
— (4,454 — 0,215.0,915.1,0462,201) - 0,0923;
9,3
0,0397 0,0923
— М“"“'Э’°142-
В стойке 2 (рис. 8.33) (см. 8.2.18):
5,6 1
при А,— — 0,4 и п — 0,2 14 5
5
к0 2,389; « — 0,357;
14
»м 2,3890,357
М4 « —- — 0,0609;
0,0609
ги — —-— — 0,00435.
14
Полное значение гц —(0,014220,00435) —0,0328.
3. Моменты, полученные по п. 2, умножаем на ггр 1,935,
8.2. РАМЫ
463
4. Складываем моменты, полученные по пп. 1 и 3, и получаем окончательную эпюру М (рис. 8.37).
Пример 2. В четырехпролетной раме, показанной на рис. 8.38, определить изгибающие моменты от действия на стойку тормозной силы от крановой нагрузки.
Для решения этой рамы методом деформаций требуется составление и решение шести уравнений.
4 ЭЬ,5 5
V' V'
ю
18
т
я
Рис. 8.38
I 3 у
и 1 1. I®
Й77 д 47а7 47777 47779 №
7
Рис. 8.39. Основная система
Членением рамы на пять элементов1 (две Г-образные 6—1—2 и 4—5—10, Т-образную 2—3—4—8 и две стойки 2 и 4) получаем основную систему (рис. 8.39), имеющую три неизвестных: углы поворота ф1 (узел 2) и фг (узел 4) и горизонтальное перемещение ригеля б.
Канонические уравнения имеют вид (см. 5.305)
г 12фа г 13 ггр 85 0;
Г21Ф1 Г 22Ф2 4“ г2р 0
т 31Ф1 згфа 88 гзр 0.
В этих уравнениях: Гц (или г22) —сумма реактивных опорных моментов в стержнях, сходящихся в узле 2 (или узле 4), от поворота узла на ф 1 (или фг 1); гзз — сумма опорных реакций, возникающих в тех же узлах от горизонтального смещения ригеля на 6 1. Значения г с другими индексами понятны из обозначений.
Для подсчета значений коэффициентов г следует в каждом из элементов основной системы, пользуясь готовыми формулами таблиц, найти моменты и опорные реакции: от единичных поворотов узлов 2 и 4, от единичного горизонтального смещения ригеля и от действия внешней нагрузки.
По 8.2.21 находим численные значения вспомогательных коэффициентов, необходимых для расчета.
№ стойки
К Нв п
'н
Ь
2
6Д
кА
Ка
1,34 и 5
2
1
оо 88
0,20
0,20
1,055
1,140
0,887
0,861
1,942
2,00
4,341
4,328
4,5 п
Линейные жесткости: ригелей — р — 0,25; «40,25; 1; стоек 1,3,4 и 5 — ст; ”т ст 6®
1,2
«0,1 • 1,055«0,1055; стойки 2 — 0,1.
От поворота узла 2 на С Ф; 1 (рис. 8.40, а) Г-образная рама (см. 8.2.6):
к 0,905;
0,1055 1 ’ ’
Ми « 21? 2-0,1055.0,25.0,905 0,0477;
Л21 — 1р (4 — «р к ) 0,26 (4 — 1-0,905) 0,773;
к1
М, —0,0477 0,0402.
К
Горизонтальные опорные реакции:
0,0477 -- 0,0402 Нв — 0,0088.
10
Т-образная рама (см. 8.2.8);
1
•«0,475;
1 Расчет рамы дан для случая, когда уравнения решают без применения ЭВМ.
— 1 10,1055 М9г 2-0,25(1 —0,475) 0,263;
Мм 0,25 (4 — 0,475) 0,881;
Мз4 2.0,25.0,475 0,238;
М43 0,50,238 0,119;
Мдо 20,25.0,10550,475 0,0251; 0,887
83 770,0251 0,0211;
1,055
0,025 0,0211 Я, Я4 - Я, 0,0046.
Стойка 2 (см. 8.2.21):
Ч ‘2 1.140,1 0,114;
Л,2 0,861.0,1 0,086;
0,114 0,086
12
От поворота узла 4 на _фг 1 (рис. 8.40,6) Стойка 4:
М4д 14 1,0550,1 0,1055;
Л94 0,8870,1 0,0887;
0,1055 0,0887
Я2 — Я,
0,0166.
Я4 —Я9
10
0,194.
464
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
О) 0,773V 1
У 0,0088
'©
'оЛ °661 '»©
з 0,025
Г’"1© '0.881 1® 0,т.
омогв Л0088 I, доги Д в ппп1е
д? 0,016В 7 0,086 Щ’'- 0,0016 (
I Г Т I 1 1
I I 1 '
а) От поборота узла 2 нас У
0М2,
I I
I
6) От поборота узла 4 ма лу?
I
I '
I
Ь) 0,0176 1
I
0,881-
г,44
0,°?5
ш?
I
0,238'
■0,263
I I
I I
I I в
1 3яляя,‘ 0,0032
л ?0551 I Л
0,0211 0,004 0,09к 0,0887 0,0Ш1°‘«°88
0,0088'
О.ОЬ77 «дД 5
0,773
Г
9 Ь-1 §» 8
, 0,0126 0,0051 0,0ЬЗЬЩ 0,0063 0,02 0№
'ГГ 11
7 I
0,017В
0,253 Т '-цсиэ 1 02 %
0,505 т
г) От Внешней нагрузки
1,06 1Е
0,253У
0305 Т
М
От смещения ригеля па 81
8
Рис. 8.40
Пользуясь симметрией, для остальных элементов подсчетов можно не производить (рис. 8.40,6).
От смещения, ригеля на б (рис. 8.40, в) Г-образная рама (см. 8.2.6):
Л112 РккЬ — 0,905.1,942-0,01 0,0176;
Л
Л81 0,5-0,0176 0,0088:
Л)61 ( а — Ч Ш кь )
(4,341 -0,1.0,905-0,887.1,942)0,01 0,042; 0,0176 0,042 10
Т-образная рама (см. 8.2.8):
А32 Ж34 0,475.1,942-0,01 0,0092;
М23 М43 0,5-0,0092 0,0046;
Мя8 1,942(1 —0,1055.0,475)0,01 0,0185;
УИ8Э (4,341 — 0 1 -0,475-0,887• 1,942) 0,01 о,";26;
я2 - я«
0,006.
0,0185 0,0426 И, Я4 - 8 - 0,061.
Стойка 2 (см. 8.2.21):
0,1
2- 0,0166; 0,1
М73 4,328 0,0361;
Н, — Н-,
0,0166 0,0361 12
0,0044.
Стойка 4 (см. 8.2.21):
М49 1,942-0,01 0,0194; МЯ4 4,341-0,01 0.0434; 0,0194 0,0434
На — — На
10
0,0063.
Ог внешней нагрузки (рис. 8.40, г)
Т-обралная рама (см 8.2.8). Находим кЬз — 0,106 и баз -0,102 (см. 8.2.21).
8.2. РАМЫ
465
Мвз (0,102 0,1-0,475-0,887-0,106) ЮГ 1,06 Т; Мза (1 —0,1055-0,475) 0,106-ЮГ 1,017';
М32 М31 0,475-0,106-ЮГ 0,505 Т;
Мгз М43 0,5-0,505Г 0,253 Т
1,01 — 1,06'
Нг
Н4(о,7
10
ЮГ 0,6957”;
Я, Г — 0.695Г 0.305Г.
Коэффициенты канонических уравнений:
-п —0,773 — 0,114 — 0,881 — 1,768 (рис. 8.40); г22 — 0,881 —0,1055 — 0,773 — 1,76 (рис 8;40,б); г33 — (0,006-2 0,0044 0,0061 0,0063)
—0,0288 (рис. 8.40,в);
Гц — г21 0,119 (рис. 8.40,6); г13г31—0,00880,0166—0,00460,0032 (рис. 8.40,в) г, — 0,0046 0,0194 — 0,0083 0,036 (рис. 8. 40,в) г1р г2р 0.253Г (ррс. 8.40,г); г3р 0,695Г (рис. Ь.40,г).
Окончательный вид канонических уравнений (3-с уравнение умножено на 10):
1) — 1,768Рх 0,119фг 0,00326 0,253Г 0;
2) 0,119ф — 1,76ф2 0,0066 0,2537’ 0;
3) 0,032ф 0,06ф2 — 0,2886 6.95Г 0.
Приводим уравнения к виду
Ф, 0,0673фг 0,001816 0,143Г;
ф2 0,0676ф1 0,003416 0,1435Г;
6 0,111ф10)208фг 24.16Г.
Решая последовательными приближениями, получим Ф, 0,202Г; ф2 0,24Г; 6 24,2Г.
Умножаем моменты: эпюры рис. 8.40, а на полученное значение фь эпюры рис. 8.40, б на ф2, эпюры рис. 8.40, в на 6, соответственно складываем и добавляем МР.
Ход подсчета показан для узлов 4 и 9:
Л4з (0,119-0,202 — 0,881-0,24 — 0,0046-24,2
0,253) Г — 0,046Г;
Л145 (—0,773-0,24 — 0,0088-24,2) Г -0.398Г;
М49 (—0,1055-0,24 0,0194-24,2) Г 0.445Г;
Ми (— 0,0857-0,24 0,0434-24,2) Г 1,029Г.
Окончательная эпюра М и опорные реакции показаны на рис. 8.41.
0.М 5ЯМЯ»
1
0,266
тп ЛМЪгйШ 0М3 7
(Множите 7ьТ
Рис. 8.41
0,147 Ю 0.№
0,05
Ппи решении уравнений по методу Гаусса следует 3-е уравнение оставить без изменений (чтобы не нарушить ьзанмность коэффициентов матрицы).
Проверка окончательной эпюры М
Проверка равновесия. Из эпюры М легко установить, что моменты во всех узлах рамы уравновешены. Проекция внешних сил на оси X и У:
2Х 0; (0,1460,1040,4550,1470,146) 7 — 7
(1 —0,998)7 «0;
2 У 0; (0,060 0,046) 7 — (0,045 0,002
0,059)7 0.
Проверка деформаций. Требуется сделать группу проверок на деформации, что обычно сводится к опреде-
Рис. 8.41а
лению заранее известных перемещений. Проверим, например, равенство нулю угловых поворотов опор 6 и 9.
В качестве статически определимых систем принимаем П-образные консольные рамы. Эпюры моментов от М на конце консоли даны на рис. 8.41 а. Поскольку М — , то после сокращения на Е получим
Д.о.
Интеграл выражает известное положение строительной механики: в бесшарнирном замкнутом контуре приведенная площадь эпюры' М от любой нагрузки равна нулю.
Проверим контуры 6—1—2—7 и 9—4—5—10 (часть эпюры, расположенную вне рассматриваемого контура, принимаем положительной).
Контур 6—1—2—7. По 8.2.23 (эпюры стоек — по формулам одноступенчатых элементов) получим: стойка 1
Я 0,3; п 0,20; (и — 14; соА
1 40,3
2,2; а2 1 4-0,32 1,36; стойка 2
X 0,25; п 0,25; [1 4; щ 1 4-0,25 2; ©2 1 4-0,252 1,25;
10(1,025 0,436) 1,36
2-1
18(0,436 — 0,37) 24,5 120,382
10-0,436-2,2 — 12(0,871 0,38) 1,25
1,2
(множитель Т опущен).
17,52-
21,2 17,522 ;
466
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Контур 9—4—5—10. Произведя аналогичные вычисления, получим (—19,7319,69)?—0,047 Получен¬
ные отклонения (0,2%) допустимы.
Пример 3. Построить эпюру М для рамы, изображенной на рис. 8.42, от заданной нагрузки (параметры рамы и способ членения приняты по примеру 2 [16]).
Членением рамы (рис. 8.43) можно вместо шести уравнений, необходимых при решении рамы методом
7» ,5 тм
т
■§
©
Рис. 8.42. Схема рамы
Рис. 8.43. Основная система. Эпюра М от 1 1
деформаций, ограничиться одним уравнением [см. формулу (5.311)]:
-1 бц Ар 0.
Для определения 611 и Д1р надо построить в основной системе эпюры М от 1 1 и от внешних нагрузок, П-образная рама (см. 8.2.10):
5 15
13,3
25
0,6;
п 4" 0,20.
5
Находим численные значения коэффициентов к и г по 8.2.21 и 1о по 8.2.13.
кь
кЪ
Ка
•г
От действия р—1,5 тм
кЫ
ка1
ГЬ1
1,05
0,895
1,945
0,31
0,108
0,061
0,847
Вх
1
Р2-
1,05-0,376 2.0,6
1
0,628;
1,05.0,376 6.0,6 — 1,945.0,31-0,376
0,267.
От действия X 1 (рис. 8.43)
Ыа 0,847-0,31 —0,108 0,1545; 53 0,877;
Ма 0,6 (3-0,1545-0,267 — 0,108-0,628) 13,30,44 тм; Мь 1,52 тм;
Ма — [0,877-0,69 — 0,895-0,376(0,108-0,628
0,1545-0,267)]-13,3 3,78 тм; Мс 4,89 тм.
Рис. 8.44. Эпюра Мр в основной системе от р 1,5 тм
От нагрузки р 1,5 тм (рис. 8.44)
МЬ Мл 1,05.0,376.0,628 19,3 тм;
Ма Мс МЬ§- 19,3 16,5 тм. к 105
По 8.2.23 (формулы для одноступенчатых элемен-
1,5 1
тов) при -0,141; п0,2; ц——14; о1
4 0,141 1,08; ша 14-0,1413 1,01
10,64 (16,5 12,14)1,01
ЯД1Р
3-5
10,64.12,14.1,08
2-5
70,3.
Рис. 8.45. Эпюра Мр в основной системе от р 0,23 тм
№
От нагрузки 710,23 тм (рис. 8.45) кь 0,056; ка 0,105; гь 0,451 (см. 8.2.21);
N2 0,451 -0,31 — 0,056 0,084; 5а 0,084-0,267Х X 1,945-0,376 0,451 0,467;
Мь 0,6(3-0,084-0,267 — 0,0560,628) 0,23-13,3 0,78 тм;
Для упрощения подсчета перемещений и Дд использованы треугольные эпюры, построенные от 1 1 в отдельно стоящих стойках рамы. Вместо взаимного перемножения полных зпюр МI и Мр эти эпюры умножены на треугольные (см. [16) 4
8.2. РАМЫ
467
М 2,49 тм;
1
Мс — [0,467-0,69 — 0,895-0,376(0,056.0 628
0,084-0,267)]0,23-13,32 6,19 тм; Ма 10,9 тм. По 8.2.23
10,642(6,19 0,76) 1,01
ЕА 1р
3-5
10,642-0,76-1,08
2-5
43,8.
П-образная рама II (см. 8.2.9)
От действия 11 (рис. 8.43)
0,8 „ 10 и
1' ттг °-075; • 7 0 417; к — 5.53;
10,64 24 г,
10,64 3-5,53 1 „
2 6-5,53 1 тМ'
Мь 2,58 тм.
Определение 58ц и (рис. 8.43)
По 8.2.23
10,642 (4,89 1,5) 1,01 10,64»-,5-1,08
3-5 2-5
10,64а
Ябп
;
(2-2,74 — 2,58) 98,8.
6-0,8
От нагрузки на ригель
Лю 70,3 Х‘ - -9-Й -0-712-
От нагрузки на стойку
43.8
98.8
— 0,44.
К ординатам эпюр Мр следует добавить эпюры Ми помноженные на Хх: МвхМр--МХх. Окончательные эпюры даны на рис. 8.46 и 8.47.
8.2.16. Рамы со стойками, имеющими два уступа (двухступенчатые). Указания по расчету с использованием таблиц
При расчете рам с двухступенчатыми стойками можно пользоваться таблицами для расчета рам с одноступенчатыми стойками, руководствуясь следующим.
В рамах с ригелями конечной жесткости (см. 8.2.5— 8.2.8, 8.2.10, 8.2.14) опорные моменты от внешней нагрузки на ригель и стойки определяются по формулам таблиц для «любых нагрузок», а от заданных деформаций (повороты узлов, смещения, осадки) и влияния температуры — по соответствующим формулам таблиц. При этом моменты защемления (М%, Ма) и опорные реакции (2) от внешних нагрузок в защемленной стойке с двумя уступами, а также значения коэффициентов к, г с индексами (6®, и др.) и определяются
по 8.2.22 (см. пример в 8.2.10).
Моменты защемления ригеля (Мад) принимаются по 8.1.3 или 8.1.4.
Для расчета многопролетных рам с ригелями конечной жесткости и двухступенчатыми стойками методом деформаций уравнения равновесия остаются теми же, что при одноступенчатых стойках [8.2.14, формулы (а) и (б)]; коэффициенты к, г и 0, моменты М°ь, Мреакции принимаются по 8.2.22.
Данные по расчету однопролетных (см. 8.2.11) и многопролетных рам (см. 8.2.12 и 8.2.13) с абсолютно жестким ригелем и двухступенчатыми стойками приведены в самих таблицах.
При расчете сложных рам, у которых стойки (частично или полностью) имеют два уступа, можно воспользоваться методом членения на простые рамы, для которых в таблицах даны готовые формулы (см. 8.2.15).
8.2.17. Многопролетные одноэтажные и многоэтажные рамы.
Изгибающие моменты от вертикальной, горизонтальной нагрузок и осадок опор
Одноэтажные рамы. По таблицам определяют опор- Рамы имеют равные пролеты с ригелями одинакового
ные моменты в двух-, трех- и четырехпролетных одно- сечения и одинаковыми погонными жесткостями стоек,
этажных рамах с шарнирным опиранием стоек от вертикальной и горизонтальной нагрузок и от осадок опор. (продолжение на стр. 476)
468,
РАЗЛЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
а) Двухпролетные рамы
Мв мь
1 Мь2
Гв
г-Гс.
Ц
1
1,
и
—■»
—1—и
А.,-А
; —. — 121 р- , ст- л
(пунктиром обозначены растянутые волокна при положительном моменте)
Схема нагрузки
Схема нагрузки 2
Схема
нагрузки
ст
0,05
0,1
0,2
0,3
0,33
0,4
0,5
0,6
0,75
II
о
0,0781
0,0735
0,0658
0,0595
0,0579
0,0544
0,0500
0,0463
0,0417
МЫ МЬг
0,0860
0,0882
0,0921
0,0953
0,0961
0,0978
0,1000
0,1019
0,1042
Ма
0,0788
0,0747
0,0676
0,0618
0,0603
0,0570
0,0528
0,0492
0,0447
МЫ
0,0827
0,0820
0,0808
0,0798
0,0794
0,0787
0,0778
0,0770
0,0759
2
0,0033
0,0062
0,0113
0,0156
0,0167
0,0191
0,0222
0,0249
0,0283
мс
0,0006
0,0015
0,0018
0.С023
0,0024
0,0026
0,0028
0,0029
0,0030
Ма
0,1221
0.И96
0,1153
0,1120
0,1111
0,1093
0,1069
0,1050
0,1027
3
МЫ
0,1221
0,1194
0,1149
0,1113
0,1103
0,1081
0,1056
0,1033
0,1004
МЬ2
0,1260
0,1268
0,1281
0,1291
0,1294
0,1299
0,1306
0,1311
0,1317
Мс
0,1299
0,1343
0,1417
0,1477
0,1488
0,1527
0,1569
0.1606
0,1652
ма -мс
0,2540
0,2576
0,2639
0,2692
0,2707
0,2738
0,2778
0,2813
0,2857
4
МЬЛ 888 МЬ2
0,2460
0,2424
0,2361
0,2308
0,2293
0,2262
0,2222
0,2188
0,2143
Ма
5,4792
5,0292
4,3668
3,8628
3,7164
3,4762
3,1620
2,9076
2,5878
5
МЫ
5,4930
5,0772
4,4538
4,0438
3,9294
3,7284
3,4866
3,2976
3,0684
МЬ2
0,3396
0,5856
0,8988
1,0920
1,1460
1,2222
1,3128
1,3698
1,4346
Мс
0,1626
0,2766
0,3756
0,4200
0,4284
0,4380
0,4362
0,4278
0,4104
Ма
6,6418
5,3058
4,7424
4,2828
4,1448
3,9144
3,5982
3,3354
2,9982
6
МЫ
5,8326
5,6628
5,3526
5,1348
5,0754
4,9506
4,7952
4,6674
4,5030
См. сноску на стр. 476.
8.2. РАМЫ
469
Продолжение 8.2.17
Схема нагрузки 3
ГУ7 УМ?
Схема нагрузки 4
Схема 5
X.
Схема 6
Осадка опоры А на А Осадка опоры В на А
1
1,25
1,5
2
2,5
3
3,5
4
5
6
Множитель
0,0357
0,0313
0,0278
0,0227
0,0192
0,0166
0,0147
0,0132
0,0109
0,0093 '
0,1071
0,1094
0,1111
0,1136
0,1154
0,1167
0,1176
0,1184
0,1196
0,1204
0,0387
0,0341
0,0306
0,0252
0,0215
0,0188
0,0167
0,0149
0,0124
0,0106
-эк Р
0,0744
0.0732
0,0722
0,0707
0,0696
0,0688
0,0681
0,0675
0,0667
0,0662
0,0327
0,0362
0,0389
0,0429
0,0458
0,0479
0,0495
0,0509
0,0528
0,0542
0,0030
0,0029
0,0028
0,0026
0,0023
0,0021
0,0019
0,0017
0,0015
0,0014
эк'а
0,0997
0,0975
0,0958
0,0934
0,0918
0,0906
0,0897
0,0891
0,0880
0,0872
0,0967
0,0939
0,0917
0,0884
0,0861
0,0844
0,0831
0,0820
0,0805
0,0793
— рН
0,1324
0,1329
0,1333
0,1333
0,1341
0,1344
0,1345
0,1346
0,1348
0,1349
рН
0,1711
0,1757
0,1792
0,1844
0,1880
0,1906
0,1927
0,1943
0,1967
0,1984
— рН
0,2917
0,2963
0,3000
0,3056
0,3095
0,3125
0,3148
0,3167
0,3194
0,3214
РН
0,2083
0,2037
0,2000
0,1944
0,1905
0,1875
0,1852
0,1831
0,1806
0,1786
— РН
2,1990
1,9116
1,6908
1,3776
1,1622
1,0056
0,8862
0,7920
0,6534
0,5568
рД:Р
2,7948
2,6034
2,4624
2,2668
2,1306
2,0424
1,9710
1,9194
1,8468
1,7880
3
аП
1
1,4892
1,5204
1,5366
1,5534
1,5546
1,5570
1,5540
1,5486
1,5456
1,5408
) р
0,3708
0,3384
0,3072
0,2592
0,2226
0,1944
0,1728
0,1554
0,1290
0,1098
Е1р ДхР
2,5698
2,2500
1,9980
1,6368
1,3848
1,2000
1,0590
0,9474
0,7824
0,6666
-Е1 рД:Р
4,2840
4,1238
3,9990
3,8202
3,6852
3,5994
3,5250
3,4680
3,3924
3,3288
Е1 рД:Р
470
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
б) Трехпролетные рамы
ст
Р ’ ст — Схема нагрузки 1 Схема нагрузки 2 Схема нагрузки 3
(пунктиром обозначены растянутые волокна при положительном моменте) С хема нагрузки
а
II
дГ [в"
0,05
0,1
0,2
0,3
0,33
0,4
0,5
0,6
0,75
ма ма
0,0782
0,0738
0,0665
0,0607
0,0591
0,0557
0,0517
0,0482
0,0438
1
МЫ Мсщ
0,0858
0,0878
0,0905
0,0925
0,0929
0,0938
0,0949
0,0956
0,0965
мЬг МС2
0,0834
0,0838
0,0842
0,0848
0,0851
0,0856
0,0862
0,0868
0,0877
М„ ми а 4
0,0805
0,0779
0,0728
0,0682
0,0669
0,0640
0,0603
0,0570
0,0526
2
МЫ Мсз
0,0808
0,0787
0,0753
0,0727
0,0721
0,0707
0,0690
0,0675
0,0658
МЬ2МС2
0,0026
0,0049
0,0089
0,0121
0,0130
0,0149
0,0172
0,0193
0,0219
ма ма
0,0024
0,0041
0,0063
0,0076
0,0078
0,0083
0,0086
0,0088
0,0088
3
МЫМСЗ
0,0060
0,0090
0,0162
0,0197
0,0208
0,0231
0,0269
0,0281
0,0307
мЬг
0,0808
0,0797
0,0754
0,0727
0,0721
0,0707
0,0090
0,0676
0,0658
А
МЫ
0,0871
0,0900
0,0945
0,0977
0,0986
0,1002
0,Ю21
0,1036
0,1053
4
Чь»
0,0847
0,0860
0,0879
0,0907
0,0913
0,0927
0,0943
0,0957
0,0976
Ма
0,0801
0,0774
0,0729
0,0693
0,0683
0,0663
0,0638
0,0§17
0,0689
МЫ
0.0815
0,0801
0,0780
0,0765
0,0761
0,0754
0,0747
0,0741
0,0734
МЬ2
0,0827
0,0823
0,0818
0,0815
0,0815
0,0814
0,0811
0,0813
0,0814
5
Мса
0,0826
0,0819
0,0805
0,0792
0,0789
0,0780
0,0773
0,0761
0,0748
мс
0,0852
0,0866
0,0887
0,0901
0,0905
0,0912
0,0919
0,0925
0,0932
ма
0,0878
0,0917
0,0982
0,1034
0,1047
0,1077
0,1112
0,1143
0,1181
ма— ма
0,1719
0,1765
0,1842
0,1905
0,1921
0,1957
0,2000
0,2038
0,2083
6
МЫМС9
0,1667
0,1667
0,1667
0,1667
0,1667
0,1667
0,1667
0,1667
0,1667
МЬ2 МС2
0,1615
0,1569
0,1491
0,1429
0,1412
0,1377
0,1333
0,1296
0,1250
5,4774
5,0328
4,3722
3,8628
3,7176
3,4788
3,1668
2,9082
2,5926
МЬх
5,4882
5,0724
4,4772
4,0380
3,9306
3,7452
3,4992
3,3108
3,0864
7
МС2
0,3396
0,6§2
0,5856
0,2782
0,8988
0,3912
1,0920
0,4530
1,1460
0,4692
1,2222
0,4908
1,3086
0,5100
1,3698
0,«96
1,4846
0.5280
МСЗ
0,0102
0,0306
0,0792
0,1224
0,1368
0,1608
0,1908
0,2142
0,2460
ма
0,0048
0,0144
0,0330
0,0474
0,0516
0,0576
0,0636
0,0678
0,0702
Ма
5,6400
5,2986
4,7568
4,2978
4,1622
3,9342
3,6276
3,3678
3,0366
мы
5,8284
5,6580
5,3982
5,1666
5,1180
5,0226
4,8822
4,7844
4,6416
8
мпп
С 2
5,8422
5,6658
5,6838
5,3682
5,4618
4,9248
5,2734
4,6212
5,2344
4,5408
5,1522
4,3962
5,0262
4,2012
4,9362
4,0606
4,8072
3,8692
"с
0,3504
0,6)162
1,0002
1,2510
1,3242
1,4382
1,5738
1,6878
1,8012
ма
0,1674
0,2802
0,4176
0,4824
0,4962
0,5130
0,5244
0,5274
0,5142
См. сноску на стр. 476.
8.2. РАМЫ
471
Продолжение 8.2.17
Схема 7 Схема 8
Осадка опоры Л на А Осадка опоры В на Ф
1
1,25
1,5
2
2,5
3
3,5
4
5
6
Множитель
0,0381
0,0338
0,0303
0,0252
0,0215
0,0188
0,0167
0,0150
0,0125
0,0107
0,0975
0,0981
0,0985
0,0990
0,0993
0,0995
0,0996
0,0996
0,0997
0,0998
-»экг‘
0,0890
0,0900
0,0909
0,0923
0,0933
0,0941
0,0947
0,0952
0,0959
0,0965
0,0466
0,0418
0,0379
0,0319
0,0275
0,0242
0,0216
0,0195
0,0163
0,0140
0,0636
0,0619
0,0606
0,0587
0,0574
0,0565
0,0557
0,0551
0,0542
0,0536
эк
0,0254
0,0281
0,0303
0,0336
0,0359
0,0376
0,0390
0,0401
0,0417
0,0429
0,0085
0,0080
0,0076
0,0067
0,0060
0,0054
0,0049
0,0045
0,0038
0,0033
эк 12
0,0339
0,0362
0,0379
0,0403
0,0419
0,0430
0,0439
0,0445
0,0455
0,0462
0,0636
0,0619
0,0606
0,0587
0,0574
0,0565
0,0557
0,0551
0,0542
0,0536
-эк
0,1074
0,1089
0,1099
0,1114
0,1123
0,1130
0,1135
0,1138
0,1143
0,1147
0,1001
0,1020
0,1036
0,1058
0,1075
0,1086
0,1095
0,1103
0,1113
0,1121 -
0,0554
0,0526
0,0505
0,0473
0,0449
0,0433
0,0419
0,0409
0,0393
0,0381
рЬ?
0,0727
0,0723
0,0719
0,0716
0,0713
0,0712
0,0711
0,0711
0,0710
0,0709
— рН
0,0816
0,0818
0,0821
0,0825
0,0828
0,0831
0,0833
0,9835
0,0838
0,0840
рН3
0,0732
0,0718
0,0707
0,0691
0,0678
0,0669
0,0663
0,0657
0,0648
0,0642
— р13
0,0939
0,0943
0,0947
0,0950
0,0953
0,0954
0,0955
0,0955
0,0956
0,0957
рН
0,1232
0,1270
0,1301
0,1345
0,1377
0,1401
0,1419
0,1433
0,1455
0,1471
— рЛ3
0,2143
0,2188
0,2222
0,2273
0,2308
0,2333
0,2353
0,2368
0,2391
0,2407
РН
0,1667
0.1067
0,1667
0,1667
0,1667
0,1607
0,1667
0,1667
0,1667
0,1667
—РН
0,1190
0,1146
0,1111
0,1061
0,1026
0,1000
0,0980
0,0965
0,0942
0,0926
РН
2,2014
1,9206
1,6980
1,3890
1,1700
1,0116
0,8916
0,7986
0,6594
0,5622
а Д;‘
2,9158
2,6406
2,5002
2,3178
2,1954
2,1054
2,0364
1,9878
1,9188
1,870
аРл
1,4892
1,5204
1,6366
1,5534
1,5546
1?б§70
1,5540
1,54§6
1,5456
1,5408
) —гд
0,5232
0,5208
0,5130
0,5010
р,4866
0,4788
0,469.
0,4626
0,4542
0,4458
Е'р.
0,2790
0,3048
0,3204
0,3432
0,3546
0,3654
0,3708
0,3732
0,3810
0,3846
12
0,0696
0,0678
0,0642
0,0570
0,0504
0,0456
0,0414
0,0372
0,0318
0,0276
-Ер-.Р
2,6148
2,3028
2,0502
1,6926
1,4352
1,2468
1, Ю22
0,9894
0,8202
0,7002
-В Д:Р
4,4700
4,3638
4,2612
4,1400
4,0524
3,9882
3,9318
3,8970
3,8508
3,8124
1 'рд
4,6410
4,5258
4,4?02
4,2882
4,1814
4,076
4,0440
4,0026
3,9390
3,8880
1 Д
3,6264
3,4644
3,3294
3,1578
3,0336
2,9472
2,8764
2,8284
2,7570
2,6994
ЕРл
1,9332
2,0280
2,0814
2,1654
2,2116
2,2482
2,2662
2,2824
2,3130
2,3262
0,4830
0,4500
0,4164
0,3606
0,3156
0,2808
0,2520
0,2280
0,1926
0,1656
Е1р:Р
472
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
в) Четырехпролетные рамы
;Ма Мыъг Мс2Мсз Ме
А а 'С’П'
Г-?-?'
гд 1
н 1
«
I
и
1 -1
и 1 -4
и- ь
1 —1
(пунктиром обозначены растянутые волокна при положительном моменте)
л-к
КЛ
(
1
чь у
Схема нагрузки 1
Схема нагрузки 2
Схема
нагрузки
р_
ст
0,05
0,1
0,2
0,3
0,33
0,4
0,5
0,6
0,75
II
3
0,0782
0,0738
0,0664
0,0605
0,0589
0,0556
0,0515
0,0479
0,0435
43
II
0,0858
0,0877
0,0907
0,0928
0,0933
0,0943
0,0956
0,0966
0,0978
1
мы маз
0,0835
0,0839
0,0849
0,0860
0,0864
0,0872
0,0883
0,0892
0,0906
ъ
ю
II
со
0,0833
0,0831
0,0826
0,0820
0,0818
0,0814
0,0809
0,0804
0,0797
Ма
0,0797
0,0763
0,0703
0,0651
0,0637
0,0606
0,0567
0,0532
0,0488
МЫ
0,0817
0,0802
0,0776
0,0754
0,0749
0,0736
0,0721
0,0708
0,0692
“ь
0,0018
0,0036
0,0070
0,0101
0,0109
0,0129
0,0154
0,0176
0,0205
МС2
0,0035
0,0063
0,0106
0,0139
0,0147
0,0163
0,0183
0,0199
0,0218
2
%
СО
0,0798
0,0768
0,0719
0,0681
0,0671
0,0651
0,0626
0,0605
0,0579
3
0,0817
0,0803
0,0779
0,0760
0,0754
0,0743
0,0729
0,0716
0,0701
"л
0,0041
0,0076
0,0131
0,0173
0,0184
0,0207
0,0235
0,0258
0,0286
0,0015
0,0026
0,0039
0,0046
0,0048
0,0050
0,0052
0,0053
0,0053
3
мы
0,0859
0,0881
0,0918
0,0947
0,0954
0,0970
0,0989
0,1006
0,1026
МЬ2
0,0859
0,0881
0,0917
0,0945
0,0952
0,0967
0,0986
0,1003
0,1023
4
МС2МСЗ
0,0858
0,0877
0,0907
0,0928
0,0933
0,0043
0,0956
0,0906
0,0978
8.2. РАМЫ
473
Продолжение 8.2.17
-л
Г '
У
►
О 1
Схема нагрузки 3
рггг ;
о о 4 о 4
Схема нагрузки 5
,ггт
Схема 7 Осадка опоры А на А
Схема 8 Осадка опоры В на А
'И
Х'У'УУЧ 1
Схема нагрузки 4
Схема нагрузки 6
Схема 9 Осадка опоры С на А
1
1,25
1.5
2
2,5
3
3,5
4
5
6
Множитель
0,0377
0,0332
0,0298
0,0246
0,0210
0,0183
0,0163
0,0146
0,0121
0,0103
0,0993
0,1004
0,1012
0,1023
0,1031
0,1037
0,1041
0,1044
0,1049
0,1052
0,0925
0,0940
0,0952
0,0972
0,0985
0,0996
0,1004
0,1011
0,1021
0,1028
-Рэкр
0,0788
0,0780
0,0774
0,0764
0,0757
0,0752
0,0748
0,0745
0,0740
0,0735
0,0427
0,0380
0,0343
0,0286
0,0245
0,0214
0,0191
0,0171
0,0143
0,0123
0,0670
0,0654
0,0642
0,0623
0,0610
0,0600
0,0593
0,0587
0,0578
0,0572
0,0245
0,0276
0,0302
0,0340
0,0368
0,0389
0,0405
0,0418
0,0437
0,0451
0,0242
0,0546
0,0258
0,0522
0,0271
0,0503
0,0288
0,0476
0,0299
0,0458
0,0308
0,0445
0,0314
0,0434
0,0319
0,0426
0,0326
0,0414
0,0331
0,0406
рак р
0,0680
0,0664
0,0650
0,0(332
0,0618
0,0607
0,0599
0,0593
0,0583
0,0576
0,0323
0,0350
0,0370
0,0400
0,0421
0,0437
0,0448
0,0457
0,0471
0,0480
0,0051
0,0048
0,0045
0,0040
0,0035
0,0031
0,0028
0,0025
0,0022
0,0019
рэк Ь
0,1052
0,1071
0,1086
0,1108
0,1123
0,1134
0,1142
0,1149
0,1158
0,1165
0,1048
0,1067
0,1083
0,1104
0,1120
0,1131
0,1140
0,1146
0,1156
0,1164
- Рэк
0,0993
0,1004
0,1012
0,1023
0,1031
0,1037
0,1041
0,1044
0,1049
0,1052
474
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Схема
нагрузки
•а
II
С
0,05
0,1
0,2
0,3
0,33
0,4
0,5
0,6
0,75
0,0586
0,0553
0,0498
0,0454
0,0442
0,0417
0,0386
0,0360
0,0326
"л
0,0607
0,0592
0,0570
0,0554
0,0551
0,0543
0»0533
0,0525
0,0516
мы
0,0626
0,062Э
0,0637
0,0645
0,0648
0,0654
0,0662
0,0669
0,0679
Мс
0,0626
0,0627
0,0631
0,0635
0,0636
0,0639
0,0643
0,0647
0,0652
5
Мсз
0,0624
0,0623
0,0619
0,0615
0,0614
0,0611
0,0607
0,0603
0,0598
МЛ
0,0624
0,0621
0,0613
0,0605
0,0602
0,0596
0,0588
0,0581
0,0571
М14
0,0643
0,0658
0,0680
0,0696
0,0699
0,0707
0,0717
0,0725
0,0734
Ме
0,0664
0,0697
0,0752
0,0796
0,0808
0,0833
0,0864
0,0890
0,0924
ма-ме
0,1298
0,1340
0,1410
0,1465
0,14ёО
0,1511
0,1549
0,1581
0,1622
мы — мт
0,1259
0,1266
0,1274
0,1279
0,1280
0,1282
0,1283
0,1284
0,1284
6
мы “ маз
0,1221
0,1195
0,1152
0,1116
0,1107
0,1087
0,1062
0,1041
0,1014
II
1
СО
0,1222
0,1199
0,1165
0,1140
0,1133
0,1121
0,1106
0,1095
0,1081
5,4780
5,0328
4,3662
3,8610
3,7188
3,4806
3,4344
2,9112
2,5950
м
б,4906
5,0670
4,4730
4,0410
3,9276
3,74?б
3,4932
§,3186
3,0852
МЬ2
0,3390
0,5826
0,9084
1,1046
1,1592
1,2474
1,3344
1,4070
1,4754
МС2
0,1626
0,2682
0,3924
0,4536
0,4698
0,4920
0,5106
0,5226
0,5298
7
Мсз
0,0102
0,0306
0,0798
0,1242
0,1392
0,1632
0,1950
0,2226
0,2532
МЛ
0,0048
0,0144
0,0342
0,0510
0,05б4
0,0642
0,0744
0,088
0,0906
М44
0,0002
0,0018
0,0072
0,0138
0,0162
0,0210
0,0276
0,0342
0,0420
ме
0,0001
0,0006
0,0030
0,0054
0,0060
0,0078
0,0090
0,0108
0,0120
Ма
5,6406
5,2992
4,7496
4,2954
4,1634
3,9378
3,6240
33684
3,0402
МЫ
5,8290
5,6526
5,3958
5,1690
5,1162
5,0262
4,8780
4,7814
4,6380
МЬ2
5,8362
5,6826
5,4582
5,2746
5,2320
5,1540
5,0256
4,9356
4,8084
МС2
5,6622
5,3748
4,9428
4,6212
4,5474
4,4058
4,2030
4,0638
3,8820
6
МС2
0,3498
0,6186
1,0074
1,2672
1,3428
1,4640
1,6098
1,7244
1,8564
М1з
0,1668
0,2844
0,4344
0,5202
0,5424
0,5766
0,6120
0,6402
0,6648
0,0102
0,0330
0,0876
0,1410
0,1584
0,1890
0,2298
0,2664
0,3084
Ме
0,0048
0,0150
0,0366
0,0540
0,0594
0,0672
0,0768
0,0834
0,0882
Ма
0,1674
0,2808
0,4170
0,4830
0,4980
0,5166
0,5274
0,5298
0,5214
МЫ
0,3486
0,6168
1,0032
1,2552
1,3298
1,4472
1,5870
1,6930
1,8192
9
МЬ2
5,6592
5,3700
4,9500
4,6392
4,5588
4,4190
4,2288
4,0860
3,9072
МС2
5,8393
5,6946
5,4780
5,3106
5,2812
5,2146
5,1072
5,0430
4,9554
См. сноску на стр. 476,
8.2. РАМЫ
475
Продолжение 8.2.17
1
1,25
1,5
2
2,5
3
3,5
4
5
6
Множитель
0,0283
0,0249
0,0228
0,0185
0,0157
0,0137
0,0122
0,0109
0,00§1
0,0078
рА3
0,0505
0,0497
0,0491
0,0482
0,0477
0,0473
0,0469
0,0467
0,0463
0,0461
—рА3
0,0693
0,0705
0,0714
0,0729
0,0739
0,0747
0,0753
0,0753
0,0766
0,0771
рА
0,0659
0,0665
0,0670
0,0677
0,0682
0,0686
0,0689
0,0692
0,0696
0,0698
—рА3
0,0591
0,0585
0,0580
0,0573
0,0568
0,0564
0,0561
0,0553
0,0533
0,0552
рЛ
0,0557
0,0545
0,0536
0,0521
0,0511
0,0503
0,0497
0,0492
0,0484
0,0479
—рЛа
0,0745
0 0753
0,0759
0,0767
0,0773
0,0777
0,0731
0,0733
0,0787
0,0789
рЬ?
0,0967
0,1001
0,1027
0,1065
0,1093
0,1113
0,1128
01141
0,1159
0,1172
—рЛ3
0,1674
0,1713
0,1744
0,1789
0,1821
0,1844
0,1862
0,1876
0,1898
0,1913
РН
0,1283
0,1281
0,1279
0»1276
0,1273
0,1270
0,1269
0,1267
0,164
0,12бЗ
0,0978
0,0951
0,0930
0,0895
0,0877
0,0861
0,0848
0,0838
0,0823
0,0813
РН
0,1065
0,1054
0,1047
0,Ю36
0,1029
0,1025
0,1021
0,1019
0,1015
0Д013
2,2014
1,0206
1,7010
1,9872
1,1688
1,0110
0,8984
0,7980
0,6600
0,5628
Е1 Д,Р
2,8170
2,6400
2,5002
2,3203
2,1948
2,1042
2,0400
1,932
1,0230
1,8690
1
1,5372
1,5840
1,6044
1,6308
16392
1,6404
1,6410
1,6410
1,6410
1,6386
0,5280
0,5274
0,5214
0,5118
0,5010
0,438
0,4860
0,4805
0,4734
0,4бб8
ь
0,2886
0,3168
0,3342
0,3594
0,3732
0,3840
0,3906
0,3954
0,4038
0,4110
1
0,0984
0,1038
0,1068
0,1104
0,1110
0,1122
0,1122
0,1122
0,1122
0,1110
1
0,0522
0,0606
0,0666
0,0756
0,0810
0,0858
0,0882
0,0905
0,0936
0,0954
) р
0,0132
0,0138
0,0132
0,0126
0,0114
0,0108
0,0096
0,0090
0,0078
0,0072
ЕрД:Г
2,6154
2,3046
2,0544
1,6932
1,4358
1,2486
1,1064
0,9оЗ
0,3226
0,7032
-Е0 Д:«
4,4748
4,3674
4,2690
4,1560
40632
4,0032
3,9492
3,9234
3,3712
3,8244
1
■з1
4,6482
4,6414
4,4388
4,3050
4,9091
4,1346
4,0710
4,6956
3,9660
3,9102
3,6630
3,8136
з,зюо
3,2316
3,1218
30468
2,9784
2,9310
2,8704
2,8242
1 д
1,9986
2,1096
2,1708
2,2704
2,3250
2,3688
2,3952
2,4180
2,4504
2,4733
р
0,6810
0,6942
0,6954
0,6942
0,6930
0,6888
0,6862
0,6828
0,6786
0,6732
1 54
0,3624
0,4056
0,4338
0,4746
0,5058
0,5250
0,5394
0,5§14
0,5706
0,5796
1
0,0906
0,0900
0,0870
0,0792
0,0720
0,0654
0,0600
0,0652
0,0474
0,0414
-ЯрАЧ
0,4914
0,4602
0,4272
0,3726
0,3276
0,2922
0,2634
0,2388
0,2022
0,1746
Е1 гР
1,9680
2,0724
2,1360
2,2332
2,2932
2,3382
2,3604
2,3910
2,4252
2,4396
1 -а.
3,6936
3,5478
3,4230
3,2680
3,1606
3,0708
3,0030
2,9544
2,3914
2,8338
1 г
4,8450
4,7790
4,7052
4,6308
4,5726
4,5378
4,4970
4,4700
4,4436
4,4202
Е1рЬ:Р
426
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Для расчета подсчитывают отношения погонных жесткостей:
ригеля
ля(‘р т)
[. ст р
ТСТ к )’ П 1СТ;
в зависимости от схемы нагрузки определяют табличные коэффициенты к.
Опорные моменты от вертикальной нагрузки для любой симметричной относительно загружаемого пролета нагрузки определяют, пользуясь значением эквивалентной нагрузки рак по 8.1.6: М ±:крЭК12. Пролетные моменты, поперечные силы и опорные реакции определяют, как в балках, с учетом действительной нагрузки и найденных по данной таблице опорных моментов.
От горизонтальной нагрузки М ±крН2 или М ±кРк Моменты в стойках в местах их заделки в ригель определяются как разность опорных моментов в смежных сечениях ригеля (с обеих сторон стоек). Поперечные силы в стойках постоянны и равны распору.
С помощью таблиц может быть произведен расчет одноэтажных рам с защемленными или упруго защемленными стойками при вертикальной нагрузке. В этом случае погонные жесткости стоек и моменты защемления принимаются в зависимости от характера опирания стоек внизу (см. примеры расчета): при полном защемлении
мс
при упругом защемлении
_8 7
[ст —
СТ ш. Мст
Н М- 4
где Мст—моменты в стойках в местах их заделки в ригель.
Точное решение получается при отсутствии смещения ригеля рам, например при вертикальных нагрузках, симметричных относительно середины всего ригеля; при других условиях решение получается приближенным К
Многоэтажные рамы, Формулы для расчета многоэтажных рам приведены в 5.8 первого издания Справочника.
Таблицей 8.2.17 можно пользоваться и для расчета на вертикальную нагрузку многоэтажных рам с одинаковыми пролетами и сечениями ригелей и со стойками одинаковой жесткости в пределах каждого этажа.
Для расчета по таблицам многоэтажная рама расчленяется на одно- и двухэтажные двух-, трех- и четырехпролетные рамы, как показано на рис. 8.48.
Для расчета двухэтажных рам типа, показанного на рисунке, подсчитывают параметр п по формуле
1 Учет смещения узлов рамьт при определении моментов от осадки опор производится следующим образом:
а) имея эпюру М от осадки опоры при несмещающихся узлах (по таблице), находят реакцию верхней фиктивной опоры
2Л4 ; Н 2АСТ— алгебраическая сумма моментов в стой¬
ках;
б) строят по данным таблицы эпюру М от горизонтальной силы Р 1 (при осадке лгзых стоек направлена влево)» Полученные ординаты М умножают на величину ?д и складывают с эпюрой от осадки (п. а).
4
I
V
■ I -Д- I I 4
—г-
7Р
ОМ
т
•9ЛТ. ГПУ ГГГГ ГГТ7. Мт.
Г
н
Рис. 8.48
п
,н 4-,в
СТ I С
при этом погонные жесткости нижних ‘”т и верхних 1т стоек принимаются в зависимости от характера защемления их на опорах (см. пример 3).
Изгибающие моменты в крайних стойках двухэтажных рам определяются по формулам
Мп
ст
м°п
Iй 4-1В
ЧТ ' С
н -Мв
ст ‘ ‘с
где М°п — опорный момент в ригеле по оси крайней колонны; верхний индекс «н» относится к стойкам нижнего этажа, «в» — верхнего этажа.
Изгибающие моменты в средних стойках двухэтажных рам в сечениях, примыкающих к ригелю, определяются по формулам
■ 'с
4И°п
1Н л.в
СТ » ст
где ДМ®11 — разность опорных изгибающих моментов ригеля в сечении по оси средней стойки. Окончательные моменты в стойках определяются суммированием моментов, полученных при расчете отдельных рам.
Указанный тип двухэтажной рамы можно рассчитать по методу угловых деформаций (перемещений) по формулам (5.302). В этих формулах погонные жесткости стоек и моменты заделки следует принимать в зависимости от характера защемления их на опоре: при полном защемлении
эап —
м1
при упругом защемлении (приближенно)
_6_ - м™
7
— Т“ Т Мзап ‘
при шарнирной опоре
ст — '
8.2. РАМЫ
477
Продолжение 8.2.17
г) Примеры
Пример 1. Определить изгибающие моменты в раме, схема которой приведена на рис. 8.49.
Рис. 8.49
Мх — Л1х Ма — Мы 7
Ма — 11.25 тм; Мы — 6,44 — 20,6 — 27,04 тм-,
9,65 27,04—11,25
40,8.9-0,54-4,5-4,5-0,5 — 16,8 т;
4 У
при —
2 2 16,8 — 0,8-4,5— 4,5.4,5-0,5 3,07 т;
(2 — 9,65 3,07 — 6,59 т.
Ммакс в середине пролета (0 меняет знак)
0,892, 4,592 9,65-9 11,2527,04
1макс — о «с “Ь
8
16 ' 4
33,5 тм.
Нагрузка: постоянная 0,8 тм; временная ?
4,5 тм; Я9,65 т.
Подсчет опорных моментов от постоянной и временной нагрузок
Опорные
От постоянной нагрузки
От временной нагрузки
Расчетные опорные моменты
моменты
схема 1
схема 2
схема 3
схема 4
(мин) в ТМ
Ма
—0,0215-64,8—1,4
-0,0275-358—9,85
-
-
—1,4—9,85—11,25
МЫ
—0,0993-64,8—6,44
-0,0574-358—20,6
—0,0419-358—15
-0,1123-358—40,3
—6,44—40,3—46,74
МЬг
—0,0933-64,8—6,05
-0,0359-358—12,85
—0,0574358—20,6
-0,1075-358—38,5
—6,05—38,5»-44,55
По 8.1.6 находим значения эквивалентной равномерно распределенной нагрузки:
ёэк М _Р_ 54,5 39,65
“ 8 2-9
Значения моментов в простой балке см. 8.1.2.
Таким же путем определяются М в пролете 2 (при схеме нагрузки 3).
5 3
Ьк — Р — 1
■ 4,42 тл.
Определяем погонные жесткости ригеля и стоек:
5,6 1
’ П Л99« I — 4
А
0,25;
и
к Л
р
п —
0,622
2,5.
,ст 0,25
По 8.2.17,6 находим опорные моменты (см.таблицу). Подсчитываем величины:
эк 2 0,8-92 64,8; яэк 2 4,42-92 358.
Определение пролетных моментов производим для заданных (а не эквивалентных) нагрузок (рис. 8.50). В пролете 1 (при схеме нагрузки 2):
16 - МЬ1 - Мь2 (6,4420,6) - (6,0512,85) -
Рис. 8.50
Рис. 8.51. Моменты в стойке В Моменты в верхушке крайних стоек будут те же, что на опоре примыкающих ригелей: Ма —11,25тл.
Моменты в средних стойках равны разности опорных моментов в смежных сечениях ригелей: при схеме нагрузки 2 (рис. 8.51, а)
Льт :
8,14 тм; при схеме нагрузки 3 (рис. 8.51,6)
Мсь “ МЬ2 — мы (605 206) — (—6,44 — 15) — 5,21 тм.
Пример 2. Рама та же, что в примере I, но с защемленными внизу стойками:
р 0,622; 1'ст - 0,333;
_«р 0,622 0,333
478 РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.2.17
Значения опорных моментов
Опорные
моменты
От постоянной нагрузки
От временной нагрузки
Расчетные Ммин
В ТМ
схема
схема 2
схема 3
схема 4
«а
—0,026664,81,72
—0,0336358—12,03
-
-
—13,75
МЫ
—0,0989-64,8—6,40
—0,0592 358з—21,20
—0,0396358—14,18
—0,111-358—39,74
—46,14
МЫ
—0,091964,8»—5,04
—0,0327358—11,71
-0,0592-358—21,19
-0,1052 •358—37,66
—43,60
Пример 3. Рама двухэтажная (рис. 8.52). Стойки Моменты в стойках. В крайних Стойках моменты
нижнего этажа имеют упругое защемление, стойки верх- определяются по формулам (см. пояснения) (рис. 853):
0,25
Н
— 17,94
Кт Ма 7X7“ — 17,94
Опорные моменты в ригеле
0,29 0 25
0.29 0,29 0,25
■831 тм
— 9,63 т м.
Опорные
моменты
От постоянной нагрузки
От временной нагрузки
Расчетные Ммин
В ТМ
схема
схема 2
схема 3
схема 4
—0,0355 • 64, 8—2,30
-0,0437-858—16,64
-
-
—17,94
МЬ,
—0,09794,8—8,34
—0,0626•3584—22,41
-0,0353-358—12,64
-Ц), 1083-358—38,77
—45,11
"бш
—0,089664,8—5,81
—0,027358—9,67
-0,0626-358—22,41
—0,1016358—36,37
—42,18
него этажа закреплены шарнирно. Нагрузки и сечения элементов те же, что в раме примера 1:
8
ь- 0,622; — • — 0,29; — 0.25;
7 4
0,622 0,20 0,25
1,15.
8,31
Рис. 8.53
№
V.
РЛ
В месте упругого защемлейия стойки (внизу) 9,63
Ми :
зад 4
2,41 тм,
Для определения моментов в средних стойках находим разность моментов в ригеле на опоре В при схеме нагрузки 2;
Мы — 6,34 — 22,41 — 28,75 тм
МЬ2 — 5,81 — 9,67 « — 15,48 тм;
АМр — 28,75 — (— 15,48) — 13,27 тм;
0,25
МТ — 13,27 М"т 13,27
0,29 0,25 0,29
— 6,14 тм.
0,29 0,25 В месте упругого защемления (внизу)
7,13
7,13 тм.
Мн ■■
‘ зад
— 1,78 тм;
8.2. РАМЫ
479
8.2.18. Коэффициенты А0 для определения в ступенчатых стойках перемещений от единичной силы и реакций от взаимного смещения опор и поворота нижнего сечения
V л ’
а,
ХГ
штж
А.
Л,’
_1_
п
57
I
6
Я
а) Перемещение верха защемленной внизу стойки от силы X 1
к3 г3
«И (1 И-3) зЕ1и каЕ, н •
б) Реакция ь в стойке, защемленной внизу и шарнирно опертой наверху, от взаимного горизонтального смещения опор на Д 1
к0Е1н
Нь— — —;— ПРИ смещении верхней опоры;
Яь'
к
К н к9
при смещении нижней опоры.
в) Реакция Къ от поворота нижнего сечения на угол р1
р Е1»
Ь Л®
1
Значения коэффициента к
о при п равном
-
0,05
0,10
0,20
0,30
0,40
0,50
0,60
0,70
0,80
0,90
1,00
0,10
2,9411
2,9732
2,9881
2,9930
2„9955
2,9970
2,9980
2,9987
2,9993
2,9997
3,0000
0,15
2,8192
2,9116
2,9600
2,9766
2,9849
2,9899
2,9933
2,9957
2,9975
2,9989
3,0000
0,20
2,6042
27985
2,9070
2,9445
2,9644
2,9762
2,9841
2,9898
2,9040
2,9073
3,0000
0,25
2,3133
•301
2,8235
2,8945
2,9313
2,9538
2,9691
2,9800
2,9883
2,9946
3,0000
0,30
1,9828
2,4Г
, 2,70764
2,8222
2,8832
2,9211
2,9470
2,9657
2,9799
2,9910
3,0000
0,40
1,3538
ч1,9036 •
'3885 1
2,6102
2,7372
2,8196
2,8772
2,9200
2,9528
2,9788
3,0000
0,60
0,8880
1,4118
глхюо
2,3236
2,5209
2,6607
2,7092
2,8475
2,9001
2,9589
3,0000
8.2.19. Ступенчатая стойка с защемленным нижним и шарнирно опертым верхним концом. Реакции верхних опор при различных п и Я
—г 1
X
-с
1,
а) Формулы для определения реакций Нь от различных нагрузок
ц _ Н’ „’ п Численные значения коэффициентов к0 даны в 8.2.18; ан а— в 8.2.22.
N2 таблицы
Схемы нагруйок и эпюры М
№ схемы
Опорные реакции
с численными значениями
480
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ I АРОК
Продолжение 8.2.19
Схемы нагрузок и эпюры М
№ схемы
Опорные реакции
№ таблицы с численными значениями
Г
Я.р
§
к ИР
Ё Е о
2а
рНк0 ав
26
рНко (ан4-ац№)
© (§
За
рНкй (ан4-0,125 рА4)
36
рНк0(аи'хц№)
8.2.19, в
Л
№
й
4а
Рк0 ан
46
РЦан4-амА3)
8.2.19, г
8.2. РАМЫ
481
Продолжение 8.2,19
Рис. 8.54
Пример. Определить опорные реакции Рь в ступенчатой стойке от действия нагрузок, показанных на рис. 8.54; ЯЛВЛ0,3; 10,2;
1110,2—14; к0 2,708 (см. 8.2.18).
От нагрузки ръ. Г1о формуле схемы За и 8.2.22:
а и 4 Л 10 ’
ан 0,1154;
Рь 2,708 (0,1154 0,125-4-0,3) рв к 0,324 рА Н. От Р (схема 4а). По 8.2.22:
4г 0»4' «н 0,0693; к 10
Рь 2,708-0,0693 Рх 0,188 Рх.
От внешнего момента 20,35 (схема 56). По 8.2.19, д:
Яь (1,841 -0,35 — 1,232-0,15) 0,46 %
Л а
По формулам 8.2.19, а (схема 56) получим тот же
результат:
ПРИ и 1 1 ана 0,5; Л 1и
при аи—кя — ; ан —0,455;
к 10
Рг-0,35
6 г1— 2,708 (0,50,5-4.0,32) —
Л
Р-0,15
2,708-0,455 0,46 —
к к
при — О Л4 1,841; при 1 1,232;
кй кй
Эпюра М от внешнего момента показана на рис. 8.54.
6) Реакция Рь от действия горизонтальной равномерно распределенной нагрузки по всей высоте стойки
Формулы для определения Рь от действия частичной равномерно распределенной нагрузки см. 8.2.19, а и 8.2.19, в.
По таблице
В. м В
А—-; л—к н
Рь—кгрк
Значения коэффициента
0,10
0,20
0,30
0,40
0,50
0,60
0,70
0,80
0.90
1.00
0,10
0.20
ЧО»
0,40
0,50
0,3720
0,3548
0,3237
0,2928
0,2757
0,3736
0,3657
0,3493
0,3291
0,3125
0,3742
0,3694
0,3596
0,3459
0,3326
0,3744
0,3714
0,3649
0,3553
0,3454
0,3746
0,3726
0,3681
0,3614
0,3542
0,3747
0,3734
0,3704
0,3657
0,3604
0,3749
0,3740
0,3718
0,3693
0,3656
0,3749
0,3744
0,3733
0,3714
0,3693
0,3749
0.3748
0,3742
0,3733
0,3722
0.3750
0.3750
0.3750
0.3750
0,3750
482
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, АМ И АРОК
в) Реакция от действия горизонтальной равномерно распределенной нагрузки
на верхний участок стойки
[Г
Н1
7.
1:
'6
л
'П.
Формулы для определения ь при действии равномерно распределенной нагрузки на любой участок стойки см. 8.2.19, а:
п—
н
По таблице Нъ—к2рвк,
Значения коэффициента к
а
N. П
0,05
0,10
0,20
0,30
0,40
0,50
0,60
0,70
0,80
0,90
1,00
0.2 Нв
0,10
0,15
0,20
0,25
0,30
0,40
0,50
0,0197
0,0291
0,0381
0,0468
0,0552
0,0713
0,0872
0,0197
0,0292
0,0382
0,0474
0,0561
0,0726
0,0886
0,0197 С,0293 0,0386 0,0478 0,0567 0,0738 0,0900
0,0197
0,0293
0,0387
0,0479
0,0569
0,0742
0,0909
0,0197
0,0293
0,0387
0,0480
0,0570
0,0745
0,0913
0,0197
0,0293
0,0388
0,0480
0,0571
0,0747
0,0917
0,0197
0,0293
0,0383
0,0481
0,0571
0,0749
0,0920
0,0197
0,0293
0,0388
0,0481
0,0572
0,0750
0,0922
0,0197
0,0293
0,0388
0,0481
0,0572
0,0751
0,0923
0,0197
0,0293
0,0388
0,0481
0,0573
0,0751
0,0924
0,0197
0,0293
0,0388
0,0481
0,0573
0,0752
0,0925
0.4ЙВ
0,10
0,15
0,20
0,25
0,30
0,40
0,50
0,0386
0,0564
0,0728
0,0869
0,1310
0,1258
0,1501
0,0387
0,0568
0,0740
0,0895
0,1045
0,1308
0,1551
0,0388
0,0571
0,0746
0,0911
0,1069
0,1353
0,1607
0,0388
0,0572
0,0748
0,0917
0,1078
0,1373
0,1638
0,0388
0,0572
0,0749
0,0920
0,1083
0,1382
0,1657
0,0388
0,0572
0,0750
0,0921
0,1086
0,1392
0,1670
0,0388
0,0572
0,0750
0,0922
0,1088
0,1398
0,1680
0,0388
0,0572
0,0751
0,0923
0,1090
0,1402
0,1688
0,0388
0,0572
0,0751
0,0924
0,1091
0,1405
0,1693
0,0388
0,0572
0,0751
0,0925
0,1091
0,1407
0,1698
0,0388
0,0572
0,0752
0,0925
0.1092
0,1409
0,1702
0.6ЛВ
0,10
0,15
0,20
0,25
0,30
0,40
0,50
0,0569
0,0820
0,1039
0,1225
0,1382
0,1650
0,1991
0,0571
0,0830
0,1066
0,1274
0,1457
0,1758
0,2038
0,0572
0,0835
0,1081
0,1305
0,1508
0,1853
0,2134
0,0572
0,0837
0,1085
0,1316
0,1627
0,1896
0,2202
0,0573
0,0838
0,1088
0,1322
0,1538
0,1916
0,2239
0,0573
0,0838
0,1089
0,1326
0,1545
0,1937
0,2268
0,0573
0,0839
0,1090
0,1328
0,1550
0,1949
0,2288
0,0573
0,0839
0,1091
0,1329
0,1553
0,1957
0,2304
0,0573
0,0839
0,1091
0,1330
0,1555
0,1964
0,2317
0,0573
0,0838
0,1092
0,1331
0,1556
0,1968
0,2327
0,0573
0,0839
0,1092
0,1332
0,1558
0,1972
0,2331
0,10
0,0745
0,0748
0,0750
0,0751
0,0751
0,0752
0,0752
0,0752
0,0752
0,0752
0,0752
0,15
0,1060
0,1076
0,1085
0,1088
0,1089
0,1090
0,1091
0,1091
0,1092
0,1092
0,1092
0,20
0,1321
0,1364
0,1388
0,1397
0,1401
0,1404
0,1405
0,1407
0,1408
0,1408
0,1409
0,8 й
0,25
0,1517
0,1602
0,1654
0,1673
0,1683
0,1689
0,1693
0,1695
0,1698
0,1701
0,1702
В
0,30
0,1680
0,1805
0,1888
0,1904
0,1939
0,1949
0,1957
0,1961
0,1966
0,1970
0,1972
0,40
0,1918
0,2095
0,2250
0,2320
0,2356
0,2378
0,2406
0,2420
0,2430
0,2438
0,2445
0,50
0,2145
0,2316
0,2507
0,2612
0,2678
0,2724
0,2757
0,2780
0,2802
0,2819
0,2832
0,10
0,0915
0,0920
0,0923
0,0924
0,0924
0,0925
0,0925
0,0925
0,0925
0,0925
0,0926
0,15
0,1285
0,1309
0,1322
0,1326
0,1328
0,1329
0,1330
0,1331
0,1331
0,1332
0,1332
0,20
0,1576
0,1638
0,1672
0,1684
0,1691
0,1695
0,1698
0,1700
0,1701
0,1702
0,1702
1.0Л-
0,25
0,1784
0,1901
0,1972
0,1997
0,2011
0,2019
0,2025
0,2029
0,2032
0,2034
0,2036
В
0,30
0,1925
0,2098
0,2217
0,2263
0,2288
0,2303
0,2314
0,2319
0,2327
0,2331
0,2335
0,40
0,2101
0,2365
0,2560
0,2658
0,2715
0,2752
0,2777
0,2800
0,2811
0,2822
0,2832
0,50
0,2269
0,2500
0,2761
0,2903
0,2993
0,3055
0,3101
0,3136
0,3163
0,3184
0,3203
8.2. РАМЫ
483
Продолжение 8,2,19
г) Реакция Нь от действия горизонтальной силы на верхний участок стойки
I В %
ГТРП
ГГ
Формулы для определения Нь при любом положении горизонтальной силы см. 8.2.19, а.
ЯА_. ПА_
Ь. 1В
По таблице КьзРв-
Значения коэффициента к3
а
п
Л,
0,05
0,10
0,20
0,30
0,40
0,50
0,60
0,70
0,80
0,90
1,00
0,10
0,965
0,968
0,969
0,969
0,970
0,970
0,970
0,970
0,970
0,970
0,970
0,16
0,940
0,948
0,952
0,953
0,954
0,954
0,954
0,955
0,955
0,955
0,955
0,20
0,908
0,924
0,933
0,936
0,937
0,938
0,939
0,939
0,940
0,940
0,940
°,2АВ
0,25
0,874
0,897
0,912
0,917
0,920
0,922
0,923
0,924
0,924
0,925
0,925
0,30
0,839
0,869
0,890
0,897
0,902
0,905
0,906
0,907
0,909
0,910
0,910
0,40
0,781
0,814
0,844
0,857
0,865
0,869
0,873
0,875
0,877
0,879
0,880
0,50
0,745
0,771
0,800
0,817
0,827
0,834
0,839
0,843
0,846
0,848
0,851
0,10
0,931
0,936
0,938
0,939
0,939
0,940
0,940
0,940
0,940
0,940
0,940
0,15
0,881
0,896
0,904
0,906
0,908
0,909
0,909
0,909
0,910
0,910
0,910
0,20
0,821
0,848
0,866
0,872
0,875
0,877
0,878
0,879
0,879
0,880
0,880
°,4ЛВ
0,25
0,754
0,799
0,835
0,836
0,841
0,844
0,846
0,848
0,849
0,850
0,851
0,30
0,688
0,744
0,783
0,798
0,806
0,811
0,814
0,816
0,818
0,820
0,821
0,40
0,575
0,641
0,694
0,719
0,733
0,742
0,748
0,753
0,757
0,760
0,762
0,50
0,511
0,559
0,613
0,634
0,661
0,674
0,683
0,690
0,696
0,700
0.704
0,10
0,897
0,904
0,907
0,909
0,909
0,909
0,910
0,910
0,910
0,910
0,910
0,15
0,826
0,846
0,857
0,860
0,862
0,863
0,864
0,864
0,865
0,865
0,865
0,20
0,740
0,780
0,802
0,810
0,814
0,816
0,818
0,819
0,820
0,820
0,821
0,6ЙВ
0,25
0,647
0,707
0,743
0,757
0,764
0,768
0,771
0773
0,775
0,776
0,777
0,30
0,556
0,631
0,682
0,702
0,713
0,719
0,724
0,726
0,729
0,731
0,733
0,40
0,407
0,483
0,558
0,590
0,609
0,621
0,629
0,635
0,640
0,644
0,647
0,50
0,315
0,376
0,446
0,484
0,508
0,525
0,536
0,545
0,553
0,559
0,564
0,10
0,865
0,873
0,877
0„878
0,879
0,879
0,880
0,880
0,880
0,880
0,880
0,16
0,775
0,801
0,811
0,815
0,817
0,818
0,818
0,820
0,820
0,821
0,821
0,20
0,669
0,715
0,740
0,749
0,754
0,757
0,758
0,760
0,761
0,761
0,762
0,8.
0,25
0,557
0,625
0,666
0,682
0,689
0,694
0,697
0,700
0,702
0,703
0,704
В
0,30
0,448
0,533
0,590
0,613
0,624
0,632
0,637
0,640
0,643
0,645
0,647
0,40
0,275
0,362
0,439
0,476
0,495
0,508
0,517
0,524
0,529
0,533
0,536
0,50
0,170
0,235
0,308
0,351
0,373
0,391
0,403
0,413
0,421
0,427
0,432
0,10
0,835
0,843
0,847
0,849
0,849
0,850
0,850
0,850
0,850
0,850
0,851
0,15
0,730
0,755
0,767
0,771
0,773
0,774
0,775
0,776
0,776
0,777
0,777
0,20
0,611
0,657
0,682
0,691
0,696
0,698
0,700
0,702
0,703
0,703
0,704
1,0Л
0,25
0,489
0,556
0,612
0,619
0,624
0,627
0,630
0,632
0,633
0,634
В
0,30
0,372
0,453
0,509
0,530
0,542
0,549
0,554
0,557
0,560
0,562
0,564
0,40
0,195
0,274
0,344
0,376
0,394
0,406
0,414
0,421
0,425
0,429
0,432
0,50
0,093
0,147
0,208
0,242
0,263
0,278
0,287
0,297
0,303
0,308
0,313
484
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
« 0йЬ верхней часта стойки -г-
Продолжение 8.2.19
д) Реакция Яъ от действия момента на верхний участок стейки Формулы для определения Яь при любом положении внешнего момента см. 8.2.19, а:
„А. л н
По таблице Я (к±с—ке), где к±—значения коэффициента к4 при ав 1,0Лв-
Значения коэффициента кх
ав
п
я
0,05
0,10
0,20
0,30
0,40
0,50
0,60
0,70
0,80
0,90
1,00
0,10
1,752
1,620
1,554
1,531
1,520
1,513
1,509
1,506
1,503
1,502
1,500
0,15
2,012
1,741
1,613
1,566
1,543
1,529
1,519
1,512
1,507
1.503
1,500
0,20
2,292
1,903
1,686
1,610
1,571
1,548
1,532
1,521
1,512
1,505
1,500
0
0,25
2,530
2,055
1,765
1,658
1,603
1,569
1,546
1,530
1,520
1,508
1,500
0,30
2,687
2,184
1,707
1,636
1,592
1,562
1,539
1,523
1,510
1,500
'0,40
2,735
2,322
1Т95
1,775
1,697
1,635
1,592
1,570
1,535
1,516
1,500
0,50
2,556
2,294
2,000
1,839
1,737
1,667
1,615
1,576
1,545
1,521
1,500
0,2Н
0,10
0,15
0,20
0,25
0,30
0,40
0,50
1,740
1,985
2,250
2,472
2,615
2,648
2,467
1,614
1,737
1,881
2,038
2,141
2,261
2,224
1,551
1,607
1,674
1,747
1,817
1,920
1,950
1,529
1,562
1,602
1,646
1,691
1,765
1,800
1,519
1,539
1,565
1,594
1,623
1,675
1,705
1,512
1,524
1,543
1,562
1,582
1,617
1,640
1,508
1,517
1,528
1,540
1,553
1,577
1,592
1,505
1,510
1,517
1,525
1,531
1,548
1,556
1,503
1,506
1,509
1,513
1,517
1,524
1,527
1,500
1.502
1.503
1.504
1.505
1.505 1,504
1.499
1.499 1,498 1,496 1,495 1,490 1,485
0.4 к
0,10
0,15
0,20
0,25
0,30
0,40
0,50
1,695
1,911
2,125
2,299
2,401
2,433
2,200
1,597
1,698
1,813
1,923
1,970
2,080
2,059
1,542
1,587
1,640
1,694
1,744
1,806
1,800
1,523
1,549
1,579
1,610
1,640
1,681
1,684
1,514
1,529
1,547
1,566
1,584
1,610
1,611
1,508
1,518
1,529
1,540
1,550
1,563
1,566
1,505
1,510
1,516
1.522 1,527 1,531
1.523
1,502
1.507
1.507 1,509
1.508
1.508 1,495
1.500
1.500
1.500 1,499 1,497 1,488. 1,473
1,499
1,497
1,495
1,491
1,487
1,474
1,455
1,498
1,495
1,490
1,435
1,479
1,462
1,440
0,10
1,646
1,567
1,527
1,513
1,507
1,503
1,500
1,498
1,497
1,495
1,495
0,15
1,784
1,633
1,553
1,526
1,512
1,504
1,499
1,495
1,492
1,490
1,488
0,20
1,917
1,702
1,581
1,539
1,518
1,505
1,496
1,490
1,486
1,481
1,478
0,61
0,25
2,010
1,767
1,606
1,550
1,521
1,503
1,491
1,482
1,476
1,470
1,466
В
0,30
2,044
1,793
1,622
1,593
1,519
1,497
1,482
1,470
1,463
1,457
1,451
0,40
1,955
1,774
1,615
1,542
1,500
1,473
1,454
1,440
1,429
1,421
1,414
0,50
1,756
1,659
1,550
1,490
1,453
1,427
1,408
1,393
1,382
1,373
1,365
0,10
1 563
1,525
1,506
1,500
1,496
1,494
1,493
1,492
1,491
1,491
1,490
0,15
1,607
1,541
1,507
1,495
1,489
1,485
1,483
1,482
1,480
1,479
1,478
0,20
1,625
1,545
1,500
1,484
1,476
1,471
1,468
1,466
1,464
1,463
1,462
0,8й
0,25
1,боб
1,529
1,481
1,465
1,457
1,451
1,447
1,445
1,443
1,441
1,440
В
0,30
1,545
1,481
1,451
1,437
1,429
1,424
1,420
1,417
1416
1,415
1,414
0,40
1,348
1,348
1,347
1,347
1,347
1,346
1,347
1,350
1,346
1,346
1,311
0,50
1,133
1,165
1,200
1,219
1,232
1,240
1,246
1,251
1,255
1,258
1,260
10Л
0,10
0,15
0,20
0,25
0,30
0,40
0,50
1,467
1,378
1,250
1,084
0,902
0,569
0,333
1,472
1,423
1,343
1,233
1,098
0,799
0,529
1,479
1,447
1,395
1,324
1.232
1,003
0,750
1,482
1,455
1,414
1,357
1,284
1,096
0,871
1,483
1,459
1,423
1,374
1,312
1,150
0,947
1,484
1,461
1,429
1,385
1,329
1,184
1,000
1,484
1,463
1,432
1,392
1,341
1,208
1,038
1,484
1,464
1,435
1,397
1,348
1,226
1,068
1,485
1,465
1,437
1,401
1,356
1,241
1,091
1,485
1,466
1,439
1,404
1,361
1,251
4,110
1,485
1,466
1,440
1,406
1,365
1,260
1,125
0.2. РАМЫ
485
8.2.20. Моменты и реакции стойки с двумя уступами с защемленным нижним и шарнирно опертым верхним концом
Н '
п1—“■—; II 2я
V
Ли
А
ц г- 1 ц I.
п% ’ п., л,
Поворот опоры А на ф1
Смещение опоры А (или В) на Д1
Ен
Ма0;
ь
Ен
Мак« ;
Ла
Я,
н
Л3
Схемы нагрузок и эпюры М
Л"е схемы Опорные реакции 11 (численные значения а см. 8.2.22)
486
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.2.20
Схемы нагрузок и эпюры М
МЬ схемы
Опорные реакции 7? (численные значения сс см. 8.2.22)
_ «Ъ р
ТЙТ 1Г-Д
г
7
5а
56
Рс,
- °ан
Рс о не
— к0 (ана1У1хХ1) - — °ан
рНк0 (ана1М-А1а22)
Пример. Определить реакции ?ь в стойке, имеющей два уступа, от ветровых и крановых нагрузок (см. рис. 8.55) з
лЛ Е'Ц
т
и
Ь.
, -сГ 7 5
«1 — 0,7; п2 — 0,5;
10
10
0,7_1 _0,43; о',5 07 — °’®7’
Ьа ■
Рис. 8.55
2,84.
10,43-0,530,57.0,23
От нагрузки р0,8 гл (схема 36):
— — 0,6; а„ 0,0944; к 20
Г ТХ — °2; а1 — 0,1237;
Л, 10
Яг, 0,8-20-2,84 (0,0944 0,1237-0,43-0.50 0,125-0,57-0,24) 4,46 т.
8.2. РАМЫ
487
От момента 60-0,5 (схема 56):
Л -1.0,6; «.-0,42.
ан 10 —
При ан — Лн — — 0,5; ан 0,375; Кь 6°'- 2,84 (0,48 0,42-0,43-0,52) —
20 60-0,15 20
2,84-0,375 1,75 т.
Эпюра М дана на рис. 8.55.
От Т—2т (схема 4):
Т- - 085: «н 0,2589;
Ъ, 20
• “ 0,7; «х 0,1878; Нг 10
-22- — 0,25; а2 0,0287; К 4
Пь 22,84 (0,2589 0,18780,43-0,53 0,02870,570,23) 1,53 г.
8.2.21. Ступенчатая стойка с защемленными концами. Моменты защемления и реакции верхних опор при различных п и X
в п-„:
и
Схема нагрузки. Эпюра М
Коэффи¬
п
циент
0,06 0,1
0,2 0,3
0,4
0,5
0,6
1 0.7
0,8
0,9
1 Ь0
м -кв— ака н
Я—ГЬ Н2
а) От поворота верхнего сечения на угол Ф в1
кв
Ь
0,1
0,2
0,3
0,4
0,5
0,634
0,422
0,378
0,376
0,370
0,983
0,664
0,580
0,566
0,564
1,689
1,216
1,055
1,006
1,000
2,224
1,705
1,499
1,423
1,406
2,642
2,140
1,918
1,825
1,799
2,979
2,530
2,313
2,215
2,182
3,256
2,882
2,687
2,593
2,557
3,488
3,201
3,041
2,959
2,927
3,684
3,491
3,377
3,316
3,290
3,853
3,756
3,696
3,663
3,648
4.000
4.000
4.000
4.000
4.000
0,1
0,449
0,610
0,935
1,182
1,375
1,530
1,657
1,764
1,855
1,932
2,000
0,2
0,493
0,600
0,835
1,040
1,222
1,386
1,533
1,666
1,787
1,898
2,000
ка
0,3
0,583
0,687
0,887
1,061
1,220
1,369
1,510
1,652
1,768
1,887
2,000
0,4
0,609
0,749
0,965
1,128
1,273
1,407
1,535
1,658
1,776
1,890
2,000
0,5
0,551
0,730
1,000
1,180
1,325
1,455
1,574
1,686
1,794
1,899
2,000
0,1
1,083
1,594
2,625
3,405
4,017
4,609
4,913
5,251
5,539
5,786
6,000
0,2
0,915
1,264
2,051
2,748
3,362
3,916
4,414
4,867
5,278
5,655
6,000
гЪь
0,3
0,961
1,268
1,948
2,560
3,138
3,682
4,196
4,683
5,145
5,583
6,000
0,4
0,985
1,315
1,971
2,551
3,098
3,622
4,128
4,617
5,091
5,552
6,000
0,5
0,921
1,295
2,000
2,586
3,124
3,636
4,131
4,613
5,084
5,546
6,000
б) От поворота нижнего сечения на угол Ф 1
См. к»а
нЕн
Мака Е‘и
н Н
Ь Ь2
Яг
кн
а
0,1
0,2
0,3
0,4
0,5
3,271
3,247
2,997
2,491
1,889
3,352
3,340
3,228
2,893
2,357
3,507
3,480
3,454
3,312
3,000
3,621
3,579
3,572
3,504
3,312
3,710
3,663
3,660
3,624
3,503
3,782
3,735
3,732
3,714
3,636
3,841
3,799
3,795
3,786
3,737
3,891
3,857
3,843
3,854
3,848
3,932
3,879
3,905
3,903
3,888
3,969
3,957
3,954
3,953
3,947
4.000
4.000
4.000
4.000
4.000
0,1
3,720
3,962
4,442
4,803
5,085
5,312
5,498
5,655
5,787
5,901
6,000
0,2
3,740
3,940
4,314
4,619
4,885
5,121
5,332
5,523
5,696
5,855
6,000
г1
0,3
3,580
3,915
4,341
4,633
4,880
5,101
5,305
5,495
5,673
5,841
6,000
0,4
3,100
3,642
4,277
4,632
4,897
5,121
5,321
5,506
5,679
5,843
6,000
0,5
2,390
3,087
4,000
4,492
4,828
5,091
5,311
5,506
5,682
5,846
6,000
488
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.2.21
Схема нагрузки.
Зпюра М
Коэффи¬
циент
0,06 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0
в) От взаимного смещения опорных сечений на Д1
Цн
К2
0,1
0,2
0,3
0,4
0,5
1,083
0,915
0,961
0,985
0,921
1,594
1,264
1,268
1,315
1,295
2,624
2,051
1,942
1,971
2,000
3,405
2,745
2,560
2,551
2,586
4,017
3,362
3,135
3,098
3,124
4,509
3,916
3,682
3,622
3,636
4,913
4,415
4,196
4,128
4,131
5,251
4,867
4,683
4,617
4,613
5,539
5,278
5,145
5,091
5,084
5,786
5,655
5,583
5,552
5,546
6,000
6,000
6,000
6,000
6,000
0,1
0,2
0,3
0,4
0,5
3,720
3,740
3,580
3,100
2,390
3,962
3,940
3,915
3,642
3,087
4,442
4,314
4,341
4,277
4,000
4,803
4,619
4,633
4,632
4,492
5,085
4,885
4,880
4,897
4,828
5,312
5.121 5,101
5.121 5,091
5,498
5,332
5,305
5,321
5,311
5,655
5,523
5,495
5.506
5.506
5,787
5,696
5,673
5,679
5,682
5,901
5,855
5.841
5,843
5,846
6,000
6,000
6,000
6,000
6,000
0,1
0,2
0,3
0,4
0,5
4,803
4,655
4,541
4,085
3,311
5,555
5,203
5,182
4,956
4,382
7,066
6,365
6,283
6,248
6,000
8,208
7,364
7,193
7,183
7,078
9,102
8,247
8,018
7,995
7,953
9,821
9,036
8,783
8,743
8,727
10,412
9,747
9,501
9,449
9,443
10,906
10,390
10,178
10,123
10,119
11,326
10,975
10,818
10,770
10,766
11,687
11,509
11,424
11,395
11,393
12,000
12,000
12,000
12,000
12,000
г) От равномерно распределенной нагрузки
МикарЬ?
КЬгЬрН
кЬ
0,1
0,2
0,3
0,4
0,5
0,028
0,038
0,046
0,047
0,045
0,034
0,042
0,050
0,054
0,053
0,046
0,049
0,056
0,061
0,063
0,054
0,055
0,060
0,065
0,068
0,061
0,060
0,064
0,069
0,071
0,067
0,065
0,068
0,072
0,074
0,071
0,070
0,072
0,074
0,076
0,075
0,074
0,075
0,077
0,078
0,078
0,077
0,078
0,079
0,080
0,081
0,080
0,081
0,081
0,082
0,083
0,083
0,083
0,083
0,083
ка
0,1
0,2
0,3
0,4
0,5
0,110
0,114
0,134
0,159
0,180
0,107
0,108
0,117
0,137
0,156
0,101
0,101
0,104
0,113
0,125
0,097
0,097
0,098
0,103
0,111
0,094
0,094
0,094
0,097
0,102
0,091
0,092
0,092
0,093
0,097
0,089
0,090
0,090
0,090
0,093
0,087
0,088
0,088
0,088
0,090
0,086
0,086
0,086
0,086
0,087
0,084
0,085
0,085
0,085
0,085
0,083
0,083
0,083
0,083
0,083
ГЬ
0,1
0,2
0,3
0,4
0,5
0,418
0,424
0,413
0,388
0,367
0,427
0,434
0,432
0,417
0,397
0,444
0,448
0,452
0,449
0,438
0,457
0,458
0,462
0,463
0,457
0,467
0,466
0,470
0,472
0,469
0,476
0,474
0,477
0,479
0,477
0,482
0,480
0,482
0,484
0,484
0,488
0,486
0,487
0,489
0,489
0,492
0,491
0,492
0,493
0,493
0,497
0,496
0,496
0,497
0,497
0,500
0,500
0,500
0,500
0,500
д) От сосредоточенной силы
кЪ
0,1
0,2
0,3
0,4
0,5
0,052
0,081
0,095
0,097
0,098
0,059
0,084
0,101
0,104
0,104
0,075
0,092
0,108
0,113
0,113
0,088
0,099
0,111
0,116
0,118
0,097
0,104
0,115
0,119
0,121
0,105
0,109
0,117
0,121
0,122
0,111
0,114
0,120
0,123
0,124
0,116
0,118
0,122
0,124
0,125
0,121
0,122
0,124
0,126
0,126
0,125
0,125
0,126
0,127
0,127
0,128
0,128
0,128
0,128
0,128
ка1
0,1
0,2
0,3
0,4
0,5
0,074
0,079
0,119
0,132
0,133
0,066
0,067
0,085
0,101
0,105
0,057
0,055
0,060
0,068
0,073
0,051
0,049
0,050
0,055
0,058
0,047
0,045
0,045
0,047
0,050
0,043
0,042
0,041
0,043
0,045
0,040
0,039
0,039
0,039
0,041
0,038
0,037
0,036
0,037
0,038
0,035
0,035
0,035
0,035
0,035
0,034
0,034
0,034
0,034
0,034
0,032
0,032
0,032
0,032
0,032
ГЫ
0,1
0,2
0,3
0,4
0,5
0,778
0,802
0,776
0,765
0,765
0,794
0,817
0,816
0,803
0,800
0,818
0,837
0,848
0,842
0,840
0,836
0,850
0,861
0,862
0,859
0,851
0,859
0,870
0,872
0,870
0,862
0,868
0,876
0,878
0,878
0,871
0,875
0,881
0,883
0,883
0,879
0,881
0,886
0,887
0,888
0,886
0,886
0,889
0,891
0,891
0,891
0,891
0,893
0,894
0,894
0,896
0,89о
0,896
0,896
0,896
: 0,2 Н
мькь1рь
Кк-гЫР
Значения моментов и реакций от взаимного смещения опорных сечений при действии на опору В горизонтальной единичной силы см. 8.2.13.
При действии на стойку частичной равномерно распределенной или треугольной нагрузок моменты и реакции можно определить по формулам 8.2.22 (см. сноску на стр. 490.)
8.2. РАМЫ
489
Продолжение 8.2.21
Схема нагрузки.
Эпюра М
Коэффи¬
циент
0,06
0,1
0,2
0,3 0,4
0,5
0,6
0,7
0,9
1,0
0.1
0,2
0,3
0,4
0,5
0,051
0,081
0,088
0,074
0,050
0,054
0,084
0,096
0,087
0,064
0,060
0,092
0,106
0,103
0,083
0,065
0,099
0,114
0,111
0,094
0,069
0,104
0,120
0,118
0,101
0,072
0,109
0,125
0,123
0,106
0,074
0,114
0,130
0,128
0,111
0,076
0,118
0,135
0,132
0.115
0,078
0,122
0,139
0,136
0,118
0,080
0.125
0,143
0,140
0,122
0,081
0,128
0,147
0,144
0,125
0,1
0,028
0,024
0,020
0,017
0,015
0,011
0,012
0,011
0,010
0,010
0,009
0,2
0,079
0,067
0,055
0,049
0,045
0,042
0,039
0,037
0,035
0,034
0.032
ка2
0,3
0,170
0,133
0,102
0,090
0,082
0,077
0,073
0,070
0,068
0,065
0,063
0,4
0,262
0,210
0,158
0,136
0,124
0,116
0,110
0,106
0,102
0,099
0.096
0,5
0,321
0,270
0,208
0,180
0,163
0,152
0,144
0,137
0,132
0,128
0.125
0,1
0,923
0,930
0,940
0,948
0,954
0,958
0,962
0,965
0,968
0,970
0,972
0.2
0,802
0,817
0,837
0,850
0,859
0,868
0,875
0,881
0,886
0,891
0.896
ГЬ2
0,3
0,618
0,663
0,704
0,724
0,733
0,743
0,757
0,764
0,772
0,778
0.784
0,4
0,412
0,477
0,545
0,575
0,594
0,607
0,618
0,627
0,635
0,642
0,648
0,5
0,229
0,294
0,375
0,414
0,433
0,454
0,467
0,477
0.486
0,493
0,500
0.1
0,042
0,053
0,074
0,090
0,103
0,113
0,121
0,129
0,134
0,140
0,144
0.2
0,056
0,062
0,076
0,088
0,099
0,108
0,117
0.125
0,132
0.138
0,144
кЬЗ
0,3
0,070
0,078
0,090
0,099
0,107
0,114
0,121
0,127
0,1-33
0,139
0,144
0,4
0,074
0,087
0,103
0,111
0,118
0,123
0,128
0,132
0,1-36
0,140
0,144
0,5
0,071
0,087
0,107
0,117
0,124
0,129
0,133
0,136
0,139
0,142
0,144
°,1
0,144
0,139
0,129
0,121
0,115
0,110
0,107
0,103
0,101
0,098
0.096
0,2
0,147
0,141
0,129
0,122
0,117
0,112
0,108
0,105
0,100
0,099
0,096
■ каз
0,3
0,188
0,160
0,135
0,124
0,117
0,112
0,108
0,105
0,101
0,099
0,096
0,4
0,262
0,210
0,158
0,136
0,124
0,116
0,110
0,106
0,102
0.099
0,096
0,5
0,314
0,255
0,187
0,155
0,136
0,124
0,115
0,109
0,104
0,100
0,096
0,1
0,498
0,513
0,545
0,569
0,588
0,603
0,615
0,625
0,634
0,642
0,648
0,2
0,509
0,522
0,547
0,566
0,582
0,596
0,609
0,620
0,631
0.640
0,648
гЬз
0,3
0,482
0,518
0,555
0,575
0,590
0,602
0,613
0,623
0,632
0,640
0,648
0,4
0,412
0,477
0,545
0,575
0,594
0,607
0,618
0,627
0,635
0,642
0,648
0,5
0,357
0,432
0,520
0,562
0,587
0,604
0,617
0,627
0,635
0,642
0,648
0,1
0,025
0,032
0,047
0,058
0,067
0,074
0,080
0,085
0,089
0,093
0,096
0,2
0,030
0,035
0,045
0,054
0,062
0,069
0,076
0,081
0,087
0,092
0,096
0,3
0,037
0,042
0,050
0,058
0,064
0,070
0,076
0,081
0.087
0,091
0,096
0.4
0,038
0,046
0,056
0,063
0,069
0,074
0,079
0,083
0,083
0,092
0,096
0,5
0,034
0,045
0,059
0,067
0,073
0,078
0,082
0,086
0,089
0,093
0,096
0.1
0,179
0,174
0,167
0,162
0,157
0,154
0,151
0,149
0,147
0,146
0,144
0,2
0,180
0,175
0,168
0,164
0,159
0,156
0,153
0,150
0,148
0.146
0,144
0,3
0,199
0,184
0,170
0,164
0,159
0,156
0,153
0,150
0,148
0.146
0,144
0.4
0.232
0,207
0.181
0,169
0,162
0,158
0,154
0,151
0,148
0,146
0.144
0,5
0,278
0,244
0,203
0,183
0,171
0,163
0,158
0,153
0,150
0,147
0,144
0,1
0,246
0,258
0,280
0,297
0,310
0,321
0,329
0,335
0,342
0,347
0,352
0,2
0,250
0,260
0,277
0,291
0,303
0,313
0,323
0,331
0,339
0,346
0,352
ГЬ4
0,3
0,238
0,258
0,280
0,294
0,305
0,314
0,323
0,331
0,339
0,345
0,352
0,4
0,206
0,239
0,276
0,294
0,309
0,316
0,325
0,333
0,339
0,346
0,352
0,5
0,156
0,200
0,256
0,284
0,-301
0,314
0,324
0,333
0,340
0,346
0,352
аНп
2Р
ПЙТ
мькьзрн
МаказРЬ
КЬГМР
о0,6Л
"04РЛ
490
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.2.21
Схема нагрузки. Эпюра М.
Коэффи¬
п
циент
к
0,06 0,1 0,2 0,3
0,4
0,5
0,6
0,7
0,8
0,9
1.0
г
Зн'
А 7Я77
МЬкЬ5
МакаьЬ
ЬЬ
кН
0,1
0,2
0,3
0,4
0,5
—0,034
0,102
0,173
0,188
0,162
—0,096
0,075
0,171
0,213
_0,203
—0,221
0,011
0,145
0,224
0,250
—0,316
—0,046
0,115
0,218
0,267
—0,390
—0,098
0,085
0,206
0,272
—0,449
—0,145
0,056
0,192
0,273
—0,498
—0,188
0,029
0,178
0,271
—0,539
—0,225
0,002
0,163
0,267
—0,574
—0,259
—0,023
0,149
0,262
—0,604
—0,291
—0,047
0,134
0.256
—0,630
—0,320
—0,070
0,120
0,250
аь
0,1
0,2
0,3
0,4
0,5
0,442
0,405
0,225
—0,063
—0,379
0,412
0,411
0,300
0,080
—0,208
0,357
0,403
0,354
0,218
0,000
0,314
0,385
0,366
0,269
0,095
0,280
0,367
0,366
0,293
0,148
0,253
0,349
0,363
0,306
0,182
0,230
0,333
0,357
0,314
0,205
0,212
0,318
0,351
0,318
0,221
0,196
0,304
0,344
0,320
0,234
0,182
0,292
0,337
0,320
0,243
0,170
0,280
0,330
0,320
0,250
гьь
0.1
0,2
0,3
0,4
0,5
1,408
1,507
1,398
1,125
0,782
1,316
1,487
1,471
1,293
0,996
1,136
1,415
1,500
1,442
1,250
0,998
1,339
1,481
1,486
1,361
0,890
1,269
1,452
1,499
1,420
0,804
0,205
0,419
0,499
0,455
0,732
1,146
1,386
1,492
1,475
0,672
1,094
1,353
1,481
1,488
0,622
1,045
1,321
1,469
1,495
0,578
1,001
1,290
1,455
1,499
0,540
0,960
1,260
1,440
1,500
е) От внешнего момента (при знаке минус моменты в эпюре располагать с другой стороны стойки)
4 1
ж) Формулы для определения М и от действия сосредоточенной силы н внешнего момента в любом сечении (численные значения а, п у см. 8.2.22)
Щ
тж
1. " Ш‘
)ЪпГ ХП)Ь)
«■те-» р°
%
ш
Аг16( 1-4-цХ2) Л-4(1дХ»)
,12(14.дЛ)
к2кг—
12
№
схемы
4а
РЬа„
РЬув
46
РН (анацА,3)
РЬ (,унУМ'а
5а
56
Рс ан4-ама)—рёйК
аи, ун—коэффициенты а, у при ДНЛН (см. пример в 8.2.20)
8.2.22. Моменты и реакции стойки с двумя уступами и обоими защемленными концами 1 [13, 26]
',
И
;
1
—г
1
-Л
Л-1
н0
_ 2
Поворот опоры В на р1
в к,—к,
а—
ньгь—
В г»т:
4 Формулы таблицы можно применить для расчета стоек с одним уступом, при этом следует члены, содержащие А. 2, приравнять нулю.
8.2. РАМЫ
491
Продолжение 8.2.22
ч ■ л
-01 -
ъ "
С Л " Эн'
7Л
1
с 1
■ т •
-С
А—Х.
ихб (14-ДА1 4- Дг2)
к2 4 1 М-Л1 4" Дг2)» г3 12 (1 4- цД, 4- цА);
гг9— 12
Смещение опоры В на А—1
I I , мЛ
Щ
Д'н
л
,Д'н
«а а Л
, АЗ,.
Ь ь
-гЛ '« КЬ—
А
ГТ
Смещение опоры В от силы Р1
м
я ;Т »
»
4Ь
ЛтГП
мъ%оЛ Ла (1—о) Л ?Р
Ч
гдЛд—Лд (табл. 8.2.5—8.2.8 и 8.2.10)
мь
Д“,?2Л2 - А1"“
' м
Схема нагрузки и эпюра М
№
схемы
Д»
Л2
»
Ш
Ф ©
лег
Г з
4
р
7
р1а
8
(14-ДА1 4 Даз)
--(1ц,Я.?Игх)
рЬ2 (тнН-1ДЛ1Т2Д2)
Мъ %
:Л
® © ®
-За
рЛа (ан4-0,125 дЛ4"0125 ц)
РЛ (тн0Л67 цЛ?4-0Л67 м)
46
рН (ана»Д»10,125 ц)
Р («иаАавщЯг)
рЛа (7н71ДЛ140 167 2)
( 7н'№1 7гДг2)
492
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.2.22
а1
№ схемы нагрузки
№ схемы нагрузки
Н1
2
5 1
4 I
1 5 1
1
2
1
1
1 з
б
Значения а
Значения
0,05
0,1250
0,0012
0,0488
0,1667
0,0013
0,0500
—
0,10
0,0002
' 0,1248
0,0048
0,0950
—
0,0002
0,1665
0,0050
0,1000
—
0,15
0,0005
0,1245
0,0106
0,1388
0,0001
0,0006
0,1661
0,0112
0,1500
0,0001
0,20
0,0013
0,1237
0,0187
0,1800
0,0003
0,0013
0,1654
0,0200
0,2000
0,0003
0,25
0,0025
0,1225
0,0287
0,2188
0,0006
0,0026
0,1641
0,0313
0,2500
0,0007
0,30
0,0042
0,1208
0,0405
0,2550
0,0011
0,0045
0,1622
0,0450
0,3000
0,0011
0,35
0,0065
0,1185
0,0541
0,2880
0,0017
0,0071
0,1596
0,0613
0,3500
0,0018
0,40
0,0096
0,1154
0,0693
0,3200
0,0025
0,0107
0,1560
0,0800
0,4000
0,0027
0,45
0,0135
0,1115
0,0861
0,3488
0,0035
0,0152
0,1515
0,1013
0,4500
0,0038
0,50
0,0182
0,1068
0,1042
0,3750
0,0047
0,0208
0,1459
0,1250
0,5000
0,0052
0,55
0,0239
0,1011
0,1235
02988
0,0062
0,0277
0,1390
0,1513
0,5500
0,0069
0,60
0,0306
0,0944
0,1440
6,42Ш
0,0079
0,0360
0,1307
0,1800
0,6000
0,0090
0,65
. 0,0383
0,0867
0,1655
0,4388
0,0100
0,0458
0,1209
0,2113
0,6500
0,0114
0,70
0,0472
0,0778
0,1878
0,4550
0,0123
0,0572
0,1095
0,2450
0,7000
0,0143
0,75
0,0571
0,0679
0,2109
0,4688
0,0150
0,0703
0,0964
0,2813
0,7500
0,0175
0,80
0,0683
0,0567
0,2347
0,4800
0,0179
0,0853
0,0814
0,3200
0,8000
0,0213
0,85
0,0806
0,0444
0,2589
0,4888
0,0212
0,1024
0,0643
0,3613
0,8500
0,0256
0,90
0,0942
0,0308
0,2835
ТфШ)
0,0249
0,1215
0,0452
0,4050
0,9000
0,0304
0,95
0,1090
0,0160
0,3084
0,4988
0,0289
0,1429
0,0238
0,4513
0,9500
0,0357
1,00
0,1250
0
0,3333
0,5000
0,0333
0,1667
0
0,5000
1,0000
0,0417
от
Рис. 8.56
Пример. В двухступенчатой стойке с защемленными концами определить опорные реакции и моменты заделки от крановой нагрузки (см. рис. 8.56):
X, — 0,5;
1 16
Х2 — - 0,25;
1о
5 л „ 1,43
пх — 0,5; п2 -- 0,143;
5“1 1:
кг 6 (1 0,5 5-0,252) 9,375, кг 4 (1 0,5 5-0,253) 4,81; кз — 12(1 0,5 5-0,25) 33; 4,81-33 — 9,375
6
12
5,88.
8.2. РАМЫ
493
От момента I (схема-5): -- — 0,1; 0,0048; Т1 0,005;
аяА8160,5; ав0,375; ун0,5; Л, 1ан0,3751; А, 8
Д21ун0,5.; Д, ГА (0,1235 0,0048-0,58) 0,1241 ГА;
9,375-0,375 — 4,81-0,5, „,л,
Мь — 0,19 Ц Дг ГА (0,1513 0,005-0,52) 0,1526 ТН;
оо А оте о 3750 5 (9,3750,1241 —4,810,1526) 16
33-0,375 - 9,3755 10Шц Мь 1 т— 5 Г-1,17 Г;
ь 5,88-16 588
Ма (0,082-16 — 0,19— 1) Ь — 0,12,. „ (33-0,1241 — 9,375-0,1526) 16
Нь 1 ” Т 0,453 1 ;
Эпюра М дана на рис. 8.56. 5,8816
От тормозной силы Т (схема 4): авН 8,816 0,55; ан0,1235; ун0,1513; Л1а (—0,45316 1,17 8,8) Г 2,72 Г.
8.2.23. Формулы для подсчета интегралов Мора Мкйз
5
По таблице могут быть подсчитаны интегралы Мора, входящие в формулы для определения перемещений о (при ;сопз) [см. канонические уравнения метода сил (5.311)]. По формулам таблицы можно также определить углы поворота сечений и прогибы (см. пример 1).
Для элементов, имеющих по длине участки с разными жесткостями, интеграл определяется суммированием по участкам. Подсчет интегралов при элементах ступенчатого очертания приводится ниже.
Если жесткость элемента меняется по линейному закону, элемент делится на равные интервалы, и интегрирование эпюр ведется по участкам на этих интегралах с использованием формул численного интегрирования (например, способом трапеций или по формуле Симпсона).
Значения интегралов таблицы применимы для криво¬
линейных элементов переменного сечения, если соблюдено условие со8фсоп51, где ф — наклон оси элемента к оси х. Интегрирование эпюр криволинейных элементов, не отвечающих указанному условию, см. [20].
При прямолинейных эпюрах, пересекающих ось элемента, т. е. имеющих разные знаки, следует при пользовании формулами таблицы учитывать знаки и к.
При сложных криволинейных эпюрах от заданной нагрузки и прямолинейных единичных подсчеты можно упростить, применяя способы, рассмотренные в примере 2.
Приведенные в таблице криволинейные эпюры представляют собой квадратные параболы. Ниже даны формулы, которые могут быть использованы и для интегрирования эпюр, очерченных по кубической параболе, при прямолинейных единичных эпюрах.
Эпюра Мд.
Схема нагрузки
Эпюра
к
‘ИПЧптш»
[Л1М11К
5
5
Куб. парабола
[ТГг?т 1
—з1к
4
1
1
20
Куб. парабола
‘ИйЛтг».
5
3
—— 51к
1
з1к
11
‘ 5Д»
1
81 Г11Ь.4-4Ь)
дТ111
8
10
40
40 V 11а11 к2
Любая нагрузка
7
(ахь) к
-V
-V
ха ХЬ У1"0 пов°Р°та сечений на опорах по 8.1.2
494
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Пример 1. В консольной балке с равномерно распределенной нагрузкой на консоли определить угол поворота опоры А и прогиб конца консоли ос.
Строим эпюры М: а — от Иа 1; б— от Р 1; в —
А
I
6) ггтггтгттпгшк.
ра2
б) ггттгтттТТТПРСг
Рис. 8.57
от внешней нагрузки. Угол поворота т« равен интегралу эпюр рис. 8.57, а ив; прогиб 0в — эпюр 8.54, бае, По таблице имеем
раЧ ра21
Та
р1а8
622;
раа2а
12 ЕГ ра3
3.2Я 42 Я 24Я
(4 За).
Пример 2. Показать способы подсчета интеграла криволинейной эпюры ригеля рамы, полученной по расчету от заданной нагрузки (рис. 8.58, а) и единичной эпюры (рис. 8.58, б) при деформационной проверке правильности эпюры (проверку эпюр М см. 8.2.15, пример 2). Рама рассчитана по формулам 8.2.9.
Способ I. Криволинейную эпюру ригеля разложим на кубическую параболу с треугольником (рис. 8.58, в), треугольник (рис. 8.58, г) и трапецию (рис. 8.58, д). Формулы для треугольника и трапеции даны в настоящей таблице, для кубической параболы используем результаты способа И.
Интеграл равен (при 3,6 и сокращении на Е) з
2»123 (53 37) 3.3,68,4.12
а-
16-360 (5,12 4,34) 12
]и.
12.2 8.
Способ . При прямолинейной единичной эпюре интеграл по формуле (5.315) равен:
Ч Мь Ма,
где ть, та — углы поворота опорных сечений от всех нагрузок на данный элемент (включая опорные моменты), рассматривая его как простую балку (см. 8.1.2); Мь, Мл — опорные ординаты единичной эпюры (в нашем случае равны единице). По 8.1.2 получим:
1_ Г 2123 3 _ 15_ 312а(0,7—0,78)
3,6 [зб02а 42 6
5,1212 4,34-121
““3
1_ Г2-123
4 3,6 [збО
5,12.12
°т)
3122 (0,3 — 0,33)
1,34121
з
6
: 3,95;
%ЬМЬ т - (7,85 3,95) — 11,8-
Способ III [10]. Криволинейная или ломаная эпюра заменяется эквивалентной ей прямо линейной, у которой величины крайних ординат равны разности соответству-
8)
I "1
“К
ттттм 4®
ж)
ЩЦИ' 1
Д1РЦУ'а
Рис. 8.58
ющих ординат двух эпюр: 1) полученной в результате расчета всей системы; 2) полученной из расчета рассматриваемого элемента (или участка) от действия заданной нагрузки как балки с обоими заделанными концами.
Моменты заделки ригеля на опорах (при защемленных обоих концах) по табл. 8.1.4 равны (рис. 8.58, е):
тм;
38,43,62
4,37 тм.
Крайние ординаты эквивалентной эпюры равны разности эпюр а и е; на опоре В 5,12—12,19 —7,07; на опоре О 4,34—4,37—0,03 (рис. 8.58,ж). Интеграл равен:
12
3,6.2
(7,07 0,03) — 11,8.
8.2. РАМЫ
495
Способ III дает заметное сокращение подсчетов при сложных эпюрах, в особенности если система рассчитана методом, в котором требуется определять концевые моменты защемления элементов (например, методом деформации), и при стержнях переменного сечения (см.
ниже). Кроме того, приведение всех эпюр только к прямолинейным дает возможность пользоваться лишь одной расчетной формулой, что особенно важно при применении вычислительных машин.
Подсчет интегралов при стержнях переменного сечения (ступенчатых стойках)
Одноступенчатые
-Л.X
Ц — 1;
п
©1 1 дА,;' ©2 1-1- ц№;
й)з1
Двухступенчатые
О,. (ц
Пх—
1 11 1X1 — 11 — 2 2
©11М'11М2Я-2
3 3
Эпюры
«I
81 к
1к
2.
• ©2
52 51
со4
2 н н
5 (к1кг) 8(ЬЛ
51к
' ®2
1к
з.
' ©8
1кг, 1кх
81 (кг--кг) Зо
81кг
2.
-02
При перемножении криволинейных (или ломаных) нейными—см. способ III в примере 2 настоящей табли-
эпюр по единичным прямолинейным рекомендуется кри- цы и пример в 8.2.10.
волинейные эпюры заменять эквивалентными прямоли-
496
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Эпюра М
Эпюра
.Мк
«I I
5
тши
8
' г
мк
-1-
2
— а (кх Ъ)
2
.клПГПЮ
5
-1- 5к
2
— 56
3
— 5 (кх 2Л) 6
‘ЕЕШпьх
— к
6
‘МШ1’
5 (1, 1г) к
— Мг Ъг) к 6
— 5 (21%кх № ЯЛ
6
Квадратная парабола
Лт
мш
л
М СО
— 51 к
3 т
Т5'т ( »)
Квадратная парабола
МШ‘
о
51к
3
— 5 12
— 5МЗ, 5,) 12
Квадратная парабола
•Шик
51к
3
-1-51к
4
— 51 (5 к, 3) 12
Квадратная парабола
—410 8
-1- 51к
3
5-е
4
— а (к, з,) 12
Квадратная парабола
— 5(к 3
51к
12
— 31 (3 г) 12
Квадратная парабола
8.2. РАМЫ
497
Продолжение 8.2.23
Квадратная парабола
ЛГШШк
Квадратная парабола
уяШИИ'
Квадратная парабола 8
— 51к
3 т
— 51к
3
— в1к 3
— 1к
2
— в1к„ 3 т
-5— 51к 12
— 51к
4
— 5(1 а)Л 6
— 51к„
3 т
— 5
4
51к
12
— 5 (1 0) 1к 6
кт
— 5 (3. Ыг) к 12
' 5 4 312) 12
— 56(0 3) 1 (1а)]
6
— 1ткп
15 т т
— 81 к 15 171
— тк
5 т
у5(1 аВ) т»
— (к™ 15 т
— 81к 15
— 56 10
Л. 5 (5 — 3 — р) 1к 12
— 51 к 15 т
11
з1к
30
— 51к
15
-5- « (5 — а — а3) 1к 12
— 81 к 5 т
-«
10
——— в1к 5
— 5 (1 а 4- а3) 1к 12
— з1к 5 т
— 51к
15
— г 30
— 5 (1 4- 3 Р3) « 12
“й- »(« «.«)
— (Ш, 4- 252 2814) к8 60
— вк (151г 4-51х 4- 124) 60
— [« (1 Р) (1 а) 2и (1 «0)1 6
498
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
8.3. АРКИ
8.3.1. Геометрические данные осей параболической и круговой арок
а) Параболическая арка
Уравнение оси арки
4[х (I — х)
У ——;
йу 4 (I — 2х)
,е“-л ё:—;
— стрела подъема.
№ сечения
X
У
1да
Сечение х
X
У
18 а
0
0,00
0,00
4,00
0
0,00
I 0,00
4,00
1
0,05
0,19
3,60
18
0,125
0,438
3,00
2
0,10
0,36
3,20
16
0,167
0,556
2,667
3
0,15
0,51
2,80
14
0,250
0,750
2,00
4
0,20
0,64
2,40
38
0,375
0,938
1,00
5
0,25
0,75
2,00
12
0,500
1,000
0,00
6
0,30
0,84
1,60
58
0,625
0,938
—1,00
7
0,35
0,91
1,20
34
0,750
0,750
—2,00
8
0,40
0,96
0,80
56
0,833
0,556
—2,667
9
0,45
0,99
0,40
78
0,875
0,433
—3,0
10
0,50
1,00
0,00
1
1,000
0,00
—4,0
Множитель
11
1
« 1
Г
т
8.2. РАМЫ
499
Продолжение 8.2.23
Квадратная парабола
йШк
Квадратная парабола
Квадратная парабола
тлтК
А
ж
а
-оС5,
— 5-'
--5 (1 аЗ) Огт
— 5 (5 — 3 — З2) 1к 12
— 5 (1 а аа) 1к 12
—
3
1
1
— Ы [4 1 '»-2'-3)] 5
6
— [2 — Ъ (3-2Б'
6
Га)1
(з-з'-2-Л; 63 V 14
6 V аЗ
8 о
— 51 15 т
— 5 Ла
15
— 5Й“
5
— 5Й3
3
8.3. АРКИ
П родолжение 8.3.1
т
Тригонометрические функции углов а
х1
0
0,05
0,10
0,15
0,20
0,25
0,30
0,35
0,40
0,45
0,50
12
1п а
0,894
0,874
0,839
0,814
0,768
0,707
0,625
0,515
0,371
0,196
0
соз а
0,447
0,485
0,545
0,581
0,640
0,707
0,781
0,857
0,928
0,981
1,000
13
зп а
0,800
0,768
0,730
0,682
0,625
0,555
0,470
0,371
0,258
0,132
0
соз а
0,600
0,640
0,684
0,731
0,781
0,832
0,882
0,928
0,966
0,991
1,000
14
зп а
0,707
0,669
0,625
0,574
0,515
0,447
0,371
0,287
0,196
0,100
0
соз а
0,707
0,743
0,781
0,819
0,857
0,894
0,928
0,958
0,981
0,995
1,000
15
зп а
0,625
0,584
0,539
0,489
0,433
0,371
0,305
0,233
0,158
0,080
0
соз а
0,781
0,812
0,833
0,872
0,901
0,928
0,952
0,972
0,987
0,997
1,000
16
зп а
0,555
0,515
0,470
0,423
0,371
0,316
0,258
0,196
0,132
0,067
0
соз а
0,832
0,857
0,882
0,906
0,928
0,949
0,966
0,981
0,991
0,998
1,000
17
зт а
0,496
0,457
0,416
0,371
0,324
0,275
0,223
0,168
0,113
0,057
0
соз а
0,868
0,889
0,909
0,928
0,946
0,961
0,975
0,986
0,994
0,998
1,000
18
з1п а
0,447
0,410
0,371
0,330
0,287
0,242
0,196
0,148
0,100
0,050
0
соз а
0,894
0,912
0,928
0,944
0,958
0,970
0,981
0,989
0,995
0,999
1,000
110
51П а
0,371
0,339
0,305
0,270
0,233
0,196
0,158
0,119
0,080
0,040
0
соз а
0,928
0,941
0,952
0,963
0,972
0,981
0,987
0,993
0,997
0,999
1,000
1 19
эта
0,316
0,287
0,258
0,227
0,196
0,165
0,132
0,100
0,067
0,015
0
11
соз а
0,949
0,958
0,966
0,974
0,981
0,986
0,991
0,995
0,998
0,999
1,000
500
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
б) Круговая арка
Продолжение 8.3.1
Уравнение оси арки х —Я 51П а у —Я соз а —е;
2 42 8
т
а„
Ординаты
оси арки и тригонометрические функции углов а
:1
К:1
е1
0 1
0,05
0,10
0,15
0,20
0,25
0,30
0,35
0,40
0.45
0,50
12
90°
51л а соз а
0
1,000
0
0,436
0,900
0,436
0,600
0,800
0,600
0,714
0,700
0,714
0,800
0,600
0,800
0,866
0,500
0,866
0,916
0,400
0,916
0,954
0,300
0,954
0,980
0,200
0,980
0,995
0,100
0,995
1,000
0
1,000
1,5708
0,5000
0
172,883
80е
зп а соз а
0
0,985
0,174
0,350
0,886
0,463
0,535
0,788
0,616
0,666
0,689
0,724
0,765
0,591
0,807
0,843
0,492
0,870
0,902
0,394
0,919
0,946
0,295
0,955
0,976
0,197
0,980
0,994
0,098
0,995
1,000
0
1,000
1,4179
0,5077
0,0881
12,856
70е
зп а соз а
0
0,940
0,342
0,291
0,846
0,534
0,482
0,752
0,659
0,625
0,658
0,753
0,735
0,564
0,826
0,822
0,470
0,883
0,889
0,376
0,927
0,938
0,282
0,959
0,973
0,188
0,982
0,993
0,094
0,996
1,000
0
1,000
1,3001
0,5321
0,1820
13
72°22'48
51П а
соз а
0
0,923
0,385
0,280
0,831
0,556
0,471
0,738
0,674
0,615
0,646
0,763
0,728
0,554
0,832
0,816
0,462
0,887
0,885
0,367
0,929
0,936
0,277
0,961
0,972
0,185
0,983
0,993
0,092
0,996
1,000
0
1,000
1,2740
0,5417
5
24
13,464
60°
зп а соз а
0
0,866 0 500
0,253
0,779
0,626
0,442
0,693
0,721
0,591
0,606
0,795
0,709
0,520
0,854
0,803
0,433
0,901
0,876
0,346
0,938
0,931
0,260
0,966
0,970
0,173
0,985
0,992
0,087
0,996
1,000
0
1,000
1,2092
0,5774
0,2887
14
53°7'48
УН зп а соз а
0
0,800
0,600
0,235
0,720
0,694
0,421
0,640
0,768
0,571
0,560
0,828
0,693
0,480
0,877
0,791
0,400
0,916
0,868
0,320
0,947
0,927
0,240
0,971
0,968
0,160
0,987
0,992
0,080
0,997
1,000
0
1,000
1,1591
0,6250
3
8
15 4336'10'
з1п а соз а
0
0,690
0,724
0,217
0,621
0,784
0,398
0,552
0,834
0,550
0,483
0,876
0,675
0,414
0,910
0,778
0,345
0,939
0,859
0,276
0,961
0,922
0,207
0,978
0,965
0,138
0,990
0,992
0,069
0,998
1,000
0
1,000
1,1033
0,7250
21
40
16
36°52'10
9'.(
зп а соз а
0
0,600
0,800
0,209
0,540
0,842
0,386
0,480
0,877
0,538
0,420
0,907
0,665
0,360
0,933
0,770
0,300
0,954
0,854
0,240
0,971
0,918
0,180
0,984
0,964
0,120
0,993
0,991
0,060
0,998
1,000
0
1,000
1,0731
0,8333
2
3
17
32°53'27
У? зпа соз а
Ю
0,528
0,849
0,202
0,475
0,880
0,379
0,423
0,906
0,530
0,370
0,929
0,658
0,317
0,948
0,765
0,264
0,964
0,850
0,211
0,977
0,917
0,158
0,987
0,963
0,106
0,994
0,991
0,053
0.999
1,000
0
1,000
1,0536
0,9464
45
56
“ 18 гв'го
у:1 зт а соз а
0
0,471
0,882
0,200
0,424
0,906
0,375
0,378
0,926
0,526
0,329
0,944
0,654
0,282
0,959
0,761
0,235
0,972
0,848
0,188
0,982
0,914
0,141
0,990
0,962
0,094
0,996
0,990
0,047
0,999
1,000
0
1,000
1,0411
1,0625
15
16
110
22°37'5
у:
зт а соз а
0
0,385
0,923
0,196
0,346
0,938
0,369
0,308
0,951
0,519
0,269
0,963
0,649
0,231
0,973
0,757
0,192
0,981
0,845
0,154
0,988
0,913
0,115
0,993
0,961
0,077
0,997
0,990
0,038
0,999
1,000
0
1,000
1,0265
1.3
6
5
112
18в55'30
У- зп а соб а
0
0,324
0,946
0,194
0,292
0,956
0,366
0,259
0,966
0,618
0,227
0,974
0,647 1 Ю,195 0,981
0,756
0,162
0,987
0,845
0,130
0,992
0,911
0,097
0,995
0,959
0,065
0,998
0,989
0,032
0,999
1,000
0
1,000
1,0187
1,5417
1,4583
8.3. АРКИ
501
Продолжение 8.3.1
в) Длина и центр тяжести половины дуги; площадь, ограниченная осью арки; площадь и центр тяжести пазух
Для параболической арки: т], 0,373 I;
3 I
ТЪ — - — 0,188.
Параболическая
Круговая
т — расстояние центра тяжести половины дуги арки от вертикальной оси;
— площадь одной пазухи;
% — расстояние центра тяжести площади пазухи от вертикальной оси арки;
Р2 — площадь, ограниченная осью арки; т]2 — расстояние центра тяжести половины площади, ограниченной осью арки, от вертикальной оси.
1
Параболические арки
Круговые арки
длина половины дуги арки
1
1 Л
Рг
2
длина половины дуги арки
Л
Рх
%
7
1Ъ
0.1
__
_
0,514 1
0,253
0,0164 2
0,374 1
0,0335 2
0,189
0,2
0,549 1
0,261
0,0333 а
0,067 2
0,552 1
0,263 1
0,0314 2
0,377
0,0686 а
0,192
0,3
0,602
0,270 1
0,050 2
0,1 2
0,614 1
0,277
0,0433 2
0,381
0,1066 2
0,197
0,4
0,667 1
0,279
0,067 2
0,133 Р
0,692
0,296
0,0512 а
0,385 1
0,1488 2
0,203
0,5
0,740 1
0,287 1
0,083 а
0,167 12
0,785 1
0,317 1
0,0538 2
0,388
0,1962 2
0,212 1
0,6
0,818 1
0,293
0,1 2
0,2 2
__
_
0,7
0,900
0,299
0,117 а
0,233 2
0,8
0,985 1
0,3025
0,133 2
0,267 а
0,9
1,072
0,306 1
0,150 а
0,3 »
1,0
1,161 1
0,3095
0,167 2
0,333 2
—
—
—
—
—
—
8.3.2. Симметричные трехшарнирные арки любого очертания. Изгибающие моменты, распоры и опорные реакции от различных нагрузок
М.
■■ м
О
- Нау; (х 2 соз а — На зш а;
1Х 1Г1Х
Nх 2 зш а на сов а;
М°, 2° — моменты и поперечные силы в простой балке;
х
У
У
Схема нагрузки
Опорные реакции и распоры
Изгибающие моменты
1 й -
— а —
31 Эг
ч2
А — Р — ; В Р — I I
Нп НИ Р а Ь 2
А В -
Р1
4
502
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК. РАМ И АРОК
Продолжение 8.3.2
В — — р1
8
ра
щ
Мт 16 [8 ( 61 21 ”1] ;
Для квадратной параболы
при х — -1— М
4 64
-ч
РШйпс2
1Я
лГ V
N
- ДГ —
А
В
рса'
рса
рса
ЛГ
Парабола
р -ПМгт,— —гттпПТТЬ'
4 В — ;
6
_рР
8.3. АРКИ
503
Продолжение 8.3.2
Схема нагрузки
Опорные реакции и распоры
Изгибающие моменты
1
1 ПК
К
-—ЬД
1
» -1» ад II
•О
-1-
1
"«. -7(1 Чх);
Формулы также годны для а я 0 1
или а —
2
X XI
хг 1
.
АВ 0;
На НЬ у
Р 3
л—вр11;
21 21
На - ±о1; НЬ±0
«• а
1 2 -1
к
а»
1
:эг» 1
.я
Л—Щ-1;
6
1;
ы
Н - — р): Нь —
а 12 0 12
“«"ТГР К_Ч13) 111_251]
"" — ;1
8
8.3.3. Трехшарнирные круговые и параболические арки. Опорные реакции, изгибающие моменты, поперечные и продольные силы от равномерно распределенной нагрузки
Яруёобые р загрцжения Параболические 2-й степени
ГГ 11 п щ 1111II111 1 мигШтмиичици
Круговые сфК»:
Мно¬
житель
Параболические арки Гпри — г? -1.
V 1 10
почти совпадают с круговыми
±
1
1
2
1
3
1
4
1
6
1
8
0,1465
0,1995
0,2205
0,2365
0,2423
1
«0,25001
4
3
0,7071
07272
0,7360
0,7434
0,7466
1
А 0,7500 4
0,2929
0,3543
0,3750
0,3890
0,3939
1
— 0,4000 1
С
504,
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК Продолжение 8.3.3
Круговые арки
Параболические арки при ф почти совпадают с круговыми
ю ;
1
1
2
_
3
_1_
4
_1_
6
1
8
X л § ё
А
0,5000
0,5000
0,5000
0,5000
0,5000
р1
— 0,5000 р1 2
А,
0,3750
0,3750
0,3750
0,3750
0,3750
Р1
— р1 0,3750 р1 8
А,
0,2500
0,2915
0,3047
0,3133
0,3163
р1
— р1 0,3200 р1 25
В
0,5000
0,5000
0,5000
0,5000
0,5000
р1
0,5000 р1
2
Вг
0,1250
0,1250
0,1250
0,1250
0,1250
р1
— р1 0,1250 р1 8
в,
0,0429
0,0628
0,0703
0,0757
0,0776
р1
— р1 0,0800 р1 25
Их
0,2500
0,3750
0,5000
0,7500
1,000
р1
0,1250
Г
Нг
0,1250
0,1875
0,2500
0,3750
0,500
Р1
0,0625 — Г
я»
0,0429
0,0942
0,1406
0,2271
0,3104
р1
0,0400 Г
Мг
-0,0259
—0,0110
-0,0051
-0,0027
—0,0015
РР
0
м2
0
0,0094
0,0124
0,0142
0,0149
рР
— р19 0,0156 рР 64
Мш
0,0107
0,0154
0,0170
0,0182
0,0185
рР
— рР « 0,01875 рР 160
0,0732
0,0420
0,0264
0,0128
0,0075
р1
0
О
0,0732
0,0420
0,0264
0,0128
0,0075
р1
0
Ог
0,0429
0,0243
0,0124
0,0011
—0,0035
р1
—0,0100 — V 1-4-(2ф)3
Ыг
—0,4263
—0,4787
-0,5722
—0,7948
—1,0326
Р1
—0.2500 рс 1 1 —— Г (2ф)3
—0,2500
—0,2534
—0,2927
—0,3995
—0,5173
Р1
—0,1250 р1 "I 1 4- —1— Г (2ф)2
А
—0,1036
—0,1294
—0,1634
—0,2397
—0,3191
VI
0,8750 Н —
0,1600 'р1 (2сЬ)3 1 2ф)а
П 1
зимечания:
1- Подстрочи
ле цифровые ш
1дексы означаю
т схему загруж
ения.
2. Схема загружения 3 —равномерно распределенная нагрузка на участке длиной с.
при которой изгибающий мом?нт в се-
чении
— в параболической или в сечении сь 4
сс„
: — в круговой арке получается наибольшим. Для параболы с0,4, для кру
говой арки с изменяется в зависимости от стрелы подъема (см. таблицу).
3.
Все значения М, ф и N в таблице даны для сечения арки хг.
8.3. АРКИ
505
8.3.4. Трехшарнирная параболическая арка. Изгибающие моменты, опорные реакции
и распоры от сосредоточенного груза
5 ? 3 11 13 15 17 Я
л ? г
Геометрические данные параболических ароксм. 8.3.1, а.
Поперечные и продольные силы определяются по формулам 8.3.2.
№
сече¬
ния
а 0,05 1
о 0,10
а 0,15 1
а 0,20
а « 0,25
а 0,30
а 0,351
а » 0,40 1
а — 0,45 1
а ■» 0,50 1
Величины изгибающих моментов (умножить на Р1)
0,043
0,036
0,029
0,021
0,014
0,006
0,000
—0,008
—0,015
—0,023
2
0,036
0,072
0,058
0,044
0,030
0,016
0,002
—0,012
—0,026
—0,040
3
0,030
0,060
0,090
0,069
0,049
0,028
0,009
—0,012
—0,032
—0,053
4
0,024
0,048
0,072
0,096
0,070
0,044
0,018
-0,008
—0,034
—0,060
5
0,019
0,043
0,057
0,075
0,094
0,062
0,032
0,000
—0,031
—0,063
6
0,014
0,028
0,042
0,056
0,070
0,084
0,048
0,012
—0,024
—0,060
7
0,010
0,020
0,030
0,039
0,047
0,058
0,069
0,028
—0,012
—0,053
8
0,006
0,012
0,018
0,024
0,030
0,036
0,042
0,048
0,004
—0,040
9
0,003
0,006
0,009
0,011
0,014
0,016
0,020
0,022
0,025
—0,023
10
0,000
0,000
0,000
0,000
0,000
0,000
0,000
0,000
0,000
0,000
и
—0,002
-0,005
—0,006
0,009
0,011
—0,014
—0,015
—0,018
—0,023
—0,023
12
—0,004
—0,008
—0,012
—0,016
—0,020
—0,021
—0,028
—0,032
—0,036
—0,040
13
—0,005
—0,011
—0,015
-0,021
—0,026
—0,032
—0,036
—0,042
—0,047
—0,053
14
-0,006
—0,012
—0,018
—0,024
—0,030
—0,036
—0,042
—0,048
—0,054
—0,060
15
—0,006
—0,013
—0,018
—0,025
—0,031
—0,038
—0,043
—0,050
-0,056
—0,063
16
—0,006
—0,012
—0,018
—0,024
-0,030
—0,036
—0,042
—0,048
—0,054
—0,060
17
—0,005
—0,011
—0,015
—0,021
—0,026
—0,032
—0,036
—0,042
—0,017
—0,053
18
—0,004
—0,008
—0,012
—0,016
—0,020
—0,024
—0,028
—0,032
—0,036
—0,040
19
—0,002
—0,005
—0,007
—0,009
—0,011
—0,014
—0,015
—0,018
—0,020
—0,023
Опорные реакции и распоры
А
0,95Р
0,90Р
0,85Р
0,80Р
0,75Р
0,70Р
0,65Р
0,60Р
0,55Р
0.50Р
В
0,05Р
0,10Р
0.15Р
0,20Р
0,25Р
0,30Р
0.35Р
0,40Р
0,45Р
0,50 Р
Н
0,025Р —
0.050Р
0.075Р —
0Д00Р ±
0,125Р
0.150Р —
0,17бР -
0,200Р -
0,225Р 1
0,25Р —
1
Г
Таблица может быть
использована для построения л. в
, М, А, В,
И.
Пример. Для сечения 3 ординаты л. в. М: 0,03
:; 0,060; 0,090; 0,069; 0,049; 0,028; 0,009; —0,012;
—0.032; —0,053. Для а0,5 (груз
на правой половине
арки) берут значения симметричного сечения 17 (третье от правой опоры): —0,017: —0,042; —0,036; —0,032;
—0,026; —0,021; —0,015; —0,011; —0,005.
-1шптгг[
Н
«♦
Ъ Н ■»
к 1 3 5 7 9 11 13 15 17 19 к А I ——
8.3.5. Трехшарнирная параболическая арка. Изгибающие моменты, опорные реакции и распоры от односторонней частичной равномерно распределенной нагрузки
См. пояснения к 8.3.4
№
сече¬
ния
а » 0,05 1
а 0,10 1
а 0,15
а 0,20
а — 0,25
а 0,30
а 0,35
а 0,40
а 0,45
а 0,50
а 1.00
Величины изгибающих моментов (умножить на р2)
1
0,0010
0,0030
0,0046
0,0069
0,0170
0,0071
0,0073
0,0072
0,0065
0,0056
0
2
0,0009
0,0036
0,0069
0,0094
0,0112
0,0122
0,0127
0,0126
0,0115
0,0100
0
3
0,0007
0,0030
0,0065
0,0105
0,0136
0,0153
0,0163
0,0164
0,0151
0,0131
0
4
0,0006
0,0026
0,0052
0,0094
0,0138
0,0163
0,0180
0,0184
0,0172
0,0150
0
5
0,0004
0,0019
0,0041
0,0075
0,0115
0,0152
0,0177
0,0188
0,0177
0,0156
0
506
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.3.5
№
сече¬
ния
а0,05 1 Г
а 0,10
а 0,15
а0,20 1
а0,25 1
а0,30 1
а0,35 1
а0,40 1
а0,45 1
а—0,50 1
а1,00 1
6
0,0003
0,0014
0,0030
0,0056
0,0085
0,0122
0,0157
0,0174
0,0169
0,0150
0
7
0,0003
0,0010
0,0021
0,0039
0,0059
0,0084
0,0115
0,0144
0,0145
0,0131
0
8
0,0001
0,0006
0,0012
0,0024
0,0035
0,0049
0,0074
0,0096
0,0106
0,0100
0
9
0,0001
0,0003
0,0006
0,0011
0,0016
0,0025
0,0033
0,0044
0,0051
0,0056
0
10
0,0000
0,0000
0,0000
0,0000
0,0000
0,0000
0,0000
0,0000
0,0000
0,0000
0
И
—0,0001
—0,0002
—0,0005
—0,0009
—0,0015
—0,0022
—0,0028
—0,0036
—0,0050
—0,0056
0
12
—0,0001
—0,0004
—0,0010
—0,0016
—0,0027
—0,0041
—0,0054
—0,0064
—0,0086
—0,0100
0
13
—0,0001
—0,0005
—0,0012
—0,0021
—0,0034
—0,0051
—0,0068
—0,0084
—0,0110
—0,0131
0
14
—0,0001
—0,0006
—0,0014
—0,0024
—0,0039
—0,0058
—0,0077
—0,0096
—0,0125
—0,0150
0
15
—0,0002
—0,0006
—0,0018
—0,0025
—0,0040
—0,0060
—0,0080
—0,0100
—0,0130
—0,0156
0
16
—0,0002
—0,01)06
—0,0014
—0,0024
—0,0038
—0,0057
—0,0076
—0,0096
—0,0124
—0,0150
0
17
—0,0001
—0,0005
—0,0012
—0,0021
—0,0033
—0,0049
—0,0066
—0,0084
—0,0108
—0,0131
0
18
—0,0001
—0,0004
—0,0009
—0,0016
—0,0026
—0,0038
—0,0051
—0,0064
—0,0083
—0,0100
0
19
—0,0001
—0,0002
—0,0005
—0,0009
—0,0014
—0,0021
—0,0028
—0,0036
—0,0046
—0,0056
0
Опорные реакции и распоры
А
0,049р
0,095р
0,139р
0,180р
0,2197
0,255р1
0,289р1
0,320р1
0,349р
0,375р1
0,500р
В
0,001р
0,005р
0,011р
0,020р
0,031р
0,045р1
0,061р
0,080р1
0,101 р1
0,125р1
0,500р
Н
0,0006 —
0,0025
0,0056 —
0,0100 Р—
р12
0,0156 —
0,0230-
0,0310 Р—
0,0400 Р—
0,0510
0,0625
0,1250 Р—
Г
Г
1
Г
I
Г
1
Г
I
1
8.3.6. Трехшарнирная параболическая арка. Изгибающие моменты, опорные реакции и распоры от симметричной частичной равномерно распределенной нагрузки
№
11 См. пояснения к 8.3.4
з а
А 1 7 3 10 т
Л
Г-1.»-« 1
13 5 7
9 Ю
I
Схема нагрузки 1
А
Схема
— 1 ——
нагрузки 2
й
Размер а при нагрузке по схеме
1
N° се¬
0,45 1
I 0,40 1
0,35 1
0,30 1
0,25 1
0,20 1
0,15 1
0,10
0,05 1
чения
Размер а при нагрузке по схеме 2
0,05 1
1 0,10
0,15 1
1 0,20 1
1 0,25
I 0,30 1
0,35 1
0,40 1
0,45
Величины изгибающих
моментов для нагрузки по схеме 1 (умножить на р2). При нагрузке
по схеме 2 знаки менять
на обратные
1
-0,0009
—0,0028
—0,0041
—0,0060
—0,0056
—0,0050
—0,0045
—0,0036
—0,0019
2
—0,0008
—0,0032
—0,0061
—0,0078
—0,0086
—0,0084
—0,0076
—0,0062
—0,0032
3
—0,0006
—0,0025
—0,0053
—0,0084
—0,0103
—0,0104
—0,0097
—0,0080
—0,0043
4
-0,0004
—0,0020
—0,0038
—0,0070
—0,0088
—0,0106
—0,0104
—0,0088
—0,0048
5
—0,0002
—0,0013
—0,0023
—0,0050
—0,0075
—0,0092
—0,0097
—0,0088
—0,0047
6
—0,0002
—0,0008
—0,0016
-0,0032
—0,0046
—0,0064
—0,0087
—0,0078
—0,0044
7
—0,0002
—0,0005
—0,0009
—0,0018
—0,0025
—0,0033
—0,0047
—0,0060
—0,0035
8
0,0000
—0,0002
—0,0002
—0,0008
—0,0008
—0,0008
—0,0020
—0,0032
—0,0020
9
0,0000
—0,0001
—0,0001
—0,0002
—0,0001
—0,0003
—0,0005
—0,0008
—0,0001
10
0,0000
0,0000
0,0000
0,0000
0,0000
0,0000
0,0000
0,0000
0,0000
Опорные реакции и рг
1 С П О р Ы
для схемы
нагрузки
1
А
0,45рг
0,40р
0,35 р1
0,30 р1
0,25 р1
0,20 р1
0,15р
0,10р1
0,05р
В
0,45р
0,40р
0,35р
0,30р1
0,25 р1
0,20 р1
0,15р
0,10р1
0,05рг
Н
0,12381
0,12001
0,11381
0,10501
0,0938 Р—
0,0790 ВИ
0,0630
0,0450 Р—
0,0230 Р—
Г
Г
г
Г
Г
Г
Опорные реакции и распоры для схемы
нагрузки
2
А
0,05 р
0,10р
0,15 р1
0,20 р1
0,25 р1
0,30 р1
0,35 р1
0,40 р1
0,45 р
В
0,05р
0,10р
0,15 р1
0,20р1
0,25 р1
0,30 р1
0,35 р
0,40р
0,45р1
Н
0,0012
0,0050 Р—
0,0112 —
0,0200 Р—
0,0312
0,0460
0,05201
0,0800 ?-
0,10201
Г
Г
Г
1
1
I
Г 1
8.3. АРКИ
507
8.3.7. Двухшарнирная параболическая арка. Изгибающие моменты, распоры и опорные реакции от различных нагрузок
Очертание оси арки по квадратной параболе (геометрические данные оси см. 8.3.1, а)
с, Рс—момент инерции и площадь сечения арки в клю¬
че; Е модуль упругости материала арки; Еи Л—-модуль упругости материала затяжки, площадь сечения
Ес
затяжки; [ — стрела подъема; (3.
ДЛ
Сечение арки изменяется по закону со5а с (убывание от опор к ключлг)1, где а — угол между касательной к оси и горизонтов.
Коэффициент к определяется следующим образом.
1 С достаточной для практических целей точностью формулами таблицы можно пользоваться и при расчете арок постоянного сечения, см. [1, стр. 151].
Тип
арки
Формулы для определения к
При учете в тяжку
Без затяжки
лияния продольной силы на арку (обжатие) и за-
V-
1 V 8 Рер
При учете влияния продольной силы только на затяжку
, 1; V 0
С затяжкой п — коэф
к —— ; V, — • А. -Я- -Ц
1 8 » Е1Р1 Рс) [ициент, зависящий от отношения
1 15 1СЕ 15 3
к » ; V, или V2 —
1 V, 8 рЕхРг 8 гл
к-,А±
8
Значения п
№
13
14
15
16
17
18
19
11Ю
115
120
п
0,6960
0,7852
0,8434
0,8812
0,9110
0,9306
0,9424
0,9521
0,9706
0,9888
Продольные и поперечные силы в сечениях арки оп« распору Н; для усилий в затяжке от горизонтальной наределяются по формулам 8.3.2. грузки в таблице приведены соответствующие формулы.
Усилие в затяжке при вертикальной нагрузке равно
Схема нагрузки
Моменты и реакции
Схема нагрузки
Моменты и реакции
хир
128
М1
(0,250 — к Р1
128 )
На ИЬ
-2 (5 - 59 23);
16
2-);
2
В
2
508
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.3.7
8.3. АРКИ
509
Продолжение 8.3.7
Схема нагрузки
Моменты и реакции
Схема нагрузки
Моменты и реакции
Л —ЕС-; В
6 6
„ _ 0,792р? Ш п _ р?. 8 150 ‘2
с 12
»
С затомпой 1 ч77 Р
Л 8
Л-8Е.;В —йС.
6 61
3,208ро 8’ 150 ’
Н Л1;
2
Мс -±-рР-2
р тг С затямнси 1 лг
р
На
Иа — - 0,714 р; Нь 0,286 р;
21
Мс — 0,0357 р2
Относительное горизонтальное смещение опоры
„-11.,
8
Л В 0;
Я
И а — — 0,401 р;
Нь 0,099 р;
Л — 22-; В — Л; 6
Мс — 0,0159 ра
Равномерный нагрев на 1°
С
а — коэффициент линейного расширения
15 Яа
V ч
8 Л В 0;
Мс -я
8.3.8. Двухшарнирная параболическая арка. Изгибающие моменты, распоры и опорные реакции от сосредоточенного груза
Сечение арки меняется по закону соза с, гдес—момент инерции сечения арки в ключе.
Изгибающий момент в любом сечении арки
Мх - Нук.
Величины М% (моменты в простой балке) и Ну даны в настоящей таблице. Коэффициенты к определяются по формулам 8.3.7.
№ сеченйя
а:
1
0,(15
0,10
0,15
0,20
0,25
0,30
0,35
0,40
0,45
0,50
Величины М® ( множитель Р1)
0,0475
0,0450
0,0425
0,0400
0,0375
0,0350
0,0325
0,0300
0,0275
0,0250
2
0,0450
0,0900
0,0850
0,0800
0,0750
0,0700
0,0650
0,0600
0,0550
0,0500
5
0,0425
0,0850
0,1275
0,1200
0,1125
0,1050
0,0975
0,0900
0,0825
0,0750
4
0,0400
0,0800
0,1200
0,1600
0,1500
0,1400
0,1300
0,1200
0,1100
0,1000
5
0,0375
0,0750
0,1125
0,1500
0,1875
0,1750
0,1625
0,1500
0,1375
0,1250
6
0,0350
0,0700
0,1050
0,1400
0,1750
0,2100
0,1950
0,1800
0,1650
0,1500
7
0,0325
0,0650
0,0975
0,1300
0,1625
0,1950
0,2275
0,2100
0,1925
0,1750
0,0300
0,0600
0,0900
0,1200
0,1500
0,1800
0,2100
0,2400
0,2200
0,2000
9
0,0275
0,0550
0,0825
0,1100
0,1375
0,1650
0,1925
0,2200
0,2475
0,2250
10
0,0250
0,0500
0,0750
0,1000
0,1250
0,1500
0,1750
0,2000
0,2250
0,2500
И
0,0225
0,0450
0,0675
0,0900
0,1125
0,1350
0,1575
0,1800
0,2025
0,2250
12
0,0200
0,0400
0,0600
0,0800
0,1000
0,1200
0,1400
0,1600
0,1800
0,2000
13
0,0175
0,0350
0,0525
0,0700
0,0875
0,1050
0,1225
0,1400
0,1575
0,1750
14
0,0150
0,0300
0,0450
0,0600
0,0750
0,0900
0,1050
0,1200
0,1350
0,1500
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.3.8
а
:
№ сечения
0,05
0,10
0,15
0,20
0,25
0,30
0,35
0,40
0,45
0,50
15
16
17
18 19
0,0125
0,0100
0,0075
0,0050
0,0025
0,0250
0,0200
0,0150
0,0100
0,0050
0,0375
0,0300
0,0225
0,0150
0,0075
0,0500
0,0400
0,0300
0,0200
0,0100
0,0625
0,0500
0,0375
0,0250
0,0125
0,0750
0,0600
0,0450
0,0300
0,0150
0,0875
0,0700
0,0525
0,0350
0,0175
0,1000
0,0800
0,0600
0,0400
0,0200
0,1125
0,0900
0,0675
0,0450
0,0225
0,1250
0,1000
0,0750
0,0500
0,0250
Величины Ну (множитель Р1)
1
2
3
4
5
6
0,0059
0,0112
0,0159
0,0199
0,0233
0,0261
0,0117
0,0221
0,0313
0,0392
0,0460
0,0516
0,0171
0,0324
0,0458
0,0575
0,0674
0,0755
0,0220
0,0418
0,0592
0,0742
0,0870
0,0974
0,0264
0,0501
0,0710
0,0891
0,1044
0,1169
0,0302
0,0572
0,0810
0,1016
0,1191
0,1334
0,0332
0,0628
0,0890
0,1117
0,1309
0,1466
0,0353
0,0670
0,0949
0,1190
0,1395
0,1562
0,0367
0,0695
0,0984
0,1235
0,1447
0,1621
0,0371
0,0703
0,0996
0,1250
0,1465
0,1641
7
8 9
10
11
12
0,0283
0,0299
0,0308
0,0311
0,0308
0,0299
0,0558
0,0589
0,0607
0,0613
0,0607
0,0589
0,0818
0,0863
0,0890
0,0899
0,0890
0,0863
0,1056
0,1114
0,1148
0,1160
0,1148
0,1114
0,1266
0,1336
0,1378
0,1392
0,1378
0,1336
0,1445
0,1525
0,1572
0,1588
0,1572
0,1525
0,1589
0,1676
0,1728
0,1746
0,1728
0,1Ь76
0,1693
0,1786
0,1841
0,1860
0,1841
0,1786
0,1756
0,1853
0,1911
0,1930
0,1911
0,1853
0,1777
0,1875
0,1934
0,1953
0,1934
0,1875
13
14
15
16
17
18 19
0,0283
0,0261
0,0233
0,0199
0,0159
0,0112
0,0059
0,0558
0,0516
0,0460
0,0392
0,0313
0,0221
0,0117
0,0818
0,0755
0,0674
0,0575
0,0458
0,0324
0,0171
0,1056
0,0974
0,0870
0,0742
0,0592
0,0418
0,0220
0,1266
0,1169
0,1044
0,0891
0,0710
0,0501
0,0264
0,1445
0,1334
0,1191
0,1016
0,0810
0,0572
0,0302
0,1589
0,1466
0,1309
0,1117
0,0890
0,0628
0,0332
0,1693
0,1562
0,1395
0,1190
0,0949
0,0670
0,0353
0,1756
0,1621
0,1447
0,1235
0,0984
0,0695
0,0367
0,1777
0,1641
0,1465
0,1250
0,0996
0,0703
0,0371
Опорные реакции и распоры
А 1
0,95Р
0,90Р
0,85Р
0,80Р
0,75Р
0,70Р
0,65Р
0,60Р
0,55Р
0,50Р
в 1
0,05Р
0,10Р
0,15Р
0,20Р
0,25Р
0.30Р
0,35Р
0,40Р
0,45Р
0,50Р
1
0,0311
0,0613
0,0898
0,1160
0,1392
0,1588
0,1745
0,1860
0,1930
0,1953
( Р1 '
множитель ,)
8.3.9. Двухшарнирная параболическая арка. Изгибающие моменты распоры и опорные реакции от частичной равномерно распределенной нагрузки
Сечение арки меняется по закону соз а 1С где 1С — момент инерции арки в ключе.
Изгибающий момент в любом сечении арки:
МХ М°Х— Нук.
х ЛГЛх
Величины М°х (моменты в простой балке) и Ну приведены в таблице. При схеме загружения I: М°х
При схеме загружения И: М°х
Коэффициенты к определяются по формулам 8.3.7.
кхр12; Ну г3р2. к2р12 Ну кЛр12.
№
Коэффи¬
а
:
сечения
циенты
0,05
1 °'10 1
0,15
0,20
0,25
0,30
0,35
0,40
1 °-45 1
0,50
Величины М0
X
(множитель
1 юо;
1
кх
к2
0,1188
0,1313
0,3500
0,2750
0,5688
0,4313
0,7750
0,6000
0,9688
0,7813
1,1500
0,9750
1,3188
1,1813
1,4750
1,4000
1,6188
1,6313
1,7500
2
кх
0,1113
0,4500
0,8875
1,3000
1,6875
2,0500
2,3875
2,7000
2,9875
3,2500
к2
0,2625
0,5500
0,8625
1,2000
1,5625
1,9500
2,3625
2,8000
3,1388
8.3. АРКИ
511
Продолжение 8.3.9
Кя
Коэффи¬
а
:
сечения
циенты
0,05
0,10
0,15
0,20
0,25
0,30
0,35
0,40
0,45
0,50
3
кх
0,1062
0,3938
0,4250
0,8250
0,9563
1,2938
1,5750
1,8000
2,1563
2,3438
2,7000
2,9250
3,2063
3,5438
3,6750
4,1750
4,0063
4,3938
4,5000
4
Ьх
0,1000
0,5250
0,4000
1,1000
0,9000
1,7250
1,6000
2,4000
2,3750
3,1250
3,1000
3,9000
3,7750
4,6000
4,4000
5,1000
4,9750
5,4000
5,5000
5
кг
0,0938
0,6568
0,3750
1,3750
0,8438
2,1568
1,5000
3,0000
2,3238
3,9263
3,2500
4,7500
4,0938
5,4063
4.8750
5.8750
5,5938
6,1564
6,2500
6
кг
к2
0,0875
0,7875
0,3500
1,6500
0,7875
2,5875
1,4000
3,6000
2,1875
4,6625
3,1500
5,3500
4,1625
5,9625
5,1000
6,4000
5,9625
6,6625
6,7500
7
Ьх
0,0813
0,9188
0,3250
1,9250
0,7313
3,0188
1,3000
4,0750
2,0313
4,9688
2,9250
5,7000
3,9813
6,2688
5,0750
6,6750
6,0813
6,9188
7,0000
8
кг
кг
0,0750
1,0500
0,3000
2,2000
0,6750
3,3250
1,2000
4,3000
1,8750 5,1250
2,7000
5,8000
3,6750
6,3250
4,8000
6,7000
5,9500
6,9250
7,0000
9
кг
К
0,0688
1,1813
0,2750
2,3500
0,6188
3,4438
1,1000
4,2750
1,7188
5,0313
2,4750
5,6500
3,3688
6,1313
4,4000
6,4750
5,5688
6,6813
6,7500
10
кг
К
0,0625
1,1875
0,2500
2,2500
0,5625
3,1875
1,0000
4,0000
1,5625
4,6875
2.2500
5.2500
3,0625
5,6875
4.0000
6.0000
5,0625
6,1875
6,2500
и
кх
кг
0,0563
1,0688
0,2250
2,0250
0,5063
2,8688
0,9000
3,6000
1,4063
4,2188
2,0250
4,7000
2,7563
5,1188
3,6000
5,4000
4,5563
5,5683
5,6250
12
к2
( 0,0500 0,8500
0,2000
1,8000
0,4500
2,5500
0,8000
3,2000
1,2500
3,7500
1,8000
4,2000
2,4500
4,5500
3,2000
4,8000
4,0500
4,9500
5,0000
13
кх
кг
0,0437
0,8313
0,1750
1,5750
0,3938
2,2313
0,7000
2,8000
1,0938
3,2813
1,5750
3,6750
2,1438
3,9813
2,8000
4,2000
3,5438
4,3313
4,3750
14
кг
кг
0,0375
0,7125
0,1500
1,3500
0,3375
1,9125
0,6000
2,4000
0,9375
2,8125
1,3500
3,1500
1,8375
3,4125
2,4000
3,6000
3,0375
3,7125
3,7500
15
кг
К
0,0313
0,5938
0,1250
1,1250
0,2813
1,5938
0,5000
2,0000
0,7813
2,3438
1,1250
2,6250
1,5313
2,8438
2,0000
3,0000
2,5313
3,0938
3,1250
16
кх к 2
0,0250
0,4750
0,1000
0,9000
0,2250
1,2750
0,4000
1,6000
0,6250
1,8750
0,9000
2,1000
1,2250
2,2750
1,6000
2,4000
2,0250
2,4750
2,5000
17
кг
к2
0,0188
0,3563
0,0750
0,6750
0,1688
0,9563
0,3000
1,2000
0,4688
1,4063
0,6750
1,5750
0,9188
1,7063
1,2000
1,8000
1,5188
1,8563
1,8750
18
кг
0,0125
0,2375
0,0500
0,4600
0,1125
0,6375
0,2000
0,8000
0,3125
0,9375
0,4500
1,0500
0,6125
1,1375
0,8000
1,2000
1,0125
1,2375
1,2500
19
0,0063
0,1188
0,0250
0,2250
0,0563
0,3188
0,1000
0,4000
0,1563
0,4688
0,2250
0,5250
0,3063
0,5688
0,4000
0,6000
0,5063
0,6188
0,6250
Величины Ну (множитель — МО)
кь
0,0148
0,0588
0,1309
0,2288
0,3510
0,4921
0,6507
0,8216
1,0027
1,1875
1
кА
0,1848
0,3659
0,5368
0,6955
0,8365
0,9587
1,0567
1,1287
1,1727
2
к, к4
0,0280
0,3502
0,1114
0,6934
0,2478
1,0175
0,4334
1,3177
0,6650
1,5850
0,9323
1,8166
1,2329
2,0022
1,5566
2,1386
1,8998
2,2220
2,2500
512
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК. РАМ И АРОК
Продолжение 8.3.9
№
сечения
Коэффи¬
циенты
а1
0.05
0,10
0,15
0,20
0,25 0,30 0,35
0,40
0,45 0,50
3
:
0.0398
0,4961
0,1579
0,9823
0,3510
1,4408
0,6140
1,8667
0,9421
2,2454
1,3208
2,5735
1,7467
2,8365
2,2052
3,0297
2,6914
3,1478
3,1875
4
к
0,0499
0,6225
0,1981
1,2326
0,4405
1,8081
0,7706
2,3426
1,1822
2,8178
1,6574 3,2294
2,1919
3,5595
2,7674
3,8019
3,3775
3,9501
4,0000
5
к,
0,0585
0,7295
0,2321
1,4445
0,5162
2,1189
0,9030
2,7452
1,3854
3,3021
1,9423
3,7845
2,5686
4,1713
3,2430
4,4554
3,9580
4,6291
4,6875
6
к,
0,0655
0,8170
0,2600
1,6178
0,5781
2,3731
1,0114
3,0746
1,5516
3,6984
2,1754
4,2386
2,8769
4,6719
3,6322
4,9900
4,4330
5,1845
5,2500
7
3
кА
0,0709
0,8851
0,2817
1,7527
0,6263
2,5709
1,0956
3,3308
1,6809
4,0066
2,3567
4,5919
3,1166
5,0612
3,9348
5,4059
4,8024
5,6166
5,6875
8
кг к
0,0748
0,9338
0,2971
1,8490
0,6607
2,7121
1,1558
3,5138
1,7733
4,2267
2,4862
4,8442
3,2878
5,3393
4,1510
5,7029
5,0663
5,9252
6,0000
9
к»
К
0,0772
0,9629
0,3064
1,9067
0,6813
2,7969
1,1920
3,6237
1,8287
4,3588
2,5639
4,9955
3,3905
5,5062
4,2808
5,8811
5,2246
6,1104
6,1875
10
к, к,
0,0779
0,9727
0,3095
1,9260
0,6882
2,8252
1,2040
3,6603
1,8472
4,4028
2,5898
5,0460
3,4248
5,5618
4,3240. 5,9405
5,2773
6,1721
6,2500
и
кь
К
0,0772
0,9629
0,3064
1,9067
0,6813
2,7969
1,1920
3,6237
1,8287
4,3588
2,5639
4,9956
3,3906
5,5062
4,2808
5,8811
5,2246
6,1104
6,1875
12
кг к,
0,0748
0,9338
0,2971
1,8490
0,6607
2,7121
1,1558
3,5138
1,7733
4,2267
2,4862
4,8442
3,2878
5,3393
4,1510
5,7029
5,0663
5,9252
6,0000
13
8
к,
0,0709
0,8851
0,2817
1,7527
0,6263
2,5709
1,0956
3,3308
1,6809
4,0066
2,3567
4,5919
3,1166
5,0612
3,9348
5,4059
4,8024
5,6166
5,6875
14
кг
0,0655
0,8170
0,2600
1,6178
0,5781
2,3731
1,0114
3,0746
1,5516
3,6984
2,1754
4,2386
2,8769
4,6719
3,6322
4,9900
4,4330
5,1845
5,2500
15
0,0585
0,7295
0,2321
1,4445
0,5162
2,1189
0,9030
2,7452
1,3854
3,3021
1,9423
3,7845
2,5686
4,1713
3,2430
4,4554
3,9580
4,6291
4,6875
16
к
0,0499
0,6225
0,1981
1,2326
0,4405
1,8081
0,7706
2,3426
1,1822
2,8178
1,6574
3,2294
2,1919
3,5595
2,7674
3,8019
3,3775
3,9501
4,0000
17
к
0,0398
0,4961
0,1579
0,9823
0,3510
1,4408
0,6140
1,8667
0,9421
2,2454
1,3208
2,5735
1,7467
2,8365
2,2052
3,0297
2,6914
3,1478
3,1875
18
к
0,0281
0,3502
0,1114
0,6934
0,2478
1,0171
0,4334
1,3177
0,6650
1,5850
0,9323
1,8166
1,2329
2,0022
1,5566
2,1386
1,8998
2,2220
2,2500
19
к
0,0148
0,1848
0,0558
0,3659
0,1309
0,5368
0,2288
0,6955
0,3510
0,8365
0,4921
0,9587
0,6507
1,0567
0,8216
1,1287
1,0027
1,1727
1,1875
Опорные реакции (множитель р1) и распоры Г множитель (подстрочные индексы означают схему загружения)
ЮО
Л1
В1
0,049
0,001
0,095
0,005
0,139
0,011
0,180
0,020
0,219
0,031
0,255
0,045
0,289
0,061
0,320
0,080
0,349
0,101
0,375
0,125
А И
вп
0,026
0,024
0,055
0,045
0,086
0,064
0,120
0,080
0,156
0,094
0,195
0,105
0,236
0,114
0,280
0,120
0,326
0,124
0,375
0,125
«I
«II
0,0779
0,9727
0,3095
1,9260
0,6882
2,8252
1,2040
3,6603
1,8472
4,4028
2,5898
5,0460
3,4248
5,5618
4,3240
5,9405
5,2773
6,1721
6.250
6.250
8.3. АРКИ
513
8.3.10. Двухшарнирная круговая арка. Изгибающие моменты и распоры
от сосредоточенного груза
Сечение арки постоянно. Геометрические данные оси арки см. в 8.3,1, б. Изгибающий момент в любом сечении арки
Мх М°— Ну.
Величины М° (моменты в простой балке) см. в 8.3.8.
Величины распоров Н — Рк0у где к0— табличные значения.
Значения у (ординаты оси арки) см. в 8.3.1, б.
Поперечные и продольные силы в сечениях арки определяются по формулам 8.3.2.
или а0
а1
0,05
0,10
0,15
0,20
0,25
0,30
0,35
0,40
0,45
0,50
12
0,0605
0,1146
0,1623
0,2037
0,2387
0,2673
0,2896
0,3055
0,3151
0,3182
80°
0,0754
0,1428
0,2023
0,2539
0,2976
0,3333
0,3610
0,3809
0,3923
0,3967
70°
0,0933
0,1768
0,2504
0,3142
0,3682
0,4124
0,4468
0,4714
0,4861
0,4910
13
0,0982
0,1861
0,2636
0,3308
0,3877
0,4341
0,4692
0,4962
0,5117
0,5169
Ы)°
0,1159
0,2195
0,3110
0,3902
0,4573
0,5122
0,5549
0,5854
0,6037
0,6097
14
0,1341
0,2541
0,3600
0,4517
0,5294
0,5929
0,6407
0,6776
0,6988
0,7059
15
0,1718
0,3256
0,4612
0,5787
0,6783
0,7592
0,8209
0,8681
0,8952
0,9043
16
0,2064
0,3911
0,5541
0,6953
0,8149
0,9125
0,9862
1,0429
1,0755
1,0865
17
0,2425
0,4595
0.6510
0,8169
0,9574
1,0721
1,1587
1,2254
1,2636
1,2765
18
0,2782
0,5272
0,7468
0,9371
1,0983
1,2299
1,3292
1,4057
1,4497
1,4644
110
0,3526
0,6682
0,9466
1,1878
1,3921
1,5588
1,6847
1,7817
1,8374
1,8561
112
0,4195
0,7950
1,1261
1,4131
1,6562
1,8546
2,0044
2,1197
2,2871
2,2082
8.3.11. Двухшарнирная круговая арка. Изгибающие моменты и распоры от частичной равномерно распределенной нагрузки
Сечение арки постоянно. Изгибающий момент в любом сечении арки Мх М°х— Ну.
Величины Л-1® (моменты в простой балке) см. в 8.3.9.
Величины распоров Н: при схеме загружения I Нкр1;
при схеме загружения II Н к2р1, где ки к2 — табличные коэффициенты. Значения у (ординаты оси арки) даны в 8.3.1, б.
Поперечные и продольные силы в сечениях арки определяются по формулам 8.3.2.
Ш
Коэффи¬
а:
1
или
а0
циенты
0,05
0,10
0,15
0,20
0,25
0,30
0,35
0,40
0,45
0,50
12
К
к2
0,0015
0,0162
0,0059
0,0317
0,0128
0,0465
0,0220
0,0604
0,0330
0,0731
0,0457
0,0841
0,0596
0,0933
0,0744
0,1002
0,0899
0,1046
0,1061
80°
к
0,0019 0,0202
[ 0,0074 0,0402
0,0160
0,0588
0,0274
0,0751
0,0412
0,0910
0,0571
0,1048
0,0734
0,1162
0,0920
0,1248
0,1120
0,1303
0,1322
70°
кг
0,0023
0,0248
0,0091
0,0487
0,0198
0,0717
0,0339
0,0931
0,0510
0,1126
0,0705
0,1297
0,0919
0,1438
0,1149
0,1545
0,1388
0,1613
0,1636
13
К
кг
0,0025
0,0258
0,0096
0,0510
0,0208
0,0761
0,0356
0,0977
0,0536
0,1182
0,0741
0,1362
0,0957
0,1510
0,1208
0,1622
0,1460
0,1693
0.1718
60°
к
0,0029
0,0305
0,0113
0,0603
0,0246
0,0888
0,0422
0,1155
0,0634
0,1398
0,0877
0.1610
0,1144
0,1786
0,1429
0,1919
0,1727
0,2003
0,2032
Влияние продольной силы на деформацию арки не учтено. При пологих арках (6) влияние продольной силы можно учест] приближенно, умножив величину Я на коэффициент к (см, 8.3.7).
514
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.3.11
№
Коэффи¬
циенты
а:
1
0,05
0,10
0,15
0,20
1 °“ 1
0,30
0,35
0,40
0,45
0,50
14
%
0,0033
0,0362
0,0131
0,0706
0,0284
0,1025
0,0487
0,1334
0,0732
0,1614
0,1012
0,1859
0,1321
0,2062
1
0,1640
0,2215
1
0,1984
0,2313
0,2346
15
к
0,0043
0,0451
0,0167
0,0892
0,0364
0,1314
0,0624
0,1709
0,0928
0,2078
0,1297
0,2382
0,1692
0,2642
0,2114
0,2839
0,2555
0,2963
0,3006
16
к
0,0052
0,0542
0,0201
0,1071
0,0437
0,1578
0,0749
0,2053
0,1127
0,2484
0,1558
0,2862
0,2033
0,3174
0,2540
0,3410
0,3069
0,3559
0,3611
17
к
0,0061
0,0636
0,0236
0,1258
0,0514
0,1854
0,0880
0,2412
0,1324
0,2919
0,1831
0,3363
0,2389
0,3729
0,2985
0,4007
0,3607
0,4182
0,4243
18
2
0,0069
0,0730
0,0271
0,1444
0,0589
0,2127
0,1010
0,2767
0,1519
0,3348
0,2100
0,3857
0,2740
0,4278
0,3423
0,4596
ОО
СОСО ОО -ч
0,4867
110
0,0088
0,0925
0,0343
0,1830
0,0747
0,2696
0,1280
0,3507
0,1925
0,4244
0,2662
0,4889
0,3473
0,5422
0,4339
0,5826
0,5244
0,6081
0,6169
112
к
0,0105
0,1100
0,0409
0,2176
0,0889
0,3207
0,1523
0,4171
0,2290
0,5049
0,3168
0,5816
0,4132
0,6450
0,5163 1 0,6930
0,6239
0,7234
0,7339
8.3.12. Бесшарнирные параболические арки
Изгибающие моменты, распоры и опорные реакции от различных нагрузок
На схеме показано положительное направление моментов и реакций.
В приводимых в таблице формулах коэффициент к учитывает влияние продольной силы (обжатия);
1
Очертание оси арки — пологая квадратная парабола. Сечение арки изменяется по закону
соз а с,
где а — угол между касательной к оси и горизонтом; с—момент инерции арки в ключе.
1 ’
V -
45
с, Рс — момент инерции, площадь сечения арки в ключе.
Если пренебречь влиянием обжатия, то у0, к 1. Поперечные и продольные силы определяются по формулам 8.3.2.
Геометрические характеристики оси арки см. в 8.3.1, а.
Схема нагрузки
Опорные реакции и распоры
Изгибающие моменты
1
±—1 2
Ла (1 21) Р; в 5’ (12 5)Р;
и р — • — %'Ч 4 1
ма рщ'2 (-у-1)- -««'(-г1'"1)'
Для 0 —
2
ТР‘(1“5ГЕ'')
Численные значения моментов в распоров арок с защемленными концами постоянной толщины от различных нагрузок см [12, 23].
8.3. АРКИ
515
Продолжение 8.3.12
Схема нагрузки
Опорные реакции и распоры
Изгибающие моменты
А В — ;
2
Я--.
64
-т(-т)-
ПрИ к ав 1
М М, — ; М-——Р1
а 32 е 64
з Р
[ — — : В .— а
я — ■
А1 «0
0,1
—0,097
Я?
0,2
0,3
0.4
—0,307 О-
—0,509
Р
—0,894 —0,712Р
Ма
—0,224Я
0.039Р
—0,692 —
-0,5Ю
—0,236Р
0.097Р
—0,182Р
0.129Р
—0,138Р
0,131
По данным этойтаблицы можно построить л. в. опорных моментов, распора и опорных реакций от горизонталь ной силы
2 8 При 6 1
8
Я
Л1„
0 12
М — (1- Л),
с 24
При Ы1
ма-мь-мс-0
[ — р1; в — р1
32 32
16
При 1 рР
И -
16
(11 — 8е;
а 192
(8А — 5);
0 192
Л1с-(1-).
с 48
М
При к 1 РР а 64 ра
— ——; лс о
64 с
516
РАЗДЕЛ 8. ТАБЛИЦЫ И ФОРМУЛЫ ДЛЯ РАСЧЕТА БАЛОК, РАМ И АРОК
Продолжение 8.3.12
1000
8.3. АРКИ
517
Линии влияния распора Н, опорной реакции А, опорного момента Ма и момента в середине пролета Мс
Множитель I
Множитель Р
а,и
Множитель I 0,61
С с Са С Са
4 ■• •
111111
кЧЦШР
Множитель I
§3%
. тт» ♦Ггттт
5
сГ
I 111111
ж
-н 0,2651
Н
Ма
Мс
ЗСмС. N1 л
Г5Г5Ге«5Г III III Ь
ЛИТЕРАТУРА
1. Бернштейн С. А. Основы расчета статически неопределимых систем. ОНТИ, 1936.
2. Б ы ч к о в Д. В. Формулы и графики для расчета рам. Госстройиздат, 1957.
3. Волчегорский М. С. Усовершенствование расчета рам одноэтажных промышленных зданий со ступенчатыми стойками. Центральный институт научной информации по строительству и архитектуре Госстроя СССР. Строительное проектирование промышленных предприятий. 1970, № 6.
За. Г л у ш к о в Г. С., Егоров И. Р., Ермолов В. В. Формулы для расчета сложных рам. «Машиностроение», 1966.
4. Е р о х и н И. П., М а л и е в А. С. Формулы для расчета сложных рам методом расчленения. Главная редакция строительной лит-ры, 1935.
5. Железобетонные стойки одноэтажных промышленных зданий. ' Серия Е-302. Промстройпроект, 1948.
6. И в а н о в В. Ф., Никитин Г. В. Справочник по строительной механике, т. I и II. Изд. «Кубуч», 1933—1935.
7. Илларионов В. А., Френкель П. М. Расчет железобетонных подкрановых балок (таблицы). Стройиздат, 1934.
8. Инструкция по расчету железобетонных балок, плит и балочных перекрытий. ЦНИПС, Стройиздат, 1938.
9. Клейнлогель А., Хазельбах А. Формулы для расчета сложных рам. Стройиздат, 1968.
10. М а н и н В. Е. Упрощение при определении перемещений в упругих стержневых системах. Строительное проектирование промышленных предприятий. Информационный выпуск № 1. Госстрой СССР. Главпромстройпроект, 1967.
11. Нейшильд В. Ч. Таблицы для расчета многопролетных многоэтажных рам и неразрезных балок. Госстройиздат, 1933.
12. Н о в и к о в А. М. Таблицы для расчета труб, сводов и арок. Госстройиздат. 1942.
13. Одинцов Б. А. Определение усилий в поперечных рамах одноэтажных производственных зданий. Строительное проектирование промышленных предприятий. Информационный выпуск № 2. Госстрой СССР. Главпромстройпроект, М., 1966.
14. Онуфриев Н. М. Расчетные формулы для проектирования шпренгельных систем смешанной конструкции. Научные труды Ленинградского инж.-строит. ин-та, вып. 17. «Строительная механика и строительные конструкции». Госстройиздат, 1954.
15. Папкович П. Ф. Строительная механика корабля, ч. I, т. 1. «Морской транспорт», 1945.
16. П р и м а к Н. С. Расчет рамных конструкций одноэтажных промышленных зданий,. «Буд1вельник», Киев, 1966.
17. Ремез М. Б. К вопросу о расчете криволинейных и ломаных в плане балок. Труды Ленинградского института инженеров промышленного строительства, вып. 5, 1938.
18. Справочная книга по расчету самолета на прочность. Оборонгиз, 1954.
19. Справочник инженер а-конструктор а. Моспроект, 1958.
20. Справочник инженера-проектировщика промсооружений, т. II. — «Расчетно-теоретический». Промстройпроект. Госстройиздат, 1934.
21. Справочник «Инженерные сооружения», т. I. Машстройиздат, 1950.
22. Справочник машиностроителя, т. ПК Машгиз, 1956.
23. Справочник проектировщика «Расчетно-теоретический», Госстройиздат, 1960.
24. Справочник проектировщика промышленных зданий, глава IV. «Буд1вельник», Киев, 1968.
25. Справочник проектировщика «Металлические конструкции промышленных зданий и сооружений», глава IV. Проектстальконструкция. Госстройиздат, 1962.
26. Стальные конструкции одноэтажных промышленных зданий. Руководство по проектированию. КТИС, Гос. изд-во лит. по строит, и арх., 1952.
27. Технический справочник железнодорожника, т. II. Трансжелдориздат, 1950.
28. У л и ц к и й И. И, Ривкин С. А., Самолетов М. В., Дыховичный Ю. А. Железобетонные конструкции. Расчет и конструирование. Гостехиздат УССР, Киев, 1959.
29. Штейнкман В. С. Определение максимальных моментов и поперечных сил в однопролетной балке от действия подвижной системы сосредоточенных сил. Строительное проектирование промышленных предприятий. Госстрой СССР. Главпромстройпроект, № 5—6, 1968.
30. Энциклопедический справочник «Машиностроение», т. I, кн. 2., Машгиз, 1948.
31. Веоп—Ка1еп3ег. ТазсЬепЬисЬ Шг Ве1оп ип 51аЫЪе1опЪаи, ВегПп (издается ежегодно).
32. В е у е г К. 01е 51аик 1Ш 5аЬ1Ье1опЪаи, ВегИп, 1956.
РАЗДЕЛ 9
СТЕРЖНИ, ОЧЕРЧЕННЫЕ ПО ДУГЕ КРУГА, И КРУГОВЫЕ КОЛЬЦА1
9.1. Круговые стержни
Основные обозначения и общие указания
Сечение стержней — постоянно. Главные центральные оси инерции х и уг повернуты на постоянный для всех сечений угол % по отношению к оси х, лежащей в плоскости кривизны стержня. Ось у перпендикулярна плоскости кривизны (рис. 9.1, а). Геометрические характеристики сечения: Р—площадь; г г — главные центральные моменты инерции; , у, 1ху — осевые и центробежный моменты инерции относительно основных осей х и у, связанных с плоскостью кривизны стержней; к — момент инерции при свободном кручении стержня; 1 — секториальный момент инерции.
Характеристики жесткости сечения:
изгибно-крутильная характеристика;
О и Е —- модули упругости материала
стержня;
г —радиус кривизны оси стержня. Осью бруса считается линия, проходящая через центры тяжести 0 сечений. Для тонкостенного бруса при нагрузке, перпендикулярной Плоскости кривизны,
за ось стержня принимается линия, проходящая через центры изгиба О2 сечений (рис. 9.1,6).
Приведенные податливости при изгибе относительно основных осей хн у:
а0-
а ху —
г
Е
г
Е Хв XV
Приведенная податливость при кручении
х2
а2 -
г
ей
(9.2)
(9.1)
Рассматриваются стержни и кольца малой кривизны. Стержни большой кривизны см. в «Справочнике проектировщика», изд. 1. Стройиздат. 1961 и [9, 10, 11, 16, 21]
а, Р—угловые координаты текущих сечений стержня;
°ь.I — угловая координата сечения, в котором при• ложен внешний силовой фактор (сосредоточенная сила или момент).
Внешние сосредоточенные силовые факторы, приложенные в сечении с координатой а:
Рх1—радиальная сила;
Ру1 — вертикальная сила;
Рх1 — тангенциальная сила;
МХ1 — момент в вертикальной плоскости, касательной к оси стержня (вертикальный изгибающий момент) ;
Му1 — момент в плоскости кривизны бруса (горизонтальный изгибающий момент);
МХ1 — момент в вертикальной радиальной плоскости (крутящий момент);
В( — бимомент.
На рис. 9.2, а показаны положительные направления усилий; моменты изображены дуговой стрелкой, показывающей направление положительного момента. Поло-
Рис. 9.2
9.1. КРУГОВЫЕ СТЕРЖНИ
519
жительный бимомент увеличивает кривизну верхней полки; на рис. 9.2, а не показан.
Внешние распределенные нагрузки (рис. 9.2,6):
Рх (Р) — погонная радиальная нагрузка;
Ру (Р)— погонная вертикальная нагрузка;
РгР)— погонная тангенциальная нагрузка;
тх(Р), яу(р), га(Р) —погонные моментные нагрузки; (Р)—распределенный бимомент (на рис. 9.2 не показан).
Внутренние усилия в произвольном сечении:
Я (а) — радиальная поперечная сила;
О(а) — вертикальная поперечная сила;
N (а) — продольная сила;
(а) и Н (а) — изгибающие моменты, действующие соответственно в вертикальной и в горизонтальной плоскости;
К (а) — крутящий момент;
К (а) — момент свободного кручения;
К (а) — момент стесненного кручения;
В (а) — бимомент.
Перемещения, возникающие в результате упругой деформации стержня:
Я( а) — радиальное перемещение; прогиб к центру кривизны считается положительным (рис. 9.3);
(а) — тангенциальное перемещение; считается положительным, если сечение смещается в направлении уменьшения угла а; б (а) — вертикальное перемещение (прогиб вниз считается положительным); ф (а), ф (а) — углы поворота сечения; считаются положительными, если их направления совпадают с направлением положительных моментов Ц а), Я (а);
0 (а) — угол закручивания.
Начальные параметры: Яо, Оо, о, Ы, Н0, КоУ Ко, В0, о, 60, фо; фо, во — значения внутренних усилий и пе¬
ремещений в сечении, принятом за начальное.
Рис. 9.3
Расчет стержня следует начинать с параллельного переноса всех нагрузок в плоскости данного сечения на ось стержня с добавлением соответствующих моментов (приведение нагрузок к центру тяжести сечения О. В случае тонкостенного стержня при переносе моментов
в центр изгиба Ог могут добавляться собтветстйующие бимоменты (см. [16, 25]).
Если нагрузка действует пбд углом к плоскости кривизны стержня, ее следует разложить на радиальную, вертикальную и тангенциальную составляющие.
Положительное направление углов аир соответствует вращению радиуса оси стержня против часовой стрелки (см. рис. 9.2).
Общие формулы для усилий и перемещений
Продольная сила
N (а) М0соза — Я0 эта [ЛГ (а)]. (9.3)
Радиальная поперечная сила
Я (а) Яо соз а зт а (а)]. (9.4)
Вертикальная поперечная сила
Э (а) 20 2 Рщг] ру (Р) р («)) • (9.5)
Изгибающий момент (в вертикальной плоскости)
I (а) Ь0 соз а С0 зт а — г(0 зт а[Ь (а)]. (9.6)
Изгибающий момент (в горизонтальной плоскости)
Н (а) Н0 Ло г (1 — соз а) 0 г 8п а[Я(а)]. (9.7) Полный крутящий момент К (а)С0соз аф0 г (1—соз а)’— Ь0 зт а[С(а)]. (9.8)
Момент свободного кручения _ х2 соз асЬ ха г
к (а)с0 —гттт(х21 2 со а-
у2 1 'вх Г
х (х зт а — зЬ ха) х2 1
— сЬ ха) — 10
(9.9)
— Со сЬ ха — В0 — зЬ ха [С (а)]. г
Момент стесненного кручения
г- х, соз а—сЬ ха
К (а) К0 ха В0 — зЬ хаС0 — г х2 1
г (соз а—сЬ ха). х зЬ хазт а
0 х2 , ■ х2 1 [«)]. (9.10)
Бимомент
„ г .г, г( 31па—зЬха)
В (а)В0 сЬ хаК— зЬ ха К0 : —
х х (х2 1)
х зт а — зЬ ха — 2ог х(х2 1) соз а—сЬ ха
°г Х2 1 Iй (а)Ь
(9.11)
Угол закручивания
е (а) 0О соз а-ф08шо аг яо гАт (а)
Э0 гАт (а "о гАВМ («)0 Аы. (“ Но Авн (“) о ле? («) оле(«)
Во -у Авв («)] Iе («)] • О-12)
520
РАЗДЕЛ 9. КРУГОВЫЕ СТЕРЖНИ И КОЛЬЦА
Угол поворота сечения в вертикальной плоскости Ф (а)Р0 соз а0о зш аа яо гАрР (а)Э0гЛф(3 (а)
Л'о ' V («)-о Ач1- ЫНо н «)„ к (а)
АфК («)В0 -у ЛфВ (а)] [Ф (а)]. (9.13)
Угол поворота сечения в горизонтальной плоскости (а)0яг [0 гАа (а)(?у гА (а)М0 гАм (а)
■Ь 0 АН (а)0 "к (а)]№(а)]- (9-14)
Радиальный прогиб (а)А,0 соз а?0 зт а—р0 г зт агсг [0 гАш (а) 4-
Оо Го. (а)о (а)“0 а)Я0
К0к(а)][Х(а)]. (9.15)
Вертикальный прогиб б (а)60е0 т (1—соз а)ф0 г зш агаР.0 гАш (а) а)А70 гАьы (а)0 (а)Но (а) “Ь
К0 А6К (а)К0 Ат(а)В -у А6В ()][«() ]. (9.16)
Тангенциальное перемещение (а)0 соз а— Х0 зт аг?0г (1—соз а)гаг[К0гА(п)
Ф0 г (а)0 (а)"ЬИя
К0Агк(а)][Ца)]. (9.17)
Функции влияния начальных параметров, входящие в формулы (9.12) — (9.17), вычисляются следующим образом:
для определения угла 0(а) по формуле (9.12)
, V ахи 81П а — а соз а
АкМ-т1 5 а соз а — зЬ ха
'4е«(а) 2 (в 1)'
1 а, 3., -Т(7 ТТ)5,Па Т(х» 1)’
ч ахи(. азта
ел,(а) -(1-с°за-— );
(а), -I. (««■ Ла5па « ■
2 аг ) т к 1
Аен (а) — (1 — соз а);
х2(2 1) 2
х2 (х2 1)
зЬ ха
8ша
ел (а) о
(к2 1) ’
зЬ ха
Л0в (а) са — соз а;
для определения угла ф(а) по формуле (9.13)
сху а 51 па
(а) ■
Лфд («) -у 1азпа
х2 2 сЬ ха
соз а
(а)
х2 1 х2 (х2 1)
ахи а соз а — зт а
иху а,
х2 1 х2
— (а)»
[ткг)“"°'“
1 ах х2 3. зЬ ха 1
Т (7 у? ) 8Ш а X ( 1)
ахУ 0 •
4вя(а) -зша;
•4ФЛ(а
Я
соз а — сЬ ха
а7
1
х2 (х2 4- 1)
4- 1 а зта;
А.ма) ТХ (сЬ ха - С03 а) ГГ лев («);
фА'
X2
X2
1
ЛфВ(а) — (зЬ ха—х зт а);
для определения угла г)(а) по формуле (9.14) (а) — (соз а — 1);
аг
— (1 — соз а);
аг
Аы (“) — (З‘п «—«)'■ аг
Ль(а)——5аа;
и («) а
Схр
Г (С08 а_ — л4'а(а):
для определения радиального прогиба л(ф) по формуле (9.15)
■
А (а)
•ху
зт а—а соза
а соз а — зт а
— Ат («);
(«)
ху
' — я («);
9.1. КРУГОВЫЕ СТЕРЖНИ
521
Ахн (а) — (1 — соз а) — (а);
аг
аг, зта— а соз а
Ак («)— 5 (а):
для определения вертикального прогиба б (а) по формуле (9.16)
аху а соз а—зта
А6Я («) 9 Аь (“):
3X2
Т7
1 ( о,х Зх2 4 5
(«) т1Г ТТ)5,па“
1 ах 8Ь
— — [ (- 1 ) а-соз а 4- ——-
2 в2 х х
зЬ ха х2 4- 1
(х2 4-1) х2
я™ а зш а , ч
— (соз а — ) 0Л
х2 1 х° 2
а;
61. (“) - 2 .
соз а —
1 я Л •
— — —-- 1 а зш а •
2 а2 )
сЬ ха
х2 (Х2 1)
■ - а «).
А6Н («) — (с0 « - 1) - Л0Я (а);
х зт а—зЬ ха
Абк «) "г" ("7 ) (“008 а_5'П а) "Г 3(и1) ’
зЬ ха — х зш а А, (а) ;
6Л X3
сН ха — 1 Ав (а) соз а — 1;
для определения тангенциального перемещения 5 (а) по формуле (9.17)
аи ( а зт а
АЪХ (а) (соз а —— 1 у — (а);
о. а зш а
А1й (а) а 008 а 2) (а);
аи ( 3 а соз а л(а) 71т5Ша-
аху а соз а — зта а,
АЬ (а) — “ о —
н а)88 — 51п а — а) (а);
аги ( а зта
А1К (а) (соз а 4- —-— — 1 у — (а).
Для массивных стержней (см. стр. 526) функции влияния, не зависящие от х, остаются неизменными. Остальные функции (при х 0) имеют вид:
для определения угла 0(а) по формуле (9.12)
(« 1) « со5 а - 1) зш а;
Аы («) (- 1 а 8п «:
ел (а)Т ('"1)5‘Па-_(аГ 1)аСОЗа;
Л( (а) Лев«х) 0;
для определения угла ф(а) по формуле (9.13)
Лфд(а) •у 11 а зш а -- соз а — 1;
V « - т Й; 1)а со а “ 1"ЙГ “')51п 04
-V («) - (- )«5п ;
А (а) А (а) 0; фК ' рь у ' ’
для определения вертикального прогиба б (а) по формуле (9.16)
А6э (а) “7Г ( 3 зт а — 4- 1 а соз а—а;
Аьь (а) 1 - соз а — -у 1 а 31П а—(а);
Абк 1 (а со5 а—81П а);
АЬХ («) 6Й(“)°-
С целью упрощения вычислений при ручном счете значения некоторых комбинаций тригонометрических функций, входящих в выражения коэффициентов влияния Л (а), приведены в табл. 9.1.
Грузовые члены. Последние слагаемые формул
(9.3) —(9.17), заключенные в квадратные скобки:
[(а)], [(а)],., [(а)], — величины усилий и перемещений, которые зависят только от нагрузок, действующих на стержень на рассматриваемом участке, и не зависят от начальных параметров. Развертывание этих членов в формулах (9.3)—(9.17) производится по правилам метода начальных параметров (см. [18, 25]). Каждая нагрузка, приложенная в сечении а«, умножается на функцию влияния соответствующего начального параметра, в которой угол а заменяется на а—а«. Полученные выражения суммируются. В случае распределенной нагрузки суммирование заменяется интегрированием по длине участка, к которому приложена распределенная нагрузка.
Для примера приведем развернутое выражение грузового члена формулы (9.8), определяющей полный кру« тящий момент:
[Л (а)] Б Мг( соз (а—аг) [1—сое (а—а.)]—
а
— 2 Мх 51П (а—а.) т шг (РНсоз (ос—(3)
— • Я1(Р) 51 л (а—(3)сф.
(9.18)
РАЗДЕЛ 9. КРУГОВЫЕ СТЕРЖНИ И КОЛЬЦА
Таблица 9.1
Вспомогагельные функции для расчета стержней с осью, очерченной по дуге круга
3
§
8
о.
8
«
2
8
с
«0
8
8
8
а
8
8
с
СО
8" СО
О
а
д
м
8
с
00
м
“8
с
со
1
м
8
сч
С
да
1
81
1
1
8
о
о
х
с
се
84
С
со
1
8,
8
с
со
§
о
0
1
СО
N
I
со
А
8
сл
О
О
ь
I?
0
0,0000
0,0000
0,0000
0,0000
0,0000
0,0000
0,0000
0,0000
0,0000
0,0000
0,0000
0,0000
0,0000
0,0000
10
0,1745
0,0152
0,0303
0,1719
0,0009
0,0001
0,0151
0,0000
0,0018
0,0026
0,0002
0,0009
0,0009
—0,0151
20
03491
0,0609
0,1194
0,3280
0,0070
0,0018
0,0585
0,0000
0,0138
0,0206
0,0024
0,0070
0,0066
—0,0591
30
0,5236
0,1371
0,2618
0,4534
0,0236
0,0090
0,1250
0,0003
0,0453
0,0670
0,0118
0,0233
0,0204
—0,1278
40
0,6981
0,2437
0,4488
0,5348
0,0553
0,0234
0,2066
0,0015
0,1029
0,1504
0,0356
0,0540
0,0419
—0,2148
50
0,8727
0,3808
0,6685
0,5609
0,1066
0,0638
0,2934
0,0057
0,1901
0,2736
0,0817
0,1026
0,0685
—0,3113
60
1,0472
0,5483
0,9069
0,5236
0,1812
0,1250
0,3750
0,0164
0,3071
0,4330
0,1569
0,1712
0,0906
—0,4069
70
1,2217
0,7463
1,1480
0,4179
0,2826
0,2165
0,4415
0,0399
0,4502
0,6183
0,2656
0,2609
0,0967
—0,4961
80
1,3963
0,9748
1,3750
0,2425
0,4114
0,3414
0,4849
0,0846
0,6126
0,8138
0,4052
0,3712
0,0714
—0,5387
90
1,5708
1,2337
1,5708
0,0000
0,5708
0,5000
0,5000
0,1629
0,7854
1,0000
0,5708
0,5000
0,0000
—0,5708
100
1.7453
1,5231
1,7188
—0,3031
0,7605
0,6887
0,4849
0,2892
0,9582
1,1558
0,7490
0,6434
—0,1321
—0,5452
110
1,9199
1,8429
1,8429
—0,6566
0,9802
0,9005
0,4415
0,4804
1,1206
1,2611
0,9211
0,7982
—0,3352
—0,5009
120
2,0944
2,1933
1,8138
—1,0472
1,2284
1,1250
0,3750
0,7544
1,2637
1,2990
1,0638
0,9566
—0,6142
—0,3138
130
2,2689
2,5740
1,7381
—1,4584
1,5029
1,3494
0,2934
1,1293
1,3807
1,2584
1,1513
1,1122
—0,9660
—0,0953
140
2,4435
2,9852
1,6706
—1,8718
1,8007
1,5594
0,2066
1,6212
1,4679
1,1352
1,1574
1,2573
—1,3794
0,1954
150
2,6180
3,4178
1,3090
—2,2673
2,1180
1,7410
0,1250
2,2429
1,5255
0,9330
1,0590
1,3836
—1,8342
0,5570
160
2,7925
3,8991
0,9551
—2,6241
2,4505
1,8812
0,0585
3,0025
1,5570
0,6634
0,8381
1,4831
—2,3027
0,9846
170
2,9671
4,4017
0,5152
—2,9220
2,7934
1,9697
0,0151
3,9016
1,5690
0,3447
0,4851
1,5478
—2,7510
1,4696
180
3.1416
4,9348
0,0000
—3,1416
3,1416
2,0000
0,0000
4,9348
1,5708
0,0000
0,0000
1,5703
—3,1416
2,0000
190
3,3161
5,4983
—0,5758
—3,2658
3,4898
1,9697
0,0151
6,0893
1,5726
—0,3447
—0,6060
1,0461
—3,4368
2,5606
200
3,4907
6,0924
—1,1939
—3,2801
3,8327
1,8812
0,0585
7,3447
1,5846
—0,6634
—1,3108
1,4691
—3,6015
3,1336
210
3,6652
6,7168
—1,8326
—3,1742
4,1652
1,7410
0,1250
8,6744
1,6161
—0,9330
—2,0826
1,3371
—3,6072
3,6986
220
3,8397
7,3717
—2,4681
—2,9414
4,4825
1,5594
0,2066
10,046
1,6737
—1,1352
—2,8813
и.
1493
—3,4338
4,2342
230
4,0143
8,0571
—3,0751
—2,5803
4,7803
1,3494
0,2934
11,426
1,7609
—1,2584
—3,6619
0,9072
—3,0727
4,7179
240
4,1890
8,7730
—3,6276
—2,0944
5,0548
1,1250
0,3750
12,776
1,8779
—1,2990
—4,3776
0,6142
—2,5274
5,1276
250
4,3633
9,5193
—4,1002
—1,4923
5,3030
0,9005
0,4415
14,061
2,0210
—1,2611
—4,9832
0,2763
—1,8137
5,4422
9.1. КРУГОВЫЕ СТЕРЖНИ
523
Продолжение табл, 9.1
с
8
а
сх
8
а»
2
8
с
от
8
8
о
о
8
8
от
А
8
СО
О
О
д
см
8
с
"от
м
8
с
от
А
сч
Я
С
от
1
81
1
м
I
г
I
со
1
СО
I
от
8
8
о
с
от
ся
84
с
"от
1
о
5“
8 от
I?
260
4,5379
10,296
—4,4689
—0,7880
5,5227
0,6887
0,4849
15,250
2,1834
—1,1558
—5,4388
—0,0984
—0,9590
5,6426
270
4,7124
11,103
—4,7124
0,0000
5,7124
0,5000
0,5000
16,316
2,3562
—1,0000
—5,7124
—1,5000
0,0000
5,7124
280
4,8869
11,941
—4,8127
0,8486
5,8717
0,3414
0,4849
17,239
2,5290
—0,8138
—5,7825
—0,9167
1,0196
5,6390
290
5,0615
12,809
—4,7562
1,7311
6,0012
0,2165
0,4415
18,007
2,6914
—0,6183
—5,6392
—1,3354
2,0525
5,4142
300
5,2360
13,708
—4,5345
2,6180
6,1020
0,1250
0,3750
18,617
2,8345
—0,4330
—5,2845
—1,7420
3,0510
5,0345
310
5,4105
14,637
—4,1447
3,4778
6,1766
0,0638
0,2934
19,075
2,9515
—0,2736
—4,7315
—2,
1219
3,9702
4,5019
320
5,5851
15,596
—3,5900
4,2784
6,2268
0,0274
0,2066
19,387
3,0387
—0,1504
—4,0026
—2,4606
4,7700
3,8240
330
5,7596
16,586
—2,8798
4,9880
6,2596
0,0090
0,1250
19,591
3,0963
—0,0670
—3,1298
—2,7440
5,4210
3,1038
340
5,9341
17,607
—2,0296
5,5762
6,2761
0,0018
0,0585
19,695
3,1278
—0,0206
—2,1466
—2,9590
5,8976
2,0899
350
6,1087
18,658
—1,0608
6,0159
6,2823
0,0001
0,0151
19,734
3,1398
—0,0026
—1,0909
—3,0948
6,1869
1,0760
360
6,2832
19,739
0,0000
6,2832
6,2832
0,0000
0,0000
19,739
3,1416
0,0000
0,0000
—3,1416
6,2832
0,0000
При составлении выражений для грузовых членов в формулах (9.9) —(9.17) функцию влияния сосредоточенного крутящего момента Мги приложенного в сечении а, а также функцию влияния распределенной крутящей нагрузки, необходимо брать равной__сумме функций влияния начальных параметров Со и Со. Например, грузовой член в формуле (9.11) имеет вид:
[В (а)] 2 В( сЬ х (а — щ)
2Мг,- —г [зш (а—а)х зЬ х (а—а,)] —
X —— 1
х(х 1) г
к 1
2 РУ1 [х 51П (а—а) — Ь х (а — а)]
2 Мх1 [соз (а—а) — сЬ х (а—а)]
а
г Ь (Р) сЬ х (а—Р) с?Р
а
- шг (р) [51 п (а—р) хзЬх (а—Р)]
Грузовой член для вычисления вертикального прогиба в формуле (9.16) представляется как
[б (а)] гаг г 2 Рх1 Л6 (а-а.) г 2 Ру.А69 (а-а;) г 2 Рг1А6ы (а-ос,) 2 А6[_ (а - х()
2 МиЛна-а1)Мг.[Аьк(а-а.)-А-а.)]
1 “
2 В( —Авв(“—Рх (Р) Абк («“Р) Р
г’
а а
Ру (р) Ы (а-р) ар рг (Р) А6Ы (а-Р) ф
а
■У
а а
гтх (Р) Аи (а-р) ф г ту (р) А6Н (а-р) р
Г тг (а Р) АЖ (а — Р)] — • Г I 14 1 Ру (Р) Iх 5‘п (аР) — 5Ь х («—Р)] Р
х(х2 1).)
о
а
х ] тх (Р) [соз а—Р) — сЬ х (а-Р)] (9.19)
МР) А6В (а-р)4р).
(9.20)
Остальные грузовые члены образуются по аналогии.
Граничные условия. Начальные параметры определяются из условий закрепления балки. На свободном конце балки М Ь — Н — К — В—0. Наличие
шарнирной опоры ведет к обращению в нуль соответствующего линейного перемещения: при радиальной
опоре Х0, при вертикальной опоре 60. На непод-
524
РАЗДЕЛ 9. КРУГОВЫЕ СТЕРЖНИ И КОЛЬЦА
вижной (нескользящей) опоре, кроме того, тангенциальное перемещение ?0.
Для абсолютно жесткого защемления, препятствующего депланации торца стержня, обращаются в нуль все перемещения (линейные и угловые), а момент стесненного кручения равен полному крутящему моменту:
К—К. Если защемление не препятствует депланации торца, бимомент В 0.
Случай совпадения одной из главных осей инерции с плоскостью кривизны стержня. Главные оси хг, уг совпадают с основными осями х у. Угол %0 (см. рис. 9.1); х хг, у уг, у 0. Приведенные податливости на основании формул (9.1) равны:
а,
Е1Х
аи
Е1 гк2
аху 0;
у?
1 и 1, I I,
86,6Р 1340?
1600,
181
212,4
- (9'21»
Формулы (9.3)—(9.17) сильно упрощаются, так как все члены, содержащие множитель аху, обращаются
в нуль.
Пример 9.1. Консоль из прокатного двутавра № 20 изогнута в плоскости полок по дуге круга радиуса г— 100 см. Центральный угол о160°. Правый конец консоли жестко защемлен, а левый нагружен вертикальной силой Руг —Р. Определить допустимую величину силы по допускаемому напряжению [а] 1600 кГсм2 и вычислить прогиб свободного конца стержня. Влияние собственного веса не учитывать (рис. 9.4).
По сортаменту прокатных балок ГОСТ 8239—56 находим: (1) 104 см6; 1Х—1810 см; к 6,73 смА; №х 181 см; 212,4 см4; Е 2,МО3 кГсм2; 0 0,8105 кГсм2.
По формулам (9.21) вычисляем ах 2,6-10-8; аг—1,34 105. Изгибно-крутильная характеристика бруса х1,6; а 1,6 я3 1,68.
Выбрав начало отсчета угла а, в заделке Оь имеем следующие величины начальных_параметров: 20 —Р;
10—г5ш60°— 86,6 Р; КоКо-Рг (1—соз 60°) — —50 Я. Последний начальный параметр В0 находим из условия, что бимомент на свободном конце (при а(11 60°) равен нулю. По формуле (9.11) имеем:
100
В (60°) В0 сЫ,68 К0 — зЬ 1,68
1,6
100 (1,6 зш 60° — зЪ 1,68)
0 1 А о ргд ""
1,63,56 1,6 зш 60° — зЬ 1,68 -51002——
.„100 С°5б° з5бЬ1’68 °
откуда Во 1340 Р кГсм2.
Допустимую нагрузку Р определяем из условия прочности бруса в заделке (по нормальным напряжениям) :
Р С236 кг. Выберем для дальнейших расчетов Р 200 кг.
Поскольку в начальном сечении все перемещения равны нулю, уравнение (9.16), определяющее вертикальный прогиб, для левого конца бруса примет следующий вид:
6(60°) 100-1,34-10—5 — 200-100,46(Э(60о) 1340-200
-00 Л6В (60°) - 86,6-200(60°)-
- 50-200 А6К (60°)Аъ (60°)).
Вычислив функции влияния: Ащ 0; Аьь 0; Аьк —0,25; Аь 0,29; Аьв 0,2, находим прогиб левого конца бруса 60,18 см.
Если прогиб вычислять по формулам для стержней массивного сечения, то получится величина 6 1,34 см,
что больше примерно в 7 раз и не соответствует результатам эксперимента. Поэтому прокатные балки необходимо рассчитывать с учетом влияния стесненного кручения. Пример расчета стержня с учетом собственного веса см. [16, стр. 533].
Монорельс на трех и на четырех равноотстоящих опорах
Реакции опор монорельса, подвешенного на трех тягах (рис. 9.5) и нагруженного силой Р посередине одного из пролетов, вычисляются по формулам [16]:
3
зш — гЬ
4 к
яЬ
2з1п гЬ соз — т 4
3
зш — гЬ 4 т
гэ г)
2 ЗШ 31П —
2 4
Р — СгР;
Р — С2Р;
2 51П г ‘
Р С,Р.
(9.22)
9.1. КРУГОВЫЕ СТЕРЖНИ
525
Наибольший изгибающий момент (в сечении под силой Р) равен:
Мы
'Ф Ф
4 соз — соз —
4 2
гР С4гЯ. (9.23)
Значения коэффициентов Си С2, С3, С4 даны
в табл. 9.2.
Таблица 9.2
Коэффициенты для определения усилий в двухпролетном монорельсе
град
Сг
с2
а.
10
0,3760
0,7500
0,1260
0,0328
20
0,3799
0,7479
0,1278
0,0660
30
0,3860
0,7455
0,1315
0,0999
40
0.3949
0,7423
0,1372
0,1351
50
0,4070
0,7378
0,1448
0,1720
60
0,4227
0,7320
0,1547
0,2114
70
0,4426
0,7252
0,1678
0,2539
80
0,4680
0,7168
0,1848
0,3008
90
0,5000
0,7071
0,2971
0,3536
100
0,5411
0,6956
0,2367
0,4145
110
0,5947
0,6823
0,2770
0,4872
120
0,6667
0,6667
0,3334
0,5774
130
0,7673
0,6485
0,4158
0.6954
140
0,9172
0,6274
0,5446
0,8619
150
1,1645
0,6028
0,7673
1,1248
Момент стесненного кручения над опорой А
Рг Г 3 3
Ко : : 5п Хф — X 51П — —
0 (х2 1) зЬ 2я? _ 2 У 2 Т
— Сг (зЬ 2хф — к зш 2ф) — С2 (зЪ хф — х зш. (9.24)
Наибольший бимомент (в сечении под силой Р)
I гЬ т — хф
макс В — К0 5Ь — Рг2 , 1Ь ф
СЛзЬх——хзт— ). (9.
х (х2 4 1) 2 2 25)
Пример 9.2. Определить реакции опор и вычислить наибольшие нормальные напряжения в монорельсе радиуса г200 см на трех подвесках, нагруженном сосредоточенной силой Р500 кГ, приложенной посередине пролета и направленной сверху вниз. Центральный угол между смежными опорами -ф90°. Сечение монорельса — двутаврз к 11,4 см4; 1660 см; 1т 8220 см6; ЧУ х 185 см3;; №(0 210 см4. Модули упругости материала: Е2,Ы0б кГсм2: С?0.8Х
XI О6 кГсм2.
По табл. 9.2 находим коэффициенты и вычисляем реакции опор и изгибающий момент:
VА — 0,5500 — 250 кГ
'в — 0,707-500 — 354 кГ;
Ус 0,207-500 104 кГ
Ломакс 0,354-200.500 35 400 кГ-см;
[ 0,8-10в-11,4
к 200 Л 4,6:
У 2,1»10е •8220
зЬ 2хф зЬ 14,4 1,87.10е;
, 3
зЬ — Х1[? зЬ 10,8 50 500;
гЬ
зЬхфзЬ 7,22 684; зЬ х -у- зЬ 3,61 18,5.
По формулам (9.24) и (9.25)
500-200
Ко I50 500
4,60,707 —
" (4,62 1) 1,87-106
— 0,5 (1,87• 106 — 4,60) —
— 0,707 (684 — 4,6-1)] 2125 кГ-см;
200
макс — л а 212518,5 —
4,6
500.2002 4,63 4,6
0,5 (18,5— 4,60,707) 213 000 кГ-см.
Наибольший бимомент действует в сечении под силой Р9 там же, где достигает максимума изгибающий момент. Наибольшее напряжение
35 400 213 000
макс—, «г- гм 1 1200 кГс м2
185
211
действует во внутренних волокнах стержня: растягивающее — в нижней полке, сжимающее — в верхней.
Для трехпролетного монорельса (рис. 9.6) опасное положение силы посередине среднего пролета. Максимальные нормальные напряжения возникают в сечении под силой, максимальные касательные в сечении над промежуточной опорой: реакции опор [16]
°гр „ „
-4—; (9.26)
V, У2.
максимальный изгибающий момент макс (Зф) ;
максимальный бимомент
(9.27)
526
РАЗДЕЛ 9. КРУГОВЫЕ СТЕРЖНИ И КОЛЬЦА
Рг 2
Ймакс В (Зф) 2к (2 1) сь Зкф (зЬ Зх
— Р3х сЬ Зхф — Г2 зЬ 2хф); (9.28)
максимальный момейт свободного кручения (в сечениях 2 и 2' у средних опор)
Смакс(2ф) у X
сЬ 2хф — Р2 сЬ хф сЬ 2хг) Рб сЬ Зхф (х2 1) сЬ Зхг
Значения коэффициентов ) приведены в табл. 9.3.
Если монорельс на закруглении имеет только один или два криволинейных пролета, то прямолинейный пролет, примыкающий к закруглению, можно условно
Рис. 9.6
считать недостающим криволинейным участком. При числе пролетов больше трех рассчитываются три средних пролета по формулам (9.26)—(9.28). Влияние остальных пролетов не учитывается (в запас прочности и жесткости). Графики для подбора монорельсов на четырех равноотстоящих опорах можно найти в [8 и 16].
Стержень с исчезающе малой жесткостью свободного кручения. Кривой стержень открытого профиля с тонкими стенками имеет очень маленькую жесткость свободного кручения. Внешний крутящий момент воспринимается только поперечными усилиями и создает напряжений стесненного' кручения [18, 25].
Изгибно-крутильная характеристика такого стержня близка к нулю. При расчете следует пользоваться формулами (9.3)—(9.17), полагая при вычислении коэффициентов влияния х0, зЬхаО; сЬха1. Момент свободного кручения К0; КК. Легко убедиться, что при х 0 формулы (9.8) и (9.10) совпадают.
Стержень массивного поперечного сечения
Стержень с очень толстыми стенками или со сплошным поперечным сечением депланирует при кручении очень слабо, так что стеснение депланации, всегда имеющее место в кривом стержне, оказывается незначительным. Напряжения стесненного кручения близки к нулю, а следовательно, С0 и В0. Внешний крутящий момент целиком воспринимается напряжениями свободного кручения: КК.
При пользовании формулами (9.3)—(9.17) необходи
Таблица 9.3
Коэффициенты для определения усилий в трехпролетном монорельсе
град
Ох
Ог
Ог
о,
оь
5
0,1254
1,1254
0,0660
0,0019
0,1235
10
0,1279
1,1279
0,1313
0,0077
0,1202
15
0,1317
1,1317
0.1998
0,0176
0,1140
20
0,1371
1,1371
0,2702
0,0321
0,1050
25
0,1447
1,1447
•0,3439
0,0517
0,0930
30
0,1547
1,1547
0,4226
0,0774
0,0774
35
0,1677
1,1677
0,5078
0,1104
0,0574
40
0,1848
1,1848
0,6016
0,1527
0,0321
45
0,2071
1,2071
0,7071
0,2071
0,0000
50
0,2367
1,2367
0,8290
0,2778
—0,0411
55
0,2770
1,2770
0,9744
0,3717
—0,0947
60
0,3333
1,3333
1,1547
0,5000
—0,1667
мо, вычисляя коэффициенты влияния, опустить все члены, содержащие зЬ ха и сЬ ха, а в остальных членах произвести предельный переход при х- оо. При этом формулы (9.9) и (9.10) теряют смысл, а формула
(9.9) совпадает с формулой (9.8).
Написание формул (9.12)—(9.17) внешне не изменится, однако, как это следует из формулы (9.2), при оо
аг. (9.30)
01 к
Функции влияния для массивных брусьев приведены На стр. 521.
Грузовые члены развертываются аналогично случаю тонкостенного стержня (см. стр. 521). Начальные параметры находятся из условия закрепления стержня.
Частные случаи. В табл. 9.4 приведены значения усилий и перемещений стержня, закрепленного одним концом и нагруженного единичными силами и моментами. Главная ось инерции не лежит в плоскости кривизны стержня. Величины усилий даны в функции текущего угла а. Величины перемещений вычислены для свободного конца стержня. Они могут быть использованы в качестве коэффициентов канонических уравнений дгд при расчете статически неопределимых стержней. С этой целью единичные нагрузки обозначены Хи в соот¬
ветствии с общепринятыми обозначениями неизвестных при решении статически неопределимых задач методом сил. Для упрощения вычислений значения некоторых функций приведены в табл. 9.1.
В табл. 9.5 приведены значения усилий и перемещений консольного стержня, нагруженного равномерно
). (9.29)
9.Т. КРУГОВЫЕ СТЕРЖНИ
527,
Таблица 9.4
Усилия и перемещения стержня массивного сечения от действия сосредоточенных
ах
нагрузок —; ах, ау9 вычисляются по формулам (9.1); а2 — по формуле (9.30)
2 Определяемые
величины
Схема нагружения
а
Хг1
г7
Усилия в текущем сечении стержня
Радиальная сила Д(оь)
соз а
0
зш а
Вертикальная си ла 2(а)
0
1
0
Продольиая сила N (а)
— зп а
0
соз а
Изгибающий момент Ь (а)
0
-гзШа
0
Изгибающий момент Н (а)
г з1п а
0
г (1 — соз а)
Крутящий момент К (а)
0
г (1 — соз а)
0
Перемещения свободного конца стержня
Радиальный прогиб X (V)
_ Г2„ - С06 V)1
12 аУ 4 2)
» ГаУ 2
Вертикальный прогиб о (V)
8 _ г,а ( 2Г _ V
5п 27 — 2 зш 7
1
1
1
V»
5
1
О
о
с
21 4 2)
83 "ху 2
Продольное перемещение (V)
а (1 - С05 V)1
6 — г-а (1 008 у)
4«-гв,(-
-8 2у — 281П 2у
1
ю
32 “ аху 2
Угол поворота Ф (V)
в з1п V 41 '“ХУ 2
642 гаг (С08 7
- П- ЗШ2 7 — 1
-1-)
Угол поворота Ф (V)
С03 V)
б2Гаху (С057-1)
в5Э гау ■» - ®П
Угол закручивания 0 (V)
б -га (У. 5П.2У
6б2 гаг (8Ш V
, п — 1. л-1-1
51П 2у у
4 2 )
(О
о
0
1
61 ху2 4
ивз — '“ху 2
528
РАЗДЕЛ 9. КРУГОВЫЕ СТЕРЖНИ И КОЛЬЦА
Продолжение табл. 9.4
Схема нагружения
Определяемые величины
д
Оь
Радиальная сила ?(а)
0
0
п
а
и
н
о
X
Вертикальная сила (?(эс)
0
0
0
X
X
ф
гг
а
о
Продольная сила
N (а)
0
0
0
а
3
Изгибающий момент (а)
соз а
0
51п а
н
00
9
22
Изгибающий момент Н (а)
0
1
0
и
Крутящий момент
К (а
— зш а
0
соз а
Радиальный прогиб МУ)
в 51П2 у
14 Гаху,
15 Гау (1 005 V)
с 1 у з1п 2у
стержня
Вертикальный прогиб Ь (у)
б24 ,аг (С05 У -
— 51П2 V —1)
б25 гаХу с03 V — 1)
бг« гаг (51п V
, п — 1. п 1
зш 2у V I
4 2 )
я
а
о
о
и
О
Продольное перемещение с (V)
б34 гаху (5п V - у -
51П 2у
б35 гау (V — 3п V)
(1 — соз V)2 Зв - гаху 2
с
О
4
о
а
о
о?
3
X
а
3
0)
25
а
Угол поворота Ф (V)
(п -4-1 844 аг( 2 ?
, П — 1 • О
Н 51П 2у
4 )
б45 аху 8п V
п — 1
46 аг,2 5Ш У
а
С
Угол поворота “ф (V)
64 ахи 5111 V
I
655 ау V
()
О
0
1
ч
а
II
со
ю
Угол закручивания
6 (у)
X я — 1. •
64 аг 2 5Ш V
б65 аху (1 - 005 V)
(п 4-1
в« ‘Ц 2 V
п — 1 О
51П 2у 1
4 )
9.1. КРУГОВЫЕ СТЕРЖНИ
529
Таблица 9.5
Усилия и перемещения стержня массивного сечения от действия равномерно распределенных нагрузок
530
РАЗДЕЛ 9. КРУГОВЫЕ СТЕРЖНИ И КОЛЬЦА
Продолжение табл. 9.5
9.1. КРУГОВЫЕ СТЕРЖНИ
531
распределенными силами и моментами, как это показано на схемах таблицы. Величины перемещений конца стержня могут быть использованы в качестве свободных членов канонических уравнений при расчете статически неопределимых стержней.
Этой же табл. 9.5 можно пользоваться для расчета стержней, частично нагруженных равномерно распределенными силами и моментами на участке с центральным углом улв (рис. 9.7, а). Искомые величины нахо-
Рис. 9.7
дятся суммированием соответствующих усилий и перемещений от действия сплошной нагрузки р на дуге с углом у и от нагрузки—р на дуге с углом у вс- В последнем случае по табл. 9.х вычисляют перемещения точки В, а затем находят перемещения свободного конца (точки А):
%А %в С05 УАВ — %в 8Ш УАВ Фв • ш уАВ;
Ьа с03 Уав хв 5‘п Уав
Фв г ( — 003 Уав )• (9.31)
6А 6в — Фв т ®п Уав ев т О — со8 Тлв):
Ра Фв 008 Глв — ев ®п Уав •
в а 003 Уав Фв з1п Уав •
Табл. 9.4 и 9.5 можно также использовать для расчета тонкостенного стержня при нагрузке в плоскости его кривизны, т е. при отсутствии стесненного кручения.
Пример 9.3. Вычислить наибольшие напряжения в заделке и перемещения конца А криволинейной консоли АС радиусом г300 см, имеющей горизонтальный отросток ВО длиной 200 см. Участок АВ консоли и отросток Вй нагружены равномерно распределенной на-
а)
б)
грузкой р5 кГсм (рис. 9.8,а). Консоль выполнена из прокатного двутавра № 30; ?2,Ь106 кГсм2.
По сортаменту двутавровых балок (ГОСТ 8239—56): 7746,5 см2; у 7080 см4; №„ 472 см3; Е1У 1,49-1010.
Равнодействующая нагрузки на участке В, приложенная в его середине, 5 200 р 1000 кГ. Перенеся силу 5 в точку В и разложив ее на радиальную Рх и тангенциальную Рг составляющие, получим с учетом принятого правила знаков (см. рис. 9.2,а): Рх 5 зш 30°500 кГ; Р2 —5 соз 304 866 кГ.
При переносе нагрузки добавится момент М„ 1005 105 кГсм.
Для того чтобы иметь возможность воспользоваться табл. 9.4 и 9.5, продолжим радиальную нагрузку рх на участок ВС и приложим к этому участку компенсирующую нагрузку — рх. Окончательная схема нагружения балки показана на рис. 9.8, б.
Усилия в заделке:
Нс рг зп 90® — рг 31П 30° Рх соз 30° Р2 зш 30° 5-300 — 5-3000,5 5000,866 — 866-0,5 750 кГ;
Ис — рг (1 — соз 90°) -г рг (1 — соз 30) —
— Рх зш 30° Р2 соз 30° — 5-300-1
5-300-0,134 — 500-0,5 — 866-0,866 — 2300 кГ;
Нс рг2 (1 — соз 90°) — рг2 (1 — соз 30°)
Рхг зш 30° Р2 г (1 — соз 30°) Му
5-9-104-1 — 5-9-104 • 0,134 500-300-0,5 —
— 866-300-0,134 105 5,3-№ кГ-см.
Наибольшие нормальные напряжения (сжимающие) действуют в сечении С во внутренних волокнах стержня:
Аг
Нг
2300
Р
5,3-105
472
46,5 1170 кГсм.
Прежде всего вычислим перемещения сечения В от нагрузок Рх, Рг Му и —р (действующей на участке ВС, для которого точка В является конечной). Суммируя перемещения для соответствующих нагрузок, приведенные в табл. 9.4 и 9.5 (для 'у'Увс30°), получим:
хв х (30°) РХ би (30») рг а13 (30°)
(1 — сов30°)а МУЬ1Ь (30°) — рг3ау - 0,0835 см;
А
ЪВ 5 30°) рх б31 30° Рг 6зз 30° Му 635(30°)-
— рг3ау — 2 1П 30° 0,0142 см
ф (30°) Рх б51 (30е) Рг 653 (30е) -МуЬьь(ЪЪ°)—ргау зп 30° 0,00112 рад.
Зная перемещения сечения В, переходим к сечению А с помощью формул (9.31), добавляя перемещения
532
РАЗДЕЛ 9. КРУГОВЫЕ СТЕРЖНИ И КОЛЬЦА
от еще не учтенной нагрузки р, приложенной на всем протяжении стержня ЛС(ууАс90°; Уав 60°):
ХА соз 60° — 1В 51П 60° Г 51П 60
в (1 — соз90°)2,
рггау — 1,68 см
1а 1В СОЗ 60° хв 51П 60° Фв г О — 008 60°)
3 я зш180° '
Рг3ау[ тт
• 2 ЗШ 90°
1,22 см;
Фв Рг2(гу — 31П 90° 0,0063 рад.
Статически неопределимые кривые стержни. Кроме уравнений равновесия стержня для определения реакций следует воспользоваться условиями совместности деформаций, приравнивая нулю перемещения в направлении лишних связей. В общем случае выражения для перемещений получаются на основании формул (9.12)— (9.17).
Усилия в ключевом сечении тонкостенного стержня, защемленного двумя концами и нагруженного перпендикулярно плоскости кривизны (арочная балка, эркер)
Задача нахождения усилий в ключевом сечении С
стержня, показанного на рис. 9.9, является статически
неопределимой и ее удобно решать методом сил. Разрезав стержень по оси симметрии ОС, вычисляем перемещения концов каждой половины стержня от действия заданной нагрузки, по формулам (9.12), (9.13) и (9.16), полагая аху—0, так как одна из главных осей инерции сечения считается лежащей в плоскости кривизны стержня.
Разности соответствующих перемещений половинок стержня дают взаимные перемещения торцов в разрезе: Дф,
А0 и Аб.
Для стержня массивного или тонкостенного, нагруженного в плоскости его кривизны, готовые коэффициенты канонических уравнений берутся из табл. 9.4,
а свободные члены этих уравнений при нагружении
стержня сосредоточенными силами, моментами и равно мерно распределенной нагрузкой — из табл. 9.4 и 9.5.
В случае произвольной нагрузки удобно разложить ее на симметричную и антисимметричную, так как это упрощает уравнения (см. [10, 25]).
Если стержень нагружен неравномерной нагрузкой, то при пользовании формулами (9.12) — (9.17) или при решении задачи по методу сил требуется вычисление интегралов от различных комбинаций тригонометрических функций. Наиболее часто встречающиеся интегралы приведены в табл. 9.12.
Усилия в ключевом сечении С вычисляются по формулам:
Рис. 9.9
1Г
А0 АО
кс ок вс ов —1-саа-
(9.32)
где
2 а2у
с1г -рг— г (х зш у сЪ ху — соз у) — г; ик
х 1 зЬ ху )
О в —
(9.33)
(9.34)
01 к г01к
Относительный угол закручивания в месте разреза
0а
Значения йи й2 и коэффициентов А приведены в табл. 9.6—9.11 в зависимости от значения угла у и изгибно-крутильной характеристики х.
В случае симметричной нагрузки Аб А90, следовательно, (с и Кс обращаются в нуль. При действии антисимметричной нагрузки Аф А0, поэтому ВС0. Произвольную нагрузку, приложенную к стержню, рекомендуется разлагать на симметричную и антисимметричную группы. Это позволяет свести весь расчет к расчету одной половины стержня.
Пример 9 4. Вычислить максимальные нормальные напряжения в ключевом сечении и опорных сечениях защемленной круговой арки, несущей симметричную радиальную равномерно распределенную нагрузку р 75 кГсм, как показано на рис. 9.10, а. Арка выполнена из прокатного двутавра № 30; Е2,IX XI О6 кГсм2.
Разрезав арку в ключевом сечении, получим основную систему, симметричную относительно вертикального радиуса и симметрично нагруженную. Следовательно, в разрезе будут действовать только симметричные неизвестные Х3 и Х (рис. 9.10,6).
Если рассмотреть левую половину арки, то горизонтальное перемещение %А и угол поворота фа сечения А этой половины являются свободными членами канонических уравнений. Воспользуемся величинами этих перемещений, вычисленными в примере 9.3 (см. рис. 9,8) Азр а 1,22 см Д5Р'фа 0,0063. Вычисляя коэффициенты уравнений по табл. 9.4, получим систему уравнений:
зб3
ХА
(т)Чт)-
-3
(-§•) ХА. (-у)
— А
з р
или 0,65-103 Х3 0,34• 10 5 Хь
— 1,22; Ър у
или 0,34-10 5 Х3 0,314 10 7 Хь —0,0063.
9.1. КРУГОВЫЕ СТЕРЖНИ
533
Таблица 9.в
Значения йх (в долях радиуса
у, град
я
1,0
2,0
3,0
4,0
5,0
1 6’°
1 7’° 1
8,0
9,0
10,0
40
0,0502
0,0512
0,0533
0,0550
0,0577
0.0596
0,0616
0,0632
0,0647
0,0663
50
0,0800
0,0830
0,0873
0,0913
0,0960
0,0998
0,1032
0,1060
0,1084
0,1109
60
0,1175
0,1239
0,1320
0,1394
0,1471
0,1531
0,1585
0,1627
0,1664
0,1699
70
0,1640
0,1756
0,1894
0,2019
0,2134
0,2224
0,2302
0,2364
0,2416
0,2465
80
0,2230
0,2400
0,2595
0,2810
0,2979
0,3108
0,3219
0,3305
0,3380
0,3502
90
0,2872
0,3186
0,3520
0,3802
0,4042
0,4228
0,4382
0,4505
0,4607
0,4699
100
0,3664
0,4142
0,4634
0,5041
0,5379
0,5642
0,5857
0,6042
0,6174
0,6302
110
0,4580
0,5288
0,5996
0,6576
0,7053
0,7425
0,7730
0 7977
0,8183
0,8364
120
0,5617
0,6636
0,7670
0,8367
0,9138
0,9673
1,0113
1,0474
1,0806
1,1040
130
0,6787
0,8185
0,9578
1,0740
1,1707
1,2542
1,3136
1,3899
1,4134
1,4535
140
0,8018
0,9870
1,1752
1,3374
1,4760
1,5910
1,6888
1,7720
1,8438
1.9072
150
0,9215
1,1503
1,3914
1,6092
1,8031
1,9711
2,1189
2 2485
2,3599
2,4670
160
1,0187
1,2656
1,5388
1,8045
2,0487
2,2724
2,4806
2,6720
2,8486
3,0131
170
1,0602
1,2532
1,4760
1,7016
1,9270
2,1460
2,3594
2,5667
2,7682
2,9644
180
1,0000
1,0000
1,0000
1,0000
1,0000
1,0000
1,0000
1,0000
1,0000
1,0000
Таблица 9.7
Значения (в долях радиуса г)
х
у, град
1,0
2,0
3,0
4,0
5,0
6,0
7,0
8,0
9,0
10,0
10
0,0051
0,0050
0,0049
0,0048
0,0047
0,0045
0,0043
0,0041
0,0039
0,0037
20
0,0317
0,0191
0,0179
0,0164
0,0148
0,0131
0,0117
0,0102
0,0089
0,0079
30
0,0437
0,0392
0,0348
0,0293
0,0244
0.0195
0,0164
0,0135
0,0112
0,0094
40
0,0750
0,0644
0,0516
0,0402
0,0310
0,0238
0,0186
0,0148
0,0119
0,0098
50
0,1122
0,0896
0,0663
0,0479
0,0348
0,0258
0,0195
0,0152
0,0121
0,0099
60
0,1539
0,1131
0,0775
0,0498
0 0367
0,0265
0,0198
0,0153
0,0122
0,0099
70
0,1967
0,1352
0,0856
0 0526
0 0378
0,0268
0.0199
0,0154
0,0122
0,0099
80
0,2400
0,1516
0,0910
0,0550
0,0381
0,0269
0,0200
0,0154
0,0122
0,0099
90
0,2825
0,1654
0,0946
0,0581
0,0383
0,0270
0,0200
0,0154
0,0122
0,0099
100
0,3227
0,1760
0,0969
0 0584
0.0385
0,0270
0,0200
0,0154
0,0122
0,0099
110
0,3592
0,1860
0,0982
0,0586
0,0385
0,0270
0,0200
0,0154
0,0122
0,0099
120
0,3915
0,1895
0,0990
0,0587
0,0385
0,0270
0,0200
0,0154
0,0122
0,0099
130
0,4199
0,1935
0,0995
0,0588
0,0385
0,0270
0,0200
0,0154
0,0122
0,0099
140
0,4446
0,1961
0,0998
0,0588
0,0385
0,0270
0,0200
0,0154
0,0122
0,0099
150
0,4644
0,1979
0,0999
0,0588
0,0385
0,0270
0,0200
0,0154
0,0122
0,0099
160
0,4790
0,1990
0,1000
0,0588
0,0385
0,0270
0,0200
0,0154
0,0122
0,0099
170
0,4909
0,1996
0,1000
0,0588
0,0385
0,0270
0,0200
0,0154
0,0122
0,0099
180
0,5000
0,2000
0,1000
0,0588
0,0385
0,0270
0,0200
0,0154
0,0122
0,0099
Таблица 9.8
Коэффициенты Л?
•у, град
X
1,0
2,0
3,0
4,0
5,0
6,0
7,0
8,0
9,0
10,0
40
0,0001
0,00095
0,00183
0,00268
0,00354
0,0044
0,0053
0,0061
0,00705
0,0079
50
0,0009
0,0028
0,00452
0,0077
0,0084
0,0104
0,0123
0,0142
0,0160
0,0180
60
0,0019
0,0069
0,0160
0,0218
0,0252
0,0288
0,0329
0,0384
0,0430
0,0470
70
0,0056
0,0199
0,0383
0,0544
0,0640
0,0770
0,0840
0,0875
0,0885
0,0890
80
0,0078
0,0476
0,0807
0,1310
0,1541
0,1780
0,1965
0,2165
0,2330
0,2420
90
0,0350
0,1122
0,1950
0,2830
0,3260
0,3740
0,4240
0,4460
0,4870
100
0,0766
0,2366
0,4600
0,5650
0,6630
0,749
0,820
0,825
0,4750
0,943
0,968
110
0,1543
0,4770
0,8020
1,0960
1,2850
1,460
1,595
1,718
1,822
1,888
120
0,3225
1,0140
1,5570
2,1640
2,4490
2,775
3,040
3,248
3,261
3,595
130
0,5510
1,7960
2,8340
3,8290
4,6790
5,308
5,773
6,251
6,593
6,897
140
0,9909
3,2560
5,160
9,227
7,016
8,518
9.805
10,894
11,837
12,658
13,330
150
1,721
5,372
12,764
15,805
18,494
20,846
22,940
24,984
26,410
160
2,833
9,171
16,118
22,795
29,041
37,790
40.082
44,964
49,478
53,637
170
4,678
15,034
26,976
41,627
39,169
51,158
62,902
74,343
85,461
96,274
106,77
180
7,245
23,143
60,843
80,329
99,932
119,57
139.26
158,96
178,67
534
РАЗДЕЛ 9. КРУГОВЫЕ СТЕРЖНИ И КОЛЬЦА
Коэффициенты Аь
у, град
УС
1,0
2,0
3,0
4,0
5,0
I 6,0
1 7’°
8,0
9,0
Ю,0
40
0,0065
0,0233
0,0438
0,0639
0,0811
0,0956
0,1075
0,1172
0,1255
0,1324
50
0,0188
0,0625
0,1106
0,1523
0,1851
0,2107
0,2310
0,2472
0,2603
0,2713
60
0,0433
0,1352
0,2242
0,2940
0,3452
0,3837
0,4130
0,4360
0,4546
0,4696
70
0,0853
0,2494
0,3907
0,4920
0,5629
0,6142
0,6526
0,6822
0,7057
0,7245
80
0,1500
0,4095
0,6200
0,7428
0,8321
0,8951
0,9414
0,9775
1,0043
1,0265
90
0,2402
0,6142
0,8737
1,0355
1,1405
1,2128
1,2650
1,3042
1,3348
1,3592
100
0,3570
0,8564
1,1702
1,3551
1,4713
1,5495
1,6052
1,6465
1,6786
1,7038
110
0,4990
1,1246
1,4825
1,6827
1,8048
1,8852
1,9426
1,9830
2,0148
2,0396
120
0,6612
1,4033
1,7918
1,9984
2,1207
2,1996
2,2541
2,2976
2,3234
Л3469
130
0,8346
1,6758
2,0796
2,2843
2,4015
2,4756
2,5257
2,5617
2,5885
2,6092
140
1,0120
1,9267
2,3306
2,5255
2,6336
2,7003
2,7444
2,7756
2,7986
2,8161
150
1,1830
2,1422
2,5330
2,7128
2,8091
2,8669
2,9044
2,9304
2,9491
2,9633
160
1,3373
2,3134
2,6814
2,8433
2,9270
2,9760
3,0069
3,0278
3,0427
3,0538
170
1,4685
2,4365
2,7773
2,9212
2,9936
3,0349
3,0605
3,0773
3,0892
3,0977
180
1,5708
2,5133
2,8274
2,9569
3,0206
3,0568
3,0788
3,0932
3,1033
3,1105
Т а б л и ц а 9.10
Коэффициенты А к
у, град
УС
1,0
2,0
3,0
1 4,0
5,0
6.0
7.0
8.0
9,0
Ю,0
40
0,199
0,730
1,458
2,273
3,115
3,962
4,812
5,658
6,501
7,339
50
0,361
1,271
2,427
3,652
4,880
6,105
7,317
8,523
9,724
10,916
60
0,571
1,916
3,510
5,126
6,724
8,299
9,855
11,400
12,938
14,464
70
0,815
2,604
4,586
6,534
8,435
10,300
12,138
13,962
15,775
17,573
80
1,075
3,263
5,Ь49
7,722
9,828
11,887
13,912
16,330
17,915
19,812
90
1,330
3,826
6,214
8,564
10,755
12,890
14,985
17,061
19,121
21,161
100
1,559
4,239
6,715
8,979
11,124
13,207
15,246
17,264
19,235
21,246
110
1,742
4,467
6,829
8,936
10,913
12,822
14,687
16,529
18,355
20,161
120
1,996
4,496
6,621
8,460
10,164
11,801
13,393
14,964
16,519
18,056
130
1,927
4,342
6,135
7,629
8,990
10.286
11,542
12,777
13,998
15,204
140
1,924
4,037
5,448
6,564
7,553
8,484
9,379
10,256
11,121
11,974
150
1,868
3,635
4,662
5,410
6,045
6,629
7,183
7,722
8,251
8,771
160
1,776
3,202
3,892
4,323
4,670
4,968
5,242
5,504
5,759
6,007
170
1,670
2,806
3,248
3,470
3,612
3,719
3,808
3,888
3,962
4,032
180
1,571
2,513
2,827
2,957
3,021
3,057
3,079
3,093
3,103
3,110
Таблица 9.11
Коэффициенты А в
у, град
УС
1,0
I 2,0
3,0
4,0
5,0
6,0
7,0
8,0
9,0
10,0
40
0,6032
1,7690
2,9103
3,9700
5,0
6,0
7,0
8,0
9,0
10,0
50
0,7027
1,8812
2,9682
3,9924
5,0
6,0
7,0
8,0
9,0
10,0
60
0,7807
1,9402
2,9889
4,0
5,0
6,0
7,0
8,0
9,0
10,0
70
0,8401
1,9698
2,9961
4,0
5,0
6,0
7,0
8,0
9,0
10,0
80
0,8845
1,9850
3,0
4,0
5,0
6,0
7,0
8,0
9,0
10.0
90
0,9172
1,9926
3,0
4,0
5,0
6,0
7,0
8,0
9,0
10,0
100
0,9457
1,9962
3,0
4,0
5,0
6,0
7,0
8,0
9,0
10,0
110
0,9579
0,9982
3,0
4,0
5,0
6,0
7,0
8,0
9,0
10,0
120
0,9701
2,0
3,0
4,0
5,0
6,0
7,0
8,0
9,0
10,0
130
0,9787
2,0
3,0
4,0
5,0
6,0
7,0
8,0
9,0
10,0
140
0,9850
2,0
3,0
4,0
5,0
6,0
7,0
8,0
9,0
10,0
150
0,9894
2,0
3,0
4,0
5,0
6,0
7,0
8,0
9,0
10,0
160
0,9925
2,0
3,0
4,0
5,0
6,0
7,0
8,0
9,0
10,0
170
0.3947
2,0
3,0
4,0
5,0
6,0
7,0
8,0
9,0
10,0
180
0,9963
2,0
3,0
4,0
5,0
6,0
7,0
8,0
9,0
10.0
9.1. КРУГОВЫЕ СТЕРЖНИ
535
Таблица 9.12
Значения определенных интегралов, встречающихся при вычислении усилий и перемещений в стержнях с круговой осью
ИР)
а
и (Р р 0
8)П 3
1 — соз а
соз 3
зт а
зп2 3
— з1п 2а 4- а 4 2
соз2 3
— зт2а — а 4 2
31П3 3
1 „ 3 2
соз За соз а -4 12 4 3
СОЗ8 3
1, о. 3 •
— зт За зт а
12 4
3 з1п 3
зп а — а соз а
3 соз 3
соз а а зп а — 1
З3 51п з
2 а зп а — (а3 — 2) соз а — 2
За СОЗ 3
2а соз а 4- (а2 — 2) зп а
51(1 3 СОЗ 3
з1п2 а
2
зп 3 соз3 3
(1 — соз3 а) 3
з1па 3 соз 3
з1п3 а 3
3 соз2 3
1 1 • а
— а 31 п 4а
8 32
3 зп2 з
11, о 1, 1
— а2 а зп 2а соз 2а Н 4 4 8 8
3 соз3 3
— а2 а зп 2а соз 2а — 4 4 8 8
зп 23
— (1 — соз 2а) 2
соз 23
зп 2а
2
3 зп 23
з1п 2а — а соз 2а
4 2
3 соз 23
— соз 2а 4- —- сб зт 2а —
4 2 4
зп (а — 3)
1 — соз а
Продолжение табл. 9.12
М3)
а
С 1 (Р) Р
0
соз (а — 3)
з1п а
1 » 1
з1п 3 зп (а — 3)
— зт а а соз а
2 2
з1п 3 соз (а — 3)
а зт а
2
соз 3 зп (а — 3)
1
— а з1п а 2
соз 3 соз (а — 3)
1,1
— вт а - а соз а
2 2
Рис. 9.10
Усилия в ключевом сечении: сила Х —1910 кГ, момент Хь—6250. Максимальное напряжение в сечении 1910 6250 ее г, о
Омане 46 5 - 472 55 кГсм.
Усилия в защемлении С найдем, рассматривая полуарку под действием заданной нагрузки и вычисленных начальных параметров и п0 Х5. По формулам
(9.3), (9.4) и (9.7)
N0 —2300 кГ; с —1160 кГ; с— 3,7-104 кГ-см. Максимальное напряжение в защемленном сечении равно 130 кГсм2.
Пример 9.5. Стальная трубка с отношением диаметров к — йО — 0,8 изогнута по дуге круга радиуса г 100 см и нагружена в точке В вертикальной силой РУЮ00 кГя перпендикулярной плоскости кривизны.
536
РАЗДЕЛ 9. КРУГОВЫЕ СТЕРЖНИ И КОЛЬЦА
Таблица 9.13
Усилия в ключевом сечении стержня, защемленного двумя концами
9.1. КРУГОВЫЕ СТЕРЖНИ
537
Продолжение табл. 9.13
Схема нагружения
Условия в ключевом сечении А
Вертикальная поперечная сила Хг и крутящий момент Хй находятся из системы
уравнений:
622 Х2 62б Ха а2М °;
в2 Х2 66 6 6А1
А2м га7 (с03 V — 1 — — зш2 V ;
2 )
Д6Л а2 8ш2 V; 6 см. табл. 9.4.
Опоры концов стержня допускают свободный поворот сечений относительно радиальных осей (рис. 9.11, а). Вычислить реакции и реактивные моменты опор стержня.
При нагрузке перпендикулярной плоскости кривизны возникают вертикальные реакции (а, (2с и реактивные
крутящие моменты Ка и К с. Задача является один раз статически неопределимой. Использование метода сил в рассматриваемом случае потребует довольно громоздких вычислений для нахождения коэффициентов канонических уравнений. Задача значительно упростится, если использовать готовые формулы. Для этого освободим конец А, приложив к нему неизвестные усилия (За и Ка, повернем стержень относительно радиальной оси на неизвестный (неопределенный) угол фс (рис. 9.11,6) и жестко закрепим этот конец. Получим консольно закрепленный стержень, усилия и перемещения которого приведены в табл. 9.4. Искомые усилия 2А и Ка найдутся из условий равенства нулю вертикального прогиба 6 а, угла поворота сечения 0а вокруг касательной и изгибающего момента Ьс в сечении С. При составлении первых двух условий необходимо учесть влияние угла рс и воспользоваться формулами (9.31). В результате имеем:
6 — фс г 51П 120° Ру 622 (90°) —
- Г 51П 30° Ру 542 Г (1 - СОЗ 30°) Ру 6б2 0А 8 (120®) КА 626 (120°) 0;
0А фс 81П 120° Ру 662 С05 30°
Ру б42(-)81п 30е СА б62 (120°) КА б68 (120°) 0; 1С КА соз 30° — Р г — 0А г соз 30° 0.
01 к
Учитывая, что л -— 0,8, вычислим значения
Е1 х
коэффициентов б,ь согласно табл. 9.10 и получим систему уравнений:
— 0,866фс 2,23гаг 0.А — 0,97аг КА 1,4га г Ру 0;
0,866фс — 0,97гаг ЧА 1,84аг КА — 0,82гаг Р О,
Ка-Ра'Р,-
Исключив из первых двух уравнений неизвестный угол фс найдем: С?а—0,75 Ру—750 кГ Са 0,41 гРу 0,4Ы05 кГ-см.
Остальные две реакции находятся из уравнений равновесия стержня: 2с—0,25 —250 кГ; Са
0,32 г Ру 0,32-105 кГ-см.
Массивный стержень, защемленный двумя концами
Усилия в ключевом сечении А для некоторых видов сосредоточенных нагрузок даны в табл. 9.13. Обозначения усилий соответствуют обозначениям нагрузок в табл. 9.10. Из этой таблицы следует брать значения коэффициентов бгь при составлении системы канонических уравнений для стержней с более сложной нагрузкой, чем в табл. 9.7. Зная усилия в ключевом сечении, находим усилия в произвольном сечении стержня, пользуясь табл. 9.10 или общими формулами (9.3) — (9.8). Приведенные податливости ах и аг вычисляются по формулам (9.1) и (9.30). Для схем 5, 6 и 7 аху0
я
и п.
538
РАЗДЕЛ 9. КРУГОВЫЕ СТЕРЖНИ И КОЛЬЦА
9.2. КРУГОВЫЕ КОЛЬЦА
Рис. 9.12
Расчет кольца, как статически неопределимой системы, возможен с помощью формул и приемов, изложенных в 9.1. Однако решение оказывается крайне сложным и трудоемким. Особенности работы кольца как циклически симметричной системы [7, 13] позволяют внести значительные упрощения и получить для усилий и перемещений более простые формулы.
Правила знаков для внешних нагрузок и внутренних усилий и для перемещений кольца остаются теми же, что и для кривого стержня (равно как и обозначения
этих величин). Они указаны на рис. 9.2 и 9.3. Сечение
кольца ориентировано
относительно плоскости кривизны произвольным образом, т. е. в общем
случае главные оси
инерции сечения повернуты на некоторый угол % (см. рис. 9.1,а). Характеристики жесткости сечения вычисляются по формулам (9.1) и (9.2).
Перемещения кольца как абсолютно жесткого тела сводятся к трем поступательным перемещениям и, V, до и к трем углам поворота йи, О®, относительно осей, показанных на рис. 9.12 (на чертеже показаны положительные направления перемещений).
Дислокации представляют собой сосредоточенные в каком-либо сечении кольца взаимные смещения правой и левой половин кольца. Разрежем мысленно кольцо в некотором сечении и сместим образовавшиеся в разрезе торцы в каком-либо направлении. Затем снова жестко соединим концы разрезанного стержня. В результате в кольце возникнет сосредоточенная дислокация в направлении произведенного смещения. Наличие дислокации ведет к появлению внутренних усилий и к упругой деформации кольца. Практически дислокации могут появляться в результате неточного соединения концов кольца при монтаже конструкции, либо вследствие местного нагрева. В ряде случаев понятием дислокаций удобно пользоваться при расчете колец с промежуточными шарнирами.
Обозначения дислокаций: Л — радиальная дислокация; А — вертикальная дислокация; 3 — продольная дислокация; Ф, Ч, 0 — угловые дислокации относительно радиальной, вертикальной и продольной осей соответственно.
На схемах табл. 9.20 показаны положительные направления дислокаций. В случае положительной дислокации впереди лежащее сечение (положительный угол а отсчитывается против часовой стрелки) сдвигается или поворачивается в направлении векторов, показанных на рис. 9.3.
Общие формулы для определения усилий и перемещений
колец, нагруженных сосредоточенными силовыми факторами
Приведенные ниже формулы справедливы при изменении а по участкам между двумя соседними силовыми факторами.
Продольная сила ы (а)(в “ 7г) °хф °ху] 005 “
[дгПху — ЛГу 51 п а — с2 Оху 2АТг,- соз(а — щ) -)-
г2Яг, зш (а — аг) ЪМу1 зт (а — — 2Р, 4 (а — а) 2Рг( Р3 (а — а). (9.35)
Радиальная поперечная сила _1 пг
Я (а) — [(2 — Чг) Их Фгйу] зш а
[АЛХ — вйху г] соз а] — [аг Оху 2Мг зт (а—а4)—
пг
■ ХМц1 соз (а — а)] -
1
у‘ ■ 2я
— 2Рг54(а — ®г)-
Вертикальная поперечная сила
(а 0Г) Т-
2 пг2 2лг
ИРг1 2РХ1 Р3 (а — а,-) — (9.36)
ЪМх1
— Т.Ру1 зт (а — а,) 2Ру1 Рг (а — а). (9.37)
П
Полный крутящий момент
С (а) — [ВгИу — АОху] соз а пг I
, 01к
2 г
- (Д г) [С?г —- 2) Оху — ФгГзш а
— 1 _ а2 о ) 2м215111 (а — а)
л
ЯМ Рз(а — а1) Шх( Р4 (а — а) —
— гЪРУ1 Р9 (а — а). (9.38)
Вертикальный изгибающий момент
I (а) [ВгИу — Оху] 31П а
[ФгЭу (2 — Уг) Эху] соз а
— й2 Оу Шг1 соз (а — а) Ш21
ЗТ 2 ЗТ
г2Ру1 Рь (а — а) ЪМх1 Р3 (а — а,) —
-ХМг1Р4 (а-«[). (9.39)
Горизонтальный изгибающий момент
1 ( С
Н (а) — [ЛОд. — вгОху] 31П а —2 ’Р
ПГ V [(■ -Е)йх ФОху Г] С05 СС ““ Шг1 -
2я
— — аг Оху 2Мг1 соз (а — щ) — гХРх1 Р (а — а;) —
зх
— г2Рг Рь (а — «г) Шу Рх (а — щ). (9.40)
9.2. КРУГОВЫЕ КОЛЬЦА
539
Бимомент
В (а)
1
[ ЭгОу — ЛД,] зш а [фгОу
(3 — 47) йху] соз а)
- (аг Оу — 1) 2Мг1 соз (а — щ) 4
зт (х2 -— 1)
г г2Ру Ри (а — щ) ШХ1 Р13 (а — щ) —
— ЪМг1Ры( а-а;). (9.41)
Момент стесненного кручения
к (а) яГГ) “ Л°1 С05 « [(Уг - Е) йху - ФгД, ] зш а
„■'1)' (1 — аг Оу) 2Мг, 5П (а — а,) —
— г2РУ1 Р13 (а — щ) Шх, Р1й (а — а,)
2Л„?„(-,). (9.42)
Момент свободного кручения
у2
к (а) “ГТГТТГ 1вг°у — л] соз а
пг (х2 1)
61к
[(■- 2) - ФгОу) 81п а — (Д вг)
И2
(1 — аг Иу) 2Мг( зш (а — а,) —
щ) ШХ1 Р20 (а — а)
я (х2 -(- 1)
- %Ру1 Р17 (а
2Л1г Р19 (а — а)
(9.43)
Угол закручивания
0 (а) — 00 соз а Ии з1п а Фа з1п а —
2я
- ва соз а -2а. Т1 2Л„ -
] а 2л
— га 2Р в (а — а,) — а 2А?,- (а — )
4 2Л12 (а — СС() тоху л 8 (а а) 4"
4“ 221 9 ®) А'Г 2М б (оь — ОС) —
2Р22(а — а) — 2А, 21 (а — щ)
01 к
01 к
4 л 2Л1г Рха (а а).
01 к
(9.44)
Вертикальный угол поворота
ф (а) — а соз а — 31П а
4- 0г (соз а — 2а2 Осоз а — а зт а — 1)
2яг
Фг (2а2 зт а — з1п а — а соз а) Л2а2 (2 Тг) 2а2 31П а — А 4-
7Г (а — I) — 2М2 31П (а — а) —
ии Я
гах 2Ру1 Ру (а а) -- 7 2уИд-:- 2 (а — а4) —
— ах ЪМг1 Р7 (а — щ) гаху ИРх1 Р7 (а — а,) —
гаху 2Яг 8 (а — ) Ч" 2М 4 (а — а) —
г2 г
— 2Р 23 (а — «) 2М 22 (а — а) 7 2г 21 (а — а). (9.45)
ик
Горизонтальный угол поворота
Т (а) — — Л соз а Н 31П а —
пг [_
— 'Уг 51 п а — гаху 2Ру1 Ръ (а — а,-)
аху ЪМх1 Р (а — аО — аху ХМг1 Р6 (аа—а()
тау 2РХ1 Р (а — щ) — гау 2Рг1 Р« (а — щ)
ау ШУ1 Р2 (а —а,). (9.46)
Продольное перемещение
(а) и 31П а — V соз а — г
[Ла 31П а — 2а соз а Ч (а соз а — а)]
г [таху 2Ру1 Р9 (а — а() — 2 Р8 (а — а,)
аху 2Лг (а — а) — 2Я; Р9 (а — а)
Ыц ЪР21 Р10 (а — ад — ау Шу( Рв (а — сц)]. (9.47)
Радиальное перемещение
Я (а) — и соз а — у зш а
[2 (соз а — а зш а) — Л (зт а а соз а)
2л
Тг (1 — а 31П а — соз а)]
г [— гаху 2Ру1 Р„ (а — а,) — аху Шх1 Рп (а — а,)—
— аху Шг1 Ра (а — а.) гау ЪРх1 РЙ (а — а,)
тау 2Рг,- Р» (а — щ) — ац ЪМу1 Рь (а — а)]. (9.48) Вертикальное перемещение
6 (а) — ш — и г зш а V г соз а
;т [в7, (а соз а — 2я2 Еу 31П а — а) —
- Фг (а зш а 2аг Оу соз а) (ХР — 2) 2аг Оху соз а 4- Л2п2Вху 51П а — Ла] --
— (1 — аг Оу) 2 Мг1 соз (а — а) л
4- г гах 2РУ1 Рз (а — щ) 4 ах 2Мх1 Рт (а — а.()
4- ах Ш21 Р8 (а — ае) гаху 2Рх1 Р8 (а — а) —
— гаху 221 (а — ) 4 я 2М Рь (а — а)
7ГГ ру1 24 (а — Щ) тт 2Л4Х (а ) — 0к 01 к
-2Жг Р„ (а - а,) ]. (9.49)
540
РАЗДЕЛ 9. КРУГОВЫЕ СТЕРЖНИ И КОЛЬЦА
В формулах (9.35)—(9.49) кроме введенных ранее приняты следующие обозначения:
0Х °2.
ах ау аху “Ь ау аг
Г
ху ’
ах ау аху “I- ау
ЯХУ_ ах ау аху “1“ ау аг
(9.50)
Функции влияния Л (а), входящие в формулы
(9.35) — (9.49), вычисляются следующим образом:
Рг (а) — (я — а — 2 51П а);
2я
1 я2 а2 (а)1т-яат-2со8а):
р3 (а) — а) соз а — -у зш а ;
Р4(сс)
— — Г1 — соз а — (л: — а) зша; 2л I 2 ]
Р5 (а) Р3 (а) — Рг (а); Ре («) Р (а) - Р, (а);
зш а я2 1
■ яа
а2
1 Гл —а.
'8(а) [_Т_5ша
1 л 3, а2,Т
4- — — — — яа — соз а — 1 ;
2 3 4 2 ) _]’
Рэ (а) (а) — Ъ (а);
Р10 (а) 8 (а) — (а); Ри (а) 7 (а) 3 (а);
12 (°0 8 (а) 4 (а)»
1
7а3(а)
14 (а) 15 (а)
Ри (а) ;
х2 1 1
х2 1 1
: х2 1 1
х2 1
Рц (а) б (а) — 13 (а)
Р18 (а) р2в (а) 22 (°0
20 (а) гз (а) — Р15 (а);
20 (а) ?4 (а) 16 (а);
[Рз (а) - 5 (а)]; [Р4 (а) - (а)]; [Рз (а) х22б (а)]; [4 (а) к2Р2в (а)];
(а)17 (а)з И» Р22 (а) [в (а) — (а)];
23 (а) — (а) Р21 (а)»
24 (°0 — 10 (а) 22 (а)»
25 (а)
Р26 (а)
зш а
зЬ х (я — а)
2 зЬ хя я (х2 1)
сЬ х (я — а) 1 соз а
2х зЬ хя 2ях2 я (х2 1)
Суммирование в формулах (9.35)—(9.49) ведется по всем силам и моментам, нагружающим кольцо, включая реакции опор кольца, определяемые из условий равновесия и условий совместности деформаций (последние используются в случае статически неопределимого закрепления кольца). Угол а—а» всегда отсчитывается от сечения, в котором определяется искомая величина, к сечению, в котором приложено внешнее усилие. При отсчете против часовой стрелки этот угол считается отрицательным. Всегда принимается минимальное расстояние между силой и сечением, т. е. угол а—а всегда меньше 180°. Поэтому функции Р вычисляются в интервале изменения угла от 0 до 180° при положительных значениях аргумента. Все функции делятся на две группы — «нечетные», обозначенные нечетными индексами
1, 3,., 25 и «четные», обозначенные четными индексами 2, 4,., 26. Все «нечетные» функции при отрицательном знаке угла а—а берут с противоположным знаком, например, вместо р7(—а) берут — р7(а). На знак «четных» функций изменение знака угла не влияет: вместо Р14 (—а) берут Р и (а).
В табл. 9.14—9.16 приведены значения функций Л( а), 2 (а), Л(а), Р4( а), Р7( а), ?в( а), Р2(а) и 26 (а) для значений угла а, меняющегося через 10°. Остальные функции выражаются через функции, приведенные в таблицах.
В случае, когда одна из главных осей инерции сечения лежит в плоскости кривизны кольца, аху —0, формулы (9.35) — (9.49) упрощаются и искомые усилия и перемещения распадаются на две не связанные между собой группы, одна из которых зависит только от нагрузок, лежащих в плоскости кривизны, а другая — от нагрузок, перпендикулярных плоскости кривизны.
Пример 9.6. Определить перемещения и нормальные напряжения в сечении кольца радиусом г 100 см, нагруженного, как показано на рис. 9.13, а, силами
5 500 кГ каждая. Площадь сечения кольца Р — 10 см2; момент сопротивления изгибу Р5 см2; момент инерции 25 см4; В — 2-106 кГсм2.
Определяем реакции опор из условий равновесия кольца: Оа —1,125500562 кГ; с62,5 кГ; Ус 500 кГ.
Перенесем все силы на ось кольца с добавлением соответствующих моментов и разложим каждую силу на радиальную и тангенциальную составляющие. Расчетные нагрузки показаны на рис. 9.13,6. Полагая сосредоточенные дислокации отсутствующими и учитывая, что аху — 0 и, следовательно, йху —0, по формулам
9.2. КРУГОВЫЕ КОЛЬЦА
541
Таблица 9.14
Функции влияния
а,
град
Рх(сс)
Ъ(а)
з(а)
4(а)
(а)
в(а)
0
0,5000
0,2053
0,5000
0,2387
0,0000
0,0430
10
0,4169
0,1253
0,4512
0,1555
0,0415
0,0391
20
0,3356
0,0596
0,3904
0,0819
0,0682
0,0293
30
0,2575
0,0080
0,3210
0,0197
0,0808
0,0161
40
0,1843
—0,0305
0,2468
—0,0298
0,0813
0,0018
50
0,1173
—0,0567
0,1712
—0,0663
0,0719
—0,0117
60
0,0577
—0,0719
0,0978
—0,0897
0,0550
—0,0228
70
0,0064
—0,0774
0,0279
—0,1008
0,0335
—0,0306
80
—0,0357
—0,0742
—0,0301
—0,1006
0,0100
—0,0344
90
—0,0683
—0,0654
—0,0796
—0,0908
—0,0123
—0,0342
100
—0,0912
—0,0514
—0,1170
—0,0735
—0,0329
—0,0301
110
—0,1047
—0,0342
—0,1413
—0,0508
—0,0485
—0,0229
120
—0,1090
—0,0154
—0,1522
—0,0250
—0,0583
—0,0135
130
—0,1050
0,0034
—0,1502
0,0016
—0,0618
—0,0029
140
—0,0935
0,0208
—0,1363
0,0268
—0,0589
0,0077
150
—0,0758
0,0357
—0,1120
0,0486
—0,0500
0,0173
160
—0,0533
0,0470
—0,0794
0,0654
—0,0363
0,0249
170
—0,0275
0,0541
—0,0412
0,0760
—0,0191
0,0298
180
0,0000
0,0565
0,0000
0,0796
0,0000
0,0314
— [Му1 51П (—60°) Муг зш 120°];
' [рх1р4 (0°) Рх2 Г4 (120°) Рг1Ръ (0°) РгцГь (-60°) Рг3Рь (-150°) Рг4Ръ (120°)] Му1Р1 (-60°) Му2Р± (120°).
(9.35) и (9.39) вычисляем продольную силу и изгибающий момент в сечении О:
МорХ1 (120°)
Р ХЛ Р X
2л
РггГ3 (0°) ГжшЪ (— 60°) Рг3Рз (— 150°) Р2Р3 (120°) — Рг1 81П 0° Я22 51П (— 60°)
71
Рг3 зш (— 150°) Р24 31П (120°)]
Рис. 9.13
Подставив значения функций Ри Р3у рА, р5 из табл. 9.14, получим: А —440 кГ; 2
6490 кГ'СМ. Максимальное нормальное напряжение в сечении Г
440 6490
°о — — — — 1340 кГсм2.
Произвольные постоянные и, у, в формулах (9.46) — (9.48) для перемещений вычисляем из условий равенства нулю продольных перемещений 1с и радиального перемещения Хс:
%Аи зш 0° - V соз 0°-атг гау [- тРЛР (60°) —
— гРх2 Р9 (180°) гР21 Р10 (60°) гР22 Р10 (0°)
гРг3Р10 (—90°) гРг4 Р10 (180°) — Му1 Рв (0°) —
— Му2Ре (180°)] 0;
1С и зш 180° — V соз 180° — Й г А-
IV 1
гау [— гРх1 Р» (120°) — гРхг Р9 (0°) гРг1 Ры (—120°) гРг2 Р1а (180°) гРг3 Р10 (90°) гРы Ры (0°) — Му1 ре (180°) — Му2 Рв (0°)] 0;
— и соз 180° — V зш 180°
га„ [гРх1 Рн (-120°) гРх2 РЙ (0°) гРг1 Р9 (—120°) гРг2 Р9( 180°) гРгз Ря (90°) гРг4 Ря (0°) —Му1 Рй (180°) -Му2Ръ0°) 0.
Подставив значения функций Р из табл. 9.14 с учетом знака угла и «четности» функции, после решения системы уравнений получим: и —10-5 см; а 5Х ХЮ-4 см; Й 0,5-10-6 рад.
Определив постоянные, вычисляем перемещения сечения по формулам (9.46) —(9.48): 1В 0,23 см; Ял 0,12 см; 1 3,5-10"4 рад.
542
РАЗДЕЛ 9. КРУГОВЫЕ СТЕРЖНИ И КОЛЬЦА
Таблица 9.15
Функция ВЛИЯНИЯ 25 (а)
а,
X
град
0
1
2
3
1 4
5
6 1
1 7 1
8
9
10
0
0,5000
0,5000
0,5000
0,5000
0,5000
0,5000
0,5000
0,5000
0,5000
0,5000
0,5000
10
0,4169
0,3920
0,3416
0,2907
0,2555
0,2068
0,1740
0,1462
0,1229
0,1033
0,0870
20
0,3356
0,2976
0,2370
0,1646
0,1174
0,0831
0,0586
0,0413
0,0290
0,0203
0,0142
30
0,2575
0,2156
0,1436
0,0880
0,0522
0,0304
0,0183
0,0096
0,0051
0,0026
0,0011
40
0,1843
0,1450
0,0828
0,0411
0,0248
0,0074
0,0021
—0,0003
—0,0013
—0,0016
—0,0017
50
0,1173
0,0852
0,0385
0,0121
0,0009
—0,0030
—0,0039
—0,0038
—0,0033
—0,0028
—0,0023
60
0,0577
0,0353
0,0060
—0,0060
—0,0086
—0,0079
—0,0065
—0,0052
—0,0041
—0,0033
—0,0027
70
0,0064
—0,0051
—0,0164
—0,0171
—0,0138
—0,0104
—0,0078
—0,0059
—0,0046
—0,0036
—0,0030
80
—0,0357
—0,0365
—0,0321
—0,0238
—0,0166
—0,0116
—0,0084
—0,0062
—0,0048
—0,0038
—0,0031
90
—0,0683
—0.0595
—0,0421
—0,0278
-0,0178
—0,0120
—0,0086
—0,0064
—0,0049
-0,0039
—0,0032
100
—0,0912
—0,0746
—0,0475
—0,0287
—0,0230
—0,0120
—0,0085
—0,0063
—0,0048
—0,0038
—0,0031
110
—0,1047
—0,0825
—0,0492
—0,0283
—0,0174
—0,0115
—0,0081
—0,о060
—0,0046
—0,0036
-0,0030
120
—0,1090
—0,0837
—0,0477
—0,0266
—0,0161
—0,0106
—0,0074
—0,0055
—0,0042
—0,0034
—0,0027
130
—0,1050
—0,0790
—0,0436
—0,0238
—0,0143
—0,0094
—0,0066
—0,0049
—0,0038
—0,0030
—0,0024
140
—0,0935
—0,0696
—0,0374
—0,0202
—0,0120
—0,0079
—0,0055
—0,0041
—0,0032
—0,0025
—0,0020
150
—0 Д)758
—0,0559
—0,0305
—0,0157
—0,0093
—0,0061
—0,0043
—0,0032
—0,0024
-0,0019
—0,0016
160
—0,0533
—0,0390
—0,0204
—0,0108
—0,0064
—0,0042
—0,0023
—0,0022
—0,0017
—0,0013
—0,0011
170
—0,0275
—0,0200
-0,0104
—0,0054
—0,0033
—0,0020
—0,0015
—0,0011
—0,0008
—0,0006
—0,0005
180
—0,0000
0,0000
0,0000
0,0000
0,0000
0,0000
0,0000
0,0000
0,0000
0,0000
0,0000
9.2. КРУГОВЫЕ КОЛЬЦА
543
Таблица 9.16
Функция влияния Р26 (а)
а,
град
к
0 1
2 3
4
5
6
7 8
9 10
0
0,2053
0,1815
0,1464
0,1170
0,0944
0,0814
0,0703
0,0619
0,0551
0,0496
0,0452
10
0,1253
0,1059
0,0739
0,0497
0,0337
0,0234
0,0164
0,0115
0,0082
0,0059
0,0040
20
0,0596
0,0460
0,0238
0,0108
0,0034
—0,0004
—0,0022
—0,0033
—0,0032
—0,0031
—0,0030
30
0,0080
0,0013
—0,0072
—0,0107
—0,0108
—0,0097
—0,0083
—0,0059
—0,0050
—0,0049
—0,0041
40
—0,0305
—0,0300
—0,0267
—0,0216
—0,0166
—0,0157
—0,0108
—0,0076
—0,0060
—0,0049
—0,0042
50
—0,0567
—0,0499
—0,0371
—0,0260
—0,0182
—0,0130
—0,0127
—0,0075
—0.0057
—0,0045
—0,0036
60
—0,0719
—0,0613
—0,0408
—0,0264
—0,0174
—0,0120
-0,0085
—0,0064
—0,0049
—0,0039
—0,0032
70
—0,0774
—0,0638
—0.0398
—00243
—0,0154
—0,0103
—0,0072
—0,0054
—0,0042
—0,0033
—0,0026
80
—0,0747
—0,0590
—0,0335
—0,0207
-0,0127
—0,0083
—0,0058
—0,0044
—0,0033
—0,0023
—0,0021
90
—0,0654
—0,0505
—0,0290
—0,0192
—0,0097
—0,0064
—0,0044
—0,0032
—0,0025
—0,0020
—0,0016
100
—0,0514
—0,0387
-0,0211
—0,0113
-0,0066
—0,0042
—0,0029
—0,0021
—0,0016
—0,0013
—0,0010
110
—0,0342
—0,0249
-0,0126
—0,0063
—0,0035
—0,0022
—0,0015
—0,0011
—0,0009
—0,0006
—0,0004
120
—0,0154
—0,0103
—0,0041
—0,0015
—0,0006
—0,0002
—0,0001
—0,0001
0,0000
0,0000
0,0000
130
0,0034
0,0040
0,0036
0,0030
0,0021
0,0016
0,0011
0,0008
0,0007
0,0005
0,0004
140
0,0208
0,0170
0,0110
0,0068
0,0044
0,0030
0,0022
0,0016
0,0013
0,0010
0,0008
150
0,0357
0,0280
0,0168
0,0100
0,0063
0,0042
0,0030
0,0023
0,0018
0,0014
0,0011
160
0,0470
0,0364
0,0212
0,0123
0,0076
0,0051
0,0037
0,0027
0,0021
0,0017
0,0014
170
0,0541
0,0415
0,0239
0,0137
0,0085
0,0057
0,0040
0,0030
0,0022
0,0018
0,0015
180
0,0565 0,0433 0,0258
0,0141
0,0088
0,0059
0,0042
0,0031
0,0025
0,0019
0,0016
544
РАЗДЕЛ 9. КРУГОВЫЕ СТЕРЖНИ И КОЛЬЦА
Кольцо с исчезающе малой жесткостью свободного кручения.' Изгибно-крутильная характеристика х 0, первые двенадцать функций Р(а) остаются неизменными, а остальные будут равны:
Р13 («) Рз (а) — Р25 (а); Ри (а) 4 (а) — 6 (а);
Р1В (а) (а); 16 (а) 4 (а);
17 (а) О Р18 (а) Р19 (а) 0; Р2о () 0;
Р21 Ф 722 (®0 23 (®0 0» Р24 ()
л— а зта Р2ь (а) Рг (а) —— — —— ;
2л л
1 л2 а2 Р2в (а) Р2 (а) — I — —яа—2соза 1.
Эти значения функций следует подставлять в формулы (9.35)—(9.49) при вычислении усилий и перемещений тонкостенного кольца с ничтожной жесткостью свободного кручения.
Кольцо массивного сечения. Жесткость свободного
кручения намного больше жесткости стесненного кручения. В пределе изгибно-крутильная характеристика оо. Используя формулы (9.35) — (9.40), следует учесть, что первые двенадцать функций Р остаются неизменными, а остальные принимают следующие значения:
Р 1§ (а) 0; Р14 (а) 0; Р15 (а) 0; Р16 (а) 0;
Р17 (а) Р5 (а); Ри (а) Рщ (а); Рп (а) Р3 (а); Рго (а) Р4 (а); Р21 (а) Рч (а); 22 (а) Рб (а);
(а) Р9 (а); 24 (а) Р10 (а);
25 (®0 Р2в (®0
_ При этом бимомент и момент стесненного кручения К тождественно равны нулю, а К—К.
Кольцо с тонкостенным или массивным сечением, нагруженное силами и моментами перпендикулярно плоскости кривизны
Если одна из главных центральных осей инерции сечения лежит в плоскости кольца, то аху 0, и для определения неизвестных силовых факторов 20, Ко, -о, Во
Таблица 9.17
Формулы для определения начальных параметров в кольце
аг« з Два
Общий случай нагружения1
Вид нагрузки
изгибающие моменты
крутящие моменты
Тонкостенное или массивное кольцо
Э — 2Р. а. Н — 2М,
О I о XI
1
2яг
2я
?п
2 яг
• 2Л1
л:
?„
“ г?0 — ™Х1 СС зт а, 81п а,; 4- аг- соз
гРу1 (зт соз аг0 ]
соз аг-
— ГР.
2я
-1 2М„, а,- зп а,
2я Л'п — 2Л1. а; соз а
0 2я ‘
— [2Мх. (зп а,- а, соз а,) — зп а( с2 соз а- гу1 а1 5п а1
1-0 — 2Р а, зш а,
2я
2МХ1 а1 соз а1
— З1п а
2я
тонкостенное кольцо
в __ ь —— Г хм. вькх
0 К 1 1 2 зЬ ия I х‘
X (я — а) — сЬ х (я — а-) —
к(я-аг)]
3о-и. 1 [о
2к зЬ хя
X ЪРу1 СЬ
2 зЬ хя
X зЬ
ч(я-а,.)]
1
2 зЬ хя
X сЬ
X (я — а?) — х2М. зЬ х (я — а•) —
'•-«-гЬ
2 зЬ хя
X 2Р. зЬ
К (71 - а(.)
0 и3 1 [
к
к«
X
2 зЬ хя
X сЬ х (я — аг)
А'о [— ГФ0 “Ь
0 ха 1 I 0
х2
2 зЬ хя
X 2М. зЬ
х (я — а.)
1 Если 1 — 1 (рис. 9.12)— ось симметрии нагрузки, то ?0 К0 0 0» если 1 — 1 — ось антисимметрии, то — В0 0.
9.2. КРУГОВЫЕ КОЛЬЦА
545
Т а б л в а а 9.18
Формулы для расчета массивных и тонкостенных колец
Схема нагружения
Внутренние усилия
Наибольшие значения внутренних усилий
ЪХ2
О а —
2
Ь (а) — соз а: 2
К (а) зп а
2
В (а)
Кг
2 х2 1)
(соз а — сЬ ха
-• )
й» 0,5К;
а0 -
(т)
Л(т-)-Т°.Яй
2(ч-
Кг
—
2 (ха 1) 2
О а а»
? (а) — 0;
Рг
Ь (а) (1 — зп ах) соз а:
Рг
С (а) — (1 — з1п ах) зп а
2
Рг5 I
В (а) х (1 —
2х (х2 1)
зп а») соз а —
сЬ ха
а» а —
Р
С? (а) —
2
Рг
(а) — — (соз а — соз а зш а):
2
Рг
К (а) (з1и а 4- соз а соз а — 1):
2
В (а)
Рг
2х (х3 1)
х (соз а — соз зп а) 4-
2 зЬй
4- зЬ х (а — аг) —
“(т-т)
сЬ ха
Ъ -
в °5 003 а1 Г
К (ам) — 0,5 (Г 4- соз3 а, — 1) Рг; сЬз ам 005 аг; ам аг;
Рг3
2х (х3 4- 1)
X (1 — 51П аг) —
2 зЬа
сЬ хаг
. хл зЬ — х соз аг
546
РАЗДЕЛ 9. КРУГОВЫЕ СТЕРЖНИ И КОЛЬЦА
Продолжение табл. 9.19
Схема нагружения
Внутренние усилия
Наибольшие значения внутренних усилий
Схема 3
О а —
2
р
О (а) —;
2
Рг
Ь а) — (соз а — зш а):
рг
К (а) (зш а 4- соз а — 1)
2
В (а) ■
2х (х2 4- 1)
(т-а)
х (со? а —31П а)—
Н г,
сЬ-
и - . о.5Рг:
К -2- — 0.2071РГ
— 2 ) 2н (X2 1) 4 Схема Ч
О а а,
(а) Рг соз а, зш а;
К (а) — Рг соз а, соз а — 1 4- ;
В (а) ■
Рг2
х (х2 1)
х соз а 31П а—
зЬ
зЬ ха
зЬ -
а2 а л — а».
0(а) Р
Я
(а) Рг зш а, соз а;
К (а) Рг — зп а, зп а);
В (а)
Яг2
х (х2 4-1)
х зп соз а —
_1И5Ьн (— а
8Ь 2 )
а, ■
Ь (а,) -0,5 31П 2а, Рг;
2а»
Со — 1 _ соз аг Рг;
к(т) (т-8па‘)Рг:
макс В (ам) уравнения для ам
а„ а,
зЬ
х(т-а)
сЬ хам;
соз а зЬ
зш ам
ам а
зЬ хаг
зш аг зЬ
9.2. КРУГОВЫЕ КОЛЬЦА
547
Продолжение табл. 9.18
Схема нагружения
Внутренние усилия
Наибольшие значения внутренних усилий
г? У,6,8,
1 т кратные
О а ах
(2(а) —;
2
з1п
Ь (а) — • 2 а,
й—).
соз ■
К (а)
В (а) -
Яг
Яг2
(т-“)
2х (к2 1)
зп
(т-)
зЬ х
сЬ
ха.1
1о — — (а4) 0,5 1д — Рг;
2
(•-)- адцй-цй.,
В0 — В (ах)
Яг2
2х (х- 1)
0 а —
2
Я
(2 (а) — а;
(т)-»'
3183Яг;
I, (а) Яг соз а М ;
2 я К (а) — Рг I— зш ;
V л 2 )
К (50°28') — 0,1052Яг;
Во Яг2
1
-4г
2 (х3 1) ПК 1
В (а) Яг2
2 (х2 1)
2х(х21) зЬ —
2
сЬ ха
2х (х2 Н- 1) зЬ —
2
(т)-
Яг2
оь :
1
_ 2х (X2 4- 1) лх2
Схема ?
в (а) ■
0 а —
2
2 (а) — (0 а 2я); яг
(а) — 2 зш а;
Л г
2(х9Н-1)
(зЬ ха. зп а ;
-■ )
1 (т)Т0,5Л:
К 0,3183Л ;
Вмакс В (“м): уравнение для ам
К (а) Л ( — соз а
я 2 )
- сЬ ха„
зЬ-
548
РАЗДЕЛ 9. КРУГОВЫЕ СТЕРЖНИ И КОЛЬЦА
Продолжение габл. 9.1Н
Схема нагружения
Внутренние усилия
Наибольшие значения внутренних усилий
I. (а) — К ( — со а 4- зт оЛ ;
я 2 )
К (а) К соз а — — зт а ;
и я В (а)
К г
2 (ха 1)
, 2с1
зш а 4 1 соз а •
л
сЬ ха
хзЬ х а
сЪ
Сх О
а ;
" 2е,
К. ±0,5К
с,0
(т)-
,5К;
т4 I
Т 7К;
а — — ; м я
— ]
2(х94-) л 2 сЬ—
Схема 9
А Рт
Рг -К
I, (а) К — соз а; я
К (а) К — зпа ;
В (а) Кг
я (ха 4-1)
5Ъ
"(т-)
2х сЬ -
I., — К;
Я
К. ±0,5К;
В0 Кг
[. “т
_я(ха4-1) 2 Л
Примечание. В третьей колонке даны наибольшие значения I., К и В.
у.2. КРУГОВЫЕ КОЛЬЦА
549
()
X 1,40
Рис. 9.14
и Со в каком-либо сечении, принятом за начальное (начальных параметров), или для раскрытия статической неопределимости кольца можно использовать формулы из работы [23], приведенные в табл. 9.17. Суммирование в формулах табл. 9.17 ведется по всем нагрузкам на кольцо, причем все углы а» отсчитываются от точки 02 против часовой стрелки (см. рис. 9.2 и 9.12). Если внешняя сосредоточенная нагрузка приложена в точке 02, то она делится пополам, прикладывается справа и слева от точки 02 и учитывается как местная нагрузка при ог0 и а,2л. При наличии распределенной нагрузки суммирование на соответствующем участке кольца заменяется интегрированием. Последующий расчет кольца можно вести по форхмулам (9.5) — (9.16) для круговых стержней.
В табл. 9.18 для некоторых наиболее часто встречающихся схем нагружения кольца приведены значения внутренних силовых факторов при любых углах а, а также наибольшие значения моментов и бимоментов [23]. В табл. 9.17 и 9.18
1
п— 1 — —
X2 АП
Сх “ » С 2 '
1
п 1 •■ 0
х2
ей 01 к
(для массивных колец 1х20).
Пример 9.7. Стальное опорное кольцо, нагруженное крутящими моментами КЮ0 Тм по схеме 1 (табл. 9.18), имеет корытное сечение (см. рис. 9.1,6) с размерами: высота и толщина стенки 170 и 5,5 см; ширина и толщина полок 30,5 и 15,5 см. Необходимо определить нормальные напряжения а и наибольший угол закручивания 0 кольца. Геометрические характеристики сечения [1]: радиус центра изгиба г 219 см 1Х 7,03-106 см4 Г 8,27-104 см3; к 7,43-10б см 6,04-108 см% секториальная координата наиболее опасной точки 1 (см. рис. 9.1,6) 0)1 1312 см2. Изгибнокрутильная характеристика
8105-7,43.104
х 219 1 1,49.
V 2,1 1066,04108
Определим начальные параметры. В данном случае
имеется ось симметрии нагрузки , поэтому начало отсчета углов а примем в точке 02 на этой оси. По
табл. 9.17 (20 КоКс 0. Остается определить
я
и В0. Имеем: I— 1; а1 ; И1 К;
I 2; а2
Зл ;
Мг2 К; при этом
1 тг л л, Зл. Зл К
и — 1КТ5‘"Т ,'Т“Т)-Т'
х2 1 2 2 зЬ хл [ 2 ]
КсЬк(я-)] -
Кг
2х 1)
Далее по зависимостям (9.6)—(9.11)
К х зЬ ха (а) 2 V 1 ( хп
5ЬТ
Ь
зт а
К (а)
К
х2
2 (х2 1) I, хл
5ЬТ
зЬ ха зт а .
Остальные формулы приведены в табл. 9.18. По этим формулам на рис. 9.14 построены эпюры 1(а), С(а), К (а) и К (а) в долях К и В (а) в долях Кг при к 1,49.
Наиболее опасным оказывается сечение, где а0 (в сечении, где а л2, расположена цапфа). Тогда 1о 0,5-10050 Т-м; В00,11 • 100-2,19 24,1 Т-м Наибольшее нормальное напряжение возникает в точке 1 сечения, где по принятому правилу знаков изгибающий момент создает сжатие, а бимомент — растяжение:
Формулы для определения начальных параметров в массивном кольче
550
РАЗДЕЛ 9. КРУГОВЫЕ СТЕРЖНИ И КОЛЬЦА
сх н о с; с о
X о
« ч с
ГЧ1ГИЭ
Д1ЯНЧ1ВМ
-илс1эн
Л2н
Ч СС
лхо ф
ь?
3
та Ч
о
О п
о.
С р.
с1хэмвс1 -ВП у1ЯВЧ1ГВЬВН
I
о
'» §оо гуц2 X
I “Г и лг
"Ж ’ т
'х и»5 лот? — °д
;Г) Щ5 'Ъ 1ХсГЗ —р °л
?Х 800 ?2с3 —— °Ы
8
гГ
1
п
«0
гГ
N
о
«X.
о
сГ
1
8
а.
8
?Г
со
О
сЛ
0
сГ
1
8
СЛ
1.
1
сГ
гГ
а.
1
II
О
:
о.
ч-
и
ч
1
И
II
о
о:
я.
ъ и 18 • X 1 4- V т —-Г-0
чоо Ъ 500 'Г)
Л;
'70 и5 ?70 г1Х гГ
гГ
о.
м
8
8
со
О
и
гГ
ч
о,
м
м
-I
I
о
ск
8
о,
И
ИГЗ
вх.
Щ
I
II
4
II
а:
II
Ж2
Пх,
1Г?.
I
77
» иге
«г
Г
4- V -
?2сХ—
о
н
«X.
8
и
V»
1
Н
8
—'
1 К
0,
1
н
к»
8
1
-5
0 «
1 И
о
а;
о.
м
«V
I
гГ
о.
с?
с
й)
СХ.
со
з II 3
Ч. о О 2 0-11 Ф СУ а
(рис. 9.12) — ось симметрии нагрузки, то ?0 ?0 К0 0; если — — ось антисимметрии, то
9.2. КРУГОВЫЕ КОЛЬЦА
551
±0. ±Г Я0СО,
05 и
50-10» 94,1.10’. 131?
8,27•104 6,08-10й
460 кГсм.
Касательные напряжения свободного кручения по сечениям согласно 'мпюре С (х) невелики.
Наибольший угол закручивания 0 имеет место в сечениях, где к кольцу приложены крутящие моменты ([23]:
0 Т К' 77 сз ).
8 Е1Х 01к у?
где с3
(Х2 1)2
4к хя 1_-си,т).
Для массивных сечений съ— 1. В нашем случае при х1,49 Сз — 0,276 и 0 — 0,004 рад — 14'.
Кольцо массивного асимметричного сечения, нагруженное произвольными силами и моментами
Для определения неизвестных силовых факторов М0, До, о, Фо, и Со в каком-либо сечении, принятом за начальное (начальных параметров), или для раскрытия статической неопределимости кольца можно использовать формулы из работы Г24]. В табл. 9 19 приведены выражения для М0, ?0 и Н0. Величины ?о, Ц и Со и в этом случае определяются по зависимости из табл. 9.17. Последующий расчет кольца можно вести по формулам (9.3) — (9.17) для круговых брусьев. Некотооые дополнительные данные можно найти в работе [2].
Напряжения в кольцах, вызванные наличием дислокаций
Внутренние усилия, возникающие в кольцах благодаря наличию дислокаций, определяются первыми ела гаемыми формул (9.35)—(9.43). Коэффициенты ), входящие в эти выражения, определяются формулами (9.50). Угол а отсчитывается от места расположения дислокации до текущего сечения. При наличии нескольких дислокаций производится суммирование усилий от каждой дислокации. В случае распределенных дислокаций суммирование заменяется интегрированием по участку. на котором распределены дислокации.
В табл. 9.20 приведены усилия, вызываемые в кольце наличием сосредоточенных дислокаций различных типов.
Пример 9.8. Стальной прокатный уголок Ю0Х100Х Х1П мм согнут г» виде кольца радиусом 100 см. Образовавшийся при этом зазор шириной 2 1 см ликвидирован путем подтяжки свободных торцов вплотную друг к другу с последующей сваркой в месте стыка. Вычислить внутренние усилия, возникшие в кольце: Е 2-108 кГсм2; О — 0,8 10е кГ1см2 (см. схему 3 табл. 9.20).
Характеристики сечения (ГОСТ 8509—57): Р
19,2 см2; 1Х 1У —179 см4; Iг 284 см4; уГ 74,1 см4; Iху — —105 см4;
Таблица 9.2'»
Усилия в кольце от сосредоточенных дислокаций
Р'ИД дислокации (схема нагружения)
Ьвутревние усилия
Ла)«0; Н (а. .
°'к
0«а,- Л.
С1
«“ 2л“ '
Ь 1а) о-,1 0-
Ка) » В «а) «0
о
N а) — — зт аЛ; лгл
К (а) — -—у созал. г«х)—о
ПХУ
К «а) — -■ со» аЛ; яг
°хи
6 (а) • зт аЛ;
пг
Г
а) —— зш аЛ;
ЯГ
в)-, 008 аА; °хи
В а) — ■, ч 8п аЛ я (чя 1)
пх
Л4а -рг 005 а3’
? а) —— ш аа; ? (а) 0: ЯГ
г
К (а) — —зт аЗ. яг
И,
Ь а) —2- соз ан; яг
ГУХ
Н (а) соз аЗ;
яг
а,“ яг х“ 1) 8,П В,а,-п,х»,» 003 а3:
N (а) —соз аФ;
ПГ
К а) зш аФ; 3 (а)
яг
°и
К (а) зп аФ
Л
Ь а) —— соз аФ я
°хи
Н (а) —соз аФ,
Л
а) — я (х 1 5,ПаФ: ва,-я,х» 1) СОЯаФ
552
РАЗДЕЛ 9. КРУГОВЫЕ СТЕРЖНИ И КОЛЬЦА
Продолжение табл. 9.20
Вид дислокации (схема нагружения)
Внутренние усилия
N (а) соз а'Р.
°г
К (а) —— 31 п аУ; пг
2 (а) 0:
'7)
К (а) °хи «йпаф-;
7
°и
С (а) —соз аФ“; п
ох
И (а) —— соз аФ; п
К (а) —, зт аУ; я (к -н 1)
ГОг
В (а; т—г: г 008 аЧ
я(ха-М
А' (а) —И— 51(1 ав; ш
°ги
Я (а) —- соз ав;
пг
01
К (а) соз а Н ] в;
°и
С(сс) зш ав;
я
1
1
Н (а) -— °хр зш ав °и
К (а) —■ ■.■■■■—■— соз аО; л (х -4- 1)
г°и
а) —-«т1 51п
71 (к 4-
100-179
о., -
2.10».284.74,1
100 (—105)
0.425-10-6; ау 0,425- 1Г-Ь;
2.1028474,1
- 0,2510
Пс формулам (9.50) О 2,37«10е; Оху — —0,03-1Э6. Из габл. 9.20 для кольца с дислокацией Н
соз а
А (а 1.2,37-10—— 75 соз а кГ я 104
(а) 1 •2,37»10в
К (а) 1-0,0310»
5та я-10
75 51П а кГ;
1па я-100
100 5Ш а кГ.см;
соз а
(а) 1 «0,03 10е 100 соз а кГ см
п-100
Н (ос) — 1 «2,37 106 соз а —7500 соз а кГсм, В (а) К (а) 0.
Наибольшие напряжения действуют в сечениях при а 0° и а180°, где изгибающий момент Н достигает максимума.
Кольцо на упругом основании
При произвольной внешней нагрузке на кольцо, опертое на трехмерное упругое основание с шестью [27] или с двумя [26] постоянными коэффициентами упругого основания, решения для кольца могут быть получены из обыкновенного дифференциального уравнения восьмого порядка (или двух уравнений 6-го и 2-го порядка) для перемещений с помощью рядов Фурье, однако эти решения еще почти не изучены. Упругим основанием может служить грунт, на котором лежит кольцо, либо тонкая оболочка, к которой прикреплено кольцо, являющееся для оболочки элементом жесткости. Если сосредоточенные силы и моменты, приложенные к кольцу, уравновешиваются реакциями оболочки или грунта только в виде сил, распределенных по окружности кольца, то и в этом случае закон изменения реакции упругого основания может быть весьма сложным, если жесткости кольца и основания соизмеримы [5, 14].
Если в первом приближении кольцо считать по сравнению с основанием абсолютно жестким, то реакция оказывается распределенной по синусоидальному (или косинусоидальному) закону. В случае сил, перпендикулярных плоскости кольца, можно считать, что реакция основания сводится к отпору р(а), перпендикулярному плоскости кольца. В случае нагрузок, деформирующих кольцо в его плоскости, реакция упругого основания или оболочки, которую это кольцо подкрепляет, сводится к касательным усилиям 7(а), уравновешивающим внешнюю нагрузку. Если в силу конструктивных особенностей прикрепления кольца к упругому основанию реакция основания оказывается приложенной на расстоянии I от оси кольца, то возникают дополнительные распределенные моменты ту(а)(а), когда кольцо нагружено в плоскости кривизны и т2(а) р(«), при нагрузках, перпендикулярных плоскости кривизны. В табл. 9.21 приведены значения внутренних усилий, возникающих в кольце под действием сосредоточенных сил и моментов. Эксцентрицитет I распределенной реакции считается положительным, если реакции смешены относительно оси кольца от центра кривизны 0.
Реакции, перпендикулярные плоскости кольца, изображены кружками с точкой в центре, если они направлены вверх, и кружками с крестиком, если они направлены вниз (последние три схемы табл. 9.21). Сосредоточенные моменты изображены волнистой стрелкой (направление вращения показывается дуговой стрелкой). Значения внутренних усилий, приведенные в табл. 9.21, выражаются через функции влияния Р(а), величины которых можно вычислить по формулам (см. стр. 540) или с помощью табл. 9.14—9.16.
Значения усилий и перемещений для других частных случаев нагрузки можно найти в справочниках [15, 16 и 25].
9 2. КРУГОВЫЕ КОЛЬЦА
553
Т а б л и ц а 9.21
Усилия в абсолютно жестких круговых кольцах на упругом основании
Схема нагружения
Формулы для усилий в текущем сечеинв
ч (а) а
' зт а;
А (св) Р «г) — (I соз ос) — —— соз а I;
гя 2лг
-М
Я (а) Рх
(а) зт
пг
? (а 0; (а) О; К (а) 0;
Н (а) — Рх г?4 (а);
В «а) в 0: К 0
«“ -' “' -Го К « "ЦГ о 1
Л (а) Р? А’э (о) 1— зт а;
(а) Р I—со8 а — Рл а) 4-
I пг 2я (г 4- ) (а) 0; ь а) О; К (а) 0; м (а) РгП ъ (а);
В (а — 0; К (о ) — 0
«а
Ми
N (а — —2- 51П а;
ЛА
(а) —■ (— 2соза;
2яг V 4- (а) 0; Ма) 0; К а) 0;
Н (а) -2- (2 з»п а — а);
2л
в«)0; Ка) 0
р (а — —— 14- соз сЛ Р 1 2л г 1 ) N (а) - °ху. —-— л, " 4-
Р,. соз а;
Я (а)
(? (а) ан - зп а Р
к,а) [-« °„?0у- ■ ГТТ 8,па] ГР'Г
:№) [4(оН- ф- - со5а5г]г»
н (а) т (-§7“ а) "V
в Г 1 — а9 Огл, 7
а) “ [ ли1, • — 5па- гИ°]'V
в а “ свз “ а) 1,а р
554
РАЗДЕЛ 9. КРУГОВЫЕ СТЕРЖНИ И КОЛЬЦА
Продолжение табл. 9.21
Схема нагружения
Формулы для усилий в текущем сечении
р (а) -
1
ЛМ ос)
Я (а)
О (а)
Лг (г-- )
аг
я [Г -I- Ь аг ®хц
л (Г I)
1
л (г 4- П
со, а М?;
■ соз а М„
зт а Л
а М ;
К (а) —— • 7Г7 3п а ] Мг
■ ГТ7с08а-25Г Г4 ()] Мг:
" (а’- т [“5г°г 0x9 С08 а]Мг:
“ [тйлт • гЬ зп а '» (а ]
В (а' (ййпг • ТГ7 соз а - 1в(а)] гМ,
р (а)
лг г 4- о
■ зш а М ;
о9 йу. N (а) ■■■%- • 77 зШ а М.;
а, О., 1
Я (а) ' —;—г 008 а
р 00 —-— 11 —— соз а 1 М •
2яг I г 4. ]
к («) [гР1 • с03 а 4 (а) [ Мх;
Ь (а) — и ■ ру 81п а „ (а) Мх;
° 11 1
И (а) ——• —— зт а М„;
я г 41 х
Т(а) 1%° п ' ТГс05а Г1«(а)]
в а) “ Кп' • -г75П а г««]
ЛИТЕРАТУРА
555
ЛИТЕРАТУРА
1. Беляев И. М. Сопротивление материалов. ГИТТЛ, 1958.
2. Б е р к м а н Б. А. Деформация замкнутой рамы переменного сечения под действием произвольной периодической нагрузки. «Энергомашиностроение», 1965, № 1.
3 Биргер И. А. Расчет колец. В сб.: «Расчеты на прочность», вып. 10. Машиностроение, 1964.
4. Биценко К. Б., Граммель Р. Техническая динамика, т. 1. Гостехиздат, 1950.
5. Бояршинов С. В. Изгиб кольца, опирающегося на упругое основание. ИВУЗ. «Машиностроение», 1967, № 4.
6. Григорьев Ю. П. К расчету кривых тонкостенных брусьев. В сб.: «Расчет пространственных конструкций», вып. 1. Машстройиздат, 1950.
7. Григорьев Ю. П. Формулы и таблицы для расчета тонкостенных круговых колец. В сб.: «Расчет пространственных конструкций», вып. 2. Госстройиздат, 1951.
8. Гучков В. В. Формулы и графики на прочность и жесткость монорельсовых балок на закруглении. Сборник ВНИИПТМАШ «Новая подъемно-транспортная техника». Машгиз, 1948.
9. Д е м и д о в С. П. Расчет на прочность плоского кривого бруса прямоугольного поперечного сечения, нагруженного силами, перпендикулярными плоскости кривизны. В сб.: «Расчеты на прочность элементов машиностроительных конструкций», вып. 33, МВТУ. Машгиз, 1955.
10. П о н о м а р е в С. Д. Бидерман В. Л. и др. Расчеты на прочность в машиностроении, т. 1. Машгиз, 1956.
11. Попов А. А. Сопротивление материалов. Машгиз. 1958.
12. П о п о в А. А., Орлик А. С., Пономарев С. Д. Расчет кривого бруса. ГТТИ. 1933.
13. С е г а л ь А. И. Расчет замкнутого кольца как статически определимой системы. В сб.: Исследования по теории сооружений», вып. Л”0 3. Госстройиздат, 1950.
14. С е г а л ь А. И. К расчету кольца и балки на упругом
основании. Сб. научно-исследовательских трудов МИ ИКС, вып. 4, 1947.
15. Справочник машиностроения, т. 3. Машгиз, 1951.
16. Справочник проектировщика. Расчетно-теоретический том., Госстройиздат, 1960.
17. Т и м о ш е н к о С. П. Сопротивление материалов, т. 2, 1965.
18. У м а н с к и й А. А. Пространственные системы. Стройиздат, 1948.
19. У м а н с к и й А. А. Теория и примеры расчета на прочность монорельсовых балок на закруглении. Сборник
ВНИИПТМАШ «Новая продъемно-транспортная техника». Машгиз, 1948.
20. У м а н с к и й А. А. Специальные расчеты монорельсовых балок. Сборник ВНИИПТМАШ «Новая подъемно-транспортная техника». 1948.
21. У р б а н И. В. К вопросу о расчете кривых брусьев. Труды МИИТ, вып. 1, 1956.
22. Ш и м а н с к и й Ю. А. Строительная механика подводных лодок. Судпромгиз, 1948.
23. Ш у с т о р о в и ч В. М. Расчет на прочность опорных круговых колец. «Вестник машиностроения». № 5, 1966.
24. Ш у с т о р о в и ч В. М. Расчет круговых колец с асимметричным поперечным сечением на произвольную нагрузку. Труды I Всесоюзной конференции по расчетам на прочность металлургических машин. ВНИИМетмаш, сб. 23, т. 2, 1969.
25. ЭСМ т. 1, кн. 2. Машгиз, 1948.
26. Р о с1 г 1 д и е г О. А. ТЪгее сПтеп5юпа1 ЬепсПпя о а Нпег
оп ап е1аз11с ГоипйаНоп. Л. Арр1. МесЬ., 28, 461—463, 1961,
[Родригес Д. А. Трехмерный изгиб колец на упругом основании. Прикладная механика, серия Е, № 3. 1961, стр. 167 (русский перевод)]
27. АУ е 11 е г Р. С. АпаНз1з о а пп.? оп а 1Ъгее 1ипеп5юпа1 еазис 1оипсЫюп. 1оигпа1 о? Зрасесга?: ап1 Коскез 1966. уо1. 3, Л 2, р. 285—287.
РАЗДЕЛ 10
ФЕРМЫ
10.1. ПЛОСКИЕ ФЕРМЫ
10.1.1. Основные положения расчета
Элементы. Совокупность стержней, ограничивающих контур фермы сверху, образует верхний пояс, а снизу — нижний пояс. Внутренние стержни фермы образуют ее решетку.
Порядок расчета. Расчетом определяются опорные реакции и максимально возможные значения усилий в каждом из стержней от постоянной и временной нагрузок. В статически неопределимых фермах реакции и усилия определяются также и от температурных воздействий. При необходимости определяются перемещения узлов от нагрузки и температурного воздействия.
Порядок расчета статически определимых ферм:
1) составление (вычерчивание) расчетной схемы;
2) проверка геометрической и мгновенной неизменяемости; 3) определение нагрузок; 4) определение опорных реакций; 5) определение усилий; 6) подбор сечений элементов; 7) определение перемещений (при необходимости).
Порядок расчета статически неопределимых ферм: пп. 1—3 — как для статически определимых; 4) предварительное определение сечений элементов на основании практического опыта или путем приближенного расчета (при определении усилий от нагрузки достаточно выяснить лишь соотношение между площадями сечений элементов, а при определении усилий от температурного воздействия надо знать фактические площади);
5) определение усилий; 6) проверка сечений; 7) уточнение расчета в случае, если разница между предварительно принятыми и фактическими сечениями велика; 8) определение перемещений.
Усилия и реакции в статически определимой ферме могут быть найдены с помощью уравнений статики: трех — в плоских, шести—в пространственных фермах. Для расчета статически неопределимых ферм условий статики недостаточно.
Условия статической определимости: плоских ферм С—— пространственных ферм С—ЗУ 0. Здесь С — число стержней фермы, включая опорные; У — число узлов фермы, включая опорные (узлы, принадлежащие земле, в счет не входят).
Если левая часть равенства больше нуля, ферма статически неопределима и полученное число показывает необходимое количество дополнительных уравнений; если левая часть меньше нуля, ферма геометрически изменяема.
Нагрузки. Как правило, нагрузка прикладывается в виде сосредоточенных сил к соответствующим узлам фермы. Собственный вес фермы прикладывается к узлам верхнего пояса, а при наличии подвесного потолка (или подвесных грузов) он распределяется пополам между узлами верхнего и нижнего поясов. Ветровая нагрузка прикладывается в виде грузов, нормальных к кровле.
Для большинства стропильных ферм невыгодные комбинации нагрузок исчерпываются загружением всей фермы постоянной и временной нагрузкой и затем всей фермы постоянной, а полупролета — временной нагрузкой. Из этого правила бывают исключения; например,
для стойки полигональной фермы невыгодным будет загружение временной нагрузкой по рис. 10.1.
Усилия целесообразно определять от единичных сосредоточенных нагрузок; при симметричных фермах в большинстве случаев достаточно определить усилия
Рис. 10.1
от единичных грузов на полупролете, при несимметричных — на полупролете слева и справа и затем использовать способ наложения.
10.1.2. Определение усилий в статически определимых фермах при неподвижной нагрузке
Установление неработающих стержней и стержней, усилия в которых определяются местной нагрузкой
Возможны следующие случаи (рис. 10.2):
1) узел имеет два стержня, и внешняя сила к узлу не приложена — усилия в обоих стержнях равны нулю (узел );
2) узел имеет два стержня, и к узлу приложена внешняя сила или реакция, направление которой совпа¬
дает с направлением одного из стержней, — усилие в нем равно внешней силе и направлено в противоположную сторону (узел 2, У А) в другом стержне усилие равно нулю (узел 2, 10);
3) узел фермы имеет три стержня, из которых два лежат на одной прямой, а третий направлен к этой пря¬
10.1. ПЛОСКИЕ ФЕРМЫ
557
мой под произвольным углом, и к узлу внешняя сила не приложена, — усилия в первых двух стержнях равны, а третий не работает (узел 3 62 з Уз 0);
4) если в предыдущем случае к узлу приложена внешняя сила, действующая в направлении третьего стержня, то усилие в нем численно равно внешней силе, а знак определяется нагрузкой; усилия же в стержнях, лежащих на одной прямой, равны между собой (узел 4, У2 —Р, 0 — 02)
5) узел фермы имеет три стержня, из которых два расположены под одним углом к третьему, и к узлу приложена внешняя сила, действующая по направлению третьего стержня, или не приложена вовсе — усилия в первых двух равны между собой (узел 5, 03 04).
Аналитическое определение усилий
Производится с помощью уравнений статики, которые составляются так, чтобы в каждое входило по возможности не более одного неизвестного. Аналитический способ целесообразно применять главным образом в тех случаях, когда интересуются усилием в одном стержне или небольшом числе стержней.
Способ вырезания узлов. Узлы вырезаются в таком порядке, чтобы в каждом было не более двух неизвест-
Сг А
соз а соз Р
01 — А
соз у соз 6
усилий, которые полагают направленными от узла. Составляют уравнения моментов относительно точек, которые выбираются в пересечениях двух стержней, или уравнения проекций на ось, перпендикулярную направлению двух усилий (если имеются параллельные). Тогда в каждое уравнение входит не более одного неизвестного (см. разд. 2).
Пример 10.2. Определить усилия в стержнях Оз, 2 (рис. 10.3, а). Уравнения составляются относительно точек ти т2, тъ (рис. 10.3, в). Уравнение моментов относительно точки т:
— Аа Р (а й) Р (а 2й) Зная, что Л 2,5Р, находим
3(1 — 0,5а
Р.
Составляя аналогично уравнения моментов относительно двух других точек, находим 03 и Ц2. Проводя далее сечения по другим панелям, этим методом можно рассчитать всю ферму.
Если в сечение попадают только два стержня, моментная точка выбирается в любом удобном месте на
ных усилий. Последние определяются либо из уравнения проекций на ось, перпендикулярную одному из стержней, либо из уравнения моментов относительно точки, лежащей на одном из стержней.
Пример 10.1. Определить усилия в стержнях, сходящихся в опорном узле А (рис. 10.3, а). Уравнения проекций на оси П—П и п2—п2 (рис. 10.3,6):
А соз а — соз 3 0; А соз у 4- Ог соз 6 0. Реакция А предполагается известной. Находим
Рис. 10.4
стержне, усилие в котором определяют во вторук очередь.
В фермах с параллельными поясами (рис. 10.4, а) усилия в поясах и раскосах определяются с помощью сечений типа а—а, а усилия в стойках определяются из уравнений проекций на вертикаль с помощью сечений типа Ь—Ь. При нагрузке, перпендикулярной общему направлению поясов, целесообразно использовать эпюры М и 0 (рис. 10.4,6, в), например, при нисходящих раскосах (в левой половине фермы), как показано на рис. 10.4, а:
Оп
Мп
Мт—
знак минус указывает, что направление усилия было выбрано неверно, стержень 01 фактически сжат. Следующим должен быть вырезан узел, где сходятся стержни Оь Ог, Дг, усилие 0 уже известно. Аналогично определяются усилия в последующих узлах.
Метод сквозных сечений. Ферму разрезают на две части так, чтобы обнажилось не более трех неизвестных
(101)
В ферме с восходящими раскосами индексы моментов в формулах для С? и I меняются местами, а в формулах для Ь и V знак меняется на обратный (в последние формулы входит со своим знаком соответственно эпюре).
558
РАЗДЕЛ 10. ФЕРМЫ
Графическое определение усилий
Осуществляется построением диаграммы Максвелла—Кремоны. Ею удобнее всего пользоваться, когда надо определить усилия во всех стержнях.
Расчет ферм на внеузловую нагрузку
Внеузловая нагрузка, приложенная непосредственно к стержню, распределяется между узлами по правилу рычага (рис. 10.5, а, б). В самом стержне возникают,
N -А
В »
м к
ч Ч
р р р
но при подборе сечений пояса учитываются моменты от кривизны оси и от внеузловой нагрузки, которая обычно имеется на криволинейном верхнем поясе. Подробнее о расчете см. [12].
Расчет составных ферм
При больших размерах панелей стержни фермы могут заменяться дополнительными решетчатыми элементами и шпренгелями. В этом случае (рис. 10.5, в) сначала рассчитывается основная ферма на узловую нагрузку (рис. 10.5, г), которая определяется, как было указано выше. Затем находят усилия в дополнительных элементах; например, в фермочке аЬ (рис. 10.5, (9) — с учетом усилия А[а-ь в стержне а—Ь основной фермы, в шпренгеле сей (рис. 10.5, е)—с учетом усилия Лгс_ в стержне с—й. В стержнях заданной фермы, которые не являются общими со стержнями дополнительных элементов, усилия целиком определяются из расчета основной фермы. В стержнях, общих для основной фермы и шпренгеля, например в стержне с1—е, усилия определяются суммированием величин, полученных из расчетов основной фермы и дополнительного элемента.
Способ замены стержней
Для ферм, не являющихся простейшими, т. е. не представляющих последовательный ряд треугольников, аналитический и графический способы определения усилий оказываются непосредственно неприменимыми и используется способ замены стержней [32].
'I н I и и I и
Р, Р1 Р, Р Р, Р, Р, Р Ъ Р Р
Рис. 10.5
кроме продольного усилия, изгибающий момент и поперечная сила.
Расчет ферм с криволинейным поясом
При расчете ферм с криволинейным поясом усилия определяются обычным методом в предположении шарнирных узлов и прямолинейных стержней между ними,
Тонкостенные фермы [31]
Тонкостенными называются фермы, образованные из обычных путем замены раскосов тонкими пластинками. Расчет ведется в предположении шарнирных узлов, действия узловой нагрузки и наличия только сдвигающих сил взаимодействия между стенкой и стержнями. Усилия определяются графически из диаграммы, которая строится для условной модели, заменяющей данную тонкостенную ферму. Модель образуется вписыванием в каждую панель фермы вместо стенки стержневого параллелограмма, стороны которого параллельны диагоналям панели; форма параллелограмма может быть произвольна. В местах пересечения сторон параллелограмма со стержнями фермы вводятся шарниры. Модель геометрически изменяема, но при любой нагрузке, приложенной к основным узлам, система статически определима и имеет конечные усилия. Равнодействующая сдвигающих усилий получается как равнодействующая усилий полураскосов, примыкающих к поясу или стойке. Устойчивость пластинки должна быть обеспечена.
Пример 10.3. Определить усилия в тонкостенной консольной ферме (рис. 10.6, а, б). Усилия в поясах и стойках вследствие наличия сдвигающих сил — переменные. Усилие в стержне 3—4 например вблизи узла 2—5, определяется отрезком диаграммы с—3 (рис. 10.6, в), а вблизи узла 4—5 — отрезком с—4. Распределение сдвигающего усилия вдоль стержня принимается равномерное, а распределение продольного усилия в стержне — по линейному закону. Сдвигающая сила между стенкой и элементом 3—4 пояса определяется отрезком диаграммы 3—4. На рис. 10.6, г показаны сдвигающие силы, действующие на стенку панели В, на рис. 10.6, д— воздействие стенки на окаймляющие стержни, а на рис. 10.6,в — эпюры усилий в стержнях этой панели.
10.1. ПЛОСКИЕ ФЕРМЫ
Распорные и комбинированные фермы
К числу распорных относят трехшарнирные арочные фермы, фермы с затяжками и висячие конструкции. В арочных конструкциях распор направлен внутрь пролета, в висячих — наружу. Определение реакций — см. разд. 2. Усилия определяются графическим или
5 6
——
1
аг —€
к
1 1
Г' 6
4
ч II ПТ
аналитическим способом, так же как и в балочных фермах. Усилие в затяжке, если она имеется, определяют методом сечений.
О расчете комбинированных ферм, которые применяются главным образом в мостовых сооружениях, см. [22].
10.1.3. Перемещения узлов статически определимых ферм.
Предварительно вычисляются удлинения всех стерж-
упругие — по формуле
Д'° Хр:ЁР
где А'0 — усилие в стержне от заданной нагрузки;
I — его длина;
Е—модуль упругости;
Е — площадь поперечного сечения; от температурного воздействия — по формуле
а,
(10.3)
где а — коэффициент линейного расширения материала стержня;
(— изменение температуры.
Перемещения могут определяться аналитическим и графическим способами. Первый удобен при определении какого-либо одного перемещения, например прогиба нижнего пояса в середине пролета, второй — для получения линии прогиба и вообще всех перемещений фермы.
Аналитический способ определения перемещений сводится к пользованию формулой
Ар 2А,р N или А N
(Ю.4)
где Ар или А— перемещение от заданной нагрузки или от температурного воздействия по интересующему направлению;
Хр или А — удлинение стержня от заданной нагрузки или от температурного воздействия;
N — усилие в стержне от единичной нагрузки, приложенной по направлению искомого перемещения.
В уравнении (10.4) суммирование ведется по всем стержням, усилия и удлинения входят со своими знаками.
Для определения прогиба какого-либо узла фермы в нем прикладывается единичная вертикальная сила (рис. 10.7,а). Для определения сближения двух узлов
о)
Рт1
в)
(10.2)
Рис. 10.7
(рис. 10.7,6) в этих узлах прикладываются равные и противоположные единичные силы, действующие по направлению прямой, соединяющей узлы. Для определения угла поворота стержня берется пара сил с моментом, равным единице, причем составляющие пары, равные 1т, прикладываются к узлам стержня перпендикулярно последнему (рис. 10.7, в); в этом случае усилия N имеют размерность см1. Для вычисления приращения угла ат берутся две противоположные пары (рис. 10.7, г).
При определении перемещений от осадки опор опорные устройства заменяются стерженьками, которым да-
560
РАЗДЕЛ 10. ФЕРМЫ
ются удлинения или укорочения, равные осадке, после чего применяется формула (10.4).
Графическое определение перемещений см. Г32]. Пример 10.4. Найти прогиб среднего узла нижнего пояса стальной фермы (рис. 10.8). В табл. 10.1 даны
иг и3
— 3000 —
. 1
Рис. 10.8
геометрические характеристики элементов, усилия в т от нагрузки в узлах верхнего пояса и от единичного груза, приложенного в рассматриваемом узле для вычисления прогиба, значения NрМЦР для каждого стержня. При Е 2,1Ю3 тсм2 прогиб
12 867
Д ■ 6,1 см, (10.5)
2100
что составляет 1500.
Таблица 10.1
Н аименование элемента
1
Р
Усилие от нагрузки Nр
Усилие от единичного груза N
Nр N1
Р
1
2
3
4
5
о,
8,75
—33,6
—0,63
185
о2
8,75
—33,6
—0,63
185
Оз
5,95
—65,5
—1,56
608
О4
5,95
—65,5
-1,56
608
об
6,0
—66,3
—2,23
887
СЛ
10,0
0
0
0
иг
14,1
54,6
1,12
862
V,
14,1
69,0
1,92
1870
Ог
15,0
4-41,2
0,77
477
О,
13,0
—27,7
-0,67
242
А
42,2
15,1
0,57
365
О
25,0
—5,0
—0,52
65
Пь
25,0
—3,4
0,45
—38
V,
6,2
—30,2
—0,50
94
У2
16,5
—5,9
0
0
У
25, »
-6,7
1
0
26410
У4
22.5
5,9
0,35
47
N„N1
V У
—641024- 47—12 867
Р
10.1.4. Линии влияния усилий и перемещений в статически определимых фермах
Линией влияния (л. в ) называется диаграмма, изображающая закон изменения усилия в элементе фермы или перемещения ее узла, вызываемого движущимся вдоль фермы единичным грузом постоянного направления. Л. в. используются для вычисления усилий или перемещений при подвижной нагрузке и при большом числе грузов.
Если ордината л. в. усилия какого-либо элемента под грузом Р равна у, то усилие в элементе
N Ру. (10.6)
Усилие при нескольких грузах Р2,., Рп
N Ргуг - Р2У2 - • • - Рп • (Ю.7).
Усилие при наличии равномерной нагрузки интенсивностью р
А; (10.8)
где — площадь части л. в., расположенной под нагрузкой интенсивностью р.
При нагрузке переменной интенсивности р(х)
Х2
А7 р(х)с1х. (10.9)
По аналогичным формулам с помощью соответствующих л. в. вычисляются и перемещения.
Статический способ построения линий влияния усилий
Используются л. в. опорных реакций, которые строятся так же, как в простой балке, и метод сквозных сечений. Усилие в стержне выражается через одну реакцию из условий равновесия отделенной разрезом части фермы, на которой отсутствует груз.
Пример 10.5 (рис. 10.9). Л. в. опорных реакций построены заранее. Для построения л. в. усилия 03 пра-
04
Ш1111,111II1111111 18111ш11111111111и.
«»;;л
дг ;.,Т;г1Т»«тттттвтгптпг.п-
V" I о
Рис. 10.9
водим сечение через третью панель. Когда груз находится в правой части фермы, из равновесия левой имеа
ем Оз—А ; стержень Оз сжат; л. в. в пределах от
гз
опоры В до узла 3 получается из л. в. реакции А пу
10.1. ПЛОСКИЕ ФЕРМЫ
561
тем умножения ее ординат в тех же пределах на велиа
чину —. Из равновесия правой части фермы, когда гз
Ь
груз на левой, 03 —В—; в пределах от опоры А до 'з
узла 3 л. в. 03 получается из л. в. реакции В путем ум-
Ь
ножения ее ординат в тех же пределах на —. Техника
гз
построения ясна из чертежа. Так же построена и л. в. усилия I3.
(в пределах рассеченной панели) получаем л. в. усилия 1з. Л. в. усилия К2 получим, рассматривая равновесие узла 3 с использованием л. в. 03 и аналогичной ей, но не показанной на чертеже л. в. 02. Одиночный стержень Уз работает только тогда, когда груз находится в пределах третьей и четвертой панелей; наибольшего значения усилие достигает при нахождении груза в узле 4.
В распорных конструкциях л. в. усилий строятся аналогично, но, кроме л. в. вертикальных реакций, используется и л. в. распора, которая определяется выражениём Н М°с(а, (10.10)
где —л. в. момента от нагрузки в простой балке в точке, соответствующей ключу арки;
а — стрела подъема.
На рис. 10.10 даны л. в. усилий в характерных стержнях некоторых ферм. Построение л.в. усилий в других фермах см. [22].
Кинематический способ построения линии влияния усилий
Линия влияния какого-либо усилия получается как эпюра малых вертикальных перемещений пояса фермы, по которому движется единичный груз, построенная в предположении, что исследуемому стержню дается единичное удлинение, а все остальные стержни остаются недеформированными. Эпюры перемещений могут быть построены
Рис. 10.10
Для усилия 03 тоже получаем два значения соответственно нахождению груза в правой и левой частях в ■
пролета: Оз — А — и Э3 В —.
'о г0
Первое значение действительно от опоры В до узла 4, второе — от опоры А до узла 3. Умножая в этих
е
пределах ординаты л. в. Л и В соответственно на —
го
и — и соединяя точки 3 и 4 на диаграмме прямой
графо-аналитически или чисто графически [22, 32]. Целесообразно кинематическим способом определять только вид л. в., а ординаты вычислять статическим способом.
Пример 10.6. На рис. 10.11 построена л. в. усилия 03. Ординаты взяты из аналитического расчета.
Линия влияния перемещения
Строится, как эпюра прогибов пояса фермы от единичной силы (или сил, если речь идет о сближении узлов), приложенной по направлению рассматриваемого
562
РАЗДЕЛ 10. ФЕРМЫ
перемещения. Построение делается для пояса, по которому передвигается нагрузка. Для построения используется графический или аналитический способ определения прогиба.
Невыгодная установка грузов на линии влияния
Для получения максимальных значений усилия или деформации от системы связанных между собой сосредоточенных грузов наибольший из них ставится над максимальной ординатой линии влияния.
Рис. 10.12
Подсчитывается величина
5 (10.11)
где ? — равнодействующие грузов, находящихся над каждым прямолинейным участком л. в. (рис. 10.12);
а—углы наклона прямолинейных отрезков, положительные для левой части л. в. (когда ординаты возрастают) и отрицательные — для правой (когда ординаты уменьшаются).
Подсчет 5 ведется дважды: груз, стоящий над максимальной ординатой, первый раз относится к левому примыкающему участку, а второй раз — к правому. Если в обоих подсчетах величина 5 разнозначна, принятая установка — невыгоднейшая. Если 5 оба раза положительна, систему грузов надо передвинуть на один груз вправо, если отрицательна, то соответственно влево, после чего вновь проверить 5 на разнозначность. Когда при невыгоднейшей установке часть грузов сходит с пролета, вычисление повторяется для оставшихся грузов.
10.1.5. Определение усилий в статически неопределимых фермах при неподвижной нагрузке
Метод сил
Основную систему следует выбирать наиболее простой и симметричной. В фермах с перекрестной решеткой ее рационально образовывать разрезом обратных раскосов (рис. 10.13, а), в шпренгельных фермах — разрезом шпренгеля (рис. 10 13,6), в двухпролетных фермах (рис. 10.13, в)—отбрасыванием промежуточной опоры (№ 1) или одного из стержней пояса, примыкающего к средней опоре (№ 2), в многопролетных фермах — отбрасыванием по одному из стержней пояса, примыкающих к промежуточным опорам, в Двухшарнирных арках — отбрасыванием стержня (№ 3) с преобразованием двухшарнирной арки в трехшарнирную (рис. 10.13, г).
Перемещение в основной системе по направлению
1-й лишней неизвестной от нагрузки определяется по формуле
Ь ' Ер" ’
перемещение от температурного воздействия и осадки опор — согласно 10.1.3 и 10.1.7, а перемещение в основной системе по направлению -й лишней неизвестной от к-й неизвестной — по формуле
ЕР
(10 13
В (10.12) и (10.13) А70, Nг, Ик — усилия в стержне соответственно от внешней нагрузки, 1-й и к-й единиц-
О)
ных лишних неизвестных (т. е. Х,- 1, Л 1). Суммирование в этих формулах распространяется на все стержни основной системы, а при вычислении 6ц — также и на стержень, усилие в котором принято за лишнее неизвестное, если только он не является бесконечно жестким.
Уравнения для определения лишних неизвестных составляются и решаются, как обычно в методе сил. Окончательные значения усилий в стержнях вычисляются по формуле
N № Х,Л', . ХпМп. (10.14)
Фермы с нецентрированными узлами
Неизменяемость таких ферм обеспечивается неразрезностью элементов и способностью их работать на изгиб. Точный расчет при значительных эксцентрицитетах проводится по методу сил. Перемещения определяются по формулам (10.12) и (10.13), но с добавлением соответственно в правой части слагаемых
(10.12)
V Г м°мах
Е1
У ( М (1х
е ’
(10.15)
(10.16)
10.1. ПЛОСКИЕ ФЕРМЫ
563
учитывающих деформацию изгиба. Эти слагаемые вычисляются только для тех стержней, которые работают на изгиб.
Малые эксцентрицитеты могут быть учтены после расчета фермы в предположении центрированных узлов путем приложения найденных усилий в точке фактического присоединения стержней и расчета соответствующих элементов на сжатие или растяжение с изгибом.
Учет защемления ферм, жестко связанных с колоннами
При расчете ферм, являющихся ригелями рамных конструкций и жестко связанных с колоннами, кроме обычных нагрузок учитываются продольные силы ригеля и опорные моменты. Продольные силы условно счи-
-рГтЛг - "X
V
Рис. 10.14
таются приложенными на уровне нижнего пояса фермы. Опорные моменты заменяются парами горизонтальных сил Н с плечом 10, равным высоте фермы на опоре (рис. 10.14):
Н —. (10.17)
К
Работа «нулевых» стержней
При значительных деформациях ферм «нулевые» стержни включаются в работу. Действительные усилия в них находятся из расчета фермы по деформированной схеме, т. е. без гипотезы малых перемещений. Конструктивное назначение размеров сечения «нулевых» стержней иногда может привести к снижению несущей способности фермы. Для обоснованного подбора сечения этих элементов можно пользоваться расчетом [15], дающим предельное значение усилия.
10.1.6. Учет жесткости узлов. Расчет ферм на ЭВМ
Расчет ферм в предположении шарнирных узлов иногда не дает правильного представления о прочности, так как не учитывает изгиба элементов, вызывающего порой напряжения, соизмеримые с основными напряжениями от продольных усилий. Изгиб следует учитывать при относительно большой высоте сечения элемента фермы и в случае малой пластичности материала.
При большой высоте сечения пояса и слабой решетке можно пренебречь изгибом элементов решетки и вести расчет, включив в узлы пояса шарниры и приняв за неизвестные изгибающие моменты в этих шарнирах. Подробнее о расчете см. [29, 37].
Во всех случаях, однако, расчет целесообразно вести на ЭВМ. С их помощью усилия и перемещения в статически определимых и статически неопределимых фермах легко могут быть получены при использовании готовых универсальных типовых программ расчета стержневых конструкций см. (5.12 и [7]).
10.1.7. Определение перемещений в статически неопределимых фермах
Аналитический способ. Перемещения от нагрузки определяются так же, как и в статически определимых фермах, по формуле (10.4). Усилия N можно определять в основной системе.
Перемещение от воздействия температуры
А‘ ИЩг 2“Л’«- (10.18)
Здесь.V — усилия в стержнях от температурнога воздействия, определяемые из расчета статически неопределимой системы [22].
10.1.8. Линии влияния усилий в статически неопределимых фермах
При построении л. в. усилий всех стержней следует сначала построить л. в. лишних неизвестных. Л. в. каждого усилия получается затем путем суммирования л.в. усилия в основной системе с л. в. усилий лишних неиз-
564
РАЗДЕЛ 10. ФЕРМЫ
вестных, умноженных на соответствующие коэффициенты влияния. Эти коэффициенты представляют собой усилия в элементах основной системы от лишнего неизвестного, принятого равным единице. При построении л. в. небольшого числа усилий целесообразно строить их как эпюры прогибов от единичных удлинений (дислокаций Д1) исследуемого стержня в действительной статически неопределимой системе.
Пример 10.7. На рис. 10.15 дана линия влияния лишней неизвестной Х (реакции опоры В), полученной как эпюра прогибов основной системы — балочной фермы на двух опорах А и С от Х1 1. Масштаб л. в. получен из условия, что ордината над опорой В равна единице (рис. 10.15, в). Л. в. реакции А (рис. 10.15,5) и усилий в стержнях 03 (рис. 10.15, д) и Оз (рис. 10.15, е) получены суммированием л. в. основной системы и л. в. Хь умноженной на коэффициенты влияния:
УА 10л - о,5Х1; о3 о°3- Ха
2г0
А
2г,
'Хг.
следних обеспечивается спариванием их в пространственные блоки.
Расчет ведется по действующим техническим условиям для невыгодных сочетаний нагрузок, включая предварительное напряжение, усилие от которого входит в основное сочетание. Предварительное напряжение мев)?
1Т777
о)
»
ЮЛ.9. Предварительно напряженные фермы. Основные положения расчета и конструирования
Предварительно напряженными называются фермы, в элементах которых в процессе изготовления или монтажа искусственно создаются напряжения, обычно противоположные по знаку напряжениям от расчетной нагрузки. Предварительное напряжение имеет целью:
а) снижение расхода основного материала фермы путем использования материалов более высокой прочности;
б) повышение жесткости конструкции и улучшение ее эксплуатационных качеств.
Основным способом создания предварительного напряжения в статически определимых и статически неопределимых фермах является устройство напрягающих элементов из стальных канатов, высокопрочных стержней или проволоки. Ниже рассматриваются конструкции, в которых напрягающие элементы не связаны сцеплением с материалом основных элементов. К таким конструкциям относятся в первую очередь предварительно напряженные металлические фермы. Возможные схемы таких ферм показаны на рис. 10.16; на рис. 10.16, а представлена ферма, у которой предварительно напряжены сжатием отдельные растянутые стержни, на рис. 10.16,6—д — фермы, в которых предварительное напряжение затяжек различной конфигурации вызывает усилия одновременно во всех или нескольких стержнях.
При напряжении отдельных стержней тяжи располагаются вблизи центра тяжести стержней; при напряжении фермы в целом затяжки располагаются симметрично относительно ее вертикальной плоскости. Крепятся затяжки или тяжи с помощью специальных анкерных устройств. Для обеспечения устойчивости элементов ферм, сжимаемых в процессе предварительного напряжения, при расположении затяжек по оси элемента затяжки крепятся к элементам с помощью диафрагм , расстояние между которыми определяется расчетом. При расположении затяжек вне ферм устойчивость по-
1 Крепление затяжки не должно, однако, препятствовать ее продольному перемещению.
Рис. юле
таллических ферм целесообразно применять при больших пролетах и тяжелых нагрузках.
Фермы с предварительно напряженными отдельными стержнями
Расчетные усилия в стержнях определяются без учета предварительного напряжения.
Задаются распределением материала между сечениями стержня Ро и затяжки Ра:
Находят суммарную площадь сечения при полном расчетном усилии
Р N1? (1 — к) к. (10.19)
Вычисляют
Ра кР и Р0 (1 — к) Р. (10.20)
Определяют усилие предварительного натяжения
Х уКР0 (10.21)
и усилие, воспринимаемое затяжкой при действии полного расчетного усилия:
МР,ЕаЕ
А1 — ■
Ра ЕаЕ -- Ро
(10.22)
Проверяют напряжения в затяжке и в основном стержне:
Хпг-'гХх А1 — (Хп2--Х1)
о — Яа; ° (Ш.2,3)
Р я ГП Р о
10.1. ПЛОСКИЕ ФЕРМЫ
565
Коэффициент продольного изгиба ф в процессе предварительного напряжения принимается 0,9—0,95; неоговоренные обозначения — см. ниже.
Предварительно напряженные фермы с затяжками
Эти фермы работают на внешнюю нагрузку как внутренне статически неопределимые системы; за лишнюю неизвестную в основной системе (которая может быть и статически неопределимой, как на рис. 10.16, д) целесообразно принимать усилие в затяжке.
Дополнительное усилие в затяжке, возникающее вследствие внутренней статической неопределимости системы, определяется из канонических уравнений метода сил с учетом деформаций затяжки. При одной затяжке это усилие
■
V
— е1р1 Щи Iа
Е1 Р, Еа Ра
У
(10.24)
где «V, и NI — усилия в стержне основной системы от единичного усилия в затяжке и от нагрузки;
Е[ и — модуль упругости и площадь сечения стержня;
; и а—длины стержня и затяжки;
Ел и Ра — модуль упругости и площадь сечения затяжки.
При расположении затяжки по оси нижнего пояса постоянного сечения (рис. 10.16,6) формула (10.24) принимает вид:
2ЛМ 1ЛПР,
х—]—гм • ,0-25,
'•(Ы
Проверка несущей способности стержней производится по следующим формулам.
Для стержней фермы, у которых в основной системе усилия от расчетной нагрузки и от усилия в затяжке имеют разные знаки:
при сжимающем усилии в стержне
при Ых Ло —(пХ МХг) нфЯРбр; (10.26) при Ы1ЫИХ N1 — ( п, ЛГХ Л'ху) трКРт; (10.26')
при растягивающем усилии в стержне:
при N1 Ых N0 — пХ И- МХх) т%РИТ; (10.27)
при ЛГ§ лг§ — ( яг ЫХ Л?ху) тЯРбр. (10.27')
Для стержней, у которых в основной системе усилия от расчетной нагрузки и от усилия в затяжке имеют одинаковые знаки:
при сжимающем усилии в стержне
До (пгЙХ МХх) трЯР6р; (10.28)
при растягивающем усилии в стержне
N0 (пг ЛХ ИХг) тКРт. (10.29)
Для затяжки
пгХ Хг тЯРъ. (10.30)
В приведенных формулах:
N1 и — усилие в стержне фермы от нормативной и расчетной нагрузки при расчете основной системы (без учета работы затяжки);
А — усилие в стержне от единичной силы в затяжке;
—усилие в стержне от усилия в затяжке от предварительного напряжения и нормативной нагрузки;
Л — усилие в стержне от расчетного усилия в затяжке;
X—расчетное усилие предварительного напряжения в затяжке;
X” и Хх—усилие в затяжке от внешней нормативной и расчетной нагрузки;
ври Рнт — площади сечения стержня брутто и нетто;
— расчетные сопротивления стержня и затяжки;
Ф—коэффициент снижения несущей способности материала стержня при проверке устойчивости, определяемый нормами, с учетом, что в местах соединения фермы с затяжкой ферма является закрепленной из плоскости;
т—коэффицент условий работы, принимаемый по нормам; для анкерных устройств т0,8;
пг и п2 — коэффициенты перегрузки усилия от предварительного напряжения.
Значения пх и п2 принимаются следующие:
а) при обеспечении прямого надежного контроля усилия предварительного напряжения (по приборам) П п2 1;
б) при косвенном контроле: для элементов, у которых рабочие напряжения больше по величине и противоположны по знаку предварительным, я2 0,9 ; для элементов, у которых рабочие напряжения совпадают по знаку с предварительными или предварительные напряжения больше по величине и противоположны по знаку, щ 1,10.
Величина контролируемого усилия предварительного напряжения затяжки Аг„ определяется с учетом потерь напряжения вследствие релаксации материала затяжки 1 и податливости анкеров:
Хк 1,05Х Д
РРъ
я
(10.31)
Величина податливости анкера Д принимается при плотно завинчиваемых гайках или клиновидных шайбах равной 0,1 сму при анкерах с прокладками — 0,2 см.
При криволинейных затяжках следует также учитывать потерю напряжения за счет трения в местах перегибов. При устройстве затяжек из нескольких неодновременно натягиваемых элементов при назначении контролируемого усилия натяжения для каждого из них надо учитывать влияние натяжения одного на усилие в другом.
Наибольшее контролируемое усилие предварительного натяжения затяжки не должно превосходить несу¬
1 Затяжки из проволоки и канатов до постановки следует подвергать вытяжке.
566
РАЗДЕЛ 10. ФЕРМЫ
щую способность стержней, сжимаемых в процессе предварительного напряжения;
Л'к шрбр. (10.32)
Общий порядок расчета следующий: 1) определяют усилия от нагрузки и от единичного значения неизвестного в основной системе; 2) вычисляют Х — усилие в затяжке от нагрузки, предварительно задавшись соотношениями между площадями стержней и затяжки; 3) из условий прочности или устойчивости основных, наиболее нагруженных стержней по вышеприведенным уравнениям определяют величину предварительного натяжения затяжки Ху площади этих стержней и затяжки; 4) устанавливают контролируемую величину предварительного напряжения; 5) уточняют Х и проверяют сечения всех элементов для различных стадий работы конструкции; 6) проверяют прогиб фермы. О расчете см. также [2].
10.1.10. Отыскание оптимальных ферм
Проблема заключается в отыскании для заданных условий такой фермы из множества возможных, которая являлась бы отимальной с точки зрения удовлетворения определенному требованию. Таким требованием может быть равнопрочность стержней, наименьший вес, наименьшая стоимость и т. п.
Для проектирования статически определимых или неопределимых ферм с заданными параметрами, в числе которых, кроме геометрической схемы и внешней нагрузки, могут быть усилия, напряжения и продольные де¬
формации стержней, перемещения узлов, применяется метод заданных напряжений и перемещений [23]. При этом число задаваемых параметров равно 5 — общему числу стержней (не считая опорных), перемещений и продольных деформаций (напряжений) в числе заданных параметров должно быть не более 5П—числа основных (необходимых) стержней; в статически определимых фермах 5 5П. Задаваться можно только напряжениями, только перемещениями всех или некоторых узлов и комбинацией некоторых количеств одних и других параметров.
Задача отыскания статически неопределимых упруго работающих ферм минимального объема при заданной геометрической схеме, одной комбинации нагрузки и допускаемом напряжении решена с применением ЭВМ [13, 24].
К указанной проблеме относятся задачи синтеза ферм, т. е. отыскания их оптимальной схемы. В [16] разработан метод отыскания из множества возможных статически определимой стержневой конструкции минимального веса, которую можно образовать соединением заданных на плоскости точек — узлов с приложенными к ним внешними нагрузками; при этом напряжения в стержнях при заданных внешних силах не должны превосходить заданной величины. Решение приводится к общей задаче линейного программирования; разработан аглоритм для БЭСМ-2М. Та же задача, но в предположении, что некоторые из узлов могут быть расположены произвольно, решается в [17]; отыскание конфигурации упругой статически неопределимой шарнирно-стержневой конструкции в случае многих загружений проводится в [18], распространение решения на пространственные фермы см. [19].
10.2. ПРОСТРАНСТВЕННЫЕ ФЕРМЫ
10.2.1. Основные положения образования и расчета
Пространственными называются фермы, стержни которых не лежат в одной плоскости.
По характеру образования различают простые и преобразованные фермы. Ферма, образованная по общим правилам образования пространственных систем, т. е. последовательным прикреплением шарнирных узлов тремя стержнями, не лежащими в одной плоскости, называется простой. Неизменяемая ферма, которая не мо жет быть образована по общим правилам, а получается путем замены одного или нескольких стержней простой фермы, называется преобразованной.
Ферма, которая, будучи отделена от опор, становится изменяемой, называется прикрепленной; ферма, остающаяся неизменяемой после отделения от опор, называется свободной. Частным случаем свободной фермы является замкнутый выпуклый стержневой многогранник с треугольными или подразделенными на треугольники плоскими гранями; для такого многогранника между числами стержней С, узлов У и граней (полей) Г по теореме Эйлера существует зависимость С — У--Г—2; при треугольных гранях С32 Г.
Необходимое, но недостаточное условие неизменяемости пространственных ферм: С —ЗУ; в число стержней С входят опорные, минимальное число которых равно 6'. Безусловным доказательством неизменяемости является равенство нулю усилий во всех стержнях при нулевой нагрузке.
Для прикрепления пространственных ферм к земле служат три категории опор: а) неподвижные, эквива
лентные трем опорным стержням; б) подвижные цилиндрические, эквивалентные двум опорным стержням;
в) подвижные шаровые, эквивалентные одному опорному стержню. Подробнее об образовании пространственных ферм и проверке неизменяемости см. [32].
Частным случаем пространственных ферм являются биконструкции — системы, состоящие из двух и более плоских ферм, параллельных или непараллельных, жестких только в своей плоскости и соединенных связями. К числу биконструкций при определенной нагрузке относятся крановые конструкции, некоторые башенные сооружения и др. О расчете биконструкций см. [9, 10, 31].
Нагрузки обычно прикладываются в узлах в виде сосредоточенных сил.
10.2.2 Общие методы определения усилий
Установление неработающих стержней и равных усилий:
а) если в узле все стержни, кроме одного, и внешние силы лежат в одной плоскости, то в этом стержне усилие равно нулю;
б) если в ненагруженном узле сходятся три стержня, не лежащие в одной плоскости, то усилия в них равны нулю;
в) если из плоскости действия нескольких сил выходят только две силы (усилия двух стержней), то они равны, но противоположно направлены;
г) если все силы узла расположены в двух плоскостях, то равнодействующие сил каждой из плоскостей лежат на ребре пересечения этих плоскостей, равны между собой и противоположно направлены;
10.2. ПРОСТРАНСТВЕННЫЕ ФЕРМЫ
567
д) если на плоскую грань действуют только три усилия, лежащие в той же плоскости и не пересекающиеся в одной точке, то они равны нулю.
Способ узловых сечений. Применяется в фермах, образованных присоединением каждого последующего узла к предыдущим тремя стержнями, не лежащими в одной плоскости. Последовательно рассматриваются узлы, в которых сходятся внешние силы (опорные реакции относятся к внешним силам), известные усилия и не более трех стержней с неизвестными усилиями. Возможны аналитическое и графическое решения. Аналитическое решение состоит в составлении и решении трех уравнений проекций для каждого узла, отрезанного от фермы. Графическое определение усилий сводится к уравновешиванию известной силы тремя силами, оси которых пересекаются в точке на линии действия известной силы (см. разд. 2).
Способ сквозных сечений. Применяется, когда в ферме можно провести сечение, разрезающее не более шести стержней с неизвестными усилиями. Последние определяются из уравнений статики. Целесообразно для расчленения уравнений выбирать оси так, чтобы для части из шести усилий проекции и моменты оказывались равными нулю.
Если шесть стержней могут быть пересечены одной прямой, система геометрически изменяема.
Способ разложения на плоские фермы. Применяется, когда боковые грани пространственной фермы представляют собой статически определимые плоские фермы. Нагрузка в узлах разлагается на три направления, два из которых лежат в плоскости двух соседних граней, а третье совпадает с ребром их пересечения. Если каждая грань прикреплена к земле жестко в своей плоскости, то составляющие нагрузки полностью уравновешиваются на плоской ферме.
Пример 10.8 (рис. 10.17). Сила действующая на конструкцию, разлагается на составляющие Р, Р2 и Рг. Плоская ферма ЮЕМ рассчитывается на действие Ру ферма МЕРЫ — на действие Р2; в стойке ЕМ действует сила Я3. Полные усилия в стержнях, общих для соседних граней (в данном случае в стойке ЕМ), определяются алгебраическим суммированием усилий от всех составляющих нагрузки.
Если плоская грань не прикреплена жестко к земле, ее реакции передаются соседним граням, причем эти реакции лежат на ребрах пересечения граней. Примеры применения способа в этом случае см. [14].
Способ замены стержней. Применяется для расчета преобразованных ферм, в которых нет узлов, где сходятся не более трех стержней с неизвестными усилиями.
Метод статического моделирования [32, 21]. Метод статического моделирования позволяет заменить расчет пространственной фермы расчетом статически эквивалентной плоской модели, в которой для определения усилий в стержнях применим аппарат расчета плоских ферм (см. 10.1.2) и, в частности, графический метод — построение диаграммы Максвелла — Кремоны.
Рис. 10. Г7
10.2.3. Башни и мачты
Трехгранные башни (рис. 10.18). При раскосной и полураскосной решетке — статически определимы. Расчет ведется способом узловых сечений или разложением на плоские фермы. В последнем случае, если имеются стержни, пересекающие внутреннюю полость башни, в них предварительно должны быть определены усилия способом узловых сечений.
Башни с четырьмя и более гранями. При раскосной и полураскосной решетке — статически определимы, если не имеют поперечных связей и верхнего яруса с пересекающимися стержнями (шпица). В этом случае башня представляет собой купол
Шведлера (см. ниже) и рассчитывается способом узловых сечений или разложением на плоские фермы.
При наличии шпица башня статически неопределима. Однако расчет в случае симметрии башни относи¬
тельно осей плана упрощается.
Пример 10.9 (рис.
10.19). Сила Р может быть разложена на две составляющие, лежащие в плоскостях Л5В и С8й точно так же на составляющие, лежащие в плоскостях граней Л5В и С50, можно
разложить силу Р2, а силу Рз — на составляющие, лежащие в плоскостях граней
Рис. 10.18
Рис. 10.19
568
РАЗДЕЛ 10. ФЕРМЫ
А50 и В5С; все составляющие в свою очередь могут быть разложены по направлениям ребер, так что усилия в стержнях шпица станут известны. Дальнейший расчет можно выполнить разложением на плоские фермы. Так как в данном случае в узлах А, В, С и й ребра имеют перелом, за плоские фермы следует принять грани АВ1КУ АОЛ., ВСМК и После того как станут
известны усилия в стержнях, примыкающих к узлам Л, В, С и О сверху, способом узловых сечений можно рассчитать нижнюю часть мачты.
Поперечные связи (рис. 10.20) также делают систему статически неопределимой. Однако при симметричной горизонтальной нагрузке, действующей в плоскостях граней или в плоскостях связей, башня приближенно может быть рассчитана как статически определимая разложением на плоские фермы, так как в этом случае связи большой роли не играют.
Существенную роль играют связи при кручении башен, вызываемом либо непосредственно крутящим моментом, возникающим при эксплуатации конструкции (например, в башнях молотковых кранов), либо несимметричной горизонтальной нагрузкой (например, при обрыве провода в мачтах электропередач).
Расчет башен на кручение проводится методом сил. За лишние неизвестные принимаются усилия в диагоналях поперечных связей или усилия в одном из поясов (когда они не имеют изломов). В последнем случае основная система получается расслоением поперечных диафрагм и состоит из отдельных отсеков, соединенных стерженьками, расположенными по линиям поясов; один из стерженьков в каждом просвете между отсеками разрезается, и за лишнее неизвестное принимается действующее в нем усилие [4]. Расчет на кручение монотонных башенных конструкций (т. е. конструкций, в которых соблюдается постоянство по всей высоте углов сопряжения распорок с диагоналями) см. [36].
Следует отметить, что наличие чрезмерного числа поперечных связей по высоте конструкции не улучшает ее работы. Поперечные связи должны устанавливаться лишь в плоскостях действия крутящих моментов и в ме-
Рнс. 10.21
стах перелома ребер, если в других местах они не требуются по соображениям устойчивости.
Мачты на расчалках. Ствол мачты обычно трехили четырехгранный с раскосной или перекрестной решеткой. Число оттяжек в одном ярусе соответствует числу граней. Мачта статически определима, если вверху и внизу ствола расположены шарниры и имеется только один ярус расчалок. При наличии нескольких ярусов расчалок мачта обращается в статически неопределимую многопролетную балку на упругих опорах. При большой высоте мачт расчалки устраиваются предварительно напряженными. Метод расчета и примеры см. [26, 28].
Гиперболоидальные башни Шухова. Конструкция имеет форму однополостного гиперболоида и состоит из двух систем взаимно пересекающихся наклонных стоек, скрепленных по высоте горизонтальными кольцами (рис. 10.21). При наличии в плоскости верхнего кольца поперечных связей или жесткого резервуара система статически неопределима. Однако благодаря симметрии конструкции на центральную вертикальную нагрузку она рассчитывается элементарно. Усилие в каждой стойке
N ———, (10.33)
п соз а
где Р — центральная нагрузка (собственный вес, снег и т. п ); п — число стоек;
а— угол наклона стойки к вертикали.
Подробнее о расчете см. [8].
10.2.4. Стержневые пластины — структурные конструкции
Структурные конструкции (структуры) представляют собой пространственные системы, состоящие из параллельно расположенных сеток, соединенных решетчатыми связями, лежащими в плоскостях, ортогональных или наклонных к плоскостям сеток.
Различают три класса структур
1) регулярные — с одинаковым по всей площади покрытия строением каждой из двух сеток, геометрически изменяемых или неизменяемых. Сечения стержней в верхней и нижней сетках могут быть различными, но должны иметь одинаковые коэффициенты Пуассона для одинаковых направлений обеих сеток;
2) регулярные, но одна из сеток геометрически изменяема, а вторая — неизменяема;
3) нерегулярные — с различным строением в разных зонах покрытия (например, в углах и центре). Если ячейки одной или двух сеток геометрически неизменяемы, система способна работать на изгиб и кручение; если ячейки обеих сеток изменяемы, она работает только на изгиб и по существу не отличается от системы перекрестных балок.
Структуры применяются самостоятельно для плоских покрытий промышленных и общественных зданий на треугольном, квадратном, прямоугольном и многоугольном плане или в комбинации с другими типами несущих конструкций (фермами, арками, вантовыми конструкциями). Опирание возможно по всему контуру или его части, на жесткие и упругие опоры и в отдельных точках.
Структуры отличаются однородностью узлов и элементов, что создает возможность типизации конструкций, повышенной степенью надежности от внезапных разрушений и архитектурной выразительностью; они позволяют укрупнить сетку колонн и уменьшить строи-
10.2. ПРОСТРАНСТВЕННЫЕ ФЕРМЫ
569
тельную высоту покрытия; при многопролетном решении они экономичны.
В зависимости от формы сооружения и характера опирания высота покрытия Н принимается равной 1 1
— —пролета. При выполнении в металле и ограничении высоты покрытия габаритами транспортных средств наибольший экономичный пролет 70 м.
В расчетном отношении система многократно статически неопределима. Точный расчет ее, как стержневой системы, возможен с использованием ЭВМ. Программа такого расчета составлена в ЦНИИСК им. В. А. Кучеренко. Регулярные структуры, а также структуры с небольшим отклонением от регулярной системы могут при вариантном проектировании и в случаях покрытий с простыми схемами опирания рассчитываться приближенно [30, 33].
ПриОлиженный расчет применим при членении плана не менее чем на шесть ячеек и при указанной выше относительной высоте покрытия. Он состоит в замене стержневой конструкции ее расчетной моделью — тонкой пластинкой, в общем случае ортотропной, имеющей опорные условия и нагрузку такие же, как и у основной конструкции, и эквивалентные ей упругие характеристики.
При условии пренебрежения влиянием сдвигов в вертикальных плоскостях и принятия гипотезы прямых нормалей напряженное состояние расчетной модели структуры описывается уравнением
д4ад
ду
где
6'
2П
кр
-Ч
И—цилиндрическая жесткость;
Г)кр—жесткость на кручение;
V — коэффициент Пуассона.
Упругие характеристики определяются из рассмотрения соответствующих деформаций повторяющегося элемента структуры — «кристалла» и распространяются на всю расчетную модель. «Кристаллу» структуры в модели отвечает элементарный параллелепипед, по объему равный «кристаллу».
Полученные при расчете пластинки-модели внутренние усилия прикладываются к граням параллелепипеда, а при переходе к «кристаллу» концентрируются в его узлах; моменты при этом заменяются соответствующими парами сил. Расчет «кристалла» как стержневой системы на приложенные к его узлам силы позволяет определить усилия во всех его элементах. Обычно расчет ведется на наиболее невыгодное сочетание усилий в расчетной модели, и сечения одноименных стержней структуры принимаются одинаковыми. В случае, когда из соображений экономичности сечения элементов в центральной и опорной зонах принимаются неодинаковыми (при нерегулярной системе), жесткость модели на изгиб следует принимать по центральной зоне, а жесткость на кручение — по угловым участкам опорной зоны.
Для определения усилий в расчетной модели могут быть использованы готовые решения и таблицы для расчета плит и безбалочных перекрытий.
Эквивалентные упругие характеристики расчетных моделей различных структур приведены в табл. 10.2, а в табл. 10.3 даны усилия в стержнях «кристалла» тех же структур от усилий в расчетной модели [30].
В случае, когда в уравнении (10.34) параметр 6—1, расчетная модель изотропна. Условием изотропности Систем с равносторонними треугольными ячейками является равенство площадей сечения стержней в каждой поясной сетке. Условием изотропности ортогональных систем с перекрестным расположением диагоналей в обеих сетках является соотношение между площадями сечений поясов и диагоналей
РаРлУ 2.
При 0 (60) структура не воспринимает сдвигающих усилий и по существу переходит в систему перекрестных ферм, ориентированных по направлениям осей X и У, а при гп0 (63) —в систему перекрестных ферм, ориентированных под углом 45° к осям X и У.
При действии значительной сосредоточенной нагрузки зону ее влияния размером не менее 0,2X0,2 пролета следует рассчитывать как стержневую систему на внешнюю сосредоточенную нагрузку и внутренние усилия по контуру зоны, определяемые из расчета пластинки. Аналогично рассчитываются зоны вблизи точечных опор (опирание на колонны). В таких случаях целесообразно устройство стержневых капителей размером б пролета. Расчет капители см. [1, 30].
Для определения расчетной длины стержней в ортогональных системах без диагоналей могут применяться следующие коэффициенты: для опорных раскосов — 0,9, для прочих раскосов — 0,7, для поясов—1,0, для поясов при сосредоточенных нагрузках — 0,9.
Приближенный расчет усилий в регулярных структурах с одинаковым и неодинаковым строением верхней и нижней сеток дает точность до 15%—приближенные значения усилий большей частью ниже вычисленных точным методом. Приближенный расчет прогибов дает большую погрешность, действительные прогибы структур с изотропными свойствами более вычисленных в 1,4 раза, а прогибы ортогональных структур без диагоналей— в 1,2 раза.
10.2.5. Стержневые купола
Традиционные системы — купол Шведлера (рис. 10.22, а); купол Феппля, отличающийся от первого тем, что в каждой грани вместо диагонали поставлена пара полураскосов (рис. 10.22,6); звездчатый купол (рис. 10.22, в), неизменяемый при нечетном числе сторон и смещениях цилиндрических опор, направленных по биссектрисам углов; Шлинка (рис. 10.22, г) и др. Опорные узлы этих куполов закрепляются либо неподвижно, либо соединяются опорным кольцом и устанавливаются на цилиндрические катки (двухстержневые опоры). В последнем случае направление смещения выбирается так, чтобы реакции по возможности лежали в плоскостях стен. Для расчета усилий во всех стержнях циклически симметричной системы при любой нагрузке достаточно определить усилия от загружения одного узла в каждом ярусе и воспользоваться наложением. Расчет облегчается тем, что в этом случае работает ограниченное число стержней. Эффективно применение метода статического моделирования, сводящего расчет пространственной системы к расчету эквивалентной плоской модели.
Более подробные данные о расчете см. [31, 32].
Дальнейшим развитием этих систем являются различные сетчатые стержневые купола больших пролетов, отличающиеся определенной однотипностью элементов: геодезические, купола из ромбовидных панелей, двух-
Структуры с одинаковым строением сеток
570
о
СО
с
я
ч
ю
СЗ
Н
РАЗДЕЛ 10. ФЕРМЫ
Параметр уравнения (10.1) Б
Структуры с различным строением сеток
10.2. ПРОСТРАНСТВЕННЫЕ ФЕРМЫ
571
?ВвП; н.п — площади сечений поясоз в верхней и нижней сетках;
вд’ н.д “ площади сечений диагоналей в верхней и нижней сетках;
р — площадь сечения раскосов; а — угол наклона раскоса к горизонтальной плоскости. На рисунках: — элементы верхней сетки; элементы нижней сетки; раскосы.
572
РАЗДЕЛ 10. ФЕРМЫ
Структуры с одинаковым строением сеток
оГ
ОС
1
2 (Мх — Му)
Мх
(“»х»)
1
II
1
00
1
0?
(1 4- V) а
иг а
0?
2 а
ОС
0?
1
УТ (Л1 — чМх)
-12%.
1
3
1
1
му Угнху
II
(1 V) 1ёа
'?а
II
а
X
со
X
ос
0?
н
и
о
оГ
а?
X
1
(Мх М1')-(1 ) Нху
1
ми-Угнху
2
ас
II
(1 V) 48 а
—
II
а
к
о
ос
0?
Б
О
сГ
к
я
1
(МхМу) V-- (1 Ч)НХУ
_
е;
к
II
(1 V) %а
о
0?
-
-
-
-
-
-
-
-
-
-
-
ос
0
1
(? - Яу) 9
?
ос
II
II
0?
2 51П а
У2 зт а
II
ОС
51П а
к
сз
О
о
о
сз
р.
ос
(0Х 0у)3
ОС
II
(Ох-Оу) 8
©
2 51п а
V? 51П а
2 зт а
ГС
5
ос
Г5
-
( ?, °у) 5
ос
( 9 1у) 5
ОС
2 51П а
V 2 зт а
II
с:
2 зш а
Пр
и м е
ч а н и я: 1. Для структур 3 и 6 учтено, что МХМу.
Т а б л и ц а 10.3
Структуры с различным строением сеток
У2 (М — V М
— У в у) (1 в)
Уггмх ми-2уГбны)
4 1ё а
У2(Ми-УвМх) (1 в) 18 а
тх М02Пнха) 4а
(Мх Ми) ув2(1ув)Нху (1 гв) 48 а
18 а
"у 18
(МХ Мц) Ув2 (1 Ув) Нху (1 V 1г а
мх "х
а
2 1ц а
Мх
У2М,
I? а
МХ-Ш„-9УЪН„
4 1ёа
У2 Мх а
Мх-5Ми бУзНх„ 41га
(0Х О,) 4Нхд
2 зт а
х)54нху 2 51П а
(Ох Уу) 5Анхч 2 51П а
2 81П а
о?
I о?
II
о?
V (м - 2 зп а
ОС
II
о?
II
О?
4 51П а
11
о?
II
О?
ЦрхУ2 о„)5- (Мх-Му) 4- ьихи
4 з1п а
3. Графические условные обозначения — см. в табл. 10.2. д
4. Правило знаков указано на схеме, показано положительное направление усилий. Лг Ми к У
5. При выводе формул усилия приняты положительными, У
мхс1р-;их
уЩ
574
РАЗДЕЛ 10. ФЕРМЫ
сетчатые на основе правильной сферической сети Чебышева и др.
Геодезическая сеть образуется проектированием на сферу по радиусу правильного вписанного в нее многогранника, например икосаэдра. В последнем случае сеть состоит из 20 правильных сферических треугольников (стороны треугольника соединяют вершины по кратчай-
(при монтаже свода они устанавливаются после сборки основных стержней). Для круглых куполов более рациональна система с треугольными ячейками (рис. 10.25,6). Число типоразмеров стержней этого купола получается меньше, чем у геодезического тех же размеров.
Сетчатые купола опираются в отдельных точках или
Рис. 10.22
шим расстояниям — геодезическим линиям — дугам большого круга); каждый из них может быть расчленен на более мелкие треугольники (рис. 10.23, а). Членение ведется до получения элемента такой длины, которая обеспечивает при данном материале легкость изготовления, транспортировки и сборки. Однако каждое последующее членение увеличивает число типоразмеров элементов. После окончательной разбивки криволинейные элементы заменяются плоскими. Для повышения обшей устойчивости купола с увеличением его пролета вершины треугольников располагают не на одной сфере, а на поверхности двух (или даже трех) концентрических сфер (рис. 10.23,6), радиусы которых отличаются на небольшую величину (0,5—1 м). В число основных элементов купола наряду со стержнями при этом включаются листовые панели в виде гнутых ромбов или пирамидок.
Более простой системой, обеспечивающей в ряде случаев получение небольшого числа типоразмеров элементов и обладающей рядом других преимуществ, является купол из ромбовидных панелей с радиальнокольцевой разбивкой поверхности вращения, например сферического сегмента (рис. 10.24) [3].
Правильной сетью Чебышева называется такая четырехугольная сеть на поверхности, у которой все противоположные отрезки каждой ячейки попарно равны. Купол на основе этой сети [27] конструируется из трапецеидальных элементов, центры которых располагаются на поверхности сферы радиуса Я (рис. 10.25, а), а сами элементы могут выполняться в виде стержней из двух ветвей, соединенных раскосной решеткой (верхние и нижние ветви образуют две сети). По боковым сторонам элементы соединяются линейными шарнирами, образуя ромбические ячейки. Для обеспечения пространственной работы конструкции в каждой ячейке устанавливаются дополнительные диагональные стержни
связываются упруго с опорным кольцом. При крупном членении (малом пролете и малом числе элементов) расчет возможен методом статического моделирования.
0
При мелком членении возможен приближенный расчет путем представления сетчатых куполов в виде однослойной (при наличии одной сети) или трехслойной (при наличии двух сетей, соединенных связями, работающими на сдвиг) безмоментной оболочки. Меридианальные и кольцевые усилия, соответствующие определенному участку такой оболочки, равному по площади участку купола, приходящемуся на данный его узел, раскладываются на направления стержней купола, сходящихся в этом узле. Наличие опорного кольца должно учитываться наложением усилий от краевого эффекта на усилия безмоментного состояния.
О расчете цилиндрических сетчатых оболочек см. [20].
10.2. ПРОСТРАНСТВЕННЫЕ ФЕРМЫ
575
Фасад1
Вид сберху
8и снизу
а)
О
Фасад
Рис. 10.24
Рис. 10.25
10.2.6. Тонкостенные ребристые циклически симметричные купола
Безмоментная расчетная схема
Мембранное состояние ребристых куполов, выполняемых из трапецеидальных плит, окаймленных ребрами, обусловливается прежде всего конструктивным решением стыков, не воспринимающих изгибающих моментов. Сопряжения такого типа отличаются простотой изготовления и монтажа. Сборка панелей может осуществляться на штырях или болтах, и такие соединения рассматриваются как шарнирные.
Предполагается, что осевые усилия воспринимаются меридиональными и кольцевыми ребрами. Сдвигающие усилия воспринимаются тонкостенными панелями, образующими собственно оболочку, которые здесь эквивалентны в статическом смысле раскосам стержневых куполов [32]. Учитывается круговая симметрия [5].
Обозначим:
—порядковый номер кольцевого ребра, считая от верхнего нулевого кольца; п— порядковый номер меридионального ребра, считая против часовой стрелки от нулевого; т — номер узла ребристого купола; а — длина стороны кольцевого ребра;
Ь( — длина стороны меридионального реб_ ра выше -го кольца;
Мт — продольное усилие в меридиональном ребре, подходящем к узлу , п сверху;
N сп — то же, в элементе меридионального __ ребра, подходящем к узлу Ь, п снизу; 1п — продольное усилие в элементе кольцевого ребра, примыкающем к узлу
I, п слева;
— то же, в элементе кольцевого ебра, примыкающем к узлу I, п справа;
'Ггп—сдвигающее усилие, действующее на ребра меридиана со стороны пластин;
т °1
11п — сдвигающее усилие, действующее на
элемент кольцевого ребра г—1;
й[—1
Т1П — сдвигающее усилие, действующее на
элемент кольцевого ребра г,
V, Т— система натуральных осей координат;
УшУРьшТьп — проекции внешней нагрузки, передающейся узлу т;
%—угол между осью элемента I, —1 меридионального ребра и осью V;
2я
В — центральный угол, соответствующий
стороне правильного кольцевого многоугольника; пг—число сторон кольцевого ребра.
Запишем уравнения равновесия узла (рис. 10.26, б)
217 0; Ущ Ыщ соз — Ы,п соз 0; (10.35)
2Г 0; 1п п8т ЛГп81пя),1
(1п п) зш 0; (10.36)
2Г 0; Т1п (8ы-81п) соз-- 0. (10.37)
К ним присоединяются уравнения равновесия элемента меридионального ребра (—1), п——, п—1 (рис. 10.26, в) и кольцевого Цп—1)—, п:
Т1п ““ Ть,п1 (1—1),л 0; (10.38)
С— Я4-1.
ь, 7«»м Ь11
51В 81Лп-1) — °
(10.39)
576
РАЗДЕЛ 10. ФЕРМЫ
Предполагается, что касательная составляющая нагрузки Тщ0.
Из системы уравнений (10.35) — (10.39) получены выражения для продольных усилий в ребрах и для сдвигающих усилий в стенках панелей при действии произвольной нагрузки:
— соз гЬ
1п Нш — СОЗ 1Ь
N1 V, V, ■
соз Ц;
СОЗ
(10.44)
'(1
С051,1
Ущ
1
соз %1 ’
(10.40)
X
2 51П
0
0 ’
2 31 п —
2
тах).п 01-х
11
(10.41)
Т.
ш 1
или
Т
I—1 Ьь
(10.42)
°11 °11
——Л’ыл—1)) X
СОЗ — 31П
0
X
р1
2 31П “
_ соз8,1 -ап,
■ 5, А, -
2 51П 2
'
4-1
0
2 51П 2
1'
вЧН-1
1
2 31П-
0
2 ЗШ — 2
(10.45)
(10.46)
X
8 1 6
2 ЗШ— 2
РЛ-1 а11
(10.42а)
Л1-И),Л :
((-НЫл1) Т (11).п) (Ю.43)
Соотношения (10.40) — (10.43) имеют рекуррентную структуру и позволяют вести расчет всех усилий, следуя сверху вниз.
Симметричная нагрузка. Когда на ребристый купол действует нагрузка, симметричная относительно его оси, сдвигающие усилия оказываются равными нулю, а для продольных усилий из (10.40), (10.41) и (10.43) получаются следующие простые расчетные формулы:
Произвольная нагрузка. Расчет рассматриваемой системы при действии произвольной нагрузки можно существенно упростить, если использовать особенности систем, обладающих циклической симметрией, и представить нагрузку в виде тригонометрических рядов:
V 31 п кпд 2 VI соз кпд; (10.47)
61,2,3. 60,1,2,3.
Щ зш кпд -- 2 соз кпд, (10.48)
61,2,3. г0,1,2,3.
где к — номер члена ряда.
Предполагается, что в каждом из состояний, описываемых отдельными членами рядов (10.47) и (10.48), нагрузка приложена непосредственно к узлам ребер купола и может изменяться по любому закону.
10.2. ПРОСТРАНСТВЕННЫЕ ФЕРМЫ
577
Когда внешняя узловая нагрузка изменяется вдоль кольца по закону синуса
У1п У5(ткпд; №п зт кпд, (10.49)
продольные усилия в меридиональных и кольцевых ребрах одного яруса и сдвигающие усилия в панелях изменяются по закону:
31 п кпд;
ы1п Щ 51 п кпд;
5‘п кпв’ соз к(п — 0,5) В
ТспП
соз -
кд
Амплитуды усилий 5? и Т
формулам:
Щ соз гр; У
находят по
соз ф,1
Щ (соз 1. 1б1 — 81П 1) —ЩУ] 1
(10.51)
2зт-
0
(10.52)
(10.53)
(10.54)
Ы1п Лг соз кпд;
Ы1п Л? с08
1п 1п “ С08 кпд;
. зтк (п — 0,5) 0
кд
7 са ■
Выражения для амплитуд усилий в куполе при действии узловых нагрузок, изменяющихся вдоль колец по закону косинуса, будут:
Л'?
(10.50) Пользуясь зависимостями (10.51)—(10.54), можно вычислить амплитуды мебранных усилий в ребристом куполе, начиная расчет с верхнего кольца ( 0). Очевидно, 7о 0. Тогда из формул (10.51) и (10.52) находим о и 5с- Затем из соотношений (10.53) и (10.54) последовательно находим Т н Ы. Возвращаемся затем к формулам (10.51) и (10.52) и, положив 1, находим и5. Этот рекуррентный процесс продолжается, пока не будут определены амплитуды усилий во всех элементах ребристого купола.
В том случае, когда внешняя узловая нагрузка изменяется вдоль кольцевого ребра по закону косинуса
У1п У 005 кп в; №1п Щ соз кпд, (10.55)
осевые усилия в элементах меридиональных и кольцевых ребер и сдвигающие усилия в панелях подчиняются следующим зависимостям:
соз 1 с
Щ (С05 Ч «8•Фг-н — 51'п Ф,) Щ Фг-и е
2 51П — 2
(10.60)
; (10.61)
П1-
°Н-
а11
Г' 5?5тй0; (10.
62)
№
(10.56)
(10.57)
(10.58)
(10.59)
И-1 Л'-2ПИ§— • (10.63)
Какова бы ни была узловая нагрузка, действующая на ребристый купол, ее можно разложить на симметричное и антисимметричное состояния относительно диаметра, проходящего через узел кольцевого ребра. Симметричную нагрузку затем можно разложить в тригонометрический ряд по косинусам угла, а антисимметричную — в ряд по синусам угла. Подробный численный расчет купола см. [34].
Моментная расчетная схема. Появление в сборных ребристых тонкостенных циклически симметричных куполах относительно жестких ребер может привести к тому, что при действии внешних сил ребра помимо осевых усилий будут испытывать изгиб, в то время как тонкостенная оболочка воспринимает в основном мембранные усилия. Расчет см. [35].
ЛИТЕРАТУРА
1. Бегун Г. Б. К расчету пространственно-стержневых покрытий безбалочного типа. «Строительная механика и расчет сооружений», 1967, № 6.
2. Беленя Е. И. Предварительно напряженные металлические несущие конструкции. Госстройиздат, 1963.
3. Бриль М. Г., Павилайнен В. Я., Ш у л ьк и н Ю. Б., И м м е р м а н А. Г. Пространственные конструкции больших пролетов из легких сплавов. В сб.: «Расчет пространственных конструкций», вып. 6. Госстройиздат, 1961.
4. Бух.рин Е. М., Коляков А. М. и др. Проектирование строительных конструкций линий электропередачи по предельным состояниям, под ред. М. Бухарина. «Энергия», 1965.
5. Вайнберг Д. В., Чудновский В. Г. Расчет пространственных рам, 1964.
6. Вишняков А. И. Разработка методов, алгоритмов и программ решений инженерно-строительных задач на ЭЦВМ. Стройиздат, Л. — М., 1969.
7. Гипротис. Гострой СССР:
а) Система автоматизации расчетов стержневых конст¬
рукций (СМ—5). Отраслевой фонд алгоритмов и программ, вып. 1—99; 1969.
б) Инструкция к системе автоматизации расчетов стер¬
жневых конструкций СМ—5. Отраслевой фонд алгоритмов и программ, вып. 1—98: 1969.
в) Расчет плоских и пространственных стержневых систем (МАРСС—103). Отраслевой фонд алгоритмов и программ, вып. 1—95; 1969.
г) Инструкция по подютовке исходных данных для расчета плоских и пространственных стержневых систем по программе МАРСС — 105. 1971.
578
РАЗДЕЛ 10. ФЕРМЫ
8. Горенштейн Б. В. Расчет сетчатых систем В. Г. Шухова на прочность, жесткость и устойчивость. В сб.: «Расчет пространственных конструкций», вып. 5. Госстройиздат, 1959.
9. И м м е р м а н А. Г. Пространственная работа крановых стрел. В сб.: «Расчет пространственных конструкций», вып. 2. Госстройиздат, 1951.
10. И м м е р м а н А. Г. Расчет перегрузочных мостов на кручение. В сб.: «Исследования. Массивные и стержневые конструкции». Госстройиздат, 1953.
11. Инструкция по применению универсальной программы расчета статически неопределимых стержневых систем методом деформаций (ДО). Киев, 1964.
12. К а р л с е н Г. Г., Большаков В. В. и др. Деревянные конструкции. Стройиздат, 1961.
13. Ким Т. С. Расчет ферм наименьшего объема методом целочисленного программирования. «Строительная механика и расчет сооружений». 1969, № 1.
14. К У д р я в ц е в П. А. Расчет стрел на кручение. Труды ВНИИПТМАШ, кн. 5. Машгиз, 1952.
15. Л ь в и н Я. Б. К определению усилий в «нулевых» стержнях ферм. В сб.: «Исследования по теории сооружений», вып. 4. Стройиздат, 1949.
16—18. Мацюлявичус Д. А. Статьи в сб.: «Строительная механика и конструкции», доклады 14—16 науч.-техн. конференций Каунасского политехи, ин-та, изд. «Минтис». Вильнюс, 1964, 1965, 1966.
19. Мацюлявичус Д. А. Некоторые алгоритмы синтеза оптимальных схем стержневых упругих конструкций минимального веса. В сб.: «Применение ЭВМ в строительной механике». Киев, «Наукова думка», 1968.
20. П о п о в И. Г. Цилиндрические стержневые системы. Госстройиздат, 1952.
21. Попова Т. А. Применение метода статического моде¬
лирования к расчету некоторых современных пространственных стержневых конструкций. В сб.: «Расчет пространственных
конструкций», вып. 10. Стройиздат, 1965.
22. Р а б и н о в и ч И. М. Курс строительной механики стержневых систем, ч. 1. Стройиздат, 1950; ч. 2. Госстройиздат, 1954.
23. Рабинович И. М« Об одной з адаче теории ферм.
В сб.: «Исследования по теории сооружений», вып. 7. Стройиздат, 1957.
24. Р а д ц и г Ю. А., Кол у паев А. Н. Программированные расчеты статически неопределимых ферм наименьшего объема. В сб.: «Применение ЭВМ в строительной механике». Киев, «Наукова думка», 1968.
25. Р е з н и к о в Р. А. Методы решения задач строительной механики на электронных цифровых машинах. Стройиздат, 1964.
26. Р о з е н б л и т Г. Л. Стальные конструкции зданий и сооружений угольной промышленности. Углетехиздат, 1953.
27. С а в е л ь е в В. А. Устойчивость сетчатых куполов.
В сб.: «Металлические конструкции. Работы школы проф.
Н. С. Стрелецкого». Стройиздат, 1966.
28. С а в и ц к и й Г. А. Основы расчета радиомачт. Статика и динамика. Связьиздат, 1953.
29. С н и т к о И. К. Практические методы расчета статически неопределимых систем. Стройиздат, 1964.
30. Т р о ф и м о в В. И., Бегун Г. Б. Структурные конструкции. Стройиздат, 1972.
31. У м а н с к и й А. А. Пространственные системы. Стройиздат, 1948.
32. У м а н с к и й А. А. Статика и кинематика ферм. Техтеоретиздат, 1957.
33. X и с а м о в Р. И. Приближенный расчет пространственных стержневых покрытий. «Строительная механика И расчет сооружений», 1965, № 1.
34. Чудновский В. Г., Беднарский Б. А. Безмоментная теория тонкостенных ребристых оболочек вращения при действии произвольной нагрузки. В сб.: «Расчет пространственных конструкций», т. 8. Госстройиздат, 1962.
35. Ч у д н о в с к и й В. Г., Р ы м а р И. М. Расчет ребристых тонкостенных купольных покрытий. В сб.: «Расчет пространственных конструкций», т. 7. Госстройиздат, 1962.
36. Ш м у л ь с к и й М. Д. Работа металлических башенных конструкций на кручение. Сб. трудов Института строительной механики АН УССР, К? 14. Киев, 1950.
37. Энциклопедический справочник. «Машиностроение», т, 1 кн. 2. Машиностроение, 1948.
РАЗДЕЛ 11
ВАНТОВЫЕ И ПНЕВМАТИЧЕСКИЕ КОНСТРУКЦИИ
11.1. ГИБКИЕ НИТИ
11.1.1. Общие положения
Гибкая нить представляет собой геометрически изменяемую систему с бесконечно большим числом степеней свободы, работающую только на растяжение, но способную воспринимать нагрузку при надлежащем закреплении ее концов. Форма равновесия нити зависит от характера нагрузки. Наибольший практический интерес представляет нагружение нити нагрузками, имею-
На этих аналогиях основано построение эпюры изгибающих моментов и эпюры прогибов балки как веревочных кривых. Для построения линии равновесия гибкой нити используются правила построения эпюры изгибающих моментов для балки. Линия равновесия гибкой нити под действием вертикальной нагрузки 7 (я) совпадает с эпюрой изгибающих моментов шарнирно опертой балки пролетом , находящейся под действием той же нагрузки 7; при этом ординаты эпюры моментов уменьшены в Н раз и отложены от хорды АВ, соединяющей точки подвеса нити.
В результате, применительно к схеме, изображенной на рис. 11.1, ординаты у линии равновесия нити определяются так
М
(Н.4)
где М — изгибающий момент в шарнирно опертой однопролетной балке пролетом , нагруженной нагрузкой 7(х).
В соответствии с этим значения тангенсов углов наклона нити к горизонту будут равны:
йУ ?., 0'ТГ1ГР’
йх
Н
(11.5)
щими постоянное направление, например собственным весом в комбинациях с различными распределенными или сосредоточенными полезными нагрузками.
Дифференциальна уравнение линии равновесия нити (рис. 11.1) имеет вид:
йх
Н
Здесь у — ордината линии равновесия нити;
д 7 () — значение заданной в виде функции от координаты х нагрузки в рассматриваемом сечении;
Н — распор, т. е. горизонтальная составляющая опорных реакций в точках подвеса нити, равная по величине горизонтальной составляющей продольных усилий Т во всех сечениях нити.
Уравнение (11.1) аналогично дифференциальному уравнению эпюры изгибающих моментов балки при вертикальной нагрузке:
йШ йх2
—7,
(И.2)
а также дифференциальному уравнению изогнутой оси балки;
йу йх2
' Е1
(11.3)
где О—поперечная сила в шарнирно опертой балке пролетом 1, нагруженной нагрузкой я(х). Величина продольного усилия в гибкой нити
Т Ун (0 Н12 ф)«.
(11.6)
(111)
Из формул (11.4) — (П.б) видно, что для решения поставленной задачи необходимо знать величину распора Я. Наиболее просто величина распора определяется в том случае, когда кроме концевых известна хотя бы одна из промежуточных ординат линии равновесия нити, в этом случае
Н —, (11.7)
У—хёР
где М — балочный изгибающий момент в сечении хсопз1; у — ордината кривой равновесия нити в сечении соп5 (рис. 11.1). Так, например, если нагрузка равномерно распределена по проекции нити (7 соп51;) и известна стрелка ? провеса нити в середине пролета, то в этом простейшем случае
Я -г. (П.8)
Однако в большинстве практических случаев ни одна из промежуточных ординат линии равновесия нити заранее неизвестна.
Это объясняется тем, что гибкие нити, применяемые в инженерных конструкциях, подвергаются, как прави-
580
РАЗДЕЛ 11. ВАНТОВЫЕ И ПНЕВМАТИЧЕСКИЕ КОНСТРУКЦИИ
ло, воздействиям различных временных нагрузок, вызывающих изменения формы равновесия нити.
Здесь задачу практически целесообразно поставить следующим образом: по заданным схеме нагружения и первоначальной длине нити 50 (т. е. по длине заготовки нити до ее нагружения) — определить распор, форму равновесия нити и действующие в ней усилия, с учетом ее упругих деформаций. В такой постановке для всей области пологих и непологих нитей при п 4 и произвольном угле ф наклона хорды излагается дальнейшее решение рассматриваемой нелинейной задачи. К такой постановке могут быть приведены все практические случаи.
11.1.2. Определение величины распора нерастяжимой нити
Если длина заготовки 50 известна, то для определения величины распора нерастяжимой нити Н0 при произвольной вертикальной нагрузке рекомендуется формула:
йа (1 — а)
(11.9)
Но — г Ус
Здесь В — характеристика нагрузки:
I I
Л Г Мдс1х 2Чх, (11.10)
о о
где М и 0 — соответственно изгибающий момент и поперечная сила в однопролетной балке пролетом I, нагруженной нагрузкой д(х);
ау-, (11.11)
где а—расстояние по горизонтали (см. рис. 11.1) от левой опоры до линии действия равнодействующей Н внешней нагрузки, приложенной к нити;
(т2— 1) Г
цс (1 —2а) зшф--
2 (т2 — зт2 ф) соз ф [
Ф
_. 4а (1 —а) соз2 ф.
от1 ] „«"Г I ■ 11Л2
где
т -% 41 соз р. (11.13)
а I
При нагрузке, симметричной относительно вертикальной оси, проходящей через середину пролета , а также в других случаях, когда а0,5,
В1 (т2 — 81 п2 ф)
(11.14)
т2 — 1 при а 0,5
Если известна первоначальная стрела провеса 0, то при равномерно распределенной нагрузке, вместо (11.14) при а0,5
У ъю
я0 —. (11.15)
при а 0,5
Интегралы (11.10), выражающие характеристику нагрузки Д легко вычисляются методом Верещагина
Таблица 11.1 Формулы для определения характеристики нагрузки й
11.1. ГИБКИЕ НИТИ
581
(если одна из эпюр Му 7 или ф — прямолинейная) или непосредственным интегрированием. Например, при 7 сопз1
с 2 ?2, д213
0Мч(1х — -—1Я — •
О
Подстановка этого значения в (11.15) дает формулу (11.8). Готовые формулы для вычисления характеристики нагрузки Ь для некоторых распространенных случаев нагружения помещены в табл. 11.1.
11.1.3. Определение распора упругой нити
Определение распора упругой нити производится в два этапа. Сначала определяется распор Я0 без учета ее продольных деформаций, т. е. как для нерастяжимой нити, а загем находится распор Я с учетом упругих деформаций. При этом этап сводится к решению кубического уравнения:
Я3-
Лео С052 ф й(й С052 ф
Я2
21кН
Ш
(11.16)
где оЕР;
Р — площадь поперечного сечения нити;
Е — модуль упругости; й — определяется по формулам (11.10); 0 —по формулам (11.9) или (11.14), (11.15);
к
а2 г (1 — а)2 здесь а определяется из (11.11), а Г и г2 по формулам:
о ( 08 Ф)2; (11.18)
ггУ( 1 - «)2 1(1 - а) 6-Ф Чс], (11.19)
где
Ус
(11.20)
I
а ус определяется из (11.12).
При нагрузках, симметричных относительно середины пролета, а также в других случаях, когда а0,5, если при этом известна стрела провеса нити при равномерно распределенной нагрузке, коэффициент к может быть вычислен по формуле
(11.21)
(11.22)
(11.23) (1Ь24)
где
-4(4),
зес2 ф 2 Ф 4 пУз
4
Зяа
28Ф, 4
пУТ Зп3
11.1.4. Вычисление длины нити
Если известна стрела ( провеса нити в середине пролета при равномерно распределенной нагрузке, то соответствующая длина нити
( «. (11-25)
где с1 и й2 вычисляются по формулам (11.22), (11.23).
Формула (11.25) дает приближенное решение задачи, однако степень этого приближения весьма высока. Так, например, погрешность вычисления при значениях угла наклона ф 30° и я 10, составляет всего 0,002% величины 5.
На практике задача часто ставится следующим образом: задается форма равновесия нити, нагруженной постоянной равномерно распределенной вдоль пролета нагрузкой §, и требуется произвести расчет при различных комбинациях этой постоянной и временной нагрузок.
В этом случае величины распора Я и стрелы провеса при постоянной нагрузке § известны.
Для дальнейших расчетов (с учетом дополнительных нагружений и других воздействий), а также для изготовления нити необходимо знать длину заготовки 50. Для ее вычисления рекомендуется следующий метод:
а) вычисляется величина о — первоначальной стрелы провеса нити (т. е. величина стрелы провеса при равномерно распределенной нагрузке, близкой по величине к нулю, когда можно пренебречь деформациями удлинения нити). Для этого рекомендуется формула:
и]Г1
3§кр1п3
64© соз2 ф
(11.26)
(11.17)
где к0 вычисляется по формуле (11.21); й и й2 вычисляются по формулам (11.22) и (11.23); о ЕР; Е — модуль упругости; Р — площадь поперечного сечения нити, постоянная по всей ее длине. Найдя величину 0, определяем:
пл
о ’
б) подставляя п0 в формулы (11.22) и (11.23) вместо пу вычислим соответствующие значения коэффициентов й и 2 при пя0; подстановка полученных результатов в формулу (11.25) дает искомую длину заготовки нити 5о.
Если задана форма равновесия нити при любой другой (неравномерной) нагрузке, то для определения длины заготовки поступают следующим образом: по заданной форме равновесия вычисляют длину нити 5 в нагруженном состоянии, затем по формуле (11.7) вычисляют величину распора Я, соответствующую нагруженному состоянию; после этого, используя полученное значение Я, определяют первоначальную величину распора
ЯЛ
1
26Я3
(11.27)
1)0) С052 ф
где О определяется из (11 10), а к—из (11.17).
Зная Я0, можно построить пользуясь (11.4), линию равновесия нити в исходном состоянии, т. е. до проявления продольных деформаций нити. Для определения длины заготовки 50 вычисляют длину построенной (по Н0) линии равновесия, разбив ее на достаточно большое число участков.
Здесь коэффициент к вычисляется исходя из заданной длины нити 5 в нагруженном состоянии.
582
РАЗДЕЛ 11. ВАНТОВЫЕ И ПНЕВМАТИЧЕСКИЕ КОНСТРУКЦИИ
11.1.5. Расчет струны
Если первоначальная длина нити, т. е. длина заготовки, равна длине хорды АВ (рис. 11.1), то в этом случае решение уравнения (11.16) будет иметь вид: з,
—
Н соз ф Л соз2 ф.
Расчет предварительно напряженной струны
Если упругая нить находится под воздействием силы предварительного натяжения N (рис. 11.2), направленной по хорде АВ, и произвольной вертикальной на¬
грузки д(х), то при этом зависимость между величинами распора и силы предварительного натяжения выражается уравнением
)о
— N11 соз ф соз ш
21
или
N
Н
И®
2Я2
С034ф.
(11.29)
(11.30)
СОЗ ф
Пример 11.1. Стальной канат закреплен в точках А и В, расположенных на разных уровнях (рис. 11.3), и нагружен постоянной равномерно распределенной по всему пролету нагрузкой 500 кГм и временной нагрузкой 7420 кГм, расположенной на половине пролета. Величина пролета 100 м; угол наклона хорды Ф30°; стрела провеса каната в середине пролета при нагружении его только постоянной нагрузкой § принята равной 10 м; Е6 • 106 тм2; Р—15,96 см; разрывное усилие каната 248 т (табл. 11.2, канат диаметром 59 мм).
Требуется определить распор, максимальное усилие в канате, угол наклона каната у опоры В и ординату линии равновесия в середине пролета.
Определим жесткость каната на растяжение: соЕ • Р 16 10б • 15,96 • 10—25 536 т.
Пользуясь строкой 3 табл 11.1, вычислим характеристику нагрузки О при заданной схеме нагружения; найдем предварительно
420
отсюда
0,52 100
500
— 0,84;
12
1 0,84 — 0,842 42,910? тм
16
■)-
Для вычисления длины заготовки 50, исходя из заданной величины стрелы провеса каната, при равномерно распределенной постоянной нагрузке (10 м; п
(11.28)
Рис. 11.3
—Щ 10), пользуясь формулами (11.22) и (11.23), определим коэффициенты (1 и А?.
1552
2-0,577 4
——0,643;
10 Уз
3-102
2-0,577
3-10а
0,52911;
10 К 3
по формуле (11.21)
0 4 (0,6433 0,5293) 1,656;
Таблица 11.2
Канаты стальные типа ТК 7X37259 проволок с металлическим сердечником (ГОСТ 3068—55)
Диаметр
каната,
Площадь
сечения,
ММ
Расчетный
Расчетный предел прочности проволоки при растяжении, кГмм
вес 100 пог. м
риоо аштПГП
170
180
190
каната, кг
Разрывное усилие каната в целом, кг
21,0
204,46
179,3
28 450
30150
31 800
23,5
247,31
216,8
34 400
36 450
38 450
25,5
294,04
257,8
40 950
43 350
45 750
27,5
345,17
302,7
48 050
50 900
53 750
29,5
400,40
351,1
55 800
59 050
62 350
31,5
457,69
401,3
63 750
67 500
71 250
34,0
522,41
458,1
72 800
77 050
81 350
36,0
589,82
517,2
82 000
86 900
91 800
38,0
659,81
578,6
91 800
97 150
102 500
42,0
815,61
715,2
113 500
120 000
126 500
45,5
990,65
868,7
137 500
145 500
154 000
50,5
1173,34
1028,9
163 000
173 000
182 000
55,0
1378,16
1208,5
191 500
203 000
214 000
59,0
1596,00
1399,6
222 000
235 000
248 000
63,0
1834,49
1608,7
255 500
270 500
285 500
67,5
2085,86
1829,1
290 500
307 500
325 000
Примечание.
По стальным канатам имеются также
ГОСТ 3063—55, ГОСТ ГОСТ 7676—55 и др.
3064—55, ГОСТ 3067-
55, ГОСТ
7675—55,
11.2. ВАНТОВЫЕ СИСТЕМЫ
583
по формуле (11.26) о
отсюда
30,51,656100•103
1 — Л 8,93 ж,
64-25536-0,8662 100
«о
8,93
11,20;
подставляя значение по в формулы (11.22) и (11.23) вместо п, получаем: 01 0,635; а020,533. Подставляя эти коэффициенты в формулу (11.25), находим длину заготовки
50 (0,635 0,533) 100 116,854 м.
Для определения распора при заданной схеме нагружения (рис. 11.3) определим предварительно необходимые коэффициенты: расстояние а от левой опоры до равнодействующей нагрузки:
0,5-100-50 0,42-50-75
а 57,4 м
0,5-100 0,4250
отсюда, по (11.11)
а - 0,574;
100
далее, по (11.13)
те -11М о,86б 1,012;
100
я2 1,024; л2 — 1 0,024; т — 81П» ф 1,024 — 0,25 0,774; подставляя в формулу (11.12), найдем:
100-0,024 Г
Ус ■ (1 — 20,574) 0,5
яс 2.0,774.0,866 I.' • т
„ " 4-0,574.0,426.0,75 1,Л Л,
' •°12 V 1 — ]" '0,°7 ■
Пользуясь формулой (11.9), определим величину распора без учета упругих деформаций каната:
V 429-102-0,574-0,426-100 10,07
101,75 т.
ус 10,07 Л 1лп„
I юо 01007:
гх ]Г0,5742 (0,1007 0,574-0,577)2 0,718;
Л, V 0,4262 (0,426-0,577 —0.1007)2 0,450;
, 0,718?, 0,4503. „„„
к 1,628.
0,5742 0,4262
На основе полученных данных составим уравнение
(11.16):
42,9-103-25536-0,8662
2-100-1,628-101,7а
42,9-103-25,5-103«0,866а " 2-100-1,628
или
Я3 244Я2 2,525 - 10е.
Отсюда распор Я87,314 г.
Определим максимальное усилие в канате. Своего максимума это усилие достигает в рассматриваемой задаче у опоры А.
Балочная поперечная сила на левой опоре
ЭА 0,5-100-0,5 0,42-50-0,25 30,25 т.
Пользуясь формулой (11.6), находим максимальное усилие в канате:
Гмакс V87,32 (30,2 87,3-0,577)2 119 т.
Определим угол наклона каната у опоры В. Поперечная сила у опоры В
(?Б 30,25—0,5-100 — 0,42-50 —40,75 г. Пользуясь формулой (11.5), получим:
. Л 40,75
0,577 0,1106.
Отсюда
87,3
ев 6°18' 50".
Перейдем к вычислению распора с учетом упругих деформаций каната; для этого, пользуясь формулами (11.18)—(11.20), определим коэффициент к:
Пользуясь формулой (114), определим ординату линии равновесия каната в середине пролета
30,2-50 — 0,5-502-0,5 У112—’ 87 3 39,032 м.
11.2. ВАНТОВЫЕ СИСТЕМЫ
11.2.1. Общие сведения
Плоская или пространственная стержневая система, основные несущие элементы которой рассматриваются при расчете как гибкие нити, называется вантовой системой. Если элементы заполнения (например, ограждающие элементы висячего покрытия, выполненные из железобетона или армоцемента) замоноличены и работают совместно с вантовой системой, то образуется висячая оболочка, армированная вантами. Такая оболочка рассчитывается обычными методами (см. разд. 14), одна¬
ко на стадии монтажа и в предельном состоянии представляет собой вантовую систему.
Многие из применяемых в строительной практике вантовых систем являются изменяемыми. Если такая система находится в равновесии, то ее конфигурация и соответствующие ей внешние нагрузки называются равновесными. Изменение интенсивности равновесной нагрузки вызывает только упругие деформации, и в этом отношении изменяемые системы, нагруженные равновесной люцэузкой, не отличаются от систем неизменяемых.
584
РАЗДЕЛ И. ВАНТОВЫЕ И ПНЕВМАТИЧЕСКИЕ КОНСТРУКЦИИ
Среди изменяемых систем существуют вырожденные системы, которые при условии недеформируемости материала полностью лишены подвижности, но в случае реального материала допускают бесконечно малые перемещения за счет удлинений второго порядка малости. В соответствии с этим кинематическим признаком такие особого рода системы получили в строительной механике название мгновенно-жестких [19]. Как показано в [15], система, обладающая положительным числом степеней свободы, но допускающая устойчивое равновесие с начальными усилиями, есть мгновенно-жесткая система. В частности, таковыми являются предварительно напряженные вантовые системы.
Простейшей мгновенно-жесткой системой является прямолинейная шарнирно-стержиевая цепь с закрепленными концами и ее предельный слу-
Цев»
Н
Н
Рис. 11.4
Рис. 11.5
чай — струна (рис. 11.4), т. е. нить, длина которой в естественном состоянии равна или (в случае предварительного напряжения) меньше расстояния между опорами. Отличительная особенность этой системы состоит в отсутствии таких поперечных нагрузок, для которых исходная (прямолинейная) форма шарнирной цепи или струны была бы равновесной; равновесие может наступить только после изменения очертания системы, которое происходит благодаря податливости материала. Поэтому расчет таких систем на поперечную нагрузку возможен только по деформированной схеме.
Двухпоясная вантовая система (рис. 11.5, а) в кинематическом отношении подобна струне, так как представляет собой шарнирную цепь, у которой все мгновенные центры взаимного вращения звеньев расположены на одной прямой; на этой прямой пересекаются все пары касательных к верхнему и нижнему поясам, проходящие через точки с одинаковой абсциссой. Принципиальное отличие этой системы от струны заключается в том, что очертание двухпоясной системы в ненагруженном состоянии является равновесным для поперечной нагрузки, эпюра которой подобна эпюре усилий в вертикальных связях в стадии предварительного напряжения.
Двухпоясные вантовые системы рассмотренного типа, будучи расположены в плоскостях, проходящих
через одну вертикальную прямую, образуют пространственную радиальную вантовую систему (рис. 11,5,6). Существуют и другие разновидности радиальных систем.
Еще один вид пространственных вантовых систем составляют вантовые сети. Кинематический анализ сети свидетельствует о ее многократной геометрической изменяемости. Очевидно, что из всех сетей мгновенножесткими могут быть только те, у которых нормальные кривизны нитей всюду разнозначны или равны нулю (рис. 11.6), ибо в противном случае состояние с начальными напряжениями заведомо не может быть устойчивым.
В отличие от рассмотренных ранее систем, каждая сеть имеет довольно широкий класс равновесных поперечных (т. е. нормальных к поверхности) нагрузок; единственное исключение составляет асимптотическая сеть поверхности (линии которой имеют нулевую нормальную кривизну) и ее вырождение — произвольная плоская сеть. Асимптотическая сеть допускает начальные напряжения и поэтому обладает мгновенной жесткостью, но равновесных поперечных нагрузок для нее не существует, и в этом отношении она представляет собой двухмерный аналог струны.
11.2.2. Особенности расчета и общие расчетные предпосылки
Одна из характерных особенностей, присущих вантовым системам (как изменяемым, так и мгновенножестким), заключается в том, что их очертание в значительной мере зависит от деформаций (кинематических, упругих, пластических, температурных и т. д.). Тот факт, что равновесная форма этих систем может существенно отличаться от исходной, осложняет определение их напряженного и деформированного состояния, поскольку делает задачу геометрически нелинейной. Исключение в этом отношении может представить только расчет на равновесные нагрузки, которые, как уже отмечалось, вызывают одни лишь упругие перемещения. Но и в этом случае следует убедиться, что перемещения достаточно малы по сравнению с генеральными размерами системы, ибо только при таком условии можно не делать различия между деформированной схемой конструкции и исходной. Если принять во внимание относительно большую деформативность вантовых систем, то рассматриваемый случай, казалось бы, не должен иметь большого практического значения. Однако, в отличие от выпуклых, сжатых конструкций (как, например, пологие арки и оболочки положительной гауссовой кривизны), для которых именно учет нелинейных членов позволяет получить достоверную оценку их прочности, жесткости и устойчивости, висячие системы вовсе не теряют устойчивости, а пренебрежение геометрической нелинейностью идет для них в запас прочности и жесткости. Вот почему на практике при расчете на равновесные нагрузки линейная постановка задачи часто оказывается вполне достаточной. Более того, линейная постановка может оказаться приемлемой и при расчете на неравновесные нагрузки, если в системе имеются настолько большие усилия от равновесной нагрузки или предварительного напряжения, что их изменениями можно пренебречь.
Наряду с геометрической и физической нелинейностью в задаче о расчете вантовой системы может возникнуть еще так называемая конструктивная нелинейность, связанная с качественным изменением расчетной схемы конструкции в процессе ее деформирования. Наиболее характерным проявлением конструктивной нелинейности служит выключение связей (например,
11.2. ВАНТОВЫЕ СИСТЕМЫ
585
при потере натяжения в какой-либо нити), которое, как правило, недопустимо и рассматривается в качестве одного из предельных состояний системы.
При решении нелинейных задач широкое применение получили шаговые методы, сущность которых состоит в следующем. В нелинейном уравнении выбирается (или вводится в него искусственно) некоторый параметр. При каком-либо одном его значении напряженнодеформированное состояние рассматриваемой системы должно быть известно (исходное состояние). Затем этому параметру последовательно даются малые приращения. Каждый из последовательных однотипных этапов расчета состоит в определении изменений напряженного и деформированного состояния системы при заданном изменении варьируемого параметра. Приращения параметра назначаются настолько малыми, чтобы на всех этапах расчета можно было в рамках требуемой точности пренебречь нелинейными членами. В результате решение нелинейной задачи сводится к вычислительному процессу, на каждом этапе которого решаются линейные уравнения, причем рекуррентный характер процесса позволяет эффективно использовать электронно-вычислительные машины. Понятно, что варьируемый параметр целесообразно выбирать таким образом, чтобы процесс решения линеаризованных уравнений сопровождался получением максимального количества полезной информации о рассчитываемой системе.
Известно, например, что прямая задача инженерного расчета, проводимого при проектировании конструкций, состоит обычно в определении сечений конструктивных элементов. Этой задаче в наибольшей мере отвечает метод расчета [14], основанный на совмещении шаговой линеаризации с поэтапной корректировкой сечений конструкции. В исходном для расчета состоянии конструкция имеет избыточные сечсния, при которых деформации малы, но прочность недоиспользуется. Поэтому уменьшение сечений, вызывающее рост напряжений и деформаций, продолжается до тех пор, пока на некотором этапе оно не окажется невозможным. Указанный процесс, который можно трактовать как процесс оптимального проектирования, хорошо алгоритмизуется в виде рекуррентной последовательности задач линейного программирования, решаемых симплекс-методом При этом на каждом этапе минимизируется, например, теоретический вес системы (целевая функция) при следующих ограничениях: 1) линеаризован¬
ные уравнения статики для всех расчетных сочетаний нагрузок; 2) условия прочности и жесткости системы;
3) максимальные значения изменений сечений (гарантирующие приемлемость линейного подхода на каждом этапе).
Другая разновидность шагового метода — метод последовательных нагружений [17], который состоит в том, что на каждом этапе расчета к конструкции прикладывается небольшая доля внешней нагрузки. При этом можно изменять последовательными этапами не только интенсивность нагрузки, но и закон ее распределения, что сокращает объем вычислений при расчете на различные виды нагружения, а также позволяет выявить эффект «перемещения» нагрузки по конструкции.
Применение описанных методов дает возможность при минимальном объеме вычислений получить ту информацию, которая обычно интересует проектировщика.
При статическом расчете висячей системы целесообразно выбирать в качестве исходного состояния для начала расчета какое-либо из ее предельных состояний (по прочности, по деформативности, по выключению на¬
прягающих вант). Соответствующим подбором геометрических параметров и усилий в этом состоянии можно добиться наиболее рационального использования материала конструкции. Кроме того, можно потребовать, чтобы два (или даже больше) предельных состояния совмещались, что также является одним из критериев оптимального проектирования. При таком подходе целью расчета становится определение недеформированного состояния системы, из которого она под влиянием заданных расчетных воздействий переходит в заранее назначенное предельное состояние. Все требующиеся данные о предельном состоянии, необходимые для начала расчета, удается получить на основе одного из постулатов статики — принципа отвердения, согласно которому в любом равновесном состоянии механическая система может считаться недеформируемой.
Применяя принцип отвердения к вантовой системе при расчетной нагрузке, можно найти максимальные усилия в несущих вантах и определить их сечения. Для двухпоясных вантовых систем и седловидных сетей усилия в напрягающих вантах в предельном состоянии принимаются равными нулю, а их сечения определяются шаговым методом. С этой целью вначале назначаются заведомо избыточные их сечения и на первом этапе расчета удаляется вся временная нагрузка; далее производится постепенное уменьшение сечений этих вант вплоть до исчерпания их прочности или получения предельных прогибов системы. В итоге расчета определяются сечения напрягающих вант и напряженно-деформированное состояние системы при действии одной лишь постоянной нагрузки. Чтобы определить состояние системы при отсутствии постоянной нагрузки, можно последовательными этапами удалить и эту нагрузку. Для мгновенно-жесткой системы таким путем однозначно определяется состояние с начальными напряжениями. Подробный числовой пример, иллюстрирующий применение шаговых методов к расчету радиальной вантовой системы см. [И].
11.2.3. Двухпоясные вантовые системы
1. Различные виды плоских двухпоясных вантовых систем (см. рис. 11.5) с точки зрения статического расчета не отличаются друг от друга. При расчете этих систем принимаются следующие допущения:
1) начальные очертания поясов суть квадратные параболы
х2 х2
—, г2-2—. (11.31)
Здесь и в дальнейшем индекс «1» относится к напрягающим вантам, индекс «2» — к несущим. Форма (11.31) является равновесной для равномерно распределенной нагрузки;
2) система настолько полога, что для обоих ее поясов
созр«1, (11.32)
где Р — угол наклона ванты к горизонту в любой точке. Принятие этого допущения уничтожает различие между усилиями в вантах'Гц2)И их горизонтальными проекциями— распорами1(2), а также между вертикальной и нормальной к ванте составляющей внешней нагрузки;
3) связи между поясами (распорки или растяжки) считаются недеформируемыми и распределенными непрерывно.
586
РАЗДЕЛ И. ВАНТОВЫЕ И ПНЕВМАТИЧЕСКИЕ КОНСТРУКЦИИ
В случае нагрузки, показанной на рис. 11.7, расчет вантовой системы сводится к решению следующей системы нелинейных уравнений:
(т, - г?)чг, V — г2-4-
3 11 3 6
01 А(7’-7’н) 0;
(Г2 - г§) 2-уч2г-г2-у V2
й2 (Т — Т») 0;
ТУ — Р 0; (П1-2)7’1-(т12 г)7'1 0.
(11.33)
Здесь Чг1(2
ВР
1(2) 1(2)
_ 2) 1(2) “
2 —
I
1(2)
(11.34)
Г Г Г2, Тн Г? Т, к .Р -1 (9п _ яЛ) ( --цп ?л),
4 4
Г”(2) — начальные усилия в вантах; ЕРц2)—жесткости на растяжение; УРо — прогиб в центре; а—коэффициент линейного расширения; 6ц—взаимное горизонтальное перемещение опор от действия 1.
Горизонтальные перемещения 7ц2)сеРедин верхнего и нижнего поясов определяются по формулам:
2 012 2);
1(2)
ц°
1(2)
(11.35)
где V и 1 находятся из решения системы (11.33).
Для решений этой системы шаговыми методами дадим параметрам деформативности Ч'щ)и нагрузки Р
и С3 малые приращения; в связи с этим приращения получат также все усилия и перемещения. Обозначая приращения всех величин соответствующими малыми буквами, приходим к рекуррентной системе линейных уравнений (табл. 11.3).
Здесь
41 П1 ■
(11.36)
Индекс «1» относится к приращениям (Н-1)-го этапа, индекс «Ь относится к полным значениям величин после -го этапа расчета.
2. Предварительно напряженная радиальная вантовая система (рис. 11.8) считается закрепленной на недеформируемом опорном контуре. Внутреннее кольцо представляется в виде узла, в котором неподвижно скреплены все нити. В качестве системы координат принимаются полярные координаты плоскости с полюсом, совпадающим с проекцией на эту плоскость узлов верхнего и нижнего поясов. Начальные очертания поясов принимаются такими:
1 '(р1“;01); га г(р2--д2), (11.37)
Таблица 11.3
Свободные члены
Ч-1
1
41
изменение
жесткости
изменение нагрузки и температуры
-±У1
3
Т Ч1
( т - Г?) ч1
к
Щ к
-1И
3
( Г«-Г»)1
41
— V1 3
-V
3
— т1
3
0
0
-т »‘1
4 1
3
0
— т1
3
0
-±.ж
11.2. ВАНТОВЫЕ СИСТЕМЫ
587
где
где
(11.38)
Эта форма является равновесной для нагрузки, распределенной равномерно по площади покрытия. Остальные расчетные предпосылки аналогичны соответствующим допущениям для плоских двухпоясных систем.
В случае нагрузки 77(ф) расчет сводится к ре-шению следующей системы уравнений:
(г, - г?) -
— — 22 Хг соз ф Ух зт ф 1 0;
(г2-г5)т2--д,у— у2-ъг
— — 22 Х2 соз ф У2 зш ф й2 0; 1 -У)?- (2 V) Т% Р 0;
2л 2л
§ Т1 соз фЖр 0; ] Тг зш фЖр 0;
2 я
Г Т2 соз ф?ф 0; ] Т2 З1п фф 0; о о
2л
0о [Я Г1(л1-2)-Га(л2 2)]йф 0,
Р
?Я2
1(2)
1(2)
1(2)
1(2)
?
(11.40)
Здесь Хц2)у У 1(2) 2 — направленные вдоль соответствующих осей компоненты перемещения узлов системы;
Эо — приложенная в центре сосредоточенная вертикальная сила; величины 72) и 4(2) относятся к полоске д?ф1, содержащей определенное постоянное число нитей.
Давая параметрам деформативности и нагрузки малые приращения, приходим к рекуррентной системе линейных уравнений (табл. 11.4). Структура этой системы такова, что для ее решения вначале приходится выразить из первых трех уравнений величины 41 „41 через приращения перемещений, а затем подставить эти выражения в оставшиеся уравнения. При вычислении интегралов перемещения следует представить в виде
(11.39)
?1
«1'
-Щ _ _ 1М,
и т. д. с тем, чтобы величины Хц2у'Уц2) и г можнсг было вынести из-под знака интеграла, а затем найти их из линейных уравнений, получающихся после вычисления интегралов.
Для различных частных случаев рекуррентная система уравнений (табл. 11.4) получает те или иные очевидные упрощения, связанные с наличием плоскостей симметрии и т. д. Наибольшие упрощения получаются для вантовых систем кругового очертания в плане. Эти системы обладают замечательной особенностью работы
Т а б л и ц а 11.4
Свободные члены
41
41
«и-1
41
х11
2
у[1
Ах
изменение жесткости
изменение нагрузки
0
т
0
0
5Ш ф
СОЗ ф
(П-ЧН1
0
0
И
зп ф
СОЗ ф
0
0
(Г-ГН) 1
0
±0
5 2
Т1
5
0
0
0
0
0
е
ч
0
1Т1
0
0
0
0
0
-(01р«1)
0
— I зп ф
0
0
0
0
0
0
0
0
0
— СОЗ ф
0
0
0
0
0
0
0
0
— зп ф
0
0
0
0
0
0
0
0
0
— соз ф
0
0
0
0
0
0
0
0
0
— V1;
-
Л - 2.Н
Т1
г‘ г'3
• 2
2л
)[()Ф.
588
РАЗДЕЛ 11. ВАНТОВЫЕ И ПНЕВМАТИЧЕСКИЕ КОНСТРУКЦИИ
на неравномерные нагрузки, изменяющиеся по закону зшф или созф (снег, ветер). Именно, если считать такую систему линейно-деформируемой (первое приближение), то при осесимметричной постоянной нагрузке и синусоидальной временной усилия во всех вантах обоих поясов будут одинаковы, и контурное кольцо не будет испытывать изгиба в своей плоскости.
3. Отличие двухпоясных радиальных вантовых систем, представленных на рис. 11.9, от рассмотренных выше состоит в том, что верхний и нижний пояса связаны
Рис. 11.9
Рис. 11.10
между собой не на всем протяжении, а лишь посредством элемента, соединяющего внутренние кольца обоих поясов; в расчетной схеме этот элемент считается не деформируемым стержнем, соединяющим узлы поясов.
Начальные линии равновесия вант таковы (рис. 11.10):
—«1); -0). (П.42)
причем
■
1(2)
(11.43)
При всех прочих допущениях, аналогичных предыдущим, система уравнений для расчета вантовой системы рассматриваемого типа запишется так:
(г, - т) - — V, - т V? V -
— 22 Хг соз Ф У зш Ф 4- — 0;
(г, - г») - -1- V' - ’4 - ъ -
— — 2" Х2 соз ф У2 зш ф 0;
П («Ч Ух) - Рг 0; Г2 (в2 У2) -Рг 0-1
2я 2я
7’1СО5фф 0; ТI 51П фС?ф 0, о о
2я 2л
Т2 соз фс?ф 0; Т2 зш фф 0;
о
2я
[?Ч СП—) — 72(т2 2)]ф 0,
причем здесь
1(2)
1(2) 6 • а остальные обозначения те же, что и выше.
(11.45)
п±з
О
т
Рис. 11.11
Рекуррентная система линеаризованных уравнений имеет вид табл. 11.5; по отношению к этой системе справедливо все сказанное ранее о системе, приведенной в табл. 11.4.
В качестве частных случаев из полученных выше уравнений вытекают уравнения для однопоясных радиальных вантовых систем — вогнутой и шатровой (рис. 11.11, а и б). Для вогнутой системы следует в уравнениях табл. 11.4 положить равными нулю все величины (перемещения, усилия, жесткости), относящиеся к напрягающим вантам. При совместном действии осесимметричных и синусоидальных нагрузок усилия во всех вантах вогнутой системы в первом приближении оказываются одинаковыми.
Уравнения для расчета вантовой системы шатрового типа можно получить из рекуррентной системы уравнений табл. 11.5. Для этого следует положить равными нулю все величины, относящиеся к нижнему поясу, а также, считая внутреннюю опору несжимаемой, принять 20. Кроме того, в уравнения равновесия узла в горизонтальной плоскости нужно ввести величины горизонтальных реакций внутренней стойки, возникающих при смещении ее вершины:
X — ? 11Х 0.у — Г22У1
(11.46)
(11.44)
где гп и г22 —упругие реакции стойки от единичного горизонтального смещения ее вершины в соответствующем направлении. В результате рекуррентная система уравнений приобретает вид табл. 11.6.
Присутствие внутренней опоры ведет к тому, что при несимметричных нагрузках на покрытие и внутренняя стойка, и опоры, расположенные по периметру, будут работать на горизонтальные усилия, а контурное кольцо будет воспринимать сосредоточенные горизонтальные реакции поддерживающих его опор. Чтобы избежать этого, достаточно сделать внутреннюю стойку качающейся или обеспечить подвижность контурного кольца в его плоскости.
11.2. ВАНТОВЫЕ СИСТЕМЫ
589
Таблица 11.5
Свободные члены
,‘
41
41
г11
у2
•41
;1
41
изменение
жесткости
изменение нагрузки
0
0
-71
0
0
зт ф
соз ф
7 1
0
0
-■и
0
-П2
51П ф
СОЗ ф
0
0
Т2
0
0
5 2
т7»
0
0
0
0
0
0
0
-т'
± 01 5 1
0
0
т".
0
0
0
0
0
0
Н1
— Ых
Ы2
0
0
1Т1
0
0
0
0
0
-(«0Н "')
0
— 8Ш ф
0
0
0
0
0
0
0
0
0
0
— С05 ф
0
0
0
0
0
0
0
0
0
— 31П ф
0
0
0
0
0
0
0
0
0
0
— СО3 ф
0
0
0
0
0
0
0
0
с
0
0 у[, г[
- г1; т
■т[ т
1 а
»
в2 У2;
4
2л
■г)2 г(; ()(Мф.
Таблица 11.6
Свободные члены
-1
х‘'
изменение
жестко¬
сти
изменение
нагрузки
5
31П ф
СОЗ ф
0
±4
5
± 71
5
0
0
0
_ ±
5
— зп ф
0
0
0
0
— СОЗ ф
0
0
0
0
11.2.4. Вантовые сети
1. Расчетной моделью вантовой сети служит сеть из нитей или просто сеть, т. е. система гибких нитей, расположенных вдоль двух однопараметрических семейств линий на поверхности. Считая толщину каждой нити бесконечно малой, а сами нити расположенными вплотную друг к другу, получим континуальную модель сети (такую сеть иногда называют тканью). С инженерной точки зрения представляют интерес следующие типы сетей:
1) ортогональная сеть, состоящая из двух взаимно ортогональных семейств нитей (например, сеть линий кривизны поверхности);
2) чебышевская сеть, которая характеризуется равенством противоположных сторон каждой ячейки (пример — произвольная сеть переноса). Чебышевская сеть может быть ортогональной только на развертывающихся поверхностях;
3) геодезическая сеть, образуемая двумя семействами геодезических линий. Это единственная сеть, в которой при отсутствии тангенциальных компонент нагрузки усилия в каждой нити неизменны по длине. Геодезическая сеть может быть ортогональной только на развертывающихся поверхностях;
4) полугеодезическая сеть, получаемая из однопараметрического семейства геодезических линий и их ортогональных траекторий. Таковой является сеть меридианов и параллелей поверхности вращения (меридианы— геодезические), которая служит одновременно сетью линий кривизны;
5) асимптотическая сеть, которая состоит из двух семейств асимптотических линий и существует только на поверхностях отрицательной гауссовой кривизны. Асимптотическая сеть ортогональна только на минимальных поверхностях.
2. Отмеченные здесь признаки сетей (за исключением асимптотической сети) относятся к их внутренней геометрии. Знание внутренней геометрии сети необходимо при конструировании самой сети и элементов заполнения. Что же касается статического расчета, то для наиболее часто применяемых на практике пологих сетей принятие приближенного равенства (11.32) уничтожает всякое различие между внутренней геометрией пологой сети и геометрией плоскости. Так, например, в случае пологой сети переноса, которая проектируется на плоскость в виде ортогональной декартовой сети, все параметры ее внутренней геометрии (длины, углы, геодезические кривизны и т. д.) принимаются равными соответствующим параметрам декартовой сети. В результате пологая сеть переноса в данном приближении оказывается одновременно ортогональной, чебышевской и геодезической.
Сеть переноса обладает тем свойством, что ее статически возможное состояние при действии равновесной
590
РАЗДЕЛ И. ВАНТОВЫЕ И ПНЕВМАТИЧЕСКИЕ КОНСТРУКЦИИ
нагрузки не единственно. Так, например, в сети переноса эллиптического или гиперболического параболоида к усилиям, возникающим от внешних нагрузок, можно добавить самоуравновешенную систему, которая состоит из сил, постоянных вдоль нитей каждого направления. Это позволяет из всех статически возможных состояний выбрать наиболее выгодное с точки зрения рационального использования материала вант или создания оптимального распределения усилий в контурных элементах [15].
Напряженно-деформированное состояние пологой сети переноса при действии только нормальной нагрузки описывается следующей системой уравнений:
(Г, - Г«) ЧГХ -1, Га, - — IVI- 0;
(Г2-Г«) Ч2-Уу Га2
(11-47)
(а1 ЧРхх) 2 (а2 УРуу) Р — 0 •
Здесь Тх(у) и Т2(х) —усилия в вантах, параллельных соответственно осям х и у, (Т1 и Тг — нормальные кривизны, V и V — продольные перемещения вант, V? — прогиб; Р — нагрузка на единицу площади; нижние индексы х и у означают частные производные по координатам. Граничные условия при неподвижном закреплении вант на контуре будут
( у Г о. (1К 48)
На основе шаговых методов система (11.62) сводится к рекуррентной последовательности линейных систем вида:
1Т1 (Т1 Г") -«, ®", “ О
2(Г2-71)фг-л га
1 (а1 №хх) Тги)хх 1ч (а2 №уу)
Т2шуу р 0,
где малыми буквами, как и ранее, обозначены приращения всех величин на очередном этапе расчета. Система (11.49) эффективно решается на ЭВМ [11].
3. Для предварительных расчетов на равномерную нагрузку можно использовать приводимые ниже решения, полученные с помощью метода Бубнова—Галеркина в первом приближении. Для сети, закрепленной на контуре прямоугольной формы (рис. 11.12)
_ . лх. пу
Г Р01П 51П—, (11.50)
о Ь
где прогиб в центре находится из уравнения
(11.49)
(11.51)
в котором:
_ЗяЧ
8 64 Ь а )
с—2 'г’ V4’-)-
(11.52)
4 Р
Кривизны 0 и ст2 приняты здесь постоянными, причем для напрягающих вант они считаются положительными, а для несущих — отрицательными. Выражения для усилий таковы:
' 'ГН 1 я2. 0 Щ
Т'-Г 5Г1Т”"'Т-
ОхГ08т-); л Ь )
гг 7-Н I (лг о лх
Т2 Т — —. — з п2 — —
2 2 4 62 а
2 лх 1
О2Г0 81П I.
я а 1
(11.53)
7 У 7
Рис. 11.12
Для сети эллиптического очертания в плане (рис. 11.13)
№
11.2. ВАНТОВЫЕ СИСТЕМЫ
591
причем уравнение для прогиба в центре имеет вид (11.66) со следующими значениями коэффициентов:
(грн Тн
12»
с0 — №
Усилия в вантах будут такими:
г, гц-
ЗУ,
1 —
V?.
о
(11.56)
Полагая в приведенных формулах (Т1 (Т20, приходим к случаю плоской в ненагруженном состоянии сети, несущей равномерно распределенную нагрузку.
где У(—углы между радиусом-вектором и касательными в точке перелома;
5) в частном случае безмоментного контура полигональной формы на протяжении каждой его стороны нагрузки должны отсутствовать, остаются лишь прило-
(11.55)
Рис. 11.14
11.2.5. Контурное кольцо
Для пологих висячих систем характерна большая распорность. Так как при действии на конструкцию вертикальных нагрузок распоры образуют самоуравновешенную систему сил, то наиболее рациональным способом их восприятия будет создание в уровне покрытия замкнутого контурного кольца с очертанием оси, близким к кривой давления.
Для плоского кольца произвольной формы закон нагружения, при котором кольцо не испытывает изгиба, имеет вид [14]:
Са -
51П у
(11.57)
Здесь Н8— погонная нагрузка на кольцо; а— кривизна его оси; V — угол между касательной к оси и направлением силы Н3 в той же точке; 5 — длина дуги.
Для центрального поля сил эта формула получает вид
гг Со
-Г-Т-г-, (11.58)
Я 51П2 у
где Я—Я(у) —уравнение оси кольца в полярных координатах с полюсом, расположенным в центре системы радиальных сил. Никаких ограничений на очертание оси кольца и положение центра сил не накладывается.
Законы нагружения, обеспечивающие безмоментность участков кольца некоторых характерных видов, таковы:
1) для прямолинейного участка кольца Н8—0;
2) для участка в форме дуги окружности, центр которой совпадает с полюсом сил, Н8 — Сосопз1;
3) случаю скачкообразного изменения кривизны в какой-либо точке оси кольца при сохранении плавности поворота касательной отвечает разрыв функции Н8
4) при переломе оси контурного кольца в 1-й точке перелома необходимо приложить сосредоточенную силу
(свТ — т?). (П-59)
Рис. 11.15
женные в вершинах сосредоточенные усилия г, определяемые по (11.59).
При расчете радиальных вантовых систем удобнее иметь дело не с погонными усилиями Н8 а с усилиями ф на единицу полярного угла:
Я2 2Я' — ЯР" Я3
(11.60)
Рассматриваемое как дифференциальное уравнение, это соотношение позволяет для произвольной системы радиальных сил ф найти очертание Яф оси безмоментного кольца. Установлено [14], что единственной формой оси безмоментного кольца радиальной системы, в которой при равномерной нагрузке образованная вантами поверхность имеет горизонтальную касательную плоскость в узле, служит эллипс произвольного вида, центр которого совпадает с проекцией узла системы (рис. 11.14). Единственной формой оси безмоментного кольца радиальной системы с одинаковыми распорами всех вант при постоянном угловом расстоянии между ними служит эллипс произвольного вида, один из фокусов которого совпадает с проекцией узла системы (рис. 11.15).
Отметим, что эллипс есть также очертание оси безмоментного кольца для пологой сети переноса, в которой усилия постоянны для всех вант каждого направления и относятся между собой как квадраты полуосей эллипса.
Ряд задач об определении формы оси безмоментного контурного кольца рассмотрен в [10].
Контурное кольцо висячей системы рассматривается при расчете как криволинейный стержень малой кривизны. Учет его совместной работы с вантовой системой представляет довольно сложную нелинейную контактную задачу. Возможно следующее упрощение этой задачи. Вначале вантовая система по всем правилам рас-
592
РАЗДЕЛ II. ВАНТОВЫЕ И ПНЕВМАТИЧЕСКИЕ КОНСТРУКЦИИ
считывается на заданную нагрузку в предположении недеформируемости контурного кольца. Далее вводится в расчет фактическая жесткость кольца и предполагается, что перемещения вантовой системы, вызванные упругой податливостью кольца, достаточно малы для того, чтобы можно было пренебречь их квадратами. В результате такого подхода нелинейность учитывается только при расчете вантовой системы, тогда как собственно контактная задача оказывается линейной и ее численное решение с помощью ЭВМ не встречает принципиальных затруднений. Для двухпоясной радиальной вантовой системы учет совместной работы достигается введением в плоскости и из плоскости кольца упругой среды винклеровского типа соответственно с коэффициентами постели
51П V л л 5ШГ
кг (1 Ч)’ (' Рг - 1 0Ь61)
В этих формулах для системы с непрерывно распределенными связями между поясами
р1 41 Ргк ч (11.62)
а величины и 12 находятся из системы, приведенной в табл. 11.7.
Таблица И.7
Свободные члены
и
2
V
определение кх
определение кг
0
-Т«
0
2
4
72
7
4 5 2 -1 т
5
1
Я
1
к
0
А.
я
_ 2 Я
0
Для однопоясных систем (вогнутой и шатровой)
т
кх ■
Я2
кг -ф1. (11.64)
Для кругового контурного кольца радиальной вантовой системы получены следующие решения. Изгибающий момент в плоскости кольца:
М
1 (Ф) Л1л соз пр;
п2
где Нп — коэффициенты разложения погонного распора Н8 в ряд Фурье:
Н8 (ф) 2 Нп соз яр;
сх (п) п - 2 п2 1 (11.66)
2НЯ3к1Я Е1г :
(11.67)
Я,
2я 2л
2л (ф) аЦ'’ 2тГ (Ф) (И-68)
Для кольца, свободно опертого на к равноотстоящих опор и нагруженного равномерной погонной вертикальной нагрузкой Уа, изгибающий момент из плоскости будет:
Для вантовой системы со связью поясов в центре 1? ‘П— Р2Я 2 “Ь 22» (11.63)
и величины и находятся из системы, приведенной в табл. 11.8.
Таблица 11.8 крутящий МОМеят
М2 (ф) 2 М2п соз яф;
о
п2 (п2 — 1) К2 (п)
Свободные члены
(х
12
определение кх
определение к9
А
V1
0
0
2
0
-•Н
0
- 1 %
1 1
Я
„I
2
0
4-
7
0
0
0
4
0
0
7
0
где
Мц (ф) 2 М1м з1 п пф;
о
Мы - 2К5 Я2
п (п2 — 1) К2 (п)
01,
Е1,
01л
(11.69)
(11.70)
(11-71)
11.3. ПНЕВМАТИЧЕСКИЕ КОНСТРУКЦИИ
593
11.3. ПНЕВМАТИЧЕСКИЕ КОНСТРУКЦИИ 11.3.1. Основные сведения
Пневматическими конструкциями называются конструкции, изготовленные из мягких (матерчатых или пленочных) газонепроницаемых материалов, способные противостоять действию внешних нагрузок за счет избыточного давления воздуха или газа, наполняющего все сооружение или его отдельные конструкционные элементы.
Достоинствами пневматических конструкций являются: дешевизна, малый вес, малые габариты в сложенном состоянии, быстрота монтажа и демонтажа, простота ремонта. Основные недостатки: легкая повреждаемость, относительно малая долговечность, необходимость поддержания повышенного давления внутри сооружения или его конструктивных элементов.
Основные типы пневматических конструкций
Однослойные оболочки без силового каркаса. Эти оболочки часто выполняются либо в виде полуцилиндра с днищами в форме четвертей сферы (рис. 11.16, а), либо в виде сферического сегмента (рис. 11.16,6), хотя возможны и другие весьма разнообразные формы. Обя¬
зательными элементами сооружений этого типа являются шлюзы (Ш) и воздуходувки (В), при поомщи которых внутри оболочки создается и поддерживается давление Рь превосходящее давление снаружи ре. Оболочка должна быть прикреплена к основанию. При расчете прикрепления необходимо учитывать как силы
давления, так и ветровую нагрузку. Разность давлений рг—ре—р обычно назначается равной 2 —
100 мм. вод. ст. — кГм2, а производительность воздуходувок — в размере от одного до десяти объемов сооружения в час [32, 33, 34].
Однослойные оболочки с силовым каркасом (рис. 11.17). Каркас может быть жестким, например металлическим, или пневматическим. Оболочка может не быть несущей, но в этом случае ветер вызывает ее полоскание, которое может допускаться лишь в соору-
Рис. 11.17
Рис. 11.18
жениях малых размеров. Для уменьшения колебаний оболочки внутри сооружения создают повышенное давление, которое на некоторое время может стравливаться. Сооружения этого типа могут употребляться, например, в качестве гаражей или складов для крупных изделий.
Двухслойные оболочки (рис. 11.18). Двухслойную оболочку можно получить, скрепляя в отдельных точках однослойные оболочки (рис. 11.18, а). Эти оболочки изготавливаются также в виде пористого волокнистого слоя (рис. 11.18,6). В полости между слоями создается повышенное давление. Силы давления в двухслойных оболочках самоуравновешены и на основание не передаются. Прикрепление должно рассчитываться только на ветровую нагрузку. Внутри сооружения давление равно наружному.
Пневмостержни образуются длинной цилиндрической оболочкой, скрепленной с двумя жесткими дисками (рис. 11.24, а). При действии постоянного внутреннего давления р такая оболочка способна воспринимать любые нагрузки, приложенные к дискам, и поэтому является хорошим конструкционным элементом. Изогнутые пневмостержни могут использоваться как элементы силового каркаса пневматических оболочек (см. рис. 11.17). Пневмостержни, подвергающиеся изгибу, обычно называют пневмобалками или аэробалками.
11.3.2. Особенности расчета пневматических конструкций
Основные особенности расчета пневматических конструкций определяются свойствами применяемых для их изготовления матерчатых и пленочных материалов. Наиболее существенными особенностями этих материалов являются: практически полное отсутствие сопротивления изгибу и сжатию; большая деформативность при растяжении; малый вес.
В связи с первым из отмеченных свойств материалов пневматических конструкций в качестве расчетной модели их оболочек используются мягкие оболочки.
594
РАЗДЕЛ И. ВАНТОВЫЕ И ПНЕВМАТИЧЕСКИЕ КОНСТРУКЦИИ
Мягкие оболочки рассчитываются как безмоментные оболочки, однако их расчет имеет следующие особенности.
Мягкая оболочка находится либо в двухосном напряженном состоянии, когда оба главных натяжения являются растягивающими (положительными), либо в одноосном напряженном состоянии, когда одно из главных натяжений, определенных по деформациям, получается сжимающим (отрицательным). Если деформации сжатия достаточно велики, оболочка образует складки вдоль траекторий растягивающего главного натяжения. Область, в каждой точке которой напряженное состояние двухосное, называется двухосной областью; аналогично, в каждой точке одноосной области напряженное состояние одноосное.
Оболочка может быть либо целиком одноосной, либо целиком двухосной, либо содержать как двухосные, так и одноосные области. Расчет каждой из этих областей производится раздельно. На границе между двухосной и одноосной областями должны выполняться условия сопряжения.
Эта особенность мягких оболочек ограничивает формы пневматических конструкций, действующие на них нагрузки и условия их закрепления.
Со второй из отмеченных особенностей материалов пневматических конструкций (большая деформативность) связана необходимость рассматривать при расчете оболочек ПК нелинейные задачи, четко различать начальное (раскройное) и конечное (деформированное) их состояния и относить условия равновесия или уравнения движения к конечному состоянию.
С малым собственным весом материалов пневматических конструкций связаны особенности их расчета на ветровые нагрузки, которые для них оказываются более существенными, чем для сооружений обычного типа. В частности, при расчете ПК весьма важным является учет не только их сопротивления ветровому давлению, но и подъемной силы, отрывающей сооружение от основания.
В соответствии с перечисленными выше особенностями пневматических конструкций основной задачей их расчета является предотвращение предельных состояний, определяемых:
разрушением их материала, т. е. нарушением условия где Т — максимальное натяжение в оболоч¬
ке; Я — расчетное сопротивление материала оболочки (см. Н,3.6) при том же напряженном состоянии;
складкообразованием, т. е. нарушением условия Г0 в тех случаях, когда образование одноосных областей недопустимо (например, в пневмостержнях);
недопустимо большими деформациями или прогибами, связанными с нежелательными искажениями формы оболочки.
11.3.3. Расчет мягких оболочек
Определение усилий и смещений по известным нагрузкам, условиям закрепления и при заданной начальной форме представляет собой сложную задачу, так как система физически и геометрически нелинейна. Известен ряд решений этой задачи для осесимметричных оболочек [27, 28].,
Если же известна форма оболочки в конечном состоянии, то система является статически определимой. В общем случае усилия определяются путем интегрирования системы из трех линейных дифференциальных уравнений первого порядка в частных производных [22, 23],
а для оболочек вращения — при помощи одной квадратуры [22]:
Р Т,
ге Т (Рр 005 е) РЯ-
р 1 й
2п
йз
(11.72)
Здесь (рис. 11.19) —натяжения соответст¬
венно в направлениях меридианов и широт;
0 — угол между касательной к меридиану и плоскостью, перпендикулярной оси симметрии;
р — расстояние текущей точки от оси симметрии;
5 длина дуги меридиана, отсчитываемая от некоторой фиксированной широты;
2, Я — проекции внешней распределенной нагрузки соответственно на осевое и радиальное направления;
2 — сумма всех осевых нагрузок (кроме сил давления), приложенных к центральному диску.
Если форма меридиана задана уравнением (р),
то
С'
соз 0
1
V 1г2
К 1Г2 Ф-
V1С12 ’
(И.73)
Когда нагрузка Я(р) направлена по нормали к оболочке, как, например, при гидростатическом давлении, то
рГрш0 рР(р)ф; Тв (рГр). (11.74)
О
Когда давление Р(р)—р постоянно, эти формулы получают вид:
ро2 О й
РГр1„е- — (П.75)
11.3. ПНЕВМАТИЧЕСКИЕ КОНСТРУКЦИИ
595
Если одно из натяжений Тр,Те в некоторой части оболочки получается отрицательным, заданная форма при принятой нагрузке нереальна.
Оболочка в форме трехосного эллипсоида с полуосями а, Ь, с при действии равномерного давления может быть выполнена, если справедливы следующие неравенства:
с2 Ь2 с2 7 Ь2 с2 а2
1 1
1
(11.76)
Гр --Угв (•-«) р2;
г„- Р о4 2(62-)рг
0 2Ь V а (Ь2 ■
О2) Р2
(11.78)
Для определения усилий в сферической оболочке с радиусом а в формулах (11.78) следует принять Ь а.
Оболочка круглого сечения, полученная движением центра круга с радиусом г вдоль плоской кривой 5
(плоскость круга нормальна к кривой 5), при действии равномерного внутреннего давления р имеет натяжения соответственно в продольных и поперечных сечениях (рис. 11.20):
2 — соз В Т рт П т рг
71 Т г ’ т-Т1 с
(11.79)
Угол р отсчитывается в плоскости поперечного сечения от точки, наиболее удаленной от центра кривизны кривой 5; Я — радиус кривизны кривой 5.
Наибольшее натяжение имеет место в точках, ближайших к центру кривизны кривой 5:
2 — — Л
г
(11.80)
Геометрическое истолкование этих неравенств состоит в том, что в случае их справедливости на отрезках,
1 1 1
длины которых пропорциональны числам —,
а2 Ь2 с2
можно построить треугольник [23, 24]. Если длины полуосей не удовлетворяют неравенствам (11.76), оболочка будет иметь одноосные области и форма ее будет отличаться от эллипсоидальной.
Оболочка в форме эллипсоида вращения с полуосями а в радиальном и Ъ — в осевом направлениях имеет неотрицательные натяжения, если
а2 2Ь2. (11.77)
Таким образом, возможны как угодно вытянутые вдоль оси симметрии оболочки; сильно же сплющенных двухосных оболочек вращения быть не может. Натяжения в оболочке в форме эллипсоида вращения при равномерном давлении р:
Оболочка этого типа может существовать, если радиус кривизны кривой 5 нигде не меньше г. В частном случае оо формулы (11.79), (11.80) определяют
усилия в цилиндрической оболочке (7’12Г2рг).
Оболочка в форме эллиптического тороида (рис. 11.21)—поверхности, образованной вращением эллипса вокруг оси, параллельной одной из его главных
осей, — при равномерном внутреннем давлении имеет натяжения:
Те С) Ус (Ь - а«) (р - с)2;
7а
Р а 2 (Ь2 — а2) (р2 — ре)
26 У а (62 _ 02) (р _ С)2
[еотрицател т неравенс'
■(т0
(11.81)
Натяжения неотрицательны, если параметры а, Ь, с удовлетворяют неравенствам
(11.82)
На рис. 11.21 область существования заштрихована. Оболочка имеет вид кольца, если са.
В частности, в торообразной оболочке с радиусом а — Ъ поперечного сечения натяжения:
р(р с)а _ра
2р ’ е_ 2 ' ( '
Ряд оболочек рассмотрен в книге [29].
Коль скоро известен закон, связывающий натяжения
596
РАЗДЕЛ 11. ВАНТОВЫЕ И ПНЕВМАТИЧЕСКИЕ КОНСТРУКЦИИ
с деформациями, то по известным натяжениям деформации определяются без особых трудностей. Чтобы по известным деформациям определить смещения, в общем случае нужно интегрировать систему из трех дифференциальных уравнений первого порядка в частных производных [25]. Если деформации малы (порядка 1%), эти дифференциальные уравнения линейны. При наличии осевой симметрии смещения определяются после выполнения одной квадратуры [22, 25]. Следовательно, задавшись формой оболочки в конечном состоянии, можно сравнительно просто найти форму в начальном состоянии и определить раскройную форму оболочки, которая после приложения нагрузок переходит в заданную.
Простота этого пути установления связи между начальной и конечной формами позволяет вести определение конечной формы по заданной начальной методом последовательных попыток: задаваясь конечной формой, получать начальную и при необходимости на последующих шагах изменять задание конечной формы с тем, чтобы полученная начальная форма удовлетворительно согласовывалась с известной начальной формой.
Мягкая оболочка в одноосной области рассчитывается как гладкая оболочка, образованная одним семейством абсолютно гибких нитей. Эти нити направлены по линиям действия растягивающего главного натяжения Т второе главное натяжение Т2 следует считать равным нулю. Расчет мягкой оболочки в одноосной области таким образом сводится к расчету нитей.
Форма оболочки в одноосной области не может быть задана произвольно — она определяется нагрузкой и условиями закрепления нитей.
Одноосная область граничит либо с контуром, либо с двухосной областью. На линии, разделяющей обе области, должны быть выполнены условия сопряжения [25]:
7’1(1) гР); Тр 0. (11.84)
Здесь верхние индексы указывают на то, что эти равенства связывают предельные значения натяжений в одноосной и двухосной областях. Кроме того, на линии сопряжения должны соблюдаться условия непрерывности координат и их первых производных (условия гладкости).
В осесимметричной одноосной оболочке при нагрузке, направленной по нормали, произведение рТр постоянно.
Одна и та же форма одноосной области соответствует различным начальным формам.
При расчете одноосных оболочек во многих случаях можно пренебречь растяжимостью материала и рассматривать их как системы абсолютно гибких нерастяжимых нитей.
Замкнутую одноосную оболочку вращения можно получить, например, из цилиндрической оболочки с радиусом г, если стянуть в точки граничные сечения и создать внутри оболочки повышенное давление (рис. 11.22). Меридианы получают форму овалов с отношением полуосей, приблизительно равным 53. Расстояние между граничными сечениями цилиндрической оболочки должно удовлетворять приближенному неравенству 2,5г. Если взять А, больше 2,5г, то около экватора оболочки появится двухосная область [22, 23].
Двухслойные цилиндрические оболочки (рис. 11.18) имеют в обоих слоях одинаковые натяжения
Тг Тч — рН,
(11.85)
где Н — расстояние между слоями;;
р— равномерное давление между ними.
Внешние распределенные нагрузки на пневматические конструкции ПК в том случае, когда они вызывают
незначительное изменение формы (большое значение имеет изменение углов наклона касательных), учитываются путем интегрирования системы из трех линейных дифференциальных уравнеий относительно смещений [25]. Если изменение формы при приложении дополнительной внешней нагрузки существенно, необходимо рассматривать нелинейные дифференциальные уравнения. Исключение составляют цилиндрические оболочки, расчет которых значительно проще [30]. Если к цилиндрической оболочке, находящейся под равномерным внутренним давлением, приложена нагрузка, распределенная вдоль образующей (рис. 11.23, а, б), то новая форма сечения составлена из двух дуг окруж-
Рис. 11.22
777777УУУУ77УУУУ7У УУУУУУУУУУ7УУГ777‘, Рис. 11.23
ностей. Натяжения и другие величины, относящиеся к новому состоянию, легко определяются исходя из того, что длина сечения остается постоянной (при нерастяжимом материале) или получает упругие удлинения [31].
11.3.4. Расчет пневмостержней
В ненагруженном состоянии пневмостержни рассчитываются на внутреннее давление (рис. 11.24, а) как оболочки круглого сечения по формулам (11.79),
и, в частном случае, как цилиндрические оболочки. Особенности их расчета на внешние силы определяются видом нагрузки. Ниже рассматриваются некоторые частные случаи нагружения пневмостержней с прямолинейной осью в исходном состоянии.
При «чистом изгибе» поведение пневмобалки, лежащей на двух шарнирных опорах (рис. 11.24,6), зависит от величины параметра
где
(1ЗД(6-?.)2 8р. (1 ц) г2
3 рг 2 ' ЁН '
(11.86)
(11.87)
11.3. ПНЕВМАТИЧЕСКИЕ КОНСТРУКЦИИ
597
Здесь р—давление внутри оболочки; г—радиус сечения; к — толщина оболочки;
Ь — расстояние между опорами;
Е — модуль упругости материала.
В случае нелинейной зависимости а(е) величина Е есть касательный модуль при напряжении
ЛИ
2 к '
а)
1
Го» т ттт
5)
т« ±
м
ПГ2
Предельное значение изгибающего момента получается, если положить 7,Мин 0:
Мпред — РГ3
Дальнейшее увеличение момента возможно лишь при значительном искажении формы за счет повышения давления внутри пневмобалки.
Если % велико, пневмобалка работает принципиально иначе. Деформации сосредоточиваются в узких зонах, примыкающих к дискам, в средней же части сечения практически не получают искажений, а натяжение Т2 постоянно во всем сечении. Ось пневмобалки существенно отличается от упругой оси балки постоянного сечения, находящейся в состоянии чистого изгиба. Деформированное состояние пневмобалки в этом случае является суммой деформированного состояния, соответствующего чистому изгибу балки постоянного сечения и деформированного состояния, изображенного на рис. 11.25. В случае, если А,«1, работа пневмобалки существенно отличается от работы пневмобалки как по
классической схеме, так и по схеме рис. 11.25. То же относится к случаю, когда К отрицательна.
При растяжении пневмостержень рассчитывается по формуле
При сжатии пневмостержень рассчитывается на устойчивость пр эмпирической формуле [32]
Ркр ряг2 ф,
где коэффициент ф принимается по таблице, в зависимости от отношения расчетной длины к радиусу сечения
— и от величины внутреннего давления р.
Таблица 11.9
Рис. 11.24
Если Я мало, то расчет пневмобалки производится по правилам сопротивления материалов для балок, подвергающихся одновременному действию изгиба и растяжения. Например, натяжение в крайних точках поперечных сечений
Р
Иг
1
1
1
1
1 1
1 1
1,5
2 1
2,5
3 1
1 1
1 Ь5
1 2 1
2,5
Шарнирные
Комбинированные
опоры
опоры
20
0,70
0,55
0,45
0,38
0,32
0,90
0,74
0,65
0,55
30
0,37
0,28
0,23
0,20
0,19
0,55
0,50
0,40
0,35
40
0,24
0,18
0,15
0,14
0,13
0,33
0,30
0,24
0,20
50
0,15
0,12
0,10
0,09
0,08
0,30
0,26
0,20
0,18
60
0,12
0,10
0,08
0,064
0,054
0,18
0,14
0,12
0,11
(11.88)
(11.89)
При кручении предельное состояние пневмостержней определяется складкообразованием. При этом, как следует из условия существования двухосной напряженной оболочки, крутящий момент, соответствующий появлению складок [23, 32],
кр 2яг2 5, где погонное касательное усилие
5 ]г1.7'а.
11.3.5. Ветровые нагрузки
Ветровые нагрузки пропорциональны скоростному напору
7-р02, (11.91)
где V — скорость ветра; р — плотность воздуха: Р Г кГ • сек2 1 286Т [ м
Р
(11.92)
Здесь Р—атмосферное давление в кГм2 мм вод. ст.; Т — абсолютная температура воздуха.
598
РАЗДЕЛ И. ВАНТОВЫЕ И ПНЕВМАТИЧЕСКИЕ КОНСТРУКЦИИ
При «нормальных условиях» (Р10 330 кГм2; Т 15° С273 288° К) р0,125 кГ-сек21м
При этом
Суммарные силы У и А- от ветровых нагрузок
У Су д8 у Х Схя8,
где Су, С — аэродинамические коэффициенты, зависящие в основном от формы сооружения; 5 — площадь,
(11.93)
ГЛ777777?
Рис. 11.26
к которой отнесены эти коэффициенты. Сила X действует параллельно основанию; У — перпендикулярно ему; направление ветра считается параллельным основанию. Для цилиндрической оболочки (рис. 11.26,а):
Су 1,67, С 0,15, 3 2Ьг.
Сечение оболочки при ветре искажается (рис. 11.26,6). При небольших скоростях ветра стрела
-.,-4-
' 3 Ар
г,
(11.94)
где Аррг—ро (р—давление внутри оболочки; р0 — давление вдали от сооружения).
Для оболочки в форме полусферы (рис. 11.27, а)
Сд 0,75; Сх 0,15; 5 пгК
При действии ветра на оболочку в форме сферического сегмента с тупым углом а (рис. 11.27,6) макси¬
Рис. 11.27
мальное натяжение Тмакс связано с прочими параметрами зависимостью [26]
2ТМ
р 2д.
(11.95)
Скоростной напор, при котором в оболочке образуются одноосные области,
0-Др. (П-96)
В общем случае аэродинамические коэффициенты должны определяться при помощи продувок в аэродинамических трубах. Приведенные выше значения аэродинамических коэффициентов являются ориентировочными.
11.3.6. Материалы для пневматических конструкций
Ткани воздухонепроницаемые . Воздухонепроницаемые ткани № 24, 42, 806, 60, 19, 109Ф и 110Ф, предназначенные для пневматических строительных конструкций, представляют собой одно-, двух- и трехслойную ткань, покрытую слоем резины. В качестве основы для тканей № 24 и 806 служит капроновый текстиль (артикул 1528), для тканей № 60, 42 и 19 — капроновый текстиль (артикул 1539) и для тканей № 109Ф и 110Ф— капроновый текстиль (артикул 1549).
1 Составлено канд. техн. наук Г, Н. Зубаревым.
Таблица
Прочностные и деформационные характеристики воздухонепроницаемых тканей и армированных пленок
11.10
Виды тканей и пленок
Нормативное сопротивление растяжению в кГсм
Коэффициент длительной прочности дл
Коэффициенты
однородности
йодн
Расчетное сопротивление растяжению в кГсм
Модуль упругости при растяжении в кГсм
по основе
по утку
по
основе
по
утку
кратковременное
длительное
кратковременный Ек
длительный Е
по основе
по утку
по основе
по утку
Воздухонепроницаемые ткани
№ 24
36
26
0,3
0,8
0,7
28,8
18,2
8,6
5,5
90,5
44,0
№ 808
36
21
0,3
0,8
0.7
28,8
14,7
8,6
4,4
114
44
№ 60
40
38
0,3
0,8
0,7
32,0
26,6
9,6
7,9
—
—
№ 42
40
38
0,3
0,8
0,7
32,0
26,6
9,6
7,9
—
№ 19
80
60
0,3
0,8
0,7
64,0
35,0
19,2
10,5
—
Армированные пленки
ПС-40-П
9,4
7,6
0,35
0,8
0,7
7,5
5,3
2,6
1,9
50
41,5
ПС-40-С
9,4
7,6
0,35
0,8
0,7
7,5
5,3
2,6
1,9
50
41,5
Тип А
28
25
0,35
0,8
0,7
22,2
17,5
7,8
6,1
84
81,5
» АС
28
27,3
0,35
0,8
0,7
23,0
19,1
8,0
6,7
—
200
39
28,4
0,35
0,8
0,7
31,2
19,0
11,0
7,0
“
11.3. ПНЕВМАТИЧЕСКИЕ КОНСТРУКЦИИ
599
Воздухонепроницаемые ткани выпускаются в рулонах шириной 90 см. Толщина тканей от 0,6 до 1,8 мм; вес от 0,45 до 1,8 кГм2. Ткани № 24, 806, 60, 42 и 19 предназначены для изготовления воздухоопорных пневматических конструкций.
Пленки армированные. Армированные пленки ПС-40-П, ПС-40-С, типы А, АС и 206 предназначены для пневматических строительных конструкций воздухоопорного типа небольших пролетов. Они представляют собой синтетические пленки из совмещенного полиамида, в которые впрессованы капроновые сетки. В пленках ПС-40-П и ПС-40-С применена сетка артикула 21585, в пленке типа А — артикула 220231, в пленке типа АС — артикула 2232311 и в пленке типа 200 — артикула 22184.
Армированные пленки выпускаются в рулонах шириной 85—90 см. Толщина пленок от 0,45 до 0,71 мм; вес от 0,45 до 0,76 кГм2.
Нормативные сопротивления, коэффициенты длительной прочности и однородности, расчетные сопротивления и модули упругости воздухонепроницаемых тканей и армированных пленок приведены в табл. 11.10. Ослабление сечений оболочек в местах шитых швов учитывается коэффициентом 0,85.
ЛИТЕРАТУРА к 11.1
1. Киселев В. А. Рациональные формы арок и подвесных систем. Стройиздат, 1953.
2. Мацелинский Р. Н. Статический расчет гибких висячих конструкций. Под ред. чл.-корр. АН СССР проф. Н. С. Стрелецкого. Госстройиздат, 1950.
3. Мацелинский Р. Н. Статический расчет упругих нитей. «Строительная механика и расчет сооружений», 1959, № 4.
4. Мацелинский Р. Н. Расчет гибких пологих нитей. «Справочник проектировщика промышленных, жилых и общественных зданий и сооружений, том расчетно-теоретический», под ред. проф. А. А. Уманского. Госстройиздат, 1960.
5. Мацелинскй Р. Н. Расчет гибких нитей на произвольную вертикальную нагрузку. В сб.: «Висячие покрытия», под ред. чл.-корр. АН СССР проф. И. М. Рабиновича. Госстройиздат, 1962.
6. Мацелинский Р. Н. Уточнение методики расчета вант. «Строительная механика и расчет сооружений», 1969, №2.
7. Мацелинский Р. Н., Фельдман Е. Ш. Расчет полигонально-вантовой системы покрытия. В сб.: «Строительные конструкции», вып. XV. «Буд1вельник», Киев, 1971.
8. Р ж а н и ц ы н А. Р. Статика и динамика пологой упругой нити. В сб.: «Висячие покрытия». Госстройиздат, 1962.
к 11.2
9. Гордеев В. Н. Исследование плоских нитяных сетей и тканевых оболочек. Диссертация. Киев, 1964.
10. Гохбаум Ф. А. Безмоментные опорные контуры вантовых систем покрытий. В сб.: «Висячие покрытия». Госстройиздат, 1962,
11. Дмитриев Л. Г., Касилов А. В. Вантовые покрытия. Госстройиздат УССР, Киев, 1968.
12. К а ч у р и н В. К. Статический расчет вантовых систем Стройиздат, 1969.
13. Кирсанов Н. М. Альбом конструкций висячих покрытий. Изд-во «Высшая школа», 1965.
14. К у з н е ц а в Э. Н. Радиальные вантовые системы (теория и расчет). Госстройиздат, 1963.
15. Кузнецов Э. Н. Введение в теорию вантовых систем. Стройиздат, 1969.
16. Лилеев А. Ф., Селезнева В. Н. Методы расчета пространственных вантовых систем. Стройиздат, 1964.
17.Петров В. В. К расчету пологих оболочек при конечных прогибах- Научн. докл. высш« школы. «Строительство», № 1, 1959,
18. Перельмутер А. В. Основы расчета вантово-стержневых систем. Стройиздат, 1969.
19. Р а б и н о в и ч И. М. Мгновенно-жесткие системы, их свойства и основы расчета. В сб.: «Висячие покрытия»« Госстройиздат, 1962.
20. Р а й н у с Г. Э. Принципы расчета висячих покрытий с несущей конструкцией из гибких нитей. В сб.: «Висячие покрытия». Госстройиздат, 1962.
21. Отто Ф., III л е й е р К. Тентовые и вантовые строительные конструкции. Стройиздат, 1970,
к 11.3
22. Алексеев С. А. Основы теории мягких осесимметричных оболочек. «РПК», вып. 10. Стройиздат, 1965.
23. А л е к с е е в С. А. Основы общей теории мягких оболочек. «РПК», вып. И, Стройиздат, 1967.
24. А л е к с е е в С. А. Условия существования двухосного напряженного состояния мягких оболочек. Изв. АН СССР, «Механика», № 5, 1965.
25. А л е к с е е в С. А. Задачи статики и динамики мягких оболочек. Труды VI Всесоюзной конференции по теории оболочек и пластин. «Наука», 1966.
26. А л е к с е е в С. А. Расчет мягкой сферической оболочки в потоке жидкости. Инженерный журнал «Механика твердого тела» АН СССР, 13, 1967.
27. Г р и г о р ь е в А. С. Равновесие безмоментной оболочки вращения при больших деформациях, ПММ, т. 25, 6, 1961.
28. Г р и г о р ь е в А. С. Устойчивость безмоментных оболочек вращения в условиях растяжения. Труды VI Всесоюзной конференции по теории оболочек и пластин, «Наука», 1966.
29. Отто Ф., Тростель Р. Пневматические строительные конструкции. Стройиздат, 1970
30. М а г у л а В. Э., Друзь Б. И. и др. Судовые мягкие емкости. Судостроение, 1966.
31. П е т р а к о в Б. И. Поперечные погонные натяжения в цилиндрической пневматической оболочке при действии на нее погонной равномерно распределенной нагрузки. «СМРС», 1967.
32. Г у б е н к о А. Б. Прочность и деформативность конструкций с применением пластмасс. Стройиздат, 1966.
33. М а г у л а В. Э. Расчет мягких оболочек. В сб.: «Строительная механика в СССР. 1917—1967 гг». Стройиздат, 1969.
34. Рекомендации по проектированию и расчету конструкций с применением пластмасс, ЦНИИСК им. Кучеренко. Стройиздат, 1969.
35. Архангельский В. Н., Глухарев А. Н. Пневматические конструкции, 1-е изд. настоящего справочника,
36. Г е н и е в Г. А. Вопросы теории пневматических оболочек. Труды IV Всесоюзной конференции по теории оболочек и пластин. Ереван, «Наука», 1964.
СПРАВОЧНИК ПРОЕКТИРОВЩИКА ПРОМЫШЛЕННЫХ, ЖИЛЫХ И ОБЩЕСТВЕННЫХ ЗДАНИЙ И СООРУЖЕНИЙ
РАСЧЕТНО-ТЕОРЕТИЧЕСКИЙ
под редакцией А. А. У майского
Издание второе переработанное в двух книгах Книга 1
С1 ройиздат Москва, К-31, Кузнецкий мост, д. 9 •
Редакторы издательства Осипова Э. М., Бородина И. С. Круглова П. Н.
Технический редактор Мочалина 3. С.
Корректоры Кудрявцева Е. Я., Бирюкова Л. П.
Сдано в набор 16ХП 1971 г. Подписано к печати 22У1 1972 г. Т-11431. Бумага 84хЮ8х1в — 18,75 бум. л. 63 уел. печ, л.
(уч.-изд. 86,1 л.) Тираж 50 000 экз. Изд. № X—593.
Зак. № 1303 Цена 4 р. 96 к.
Владимирская типография Главполиграфпрома Комитета по печати при Совете Министров СССР Гор. Владимир, ул. Победы, д. 18-6,
Стр.
47
48
70
90
320
320
326
328
328
329
331
331
335
338
342
342
344
399
422
446
479
490
516
ОПЕЧАТКИ
Строка
Напечатано
Должно быть
Левый столбец, 33-я сверху Левый столбец, 16-я снизу Правый столбец, 2-я снизу Правый столбец, 21-я снизу Пропущена сноска
п. 14 п. 22 п. 50
Правый столбец,
11-я сверху Правый столбец,
5-я сверху
Правый столбец, 9-я сверху
Левый столбец, 28-я сверху
Левый столбец, 5-я снизу Правый столбец, 24-я сверху
Формула (6.111)
Левый столбец,
12-я сверху
Ф-лы (6.156) и (6.157)
Формула (6.158)
Формула (6.178)
Нижняя таблица слева; 2-й столбец справа, 4-я строка снизу
3-я снизу
4-я сверху
1-я снизу
Табл. 8.2.18, левая графа
Табл. 8.2.22, правая графа
Средняя графа, 1-я строка сверху
а00. Ут1 •
1,(4)м1
. 1п1ега1
. я20. Ут1 • • • 14)()1. Ыеег I;
1 ИТС, РПК, СМРС — сокращенные обозначения названий сборников «Исследования по теории сооружений», «Расчет пространственных конструкций» и журнала «Строительная механика и расчет сооружений» (Стройиздат).
Гарелкин Б. Г. Стрелецкая А. И. Миекладзе Ш. Е.
аис1 ву
Собственные векторы, отвечающие.
Предположим сначала,
Пусть теперь. и Виу —.
м12.
4к) ьзАк)
Ау р
р«
Рх
я •
Р,г Потхат
. (СРС)-1. 2,7459
стойки по табл. 8.1.4
Мс2 П
к2
(126')
Галеркин Б. Г. Стрельбицкая А. И. Микеладзе Ш. Е.
°УС В.
Собственные векторы вещественной симметричной матрицы, отвечающие.
Пусть А — вещественная симметричная матрица. Предположим сначала,.
Пусть А — несимметричная матрица, и пусть теперь.
щ Виу .М—1'2.
Ак) ь,Ак)
Аи
р
Рх
отхот
.(С'РС)-1. 0,7459
ригеля по табл. 8.1.3
и -Е
Мс- 2
ч
%
к
(')
СПРАВОЧНИК ПРОЕКТИРОВЩИКА ПРОМЫШЛЕННЫХ, жилых И ОБЩЕСТВЕННЫХ ЗДАНИЙ И СООРУЖЕНИЙ
РАСЧЕТНО-ТЕОРЕТИЧЕСКИЙ
Под редакцией д-ра техн. наук, проф. А. А. УМАНСКОГО
Рассмотрен и одобрен Центральным научно-исследовательским институтом строительных конструкций им. В. А. Кучеренко
ИЗДАНИЕ ВТОРОЕ, ПЕРЕРАБОТАННОЕ И ДОПОЛНЕННОЕ В ДВУХ КНИГАХ
КНИГА 2
ИЗДАТЕЛЬСТВО ЛИТЕРАТУРЫ ПО СТРОИТЕЛЬСТВУ Москва— 1 973
УДК 624.04(031)
Справочник проектировщика промышленных, жилых и общественных зданий и сооружений. Расчетно-теоретический. В двух книгах. Кн. 2. Под ред. А. А. Уманского. Изд. 2-е, перераб. и доп. М., Стройиздат, 1973, 416 с.
Вторая книга расчетно-теоретического тома Справочника проектировщика промышленных, жилых и общественных зданий и сооружений дополняет расчет стержней и стержневых систем, приведенный в первой книге, вопросами устойчивости, динамики и предельных состояний.
Во второй книге даны примеры расчета пластин и оболочек, рассмотрены вопросы взаимодействия сооружений с грунтом, основные принципы моделирования, применения метода конечных разностей.
Справочник предназначен для проектировщиков, научных работников и студентов вузов.
Табл. 230, ил. 507, список лит. 487 назв.
ОГЛАВЛЕНИЕ
Стр.
Предисловие ко второму изданию 8
РАЗДЕЛ 12
УРАВНЕНИЯ И ФОРМУЛЫ ТЕОРИИ УПРУГОСТИ, ПЛАСТИЧНОСТИ И ПОЛЗУЧЕСТИ
И. И. Гольденблат, В. А. Копнов
12.1. Основные уравнения теории упругости. 9
12.1.1. Уравнения равновесия. . 9
12.1.2. Уравнения совместности деформаций 10
12.1.3. Определение перемещений по составляющим
тензора деформаций И
12.1.4. Физические уравнения теории упругости и термоупругости . 12
12.1.5. Уравнения теории упругости в напряжениях. 13
12.1.6. Уравнения теории упругости и термоупругости
в перемещениях (уравнения Ляме) 13
12.1.7. Потенциальная энергия деформации „ . , 14
12.1.8. Общие принципы теории упругости ., 14
12.2. Плоская задача теории упругости. 14
12.2.1. Плоское напряженное состояние. 14
12.2.2. Плоская деформация 1. 15
12.2.3. Функция напряжений Зри 15
12.2.4. Функция Эри для плоской задачи анизотропного
(ортотропного) тела 15
12.2.5. Плоская задача в полярных координатах. 13
12.2.6. Сведение плоской задачи к задаче об изгибе
пластинки 16
12.3. Вариационные методы решения задач теории
упругости 17
12.3.1. Метод Ритца. 18
12.3.2. Метод Бубнова — Галеркина 19
12.3.3. Метод Треффца (метод смягчения граничных
условий) 20
12.4. Сводка некоторых решений теории упругости 21
12.4.1. Чистый изгиб 21
12.4.2. Поперечный изгиб консоли 21
12 4.3. Поперечный изгиб балки 21
12.4.4. Изгиб кривого бруса (задача X. С. Головина) 22
12.4.5. Клин, сжатый сосредоточенной силой. 22
12.4.6. Толстостенный цилиндр и сферический сосуд. 23
12.4.7. Упругая полуплосткость и упругое полупространство 23
12.5. Концентрация напряжений 24
12.5.1. Концентрация напряжений при растяжении. 24
12.5.2. Концентрация напряжений при изгибе. 25
12.6. Элементы теории упругости, учитывающей
моментные напряжения 12.6.1. Основные положения моментной теории упругости 6
12.6.2. Уравнения равновесия и несимметричный тензор
напряжений в двухмерном случае 26
12.6.3. Деформации, вызванные действием силовых и
моментных напряжений 27
12.6.4. Закон Гука 27
12 6.5. Условия совместности деформаций.,. 28
12.6.6. Функции напряжений 28
12.6.7. Некоторые результаты расчетов по моментной
теории упругости 28
12.7. Основные уравнения теории пластичности и
термопластичности . 28
12.7.1. Общие свойства пластической деформации .12.7.2. Основные положения теории пластического
течения 12.7.3. Основные уравнения теории пластического
течения.
12.7.4. Деформационная теория пластичности — частный
случай теории пластического течения. .12.7.5. Идеально упруго-пластическая среда.
12.7.6. Метод характеристик решения задач теории
пластичности .12.7 7. Напряжения под жестким штампом I
12.7.8. Плоское напряженное состояние
12.7.9. Пластические деформации вблизи круглого отверстия в пластине .12.7 10. Упруго-пластическое кручение 12.7.11. Пластическое кручение стержня с растяжением
12.8. Ползучесть и релаксация 12.8.1. Основные понятия
12.8.2. Релаксация I.
12.8.3. Ползучесть 12.8.4. Особенности процесса ползу чести некоторых
строительных материалов. 12.8.5. Реологические модели
12.8.6. Теории ползучести 12.8.7. Наследственная теория ползучести бетона
Н. X. Арутюняна. 12.8.8. О ползучести металлов '
12.8.9. Ползучесть при изгибе балок и кривых стержней
12.8.10. Ползучесть при кручении. ,. Литература. РАЗДЕЛ 13
УПРУГИЕ ТОНКИЕ ПЛАСТИНЫ (ПЛИТЫ И БАЛКИ-СТЕНКИ)
К. А. Китовер
13.1. Общие термины, обозначения 13.1.1. Основные обозначения 13.1.2. Определение упругих характеристик конструктивно ортотропных пластин 13.1.3. Связь между усилиями и напряжениями
13.2. Прямоугольные пластины
13.2.1. Прямоугольные изотропные плиты Нагрузка равномерно распределенная по всей площади плиты (48). Нагрузка, распределенная по гидростатическому закону (49). Нагрузка, распределенная равномерно по части площади плиты
(50). Нагрузка в виде трехгранной призмы (50). Нагрузка, распределенная вдоль прямой линии
(51). Нагрузка в виде силы, приложенной в цен¬
тре плиты (51). Квадратная плита на упругих опорах под равномерно распределенной нагрузкой (51). Определение сосредоточенны реактивных сил в углах плиты, свободно опертой по периметру (52) 13.2.2. Ребристые плиты
13.2.3. Многопролетные плиты .Бесконечная плита, опертая в узлах прямоугольной сетки (53). Квадратная плата, oi'cpian по контуру и поддерживаемая колоннами (54). Приближенный способ расчета неразрезных плит, .13.2.4. Плиты на упругом основании,. „ „ s
13.2.5. Балки-стенки 13.3. Круглые и кольцевые пластины
Стр.
29
29
29
30
31
31
32
33
34
35
35
36
36
37
37
38
38
39
41
43
43
45
45
46
46
47
47
48 48
52
52
53
54
55 60
61
4
ОГЛАВЛЕНИЕ
13.3.1. Осесимметричная задача расчета изотропных
плит Плоское напряженное состояние (61). Плиты на жестких опорах (62). Круглые плиты с кольце выми ребрами (65). Плиты на упругом основании (66). Бесконечные плиты (66). Круглые и кольце вые плиты (69) 13.3.2. Изотропные круглые плиты под произвольной
нагрузкой Круглая плита с защемленной кромкой (69). Круг лая плита со свободно опертой кромкой (69). Сво бодная круглая плита под действием статически уравновешенной нагрузки (70) 13.3.3. Круглые и кольцевые ортотропные пластины.
Плоское напряженное состояние (70). Изгиб круг лой и кольцевой плиты (70) 13.4. Изотропные плиты разной формы.
13.4.1 Треугольные плиты
13.4.2. Трапецеидальные плиты
13.4.3. Эллиптические плиты. 13.4.4. Плиты в виде кругового сектора 13.5. Температурные напряжения в пластинах
13.6. Обзор таблиц по расчету плит.
13.7. Краткие сведения об аналитических методах
определения усилий и перемещений при изгибе тонких упругих плит Литература
РАЗДЕЛ 14
ОБОЛОЧКИ
Я. А. Лукаш, И. Е. Милейковский,
А. Г. Иммерман, Я. Б. Львин
14.1. Классификация оболочек и качественная характеристика их работы (Я. А. Лукаш).
14.1.1. Общие положения. . .14.1.2. Тонкостенные оболочки 1 14.1.3. Общая характеристика работы оболочек.
14.1.4. Характеристика теорий расчета оболочек
14.1.5. Условия применимости безмоментных теорий
14.1.6. Основные постановки задач теории оболочек
14.2. Замкнутые круговые цилиндрические оболоч
ки (А. Г. Иммерман)
14.2.1. Основные условные обозначения 14.2.2. Общие дифференциальные зависимости теории
цилиндрических оболочек 14.2.3. Оболочка под действием осесимметричной на
грузки. Безмоментная теория. 14.2.4. Оболочка под действием осесимметричной на
грузки. Моментная теория 14.2.5. Сопряжение оболочек. Осесимметричная нагрузка
14.2.6. Оболочка под действием нагрузки, не обладаю
щей осевой симметрией 14.2.7. Особые случаи нагрузок и расчета оболочки
14.3. Оболочки вращения (Я. А. Лукаш)
14.3.1. Определение и основные обозначения.
14.3.2. Усилия и перемещения в оболочках по безмо ментной теории при осесимметричной нагрузке
14.3.3. Безмоментные сферические оболочки при верти кальной осесимметричной нагрузке.
14.3.4. Оболочки вращения под действием равномерно распределенного нормального давления.
14.3.5. Расчет оболочек вращения по безмоментной тео рии на несимметричную нагрузку.- ,14.3.6. Учет изгибающих моментов
14.4. Циклическое (моментное) напряженное
состояние оболочек вращения, сопрягаемых между собой (Я. Б. Львин). 14.4.1. Выделение циклического воздействия и его распределение. Общий порядок расчета 14.4.2. Единичные (краевые) реакции оболочек.
14.4.3. Изменение усилий вдоль меридиана каждой
оболочки 14.4.4. Кольцо. Единичные реакции и внутренние усилия
14.5. Пологие оболочки (Я. А. Лукаш).,.
Стр.
И
69
70
70
70
70
71
71
73
75
76
76
77
78
79
80
80
81
81
81
87
83
83
83
85
85
85
86
89
93
93
93
95
96
97
98
99
100
100
102
104
105
106
14.5.1. Определение, формы срединной поверхности и
граничные условия. 14.5.2. Усилия и перемещения пологой оболочки. Особенности расчета 14.5.3. Формулы и таблицы для расчета пологих оболочек, прямоугольных в плане.
14.5.4. Круговые цилиндрические оболочки открытого
профиля 14.5.5. Дифференциальные уравнения пологих сферических оболочек в полярных координатах -.
14.5.6. Некоторые решения нелинейной теории пологих
оболочек 14.6. Своды-оболочки и призматические складки
(И. Е. Милейковский) 14.6.1. Основные обозначения и классификация сводов-
оболочек 14.6.2. Расчет оболочек и складок средней длины. Допущения и гипотезы .14.6.3. Расчет диафрагм-оболочек и складок средней
длины. Литература РАЗДЕЛ 15
МЕТОД СЕТОК В ПРИЛОЖЕНИИ К РАСЧЕТУ ПЛАСТИН И ОБОЛОЧЕК
Я. М. Варвак, Д. В. Вайнберг
15.1. Основы метода сеток
15.2. Плоская задача.
15.2.1. Плоская задача в напряжениях 15.2.2. Двойной итерационный процесс решения плоской
задачи 15.2.3. Решение в перемещениях. Вариационный метод
построения разностных уравнений (Ю. М. Стругацкий) 15.3. Изгиб пластин в
15.3.1. Основные уравнения и граничные условия
15.4. Устойчивость и колебания пластин
15.4.1. Уравнения устойчивости пластин 15.4.2. Собственные колебания пластин 15.5. Оболочки 15.5.1. Основные уравнения и граничные условия для
пологих оболочек Литература РАЗДЕЛ 16
МОДЕЛИРОВАНИЕ
А. Я. Александров, М. X. Ахметзянов,
В. Б. Геронимус
16.1. Основные положения теорий подобия и размерности 16.2. Простое подобие статических упругих со стояний. Метод анализа размерностей
16.3. Расширенное подобие в статических задачах
теории упругости. Анализ уравнений.
16.4. О влиянии коэффициента Пуассона на рас
пределение напряжений 16.5. О моделировании объемных сил.
16.6. Подобие в динамических задачах теории
упругости 16.7. Подобие в задачах термоупругости
16.8. Моделирование больших деформаций.
16.9. Подобие в задачах пластичности.,
16.10. Подобие в задачах ползучести.
16.11. Моделирование некоторых видов конструкций
16.12. Вопросы подобия при исследовании состав
ных систем 16.13. Таблица критериев подобия и уравнений свя
зи между масштабами в задачах статики и ди намики Стр.
101
107
109
111
114
117
118 118 120
135
136
138
139 139 139
141
143
143
157
157
159
164
164
168
170
172
173
174
174
175
176
176
177 177 177
179
180
ОГЛАВЛЕНИЕ
5
16.14. Таблица критериев подобия температурных полей Литература .РАЗДЕЛ 17
УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
С. Д. Лейтес
17.1. Основы теории устойчивости стержневых систем со сжатыми элементами
17.1.1. Понятия устойчивости и неустойчивости. Устойчивость равновесия деформируемых систем.
171.2. Консервативные, и неконсервативные системы.
Методы исследования устойчивости равновесия.
1.71.3. Потеря устойчивости при разветвлении форм. равновесия 17.1.4. Потеря устойчивости при достижении предельной
нагрузки 17.1.5. Устойчивость линейно упругой системы с конечным числом степеней свободы 17.1.6. Собственные значения и собственные функции.
17.1.7. Энергетический критерий качества равновесия.
17.1.8. Потенциальная энергия центрально сжатого линейно упругого стержня 17.1.9. Задача Эйлера 17Л.10. Равновесные состояния сжато-изогнутого линейно упругого стержня 17.1.11. Об анализе больших перемещений сжатых и
сжато-изогнутых стержней 17.1.12. Устойчивость в большом и явление перескока
17.1.13. Идеальные и неидеальные системы. Начальные
несовершенства реальных стержней.
17.1.14. Свободная длина и гибкость стержня.
17.2. Линейно упругие сжатые и сжато-изогнутые стержни постоянного сечения.
17.2.1. Линейно упругий материал. Обозначения.
17.2.2. Уравнение упругой линии стержня в форме метода начальных параметров 17.2.3. Критические силы центрально сжатых стержней
с различными условиями закрепления концов.
1.7.2.4. Внецентренно сжатые стержни 17.2.5. Сжато-изогнутые стержни 17.2.6. Принцип независимости действия сил. Принцип
взаимности перемещений 17.2.7. Растянуто-изогнутые стержни 17.2.8. Большие перемещения внецентренно сжатых
стержней 17.3. Линейно упругие стержневые системы. Методы расчета. 17.3.1 Основные положения расчета по деформированной схеме .17.3.2. Метод сил 17.3.3. Метод перемещений . 17.3.4. Расчет неразрезных балок 17.4. Линейно упругие стержневые системы. Определение критических нагрузок.
17.4.1. Постановка задачи об устойчивости линейно упругой стержневой системы 17.4.2. Анализ критических состояний методом сил и методом перемещений 17.4.3. Примеры исследования устойчивости методом сил
и методом перемещений 17.4.4. Качественный анализ устойчивости линейно упругих стержневых систем 17.4.5. Устойчивость однопролетных стержней с упруго
закрепленными концами 17.4.6. Устойчивость неразрезных балок на упруго перемещающихся опорах 17.4.7. Устойчивость неразрезных балок на упруго вращающихся опорах .17.4.8. Устойчивость рамных систем .17.4.9. Устойчивость стержня в упругой среде.
17.4.10. Справочные данные для определения свободных
длин 17.5. Линейно упругие сжатые стержни составного
сечения. Стержни с переменными по длине жесткостью и сжимающей силой Стр.
17.5.1. Сжатые стержни составного сечения. 229
17.5.2. Сжатые ступенчатые стержни 223
17.5.3. Сжатые и сжато-изогнутые стержни с непрерывно изменяющейся по длине жесткостью 224
17.5.4. Сжатые стержни, жесткость которых изменяется
по степенному закону 226
17.5.5. Сжатые стержни с переменными по длине жесткостью и сжимающей силой 227
17.6. Линейно упругие стержни, сжатые следящими силами : 228
17.6.1. Стержень, сжатый следящей силой общего типа 228
17.6.2. Динамический критерий устойчивости равновесия.
Три вида собственных дбижений стержня. 228
17.6.3. Гармоническое колебание стержня, сжатого следящей силой 229
17.6.4. Критические состояния стержня, сжатого следящей силой 230
17.6.5. Области устойчивости и неустойчивости невесомо¬
го стержня, несущего сосредоточенную массу и сжатого следящей силой 231
17.6.6. Области устойчивости и неустойчивости весомого
стержня, сжатого следящей силой 232
17.7. Нелинейно упругие сжатые и сжато-изогнут
тые стержни :. 233
17.7.1. Нелинейно упругий материал . 233
17.7.2. Устойчивость центрально сжатых стержней. 234
17.7.3. Изгиб и устойчивость сжато-изогнутых стержней 234
17.7.4. Аналитическое исследование равновесных и критических состояний внецентренно сжатого стержня
с двухточечным профилем 234
17.7.5. Численное исследование равновесных и критических состояний сжато-изогнутых стержней. 235
17.7.6. Приближенное определение критической силы внецентренно сжатого стержня 236
17.7.7. Качественный критерий устойчивости сжато-изогнутых нелинейно упругих стержней 237
17.8. Упруго-пластические сжатые и сжато-изогну-
тые стержни :. 237
17.8.1. Упруго-пластический материал. Обозначения. 237
17.8.2. Устойчивость центрально сжатых стержней. 238
17.8.3. Изгиб и устойчивость сжато-изогнутых стержней 240
17.8.4. Сжато-изогнутые стержни из идеального упругопластического материала 240
17.8.5. Приближенное ' исследование устойчивости внецентренно сжатого стержня прямоугольного сечения
из идеального упруго-пластического материала. 242
17.8.6. Влияние формы поперечного сечения на устойчи¬
вость внецентренно сжатых стержней из идеального упруго-пластического материала 9 244
17.9. Подбор сечений сжатых и сжато-изогнутых
стержней 244
17.9.1. Основные положения подбора сечений сжатых и
сжато-изогнутых стержней 244
17.9.2. Расчет центрально сжатых стальных стержней
по нормативной методике 245
17 9.3. Расчет сжато-изогнутых стальных стержней по
деформированной схеме. 245
17.9.4. Расчет сжато-изогнутых стальных стержней по
нормативной методике. 246
17.9.5. Расчет сжато-изогнутых стальных стержней по
критическому напряжению 247
17.9.6. Сопоставление результатов расчета внецентренно
сжатого стержня по трем различным методикам 248
17.10. Линейно упругие тонкостенные сжатые и
сжато-изогнутые стержни 249
17.10.1. Дифференциальные уравнения равновесия тонкостенных стержней 249
17.10.2. Изгиб и кручение тонкостенных сжато-изогнутых стержней 250
17.10.3. Расчет тонкостенных сжато-изогнутых стержней
по деформированной схеме . 250
17.10.4. Изгиб, кручение и устойчивость тонкостенных
внецентренно сжатых стержней . 250
17.10.5. Устойчивость тонкостенных центрально сжатых
стержней . 251
17.11. Нелинейно упругие стержневые системы.
(А. В. Геммерлинг), 251
17.11.1. Постановка задачи об. устойчивости нелинейно
упругих стержневых систем 251
Стр.
185
185
186
186
186
187
188
188
189
190
190
190
191
192
192
192
193
194
194
194
195
199
200
200
203
204
206
206
206
208
211
213
213
214
216
218
219
219
220
221
222
222
222
6
ОГЛАВЛЕНИЕ
17.11.2. Основные аналитические зависимости
17.11.3. Алгоритм Сечение
17.11.4. Алгоритм Стержень
17.11.5. Алгоритм Рама 17.11.6. Предельное состояние системы. . 17.12. Устойчивость линейно упругих колец и арок
(А. Б. Моргаевский) 17.12.1. Постановка задачи. Поведение нагрузки 17.12.2. Устойчивость круговых колец 17.12.3. Устойчивость круговых арок в их плоскости
17.12.4. Устойчивость параболических арок в их пло
скости 17.12.5. Устойчивость пологих двухшарнирных арок
их плоскости 17.12.6. Устойчивость одиночных арок из их плоскости
17.13. Местная устойчивость профилей сжатых
стержней (А. Г. Иммерман) 17.14. Устойчивость плоской формы изгиба балок.
(Г. М. Чувикин) 17.14.1. Устойчивость двутавровых балок. Учет прогиба балки в плоскости изгиба (264). Критические напряжения (265). Балки с продольными связями (265). Влияние перехода критических напряжений за предел пропорциональности (265).
17.14.2. Устойчивость стальных двутавровых балок. Балки с сечением, имеющим две оси симметрии (266). Переходные коэффициенты для сталей разных классов (267). Двутавровые балки с сечением, имеющим только одну ось симметрии (267).
Литература
Стр
252
252
253
253
254
254
254
255
256
256
256
257
256
262
262
265
268
18.6.2. Мембраны Литература.
Сто.
292
295
РАЗДЕЛ 18
устойчивость пластинок и оболочек.
РАСЧЕТ ГИБКИХ ПЛАСТИНОК
В. Л. Агамиров, А. С. Вольмир
18.1. Определение и основные обозначения. 270
18.2. Устойчивость пластинок в пределах упругости 270
18.2.1. Прямоугольные пластинки . 270
18.2.2. Прямоугольные и квадратные пластинки, подкрепленные ребрами 274
18.2.3. Несущая способность подкрепленных ребрами
прямоугольных пластинок после потери устойчивости при сжатии, сдвиге и чистом изгибе. Редукционные коэффициенты „. 277
18.2.4. Непрямоугольные пластинки. 277
18.3. Устойчивость незамкнутых
лей) в пределах упругости
оболочек (пане
18.3.1. Цилиндрические панели
18.3.2. Конические панели.
18.3.3. Сферические панели.
18.4. Устойчивость замкнутых оболочек в преде лах упругости 18.4.1. Цилиндрические круговые оболочки. 18.4.2. Цилиндрические эллиптические оболочки 18.4.3. Усеченные конические круговые оболочки
18.4.4. Усеченные конические круговые подкрепленные оболочки. . 18.4.5. Усеченные конические эллиптические оболочки
18.4.6. Сферические оболочки
18.4.7. Эллипсоидальные оболочки. .
18.5. Устойчивость пластинок и оболочек за пре делами упругости 18.5.1. Общие положения .18.5.2. Прямоугольные пластинки
18.5.3. Цилиндрические оболочки
279
279
281
281
18.6. Гибкие пластинки и мембраны 18.6.1 Гибкие пластинки . 281
281
285
285
286 286 287 287
288
288
290
299
290
РАЗДЕЛ 19
РАСЧЕТ СООРУЖЕНИИ, ВЗАИМОДЕЙСТВУЮЩИХ С ГРУНТОМ М. С. Бернштейн, Г. К. Клейн, А. Я. Синицын
19.1. Статика сыпучей среды (М. С. Бернштейн)
19.1.1. Давление на ограждающие конструкции хранилищ сыпучих тел --
19.1.2. Предельное равновесие сыпучей среды. Строгие и приближенные решения плоской задачи.
19.1.3. Давление сыпучего тела на массивную стенку.
Теория Кулона. Строгое решение для частного случая 19.1.4. Графическое определение активного давления. Построение Ребхана. Построение Понселе.
19.1.5. Графическое определение пассивного давления. Построение Ребхана. Построение Понселе.
19.1.6. Давление сыпучего тела в бункерах и силосах
19.2. Расчет подземных сооружений (Г. К Клейн)
19.2.1. Физико-механические свойства и характеристики
грунтов Виды и составные части грунтов (306). Напряжения и осадки грунта (306). Расчетные механические модели грунтов (307). Прочность грунтов (307).
19.2.2. Давление грунтов на подземные сооружения. Напряженное состояние грунтов до и после проведения выработки (308). Давление грунта на сооружение в насыпи (309). Давление грунта на сооружение в выемке (траншее) (311). Давление грунта на крепь выработки и обделку туннеля (311). Давление грунта в пространственной задаче (312). Давление на сооружение от наземных нагрузок (313).
19.2.3. Расчет жестких подземных сооружений кругового
поперечного сечения Распределение опорных реакций (314). Внутренние усилия в сооружении от различных нагрузок (315). Приведение расчетных нагрузок к двум эквивалентным сосредоточенным силам (315). Деформация поперечного сечения сооружения (317).
19.2.4. Расчет подземных сооружений с учетом отпора
грунта Общие соображения (320). Способ Метропроекта (320). Способ О. Е. Бугаевой (322). Совместное действие на подземное сооружение нагрузок и внутреннего давления при учете упругого отпора грунта (322). Несущая способность сооружения по условию прочности (323). Расчет сооружения на упругую устойчивость и жесткость (324).
19.2.5. Расчет сооружений с учетом пластичности материалов Выравнивание изгибающих моментов в стенках сооружений (324). Пластическая стадия работы подземного сооружения при совместном действии внешней нагрузки и внутреннего давления (324). Предельное состояние сборной туннельной обделки
(325).
19.2.6. Расчет сооружений некругового поперечного
сечения , Расчет туннельной обделки в виде пологого свода
(326). Расчет обделки подземного сооружения в виде свода, опирающегося на массивные стенки (326).
19.3. Балки и плиты на упругом полупространстве
(А. Я. Синицын). 19.3.1. Выбор расчетной схемы 4
19.3.2. Бесконечно жесткая балка .,19.3.3. Гибкая короткая балка Двухслойное основание (329). Два здания, расположенные рядом (330).
19.3.4. Балка за пределом упругости.
Определение наибольшей нагрузки в упругой стадии Распределение реакций за пределом упругости (332). Величина предельной нагрузки (333).
19.3.5. Расчет плит за пределом упругости. . „
Бесконечно-протяженная плита (333). Влияние местных и общих деформаций (334). Нагрузка на краю плиты (335). Расчет слоистой плиты (335). Оптимальная толщина плиты (337),
Литература
296
296
297
299
301
303
304
306
306
308
314
320
324
326
327
327
328
329
331
333
338
ОГЛАВЛЕНИЕ
7
РАЗДЕЛ 20
ДИНАМИКА СООРУЖЕНИЙ
Б. Г. Коренев, В. И. Сысоев
20.1. Элементы теории колебаний
20.1.1. Кинематика колебательного движения.
20.1.2. Колебания системы с одной степенью свободы Свободные колебания при отсутствии сил сопротивления (340). Свободные колебания при наличии сил сопротивления (340). Вынужденные колебания при отсутствии сил сопротивления. Резонанс (341). Вынужденные колебания при наличии сил сопротивления, пропорциональных скорости колебаний (342). Вынужденные колебания при затухании по теории Е. С. Сорокина (342).
20.1.3. Колебания системы с несколькими степенями
свободы Свободные колебания при отсутствии сил сопротивления (343). Свободные колебания при наличии сил сопротивления (344). Приближенные способы определения основной частоты свободных колебаний (345). Вынужденные колебания при отсутствии сил сопротивления (345).
20.1.4. Колебания систем с непрерывно распределенной
массой Продольные свободные колебания стержней (345). Свободные колебания балок (346). Изгибные колебания пластинки постоянной толщины (347). Вынужденные колебания балок (348)
20.2. Частоты собственных колебаний.
20.2.1. Балки на жестких опорах .20.2.2. Балки на упругих опорах 20.2.3. Балки с распределенными и сосредоточенными
массами 20.2.4. Балки, нагруженные продольными силами
20.2.6. Рамы Рамы без сосредоточенных масс (357). Рамы с сосредоточенными массами (358).
20.2.6. Фермы .Метод Польгаузена (360). Метод наложения (360). Метод эквивалентной балки (360).
20.2.7. Арки, длинные своды, кольца Круговые арки и своды постоянного сечения (360). Параболические симметричные арки переменного сечения (361). Круговые кольца (362).
20.2.8. Плиты.
20.2.9. Стержни переменного сечения 20.2.10. Крутильные и продольные колебания стержня.
Колебания струны 20.2.11. Колебания жидкости в резервуарах 20.2.12. Колебания трубопровода, по которому движется жидкость 20.3. Динамические характеристики строительных
материалов и конструкций 20.3.1. Динамическая жесткость
20.3.2. Внутреннее поглощение энергии колебаний (затухание) в конструкциях и материалах сооружений
20.3.3. Выносливость строительных материалов.
20.4. Динамические нагрузки от машин.
20.4.1. Машины с конструктивно неуравновешенными
движущимися частями 20.4.2. Машины с номинально уравновешенными, а фактически неуравновешенными движущимися частями
20.5. О динамическом расчете перекрытий и каркасов зданий 20.5.1. Расчетные схемы .20.5.2. Частоты и формы свободных колебаний.
20.5.3. Результаты динамического расчета и нормативные требования 20.6. Виброизоляция и другие способы борьбы с
вибрациями 20.6.1. Виброизоляция.
20.6.2. Принципиальная схема работы виброизолированной установки. Констрктивные схемы виброизоля-
СТР Стр.
ции и виброизоляторов. Содержание и задачи расчета . 376
20.6.3. Расчет виброизоляции 377
Активная вибрация при периодических нагрузках
20.6.4. Другие способы борьбы с вибрациями строительных конструкций 378
339 20.6.5. Мероприятия по уменьшению вынужденных колебаний, лередаваемых машинами 379
339 20.6.6. Мероприятия по уменьшению колебаний при про-
270 хождении через резонанс.,., 380
Литература 380
РАЗДЕЛ 21 РАСЧЕТ КОНСТРУКЦИЙ (СТЕРЖНЕВЫХ, ПЛАСТИНОК И ОБОЛОЧЕК)
ПО ПРЕДЕЛЬНОМУ РАВНОВЕСИЮ 343 И УЧЕТ ПОЛЗУЧЕСТИ
А. М. Проценко
21.1. Основные'положения по расчету конструкций в состоянии пластичности 382
345 21.1.1. Поведение конструкций в пластической стадии 382
21.1.2. Основные положения теории предельного равновесия. 383
21.1.3. Основные ограничения теории 384
21.1.4. Типы нагрузок и классификация задач. „ 384
349 21.2. Несущая способность сечений 385
349
ок1 21.2.1. Чистый изгиб сечений в плоскости симметрии. 385
21.2.2. Косой изгиб стержня 388
gel 21.2.3. Внецентренное растяжение (сжатие) в плоскости
35J симметрии . 388
357 21.2.4. Учет поперечной силы при изгибе 389
21.2.5. Предельные состояния сечения при кручении. 389
21.2.6. Условия пластичности для изгибаемых плит. 390
359 21.2.7. Несущая способность плиты при совместном дей¬
ствии изгиба и плоского напряженного состояния 391
21.2.8. Ассоциированный закон пластического течения
360 для конструкций 391
21.3. Расчет плоских стержневых систем. 392
363 21.3.1. Пластические шарниры в стержневых системах 392
365 21.3.2. Расчет статически определимых стержневых
систем 392
368 21.3.3. Расчет неразрезных балок . 393
369 21.3.4. Расчет статически неопределимых рам. . 395
370
21.4. Предельное равновесие пластинок 398
21.4.1. Общие положения расчета . 398
370 21.4.2. Кинематический способ определения несущей спо-
f собности плит. 398
dU 21.4.3. Статический способ определения несущей способ-
ности плит 399
21.4.4. Некоторые частные решения для пластинок, за,31 груженных сосредоточенной силой, при шарнирном
опирании 400
371 21.4.5. Пластинки, загруженные равномерно распределенной нагрузкой 401
21.4.6. Предельное равновесие плаепедок, защемленных
372 по контуру 403
21.4.7. Пластинка с отверстием при равномерно распре-
372 деленной нагрузке 404
21.5. Предельное равновесие оболочек. 406
373 21.5.1. Общие положения расчета оболочек 406
21.5.2. Расчет осесимметричных оболочек 405
21.5.3. Некоторые типы оболочек вращения 407
21.5.4. Пологие оболочки с отверстием. 409
з?5 21.6. Методы решения задач ползучести. 409
21.6.1. Уравнения состояния для задач ползучести. 409
21.6.2. Методы решения задач линейной ползучести 411
21.6.3. Методы решения задач нелинейной установив-
376 шейся ползучести 412
о7Л 21.6.4. Расчет стержневых систем при нелинейной ползучести 413
Литература, 414
ПРЕДИСЛОВИЕ КО ВТОРОМУ ИЗДАНИЮ
При составлении второго издания Справочника мы воспользовались советом многих читателей — разделить содержащийся в Справочнике обширный материал на две книги, облегчив тем самым пользование им.
В первую книгу вошли разделы:
1. Математика
2. Теоретическая механика
3. Напряжения, деформации, прочность материалов
4. Материалы для строительных конструкций. Методы расчета
5. Строительная механика упругого стержня и стержневых систем
6. Матрицы. Численные методы строительной механики
7. Таблицы геометрических характеристик сечений стержней
8. Таблицы и формулы для расчета балок, рам и арок
9. Стержни, очерченные по дуге круга, и круговые кольца
10. Фермы
И. Вантовые и пневматические конструкции
Во вторую книгу вошли разделы:
12. Уравнения и формулы теории упругости, пластичности и ползучести
13. Упругие тонкие пластины (плиты и балки-стенки)
14. Оболочки
15. Метод сеток в приложении к расчету пластин и оболочек
16. Моделирование
17. Устойчивость стержневых систем
18. Устойчивость пластинок и оболочек. Расчет гибких пластинок
19. Расчет сооружений, взаимодействующих с грунтом
20. Динамика сооружений
21. Расчет конструкций (стержневых, пластинок и оболочек) по предельному равновесию и учет ползучести.
Первая книга, наряду со Строительными нормами и правилами (СНиП), а также со специализированными томами Справочника проектировщика, должна удовлетворять практическую потребность инженеров, занятых расчетом прежде всего стержневых конструкций. Вторая книга предназначена для инженеров, решающих более сложные задачи, в частности, по расчету оболочек.
Разделы б, 11, 15, 16 — новые, написанные специально для второго издания. Разделы 17 и 21 коренным образом переработаны по сравнению с соответствующими разделами первого издания. Остальные разделы переработаны частично и дополнены краткими сведениями
о расчетных методах, развитых в последнее десятилетие.
Раздел Нормы нагрузок и габаритов исключен как дублирующий официальные нормативные издания.
РАЗДЕЛ 12
УРАВНЕНИЯ И ФОРМУЛЫ ТЕОРИИ УПРУГОСТИ, ПЛАСТИЧНОСТИ И ПОЛЗУЧЕСТИ
В разделе справочника Напряжения, деформации и прочность материалов даны определения тензора напряжений и тензора деформаций (см. 3.1.5 и 3.2), а также различные формы записи закона Гука для изотропных и анизотропных тел (см. 3.3.1 и 3.3.2). Здесь даются основные уравнения и формулы теории упругости, пластичности и ползучести.
12.1. ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ
12.1.1. Уравнения равновесия
Составляющие тензора напряжений (рис. 12.1)
'Ox
тху
xz
тух
Оу
V I
(12.1)
гх
Т2У
oj
являются в общем случае функциями координат.
Здесь: сг, оу ог— нормальные напряжения на площадках, перпендикулярных соответственно осям х, у и г.
В обозначениях касательных напряжений первый индекс соответствует направлению напряжения, второй — направлению оси, перпендикулярно которой расположена рассматриваемая площадка.
Для тела, находящегося в равновесии, эти функции должны удовлетворять уравнениям равновесия:
до у
дх
дТ:
ду
до.
дх
v
дтгд
дх
ду
дт
гу
ду
дТдг
дг
дг
до2
—2 z o.
дг
У 0;
(12.2)
Здесь X, У, Z — составляющие вектора объемной силы, т. е. внешней силы, отнесенной к единице объема. Такой объемной силой является, например, собственный вес единицы объема твердого тела.
Внешние напряжения (рис. 12.2) р ХУ, p„v, р, действующие в какой-либо точке поверхности тела с внешней нормалью v, связаны с внутренними напряжениями у границы тела ах, ту,., ог (рис. 12.3) формулами:
Pxv J 4™ zK
Pyv V' m V
Pzv х1 хгу m 2 (12.3)
Здесь
Соотношения (12.3) носят название граничных условий. Тензор напряжений в цилиндрической системе координат г, 0, 2 (рис. 12.4)
хгв
Т'А
V
ае
тег (12.4)
Хгг
тг6
Здесь:
Or — нормальное напряжение на площадках, перпендикулярных радиусу-вектору г; о0 — нормальное напряжение в меридиональных сечениях, проходящих через ось г
и радиус-вектор г;
1()г '
касательное напряжение на
площадке, перпендикулярной оси z, направленное по касательной к окружности r const в сторону увеличения угла 0; тгг — касательное напряжение на той же пло-
I cos (х, v); m cos (у, v); п cos (г, v).
10
РАЗДЕЛ 12. УРАВНЕНИЯ И ФОРМУЛЫ ТЕОРИИ УПРУГОСТИ, ПЛАСТИЧНОСТИ И ПОЛЗУЧЕСТИ
щадке, направленное вдоль радиуса-вектора г; тгг — касательное напряжение на площадке, перпендикулярной радиусу-вектору г и направленное по оси г; тбг — касательное напряжение на той же площадке, направленное по касательной к окружности гconst в сторону увеличения угла 0; t2q — касательное напряжение в меридиональном сечении с внешней нормалью в сторону увеличения угла 0, направленное вдоль оси z тг0 — касательное напряжение в том же сечении, но направленное вдоль радиуса-вектора г.
Уравнения равновесия в цилиндрических координатах:
дг г
9_
ае
дхгг
дг
с — о
дг,
вг 1 d(JQ t дх6г v0r
дг г ' ае дг Г Q 0;
dL, J_, даг, V,
dr г ' 30 дг 2-0.
Г
Vn
' R 0;
(12 5)
Здесь Q, Z — составляющие объемной силы в направлениях г, 0, z соответственно.
12.1.2. Уравнения совместности деформаций
Составляющие тензора деформаций в декартовых координатах (рис. 12.5)
2 Уух
etdx
2
1
2 Тгг
У
(12.6)
Л.-.
Л-
г
J.
У
о Т
1
f -fxz
Л
, I
Рис. 12.5
V7
должны удовлетворять уравнениям совместности СенВенана:
д2е.
ду2
дг
дЧг
дх
— 4 дг djc
52
а2вг
дг'1
дУгх
У ху
дхду
_ д2Унг дудг
дхд:
дУху
ду дг)
d _ дуу2 дх ду дг дх )
— д-2У л. _ дЪх) о ду дг дх ду j
;
'дхду ;-дудг сМг
(12.7)
12.1. ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ
И
В случае плоской деформации (о0) система уравнений совместности деформаций (12.7) заменяется одним уравнением
д2гх дЧ
д2У ху
ду2 dx2 дхду Тензор деформаций в цилиндрических координатах:
(12.8)
1
тг'в
Увг
—v N
2 Ггг
Ve2
V20
(12.9)
Если через обозначить радиальное, через г — тангенциальное и через w — аксиальное перемещения
(рис. 12.6), то компоненты тензора деформаций в цилин¬
дрических координатах могут быть вычислены по формулам:
dl 1 дг)
€г дг ; 80 “ г ’ае
I dw
; sz т;
г дг
дт г 1 дс
Тге дГ7 Т 'дв ;
dw 3г
д0 дг
d dw
)
Уравнение совместности деформаций в случае плоской деформации (ш 0)
Л- Л- 1 1 М
V г2 ав2 г ’ дг -2 )Г ,( 1 52 2' 1
V2 ' г2 ‘ д№ г) 80 г дгдд
12.1.3. Определение перемещений по составляющим тензора деформаций
Составляющие тензора деформаций связаны с составляющими вектора перемещения м, v и w дифференциальными зависимостями — уравнениями Коши (рис. 12.7):
du
dv
dw
дх
; ty -
ду ’
; :
dz
du
dv
dw
dv
dy
д7
; Ууг
ду
aT
dw
du
Угх
аГ
dz
(12.12)
I
Составляющие вектора перемещения и, v и w и составляющие вихря вектора перемещения со, ыу и ы2 связаны соотношениями
dw dv ди dw
cov — —
G)„
Составляющие вихря перемещения характеризуют вращение бесконечно малого элемента в рассматриваеdu dv
мои точке. Так, уху — — (рис. 12.7) характеризует сдвиг, т. е. уменьшение прямого угла в рассматриваемой точке между направлениями, первоначально параллельными осям Ох и Оу разность этих углов du dv
даёт удвоенный угол поворота вокруг
оси Ог биссектрисы угла между этими двумя направлениями.
Зависимости между составляющими тензора деформации и составляющими вихря вектора перемещения:
(12.14)
)
Пусть составляющие вектора перемещения и вихря вектора перемещения точки Mq(x0, у0, г0) тела (рис. 12.8) имеют значения: а0, v0, w0 и со, 0), со соответственно.
Составляющие вектора перемещения любой другой точки Mi(xu У и z) могут быть вычислены по формулам
дуХу.
dx
dy
dz
dox
дУуг
9 deV.
dy
dy
dz ’
dax _
9 Oh.
дУуг
dz
dy
dx
U1 U0-J “D(zi-?o)-
- Y0z(-o)
(Uxdx Uydy U,dz) м,м.
1 0 у “(—о)-
2 (г1— го)
J (Vx dx Vу dy Vt dz) м,м„
f (Wxdx WydyW2dz).
(12.15)
Здесь
дех ду.
ху
12
РАЗДЕЛ 12. УРАВНЕНИЯ И ФОРМУЛЫ ТЕОРИИ УПРУГОСТИ, ПЛАСТИЧНОСТИ И ПОЛЗУЧЕСТИ
1 1, ч иу —ЧХу — (У1-У)
дУхг дууг
)
иг±-угх 2 (Уг-У)у ду
, 1.(духг „ дгг
у(г1-г)( дг a J
Рис. 12.6
Рис. 12.8
этого тела как функции координат. Таким путем может быть, например, решена задача о смещении точек верхней поверхности полупространства и другие аналогичные задачи.
12.1.4. Физические уравнения теории упругости и термоупругости
Физические уравнения теории упругости, связывающие компоненты тензора напряжений с компонентами тензора деформаций, для избранного тела в пространственном случае (для нормальной температуры) имеют вид, представленный в 3.31 и 3.32.
В случае наличия неравномерного поля высоких температур эти связи между напряжениями и деформациями принимают вид
8 ёт) fCT —11 (Т) ( и 2) “(Г) (Г Го);
Уху —
ьху л
О (Г)’
или при записи напряжения через деформации
3(х (Г)
ах — 2G (Т) I Ц (Т)
1 -2ц (Г)
ср 1-2 МГ) о(Г)(Г-Г0);
Формулы (12.15) носят название формул Чезаро. В этих формулах выражения для Ух У у, У г и Wx, Wy Wz получаются из приведенных выражений для UXy Uy, Uг круговой перестановкой букв х, у, z. Криволинейные интегралы в формулах (12.15) могут быть вычислены по любому пути между точками М0 и Мх.
Обычно в теории упругости интересуются только относительными смещениями точек тела относительно друг друга а не движением тела как целого, поэтому для точки М0 u0 Vqw0—0 и cd ю-Формулы
Чезаро дают возможность найти перемещения точек тела, если известны составляющие тензора деформаций для
ху — О (Г) уХу
В случае анизотропного тела физические уравнения теории упругости имеют вид, приведенный в 3.3.2. В плоском случае для ортотропного тела в технических обозначениях физические уравнения имекгг вид, приведенный в 3.3.4.
При наличии неравномерного поля высоких температур для анизотропного тела физические уравнения обобщаются, в них так же, как для изотропного тела, добавляются температурные слагаемые. Причем поскольку коэффициенты линейного расширения для анизотропного тела будут, как и другие физико-механические характе-
12.1. ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ
ристики, зависеть от направления, необходимо ввести в рассмотрение тензор коэффициентов линейного расширения агкС).
12.1.5. Уравнения теории упругости в напряжениях
В теории упругости в основном приходится иметь дело с двумя типами задач. В задачах первого типа на поверхности исследуемого тела задаются внешние силы. Требуется найти напряжения и смещения любой точки тела под действием этих сил. Иногда в задачах этого типа помимо поверхностных сил задается еще объемная сила (например, собственный вес тела). В задачах данного типа для 15 неизвестных функций, а именно:
шести составляющих тензора напряжений а, сгу, сгг,
Trx, Тyz, Хху
шести составляющих тензора деформаций е, еу, Ег,
1 1 1
2 Vzx 2 Ууг' 2 Ху'
трех составляющих вектора смещений и, до, v, имеется 15 уравнений: три уравнения равновесия (12.2); шесть уравнений, связывающих составляющие тензора деформаций с составляющими вектора перемещений (12.12); шесть уравнений закона Гука (см. 3.3.6).
Эти уравнения должны быть решены таким образом, чтобы на поверхности тела удовлетворялись граничные условия (12.3). Для решения задач теории упругости в напряжениях нужно использовать уравнения равновесия (12.2) и уравнения совместности деформаций
(12.7), выраженные через напряжения с помощью уравнений закона Гука (см. 12.1.4). Эти уравнения совместности деформаций, выраженные через напряжения, носят название уравнений Бельтрами — Митчелла:
д2о дХ
l )V — -2(1 ц) — -
дх
Р1 П Ч 10
1 — р, дх д2о
(1 ,0уо„ —
дУ ду
dZ
дг
дУ
-2(1 ц) —ду
_i(l ц) дХ дУ dZ
1 — ц I дх ду дг ) ’
д a dZ
(1 Ц) У2 г — — 2 (1 V) дг
ц(1 М) (дХ dZ
1 — р, дх ду дг
д2а
(1 )v2 — (дХ
д2о
дх );
дуд7
(dY dZ
U ф г
(1 И)
r)-g
dzdx
(12.16)
д_Х_
дг
) где о ох-J- оу ог, д2. _д_ д2 ду2
у2 — — 4v дх2 ду2 дг2
Таким образом, получается система из девяти уравнений (12.2) и (12.16) для шести неизвестных функций a, сгу, Oz, Xxzy хгу, тху, т. е. сверхопределенная система. Доказательство того что эта система не противоречива и допускает единственное решение при заданных на поверхности тела усилиях, см., например 11.
12.1 об. Уравнения теории упругости и термоупругости в перемещениях (уравнения Ляме)
В задачах второго типа, решаемых в теории упругости, на поверхности тела задаются смещения. Требуется найти напряжения и смещения в любой точке тела.
В задачах этого типа за основные неизвестные принимают три составляющие вектора смещения и, v и до. Чтобы получить три уравнения для нахождения и, v и до, удобно в уравнения закона Гука (см. 12.1.4) подставить формулы, связывающие составляющие тензора деформаций с составляющими вектора смещения (12.12), и затем полученные выражения для напряжений подставить в уравнения равновесия (12.2). В результате получаются три уравнения для трех составляющих вектора смещения — уравнения Ляме 16:
l а) л а,г“ х _МЦ±А._1
1 — 2ц дхк Э0
(А. 6)— G?2p K ду
2 а (1 ц)
1 — 2ц
дв
ду
(а Г);
(12.17)
(к -f G) — -j- Gy2w -j- Z — дг
1 — 2i дг
)
Здесь 0 ех гу е2; X
коэффициент Ляме G
(, i) (I — 2ji) ’
Е
——;—- const совпадает с
2 (1 М-)
модулем сдвига (р,—const— коэффициент Пуассона).
Должно быть найдено такое решение этих уравнений, которое удовлетворяет граничным условиям, т. е. необходимо найти три такие функции координат
ы и(х,у,г), 0 0(дг, у, г), w w(x,y, г),
которые, удовлетворяя уравнениям Ляме (12.17), в. то же время на поверхности тела принимали бы заданные значения составляющих вектора смещения.
14
РАЗДЕЛ 12. УРАВНЕНИЯ И ФОРМУЛЫ ТЕОРИИ УПРУГОСТИ, ПЛАСТИЧНОСТИ И ПОЛЗУЧЕСТИ
Точное решение уравнений теории упругости для большинства задач, выдвигаемых практикой, неизвестно, поэтому большое значение приобретают приближенные методы решения этих задач.
12.1.7. Потенциальная энергия деформации
Потенциальная энергия деформации может быть вычислена либо через компоненты тензора напряжений, либо через компоненты тензора деформаций:
JjjKS -2t (СТ у у г СТг д
2 (1 ц) ( тхи 1г т2уг) dxdydz; (12.18)
1 —2ц
02
— ( vLу)
dxdydz. (12.19)
Интегралы (12.18), (12.19) распространяются на весь объем тела. В случае плоского напряженного состояния при ог—TzTzy0 выражение (12.18) принимает вид
W
JliJ 0 2-20
S
У
W
2(1 и) ту dxdy; де
-Я-
(12 20)
в случае плоской деформации выражение (12.19) принимает вид
у' 1 — 2ц
02
у2
Хху
)'
(12.21)
12.1.8. Общие принципы теории упругости
Принцип возможных перемещений Лагранжа формулируется в таком виде: работа всех внешних и внутренних сил на любом возможном (т. е. совместном с геометрическими связями) перемещении для любой системы, находящейся в равновесии, должна быть равна нулю:
JTJ (ХЪи -f- Yfiv -f- Z6w) dxdydz V'
jj (Xv bu Yv 6v Zv Sw) dS — 6Г 0.
5
Вариационное уравнение Лагранжа представляет собой равенство нулю первой вариации полной потенциальной энергии системы. Составляя вторую вариацию полной потенциальной энергии всей системы, можно показать 10, что эта энергия принимает минимальное значение. Это составляет содержание принципа минимума полной потенциальной энергии деформации: в состоянии устойчивого равновесия полная энергия деформации должна принимать минимальное значение.
Из этого вариационного уравнения могут быть получены дифференциальные уравнения равновесия в напряжениях и статические граничные условия 10. Это урав¬
нение лежит в основе ряда широко используемых вариационных методов приближенного решения задач теории упругости, в частности в основе методов Ритца и Бубнова— Галеркина (см. 12.3).
Принцип Кастилиано предполагает такое изменение напряженного состояния тела, при котором удовлетворяются дифференциальные уравнения равновесия и статические граничные условия, т. е. исходное напряженное состояние тела и вариации этого состояния являются статически возможными. При этом вариационное уравнение Кастилиано имеет вид 10:
где
Эч — W— JJ (uXv -f- vYv -f- wZv ) dS,
5
т. e. среди всех статически возможных напряженных состояний в действительности имеет место то, для которого величина Эj имеет стационарное значение.
Составляя вторую вариацию 6-увидим, что полная энергия деформации в этом случае принимает минимальное значение.
Из вариационного уравнения Кастилиано можно получить уравнения неразрывности деформаций. Оно используется при приближенном решении в напряжениях ряда конкретных задач теории упругости.
12.2. ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ 12.2.1. Плоское напряженное состояние
Рассмотрим случай, когда тонкая плоская пластинка находится под действием сил, приложенных по контуру параллельно ее плоскости и равномерно распределенных
по толщине (рис. 12.9). Допустим также, что объемная сила Z равна нулю, а силы X и Y являются функциями
только х и у. Поверхности пластинки 2rfc— свободны
от внешних сил, и компоненты напряжений аг, тгх,т2у здесь равны нулю. Если пластина тонкая, то без существенной ошибки можно принять, что эти компоненты равны нулю по всей толщине пластинки и что три другие компоненты — а, оу, хху — практически остаются постоянными по толщине пластинки. В таком случае имеет место плоское напряженное состояние, для которого Ог — Т2Х Тгу—0, a Gx, Оу и тху являются функциями ТОЛЬКО X И у.
Средние по толщине пластины напряжения ох оу и тху связаны с действительными напряжениями ох, ау и хХу соотношениями
12.2. ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ
15
а y J х йг' Г f Ъи dz;
l —1l
2 2
h_
2
1 f
тху — J Txydz.
Sjl
2
12.2.2. Плоская деформация
Пусть длинный цилиндр находится под действием поперечной нагрузки, равномерно распределенной вдоль оси (рис. 12.10). Пусть составляющая объемной силы Z равна нулю, a X п Y являются функциями только х и у.
) 1111
I 11
Рис. 12.10
Pxv х cos (V, Ж) тхи cos (V, у)Pyv — rXy cos (vx) Оу cos (V, у). Положив
д2р д2ф д2ф x w; ауд',Тху'дГд
(12.23)
дх, (12.24)
легко убедиться, что первые два уравнения системы (12.22) удовлетворяются тождественно, а третье приводится к бигармоническому уравнению
д4Ф
— ), (12.25)
, 2 д4Ф
дх4 дх2 ду2
функция ф(х, ) носит название функции напряжений, или функции Эри. Контурные условия (12.23), выраженные через функцию Эри:
д2а
xv cos х v) 5
( дхду
дх ду-qxj cos (х, v)
cos (у, v);
д2Ф
— cos (у, v).
(12.26)
Итак, при заданных на контуре напряжениях плоская задача теории упругости приводится к интегрированию уравнения (12.25) при условиях (12.26).
В этом случае деформация значительной части тела, находящейся на некотором удалении от торцов, не зависит от координаты z, а перемещения и и v являются функциями только хну. Если торцы цилиндра не могут смещаться в направлении оси г, то перемещение до0. Из симметрии следует, что в среднем сечении также w0. Можно приближенно допустить, что и в любом поперечном сечении тела w0. Тогда компоненты тензора деформаций е, еу и уху будут функциями хну, а компоненты е2, yZx Yv — равны нулю; компоненты тензора напряжений а, ау, а2, тху будут функциями только х и у, а компоненты yz и rzx — во всех точках — равны нулю. Такое напряженное состояние носит название плоской деформации.
Допустим, что торцы цилиндра могут свободно смещаться. Тогда можно предположить, что продольная деформация е2 представляет собой постоянную величину. Такое напряженное состояние называют обобщенной плоской деформацией.
12.2.3. Функция напряжений Эри
Если объемные силы постоянны (к постоянным объемным силам относится, например, собственный вес), то как для плоского напряженного состояния, так и для плоской деформации основные уравнения теории упругости (12.2) и (12.16) приводятся к виду
дох
дтг
дх
0;
дт.
ух
даи
ду дх ду
V2 ( х оу) 0,
где q — объемный вес.
На контуре тела, согласно (12.3):
— 7 0;
(12.22)
12.2.4. Функция Эри для плоской задачи анизотропного (ортотропного) тела
Для данного случая введем функцию напряжений ф следующим соотношением:
ст. —— tk ice. pк
д2ф
(i, ft 1,2).
(12.27)
Здесь ycpq — компоненты обратно симметричного тензора второй валентности
(-?:).
т. е.
0; х12 1; — 1; х22 0. (12.28)
Легко установить, что при подстановке выражений (12.27) в (12.2) при отсутствии массовых сил уравнения равновесия удовлетворяются тождественно.
Из закона Гука (см. 3.3.4) следует
— —
Vyx
1
Ех
д2ф
ду2
Vxy
— о J Z- — —
Ех х Еу Е
УУХ и
Еу
а2ф
’ ду2
д2ц дх2 т
Уху
Jxy
д2Ф
"дх2' _1 G
Ху
а2ф
дх ду
(12.29)
Если подставить формулы (12.29) в бигармоническое уравнение (12.25), то получим
16
РАЗДЕЛ 12. УРАВНЕНИЯ И ФОРМУЛЫ ТЕОРИИ УПРУГОСТИ. ПЛАСТИЧНОСТИ И ПОЛЗУЧЕСТИ
1 d4q
— - 2
ду
ii—jг)
Gxy Еу 1
d4tp
дх2 ду
1
Еи
д4ф
14
0.
(12.30)
Таким образом, функция напряжений в плоской задаче теории упругости анизотропного тела должна удовлетворять уравнению (12.30).
Из сопоставления уравнений (12.25) и (12.30) можно записать условия эквивалентности напряженных состояний изотропной и анизотропной пластин:
Еи
(12.31)
(12.32)
дог 1 дг V
до,
О
ve
дв
дт,
гв, 2тгВ, л
ло Q о.
дв дг г
(12.33)
Если ввести функцию напряжений ср (г, 0) и положить (при отсутствии объемной силы) R Q0
д2р
дф 1 1Г "
дв
2 а0 —
дг2 ’
ve
_ д 1 аф
дг г ао2)9
(12.34)
то уравнения равновесия (12.33) удовлетворяются тождественно.
Функция напряжений ф должна удовлетворять дифференциальному уравнению
а2_ _L jL _L 82 V а2(р. -аг дф 5Г
дг2
f — г
1
7'
(302
ф
дг2
0.
(12.35)
В частном случае, если напряженное состояние симметрично относительно оси, проходящей через начало координат перпендикулярно плоскости чертежа (плоскости деформации),
Ve ;
.4
ог — В( 1 21пг) 2С;
Г2
On -
в (3 2 In г) 2С.
Постоянные Л, С определяются из условий на контуре.
Упругие характеристики многих анизотропных материалов не подчиняются условиям (12.31) и (12.32), и решение плоской задачи для таких материалов более сложно. В частном случае изотропного тела условие( 12.31) выполняется автоматически, а условие (12.32) приводится к известному соотношению между упругими константами:
0- —.
2(1 4-Ц)
Исключением является ряд простейших напряженных состояний, характеризуемых функцией Эри, например вида
Ф Схъ 4- Du3 4- Ех2у Fxy2 -f- Gx2 4- Ну2 4- Кху.
Эти напряженные состояния будут одинаковы как в изотропных, так и в анизотропных пластинках, так как все производные четвертого порядка от ф равны нулю и уравнения (12.25) и (12.30) обращаются в тождества.
12.2.5. Плоская задача в полярных координатах
Уравнения равновесия (рис. 12.11): дт,а о. — Ол
R 0;
Рис. 12.11
12.2.6. Сведение плоской задачи к задаче об изгибе пластинки
Для решения плоской задачи можно прибегнуть к следующему приему 5. Разыскивается функция ф (л:, у) таким образом, чтобы на контуре выполнялись условия
д2г) д2Ь
pv lcosx’v)-incos(y’ v);
C2)
дх ду
Y д2г)
v-7 cos (. V) — cos (у, V).
(12.36)
Функция t)(, у) при этом вовсе не должна удовлетворять уравнению (12.25) и может быть задана без затруднений, например, в виде полинома с достаточным числом неопределенных коэффициентов. Эти коэффициенты следует подобрать таким образом, чтобы хотя бы приближенно удовлетворять условиям (12.36). Возможны и другие формы задания функции г)(х, у). Функцию Эри ищут в виде
Ф Ф(, У) У(х, y) w(x, у). Поскольку на контуре, согласно (12.26):
(12.37)
Pxv : Руу
д2ф
ду2
д2ф
COS (X, V)
д2ф
дх ду
cos (, v) 4-
дхду
д2Ф
дх2
cos (у, V);
- cos (у, V),
3. ВАРИАЦИОННЫЕ МЕТОДЫ РЕШЕНИЯ ЗАДАЧ ТЕОРИИ УПРУГОСТИ
17
то функция w должна удовлетворять условиям
d2w
d2w
— cos (, v) ду2
дх ду
cos (у, v) 0;
d2w d2w
——cos (xt v)—- cos (у, v) 0. дх ду dx2
(12.38)
Подставив (12.37) в (12.25), получим
d4
—) -)- .
d a
I 2 a Эх2 dy
Следовательно: d4w
d4w
2 dx4 d2 at2
d4w
P(x,y),
dy
где
вц аф
-( 2а )’
(12.39)
(12.40)
ш11Т1ТТГПТтш аггтГГТ1117Т
pPP Рис. 12.12
т. е. известная нам функция. Итак, плоская задача сводится к задаче об изгибе пластинки при контурных условиях (12.38) (см. раздел 13).
Так как решение последней задачи во многих случаях известно, указанный прием может оказаться весьма полезным для решения ряда задач.
Отметим, что для полной аналогии с задачей об изгибе пластинки необходимо положить
Р (,)
р(х У) D
где р(ху у) — действующая на пластинку нагрузка; D — цилиндрическая жесткость.
В случае прямоугольного диска контурные условия (12.38) принимают вид
d2w
ду
д2т
дх2
d2w
дхду
0 при х — 0 и х ;
0 при у — 0 и у — 1
0 — вдоль всего контура.
(12.41)
3р.
h2 h
Подставив в (12.25) ф г)w,'получим
d4w d4w
—j- 2 дх4 дх2 ду2
d4w
ду4
2 4р К2
Задача сведена к задаче об изгибе полностью защемленной пластинки (см. раздел 13). В самом деле, если на контуре пластинки удовлетворяются условия
w 0 при х 0; х 1; у 0 и у h;
dw dw
“7 0 при х 0, х и — 0 при у — 0, у г,
то должны удовлетворяться также вытекающие из (12.25) условия. В результате приходим к формулам
d2w 2х2 2х _ d2w
х -тт-; о у
ду2 у
W h г)Р дх’ d2w
дх ду а
(Г
:ц
6 t—
. Рис. 12.13
где w — функция прогибов полностью защемленной пластинки, находящейся под нагрузкой 24pjh2.
Для балки, нагруженной согласно схеме, показанной на рис. 12.13, примем
3
У
г) —. 2 2
(12.43)
Это дает
б р х2 d2w
1Г2-у т
ьху _6р_
Н3
(У2 — yh) -
d2w дх d2w
дх ду
Для прямоугольного диска, нагруженного согласно рис. 12.12, возьмем функцию гэ в виде
х4 2 §5xaJ р. (12.42)
Продифференцировав (12.42) дважды по х, получим 12л:2 12
Все условия на контуре удовлетворяются, если в качестве w взять функцию прогибов прямоугольной, полностью защемленной на контуре пластинки, находящейся б р 2р
под нагрузкой ——77У' Положив ш ш1ш2, где h2 Я3
12 р
ze2 — прогиб пластинки от нагрузки у, a Wi — прогиб 6р
пластинки от нагрузки —, можем воспользоваться готовыми решениями.
Изложенный прием дает возможность при надлежащем выборе функции ф использовать решения задач
о защемленной пластинке для плоских задач теории упругости.
12.3. ВАРИАЦИОННЫЕ МЕТОДЫ РЕШЕНИЯ ЗАДАЧ ТЕОРИИ УПРУГОСТИ
Вариационные методы решения задач теории упругости имеют большое практическое значение, так как они в большинстве случаев дают возможность получить сравнительно просто приближенное решение тех задач
18
РАЗДЕЛ 12. УРАВНЕНИЯ И ФОРМУЛЫ ТЕОРИИ УПРУГОСТИ, ПЛАСТИЧНОСТИ И ПОЛЗУЧЕСТИ
теории упругости, для которых точное решение неизвестно или слишком громоздко. Ниже излагаются основные вариационные методы решения задач теории упругости.
12.3.1. Метод Ритца
Метод Ритца основан на использовании начала Кастилиано. При решении задачи этим методом для данной конкретной задачи выбирается система функций:
(12.44)
5.
. 0 у.
а(2)
У
S.
?. т(1)
’ ху '
Т . 1хг
т(2)
Txz
Т(1 lyz ’
чтобы выражения
т
х S ак
k
(ft).
o, o® Sao;
kl
г г 2 ak kl
(k). z
Xxv — Txy S я kl
r(b)
k xxy
m
Xxz TL 2 ak т; X k
-X fit.
i (lk lyz
r yz
k
удовлетворяли как уравнениям равновесия
0;
дох
, drxz
дх
1 а,
1 Эг
d'tyx
дх
, даУ
ду
г хУг. дг
dzx
дх
, дгу
ду
. даг дг
так и условиям на поверхности тела:
сг х I Т?ху т п pxv с I т‘ т т( п 0;
1ух1а ут п РуУ’ ух 1 аук) т т(уг п 0
Ах 1 х т п Pzv’ Х1х 1 хгу т Я 0.
Что касается других уравнений теории упругости, то они, вообще говоря, не будут удовлетворены выбранной системой функций (12.44). В самом деле, подставив выражения (12.44) в уравнения закона Гука (см. 3.3.1), найдем составляющие тензора деформаций е, еу, ez, уху, Подставив затем эти составляющие тензора деформаций в уравнения (3.23) (см. 3.2.1), получим шесть уравнений для составляющих вектора перемещения (и, v, w):
ди
дх
ди
dv dw
дуЧ’ дГ
dv. dw dw ди
Однако если выражения (12.44) не являются точными решениями уравнений теории упругости, полученная система уравнений будет неразрешима, так как определенные вышеуказанным способом составляющие тензора де¬
формаций не будут удовлетворять уравнениям совместности деформаций Сен-Венана (12.7).
Тем не менее, согласно Ритцу, можно, исходя из выражений (12.44), получить приближенное решение уравнений теории упругости, определив неизвестные коэффициенты аК из уравнений
6W
— 0 при 1,2,3,., (12.46)
дак
где W — выражение для потенциальной энергии деформации (12.18) или (12.19).
В случае плоского напряженного состояния выражение для потенциальной энергии принимает вид (12.20).
Воспользовавшись функцией Эри (12.24) и принимая 7 0, преобразуем уравнение (12.20) к виду
2ц
д2 ф 2 дхду )
д2 ф д2 ф
дх2
ду2 Jj
dxdy. (12.47)
(12.45)
Выберем теперь систему функций
(х,У), Pi (х,у), Фз (Jс, у),.
таким образом, чтобы удовлетворялись следующие контурные условия:
Фо ду д2 Фо дхду дЩ ду
COS (X, V) -
COS (х, V) -
д2 фо
дхду
д2ф0
дх
cos (у, v) Pxv; cos (у, v) р
д2 ф ь
cos (х, v) — а cos (у, v) 0;
дЩ
cos (, v)
дхду Положив далее
д2Щ дх
дхду
cos (yt v)0 ( 1,2,3.).
Ф Фо h ak (Pk (х, у), ki
можно найти коэффициенты cik из системы уравнений (12.46), используя для W выражение (12.47).
Пример 12.1. Найти распределение напряжений в прямоугольном диске, ограниченном прямыми х ±а, у— ±Ь и нагруженном на кромках х±а напряжениями
Граничные условия:
при
при у±Ь оу 0,
Это дает для функщш Эри д2 ф
ху
0.
при X :
ду2
д2ф
д2 ф
при у ± Ь — 0;
дх2 дхду
д2 ф дхду
0.
0;
12.3. ВАРИАЦИОННЫЕ МЕТОДЫ РЕШЕНИЯ ЗАДАЧ ТЕОРИИ УПРУГОСТИ
19
Положим
ф Фо (. у) ak т (X, У) -у2 (l— k
кЩ (ХУ)-
аг
а‘162 64 256 b2 64 Ь4
— 49
а
а 62
abL '
а3 0,1826 а6 62
12.3.2. Метод Бубнова — Галеркина
Выбирается такая система функций
(12.48)
Все граничные условия будут удовлетворены, если в качестве функций фк(х, у) принять выражения:
Фг (, У) (х2 — а2) (У2 — 2);
Фг (х У) (х2 2) (2 ““ 2) 2;
Фз (х у У) (2 — я2) (2 2) ф4 (, ) (х2 — а2) (У2 “ 2)
Подставив (12.48) в интеграл (12.47), произведя интегрирование и потребовав выполнения соотношений (12.46), получим систему уравнений для коэффициентов. В первом приближении можно все ал, кроме а положить равными нулю, и задача сведется к решению однод
го уравнения — 0, из которого
о (ХУ г); fk(xy г);
М, У г); р (х, у, г);
Щ(х У. г); У. г) (Л 1,2,3.),
(12.49)
чтобы выраженные с ее помощью составляющие вектора перемещения
u v v0 'Zbk (Pk
k k
w w0 t),
k
(12.50)
где ал, Ch — пока произвольные постоянные, удовлетворяли некоторым изложенным ниже условиям.
С помощью составляющих вектора перемещения можно вычислить составляющие тензора деформации:
V
' ху
Ухи уУх У,у); т„ тЧг W";
В частном случае квадратной пластинки а,
—0,0233, и составляющие тензора напряжений а4 будут:
) -о-7ог'’ ( - ?) ; o,T70a.(l—
,„-0,6805, -2.
Для получения более высокого приближения можно принять k3. Это приведет к системе трех уравнений с тремя неизвестными.
В частном случае квадратной пластинки
ах 0,04040-; аг а3 0,01174 —,
а для пластинки с отношением сторон а6 2
0,07983 ; аг 0,1250 -
где
о ди0 дх
еу
ду
ео-Иа. е e аг
(1)
к
-s
-W0 XZ
к
duo
dtyk дг ’
. dwa
дг
дх
„о ЛЕа, jtoo_. vMY(a дЖ.
иг дг ду ’ ху ду дх
к
ду)'
Имея составляющие тензора деформации, можем по формулам закона Гука (см. 3.3.1) вычислить составляющие тензора напряжений:
0 0 а; ага”аГ;
Имея значения аи а2, аз, с помощью формулы (12.48) получаем приближенные значения функции Эри, что, в свою очередь, дает возможность подсчитать по формулам (12.24) возникающие в диске напряжения.
г Т 21) :
т т1 т);
ху ху ' ху ’
т — г Л.тМ- т —т -Т(1) тХг хг хг ’ Tyz yz туг
(12.51)
20
РАЗДЕЛ 12. УРАВНЕНИЯ И ФОРМУЛЫ ТЕОРИИ УПРУГОСТИ, ПЛАСТИЧНОСТИ И ПОЛЗУЧЕСТИ
где
х 20 ех ( г х е у 8z) _0 л,а0.
xy Gyxy
т(1)
ху
: Gv(1);
Уху
Составляющие тензора напряжений (12.52) должны удовлетворять на поверхности тела условиям:
а х ху т х х2п pxv;
„(П, T(lm TO)n0;
lx I Уи т 1г п
'ух 1 ’ т ХУг П 0:
T xl T zym o n pzv;
T xU a(„ 0.
уг'
(12.53)
Для этого исходная система функций (12.49) должна быть выбрана таким образом, чтобы на поверхности тела удовлетворялись условия:
2(1 -ц)
1
2(li
- 2jut
дфг
1 — 2ы ду 2и 1— 2ц dfk
1
dfk, dfk
— I — m 0; a dy
1
oqk
dx
m
дф dz
n — 0;
2fi
-f 0;
dy
dz
dqk
dz
1 — 2(ы 2jm
m
dfe
ад:
dVk
dtyk,
dx
H
1 —2ц 2(1 -
n — 0;
n — 0;
m
dy
m) 1
a
d
2ц
M-
1 —2ц 2ц dx
1 — 2ц
at
dz m — 0;
n 0;
1 — 2ц
m ‘
dy
n — 0;
aPft 2(i — ц)
a l — 2ц
d(fk
dVk
dy dz
(1,2,3.).
n — 0
(12.54)
Заметим, что эти условия на поверхности тела могут быть легко удовлетворены, если систему функций (12.49) выбрать в виде полиномов достаточно высокой степени с надлежаще подобранными коэффициентами.
Для того чтобы выражения (12.51) действительно представляли собой приближенное решение соответствующей задачи теории упругости, И. Г. Бубнов предложил определять входящие в них коэффициенты аьУ bk и Ck ( 1, 2, 3.) из системы алгебраических уравнений, которая получается после подстановки выражений (12.51) в уравнения
(12.52)
dox
dx
яи як
дтх
дтх
dy
dz
dxdydz 0;
dou
dzx
dx
dy
дт
dr,
Уг
zy
dz
do?
dxdydz 0;
dy ' dz I (Jfe 1, 2, 3.)
dxdydz 0
(12.55)
с последующим вычислением приведенных интегралов.
Эффективность метода Бубнова — Галеркина зависит от того, насколько удачно выбрана исходная система функций (12.49). Опыт показывает, что при удачном выборе этих функций можно добиться необходимой точности решения, ограничившись в рядах (12.50) двумя или тремя членами, т. е. приняв
и щ ах;
v v0 6фг;
ww0
или
и и0 fi а2 2‘ i у о 1Ф1 2ф2; 1 (12.56)
w w0c1y1 с2Ц2.
12.3.3. Метод Треффца (метод смягчения граничных условий)
Выбирается система функций
uk(x,ytz) vk(x9y,z); wk(x,y,z) ( 1,2,3.) таким образом, чтобы ряды
и — аь Uk (х, у, z)‘,
v lbkvk (дг, у, z); k
whckwk (х, у, г) k
(12.57)
(12.58)
)
удовлетворяли уравнениям Ляме (12.17). Функции (12.57) рассматриваются как составляющие вектора перемещения точек упругого тела и по формулам п. 12.1 вычисляются составляющие тензора деформаций ех, ev,
ez, Уху, Ухт, Ууг.
После этого по формулам закона Гука вычисляются составляющие тензора напряжений тх, оу, тг, ту,
Тжг Туг.
Полученные составляющие тензора напряжений будут автоматически удовлетворять уравнениям равновесия (12.2), поскольку функции (12.57) удовлетворяют урав-
12.4. СВОДКА НЕКОТОРЫХ РЕШЕНИЙ ТЕОРИИ УПРУГОСТИ
21
нениям Л яме, но граничные условия при этом не будут, вообще говоря, удовлетворены. Однако при надлежащем выборе неопределенных коэффициентов аи, bk, Ck граничные условия удовлетворяются приближенно. Для этой цели следует подставить выражения (12.58) в уравнения
(:axlXxym Xxzn-PxV)ukdF0’
Я ( V аутгп- Pv) vk dF
F
Я(
тг l ym azn-pzv) wk dF 0
(12.59)
Рис. 12.14
с моментами M. Решение теории упругости совпадает с элементарным решением сопротивления материалов:
М
'У
1ху
0.
12.4.2. Поперечный изгиб консоли
а) Консоль, имеющая поперечное сечение в виде узкого прямоугольника, нагружена на конце поперечной силой (рис. 12.15). Если распределение касательных напряжений по торцовому сечению следует закону
_ Q (№ -4у2)
Хху 8
то точное решение теории упругости совпадает с элементарным решением сопротивления материалов:
М Рху
х — У —Г" ; а у 0;
Тху —
QS
1Ь
Q (ft2-4у2) 8
Если касательные напряжения по торцовому сечению распределены по какому-либо иному закону, то в соответствии с принципом Сен-Венана, на расстояниях от торца балки, равных примерно высоте ее сечения, можно с достаточной точностью пользоваться приведенными формулами.
б) Консольная балка, имеющая поперечное сечение в виде узкого прямоугольника (рис. 12.16), нагружена
треугольной нагрузкой. Напряжения вычисляются по формулам
х3 У Р 6 Л
ХРЬ ’ь?2хуТС2ХУ);
— Р—РХ
у " 2 ЗрХ 2
Г 4 с3
Р
_ Зу ) 4с )’
и решить полученную систему линейных алгебраических уравнений относительно неизвестных коэффициентов.
12.4. СВОДКА НЕКОТОРЫХ РЕШЕНИЙ ТЕОРИИ УПРУГОСТИ
12.4.1. Чистый изгиб
Пластинка, имеющая поперечное сечение в виде узкого прямоугольника, нагружена по торцам нормальными напряжениями (рис. 12.14), сводящимися к двум парам
Рис. 12.15
Рис. 12.16
-U
I
I ——I — Рис. 12.17
UL
1
Решение справедливо, если по торцовому сечению будут действовать нормальные и касательные напряжения, получающиеся из приведенных формул при х1.
12.4.3. Поперечный изгиб балки
а) Действие собственного веса (рис. 12.17). Распределение напряжений:
f-v(i-g-).
Здесь у — объемный вес материала. Решение справедливо, если по торцовым сечениям действуют касательные и самоуравновешенные нормальные напряжения, получающиеся из приведенных выражений (при х ±).
б) Действие поперечной нагрузки (рис. 12.18). Распределение напряжений:
21
( -x2)yt ту3тс2,);
22
РАЗДЕЛ 12. УРАВНЕНИЯ И ФОРМУЛЫ ТЕОРИИ УПРУГОСТИ, ПЛАСТИЧНОСТИ И ПОЛЗУЧЕСТИ
Здесь
'— г(-у3с2у
ху — 2 2) — с3. 3
И
з ch а( — агу sh ay) — — (64 sh ay —
— а2усЪ ay)
j sin ax
Г 1
Tху — P i — (a2 C sh ay — аг у ch ay) — (a1c ch ay — 1 di A
— aty shay) cos a.
4- 0
и
-U
Рис. 12.18
px-psinotx J-
Рис. 12.19
-of
Рис. 12.20
a,
Я 2у
tg 3 tgs P
yx;
y (
У
lxy -
tg2?
tg2p
У-
Ях;
Здесь ух — давление воды на глубине х; q — собственный вес единицы объема.
Решение справедливо при условии, что по торцовому сечению действуют нормальные и касательные напряжения, получающиеся из приведенных формул при x — h.
г) Изгиб балки синусоидальной нагрузкой (рис. 12.20):
—-i
(Ьг ch ay — аг у sh ay) — (b2 sh ay —
do
— a2 у ch ay)
j sin ax;
Здесь
a sh a с аг; a ch ac — a2; ac ch ac — sh ac bA ac sh ac — ch ac — b2 ac ch ac shac b ac sh ac ch ac 64; sh 2aс 2aс — с1г; sh ac — 2ac J2
Решение справедливо при условии, что на торцах балки действуют касательные напряжения, получающиеся из приведенной формулы при х 0 и х.
12.4.4. Изгиб кривого бруса (задача X. С. Головина)
Брус имеет круговую осевую линию радиуса г и постоянное поперечное сечение в виде узкого прямоугольника. Брус изгибается в плоскости своей кривизны парами сил М, приложенными по концам. Распределение напряжений в полярных координатах дается формулами:
4 М a2 b2 b г а (п- ЬЧпТ а21п-7)'
4 М
N
а2Ь2 Ь лг
-——In — 62 In — r2 a b
Решение справедливо, если по торцам балки действуют касательные и самоуравновешенные нормальные напряжения, получающиеся из приведенных формул при
X—drl.
в) При переменном поперечном сечении (рис. 12.19). Распределение напряжений:
2 In -J- 62 _ а2.
тг0 0: N (62 — а2)2 — 4а2 Ь2 In
Здесь a, Ъ — соответственно внутренний и наружный радиусы бруса.
Эти выражения являются точным решением задачи, если по торцам бруса распределение нормальных напряжений следует выражению для о.
0
12.4.5. Клин, сжатый сосредоточенной силой1 (рис. 12.21)
Радиальное напряжение в полярных координатах 21 вычисляется по формуле
Р cos 0
ог — j .г (a — sin 2a j
1 Приведенные в 12.4.1—12.4.5 решения справедливы, как это выше отмечалось, только при определенных законах распределения нормальных и касательных напряжений по торцовым сечениям балок. При других, статически эквивалентных распределениях нормальных и касательных напряжений по торцовым сечениям балок эти решения остаются достаточно точными на расстояниях от торцов, равных примерно половине высоты балки.
12.4. СВОДКА НЕКОТОРЫХ РЕШЕНИЙ ТЕОРИИ УПРУГОСТИ
23
Распределение нормальных и касательных напряжений в прямоугольных координатах дается формулами
оу оr sin2 0; ох ог cos2 0;
1
кху or sin 20.
ИШПйь б
1ТГТТтт-п-тТГ Рис. 12.21
ра а2 — рь b2 Ъ2 — а2 раа? — рь b2
Решение является точным, если распределение нормальных и касательных напряжений по торцовому сечению следует приведенным формулам.
12.4.6. Толстостенный цилиндр и сферический сосуд
При осесимметричной деформации толстостенного цилиндра или диска (рис. 12.22) распределение напряжений в полярной системе координат с началом в центре дается формулами
Pb) cl2 Ь2
(Pt
гЧ
(Ра-
2- а2)
Рь) а2 Ь2
Ь2-
г2 (Ь2 — а2)
Здесь Ot — нормальное напряжение на площадке, плоскость которой проходит через ось трубы; аг — нормальное напряжение на площадке, перпендикулярной радиусу г.
Рис. 12.22
При полярно-симметричной деформации толстостенного сферического сосуда (рис. 12.23) распределение напряжений в сферической системе координат 21 дается формулами
а3 (2г3 -Ь Ь3) Ь3 (2г3 Ь3)
at — Ра 0_я ил Pb t
г — Ра'
' 2г3 (b3 — а3) а3 (г3 — Ь3) г3 (Ь3 — а3)
Рь
2г3Ь3 — а3) 9 Ь3 (а3 — г3) г3 (b3 — а3)
Рис. 12.23
В приведенных формулах ра — внутреннее и рь — внешнее давления.
12.4.7. Упругая полуплоскость и упругое полупространство 21
Дана сосредоточенная сила, приложенная к точке прямолинейного края полубесконечной пластинки (рис. 12.24). Распределение напряжений в плоскости тп
-щтггТор о
Рис. 12.24
на расстоянии х от прямолинейного края дается формулами
2Р cos3 0 2 Р з х—
л
я
(X2 У2)?
У,у 2 Р
2 Р
пх
sin2 0 cos2 0;
'ху п ч л 2Р х2У
— sin 0 cos3 0 — — —
пх п (22)2
(12.60)
Здесь Р — сосредоточенная сила. Угол 0 — см. рис. 12.21.
При сосредоточенной силе Р действующей на плоскость, ограничивающую полубесконечное тело (рис. 12.25), распределение напряжений в цилиндрической системе координат дается формулами
24
РАЗДЕЛ 12. УРАВНЕНИЯ И ФОРМУЛЫ ТЕОРИИ УПРУГОСТИ, ПЛАСТИЧНОСТИ И ПОЛЗУЧЕСТИ
_ 3 Р 2 2 л
Р Г 1—21
-
i_
5 ’
3zr2
zr2
J;
2n I 1(1 z)
-L_ 1
3 l(l z) 3P z2r
2л §
br—'
12.5. КОНЦЕНТРАЦИЯ НАПРЯЖЕНИИ1
12.5.1. Концентрация напряжений при растяжении
а) У отверстий. На рис. 12.26 даны эпюры распределения напряжений по поперечным сечениям растянутой
Рис. 12.26
Рис. 12.27
полосы, ослабленной отверстиями различной формы. При приближении к краю отверстия напряжения резко возрастают (эффект концентрации напряжений). Коэффициент концентрации напряжений
ГГ k-
о
1 Уточнение решений может быть получено на основе мо ментной теории упругости (см. 12.6.7).
N
где о0 — F
N
номинальное напряжение, отнесен-
2 ЬЬ
ное к площади брутто.
Для овальных отверстий коэффициент концентрации напряжений может быть вычислен по формуле
12
(12.62)
ио rp
где р — радиус кривизны дна отверстия; t — половина ширины отверстия.
х
kP
(12.61)
При круговом отверстии 3.
б) У выточек. На рис. 12.27 и 12.28 даны эпюры распределения напряжений по поперечным сечениям растянутых стержней, ослабленных выточками, а на рис. 12.29 — у выкружек. Максимальное напряжение
макс ko0t
где
Р Р а F 2а6
Т а б л и ц а ' 1211
Поперечное сечение стержня
Отношение ар
по рис. 12.28
по рис. 12.27
ДЛЯ 01
для о2
0
1
1
1
10
4,1
3,3
1,05
20
5,6
4,6
1,5
30
7
5,6
1,8
Т а б л и ц а 12.2
tj Р
а9
10
1 5
4
1 2
1
1,79
1,66
1,59
1,42
2
1,95
1,81
1,70
1,43
3
2,09
1,91
1,79
—
4
2,15
1,99
1,81
—
5
2,17
2,02
1,81
—
Коэффициент концентрации напряжений k определяется: у выточек по табл. 12.1, у выкружек (рис. 12.29) по табл. 12.2.
12.5. КОНЦЕНТРАЦИЯ НАПРЯЖЕНИЙ
25
12.5.2. Концентрация напряжений при изгибе 15
Балка с круглым отверстием (рис. 12.30)
а) Чистый изгиб (рис. 12.31,а). Для балки с круглым отверстием, центр которого расположен произвольно по высоте балки, напряжение
Mr
Oq — (sin 0 — sin 30) —
IX
M
i(l —2 cos 20).
§-
a)
6)
6)
Рис. 12.31
Здесь M — изгибающий момент; — момент инерции сплошного сечения балки относительно нейтральной оси; г — радиус отверстия; 0 — полярная координата точки контура; h — расстояние от центра отверстия до нейтральной оси балки; расстояние h считается положительным, когда центр отверстия расположен в сжатой зоне.
б) Поперечный изгиб при действии сосредоточенной силы (рис. 12.31,6). Центр отверстия расположен произвольно по высоте балки. Напряжения по контуру:
М
ст0 — г (sin 0 — sin 30) h (1 — 2 cos 20) —
IX
p
— r2 (sin 20 — sin 40) rh (cos 0 — 3 cos 30) —
I x
- 2 (c — h2) sin 20.
в) Поперечный изгиб под действием равномерно распределенной нагрузки (рис. 12.31, в). Центр отверстия лежит на нейтральной оси балки. Напряжения по контуру
JL (_Jx_
lx V d
-f- г sin 0 — 0,9 sin 0 —
db
21 x cos 20 6 2r2
sin 20 — sin 20 —
d3
db 5,1 r
— r sin 30— sin 30 —sin 30
a2 b
r2 r
2 — sin 40 — — sin 50), d d2 1
(12.63)
(12.65)
где
-Vb-
M — изгибающий момент в сечении по центру отверстия.
При построении эпюры контурных напряжений значения Gy откладываются на радиусах.
Эпюра, построенная по формуле (12.65), показана на рис. 12.30.
Балка с отверстием квадратной формы (рис. 12.32)
Т аблица 12.3
0
в град
0
15
30
45
60
75
80
90
в град
0 I
9 40'
24 10'
СЛ
О
65 50'
80 20'
83 40'
90 (12.64)
е
в град
100
105
120
135
150
165
180
Ф
в град
96 20'
99'40'
114 10'
135 155 50'
170 20'
180 Центр отверстия лежит на нейтральной оси балки. Решение дано для квадрата с прямолинейными сторо¬
26
ГАЗДЕЛ 12. УРАВНЕНИЯ И ФОРМУЛЫ ТЕОРИИ УПРУГОСТИ, ПЛАСТИЧНОСТИ И ПОЛЗУЧЕСТИ
нами и закругленными углами. Две стороны квадрата параллельны нейтральной оси балки.
а) Чистый изгиб (см. рис. 12.31,а). Напряжение
о —
тУч
I з тГ1,
f 2 (о,9 — — cos 40 J cos 0) (sin 30 — cos 30)
4- (sin 50 cos 50)J.
185 (sin 0
(12.66)
1
OA -
Mr 1Г2
2 -
(o,9 — cos 40j
185 (sin 0 cos 0)
1
(sin 30 — cos 30) -j- (cos 50 sin 50) —
У J
"cos 40 j
' 834 cos 20 sin 40
cos 60 j — — c2 cos 20
(12.67)
Эпюра a, построенная по этим формулам, показана на рис. 12.32.
При построении эпюры значения стоткладываются по
нормали к контуру. Отсчет углов О ведется от линии Ф0, составляющей с горизонтальней осью балки угол a45 .
Формулы п. 12.5.2 выведены для бесконечной полосы прямоугольного сечения, но они могут быть применены с достаточной для практических расчетов точностью для балок ограниченных размеров и любого сечения. Точность результатов зависит от величины отверстий. Формула для чистого изгиба дает хорошее совпадение с опытными данными, если наиболее близкая к краю балки точка отверстия отстоит от этого края на расстояние, не менее наибольшего полудиаметра отверстия; в случае изгиба сосредоточенной силой — не менее 3— 4 диаметров отверстия.
Наличие нескольких отверстий изменяет картину распределения напряжений в балке; но для практических расчетов и в этом случае могут быть использованы те же формулы при условии, что расстояние между центрами отверстий больше двух диаметров отверстий.
Пластические деформации вблизи круглого отверстия см. 19.
12.6. ЭЛЕМЕНТЫ ТЕОРИИ УПРУГОСТИ, УЧИТЫВАЮЩЕЙ МОМЕНТНЫЕ НАПРЯЖЕНИЯ
12.6.1. Основные положения моментной теории упругости
Действительная прочность некоторых материалов зависит от градиента деформаций или напряжений. Кроме того, распределение напряжений при резких градиентах (например, в условиях концентрации напряжений)
Здесь г— (а0Ч о), где а0 — половина стороны квадрата; Ь0 — половина диагонали квадрата; 0 — полярный угол в преобразованной области; 0 — полярный угол в плоскости балки.
Задаваясь углом 0, получаем а — напряжения по
площадкам, перпендикулярным контуру отверстия.
Для построения эпюры контурных напряжений нужно в плоскости балки откладывать соответствующие углам
0 углы б1. Пересчет углов производится по табл. Г2.3.
б) Поперечный изгиб под действием сосредоточенной силы (см. рис. 12.31,6). Контурные напряжения
Рис. 12.33
в большинстве случаев не соответствует решениям, полученным в классической теории упругости. Дело в том, что в классической теории упругости, начиная с Коши, считают, что воздействие одной части тела на другую по некоторому произвольному сечению может быть сведено к распределенной нагрузке — нормальной и касатеаьной. При этом возможная распределенная моментная нагрузка не учитывается. Не учитывается и деформация малых элементов, вызываемая моментной нагрузкой.
Моментные напряжения (рис. 12.33) учитывает теория упругости, разработанная Коссера 13.
12.6.2. Уравнения равновесия и несимметричный тензор напряжений в двухмерном случае
Уравнения равновесия, выражающие, что суммы проекций всех сил, действующих на выделенный элемент, на оси х и у равны нулю, имеют обычный вид (при отсутствии объемных сил и моментов)
дох
дх
д?ху
ду
0;
дг,
ух
дх
дОу_
ду
0.
Уравнение, выражающее равенство нулю суммы моментов всех сил, действующих на выделенный элемент, имеет вид (рис. 12.34)
дтх
дх
дти
ду
ТХу Хух 0.
Следовательно, вообще говоря, тензор напряжений (см. 3.1.5) не симметричен, т. е. хуфух.
12.6. ЭЛЕМЕНТЫ ТЕОРИИ УПРУГОСТИ. УЧИТЫВАЮЩЕЙ МОМЕНТНЫЕ НАПРЯЖЕНИЯ
27
Несимметричный тензор напряжений х тху
'ух
можно представить в виде суммы симметричного и кососимметричного тензоров
х “Г" (ху тух)
i
1 -J О,
2 (Хху ух)
2 (ух — тху)
дбу
fa
ду Ч
дб.
дх ox
X
Рис. 12.34
Обозначим:
1
(X Т ) То.
2 ху цх Ь
1
(Г — Т ) ТА.
2 V ху ух А
12.6.3. Деформации, вызванные действием силовых и моментных напряжений
Деформации е, г у, Уху и жесткий поворот со2 находятся по обычным формулам:
ди dv _ dv ди
17: u 1Г’ Уху дх ду'
СО, ду
дх
ди
V;
Деформации еж, еу, yv и жесткий поворот со2 наховает обычный сдвиг, антисимметричная (та) — неуравновешенное вращение (рис. 12.35).
Наряду с приведенными деформациями существуют еще деформации изменения кривизны элемента
дсо2
йГ‘ '
ду
(рис. 12.36).
Го
r-Lf х
А Рис. 12.35
12.6.4. Закон Гука
В теории упругости, учитывающей моментные напряжения, закон Гука имеет вид (в двухмерном случае изотропного тела)
1 и
х №х И' (®х “Н ®у)
28
РАЗДЕЛ 12. УРАВНЕНИЯ И ФОРМУЛЫ ТЕОРИИ УПРУГОСТИ, ПЛАСТИЧНОСТИ И ПОЛЗУЧЕСТИ
1 JA
Уху- G
Gy — (ах х„);
1 “f-
“ iTxy yxh
У
Здесь В — новая константа упругости материала, носящая название модуля кривизны; множитель XU введен для удобства.
12.6.5. Условия совместности деформаций
ие сов ет обьг
д2Уху
В двухмерном случае условие совместности линеиных и угловой деформаций имеет обычный вид
д _
дх ду
дЧх
ду2 дх2
Кроме того, должно иметь место условие совместности кривизн:
дхх дку
ду дх
Условия совместности деформаций и кривизн имеют вид
ду
ху
дех
ду
деи
2 дх ду 1 дх
12.6.6. Функции напряжений
J_ ду ху 2 ду
Если ввести две функции напряжений ф (х,у) и у), то можно удовлетворить всем уравнениям равновесия, положив
а2ф
х
Ох '
1ху '
ду2
а2ф
дх ду т.
д2ф д2ф д2ф
дх ду у дх2 дхду '
д2о)
'др
хих —-
д2ф д2Ур
дхду дх2 ’
до)?
—- ; ти —— дх у ду
Причем обе функции ф и г? должны удовлетворять системе уравнений
± № _ 2v-2t)) 2(1 — (i) I2 у2ф;
дх ду
ду
СФ — 2у2) 2(1
а каждая в отдельности — уравнениям у4Ф 0 и у2я? — 2у4,ф 0 (у4 V2V2)
В последних формулах где В — модуль кривизны, G — модуль сдвига.
От величины I зависит степень влияния моментных напряжений. Если отношение наименьшего размера те¬
ла к велико, эффект влияния моментных напряжений невелик. Однако при наличии градиента деформаций в том случае, когда размер тела приближается к, моментные напряжения могут существенно влиять на результат расчета.
12.6.7. Некоторые результаты расчетов по моментной теории упругости
В 12.5.1 отмечалось, что при одноосном растяжении пластины с круглым отверстием радиуса t коэффициент концентрации k — З. Это действительно имеет место во всех случаях, когда ' 10. Однако, при уменьшении
Ш уменьшается и коэффициент концентрации. Зависимость коэффициента концентрации от отношения tl при разных значениях коэффициента Пуассона х показана на рис. 12.37.
Зависимость коэффициента концентрации напряжений около круглого отверстия от отношения til в случае чистого сдвига показана на рис. 12.38 (см. также 19).
12.7. ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ ПЛАСТИЧНОСТИ И ТЕРМОПЛАСТИЧНОСТИ
В настоящем разделе используются обозначения (помимо введенных ранее)
1
О — (Ох у агУ
1
i — X
V2
X
( х-ау? (ах-аг)2 ( „-Сг)2 6 Тху Xxz Т1г)
(интенсивность напряжений);
еср х “Ь ez)
V7
х
X
12.7. ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ ПЛАСТИЧНОСТИ И ТЕРМОПЛАСТИЧНОСТИ
29
-г (т ly y2yz yL)
(интенсивность деформаций).
Уравнения равновесия (12.2), геометрические уравнения связи между вектором перемещения и тензором деформации (12.12), а также уравнения неразрывности деформаций (12.7) полностью сохраняются при решении задач пластичности и термопластичности.
Граничные условия (12.3) в деформационной теории пластичности полностью сохраняются; в теории пластического течения они изменяются.
12.7.1. Общие свойства пластической деформации
Перечислим свойства упруго-пластического упрочняющегося материала.
1. Пластическая деформация носит необратимый характер. Эта необратимость проявляется как в остаточных деформациях, так и в ходе изменения температуры образца при деформировании.
2. В пластической области между напряжениями и деформациями не существует какой-либо однозначной сзязи. Пластическая деформация зависит от программы или истории нагружения.
3. Полные приращения составляющих деформации de аддитивно складываются из приращения составляющих упругой деформации dey и пластической деформации den, т. е. de — dpJde11.
4. Составляющие упругой части полной деформации описываются законом Гука (3.3.1), если среда изотропна, или (3.3.2), если среда анизотропна.
5. Разгрузка из любого состояния происходит упруго, подчиняясь тому же закону упругости (3.3.1) или (3.3.2).
6. Повторное нагружение по пути разгрузки может быть проведено почти без петли гистерезиса. Поэтому в теории пластичности принимается, что петля гистерезиса отсутствует.
7. Для многих металлов и сплавов пределы текучести и пропорциональности практически совпадают, как это следует из опытов. Поэтому в теории пластического течения принимается, что они в точности равны друг другу.
8. Опыт показывает, что при деформировании металлов и сплавов в широком диапазоне скоростей вязкость проявляется весьма слабо. Поэтому в теориях пластичности материал предполагается невязким. В теориях пластичности пренебрегают также деформациями ползучести, что вполне допустимо, если рассматривать деформацию на относительно небольших отрезках времени. Таким образом, при указанных условиях кривая о—е не зависит от скорости нагружения и эффектов ползучести.
9. Пластическая деформация упрочняющегося упругопластического материала — есть равновесный процесс, следовательно, как и в случае упругого материала, скорости деформаций должны быть однородными функциями первого порядка скоростей напряжений.
10. Напротив, в случае деформации идеально пластического материала скорости пластических деформаций являются функциями напряжений. Тем не менее идеально пластическая среда имеет глубокие отличия от вязкой среды. Так, для вязкой среды не существует понятия разгрузки, в то время как для идеально пластической среды при разгрузке деформации становятся чисто упругими. Есть и другие различия.
12.7.2. Основные положения теории пластического течения
Теория пластического течения является более общей, чем теория малых упруго-пластических деформаций, так как в случае простого нагружения теория течения приводит к тем же результатам, что и теория малых упруго-пластических деформаций. Вместе с тем теория течения относительно лучше описывает процесс сложного нагружения, чем теория малых упруго-пластических деформаций.
Теория пластического течения упрочняющегося материала основывается на предположении, что существует замкнутая поверхность в пространстве напряжений —. начальная поверхность текучести, отделяющая чисто упругую область от пластической области.
В процессе нагружения начальная поверхность текучести деформируется так, что изображающая напряженное состояние точка в пространстве напряжений никогда не покидает эту поверхность.
В теории пластического течения задается закон деформации этой поверхности при нагружении (закон упрочнения).
В теории пластического течения формулируется закон пластического течения, ассоциированный с функцией текучести (или функцией нагружения).
Основные уравнения теории пластического течения получаются из постулата Д. Друккера 20, утверждающего, что в процессе приложения к первоначально напряженному элементу тела дополнительных напряжений внешнее воздействие совершает неотрицательную работу; работа внешнего воздействия за полный цикл приложения и снятия дополнительных напряжений также неотрицательна.
Из постулата Друккера вытекают следствия:
1) поверхность текучести 0 выпукла;
2) вектор скорости пластической деформации ортогонален к поверхности текучести f — 0;
3) между скоростями пластической деформации и скоростями изменения напряжений должны быть линейные связи.
Наконец, важным положением теории пластического течения является условие непрерывности, в соответствии с которым напряжения и деформации в пластической области согласуются с напряжениями и деформациями в упругой области, когда изображающая напряженное состояние точка движется по поверхности текучести.
12.7.3. Основные уравнения теории пластического течения
Для упрочняющегося материала физические уравнения теории пластического течения записываются следующим образом:
Н. 0 при f 0 или
df
при 0; f —— ац 0; дац
д df. е.7Л л ПРИ 0; f -r-ai ’
1 дац дац
(12.68)
где h — скалярная функция, зависящая от пластических деформаций, напряжений и программы нагружения.
30
РАЗДЕЛ 12. УРАВНЕНИЯ И ФОРМУЛЫ ТЕОРИИ УПРУГОСТИ, ПЛАСТИЧНОСТИ И ПОЛЗУЧЕСТИ
В случае идеально пластической среды скорости пластического течения отличны от нуля при постоянных напряжениях. В этом случае физические уравнения теории пластического течения принимают вид
г”Х ч доц ’
где X 0 при 0, а также
при а.
0; — оц 0; доц
df
X 0 при f где — скалярная величина
0; f — Gtf 0,
дои
(12.69)
Можно отметить, что приведенные в 12.7.1 свойства пластической деформации получают полное отражение в теории пластического течения.
Следует подчеркнуть, что теория пластического течения отражает фундаментальное свойство пластической деформации — зависимость ее от программы нагружения. В этом заключается большое преимущество теории пластического течения перед деформационной теорией.
12.7.4. Деформационная теория пластичности — частный случай теории пластического течения
Деформационная теория пластичности является тем частным случаем теории пластического течения, в который последняя переходит при простом (пропорциональном) нагружении.
Деформационная теория (или теория малых упругопластических деформаций) основана на предположении, что между напряжениями и деформациями существует однозначная связь как для процессов нагружения, так и для процессов разгрузки.
Тепловое расширение в деформационной теории пластичности учитывается точно так же, как в теории упругости. Таким образом, основные уравнения деформационной теории термопластичности для случая нагружения записываются в виде
Их — Ф () (Ох — о) а (Т — Т0); А
Ухи 2Ф ( ) 1ху
(12.70)
Здесь К — модуль всестороннего сжатия и Ф(сг) —модуль пластичности, связанный с ef зависимостью
—
В общем случае модуль пластичности Ф зависит не только от Ji, но и от 7 т. е. Ф —Ф(аг,7’).
Для нормальных температур (Т — Т0) уравнения термопластичности (12.70) превращаются в уравнения деформационной теории пластичности.
Если вместо составляющих тензора деформации вх, еу и ez ввести составляющие:
ех — ос (7 То);
ёу еу—сс(7 — Т о); г2 г2 — а(Т — Т0)у
(12.72)
то уравнения термопластичности и уравнения деформационной теории пластичности формально ничем не будут отличаться.
Уравнения (12.70) справедливы для многих материалов только в тех случаях, когда все напряжения растут пропорционально времени (простое нагружение) или при нагружении, близком к пропорциональному. Следовательно, для обоснованного использования уравнений
(12.70) должна быть решена задача об общих условиях внешнего силового и теплового нагружения, при которых для материала с заданным законом упрочнения
(12.71) процесс нагружения каждого элемента объема был бы простым.
В общем случае для любого закона (12.71) эта задача не имеет решения. Частный случай этой задачи, когда отсутствует тепловое нагружение и закон упрочнения имеет вид исследовался А. А. Ильюшиным 8.
Процесс разгрузки элемента описывается обычными уравнениями термоупругости. При этом пластические деформации могут быть подсчитаны как:
82 8-8; 8 8„-85;; 8? 82-8 гху Уху Усу 8
yz
Уиг yJrz гх Угх Угх'
(12.73)
Здесь е", е" и т. д.
IJZ yz’ ZX I zx
у i. пластические и соответственно ?yXi,. и т. д. упругие деформации.
В случае плоского двухосного напряженного состояния уразнения деформационной теории пластичности для несжимаемого материала могут быть записаны в виде
Ч ( 1 — a——a J;
о
-ii-L __L i У 2
2 у) ау
(12.74)
где
ai У а1 1 С1х аи Цх;
2 2 1
е‘- у'2 ех ехец еу Уху '
Решая уравнения (12.74) относительно ох и оу, получим
2
(12.71)
JU-
(12.75)
Для перехода к уравнениям термопластичности нужно воспользоваться соотношениями (12.72).
Функциональная связь Oi—fei,T) может быть получена на основе экспериментов на растяжение при различных температурах.
12.7. ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ ПЛАСТИЧНОСТИ И ТЕРМОПЛАСТИЧНОСТИ
31
Пример 12.2. Рассмотрим прямоугольную пластинку, жестко закрепленную по контуру. Начальная температура пластинки Г0. При равномерном нагреве до температуры Т в пластинке возникнут сжимающие напряжения, которые и нужно определить.
Запишем уравнения (12.72) с учетом (12.74) в виде
а (7 Т0) о By еу а Ф То) ” — Y Так как пластинка защемлена по контуру и нагрев равномерен, то всюду в пределах пластинки должно быть ех еу 0. Учитывая это, получим
х — Oy—a(T — TQ)- ;
— — ох оу — а (Т 7 о) —,
откуда
ох Оу — 2а (Г — Т0) —.
ех
В рассматриваемом примере
V з
”Ь
-А: Кза2 (7 _ 7о)2 2а (Г — Г0).
Кз
Величина сь (е, Г) f 2а(Г—Г0),Г может быть найдена для данной температуры Т по экспериментальной кривой.
Окончательно напряжения
х у f 2а (Г —Г0), TJ-
Bce рассмотренные выше закономерности относятся к упрочняющимся упруго-пластическим материалам.
12.7.5. Идеально упруго-пластическая среда
Как показывают эксперименты, некоторые сплавы, полимеры и другие материалы характеризуются упругими деформациями в начальной стадии нагружения и после достижения предельного напряженного состояния — безграничным возрастанием пластических деформаций. Переход от одной стадии деформации к другой определяется условием пластичности. В пластической стадии деформирования инварианты девиатора деформации могут принимать любые значения. Наоборот, иивариаторы девиатора напряжений в этой стадии сохраняют постоянные (предельные) значения. Соотношения компонентов девиатора деформации сохраняются неизменными. Изменением объема тела по сравнению с пластическими деформациями пренебрегают.
Такие материалы, для которых упругие и пластические деформации проявляются раздельно на разных стадиях нагружения, называют идеально упруго-пластическими материалами.
В упругой области связь между напряжениями и деформациями выражается законом Гука (3.3.1) или (3.3.2); в пластической области эта связь выражается уравнениями (12.70) и условием пластичности. Причем в этих
уравнениях модуль пластичности Ф принимает постоянное значение. В качестве условия пластичности для изотропных пластических материалов используют условие Губера — Мизеса — Генки либо условие Сен-Венана 2,22. Для анизотропных материалов или изотропных материалов, получающих заметную анизотропию в процессе деформирования, может быть использовано условие пластичности Мизеса — Хилла 22.
Применительно к строительной стали лучшее соответствие с опытом дает условие пластичности Сен-Венана.
12.7.6. Метод характеристик решения задач теории пластичности
Рассмотрим плоскую деформацию идеально упругопластического тела в пластической стадии. Это напряженное состояние определяется уравнениями равновесия
дх
дт
ху
ду
0;
дх
дОу
ду
0 (12.76)
и соответствующим условием пластичности, например: по Сен-Венану
'r„-aJ,)2 4t 4T (12.77)
(
по Губеру — Генки — Мизесу
ах у 1 Зх1ц т Подстановка в уравнения (12.76) выражений ох о тх sin 2р;
Оу — о — тх sin 2ф; хху — тт cos 2ф
приводит к системе уравнений
да дер дф —— 2тт cos 2ф—- sin 2ф 0;
дх дх ду J
до ( дф дш —- 2тх sin 2ф — — cos 2ф 0,
ду дх ду
(12.78)
(12.79)
(12.80)
обеспечивающей тождественное выполнение условия пластичности (12.77) или (12.78). В формулах (12.79) и (12.80) о — среднее напряжение, ф — угол наклона площадки Тмакс к 'оси х.
Характеристические линии (характеристики этой системы) совпадают с линиями скольжения, т. е. линиями, которые в каждой своей точке касаются площадок максимальных касательных напряжений.
Линии скольжения образуют два ортогональных семейства кривых а и р. В локальной системе координат, образованной касательными к линиям скольжения в некоторой точке.пластического тела, вместо (12.80) получается система уравнений
д д -fa- (а 2тт (р) 0; (а — 2тх р) О,
ОС Р
д д
где и — производные вдоль линий скольже¬
ния аир. Эти дифференциальные уравнения выражают равновесие бесконечно малого элемента скольжения
32
РАЗДЕЛ 12. УРАВНЕНИЯ И ФОРМУЛЫ ТЕОРИИ УПРУГОСТИ, ПЛАСТИЧНОСТИ И ПОЛЗУЧЕСТИ
пластической среды, образованного сеткой линий скольжения. Вдоль семейств линий скольжения аир
- tgp; ф const ; (12.81)
dy о
— ctg р; — ф const г. (12.82)
Здесь и г — параметры, меняющиеся при переходе от одной линии семейства к другой того же семейства (а или Р).
Рис. 12.39
Если известно поле линий скольжения и их параметры g и т), то из уравнений (12.81) и (12.82) находят о—о(х,у) и ф ср(, у) и затем с помощью соотношений (12.79) компоненты тензора напряжений Ох (х, у), оу (х, у) и тХу(х, у).
Пусть имеет место равномерное напряженное состояние, когда аconst и ф const и уравнения линий скольжения имеют вид
у ctg ф Сх и у — х ctg ф-С2.
Им соответствуют два ортогональных семейства прямых (рис. 12.39).
Случай г const характеризует простое напряженное состояние, при котором Ф const, и одно семейство линий скольжения определяемое уравнением у—д ф const.
Это семейство линий является пучком прямых, зависящих от двух параметров ф и С. Вдоль каждой прямой этого семейства среднее напряжение а 2тт (т— —ф) сохраняет свое постоянное значение.
Второе семейство линий скольжения представляет семейство кривых, ортогональных прямым первого семейства (рис. 12.40).
Граничные условия, определяемые нормальной (Тл() и касательной xn(s) составляющими напряжения, заданными на контуре, ограничивающем пластическую зону, учитываются с помощью соотношений:
оп (s) о тт sin 2 (ф — а); (s) —'
т тт sin 2 (ф — а);
- тт cos 2 (ф — а), J
(12.83)
где а угол между нормалью к элементу контура А и осью абсцисс (рис. 12.41).
Зная уравнения кривой контура (), y y(sy а также заданные на контуре напряжения on(s)
и тп (s), можно определить из (12.83) a a(s) и ф Ф (s):
a (s) оп (s) тх sin 2 (ф — a);
1 is)
Ф (s) a (s) ± — arccos — щ.
(12.84)
Здесь m — произвольное целое число, а под арккосинусом понимается его главное значение. Знак выбирается исходя из конкретных механических условий задачи.
В частном случае, когда на контуре т0, вместо (12.84) получаем формулы
Ф (s) a (s) ± — тп; 4
(s) п () Т V
(5) п (s) F 2тх.
(12.85)
Для свободной прямолинейной границы (х 0) имеем а0 и On (s) тп (5) 0; следовательно:
Ф (5) ± тп; о (s) тт;
х 0; оу ot :р 2тт.
По полученным величинам граничных значений ф(я) и j(s) переходим к параметрам (s) и r)(s) с помощью вторых равенств (12.81) и (12.82).
Параметры и rj, сохраняющие постоянное значение вдоль линий скольжения, вообще говоря, изменяются вдоль граничного контура.
12.7.7. Напряжения под жестким штампом
На рис. 12.42 показаны штамп и пластическая зона вблизи его. Линия контакта штампа со средой предполагается симметричной относительно оси х и неизменной вследствие жесткости штампа. Она характеризуется уравнениями
х — х (ot) x0i у — у (а). (12.86)
Кривая контакта в месте пересечения с осью х может иметь перелом. Свободная граница пластической среды представляет собой горизонтальную прямую (а0). Пластические перемещения предполагаются малыми. Трение между штампом и средой отсутствует т е Tn(s)0.
На свободном участке границы
(s) Тп (S) 0.
С учетом (12.85) можно записать:
Ф (s) ± — тп; 4
a(s) ртт.
(12.87)
Вдоль контакта Tn(s)0, а on(s) неизвестно; следовательно, вдоль линии контакта
ф (s) a (s) ± тп;
4
G (s) оп (s) F T.
Из последних формул видно, что линии скольжения примыкают к граничной линии под углом я4 как вдоль контура, так и вдоль свободной границы. Предполагая,
12.7. ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ ПЛАСТИЧНОСТИ И ТЕРМОПЛАСТИЧНОСТИ
33
что вблизи свободной границы среднее давление имеет отрицательные значения, принимают для этой части границы
я
4
о (s) — тт (т 0). (12.88)
Вдоль участков BE и AG (рис. 12.42), согласно вторым равенствам (12.81) и (12.82),
1 я
Ш -Т ТМ„;
1 Л
В случае плоского штампа а0. Нормальное давление на поверхности штампа составляет
оп — — тт (2 -f- я)
(решение Прандтля).
На рис. 12.43 показано поле линий скольжения иод плоским штампом.
X
(18.89)
Р
6 А
В т. е. в областях AGD и BEF напряженное состояние равномерное. В областях ADH и BFJy в которых const go, возникает центрированное поле, характеризуемое наличием пучков прямых, сходящихся в точках А и В. Вдоль прямых AD и BF о и т то, а вдоль прямых АН и BJ 5о, но Ti Ti.
В областях АСН и BCJ также о и имеются семейства прямолинейных характеристик, а также семейства характеристик, являющиеся продолжением характеристик соседних областей. При подходе к линии контакта
кривые этих семейств образуют о осью х угол а“-я.
Поэтому для линии контакта
а () — я;
p(s)
а () о„ (s) т.
As)
(т 1);
(12.90)
i- a(s) -n. (12.91)
2ат 2 4
В то же время в областях АСН и BCJ
1 п
Ъ1о — — см. формулу (12.89).
Из сопоставления формул (12.89) и (12.91) следует п (s) — тт(2 я 2а).
Равнодействующая давлений под штампом ак
Р 2 J оп (s) R (s) cos ada,
где R — радиус кривизны профиля штампа; а0 и ак — начальное и конечное значение а на концах профиля штампа.
Рис. 12.43
12.7.8. Плоское напряженное состояние
Напряженное состояние идеального упруго-пластического тела в пластической стадии при плоском напряженном состоянии определяется, как и при плоской деформации, двумя дифференциальными уравнениями равновесия и соответствующим условием пластичности, например Сен-Венана (12.77) или Губера — Генки —
— Мизеса (12.78).
Последнее выполняется, если положить
ах — 2тт cos а2 2тх cos
(-тМ
(“i)
(12.92)
где Ji и 02 — главные напряжения, а о(х, у) —неизвестная функция (0о2л).
При этом
ох тх (VTcos со —f— sin со cos 20);
Gy тт (l3 cos со — sin со cos 20); TjTT sin со sin 20,
(12.93)
Здесь 0 — угол между первой главной осью и осью абсцисс. Компоненты тензора напряжений ограничены пределами
I ох 2тх; о у 2тт; т ху J тт.
Дифференциальные уравнения равновесия, выраженные через введенные функции со и 0, имеют вид
(V3 sin со cos 20 — cos со) —
13 sin со sin 20 — — 2 sin со 0;
ду ду
1 — д(о
у 3 sin со sin 20 — — дх
дх
дд
(12.94)
34
РАЗДЕЛ 12. УРАВНЕНИЯ И ФОРМУЛЫ ТЕОРИИ УПРУГОСТИ, ПЛАСТИЧНОСТИ И ПОЛЗУЧЕСТИ
— V3 sin со cos 20 cos со) -—
ду
дВ
4- 2 sin со 0.
дх
(12.94)
я 5я 7 я 11л
При — со — или — со система (12.94)
6 6 6 6
я 5 7 11
гиперболическая; при со —, — я, я, — я
6 6 6 о
— параболическая; при 3—4cos2co0 эллиптическая.
Если система (12.94) является гиперболической, то уравнения семейств характеристик аир принимают соответственно вид
djL
дх
ду_
дх
Здесь
tg (0 — г?), Q (со) — const ; tg (0 гр), Q (о) 0 const r.
1 Г 2 (со)
J (со) — — ——
2 J sin со
п
V
2 (со) 1"з — 4 cos2 со ; 2ф я -
d(o,
arceos
ctg со
Vz
Линии характеристик пересекаются под углом 2г и образуют неортогональную сетку кривых, не совпадающих с линиями скольжения.
Если система уравнений (12.94) параболическая, то 2 (со) 0 и Q(co)0. Вдоль каждой характеристики угол 0 постоянен. Уравнение одного из семейств характеристик записывается в виде
0 tg(0-i) (D(0),
где Ф(0)—произвольная функция, определяемая из граничных условий:
. л 5 11
г) 0 при со — я и — я;
6 6
я 1 7
tb — при со — я и — я. г 2 У 6 6
Вдоль каждой характеристики напряжения постоянны.
12.7.9. Пластические деформации вблизи круглого отверстия в пластине
Пусть в пластине имеется круглое отверстие, по краю которого приложено равномерно распределенное давление р (рис. 12.44). Эта задача осесимметричная и решается в полярных координатах.
Уравнение равновесия имеет вид
dor г — а dr г
0
0,
(12.96)
Условие пластичности возьмем по Мизесу: Ог-аг вав 3хТ-
(12.97)
При небольших давлениях р в упругой стадии работы в пластине возникает напряженное состояние чистого сдвига. Пластическая деформация появляется на краю отверстия при р — тт. При рхт пластическая деформация возникает в зоне где с — подлежит оп¬
ределению.
(12.95)
Для напряженного состояния в пластической зоне
справедливы уравнение равновесия (12.96) и условие
пластичности (12.97).
На границе пластической и упругой зон, т. е. при
г—с, должно быть Gr cr ат.
0
Положим
О г 2тт cos ае 2тт cos
(т)-
(-т)
и подставим в уравнение равновесия (12.96). В результате получим уравнение
(У1Г ctg со) dco-2 —- 0. Решение этого уравнения при со
я
т
и г с дает
(т)’
где аг и — радиальное и тангенциальные напряжения.
о
Полагая здесь г —а, получим соа при данной величине с. Давление по краю отверстия р ог находится из формулы Ог 2тт COS СО при СО СОа.
При увеличении давления соа растет и достигает зна5
чения соа ПРИ максимальном значении рмакс
2тт.
12.7. ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ ПЛАСТИЧНОСТИ И ТЕРМОПЛАСТИЧНОСТИ
35
12.7.10. Упруго-пластическое кручение
В случае чистого кручения стержня из идеального упруго-пластического материала напряженное состояние в пластической стадии (так же, как и в упругой стадии) удобно представить с помощью мембранной аналогии Прандтля. Вводится функция напряжений соотношениями
Ху? —
дф
ду"’
дф
дх
Рис. 12.45
Крутящий момент, воспринимаемый стержнем с круглым сечением в упруго-пластической стадии,
М — (4R3 — а3)тт, 6
где а — радиус упругого ядра сечения.
при этом дифференциальные уравнения равновесия удовлетворяются тождественно. Крутящий момент, возникающий в стержне, М — 2 J qdF, т. е. равен удвоенному
объему, ограниченному поверхностью функции ф (поверхность мембраны) и плоскостью поперечного сечения.
В пластической стадии кручения поверхность ф представляет собой поверхность равного ската (рис. 12.45), так как касательные напряжения, равные тангенсу угла наклона плоскости, касательной к поверхности функции напряжений, в пластической стадии работы всегда равны тт.
В табл. 12.4 приведены предельные крутящие моменты, воспринимаемые различными сечениями в пластической части работы Мпл. Для сравнения в этой же таблице помещены крутящие моменты Л1уп, соответствующие упругой стадии работы стержня к началу появления пластических деформаций в наиболее напряженных точках сечения. В табл. 12.4 введены обозначения: Q — площадь, ограниченная срединной линией замкнутого профиля (рис. 12.46); а — коэффициент, приводимый в справочниках для различных отношений Ьа.
В случае тонкостенного поперечного сечения стержня с переменной толщиной стенки б пользуются той же формулой, что и при 6 const, вводя минимальное значение бмин.
При упруго-пластической работе стержня, когда не все его сечение перешло в пластическую стадию работы, для упругой части сечения следует применять дифференциальное уравнение мембраны
д2ср д2ф
—- 20'G,
дх2 дФ
где 0' — относительный угол закручивания.
Для пластической зоны следует применять поверхность равного ската.
бrconst
Рис. 12.46
Относительный угол закручивания определяется по упругому ядру сечения
0' —. aQ
12.7.11. Пластическое кручение стержня с растяжением
а) Круглый цилиндрический стержень. В поперечном сечении действуют только напряжения а2, хХг и хуг. Условие пластичности по Губеру — Генки — Мизесу имеет вид
г 3 ( тг Ттг) по Сен-Венану
(12.98)
аг 4 ( хг туг)
Рис. 12.47
Плоские поперечные сечения в процессе деформирования остаются плоскими, поворачиваясь подобно жестким дискам вокруг оси стержня. Продольная деформация Ez — const.
Используя зависимости между Xxz и Ту2 и соответствующими деформациями упруго-пластического тела, а также между сдвигами и относительным углом закручивания 0', с учетом условия пластичности, например (12.98), получим значения напряжений в сечении:
Т а б л и ц а 12.4
Типы сечений
м
круг радиуса R
квадрат аха
прямоугольник аХЬ (Ъ а)
тонкая полоса 6 Xh
кольцо (наружный радиус—R, внутренний радиус—г)
тонкое кольцо и тонкое замкнутое сечение
пл
— я?х
3 т
1 3 — а3 т_ 3 т
— d2 (3Ь — а) т
6 т
— Л6Ч_
2 1
— Я Я“-г) т 3 т
2Q6xT
"уп
— лЯЧ
2 т
0,208 а3тт
abcPx„
т
— НбН
3 т
— я — Г) т.
2R т
2Йбтт
36
РАЗДЕЛ 12. УРАВНЕНИЯ И ФОРМУЛЫ ТЕОРИИ УПРУГОСТИ, ПЛАСТИЧНОСТИ И ПОЛЗУЧЕСТИ
: Y А
2 4- т2 уг
гЮтг
Y
- г?2 г2
Л',
пр
м
пр
2mJ)3
у
X
т (1т
( j1 Y Ч’2-'?2 2
1 х
(12.99)
Определив из выражения для Nap
яох
6У — "V siR‘0T
а;
пр
Vn
М2 А- — R2 N2
mnp g А iVnp
N:
пр
27яат
3
т2 №2 т пл
где
Wn
nR3 — пластический момент сопротивления
при чистом кручении.
Предельные значения М и N по упругой стадии работы стержня в момент достижения касательного напряжения тт в наиболее напряженных точках находятся из уравнения
№ 12 М2
—— 1.
л 2R4ol
я26®
б) Тонкая полоса. Для тонкой полосы депланацией поперечного сечения можно пренебрегать только для сдвигов yXz С учетом этой особенности получены формулы напряжений и уравнения, связывающие предельные значения N пр и Мир:
j1 у ¥ V
з "i -j Гу2
(12.100)
егот
NnD 1п
Здесь г — расстояние рассматриваемой точки сечения до центра сечения;
0'
Эпюры аг иг приведены на рис. 12.47. Соответствующие этим напряжениям предельные значения продольной силы и крутящего момента равны:
6Ьот IV 3 -pz.— In —т- № jз )2 Ь
(12.100)
В этих формулах: h — толщина; b — ширина пластинки; у — измеряется в направлении толщины пластинки. Уравнения (12.100) приводятся к виду
IT,
и подставив в выражение для Мпр, получаем уравнение, связывающее предельные значения iVflp и Мир:
1,3 а; г
Апо bhoT- 1
-f
Величина определяется по NUp из первого уравнения, а величина Mnv по гэ и Nap — из второго уравнения.
12.8. ПОЛЗУЧЕСТЬ И РЕЛАКСАЦИЯ
12.8.1. Основные понятия
Равновесные и неравновесные процессы деформации.
Равновесным состоянием тела называют такое состояние, в котором тело может находиться неограниченно долго; при этом размеры тела, его температура и величины внешних нагрузок, приложенных к нему, остаются постоянными. Равновесный процесс деформации — это бесконечно медленный процесс, когда тело проходит через ряд равновесных состояний, непрерывно вытекающих одно из другого.
Если процесс состоит из ряда неравновесных состояний, следующих одно за другим, то это будет неравновесный процесс. Пример равновесного процесса — упругая деформация; пример неравновесного процесса—деформация ползучести.
Равновесный процесс деформации может протекать и в обратном направлении, т. е. равновесные процессы обратимы. Неравновесные процессы необратимы. Следовательно, процесс ползучести необратим.
Квазиравновесные процессы. Упругая деформация и вязкое течение. Равновесный процесс деформации твердых упругих тел является примером обратимого процесса. Такого рода процессы в случае малых деформаций и линейной связи между напряжениями и деформациями изучаются в классической теории упругости. Близкими к ним являются почти равновесные или квазиравновесные процессы деформации.
Если же рассматривать тело в состоянии текучести, то его сопротивление воздействию сдвигающих сил определяется не деформациями, а характером изменения скоростей деформаций. Такие сопротивления называют вязкими сопротивлениями.
12.8. ПОЛЗУЧЕСТЬ И РЕЛАКСАЦИЯ
37
Большая часть строительных материалов, обладающих аморфной структурой (или имеющих аморфную фазу в своем составе), проявляет одновременно свойства упругости и свойства текучести. К таким материалам относятся, например, бетоны, смолы и др. В зависимости от длительности наблюдения процесса деформации упруговязких тел на первый план выступает свойство либо упругости, либо текучести.
Т а б л и ц а 12.5
Материал
TJ в пз
t в сек
Асфальт при 20 С Ю7
103
500
Исландский шпат при 18 С.
Ю1®
10®
Зеленогофенский известняк.
1021
101в
12.8.2. Релаксация
Представим себе стержень из упруго-вязкого материала, сжатый двумя продольными силами Р до некоторой определенной величины относительной деформации А
е —, где — первоначальная длина стержня; А —
укорочение, вызванное силами Р. Подобное состояние деформации стержня будет состоянием неравновесным, и для поддержания деформации е, неизменной во времени, необходимо постепенно снижать силы Р. Этот процесс уменьшения величин внешних сил (или напряжений) при неизменности во времени вызванной ими деформации называется релаксацией.
Время, в течение которого внешние силы (или напряжения) ослабевают в е 2,72 раза, называется временем релаксации.
Простейшая релаксационная теория упруго-вязких тел (теория Максвелла) дает закон деформирования в виде уравнения
1
dy_ 1уу_ dyп_
dt At dt
G
do о
(12.101)
at т
Здесь G — модуль сдвига; т — коэффициент вязкости по Ньютону; уу и уи — соответственно обратимая (упругая) и необратимая части деформации сдвига. В основе закона (12.101) положена линейная зависимость (Гука) упругой деформации от напряжения и линейная зависимость (Ньютона) скорости деформации ползучести от напряжения.
dy
При остановке деформации “37 0, и, следовательно,
dt
Gt_ Л
т. е. напряже-
1 do о
— — — 0, откуда GG0 е G at т)
ние о снижается с течением времени (релаксация) по экспоненциальному закону (рис. 12.48). Время релаксации
Т
в данном случае равно t —-. В табл. 12.5 приведены
G
данные о коэффициентах вязкости в пуазах (1 пз 1 днсек1см2) и времени релаксации для некоторых материалов.
Максвелловская теория является наипростейшей из возможных. В более общем случае уравнение, описывающее поведение упруго-вязкой среды под нагрузкой, представляется в виде
dn „ dnia —Ап-г
dtn'
dk
k Г В0в dt
или даже в виде нелинейных соотношений между различными производными напряжений и деформаций по времени.
3-я стадия 2- я стадия
Рис. 12.48
дремя
Рис. 12.49
12.8.3. Ползучесть
Под термином ползучесть обычно понимают неравновесный процесс развития деформаций материала во времени без увеличения нагрузки. В зависимости от величины приложенных сил деформация ползучести либо стремится к некоторой постоянной величине, либо неограниченно увеличивается вплоть до разрушения. Пола-
dy 0О
гая в (12.101) 00оconst, получим — —, от-
at г)
куда у yo t. Таким образом, деформация ползуЛ
чести материала, подчиняющегося уравнению (12.101),
0О
происходит с постоянной скоростью —. На рис. 12.49
Л
дана типичная диаграмма ползучести. Как видно из рисунка, процесс ползучести можно разделить на три стадии. Первая стадия характеризуется переменной скоростью деформации ползучести (неустановившаяся ползучесть), вторая — постоянной скоростью (установившаяся ползучесть). третья — резким нараста-
Рис. 12.50
нием скорости деформации ползучести (стадия разру шения).
Рис. 12.51
38
РАЗДЕЛ 12. УРАВНЕНИЯ И ФОРМУЛЫ ТЕОРИИ УПРУГОСТИ, ПЛАСТИЧНОСТИ И ПОЛЗУЧЕСТИ
Явление отставания деформации от напряжения называется последействием. Если напряжение растет быстро (неравновесный процесс), то полная деформация, соответствующая конечному напряжению, наступит спустя некоторое время. То же явление наблюдается при разгрузке. На рис. 12.50 отражены один процесс нагружения и один процесс разгрузки. На рис. 12.51 участки, II и III соответствуют деформациям под действием сил Рв, приложенных в моменты времени А, Б
ь
и В. Участки IVt V и VI соответствуют мгновенной разгрузке.
12.8.4. Особенности процесса ползучести некоторых строительных материалов
а) Ползучесть гипса. Гипсовые конструкции, хорошо работающие в воздушно-сухом состоянии, обнаруживают ползучесть при увлажнении. На рис. 12.52 показаны типичные кривые ползучести
гипса. Они получены на основании изучения изгиба гипсовых призматических брусков постоянного сечения. Кривая I относится к
бгбг,кгсм
Рис. 12.52
о t г з s в ? Относительное сжатие,
Рис. 12.53
бремя 6 сутках Рис. 12.54
1
I
I
50
-
-
— h —
1
я
работе образцов в воздухе. В этом случае деформация остается постоянной, т. е. ползучесть отсутствует. Кривая II относится к случаю ползучести при обильном смачивании образцов водой и кривая III — при смачивании их 10—30 водным раствором СаСЬ-
б) Пластичность и ползучесть каменных материалов. Хрупкие каменные материалы обнаруживают способность к значительным пластическим деформациям и деформациям ползучести в условиях высокого всестороннего сжатия. На рис. 12.53 показаны кривые деформации песчаника при всестороннем сжатии. Исследования показывают, что механизм и характер пластической деформации каменных материалов отличаются от механизма и характера пластической деформации металлов.
в) Ползучесть дерева. Величина деформации дерева в высокой степени зависит от продолжительности действия нагрузки. Если приложенные напряжения не превосходят известных пределов, деформация ползучести носит затухающий характер; в противном случае она нарастает со временем вплоть до разрыва (рис. 12.54). На рис. 12.55 показано изменение со временем деформаций упругого последствия в опыте с изгибом деревянного бруска.
Отмеченные особенности процесса ползучести некоторых строительных материалов имеют весьма важное значение, так как они показывают, что процесс ползучести зависит не только от свойств самого материала, но и от условий среды, особенностей нагружения и т. д.
О ❖ д ;V 16 02 Ь 6 0 12 6
время в я
Рис. 12.55
12.8.5. Реологические модели
Законы деформации различных сред можно иллюстрировать посредством простых механических или, как их в настоящее время называют, реологических моделей.
б
.ij
t.
Рис. 12.57
Г
'
Рис. 12.58
Деформация чисто упругой среды, подчиняющейся закону Гука о е, иллюстрируется деформацией пружины (рис. 12.56). Деформация вязкой среды, подчиняю-
de
щейся закону Ньютона а г — , может быть проиллю-
dt
стрирована при помощи модели, состоящей из поршня, двигающегося в цилиндре с вязкой жидкостью (рис. 12.57).
12.8. ПОЛЗУЧЕСТЬ И РЕЛАКСАЦИЯ
39
Деформация жестко-пластического тела, которое при напряжениях ниже предела текучести от совсем не деформируется, а при напряжениях, большие Ут, переходит в состояние течения, может быть проиллюстрирована при
г
б
Рис. 12.60
ЛЬ
Рис. 12.61
и
Рис. 12.62
Рис. 12.63
помощи модели, состоящей из двух пластинок, по площади контакта которых развивается кулоново трение (рис. 12.58).
На комбинациях этих исходных моделей можно иллюстрировать процессы деформации сред, обладающих более сложными свойствами, чем упругая, вязкая или жестко-пластическая среда. Так, модель на рис. 12.59 изображает упруго-пластическую среду; на рис. 12.60 показана модель упруго-вязкой среды, деформация которой описывается уравнением
, de
аГе11_.
Модель на рис. 12.61 изображает среду, деформация которой подчиняется уравнению Максвелла:
— dt
1 do о
1Г‘ dt л
описываются некоторыми интегральными соотношениями. К такого рода средам принадлежит, например, среда Больцмана, деформация которой описывается уравнением
t
о (t) — Ее (t) 1 (t — т) е (т) дх.
12.8.6. Теории ползучести
Если тело, расположенное в среде с постоянной температурой, находится в равновесии под действием приложенных к нему сил, то между возникающими в теле напряжениями а, деформациями е и температурой Т должны существовать соотношения )(j, е, Г)0, называемые уравнениями состояния. Примером уравнений состояния являются уравнения, выражающие закон Гука в теории упругости.
Связь между всеми переменными, входящими в уравнение состояния: напряжением, деформацией, скоростями их изменения и временем, устанавливается на основе той или иной принятой гипотезы, в зависимости от которой и различаются существующие теории ползучести.
Теория упруго-вязкого тела. Эта теория рассматривает среды, обладающие упруго-вязко-пластическими свойствами. В общем виде уравнение состояния таких сред имеет вид
ко-8 -f- -j- ko -f- o 0,
где ki — реологические параметры. В работах 9 и 18 рассмотрено это уравнение в виде закона линейного деформирования упруго-вязкого тела:
Ее Гр Егг о Гра, (12.102)
где Тр — время релаксации; г) — коэффициент
Ei Е
вязкости; Е — начальный модуль упругости, характеризующий мгновенную деформацию; Еъ — модуль эластической (упруго-вязкой), развивающейся во времени деформации; Е —конечный модуль упругости,
Ei 2
характеризующий конечную, предельно длительную деформацию.
Из (12.102) при оconst получается закон деформирования (последействия) в виде
t
е (t) ек — (ек — е0) е Т ,где ек ‘
-конечная, стабилизировавшаяся деформа-
На рис. 12.62 показана модель, изображающая вязкопластическую среду; на рис. 12.63 — модель среды, деформация которой описывается уравнением
de Ег do
ie Th (,)аг-
ция (при -оо); е0 -г— — начальная мгновенная де-
Ei Г
формация (при 0); Тп Тр -— — время после-
Е Е 2
действия, т. е. время, за которое разность ек—8о уменьшается в е 2,72 раза.
Из (12.102) при е const получается закон релаксации
dt
Деформация среды с более сложной структурой изображается моделью, показанной на рис. 12.64, и т. д.
Можно рассматривать также модели сред с непрерывным распределением параметров, характеризуемых однотипными элементами. Законы деформаций таких сред
Ot ок (сг0 где Oq Ez — начальное напряжение (при f0); сгк Еъ — конечное напряжение (при t-oo); Тр — время релаксации.
Частными случаями уравнения (12.102) являются бо¬
40
РАЗДЕЛ 12. УРАВНЕНИЯ И ФОРМУЛЫ ТЕОРИИ УПРУГОСТИ. ПЛАСТИЧНОСТИ И ПОЛЗУЧЕСТИ
лее простые законы — закон Гука, закон Ньютона, уравнение релаксации Максвелла (12.101) и др.
Теория упрочнения. Эта теория предполагает наличие функциональной зависимости между деформацией, ее скоростью и напряжением:
я? (е, е, а) 0.
Указанная зависимость исходит из подобия кривых ползучести (упругая деформация обычно не учитывается) и принимается в виде
f(o)
„)
где ви — деформация ползучести, а вид функций f(а) и F(eH) принимается различным.
Так Ф. С. Чуриковым и Ю. Н. Работновым предложено
О
F (еп) (а) аеь, откуда
8 еа
а b In при ееа а,
а
а 0 при ееа а.
При а const
.-1с 'гп“р,-'5ТГ.
где а, а, с, Ъ — параметры.
Уравнение релаксации в данном случае имеет вид
0(0
0(0
а сс1
(а0 — а)е
ab—o b da.
(0 dt.
Теория старения. По этой теории время явно входит в уравнение состояния:
г(о,8,00.
Рассматривая деформацию как сумму упругой деформации и деформации ползучести, имеем
е(0 еу 8п,
О
где 8у—, а 8П — некоторая функция напряжения и
н
времени, например, если кривые ползучести подобны, то можно принять
еп (t) F(o)Q(t).
При степенной зависимости между напряжением и деформацией полная деформация
e(0Ta,Q (0‘
Функция Q(t) отражает изменение свойств материала во времени, его старение. Отсюда и название теории.
Уравнение релаксации по теории старения
a0 a -f anEQ (t).
Линейная теория наследственной ползучести. Теория наследственной ползучести исходит из того, что деформация в данный момент времени зависит не только от величины напряжения в этот же момент, но и от истории предшествующего деформирования. При этом учет предшествующих деформаций производится на основе принципа суперпозиции (наложения).
Уравнение состояния в теории наследственной ползучести имеет вид
Теория течения. По этой теории уравнение состояния имеет вид t?(a, е, t)0. Принимая, что полная скорость деформации складывается из скорости упругой деформации еу и скорости деформации ползучести еп получим
8 (t) 8у-8П.
Скорость упругой деформации
1 da Zy Е ’ dt
Скорость деформации ползучести при подобии кривых ползучести можно определить как произведение функции напряжения F(a) и функции времени х():
8n F(a)x(0.
В теории ползучести часто применяется зависимость F(a)an; тогда
1 da в о"х () —. —.
При большом значении t или при пренебрежении затухающей деформацией const. Уравнение ре¬
лаксации по теории течения записывается в виде
1_
a a0 l (п — 1) (0 п1.
где Со — начальное напряжение, а
е(0
o(t)
Ео
т)а(т)Л, (12.103)
где первый член правой части отображает мгновенную деформацию е0 в момент t, вызванную напряжением a(t)f а второй член — развивающуюся во времени деформацию, вызванную переменным во времени напряжением о(т).
Разрешив уравнение состояния относительно напряже-
ния а, получим
t
а (0 Е0г (0— f R (t — т) е (т) dx, (12.104) о
где первый член отображает начальное напряжение в момент t, а второй — изменение напряжения во времени при изменяющейся во времени деформации е.
При оconst уравнение ползучести по данной теории имеет вид
t
—- -j4
0
при е const получаем уравнение релаксации
t
a(0e 0 —
12.8. ПОЛЗУЧЕСТЬ И РЕЛАКСАЦИЯ
41
Функция K(t—т) в (12.103) — ядро ползучести — характеризует влияние на деформацию в момент t нагрузки, приложенной ранее, в момент т; функция R(t—т)— ядро релаксации — характеризует влияние на напряжение в момент t деформации, возникшей в момент т.
о)
Ю
б)
Рис. 12.65
Дифференцируя уравнения (12.103) и (12.104), получим
de
ИГ
R (0
do
dt
(0 Pofe () - R (о; t — т) о (т) dx; о
(0 Фо Г8 (0 — f R (t — t) ф 8 (r)j dx;
0
уравнение для деформаций
t
6 (0 о о (0 f Q (t — T) o (t) dx. 0
Следовательно, функция K(t)—есть скорость деформации при т1; функция R(t) — напряжение, необходимое для поддержания деформации е1. Функция K(t) может быть определена по кривой скорости деформирования при оconst, a R(t) —по кривой скорости релаксации при е—const.
Уравнения наследственной ползучести отличаются большой общностью и при соответствующем выборе ядра K(t) приводятся к рассмотренным выше законам ползучести.
Нелинейная теория наследственной ползучести. Учет нелинейной зависимости между а и 8 достигается введением в уравнения (12.103) и (12.104) не самих напряжений и деформаций, а их функций F(o) или р(е), характеризующих связь между о и е. В зависимости от вида семейства кривых о—е могут иметь место три случая.
1) Кривые о—е для разных t не подобны, каждая из них описывается своим законом ф,(е) (рис. 12.65, а). Уравнение для напряжений имеет вид
уравнение для деформаций t
8 (0 fo I® (0J J Q t — T) f (T)l dx.
0
Здесь (ро(в)-Оо и M r)8o— мгновенные напряжения и деформации. В частности, при степенной связи между напряжением и деформацией функции ф(е) и (а) могут принять вид
1
Ф (е) Агет; f (а)
2) Кривые о—в подобны для всех моментов времени, за исключением начального (рис. 12.65,6). Функции ф(е) и f(o) имеют два значения: Фо(е) и f0(o) при t0; ф(е) и f(o) при ОССоо. Уравнение для напряжений принимает вид
Здесь
do 1 de 1
R(t— т) — ; Q (t — т) . .v dt ф(е) ' dt f(o)
3) Все кривые a—e для любого 0oo являются взаимоподобными, т. е. описываются единой функцией ф(е) (рис. 12.65,в). Уравнение для напряжений имеет вид
t
о (t) ф е (0 — f R (t — Т) ф е (т) dx. (12 105)
о
Это уравнение можно разрешить относительно ф(е):
t
ф е ( ) о (0 f К ( — т) о (т) dx. (12.106)
о
При о const и econst уравнения (12.105) и (12.106) принимают соответственно вид
t
a (0 ф (8) 1-_jtf(0;
Р 8 (()', a 1 K(t)dt.
vo
12.8.7. Наследственная теория ползучести бетона Н. X. Арутюняна
В основу этой теории положены три предпосылки:
1) рассматриваемый материал однороден и изотропен;
2) деформация и напряжение связаны между собой линейной зависимостью; 3) для деформации ползучести принимается закон наложения. Вторая предпосылка для ряда материалов справедлива при напряжениях, не превышающих примерно половины предела прочности материала. Построенная на этих предпосылках теория утверждает, что если на сооружение действуют только внешние силы, то напряженное состояние в элементах сооружения при некоторых условиях (если коэффициент поперечной деформации ползучести цп равен коэффициенту упругой поперечной деформации цу и р,п цу const) остается неизменным и при наличии в них явления ползучести. В этом случае ползучесть не меняет напряженного состояния, а влияет только на деформации сооружения. В задачах подобного типа обычные методы строительной механики позволяют учесть влияние ползучести. Необходимым условием этого является следующее: относительная деформация ползучести C(tt т) от единичной нагрузки при одноосном напряженном состоянии (мера ползучести) должна быть пропорциональна деформации ползучести со(, т) при чистом сдвиге, т. е.
с а, х) "‘ т)
где t — момент времени, в который определяется деформация; т — возраст бетона в момент загружения; Е и
42
РАЗДЕЛ 12. УРАВНЕНИЯ И ФОРМУЛЫ ТЕОРИИ УПРУГОСТИ, ПЛАСТИЧНОСТИ И ПОЛЗУЧЕСТИ
G — соответственно модули упругости мгновенной деформации и сдвига.
Если же напряжения изменяются вследствие деформаций ползучести, то последняя сказывается и на напряженном состоянии и на деформациях. Н. X. Арутюнян 1 составил уравнение упруго-ползучей среды, считая, что закон изменения меры ползучести бетона может быть представлен следующим выражением:
C(t, х) I — —. (12.107)
где С0 — предельная мера ползучести при t-x; А и Y — постоянные.
С учетом этого закона изменения C(t, т) (подтверждающегося экспериментами) получаются следующие уравнения для напряжений:
Т а б л и ц а 12.6
4 (о и (о (Ч №
С(,т)
д
дх
E(t)
Ti
I dx
L-(t)
(t 1,2,3);
t
(12.108)
v'lk (0 olk (0 Jhk W 0(0 x
со(t)J dx афк),
X
g(t)
)
где Gik(t)—напряжения для упруго-мгновенной задачи.
Для случая изменения C(ty х) по закону (12.107) и при условии, что модуль мгновенной деформации Е(х) изменяется во времени незначительно, так что его можно принять постоянным, уравнения (12.108) приводят к решению
®(0 CTu(Ti) 1 У о (- со) X
t _
XT'erT'rdT-
(12.109)
Задачи термоупругого состояния с учетом ползучести разбивают на три этапа: 1) определение температурного поля; 2) решение термоупругой задачи; 3) определение напряженного состояния с учетом ползучести бетона.
Для определения напряжения в любой момент времени представим уравнение (12.109) в виде
ап(0 о„(г1)Я1(,т1), где
1-7 с.
xerx X
X Ф (rt, р) — Ф (rxlt р) — коэффициент затухания.
Здесь приняты обозначения: 0ц(т) —термоупругое напряжение в теле для данного температурного режима; Е0 — модуль мгновенной деформации; гу(Е0Со) — параметр, характеризующий с физической точки зрения ползучесть бетона в старом возрасте; р—уАЕ0— параметр, характеризующий меру ползучести бетона в моло¬
Время в днях
Возраст бетона т
В ДНЯХ
7 1
14
28
1 45
60
90
360
7
14
1
0,584
1
-
-
-
28
0,25
0,47
1
—
—
—
—
45
0,134
0,297
0,487
1
—
—
—
60
0,105
0,252
0,259
0,535
1
—
—
90
0,092
0,232
0,301
0,323
0,334
—
—
130
0,092
0,232
0,301
0,323
0,334
0,34
1
0,092
0,232
0,301
0,323
0,334
0,34
0,355
дом возрасте; С0 lim C(t, ti)—предельное значение
t- oo
меры ползучести для данного материала; А и у — опытные коэффициенты, характеризующие интенсивность изменения меры ползучести бетона, необходимые для определения C(t, Ti) по формуле
С (t, Ti) — (Со j l —
шляется I r f e
Функция Ф( , p) определяется по формуле I
фр) f
Значения этой функции протабулированы и приводятся, например, в 6.
В приводимых ниже примерах приняты следующие характеристики бетона (по данным экспериментальных работ):
Ах 4.82.Ю-5; С0 0,9-Ю-6; у 0,026;
0 2-105 кГсм; р 0,25; л 0,073.
Для этих постоянных коэффициент затухания Hi(t, Ti) приведен в табл. 12.6.
Пример 12.3. Определить напряжения в толстой бетонной плите при возрасте бетона Х7 дней (рис. 12.66), торцы которой не могут перемещаться, т. е. и и и2 равны нулю. Плита равномерно нагревается от нуля до Т25 С.
В данном случае термоупругие напряжения равны:
11 (Tl) — 22 (Ti):
Е0а
1 — I
Т.
Остальные напряжения, как и перемещения и и и2 по осям 1 и 2 равны нулю. Перемещение по оси 3 (ы3) равно:
1 Из : Т.
1— I
где а — коэффициент линейного расширения для бетона (а0,000012); jj,— коэффициент Пуассона для бетона (ц7б). Тогда an(Ti) 022(ti) —43,2 кГсм2, а напряжения с учетом ползучести бетона будут Ou(t)—a22(t) —43,2i(, Tj). В табл. 12.7 приведены значения напряжений для различных моментов времени.
Пример 12.4. Бетонный брус, один конец которого защемлен, а другой свободно оперт (рис. 12.67), подвергается неравномерному нагреву, его верхние волокна имеют температуру Г1 15 С, а нижние — Г25 С.
12.8. ПОЛЗУЧЕСТЬ И РЕЛАКСАЦИЯ
43
Т а б л и ц а 12.7
Время в днях
а„ (О
в кГсм2
14
28
45
60
90
360
—43,2
-25,2
-10,8
—4,5
—4
—4
—4
—4
о
11
Рис. 12.67
Термоупругая задача для такого бруса известна при следующем законе распределения температуры по высоте сечения:
1 Г 2x1
т — (TiT2) (T1-Tb)—y
Максимальные напряжения по этому решению будут в сечении х—1, т. е. в защемленном сечении.
Напряжения по сечению будут определяться формулой (для TiT2)
3 2х
аи (Ti) — Т2) Величины упругих и упруго-ползучих напряжений для бетона в возрасте Xi 14 дней соответственно будут равны:
11 макс (Tl) ± 36 Гсм; 011макс (0
МИН МИН
±36 (t, 14).
В табл. 12.8 приведены значения сгцмакс() для различ¬
ных моментов времени.
Таблица 12.8
Время в днях
14
28
45
60
90
360
3 года
ОО
On
макс
мин
кГсм2
±36
±17,25
±10,7
±9,1
±8,4
±8,4
±8,4
±8,4
Из таблицы видно, что уже к 90-му дню напряжения за счет ползучести бетона уменьшаются более чем в 4 раза.
12.8.8. О ползучести металлов
Явление ползучести металлов и сплавов становится заметным при повышенных температурах. Так, для углеродистых сталей и чугуна ползучесть начинает сказываться при 300—350 С, для легированных сталей — при 350—400 С, для цветных металлов — при 50—150 С и т. п.
Некоторые металлы, например свинец, испытывают деформации ползучести и при обычной комнатной температуре.
Расчет на ползучесть конструкций основан на результатах экспериментального исследования металла главным образом на постоянную нагрузку. На основании экспериментальных данных предложены многочисленные формулы эмпирического и полуэмпирического характера.
Для установившейся стадии ползучести применяется следующая зависимость между скоростью ползучести и напряжением
8П ko,
где k и п — коэффициенты, зависящие от температуры испытания и свойств материалов 6.
Максимальное напряжение, не вызывающее деформаций ползучести больше допускаемых для данных условий работы, называется условным пределом ползучести материала по допускаемой суммарной деформации ползучести.
Расчетное условие ползучести при одноосном напряженном состоянии имеет вид
8 8у 8П1 8п2 80 k ntc t8l
где еу — относительная упругая деформация) 8 —
V Ет
Ет — модуль упругости при данной температуре; еп и 8Пг — относительные деформации неустановившейся и установившейся ползучести; е —допускаемая деформация за время службы конструкции; tc — срок службы конструкции.
Деформацией неустановившейся ползучести (еп,) иногда, можно пренебречь. Тогда для о получается уравнение
— kantc t.
Если пренебречь и упругой деформацией, то расчетное условие принимает вид
а
Пренебрегать упругой деформацией и деформацией неустановившейся ползучести можно только тогда, когда эти деформации малы по сравнению с деформацией установившейся ползучести.
12.8.9. Ползучесть при изгибе балок и кривых стержней
Рассмотрим некоторые задачи по расчету балки, сечение которой имеет две оси симметрии, на изгиб для случая установившейся ползучести. Изгибающий момент
44
РАЗДЕЛ 12. УРАВНЕНИЯ И ФОРМУЛЫ ТЕОРИИ УПРУГОСТИ, ПЛАСТИЧНОСТИ И ПОЛЗУЧЕСТИ
действует в вертикальной плоскости уОг (рис. 12.68). При решении задач установившейся ползучести считают, что спустя известный промежуток времени после загружения напряжения в сечении не изменяются и скорость деформации постоянна.
Определим закон изменения нормального напряжения по сечению и прогиба балки во времени. При решении пренебрегают касательными напря жениями и предполагают справед-
ливость гипотезы плоских сечений.
Г ‘
П
к
л )—♦
Рис. 12.68
Рис. 12.69
1. Чистый изгиб (рис. 12.69). Примем закон ползучести в форме
1,. 1
где
ie2
di
— скорость деформации.
Из условия равенства момента внутренних и внешних сил
уЬ (у) dy — Му (12.110)
а на основании гипотезы плоских сечении de2
dt
-my. (12.111)
Тогда
а2 k п (my)n,
(12.112)
где m — скорость изменения кривизны изогнутой оси в рассматриваемом сечении.
Подставляя (12.112) в (12.110), получим
1 1_
Mmnk nInt (12.113)
где
г (, М
Л пК
1п 4 Ь(у) уК
dy.
Из (12.111) и (12.113) следует
d2
ИГ
мп
п
(12.114)
Подставляя выражение для m из (12.113) в (12.112), получаем закон распределения нормальных напряжений при чистом изгибе в случае установившейся ползучести:
а,
м
ту
1 п
Для прямоугольного сечения Н_
2 ” 1
п dy 2л1
п 4-1 2
2 п 1
ЬН
Следовательно, напряжения для бруса с прямоугольным сечением будут
' _ 2п 1 ( Г
г 3п h j bh '
6 М
Величина — равна максимальным упругим нормальным напряжениям
6М ЪН2
Следовательно, максимальное напряжение установившейся ползучести при чистом изгибе в брусе с прямоугольным сечением будет полагаем у -
— од
гмакс
-)
2п 1 3 п
гмакс Так как п всегда больше единицы, то az макс всегда меньше омакс Для малых прогибов d2y dm d2y
dm
m
Подставив выражение для — в (12.111), предварительно продифференцировав (12.111) по и используя (12.114), получим выражение для определения скорости изменения прогиба балки при ползучести:
dz2
Интегрируя и учитывая граничные условия: при z 0 у 0;
I dy
при г
2 dz
0,
(12.115)
получим величину полного прогиба в момент t (с учетом упругого прогиба):
Ml2
(, Й7
НхР-
2. Поперечный изгиб балки, загруженной сосредоточенной силой Р в середине пролета. Условия (12.115) будут такими же, как и при чистом изгибе. Максимальный прогиб во времени определится по формуле (с учетом упругого прогиба)
рр ь Рп1п2
Умакс (0 ‘ I t-
48El 2 n1 (n 2) 1
12.8. ПОЛЗУЧЕСТЬ И РЕЛАКСАЦИЯ
45
3. Поперечный изгиб консольной балки, нагруженной сосредоточенной силой Р на свободном конце. Граничные условия имеют вид:
I dy
при г — 0;
2 dz
при z — I у — 0.
Максимальный прогиб во времени (с учетом упругого прогиба) будет
рз k Рп 1п2
У макс (0 ос, . t-
3 El
п 2
Г
Умакс (0 —
384
299 q4
kt.
5. Поперечный изгиб консольной балки, нагруженной равномерно распределенной нагрузкой интенсивности q:
макс (0 —
ql4 kqnl2nl)
8EI
л:
t.
4. Поперечный изгиб балки на двух опорах с равномерно распределенной нагрузкой интенсивности q. Балка выполнена из никельхроммолибденовой стали и нагрета до Т 450 С. При этой температуре п 2.
12.8.10. Ползучесть при кручении
При решении конкретных задач кручения с учетом ползучести применяется теория старения, основанная на теории малых упруго-пластических деформаций, или обобщенная теория вязкого течения.
Решения многих задач, в том числе и задач кручения см. 9J.
ЛИТЕРАТУРА
1. Арутюнян Н. X. Некоторые вопросы теории ползучести. Гостехиздат. М. — Л., 1952.
2. Б е з у х о в Н. И. Основы теории упругости, пластичности и ползучести. Изд-во Высшая школа, 1961.
3. Б е з у х о в Н. И. и др. Расчеты на прочность, устойчивость и колебания в условиях высоких температур. Машгиз, 1965.
4. В я л о в С. С. Прочность и ползучесть мерзлых грунтов и расчеты ледогрунтовых ограждений. Изд-во АН СССР, 1962.
5. ГольденблатИ. И. Расчет и конструирование железобетонных балок. Госстройиздат, М. — Л., 1940.
6. Гольденблат И. И., Николаенко Н. А. Теория ползучести строительных материалов и ее приложения. Стройиздат, 1960.
7. Гольденблат И. И. иКопнов В. А. Обобщенная теория пластического течения анизотропных сред. В сб.: Строительная механика. Стройиздат, 1966.
7а. Г о л ь д е н б л а т И. И. иКопнов В. А. Критерии прочности и пластичности конструкционных материалов. Машиностроение, 1968.
8. И л ь ю ш и н А. А. Пластичность. Изд-во АН СССР, 1963.
9. К а ч а н о в Л. М. Теория ползучести. Физматгиз, 1960.
10. Л е й б е н з о н Л. С. Курс теории упругости. ОГИЗ. ГИТТЛ, 1947.
11. Ляв А. Математическая теория упругости. ОНТИ НКТП, М. — Л., 1935.
12. М а л и н и н Н. Н. Основы расчетов на ползучесть. Машги?. 1948.
13. Мин длин Р. Д. Сборник переводов Механика. Мир, Л? 4 (86). 1964.
14. Мусхелишвили Н. И. Некоторые задачи теории упругости. Изд-во АН СССР, 1956.
15. Н е й м а н М. И. Напряжения в балке с криволинейным отверстием. Труды ЦАГИ, № 313, Л., 1937.
16. П а п к о в и ч П. Ф. Теория упругости. Оборонгиз, 1939.
17. Работнов Ю. Н. Ползучесть элементов конструкций. Наука, 1966.
18. Ржаницын А. Р. Некоторые вопросы механики систем, деформирующихся во времени. Гостехиздат. М. — Л., 1949.
19. С а в и н Г. Н. Распределение напряжений около отверстий. Изд-во Наукова думка, Киев, 1968.
20. Сборник статей Реология. ИИЛ, М., 1962.
21. Филоненк о-Б о р о д и ч М. М. Основы теории упругости. Гостехиздат, 1950.
22. X и л л Р. Математическая теория пластичности. ГИТТЛ, 1956.
РАЗДЕЛ 13
УПРУГИЕ ТОНКИЕ ПЛАСТИНЫ (ПЛИТЫ И БАЛКИ-СТЕНКИ)
13.1. ОБЩИЕ ТЕРМИНЫ, ОБОЗНАЧЕНИЯ
Пластиной (рис. 13.1) называют цилиндрическое тело, толщина которого h const мала по сравнению с другими размерами (сторонами прямоугольника, диаметром и т. д.). Плоскость, параллельную основанию и делящую пополам толщину пластины, называют срединной плоскостью. К тонким относятся пластины, у которых h не превышает 0,2 наименьшего размера основания.
р— интенсивность нагрузки, распределенной по площади; р — то же, по линии; mXt тт—интенсивность моментной нагрузки, распределенной вдоль линии и вращающей вокруг осей х, г.
Пластины, подвергающиеся изгибу, называют плитами. Прямоугольные пластины, находящиеся в плоском напряженном состоянии, называют балками-стенками.
От тонких упругих пластин следует отличать гибкие плиты (плиты, у которых максимальный прогиб больше lUh методы их расчета изложены в разделе 18) и пластины, в которых возможны пластические деформации (см. раздел 21).
Приведенные критерии деления пластин на толстые, тонкие и гибкие условны и могут быть использованы в качестве первого приближения.
13.1.1. Основные обозначения
х У z—прямоугольные координаты (рис. 13.1, а);
плоскость ху совмещена со срединной плоскостью пластины; г, 0, г—цилиндрические координаты (рис. 13.1,6);
плоскость г0 совмещена со срединной плоскостью пластины.
Размеры (рис. 13.1), нагрузки (рис. 13.2) h— толщина пластины;
Н—высота ребра; а, b— размеры прямоугольной пластины, радиусы круглой и кольцевой пластины;
Р— сосредоточенная сила;
М х, Му, М г — сосредоточенные парык вращающие вокруг осей х, у, г;
Индекс у РУ Р, р показывает направление силы. Так, Рх, рг означает, что Рх направлено вдоль оси х, а рг — вдоль радиуса.
Компоненты напряжений и усилий (см. рис. 13.2)
ох, ог и т. д. — нормальные напряжения по площадке с нормалями х, г и т. д.; тху тrz—касательные напряжения. Первый индекс указывает направление напряжения, а второй — нормаль к площадке, по которой действует напряжение;
N — нормальная (продольная) сила;
Q—поперечная сила (направлена перпендикулярно срединной плоскости);
V — приведенная поперечная сила или реактивное усилие;
5—сдвигающая сила (расположена в срединной плоскости);
М — изгибающий момент;
Мк— крутящий момент;
Н—сосредоточенная реактивная сила в угловой точке прямоугольной пластины.
Индекс у усилия означает направление нормали к единичной площадке, по которой действует усилие. Так, например, Мх—изгибающий момент по площадке с нормалью х Мкг — крутящий момент по площадке с нормалью г.
Перемещения
w — перемещения точек срединной плоскости при изгибе по направлению оси г;
13.1. ОБЩИЕ ТЕРМИНЫ, ОБОЗНАЧЕНИЯ
47
их. иг и т. д — перемещения точек срединной плоскости при плоском напряженном состоянии по направлению оси х, радиуса гит. д.;
ху ®у —угол поворота при изгибе волокна, направ¬
ленного вдоль оси х, у, г.
Упругие константы и характеристики жесткости
El9 Е2, G—модули упругости;
pi, ц,2 — коэффициенты Пуассона;
Я1 1 ji; Я-2 1 М' 3 -j- jli;
4 1 3fx; Л5 5 ji; Я6 5 — 3fi. J. (13.1)
X7 7-3i;
Dr-
Eth3
12 (1—и-i И2)
— жесткость плиты (tl, 2).
l 2Ш ;
ah0
F2 hb bh0
E;
li:
IxE
цЕ
V2 -ТГ-
(13.2)
где Fi и F2 — площади сечений ребер, параллельных осям х, У-
Модуль упругости при сдвиге эквивалентной пластины Gq вычисляется по формуле 6
G0(l kp)G. (13.3)
Коэффициент kp в (13.3) равен:
а) для ребер, расположенных симметрично относительно срединной плоскости пластины (см. рис. 13.3):
(а2 b2) sin 2а
kp —
б) для пластины:
2abh0 6С ребер, расположенных п
(а2 b2) sin 2а
kp —
2abfiQ (бс -f- 6И)
Значения бс и 6И в (13.4а) равны:
к 1.г(-т-4-
; (13.4)
одну сторону от
(13.4а)
и
ab
24(1ц)
Ъ
hz
(13.46)
13.1.2. Определение упругих характеристик конструктивно ортотропных пластин
Пластины, усиленные часто поставленными ребрами, а также решетки, состоящие из перекрестных балок, жестко сопряженных между собой, часто заменяют при
определении усилий и перемещений эквивалентной орготропной пластиной. Ниже приводятся формулы, по которым можно определить упругие характеристики эквивалентной пластины.
Предполагается, что рассматриваемая конструкция выполнена из изотропного материала, характеризуемого константами Е, ц, G. Обозначим толщину эквивалентной ортотропной пластины h0. Она может быть задана произвольно сообразно с удобством расчета.
Следует иметь в виду, что замена действительной конструкции эквивалентной пластиной неизбежно связана с неточностями при определении усилий и деформаций в основной конструкции. Эти неточности резко возрастают по мере увеличения расстояний между ребрами.
Для пластины, снабженной рядом перекрестных ребер (рис. 13.3), модули упругости и коэффициенты Пуассона эквивалентной пластины можно определять по формулам
Здесь 12 и I2z — моменты инерции сечений ребер, параллельных осям х, у относительно центральных осей, перпендикулярных плоскости х, у.
Если конструкция состоит только из перекрестных балок, то в (13.2) следует положить 1 0, а (13.3) заменить на
G0 kpG. (13.4в)
Если пластина усилена ребрами в одном направлении, то в (13.2) следует положить либо Fu либо F2 равными нулю, а в (13.3) принять kv 0.
Жесткости плиты при изгибе D и D2 можно определять по формулам
D 12(1 -
Eh3
Ц2)
EU
(13.5)
12(1—р) b
Здесь 1у и 2 —осевые моменты инерции сечений ребер, параллельных осям х и у относительно центральных осей, параллельных осям х, у.
Коэффициенты Пуассона можно либо принять равными нулю, либо определять по (13.2).
Жесткость при кручении для эквивалентной плиты D вычисляем по
формуле 6. Gh3
DZ
аЬ
где
61
д2 Л У (til 2К ы 1к)
Ы2К (Я2 1у -Ь2 12х)
(13.5а)
(13.56)
Здесь,к и I, раллельных осям х и у при кручении, а 1у и 72 — осевые моменты инерции тех же ребер относительно цент ральных осей, параллельных осям х, у.
моменты инерций сечений ребер, па-
у
13.1.3. Связь между усилиями и напряжениями
а) Задача изгиба (г — расстояние точки от срединной плоскости)
ох
12 гМх №
2гМу
№
о;
(13.6)
48
РАЗДЕЛ 13 УПРУГИЕ ТОНКИЕ ПЛАСТИНЫ (ПЛИТЫ И БАЛКИ СТЕНКИ)
t — хХ2 —
30
2h
б) Плоское напряженное состояние
(13.6)
ffx
h ’
h
.-Л.
II
1
h
h
0;
(13.6а)
10
Ров м Р_ 2 D ’ “ 10 Ро '
му Ро a2; vx ш от.
Vy Фо а-
(13.7)
Здесь ро — максимальная интенсивность распределенной нагрузки;
X
_ п
Кромка, свободно опертая на жесткую опору Жестко защемленная кромка
Кромка, сбободная от усилий
4 9
-7 —
fZ
1
u
О
4 5 2
s
3
7
(X от хт для уточнения значений изгибающих моментов можно применять приближенную формулу:
1 13-8)
Af1
1-15
Для полярной системы координат индексы х, у, заменяются на г и 0.
13.2. ПРЯМОУГОЛЬНЫЕ ПЛАСТИНЫ 13.2.1. Прямоугольные изотропные плиты
Для расчета прямоугольных изотропных плит, опертых одним из указанных на рис. 13.4 способов, можно использовать следующие формулы:
где М2 МУу если М — Мх и М2 МХ, если М — Му;
МТ — значение момента, определенное с помощью таблицы.
При необходимости рассчитать плиту на нагрузку, линейно зависящую от указанных в таблицах, следует использовать принцип суперпозиции.
Нагрузка, равномерно распределенная по всей площади плиты
Коэффициенты а, р, у находятся по табл. 13.1, а коэффициенты фik и ifift (здесь k — номер схемы на
рис. 13.4) — по графикам рис. 13.5.
Пример 13.1. Определить стрелу прогиба и усилия в плите, представленной на схеме 7 рис. 13.4 при следующих данных: а 1,8 м;
Ь 3 м; р 1 TJm2; и 0,15.
Для — о
1,8
0,6 по
шб 5
104
ра4
Б
М х — —- ра2 103
103
ра2
__38 104 15 Ю3 45
табл. 13.1 находим а538; р5 15; Ys45; р, -77;
V4 — Ю2.
По формулам (13.7) находим прогиб и изгибающие моменты в центре плиты:
1 1,84107 4-105 см;
D D
1-1,82 0,049 Т-мм;
103
1-1,8а 0,146 Т-мм.
(а)
Рис. 13.4
а — аг, Р Р; YYФФ; — коэффициенты,
используемые при определении значения прогибов или усилий в указанной на схеме А (рис. 13.4) точке i; ааP Pj, у—уа — коэффициенты, используемые при определении максимального из значений, которые принимает прогиб или усилие на отрезке прямой с концами в указанных на рис. 13.4 точках i и.
Все перечисленные коэффициенты определяются по приведенным ниже таблицам или графикам. Таблицы коэффициентов а, р, у составлены при фиксированных значениях При значительном отличии заданных
H0,06Sqa
I А №2Ца
Рис. 13.6
Здесь 107 — переходный множитель, связанный с переходом Г м2 в кГсм2.
13.2. ПРЯМОУГОЛЬНЫЕ ПЛАСТИНЫ
49
Таблица 13.1 10
Значения а, 3 V Для определения w, Мх, Му при равномерно распределенной нагрузке ( 10,15)
Аналогично вычисляем изгибающие моменты в точке 1:
Схема 1
Зь Ye
Схема 2
а 3 Ye —Y
Схема 3
I Р. I V, I -0
0,5
101
17
96
49
6
58
121
93
20
88
122
0,6
8(5
24
82
45
10
54
116
75
27
71
117
0,7
73
30
68
41
15
49
109
59
31
5
110
0,8
60
33
56
37
19
43
101
46
32
42
102
0,9
50
35
46
32
22
37
92
36
32
32
93
1,0
41
37
37
28
24
32
85
28
32
24
85
0,5
0,6
0,7
0,8
0,9
1,0
Схема 4
ав 3s Vs —V2
26
25
24
23
21
19
Схема о
a 3fi V -Pi а5 35 Y j—3a—V
Схема 7
a6 36 Y5 —3iY4
0,6
0,7
0,8
0,9
1,0
Схема 6
Схема 8
a5 3s Ye Зз —Y 2
7
56
78
13
50
78
17
43
77
20
36
75
23
29
71
23
23
67
Схема 9
ae I 3e Ye 3t Y2
а
Схема 10
Схема
13
Ь
5 1
1 р 1
Ye
a,
1 v.
a
k 1
1 Ve
-3,
U
at
Vi
-Y
0,5
35
16
32
62
58
9
2
12
50
34
18
27
71
0,6
45
18
41
77
72
11
4
17
53
42
22
33
80
0,7
54
20
50
89
85
14
6
21
54
49
25
38
84
0,8
62
21
58
97
92
16
8
24
55
56
26
41
85
0,9
71
20
67
108
104
18
9
26
56
62
27
43
85
1,0
78
20
74
116
111
19
8
28
55
66
28
44
85
1,2
89
18
86
125
120
22
8
32
56
73
28
44
85
1,5
102
14
97
132
126
24
5
36
56
79
28
45
85
2,0
114
9
110
137
132
25
3
40
56
83
29
45
84
Схема 11
0,5
0,6
0,7
0,8
0,9
,0
,2
,5
2,0
13
21
30
39
47
55
69
86
105
Y6 j —3
77
90
101
109
115
118
121
123
125
32
48
64
78
90
100
115
128
136
Схема 12
a-, I 3e Vs —V2 at 3i
-Ver
85
85
85
85
85
85
85
84
84
Изгибающие моменты в точке 4 (схема А рис. 13.4):
м—
102
Ы,82 —0,325 Т-мм-,
Ю3 V (б)
Мх х,Му — 0,049 Т'мм.
мх pa -1-1,8_0,250 Т-мм; Му — iMx — 0,037 Т'Мм.
(в)
На рис. 13.6 приведены эпюры для задачи об изгибе свободно опертой квадратной плиты равномерно распределенной нагрузкой 23.
Нагрузка, распределенная по гидростатическомузакону
Прогибы и усилия находим по формулам (13.7). Значения коэффициентов приведены в табл. 13.2 и 13.3 для схем нагрузок, представленных на рис. 13.7. Коэффициен¬
ты ф и г) для некоторых схем можно определить по графикам на рис. 13.8 (коэффициенты ф и -ф для нагрузок по схеме рис. 13.7, а; ф и г) для нагрузок по схеме
рис. 13.7, б, где р-
Ро
(‘-т)
Таблица 13.2 10
Значения а, 3 V в (13.7) для нагрузки, изображенной на рис. 13.7, а (fJL —0,15)
a
Схема 1
Схема 9
b
е
3e
Ye
к
V4
5
1 e.i
1 V.
З24
V24
l-Y.I
1 Yi
-3i
Pee
0,5
51
9
48
12
50
12
2
20
5
20
49
32
28
29
0,6
43
12
41
14
44
12
4
18
5
18
47
31,
28
30
0,8
30
17
28
17
31
9
7
14
7
14
41
24
28
29
1,0
20
18
18
18
09
6
9
9
9
10
33
18
26
27
a
Схема 2
Схема
7
b
e
3e
Te
Э24
T24
—V4
P.
Te
З24
К
T24
-3.
Зв9
0,5
22
3
27
5
27
65
20
4
25
6
61
25
36
36
0,6
20
5
26
7
26
63
17
7
22
7
56
22
36
36
0,8
17
8
21
9
21
56
12
10
14
10
44
14
33
33
1,0
13
11
16
11
16
50
7
11
9
11
34
10
32
31
a
Схема 4
Схема
О
b
e
3.
Ye
З24
Y 24 1
h.
-T.I
a
3e
Тб
З24
v,
-P.I
3eo
0,5
13
1
21
4
21
51
34
42
12
40
12
42
61
61
0,6
13
2
20
5
20
50
33
32
14
30
14
33
55
56
0,8
11
5
18
7
18
47
31
18
16
16
16
20
45
48
1.0
10
8
14
8
15
43
26
10
14
8
14
13
35
38
50
РАЗДЕЛ 13. УПРУГИЕ ТОНКИЕ ПЛАСТИНЫ (ПЛИТЫ И БАЛКИ-СТЕНКИ)
Таблица 13.3 flO
Значения хБ, 06, 76 в (13.7) для нагрузки, изображенной на рис. 13.7, 6 (Л0,15)
Нагрузка, распределенная равномерно по части площади плиты
В табл. 13.4 и 13.5 приведены значения Р и у для определения изгибающих моментов от нагрузки, распределенной равномерно с интенсивностью р по заштрихованной площади (рис. 13.9). Моменты при этом определяются по формулам (13.7) с заменой в них ра2 на равнодействующую приложенной к плите нагрузки. Это дает возможность использовать табл. 13.4 и 13.5 в частных случаях — при ai0 или i0, т. е. при нагрузке, распределенной вдоль линии у а2 или хЬ2.
T а б л и ц а 13.4 51
Значения 35, Ys в (13.7) для плиты, опертой по всему контуру (схема 1, рис. 13,4) и нагруженной по рис. 13,9 при Ы 0
b_
bi__
0
б при
aja
Ys
при
aja
a
a
0
0,2
0,4
0,6
0,8
1,0
0
0,2
0,4
0,6
0,8
1
0
256
196
160
133
110
175
121
93
72
59
0,2
175
165
144
123
104
88
256
165
117
90
72
58
0,4
121
117
109
96
83
69
196
144
109
84
67
55
1,0
0,6
93
90
84
76
67
56
160
123
96
76
61
50
0,8
72
72
67
61
54
44
133
104
83
67
54
43
1,0
59
58
55
50
43
37
110
88
69
56
44
37
0
238
184
147
122
101
204
153
119
98
80
0,2
160
150
131
111
96
79
234
194
147
119
96
79
1,4
0,4
79
78
72
65
57
48
195
158
130
107
88
72
0,6
49
48
46
42
36
31
147
125
104
88
74
61
0,8
40
39
37
34
30
26
129
110
93
79
66
54
1,0
34
33
32
30
20
22
113
96
82
68
57
47
0
228
175
139
115
95
221
. 168
133
110
90
0,2
98
94
87
76
65
55
246
193
155
127
105
87
2,0
0,4
51
49
47
42
37
30
188
159
134
114
95
79
0,6
28
28
27
25
21
18
153
133
114
98
83
69
0,8
19
18
17
15
14
11
125
110
96
82
70
59
1,0
14
14
13
12
11
9
103
90
79
69
58
48
T а б л и ц а 13.5 5
Значения 05, Vs в (13.7) для плиты по схеме 4 (рис. 13.4) с нагрузкой по рис. 13.9 при 0
b_
Oi_
36 при bjb
Ye при bjb
—y2 при bjb
a
b
0
0,2
0,6
1,0
0
0,2
0,6
1,0
0
0,2
0,б
I1-0
0
210
123
83
231
143
97
85
83
72
54
0,4
233
182
117
79
101
98
80
58
86
85
74
55
0,5
1,2
139
119
87
60
33
32
28
21
101
99
85
63
2,0
90
78
57
40
18
18
16
12
120
108
84
60
0
172
91
60
240
149
102
140
138
119
88
0,4
196
143
84
57
110
107
87
61
142
139
119
88
0,7
0,8
136
108
69
46
63
62
53
38
146
142
120
87
1,4
85
68
46
30
36
36
30
22
150
133
101
71
b_
36 при aja
V5 при aja
-V2 при aja
a
a
0
0,2
0,6
1,0
0
0,2
0,6
.0
1
,2
0,6
1,0
0
129
55
32
239
144
98
166
162
136
98
1,0
0,4
211
121
52
30
177
148
108
77
166
162
135
97
1,2
117
81
39
24
77
75
62
45
165
159
126
90
2,0
75
53
25
16
47
46
39
28
163
140
101
70
0
197
109
70
161
80
49
169
169
167
164
1,4
0,4
68
67
49
32
186
132
74
47
156
155
148
121
1,2
28
27
20
13
129
100
62
38
127
126
115
89
2,0
10
10
7
5
83
66
42
27
86
85
76
58
0
196
109
61
161
79
51
168
168
167
164
0,4
68
64
48
32
185
134
73
46
155
154
147
121
2,0
1,2
10
8
6
4
97
79
51
. 32
99
98
88
67
2,0
1
1
1
1
63
51
32
20
63
62
56
42
Нагрузка в виде трехгранной призмы
В табл. 13.6 даны значения as. ps, Ys для определения по формулам (13.7) прогибов и изгибающих моментов в центре опертой по контуру плиты под нагрузкой, показанной на рис. 13.10. Коэффициенты ф и в (13.7)
Схема 1
ав 0б 7б 013 YtS
Схема 9
a 05 Уь Pis V —08 —0i —V2 —‘Vfl7
Схема 3
Схема
оь 06 Ye J 01 Via 0з
0,5
0,6 0,8 1,0
a8 06 Vs 018 Vis —0:
03 V2I Ve7
Схема 4
Схема 5
06 Уь 018 I Yl3 У2 V7
06 J 06 I Ye 013 Yl3 01 0:
0,5
0,6 0,8 1,0
a
Схема
10
Схема 11
b
a6
06
Ys
at
Yi
a8
06
Y6
-03
at
Yi
0,5
13
9
11
20
19
4
2
3
29
9
8
0,6
17
11
15
24
23
7
4
6
36
13
12
0,8
24
13
22
31
30
13
8
12
48
21
20
1,0
31
13
29
34
33
20
11
18
57
26
25
1,2
37
13
35
34
33
27
12
25
65
30
29
1,5
45
11
42
32
31
36
12
34
75
30
29
2,0
53
7
51
28
28
47
9
45
85
27
27
b_
Схема
12
Схема 13
a
a6 05
Y6
—V2
a,j
1 V,
U
a61
0s
V6
-V2
-p.
a,
p. 1
Ye
0,5
6
8
8
24
8
12
24
3
2
4
12
23
4
7
24
0,6
7
8
10
25
8
12
20
4
3
5
17
26
6
8
17
0,8
9
8
13
33
7
11
16
7
6
9
23
29
6
10
15
1,0
11
6
16
36
6
10
11
8
7
12
30
34
5
10
12
1,2
11
5
18
40
5
8
9
10
7
14
35
38
5
8
10
1,5
12
20
41
4
6
7
12
4
16
38
41
4
6
7
2,0
12
1
21
42
2
4
5
12
2
19
41
45
2
4
5
13.2. ПРЯМОУГОЛЬНЫЕ ПЛАСТИНЫ
51
гтпТПтггг
Xi
Ро
5
1
i
4
2
3
-—С
г—
Рис. 13.9
Рис. 13.10
Т а б л и ц а 13.6 51
Значения аб, Эе Vs в (13.7) для плиты, свободно опертой по контуру, с нагрузкой в виде трехгранной призмы (М0)
Нагрузка
Ь
а
По схеме а на рис. 13.10
По схеме б на рис. 13.10
а
Зб
Vs
а5
Рб
V
1,0
26
24
27
26
27
24
1,2
36
22
37
37
27
34
1,4
46
19
46
46
25
43
1,6
53
16
54
55
23
52
1,8
60
14
60
62
22
59
2,0
65
11
65
65
20
65
3,0
78
4
78
78
12
89
для определения приведенных поперечных сил можно находить по графикам на рис. 13. И (коэффициенты ср и фг для нагрузки по схеме а, а ср и -фг для нагрузки по схеме б на рис. 13.10; i — номер точки на рис. 13.10).
Нагрузка, распределенная вдоль прямой линии
Если нагрузка распределена равномерно вдоль прямой линии у а2 или х Ь2 (рис. 13.4), то при опорных закреплениях по схемам 1 и 4 на рис. 13.4 можно определять изгибающие моменты по табл. 13.4 и 13.5. Прогибы в центре плиты от подобной нагрузки, действующей на плиту, свободно опертую по периметру, можно определять по первой формуле (13.7), заменив в ней произведение р0а2 равнодействующей нагрузки, приложенной к плите.
Т а б л и ц а 13.7 231
Значения аь в (13.7) для плиты, свободно опертой по контуру и равномерно загруженной по линии хЬ2 или уа2
Ь
По линии х ЬЧ
По линии у — а2
а
1.0
1,2
1,5
2,0
1,0
1,2
1,5
2,0
а 5
67,4
95,3
125,1
162,9
67,4
79,9
91,1
98,7
Нагрузка в виде силы, приложенной в центре плиты
Если положить, что сила Р распределена по площади малого круга радиуса с с центром в точке 5 (рис. 13.4)
схема Л), то прогибы и усилия можно определять по формулам (13.7) с заменой в них ?0а2 на Р.
Коэффициенты (Зб и ys для плиты, опертой по контуру, определяем по формулам 23:
103 fMn
р5 '
Ys
4я 103 4 я
Х2 In
2 с л
1 — ;
л с 2” с Ц 2 ) ПС (13.9)
Т а б л и ц а 13.8 231
Значения а6 и у2 в (13.7), а также 6, и б2 в (13.9) для нагрузки в виде силы Р в центре плиты
Ь
а
Плита, опертая по (схема 1 на рис
1 контуру. 13.4)
Плита с жестко защемленным контуром (схема 9 на рис. 13.4)
as
1
62
5
I —V2
1,0
116
0,565
0,135
56
126
1,2
135
0,350
0,115
65
149
1,4
148
0,211
0,085
69
160
1,6
157
0,125
0,057
71
165
1,8
162
0,073
0,037
72
167
2,0
165
0,042
0,023
72
167
оо
169
0
0
Значения 6162 и as для рассматриваемой плиты приведены в табл. 13.8. В ней же приведены значения as и Y2 для плиты с жестко защемленным контуром, загруженной силой Р в центре.
На рис. 13.12 приведены эпюры некоторых усилий для квадратной плиты со свободно опертым контуром, загруженной силой в центре 23. Из эпюр следует, что если углы плиты не могут перемещаться, то там возникают не только сосредоточенные силовые реакции У, но и реактивные моменты.
Квадратная плитана упругих опорах под равномерно распределенной нагрузкой
Прогибы и изгибающие моменты находим по формулам (13.7). Значения а, 3 и у приведены в табл. 13.9 для следующих плит (схема А рис. 13.4):
1) плита, у которой кромки х0 и хЬ оперты на упругие балки а остальные кромки — на жесткие опоры (плита а); -
52
РАЗДЕЛ 13. УПРУГИЕ ТОНКИЕ ПЛАСТИНЫ (ПЛИТЫ И БАЛКИ-СТЕНКИ)
Т а б л и ц а 13.9 5
Значения а, 3, у в (13.7) для плит, опертых полностью или частично на упругие балки (Х0,25)
Е1
Плита а
Плита 6
aD
а5
ОС,
Э. 1
Vs
а 5
1
Ps V5
1 fll V2
ОО
41
0
46
46
41
0
46
0
100
41
0
46
46
41
0,3
46
0
50
41
0,4
46
46
42
0,7
46
0
25
42
1,4
47
46
43
1,7
47
0,2
10
43
4,2
48
45
47
4,4
48
2,4
5
46
8,6
50
45
52
9,9
49
6,5
4
48
10
52
44
55
11
50
8,5
3
50
14
53
44
59
15
52
12
2
53
20
57
41
67
21
54
18
1
63
36
65
39
87
38
60
33
0,5
76
58
77
37
117
62
69
56
0
130
144
123
23
257
175
111
153
2) плита, у которой все кромки оперты на упругие балки (плита б).
Принято, что все опорные балки имеют одинаковую жесткость 7.
При 1 0 по табл. 13.9 можно рассчитать плиту, опертую только в вершинах (плита б), и плиту, свободно опертую по двум кромкам, при условии, что две другие кромки свободны от усилий (плита а).
Определение сосредоточенных реактивных сил в углах плиты, свободно опертой по периметру
Если углы плиты, свободно опертой по периметру, не могут перемещаться в направлении оси z (см. рис. 13.1), то у вершин возникают реактивные сосредоточенные силы
Н -
б,
ю3
'Ро в2,
(13.10)
где б,- следует брать в зависимости от нагрузки из табл. 13.10 (i — номер точки на схеме А рис. 13.4).
Реактивные силы в вершинах плиты вызывают появление у вершин распределенных изгибающих моментов. Максимальное значение этих моментов по единичной площадке, наклоненной к сторонам плиты под углом 45 , равно:
Ц
М0 —. (13.11)
13.2.2. Ребристые плиты
На рис. 13.13 представлены следующие ребристые плиты:
а) прямоугольная плита, свободно опертая по трем кромкам и снабженная ребром по четвертой кромке; нагрузка равномерно распределенная;
Q) р0
шШ.
т.и
Т
оин
— ь -7
.J
3:
Г 2
да
А
Рис. 13.13
Т а б л и ц а 13.11 18 Значения Р, -ув (13.7) для плиты а по рис. 13.13 (М- 0,18)
Hh
4
5
6
ba
Pi
-P2
V.
ъ
0t
j З2
Vi
1 V2
3i
З2 '
1 Vi
1 v2
0,6
28
8
18
11
26
16
14
4,4
24
24
12
0,5
0,7
32
13
23
12
30
24
19
4,2
29
32
17
—0,3
0,8
35
18
30
13
34
30
26
3,4
33
40
23
—1,1
Таблица 13.10 23 Значения б. в (13.10) для разных нагрузок
Нагрузка
Ьа
1,0 I
1 1.2
1,4
1,6
1,8
2,0
Равномерно распределенная
67
65
74
83
86
90
92
Г идростатическая
2
26
31
35
37
38
40
(рис. 13.7,6)
39
43
18
49
52
52
Г идростатическая
Ь
26
27
30
27
27
26
(рис. 13.7,а)
39
47
53
59
63
66
Сосредоточенная сила Р в центре плиты
67
122
116
103
88
74
60
Для сосредоточенной силы в центре плиты следует
(13.10) заменить р0а2 на Р.
Ро'-
.РЙшпд,
Рис. 13.14
б) прямоугольная полоса, свободно опертая по краям, параллельным оси х, снабженная рядом ребер, расположенных на равных расстояниях друг от друга; нагрузка показана на рис. 13.13,6.
Изгибающие моменты для точек, показанных на рис. 13.13, определяются по формулам (13.7). Значения р и у приведены в табл. 13.11 и 13.12.
13.2. ПРЯМОУГОЛЬНЫЕ ПЛАСТИНЫ
53
Таблица 13.12 18
Значения 3 и у в (13.7) для плиты а по рис. 13.13 б (Ы0,18)
Hk
ь
3
4
1
5
1
6
а
i
У
i
1 2
1 3
1
1.
2
3 1
1 1
1 '
1 1
1 3 1
1 4
0,6
h
21
— 15
—5,6
—5,0
19
—19
—5,4
—3,9
18,1
—22
—4,4
—3,0
Vi
19
9,3
11
8,3
13
3,5
5,7
4,0
9,9
0,3
3,3
2,0
0,7
1
25
— 19
—7,2
-5,5
24
—25
-6,9
—4,2
22
—30
-5,6
—3,1
vt
24
10
12
8,2
18
3,3
6,4
3,8
13,7
—0,3
3,7
1,9
0,8
29
-24
—8,7
—5,7
27
—32
—8,4
—4,3
26
—37
—6,8
—3,1
Vi
30
10
13
7,8
23
3,1
7,0
3,4
18,5
—1,0
4,0
1,5
Т а б л и ц а 13.13 3
Значения kjB (13.12)—(13.15)
О
0,25
0,50
0,75
1.0
0 0,ю 0,2б 0,50 0,75 1,0 0 о,Ю 0,25 0,50 0,75 1,0
130
130
130
130
126
130
130
130
117
96
130
130
121
94
66
37
37
37
72
128
93
102
120
197
262
185
194
252
341
378
278
281
357
434
438
375
384
464
504
479
О
0,25
0,50
0,75
1,0
О 0,10 0,2б 0,50 0,75 1,0 0 0, ю 0,25 0,50 0,75 1,0
313
318
322
313
283
625
623
600
508
389
940
930
820
626
440
1250
1235
1017
713
479
125
125
125
125
117
125
124
115
88
61
125
123
105
73
45
Для плиты, свободно опертой по контуру и усиленной рядом часто поставленных ребер (рис. 13.14) при равномерно распределенной нагрузке, можно определять прогиб в центре и изгибающие моменты по формулам 3: прогиб в центре
(А.
V ю
сЬ С
jT o.om —
)
изгибающие моменты в центре между ребрами
ir)w
Ми(-
104
Ь2-
с2 24
изгибающие моменты в центре у ребер
Мх( — Ь2 — —) р0;
10 12 ) 0
Му(
наибольший изгибающий момент в ребре
М„
А.
103
РоЬ2-
(13.14)
(13.15)
Здесь с — расстояние между ребрами; — момент инерции сечения ребра; — коэффициенты, зависящие от параметра
6—, (13.16)
определяются из табл. 13.13.
13.2.3. Многопролетные плиты
Бесконечная плита, опертая в узлах прямоугольной сетки 3 (рис. 13.15)
Под действием нагрузки, равномерно распределенной по всей поверхности такой плиты, в ней возникают прогибы и усилия, определяемые формулами (13.7) при
(13.12)
(13.13)
6)
2
7Л
p
-f
1
i
Ш
-
i
'A
54
РАЗДЕЛ 13. УПРУГИЕ ТОНКИЕ ПЛАСТИНЫ (ПЛИТЫ И БАЛКИ-СТЕНКИ)
Таблица 13.14 3
Значения а, 0 у в (13.7) для плиты по рис. 13.15 (Ц 0,30)
а
Ь
а1
а2
Pi
02
03
04
аа
1
аа
1
Vi
1
1
1
1
1
1
58
44
36
50
40
1
11
1
52
123
36
13
21
48
111
181
1,1
49
40
37
41
35
5,7
51
114
29
19
26
48
107
173
1,2
43
38
38
35
28
4,8
49
106
24
24
31
54
106
167
1,3
39
36
39
30
24
2,4
47
100
21
28
35
56
104
159
1,4
36
35
39
26
21
—0,4
45
95
19
32
38
58
103
153
1,5
34
33
39
23
17
— 1,5
44
90
17
36
41
60
102
149
2
30
29
41
11
5,5
—6,7
39
74
13
48
50
66
97
132
ОО
1
26
26
42
—25
—25
—25
25
25
13
83
83
83
83
83
а -у(4158)
50-0,8-ЗМ07
а 10" 3,24-10е
Ро с D
- см.
D-104 D
Здесь 107—переходный коэффициент от Т-м2 к кГ-см2.
Квадратная плита, опертая по контуру и поддерживаемая колоннами (рис. 13.16)
Для плиты, опирающейся на четыре колонны и по периметру на жесткие опоры, можно определять изгибаю-
Таблица 13.15 23
Значения 3, у в (13.7) для плиты по рис. 13.16
(с0,25 а; М, 0,2)
значениях а аР Рг, У Уг ( — номер точек на рис. 13.15, а) по табл. 13.14.
При размещении равномерной нагрузки не по всей плите, а лишь на некоторых панелях, наиневыгоднейшей является загрузка в шахматном порядке (например, загрузка панелей, заштрихованных на рис. 13.15,6). При такой загрузке напряженно деформированное состояние любой панели может быть определено суммой двух состояний: первого, возникающего при загружении всей плиты равномерной нагрузкой интенсивности 12 ?0, и второго, возникающего при нагрузке, показанной на рис. 13.15,6 (заштрихованные и незаштрихованные панели загружены нагрузкой одинаковой интенсивности Г2 роу но разного знака). При втором загружении каждую панель можно рассматривать как свободно опертую по контуру, и, следовательно, определять в ней усилия и прогибы с помощью табл 13.1 (схема 1). Иначе говоря, максимальные прогибы и усилия в панели при шахматном расположении нагрузки можно определять по
(13.7), полагая а, Р, у равными среднему арифметическому значений, определенных по табл. 13.1 (схема 1) и табл. 13.14.
Пример 13.2. Определить максимальный прогиб в центре квадратной панели безбалочного перекрытия при а
— 3 м, р0 — 0,8 Тм2. По табл. 13.1 (схема 1) и 13.14 и формулам (13.7) находим
Нагрузка
i
У
1
1 2
1 з
1 4
5
1 6
7
1 8
1 9
По схеме рис. 13. 16, а
1
Э
21
-40
69
38
—140
74
25
—4
53
L
V
21
38
25
—40
-140
-4
69
74
53
По схеме
0
—48
—20
93
—36
—70
92
—28
—2
66
рис. 13. 16, б
. V,
—4
19
27
—36
—70
14
17
37
44
По схеме рис. 13. 16, в
h
V
69
—20
—24
74
—70
—18
52
—2
—13
25
19
—2
—4
—70
— 18
52
37
9
I
-а—
Рис. 13.17
щие моменты по формулам (13.7). В табл. 13.15 приведены значения р, у для равномерно распределенной нагрузки по заштрихованным областям плиты на рис.
13,16, ау бу в (i — номера точек по рис. 13.16, а).
Приближенный способ расчета неразрезных плит 23
Если неразрезная плита состоит из панелей примерно одинаковых размеров и одинаковой жесткости, то приближенно максимальные значения опорных моментов
можно определить следующим образом. Каждая панель рассчитывается как
изолированная плита, защемленная по линиям сопряжения с соседними панелями (остальные кромки закреплены заданным спо¬
собом). За действительные значения моментоз в опорных сечениях неразрезной плиты принимаются среднеарифметические значения, найденные из расчета смежных панелей.
Пример 13.3. Определить расчетные моменты на опорах плиты (рис. 13.17), загруженной по заштрихованной области равномерно распределенной нагрузкой. По внешнему периметру плита свободно оперта.
Так как пролеты панелей одинаковы, то достаточно вычислить осредненные значения коэффициентов Р из
(13.7) в опорных сечениях 1—1 и 2—2, показанных на рис. 13.17. В сечении 1—1 от нагрузки левой панели находим по схеме 3 табл. 13.1 значение Р' —85. В сечениях 1—1 и 2—2 от нагрузки средней панели получим по схеме 5 табл. 13.1 значение р" —70.
Для расчета принимаем для кромки 1—1
Pi- (85 70) — 78. ( а)
По аналогии для кромки 2—2
Р2—J (70 0) -35. (б)
Точные значения этих величин 5 равны:
Р, — 80,4; Р2 — 33,9. (в)
13.2. ПРЯМОУГОЛЬНЫЕ ПЛАСТИНЫ
55
13.2.4. Плиты на упругом основании 26
Ниже приводятся таблицы для расчета плит бесконечных размеров в одном и двух направлениях, лежащих на упругом основании и загруженных сосредоточенными силами Р.
Предполагается, что интенсивность реакции основания р определяется по формуле (гипотеза Винклера)
р to, (13.17)
где k — модуль основания или коэффициент постели (см. 16, 26 и разделы 5, 19).
ц——I I 1 I
1 и S
Рис. 13.18
Ж
-уа jj,(Ч1 г Рис. 13.19
Ау 8
Ч ЬЛ - Т
I I
— Ц—
J—
з
20Рис. 13.20
на рис. 13.20 — 21 0,2 b i40,2a; i50,6a.
Пример 17.4. Определить прогибы и усилия в точках 11 и 1 для плиты на упругом основании, загруженной колоннами, расположенными в вершинах квадратной сетки (см. рис. 13.19).
Дано. Расстояние между колоннами 2а 500 см. Вылет консольной части плиты 125 см. Толщина плиты h60 см. Нагрузка на средние колонны Р 240 Г; нагрузка на крайние колонны Pi 160 Т. Модуль упругости плиты 2,1-105 кГсм2. Коэффициент постели грунта k 2 кгсм3.
Жесткость плиты (ш0):
Eh3 2,1 10б 603
D -тт- 37,8 108 кГ-см.
12 12
Определяем параметр т по (13.18)
4 Г 4
250
т,о‘Ег250 У
37,8-Ю8
1,2.
(а)
(б)
Таблица 13.16 26
Значения а, 3, v в (13.7) для центрального поля бесконечной плиты при одинаковой нагрузке от всех опирающихся на нее колонн (рис. 13.18) (Ц 0)
10 а.
1
1
103 3
1
103 Vi
Л
i
1
1 2
3
6
1
2
3
6
2
3
0,8
625
623
609
603
—189
—116
—29
29
—45
57
1,2
135
133
119
113
—188
—115
—29
27
—44
56
1.6
52
50
36
31
—186
—113
—27
25
—42
53
2,0
29
26
14
9
—182
—108
—23
21
—39
49
2,4
20
17
6
2,2
—174
—101
—19
17
—33
43
Расчетные величины определяются по формулам (13.7) с заменой р0а2 на Р.
Значения а, р и у даны в зависимости от параметра
П аГ0’ (13Л8)
где а — величина, определяющая расстояние между силами Р.
Рассматриваются следующие расчетные схемы:
а) бесконечная плита, загруженная равными силами Р, расположенными в вершинах прямоугольной сетки (рис. 13,18);
б) полубесконечная плита, загруженная равными силами Р, расположенными в вершинах прямоугольной сетки (рис. 13.19);
в) полубесконечная плита, загруженная равными силами Р, расположенными с шагом 2а вдоль оси х (рис. 13.19);
г) плита в виде бесконечной полосы, загруженная рядом равных сил Р, расположенных по оси симметрии полосы (рис. 13.20).
Для определения моментов и прогибов в точках, указанных на рис. 13.18—13.20, по формулам (в) на стр. 57 следует пользоваться значениями коэффициентов а, р, у, приведенными в табл. 13.16—13.19 (эти значения вычислены при И'0). При этом следует иметь в виду, что расстояния между точками i и (j), приведенными на рис. 13.18—13.20, приняты равными:
на рис. 13.18 — i2i40,2 а;
на рис. 13.19 — 34497678—0,2а; 420,2 ;
Таблица 13.17 26
Значения а,3, vb (13.7) для крайних полей и консольной части полубесконечной плиты при одинаковой нагрузке от всех опирающихся на нее колонн (рис. 13.19) (Ц0)
f
а
103 at
H
i
4
1
1 3 1
5
7 1
10
ii 1
12
13
7
0,8
1.2
1.6
2,0
2,4
1189
309
128
68
41
1106
271
107
65
34
805
142
37
12
4,3
659
124
47
27
19
643
108
31
12
5,6
757
136
31
6,9
0,3
1018
247
83
33
14
1162
283
102
44
20
lh
0,8
1.2
1,6
2,0
2,4
945
221
81
38
20
867
194
72
37
23
706
128
36
13
5,4
641
130
50
28
20
625
114
35
14
5,8
700
122
31
8,5
1,8
848
175
54
20
7,5
930
205
67
25
8.7
7
0,8
1,2
1,6
2,0
2,4
730
150
46
17
7,1
711
154
59
32
21
649
124
37
14
5,8
637
135
52
29
20
620
119
36
14
5,9
643
119
32
10
2,3
693
137
42
16
6,8
721
139
38
10
1.4
1
0,8
1,2
1,6
2,0
2,4
543
90
21
4,6
0,3
614
136
55
31
21
618
124
38
14
5,9
638
138
53
29
20
622
122
37
14
5,9
619
119
33
10
2,4
597
120
39
16
6,9
538
85
17
1.1
—2,4
56
РАЗДЕЛ 13. УПРУГИЕ ТОНКИЕ ПЛАСТИНЫ (ПЛИТЫ И БАЛКИ-СТЕНКИ)
Продолжение табл. 13.17
103 р.
i
Q
п
1
2 1
1 з
4 I
1 5
1 е
1 7
1 8
9 1
1 ю
11
1 I2
1 13
0,8
182
201
198
135
32
106
149
46
80
-57
—35
—92
— 105
1.2
180
200
197
133
31
105
148
45
79
—56
—29
—90
— 103
7
1,6
176
196
193
130
29
103
146
43
76
—54
—27
—89
-99
2,0
167
188
185
123
25
98
141
40
70
—49
—23
—79
—91
2,4
155
176
174
ИЗ
20
91
134
34
61
—43
— 18
—69
—79
0,8
89
151
164
115
30
106
149
46
57
-57
—28
-69
—69
1,2
88
150
162
113
29
105
148
45
56
-57
-28
-68
—66
' и
1,6
84
147
159
110
27
102
146
43
53
—53
—25
-65
-63
2,0
78
141
158
105
24
98
141
40
49
-49
—22
-60
—57
2,4
68
131
144
97
20
91
134
34
42
—43
— 17
—52
—48
0,8
46
125
153
108
29
106
149
46
49
—59
—27
—60
—40
1,2
44
12?
152
107
28
105
148
45
48
—56
—26
—59
—39
1,6
42
120
149
105
26
102
146
43
46
—53
—24
—57
—36
2,0
38
116
144
100
23
98
141
40
42
—49
—21
-52
—32
2,4
31
107
137
93
18
91
134
34
36
—43
—16
-45
—25
0,8
24
106
150
106
29
106
149
46
46
—56
—27
—57
—22
1,2
23
105
149
105
28
105
148
45
46
—66
—26
-56
—21
1
1,6
21
103
146
103
26
102
146
43
44
-53
—25
—54
—20
2,7
18
96
141
98
23
98
141
39
40
—49
—21
-49
—18
2,4
14
92
135
91
18
91
134
34
34
—43
—16
—43
—13
Продолжение табл. 13.17
_
10'v.
i
а
л
2 I
з 1
4
5 1
6 1
1 7
1 8
1 9
1 10
1 11
1 2
0,8
75
144
61
— 185
—63
130
28
46
—68
-151
—27
1,2
78
147
50
— 137
1,4
195
82
50
—V
—104
—23
‘4
1.6
80
151
40
—101
30
218
122
53
21
—68
— 19
2,0
81
154
31
—74
37
222
119
56
25
—43
— 15
2,4
82
156
23
—54
34
215
113
59
21
—20
— 12
0,8
68
187
—8
—122
—10
179
76
86
—20
-91
—2
1,2
72
193
3
—92
25
214
111
92
15
—61
4
7
1.6
75
198
12
—71
37
223
120
96
25
—41
9
2,0
76
199
17
—57
38
221
119
98
24
—28
11
2.4
75
200
19
—45
33
214
112
98
20
— 19
13
0,8
72
227
37
—74
27
213
110
125
14
—44
31
1,2
72
228
40
—64
38
223
120
126
24
—35
аз
Vi
1,6
71
227
40
—57
40
224
123
125
26
—29
32
2,0
67
223
37
—51
37
220
115
121
24
—24
29
2,4
60
216
32
—44
32
214
111
114
19
— 18
23
0,8
80
261
74
—39
53
236
133
159
36
— 10
63
1,2
73
252
64
—49
43
227
125
150
28
-21
54
1
1,6
64
242
53
—53
40
224
121
139
26
—25
44
2,0
53
230
43
—50
37
220
118
128
23
—23
34
2,4
41
218
34
—44
32
213
111
116
20
— 18
24
Т а 6 л и ц а 13.18 26
Значения а, 3, у в (13.7) для крайних полей и консольной части полубескоиечной плиты при загрузке только крайнего ряда опирающихся на нее колонн (рис. 13.19)
f
a
103a,
i
1 3 5 7 10
11 12
13
lU
0,8
1,2
1,6
2.0
2.4
1201
338
139
71
42
1056
283
112
57
34
509
82
18
4,7
1,4
150 —3,6 —5 8 —2,3 —0,7
150 —3,8 —6,0 —2,5 — 1,1
505
79
15
2,0
—6,4
1032
259
71
35
14
1075
311
113
47
21
7.
0,8
1,2
1,6
2.0
2.4
1008
252
90
40
20
809
196
74
38
24
407
67
17
6,1
2,5
131
3,2 —2,2 — 1,2 —0,5
131
3,0
—2,4
—1,4
—0,6
404
64
15
3,7
—0,7
789
218
56
21
8,1
992
237
76
27
9
7
0,8
1.2
1.6
2.0
2,4
828
178
53
19
7.1
637
150
59
32
21
344
63
19
7,1
2,9
126
8,9
—0,3
—0,9
0,5
126
8,7
—0,5
—1,0
0,6
341
51
16
7,6
1,3
620
120
42
17
7,3
819
170
45
11
1,4
l
0,8
1,2
1,6
2,0
2,4
665
118
26
5,1
0,2
524
128
55
32
21
308
63
20
7,5
3,0
128
13
1,0
—0,8
—0,5
128
13
0,8
—0,9
—0,6
305
60
18
5,3
0,3
470
112
39
17
7,5
660
114
22
16
—2,5
Продолжение табл. 13.18
JL
a
i
Л
1 1
1 2
3I
4I
5I
7I
9I
10
1
12
13
0,8
181
200
197
132
18
1,2
79
— 1,2
— 17
—91
— 104
1,2
179
199
195
132
17
1,1
78
— 1,2
—16
—89
— 103
7
1,6
175
197
191
128
16
1,0
75
— 1,0
— 15
—85
—98
2,0
169
187
184
121
14
0,7
69
-0,7
— 13
—79
—93
2,4
155
176
173
112
11
0,4
61
—0,4
— 10
-68
-79
0,8
89
149
162
113
16
M
56
— 1.1
— 15
—68
—67
1,2
87
149
161
112
15
1,1
55
— 1.1
— 14
-67
—66
7
1,6
84
146
158
109
14
0,9
52
—0,9
— 13
-64
—63
2,0
78
140
152
104
12
0,6
48
—0,6
—11
—59
—57
2,4
68
131
144
96
10
0,3
41
—0,3
—9
—51
-48
0,8
45
124
152
106
15
1,1
48
— 1.1
— 14
—59
—40
1,2
44
123
151
105
14
1,0
47
— 1,0
— 13
—58
—39
74
1,6
42
120
148
103
13
0,9
45
—0,9
—12
—56
—36
2,0
37
115
144
99
12
0,6
41
—0,6
— 11
—51
—38
2,4
31
107
136
92
9
0,3
36
—0,3
—8
—45
—26
0,8
24
106
149
63
14
1,0
45
— 1,0
— 13
—56
—22
1,2
23
105
148
103
14
1,0
45
— 1.0
— 13
—55
—21
l
1,6
21
102
145
101
13
0,8
43
—0,8
— 12
—53
—20
2,0
18
98
141
97
11
0,6
39
—0,6
— 11
—49
— 17
2,4
14
92
134
91
9
0,3
34
—0,3
—8
—43
— 12
Продолжение табл. 13.18
f
a
iovz
T1
i
2
3 4
5
7 9 10
11 12
74
0,8
1,2
76
79
144 —62
149 —15
—206 — 129
—194 47 —192 —72 52 —70
— 187 —28
— 110 —22
13.2. ПРЯМОУГОЛЬНЫЕ ПЛАСТИНЫ
57
Продолжение табл. 13.18
f
10
а
1
Л
1 '
1
2
3
4
5
7 I
1 9
1 10 1
1 11 1
1 12
1,6
82
153
—34
—81
—23
56
—21
—62
— 18
V,
2,0
83
156
—25
—52
—5,5
58
—4,1
—34
—14
2,4
83
157
—20
—34
—3,1
60
—0,7
—17
—11
0,8
70
189
4
—141
—143
88
—141
—124
—2
1.2
77
200
14
—78
—51
98
—49
—62
—9
12
1.6
79
204
23
—48
— 18
103
— 17
—32
—14
2,0
79
204
25
—33
—6,3
102
—5,1
—18
—15
2,4
76
201
1
23
1
—24
—1.7
100
—0,9
— 11
—14
0,8
76
232
43
—88
— 106
130
—105
-73
35
1.2
81
241
57
—46
—40
138
—38
—31
44
3А
1,6
78
237
56
—32
—17
135
—16
-18
41
2.0
70
229
46
—27
—7,1
126
—5,9
— 13
34
2,4
61
218
36
—22
-2,7
116
—2,3
— 10
25
0,8
89
273
86
—47
—80
170
—78
—33
72
1,2
86
270
86
—27
—35
168
—33
— 13
64
1
1.6
72
255
71
—27
—17
152
-16
—13
56
2,0
57
237
53
—26
—7,4
134
—6,3
— 12
39
2,4
42
220
38
—22
—2,3
118
—1,4
—10
26
Продолжение табл. 13.19
ь
ю3
а
И
i
Ч
I
1 1
1 2
1 з
4 1
5 I
6
1 7
1 8
0,8
286
284
247
146
—85
— 163
— 163
— 162
1,2
283
181
243
143
—84
— 160
— 160
— 159
Ча
1,6
274
272
235
136
—81
— 152
— 152
—151
2,0
259
256
220
124
—76
— 137
— 137
—186
2,4
236
234
197
106
—69
— 115
— 115
— 114
0,8
181
167
97
69
—48
—86
—83
—75
1.2
180
165
95
69
—48
—85
—82
—74
V
1.6
175
161
90
65
-46
—79
—77
—70
2,0
168
153
83
60
—44
—73
—70
—62
2,4
155
141
72
50
—40
—60
—69
—51
0,8
157
128
47
52
—41
—64
—58
—41
1.2
156
126
46
51
—40
—63
—57
—40
3А
1.6
153
123
43
49
—39
-60
—54
—37
2,0
147
118
38
44
—38
—55
—49
—33
2,4
138
108
31
37
—35
-46
—41
—26
0,8
150
107
23
47
—38
—58
—46
—22
1.2
149
106
23
46
—38
—59
—45
—22
1
1.6
147
103
21
44
—37
—54
—42
—20
2.0
142
99
18
40
—36
—50
—39
-17
2.4
135
92
14
35
—34
—43
—32
—13
Таблица 13.19 26
Значения ос, 0f v в (13.7) для плиты в виде бесконечной полосы, загруженной равными силами по оси симметрии (рис. 13.20)
КРа
1
1
10V
а
л
i
1 I
1
з
5
6 I
1 7
1 8
1
2
1 4
5
6
1
0,8
2463
2462
2435
2422
2423
2423
142
69
51
6,1
1,9
1,7
1.2
504
502
476
464
464
464
142
69
51
6,1
1.9
1,7
У 4
1,6
173
172
146
135
135
135
142
69
51
6,1
1.9
1,7
2,0
82
80
56
46
46
46
142
69
51
6,1
1,9
1.6
2,4
47
46
25
16
16
16
142
69
51
6,1
1.8
1.6
0,8
1235
1227
1219
1212
1212
1210
199
75
98
29
20
15
1,2
255
248
239
233
233
231
197
73
97
29
20
15
'о
1,6
89
82
74
68
68
66
197
72
96
29
19
15
2,0
44
37
29
24
24
22
197
71
94
28
19
15
2,4
26
19
13
8,3
7,9
6,8
195
70
94
26
16
13
0,8
829
810
816
811
809
802
236
77
134
57
43
32
1,2
176
157
163
158
156
149
235
76
133
56
42
32
Vi
1,6
65
48
53
48
46
40
232
73
130
56
40
30
2,0
35
18
22
18
17
10
227
68
125
49
35
27
2,4
22
7.1
11
7,8
6,6
1.4
218
61
116
42
29
22
0,8
632
594
620
615
610
590
269
85
167
87
71
48
1.2
142
105
129
125
120
101
265
81
162
83
67
45
1
1.6
58
25
46
42
37
21
255
72
153
73
57
39
2,0
33
5,2
21
18
14
1.7
240
58
138
59
44
29
2,4
21
0,2
11
7,5
5,6
—2,5
220
42
118
41
2
19
Формулы для прогибов и усилий (13.7) принимают вид
W atP — di(P — Pi) (240 а, —
10s-2502
—80а) -у — 1,224 (За,- — ос,) см;
Mx hP-fi(P-P1) 8
80 (Зр,- — р,) Т- см,см; му ър — ъ (Р — Pi) 80 (Зу, — у,) Т-смсм.
Здесь а, р, у определяют из табл. 13.17, а а, Г, у — из табл. 13.18.
При fla12: для точки 11
w 1,224 (30,122 — 0,064) 0,4 см;
Мх —80(3-0,028 — 0,014) —5,6 Т-смсм; (г)
Му — 80 (3-0,061 — 0,062) —9,7 Т-смсм; I
для точки 1
1,224 (3-0,221 — 0,252) 0,56 см; 1
Мх 80(3-0,088 — 0,087) 14 Т-смсм; Му0. ) Д)
Давление плиты на основание:
рх kwu 2-0,4 0,8 кГсм2; р 20,56 1,1 кГсм2.
58
РАЗДЕЛ 13. УПРУГИЕ ТОНКИЕ ПЛАСТИНЫ (ПЛИТЫ И БАЛКИ-СТЕНКИ)
Т а б л и ц а 13.20 3
Значения а, 3, у в (13.19) для схем нагрузок по рис. 13.21 (i — номера точек на схеме Л, — номера точек на схеме В)
Схема 1: аЬ с0,075а
У
1
2
3
4
5
аУ
у
—43
1,2
—14
34
—21
83
0
100
142
Схема 2: а Ь- с0,а
i
1
2
3
4
5
6
7
11
12
13
14
a i 1
—49
—100
—21
—94
—15
—79
— 18 —50
— 12 —30
26
—53
127
0
—16
—65
—13
—43
—17
—19
122
0
i
18
19
20
21
25
26
27
28
-
-
ai
—8
—88
—11
—94
0,9
-90
79
0
0
-117
0
—175
0
—257
0
—400
-
-
Схема 3: a b
I
1
2
3
4
5
6
7
i
4
10
18
25
ai
—28
—24
—31
—37
—26
39
184
Э
—52
—68
—116
— 181
Схема 3: a2b
Схема 4: al,56
1
2
3
4
5
У
1
2
3
4
5
aj
—258
—123
-116
-117
302
a j
—123
—66
—28
50
211
Схема 5: ab
i
1
2
3
4
5
6
7
8
9
10
11
12
13
14
а (
V
—319
—5
—345
— 11 — 191
—4 — 103
—3
—43
57 — 1,8
207
—64
—56
—95
75
—21
—109
63
— 18 —86 52
—13
—48
44
38
—11
23
205
i
15
16
17
18
19
20
21
23
24
25
26
27
ai
t
1,2
—26
—33
30
— 17 —71 49
— 17 —96 59
—24
—105
—67
—7
—78
—61
181
1,2
—49
—134
—253
—419
Схема 6: ab
I
1
2
3
4
5
6
7
i
4
11
18
25
ai
—54
—39
—55
—70
—67
25
475
1
99
50
—36
—128
Схема 7: a b
i
8
9
10
11
12
13
14
-
-
ai
206
52
0,4
—8,4
—32
—68
—93
-
-
13.2. ПРЯМОУГОЛЬНЫЕ ПЛАСТИНЫ
59
Продолжение табл. 13.20
i
9
16
23.
11
18
25
13
20
27
3,2
—15
—182
—76
— 185
302
88
—344
—483
Схема 8
У
а0,5 b
аЬ
а2Ь
а
1 р
V
4
1
V
а
Р
V
1
—31
-100
0
-60
-100
0
—138
— 100
0
2
— 16
—80
0
—20
—81
0
—53
—95
0
3
—83
—50
0
—8,3
—50
0
—8,3
—50
0
4
—0,8
—20
0
ЭЛ
—19
0
37
— 15
0
5
14
0
0
44
0
0
121
0
0
6
—30
—100
0
—54
— 100
0
— 120
— 100
0
7
— 16
—81
6,8
-19
—80
— 15
—42
—85
—29
8
—8,3
—50
—8,0
—8,3
—50
— 16
—8,3
—50
—39
9
— 1,0
— 19
—6,8
2,0
—19
— 15
26
—14
—30
10
13
0
0
37
0
0
104
0
0
И
—22
—100
0
—32
— 100
0
—60
— 100
0
12
— 15
—83
— 14
—16
—80
—29
— И
—86
—58
13
—8,3
—50
—17
—8,3
—50
—32
—8,3
—50
—78
14
— 1,8
—17
—14
—0,8
—20
—29
—5,8
— Н
—58
15
5,0
0
0
15
0
0
43
0
0
16
—4,5
—100
0
12
—100
0
56
— 100
0
17
— 13
-87
—20
—11
—85
—42
40
—82
—88
18
—8,3
—50
—26
—8,3
—50
—50
—8,3
—50
—112
19
—3,7
—13
—20
—5,5
—15
—42
-57
—18
—88
20
—12
0
0
—28
0
0
-72
0
0
21
10
— 100
0
88
—100
0
305
—100
0
22
—9,2
—94
—28
—1,3
—109
—56
101
—90
-113
23
—8,3
—50
—38
—8,3
—50
—75
-8,3
—50
— 150
24
—74
—5,6
—28
— 18
—9,3
—56
-118
—9
— ИЗ
25
—2,7
0
0
—105
0
0
—322
0
0
Схема 9: аЬ; са6
а при i, равном
1
2
3
4
5
6
7
15
16
17
18
19
344
70
70
—95
—84
—43
103
347
—28
—60
—53
4
а
i
1 1 ъ
при равном
20
21
4
11
18
25
29
30
31
32
33
34
38
—184
—64
—116
—256
—392
—174
—145
—85
—50
—54
—92
Схема 9: а2Ь‘, с0,25а
j
1
2
3
4
5
11
12
13
14
15
-
аj 632
245
—55
—298
—543
—636
167
—16
—141
—57
-
' 1 3
8
13
18
23
16
17
18
19
20
Э -13
—61
—210
—249
—548
V
0
—201
—238
—199
0
Схема 10: а Ь; значения
с
11
i—2
i3
г4
i—5
i5
i—7
1
а
—35
—12
4,6
8,8
7,5
5,6
6,2
3
60
РАЗДЕЛ 13. УПРУГИЕ ТОНКИЕ ПЛАСТИНЫ (ПЛИТЫ И БАЛКИ-СТЕНКИ)
Продолжение табл. 13.20
i1
i—2
i4
t 5
i6
i7
—35
7,8
6,8
5,7
7,4
Схема ab; значения at
с
ii
2
3
4
5
6
7
8
9
10
11
0
—591
—304
—S8
—3,6
27
40
67
—660
—281
—76
2,6
-U
6
—302
—262
—148
—61
—13
13
41
—280
—682
-141
—51
3
—99
—145
—204
— 135
—62
—13
26
—77
— 141
—238
—132
-U
2
—5,6
—60
—136
—203
— 136
—60
—5,6
0,2
—51
—133
—234
с
12
13
14
15
16
17
1
.8
19
20
21
-
0
26
33
53
—882
—188
—24
11
16
16
20
—
-U
6
—20
13
33
—190
—387
—105
—25
—1,8
—7,3
15
-
-U
3
-56
—6,5
—22
—22
— 107
—360
—101
—27
— 1,2
15
-
-Lb
2
—133
—51
0,2
13
—27
— 100
—359
—100
—27
13
-
Схема 11: значения а у
а 62 при, равном
а
2Ь при,
равном
1
1
j 2
3
4
1 5
с
6 8 1
1 1
1 10
0
—538
— 14
16
3,4
1
0
— 1592
—900
—321
126
582
—Ъ
4
—14
—202
—23
2,7
3,5
-L6
4
-898
—696
—397
—122
128
-U
2
16
—23
—200
—23
16
—ь
2
—324
—395
—485
—395
—324
Схема 11: a2b; значения ay при, равном
с
11
12
13
14
15
16
17
18
19
20
0
— 1836
—802
—220
108
444
—2388
—524
—67
83
205
JU
4
—802
—780
—379
—400
108
—526
—1043
—282
—49
80
2
—220
—379
—622
—379
—220
—62
-287
—964
—287
-62
13.2.5. Балки-стенки 3
На рис. 13.21 приведены 11 схем различного загружения прямоугольных балок-стенок. Предполагается, что все нагрузки отнесены к пластине с толщиной А1. При этом усилия, действующие на единичную площадку, численно равны напряжениям.
Усилия и напряжения определяются по формулам
л', yNy-p-,
где в зависимости от нагрузки р равно:
РРа, Р —; (13.20)
а а2
Таблица 13.21 3
Значения 6 в (13.21) для схем нагрузок по рис. 13.21 тxu s
10
(13.19)
Схема
б при i, равном
0,144
1,014
2,135
0,515
0,153
0,866
2,052
0,545
0,183
0,729
1,364
0,568
0,244
0,624
1,123
0,762
0,346
0,560
1,006
0,989
0,486
0,532
0,965
1,545
0,608
0,495
0,907
1,845
13.3. КРУГЛЫЕ И КОЛЬЦЕВЫЕ ПЛАСТИНЫ
61
Значения коэффициентов а, р, у из (13.19) в точках, занумерованных на схемах Л, В рис. 13.21, для всех расчетных схем сведены в табл. 13.20. В этой таблице индекс i обозначает номер точки на схеме Л, а индекс — номер точки на схеме В, для которой определяются усилия или напряжения.
А
1
М
в 1
1 ?9
ж
2
9
16
30
ж
3
10
17
31
ж
Ч
11
18
32
ж
5
12
19
33
ж
6
13
20
, 34
ж
21
7
- а
Ш
23
24
25
26 27 2
6 11 16 21
22
А 2
7
12
17
I
.FT3
в
13
18
fOr
9
щ
19
10
15
20
а -
23 j 2
25
Т
ц
OL
Ро
С
а-2с
с
I
ш
yj
о-2с
I
ггшт
м
,1.11111
111111
о1
X
- а — №
2
I
X
ч
г
X
I
О 4 —а -
р
2
р 1
а2 a2f
Р
2
minntm
¥
' X
-tilt кУ
Р
Р
cta-?cf с
—а-
Рис. 13.21
На рис. 13.22 показаны эпюры сгх, оу и хху для характерных сечений некоторых схем нагрузки, представленных на рис. 13.21 (пунктирные линии показывают закон распределения напряжений по формулам курса сопротивления материалов).
В табл. 13.21 приведены значения коэффициента 6г (i— номер точки на схеме Л), позволяющего определять значения вертикального перемещения иу для некоторых схем нагрузки, показанных на рис. 13.21, по формуле
„ „ -Ж. (13.21)
13.3. КРУГЛЫЕ И КОЛЬЦЕВЫЕ ПЛАСТИНЫ
13.3.1. Осесимметричная задача расчета изотропных плит
Если нагрузка и граничные условия не зависят от угла
0 (см. рис. 13.1), то имеет место осевая симметрия (любая плоскость, проходящая через ось г, является плос-
fits, Ш б. р
ттттштшш
тшштштш
msmmjm
Л, 2Z? Jp n L2_aPa_
“Fr- Та я
Рис. 13.22
костью симметрии). В силу этого Qq Mk Vq 0; Qr Vт при изгибе плиты и Sr u0 0 при плоском напряженном состоянии пластины.
Все остальные компоненты усилий и перемещений зависят только от переменной г (рис. 13.1) или безразмерной координаты
9 га, (13.22)
где а — радиус одной из кромок пластины.
Плоское напряженное состояние
Формулы для усилий и перемещений:
Ut Ek (д С ‘
(13.23)
Постоянные с в (13.23) для первых двух схем, показанных на рис. 13.23, находим по формулам: схема а
г го:с1 -ТрК Х1)- с2 :
схема б
1-1 -
г г:с1 —pv; с2 — — р v62;
г Га-.С — л2); с„—
— "T?(v2Vo) (13.24)
62
РАЗДЕЛ 13. УПРУГИЕ ТОНКИЕ ПЛАСТИНЫ (ПЛИТЫ И БАЛКИ-СТЕНКИ)
Здесь принято
Vi -2-. (13.24а)
а
1—
Используя (13.23), нетрудно получить решение для других схем, аналогичных показанной на рис. 13,23 Пример 13.5. Определить реактивные усилия р для схемы на рис. 13.23, в при а 6 м Ъ — 3 м р— 1 Тм и (10,15.
По (13.1) находим Я 0,85; 21,15. Постоянные Ci от нагрузки р находим по (13.24) для схемы б при г0 (Ьа0,5):
1,15 0,85-0,52 f л1 )
v 1,81;
1—0,52
сх -у (1,81 — 1,15) 0,33 Тм; с2— -J- З2 (1,810,85)—12Гм.
(а)
Затем по (13.23) определяем иг для га 6 м:
, ( .8Б- .33 б
Постоянные с от реактивных сил р находим по (13.24)
( ь
для схемы б при rr0a I— 0,51:
1,15 0,85
v - 0,52
2,67;
Cj — 2,67 — 1,33р Тм;
(в)
с2 — 2.67-32 12р Тм
2 ;
и по (13.23) определяем ит для г—а 6 м:
ар 12 ар
’33-0'85 -1 ’,51-) -1 -51 7Г (г)
Суммируя (б) и (г), найдем полное перемещение ит точки га и приравняем его нулю:
иг — (0,67-1,51р) 0, Eh
откуда
0,67
1,51
0,44 Тм.
Плиты на жестких опорах
Решение осесимметричной задачи об изгибе изотропной плиты на жестких опорах методом начальных параметров см. 12. Здесь приводятся готовые решения задач об изгибе плит, показанных на рис. 13.24. Во всех этих
Ф Р Р
wzzzzm
6)
ZJ
I— Га н-а
W
ш
Рис. 13.23
,-±;
задачах, как и в любой осесимметричной, поперечные силы в сечении гг0 можно определить по формуле
Qr -—, (13.25)
2 яо
где Р — проекция на ось 2 равнодействующей всех сил, расположенных в области 0 г г0.
Для определения w, Мг, в задачах, показанных на схемах 1—5, следует пользоваться формулами табл. 13.22. В этой таблице помимо обозначений (13.1) принято:
R2
1 — р2’
1
1 2Р2
(13.25а)
При решении задач, показанных на схемах 6—18, следует пользоваться следующими формулами:
W (Cl с2р2 с3 In р
с4р2 In р) р;
dw 1 Г с3
—- ,. — 2с2р — dr а р
с4р (2 In р 1) I М
L ‘
с4 (2Х2 In р Яд) j
р3;
16D
D Г К
Г — — 2 V2 — — Яз ра2
(13.26)
УИ0 2Я2с2
с4 (2а2 In р -f- A,4)j — 4с4Р
16
р2 Хра2
Р J
Qr Vr -
16
pa
С3 р2;
Р,
)
(д)
(е)
где Ci — коэффициенты, отражающие граничные условия; они определяются по табл. 13.23, 13.24 (для схем 6—11) и 13.25 (для схем 12—18), в которых, как и в табл. 13.22, используются обозначения (13.25а).
Наибольшие напряжения и прогибы в плитах, изображенных на схемах 12, 12а, 13, 16а, 17а, 19—21, определяются по формулам
Vi
макс — 72 '
рг а
Eh3
(13.27)
13.3. КРУГЛЫЕ И КОЛЬЦЕВЫЕ ПЛАСТИНЫ
63
где Yi и Y2 берутся по графикам рис. 13.25, а и 13.25, a Р и г0 определяются так:
1ра2— схема 12 pb2— схема 12а, 16а, 9, 20; л;ра— схемы 13, 2; npb— схема 77а;
__ ( а— схемы 12, 75; г 6— 2а, 5а, 17а, 19, 20, 2.
fllfl
5
5
2д.
'М
‘НЭСЙЗ 'ЕШЗ
7uf
йй "йй “®J
“fttr
а
U-2b—I
4 а
§fjp u_2a-
V- TT1 rrfi
,6rWl
Lv-I
,5Ш'
ЛыК mfbn “Hzs 1—2b—1 U-2b—J U—2fc—.—-I
U-—J
Рис. 13.24
Пример 13.6. Для плиты по рис. 13.24 (схема 6) дано: а 4 л; 6 2 ж, ?1 Тм2 (ш0,15. Требуется определить прогибы и усилия в точках г—0, г — 2м,г — 3м.
Вычисляем вспомогательные величины по (13.1): Xi 0,85; 2 1,15; Я33,15; Л4 1,45; Л7 7,45; Ьа 0,5.
По табл. 13.23 определяем постоянные для загруженного участка плиты:
Cl
ра4 64 KD
(43,15 — 7,45-0,52
41,15-0,52 1п0,5)-0,52 2,161
па4 64 D ’
с2
па4
(81,15 In0,5
(а)
4- 2-0,85-0,52 — 8) 0,52-3,033 —
64 D
)
Т а б л и ц а 13.22 Значения w, Mr, Mq для схем 1—5 рис. 13.24
Схема
W
Mr
Щ
pai (К
64Яа D — 2Х,р2 А р‘
Q.
1
2
pa?
(K-K P‘)
16
2
(1-р2)2
64D
(Я-Я, p5)
16
-Л-1(р’)
16
3
Ра2
——з (1-Р2) 16лА,2 Z)
2Ь2 р in Pi
2 111 P
4Я
p
(Ц — K2 In p)
4эт
4
Ра2
(1—p2-f-2pa In р)
163TD
(l-f-A,2 In p)
2л
P
(H2 In p)
4ji
5
“о1Г7Г(1р3)
22 D
—m
—m
Т а б л и ц а 13.23
Значения для схем 6—11 (рис. 13.24) при гЬ (с3с40)
Схема
Общий
множитель
6AX2Dcl
64A2.Dc2 I
Схема
Общий
множитель
64Х2 с
64 zDcz
6
pa4P2
(4К-Ь7Р2 4А,2р2 In р)
8(Я2 Inp—1)2А,Р2
9
8 h2pa?b
(1-р2)22 In р
1-ра 2 In Р
7
Л.2ря432
4 — ЗР2 4Р2 In Р
4 (2 In Р — р2)
10
32 та2
(Ь2 In р — 1) ра
(Я2 -f XjP2)
2
8
8раЬ
(1 _ Х3 2Я2р2 In Р
Ь2 (2 In 0-1 Р2)
и
16та2
2Я2р2 In Р
К (1-Р)3
64
РАЗДЕЛ 13. УПРУГИЕ ТОНКИЕ ПЛАСТИНЫ (ПЛИТЫ И БАЛКИ-СТЕНКИ)
Таблица 13.24 Значения для схем в—И (рис. 13.24) при гЬ
Схема
Общий
множитель
6-X2Dcl
64А,2 )с2
64 X2Dc,
64Хо Dc4
6
2 ра2
.,32-2Х,
4Х2
7
2X2fipa
2 - (2 52)
1
22
4
8
8 раЬ
к -
.i32-Ьз
2Х,
9
8 Х2раЬ
1 31
-1 3)
2ЭЛ
2
10
16 та32
—
2
0
и
16 таг02А,
1
— 1
2
0
По формулам (13.26) находим:
а) для г — 0; р 0
2,161 pa 2X9Dco 6,9 Spo2
w d — —слгл— ’ — Mq — —: 64 D
б) для r — 2 м p 0,5
64
(6)
6
(12.13.19.20,21) C- (12a. 16 a, 17a)
С (12a,1Sa,m) Рис. 13.25
pa pa4
_2_V a2 16 ’64
Kpa2 P2 „ par-
7T 5,8.3 ;
16 64
Ma-
2.,Dc2 a2
Qr -
(в)
pap
pa
4
T а б л и ц a 13.25
Значения с для схем Я—18 (рис. 13.24)
Схема
Общий
множитель
64, 2 Dcx
64А.2 Dc2
64Я2 Dc3
64A, 2 Dc4
12
12а
ра
К-2Х3 З2 8Х2 3'’ v In р
2 А,3 (1—З2) 4Я,2 Y3’ in 31
432 —- (A-3 -j- 4Я,2 7 In 3) Л,
-8X2 3j
13
1Са
8Я,2 par Ь
2vln 3
2v In 3 4 v In 3
X2 j A,t
2
14
14а
3 Zyma2
— 1
1
2
0
15
1,5 а
32у
З2
1
—1
_2-Ь.р‘
0
16
16а
2 бра
К—К 23 Р4—8Х2 З4 In 3
SX2 31 In 3— — 4- 2КЯ 3
0
-f 3 —
4p2 (t ak pJ ln p)
_ ±L
0
17
17а
8Я2 Ьраг Ь
-j- Я3 3' “Ь 2Я.г 3 In 3
—Я,-X2 — 2Xj 32 In 3
432 (1 b2 ln 3)
2
6
18
18а
32с mb2
1
—1
2
0
13.3. КРУГЛЫЕ И КОЛЬЦЕВЫЕ ПЛАСТИНЫ
65
Для ненагруженного участка плиты с находим по табл. 13.24:
О,. Р-, 2Ра ? Го Ра
Cl-Сг (2Xs-р ) D-2,63 MD,
2_ра ±ра
3 64Ал '
4 64D
2раft2.
L т г гг- 4Ло — 2 64X.D
64 )
(г)
Затем по (13.26) для г3 м и р0,75 находим:
ш Гг.бЗ (1 — 0,758) In 0,75 -64D L 4
ра4
0,77 64D’
DQ2 Г 0 81
,- 2.1.15.2.63 —
(д)
0,85,752
2 (21,15 In 0,75 3,15)j — 1, 0 64 L
раi 64
М,152,63-
0,85
4-0,752
(е)
ра1
2(21,15 In 0,75 l,45)j 4,i ,Qr
4c.D
8paD
а3 р
64Da30,75
ра
6
Круглые плиты с кольцевыми ребрами
Если кольцевое ребро (рис. 13.26) отделить от плиты, то при осесимметричной нагрузке усилия, передающиеся на него от плиты, сведутся к равномерно распределенным силам и парам, показанным на рис. 13.26,6. Чтобы получить расчетные усилия, следует силы р перенести в срединную плоскость плиты и плоскость, проходящую через нейтральную ось сечения ребра. Это выполнено на рис. 13.26, в. Обозначим угол поворота и радиальные перемещения сечения плиты г —Го (рис. 13.26) соответственно рп и п, а угол поворота сечения ребра и радиальные перемещения его точки, отмеченной на рис. 13.26, в крестиком, назовем рр и ир. Тогда уравнения совместности деформаций, из которых определяются р и т, запишутся так:
I
Рис. 13.26
и
Рп — Рр ип — ир иа находятся по
(13.28) формулам (13.23)
Величины рп и (13.26).
Для ребра имеем (поворот по часовой стрелке считаем положительным)
J1 г,2
Рр
т, г,
1 го
р ’р
где Fp и р — площадь и момент инерции сечения ребра относительно нейтральной оси х (рис. 13.26), а Нх — расстояние от оси х до верхней кромки ребра.
Упрощенный расчет основан на пренебрежении деформациями плиты от сил р. При этом второе уравнение совместности деформаций (13.28) заменяется условием равенства нулю_иР (13.29). Отсюда можно найти зависимость между р и Ш.
Для ребра прямоугольного сечения получим
6-_ h _
Р — тг; т0 (4 3 — J mi- (13.30)
Величина т определится из первого уравнения (13.28).
Пример 13.7. Рассмотрим плиту, представленную на рис. 13.26, при следующих данных: а4 м; г02 м; i10 см; 6 10 см; 20 см; (Л0,15. Равномерно распределенная нагрузка ? 1 Тм2.
Находим отношение жесткостей ребра и плиты:
Е1т ( Я 3 Ь
(1— ц) 0,364.
Р 'о
РРЯЪ (13.29)
г qD
По формуле (13.29) ребра:
3 JL
го
находим
(а)
угол поворота сечения
щ р Е1В
— 2,75
г0
5, 5т
D
(б)
Прогибы плиты запишем в виде
w w0 wu (в)
где Wo — прогибы от нагрузки, a wx — прогибы от действия реактивных пар т0.
Угол поворота сечения г02 м от нагрузки найдем по схеме 2 табл. 13.22 (рг0а0,5):
an—
ра6
64D 1480,750,5 16D
2(1 — р2) 2р
’5 Л -Рад.
(Г)
Для определения угла поворота того же сечения от действия т0 находим для схемы И табл. 13.23 значения с 1 и с2 (Р 6а 0,5) и используем (13.30):
16m0a2X2 (1 — Р2)
42 (1 — 0,52)
64DX2
16,5Пх
с 1
42.0,52 In 0,5 4 3
4D
16т0а22ХгР2 In р 64 DX,
10 — Г1
3,8т
4 D
(Д)
66
РАЗДЕЛ 13. УПРУГИЕ ТОНКИЕ ПЛАСТИНЫ (ПЛИТЫ И БАЛКИ-СТЕНКИ)
Затем по (13.26) при гг02 м найдем 2с2Р 4,12т1
W-,
(е)
Следовательно, полный угол поворота сечения плиты Рп равен:
Рп w0 W1
4,12m—1,5 D
Приравнивая правые части (б) и (ж), найдем mi 0,155 Т мм.
:
D
0,589 2Я? 16,5m
D п a2
0,363 Тмм.
Следовательно, ребро снижает прогиб в центре плиты в 2,43 раза, а изгибающий момент в 1,46 раза.
Плитына упругом основании
Рассматриваются пластины, расположенные на основании типа Винклера, характеризуемом коэффициентом постели k. Реакции основания сведутся к вертикальной распределенной нагрузке (см. разделы 23, 6)
pz——kw. (13.31)
Общее решение для осесимметричной нагрузки имеет вид 15:
ш ВгЩ (р) B2U2 (р) B3U3 (р) B,U4 (р)
k ’ (13.32)
где р— интенсивность распределенной нагрузки;
Bi — произвольные постоянные;
Vi—цилиндрические функции аргумента р, определяемого формулой
(13.33)
Значения функций и их первых производных Vi d
—j— Ui приведенные в табл. 13.26, позволяют вычислить не только прогибы, но также углы поворота и усилия по формулам
Ог w Т BXU В.2и'2 B3U’Z ВАи) ;
V2ffi) (Sit-DM, B3U4-B4U3) n;
(Д2w)' if B,U'2-BJj'i B3U'4-B4u'3);
Mr Dr? s, U-U2J B2 U2
u
(ж)
(3)
Зная mb можно вычислить прогибы и усилия в любой точке плиты.
К примеру прогиб и изгибающий момент в центре плиты от нагрузки находим по табл. 13.22 (р0; 2 1ц1,15):
па4 1 ра29
w0 — м; Мг0 1,15 Т мм.
64D D 16 '
Те же величины от находим по (13.26) и (д):
3,8тх
(13.34)
)
4) h (у Ви
Щ-Drf Sl( -Ь- и ц(2)
В2—и2 — ntjj В3 t3 fiU4j
B4(7-Mt3)
Qr Vr-Or)3 вхи2 Вги
В3и-ВАи'ъ).
При пользовании формулами (13.34) следует иметь в виду, что при р0
”-(p) 0; tg (Р) — 0,5. (13.35)
Постоянные В из (13.32) и (13.34) в общем случае следует определять по заданным краевым условиям; в некоторых частных случаях можно воспользоваться приведенными ниже готовыми формулами 15.
Бесконечные плиты
а) Сила Р, сосредоточенная в начале координат:
Bi В2 В4 0; —77-. (13.36)
4т2D
б) Силовая нагрузка, распределенная по окружности радиуса а с интенсивностью р:
при г а; р р0; р0 та ярро
Bi
в.,
2rfD
2r3D
и3 (Ро);
4 (Ро);
(13.37)
В3 В4 0; при г а; р р0; р0 щ
прро
В± — В — 0; В3
2тfD
и 1 (Ро);
R Лрра ГГ ч
4“ 2цЮ 2 (Ро)-
(13.38)
в) Моментная радиальная нагрузка, распределенная по окружности радиуса а с интенсивностью гп: при г а; р р0; р0 ца
В2 -
ятр0
2r2D
зхтр0
2t2D
3 (Ро);
4 ( Ро) 3 — 4 — 0
(13.39)
13.3. КРУГЛЫЕ И КОЛЬЦЕВЫЕ ПЛАСТИНЫ
67
Таблица 13.26
Значения U и V в (13.32)
р
"з
U4
-з
"4
0,00
1,0000
0,0000
0,0000
0,0000
0,5000
оо
0,0000
оо
0,02
1,0000
0,0001
0,0000
0,0100
0,4997
2,5643
0,0288
31,828
0,04
1,0000
0,0004
0,0000
0,0200
0,4989
2,1282
0,0488
15,905
0,06
1,0000
0,0009
0,0000
0,0300
0,4978
1,8653
0,0655
10,595
0,08
1,0000
0,0016
0,0000
0,0400
0,4963
1,6825
0,0800
7,9378
0,10
1,0000
0,0025
0,0001
0,0500
0,4946
1,5409
0,0929
6,3413
0,12
1,0000
0,0036
0,0001
0,0600
0,4926
1,4254
0,1046
5,2754
0,14
1,0000
0,0049
0,0002
0,0700
0,4904
1,3279
0,1152
4,5126
0,16
1,0000
0,0064
0,0003
0,0800
0,4880
1,2436
0,1248
3,9394
0,18
1,0000
0,0081
0,0004
0,0900
0,4854
1,1695
0,1337
3,4925
0,20
1,0000
0,0100
0,0005
0,1000
0,4826
1,1033
0,1419
3,1340
0,22
1,0000
0,0121
0,0007
0,1100
0,4797
1,0437
0,1495
2,8400
0,24
0,9999
0,0144
0,0009
0,1200
0,4767
0,9894
0,1565
2,5941
0,26
0,9999
0,0169
0,0011
0,1300
0,4735
0,9397
0,1630
2,3854
0,28
0,9999
0,0196
0,0014
0,1400
0,4701
0,8938
0,1690
2,2059
0,30
0,9999
0,0225
0,0017
0,1500
0,4667
0,8513
0,1746
2,0498
0,32
0,9998
0,0256
0,0020
0,1600
0,4632
0,8117
0,1798
1,9127
0,34
0,9998
0,0289
0,0025
0,1700
0,4595
0,7747
0,1846
1,7912
0,36
0,9997
0,0324
0,0029
0,1800
0,4558
0,7400
0,1891
1,6828
0,38
0,9997
0,0361
0,0034
0,1900
0,4520
0,7073
0,1932
1,5854
0,40
0,9996
0,0400
0,0040
0,2000
0,4480
0,6765
0,1970
1,4974
0,42
0,9995
0,0441
0,0046
0,2100
0,4441
0,6473
0,2006
1,4174
0,44
0,9994
0,0484
0,0053
0,2200
0,4400
0,6198
0,2038
1,3443
0,46
0,9993
0,0529
0,0061
0,2299
0,4359
0,5935
0,2068
1,2773
0,48
0,9992
0,0576
0,0069
0,2399
0,4318
0,5686
0,2096
1,2156
0,50
0,9990
0,0625
0,0078
0,2499
0,4275
0,5449
0,2121
1,1585
0,52
0,9989
0,0676
0,0088
0,2599
0,4233
0,5223
0,2144
1,1056
0,54
0,9987
0,0729
0,0098
0,2699
0,4190
0,5006
0,2165
1,0564
0,56
0,9985
0,0784
0,0110
0,2799
0,4146
0,4800
0,2184
1,0105
0,58
0,9982
0,0841
0,0122
0,2898
0,4102
0,4602
0,2201
0,9675
0,60
0,9980
0,0900
0,0135
0,2998
0,4058
0,4413
0,2217
0,9273
0,62
0,9977
0,0961
0,0149
0,3098
0,4014
0,4231
0,2230
0,8894
0,64
0,9974
0,1024
0,0164
0,3197
0,3969
0,4057
0,2242
0,8538
0,66
0,9980
0,1089
0,0180
0,3297
0,3924
0,3889
0,2252
0,8201
0,68
0,9967
0,1156
0,0198
0,3396
0,3879
0,3729
0,2261
0,7883
0,70
0,9962
0,1224
0,0214
0,3496
0,3834
0,3574
0,2268
0,7582
0,72
0,9958
0,1295
0,0233
0,3595
0,3788
0,3425
0,2274
0,7296
0,74
0,9953
0,1368
0,0253
0,3694
0,3743
0,3282
0,2279
0,7024
0,76
0,9948
0,1443
0,0274
0,3793
0,3697
0,3144
0,2282
0,6766
0,78
0,9942
0,1520
0,0296
0,3892
0,3651
0,3011
0,2285
0,6520
0,80
0,9936
0,1599
0,0320
0,3991
0,3606
0,2883
0,2286
0,6286
0,82
0,9929
0,1680
0,0344
0,4090
0,3560
0,2760
0,2286
0,6061
0,84
0,9922
0,1762
0,0370
0,4189
0,3514
0,2641
0,2285
0,5847
0,86
0,9915
0,1847
0,0397
0,4288
0,3469
0,2526
0,2283
0,5642
0,88
0,9906
0,1934
0,0426
0,4386
0,3423
0,2415
0,2279
0,5446
0,90
0,9898
0,2023
0,0455
0,4485
0,3377
0,2308
0,2276
0,5258
0,92
0,9888
0,2113
0,0486
0,4583
0,3332
0,2205
0,2271
0,5077
0,94
0,9878
0,2206
0,0519
0,4681
0,3286
0,2105
0,2265
0,4904
0,96
0,9867
0,2301
0,0553
0,4779
0,3241
0,2008
0,2259
0,4737
0,98
0,9856
0,2397
0,0588
0,4876
0,3196
0,1915
0,2251
0,4576
1,00
0,9844
0,2496
0,0624
0,4974
0,3151
0,1825
0,2243
0,4422
1,10
0,9771
0,3017
0,0831
0,5458
0,2929
0,1419
0,2193
0,3730
1,20
0,9676
0,3587
0,1078
0,5935
0,2713
0,1076
0,2129
0,3149
1,30
0,9554
0,4204
0,1370
0,6403
0,2504
0,0786
0,2054
0,2656
1,40
0,9401
0,4867
0,1709
0,6860
0,2302
0,0542
0,1971
0,2235
1,50
0,9211
0,5576
0,2100
0,7302
0,2110
0,0337
0,1882
0,1873
1,60
0,8979
0,6327
0,2545
0,7727
0,1926
0,0166
0,1788
0,1560
1,70
0,8700
0,7120
0,3048
0,8131
0,1752
0,0023
0,1692
0,1290
1,80
0,8367
0,7953
0,3612
0,8509
0,1588
0,0094
0,1594
0,1056
1,90
0,7975
0,8821
0,4238
0,8857
0,1433
0,0189
0,1496
0,0854
2,0
0,7517
0,9723
0,4931
0,9170
0,1289
0,0265
0,1399
0,0679
2,2
0,6377
1,1610
0,6520
0,9661
0,1026
0,0371
0,1210
0,0397
2,4
0,4890
1,3575
0,8392
0,9944
0,0804
0,0429
0,1032
0,0189
2,6
0,3001
1,5569
1,0552
0,9943
0,0614
0,0446
0,0868
0,0039
2,8
0,0651
1,7529
1,2993
0,9589
0,0455
0,0447
0,0718
0,0066
3,0
0,2214
1,9376
1,5698
0,8804
0,0326
0,0427
0,0586
0,0137
3,2
0,5644
2,1016
1,8636
0,7499
0,0220
0,0394
0,0470
0,0180
3,4
0,9680
2,2334
2,1755
0,5577
0,0137
0,0356
0,0369
0,0204
(Продолжение таблицы на след, стр.)
68
РАЗДЕЛ 13. УПРУГИЕ ТОНКИЕ ПЛАСТИНЫ (ПЛИТЫ И БАЛКИ-СТЕНКИ)
Продолжение табл. 13.26
р
-щ
2
ип
-4
-"з
и4
3,6
1,4353
2,3199
2,4983
0,2936
0,0072
0,03Ь
0,0284
б,621
3,8
1,9674
2,3459
2,8221
0,0526
0,0022
0,0260
0,0212
0,0210
4,0
2,5634
2,2927
3,1346
0,4912
0,0014
0,0230
0,0152
0,0200
4,2
3,2195
2,1422
3,4199
1,0318
0,0039
0,0192
0,0104
0,0185
4,4
3,9283
1,8726
3,6587
1,6833
0,0056
0,0156
0,0065
0,0168
4,6
4,6784
1,4610
3,8280
2,4520
0,0066
0,0125
0,0035
0,0148
4,8
5,4531
0,8837
3,9006
3,3422
0,0071
0,0097
0,001?
0,0129
5,0
6,2301
0,1160
3,8454
4,3542
0,0071
0,0073
0,0005
0,0109
5,2
6,9803
0,8658
3,6270
5,4835
0,006г
0,0053
0,0017
0,0091
5,4
7,6674
2,0845
3,2063
6,7198
0,0065
0,0037
0,0025
0,0075
5,6
8,2466
3,5597
2,5409
8,0453
0,0059
0,0023
0,0030
0,0060
5,8
8,6644
5,3068
1,5856
9,4332
0,0053
0,0012
0,0033
0,0047
6,0
8,8583
7,3347
0,2931
10,346
0,0046
0,0004
0,0033
0,0036
Примечание: Табличные значения, расположенные ниже жирных горизонтальных линий,
отрицательны.
при г а р р0; ро Ла ятр0
0; В
2 цЮ
ятро
2т2 2 ( Ро) г) Нагрузка интенсивностью р, распределенная по площади круга радиуса а
при г а; р р0; ро Щ
в1 -
2 уИро);
в,
26
3 (ро); Я3 4 :
(13.41)
при г а; р р0; р0
лРРо
S1 S2 ; 53 2k
(Ро);
д
(13.42)
Пример 13.8. Плита весьма значительных размеров в плане и толщиной h 6Q см загружена нагрузкой Р 20 Т, распределенной по площади круга радиуса а — 2 ж. Коэффициент постели основания 6 3-103 Гж3. Упругие константы плиты ц0,15; 0,85; 2 Ю6 кГсм2.
Приняв центр нагрузки за начало цилиндрической системы координат, определить прогиб и усилия в плите для г0 и г — 3 м.
Вычисляем D и г (13.33):
D
2-106-0,63 12(1 — 0,152)
3,64 104 7” ж;
10 1
0,538 —
64-104 л
(а)
Определив
Ро ria 1,08;
Рр0 200-1,0S 9,08
(13.40)
2ka2 2-3-103-4 10s и найдя по табл. 13.26 для ро1,08
1г 0,979; U2 — 0,291; Uz 0,297;
(4 —0,150;
U— 0,079; U2 —0,536; t3 — 0,220; У4 0,387,
вычислим по (13.41) и (13.42) постоянные Вс а) для участка г2 м (В3В40)
В, — Ж1 — ж: В2 — AU — м.
1 О
10
б) для участка г2 м (В, В20)
Д3 — 4to —— м; В — У11Л ж.
d 2 Ю4 4 1 10
Затем по формулам (13.32), (13.34), (13.35) и табл. определим для центра плиты (гр0)
I л л 2000
w -гг ( — 35-1 19,9
(б)
(в)
104 V
3,14-22-3
18,3
104
м — 0,183 см,
Мг — 0,5382-3,64 -35,1-0 —
— 19,9(1 — 0,85-0,5 12 Т-мм;
Мв — 0,5382-3,64 — 35,1-0 — -19,9(0,150,85-0,5) 12 Т-мм. Определив затем по табл. 13.26 для ро1,62 (г U3 0,186; t4 — 0,011; U’3 — 0,175;
U' 0,145,
(г)
(Д)
13.26
(е)
(ж)
(з)
3 м)
(и)
13.3. КРУГЛЫЕ И КОЛЬЦЕВЫЕ ПЛАСТИНЫ
69
вычислим по тем же формулам для г3ж
w — (48,5.0,186 — 7,14-0,011) 10
4,9
104
м — 0,049 см;
(к)
Мг — 0,5382-3,
0,85
— 7,14 (0,186 -j- —— -0 1,62
,64 48,5 — 0,
—2,35 Т-мм; (л) м0 — 0,5382.3,64 48,5 (—0,15-0,011 —
J45)
0,85 — -1—0, 1,62
4,59 Тмм
(м)
Qr — 0,5383-3,64 48,5.0,145 7,14.0,175
4,7Тм. (н)
Круглые и кольцевые плиты
Решение ищется в виде суммы
w w -w, (13.43)
слагаемые которой определяются из расчета бесконечной плиты: первое — ш — из расчета на заданную нагрузку по формулам (13.32) — (13.42); второе — до— из расчета на компенсирующую нагрузку, выбираемую так, чтобы условия в сечениях бесконечной плиты, совпадающих с краями рассматриваемой кольцевой или круглой плиты, были тождественны заданным. Расчет на компенсирующую нагрузку ведется по формулам (13.32) — (13.34) при р—0 и сводится к определению произвольных постоянных Bt(i 1,2,3,4,). В частности, для сплошной плиты следует принять ВВ 0, а в и 2 определять из граничных условий.
Пример 13.9. Плита из примера 13.8 имеет по окружности г — Зм кромку, свободную от усилий. Определить прогиб в центре плиты.
Слагаемое w в (13.43) было найдено в примере 13.8. Соответствующие усилия в сечении г 3 м равны см. формулы (л), (н) из примера 13.8:
М г — 2-.35Т-ММ, Q 4,7 Тм. (а)
При расчете бесконечной плиты на компенсирующую нагрузку з 40. Используя значения (и) из примера 13.8, а также (13.34), найдем М и Q в сечении г — 3 м:
м Г)2 D (о,51В — 0,4852) ;
Q' Г)3 D (0,78Д — 0,273j.
Из заданных в сечении г3 м граничных условий
(б)
Mr M r M 0; Qr QQ; 0
получим
в,
50,3
36,1
D
Прогиб в центре плиты (см. пример 13.7) 18,3 50,3
104
32 2
— м. 0,322 см. (д) 3,64-104 104 Л)
Если бы плита была абсолютно жесткой, то прогиб в центре был бы равен:
92 24
w —г- 0,24 см. (е)
3,1432.3
104
13.3.2. Изотропные круглые плиты под произвольной нагрузкой
Круглая плита с защемленной кромкой
На плиту действует следующая нагрузка:
1) сила Рг приложена в точке В (рис. 13.27):
w — 16зт1)
- ’ (-т)
(loR aRt
2R In
(13.44)
2) пара Mq, действующая в радиальной плоскости, приложена в точке В (рис. 13.27) и стремится выгнуть центральную часть плиты вверх:
83iD
('Г‘)“
(а — г cos 0) (1 2 In -
V Яг J
Рг
аЧ
ar — -qCos 0)
(13.45)
В (13.44) и (13.45) принято (рис. 13.27) R2 — г2 а2 — 2 cos 0;
я? 'Ч-
2г20г
cos 0;
(13.46)
(в)
(г)
Круглая плита со свободно опертой кромкой
Прогиб от действия силы Р, приложенной в точке В (см. рис, 13.27),
70
РАЗДЕЛ 13. УПРУГИЕ ТОНКИЕ ПЛАСТИНЫ (ПЛИТЫ И БАЛКИ-СТЕНКИ)
w
16л D
- И)
X
X
го ( го — га cos
.к 2 dS
2Я2 ln
r0R'
aRi j
(13.47)
Свободная круглая плита под действием статически уравновешенной нагрузки
а) Вдоль кромки плиты действуют п равных сил Р, расположенных на равных расстояниях друг от друга и уравновешенных равномерно распределенной вдоль той же кромки нагрузкой р (рис. 13.28).
Прогиб в центре плиты
W
Рго ( К ыГоа ь xj'
(13.48)
где 3 0,159; b 0,195 при п 4
а 0,296; 6 0,378 л 3
а 0,773; 61,128 п 2
б) Вдоль кромки плиты действуют п равных сосредо¬
точенных пар (рис. 13.29).
Прогиб в центре плиты
w
мвго (, Ь
— а —
2лА3 D
2Хз
пХ,
где а и b равны:
а — 2; b 5,545 для п 2;
а — 1,179; b — 2,950 для п — 3;
а —0,858; 6 2,035 для п 4.
13.3.3. Круглые и кольцевые ортотропные пластины
Рассматривается осесимметричная деформация круглых и кольцевых пластин из ортотропного материала. В каждой точке пластины существуют три взаимно пер¬
пендикулярные плоскости упругой симметрии, из которых одна проходит через ось z (см. рис. 13.1), вторая параллельна срединной плоскости, а третья перпендикулярна первым двум (плита отнесена к цилиндрической системе координат г, 0, г). Пластину, обладающую такими свойствами, будем называть цилиндрически ортотропной. Упругие свойства такой пластины характеризуют величины Еи jii (для волокна, совпадающего с радиусом) и E2i i2 (для волокон, перпендикулярных г). Модуль упругости сдвига G при осесимметричной деформации не используется.
В последующем приняты обозначения
—; Л а У Dx
(13.50)
Плоское напряженное состояние 17
Усилия и перемещения определяются по формулам
Nr Sip-1-B2ik-
Ne k(BlPk-' B2 pkl);
ur — (—Ha) Pk 1 ( Щ) P k 4; 0 0.
(13.51)
Постоянные г в (13.51) определяются из граничных условий ка кромках пластины и из условий сопряжения смежных участков. Приводам значения постоянных для кольцевой пластины, загруженной по внешней или внутренней кромке равномерно распределенными радиальными усилиями (а и b — радиусы внешней и внутренней кромки, р0 — аЬ).
а) По внешней кромке действуют растягивающие усилия с интенсивностью р:
Р
1-рГ
Pvf 1 -Ро
(13.52)
б) По внутренней кромке действуют растягивающие (направленные к центру) усилия с интенсивностью р2'
1 2-
Р‘2 Р01
1-р8
(13.53)
(13.49)
Изгиб круглой и кольцевой плиты 17
Уравнения срединной поверхности и формулы для усилий при осесимметричной нагрузке имеют вид
ш Dt B2r B3rlk В4 ryk -4- рг
О
dw
dr
2B2r (1 k) Brk -f-
(1 -k)Btr-k — pr;
Mr — Dxiw
' y- o-'J ;
(13.54)
13.4. ИЗОТРОПНЫЕ ПЛИТЫ РАЗНОЙ ФОРМЫ
71
Me — D2 -j- w,Sj;
1 k2 Qr — ii К" — и"— ш');
1
(9 — ft2) Di
(13.54)
)
Постоянные в (13.54) определяются из граничных условий на кромках плиты и из условий сопряжения отдельных участков плиты.
Сплошная плита должна содержать изотропный сердечник, для которого
w В2г2.
(13.55)
Приводим формулы для прогибов и усилий в круглой плите, загруженной сосредоточенной силой в центре и сплошной равномерно распределенной нагрузкой.
а) Плита радиуса а загружена силой Р в центре. Внешняя кромка жестко защемлена ():
w
Mr
4я (1 — k) (1 k) Dx (1 ft) р2-2р'; р
(l-ft
2я (1 — ft2)
— (1 (); р
М 2я (1 — ft2)
(ft ц2) р"1 ();
(1 -Н И1) pfe_1 —
(13.56)
-( IXOJ: С- —.
б) Плита радиуса а загружена силой Р в центре. Внешняя кромка шарнирно оперта (кф 1):
Ра2
w
4л (1 Р2
к2)
'(2 m)g-fe)
(1)( Ш)
2 (1 Иг) l-f-fe
Мг
(1 ft) (ft щ)
Р (1 Иг) ( ъ-1
2л (1 — к2)
Р
2лг
Рк2
Г(lM-2) СИ’Г'Н) k—1 2л (1 — к2) I к ц2
- (1 fix)
)
в) Плита радиуса а загружена равномерно распределенной нагрузкой интенсивностью р. Внешняя кромка жестко защемлена (кФ3; кф1):
w
ра4
З —ft —
8(9-ft2)(l k)D1 -4р1 (1 ft) р4;
Мг —— (ft щ) p_1 —
2 (9 — ft2) L ™
(3Ц2)Р2;
i )PW-
_(3ц, 1)р2;
Qr — r-
(13.58)
г) Плита радиуса а загружена равномерно распределенной нагрузкой интенсивностью р. Внешняя кромка шарнирно оперта на жесткую опору (кфЗ кф 1):
w _ ра4 Г
8 (9 — ft2) )х
(1ft) ( ц2)
4 (3 Иг) ь1
Мг
Же
(1ft) (ft Иг) р (3 ц2) а2
р4 J;
2 (9 — ft2)
pa2k2
2 (9 — к2)
— (1 3fii) р2
(Зщ) 0 k—i
k 14
(13.59)
)
13.4. ИЗОТРОПНЫЕ ПЛИТЫ РАЗНОЙ ФОРМЫ
13.4.1. Треугольные плиты 3
Прогибы и усилия в треугольных плитах (типа показанной на рис. 13.30) можно определить по следующим формулам:
Т а б л и ц а 13.27
Значения а, 0, у в (13.60) для плит, опертых по схеме А рис. 13.31, при 0О 30 (равносторонний треугольник) (Ц-0)
(13.57)
-
Sec
а1
1
1
Xl
2
5 ий
i
(J о.
13
1 10
1 е
113
10
1 б
13
10
6
1
12
1
50
197
232
98
112
71
—42
38
99
207
207
2
26
122
159
51
68
47
—30
18
73
166
120
Т а б л и ц а 13.28
Значения а, 0. V в (13.60) для плит, опертых по схеме В рис. 13.31 при 0о 30 (равносторонний треугольник) ( М-0)
Схема нагрузки (рис. 13.32)
ai
yi
xi ui
Vi
i
13
10 6
13 10
6
13
10
6
12 1 12
1
2
12
4
79
48
123
88
23
8
60
36
48
33
—19
—13
4
—3
63
48
—137
—89
155
130
219
132
72
РАЗДЕЛ 13. УПРУГИЕ ТОНКИЕ ПЛАСТИНЫ (ПЛИТЫ И БАЛКИ-СТЕНКИ)
Т а б л и ц а 13.29
Значения а, 3, у в (13.60) для плит, опертых по схеме С рис. 13.31
а
Параметры
Нагрузка по схеме 1 на рис.
СО
об
1
-jT 1при, равном
о
1 2
3
4
6
1 7
8
1 9
1 10
1 и
1
1 13
1 14
а
0
0
0
0
322
262
118
0
102
63
0
12
0
0,5
е
—22
—134
-19
—116
—12
—70
—3,5
—21
126
57
90
45
—24
9
—229
—47
75
1,5
23
—7
— 135 —31
23
0,2
—29
—7
V
266
239
159
46
—
—
—
288
—
—
208
—
100
а
0
0
0
0
199
162
74
0
98
61
0
11
0
0,75
р
—23
—140
—20 — 120
—12
—71
—3,4
—21
82
67
60
57
— 11 24
— 132 —36
73
4,9
23
—6,8
— 135 39
21
—5,5
—34 — 12
V
244
218
143
44
—
—
—
218
—
—
224
-
102
а
0
0
0
0
118
95
42
0
82
51
0
12
0
—21
—18
—10
“3
53
38
-6
-67
62
20
— 110
21
—42
1,0
—125
—107
—62
—18
59
51
25
—26
16
1.3
—43
— 11
— 18
V
222
197
129
48
—
—
—
152
—
—
220
-
112
0
0
0
0
45
36
15
0
45
28
0
11
0
Р
—15
—13
—7,2
—2
25
17
-2,4
—19
38
12
-53
19
—40
1,6
РУ
—92
—77
—43
—12
38
34
20
—11
27
12
—38
— 11
—30
V
182
160
106
48
—
—
—
78
—
—
—
—
139
а
0
0
0
0
20
15
6
0
23
14
0
7,2
0
2,U
ix
—И
—66
—9,1
—55
—4,9
—30
—1,3
—8
13
24
8,2
22
—0,7
14
—6,3 — 3
22
25
6,5
13
—24
-26
13
1,7
—26
—34
У
151
132
89
45
—
—
—
47
—
-
122
-
144
а
Параметры
Нагрузка по схеме 2 на рис. 13.32
-7-)
при i, равном
1 1
2
3 1
4 I
6
7 1
8 1
1
10
11
1 12
I 13
1 14
а
0
0
0
0
245
200
90
0
54
34
0
2,9
0
0,5
е
—19
—111
—16
—97
—9,8
—59
—2,9
—17,7
95
43
68
34
—17
5,8
—177
—36
39
11
11
7,9
—76 — 18
5,5 — 1,1
—8,4
—2,5
V
239
218
152
56
—
—
-
222
—
—
108
—
25
а
0
0
0
0
147
120
55
0
56
35
0
2,9
0
0,75
РУ
—19
—111
—16
—96
—9,7
—58,4
—2,9 —17,6
60
51
45
43
—6,3
18
—100
—27
41
—3,2
12
—9,3
—81
—24
4,8
-4,7
— 12 —4,7
V
211
191
133
51
—
—
—
168
—
—
125
—
25
а
х
0
—16
0
—14
0
—8,3
0
—2,5
84
37
68
28
31
45
0
—51
48
35
30
И
0
—68
3,7
5,6
0
—18
1
—98
—83
—49
15
45
39
39
—195
4,4
—3,7
—27
—8,8
—7,8
V
185
167
117
51
—
—
—
119
—
—
128
32
1.5
а
,
0
—И
—66
0
—9,4
—57
0
—5,5
—33
0
— 1,6 —9,6
30
16
28
24
12
26
11
—0,3
15
0
—14 —8,5
26
21
13
16
7
4,6
0
—31
—24
4,5
7
9,9
0
—20
—15
V
145
131
94
47
—
—
—
' 63
—
—
ЮЗ
—
53
2
а
Ру
V
0
—7,7
—46
117
0
—6,5
—39
105
0
—3,7 —22 77
0
—М
—6,5
43
13
8,2
18
10
5,8
17
4,3
0,3
11
0
-4,7
—3
39
13
12
13
8
3,8
61
0
—15 —17
75
3.3
5.4
—6,3
0
—14
—18
61
13.4. ИЗОТРОПНЫЕ ПЛИТЫ РАЗНОЙ ФОРМЫ
73
Продолжение табл. 13.29
а
b
Параметры
Нагрузка по схеме 3 рис. 13.32
(“Т
j при i,
равном
1 2
3
4
6
7
8
1 1 10
1 и
12
13
14
,ЛГ
х
—4,8
—3,9
—2
—0,5
13
8,2
—3
—11
23
7,5
—34
—24
14
V з
2
—29
—24
—12
2,8
12
11
6,3
—5
13
6,2
—16
—11
—2,5
V
35
28
13
0,7
“
—
—
27
—
—
82
—
82
и
—24
-19
—8,4
— 1,7
11
15
7,1
—2,9
23
12
—30
7,8
—49
2
h
—24
—19
—8,4
—1,7
П
1,6
—1,9
—0,5
23
7,7
—5
7,8
—8,2
V
35
28
14
0,4
—
—
—
14
—
—
64
-
106
W
41 ООО D
Му
мх
“2Р 6400
Р 2Ро 6400 ’
Рц 2Ро m 6400 ’
V
Mv
yap 800 ’
Pt з2Ро
6400 ’
Значения коэффициентов a, P, у в (13.60) для точек, пронумерованных ьа рис. 13.30 при краевых условиях,
llllu Кромка, свободно опертая на жесткую опору, Жестко защемленная кромка Рис. 13.31
показанных на рис. 13.31 и нагрузках по рис. 13.32, приведены в табл. 13.27—13.29. Более подробные таблицы для треугольных пластин см. 3, 23.
Эпюра по прямой уу0 Эпюро по прямой 0
Схема 1
А У
(13.60)
уРо уРо
ГП ШТН Hi CEU. рПБЗШХШ
19 р Схема 2
ihih 1.П 1 dmх. —-т-ггггтТГНу
Рис. 13.32
13.4.2. Трапецеидальные плиты 3
Изгибающие моменты в равнобочных трапецеидальных плитах (рис. 13.33), как и в треугольных, определяются формулами (13.60). В табл. 13.30—13.34 приве-
v г о —1
U 3 2 1 Х
Ь1676
1211
10
1Фу
17 а
У
Рис. 13.33
а)
6)
ж
-пт
JLl v
I ал
2j
I в Л
vvmvt Жестко защемленная кромка t т Свободно опертая кромка
Рис. 13.34
74
РАЗДЕЛ 13. УПРУГИЕ ТОНКИЕ ПЛАСТИНЫ (ПЛИТЫ И БАЛКИ-СТЕНКИ)
Значения х, Зу в (13.60) для плиты а (рис. 13.34) Схема плиты
Нагрузка
р
i
по рис. 13.33
1
2
1 3
1
6
1 7
1 8
9
10
1 и
fix
—6,9
—41
—5,7
—34
—3,0
—18
-0,7
—4,4
4,9
—1,1
1,6
0,2
—3,2
1,7
—3,5
—1,7
17
22
12
19
CL
II
е
зу
—11
-65
-9,6
—58
—6,0
35
—1,9
—И
8,3
14
6,3
14
0,2
11
—8,9
—4,2
19
32
15
28
б
I
е
Ру
—5,9
—36
-5,1
—31
3,0 — 18
—0,8
—5
4,1
4,0
3.0
4.1
—1,6
—3,2
—4,0
—1,9
И
25
11
21
II
е
fiy
—8,1
—49
—7,3
—44
— 1,9 —29,3
—1,6
—9,8
6,2
16
6,1
15
2,0
12
-7,8
—3,7
1
25
10
22
Схема плиты по рис. 13.33
р
i
Нагрузка
12
13
14
15
16
- 1
18
19 1
20 I
1 21
fiy
—6,0
12
—16
-7,5
20
25
4,1
13
—32
—15
14
9,3
9,4
3,8
—36
—17
-8,3
—50
—18
—18
а
II
fix
fiy
1,4
15
—26
—13
17
17
5,1
12
—37
-17
8,5
—5,4
3,9
—7,7
—30
—14
—5,6
—35
—12
—12
А
I
х
fiy
2,2
12
—15 —7,3
8,2
15
7,0
8,5
—24
—И
—7,8 — 17
—6,5
—39
—14
—14
—
—
О
II
х
РУ
4
12
—21
—10
5,1
2,7
3,4
1,1
—22
—10
—5,9
-35
—4,8
-29
—14
—14
—
-
Значения х, Зу, в (13.(Ю) для плиты б (рис. 13.34)
Схема плиты
Нагрузка
е
i
по рис. 13. 33
1
2
3
4
6
7
8
9
10
fix
1 1
—6,3
—38
—3,2
—19
—0,8
—4,6
5,5
—2,9
1,5
—0,3
—3,9
1,3
1 1 и- СО
Vi o
20
22
CL
II
fix
fiy
—12
—69
—10
-60
—6,1
—37
—1,9
-11
8,7
13
6,1
13
—0,3
11
—8,9
-4,2
21
32
h
—7,7
—6,5
-3,6
—0,9
5,5
2,9
2,6
—4,4
16
1
fiy
—55
—39
—22
—5,8
1,9
2,8
5,5
—2,1
30
О
II
fix
fiy
—9,4
—55
i i
ел со
—5,3
—32
—1,7 — 10
7,2
15
6,1
15
0,9
11
—8,1
—3,8
15
29
Схема плиты
Нагрузка
i
по рис. 13. 33
P
11
12
1 3
И
1.5
1 16
1 7
18
1 19
fix
13
—4,1
— 17
26
2,7
—37
25
15
—48
fiy
19
11
—8,1
29
15
—16
27
15
—23
II
fix
fiy
16
28
0,2
15
—27
—13
21
20
3,2
7,5
—40
—19
— 16
6,2
7,3
0,4
—38 — 18
fix
14
0
— 19
16
10
—34
0
o
0
б
I
fiy
26
14
—8,9
33
19
— 16
0
0
0
II
fix
fiy
13
25
2,5
13
O
—11
11
16
з. з
o,4
—29 — 14
0
0
0
0
0
0
13.4. ИЗОТРОПНЫЕ ПЛИТЫ РАЗНОЙ ФОРМЫ
75
Таблица 13.32
Таблица 13.34
Значения
3 в (13.60) для пльты в (рис. 13.34)
Схема плиты по рис. 13.33
Нагрузка
Р)
6
7
8
9
10
11
12
13
а
I
У
12
17
5,4
14
—4,6
7,6
—6,9
—3,3
23
28
16
24
—3,3
12
—35
—17
и
h
20
45
13
38
1,4
22
—15
—7,0
28
38
22
37
0
18
—41 — 19
Схема плиты по рис. 13.33
Нагрузка
1
Р
i
14
15
16
17
18
19
20
21
а
“у
24
25
4,0
11
—40 — 19
15
6,2
9,5
6,2
—41
—20
-9,2
—55
—20
—20
и
е
Ру
23
18
4,0
3,8
—51
—24
11
—11
4,0
—13
—39
—18
—7
—42
—15
—15
Значения
Т а б л и ц а 13.33 в (13.60) для плиты г (рис. 13.34)
(-т)
Схема плиты по рис. 13.33
Нагрузка
Э
1
ь
8
9
10
11
12
а
I
К
эу
13
17
5,4
14
—5,6
7,7
—7,3
—3,5
27
29
18
25
5,5
13
и
h
21
45
13
38
—2,2
22
—15
—7,3
32
44
24
38
—1,6
18
Схема плиты по рис. 13.33
Нагрузка
Р
i
13
14
15
16
17
18
19
а
е
У
—46
—22
31
30
2,4
13
1
—47
—22
27
25
15
13
—55
—26
и
х
РУ
—43
—20
28
21
2,8
5,0
—56
—27
20
3,
8,5
—3,8
S3 1 1
дены значения коэффициентов Р и ру для точек плиты, пронумерованных на рис. 13.33 при краевых условиях и нагрузках р(х, у)р(у), показанных на рис. 13.34.
13.4.3. Эллиптические плиты (рис. 13.35)
Нагрузка (интенсивностью р), равномерно распределенная по всей площади плиты. Для плиты с жестко защемленной кромкой (А 0).
Значения Зд в (13.60) для плит рис. 13.34
Схема
3
Плита а при i, равном
Плита б при i
, равном
плиты ПО рис. 13.33
о.
U
СО
X
9
13
16
19
21
9
13
16
19
21
-4,4
—20
—40
—42
—18
—4,6
—22
—47
—60
0
а
II
—11
—34
—46
—38
—12
-11
—35
—51
—48
0
”5,0
—19
—30
—14
—
—5,6
—24
—42
0
б
II
—10
—26
—27
—14
-
—4,2
—13
—19
— 18
-
Схема
я
X
Плита 6
г при
U равном
Плита г при ь,
, равном
плиты по рис. 13.33
о.
U
я
X
9
13
16
19
21
9
13
16
19
21
I
—8,7
—30
—51
—52
—20
—9,2
—33
—59
—70
0
а
II
—19
—52
—65
—49
—15
-19
—54
—71
—62
0
мх — м
Р Л 2 у2 2
г. 3 3 2
“8D(e 6 ):
а4 аЧ а2 ’
4pD
РР (3j2 X2 _ 1
и А 64 аЧ2 Ь2)'
(13.61)
)
Изгибающие моменты в центре плиты и на концах главных осей эллипса равны:
. ч 4рГ)
(х)х0; уо
у0
Аа 8рР Аа2
(13.62)
4 рР
(Му)х0; у0 ’
_ 8Р (Му)х0; у—Ъ “ АЬ ’
Для плиты с кромкой, шарнирно опертой на жесткую опору, прогиб и изгибающие моменты в центре плиты при ц 0 определяются по формулам
рь
w aL-; Мх рЬ; Му урЬ. (13.63)
Значения коэффициентов а, р, у Даны в табл. 13.35.
Нагрузка Р, распределенная в центре плиты по кругу малого радиуса г0. Максимальные значения прогиба и нормального напряжения в центре плиты с кромкой, шарнирно опертой на жесткую опору, определяются по формулам (pi0,3; р Ьа).
-2а-
ы
л
Рис. 13.35
76
РАЗДЕЛ 13. УПРУГИЕ ТОНКИЕ ПЛАСТИНЫ (ПЛИТЫ И БАЛКИ-СТЕНКИ)
Т а б л и ц а 13.35
Значения а, 3, v в (13.63) (М- 0)
а
Ь
1
1,1
1,2
1,3
1,4
1,5
2
3
4
5
оо
а
0,064
0,076
0,088
0,098
0,107
0,115
0,145
0,172
0,185
0,192
0,209
е
0,159
0,159
0,155
0,152
0,145
0,138
0,105
0,064
0,049
0,029
0
V
0,159
0,188
0,215
0,237
0,260
0,280.
0,348
0,414
0,451
0,472
0,500
Т a б л и ц a 13.36 5
Значения а, 3, V в (13.67) для плиты с защемленной дуговой кромкой
105 ос
1
1
Ю4 Р;
1
10
е0
i
1
2 1
3 1
1 о
1
2 1
3
4
5
0
1
2
3
я
5
26
28
0
—37
31
82
250
—196
0
97
186
83
4
я
17
57
47
0
—56
92
97
—340
—274
0
167
169
87
3
я
2
63
132
82
—265
—3
220
87
—488
—403
—265
238
172
87
Я
293
337
152
0
440
396
—25
—756
—654
0
111
168
136
®макс (0,745-0,0750);
3 Р 2nh2
1,3 In 1,97—0,77(5 j.
(13.64)
Аналогичные величины для плиты с жестко защемленной кромкой при ja 0,3:
3 РК2 ' 2я2
РЬ2
"(0,30_0,04Р):
1п — 0,317(5 — 0,376.
(13.65)
Нагрузка, распределенная по линейному закону х
р(х, у) —ро —. Для плиты с жестко защемленным контуа
ром уравнение срединной поверхности имеет вид
РоХ („ х2 v2 2
24 аВ
(13.66)
В I
13.4.4. Плиты в виде кругового сектора
Плита представлена на рис. 13.36; радиальные кромки свободно оперты на жесткие опоры.
Прогибы и усилия при равномерно распределенной нагрузке вычисляются по формулам
Рг0 Л4 2
a‘D ; г Pi Рго
г „ (13.67)
Me Vi рго; Qr ф,- рго
Q iPro’
где i — номера точек, показанных на рис. 13.36.
Т а б л и ц а 13.37 5
Значения а, 3 V в (13.67) для плиты со свободно опертой дуговой кромкой
10 а1
1
104 р.
1
104 v.
во
i
1
2
3
0
11
2
1 3
0 1
1 11
I 2 ’
1 3
Я
4
5
33
49
0
—47
16
121
0
107
179
133
Я
3
19
80
92
0
—86
80
197
0
203
231
154
я
2
92
225
203
—366
—66
272
325
—366
339
271
189
Я
589
884
584
0
643
785
524
0
164
280
311
Значения коэффициентов а, р, у, ф, ф при ы 0, приведены в табл. И 36-13.38. На рис. 13.37 приведены эпюры прогибов и усилий для плиты с дуговым краем, свободным от закреплений, при 0О — я4.
13.5. ТЕМПЕРАТУРНЫЕ НАПРЯЖЕНИЯ В ПЛАСТИНАХ
77
Т а б л и ц а 13.38 5 Значения р и ф в (13.67) для секторных плит
Дуговая кромка защемлена
Ф;
10 -ф,
Дуговая кромка свободно оперта
Юз ср.
5 6 78945б789
л
4
Я
3
Я
2
Я
280
317
362
424
245
282
330
400
-162
-178
-197
-212
182
218
287
348
156
187
235
316
198
220
246
275
198
244
305
375
118
169
264
426
Для 0оя и г—0 )0,340
я
2
ф0,442
Для 00— и г0
13.5. ТЕМПЕРАТУРНЫЕ НАПРЯЖЕНИЯ В ПЛАСТИНАХ
При неравномерном распределении температуры в пластинах могут появляться усилия.
Ниже рассмотрен случай, когда изменение температуры зависит только от координаты z (см. рис. 13.1 и 13.2).
Пусть температура нижней поверхности пластины (2г2) изменилась на 12 С, а верхней поверхности (2 —г2)—на ti С. Тогда, определив
ht2 2 ’
tn ti
(13.68)
найдем, что средняя температура t0 вызывает плоское напряженное состояние, a t — изгиб пластины.
Если пластина любого очертания в плане жестко закреплена по контуру, то при воздействии температурного поля (13.68) она останется плоской и на ее контуре возникнут продольные силы N и изгибающие моменты Мизг, определяемые по формулам
aEt0h atDK,
— 1 -Мизг , (13.69)
где — коэффициент линейного расширения.
Таким образом, задача сводится к построению решения для пластины с заданными опорными закреплениями от нагрузки, приложенной по кромкам и определяемой (13.69). Это может быть выполнено при помощи формул, приведенных в 13.31.
Пример 13.10. Определить деформацию круглой плиты радиуса а, свободно опертой по контуру, от действия,
t:
U
Рис. 13.36
мг'?Рго
Рис. 13.37
Используя (13.26) и положив с3с40, получим для г а кромки пластины р — ; рп — 1 а а )
w с с2 — 0;
Мг —— 2Лгс2 а2
Откуда
аЮ№
h
ata2
2h
Следовательно,
ata2
(1-р2).
(а)
(б)
(в)
13.6. ОБЗОР ТАБЛИЦ ПО РАСЧЕТУ ПЛИТ
Приводим некоторые сведения о наиболее распространенных монографиях, содержащих таблицы для определения прогибов и усилий в плитах.
1. Вайнберг Д. В., Вайнберг Е. Д. Пластины, диски, балки-стенки. Стройиздат УССР, 1959. В работе содержится весьма обширный справочный материал (формулы, таблицы, графики, примеры) по определению усилий и деформаций в круглых, прямоугольных и дру-
78
РАЗДЕЛ 13. УПРУГИЕ ТОНКИЕ ПЛАСТИНЫ (ПЛИТЫ И БАЛКИ-СТЕНКИ)
гой формы плитах под сосредоточенными и распределенными нагрузками.
2. Варвак П. М. и др. Таблицы для расчета прямоугольных плит. Изд. АН УССР, 1959. Даны таблицы коэффициентов для определения прогибов и усилий в прямоугольных плитах с разнообразными опорными условиями от равномерно распределенной и сосредоточенной нагрузок. Таблицы составлены при помощи численного интегрирования, в связи с чем возможна погрешность при определении расчетных величин, которая (по мнению авторов) в большинстве случаев не превышает 10.
3. Галеркин Б. Г. Упругие тонкие плиты. Госстройиздат, 1933. Содержит таблицы по расчету прямоугольных, секторных, треугольных плит с разнообразными опорными условиями под распределенной и сосредоточенной нагрузками.
4. П а п к о в и ч П. Ф. Строительная механика корабля, ч. II. Судпромгиз, 1941. Приведены таблицы для определения усилий и прогибов прямоугольных плит, а также таблицы для расчета круглых плит под осесимметричной нагрузкой на опорах и упругом винклеровском основании.
5. К а л м а н о к А. С. Изгиб тонких прямоугольных плит. Машстройиздат, 1950. Таблицы по определению прогибов и усилий в прямоугольных плитах под трапецеидальной нагрузкой.
6. Коренев Б. Г. и Черниговская Е. И. Расчет плит на упругом основании. Госстройиздат, 1962. Приведено большое количество табулированных функций, которые существенно облегчают расчет прямоугольных и круглых плит на упругом основании.
7. Смотров А. Решение плит, нагруженных сплошной нагрузкой, по закону трапеции. ОНТИ, 1936. Приведены таблицы для прямоугольных и треугольных плит.
8. Тимошенко С. П., В о й н о в с к и й-К р и гер С. Пластинки и оболочки. Наука, 1963. Даны таблицы для определения усилий в прямоугольных плитах под разнообразной нагрузкой. Имеются также таблицы, формулы и графики для расчета эллиптических, круглых и треугольных плит.
9. Шехтер О. Я. и Винокурова А. В. Расчет плит на упругом основании. Госстройиздат, 1936. Содержит таблицы по определению усилий и прогибов в бесконечно большой плите и плите в виде бесконечной полосы, опирающейся на упругое винклеровское основание и загруженной сосредоточенными силами, расположенными в углах прямоугольной сетки, либо по оси симметрии бесконечной полосы.
10. Ш и м а н с к и й Ю. А. Изгиб пластин. ОНТИ, 1934. Содержит таблицы по расчету прямоугольных плит под разной нагрузкой.
13.7. Краткие сведения об аналитических методах определения усилий и перемещений при изгибе тонких упругих плит
Задача об изгибе упругой тонкой плиты сводится к определению функции прогибов wy зная которую, можно вычислить усилия и углы наклона касательной к срединной поверхности плиты по формулам
fd2w d2w
м м,
d2w d2w
ду
дх)’
(13.70)
Мк -(1
d2w
d2w d2w д
у2ш; дМк дМк
v Qx -g; v Qysf;
dw
:
dw
liy
(13.70)
Функция прогибов должна удовлетворять дифференциальному уравнению в частных производных четвертого порядка (разрешающее уравнение) и граничным условиям на кромках плиты. В частности, для плиты постоянной толщины из изотропного материала разрешающее уравнение в декартовых координатах имеет вид 5, 19, 23
д д
2 дх дхЧу
dy)W D
(13.71)
Соответствующие уравнения для плиты из анизотропного (в частности, ортотропного) материала приведены в 17, для плиты переменной толщины — в 3, 23, для плиты на упругом основании — в 4, 16, 23. Соотношения (13.70) и (13.71) в декартовых координатах целесообразно применять для бесконечных пластин, загруженных нагрузкой, распределенной по площади прямоугольника; для полубесконечной плиты, ограниченной прямолинейной кромкой; для бесконечной (или полубесконечной) полосы с параллельными кромками и, наконец, для плит, имеющих форму прямоугольника, параллелограмма, треугольника или трапеции. Для круглых и кольцевых плит, а также для плит, имеющих форму сектора или кругового прямоугольника, целесообразно использовать полярные координаты (соответствующие зависимости см. 5, 12, 17, 20, 23). Для плит, имеющих форму эксцентричного кольца, кругового сегмента или круговой луночки, целесообразно применять биполярные координаты 24. Другие возможные системы координат см. 5, 23.
Как правило, решение задачи об изгибе плиты ищут в виде суммы
w ш ад,
(13.72)
где w удовлетворяет только (13.71) при заданной нагрузке, a w удовлетворяет (13.71) при р0 и подбирается таким образом, чтобы погасить искажения граничных условий на кромках плиты, вызываемые w . Слагаемое w называют однородным решением.
Оба слагаемых (13.72) компонуют из элементов (6 const)
Fn — fi(n kx)f2(n,ky) (13.73)
в следующих формах:
w — S F„
J t'ndn.
(13.74)
(13.75)
13.6. ОБЗОР ТАБЛИЦ ПО РАСЧЕТУ ПЛИТ
79
Отметим возможные варианты.
а) Задавая 2 или fi в (13.73) в виде
f2 С cos tikyс2 sin nky (13.76)
и используя (13.74), можно получать решения большого количества задач в виде ряда Фурье 3, 5, 20, 23.
б) Используя (13.76) и (13.75), можно получать решения в виде интеграла Фурье. Такие решения используются обычно для плит бесконечных размеров 3, 14, 20, 23, 24, 25.
в) Придав 2 или 1 в (13.73) в виде
2сгепкУ С2Гпку (13.77)
и подобрав соответствующим образом параметр л, можно определить ряд однородных решений, удовлетворяющих заданным граничным условиям на кромках пластины у—0 и у аа Такие решения принято называть
функциями Папковича—Фадля. Они могут быть использованы для расчета прямоугольных секторных плит и плит в виде кругового прямоугольника И, 20.
г) Задав fi и f2 в (13.73) в виде степенных функций, можно, суммируя конечное число элементов Fn, получить решения в виде степенных полиномов, удовлетворяющих (13.71). Такие полиномы могут быть использованы при решении задач об изгибе прямоугольных пластин 13.
д) Ряд эффективных решений задач об изгибе плиты в виде полосы, круговой луночки и кругового прямоугольника может быть получен в форме (13.75) путем применения интегральных преобразований Фурье, Меллина 25.
Если удается получить решение задачи, используя конечное число элементов (13.73), или найти аналитическое выражение для суммы ряда (13.74) или значения интеграла (13.75), то говорят, что задача допускает замкнутое решение. Так, например, замкнутое решение для усилий может быть получено в задачах об изгибе бесконечной плиты, ограниченной прямолинейной кромкой (защемленной, свободно опертой или свободной от закреплений) под действием сосредоточенных сил или пар.
В тех случаях, когда задача не имеет замкнутого решения, имеется большое число приемов, позволяющих
ЛИТЕР
1. Биргер И. А. Круглые пластинки и оболочки вращения. Оборонгиз, 1961.
2. В а р в а к П. М. и др. Таблицы для расчета прямоугольных плит. Изд. АН УССР, 1959.
3. Вайнберг Д. В. иВайнберг Е. Д. Пластины, диски, балки-стенки. Госстройиздат УССР, 1959.
4. Власов В. 3. иЛеонтьев Н. Н. Балки, плиты и оболочки на упругом основании. Физматгиз, 1960.
5. Г а л е р к и н Б. Г. Упругие тонкие плиты. Госстройиздат, 1933.
6. Г а с т е в В. А. и К и т о в е р К. А. К определению упругих характеристик ребристых пластин. Строительная механика и расчет сооружений, 1961, № 6.
7. Горбунов-Посадов М. И. Таблицы для расчета тонких упругих плит на упругом основании. Госстройиздат, 1959.
8. Горбунов-Посадов М. И. Расчет конструкций на упругом основании. Госстройиздат, 1953.
9. Жемочкин Б. Н. и Синицын А. П. Практические методы расчета фундаментных балок и плит на упругом основании без гипотезы Винклера. Госстройиздат, 1962.
10. К а л м а н о к А. С. Строительная механика пластин. Машстройиздат, 1950.
11. Китовер К. А. Изгиб тонких прямоугольных пластин.
В сб.: Расчет пространственных конструкций, вып. 2. Госстройиздат, 1950.
12. К и т о в е р К. А. Круглые тонкие плиты. Госстройиздат, 1953.
13. К и т о в е р К. А. Применение степенных полиномов к решению задач об изгибе ортотропных плит. В сб.: Расчет пространственных конструкций, вып. V Госстройиздат, 1959,
облегчить вычисления путем усиления сходимости ряда
(13.74) (см. первое издание справочника). Приемы, облегчающие вычисление несобственных интегралов
(13.75), см. 25.
В ряде задач слагаемые Fn в (13.74) могут быть найдены независимо друг от друга. В этом случае можно говорить о точном решении задачи. Однако в большинстве задач слагаемые Fn в (13.74) определяются с точностью до множителей сп. Эти множители могут быть найдены из бесконечной системы линейных уравнений. Хотя и в этом случае решение может быть получено с любой степенью точности, будем такие решения называть приближенными.
К группе приближенных решений следует отнести решения, основанные на принципе минимума потенциальной энергии деформации. В этих методах компонуют решение в виде ряда (13.74) при условии, что каждое из слагаемых Fn задано с точностью до постоянного множителя сп и удовлетворяет заданным граничным условиям. Множители сп определяются из бесконечной системы алгебраических уравнений 30, 21, 23.
В заключение приведем ссылки на литературу по некоторым аналитическим решениям задач об изгибе плит, которые могут представлять интерес для проектировщиков:
а) метод начальных параметров для осесимметричной деформации круглых и кольцевых плит 12;
б) осесимметричная деформация круглых и кольцевых плит переменной жесткости 1, 3, 23;
в) некоторые решения по неосесимметричной деформации круглых плит 3;
г) некоторые решения по изгибу прямоугольных плит переменной жесткости 3, 23;
д) изгиб прямоугольных и круглых плит из анизотропного материала 17;
е) метод начальных параметров для осесимметричной деформации круглых и кольцевых плит на упругом основании типа Винклера 15;
ж) задачи об изгибе плит на упругом основании с двумя упругими характеристиками 4, 16;
з) решения некоторых задач об изгибе плит в виде треугольника, сектора, кругового прямоугольника, эллипса, кругового сегмента 3, 20, 23, 25.
АТУРА
14. К и т о в е р К. А. Об упругом равновесии тонких бесконечных пластин из ортотропного материала. Инженерный сборник АН СССР, т. XXX, 1960.
15. К о р е н е в Б. Г. Некоторые задачи теории упругости и теплопроводности, решаемые з бесселевых функциях. Физматгиз, 1960.
16. Коренев Б. Г. и Черниговская Е. И. Расчет плит на упругом основании. Госстройиздат, 1962.
17. Л е х н и ц к и й С. Г. Анизотропные пластинки. ГосГизд. технико-теор. лит., 1957.
18. М а л и е в А. С. Исследование изгиба ребристых плит, вып. 1, ВВМИСУ, 1939.
19. П а п к о в и ч П. Ф. Строительная механика корабля,
ч. И. Судпромгиз, 1941.
20. П а п к о в и ч П. Ф. Теория упругости. Оборонгиз, 1939.
21. П р а т у с е в и ч Я. А. Вариационные методы в строительной механике. Гостехиздат, 1948.
22. С м о т р о в А. Решение плит, загруженных сплошной нагрузкой по закону трапеции. ОНТИ, 1936.
23. Сладкопевцев А. А. К вопросу о расчете пластин
средней толщины. В сб.: Нелинейные задачи строительных
конструкций. Под ред. И. С. Цуркова. МИСИ, 1970.
24. У ф л я н д Я. С. Биполярные координаты в теории упругости. ГТТИ, 1950.
25. У ф л я н д Я. С. Интегральные преобразования в задачах теории упругости. Наука, 1967.
26. Шехтер О. Я. иВинокурова А. В. Расчет плит на упругом основании. Госстройиздат, 1936.
27.-Ш и м а н с к и й Ю. А. Изгиб пластин. ОНТИ, 1936.
РАЗДЕЛ 14
ОБОЛОЧКИ
14.1. КЛАССИФИКАЦИЯ ОБОЛОЧЕК И КАЧЕСТВЕННАЯ ХАРАКТЕРИСТИКА ИХ РАБОТЫ
14.1.1. Общие положения
Оболочка представляет собой тело, ограниченное двумя криволинейными поверхностями, расстояние между которыми, называемое толщиной оболочки (t)y мало по сравнению с другими размерами. Толщина оболочки может быть переменной величиной. Поверхность равноотстоящая от ограничивающих криволинейных поверхностей, называется срединной поверхностью. В зависимости от характера этой поверхности различают гладкие оболочки и складки. У гладкой оболочки (рис. 14.1) срединная поверхность плавная, без выступов и переломов. Складка составлена из отдельных пластинок, так что ее срединная поверхность представляет собой поверность многогранника (рис. 14.2). Кривизна срединной поверхности гладких оболочек или повсюду постоянна, или плавно изменяется от точки к точке; у срединной поверхности складок она сосредоточена в местах сопряжения граней; во всех остальных точках она равна нулю.
Встречаются оболочки смешанного типа, состоящие из частей гладких оболочек, соединенных между собой под некоторыми углами (рис. 14.3), а также комбинации из гладких оболочек и складок.
В зависимости от знака гауссовой кривизны различают три класса оболочек:
1) оболочки положительной гауссовой кривизны (сферическая, эллиптическая и т. п.) (рис. 14.1,а);
2) оболочки нулевой кривизны (цилиндрические и конические) (рис. 14.1, б и в)
3) оболочки отрицательной гауссовой кривизны (например, в форме гиперболического параболоида и т. п.) (рис. 14.1, г).
Часто встречаются оболочки смешанной кривизны, у которой гауссова кривизна имеет различные знаки на различных участках, например торообразная оболочка и др. (рис. 14.4).
Оболочки, срединная поверхность которых представляет собой поверхность вращения, т. е. поверхность, образованную вращением плоской кривой около неподвижной прямой (оси вращения), называются оболочками вращения.
Оболочки, срединная поверхность которых образована поступательным перемещением плоской кривой по некоторой другой плоской кривой (плоскости обеих крипых перпендикулярны), называются оболочкой переноса или трансверсальной оболочкой.
В аависимости от соотношения между толщиной обо¬
лочки f и ее генеральными размерами в плане L различают:
толстые оболочки t
U
Л _i_
5 8
тонкие (тонкостенные) 1200 Мин 18 мин и очень тонкие 1200 Lmhh.
Рис. 14.1
Рис. 14.2
Конструктивно оболочки могут быть оформлены как сплошные, сетчатые или ребристые.
В зависимости от применяемых материалов
6) различают анизотропные
и изотропные оболочки. К анизотропным оболочкам относятся многослойные (например, двух- и грехслойные оболочки), слои которых могут состоять как из изотропных, так и из анизотроприс g ных материалов (напри¬
мер, стеклопластиков). Если оболочка сделана из изотропного материала, но по разным направлениям конструктивно оформлена различно, то говорят о ее конструктивной анизотропии.
14.1. КЛАССИФИКАЦИЯ ОБОЛОЧЕК И КАЧЕСТВЕННАЯ ХАРАКТЕРИСТИКА ИХ РАБОТЫ
81
Диафрагмы
Края оболочки могут быть свободными, шарнирно опертыми (подвижными или неподвижными) либо защемленными как по всему контуру, так и по части контура или же в отдельных точках, а также могут иметь упругие опоры в виде гибких диафрагм или балок.
участок нуле бои нрибизны ' Участок отрицательной нрибизны Участок положительной нрибизны
Рис. 14.4
14.1.2. Тонкостенные оболочки
Тонкостенные оболочки, применяемые в покрытиях и перекрытиях, разделяются на: 1) купола; 2) своды, своды-оболочки, волнистые своды; 3) пологие оболочки;
4) призматические складки и шатры; 5) висячие оболочки.
Куполами перекрывают помещения, круглые в плане или имеющие форму правильного многоугольника. Они бывают: гладкие, ребристые и многоугольные.
Гладкие купола имеют форму оболочки вращения.
Ребристые купола в своей основе имеют решетку, составленную из ребер, направленных по параллелям и меридианам. Многоугольные купола составлены из пересекающихся частей оболочек вращения (рис. 14.3,6).
Сводами называются оболочки, очерченные по цилиндрической поверхности. Они применяются в качестве покрытий помещений, прямоугольных в плане. Края сводов (параллельные образующей) могут опираться на сплошные непрерывные опоры. В этом случае размерами, характеризующими свод, будут: пролет I (расстояние между опорами) и подъем свода 0. Отношение о для сводов не меньше 16. Своды, опирающиеся на жесткие поперечные диафрагмы и на продольные бортовые элементы, называются сводами-оболочками (рис. 14.5). Они характеризуются тремя размерами: расстоянием 1 между поперечными диафрагмами (пролет оболочки), расстоянием между бортовыми элементами 2 (длина волны) и подъемом f0.
Если i2l то свод-оболочка называется длинной (практически это отношение достигает 3—4). Подъем fo принимается не меньше 7ю 1 и не меньше 7б 2. Длинные своды-оболочки бывают однопролетные (опирающиеся на две диафрагмы), многопролетные (опирающиеся на ряд диафрагм), одноволновые и многоволновые (состоящие из нескольких параллельных оболочек, связанных общими бортовыми элементами).
При i2l свод-оболочка называется короткой;
1
подъем короткой оболочки f0 h-
Рис. 14.5
подъем (о7бмин). Близкими к пологим оболочкам по характеру работы и применению являются слегка вспарушенные плиты и ступенчато-вспарушенные панели, у которых верхняя поверхность делается плоской, а нижняя представляет собой криволинейную или ступенчатую поверхность.
Призматические складки (см. рис. 14.2, б) и шатры (см. рис. 14.2, а) применяются для тех же целей, что и своды-оболочки или пологие оболочки. Шатры имеют форму усеченной пирамиды; более подробно они описаны в 37. Описание складок см. 37, 42, 59.
Волнистыми сводами называются своды, имеющие в продольном разрезе волнистое очертание (рис. 14.6). Форма поперечного сечения волнистого свода может быть криволинейной или складчатой — треугольной или трапециевидной.
Пологие оболочки (см. рис. 14.25) имеют небольшой
Висячие оболочки применяются в покрытиях больших пролетов, они создаются на основе пространственных сеток из вант (см. раздел И).
14.1.3. Общая характеристика работы
оболочек
В оболочке в отличие от плиты, кроме изгибающих и крутящих моментов и поперечных сил, возникают продольные (осевые) и сдвигающие силы. При определенных условиях величина первой группы сил, связанных с работой оболочки на изгиб, относительно мала, поэтому оболочка работает в основном на продольные силы (сжатие или растяжение), а не на изгиб и кручение. Это определяет эффективность конструкции типа оболочек, поскольку материал используется более выгодно, чем в плитах или балках.
Вследствие кривизны оболочки проекции продольных и сдвигающих сил на нормаль к поверхности оболочки создают подобие упругого (фиктивного) основания под оболочкой. Можно сказать, что оболочка работает как плита, под которую подведено упругое основание. Этим объясняется увеличение прочности и жесткости оболочки по сравнению с плитой. Большое влияние на работу оболочки оказывают условия ее опирания.
14.1.4. Характеристика теорий расчета
оболочек
В основу различных технических теорий оболочек положена гипотеза Кирхгофа—Лява: прямолинейные волокна оболочки, перпендикулярные к ее срединной поверхности до деформации, остаются после деформации прямолинейными и перпендикулярными к срединной поверхности и не изменяют своей длины.
Исходя из этого, построены две группы теорий расчета оболочек: линейные и нелинейные.
Линейные теории описывают напряженно-деформированное состояние оболочек, выполненных из материала, подчиняющегося закону Гука. Кроме того, предполагается, что перемещения оболочки, возникающие при ее деформации, малы и не могут вызвать существенного
82
РАЗДЕЛ 14. ОБОЛОЧКИ
перераспределения усилий. Линейные теории относительно просты, но имеют сравнительно узкую область применения, ограниченную предпосылками, на которых они основаны.
Исчерпывающие представления о работе оболочки на всех этапах нагружения можно получить с помощью нелинейных теорий. Различают три вида нелинейности: физическую — обусловленную нелинейной связью между тензорами напряжений и деформаций (материал не подчиняется закону Гука), геометрическую — определяемую нелинейной связью между деформациями и перемещениями и конструктивную, связанную с возможными изменениями расчетной схемы оболочки в процессе нагружения.
При определенной величине напряжений почти все строительные материалы перестают следовать закону Гука, так что диаграмма, определяющая зависимость между напряжениями и деформациями, становится нелинейной. Кроме того, возникают пластические деформации. В тех случаях, когда требуется изучить напряженно-деформированные состояния оболочки при напряжениях, превосходящих предел пропорциональности (например, в тех случаях, когда изучается работа оболочки при нагрузках, близких к разрушающим), необходимо учитывать физическую нелинейность. Наиболее просто учитывает физическую нелинейность теория предельного равновесия, основанная на понятии жесткопластического материала.
Если перемещения, возникающие в оболочке (например, прогибы), настолько велики, что могут вызвать существенное перераспределение усилий, то необходимо учитывать геометрическую нелинейность. Такие случаи встречаются, например, при работе тонких, очень пологих оболочек.
Нелинейные теории значительно сложнее линейных, и расчеты по ним весьма трудоемки. Поэтому важно в каждом конкретном случае решать вопрос о выборе теории. Можно руководствоваться следующим критерием.
1. Подсчитывается вся нагрузка 7, действующая на оболочку вместе с коэффициентами перегрузки, и определяется характерное перемещение (например, прогиб) по линейной теории.
2. Это значение прогиба подставляется в формулу, устанавливающую связь между нагрузкой и прогибом по нелинейной теории, и определяется величина qn, соответствующая прогибу f л.
3. Если разница между qn и q будет больше необходимой точности расчета, например 5, то расчет оболочки необходимо производить по нелинейной теории.
Иногда в процессе нагружения могут изменяться граничные условия, исчезать некоторые связи или появляться новые. В этих случаях оболочка ведет себя как конструктивно-нелинейная систем а.
В силу некоторых, упомянутых ниже, особенностей оболочки изгибающие и крутящие моменты могут быть настолько малы, что их можно отбросить без особого ущерба для точности расчета. В соответствии с этим все теории оболочек (как линейные, так и нелинейные) можно разделить на моментные и безмоментные. Безмоментные теории значительно проще моментных, поэтому практически важно знать условия их применимости.
14.1.5. Условия применимости безмоментных теорий 29
Эти условия зависят от ряда факторов, влияющих на работу оболочки:
1) гауссовой кривизны;
2) наличия на поверхности оболочки линий искажения напряженного состояния, т. е. линий, вдоль которых могут произойти возмущения напряженного состояния. Это те места, где геометрические или физические свойства оболочки (или характер нагрузки) изменяются скачком: а) края оболочки; б) линии, вдоль которых нагрузка (или ее производные) или геометрические параметры оболочки (кривизна или толщина) изменяются скачком. Вблизи этих мест возникают дополнительные напряжения, вызываемые краевым эффектом (см. 14.3.6).
Для характеристики работы оболочки большое значение имеет показатель изменяемости нагрузки, определяемый следующим образом. Назовем коэффициентом изменения нагрузки (или вообще какой-либо функции) число у, равное отношению среднего значения производной функции к среднему значению самой функции (на некотором интервале). Например, для равномерно распределенной нагрузки у0; для треугольной нагрузки Р Р
(рис. 14.7) у — для сосРеДоточенной силы
Yoo. Показателем изменяемости нагрузки назовем число S, связанное с у соотношением
где t — толщина оболочки; R — некоторый характерный радиус кривизны поверхности оболочки.
Из этой формулы получим
Для равномерно распределенной нагрузки показатель изменяемости равен — оо, для сосредоточенной силы
оо.
По безмоментной теории могут быть рассчитаны оболочки, удовлетворяющие следующим условиям.
1. Линии искажения напряженного состояния должны быть расположены на поверхр ности оболочки достаточно редко — так, чтобы зоны затухания возмущений напряженного состояния, возникающие около этих линий, не покрывали целиком срединную поверхность оболочки. Например, оболочки, подкрепленные часто расположенными ребрами, не могут быть рассчитаны по безмоментной теории.
2. Нормальная кривизна срединной поверхности оболочки на любой линии искажения не должна обращаться в нуль ни в одной точке. Например, цилиндрическая оболочка с краями, расположенными вдоль образующей, или та же оболочка, имеющая отверстие, или замкнутая цилиндрическая оболочка с ребрами, расположенными вдоль образующих, не могут быть рассчитаны по безмоментной теории.
3. Показатель изменяемости внешних поверхностных
и краевых нагрузок не должен быть слишком большим. Для поверхностной нагрузки по всем направлениям должно быть 5 7г, Для краевой нагрузки (для
оболочек положительной и отрицательной кривизны) и 5V4 (для оболочек нулевой кривизны). На сосредоточенную нагрузку, показатель изменяемости которой равен оо, оболочки не могут рассчитываться по безмоментной теории.
4. Срединная поверхность не должна обладать некоторыми особыми свойствами Например: а) коническая
14.2. ЗАМКНУТЫЕ КРУГОВЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ
83
оболочка не должна содержать вершину конуса;
б) срединная поверхность оболочки не должна касаться плоскости по замкнутой кривой, как в торообразной оболочке (см. рис. 14.20).
5. Срединная поверхность оболочки не должна деформироваться без растяжений (сжатий) и сдвигов. Иными словами, по безмоментной теории можно рассчитывать только такие оболочки, в которых изгиб и кручение возможны лишь при растяжении (сжатии) или сдвиге элементов срединной поверхности.
Указанные пять условий применимости безмоментной теории являются достаточными, но не необходимыми. Иногда можно рассчитывать оболочки по безмоментной теории и при нарушении одного или нескольких из этих условий.
Например, призматическая складка (см. рис. 14.2), пластинки которой соединены шарнирами, нагруженная в местах шарниров сосредоточенной нагрузкой, может быть рассчитана по безмоментной теории, хотя при этом нарушаются второе и третье условия. Оболочку положительной гауссовой кривизны, нагруженную сосредоточенной силой, можно рассчитывать по безмоментной теории, так как возмущения, вызванные сосредоточенной силой, быстро затухают.
Концентрации напряжений, вызванные возмущениями напряженного состояния около линий искажения, могут не приниматься в расчет, если пластические деформации и изменение формы оболочки не приводят к снижению ее несущей способности; в оболочках, выполненных из хрупкого материала, учет концентрации напряжений необходим.
Поэтому вопрос о применимости той или иной теории должен решаться в каждом отдельном случае. Для оболочек положительной кривизны второе и четвертое условия всегда выполняются.
14.1.6. Основные постановки задач теории оболочек 48
Имеется несколько постановок задач расчета оболочек. Для полного описания напряженно-деформированного состояния оболочки необходимы четыре функции:
1) функция F0) описывающая срединную поверхность при начальном нагружении q0 (эта функция описывает заданную поверхность оболочки);
2) функция F, описывающая срединную поверхность при расчетном загружении q. Эта функция выражается через перемещения оболочки и, следовательно, зная ее, легко вычислить деформации и напряжения;
3) функция qy описывающая нагрузки (или другие факторы, например, температуру), переводящие оболочку из состояния, выраженного функцией F0, в напряженно-деформированное состояние, выраженное функцией F;
4) функция f, устанавливающая связь между напряжениями и деформациями, т. е. функция, описывающая свойства материала.
В зависимости от того, какими функциями задаются и какие разыскиваются, различают следующие постановки задач расчета оболочек.
1. Заданы начальная поверхность оболочки (функция F0), нагрузка q и материал (функция f). Требуется определить напряженно-деформированное состояние оболочки (функцию F).
Это так называемая прямая постановка задачи. Ее решение получается путем интегрирования сложной системы дифференциальных уравнений, выполняемого приближенными методами. Большинство решенных задач относится к прямой постановке.
2. Заданы начальная поверхность (F0), напряженнодеформированное состояние, выраженное функцией F, и материал (функция f). Требуется определить нагрузку q.
Это обратная постановка задачи. Ее решение не требует интегрирования уравнений и сводится к дифференцированию известных функций. Эта постановка позволяет получить точные решения. К обратной постановке прибегают в тех случаях, когда решение задачи в прямой постановке становится очень громоздким. В литературе описано сравнительно мало задач, решенных в такой постановке.
3. Заданы нагрузка q, напряженно-деформированное состояние оболочки (F) и материал (). Требуется определить начальную форму оболочки. Решение этой задачи позволяет получить наиболее экономичные формы оболочек. Задачи в такой постановке почти не решались.
4. Возможна четвертая, малоисследованная постановка: заданы начальная (Fo) и деформированная форма оболочки F, а также нагрузка q. Требуется подобрать материал, т. е. определить функцию f. Эта постановка может найти применение при расчете многослойных оболочек.
14.2. ЗАМКНУТЫЕ КРУГОВЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ
14.2.1. Основные условные обозначения
Геометрические параметры (рис. 14.8)
R — радиус срединной поверхности стенки или обшивки оболочки;
I — длина оболочки; ailR — относительная длина оболочки;
х— расстояние вдоль образующей от некоторого начального поперечного сечения до какой-либо произвольной точки на срединной поверхности; ссл — относительная величина х;
s — расстояние по дуге окружности срединной поверхности от некоторой начальной до какой-либо произвольной точки на той же поверхности; рsR — относительная величина (центральный угол);
ах — расстояние между кольцами жесткости; as — расстояние между продольными ребрами жесткости;
— момент инерции всего поперечного сечения оболочки (пустотелой балки) относительно нейтральной оси;
S — статический момент части поперечного сечения относительно той же оси;
Fх — площадь поперечного сечения продольного ребра с примыкающей к нему частью обшивки; ls — момент инерции сечения 5const кольца жесткости с примыкающей к нему частью обшивки;
Is — погонный момент инерции продольного сечения s const;
х — момент инерции поперечного сечения const продольного ребра жесткости с примыкающей частью обшивки;
Ik — момент инерции сечения s const конце-
84
РАЗДЕЛ 14. ОБОЛОЧКИ
вого кольца жесткости относительно оси, параллельной образующей оболочки;
Iх — погонный момент инерции сечения х— const;
tx—Fxias — приведенная толщина оболочки в поперечном сечении х const;
Px—txIR —относительная величина tx
-VW-
приведенная толщина оболочки в
продольном сечении s const;
— относительная величина ts; t — толщина гладкой стенки безреберной оболочки;
i—t,R — то же, относительная величина ;
Рис. 14.9
Нагрузка
р — величина вектора внешней удельной нагрузки (на единицу поверхности или на погонную единицу);
Px, Pv, р—проекции вектора внешней нагрузки на ось х, на нормаль и на касательную к контуру поперечного сечения срединной поверхности оболочки.
Напряжения и усилия (рис. 14.9)
ах Nx, Qxу Мх—нормальные напряжения, нормальные (продольные) силы, поперечные силы и изгибающие моменты, действующие в поперечном сечении (х const) оболочки;
os Ns, Qs, Ms — нормальные напряжения, нормальные (продольные) силы; поперечные силы и изгибающие моменты, действующие
в продольном сечении (5 const) обо¬
лочки;
Nxs—Nx — сдвигающие силы;
т — касательные напряжения;
Q, Мк — изгибающий момент, поперечная сила и крутящий момент в пустотелой
балке.
Перемещения и деформации
w, и у v—перемещения точек срединной поверхности
оболочки в радиальном, продольном и тангенциальном направлениях;
Ф—Угол поворота образующей оболочки;
Хху Xs — деформация изгиба в продольном и поперечном направлениях;
Xxs — относительная деформация кручения;
Е — модуль упругости;
G — модуль сдвига; v — коэффициент Пуассона ; ех 8s— относительное удлинение в продольном и кольцевом направлениях; exs — относительный сдвиг.
14.2.2. Общие дифференциальные зависимости теории цилиндрических оболочек
Основные зависимости теории тонких цилиндрических оболочек, выведенные исходя из допущений двухосного напряженного состояния и сохранения прямых нормалей, в общем случае имеют следующий вид.
Дифференциальные уравнения равновесия:
dNx dNsx dh' N,.
дОх dQ,
Ns На д Rpv ’
дМх
дМ,
да
дМ,
ер
S. дМ. др да
QSR — 0; QXR — 0.
(14.1)
)
Уравнения неразрывности деформаций:
ар
да
дХ.
dxs
' ар
дег
0;
г лъ j
да Rd Р Rd а
0;
Хх
R
R2d а д I дгх
де
rwр V ар
. _ дг ар да 1 де:
о.
2 да )
(14.2)
Связь между усилиями и деформациями: Et
1 — v2 Et 1 — V
(Sx ves);
(®s ve);
A Et
2(1 v)
1 Коэффициент Пуассона обозначается обычно через Ц-; здесь он обозначен через v, так как через М- обозначена относительная толщина оболочки.
14.2. ЗАМКНУТЫЕ КРУГОВЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ
85
Et3
Мх-
12 (1 — v2) Et3
12 (1 —V2)
Мун — МсХ —
(Хх vXsY (Xs vXx) Xxs Et3
12(1 v)
(14.3)
Связь между деформациями и перемещениями:
R
ди
да
R
dv
W
ди
д dv
да
д
); - w
d2w
да2
dw
х я2 ‘ ар ар ) ’
1 д I dw
Xxs ’ fa (“Зр" v) (14.4)
14.2.3. Оболочка под действием осесимметричной нагрузки.
Безмоментная теория
Безмоментная (мембранная) теория приложима к расчету цилиндрических оболочек при выполнении общих условий, указанных в 14.1.5. Следует лишь отметить, что при осесимметричной нагрузке в безмоментной цилиндрической оболочке отсутствуют не только изгибающие и крутящие моменты и поперечные силы, но и сдвигающие силы.
Дифференциальные зависимости: а) уравнение равновесия
Rpx 0; N. Rpv 0; (14.5)
da
б) перемещения
R
У “ТГ
dw
dx
R
dw
da
(14.6)
Усилия в оболочке и ее перемещения при различных нагрузках даны в табл. 14.1.
14.2.4. Оболочка под действием осесимметричной нагрузки.
Моментная теория
Исходят из гипотез общей теории оболочек. При осесимметричной нагрузке отсутствуют крутящие моменты, сдвигающие силы и поперечные силы в продольных сечениях.
Моментная теория применяется для определения усилий краевого эффекта и для расчета коротких оболочек, когда длина оболочки не превышает длины участка действия краевого эффекта.
Т а б л и ц а 14.1 Усилия в оболочке и ее перемещения при осесимметричной нагрузке (по безмоментной теории)
Вид нагрузки
Расчетные формулы
1. Собст: равномерн периметру венный вес о распред г нагрузка
Q
у7777777
U-2P—1
в кГсм2 и еленная по go в кГсм
9о
Nx -gx- g0; Ns 0;
и (gRx gR); Et
x Et
2. Равно; ление pv е
мерное вну' кГсм2
?? н
греннее дав-
J
Nx
Pv (t v Ш Et lT)'
P 3. Гидрос жидкости кгсм3
V
г
статическое с удельныь
-—7R — давление весом v в
ч
л
К
N x 0; Ns yxR;
yxR2. _ VR2
w ; cp Et x Et
4. Давлени весом vrp рв в кГо
ищи
е грунта с в кгсм3 и н'2
объемным пригрузка
Nx 0;
X tg 45 -± j ;
w —.?rP — (x x Et Чгр)
R2
Ф, Yro X
Et rp
Xtg2 (45 .
КоэффИ по стен нулю
— 2R —— шент трен и ке принят
1
я грунта равным
5. Равномерное нагревание оболочки на t o;
w — OLf t R; qx 0
86
РАЗДЕЛ 14. ОБОЛОЧКИ
Дифференциальные уравнения равновесия: dNx dQx
dM,
da
RQX 0.
Связь между усилиями и деформациями: N
Et Et
(Ex ve,s); Ns г X
1 _V2
Mr
X (es ve); Et3 12(1 — v)
Et3
1 _V2
Xx,
12(1—Vs) VXx'
Связь между деформациями и перемещениями:
dw
1
dil
Rda’ Sx R ' da ’
e —
w
R
1 dw
1 d2w
Xx R2 ’ da2 ’ Xs R2 a’P2 Выражения усилий через перемещение w:
(14.9)
Л’х С — J pvdx; Ns Vxv— Et
w
Mx
Et3
R J 1 — v’
d2w
12(1 —v) d2 ’
d3w
12(1—v2)
Основное дифференциальное уравнение:
(14.10)
JL JL
tf4 ’ da2
Г Et3 dw 12(1 — v2) da2 ы
Et Nx
® Pm V R2 tv R
(14.11)
При ? const уравнение (14.11) принимает вид
dw
R
-4t, -v v-
(14.12)
dw
dx
4t
13)
где
D Et3
12(1 — v2)
(14.7)
у
3(1 —v2) R42
(14.8)
Уравнения (14.12) или (14.13) того же вида, что и уравнение балки на упругом основании. Общее решение уравнения (14.13):
w ех (Сг cos цх -f С2 sin трс) ецх (С3 cos rx -J-
С4 sin цх) 4- (). (14.14)
Здесь
f(x) — частное решение уравнения, зависящее от поверхностной нагрузки;
Ci, С2, С3, С4— произвольные постоянные, определяемые по граничным условиям (табл. 14.2).
Т а б л и ц а 14.2 Характеристика граничных условий
Край оболочки защемлен
в
II
о
8
II
о
Край оболочки свободен
и
о
II
о
Край оболочки шарнирно закреплен
w 0; Мх — 0
Если выражение для перемещений w решением уравнения (14.13) получено, то все усилия и деформации могут быть определены по формулам (14.10), (14.9) и (14.8).
В табл. 14.3 приведены усилия и перемещения при различных нагрузках.
14.2.5. Сопряжение оболочек. Осесимметричная нагрузка
В местах сопряжения двух оболочек вращения различной формы (цилиндрической, конической, сферической и т. п.), в местах перелома меридиана или скачкообразного изменения его радиуса кривизны или ступенчатого изменения толщины оболочки, а также в местах подкрепления кольцами к усилиям, определяемым по безмоментной теории, добавляются усилия и моменты, вызванные изгибом (см. также 14.3.8).
Расчет сопряжения ведется обычными методами строительной механики: а) методом сил с использованием условия совместности деформаций сопрягаемых элементов; б) методом перемещений с использованием условия равновесия усилий, действующих на сопряжение; в) смешанным методом. Рациональная основная система, допускающая расчет на действие нагрузки по безмоментной теории, может быть образована в простейшем случае (рис. 14.10, а) методом сил, в более сложных — смешанным методом (рис. 14.10,6, в).
В общем случае (рис. 14.10, в) на линии сопряжения оболочек или на осевой линии кольца в каждой точке накладываются две связи — радиальная и противовращательная, реакции которых обозначены Ri (сила) и ?2 (пара); соответствующие перемещения Z (радиальное)
14.2. ЗАМКНУТЫЕ КРУГОВЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ
87
1 3(1 — V1)
Усилия в оболочке и ее перемещения при осесимметричной нагрузке (по моментной теории) Г) у ; D —
V R2t2 12 (1 — v3)
(входящие в 1’ор'ут ''ункции W, V, U, Т приводятся в 5.5.6)
Т а б л и ц а 14.3
ЕР
Вид нагрузки
Расчетные формулы
1. Равномерно распределенная по кругу нагрузка pv в кГсм
ру
8т3 W (гх); при 0 шмакс -
8т 3 4г
U (гх);
при 0 мх макс_; Ms vMx-, Qx Формулы справедливы при I —
Т (ад.
2. Равномерно распределенные по контуру радиальная нагрузка Q0 в кГсм и момент М0 в кГ-смсм
щ(
1.
_т
2тf TiMoC (тр;) -f- Q0T (Глг);
М — гМ (л) QoV (Л); Л15 vAf; Q — 2tiM0 V (тр:) Q0 U (rix).
n
Формулы справедливы при I —
Л
3. Цилиндр с защемленными краями под равномерным внутренним давлением pv в кГсм2
Л
Г
я
2па
Qo-
'П
Прогибы и усилия в любом промежуточном сечении оболочки на расстоянии х определяются как сумма случая 2 этой таблицы и случая 2 табл. 14.1.
Если давление на торцы не передается стенкам, то в табл. 14.1 надо принять v 0
-I-
4. Цилиндр со свободно опертыми краями под равномерным внутренним давлением pv в кГсм3
I 3 VRt М00; Q0 —.
2Л
Прогиб и усилие в любом промежуточном сечении оболочки на расстоянии х определяются как сумма случая 2 этой таблицы и случая 2 табл. 14.1.
Если давление на торцы не передается стенкам, то в табл. 14.1 надо принять v 0
5. Цилиндр, подкрепленный кольцами шириной с и поперечным сечением FK, под равномерным внутренним давлением pv в кГсм3
При х 0 (сечение у края кольца) F., — ct
FK 1,56 YRt ’ Q ’78Pv FKlt56tYRt
p R c
V T)
EFk 2t
1
Fk 4 Усилие в кольце
c —
Л 4
N pv R — Формулы справедливы при д —
- - п
88
РАЗДЕЛ 14. ОБОЛОЧКИ
Продолжение табл. 14.3
Вид нагрузки
Расчетные формулы
6. Цилиндр с плоским днищем под равномерным внутренним давлением pv в кГсм3
D„
2pv R2 л?. Et
д
Г
гпгггг
л - llLlu
Mq
Mo 40Д (1 V Ц ('-7) 'д 2RO„ (1-v)
2Чц ц Од (1 V)
д 2 ц-ц
я Д(1
- V)
Ол
о
, 2Ч п1
2т) -j- ————— I —- “ Da(I v)J 40д(1г)
После вычисления М„ и ?0 перемещения и усилия в цилиндре определяются суммированием величин для случая 2 этой таблицы и случая 2 табл. 14.1. В днище напряжения определяются, как в пластинке с нагрузкой pv, MQ и Qft. Формулы справедливы при длине цилиндра I
3 УШ
7. Цилиндр со сферическим днищем под внутренним давлением pv в кГсм
М0
PV k (2 — v) — (1 — у) (1 — fe3)
4т2 (1 — fea)‘ — 2 (1 4.F)(l
тЛг 4-1
В цилиндре перемещения и усилия определяются по вычисленным М0 и Q0 суммированием величин для случая 2 этой таблицы и случая 2 табл. 14.1. В сферическом днище перемещения и усилия определяются, как в сферической оболочке, с нагрузкой pv, MQ и Q0- Формулы справедливы-при I 3 Y Rt
8. Резервуар с защемленными стенками под гидростатическим давлением жидкости, удельным весом V в кгсм3
о — l -Г(пх)-( -—)v(rx) ; Et I Н rH ) J
Ns yRH Г 4)— V ’
M Г- V (rx) (-— T (rx) ;
x У12 (1 — v) vH J J
при 0 M (1 —Лг макс V 112 (1 — V-)
Формулы справедливы при Н 3 YRt
14.2. ЗАМКНУТЫЕ КРУГОВЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ
89
и 12 (угловое) образуют первую группу основных неизвестных. Между примыкающими к кольцу оболочками и кольцом (с наложенными на него связями) в основной системе сохраняются только связи-стержни меридионального направления. Дополнительные к безмоментному состоянию силовые взаимодействия оболочек с кольцом и наложенными связями (радиальные усилия Х9 Xз, пары 2, Х4) образуют вторую группу основных неизвестных.
Матрица уравнений смешанного метода для случая, когда сопряжение оболочек усилено кольцом массивного профиля высотой 2с, имеет вид
Урав¬
нения
z2
1
2
8
4
Свободные
члены
I группа:
Jo
II
0
0
—1
0
1
0
2 0
г22
—с
1
-с
1
II группа:
д1 1
с
б11
12
0
0
Д1 р
О
II
см
3
0
21
622
0
0
Д2р
д3 —1
с
0
0
33
34
лз р
Д4г0
0
—1
0
0
643
fi44
Л4 р
Рис. 14.10
14.2.6. Оболочка под действием нагрузки, не обладающей осевой симметрией
При действии нагрузки, не обладающей осевой симметрией, оболочка рассчитывается на основе гипотез технической (полубезмоментной) теории В. 3. Власова: в уравнениях упругости не учитываются крутящие и продольные изгибающие моменты, сдвиг, растяжение (сжатие)
Свободные члены RiPy R2P— радиальная и моментная реакции в наложенных связях — и AiPi., Д4Р — радиальные и угловые перемещения контура оболочек — определяются расчетом безмоментного состояния. Коэффициенты Гц, г22 — радиальная и моментная реакции от единичного растяжения и единичного закручивания кольца— зависят от жесткости последнего; 6ц,., 644 — радиальные и угловые перемещения контура оболочки от единичных радиальных усилий и единичных моментов — зависят от очертания и толщины оболочки. В побочных квадратах матрицы — элементарные выражения коэффициентов смешанного метода, удовлетворяющие условию
ГА—бы.
При решении системы уравнений целесообразно выразить Xlt., Л4, используя уравнения II группы, и подставить в уравнения I группы; это приводит к двум уравнениям метода перемещений относительно Zlt Z2.
Если кольца нет, но меридиан имеет излом (см. рис. 14.10, б)у то гw-T220j С0; R2Pz0‘t ХХ-RP', Х2 — Х4. Исключая Zb Z2, 2, получим систему двух
уравнений метода сил относительно XSi Х4.
Еспи к тому же и меридиан не имеет излома (см. рис. 14.10, а), то RipQ, Xi X (соответствующую систему уравнений метода сил можно составить непосредственно).
Формулы и графики для расчета сопряжений цилиндрических оболочек с оболочками других видов и с кольцами жесткости см. 45.
Рис. 14.11
в кольцевом направлении. Ниже дается способ расчета 36, основанный на указанных гипотезах. Он распространяется на тонкостенные гладкие и ребристые оболочки; последние приближенно заменяются ортотропными. Различная жесткость ортотропной оболочки в продольном и кольцевом направлениях оценивается введением в расчет различных приведенных толщин стенки. Расчетные формулы, даваемые ниже, справедливы при следующих соотношениях между длиной оболочки и ее толщиной: а' 5: а' 10: ;
1
щ 20; ц . 100
При промежуточных значениях щ предельную относительную толщину р можно определить интерполяцией. В ребристых оболочках отношение ММ должно быть не более соответствующих значений р,2.
В дальнейшем рассматриваются нагрузки, симметричные относительно некоторого диаметра оболочки (рис. 14.11, а), что отвечает большинству практических случаев 1. За начальную точку для отсчета дуговой координаты р принимается точка Оь лежащая на указанном
1 Расчет в случае несимметричной нагрузки см. 136, где в формуле (1.3) МкРех.
90
РАЗДЕЛ 14. ОБОЛОЧКИ
Таблица 14.4
Кольцевые изгибающие моменты, поперечные и нормальные силы, грузовые коэффициенты для некоторых нагрузок
Схема нагрузки
Кольцевые усилия в первом состоянии
Грузовой коэффициент
Неравномерно р 0; 7 0
е радиальное давление, заданное тригонометрическим рядом р—раМ® 0; Q 0; JV р0 R
fpi cos3p2 cos20
Ф 0
Р— яRpi', q— Pi sin 0 PV Pi cos0
М 0; 0; JV Pj Л cos 3
Ф 0
P 0; 7 0 pv pn COS Л0 при n 2
0 рпR
К— п- С08ПР:
п пРпR
Q s— „Л,
№s cos яР;
Ф —. p p2 Л na _ Я i
p v1;
2
D
(7 7 sin 0
2
Давление жидкости с удельным весом у в кгсм3
0р —;
2
М 0,25 cos 0 0,25 0 sin 0 v 3; q0 — 0,250 cos ЗД2;
(0,25 0 sin 0 -f- 0,75 cos 0) yR2;
3 Щ 2
М2 ( 0,25 cos 0 — 0,250 sin 0 -f — sin 0 yR3;
s я 4
Q® — 0,25 (я — 0) cos 0v2;
у® 0,25 (cos 0 — 0 sin 0 я sin 0) yR2.
is 2 ял;
Ф cos уЯ3;
n (ла — l)2 2
при n — 2
ф2 — 0,2222yR3;
14.2. ЗАМКНУТЫЕ КРУГОВЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ
91
диаметре. За начало отсчета продольной координаты а принимается поперечное сечение, совпадающее с одним из краев оболочки или с плоскостью симметрии, общей для оболочки и нагрузки.
Напряженное и деформированное состояние слагается из: 1) элементарного напряженного и деформированного состояния пустотелой балки, которая является в данном случае основной системой, и 2) дополнительного напряженного и деформированного состояния, отражающего статическую неопределимость оболочки и характеризующего в сочетании с первым действительную работу оболочки.
Усилия в пустотелой балке и ее перемещения (их обозначениям присвоен верхний нулевой индекс) определяются элементарными методами сопротивления материалов.
1. Продольное нормальное и касательное напряжения — как в обычной балке кольцевого сечения:
М
т nR4x
Q
nRtx
cos р к Г сл2;
sin р кГсМ2,
где М и Q — изгибающий момент и поперечная сила в балке кольцевого сечения от данной нагрузки.
2. Изгибающие моменты, нормальные и поперечные силы в продольном сечении s const и соответствующие перемещения — как в кольце от заданной нагрузки, уравновешиваемой (рис. 14.11,6) поверхностными касательными силами:
Я
nR
sin Э кГсм2,
S s 2 10
(14.15)
после замены буквы S соответствующим искомому фактору обозначением (М, Q, N). В частности, этот прием удобно применять при расчете вертикальных цилиндрических сооружений на ветровую нагрузку, распределение которой в кольцевом направлении согласно СНиП, задается численно,— аэродинамическими коэффициентами с, определяющими давление на единицу поверхности оболочки.
Усилия и перемещения дополнительного состояния (они обозначены буквами с чертой наверху) определяются по следующим формулам:
ах 2 сХп т S V Msi Msn;
2 2 2
§ N, 2as„;
2 2
’ 2w„; V 2i'n; vx px„_
(14.16)
В этих формулах все величины под знаками суммы выражаются через продольное напряжение и его производные 1:
- R —
т„ —ахп sinnfr РЗ
Msn „ соаяР;
Л2 (Л2— 1)
тх
Л (Л2 — 1)
a sin лР;
№х -
— — ахп cos лР;
л2 — 1 хп R4.
EIsn2 (n2 — l)2
cos лР;
R4X
P xn-
EIS n3 (л2 — l)2 xn
W
axn sn лр;
где P — равнодействующая внешней нагрузки на оболочку в данном сечении в кГсм.
Выражения кольцевых моментов, нормальных и поперечных сил для нагрузок, задаваемых простыми аналитическими формулами, можно сразу найти в замкнутой форме, подобной приведенной в табл. 14.4 для трубопровода, наполовину заполненного жидкостью. Аналогичные выражения для некоторых других нагрузрк имеются и в 45. Однако в ряде случаев нагрузку целесообразно раскладывать в кольцевом направлении в тригонометрический ряд, приведенный в табл. 14.4. При этом все силовые факторы в продольных сечениях пустотелой балки (Afg, Q5, Wg) определяются тоже рядами, образующимися из разложения
EIS п2 (л2— I)2
— Охп COS пр.
(14.17)
Полные усилия и перемещения вычисляются по формулам 2:
х тт ?;
f0 I П
(14.18)
Ms Ms Ms; Qs Qs;
Nt N s ’t; w f cos P w;
v sin P v ;
4x cos P Ф Ф Здесь f и — прогиб и угол поворота простой балки кольцевого сечения от заданной нагрузки.
Значения axn и его производных определяются из дифференциального уравнения, совпадающего по своей ма-
1 При кососимметричной нагрузке тригонометрические функции циклически заменяются: cos n Р на sin n Р, а sin n Р на
cos п р.
2 При нагрузке, постоянной вдоль образующей,
92
РАЗДЕЛ 14. ОБОЛОЧКИ
тематической форме с уравнением балки на упругом основании:
;iv,1,1,4;
хп 4 хп епфп-
(14.19)
Здесь
п4(п
)п Т 41
2-i)2 ?
п2 (г2 — 1)
48RGtx ’ nRtx
Фп cos я 6 d3.
Последнее выражение — грузовой член — связывает напряжение оХп и его производные с внешней нагрузкой. Для некоторых видов нагрузки его значения даны в табл. 14.4.
Уравнение (14.19) решается в начальных параметрах точно так же, как уравнение для балки на упругом основании. Искомая функция и ее производные выражаются через начальные параметры в общем случае следующим образом:
- вх
хп хп О Ах хп О ZT
о 1 Фхп о з 8nnO 2
€ €
Dx
X
8„0-7Г Г фп () Dx-u du’
Вх
хп — хп О яО “Г“
Сг
Вх
фЯ о я 9 аХП 0 4'Фл Dx 8„ Ф1 о. ЕпФпо 7" ГK()Cx-udw,
J
о
вх
ахп — wn 0 ?я Ах Р хп 0 п рп хп 0 Х
X 4 С,-ахя о-Н’„ Dx 8П Фп0Ах
X
О
хп ф„ о кАх- ХП 0 4 Вх-охяо'1 сх-Wn 0 С„ -4г)л-8П Ф„ 0 X
X4t„ D ел Ф; о Ах еп ф"п (и) Ax_udu. j
о )
Фя
Здесь
_ EIS п(п — I)2 _ п2 (n2 — 1)
nR1 ti nR3tx
Гиперболо-круговые функции, входящие в (14.20), Ах ch in cos i)n х;
Бх (chг? х sintyrt х shг?,г х cos гЬл );
Сх — sh г)я sin г?„ ;
Dx — (ch л-sin х—sh г?Л,vcos х),
табулированы в 5.5.6.
В качестве начальных параметров в (14.20) входят, кроме начальных значений искомой функции и ее производных, обобщенные деформации, которые связаны с производными искомой функции и грузовым членом:
R4X А 1 ги_ — -гг—„. гг Ф
, л2 (я2 — 1) nR7 t
флтя -
f:ls П (Я2 — О2 хп
R
CIS n2 (л2 —1) EIS л4 (n2 — l)2 ajcn
Фя
(14.21)
Через начальные параметры выражаются и обобщенные деформации:
?г wn — wn о Zn Ах f Фхп о.
♦я
(14.20)
ахп о-я с- ХП о-4 Dx епфп 0А Вх
8 Ф„ л —— — 8 Ф
Фя п ПХ
х
ч-
() Вх_и du;
аГ р. Л — a n-4ibfi,—
п хп Yхп 0п X ХпО ТЛ
— о' n-4t cv — аГ ftt 4гЬ Dx—8 Ф лХ
хпО пх пО'П тг п п О
X 4фЛ DA. 8П Фг 0 8П Фд;
яФя(“)
Входящие в (14.20) и (14.22) члены с интегралом представляют собой частные решения дифференциального уравнения и зависят от характера нагрузки. Неизвестные начальные параметры определяются из граничных условий согласно табл. 14.5.
При нагрузке, постоянной вдоль образующей оболочки, Фп 0, и решение упрощается. В табл. 14.6 приведены для этого случая готовые формулы для усилий и перемещений дополнительного состояния в зависимости от граничных условий.
3. ОБОЛОЧКИ ВРАЩЕНИЯ
93
Граничные условия
Таблица 14.5
Условия на краях оболочки
Нагрузка постоянна вдоль образующей
Нагрузка постоянна или меняется вдоль образующей (общий случай)
1. Жесткая заделка края
Л2 (Л2 — 1)
О — 1 — ф ;
хп nRа tx П'
о’" — 0 хп
w 0; ф 0 п Vхп
2. Свободный край
о" 0; о' —0 хп хп
о — 0; хп
о' 0 хп
3. Край связан с абсолютно жестким кольцом
л-п'2 (л2—1 ,т,
о 0; а —-гтг, хп хп nR4 tx п
о 01 w ——0 хп ’ п
4. Край связан с упругим незагруженным кольцом
о 0; хп
г2 (л2 — 1) -, хп яR tx п
хп к
-
5. Условия на краях симметричны; распределенная нагрузка постоянна вдоль образующей; за начальное принимается среднее сечение оболочки
су' 0; о"' 0 хп хп
-
Мх
Р‘V —YIX
е (cost — sinipf), (14.23)
Имея решения для оболочки с одним защемленным краем, а другим свободным и для оболочки с одним защемленным краем, а другим, связанным с абсолютно жестким кольцом, можно получить все усилия в оболочке, у которой один край защемлен, а другой подкреплен упругим кольцом:
УП‘К — SCB (5Ж SCB) Куп
Здесь Syn.K — усилие в оболочке, имеющей упругое кольцо; Sj — усилие в оболочке с жестким кольцом; SCB — усилие в оболочке со свободным краем;
If СВ
А уп. Щп ““ев
где шСв— перемещение свободного края оболочки;
Шуи — перемещение упругого кольца от сил взаимодействия оболочки и абсолютно жесткого кольца (в обоих случаях — амплитудные значения перемещений).
Приближенное определение продольного изгибающего момента. Продольные изгибающие моменты Мх в сечениях, удаленных от краев, при неосесимметричной поперечной нагрузке невелики и практически могут не учитываться. Вблизи защемленных краев продольные изгибающие моменты могут определяться по формуле
где
jl2(l — V)
-К
Г):
3(1-уД)
RW ’
pv — наибольшая интенсивность поперечной нагрузки в месте защемления в кГсм2.
При 0
Pv
Мх
(см. случай 3 табл. 14.3).
2т)2
14.2.7. Особые случаи нагрузок и расчета оболочки
Расчет замкнутой тонкостенной цилиндрической оболочки на действие произвольной сосредоточенной нагрузки, приложенной к шпангоуту, можно найти в 94. Действие сосредоточенных и локальных нагрузок непосредственно на оболочку рассмотрено в 3, 5, 6.
Оценку дополнительных напряжений в цилиндрической оболочке вследствие начальных отклонений от правильной формы см. 96.
Расчет круговых цилиндрических оболочек с косым срезом см. 56, 106.
14.3. ОБОЛОЧКИ ВРАЩЕНИЯ 14.3.1. Определения и основные обозначения
Рассматриваются оболочки, срединная поверхность которых в цилиндрических координатах z, р, г (рис. 14.12) задается уравнением r—r(z). Линии пересечения этой поверхности с вертикальными плоскостями рconst называются в дальнейшем меридианами или образующими
Рис. 14.12
(поверхность рассматриваемых оболочек может быть образована вращением такой линии вокруг оси z). Линии пересечения поверхности оболочки с горизонтальными плоскостями 2 const называются параллелями или направляющими.
Основное внимание уделено расчету оболочек вращения по безмоментной теории при наиболее распростра-
Дополнительные усилия и перемещения при симметричной поперечной нагрузке
94
РАЗДЕЛ 14. ОБОЛОЧКИ
со.
с
с
е
2
Cl
g
с oo
"w 00
52
Су'
N
Ц;
-ч
”-L
0
1 1 00 l a.
1
II
с
со С
54
а.
9
00
со
©
со.
si
0С
со.
с
в
0
S19
7
N
С
CO
ОС
—Ju Cl
0J
СО V)
a.
Ю
О
N
IS
cd si
e
00
CO
o'
14.3. ОБОЛОЧКИ ВРАЩЕНИЯ
95
Рис. 14.13
ненной нагрузке — осесимметричной (симметричной в любом сечении р const). Из неосесимметричных нагрузок рассмотрены односторонняя снеговая и ветровая. Более подробные сведения о расчете оболочек вращения по безмоментной теории на несимметричные нагрузки можно найти в книге В. 3. Власова 16; в частности, в ней приводятся формулы и таблицы, позволяющие рассчитывать сферические и эллиптические оболочки под действием силы, приложенной в произвольной точке, а также сферическую оболочку, ограниченную двумя перпендикулярными сторонами, под действием собственного веса.
Рассматриваются также практические методы определения дополнительных моментных напряженных состояний, возникающих вблизи опорных сечений оболочек (краевой эффект) и, в частности, циклических моментных состояний, возникающих, например, при опирании одной или нескольких сопрягаемых оболочек через кольцо на ряд равноотстоящих по окружности колонн.
Некоторые вопросы расчета оболочек вращения за пределом упругости материала освещены в разделе 21.
В дальнейшем наряду с используемыми ранее обозначениями, применяются следующие (см. рис. 14.12):
а — угол между нормалью к поверхности оболочки и осью z
(о — угол широты; t — толщина оболочки;
Ri — радиус кривизны меридиана (образующей);
kilIRi—кривизна меридиана;
Rz — радиус кривизны нормального сечения поверхности оболочки, перпендикулярного меридиану в рассматриваемой точке; 21 IR2—соответствующая R2 кривизна; r?2sin а—радиус параллели;
р — величина вектора внешней удельной нагрузки (на единицу площади);
Р2 Р Ps — соответственно величина вертикальной, нормальной и тангенциальной составляющей вектора внешней нагрузки;
Qz — величина вертикальной составляющей равнодействующей внешней нагрузки, действующей на часть оболочки, расположенную выше сечения z —const;
Ji — меридиональное напряжение — напряжение в нормальном сечении поверхности со const;
Ni—Gt — меридиональное усилие;
а2 — кольцевое напряжение — напряжение в сечении (3 const;
N2—G2t — кольцевое усилие;
N12 — сдвигающее усилие;
Н — распор;
Q — поперечная сила;
Mj — меридиональный момент, приходящийся на единицу длины параллели;
М2 — кольцевой момент — момент в сечении Р const на единицу длины меридиана; М12—крутящий момент; и, wr — соответственно проекции вектора переме¬
щения на касательную к меридиану (по¬
ложительное направление вниз), нормаль к поверхности оболочки (положительное направление наружу) и радиус параллели г (рис. 14.13);
0 — угол поворота касательной к меридиану;
он положителен, если увеличивает угол а; е2 — соответственно относительные удлинения меридиана и параллели, определяемые формулами
ei
,Уг — уМ2 Et
N9i — vA Et
14.3.2. Усилия и перемещения в оболочках по безмоментной теории при осесимметричной нагрузке 70
Моменты М и М2 принимаются равными нулю; кроме того, в силу осевой симметрии нагрузки N20. Усилия Ni и N2 определяются из системы уравнений:
Qz n2
Здесь первое уравнение выражает условие равновесия (22 0) части оболочки, лежащей выше рассматриваемого сечения zconst. Второе уравнение (уравнение Лапласа) есть условие равновесия элемента оболочки (сумма проекций всех сил, приложенных к элементу, на нормаль к срединной поверхности оболочки равна нулю).
Величина Qz в общем случае определяется по формуле
?2 г2я, Y1 (±Jdz.
Для сферической оболочки с радиусом R
(14.24а)
Qz 2nR2 J рг sin ad cl.
Для прямой конической оболочки (рис. 14.14)
h
Qz 2я cos a J р2 Idl.
Для сферической оболочки Rl—R2Rt второе уравнение (14.24) принимает вид NN2—pvR.
Для конической и цилиндрической оболочек Ri oo и N2—pvR2.
Перемещения (рис. 14.13) рассматриваемых оболочек определяются следующими формулами:
(
w —— I и w'
N2 — vN1 Et
R2 — u ctg aj;
Ri
; wr e2R2 sin a; w' —
dw
da
(14.25)
Здесь величина и определяется: для сферических оболочек из уравнения
и' — и ctg a — (ЛГг— Nt)(l V);
(14.26)
96
РАЗДЕЛ 14. ОБОЛОЧКИ
для конических оболочек (см. рис. 14.14)
h
-и-
1 Г Nx — N2
t
dl C,
где С — постоянная интегрирования, определяемая граничными условиями.
Так как в конических оболочках перемещения вдоль меридиана не вызывают увеличения угла поворота, то Q dwdl.
14.3.3. Безмоментные сферические оболочки при вертикальной осесимметричной нагрузке 70
а) Разномерная нагрузка на горизонтальную проекцию оболочки (рис. 14.15) интенсивностью рг кГсм2;
A'l 4" Рг Я; Afg — -pzR cos 2а; (14.28)
2
распор Я — p2Rcosa.
Нулевая точка (N20) при а 45 .
Для незамкнутой оболочки (рис. 14.16):
sin2 аг sin2 а
Nt Рг R (l -
1 sin2 ах
Лг2 Рг R cos2 а "ГГ “—
2 2 sin2 а
1 sin2 аг
Я — pzR cos а 1 —— ;
2 sin2 а I
(14.29)
0
3 11 — “ (3 v) R3pz
, 42 I
Ч — J
Et
sin а cos ах;
(14.27)
?sina
av ——
б) Нагрузка от собственного веса (рис. 14.17). Толщина оболочки меняется по закону
Qz 2nR2
gi(l—cos a) a,"1 (1 sin a — cos a),
где g0—вес на единицу площади в пяте; gi— то же, в ключе;
Qz
N±-
2nr sin a
-4
gl _j_ —2—-gl a j cos a — Nx;
H
о
Qz ctg a
2aR sin a
(14.31)
Если толщина оболочки постоянная (gi gog), то Qz — 2яR2g (1 — cos a);
Rg
1 cos a
H
; N2 Rg cos a — A; Qz ctg a
2rci? sin a
(14.32)
Нулевая точка (W20) при a51 49'.
Для оболочки в виде сферического пояса постоянной толщины (обозначение a-i см. на рис. 14.16):
Qz 2nR2g (cos i — cos a);
Rg
N i:
(cos ax—cos a);
sin2 a N2 Rg-Ni;
(14.33)
(14.30)
Rg cos a,
H — (cos ax — cos a).
sin2 a
Перемещения для рассмотренных оболочек постоянной толщины:
12
т —
0-7)
Я3 (2 v)
tz — h (to — h
a0
‘'2(v-,)r
R sin a wr ——— (N2 — vNt).
sin a;
(14.34)
14.3. ОБОЛОЧКИ ВРАЩЕНИЯ
97
в) Нагрузка жидкостью (рис. 14.18). Объемный вес жидкости у; высота, жидкости над вершиной купола а (рис. 14.18); интенсивность нагрузки
Pv V (о г) v а R (1 — cos а).'
Яг Y а О—cos а) cos а; (14.35)
ps 0.
Усилия:
Qz nyR2 (а R) sin2 а (cos3
v yR Г
Л1 а
2 L
Nz yR
R-
2R( 1 — cos
3 sin2
a —l)j.
ds3 a) "1
J;
1 1 — cos3 a 1
T(" ) M"a-C0Sa)J;
H — cos a.
При a0 N 1(a0) jV2(ct0)
(14.36)
yR
7T77777777777777777777777777 Рис. 14.18
Для оболочки в виде сферического пояса (обозначение ai и Z по рис. 14.16; высота а на рис. 14.18 может быть отрицательна, но всегда а —Z)
2nyR‘
i
(a R)(sin2 a — sin2 ax)
-j- — R (cos3 a — cos3 ax)
N-
yR Г
sin2 a 2
(a -f- R)(sin 2 a —
1
— sin2 ax) R (cos3 a — cos3 ax)
N2 yR a R (1-— cosa) — Nx;
H — N1 cos a.
)
Перемещения определяются по формулам, одинаковым для оболочек типа сферического сегмента и оболочек типа шарового пояса:
yR2 R sin a
0 —— sin a; wr ———(.V2—WX). (14.38)
Lt lit
Для оболочки, находящейся под внутренним давлением столба жидкости высотой а, выведенные формулы сохраняют силу при перемене знака на обратный (у определяемых величин), г) Нагрузка, в виде постоянного внешнего давления:
Рг Pv cos a Р cos a.
Для оболочки типа сферического сегмента: Qz pnR2 sin2 a;
л д pR pR N j Л2 -у-; H cos a.
(14.39)
Для оболочки типа сферического пояса (обозначение ai по рис. 14.16):
Qz nR2p (sin2 a — sin2 04);
pR Л sin2 at
‘"Tl1
Л',
sin2 a
N _( 1S2l5iV
2 sin2 a
„ pR, sin2 aj
H cos a 1 — .2 sin2 a
Перемещения:
(14.40)
л sina
0 0; av —— (N2-v).
(14.41)
д) Оболочка в виде сферического пояса под вертикальной нагрузкой (обозначение ai по рис. 14.16), распределенной вдоль контура меньшего основания с интенсивностью р (единица силыединица длины);
Qz 2л sin ахр 2яг?;
sinai, sin aj
'"'ST1 'JST
И-р
sin ax cos a sin2 a
(14.42)
(14.37)
14.3.4. Оболочки вращения под действием равномерно распределенного нормального давления 16
Рассматриваются в основном оболочки, образующая поверхности которых является кривой второго порядка (эллипс, парабола, гипербола). При направлении оси 2, показанном на рис. 14.19, нормальные силы в таких оболочках, загруженных нормальным давлением Pv ?const, определяются приводимыми далее формулами.
а) В эллиптической оболочке (уравнение образующей
г2 -(2г-г2),
где a, b — полуоси эллипса)
462р2 о2 (1 — р2)2; '
26 (1 Н- р2)
2 462р2 а (1 — Р2)1 — а2 (1 Р2)V 4b2p2 в2 (1 — р2)2
(14.43)
98
РАЗДЕЛ 14. ОБОЛОЧКИ
где р
-Ysb-
(14.44)
При z 0 (р 0) и г 2Ь (р оо) а2
Ni N а — р 1 2 26а
При г Ъ (р 1)
пг а(2Ь-а)
N1-pT;N2-p б) В сферической оболочке a—bR)
Ni Ni — p—.
(14.45)
Nx-p
r — (2 Ьг г2); ог
а У462р2 а2 (1 Р2)2
26
1 — р2
Д'2 — р — X 2 26
2 462р2 a2 (1 Р2)2 — оа(1 — Р2)2 (1-р2) 462р2 а2 (1 р2)2
(14.46)
где
При г 0 (р 0)
Wi N2 р
2 b -j- z
а
2 Ъ
При г
Nl р 1ь 4“2
662 7о2
26 К 362 4в2 ПрИ Z — оо (р — 1)
Nx N2 00.
г) В параболической оболочке вращения (уравнение образующей r2 2cz)
Ni-p -у V 1 2р2;
A'2 P
1 4р2
(14.47)
где
При г 0 (р 0)
2 V 1 2р2 гуТ Т
,J r l т-
W?
При г с (р 1)
рс Vz
N.
Ърс
2 У"з
д) В торообразной оболочке (рис. 14.20) р (а2 — С2)
1С
1D“
2 Г
;? (62 — а2) 26
в) В оболочке вида нижней полости двухполостного гиперболоида вращения с образующей
я2
NlA pR.
(14.48)
Большое количество формул для расчета оболочек вращения см. 68.
в- Рис. 14.20
14.3.5. Расчет оболочек вращения по безмоментной теории на несимметричную нагрузку 37
Снеговая нагрузка (рис. 14.21). Расчет сферической оболочки на вертикальную нагрузку типа снеговой при одностороннем загружении снегом производится по формулам:
нормальная составляющая снеговой нагрузки
Рх) 0,4?2 (1 sin a sin'll)),
(14.49)
где рг — нагрузка на единицу площади горизонтальной проекции поверхности оболочки;
соответствующие усилия A'i 0, 4р2 R
cos а
v:;, (2 cos а)Х
3 sin3 а X (1 — cosa)2 sin 1
in t) j;
N2 0,4p2R I “ a
cos a
3 sin3 a
(2 cos a) (1 — cos a)2 X
j sim)J ;
(2 cos a) (1 — cos a)2
X — cos if.
sin3 a
(14.50)
14.3. ОБОЛОЧКИ ВРАЩЕНИЯ
99
Ветровая нагрузка на оболочку вращения принимается нормальной к ее поверхности и определяется согласно 37, т. е. как произведение скоростного напора q на эпюру аэродинамических коэффициентов Св 0.5 sin2a (0,85 sin —0,15 sin 3f)—cos2a (рис. 14.22). Нормативные и расчетные значения скоростного напора ветра определяются в соответствии с указаниями СНиП. Можно также пользоваться упрощенной формулой:
р p0sin a sin ф,
Меридиональные и сдвигающие усилия N и N2 находятся из условий равновесия сегмента оболочки, отсекаемого‘параллелью, проходящей через точку, в которой определяются усилия; они имеют значения:
М
N 12
Н
sint? sin a М
дг2 tg
— I costb.
a)
(14.52)
Здесь H — равнодействующая ветровой нагрузки, приложенной к сегменту оболочки; М — момент этой нагрузки относительно диаметра отсекающей параллели, перпендикулярного направлению ветра. При очертании меридиана, заданного уравнением rr(z):
Н л?0 j г sin adz; h
М Hh-— про j (гг sin а г2 cos a) dz
(14.53)
где h — высота сегмента; координата z отсчитывается сверху вниз (см. рис. 14.19).
После определения N кольцевое усилие N2 определяется из уравнения Лапласа (14.24).
Для полусферы величины усилий определяются по 25, табл. 15, стр. 115. Если закон изменения нагрузки
задается согласно (14.51), то усилия определяются по формулам:
АГ1 PoR
'
cos a I simp;
(14.51)
- cos a
где ро — давление ветра на вертикальную площадку, перпендикулярную его направлению (при а р 90 ).
cos а Г 2
— — I
sin3 а 3-— cos3 а 1 sii
3 J
ЛГ. cos а 2
N3 poR sin а — —— — —'
L sin3 а 3
cos3 a)J sin i);
R ( 2
А12 Ро о — — cos а sin3 а 3
-f- cos3 a j cos i) или же по таблице Дишингера 33, стр. 49.
(14.54)
a
Nt
—Щ
Nl2
0
0,0000
0,0000
0,0000
10 0413
1334
0419
20 0840
2580
0894
30 1187
3913
1371
40 1455
4973
1900
50 1615
6045
2510
60 1605
7055
3210
70 1409
7958
4125
80 0909
8943
5200
90 0000
1,0000
6667
Ny—Nx ро R sin ”ф; N2—N2Po R sin гэ; Ni2 N 12p0 R cos
14.3.6. Учет изгибающих моментов 41
Около мест прикрепления оболочки к опорному кольцу возникают изгибающие моменты (краевой эффект), которые быстро затухают по мере удаления сечения от края.
Эти моменты и их влияние на нормальные и поперечные силы (которые надо предварительно определить по безмоментной теории) при осесимметричной нагрузке приближенно учитываются следующим образом.
Вычисляется коэффициент затухания:
3(1 — У2)
r ?
(14.55)
который при переменной кривизне является переменным. Для сферической оболочки
'-Vt
3(1 — V).
(14.56)
Усилия, моменты и угол поворота касательной к меридиану определяются по формулам:
100
РАЗДЕЛ 14. ОБОЛОЧКИ
h2 и
Ni — ctg а Се kb cos (km б);
472
Д'2 И2,2- кСеы sin 6 т):
1
Г-
Q —— Се cos (со б); 4i?2
AI, —-Сеы cos X
I n
X 6 -f- I
3 ctg
iM
0 vJHb
,-LJ
К 4
12(1—v) R2
(1 — v2) Ce—“ sin X
X (ka 6).
Эти формулы выведены для постоянного k, но с известной точностью ими можно пользоваться и при переменном k. Угол широты со отсчитывается от нижнего края до того сечения, где определяются усилия (см. рис. 14.12). Постоянные интегрирования С и б определяются из условий прикрепления оболочки к кольцу.
При абсолютно жестком кольце формулы (14.57) приобретают вид
Ri ctg а
х
ЛГ2 Л'к
12 R2k sin
X ek(0 cos (km 6);
sin -“ 6 f “
n—kto
Sin(6T)
Q-N к
i
V2 sin (a -j-)
X e—cos (ka 6);
Ali -ЛГК
М
2R2k2 sin
X “ cos 6 — j ; f3 ctg a
0 .V,
12(1—v) R2
RtVT
0 vAfi;
?x sin 6 j X kek( sin (km 6).
Здесь NK — кольцевое усилие в оболочке в зоне, непосредственно примыкающей к кольцу, определяемое по безмоментной теории.
Величина б зависит от условий связи оболочки с кольцом: при полной заделке 6 0, а при шарнирном соединении б я4. При указанных значениях б формулы (14.58) значительно упрощаются. По ним легко могут быть определены усилия, моменты и углы поворота при любых значениях параметров а и со, в частности в месте сопряжения оболочки с абсолютно жестким кольцом (со0 и a a0 — см. рис. 14.12).
Задача определения краевого эффекта в оболочке, со-
(14.57) прягаемой с кольцом конечной жесткости или с другой оболочкой вращения при осесимметричной нагрузке является частным случаем задач, рассмотренных ниже и может быть решена по формулам, приведенным в 14.4.
14.4. ЦИКЛИЧЕСКОЕ (МОМЕНТНОЕ) НАПРЯЖЕННОЕ СОСТОЯНИЕ ОБОЛОЧЕК ВРАЩЕНИЯ, СОПРЯГАЕМЫХ МЕЖДУ СОБОЙ
14.4.1. Выделение циклического воздействия и его распределение. Общий порядок расчета
Когда одна или несколько монолитно связанных оболочек вращения опираются через бортовое или объединяющее их кольцо на ряд равноотстоящих по окружности колонн (рис. 14.23) или поддерживают стойки фонаря, радиальные ребра, стяжки и т. п., их напряженное состояние можно разложить на осесимметричное состояние и циклическое состояние. Для выделения осесимметричного состояния следует рассмотреть действие осесимметричной нагрузки совместно с уравновешивающей ее реакцией, принимаемой также за осесимметричную, т. е. равномерно распределенную по осевой линии кольца. Для выделения циклического состояния надо рассмотреть действие проти-
(14.58) воположно направленного давления, равномерно распределенного по осевой линии кольца, совместно с уравновешивающими его реакциями колонн (рис. 14.23).
Основная трудность при расчете оболочек на циклическое воздействие — в его распределении, т. е. в определении контактных усилий между сопрягаемыми элементами (кольцом и оболочками). Эта задача решается разложением циклического воздействия в тригонометрический ряд, число волн в гармониках которого п кратно числу колонн п0 (п п0, 2п0, 3п0у.). Каждый член такого ряда вызывает в рассматриваемых оболочках и в кольце независимые от других членов ряда гармонические циклические состояния, при которых усилия и перемещения в кольцевом направлении изменяются пропорционально cosp или sinгр, где р — угол широты.
Число членов ряда, которые необходимо учитывать при практических расчетах, зависит от числа колонн и отношения жесткостей кольца и оболочек. С ростом п отно-
14.4. ЦИКЛИЧЕСКОЕ (МОМЕНТНОЕ) НАПРЯЖЕННОЕ СрСТОЯНИЕ ОБОЛОЧЕК ВРАЩЕНИЯ
101
сительная жесткость кольца увеличивается, поэтому можно принять, что гармоники циклической нагрузки с числом волн больше некоторого п воспринимаются только кольцом. При достаточно жестком кольце можно при расчете оболочек ограничиться первым членом ряда (п — п0).
Ниже под циклическим состоянием подразумевается гармоническое состояние с произвольным числом волн п. Поскольку для такого состояния закон изменения уси¬
лий и перемещений в кольцевом направлении известен, задача сводится к отысканию лишь их амплитудных значений.
Для сокращения записи дальнейшее изложение ведется в матричной форме что потребовало использования следующих обозначений:
j— порядковые номера сопрягаемых элементов (0 относится к кольцу; 1,2. — к оболочкам);
I., k— 1, 2, 3, 4 — индексы направлений перемещений и усилий; 1 — нормальное к срединной поверхности (для оболочки) или радиальное (для кольца); 2 — вращательное в меридиональной плоскости (для углов поворота и моментов); 3 — меридиональное (для оболочки) или осевое (для кольца); 4 — касательное к параллели (тангенциальное);
о—радиус осевой линии кольца; г.— радиус линии контакта срединной поверхности -й оболочки с кольцом (рис. 14.24);
Zt и У.— амплитудные значения перемещений точек осевой линии кольца и линий контакта срединной поверхности -й оболочки с кольцом;
R и Х— амплитудные значения контактных усилий, действующих между кольцом и -й оболочкой, заданные соответственно в координатных направлениях кольца и оболочки;
Pi и Ri— амплитудные значения внешней циклической нагрузки, приведенной к осевой линии кольца и нагрузки, действующей на изолированное кольцо.
1 Матричные символы: — прямоугольная матрица; —
квадратная матрица; —матрица-столбец (вектор); ' — знак транспонирования матрицы.
Для унификации размерностей символами и Z2 (Х2, Rj2, 2 2) 0б значены углы поворота (моменты), умноженные (разделенные) на соответствующие радиусы г7- или г0.
Связь между перемещениями и усилиями Zt и R(, с одной стороны, и У( и Xj, с другой, вытекает из их определения и геометрии сопряжения оболочки с кольцом:
И ИИ,; (И.59)
П ИГИГИЬ (14.60)
где матрицы и К2 определяются параметрами, указанными на рис. 14.24:
bj 0 —с 0
0 1 0 0
а 0 bj 0 ;
0 0 0 1
0 о -
0 0
1 0
nrf
Кроме того, для каждого изолированного элемента (оболочки или кольца) между усилиями и перемещениями может быть установлена связь вида
И 4 у: (1). (14-61)
“' 14-62 где rk (0, 1,.) — матрицы единичных реакций, определяемые формулами из 14.4.2 и 14.4.4.
Из приведенных соотношений ясно, что если перемещения кольца Zi известны, остальные факторы находятся весьма просто: У из (14.59), Х из (14.61). Для определения Zi используется уравнение (14.62) вместе с очевидным соотношением:
i -2 ?'. (14.63)
1,2,.
Замена -? в (14.63) выражением (14.60) приводит на основании (14.62) к системе канонических уравнений метода перемещений относительно неизвестных 2:
rtk Zt Pi, (14.64)
где
' -' 2 N' И' 4 И И 1, 2,.
(14.65)
После вычисления контактных усилий изменение напряженного состояния каждой из сопрягаемых оболочек в меридиональном направлении может быть определено по формулам (14.4.3).
м-
1
Л
0
И
0
-6
nlf
0
м-
102
РАЗДЕЛ 14. ОБОЛОЧКИ
14.4.2. Единичные (краевые) реакции оболочек
Дополнительные обозначения:
г р( 2 3
х К12(1 -V) ; ВхЕЬ ; 6377-
Л Л
жесткости;
х —— —отношение главных кривизн (х0 для коbRi
нической и и 1 для сферической оболочки);
Ьг
р -у — приведенный радиус;
t —;
г 2 ХР
ш 4ф 1 Н- 1 ; m, VVWT; m2 liijT — ;
g 1 -f- г)2; k
S
m4 — 1 m4 1 ’
Гц n2 (dTи dn), Г33 Аг n2 Г44, 12 “ 8 Л (12 di2); 34 “ 1 2 Гз4
Г22 A3 (dr22 22); г13 — л2 n2 di3;
До id.
23
Г44 — ii n2 Гзз;
ru 42 fi2 d14;
r24 — tid24
(14.66)
Здесь:
A
Bi
srd
B2 f2 d
sB3 r3 d
d — Г33 Г44 — Г34;
13 Г34 Гi4—Г44 Гi3; dn Г14 14—Гi3 di;
14 — Г33 Ti4 — Гз4 Г13; di2 Г14 d24 — Г13 23
Г24 14 — Г23 is;
23 Г34 Г24 — Г44 Г23
24Г33 Г24 — Г34 Г23 d22 Г24 24
для переменных величин вводится значение на линии сопряжения с кольцом.
Для каждой из сопрягаемых оболочек элементы матрицы гк определяются по следующим формулам (индекс далее опускается):
(14.67)
Для гih справедливы условия взаимности ггл гг- и, кроме того, дополнительные тождества: а) для конической оболочки г33г44; б) для сферической оболочки
гзз’44; Гз——г 14; г2з——24-
Выражения входящих в (14.66) — (14.67) коэффициентов Гг-Л приводятся ниже для оболочек, замкнутых в полюсе или образующих пояс, достаточно широкий, чтобы пренебречь взаимным влиянием условий на отдаленных краях. Формулы приближенные, порядок их погрешности 1 : п2. Для оболочек, отличных от конической и сферической, для упрощения опущены также члены порядка а: п
Более полные данные см. 54.
Таблица 14.7
ik
ik
ik
aik
ik
Коническая оболочка
11.22
т
1_ 1 V
2s s
)
13
1
m
2 4- 2ps
33,44
т
1 — k J 1 — V 2s ' s
24
1
m
2 s
12
1 V ——-— п
ч
m j 1 — k n An
14
2s
n
1A
Amn
34
1 — V
п
a
m 1 — k n An
23
0
1 Amn
Сферичес
кая оболочха
11,22
тх т2
1 -f- v Vi —
s
12
mx 4- vw,
Vs_J5l__L
n s
33,44
тх тг
v, 1 v " s n
34
mx — vm2
. TTt 1
V2 —“ 4 n s
13,14
— —
тх т2
23,24
1
mx
V
14.4. ЦИКЛИЧЕСКОЕ (МОМЕНТНОЕ) НАПРЯЖЕННОЕ СОСТОЯНИЕ ОБОЛОЧЕК ВРАЩЕНИЯ
103
Таблица 14.8
Тип оболочки
ik
ik
pik
ik
Сферическая и коническая
11
2
— (1 V)
В3п
12
1 V
— 2
22
2
— (1 V)
33
2
1 — V
) в,
34
1 — V
2
—
44
2
1 — V
1
а) Коническая и сферическая оболочки:
Значения коэффициентов
гik aik afiik
(3—V) (1V)
Коничес¬
кая
13
14
23
24
4—8v 142V
2—2v 4
9 v 3 — 5v
3 — V
3 —v
jB1шь_
8 rn
ЛL
) 8 т2
(3—V) (1——V)
Сфери¬
13
14
1
со со
—2
2
) 2rn В'Ь ) 2 гп
3—V
ческая
23
24
— 1 1
—2
2
)
(14.68)
приведены в табл. 14.7.
При достаточно больших значениях параметра “ф можно, минуя определение Г, определить непосредственно значения
Dik
приведенные в табл. 14.8.
Таблица 14.9
Значения “ф
Уровень
погрешности
для конической оболочки
для сферической оболочки
5
9
0,01
4
7
0,02
3
5
0,03
Относительная погрешность при этом оценивается с помощью табл. 14.9.
б) Круглая и кольцевая пластинки. Формула (14.69) и табл. 14.8 в предельном случае Ь0, а —1 дают точные значения гг для круглой пластинки, а также приближенные значения гдля достаточно широкой кольцевой пластинки, нагруженной по наружному краю. Предельный случай Ь0, а 1 также соответствует кольцевой пластинке, но нагруженной по внутреннему краю. В обоих случаях г — радиус нагруженного края.
в) Оболочки вращения других очертаний. Исходя из
г
отношения главных кривизн —на контуре оболоч-
oRi
ки (табл. 14.10), определяются вспомогательные величины:
"Т; r'V
11 Е
I
1 „1
G, 2i(Hi 1); T'i 1 2tJHs,
(14.70)
после чего находятся входящие в (14.66), (14.67) выражения (14.71):
Таблица 14.10
Тип оболочки вращения
Уравнение меридиана
Вспомогательные
параметры
X
Эллипсоид
— — 1
Р Ф
1
qd
Двуполостный гиперболоид
т
II
n
1
Ч
й- — — Р4 Q
1
q2 d
Однополостный гиперболоид
_Г _ 1
Р3 о1
1_
ф d
Параболоид
гР”И с (р-1)2
ГР
ф, Р
i ф3
Тороидальная 1
r-A?V R?-2
II
,тТ
Катеноид (антисфера)
г с ch
с
-
—1
1 А — расстояние от оси оболочки до центра кривизны меридиана.
104
РАЗДЕЛ 14. ОБОЛОЧКИ
Г22 Г44 i V А т;
-V-g. Vg t.
м11
Гц Гзз Г22 — И2 Г24 (14.71)
1з Г24 Г22;
п 2s
Гх2 (Hi v); Гх4 Г2з
S п
г34 — (Hi — V); Г2з — и2s s
14.4.3. Изменение усилий вдоль меридиана каждой оболочки
Нормальные и касательные усилия определяются через функцию
Ф (а) сг h (а) — с2 2 (а) с3 3 (а) с4 f4 (а) (14.72)
и ее производные по а по формулам:
Ni — (аФ' — л2 Ф); т
N2 — (Ф"аФ' — ъЪ2 Ф); г
Д'12 — пФ'.
(14.73)
Изгибающие и крутящие моменты и поперечные силы определяются через аналогичную функцию
W (а) с2 ft (а) сг 2 (а) с4 fs (а) — с3 4 (а) (14.74)
и ее производные по а по формулам:
Мг — W" (1 V) aW — п2№1;
гг
м
2 vW" (1 v) aW’ — я2 wy.
r
М12 (1 —v)nW';
Xr
(Wm aW" — n2 W' — an2 B7);
r2
?. — 0Г" 2aW" — n2 Г).
X'2
Определение постоянных с, аргумента а и функций г(а) излагается далее.
С удалением от граничной параллели усилия циклического состояния имеют тенденцию к затуханию. Затухание может начаться непосредственно от границы или для части усилий ему может предшествовать некоторое возрастание по сравнению со значением на границе. Для практических целей достаточно установить начало затухания и оценить его интенсивность. В связи с этим выражения fi и правила их дифференцирования определяются здесь лишь приближенно.
а) Определение постоянных с. Постоянные с связаны с краевыми перемещениями Yь У2 и усилиями Ху Х2 через параметры а, Lt следующим образом:
В2 Ип
— у a i2—г2;
Г rs
1з-7х; 14 —хв:
п2 ns
(14.76)
ai 2 (1_ я 2
Оо — Li
31 32 33 34 41 42 43 44
Cl —
gi f аз 2
gi — аз
X t
L3
и
24
2
G2
(14.77)
(14.78)
Значения 6ih зависят от типа оболочки. Для конической и сферической оболочки значения
bikaik s
(14.79)
приведены в табл. 14.11.
Для оболочек других типов дополнительно к формулам (14.70) — (14.71) определяются вспомогательные величины:
G2 2ij)((x, — 1); Тг 1 — 2ti2;
г;
1 22
V GtV 2 ' т'2-
Gi Ti;
r'uV-GV
щп
Т2
iTi
(14.80)
(14.75) после чего находятся
6qi бдя 32 — 44
боо бд1 Г22 Г22 24 Г24
Го
22 Г0 ;
Г82 г22 Г24 Г24
(14.81)
634 — — б42 —
б) Определение аргумента а. Аргумент а (безразмерный) определяет положение точки на меридиане. В общем случае
za
dr2 аг-
(14.82)
14.4. ЦИКЛИЧЕСКОЕ (МОМЕНТНОЕ) НАПРЯЖЕННОЕ СОСТОЯНИЕ ОБОЛОЧЕК ВРАЩЕНИЯ
105
Таблица 14.11
ik
ft
aik
ft
ik
Обозначения
Коническая оболочка
31
аг
-i p-p2
32
33
34
1
—а2 1
-p-p,
—3i Зз 3 4" 34 4- 3
m? — 1 ma 1 „ 1 — ft3 л k7
cti ; a2 ; 3, ;, ;
2m 2m 4 16?
41
42
43
—а2 —1 —а,
l-3i- 32
Зз-Р “3i 4- Зг
k t a 1 —Л 0 m3 l. Q m — 1 Рз — " P " m, ps , Ps . 4m 4 4im 4ij?m
44
1
-3, -34 3,
Сферическая оболочка
31
m2 at
3l Зз 2
32
а,
-3. Зз
33
34
41
42
—а, а2
а2 —а, а2
—а2
3i З4 fth
m2
3, З4
—Pi Зг Ф
ft ft m2 -Р,Рг —
, 1 о at о 2mt —
a, — m, 4- m2; a2 — ; 3i —- ; 32 1 -L- J
mx 2g mt
3 2 — 3e mz 4" —— ;
43
—т2 at
Pi З2
44
ai
P,S2 —
m2
Т аблица 14.12
Тип оболочки
Тип оболочки
Цилиндрическая
Коническая
Катеноид вращения (антисферическая)
Сферическая
Параболоид вращения степени р1
1 1п га
. (L J L
I аа Эллипсоид вращения вытянутый
То же, сплюснутый
Гиперболоид вращения однополостный
То же, двухполостный Тороидальная
L — W arc tg W aja
L W Ar cth W a®
—1
Ar th
a V1 — 1 — cb
Обозначения (см. также табл. 14.10): — ; — полюсное расстояние
Q
(индекс а относится к исследуемой точке, индекс 0 — к граничной параллели).
У параболоида вращения второй степени (р1) a можно определять по табл. 14.14, в которой приведены
В табл. 14.12 приведены выражения а для оболочек значения переменных геометрических параметров поверх-
различных типов.
У сферической оболочки а можно определять по табл. 14.13, содержащей разности Да а(у)—(Y—1 ) ях отношения Ф e Q 3
при изменении у от 1 до 90 (в табл. 14.13 у Фв).
ности, в том числе разностей Аа при различных значенит
106
РАЗДЕЛ И. ОБОЛОЧКИ
Таблица 14.13
Таблица 14.15
е
ф
0 1 150 1
30 1 450
60 75 0 175
181
203
249
354
697
1 175
182
205
253
366
748
2 175
183
207
258
378
807
3 175
184
209
263
391
876
4 175
185
212
269
405
959
5 175
186
214
274
421
1058
6 176
187
217
280
438
1182
7 176
189
220
287
456
1339
8 176
190
223
293
476
1545
9 10 177
192
226
301
499
1826
11 178
193
230
308
523
2234
12 178
' 195
233
316
550
2878
13 179
197
237
325
580
4056
14 180
198
241
334
615
6932
180
201
245
344
653
оо
П р и м е ч а 10 4.
н и е. 1
Габличн
lie зна
ения 5
гмножат
ь на
Таблица 14.14
г
с
Ъ
а
X
Да
_
4-
3,0
0,9487
0,3162
0,1000
0,211
2,8
9417
3363
1131
213
2,6
9333
3590
1289
215
2,4
9231
3846
1479
2,2
9104
4138
1712
218
222
2,0
8944
4472
2000
226
1,8
8742
4856
2358
232
1,6
8480
5300
2809
1,4
8138
5812
3378
241
252
1,2
7682
6402
4098
271
1,0
7071
7071
5000
300
0,8
6247
7809
6098
0,6
5145
8575
7353
350
0,4
3714
9285
8621
453
0,2
1961
9806
9616
723
0,0
0000
1,0000
1,0000
оо
Ь1
Коническая
оболочка
Сферическая
оболочка
Другие типы оболочек
т 1
Г22 Г24
Ь
2
2
Ьг
т 1
1
Г22 Г24
2т
m,
2
Ь3
т — 1
п
т2 —
Г22 Г24
2
S
2
т-1
Л
Г22 Г24
bi
2т
и
2
14.4.4. Кольцо. Единичные реакции и внутренние усилия
Формулы относятся к случаю кольца нетонкостенного профиля; одна из главных центральных осей инерции се чения предполагается лежащей в плоскости осевой линии кольца.
Обозначения:
EF EJi EJ 2 GJ к
А Я ' х,4 ’ Аг А ' Ак 4 г0 г0 г0 г0
Значения а определяются путем сложения значений Да нарастающим итогом от граничной параллели до рассматриваемой.
Значение а и b см. рис. 14.24.
в) Определение функций г(а) и их производных.
Функции г (а)—затухающие:
i epi (а) cos р2 (а); f3 — ерз (а) cos ?4 (а); )
(14.83)
г е рЛа) sin (а); 4 е рЛа) sin pt (а). J
В первом приближении можно положить pt(а) sbiCLy приняв Ь по табл. 14.15.
Производные от функций г- линейно связаны с теми же самыми функциями. В первом приближении
f — s (i 1 b2 2);
2 -s(i f2-bs J;
(V3 V4): (14'83a
4-К4-64з):
жесткости, отнесенные к радиусу осевой линии (при продольной деформации, при изгибе в плоскости осевой линии, при изгибе около этой плоскости и при кручении).
Единичные реакции определяются по формулам:
ги А) (я2 — 1 )2 Ai; г22 Л2 п2 Ак, ги пАц г23 г2 Л2 п2 Ак,
г и л2 г33 я4 Л2 лМк‘ 4
Г12 — Г13 24 — Г34 0 Продольные силы, изгибающие и крутящие моменты и поперечные силы в сечениях кольца определяются через Z
N — -о — (п2—О г0 tiAoroZfr
М2 A2r2(z2 n2z3);
H "AKrlZ2 Z3); (14-85)
n Го
Qi — Q2 —
ro
M2 — И.
14.5. ПОЛОГИЕ ОБОЛОЧКИ
14.5.1. Определение, формы срединной поверхности и граничные условия
Оболочка, имеющая небольшой подъем, называется пологой. По В. 3. Власову, к пологим относятся оболочки со стрелой подъема, не превышающей Vs наи-
14.5. ПОЛОГИЕ ОБОЛОЧКИ
107
меньшего размера опорного плана. Это простое определение требует уточнения. Обозначим уравнение срединной поверхности пологой оболочки до нагружения (рис. 14.25) через z — F0(x, у). Для пологой оболочки должно соблюдаться условие: в любой точке срединной
поверхности частные производные
dF0
дх
д (Ц
ду
долж¬
ны быть величинами первого порядка малости, так что их квадратами при вычислении кривизн поверхности
Рис. 14.25
Рис. 14.26
Рис. 14.27
можно пренебречь. Иными словами, для пологой оболочки характерно, что в любой точке кривизны и кручение поверхности можно отождествлять со значениями вторых производных, т. е. определять по формулам:
дх2
ky dF0 ду2
ху — '
dF0 дх ду '
гие поверхности второго порядка (или более высоких порядков). К категории пологих оболочек относятся также слегка искривленные пластины (вспарушенные плиты). Опорный контур может быть плоским или выпуклым (рис. 14.25, а, б). Оболочки с прямоугольным планом, опирающиеся на плоский контур, имеют в центральной части положительную, а вблизи углов — отрицательную гауссову кривизну. Если плоский контур не обязателен по архитектурным или иным соображениям, то рекомендуется применять оболочки с выпуклым опорным контуром, что обеспечивает повсюду внутри контура положительную кривизну.
Пологие оболочки могут располагаться отдельно (рис. 14.25) или входить в состав многоволнового покрытия (рис. 14.27). Отдельно стоящие оболочки могут опираться на бортовые диафрагмы, выполняемые в виде балок, арок или ферм, или же непосредственно на стены. Опоры считаются шарнирными, если оболочка опирается на стены или диафрагмы, достаточно жесткие в своей плоскости и гибкие из плоскости диафрагмы. Средние волны многоволнового перекрытия считаются защемленными (в отношении углов поворота) по контуру.
14.5.2. Усилия и перемещения пологой оболочки. Особенности расчета
В пологой оболочке возникает система усилий NXy Ny, Nxy (рис. 14.28, а) и изгибающих и крутящих моментов MXi Му и Мху (рис. 14.28,6). Перемещения характеризуются тремя компонентами: их; vyi wz.
(14.86)
Связь между перемещениями и деформациями устанавливается формулами:
Если это условие не соблюдается хотя бы в одной точке, то оболочка перестает быть пологой.
Например оболочка, изображенная на рис. 14.26, не яв-
fo 1
ляется пологой, несмотря на то, что у нее ""г
I о
так как в средней части при вычислении кривизн нельзя пользоваться формулами (14.86). Из этого определения пологой оболочки следует, что линейный элемент ее срединной поверхности ds можно считать равным
ds Vdx2-dy2 это означает, что метрика срединной поверхности пологой оболочки приблизительно совпадает с метрикой плоскости. Такое допущение положено в основу технической теории пологих оболочек. Пологие оболочки могут быть любой гауссовой кривизны: положительной, нулевой и отрицательной. Вследствие пологости срединной поверхности разница между теми или иными поверхностями одного типа кривизны несущественна. С конструктивной точки зрения наиболее приемлемы поверхности переноса (например, для оболочек положительной кривизны эллиптический параболоид, круговая поверхность переноса). Кроме того, могут быть использованы сфера, эллипсоид вращения и дру-
е
Ъху ди
дГ
dv
ду
dw 2 дх
— kvw
1 dw 2
2 UT):
ди
ду
4-
ди
дх
2kxy w 4-
Хх —
dw
д7 '
d2w дх 2 ;
Хху —
dw
ду
Ху '
d-w дх ду
d2w
ду2
(14.87)
Здесь 8 и Еу — относительные удлинения; гху — деформация сдвига; х, у — приращения кривизны; ху — приращение кручения срединной поверхности.
Для оболочки из линейно-упругого материала усилия и моменты (положительные направления которых указаны на рис. 14.28) согласно закону Гука равны:
108
РАЗДЕЛ 14. ОБОЛОЧКИ
Nx
(е ™yY (еу ve);
Et 1 —v2
Et
i
Et
Nxu 2(1 ) Mx — D (x vxy)'
My — D(Xy vx);
MxyD( 1 — v)
(14.88)
Здесь t — толщина оболочки; v — коэффициент Пуассо-
Etz
на; E — модуль упругости; D 12(1 — v2)
’ — цилинд¬
рическая жесткость.
Для оболочки из нелинейно-упругого материала усилия определяются согласно 48.
Условия равновесия:
-.Рж 0;
ИХ 0; 2К 0; 2Z 0; дх
dN,
у
ду
dN
ду
дМг
ху
дх2
— 2-
дх д2М
4- Ру — 0;
ХУ
дти
ду
дхду Nx (kx X)
(14.89)
Et
d2w
ду2 d2w
2kxy дхду 'dx-
dx2 d2m dy2
d2w dx dyi
)-
d2w
RV2V2W — kx —— — k,
о у
d2q д2ф
2кхудхдУ
d2q d2w
д2ф у дх 2
d2w
дх2
ду2
2
ду2 дх2
d2p d2w
дхду
д2.
— Pz (У) 0; у3 “777“ 4
дх ду
а2.
дх2
(14.91)
Первое уравнение (14.91) —уравнение неразрывности деформаций — получено из первых трех выражений (14.87) путем исключения из них перемещений и и v и замены деформаций усилиями по формулам (14.88) и (14.90). Второе уравнение (14.91) получено из третьего уравнения (14.89) после подстановки в него значений усилий через перемещения и функцию напряжений по формулам (14.87), (14.88) и (14.90). Система уравнений (14.91) описывает поведение пологой оболочки в самом общем случае с учетом моментов и конечных перемещений; иными словами, это есть уравнения моментной нелинейной теории пологих оболочек. Отбросив в этих уравнениях нелинейные члены, получим дифференциальные уравнения линейной моментной теории пологих оболочек:
1 d2w d2w
it vVp kxwkyd-
— 2k4 Dy2y2w — kx
4 2kxy
d2w
Xydx dy d2p дуГ ' d-q дх dy
0;
k ky dx2
-Pz 0.
(14.92)
N у (ky Ху) 2AJ Xy (kxy Xxy) 4“
Pz 0.
Здесь px py, pz — проекции внешней нагрузки на оси х, у, z. В наиболее часто встречающемся случае вертикальной нагрузки рх — ру —0, т. е. когда тангенциальные составляющие поверхностной нагрузки равны нулю, нормальные и сдвигающие силы выражаются через функцию напряжений по формулам:
д2р д2ф д2Ф
Ых Ф йЬ 1490)
В этом случае дифференциальные уравнения пологой оболочки можно записать в следующем виде 16 и 21: 1 d2w d2w
"Т7 V2V2(P kx ky —
Если в уравнениях (14.91) положить D—0, т. е. пренебречь работой моментов, то получим дифференциальные уравнения безмоментной нелинейной теории пологих оболочек; если исключить работу моментов в уравнениях (14.92), получим уравнения безмоментной линейной теории пологих оболочек:
1 d2w d2w
у2и2ф kx ku —
Et V V Y -Г ду2 -Г У дх2
d2w
2jсу -j -v
у дх ду
д2(р д2ф д2ф ъ —— I ь —I- оь I— _1_
Rx. Г Ку л 2 лху ду2
дх2 Pz — 0
дх ду
(14.93)
Уравнения (14.93), (14.92) и (14.91) отличаются различной точностью и сложностью. Поэтому практически необходимо решить, какие уравнения целесообразно положить в основу расчета заданной оболочки.
Особенно важен вопрос о пределах применимости линейных теорий. Следует иметь в виду, что пологая оболочка, например положительной гауссовой кривизны, работает аналогично плите, находящейся на некотором фиктивном упругом основании, создаваемом кривизной оболочки с коэффициентом упругости, равным (для сферической оболочки):
С—
Et
R2
где R — радиус кривизны. По мере нагружения оболочки радиус кривизны увеличивается (оболочка выпрямляется), а это приводит к уменьшению коэффициента упругости фиктивного основания. Это означает, что с увеличением прогибов конструктивная схема пологой обо-
14.5. ПОЛОГИЕ ОБОЛОЧКИ
109
лочки ухудшается. Поэтому расчет по нелинейной теории для пологих оболочек необходим для выяснения действительного коэффициента запаса, который при расчете по линейной теории получается завышенным.
Влияние нелинейных членов в уравнениях (14.91) на величину усилий зависит от подъема оболочки: чем меньше подъем, тем это влияние значительнее. Для оболочек положительной или нулевой кривизны при подъеме fotZ6 линейная теория может дать погрешность в отношении прогибов в пределах 5.
Для заданной конкретной оболочки положительной или нулевой кривизны вопрос о целесообразности расчета по нелинейной теории можно решать следующим образом: подсчитывается вся нагрузка q, действующая на оболочку (вместе с коэффициентами перегрузки), и по формулам линейной теории определяется максимальный прогиб л. Это значение прогиба подставляется в формулы нелинейной теории, по которым определяется величина нагрузки qB, соответствующая прогибу л. Если окажется, что qQ существенно меньше q (например, на 5), то данную оболочку необходимо рассчитывать по нелинейной теории.
Для оболочек отрицательной гауссовой кривизны вопрос о применимости линейной теории подробно не обследован. Но вследствие того что эти оболочки могут обладать мгновенной изменяемостью, расчет их должен быть проверен с помощью нелинейной теории.
Область применения моментной теории для пологих оболочек может быть определена следующим образом: пологие оболочки отрицательной и нулевой гауссовой кривизны должны рассчитываться по моментной теории при всех видах нагрузок. Оболочки положительной кривизны, нагруженные распределенными нагрузками, можно рассчитывать по безмоментной теории при достаточно большом подъеме оболочки (например, при foft 20). При этом необходимо учитывать изгибающие моменты у опорных участков. Указанные границы применимости отдельных теорий намечены ориентировочно, в порядке первого приближения, и подлежат уточнению.
14.5.3. Формулы и таблицы для расчета пологих оболочек, прямоугольных в плане
Для шарнирно опертой оболочки (см. рис. 14.25) в системе главных координат (kxy0) с граничными условиями, определяемыми формулами:
при х 0; х — а у — 0; у 6, w 0;
д2 w д2 w
0;
дх2
ду2
167
при х 0; х a; Nx
Э2ф
при у 0; у Ь;
Ny
ду
д2 ф дх2
0;
0;
Nху dx 0,
J Nxy dy 0;
о
усилия и прогибы в точке с координатами х у определяются по формулам 16: _
N
т— п1
тп F (х У)
Nu
-ЕЕ
m1 11
(v)'
amnFi, У)'.
-22 т1 11
тпп2
ab
amnF(x, У)',
(14.94)
Мх
Мь
М
т1 я1
оо оо
S(f-)
т1 11
т1
ОО ОО
'"ЕЕ
тп 2 пп 21
лт
V
bmn F (х У)
D( 1
тпп2
ab
bmn FiiX9 У)
т1 11
0 Ьп
т1 п1
Здесь
. tin 2 ( тп 2
ч— ) (“)
Ьтп
тпп2
16р
тпп2
пп
Г тп 2 ( пп 24 Г пп 2 тп 212
F(x, у) sin-
sin
ппу
„ ч тпх
Fi (х У) — cos cos
ппу
(14.95)
110
РАЗДЕЛ 14. ОБОЛОЧКИ
k и 2 — главные кривизны; т 1, 3, 5, п 1, 3, 5,.
Эти формулы получены путем интегрирования системы уравнений моментной линейной теории пологих оболочек (14.92) методом Бубнова—Галеркина в форме, предложенной В. 3. Власовым 16. Чем больше кривизна оболочки, тем больше членов ряда необходимо брать в выражениях (14.94). Один член ряда дает удовлетворительную точность для очень пологих оболочек (fotC 0,8), для которых по существу линейная теория неприемлема. Для оболочек с подъемом fot6 необходимо брать 4—5 членов ряда (по каждому направлению).
Если в формулах (14.94) и (14.95) положить D 0, получим выражения для усилий пологой безмоментной оболочки. На основе этих формул В. 3. Власовым составлены таблицы для определения усилий, моментов и прогибов пологой сферической оболочки на квадратном плане с подъемом 0fot 10, нагруженной равномерно распределенной нагрузкой 16. При больших подъемах рекомендуется пользоваться таблицами, составленными В. В. Дикович 33, а также Инструкцией 37.
Усилия по безмоментной теории для оболочки с прямоугольным планом, очерченной по поверхности эллипсоида под действием сплошной и односторонней равномерно распределенной нагрузки, можно определять по таблицам, вычисленным методом конечных разностей А. Р. Ржаницыным 82.
В работе В. М. Никиреева и В. Л. Шадурского 68 приводятся многочисленные формулы для определения усилий, моментов и перемещений для оболочки положительной кривизны при шести случаях закрепления оболочки тангенциальными связями. Там же имеется большое количество формул для расчета многоволновых оболочек и оболочек отрицательной кривизны.
Л. С. Гараниным составлены таблицы для расчета прямоугольных в плане пологих оболочек, нагруженных равномерно распределенной нагрузкой pzp const 22. _ _
_ Таблицыjiакуг значения безразмерных величин V, Wv, Nxy, MXt My, Mxyt u, v и w, через которые действительные значения усилий, моментов и перемещений определяются по формулам:
Nx pR2 Nx; Мх ps2 Мх; и
pR2s
Et
Ny pRt Ny; My ps2 My, о PRS v;
NXy pR2 NXy MXg ps2 Mxy;
PR _
w w.
Et
fi fi
(14.96)
f Тш ’ I fl 7 f 2
II — ; 2 —,
a b
(14.98)
Рис. 14.29
При выводе формул (14.98) принято: я2 а
lS 1Г Ж’
Ьг
8ft
j§S й
1 471
()-ЯГ -т
ь_
8U
Л1
0.2
fiJ
№
W
Ш
(Шо
г -Л
'f
Рис. 14.30
Таблицы составлены для различных значений параметров
а —; r-; s —, (14.97)
a Rx а
которые в свою очередь могут быть выражены через геометрические характеристики оболочки, а, Ь, R (приведены на рис. 14.29) и
s 0,76. (14.97')
Параметры г и s также выражаются через стрелки подъема контурных диафрагм по формулам:
Безразмерные коэффициенты подсчитаны для узлов сетки прямоугольного плана оболочки (рис. 14.30) при двух вариантах граничных условий. В обоих вариантах кромки 0; х—а шарнирно-подвижны; граничные условия на кромках:
(w Мх — N х и)х0 о.
х—а
В первом варианте граничных условий края у dob2 тоже шарнирно-подвижны
(ш — Му — Ny и) ь 0.
у±т
14.5. ПОЛОГИЕ ОБОЛОЧКИ
Ш
Во втором варианте края у dbb2 полностью защемлены
w и 02 v О,
где 02— угол поворота касательной к срединной поверхности оболочки.
При отсутствии табличных данных для расчета пологих оболочек, прямоугольных в плане, можно пользоваться методом сеток (см. раздел 15).
14.5.4. Круговые цилиндрические оболочки открытого профиля
Уравнения моментной линейной теории пологих оболочек можно применить к расчету круговых цилиндрических оболочек открытого профиля (не пологих). Положим в уравнениях (14.92)
Н 0; fce -j-; а F; у ptf,
н
где а и р — безразмерные координаты (рис. 14.31). Уравнения примут вид:
1 d2w
— v2V2P S-r 0;
д2 ф
ЧгЧ Рг,
(14.99)
где рг в отличие от предыдущих параграфов обозначает нагрузку, нормальную к поверхности оболочки.
Усилия и моменты выражаются через функции ср и w следующим образом:
1 д2р Nt — М.
— ( R2
R2 д2 w
ар2 ’
д2 w
—( R2 V
ар2 ы12 — —
R2 Et3
v да2 ар2 1
R2
а2 до Э2 до
V
)‘
д2 ф да2
да2 д2 ф ааар ;
д2до
i2(iv)2 aaap
(14.100)
Подстановкой w у2 у2 Ф Ф 85 ’
д2Ф
да2
получаем
из уравнений (14.99) одно дифференциальное уравнение восьмого порядка
у2у2у2у2 Ф.
1 _ V2 дФ
С2
да4
Рг, (14.101)
где
С2
Рис. 14.31
Перемещения, усилия и моменты выражаются через разрешающую функцию Ф следующими формулами:
дФ
дФ
да
-
дадр
дФ д3Ф
(2 v)
ар ' ' ' ’дад
W у2 Ф;
дФ
до ар2 ’
N,- Et
N, дФ
Et
дФ
да
МгAf Mlt ) г а а2 1 ?2 а2 v ар2
—Г"
Я2
а8ар ’
у2 у2ф.
д2 а2
— -i-v др2 doc2 D д2
r2 (1 — v) аар
(14.102)
V2 V2 у2 V2
D га8 а8 2,'-vWJv‘v®;
D Г д3 д3 1
Здесь Q и Q2 — обобщенные поперечные силы (в смысле Кирхгофа), необходимые при формулировке граничных статических условий.
Однородное уравнение (14.101) (Pz—O) может быть разложено на четыре независимых уравнения:
дФг V2i Y(1 0- 0;
V2 2 — V (1 0
да
дФ2
да
0;
12 R2
дФ3
va03 Y(i_O_i- O: оа
(14.103)
112
РАЗДЕЛ 14. ОБОЛОЧКИ
где
3(1 — V2) Д2
12
Полное решение однородного уравнения Ф Фх Ф2 "Ь Фз Н” 4
(14.104)
Оболочка, свободно опертая по контуру. Нагрузка считается положительной, если она направлена по внешней нормали (на рис. 14.31 нагрузка рг отрицательна). Граничные условия:
I
при а 0 и а ах — и w Ni Мх 0 R
при р 0 и р Pi
: W — N2 — М2 — 0.
Нагрузка рг и разрешающая функция представляются в виде двойных тригонометрических рядов.
Окончательное выражение для разрешающей функции имеет вид:
R4
Ф(а,Р)— X
Втп sin
тяа
дяр
Pi
SfтлД2 (пп 24 1 — v2 тя4
4fcHidJ—Ы
(14.105)
OCj 3,
тп —
iPi
Я тяа. яяр trt,
Рг (а Р) sin sin
о о
Pi
где
2 а п ь
С2 ; глх — ; Pi .12 R2 1 R H1 R
а) Случай радиальной сосредоточенной нагрузки Р, приложенной в произвольной точке с безразмерными координатами а и Р г) и направленной по внешней нормали вниз
4Р
Втп -——-F(l, л),
Ф:
aiPi R2 4а ХхР nEt яяр
оо оо 72 ЯСС г
т1 21
(т2 Х2Л2)4 цт4
где
тя гяг
(I. Л) sin sin —
ai Pi
Pi
1 — v2
С2
я4
12(1 — V2)
я4
R2t2
Перемещения и усилия в любой точке срединной поверхности в соответствии с формулами (14.102):
оо оо
4ХиР VI VI fn (vm2 — 2п2)
1 -х
ахя (m2 Х2л2)4 М-яг4
ml 21
тяа. ппр ч X cos sin —— F ( , л);
ai Pi
4XliP
оо оо
lP_ yi yin A2;;2 2(1 v) m2l
fcr2j (m2 я.г„2)4 um4
anEt' i-J (m2 Я.гл2)4 цт4
т1 1
тяа. гяЗ X sin sin F (l, л);
1 Pi
X
со oo
Ni
V V
m2n2
4 №lP
R jLa Zj (m2 k22)4
m1 г1
тяа ляр
X sin sin—— F(, T1);
ai Pi
X
оо oo
iV,
V V
m4
44iP
а?? Zj Zj (m2 Я2г2) p,m
ml n1
. тяа. пяр
X sin sin —— F ( , ri);
ai px
X
4ЩiP
OO oo
V
m4
aR Zj Li (m V2) Vm
ml-г1
тяа яр
X
X cos——cos — F (, Я); (14.107)
1 Pi
o2P
ш — (a0 — “'ft);
Mx P (Mm-Mlfc);
M2 P (Ml0-Aflft);
JM12 Я — Ai§).
Здесь wo, Mio, M20 и прогиб и моменты от силы
Я 1 в плоской пластинке со сторонами а и b:
со оо
(14.106)
w0
4Я. yi
Л4 2j Zj (m2 X22)2
ml rtl
. тяа. пп P
X sin sin —- F (l, л);
ai Pi
X
Ml0
41
oo oo
mz v№n2
n2 (m2 X2n2)2
m—1 21
тяа. пяр X sin sin —— F (5, r();
1 Pi
14.5. ПОЛОГИЕ ОБОЛОЧКИ
113
а
с© оо
vm2
л2 Xl (m2 A.2;t2)3
ml л1
шла яяВ
X sin Sin-— F (, 11);
ai Pi
oo OO
X
(m2 AM2)2
X
ml n1
тла я8
X cos cos ——F( , T).
ai Pi
. mn а пл
X sin cos ;
®i Pi
AT,
16Ay
Я2
ОО оо
Rp
Svi тп
2ш ctnn
mn тла гяр . sjn _—
m—1 n—l
sin mn al
OO oo
Я2
m3 тла пл 6
—— sin sin n—
nCmn ax Pi
m 1 n1
1бХц „
Al2 я2 RpX
(14.108)
Величины wh Afjfc, M2k связаны с кривизной
оболочки:
4А41 — х
ОО ОО
X
ОО ОО
S т1 г1
тла пяр
т4 sin sin ——
1 Pi
(тг Х2я2)2 (т2 vi) jxm4
4А.Ц
Mlk -7- X я3
яяа пяв
" " т (т2 4- vX2n2) sin sin ху у 1 Pi
Li Li (m2 .2rt2) (m2 .2t2) цт4
ml 11
4Xja
"—S’ x
тла ляВ
00 00 m (X2i2 4- vm2) sin sin ——
xV V i Pi
Li Ll (nfi Я2я2) (m2 Я.22) цт‘
ml 11
тяа яр
тбл cos cos ——
1 Pi
— F(t, n). 16 V V
(т2 А.2п2)(.-п2 Х2п) цл U Wk T 2j 2jTi
xSS-
m lil
б) Случай равномерно распределенной поверхностной нагрузки рг const.
Усилия и перемещения:
оо оо
16А Rap VI V4 vm2 — Х2п2
X
V1 V —
2j Acm„
ml 11
тяа яр
cos cos ;
1 px
pa4
Ш Wk Ml pa2 10 M2 pa2 (M20 — M2); Af12V(Af‘-Af);
Qni (m2 A,2rt2)4 J-im4.
Здесь
тяа гяр
со оо 81п sin аг pt
— — V V
л 2j 2j
т— п1
ОО ОО
тп (т2 к2п2)2
М10
М2 о —
16 vi m2 v2n2 тла плр
— 7. 7. : sin sin ——,
я4 sLl тп (т2 2г2)2 аА рх
т1 71
ОО
VI Я2я2 4- vm2 тяа
sin sin
00 00
16 yi yi №n2 vm2. тяа. плp
я4 2j 2j
тяа пл p
mi г1
I mn (m2 -f- X2i2)2 at
pi ’
00 OO cos cos
al Pi
ml 21
00 00
т1 г1
(m2 Я2г2) C„
тяа плр
sin sin Pi
Mlk
1 6jLl Я4
16fx Rap VI vm2
“ ” l3" 17"2j 2j nC
v y-
-J -Jfl
т1 л1
m3 (m2 -j- vX2n2) (m2 A,2n2)2 Cml
X
т1 г1
тяа яр
X cos sin —— ;
ai Pi
тяа 2 яр X sin sin —- ;
i Pi
00 00
1 бцХ. Rap
л3 Et
22
m t n 1
X2n2 2 (1 v) m
mCmn
18ц VI m3 (X2n2 vm2)
MkiL Ln- — x
т1 г1
. (m2 X2n2)2
X
тяа гяр
X sin sin ——;
i Pi
114
РАЗДЕЛ 14. ОБОЛОЧКИ
т— п1
пл р
- X
тпа Xcos cos л
ai Pi
В этих формулах индексы т и п — нечетные числа натурального ряда (т, 3, 5, п 1, 3, 5,.).
Для круговых цилиндрических оболочек со свободными криволинейными краями при отношении толщины к радиусу tR 0,01 и коэффициенте Пуассона v0 А. Л. Гольденвейзер 29 составил графики, позволяющие определять усилия Ni, N2, и М2, и таблицы для определения вертикальных перемещений при равномерно распределенной нагрузке.
Если круговые цилиндрические оболочки оперты по всему контуру (с различными вариантами граничных условий), то для определения усилий, моментов и перемещений следует пользоваться таблицами, составленными В. Д. Жемочкиной и М. М. Микшисом 35.
14.5.5. Дифференциальные уравнения пологих сферических оболочек в полярных координатах 16
Дифференциальные уравнения моментной линейной теории в полярных координатах г и Р (рис. 14.32) имеют вид 2, гл. IX, § 9:
D
у2у2ф у2ш 0;
Ftr 5
V2 Ф — -Г v2 V2 “ rl Ярг 0.
(14.109)
В этих уравнениях: ср — функция напряжений; w — прогиб срединной поверхности; R — радиус кривизны оболочки; D — цилиндрическая жесткость:
Р„ . у:
12 (1 — v2) ’ 0 V
t2
12(1 — v2) 2 Дифференциальный оператор V2 имеет вид
1 г а э 1 д2 1 г
“TI.'Srr'fcj T'apl-
Нагрузка рг и прогиб w считаются положительными, если они направлены по внутренней нормали (на рис. 14.32 — сверху вниз).
Подстановкой
W у2У2Ф и
ф -
Etrl
у2ф
(14.110)
Это уравнение аналогично уравнению плиты на упругом основании; таким образом, сферическая пологая оболочка работает так же, как плита, лежащая на упругом основании с коэффициентом упругого основания cEtR2.
Рис. 14.32
Изгибающие и крутящие моменты определяются по формулам:
М1 - (Xa vh)’ м2 - ()Ср ча); М1г D (1 — V) х„р.
Здесь
1__ d2w 1 1 d2w Jl_ dw
Za"T’ da2’ Xp rl a ’ ’djp2’"a da'’
(14.113)
'o
11 dw J_ jtaA
ХаР rl a da d a ' d ’
Это уравнение следует применять только для свободно опертых оболочек. Для оболочек с другими граничными условиями подстановка (14.110) может привести к ошибкам, потому в этих случаях следует исходить из системы (14.109).
Нормальные и сдвигающие силы определяются по формулам:
1 1 d2p 1 dp
,2 а ’ dfP а ' да )’’
ЛГ,
32ф да2
-Ит
rl
д2ф да д
a2
dp
“ар
(14.114)
или через функцию Ф по формулам
Eh I I д2 1 д
Vl — R (a2 ‘ др2 а ’ да ) V ’
второе уравнение системы (14.108) приводится к виду (V2V2 Dv2?2®- Pz 0 (14.111)
или с учетом первого равенства (14.110)
R2
у2у2а; 4-ш — —— рг 0. (14.112)
ct
Лг2 -
Eh 1
Eh д2
да2
у2Ф;
1
R а da др а2
дР
) у2Ф
XQ I V
(14.115)
Осесимметричные задачи 2, гл. IX, § 10. В осесимметричных задачах нагрузка зависит только от одной радиальной координаты а, поэтому напряженное состояние будет также зависеть только от одной переменной а. Оно будет полностью симметрично относительно оси вращения.
14.5 ПОЛОГИЕ ОБОЛОЧКИ
115
Уравнения (14.109) превращаются в обыкновенные дифференциальные уравнения четвертого порядка:
( ±.
da2 а
Продолжение табл. 14.16
d (d2w dw 1
da J da2 a da j
w
J?
Et
P
d d2Ф J_
da Д da2 a da
(14.116)
Крутящий момент и сдвигающая сила равны нулю, все прочие моменты и усилия определяются по формулам:
D (d2w 1 dw
jAi -— — ' -j- v —— j r2 da2 a da )
D I 1 dw d2w
M2 —— —. v ;
r2 a da da2
__ D__ d d2w
1 r da da2 a
dw da ) 1
(14.117)
v __L jL v _ JL
“ 2 ’ a 'da' г У
ro ro
Общий интеграл первого из уравнений (14.116) имеет вид
w (ос) Aili Л22 А1 з -f- А 44 Wp (а). (14.118)
Здесь wP(a) —частный интеграл неоднородного уравнения; ь hf h, 4 — некоторые функции а, представляющие частные интегралы однородного уравнения.
Значения функций и их первых производных приведены в табл. 14.16 Значения вторых производных вычисляются по формулам:
1 1
3 '4 —'Si
ОС
— h-—U
a
(14.119)
Значения постоянных Ль 2, и Л4 определяются из граничных условий.
Частные случаи. 1. Сферическая оболочка находится под действием сосредоточенной вертикальной силы Ру приложенной в верхней точке (полюсе). На опорной параллели, имеющей радиус b, оболочка закреплена шар-
Таблица 14.16 Значения функций 1, 2, 3 4 и их первых производных
а
h
2
1
1
1
2
0
1,0000
0
0
0
0,1
-f 1,0000
0,0025
—0,0001
0,0500
0,2
1,0000
0,0100
—0,0005
0 1000
0,3
0,9999
0,0225
—0,0017
0,1500
0,4
0,9996
0,0400
—0,0040
0,2000
0,5
0,9990
0,0625
—0,0078
0,2499
0,6
0,9980
0,0900
—0,0135
0,2998
0,7
0,9962
0,1224
—0,0214
0,3496
0,8
0,9936
0,1599
—0,0320
0,3992
0,9
0,9898
0,2023
—0,0455
0,4485
1,0
0,9844
0,2496
—0,0624
0,4974
1.1
0,9771
0,3017
—0,0831
0,5458
1,2
0,9676
0,3587
—0,1078
0,5935
1,3
0,9554
0,4204
—0,1380
0,6403
1,4
0,9401
0,4867
—0,1709
0,6860
1,5
0,9211
' 0,5576
—0,2100
0,7302
а
h
2
1
2
1,6
0,8979
0,6327
—0,2545
0,7727
1,7
0,8700
0,7120
—0,3048
0,8131
1,8
0,8367
0,7953
—0,3612
0,8509
1,9
0,7975
0,8821
—0,4238
0,8857
2,0
0,7517
0,9723
—0,4931
0,9170
2,1
0,6987
-1,0654
—0 5690
0,9442
2,2
0,6377
-1,1610
—0,6520
0,9666
2,3
0,5680
-1,2585
—0,7420
0,9836
2,4
0,4890
-1,3575
—0,8392
0 9944
2,5
0,4000
-1,4572
—0,9436
0,9983
2,6
0,3001
1,5569
—1,0552
0,9942
2,7
0,1887
1,6557
—1,1738
0,9814
2,8
0,0651
1,7529
—1,2992
0,9590
2,9
—0,0714
1,8472
— 1 4314
0,9256
3,0
-0,2214
1,9376
—1,5698
0,8804
3,1
—0,3855
2,0223
—1,7141
0,8223
3,2
—0 5644
2,1016
—1,8636
0,7499
3,3
—0,7584
2,1723
—2,0177
0,6621
3,4
—0,9680
2,2334
—2,1755
0,5577
3,5
—1,1936
2,2832
—2,3361
0,4353
3,6
—1,4353
2,3199
—2,4982
0,2936
3,7
-1,6933
2,3413
—2,6608
0,1052
3,8
—1,9674
2,3454
—2,8222
—0,0526
3,9
—2,2576
2,3300
—2,9808
—0,2596
4,0
—2,5634
2,2927
—3,1346
—0,4912
4,1
—2,8843
2,2309
—3,2818
—0,7482
4,2
—3,2195
2,1422
—3,4200
—1,0318
4,3
—3,5679
2,0286
—3,5466
—1,3432
4,4
—3,9283
1,8726
-3,6588
—1,6832
4,5
—4,2991
1,6860
—3,7536
—2,0526
4,6
—4,6784
1,4610
—3,8280
—2,4520
4,7
—5,0639
1,1946
—3,8782
—2,8818
4,8
—5,4531
0 8837
—3,9006
—3,3422
4,9
—5,8429
0 5251
—3,8910
—3,8330
5,0
—6,2301
0,1160
—3,8454
—4,3542
5,1
—6,6107
—0,3467
—3,7589
—4,9046
5,2
—6,9803
—0,8658
—3,6270
—5,4835
5,3
—7,3344
-1 4443
—3,4446
—6,0892
5,4
—7,6674
-2,0845
—3,2064
—6,7198
5,5
—7,9736
-2,7890
—2,9070
—7,3729
5,6
—8,2466
-3,5597
—2,5410
— 8;0454
5,7
—8,4794
—4,3986
—2,1024
— 8,7336
5,8
—8,6644
—5,3068
— 1,5856
— 9,4332
5,9
—8,7937
-6,2854
—0,9844
—10,1394
6,0
—8,8583
-7,3347
—0,2931
—10,8462
Продолжение табл. 14.16
а
'з
4
3
9
I
4
0,0
0,5000
—оо
0
оо
0,1
0,4955
-1,5409
—0,09293
6,3413
0 2
0,4826
-1,1034
—0,1419
3,1340
0,3
0,4667
—0,8513
—0,1746
2,0498
0,4
0,4480
—0,6765
—0,1970
1,4974
0,5
0,4275
—0,5449
—0,2121
1,1585
0,6
0,4058
—0,4413
—0,2216
0,9273
0,7
0,3834
-0,3574
—0,2268
0,7582
0,8
0,3606
-0,2883
—0,2286
0,6286
0,9
0,3477
—0,2308
—0,2276
0,5258
1,0
0,3151
-0,1825
—0,2213
0,4422
1,1
0,2929
—0,1419
—0,2193
0,3730
1.2
0,2713
-0,1076
—0,2129
0,3149
1,3
0,2504
-0,07859
—0,2054
0,2656
1,4
0,2302
-0,05419
—0,1971
0,2235
1,5
0,2110
—0,03370
—0,1882
0,1873
1,6
0,1926
-0,01657
—0,1788
0,1560
1,7
0,1752
-0,00235
—0,1692
0,1290
1,8
0,1588
0,00936
—0,1594 0,1056
1,9
0,1433
0,01888
—0,1496
0,08539
2,0
0,1289
0,02651
—0,1399
0,06786
(Продолжение таблицы на след, стр.)
116
РАЗДЕЛ 14. ОБОЛОЧКИ
Продолжение табл. 14.16
а
73
74
'з
и
2,2
0,1026
0,03712
—0,1210
0,03968
2,4
0,08039
0,04290
—0,1032
0,01892
2,6
0,06136
0,04463
—0,08675
0,00391
2,8
0,04553
0,04474
—0,07186
—0,00662
3,0
0,03256
0,04267
—0,05860
—0,01367
3,2
4-0,02202
0,03944
—0,04697
—0,01805
3,4
0,01366
0,03557
—0,03692
—0,02041
3,6
0,007152
0,03139
—0,02836
—0,02127
3,8
0,002154
0,02305
—0,02117
—0,02103
4,0
—0,001398
0,02304
—0,01522
—0,02004
4,2
—0,003943
0,01917
—0,01039
—0,01855
4,4
—0,005620
0,01564
—0,006522
—0,01675
4,6
—0,006608
0,01248
—0,003497
—0,01482
4,8
—0,007066
0,00971
—0,001190
—0,01286
5,0
—0,007122
0,007309
0,0005218
—0,01095
5,2
—0,006893
0,005325
0,001735
—0,009147
5,4
—0,006456
0,003661
0,002546
—0,007496
5,6
—0,005892
0,002312
0,003036
—0,006014
5,8
—0,005257
0,001243
0,003276
—0,004711
6,0
—0,004594
0,0004166
0,003326
—0,003585
нирно. Граничные условия: при а — а2—Ьг0; ш0;
М, 0.
Из условий, относящихся к полюсу оболочки, следует, что
Prl
А3 — и А4 -
4 D
Вследствие отсутствия распределенной поверхностной нагрузки частный интеграл шр(а)0.
Отсюда согласно (14.119) прогибы и моменты определяются по формулам:
w АХ1 х А212
w АХ1Х Л212
РА
4 D 4 D
Мл
D 2
1 —V
а
Л
(г
1 —
V,
V1
а
2
p4i
4 D
1 — а
з
(14.120)
Если коэффициент Пуассона v0, то
Pri
А —— X
4 D
X
а ( Л 3 — 24) 3 2 “Ь 2 Лз 1
.-(? Jaa,
1 РГ А„ —— X 4D
X
f 1,3)-л;у;1
- а ( f 2) , 2 — 2 Л Jaa
(14.121)
2. Та же оболочка, защемленная по опорной параллели.
Ъ
Граничные условия: при а аг—; а0; аг0.
го
Прогибы и моменты и в этом случае определяются по формулам (14.120); постоянные А и А2 при v 0 равны:
р_
4D
3 2 "Ь 3 2
j 2 — 3 I
' a—а.
4D
Л Аз Л Аз
Л 2 2 Л J а—о
(14.122)
3. Сферическая оболочка под действием нормальной нагрузки р, равномерно распределенной по всей поверхности. Коэффициент Пуассона v 0. В данном случае из условий у полюса оболочки Л3Л40. Частный интеграл
При шарнирном закреплении:
R2 ((аЛ )а2 Л (а) (а2 Л )аг h ( 0 р -(?22), 4-2;аг
Eh
DR
Ehrj
Мг
— а (1 ) , 2 — 2,)в
При защемленном крае:
Я2 _-h Ы Л () 4 (a2) 72 () ( Л 2 — 2 А?) 2 ( 1Х 2 2Л) а2
ад2 72 (а2) I" h (а) Л (а) — Л (аг) Л (а) — h (а) j
——— 7 - — — —
( Л l2' hh) а2
(14.123)
Eh Р
Ehr
(14.124)
5. ПОЛОГИЕ ОБОЛОЧКИ
4. Кольцевая пологая сферическая оболочка под действием вертикальной равномерно распределенной нагрузки р, приложенной по верхнему основанию.
Если по нижнему основанию оболочка имеет шарнирное закрепление, то граничные условия будут: а
при а хг — — Mi 0; Qi — Р sin у; го
Ь
при а а2 — ау00; Мг 0.
го
Здесь Y — Уг л наклона к оси вращения касательной к меридиану в точке а. Величина w определяется по формуле (14.118), в которой надо положить шр(а)0. Для определения коэффициентов Ль Л2, Л3, Л необходимо решить систему уравнений:
. 1 — v Лл I LM
1
1 —у
OCi
7Ы 2 М-
-A2ll(ai)
- А3 U (®l) ;3 ( “0 3(i)1L4(a2) 0;
Al2 (al) — А2 (О Рг0
а4 з(1) -5' sinv;
А Л (®г) А22 (“2) Va (аг)
А4 4 (а2) — 0;
2(а2)-4га_
-Л4(г)-4гз(а2)
л4 7з (аа) (“2) -
Л44 (ai) g — 0;
(14.126)
3 U (ai) ;3 (ai) Ai 73 (ai) 74 (ах) г
-(,)“
— Аз U (аг) 1з (a2)j
-447з(а2)
А 2 (а2) 2 Л ( 2) 34 (а2)
4 3 (аг) Во всех приведенных случаях нормальные силы N и N2 определяются по формулам (14.117).
Функция ф связана с функцией w уравнением
d2 ф 1 dtp
da2 a dx
Etr
(14 125) Общий интеграл этого уравнения имеет вид
Etr20
Ф —(Л5 lna (14.127)
(14.128)
Моменты определяются по формулам (14.117); для их определения необходимо вычислить с помощью выражений (14.119) и (14.120) вторые производные от w.
5. Та же оболочка под действием собственного веса g кГм2.
Прогиб w определяется по формуле (14.118), в которой надо положить
R3
Для определения коэффициентов Аи Л2, Л3, Л4 необходимо решить систему уравнений:
Л11 (i) Л212 (®i) A313 (ax)
Здесь Л5 — новая постоянная интегрирования, определяемая из граничных условий; фш — частный интеграл неоднородного уравнения
1 dcpMf
-l r-ltw0’ 14Л29
которое при известной функции w легко интегрируется.
14.5.6. Некоторые решения нелинейной теория пологих оболочек 21
Ниже приводятся некоторые формулы, полученные в результате решения общих нелинейных уравнений (14.91) приближенными методами.
Шарнирно опертая по четырем сторонам пологая панель, прямоугольная в плане и нагруженная равномерно распределенной нагрузкой (см. рис. 14.25).
Обозначим безразмерные величины:
(14.126)
II
(М-Р
f_.
t '
. kx a2 k t '
II
W5
kyb2 t
; x—; b
II
hjj;?
a2b2
t
Pxb2
’ Px Et2
Ру а2 Et2
(14.130)
118
РАЗДЕЛ 14. ОБОЛОЧКИ
Здесь рх — нормальные напряжения на кромках х0, ха ру — нормальные напряжения на кромках уО, уЬ. При этих обозначениях зависимость между безразмерными нагрузкой и прогибом выражается формулой:
Р 256 U2
1
1 2
11т)
л4
Тб
Tfi ( ру) " k Рх куру "
яв 1 2
( — X ) g. (14 131)
192(1 —V2) Частные случаи: 1. Края оболочки свободно смещаются в плане. В уравнении (14.131) надо положить рх Ру 0. Для квадратной в плане оболочки (Л. 1) со стороной b при v0,3 получим
р 7,5 — 2,062 (0,15fc2 22) (14.132)
где k—kxk.
Для цилиндрической панели шириной b и радиусом R k bRt для сферической k2b2Rt.
2. Края панели не смещаются. В этом случае:
р-тЬ')тг(кт?
vkl) г k'xkl)
4
Я2
fc
т1'
л;2
x-Ts- 0-
(тЧ
ки к ее толщине; р
Et4
где а — ширина опорного
плана.
Коэффициенты oti, a2, а3 и а4 приведены в табл. 14.17 для квадратной в плане оболочки со стороной а для шести случаев граничных условий, обозначенных в таблице римскими цифрами I—VI. Штриховка на рисунках, помещенных в таблице, означает, что соответствующий
край защемлен относительно углов поворота; отсутствие штриховки означает, что край шарнирно оперт.
В таблице приведены коэффициенты для сферической оболочки и цилиндрической панели. Коэффициенты а2 и а3, стоящие в числителе (для граничных условий II, III и V), относятся к цилиндрической оболочке, у которой края ab и cd криволинейны; значения аг и а3, стоящие в знаменателе, относятся к цилиндрической оболочке, у которой края ас и bd криволинейны. Коэффициенты подсчитаны при v0,3; при других значениях коэффициента Пуассона необходимо величину а умно0,91
жить на отношение
1 — V2
; значения аи (2 и а3 не из¬
меняются.
Следует иметь в виду, что в случаях II, III и V в таблице указаны величины, относящиеся к прогибу в центре плана оболочки, а не к максимальному прогибу. Формула (13.134) может быть использована для предварительной оценки влияния геометрической нелинейности на величину нагрузки для заданной конкретной оболочки, иными словами, ее можно использовать при решении вопроса о выборе теории для расчета заданной оболочки (см. 14.14). Для этого подсчитывается наибольшее значение всех нагрузок (?), действующих на оболочку (вместе с коэффициентами перегрузки). Далее по формуле 1л—р1а4 подсчитывается значение прогиба л, определяемое линейной теорией. Это значение прогиба подставляется в формулу (14.134), по которой вычисляется соответствующее значение нагрузки ра и подсчитывается относительная разница между ? и ?:
(р)2 if
2 SOP
4 4
So-
Для квадратной цилиндрической панели при v0,3 из формулы (14.131) получим
р 28,9 3 — 6,Щ2 (0,52 22)1. (14.133)
Края оболочки в плане свободно смещаются и либо шарнирно оперты, либо защемлены. Зависимость между нагрузкой и прогибом в центре опорного плана оболочки выражается формулой 48
pajf ogo c a. (14.134)
Здесь lo folt — отношение начального подъема оболочра4
Если эта разница не велика (например, меньше 5), то расчет заданной оболочки можно производить по линейной теории.
14.6. СВОДЫ-ОБОЛОЧКИ И ПРИЗМАТИЧЕСКИЕ СКЛАДКИ
14.6.1. Основные обозначения и классификация сводов-оболочек
Своды-оболочки и складки (см. 14 1) вдоль криволинейных краев опираются на диафрагмы, а вдоль прямолинейных краев окаймляются бортовыми элементами.
Расстояние между опорными диафрагмами называется пролетом оболочки или складки и обозначается 1. Расстояние между бортовыми элементами называется длиной волны и обозначается 2 Стрела подъема оболочки (без бортовых элементов) обозначается 0 (рис. 14.33). Для расчета сводов-оболочек и складок приняты следующие обозначения координатных осей: ось, параллельная образующим поверхности оболочки, называется продольной и обозначается х; горизонтальная и вертикальная оси в плоскости поперечного сечения оболочки — у и г; криволинейная ось, направленная вдоль контура поперечного сечения оболочки, — s; нормаль к поверхности оболочки — V.
Опорные диафрагмы при расчете оболочек и складок условно рассматриваются абсолютно жесткими в своей плоскости и абсолютно гибкими из плоскости.
В общем случае напряженное состояние оболочек и складок определяется десятью силовыми факторами (рис. 14.34, а): нормальными и сдвигающими силами
14.6. СВОДЫ-ОБОЛОЧКИ И ПРИЗМАТИЧЕСКИЕ СКЛАДКИ
119
Таблица 14.17
Коэффициенты а для сферической и цилиндрической оболочек
Граничные условия
Сферическая оболочка
Цилиндрическая оболочка
1 аз а3
а4
1
а2 а а4
8,63
— 19,62
9,92
22,12
8,63
—19,62
9,92
22,12
I
а
о с
о
ь cf
9,9
—19,05
8,15
32,51
9,9
—20,4
—17,7
9,34
7,05
32,51
О
III у
Ь
' с 0
i
7,57
—13,65
5,48
45,07
7,57
— 11,55 —9,47
5,07
4,45
46,07
V 12,45
—20,18
7,27
43,59
12,45
—20,18
7,27
43,59
с
v ; 1
Г L
777?
С
7
10,31
—15,64
5,27
4-56,99
10,31
—15,2 — 16,05
4,99
5,55
56,99
" О
9,24
т
— 13,10
4,13
68, Ю
9,24
—13,1
4,13
68,89
Элементарная попе речная полоска
AV, Si S; изгибающими и крутящими моментами Мх М; Н — Н и поперечными силами Q и Q.
Цилиндрические оболочки и складки для расчета условно принято подразделять на следующие три группы:
а) длинные при i23; б) средней длины при 3 1(2 1; в) короткие при i2l.
В оболочках большой и средней длины продольные изгибающие и крутящие моменты (М и Н) являются вто-
В предыдущих главах для цилиндрических оболочек усилия и моменты по сечениям вдоль оси х обозначены с индексом 2; в этой главе индекс 2 для произвольной точки прперечного контура опущен, а для конкретной точки индекс соответствует номеру этой точки. Сдвигающая сила обозначена через 5 вместо N12, а крутящий момент — через Н вместо Мц.
Своды-оболочки и складки средней длины по классифика ции Инструкции 1961 г. 37 отнесены к длинным оболочкам, рассчитываемым с учетом деформаций поперечного контура.
120
РАЗДЕЛ 14. ОБОЛОЧКИ
ростепенными и могут быть отброшены. В коротких оболочках влияние поперечных моментов (М) резко падает, а продольных (Mi) возрастает.
В длинных свободно висящих оболочках и складках деформация контура и поперечные моменты мало влияют на величину и характер распределения продольных напряжений в поперечном сечении.
61
Рис. 14.34
В соответствии с классификацией и характером работы цилиндрических оболочек и складок вводится ряд гипотез и допущений, позволяющих упростить их расчет.
Длинные своды-оболочки и складки со свободно висящими продольными краями при симметричном сечении и нагрузке рассчитываются как балки, а при несимметричном сечении или нагрузке — как тонкостенные стержни, но без учета жесткости при чистом кручении 37, стр. 51—76. По длине оболочки нагрузка либо постоянна, либо медленно изменяется. Поперечные моменты М, соответствующие им поперечные силы Q и нормальные силы поперечного направления N определяются из равновесия полоски единичной ширины, выделенной в пролете, в месте наибольшего значения продольного балочного момента. По длине пролета изменение М и Q приближенно можно принять таким же, как изменение прогибов в балке, с той же схемой опор, а изменение N — как нагрузки.
Напряжения в коротких оболочках невелики, поэтому при обычных пролетах и нагрузках такие оболочки рассчитываются упрощенно 37, стр. 91—102.
14.6.2. Расчет оболочек и складок средней длины. Допущения и гипотезы
В общем случае оболочки средней длины рекомендуется рассчитывать с учетом взаимного влияния продольных усилий и поперечных изгибающих моментов. Од-
eis
Плита
Сг-1
ЬортоЬсй элемент
Рис. 14.35
ЕЖ
12 —t-— t2 Сг
нако, как показали экспериментальные и теоретические исследования, в ряде частных случаев это взаимное влияние незначительно и для упрощения расчета им можно пренебречь 37, стр. 47—51.
Средние волны многоволновых складок с поперечными сечениями, приведенными на рис. 14,35, при i22, нагруженные равномерно распределенной нагрузкой
Рис. 14.36
(рис. 14.36,я), могут рассчитываться в продольном направлении, как балки корытообразного сечения (рис. 14.36, в).
Для определения поперечных моментов в средних волнах по длине складки выделяется полоса шириной
1 м, которая рассчитывается как неразрезная балка с опорами по ребрам складки (рис. 14.36,а).
Средние волны многоволновых бесфонарных и фонарных с распорками цилиндрических оболочек с симметричным поперечным сечением, со свободно висящими продольными краями, при i22, нагруженные равномерно распределенной нагрузкой (рис. 14.37,а), могут быть приближенно рассчитаны как балки корытообразного сечения подобно длинным оболочкам (рис. 14.37, в).
Одноволновые и многоволновые оболочки с поперечными ребрами высотой не менее 252 и числом более трех, нагруженные равномерно распределенной нагрузкой, могут в продольном направлении также рассчитываться как балки корытообразного сечения. За расчетное поперечное сечение, воспринимающее продольные усилия, принимается сечение между ребрами.
После определения продольных нормальных напряжений о Nft и сдвигающих усилий S поперечные моменты М9 поперечные силы Q и нормальные силы поперечного направления N в ребристой оболочке определяются как в длинных оболочках. При этом в пролете оболочки выделяется поперечная полоса шириной, равной шагу поперечных ребер 37, стр. 70—76.
Одноволновые складки и оболочки и крайние полуволны многоволновых складок и оболочек средней длины, промежуточные волны многоволновых оболочек при и оболочки, опертые по контуру независимо от
14.6. СВОДЫ-ОБОЛОЧКИ И ПРИЗМАТИЧЕСКИЕ СКЛАДКИ
т
длины, рассчитываются с учетом деформации поперечного контура и взаимного влияния продольных нормальных сил и поперечных изгибающих моментов. При этом крайние полуволны многоволновых оболочек и складок со свободно висящими продольными краями можно приближенно рассчитывать как полуволны одноволновой оболочки или складки с симметричным сечением (рис. 14.36,6 и 14.37,6).
Одним из распространенных практических методов расчета цилиндрических оболочек средней длины произвольного сечения является метод заменяющей складки, при котором цилиндрическая поверхность заменяется вписанной складчатой системой. Для оболочек кругового сечения такая замена не обязательна (см. ниже).
В общем случае для расчета цилиндрических оболочек и складок средней длины обычно вводятся следующие гипотезы:
а) геометрические — деформации сдвига и удлинения поперечного контура срединной поверхности оболочки принимаются равными нулю, деформации изгиба контура поперечного сечения учитываются;
б) статические — учитываются продольные нормальные усилия Nu сдвигающие S, поперечные моменты М, поперечные усилия Q и нормальные усилия по продольным сечениям N; при этом усилия Ni и моменты М находятся из рассмотрения деформаций оболочки, а остальные из уравнений равновесия. Не учитываются расчетом продольные моменты М и крутящие Н. Система учитываемых расчетом усилий на единицу длины сечений оболочки приведена на рис. 14.34,6. Указанное направление усилий принято за положительное.
Складка представляет собой многократно статически неопределимую систему. Определение усилий по ее ребрам может быть выполнено методом сил 1 (за лишние неизвестные принимаются усилия), смешанным методом 2 (за неизвестные принимаются частично усилия и частично перемещения) и методом перемещений (за неизвестные принимаются перемещения). Метод сил в форме 73, 74 приводит к системе 12-членных уравнений, он удобен для расчета складок с небольшим числом граней. Смешанный метод в общем случае приводит к более компактной структуре восьмичленных, обыкновенных дифференциальных уравнений. Этот метод подробно изложен в первом издании справочника 87 и в работах 14, 15, 16, 19, 37. Вариант этого метода с весьма простой структурой выражений коэффициентов уравнений, позволяющий рассчитывать также складки, имеющие кривизну в продольном направлении, см. в 62а.
В методе перемещений 3 почти вдвое сокращается число расчетных уравнений, даже если учесть продольные и крутящие моменты; он применим для расчета оболочек средней длины и коротких 37, 42, 59. Этот метод удобен, если заранее составить выражения коэффициентов уравнений, особенно для цилиндрических оболочек кругового очертания.
В последнее время с учетом использования ЭВМ были разработаны: а) в МИИТе — метод расчета в перемещениях многопролетных в одном направлении плитно-балочных и призматических складчатых систем с шарнирным опиранием на поперечных краях 85. Решение строилось на основе интегрирования бигармонических
1 Метод сил расчета призматических складок разработан П. Л. Пастернаком 73, 74, 76.
2 Смешанный метод расчета призматических складок разработан В. 3. Власовым 14, 15, 16, 19.
3 Метод перемещений для цилиндрических оболочек призматических складок и складок, имеющих кривизну в продольном направлении разработан И. Е. Милейковским 42, 57, 59, 60. В основу был положен вариационный метод В. 3. Власова 16, 19.
уравнений плоского напряженного состояния и изгиба пластинки (как элемента основной системы) в одинарных тригонометрических рядах; б) в ЦНИИСКе — метод расчета складчатых систем 63а, а также пологих прямоугольных в плане многопролетных в одном и шарнирно опертых в другом направлении оболочек складчатого типа, поверхность которых вписывается в поверхность переноса положительной, нулевой и отрицательной гауссовой кривизны 636. Решение строилось путем приведения исходных уравнений пологих оболочек на основе некоторой модификации метода Власова — Канторовича сразу к нормальным системам обыкновенных дифференциальных уравнений первого порядка, составленных относительно четырех групп обобщенных перемещений и четырех групп обобщенных усилий. Интегрирование этих уравнений выполнялось методом Рунге — Кутта в сочетании с методом Годунова 28. По этому методу в ЦНИПИАСС на языке АЛГОЛ составлена программа РОСТ (расчет оболочек складчатого типа) для ЭВМ. Учтена совместная деформация оболочек с промежуточными диафрагмами и дискретное расположение ребер жесткости и переломов поверхности в одном из направлений. При разработке метода и программы РОСТ не вводилось никаких дополнительных гипотез, помимо основных гипотез тонких оболочек Кирхгофа — Лява. В результате оказывается возможным избежать разделения складчатых систем на длинные, средние и короткие.
Расчет круговых цилиндрических оболочек средней длины методом перемещений (вариационный метод) 59, 60. При расчете цилиндрических оболочек кругового сечения с радиусом дуги R const проще не использовать метод заменяющей складки, а сохранить исходную поверхность. Продольные перемещения u (х, s), тангенциальные перемещения (по касательной к контуру) v (х, s) и перемещения по нормали w (х, s) любой точки срединной поверхности оболочки (см. рис. 14.33) представляются в виде конечных рядов:
i
f(,s) SV()Tb-(s);. (14 135)
W(x,s) 2 Vi (x)fi (s).
i
Каждый член ряда образован из произведения двух функций, одна из которых зависит от продольной координаты х, а вторая — от поперечной (тангенциальной) координаты s.
Функции Ui(x) и Vi(x), зависящие только от координаты х, это неизвестные функции обобщенных продольных и поперечных перемещений, подлежащие определению.
На основании принятых геометрических гипотез эти функции связаны между собой зависимостью (которой подчиняются угол поворота и прогиб оси обычной балки)
и.(х) -У' (х). (14.136)
Поэтому для расчета достаточно определить или функции Ui(x) или Vi(x). Функции i(s); b(s) и fi(s) называются элементарными или единичными (а также координатными). Они определяют соответственно изменение продольных и поперечных (по касательной и по нормали) перемещений точек контура сечения оболочки при Vt 1 и характеризуют единичные деформированные состояния расчетной модели. Вид этих функций устанавливается
122
РАЗДЕЛ 14. ОБОЛОЧКИ
предварительно (см. ниже). Благодаря принятым геометрическим гипотезам функции Ы5); ЛФ) и М5) взаимосвязаны равенствами 59, стр. 17, 18:
ii (S) Г. (s); xt (s) k2 ft (s);
k2l Я; (14.137)
поэтому достаточно установить вид функций §i(s).
Единичные функции перемещений должны быть непрерывными и удовлетворять условиям сопряжения оболочки с бортовыми балками.
Рис. 14.38
Рассматривая оболочки с симметричным поперечным сечением, следует разделять единичные функции на симметричные и обратно симметричные.
Симметричные функции (s) определяются выражениями (рис. 14.38, а):
6о Я; Ь () ; sinprt0,
где (0 0 20); п 21-3; (14.138)
t 2,3,4,.;
20i — центральный угол дуги поперечного сечения;
0 — переменный угол, отсчитываемый вправо от радиуса-вектора в точке 1 (рис. 14.38, а).
Обратно симметричные функции t(s) определяются выражениями (рис. 14.38,6):
о (s) y; Ii (s) w; i (s) ? sin prt 0,
где n 2i — 2; ( 2,3,4,.
Функции go и h характеризуют распределение продольных перемещений в сечении оболочки по закону плоских сечений и секториальных площадей (или пропорционально им) как для балки и тонкостенного стержня; остальные функции определяют депланацию поперечных сечений, связанную с деформацией их контура 60.
В силу геометрических гипотез вид функций (s) для контура поперечного сечения плиты оболочки определяет их вид также в сечениях бортовых балок (см. рис. 14.38) 60, стр. 43.
Ni
Напряжения о— —и поперечные моменты М на основании закона Гука и принятых гипотез выражаются через перемещения по формулам:
а Е JV; (X) 1. (s) -Е JV; () I. (s);
i i Af -2 ) AMs); а о,1,.). (14.140) tl
Единичные функции Mi(s) характеризуют изменение поперечных моментов вдоль контура поперечного сечения и определяются по формуле 59, стр. 19
М Е f’((s)4f(s), (14.141)
где I — момент инерции единицы длины продольного сечения оболочки. Если оболочка имеет более трех равномерно расставленных поперечных ребер, то момент инерции вычисляется по формуле рр, где р— момент инерции продольного таврового сечения, образованного из сечения ребра и продольного сечения плиты шириной, равной шагу поперечных ребер р.
Для определения неизвестных функций Ui(x) или Vi(x) по длине оболочки выделяется элементарная поперечная полоска шириной dx (см. рис. 14.33) и составляются уравнения работы всех сил, действующих на эту полоску на возможных ее перемещениях, за которые принимаются функции gi(s) и fi(s). После ряда преобразований получается система дифференциальных уравнений равновесия элементарной полоски, имеющая вид 59, стр. 21 и 47:
Ealt V™ (х) ESj. Vt (х)-q. (x) 0;
U,i 0,1,2,.). (14.142)
Коэффициенты уравнений и свободные члены qj вы числяются соответствующим взаимным интегрированием эпюр единичных функций и функции нагрузки по длине b контура поперечного сечения оболочки:
Ь
ац J (s) It (s) t ds; оi ац;
о
М (s) Mi (s)
d; sji sij;
sii
El
(14143a)
qj J (s) рГ Г (s)l ds’ (14‘1436)
0
где рв и pv — интенсивности вертикальных и горизонтальных нагрузок; f® и fj (5) — проекции ординат единичных функций поперечных перемещений на вертикальное и горизонтальное направления.
14.6. СВОДЫ-ОБОЛОЧКИ И ПРИЗМАТИЧЕСКИЕ СКЛАДКИ
123
Таблица 14.18
Коэффициенты разложения нагрузки в ряд по фундаментальным функциям
Вид нагрузки
Род закрепления
А,
А
А,
A.
край х—0 крах,
Постоянная 1
Оперт
Оперт
1,2732
0 0,4244
0
Защемлен
Защемлен 0,8164
0 0,3639
0
Свободен
0,5748
0,4419
0,2542 0,1819
Оперт
1,2168
—0,1169 1 0,4729 —0,06198
По закону треуголь-
X
ника р— —
0,6366 —0,3183 0,2122 —0,1591
Защемлен 0,4082
—0,1902
0,1818 —0,1215
Свободен 0,4176 0,09245 0,03239 0,01654
Оперт 0,5377
—0,3436 0,2499 —0,1958
В силу ортогональности тригонометрических функций (il), Sji0 при 'ФЬ.
Решение уравнений равновесия (14.142) для оболочек средней длины выполняется с помощью разложения перемещений Vi(x) и свободных членов qj(x) в ряд по фундаментальным функциям свободных колебаний балки:
(14.144)
Функция Zm удовлетворяет дифференциальному уравнению:
() zm(xy, хт
(14.145)
Общие выражения функций Zm(x) и параметров для различных схем опирания однопролетных оболочек на криволинейных краях и значения этих функций и их
производит для первых четырех членов ряда приведены в работах 19, стр. 81—86 и 37, стр. 280, а для последующих четырех членов в 61.
Если эпюра поперечной нагрузки по длине оболочки постоянна р (х) const или имеет вид треугольника р(х) rrpxli с максимальной ординатой р, то коэффициенты qjm определяются выражением
qim — qi Am- (14.146)
Коэффициенты Ат для первых четырех членов разложения нагрузки приведены в табл. 14.18. Если нагрузка меняется по трапеции, то коэффициенты получаются
линейной комбинацией для первых двух схем; q, определяется по формуле (14.1436).
При расчете на сосредоточенную вертикальную нагрузку Р® (а), приближенную к бортовой балке или к поперечным ребрам в точке k сечения ха: д f(a)Zm(a) чт — д ,.(2) ’, (14.147)
где коэффициенты Вт определяются из табл. 14.19.
Таблица 14.19
Схема граничных условий на торцах
Вг
Вя
В4
Вт 4
fee 1
0,500,
0,500,
0,500 It
0,500
0,500,
1,0359 U
0,9984 1х
1х
h
It
i 1
0,4996 U
0,4999 U
0,4999 1х
0,5002 1,
0,5,
1 1,8556 h
0,9640,
1,0061 lt
0,9999,
и
124
РАЗДЕЛ 14. ОБОЛОЧКИ
Таблица 14.20
Матрица алгебраических уравнений при симметричной вертикальной нагрузке
№
уравнения
оо
V V2
у0
К3
Свободные члены
0
00 Кп
а0Кг
02 Кп
03 Кп
0
1
11
12 Кп
13 Кп
Ат
qi
2
22 Кп 522
23 Кп
А-т Е Я2
3
О
33 Кп s33
Ат
-Q3
Дифференциальные уравнения (14.142) после подстановки (14.144) преобразуются в алгебраические; при этом для каждого из первых членов ряда (при т— 1, 2, 3, 4) эти уравнения можно разделить на совместную систему, состоящую из четырех уравнений, определяющих параметры ит и V m при 0, 1, 2, 3 и независимые уравнения:
т sjj) т Qт
( 3). (14.148)
Такая возможность обусловливается резким увеличением главных членов уравнений, содержащих коэффициенты Sjj. Независимые уравнения (14.148) уточняют значения поперечных моментов; при этом для практического расчета цилиндрических сводов-оболочек, загруженных распределенной нагрузкой, достаточно ограни¬
читься учетом одного из уравнений (14.148) при 4.
Для оболочки с симметричным сечением совместные уравнения в форме матрицы (по Власову) для расчета на симметричную нагрузку приведены в табл. 14.20 и в табл. 14.21 для расчета на обратно симметричную нагрузку (индекс т при неизвестных параметрах опущен).
Не указанные в этих таблицах побочные коэффициенты, относящиеся к нижней левой половине матрицы, отмечены точками и определяются из условия симметрии на основании равенств, приведенных в формулах
(14.143). Для получения какого-либо уравнения нужно коэффициенты одной строки умножить на неизвестные, выписанные над ними в верхней строке матрицы, прибавить свободный член этой строки и результат приравнять нулю.
Для оболочек с соотношением последнее
уравнение табл. 14.21 уместно решать независимо ог остальных, подобно уравнениям (14.148).
Таблиц 14.21
Матрица алгебраических уравнений при обратно симметричной вертикальной нагрузке
No
уравнения
V0
уо
V0
V0
У2
V3
Свободные члены
0
00 Кп
01 Кп
02 Кп
14
03 лт
0
1
11 Кп
12
13ш
А-т Е Ql
2
22 Кп s22
23
А-ТП
Е
3
33 Кп “Ь 5зз
А-т Е
14.6. СВОДЫ-ОБОЛОЧКИ И ПРИЗМАТИЧЕСКИЕ СКЛАДКИ
125
Таблица 14.22 Выражения коэффициентов а. — tfi. FQ -f a. Rr при симметричной нагрузке
н
‘
a'n
00
1
1
01
ai
1
— V6 cx v0c0
02
1
Mi
61 sin 0
V6C1 VoCopiSinO
ОЗ-
— 02
3fl02
ll
2
yv6ci voco
12
COS 0X
„ pi sin 0t
-V6C1 0 -
(Pi-OPi e'
0
— V0 eg p, sin 02
13
COS 0
3o12
( Рз — 1) Рз
22
7
Pfsin2©
3 v0 c0 Pi sin 01
23
0
3(222
33
V.
9(122
7 33
7
(2 З)2 a22
Примечание. Выражения величин, входящих в табл. 14.22—14.28:
0 0 0 а — '
0; 27; ni;
k2
1 R; Lt2RQl-,
сг diR; c0 d0R;
F„
tRQi, F1t1dl;
F6 Fi A fi AF0;
37, стр, 69
V0
A F0 AFi F6 Vl F6
sin 0x
; ax —cos0 ;
yi
sin 201 sin 20i 02—10 5 cos 20—0,75 ; a3—1—0,5
0i
Таблица 14.23 Выражения коэффициентов а — cfi. F a. FA R
l l V 1 О
при обратно симметричной нагрузке
n
a?.
n
aii
00
1
T 3
sin2 0X
01
— 01
V6 sin 01(20 sin 0X) K0ii0ivoco sin 0x) sin 0
02
P2 sin 0X
(1) 0i
P2 sin2 0X V6C1 V0C0p2 sin2 0
03
P4 sin 0j
(P4-1)0.
2 Cl02
11
-e?
3 1
v6 (0? cle1 sin0l
-J- Sin2 0, vo(0i cosinei)2 vi ei
12
1
“ P2
ve “г p2 sin 0X (30X2C sin Qi) 6
v0c0p2 sin 00 cQ sin 0X)
13
0
— X2
212
22
1
2
p sin2 0j v6 ci "3 v0psm2e,
23
0
2a22
33
2
4e22
7 33
1
2
( — l)2 22
126
авГГЧ1 'J '
РАЗДЕЛ 14. ОБОЛОЧКИ
Таблица 14.24
Коэффициенты s.
Симметричная нагрузка
Обратно симметричная нагрузка
а
4
s a
22
р f(p?-i)2
гё(гё-1)2
33
Й(Й-1)2
й(й-0
33
P(P-i)2;
п 2 — 3
п 2 ( — 1)
В табл. 14.22— 14.24 приведены выражения коэффициентов ац и Sjj и входящих в них множителей: а7; сijl и для одной половины поперечного сечения.
Выражения некоторых общих величин в табл. 14.22— 14.28 приведены в примечании к табл 14.22.
Бортовые балки рассматриваются состоящими из прямоугольной стенки площадью Fi — txdi и утолщений (стрингеров) по концам с площадью сечений AF0 и Airi (рис. 14.39).
В табл. 14.25 приведены выражения свободных членов для двух случаев вертикальной нагрузки (равномерно распределенной по сечению оболочки р и полосовой вдоль бортовых балок р) также для половины поперечного сечения.
Таблица 14.25
Свободные члены q. 7? Rp (cos 0 — cos и 7.
0 1 1 2 1 p. pj sin 0j соответственно при вертикальной равномерно
распределенной нагрузке р и полковой вдоль бортовых балок рх
Симметричная нагрузка
Обратно симметричная нагрузка
1 ?
1
01
1
1
— 1
COS 0
sin 0г
COS 0Х
2
в Р‘ 1
“ Р1 „
Рт-1
-Pi
в Pl1 "раРЫ
—р2
3
Р.з 1
со I со.
1
Р41
-Р4
3
1
3
5 гг, 1
-Р
Й 1
-Рп
Второе слагаемое в скобке отлично от нуля для обратно симметричной нагрузки (при 2 2 4. 6. и 1).
В табл 14.26—14.28 приведены единичные функции перемещений, моментов и углов поворота бортовой балки при симметричной и обратно симметричной по сечению нагрузках. Двойными индексами помечены значения этих функций в нижней и верхней точках (0 и 1) сечения бортовой балки; первый индекс здесь и в последующих формулах обозначает номер точки поперечного сечения, второй — номер единичного состояния.
После решения уравнений табл. 14.20 и 14.21, уравнений (14.148) и определения параметров Uq и V t перемещения и усилия для каждого члена ряда вычисляются по следующим формулам (индекс т при неизвестных параметрах, при функции Z и ее производных опущен):
а) нормальные, вертикальные и горизонтальные прогибы точки k
wk W v i hi 2 ();
i
i
J?(); (14.149)
i
б) изгибающие моменты в точке k
MkW -YiV iMkiZ(X)' (14Л50)
11
в) продольные нормальные напряжения в точке k от симметричной нагрузки
14.6. СВОДЫ-ОБОЛОЧКИ И ПРИЗМАТИЧЕСКИЕ СКЛАДКИ
127
Таблица 14.26
Ординаты эпюр единичных функций перемещений при симметричной нагрузке
i
ь м
f, (s)
Fi(s)
fris)
0
Ео я
Ею г Еоо R
0
0
0
0
1
ii — R. (cos а — — COS 0j) loi dx
— sin a; Л01 i — 1
cos a;
01 п 0
01 — 11 — 1 2
S2 R sin 0J0; lot — PA sin ei
T)2 cos РД Лог Pi sin 0i
f2 — sin рг0; fl2— Pi COS 0Ъ
02 — Pi C0S 01 dx fc2(P? — 0
2 Pi (Pi sn Pi0X
X cos acos px0 sin a); 02 fl2 Pi sn 01
2 Pi (cos pj0cosa— — pi sin px0 sin a);
fl2 fl2 02 f02
3
Is R sin f530;
?03 — Mi sin 0
p3 cos p30; Чоз T)is pssin0
3 — Pi sin №
f3 Рз cos 0X;
оз — Рз C0S 1
d k2 (Рз ““ 0
3 P3 (Рз sin p30X Xcos a -f-cos p30 sin a);
fo3 fl3 Рз sn 01
3 P3(cos Рз0 cos a— — p3 sin p30 sin a);
fs — f3 03 оз
i 3
h R sin p„ 0; ioi — Pn di sin 0j
T, p„ cosP„ 0; TloiTIUPn sin 0j
fi “ Pn Sin Рг0’
hi PП cos 0ь foi Pn cos 0i
d (Рл”"1)
ft-Prt (P„sin P„0X X cos a
-f cos p„ 0 sin a); “K—PnSinO,
rPi(cos Рл0 cos a—
— P„ sin Pn0 sin a); fit fii foi foi
Таблица 14.27
Ординаты единичных функций перемещений при обратно симметричной нагрузке
i
6 W
Л (5)
fi (s)
Jw
fri(s)
0
?0 — sin a;
?00 “ SlO “
—— R sin 0,
t0 cos a; Лоо Лю 0
'i ii
.tu 0
CO 4
II II
f
Ош
11
OB
II
0
II
II
II
u8
. 1
1
61-?;
In-Ri Soi-(0i -f- di sin 0j)
Л1 i;
Л01 Л11 sin 0
fi o
fu cos 0X;
01 — cos 0j — kdx
f —— sin a;
1 fi1 “ sin 01
f J cos a;
и 11 foi15 01
2
2 — R sin P20; Ion —Psi sn 0i
T)8 P2 cos p20; Л02 Л12
p2 sin 0j
(tfp
f2 — p sin p20;
13 Рг cos eb 02 Рг cos 0i
dt fc ( Pj — 1 )
одолжение таблицы на след
P2 (P2sin Рг0 Xcos acos p20 sin a);
fo2 12 P2s'n 0i
►. стр.)
5P2(cos P20 cos a —
— p2 sin p20 sin a); 12 12 02 f02
128
РАЗДЕЛ 14. ОБОЛОЧКИ
Продолжение таба. 14.27
i
11 (s)
П ()
fi ()
ff(s)
?(
3
is R sin p40;
?03 — ?41 sn 01
?4 cos p40;
Лоз — Л13 p4 sin
3 — P4 sn ?40 is P4 C0S ®1 oj P4 cos 0i 4" rf,fe2(p-l)
з P4O4 sin P40 X Xcos a-f-cos p40 sin a);
fo3 13 — P4sin 0l
5p4(c s (54e cos a — — p4 sin p40 sin a); fT3 fiz озоз
i 3
i, R sin p„0; lol — Pn sin 0
Л Pncos P0; T)iiPnsin0i
h — P nsin Pn0;
fii Pn cos 0,; hi Pn cos 0i dl k2 ( Pn — 1 )
(B— Pn(P„ sin p„0X Xcos acos p„9 sin a); ? “P Sin 0J
,-WC0S Рл0 cosa—рл sin pn0 sin a);
fi 55 f U‘ ’ foifoi
Таблица 14.28
0 2 '
Ординаты эпюр единичных моментов М( — MEIk2 в плите оболочки и угла поворота Фц бортовой балки
Mt, PU-
Симметричная нагрузка
Обоатно симметричная нагрузка
M
Pi (Pi — 0 sinPi6
р (э—1)sin Р20
М3
Pi (Pi — l)sinP30
Р4 (Р4 — 1) sin р4 0
AfV
Ря (Ря-0 sin PI 0
Р (Р — 1) sin р„ 0
Ф11
—
2
Ф12
—fe2 Pi (Pi 0
—2 Р2 (р—i)
фз
— 2 Рз (Рз — 0
-2р4(р4-1)
Ф
-Ря(Ря-0:
-2Рл(Рп-)
n — 2i — 3
п 2 (i — 1)
ak () - (U 0 о S V Еи) Z" (); (14.151а)
t0
от обратно симметричной нагрузки
ak(x) -EllV0ilk.Z" (х); (14.1516)
г) для вычисления сдвигающих усилий дугу окружности произвольного поперечного сечения можно заменить вписанным (не обязательно равносторонним) ломаным контуром из восьми — двенадцати участков (рис. 14.40). Сдвигающие усилия в вершине к ломаного контура
о., 4- о. Z'"(x)
(14152)
где th и dk — толщина и длина k-ro участка вписанного ломаного контура, предшествующего k-й вершине (рис. 14.40); значение Z"(xi) принимается для сечения, в котором вычислялись напряжения Ok(Xi);
д) суммарные сдвигающие усилия Тн(х) по А;-му участку вписанного контура
h dt Zm(x)
Tk (x) (x) — (20 ak) (14.153)
Oh — напряжения в k-к вершине;
14.6. СВОДЫ-ОБОЛОЧКИ И ПРИЗМАТИЧЕСКИЕ СКЛАДКИ
129
е) нормальные силы по продольным сечениям (вне точки 1 поперечного сечения)
N-2 кг Р V? Мк. 2, () Rpv, (14.154)
i 1
таблиц 37, стр. 279—283. Для шарнирно опертой оболочки (табл. 14.19, схема 1) коэффициент равен:
я2
- — -1.23.
(14.1566)
где pv интенсивность нормальной нагрузки; в точке 1 A'i Pi — Tx (0) KiАг sin©, (14.155)
6)S,xrcM (x -0
где pi и Т — соответственно полосовая распределенная нагрузка и суммарное сдвигающее усилие в опорном сечении, действующее в плоскости бортовой балки. Формулы (14.154) и (14.155) относятся к случаю расчета оболочки на равномерно распределенную нагрузку.
При расчете оболочки на нагрузку, равномерно распределенную по длине, достаточно в разложениях
(14.144) ограничиться одним первым членом ряда, решая уравнения табл. 14.20 и 14.21 и уравнения (14.148) при т— 1. Значения а, М и w с достаточной степенью точности определяются этим расчетом. Влияние последующих членов ряда на значения S и Т может быть учтено умножением их на коэффициент
В формуле (14.155) значения Тх и относятся к первому члену разложений (14.144).
При расчете сводов-оболочек, нагруженных сосредоточенными по ребрам или неравномерно распределенными по длине нагрузками, напряжения а (и сдвигающие усилия 5) следует определять с точностью пяти — семи первых членов ряда в разложениях (14.144). Если оболочка и нагрузка по длине имеют ось симметрии, то расчет следует производить с точностью трех-четырех членов ряда (т1, 3, 5, 7). При отсутствии поперечных ребер для определения поперечных моментов М можно ограничиться одним, а при наличии ребер первыми двумя-тремя (m 1, 2, 3,) членами ряда 37, стр. 251, производя расчет по табл. 14.20 и 14.21 и уравнениям (14.148). Для определения напряжений а (и усилий
5), соответствующих последующим членам ряда, расчет можно производить как для безмоментной оболочки по табл. 14.20 и 14.21, отбрасывая в них коэффициенты Sjj.
Упрощенный расчет сводов-оболочек на сосредоточенные поперечные и продольные силы, включая предварительное напряжение, и указания о расчете неразрезных сводов-оболочек изложены в работах 87, 37 и 42. Методика учета кручения бортовых балок изложена в работе 60; обобщение метода на оболочки положительной кривизны см. 626.
Пример 14.1. Рассчитать сборную оболочку конструкции Ленинградского Промстройпроекта (рис. 14.39,а). Бортовые балки двутаврового сечения (рис. 14.39,6) имеют небольшую кривизну по верхнему поясу (для стока воды). Стенка балок имеет отверстия. При расчете предполагается, что балки имеют постоянное сечение с приведенной высотой d0 и что стенка воспринимает только сдвигающие усилия. Площади сечения нижнего и верхнего поясов бортовой балки обозначены соответственно через AF0 и ДгУ Оболочка имеет поперечные ребра, расположенные через 3 м (рис. 14.39, в). Схема поперечного сечения оболочки приведена на рис. 14.39, б.
(14.156а)
равный отношению площади эпюры равномерно распределенной нагрузки к площади эпюры нагрузки в виде первого члена ряда.
Значения хг и Zx при х0 и х 1 принимаются из
Приведенная высота может быть определена по жесткости приравниванием максимальных прогибов заданной балки переменного сечения и эквивалентной балки постоянного приведенного сечения при нагружении их одинаковой равномерно распределенной нагрузкой. Прогиб балки переменного сечения может быть определен, например, графо-аналитически 87, стр. 234 или согласно работе Г. И. Бердичевского: Расчет деформаций предварительно напряженных железобетонных двускатных балок переменной высоты (Бетон и железобетон, 1961, Яг )
130
РАЗДЕЛ 14. ОБОЛОЧКИ
Основные геометрические данные (расчет производится в кГ и см):
Таблица 14.2
е?:
28 29'; 0Рад 0,497128;
1
,-з.
R 1258,42 см; й2 — 0,79465-10'
R
1г 2400 см; 12 — 1200 см; d0 — 96 см; — 4 см; AF0 900 см3; AFi 390; Fl 0; F6 AFo AFi Fi 1290 cm2;
F0 2502,38 cm-;
F Л F
v6 Ti0; v0 — 0,69764;
Гб Гб
c0 — 7,62861 10 2;
R
Погонный (рис. 14.39, в)
vt 0,302325.
продольного сечения
F6
момент инерции
43402
1Р 300
144,67 см3.
Модуль упругости бетона 3,Ы05 кГсм2.
Расчет на симметричную нагрузку
Схема нагрузки показана на рис. 14.39,6 и состоит из равномерно распределенной по поверхности нагрузки р393 кГм2 и полосовой Pi 323 кГм, действующей вдоль бортовых балок.
Система расчетных уравнений приведена в табл. 14.20. Решение выполняется с точностью до первого члена ряда (т1). Коэффициенты и свободные члены этих уравнений вычисляются по табл. 14.22—14.25.
Вспомогательные величины, входящие в эти коэффициенты, вычисляя на основании выражений, приведенных в примечании к табл. 14.23:
sin 0 0,47690; cos 0Х 0,87896; sin 20 0,83835; cos 20х 0,54513;
ах cos 0Х— -1- — 0,080350;
0i
а2 1 0,5 cos 20 — 34 Sin- 0,007775;
Pl__3,l5974.
в,
, 301 9,47922;
p5 5p, 15,7987; P“ 9,98396; p 89,8556; p 249,598.
Значения угла 0, sin P0, a, sin a и cos a в точках сечения U 2, 3, 4, 5 (рис. 14.40.6) приведены в табл. 14.29 Оболочка однопролетная, на поперечных краях свободно оперта (табл. 14.19, схема 1); при этом фундаментальные функции совпадают с тригонометрическими, т. е.
л:
Zm sin рт —,
1
где лт — гпп при т— 1, jii я,
-у- 0,130899-102;
Тригономет¬
рические
величины
№ точки
1
2 3
4
5
e
0
V.
7з et
7, 0i
0i
а01—в
0.
. 6i
73 0i
Чг 01
0
sin a
0,47690
0,40594
0,33271
0,16505
0
cos a
0,87896
0,91390
0,94303
0,98629
1
sin 3i 0
0
0,2588
V.
0,866
1
sin 080
0
0,707
1
0
—1
sin 060
0
0,9659
7
0,866
1
0,171348-КГ5 0,29360-10_и.
По табл. 14.22 вычисляем:
00 Х1 (ро Fe) R2 (2502,38 1290) 1258,422-0,29360-10-11 17,6327-10_3;
аЮ ( al Fo v0 с0 Fб) “
(—0,08035-2502,38 0,697674-7,62861 102 1290) X X1258,422 0,2936 10—11 — 0,615598 10-3; а02 'к 6,925968-10_3; a03 Д., 1,025965-103;
an? 0,107449-10-3; о12 — 0,761366-10_3;
а13 Х — 0,134506-10 3; о22 Xf 5,872714-103;
а Xf 0,165882-10-3; a Xf 6,315066-10_3;
a44Xt 7,199768-103.
44 Л1
По табл. 14.24 вычисляем:
_ ль.
S22 2
Х(0,79465-10_3)3-9,9839572 (9,983957 — I)2
0,145504-10-3; sS3 1,152906; su 69,632321. По табл. 14.25 вычисляем:
Ql PRQl pj 0,0393-1258,42-0,497128
3,23 27,8354 кГсм2;
pR cos 0 — Pi Pi sin 0г
10 98396
— 3,15974 0,0393-1258,42-0,87896—
8,98396
14.6. СВОДЫ-ОБОЛОЧКИ И ПРИЗМАТИЧЕСКИЕ СКЛАДКИ
131
Таблица 14.30
№ уравнения
оЪ
2
V0
кз
Свободные члены; множи 1
тель — Е
Контрольные суммы
0
1,76327
—0,06156
0.69260
0,102596
0
2,496906
1
—0,06156
0,010745
—0,076137
—0,013451
—35,44106
—35.58146
2
0,69260
—0,076137
0,601822
0,016588
220,01254
221,24738
3
0,102696
—0,013451
0,016588
115,922107
555,04953
671,07737
2
2,496906
—0,140403
1,234873
116,02784
739,62101
858.97779
858.97779
__,
-3,15974-3,23-0,47690 — 172,7987;
Vs — 435,933; qt 716,627.
Вычисляя суммы djiSjj и умножая свободные члены на 4 4jx, окончательно получаем числовую матрицу уравнений, приведенную в табл. 14.30. При этом коэффициенты при неизвестных увеличины в 100 раз. Пятое уравнение выделено согласно (14.148) в качестве независимого:
69,641®— -912,41 0.
Окончательные значения корней уравнений;
tg 215,549-102 4г. V . 1739,306-102 ;
Е Е
V 2-393,468-10-J; V— 4,721 -102 ;
V-0,13-102-.
Усилия и прогибы вычисляются по формулам (14.149) —
(14.153). Предварительно по табл. 14.26—14.28 (где d заменяется на do) вычисляем ординаты единичных функций для точек 0—5 поперечного сечения (рис. 14.40,6). Например:
pj d0 sin 02 — 3,15974-96.0,47690 — 144,7;
§32 i?sin — 1258,42 629,2 и т.д.;
3 2
M3i Elk Рг ( P? -1) sin -144,67-0,794652-10“6-9,98396-8,98396-y
0,410-10-2 E; f2 cos 0, 3,15974-0,87896 2,78;
U2 -P?sin7- 9.98396- -4,99.
Значения ординат единичных функций приведены в табл. 14.31.
а) Нормальные напряжения в среднем сечении 00,5; Zj(0,5j)-X2:
b (0-5,) (U 0 I'® ?01 vgEoa Vg ?03) X?
(0,21555-1258,421,73931 -960,39347.144,50,00472 X X433,5)0,17134 85,19 кГсм2 (параметр V по малости не влияет на напряжения а);
cti 46,48 кГсм2; а20,42; а3 —20,99; а4 —67,03; а5 -84,78.
Таблица 14.31
Значения функций f
Функция
№ точки
0
1 1 2 1 3 4
5
ko,
1258,42
1258,42
1258,42
1258,42
1258,42
1258,42
kl
96
0
—44,0
—80,6
—134,3
—152,3
k2
—144,5
0
325,67
629,2
1089,8
1258,42
k3
—434,0
0
889,8
1258,42
0
—1258,42
k4
—723,3
0
1215,5
629,2
—1089,8
1258,42
hi
0
0
-
0,94
0,98
1,0
fk2
4,94
2,78
-
— 4,99
—8,64
—9,98
fk3
72,59
8,33
-
—89,86 j 0
89,86
hi
314,71
13,89
-
—124,8
216,1
—249,5
-
0,212-10“2
0,41-10 2
0.71 10 2
Л82 10 2
-г"
-
-
0,515
0,726
0
—0,726
-г"'
-
-
5,56
2,83
-4,99
5,76
Эпюра нормальных напряжений, построенная по вычисленным значениям, приведена на рис. 14.40, а.
Для контроля эпюры напряжений а проверяется условие равновесия продольных сил, действующих в поперечном сечении при л;0,5 :
td
AFо ст0 AF ох —— (ох 2аа аз) td
(с3 2о4 а5) 0,
где d — ?0i3 208,53 см.
Подставляя числовые значения и суммируя отдельно все положительные и отрицательные члены, получаем: 100 292 100 026. Расхождение около 0,3.
б) Сдвигающие усилия S в опорном сечении (х0; 1 (6) 'Z (0,5 1) Я-i). Дуга окружности сечения за¬
132
РАЗДЕЛ 14. ОБОЛОЧКИ
Таблица 14.32
Т ригонометрические величины
№ точки
1
2 1
1 з
3'
1 4 1
1-1
5
0
0
V. 0г
7з 0,
7. 0,
7з 0,
6в 01
0
а01—0
6i
Re 0,
7з 01
7 01
7.01
7е 0.
0
sin а
0,47690
0,40594
0,33271
0,24587
0,16505
0,082808
0
cos а
0,87896
0,91390
0,94303
0,96930
0,98629
0,996566
1
sin 00
0
0,2588
7
-
0,866
-
1
sin 0,6
0
0,5
0,866
1
0,866
0,5
0
cos
1
0,866
0,5
0
—0,5
—0,866
—1
sin330
0
0,707
1
-
0
—
—1
sin p40
0
0,866
0,866
0
—0,866
—0,866
0
cos 040
1
0,5
—0,5
—1
—0,5
0,5
1
sin PR0
0
0,9659
V2
-
—0,866
-
1
cos Э8 0
-
-
-
-
—
-
-
меняется вписанным ломаным контуром (рис. 14.40, б пунктирная линия); при этом длина участка контура приближенно принимается равной d.
S0(0) S“ (0) ДF0C0X,
900-85,193-0,1309-10-2 100,4 кГсм-, S® S4 AF0 ox 124,09 кГсм;
02
td Qj 136,9;
S3 131,28; S4 83,23 кГсм-, Ss 0.
в) Суммарные сдвигающие силы в опорном сечении (х0). Так как бортовая грань сквозная, то
Tj d„ S0 96-100,37 9635,1 кГ;
(2ax a2) 13824,6 кГ;
2 6
Г2 14 082,4 кГ; T4 23 239,7 кГ; T5 9051,6 кГ.
Проверка равновесия оболочки, отделенной от диафрагм (внешняя нагрузка должна равняться сумме проекций суммарных сдвигающих сил на вертикальную ось); проверка выполняется для части оболочки:
STk sin (сДОх Pi)— Щ-.
я я2
k
Сумма части внешней нагрузки, определяемой первым членом ряда:
(pRQj Pl) -4 (0,0393-1258,42-0,49713 я22
42400
3,23) 27055,8 кГ.
3,142
Коэффициент 8я2 учитывает нагрузку только от первого члена ряда формула (14.1566).
Сумма проекций суммарных сдвигающих сил на вертикальную ось
Ti Т2 sin ?2 -j- Т3 sin ф3 -f- 74 sin t)4 Tg sin 5
963513824 0,440214082 0,36433 23240 0,245S7
9051,60,0828 27321 кГ.
Здесь: -ф5 016; 411)5013; 'ф3ф4014; ф2яз 0i6. Расхождение меньше 1.
г) Значения Sk с учетом коэффициента (14.156): 505? 123,8 кГсм; Sf 153,1; S2 168,9; S3162; S4 Ю2,7.
Эпюра сдвигающих усилий приведена на рис. 14.40,6.
д) Поперечные моменты в среднем сечении (0,51):
“l) (V2 М22 У 3 23 4 Щ)
— (—393,5-0,212-10-2 — 4,72-0,515 —
— 0,13-5,56)-102 398,8 кГ;
М3 540,8; М4 214,5; Мъ Ь4,8кГ-смсм.
Эпюра моментов приведена на рис. 14.40, г. Пунктирной линией показана эпюра моментов только от равномерно распределенной нагрузки р 393 кГм2.
е) Нормальные прогибы в среднем сечении
wo — wo 2 о2 V s Гог 4 о4
14.6. СВОДЫ-ОБОЛОЧКИ И ПРИЗМАТИЧЕСКИЕ СКЛАДКИ
133
— 10_5(—393,5-4,94 —4,72-72,59 —
3,1
— 0,13-314,71)102— 0,75 см;
0 0—0,37 см дод 0,78; — 1,09;
w5 — 1,14 см
Эпюру прогибов см. рис. 14.40, в.
Расчет на обратно симметричную нагрузку
Нагрузка, равномерно распределенная по каждой симметричной половине оболочки интенсивностью р 100 кГм2, обратно симметрична относительно оси
а) 6,кГаЁ1в(91)
По табл. 14.23 вычисляем: аоо i ( аоо Fo а'оо F6) Я2 К (0,0784035-2502,38 0,227434)1258,422-0,29359- 10п 2,276304-10-3; eoi. (0,08035-2502,38 0,249184) 1258,422Х X 0,29359 10-11 2,429354 -10"3; о02Я — 1,352706-10-3; аи A,f 2,59757-10_3;
13 X 0,105972-10-35
а23 X, 0,442356-10-3; воз 0,0289598-Ю-3; a12tf — 1,3278-10-3; о22 XJ 6,038403-10-3; аззХ 6,701948-КГ3.
По табл. 14.24 вычисляем:
е) wg, )
if) 5 Г(см
245,8
ЩЧ
г) м, кРсмсг
гАааягЙ
т,г
22
25,61
997 7'.
П 40 1Ц12 6,71 18,й
rPz
29,64
220,4
Рис. 14.41
симметрии сечения. Система расчетных уравнений приведена в табл. 14.21. Решение выполняется с точностью до первого члена ряда (т 1). Коэффициенты и свободные члены этих уравнений вычисляются по табл. 14.22— 14.25. Вспомогательные величины, входящие в коэффициенты, вычислены на основании выражений, приведенных в примечании к табл. 14.22:
р2 2р 6,31948; р4 4р2 12,63896;
Pl 39,9358; 159,7433;
1594,868; 0,255178-105;
sin 20г
a3 1—0,5 1
дх 7j Rp cos 0. 1
И1
18,0442-10 X X1594,87 (39,9358 — 1)г
18,0442-10-9-2.41782X X 10е 43,6276-103 ;
Sgg И, 60325 -
По табл. 14.25 вычисляем свободные члены:
- Rp cos 0Х
i
cos 0
) 1258,42-0,010,87896
Й2
0,87896 j
p2 1 2я
“ Rp cos 01— cos —
p2 — 1 1
1,52319;
0,83835
1—0,5 — 0,156807.
0x 0,497128
При расчете на обратно симметричную нагрузку по сравнению с расчетом на симметричную введены дополнительные точки 3' и 4', показанные на рис. 14.41.
Значения используемых тригонометрических величин приведены в табл. 14.32.
40,9358
-6,31948 1258,42-0,01 (0,87896 1)
— — 157,10089;
— 12,6531-12,5842 (0,87896— 1) 19,4941. Вычисляя сумму ajjXfSjj и умножая свободные члены на Ai 4л, окончательно получаем числовую матри-
134
РАЗДЕЛ 14. ОБОЛОЧКИ
Таблица 14.33
№ уравнения
V?
V?
А
Свободные члены (множитель 1Е)
0
2,276304
2,429354
—1,352706
0,0289548
0
1
2,429364
2,59757
—1,32780
0,105972
1,939386
2
-1,352706
—1,32780
49,6660
0,442356
200,02710
3
0,0289598
0,105972
0,442356
11609,95
—24,82067
цу уравнений, приведенную в табл. 14.33. Коэффициенты при неизвестных увеличены в 1000 раз Окончательные значения корней уравнений следующие:
1 337,910-Ю3 y
tf—318,481-Ю3-jr;
V —3,338599-10s
И 0,0043292-10sr.
з Усилия и прогибы вычисляются по формулам (14.149)—
(14.153). Предварительно по табл. 14.27—14.28 (где d
заменяется на d0) вычисляем ординаты единичных функций для точек 0—5 поперечного сечения (рис. 14.41,б), например:
?02 20 sin 02
— 6,3194896-0,47690 — 289,321;
50
— sin —L — 0,40594;
6
fl2 — 02 ( P2 Sin 2 0 C0S “l C0S 2 0S'n ®l)
—6,31948(6,31948-0-0,87896 1-0,47690)
-6,31948-0,47690 —3,01376;
M22 M Elk p ( — 1) sin p2 e2 Elk I
39,9538-38,9538-0,5-144,67-0,631464-106 0,0710244 и т. д.
Значения ординат единичных функций приведены в табл. 14.34.
а) Нормальные напряжения в среднем сечении:
k Е (V? Iko v 6i v2 62 V3 63) a0 337,910 (— 600,14) (— 318,481) (— 671,378) (— 3,338599) (— 289,321)
0,0043292 (—578,642) 103-0,171345-10“5
20,5 кГсм2;
Oi — — 6,1 кГсм2; a2 — 12,38 кГсм2;
o3 — — 15,71 кГсм2; a3, — 15,75 кГсм2;
— 12,64 кГсм2; а4, — 7,01 кГсм2;
a5 0.
Таблица 14.34
Значения функций I;. ? ; Mi Е
Функции
jyv? точки
0
1 2 3
3'
4
4'
5
—600,14
—600,14
—506,539
—409,465
—309,584
—207,589
—104,147
0
1
—671,378
—625,596
—521,329
—417,063
—312,798 j —208,533
—104,266
0
2
—289,321
0
629,21
1089,79
1258,42
1089,79
629,21
0
k3
—578,642
0
1089,79
1089,79
0
— 1089,79
— 1089,79
0
fk0
0
0
0
0
0
0
0
0
fkl
—0,47690
—0,47690
—0,40594
—0,32538
—0,24601
—0,16496
—0,082760
0
—3,01376
—3,01376
—20,48169
—33,7305
—38,6657
-33,5894
—19,4465
0
CO
—6,02749
—6,02749
—129,179
— 128,753
3,10931
137,484
137,339
0
-
0
0,0710244
0,1230144
0,142049
0,1230144
0,0710244
-r
-
0
2,006142
2,006142
0
—2,006142
—2,006142
0
14.6. СВОДЫ-ОБОЛОЧКИ И ПРИЗМАТИЧЕСКИЕ СКЛАДКИ
135
Эпюра напряжений приведена на рис. 14.41, а.
б) Сдвигающие усилия 5 (в опорном сечении); контур сечения принимается в виде ломаной линии:
S0 AFo0Ai9OO-2O,5-O, 130899-10-2 24,1; S? 24,1; S?-S0Af1a1A,1 24,l
-f 390 (— 6,1)-0,130899-10-2 20,82 кГсм; s sx -J ъ 15.78;
So 8,11 кГ l см
So, — 0,48 кГ см;
S4 — 8,23 кГIсм S4, — 13,59 кГсм;
S5 — 15,01 кГсм.
в) Суммарные сдвигающие силы:
Тх d0S0 96-24,1 2313,36 кГсм;
rt_i(op.(Soi yl_
1937,610 кГсм;
Т. 1261,271 кГсм; Tz, 398,095 кГсм;
3
Tt — 468,796 сГсл; Г4, — 1164,431 кГсм;
Ть — 1549,965 кГсм.
Проверка равенства нулю суммы проекции суммарных сдвигающих сил на горизонтальную ось:
Г2 cos t2 Т3 cos ф3 Ту cos. cos Т4, cos, Т cos t5 0; 1937,61-0,8980 1261,271-0,93137 398,095-0,9583 —
— 468,796-0,9786 — 1164,431-0,9923 —
— 1549,965-0,99910 3299,0 — 3160,0 0.
138,0-100
Погрешность —————— 4,4
3160,0
Проверка равновесия оболочки, отделенной от диафрагм: полный внешний крутящий момент Мкр равен крутящему моменту суммарных сдвигающих сил ГКр относительно центра дуги поперечного сечения оболочки (проверка выполняется для части оболочки):
Мкр -j-Ti2-iT(R cos 0;
cos ерь — cos 0,9992;
w 12
™кр h
M
p 2
я2
— 864454,3 кГсм,
n n
4 (— 1,52319) 1258,422400 9,86959
где mKp qxR
Txl2 S Tk (R cos p) 2313,36600 k
(1937,61 -j-1261,271398,095—468,796—
— 1164,43 — 1549,965) 1257,41 1935976,0.
71521,7-100
Ошибка составляет —; — 3,80.
1 864 454
Значения сдвигающих усилий с учетом коэффициента (14.156 6): S0 5? 29,64 кГсм Sf 25,61; S2 19,40; 539,97; 53 —0,59; S4 —10,12; S4. —16,71; S5 —18,46.
На рис. 14.41,6 приведена эпюра сдвигающих усилий S и показано направление действия суммарных сдвигающих усилий Т со стороны торцового сечения оболочки.
г) Поперечные изгибающие моменты в среднем сечении (рис. 14.41, в):
УИ, 0; М2 (0,5,) -(V 2 М22 V 3 М23)
— (— 3,338599-103-0,0710244
0,0043292-103-2,006142) 228,437;
М3 402,009; Му 474,245;
jM4 419,379; М4, 245,807.
д) Вертикальные прогибы в среднем сечении (рис. 14.41, в):
w vfl vlf2vtfz
0,323.105 (— 318,481.103) (— 0,4769)
(— 3,338599103) (— 3,01376)
0,0043292103 (— 6,02749) 0,523 сл; ш 0,637; ш 0,700;
wy 0,670; ш4 0,530;
w4, 0,293;
wr — 0.
Миш® для правой половины сечения имеют обратные знаки (рис. 14.41,0, г).
14.6.3. Расчет диафрагм-оболочек и складок средней длины
Диафрагмы рассчитываются как плоские стержневые конструкции на нагрузку от собственного веса и опорного давления оболочки, передаваемого в виде сдвигающих сил. Для расчета диафрагм арочного типа удобно заменить геометрическую ось арки ломаной линией, подобной ломаному контуру, которым заменяется опорное сечение оболочки при вычислении сдвигающих усилий. После этого полученные из расчета оболочки значения усилий Th в опорных сечениях каждой грани следует сосредоточить в узлах ломаного контура оси арки и разложить их на вертикальные Р и горизонтальные составляющие-Так как срединная поверхность оболочки не совпадает с осью арки, то, помимо сил Р и следует приложить узловые моменты гпк. Значения этих сил и моментов определяются формулами:
р (ть sin Tksin 1);
i
(Tkcosk Tk1cosl);
тг -—(Tk Tk
(14.157)
136
РАЗДЕЛ 14. ОБОЛОЧКИ
Эксцентрицитет определяется по формуле
где ha и t — соответственно высота сечения арки и толщина оболочки. Знак плюс берется, когда оболочка примыкает к арке по нижнему краю, знак минус — когда оболочка примыкает к арке по верхнему краю.
Расчет диафрагм коротких оболочек см. 37 и 25. Расчет диафрагм длинных оболочек см. 30 и 37.
Расчет цилиндрических оболочек и складок с учетом влияния на их напряженно-деформированное состояние конечных жесткостей реальных диафрагм 71а, 716, 88, 89, 104.
ЛИТЕРАТУРА
1. Абовский Н. П., Азархин А. М., Шестопал Б. М., Кириллова Л. И. Программа расчета пологих ребристых оболочек для ЭЦВМ. Красноярский политехи, ин-т (учебное пособие). Красноярск, 1969.
2. Амбарцумян А. С. а) К вопросу построения приближенных теорий расчета пологих цилиндрических оболочек. ПММ, 1954, № 3; б) О пределах применимости некоторых гипотез тонких цилиндрических оболочек. Известия АН СССР, Отд. техн. наук, 1954, № 5.
3. А н о х и н а С. И. Применение тригонометрических рядов к расчету цилиндрических оболочек на сосредоточенную нагрузку. Сб. трудов ЛИИЖТа Исследования по строительной механике, вып. 190, Л., 1962.
4. Б а р т е н е в В. С. Практический метод расчета покрытий в виде железобетонных круговых цилиндрических оболочек. Сборник трудов МИСИ им. Куйбышева, № 11. М., Стройиздат, 1957.
5. Бийлард П. П. Напряжения от локальных нагрузок в цилиндрических сосудах давления. Сб. переводов Вопросы прочности цилиндрических оболочек. ИЛ., 1960.
6. Б и й л а р д П. П. Напряжения от радиальных нагрузок и пнсшних моментов в цилиндрических сосудах давления. Там же.
7. Б о б р о в и и к А. Е. К расчету оболочек методом сил. Строительная механика и расчет сооружений, 1962, N 4.
8. Вайнберг Д. В., Синявский А. Л. Дискретный анализ в теории пластин и оболочек. М., Наука, 1966.
9. Вайнберг Д. В., Синявский А. Л. Расчет оболочек. Госстройиздат УССР, Киев, 1961.
10. В а й н б е р г Д. В., Р о й т ф а р б Н. 3. Расчет пластин и оболочек с разрывными параметрами. Сб. Расчет пространственных конструкций, вып. X. Стройиздат, 1965.
11. Васильков Б. С. Расчет коротких цилиндрических оболочек с учетом трещинообразования. Строительная механика и расчет сооружений.
12. В а с и л ь к о в Б. С. Расчет оболочек с несимметричным сечением. М., Госстройиздат, 1962.
13. Васильков Б. С., Милейковский И. Е. Экспериментально-теоретическое исследование сборной железобетонной оболочки. Сборник ЦНИИСК АСиА СССР Экспериментальные и теоретические исследования по железобетонным оболочкам. М., Госстройиздат, 1959.
14. В л а с о в В. 3. Новый метод расчета тонкостенных призматических складчатых покрытий и оболочек. М., Госстройиздат, 1933.
15. Власов В. 3. Строительная механика оболочек. ОНТИ, 1936.
16. Власов В. 3. Общая теория оболочек. ГИТТЛ. 1949.
17. В л а с о в В. 3. Избранные труды, т. I, Изд. АН СССР,
1962.
18. В л а с о в В. 3. Избранные труды, т. II. Изд. АН СССР,
1963.
19. В л а с о в В. 3. Избранные труды, т. III. Наука, 1964.
20. В л а с о в В. 3., М р о щ и н с к и й А. К- Контактные
задачи по теории цилиндрических оболочек, подкрепленных продольными ребрами. Сборник ЦНИПС Исследования по вопросам теории и проектирования тонкостенных конструкций. М., Госстройиздат, 1950.
21. В о л ь м и р А. С. Гибкие пластинки и оболочки, ГИТТЛ,
1956.
22. Г а р а н и н Л. С. Расчет пологих оболочек. Стройиздат,
1964.
23. Г в о з д е в А. А. К расчжу тонкостенных цилиндрических оболочек. Строительная промышленность, 1932. № 1.
24. Г в о з д е в А. А. Еще о безмоментной теории оболочек. Строительная промышленность, 1933, № 2.
25. Г в о з д е в А. А., М у р а ш е в В. И., Горнов В. И., Власов В. 3. Инструкция по проектированию и расчету монолитных тонкостенных покрытий и перекрытий, ЦНИПС, ОНТИ. М., Стройиздат, 1937,
26. Г и л ь м а н Л. С. К расчету железобетонных цилиндрических оболочек. Труды Ленинградского института инженернопромышленного строительства, вып. 5, 1938.
27. Г и л ь м а н А. С. К расчету изотропных цилиндрических оболочек под произвольной нагрузкой. Труды Высш. военноморск. инж.-стр. училища РКМФ, 1939.
28. Г о д у ь о в С. К. О численном решении краевых задач для систем линейных обыкновенных дифференциальных уравнений. Успехи матем. наук, т. XVI, вып. 3, 1961.
29. Гольденвейзер А. Л. Теория упругих тонких оболочек. М., Гостехтеориздат, 1953.
30. Горенштейн Б. В. Формулы и графики для усилий в цилиндрических оболочках и диафрагмах. Строительная механика и расчет сооружений, 1964, № 1.
31. Григоренко Я. М., Беспалова Е. И., Василенко А. П. и др. Численное решение краевых задач в статике ортотропных слоистых оболочек вращения на ЭВМ типа ЭМ-220. Методическое пособие. Киев, Наукова думка, 1971.
32. Д а р е в с к и й В. М. Решение некоторых вопросов теории цилиндрических оболочек. ПММ, т. XVI, вып. 5, 1952.
33. Д и к о в и ч В. В. Пологие прямоугольные в плане оболочки вращения. М., Госстройиздат, 1960.
34. Дишингер Ф. Оболочки, тонкостенные железобетонные купола и своды. М., Госстройиздат, 1932.
35. Ж е м о ч к и н а В. Д., М и к ш и с М. М. Таблицы для расчета средней длины цилиндрических круговых и призматических оболочек, опертых по всему контуру. М., Стройиздат, 1967.
36. И м м е р м а н А. Г. Расчет ортотропной цилиндрической оболочки на поперечную нагрузку. Сб. Расчет пространственных конструкций, вып. III. М., Госстройиздат, 1955.
37. Инструкция по проектированию железобетонных тонкостенных пространственных покрытий и перекрытий. АСиА СССР, НИИЖБ и ЦНИИСК. М., Госстройиздат, 1961.
38. Итцхаки Д. Расчет призматических и цилиндрических оболочек покрытий. М., Госстройиздат, 1963.
39. К а л ь м е й е р А. Ф. Алгоритм и программа расчета пологих ребристых оболочек с переломами срединной поверхности. В сб.: Организация и методика строительного проектирования с применением вычислительной и организационной техники. ГИПРОТИС. Реферативная информация. Серия X, вып. 7, М., 1971.
40. К а н С. Н. Строительная механика оболочек. Машиностроение, 1966, № 1.
41. Кол кунов Н. В. Основы расчета упругих оболочек. Высшая школа, 1972.
42. К У з ь м и н Н. Л., Лукаш П. А., Милейковский И. Е. Расчет конструкций из тонкостенных стержней и оболочек. М., Госстройиздат, 1960.
43. К У л а г и н А. А., К о р м е р Б. Г. Расчет пологих оболочек покрытий с учетом действительной жесткости контурных элементов. Сб. Строительное проектирование промышленных предприятий, 1968, № 2.
44. Л а у л ь X. X. Расчет цилиндрических оболочек с криволинейными частями, очерченными по окружности. Труды Таллинского политехнического института, № 50 Таллин, 1953.
45. Л е с с и г Е. Н., Лилеев А. Ф., Соколов А. Г, Металлические листовые конструкции. М., Стройиздат, 1970.
46. Л е с с и г Е. Н. Расчет консольных цилиндрических оболочек на неосесимметричные поперечные нагрузки. Сб. трудов МИСИ им. Куйбышева, № 43, Гос. научно-техн. изд. лит. по горному делу, 1962.
47. Л и п н и ц к и й М. Е., Горенштейн Б. В., Виноградов Г. Г. Железобетонные пространственные покрытия зданий.
48. Л у к а ш П. А. Расчет пологих оболочек и плит с учетом физической и геометрической нелинейности. Сборник Расчет конструкций, работающих в упруго-пластической стадии. М., Госстройиздат, 1961.
49. Л у н и н В. С. Балки постоянного поперечного сечения, лежащие на упругом основании, КУБУЧ, 1933.
50. Л у р ь е А. И. Концентрация напряжений в области отверстия на поверхности кругового цилиндра, ПММ, т. X, вып. 3, 1946.
51. Л у р ь е А. И. Статика тонкостенных упругих оболочек. М., Госстройиздат, 1947.
52. Л ь в и н Я. Б. Сопротивление сферической оболочки
краевым циклическим воздействиям. Сб. Расчет пространствен¬
ных конструкций, вып. V. М., Госстройиздат, 1959.
53. Л ь в и н Я. Б. Сопротивление конической оболочки краевым циклическим воздействиям. Сб. Расчет пространственных конструкций, вып. VI. М., Госстройиздат, 1961.
54. Л ь в и н Я. Б. Сопротивление оболочек вращения краевым циклическим воздействиям. Сб. Расчет пространственных конструкций, вып. VII. М., Госстройиздат, 1962.
55. Л я в А. Математическая теория пругости, ГТТИ, 1935 (перев. с англ.).
56. М а л ь к о в В. М. Расчет цилиндрической оболочки
с косым срезом, Ленинградск. гос. университет им. Жданова,
Исследования по упругости и пластичности, вып. 3. Изд. ЛГУ, Л., 1964.
57. М и л е й к о в с к и й И. Е. Некоторые практические задачи по расчету покрытий типа цилиндрических оболочек. В сб.
ЛИТЕРАТУРА
137
ЦНИПС Исследования по вопросам теории и проектирования тонкостенных конструкций. М., Госстройиздат, 1950.
58. Милейковский И. Е., Васильков Б. С. Расчет покрытий и перекрытий из пологих выпуклых оболочек двоякой кривизны. Сб. ЦНИПС Экспериментальные и теоретические исследования тонкостенных пространственных конструкций. М., Госстройиздат, 1952.
59. Милейковский И. Е. Расчет оболочек и складок методом перемещений. М., Госстройиздат, 1960.
60. Милейковский И. Е. Расчет железобетонных цилиндрических сводов-оболочек. М., Госстройиздат, 1963.
61. Милейковский И. Е., Доренбаум И. В. Метод расчета покрытий из оболочек, очерченных по поверхности гиперболического параболоида. Сб. Строительное проектирование промышленных предприятий, 1965, № 5.
62. М и л е й к о в с к и й И. Е. а) Новый вариант уравнений смешанного метода расчета складок и оболочек. Строительная механика. М., Стройиздат, 1966; б) Практические методы расчета оболочек и складок покрытий. Сб. ЦНИИСК им. Кучеренко. М., Стройиздат, 1970.
63. М и л е й к о в с к и й И. Е., Золотов О. Н. а) К расчету складчатых систем на ЭЦВМ. Сб. ЦНИИСК им. Кучеренко Строительные конструкции, вып. 6. Расчет оболочек, 1970. Ротапринтное издание; б) Вариационный метод исходных уравнений при расчете складок и особенности напряженного состояния оболочек складчатого типа Сб. Пространственные конструкции зданий и сооружений, М., Стройиздат, 1972.
64. М и ш о н о в М. К теории пологих оболочек. ПММ, XXII, вып. 5, 1958.
65. Мрощинский А. К. Расчет цилиндрической оболочки на сосредоточенные силы. Сб. Пластинки и оболочки. М., Госстройиздат, 1939.
66. Назаров А. Основы теории и методы расчета пологих оболочек. М, Стройиздат, 1966.
67. Н и к и р е е в В. М. Раздельное применение безмоментной и моментной теорий к расчету пологих оболочек Труды
IV Всесоюзной конференции по теории оболочек и пластин. Ереван, 24—31 октября 1962 г. Изд-во АН Армянской ССР.
68. Н и к и р е е в В. М., Шадурский В. Л. Практические методы расчета оболочек. Стройиздат, 1966.
69. Н о в о ж и л о в В. В. Теория тонких оболочек. 2-е издание. Гос. союзное издательство судостроительной промышленности, Л., 1962.
70. О в е ч к и н А. М. Расчет железобетонных круглых резервуаров. М., Стройиздат, 1950.
71. Одинцов М. Н. а) Расчет цилиндрической оболочки с учетом упругой податливости опорных диафрагм. Строительная механика и расчет сооружений, 1962, № 5; б) К расчету диафрагм цилиндрических оболочек. Строительная механика и расчет сооружений, 1964, № 5.
72. П а в и л а й н е н В. Я. Расчет многоволновых покрытий. Сб. Расчет пространственных конструкций, вып. XIII. М., Стройиздат, 1970.
73. П а с т е р н а к П. Л. Практический расчет складок и цилиндрических оболочек с учетом изгибающих моментов. Информационный бюллетень НКТП, 1932.
74. П а с т е р н а к П. Л. Практический расчет складок и цилиндрических оболочек с учетом изгибающих моментов. Проект и стандарт, 1933, № 2.
75. П а с т е р н а к П. Л. Оболочки двоякой кривизны в гражданском и промышленном строительстве. Известия АСиА,
1960, № 3.
76. П а с т е р н а к П. Л. и др. Железобетонные конструкции. Специальный курс. М., Госстройиздат, 1961.
77. П и р о г о в И. М. Распределение напряжений около отверстия в цилиндрической оболочке при действии сосредоточенных сил. Изв. АН СССР, ОТН, Сер. мех. и маш. № 2, 1959.
78. П о п о в И. Г. Приближенный расчет длинных цилиндрических оболочек. Расчет пространственных конструкций, вып. VI. М., Госстройиздат, 1961.
79. Пшеничное Г. И. Расчет сетчатых цилиндрических оболочек. Изд. АН СССР, 1961.
80. Р ж а н и ц ы н А. Р. Об определении секториальных геометрических характеристик сечения тонкостенного стержня (метод произвольных эпюр). Труды лаборатории строительной механики ЦНИПС, М., Стройиздат, 1941.
81. Ржаницын А. Р. Расчет тонких безмоментных оболочек вращения малой кривизны на произвольную нагрузку. Труды лаборатории строительной механики ЦНИПС. М., Стройиздат, 1949.
82. Р ж а н н ц ы н А. Р Безмоментные пологие оболочки. Сб. Расчет пространственных конструкций, вып. III. М., Гос, изд-во литературы по строительству и архитектуре, 1955.
83. Ржаницын А. Р. Пологие оболочки и волнистые настилы (некоторые вопросы теории и расчета). Научное сообщение ЦНИИСК АСиА СССР, вып. 14. М., Госстройиздат, 1960.
84. С л е з и н г е р И. Н. Решение основных уравнений полубезмоментной теории цилиндрических оболочек. Строительная механика и расчет сооружений, 1966, № 1.
85. Смирнов А. Ф., Александров А. В., Шапошников Н. Н., Лащеников Б. Я. Расчет сооружений с применением вычислительных машин. М., Стройиздат, 1966.
86. Строительная механика в СССР 1917—1967 гг. Раздел Расчёт оболочек и других тонкостенных конструкций. Стройиздат, 1969.
87. Справочник проектировщика промышленных, жилых и общественных зданий и сооружений Расчетно-теоретический. Под ред. проф. А. А. Уманского. М., Госстройиздат, 1961.
88. Стругацкий Ю. М. Некоторые вопросы расчета призматических складок по полубезмоментной теории. Сб. Расчет пространственных конструкций, вып. IX. М., Госстройиздат, 1964.
89. С т р у г а ц к и й Ю. М. Расчет ортотропных цилиндрических оболочек в главных координатах. Сб. Расчет пространственных конструкций, вып. XII. М., Госстройиздат, 1969.
90. С у м б а к А. А. Расчет предварительно напряженных цилиндрических железобетонных оболочек с учетом жесткостей кручения и горизонтального изгиба бортовых элементов. Труды Таллинского политехнического института, № 161, 1959.
91. С у м б а к А. А. Экспериментальные исследования предварительно напряженных цилиндрических оболочек. Труды Таллинского политехнического института, № 163, 1959.
92. Т и м о ш е н к о С. П. Пластинки и оболочки. ОГИЗ Гостехиздат, 1948.
93. Тимошенко С. П., Войновский-Кригер С.
Пластинки и оболочки. Физматгиз, 1963.
94. Т ю л е н е в А. И. Расчет цилиндрической оболочки
и шпангоута на сосредоточенную нагрузку. Сб. Расчет пространственных конструкций, вып. V. М., Стройиздат, 1959.
95. Труды VII Всесоюзной конференции по теории оболочек и пластинок. Обзорные доклады. М., Наука, 1970.
96. Финкельштейн Р. М. О напряженном состоянии
круговой цилиндрической оболочки, имеющей начальные отклонения от правильной формы; Ленинградск. гос. университет им. Жданова. Исследования по упругости и пластичности, сб. 1. Изд. ЛГУ, Л., 1961.
97. Ф л ю г г е В. Статика и динамика оболочек (пер. с немец.) М., Госстройиздат, 1961.
98. Ф и л и н А. П. Элементы теории оболочек. М., Стройиздат, Л., 1970.
99. Ч е р е н и н а В. С. Статика тонкостенных оболочек вращения. Наука, 1968.
100. Черных К. Ф. Линейная теория оболочек. Изд. ЛГУ.
Часть I, 1962, част. II, 1964.
101. Шахраманов Г. С. Расчет тонкостенных цилиндрических оболочек по обобщенным формулам. АН ГрузССР. Труды научных корреспондентов ин-та строительного дела, т. I. Тбилиси, 1955.
102. Штаерман М. Я. Основные идеи современной теории куполов и сводов. Труды Всесоюзной конференции по бетону и железобетону, 1932.
103. Штаерман И. Я. Расчет купола как арки на упругом основании. Проект и стандарт, 1933, № 9.
104. Штейнберг М. В. К расчету неразрезных цилиндрических оболочек. Строительная механика и расчет сооружений. 1963, № 6.
105. Щепотьев А. С. Экспериментальные исследования железобетонной цилиндрической оболочки. Проект и стандарт, 1936, №11.
106. Э с т р и н М. И. Расчет цилиндрической оболочки, закрепленной по косому контуру. Изв. АН СССР. ОТН мех. и машиностр., т. 2, 1952.
107. Эстрин М. И. Расчет цилиндрической оболочки, закрепленной по косому контуру. Изв. АН СССР. ОТН. Стр. мех. и маш. № 2, 1959.
108. Второй международный конгресс по тонкостенным оболочкам-покрытиям (пер. с англ., франц. и нем.) под редакцией А. А. Гвоздева. М, Госстройиздат, 1960.
109. Симпозиум по проблемам взаимосвязи проектирования и возведения оболочек для производственных и общественных зданий с большими пролетами. М., Госстройиздат, 1966.
РАЗДЕЛ 15
МЕТОД СЕТОК В ПРИЛОЖЕНИИ К РАСЧЕТУ ПЛАСТИН И ОБОЛОЧЕК
15.1. ОСНОВЫ МЕТОДА СЕТОК
Метод сеток, или метод конечных разностей, нашел широкое применение при решении различных задач механики. Этому за последние годы способствовало внедрение в практику электронных вычислительных машин.
Основная идея метода состоит в замене точных значений производных их приближенными значениями через конечные разности или дискретные значения функций.
Пусть, например, дана функция двух переменных FF(x, у) и надо вычислить частную производную dFjdx в узле i (рис. 15.1, а).
Аналогично
dF_
ду
2КХ
Fn-Pn,
2К
(15.2)
Аналогично (рис. 15.1,6): da-F ду2
PF Fn-2FjFm
ч
4
У
и
4,
п
Р
S
к с
4
1
t
о
т
г
t
и
w
Запишем еще третью и четвертую производные: дF Ft-2(Fl-Fk)-Fs дхз 2К3Х
dF Ft — 4Fi 6Fi — 4Fk Fs
дх4 х4
х
Аналогично
dF __FV — 4Fn -f- 6Fj — 4Fm -f- Fu dy4 X4
у
Для смешанных производных:
d2F (.Fo Fp)-(F0 Fr)
(15.3)
(15.4)
(15.5)
(15.6)
дхду d4F 1
4XxXy
(15.7)
4 Fi-2(Fn Fl Fm Fk)
Рис. 15.1. К замене производных разностями
Если АВ есть касательная к поверхности F — F(x, у) в узле i, параллельная плоскости ху, то точное значение производной равно тангенсу угла (tg ос) наклона прямой к оси х. Приближенное значение для производной можно получить, если вместо прямой АВ рассмотреть прямую АВ тангенс угла наклона прямой АВ приближенно представит первую производную в точке i:
1L _ Fi—F
дх
д2ду2 Х2х
( )Ь (15-8)
В некоторых случаях необходимо применять уточненные и односторонние производные. Уточненные значения первой и второй производных в точке i:
f‘"TSr_f,№_8F' f‘)- (l5-9
Или
-7Т— Wp Ft)-(Fo Fq); (15.9а)
(15.1)
дх dF дх2
12X1
— Fs-16Fk — 30F(
где X, Ху — шаги сетки.
Вторые производные можно получить, записав в числителе разность первых разностей, т. е. вторую разность, а в знаменателе — квадрат шага сетки:
dF _ Ft — Fj) — (Ft-Fk) 2Fj Fk
dx x2 I2
167 — Ft. (15.10)
Односторонние производные в узле i могут быть представлены следующим образом:
dF Ft — Ft
—1 (15.11)
дх
dF
дх
Fi-Fk Хх
(15.12)
15.1. ОСНОВЫ МЕТОДА СЕТОК
139
Уточненные значения односторонних производных в узле k:
dF
дх
Также
dF
дх
д2Р
(-SFk iFi-Fi).
(- 3FS-10Fk 1 SFi -
дх2
2кх
-6 Ft-Ft);
1
(15.13)
(15.14)
mi
(llFs-20Ffe 6Ft-
dF
dF
dF
дх дх2 ду2 dy
0.
(15.16)
Покажем, как методом сеток найти интеграл уравнения (15.16) при заданных на контуре значениях F и dFdn.
Используя (15.5), (15.6) и (15.8), можно уравнение
(15.16) для узла i (см. рис. 15.1,6) записать так:
Pi (6о 8а0 6) — 4 (Fn аJFi Fm a0Fj) (а0 1)
2а0 (Fq -h Fp Fr F0) Fv Ftal
(15.17)
(15.18)
Pи Psa0 0.
Через а обозначена величина
В случае квадратной сетки (а1) уравнение (15.17) упрощается:
20Pi — 8 (Fk Pi Рт Fn) 2 (F0 Fp -f Pq Pr) PsJrFt-Fu-Fv — (S. (15.19)
В качестве примера рассмотрим ход решения задачи
о плоском напряженном состоянии квадратной балкистенки (рис. 15.2, а), находящейся под действием силы посередине. Найдем на контуре области значения F и дРдп, используя рамную аналогию: будем контур балки-стенки рассматривать как замкнутую раму. Разрежем раму внизу посередине (рис. 15.2,6) и для этой основной
системы построим эпюру изгибающих моментов (показана сплошной линией) и эпюру продольных сил (показана пунктиром). Значение функции напряжений F на контуре балки-стенки равно изгибающему моменту,
4Ft-Ft). (15.15)
Замена точных значений производных конечными разностями сводит задачи, описываемые системами дифференциальных уравнений, к задачам решения систем алгебраических уравнений. Общие методы их решения здесь не рассматриваются. Некоторые из них можно найти в разделе 2.2, а также в специальной литературе 8, 10, 29. Здесь основное внимание уделено построению разностных уравнений и формулировке граничных условий в задачах расчета пластин и оболочек. Рассмотрены также некоторые частные способы решения систем разностных уравнений, существенно связанные с особенностями исходных дифференциальных уравнений или со спецификой самого метода сеток.
15.2. ПЛОСКАЯ ЗАДАЧА 15.2.1. Плоская задача в напряжениях
Для решения плоской задачи теории упругости исходят из бигармонического уравнения
б)
1 I
Лг Ш
10
13
шг
к
12
15
r-_v
I
JL_4r
I
Рис. 15.2. К расчету балки-стенки
а нормальная производная dFdn равна продольной силе в соответствующем сечении рамы.
Правило знаков сформулируем следующим образом. Будем откладывать изгибающий момент со стороны растянутого волокна; тогда изгибающий момент, построенный внутри области, соответствует положительному значению Ft а построенный вне — отрицательному значению F. Продольную силу считаем положительной при растяжении; положительная продольная сила соответствует положительному значению дРдп.
Из (15.1) следует, что
Fi Fk 2XN. (15.20)
Выберем сетку, изображенную на рис. 15.2, в с шагом Х16. Неизвестными являются значения F в отдельных узлах. В силу симметрии количество неизвестных значений функции F при выбранной сетке равно пятнадцати.
Значения Р на контуре легко находим из эпюры М (см. рис. 15.2,6):
PI _ Р1
1
мп
140
РАЗДЕЛ 15. МЕТОД СЕТОК В ПРИЛОЖЕНИИ К РАСЧЕТУ ПЛАСТИН И ОБОЛОЧЕК
Flu — Мт :
PI
12 ’
Fiv FVI . xiii “ 0;
dF
дУ
dF
dy
dF
dy
dF
dx
dF
dF
v dx
VI
dx
ill
IX
0;
jP
2
На основании (15.20) запишем выражения функции напряжений F во внеконтурных узлах ai, an и др Они нужны при составлении уравнений в предконтурных узлах. Имеем:
Fai Fv и —
Fa III F3; у F3 2 21
Fa VI f 6 2 р
XI 15 И Т Д-
Составим уравнения для характерных узлов сеточной области (см. рис. 15.2, в): для узла 7
20F,-8 (2F8 F4 F10) 2 (2F5 2Fu)
2F9 -f- Fis -f- Fi — 0;
для узла 5
20F5-8(F4 Fe F8 F2) 2 (F, F7 Fx
F) F5 Fn —— 0;
для узла 2
20F2 — 8 F3 F5 -f-
PI PI 4- Fe j F7 f8 f2 0.
Таким образом можно составить систему 15 уравнений, решить их и найти значения функции F во всех узлах сетки. После этого составляющие напряжений находят по формулам:
d2F d2F
сг,
dy2 ’
Т VM
а ’
dxdy
(15.21)
или на основании (15.2), (15.3) и (15.4). Напряжения в узле i равны:
F — 2Fj Ffe. a
Fn-2Ff4-Fm X2
(F0 FP)-(F Fr)
42
aw
При решении плоской задачи для неодносвязных областей, например пластин с отверстиями, возникают неко¬
торые особенности. Они заключаются в том, что по заданной нагрузке функция напряжений на контуре области определяется с точностью до слагаемого вида
Ct Cf Ctf (15.23)
В случае односвязной области константы С могут быть заданы произвольно и, в частности, приняты равными нулю, так как уравнения Сен-Венана, устанавливающие связь между компонентами относительных деформаций ЕХу еу и уху, выражают необходимые и достаточные условия сплошности плоского односвязного тела. Если тело ограничено многосвязной областью, то эти уравнения недостаточны для удовлетворения неразрывности деформаций. Должны быть выполнены дополнительные условия. Этот вопрос рассматривается в работах 28, 31. Трудности решения плоской задачи теории упругости для неодносвязных областей можно обойти, если пользоваться уравнениями в перемещениях. Большие возможности решения плоской задачи, а также других задач теории упругости открывает метод сеток в сочетании с конформным отображением. Используя различные системы ортогональных криволинейных координат, можно достаточно точно исследовать поле напряжений плоских областей сложного очертания, включая неодносвязные области. Указанный метод изложен в работах 14, 28.
15.2.2. Двойной итерационный процесс решения плоской задачи
Для решения систем алгебраических уравнений наряду с методом Гаусса представляется целесообразным в случае матриц высоких порядков прибегать к итерационным методам, особенно учитывая специфику современных цифровых машин. С этой точки зрения оказалось удобным при решении плоской задачи разностным методом заменить бигармоническое уравнение относительно функции напряжений
v2v27 o (15.24)
системой двух уравнений второго порядка: dF d2F
f(x,y);
дх2 ' ду
df а
дх
Ф2
0.
(15.25)
(15.26)
где
f(x,y) axa.
Представим уравнения (15.25) и (15.26) в разностной форме, приняв квадратную сетку с шагом Хх Ху Х (см. рис. 15.1,6).
Уравнение Пуассона
Fk Fl F„ Fn-4Ft и. (1527)
уравнение Лапласа
fkfl fm f fn —
X2
0.
(15.28)
(15.22)
Двойной итерационный процесс решения этих систем уравнений сводится к следующему. Во всех внутренних узлах сеточной области задают произвольные начальные значения F и находят первые приближенные значения f. Эта операция состоит из двух частей. Вначале опреде-
15.2. ПЛОСКАЯ ЗАДАЧА
141
ляют контурные значения конт, подставляя в формулы (15.27) соответствующие начальные значения предконтурных ординат и известные на контуре и в его окрестности контурные и законтурные значения функции напряжений F. Законтурные значения функции напряжений находят по экстраполяционной формуле
где
Fзак — конт 4" 2А f
дп к
(15.29)
При известных на контуре значениях конт находят значения во внутренних узлах сетки, решая задачу Дирихле для уравнения Лапласа (15.26) по формуле
?1
n1 fi fnm rn1
(15.30)
Индекс п относится к первоначальным значениям, а п1—к исправленным.
Численное решение этого уравнения может быть выполнено с помощью итерационного метода верхней релаксации 10, 33, 39.
После решения уравнения Лапласа переходят к исправлению первоначально принятых значений F при помощи формулы
г(л1) __
1 i “
fil) __ pin) р(п) р(п1) _ 2 f(n) А
(15.31)
Операция (15.31) совершается однократно. Далее, используя исправленные значения в предконтур-
ных узлах сетки, находят новые значения FKOht на контуре, затем итерационным путем решают уравнения Лапласа и т. д.
Процесс повторяется до тех пор, пока сумма квадратов разностей (гг)-го и (п-1)-го приближений по всей области не оказывается меньше заданного числа. Эти значения функции считаются окончательными, и по ним находят напряжения в узловых точках пластины.
Для ускорения процесса итераций при решении уравнения Пуассона используется метод нижней релаксации 33, 39.
Описанный двойной итерационный процесс решения плоской задачи легко реализуется с помощью ЭВМ. В настоящее время имеются типовые программы, позволяющие решать таким способом задачи о плоском напряженном состоянии для областей, вписанных в сетку с числом узлов более 1000.
15.2.3. Решение в перемещениях. Вариационный метод построения разностных уравнений
Решение плоской задачи для неодносвязных областей во многих случаях упрощается при использовании уравнений в перемещениях:
д2и 1 — v
'дх22
1v
д2и 1 v ду 2
dv 1
— — Х 0;
дхду В
д2и
d2v 1 — v
d2v
дхду
ду2
1
дх2
0,
(15.32)
Eh
1 — V25
и, у — компоненты вектора перемещений, направленные соответственно вдоль осей х и у X и У — компоненты массовых сил; В — жесткость.
Хотя в (15.32) число неизвестных удваивается, получение их конечно-разностного аналога благодаря понижению порядка уравнений упрощается. Кроме того, решение в перемещениях особенно удобно для вывода разностных уравнений вариационным методом. Этот метод вывода сеточных уравнений отличается от обычно используемого тем, что конечными разностями заменяются производные не в уравнениях (15.32), а в выражении потенциальной энергии Я, представленной функционалом
(5)
_В_
2
Кди 2. ди ди ( ди 2 1
ду) ду дх ( дх ) J
— (Xu Yv) dx dy,
(15.33)
где S — рассматриваемая плоская область.
После замены в (15.33) производных конечными разностями сеточные уравнения находятся как необходимые условия минимума потенциальной энергии. Матрица коэффициентов этих уравнений всегда (независимо от граничных условий и формы контура рассматриваемой области) симметрична и позволяет применять для решения системы наиболее эффективные численные методы, легко реализуемые на ЭВМ.
Рассмотрим описанный способ составления сеточных уравнений подробней И, 12, 13, 25, 26.
Наложим на рассматриваемую плоскую область S прямоугольную сетку с шагами Хх и Ху (рис. 15.3, а) и будем искать перемещения ее узловых точек.
Введем вспомогательную сетку с шагами Хх2 и Ху2 (рис. 15.3,6). Присвоим каждой ячейке этой сетки номер ее нижней левой угловой точки (например, на рис. 15.3,6 прямоугольнику idha присваивается номер i) и назовем Sj его пересечение с S. Если обозначить через IJj значение функционала (15.33) при S Sh можно записать:
52 5; Я Я. (15.34)
Заменим дифференциальные выражения в функционале Ilj конечными разностями. Считая основную сетку достаточно мелкой, можем принять для областей Sit Se, S, Sb (на рис. 15.3,6 заштрихованы наклонными линиями):
и(х,у) щ v(x,y)
для областей Si, Sa Se, Sb (на рис. 15.3,6 заштрихованы вертикальными линиями):
ди щ — щ ди
VI — Vi
дх Хх дх Хх
для областей Sc, Sg, Si (на рис. 15.3,6 заштрихова¬
ны горизонтальными линиями):
ди Uj ип dv vi — уп
ду Ху 9 ду Ху
Кроме того, истинную нагрузку с компонентами X и У (включая и контурные силы, которые можно рассматри-
142
РАЗДЕЛ 15. МЕТОД СЕТОК В ПРИЛОЖЕНИИ К РАСЧЕТУ ПЛАСТИН И ОБОЛОЧЕК
вать как частный случай массовых) заменяем статически эквивалентной с компонентами X и У, так что в области S SiScSfSb (на рис. 15.3,6 она заштрихована наклонными линиями):
Х(х,у) Хц Y(x,y) Yh
где
Xt Yt —
1
F, FC Ft Fb
1 Fi Fe Ff Fb
j j X dx dy; (S)
ijYdx dy;
(Sn
Fj — площадь области Sj. Ш)
1
1
1
I
1
1
1
- 1
1
I -
1
1
I
j -
i 1 i i
1
1
1.
—
1
-Д-
1
1
1
-Д-
1
X
1
._1_.
1
1
1
-Д-
1
- 1
1
_д_
1
1
1
t
1
i
-д-
i
i
1
-д-
1
j
1
1
-1— I
—
—
1
- Д— 1
1 1
i
1
_х_
1
_
1
_
1
—1— 1
1
—1— 1
1
1
.1
i
i
1
—h 1
f
I
-1
1
Г“
1
1
1
Т““
1. _.
1
—1— 1 1
1
h
1
i
—h— 1
1
1
-h-
1
I
I
—r
I
—
1
1
j
1
д
1
1
1
1
I
1
1
1
1
l
I
1
1
1
1
1
i
1
1
1
1
1
1
T
1
_r
I
?1сч,
’ 1—
I
—1— 1
1
_л_.
1
J
1
-Д-
1
1
1
I
1
1
1
;, 1
1
1
1
1
i
1
i
1,
1
1.
1
_ .1
1
1
J.H
1
1
—1 1
-1
1
1
1
1
1-
1
1
кн
I
i
1
1
1
1
1
1
Рис. 15.3. К выводу разностных уравнений вариационным методом
Я
(si)
ди dv Ur — Us Vi — —dxdy Ft —
dx dy Kx
fj XudxdyXu dx dy Fi Xt щ
Ф) (si)
и Т. Д.
После замены дифференциальных выражений конечными разностями необходимые условия минимума полной энергии сводятся к системе алгебраических уравнений:
дП dlJj дП Y4 дП
i
где пробегает все узлы, a i — только основные.
В каждое уравнение системы (15.35) входят значения неизвестных перемещений лишь в девяти узлах. В этом нетрудно убедиться, приняв во внимание, что значения неизвестных в узле i входят в выражение потенциальной энергии только четырех окружающих ее ячеек основной сетки или 12 ячеек вспомогательной сетки. Таким образом, систему (15.35) можно записать и так:
(15.36)
Ф Ф
Коэффициенты Aifp из (15.36) в общем случае могут быть определены по формуле
tS (,5-37)
где -
индекс, пробегающий 12 значений (rf, i a, g
4 Fj
Су ky s, t, m, 6, e); kj r— — отношение площади
кхку
области Sj к площади ячейки вспомогательной сетки (очевидно, что 0 6 1, причем крайние значения соответствуют расположению -й ячейки вспомогательной сетки целиком вне или внутри области S, а промежуточные— пересечению -й ячейки контуром области S); aipj коэффициенты с такими же верхними индексами, как и у определяемых Ai(p здесь и в (15.37) они опущены, значения которых находятся по табл. 15.1. В этой таблице приняты обозначения:
а
V-1 —V -
2-
?
1 V
1 — Зу 8
G)
В
Таким образом, нагрузка, перемещения и их производные в любой точке области S определяются лишь их значениями в узлах основной сетки. Соответственно только эти значения войдут и в выражение энергии, отдельные слагаемые которого примут вид:
(si)
Рассмотрим несколько примеров определения коэффициентов уравнений (15.36) по формуле (15.37). Составим, например, сеточные уравнения (15.36) для точки 11 области 5, показанной на рис. 15.4. Наложим сетку рис. 15.3,6 на область S так, чтобы узел i совпал с рассматриваемой точкой 11. Тогда коэффициенты kj определятся следующим образом:
(I при d, i, a, g, с kt т, 6, е
kr J 10 при s, ftt
15.3. ИЗГИБ ПЛАСТИН
143
Умножая каждую строку табл. 15.1 на соответствующий коэффициент kj и складывая в соответствии с (15.37), найдем искомые уравнения:
— 2— а ик а(а Р) щ — 2 а щ —рит —
— 2yvq 2уог — 26vk 2 yvi 2vm —
3.
— 2 yvp
— 2 yuq 2 yur 2 buk 2ущ 2yup — 2avn — p vk 3 (а P) vt 3
26 um —
2 p vt —
OLV
mYWY‘-
Умножая значения
ui ф
— 7Prn — 8auk — a w
— (1 V) „ — VO„ (1 — V) Or
6P“m (9 a 13 P) и,- —
1 V
Аналогично можно записать уравнения (15.36) и для любой другой точки, приведенной на рис. 15.4. Поскольку этими схемами охватываются все возможные варианты, возникающие при совпадении контура области S с отдельными межузловыми отрезками сеточных прямых, в табл. 15.2 приведены уравнения (15.36) для любого из пронумерованных на рис. 15.4 узлов.
В качестве примера составления разностных уравнений при несовпадении контура области S с сеточными прямыми рассмотрим узел на рис. 15.3, а. Наложив сетку рис. 15.3,6 так, чтобы ее узел i совпадал с получим:
О при j by е, а 0,5 при j i
1 при dt g, с, kt t, f, s, m
(1 V) to 2vvm — (1 — v) Vp 5Xi m;
1 — V
— (1 V) u4 — un 2vu, — 4ущ vut
(1 v) u0 (1 — v) um — 2vup — 7avn —
— 8 P Vk (13 a 9 p)oi — pvi — 6avm
На рис. 15.5, a показана квадратная пластина с центральным квадратным отверстием, сжатая сосредоточенными силами вдоль оси симметрии. На рис. 15.5,6 показаны эпюры напряжений в некоторых характерных сечениях пластины. У узлов помещены величины коэффициентов кх и kv, входящие в формулы для найденных напряжений:
Р Р
1хкхаб;
где Р — величина действующей нагрузки; а, б и толщина пластины.
сторона
, указанные в -х строках
табл. 15.1, на коэффициенты kj и складывая в соответствии с (15.37), найдем:
15.3. ИЗГИБ ПЛАСТИН
15.3.1. Основные уравнения и граничные условия
Функция прогибов w пластины определяется из решения краевой задачи для бигармонического уравнения
д w сИ w d4w а
дх 2 дхЩ ду D (15.38)
при удовлетворении граничных условий.
Выше обозначено:
гч Fh3
D г. — цилиндрическая
— V2)
q — интенсивность
жесткость нормальной на-
12(1 пластины; грузки.
Используя центральные разности, представим уравнение (15.38) в конечных разностях для узла i сеточной области (рис. 15.1,6):
20ay —8(wk wl wm wn) 2 (ш0 wp
Рис. 15.4. Обозначения типовых узлов сеточной области
Wq Wr) Ws Wt-Wu Wvz
, (15.39)
o)
где qi — интенсивность нагрузки в узле L б)
3“ li
I p
I
шшшт
♦
□
111
Рис. 15.5. Сжатие квадратной пластинки с отверстием сосредоточенными силами
144
РАЗДЕЛ 15. МЕТОД СЕТОК В ПРИЛОЖЕНИИ К РАСЧЕТУ ПЛАСТИН И ОБОЛОЧЕК
Таблица 15.1
Коэффициенты при перемещениях узлов и свободные члены
uu uv aiqi aiqj
up
aH
n
k
i m 1 7
n
r
k
1
0
m j p
d
-23
20
V—1
1—V
1
-20
2(a0)
—2a
2v
—87
1—V
2cd
а
2a
—2a
2v
—2v
ё
-20
20
v—1
1—V
с
-20
—2a
2(a40)
II
—2v
V—1
8v
II -
k
—2a
2a
—2v
2v
S
20
-20
1—V
v—1
1
f
—2a
2(a-f-0)
-20
1—V
—87
2v
II 2"
t
-2a
2a
—2v
2V
I
т
20
-20
1—V
V—1
1
2(a0)
—2a
-20
8V
V—1
—2v
1 2w
6 II
2a
—2a
I
2v
—2v
JM nvv W
II я r
k
i
I
0
m
p II я
1 1
m
—2v
2v
II -2a
2a
i
1—V
—87
2v
1 2a
2a-f-0)
-20
2©
а
1—V
v—1
20
-20
g
j —2v
I-
2a
il
v—1
—2v
8v
1-
-20
2(a0)
2(0
k
v—1
1—V
-20
20
I
2v
—?v
2a
—2a
t
2v
-8v
1—V
—20
2(a0)
—2a
2(0
t
V—1
1—V
—20
20
m 1
2v
—2v
2a
—2a
P jj
8V
—2v
V—1
2(a0)
—20
—2a
2©
l 1_ V
V—1
l l 2P
—20
15.3. ИЗГИБ ПЛАСТИН
145
Таблица 15.2
Разяостные уравнения плоской задачи теории упругости в узлах сетки, указанных на рис. 15.4
и
V
Уp 3B-
нения
Узлы
п
к
1
т
q
n
r
k
i
I
0
m
V
X
1
4аР)
—4а
-43
8V
3v—1
1—3v
-(vl)
20)
2
—4а
4аР
-43
1—3v
—8v
1v
3v—1
2(0
3
-40
4(аЭ)
—4а
3v—1
1v
—87
1—3v
2(0
4
-43
—4а
4(аР)
-(vl)
1—3v
3v—1
8v
2(0
5
—4а
8(а3)
—4а
-83
1—3v
3v—1
1v
—(Vl)
4(0
о
6
-43
8(а3)
—8а
-43
3v—1
1v
1—3v
—(Vl)
4(0
в
о.
й)
7
-43
—8а
8(а3
-43
— (Vl)
1—3v
lv
3v—1
4(0
С
8
-83
—4а
8(а3)
—4а
-(vl)
1V
3v—1
1—3v
4(0
9
-83
—8а
16(а3)
—8а
-83
-(vl)
1V
1v
-(Vl)
8(0
10
-83
—8а
12(а3)
—4а
-43
-(Vl)
1V
—87
1—3v
1v
3v—1
6(0
11
-83
—4а
12(53)
—8а
-43
-(vl)
1v
3v—1
8v
1—3v
1—3v
-(Vl)
6(0
12
-43
—8а
12(а3)
—4а
-83
-(vl)
1—3v
87
3v—1
1v
-(Vl)
6(0
13
-43
—4а
12(а3)
—8а
-83
3v—1
1v
1—3v
-8V
1v
-(Vl)
6(0
Узлы
и
V
Y
Я
n
r
k
i
I
0
m
P
n
k
I
I
m
1
8V
1—3v
3v—1
-(1V)
4(a3)
-43
—4a
2©
2
3v—1
-8V
1V
1—3v
-43
4(a3)
—4a
2©
3
1—3v
1v
—87
3v—1
—4a
4(a3)
-43
2©
4
-(Vl)
3v—1
1—3v
8V
—4a
-43
4(a3)
2(0
5
3v—1
1—3v
1v
-(1V)
-43
8(a3)
-43
—8a
4co
0
6
1—3v
1v
3v—1
-(1V)
—4a
8(a3
-83
—4a
4©
Q.
0
7
-(Vl)
3v—1
1v
1—3v
—4a
-83
8(a3)
—4a
4©
8
-(Vl)
1V
1—3v
3v—1
—8a
-43
8(a3)
-43
4©
9
-(Vl)
1v
1v
-(1V)
—8a
-83
16(a3)
-83
—8a
8©
10
-(Vl)
1v
—87
3v—1
1v
1—3 V
—8a
-83
l2(a3)
-43
—4a
6©
11
-(Vl)
1v
1—3v
8V
3v—1
—(1V)
—8a
-43
12(a3)
-83
—4a
6©
12
-(Vl)
3 V—1
8V
1—3v
1v
—(1V)
—4a
-83
12(aF)
-43
—8a
6©
13
1—3v
1v
3v—1
-8v
1v
—(1v)
—4a
-83
12(a3)
-83
—8a
6©
Приводим выражения для интенсивности усилий: изгибающие моменты
D
Мх — -jj l(wk—2wiwi)v (wm — 2wtwn); (15.40) D
My — — l(wm — 2wiwn) (wk — 2wiwt) (15.41) крутящий момент
Мху -и Wp)-® “V); (15.42)
поперечные силы
Qx — Щ ws Wr — Щ wp —
— wQ — 4 (wt — wk) (15.43)
Qy iwv Wu Wq — —
— wr — 4(шл — wm). (15.44)
Если на рис. 15.1,6 ось у принять за правый край пластины, то полная интенсивность реакции или обобщенной поперечной силы в узле i может быть представлена в виде:
Ах щ — ws — 2(®l — Wk)
(2 — v) wr — w0wp — wq-2(wi — Wk). (15.45)
146
РАЗДЕЛ 15. МЕТОД СЕТОК В ПРИЛОЖЕНИИ К РАСЧЕТУ ПЛАСТИН И ОБОЛОЧЕК
Разностные уравнения
Узлы
W
(рис. 15.6, 15.7)
1
я
п
p
. 1
1
1
1
0,5 a2
2
0,5 v
0,5 a2
— (a2v)
0,5 a2
3
0,5 а2
0,5 v
- (x2v)
0,5 v
0,5a2
4
0,5 v
0,5 a2
5
a2
6
V
a2
7
V
a2
— 2 (a2v)
a2
8
а2
V
— 2 (a2v)
V
a2
9
— (a2v)
V
- (asv)
3 (a2a2)4
10
V
— (a2 -f- v)
a2
— 3(a2v)—4(1—v)
3(a2a2)4
11
а2
V
—3(a2v)—4(1—v)
4—2v
- (a2v)
3 (a2a2)4
12
а2
4—2 v
—3(a2v)—4( 1 — v)
V
a2
— 3 (a2v)—4(1—v)
3 (a2-fa2)4
13
0,5 v
— 2 (a2v)
V
0,5 a2
— 3(a2v)—4(1—v)
5,5 a26a2-8
14
V
—2 (a2v)
0,5 v
a2
—4 (a2l)
5,5 a26a28
15
2а2
4—1,5 v
—6 (a2v)—8(1—v)
4—v
0,5 a2
— 3(a2v)—4(1—v)
5,5 a26a28
1S
2а2
4—v
—6 (a2v)—8 (1—v)
4—1,5 v
a2
-4(a2D
5,5 a26a28
17
0,5 а2
0,5 v
—3(a2v) —4 (1—v)
4—1,5 v
— 2 (a2 v)
6 a25,5 a28
18
0,5 а2
4—1,5 v
— 3 (a2-j-v)—4 (1—v)
0,5 v
2 a2
— 6(S2v)—8(1—v)
6 a25,5 a28
19
а2
V
-4(a2l)
4—v
— 2 (a2 v)
6 a25,5 a28
20
а2
4—-V
—4(a2l)
V
2 a2
— 6(a2v)—8(1—v)
6a2-5,5 a8
21
1
1 v
— 2 (a2v)
1 v
a2
— 4(a2l)
6 (a2a2)8
15.3. ИЗГИБ ПЛАСТИН
147
Таблица 15.3
изгиба пластин
Правая часть Z
1 t 0
m
r
и
0,5 v
—(a2v)
0,5 v
0,5 a2
0,5 v
— (а2 V)
0,5 a2
0,5 v
V
— 2 (a2v)
V
a2
— 2 (а2 v)
a2
V
V
—3(ccv) — 4(1-v)
a2
V
— 3(a2 v) — 4(1—v)
4—2 v
a2
1
2 8
—(a2v)
4—2 v
— 3(2v) —4(1—v)
V
a2
1
8
2
— 3(a2v) — 4 (1—v)
a2
— (a2 v)
V
1
2 8
- (а v)
V
— (a2v)
1
2 8
— 4(а2 1)
a2
4—1,5 v
— 6(a2v) 8(l —v)
4—v
2a2
8
— 3 (a2v) — 4 (1 — v)
0,5 a2
4—v
— 6(a2v)—8(1—v)
4—1,5 v
2a2
8
— 4(а2-(-1)
a2
0,5 v
— 2 (a2v)
V
8
— 3(a2v)—4(1—v)
0,5 a2
V
— 2 (a2v)
0,5 v
8
— 6(av) — 8 (I—v)
2 a2
V
— 4(a2 1)
4—v
a2
8
— 2 (a v)
4—v
- 4 (a2 1)
V
a2
8
— 6(a2v)—8(1—v)
2 a2
0,5 v
— 3(a2v) — 4(1—v)
4—1,5 v
0,5 a2
8
— 2 (asv)
4—1,5 v
— 3 (a2v) — 4 (1 — v)
0,5 v
0,5 a2
8
— 4(a2 l) a2
4—v — 6(a2v) — 8(1 — v)
(Продолжение таблицы на след, стр.)
4—v
2a2
8
№
РАЗДЕЛ 15. МЕТОД СЕТОК В ПРИЛОЖЕНИИ К РАСЧЕТУ ПЛАСТИН И ОБОЛОЧЕК
Узлы
w
L(pHC. 15.6, 15.7)
V
я
n
p
1 s
k
i
22
а
V
— 4 (а2 t)
4—v
— 2 (a2v)
6 (ос®о2)8
23
а2
4—v
— 4 (a2l)
V
2a2
— 6 (a2v)—8(1—v)
6 (02сс2)8
24
2а2
4—v
—6 (a2v)—8(1—v)
4—v
a2
- 4 (21)
6 (a22)8
25
а2
4—2v
—6 (a2-f v)—8(1—v)
4—v
a2
— 6(2v)—8(1—V)
11 (52aa)16
26
а2
4—v
—6(a2v) — 8 (1—v)
4—2v
2 a2
-8(5 1)
11( a2 a2) 16
27
2а2
4—v
— 8 (a2-fl)
4
a2
— 6 (a2v)—8(1—v) J
11 (52a2) 16
28
2а2
4
-8(a2l)
4—v
2a2
-8(al)
11 (52as) 16
29
а2
4—v
—6(a2v)-8(l-v)
4—v
2 a2
-8(54-1)
12 5211 216
30
2а2
4—v
— 8(a2l)
4
a2
— 6(asv)—8(1—v)
11 0212 216
31
2а2
4
— 8(a2l')
4—v
2 a2
-8(al)
11 212216
32
2а2
4
_8(a2l)
4
252
- 8 (ol)
12 a2ll 216
33
2а2
4
-8(a2)
4
2 a2
-8(5l)
12 (52 2) 16
34
2а2
4
— 8 (a2 1)
4
2 a2
-8(521)
12 5211,5 216
35
2а2
4—0,5v
-8(a2l)
4
1,5 a2
— 7 (52v)—8(1—v)
11,5 5212216
36
2а2
4
-8(a2l)
4—0,5v
2 a2
— 8(a2l)
Il,5212a216
37
1,5 а2
4—0,5v
— 7(a2v)—8(1—v)
4—0,5v
2 a2
- 8 (521)
12 5211,5216
38
2а2
4
— 7(a2v)-8(l—v)
4—v
2a2
— 7(52v)—8(1—v)
9 (52 2) 12
39
2а2
4—v
— 7 (a2v)—8(1—v)
4
a2
— 5 (a2v)—4(1—v)
9 (a22) 12
40
а2
2v
— 5 (a2v)—4 (1—v)
4—v
a2
— 5(52v)—4(1—v)
9 (52S) 12
41
а2
4—v
— 5 (a2v)—4(1—v)
2v
2a2
— 7 (52v)—8(1—v)
9 (a22)12
42
2а2
4—0,5v
— 6(a2v)—8(1—v)
4—v
1,5 a2
— 5 (a2v)—4(1—v)
6,5 52628
43
2а2
4—v
— 6(a2v)—8(1—v) j
j 4—0,5v
a2
— 4(521)
6,552628
15.3. ИЗГИБ ПЛАСТИН
149
Продолжение табл. 15,3
W
Правая часть Z
г t
о
m r и
-6(a2v)—8(l-v)
2 a2
V
_4(a l)
4—v
a2
8
— 2(a2v)
4v
-4(a l)
V
a2
e
-4оЧ-1)
a2
V
— 2 (a v)
V
e
-8(al)
2 a2
4—v
— 8 (a2 1)
4
2a2
2e
— 6(a2v)—8(1—v)
a2
4
— 8 (a2l)
4—v
2a2
2e
— 8 (21)
2 a2
4—2v
— 6 (a2v)—8(1—v)
4—v
a2
2e
— 6(a2v)—8(1—v)
a2
4—v
— 6(a2v)—8(1—'v)
4—2v
a2
2e
-8al)
2a2
4
— 8 (a2l)
4
2a2
28
— 8 (a2l)
2a2
4—v
— 8 (a2l)
4
2a2
28
— 6(52v)—8(1—v)
a2
4
—8 (a2l)
4—v
2a2
28
— 8 (4-1)
2 a2
4—v
— 6(a2v)8(l—v)
4—v
a2
28
-8(a2l)
2a2
4
— 8 (a2l)
4
2a2
28
-8(a2l)
2 a2
4—0,5v
—7 (a2v) —8(1—v)
4—0,5 v
1,5 a2
2e
— 8(a2l)
2 a
4—0,5v
-8(a2l)
4
2a2
2e
— 7(a2v)—8(1—v)
1,5 a2
4
— 8 (a2l)
4—0,5 v
2a2
2e
— 8(a2l)
2 a2
4
— 8(a2l)
4
2a2
28
— 5 (a2v)—4(1—v)
a2
4—v
— 5 (a2v)—4(1—v)
2v
a2
3
8
2
— 7(a2v)—8(1—v)
2 a2
2v
— 5 (a2v)—4 (1—v)
4—v
a2
3
8
2
— 7(a2v)—8(1—v)
2 a2
4—v
— 7(a2v)—8(1—v)
4
2a2
3
2 8
— 5 (a2v)—4(1—v)
a2
4
— 7(a2v)—8(1—v)
4—v
2a2
28
-4(al)
1,5 v
— 2 (a2v)
V
8
— 5(a2v)—4(1—v)
1,5 a2 v — 2(a2v) l,5v
(Продолжение таблицы на след, стр.)
8
150
РАЗДЕЛ 15. МЕТОД СЕТОК В ПРИЛОЖЕНИИ К РАСЧЕТУ ПЛАСТИН И ОБОЛОЧЕК
Узлы
W
(рис. 15.6, 15.7)
V
1
п
1 P
1 s
1
i
44
1,5 v
— 2 (a2v)
V
1,5 a2
— 5 (ct2v)—4(1—v)
6,5 a2 6a2 8
45
V
— 2 (a2-fv)
1,5v
a2
-4(a2l)
6,5 a26a8
46
1,5а2
4—0,5v
— 5 (a2v)—4(1—v)
1,5 v
2a2
— 6 (a2v)—8( 1— v)
6a26,5a8
47
1,5а2
1,5 v
— 5 (a2v)—4(1—v)
4—0,5v
— 2 (a2v)
6 a4-6,5 a8
48
а2
4—v
— 4(a2l)
V
2 a2
— 6(a2v)—8(1—v)
6 a26,5as8
49
а2
V
— 4(al)
(4—v)
— 2 (a2v)
6a26,5a8
50
а2
2v
— 2 (a2v)
V
a2
— 2 (a2v)
a2 a2
51
а2
V
— 2 (a2v)
2v
a a2
52
V
a2
— 2 (asv)
a2 a9
53
V
a2 a2
54
0,5 a
55
0,5 a2
56
V
0,5 a
57
V
0,5a2
58,
0,5 a
59
0,5 a2
60
V
0,5 a2
61
V
0,5 a2
62
V
— 2 (а2л)
V
7 a2 6a 8
63
V
— 2 (a2-f v)
V
a2
— 4 (a2l)
7a26a8
64
2а2
— 6(a2v)—8(1—v)
4—v
7 a26a8
, 65
2а2
4—v
— 6(a2v)—8(1—v)
a2
-4(a2l)
7 a26a28
I 66
— 2 (a2v) 6 a27a2-f-8
15.3. ИЗГИБ ПЛАСТИН
15i
Продолжение табл. 15.3
W
Правая часть Z
1 I I о 1 m I г U
-4(а21)
a2
4—0,5 v
— 6(a2v)—8(1—v)
4—v
2a2
8
— 5(a2v)—4(1—v)
1,5 a2
4—v
— 6(a2v)—8(1—v)
4—0,5 v
2a2
8
— 2 (a2v)
4—v
— 4(а21)
V
a2
8
— 6 (a2v)—8(1—v)
2 a2
V
— 4(а21)
4—v
a2
8
— 2 (a2v)
4—0,5 v
— 5 (a2v)—4(1—v)
1,5v
1,5a2
8
— 6(a2v)—8(1—v)
2 a2
1,5v
— 5 (a2v)—4(1—v)
4—0,5 v
1,5a2
6
V
— 2 (a2v)
a2
V
2v
— 2(a2v)
V
a2
— 2 (a2v)
a2
V
— 2 (a2v)
2v
a2
V
V
V
V
— 4 (a2l)
a2
— 6(a2v)—8(1—v)
4—v
2a2
8
4—v
— 6(a2v)—8(1—v)
2a2
8
4(52l)
a2
V
— 2 (a2v)
V
8
V
— 2 (a2 v)
V
8
— 6(a2v)—8(1—v)
2 a2
v —4(a2l) 4—v (Продолжение таблицы на след, стр.)
a2 e
152
РАЗДЕЛ 15. МЕТОД СЕТОК В ПРИЛОЖЕНИИ К РАСЧЕТУ ПЛАСТИН И ОБОЛОЧЕК
Узлы
W
(рис, 15.6, 15.7)
V
я
1
р 1
s 1
к
i
67
V
2 а2
— 6(a2v)—8(1—v)
6а27а28
68
а2
V
-4(аЧ-1)
4—v
— 2 (a2-f v)
6 а27а28
69
а2
4—v
-4 (21)
V
2 а2
— 6(cc2v)—8(1—v)
6 а27а28
70
а2
_6(2v)—8(1—v)
4—v
142112 16
71
а2
4—v
— 6 (a2v)—8(1—v)
2 а2
-8(аЧ-П
14 а211а2 16
72
2а2
-8(а21)
4
14 а211 а216
73
2а2
4
— 8(а2 1)
2 а2
-8 (21)
14 Сё2Ц 216
74
а2
— 6 (a2v)—8(1—v)
11 а2 14216
75
2 а2
— 8 (а21)
11 214а2 16
76
2а2
4—v
-8(а21)
4
а2
— 6 (a2v)—8(1—v)
11 2142 16
77
2а2
4
-8(а2 1)
4—v
2 а2
— 8 (а21)
11 а2142 16
78
2а2
-8 (21)
12 а214 а216
79
2а2
— 8(а2 1)
4
14 212 216
80
2а2
4
_8(а2 1)
2а2
-8(2D
14 а212 216
81
2а2
4
— 8(а2 1)
4
2а2
-8 (21)
12 а214 а216
82
14 (а2 а2) 16
83
2 а2
-8 (21)
14 (а2 а2) 16
84
2а2
— 8(а2 1)
4
14 (а2 а2) 16
85
2а2
4
— 8 (а2 1)
2 а2
— 8 (а21)
14 (а2 2) 16
15.3. ИЗГИБ ПЛАСТИН
153
Продолжение табл. 15.3
W
Правая часть
1
t
0
m
1 '
1 -
Z
— 2 (52v)
4—v
— 4 (21)
V
a2
8
— 6(52v)—8(1—v)
2 a
V
— 2 (52v)
V
8
— 8(al)
2 a2
— 8(2 1)
4
2a2
2e
4
— 8(2 1)
2a2
28
-8(52l)
2a2
— 6(2v) — 8 (1—V)
4—v
a2
28
4—v
— 6(2V) — 8(1 — V)
a2
28
-8(ol)
25
4—v
— 8(a2 1)
4
2a2
28
— 6(a2v)—8(1—v)
52
4
— 8(a2 1)
4—v
2a2
28
-8(52l)
2 a2
2e
— 6 (52v)—8(1—v)
a2
28
— 8 (21)
252
4
— 8(a2 1)
4
2a2
2e
-8(54-1)
2 a2
-8 (2 1)
4
2a2
28
4
-8 (2 1)
2a2
28
-8(52l)
252
2e
-8(52l)
252
-8 (a2l)
4
2a2
28
4
— 8 (2 1)
2a2
28
— 8 (a8l)
252
2e
28
РАЗДЕЛ 15. МЕТОД СЕТОК В ПРИЛОЖЕНИИ К РАСЧЕТУ ПЛАСТИН И ОБОЛОЧЕК
а.I
6)
г А
25
i. J
?9 1
Т22
30
33
г
9??
в)
И is
П -L-
4
—t
1, —.J,г5
t29 1
т
1—
1—
3 ,
У
1
JJ
31
?8
1
Г”—Г
—I
д)
I'7 а
.
I29
Т??.
1JJ
JJ,
Дн Л
ф
7
14
Sj
1. j
Л
JJ
Зй 1 з?
36
38 LU2
2Л
(
31
'mZjoZj
V
23 7
t
37
зз
?Ь
4.7
л
'зз
-Л
L -А
№
U7
зо )
w 1
1
22
Г 4
л
V
х
Р
Л,
36
1 ч -vjTcg
Фо
1
V
JP
А
is is
гг-1
(л)
L_4'
4-
5 TJJ
jД
Jff
29
Г
Гл
Л
f i
1 T
fjJ
US
so e 7
-тзг;
jT
кл
Va
.j
47 (
Д
J J
гг. 7
J v
-
p 129 '
r — 1
4
у
A
A
5П
Тя
J
4
г
F "7
ж.
36
д
J4
.50.
f
JO
№
lI I
js
4-4
jQa
. J 1 . 4
Л?
У
J
V
l 44 i 21
JJ
A
дТ7
f-l
Г
__. d
J0
jJ 145
35
' I,
J7 i
,331
Рис. 15.6. Типовые узлы изгибаемой пластины
15.3. ИЗГИБ ПЛАСТИН
й) 1 5
k ТТзт’ТI—I
ЩЕГГь J 1 57
7i
33
во ъ
43
' S
гЗЗ.
CJWt;
;
81
85
7777?
V7T,
р'
65
UjU.
74
к 1
ft
)
Г (
1 4
Р У
tJ0 (
JJ
Г 1 1
е)
74
V4
30
hj
,Д
76
,А
?5
Ijj.
Л
л1
77
777777:
7777
и1;
)
и)
СЙободпыа край пластины
Шарнирно опертый край пластины
''SsSSSSssSSs SSS
Шестно защемленный край пластины
Рис. 15.7. Типовые узлы изгибаемой пластины
РАЗДЕЛ 15. МЕТОД СЕТОК В ПРИЛОЖЕНИИ К РАСЧЕТУ ПЛАСТИН И ОБОЛОЧЕК
Аналогично, принимая на рис. 15Л,6 ось х за нижний край пластины, найдем:
D
АУ 2Х3 Wv Wu 2 (Wn Шш)
(2 — v) wq — Wq wp — wr — 2(wn — wm). (15.46)
Разностные уравнения изгиба пластин удобнее всего формировать вариационным методом.
В табл. 15.3 приведены эти уравнения для сеточных узлов одно- и многосвязных изгибаемых пластин, фрагменты которых изображены на рис. 15.6 и 15.7, где показаны условные обозначения граничных условий.
Табл. 15.3 содержит коэффициенты при искомых узловых перемещениях в разностных уравнениях, относящихся к типовым узлам, пронумерованным на рис. 15.6 и 15.7. В таблице приняты следующие обозначения:
решения составленной системы разностных уравнений найдены прогибы в узловых точках области. По ним вычислены внутренние усилия в узлах. Результаты представлены в виде формул:
ничЩИЧПнтнНИЯ1И1НШ1НШДГ qjp шгттп iitimfl
X — Ху
Ху Хх
12(1 — v2)’
6 D '
где h — толщина пластины; , v — модуль упругости, коэффициент Пуассона; q — интенсивность поперечной нагрузки; Z — правая часть разностного уравнения.
Составим разрешающее разностное уравнение для узла 7, лежащего на свободном контуре пластины вблизи угла, к которому подходит шарнирно опертая сторона (см. рис. 15.6). Совместив узел i сеточного шаблона рис. 15.1,6 с соответствующим узлом пластины и пользуясь табл. 15.3, можем записать из строки 17:
0,5 а2 щ 0,5 vwq — 3 (а2 v) 4 (1 — v)J wn
(4 — 1,5 v) wr — 2 (а2 v) -f (6a25,5 a2 -j- 8)wi —
— 6 (a2 v) 8 (1 — v) ш 2 a2 Wf vce;0 —
- 4 (a2l) wm (4-v) wpa wu .В качестве примера рассмотрим задачу изгиба пластины с тремя отверстиями, опертой продольными краями и неопертой вдоль коротких сторон, находящейся под действием нагрузки интенсивностью q (рис. 15.8).
На область пластины нанесена квадратная сетка с шагом а12. При решении задачи использована симметрия относительно осей хну.
С помощью табл. 15.3, сеточного шаблона из рис. 15.1,6 и обозначений типовых узлов на рис. 15.6 и 15,7 сформирована матрица уравнений. В результате
Рис. 15.8. Изгиб пластины с квадратными отверстиями: прогибы w w ——102 и изгибающие моменты
Мх Мх qX2W в характерных сечениях.
На рис. 15.8,6, в построены сплошной линией кривые прогибов w и изгибающих моментов Мх в пластине. Пунктирной кривой показаны результаты экспериментов, проведенных на железобетонной плите. Обнаруживается исключительная близость результатов.
15.4. УСТОЙЧИВОСТЬ И КОЛЕБАНИЯ ПЛАСТИН
157
15.4. УСТОЙЧИВОСТЬ И КОЛЕБАНИЯ ПЛАСТИН
15.4.1. Уравнения устойчивости пластин
Исходное дифференциальное уравнение для решения задач устойчивости пластин имеет вид:
dw dw
2 дх4 дх2ду2
дЧр
а2"
d2w
дхду
где
где
Фх
wu wv О,
6 8т 6т2 2 (т3 7) k; ф2 —4т — 4т2 — mfik;
Фз — 4 — 4т — yk;
ф4 — 2т — 0,5 Ут 8k;
ф5 2т 0,5 т 8k;
Фб т2;
(15.50)
k
D
(15.51)
k — параметр критического состояния.
Полагая А1, для квадратной сетки (т— 1) получим:
Ф1 — 20 -f- 2 (3-у) k; Ф2 — 3 — Qk;
Фз — 8 — yk; ф4 2 — 0,5б ;
p52 0,56 ; фб1. (15.52)
Обозначим
(СЛ.)Кр Дкр Скр ’ (15.53)
где Ъ — ширина пластины, Ь — tiX, СКр кр-
л2
Ход решения задачи. При действии на пластину в ее плоскости системы сил необходим© в общем случае ре-
dw 1 Ity4 “"Б" V
дЧ)
л'г) (1547
Nx — oxh; N у Oyh; Nxy xxyh. (15.48)
Введем обозначения:
ax pC; oy — yC; xxy — 8C. (15.49)
При распределенной нагрузке величина С равна интенсивности этой нагрузки: Ср. При сосредоточенной силе Р величина С Ря, где а — характерный размер пластины.
Уравнение (15.47) в конечных разностях для узла i прямоугольной сетки (рис. 15.1,6) имеет вид 6, 17, 38, 39:
Ф1Щ Ф2 (wK w) фз (wm wn)
94 (Wp Щ) Ф5 (Wq Wr) Фб (Ws wt)
Рис. 15.9. Расчетная схема к задаче о потере устойчввости квадратной пластины, сжатой в одном направлении
V щ
М._ _
0.5а
'мЛ
Р
УЛ,
S
Рцр
я в
38rjf
Рис. 15.10. Величины критических сосредоточенных сил для квадратных пластин с отверстием
158
РАЗДЕЛ 15. МЕТОД СЕТОК В ПРИЛОЖЕНИИ К РАСЧЕТУ ПЛАСТИН И ОБОЛОЧЕК
шить плоскую задачу и найти составляющие напряжений или усилий. Эти значения надо подставить в (15.47), после чего можно перейти к разысканию параметра критической нагрузки.
В некоторых случаях первый этап может отпасть. Так, например, для пластины, равномерно сжатой с двух сторон, имеем однородное напряженное состояние, и значения составляющих напряжений в любой точке могут быть записаны сразу:
Оу р ох тХу 0.
При сжатии пластины сосредоточенными силами необходимо решить плоскую задачу и найти составляющие напряжений в выбранных узлах сетки. После этого вычисляются коэффициенты (15.51) и для каждого узля составляются уравнения (15.50) с учетом граничных условий изгиба. Определитель полученной системы уравнений дает возможность найти критическую нагрузку.
D
Коэффициент k в формуле Кр k д для критических нагрузок
Пример 15.1. Рассмотрим свободно опертую квадратную пластину (рис. 15.9), равномерно сжатую в одном направлении. В этом случае (см. 15.3.3): а6; у —1; Р60. Принимаем шаг сетки Я64.
Запишем граничные условия. Для узла : wi0;
wa — w2; для узла : адп0; —w1 и т. д.
Коэффициенты уравнений из (15.52) равны:
ф 20 — 2k; фа — — 3; ф3 8 k;
Ф4 2; Фб 2; ф 1.
Составим уравнение для узла :
(20 — 2k) w1 — 3 (tt'3 юп) (— 8 k) (ю2 wt)
2 (W4 WI ) 2(W4Wl ) Wl — W1 0.
Аналогично составляются другие уравнения.
Таблица 15.4
прямоугольных пластин при различных условиях на контуре
Схема контурных закреплений
Схема нагружения
аг
аи
аи
.п.
си
Густота сетки
4X4 6x6 8x8 I 4X4 8x8 4X4 8x8 4x4 8x8 51,2
59,18
53,6
70,5
54,3
73,5
79,8
32,9
35,2
36,03
66,6
86,4
92,97
'МYML
ь:
'777777
35,4
43,2
45,05
46,6
51,7
75,6
8,7
11,3
12,2
66,8
86,4
92,96
32,0
46,2
46,3
46,7
47,1
56,4
59,5
22,9
24,6
25,2
62,2
77,'
82,8
21,0
26,0
26,26
26,6
26,7
36,0
39,1
12,2
15,2
16,2
54,9
75
81,7
12,2
15,12
16,2
16,7
26,4
30,0
31,2
6,65
9,1
9,9
54,9
75
81,7
По экстраполяции порядка Я2.
15.4. УСТОЙЧИВОСТЬ И КОЛЕБАНИЯ ПЛАСТИН
159
Решение задач устойчивости пластин при действии сосредоточенных сил, наличии отверстий и других сосредоточенных источников возмущения силового поля принципиально не отличается от рассмотренного примера, но требует более густой сетки. Поскольку заранее определить необходимую густоту сетки очень сложно, а иногда и невозможно, оказывается полезным следующий способ уточнения приближенного значения параметра критической нагрузки k: если известны его два значения ki и kj, вычисленные при сетках разной густоты соответственно
при X X., X — Хг и при X Х„. с. К, X г у УI X Х1 '
cji Xxi (Cji ). ТО
можно определить по формуле
у yj уточненное
значение
' 2ji bj
(15.54)
Приложение метода сеток к задачам устойчивости пластин позволяет составлять программы счета на ЭВМ, применимые при расчете пластин самой различной конфигурации под любой нагрузкой и при смешанных граничных условиях. Примеры результатов таких расчетов приведены на рис. 15.10 (критические силы для пластин с отверстиями) и в табл. 15.4 (значения пара-
D
метра k из формулы Якр —, позволяющие опреде-
а
лить критические силы для квадратной пластины при различных условиях опирания и комбинациях нагрузок).
15.4.2. Собственные колебания пластин
Эта задача связана с нахождением собственных значений следующего дифференциального уравнения 8, ГЗ, 27, 37, 38, 41:
dw
— р2Ш0. (15.55)
д4до dw
2 ,д4 дхду ду4
Круговая частота определяется по формуле
(15.56)
где
Л?о
— плотность на единицу поверхности; т —
номер частоты.
Для узла i прямоугольной сетки (см. рис. 15.1,6) уравнение (15.55) примет вид:
4-)-4 e 1) )
6(а ) (шт wn) 2 (w„ wp wq wr
(®S Щ) — (
a
где частотный параметр
и Щ) — тт о,
Vm
Хх Ху
(15.57)
Для квадратной сетки а1 н (15.57) упрощается:
20Wi — 8 (щ W шт wn)
2(WbWpWg wr) Ws wi wu
wv — xm Wi 0. (15.58)
Для узла i сетки (рис. 15.11, a), состоящей из разносторонних треугольников, уравнение (15.55) примет вид:
2 2 (и 1)2 Л2 Я ф) Wi — 2 2a (и 1) —
— АВ (ш0 wr) — 2 24 (и 1) — Ви (wp ws) —
— 2 12В (и 1) — Ли (wq Wt) и2 (wm wt)
2Ли (wn Wf) 2Ви (wd Wk) -42 (wa wq)
В2 (wc wj) 2ЛВ (wb ь) — Wi 0. (,15.59)
Параметр pw определяется по формуле
V4.
p.,
(15.60)
В ряде случаев удобно для решения задач применить параллелограммную сетку (рис. 15.11,6).
Для узла i (рис. 15.11,6) такой сетки уравнение
(15.55) примет вид:
4(1 г2)2 2 2г4 г2 cos ф wi —
- 42 (1 г2) (wm wn)-4 (1 г2) (wk wt) -
— 2Г (Г2 COS ф COS Ф — г) (Wq wr)
2г (г2 cos Ф cos Ф г) (ад0 Щ)
(1 — 0,5r2 cos ф) (ws w — г3 cos ф (wa wb)
г2 (г2 — 0,5 cos2 ф) (wu wv) г3 cos ф (wc wa) —
)
-It—
Рис. 15.11. Различные системы сеток
160
РАЗДЕЛ 15. МЕТОД СЕТОК В ПРИЛОЖЕНИИ К РАСЧЕТУ ПЛАСТИН И ОБОЛОЧЕК
Безразмерные параметры а2 Застот свободных колебаний прямоугольных пластин
Таблица 15.5
Схема пластины
а2 Э.
Зз
Я’З
a23.
- Рп
1
а
21,49
22,13
49,36
49,66
53,17
54,55
81,09
81,72
96,18
96,66
t
fci
14
П
О
Q
24,38
27,06
52,70
58,50
59,44
60,10
85,79
92,03
101,9
104,8
аг
28,82
53,13
86,07
106,6
138,7
с а3 а2
32,60
34,25
62,78
65,53
83,85
94,25
102,3
109,9
132,9
140,3
аг
7,145
14,31
24,94
27,26
6,561
14,47
26,96
32,47
51,64
7,137
15,80
19,20
38,53
43,67
П
10,45
20,44
23,71
47,72
50,16
17,45
19,17
24,45
31,30
36,19
51,66
50,73
52,24
53,58
64,04
(Г
iwww
jss-чч
-4 Ьа-г
Л baf,5
18,95
19,73
24,35
31,64
36,79
52,47
51,95
52,60
55,74
65,42
15.4. УСТОЙЧИВОСТЬ И КОЛЕБАНИЯ ПЛАСТИН
161
Продолжение табл. 15.5
Схема пластины
e2p, ар,
ч
Ыг
♦ л
М? в2 ba-t,5
15,42
18,36
25,83
34,48
36,60
48,43
43,76
55,26
55,05
66,82
И
Я
ySSSSssssAs
'Ла г j 2 -1. J
17,38
20,10
24,51 34.2i
36,35
51,60
50,97
56,70
52,29
64.83
Безразмерные параметры а2
частот свободных
колебаний
треугольных пластин
Таблица 15.6
Схема пластины
а, град
1
0‘Р. 1
Я23з О204
оаЭ.
45
60
49,34
52,63
98,36
122,7
128.0
209,8
159.9
226.9
189,6
329,0
45
60
60,09
66,06
112,3
141,6
142.5
142.6
172,4
232,9
205.1
250.2
'7777777ТТТ77
45
60
65,49
66,06
118,7
141,6
152,1
142,6
178,3
232,9
216, b 250,2
45
72,05
81,15
125,9
162,0
157.6
162.7
184.3
256.3
219,5
273,2
45
60
77,53
81,15
132,9
162,0
166.7
162.7
190,1
256,3
231,1 273, i
45
60
90,68
98,17
146,7
185,4
184,4
285,0
200,0
302,7
244,8
412,2
45
9,787
45
29,40
(77родолжение таблицы на след, стр.)
162
РАЗДЕЛ 15. МЕТОД СЕТОК В ПРИЛОЖЕНИИ К РАСЧЕТУ ПЛАСТИН И ОБОЛОЧЕК
Продолжение табл. 15.6
Схема пластины
а, град
ягЭ,
а3.
fl2 3,
уАГ
1
St
45
6,308
k
60
6,599
—
—
—
777J77777
А
т
з
45
6,164
23,59
i
60
6,618
28,07
Таблица 15.7
Безразмерные параметры а Зт частот свободных колебаний трапецеидальных пластин
15.4. УСТОЙЧИВОСТЬ И КОЛЕБАНИЯ ПЛАСТИН
163
Таблица 15.8 Безразмерные параметры а2 Рт частот свободных колебаний ромбических пластин
Таблица 15.9
Безразмерные параметры а2 (Зт частот свободных колебаний параллелограммных пластин
— Г COS ф (Wi Wf) Г COS ф (Wg Wh)
0,25r2 cos2 ф (ша Wp Wj Wfr ) —
где
Частотный параметр:
В I7™
Я sin2 ф
Схема пластины
а,
град
ааЭ2
Д2Э4
60
45
30
24.96
35,13
64,90
60
45
30
18,17
25,90
48,44
52,99
68,17
115,0
72,11
107,6
181,0
85,42
109,2
217,0
32,71
43,47
75,23
55,05
70,10
117,1
58,22
86,59
169,8
60
45
30
15,85
23,0
44,48
24,04
32,84
58,50
37,74
49,97
86,63
57,43
80,25
148,4
Приближенное собственное значение рт может быть уточнено, если известны его два значения: т., определенное при сетке с шагами Я, Я, и т.9 определен¬
ное при сетке с шагами Я k. Я и Яг X
Г 11 1 Л JI М(
(я1). Уточненное значение определяется формулой Р2
о2
Vtnji
(15.63)
(15.61)
(15.62)
Пример 15.2. Квадратная пластина (см. рис. 15.11, в) свободно оперта по контуру. Принято Хх — Ху — а1п.
При п — 3, записав для каждого узла уравнения (15.49) с учетом граничных условий (они выписаны на рисунке), получим систему уравнений, определитель которой равен:
0.
Найденные собственные значения: Ki 4; Х2 з 16; Х4 36.
Используя формулу (15.57), вычисляем: a2Pi 18; a2p2 a2p3 36; a2p4 54.
При п — 4 частотные параметры, соответствующие тем же формам колебаний, имеют значения: a2j3i 18,744; a2р2а2Рз41,372; а2р464.
18 — х;
— 8;
— 8;
2
— 8;
18 —х;
2;
— 8
— 8;
2;
18 — х;
— 8
2;
— 8;
— 8;
18 — х
11
164
РАЗДЕЛ 15. МЕТОД СЕТОК В ПРИЛОЖЕНИИ К РАСЧЕТУ ПЛАСТИН И ОБОЛОЧЕК
Уточняя по (15.63), получим
аг 19,66.
Аналогично: а2р2 а2рз 47,39; а2 — 74,92.
В табл. 15.5—15.9 приведены безразмерные значения а2рт для пластин: прямоугольных, треугольных, трапецеидальных, ромбических и параллелограммных при смешанных граничных условиях.
15.5. ОБОЛОЧКИ
15.5.1.Основные уравнения и гранитные условия для пологих оболочек
Дифференциальные уравнения для пологих оболочек с учетом геометрической нелинейности записываются следующим образом:
о д‘-Ф д2ю д2Ф d2w
Dv2sj2w — у, Ф — 2 —
v v Vk ду2 дх2 дхду дхду
д2ф d2w Ix2 ' 'ду2
— рг 0;
(15.64)
1 о 9 о d2w d2w d2w2
— V У Ф — т— — 7“7 . VT k -Г а 2 д 2 дхду)
Eh
д2
д2г дх2 '
дхду д2г
д2 а2 ; а2г кхи — тт : Т7' (15 65)
а3 dz2
При небольших прогибах оболочек можно исходить из линейных дифференциальных уравнений:
v V® — v ф — рг ;
1 9 9.
— VV Ф Да 0.
(15.66)
(15.67)
Рассмотрим пологую оболочку положительной гауссовой кривизны с прямоугольным планом. В конечных разностях для узла i (см. рис. 15.1,6) прямоугольной сетки уравнение (15.64) может быть записано 4, 5, 13, 15, 22, 36, 42—44:
2 tlx ky ) ф,- — kx (ФшФл) —
а — —, —, V а
— ку (Ф Ф)
Р2
2,8
кХу (Фо фр — Ф? — Фг)
а2ф
((6а2 8а 6) wi — 4 (1 а) (w,n аwk
Аналогично уравнение (15.65) примет вид:
(6а2 8а 6) ф,- — 4 (1 а) (фт atp ф„ аср;) -f 2а (фо фр ф? фг) фн а2 ф, Фг, а ф, —
а _
—2 kx — — k.
щ kx (wm wn)
VZr
Wrf—
-bu(wk wi)-
wp — wq — ay) Rn2 0,0625 (w0 wp — wq — (wk — 2wt wt) (wm — 2щ „). (15.69)
Линейные уравнения (15.66) и (15.67) в конечных разностях имеют такую же форму, как (15.68) и (15.69), только правую часть нужно положить равной нулю. В этих уравнениях введены безразмерные функции напряжений ф и функция прогибов w, которые определя¬
ются соотношениями: Ф
сгф
ИГ
Q4 Рг 10 ф
Здесь:
о4 Рг -
W- W.
104 D
( К Y а а хх)' п хх ;
(15.70)
(15.71)
а — меньшая сторона плана оболочки, параллельная оси х; Р Ьa — соотношение сторон оболочки; 12(1 — —v2)2— коэффициент вспарушенности оболочки; л fh — вспарушенность оболочки; f — стрела подъема оболочки в центре; ?12(1—v2) 10“4S — коэффициент
а2
kx — у. kx
EX h k
гибкость оболочки;
ху -
ah __ _
7
kxу ky Ъ2
f
ky
безразмерные параметры кривизны оболочки.
Приводим выражения относительных деформаций через функцию напряжений:
e _L(iL _vL _).
Eh V ду
дх2
ду2)'
Уху 2(1 у) д2ф
Eh дхду
Нормальные и сдвигающие силы равны: д2 ф ат д2 ср ; д2 ф
ду2
Nxy -
дхду
дх2
(15.72)
(15.73)
(15.74)
(15.75)
wn a xsi) 2a (ш„ wp wq wt)
_-104
wu wv -j- a2ws a2tt)( — if
R.n2 (Фт — 2ф,- Ф„) (Wk — 2щ щ) —
— 0,125 (Ф0 фр — ф, — фг) (ш0 Wp — wq — wr) (ф — 2ф,- фЛ (wm — 2щ wn) J. (15.68)
Они могут быть представлены в виде безразмерных величин:
Nx-
аРг -
10 2h
N ху Nu
10 аЛ у
NU.
10а h
(15.76)
(15.77)
(15.78)
15.5. ОБОЛОЧКИ
165
Запишем выражения Nx, Nxy и Ny в конечных разностях для узла i (сеточная схема на рис. 15.1,6):
Ых — О,12. (1 — V) (фт — 2рI р„); (15.79)
Ny— 0,12Х (I — )(ф-2фх ф); (15.80)
Nxy О.ОЗХ Vа (1 — v2) (фо фр — — фг). (15.81)
Мембранные напряжения по толщине оболочки рас¬
пределяются равномерно:
Nx
h
Л'
у h
Моментные усилия равны:
д2
Мх-D
дг w
My-D
д2 w d2w
——— —1—v дх2 ду2
о- w
Мху — 0(1 —V)
дх2 д2 w дхду
(15.82)
(15.83)
(15.84)
(15.85)
Они могут быть также представлены в виде безразмерных параметров:
Мх
Ми -
аг Рг -Т
мх
102
МУ 10- у
Мху М
102
ху-
(15.86)
(15.87)
(15.88)
Запишем их в копечно-разностной форме для узла i:
м — I® 2w‘ wi)
НИ ОС
v(wm — 2wiwn); (15.89)
(wm — 2ai wi) (15.90)
ioT
n2(l —v) -
Mxv — Wp 4-102 V ol
w.
— wr). (15.91)
Изгибные напряжения определяются по формулам: Мх. М
; j -v j
о::-г. (15.92)
Рассмотрим некоторые характерные случаи граничных условий.
а) Шарнирно подвижное опирание соответствует закреплению краев оболочки в тонкие диафрагмы, жесткие в своей плоскости и гибкие из плоскости. Кинематические краевые условия в этом случае запишутся: b
для кромок у ± — :w 0; и 0; (v Ф 0); а
для кромок х — :w — 0; v — 0; (иф0).
Статические краевые условия:
при у —± Му 0; Ny 0; (Nxy ф 0);
при х±— Мх — 0; Nx 0; (Nxy 0).
Из статических и кинематических краевых условий b
следует, что при у Ь :
w 0;
d2w
ду2
0; ф 0;
ду
0; (15.93)
при х —
д2 w
w — 0; — — 0; ф дх2 д2 ф ; -гГ о.
дх1
(15.94)
б) Шарнирно неподвижное закрепление оболочки на жестком контуре характеризуется наличием распора, а перемещение точек контура отсутствует. Имеем:
Ь
при у ±— и v — w Оу
при х — ±
и v — w 0.
Запишем статические условия:
Ь
при у — Му 0; (Ny ф 0);
при х—± — Мх 0; (Nx ф 0).
Из этого для кромки, параллельной оси х, вытекают следующие условия:
д2 w д2 ф д2 ф
w — 0; — 0; —v 0;
ду2 ду2 дх2
1 Г а3 ф д3 ф I, dw
Eh ду3 (2V) дх2 ду х ду
Аналогично для кромки, параллельной оси у:
(15.95)
д2 ф
дх2
d2w
w 0; 0;
дх2
д2 ф “V -гг 0;
1 Г д3д Eh дх3
(2 4- v)
ду2 д3 ф дхду2
НА
dw
дх
0.
(15.96)
в) Жесткое защемление характеризуется наличием распора на контуре оболочки и отсутствием поворотов опорных сечений.
b dw
При „±— u i w 0; т- 0;
при х а
и — v w — 0;
ду
dw
dx
Из этих четырех кинематических условий вытекает, что для кромки, параллельной оси х:
dw л d2 ф d2 ф
W ’ ду ’ ду2 V дх2 — ’
(2v)Jlf-0 (15.97)
ду3
дх2 dy
166
РАЗДЕЛ 15. МЕТОД СЕТОК В ПРИЛОЖЕНИИ К РАСЧЕТУ ПЛАСТИН И ОБОЛОЧЕК
и для кромки, параллельной оси у:
dw д2 ф
0; —
дх дх2
w — 0;
д2 ф -v —- 0;
о3 ф дх3
(2 v)
д3 ф
: 0.
(15.98)
дхду2
Для каждого внутреннего узла составляется по два основных уравнения (15.68) и (15.69); таким образом, общее количество неизвестных равно удвоенному количеству узлов, если не учитывать симметрию системы или нагрузки.
При написании основных уравнений (15.68) и (15.69) для предконтурных или контурных узлов в эти уравнения в качестве неизвестных войдут значения w и ф в первых или вторых законтурных узлах.
Приведенные выше граничные условия и представляют собой те дополнительные уравнения, которые могут быть включены в основную систему для нахождения всех неизвестных, включая и законтурные. С другой стороны, можно на основании граничных условий записать выражения для внеконтурных неизвестных w и ф, выразив их через внеконтурные или контурные неизвестные. Напишем выражение для внеконтурных значений функции на основании приведенных граничных условий.
При шарнирно подвижном опирании кромки на основании (15.93) найдем: если на рис. 15.1,6 ось х совпадает с верхней кромкой плана оболочки, то
Ф—Фт; (15.99)
wn —wm, (15.100)
если на рис. 15.1,6 ось у совпадает с правой кромкой плана оболочки, то:
Ф — Фт; Wi — Wfr.
При шарнирно неподвижном закреплении кромки: если на рис. 15.1,6 ось х совпадает с верхней кромкой плана оболочки, то:
— (15.103)
Ф„ 2 (1 — voc) ф av (фЛ ф) — фт; (15.104) ф0 2 2 (1 -f- 2а) — За2 v (2 v) ф —
— 4а 1 — av (2 v) (p ф,) — 4 1 а (2 v) х
X фт 2а (2 v) (ф0 фг) — a2v (2 v) X
X (ps ф) фи —Ьх (wn — й?от); (15.105)
если на рис. 15.1,6 ось у совпадает с правой кромкой плана оболочки, то:
W, — wk
ф I ф t
X
I V _ V-_ —
— 2(1 — — I ф — (фш -f фп)-ф;
Г 2 3v 4
2K,)'(2 v)q,'“ir
— (2 v) ф (2 V) (фо Ф?)
(15.106)
(15.107)
X(wt — wk). (15.108)
При жестком закреплении оболочки:
если на рис. 15.1,6 ось х совпадает с кромкой, то
wn wm (15.109)
если на рис. 15.1,6 ось у совпадает с кромкой, то
wt Wfo. (15.110)
Функции напряжений в первых внеконтурных точках сравним (15.95) и (15.97) определяются, как и при шарнирно неподвижном закреплении, по формулам (15.104) и (15.107), а во вторых внеконтурных точках — по формулам (15.105) и (15.108).
Выпишем для иллюстрации уравнения совместности деформаций (15.65) для предконтурных и контурных точек без включения внеконтурных, которые исключаются на основании (15.104), (15.107), (15.105), (15.108).
Если ось х на рис. 15.1,6 совпадает с верхней кромкой плана оболочки, уравнение (15.65) для узла i может быть представлено в виде:
2 1-a (3a -f- 4)-av (1 — 3av) ф — — 4а 1(1 а) -j- v (1 — av) (ф ф) —
— 4 1 а (2 v)J фш 2а (2 v)(p0 фг)
-f- а2 (1 — v2) (ф5 ф) -J- 2 фп -f- 2kx wm —
Vа
kxy (w0 -Wp—W0— Wr) —
(15.101)
(15.102)
Rn2 (0,0625 (ш0 wD — wa — wr)2. (15.111)
Для узла t, смежного с угловым на рис. 15.1,6, граница плана оболочки проходит по узлам s, k, i. I, г, уравнение может быть записано так:
i2 a (5а 8) av (8 — 5а) ф —
— 2а(1 v)2 a(l — v)J ф — 4 1 а (2-v)m —
- 4а (1 v) 1 а) (1-v) ф
- 2а (2 v) (ф0 qv) -f- 2ф„ а2 (1 — v2) ps
kx Wm —
V
2f)
kXy (W9 — Wq)
Rn2 10,0625 (w0 — wQ)z.
(15.112)
Аналогично (15.111) и (15.112) могут быть записаны уравнения для узла t, если кромка оболочки на рис. 15.1,6 изображается отрезком оси у.
Пример 15.3. Рассмотрим оболочку типа эллиптического параболоида с квадратным планом (а — Ь) и с шарнирно неподвижным опиранием. Нагрузка — равномерно распределенная. Уравнение срединной поверхности оболочки
—Ф-
(X2 у2)
„1-
(15.113)
_ Безра мерные_ параметры кривизны приняты равными: kx — 4; ky — 4; 0.
Вспарушенность X—10. Коэффициент Пуассона v 0,17.
15.5. ОБОЛОЧКИ
167
Выбираем квадратную сетку (а1) с шагом (рис. 15.12)
— 0 Решим задачу в линейной постановке, приняв — 0. Ввиду симметрии оболочки и нагрузки уравнения мож-
У
к-
I
Е
Ш W
1
2
3
4
5
6
и
II
о
и
1
-
t
Ц о — —
Рис. 15.12. Сеточная область на оболочке типа эллиптического параболоида
но составить для 7в части. Запишем для узла уравнение (15.69):
20 pi — 8 (2 Ф2 Ф4 Ф1) 2 (2 ф5 2 фи)
2 Ф3 Ф6 Фи — 2 (44) а 4 (шх wv)
4 (ш2 щ) 0.
Используя (15.103) и (15.104) для исключения ф и wI, получим окончательно такое уравнение:
19 ф — 16 ф2 2 ф3 — 8 ф4 4 ф5 фв —
— 6,34 pj 4,34 фп— 16 Sw2 4ш3 0-
Аналогично записывают остальные уравнения. В результате решения системы уравнений найдены величины прогибов и функции напряжений в узлах сетки.
По этим значениям вычисляют мембранные и изгибные усилия, пользуясь формулами (15.79) — (15.81) и (15.89) — (15.91).
Например, для узла 6 (см. рис. 15.12)
NXt —0,12-10(1— 0,172)(2ф4 —2р6) 1,277 и т. д.
В табл. 15.10 приведены значения безразмерных коэффициентов прогибов, усилий и моментов в центре равномерно нагруженной оболочки при шарнирно подвижном и шарнирно неподвижном закреплениях по контуру для различных соотношений сторон в диапазоне вспарушенности оболочки от 1 до 25.
Таблица 15.10 Безразмерные коэффициенты прогибов и усилий в центре оболочки типа эллиптического параболоида
Вспарушенность оболочки
Приведенные перемещения и усилия
Шарнирно подвижное опирание
Шарнирно неподвижное закрепление
соотношение сторон оболочки
1
1,5
2 1
1
1,5
2
W
26,623
55,600
84,329
20,461
37,190
45,895
6,210
4,663
2,522
7,706
12,111
14,176
Ny
6,210
11,194
12,774
7,706
7,282
6,779
мх
2,668
5,241
7,844
2,045
3,509
4,253
му
2,668
2,756
2,754
2,045
1,735
1,285
W
12,867
29,576
54,262
7,982
13,970
16,477
",
5,998
4,788
3,133
6,118
9,105
10,138
Nv
5,998
12,007
16,470
6,118
5,525
5,057
мх
1,144
2,640
4,934
0,704
1,257
1,492
МУ
1,144
1,331
1,718
0,704
0,502
0,327
W
6,690
16,344
33,861
3,792
6,501
7,766
"х
4,678
3,831
2,870
4,470
6,434
6,171
3
Ny
4,678
10,034
15,447
4,470
4,321
3,673
мх
0,488
1,337
2,968
0,272
0,519
0,685
Му
0,488
0,655
1,044
0,272
0,144
0,119
W
3,881
9,887
22,063
2,103
3,709
4,420
х
3,618
3,026
2,480
3,398
4,912
5,467
4
"у
3,618
8,142
13,447
3,398
3,285
2,832
мх
0,214
0,718
1,838
0,112
0,286
0,379
МУ
0,214
0,356
0,664
0,112
0,069
0,061
W
2,462
6,474
15,149
1,306
2,340
2,830
Wx
2,869
2,459
2,138
2,696
3,926
4,407
5
Ny
2,869
6,890
11,567
2,696
2,560
2,286
мх
0,094
0,404
1,181
0,047
0,164
0,234
Му
0,094
0,212
0,445
0,047
0,033
0,038
W
1,674
4,506
10,888
0,868
1,596
1,959
"х
2,342
2,058
1,863
2,217
3,265
3,689
6
Nу
2,342
5,602
10,001
2,217
2,162
1,912
мх
0,040
0,234
0,782
0,019
0,100
0,155
Му
0,040
0,136
0,310
0,019
0,018
0,026
8
W
0,904
2,493
6,248
0,459
0,869
1,085
”х
1,685
1,546
1,466
1,629
2,444
2,783
Продолжение таблицы на след, стр.)
168
РАЗДЕЛ 15. МЕТОД СЕТОК В ПРИЛОЖЕНИИ К РАСЧЕТУ ПЛАСТИН И ОБОЛОЧЕК
Продолжение табл. 15.10
Вспарушенность оболочки
Приведенные перемещения и усилия
Шарнирно подвижное опирание
Шарнирно неподвижное закрепление
соотношение сторон оболочки
1
1 1.Б
1 2
1
1,5
2
ЫУ
1,685
4,142
7,698
1,629
1,605
1,427
8
мх
0,082
0,078
0,359
0,001
0,043
0,078
Му
0,032
0,066
0,165
0,001
0,007
0,014
W
0,562
1,558
4,067
0,280
0,542
0,682
"х
1,310
1,237
1,290
1,277
1,954
2,334
10
"у
1,310
3,240
6,349
1,277
1,246
1,130
Мх
—0,004
0,020
0,165
—0,003
0,020
0,043
Му
-0,004
0,036
0,096
—0,003
0,003
0,008
W
0,242
0,660
1,676
0,120
0,231
0,289
"х
0,846
0,824
0,817
0,839
1,304
1,495
15
у
0,846
2,060
3,958
0,839
0,808
0,731
—0,003
—0,013
0,004
—0,001
0,004
0,012
Му
—0,003
0,012
0,030
—0,001
0,001
0,003
W
0,135
0,361
0,927
0,067
0,127
0,157
0,628
0,618
0,615
0,627
0,978
1,123
20
"у
0,628
1,502
2,860
0,627
0,566
0,535
йх
—0,001
—0,004
—0,028
—0,001
0,001
0,004
Му
—0,001
0,006
0,011
—0,001
0,000
0,001
Продолжение табл. 15.10
Вспарушенность оболочки
Приведенные перемещения и усилия
Шарнирно подвижное опирание
Шарнирно неподвижное закрепление
соотношение сторон оболочки
1
1 1.S
1 2
1
1
1 2
W
0,086
0,227
0,552
0,042
0,080
0,098
х
0,501
0,494
0,492
0,501
0,783
0,899
25
Ny
0,501
1,182
2,224
0,501
0,456
0,420
Мх
—0,001
—0,011
—0,031
0,000
0,000
0,001
Му
—0,001
0,003
0,005
0,000
0,000
0,001
Примечание. При расчете прямоугольной оболочки при 3 1,5 меньшая сторона делилась на четыре части, а большая — на шесть частей.
В оболочке с соотношением сторон 3 2 меньшая сторона делилась на четыре части, а большая — на восемь частей.
В заключение изложим ход решения геометрически нелинейных задач деформации оболочек. В этом случае правые части уравнений 15.68), (15.69), (15.111) и
(15.112) нелинейны.
Записав уравнения для всех внутренних узлов сетки, а также для контурных узлов, получим систему нелинейных алгебраических уравнений, которую можно решить методом последовательных приближений, учитывая гибкость оболочки. В качестве первого приближения принимается решение линейной задачи. По значениям функций ф и ш первого приближения вычисляются нелинейные правые части уравнений. Решив полученную линейную систему, найдем значения_ функций р и w второго приближения. По значениям р и w второго приближения вычисляются новые правые части, а после решения системы уравнений получаем третье приближение.
Процесс повторяется до тех пор, пока значения п-го и (п-И)-го приближений не будут практически совпадать.
Процесс последовательных приближений может быть реализован на электронно-вычислительной машине.
ЛИТЕРАТУРА
1. АбовскиЛ Н. П. Самольянов И. И., П а с ьк о Д. А. Расчет пологих оболочек в матричной форме методом сеток. Красноярск, 1965.
2. Абовский Н. П., Енджиевский Л. В. Дискретные методы расчета пластинчатых систем. Красноярск, 1965.
3. Б е з у х о в Н. И. Основы теории упругости, пластичности и ползучести. Высшая школа, 1968.
4. Березовский Л. Ф. О граничных условиях при расчете пологих оболочек методом конечных разностей. В сб. научных работ института строительства и архитектуры АН БССР, вып. 3. Минск, 1960.
5. Березовский Л. Ф. К вопросу о расчете тонкостенных пологих оболочек. Инж.-физ. журн., т. III, № 5, 1960.
6. Боженов А. Ш. Устойчивость квадратной пластинки переменной толщины, сжатой в двух направлениях. Прикладная механика, т. X, вып. 6. Изд. АН УССР, 1964.
7. Б о ж е н о в А. Ш. Устойчивость прямоугольных пластинок за пределами упругости. В сб.: Сопротивление материалов и теория сооружений, вып. 1. Буд1вельник, 1965.
8. В а з о в В., Форсайт Д ж. Разностные методы решения дифференциальных уравнений в частных производных. ИЛ,
1963.
9. Вайнберг Д. В., Вайнберг Е. Д. Пластины, диски, балки-стенки. Госстройиздат УССР, 1959.
10. В а й н б е р г Д. В., Синявский А. Л., Д е х т я-
р ю к Е. С. Итерационные алгоритмы и численные задачи теории пластин и оболочек. Труды IV Всесоюзной конференции по теории оболочек и пластин. Ереван, Изд. АН АрмССР, 1964.
11. В а й н б е р г Д. В., Геращенко В. М., Ройт-
ф а р б И. 3., Синявский А. Л. Вывод сеточных уравнений изгиба пластин вариационным методом. В сб.: Сопротивление материалов и теория сооружений, выи. I. Буд1вельник, 1965.
12. В а й и б е р г Д. В., В о р о ш к о П. П., Р о й т-
ф а р б И. 3., Синявский А. Л. Разностные уравнения контактной задачи изгиба пластин. В сб.: Сопротивление материалов и теория сооружений, сып. II. Буд1вельник, 1965.
13. В а й н б е р г Д. В. Синявский А. Л. Дискретный анализ в теории пластин и оболочек. Материалы VI Всесоюз¬
ЛИТЕРАТУРА
169
ной конференции по теории оболочек и пластил. Наука, 1966.
14. Вайнберг Д. В., Гуляев В. И. Конформное отображение и разностный метод в задачах о концентрации напряжений. В сб.: Концентрация напряжений, вып. II. Наукова думка, 1967.
15. В а й н б е р г Д. В., Гуляев В. И., Дехтярюк Е. С. Краевые задачи пологих двояковыпуклых оболочек, взаимодействующих с опорными конструкциями. В сб.: Расчет пространственных конструкций, вып. XII. Стройиздат, 1966.
16. В а р в а к П. М. Развитие и приложение метода сеток к расчету пластинок, ч. I. Изд. АН УССР, 1949.
17. В а р в а к П. М. Устойчивость пластинок под действием сосредоточенных сил. Доклады АН УССР, N 6, 1950.
18. В а р в а к П. М. Развитие и приложение метода ссток к расчету пластинок, ч. II. Изд. АН УССР, 1952.
19. В а р в а к П. М., Г у б е р м а н И.О. Изгиб квадратной пластинки с различными условиями на краях. В сб.: Информ. материалы института строит, мех. АН УССР, 1957, № 10.
20. В а р в а к П. М., Губерман И. О., Мирошниченко М. М., Предтече некий Н. Д. Таблицы для расчета прямоугольных плит. Изд. АН УССР, 1959.
21. В а рва к А. П. Прямоугольные плиты на упругом основании переменной жесткости. ДАН УССР, № 10, 1963.
22. В а р в а к П. М., Рассказов А. О. Покрытие из оболочек в форме гиперболического параболоида. В сб.: Пространственные конструкции в Красноярском крае, вып. III. Изд. Красноярского политехи, ин-та, 1968.
23. В а с и л ь е в В. В. Осесимметричное упруго-пластическое состояние оболочек вращения. Прикл. мех., т. VII, вып. 3,
1961.
24. В а с и л ь е в В. В. К решению задачи о концентрации напряжений возле кругового отверстия в сферической оболочке в упруго-пластической стадии. Труды IV Всесоюзной конференции по теории оболочек и пластин. Изд. АН Арм.ССР, Ереван, 1964.
25. В о р о ш к о П. П., Сахаров А. С. Побудова р1зницевих р1внянь теорН пружносп та ix одержания на ЕОМ. В сб.: Onip матер1ал1в i теор1я споруд, вып. IV. Буд1вельник, 1966.
26. Геращенко В. М., Любченко С. Н. Складання р1зницевих р1внянь плоско теорп пружносп за допомогою ваpiauifiHoro методу. В сб.: Onip матер1ал1в i Teopin споруд, вып. V. Буд1вельник, 1966.
27. Г о н т к е в и ч В. С. Собственные колебания пластинок и оболочек. Наукова думка, 1964.
28. Г у л я е в В. И. О смешанной задаче плоской теории упругости. В сб.: Сопротивление материалов и теория сооружений, вып. II. Буд1вельник, 1965.
29. Г у л я е в В. И., Дехтярюк Е. С. Программа матричной прогонки для систем уравнений. Труды IV Всесоюз¬
ной конференции по применению ЭЦВМ в строительной механике, машиностроении и строительном производстве. Киев, 1965.
30. Г у л я е в В. I., Романенко Ф. О., С и н я вс ь к и й О. Л. Плоский напружений стан i спйюсть пластин при зм1шаних граничних умовах. В сб. Onip матер1ал1в i теоpin споруд, вип. V. Буд1вельник, I960.
31. Длугач М. И. Метод сеток г смешанной плоской задаче теории упругости. Наукова думка, 1964.
32. И л ь ю ш и н А. А. Пластичность. Гостехиздат, 1948.
33. К и с л о о к и й В. Н. Решение задач динамики пластин численными методами. В сб.: Сопротивление материалов и теория сооружений, вып. VIII. Буд1велышк, 1969.
34. К о л о м и е ц И. А. Расчет тонких прямоугольных плит, защемленных в упругий контур. Сб. научных трудов, вып. 20, КИСИ, 1962.
35. К о р у н с к и й В. С. О расчете прямоугольных плит на упругом основании. Прикладная механика, т. III, вып. 1,
1957.
36. П а с т е р н а к П. Л. Основы нового метода расчета фундаментов на упругом основании при помощи двух коэффициентов постели. Госстройиздат, 1954.
37. П i с к у н о в В. Г. До визначення частот власних коливань прямокутних пластинок при мппаних граничних умовах. Прикл. мехашка, т. X, вып. 1. 1964.
38. П и с к у н о в В. Г. К задаче о колебаниях и устойчивости параллелограммных пластинок и мембран. Прикладная механика, т. I, вып. 3, 1965.
39. Р о м а н е н к о Ф. О., Синявський О. Л. Чисельне розвъязання узагальнено1 задач1 про власш значения. В сб.: Onip матер1ал1в i теор1я споруд, вып. IV. Будвельник, 1966.
40. Са л ь в а д о р и М. Д ж. Численные методы в технике. ИЛ, 1955.
41. Ф и л и п п о в А. П. Колебания механических систем.
Наукова думка, 1965.
42. Ш е в ч е н к о В. Д. Об уравнениях для расчета пологих оболочек. Прикладная механика, т. VIII, вып. 4, 1962.
43. Ш е в ч е н к о В. Д. О влиянии некоторых геометриче¬
ских параметров на напряженно-деформированное состояние пологих оболочек. Прикладная механика, т. IX, вып. 4, 1963.
44. Ш е в ч е н к о В. Д. Нелинейная задача изгиба пологой оболочки. Прикладная механика, т. I, вып. 2, 1965.
45. Р о з и н Л. А. Расчет гидротехнических сооружений на ЭВМ. Метод конечных элементов. Энергия, 1971.
46. Ф и л и н А. П. Приближенные методы математического анализа, используемые в механике твердых деформируемых тел. Л., Стройиздат, 1971.
47. Справочник по теории упругости (для инженеров-строителей). Под ред. П. М. Варвака и А. Ф. Рябова. Буд1вельник, 1971.
РАЗДЕЛ 16
МОДЕЛИРОВАНИЕ
16.1. ОСНОВНЫЕ ПОЛОЖЕНИЯ ТЕОРИИ
ПОДОБИЯ И РАЗМЕРНОСТИ
Различают следующие виды моделирования:
1) физическое моделирование, когда исследование ведется на моделях (конструкциях, установках или устройствах), сохраняющих физическую природу изучаемого явления. При этом соответствующие величины, характеризующие явление, в прототипе (натуре) и модели отличаются лишь количественно. Частным видом физического моделирования является масштабное моделирование, когда модель изготовлена из того же материала, что и прототип, но отличается от последнего размерами;
2) математическое моделирование — это исследование явлений на моделях иной физической природы, однако имеющих такое же математическое описание, что и прототип (электро-, гидроаналогии и т. п.).
В настоящем разделе рассматривается только физическое моделирование.
Условия подобия, лежащие в основе моделирования, устанавливаются путем анализа размерностей величин, характеризующих исследуемое явление (п. 16.2), или анализа уравнений задачи (п. 16.3). В п. 16.13 приведены для различных задач критерии подобия и формулы пересчета, полученные при помощи этих методов.
Напряженно-деформированные состояния двух тел называются подобными, если напряжения, деформации, перемещения и другие величины, характеризующие изучаемое явление, в сходственных точках этих двух, тел в сходственные моменты времени связаны соотношениями вида
(16.1)
Здесь осн и ам — значения рассматриваемой величины соответственно для натурного объекта и модели; та— масштаб этой величины.
Вопросы теории подобия связаны с теорией размерностей. Размерность данной величины записывается символически с помощью букв, присвоенных основным единицам измерения. Так, например, если Р означает единицу силы, a L — единицу длины, то размерность напряжения выражается формулой PL2.
Размерности нескольких рассматриваемых величин могут быть взаимно зависимыми и независимыми. Независимость размерностей означает, что формула, выражающая размерность одной из величин, не может быть представлена как комбинация в виде степенного одночлена из размерностей других рассматриваемых величин. Например, размерности длины L, скорости LT- и напряжения PL2 независимы, так как ЬФ
Ф (LT-)a (PL2) при любых значения а и р. Размерности длины L, изгибающего момента PL и на¬
пряжения Р12 зависимы, так как можно подобрать такие значения показателей степени а и Р, при которых справедливо соотношение L—(PL)a (PL2) (в данном случае а7з, р—V3).
Кроме размерных величин могут быть безразмерные. При переходе от одной системы единиц к другой численные значения размерных величин изменяются, безразмерных — не меняются.
Будем различать простое и расширенное подобия. При простом подобии масштабы всех безразмерных величин равны 1, а все величины, имеющие одинаковую размерность (например, напряжения, модуль упругости и нагрузка, распределенная по поверхности), моделируются в одном и том же масштабе. При расширенном подобии безразмерные величины могут моделироваться в масштабе, не равном единице, а разные величины одинаковой размерности могут иметь и отличные друг от друга масштабы.
Расширенное подобие, в свою очередь, можег быть двух видов: аффинное и нелинейное 1. Аффинное — это такое расширенное подобие, при котором масштабы всех величин постоянны в пространстве и во времени. Нелинейное — это такое расширенное подобие, при котором масштаб хотя бы одной величины изменяется в пространстве или во времени.
При простом подобии безразмерные степенные комплексы, составленные из величин, характеризующих состояние в сходственных точках и в сходственные моменты времени, соответственно друг другу равны. Это положение составляет содержание так называемой первой теоремы подобия.
Так, например,
irL’ г-; 8.и 06.2)
где о — напряжение; Е — модуль упругости; р, — коэффициент Пуассона; и — перемещение; х — координата; е — относительная деформация.
Для удобства (особенно, когда рассматривается не два, а группа подобных состояний тел) зависимости
(16.2) принято записывать в виде
— idem; ц idem; — idem; 8 idem. (16.3)
Если величины, входящие в критерии подобия, заменить соответствующими масштабами т, то получим
1 По вопросам электрического моделирования см. 2. 5, 9, 12.
idem (лат.) означает одинаковый, один и тот же
Критерий подобия Пуассона.
16.1. ОСНОВНЫЕ ПОЛОЖЕНИЯ ТЕОРИЙ ПОДОБИЯ И РАЗНОМЕРНОСТИ
171
степенные комплексы, которые в теории подобия называются индикаторами подобия:
откуда находим критерии подобия:
; т
8. Е
' -л -л Раг
idem; — idem; idem.
ех Е
ех Е
Из первой теоремы подобия вытекает, что для подобных состояний тел все индикаторы подобия равны единице:
Г ; m 1;— 1; те 1. (16.4)
тЕ тх Из уравнений связи между масштабами (16.4) следует, что в случае простого подобия все безразмерные величины натуры и модели должны быть соответственно равны (например, коэффициенты Пуассона fx, компоненты деформаций е и у). Масштабы остальных (т. е. размерных) величин должны удовлетворять уравнениям (16.4). Поскольку этих уравнений в общем случае меньше, чем входящих в них масштабов, часть масштабов выбирается произвольно, а остальные определяются в соответствии с (16.4). Вопрос о том, какими именно масштабами задаться, решается в каждом конкретном случае в зависимости от содержания задачи.
Существует несколько путей получения критериев подобия. Один из них основан на знании размерностей всех величин, характеризующих исследуемое явление. В общем случае из величин, характеризующих состояние тела, можно образовать множество безразмерных комплексов (критериев подобия). Однако известно вполне определенное количество независимых критериев подобия, с помощью которых можно получить все остальные безразмерные комплексы.
Согласно так называемой я-теореме количество независимых критериев подобия п определяется выражением
п п 1 я2 — л3, (16.5)
где пх — количество размерных величин; п2 — количество безразмерных величин; пг — количество величин, обладающих независимыми размерностями (пг.п).
Изложенный подход к определению критериев подобия называется методом анализа размерностей. Достоинство этого подхода в том, что он позволяет найти критерии подобия без привлечения уравнений рассматриваемой задачи. Важно лишь знать все величины, характеризующие изучаемое явление.
Метод анализа размерностей применим только для простого подобия.
Второй способ получения критериев подобия основывается на использовании уравнений, описывающих исследуемое явление. Для этого обе части каждого из уравнений делятся на один из членов-слагаемых. Получаемые при этом в виде слагаемых степенные комплексы и есть критерии подобия. Кроме того, критериями подобия являются аргументы всех трансцендентных функций, входящих в уравнения.
Сопоставляя полученные критерии подобия, в каждом конкретном случае можно определить, какие из них независимые.
Например, одно из уравнений обобщенного закона Гука
е — К — ц (оу с2)
может быть преобразовано к виду QX Wy
Если уравнение содержит дифференциальные или интегральные операторы, то перед тем как производить деление на один из членоз-слагаемых, знаки дифференциалов и интегралов надо опустить. Например, з уравнения
дох дх
ху
Х 0
дх ду
получаются следующие критерии подобия:
vxy А 5хУ
Хх
idem; — idem, Ox
а из уравнения
получается
дх
ду2 '
дх
д2 Уху дх ду
1 idem;M idem.
гх х2 ех х
До сих пор рассматривались соотношения между величинами в заведомо подобных состояниях тел. Рассмотрим теперь обратную задачу — какие условия необходимо и достаточно выполнить, чтобы состояния тел были подобны. Согласно третьей теореме подобия (теореме М. В. Кирпичева — А. А. Гухмана 6) эти условия таковы:
1) состояния обоих тел описываются уравнениями одинакового типа;
2) для обоих тел соответственно равны друг другу независимые критерии подобия, которые составляются из величин, входящих в условия однозначности (т. е. единственности) рассматриваемых состояний. Критерии подобия, составленные из величин, входящих в условия однозначности, называются определяющими.
Рассмотрим оба эти требования.
Основными уравнениями, определяющими тот или иной класс задач механики сплошной среды, являются дифференциальные уравнения равновесия (движения), уравнения сеязи деформаций и перемещений (или уравнения совместности деформаций), условия однозначности перемещений для многосвязных тел, а также уравнения связи напряжений с деформациями и с их скоростями. Все уравнения, за исключением последних, являются общими для всех задач механики сплошной среды. Уравнения связи напряжений с деформациями формулируются по-разному для упругих задач при малых и больших деформациях, для задач пластичности, ползучести и т. п. Поэтому для выполнения первого условия третьей теоремы подобия необходимо, чтобы уравнения связи напряжений с деформациями для материалов модели и натуры имели один и тот же вид.
Единственность (однозначность) решения задачи определяется граничными и начальными условиями, а также нагрузками, распределенными по объему. Граничные условия определяют нагрузки или перемещения на границах тела, а начальные условия — состояние в начальный момент времени.
172
РАЗДЕЛ 16. МОДЕЛИРОВАНИЕ
Таким образом, в условия однозначности должны входить следующие параметры и зависимости:
1) геометрические характеристики тела или системы
тел — безразмерные геометрические параметры рг- (углы и др.) и линейные параметры где ф(1
2,.) — безразмерные коэффициенты, с помощью которых любой размер тела выражается через один характерный размер ;
2) физические характеристики материалов, образующих рассматриваемую систему (поскольку первым требованием третьей теоремы подобия установлена идентичность вида уравнений, но не численное совпадение входящих в них параметров): коэффициент Пуассона i, модуль упругости с, плотность р, предел текучести ат, предел пропорциональности аПц, модуль упрочнения , коэффициент линейного расширения а, удельная теплоемкость су коэффициент теплопроводности Хит. п.;
3) величины, входящие в граничные условия: сосредоточенные силы Яг ф.(Я)Р; моменты Л4 ф-М) М; нагрузки, распределенные по линии, qi — (здесь ф— безразмерные коэффициенты, с помощью которых каждая нагрузка может быть выражена через один характерный параметр — соответственно силу Р, момент М или интенсивность); нагрузки, распределенные по поверхности, Ху Y, Z; заданные перемещения на контуре
к, 0к, к;
4) нагрузки, распределенные по объему, X, К, Z;
5) начальные условия, в которых искомые функции задаются в исследуемой области в начальный момент времени.
Во всех приведенных выше рассуждениях имелось в виду так называемое полное линейное подобие, когда условия подобия (16.1) соблюдаются для всех величин, характеризующих исследуемое явление.
Однако условия полного подобия оказываются весьма жесткими. Соблюдение их при моделировании (ю многих случаях сопряжено с большими трудностями и не всегда необходимо. Поэтому на практике часто прибегают к моделированию, основанному на неполном подобии. В этих случаях условия подобия соблюдаются не для всех величин, характеризующих исследуемое явление, а только для некоторых, и в сходственных точках натуры и модели численно равными принимаются критерии подобия, составленные из величин, относительно которых стремятся соблюсти подобие. При этом сознательно идут на то, что относительно других величин подобие будет нарушено. Однако такой подход требует осторожности и ясного понимания существа задач.
Кроме неполного часто используется приближенное подобие. Сущность его состоит в отказе от учета некоторых факторов, незначительно влияющих на напряженно-деформированное состояние тела (например, во многих случаях ке учитывается собственный вес тела и т. п.).
ловия однозначности и являющиеся критериями подобия:
Pt- idem; ф( idem; jut idem; cpjP) idem;
idem; idem. (16.6)
Запишем все входящие в условия однозначности размерные величины с их размерностями: lLt EPL2' РР, М PL, qPL-'y XPL 2, 1PL, 7PL2 ииЦ, uKLl, L, XPL YPLy ZPL- Всего размерных величин 14, из них две величины, например I и Е, имеют независимые размерности. Таким образом, дополнительно к (16.6) можно получить 14— —212 независимых критериев подобия:
X
idem: idem’
Y., ик 0К
idem: — к'ет; — — idem; — idem; LEI I
wK. XI Yl
— idem; — idem; — I E E
zl
пет; — idem.
(16.7)
Критериям подобия (16.6) — (16.7) соответствуют следующие уравнения связи между масштабами соответствующих величин:
т-1;.7_(0 1; от, 1; т
П
' '
т
1;
тЕ т1
1;
Г1м
1;
та
х 1. г 1. Щр Шр. Шп
тЕ т т,
1;
Е
т у т
Е
т mi т:
Из (16.8) следует, что
т,
iiL
т
1;
1;
т7 т 1: ——L 1.
(16.8)
т„ т„
ту mv т7
(16.9)
а шесть уравнении связи:
ГПг
m
М
1;
"S
ГГЦ
mErrii
L 1;
mPm,
1
(16.10)
16.2 ПРОСТОЕ ПОДОБИЕ СТАТИЧЕСКИХ УПРУГИХ СОСТОЯНИЙ.
МЕТОД АНАЛИЗА РАЗМЕРНОСТЕЙ
Определим условия подобия напряженно-деформированных состояний однородных изотропных упругих гел в случае малых деформаций при заданных на контуре тел статических нагрузках или перемещениях.
Запишем все безрасчетные величины, входящие в ус-
содержат восемь масштабов. Значит любые два масштаба могут быть выбраны произвольно, а остальные шесть масштабов определяются из уравнений (16.10).
Таким образом, необходимыми и достаточными условиями простого подобия пространственной задачи теории упругости являются следующие:
1) модель и прототип должны быть геометрически подобными;
2) коэффициенты Пуассона для материала модели и материала прототипа должны быть равны. При этом
Критерий подобия Гука.
16.3. РАСШИРЕННОЕ ПОДОБИЕ В СТАТИЧЕСКИХ ЗАДАЧАХ ТЕОРИИ УПРУГОСТИ
173
выбор материалов обусловливает и масштаб модулей продольной упругости тЕ
3) все нагрузки, действующие на модель, должны находиться в таком же отношении одна к другой, как и соответствующие нагрузки, действующие на прототип;
4) поскольку выбор материала для модели определяет масштаб тЕ, то для произвольного выбора остается только один масштаб: либо масштаб т, либо масштаб одного из видов нагрузки, например сосредоточенных сил тр.
В случае произвольного выбора масштаба т нагрузки должны моделироваться в масштабах тр-тят тм тЕтmq — mEtni тх ту — т-—тЕ тх т y тz теnii, а заданные перемещения на контуре — в масштабах тик т„к — mWK mt. При этом напряжения будут моделироваться в масштабе, равном тЕ, перемещения — в масштабе т, а деформации в модели будут равны соответствующим деформациям прототипа.
При произвольном выборе масштаба тР линейный
масштаб модели оказывается равным т
г.Tip
нагрузки должны моделироваться в масштаоах тм
1 з
Р ; тчт т ; т-ттут ; т
zmY mztnр т
Е Р
тр, а заданные перемещения на кон
туре — в масштабах ти
тр — тР
В этом случае напряжения будут моделироваться в масштабе, равном Шк, перемещения — в масштабе mw
- ГтР
— mv mw— —, а деформации в модели будут г Ир
равны соответствующим деформациям прототипа.
16.3. РАСШИРЕННОЕ ПОДОБИЕ В СТАТИЧЕСКИХ ЗАДАЧАХ
ТЕОРИИ УПРУГОСТИ. АНАЛИЗ УРАВНЕНИЙ
При моделировании может быть поставлена задача определения не всех величин, характеризующих явление, а только некоторых. Например, часто требуется определить только компоненты напряжений. В связи с эгим возникает вопрос, можно ли упростить моделирование, обеспечивая подобие по напряжениям и не заботясь
о соблюдении подобия по деформациям и перемещениям. Разумеется, такая постановка задачи возможна лишь при малых упругих деформациях, когда изменением конфигурации тела и перераспределением напряжений в процессе деформирования можно пренебречь.
Выявление условий расширенного подобия проиллюстрируем на примере первой основной задачи теории упругости для плоского напряженного состояния.
Напряжений в этом случае определяются уравнениями:
V2 ) 0; д х, „ n. I
ТГ '" ду дх j
(16.11)
Здесь рхconst; ру const.
В случае неодносвязного тела к уравнениям (16.11) должны быть добавлены условия однозначности перемещений:
да с ди
17 РГЛ-0' вг
Здесь интегрирование распространяется на любой замкнутый контур, не пересекающий контур тела; s — длина дуги этого контура. Пользуясь формулами Коши, можно подынтегральные выражения записать через деформации, а последние заменить напряжениями, воспользовавшись законом Гука. В результате можно прийти к следующим выражениям однозначности перемещений:
(axav) cos (sx)y — (ах a) ds '
an I
-(1 ц)7?,;
д 1 (аха„) cos (sy)—x — ;ах ay) I ds
(16.13)
dn
“ (1 4" M-) Rx
Здесь n — нормаль к линии интегрирования; Rx, Ry — составляющие равнодействующей усилий по замкнутому контуру.
Рассмотрим сначала односвязное тело или многосвязное тело, у которого главный вектор внешних нагрузок по каждому замкнутому контуру равен нулю. 3 этом случае в условия однозначности рассматриваемой задачи входят только геометрические параметры тела и нагрузки. Значит, материал модели может иметь произвольные упругие постоянные, а сама модель должна быть геометрически подобна прототипу, причем линейный масштаб mi может быть выбран произвольно. Так же произвольно можно выбрать масштаб одного из видов нагрузки, например сосредоточенных сил тР. Другие виды нагрузки должны моделироваться в соответ-
тр
ствующих масштабах mM mPmr, mq — ;
mf
тх e mv л Y mj
т
Щр
т,
При соблюдении этих условий компоненты напряжений будут моделироваться в масштабе та тп
ху
Выясним, как при обеспечении подобия только по напряжениям будут моделироваться деформации и перемещения.
Записав закон Гука для материалов модели и прототипа, после ряда преобразований получаем выражения для масштабов компонентов деформаций те, ле
ху
тР т, сг
г у, м
тР
пР у,м — Мн х,м
тР т
Е гп1
У,М х,м
__ тР 1 Пн vxy тв п 1 цм'
(16.14)
174
РАЗДЕЛ 16. МОДЕЛИРОВАНИЕ
Таким образом, при соблюдении указанных выше условий подобия полей напряжений в первой основной плоской задаче теории упругости поля углов сдвига
уХу будут аффинно подобными, а масштабы mfi и тр
х у
будут функциями координат, т. е. поля относительных продольных деформаций ех и еу будут нелинейно подобными.
Если же к рассматриваемым условиям расширенного подобия добавить требование о равенстве коэффициентов Пуассона материалов прототипа и модели, то поля относительных продольных деформаций гх и гу окажутся аффинно подобными и все компоненты деформаций будут моделироваться в одном масштабе
Шг
т., — тР тР -
Уху гх еу
2'
Е"Ч
х у тр т‘ При моделировании, когда тЕ 1,
тр
т9 т9 т —— m?
Для масштабов перемещений можно получить зависимость
m те т.;
ти e r mv
(16.15)
т. е. поля перемещений будут нелинейно подобными при ЦнМ-м.
При равенстве коэффициентов Пуассона материалов прототипа и модели компоненты перемещений будут моделироваться в масштабе
т„ т„ '
а при тЁ 1 т — т
тр
щ
Отметим, что при от напряжений в модели
может быть совершен непосредственный переход к напряжениям в прототипе. При этом масштаб напряжений равен масштабу нагрузки, распределенной по поверхности. Переходить в этом случае от деформаций и перемещений модели непосредственно к деформациям и перемещениям прототипа нельзя, так как масштабы деформаций и перемещений переменны в исследуемой области.
Если моделируется многосвязное тело, у которого имеется хотя бы один замкнутый контур, где главный вектор внешних нагрузок не равен нулю, то кроме уже рассмотренных величин в условия однозначности должен войти коэффициент Пуассона р. из условий однозначности перемещений (16.13). В этом случае условия подобия полей напряжений должны быть дополнены требованием равенства коэффициентов Пуассона материалов прототипа и модели. Аналогичное требование должно выполняться и при исследовании второй основной и смешанной задач теории упругости.
Толщина плоской модели может быть выбрана независимо от линейного масштаба ти Однако чрезмерно большой толщину принимать не следует во избежание появления отклонений от плоского напряженного состояния, т. е. возникновения неравномерности распределения напряжений ах, ау и тху по толщине модели и возникновения во внутренних слоях модели напряжений
Ozf ТXz И Туг-
16.4. О ВЛИЯНИИ КОЭФФИЦИЕНТА ПУАССОНА НА РАСПРЕДЕЛЕНИЕ НАПРЯЖЕНИЙ
Во многих случаях распределение напряжений в упругих телах зависит от величины коэффициента Пуассона. Поэтому при моделировании, строго говоря, необходимо подбирать материал модели так, чтобы соблюдать равенство этих коэффициентов у материалов прототипа и модели. Практически это условие часто трудно выполнить, поэтому возникает вопрос о величине возможных погрешностей, вносимых несоблюдением критерия Пуассона, и о путях соответствующей корректировки результатов исследования.
При исследовании плоских задач принципиально возможна корректировка результатов исследования при помощи испытания второй модели с другим коэффициентом Пуассона. Тогда для определения напряжений в натуре можно воспользоваться выражением
Р. 2 Q
ml2 ( — Hh)0V2-m,i)
m,2 '
(16.16)
Здесь индексом 1 отмечены величины, относящиеся к первой модели, а индексом 2 — относящиеся ко второй модели.
По аналогичной формуле можно определить и другие компоненты напряжений оу,я и ту,п.
Формула (16.16) записана для случая плоской деформации. Если имеет место обобщенное плоское напряженное состояние, то соответствующий коэффициент Пуассона должен быть заменен в (16.16) на величину
“ -Т7Г-,6,7
Практическая реализация этого подхода связана с трудностью точного определения значений коэффициента Пуассона. Поскольку значения коэффициентов Пуассона модельных материалов находятся в довольно узких пределах, то точность определения напряжений при помощи выражения (16.16) обычно невелика.
Часто при исследовании плоских задач влияние различия коэффициентов Пуассона на величины напряжений незначительно. Однако в некоторых случаях оно может быть большим (например, для плоской задачи о нагружений бесконечной плоскости сосредоточенной силой).
Менее изучено влияние коэффициента Пуассона на распределение напряжений в пространственно-напряженных телах. Известно, что оно зависит от характера изменения суммы нормальных напряжений по точкам объема тела. Чем более плавно изменяется величина этой суммы, тем меньше погрешность, вызванная различием коэффициентов Пуассона. В частности, в цилиндрическом теле, подверженном чистому кручению, когда сумма нормальных напряжений постоянна (равна нулю), распределение напряжений не зависит от коэффициента Пуассона. Как правило, наибольшая погрешность, вызванная различием коэффициентов Пуассона, получается при определении меньших по абсолютной величине главных напряжений.
16.5. О МОДЕЛИРОВАНИИ ОБЪЕМНЫХ СИЛ
Выбор для модели материала, у которого коэффициент Пуассона такой же, как и у материала прототипа, предопределяет масштабы модулей продольной упру-
16.6. ПОДОБИЕ В ДИНАМИЧЕСКИХ ЗАДАЧАХ ТЕОРИИ УПРУГОСТИ
175
гости гпе и объемного веса т. А это, в свою очередь, означает, что для всех остальных величин масштабы уже не могут быть выбраны произвольно, и каждый из этих масштабов определяется величинами тЕ и rriy. При этом линейный масштаб модели
т Может оказаться, что линейный масштаб модели, определенный по формуле (16.18), будет неудобным или технически трудно осуществимым. В этом случае можно произвольно выбрать линейный масштаб модели тг но тогда в соответствии с выбранным т надо будет обеспечить и соответствующий масштаб объемных сил
m __ Ше что может быть достигнуто с помощью
тУ mt
центрифуги.
16.6. ПОДОБИЕ В ДИНАМИЧЕСКИХ ЗАДАЧАХ ТЕОРИИ УПРУГОСТИ
Из основных уравнений динамики упругого тела выпишем величины, входящие в условия однозначности, и их размерности: XPLzy плотность р -4Г21,
EIPL-, ц1.
К этим величинам надо добавить величины, входящие в граничные и начальные условия, которые рассмотрим применительно к трем основным задачам.
а) Первая основная задача. На поверхности 5 тела во все моменты времени начиная с t0 заданы нагрузки
(16.19)
а в области V, занятой телом при t—t0, начальные условия
du
и и0 v v0; w w0; и0 I ;
(dv. (dw
" -Ы -Ы,-,б'2о)
Здесь f 1, f2, h — функции, заданные на поверхности тела и зависящие также от времени; м0, v0, w0 uQ, v0, w0— заданные функции от х, у, z.
Выпишем все величины, входящие в условия однозначности первой основной задачи: XPL-Zy рР -4Г2, Е PL2, ц1, РР lL, время tT, u0L,
u0LT-'.
Отсюда можно получить определяющие критерии подобия:
Р -Л XlS о.
х idem; idem; — idem; — idem;
Р 1г. u0t — iJem; т
idem,
(16.2I)
В целях единообразия записи_критериев подобия вводится сосредоточенная сила Р вместо X (У, Z), поскольку масштабы этих величин связаны между собой зависимостью т-т—
тр
— т__ .Z m2
которым соответствуют следующие уравнения связи между масштабами
mu 1;
х "Ч
(16.18)
тЕ т1
трт1 тР т?
о
Щ
1;
щ
1;
(16.21а)
В зависимостях (16.21) первые четыре критерия подобия— это уже полученные ранее критерии подобия для статической задачи, остальные два — специфические критерии подобия динамической задачи.
б) Вторая основная задача отличается от первой только тем, что граничные условия (16.19) заменяются следующими условиями на поверхности S:
к vk F2; wK — F3y (16.22)
где Fь F2, F3 — заданные функции на S, зависящие также от времени.
Для второй основной задачи в условия однозначности войдут следующие величины: XPL3; pPL-47’2l; Б PL-2; il; uKL; lL; tT); u0L; oLTu Отсюда можно получить определяющие критерии подобия
ик
11 — idem; — idem;
XIs
idem;
ио р2 Щ t
“7“ idem; —— idem; —— idem, I Et2 (16.23)
которым соответствуют следующие уравнения связи между масштабами
тм- 1;
mi
1;
"ltiQ
mi
l;
, i;
171ц rJlf
mi
1.
(16.24)
в) Смешанная задача, где на части поверхности даются условия (16.19), а на другой части — условия (16.22).
Для этой задачи в условия однозначности войдут все те величины, которые входили в первые две задачи. Из них можно получить следующие определяющие критерии подобия:
Р XI3
ц idem; —- idem; — idem;
El2 P
uK u0
— idem; — idem; (16.25)
P2 'A “0 -A
— idem; — idem,
которым соответствуют уравнения связи между масшта¬
бами
1;
ГПг
1Х Ш1
пЕ "ч
т
1;
;i;
т;, т.
тх
т
1.
1;
(16.26)
176
РАЗДЕЛ 16. МОДЕЛИРОВАНИЕ
Зависимости (16.20), (16.23) и (16.25) свидетельствуют о том, что при моделировании динамической задачи необходимо соблюдение уже встречавшихся ранее критериев статического подобия это первые четыре критерия в (16.20), первые четыре — в (16.23), первые
пять — в (16.25). Сверх того в динамических задачах
надо обеспечить соблюдение еще двух критериев. Эти дополнительные динамические критерии одинаковы для всех трех краевых задач:
р2., tiot., idem ; — idem
Et2 При малых упругих деформациях можно отказаться от соблюдения требования те 1.
16.7. ПОДОБИЕ В ЗАДАЧАХ ТЕРМОУПРУГОСТИ
При экспериментальном решении задач термоупругости необходимо для моделей и прототипа обеспечить подобие температурных полей и полей напряжений, деформаций и перемещений.
Условия подобия нестационарных температурных полей в геометрически подобных телах получаются из рассмотрения уравнения теплопроводности Фурье. Для твердого однородного тела при наличии в системе внутренних источников тепла это уравнение имеет вид
где
Qv
(16.27)
СУ
дТ_
dt л дх2 ' ду2 ' дг2) су
ТТ0—температура; tT—время; ат — LTl —коэффициент температуропроводности;
?vPT0 lT — коэффициент теплопроводности;
сLTq — удельная теплоемкость; yPLz—удельный вес; xL, yLt zL—координаты; PL-2-1 — плотность внутреннего источника тепла (количество тепла, выделяемого источником в единицу объема за единицу времени).
Здесь и в дальнейшем в формулах размерности символ Т соответствует единице времени, Т0 — единице температуры.
Если состояние тела стационарное, то уравнение (16.27) принимает вид
(д2Т дП д27
0,7 дх2 ду2 дг2
Полагаем, что физические характеристики материала из зависят от температуры.
Путем анализа уравнения (16.27) получаем критерии
подобия
Qt t. ) Qv №
idem
XT
idem.
В (16.29) записаны не все критерии подобия, а только те, которые понадобятся в дальнейшем. При этом ввиду соблюдения геометрического подобия координагы заменены характерным линейным размером I.
Для того чтобы полностью решить вопрос об условиях подобия температурных полей, необходимо в дополнение к уравнению (16.27) рассмотреть граничные условия, которые могут быть трех видов.
Критерий подобия Коши.
Критерий гомохронности.
Критерий подобия Фурье (критерий тепловой гомохронности).
Граничные условия первого рода характеризуются тем, что на поверхности тела задается температура Г как функция пространственных координат и времени.
Граничные условия второго рода определяются заданием на поверхности тела удельного теплового потока л дТ л, где п — нормаль), как функции пространственных координат и времени.
Граничные условия третьего рода задаются в виде температур сред, окружающих твердое тело, и коэффициентов теплоотдачи а г от этих сред к поверхности тела.
Заметим, что все величины, входящие в граничные условия первого и второго рода, фигурируют в критериях подобия (16.29) и только граничные условия третьего рода добавляют к величинам, входящим в условия однозначности, новую величину aTPLl7 1Т-1.
Следовательно, при моделировании задачи на основе граничных условий третьего рода к (16.29) добавляется еще один критерий подобия
ОСу I
idem.
(16.30)
Обратимся теперь к вопросу о подобии полей напряжений, деформаций и перемещений при уже обеспеченном подобии температурных полей прототипа и модели.
При простом подобии в условия однозначности задачи войдут величины: lLy ц1, EPL2, ГГ0 и коэффициент линейного расширения а. Отсюда можно получить два критерия простого подобия
jli idem; аТ idem. (16.31)
Рассмотрим теперь условия расширенного подобия. Для пространственной задачи остаются в силе обычные уравнения равновесия и зависимости между перемещениями и деформациями. Закон Гука имеет вид:
1
е — о — Ц. (ау тг) аТ;
Уху '
2(1 И)
(Гл)
ху (16.32)
— 0. (16.28)
су
Из анализа уравнений (16.32) получаем критерии подобия по напряжениям:
idem; ix idem
EaT р
to)-
(16.33)
(16.29)
Условия (16.33) в сочетании с требованием геометрического подобия определяют подобие по напряжениям для пространственной задачи термоупругости.
Аналогичным образом, проведя анализ общих уравнений термоупругости, можно доказать, что для плоской задачи достаточно обеспечить только геометрическое подобие.
Если кроме изменения температуры на тело действуют и нагрузки, то, наряду с критериями и условиями термоупругого подобия, должны быть учтены критерии и условия подобия, соответствующие нагрузкам.
16.8. МОДЕЛИРОВАНИЕ БОЛЬШИХ ДЕФОРМАЦИЙ
Для определения связи деформаций с напряжениями в качестве одного из возможных соотношений восполь-
1 Критерий Био (критерий краевого подобия).
16.9. ПОДОБИЕ В ЗАДАЧАХ ПЛАСТИЧНОСТИ
177
зуемся рядом Муни 3. Если удержать два члена этого ряда, то получим:
2 В 1
i 2Л2 Ц -t 4Л4 Ц-4В4 — Р h Ki
( 1,2,3), (16.34
где (Jj — главное напряжение; hj — степень удлинения:
р ai г2 ?_з. — физические харак-
3
теристики среды.
В условия однозначности рассматриваемой задачи входят те же величины, что и в случае малых деформаций, за исключением Е и i, вместо которых здесь входят другие физические характеристики среды: AzlPL-2, B2PL2y A4PL2, B4PL-2. Соответствующие этой задаче условия (критерии) подобия указаны в табл. 16.13. При-соблюдении этих условий будет сохраняться геометрическое подобие прототипа и модели и в деформированном состоянии, что при больших деформациях является обязательным (в отличие от малых).
В некоторых случаях условие равенства деформаций модели и прототипа необходимо соблюдать и при малых деформациях. Сюда относится, например, тот класс контактных задач, где поверхность контакта существенно изменяется в процессе нагружения.
16.9. ПОДОБИЕ В ЗАДАЧАХ ПЛАСТИЧНОСТИ
В задачах пластичности в условия однозначности входят следующие величины и зависимости:
1) геометрические параметры тела;
2) физические характеристики материала: EPL2, jli 1, кривая зависимости Oi — f(ei), где а—интенсивность напряжений; е — интенсивность деформаций; физические характеристики материала фигурируют в рамках классических теорий пластичности: деформационной и теории течения Рейсса;
3) история нагружения. В классической деформационной теории история нагружения не находит прямого отражения, а предопределяет лишь области ее применимости.
Следовательно, для обеспечения подобия при моделировании задач пластичности требуется соблюдение геометрического и силового подобия, равенство коэффициентов Пуассона для прототипа и модели, а материал модели должен характеризоваться кривой Oi f(ei), которая подобна аналогичной кривой, описывающей материал прототипа, т. е. в сходственных точках этих кривых 8г,н бг,м; Oi,n mEGi,M. Для обеспечения подобия истории нагружения необходимо, чтобы все критерии силового подобия были соответственно равны в сходственные моменты времени.
Аналогично могут быть получены условия подобия и для ряда других теорий пластичности.
16.10. ПОДОБИЕ В ЗАДАЧАХ ПОЛЗУЧЕСТИ
Определение критериев подобия при моделировании ползучести производится на основе теории ползучести и общих уравнений механики сплошной среды.
В основе теории старения лежит предположение
о связи между напряжениями, полной деформацией и временем, которую можно представить в виде 10:
8 2G- ГV ) ф (16'35
здесь а — среднее напряжение; р — функция инвариантов тензоров напряжений и деформаций, характеризующая состояние материала.
В тех случаях, когда кривые ползучести подобны, функция ф может быть представлена в виде
р тжо- (16.36)
Здесь f — функция интенсивности напряжений; -ф — функция времени.
Функция f может иметь вид:
экспоненты f (а) ехр bot; (16.37)
степенной — Ао™ (16.38)
или какой-либо другой (например, гиперболический синус).
Если вид функции f(Oi) одинаков для материалов прототипа и модели, то для обеспечения подобия в распределении напряжений необходимо подбирать материал так, чтобы bR — bM (16.37), либо mn mM (16.38) и т. п. Можно показать, что величина А не влияет на обеспечение подобия.
Существенно, что функция времени ф(0 может иметь разную форму для материалов модели и прототипа. Сходственные моменты времени находятся из условия
вн1„(н) вм1м(м). (16.39)
Это позволяет значительно сократить время испытания специальным подбором материала.
При отыскании критериев подобия влиянием коэффициента Пуассона на распределение напряжений обычно пренебрегают, так как оно несущественно.
Более удовлетворительные результаты получаются на основе теории упрочнения, которая может быть положена в основу рассмотрения вопросов моделирования ползучести.
Уравнение кривой ползучести по одному из вариантов теории упрочнения имеет вид 10:
по
е е0 (а) Btn ехр —. (16.40)
1
При моделировании статических задач и в тех случаях, когда начальная деформация является линейной функцией от напряжения, необходимо обеспечить выбором материала и температуры испытания выполнение условия
лн (16.41)
16.11. МОДЕЛИРОВАНИЕ НЕКОТОРЫХ ВИДОВ КОНСТРУКЦИЙ
Моделирование комбинированных конструкций, состоящих из оболочек, пластин, стержней и т. п., основывается на изложенных выше общих условиях подобия. При этом, если элементы конструкции выполнены не из одного материала, коэффициенты Пуассона в прототипе и модели при простом подобии должны быть соответственно равны, а отношение модулей упругости материалов прототипа должно быть равно отношению соответствующих модулей упругости материалов модели.
В тех случаях, когда нас интересует не картина напряженного состояния каждого элемента, а перемещения характерных точек или распределение усилий между элементами, можно отказаться от строгого геометрического подобия и моделировать для всех или для отдельных элементов какие-либо интегральные характе¬
178
РАЗДЕЛ 16. МОДЕЛИРОВАНИЕ
ристики (например, соответствующие жесткости). Укажем на некоторые особенности моделирования отдельных видов конструкций, имея в виду их работу в пределах упругости.
Тонкие пластинки постоянной и переменной толщины должны моделироваться с соблюдением геометрического подобия в плоскости пластинки в произвольном линейном масштабе пц. Толщина пластинки может моделироваться в масштабе тн, в общем случае отличном от mi. Масштаб нагрузки rrip также произволен.
В этом случае при равенстве коэффициентов Пуассона материалов прототипа и модели (цн Хм) напряжения будут моделироваться в масштабе
Для соблюдения простого подобия напряженных и деформированных состояний масштаб сосредоточенных сил должен быть равен тр тЕщтк. При расширенном подобии (подобии по напряжениям) масштаб тр может быть произвольным.
Другие виды нагрузок должны моделироваться в следующих масштабах: нагрузки, распределенные по линии, тр
mQ — — ; нагрузки, распределенные по поверхности, mi
77 р
нагрузки, распределенные по
тх
mY mz „,2 ’
ml
(16.42) объему, тх ту tnz Шг
деформации — в масштабе
прогибы — в масштабе
trip т
lE mh
2
h
(16.43)
(16.44)
то
У
М'Н пс.м
mh
тр
.2
1_
1
Мм
гу, м
Гу,М
М'Н
vy м
Мм'
тр 1
-К.
т
ху
т11
-is.
тр
3
Г
II
II
и
В
II
тгтн ’
)
ГПр
1 —Пн
тР еу
щ
Yxy
II
ft
3
й- Ю
1 -Им
тр ntj
1-и2„
Шцу
mEml
1-й
1 1
Здесь —, — — кривизны срединной поверхности деРх Ру
формированной пластинки в рассматриваемой точке в направлении осей х и у соответственно.
Для формул (16.45) — (16.47) координатная плоскость совпадает со срединной плоскостью пластинки.
При моделировании напряженных состояний безмоментных оболочек постоянной толщины срединная поверхность модели должна быть геометрически подобна срединной поверхности натуры. Линейный масштаб срединной поверхности mt может быть произвольным.
Масштаб толщины оболочки тн может быть отличным от mi. Коэффициенты Пуассона материалов натуры и модели должны быть равны (mjA l).
— ; сосредоточенные мо-
Щ mh
менты — тм тРтг.
При соблюдении всех указанных условий подобия все компоненты напряжений будут моделироваться в масштр
, деформации — в масштабе те
ml mh
(16.45)
(16.46)
(16.47)
т т т ’ пеРеме1ения —в масштабе mu — mv — mi.
Е I h
В некоторых случаях моделирование безмоментных оболочек можно осуществить при произвольном выборе многих масштабов. Так, при моделировании напряженного состояния безмоментных оболочек вращения масштабы тЕ, т, ти тп, тР могут быть выбраны произвольно.
Рассмотренные условия могут быть использованы и при моделировании оболочек с небольшими моментными зонами, однако в последнем случае подобие будет приближенным.
Для моментных оболочек постоянной и переменной толщины следует соблюдать условия полного геометрического и силового подобия пространственной задачи теории упругости.
Пространственные стержневые системы могут исследоваться на модели с соблюдением полного геометрического подобия или же на модели с сохранением подобия лишь в соотношениях жесткостных характеристик отдельных элементов и поперечных сечений. При этом должно сохраняться одно и то же соотношение для основных жесткостных характеристик: на изгиб в обеих главных плоскостях инерции и на кручение.
Если влияние продольных сил на деформацию мало, то масштабы жесткостей всех подобно расположенных элементов пространственной рамы должны удовлетворять условию
1 11
mEIt тЕ1, ГТ mGI _ (16.48)
1ЕГг
4GI,
В тех случаях, когда деформациями от продольных сил в элементах пренебрегать нельзя, соответствующие жесткости должны быть дополнительно кроме (16.48) связаны зависимостью
m F
El
(16.49)
Здесь 1 и г — моменты инерции поперечных сечений относительно главных центральных осей инерции; к— момент инерции поперечного сечения на кручение; F — площадь поперечного сечения.
Для изучения сложных рамных конструкций, где трудно оценить влияние отдельных жесткостных харак-
16.12. ВОПРОСЫ ПОДОБИЯ ПРИ ИССЛЕДОВАНИИ СОСТАВНЫХ СИСТЕМ
179
теристик, модель целесообразно выполнять полностью подобной по всем жесткостным характеристикам или по всем размерам и форме натурной конструкции.
Итак, для обеспечения подобия в распределении усилий и перемещений:
1) модель в осях должна быть геометрически подобна прототипу в произвольном линейном масштабе mt
2) одну из жесткостей поперечных сечений (например, Е1) можно выбрать произвольно в масштабе т, а
lLi I
масштабы остальных жесткостей — в соответствии с (16.48) и (16.49);
3) сосредоточенная нагрузка моделируется в произвольном масштабе тР (другие виды нагрузки — в соот-
тР
ветствующих масштабах, например mq —, и т. д.).
mi
При соблюдении указанных условий перемещения бу¬
дут моделироваться в масштабе ти — mv -
rtiptrit “lBll
а изгибающие моменты — в масштабе тм — тРти
Плоские стержневые системы в последнее время моделируются все реже, особенно в связи с использованием для расчетов ЭВМ. Однако когда к моделированию таких систем все же прибегают, то учитывают, в отличие от пространственных систем, жесткость поперечных сечений на изгиб в одной плоскости. Остальные зависимости подобия — те же, что и у пространственных рам.
При моделировании плоских стержневых систем, имеющих в своем составе криволинейные элементы, должно соблюдаться также условие (16.49).
В общем случае комбинированных систем должны учитываться все указанные выше условия подобия отдельных элементов в соответствии с характером работы этих элементов.
16.12. ВОПРОСЫ ПОДОБИЯ ПРИ ИССЛЕДОВАНИИ СОСТАВНЫХ СИСТЕМ
Пусть на упругое тело А, находящееся в контакте с телом В, действует нагрузка. Требуется посредством моделирования определить напряжения, деформации и перемещения в теле А.
Рассмотрим отдельные возможные здесь случаи.
1. Материалы тел А и В упруги.
В этом случае должны соблюдаться рассмотренные выше условия подобия упругой задачи. Важно лишь подчеркнуть, что соответствующие критерии подобия должны быть численно равны в сходственных точках натуры и модели.
Если у натуры а,н в,н, то необходимо, чтобы и в модели было а,м в,м, и тогда приближенно можно учитывать только три определяющих критерия подобия:
хА idem; хв — idem;
еап
idem, (16.50)
которым соответствуют следующие уравнения связи между масштабами:
„2
тА 11
т. 1;
тВАт1
1. (16.51)
2. Материал тела А — упругий, тела В — сплошная пластичная среда.
В условия однозначности рассматриваемой задачи входят: L, EaPL-2, Ца1, EbPL2, Цв1, кривая зависимости Ог,в?в(гв), история нагружения, Здесь должны быть соблюдены условия подобия, полученные для случая, когда оба материала упруги, и, кроме того:
а) материал в модели должен характеризоваться
кривой ot в fB (г. в ), которая подобна ана-
' м м ’ м
логичной кривой, описывающей материал натуры о в вн
б) история и характер нагружения должны быть в натуре и модели одинаковыми.
3. Материал тела А — упругий, тела В — сыпучее тело без сцепления.
Здесь в условия однозначности войдут величины: L, EAPL2t jxa1, РР объемный вес yBPL3t а также угол внутреннего трения Фв1 и угол трения по поверхности контакта материала В по материалу А Фв а 1.
Из этих величин получим следующие независимые определяющие критерии подобия:
iA idem; фБ idem; фБЛ idem;
еа 2 У в 3
—-— idem; —-— idem, (16.52)
которым соответствуют следующие уравнения связи между масштабами
tn р т 1
1; т9 В 1: тР ВЛ1’ тр 1;
тувт1
1.
(16.53)
Если для модели взят такой же материал (тело В), что и в натуре, то тцв
соблюдение зависимостей:
и тув — 1
и необходимо
тхА
1;
mt
Ф ВА
I;
тЕт1
1;
тг
(16.54)
Отсюда вытекают необходимые и достаточные условия подобия в случае, когда тело В является сыпучим телом без внутреннего трения:
а) коэффициенты Пуассона материалов упругого тела А для натуры и модели должны быть равны (лАн
М.м);
б) углы трения грунта по поверхности контакта натуры и модели должны быть равны (фва,нФва,м) ;
в) масштаб модулей упругости материала упругого тела А должен быть равен линейному геометрическому масштабу, т. е. тв — ти
Следовательно, можно либо произвольно выбрать масштаб тЕ тг (и тогда тР т3Е ), либо произвольно
з j выбрать масштаб нагрузки тР (и тогда тг у тР).
При соблюдении указанных условий напряжения будут моделироваться в масштабе тЕ, перемещения — в масштабе mi, а деформации модели будут равны соответствующим деформациям натуры.
4. Материал тела А — упругий, тело В — сыпучее тело со сцеплением.
В этом случае к условиям подобия (16.52) — (16.54) добавляется критерий подобия
2
где с в — удельное индикатор подобия
Р
сцепление,
idem, (16.55)
и соответствующий ему
тсвт1
1.
(16.56)
180
РАЗДЕЛ 16. МОДЕЛИРОВАНИЕ
5
II
Б X X
ш s
СО S О. X
н
2
и
S X
о Ef С
со
ss 5
2
а н
з
о я'
S 5
Lu к
5
Н . ш 2 II
S
1 II
с
U Q,
N
-
I IN
М 1
In
о I
О
о 1. е. ©.
'4
со СП
3
U
сс
3S
хо
о_
8
II
Примечания
О
Аналогичные условия справедливы для моментных оболочек
При абсолютно жестких связях и отсутствии других заданных перемещений см. п. 1-а
h — толщина тела. Аналогичные условия справедливы для без моменты ых оболочек
Масштабы перехода от модели к натуре
для перемещений
О
0.
5
ЕЧ
S
s'
к
s55
ё
Сц
Б
ж
а
S
со
5
для деформаций
00
а
S
cq
S
СО
S
г
Q,
S
СЧ чл
S
S
ш
S
См. формулы 16.14
для напряжений
Г—
s 1 S
53
СЦ S
S
0.
6
сч
6
S
с
о, S Г
Возмож¬
ные
варианты
выбора
масштабов
со
V
о. су 5 S
е" Б
о,
г
СЦ
S
3
4 г
UJ
5
is ёц
Q.
. 5
5 Необходимые и достаточные условия подобия (в дополнение к общим условиям подобия для всех задач)
уравнения связи между масштабами
ю
1
л
5
II
з
S
1
1
А 0.
5 Б
тЕ т1тик
1
определяющие критерии подобия
Е
0)
Н
II
А
Е
и
2
II
п
Е U S 1 II
1 о.
lUlll
Е1ик
1
Вид граничных условий или тип задачи
со
а) Первая основная задача
б) Вторая основная задача
в) Смешанная задача
а) Первая основная задача при выполнении услозий Леви — Митчелла
Наименование
задачи
см
Пространственная упругая статическая изотермическая задача для изотропных тел (малые деформации)
Плоская упругая статическая изотермическая задача для изотропных тел (малые деформации)
о. Е
-
-
см
16.13. ТАБЛИЦА КРИТЕРИЕВ ПОДОБИЯ И УРАВНЕНИЙ СВЯЗИ МЕЖДУ МАСШТАБАМИ
181
а
о
8
CL) 33 С
к 2 а
О О) я g-t 35
я Я о 3 э
Ч д S'S 0x5
са со a S
и
; н 2 я
1аИ
§я
_
я 35 п
О
SI5
5 х es2 О О ?
О ч и о
а г; —
X
л. 2
S Ж Я
ж 'О
(U ез
ш s 3 я л о о.о:
а
з X us в л tO Я е;
CQ О
3 v
® “я 12 5B:-i §§ ч я я
5
. ч
2 ©.Я
О п
О X S К
н т
2 “
. и. ас
к
w i 5н 5и
Q. Н О
С и 3 я ч ю ш ч
л.§ае. “ Si I ;
а я ; н я :
я ч 4 : о ос s
Г з
и
3:
—f ► ) ?ЯЗ
I
S Ч-—
с я
I
I §ч
S
II
5
: 2
JCM
„О- II Е„
5
СЦ
Б
—1 1
II
-1 Б
Б
5
Б
Б
Е
§
I
3 'S.123
о я s a S ;?.s
ЦГ Ы
355 §из§ § ?Si
С к о Ц со ро я а. л и я со н ч
Я 2.2 Щ
SSs"
нО
ss§_
к о я ОС OS (О я я ьяах к с. я о. о О 5 в О 0 1111
182
НАЗДЬЛ It). МУДЬЛИКиЬАНИЬ
tt D
о a x
2
CX s 2 с a
к
§
iax cxot 2 3 п о h я sv2 3 ?? Q. 3 r
н 2- 5.
w 4o
® 5
o w о j Я S S ®
lift
stoR
4Kas o5 o x 5 u о ю 5 s ц
§ g
e c
я
5S
я шо
SSH азЭ CO rt O О. К со r- я 2
2§.
к 5?к
u яо Чо,о 0) а; Ч § 1
а
П
X Я у ся се
а с
USCC CQ
4 О
5 ч
и с s S
N
S
S
ео-?
6
1
1 II
с т
0,
S
S
сч
“ So
Б а
¥ б"
S4.3
а
Б
т
т
а“ а 53 '1
S са О в
я 3 ш и
’©'Р
её
к
Б
si
Я я W а с
х са к я ч Я 2 со
д Я С S'O v-
я ас и ао2 о, и н 3 л
е о о гс л о С ftS
— bo'О О 5 м я
® я Я 2 ? ,§ Я SooSClDto ч агнЕя Я о О е- Я а О —ЧКЧийЬС
6 Ь с
СО tr
S s а к н я
'g 2о
5 О
8gs
5о
s'0 5? Э g
2 о с ю
№
“ 2 Si
Ч СО К
25
,(U се (U 5 SP-О U я 5 л ЧУНСидО ЧоЧк ч ЬсОО-5о н о ю О О 2хчс'ай 25§нин®ч sg
а и о о с а
“"“SsxHS? a
S§S§s g й gs О. ЕЗ О. Ж qj D“ о
„2й a s н СО л-
В X SBjhhga; хи ц s
SROOHSJejR u t.
Jowsswaasas о л нсегяа'а.ктяитя0
8
С
К
8
S
S
8
6
я
А
S
5 5 S
Я § CO D
a со
gS
8.
с K
СО о
G
§8
О D
о о ч SC
С ж
и и
о
'О о О. X
с
8
Ж S
А х
41 2 о 5 и и
О.
Я К 15 н
I 2- 2 О)
. О. СО о cs S к а о Н tCft4 СО СО он"5,
HftR OSC
J-J О со м — С (- к S я
2 s ч hgH зн
a со я о с к я е Й’0' 1—1 со со со о 2 ?
Я Я Чая
16.13. ТАБЛИЦА КРИТЕРИЕВ ПОДОБИЯ И УРАВНЕНИЙ СВЯЗИ МЕЖДУ МАСШТАБАМИ
183
I го
X СО
CQ Я Я
V rt 0
К к
СМ
о.
. О) го к н ж к с. я г го и о О. н Я
х 1 Я,
к тг
к я сч со II
s
к в О о. ©и
Tf
сх
00
тГ
3
со
-тг
см
1
9
Q. О ГО О я Я
'ВБ2 5 Я о
1 и а а.
2 2 о
133
Vs и Т W Н ►
as cQg о л
ЯОЯ 1 1 Ifiok
S I гл.gaSgg s ё5§з§
S
s a 5 я я s
йви w ЧХО о, в 5
ООщЯй
eirtH
H co Я '
л 83Г'
н. KtfSjL о в го а я а О S SsDvjH
s м о г н 2 5 СО о К 5 И я 2 (u2ao н о ж н-0 г
"ъ,
af
- I
CQ
S S
II
CD
S
II
S
с5
У
0)
5
S
S
QQ QQ
о, -V,
I
я я
й s з
а
9
- t- ЕГ О Го. т е :
” g
и т :
ос К
ГО ГО
о о а) а
i§
a3S
S§ g
flOC я a vo S
S
u
I II
X я
§0.211 S12 S©-
Я о. о
о S я К v я
ЛСО Ё К ё.§
11
sa
е;о о о et©.
о s го я м 5 х о. я я 55 и Hg.§Й
§ CJ ф y-s
1§§о
а и©1 х о го ” О й) Го о ч о. Ct о. О го
и к 2 я ' а-ч л tj ® "
iS-s-g
к О я
ч 5 я Я о л
§§S S 5
sa, у to j® c
J S g. н о II кяякоо
5- ? А w я
я- о s-e-ю-е- с g и х s
И Я 2
S ' 5 ft. Ы
g
41
Е
0)
2
S
X
е
о
"О
0)
2
сЗ
s g
II
w
II
ui
S
S
Е
igg
о a p
m
4 t u
?g5
о я
s О о
О) CD cr cr
§og
ss
' t; tu t ? H 32 05 a я д о et я is ю о я
ГО О- О- О U О О. о Я Я Н
( X О Го
С
184
РАЗДЕЛ 16. МОДЕЛИРОВАНИЕ
16.14. ТАБЛИЦА КРИТЕРИЕВ ПОДОБИЯ ТЕМПЕРАТУРНЫХ ПОЛЕЙ (ОБЩИМ УСЛОВИЕМ ПОДОБИЯ ЯВЛЯЕТСЯ ГЕОМЕТРИЧЕСКОЕ ПОДОБИЕ НАТУРЫ И МОДЕЛИ)
№
пп
Тип задачи
Внутренние
Вид граничных условий
Необходимые и достаточные условия подобия (в дополнение к геометрическому подобию)
Возможные варианты
источники
тепла
Определяющие критерии подобия
Уравнения связи между масштабами
ПРОИЗВОЛЬНОГО ВЫ"
бора масштабов
maTmt
т„ ; т.; т4 т_
1
Нестационарное поле
Есть
Первого и второго рода
ат t
——— idem,
i;
maf mV mV mqv
—ту— idem XT
m4v ml,
maf "V mV mT
mX mT
mn ; m.; m m_ т К I I
Gj f
idem,
a
maTmt mqvm2l
Есть
Третьего рода
P-idem
m mX mT
m„ ; m.; m, m„ Y X a 7 Qv
XT aT
idem
X
ma mt
1
m„ ; m.; m ; m_ а т X aj T
Нет
Первого и второго рода
aTi
maTmt
— 1
m_ ; m.; m aT-I
P
-г
maf mX' mt
aT 1 idem
m, а-p t
Нет
Третьего рода
icem,
I2
aT I
idem,
X
9 — Ь mi maTmi
1
maT' mX
о
“v "V mi
2
Стационарное
поле
Есть
Первого и второго рода
xt -,dcm
mn mj
tv 1 _,
mX mT
v mi' тт
mx- "V mT
qv1',dc
m„m
Есть
Третьего рода
xt :,demi
mX mT
"V mV m9v
ar I
idem
X
ma ml
1
mX' mT
Нет
Первого и второго рода
-
-
mr mi mx
Нет
Третьего рода
aT 1
maT mi
mT- mX
X
mx l
Примечание. ат — коэффициент температуропроводности; t — время; q — плотность внутреннего источника тепла;
v л—коэффициент теплопроводности; Т — температура; — коэффициент теплоотдачи.
ЛИТЕРАТУРА
185
ЛИТЕРАТУРА
1. Алабужев П. М., Геронимус В. Б., Минке вич Л. М., Шеховцов Б. А. Теория подобия и размерностей. Моделирование. Высшая школа, 1968.
2. В е н и к о в В. А. Теория подобия и моделирование применительно к задачам электроэнергетики. Высшая школа, 1966.
3. Г р и н А., Адкинс Д ж. Большие упругие деформации и нелинейная механика сплошной среды. Мир, 1965.
4. Г у х м а н А. А. Введение в теорию подобия. Высшая школа, 1963.
5. К е р о п я н К. К., Ч е г о л и н П. М. Электрическое моделирование в строительной механике. Госстройиздат, 1963.
6. К и р п и ч е в М. В. Теория подобия. Изд-во АН СССР, 1953.
7. Н а з а р о в А. Г. О механическом подобии твердых деформируемых тел (к теории моделирования). Изд-во АН Арм.ССР, Ереван, 1965.
8. П и т л ю к Д. А. Испытание строительных конструкций на моделях. Стройиздат, 1971.
9. П у х о в Г. Е., Васильев В. В., С т е п а н о в А. Е., Токарева О. Н. Электрическое моделирование задач строительной механики. Изд-во АН УССР, Киев. 1963.
10. Работнов Ю. Н. Ползучесть элементов конструкций. Наука, 1966.
11. Седов Л. И. Методы подобия и размерности в меха нике. Наука, 1972.
12. Тетельбаум И. М. Электрическое моделирование
Физмаггиз, 1959.
13. Ф и н к К-, Робах X. Измерение напряжений и деформаций. Машгиз, 1961.
РАЗДЕЛ 17
УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
17.1. ОСНОВЫ ТЕОРИИ УСТОЙЧИВОСТИ СТЕРЖНЕВЫХ СИСТЕМ СО СЖАТЫМИ ЭЛЕМЕНТАМИ
17.1.1. Понятия устойчивости и неустойчивости. Устойчивость равновесия деформируемых систем
Понятия устойчивости и неустойчивости играют большую роль во многих разделах естествознания и техники. Предположим, что в некоторой системе изучается зависимость между причиной и следствием. Если малому изменению причины соответствует столь же малое изменение следствия, то говорят, что система устойчива. Если же малое изменение причины вызывает большое изменение следствия, то система неустойчива.
Строгая математическая формулировка этих понятий была дана впервые А. М. Ляпуновым (1892 г.).
Одной из задач строительной механики является изучение устойчивости равновесия деформируемых систем, т. е. стержней, рам, пластинок, оболочек и т. д. Теория устойчивости равновесия ведет свое начало от Л. Эйлера, который впервые определил критическую силу центрально сжатого прямолинейного упругого стержня (1744 г.).
Параметр нагрузки и, принимающий различные значения, характеризует состояние системы. В процессе непрерывного изменения этого параметра система может перейти от состояния устойчивого к состоянию неустойчивого равновесия. На границе между устойчивым и неустойчивым состояниями система попадает в критическое состояние; соответствующее значение параметра нагрузки и также называются критическим.
Явление потери устойчивости при и и характеризуется мгновенным переходом от устойчивых состояний системы к неустойчивым в процессе изменения параметра нагрузки и и представляет собой качественный скачок, переход от одного качества равновесия к другому.
Понятия критическое состояние и критический параметр нагрузки относят не только к явлению потери устойчивости, но также и ко всем другим состояниям, изменяющим степень неустойчивости системы (см. 17.1.6; 17.4.2; 17.4.4).
В настоящем разделе рассматриваются изгиб и устойчивость сжатых и сжато-изогнутых стержней, а также систем, содержащих такие стержни. Вопросы теории излагаются применительно к стержневым системам 3, 8, 19, 21а, 32, 35, 36, 39, 44, 46.
17.1.2. Консервативные и неконсервативные системы. Методы исследования устойчивости равновесия
Консервативная система обладает следующим свойством: работа внешних и внутренних сил системы, совершаемая при переходе из одного состояния в любое другое, определяется только этими состояниями и не зависит от траектории движения.
Понятие система объединяет деформируемую конструкцию (стержень или совокупность стержней) и нагрузку, поведение которой должно быть задано.
Отсюда следуют два необходимых и достаточных условия консервативности системы: 1) упругость деформируемой конструкции, т. е. обратимость деформаций, и 2) консервативность нагрузки, т. е. независимость совершаемой ею работы (при перемещении из одной точки пространства в другую) от траектории движения.
Консервативная система характеризуется замкнутым энергетическим балансом — рассеивание энергии (диссипация) в ней не происходит. Из условия равенства работы внешних сил (нагрузки) и работы деформации следует существование для консервативной системы потенциальной энергии. Потенциальная энергия определяется рассматриваемым напряженным и деформированным состоянием системы и не зависит от ее предшествующих состояний, т. е от программы нагружения.
Потенциальная энергия системы обладает экстремальными свойствами, которые позволяют сначала выделить равновесные состояния системы из множества неравновесных, а затем оценить качество равновесия (устойчивость или неустойчивость) каждого равновесного состояния.
Для исследования устойчивости равновесия консервативной системы достаточен статический метод, основанный на рассмотрении равновесного состояния системы и на оценке его устойчивости с помощью энергетического критерия.
Системы, не обладающие свойствами консервативности, относятся к классу неконсервативных систем.
Неконсервативность системы может определяться поведением нагрузки, в то время как стержень или совокупность стержней обладают упругими свойствами. В этом случае исследование устойчивости выполняется динамическим методом, основанным на изучении характера возмущенного движения системы. Здесь возможны явления, не наблюдаемые в системах консервативных (см. 17.6).
Более сложными являются случаи, когда неконсервативность системы определяется необратимостью деформаций материала. Анализ устойчивости стержневых систем, выполненных из упруго-пластического материала, требует учета разгрузки и остаточных
17.1. ОСНОВЫ ТЕОРИИ УСТОЙЧИВОСТИ СТЕРЖНЕВЫХ СИСТЕМ СО СЖАТЫМИ ЭЛЕМЕНТАМИ
187
деформаций в тех случаях, когда они возникают. Трудности решения подобных задач обычно обходят, рассматривая однократное нагружение системы в условиях активной деформации. При таких предпосылках упругопластический материал можно рассматривать как нелинейно упругий (см. 17.8).
Устойчивость равновесия деформируемой системы удобно изучать с помощью графика поведения, изображающего совокупность всех возможных равновесных состояний системы. По оси абсцисс откладывают характерное перемещение, которое должно, по возможности, отобразить деформированное состояние системы в целом. По оси ординат откладывают параметр нагрузки и или величину, одновременно с ним возрастающую, — сжимающую силу, осевое напряжение и т. п.
Особые точки графика (например, точки экстремума и точки разветвления) соответствуют критическим состояниям системы.
17.1.3. Потеря устойчивости при разветвлении форм равновесия
Модель с одной степенью свободы (рис. 17.1) иллюстрирует рассматриваемые в настоящей главе явления.
Бесконечно жесткий стер-
М(у)
Рис. 17.1
жень длиной сжат силой N, приложенной с эксцентрицитетом а. Малому отклонению у верхнего конца стержня от вертикали противодействует упругая опора, создающая горизонтальную реакцию Н.
Отклоняющий момент относительно опорного шарнира, создаваемый силой N, равен MN(a-y). Ему противодействует удерживающий момент М2-Н1.
Упругие свойства опоры характеризуются зависимостью
н () v( — цг3),
(17.1)
фике) вертикальное равновесное состояние неустойчиво, так как при отклонении у удерживающий момент меньше отклоняющего: М2МХ. Здесь малое возмущение повлечет за собой дальнейший рост отклонений.
Значение сжимающией силы
N
V
(17.3)
является критическим, ему соответствует состояние безразличного равновесия (прямая RKS на рис. 17.2) с произвольным по величине и по знаку отклонением у.
где v0 и fxO. Условие равновесия —М2 § приво¬
дит к соотношению
Л' (я У) — vl (У — РУ3) 0 (17.2)
Линейно упругая опора (ц 0). В частном случае при р,0 нелинейно упругая опора вырождается в линейно упругую. График поведения модели представлен на рис. 17.2. По оси абсцисс отложено характерное перемещение у, по оси ординат отложена сжимающая сила N.
а) Центральное сжатие. Уравнение равновесия (17.2) при ц 0 и а 0 приводится к виду y(vl—W) 0. Неотклоненная форма равновесия у — 0 возможна при любом значении N. Отклоненные формы равнозесия с произвольной величиной у возможны только при Nvl.
В случае Nvl (отрезок О К на графике) неотклоненная форма равновесия устойчива, ибо при отклонении у удерживающий момент больше отклоняющего: М2 МХ. Малое возмущение (например, малая горизонтальная сила) вызовет малое отклонение модели от вертикали. Наоборот, в случае Afv (отрезок KN на гра¬
Рис. 17.2
Потеря устойчивости здесь характеризуется разветвлением (бифуркацией) форм равновесия: помимо неотклоненной формы у—0 при NN становятся возможными смежные отклоненные формы равновесия У 0.
Точка К на графике (рис. 17.2), соответствующая критическому состоянию системы, называется точкой разветвления (бифуркации).
Потерю устойчивости при разветвлении форм равновесия называют часто потерей устойчивости эйлерова типа (или в смысле Эйлера). В строительной механике стержневых систем принят также термин: потеря устойчивости первого рода.
Характерный признак этого явления — существование смежных форм равновесия при критическом значении нагрузки.
б) Внецентренное сжатие. Анализ зависимости (17.2) при ы0 и а20 прежде всего показывает существование первичных равновесных состояний (кривая О А на графике поведения, рис. 17.2) при у0, NZvl. Эти равновесные состояния возникают в процессе естественного возрастания нагрузки.
Существуют также вторичные равновесные состояния (кривая PQ) при у0, N1. Система может быть заброшена в эти состояния только искусственным образом. Обе кривые равновесных состояний при а0, ОА и PQ имеют своей асимптотой прямую RKS, параллельную оси абсцисс и проходящую через критическую точку К.
Анализ качества равновесия с помощью энергетического критерия (см. 17.1.6) показывает, что первичные равновесные состояния устойчивы, вторичные неустойчивы.
188
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
Асимптотическое поведение, связанное с неограниченным ростом отклонения у по мере приближения сжимающей силы N к критическому значению, характерно для линейно упругих сжато-изогнутых стержней. Представление о неограниченном росте отклонений является следствием геометрически линейной постановки задачи — учет больших перемещений (см. 17.2.8) показывает, что по мере приближения сжимающей силы к критическому значению отклонения быстро растут, но остаются ограниченными по величине.
В реальных конструкциях быстрый рост перемещений приводит к достижению предела пропорциональности, после чего начинается стадия упруго-пластической работы материала.
17.1.4. Потеря устойчивости при достижении предельной нагрузки
Для иллюстрации явления используется рассмотренная выше модель с одной степеьио свободы (см. рис. 17.1), но при значении параметра жесткости упругой опоры ц0.
позволяет классифицировать рассматриваемое явление как потерю устойчивости эйлерова типа.
б) Внецентренное сжатие. Уравнение равновесия (17.2) при а0 приводят к виду
NiyL. (17.5)
а У
Кривая ОАхВА2 на графике поведения (рис. 17.3) изображает первичные равновесные состояния системы при (), кривая PQ — вторичные при у.0. Предполагается. что a У ц 1.
Характерной особенностью поведения модели в процессе естественного возрастания сжимающей силы является наличие экстремальной точки В, соответствующей максимуму сжимающей силы N. При сжимающей силе, превышающей это предельное значение Ломакс, первичные равновесные состояния невозможны.
Анализ качества равновесия с помощью энергетического критерия (17.1.8) показывает, что устойчивыми являются только первичные равновесные состояния, изображаемые восходящей кривой ОЛхВ графика поведения. Первичные равновесные состояния, соответствующие нисходящей ветви ВА2 графика, а также все вторичные равновесные состояния (ветвь PQ) неустойчивы. Отсюда следует, что наибольшее (предельное) значение сжимающей силы
(17.6)
является критическим.
Критической силе N соответствует критическое отклонение у. Каждому значению сжимающей силы NzN соответствуют два равновесных состояния, из которых первое, с меньшим отклонением устойчиво, а второе, с большим отклонением неустой¬
чиво (рис. 17.3).
Необходимым условием максимума силы N, рассматриваемой как функция характерного перемещения у, является равенство нулю первой производной или, как говорят, условие стационарности:
Рис. 17.3
Нелинейно упругая опора (ц0). График поведения модели представлен на рис. 17.3.
а) Центральное сжатие. Уравнение равновесия (17.2) при а0 приводится к виду
yN — v (1 — ру2) 0, (17.4)
откуда следуют два решения:
1) У—0 при любом значении N (неотклоненная форма равновесия, отрезок OKN оси ординат на рис. 17.3);
2) Nvl( 1—iy2) при Ncvl (отклоненная форма равновесия, кривая RKS на рис. 17.2).
Потеря устойчивости при разветвлении форм равновесия вызывается критической силой (17.3).
Анализ качества равновесия с помощью энергетического критерия (17.1.8) показывает, что неотклоненные равновесные состояния при NiN устойчивы, при NN неустойчивы. Также неустойчивы отклоненные состояния уф0.
Здесь в критической точке К наблюдается мгновенное состояние безразличного равновесия. При N — N становятся возможными бесконечно близкие смежные формы равновесия. Касательная к кривой RKS в критической точке параллельна оси абсцисс. Эю обстоятельство
dN
dy
0-
(17.7)
Здесь наблюдается потеря устойчивости при достижении предельной нагрузки или, как принято говорить в строительной механике стержневых систем, потеря устойчивости второго рода. Это явление отличается от потери устойчивости эйлерова типа, обусловленной разветвлением форм равновесия в критическом состоянии.
Экстремальная точка В на графике поведения (рис. 17.3) называется предельной точкой.
Потеря устойчивости при достижении предельной нагрузки характерна для сжато-изогнутых стержней из нелинейно упругого или упруго-пластического материала.
17.1.5. Устойчивость линейно упругой системы с конечным числом степеней свободы
Положение системы характеризуется обобщенными координатами уи У2, ., гn, число которых равно числу степеней свободы п. Пусть при любом значении параметра нагрузки и возможно неотклоненное равновесное состояние системы, когда все у к—0. При значении ии неотклоненное состояние является единственно возможным. Требуется найти критическое значение параметра нагрузки м, при котором становятся воз¬
17.1. ОСНОВЫ ТЕОРИИ УСТОЙЧИВОСТИ СТЕРЖНЕВЫХ СИСТЕМ СО СЖАТЫМИ ЭЛЕМЕНТАМИ
189
можными смежные отклоненные формы равновесия (потеря устойчивости в эйлеровом смысле).
Условия равновесия системы имеют вид линейных однородных алгебраических уравнений относительно обобщенных координат:
Уп Уп о
1 Угп Уп 0;
УнУх УиУ Т,11 У22У2
УтУ1 УпгУг Упп Уп0-
(17.8)
Коэффициенты этих уравнений уц зависят, вообще говоря, от геометрических размеров исследуемой системы, жесткости ее упругих связей и параметра нагрузки и.
Условие существования нетривиальных (ненулевых) решений системы (17.10) заключается в равенстве нулю определителя (детерминанта):
О(и) 1т 0. (17.9)
В простейшем случае коэффициенты являются
линейными функциями параметра нагрузки и, т. е.
Vik atk btku. (17.10)
При этом алгебраическое уравнение п-й степени (.17.9) имеет ровно п корней
И1. И.“л (17.11)
определяющих критические состояния системы.
Если исследуемая система консервативна, то матрица коэффициентов обладает свойством симметрии (или взаимности) yik — yhi. В этом случае все критические значения параметров иу будут вещественными.
Потеря устойчивости происходит при достижении параметром нагрузки и наименьшего из критических значений:
. (17.12)
Индекс 1 у наименьшего из критических значений опускается в тех случаях, когда это не может вызвать недоразумений.
17.1.6. Собственные значения и собственные функции
Теория собственных значений является аналитической основой исследования явлений потери устойчивости при разветвлении форм равновесия. Ниже в самом сжатом виде формулируются основные положения этой теории применительно к рассматриваемой линейной задаче.
Дано линейное однородное уравнение
У 0.
(17.13)
где Lu — оператор, содержащий параметр и. Для системы с бесконечно большим числом степеней свободы у — у(х)—искомая функция непрерывного аргумента, оператор Lu имеет интегральную или дифференциальную форму. В этом последнем случае уравнение (17.13) дополнено однородными граничными условиями. Для системы с конечным числом степеней свободы п неизвестным является вектор
У(У1,У Уп); (1714)
оператор Lu имеет матричную структуру и уравнение (17.13) приводится к виду (17.8).
Однородное уравнение (17.13) при произвольном значении параметра и имеет тривиальное решение у0. Собственным значением и. называется такое значение параметра и, при котором уравнение (17.13) имеет отличное от нуля (нетривиальное) решение.
Для задач устойчивости равновесия каждому собственному значению м соответствует критическое состояние системы, связанное с разветвлением форм равновесия. Возникающая при этом смежная форма равновесия характеризуется собственной формой (или собственной функцией) уj, определенной с точностью до постоянного множителя. В рассматриваемой задаче
(17.8) это будет собственный вектор
(гi, Уг,-,Уп)
(17.15)
одна из координат которого выбрана произвольно, а все прочие определены из уравнений (17.8) при ы ы.
Все собственные формы у являются формами отклоненного равновесия. В случае систем с бесконечно большим числом степеней свободы их называют также формами криволинейного равновесия или кривыми выпучивания.
Первая собственная форма у—уг является формой потери устойчивости.
Совокупность всех чисел и образует спектр собственных значений (17.11).
Потеря устойчивости системы происходит при первом критическом состоянии системы, т. е. при наименьшем критическом значении параметра нагрузки и mi.
Собственные формы системы с бесконечно большим числом степеней свободы (сжатый стержень постоянного сечения длиной I) обладают свойством обобщенной ортогональности
1 1
y.i y.i dx f y,j yi dx 0 (i i).
(17.16)
Для системы с конечным числом степеней свободы свойство ортогональности выражается в равенстве нулю скалярного произведения двух любых (не тождественных) собственных векторов
(yi yj) — 0 (('¥) (17.17)
Бесконечное множество собственных функций () или совокупность собственных векторов yj обладают свойством полноты. Для рассматриваемых в настоящем разделе задач любое отклоненное состояние системы у, вызванное произвольной нагрузкой, может быть представлено в виде разложения по собственным формам (векторам)
уЪАу, (17.18)
1
где Aj — коэффициенты разложения.
Рассмотрение высших критических значений параметра нагрузки м2 з, . дает возможность ответить на вопрос о степени неустойчивости системы. Говорят, что при параметре нагрузки и система имеет степень неустойчивости v, если
wv и v1.
(17.19)
Система с конечным числом степеней свободы п находится в состоянии полной неустойчивости, если ыя.
190
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
17.1.7. Энергетический критерий качества равновесия
Потенциальной энергией упругой системы называют работу, совершаемую внутренними и внешними силами системы при переводе ее из деформированного состояния в начальное, недеформированное.
Общие методы исследования равновесия и устойчивости консервативных систем основаны на экстремальных свойствах потенциальной энергии.
Здесь в качестве начала отсчета принято недеформированное (неотклоненное) состояние системы. Предполагается, что перемещения (отклонения) системы убывают от рассматриваемого значения до нуля; величина нагрузки при этом остается без изменения.
Для системы с бесконечно большим числом степеней свободы потенциальная энергия представляет собой функционал
i
П J F(xty,y',y",.)dxt (17.20)
Хо
который в частном случае линейно упругой системы будет квадратичным.
Для системы с конечным числом степеней свободы потенциальная энергия представляет собой функцию обобщенных координат
П П(1иу2 уп), (17.21)
а в частном случае линейно упругой системы — квадратичную форму.
Выражения для потенциальной энергии системы (17.20), (17.21) содержат параметр нагрузки и.
Теорема равновесия. В состоянии равновесия потенциальная энергия системы имеет стационарное значение. В частности, это условие может определять экстремум, когда в состоянии равновесия потенциальная энергия достигает наименьшей или наибольшей величины по сравнению с неравновесными состояниями, близкими к рассматриваемому равновесному.
Теорема равновесия требует обращения в нуль первой вариации потенциальной энергии
6П 0. (17.22)
Это условие стационарности эквивалентно принципу возможных перемещений Лагранжа, так как первая вариация потенциальной энергии системы 6П представляет собой элементарную работу всех сил системы на возможных (виртуальных) перемещениях.
Для системы с конечным числом степеней свободы в нуль должен обращаться полный дифференциал, откуда следует равенство нулю всех частных производных
ап
-— 0 ( 1, 2,., п). (17.23)
dyi
Как известно, условия стационарности (17.22) или (17.23) являются необходимыми, но не достаточными условиями экстремума.
Для системы с бесконечно большим числом степеней свободы условие (17.22) приводит к уравнению Эйлера — Пуассона
dF d dF d dF
ду dx ду' dx dy" ’ (17’24)
т. e. к дифференциальному уравнению равновесных состояний системы.
Теорема качества равновесия. В состоянии устойчивого равновесия потенциальная энергия системы имеет ми¬
нимальное значение по сравнению с неравновесными состояниями, близкими к рассматриваемому равновесному. При несоблюдении этого условия система неустойчива, если отсутствие минимума определяется членами второго порядка в разложении потенциальной энергии.
Первую часть теоремы (критерий устойчивости) сформулировал Лагранж (1788 г.), строгое доказательство дали Ф. Миндинг (1838 г.) и Г. Лежен-Дирихле (1846 г.).
Вторая часть теоремы (критерий неустойчивости) принадлежит А. М. Ляпунову (1892 г.).
Условие устойчивости требует положительности второй вариации потенциальной энергии
62П 0. (17.25)
Для устойчивости системы с конечным числом степеней свободы положительным должен быть второй полный дифференциал.
Потенциальная энергия модели с одной степенью свободы, рассмотренной выше (см. рис. 17.1), равна:
U
П v(y — ху3) dy — N. (17.26)
О
Анализ этого выражения подтверждает выводы о качестве равновесия модели, сделанные выше.
17.1.8. Потенциальная энергия центрально сжатого линейно упругого стержня
Рассматриваются малые изгибные перемещения прямолинейного центрально сжатого стержня, материал которого следует закону Гука. Потенциальная энергия такого стержня равна:
I
1 С
П — (Ely"2 — Ny'2) dx, (17.27)
о
где х, у — координаты точки на упругой кривой; — длина стержня; EI — жесткость стержня при изгибе; N — продольная сжимающая сила.
Выражение для потенциальной энергии (17.27) основано на технической теории изгиба стержней; такю постановку задачи устойчивости называют геометрически линейной.
Уравнение Эйлера — Пуассона (17.24) в данном случае приводит к линейному однородному дифференциальному уравнению четвертого порядка
Ely™ Ny" 0, (17.28)
определяющему равновесные состояния стержня.
При обозначении
a NEI (17.29)
общий интеграл уравнения (17.28) имеет вид
у Сг sin ах С2 cos ах С3х С4, (17.30)
где Ch — постоянные интегрирования.
17.1.9. Задача Эйлера
J1. Эйлер впервые рассмотрел задачу об устойчивости центрально сжатого линейного упругого стержня с шарнирным опиранием концов (17 44 г.).
Граничные условия
У 0, у" 0 при х 0 и х
17.1. ОСНОВЫ ТЕОРИИ УСТОЙЧИВОСТИ СТЕРЖНЕВЫХ СИСТЕМ СО СЖАТЫМИ ЭЛЕМЕНТАМИ
191
приводят к системе уравнений относительно постоянных интегрирования С:
С2 С 4 0;
— С2 а2 0;
Ci sin а С3 0;
— Сха2 sin а — С2а2 cos at — 0.
(17.31)
Параметром нагрузки для сжатого стержня служит число нулевой размерности
: ОС
(17.32)
a4sin0. (17.33)
Условие существования ненулевых решений системы линейных однородных уравнений (17.31) имеет вид
0 10 1
0 — а2 0 0
sinw.0 10
—a2 sin и —a2 cos и 0 0
Отсюда находят спектр собственных значений
. " (1,2,.). (17.34)
Этим критическим значениям параметра нагрузки соответствуют критические силы
я 2
и собственные формы
yj
: TJy sin -
j nx
I
nx
У W П sin —
где i") — прогиб в середине пролета, произвольный по величине.
Выражение для критической силы (17.37) носит название формулы Эйлера.
Анализ устойчивости с помощью энергетического критерия показывает, что прямолинейная форма равновесия устойчива только при N,N.
Упругая линия у(х)у вызванная произвольной нагрузкой, может быть представлена в виде разложения по собственным формам типа (17.18):
,()2л'
i-i
sin
ПХ
г
Рассмотренное явление потери устойчивости характеризуется разветвлением форм равновесия при критическом значении сжимающей силы NN: этой силе соответствует начальная, прямолинейная форма и смежная, криволинейная форма равновесия.
В этом случае говорят также о потере устойчивости в эйлеровом смысле или о потере устойчивости первого рода.
17.1.10. Равновесные состояния сжатоизогнутого линейно упругого стержня
Сжато-изогнутым называют стержень, сжатый продольной силой N и нагруженный некоторой поперечной (вызывающей изгиб) нагрузкой р(х), в составе которой могут быть сосредоточенные силы Р, внешние изгибаю-
(17.35)
(17.36) абсциссой
где г — ордината упругой линии в точке с х2, произвольная по величине.
При 0 возможна только прямолинейная форма равновесия у(х)0; следовательно, значение ы0 не является собственным, хотя оно и удовлетворяет уравнению (17.33).
Наименьшее значение критической силы из ряда (17.35) при 1 соответствует потере устойчивости. Эта критическая сила
п2Е1
N Л'э —— (17.37)
2
называется эйлеровой силой. Первой собственной формой, или формой потери устойчивости, будет
(17.38)
Рис. 17.4
щие моменты (пары сил).Mi и равномерно распределенные нагрузки р (рис. 17.4, а). Частным случаем сжатоизогнутого стержня является внецентренно сжатый стержень (рис. 17.4,6) с концевыми эксцентрицитетами на левой опоре а и на правой опоре ka.
Пусть будет М — изгибающий момент в точке с абсциссой х, вызванный одной только поперечной нагрузкой р(х), без учета влияния продольной силы N. Полный изгибающий момент равен
M M Ny. (17.40)
В случае линейной упругости материала и постоянной жесткости стержня дифференциальное уравнение изгиба имеет вид
EIylv Ny"p(x). (17.41)
Это уравнение четвертого порядка эквивалентно системе двух уравнений второго порядка
Ely М- Ny — 0; М'-р(х).
Другая эквивалентная система имеет вид EIM" NM — Е1р (х);
Ely — М.
, j
;ет в
)
(17.42)
(17.43)
(17.39)
Весьма удобным является решение дифференциального уравнения (17.41) в форме метода начальных пар аметров (см. 17.2.2).
Сжато-изогнутый стержень испытывает деформации сжатия и изгиба с самого начала нагружения. Под воз-
192
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
действием продольной сжимающей силы рост перемещений (и напряжений в сечениях стержня) опережает рост нагрузки.
В процессе естественного увеличения нагрузки прогибы сжато-изогнутого стержня неограниченно возрастают по мере приближения сжимающей силы к критическому значению N в эйлеровом смысле, т. е. первичные равновесные состояния определяют асимптотическое поведение стержня. При возможно
существование вторичных равновесных состояний стержня. График поведения стержня подобен ранее рассмотренному графику для модели с линейно упругой опорой при аО (см. рис. 17.2).
17.1.11. Об анализе больших перемещений сжатых и сжато-изогнутых стержней
Геометрически нелинейная постановка задачи устойчивости основана на учете больших перемещений системы. При анализе стержневых систем используют точное выражение для кривизны при изгибе
T- N)T
2-(ГГ
2 _
(17.44)
и учитывают сближение концов стержня. Во втором из выражений для кривизны, предложенном Ф. С. Ясинским, независимым переменным является длина дуги упругой линии s 47.
Анализ больших перемещений преследует цели изучить поведение системы при нагрузке, близкой к критическому значению, исследовать механизм потери устойчивости, описать закритическое поведение системы. Определенная в результате такого исследования величина критической силы совпадет с результатом решения задачи в геометрической линейной постановке, если предкритическое (невозмущенное) состояние стержня является недеформированным (пример — центрально сжатый линейно упругий стержень, задача Эйлера). В противоположном случае, когда стержень испытывает дефорхмацию (изгибается) до потери устойчивости, учет больших перемещений вносит поправку в величину критической силы. Решение ряда частных задач (см. 17.2.8) показало, что величина этой поправки незначительна (порядка десятых и даже сотых долей процента).
Отсюда следует, что практические расчеты стержней и стержневых систем могут быть основаны на геометрически линейной постановке задачи.
17.1.12. Устойчивость в большом и явление перескока
В некоторых более сложных задачах (например, при исследовании закритического поведения стержня в геометрически нелинейной постановке) при одном и том же значении сжимающей силы возможно не одно, а два или более равновесных состояний, не смежных между собой. Динамический процесс перехода от одного равновесного состояния к другому, устойчивому через ряд неравновесных состояний, называется перескоком.
Исследование явления перескока требует, как правило, геометрически нелинейной постановки задачи.
Простейшим примером системы, в которой реализу¬
ется это явление, служит так называемая ферма Мизеса (рис. 17.5). Система образована двумя шарнирно соединенными стержнями из линейно упругого материала. Стержни могут испытывать значительные продольные деформации, не разрушаясь и не изгибаясь. Под воздействием силы Р узел В фермы перемещается в гоч-
Рис. 17.5
Рис. 17.6
ку В' (рис. 17.5, а). При достижении силой Р критического значения этот узел мгновенно, перескоком, перейдет в новое положение В" (рис. 17.5,6). В этом новом положении стержни фермы растянуты, система устойчива 53а. Более подробный анализ задачи см. 31.
В других задачах возможность потери устойчивости с перескоком зависит от меры возмущения, которая должна иметь определенную конечную величину.
17.1.13. Идеальные и неидеальные системы.
Начальные несовершенства реальных стержней
Идеальным называют линейно упругий стержень, нагруженный так, что упругая линия изгиба у(х) ортогональна первой собственной форме у(х), т. е. кривой выпучивания при потере устойчивости в смысле Эйлера. Для стержня постоянного сечения это условие ортогональности записывается в виде
1
j У () У (x)dx 0.
(17.45)
Отсюда следует, что в разложении упругой линии по собственным формам (17.39) коэффициент Ах равен нулю.
Стержень называется неидеальным, если он нагружен так, что условие (17.45) не выполняется.
Простейшим примером идеального стержня служит центрально сжатый шарнирно опертый стержень (рис. 17.6, а), для которого у(х)0. В момент потери устойчивости становятся возможными смежные формы равновесия у(х), стержень выпучивается по полуволне
17.1. ОСНОВЫ ТЕОРИИ УСТОЙЧИВОСТИ СТЕРЖНЕВЫХ СИСТЕМ СО СЖАТЫМИ ЭЛЕМЕНТАМИ
193
синусоиды (17.38). Кривая выпучивания показана на рис. 17.6, а пунктиром.
Очевидно, что идеальными являются также центрально сжатые стержни с любыми другими закреплениями концов.
Внецентренно сжатый стержень постоянного сечения с равными по абсолютной величине, но противопо-
Рис. 17.7
Рис. 17.8
ложно направленными концевыми эксцентрицитетами (рис. 17.6,6) изгибается по S-образной (антисимметричной относительно середины пролета) упругой линии у(х), которая ортогональна первой собственной форме у(). Критическое состояние при эйлеровом значении сжимающей силы N3 характеризуется разветвлением форм равновесия: на антисимметричную упругую линию у(х) накладывается симметричная кривая выпучивания У(х)—полуволна синусоиды (17.38) с произвольной по величине и знаку наибольшей ординатой г). График поведения этого идеального стержня представлен на рис. 17.7, в качестве характерного перемещения выбран угол поворота на опоре 0. Отрезок кривой 0,К при N N э соответствует устойчивым состояниям стержня, отрезок KS при NN3 —неустойчивым. Точка К графика определяет критическое состояние стержня, связанное с разветвлением форм равновесия.
Идеальным будет также любой сжато-изогнутый стержень постоянного сечения, упругая линия которого антисимметрична относительно середины пролета (см. рис. 17.6, в).
Обобщение условия ортогональности по отношению к первой собственной форме (17.45) на систему стержней приводит к понятию идеальной системы. Примером такой системы служит П-образная рама, обладающая вертикальной осью симметрии и нагруженная равномерно распределенной по ригелю нагрузкой (рис. 17 8). Сплошной линией показано очертание рамы в состоянии изгиба, вызванного нагрузкой; пунктирной линией показана кривая выпучивания при потере устойчивости в эйлеровом смысле.
К неидеальным системам относятся все системы, форма изгиба которых не ортогональна первой собственной форме.
Идеальные системы испытывают потерю устойчивости при разветвлении форм равновесия, когда сжимающая сила достигнет критического значения.
Для неидеальных линейно упругих систем характерно асимптотическое поведение, т. е. неограниченное возрастание перемещения по мере приближения сжимающей силы к критическому значению (пунктирная кривая ОЛ2С на рис. 17.7).
Все реальные стержни имеют начальные искривления и, кроме предусмотренных проектом эксцентрицитетов,
также начальные (случайные) эксцентрицитеты приложения сжимающих сил. Начальные искривления и случайные эксцентрицитеты объединяют понятием н а чальных несовершенств.
Вопрос о необходимости учета начальных несовершенств при расчете сжатых и сжато-изогнутых стержней следует рассматривать отдельно для стержней с идеальной и неидеальной расчетной схемой.
При расчете неидеальных стержней учет начальных несовершенств вносит количественные коррективы, пропорциональные мере этих несовершенств. В большинстве случаев изгибающие моменты, вызванные начальными несовершенствами, мальгпо сравнению с изгибающими моментами, вызванными поперечной нагрузкой р(х) или проектным эксцентрицитетом а приложения сжимающей силы N. В этих случаях влиянием начальных несовершенств можно пренебречь.
При практическом расчете идеальных стержней необходим учет начальных несовершенств, нарушающих идеальную схему и создающих качественно другие условия работы стержня. Рост напряжений и перемещений по мере приближения сжимающей силы к критическому значению вызывает развитие неупругих деформаций материала.
Для учета начальных несовершенств идеального стержня на него накладывают начальное малое искривление Уо(х) или дополнительную малую нагрузку, вызывающую упругую линию уо(х) причем в обоих случаях форма Уо(х) не должна быть ортогональной первой собственной форме у(х). Мера начального несовершенства и его направление особой роли не играют, так как самое малое нарушение идеальности в ту или иную сторону переводит кривую OKS на графике поведения в положение ОС (см. рис. 17.7).
17.1.14. Свободная длина и гибкость стержня
Понятие свободной длины было введено Ф. С. Ясинским 47 с целью обобщения формулы Эйлера (17.37) на случай центрально сжатого линейно упругого стержня с произвольным закреплением концов:
я П1 I2
Здесь свободная длина стержня
(17.46)
(17.47)
представляет собой произведение коэффициента свободной длины р на геометрическую длину I. Величину Р выбирают в соответствии со схемой закрепления концов стержня.
Запись критической силы
Мт п
(17.48)
удобна для задач о потере устойчивости при разветвлении форм равновесия, так как позволяет результат решения записать в виде одного числа — коэффициента свободной длины р, не зависящего от геометрических размеров стержня.
В случае стержня переменного сечения () запись в форме (17.48) становится условной, поскольку величина р зависит от выбранного частного значения EJ в (17.48).
194
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
Гибкостью стержня называют отношение его свободной длины к радиусу инерции поперечного сечения:
-Vi-
(17.49)
Здесь — момент инерции; F—площадь поперечного сечения стержня.
Нормативная методика расчета сжатых и сжато-изогнутых стержней основана на понятиях свободной (расчетной) длины и гибкости стержня (см. 17.9.2; 17.9.4).
17.2. ЛИНЕЙНО УПРУГИЕ СЖАТЫЕ И СЖАТО-ИЗОГНУТЫЕ СТЕРЖНИ ПОСТОЯННОГО СЕЧЕНИЯ
17.2.1. Линейно упругий материал. Обозначения
17.2.2. Уравнение упругой линии стержня в форме метода начальных параметров
Дифференциальное уравнение малых изгибных перемещений сжато-изогиутого стержня с произвольными условиями закрепления концов имеет вид
Р ()
EI ’
где a2NEI; р(х)—поперечная нагрузка.
dy d2y
—- а2—dx4 dx2
(17.50)
Рис. 17.9
Рассматриваются прямолинейные массивные (не тонкостенные) стержни постоянного сечения. Материал стержней линейно упругий, т. е. существует прямая пропорциональность между напряжением о и деформацией е, выражаемая законом Гука о —Ее.
Силовая плоскость совпадает с плоскостью одной из главных осей поперечного сечения. Сохранение плоской формы изгиба считается обеспеченным. Не учитываются деформации осевого обжатия и деформации, вызванные касательными напряжениями. При анализе изгибных деформаций принимается гипотеза плоских сечений.
Общие положения см. 17.1.3; 17.1.9; 17.1.10; 17.1.13; 17.1.14.
Основные обозначения:
I — длина стержня; х, у — координаты точки на упругой линии;
ут — прогиб в середине пролета;
г — абсцисса точки приложения нагрузки;
Qdyldx — угол поворота;
М — изгибающий момент;
Q — поперечная сила;
И — проекция поперечной силы Q и продольной силы N на направление, перпендикулярное первоначально прямолинейной оси стержня;
EI — жесткость стержня при изгибе в силовой плоскости;
N — продольная сжимающая сила;
N — наименьшее критическое значение сжимающей силы;
N3 — эйлерова критическая сила для шарнирно опертого стержня;
р — распределенная поперечная нагрузка на стержень;
Р — сосредоточенная внешняя сила;
Мг — внешний момент, пара сил;
и—УNjEIl — параметр нагрузки для стержняз
— -е критическое значение параметра нагрузки;
итит 1 — наименьшее критическое значение параметра нагрузки.
Общий интеграл этого уравнения равен сумме общего интеграла (17.30) однородного дифференциального уравнения (17.28) и любого частного интеграла уы(х) полного уравнения (17.50):
У Сг sin ах С2 cos ах С3х С4 ун (х). (17.51)
Наиболее удобным является решение уравнения (17.50) в форме метода начальных параметров. Под начальными параметрами понимают величины у о, 0О, М0, 0 в начале координат при х 0 (рис. 17.9). Здесь Н— проекция поперечной силы Q и продольной силы N на направление, перпендикулярное первоначально прямолинейной оси стержня. Из условия равновесия (рис. 17.10) Qcos0-HVsin0-HV0 следует
Н Q — УУ0; (17.52) H0 Q0-NQ0. (17.53)
Решение уравнения (17.50) в форме метода начальных параметров имеет вид
§ sin ах М0 1 — cos ах У Уо в Л0_ EI
ах -
EI
sin ах
а2
а
н;
е dx
а М
0О cos ах —
Яо
EI
1 — cos ах
а2
0;
dy
М — EI —— 0о а sin ах 4dx2 0
sin ах
MQ cos ах Н0 -f- Мн;
а
Н Hq — Нн.
Здесь зависящее от нагрузки слагаемое равно
X
У” () J ( — ) — sin а (-6)1 р (Ш, (17.
55)
17.2. ЛИНЕЙНО УПРУГИЕ СЖАТЫЕ И СЖАТО-ИЗОГНУТЫЕ СТЕРЖНИ ПОСТОЯННОГО СЕЧЕНИЯ
195
Таблица 17.1
Метод начальных параметров. Слагаемые, зависящие от нагрузки
Вид нагрузки
minrimfi
ШПГМЙ
Р- х
,м,
У
р Г (х — г)2 1 — cos а (х — г)
EI а2 2
а2
Еа2
sin а (х — г)
(x — z)— j
а Мх
— 77Т t cos а ( — г)1
EI а2
0Н
—— Г(х —г)-
FI а2 L ’
sin а (х — г)
а2
— cos а (х — z)
Мг
— — sin а (х — г) EI а
— — 1 — cosa( —г)
- — sin а (х — г) а
Mi cos а (х — г)
— sin а (х — г) а
— Р cos а (х — г)
Мх a sin а (х — г)
Нн
-p(x — z)
— Р
Примечание. При xz все слагаемые от нагрузки, приложенной в точке с абсциссой г, принимаются равными нулю.
причем — вспомогательная переменная, которая после интегрирования и подстановки пределов исключается; z — абсцисса начальной точки приложения нагрузки р(х). При xCz функцию ув(х) и все ее производные принимают равными нулю.
Аналитические выражения для зависящих от нагрузки слагаемых
duH d2uH
ун (х); 0 —f— ; М - —;
dx dx2
d3u11
Qh _ El -2- ; HH Qh — дг0н v dx3
(17.56)
приведены в табл. 17.1. Для равномерно распределенной нагрузки р const, воздействующей на всем протяжении стержня правее точки г, из (17.55) следует
где функция влияния (.г — г)2 1
V (х, z)
- cos a (х — z)
(17.57)
(17.58)
Выражения для от сосредоточенной силы Р и от пары сил (внешнего момента) приложенных в точке z получают дифференцированием функции влияния по переменной z
Р д
уНТ'7'пг); уН
Выражения для 0Н, MH, QH получают из (17.57) и (17.59) дифференцированием функции влияния г) по переменной х в соответствии с (17.56).
Преимущество решения (17.54) по сравнению с другими возможными формами: а) из четырех подлежащих определению величин у0, 0О, М0, Я0 две известны по условиям закрепления левого конца стержня; б) влияние поперечной нагрузки р(х) учитывается добавлением слагаемых ун, 0Н,. при х;2 без изменения предшествующих членов.
17.2.3. Критические силы центрально сжатых стержней с различными условиями закрепления концов
Решение задачи устойчивости (в эйлеровом смысле) для однопролетного стержня при произвольных закреплениях концов удобно основывать на соотношениях метода начальных параметров (17.54), в которых следует положить гн 0н Л4н нО. Из четырех начальных параметров у0, 0о М0, Н0 два известны по условиям закрепления левого конца стержня при х0. Составляют два уравнения, отражающие условия закрепления правого конца стержня. Эти уравнения будут линейными и однородными относительно двух начальных параметров, оставшихся неизвестными, которые здесь обозначены символами Zb Z2:
мг а2
г). (17.59)
(17.60)
196
РАЗДЕЛ 17, УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
Таблица 17.2
Собственные формы и критические параметры нагрузки для сжатых линейно упругих стержней
17.2. ЛИНЕЙНО УПРУГИЕ СЖАТЫЕ И СЖАТО-ИЗОГНУТЫЕ СТЕРЖНИ ПОСТОЯННОГО СЕЧЕНИЯ
Продолжение табл. 17.
Схема стержня и форма потери устойчивости
Уравнение упругой линии (собственной формы)
Уравнение критического состояния ()0, и VnEJ I
Первые три критические
Критическая сила Nm и
вторая собственная форма
Общее решение уравнения
значения параметра нагрузки и j
свободная
длина
третья собственная форма
D (и) 0
(Продолжение таблицы на след стр.)
198
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
Поодолжение табл. 17.2
Схема стержня и форма потери устойчивости
Уравнение упругой линии (собственной формы)
Уравнение критического?состояния D(u)0, u—V NE1 1
Первые три критические значения паоаметоа
Критическая
сила N и
вторая собственная форма
Общее решение уравнения D (и) 0
нагрузки
свободная длина 10
третья собственная форма
1
N
xmlW—
7
N
' — нечетное
и (. и и и -
sin — sin — COS 10
2 2 2 2j
1
2л 6,2832
U — С (1 — cos rnuj)
2
i — нечетное “ 2‘я
и
2
2,4606л 8,9868
4л2Е 1
i — четное
1 ’ 2
у С Jsin (1—2m) — — четное; о к
3
U у 1
— (1 — 2m) sin -rp-J
и 2(0 — 1 ' (О ЗоЯ — 26 15o)ft
ы,
4л 12,5664
D(u)
0,
(17.62)
Коэффициенты этих уравнений yikyik(u) являются функциями параметра нагрузки
u al VnEII. (17.61)
Условие существования ненулевых решений системы (17.60) заключается в равенстве нулю определителя
Vll Vl2
V 21 722
который следует рассматривать как функцию параметра нагрузки и.
Условие критического состояния (17.62) приводит к трансцендентному уравнению относительно и, корни которого образуют бесконечный спектр собственных значений параметра нагрузки
к1. 42, Utf. (17.63)
Для -й критической силы имеем
и2,Е1
(1,2,.).
А'.
2
(17.64)
Наименьшее критическое значение параметра нагрузки соответствует потере устойчивости стержня при разветвлении форм равновесия. Критическая сила, вызывающая потерю устойчивости, равна
и2 Е1
-7— 07.65)
Для построения собственной формы используют первое из уравнений метода начальных параметров (17.54) при и ; соотношение между двумя неизвестными начальными параметрами Z и Z2 определяют из уравнений (17.60), которые при u — uf становятся эквивалентными друг другу.
Любые две собственные формы и yj обладают свойством обобщенной ортогональности (17.16).
Из сравнения двух значений критической силы (17.49) и (17.65) определяют свободную длину стержня
(17.66)
Рис. 17.11
17.2. ЛИНЕЙНО УПРУГИЕ СЖАТЫЕ И СЖАТО-ИЗОГНУТЫЕ СТЕРЖНИ ПОСТОЯННОГО СЕЧЕНИЯ
199
Табл. 17.2 содержит результаты исследования устойчивости однопролетных стержней для пяти схем с различными условиями закрепления концов. Показаны схема стержня, начальная недеформированная его ось, форма потери устойчивости, вторая и третья собственные формы, уравнение упругой линии с произвольным множителем С, уравнение критического состояния D(u) 0 и общее выражение для -го корня этого уравнения, первые три критических значения параметра нагрузки мх, н2 из формула для наименьшей критической силы N, свободная длина.
Если подобрать длины стержней I для каждой из схем так, чтобы критическая сила была во всех случаях одинаковой, то формы потери устойчивости можно рассматривать как дуги одной и той же синусоиды (рис. 17.11)
юс
y S in—. (17.67)
При этом свободная длина равна расстоянию между двумя смежными точками перегиба, т. е. полуволне синусоиды.
17.2.4. Внецентренно сжатые стержни
Общий случай — неравные концевые эксцентрицитеты.
Концевой эксцентрицитет равен а на левой и ka на пра¬
вой опоре (см. рис. 17.4,6). Предполагается, что 1. Условия на левом конце стержня дают у00, M0Na. Из условия равновесия определяют величину
Wo-y-0-).V.
Воспользовавшись первым из уравнений (17.54) и подчиняя решение граничному условию на правом конце стержня (у — 0 при х—1), определяют единственный неизвестный начальный параметр
Nal
—c(u) ks(u), (17.68)
где приняты обозначения для функций Н. Е. Жуковского 15:
с (и) — — (1—; s (и) —- (——— — l). (17.69)
и2 tg и ) и2 sin и
Уравнение изогнутой оси стержня после преобразований приводят к форме
а ( и
у — sin (и — ах) k sin ах —
и Isinu
— (и — ах) о. (17.70)
Таблица 17.3
Равновесные состояния сжатых и сжато-изогнутых линейно упругих стержней
200
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
Ниже рассматриваются частные случаи внецентренно сжатого стержня.
а) Равные по абсолютной величине и по знаку конце вые эксцентрицитеты. В случае k — уравнение (17.70)
принимает вид
и — — ах
2 (17.71)
прогиб в середине пролета равен:
1
Ут — а I
(17.72)
cos График поведения стержня представлен в табл. 17.3, а. Сплошная линия соответствует устойчивым первичным состояниям равновесия при NN9, Ут0, пунктирная — неустойчивым вторичным при NN0,ут.—2а. Формы равновесия на схеме стержня и на графике поведения отмечены цифрами 1 и 2.
Для первичных равновесных состояний характерно асимптотическое поведение — неограниченное возрастание прогиба ут по мере приближения сжимающей силы N к эйлерову значению.
б) Равные нулю концевые эксцентрицитеты — центрально сжатый стержень. При а0 возникает задача Эйлера, рассмотренная в п. 17.1.9. График поведения стержня представлен в табл. 17.3, б. Прямолинейная форма равновесия у 0 устойчива при N Nэ и неустойчива при NNz. Точка К на графике соответствует потере устойчивости при разветвлении форм равновесия.
в) Равные по абсолютной величине, но противоположно направленные концевые эксцентрицитеты. В случае
k—— уравнение упругой линии (17.70) принимает вид
2а
и
sin (17.73)
Угол поворота на левой опоре при 0 равен:
0О- — 2-
(17.74)
График поведения представлен в табл. 17.3, в; по оси абсцисс отложено характерное перемещение 0О по оси ординат отложена сжимающая сила N. Форма изгиба по 5-образной упругой линии ортогональна первой собственной форме (17.38), стержень является идеальным. Соответствующие этой упругой линии равновесные состояния устойчивы при NN9 и неустойчивы при обратном знаке неравенства. Разветвление форм равновесия (точка К на графике) характеризуется наложением полуволны синусоиды (17.38) на S-образную упругую линию (17.73). В критическом состоянии tfN9t и„ я, 02а1.
17.2.5. Сжато-изогнутые стержни
Сжато-изогнутые стержни разделяются на идеальные и неидеальные; примеры тех и других даны в крайнем правом столбце табл. 17.3. Качественные особенности поведения соответствуют рассмотренным выше случаям а и в виецентренно сжатого стержня.
Если стержень не является шарнирно опертым, то эйлерова сила N3 должна быть заменена критической силой jV по данным табл. 17.2.
Табл. 17.4 содержит справочные данные для шарнирно опертого стержня, нагруженного в точке z — kl внешними силами р, Р и Мх. В таблице даны: выражение для прогиба у в точке x — ml при mk (первая строка) и mk (вторая строка); аналогичное выражение для угла поворота 0; значения 0о и 0j на левой и соответственно на правой опорах; выражение для изгибающего момента М абсцисса точки га, в которой изгибающий момент достигает наибольшей величины МиаКс; выражение ДЛЯ Ммакс.
Табл. 17.5 содержит аналитические выражения для усилий и перемещений сжато-изогнутых стержней с различными условиями закрепления концов.
Зависимость усилия (или перемещения) сжато-изогнутого стержня от величины сжимающей силы выражается приближенным соотношением
5
1-NN
(17.75)
где S—соответствующее усилие (перемещение), определенное без учета влияния продольной сжимающей силы.
17.2.6. Принцип независимости действия сил. Принцип взаимности перемещений
Принцип независимости действия сил (принцип суперпозиции) для сжато-изогнутых линейно упругих стержней применим в специфической трактовке: сжимающую силу N следует исключить из понятия нагрузка и отнести к свойствам стержня 19, 21а.
Линейность дифференциального уравнения (17.50) дает возможность наложить два решения у и у вызванных нагрузками Р(х) и соответственно р2(х), если величина а остается постоянной. Это значит, что при фиксированной величине сжимающей силы N решение У — У-У2 будет отражать воздействие нагрузки р р"-р2-
Использование принципа суперпозиции позволяет с помощью табл. 17.4 и 17.5 получить решение ряда более сложных задач, когда на сжато-изогнутый стержень одновременно воздействуют несколько поперечных нагрузок.
Для сжато-изогнутого стержня, как и для любой линейно упругой системы, справедлив принцип взаимности работ (принцип Максвелла)
Piik Pkbki- (17.76)
Здесь Pi,Pk — сила первого и соответственно второго состояния; бгь — перемещение по направлению силы Pi, вызванное силой Ph.
Под силами Рг, Рк следует понимать поперечные нагрузки; продольная сила N одинакова как в первом, так и во втором состоянии.
Если силы Pi и Рь равны между собой по численной величине, например в частном случае единичных сил
17.2. ЛИНЕИНО УПРУГИЕ СЖАТЫЕ И СЖАТО-ИЗОГНУТЫЙ СТЕРЖНИ ПОСТОЯННОГО СЕЧЕНИЯ
201
Усилия и перемещения линейно упругого сжато-изогнутого шарнирно опертого стержня
Т а б л и а а 17.4
ntfmiiiniiii
-ml-
.j
mk
clA Г1 — cos (1 — ft) w.
sin mu -
El и2 ы2 sin
P3 rsin(l — k) и sin mu EIu2 L и sin и
— m (1 — ft)
X
M,2 Eu2 x
COS (1 — ft) i sin 72К
sin a
-J- m
mk
Pi4 Г_У ы2 L
— ft2)(l — m)
и2 L 2 sin n-f-sin(l—m)ucosku—sin и
и2 sin и
P3
Fa2
sin ku sin ( — m) и
и sin и
— ft (1 — m)j
Mil2 fcosfttfsin(l —tn) и
EIu2
sin и
mk
pp Г (1 ft)2
EIu2L 2 1 — cos (1 — ft) и и sin ы
cos mu
PI2
7w2
sin (1 — ft) Ы COS 7Ш
sin и
-(1 -ft)j
Myl
Elu X
: cos (1 — ft) a cos mu
X I — 1 — 1
sin и
p
mk
pi3 Г 1 ft2 — 2m Еи2 L 2
cos mu — cos (1 — m) и cos ftw
P2
X
EIu2
fsin ku cos (I — m) и
X
и
Mxl
—гг X Elu2
cos fta cos (1 — m) и
sin и
Pi
Elu
1 — cos (1 — ft) и
(1-ft)’-
PI
Elu
sin (1 — ft) и
-(1-ft)
cos (1 — ft)
?3
fli
EIu -
cos ft — cos и и sin и 1 — ft2 1
p2
z:u2
n ft 1
:—- in и J
sin
sin
Mil Г и cos ku
EIu2 I sinw
— 1
m ft
pi2 1 — cos (1 — ft) a
. sin яш
2 u2 sin и
PI
t sin (1 — ft) и sin mu
и sin и
— M
cos (1 — ft) и sin mu
M
pi2
X
m ft
sin дш-f-sin (1—m) и cos ku—sin и
Ft
sin ku sin (1 — m) и и sin и
M i
cos ku sin (1 — m) и
1 1 — cos и cos ku
— arctg
sin и cos ku
pi
x
мы
Vi —2 cos и cos fta-j-cos2 ku
sin и
PI
sin ku sin (1 — ft) и и sin и
202
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
Таблица 17.5
Усилия и перемещения линейно упругих сжато-изогнутых стержней
Схема
Усилия и перемещения
дг jnniiiimlfnurrm д
Т_,-Т
N
—- d
P
N.
F
Момент в середине пролета
M_i -J-
Прогиб в середине пролета
plA I _J ЕШ1 I и ' 8
Угол поворота на опоре
0 -PiL
Elu2
Момент под грузом Pl “
М tg.
2и 2
Прогиб под грузом
„-"-ft T-2.-JL)
2Е1и3 2 2 1
в
Угол поворота ня опоре РР 1
2Е1и2
— 1
м
А ТЧ
V
Момент в середине пролета
М. 2 cos —
Прогиб в середине пролета Мп'-' 1
2Е1и2
Угол поворота на левой опоре
0 —i— (1 — и ct и). Е1и2
Угол поворота на правой
ли
Ем2
опоре
(—-1)
sin и )
. (Мд Na)
Момент в середине пролета
м.-ЛЬ-
Прогиб в середине пролет М„12 ( 1
Е1и2
Угол поворота на опоре Mnl 1 — cos и
9 -
EJ
и sin и
Продолжение табл. 17.5
Схема
Усилия и перемещения
N tallLllimfl
Момент в заделке
m-EL х 2 и
2 — w sin ы — 2 cos и
sin и — и cos и
Угол поворота на левой опоре
0 -2- х
Е1и3
(2 — и sin и — 2 cos ц)2 2 (sin и — и cos и) 1 — cos ы)
Реакция правой опоры sin ku — ku cos ы
R P
sin и — и cos и Момент под грузом sin ku
М — PI
sin и — и cos и X cos (1 — k) и— sin (1 —
Момент в заделке
sin ku — k sin и
M — PI
sin и — и cos и
Прогиб под грузом РГ
Е1и2
A'sin ku—k sin и)
. sin Ли1.
4- Кг I k cos и J,
Kx
K,
1 — cos (1 — k) и sin и — и cos и (1 — k)u — sin (1 — k)u
sin и — и COS и
Угол поворота на левой опоре
Р1Х
0 — X Е1и2
X К, (и—sin и) — Кг (1—cos и).
Реакция правой опоры
R Р
sin cos и
2 2
sin и — и cos и Момент под грузом и
sin М Р1.
sin и — и Cos и и
sin COS
17.2. ЛИНЕЙНО УПРУГИЕ СЖАТЫЕ И СЖАТО-ИЗОГНУТЫЕ СТЕРЖНИ ПОСТОЯННОГО СЕЧЕНИЯ
203
Продолжение табл. 17.5
Схема
Усилия и перемещения
Момент в заделке
sir
М.——PI -
in “ cos
sm и — и cos и
Прогиб под грузом
Р3 к
Е1и1 sin и — и cos и
и
4
К cos и — sin
sin
sin —— 1 1 -f- 2 и
2
J
Угол поворота на левой опоре
РР
Е1и
2 sin -
(l -cosJL).
sin U — U COS U
Реакция правой опоры М. и (1 — cos и)
I sin и — и cos и
Момент в заделке
М — М0 ——.
sin и — и cos и
Угол поворота на левой опоре
МЬ1 2—и sin и—2 cos и
Е1и
sin и — и cos и
Момент в середине пролета _рР
— Г
2 sin -
Момент в заделке
Л, — SLfl-JLctg-M.
us 2 2 Прогиб в середине пролета
2EIu V Л 4
Р
N
d
2
Момент в середине пролета
Р1 и
М tg.
2и 4
Момент в заделке Р1
4, U
t g .2 и 4
М —
Прогиб в середине пролета EItiA 4 4 )
Схема
, N
Ь Продолжение табл. 17.5
Усилия и перемещения
Момент в заделке М к— р. cos sin и—1 и3 cos и
Прогиб левого конца pi
и —— х ы
cos и -f- ц sin и — 1 ы2 cos и 2 )
Угол поворота левого конца рР и — sin и
0-
Е1и
cos и
мо
N Г
S'2
Момент в заделке
М — Р1
t g и
Прогиб левого конца Р3
0-
ыа
а левого кон (— -1) cos и )
У -
и2
Угол поворота левого конца Р2
Момент в заделке
М ———.
cos и
Прогиб левого конца М0Р
-(—— Л
cos и )
EIU1
Угол поворота левого конца
6 M l и Е1 и
Примечание. Положительные реакции направлены вверх. Положительные моменты растягивают нижнее волокно. Положительные прогибы направлены вниз. Положительное направление углов поворота на опорах соответствует положительному направлению опорных моментов.
М
PiPk 1, то из соотношения (17.76) следует принцип взаимности перемещений (принцип Бетти)
(17.77)
17.2.7. Растянуто-изогнутые стержни
Дифференциальное уравнение малых изгибных перемещений растянуто-изогнутого стержня (рис. 17.12) имеет вид
d4y d2y р ()
—— _ а2—— -(17.78)
dx dx2 FI ' '
где a2 NEl; N — растягивающая сила.
204
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
Общий интеграл этого уравнения
у — Ci sh сх,х -j- C2 ch ax -j- Cx -f- C4 -j- уH (x)
содержит гиперболические функции; он может быть преобразован к форме метода начальных параметров.
Однако нет необходимости в развертывании дальнейших аналитических зависимостей, так как формулы для усилий и перемещений растянуто-изогнутого стержня
Рис. 17.12
могут быть получены из соответствующих формул для сжато-изогнутого стержня (табл. 17.4; 17.5) на основе простого преобразования. Параметр нагрузки растянуто-изогнутого стержня V V S’EH (17.79)
(где N — растягивающая сила) связан с параметром нагрузки и соотношением ы2 —v2. Отсюда получают следующие условия перехода:
сжато-изогнутый стержень и sin и cos и tg и растянуто-изогнутый стержень iv i sh v ch v i th v.
В результате преобразования любой из формул символ мнимой единицы iY—1 исключается.
Перемещения растянуто-изогнутого стержня растут медленнее нагрузок. Потеря устойчивости растянутого стержня невозможна.
17.2.8. Большие перемещения внецентренно сжатых стержней
Здесь рассматриваются большие изгибные перемещения внецентренно сжатого линейно упругого стержня. О смысле и цели такого исследования см. 17.1.11.
Общий случай — неравные концевые эксцентрицитеты (рис. 17.13). Дифференциальное уравнение изгиба имеет вид
у Г fdyyi-V
где 5 — длина дуги упругой линии, отсчитываемая от левой опоры; Я — реакции опор, направленные перпендикулярно недеформированной оси стержня.
При обозначениях
a NEI, у HN (17.81)
решение этого уравнения записывают в параметрической форме:
2х
у (1 -f у2)4 cos уХ а.
ОС
фоГ. ха sin ф
х
1
,2)34
а(1 Y
Ф
1 — 2х2 sin2 ф
2xy(cos ф0—cos ф)"j-
.f
Ф
VT
х2 sin2
pl Ф J
(17.82)
)
Здесь ф —- вспомогательная переменная (параметр); фо— (значение этой переменной при х 0, s —0) и число х(х1)—постоянные интегрирования.
Полученные интегралы могут быть преобразованы к нормальной форме эллиптических интегралов Лежандра первого и второго рода с модулем х и амплитудой ф:
5 11 — х2 sin2 ф
ф
1 — 2х2 sin2 ф о l 1 — х3 sin2 ф
F (фк);
dq 2Е (ф, х)—F (ф,х).
(17.83)
Из граничных условий
у — 0 при 0, s 0, ф ф0;
у — 0 при х хг, s , ф фг
и условия равенства нулю изгибающего момента на правой опоре Xi a(l—k) находят
cos ф0:
COS фх
ос а
(17.84)
k 2и(1 v2)l4
Второе и третье соотношения (17.82) при ф ф1 дают
Ф1
2х Vl v3 cos фо -у- j
dcp
фо
Л — х2 sin2 ф
Г 1 — 2х2 sin2 ф 2х (1 — k) соэфо у — 1 — х2 sin2 ф
Соответствующий рассматриваемому равновесному состоянию параметр нагрузки равен
(17.85)
80)
U — Oil —
бф
(17.86)
sin3 ф
17.2. ЛИНЕЙНО УПРУГИЕ СЖАТЫЕ И СЖАТО-ИЗОГНУТЫЕ СТЕРЖНИ ПОСТОЯННОГО СЕЧЕНИЯ
205
Для тангенсов углов поворота получают
dy_
dx
tg в —
y(l— 2х8 sin2 ф) — 2х sin p f I — х2 sin2 р
1 — 2х2 sin2 р 2xy sin ф Vl — х2 sin2 ф
; (17.87)
при ффо отсюда определяют тангенс угла поворота на левой опоре tgOo.
Основанный на выведенных зависимостях вычислительный алгоритм позволяет построить равновесное состояние стержня по заданным значениям a, , р0.
Ниже рассматриваются частные случаи внецентренно сжатого стержня.
а) Равные по абсолютной величине и по знаку концевые эксцентрицитеты. В случае 1, у0 основное расчетное соотношение (17.85) принимает вид
X COS фо — — г(ф0, X).
(17.88)
График поведения стержня при больших перемещениях дан в табл. 17.3, . Прямолинейная форма равновесия р0 устойчива при и неустойчива при
iVva. Представление о безразличном состоянии равновесия при N Nq с неопределенными по величине и по знаку прогибами у С sin (лхl) является следствием геометрически линейной постановки задачи. Безразличное состояние равновесия на самом деле является мгновенным, так как при N — существуют лишь беско¬
нечно близкие формы равновесия, смежные с прямолинейной формой 0.
Для каждого значения NN3 помимо неустойчивой прямолинейной формы существуют две устойчивые криволинейные формы равновесия со строго определенными, равными по абсолютной величине, но противоположно направленными прогибами. Неопределенность устойчивых равновесных состояний при NN3 заключается в выборе направления изгиба.
Критическую силу Ыэ следует рассматривать как нижний предел транскритической силы Лгт:
Решения этого уравнения при положительных значениях модуля к и при фоя2 соответствуют первичным равновесным состояниям стержня. Вторичные равновесные состояния определяются решениями уравнения
(17.88) при х0 и фо я2 22.
Наибольший прогиб в середине длины стержня равен:
Ут Р, „ч —а- (17.89)
F (Фо. х)
Выражение (17.86) для параметра нагрузки приводят к виду
и 2F (ф0, х). (17.90)
График поведения стержня при больших перемещениях представлен в табл. 17.3, Л. Первичные равновесные состояния (сплошная линия OLS на графике) возможны как при N С N3i так и при NN3; прогибы положительны и ограничены по величине. Анализ качества равновесия с помощью энергетического критерия показывает, что первичные равновесные состояния устойчивы.
Вторичные равновесные состояния при ymZ
—2а разделяются на устойчивые (сплошная линия) и неустойчивые (пунктир на графике). Точка Т на графике служит границей между устойчивой и неустойчивой ветвями; этой точке соответствует т р а н с к р итическое значение сжимающей силы JVTAfa. При N.NT возможны только первичные равновесные состояния. Каждому значению wNT соответствуют три равновесных состояния: одно устойчивое первичное и два вторичных, из которых устойчиво только одно с большим по абсолютной величине прогибом ут.
Переход внецентренно сжатого стержня от первичной формы равновесия ко вторичной может произойти только путем перескока.
По мере убывания эксцентрицитета а точки L и Т на графике стремятся к одной и той же точке с координатами (О, N9).
б) Равные нулю концевые эксцентрицитеты — центрально сжатый стержень. При а0 из уравнения
(17.88) следует ф0 я2. Расчетные зависимости (17:89) и (17.90) преобразуются к виду
УттЬ)'и 2Рт' (17,91)
где Fw) — полный эллиптический интеграл первого рода (амплитуда фя2).
lim NT N3,
а- 0
(17.92)
Разветвление форм равновесия представляет собой предельный случай явления перескока — перескок нулевой длины.
В рассмотренной геометрически нелинейной задаче спектр собственных значений при является не¬
прерывным.
Упругую линию центрально сжатого стержня часто называют эластикой.
в) Равные по абсолютной величине, но противоположно направленные концевые эксцентрицитеты 20. График поведения стержня при k — представлен в табл. 17.3, В; характерным перемещением служит тангенс угла поворота на левой опоре 0О. Стержень является идеальным. Первоначальная 5-образная форма равновесия с равным нулю прогибом в середине длины стержня (Ут 0) устойчива при NN9 и неустойчива при NN9: Помимо этой неустойчивой формы каждому значению NN9 соответствуют две устойчивые формы равновесия, в которых обратная симметрия первоначальной S-образной упругой линии нарушена, прогибы ут ОТЛИЧНЫ ОТ НуЛЯ.
Потере устойчивости при разветвлении форм равновесия соответствует тангенс угла поворота на опоре tg0 2ai. В критическом состоянии фо я2, и уравнения (17.85) приводят к виду
X Vl V2 -у- F (х); 2х у 2Е (х) — F (х), (17.93)
где F(y) (х) —полные эллиптические интегралы.
Критическое значение параметра нагрузки
2F (х)
(1 __ ?2)14
(17.94)
зависит от величины эксцентрицитета а и оказывается несколько мешжмм л, одако различие весьма мало и составляем лишь соте дали процента, поэтому В рассмотренной задаче иредкритическое (невозмущенное) состояние является деформированным в отличие от случая центрально сжатого стержня. Это обстоятельство служит причиной несовпадения критических параметров, определенных из анализа малых и больших изгибных перемещений стержня.
206
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
17.3. ЛИНЕЙНО УПРУГИЕ СТЕРЖНЕВЫЕ СИСТЕМЫ МЕТОДЫ РАСЧЕТА
17.3.1. Основные положения расчета по деформированной схеме
Рассматривается линейно упругая плоская стержневая система, элементы которой испытывают продольные усилия и нагружены поперечной нагрузкой, лежащей в плоскости системы. Каждый из элементов системы удовлетворяет условиям, сформулированным в 17.2.1. Кроме того, приняты следующие допущения:
а) обеспечено сохранение плоской формы изгиба как для каждого элемента, так и для всей системы в целом;
б) система находится в состоянии устойчивого равновесия;
в) величина продольных усилий в элементах системы задана; приращение этих усилий, вызванное узловыми моментами, или приближенно учитывается заранее, или совсем не учитывается;
г) наибольшее фибровое напряжение в самом напряженном сечении системы не превышает предела пропорциональности, который в большинстве случаев условно принимают равным пределу текучести
макс От (17.95)
Более точное определение продольных усилий с учетом влияния узловых моментов возможно на основе метода последовательных приближений, т.е. требует выполнения расчета несколько раз 19.
Расчет по деформированной схеме основан на предположении о линейно упругой работе материала и учитывает влияние продольных сжимающих сил. В качестве предельного состояния здесь условно принимается опасное состояние, соответствующее достижению фибровой текучести: аМакс сГт.
Аналитической основой этой методики является обобщение канонических методов расчета статически неопределимых систем на случай действия продольных сжимающих сил. Возможность такого обобщения опирается на принцип независимости действия сил (в его специфической трактовке) и на принцип взаимности перемещений (см. 17.2.6) 19, 21а, 36, 44.
Ниже излагаются два основных канонических метода: метод сил и метод перемещений. Отдельно рассматриваются наиболее эффективные приемы расчета неразрезных балок.
17.3.2. Метод сил
Основная система. Заданная система п раз статически неопределима. Основную систему метода сил (геометрически неизменяемую) получают исключением п связей. Неизвестные метода сил Xh должны заменить воздействие исключенных связей.
Рассматривают п единичных состояний 1 и для каждого состояния строят две эпюры изгибающих моментов: а) эпюру Mh — моменты определяют с учетом влияния продольных сил; б) эпюру Мк — моменты определяют без учета влияния продольных сил.
Строят также эпюру моментов в основной системе М0, вызванную поперечной нагрузкой; при этом учитывают влияние продольных сил.
Перемещения в основной системе. Символом 6ih (i, fcl, 2,., п) обозначено перемещение в основной системе по направлению неизвестного Xi, вызванное единичным неизвестным Х 1; символом б о — перемеще¬
ние в основной системе по направлению неизвестного Xit вызванное поперечной нагрузкой.
Единичные перемещения удовлетворяют принципу взаимности (17.77). Вследствие устойчивости системы главные перемещения положительны: бьХ).
Формула Мора для перемещений. Перемещения в основной системе определяются обобщенной формулой Мора 21а
” Здесь EI — жесткость стержня при изгибе; dx — элемент длины стержня. Интегрирование распространяется на всю длину стержня, суммирование — на все стержни системы.
Формула (17.96) справедлива также и для перемещений от нагрузки; в этом случае
(17.97)
Несмотря на внешнюю простоту обобщенной формулы Мора (17.96), практическое использование ее затруднительно, поскольку закон изменения изгибающих моментов М(х) неизвестен, пока неизвестно уравнение изогнутой оси у(х).
В практических расчетах для вычисления перемещений могут быть использованы данные табл. 17.6, а также табл. 17.4 и 17.5.
Канонические уравнения. Для определения неизвестных метода сил Xh служит система линейных алгебраических уравнений
n 12 Х2 -(- т Хп б10 0;
21 1 22 Х2 2п Хп 20 Ф
Л1 1 Л2 Х2 —Ь МП Хп Л0 0
(17.98)
Так как исследуемая стержневая система устойчива, то детерминант матрицы уравнений (17.98) существенно положителен, т. е. отличен от нуля, и все неизвестные могут быть однозначно определены.
Усилия в заданной системе. Эпюру моментов в заданной системе строят на основе зависимости
М М1Х1 М2Х9 -М1 Хп М0. (17.99)
Подобным же образом определяют поперечные силы в элементах системы.
Дальнейший ход расчета зависит от результата проверки условия (17.95).
Практические рекомендации. В практических расчетах выбор основной системы подчинен тем же соображениям, которые определяют выбор основной системы при обычном расчете рам.
Удачный выбор основной системы характеризуется следующими признаками:
а) возможно большее число взаимно нулевых (ортогональных) состояний 1;
б) удобство анализа основной системы; возможно большее число ненагруженных стержней в состояниях Xft l;
в) возможность использования готовых материалов, таблиц или результатов другого расчета.
Использование симметрии системы. Для симметрии системы необходимы: а) симметрия геометрического контура; б) симметрия опорных закреплений и шарниров;
в) симметрия жесткостей; г) симметрия сжимающих (растягивающих) сил.
17.3. ЛИНЕЙНО УПРУГИЕ СТЕРЖНЕВЫЕ СИСТЕМЫ. МЕТОДЫ РАСЧЕТА
207
Таблица 17.6
Интегралы Мора J М dx
Расчет симметричных систем может быть упрощен на основе разложения поперечной нагрузки на симметричную и антисимметричную составляющие.
При расчете по методу сил возможно использование сложной (статически неопределимой) основной системы.
Пример 17.1. Заданная рама (рис. 17.14) дважды статически неопределима. Основная система _метода сил и эпюры единичных состояний Ми М; М2, М2 М0 показаны на рис. 17.15.
Сначала должны быть приближенно определены сжимающие силы в стержнях системы
A'i . N2 Х2
с учетом их приращения от узловых моментов. Пусть после вычислений параметры нагрузки оказались равными
щ У NJEIt 1г 0,4.
208
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
Воспользовавшись табл. 17.6 и обозначая k—EhklEIilj, находят:
к
Eh
JiifL I А_ 1 — ctg и
иг Е1г ' и
к
(1,5574 0,3369);
Eli
ОспоВна система
Рис. 17.14
i
Рис. 17.15
Рис. 17.16
1 i
б12 би 1 — 0,8508;
EL и? V cos “1 -i
'i “I
3. z3
' tg Ml — Ul 1
22 — nr з —-05574,
Eh
io—-
Pl
1
2 El ui I “s
2 2 I COS —
1 к
Eh
P,.0,06354; 6j0 0.
Канонические уравнения метода сил имеют вид (1,5574 0,3369ft) Xt 0.8508Х, 1г Р,.0,06354; 0,8508 0,5574Х2к 0,
откуда
V Plk V — 1 5278
1 4,073 5,302 ’ 9 к '
Дальнейший ход расчета пояснений не требует.
Этот же результат получается при меньшем объеме вычислений, если выбрать статически неопределимую основную систему (рис. 17.16) и воспользоваться данными табл. 17.5.
17.3.3. Метод перемещений
Основная система. Заданная система п раз кинематически неопределима. Основную систему метода перемещений образуют из заданной введением закреплений, препятствующих поворотам и линейным перемещениям
узлов (рис. 17.17). Неизвестными являются углы поворота и линейные перемещения узлов Xk (61, 2,., п).
Строят п эпюр Mk единичных состояний Xh — 1 и эпюру М0 от нагрузки в основной системе, учитывая во всех случаях влияние продольных сжимающих сил.
rrnfrn
Основная г и стен а
х
л
Рис. 17.17
Реакции основной системы. Символом rift (i, 61, 2,. п) обозначена реакция в основной системе, развивающаяся во введенной i-й связи от единичного перемещения Xfc l; символом ri0 — реакция, развивающаяся в i-й связи от нагрузки.
Реакции связей основной системы удовлетворяет принципу взаимности
Пк ги. (17.100)
Вследствие устойчивости системы главные реакции положительны: гьь0.
Единичные состояния и реакции основной системы метода перемещений для стержней постоянного сечения представлены в табл. 17.7. Для шести различных схем указаны усилия в опорных закреплениях и уравнения упругой линии. Реакции основной системы выражаются при посредстве девяти функций Lj(u) параметра нагрузки и YNEI. В таблице приведены также разложения этих функций в ряд Маклорена; первые члены разложений дают значения Lj(0), равные известным коэффициентам метода перемещений при отсутствии продольных сил 19а, 21а.
График первых шести функций Lj(u) представлен на рис. 17.18.
Численные значения функций Lj(u) имеются в источниках, перечисленных в табл. 17.8. В этой же таблице сопоставлены различные обозначения, применяемые для реакций основной системы.
Для определения реакций основной системы от нагрузки можно пользоваться данными табл. 17.5.
Реакции основной системы метода перемещений для стоек, упруго защемленных в основании, приведены в табл. 17.9. Здесь вместо функций Lj(u) используют функции Rj(u,m), где параметр упругого защемления т х1Е1; р, — коэффициент жесткости опоры.
Канонические уравнения. Неизвестные метода перемещений Xh определяют из системы линейных алгебраических уравнений
fn ri2 2 гт Хп ю 0;
r2i г22 Х2 г2п Хп -f- г20 0;
'1.1 1 ГП2 2 rnnXn 00 0.
(17.101)
Так как рассчитываемая стержневая система устойчива, то определитель этой матрицы существенно положителен, т. е. отличен от нуля, и все неизвестные А могут быть однозначно определены.
Единичные состояния и реакции основной системы метода перемещений для линейно упругого стержня
17.3. ЛИНЕЙНО УПРУГИЕ СТЕРЖНЕВЫЕ СИСТЕМЫ. МЕТОДЫ РАСЧЕТА
209
210
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
_ ч л. Таблица 17.8
Обозначения реакций основной системы и ссылки на таблицы численных значений
Автор
Функция
и
и
1 L
1
1
1 L.
и
H. В. Корноухов 119a.
2а
2Э
2ар)
2у
а
V
и
tgu
и
sin и
и tg и
В. Г. Чудновский 44.
а
V
М-
а Ц —
—
—
4Р2
2ф8
6v4
12Т2
Зф
3it
—
—
—
Примечания: 1. Сокращенные таблицы см. в Справочнике проектировщика, стр. 801—803.
2. Таблицы для растянутых стержней см. в 19а, 44.
Расчетно-теоретический том,
1-е изд.,
Таблица 17.9
Реакции основной системы метода перемещений для линейно упругого сжатого стержня с упругим защемлением одного конца
(и VNEI I; т xlEl)
Эпюру моментов в заданной системе строят на основе зависимости (17.99).
Практические рекомендации. Метод перемещений весьма эффективен для расчета рамных систем, не имеющих наклонных элементов.
При расчете симметричных систем может быть использован прием разложения нагрузки на симметричную и антисимметричную составляющие.
Возможно использование сложной основной системы, элементами которой являются не отдельные стержни, а группы стержней. В этом случае необходимо предварительное определение реакций основной системы для каждой из этих групп.
Предварительное определение реакций основной системы позволяет распространить метод перемещений на системы, содержащие стержни переменной по длине жесткости, в частности ступенчатые стержни (17.5).
Пример 17.2. Заданная рама (рис. 17.19) трижды кинематически неопределима. Основная система метода
перемещений и эпюры единичных состояний показаны на рис. 17 19. Сжимающие силы в стойках N и N2 заданы; продольным усилием в ригеле можно пренебречь, положив м3 0.
Реакции основной системы определены по табл. 17.7 (единичные реакции) и табл. 17.5 (реакции от нагрузки):
Eh г, з
гп —. (ui) 4-;
п h
о Ез П1' Т i ч
ri2 — r2i — 2, гхз — г31 — Lb (i);
'
Pii 2 — их sin ut — 2 cos иг Pii
10 2 ut (sin ui — ui cos ui) 2LX (Ui)
El2 3
r22 — J Lx (u2) 4 ;
l2 h
17.3. ЛИНЕЙНО УПРУГИЕ СТЕРЖНЕВЫЕ СИСТЕМЫ. МЕТОДЫ РАСЧЕТА
211
ei2
Г23 Г32 “ о -3 (иг) г20 0
2
Гзз — Г” -6 (Wl) Г
г so
1'
Li (i)
Дальнейший ход расчета: определение неизвестных Хк из решения системы трех уравнений, построение эпюры М в заданной системе и т. д.
17.3.4. Расчет неразрезных балок
Постановка задачи. Многопролетная неразрезная балка на жестких (не перемещающихся) опорах является простейшей из статически неопределимых систем. Для расчета неразрезной балки по деформированной схеме могут быть использованы методы сил и перемещений, а также и метод частных решений, удобный для реализации на ЭВМ.
Принятые обозначения (рис. 17.20):
п— общее число пролетов балки;
k—номер опоры (0, 1, 2,.ri) и номер пролета ( 1, 2,., п);
Ik — длина пролета;
Elk — жесткость балки при изгибе в силовой плоскости, постоянная в пределах длины пролета;
Nk — сжимающая сила в пролете;
Uk—параметр нагрузки для пролета.
Уравнение трех моментов. Основная система метода сил — совокупность однопролетных шарнирно опертых балок. Неизвестными являются изгибающие моменты
Ж
212
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
в опорных сечениях Mh Уравнение трех моментов имеет вид
,
М
k—1
El
s(u)Mk
k
k' -s(ukl)Jr 6k0 0. (17.102)
b_l_1
'fe1
Здесь бо — взаимный угол поворота в шарнире основной системы на опоре k, вызванный нагрузкой (см. табл. 17.4, 17.5).
Функции Н. Е. Жуковского с (и) и s(u) были определены выше см. формулы (17.69). График этих функций представлен на рис. 17.21; таблицы см. 19, 44,
щемленных двумя концами балок. Неизвестными являются углы поворота опорных сечений 0л. Уравнение трех углов поворота имеет вид
Flu
EL
LM
El
k
0,
El
л-И
'1 ("0
h
b
MttAl)rAoe0- (17103
Здесь гко — суммарный момент в основной системе в опорном защемлении k, вызванный нагрузкой (см. табл. 17.5).
Число расчетных уравнений равно числу неизвестных углов поворота 0л. Уравнения имеют стандартную трехчленную структуру (17.103), за исключением двух уравнений (первого и последнего), отражающих условия закрепления концов балки.
Метод частных решений. Из уравнений метода начальных параметров (17.54) при л-1 л0, ал
— Uk следует:
е — e-i
Sin Uk — Uk COS Uk
Mk-' itk
Uk — Sin Uk 2 — Uk sin Uk— 2cos Uk
yl
Я2- — h
Mk efe_,
Eh
uk (uk — sin uk)
uk(lcosuk) uk — sin Uk
u sin uk
I
(17.104)
г-1
Ml Nky
Ik Uk — sin Uk sin Uk — Uk cos Uk Uk — sin Uk sin Uk
Uk — Sin Uk
a также в Справочнике проектировщика, 1-е. изд., стр. 800—801.
Число расчетных уравнений равно числу неизвестных опорных моментов Мн. Уравнения имеют стандартную трехчленную структуру (17.ГО2), за исключением двух уравнений (первого и последнего), отражающих условия закрепления концов балки.
Уравнение трех углов поворота. Основная система метода перемещений — совокупность однопролетных за-
Значения уп 0я, Мп см. табл. 17.1.
Рекуррентные соотношения (17.104) позволяют вычислить последовательно все значения 0л, Мл, если заданы начальные параметры 0О, М0 на опоре 0. Из этих двух величин одна известна, например 0оО при защемлении на опоре 0 (или М00 при шарнирном опирании); другая величина Z M0 (или Z 0O) неизвестна и подлежит определению.
Первое частное решение строят при начальных параметрах 00 0, Z — Mo 1 (или Z 0O1, Af00). В результате последовательного применения формул (17.104) при уа 0н — МИ0 определяют значения 0„ и Мп на опоре п.
Второе частное решение строят при нулевых начальных значениях 0оО, М0 0, учитывая зависящие от нагрузки слагаемые уИ, 0Н, Мн в формулах (17.104). В результате определяют значения вп и Мп на опоре п.
Наложение двух частных решений дает
en ze; e;: мп гм’п м'п. (17.Ю5)
17.4. ЛИНЕЙНО УПРУГИЕ СТЕРЖНЕВЫЕ СИСТЕМЫ. ОПРЕДЕЛЕНИЕ КРИТИЧЕСКИХ НАГРУЗОК
213
Используя условие 9П0 (защемление на опоре п) или Мп—0 (шарнирное опирание правого конца балки), определяют величину Z.
Рекуррентные зависимости (17.104) используют в третий раз при начальных параметрах 0о, М0, учитывая слагаемые от нагрузки. В процессе вычислений определяют истинные значения углов поворота 0ь и моментов Mk на опорах.
17.4. ЛИНЕЙНО УПРУГИЕ СТЕРЖНЕВЫЕ СИСТЕМЫ,
ОПРЕДЕЛЕНИЕ КРИТИЧЕСКИХ НАГРУЗОК
17.4.1. Постановка задачи об устойчивости линейно упругой стержневой системы
Обобщение эйлеровой задачи. Рассматривается линейно упругая плоская стержневая система, элементы которой центрально сжаты (или растянуты). Каждый из элементов системы удовлетворяет условиям, сформулированным в 17.2.1, а система в целом — условиям, сформулированным в 17.3.1, за исключением предположения
об устойчивости рассматриваемого равновесного состояния.
Вызывающая изгиб поперечная нагрузка отсутствует, система является идеальной.
Исследование устойчивости системы в полном объеме предполагает решение следующих трех частных задач.
а) Построение спектра критических значений пара¬
метра нагрузки для исследуемой системы. Обычно ограничиваются вычислением нескольких первых элементов спектра. Наименьшее из этих критических значений соответствует потере устойчивости системы при разветвлении форм равновесия: на¬
ряду с первоначальной прямолинейной формой равновесия становится возможной смежная криволинейная форма. Говорят также о потере устойчивости в эйлеровом смысле или о потере устойчивости первого рода.
б) Построение собственных форм (форм криволинейного равновесия), соответствующих всем или нескольким найденным критическим значениям параметра нагрузки. Эти формы могут быть определены с точностью до произвольного постоянного множителя. Первая из собственных форм является формой потери устойчивости (кривой выпучивания).
в) Определение степени неустойчивости системы при заданном значении параметра нагрузки (см. 17.1.6). Определяют место испытываемого числа в спектре критических значений.
Задача-минимум. В практике проектирования часто ограничиваются определением первого (наименьшего) критического значения параметра нагрузки, соответствующего потере устойчивости при разветвлении форм равновесия.
Обозначения. Сохраняются основные обозначения, принятые в 17.4. Под символами у, 0, М понимаются изгибные факторы, возникающие в критическом состоянии системы.
Для сжатого стержня системы с номером k приняты следующие обозначения:
Ik — длина стержня;
Elk — жесткость стержня;
Nk — сжимающая сила;
Nk — первое критическое значение сжимающей силы;
Uk — параметр нагрузки для стержня;
ил — наименьший критический параметр нагрузки для стержня.
Система в целом характеризуется следующими параметрами:
и —ведущий параметр нагрузки; u0f — -е собственное значение параметра нагрузки для основной системы; uxi — -е явное критическое значение параметра нагрузки для заданной системы; и — -е критическое значение параметра нагрузки для заданной системы; ы1 — наименьшее критическое значение параметра нагрузки для заданной системы.
Условия возрастания сжимающих сил. Обычно предполагают, что в процессе перехода системы от устойчивого состояния к неустойчивому сжимающие силы в стержнях Nu N2,. сохраняют заданное соотношение. Отсюда следует пропорциональность между сжимающими силами в исходном (устойчивом) состоянии и в критическом состоянии потери устойчивости:
N1 N п± N k±
- -—. -. (17.106)
Лх Nt Nk
Возможно другое предположение о характере возрастания нагрузок: одна сжимающая сила возрастает, в то время как другие силы сохраняют постоянную величину. Такое предположение менее правдоподобно и приводит к преувеличенной оценке запаса устойчивости системы.
Ведущий параметр нагрузки. Параметром нагрузки для стержня k служит число
ukVNkF.lk lk.
(17.107)
Один из сжатых стержней системы можно рассматривать как ведущий. Пусть значения N, EI, (без индексов) относятся к ведущему стержню; параметр нагрузки для этого стержня и будет ведущим параметром для системы в целом.
Вследствие предположения о пропорциональном возрастании сжимающих сил параметр нагрузки для любого из стержней системы равен:
.ть“.i. (17.
V NEIk I
108)
где соh — постоянные числа, известные с самого начала расчета.
Определение ведущий к словам параметр нагрузки в дальнейшем опускается, если это не может привести к недоразумениям.
Сопоставление двух расчетных задач: 1) расчет по деформированной схеме; 2) определение критической нагрузки дано в табл. 17.10.
Несмотря на черты сходства в исходных предпосылках, обозначениях и расчетных методах, задачи эти различны по существу. В первой задаче исследуется напряженное состояние системы в стадии упругой работы материала — состояние это реализуемо в натуре. Исследуемые во второй задаче критические состояния не могут быть реализованы по двум причинам: а) идеальные системы в натуре не существуют; б) критические нагрузки, определенные в предположении упругой работы материала, создают в сечениях обычно применямх стержней малой и средней гибкости напряжения сжатия, значительно превышающие предел пропорциональности.
Учет начальных несовершенств и упруго-пластических свойств материала резко изменяет характер работы системы со сжатыми элементами.
214
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
Таблица 17.10
Сопоставление двух задач расчета линейно упругой стержневой системы
Элементы сопоставления
Расчет по деформированной схеме
Определение критической нагрузки (задачаминимум)
Сжимающие силы Л,.
Заданы фиксированные значения
Задано соотношение между силами N : W2:. Критические значения N Л2 -неизвестны
N
Осевое напряжение Jo Не превосходят предела пропорциональности (текучести)
Может достигать любой величины
„ N м
Фибровое напряжение о— _i_ F W
Не может быть определено
Ордината упругой линии
Ордината изогнутой оси, вызванной совместным действием поперечных нагрузок и продольных сил, определяется однозначно
Ордината кривой выпучивания (первой собственной формы), возникающей в момент потери устойчивости, определяется с точностью до произвольного множителя
Неизвестные расчетного метода X, а также другие изгибные факторы — углы поворота 0, изгибающие моменты М
Изгибные факторы, вызванные совместным действием поперечных нагрузок и продольных сил
Изгибные факторы, возникающие в момент потери устойчивости и характеризующие первую собственную форму
Расчетные уравнения
Неоднородные
Однородные
Искомые величины
Неизвестные X, определяемые решением расчетных уравнений
Наименьший параметр нагрузки, при котором расчетные уравнения имеют ненулевые решения
Цель расчета
Анализ устойчивого напряженного состояния
Определение критической нагрузки в эйлеровом смысле
Форма представления результата для задачи-минимум. Если известно критическое значение ведущего параметра нагрузки а, то критический параметр нагрузки для сжатого стержня с номером k на основании (17.108) равен иан.
Критическая сила для этого стержня
Nk
“lEIk
Е1_к ihhf ’
(17.109)
где к о э фф ициент свободной длины
я я
. (17.110)
uk Щ
Здесь понятие коэффициента свободной длины используется для компактной записи результатов исследования устойчивости системы.
Свободная длина стержня lk hlk представляет собой длину центрально сжатого шарнирно опертого стержня той же жесткости Elk, который по устойчивости эквивалентен рассматриваемому.
Истолкование результата для задачи-минимум. Критическую силу Nfe, полученную в результате решения обобщенной эйлеровой задачи, нельзя понимать как реальную критическую нагрузку; ее следует рассматривать как упругую характеристику, оценивающую длину стержня, его жесткость и связь стержня с системой.
Определение критической нагрузки Nk в эйлеровом смысле может иметь следующее практическое значение:
а) величина представляет собой верхнюю грани¬
цу реальной критической силы. Выше уже указывалось, что эта оценка слишком груба;
б) величина Nk характеризует влияние продольной силы на усилия и перемещения в упругой стадии работы стержня. Приближенная зависимость (17.75) показывает, что величина Nk характеризует влияние продольной сжимающей силы на напряженное состояние стержня в упругой стадии работы независимо от возможности реализации этой критической нагрузки;
в) величина Nk позволяет определить свободную длину стержня, которая необходима для выполнения расчета по нормативной методике СНиП (см. 17.9).
17.4.2. Анализ критических состояний методом сил и методом перемещений
Три этапа исследования. Построение спектра критических значений стержневой системы методом сил или методом перемещений разбивается на три этапа:
1) построение спектра собственных значений параметра нагрузки для основной системы;
2) построение спектра явных критических значений параметра нагрузки для заданной системы;
3) построение полного спектра критических значений параметра нагрузки для заданной системы, который формируется из спектра этапа 2 с добавлением в некоторых случаях отдельных элементов спектра этапа I.
Собственные значения параметра нагрузки для основной системы. Основная система метода сил (перемещений) образуется из заданной устранением (введением) связей. В обычном случае, когда основная система не является сложной, она статически (кинематически) определима.
17.4. ЛИНЕЙНО УПРУГИЕ СТЕРЖНЕВЫЕ СИСТЕМЫ. ОПРЕДЕЛЕНИЕ КРИТИЧЕСКИХ НАГРУЗОК
215
Основная система обладает бесконечным числом степеней свободы и имеет бесконечный спектр собственных значений параметра нагрузки:
"01
oi
) (17Л11)
02 У о )
Каждому собственному значению u0j соответствует
собственная форма y0j основной системы. Спектр
(17.111) можно построить, приравняв нулю определитель некоторой системы уравнений, характеризующих равновесные состояния основной системы:
D0(u) 0. (17.112.)
Корни этого уравнения образуют спектр (17.111), определяющий критические состояния основной системы (в эйлеровом смысле).
Для основной системы метода перемещений имеем
Ub
D0 (и) П sin — (sir
Uk
2
иь Щ „.
— — cos — )n(sinufe
tfecosft) 0, (17.113)
где первое произведение распространяется на все сжатые стержни, защемленные двумя концами, а второе — на все сжатые стержни с одним защемленным и другим шарнирно опертым концом (см. табл. 17.2).
Анализ устойчивости основной системы метода сил часто связан со значительными трудностями.
Среди элементов спектра (17.111), расположенных в порядке возрастания, необходимо различать кратные собственные значения. Собственное значение u0j имеет кратность г, если
ао, -
-1 о, г
"о, г—1 и0. Н-г-
В этом случае основная система распадается на г независимых частей, одновременно достигающих критического состояния при U U0j.
Все собственные формы y0j основной системы взаимно ортогональны независимо от наличия кратных собственных значений в спектре (17.111).
Явные критические значения параметра нагрузки для заданной системы. Неизвестными метода сил (перемещений) являются силовые факторы (перемещения) Xj, Х2,., Хп. Рассматривая п единичных состояний Xh 1, вычисляют перемещения (реакции) основной системы Y ih(L 61, 2,., п), причем Угк б ik( rih) в случае применения метода сил (перемещений). Канонические уравнения линейны и однородны относительно неизвестных Хн:
X-k Vik : k
0 ( 1, 2,., п). (17.114)
Коэффициенты этих уравнений рассматривают как функции ведущего параметра нагрузки уik yik(u).
Условие существования ненулевых решений однородной системы (17.114) заключается в равенстве нулю определителя 19, 21а, 36, 44:
Уп
V12
Ут
Dx (и)
V 21
У22
У 2tl
0.
(17.115)
Ут
УП2
Упп
’ ) (17.116)
2 Ух )
нения образуют бесконечный спектр явных критических значений параметра нагрузки для заданной системы:
UXl UX2
УXI Ух2 9 f Ух
Каждому явному критическому значению uXj соответствует явная собственная форма (кривая выпучивания) yXj. Термин явная и обозначение yXj подчеркивают тот факт, что рассматриваемая собственная форма заданной системы определяется отличными от нуля значениями неизвестных Xh.
Для метода сил для метода перемещений
знак неравенства следует изменить на обратный.
Построение явных собственных форм. Среди неизвестных Xh есть по крайней мере одно, которое можно принять равным единице, например A’i l. Тогда все остальные неизвестные однозначно определяются из уравнений (17.114) при u uXj. Ордината собственной формы в произвольной точке системы равна:
ух 2 ykXky kl
(17.117)
Корни этого трансцендентного относительно и урав-
где уь — соответствующая ордината единичного состояния Xh — 1 при и uxj. В случае применения метода перемещений значения уь можно определить по табл. 17.7.
Полный спектр критических значений параметра нагрузки для заданной системы. Спектр явных критических значений параметра нагрузки uXj (17.116) отражает только те формы криволинейного равновесия, для которых по крайней мере одно из неизвестных Я отлично от нуля. В некоторых случаях возможны такие формы криволинейного равновесия заданной системы, когда все неизвестные равны нулю: Я —0(61, 2,., п). Очевидно, что эти так называемые скрытые формы следует искать среди собственных форм основной системы, соответствующих спектру (17.111). Если скрытые формы криволинейного равновесия существуют, то основную систему называют несовершенной. Основную систему называют ложной, если скрытая форма криволинейного равновесия соответствует первому критическому значению параметра нагрузки для заданной системы, т. е. эта скрытая форма является формой потери устойчивости 36. Скрытые формы криволинейного равновесия ортогональны по всем единичным состояниям Хь У.
Полный спектр критических значений параметра нагрузки для заданной системы
“’ “2 “♦; ) (17Л18)
У1, У2 , ) включает следующие элементы:
1. Все элементы uXj спектра явных критических значений для заданной системы (17.116).
2. Собственные значения для основной системы ы0,-, ортогональные всем единичным состояниям Xft l ( 1, 2,., п) в этом случае определитель Dx(uoj) имеет ограниченную (не равную бесконечности) величину.
3. Кратные собственные значения для основной системы Uoj u0,ji . —u0yjr-и если можно подобрать не все одновременно равные нулю числа Xj, Х2,., Хг таким образом, чтобы линейная комбинация соответствующих собственных форм
у Уо 4o,i Н bojr— 1 (17.119)
была ортогональна всем единичным состояниям Xk — кратность критического значения u u0j равна числу
216
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
линейно независимых комбинаций типа (17.119), удовлетворяющих условию ортогональности.
Определенные таким образом элементы и спектра
(17.118) располагают в порядке их возрастания.
Если скрытые формы криволинейного равновесия отсутствуют, то спектр явных критических значений (17.116) совпадает с полным спектром критических значений (17.118).
При решении задачи-минимум, когда методом перемещений определяют первое (низшее) критическое значение параметра нагрузки, критерием потери устойчивости может служить условие (17.115).
Спектральная функция. Произведение определителей
5 (и) D0 (и) Dx (и) (17.120)
обладает свойствами спектральной функции, а именно:
а) функция S(a) непрерывна и имеет непрерывную производную;
б) корни уравнения S(u)— 0 при 0 образуют полный спектр критических значений заданной системы
(17.118).
Выбор метода расчета и основной системы. При выборе расчетного метода и основной системы следует руководствоваться общими указаниями п. 17.3.
Простота основной системы и удобство ее анализа являются существенными признаками удачного решения расчетной задачи. При этом на второй план отступает стремление получить решение с наименьшим числом неизвестных.
По указанной причине для анализа критических состояний стержневой системы чаще используют метод перемещений, но не метод сил.
В случае использования метода сил может быть применена статически неопределимая основная система, полученная из заданной исключением части лишних связей. При использовании метода перемещений основная система может быть образована введением закреплений не между отдельными стержнями, а между группами стержней.
Применение таких сложных основных систем снижает число неизвестных Хъ. и соответственно уменьшает порядок п определителя Dx(u), но усложняет анализ основной системы и затрудняет построение определителя D0(u) и разыскание собственных значений основной системы.
Во всех случаях сопоставления и оценки различных вариантов выбора основной системы необходимо учитывать суммарную сложность и трудоемкость расчета на всех его этапах.
Использование симметрии системы. Определение симметрии системы см. 17.3.2.
Для симметричной системы все собственные формы или симметричны, или антисимметричны. Возможно раздельное построение спектров критических значений для симметричных и антисимметричных форм криволинейного равновесия с последующим объединением критических значений параметра нагрузки в один общий спектр
(17.118).
17,4.3. Примеры исследования устойчивости методом сил и методом перемещений
Пример 17.3. Требуется исследовать критические состояния двухпролетной регулярной балки; обозначения ясны из рис. 17.22. Задача решается тремя разными способами.
Вариант а — метод сил. Основная система и единичное состояние показаны на рис. 17.22, а.
Для основной системы — однопролетной балки длиной 21 — имеем
D0 (и) sin 2а 0,
откуда oi sin зт2 и спектр собственных значений для основной системы начинается элементами
я
т
Зя 5я
я, , 2л, , Зя,
2 2 '
Заданная система.
(17.121)
7
—jr"—2 i Jy. i
а) Метод сип Основная система
ИХ. Г зг
б) Метод сип Основная система.
s,—¥ sr
Состояние Xft
б) Метод перемещении Основная система
—Уу г1 Т-
95W w:
Состояние Xfsf
Рис. 17.22
Единичное перемещение основной системы определено по табл. 17.5
3
(tgu— и).
2 1и3
Условие критического состояния
Dx и) ЕЕ tgu —и О приводит к значениям
1 2 _КЗ_
15
tixi
(тЬ
(17.122)
(17.123)
17.4. ЛИНЕЙНО УПРУГИЕ СТЕРЖНЕВЫЕ СИСТЕМЫ. ОПРЕДЕЛЕНИЕ КРИТИЧЕСКИХ НАГРУЗОК 2Т7
следовательно, первые три элемента спектра явных критических значений для заданной системы будут
4,4934; 7,7253; 10,9041;. (17.124)
Этот спектр должен быть дополнен элементами спектра (17.121), определяющими скрытые формы криволинейного равновесия. Графики функций Д() (тонкая линия) и Dx(u) (жирная линия) показаны на рис. 17.23, а.
Для собственных значений основной системы 02я, 042я, об — Зя и т. д. определитель Dx(u) имеет конечную величину. Поэтому указанные элементы входят в полный спектр критических значений для заданной системы
я; 4,4934; 2я; 7,7253; Зя; 10,9041. (17.125)
Здесь основная система является ложной по отношению ко всем антисимметричным формам выпучивания. Эти формы находят среди собственных форм основной системы.
Вариант б — метод сил. Основная система и единичное состояние показаны на рис. 17.22,6.
Основная система распадается на две независимые части, критические состояния которых определяются одними и теми же собственными значениями. Из уравнения
D0 (и) sin и sin и 0 (17.126)
находят спектр, у которого все элементы имеют кратность 2:
я, я, 2я, 2я, Зя, Зя. (17.127)
Комбинируя собственные формы, соответствующие каждой паре равных собственных значений, получают антисимметричную кривую, ортогональную единичному состоянию Х . Следовательно, спектр (17.127) входит в полный спектр критических значений для заданной системы.
Единичное перемещение основной системы
21
Ьц — (1 — ctg ),
Ыи2
откуда
Dx(u) 1 — и ctg и 0. (17.128)
Это уравнение имеет решения (17.123), образующие спектр собственных значений (17.124). Графики функций Ео(и) и Dx(u) показаны на рис. 17.23,6.
Полный спектр критических значений (17.125) представляет собой сумму спектра собственных значений для основной системы (17.127) и спектра явных критических значений для заданной системы (17.124).
Здесь основная система также является ложной по отношению к антисимметричным формам выпучивания. Эти формы соответствуют собственным формам основной системы.
Вариант в — метод перемещений. Основная система и единичное состояние показаны на рис. Ц22, в.
Основная система распадается на две независимые части, критические состояния которых определяются одними и теми же собственными значениями. Из уравнения
D0 () (sin и — cos )(sin — cos и) — 0 (17.129)
находят спектр собственных значений основной системы, все элементы которого имеют кратность 2:
4,4934; 4,4934; 7,7253; 7,7253; 10.9041; 10,9041. (17.130)
Комбинируя собственные формы, соответствующие каждой паре равных собственных значений, получают симметричную кривую, ортогональную единичному состоянию Xi —. Следовательно, спектр (17.130) входит в полный спектр критических значений для заданной системы.
Реакция основной системы метода перемещений по данным табл. 17.7 равна:
2EI 2EI 2sin
Гц -Г- Ц (и) —— — ,I I sin и —cos и
откуда
, sn и
Dx (и) —; 0. (17.131)
sin и — и cos и
Корни этого уравнения образуют спектр
я, 2я, Зя,. (17.132)
Графики функций D0() и Dx() показаны на рис. 17.23, в.
Полный спектр критических значений (17.125) представляет собой сумму спектра собственных значений для основной системы (17.130) и спектра явных критических значений для заданной системы (17.132).
Здесь основная система является ложной по отношению к симметричным формам выпучивания. Эти формы соответствуют собственным формам основной системы.
Спектральная функция для всех трех вариантов исследования а, 6, в имеет один и тот же вид
S () D0() Dx () sin (sin — cos ), (17.133)
218
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
N
N
ЕЗ
а а
1
О
1—1—1
Рис. 17.24
если исключить не влияющие на результат множители. График спектральной функции представлен на рис. 17,23, г. Корни уравнения S(u) 0 (исключая корень и0) образуют полный спектр критических значений (17.125).
Пример 17.4. Рама со сжатыми стойками (рис. 17.24) представляет собой упрощение и идеализацию (в смысле исключения вызывающих изгиб нагрузок) системы, рассмотренной в п. 17.3.3. Исследование устойчивости выполняется методом перемещений. Основная система и единичные состояния показаны на рис. 17.19.
На основании (17.113)
и ( и и и . ч
D0 (и) sin —I,sin — — — cos —J (sin и—и cos u)q f
откуда получают спектр собственных значений основной системы
1,4303л; 2л; 2,4590л; 2,8606л;.
Условие критического состояния заданной системы 15 4 2 L
Dx (и) 2 Ьг 4 Z.3 0.
L5 L3 Lq -f- L4
Задаются рядом последовательных значений параметра нагрузки и и вычисляют определитель Dx(u)
Задано произвольное положительное число и, требуется определить:
1) степень неустойчивости системы v при параметре нагрузки и—8 (е — малое число), т. е. число элементов полного спектра критических значений (17.118), расположенных в открытом интервале 0
2) кратность q критического значения и — и, равного испытываемому числу иу в полном спектре (17.118); при 7 0 число и в этот спектр не входит;
3) степень неустойчивости системы v' v-q при параметре нагрузки w-f-e, т. е. число элементов полного спектра критических значений (17.118), расположенных в закрытом интервале 0Cuju.
Качественный анализ устойчивости позволяет ответить на эти вопросы, не прибегая к построению полного спектра критических значений (17.118). Если известен спектр собственных значений для основной системы
(17.111), то решение задачи требует однократного вычисления определителя Dx(u).
Пусть для испытываемого числа и известны:
v — число пройденных собственных значений для основной системы (включая каждое из кратных значений), т. е. число элементов спектра (17.111), заключенных в интервале 0.u0j.u;
г — кратность собственного значения и в спектре для основной системы (17.111); при г 0 число и в этот спектр не входит.
Прямой ход алгоритма Гаусса приводит симметричный определитель Dx(u) к треугольной форме:
Dx (и)
Yu V12 Ут
Mi М12 Mi
Т21 V22 У2П
0 М2п
Ут Уп2 ’ Упп
0
0
М п
Mi Ш- Ц„.
(17.135)
Коэффициентами устойчивости называют числа (Иг,., расположенные по главной диагонали треугольного определителя. Эти коэффициенты выражаются через главные миноры Д определителя Dx(u) следующим образом:
Mi — Y11 — Ai М2 —
А
Мл :
Рх ()
(17.136)
i—1
Лп—1
Лп—1
с помощью прямого хода алгоритма Гаусса. График спектральной функции S(a)Z0(a). Dx(u) представлен на рис. 17.25. Критические значения параметра нагрузки равны:
0,6697л; 1,2332л; 1,6806л;. (17.134)
Скрытые формы криволинейного равновесия в данном примере отсутствуют. Потеря устойчивости происходит при критическом значении сжимающей силы
Е1
N (0,6697л)2 —.
17.4.4. Качественный анализ устойчивости линейно упругих стержневых систем
Анализ устойчивости стержневой системы предполагает в числе других частных задач также определение степени неустойчивости системы 27, 29, 36.
Среди коэффициентов устойчивости различают нулевые, конечные, положительные, отрицательные и бесконечные значения. Пусть будет: Vo — число нулевых значений; V- — число конечных отрицательных значений; Voo — число бесконечных значений.
Степень неустойчивости определяют с помощью соотношений 30J:
число
метод сил
1
метод перемещений
i
v
v — v0 — v_
V V_ 4-v
Я
r v0 — v
r v0 v
v'v q —
v r—v_—vm
V rv0 v-
)
17.4. ЛИНЕЙНО УПРУГИЕ СТЕРЖНЕВЫЕ СИСТЕМЫ. ОПРЕДЕЛЕНИЕ КРИТИЧЕСКИХ НАГРУЗОК
219
Отсюда следует, что если при некотором значении параметра нагрузки и основная система устойчива (а ы0ь v 0) и все коэффициенты устойчивости конечны и положительны (vo v_Voo 0), то и заданная система устойчива.
В случае применения метода перемещений потеря устойчивости системы (критическое состояние при наименьшем значении и) характеризуется следующими тремя признаками: а) основная система устойчива
(иСМ(н); б) все коэффициенты устойчивости конечны и положительны, кроме последнего: (il, 2,.,
п—1); в) последний коэффициент устойчивости ц,п 0.
Качественный анализ эффективно используют также для отделения корней уравнения Dx(u)0 при построении спектра критических значений, а также и при решении задачи-минимум.
Пример 17.5. Качественный анализ. Рама со сжатыми стойками (см. рис. 17.24) была исследована в примере 17.4 методом перемещений. При и1,5я определитель равен:
26.207 2 22,207
Dx (1,5я) 2 3,298 3,308
22.207 3,308 —15,59
26,207 2 22,207
0 3,145 1,614
0 0 —35,23
26,2073,145 (—35,23) — 2904.
Здесь Vo Voo 0; v- l. Число пройденных собственных значений основной системы v l, так как 1,5л 1,4303л; ы01; г 0.
Степень неустойчивости системы равна:
v' v v-fr v0 —v 1 4-0 0 1 2,
т. е. испытываемое значение параметра нагрузки и лежит между вторым и третьим критическими значениями: и2 1,5л м3. Эта оценка подтверждается сопоставлением со спектром (17.134).
17.4.5. Устойчивость однопролетных стержней с упруго закрепленными концами
Стержень а—Ь, входящий в состав упругой системы, можно рассматривать как однопролетный стержень с упругими закреплениями концов (рис. 17.26). Связь стержня с системой в узле а характеризуется тремя коэффициентами жесткости Ыа, Va, ра. При ПОвороте узла а на угол 0а1 в упругой опоре возникает момент fia и перпендикулярное первоначальной оси стержня усилие ра. Линейное перемещение узла а 6а 1 вызывает в упругой опоре усилие va и момент ра- Подобным же образом коэффициенты жесткости Ыь, Vb и рь характеризуют связь стержня с системой в узле Ь.
Задачу решают методом перемещений. Вводя безразмерные параметры жесткости
Р V 3 р; 2
mt ; щ ; г, -77-(i а, ), (17.138)
r N
1
6 Рис. 17.26
получают критерий потери устойчивости:
Dx (и)
ma
ц
з ЛГа
Ls
Li -ть
и
Ls f'b
г а
3
L па
L
и
Lz rb
La nb
0.
(17.139)
Рис. 17.27
Обычно побочными реакциями пренебрегают, полагая их равными нулю: ра р60. При этом (рис. 17.27, а) число параметров жесткости можно уменьшить до трех, принимая
V3
(17.140)
уаЧ vav ’ El
El
Ш
El
и рассматривая эквивалентные по устойчивости схемы (рис. 17.27,6, в).
Критерий потери устойчивости преобразуют к виду
та ть (L4 п) (та ть) Lx (Ie п)
14(л — и2) о (17.141)
или к виду
та ть 2 (1 — cos и) — A sin и (та ть) и (sin и —
— Л cos и) Аи2 sin и 0; А и (1 — и2п). (17.142)
Если стержневая система, включающая исследуемый стержень а—Ьу содержит также и другие сжатые элементы, то коэффициенты жесткости ja, v, р должны быть предварительно определены на основе расчета по деформированной схеме. При отсутствии в системе других сжатых элементов коэффициенты жесткости определяют обычными методами.
17.4.6. Устойчивость неразрезных балок на упруго перемещающихся опорах
Методы исследования устойчивости. Свойство упруго перемещающейся опоры характеризуется соотношением
Pk Hkl-Hk vkyk, (17.143)
где Rk — реакция опоры;
Ук — ее линейное перемещение;
V — коэффициент жесткосги.
220
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
Решение задачи методом сил приводит к уравнению пяти моментов. Возможно применение метода перемещений или же смешанного метода.
Ниже излагается метод решения, особенно удобный для реализации на ЭВМ.
Метод частных решений. Обозначения ясны из рис. 17.28. Расчет основан на многократном использовании рекуррентных зависимостей
1 )
0 — (Гк cos ик-Мк_х sin ик-Ск)
Мъ
АК
ift_i cos uk T
. sin U'
R k
lj_ (Mk-Mk_x
Bk Uk wi wa Vi,
.
(17.144)
крепления концов балки и безразмерного параметра жесткости
v3
т —. (17.146)
В случае бесконечно большого числа пролетов (п оо) условия закрепления концов балки роли не играют. Критическое значение параметра нагрузки м определяют из уравнения
м 2и2 (1 cos и) (17 И7)
(l Vsin ии )
Задача И. Г. Бубнова. Для регулярных балок существует предельное значение параметра жесткости упругих опор т0, при котором критическое значение параметра нагрузки становится равным ы л. Каждый пролет выпучивается по полуволне синусоиды, упругие опо-
где обозначено
ck Hk- ; тк ск вк_вк. (17.145)
Из уравнений (17.144) первые два представляют собой соотношения метода начальных параметров, третье уравнение выражает условие равновесия пролета, четвертое уравнение — условие упругости опоры k.
Пусть левый конец стержня шарнирно закреплен, тогда оЛо0, величины 0О и Нi неизвестны. Первое частное решение строят при начальных значениях
УоМ0 0; 1 1.
Последовательное применение рекуррентных формул (17.144) при 1, 2,., п приводит к значениям, 0Л, Мп и НnJrj. Второе частное решение основано на значениях
у 0 М0 0; 0О 1.
Вычисления по формулам (17.144) позволяют определить величины уп, Qn, Мп, л1.
Полное решение строят как сумму двух частных решений:
Уп y’nHi у"п 0л0лЯ10лео и Т-Д.
Критерий потери устойчивости составляют в соответствии с условиями закрепления правого конца балки.
Регулярные балки. При , ; jV .V; vv балка будет регулярной. Критический параметр нагрузки и зависит от числа пролетов я, условий за¬
ры ведут себя как абсолютно жесткие. Дальнейшее увеличение жесткости упругих опор (mm0) уже не повышает устойчивости системы 6.
Предельное значение параметра жесткости упругих опор равно 21а.
Ото 2я21COS (17.148)
где т 72, если жесткой является только одна крайняя опора, или т0, если обе крайние опоры жесткие.
17.4.7. Устойчивость неразрезных балок на упруго вращающихся опорах
Методы исследования устойчивости. Свойство упруго вращающейся опоры характеризуется соотношением
Л ц0ь (17.149)
где Mk — момент в сечении над опорой k;
0 — угол поворота этого сечения; jiife— коэффициент жесткости.
Решение задачи методом перемещений приводит к уравнению трех углов поворота (рис. 17.29)
Eh л Г Efk
— Ц()вы 11(4)
1 1
L1 (ukl) Hft 0
'1.1
EIk
-—— L2(ubi) б10. (17.150)
‘1
17.4. ЛИНЕЙНО УПРУГИЕ СТЕРЖНЕВЫЕ СИСТЕМЫ. ОПРЕДЕЛЕНИЕ КРИТИЧЕСКИХ НАГРУЗОК 221
Ниже излагается метод решения, особенно удобный для реализации на ЭВМ.
Метод фокальных отношений. Левое фокальное отношение определяют по рекуррентной формуле 23а
. 1 — 1
' (Li Ki)
ft1
в
rk U-i (“) mk
Ц (“ft)
Fk
(17.151)
0,7 0,5 k
lk
(17.157)
Здесь обозначено (n — число пролетов)
k
El „I Ell0
2n 3 1 VI
i'c-rp7A,"-lAr'- 17IS8
0
Рамы с упруго защемленными в основании стойками.
Реакции основной системы метода перемещений для
4l:; 'izr'-firkz-k:. fhrfciL
Рис. 17.29
где обозначено тк kh
Е1ь '
г к
У1 'ft. 1к
(17.152)
л-;
2 5К
15 К
но не менее
стержней с одним упруго защемленным концом см. в табл. 17.9.
Рамы со ступенчатыми стойками. Стойку, образованную несколькими участками постоянной жесткости, мож-
Начальное значение левого фокального отношения равно.
Z7 7-Л- Г(“i (17Л53)
М j L iJ
При жесткой заделке на крайней левой опоре (а0 и Fx—оо; в случае шарнирного опирания Цо—О.
Последовательное вычисление Fu F2., Fn позволяет составить критерий потери устойчивости
D(u) FnF'n- 1 0, (17.154)
где правое фокальное отношение равно:
(17155)
12 (иП)
В случае жесткой заделки на правой опоре Пяоо, и условие (17.154) принимает более простой
вид
D(u) —Fn 0. (17.156)
Полагая все jx 0, получают решение задачи об устойчивости балки на жестких опорах.
17.4.8 Устойчивость рамных систем
Методы исследования устойчивости. Для определения критических параметров нагрузки рамной системы рекомендуется метод перемещений, качественный анализ и построение спектральной функции.
Одноэтажные многопролетные регулярные рамы. Стойки в основании защемлены, сжимающие силы распределены произвольно (рис. 17.30).
Коэффициент свободной длины для й стойки приближенно равен:
Но
CJ
Jo
J
Ip
u
a
EJ
’ Ьр
Рис. 17.30
но рассматривать как несколько однопролетных стержней, если при образовании основной системы метода перемещений ввести на границах участков дополнительные
а)
Рис. 17.31
закрепления, препятствующие повороту сечения и горизонтальному перемещению (рис. 17.31). При этом увеличивается число неизвестных Хъ. и порядок определителя Dx(u).
Другая возможность заключается в предварительном исследовании ступенчатой стойки. После определения реакций от линейного перемещения и поворота верхнего
222
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
конца стойку можно рассматривать как однопролетный элемент основной системы метода перемещений (рис. 17.32).
Рамы со стойками, жесткость которых непрерывно изменяется по длине (рис. 17.33). При некоторых законах изменения жесткости EI (х) реакции основной системы метода перемещений выражаются в замкнутой форме (см. 17.5.3).
Рис. 17.34
ГГ77 Г9Т,-
—в
Высокие узкие рамы (рис. 17.34). Расчет устойчивости, основанный на пренебрежении осевым обжатием, дает удовлетворительную точность только в том случае, когда высота рамы Н превышает ее основание В не более чем в шесть раз.
Методы исследования устойчивости высоких узких рам с учетом осевого обжатия см. в 19.
Здесь обозначено:
‘’1,2) 2 ± "(т) т''
1 f и-у 1г'-т-
cl__
EI
(17.162)
Шарнирно опертый стержень (рис. 17.36). Подчиняя решение (17.161) граничным условиям у М0 при
0, х — 1 и приравнивая определитель уравнений нулю, получают условие критического состояния
D (и) sin Vi sin v2 0. (17.163 )
Отсюда находят
Vq 2jx (п 1,2,.); (17.164)
i
ПП,
следовательно, квадрат критического параметра нагрузки равен:
(лл)2
(пп)2
(17.165)
Целое число п должно быть выбрано так, чтобы веичина была наименьшей, следовательно:
0 т 4л4 п 1
4л4 т 36 л4 п — 2
36л4 т 144 л4 п — 3
17.4.9. Устойчивость стержня В упругой среде Если рассматривать и как функцию непрерывного
аргумента я, то из условия минимума и2 можно найти
(17.166)
Дифференциальное уравнение задачи и его общий интеграл. Линейно упругая среда противодействует изгибу стержня, создавая на стержень (рис. 17.35) нагрузку
— р су, (17.159)
где с — коэффициент жесткости среды.
су
Рис. 17.35
Рис. 17.36
Дифференциальное уравнение изгиба сжатого стержня имеет вид
(lv Ny" су — 0. (17.160)
В рассматриваемом случае говорят также о балке на упругом (винклеровом) основании с коэффициентом постели с.
Если жесткость , сжимающая сила N и коэффициент жесткости с постоянны по длине I стержня, то общим решением однородного уравнения (17.160) при и2 2 К т будет
V-iX ViX
у Ci sin — С2 cos —
VeX
Q cos j'
C3 sin '—j-
(17.161)
Это приближенное решение задачи дает, вообще говоря, заниженные значения и, но в отдельных точках при т л4, 16л4, 81л4. совпадает с точным решением
(17.165).
Другие схемы опорных закреплений могут привести
к случаям, когда и22т и решение уравнения (17.160) имеет вид, отличный от (17.161). Анализ ряда схем см. в 35. Там же исследована устойчивость балки на упругом основании более общего вида.
17.4.10. Справочные данные для определения свободных длин
Формулы, таблицы и графики для определения свободной длины сжатого стержня, входящего в состав упругой стержневой системы, имеются во многих изданиях, например в 2, 3, 12, 19, 21, 27, 36, 44, а также в Справочнике проектировщика, 1-е изд., стр. 784 и далее.
Большое число графиков для определения свободной длины содержится в 216.
17.5. ЛИНЕЙНО УПРУГИЕ СЖАТЫЕ СТЕРЖНИ СОСТАВНОГО СЕЧЕНИЯ.
СТЕРЖНИ С ПЕРЕМЕННЫМИ ПО ДЛИНЕ ЖЕСТКОСТЬЮ И СЖИМАЮЩЕЙ СИЛОЙ
17.5.1. Сжатые стержни составного сечения
Влияние поперечной силы на критическую нагрузку центрально сжатого линейно упругого шарнирно опер-
17.5. ЛИНЕЙНО УПРУГИЕ СЖАТЫЕ СТЕРЖНИ СОСТАВНОГО СЕЧЕНИЯ
223
того стержня оценивают приближенной формулой (Ф. Энгессер, 1891 г.)
-— (17-167)
1 aN3GF
Здесь Nэ — эйлерова критическая сила; G — модуль сдвига; F — площадь поперечного сечения; а — коэффициент, зависящий от формы поперечного сечения стержня.
Пусть Х0 иг — гибкость стержня с произвольными условиями закрепления концов; — свободная длина; г — радиус инерции поперечного сечения. Тогда критическое напряжение стержня
я2 Е
С, —. (17.168)
Пр
Здесь Е — модуль упругости, а приведенная гибкость определяется соотношением
A.np V л2аЕа. (17.169)
Для сплошных (монолитных) стержней поправка, вносимая вторым слагаемым под знаком радикала, пренебрежимо мала.
Составные стержни. К стержням составного сечения относят (рис. 17.37): а) стержни на шпонках; б) решет-
т
б) -
Р Т
И
-М
1 1 1
4 ul
1
i
1
Li
1 1 1
X
и J
ini.
Рис. 17.37
чатые стержни; в) рамные стержни (стержни на планках). Здесь воздействие поперечной силы, воспринимаемой н по всей длине стержня, как в случае сплошного стержня, а в отдельных точках, требует обязательного учета.
Самое простое решение основано на формуле (17.168), где приведенная гибкость составного стержня
(17 170)
Выражения для А2 в отдельных частных случаях см. в Справочнике проектировщика, 1-е изд, стр. 765 и далее, а также в СНиП.
Стержень, состоящий из двух ветвей (оис. 17.38).
Более точное решение задачи 35 приводит к выраже¬
нию для критической силы
я ф 1
— „, ZIVFl, (17-171)
I2 t EIZEIk
где EI — жесткость на изгиб всего сечения, рассматриваемого как сплошное; 2 fc i- 2 — сумма жесткостей на изгиб каждой ветви относительно ее центра тяжести.
Коэффициент ф вычисляют по формуле
I2
'P zr(-
1
я2 2EIk ' ЕРг 1 EF,
1 Т zFj 6’
(17.172)
где Fu Fo — площади поперечных сечений ветвей; с — расстояние между центрами тяжести ветвей; Т — сдвигающее усилие на единицу длины; б — деформация взаимного сдвига смежных волокон, принадлежащих различным ветвям, в месте соединения связями.
fZl.-г
р
t. Рис. 17.38
Если пренебречь жесткостями отдельных ветвей 2 а по сравнению с жесткостью всего сечения , то выражение для критической силы (17.171) становится структурно подобным формуле (17.167).
17.5.2. Сжатые ступенчатые стержни
Ступенчатым стержнем называется однопролетный стержень с прямолинейной осью, состоящий из конечного числа участков с постоянной жесткостью и с постоянной по длине участка сжимающей силой. Предполагается линейно упругая работа материала. Для каждого из участков в отдельности справедливы допущения, принятые в 17.2.
Сжимающие силы приложены по оси стержня, система является идеальной. Ставится задача определения критической нагрузки в эйлеровом смысле.
Приняты следующие обозначения (рис. 17.39): п — общее число участков;
k— номер узла (0, 1, 2,., п) и номер участка (61, 2,., г);
Ik — длина участка;
Elk — жесткость участка;
Nk — продольная сжимающая сила на участке;
, цп — коэффициенты жесткости упругих защемлений на концах стержня.
Параметр нагрузки для участка k равен:
uk VNkEIklk
Рис. 17.39
Метод фокальных отношений. Один из концов стержня
предполагают линейно подвижным в направлении, перпендикулярном оси стержня (см. рис. 17.39). Основная рекуррентная зависимость для левого фокального отношения имеет вид 23а:
, Vi
k1 : COS U
ukslnukl
1 '1 к
uk
sin и.
(17.174)
224
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
Начальное значение левого фокального отношения sinui p.0i 1 ' Eh '
Fx cos u -
(17.175)
При o0 (шарнирная опора) Fi coswj. Если p,000 (жесткая заделка), то Л оо.
Критерием потери устойчивости служит уравнение
D(u) FnFn- 1 0,
где начальное значение правого фокального отношения
(17.177)
г _, sn ип Мп 1г
_со,„д
(17.180)
ф2 (х) шрх() f cpg)—2rfg,
о
где w — постоянное число, равное вронскиану системы фундаментальных функций pi(x) и фг()
Ф1 Ф2 w I,
I Фх Ф2
Общее решение уравнения (17.179) имеет вид
У Сг ф1 (х) С2 ф2 (х) x)t (17.181)
где Ci, С2 — постоянные, ун— частное решение уравнения, зависящее от нагрузки.
Пусть на участке стержня xz действует равномерно распределенная нагрузка р, тогда
(17.176)
гн — ’Too (, г),
(17.182)
Для случая свободного верхнего конца лп0. Если ця оо (жесткая подвижная заделка), то критерий потери устойчивости (17.176) приводят к более простому виду
D(u) 0. (17.178)
Здесь и — ведущий параметр нагрузки. Наименьший корень и уравнения (17.176) или (17.178) является критическим значением этого параметра (см. 17.4.1; 17.4.2).
Метод частных решений, изложенный в 17.4.6, позволяет исследовать устойчивость ступенчатого стержня при любых опорных закреплениях концов. В рекуррентных соотношениях (17.144) следует положить Vfc 0,
Справочные данные по определению критических нагрузок и свободных длин ступенчатых стержней см. в Справочнике проектировщика, 1-е изд., стр. 752.
17.5.3. Сжатые и сжато-изогнутые стержни с непрерывно изменяющейся по длине жесткостью
Сжато-изогнутый линейно упругий стержень с переменной по длине жесткостью EI() испытывает изгиб с самого начала нагружения. Дифференциальное уравнение изгиба имеет вид
d2u _
El(x)- NyM0, (17.179)
ах3
где ху у — координаты точки на изогнутой оси стержня; N — постоянная по длине сжимающая сила; М — изгибающий момент от поперечной нагрузки р(х) без учета влияния продольной силы.
Это линейное уравнение второго порядка с переменным коэффициентом при старшем члене может быть проинтегрировано численно; методы решения задачи устойчивости указаны в 17.5.5.
Ниже рассматривается решение задачи в том частном случае, когда уравнение (17.179) интегрируется в замкнутой форме.
Общее решение уравнения. Пусть ф1(х)—решение однородного уравнения, получающегося из (17.179) при
0. Второе линейно независимое решение однородного уравнения определяется по формуле Лиувилля
где функция влияния равна:
w J
(,) (17.183)
Здесь обозначено
Фоо (. ) Фх (X) ф2 (1) — Фа (ДГ) pt (I).
(17.184)
Частные производные функций Чг0о(, z) и Фоо(, ) в дальнейшем обозначаются символами
dik дх‘ дгк
а
дх‘ д-‘
(.) Ък (. г);
(17.185)
Воздействие равномерно распределенной нагрузки р, сосредоточенной силы Р, и пары сил (внешнего момента) Ми приложенных в точке с абсциссой г, дает
У (X) Ч'оо (х, г) — vn х, г) —
N N
(17.186)
Решение в форме метода начальных параметров получают, выражая постоянные интегрирования Сх и С2 через начальные параметры у0у 0О dydx)0 (см. 17.2 2),
У Уо — Фоо (. 0)-2 (х, 0)
w Л
ЧГ01(ДС’0) Н- (17.187)
Для дифференцирования по х достаточно прибавить единицу к первому индексу функций и Ф. С помощью этого правила из (17.187) получают выражения для Q y' и М — —Е(х) у".
Метод перемещений. Реакции основной системы метода перемещений для стержня переменного сечения приведены в табл. 17.11. Приняты обозначения ( — длина стержня)
®ik Фtk (I, 0), D 2w Ф10-Ф01 Фп. (17.188)
Задача устойчивости. Центрально сжатый стержень с переменной по длине жесткостью является идеальной системой, для которой возможна потеря устойчивости при разветвлении форм равновесия. Критическую силу находят, приравняв нулю определитель системы однородных уравнений, выражающих условия равновесия стержня.
Устойчивость однопролетных стержней с упруго закрепленными концами (рис. 17.40). Обобщается на слу-
17.5. ЛИНЕЙНО УПРУГИЕ СЖАТЫЕ СТЕРЖНИ СОСТАВНОГО СЕЧЕНИЯ
225
Таблица 17.11
Реакции основной системы метода перемещений для линейно упругого стержня переменного сечения
М,
Н
Схеца стержня
N
N
N
А
N
ф10— фо) D
lw Ф00 D
гсФк
D
Ж V2
н
lw- Ф00
Ф011Ф00
D
ОУ—Фо
D
02'—-ф.
10
W— Фп
Фи
D
Ф
Ф20“НФ21
Ф(
Ф20Ф21
I
М1
N
-Г
Фо,
ФгоНФ?
Ф,
Ф20НФ21
Ф0(
Фю—Фо
Фи
Фг0—Фоо
чай стержня переменной жесткости задача, рассмотренная в 17.4.5. Критерий потери устойчивости имеет вид
“7" (2w Фю — Фо фи) фоо“фо1)
N N я
1Г (“ фоо офю) “ фоо-0. (17 189)
N
где обозначено
v l — Nv. (17.190)
Табл. 17.12 содержит критерии потери устойчивости для стержней переменного сечения с различными условиями закрепления концов. Эти уравнения получают из (17.189), придавая коэффициентам жесткости упругих закреплений ца, ць и v значения 0 и оо,
226
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
Таблица 17.12
Критерии потери устойчивости для линейно упругих сжатых стержней переменного сечения с различными условиями закрепления концов
Схема стержня
Дх
И2
V
Критерий
.—j
оо
оо
оо
ь
II
о
1 4
i
Г
оо
оо
0
о
II
е
1
Г"
оо
0
оо
1 Ф„1 “г Фо — ®
со
0
0
фв1 о
Л
0
оо
оо
Фоо — Фю 0
ST "1
к
0
оо
0
Фю 0
a Х
Т I
0
0
оо
о
II
е§
17.5.4. Сжатые стержни, жесткость которых изменяется по степенному закону
Закон изменения жесткости. Пусть жесткость стержня изменяется по степенному закону (рис. 17.41)
El (X) — макс
т)“
(17.191)
где х — абсцисса точки на оси стержня, отсчитываемая от полюса о; а, b — абсциссы концов стержня (6а); Макс — наибольшая жесткость стержня (при х — Ь).
Общий случай аФ2. Решение дифференциального уравнения (17.179) выражают с помощью цилиндрических функций первого и второго рода
Рис. 17.41
Vi(x) Vx Jг (х); р2() 1Т Yr(x) (17.192) с индексом г 1 а—2 и аргументом 2—а - 2 иг I х 2. f N, а
х —) ; и ; k —.(17.193)
1 -kb) V макс Ь
Вронскиан системы функций рь Ф2 равен w—(2—а)п. Функция
Fa (a, b) Ji (a) Yj (Ь) — Yt (д)(Й (17.194)'
зависит от двух аргументов:
2-сс
a — bk
— 2 иг
Ь— ; (17.195)
1 К
индексы, принимают значения г, s rsign (а—2).
Критерий потери устойчивости (17.189) для сжатого стержня с упругими закреплениями (см. рис. 17.40) принимает вид
тать
—1 9 2к 2 (1-к) — Fsr—k 2 Frs-AFss я и
Маи
( Т
k Frr AFSl
а
2
гаьи k (Fr АиЧ Frr 0,
AF rs)
(17.196)
17.5. ЛИНЕЙНО УПРУГИЕ СЖАТЫЕ СТЕРЖНИ СОСТАВНОГО СЕЧЕНИЯ
227
где обозначено: Val
Ша ш—
; ГПЬ :
ь1
Еи
; А—и (1 — "У (17.197)
: 'V
'макс 1 макс
Особый случай а 2. Полагая, что 2а1—k, т. е. что величина критической силы не слишком мала, находят
Pi W-V7 cos, (р2(х) — х sin, (17.198) где обозначено:
X з Р In X, Р
Критерий потери устойчивости (17.189) для сжатого стержня с упругими закреплениями имеет вид:
та ть J4p Vk — 2р (1fe) cos 1— k—jsin A.J
Г 2ku I
mau sin X A (sin X — 2p cos X)
ть ku sn (sn 2p cos A,)J
2ku3
A sin A, 0; X — pnk. (17.200)
1—k
Случай 2u.—k рассмотрен в 35.
Справочные данные. Большое число задач устойчивости упругих сжатых стержней, жесткость которых изменяется по степенному закону, рассмотрено в трудах А. Н. Динника 14 и А. Р. Ржаницына 35. Графики для определения свободной длины таких стержней даны в 236.
17.5.5. Сжатые стержни с переменными по длине жесткостью и сжимающей силой
Дифференциальное уравнение изгиба. Прямолинейный стержень переменного сечения Е1(х) сжат сосредоточенной силой S и равномерно распределенной продоль-
Дифференцируя дважды по х обе части соотношения
М (х) — EI (х) у" (17.203)
и принимая во внимание, что
х
ЛГ () н0 Sy' — J s (у—ц) dlH0N (х) у',
0
получают дифференциальное уравнение изгиба
EI (х) у " А' (х)у’ 0 (17.204)
или в развернутом виде
Ely™ 2Е1'у ( ' N)y" N' у 0. (17.205)
Задача устойчивости возникает при отсутствии поперечной нагрузки на стержень и при однородных граничных условиях. Заменяя продольные нагрузки S через kS и s() через ks(x)„ разыскивают критическое значение параметра нагрузки, соответствующее потере устойчивости в эйлеровом смысле. Ниже описываются два метода решения этой задачи.
Численное интегрирование уравнения с использовани ем метода частных решений. Из четырех начальных па раметров уу г0, Уо и Уо два известны по условиям за крепления левого конца стержня; остальные два началь ных параметра обозначают символами Zj и Z2. Уравнение (17.205) при некотором фиксированном значении k численно интегрируют по методу Рунге-Кутта дважды: при Z 1 1, Z2 0 и Z 1 0, Z2l. Наложение этих двух частных решений позволяет сформулировать граничные условия на правом конце стержня в виде системы двух уравнений относительно Zx и Z2. Условие потери устойчивости заключается в равенстве нулю определителя этих уравнений: D(k) 0. Критическое значение параметра нагрузки, удовлетворяющее этому условию, находят методом попыток (направленного поиска).
Другой способ решения задачи. Длину стержня разбивают на п участков таким образом, чтобы в пре-
Ж'
ЕЭ(х), N(x)
4;
Дх
ной нагрузкой s(x) (рис. 17.42). Сжимающее усилие в точке с координатой х будет равно
Л'() s(). (17.201)
о
а изгибающий момент
М Мй Н0х Sy fs(6)y-
О
Т) ( ). (17.202)
Рис. 17.43
делах длины каждого участка жесткость EJ и сжимающую силу N можно было считать постоянными с погрешностью, не превышающей допустимой величины. Устойчивость полученного таким образом ступенчатого стержня (рис. 17.43) исследуют одним из методов, изложенных в 17.5.2. Способ позволяет учитывать также скачкообразное изменение жесткости и сжимающей силы.
228
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
17.6. ЛИНЕЙНО УПРУГИЕ СТЕРЖНИ, СЖАТЫЕ СЛЕДЯЩИМИ СИЛАМИ
17.6.1. Стержень, сжатый следящей силой общего типа
Следящая сила общего типа. Рассматривают линейно упругий стержень длиной с защемленным нижним и свободным верхним концом. Пусть будет 0 — угол поворота, б — линейное перемещение верхнего конца стерж-
б — kn 0 -f- ki2 б; 0Н 6210fc22 —,
Рис. 17.45
Рис. 17.44
ня (рис. 17.44). Стержень сжат продольной силой N, точка приложения и угол наклона которой изменяются в зависимости от перемещений верхнего конца стержня. Сдвиг бн и вращение 0Н такой следящей силы общего типа определяются соотношениями:
(17.206)
Условие консервативности нагрузки. Следящая сила общего типа создает на верхнем конце стержня момент М и горизонтальную силу Н:
м Л?6Н N (п 0 kl2 6); '
М 1 (17-207)
Н NQ N lk21022 — 1.
Работа силы N на виртуальных перемещениях dA W(6Hd00M6) будет полным дифференциалом, если
дб дО
Отсюда следует, что необходимое и достаточное условие консервативности нагрузки заключается в симметрии матрицы коэффициентов ориентации 25
k12 k21. (17.208)
17.6.2. Динамический критерий устойчивости равновесия. Три вида собственных движений стержня
Недостаточность статического критерия устойчивости следует из того факта, что консервативность нагрузки в общем случае следящей силы не обеспечена.
Динамический критерий устойчивости оценивает качество равновесия в соответствии с видом собственного движения, которое совершает стержень 4 31.
Для неконсервативных систем при определенных условиях становятся возможными такие явления потери устойчивости, которые не могут быть обнаружены на основе статического критерия.
Дифференциальное уравнение собственных движений стержня, основанное на допущениях, сформулированных в 17.2 для задач статического изгиба, имеет вид
.
EI
где kij (,-1, 2)—коэффициенты ориентации 52а.
Схемы стержней, сжатых следящей силой. Частные случаи, возникающие при различных значениях коэффициентов ориентации, представлены на рис. 17.45.
Схема а, кцфО, 12—21220 сдвиг бн пропорционален углу поворота 0.
Схема б, 120, ц 21 220, сдвиг бн пропорционален линейному перемещению б. В частном случае i2l стержень сжат продольной силой с фиксированной линией действия; критическую нагрузку такого стержня на основе динамического критерия устойчивости впервые определил Б. Л. Николаи (1939 г.).
Схема в, 2i¥0, ц12220, вращение 0Н пропорционально углу поворота 0, коэффициент k2l называют коэффициентом преследования. Устойчивость стержня для случая k2 — (строго следящая или тангенциальная сжимающая сила) на основе динамического критерия впервые исследовал М. Бек 48.
Схема г, 220, ku — k2k2lQ, вращение 0Н пропорционально линейному перемещению б. При цС0 сжимающая сила N направлена на фиксированную точку первоначально прямолинейной оси стержня. Расстояние от полюса до верхней точки этой оси равно Ь — —Цк22. При г221 полюсом служит основание стержня.
где х — абсцисса точки на оси стержня; у(х, t)—ордината этой точки в момент времени t El — жесткость стержня; ц — масса единицы длины стержня.
Решение уравнения ищут в форме (метод Фурье)
y(x,t) yf( t), (17.210)
где у зависит только от ху f — только от t.
После подстановки (17.210) в (17.209) переменные х и t разделяются
El tlv Ny
— — 0)2.
(17.211)
W f
Здесь со2 — параметр разделения, постоянная величина, равная квадрату частоты в случае гармонического колебания.
Три вида собственных движений стержня определяются величиной со2:
1. Гармоническое колебание — параметр разделения со2 положителен, частота со имеет вещественное значение. Равновесное состояние стержня устойчиво.
2. Апериодическое движение с возрастающими по времени отклонениями (дивергентное движение) — параметр разделения со2 отрицателен, частота со
17.6. ЛИНЕЙНО УПРУГИЕ СТЕРЖНИ, СЖАТЫЕ СЛЕДЯЩИМИ СИЛАМИ
229
имеет чисто мнимое значение. Равновесное состояние стержня неустойчиво — наблюдается апериодическая неустойчивость (дивергенция).
3. Сложное колебательное движение с возрастающими по времени отклонениями (флаттерное движение) — параметр разделения со2 и, следовательно, частота со — величины комплексные. Равновесное состояние стержня неустойчиво — наблюдается колебательная неустойчивость (флаттер).
17.6.3. Гармоническое колебание стержня, сжатого следящей силой
Уравнение движения
со2 0 (17.212)
при со20 имеет решение
f Схеш С2 ёш A cos (со q), (17.213)
где со — частота собственных колебаний; ср — сдвиг фазы; Сь С2, А от времени не зависят.
Стержень совершает гармоническое колебание
у (х, t) у () cos (со ф). (17.214)
Уравнение изгиба стержня определяет амплитудные значения у(х)
TV, и2, v
у -JTУ -1Гу 0- (17-215)
Здесь — длина стержня; параметр нагрузки и и параметр движения и равны:
Общий интеграл уравнения (17.215) имеет вид
_, ихх щх щх
уСх sh С2 ch -у- -f С3 sin —j—
UcyX
С4 cos —j, (17.217)
где обозначено 1.2 j у; V у с-. (17.218)
Таблица 17.13
Реакции основной системы метода перемещений для сжатого линейно упругого стержня, совершающего гармоническое
колебание
Единичное состояние
Реакции основной системы
Угол поворота 0 1
Линейное перемещение 61
и
-L I3 L
1г
it Ч
Обозначе-
ния
— (иг ch иг sin и2 — и2 sh иг cos и2)
— (и2 sh ut — Ui sin и2)
1 и2 — (1 — ch Ui cos и2) v sh иг sin и21
U
(ch иг — cos u2)
U1U2V,.
— (2 ch иг sin u2 i sh ux cos u2
uxu2V
U
(u2 sin u2 1 sh ux)
-v'-ь-
цо2
El
U UiU2 (1 — ch Ui cos u2) — — sh иг sin u2
230
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
Метод перемещений основан на выборе обобщенных координат
0 (0 0 cos (cat р), б (t) б cos (со q). (17.219)
Единичные состояния амплитудных величин 0 1 и 61 вызывают реакции основной системы, показанные в табл. 17.13. Эти реакции определяются с помощью шести функций Lj(uu и2)У которые при со0, у0 вырождаются в функции Lj(u) для статической задачи (см. табл. 17.7).
Канонические уравнения метода перемещений для амплитудного состояния стержня, сжатого следящей силой, имеют вид:
(у- Li — Nkul — 1т со2 j 0
El
— L3 — Л'12 (El
— L2-Nkn
I
6 0;
e
mco2 16 0.
Здесь m — сосредоточенная масса на верхнем конце стержня; 1т — полярный момент инерции массы (см. рис. 17.44).
Частотное уравнение получают, приравняв нулю определитель системы уравнений (17.220)
D(u, v)
Li — кг1и2 — kv U — k21u2 где приняты обозначения
1 т ц3 1
х Ьз
т
pi
0, (17.221)
(17.222)
Если параметр нагрузки и фиксирован, то из уравнения (17.221) определяют спектр собственных значений параметра движения v. Каждому собственному значению параметра движения v соответствует собственная форма — упругая линия стержня, совершающего свободное колебание.
17.6.4. Критические состояния стержня, сжатого следящей силой
Состояния потери устойчивости стержня определяются переходом от гармонического колебания к апериодическому движению (дивергенция) или к сложному колебательному движению (флаттер). Соответствующие таким состояниям критические параметры нагрузки и исследуются ниже на основе выведенных в 17.6.3 аналитических зависимостей, описывающих свободное гармоническое колебание стержня.
Исследования всех возможных критических состояний стержня, а также построения упругих линий для всех трех видов собственных движений должны быть основаны на решениях дифференциальных уравнений (17.211) не только для гармонического колебания (со20), но также и для случаев дивергентного (со2С0) и флаттерного движений (о2 а-Р0 25.
Классификация явлений потери устойчивости. Схематический график зависимости параметра движения v (пропорционального квадрату частоты о) от параметра нагрузки и (рис. 17.46) показывает возможность трех различных явлений потери устойчивости стержня.
а. Переход к апериодической неустойчивости, тип а.
Сплошными линиями на графике показаны два первых корня V и V2 уравнения (17.222). По мере возрастания параметра нагрузки и параметр движения (меньший корень) Vi убывает и становится отрицательным, переходя через нуль. Значение Pi0 характеризует потерю устойчивости стержня при критическом значении параметра нагрузки ииа.
Такой тип потери устойчивости характерен для консервативных систем, но может встретиться также и в том
(17.220)
случае, когда нагрузка проявляет слабые неконсервативные свойства.
Обращение в нуль определителя (17.218) при одновременном равенстве нулю частоты собственных колебаний ((о0) эквивалентно статическому критерию потери устойчивости. Рассматриваемый случай потери устойчивости относится к эйлерову типу (разветвление форм равновесия). Критический параметр нагрузки и иа может быть определен с помощью статического критерия.
р. Переход к апериодической неустойчивости, тип р. Штрихпунктирная линия на графике (рис. 17.46) показывает другой случай перехода параметра движения V от положительных значений к отрицательным. Функция v (и) испытывает разрыв непрерывности от y -foo до v—оо при критическом значении параметра нагрузки
Этот тип потери устойчивости характерен для неконсервативных систем с одной степенью свободы. Статический критерий не дает возможности обнаружить рассматриваемое явление.
у. Переход к колебательной неустойчивости. Два первых значения параметра движения V и v2 по мере роста и сближаются по величине (пунктирная линия на графике). В критической точке у при критическом значении параметра нагрузки мт корни уравнения (17.218) становятся кратными (двойными): v — v. При дальнейшем увеличении параметра нагрузки эти корни принимают комплексные значения.
17.6. ЛИНЕЙНО УПРУГИЕ СТЕРЖНИ, СЖАТЫЕ СЛЕДЯЩИМИ СИЛАМИ
231
Такой тип потери устойчивости характерен для неконсервативных систем с числом степеней свободы не менее двух.
Классификация рассмотренных явлений потери устойчивости дана на рис. 17.47.
TSV;У SS777V? WV ? ГГУТГ'ГУ'ГГ ✓ НенонсерватиЗиая нагрузка при, числе степеней сВободы УУУУУУУУУУУУУуУУУУУУУУУУУУУУУУУУУ
Дивергенция
Р
ДиЬергенция
ос
Флаттер
Г
Нонсервативная нагрузиа шуууууууууууууууууууууууА
aw2 bw с — О,
где
а —к, b (и) — — х (14 — k22u2) —-(Li-knu);
с (и) (Lj — к1ги2) (I4 — k22u2) — — ( з — k12u2) (L3-k21u).
Отсюда определяют параметр движения
— Ь ± Vb — 4ас w .2а
Переход к апериодическому движению (дивергенции), тип р, определяется критерием
1
W (и)
0.
(17.228)
Критерий перехода к флаттерному движению заключается в равенстве нулю дискриминанта квадратного уравнения (17.224)
Dy (и) Ь2 — 4ас 0. (17.229 J
Исследование схемы а. Нагрузка является консервативной. Статический критерий потери устойчивости
(17.227) приводят к виду
11
cos и и sin и
(17.230)
Рис. 17.47
17.6.5. Области устойчивости и неустойчивости невесомого стержня, несущего сосредоточенную массу и сжатого следящей силой
Частотное уравнение для невесомого стержня получается из (17.221) при ц0. Параметром движения служит величина
т3©2
ш —(17.223) EI
коэффициенты хит принимают значение х I т тР, т 1. При этих обозначениях
Lt — knu — ш L3 — i22
D (и, w)
I L3 — k21 u2 L4 — k22 u2 — w
Исследование сопряженных схем б и в. Схемы являются сопряженными, так как при перестановке коэффициентов ориентации е12 и k2 величина определителя D(u, w) не изменяется. Статический критерий потери устойчивости (17.227)
кло — к 1 — — ;
cos и 1 — cos и
(17.231)
определяет переход к дивергентному движению, тип а.
Критерий перехода к дивергентному движению, тип р,
(17.228) при х0 (инерция поворота массы т не учитывается) приводит к уравнению
sin и — и cos и 0,
(17.232)
которое не содержит коэффициентов ориентации. Наименьший корень этого уравнения и4,4934 дает для критической силы постоянное значение
20,19 7
N . (17.233)
2
2
На графике (рис. 17.48) показана зависимость от коэффициента ориентации k2 (или 621); области устойчивости заштрихованы. Кривая ACDF построена по уравнению (17.231), прямая KLM соответствует критической силе (17.233). При г120,5 стержень теряет устойчивость в эйлеровом смысле; критическая сила зависит от величины k2. В случае k20,5 потеря устойчивости не может быть установлена с помощью статического
(17.224)
(17.225)
(17.226)
Критерии потери устойчивости. Статический критерий потери устойчивости (ш0)
Da(u) с(и) 0 (17.227)
характеризует -переход к апериодическому движению (дивергенции), тип а.
232
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
критерия; критическая сила (17.233) постоянна по величине.
Эта критическая сила (17.233) по величине совпадает с критической силой постоянной ориентации, вызывающей потерю устойчивости (в смысле Эйлера) центрально сжатого стержня с нижним защемленным и верхним
шарнирно закрепленным концом (см. схему 2 в табл. 17.2).
Представленные на рис. 17.49 для схем б, в формы изогнутой оси стержня, совершающего собственное колебание в критическом состоянии, совпадают с формой потери устойчивости упомянутого выше стержня, верхний конец которого закреплен. Верхний конец стержня
не перемещается в горизонтальном направлении, 60, но инерционная сила ? гаа28 имеет конечное, отличное от нуля значение, так как одновременно с убыванием б до нуля возрастает до бесконечности частота собственных колебаний со. Неопределенность типа 0оо может быть раскрыта.
Рис. 17.49 показывает, что при совпадающих формах изгиба условия равновесия (в смысле Даламбера) горизонтальных сил для схем б ив различны.
Исследование схемы г. Нагрузка является консервативной. Статический критерий потери устойчивости
(17.227) приводят к виду
U COS U
k22 — —;. (17.234)
sin u — u cos u
17.6.6. Области устойчивости и неустойчивости весомого стержня, сжатого следящей силой
Частотное уравнение при отсутствии сосредоточенной массы получают из (17.221), полагая т0.
Области устойчивости для каждой из четырех схем лежат ниже соответствующих кривых на графике (рис-. 17.50), изображающих зависимость критического параметра нагрузки а от коэффициентов ориентации ki. Сплошные линии на графике соответствуют потере устойчивости, связанной с переходом к апериодическому движению (дивергенции), тип а. Эти кривые построены на основе статических критериев потери устойчивости (17.230), (17.231) и (17.232).
Исследование сопряженных схем б и в показывает, что при 6120,354 (или 21 0,354) возможна также потеря устойчивости, связанная с переходом к сложному колебательному движению (флаттеру); соответствующая этому случаю кривая показана на рис. 17.50 пунктиром.
17.7. НЕЛИНЕЙНО УПРУГИЕ СЖАТЫЕ И СЖАТО-ИЗОГНУТЫЕ СТЕРЖНИ
233
Частотное уравнение для рассматриваемой задачи приводят к виду:
D (и, v) 2и и — ul и2 ( ul — sh sin и2
"Ь ( и1 “Ь U1 C0S W2 12 ( 2 wl)2 "b
21 ( 2 A) и1 Sin и2 “
— ( — j)2ch cos 2 0, (17.235)
4?
Рис. 17.51
или, для частного случая k2 (21 1),
D (и, v) 2 и и2 ( и2 — wl) ui sn и2Ь
2wj ul ch ux cos u2 0.
(17.236)
Условие колебательной неустойчивости заключается в равенстве между собой двух наименьших корней V
и v2 уравнения (17.235) или (17.236). Для частного случая 2il (строго следящая или тангенциальная сила) критическую силу определил М. Бек (1952 г.)
20,05 7
2
схемы в при коэффициенте преследования 62i l (строго следящая или тангенциальная сила) показывает, что критические силы для крайних значений т 0 (17.237) и jLt 0 (17.233) отличаются мало (А. Пфлюгер, 1955 г.). График зависимости н от коэффициента распределения масс представлен на рис. 17.52; для промежуточных значений 0, критическая сила снижается и может
составить приблизительно 80 от наибольшей величины. На этом же графике дано решение задачи при 2i0,8 и 621 0,6.
17.7. НЕЛИНЕЙНО УПРУГИЕ СЖАТЫЕ И СЖАТО-ИЗОГНУТЫЕ СТЕРЖНИ
17.7.1. Нелинейно упругий материал
Закон нелинейной упругости. Деформации материала полностью обратимы, напряжение и относительное удлинение связаны нелинейной зависимостью ag(e) или e f(a). В общем случае эта зависимость для сжимающих (т0) и растягивающих (сгСО) напряжений может быть различной (см. схематический график работы материала на рис. 17.53).
Функция tfg(e) однозначна, т. е. каждому значению 8 соответствует только одно строго определенное значение ст. Закон нелинейной упругости может быть задан или аналитически,
или в форме таблицы, содержащей достаточно большое число пар точек е, а.
Начальный модуль упругости
Рис. 17.53
ё' (0)
(17.238)
определяет наклон касательной к кривой графика в начале координат, при е 0, а0.
Касательный модуль
Et
do
d
g' (6)
(17.239)
(17.237)
Формы изогнутой оси стержня, совершающего колебание в момент потери устойчивости при критической силе (17.237), показаны на рис. 17.51. Несмотря на совпадение критических сил, формы эти для схем бив различны.
Влияние распределения масс. Анализ устойчивости весомого стержня, несущего сосредоточенную массу, для
определяет наклон касательной к кривой графика работы материала в произвольной точке с текущими координатами е и crg(e).
График работы нелинейно упругого материала может включать прямолинейные участки. Часто рассматривают материал, который в начальной стадии работы, до достижения предела пропорциональности аПц обладает свойством линейной упругости т е; при дальнейшем развитии деформаций эта зависимость заменяется другой.
Энергетические теоремы сохраняют свое значение для нелинейно упругих стержней, поскольку деформации обратимы и силы упругости имеют потенциал.
Исследование изгиба и устойчивости нелинейно упругих стержней основано на анализе малых изгибных перемещений. Используется гипотеза плоских сечений. Предполагается сохранение плоской формы изгиба как в устойчивых, так и в неустойчивых состояниях стержня. Влияние касательных напряжений не учитывается.
234
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
17.7.2. Устойчивость центрально сжатых стержней
Центрально сжатый стержень представляет собой идеальную систему и до потери устойчивости сохраняет первоначальную прямолинейную форму. Потеря устойчивости связана с разветвлением форм равновесия. Критическая сила шарнирно опертого стержня равна (Ф. Энгессер, 1889 г.):
—тт—. 1-1 '(„). (17.240)
(17.242)
задаваясь значением а и вычисляя соответствующую гибкость К.
17.7.3. Изгиб и устойчивость сжато-изогнутых стержней
Процесс нагружения сжато-изогнутого нелинейно упругого стержня иллюстрируется графиком поведени я (рис. 17.54); по оси абсцисс откладывают
характерное перемещение — прогиб в середине пролета т, по оси ординат — сжимающую силу N. В точке В сжимающая сила N, рассматриваемая как функция прогиба ут, достигает экстремального (максимального) значения. Это максимальное значение NMavc N является критическим; оно определяет состояние потери устойчивости при достижении предельной нагрузки. В строительной механике стержневых систем говорят также о потере устойчивости второго рода.
Критерий потери устойчивости сводится к условию стационарности функции N N(ym)
dN dym
о,
(17.243)
если фиксирована длина стержня. Другая возможная постановка задачи предполагает фиксированной сжимающую силу N; тогда из множества стержней с раз¬
ными длинами I в критическом состоянии будет находиться самый длинный стержень, т. е. тот, для которого
dl
-— 0. (17.244)
1ут
Качественная характеристика явления дана в 17.1.4. Идеальной системой будет сжато-изогнутый
где — длина стержня; — момент инерции поперечного сечения.
Другие условия закрепления концов стержня учитываются с помощью понятия свободной длины (см. 17.1.14; 17.2.3). Критическое напряжение равно
N зт2 (do
7 (,7-24,)
где Я 1т7— гибкость стержня; F —площадь поперечного сечения.
График критических напряжений, изображающий зависимость а от X, удобно строить по формуле
стержень, нагруженный так, что форма изгиба ортогональна форме потери устойчивости. Примером служит антисимметрично нагруженный шарнирно опертый стержень с S-образной упругой линией (см. рис. 17.6). В этом особом случае потеря устойчивости при разветвлении форм равновесия может произойти до достижения предельной нагрузки.
При слабой нелинейности в некоторых случаях возможно также асимптотическое поведение стержня (пунктирная кривая на рис. 17.54), характерное для линейно упругих стержней (см. 17.2.4; 17.2.5). Предельное (асимптотическое) значение сжимающей силы зависит от графика работы материала, от длины стержня, формы и размеров его поперечного сечения.
Дифференциальное уравнение изгиба имеет вид (рис. 17.55)
_ _е1 — е2 ю — Ю
dx2 h h
(17.245)
Здесь Ху у—координаты точки на оси стержня; ei 8г — удлинения крайних волокон сечения; а1 а2 — соответствующие фибровые напряжения; h — высота сечения.
В общем случае, при произвольной форме профиля стержня и при произвольном законе нелинейной упругости, возможно только численное решение уравнения
(17.245) (см. 17.7.5).
17.7.4. Аналитическое исследование равновесных и критических состояний внецентренно сжатого стержня с двухточечным профилем
Внецентренно сжатый стержень с двухточечным профилем (рис. 17.56). В этом простейшем случае уравнение
(17.245) интегрируется в квадратурах. Из условий равновесия
Fh
М N (а у)(а1 — о2)-
N — a0F — (а1 а2) —,
17.7. НЕЛИНЕЙНО УПРУГИЕ СЖАТЫЕ И СЖАТО-ИЗОГНУТЫЕ СТЕРЖНИ
235
определяют фибровые напряжения
CTj (1 и)СГ0; т2(1 — и)а0, о0 NF.
Здесь М — изгибающий момент; а — эксцентрицитет приложения продольной сжимающей силы N; и
— 2(a-y)h. В безразмерных координатах 2xh и и уравнение (17.245) принимает вид 24в
du 1
где функция двух переменных равна:
Ф ( о и) (1 и) О0)- (1-и) а0. (17.247)
Разрез к-к
2L
h
Ф(а0) ит) — Ф(а0, (17.248)
где обозначено
Ф (а0, и) J ф (а0, и) du.
о
(17.249)
Условие потери устойчивости (17.244) преобразуют к форме дХдит 0. Построение равновесного состояния стержня сводится к двум квадратурам, а определение критической нагрузки требует, кроме того, разыскания экстремума несобственного интеграла (17.248).
Замкнутое решение получают при законе нелинейной упругости
о ( а ве — ос(—j, (17.250)
где а — показатель нелинейности. Гибкость стержня на основании (17.248) выражают с помощью эллиптического интеграла первого рода
Ь (Pi, k),
Ут
где приняты обозначения
t оЕ; Ф arccos uum фх arccos mит
(17.251)
г2
2 2аt2 (3 4г)
Г а3(з ).
(17.252)
Критерий потери устойчивости (17.244) преобразуют
к форме
V l — № sin2p1 (Фх,)
1 — 2k 1 — k
Е (фх
.)-
(1 2k2 1-fe ——— sin2 ф1 J ctg ф1, (17.253)
(17.246) где (ф? )—эллиптический интеграл второго рода.
Рис. 17.56
При шарнирном опирании концов стержня граничные условия на опоре 0, u2ah — m и в середине пролета g A, u m2ymlh um приводят к выражению для гибкости стержня
График критических напряжений при а5104 для ряда разных значений относительного эксцентрицитета m 2afh приведен на рис. 17.57.
Решение для кубического закона е(ос)3 получают как частный случай выведенных соотношений, полагая а (Ес)3 и затем устремляя Е к бесконечности. Гибкость стержня в равновесном состоянии равна:
2F (puk)
V з;
(tr
k
62 ul
(17.254)
17.7.5. Численное исследование равновесных и критических состояний сжато-изогнутых стержней
Постановка задачи. Закон нелинейной упругости и форма профиля предполагаются произвольными. Шарнирно опертый стержень сжат силой N и испытывает изгиб от поперечных нагрузок Ми Р, р и т. д. (рис. 17.58). Анализируются равновесные и критические состояния стержня 10, 11а, 49, 55.
236
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
Ниже описывается один из оптимальных алгоритмов численного решения задачи с помощью ЭВМ.
Процедура наложения. Пусть действующие в сечении усилия Ми iV известны; требуется построить эпюру нормальных напряжений а. Задача решается наложением сечения на график работы материала (рис. 17.59). Удлинение крайнего волокна с вогнутой (выпуклой) стороны равно 81(82); удлинение в центре тяжести сечения — 8о.
.0
к к1 п-1
Рис. 17.58
Высоту сечения h необходимо преобразовать так, чтобы она стала равной длине (ei—82) в масштабе графика. Условия равновесия имеют вид:
§odFN; §eodF M. (17.255)
Текущая координата v отсчитывается от центра тяжести сечения; соответствующее напряжение равно:
og(e),
е е —(8 —ег). (17.256)
Неизвестные величины ei и 8г находят методом двойного направленного поиска или на основе итерационного процесса (см. 17.11.3).
Процедура интегрирования. Дифференциальное уравнение изгиба
d2y _ et — е2 dx 2 “ h
Критическое состояние стержня. Построив несколько равновесных состояний, наносят соответствующие точки на график поведения стержня. Критическое состояние стержня соответствует точке максимума; ордината этой точки определяет критическую силу N.
17.7.6. Приближенное определение критической силы внецентренно сжатого стержня
Постановка задачи. Разыскивается приближенное значение критической силы внецентренно сжатого стержня. Не преследуется цель анализа напряженного состояния стержня как в критическом состоянии, так и в равновесных состояниях, предшествующих потере устойчивости при достижении предельной нагрузки.
Метод коллокации основан на задании формы изгиба стержня и требовании, чтобы условия равновесия выполнялись в п фиксированных сечениях по длине стержня. Задача сводится к исследованию изгиба и устойчивости системы с п степенями свободы.
В простейшем случае шарнирно опертого стержня принимают форму изгиба в виде полуволны синусоиды (рис. 17.60)
лх
у Ут sin —.
(17.258)
Напряженное состояние стержня полностью определяется условиями работы одного сечения в пролете; система обладает одной степенью свободы (я1).
Дифференцируя дважды по х соотношение (17.258), полагая затем 2 и используя зависимость (17.257), находят
численно интегрируют методом Рунге — Кутта при начальных условиях о0 и о9 В общем случае граничное условие на правом конце уп— 0 не выполнено.
Одну из двух величин N или 0О следует изменить так, чтобы это условие было удовлетворено.
Равновесное состояние стержня. Целесообразно зафиксировать 0О и искать значение N, удовлетворяющее граничному условию на правом конце стержня. В этом случае при рассмотрении первичных равновесных состояний стержня исключается двузначность решения, свойственная обратной постановке задачи.
Величину сжимающей силы N определяют методом направленного поиска, после чего становятся известными напряжения и перемещения каждой точки стержня.
(17.259)
Здесь M — Na-ym)—изгибающий момент в среднем сечении стержня.
Для построения равновесного состояния стержня целесообразно фиксировать величину ут и после ряда наложений подобрать значение N, удовлетворяющее одновременно уравнениям
(17.258) и (17.259). Критическое состояние выделяется с помощью условия
(17.244) 21а, 33, 51.
Оценка погрешности. Метод коллокации приводит к несколько преувеличенным значениям критической силы N.
Графики критических напряжений для стержней с различными формами профиля с помощью метода коллокации построены в работе 55. Материал обладает свойством линейной упругости при 8СеПц, сгОпц; при 8еПц закон нелинейной упругости выражается суммой четырех экспонент. Условный предел
Рис. 17.61
17.8. УПРУГО-ПЛАСТИЧЕСКИЕ СЖАТЫЕ И СЖАТО-ИЗОГНУТЫЕ СТЕРЖНИ
237
текучести принят 7т 20Пц, асимптотическое напряжение СГас1,2(Тт (рис. 17.61).
Один из графиков критических напряжений (для двутаврового профиля) представлен на рис. 17.62. Он содержит семейство кривых, соответствующих ряду значе-
Заменяющий стержень получают, нанизывая центры тяжести всех сечений Fi0 на прямолинейную ось, длина которой равна длине исследуемого стержня I. Разыскивают критическую силу при разветвлении форм равновесия заменяющего стержня, рассматривая его как центрально сжатый линейно упругий стержень с переменной жесткостью EI (см. 17.5).
Nu
Y
V
Л
N
",
Рис. 17.64
ний относительного эксцентрицитета m — aFWt где W — момент сопротивления сечения. По оси абсцисс отложе-
на относительная гибкость лЛДт, А,тя V сгт.
17.7.7. Качественный критерий устойчивости сжато-изогнутых нелинейно упругих стержней
Качественный критерий устойчивости сжато-изогнутых нелинейно упругих стержней в отличие от экстремальных критериев (17.243) или (17.244) не требует вычисления производных dNdym или dldym. Он позволяет оценить устойчивость одного рассмотренного равновесного состояния стержня; такая оценка с помощью экстремальных критериев (17.243) или (17.244) невозможна 5а, 11а.
Качественный критерий устойчивости основан на свойствах заменяющего стержня.
Анализ равновесного состояния сжатоизогнутого нелинейно упругого стержня определяет напряжение в каждой его точке о — о(ху v)y где х—абсцисса, указывающая место сечения, v — координата, определяющая положение волокна в сечении (см. рис. 17.55). После этого, пользуясь графиком работы материала (или аналитическим законом нелинейной упругости), находят касательный модуль Ety соответствующий напряжению о(х, v), и вычисляют коэффициент соС 1
Et 1 do
l7'260)
Сечение заменяющего стержня получают заменой ширины каждого волокна b(v) шириной Ь(и) со (дг, v). Площадь сечения заменяющего стержня равна:
J(o)cd(, v)dv. (17.261)
Символом обозначают момент инерции площади заменяющего стержня Еф относительно центра тяжести этой площади.
Рис. 17.63
Для шарнирно опертого стержня приближенно можно принять
л2 ,(17.262)
JiT _ 0)
2
где Е1Ш — жесткость заменяющего стержня в середине пролета; — коэффициент, учитывающий переменность сечения по длине. В случае решения по методу коллокации обычно полагают 1.
Критерий устойчивости. Если N(0N, то исследуемый стержень находится в устойчивом состоянии, т. е. NkZN. При обратном знаке неравенства равновесное состояние стержня неустойчиво, следовательно, Если
N„ N, то исследуемый стержень находится в критическом состоянии; условие
N (17.263)
является признаком потери устойчивости при достижении предельной нагрузки.
Кривую зависимости критической силы заменяющего стержня от характерной деформации ут исследуемого стержня показывают на графике поведения (рис. 17.63). Точки А и А' соответствуют границе линейно упругой стадии работы материала (фибровое напряжение достигает предела пропорциональности апц), точка В является критической для исследуемого стержня.
Удобно также строить зависимость от N
(рис. 17.64). Ветвь кривой, лежащая выше биссектрисы координатного угла, соответствует устойчивым, ветвь, расположенная ниже биссектрисы, — неустойчивым состояниям исследуемого стержня.
17.8. УПРУГО-ПЛАСТИЧЕСКИЕ СЖАТЫЕ И СЖАТО-ИЗОГНУТЫЕ СТЕРЖНИ
17.8.1. Упруго-пластический материал. Обозначения
Упруго-пластический материал характеризуют следующие три основные свойства:
а) нелинейность зависимости между напряжением о и деформацией е в целом; на отдельных стадиях эта зависимость может быть линейной;
238
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
б) текучесть материала, определяющая рост деформации при постоянном (или почти постоянном) напряжении;
в) необратимость деформаций, связанная с возникновением остаточных деформаций при разгрузке.
При упруго-пластической деформации часть энергии расходуется на изменение кристаллической решетки материала; диссипация (рассеивание) энергии делает систему неконсервативной. Энергетические теоремы, осно-
F — площадь поперечного сечения;
— момент инерции поперечного сечения; СГ0 Л1 fF — осевое напряжение;
0 NF — критическое напряжение;
— длина стержня;
— свободная длина стержня;
Л — гибкость стержня.
ванные на свойствах потенциальной энергии системы, в этом случае неприменимы.
Схематический график работы упругопластического материала (рис. 17.65) показывает: стадию упругой работы при еСеПц, сгаПц (прямая ОА)у когда связь между деформацией е и напряжением а линейна о е (Е — модуль упругости); переходную кривую А В, соединяющую предел пропорциональности (еПц, стцц) с пределом текучести (ет, от); площадку текучести (прямая ВС), характеризующую быстрый рост деформации при постоянном (или почти постоянном) напряжении от; стадию самоупрочнения (кривая CD) с напряжениями
а(Тт.
Разгрузка происходит по линейному закону (пунктирная линия PQ на рис. 17.65) с модулем разгрузки ' .
Исследование изгиба и устойчивости сжатых и сжатоизогнутых упруго-пластических стержней основано на анализе малых изгибных перемещений, используется гипотеза плоских сечений. Предполагается сохранение плоской формы изгиба как в устойчивых, так и в неустойчивых состояниях стержня. Влияние касательных напряжений не учитывается.
В практических задачах обычно принимают во внимание не все свойства упруго-пластического материала, а только некоторые из них. Если используют предположение об активности деформации, то разгрузка не происходит, и упруго-пластический материал можно рассматривать как нелинейно упругий (см. 17.7).
Идеализация свойств материала позволяет существенно облегчить решение задач изгиба и устойчивости.
Материал с линейным упрочнением (рис. 17.66, а) обладает упругими свойствами сг е при еет, аТт. В случае еет, сгат линейная зависимость между напряжением и удлинением определяется модулем деформации ) С при догрузке
а — ах ф (е—- 8Т), а г? г (1 — ф) ах (17.264)
или модулем упругости Е при разгрузке.
Идеальный упруго-пластический материал обладает свойством неограниченной текучести при е8т, о —ог (график Прандтля, рис. 17.66,6). Разгрузка определяется модулем упругости Е.
Основные обозначения:
N — сжимающая сила;
Л’ — критическая сила;
17.8.2. Устойчивость центрально сжатых стержней
Центрально сжатый стержень представляет собой идеальную систему и до потери устойчивости сохраняет первоначальную прямолинейную форму. В основу исследования устойчивости положен график работы материала, представленный на рис. 17.65.
Потеря устойчивости в упругой области возможна для стержней высокой гибкости ц,
где граничная гибкость равна ХПц — пУЕоац. Критическая сила и критическое напряжение на основании обобщенной формулы Эйлера (17.47) равны:
riEI пЕ
а —. (17.265)
Л'
,2
№
При этом критическое напряжение а не превосходит предела пропорциональности оПц.
Потеря устойчивости в упруго-пластической области была исследована Ф. Энгессером 50 и Т. Карманом 52 на основе концепции Эйлера. В формировании теории большую роль сыграли критические замечания Ф. С. Ясинского 47. Наложение поперечного сечения произвольной формы на график работы упруго-пластического материала показано на рис. 17.67. Изгибные деформации стержня в начальный момент выпучивания определяются: в зоне догрузки — касательным модулем Et dode, а в зоне разгрузки — модулем разгрузки ' . Пусть
17.8. УПРУГО-ПЛАСТИЧЕСКИЕ СЖАТЫЕ И СЖАТО-ИЗОГНУТЫЕ СТЕРЖНИ
239
будут Si(S2) и I (2)—статический момент и соответственно момент инерции зоны догрузки (разгрузки) относительно оси, проходящей через нулевую точку эпюры дополнительных напряжений изгиба. Положение этой оси определяется из условия равновесия EtSi ES2. Приведенный модуль равен
Ек Л . (17.266)
Дальнейший анализ полностью аналогичен выводу формулы Эйлера. Критическая сила и критическое напряжение
n2Ekl 7i2Ek
А' —-Г (17.267)
вызывают потерю устойчивости при разветвлении форм равновесия. Критическое напряжение зависит от гибкости стержня X, от очертания графика работы материала на участке переходной кривой АВ (см. рис. 17.65) и от формы поперечного сечения стержня. Схематическое очертание графика критических напряжений центрально сжатого стержня показано на рис. 17.68 сплошной линией.
Концепция Ф. Шенли 45 устанавливает возможность криволинейных равновесных состояний центрально сжатого стержня в условиях непрерывно возрастающей сжимающей силы N. В начальный момент выпучивания разгрузка не происходит, так как бесконечно малые растягивающие напряжения изгиба компенсируются бесконечно малым приращением осевого сжатия. Закритические состояния криволинейного равновесия характеризуются разгрузкой со стороны растянутого от изгиба волокна 31. Наименьшая сжимающая сила и соответствующее напряжение, при которых становятся возможными криволинейные формы равновесия в условиях непрерывного возрастания сжимающей силы, пропорциональны касательному модулю:
, 3i2E I, 712Е (do -Ь, о.-—', -() (17.268)
График поведения центрально сжатого упруго-пластического стержня показан на рис. 17.69; в качестве характерного перемещения принят прогиб в середине пролета у т. Точка К соответствует критическому состоянию по теории Энгессера — Кармана, точка С' соответствует концепции Шенли.
Стержень может начать отклоняться от прямолинейной формы равновесия при осевом напряжении сг0 в интервале СсгоСсг, если сжимающая сила возрастает и прямолинейная форма до этого не была нарушена. Поэтому участок оси ординат на графике (рис. 17.69)
между точками К' и К рассматривают как зону неустойчивости.
Критические напряжения сг по Шенли показаны на графике (рис. 17.68) пунктирной линией.
Несмотря на внешнее сходство формул Энгессера (17.241) и Шенли (17.268), они относятся к разным явлениям. Первая из них определяет для нелинейно упругого стержня величину критической силы, вызывающей потерю устойчивости при разветвлении форм равновесия. Формула (17.268) определяет наименьшую величину сжимающей силы, при которой становятся возможными криволинейные формы равновесия центрально сжатого упруго-пластического стержня в условиях непрерывного возрастания сжимающей силы. Это явление качественно отличается от потери устойчивости в эйлеровом смысле, так как здесь при напряжении а стержень остается прямолинейным и не существует смежных форм равновесия. Ответ на вопрос, следует ли относить такого рода бифуркацию к явлениям потери устойчивости или же нет, зависит от строгой формулировки признаков потери устойчивости. С практической точки зрения разветвление форм равновесия в условиях возрастающей нагрузки следует рассматривать как особое, критическое состояние стержня.
Концепция Ф. Шенли не означает возврата к теории касательного модуля, первоначально выдвинутой Ф. Энгессером, так как возможность реализации рассматриваемых явлений существенно зависит от поведения сжимающей силы в процессе выпучивания.
Модель с одной степенью свободы (рис. 17.70) иллюстрирует концепцию Шенли.
При сжимающей силе N модель сохраняет состояние прямолинейного равновесия (0), при NAN возможно отклоненное равновесное состояние (0). Опорные стержни 1 и 2, обладающие упруго-пластическими свойствами, в результате перехода модели к отклоненному равновесному состоянию приобретают деформации ei (укорочение) и е20 (удлинение). Стержень
1 испытывает догрузку и работает с касательным модулем , стержень 2 — разгрузку и работает с модулем Е. Если F — площадь поперечного сечения каждого из стержней, то условия равновесия имеют вид:
Рис. 17.70
ДАТ F (ZyEi — е2Е);
Ny Fb (еtEt е2Е)
Используя геометрическое условие
h и
-(81 е2)т
?) находят
1
®3 —
E Et т 1 (2byEt
12ЬуЕ ДДА
F );
Е .t
lh
ДVX
' F J
(17.269)
(17.270)
(17.271)
240
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
Второе из условий равновесия (17.269) преобразуют к виду
Abu AN 1 1 TDT(i7-T)’ (,7'272)
где обозначено
D 1 —
Nlh I 1
Ab2F
Et ) (17.273)
Потеря устойчивости в эйлеровом смысле, при ДМ0, возможна только в случае D 0, откуда определяют приведенн о-м одульную критическую силу
4b2F Et Е
N1T ' FTT-(17'274)
In Lf E
соответствующую критической силе Энгессера — Кармана (17.267).
Далее определяют сжимающую силу Nt при которой становятся возможными отклоненные формы равновесия, если ANX). Найдя у из условия (17.272), приводят второе из уравнений (17.271) к виду
AN Et ( 1 I 1
Наименьшее значение сжимающей силы N, при котором е2 имеет неотрицательную величину, находят, приравнивая нулю выражение в прямых скобках. Отсюда находят касательн о-м одульную критическую силу
2b2FFf
N —г—, (17.276)
lh
соответствующую критической силе Шенли (17.268).
Исчерпание несущей способности при a0JT теоретически возможно для стержня из идеально упруго-пластического материала (рис. 17.66,6) при малой гибкости ХХТ, где граничная гибкость Хт
пУГЕат. График критических напряжений для такого стержня показан на рис. 17.68 штрихпунктирной линией.
Устойчивость центрально сжатого стержня из л и н е й н о-у п р о ч н я ю щ е г о с я м атериала (см. рис. 17.66, а) требует специального рассмотрения, так как площадка текучести, строго говоря, отсутствует и критическое напряжение может превзойти предел текучести сгт. Три характерные точки на оси абсцисс графика критических напряжений (рис. 17.71) определяются граничными гибкостями:
(17.277)
В интервале гибкостей ХХХТ пряжение постоянно и равно a aT.
Линия LKTS на графике определяет критические напряжения стержня, теряющего устойчивость по теории Энгессера — Кармана при Х.Хъ.‘
На рис. 17.71 показаны также графики поведения стержня, основанные на решении задачи в геометрически линейной постановке. Символом у0 обозначена наи-
В случае непрерывно возрастающей нагрузки критические напряжения стержня соответствуют линии QPTS; разветвление форм равновесия по Шенли происходит при критическом напряжении
(ХХ). (17.278)
критическое на¬
большая ордината кривой выпучивания при критическом напряжении а; дальнейший рост прогиба у сопровождается возрастанием (при ЯсА) или убыванием (А, Xfe) осевого напряжения сг0.
17.8.3. Изгиб и устойчивость сжато-изогнутых стержней
Сжат о-и зогнутый стержень в общем случае представляет собой неидеальную систему. Исключением является, например, особый случай стержня, испытывающего изгиб по S-образной кривой (см. 17.7.3).
Процесс нагружения обусловлен возрастанием сжимающей силы N. Предполагается, что упругопластическая деформация является активной в каждой точке стержня, т. е. что нормальное напряжение а нигде не убывает. При этих условиях разгрузка не происходит и упруго-пластический материал ведет себя как нелинейно упругий 11а, 33, 49, 51.
Потеря устойчивости при достижении предельной нагрузки определяется теми же условиями, что и для стержней из нелинейно упругого материала. Сохраняют силу критерии устойчивости, изложенные в 17.7.3 и 17.7.6.
Методы исследования изгиба и устойчивости рассмотрены в 17.7.3 и 17.7.4. Для приближенного определения критической силы может быть использован метод коллокации (см. 17.7.5).
17.8.4. Сжато-изогнутые стержни из идеального упруго-пластического материала
Идеальный упруг о-п ластический материал (см. рис. 17.66,6) обладает свойством неограниченной текучести.п й ебт, g'0t- Это свойство, с одной стороны, определяй'-возможность исчерпания несущей способности сечения вследствие образования
17.8. УПРУГО-ПЛАСТИЧЕСКИЕ СЖАТЫЕ И СЖАТО-ИЗОГНУТЫЕ СТЕРЖНИ
241
пластического шарнира, с другой стороны, упрощает аналитическое решение задачи. Эти два обстоятельства обусловливают целесообразность специального рассмотрения изгиба и устойчивости сжато-изогнутых стержней из идеального упруго-пластического материала 21а, 51.
Сохраняет свою силу допущение об активности деформации, принятое в 17.8.3.
Три стадии работы сечения произвольной формы определяются эпюрой напряжений: упругая стадия (рис. 17.75, а), стадии односторонней (рис. 17.75, б, в) и двусторонней текучести (рис. 17.75,г).
Сечение по высоте разбивается на зоны текучести (аат) и упругое ядро (гат).
Рис. 17.73
Рис. 17.74
а)
OJ
в)
г) 6Т
Исчерпание несущей способности сечения. Развивающиеся в сечении усилия — сжимающая сила N и изгибающий момент М достигают предельной величины, когда в сечении образуется пластический шарнир (рис. 17.72). Напряжение в каждой точке сечения равно (по абсолютной величине) пределу текучести ат; при дальнейшем росте усилия N и М уже не могут быть восприняты сечением.
Конечное соотношение между усилиями N и М определяется условием: если а0 — осевое напряжение, то сжимающее напряжение от изгиба равно (от—(То), растягивающее—(сГтОо). Положение нулевой точки на эпюре напряжений от изгиба определяют из условия равенства нулю главного вектора этой эпюры. Отсюда получают конечное соотношение между усилиями N и М в предельном состоянии
Ф(М,М). (17.27)
Для прямоугольного сечения (h — высота, b — ширина) это уравнение имеет вид 35
4М I N 2
“ 17'280)
соответствующая кривая взаимодействия показана на рис. 17.73.
Исчерпание несущей способности стержня возможно в том случае, когда стержень статически определим и пластический шарнир образуется раньше, чем стержень потеряет устойчивость при достижении предельной нагрузки, например, шарнирно опертый стержень, сжатый продольной силой N и нагруженный опорным моментом М0 значительной величины (рис. 17.74). Предельную нагрузку находят из условия (17.279); она не зависит от длины стержня.
Дифференциальное уравнение изгиба стержня из идеального упруго-пластического материала имеет вид
d?y ат
— (17.281)
где х, у — координаты точки на изогнутой оси; с — расстояние от нулевой точки эпюры напряжений до ближайшего волокна, в котором напряжение равно пределу текучести ат.
Процедура наложения сечения на график работы материала сводится к построению эпюры напряжений по заданным усилиям N и М. Приняты следующие обозначения: при односторонней (рис. 17.76, а) и двусторонней (рис. 17.76, б) текучести.
vi (2) — расстояние от центра тяжести сечения до крайнего вогнутого (выпуклого) волокна; v—текущая координата по высоте сечения, отсчитываемая от центра тяжести (направление к зоне пластического сжатия считается положительным);
Ь (v)—ширина сечения в точке с координатой v; и—координата ближайшего к центру тяжести _ волокна в зоне пластического сжатия;
u — u — 2с — координата ближайшего к центру тяжести волокна в зоне пластического растяжения.
Расстояния и v2 считаются положительными; координаты и и и подчинены правилу знаков, установленному для V.
Задача определения параметров сии, соответствующих известным усилиям М и N, решается методом направленного поиска. В процессе решения приходится многократно вычислять усилия М п N по заданным значениям сии.
242
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
Алгоритм определения М и N основан на вычислении функций
2 2
(г) j Ъ (и) dv; s (z) — J b (v) vdv;
—Vo —Vi
2
i(z) §b(v)v2dv, (17.282)
—2
представляющих собой статические характеристики части сечения, лежащей ниже волокна с координатой z: f — площадь; s — статический момент (по абсолютной величине); i — момент инерции.
Главный момент и главный вектор эпюры нормальных напряжений равны:
м — 2т zs (z) i (2);
С
2т г (г) s (г).
с
(17.283)
Статические характеристики упругого ядра вычисляют по формулам:
я 2т (г)-2тs (г)№, F, 2т (г). (17.284)
Каждая из сумм в соотношениях (17.283) и (17.284) содержит по два слагаемых; в первом слагаемом принимают т1, z u, а во втором т — 1, z — u.
Критерий потери устойчивости при достижении предельной нагрузки имеет вид условия экстремума (17.243) или (17.244).
изменение жесткости упругого ядра
Качественный критерий устойчивости, рассмотренный в 17.7.7 применительно к нелинейно упругим стержням, сохраняет свою силу также и для упруго-пластических стержней при условии отсутствия разгрузки. Для идеального упруго-пластического материала о)0 в зонах текучести и со 1 в упругом ядре сечения. Поэтому момент инерции заменяющего стержня 1т равен моменту инерции упругого ядра я относительно центра тяжести этого ядра (рис. 17.77) На.
Прямоугольное сечение. Если h — высота, b — ширина сечения, то относительная высота сжатой зоны упругого ядра в случае односторонней текучести равна 21а
с 9ат Г 21 М 12 _ гч
— а— а0 — (17.285)
h 8 (гт — т0)3 L bh? J v
В случае двусторонней текучести
— 11- —1-
3 ж I
bh2oT
(17.286)
Замкнутое аналитическое решение задачи об изгибе и устойчивости сжато-изогнутого стержня прямоугольного сечения для некоторых простейших нагрузок получил К. Ежек 51. Эта же задача для материала с линейным упрочнением рассмотрена в 33.
17.8.5. Приближенное исследование устойчивости внецентренно сжатого стержня прямоугольного сечения из идеального упруго-пластического материала
Внецентренно сжатый стержень прямоугольного сечения сжат силой N с эксцентрицитетами на концах а и ka ( k 1). Изогнутую ось стержня в кри-
тическом состоянии аппроксимируют дугой синусоиды (рис. 17.78)
ИХ
У Ут sin—, (17.287)
17.8. УПРУГО-ПЛАСТИЧЕСКИЕ СЖАТЫЕ И СЖАТО-ИЗОГНУТЫЕ СТЕРЖНИ
243
о ?и ю 60 0 то по но 60
Рис. 17.80
в W 40 60 80 100 по МО Ч0 18В 200
Рис. 17.83
Рис. 17.81
40 во во т т т
Рис. 17.84
т гоо
244
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
где ут — наибольшая ордината, L — длина полуволны синусоиды. Абсциссу х отсчитывают от начала координат, расположенного на расстоянии Хо левее левой опоры.
Принимая длину стержня равной l uLnt где и — число, подлежащее определению, из сопоставления зависимостей (17.281) и (17.287) находят 40
12 и2сут.
(Тт
(17.288)
Относительная гибкость стержня X равна отношению его гибкости к к граничной гибкости материала ХТ —
jt У ат; для стержня с прямоугольным сечением:
_ JL l11
“ nh V Е
(17.289)
Равновесные состояния стержня. Обозначая ф aoaT iVbiaT, z — 6ymh и используя зависимости (17.276), (17.277) для стадии односторонней и соответственно двусторонней текучести, находят
“If— ;
4л2 (1 — ф) 1 — ф — з—
Г Я2 у 1_ ф2
(17.290)
Величины и и z связаны геометрическим условием. Так как
sin
лхп sin и —г——; f(u) V 1 -k2 — 2k cos и, (17.291) L f(u)
то, принимая обозначение для относительного эксцентрицитета m 6at, находят
г mf (u)sin и. (17.292)
Критические состояния стержня в обопределяют из условия экстремума
dX2
щем случае кф24г
dz
о,
(17.293)
литическое решение, основанное на методе коллокации (см. 17.7.5).
Используя соотношение (17.281) для сечения в середине пролета, находят 51
л2 Е
р —— сУт-
(17.294)
а в особом случае k — 1—из условий и л, г —т.
При k — 1 стержень теряет устойчивость в упругой
области, если Х ф V
График критических напряжений для стержней из стали марки Ст. 3 представлен на рис. 17.79. Три кривые на графике для одного и того же значения относительного эксцентрицитета т соответствуют случаям k—1, k 0 и k.
Сравнение результатов с данными более точного решения на ЭВМ показывает, что погрешность приближенных значений ф положительна при 61 и отрицательна при k —1.
17.8.6. Влияние формы поперечного сечения на устойчивость внецентренно сжатых стержней из идеального улруго-пластического материала
Метод коллокации. Для оценки влияния формы профиля на критические напряжения внецентренно сжатого шарнирно опертого стержня с равными концевыми эксцентрицитетами удобно использовать приближенное ана-
Исследуя напряженное состояние этого сечения, получают аналитическую зависимость, связывающую переменные с и ут или непосредственно или же с помощью
вспомогательного параметра. Критерием потери устойчивости служит уравнение
"Г" (СУт) 0. (17.295)
dym
В результате определяют аналитическую зависимость
ХЧ(т, о), (17.296)
связывающую гибкость стержня А, с относительным эксцентрицитетом m aFW и критическим напряжением (F — площадь сечения, W — момент сопротивления сжатого от изгиба волокна).
Выражение для функции содержит также параметры материала , гт и параметры формы профиля.
Графики критических напряжений построены для стержней из стали марки Ст. 3 с пределом текучести сгт 2400 кГсм2 и модулем упругости Е 2,Ы06 кГсм2 246. Кривые зависимости критического напряжения о от гибкости X соответствуют относительным эксцентрицитетам
aF
т — 0,2; 0,6; 1,2; 2,4 и 4,8.
W
Симметричный двутавровый профиль (рис. 17.80). Площадь каждой из полок п, площадь стенки Fcr
— aFuy где a — параметр формы.
Симметричный двутавровый профиль, изгиб в плоскости, параллельной полкам (рис. 17.81). Параметр а имеет тот же смысл, что и в предыдущем случае. Результаты применимы также и для крестового профиля.
Тавровый профиль, изгиб в сторону стенки (рис. 17.82) и в сторону полки (рис. 17.83). В последнем случае параметр формы a FctFu весьма существенно влияет на величину критических напряжений.
Сплошное круглое и тонкостенное кольцевое сечения (рис. 17.84).
17.9. ПОДБОР СЕЧЕНИЙ СЖАТЫХ И СЖАТО-ИЗОГНУТЫХ СТЕРЖНЕЙ
17.9.1. Основные положения подбора сечений сжатых и сжато-изогнутых стержней
Здесь рассматривается только расчет по первому предельному состоянию — по несущей способности. Основное расчетное неравенство имеет вид
N А1 пред (17.297)
где N — сжимающая сила в стержне от расчетного сочетания нагрузок; Лпред — предельное значение сжимающей силы, пропорциональное расчетному сопротивлению R материала.
Подбор сечений основан на сравнении нескольких вариантов. Задаются подходящим сечением, удовлетворяющим конструктивным требованиям (материал, габари-
17.9. ПОДБОР СЕЧЕНИЙ СЖАТЫХ И СЖАТО-ИЗОГНУТЫХ СТЕРЖНЕЙ
245
ты сечения, сортамент и пр.), и вычисляют его несущую способность, т. е. предельную нагрузку пред при заданных условиях работы. Из нескольких сечений, удовлетворяющих расчетному неравенству (17.297), выбирают наиболее экономичное (по затрате материала, трудоемкости изготовления и т. п.) 56, 32, 38.
Величина предельной нагрузки Апред зависит от выбора критерия, характеризующего предельное состояние конструкции, т. е. от принятой методики расчета.
При проектировании строительных конструкций, за редкими исключениями, применяют нормативную методику расчета сжатых и сжато-изогнутых стержней, предписываемую соответствующими главами СНиП.
В технической литературе рассматриваются также и другие возможные методы расчета сжато-изогнутых стержней, в том числе расчет по деформированной схеме (см. 17.9.3) и расчет, основанный на анализе критического состояния стержня в упруго-пластической стадии работы материала (см. 17.9.5).
Ниже рассмотрены принципиальные основы подбора сечений сжатых и сжато-изогнутых стержней в предположении, что плоская форма изгиба сохраняется как в равновесных, так и в критических состояниях. Примеры расчета даны для стальных стержней (СНиП II-B.3-62. Стальные конструкции. Нормы проектирования).
Более полные практические указания по подбору сечений и необходимые для этого таблицы следует искать в главах СНиП, нормирующих проектирование стальных, алюминиевых, деревянных, железобетонных, бетонных и каменных конструкций, а также в других томах Справочника, посвященных этим конструкциям.
Расчет тонкостенных стержней см. 17.10.
17.9.2. Расчет центрально сжатых стальных стержней по нормативной методике
Центрально сжатый стержень относится к идеальным системам, при расчете которых учет начальных несовершенств обязателен (см. 17.1.13).
Основное расчетное неравенство имеет вид
NqFRt (17.298)
где F — площадь поперечного сечения стержня; р вот — коэффициент снижения расчетного сопротивления при центральном сжатии, равный отношению критического напряжения а к пределу текучести материала ат; R — расчетное сопротивление материала.
Коэффициент ф является функцией гибкости стержня
(17.299)
где — свободная (расчетная при проверке устой¬
чивости) длина стержня; — геометрическая длина стержня; р— коэффициент свободной длины (см. 17.1.14, 17.4.1); г — радиус инерции поперечного сечения; — момент инерции поперечного сечения стержня.
Для стальных стержней критическое напряжение а соответствует потере устойчивости при достижении предельной нагрузки внецентренно сжатого стержня той же гибкости X с относительным начальным (случайным) эксцентрицитетом
о —jp- (17.300)
где do — плечо силы N, W—момент сопротивления поперечного сечения стержня.
Вычисление а основано на представлении об идеальном упруго-пластическом материале (см. рис. 17.66,6) и прямоугольной форме поперечного сечения стержня.
График зависимости tn0 и ф от гибкости К для стали марки Ст.З представлен на рис. 17.85.
Табл. 17.14 содержит нормативные значения коэффициента ф для сталей разных марок.
Пример 17.6. Сжатый по- „
яс фермы образован из двух равнобоких уголков 125X14 по ГОСТ 8509—57 (рис.
17.86). Материал — Ст. 3, расчетное сопротивление
2100 кГсм2. Свободные длины стержня 3 м,
1у 6 м. По сортаменту площадь поперечного сечения F 2-33,4 66,8 см2; радиусы инерции гж 3,80 см, гу 5,60 см. Гибкости стержня равны:
300
Ь — 79;
L12ju5n
Рис. 17.86
3,80
600
5,60
107.
По табл. 17.14 для Ст.З и гибкости А, 107 находят Ф0,544, следовательно, предельная нагрузка стержня равна:
Апред ФFR 0,544 66,82,1 76 т.
17.9.3. Расчет сжато-изогнутых стальных стержней по деформированной схеме
Рассматривается стержневая система со сжатоизогнутыми элементами. Предполагается линейно упругая работа материала вплоть до достижения наибольшим фибровым напряжением предела текучести 16, 19
макс т (17.301)
Определение напряжений производится на основе
246
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
Таблица 17.14
Коэффициенты ф продольного изгиба центрально сжатых элементов
Гибкость X
Значения ф для элементов из стали марок
Ст. 3 Ст. 4
Ст. 5
14Г2, юг;с1 15ХСНД
10ХСНД
0
1,00
1,00
1,00
1,00
10
0,99
0,98
0,98
0,98
20
0,97
0,96
0,95
0,95
30
0,95
0,93
0,92
0,92
40
0,92
0,89
0,89
0,88
50
0,89
0,85
0,84
0,82
60
0,86
0,80
0,78
0,77
70
0,81
0,74
0,71
0,68
80
0,75
0,67
0,63
0,59
90
0,69
0,59
0,54
0,50
100
0,60
0,50
0,46
0,43
110
0,52
0,43
0,39
0,36
120
0,45
0,37
0,33
0,31
130
0,40
0,32
0,29
0,27
140
0,36
0,28
0,25
0,23
150
0,32
0,25
0,23
0,20
160
0,29
0,23
0,21
0,18
170
0,26
0,21
0,19
0,16
180
0,23
0,19
0,17
0,14
190
0,21
0,17
0,15
0,12
200
0,19
0,15
0,13
0,11
210
0,17
0,14
0,12
0,10
220
0,16
0,13
0,11
0,09
Гибкость стержня в силовой плоскости
142022,8 62.
Относительный эксцентрицитет
qF 19,3 150 _ т 55 Г 2890 _ 1'
А,
а)
)
По данным табл. 17.5 находят изгибающий момент в середине пролета
М
aN f N
—— ““У sr‘-
cos —
расчета по деформированной схеме с учетом влияния продольных сжимающих сил (см. 17.2, 17.3).
Основное расчетное неравенство для одного из сжато-изогнутых стержней системы можно представить в виде
Nq™FR, (17.302)
где фвн Топат — коэффициент снижения расчетного сопротивления при внецентренном сжатии; а0п — осевое напряжение в стержне, соответствующее наступлению фибровой текучести в наиболее напряженной точке системы.
При расчете идеальных систем по деформированной схеме неустойчивость равновесного состояния не может быть обнаружена. Например, сжато-изогнутый стержень, нагруженный антисимметричной относительно середины пролета нагрузкой, изгибается по S-образной кривой (см. рис. 17.6,6). Равновесное состояние стержня, соответствующее точке А на графике поведения (см. рис. 17.7), неустойчиво, так как AfN, но можно допустить, что напряжения ни в одной точке не превышают предела пропорциональности. Учет даже самого малого по величине несовершенства нарушает идеальную антисимметричную форму изгиба и приводит к точке А2 (см. рис. 17.7), для которой NAf.
Поэтому при расчете по деформированной схеме идеальных систем учет начальных несовершенств обязателен.
Пример 17.7. Шарнирно опертый стержень длиной 14,2 м сжат продольной силой Аг, приложенной с равными концевыми эксцентрицитетами а19,3 см. Сечение стержня показано на рис. 17.87, а. Материал — сталь марки Ст.З.
Основные геометрические характеристики сечения: площадь F150 см2, момент инерции 78 000 см4, момент сопротивления №2890 см3, радиус инерции г 22,8 см.
Приравняв напряжение в среднем сечении пределу текучести
N t М и2 Е т п I 1 От
W
cos
т
при модуле упругости 2,1 10б кГсм2, ат 2400 кГсм2 находят после нескольких попыток ы 1,383, следовательно,
и2Е
X2
1043 кГсм2; фвн
1043
2400
Эпюра напряжений в среднем сечении стержня в момент достижения фибровой текучести представлена на рис. 17.87,6.
Предельная нагрузка стержня при ? 2100 кГсм2 равна:
Л'ПреД 0,435.1502,1 137 т.
17.9.4. Расчет сжато-изогнутых стальных стержней по нормативной методике
Нормативная методика расчета сжато-изогнутого стержня, входящего в состав стержневой системы, основана на приведении его к эталонному шарнирно опертому внецентренно сжатому стержню прямоугольного сечения.
Расчет распадается на следующие этапы:
а) Расчет стержневой системы классическими методами (без учета продольных сил) и определение расчетных усилий для стержня N и М. Расчетный изгибающий момент М определяют в соответствии с указаниями СНиП в зависимости от очер-
17.9. ПОДБОР СЕЧЕНИЙ СЖАТЫХ И СЖАТО-ИЗОГНУТЫХ СТЕРЖНЕЙ
247
Таблица 17.15
Коэффициенты т влияния формы сечения для вычисления приведенного эксцентрицитета пц 11 т
Тип сечения
Схема сечения
Значения ri при
20 X 150 v 150
-Ч-
¥
l ft fgP'W
риз
nr,
I 1
Для сечений типа 2 формула действительна при FJF2 0,7750,0015Х
1,30,5" п
1,0
1,45—0,003Х
1,3-0,0027,
1,0
I,'4-0,5 т
1,0
1,0
1.0
тания эпюры изгибающих моментов на длине стержня. В частном случае внецентренно сжатого стержня с равными концевыми эксцентрицитетами а расчетный момент равен MNa.
б) Определение свободной длины для каждого из сжато-изогнутых стержней системы с помощью методов, описанных в 17.4. Гибкость стержня X находят по формуле (17.299).
в) Определение приведенного эксцентрицитета
MF
Щ ЦШ ’ (17 303)
где rj — коэффициент влияния формы сечения (значения г для стальных стержней даны в табл. 17.15).
г) Определение коэффициента снижения расчетного сопротивления при внецентренном сжатии фвн аат, зависящего от гибкости стержня X и приведенного эксцентрицитета ГП.
Для стержней сплошного сечения из стали марки Ст.З эта зависимость дана в табл. 17.16. Положенное в основу таблицы критическое напряжение т соответствует потере устойчивости при достижении предельной нагрузки эталонного стержня, т. е. внецентренно сжатого стержня той же гибкости X с относительным эксцентрицитетом тх. Сечение стержня принято прямоугольным, материал — идеальным упруго-пластическим.
Для сквозных (решетчатых) стальных стержней коэффициент фвн определяют по другой таблице, основанной на критерии фибровой текучести (17.301). В этом случае коэффициент фвн зависит от приведенной гибкости стержня (см. 17.5.1).
д) Оценка несущей способности сечения по формуле (17.302).
Оценка погрешности нормативной методики для сжато-изогнутых стержней, входящих в состав сложной системы (рамы), затруднительна.
Для шарнирно опертых внецентренно сжатых стальных стержней с симметричным относительно нейтральной оси профилем погрешность нормативной методики невелика. Эта погрешность становится более значительной для стержней с несимметричным сечением.
Пример 17.8. Стержень, рассмотренный в примере 17.7 (рис. 17.87, а). Гибкость стержня Х62. По табл. 17.15 находят для двутаврового профиля коэффициент влияния формы поперечного сечения
г 1,45 — 0,003Л, 1,264.
Приведенный эксцентрицитет
т1 г)т 1,264-1 1,264,
По X 62 и 1,264 с помощью табл. 17.16 полу¬
чают фвн0,487.
Предельная нагрузка стержня
пред 0,487.150-2,1 153 т.
17.9.5. Расчет сжато-изогнутых стальных стержней по критическому напряжению
Несущая способность сжато-изогнутого стержня в подавляющем большинстве случаев ограничена потерей устойчивости при достижении предельной нагрузки в стадии нелинейно упругой или упруго-пластической работы материала.
Методы определения критической нагрузки для изолированных стержней рассмотрены в 17.7 и 17.8, для стержневых систем — в 17.11.
Решение задачи требует значительного объема вычислений, поэтому практическая реализация расчета предполагает применение ЭВМ.
Пример 17.9. Стержень, рассмотренный в примерах 17.7 и 17.8 (рис. 17.87, а). Расчет выполнен с помощью
248
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
Таблица 17.16
Коэффициенты рвн для сплошностенчатых стержней из стали марки Ст.З
Гиб¬
кость
А,
Значения 1000 р вн при приведенном эксцентрицитете тх
0,l 0,25 0,50 0,75
1,0
1,25
1,50 1,75 2,0
2,б 3,0
3,5
4,о 4,5
5,о 5,5
6,0
6,5(7,0
О
сГ
о
00
10,0 12,0
14,0 17,0 20,0
10
967
920
847
781
721
667
618
574
535
468
414
370
333
303
285
256
235
220
205
182
162
147
123
106
089
075
20
959
887
800
729
673
623
577
536
501
439
390
349
315
288
263
243
225
210
196
174
157
141
120
102
085
072
30
942
868
773
699
641
592
550
511
478
420
373
335
303
277
254
234
218
203
191
169
152
138
117
100
084
071
40
920
846
743
668
608
560
520
484
453
399
355
320
290
265
243
226
210
196
184
164
148
135
114
098
083
070
50
890
820
711
634
574
528
490
456
427
377
338
304 J277
253
234
216
201
189
177
159
143
130
' 111
096
081
069
60
860
788
674
598
540
495
459
428
402
355
319
289
263
241
224
207
193
182
171
153
138
126
107
094
079
068
70
810
749
634
560
505
463
429
401
377
334
301
273
249
230
213
198
185
174
164
147
134
122
104
091
077 j 066
80
750
701
591 521
Г
471
432
400
374
353
314
283
258
236
218
203
189
177
167
157
142
129
118
101
089
075
065
90
690
648
546
483
436
401
372
348
329
294
266
243
224
207
192
180
169
160
151
136
124
114
098
087
073
063
100
600
590
500
444
403
371
345
324
305
275
250
229
211
197
183
172
161
153
144
131
120
110
095
084
071
062
110
520
520
456
407
371
342
320
301
284
257
234
216
200
186
173
163
154
146
138
126
115
106
092
081
069
060
120
450
450
413
372
341
316
296
279
264
239
221
203
189
176
165
155
147
138
132
120
110
102
089
079
067
059
130
400
400
374
339
312
291
273
258
245
224
206
191
178
166
156
147
139
132
126
115
106
098
086
076
065
057
140
360
360
338
309
287
268
253
240
228
209
193
180
168
158
149
140
133
126
121
110
102
095
084
074
063
055
150
320
320
306
282
263
248
234
222
212
195
182
169
158
149
141
133
126
120
115
106
099
091
080
071
062
054
160
290
290
277
257
241
228
216
206
197
182
170
159
149
141
134
127
120
115
110
101
094
087
077
069
050
053
170
260
260
252
237
222
211
200
192
184
170
159
150
141
134
127
120
114
110
105
097
090
084
074
067
059
052
180
230
230
229
216
204
194
185
178
171
159
149
141
133
126
120
114
109
104
100
093
086
080
072
065
057
051
190
210
210
210
199
188
180
172
166
160
149
141
133
126
120
114
109
104
099
096
090
083
078
070
063
055
049
200
190
190
190
182
174
167
160
154
149
140
132
125
119
113
107
103
099
095
092
086
079
075
067
061
053
048
метода коллокации (см. 17.7.5 и 17.8.6) в предположении, что материал стержня идеальный упруго-пластический с пределом текучести ат 2400 кГсм2. Толщина полок двутавра принята пренебрежимо малой по сравнению с высотой профиля.
Эпюра напряжений в среднем сечении стержня в момент потери устойчивости при достижении предельной нагрузки представлена на рис. 17.87, в. Сечение испытывает одностороннюю текучесть. Критическое напряжение а 1080 кГсм2у следовательно, срвн а ат 0,450.
Предельная нагрузка стержня
Апред 0,45-15.2,1 142 т.
17.9.6. Сопоставление результатов расчета внецентренно сжатого стержня по трем различным методикам
Сравнение результатов расчета внецентренно сжатого стального стержня в примерах 17.7, 17.8 и 17.9 дано на схематическом графике поведения (рис. 17.88). Масштаб выдержан только в направлении оси ординат.
Расчет по критическим напряжениям дает наиболее точный результат. Расчет по деформированной схеме приводит к некоторой недооценке несущей способности стержня. Для двутаврового профиля разница в величине предельных нагрузок, найденных по этим двум
17.10. ЛИНЕЙНО УПРУГИЕ ТОНКОСТЕННЫЕ СЖАТЫЕ И СЖАТО-ИЗОГНУТЫЕ СТЕРЖНИ
249
методикам, невелика; в рассмотренном случае она составила всего 3,5. Для прямоугольного сечения эта разница будет более значительна.
Нормативная методика в данном случае привела к преувеличению несущей способности стержня на 7,8
тонкостенных линейно упругих стержней были впервые получены В. 3. Власовым 7;
Е1У1" Nl (MxauN)v My,
Е1ХЦ Nr (My — ax N)(f —Мх;
(Mx ау N) (Му- ах Л') т) ш р
(rN хМу-2Мх-GId) ф 0.
Здесь , G — модуль упругости и модуль сдвига; 1х, 1У — моменты инерции сечения относительно глав-
(17.304)
по сравнению с предельной нагрузкой, вычисленной на основе анализа устойчивости стержня. Этот частный результат не может быть распространен на другие случаи, для которых погрешность, связанная с применением нормативной методики, может отличаться от найденной выше не только по абсолютной величине, но и по знаку.
17.10. ЛИНЕЙНО УПРУГИЕ ТОНКОСТЕННЫЕ СЖАТЫЕ И СЖАТО-ИЗОГНУТЫЕ СТЕРЖНИ
17.10.1. Дифференциальные уравнения равновесия тонкостенных стержней
Основные положения теории линейно упругих тонкостенных стержней см. раздел 5.
Рассматриваются сжатые и сжато-изогнутые стержни с открытым тонкостенным поперечным сечением, постоянным по длине пролета.
Стержень длиной сжат продольной силой N и некоторой вызывающей изгиб и кручение нагрузкой, которая возрастает пропорционально увеличению силы N (рис. 17.89). Дифференциальные уравнения равновесия
ных осей; Id — момент инерции сечения при кручении; 1Ш — бимомент инерции сечения (секториальный момент); F — площадь поперечного сечения; , ц — линейные перемещения точки на оси стержня с абсциссой z; х, у — координаты точки сечения; ф — угол закручивания сечения с абсциссой г; Мх, Му — изгибающие моменты от поперечной нагрузки, вычисленные без учета влияния продольной сжимающей силы; ах ау — координаты центра изгиба.
Геометрические характеристики г, р и вычисляют по формулам:
г2 — г2 А-п2 4-а2- г2 —-х 1у г — 0 ах ау' 0 р
щ J(2 уг)dFax;
х2 у2' dF ау
(17.305)
Уравнения (17.304) должны быть дополнены шестью граничными условиями, отражающими опорные закрепления концов стержня.
Система трех линейных дифференциальных уравнений второго порядка (17.304) интегрируется в замкнутой
250
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
форме для некоторых простейших случаев нагрузки и простейших поперечных сечений. В общем случае эти уравнения решают численно.
Приближенное решение уравнений (17.304) основано на аппроксимации кривых изгиба и кручения известными функциями, удовлетворяющими условиям закрепления концов стержня. Затем требуют, чтобы дифференциальные соотношения (17.304) удовлетворялись в отдельных сечениях на длине стержня (метод коллокации). Другая возможность заключается в использовании процедуры Бубнова—Галеркина.
Уравнения (17.304) являются приближенными; обзор более точных постановок задачи см. 1.
17.10.2. Изгиб и кручение тонкостенных сжато-изогнутых стержней
Если сжато-изогнутый стержень находится в состоянии устойчивого равновесия, то система уравнений (17.304) имеет строго определенное и конечное по ве-
Рис. 17.90
личине решение. Здесь исключается случай однородных уравнений с однородными граничными условиями, рассмотренный в 17.10.5.
Схематический график поведения стержня представлен на рис. 17.90. По оси абсцисс отложено характерное перемещение (например, прогиб Цш в середине пролета стержня), по оси ординат — сжимающая сила N.
Кривая ОАС на графике показывает асимптотическое поведение стержня — характерное перемещение неограниченно возрастает по мере приближения N к значению N ас.
Это асимптотическое значение Аас, зависящее от вида поперечной нагрузки на стержень, приближенно определяют следующим образом. Уравнения (17.304) варьируют, заменяя через б, г) — через лбг, ср — через фбф. Из полученных уравнений вычитают исходные уравнения (17.304) и для шарнирно опертого стержня полагают:
- nz б л sin —j—,
nz
бт В sin -у-,
л. л z бф — С sin -у—.
(17.306)
Варьированные уравнения при г — Ц2 дают систему линейных однородных уравнений относительно постоянных А у В, С:
(N- ) А (Мхт у N) С — 0;
N_IhB СМут -axN)C 0;
(МХт ау Л7) A -J- (Мут — ах N) В -f-
N 26, Мут-2 Мхт -
я2 EI -GId—-я-?- С0.
(17.307)
)
Здесь Мхту Мут —начения изгибающих моментов
Мх и соответственно Му в середине пролета при z l2.
Условие существования нетривиальных (ненулевых) решений системы уравнений (17.307) заключается в равенстве нулю определителя D(N) этой системы. Асимптотическая нагрузка Nc представляет собой наименьший корень уравнения
D (N) 0. (17.308)
17.10.3. Расчет тонкостенных сжато-изогнутых стержней по деформированной схеме
В качестве характеристики предельного состояния принимают достижение фибровой текучести в наиболее напряженном сечении стержня — точка В на графике поведения (см. рис. 17.90)
N Мл
(ТЕЕ 4- —
F Ми
со сгт.
(17.309)
1 у Здесь МХу Му — изгибающие моменты, вычисленные с учетом влияния продольной силы N В — бимомент; Ху у— координаты рассматриваемого крайнего волокна; со — секториальная площадь; от — предел текучести (или предел пропорциональности при более точной постановке задачи).
Соответствующая состоянию фибровой текучести продольная сжимающая сила N0n условно считается предельной нагрузкой, ограничивающей несущую способность стержня.
Другое возможное предельное состояние стержня связано с достижением предельного по величине перемещения т)Пред (или Пред, фпред) —точка А на графике поведения (см. рис. 17.90).
Поведение стержня при развитии упруго-плас тических деформаций иллюстрируется участком кривой BDE на рис. 17.90. Экстремальная точка D характеризует потерю устойчивости при достижении предельной нагрузки. Соответствующая критическая сила N лишь немного превышает величину Non.
17.10.4. Изгиб, кручение и устойчивость тонкостенных внецентренно сжатых стержней
Внецентренно сжатый стержень в общем случае двухосного эксцентрицитета ех, еу при
Мх _ Ney
Ми
' Nex
(17.310)
17.11. НЕЛИНЕЙНО УПРУГИЕ СТЕРЖНЕВЫЕ СИСТЕМЫ
251
с самого начала нагружения испытывает кручение и изгиб в плоскости каждой из двух главных осей инерции поперечного сечения. Поведение стержня качественно не отличается от рассмотренного выше поведения сжато-изогнутого стержня.
В двух частных случаях внецентренно сжатого стержня возможна потеря устойчивости в эйлеров о м смысле.
А. Сжимающая сила приложена в центрах изгиба торцевых сечений ey — aVi ех — ах. Уравнения (17.295) приводятся к виду:
EIу N ax N;
Е1Х П Nr ayN-,
Я Я' ( г22К ах2 y)N-GIa СР -
силой N наименьшего из следующих трех критических значений:
лЕ1х яЕ„
Л'дг —Г—; N,
я EL,
Г- 2
(17.313)
(17.311)
Первые две критические силы соответствуют изгибной форме, третья — крутильной форме потери устойчивости.
Поперечное сечение с одной осью симметрии. Если ось симметрии — ось у, то из трех критических сил N1 Nx.
1
2.3
В устойчивом состоянии стержень испытывает изгиб в двух главных плоскостях, кручение отсутствует. П о теря устойчивости при разветвлении форм равновесия характеризуется возможностью возникновения крутильных перемещений при критической силе N, которую определяют из третьего уравнения системы (17.311).
Б. Сечение имеет ось симметрии, сжимающая сила расположена в плоскости симметрии Если ось х — ось симметрии, то ау у0, Мх — 0, My — Nex и уравнения (17.295) принимают вид:
Е1У l"Nl Nex;
EIX Л" .Vtj N (ех — ах) р 0;
N (ехах) т1 (0 ф" (г22Р,) N
-GI, 1ф 0.
(Л'й)г3Т
“ О
F -4Л2г20
(17.314)
(17.312)
В устойчивом состоянии стержень испытывает изгиб в плоскости симметрии. Потеря устойчивости при разветвлении форм равновесия характеризуется нарушением плоской формы изгиба и возможностью возникновения изгибно-крутильных перемещений. Соответствующую критическую силу N определяют из второго и третьего уравнений системы (17.312).
17.10.5. Устойчивость тонкостенных центрально сжатых стержней
Сжимающая сила приложена в центрах тяжести торцевых сечений; Мх — 0, Му 0. Однородные уравнения (17.304) при однородных граничных условиях имеют тривиальное решение g rj ф 0, следовательно, в состоянии устойчивого равновесия изгибные и крутильные перемещения отсутствуют, стержень является идеальным. Потеря устойчивости при разветвлении форм равновесия характеризуется возможностью возникновения изгибных, крутильных или изгибно-крутильных перемещений в зависимости ст условий задачи.
Ниже приводятся формулы для критической силы центрально сжатого шарнирно опертого стержня. Опорные сечения закреплены от линейных перемещений в направлении осей ху у и от вращения относительно продольной оси стержня ( т1 ф0), но имеют возможность свободной депланации.
Поперечное сечение с двумя осями симметрии. Потеря устойчивости произойдет при достижении сжимающей
первая соответствует изгибной, две последующие — изгибно-крутильной форме потери устойчивости.
Поперечное сечение не имеет оси симметрии. Значения трех критических сил определяют из кубического (относительно N) уравнения
(Л',-) (Ny N) (Л'ш-Щг-N2 (ЛГх-К) 4
(Л-Л')4 - (17.315)
Потеря устойчивости характеризуется изгибно-крутильными перемещениями стержня и произойдет при наименьшей из трех критических сил N.
17.11. НЕЛИНЕЙНО УПРУГИЕ СТЕРЖНЕВЫЕ СИСТЕМЫ
17.11.1. Постановка задачи об устойчивости нелинейно упругих стержневых систем
Рассмотренная в 17.7.5 задача численного исследования равновесных и критических состояний сжато-изогнутого стержня из нелинейно упругого материала в настоящей главе распространяется на плоскую стержневую систему (раму), составленную из таких стержней.
Свойства материала характеризуются нелинейной зависимостью ag(e) между напряжением а и деформацией е (см. 17.7.1).
Для упруго-пластического материала принимается предположение об активности деформации в каждой точке конструкции (см. 17.8.3). При этом разгрузка не происходит и упруго-пластический материал можно рассматривать как нелинейно упругий.
Исследование малых изгибных перемещений системы основано на гипотезе плоских сечений и использовании приближенного выражения для кривизны. Предполага-, ется сохранение плоской формы изгиба как в равновесных, так и в критических состояниях системы. Влияние касательных напряжений не учитывается.
В дополнение к обычному расчету принимаются во внимание вертикальные перемещения узлов рамы вызванные сближением концов стоек вследствие изгиба и осевого обжатия. Благодаря этому исключается необходимость специального рассмотрения особых предельных состояний системы, связанных с потерей устойчивости одного отдельного сжатого стержня или же с исчерпанием его несущей способности вследствие образования пластического шарнира.
252
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
Предполагается, что все нагрузки (как продольные, так и поперечные) возрастают пропорционально одному параметру k. Результаты исследования равновесных состояний представлены на графике поведения системы (рис. 17.91); по оси абсцисс отложено характерное перемещение (прогиб у или угол поворота 0 в одной из точек системы), по оси ординат — параметр нагрузки k.
В подавляющем большинстве случаев несущая способность системы определяется потерей устойчивости при достижении предельной нагрузки — точка В на графике поведения (см. рис. 17.91).
0 Аналитическим критерием поте-
qi ри устойчивости является условие. 1.У1 вие стационарности пара¬
метра нагрузки k.
dk
— 0, (17.316)
рассматриваемого как функция характерного перемещения.
17.11.2. Основные аналитические зависимости
Исследование малых изгибных перемещений одного из сжато-изогнутых стержней системы основано на понятии приведенной жесткости Е1Х сечения, зависящей от развития деформаций в этом сечении (см. 17.11.3).
Дифференциальное уравнение изгиба имеет вид (см. рис. 17.9)
Е1х N(y- М Я“ Ж" - (17-317)
Процедура наложения в общем виде описана в 17.7.5; алгоритм Сечение решает эту задачу на основе эффективного итерационного процесса 18.
Относительное удлинение (укорочение) волокна с координатой v (рис. 17.92) выражается формулой
ee0 xi, (17.320)
где х — кривизна. Напряжение этого волокна
Рис. 17.92
Здесь х, у— координаты точки на изогнутой оси стержня; N — продольная сжимающая сила; Н0 — опорная реакция на левом конце стержня при х 0; М0 — опорный изгибающий момент; Mli — изгибающий момент, вызванный поперечной нагрузкой.
В процессе интегрирования уравнения (17.317) не учитывают различие между абсциссой х и длиной дуги изогнутой оси s. После интегрирования определяют сближение концов стержня по приближенной формуле
Д j(e0-d, (17.318)
где- I — длина стержня; е0 — относительное удлинение (укорочение) оси стержня в точке с абсциссой ; 0 — угол поворота этого же сечения.
Численное исследование равновесных состояний нелинейно упругой стержневой системы предполагает применение ЭВМ. Итерационный процесс решения задачи основан на трех алгоритмах, описанных ниже 116.
17.11.3. Алгоритм Сечение
Целью алгоритма является наложение сечения на график работы материала, т. е. построение эпюры напряжений и эпюры удлинений по заданным усилиям в сечении — продольной сжимающей силе N и изгибающему моменту
М N (у-у0) М0 Н0 х Мн. (17.319)
а г)е, (17.321)
где Е — модуль упругости; ц — относительный секущий модуль; отсюда
Л
Ее
g(g)
Ев
(17.322)
Условия равновесия для рассматриваемого сечения с площадью F записывают в виде:
W foif (eeft, xS4); Fc, (17.323)
M JOTdF (e0S1, xT1).
F )
Здесь характеристики первого расчетного сечения равны 11а:
f S jnw?, „-JVdF. (17.324)
F F F
Из уравнений (17.323) следует:
x-
MSp-V4
(S-V4) ’
' (4-v„)
(17.325)
17.11. НЕЛИНЕЙНО УПРУГИЕ СТЕРЖНЕВЫЕ СИСТЕМЫ
253
Каждый шаг итерационного процесса основан на исходных значениях е0, Разбивая сечение по высоте на достаточное число тонких полос, находят для каждой полосы удлинение и относительный секущий модуль т по формулам (17.320), (17.322). Далее численно определяют характеристики сечения F, S, и находят ео, к по формулам (17.325). Эти значения е0, х являются исходными для следующего шага итерации. Процесс продолжается до тех пор, пока не будет достигнута требуемая степень точности.
17.11.4. Алгоритм Стержень
Алгоритм Стержень предназначен для исследования отдельного элемента системы (стержня рамы). В процессе реализации алгоритма многократно используется описанный выше алгоритм Сечение.
Требуется найти интеграл дифференциального уравнения (17.317), удовлетворяющий перемещениям концов стержня, определенным из предыдущей итерации расчета рамы.
Для численного решения этой краевой задачи по длине стержня выбирают достаточное количество расчетных сечений. Алгоритм Сечение позволяет для каждого расчетного сечения определить кривизну к и продольную деформацию оси стержня ео. После этого находят приведенные жесткости сечения на изгиб и на сжатие. В качестве первого приближения можно принять
М
N
Е1Х-—, EFX. (17.326)
х е0
Более полные рекомендации даны в 11а.
При итерационном решении задачи целесообразно дифференциальное уравнение (17.317) привести к виду
d2 У- _ К(у-уй) мй
Я„ Л1н ,предполагая правую часть известной из предшествующего шага итерации. В результате двукратного интегрирования находят:
dn
0 —- — 0О — М0 UqX — Н0 Uix
dx
— N (hx — Уо иох) — wox‘
У — Уо 4 4" Мо (и1х — хиох)
Н0 (и2Х — хи1х) “Ь N tlx хох)
— Л'Уо (“IX — хиах) W1X — xwox-
Здесь приняты обозначения для интегралов:
(17.328)
lld
Eh
Л
J
llydl
и Е1 о
X
-а
El
(t — 0, 1, 2).
Эти же интегралы, взятые по всей длине стержня, обозначают соответственно ии ti Ц гИзгибающий момент М0 и реакцию Я0 на левой опо¬
ре выражают через перемещения концов стержня 0о, 0z, о б0, бi (рис. 17.93) следующим образом:
(17.327)
Mq — 0Q и2 0 (11 — и2) (б0 — бi) Ux N (иг tx — и2 t0) —w0u2 wx wrD;
HQ— 0O Ui -f- 0 (u01 — wx) -f- (60— 6) u0 -j N (ui t0 — Uq ti) w0 Ui — Wi u0D,
(17.330)
Рис. 17.93
где обозначено
D“0U2_“l (17.331)
Из выражений (17.330) определяют реакции основной системы метода перемещений Л10, Н0, HL как для единичных состояний, так и от нагрузки.
Выполнив ряд итераций, получают с необходимой точностью искомые прогибы и углы поворота во всех сечениях стержня, а также реакции г, Гг0 основной системы метода перемещений. Если две смежные итерации отличаются одна от другой не более чем на 5, то такую точность можно считать достаточной для практических целей.
17.11.5. Алгоритм Рама
Алгоритм предназначен для построения равновесного состояния исследуемой стержневой системы (рамы). В процессе реализации алгоритма многократно используется описанный выше алгоритм Стержень.
Канонические уравнения метода перемещений имеют вид:
rik Xk ri0 О, (t 1, 2, ki
.,rt), (17.332)
(17.329)
где n— число неизвестных (степень кинематической неопределимости системы); Xh— неизвестные перемещения (линейные горизонтальные и вертикальные, углы поворота); гih— реакции основной системы, вызванные единичными перемещениями; riQ — реакции основной системы от нагрузки.
Нелинейность системы уравнений (17.332) определяется тем обстоятельством, что коэффициенты этих уравнений г iky Г0 зависят от величины неизвестных Xh.
Пример выбора основной системы. Для одноэтажной двухпролетной рамы, изображенной на рис. 17.94, а, основная система (рис. 17.94, б) образована введением семи дополнительных связей. Число неизвестных метода перемещений равно семи: одно горизонтальное перемещение, три вертикальных и три угла поворота. При этом сближение концов ригелей не учитывают, так как продольные усилия в ригелях незначительны.
Построение равновесного состояния стержневой системы. Задаются некоторым фиксированным значением
254
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
параметра нагрузки k, определяют сжимающие силы во всех элементах рамы и решают систему уравнений (17.332) методом итерации до определения всех неизвестных Xk с требуемой точностью. Сходимость итерационного процесса обеспечена, пока рама находится в
состоянии устойчивого равновесия — параметр нагрузки k, меньше критического значения k.
В результате однократной реализации алгоритма Рама строится напряженное и деформированное состояние системы при заданном значении параметра нагрузки г, находится характерное перемещение. Пара значений k, f определяет точку на графике поведения системы (см. рис. 17.91).
Рис. 17.94
Поведение нагрузки в процессе деформирования системы влияет на величину критической нагрузки. При анализе устойчивости арки в ее плоскости различают четыре основных типа нагрузок (рис. 17.95):
а) следящая нагрузка, направленная всегда под углом у к деформированному элементу дуги;
17.11.6. Предельное состояние системы
По мере приближения параметра нагрузки k к критическому значению k сходимость итерационного процесса ухудшается. Состояние потери устойчивости при достижении предельной нагрузки — точка В на графике поведения (см. рис. 17.91) не может быть построено с помощью описанного алгоритма. Поэтому за критическую (предельную) нагрузку принимают наибольшее значение k, для которого итерационный процесс сходится. Такое предположение создает небольшой дополнительный запас прочности.
17.12. УСТОЙЧИВОСТЬ ЛИНЕЙНО УПРУГИХ КОЛЕЦ И АРОК
17.12.1. Постановка задачи. Поведение нагрузки
Общие положения расчета криволинейных стержней, колец и арок см. разделы 5 и 9.
Здесь предполагается линейно упругая работа материала. Ось арки или кольца во всех случаях считается несжимаемой 14, 28, 36, 39, 44, 46.
Для криволинейных стержней и арок характерны три случая потери устойчивости.
1. До потери устойчивости изгибные перемещения отсутствуют. Потеря устойчивости при разветвлении форм равновесия определяется появлением изгибных перемещений.
2. До потери устойчивости имеются изгибные перемещения. Потеря устойчивости при разветвлении форм равновесия определяется появлением изгибных перемещений нового типа, ортогональных к начальным.
3. Потеря устойчивости определяется перескоком (прощелкиванием), т. е. мгновенным переходом к равновесному состоянию нового типа.
б) гидростатическая нагрузка, направленная всегда по нормали к деформированному элементу дуги (частный случай следящей нагрузки при у —л2);
в) полярная нагрузка, направленная всегда к фиксированному полюсу;
г) гравитационная нагрузка, сохраняющая постоянное направление, не зависящее от перемещении системы (например, собственный вес арки).
В случаях а, б и г предполагают, что точка приложения нагрузки перемещается вместе с элементом дуги.
При анализе устойчивости колец и арок из плоскости кривизны поперечные сечения предполагаются массивными (не тонкостенными). Различают два случая поведения нагрузки: а) нагрузка остается параллельной плоскости недеформированной арки (рис. 17,96, а);
р) нагрузка поворачивается вместе с сечением, сохраняя направление вдоль главной оси сечения (рис. 17.96,6).
В обоих случаях
Рис. 17.96
точка приложения мещается вместе с элементом дуги.
нагрузки пере-
17.12.2. Устойчивость круговых колец
Круговое кольцо, подверженное равномерному внешнему давлению q, в начальной стадии нагружения испытывает только кольцевые сжимающие усилия.
Потеря устойчивости в плоскости коль ц а характеризуется появлением изгибных перемещений в этой плоскости. Критическая нагрузка равна:
? К, (17.333)
где EIх— жесткость кольца при изгибе в его плоскости; R — радиус кольца.
17.12. УСТОЙЧИВОСТЬ ЛИНЕЙНО УПРУГИХ КОЛЕЦ И АРОК
255
Коэффициент К равен: для гидростатической нагрузки К—3; для полярной — К4,5.
Потеря устойчивости из плоскости кольца характеризуется появлением изгибных перемещений, перпендикулярных этой плоскости. Если нагрузка сохраняет направление, параллельное плоскости недеформированного кольца, то критическая нагрузка
Таблица 17.18
Кривые выпучивания и условия потери устойчивости для круговых арок при гидростатической нагрузке
Е1и
Я (17.334)
Я 4 EIyGld ’
где Ely — жесткость кольца при изгибе в направлении, перпендикулярном его плоскости; GId— жесткость кольца при кручении.
17.12.3. Устойчивость круговых арок в их плоскости
Круговая арка, нагруженная радиальной нагрузкой (рис. 17.97), в начальной стадии работы испытывает только кольцевые (окружные) сжимающие усилия, постоянные по длине арки.
Критическая нагрузка, вызывающая потерю устойчивости арки в ее плоскости, определяется по формуле (17.334). Значения коэффициента К для гидростатической и полярной нагрузки приведены в табл 17.17 в зависимости от угла раствора арки 2а. Схемы арок, формы потери устойчивости (кривые выпучивания),
Рис. 17.97
А
D 2
у
ал
I
А
Л
1i
а.
Ч
2а 180'
9
(шкала слева
0
г
0 2 4 6 8 10 12 14 16 iRE3M
Рис. 17.98
Т а б л и ц а 17.17
Коэффициенты К для круговых арок при гидростатической и полярной нагрузке
2а,
град
Нагрузка гидростатическая
Нагрузка полярная
бесшар-
нирная
двухшар-
иирная
трех¬
шарнирная
бесшар-
нирная
двухшар¬
нирная
30
294
143
108
296
148
60
73,3
35
27,6
75,2
36
90
32,4
15
12
34,3
16
120
18,1
8
6,75
20,1
9,1
150
11,5
4,76
4,32
13,9
6,02
180
8
3
3
10,6
4,5
Схема арки
Условие потери устойчивости
Двухшарнирная
я3 К — о
- а2
Бесшарнирная
Ц8
II
а а
Трехшарнирная
t gu — и tg а—а
И
9 к 1'
и3 а3
Концы упруго защемлены
а R-q а М- tg а 2 и
0
tg2u
а также аналитические условия потери устойчивости от гидростатической нагрузки приведены в табл. 17.18. Для случая упругого защемления концов арки опорный момент М и угол поворота опорного сечения (3 связаны соотношением М д,(5, где х — коэффициент жесткости. Критическую нагрузку определяют из уравнения табл. 17.18 или по графику рис. 17.98.
Если вертикальная гравитационная нагрузка изменяется по длине пролета арки в соответствии с законом (рис. 17.99)
? 7ocos0, (17.335)
где qo — интенсивность нагрузки в замке, 0 — центральный угол, то критическая нагрузка в эйлеровом смысле определяется по формуле (17.333). Значения коэффициента К для бесшарнирной арки даны в табл 17.19.
Круговая арка, нагруженная вертикальной равномерно распределенной вдоль пролета гравитационной нагрузкой (рис. 17.100), испытывает изгиб по симметричной (относительно середины пролета) упругой линии. Потеря устойчивости в эйлеровом смысле характеризу-
Таблица 17.19
Коэффициенты К для круговых арок при гравитационной нагрузйе
Вид арки, характер нагрузки
2а, град
30
60
90
120
180
Бесшарнирная, нагрузка переменная
294
73
31,2
16,4
Двухшарнирная, нагрузка равномерная
-
36
16,2
-
3,72
256
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
ется наложением антисимметричной кривой выпучивания на симметричную линию изгиба. Значения коэффициента К в формуле (17.333) для двухшарнирной арки даны в табл. 17.19.
Рис. 17.100 Рис. 17.101
17.12.4. Устойчивость параболических арок в их плоскости
Параболическая арка, несущая вертикальную равномерно распределенную по длине пролета нагрузку (рис. 17.101), испытывает только сжимающие усилия, возрастающие от замка к пяте.
Критическая нагрузка, вызывающая потерю устойчивости арки в ее плоскости, равна
Е1 17‘336 3
Таблица 17.20
Коэффициенты К для параболических арок
Арки
трехшарнирная
Характер нагрузки. Закон изме¬
fl
бес-
двух-
Форма потери устойчивости
нения жесткости
шарнирная
шар-
нирная
обратно-
симмет¬
ричная
симмет¬
ричная
Следящая 1 x(Q)Jconst
0,1
0,2
0,3
0,4
0,5
0,6
0,8
1
60.7 101 115 111 97,4
83.8 59,1 43,7
28,5
45.4
46.5 43,9
38.4
30.5 20 14,1
22.5
39.5 47,3 49,2
38
28,8
22,1
Гравитационная 7.(0 )const
0,1
0,2
0,3
0,4
0,6
1
-
28,8
46,1
48.4 45 31,7
15.4
22.7 40,2
49.8 54,5
Следящая
v0)-,
cos 0
0,1
0,2
0,3
0,4
0,6
0,8
1
65,5
134
204
277
444
587
700
30.7
59.8 81,1 101 142 170 193
24
51
83
118
Следящая
' (0) х cost)
0,1
0,2
0,3
0,4
0,6
0,8
1
62,3
112
154
152
133
118
29,5
49
57
52
44
37
23,2
43,6
59
68
70
где — длина пролета арки; Е1 х—жесткость сечения арки в замке при изгибе в ее плоскости.
Значения коэффициента К для арок постоянного и переменного сечения приведены в табл. 17.20 в зависимости от отношения (— стрела подъема) при различных типах нагрузок.
Формы потери устойчивости двухшарнирных и бесшарнирных параболических арок, соответствующие наименьшей критической нагрузке, аналогичны указанным в табл. 17.18 для круговых арок. Для пологих трехшарнирных параболических арок с 0,3 I наименьшая критическая нагрузка соответствует симметричной форме потери устойчивости. У более крутых трехшарнирных арок наименьшей критической нагрузке соответствует антисимметричная форма потери устойчивости по двум полуволнам, как у двухшарнирных арок. В этом случае коэффициенты К для двухшарнирных и трехшарнирных арок, соответствующие антисимметричной кривой выпучивания, совпадают.
В запас устойчивости параболические арки при любых нагрузках можно рассчитывать по таблицам, составленным для следящей нагрузки.
17.12.5. Устойчивость пологих двухшарнирных арок в их плоскости
Пологая двухшарнирная арка может потерять устойчивость в эйлеровом смысле, выпучиваясь
Г-
Рис. 17.102
по антисимметричной относительно середины пролета кривой ADB (рис. 17.102). Критическая нагрузка
q, 32n-t-. (17.337)
Арка может испытать также прощелкивание с мгновенным переходом в новое равновесное состояние АСВ (рис. 17.102). Соответствующая критическая нагрузка 9Т‘ '1 V 27 т2 J’
17-338 Ff
где F — площадь поперечного сечения арки; — момент инерции сечения относительно оси, перпендикулярной плоскости арки.
Расчетным является меньшее из двух значений критической нагрузки.
Если арка нагружена сосредоточенной силой Р в замке, то прощелкивание становится возможным при нагрузке
Р — я. (17.339)
Я
Вследствие пологости арки очертание ее оси, а также и поведение нагрузки не оказывают существенного влияния на величину критической нагрузки.
17.13. МЕСТНАЯ УСТОЙЧИВОСТЬ ПРОФИЛЕЙ СЖАТЫХ СТЕРЖНЕЙ
257
17.12,6. Устойчивость одиночных арок из их плоскости
Пространственная устойчивость одиночной арки обеспечивается заделкой ее пят, препятствующей поворотам из плоскости арки, и не зависит от способности опор к поворотам в ее плоскости. Арки, закрепленные в пятах цилиндрическими шарнирами, можно считать защемленными относительно поворота из плоскости арки.
а) Круговая арка сжата равномерно распределенной по длине дуги внешней нагрузкой, сохраняющей направление, параллельное плоскости недеформированной арки (см. рис. 17.96, а). Критическая нагрузка
Я К1-Г- (17.340)
R3
Коэффициент Ci находят из трансцендентного уравнения:
tg ria
tg r2a
1 — r 1 -r?
.2 2
A
Ely
01d
(17.341)
где a — половина центрального угла; EIy — жесткость арки при изгибе в направлении, перпендикулярном его плоскости; GIi — жесткость арки при кручении.
В табл. 17.21 приведены значения коэффициента К для некоторых частных случаев.
Таблица 17.21
Коэффициенты К для круговых арок при нагрузке, сохраняющей направление А
2а, град
А
10
20
30
0,7
2
5
90
13,8
13,3
12,1
10,86
9,25
7,9
120
7,05
6,7
5,88
5,06
3,94
3,3
б) Параболическая арка нагружена вертикальной равномерно распределенной по длине пролета гравитационной нагрузкой, приложенной в центре тяжести сечения. Критическая нагрузка, вызывающая нарушение плоской формы арки (рис. 17.103, план).
? -4- 17-342
Рис. 17.103
Значения коэффициента (, в зависимости от Л и даны в табл. 17.22.
Таблица 17.22 Коэффициенты для параболических арок
Нагрузка
поворачива¬
сохраняет направление
ется с сече¬
fH
нием
А
0,7
1 1
2
1
0,1
28,5
28,5
28
31,7
0,2
41,5
41
40
65
0,3
40
38,5
36,5
137
17.13. МЕСТНАЯ УСТОЙЧИВОСТЬ ПРОФИЛЕЙ СЖАТЫХ СТЕРЖНЕЙ
Под местной потерей устойчивости тонкостенных профилей понимают выпучивание пластинчатых элементов, составляющих профиль. Длина полуволны выпучины зависит в основном от условий на ненагруженных краях профиля, т. е. от его формы, и не зависит от условий на нагруженных краях, т. е. от концевых условий, если отношение длины профиля к наибольшей ширине достаточно велико. Местная потеря устойчивости профиля может предшествовать общей потере устойчивости стержня или происходить с ней одновременно. Под критическим напряжением местной устойчивости понимается напряжение, до которого исходное равновесное состояние пластинчатых элементов, составляющих профиль, является устойчивым. Для профилей, образованных из очень тонких пластинок, местная потеря устойчивости не обязательно означает полное разрушение: в закритической области стержень может еще иногда нести некоторую возрастающую нагрузку до полного разрушения или до общей потери устойчивости.
В пластинках, теряющих устойчивость за пределом упругости и при распределении напряжений, близком к равномерному, предельная нагрузка приближается к критической. Поскольку местное выпучивание элементов профиля обычно ведет к быстрой общей потере устойчивости, в большинстве практических расчетов выпучивание не допускается. Некоторое исключение может быть сделано лишь для пластинок-стенок с опертыми продольными кромками (для которых згкритическая стадия значительна) и только при действии статической нагрузки 5.
Критические напряжения местной потери устойчивости профилей зависят от соотношения геометрических размеров, взаиморасположения пластин, образующих профиль, физико-механических свойств материала и характера распределения напряжения по загруженным кромкам. Простейший прием теоретической оценки критических напряжений состоит в расчленении профиля на отдельные пластинки с последующим определением для каждой из них своих критических напряжений при подходящих основных граничных условиях. За критическое напряжение при этом принимается наименьшее критическое напряжение, полученное из расчета всех пластинок.
Однако этот прием дает достаточно точный результат только для тех профилей, граничные условия элементов которого четко выражены: для тонкостенной квадратной трубы, крестообразного сечения с равными полками, равнобокого уголка без утолщений в сопряжении полок. В этих случаях сопряжение пластин профиля может рассматриваться как шарнирное. Для профилей, состоящих из нескольких связанных между собой пластинок разной ширины и толщины, граничные условия закрепления сложнее (упругое защемление по линиям сопряжения) и значения критических напряжений определяются с учетом взаимодействия элементов профиля.
С целью повышения критического напряжения местной устойчивости тонкостенных профилей может применяться подкрепление его полок отбортовками или бульбами (утолщение краев). При достаточно широкой отбортовке линия сопряжения ее с подкрепляемой полкой при потере устойчивости мало отклоняется от прямой и отбортовка сама играет роль полки, а подкрепляемый ею элемент может рассматриваться как стенка с упруго защемленными краями.Приближенно, на осно-
258
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
вании данных экспериментов, стороны профилей, усиленные отбортовками, можно рассматривать как стенки, если при одинаковой с ними толщине отбортовки имеют ширину не менее 0,3—0,4 ширины усиляемой стороны. При меньших размерах отбортовок их следует рассматривать как бульбы, а стороны, которые они подкрепля-
0.5
а
о,з о,г 0,1
У
У
0 20 ЬО 60 во 100 120 по 160 180 200 Рис. 17.104
ют, как полки. При распространении в отбортовках пластических деформаций их эффективность падает 2. Учет влияния бульб рассмотрен в 3, 7, отбортовок в 2, 3, 10.
Целесообразно, чтобы пластинки, составляющие профиль стержня, и стержень в целом были равноустойчивы. При выполнении условия равноустойчивости необходимо принимать во внимание возможность неравномерного распределения напряжений в отдельных
D
пластинках. Неравномерность возникает не только при внецентренном, но и при центральном сжатии. В последнем случае она обусловливается неизбежным начальным искривлением стержня, которое учитывается в СНиПе, при назначении коэффициента ф введением начального относительного эксцентрицитета т0 в зависимости от гибкости стержня: для стальных элементов— по графику рис. 17.104, для алюминиевых сплавов АМц-М, АМг-М т00,0075 Я 4, для остальных то — 0,003Я.
Начальное искривление и вызванное им неравномерное распределение напряжений неблагоприятно сказывается на местной устойчивости полок профилей, при расчете которых следует учитывать существенное увеличение напряжений на свободном крае по сравнению со средним напряжением сжатия 5.
Ниже приняты следующие основные обозначения:
У—оси, направленные соответственно вдоль и поперек длинной пластинки. Начало координат со стороны наибольшего сжатия; t — толщина пластинки-стенки, полки (свеса) или отбортовки профиля;
Л0, b—расчетная ширина пластинки-стенки или полки (свеса); do — ширина отбортовки;
— цилиндрическая жесткость пласти-
D
12 (1-м2)
нок;
i и о2 — наибольшее и наименьшее напряжения на краях пластинки в ее срединной плоскости (ai0 и j20— сжатие);
в — относительное удлинение вдоль оси х;
ос—параметр, характеризующий распределение напряжений: а1 —
— е(6)е(0) или (только в упругой стадии) а1—сггоъ в(6)—значение е при у Ь, е(0)—при 0; при равномерном сжатии а0, при чистом изгибе а 2, при треугольном распределении напряжений а — 1
)
h-0,3 0,5 h
I
v)it
) i i I1™
IF
JL L
) it o)
Г7ГР
□j
JL
n)
Г—
1
Iг
1
p)
L
Ljg
Рис. 17.105
17.13. МЕСТНАЯ УСТОЙЧИВОСТЬ ПРОФИЛЕЙ СЖАТЫХ СТЕРЖНЕЙ
259
Таблица 17.23
Предельные отношения ft0 для стенок, не имеющих свободных кромок, центрально и внецентренно сжатых стальных элементов
Центральное сжатие и внецентренное сжатие при (ХгСО'б
Внецентренное сжатие при ajl
1. Стенка, не подкрепленная ребром. Двутавр (рис. 17.105, а, з)
0.4Х.
(а)
Швеллер, прямоугольная труба (h — большая сторона) и коробчатое сечение (рис. 17.105, б, ж, н, о, п)
- 40 l— 0.2Х. (б)
t f R
Квадратная труба (рис. 17.105, е). По формуле (б), но с уменьшением на 20.
Во всех случаях h0t не должно превышать 75. При недонапряжении элемента отношение h0t может быть увеличено в
Y
RFy
N
раз, но не более чем до 90
3. Стенка, не подкрепленная ребром. Двутавр
— юо —г V о 2—
2ks
V(2—ax)2 4 (ax—lp?) ’
(в)
a — о' т Q
1 —:—; Pi о,7.з—; х т—'
hCTt
о о
о—наибольшее сжимающее напряжение у расчетной границы стенки без учета Фвн, Ф”’ CV в Формуле (в) а —в тсмг
а' — напряжение у противоположной границы стенки; т — среднее касательное напряжение в рассматриваемом отсеке
ах
1
1,2
1,4
1.6
1,8
2
К
2,22
2,67
3,26
4,2
5,25
6,3
В интервале 0,5aii отношение h0t определяется линейной интерполяцией между значениями приа,0,5 и а, — 1.
Прочие сечения — по формуле (в), но с уменьшением на 25
2. Стенка, подкрепленная посередине продольным ребром;
рЛо3
0
1
2
4
6
32
1
1,4
1,6
1,8
2
р — момент инерции сечения ребра
4. Стенка, подкрепленная посередине продольным ребром. При условии 6h0t3 за ho принимается наиболее напряженная часть
стенки между поясом и осью ребра. Если фебро расположено с одной стороны стенки, р вычисляется относительно оси, совмещенной с ближайшей гранью стенки
5. При необеспеченной устойчивости в расчет вводится часть стенки шириной по nt, считая от границ расчетной высоты h0.
Класс стали
С3823
С4429,
С4633
С5240
С6045
С7060
С3575
п
15
14
13
12,5
12
11
aT и a0,2 — физический и условный предел текучести материала;
R — расчетное сопротивление;
х — коэффициент Пуассона;
Еу Ef, Es — модуль упругости, касательный и секущий модули;
X — расчетная гибкость стержня;
Для наиболее распространенных профилей из стали разных классов и различных алюминиевых сплавов с учетом сказанного выше в СНиП установлены предельные соотношения между толщиной и шириной (высотой) стенок и полок. Соответствующие данные для стальных профилей приведены в табл. 17.23, 17.24. Аналогичные таблицы для алюминиевых сплавов приводятся в 15. Расчетные размеры профилей даны на рис. 17.105, (при отсутствии планок — а00,2 Ь).
В других случаях проверка местной устойчивости может быть выполнена с использованием решения для бесконечно длинной полосы, находящейся в одноосном напряженном состоянии 11, 12.
упругой стадии критическое краевое напряжение:
я2 D t л;2 Е
а1,кр ke tb2 — 12(1 _ц2)
(тГ’ (7'343)
где ke— коэффициент, зависящий от граничных условий и параметра а.
Для полосы с обоими защемленными или шарнирно опертыми краями ke принимается по графикам рис. 17.106 и 17.107, для полосы с одним свободным краем и вторым защемленным — по рис. 17.108, а для полосы с одним свободным, а другим шарнирно опертым краем — по рис. 17.109.
Для промежуточных случаев упругого закрепления полок коэффициенты ke даются в табл. 17.25 13.
Таблица составлена при л0,32, наибольшее сжимающее напряжение на свободном крае полки; параметр, характеризующий жесткость закрепления,
-г
(17.344)
260
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
Таблица 17.24
Предельные отношения Ьt в центрально и внецентренно сжатых и изгибаемых стальных элементах
Вид свеса полки
Класс стали
X
25
50
75
100
125
Неокаймленный свес полки двутавра (р 1с. 17.105, а, з)
С 3823
С 4429, С 4633 С 5240 С 6045 С 7060 С 8575
14
12
10
9.5 9
8.5
16
15
14
13.5
12.5
11.5
18.5 18 17
16.5
15.5 14
20.5 20
18.5
17.5
16.5 15
23
22
19.5
18.5
17.5 16
2. Неокаймленная полка равнобокого уголка, неокаймленный свес полок гнутых профилей (рис. 17.105, в, н, р)
С ЪЯ '9
С 4429 С 4633 С 5240 С 6045 С 7060 С 8575
14
12
10
9.5 9
8.6
15
13
12
11,5
11
10
' 16,5
14.5 14
13.5 13
11.5
18
16.5 15
14.5
13.5 12
20
18.5
15.5 15 14
12.5
3. Неокаймленная большая полка неравнобокого уголка, неокаймленная полка швеллера (рис. 17.105, б, г)
По п. 2 с увеличением на 10
4. Свесы полок гнутых профилей, окаймленные ребром (отбортовкой) (рис. 17.105, о, п, с)
С 3823
С 4429, С 4633 С 5240 С 6045
20
30
22.5 19,0
17.5
32.5
26.5
23.5 23
35
28,5
25
24
37.5
30.5
26.5
25.5
5. Стенки полок гнутых профилей, окаймленные ребром и усиленные планками
-
По п. 1 табл. 17.23 путем подстановки в формулу (б) вместо Ло величины b
6. Неокаймленный свес полки тавра (рис. 17.105, д)
-
По полусумме значений пп. 1 и 2
7. Стенка тавра (рис. 17.105, д)
—
Предельное ht определяется по п. 2 с умножением на коэффициент
Ь Ь ф10,25Т 2 2L ; —2
f h h
8. Неокаймленный свес полки в балках (изгибаемых элементах)
С 3823
С 4429, С 4633 С 5240 С 6045 С 7060 С 8575
15
13
И
10,5
10
9
Примечание. При недонапряжении элемента отношение bt может быть увеличено bVЯ о раз, но не более чем на 25 ; В сжатых и внецентренно сжатых элементах о VFp ", где Ф — наименьшая из величин ФФВЫ, вн,сф, использованных
при провеоке устойчивости элемента; в изгибаемых элементах о — большая из величин М I Мг Ми 1 ст или О— — „ л. —L х
"Ч 1 ‘у
где ц — коэффициент заделки, принимаемый с достаточной степенью приближения I для полки швеллера по формуле
t9h 1
(17.345)
,з ъ 2 I2
lcb 1— 0,106—-
с2
для свеса двутавра — удвоенной величине, для стенки тавра
e Т ГТ‘ (17.346)
ti t2 ь2и
1 — 0,106
tlb
Здесь tub — толщина и ширина упруго закрепленного элемента; tc, ta, h и ba — толщина и ширина закрепля¬
ющего элемента — стенки швеллера или двутавра, свеса полки тавра.
Формулы (17.345), (17.346) действительны при положительном знаменателе.
Значения ke для упруго закрепленной стенки при равномерном сжатии см. в 1, критические напряжения при неравномерном сжатии (в упругой стадии) — в 14. Данные для проверки местной устойчивости профилей в целом в упругой стадии при равномерном сжатии имеются в 9, 10J.
В упруго-пластической стадии, согласно приближенному решению 11, 12, основанному на ряде упрощений и допущений, критическое (предельное) напряжение определяется той же формулой (17.343), но вместо
ke ВВОДИТСЯ
пл —
(17.347)
17.13. МЕСТНАЯ УСТОЙЧИВОСТЬ ПРОФИЛЕЙ СЖАТЫХ СТЕРЖНЕЙ
261
где г) — редукционный коэффициент. При этом принимается, что докритические деформации в срединной плоскости, так же как и в упругой стадии, выражаются линейным законом
6 81— (17.348)
Таблица 17.25
е
a
1
I I
I
0 1
1 .5
1 1
I 1.6
1
оо
См. i ис. 17.108
50
1,21
1,36
1,54
1.77
2,0(
20
1,14
1,29
1.48
1,70
1,99
5
0,99
1,12
1,28
1,49
1,78
2
0,84
0,96
1,10
1,30
1,57
0,8
0,70
0,81
0,94
1.11
1,36
0,.
0,57
0.65
0,70
U, 90
1,12
0
См. рис. 17. 108
где 8
. 8(0)-
удлинение
крайнего
наиболее сжатого
волокна, а а по-прежнему изменяется в пределах от О до 2.
Из уравнений (17.343) и (17.347) при заданном краевом напряжении Ощр требуемая толщина пластинки
(17.349)
Редукционный коэффициент зависит от граничных условий, параметра а и отношений EJE и EtE для наиболее сжатого края (для материала, следующего диаграмме Прандтля 0).
ки 0,5 0 0,5 ю 1,5 2,0
Рис. 17.109
Рис. 17.110
Для полосы с обоими защемленными краями
i 0,46a s (l —0,46 a). Tic (17.350)
а коэффициент т0, соответствующий а0, принимается по графику рис. 17.110 (сплошные линии на графике).
Для полосы с обоими шарнирными краями в (17.350) коэффициент 0,46 заменяется на 0,5, а г0 принимается по рис. 17.111.
Для защемленной полосы-полки
По (0,37а 0,575a2 -— 0,255 а3) X
X( s — то) (17.351)
коэффициент цо принимается по рис. 17.110 (пунктир на графике).
262
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
Для шарнирно опертой полосы-полки
Л (Па 2.6 Fe AI(At AJ. (17.352)
Здесь Aj — площадь между действительной кривой OPQ диаграммы материала (рис. 17.112) и прямой OQ;
Ап— площадь между кривой OPQ и ломаной ORQ
та дается графиком рис. 17.113;
1
Fe 2 2i 3e'
е — EEs
1.
Для материала, следующего диаграмме Прандтля,
ское напряжение не должно быть ниже R, а во втором в (17.349) вместо ащр подставляется R.
При упругом закреплении края редукционный коэффициент приближенно может определяться как средняя величина для шарнирного и защемленного краев или более осторожно приниматься наименьшим.
Ширину зоны распространения пластической деформации и нулевую точку в полках Н-образных стальных профилей при эксцентрицитете в плоскости, параллельной полкам, можно определять по данным, имеющимся в 8, в стенке тавра и полках швеллера — по данным других работ того же автора.
Об устойчивости стенок в сжато-изогнутых и изгибаемых элементах см. 6.
17Л4. УСТОЙЧИВОСТЬ ПЛОСКОЙ ФОРМЫ ИЗГИБА БАЛОК
0,9 О,в 0,7 0,6 0,5 0,4 0,3 0,2
fi :
V,
05
ол
0,3
0?
.ус.
У
У
И
0
1,0-
5?
г
л
4,9
4
Г
о,в
4
у
0,7
ESIE
С
Z
У
0J5-
I
—
z
3
Рис. 17.111
Рис. 17.112
Рис. 17.113
Практически расчет по приведенным данным сводится к следующему: по действительному эксцентрицитету или относительному начальному эксцентрицитету, соответствующему гибкости рассчитываемого стержня (по приведенным выше выражениям т0 для алюминиевых сплавов или рис. 17.104 для стали), определяют параметр а и соответствующий ему коэффициент ke затем для данной гибкости и сечения стержня определяют ширину (глубину) пластической зоны в проверяемом элементе сечения и нулевую точку эпюры напряжения и соответственно им устанавливают значения EsE и EtE для наиболее сжатого края элемента; по этим значениям и параметру а с помощью приведенных выше уравнений и графиков находят редукционный коэффициент т). Далее, при известных размерах t и Ъ определяют критическое напряжение по формуле (17.343), где kP заменено на пл, или отыскивают по формуле (17.349) толщину t. В первом случае критиче-
17.14.1. Устойчивость двутавровых балок
Балка, нагружаемая силами, действующими в плоскости ее наибольшей жесткости, являющейся плоскостью симметрии, вначале деформируется только в этой плоскости. При достижении нагрузками критических величин плоская деформация перестает быть устойчивой и дальнейшее увеличение нагрузки сопровождается изгибом в плоскости наименьшей жесткости и кручением.
Ниже рассматривается такая балка постоянного сечения. Прямолинейная ось балки принята горизонтальной, плоскость действия нагрузок остается все время вертикальной. Приведены формулы для определения критических нагрузок. Расчет стальных балок двутаврового сечения, имеющего две или одну ось симметрии, см. 17.14.2.
Критическая нагрузка двутавровых балок, сечение которых имеет две оси симметрии, определяется по формулам табл. 17.26.
В табл. 17.26 — пролет балки; — расстояние точки приложения нагрузки от ближайшей опоры; В —
— Ely — жесткость при изгибе в плоскости наибольшей гибкости (в горизонтальной плоскости); Е — модуль упругости; у — момент инерции сечения относительно оси у C — GIK — жесткость при чистом кручении; G — модуль сдвига; к 0,433 263; b и t — соответственно ширина и толщина элементарных прямоугольников, образующих сечение. Значения коэффициентов k приведены в табл. 17.27—17.34 в зависимости от вида нагрузки, места ее приложения, условий закрепления концов балки и от величины коэффициента
4GlK I 2 4 к I 2
а-(т)7-(т)’ 17-353
где v — коэффициент Пуассона.
Рассматриваются следующие условия опирания.
1. Шарнирное опирание. Опорные сечения могут свободно поворачиваться относительно своих главных осей (х и у), перемещаться вдоль оси балки и депланировать, но они закреплены от смещений в своей плоскости и от поворота вокруг продольной оси балки.
2. Концы закреплены от вращения относительно вертикальной оси у (от поворота в горизонтальной плоскости). Депланация исключена.
3. Дополнительные связи посредине пролета шарнирно опертой балки препятствуют повороту сечения балки относительно продольной оси.
17.14. УСТОЙЧИВОСТЬ ПЛОСКОЙ ФОРМЫ ИЗГИБА БАЛОК
263
Таблица 17.26
Критическая нагрузка двутавровых балок, сечение которых имеет две оси симметрии
Расчетные схемы и формулы
К S S И сз
2 с
о
Номера таблиц, по которым определяется коэффициент k
М-
М0
f-T
м V ВС кр а) МдМ в, табл. 17.27
б) М А М в вместо к вводится т к, где
Т определяется по рис. 17.114
в) Примечание к табл. 17.27
р V вс
кр 2
а) g 0,5, табл. 17.28
б) S 0,5, вместо k вводится rk, где г из табл. 17.29
в) Табл. 17.30
г) Табл. 17.31
V ВС
Табл. 17.32 Табл. 17.33 Табл. 17.34
цитпичтц
bnVвс
В заделке
кп определяется по рис. 17.115
к — момент на конце k2 — сосредоточенная сила в центре тяжести
сосредоточенная сила соответственно к верхнему и нижнему краям концевого сечения
k5 — равномерно распределенная нагрузка по оси балки k — то же, поверху
Таблица 17.27 Значения k при одинаковых моментах на концах балки
а
0,1
1,0
2,0
4,0
6,0
8,0
10
12
k
31,4
10,36
7,66
5,85
5,11
4,70
4,43
4,24
а
16
20
24
28
32
36
40
100
k
4,00
3,83
3,73
3,66
3,59
3,55
3,55
3,29
Примечание. При а 100 можно принять k я. При закреплении концевых сечений от поворота относительно вертикальных осей и одинаковых моментах на концах можно пользоваться табл. 17.27, но при вычислении а принимать 2 вместо I, а коэффициенты k, вычисленные по табл. 17.27, перед подстановкой в формулу для Мкр умножать на 2.
Если к нагрузкам, приложенным к оси балки, добавляются пары сил на концах, вызывающие чистый изгиб 1, то критический момент посредине
Мкр рМ, (17.354)
где М — критический момент при чистом изгибе, а значения х берутся из табл. 17.35
Рис. 17.114
Рис. 17.115
19.0
17.0
15.0
13.0 П,0
3.0
7.0 6,43
5.0 4,01
3.0 1,57
1.0
у
V
Lu
-р
“е
С—
н
—
1
0 0,05 0,10 0,15 0,20 0,25
J оС
Таблица 17.28
Значения k, kQ, при сосредоточенной силе посредине пролета (S0,5)
а
0,4
4,0
8,0
16
24
32
48
k
86,4
31,9
25,6
21,8
20,3
19,6
18,8
51,2
20,2
17,0
15,5
15,1
14,9
14,8
kH
145,6
50,0
38,2
30,4
27,2
25,5
23,5
а
64
80
96
160
240
320
400
k
18,3
18,1
17,9
17,5
17,4
17,2
17,2
15,0
15,0
15,1
15,3
15,5
15,7
15,8
н
22,4
21,6
21,1
20,0
19,3
18,9
18,7
Примечание. в — в случае приложения нагрузки к верхней полке балки; — в случае приложения нагрузки к нижней полке; коэффициент k без индекса соответствует приложению нагрузки к оси балки.
264
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
Таблица 17 29
Отношения критических сил и напряжений при 0,5 и приложении сосредоточенной силы к оси балки ( Q — отношение расстояния точки приложения силы от опоры к расчетному пролету )
С
0,50
0,45
0,40
0,35
0,30
0,25
0,20
0,15
0,10
Рс0,5 Г
1,00
1,012
1,051
1,123
1,240
1,422
1,717
2,235
3,305
Ъ
си 0,5
1,0С
1,003
1,010
1,024
1,041
1,067
1,100
1,142
1,192
Примечание. Коэффициенты увеличения критической силы при € 0,5 приведены во второй строке таблицы. В третьей строке приведены соответствующие отношения критических напряжений в сечениях под грузом.
Таблица 17.32
Значения k, кв ♦ k н в случае равномерно распределенной нагрузки и шарнирных опор балки (см. примечание к табл. 17.23)
а
0,4
4
8
16
24
32
48
к
в
143,0
93,0
53,0
36,4
42,6
30,1
36.6
27.6
33,8
26,7
32,6
26,1
31,5
25,4
222,0
77,3
58,9
47,9
43,4
40,4
37,6
а
64
80
128
200
280
360
400
k
в
30,5
26,0
30.1
25,9
29,2
26,0
29,0
26,5
28,8
26,6
28.7
26.7
28,6
26,7
36,2
35,2
33,3
32,2
31,5
31,1
30,8
Таблица 17.30
Значения k при сосредоточенной силе в центре сечения посредине пролета балки с концами, закрепленными от поворота в горизонтальной плоскости
ot
0,4
4
8
16
24
32
64
128
200
320
268
88,8
65,5
50,2
43,6
40,?
34,1
30,7
29,4
28,4
Таблица 17.31
Значения к при сосредоточенной силе в центре сечения посредине пролета балки с шарнирно опертыми концами при дополнительных связях посредине пролета
а
0.4
4
8
16
32
96
128
200
400
k
466
154
144
86,4
69.2
54,5
52,4
49,8
47,4
Т а б л и ц а 17.33
Значения к в случае равномерно распределенной нагрузки по оси балки при закреплении концов от поворота в горизонтальной плоскости
а
0,4
4,0
8,0
16,0
32,0
96,0
128
200
400
к
488
161
119
91,3
73,0
58,0
55,8
53,5
51,2
Таблица 17.34 Значения к, Ав, в случае равномерно распределенной нагрузки и шарнирных опор при дополнительных связях посредине пролета
а
0,4
4,0
8,0
16
64
96
128
200
к
673
221
164
126
87
79,5
76,4
72,8
в
589
195
143
111
80
74,2
71,5
69,2
777
184
142
96
86,0
81,5
77,1
Таблица 17.35
Значения
Эпюра моментов
Уравнение эпюры моментов
0,5 о
—1,0 —2,0
моп
У- к,
—1—
и и
сру
i
1
I
0П
г-ср
1 (jj.
О 2 0,5L
1,165 1,366
1,733
1,163
1,349 1,715
Ммср 4,1 — р, (-Lpj,
0
1,066
1,132
1,250
1,312
0 2
оо
1,065
1,126
1,231
1,295
Моп
Примечание. 3 м — отношение опорного момента к моменту посредине; 2 — расстояние ср
рассматриваемого сечения от опоры.
17.14. УСТОЙЧИВОСТЬ ПЛОСКОЙ ФОРМЫ ИЗГИБА БАЛОК
265
Учет прогиба балки в плоскости изгиба 1
В случае чистого изгиба двутавровой балки критический момент с учетом прогиба определяется из уравнения
PnDn-M 1-
lJL
I
Ж
Elx
0, (17.355)
где
Pn
n2 я2 EI v
Dn 0IK а
n2 я-
12 ’ "-- n.-- u
В случае шарнирного опирания концов (ппрогиба приводит к увеличению критического в т раз:
1
1) учет момента
(17.356)
При заделке обоих концов п — 2.
Критические напряжения
Наибольшие критические напряжения в сечении, соответствующем наибольшему моменту, вычисляются по следующим формулам: в случае действия моментов на концах
kVakVa
7кр—Мкр 9J
где
Ф
,к.
‘1x1
1у
При сосредоточенной силе посредине пролета Ркр I h kVa
кр —
21Х
16
ЕФ.
При равномерно распределенной нагрузке.
kVa кр-— ЕФ.
В заделке консоли
32
kVa
ЕФ.
Балки с продольными связями 1, 2
Под продольными связями понимается горизонтальная ферма, подкрепляющая балку в отдельных точках (узлах). При связях в плоскости растянутого пояса их влияние увеличивается с увеличением параметра а. Значения коэффициента увеличения критической нагрузки у см. в табл. 17.36 и 17.37.
В случае равномерно распределенной нагрузки можно пользоваться формулой 3 и 4
Va
V а
1
(2f_y К h J
2v
0,81 — —: h
,74
2
Здесь v — уровень приложения нагрузки, a f — уровень плоскости связей над осью балки.
Если связи расположены выше оси балки более чем на 0,47 v, то потеря устойчивости возможна только на участках между узлами связей. Уровни ниже оси балки вводятся со знаком минус.
Таблица 17.36 Значения коэффициента У в случае чистого изгиба
a
0
10
20
30
40
V
1,0
1,06
1,16
1,25
1,35
Таблица 17.37
Значения коэффициента V в случае сосредоточенной силы посредине пролета
ЕФ, (17.357)
a
1
8
16
24
32
48
V при нагрузке
поверху
-
1,04
1,05
1,07
1,11
1,19
понизу
1,49
1,72
1,98
2.20
2,40
2,79
(17.358)
(17.359)
Если точка приложения груза находится на расстоянии ZS от опоры, то наибольшее напряжение в сечении под грузом акр1- ф (_ ). (17.360)
(17.361)
(17.362)
(17.363)
Влияние перехода критических напряжений за предел пропорциональности
Если напряжение переходит за предел пропорциональности, то критическую нагрузку можно рассчитать, применяя вместо постоянного модуля упругости Е переменный модуль E' vE, например касательный модуль или модуль Энгессера — Кармана; здесь ц — коэффициент, зависящий от напряжения. Если принять, что модуль сдвига изменяется пропорционально модулю продольной упругости, то величина критической нагрузки, определяемая по формулам табл. 17.26, в случае перехода напряжений за предел пропорциональности должна быть умножена на коэффициент т.
Если же на основании результатов экспериментальных работ 5 и 6 для стальных и алюминиевых балок принять модуль сдвига постоянным, то поправочный коэффициент, учитывающий переход критических напряжений за предел пропорциональности:
vVr). (17.364)
17.14.2. Устойчивость стальных двутавровых балок
Согласно СНиП II-B.3-62 7 проверка общей устойчивости балок не требуется в следующих случаях:
а) при наличии настила по балкам или монолитной железобетонной плиты, опирающихся на сжатые пояса и препятствующих повороту сечений балок;
б) при отношениях свободной длины сжатого пояса двутавровой балки к его ширине, не превышающих значений, приведенных в 7. Более точно предельные значения Ijb определяются по формулам табл. 17.38;
в) проверка устойчивости прогонов при наклонной кровле не требуется, если составляющая нагрузки в плоскости настила воспринимается настилом или специальными устройствами.
266
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
Таблица 17.38
Наибольшие отношения Ijb, при которых не требуется проверка общей устойчивости двутавровых балок из стали класса Ст.З
Тип
Расчетные формулы
Значения коэффициентов а при нагрузке, приложенной
балки
к рерхней полке
к нижней полке
при чистом изгибе
Сварная
тК'тН'’т)
13
20
15,2
Клепаная
"Г"(1 “S") (' 50"г)
9,3
13,8
10,г,
Обозначения: I — расстояние между точками зак¬
репления сжатого пояса от поперечных смещений; but — ширина и толщина пояса; h — высота сечения.
Для балок из стали других классов значения lЬ, опреде-
ленные по таблице, умножаются на
'рГ 2100
фб 'PjL(-T) 10?- (17.366)
Таблица 17.39 Значения ф для балок со свободно опертыми концами
УО
U
со
S
Сосредоточенный груз посредине пролета
Равномерно распределенная нагрузка
a
3
н
по¬
по
по¬
по¬
по
по¬
т
верху
оси
низу
верху
ос и
низу
0,1
2,17
1,73
2,94
5,00
1,57
2,45
3,81
0,4
2,20
1,77
2,98
5,03
1,60
2,49
3,85
1
2,27
1,85
3,07
5,11
1,67
2,54
3,90
4
2,56
2,21
3,50
5,47
1,98
2,92
4,23
8
2,90
2,65
3,97
5,91
2,35
3,31
4,59
16
3,50
3,37
4,79
6,65
2,99
3,98
5,24
24
4,00
4,03
5,46
7,31
3,55
4,53
5,79
32
4,45
4,59
6,08
7,92
4,04
5,07
6,25
48
5,23
5,60
7,13
8,88
4,90
5,97
7,13
64
5,91
6,52
8,00
9,80
5,65
6,68
7,92
80
6,51
7,31
8,84
10,59
6,30
7,38
8,58
96
7,07
8,05
9,56
11,29
6,93
7,97
9,21
128
8,07
9,40
10,50
12,67
8,05
9,13
10,29
160
8,95
10,59
12,10
13,83
9,04
10,05
11,30
240
10,86
13,21
14,75
16,36
11,21
12,20
13,48
320
12,48
15,31
16,83
18,55
13,04
14,00
15,29
400
13,91
17,24
18,83
20,48
14,57
15,71
16,80
Таблица 17.40
Значения А) при сосредоточенном грузе, приложенном в центре тяжести сечения на свободном конце консоли
a
0,1
1
2
3
4
6
8
3,06
3,44
3,76
4,10
4,26
4,64
4,96
a
10
12
14
16
24
32
40
“Ф
5,25
5,46
5,69
5,90
6,63
7,27
7,79
Значения коэффициентов 'ф берутся из табл. 17.39 и 17.40 в зависимости от параметра а. При v0,3
'2 2к
aiAs.JL(M2
у Е U )
„(10,3)
1,54 —
Проверка устойчивости балок согласно 7 производится по формуле
—R. (17.365)
Фб №бр
где М — расчетный изгибающий момент; — момент сопротивления сечения брутто; R — расчетное сопротивление изгибу прокатной стали; фб — коэффициент уменьшения несущей способности изгибаемых элементов при проверке общей устойчивости.
Балки с сечением, имеющим две оси симметрии
Коэффициент фб определяется по формуле
(т),-©‘( ;) ('7-367’
Здесь t — толщина стенки балки, включая полки уголков; t — толщина полки балки, включая полки уголков; d — высота вертикальной полки уголков плюс толщина пакета горизонтальных листов. Для сварных и прокатных балок
d 0,5h.
При наличии связей в пролете независимо от места приложения нагрузки коэффициент г) определяется из второго столбца табл. 17.39. В этом случае — расстояние между точками закрепления сечений от поворота. При одном закреплении в пролете и нагрузке по нижней полке следует пользоваться пятым столбцом.
Таблица 17.41 Значения Ф для неразрезных балок
Значения г) при наг-
ф неразрезных балок
ру зке
чу1пишспИс — 'ф разрезных балок
a
сосредо¬
равномер¬
точенной посредине крайнего пролета
но распределенной в крайнем пролете
при нагрузке, сосредоточенной посредине крайнего пролета
при нагрузке, равномерно распределенной в крайнем пролете
04
7,83
5,81
1,55
1,50
4
8,35
6,25
1,52
1,48
8
8,83
6,69
1,49
1,44
16
9,69
7,38
1,45
1.41
24
10,44
8,00
1,42
1,38
32
11,15
8,56
1,41
1,37
48
12,35
9,58
1,39
1,34
64
13,44
10,48
1,37
1,32
96
15,31
12,02
1,36
1,30
128
16,94
13,33
1,34
1,29
160
18,40
14,52
1,33
1,28
200
20,04
15,88
1,32
1,27
240
21,60
17,08
1,32
1,27
280
22,94
18,23
1,31
1,27
320
24,23
19,27
1,30
1,26
400
26,60
21,21
1,30
1,26
17.14. УСТОЙЧИВОСТЬ ПЛОСКОЙ ФОРМЫ ИЗГИБА БАЛОК
267
Для неразрезных балок, имеющих три или более равных пролета, невыгоднейшей является нагрузка только в крайнем пролете. Этому случаю соответствуют значения г), приведенные в табл. 17.41.
Если по формуле (17.366) фб0,85, то, учитывая переход напряжений за предел пропорциональности, в расчетную формулу (17.366) следует вместо фб подставить фб, определяемое по табл. 17.42.
Таблица 17.42 Значения коэффициентов р 5
6
0,85
0,90
0,95
1,00
1,05
1,10
1,15
1,20
6
0,850
0,871
0,890
0,904
0,916
0,927
0,938
0.948
6
1,25
1,30
1,35
1,40
1,45
1,50
1,55 и более
6
0,957
0,964
0,973
0,980
0,987
0,994
1,00
Переходные коэффициенты для сталей разных классов
Таблицы значений я) составлены для балок из сталей классов Ст.З. имеющих предел текучести 2,4 тсм2. Для сталей других марок и классов значения г?, определенные из табл. 17.39—17.41, должны быть умножены на 2100
0,43-0,065
(2п— 1) h;
I — расчетная длина балки;
laA2
“т— п — секториальныи момент инерции сечеh
ния;
V з
fk — —момент инерции при кручении;
О
bi и б — ширина и толщина элементарных прямоугольников, образующих сечение; 71, 3 — для двутаврого сечения; у —1,2 — для таврового сечения (для двутаврового сечения с одной осью симметрии принимается промежуточное значение у) 2
2; а
40к
Е1и
г)'-
Е, G — модуль упругости, модуль сдвига.
Для однопролетной свободно опертой балки в упругой стадии работы коэффициент фб, соответствующий большему поясу, определяется по формуле
21 у Шг
фб
103;
h — расстояние центра тяжести сечения большого пояса от центра тяжести всего сечения.
i-т К
При сжатии меньшего пояса фбк Фб — hx
Коэффициент ф вычисляется по формуле.
t А в Увс.
Двутавровые балки с сечением, имеющим только одну ось симметрии (рис. 17.116)
12 — моменты инерции соответственно большего и меньшего поясов относительно оси симметрии сечения;
1г
п — коэффициент асимметрии сечения;
h As
Формулы для вычисления параметров Л, В и С приведены в табл. 17.43 и 17.44.
При чистом изгибе, вызывающем сжатие большего
L
пояса, В —; при чистом изгибе, вызывающем растяп
Р
жение большего пояса, В — —
h
Коэффициенты для балок таврового сечения при действии сосредоточенной или равномерно распределен-
f, lJL. с’ -Ч
л -
МЕЗ
1 г
1 1
Р .Таблица 17.43 Формула для вычисления Л и С
Рис. 17.116
Тип нагрузки
А
С
двутавровое
сечение
тав¬
ровое
сечение
Сила, сосредоточенная в середине пролета
3,265
0,33 п (1 —п) (9,87—ах)
0,0826а
Равномерно распределенная нагрузка
2,247
0,481 п (1 —п) (9,87—а,)
0,1202а
Чистый изгиб
4,315
0,101 п (1—гг) (9,87—аг)
0,0253а
268
РАЗДЕЛ 17. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
Таблица 17.44
Формула для вычисления В
В при
Схема сечения и место приложения нагрузки
силе, сосредоточенной в середине пролета
равномерно распределенной нагрузке
—- ) 1
1
n-J- 0,7337 yh
п -f- 1,145 0Л
j, т т
п — 1 4-0,7337 0yh
п — 1 1,145 ujh
1
1
t
1 — п —0,7337 fryh
1- я — U45 0 А
I
1
— п — 0,7337 yjh
— я — 1,145
ной нагрузки в случае а40 должны быть умножены на
0,80,004а. При я0,9 значения ф определяются линейной интерполяцией между значениями вычисленными при п0,9 и п 1.
Таблица 17.43 для вычисления коэффициентов г) составлена для стали марки Ст.З с пределом текучести ат 2,4 тсм2 и расчетным сопротивлением R 2,1 тсм2. Для сталей других марок коэффициенты , определенные из таблиц, должны быть умножены на отношение 2,4 От или 2.1?.
В случае перехода за предел пропорциональности критических напряжений в меньшем поясе или, кроме того, и в большем, т. е. при фб.н0,85 или, кроме того, при
М
1,0 Фб0,85, в формулу —вместо Фб подстав-
Ф eW
ляется ф или фб н, определяемые по следующим формулам:
при сжатии большего пояса
2JL. „ v5
п (1—п)
Фб Фб.н-
при сжатии меньшего пояса Фб.н Ф б.н
1 — 2 У1 — п (1 — —)
Фб.н.
Фб.н
Значения Фб и фб н определяются по табл. 54 СНиП II-B.3-62
ЛИТЕРАТУРА
1. Бейлин Е. А. Общие уравнения деформационного расчета и устойчивости тонкостенных стержней. Строительная механика и расчет сооружений. 1969, № 5.
2. Б и р г е р И. А. Пановко Я. Г. (ред.) Прочность, устойчивость, колебания. Справочник, т. 3, Машиностроение, 1968.
3. Б л е й х Ф. Устойчивость металлических конструкций (пер. с англ.). Физматгиз, 1959.
4. Б о л о т и н В. В. Неконсервативные задачи теории упругой устойчивости. Физматгиз, 1961.
5. Б р о у д е Б. М. а) О линеаризации уравнений устойчивости равновесия внсцентренно сжатого стержня. В сб.: Исследования по теории сооружений, вып. 8. Госстройиздат, 1959.
б) Теория устойчивости и принципы расчета конструкций. В сб.: Проблемы устойчивости в строительной механике. Стройиздат, 1965.
6. Б у б н о в И. Г. Строительная механика корабля, т. 1. Петербург, 1912.
7. В л а с о в В. 3. Тонкостенные упругие стержни (Прочность, устойчивость, колебания). 2-е изд. Физматгиз, 1959.
8. В о л ь м и р А. С., Устойчивость деформируемых систем. 2-е изд. Наука, 1967.
9. Г а л е р к и н Б. Г. Собрание сочинений, т. 1. Изд-во АН СССР, 1952.
10. Гартман Ф. Устойчивость инженерных сооружений (пер. с нем.). Госстройиздат, 1939.
11. ГеммерЛинг А. В. а) Несущая способность стержневых стальных конструкций. ЦНИИСК. Госстройиздат, 1958.
б) Общий метод расчета рам из упруго-пластического материала. Строительная механика и расчет сооружений, 1968, № 3.
12. Гольденблат И. И., Сизов А. М. Справочник по расчету строительных конструкций на устойчивость и колебания. Госстройиздат, 1952.
13. Горбунов Б. Н. Расчет устойчивости стержней и арок при помощи последовательных приближений. В сб.: Исследование по теории сооружений. Госстройиздат, 1936.
14. Д и н н и к А. Н. Избранные труды. Изд-во АН УССР. Киев, т. 1, 2, 1952; т. 3, 1956.
15. Ж у к о в с к и й Н. Е. Исследование устойчивости конструкции аэропланов. Труды авиац. расчетно-испытат. бюро, вып. 5, 1918.
16. 3 а в р и е в К С. Расчетные формулы прочности в особых случаях. ОНТИ НКТП. 1935.
17. Киселев В. А. Строительная механика. Специальный курс (Динамика и устойчивость сооружений). 2-е изд. Стройиздат, 19G9.
18. К о л о м и е ц В. П. Метод определения напряжений и деформаций в сечении балки при сложном нагружении с учетом действительной диаграммы (о, ej. Изв. вузов, авиац. техника, № 1, 1966.
19. К о р н о у х о в Н. В. а) Прочность и устойчивость стержневых систем. Госстройиздат, 1949. б) Избранные труды по строительной механике. Изд-во АН УССР, Киев, 1963.
20. Косых Э. Г. О статической устойчивости сжато-изогнутого упругого стержня. Известия вузов, стр-во и арх., JVfo'4, 1968.
21. Лейтес С. Д. а) Устойчивость сжатых стальных стержней. Госстройиздат, 1954. б) Справочник по определению свободных длин элементов стальных конструкций. Проектстальконструкция, 1967.
22. Л е й т е с С. Д. Формы равновесия упругих сжатых стержней и природа точек разветвления. В сб.: Исследования по теории сооружений, вып 8. Госстройиздат, 1959.
23. Л е й т е с С. Д. а) Применение метода угловых фокальных отношений к задачам устойчивости стержневых систем. В сб.: Исследования по теории сооружений, вып. 9. Госстройиздат, 1960. б) Устойчивость сжатых стержней, жесткость которых изменяется по степенному закону. В сб.: Материалы по металлическим конструкциям, вып. 6. Госстройиздат, 1962.
24. Л е й т е с С. Д. а) Устойчивость и упруго-пластические деформации внецентренно сжатого тонкостенного двутавра. В сб. Исследования по теории сооружений, вып. 12. Госстройиздат, 1963. б) Поведение и устойчивость центрально и внецентренно сжатых стальных стержней. В сб.: Материалы по металлическим конструкциям, вып. Ц. Стройиздат, 1965.
в) Исследование работы внецентренно сжатых стержней из нелинейно упругих материалов. В сб.: Проблемы устойчивости в строительной механике. Стройиздат, 1965. г) Приближенное решение задачи об устойчивости внецентренно сжатого стержня. Строительная механика и расчет сооружений, 1970, № 3.
25. Л е й т е с С. Д. а) Собственные движения и критические параметры упругих стержней при неконсервативной нагрузке. Прикл. мех., т. 4, вып. 11, 1969. б) Собственные движения и устойчивость упругого сжатого стержня. В сб.: Материалы по металлическим конструкциям, вып. 14. Стройиздат, 1969.
в) Об устойчивости упругого стержня под воздействием нагрузки. ориентация которой зависит от деформаций стержня. В сб.: Исследования по теории сооружений, вып. 18. Стройиздат, 1970.
26. Л е й т е с С. Д., Раздольскчй А. Г. Исследование устойчивости внецентренно сжатых упруго-пластических
ЛИТЕРАТУРА
269
стержней. Строительная механика и расчет сооружений, 1967, Л 1.
27. М а т е в о с я н Р. Р. Устойчивость сложных стержневых систем (качественная теория). ЦНИИСК, вып. 3. Госстройиздат, 1961.
28. М о р г а е в с к и й А. Б. а) Об устойчивости двух- и трехшарнирных арок с учетом поведения нагрузки. Вестник инж. и техн., № 1, 1938. б) Устойчивость арок при неплоской деформации. Прикл. мат. и мех., т. 2, вып. 3. 1939.
29. Нудельман Я. Л. Методы определения собственных частот и критических сил для стержневых систем. Гостехтеориздат, 1949.
30. Н у д е л ь м а н Я. Л., Л я х о в и ч Л. С. Уточнение критерия, определяющего место заданного числа в спектре собственных частот и критических сил упругих систем. В сборнике трудов Томского инж.-строит, ин-та Исследования по строительным конструкциям. Изд-во Томского ун-та, 1968.
31. Пановко Я. Г., Губанова И. И. Устойчивость и колебания упругих систем. Современные концепции, парадоксы и ошибки. 2-е изд. Наука, 1967.
32. П и к о в с к и й А. А. Статика стержневых систем со сжатыми элементами. Физматгиз, 1961.
33. Пинаджян В. В. Некоторые вопросы предельного состояния сжатых элементов стальных конструкций. Изд-во АН АрмССР, Ереван, 1956.
34. П о п о в Е. П. Нелинейные задачи статики тонких стержней. Гостехиздат, 1948.
35. Р ж а н и ц ы н А. Р. Устойчивость равновесия упругих систем. Гостехтеориздат, 1955.
36. С м и р н о в А. Ф. а) Статическая и динамическая устойчивость сооружений. Трансжелдориздат, 1947. б) Устойчивость и колебания сооружений. Трансжелдориздат, 1958.
37. С н и т к о Н. К. а) Устойчивость стержневых систем. Госстройиздат, 1952. б) Устойчивость стержневых систем в упруго-пластической области. Стройиздат, 1968.
38. Стрелецкий Н. С. Материалы к курсу стальных конструкций. Вып. 2, ч. 1. Работа сжатых стоек. Госстройиздат, 1959.
39. Тимошенко С. П. а) Вопросы устойчивости упругих систем. КУБУЧ, 1935. б) Устойчивость упругих систем (пер. с англ.). 2-е изд. Гостехиздат, 1955.
40. Ф р и д м а н А. М. Несущая способность стержневых систем. В сб.: Материалы по металлическим конструкциям, вып. 12. Стройиздат, 1967.
41. Хофф Н. И. Продольный изгиб и устойчивость (пер. с англ.). Изд-во ИЛ, 1955.
42. Ц и г л е р Г. Основы теории устойчивости конструкций (пер. с англ.) Мир, 1971.
43. Чу викин Г. М. Устойчивость рам и стержней. Госстройиздат, 1951.
44. Ч у д н о в с к и й В. Г. Методы расчета колебаний и устойчивости стержневых систем. Изд-во АН УССР, Киев, 1952.
45. Ш е н л и Ф. Теория колонны за пределом упругости (пер. с англ.). В сборнике переводов Механика (ИЛ), № 2, 1951.
46. Ш т а е р м а и И. Я., Пиковский А. А. Основы теории устойчивости строительных конструкций. Госстройиздат, 1939.
47. Ясинский Ф. С. а) Устойчивость деформаций и статика сооружений, 2-е изд., Спб., 1902. б) Избранные работы по устойчивости сжатых стержней. Гостехтеориздат, 1952.
48. Б е с k М. Die Knicklast des einseitig eingesoannte. tangential gedriickten Stabes. Zeitschr. angew. Math, und Phys., № 3. 1952.
49. С h w a 1 1 a E. Theorie des auBermittig gedrfickten Stabes aus Baustahl. Stahlbau, № 21, 22, 23, 1934.
50. Engesser F. Ober Knickfestigkelt gerader Stabe. Zeitschr. Arch.- und Ingen. in Hannover, Bd. 35, 1889.
V
51. Jezek K. Die Festigkeit von Druckstaben aus Stahl. Springer, Wien, 1937.
52. Karman Th. Untersuchungen fiber Knickfestigkeit. Mitteilungen fiber Forschungsarbeiten auf dem Gebiete des Ingenieurwesens. Zeitschr. VDI, JSTs 81, 1910.
52a. Kordas Z. Statecznosc sprezyscie utwierdzonego preta sciskanego w ogolnym przypadku zachowania sile obciazenia. Rozprawy Inzynierskie, Ks 3, 1963.
53. MisesR., Ratzers dorier J. a) Die Knicksicherheit von Fachwerken. Zeitschr. angew. Math, und Mech., ЛЬ 3, 1925. b) Die Knicksicherheit von Rahmentragwerken. Zeitschr. angew. Math, und Mech., X® 3, 1926.
54. P f l й g e r A. Stabilitatsprobleme der Elastostatik. Zweite Ausgabe, Springer, Wien, 1964.
55. W e i n h о 1 d J. a) Zur naherungsweisen Berechnung von Druckbiegestaben in Leichtmetallbau. Aluminium (DOsseldorf), № 10, 1956; № 4, 1958. b) Tragspannungen von Druckbiegestaben aus Aluminium. Aluminium (Dusseldorf), № 3, 1958.
Дополнительную литературу см. в 1-м издании Справочни ка проектировщика, стр. 808 и след.
К. П. 17.13
1. Блейх Ф. Устойчивость металлических конструкций (пер. с нем.). Физматгиз, 1959.
2. Борисов Е. В. Устойчивость окаймленных ребрами полос тонкостенных профилей. СМРС, 1965, Кя 2.
3. Б р о у д е Б. М. Об устойчивости сжатых полок профилей, усиленных бульбами. Сборник ЦНИИСК Исследование по металлическим конструкциям. Госстройиздат, 1961.
4. Б р о у д е Б. М. и Ч у в и к и н Г. М. Обоснование некоторых способов расчета на устойчивость в СН 113-60. Сборник статей Строительные конструкции из алюминиевых сплавов. Госстройиздат. 1962.
5. Б р о у д е Б. М. Теория устойчивости и принципы расчета конструкций. Сборник докладов Проблемы устойчивости в строительной механике. Госстройиздат, 1965.
6. Б р о у д е Б. М. Предельные состояния стальных балок. Госстройиздат, 1953.
7. Иммерман А. Г. и М о с к в и т и н В. С. Экспериментальные исследования местной устойчивости уголковых профилей из сплава Д16-Т. Сборник статей Строительные конструкции из алюминиевых сплавов. Госстройиздат, 1962.
8. Л е й т е с С. Д. Устойчивость внецентренно-сжатого упруго-пластического стержня Н-образного сечения. Материалы по металлическим конструкциям, вып. 11. Госстройиздат, 1966.
9. Москвитин В. С. Практический способ расчета сжатых стержней из алюминиевых сплавов на местную устойчивость, РПК, вып. 9. Стройиздат, 1964.
10. Хертель Г. Тонкостенные конструкции (пер. с нем.). Машиностроение, 1965.
11. В i j 1 а а г d P. Theory of plastic buckling of plates and application to simply supported plates subjected to bending or eccentric compression in their plane, Journal of applied mechanics, USA, № 1, 1956.
12. В i j 1 а а г d P. Buckling of plates under non-homogenuous stress, Proc. amer. soc. civil eng., Journal of the eng. mech. div. EM-3, 1957.
13. D a v i d о n J. Flange bucklingin a bent I-section beam, Journal of the mechanics and phvsics of solids. London, v. 1, № 3, 1953.
14. S u 11 e r K- The local buckling of aluminium plate elements, Sheet metal industries, № 1, 1960.
15. СНиП 11-В.3-70. Стальные конструкции. Нормы проектирования. Стройиздат, 1971.
16. СНиП II-В.5-64. Алюминиевые конструкции. Нормы проектирования. Стройиздат, 1965.
К П. 17.14
1. Броуде Б. М. Предельные состояния стальных балок. Стройиздат, 1953.
2. В л а с о в В. 3. Тонкостенные упругие стержни. Госстройиздат, 1940.
3. DIN 4114, Richtlinien.
4. Nylander Н., Abhadl. Schwed. Ingenieurwiss Akad., Bd 174, Stokholm, 1943.
5. Ж У к о в А. М., Работнов Ю. Н. Исследование пластических деформаций стали при сложном нагружении. Инж. сборник, № 18, 1954.
6. S t й s s i F. Die Grundlagen der mathematischen Plastiztatstheorie und Versuch, Zeitschr. fur angew. Math, und Physik, vol. 1, Fa sc. 4, 1950.
7. СНиП, II-B.3-62. Стальные конструкции. Нормы проектирования. Стройиздат, 1969.
РАЗДЕЛ 18
УСТОЙЧИВОСТЬ ПЛАСТИНОК И ОБОЛОЧЕК. РАСЧЕТ ГИБКИХ ПЛАСТИНОК
18.1. ОПРЕДЕЛЕНИЯ И ОСНОВНЫЕ ОБОЗНАЧЕНИЯ
Критическим напряжением для пластинок называют напряжение, до которого исходное равновесное состояние является устойчивым. Если выпучивание пластинки как элемента конструкции считается недопустимым, то напряжения от расчетной нагрузки должны составлять известную часть от критических. Для пластинок, закрепленных по краям и подвергающихся действию сжатия или сдвига, потеря устойчивости не связана с разрушением; в закритической области пластинка может нести возрастающую нагрузку.
При расчетах оболочек на устойчивость следует различать верхнее и нижнее значения критического напряжения. Под верхним критическим напряжением подразумевается напряжение, до которого исходное равновесное состояние является устойчивьш в малом, т. е. по отношению к весьма малым возмущениям.
Нижним критическим напряжением называют напряжение, до которого исходное равновесное состояние является устойчивым в большом, так что исключен перескок от начального состояния к другому состоянию, характеризуемому большими прогибами.
В реальных конструкциях оболочки обычно имеют начальные прогибы, сравнимые с их толщиной; выпучивание оболочек происходит при напряжениях, лежащих между верхним и нижним критическими значениями.
В практических расчетах оболочек на устойчивость следует определять как верхнее, так и нижнее значения критических напряжений. Напряжения от расчетной нагрузки должны составлять известную долю от верхнего критического напряжения 6, 1967 г., стр. 544. Выпучивание оболочек обычно сопровождается резким хлопком, в процессе которого возникают пластические деформации; потерю устойчивости оболочек надо считать равносильной разрушению. Более подробно см. 6.
При расчете гибких пластинок (см. 18.6) рассматривается действие нагрузок, перпендикулярных срединной плоскости. Подобные нагрузки вызывают изгиб пластинки и деформируют срединную плоскость в срединную поверхность. Если при этом в срединной поверхности не появляется значительных растягивающих или сжимающих напряжений, то пластинка называется жесткой пластинкой или плитой, а в случае если эти напряжения значительны — гибкой пластинкой. Если растягивающие напряжения в срединной поверхности столь велики, что по сравнению с ними можно пренебречь напряжениями от изгиба, то пластинку называют мембраной. Перемещения точек срединной плоскости по перпендикуляру к ней при деформации называют прогибами пластинки и обозначают через w. Принято считать, что теория гибких
пластинок применима при f wМакс t. Пластинка,
в которой при ее нагружении напряжения не превосходят предела упругости, называется упругой. Здесь будут рассмотрены упругие тонкие гибкие пластинки.
Основные обозначения:
t — толщина пластинки или оболочки; а — сторона прямоугольной пластинки; радиус круглой пластинки; b — сторона прямоугольной пластинки; внутренний радиус кольцевой пластинки;
R — радиус срединной поверхности круговой цилиндрической или сферической оболочки;
— длина цилиндрической оболочки;
х, у— координаты точек срединной плоскости прямоугольной пластинки вдоль сторон а и Ь; р — интенсивность поперечной нагрузки (приложенной по нормали к поверхности);
— стрела прогиба (наибольший прогиб);
-у — безразмерная стрела прогиба;
х у—нормальные напряжения в срединной плоскости пластинки (в расчете гибких пластинок различают нормальные напряжения изгиба и растяжения срединной поверхности, обозначая их дополнительными индексами и, с, например: ахи, оус); т — касательные напряжения в срединной поверхности;
, G — модули упругости материала при растяжении (сжатии) и сдвиге;
i — коэффициент Пуассона;
Etz
D — 7, — цилиндрическая жесткость.
12 (1 — fxa)
18.2. УСТОЙЧИВОСТЬ ПЛАСТИНОК В ПРЕДЕЛАХ УПРУГОСТИ
18.2.1. Прямоугольные пластинки
а) Сжатие усилиями, равномерно распределенными по краям х — 0 и х — а (рис. 18.1).
Критическое напряжение
г, пЮ г л2 Е t 2
окьК К (—. (18.1)
р ЬЧ 12 (1 — р.2) Ь I
Коэффициент К зависит от граничных условий и отношения сторон пластинки. Значения коэффициента К для различных граничных условий приведены в табл. 18.1 — 18.5.
На рис. 18.2 приведены графики, по которым можно определить значения,С при отношениях аЬу не помещенных в табл. 18.1 — 18.5.
18.2. УСТОЙЧИВОСТЬ ПЛАСТИНОК В ПРЕДЕЛАХ УПРУГОСТИ
271
б) Нагружение усилиями, распределенными вдоль краев х — 0 и х а (рис. 18.3) по линейному закону
70 (l — a-f-J (при -J- 2J.
Критическое напряжение (7хо)кр определяется по формуле (18.1). Значения коэффициента К для случая, когда все края пластинки шарнирно оперты, приведены
Рис. 18.1
в табл. 18.6—18.8. Для случая упругого защемления по краям у 0, у Ь и шарнирного опирания остальных краев коэффициенты Д даны в табл. 18.9.
в) Сжатие двумя сосредоточенными силами, приложенными в серединах больших сторон (рис. 18.4). Критическая сила
п Et3
PKDK— . (18.2)
кр 3 (1 — yfl)b
Для случая, когда все края пластинки шарнирно оперты, значения К даны в табл. 18.10.
В случае защемления всех краев пластинки
nEt3
кр
'3(1
с Et I а
(И'31
При защемлении по краям 0, х а и шарнирном опирании по краям у 0, у — Ь 2я Et3
3 (1 — л2) 6
при
-И-
(18.4)
Значения коэффициента К в формуле (18.1)
о О, 6
Таблица 18.1
Граничные условия
аЬ
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1.0
1,1
1,2
1,3
1,4
1,5
1,6
1,7
1,8
От
1,9
ДО оо
Все края пластинки шарнирно оперты
27
13,2
8,41
6,25
5,14
4,53
4,2
4,04
4,0
4,04
4,13
4,28
4,47
4,34
4,2
4,08
4,05
4,0
Таблица 18.2
Значения коэффициента К в формуле (18.1)
Граничные условия
аЬ
0,6
О
00
1,9
1.2
1,4
1,6
1,8
2,0
3,0
оо
Все края пластинки защемлены.
9,4
9,3
8,8
8,5
8,5
8,2
7,8
7,0
Защемление по краям t0 и уЬ при шарнирном опирании остальных краев 7,05
7,29
7,69
7,15
7,04
7,2
7,05
7,0
7,15
7,0
Защемление по краям х0 и ха при шарнирном опирании остальных краев 13,38
8,73
6,74
5,84
5,45
5,34
5,18
4,85
4,41
4,0
Шарнирное опиранне по краям х0 и ха, защемление по краю у0 и при свободном крае УЬ. 2,7
1.7
1,47
1,36
1,33
1,34
1,38
1,36
1,33
Шарнирное опирание по краям хО, х—а и t0 при свободном крае tj b 3,65
2,15
1,44
1,14
0,95
0,84
0,76
0,7
0,56
0,46
272
РАЗДЕЛ 18. УСТОЙЧИВОСТЬ ПЛАСТИНОК И ОБОЛОЧЕК. РАСЧЕТ ГИБКИХ ПЛАСТИНОК
г) (Касательные усилия, равномерно распределенные по всем краям (рис. 18.5).
Критическое напряжение сдвига (при аЬ)
л2 t 2
"85
При шарнирном опирании всех краев (5,34
‘(т)-
Значения коэффициента tK для других граничных условий приведены в табл. 18.11.
1 -к
г
t.
- а Рис. 18.3
'1
’й
2 2
А
Рис. 18.4
Рис. 18.5
Т а б л и ц а 18.3
Значения коэффициента К в формуле (18.1) для случая упругого защемления края у0 и шарнирного опирания остальных краев
GIJDb
л
0,25
0,5
1,0
2,0
4,0
6,0
10,0
0,5
6,52
6,63
6,71
6,77
6,81
6,82
6,83
0,6
5,44
5,58
5,70
5,79
5,85
5,87
5,89
0,7
4,85
5,03
5,19
5,32
5,40
5,44
5,46
0,8
4,56
4,75
4,96
5,13
5,25
5,30
5.34
0,9
4,42
4,64
4,89
5,11
5,28
5,40
5,40
1,0
4,39
4,64
4,93
5,21
5,43
5,52
5,60
ок
— жесткс
сгь на кручение
ребра,
примыкающего
) к за-
щемленному краю (характеризует степень защемления).
Таблица 18.4
Значения коэффициента К в формуле (18.1) для случая упругого защемления края 0 и шарнирного опирания остальных краев
ft
Ск
Da
а
0,25
0,5
1,0
2,0
4,0
10
0,33
4,08
4,09
4,10
4,11
4,11
4,11
0,5
4,16
4,19
4,21
4,23
4,23
4,24
1,0
4,32
4,46
4,60
4,70
4,77
4,82
1,5
5,10
5,39
5,76
6,14
6,46
6,73
2,0
6,70
7,06
7,60
8,28
8,98
9,68'
2,5
8,87
9,28
9,94
10,89
12,00
14,75
3,0
11,59
12,02
12,77
13,91
15,43
17,50
Таблица 18.5
Значения коэффициента К в формуле (18.1) для случая одинакового упругого защемления по краям 0, уЪ и шарнирного опирания остальных краев
а
GIJDa
ь 0,25
0,5
1,0
2,0
4,0
10,0
0,5
6,84
7,09
7,31
7,47
7,57
7,64
0,6
5,30
о,12
6,43
6,68
6,85
6,96
0,7
5,24
5,64
6,05
6,42
6,67
6,86
0,8
4,95
5,42
5,97
6,44
6,80
7,08
0,9
4,84
5,36
5,99
6,62
7,12
7,52
1.0
4,79
5,39
6,14
6,92
7,57
7,64
Таблица 18.6
Значения коэффициента К в формуле (18.1) для случая шарнирного опирания всех краев
аЬ
а
0,40
0,50
0,60
0,667
0,75
0,80
0,90
1,0
1.5
2
29,1
25,6
24,1
23,9
24,1
24,4
25,6
25,6
24,3
4
3
18,7
-
12,9
-
11,5
11,2
-
11,0
11,5
1,0
15,1
-
9,7
-
8,4
8,1
-
7,8
8,4
4
5
13,3
-
8,3
-
7.1
6,9
-
6,6
7,1
2
3
10,8
-
7,1
-
6,1
6,0
-
5,8
6,1
Примечание. Значение а 0 относится к случаю равномерно распределенной сжимающей силы; а 2 — к чистому изгибу; при а 2 имеет место сочетание изгиба и сжатия; при а2 — сочетание изгиба и растяжения.
Таблица 18.7
Значения коэффициента К в формуле (18.1) для случая шарнирного опирания всех краев при а 3
а
b
0,Г8
0,34
0,40
0,44
0,46
0,52
0,58
0,64
К
63,44
56,89
54,32
53,281
53,87
54,83
57,02
60,05
Таблица 18.8
Значения коэффициента К в формуле (18.1) для случая шарнирного опирания всех краев при ос 4
а
Ь
0,20
0,25
0,30
0,33
0,35
0,45 '
0,48
К
116,0
103,6
97,3
96,2
96,3
103,5
107,4
18.2. УСТОЙЧИВОСТЬ ПЛАСТИНОК В ПРЕДЕЛАХ УПРУГОСТИ
273
Таблица 18.9
Значения коэффициента К в формуле 18.1) для случая упругого защемления по краям уО, уЬ и шарнирного опирання остальных краев
а
GJJDb
а
Ь
0,25
0,50
1,0
2,0
4,0
10,0
0,5
12,83
13,37
13,86
14,23
14,46
14,62
0,6
11,03
11,69
12,34
12,87
13,23
13,48
0,7
10,22
10,86
11,72
12,44
12,96
13,35
1,0
0,8
9,60
10,50
11,55
12,53
13,26
13,83
0,9
9,41
10,42
11,68
12,94
13,93
14,74
1,0
9,40
10,52
11,99
13,54
14,46
14,62
0,4
34,05
36,04
37,79
39,03
39,80
40,32
0,5
30,45
32,83
35,17
37,01
38,24
39,10
2,0
0,6
29,11
31,90
34,92
37,52
39,35
40,72
0,7
29,00
32,17
35,91
39,41
42,06
44,14
Таблица 18.10 Значения коэффициента К в формуле (18.2)
Граничные условия
аЬ
1,0
2,0
3,0 оо
Все края пластинки шарнирно оперты 1,49
1,03
1,00
1,00
Таблица 18.11 Значения коэффициента К в формуле (18.5)
Граничные условия
аЬ
1,0
1,5
2,0
2,5
3,0
со
Все края пластинки защемлены.
14,58
11,40
10,96
10,85
8,99
Шарнирное опирание по краям х—0 и ха, защемление по краям у0 и уЬ
12,28
11,12
10,21
9,81
9,61
8,99
Защемление по краям 0 и ха, шарнирное опирание по краям у—0 и уЬ
12,28
7,78
6,70
6,40
6,17
5,35
Таблица 18.12
Значения коэффициента К для случая шарнирного опирания всех краев
а
b
V
0,2
0,4
0,6
0,8
1,0
2,0
1.0
3,36
2,85
2,50
2,22
2,00
1,33
2,0
3,36
2,40
1,84
1,49
1,25
0,69
3,0
3,24
2,42
1,74
1,36
1,11
0,58
оо
3,20
2,40
1,67
1,25
1,00
0,50
На рис. 18.6 приведены графики, с помощью которых можно определять значения Д при отношениях аЬ, не помещенных в таблицах.
д) Одновременное сжатие усилиями, равномерно распределенными в двух направлениях (рис. 18.7). Отношение сжимающих усилий задано:
Критическое напряжение определяется по формуле (18.1). Значения коэффициента Д для случая шарнирного опирания всех краев даны в табл. 18.12.
Рис. 18.7
Для случая, когда все края пластинки шарнирно оперты, рекомендуется также пользоваться формулой
т2 п2 Et2 lm2 я2
ах — оу — 0,823
(1 — (1)
(т2 п2
'—v)' (,8-6)
где т и л —числа полуволн в направлении хну соответственно.
Если Ох удовлетворяет неравенству
г)с(52г)
где
_ 0,823 ЕГ(1 —ц3)а-’
то для нахождения при заданной величине а под¬
ставляют в формулу (18.6) m 1 и п— 1.
Если ах велико и не удовлетворяет неравенству (18.7), в формуле (18.6) берут п— 1, а величина т-определяется из условия
с (2m2 —2т12
2 ) Охс2т22т 2-.
Если ох мало и не удовлетворяет неравенству (18.7), в формуле (18.6) берут т— 1, а величина п определяется из условия
с 11—(л—l)a-jo,c jl—(п1)2 -J.
274
РАЗДЕЛ 18. УСТОЙЧИВОСТЬ ПЛАСТИНОК И ОБОЛОЧЕК. РАСЧЕТ ГИБКИХ ПЛАСТИНОК
Для случая, когда все края пластинки защемлены, формула для определения критического напряжения имеет вид
a2 EtW 3 3, 2 1о о
Д— м Q2fe)- (18-8)
По заданному одному из двух напряжений находится значение второго напряжения, при котором пластинка
бу
♦ М М ♦ М
о
т
1 Л
6
Рис. 18.8
— I
г I
гг-—Л
i. _
11 М 111 г
— а Тбх
Рис. 18.9
теряет устойчивость. Уравнение это приближенное и дает хорошие результаты для квадратной пластинки и при от оу.
е) Совместное действие усилий сжатия (растяжения), равномерно распределенных по краям х — 0, х — а, и касательных усилий, равномерно распределенных по всем краям (рис. 18.8).
Все края пластинки шарнирно оперты. Формула для определения критического напряжения имеет вид:
—f (У 1, (18.9)
о т0
где а0 и то — критические напряжения сжатия и сдвига для пластинки заданных размеров и граничных условий при раздельном действии усилий сжатия и сдвига.
По данному уравнению могут быть найдены критические напряжения, если задано отношение аКртКр или задана одна из этих величин.
В случае растягивающих усилий первому члену в левой части уравнения должен быть придан знак минус.
ж) Совместное действие равномерно распределенных по всем краям усилий сжатия (растяжения) и касательных усилий (рис. 18.9).
Если все-края пластинки шарнирно оперты 19:
крс (2-jl-
(Т а у
2—-
X
Чср
X 2,31 у В обоих случаях
4 — 8 — —.
с с
0823 Е ( t
1
bl
При растяжении ох и оу отрицательны. з) Совместное действие изгибающих усилий по краям х—0, х—а и касательных усилий по всем краям (рис. 18.10).
- а __г ff
'i
i
V
j
1
Рис. 18.10
Если все края пластинки шарнирно оперты, то критические напряжения определяются из зависимости:
(?),(?),',8Л21 где о0 и то — критические напряжения изгиба и сдвига для пластинки заданных размеров и граничных условий при раздельном действии изгиба и сдвига.
По данному уравнению могут быть найдены критические напряжения, если задано отношение (Укрткр или одна из этих величин. Можно пользоваться также формулой (18.1), где К зависит от тто (отношение действительного напряжения сдвига к критическому напряжению сдвига при отсутствии изгибающих усилий) и отношения аb. Коэффициент К отклоняется менее, чем на 10 от значений, данных в табл. 18.1 и 18.2 для величин аb, равных 0,5-f-l. Для ab 1 значения коэффициента К приведены в табл. 18.13.
Таблица 18.13 Значения коэффициента К при ab 1
т
То
0
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1,0
К
25,6
24,8
23,8
22,5
21,5
19,5
17,0
1
14,5
1
9,95
0
X 2 l 6-j. (18.10)
Для случая, когда все края пластинки защемлены 19:
18.2.2. Прямоугольные и квадратные пластинки, подкрепленные ребрами
Сжатие усилиями, равномерно распределенными по краям л:0 и х — а.
а) Одно продольное ребро, делящее пластинку пополам (рис. 18.11).
Все края пластинки шарнирно оперты. Критическое напряжение определяется по формуле (18.1). Коэффициент
(1 Р2)2 2у
РЧ126) ’
X
(18.11)
- о -1
—Wi
i
7
♦
и
Рис. 18.11
Рис. 18.12
18.2. УСТОЙЧИВОСТЬ ПЛАСТИНОК В ПРЕДЕЛАХ УПРУГОСТИ
275
Таблица 13.14
Значения коэффициента К для случая одного продольного ребра
V 5
V ю
V 15
О
см
II
? -3
II
р
о
о
см
ю
о
о
8
о
о
о
м
о
о
о
о
8
о
о
o'
о
сГ
о
o'
о
о"
сГ
о
сГ
о"
о
о
II
II
II
II
II
II
II
II
II
II
II
II
II
II
II
ю
о
ьО
о
го
го
СО
о
о
к
о
о
о
оО
о
0,6
16,5
16,5
16,5
16,5
16,5
16,5
16,5
16,5
16,5
16,5
16,5
16,5
16,5
16,5
16,5
0,8
15,4
14,6
13
16,8
16,8
16,8
16,8
16,8
16,8
16,8
16,8
16,8
16,8
16,8
16,8
1.0
12
11,1
9,72
16
16
15,8
16
16
16
16
16
16
16
16
16
1,2
9,83
9,06
7,88
15,3
14,2
12,4
16,5
16,5
16,5
16,5
16,5
16,5
16,5
16,5
16,5
1,4
8,62
7,91
6,82
12,9
12
10,3
16,1
15,7
13,6
16,1
16,1
16,1
16.1
16,1
16,1
1.6
8,01
7,38
6,32
11,4
10,5
9,05
14,7
13,6
11,8
16,1
16,1
14,4
16,1
16,1
16,1
1,8
7,84
7,19
6,16
10,6
9,7
8,35
13,2
12,2
10,5
15,9
14,7
12,6
16,2
16,2
14,7
2,0
7,96
7,29
6,24
10,2
9,35
8,03
12,4
11.4
9,8
14,6
13,4
11,6
16
15,4
13,3
2,2
8,28
7,58
6,5
10,2
9,3
7,99
12
11
9,45
13,9
12,7
10,9
15,8
14,5
12,4
2,4
8,79
8,05
6,91
10,4
9,49
8,15
11,9
10,9
9,37
13,5
12,4
10,6
15,1
13,8
11,9
2,6
9,27
8,5
7,28
10,8
9,85
8,48
12,1
11.1
9,53
13,5
12,4
10,6
14,8
13,6
11,6
2,8
8,62
7,91
6,31
11,4
10,4
8,94
12,5
11.5
9,85
13,7
12,6
10,8
14,8
13,6
11,6
3,0
8,31
7,62
6,53
12
11,1
9,52
13,1
12
10,3
14,1
13
11,1
15,2
13,9
11,9
3,2
8,01
7,38
6,32
11,4
10,5
9,05
13,9
12,7
10,9
14,8
13,5
11,6
15,6
14,3
12,3
3,6
7,84
7,19
6,16
10,6
9,7
8,35
13,2
12,2
10,5
15,9
14,7
12,6
16,2
15,7
13,5
4,0
7,96
7,29
6,24
10,2
9,35
8,03
12,4
11.4
9,8
14,6
13,4
11,8
16
15,4
13,3
Таблица 18.15
Значения коэффициента К для случая двух продольных ребер
10
20
10
3
V
3
Vs
5
У '
3
V :
60,05
О
II
р
50,05
60,1
60,05
60,1
60,05
60,1
0,6
28,6
24,1
36,4
33,2
36,4
36,4
36,4
36,4
0.8
16,9
15
23,3
20,7
29,4
26,3
37,2
37,1
1,0
12,1
10,7
16,3
14,5
20,5
18,2
28,7
25,6
1,2
9,61
8,51
12,6
11,2
15,5
13,8
21,4
19
1.4
8,32
7,36
10,5
9,32
12,7
11,3
17,2
15,2
1,6
7,7
6,81
9,4
8,31
11,1
9,82
14,5
12,8
1,8
7,51
6,64
8,85
7,83
10,2
9,02
12,9
11,4
2,0
7,61
6,73
8,7
7,69
9,78
8,65
11,9
10,6
Т а б л и ц а 18.16
Предельные значения у для случая одного поперечного ребра
Р
0,5
0,6
0,7
0,8
0,9
1
1.2
1,4
V
12,6
7,18
4,39
2,8
1,82
1,26
0,433
0
где
п В С F
р , 7 —, б ;
Ъ ЪВ Ы
В — жесткость при изгибе ребра; F — площадь сечения ребра; D — цилиндрическая жесткость пластинки.
Вычисленные значения коэффициента К даны в табл. 18.14.
Значения Л, стоящие в таблице над величинами, показанными жирным шрифтом, те же, что и для свободно опертой пластинки с шириной, равной 62.
б) Два продольных ребра, делящих пластинку на три равные части (рис. 18.12).
Все края пластинки шарнирно оперты. Критическое напряжение определяется по формуле (18.1), коэффициент
(1 В2)2 Зу Р2(1Зб)
Значения коэффициента К для некоторых величин Р, Y и б приведены в табл. 18.15.
в) Число продольных ребер более двух (рис. 18.13). Все края пластинки шарнирно оперты. Критическое напряжение
Е М2.„-3,38—ДТ), 8.13)
И
Рис. 18.13
Рис. 18.14
пред-
где с — расстояние между продольными ребрами; полагается малым по сравнению с а.
г) Одно поперечное ребро, делящее пластинку пополам (рис. 18.14).
тгг
14
Гпг-ГТ
I I. I
11С U-I
111 II I
lii-i i I 1
Рис. 18.15
Рис. 18.16
Все края пластинки шарнирно оперты. Критическое напряжение определяется по формуле (18.1), причем
с -(1 У)22уР3
276
РАЗДЕЛ 18. УСТОЙЧИВОСТЬ ПЛАСТИНОК И- ОБОЛОЧЕК. РАСЧЕТ ГИБКИХ ПЛАСТИНОК
В табл. 18.16 даны предельные значения у при которых выпучивание пластинки не сопровождается потерей устойчивости ребер.
д) Три одинаковых поперечных ребра, расположенных на одинаковых расстояниях (рис. 18.15).
Все края пластинки шарнирно оперты. Критическое напряжение определяется формулой (18.1):
(1 Р)' 2гР
к- Р '
Предельные значения у приведены в табл. 18.17.
Т а б л и ц а 18.17 Предельные значения v Для случая трех поперечных ребер
0
0,6
0,8
1
1,2
1.4
V
101
42,6
21,7
12,4
7,71
Все края пластинки шарнирно оперты. Критическое напряжение определяется по формуле (18.5). В табл. 18.20 даны предельные значения К.
г) tКвадратная (прямоугольная) пластинка, подкрепленная диагональным ребром (рис. 18.20).
Все стороны шарнирно оперты. Критическое напряжение для каждой из треугольных панелей
Et2 я4
Ткр 3,07 а2 (1
о
-Р)
0
(
X
f
1
НО
и
(18.15)
п.
Рис. 18.21
е) Число поперечных ребер больше трех (рис. 18.16). Все края пластинки шарнирно оперты. Критическое напряжение
Е ( М2 скр 0,845 — (18.14)
где с предполагается малым по сравнению с Ь.
Действие касательных усилий, равномерно распределенных по всем кромкам
а) Одно поперечное ребро, делящее пластинку пополам (рис. 18.17).
Все края пластинки шарнирно оперты.
При некоторых предельных значениях жесткости В ребра каждая половина пластинки будет выпучиваться как прямоугольная пластинка размерами а2 и b со свободно опертыми краями, а ребро остается прямым. Соответствующие значения у даны в табл. 18.18.
и
а_ а
1
н
j 2
и
X
П
ti
J I J I
Рис. 18.17
Рис. 18.18
Таблица 18.18
Предельные значения у Для случая одного поперечного ребра
а
Ь
2
1,5
1,25
1
В
0,83
2,9
6,3
15
D а
Таблица 18.19 Предельные значения у для случая двух поперечных ребер
а
Ь
3
2,5
2
1,5
1.2
В
‘0,64
1,37
Я,53
10,7
22, Ь
D а
Таблица 18.20
Предельные значения К
У
5"
10
20
30
40
50
60
70
80
90
100
К
6,98
7.7
8,67
9,36
9,9
10,4
10,8
11,1
11,4
11,7
12
Ч-
U
:rtr г: lit-.
Рис. 18.19
Изгибная жесткость диагонального ребра должна удовлетворять неравенству 17
at Е
В 0,5806 ;
12(1 —ц2)
при этом ребро сохраняет свою прямолинейную форму вплоть до выпучивания треугольных панелей.
б) Два поперечных ребра, делящих пластинку на три равные части (рис. 18.18).
Все края пластинки шарнирно оперты. Предельные значения у даны в табл. 18.19.
в) Длинная прямоугольная пластинка с несколькими продольными ребрами (рис. 18.19).
Чистый изгиб
а) Одно продольное ребро на расстоянии Ь от сжатого края (рис. 18.21).
Все края прямоугольной пластинки шарнирно оперты. Приближенная формула для наибольшей возможной ве-
18.2. УСТОЙЧИВОСТЬ ПЛАСТИНОК В ПРЕДЕЛАХ УПРУГОСТИ
277
личины Yp при заданных bjb и К может быть представлена в виде 1
Yd y2 Sc, (18.16)
где
Р
bt
Значения ур даны в табл. 18.21.
Значения у
Т а б л и ц а 18.21
ЬгЬ
13
0,25
К
50
50
60
70
3
2,6
3,9
7.3
F
С
26
56
92
107
Для указанных в таблице значений bjb и,К величина Ffbt не превосходит 0,06.
Кроме того, можно пользоваться следующими приближенными формулами: если К — 80
Yp — 13,5 — 5,3 — -(- 46 6
(18.16')
если Д 100
(при 1 -2-2,25;
Vp (17.5-6-2- 58б)-21 (при 1 -у- 2,5.
(18.16')
Граничные кривые для комбинации чистого изгиба с чистым сдвигом для пластинок, укрепленных продольными ребрами, а также о влиянии упругого защемления продольных сторон пластинки на критические усилия см. 1.
18.2.3. Несущая способность подкрепленных ребрами прямоугольных пластинок после потери устойчивости при сжатии, сдвиге и чистом изгибе.
Редукционные коэффициенты
Прямоугольная пластинка шарнирно оперта на ребра, жесткие по отношению к изгибу.
а) Сжатие в направлении стороны а (а Ь)
В этом случае после потери устойчивости пластинка может нести возрастающую нагрузку, превышающую значение критической нагрузки.
С увеличением нагрузки закон распределения напряжений в срединной поверхности меняется. В то время как в центральной части пластинки напряжения мало отличаются от критических, в краевых полосах, прилегающих к продольным ребрам, напряжения (Тр пропорциональны (в пределах упругости) относительному сближению нагруженных кромок е:
ор Ее. (18.17)
Эпюра сжимающих напряжений по ширине пластинки приведена на рис. 18.22.
Нагрузка, воспринимаемая пластинкой после потери устойчивости, определяется по формуле
Р (pop bt у (18.18)
где ф — так называемый редукционный коэффициент.
Рис. 18.23
Этот коэффициент определяется по следующим формулам:
- V f:
(18.19)
— при проверке прочности перекрытий, состоящих из значительного числа смежных панелей обшивки, подкрепленных жесткими на изгиб ребрами;
(18.20)
— при проверке прочности изолированных панелей и конструадий, состоящих из обшивки, подкрепленной относительно небольшим числом ребер.
В формулах (18.19) и (18.20): акр — критическое напряжение для пластинок заданных размеров; ар — напряжение в подкрепляющих ребрах.
Несущую способность пластинок определяют обычно из условий прочности и устойчивости подкрепляющих ребер.
б) Действие касательных усилий т (рис. 18.23).
Пластинкя может нести после потери устойчивости возрастающую нагрузку, во много раз превосходящую критическую В случае тонкой длинной пластинки (а 6) при значительной деформации образуется диагональное поле растяжения с ярко выраженными наклонными складками.
Напряжение растяжения
2т
Ji
sin 2а
418.21)
где а—угол между направлением складок и длинной стороной (близкий к 40 ).
Главными напряжениями сжатия сг2 можно пренебречь.
18.2.4. Непрямоугольные пластинки
а) Круглые пластинки под действием сжимающих радиальных усилий, равномерно распределенных по конТУРУ
1) Сплошная пластинка (рис. 18.24). При шарнирном опирании по контуру
jkp0,425 — ял (18-22)
12 (1
К в
При защемлении по всему контуру коэффициент формуле (18.22) вместо 0,425 равен 1,49.
2) Круглая пластинка с отверстием (рис. 18.25). Критическое напряжение определяется по
278
РАЗДЕЛ 18. УСТОЙЧИВОСТЬ ПЛАСТИНОК И ОБОЛОЧЕК. РАСЧЕТ ГИБКИХ ПЛАСТИНОК
формуле (18.1). Для случая опирания по внешнему контуру при свободно смещающемся внутреннем контуре значения коэффициента К приведены в табл. 18.22 и 18.23.
б) Эллиптическая пластинка под действием сокимающих усилий, равномерно распределенных по контуру (рис. 18.26).
Рис. 18.25
Рис. 18.26
Таблица 18.22 Значения коэффициента К при шарнирном опирании
Продолжение табл. 18.22
а
Ь
4
5
6
7
8
9
К
0,28
0,256
0,231
0,219
0,207
0,195
Таблица 18.24
Значения коэффициента К для эллиптических пластинок, защемленных по всему контуру
а
Ъ
1
1,1
1,2
1,3
2
5
К
1,49
1,38
1,30
1,23
1,12
1,15
Шарнирное опирание по всему контуру. Критическое напряжение
акр 4,0 12(1- И ("Г) ‘ (18'23)
г) Косоугольные пластинки; шарнирное опирание по всем кромкам
1) Равномерное сжатие в направлении, параллельном двум сторонам (рис. 18.28). Критические напряжения относятся к меньшей из сто-
по
внешнему
контуру
рон
а
Ь
0
1
2
3
В
К
0,425
0,4
0,265
0,328
кр—К
п2_Е t 2
-И с ) ‘
12(1
(18.24)
В табл. 18.25 приведены значения коэффициента К.
Таблица 18.25 Значения коэффициента К в формуле (18.24)
Ф в град
аЬ
0
12
23
1 1
о
3
1 00
90
1
1,56
2,08
4
4
4
4
60
1,31
1,95
2,6
4,99
4,54
4,13
4
45
1,86
2,48
3,2
5,96
5
4,25
4
30
2,71
3,28
3,9
6,68
5,3
4,35
4
Таблица 18.23
Значения коэффициента К при защемлении по внешнему контуру
Ь
а
0
0,1
0,2
0,3
0,4
0,5
К
1,49
1,43
1,35
1,47
1,79
2,52
При защемлении по всему контуру критическое напряжение определяется формулой (18.1). Значения Дг приведены в табл. 18.24.
в) Равносторонняя треугольная пластинка под действием равномерного сжатия со всех сторон (рис. 18.27).
2) Действие касательных сил, равномерно распределенных по всем кромкам (рис. 18.29). Критическое напряжение определяется по формуле (18.24). При сдвиге существенную роль играет направление касательных усилий. Значения С даны в табл. 18.26—18.27.
18.3. УСТОЙЧИВОСТЬ НЕЗАМКНУТЫХ ОБОЛОЧЕК (ПАНЕЛЕЙ) В ПРЕДЕЛАХ УПРУГОСТИ
279
Таблица 18.26 Значения К для положительного сдвига (рис. 18.29, а)
bfa
в град
90
75
60
1 45
30
1
9,34
13,78
20,58
31,9
53,5
0,7
7,26
10,6
15,52
23,8
39,7
0,4
6,2
9,9
12,7
18,91
30,65
0
5,35
7,61
10,9
16,1
25,9
Таблица 18.27 Значения К для отрицательного сдвига (рис. 18.29, б)
Ьа
Ф в град
90
75
60
45
30
1
9,34
6,64
4,74
3,58
2,46
0,7
7,26
5,25
3,79
2,69
1,78
0,4
6,2
4,3
3,21
2.17
1,37
0
5,35
3,78
2,63
1,79
1.11
3) Равномерное сжатие в направлении, параллельном двум сторонам, и сдвиг усилиями вдоль двух других сторон (рис. 18.30). Если тр и а®р — критические напряжения при изолированном действии сдвига и сжатия, то кри-
Рис. 18.30
тические напряжения тКр и акр при совместном их действии определяются по следующей приближенной формуле 12J:
-т2-(1-Ю-с
кр
2(1- 2)1, (18.25)
кр
где
COS ф 1 COS2 ф
При положительном сдвиге (ф90 ) С положительно, а при отрицательном сдвиге (или при ф90 ) — отрицательно.
При заданных напряжениях т и о запас устойчивости п определяется как положительный корень квадратного уравнения
Ап Bn— 1 0, (18.26)
где
л_ JL±iJE_ 1- UkD
кр
К
1-с
18.3. УСТОЙЧИВОСТЬ НЕЗАМКНУТЫХ ОБОЛОЧЕК (ПАНЕЛЕЙ)
В ПРЕДЕЛАХ УПРУГОСТИ
18.3.1. Цилиндрические панели
а) Под действием сжимающих усилий, равномерно распределенных вдоль кромок х0 и ха (рис. 18.31).
При шарнирном опирании панели по всем кромкам верхнее критическое напряжение 6
У 3 (1 — (18.27)
Формула применима при условии 2л
V 12 (l-и2)
При меньших значениях угла а, если отношение
а
-g целое число, критическое напряжение
п2Е t V
3(1
Е 11 у, 1 „6v
(т) ЕЫ- (18-27,1
Верхние критические напряжения для квадратной панели при шарнирном опирании по всем кромкам приведены в табл. 18.28.
Таблица 18.28
Ь9
'
Rt
0
6
12
18
24
9,6
10,3
12,3
15,8
20,6
кр
Для панели с ab 1 нижнее критическое напряжение определяется формулой 6
22,2 b у
280
РАЗДЕЛ 18. УСТОЙЧИВОСТЬ ПЛАСТИНОК И ОБОЛОЧЕК. РАСЧЕТ ГИБКИХ ПЛАСТИНОК
Нижние критические напряжения для удлиненных панелей 6
т„3,6 -) (при “20; (18.29
t I Ъ2 сги 0,18Е "(нри 20J. (18.
.29)
30)
Все края панели защемлены. Верхнее критическое напряжение
8 я2Е (J_ 2 J2 I Ь
3 Ъ 2
Е —-(18.31)
16л2 R
9 1 — у.
В табл. 18.29 приведены верхние критические напряжения для квадратной цилиндрической панели при всех защемленных краях.
Таблица 18.29
ьг
Rt
0
6
12
18
24
ш
3,6
4,5
7,2
11,8
18,0
б) Под действием равномерно распределенных по всем кромкам касательных усилий (рис. 18.32).
Рис. 18.32
Все кромки панели шарнирно оперты. Верхнее критическое напряжение
тв 0,10 4- 5е(— Гр, (18.32)
где
R ' V Ь)
Все кромки панели защемлены. Верхнее критическое напряжение
тв 0,1 Е 7,5 (18.33)
Можно пользоваться также графическими зависимостями, представленными на рис. 18.33 и 18.34. Интенсивность нижних критических касательных усит а2
(т-)
лий т для шарнирно опертой панели
будет определяться следующими приближенными формулами
т. 8,5 (при ю);
тн 7,50,1 (при 10Г25);
в) Под действием равномерного внешнего давления р (рис. 18.35).
Кр-ая х ±2, а—0 и a — bR шарнирно закреплены в направлении нормали к панели.
К
Рис. 18.36
Приближенные формулы для определения верхнего критического давления 8:
2л
Ркр.в :
зУ в (i-И
0,75
t ( t 32
тЫ 08 341
18.4. УСТОЙЧИВОСТЬ ЗАМКНУТЫХ ОБОЛОЧЕК В ПРЕДЕЛАХ УПРУГОСТИ
281
если m 1 Р кр.в
i
л2
12(1 — ц2) Ъ
-У—1-
ь ) я2 р;ч
(18.35)
R
я R’
если т1, где
v f R f л
т, 2,77 1 -ц у — -
6 — длина дуги панели.
Формулы и графики для определения нижнего критического давления см. 0.
18.3.2. Конические панели
Коническая панель под действием равномерного внешнего давления р (рис. 18.36). Края панели закреплены в направлении нормали.
Приближенные формулы для определения верхнего критического давления 8:
2л Е t ( t з2
Ркр.в —— — (—). (18.36)
. — (—Y
з JF (1-)0-75 1 UJ
_г t Г я А 6ср
Л. 12(1-) ' 62р „22 ;4
если га 1;
Ркр.в
если ш 1, где
(18.37)
cos а
nR
Ье. -j5aLp.
2а — угол конусности.
18.3.3. Сферические панели
Сферическая панель под действием равномерного внешнего давления р (рис. 18.37)
U
Рис. 18.37
Верхнее критическое давление EV
Ркр.в-.
(18,38)
Коэффициенты Ки 2. з, К зависят от граничных условий и приведены в табл. 18.30 (принято ц — 0,3). Для сферических панелей с отношением Rt, лежа¬
щим в пределах от 400 до 2 000, и углом охвата 0 от 40 до 120 можно рекомендовать следующую экспериментальную формулу 6:
Ррасч 0,3 КЕ (18.38')
где коэффициент
С-(1-0,176 _о.07-г). (,8.38')
400 t)
Т а б л и ц а 18.30 Значения коэффициентов К2, К3, С4 в формуле (18.38)
Граничные условия
Кх
Кг
Кз
4
При шарнирном опирании по контуру, свободно смещающемуся в своей плоскости (распор отсутствует) 1,41
0,00202
1,08
0,25
При шарнирном опирании по контуру, не смещающемуся в своей плоскости 1,52
0,00576
0,407
2,07
Контур защемлен, но распор отсутствует 4,56
0,00505
5,92
0,0835
Контур защемлен и не смещается 5,45
0,05
3,29
0,394
18.4. УСТОЙЧИВОСТЬ ЗАМКНУТЫХ ОБОЛОЧЕК В ПРЕДЕЛАХ УПРУГОСТИ
18.4.1. Цилиндрические круговые оболочки
а) Равномерное осевое сжатие (рис. 18.38). Шарнирное опирание по обеим кромкам. Верхнее критическое напряжение 6, 1967 г. в случае местной потери устойчивости
акр.в Е (1:8.39)
V3(l -Ц) Я
Рис. 18.39
При 0,25-г-0,32
акр.в
(18.40)
Нижнее ближнее критическое напряжение 6
t
(18.41)
282
РАЗДЕЛ 18. УСТОЙЧИВОСТЬ ПЛАСТИНОК И ОБОЛОЧЕК. РАСЧЕТ ГИБКИХ ПЛАСТИНОК
Формула (18.40) применима к оболочкам, изготовленным достаточно тщательно (амплитуда начальной погибы не должна превышать толщины оболочки).
б) Сжатие внецентренно приложенной осевой нагрузкой (рис. 18.39).
Шарнирное опирание по обеим кромкам. Если напряжение может быть выражено в виде cr cro“f-cricosp, то критическое напряжение приближенно определяется по формуле
(ао 0i)kp.h 0,18 (18.42)
в) Действие внешнего равномерно распределенного давления р кГсм2 (рис. 18.40).
Шарнирное опирание по обеим кромкам. Верхнее критическое давление (формула Мизеса)
_ Et 1 кр.в Et3
12 (1 — ix2) R3
2п2 — 1 — i'
1
г2 2
(18.43)
я2?2
где I — длина оболочки; п — число выпучин вдоль окружности оболочки.
Число п в каждом конкретном случае при заданных 1R и Rt должно быть выбрано из условия получения наименьшего значения ркр.в. Значения п для некоторых отношений 1R и Rt даны в табл. 18.31.
Таблица 18.31
Значения п в формуле (18.43)
R(n- 1)
пЧ-
V я22
1
R
Rt
250
200
50
25
ОО
О
2
2
2
10
4
3
2
2
5
5
4
3
3
2
8
6
5
4
Рис. 18.40
В случае весьма длинной оболочки _ Et3
кр.в —
4 (1 — Л2) R3
(18.44)
18.4. УСТОЙЧИВОСТЬ ЗАМКНУТЫХ ОБОЛОЧЕК В ПРЕДЕЛАХ УПРУГОСТИ
283
100р
Рис. 18.42
Эта формула верна в той мере, в какой допустимо считать радиус R пренебрежимо малым по сравнению с длиной оболочки. Для оболочек средней длины при lLRA можно пользоваться приближенной формулой
Е R I t 2.5
кр.в 0,86(1_)075 08-45)
Значения верхних критических давлений, рассчитанных по формуле (18.43) при ш 0,3 для некоторых размеров оболочек, приведены на рис. 18.41, где рв
. На рис. 18.42 даны значения нижних критических давлений; здесь
_ Р ( 2
Рн Е t )'
г) Действие скручивающих пар по торцам (рис. 18.43)
Лкр 2я2 т, где т — средняя величина касательного напряжения.
Края оболочки шарнирно закреплены. Верхнее критическое значение момента
кр.в—"
1 — Ц,2
R2 3 2
2,8
(18.46)
Согласно экспериментальным данным реальные значения критических напряжений составляют в среднем 70— 75 от значений, вычисленных по формулам линейной теории. Теоретическое решение в нелинейной постановке
284
РАЗДЕЛ 18. УСТОЙЧИВОСТЬ ПЛАСТИНОК И ОБОЛОЧЕК. РАСЧЕТ ГИБКИХ ПЛАСТИНОК
дает следующие результаты. В случае относительно коШ 1
ротких оболочек (— — I нижнее критическое на-
пряжение Ткр.н составляет около 94 от Ткр.в. Если Rt 1
“1 200’ Т Ткр н составляет ®0 от Ткр в; при Rt 1
— 2 000 отношение Ткр нткр.в равно 0,87, т. е. сноН
ва возрастает. Для весьма длинных оболочек решение не дает удовлетворительных результатов.
Края оболочки защемлены. Верхнее критическое значение момента
кр.в—2л 1-(1
R 8 I2
4,6
У7'8 'в7(жу'1-1‘г)''
ненного решения 17. На графиках п — число выпучин, возникающих при потере устойчивости.
д) Совместное действие равномерного осевого сжатия и скручивающих пар по торцам (рис. 18.45)
Шарнирное опирание по торцам. Расчетная формула:
а т 3
— — 1. (18.49)
о о то
Здесь Go и то — критические напряжения для случая простого сжатия и простого кручения. Величина касательного напряжения в формуле (18.49) считается заданной. Соотношение (18.49) распространяется также на нижние критические напряжения.
е) Совместное действие равномерного осевого сжатия и внешней равномерно распределенной поперечной нагрузки (рис. 18.46).
Шарнирное опирание по торцам. Для оболочек средней длины (llR4) верхнее критическое напряжение
1
икр.в
1-4-
13(1 12(1
И2)
тх
и2)Г
1,755
TiR
2,5
(18.50)
Нижнее критическое напряжение при шарнирном опирании кромок определяется приближенной формулой
кр.и—0 18Е “ (1 — “ (18.50')
? V Ркр.н
где Ркр.а определяется, из графиков на рис. 18.42.
ж) Совместное действие равномерного осевого сжатия и внутренней равномерно распределенной поперечной нагрузки.
Шарнирное опирание по горцам. Нижнее критическое напряжение определяется по приближенной формуле
кр.н018 "ГГ (114,0?), К
(18.50")
(18.47) где Р
т)’
Формула (18.50") справедлива при р0,17. При
t
р0,17 следует принимать акр.н0,605 —
И
з) Действие изгибающих пар, леоюащих в диаметральной плоскости (рис. 18,47).
ч
Рис. 18.46
М
Для длинной оболочки условия закрепления на контурах не играю: роли и верхнее критическое значение крутящего момента
Мкр.в —
я 12 Е 3(1— ц2) 75
1?.
(18.48)
Для расчета оболочек произвольной длины даны графики на рис. 18.44, построенные на основании уточ-
Рис. 18.47
Закон распределения нормальных напряжений в поперечных сечениях до потери устойчивости оболочки имеет вид
М
ох cjn cos
R
У
cos nR4 R
18.4. УСТОЙЧИВОСТЬ ЗАМКНУТЫХ ОБОЛОЧЕК В ПРЕДЕЛАХ УПРУГОСТИ
Координата у отсчитывается от точки срединной поверхности, расположенной в плоскости действия пары.
Шарнирное опирание по торцам. Верхнее критическое напряжение определяется по формуле (18.39).
Судя по опытам над точеными образцами, находящимися в условиях изгиба парой сил, реальные критические напряжения составляют 68-7-75 от аКр.в и имеют сравнительно слабый разброс. При изгибе образцов, изготовленных менее тщательно, критические напряжения
t-я-ч к
Рис, 18.48
Рис. 18.49
составляют 40—70 от акр.в. Исходя из экспериментальных данных, для определения нижнего критического напряжения рекомендуется формула
кр.н :
-22Ет
(18.51)
и) Изгиб поперечной силой (рис. 18.48).
Защемление на одном торце, второй торец свободен. Для длинных оболочек реальные значения критических напряжений на 8—10 выше, чем при чистом изгибе. Верхнее критическое напряжение
кР.в ,——Г Е (18 52)
К3(1-ц2) Нижнее критическое напряжение
крн 0,242iT
R
(18.53)
Для относительно коротких оболочек критическое напряжение приближенно принимается равным критическому напряжению кручения для оболочек тех же размеров. Критические напряжения для оболочек длиной 1—2 диаметра определяются по приближенной формуле
М I
кр
0,3
(1
E—(-L)5
- I R j
R
(18.54)
18.4.2. Цилиндрические эллиптические оболочки
Оболочка с небольшим эксцентрицитетом под действием равномерно распределенного осевого сжатия (рис. 18.49).
Шарнирное опирание по обеим кромкам. Верхнее критическое напряжение определяется по формуле
1 Etb
Кр.В зо-ц)
нижнее — по приближенной формуле
кр.нСМЕ — „
Длина контура оболочки с малым эксцентрицитетом приближенно равна
s 2л,а 1 — —- k2j,
(18-57
где
k
Va2
b2
эксцентрицитет.
Минимальная критическая нагрузка Якр равна произведению минимального напряжения (верхнего или нижнего) на площадь поперечного сечения оболочки:,
2л Et2b 1
Ркр.в — I 1 2 I
Кз(1
Р Кр.н — 1,13
Н'2)
Ft2b
П' Н-
(18.58)
(18.59)
Формулами (18.58) и (18.59) определяется та критическая нагрузка, при достижении которой в зонах оболочки наименьшей кривизны начинается образование первых выпучин по длине.
Вследствие наличия на поверхности зон, поддерживающих ослабленные участки, критическая нагрузка, при которой начинается волнообразование по всей поверхности, будет несколько превышать ту, которая определяется формулой (18.59).
18.4.3. Усеченные конические круговые оболочки
а) Равномерное продольное сжатие (рис. 18.50).
Шарнирное опирание по кромкам. Верхняя критическая сила
Р кр.в —
2л
К 3(1-и)
Et2 cos2 а.
(18.60)
(18.55)
(18.56)
Нижняя критическая сила определяется по приближенной формуле
Ркрн 1,13 72 cos3 а. (18.61)
б) Внешнее равномерное давление (рис. 18.51).
286
РАЗДЕЛ 18. УСТОЙЧИВОСТЬ ПЛАСТИНОК И ОБОЛОЧЕК. РАСЧЕТ ГИБКИХ ПЛАСТИНОК
Шарнирное опирание по кромкам. Верхнее критическое давление 3
р 0 Г— (п4 dti2 е)
Икр ъ Ь пс L 6
"
п2 г
I — n2s
(18.62)
(n2g k)(n2 т) Здесь п — число выпучин, возникающих при потере устойчивости;
П г0 б cos а
"I ’ у Гг' 2(1 — р.2)
1 — V7 1 — V5
6 1,41Р3: с 0,4
— 0,203
1 — y2 ’ 1 — У2
(1 — Т3)(1 — V)
1 V
й 9,85(1 v2) Р2 3 sin2 а;
(1-У)2
g 1 —0,305 ;
1 У2
е (1 у2)(32,4Р2 138Р2 sin2 а) 32,4p4V4; 1 У2 У4 1 Y2 ’
к 2,ЗР2 0,575P2cos2a(l
3 1 — Y2
' V_)" I _ я2 ’ 1 v2
т 14,IP2 (1 v2); s 5,95р2(1 Y2);
(1у2)(1 у2 т)
(1 — У2)2
51,2р2-
При а-М) ¥r0ri- выражение (18.62) переходит в формулу 18.43) Мизеса для кругового цилиндра в случае всестороннего сжатия. Полагая в (18.62) и (18.63) г00 и гi0, получаем формулу для
определения критического давления замкнутой конической оболочки:
X
Et cos a 1
Ркр-В 2 (1 — ц2) г ’ 1,41 sin2 a 0,2и2
Г
X -л4 12,85я2 sin2 a 170 sin4 a) п2 63,5 sin2 a
i erf
0,575 sin2 a cos2 a
я4 8,85я2 sin2 a -f- 46,5 sin4
: Ркр.в — '
Я
cp
(тИ
(18.65)
где
t2
12(1 — (x2) i?2p cos2 a
(v2 л2)2
nRcp
I
Эта формула выведена в предположении, что конус закрыт с обеих сторон дисками, которые, так же как и
боковая поверхность, подвергаются действию давления. Эта же формула используется и для открытых конусов при выполнении условия
f t2 17 JlR2 Г t2 1—7г
1127?2 (1 — n2)J С1 :Ll22(l -H2)J
В этом случае возникающее меридиональное усилие значительно дальше отстоит от своего критического значения, чем окружное усилие.
Также несущественно, на каком из краев открытой оболочки уравновешивается осевая сила (создаваемая давлением из-за наклона образующей), так как связанное с этим сжатие или растяжение оболочки в меридиональном направлении сравнительно мало влияет на ее устойчивость.
Если в формуле (18.65) пренебречь величиной v2 по
(18.64)
Число выпучин п б записанных выражениях варьируется до получения (рКр.в)мин. Приближенная формула для указанного случая имеет вид 8:
Et cos3 a Еа (v2 n2) v
сравнению с n2 (считая формула для Ркр.в:
2л
Р Кр.1
v2CrcKp), получается простая
зуТ о-и0’75
t MW.
i UJ (18.66)
(18.63) re
R
cp
Из формулы (18.66) следует, что при углах конусности 2а40о ?кр.в для конуса отличается от рКр.в для цилиндра длиной I и радиусом, равным RcР конуса, не больше чем на 10. Поэтому и в других случаях загружения (осевыми силами, крутящим моментом и т. д.) можно без большой погрешности рассчитывать конус при сравнительно небольшом а, как цилиндрическую оболочку длиной и радиусом, равным RcР конуса.
18.4.4. Усеченные конические круговые подкрепленные оболочки
Равномерное всестороннее давление (рис. 18.52).
Шарнирное опирание по кромкам. Для ребер жесткости, установленных на оболочке достаточно часто, при-
Рис. 18.52
нимается, что жесткость на изгиб каждого из них равномерно распределяется по пролету. При этом жесткость обшивки на изгиб по направляющей оболочки во
18.4. УСТОЙЧИВОСТЬ ЗАМКНУТЫХ ОБОЛОЧЕК В ПРЕДЕЛАХ УПРУГОСТИ
287
много раз меньше аналогичной жесткости ребер и поэтому не учитывается. При этих допущениях верхнее критическое давление
f
Ркрв : t
Е cos а b п2с
I cos а
(я4 dn2 е)
2(1 — (л2) г j (ng k)(n т) — пЧ
‘-'Кр.В Кз(1 -ц2)
Нижнее критическое напряжение приближенно определяется по формуле
Etb
Кр.Н
0,18
я2
cos а.
Здесь а — угол между высотой конуса и образующей, проходящей через вершину большой полуоси эллипса; онр относится к сечению оболочки, где определяются параметры а и Ь. Эксцентрицитет считается малым. Минимальная выпучивающая сила, действующая перпендикулярно плоскости основания, определяется аналогично тому, как для цилиндрической оболочки эллиптического сечения:
2л
кр.в -
ЕРЬ
Уза -и2) 0
Ft2b
Р кр.н —1,13
(-
J- kj cos2 а; (18.70)
1
1— — fc2jcos2a. (18.71)
Формулами (18.70) и (18.71) определяется та критическая нагрузка, при достижении которой в зонах оболочки наименьшей кривизны начинается образование первых выпучин по длине.
Вследствие наличия на поверхности зон, поддерживающих ослабленные участки, критическая нагрузка, при которой начинается волнообразование по всей поверхности, несколько превышает ту, которая определяется формулой (18.71).
18.4.6. Сферические оболочки
Равномерное внешнее давление р (рис. 18.54).
Величина равномерного сжимающего напряжения в этом случае равна
2t
Верхнее критическое напряжение определяется по формуле (18.39).
Этому напряжению соответствует давление 2
Ркр'В —
3(1-и2)
(18.72)
(18.67)
Нижнее критическое напряжение определяется по формуле
где — момент инерции подкрепляющего ребра с присоединенным поясом обшивки; 1 — расстояние между ребрами.
Значения постоянных параметров определяются из формул (18.63).
18.4.5. Усеченные конические эллиптические оболочки
Оболочка с небольшим эксцентрицитетом под действием равномерного продольного сжатия (рис. 18.53).
Шарнирное опирание по крохмкам. Верхнее критическое напряжение
1 Etb
-cos a. (18.68)
кр.н — 0,155Z?
(18.73)
Более подробные расчеты на устойчивость сферических оболочек см. 7.
18.4.7. Эллипсоидальные оболочки
а) Вытянутая эллипсоидальная оболочка (рис. 18.55) под действием внешнего равномерно распределенного давления р. Верхнее критическое давление
Рв
2Е
t
Узц
-ц2)
2Ь2 — а?
1,21 Е
2ft2 — и2 ’
(18.74)
(18.69)
где а, b — полуоси эллипса. Появление вмятин следует ожидать в зоне экватора.
б) Сплющенная эллипсоидальная оболочка (рис. 18.56)
под действием внешнего равномерно распределенного давления р. Верхнее критическое давление
2 Е W t2 Ъг
-1,21 Е —. (18.75)
Р в
УТ(Г
-и2)
Появление вмятин следует ожидать в зоне полюсов
А и В.
в) Сплющенная эллипсоидальная оболочка при а62 под действием внутреннего давления р. Верхнее критическое давление
2 Е 2 t2
Рв _ — 1,21 — —. (18.76)
Уз и -И2) 2-22
262
Появление вмятин следует ожидать в зоне экватора.
Нижнее критическое давление рш для эллипсоидальных оболочек составляет примерно такую же долю от рв, как и для сферических оболочек; практические расчеты надо вести по величине ?н.
288
РАЗДЕЛ 18. УСТОЙЧИВОСТЬ ПЛАСТИНОК И ОБОЛОЧЕК. РАСЧЕТ ГИБКИХ ПЛАСТИНОК
18.5. УСТОЙЧИВОСТЬ ПЛАСТИНОК И ОБОЛОЧЕК ЗА ПРЕДЕЛАМИ УПРУГОСТИ
18.5.1. Общие положения
Приведенные выше формулы применимы при условии, что критические напряжения лежат в пределах действия закона Гука; это означает, что интенсивность напряжений в любой точке пластинки или оболочки, определяемая, как для плоского напряженного состояния, не должна превышать предела пропорциональности материала сгпц (считаем его равным пределу упругости ауп):
V Х-ах ау а1 Зт2 пц 18-77
Для расчета пластинок и оболочек на устойчивость за пределами упругости имеется несколько методов 6.
1. Расчет по теории упруго-пластических деформаций, предложенный А. А. Ильюшиным 9. Этот метод аналогичен расчету на устойчивость сжатых стержней с применением результирующего модуля Кармана. Здесь учитывается эффект разгрузки для волокон, расположенных при выпучивании стержня на стороне выпуклости; принимается, что для этих волокон связь между напряжением и деформацией отвечает начальному модулю упругости материала.
2. Расчет по теории упруго-пластических деформаций без учета эффекта разгрузки. Этот метод отвечает расчету на устойчивость сжатых стержней с применением касательного модуля (метод Шенли — Работнова).
3. Расчет по теории пластического течения.
Ниже приводятся данные для расчета по теории деформаций как более близкие к результатам экспериментов. При этом расчет без учета эффекта разгрузки приводит к значениям критических напряжений, лежащим ниже экспериментальных; учитывая же эффект разгрузки, получаем критические напряжения, лежащие несколько выше экспериментальных.
В расчетные формулы входят некоторые величины, определяемые по диаграмме ы—8i для данного материала; эта диаграмма связывает интенсивность напряжений Gi с интенсивностью деформаций ef, причем
1
: ех гу Т У
(18.78)
Если считать коэффициент Пуассона р, равным 0,5, то диаграмма а,-—et- совпадает с кривой с(е), полученной при одноосном растяжении (сжатии) образцов из рассматриваемого материала. Введем обозначения: с для секущего модуля, к— для касательного модуля, Т — для результирующего модуля; при указанном допущении
a do 4 ЕЕК
Ес — ; к ; Т . (18.79)
VIVZY
Кроме того, обозначим
Е с к Т
(18.80)
г (1-Фс) I 1
3
VI I
Таблица 18.32 Расчетные параметры для стали марки Ст.З
е в
с в кГсж2
к
t
0,095
2000
1
1
I
0
0,10
2100
499
0,68
0,82
0,005
0,11
2200
0,95
0,47
0,66
0,025
0,12
2280
0,90
0,32
0,50
0,052
0,13
2340
0,86
0,22
0,41
0,075
0,14
2380
0,81
0,12
0,26
0,11
0,15
2390
0,76
0,062
0,16
0,15
0,16
2400
0.71
(-,029
0,094
0,19
0,18—0,40
2400
0,63—0,29
0
0
0,33—0,71
0,45
2410
0,26
0,010
0,033
0,61
0,50
2420
0,23
0,019
0,062
0,60
0,60
2570
0,20
0,024
0,071
0,63
0,70
2520
0,17
0,024
0,071
0,65
0,80
2575
0,15
0,024
0,071
0,68
0,90
2630
0,14
0,021
0,071
0,70
1,00
2685
0,13
0,024
0,071
0,71
1,10
2740
0,12
0,024
0,071
0,73
1,20
2795
0,11
0,024
0,071
0,74
Таблица 18.33 Расчетные параметры для дуралюмина Д16Т
е в
а в кГсм
с
РК
t
г
0,27
2000
1
1
1
0
0,30
2200
0,98
0,79
0,88
0,01
0,35
2460
0,94
0,58
0,73
0,03
0,40
2640
0,87
0,50
0,66
0,067
0,45
2780
0,82
0,34
0,51
0,10
0,50
2900
0,77
0,27
0,43
0,13
0,60
3080
0,68
0,20
0,33
0,19
0,70
3200
0,61
0,16
0,27
0,24
0,80
3320
0,55
0,13
0,23
0,29
0,90
3400
0,49
0,11
0,20
0,33
1,00
3450
0,46
0,11
0,20
0,35
1,10
3560
0,43
,11
0,20
0,38
1,20
3640
0,40
0,11
0,20
0,40
В табл. 18.32 и 18.33 приводятся значения безразмерных параметров (рс, фк, t и г в зависимости от интенсивности деформации е и напряжений стг для стали марки Ст.З (табл. 18.32) при 7Пц 2000 кГсм2, ат 2400 кГсм2, 2,110® кГсм2, (х0,3 и для дуралюмина Д16Т (табл. 18.33) при аПц 2000 кГсм2, а02 3050 кГсм 7,5-105 кГсм2, х 0,32. Участок
0,18 е0,4 для стали относится к площадке текучести.
18.5.2. Прямоугольные пластинки
а) Удлиненная пластинка (а2Ь), шарнирно опертая по краям, сжата усилиями, равномерно распределенными по краям х 0 и х — а (см. рис. 18.1).
Критическое напряжение
пЮч
‘ 'кр
к-
ьч
(18.81)
Здесь при ц0,5
(18.82)
(18. S3)
18.5. УСТОЙЧИВОСТЬ ПЛАСТИНОК И ОБОЛОЧЕК ЗА ПРЕДЕЛАМИ УПРУГОСТИ
289
По теории деформаций с учетом эффекта разгрузки коэффициент
Так как коэффициент К в формуле (18.82) зависит от 8г или Gi, то эту формулу следует представить в виде
К
КР _ Ру, _ Я t 2 К ЬЧ 9 V Ь )
Без учета эффекта разгрузки К
2fpc( уХт
Фк
(рс
1
) (18.84)
(18.85)
(18.86)
и найти зависимость для данного материала между ОкрК и отношением bt. Тогда при заданных размерах пластинки определяются одновременно коэффициент К и критическое напряжение окр.
На графиках рис. 18.57 и 18.58 приведены зкачеьия окр в зависимости от bjty найденные по формулам (18.84) — (18.86) и данным, приведенным в табл. 18.32 и 18.33 для стали марки Ст.З и дуралюмина Д16Т. Пунктирная линия на рис. 18.57 соединяет прямую, отвечающую площадке текучести, с кривой, соответствующей диаграмме упрочнения материала, минуя петлю теоретических значений. В практических расчетах можно в запас прочности полагать, что при bt.40 сгкр ат. Квадратная пластинка (а — шарнирно опертая по краям, сжата усилиями, равномерно распределенными по краям х — д и х — а (см. рис. 18.1).
Коэффициент К в формуле (18.82) равен:
1) по теории деформаций с учетом эффекта разгрузки
б) К 6),
о
20
25
30
J5 UQ Ь5 Рис. 18.57
50
55
60
65
70
13
4
0-r)Tft
(18.87)
6кр, кГCM2
zm
25
J0
J5
1
ч
Дцрапюмин А76)
г
4J
ч
ч
с
ичетом
Е7.50кГм
II
м
ч
щ
щек та разгрузки
__
без учета-"
ч,
L
1
разгрузки
_
1
ч
ч
Ч
i
1
Ч
X
ч
ч
X
6
ч
S
Лmi
к
А
у
Ь-
ууЛ
’V
S
Ч
ч.
А
у у
N
Ч
J
1 (V
Ч
к
4
г
Г.и
ч
к
Г
У
N
4
-А
ТТ
2) по теории деформаций без учета эффекта разгрузки
К 3,25фс 0,75рк. (18.88)
Ниже приводятся расчетные формулы для других случаев закрепления пластинки, полученные по теории деформаций без учета эффекта разгрузки. Эти формулы используются таким же образом, как и для удлиненной шарнирно опертой пластинки. Коэффициент К выражен через такой же коэффициент Суп, найденный для упругой области (см. выше 18.2.1, табл. 18.1 и 18.2).
в) Удлиненная пластинка (аЬ) сжата усилиями, равномерно распределенными по краям х—0, ха (см. рис. 18.1).
Значения коэффициента К в формуле (18.82) при шарнирном опирании по краям х0 и х а зависят от условий закрепления двух других краев.
Край у — 0 оперт шарнирно, край у — Ь свободен:
к Фсуп. (18.89)
Рис. 18.58
где Куп—0,46.
290
РАЗДЕЛ 18. УСТОЙЧИВОСТЬ ПЛАСТИНОК И ОБОЛОЧЕК. РАСЧЕТ ГИБКИХ ПЛАСТИНОК
Край у 0 защемлен, а край у — Ь свободен:
1
К Рс
VI
) Куп,
(18.90)
где ДУп 1,33.
Края у0 и защемлены:
К Фс 0,648 "-J- Y .352) Куп.(18-91)
где Суп 7,0.
Ориентировочные расчеты для любых граничных условий можно провести по формуле секущего модуля:
С Фс Суп- (18-92)
18.5.3. Цилиндрические оболочки
1. Круговая замкнутая оболочка, шарнирно опертая по торцам, сжата осевой нагрузкой (см. рис. 18.38). Приближенно верхнее критическое напряжение равно
Зависимость (18.99) получена для оболочки средней длины. Для оболочек большой длины
тв 0,272 (0,75)-5 s
I h 3‘ I R
I h i, 0,326 s ( — .(18.100)
18.6. ГИБКИЕ ПЛАСТИНКИ И МЕМБРАНЫ
Полные нормальные и касательные напряжения в каждой точке гибкой пластинки складываются из напряжений в срединной поверхности (или цепных, мембранных напряжений) и напряжений собственно изгиба.
18.6.1. Гибкие пластинки
а) Прямоугольная пластинка шарнирно оперта по контуру; контур не смещается; поперечная нагрузка равномерно распределена по всей площади (рис. 18.59) 4.
кр.в—0,6 срс (18.93)
Для практических расчетов эту формулу следует представить в виде
- - 0,6 Е— (18.94)
Фс R
и определить зависимость аКр от отношения ?, пользуясь диаграммой о(е) для данного материала (см. выше 18.5.1).
Деформация, отвечающая ближнему нижнему критическому напряжению, определяется по формуле
_ 1
еКр.Н — 3 6
кр.в
Соответствующее напряжение акр.н с 81
кр.н
(18.95)
(18.96)
4_ nR
L
hVt R
лR
0,34— —. (18.98)
1Л
3. Круговая замкнутая оболочка подвергается действию скручивающих пар по торцам (см. рис. 18.43). Верхнее критическое напряжение равно:
б (R'U(h4i тв 0,74 (0,75) e s -j-j (—J R ‘ h 7
0,888 s(— J I— J. (18.99)
w
Рис. 18.59
Стрела прогиба (в центре) определяется из уравнения
Во всех других случаях нагружения оболочек критическое напряжение можно приближенно найти по аналогичной формуле секущего модуля:
кр — кр.уп Фс (18.97)
Здесь под (Ткр.уп понимается критическое напряжение, найденное по данным 18.4.1 для упругой области.
2. Круговая замкнутая оболочка, шарнирно опертая по торцом, подвергается действию равномерно распределенного внешнего давления р (см. рис. 18.40).
Приближенно безразмерный параметр верхнего критического давления равен:
где
А?В -р, lb
ь 4
(18.101)
Для центра пластинки
4tf 4if
х — ; ау„ (5 — ;
(18.102)
®ХП Xcl Gyn Оуи “Ь Gус
(сТхп и оУп — полные напряжения).
Коэффициенты А, В, а, р, у и б даны в табл. 18 34.
Для квадратной пластинки имеется уточненное решение 6, которое дает зависимости для определения стрелы прогиба, напряжений в срединной поверхности и напряжений изгиба, представленные на рис. 18.60 и 18.61.
б) Прямоугольная пластинка шарнирно оперта по контуру; края пластинки свободно смещаются, поперечная нагрузка равномерно распределена по всей площади (см. рис. 18.59).
18.6. ГИБКИЕ ПЛАСТИНКИ И МЕМБРАНЫ
291
Таблица 18.34 Значения коэффициентов А, В, ос, 0, у и 6
аЬ
А
В
а
Р
V
6
1,0
1,82
1,ЗЯ
1,645
1,645
0,615
0,615
1,1
1,53
1,11
1,416
1,587
0,518
0,600
1,2
1,34
0,96
1,242
1,544
0,448
0,592
1,3
1,21
0,84
1,107
1,510
0,392
0,584
1,4
1,11
0,76
1,000
1,484
0,351
0,581
1,5
1,05
0,7 ’
0,913
1,462
0,315
0,574
1,6
1,00
0,65
0,843
1,444
0,288
0,571
1,7
0,95
0,60
0,784
1,429
0,263
0,568
1,8
0,93
0,57
0,735
1,417
0,246
0,567
1.9
0,90
0.54
0,693
1,407
0,230
0,566
2,0
0,88
0,52
0,658
1,398
0,217
0,566
Приближенная формула для определения стрелы прогиба имеет вид
я 1 м л
_ 3 I 256 Я4 ) ' 192(1 — ц2)
1
7П ' (18.103)
где. —.
О
H(if
(бх)сШ(6Хс
(бх)я(бу)д
_
0,8 1,2 1,6 2 2,41,
Рис. 18.61
Напряжения в срединной поверхности оус будут наибольшими по абсолютной величине у кромок (л 0, х — а) и по средней линии пластинки (х — а2):
я2 2
v FT () (18-104)
Максимальные напряжения изгиба будут в центре пластинки
( —у
Ь2 л2 )
Наибольшие полные напряжения равны:
Jyn '
— Оус "Ь
у и-
(18.105)
(18.106)
Для квадратной плиты стрелы прогиба напряжения в срединной поверхности и напряжения изгиба по заданной величине поперечной нагрузки определяются соответственно из рис. 18.62 и 18.63, полученных с помощью уточненного решения. Буквой С обозначен центр пластинки, А — угол.
в) Прямоугольная пластинка находится под действием поперечной нагрузки, равномерно распределенной по
поверхности пластинки, и защемлена по контуру; края пластинки неподвижны (рис. 18.64).
Кубическое уравнение для определения стрелы прогиба имеет вид
6,48 () 12,18 —
И Г (1 Я)2
0,6
X2
): 8.8з(г)
t-о-.
7,53(1
(18.107)
Для определения напряжений в срединной поверхности следует величины ас и ас определенные по зависимостям (18.110), сложить соответственно с рх и р, которые находятся по формулам:
Зл2
Рх
32
Зл2
32
. -Я- __Л 2;
Х2 ) 1 — Ц2 (тгц)тС2-
(18.108)
Напряжения изгиба определяются по формулам теории жестких пластинок.
Уточненное решение для случая а Ь приводит к зависимостям, данным на рис. 18.65—18.67. Буквой В обозначена середина стороны пластинки.
г) Прямоугольная пластинка защемлена по краям и находится под действием поперечной нагрузки, равномерно распределенной по поверхности пластинки; кромки пластинки свободно смещаются (см. рис. 18.64).
_ Шарнирно- закрепленные промни
у
Свободные кротки
Рис. 18.64
0,4 0,8 1,2 1,6 2
Рис. 18.65
292
РАЗДЕЛ 18. УСТОЙЧИВОСТЬ ПЛАСТИНОК И ОБОЛОЧЕК. РАСЧЕТ ГИБКИХ ПЛАСТИНОК
Стрела прогиба определяется из кубического уравнения (при JJ, 0,3):
Г 1 12,18 1
1 J
(18.109)
Максимальные напряжения изгиба для нижних волокон посередине пролета
3
V (1 — М2) Р Ф1 (шарнирно опертые края);
(18.114)
о — — (1 — х2) р ф2 (защемленные края). (16.115)
Максимальные напряжения в срединной поверхности (в центре пластинки) равны:
я2
ус 32Я2
5
Максимальные напряжения- изгиба для верхних волокон у опор
1_
2
(18.110) Здесь
а1и "Г ( —12) Рх-
(18.116)
Напряжения изгиба определяются по формулам теории жестких пластинок.
д) Удлиненная гибкая пластинка пролетом b находится под действием равномерно распределенной поперечной нагрузки р.
mr
Лбь 7 Г
60
ио
го
о
(б)в.
1
. J 0,4 0,8 f,2 1,6 2,0 Z
Рис. 18.67
ЧОООО
20000 гоооо 8000 6000 4000
гооо
'Ш
ьоо
J 4 5 6 7 в 9 JO z
Рис. 18.68
Прогибы определяются по формулам:
— р (1 — Д.2) (шарнирно опертые края);
оЛ
(18.111)
р (1—jii2)2 г(?2 (защемленные края). (18.112)
32
Максимальные напряжения (в плоскости, параллельной длинным опертым краям) в срединной поверхности равны:
и
Ус з
(18.113)
1,5 г 2,5 3 3,5 г
Рис. 18.69
18 6. ГИБКИЕ ПЛАСТИНКИ И МЕМБРАНЫ
293
Таблица 18.35
Вспомогательные функции для расчета удлиненных пластинок
и
Нагрузка
Стрела прогиба
Напряжения
шариирные
края
lgp(l-n2)
А
защемленные
края
lgp(l-M,2)
А
шарнирные
края
защемленные
края
Ф2
посер
шарнирные края ф1
едине
защемленные края ф2
у защемленных краев X
0
ОО
ОО
1,000
1,000
1,000
1,000
1,000
0,5
0,111
0,783
0,908
0,976
0,905
0,972
0,984
1,0
0,517
406
1,114
331
0,711
0,909
0,704
0,894
0,939
1,5
0,827
310
1,337
223
0,532
0,817
0,511
0,788
0,876
2,0
1,089
262
1,519
182
0,380
0,715
0,367
0,673
0,806
2,5
1,316
227
1,680
161
0,281
0,617
0,268
0,563
0,736
3,0
1,514
198
1,826
146
0,213
0,529
0,200
0,467
0,672
3,5
1,689
175
1,960
134
0,166
0,453
0,153
0,386
0,614
4,0
1,845
156
2,084
124
0,132
0,388
0,120
0,320
0,563
4,5
1,986
141
2,199
115
0,107
0,335
0,097
0,267
0,519
5,0
2,114
128
2,306
107
0,088
0,291
0,079
0,224
0,480
5,5
2,232
118
2,403
100
0,074
0,254
0,066
0,189
0,446
6,0
2,340
103
2,499
93
0,063
0,223
0,055
0,162
0,417
6,5
2,440
100
2,587
88
0,054
0,197
0,047
0,139
0,391
7,0
2,533
93
2,669
82
0,047
0,175
0,041
0,121
0,367
7,5
2,620
87
2,747
78
0,041
0,156
0,036
0,106
0,347
8,0
2,702
82
2,821
74
0,036
0,141
0,031
0,093
0,328
8,5
2,779
77
2,891
70
0,032
0,127
0,028
0,083
0,311
9,0
2,852
73
2,958
67
0,029
0,115
0,025
0,074
0,296
9,5
2,921
69
3,021
63
0,026
0,105
0,022
0,066
0,283
10
2,986
65
3,082
61
0,0235
0,0960
0,0200
0,0599
0,270
11
3,108
122
3,195
113
0,0195
0,0811
0,0166
0,0496
0,248
12
3,220
112
3,300
105
0,0164
0,0694
0,0139
0,0417
0,229
13
3,323
103
3,397
97
0,0140
0,0601
0,0118
0,0355
0,213
14
3,419
96
3,487
90
0,0121
0,0525
0,0102
0,0306
0,199
15
3,509
90
3,572
85
0,0106
0,0462
0,00889
0,0267
0,187
16
3,592
83
3,652
80
0,00930
0,0410
0,00781
0,0235
0,176
17
3,670
78
3,727
75
0,00825
0,0366
0,00692
0,0208
0,166
18
3,744
74
3,798
71
Г,00736
0,0329
0,00617
0,0185
0,158
19
3,814
70
3,865
67
0,00661
0,0297
0,00554
0,0166
0,150
20
3,881
67
3,928
63
0,00597
0,0270
0,00500
0,0150
0,142
Таблица 18.36
Значения коэффициентов А, В, а, у и 8
Граничные условия
А
В
В центре
У контура
аЭ j 76
а
э
V I в
Шарнирное опирание по контуру
контур свободно смещается
0,376
1,436
1,778
0,295
0
0,755
0
-0,427
контур не смещается
2,660
1,436
1,778
0,905
0
0,755
0,610
0,183
Защемление по контуру
контур свободно смещается
0,857
5,862
2,860
0,500
4,400
1,320
0
—0,333
контур не смещается
2,762
5,862
2,860
0,976
4,400
1,320
0,476
0,145
Значения 2, Фь ф2 и находятся из табл. 18.35.
Зависимости между оу и С даны на рис. 18.68—18.69.
е) Круглая пластинка подвергается действию поперечной нагрузки, равномерно распределенной по всей площади.
Стрела прогиба (в центре) определяется из кубического уравнения
А В1 ру (18.117)
-Н4. t t 1
где р
Коэффициенты А и В даны в табл. 18.36. После определения стрелы прогиба нормальные напряжения изгиба а™, аи и напряжения в срединной поверхности Or с, Ot с находятся по формулам:
, аЕ
tf
— р о
а2
(18 118)
294
РАЗДЕЛ 18. УСТОЙЧИВОСТЬ ПЛАСТИНОК И ОБОЛОЧЕК. РАСЧЕТ ГИБКИХ ПЛАСТИНОК
Полные напряжения равны:
ог оги Ore, — 7и с-
(18.119)
Значения коэффициентов а, р, у и 6 даны в табл. 18.36. Знак минус относится к сжимающим напряжениям.
18.6.2. Мембраны
а) Квадратная мембрана нагружена равномерно распределенной поперечной нагрузкой; края шарнирно оперты; кромки неподвижны.
Прогиб определяется по формуле
0,285lV.
(18.120)
Напряжения в срединной поверхности (в центре пластинки)
(18.121)
c v 3-40 б) Удлиненная абсолютно гибкая пластинка с пролетом Ь нагружена равномерно распределенной нагрузкой: коая птстинки шарнирно оперты, кромки неподвижны.
Стрела прогиба
с 0,36 ZT. (18.122)
Напряжения в срединной поверхности (в центре пластинки) определяются по формуле
1 Г L „о
— ус У 24 '
123)
в) Круглая мембрана с несмещающимся контуром подвергается действию равномерно распределенной поперечной нагрузки.
Стрела прогиба в центре
t 0,662 Vр.
Максимальное напряжение в центре
з
с 0,423
(18.124)
(18.125)
г) Прямоугольная мембрана подвергается действию равномерно распределенной поперечной нагрузки; пластинка до прогиба получила предварительное натяжение в своей плоскости (рис. 18.70).
Предварительные напряжения во всех направлениях полагаем равными
Рис. 18.70
Предел упругого сопротивления гибкой пластинки
Под пределом упругого сопротивления будем понимать ту нагрузку рт, при которой наибольшие приведенные (по той или иной теории прочности) напряжения достигают величины предела текучести материала от.
Pr0'J 50
ЬО
J0
20
10
О
1 1 '
Абсолютно l
п
г
го
бкш
'V
X
Гибл
хеши
ая z 'нка'
J
А
г плс
ж
У
:
рт'
280
2
гьо
200
60
0
20
9
в
80
7
6
ЬО
1
0
'сол ют но 7
ибкая f
г
А
А
it fix
по
j
пастинка
У
1 1
г
2fl
?,8
№
V
Ь0
100 200 300 UOO 500 б Рис. 18.71
4 620 20 2U бг Рис. 18.72
Для определения предела упругого сопротивления пластинки устанавливается связь между наибольшими напряжениями и интенсивностью нагрузки. При этом де-
q-кГсм
vSfC бп паке
q,кГсм
бус Ъшкс
Опмпхг Ь
Стрела прогиба
с—
ь я
где
Ui)
(18.126)
В случае квадратной мембраны
р
с 0,082 -V.
—
Ъмас т2Ш хГсм а2,Н0вкГснi0J
-
ь
с
.
0,
16
вис
76
Y
ОпмаА
:с 0,
1
032
4
ТГ
Q07 0,05 0,013 О,ОН 0,009
0,61 1 1 1 1 1—И о,007
Ь0 30 20 60 200 2Ь0 260 Ь
(18.127) t
0,9
0,6
0,7
0,6
0,5
0,Ь
0,3
0,2
0,1
1 бппшсГбг'-200кГспг
2,110 6кГсн ju-0,3
16
,
КхОЯ
1
Ф2
— т уо
I
0,06
К
накс
Г Т
W
1
л
Ч,
Ъ
1
ом
02
0
0,09
0,08
0,07
0,06
0,05
Oflb
ЬО 80 К20 160 200 2W 260 Ь t
Рис. 18.73
Рис. 18.74
18.6. ГИБКИЕ ПЛАСТИНКИ И МЕМБРАНЫ
295
формации считаются упругими на всем участке до предела текучести.
Пример 18.1. Квадратная гибкая пластинка находится под действием равномерно распределенного по поверхности пластинки поперечного давления; кромки пластин-
у,кГсн
Рис. 18.75
Ц кГСМ
Рис. 18.76
ки шарнирно оперты; края не смещаются. На рис. 18.71 и 18.72 изображена зависимость между а и ; для малых и значительных прогибов Ст. Дана предельная
нагрузка, полученная при том же условии для абсолютно гибкой пластинки, которая оказалась равной
Рт 963 (а)1,5.
(18.128)
В практических расчетах надо вычислить ат по формуле
-Ит)‘
(18.129)
и найти рт из графиков рис. 18.71 и 18.72.
Пример 18.2. Удлиненная гибкая прямоугольная пластинка пролетом b находится под действием равномерно распределенной поперечной нагрузки. Кромки пластинки шарнирно закреплены; края не смещаются. График предельной нагрузки из условия достижения наибольшим напряжением предела текучести ап.Макс Тт представлен на рис. 18.73 сплошной кривой 11. Верхняя пунктирная кривая показывает возрастание относительного прогиба макс с увеличением bt. Нижняя пунктирная крирая характеризует рост роли цепных напряжений. Аналогичный график предельной нагрузки для пластинки с защемленными кромками приведен на рис. 18.74. Коэффициент Пуассона (л0,3.
Нагрузка на пластинку ограничивается также условием достижения предельного прогиба. Кривые постоянного значения максЬ представлены на рис. 18.75 (пластинка с шарнирно закрепленными кромками) и на рис. 18.76 (пластинка с защемленными кромками). Принято р,0,3.
ЛИТЕРАТУРА
1. Броуде Б. М. Устойчивость пластинок в элементах стальных конструкций. Машстройиздат, 1949; Предельные состояния стальных балок. Гос. изд-во лит. по строительству и архитектуре, 1953.
2. Бубнов И. Г. Труды по теории пластин. Техтеоретиздат, 1953.
3. Б у н и ч Л. М., Палий О. М. и П и с к о в и т и-
н а И. А. Устойчивость усеченной конической оболочки, находящейся под действием равномерного внешнего давления. Инженерный сборник, 1956, № 23.
4. В а р в а к П. М. Приближенный расчет пластинок сред¬
ней толщины. Труды Киевского инженерно-строительного института, вып. 3, 1936.
5. В л а с о в В. 3. Общая теория оболочек. Гостехиздат,
1949.
6. В о л ь м и р А. С. Гибкие пластинки и оболочки. Тех-
теоретиздат, 1956; Расчет пластинок. Справочник машиностроителя, т. 3. Машгиз, 1956; Устойчивость пластинок при пластических деформациях. Изд. ВВИА имени Жуковского, 1959; Устойчивость деформируемых систем, Физматгиз, 1967; Устойчивость пластинок, Устойчивость оболочек. Справочник Прочность,
устойчивость, колебания, т. 3. Машиностроение, 1968.
7. Г е н и е в Г. А., Ч а у с о в Н. С. Некоторые вопросы
нелинейной теории устойчивости пологих металлических оболочек. Стройиздат, 1954.
8. Даревский В. М., Карташкин Б. Д. Методи¬
ка расчета на прочность и устойчивость корпусов турбореактивных двигателей. Оборонгиз, вып. 5, 1956.
9. И л ь ю ш и н А. А. Устойчивость пластин и оболочек за пределами упругости. Прикладная математика и механика, вып. 5, 1944 и вып. 5—6, 1946; Пластичность. Техтеоретиздат, 1948.
10. К о р н и ш и н М. С., И с а н б а е в а Ф. С. Гибкие
пластинки и панели. Наука, 1S68.
11. Л ей те с С. Д. Упругий и упруго-пластический изгиб длинных прямоугольных пластинок. Сб. Расчет пространственных конструкций, вып. VIII. Гос. изд-во лит. по строительству и архитектуре, 1962.
12. С а ч е н к о в А. В. Приближенное определение нижней границы критической нагрузки при продольном сжатии тонкой конической оболочки. Известия Казанского филиала АН СССР, серия физико-математических и технических наук, 1955, № 7.
13. С у б б о т и н К. Н. Прочность и устойчивость косоугольных свободно опертых пластинок, автореферат диссертации издание МАИ, 1953.
14. Т и м о ш е н к о С. П. Пластинки и оболочки. Техтеоретиздат, 1948; Устойчивость упругих систем. Техтеоретиздат, 1946.
15. Ф е о д о с ь е в В. И. Упругие элементы точного приборостроения. Оборонгиз, 1949.
16. В и г g е С. G., Structural principles and data. Handbook of Aeronautics, № 1, 1952.
17. Sturm R. G., Stability of thin cylindrical shells in torsion, ASCE, vol. 73, № 4, 1947.
18. J о j i с К о s a r a, Diagonal stiffening of a simply supported square plate submitted to shearing stresses, Pubis Inst. Acad, serbe Sci., 1953, 5.
19. Roark J., Formulas for stress and strain, 1943.
20. К e m p n e г J., Postbuckling behaviour of axially compressed circular cylindrical shells, Journal of the Aeronautical Sciences, № 5, 1954.
21. N a s h W. A., Effect of large deflections and initial imperfections on the buckling of cylindrical shells, J. Aeron. Sci., Jfe 4, 1955.
22. H s u L o. G r a t e H. and Schwartz E. B., Buckling of thinwalled cylinder under axial compression and internal pressure.NACA TN 2021, 1950.
РАЗДЕЛ 19
РАСЧЕТ СООРУЖЕНИЙ, ВЗАИМОДЕЙСТВУЮЩИХ С ГРУНТОМ
19.1. СТАТИКА СЫПУЧЕЙ СРЕДЫ
19.1.1. Давление на ограждающие конструкции хранилищ сыпучих тел
Имеется в виду несвязное сыпучее тело, например дробленая руда, цементный клинкер, сухой песок, гравий, зерно и другие материалы, состоящие из отдельных твердых частиц и не обладающие сцеплением. Для расчета несвязное сыпучее тело заменяется сплошной сыпучей средой, которая характеризуется следующими свойствами:
среда не сопротивляется растяжению, нормальные напряжения в ней могут быть только сжимающими;
касательные напряжения в среде не превосходят усилий внутреннего трения, зависящих от коэффициента внутреннего трения среды;
Таблица 19.1 Нормативные характеристики сыпучих тел
Таблица 19.2
Характеристики сыпучих тел
Материал
5.
2
н.3
О с- С,
и о о о и
Коэффициент трения
х а § ? § V О CQ
§
►Г О) О ю
по бетону
по металлу
Апатитовый концентрат.
1,9
35
0,6
0,35
Гипс кусковой крупный (более 10 см) 1,45
30
0,45
0,3
То же, мелкий (до 10 см)
1,35
40
0,55
0,35
Глинозем
1,2
30
0,5
0,3
Зерно (пшеница).
0,8
25
0,4
0,37
Известь обожженная крупная (более 10 см).
1,1
30
0,45
0,3
То же. мелкая (до 10 см).,
0,8
35
0,55
0,35
Известь гашеная в порошке
0,7
35
0,55
0,35
Карналит 0,8
35
0,5
0,3
Кокс. . 0,6
45
0,84
0,47
Магнезитовый порошок с размерами зерен до Ю мм.
1,8
33
0,53
0,35
Нефелиновый концентрат.
1,5
35
0,5
0,3
Песок сухой 1,6
35
0,7
0,5
1,8
40
0,65
0,4
насыщенно-влажный.
2
25
0,6
0,35
Сода кальцинированная.
0,6
40
0,5
0,3
Уголь антрацит 0,9
30
0,5
0,3
битуминозный несортированный 0,9
40
0,6
0,3
Уголь мелкий орешковый и угли, применяемые в коксохимическом производстве.
0,8
40
0,65
0,35
Уголь бурый.
0,7
45
0,7
0,35
Фосфоритная мука .1,3
40
0,5
0,3
1,6
30
0,58
0,3
?-
о
ы
о
5
Угол трения р0 в град
Сыпучее тело
s
3
ЕЕ
S
sf
ь ® к
1
н
по стали
по дере1 ву
по бетону
Агломерат железной руды 1,7—2
45
Бобы. . „. „
О
о
О
00
32
22—25
15—27
24
Гречиха 0,6—0,7
35
17—27
20—30
—
Земля формовочная
1,85—1,3
30—36
25—35
—
—
Зола. .0,4—0,7
40—50
35—40
_
—
Известняк дробленый
1,4—1,7
35—55
29—45
35
—
Кукуруза неочищенная.
0,7—0,75
35—40
20
17—19
23
Льняное семя.
0,65—0,75
25
19
17—22
22
Мел дробленый
1,4
39
—
—
—
Мука ржаная.
0,6—0,55
35-50
26—38
—
—
пшеничная
0,45—0,65
30—45
—
—
_
Овес 0,4—0,5
27—35
22—30
20—38
25
Опилки древесные
0,15—0,3
30—55
21—40
—
—
Просо г 0,65—0,85
22—25
17
18
—
Рожь 0,65—0,8
25—35
18—30
20-35
30
Руда железная.
2,1—2,4
35—37
30—40
—
—
Сахар 0,7—0,9
50
40—45
—
—
Соль поваренная
0,7—1,3
30—50
26
—
—
Торф 0,3—0,7
45—50
27-37
19-39
—
Шлак.
0,6—1
30—50
22—50
17
—
Ячмень
0,43—0,75
25—45
23—25
18—23
24
деформации среды возможны только за счет сдвига по площадкам, где касательные напряжения достигают величины усилий внутреннего трения.
Сыпучая среда является расчетной моделью несвязного сыпучего тела. С помощью теории предельного равновесия сыпучей среды определяется давление на конструкции хранилищ несвязных сыпучих тел. За неимением лучших возможностей эту теорию часто распространяют также и на порошкообразные сыпучие тела, такие как цемент, мука и т. п. О применении теории предельного равновесия сыпучей среды к грунтам, в том числе к обладающим сцеплением, см. 35.
По своим статическим свойствам несвязные сыпучие тела значительно отличаются от сыпучей среды, так как в них могут происходить большие объемные деформации — разрыхление и уплотнение, сопровождающиеся сильным изменением коэффициента внутреннего трения 38. Поэтому в практических целях целесообразно применять приближенные методы расчета, компенсируя от-
19.1. СТАТИКА СЫПУЧЕЙ СРЕДЫ
297
клонение расчетных величин от действительных запасами устойчивости и прочности.
Сыпучее тело характеризуется двумя величинами: объемным весом у и углом внутреннего трения или принимаемым равным ему углом естественного откоса р. При решении расчетных задач необходимо также знать коэффициент f или угол фо трения сыпучего тела по поверхностям ограждающих его конструкций. В табл. 19.1 приведены нормативные характеристики различных сыпучих тел согласно 39. Эти характеристики можно принимать также при расчете бункеров и ограждающих стен складов для сыпучих тел.
В табл. 19.2 приведены характеристики некоторых сыпучих тел по данным литературы 18, которые могут быть использованы при расчете хранилищ для этих материалов.
19.1.2. Предельное равновесие сыпучей среды. Строгие и приближенные решения плоской задачи
Статика сыпучей среды есть статика ее предельного равновесия. Принимается, что в этом состоянии деформации сдвига происходят только при условии, что по некоторым площадкам касательные напряжения т и нормальные напряжения а связаны зависимостью
x atgcp, (19.1)
где ф — угол внутреннего трения.
2 2 мальных напряжений равно:
х
о.
tg(45-j;
(19.2)
Взаимное расположение направлений главных нормальных напряжений и площадок скольжения в точке среды изображено на рис. 19.2. Переходя от элемента к массиву, напряжения следует рассматривать как функцию координат точки. Б той зоне сыпучей среды, где имеет место состояние предельного равновесия, в условиях плоской задачи возникают два семейства линий скольжения: наклоненные к траекториям большего
главного нормального напряжения jj под углами
( г. Ц _ ф
45 — j и (45— — J и пересекающиеся друг с
другом под углом (90—ф).
Для решения задач о плоском предельном равновесии сыпучей среды разработаны строгие и приближенные
методы.
tat ?
Непосредственно из предельного круга Мора (рис. 19.1) видно, что в каждой точке сыпучей среды имеются две такие площадки, где соблюдается условие (19.1). Огибающие этих площадок дают линии скольжения. Нормали к указанным площадкам наклонены к большему главному нормальному напряжению Oi под 90 ф 90ф
углами и — —-—. Отношение главных нор-
Рис. 19.3
Строгие методы основываются на условии предельного равновесия элемента сыпучей среды (рис. 19.3). Для этого элемента могут быть написаны три совместных уравнения, связывающих между собой три неизвестные функции координат — напряжения тх, оу и т. Первые два уравнения — известные дифференциальные уравнения равновесия:
дог
Ф
—-Ц () (19.3)
дх
дт
dz
0;
до2
ИГ
дт
дх
У
(19.4)
где у — объемный вес среды.
298
РАЗДЕЛ 19. РАСЧЕТ СООРУЖЕНИЙ, ВЗАИМОДЕЙСТВУЮЩИХ С ГРУНТОМ
Третье уравнение связывает между собой компоненты напряжений ох, ог и т и записывается следующим образом:
(х — г)2 № (ах V2 si"2 Ф- 19-5) Строгий метод решения системы уравнений (19.4) и
(19.5) разработан В. В. Соколовским 34. Для некоторых частных случаев получены замкнутые решения. В других случаях решения отыскиваются численными методами. С. С. Голушкевич предложил для этих целей графический метод 7.
Строгая теория предельного равновесия в пространстве разработана только для случая осевой симметрии.
Приближенные методы исходят из упрощающих допущений об очертании линий скольжения. Большей частью предполагается, что линии скольжения являются прямыми.
♦ f
Приближенный метод, предложенный Ренкиным, исходит из предположения, что в состояние предельного равновесия переходит вся сыпучая среда и что полное напряжение по вертикальным площадкам параллельно верхней прямолинейной границе среды, а полное напряжение по площадкам, параллельным этой границе, вертикально и равно yz cos Р, где у — объемный вес сыпучей среды (рис. 19.4).
Это предположение эквивалентно допущению, что линии скольжения и траектории главных напряжений являются прямыми. Величины напряжений по любым площадкам находятся с помощью круга Мора (рис. 19.5). Прежде всего определяются напряжения по площадке, параллельной верхней границе среды, которые в соответствии с рис. 19.4 равны:
а yz cos Р; х — yz sin (5 cos p.
Эти величины определят на диаграмме Мора точку F.
В угол, образованный двумя прямыми, проведенными под углами -ф и — ф к оси а, вписывают окружность,
а) б)
Рис. 19.6
проходящую через точку F. Задача имеет два решения. Малая окружность с центром С отвечает случаю сползания сыпучей среды — активному давлению. Большее главное напряжение равно сги, меньшее главное напряжение равно о2а. Одно семейство прямых линий скольжения параллельно прямой EaDy другое —прямой EaD'. Большая окружность с центром С отвечает случаю надвигания сыпучей среды — пассивному давлению. Большее и меньшее главные напряжения соответственно равны oip и 02р. Семейства прямых линий скольжения параллельны прямым EpD и EPD
Метод Ренкина в настоящее время применяется только для решения таких задач, как определение давления сыпучего тела на стенки и воронки бункеров (см. далее п. 19.1.6), на криволинейные ограждающие поверхности, когда иных методов решения не имеется, а значительные отклонения от действительности в величине и распределении давления не имеют существенного значения.
Наибольшее применение в практических целях пока имеют приближенные методы решения задач статики сыпучей среды, в которых линии скольжения предполагаются прямыми, а их положение задается с точностью до одного параметра, который определяется из условия экстремального значения давления сыпучей среды на ограждающие конструкции.
Эта идея Кулона лежит в основе его теории давления сыпучего тела на массивную стенку (см. далее 19.1.3).
Деформации сыпучей среды определяются сдвигами, возникшими в результате преодоления внутренних усилий трения. Поэтому можно считать, что диаграмма малого перемещения А обобщенной силы Ру приложенной к сыпучей среде, такая же, как идеализированная диаграмма сдвига при сухом трении твердых тел (рис. 19.6, а). Пока РЯмакс, перемещение равно нулю, а при Р — Рмакс оно может неограниченно расти. Возможность проявления так называемой псевдопластичности 2, когда переход в предельное состояние сопровождается внезапным падением силы, вызывающей сдвиги, и ЯПредЛмакс (рис. 19.6,6) не принимается во внимание.
Считается, что сыпучая среда ведет себя как жесткопластичное тело и, следовательно, подчиняется положе¬
19.1. СТАТИКА СЫПУЧЕЙ СРЕДЫ
299
ниям, определяемым следующими экстремальными теоремами о предельном равновесии таких систем 1, 6.
1. Величина нагрузки заданной конфигурации, вызывающая переход в состояние предельного равновесия сыпучей среды в целом или только ограниченной ее части — так называемая разрушающая нагрузка — является паибольшей из величин статически возможных, т. е. уравновешивающихся нагрузок той же конфигурации. Это положение непосредственно вытекает из диаграммы, изображенной на рис. 19.6, а.
2. Разрушающая нагрузка есть наименьшая из нагрузок, способных вызвать пластическую деформацию сыпучей среды, т. е. наименьшая из кинематически возможных нагрузок заданной конфигурации. Это положение лежит в основе кинематического метода определения разрушающей нагрузки. В сущности именно такая задача приближенно решается при определении пассивного давления сыпучей среды на стенку. Сила, надвигающая стенку на сыпучее тело, получается наименьшей при наименьшей величине пассивного давления.
3. Величина реакции подающейся связи, ограничивающей сыпучую среду и вызывающей в ней своим перемещением состояние предельного равновесия, есть наименьшая из всех статически возможных и наибольшая из всех кинематически возможных. Типичный пример подающейся связи — стенка, ограждающая сыпучее тело. Определение активного давления на стенку по теории Кулона есть отыскание кинематическим методом приближенного значения реакции подающейся связи.
19.1.3. Давление сыпучего тела на массивную стенку.
Теория Кулона. Строгое решение для частного случая
Теория Кулона лежит в основе приближенных методов определения давления сыпучего тела на массивные стенки. Имеется в виду бесконечно длинная стенка, так что
задача решается как плоская. В расчет вводится стенка длиной, равной единице. Задняя грань стенки плоская. Верхняя граница сыпучего тела имеет произвольное очертание. Давление на стенку определяется для момента перехода ее в состояние предельного равновесия. Если этот переход вызван перемещением в сторону от сыпучего тела, стенка воспринимает активное давление или распор сыпучего тела. При перемещении стенки в проти¬
воположном направлении на нее действует пассивное давление или отпор сыпучего тела. Перемещение стенки создает состояние предельного равновесия в ограниченной зоне сыпучей среды, непосредственно примыкающей к стенке и имеющей форму призмы. Граница между этой зоной и остальной частью сыпучей среды является плоскостью. Наклон плоскости определяется из условия экстремума давления сыпучей среды на стенку.
Случай активного давления изображен на рис. 19.7. Зона сыпучей среды, находящаяся в состоянии предельного равновесия, называется призмой обрушения, ее граница — плоскостью обрушения. Фигура АВН — основание призмы обрушения. Прямая ВН— след плоскости обрушения. Призма обрушения сдвигается по плоской грани стенки АВ и плоскости обрушения ВН. Реакции этих двух плоскостей наклонены к нормалям плоскостей под углами трения соответственно фо и р.
При заданных размерах и угле е наклона.задней грани стенки к вертикали, очертании поверхности сыпучего тела, объемном весе у и углах трения р и ф0 реакция стенки является функцией одной переменной — угла 0, определяющего положение плоскости обрушения. Из треугольника сил получаем:
sin (0 — ф)
(19.6)
sin (г?-0 — ф)
где G — вес призмы обрушения, равный Х(пл. Л )Х ХЬ и угол г) 90—е—ф0.
Активное давление равно максимальной величине Е. При непрерывных Е и dEdQ угол наклона 0 плоскости обрушения может быть найден из условия dEdQ—0. Величина активного давления находится из выражения
(19.6).
Очевидно, что активное давление по теории Кулона есть реакция в подающейся связи, определяемая приближенно кинематическим способом. Погрешность делается в сторону преуменьшения, т. е. не в запас прочности. Поэтому в некоторых случаях приходится отыскивать более точное решение.
Случай пассивного давления изображен на рис. 19.8. Зона сыпучей среды, находящаяся в состоянии предельного равновесия, называется призмой выпирания, ее граница — плоскостью выпирания. Фигура АВН — основание призмы выпирания. Прямая ВН — след плоскости выпирания. В этом случае:
Е — G
sin (0 ф) sin (ф 0 Ф) ’
(19.7)
где G — вес призмы выпирания, равный уХ(пл. АВН)Х.1, и угол г5 90—ефо.
300
РАЗДЕЛ 19. РАСЧЕТ СООРУЖЕНИЙ, ВЗАИМОДЕЙСТВУЮЩИХ С ГРУНТОМ
Пассивное давление равно минимальной величине Е.
При непрерывном Е и dEdQ угол наклона 0 плоскости выпирания может быть найден из условия dEdti—0. Величина пассивного давления находится из выражения
(19.7).
Определение пассивного давления по теории Кулона эквивалентно приближенному определению кинематическим методам разрушающей величины силы, надвигающей стенку на сыпучее тело (рис. 19.9) и, следовательно,
дает погрешность в сторону преувеличения, т. е. не в запас прочности. Поэтому в некоторых случаях приходится искать более точное решение 34.
Распределение давления по высоте стенки — закон изменения его интенсивности и положение центра давления в теории Кулона остаются неопределенными. Для устранения этой неопределенности полагают, что давление на верхнюю часть стенки, расположенную выше некоторого уровня, не зависит от того, перемещается или не перемещается нижняя часть стенки, расположенная ниже того же уровня. С помощью теории Кулона можно построить кривую полных давлений на стенку, каждая ордината которой равна величине давления на ту часть стенки, которая расположена выше ординаты. Интенсивность давления находится как производная кривой полных давлений по длине. Применяют также и другой прием — центр давления находят проектированием на заднюю грань стенки центра тяжести призмы обрушения или призмы выпирания лучом, параллельным следу соответственно плоскости обрушения или плоскости выпирания.
Опыт строительства и специально поставленные эксперименты показали, что теория Кулона в большинстве случаев удовлетворительно согласуется с действительностью 29. Особенно это относится к случаю активного давления. Определять величины давления по фор¬
мулам (19.6) и (19.7) целесообразно только в простейших случаях. Для абсолютно гладкой вертикальной стснки и горизонтальной поверхности сыпучей среды (рис. 19.10). Кулон получил следующие выражения:
активное давление
Е Y vt2 tg (45—2-). (19.8)
пассивное давление
Е у yh tg2 (45-f-) (19.9)
Эпюра давления — треугольник; центр давления находится на расстоянии И3 от низа стенки.
Для более сложных случаев имеются аналитические выражения величин давления 35. Удобны графические
Таблица 19.3
Коэффициенты для определения по формуле (19.5) нормальной составляющей н активного давления (о числителе) и пассивного давления (в знаменателе)
в
град
ф.
град
Фо.
град
—30
—20
— 10
0
10
20
30
40
0
0,65
0,66
0,67
0,70
0,74
0,84
0,95
1,14
2,04
1,75
1,54
1,42
1,35
1,35
1,39
1,52
5
0,60
0,61
0,63
0,66
0,72
0,80
0,91
1,09
Г
2,17
1,94
1,69
1,55
1,47
1,47
1,47
1,58
0,57
0,59
0,60
0,64
0,69
0,79
0,90
1,07
10
2,51
2,06
1,79
1,63
1,54
1,52
1,53
1,63
0
0,3е
0,40
0,43
0,49
0,56
0,65
0,30
1,01
3,67
2,89
2,37
2,04
1,83
1,73
1,68
,72
20
10
0,31
0,35
0,19
0,44
0,51
0,61
0,7"
0,91
4,81
3,73
2,98
2,51
2,22
2,03
1,95
1,97
0,29
0,32
0,36
0,41
0,48
0,58
0,71
0,92
20
5,65
4,32
СО I
ю 1
2,86
2,49
2,29
2,17
2,12
0
0,18
0,23
0,27
0,33
0,41
0,53
0,67
0,89
7,04
5,05
3,76
3,00
2,46
2,17
1,99
1,96
30
15
0,15
0,19
0,24
0,29
' 0,37
0,48
0,61
0,82
11,7
8,14
5,80
4,46
3,60
3,08
2,68
2,47
0,13
0,17
0,21
0,27
0,34
0,44
0,57
0,78
30
15,7
10,5
7,51
5,67
4,48
3,77
3,23
2,95
0
0.03
0,12
0,16
0,22
0,30
0,40
0,5Г
0.73
15,0
9,55
6,35
4,60
3,48
2,85
2,43
2,30
40
20
0,06
35,6
0,10
21,0
0,14
13,4
0,19
9,00
0,26
6,56
0,37
5,05
0,51
3,98
0,72
3,38
0,05
0,08
0,12
0,17
0,23
0,33
0,48
0,70
40
57,9
34,2
21,0
14,0
9,73
7,20
5,55
4,55
методы определения активного и пассивного давления, основанные на теории Кулона (см. пп. 19.1.4 и 19.1.5).
Для частного случая подпорных стенок с плоской задней гранью при горизонтальной поверхности засылки удобно пользоваться результатами расчетов В. В. Соколовского и 3. Н. Буцко по строгой теории, приведенными в табл. 19.3. В этой таблице даны коэффициенты X
для определения нормальной составляющей Еп активного и пассивного давления на стенку по следующей формуле:
yh
н (19.10)
Касательная составляющая Ет вычисляется умножением Ея на коэффициент трения:
,m ,HtgPo- (19.1
19.1. СТАТИКА СЫПУЧЕЙ СРЕДЫ
301
19.1.4. Графическое определение активного давления. Построение Ребхана.
Построение Понселе
Построение Ребхана имеет в виду плоскую заднюю грань и любую непрерывную форму поверхности сыпучего тела. Оно основано на следующих положениях, вытекающих из теории Кулона:
1) на рис. 19.11 линия ВН — след плоскости обрушения, отвечающий активному давлению; линия HG параллельна основной линии BD; площадь фигуры АВН равна площади треугольника BHG;
Рис. 19.12
2) активное давление равно площади треугольника Ребхана GHJ, умноженной на объемный вес сыпучего тела (рис. 19.11).
Построение, определяющее след плоскости обрушения ВНУ и треугольник Ребхана изображены на рис. 19.12.
На горизонтальной оси наносятся точки hih2n6h и представляющие проекции точек НН2ННь соответствующих возможным положениям плоскостей обрушения. Кривая дает изменение площади основания призм обрушения АВИ, АВН2, АВНз, АВН4. Ординаты кривой II равны площадям треугольников BHiG, BH2G2, sG3,
BH4G4. Точка пересечения обих кривых, спроектированная на след поверхности сыпучего тела, определит точку
Н, а прямая ВН есть след искомой плоскости обрушения. Проведя HGBD и отложив GJ GH, получаем треугольник Ребхана. Активное давление
Е у (пji.GHJ), где у — объемный вес сыпучего тела.
а) а
Центр давления может быть найден проектированием на заднюю грань стенки центра тяжести призмы обрушения лучом, параллельным следу ВН плоскости обрушения.
В некоторых случаях по Ребхану можно найти активное давление и без помощи кривых I и II.
На рис. 19. 13, а показан случай, когда поверхность сыпучего тела — плоскость, параллельная основной линии BD. Из условия равновеликости ААВН и АВН С следует, что АН—НС. Треугольник CHJ, заштрихованный на рис. 19. 13,а, есть треугольник Ребхана.
На рис. 19. 13, б поверхность сыпучего тела — плоскость, параллельная плоскости естественного откоса. Точка С уходит в бесконечность. Треугольник Ребхана GHJ определяется проведением GHBD. Эпюра давления треугольная, и, следовательно, давление Е приложено на расстоянии hЗ от низа стенки под углом р0 к нормали задней грани.
Построение Понселе имеет в виду случай, когда поверхность сыпучего тела является плоскостью. Задняя грань стенки — также плоскость. Простота построения Понселе позволяет применять его для приближенного определения давления в ряде более сложных случаев: при ломаном очертании задней грани стенки и поверхности сыпучего тела, при наличии на поверхности сыпучего тела несплошной нагрузки и в других случаях.
Построение Понселе для определения активного давления изображено на рис. 19 14. Последовательность появления точек на чертеже отвечает порядку букв латинского алфавита. Из точки А проводится AEBD. С помощью полуокружности, построенной на диаметре ВС, определяется BF — y ВС-BEt для чего проводится
302
РАЗДЕЛ 19. РАСЧЕТ СООРУЖЕНИЙ, ВЗАИМОДЕЙСТВУЮЩИХ С ГРУНТОМ
FEJLBC. Затем из точки В откладывается BG — BF и из точки G проводится GHBD. Прямая ВН есть след плоскости обрушения. Откладывая от точки G отрезок GJ
— GH, получаем треугольник Ребхана GHJ. Активное давление на стенку
Е у (пл. GHJ)y
где у — объемный вес сыпучего тела.
Активное давление приложено в точке, расположенной на расстоянии г3 от низа стенки, и наклонено под углом фо к нормали задней грани стенки.
Рис. 19.14
На рис. 19.15 дано измененное построение Понселе для случая, когда точка С расположена далеко справа, и построение, согласно рис. 19. 14, оказывается неудобным. Компактность построения достигается параллельным переносом характерных точек.
На рис. 19. 16 изображено построение Понселе для случая, когда AEBD проходит выше следа плоскости, ограничивающей поверхность сыпучего тела. В этом случае из точки С проводится CFJ-BC и определяется BFYBC'BE. Дальше построение продолжается так же, как на рис. 19. 14.
При наличии на поверхности сыпучего тела равномерно распределенной нагрузки (рис. 19. 17) интенсивностью р она заменяется эквивалентным слоем сыпучего тела высотой
h0 —
Поверхность сыпучего тела приподнимается на величину h0. Задняя грань стенки продолжается вверх до пересечения с новой поверхностью сыпучего тела в точке
А'. Таким образом, высота стенки увеличивается на hQ. Величина h0 может быть вычислена по формуле
1
(19.13)
i tg р tg р
Построение выполняется для стенкн высотой hh0. Эпюра давления имеет форму трапеции, заштрихованной на рис. 19.17. Центр давления лежит на уровне цент-
Рис. 19.16
(19.12)
ра тяжести этой трапеции. Верхняя ордината эпюры 7а дает интенсивность активного равномерно распределенного по высоте стенки давления, вызываемого равномерно распределенной нагрузкой р.
Ниже описываются некоторые частные случаи, когда построение Понселе удается использовать только для приближенного, но практически приемлемого решения задачи.
На рис. 19. 18 изображен прием приближенного определения давления для случая, когда равномерно рас¬
19.1. СТАТИКА СЫПУЧЕЙ СРЕДЫ
303
пределенная нагрузка расположена не на всей поверхности сыпучего тела. Принимается, что участок стенки Аа, расположенный выше пересечения задней грани с плоскостью, проведенной под углом ф к горизонту через крайнюю ординату нагрузки, не воспринимает дополнительного давления от этой нагрузки. Далее полагают, что участок стенки ЬВ, расположенный ниже пересечения задней грани с плоскостью, проведенной через край нагрузки параллельно плоскости обрушения, найденной
из построения Понселе для участка А а, испытывает такое же давление, как если бы нагрузка была расположена без отступа от стенки. На участке ab давление изменяется по переходной прямой.
На рис. 19. 19 показан прием приближенного определения давления для случая, когда след поверхности сыпучего тела — ломаная линия АН N. Линия На — след плоскости обрушения для участка Аа, найденный в предположении, что поверхность сыпучего тела — плоская со следом АНМУ треугольник Oed — эпюра давления для этого же участка, построенная при том же предположении. Далее определяется давление на стенку и строится эпюра давления в предположении, что поверхность сыпучего тела — плоскость со следом AxNy а след задней грани стенки — АВ. Прямая 0d на эпюре давления является асимптотой к действительной эпюре давления, так как с увеличением глубины влияние пригрузки ААН уменьшается. Прямая dg, дающая изменение интенсивности давления на участке аВ, спрямляет кривую, проходящую через точку d и имеющую асимптоту 0d.
На рис. 19. 20 показано определение давления на стенку с ломаной задней гранью. Сначала определяется давление ЕАвг на грань АВ. Затем грань ВВ продолжается вверх до Л) и определяется давление Еахв на стенку с плоской задней гранью АВ. Давление на ВХВ равно площади нижней части трапецеидальной эпюры интенсивности давления на стенку АВ. Центры давления на каждую из граней находятся на уровне центра тяжести соответствующей части эпюры интенсивности давления.
Как указывалось, теория Кулона и основанные на ней способы приближенных расчетов несколько преуменьшают активное давление по сравнению с результатами строгой теории предельного равновесия сыпучего тела. По В. В. Соколовскому, при вертикальной задней грани
стенки это преуменьшение находится в пределах 5, если фо40 , т. е вс всех практических случаях. Разница становится существенной для стенок, наклоненных в сторону сыпучего тела, когда е0. Так, при е —30 и ф ф035 теория Кулона преуменьшает активное давление на 42.
19.1.5. Графическое определение пассивного давления. Построение Ребхана. Построение Понселе
Построение Ребхана имеет в виду любую непрерывную форму поверхности сыпучего тела. Оно основано на двух следующих положениях.
На рис. 19.21 линия ВН — след плоскости выпирания. Линия HG параллельна основной линии BD. Пло-
н
Рис. 19.21
щадь фигуры АВН равна площади треугольника BHG.
На рис. 19.22 DJ — GH. Пассивное давление равно площади треугольника Ребхана GHJ (заштрихован на рисунке), умноженной на объемный вес сыпучего тела Таким образом, пассивное давление легко определяется, если известно положение следа плоскости выпирания ВН. Этот след находится построением двух кривых: кривой изменения площади АВН и кривой изменения площади треугольника BGH; обеих в зависимости от положения точки Н на поверхности сыпучего тела. Равенство ординат обеих кривых укажет искомое положение следа плоскости выпирания. Детали построения такие же, как и в случае определения активного давления.
Центр давления находится проектированием на плоскость задней грани центра тяжести призмы выпирания лучом, параллельным плоскости выпирания. Пассивное давление отклонено ст нормали к задней грани на угол ф0.
Построение Понселе имеет в виду, что поверхность сыпучего тела — плоскость. Построение приведено на рис. 19. 22. Последовательность появления точек на чертеже отвечает порядку букв латинского алфавита. Линия естественного откоса проводится под углом ф, откладываемым от горизонтали вниз по часовой стрелке, и продолжается до точки С пересечения продолжения следа плоскости, ограничивающей сыпучее тело сверху. Основная линия ВО образует с гранью стенки угол (ф фо), откладываемый от В А также по часовой стрелке. С помощью полуокружности, построенной на диаметре ВС, строится отрезок BF-Y ВС-BE. Затем откладывается BG — BF, лроводится GH3D и откладывается
304
РАЗДЕЛ 19. РАСЧЕТ СООРУЖЕНИЙ, ВЗАИМОДЕЙСТВУЮЩИХ С ГРУНТОМ
GJ GH. Треугольник GHJ, заштрихованный на рис. 19. 22, — треугольник Ребхана. Пассивное давление
Е у (пл.GHJ),
где у — объемный вес сыпучего тела.
Эпюра интенсивности давления имеет треугольное очертание, как показано на рисунке. Следовательно, пассивное давление приложено в точке, удаленной от низа стенки на г3; оно отклонено от нормали к задней грани на угол фо.
Построение Понселе может быть использовано для определения пассивного давления и в некоторых других
Рис. 19.22
случаях, например при наличии на поверхности сыпучего тела равномерной нагрузки. Для этих целей применяются те же приемы, которые применяются для определения активного давления.
Как указывалось, теория Кулона и основанные на ней приближенные способы расчета приводят к некоторому преувеличению пассивного давления по сравнению с результатами строгой теории предельного равновесия сыпучей среды.
Разница между величинами пассивного давления, по Кулону и по В. В. Соколовскому, для вертикальной задней грани дана в табл. 19. 4.
Таблица 19.4
Разница в процентах между величинами пассивного давления, определенными по теории Кулона и по строгой теории
ф, град
10
20
30
Фо, град
5
0
10
20
15
30
Разница т.
5
4
15
8
50
Терцаги считает, что пассивное давление можно определять по теории Кулона только, если ФоФ- 38.
и
19.1.6. Давление сыпучего тела в бункерах и силосах
Бункером называется хранилище цилиндрической или призматической формы для сыпучего тела с отношением высоты вертикальной стенки к наименьшему размеру поперечного сечения меньшим 1,5. Если это отношение равно или превышает 1.5, хранилище называется силосом. Этой условной границе отвечает значительная раз¬
ница в расчетной величине и распределении давления сыпучего тела на ограждающие поверхности хранилища.
При определении давления в бункере исходят из упрощающих предположений, что хранящееся в нем сыпучее тело, ограниченное сверху горизонтальной плоскостью, целиком находится в состоянии предельного равновесия: при этом вертикальное ав и горизонтальное аг напряжения на глубине у равны:
Рис. 19.23
Вертикальная стенка бункера испытывает только нормальное давление, распределение по линейному закону (рис. 19.23), так что нормальное давление
7ih УК tg2 45—j-j (19.14)
Давление на наклонные элементы воронки имеют нормальную и касательную составляющие, определяемые по известным формулам напряжений по наклонным площадкам:
о ав cos2 а аг sin2 а;
Эпюра нормального давления на наклонный элемент воронки трапецеидальная (рис. 19. 23), нормальные давления равны:
?2н Yijcos2 а __ tg2 sin2 aj. (i9. i5j
4m y(h K) cos a tg2 45—sin aj. (19.16)
Эпюра касательной составляющей давления на наклонный элемент воронки также трапецеидальная.
Давление на стенку силоса определяется по теории Янсена — Кенена, согласно которой предполагается, что:
а) все сыпучее тело в силосе находится в осесимметричном напряженном состоянии предельного равновесия;
б) главные плошадки во всех точках сыпучего тела вертикальны и горизонтальны;
в) отношение между главными нормальными напряжениями — горизонтальным и вертикальным — во всех точках сыпучего тела
Ч (л- ф V
г) давление на стенку имеет две составляющие — нормальную 7г 02 и вертикальную касательную, равную Q fo?r, где о — коэффициент трения сыпучего тела по стенке.
19.1. СТАТИКА СЫПУЧЕЙ СРЕДЫ
305
Очевидно, что предположения б и г противоречат друг другу.
Величина и распределение давления на стенку силоса определяются из решения дифференциального уравнения равновесия слоя сыпучего тела, имеющего форму круглого диска толщиной dy (рис. 19.24):
FdgB YFdy — f0 Udy, где F — площадь поперечного сечения силоса; U — периметр диска.
чгН t t 1
1
’V
11
о
—
л 1
1 t t t t f A t i.
folz 1
Рис. 19.24
Интегрирование дает следующее выражение для нормального давления:
Яг ' О
(19.17)
где
р —; fo-
tg ф0;
T SfT'te(45—f-)'
Нормальное вертикальное давление на любом уровне
Яг
Я в
tg2
(-f)
Общий характер эпюры давления изображен на рис. 19. 25. Наибольшие значения давления получаются при у—оо;
Рис. 19.25
Таблица 19.5 К вычислению нормального давления qr по формуле (19.17)
V
k
n
k
r
k
0,02
0,020
0,50
0,393
0,98
0,625
0,04
0,030
0,52
0,405
1,00
0,632
0,05
0,058
0,54
0,417
1,10
0,667
0,03
0,077
0,55
0,429
1,20
0,699
0,10
0,095
0,58
0,440
1.30
0,727
0,12
0,113
0,60
0,451
1,40
0,753
0,14
0,131
0,62
0,462
1,50
0,777
0,16
0,148
0,64
0,473
1,60
0,798
0,18
0,165
0,66
0,483
1,70
0,817
0,20
0,181
0,68
0,493
1,80
0,835
0,22
0,197
0,70
0,503
1,90
0,850
0,24
0,213
0,72
0,513
2,00
0,865
0,26
0,229
0,74
0,523
2,20
0,839
0,28
0,244
0,76
0,532
2,40
0,909
0,30
0,259
0,78
0,542
2,60
0,926
0,32
0,274
0,80
0,551
2,80
0,939
0,34
0,288
0,82
0,559
3,00
0,950
0,36
0,302
0,84
0,568
3,20
0,959
0,38
0,316
0,86
0,577
3,40
0,967
0,40
0,330
0,88
0,585
3,60
0,973
0,42
0,343
0,90
0,593
3,80
0,978
0,44
0,356
0,92
0,601
4,00
0,982
0,46
0,369
0,94
0,609
5,00
0,993
0,48
0,381
0,96
0,617
6,00
0,998
8,00
1,000
7в-макс
-f,g2(45i
Для облегчения расчетов с помощью формулы (19. 17) в табл. 19. 5 приведены величины
1-гЛ
Измерения в натуре, р особенности проведенные в 1938—1939 гг. С. Г. Тахтамышевым на зерновых силосах элеватора в Баку, а также лабораторные эксперименты показали, что формула (19. 17) дает удовлетворительные результаты лишь для случая, когда сыпучее тело в силосе находится в покое. Как только открывается выпускное отверстие в днище силоса, величина и распределение давления по вертикали и периметру силоса в большинстве случаев значительно отличаются от получаемых по теории Янсена — Кенена. Максимальные величины горизонтального давления могут превосходить теоретические в 2—3 раза.
Учитывая опытные данные, к формуле Янсена — Кенена вводят поправочные коэффициенты, большие единицы. По 39 при расчете нижней зоны стенок силосов на протяжении 2з высоты стенки горизонтальное давление, вычисленное по формуле (19. 17), умножается на поправочный коэффициент, равный двум; на такой же коэффициент умножается вертикальное давление при расчете днищ.
В силосах для всех видов продовольственного зерна при расчете днищ и нижней зоны стенок высотой, равной 0,15 высоты силоса, а также при расчете стенок силосов для угля по всей высоте поправочный коэффициент не вводится.
Для получения расчетных нагрузок нормативные давления умножаются на коэффициент перегрузки п 1,3.
306
РАЗДЕЛ 19. РАСЧЕТ СООРУЖЕНИЙ, ВЗАИМОДЕЙСТВУЮЩИХ С ГРУНТОМ
19.2. РАСЧЕТ ПОДЗЕМНЫХ СООРУЖЕНИЙ
19.2.1. Физико-механические свойства и характеристики грунтов
Виды и составные части грунтов
Грунтами называются горные породы верхних слоев земной коры. Грунты разделяются на скальные и нескальные (дисперсные).
Скальные грунты обладают жесткой связью между частицами, спаянными или сцементированными между собой, и залегают в виде сплошного массива или трещиноватого слоя.
Нескальные грунты состоят из твердых минеральных частиц (скелет грунта), между которыми имеются промежутки (поры), заполненные водой или газами. Физико-механические свойства нескальных грунтов зависят от свойств этих компонентов, их количественного соотношения и взаимодействия.
Нескальные грунты разделяются на следующие основные виды:
крупнообломочные — несцементированные грунты, содержащие более 50 по весу обломков кристаллических или осадочных пород крупнее 2 мм;
песчаные — сыпучие в сухом состоянии грунты, не обладающие свойством пластичности и содержащие менее 50 по весу частиц крупнее 2 мм
глинистые — связные грунты, обладающие свойством пластичности.
Скальные грунты подразделяются по происхождению (изверженные, метаморфические и осадочные), по степени трещиноватости, по временному сопротивлению сжатию и по степени растворимости и размягчаемости в воде.
Крупнообломочные грунты подразделяются в зависимости от их зернового состава на щебенистые (галечниковые) и дресвяные (гравийные), а пески — на гравелистые, крупные, средней крупности, мелкие и пылеватые.
По степени влажности песчаные грунты могут быть маловлажными, влажными и насыщенными водой.
В зависимости от величины коэффициента пористости песчаные грунты разделяются на плотные, средней плотности и рыхлые.
Глинистые грунты в зависимости от числа пластичности Wп относятся к супесям (1№п7), суглинкам (7№п17) или глинам (Un 17). По консистенции глинистые грунты могут быть твердыми, пластичными и текучими. Суглинки и глины могут быть еще полутвердыми, туго-пластичными, мягко-пластичными и текучепластичными. Численные критерии, характеризующие виды и состояния грунтов, приведены в СНиП И-Б.1-62.
Напряжения и осадки грунта
Зависимость между осадками s поверхности нескального грунта и действующей здесь местной нагрузкой р имеет вид кривой, показанной на рис. 19. 26. Кроме осадок непосредственно под нагрузкой наблюдаются еще осадки за пределами загруженной площади, которые с удалением от нагрузки затухают более интенсивно, особенно при песчаных грунтах, чем расчетные вертикальные перемещения поверхности упругого однородного и изотропного полупространства.
Криволинейный график зависимости между давлением р на грунт и еп осадкой 5 под нагрузкой можно условно разделить на три участка, соответствующие трем ста¬
диям сопротивления грунта (рис. 19.27). На первом участке 0—1 в стадии уплотнения грунта зависимость -между 5 и р близка к линейной. На участке 1—2 — в стадии преобладающего сдвига грунта — зависимость между s и р носит отчетливо выраженный криволинейный характер. Третья стадия, начинающаяся от точки 2, называемая стадией разрушения, в которой сдвиги грунта получают еще большее развитие, обычно оканчивается выпиранием грунта из-под загруженной площади.
При разгрузке осадки частично сохраняются, особенно в пределах загруженной площади. За ее пределами осадки почти полностью исчезают.
Повторные нагружения поверхности грунта возрастающей с каждым циклом нагрузкой изображаются графиком с петлями гистерезиса (рис. 19.28, а). Полные осадки складываются из восстанавливающихся и остаточных, а график полных осадок 5 может быть преобразован и представлен в виде суммы ординат двух кривых (рис. 19.28,6), одна из которых соответствует восстанавливающимся осадкам s в, вторая — остаточным So-
Кривые последующих нагружений в диапазоне ранее приложенных нагрузок почти прямолинейны и более пологи, чем кривая первого нагружения, благодаря упрочнению, связанному с разрушением острых контактов
о)
б)
Рис. 19.28
и увеличением общего их количества при переходе структурных элементов грунта в более устойчивое положение. Упрочненные грунты при нагрузках, не превышающих предыдущие, характеризуются относительно меньшими остаточными деформациями и по своим механическим свойствам приближаются к упругим телам.
19.2. РАСЧЕТ ПОДЗЕМНЫХ СООРУЖЕНИЙ
307
Расчетные механические модели грунтов
Для определения напряжений и деформаций грунта путем расчета вместо самого грунта рассматривается его расчетная механическая модель, которая должна отражать основные механические свойства грунта, но свободна от второстепенных деталей, не играющих существенной роли для поставленной цели.
Разнообразие грунтов и их свойств, связанное с условиями их формирования и существования, породили несколько расчетных моделей — модель сплошной среды (упругой или неупругой), модель зернистой среды, модель местнодеформируемой поверхности (модель Фусса — Винклера) и различные комбинированные модели.
При расчете оснований и подземных сооружений в большинстве случаев используется модель Фусса — Винклера или модель упругого однородного изотропного полупространства, приводящие в большинстве случаев к наиболее сильно отличающимся друг от друга результатам. В первом случае в качестве расчетной характеристики грунта используется коэффициент упругого отпора k (коэффициент постели), во втором случае— модуль деформации Е0 и коэффициент Пуассона fx0.
Расчетную величину коэффициента упругого отпора k скального грунта в первом приближении можно принимать в зависимости от величины коэффициента крепости f по формуле
k 50а. (19.18)
где а — коэффициент, учитывающий степень трещиноватости скального грунта, принимаемый равным 0,8, I и 1,2 для грунтов соответственно значительной, средней и малой трещиноватости.
Ориентировочные значения k и Е0 для различных грунтов приведены в табл. 19.6.
Таблица 19.6
Ориентировочные значения характеристик деформируемости грунтов
Модуль
Коэффици¬
Грунт
деформации
ент пгстели
Е0 в кГсм1
, k в кГсмЛ
Базальт 75-104—95-1О4
800—1200
Гранит, порфир, диорит
50-104—80-10
500—900
Гнейс.
40-104—80 104
350—500
Песчаник 70-103—30-104
80—250
Известняк (плотный), доломит.
15. Юз-70. Ю3
40—80
песчаный сланец 30-103—40-103
20-60
Туф 1000—10 103
10-30
Крупноблочный грунт.
500—1000
5—10
Песок крупный и средней крупности 330—460
3—5
Песок мелкий.
240—370
2—4
пылеватый 100—140
1 — 1,5
Глина твердая 1000—2000
10—20
Глинистые грунты пластичные
80—350
1—4
Коэффициент Пуассона M-о принимается равным:
для скальных грунтов . 0,20
крупнообломочных грунтов. 0,27
песков и супесей . 0,30
суглинков . 0,35
глин. 0,42
Для насыпных грунтов расчетные значения модулей деформации и коэффициента постели должны быть снижены в 2—3 раза и более. Для грунтов, лежащих на значительных глубинах и испытывающих большие давления от веса вышележащей толщи, значения Е0 и (.10 могут быть более высокими, чем приведенные в табл. 19.6.
Прочность грунтов
Прочность нескальных грунтов зависит от их сопротивления сдвигу, которое определяется величиной коэффициента среза, или коэффициента крепости грунта. Последний представляет собой величину отношения между предельным касательным тир и нормальным ст напряжениями, действующими по данной площадке:
(19.19)
а а
где ф — угол внутреннего трения грунта; с — удельное сцепление.
Для несвязных грунтов с0 и f tgq-
Для скальных грунтов величины коэффициентов крепости зависят от их пределов прочности при сжатии Rem и принимаются равными f(V,01 Rem. Расчетные значения уо, ф и для различных грунтов приведены в табл. 19.7.
Таблица 19.7 Ориентировочные значения характеристик горных пород
Грунт
5
ж к
1-
a Угол внутреннего трения ф в град
Коэффициент крепости
Наиболее крепкие базальт, кварцит, порфирит и габбродиорит.
2,8—3
87
20
Очень крепкие гранит, кварцевый порфир, кварцит, кремнистый сланец, наиболее крепкие песчаники, известняки 2,6—2,7
85
15
Крепкий гранит, очень крепкие песчаник, известняк и конгломерат
2,5—2,6
82 30'
10
Некрепкий гранит, крепкие песчаник, известняк и мрамор, доломит, колчеданы 2,5
80
8
Обычный песчаник 2,4
75
6
Песчанистый сланец, сланцевый песчаник 2,5
72 30'
5
Крепкий глинистый сланец, некрепкие песчаник и известняк, мягкий конгломерат 2,8
70
4
Некрепкий сланец, плотный мергель, разрушенный песчаник.
2,5
70
3
Мягкие сланец и известняк, мел, гипс, каменная соль, мерзлый грунт, антрацит, мергель, сцементированные галька и хрящ, каменистый грунт 2,4
65
2
Разрушенный сланец, крепкий каменный уголь, слежавшиеся галька и щебень, щебенистый грунт, твердая глина 1,8—2
60
1,5
Средней крепости каменный уголь, плотный глинистый грунт.
1,8
60
1
Мягкий каменный уголь, гравий, глинистый грунт, лёсс.
1,6
40
0,8
Слабый глинистый грунт, сырой песок, растительный грунт, торф
1,5
30
0,6
Песок, мелкий гравий, насыпной грунт, добытый уголь 1,7
27
0,5
Разжиженные грунты.
1,5—1,8
9
0,3
308
РАЗДЕЛ 19. РАСЧЕТ СООРУЖЕНИЙ. ВЗАИМОДЕЙСТВУЮЩИХ С ГРУНТОМ
Для связных грунтов величина f является переменной, так как зависит от действующего напряжения а. Однако в практических расчетах величину f принимают постоянной.
19.2.2. Давление грунтов на подземные сооружения
Напряженное состояние грунтов до и после проведения выработки
До проведения выработки и до возведения подземного сооружения грунт в неограниченном массиве находится в состоянии естественного или геостатического равновесия при действии собственного веса. При этом
на глубине z в массиве грунта (рис. 19.29) действуют следующие сжимающие напряжения (давления): вертикальные
(19.20)
горизонтальные
ох 7у go То г, (19.21)
где Yo — средний объемный вес вышележащих грунтов; о — коэффициент бокового давления грунта в условиях естественного залегания.
Проведение открытой или подземной выработки изменяет условия равновесия массива грунта и приводит к возникновению в нем деформаций ц к перераспределению напряжений.
Давление грунта на подземные сооружения оказывается иным, чем давление в нетронутом массиве на той же глубине, так как, во-первых, сооружение обладает другой жесткостью, чем грунт, во-вторых, перемещения грунта успевают произойти в период времени между разработкой грунта и возведением сооружения, наконец, в третьих, между сооружением и массивом остаются зазоры, допускающие некоторые перемещения грунта.
Давление, оказываемое грунтом на сооружение, зависит от глубины заложения и жесткости последнего; влажности и степени уплотнения грунта над сооружением и особенно рядом с ним и от способа возведения сооружения. Следует различать три основных случая возведения сооружения: сооружение в насыпи (рис. 19.30, а), возведенное или уложенное непосредственно на поверхности земли или в очень небольшом по сравнению с шириной выемки углублении с последующей засыпкой; так обычно сооружаются водопропускные трубы под дорожными насыпями;
сооружение в выемке или траншее (рис. 19.30,6), когда оно возводится или укладывается в открытой выработке, имеющей небольшую по сравнению с глубиной ширину и ограниченной более или менее твердыми стенками; пространство рядом с сооружением и над ним заполняется грунтом; так обычно укладываются трубо¬
проводы водоснабжения, канализационные коллекторы, водостоки и др.;
сооружение, возведенное закрытым способом (рис. 19.30, б), при котором массив грунта не нарушается с поверхности; этот способ применяется при строител ьстве туннелей и при бестраншейной прокладке трубопроводов.
а) б) 6)
грунт грунт
Рис. 19.30
Давление грунта на подземное сооружение не остается постоянным, а меняется вследствие изменения температурно-влажностных условий и ползучести грунта. В большинстве случаев давление на сооружение постепенно нарастает с течением времени, достигая наибольшей величины через некоторый промежуток времени, с последующим иногда уменьшением.
Для определения давления на подземные сооружения от грунта последний рассматривают либо в качестве упругой, либо в качестве сыпучей среды.
Первая расчетная модель применима в тех случаях, когда напряжения в массиве грунта после проведения выработки значительно меньше разрушающих. Если же в наиболее напряженных областях грунта наступает разрушение, то применима расчетная модель сыпучей среды, находящейся в состоянии предельного равновесия.
Таблица 19.8
Значения коэффициентов перегрузки
Нагрузка
п
Собственный вес конструкций:
Давление воды. Вертикальное давление грунта:
а) на туннели железнодорожные и автодорожные при сводообразовании
б) то же, от веса всей налегающей толщи в) на городские транспортные и пешеходные туннели и трубопроводы в насыпях или траншеях Горизонтальное активное давление грунта:
а) на туннели б) на трубопроводы в насыпях или траншеях -.
Подвижная нагрузка на поверхности:
а) от колонн автомобилей б) от колесных и гусеничных нагрузок
в) от подвижного состава железных дорог г) от пешеходов 1.1
1,2
1.1 и 0,9
1,5
1.1 и 0,9
1.2 и 0,9
1.2 и 0,8
1.2 и 0,9
1,4
1,1
1.3
1.4
19.2. РАСЧЕТ ПОДЗЕМНЫХ СООРУЖЕНИЙ
309
Давление на подземное сооружение, расположенное ниже уровня свободной подземной воды, определяют как совместное давление грунта во взвешенном состоянии и воды. При этом для расчета берется наиневыгоднейший уровень подземной воды.
Давление на подземное сооружение неустойчивых водонасыщенных грунтов (плывунов) принимается по гидростатическому закону.
При расчете подземных сооружений по первому предельному состоянию нормативные нагрузки умножаются на коэффициенты перегрузки п, принимаемые по табл. 19.8.
При этом значения коэффициентов перегрузки, меньшие единицы, относятся к случаям, когда данная нагрузка уменьшает расчетное суммарное воздействие.
При расчете подземных сооружений с учетом дополнительных или особых сочетаний величины расчетных временных нагрузок принимаются с коэффициентами 0,9 и 0,8 соответственно.
Давление грунта на сооружение в насыпи
Если жесткость сооружения не превышает жесткости окружающего его грунта насыпи, то нормальная и касательная составляющие нормативного давления в любой точке верхнего свода по теории предельного рав-
Рис. 19.31
новесия сыпучих тел выражаются формулами (рис. 19.31):
а y0z (cos2 а a sin2 а); т y0z (1 — a) sn а cos (
а); i а,
где Yo — объемный вес грунта; г — глубина рассматриваемой точки от поверхности насыпи; а — угол, который составляет нормаль к поверхности сооружения в рассматриваемой точке с вертикалью;
а—коэффициент активного бокового давления грунта;
a tg2 (45 — р2)
ф — угол внутреннего трения грунта.
Составляющие давления на нижний свод сооружения выражаются также формулами (19.22), но в них вводится множитель
i
JSJL'f tge ) ‘
Равнодействующая давлений на верхнюю половину сооружения равна весу вышележащего грунта и при круговом поперечном сечении составляет:
QB у0ЯОх1 0,108. (19.25)
Равнодействующая активных давлений на обе половины круглого трубопровода, т. е. сила, передающаяся на основание, определяется из формулы
R — УоНВг
Здесь Н — высота насыпи D —наружный диаметр его.
А и ) ’ (19'26)
над верхом сооружения;
(19.22)
(19.23)
(19.24)
Рис. 19.32
Значения параметров А и Л2, в зависимости от величины а, приведены на графике рис. 19.32.
При жесткости сооружения, превышающей жесткость грунта насыпи, давление на сооружение оказывается большим, чем вес вышерасположенного грунта. Равнодействующая дополнительного равномерного вертикального давления на верхнюю половину сооружения от концентрации давления составляет:
вдоп Yotf0i(H-l), (19.27)
где Кн — коэффициент концентрации давления грунта в насыпи, определяемый по верхней части графика рис. 19.33 в зависимости от отношения ЯD, и от величины произведения Sx; х — коэффициент выступания, т. е. отношение выступающей из основания части h трубопровода к его ширине; S — коэффициент, принимаемый в зависимости от жесткости основания под трубопроводом:
очень жесткое (скальное, свайный фундамент)—S 1,0;
жесткое (крупнообломочные грунты; пески гравелистые, крупные и средней крупности, плотные; супеси твердые; суглинки и глины твердые и полутвердые) — 50,7;
плотное (пески гравелистые, крупные и средней крупности, средней плотности; пески,мелкие, плотные; супеси пластичные, суглинки и глины туго-пластичные) — S— 0,5;
310
РАЗДЕЛ 19. РАСЧЕТ СООРУЖЕНИЙ, ВЗАИМОДЕЙСТВУЮЩИХ С ГРУНТОМ
податливое (пески гравелистые, крупные и средней крупности, рыхлые; пески мелкие, средней плотности; пески пылеватые, плотные; супеси текучие; суглинки и глины мягко-пластичные) —о 0,3;
очень податливое (пески мелкие, рыхлые; пески пылеватые, средней плотности и рыхлые, суглинки и глины текуче-пластичные и текучие) —5 0.
Для гибких трубопроводов дополнительное вертикальное давление не учитывается
о г и 6 8 юн
п.
1,2 ' 0,8 0,6 0,4 0Л
Насыпь
SX 2
1 S '
в
2
? -0,7
Sx 0,5
X
кГ
J—
Г 1
Sx0
Грат
мея
2
1
26 Рис. 19.33
Боковое давление определяется по формулам (19.22) без учета концентрации давлений и может быть представлено эпюрами, показанными на рис. 19.34 с ординатами:
ЧбУоН’
D-i
Яб YoSa (Н —I
Для упрощения можно принять среднее боковое давление равномерным:
7б.ср —
VolaW
3
Н
или еще проще
7б.ср — Vo Н -
(19.30)
(19.31)
В упругой стадии работы грунта остаются справедливыми формулы (19.22) — (19.24), но при определении бокового давления уже следует исходить' из величины коэффициента бокового давления 0, которому соответствует условный угол внутреннего трения
Фу arc sin. (19.32)
А “Г feo
Кроме того, коэффициент концентрации давления грунта в насыпи берется уже по графику рис. 19.35 в зависимости от коэффициента Пуассона ц и параметра
(19.33)
1 2х-
-гр
где Ь0 — ширина опорной поверхности трубопровода; Е0 — модуль деформации грунта основания; гр — мо-
' ЖЕГ
1 1 ‘
I
дуль деформации засыпки; х — отношение выступающей из основания части трубопровода к его наружному диаметру.
Для очень жесткого сооружения Е оо и тогда
Pi ь,
можно принять (19.34)
(19.28)
(19.29)
Исходя из графика рис. 19.35 и формулы (19.34), можно рекомендовать расчетные значения коэффициента Кн для жесткого трубопровода, приведенные в табл. 19.9.
Таблица 19.9
Значения Кн (округленные)
Опирание
Основание
обычное
улучшен¬
ное
на фундамент
Скальное. „. .1,5
1,5
1,6
1,4
1,45
1,5
Плотное 1,25
1,3
1,4
Податливое 1,1
1,2
1,25
Очень податливое.
1,0
1,0
1,1
При заглублении трубопровода в основание, т. е. при малых значениях коэффициента х, снижаются и соответствующие значения Кн. Однако их не следует брать меньше единицы, так же как и для гибких трубопроводов.
19.2. РАСЧЕТ ПОДЗЕМНЫХ СООРУЖЕНИЙ
311
Давление грунта на сооружение в выемке (траншее)
Равнодействующая нормативного вертикального давления грунта на сооружение в траншее определяется по формуле
?в у0 НЗКтр, (19.35)
где Н — высота засыпки над верхом сооружения; Стр — коэффициент вертикального давления грунта в траншее, зависящий от отношения ЯВср и определяемый по нижней части графика рис. 19.33; при этом
Рис. 19.35
чае расчетное давление на сооружение в траншее определяется по формулам для насыпи.
Давление грунта на крепь выработки и обделку туннеля
Возникновение областей пластических деформаций и разрушения в некоторых породах, преимущественно пластичных, приводит к оседанию всей толщи пород, находящихся над сооружением, особенно при большом его пролете. В этом случае, как показывают измерения
кривая 1 соответствует песчаным грунтам, а кривая
2 — глинистым; В — ширина траншеи на уровне верха сооружения; ср— средняя ширина траншеи; г) — коэффициент, учитывающий совместность деформаций трубопровода и грунта, находящегося между его стенками и стенками траншеи:
1 Лг
—. (19.36)
1
"гр (В l)
ExD,
()’
Здесь б — толщина стенки трубопровода; г — радиус срединной поверхности трубопровода; х — коэффициент выступания трубопровода из основания; Е — модуль упругости материала трубопровода; Ег р — модуль деформации засыпки, принимаемый по табл. 19.10.
Таблица 19.10 Значения модулей деформации грунтов плотной засыпки
Грунт засыпки
Пески крупные и средней крупности
мелкие пылеватые Супеси и суглинки Глины гр, кГсм
170
150
50
60
40
Боковое давление грунта в узких траншеях или совсем не учитывается или при хорошем уплотнении пазух учитывается в размере до 20 вертикального.
Вертикальное давление грунта на сооружение в широкой траншее не может превышать соответствующего давления на сооружение в насыпи. В противном слу-
горного давления на сооружения, заложенные на глубине 25—50 м от поверхности, вертикальное давление в глинистых грунтах может доходить до полного веса всей налегающей толщи, а в прочных породах составляет 70—80 этого веса.
В других грунтах, например в песчаных, область нарушения может не доходить до поверхности, так как над сооружением образуется естественный разгружающий свод, очертание которого принимается параболическим (рис. 19.36).
Давление на сооружение в этом случае считается передающимся от грунта, занимающего область внутри разгружающего свода, ограниченную с боков плоскостями скольжения.
Пролет L свода давления и его высота hi над верхней точкой выработки определяются по формулам М. М. Протодьяконова:
Z. D12Atg(45 L
2 ’
(19.37)
где D — ширина или диаметр выработки в м; h — высота или диаметр выработки в м; р — угол внутреннего трения грунта в град — коэффициент крепости грунта (горной породы), учитывающий его внутреннее сопротивление разрушению, а также характер напластований, степень трещиноватости и способ сооружения туннеля.
Нормативное горное давление на крепь или на туннельную обделку принимают равномерно распределенным, и его равнодействующие определяют по формулам:
для вертикального давления
Qb — Yo Di
(19.38)
312
РАЗДЕЛ 19. РАСЧЕТ СООРУЖЕНИЙ, ВЗАИМОДЕЙСТВУЮЩИХ С ГРУНТОМ
для горизонтального давления
?б Vo Dl(h1 0,5) tg (450-, (19.39)
где Yo — объемный вес грунта.
Значения характеристик Yo, ф и различных грунтов приведены в табл. 19.7.
Расстояние от вершины свода давления до дневной поверхности или до контакта со слабыми породами должно быть не меньше высоты свода давления. В противном случае, а также при невозможности сво-
и
дообразования, нормативное вертикальное давление принимают равным весу всей толщи грунта над туннелем, а равнодействующую горизонтального давления определяют по формуле
Qe Yo Hqi tg2 45
5 -т) (19.40)
где Но — глубина заложения центра выработки от поверхности грунта; Yo — объемный вес грунта; ф — угол внутреннего трения грунта; с — удельное сцепление; К — коэффициент концентрации давлений, принимаемый равным: для песков 1,0—1,3; для глин 1,8—2,0; для сланцев 1,5—1,8.
Давление принято равномерным и действующим нормально к поверхности сооружения.
Давление грунта на подземное сооружение может быть определено из решения контактной задачи теории упругости для полуплоскости с подкрепленным отверстием.
При горизонтальной круглой выработке, центр которой находится на глубине Я0 от поверхности, нормальное давление на обделку равно:
Я
Yotfo П о
(1
ы(у
где 11
й1
о I и Е 1о Е
-jcos2ej, (19.43)
С
5 — 6х0
р2 — 1 — 2ц 1 — р2
1 Ч И- (1 Ио)(5-6ц0)
Еп 1 Ц
(1-р2) ’ D
где Но — высота толщи грунта, расположенной выше оси туннеля, приведенная к объемному весу слоя Yo грунта у оси туннеля, в м.
Горное давление на обделку параллельных туннелей при возможности образования над каждой выработкой самостоятельного свода давления определяется для каждой выработки в отдельности. Если же при заданных размерах каждой выработки, целика между ними и физико-механических свойств породы образование самостоятельного свода над каждой выработкой невозможно, то давление на обделки определяется исходя из предположения существования над ними общего свода давления.
Активное давление грунта со стороны подошвы выработки (дутье), направленное снизу вверх, возникает в результате выпирания грунта из-под стен обделки под воздействием вертикальной нагрузки и собстсенного веса обделки (рис. 19.37).
Равнодействующая сил давления грунта со стороны подошвы выработки
Я -г, (19.41)
2 Wo 1 — ll
где q — давление стены на основание.
Для определения активного давления на крепь одиночной выработки кругового поперечного сечения на основе теории предельного равновесия К. В. Руппенейтом предложена формула
9 a(Yotfo -exp(-ntg9) —- (19.42)
4 — 6(г0 Е (1 ц0)(4-6ц0) (1-р2)’
D 3 — 1 4(3 — 4ц) р2 — 6(1 — 2а) р4 —
— 4рв — (5 — 6л) р8,
где 0 — полярный угол, отсчитываемый от вертикального диаметра; — коэффициент бокозого давления; Е и ц — модуль упругости и коэффициент Пуассона материала сооружения; Е0 и ц0 — модуль упругости и коэффициент Пуассона грунта; р — г0г.
При достаточно тонкой обделке давление на нее выравнивается и может быть принято равномерным по длине окружности:
YoO So) 10 АА.
Та (19.44)
Давление грунта в пространственной задаче
Принимается, что при осадке кровли песчаного грунта над подземным сооружением круговой формы в плане над ним образуется естественный купол и что на сооружение оказывает давление вес грунта, находящегося внутри этого купола, имеющего форму параболоида вращения (рис. 19.38, а). Наибольшая интенсивность вертикального давления на сооружение по оси купола
Яв ' Уов
(19.45)
где а — радиус купола, который может быть больше радиуса сооружения; f — коэффициент крепости, берется по табл. 19.7.
Полная нагрузка на сооружение, равная весу грунта в объеме, ограниченном поверхностью купола
QB3. (19-46)
19.2. РАСЧЕТ ПОДЗЕМНЫХ СООРУЖЕНИЙ
313
учитывается неравномерность распределения -бокового давления по схеме, изображенной на рис. 19.38,6.
Давление грунтовой воды принимается равномерным и нормальным к поверхности сооружения.
Давление на сооружение от назгеэдаяга нагрузок
При расчете туннелей и трубопроводов, укладываемых под автомобильные дороги, временную вертикальную нагрузку от транспорта следует принимать от колонны автомобилей по схеме Н-30 или от одной транспортной единицы на колесном ходу по схеме НК-80. Для трубопроводов, укладываемых в местах, где возможно движение автомобильного транспорта, следует принимать нагрузку от колонны автомобилей по схеме Н-18 или гусеничную нагрузку НГ-60.
При заглублении верха сооружений на 1,2 ж и более нормативную вертикальную нагрузку от колонн автомобилей разрешается принимать равной 2 Тм2.
Для трубопроводов, укладываемых в местах, где движение автомобильного транспорта невозможно, принимается равномерная нагрузка от пешеходов 500сГОк2.
Для сооружений, укладываемых под железнодорожными путями, в качестве нормативной следует принимать нагрузку, соответствующую классу данной железнодорожной линии, но не ниже С14.
Динамический коэффициент подвижной наземной нагрузки при высоте засыпки 0,7 м и более (при наличии покрытия 0,5 м и более) принимается равным единице, а при высоте 0,25 м—1,3. Для промежуточных
Наибольшая интенсибмость бабле ми я на сооружение р Тм2
Боковое давление грунта ць на стенки вертикальных выработок (шахт) определяется как давление в массиве до выработки или активное давление по теории предельного равновесия с учетом объемного веса и угла внутреннего трения грунта каждого слоя. При этом
Рис. 19.39
314
РАЗДЕЛ 19. РАСЧЕТ СООРУЖЕНИЙ, ВЗАИМОДЕЙСТВУЮЩИХ С ГРУНТОМ
высот засыпки значения динамического коэффициента берутся по интерполяции.
Для определения давления, передающегося через грунт от нагрузок, приложенных на поверхности земли, применяется способ распределения давления под углом 30 к вертикали или, что предпочтительнее, формулы теории упругости для вертикальных напряжений в полупространстве.
На рис. 19.39 приведен график, позволяющий найти наибольшую интенсивность вертикального давления для разных глубин заложения верха сооружения от различных нормативных подвижных нагрузок. Влияние дорожного покрытия учитывается приведением его к эквивалентному слою грунта.
19.2.3. Расчет жестких подземных сооружений кругового поперечного сечения
Распределение опорных реакций
Внутренние усилия, возникающие в стенках сооружения при действии тех или других нагрузок, зависят также от распределения опорных реакций, которое определяется способом опирания сооружения на основание.
При укладке сооружения на плоское грунтовое основание (рис. 19.40, а) опорную реакцию принимают сосредоточенной вдоль нижней образующей.
Если сооружение уложено на жесткое спрофилированное по его нижней части грунтовое основание с центральным углом опирания 2а (рис. 19.40,6), то опорную реакцию принимают равномерно распределенной по всей ширине опорной поверхности интенсивностью
9-7Г (1Э.47)
где R — равнодействующая нагрузки; D — наружный диаметр трубопровода.
При ширине ложа 6o 0,6Z)i угол 2а ж 75 .
При опирании круглого трубопровода на основание из слабого грунта распределение опорной реакции можно принять по треугольнику (рис. 19.40, в) с наибольшей ординатой
2 R
Яд — “Г—: (19.48)
л DiSina
Если жесткое сооружение имеет плоскую подошву шириной bо, то эпюра реакций имеет седловидную форму. При этом разница между крайними и средними ординатами тем больше, чем большей связностью и плотностью обладает грунт (рис. 19.40, г).
Для песчаного и пластичного глинистого основания можно принять распределение опорной реакции равномерным.
Трубопровод, уложенный на фундамент (рис. 19.41, а), может рассматриваться в качестве свода с заделанными пятами (рис. 19.41,6) лишь в том случае, если в действительности обеспечена связь между трубопроводом и фундаментом и если сам фундамент достаточно жесткий. В противном случае при деформации трубопровода он оказывается как бы шарнирно опертым по двум образующим у краев опорной поверхности (рис. 19.41,в).
Если контакт между трубопроводом и фундаментом сохраняется на всем протяжении опорной поверхности, но фундамент недостаточно жесток для обеспечения полной заделки, то обычно принимают опорные реакции направленными радиально (рис. 19.41, г) и распределенными по закону
47? cos 0
(19.49)
19.2. РАСЧЕТ ПОДЗЕМНЫХ СООРУЖЕНИЙ
315
Распределение опорной реакции по подошве жесткого фундамента такое же, как и по плоской подошве самого трубопровода.
При приближенном расчете туннельных обделок реакцию принимают равномерно распределенной по длине диаметра сооружения.
Внутренние усилия в сооружении от различных нагрузок
Сооружение достаточно большого протяжения в одинаковых условиях работы испытывает плоскую деформацию, и для расчета можно выделить участок соору¬
жения длиной, равной единице. При этом расчет сооружения сводится к расчету кольца, находящегося в равновесии при действии нагрузок и реактивных сил.
Расчет кольца производится методом сил (см. раздел 5) с переносом неизвестных для их разделения в уравнениях в упругий центр, совпадающий с геометрическим центром кругового кольца. При нагрузке, симметричной относительно вертикальной оси, из трех неизвестных остаются только Х и Х2 (рис. 19.42).
Кольцо считается опертым в нижней точке А, что равносильно жесткой заделке полукольца в этом сечении. Расчет кольца можно производить отдельно на каждый вид нагрузки и на действие опорных реакций, а затем алгебраически складывать внутренние силы от тех или других внешних воздействий.
При этом равнодействующие нагрузки и соответствующей ей опорной реакции должны быть равны между собой и направлены в противоположные стороны.
Окончательные формулы для изгибающих моментов и окружных нормальных сил в любом сечении стенки круглого жесткого сооружения приводятся к виду:
M MRr; (19.50)
N NR,
(19.51)
где R — равнодействующая той или_друтой нагрузки; г — средний радиус трубопровода; М и N — коэффициенты, зависящие от распределения нагрузки и опорной реакции и от положения взятого сечения.
В табл. 19.11 —19.16 приводятся значения коэффициентов М u N для различных нагрузок при разных условиях опирания. Коэффициенты относятся к трем характерным сечениям кольца: к подошве (Л), к бокам (Б) и шелыге (В). При этом изгибающие моменты считаются положительными, если они уменьшают первоначаль¬
ную кривизну оси поперечного сечения, а окружные силы положительны, если они создают растяжение.
Учитывая, что радиус осевой линии поперечного сечения трубопровода г меньше радиуса г внешнего контура, к которому приложены внешние силы, можно еще ввести в формулу (19.50) при определении изгибающих моментов от давления грунта и временных нагрузок коэффициент, равный ггь При опирании на образующую этот коэффициент не вводится.
Основное давление грунта на сооружение, уложенное в насыпи, вызывает следующие изгибающие моменты и окружные силы:
M (19.52)
N QB (n п j NQB, (19.53)
где QByHD. _ _ _ __
Значения коэффициентов М, т, N п п, зависящих от величины — коэффициента бокового давления грунта засыпки, приведены в табл. 19.12.
Кроме того, должны быть еще учтены изгибающие моменты и окружные силы от дополнительного равномерного давления, вызванного концентрацией давлений у жесткого сооружения.
От неравномерного нагревания стенки сооружения с круглым поперечным сечением возникают изгибающие моменты
мАмБмв
щ F62 (fr-fo) 12
(19.54)
где б — толщина стенки сооружения; Е — модуль упругости материала сооружения; а — коэффициент линейного расширения; t0 и t — температура у внутренней и наружной поверхности соответственно.
Для сооружения с плоской подошвой, имеющего повышенную толщину стенки 6а у подошвы, распределение внутренних усилий оказывается другим, чем в сооружении с постоянной толщиной стенки б. Например,
при подошве с углом 2а 60 и—-1,7 для
о
равномерной вертикальной нагрузки МА 0,359; МБ —0,0875; Мв 0,091.
Приведение расчетных нагрузок к двум эквивалентным сосредоточенным силам
Для облегчения сопоставления различных нагрузок, действующих на трубопровод, и их сочетаний с несущей способностью труб, а также для облегчения расчетов принято при расчете трубопроводов приводить все нагрузки к двум эквивалентным линейным нагрузкам, действующим по вертикальному диаметру (рис. 19.43).
Принимается, что в упругой стадии работы трубопровода эквивалентными являются такие нагрузки, которые вызывают одинаковые по величине наибольшие ядровые моменты. Наибольший ядровый момент возникает в том же сечении трубопровода, в котором действует наибольший изгибающий момент, а этим сечением в большинстве случаев оказывается сечение А (лоток).
316
РАЗДЕЛ 19. РАСЧЕТ СООРУЖЕНИИ. ВЗАИМОДЕЙСТВУЮЩИХ С ГРУНТОМ
___ Таблица 19.11
Значения коэффициентов М и N для различных нагрузок, действующих на сооружение кругового сечения, опертое на нижнюю образующую
Приведенная к двум сосредоточенным силам эквивалентная нагрузка
Р р? яуймакс Л?Я, (19.55)
где R — равнодействующая той или иной активной нагрузки; Р — коэффициент приведения нагрузки; Ммакс—максимальный табличный коэффициент, соответствующий данной нагрузке с учетом действительного распределения опорной реакции; N — табличный коэффициент для окружной силы в сечении с наибольшим изгибающим моментом.
Если толщина стенки 6 трубопровода мала по сравнению с радиусом г его срединной поверхности, то МОЖНО принять Р Л;Ммакс.
Для практических расчетов и средних грунтовых условий можно рекомендовать следующие значения коэффициентов р для давления грунта с учетом бокового давления и для наземных нагрузок:
при укладке на плоское основание — 0,75; при укладке иа спрофилированное основание, а также для труб с плоской подошвой — 0,45; при укладке на фундамент — 0,3.
Для собственного веса и веса жидкости, наполняющей трубопровод, соответственно 0,75; 0,4; 0,2.
19.2. РАСЧЕТ ПОДЗЕМНЫХ COOPЖЕНИЙ
317
Деформация поперечного сечения сооружения
Перемещения стенки сооружения могут быть найдены путем интегрирования дифференциального уравнения упругой линии кольца или (при наличии эпюры изгибающих моментов от нагрузок и опорных реакций) по способу Мора.
Прогиб круглого поперечного сечения сооружения, без учета отпора грунта, равный удвоенному радиальному перемещению по вертикали, может быть выражен следующей общей формулой
„ _ Я1-1) ( Г у-R
f 2wAf (-J —. (19.56)
Та б л и ца 19.12
Значения коэффициентов М, т, N и п для давления грунта в насыян, действующего на сооружение кругового сечения, опертое на образующую
н
№
ф MD 1
121 ' АО
t
Коэффициент
мА 1
мв
НЛ
"б
"a
5
тА
тБ
тв
ПА
ПБ
пв
0,294
—0,154
0,156
-0,053
0'J
0,053
0
0,037
—0,014
0,002
—0,003
0,0j t
0,003
0,2
0,262
—0,130
0,121
—0,10' 1
1 —0,500
—0,050
0,019
—0,001
—0,010
—0,0,4
—0,054
0.034
0,4
0,4 3
-0,103
0,100
—0,177
—0,500
—0,161
—0,011
0,012
—0,015
—0,072
—0,054
0,072
0,6
0,166
—0,071
0,0 о
-0,261
—0,500
-0,263
—0,044
0,03
—0,05
—0,128
—0,054
0,128
0,8
0,104
—0,018
0,036
—0,368
—0,500
—0,375
—0,098
0,051
—0,046
—0,204
—0,054
0,204
1.0
0,000
0,000
0,000
—0,500
—0,500
—0,500
—0,187
0,071
—0,033
-0,313
—0,054
0,313
где R — равнодействующая той или иной нагрузки; Е и л — модуль упругости и коэффициент Пуассона материала трубопровода; — коэффициент, зависящий от распределения нагрузки и опорной реакции (табл. 19.17).
Таблица 19.13
Значения коэффициентов М и лГ для опорных реакций сооружения на грунтосом основании
Схема нагружения
Центральный угол 2а в град
Коэффициент
МБ
мв
na
NB
NB
В
0
0,000
0,000
0,000
0,000
0,000
0,000
30
—0,059
0,002
—0,002
0,004
0,000
—0,004
6 кт 6
60
—0,105
0,007
—0,007
0,013
0,000
—0,013
y.di
90
—0,136
0,014
—0,013
0,027
0,000
—0,027
120
-0,155
0,021
—0,019
0,040
0,000
—0,040
;Щ,я.
150
—0,163
0,026
—0,023
0,050
0,000
—0,050
180
—0,169
0,029
—0,025
0,053
0,000
—0,053
плотный грунт
I в
0
0,000
0,000
0,000
0,000
0,000
0,000
30
—0,040
0,001
—0,001
0,001
0,000
—0,001
At
я
60
—0,073
0,003
—0,003
0,007
0,000
—0,007
у
Д-4-6
90
—0,098
0,007
—0,006
0,013
0,000
—0,013
гУ
120
—0,114
0,010
—0,010
0,020
0,000
—0,020
150
—0,123
0,012
—0,012
0,025
0,000
—0,025
180
—0,127
0,014
—0,013
0,027
0,000
—0,027
слабый грунт
318
РАЗДЕЛ 9. РАСЧЕТ СООРУЖЕНИЙ, ВЗАИМОДЕЙСТВУЮЩИХ С ГРУНТОМ
___ Таблица 19.14
Значения коэффициентов М и N для опорных реакций сооружения на фундаменте Схема нагружения
Центральный угол 2а в град
Коэффициент
М4
мв
мв
мд
na
NB
NB
В
0
0,000
0,000
0,000
0,000
0,000
0,000
0,000
30
—0,113
0,005
—0,005
0,016
0,010
0,000
—0,010
6 "7
60
—0,190
0,020
—0,019
0,055
0,040
0,000
—0,040
90
—0,232
0,042
—0,038
0,098
0,080
0,000
—0,080
ft f 2 А 5 А 1 2
120
—0,249
0,065
—0,055
0,124
0,119
0,001
—0,119
150
—0,250
0,083
—0,06
0,127
0,149
0,000
—0,149
1 R
180
—0,250
0,091
—0,068
0,091
0,159
0,000
—0,159
с отрывом
от фунда-
мента
в
0
0,000
0,000
0,00 —
0,00J
0,00J
0,000
30
—0,052
0,002
0,012
—0,075
0,000
0,009
60
—0,119
0,008
0,010
—0,137
0,000
—0,001
5Л7
т6
90
—0,160
0,016
—0,003
—0,176
0,000
—0,018
s '
сК
120
—0,179
0,027
—0,019
—
—0,205
0,000
—0,046
гДу
150
—0,190
0,036
—0,050
—0,226
0,000
—0,056
без отрыва
от фунда
180
—0,195
0,043
—0,036
—0,239
0,000
—0,079
мента
_ _ Т а б л и ц а 19.15
Значения коэффициентов М и N для разных нагрузок при различных условиях опирания Способ опирания сооружения
Нагрузка
Коэффи¬
циент
на плоскость Са0
ка плотное основание
на слабое основание
на плоскую подошву
на фундамент 2а120 туннель
?а180 2а
75 2а60 Собственный вес сооружения
0,239
0,119
0,152
0,134
0,060
0,070
мв
—0,091
—0,081
-0,086
—0,084
—0,064
—0,063
мв
0,080
0,070
0,075
0,073
0,061
0,055
na
—0,080
—0,060
—0,070
-0,067
—0,285
—0,277
ЫБ
—0,250
—0,250
—0,250
—0,250
—0,250
-0,250
NB
0,080
0,060
0,070
0,067
0,034
0,027
Вес жидкости при наполне¬
ВА
0,239
0,119
0,152
0,134
0,060
0,070
нии сооружения
—0,091
—0,081
—0,036
—0,084
—0,034
—0,062
мв
0,080
0,070
0,075
0,073
0,031
0,055
na
0,398
0,418
0,408
0,411
0,193
0.451
"б
0,069
0,069
0,069
0,069
0,069
0,069
nb
0,239
0,219
0,229
0,226
0,193
0,186
19.2. РАСЧЕТ ПОДЗЕМНЫХ СООРУЖЕНИЙ
319
Продолжение
Способ опирания сооружения
Нагрузка
Коэффи¬
циент
на плоскость
2а0
на плотное основание
на слабое основание
на плоскую подошву
2а50 на фундамент 2а120 туннель
2а180 2а
75 Основное давление грунта
ВА
0,294
0,174
0,208
0,189
0,115
0,125
при о0 и HD или вертикальная равномерная на¬
мг
—0,154
—0,144
—0,149
—0,147
—0,127
—0,125
грузка
Б
В
0,150
0,140
0,145
0,143
0,131
0,125
—0,053
—0,0 53
—0,043
—0,040
-0,258
0,000
ЫБ
—0,500
—0,500
—0,500
—0,500
—0,500
—0,500
NB
0,053
0,033
0,043
0,040
0,007
0,000
Основное давление грунта
ША
0,238
0,142
0,170
0,154
0,0Э6
в насыпи при о и НУ
3
МБ
—0,113
—0,104
—0,109
—0,107
—0,091
i
D
яв
0,110
0,102
0,105
0,104
0,095
—
na
—0,150
—0,134
—0,142
—0,140
—0,314
-
nb
—0,500
—0,500
—0,500
—0,500
—0,500
—
NB
i
—0,110
.
—0,126
-0,118
—0,120
-0,147
-
м Л
0,191
0,104
0,129
0,114
0,030
Основное давление грунта
в насыпи при о и НУ
2
А
ЪБ
-0,039
—0,082
—0,085
-0,084
—0,039
_
D
мв
0,083
0,076
0,079
0,076
0,039
—
na
—0,219
—0,212
—0,212
—0,209
—0,370
—
nb
—0,500
—0,500
-0,500
—0,500
—0,500
—
NB
—0,212
—0,227
—0,219
—0,222
—0,245
-
Таблица 19.16
Значения коэффициентов М и N для бесшарнирного кругового свода при равномерной нагрузке
Схема нагружения
Коэффи¬
циент
Угол охвата трубопровода фундаментом 2 а в град
0
20
40
60
80
100
120
140
160
130
л
МА
0,294
0,285
0,240
0,200
0,172
0,150
0,120
0,095
0,070
0,054
1111
н
в
ЪД
—0,150
—0,135
—0,120
—0,100
—0,087
—0,072
—0,055
—0,050
—0,034
—0,024
б-
С
—
-6
Ъв
0,150
0,135
0,120
0,100
0,087
0,072
0,055
0,050
0,034
0,024
А
А
—0,500
—0,500
—0,500
—0,500
-0,500
—0,500
—0,500
—0,500
—0,500
—0,500
N В
0,053
0,025
0,020
—0,045
—0.0J0
—0,125
—0,160
—0,200
—0,240
—0,280
320
РАЗДЕЛ 19. РАСЧЕТ СООРУЖЕНИИ. ВЗАИМОДЕЙСТВУЮЩИХ С ГРУНТОМ
Таблица 19.17
Значения коэффициентов f
Схема нагружения
Угол 2а в град
f
Схема нагружения
Угол 2а в град
О
30
60
90
120
150
180
1,392
1,300
1,230
1,155
1,082
1,033
1,000
0
1,39;
30
1,285
60
1,125
90
0,974
120
0,817
150
0,643
180
0,500
Величина
Рл
3EJ Е 6 3
(— ц) 4(1-ц2)(г) (19‘57)
"гМ'±Л i2 мг
является критическим внешним равномерным нормальным давлением для сооружения круглого поперечного сечения по М. Леви, т. е. без учета отпора грунта.
Для сооружения, стыки которого допускают продольные деформации, принимается ц 0.
При действии на сооружение двух сосредоточенных сил по направлению вертикального диаметра (рис. 13.43) 1,8. Соответствующий коэффициент для определения укорочения горизонтального диаметра равен: б 1,632.
Если учитывать ползучесть грунта, то прогиб, подсчитанный по формуле (19.56), следует увеличивать в 1,25—1,5 раза.
19.2.4. Расчет подземных сооружений с учетом отпора грунта
Общие соображения
Грунт, в котором находится сооружение, не только создает нагрузку, но и, оказывая сопротивление перемещениям стенок, снижает изгибающие моменты и повышает несущую способность сооружения.
Для расчета сооружений с учетом отпора грунта существует несколько различных методов, отличающихся положенной в их основу расчетной моделью грунтовой среды и по форме.
Способ Метропроекта
Сооружение рассматривается как круговое кольцо в сплошной упругой среде, механические свойства которой характеризуются коэффициентом постели; среда способна оказывать только однозначный отпор, направленный в сторону сооружения.
Для расчета кольцо заменяется вписанным в него 16-угольником, а сплошная упругая среда — отдельными упругими опорами, расположенными во всех вершинах 16-угольника, кроме трех верхних, попадающих
Рис. 19.44
в безотпорную зону. Направления опорных реакций стержней принимаются по соответствующим радиусам кольца, а при учете сил трения — с отклонением на угол трения между грунтом и обделкой.
При переходе к основной системе метода сил во все вершины многоугольника, кроме двух, вводятся шарниры, а в качестве неизвестных принимаются прикладываемые в этих сечениях изгибающие моменты Ми М3,., Mg. При этом моменты М3, М4,., М8, приложенные в симметричных сечениях, будут групповыми неизвестными (рис. 19.44).
Типовое каноническое уравнение метода сил, составленное для опоры п., имеет следующий вид:
6„,П_2 Мп_2 ьп п_, мп_, Ьпп Мп
: „,„? лИ-г”-дР О' (19'58)
йп,п1 Коэффициентами при неизвестных и свободными членами уравнений являются перемещения основной системы по направлению этих неизвестных от единич-
19.2. РАСЧЕТ ПОДЗЕМНЫХ СООРУЖЕНИИ
321
ных моментов и от заданной нагрузки соответственно. Для их определения нужно предварительно найти соответствующие усилия.
Верхняя часть основной системы (рис. 19.45), находящаяся в безотпорной зоне и не подверженная действию упругого отпора грунта, рассматривается как трехшарнирная арка, опорные реакции которой от на-
cos
А.
2
реакция упругой опоры в узле п
—1
Л'я -
2г cos е„
реакции упругих опор 2ctg60
Rn— — Rn-1 —
1
г sin 0Л
грузки и единичных моментов передаются с обратными знаками на нижележащую шарнирную цепь. Усилия в звеньях шарнирной цепи определяются из условий равновесия последовательно вырезанных узлов (рис. 19.46). Из условия равновесия я-го узла при действии заданной нагрузки определяются:
Окружная нормальная сила в звене между узлами п и tl 1
К К-1 Уп —?s" ; (19-59)
В остальных элементах основной системы этот единичный момент усилий не вызывает. Единичный момент М3. приложенный на опоре трехшарнирной арки, вызывает следующие усилия: нормальные силы в звеньях
1 1
N
2г cos
во
0ft
rcos-
реакции упругих опор
1
г sin 6ft
3fg'
0n
1
2 г
1
2 г
Ctg 2 ’
Определение перемещений основной системы производится с учетом влияния нормальных сил и перемещений упругих опор. Так, например, перемещение по направлению Мт от единичного неизвестного Мп
УГГМт Мп A) EJ
ds -
гп Мпа, Rm Rn "г ЕР “Г kab
(19.61)
— Kncos0„ —X„sine„, (19.60)
где Уп — сосредоточенная вертикальная сила в узле п от заданной нагрузки; Хп — сосредоточенная горизонтальная сила в узле п от заданной нагрузки; 0п — центральный угол, заключенный между вертикалью и радиусом, проведенным через точку п 0О — центральный угол, заключенный между радиусами, проведенными через соседние вершины многоугольника; для 16-уголь-
ника 0о 22 ЗО'. От единичного момента Мп приложенного в узле п, возникают следующие усилия: нормальные силы в звеньях
- 1
Здесь Мт и Мп — изгибающие моменты в произвольном сечешш звеньев от соответствующих единичных моментов; Nm и Nn — нормальные силы в звеньях от соответствующих единичных моментов; Rm и Rn — реакции в опорных стержнях от соответствующих единичных моментов; EI и EF — жесткости продольных сечений обделки на изгиб и сжатие; а — длина стороны многоугольника; b — выделенная для расчета ширина кольца обделки; k — коэффициент упругого отпора породы.
После определения восьми неизвестных из системы восьми уравнений окончательные усилия определяются по формулам:
ЛГ„ ЕйП1.А1г;
М„М ЕМл. Л1г; (19.62)
Здесь ЛГд, М® и — усилия в основной системе от
заданной нагрузки; Nni, Mni и Rni — усилия в основной системе от единичных узловых моментов; Mi — найденные значения неизвестных.
Правильность вычислений контролируется выполнением условий равновесия отдельных частей обделки
322
РАЗДЕЛ 19. РАСЧЕТ СООРУЖЕНИЙ. ВЗАИМОДЕЙСТВУЮЩИХ С ГРУНТОМ
и равенством нулю приведенной (т. е. деленной на EI) площади окончательной эпюры изгибающих моментов.
Аналогичный метод расчета с использованием в качестве упругих характеристик грунта его модуля упругости Ео и коэффициента Пуассона ц,0 разработан С. А. Орловым.
Для приближенных расчетов трубопроводов обычно используется следующая зависимость между коэффициентом упругого сжатия k и модулем деформации грунта гр:
-71ТР -. (19-63)
Г (1-Игр) где Цгр — коэффициент Пуассона грунта.
Способ О. Е. Бугаевой
Грунтовая среда, окружающая сооружение, характеризуется коэффициентом упругого отпора k. Отпор принимается радиальным и действующим на нижнюю часть сооружения с центральным углом 270 . На протяжении верхней дуги с центральным углом 90 принимается безотпорная зона (рис. 19.47).
kwa
Рис. 19.47
Упругая линия кольца аппроксимируется уравнениями:
для 45 0 90 w Wg cos 20; для 90 0 180 w wA cos2 0 хюБ sin2 0, где 0 — угол наклона сечения к вертикали; wA и w Б — ординаты упругой линии в сечениях А и Б.
Изгибающие моменты и окружные нормальные силы в характерных сечениях кольца определяются по следующим формулам:
от собственного веса сооружения
МА 0,070Rr (1— 0,059л); Na —0,027 (1 —0,040л);
МБ — 0,063?r (1 —0,066л);
NB — 0,250? (1 0,011д);
Мв 0,055?r (1 — 0,064п);
NB 0,027? (1 — 0,040л); от веса жидкости, наполняющей сооружение,
(19.64)
МА 0,070?r (1 — 0,059л);
МА 0,451? (1 — 0,056л);
МБ — 0,063?г(1 —0,066л);
NБ 0,068? (1 — 0,042л); Мв 0,055? (1 — 0,064л); Nв — 0,186? (1 — 0,056л);
от вертикальной равномерной нагрузки МА 0,125? (1 —0,067л);
Na 0,09 Rn;
(19.65)
М.
— 0,125? (1 —0,066л);
— 0,500? (1 0,012л);
Мв 0,125?г (1 —0,56л);
NB — 0,021 Rn,
где R — равнодействующая соответствующей нагрузки;
1
(19.66)
0,06416 1
Е1 kr4
0,06416
12 kr
(19.67)
Е — модуль упругости материала сооружения; I—момент инерции продольного сечения стенки на единицу длины сооружения.
При оо или при k 0 л0, и формулы (19.64) —
(19.66) переходят в соответствующие формулы, не учитывающие отпор грунта.
При наличии безотпорной зоны опасным сечением сооружения оказывается шелыга (сечение В), так как здесь отсутствует отпор грунта.
Для этого сечения можно принять коэффициент снижения изгибающих моментов жесткого трубопровода при учете упругого отпора грунта, равный
Ь 1 — 0,056л 1- , (19.68)
1 Рг P
0,143уОгр Рл
где рЛ — критическое внешнее давление для незасыпанного трубопровода по формуле (19.57); рг Р 0,167kr— параметр, учитывающий однозначный упругий отпор грунта; k — коэффициент отпора грунта, который для сооружений, уложенных открытым способом, берется для нарушенного грунта засыпки.
Если упругие свойства засыпки выразить модулем упругости Гр и коэффициентом Пуассона лгр, то параметр, учитывающий в формуле (19.68) упругий отпор грунта,
Л-Р ТТГГ—Г - 125 гр- (19-69
6 (1 Игр)
Совместное действие на подземное сооружение нагрузок и внутреннего давления
при учете упругого отпора грунта
Внутреннее равномерное давление р транспортируемой жидкости или газа вызывает в стенках сооруже-
19.2. РАСЧЕТ ПОДЗЕМНЫХ СООРУЖЕНИЙ
323
ния кругового поперечного сечения только окружные нормальные силы:
N рг0 рг0, (19.70)
1
kn
б”
где г0 и Г — внутренний и наружный радиусы поперечного сечения трубопровода; г — радиус срединной поверхности трубопровода.
Эти нормальные силы должны быть дополнительно учтены при подборе толщины стенки сооружения или при проверке ее несущей способности.
При начальной овальности поперечного сечения сооружения или при деформировании его нагрузками, действующими извне, внутреннее давление оказывает расправляющее действие и кроме нормальных сил (19.70) вызывает еще изгибающие моменты. Если аппроксимировать начальную овальность или упругую линию кольца одним членом ряда ш ДОа cos 28, соответствующим действию равномерной нагрузки (рис. 19.48), то совместное действие отпора грунта и внутреннего давления может быть учтено умножением расчетных прогибов и изгибающих моментов или приведенных расчетных нагрузок на коэффициент
—TZ (19.71)
1
Ргр Р
ОЛГгр Рл
При этом внутреннее давление р считается положительным, а внешнее — отрицательным.
График значений коэффициента С для стальных труб и разных значений Гр при р 0 приведен на рис. 13.49. Более строгое решение дано в работе (5).
Несущая способность сооружения по условию прочности
Из условия прочности по продольному сечению напорного подземного сооружения кругового поперечного сечения, работающего в упругой стадии, при совместном действии внешней приведенной нагрузки Р и внутреннего давления р можно получить допустимую внешнюю приведенную нагрузку Р при данном расчетном внутреннем давлении р и при учете отпора грунта:
Р Р -
где
л 6
iijfF ’ Т
р® mRp —; го
Л б
Р0 — тц б — 0,524р 6 6 г
(19.72)
(19.73)
Rp — расчетное сопротивление материала сооружения при растяжении; т — коэффициент условий работы трубопровода; С — коэффициент, определяемый формулой (19.71).
Величина Р в (19.73) дает допустимое значение внешней приведенной нагрузки при отсутствии внутреннего давления и устанавливает связь с величиной р , являющейся допустимым внутренним давлением при отсутствии внешней нагрузки.
Кривые отношений РР в зависимости от отношений рр для стальных труб с 6г —0,02 при разных величинах mRp и ЕГр показаны на рис. 19.50. Чем жестче
РР Ц
у
У
б 1 7
,Егр150пГсм2
—
S
гри
А
10 к rfсм 2
Bgp 50 к Гсм 2
J 1
р г 20 кГсм1(т Rp -1000к Гсм
— —9 -U0 и Гсм2(т Rp-2000кГсм2
j— _.
ч
)
0,2
0,4 0,6
Рис. 19.50
0,8
ЬО
РР Рис. 19.49
сооружение, тем ближе его график к прямой, отсекающей на осях координат отрезки РР 1 и рр 1.
Расчетное сопротивление материала трубопровода при растяжении Rp и коэффициент условий работы т принимаются по СНиПу.
324
РАЗДЕЛ 19. РАСЧЕТ СООРУЖЕНИЙ, ВЗАИМОДЕЙСТВУЮЩИХ С ГРУНТОМ
Если для растяжения при изгибе установлено другое расчетное сопротивление Rn8, чем при окружном растяжении, то в формулы (19.73) вместо Rp вводится Rw3.
При совместном действии внешней приведенной нагрузки Р и внешнего нормального давления ри например гидростатического или атмосферного при образовании в трубопроводе вакуума, коэффициент С получается из формулы (19.71) при отрицательной величине р, а знак минус в знаменателе формулы (19.72) меняется на плюс.
В этом случае вместо Rp в формулы (19.73) входит расчетное сопротивление материала трубопровода при сжатии ?сж.
Расчет сооружения на упругую устойчивость и жесткость
При некоторой критической величине внешнего нормального давления р поперечное сечение подземного трубопровода круговой формы теряет устойчивость и он уже не в состоянии нести никакой внешней нагрузки Р.
Критическая величина внешнего давления, соответствующая любому числу полуволн упругой линии, и при Рл
Ргр А
Ркр
При
-2V
гр 4
Рл Рг р
кр — РЛ'
(19.74)
(19.75)
Кроме того, следует считаться с тем обстоятельством, что при деформации кольца нагрузка от грунта может оказаться нормальной к стенке и общее расчетное внешнее давление окажется равным:
. Р
Р Р
(19.76)
При расчете сооружения на упругую устойчивость должен быть введен коэффициент условий работы ту 0,6.
Расчет сооружения на жесткость или по деформациям сводится к определению прогиба поперечного сечения по формуле (19.56) с учетом отпора грунта коэффициентом , определяемым по формуле (19.71). При этом расчет ведется по нормативным нагрузкам, без приведения их к двум сосредоточенным силам.
Предельно допустимая величина относительного укорочения вертикального диаметра f2r установлена равной для стальных трубопроводов 0,03, а для трубопроводов из полиэтилена и твердого поливинилхлорида 0,05
19.2.5. Расчет сооружений с учетом пластичности материалов
Выравнивание изгибающих моментов в стенках сооружений
Благодаря многочисленным опытам со стальными и железобетонными трубами установлено, что действительная разрушающая нагрузка всегда оказывается значительно выше расчетной, найденной из рассмотрения трубы как упругой системы. Это позволяет использовать скрытые резервы прочности стальных и безнапорных железобетонных труб при расчете их по методу предельного равновесия с учетом пластичности материала.
Применение этого метода для расчета напорных железобетонных и других трубопроводов ограничено необходимостью их расчета на трещиностойкость в упругой стадии сопротивления материала при эксплуатации, но может быть полезным для объяснения их поведения при разрушении от совместного действия внешней нагрузки и внутреннего давления.
Предельные нагрузки для трубопровода из идеально упруго-пластического материала могут быть определены из условий предельного равновесия механизма, в который обращается кольцо при образовании в нем четырех пластических шарниров, два из которых возникают на концах вертикального диаметра, а два других — в сечениях, близких к концам горизонтального диаметра (рис. 19. 51).
Если принять, что при образовании пластических шарниров нормальные окружные усилия остаются такими же, как и в упругой стадии работы кольца, то при одинаковых несущих способностях всех четырех сечений изгибающие моменты оказываются равными:
Ч,-.
МА. пр
' МБ.пр— Мв.пр
4
где МаМб Мв,— изгибающие моменты в упругой стадии работы кольца при нагрузке данного вида.
Пластическая стадия работы подземного сооружения при совместном действии внешней нагрузки и внутреннего давления
При совместном действии на трубопровод круглого поперечного сечения двух сосредоточенных нагрузок
м
МВА
б.пр
кГмб.пр
fa.np
19.2. РАСЧЕТ ПОДЗЕМНЫХ СООРУЖЕНИЙ
325
РПр и внутреннего давления рир из условий предельного равновесия расчетной схемы деформированного кольца получается следующая зависимость между прогибом f и действующими нагрузками (рис. 13J52):
-М,
рПР-2К.
.пр
2S.np
2рпр г — 0 5Рпр Нормальные растягивающие силы в сечениях
равны:
.пр Ч'-0’5
Рпр(' 0,5)-0,5Р пр-
09.78) А я Б
(19.79)
(19.80)
Формула (19. 78) может быть использована для обработки результатов экспериментов с трубами при совместном действии раздавливающей нагрузки на прессе и внутреннего давления.
Для начала пластической стадии работы жесткой трубы можно принять 0 и тогда формула (19.78) переходит в формулу (19.77) при МаМв- В этом случае зависимость между внешней сосредоточенной нагрузкой Япр и внутренним давлением рпр выражается формулой, полученной, исходя из эпюры нормальных напряжений, показанной на рис. 19.53:
пр
(19.81)
где Р
пр —предельная сосредоточенная нагрузка отсутствии внутреннего давления;
4WT ат
при
Р :
пр
(19.82)
Уравнение (19.81) выражает нелинейную зависимость
У РпрРпр
0,8 0,8 О,к 0,2 О
V
ч
Ч
х
ч S
С" Л От
0,7 О,U 0,6 0,8 1,0
Рпр
Рис. 19.54
между PpP irp и рпрр пр (рис. 19.54), связанную с физической нелинейностью деформирования. При наличии еще геометрической нелинейности, обусловленной расправляющим действием внутреннего давления на гибкий трубопровод, кривизна графика возрастет.
В зарубежной практике такие графики для чугунных и асбестоцементных труб на основании экспериментальных данных принимаются параболическими.
Предельное состояние сборной туннельной обделки
Предельное состояние туннельной обделки из армированных бетонных блоков может наступить при образовании в ее верхней части трех пластических шарниров (рис. 19.55).
Предельная интенсивность равномерной вертикальной нагрузки
Яв.
NDh
в.пр
т sin2
(19.83)
где г — радиус срединной поверхности обделки; f j — расстояние по вертикали между центрами пластических шарниров; f — геометрическая стрела подъема свода между сечениями D и В; ев — эксцентрицитет нормальной силы (распора Н) в сечении В; ND — нормальная сила в пластическом шарнире D;
Nd 0,67т66?сж;
2 ( tnbdRcx ) ’
Н mb8Rc
Здесь m — коэффициент условий работы; б — толщина блока; b — ширина блока; RCm— расчетное сопротивление блоков при сжатии.
Угол Xd, определяющий положение пластических шарниров, находится из условия минимума величины предельной нагрузки.
Нижняя часть обделки, являющейся опорой свода с тремя пластическими шарнирами, рассчитывается как упругая криволинейная балка на упругом основании. При этом может быть использован способ, изложенный в п. 12.3.
326
РАЗДЕЛ 19. РАСЧЕТ СООРУЖЕНИЙ, ВЗАИМОДЕЙСТВУЮЩИХ С ГРУНТОМ
19,2.6. Расчет сооружений некругового поперечного сечения
Расчет туннельной обделки в виде пологого свода
Обделка в виде несущего свода, опирающегося на прочный скальный грунт, может быть применена в без¬
е2
ds
yi if
с —
s2
1
1
Ef h Aip I
JL Ла -
6ц Эх
д,РЫ-С) Ар
622Pi(-c)2 6g
(19.84)
(19.85)
(19.86)
Здесь
Рх '
1
kl.
А
Ы±
1 А А
1 „. Нр
ТГГ cos а- AP -kh7coscc:
' 'А
s2
s2 s2 s2
6nj-; 623 J’J 0 0 0
COS2 (prfs
If
s2 s2 s2
4 Mpds 4 f Mp yds ( A
TT: '
где f — стрела подъема свода; s— длина дуги свода У — ордината оси обделки по отношению к горизон тальной оси, проходящей через замок свода; у — орди ната оси обделки по отношению к горизонтальной оси проходящей через упругий центр; ф — угол наклона ка сательной к оси свода в произвольном сечении по отношению к горизонту; а — угол наклона касательной к оси свода в пяте по отношению к горизонту; hA — толщина свода в пяте; 1а — момент инерции продольного сечения обделки в пяте; I — момент инерции сечения обделки в произвольном сечении; Л1р и Np — изгибающий момент и нормальная сила в произвольном сечении основной системы; и Np—изгибающий момент и нормальная сила в пяте основной системы.
Для свода постоянной толщины h, очерченного по дуге окружности, при а 60 и при действии равномерной нагрузки q неизвестные выражаются формулами:
дг2 т(0,23100,3867tO,0440т
напорных туннелях при отсутствии бокового давления. Расчет такого свода производится методом сил с учетом упругой заделки пят в грунт (рис. 19.56) (см. также раздел 5)
При переходе к основной системе неизвестные Х, Х2, Хг переносятся в упругий центр 0 при помощи бесконечно жестких консолей, длина которых с определяется из условия, что побочное перемещение б обращается в нуль. При этом:
X,
т (1,6302 1,0019 0,3001т 0,11 Збтп) 0,216511 0,7750ля) 0,25п ’
qr2 т( 1,1632 — 0,60921 0,2354т — т (1,6302 1,0019г 0,3001т
— 0,2267mi) — 0,375г
0,7750тп) 0,25 л ’
(19.87)
(19.88)
где m
г — радиус срединной поверхности обделки. Изгибающие моменты и нормальные силы в замке, четверти пролета и пятах определяются соответственно по формулам:
Мс — 0, 173гХ2
V CX2;
М1А Х1— 0,074гХ—0, Q94qr2;
NlA 0,901Х2 0,1875?г;
МА Хг 0,327гХ2 — 0,375qr2;
0,5Х Q,75qr.
Расчет обделки подземного сооружения в виде свода, опирающегося на массивные стенки
По предложению С. С. Давыдова расчет тякой конструкции (рис. 19.57) производится с учетом совместной работы отдельных ее элементов и с учетом упругого отпора грунта по наружным граням и подошвам
19.3. БАЛКИ И ПЛИТЫ НА УПРУГОМ ПОЛУПРОСТРАНСТВЕ
327
стенок. При этом грунт сбоку и снизу от стенок рассматривается в качестве упругих сжимаемых слоев толщиной Нг и в, а непрерывный контакт между стенками и грунтом заменяется 10 стержневыми связями, усилия в которых принимаются в качестве неизвестных.
Кроме того, при переходе к основной системе смешанного метода и при введении связей против перемещений стенок прикладываются еще два неизвестных
перемещения и сдвигающая сила по подошве. Наконец, неизвестными являются еще три усилия в упругом центре свода.
Для определения неизвестных составляются две независимые системы уравнений. Коэффициентами при неизвестных силах являются осадки сжимаемых толщ грунта. Эти толщи определяются из условия, что дополнительные давления на их границах от перемещений сооружения составляют 20 природных давлений в грунтовом массиве.
Этот расчет может быть упрощен, если рассматривать грунт в качестве местнодеформируемой среды с коэффициентом постели
k
5пЕ0 Ь
tyo 0 — И'о)
где h — размер стены в плоскости, для которой отыскивается k; b — длина стены, выделенная для расчета; Е0 и io — модуль деформации и коэффициент Пуассона грунта; у0 — максимальная осадка упругого слоя, зависящая от его толщины Н.
При tf 0,2i; 0,4t; 0,6h 0,8h и большем h соответственно имеем у о 2,4; 3,8; 4,6; 5,2 и 5,6.
19.3. БАЛКИ И ПЛИТЫ НА УПРУГОМ ПОЛУПРОСТРАНСТВЕ
19.3.1. Выбор расчетной схемы
Фундаменты сооружений очень часто располагаются на грунтах естественного сложения; в этом случае их рассчитывают как балки или плиты, лежащие на сплошном упругом основании.
Если фундамент располагается на плотных грунтах, то основание рассматривается как упругое полупространство. Взаимодействие между балкой и упругим полупространством осуществляется через нормальные
и касательные усилия, возникающие по площади контакта балки и упругого основания. Для определения контактных напряжений между балкой и упругим полупространством вводятся связи, усилия в которых представляют собой равнодействующие напряжений. В такой постановке задача о расчете балки или плиты
Г
JL
хг" i слей Упругое полупространство Рис. 19.58
(19.89)
Рис. 19.59
на упругом полупространстве сводится к определению усилий в связях, т. е. к расчету обычной статически неопределимой системы (способ Б. Н. Жемочкина).
Касательные напряжения, возникающие по подошве балки, в большинстве случаев оказывают незначительное влияние на результат и поэтому в расчете ими можно пренебрегать. Тогда основная расчетная схема для балки принимается согласно рис. 19.58. Между балкой и полупространством поставлены упругие связи, позволяющие учесть наличие разрыхленного слоя грунта, расположенного непосредственно под подошвой фундамента. В предельном случае упругие связи переходят в жесткие нерастяжимые стержни.
В основной системе (рис. 19.59) балка отделяется от упругого полупространства и к ней добавляется заделка. За неизвестные принимаются усилия Xi в связяхпружинах, осадка у0 и угол поворота заделки р0. Для определения сил Хи Х2,. составляется система канонических уравнений:
11 1 12 9 13 Х9 б14 Х4
aY ф0 А1Я 0;
621 Хг 622 Хш 623 Хз 624 4
Н 1- У0 а2 Ф0 Д2р 0;
зЛ 6 2 аз А'з б34 Х4
I 1" IO fo Л3р — 0;
„1-6„2 6гЗ-Хз nl Xt
Н Ь ?0 Ф0 дпр 0;
Лг X, , 2 Pi 0;
1 -1 “Ь 2 -2 "Ь 3 3 "Ь — 0.
(19.90)
328
РАЗДЕЛ 19. РАСЧЕТ СООРУЖЕНИЙ, ВЗАИМОДЕЙСТВУЮЩИХ С ГРУНТОМ
Через ai обозначено расстояние от заделки до силы Хг 2Pi и — равнодействующая и момент внешних сил.
Физический смысл первой группы уравнений (19.90) состоит в том, что перемещения в основной системе по направлению каждого неизвестного Хи Х2 и т. д. от всех сил равны нулю. Таких уравнений надо составить столько, сколько имеется неизвестных сил Xi. Последние два уравнения являются уравнениями равновесия.
При вычислении коэффициентов б канонических уравнений приходится учитывать как прогиб балки Vik, так и осадку упругого полупространства от единичных сил (рис. 19.60):
§ik — vik yik I
L
К
j
1 К- --а—
— с:
Эпюра Мн
Эпюра
а
Рис. 19.61
Прогиб Vi вычисляется по обычным формулам как прогиб в сечении i балки, заделанный одним концом, от силы Хц — 1, приложенной в сечении k (рис. 19.61):
Vik
: ak 6 EI
где EI — жесткость балки;
с
с
6 EI
(19.92)
Ok I
Wik
с—расстояние между связями (см. рис. 19.59).
Осадка упругого полупространства вычисляется по формуле Б. Н. Жемочкина 14:
(1 — Ио)
Uik "с" tik’
Лс0 с
где ц0 — коэффициент Пуассона полупространства;
Ео — модуль деформации полупространства; Fih — значение функции.
Подставив значения Vih и yik в формулу (19.91), получим:
с3 1
ik 77ГГ ik V
6EI Е0 сл
Цо
Е0сл
с4 j
а — б(1-) 2ч
; (19.94)
(19.95)
(19 91)
Общий множитель (1—ло) 0пт одинаков для всех коэффициентов б, и поэтому при выполнении расчетов его можно учитывать в конце.
Ординаты pi эпюры реакций упругого полупространства вычисляются путем деления сил Xi на соответствующие им площади подошвы балки:
Pir, (19.96)
cb
где с — расстояние между связями; Ъ — ширина балки.
19.3.2. Бесконечно жесткая балка
При расчете бесконечно жесткой балки пользуются уравнениями (19.90), но при вычислении коэффициентов канонических уравнений учитывают, что деформа-
Таблица 19.18 Значения реакций для бесконечно жесткой балки
гшжпш
EJ
7?т
19
тшйтт
I
Ф
Ро й р2
а
7
77777,
А
Эпюра м
(19.93)
Ы1
Кс
Реакции
Ро
1
Р2
л
Ра
Ь1оо
( 0,00
0,688
0,683
0,732
0,852
1,892
1 0,50
0,704
0,720
0,790
0,950
1,680
Плоская
( 1,00
0,730
0,760
0,820
0,980
1,550
задача
1,25
0,750
0,770
0,840
1,002
1,509
0,33
0
0,799
0,832
0,858
9,907
1,494
0,22
0
0,846
0,855
0,881
0,927
1,408
0,11
0
0,889
0,890
0,919
0,961
1,298
0,07
0
0,900
0,905
0,928
0,973
1,247
Примечание. — пролет балки, b — ширина балки; h0 — толщина слоя, с1(9.
19.3, БАЛКИ И ПЛИТЫ НА УПРУГОМ ПОЛУПРОСТРАНСТВЕ
329
Таблица 19.19 Ординаты эпюр М и Q для бесконечно жесткой балки
эпюрам 0 12 3 4
Усилия
Ь1
плоская
задача
Ь1оо
0,33
0,22
0,11
0,07
общий мн ожитель
Моменты
Мо
0,148
0,136
0,134
0,131
0,129
Р1
м,
0,098
0,087
0,085
0,082
0,081
мг
0,057
0,048
0,046
0,044
0,043
м,
0,024
0,019
0,018
0,017
0,016
М4
0,004
0,003
0,003
0,002
0,002
д Поперечные силы
Q)
Q.
—0,500
—0,500
—0,500
—0,500
—0,500
Р
азаны
q2
—0,424
—0,408
—0,404
—0,402
—0,400
Q
—0,345
—0,314
—0,308
—0,302
—0,298
Q
—0,257
—0,216
—0,208
—0,197
—0,192
—0,105 j —0,083 —0,078 j —0,072
Примечание. Моменты и поперечные 1 пог. м ширины балки.
—0,069 силы ук
ция балки должна быть равной нулю, и поэтому формула для 6tfc будет состоять из одного члена, равного перемещению упругого полупространства:
6iki:Ftk'
(19.97)
Изгибающие моменты и поперечные силы зависят от закона распределения внешней нагрузки, так как момент внешних сил зависит от положения нагрузки по длине балки. При обратно симметричной нагрузке ординаты эпюр реакций будут пропорциональны моменту равнодействующей внешних сил, вычисленному относительно заделки. В табл. 19.18 указаны ординаты эпюры реакций, а в табл. 19.19 — ординаты эпюры моментов М и Q.
19.3.3 Гибкая короткая балка
Балка должна рассчитываться как короткая и гибкая, если справедливо неравенство
0,8 №
Vi-
(19.98)
где I — пролет балки; h — высота балки; Е — модуль упругости балки; Е0 — модуль деформации основания. Ординаты линий влияния моментов даны в табл. 19.20.
Двухслойное основание
Найдем распределение реакций основания для бесконечно жесткой балки, расположенной на двухслойном основании.
Расчетная схема и основная система показаны на рис. 19.62.
Q-9
-90м
Я
Т'1 i '
'777777р77777777777977777777л7777777Г777Г
w ее (i: I-
11 01L 0 it
7?'?,уЯSУЛгУ7777Фгя;;?????.
Эпюра реакций
TTTTTf
CNI чо
CM Jo o
Рис. 19.62
Упругий слой, подчиняющийся гипотезе пропорциональности, расположен между балкой и упругим полупространством, и его толщина г0 12,5 м:
л л 12,5.3,14(1 —0,352)
оо — 21,867 2 — 6,030;
о I и
6П 1,867 0,469 1,148 3,484; б22 1,867 0,246 1,148 3,261; бзз 1,867 0,165 1,148 3,180;
644 1,867 0,124 1,148 3,139.
Побочные коэффициенты вычисляют по формуле (19.94), значение ч— по таблицам Жемочкина 14.
6,030 Х„ 1,658 Xi 0,938 Х2 0,646 Х3
0,492 Х4 уа 0;
1,658 Х0 3,484 Хг 1,152 Хг 0,715 Х3
0,520 Х4 Уо 0;
330
РАЗДЕЛ 19. РАСЧЕТ СООРУЖЕНИЙ. ВЗАИМОДЕЙСТВУЮЩИХ С ГРУНТОМ
Таблица 19.20
Ординаты линий влияния моментов (общий множитель pi)
Момент
Груз в точке
Коэффициент
м4
м3
м2
Мг
Мо
м
м2
мг
м'А
а0
0,0023
0,0198
0,0494
0,0895
0,1399
0,0895
0,0494
0,0198
0,0023
0
а0,1
—0,0005
—0,0030
0,0005
0,0182
0,0592
0,0182
0,0005
—0,0030
—0,0005
а1
—0,0002
—0,0020
—0,0040
—0,0002
—0,0303
—0,0002
—0,0040
—0,0020
—0,0002
а0
0,0035
0,0297
0,0725
0,1285
0,0849
0,0510
0,0264
0,0100
0,0011
1
ос—0,1
—0,0002
0,0000
0,0133
0,0503
0,1163
—0,0018
—0,0067
—0,0046
—0,0006
а1
—0,0005
—0,0034
-0,0001
0,0303
—0,1107
—0,0040
—0,0022
—0,0007
—0,0001
а0
0,0047
0,0396
0,0955
0,0560
0,0291
0,0057
—0,0010
—0,0021
—0,0003
2
а0,1
0,0020
0,0187
0,0589
0,0169
—0,0024
—0,0090
—0,0078
—0,0040
—0,0005
ос1
—0,0003
0,0012
0,0305
—0,0003
—0,0046
—0,0019
—0,0004
—0,0001
0,0000
а0
0,0058
0,0495
0,0076
—0,0164
—0,0265
—0,0264
—0,0196
—0,0098
—0,0012
3
сс—0,1
0,0052
0,0458
0,0082
—0,0071
—0,0103
—0,0090
—0,0051
—0,0015
—0,0001
а1
0,0022
0,0265
—0,0021
—0,0047
—0,0032
0,0004
0,0016
0,0010
0,0002
а0
0,0070
—0,0507
—0,0806
—0,0888
—0,0820
—0,0650
—0,0427
—0,0196
—0,0024
4
а0,1
0,0106
—0,0233
—0,0272
—0,0211
—0,0133
—0,0088 j
—0,0042
—0,0014
—0,0001
а1
0,0128
—0,0074
—0,0052
—0,0024 j
1 —0,0019
—0,0001
0,0006
0,0009
0,0001
0,938 Х0 1,152 A’i 3,261 Х2 1,026 Х3
0,634 X4 fo 0;
0,646 Х0 0,715 Xt 1,026 Х2 3,18 Х3
0,971Х4 о 0;
0,492 Х„ 0,520 Хх 0,634 Х2 0,971 Х3
3,139Х4 о0;
Х0 Хг Х2 Х3 Х4 4,5.
Решая эту систему, найдем значения неизвестных: у0 — 6,586; Х2 0,922;
2Х0 0,886; Х3 0,992;
Х1 0,896; Х4 1,248.
Эпюра реакций показана на рис. 19.62.
Два здания, расположенные рядом
Два здания, расположенные рядом, оказывают взаимное влияние на величину осадок и реакций упругого основания. В результате деформаций упругого полупространства происходит взаимный наклон зданий.
Рассмотрим два силосных корпуса размером каждый 45X32 м в плане, поставленные рядом. Оба корпуса загружены полностью, а среднее давление на грунт составляет 3,3 кГсм2. Для определения осадок и реакций будем рассматривать эти здания как бесконечно жесткие балки. Модуль деформации основания Е0 — 400 кГсм2.
Расчетная схема и основная система принимаются согласно рис. 19.63. В основной системе должны быть
две заделки — отдельно для каждой балки. Расположим их в месте примыкания силосных корпусов. Каждую балку прикрепляем к упругому основанию пятью стержнями. Расстояние между стержнями с 10 м. В силу симметрии потребуется составить систему из
семи уравнений для определения сил Х. Коэффициенты уравнений подсчитываются по табл. Жемочкина для отношения
—-—-3 с 10 9
6(J0 2.1,867 3,734; б01 2-0,829 1,658 и т. д.
19.3. БАЛКИ И ПЛИТЫ НА УПРУГОМ ПОЛУПРОСТРАНСТВЕ
331
Решая систему уравнений, находим значения неизвестных при Q 1:
ф0 0,0663;
о — 1 284;
Х0 0,1318;
0,2133;
Х2 0,1973;
Х3 0,1892;
Х4 0,2684.
2 М 0,2133-10,197320,1892-30,2684-4 2,249.
На практике очень важно знать разность осадок различных точек одного и того же корпуса. Эту разность можно найти двумя путями: умножить полученный
угол наклона ср0 на расстояние между точками, разность осадок которых требуется определить, или вычислить независимо осадки той и другой точки, принимая во внимание, что силы, приложенные к упругому полупространству, теперь известны.
Найдем разность осадок точек 0 и 4, умножая угол поворота фо на 4:
Дг 4ф0 — 4-0,0663 — 0,265.
Определим осадки у0 и г4 по табл. Жемочкина:
у0 (1,867-0,1318 0,829-0,2133 0,469-0,1973 0,323-0,1892 0,246-0,2684) 2 1,285;
4 1,867-0,2684 0,829-0,1892 0,469-0,1973
0,323-0,2133 0,246-0,1318-2 0,197-0,2133 0,165-0,19730,142-0,18920,124-0,2684 1,017;
А у 1,017 — 1,285 —0,268.
Сравнивая результаты, вычисленные разными способами, замечаем, что расхождение оказалось в пределах точности подсчетов. Полученные величины у0 и Ау0 определены для Q l; в действительности Q 32-45X Х33 47 500 т.
Для получения действительных осадок надо умножить полученные величины, согласно формуле (19.93), на величину
1-Ио
Q —
(1 — 0,352) 47 500
Тогда получаем
3,14-4000-10
действительную
0,332.
осадку в точке 0:
дсйств"
Разность осадок точек 0 и 4:
Ддейетв 0268-0,332 0,09 м9см.
Различная осадка вызывает взаимный наклон зданий.
19.3.4. Балка за пределом упругости
Определение наибольшей нагрузки в упругой стадии
Рассмотрим балку прямоугольного сечения, нагруженную сосредоточенной силой Р в середине длины (рис. 19.64). Определим значение Ро, при котором в крайнем волокне опасного сечения балки напряжения будут достигать предельной величины тПр. Это значение силы будет наибольшим для упругой стадий рабо¬
ты балки при условии, что упругое основание сохраняется лйнеййо-деформируемым.
В сечении под грузом изгибающий момент будет равен:
Р
М со- (19.99)
Расстояние Со от середины пролета до центра тяжести эпюры реакций зависит от закона распределения реакций по длине пролета балки и вычисляется в результате решения задачи в упругой стадии.
С С
1 f t f II f I f I
X X, X, X, X0 X, tf, X, X
J UI I 1 I I
vS'')
777777,
1 s'
Эпюра реакций
эпюра м
Рис. 19.64
В зависимости от соотношения жесткости балки и упругого полупространства величина со изменяется. Чем больше жесткость балки, тем больше с0. При равномерном распределении реакций упругого основания с00,25, т. е. равнодействующая реакций проходит четверти пролета балки. Для гибких балок величина с0 становится меньше 0,25 (табл. 19.21). Для бесконечно жестких балок с0 становится больше 0,25.
Для определения Ро приравняем М0 моменту внутренних сил; тогда получим:
Р0 2апр Wc0. (19.100)
Таблица 19.21
Значение с0
а
Ыс3
ьс2
bc1
0,0
0,2798
0,1
0,1130
0,1280
0,1421
1,0
0,0303
0,0357
0,0731
332
РАЗДЕЛ 19. РАСЧЕТ СООРУЖЕНИЙ, ВЗАИМОДЕЙСТВУЮЩИХ С ГРУНТОМ
Если а0,1 и Ьс — 2, в табл. 19.21 найдем значение со0,128 ; тогда для прямоугольной балки получим:
bh2 1
(19.101)
6 0,128
Распределение реакций за пределом упругости
Выясним распределение реакций упругого основания, если внешняя сила Р будет больше Ро. Теперь балка будет работать за пределом упругости в упруго-пластической стадии, а ее жесткость изменится.
Р
МГ
Рис. 19.65
Для упрощения задачи исключим из рассмотрения процесс перехода балки в упруго-пластическую стадию и будем считать, что в результате образования пластического шарнира балка разбивается на два участка, которые находятся в упругой стадии.
Выразим силу Р через Ро по формуле
Р пР0 (19.102)
Множитель п в этой формуле будет больше единицы.
Для всех значений ЯЯо расчетная схема балки имеет вид, указанный на рис. 19.65. Особенность этой расчетной схемы состоит в том, что с увеличением Р момент МПр остается постоянным, сохраняя свою величину. Для данной расчетной схемы разрешим две вспомогательные задачи, для Мс и Р2, как это показано на рис. 19.65.
Для определения реакций упругого основания составим такие две системы уравнений, которые различаются в уравнениях равновесия правой частью:
С0 0 01 1 02 Х2 03 3 04 4
Уо 0 с 0
10 0 11 Xl 12 2 13 3 14 X4
1Уо 0
20 0 21 Хг 22 2 23 3 24 4 1о 2сф0 0
30 0 31 “Ь 32 X2 —f 33 Хз 34 1 Уо Зсф0 0
40 0 41 1 ”Ь 42 Х2 43 Хз 44 Х4
Уо г 4сср0 0
1Х0 “f” Ь 1Х -f- IX3 -f- IX4 -j- 0 0 0 0X0 -f 11 2X2 Ь ЗХ3 -f- 4X4 -f- 0 -j- 0 1
0;
0;
0;
0;
0; I; 0.
Если к балке будет приложена сила Р пР0 (при п) и момент
мПргЛСо -Х(
где 25о — пластический момент сопротивления, равнодействующие реакций упругого основания будут найдены с помощью чисел влияния по формулам:
хо 0 — ро 0 -ЙГ со ро;
2
n XnYpo-
W
Х'с — Р п W 0 с '
(19.103)
Значения Хс и Х( даны в табл. 19.22 и 19.23. Для вычисления интенсивности реакций необходимо поде-
Таблица 19.22
Числа влияния от Р2
Числа
Ъс—
Ьс
2
Ьс3
влия¬
ния
а0,1
а1
а0,1
а1
а0,1
а1
0
0,5256
0,7342
0,5738
0,8026
0,6155
0,8453
4
0,4849
0,3568
0,4880
0,2770
0,3999
0,2232
4
0,2139
0,0218
0,1844
—0,0014
0,1597
—0,0118
4
0,0177
—0,0490
0,0219
—0,0376
0,0210
—0,0282
4
—0,2417
—0,0634
—0,2181
—0,0403
—0,1957
—0,0288
9
У0
—4,8191
—5,8739
—3,6613
—4,3304
—3,0222
—3,4746
9
с фП
1,6438
3,2195
1,2366
2,2852
1,0090
1,7557
Числа влияния от М 1 с
Таблица 19.23
Числа
Ьс
Ъс
2
Ьс3
влия¬
ния
а0,1
а1
а0,1
а—1
а0,1
а1
ff
ч
—0,2389
—0,5693
—0,2907
—0,6880
—0,3383
—0,7718
1
—0,0746
0,2392
—0,0225
0,4184
0,0249
0,5565
п
Х2
0,0409
0,2259
0,0684
0,2125
0,0913
0,1854
3
0,0951
0,1064
0,0939
0,0720
0,0944
0,0458
4
0,1770
—0,0026
0,1510
—0,0149
0,1274
—0,0162
уо
1,6439
3,2190
1,2366
2,2852
1,0091
1,7560
с ф0
—1,3468
—5,8207
—1,1375
—4,8426
—1,0117
—4,2427
лить силы Xi на соответствующие им площади Ft. Например, для bс—3 и а0,1 получим:
М0 с00,118 -у 0,059 Р01.
Для прямоугольной балки
2S0
W
1,5, поэтому МПр
„5 М0 1,5-0,059 Р00,0885 PJ.
19.3. БАЛКИ И ПЛИТЫ НА УПРУГОМ ПОЛУПРОСТРАНСТВЕ
333
Теперь подсчитаем значение реакций; если Р — 2Р0, получим:
2 Р Ai
Х0 — 0,6155 —- — 0,3383 —22 0,3461 Р0.
0 2 с
Интенсивность реакций в точке 0 ро равна:
2Х„ 2-0,3461 Ро „
q0 — среднее давление на основание от Ро.
Для Р ЗР0 имеем:
Х0 0,6155-о,2694j Р„ 0,654 Р0;
р0 0,654-18 70 11.772 90.
Рис. 19.66
Рис. 19.67
Аналогично вычисляем значения реакции в других точках балки. На рис. 19.66 показаны эпюры реакций при работе балки за пределом упругости. График построен при относительных ординатах. Из графика видно, что после образования пластического шарнира под грузом изменяется эпюра распределения реакций между упругим основанием и балкой. С ростом нагрузки наблюдается более интенсивное увеличение ординат реакций под грузом. Так, например, увеличение нагрузки в три раза (п3) вызывает увеличение наиболь-
11,77
шеи ординаты эпюры реакции в
2,5
4,75 раза,
а это значит, что при переходе балки за предел упругости зависимость между внешней силой и наибольшей реакцией основания становится нелинейной. На рис. 19.67 показан график изменения макс в зависимости от Р. Бхли РРо, то балка работает в упругой стадии и между qмакс и Р имеется линейная зависимость. С увеличением Р в балке образуется пластический шарнир и поэтому необходимо сделать специальный расчет для определения макс—линейная экстраполяция в данном случае приводит к преуменьшенному значению. Это видно из графика, на котором такая экстраполяция изображена пунктиром. Здесь важно отметить, что упругое основание в данной задаче остается линейно-деформируемым и полученная нелинейность возникает в результате того, что балка переходит за предел упругости.
Величина предельной нагрузки
В данной задаче понятие о предельной несущей способности балки приобретает несколько иной смысл по
сравнению с балкой на двух опорах без упругого основания. Как известно, исчерпание несущей способности балки на двух опорах наступает тогда, когда в одном из сечений балки образуется пластический шарнир и балка превращается в механизм. Балка на упругом основании может воспринимать нагрузку и после того, как возник пластический шарнир. Для такой балки предельное состояние лимитируется наибольшим прогибом, который является предельным для данной балки по условиям ее эксплуатации. При увеличении нагрузки после образования пластического шарнира величина прогиба под грузом определяется с помощью чисел влияния. Для определения Рпр необходимо задать предельный прогиб упр в долях от наибольшего прогиба Уо соответствующего концу упругой стадии Упр — Ьуо-
'о (у’о
где у о—прогиб под грузом от Ро2; у о—то же, от М с.
После преобразования найдем:
Уо
Уо
РПрРо П k-2 — —2 — So
W
Уо Уо Учитывая, что Уо-УРо, получим:
и 2k -7- — 2 —7- Уо Уо
W
со
с
O'
So
Для таких числовых данных 6 3; 0,75;
у 1,01; с -i- 0,11; у’0 — 3,02; у0 1,009;
с0 0,118; а 0,1 и bс 3 получим:
Р пр Г о
3,02
3,02
0,11
2,5.
Этот результат показывает, что после перехода балки за предел упругости прогибы под грузом растуг. Оценим влияние жесткости балки на величину Рпр. Для этого сделаем расчет еще для а0 и а1.
При а0
гпр
Ро При а
3 1
0,555, 1,009 0,2798
--—-0,75 -1—- 1,398.
1,56 1,6
1,56 1,756
гпр Р0 3,4742 "И 3,4742
0,11 0,06
0,75
0,11
3.
Сопоставление полученных величин показывает, что величина предельной нагрузки зависит от соотношения жесткостей балки и упругого основания.
19.3.5. Расчет плит за пределом упругости
Бесконечно-протяженная плита
При переходе плиты за предел упругости образуется упруго-пластическая область, жесткость плиты изменяется, а это вызывает перераспределение реакций основания и момент-ов в плите.
334
РАЗДЕЛ 19. РАСЧЕТ СООРУЖЕНИЙ, ВЗАИМОДЕЙСТВУЮЩИХ С ГРУНТОМ
Для расчета за пределом упругости процесс деформирования плиты разбивается на интервалы. Сначала делается расчет по упругой стадии и определяется возможное расположение линейных пластических шарниров в плите. Затем выполняется новый расчет для основной системы, в которой изменяется расчетная схема плиты и учитываются образовавшиеся пластические шарниры. Перемещения, входящие в уравнения, вычисляются для новой расчетной схемы плиты, поэтому после решения уравнений будут найдены новые значения реакций основания и по ним построена эпюра моментов в упруго-пластической плите.
В данной задаче понятие предельная нагрузка принимает несколько иной смысл, так как образование в плите одного или даже нескольких линейных пластических шарниров еще не приводит к исчерпанию несущей способности в силу того, что плиту поддерживает упругое основание, которое работает в упругой стадии. Чаще всего предельная несущая способность определяется путем нормирования величины наибольшего прогиба плиты. После образования пластических шарниров для жестких плит наблюдается интенсивное увеличение прогибов, которое зависит от соотношения геометрических размеров плиты и упругих характеристик плиты и основания.
Для гибких плит образование первого пластического шарнира не влечет за собой значительного увеличения прогибов.
Упругий слой, расположенный между плитой и полупространством, оказывает влияние на распределение реакций упругого основания, в результате чего происходит снижение концентраций реакций к краю плиты. При переходе плиты за предел упругости происходит увеличение прогибов плиты за счет деформирования слоя.
Для плиты бесконечных размеров, нагруженной сосредоточенной силой, величина предельной нагрузки может быть определена приближенно с учетом образования линейных пластических шарниров по образующим конуса и кольцевого шарнира на контуре его основания. Для этого приравняем работу внешней силы РПр сумме работ моментов в шарнирах и реакций основания. Получим:
2л
' ‘-(d2r21
Рпр мпл i2 '2 )-2
d
dQ 2л
МП
Наименьшее значение Рпр получим:
Рпр)мин — 2лМпл -f- ЯГ2 (7макс Яг) “Ь
где Мпл — момент на единицу длины пластического шарнира (имеет размерность силы); г — расстояние от груза до кольцевого шарнира; макс — интенсивность реакций упругого основания под грузом; qr — интенсивность реакций упругого основания на расстоянии г.
Для балочной плиты, нагруженной сосредоточенной силой в середине пролета, величину РПр найдем для разных значений наибольшего предельного прогиба упрУ выраженного в безразмерной форме УиУо через наибольший прогиб уо, который соответствует концу упругой стадии работы плиты.
Зависимость между РПр и упр получается нелинейной и зависит от соотношения физических постоянных плит и упругого основания, которое характеризуется параметром
С 1 ' 1 (19.106)
а
т(т)’
10'
где Ео — модуль деформации основания; Е — модуль упругости плиты, I и b — пролет и ширина плиты; h — толщина плиты;
Рпр -ТТ- ( .14 0.80а,2)(ур)
2-а
(19.107)
(19.104)
(19.105)
Формула (19.107) получена при соблюдении условия 2 упр5. (19.108)
После образования первого пластического шарнира наблюдается изменение эпюры реакций основания.
Распределение реакций зависит от соотношения жесткостей плиты и упругого основания, а также от величины внешней силы — в этом случае задача становится нелинейной.
Влияние местных и о б щ и х д е ф о р м а ц и й
В прямоугольных плитах возникает комбинированная схема разрушения, состоящая из местных и общих деформаций. Если плита достаточно узка, то ее схема разрушения при грузе, расположенном в середине пролета, будет похожа на балочную схему. Под грузом образуется пластический шарнир, распространяющийся на всю ширину плиты, как это показано на рис. 19.68, а. Для широкой плиты механизм разрушения будет приближаться к случаю бесконечно-протяженной плиты (рис. 19.68,6). Эти две формы разрушения возникают в каждой плите (рис. 19.68, в).
В результате наложения обоих эффектов конфигурация местного конуса деформаций изменяется. Наличие балочного линейного шарнира сокращает размер пластического конуса в направлении линейного шарнира. В результате этого основание пластического конуса из круга превращается в сплюснутую кривую, изображенную на рис. 19.68,в. Длина кругового пластического шарнира, соответствующего основанию конуса, а также и длина образующих конуса уменьшается; поэтому предельная нагрузка Р теперь будет меньше Рп для бесконечной плиты и больше, чем для балочной плиты Ра:
РбРРп (19.109)
Для бесконечной плиты величина предельной нагрузки определяется по формуле
1
Рп — 4лА1пл Яг2 (7макс — Яг)
тег3 qr.
(19.110)
В этой формуле первые два слагаемых представляют собой работу пластических моментов в круговом шарнире и в шарнирах, возникающих по образующим ко¬
19.3. БАЛКИ И ПЛИТЫ НА УПРУГОМ ПОЛУПРОСТРАНСТВЕ
335
нуса. Последний член равен работе реакций основания в пределах пластического конуса.
Для балки величина предельной нагрузки определяется по формуле
Рб 2МПЛ —— —, (19.111)
I с0
где с0 — расстояние до равнодействующей реакции основания. Применяя общие теоремы предельного состоя¬
ния, получки величину предельной нагрузки для комбинированной схемы образования пластических шарниров.
Рассмотрим плиту с отношением сторон 6 0,5. Определим для нее величину балочной предельной силы Рб, предполагая, что шарнир образуется в середине пролета по всей ширине плиты:
РбМплс0. (19.112)
Эта сила соответствует образованию пластического шарнира в середине пролета плиты при условии, что по всему поперечному сечению плиты в середине пролета изгибающий момент распределяется равномерно. В действительности этого не получается — изгибающие моменты под силой растут быстрее, чем по краям плиты, поэтому пластическая область будет образовываться сначала в непосредственной близости от внешней силы, а затем уже распространяться в стороны. Предельные размеры пластического конуса, образующегося под силой, можно определить из формулы (19.110) для Яп, если в ней сделать изменения, учитывая, что основание пластической области будет теперь представлять собой кривую, похожую на эллипс.
Пластическая область под грузом теперь будет уменьшена на коэффициент, который равен отношению площадей 0,7. Таким образом, предельная сила, соответствующая комбинированной схеме разрушения,
Як 0,7Р„(l-y-)6- (19-113)
Величина Рь. не может быть больше Яп, следовательно, эта формула справедлива, если
Рб(Ь—2г2) 0,3Рп, (19.114)
где b — ширина плиты; г2 — малый радиус конуса пластичности.
Нагрузка на краю плиты
Когда сосредоточенный груз располагается вблизи края достаточно протяженной или полубесконечной плиты, то образуется характерный механизм разрушения плиты. В отличие от бесконечной плиты взамен кольцевого шарнира и полного пластического конуса возникает половина конуса, основанием которого служит полуэллипс. Очертание кривой, по которой распо¬
лагается пластический шарнир, соответствующий сечениям с отрицательными моментами, приближается в плане к полуэллипсу, у которого размер вдоль края плиты вдвое больше поперечного.
Линейные пластические шарниры, соответствующие образующим конуса, заполняют всю область, и работа пластических моментов в пределах всего конуса будет подсчитана аналогично тому, как это было сделано для бесконечной плиты. Теперь боковая поверхность пластической области будет почти в два раза меньше. Также уменьшится и работа пластических моментов в кольцевом шарнире, длина которого будет меньше, чем половина полуокружности, построенной на большем диаметре пластического конуса.
Реакции упругого основания, которые совершают работу при деформировании плиты, могут быть подсчитаны достаточно точно. Вдоль края эпюру реакций можно получить, выделяя из плиты полосу и рассматривая ее как бесконечную балку. В направлении, перпендикулярном краю, выделенная полоса будет представлять собой полубесконечную балку, нагруженную силой на конце. Из условий равенства прогибов для бесконечной и полубесконечной балок в точке приложения груза получим формулу для распределения внешней нагрузки между продольной и поперечной балками. Для определения границ, через которые проходит кольцевой шарнир, используются эпюры моментов, возникающие в балках. Кольцевой шарнир образуется в том сечении, где возникает наибольший отрицательный момент.
Работа, совершаемая в линейных шарнирах, равна
1,25 яМпл. Такое же выражение получим для работы моментов в кольцевом шарнире. Работу реакций упругого основания можно подсчитать, предполагая, что основанием конуса пластичности является окружность. Тогда получим:
(7макс Яг) Fqr,
F будет представлять собой площадь основания конуса пластичности, причем 70,5 пг:
" 3
Я макс 0,123 Р Пр
Яг
0,14.
7макс
Теперь можно подсчитать величину предельной силы: 2,5 тсМпл
Рпр 1 — 0,142
2,92 лМг
(19.115)
Полученное решение показывает, что нагрузка, приложенная к краю плиты, значительно раньше вызывает разрушение плиты, чем нагрузка, приложенная в центре ее. Соотношение этих нагрузок зависит от жесткости плиты и основания. Для жестких плит разница будет больше, чем для гибких. Если плита имеет небольшие размеры в плане, то необходимо также рассмотреть возможность разрушения ее по комбинированной схеме, когда кроме пластического конуса еще образуется линейный пластический шарнир, соединяющий пластический конус с незагруженной стороной плиты.
Расчет слоистой плиты
Рассмотрим трехслойную плиту, состоящую из двух плит разной жесткости, разделенных упругой проклад-
336
РАЗДЕЛ 19. РАСЧЕТ СООРУЖЕНИЙ, ВЗАИМОДЕЙСТВУЮЩИХ С ГРУНТОМ
кой. Плита расположена на упругом основании и нагружена сосредоточенной силой Р; размеры плиты в плане примем достаточно большие для того, чтобы ее можно было считать бесконечно-протяженной. Распределение сил в такой плите зависит от соотношения жесткостей всех элементов, из которых образована плита. Изменение жесткости одного элемента, например упругого основания или упругой прокладки, вызывает перераспределение сил во всей системе. Это обстоятельство значительно усложняет задачу о расчете слоистой плиты, хотя для выполнения такого расчета можно применить прежние методы.
Для расчета в упругой стадии составим два дифференциальных уравнения равновесия для каждой плиты в отдельности:
„ wi, „ д, д юх , в дх3ду2 ду J
А (щ — щ) 7i (, у);
д тг dw2 d4w2 _
2 V дх дх2 ду- ду )
—А — а2) — q2 (X, у),
где и w2— прогибы верхней и нижней плит соответ¬
ственно;
Qi(x У)—внешняя нагрузка на верхнюю плиту;
Яъ Iх У)—реакция упругого основания;
Dx и D2—жесткости верхней и нижней плиты;
D3— жесткость упругой прокладки, которая подчиняется гипотезе пропорциональности.
Если связи, размещенные между плитами, будут абсолютно жесткими, то wi w2 и, складывая оба уравнения, получим:
( д w d4w dw
(Dl г) д 2 -г)
— Qi(x, y) — q2(x, у).
Это значит, что систему в целом можно рассматривать как одну плиту, имеющую суммарную жесткость. В этом случае усилия распределяются между плитами пропорционально их жесткостям. Изгибающие моменты будут равны:
М2 М; D Dt Dt,
где Мх и М2— изгибающие моменты в верхней и нижней плитах соответственно;
М—общий момент, воспринимаемый обеими плитами, т. е. момент в монолитной плите с жесткостью, равной суммарной жесткости двух плит; в упругой стадии величину М определим, как для однородной плиты, имеющей суммарную жесткость.
При увеличении нагрузки за предел упругости будет переходить первой та плита, в которой напряжения будут больше: сначала верхняя плита, если ее толщина будет больше. При дальнейшем увеличении нагрузки, после того как в верхней плите образуется пластический шарнир и момент стабилизируется и будет равен Afoi, в нижней плите изгибающий момент будет быстро нарастать, так как
A4q2 М0
После того как в обеих плитах образуются пластические шарниры, суммарный момент, воспринимаемый обеими плитами, будет равен:
М0 — М01 М02.
Таким образом, схема разрушения слоистой плиты может быть принята такой же, как и в однородной плите с образованием пластического конуса, по образующим которого располагаются линейные пластические шарниры, а в основании конуса в сечении с наибольшим отрицательным моментом возникает круговой пластический шарнир. Величину предельной силы в этом случае получим по формуле
Рп 4яЛ1Пл 2 (7макс Яг) пг2 Яг
Входящие в последнюю формулу величины вычисляются, как было указано выше. Для Рп:
Рп 1,395-4лАГпл 1,395-4я (М01 М02)
Более сложный случай получим, если будем учитывать упругость прокладки, расположенной между плитами. В этом случае процесс деформирования слоистой плиты в упругой стадии можно рассматривать состоящим из двух этапов: сначала возникают прогибы и усилия в плите, имеющей несжимаемую прокладку, т. е. прогибы обеих плит будут одинаковыми и внешний момент распределится между плитами пропорционально их жесткостям; затем определяется величина деформации упругой прокладки — эта деформация зависит не только от соотношения жесткостей всех трех слоев, но также и от модуля деформации основания.
Прогиб слоистой плиты при жестких связях следует рассматривать как среднюю величину между прогибами верхней и нижней плит при упругих связях, поэтому для получения истинного прогиба верхней плиты к среднему прогибу необходимо прибавить половину разности прогибов; если же от среднего прогиба отнять эту величину, то получим прогиб нижней плиты.
Изгибающие моменты, возникающие в каждой отдельной плите, из которых составлено слоистое покрытие, можно рассматривать, как результат сложения двух моментов:
М1 М ДМ и м2 м- — дм.
Из этих формул видно, что при упругих связях момент в верхней плите будет больше, чем в нижней, если даже их жесткости будут одинаковыми. В практических случаях жесткость верхней плиты обычно бывает больше, чем нижней, поэтому в верхней плите будет раньше возникать первый пластический шарнир, чем в нижней. Можно было бы найти формулу для величины AM путем интегрирования соответствующего уравнения, но в этом нет особой надобности, так как для дальнейшего этот момент не потребуется. После того как образовался пластический шарнир под грузом в верхней плите за счет податливости прокладки, начнется образование пластического конуса с кольцевым пластическим шарниром, расположенным на расстоянии Г от груза. Величина гх зависит от соотношения жесткостей верхней плиты и упругой прокладки и соответствует сечению, в котором отрицательный момент будет наибольшим по абсолютной величине. Для вычисления Г можно использовать формулу
19.3. БАЛКИ И ПЛИТЫ НА УПРУГОМ ПОЛУПРОСТРАНСТВЕ
337
то тогда величина внешней силы, при которой в верхней плите образуется пластический конус,
Р’п 1,34.4яЛ01.
При этой величине внешней силы пластический конус образуется только в верхней плите, нижняя плита будет находиться в упругой стадии и поэтому несущая способность слоистой плиты еще не будет использована. Верхняя плита будет передавать избыток нагрузки на нижнюю плиту, а в результате этого эпюра нагрузки на нижнюю плиту будет состоять из двух частей: от силы Рп эпюра будет приближаться к равномерно распределенной на площадке радиуса ги а от приращения нагрузки эпюра будет представляться сосредоточенной силой. Благодаря этому кольцевой шарнир в нижней плите образуется на расстоянии г2 от точки приложения нагрузки, причем г2гь Вторая часть нагрузки Рп, воспринимаемая нижней плитой, подсчитывается аналогично, но величина г2 определится из формулы
г2 — 1,52,5 I,
Поэтому Рп равно:
Р;2,77.4хШ02.
Таким образом, полная несущая способность трехслойной плиты определяется величиной нагрузки
рпр'п Рп 4Я (1,34Af0 2.77MJ.
При наличии упругой прокладки несущая способность слоистой плиты будет выше, чем при жестком соединении плит. Например, если слоистая плита состоит из двух одинаковых плит, то
м01 02 0,5Af0.
При жесткой прокладке
Рпо 1 395‘4я (Л401 М02) 1,395-4лМ0;
при упругой прокладке
рп1 4я (1,34Af0i 2,77М02) 4яМ0-2,055;
2,055
При наличии упругой прокладки несущая способность плиты увеличилась в 1,48 раза. Оценивая благоприятное влияние упругой прокладки, размещенной между плитами, следует иметь в виду, что толщина ее должна быть достаточно большой для того, чтобы произошла полная приспосабливаемость конструкции; в противном случае величину внешней силы следует уменьшить.
Полученные формулы позволяют определить ту уменьшенную толщину слоистой плиты с упругой прокладкой, при которой эта плита будет способна выдержать ту же самую внешнюю силу, как и плита с жесткой прокладкой; для этого надо принять Pno — Pni и из полученного уравнения найти искомую величину. Например, при Moi Mo20,5 М0 была определена внешняя предельная сила Рпо 1,3954 лМ0. Теперь определим, насколько можно уменьшить момент в нижней плите для того, чтобы воспринять ту же силу, но при наличии упругой прокладки и сохранить толщину верхней плиты. Имеем уравнение
1,395.4яМ0 4п 1,34 -у- 2,77М02) или М02 0,262М0.
Это значит, что путем включения упругой прокладки
1 У 5
можно снизить толщину нижнеи ПЛИТЫ В I у 0,262
1,38 раза или, если сохранить толщину нижней плиты, то можно соответственно снизить требования к прочности материала нижней плиты.
Оптимальная толщина плиты
Для определения оптимального соотношения в толщинах слоистой плиты с упругой прокладкой служит график, показанный на рис. 19.69. В общем случае величина предельной силы будет определяться как
Рп ЛМ01-ВМ02.
Рис. 19.69
Для данной величины Рп, изменяя Л и В, которые зависят от соотношения жесткостей элементов, получим семейство прямых, которые образуют многоугольник на координатной плоскости M0i—02, как это показано жирной линией на рис. 19.69. Полная толщина плиты равна сумме толщин плит, а каждая из этих толщин пропорциональна корню квадратному из момента. Поэтому
Параметры С и D зависят от прочности 1Уатериала, из которого сделана плита, т. е. это будут постоянные величины, поэтому для данного значения h получим кривую, которая связывает М01 и М02. При изменении величины hhih2ihz получим семейство кривых, которые показаны на рис. 19.69 пунктиром. Наименьшее значение толщины плиты определяется кривой h, которая касается многоугольника. В данном случае это будет кривая hz. Хотя кривые hi и h2 соответствуют меньшему значению толщин плиты, но они расположены левее многоугольника, ограничивающего величину Рп, поэтому величина Рп для плиты толщиной h и h2 будет меньше требуемой по условиям задачи. Толщины hA и hs соответствуют значению предельной несущей способности, которое больше требуемого. Толщина h полученная из графика, представляет собой суммарную толщину слоистой плиты и отвечает вполне определенным значениям предельных изгибающих моментов, которые должны быть восприняты верхней и нижней плитами; их значение возьмем из графика рис. 19.69 для точки, в которой линия hz касается многоугольника. По этим моментам можно подобрать толщину верхней и нижней плит. Толщины плит будут разные,
338
РАЗДЕЛ 19. РАСЧЕТ СООРУЖЕНИЙ, ВЗАИМОДЕЙСТВУЮЩИХ С ГРУНТОМ
так как в данном случае Afo2Moi-
Изложенный способ, основанный на общих принципах проектирования сложных систем наименьшего веса, позволяет определить оптимальную толщину слоистой плиты, состоящей из двух плит, соединенных упругой прокладкой, которая передает нормальные напряжения и позволяет свободно скользить верхней плите по нижней при деформировании плиты. Влияние каса-
Л ИТЕ
1. Бернштейн М. С. Расчет конструкций с односторонними связями. Госстройиздат, 1947.
2. Б у р д з г л а Н. Л. Статический расчет гидротехнических туннелей. Госстройиздат, 1961.
3. Б я л е р И. Я. К вопросу о расчете несущих конструкций многопролетных станций метрополитена. Изд. АН СССР, ОТН, № 7, 1954.
4. В о л к о в В. П. Тоннели на автомобильных дорогах. Автотрансиздат, 1957.
5. Габбасов Р. Ф., Клейн Г. К. О расчете подземных напорных труб с учетом геометрической нелинейности. Строительная механика и расчет вооружений, 1966, № 5.
6. Г в о з д е в А. А. Расчет несущей способности конструкций по методу предельного равновесия. Госстройиздат, 1949.
7. Г о л у ш к е в и ч С. С. Плоская задача теории предельного равновесия сыпучей среды. Гостехиздат, 1948.
8. Горбунов-Посадов М. И. Расчет конструкций на упругом основании. Госстройиздат, 1953.
9. Д а в ы д о в С. С. Расчет и проектирование подземных конструкций. Госстройиздат, 1950.
10. Д а н д у р о в М. И. Тоннели. Трансжелдориздат, 1952.
11. Егоров К. Е. К вопросу деформации основания конечной толщины. Сборник трудов № 34 НИИ оснований и подземных сооружений. Госстройиздат, 1958.
12. Е м е л ь я н о в Л. М. О расчете подземных трубопроводов по теории упругости. Строительная механика и расчет сооружений, 1961, № 1.
13. Ж е м о ч к и н Б. Н. Расчет круглых плит на упругом основании. Изд. ВИА, 1939.
14. Ж е м о ч к и н Б. Н., Синицын А. П. Практические методы расчета фундаментных балок и плит на упругом основании без гипотезы Винклера. Госстройиздат, 1947, 1962.
15. Камерштейн А. Г., Рождественский В. В., РучимскийМ. Н. Расчет трубопроводов на прочность. Гостоптехиздат, 1963,
16. К л е й н Г. К. Расчет подземных трубопроводов. Стройиздат, 1969.
17. К л е й н Г. К. Проблемы строительной механики подземных трубопроводов. Строительная механика и расчет сооружений, 1967, JSfo 4.
18. К л е й н Г. К. Строительная механика сыпучих тел. Госстройиздат, 1956.
19. К л е й н Г. К. Расчет балок на сплошном основании. Сб. трудов МИИГС, вып. 3, 1954.
20. К о р е н е в Б. Г. Штамп, лежащий на упругом полупространстве. Доклады АН СССР, т. 112, № 5, 1957.
21. Крашенинникова Г. В. Расчет балок на упругом основании конечной глубины. Энергия, 1964.
22. Кузнецов В. И. Упругое основание. Госстройиздат, 1952.
23. Л и м а н о в Ю. А. Осадки земной поверхности при сооружении тоннелей в кембрийских глинах. ЛИИЖТ, 1957.
24. Л ь в и н Я. Б. Расчет балок на упругом полупространстве и полуплоскости методом сил. В сб.: Исследования по теории сооружений, вып. 5. Госстройиздат, 1951.
тельных напряжений, возникающих в упругой прокладке, можно также учесть, но при этом задача значительно усложняется и объем вычислений возрастает. Касательные напряжения, возникающие в упругой прокладке, оказывают второстепенное влияние на распределение сил и определение несущей способности, поэтому они существенных изменений в полученные результаты не вносят.
АТУ РА
25. О р л о в В. В., Гудзь А. Г, Сборник примеров и задач по механике горных пород и крепи. Госгортехиздат, 1961.
26. О р л о в С. А. Методы статического расчета сборных железобетонных обделок тоннелей. НИИ оснований и подземных сооружений. Госстройиздат, 1961.
27. П а щ е в с к и й Д. П. Приближенное определение собственных частот колебаний балки, лежащей на упругом полупространстве. Вестник ВИА, JV® 106, 1957.
28. П р е в о Р. Расчет на прочность трубопроводов, заложенных в грунт. Стройиздат, 1964.
29 Прокофьев И. П. Давление сыпучих тел и расчет подпорных стенок. Госстройиздат, 1947; Физматгиз, 1960.
30. Руппенейт К. В. Некоторые вопросы механики горных пород. Углетехиздат, 1954.
31. С и н и ц ы н А. П. О распределении напряжений у основания плотин треугольного профиля. Вестник ВИА, № 20, 1937.
32. Синицын А. П. Расчет балок и плит на упругом основании за пределом упругости. Стройиздат, 1964,
33. С и н и ц ы н А. П. О распределении напряжений в подпорных стенках ломаного профиля. В сб.: Исследования по
теории сооружений. Вып. 4. Госстройиздат, 1949.
34. С о к о л о в с к и й В. В. Статика сыпучей среды. Изд. 3-е. Гостехиздат, 1955.
35. Справочник проектировщика. Основания и фундаменты. Стройиздат, 1964.
36. Строительные нормы и правила: гл. П-Б.1-62, Основания зданий и сооружений; гл. Н-Г.3-62, Водоснабжение; гл. П-Г.10-62, Тепловые сети; гл. Н-Д.7-62, Мосты и трубы; гл. Н-Д.8-62, Тоннели железнодорожные и автодорожные: гл. П-Д.10-62, Магистральные трубопроводы; гл. II-M.4-62, Подземные горные выработки предприятий по добыче полезных ископаемых. Госстройиздат, 1962.
37. Т е п л и ц к и й Е. И. Давление породы на подземные сооружения. Вопросы расчета и методы возведения подземных сооружений. Сб. № 41. НИИ оснований и подземных сооружений. Госстройиздат, 1959.
38. Т е р ц а г к К. Теория механики грунтов. Госстройиздат, 1961.
39. Технические условия проектирования силосов для сыпучих тел (ТУ 124-56). Госстройиздат, 1956.
40. Филоненко-Бородич М. М. Некоторые приближенные теории упругого основания. Ученые записки МГУ, вып. 46, 1940.
41. Черкасов И. И. Механические свойства грунтовых оснований при деформации вдавливания. В сб.: Определение деформаций грунтов. Автотрансиздат, 1955.
42. Ш е х т е р О. Я. Расчет бесконечной плиты, лежащей на упругом основании конечной и бесконечной мощности. Сб. трудов научно-исследовательского сектора Фундаментстроя, № 10. Госстройиздат, 1939.
43. Э р и с т о в В. С. Расчет обделки напорных туннелей в анизотропных породах. Гидротехническое строительство, 1967, № 5.
РАЗДЕЛ 20
ДИНАМИКА СООРУЖЕНИЙ
Динамические нагрузки, в зависимости от закона их изменения во времени и пространстве, обычно делятся на: 1) периодические, 2) импульсивные, 3) случайные и 4) подвижные.
Расчет сооружения на действие динамических нагрузок имеет целью:
1) проверку прочности, выносливости и, в отдельных случаях, динамической устойчивости конструкций;
2) проверку допустимости вибраций с точки зрения их воздействия на людей;
3) проверку допустимости вибраций для нормального хода технологического процесса, работы измерительных приборов и т. д.;
4) проверку динамической жесткости конструкций, например элементов покрытий, определяемой предельно допускаемой амплитудой колебаний при данной частоте.
При проектировании междуэтажных перекрытий и каркасов зданий технологические требования и указания санитарно-гигиенических норм обычно более жестко ограничивают колебания, чем требования прочности. Наоборот, в процессе расчета высоких и гибких сооружений на действие ветра и при расчете всех конструкций на сейсмические воздействия и действие взрывов основную роль играют требования прочности.
Динамические расчеты при равных требованиях к точности описания работы конструкций расчетной схемой сложнее статических. При их проведении пользуются общими методами динамики сооружений, изложенными в литературе. Порядок динамического расчета и его содержание в значительной мере регламентируются нормативно-инструктивными документами, содержащими также ряд вспомогательных и справочных материалов.
Основные вопросы динамического расчета и соответствующие нормативные документы следующие: определение динамических нагрузок от машин 25; определение динамических воздействий ветра и расчет гибких сооружений на действие ветра 18, 19, 23, 52, 67;
расчет несущих конструкций зданий на действие периодической нагрузки от машин, а также на периодические нагрузки, передаваемые через грунт 18, 19, 52;
расчет конструкций на действие импульсивных нагрузок 26;
расчет фундаментов под машины с динамическими нагрузками 61;
расчет сооружений на действие сейсмических нагрузок 22, 53, 65;
расчет покрытий промышленных зданий на действие гармонических нагрузок 66;
виброизоляция и другие меры борьбы с вибрациями 20, 27;
специальные мероприятия по снижению уровня вибраций на заводах сборного железобетона 21;
санитарно-гигиенические требования 79;
22
нормирование усталостных напряжений 54.
Вопросы расчета сооружений на действие гармонических нагрузок являются основными для этого раздела, при составлении которого были учтены основные положения инструкции 19.
Целью динамического расчета конструкций, который носит поверочный характер, является определение уровня вибраций и установление допустимости этих вибраций с точки зрения требований, сформулированных во введении. Если технологические или санитарно-гигиенические требования не удовлетворяются, необходимы специальные мероприятия по снижению уровня вибраций; если же не выполнены требования прочности, нужны меры либо по уменьшению динамических усилий, возникающих в рассматриваемой конструкции, либо по ее усилению. Вопросы расчета конструкций зданий и сооружений на сейсмические воздействия здесь не рассматриваются (см. 10, 22, 24, 31, 35, 36, 41, 42, 46, 49, 53, 63, 65, 71).
20.1. ЭЛЕМЕНТЫ ТЕОРИИ КОЛЕБАНИИ
20.1.1. Кинематика колебательного движения
Если механическая система имеет одну степень свободы и закон изменения обобщенной координаты во времени можно представить в виде
x(t) x(kT t),
где k — произвольное целое число, то движение называется периодическим, а величина Т — периодом колебаний.
При гармонических колебаниях
х — a sin (со р0), ( 20.1)
где а — амплитуда колебаний; (о4-фо— фаза колебаний; фо — начальная фаза; со 2лТ— круговая частота колебаний; Т (д2л— период колебаний; Х—1Т— частота, число колебаний (циклов) в единицу времени (обычно Т выражается в секундах, при этом X выражается в герцах).
Удвоенная амплитуда называется размахом колебаний.
Скорость v и ускорение w при гармонических колебаниях равны:
dx
v —-— аы cos (со фо); dt
dv
w — а со2 sin (со -J- ф0) — со2.
dt
Колебания, представляющие сумму нескольких гармонических колебаний, называются полигармо ническими.
340
РАЗДЕЛАХ). ДИНАМИКА СООРУЖЕНИИ
Если x(t) — случайная функция времени, колебания называются случайными.
Колебания, которые представляют сумму двух гармонических колебаний с близкими частотами (биения), называются колебаниями с периодически возрастающей и убывающей амплитудой.
20.1.2. Колебания системы с одной степенью свободы
Свободные колебания при отсутствии сил сопротивления
Дифференциальное уравнение малых свободных колебаний системы с одной степенью свободы, например, груза на пружине, прикрепленного так, что возможны t перемещения лишь в направлении
sryJj оси х (рис. 20.1) имеет вид
д2 х
т—- сх 0, (20.2)
dt2
Рис. 20.1
где т — масса; с — квазиупругий коэффициент (для системы, изображенной на рис. 20.1, — жесткость пружины).
Решение этого уравнения при начальных условиях dx I
х(0) о и — — v0 имеет вид
dt lto
Зачастую система с одной степенью свободы имеет параллельное (рис. 20.2) или последовательное (рис. 20.3) соединение упругих элементов. Общая жесткость с определится формулами: при параллельном соединении
с С1 С2 сп
Рис. 20.2
при последовательном соединении
Рис. 20.3
111 1
— . с Сг С2 сп
Свободные колебания при наличии сил сопротивления
Если сила сопротивления Ffix пропорциональна скоростито дифференциальное уравнение колебаний имеет вид
dx
dt2
dx -в f с
2n — ш2 x 0; о I ;
dt V m
2 я
JL
m
(20.3)
X sin Cdt Xa COS tot,
(0
или
x — a sin (cot Фо)
где a
.
,2i
Ю2
G)0
Фо arctg ——;
vo
V — f m
Статическая осадка пружины, вызванная весом груза,
хст —
поэтому —, где хСг— в см; X — в герцах.
V hr
Очевидно, что при вращательных колебаниях
У±-
где с (кГмрад) — величина вращающего статического момента, вызывающего единичное угловое перемещение; U — момент инерции массы относительно. оси вращения.
и при g)- система совершает затухающие колебания по закону
х А0 ent sin (ох t ф0); у"со2 — n2;
2. (t0 яо)8
Фо arctg
X0 Oit
Щ nx0
Если CO ny TO 0i 0).
Быстрота затухания характеризуется логарифмическим декрементом колебаний 6 (логарифмом отношения двух последовательных амплитуд, взятых через промежуток времени, равный периоду), равным 6 — пТ. График движения см. рис. 20.4.
Если сопротивление вызывается только силами сухого (кулонова) трения, которые сохраняют постоянную величину и все время остаются направленными в сторону, противоположную движению, то сила трения
F —— fN sign х.
Здесь f — коэффициент трения; N — нормальная реакция; символ sign х означает знак скорости.
Для решения задачи о свободных колебаниях нужно по отдельности рассматривать движение для участков временя, на протяжении которых знак силы трения не
1 Например, силы сопротивления вязкой среды (воздуха, жидкости) при не очень больших скоростях.
20.1. ЭЛЕМЕНТЫ ТЕОРИИ КОЛЕБАНИЙ
341
меняется, и воспользоваться условиями сопряжения 14.
При свободных колебаниях с сухим трением амплитуда колебаний убывает по линейному закону. На частоту свободных колебаний сопротивление сухого трения не оказывает влияния.
Если сопротивление вызвано силами внутреннего трения, описываемыми комплексной гипотезой, то затухание колебаний происходит по закону
sin (at р), v —,
ТС
где а, ф ловий.
при
х ае
— постоянные, определяемые из начальных ус-
Вынужденные колебания отсутствии сил сопротивления. Резонанс
Дифференциальное уравнение колебаний при действии внешней силы Р sin pt имеет вид d2 х
т —_ сх _ р sin pf (20.4)
dt
где р— круговая частота нагрузки (рфы).
Решение уравнения (20.4) имеет вид
Р
X A sin (tit В COS (lit -f- —; 77“ sin pt.
Первые два слагаемых — это общее решение однородного дифференциального уравнения; третье слагаемое— частное решение неоднородного уравнения; если имеются даже небольшие силы сопротивления, то свободные колебания быстро затухают, поэтому представляет интерес рассмотрение частного решения, которое описывает чисто вынужденные колебания:
1
1 — V2
Р
sin ptf
где
v — ; хСТ — ; называется статическим (О с
перемещением (оно представляет перемещение, вызванное силой, равной по величине амплитуде динамической силы); его нельзя смешивать с ст, вызванным собственным весом системы.
Амплитуда вынужденных колебаний
Дст
а,7р 20-5
Отношение ахст называется динамическим коэффициентом.
График ахст представлен на рис. 20.5 кривой яю 0. Совпадение частот вынужденных и собственных колебаний носит название резонанса (хотя слово резонанс имеет и другое значение); в рассматриваемом случае при резонансе vl и формула (20.5) теряет смысл. Если считать, что сопротивление отсутствует, то амплитуда колебаний при резонансе растет пропорционально времени, а закон движения при нулевых начальных условиях имеет вид
i)
При vl фазы возмущающей силы и перемещения системы совпадают, при vl они отличаются на 180 .
Если на систему действует сила, изменяющаяся по закону P(t)y то решение задачи принимает вид
t
v0 со f
— sin at х0 cos о — Р (I) sin оз (t — I) d
при нулевых начальных условиях и Р(0) 0 t
Pit)
г
-1Р' (5) (-6) d.
Первое слагаемое — это статическое перемещение; второе слагаемое мало, если сила Р изменяется достаточно медленно.
QEcm
Если возмущающая сила есть заданная периодическая функция времени, то решение задачи можно получить иначе, разложив эту функцию в ряд Фурье; каждый из членов ряда представляет силу, изменяющуюся по гармоническому закону. Действие такой силы было разобрано выше, и поэтому решение сразу можно представить в виде ряда Фурье. Однако этот ряд может сходиться медленно, и тогда желательно представить периодическую часть решения в замкнутом виде. Если P(t) P(tkT), где k — целое число, Т — период возмущающей силы, то чисто вынужденные ко¬
342
РАЗДЕЛ 20. ДИНАМИКА СООРУЖЕНИЙ
лебания представляют периодическое движение с периодом Т; поэтому
_ dx 1 dx
х(0) Т); — —
dt Uo dt
tT
So cos сU —
и периодическое решение имеет вид 1 ®Т
XS'Ctg—
1 I сот
— I Sl — s2 ctg — I sin (it
I
-7- f p (?)si
mco J
sin со (t — I) dl,
где
1
ft2 5
dx P.
2n go2 — sin pt
dt m
n _ co0
имеет решение
Рис. 20.6 x Aent sin (co ф0)
Г sin (pt — 8),
где tg e
1(1 — V2)2 462 2np ft 6
; —
O)2 — 73 0) 2 я
На рис. 20.5 приведены графики отношений амплитуды чисто вынужденных колебаний к статическому прогибу хсг в зависимости от отношения я(о, а на рис. 20.6 графики величины е, характеризующей изменение фазы вынужденных колебаний в зависимости от частоты возмущающей силы.
Динамический коэффициент ахСт в этом случае равен:
1
— Р (I) cos со dt; s2 — ( Р (I) sin co dl.
m J ‘ m J
о 0
Вынужденные колебания при наличии сил сопротивления, пропорциональных скорости колебаний
Дифференциальное уравнение колебаний
d2x- -’ (20.6)
V (1 — v)2 4642
Максимального значения коэффициент достигает при
vr 1—2 6j; так как обычно 2 8iCl, то и в этом случае считают резонансом случай vl. При резонансе, определенном таким образом, динамический коэффициент не является максимальным, однако для малых п он практически не отличается от максимального.
Если на систему действует возмущающая сила Р Я(), то при о)П
х (t) Aent sin (coj? Фо)
—— f P ( ) e-n(-6) sin 0j (t — )dlтщ J
В отличие от случая, когда сопротивление отсутствует, приведенные решения справедливы при любых отношениях ро. Амплитуда колебаний при рсо1, называемая резонансной амплитудой, определяется по формуле
я 1
Ярез — -7- ст у
о wpe3
таким образом, коэффициент резонансного увеличения ахст зависит от резонансной частоты сорез. При затухании, вызванном внутренним трением в строительных конструкциях, полученная выше формула для резонансной амплитуды не подтверждается опытом.
В практике расчета строительных конструкций и нормативных документах принята другая феноменологическая теория, называемая часто теорией внутреннего трения, или комплексной теорией, или теорией Е. С. Сорокина.
Вынужденные колебания при затухании по теории Е. С. Сорокина
При расчете строительных конструкций используется теория затухания, в основу которой положено представление о поглощении энергии.
Рассмотрим движение системы с одной степенью свободы по гармоническому закону jc0sin pt. На диаграммах рис. 20.7, 20.8 показана зависимость между силой, действующей на систему, и перемещением. Если сопротивление отсутствует, то при нагрузке и разгрузке на рис. 20.7 ветви диаграммы совпадают; при наличии сопротивления ветви нагрузки и разгрузки не совпадают и график (рис. 20.8) представляет замкнутую кривую (петлю гистерезиса).
Площадь петли гистерезиса равна работе Да;, совершаемой силами неупругого сопротивления за цикл; площадь заштрихованного треугольника есть наибольшее за цикл значение энергии упругих деформаций, равное работе упругих сил за четверть цикла w0.
Aw
Отношение ф называется коэффициентом по-
Щ
глощения.
При гармонических колебаниях
Хп Rо
ф 2я — 2я —,
0 50
где Хп — амплитуда неупругой деформации, равная половине ширины петли гистерезиса; х0 — амплитуда
20.1. ЭЛЕМЕНТЫ ТЕОРИИ КОЛЕБАНИЙ
343
упругой деформации; ?0 — амплитуда силы неупругого сопротивления; So — амплитуда упругой силы.
Энергия системы с одной степенью свободы, совершающей затухающие колебания, равна:
w -x (О,
Рис. 20.7
где x(t) — ордината огибающей эпюры затухающих колебаний; с — жесткость. По определению коэффициента поглощения
-Г
—j'
dw
w
Используя приведенное выше выражение для w, можно записать
tT
-J?-
—t
2 In-
(t)
26.
При динамических расчетах можно считать, что коэффициент поглощения:
1) не зависит от статических напряжений Ост,
2) практически остается постоянным и равным ф при амплитудах динамических напряжений адао,
I аст I
где о"0 ; аСт —соответствующее допускаемое
40
статическое напряжение; при адСао коэффициент по-
ад
глощения можно принимать равным —г?;
ао
3) не зависит от коэффициента асимметрии цикла, равного
Ост
4) в диапазоне частот, с которыми приходится встречаться при расчете строительных конструкций, не зависит от частоты колебаний.
При вынужденных гармонических колебаниях системы с одной степенью свободы, коэффициент поглощения которой равен ip, амплитуда колебаний
где у 2л
— коэффициент неупругого сопротивления.
20.1.3. Колебания системы с несколькими степенями свободы
Свободные колебания при отсутствии сил сопротивления
Рассматривается случай системы с тремя степенями свободы (рис. 20.9). Используя принцип Даламбера,
1,
1 ш
1 я
к
4
й
К
—1
№ I-
Рис. 20.9
приходим к дифференциальным уравнениям движения трех точек:
d2x з
dXi d2 х2
i -епт,—-6l2m2 — 6l3H3 '
dt2
х2 — 621ml х3 — бзх
d4.
dt2 dXj
22Пг dt2
d2x 3
623m3—;
dt2
dx2 d2x3
‘ 0.322 I, О33Ш3
dt
dt2
(20.8)
(20.7)
Здесь 6ij обозначает перемещение точки i при статическом действии единичной силы в точке.
Решение этой системы имеет вид
xi ai sin ( Фо) I х2 а2 sin (Ш ф0) х8 а3 sin (© р0).
Амплитуды аи сг2у az подчинены однородной системе линейных уравнений:
(Ai— m36l3a3 0;
16211 j a2 m3bi3a3 0;
1631Я1 m2632a2 (nt3833 — a3 0.
Существование отличных от нуля амплитуд возможно только в том случае, когда определитель, составленный из коэффициентов при амплитудах, равен нулю:
т111 ” 212 Я13613
1621
тгб31
со2
0.
Раскрывая определитель и решая полученное уравнение, находим три значения частоты свободных колебаний. Каждому значению со соответствует одна определенная однородная система уравнений, из решения которой находятся значения аи а2, а3 с точностью до постоянного
344
РАЗДЕЛ 20. ДИНАМИКА СООРУЖЕНИИ
множителя, т. е. каждому значению о соответствует одно определенное соотношение между а, а2у Яз определяемое, например, числами аа2у aja. При этом предполагается, что уравнение не имеет кратных корней.
Если координаты хи х хг выбраны так, что 612 621 623 63213 31 0, то система дифференциальных уравнений (20.8) распадается на три независимых отдельных уравнения. В этом случае координаты 2 3 называются главными координатами.
---.Ж
Ьт 4
)ш '
Л
1.
J 1 т
, 1 —.
3
3
s 1
Рис. 20.10
Рассмотрим пример: к невесомой балке (рис. 20.10) в третях пролета прикреплены равные массы trii — mz—tn,
ТОГДа бц—22-
Дифференциальные уравнения:
х1 — 6цт х2— — 12т
d2x-t
dt2 d2x1 dt2
12 m
d2x 2 dt2
dt
Полагая xa sin (tH- фо); 202 sin (orfФо) noлучим:
(m6” _ m62 :
mb21ax (mn
1
— I ci о 0. to2 2
или
(твп-)г-2ви mSn — m6l3Vmen — “2 — ) 0,
откуда
О)
f Г
m (6n fil2)
12)
Так как 6n6i2, то второй корень, так же как и первый, действителен, при этом coi(d2; будем нумеровать частоты в порядке их возрастания. Внося в уравнения для определения ах и а2 вместо о) величину о)ь получим cti т. е. обе массы движутся так, что их амплитуды одинаковы и фазы совпадают. Этот первый тип колебаний назовем симметричным; при (о о)2 имеем й —а2, т. е. при втором типе колебаний, который назовем обратно симметричным, амплитуды колебаний обеих масс одинаковы, но фазы противоположны (отличаются друг от друга на 180 ).
Если при 0
2 х (0); v2 0,
то колебания будут симметричными с амплитудами ai
— a2x(0).
При начальных условиях у
х1 — 2 1 (0); о 0
возникают обратно симметричные колебания с амплитудами ai a2i(0).
В частном случае, когда отношение (0i0)2 мало отличается от единицы, возникают биения; например, если при 0
11, 2 0, Ol 0, 02 О,
1, 1 хг — cos to it — cos a2t;
1 1
Х2 — COS ©х — — cos С02t,
и колебания носят характер биений. При вынужденных колебаниях биения обычно возникают в случае, когда правая часть дифференциального уравнения представляет сумму двух гармоник с близкими частотами.
Свободные колебания при наличии сил сопротивления
Рассмотрим систему с тремя степенями свободы и учтем силы сопротивления, пропорциональные скорости; в этом случае при движении массы т возникают силы сопротивления, равные CiXi, и дифференциальные уравнения движения при с20, с30 примут вид:
Приравнивая нулю определитель, составленный из коэффициентов при неизвестных, получим (при условии, что ц 22 и учитывая, что 61291) уравнение частот
X1 — 11 — Ь12тс2 — i3m83 — nCii;
X, — б 2171— 22П22 — 2333 — 21W 3 — 3111 — 32™2 — 8333 3111.
(20.9)
Решение полученной системы дифференциальных уравнений будем искать в виде
i aiest; х a2est; х3 о9е?,
где s — комплексное число, действительная часть которого определяет скорость затухания, а мнимая — круговую частоту свободных колебаний.
Приравнивая нулю определитель системы
а1 102 1зт3а30;
21тг “i ("222 )я 23330;
311 jfll32m2a2’ 33330,
найдем три комплексных корня sb s3. Частоты колебаний равны коэффициентам при мнимых частях указанных корней, а действительные части их характеризуют скорость затухания колебаний соответствующей частоты.
20.1. ЭЛЕМЕНТЫ ТЕОРИИ КОЛЕБАНИИ
345
Приближенные способы определения основной частоты свободных колебаний
Уравнение частот в случае системы с п степенями свободы имеет вид:
Mu — X) А2
Am
где Aik §ik rrii —.
0,
V‘,
(2 г)
V)
1 Л(2г)
где
1(2 г)
2 Atf; Л„,-2 :
1 м
V-
V)
— У2А.
(2 )'
4
УГ Л(Г) 2А2г-4
Вынужденные колебания при отсутствии сил сопротивления
Положим, что к первой массе системы с тремя степенями свободы приложена сила Р sin pt; будем искать решение задачи о чисто вынужденных колебаниях в виде
Х аг sin pt xt — а2 sin pt; х9 — sin pt;
сокращая левые и правые части дифференциальных уравнений колебаний на sin pt, получим:
lTli61х “Ь 2122 “Ь Ц 1613(71 (т2б22 — —j а2 т3д13а3 б12
1 См. А. А. Яблонский и С. С. Норейко. Курс тео¬
рии колебаний. Высшая школа, 1966, § 30.
т-Азх т2623а2 (т3633 -
?ь-
б1:
(20.10)
Приближенные значения Я можно получить с помощью следующих формул1:
1) формула Дункерлея
ж Ац А22 Н b Arln
которая дает грубое приближение снизу для первой частоты;
2) формула П. Ф. Папковича
Эти уравнения имеют только одну систему решений а, а2, а3. Исключение представляет случай р — т, где со— одна из трех частот свободных колебаний; в этом последнем случае имеем явление резонанса. Если внешняя сила приложена так, что она не совершает работы при какойлибо форме колебаний, то амплитуды, соответствующие этой форме, при резонансе со временем не возрастают.
20.1.4. Колебания систем с непрерывно распределенной массой
Продольные свободные колебания стержней
Уравнение движения элемента стержня (рис. 2Q.il) при продольных колебаниях имеет вид
dN д2и _(_dJC)pf_d,
NdN
Ajf — элементы главной диагонали матрицы 11-4 И2 (1, 2, п; r2 1, 2, 4, 8);
3) формула С. А. Бернштейна
Рис. 20.11
Здесь и — продольное перемещение; р — плотность; F —
ди
площадь поперечного сечения; N — EF — продоль-
дх
ная сила; Е — модуль упругости.
Если площадь поперечного сечения постоянна, то
о д2и д2и
а2 а2
дх2 dt2
(20.11)
Полагая и (, t) — X(x)7 (t) и разделяя переменные, получим два уравнения
со2
Г ю2Г 0; X" Н X 0,
а2
которые имеют следующие решения:
Т A sin Ш В cos tot; X — С sin — х
а
D cos —х. а
Функция Х(х) называется формой колебаний; о — круговая частота свободных колебаний. Для определения постоянных С, D и со нужно воспользоваться-граничны-
346
РАЗДЕЛ 20. ДИНАМИКА СООРУЖЕНИЙ
ми, а для определения Л и В начальными условиями1. Если концы стержня защемлены, то из граничных условий и(0) 0, и(1) 0 получаем систему уравнений )
(О
0, С sin — 1 0, откуда
СО
— пл
а
Следовательно, соп
I
nlt 2,3.
Формой колебаний является отрезок синусоиды, содержащий целое число полуволн. Если начальные условия ы(0, х) 71(я), ы(0, x)F2(x) представить в виде
оо оо
и (0, х) Лп sin — х; й (0, х) — Вп sin — х,
п1
п 1
п1
Отсюда
Л1
Таким образом,
оо
(,) -2- sin Ш„ t Ап
n J "
Рассмотрим другой случай граничных условий, считая, что один конец стержня защемлен, а второй свободен, и, таким образом, ы(0)0, и'(1)0.
Из граничных условий имеем
со со со D 0; — (С cos — D sin — 1 0.
а а а )
Для определения со получаем трансцендентное уравнение
cos — I — 0,
а
откуда со ——(п— “ "”) п1 2, 3,.
положить
v _ . со D о) X С ( sin — Н cos — х . а С а )
а затем считать
АС Аг; ВС В,; X sin — л: t cos —
а а
Уравнения поперечных колебаний стержня, работающего на сдвиг, крутильных колебаний стержня и колебаний струны имеют вид, аналогичный (20.11).
Свободные колебания балок
Дифференциальное уравнение поперечных колебаний балки постоянного сечения имеет вид:
г У, ду
EI пг 0.
дх dt
(20.12)
Полагая yX(x)T(t), получим для функций X и Т после разделения переменных обыкновенные дифференциальные уравнения
я со2
IV
EI
X 0.
что можно сделать для весьма широкого класса функций, то для определения Вп, Сп получаем следующие уравнения:
оо оо
J An sinx 'BtnCnsin-x;
п—1 п—1
оо оо
SB П V1 Л Z’ '
Вп sin — х 2j nAnCnsln— Решение первого из этих уравнений приведено на стр. 345, решение второго уравнения:
X Cj sin С2 cos С3 sh kx С4 ch kx,
4
где , f mco2 ’
это решение удобнее записать в виде
X DA 6 D2B Z3C (I) D4D (g); kx,
где
Л ( ) — (ch cos I); (g) -j- (sh sin ;);
С (5) Y (ch g-cos E); 5 (I) -j (sh I- sin ). Эти функции обладают свойством единичной матрицы1:
ф
А
в
с
D
Ф(0)
1
0
0
0
ф' (0)
0
1
0
0
ф”(0)
0
0
1
0
ф" (0)
0
0
0
1
и связаны друг с другом следующими дифференциальными зависимостями:
- dB ( )-dC (I)
Л (I) —; ВЦ)— lW-
d ( ) _ „ dA(l)
c(6) —z(6) 1 Очевидно, что по существу вычисляется не пять, а четыре неизвестных, так как, не нарушая общности, можно, например,
Воспользовавшись граничными условиями на концах балки, получим частотное уравнение, из которого можно найти частоты свободных колебаний con (п 1, 2,.). Заметим, что Хп(х) представляет соответствующую форму свободных колебаний.
Покажем на примерах, как составляется частотное уравнение.
1 Функции Л(), (), С(), () легко получить с помо¬
щью таблиц раздела I (табл. 1.33).
20.1. ЭЛЕМЕНТЫ ТЕОРИИ КОЛЕБАНИЙ
347
Пусть балка длиной I шарнирно оперта по концам; гогда
У (0) 0; у" (0) 0; у () 0; у" ( х) 0, где i kl.
Первые два граничные условия дают Di0; из0; из двух других получаем
D2B (1г) D4D (gj 0; D2D (h) DB (Ь) 0.
Так как одновременно D2 и D4 не могут быть равны нулю, то должен равняться нулю определитель полученной однородной системы, т. е.
В (Ei) 0(h)
D(h) B(li)
После очевидных упрощений имеем shEisini?0 и, следовательно, kl — пл, где п— 1, 2, 3,.
Частота свободных колебаний
0
п2п2 01 I2 У
EI
т
(x)dx
К (x)dx
Если вдоль оси балки действует постоянная сжимающая продольная сила Р, то дифференциальное уравнение колебаний принимает вид
ду Р д2у т d2y
дх EJ ' дх2 EJ й dt2 В этом случае функция Х(х) удовлетворяет уравнению
Р
0.
IV а2" —а2
EI
решение которого имеет вид
X Ci sin sxx С9 cos C9 sh sx C4 ch sc. Здесь
k4
Если оба конца балки шарнирно оперты, то
л2п2
р2
Л2П2Е1
При растяжении знак Р меняется на обратный.
Дифференциальное уравнение поперечных колебаний балки переменного сечения имеет вид
д2 Г д2и 1 д2
ra j mWlf-0 (20ЛЗ)
С помощью подстановки yX(x)T(t) получим для Х(х) уравнение
m (л:) (о2Х 0.
Соответствующую форму колебаний Хп получим исходя из гого, что при заданном любое из двух граничных условий на правом крае дает возможность найти отношение D4D2, после чего форму колебаний можно считать известной. Результаты вычислений сведены в многочисленные таблицы, с помощью которых можно найти частоты собственных колебаний 26. Определение движения балки по начальным условиям у(0, ), у(0,х), заданным начальными смешениями и скоростями, производится как в предыдущем пункте, и приводит к тем же формулам для Вп и Ап; отличие заключается в том, что Ап и Вп представляют в этом случае коэффициенты Фурье разложения начальных условий в ряд по функциям Хп (см. раздел I). Таким образом:
'
Г у (0, х) Хп (х) dx J у (0, х) Хп (х) dx
А L о __ 0 А.—, вп ,Это уравнение с переменными коэффициентами для некоторых случаев и, в частности, когда брус имеет форму клина и конуса, допускает точное решение в бесселевых функциях 33. Обычно задачу о колебаниях балки переменного сечения решают каким-либо из приближенных способов.
Изгибные колебания пластинки постоянной толщины
Дифференциальное уравнение свободны колебаний пластинки постоянной толщины в прямоугольных координатах имеет вид
dW
дх
2
dW dW
dx2dy2 ду4
P-(L
D
dW dt2
(20.14)
где h — толщина; D — цилиндрическая жесткость пластинки. Используя замену Ww(xt y)T(t) по-прежнему получим Т (t) A sin сot В cos a)t, причем функция w(xy) удовлетворяет уравнению
dw d4w dw pha2
-f- 2 — 4- ш.
dx4 dx2dy2 dy4 D
Если пластинка шарнирно оперта по всем сторонам, то прогиб можно разыскивать в виде
-22-
тлх плу
, sin sin,
а b
т— л1
где а и Ь — длины сторон пластинки.
Это решение удовлетворяет всем граничным условиям; внося его в дифференциальное уравнение, получим для частоты (Own формулу:
— l Е
2 у 3 (1 — а) р Х
(т)Чт)1
г1, получим частоту основног
V 3(1— а) р ‘
Полагая т—, п— л2к
2 у 3(1 — а2) р В случае, когда две стороны пластинки (например дг0, х ) шарнирно оперты, а по двум другим (0, у — 1) условия опирания произвольны, полагаем
т
(X, у) Fa (l) sin
плу
№ 1
348
РАЗДЕЛ 20. ДИНАМИКА'СООРУЖЕНИЙ
Для Fn(y) получаем линейное дифференциальное уравнение
п2п2
dFn
dy4
— 2
Fn
dy
t (плА ph®2
V"” D )
0,
w 0.
(20.15)
Если пластинка без отверстия и не имеет опоры в центре, то решением уравнения будет
w AJо (kr) BIQ (kr),
где о(г)—функция Бесселя нулевого порядка;
I0(kr)—модифицированная функция Бесселя нулевого порядка;
4
k-.
-У?-
w (R) 0;
1 dw г dr
0,
Если пластинка шарнирно оперта по контуру радиуса R, то граничные условия записываются в виде
d2w
dr2 г dr rR
откуда В—0, и для определения частот получаем трансцендентное уравнение:
0(Я) 0.
Вынужденные колебания балок
Дифференциальное уравнение вынужденных колебаний балки постоянного сечения при действии внешней нагрузки q(x) sin pt имеет вид
д4и д2и
El — т—q(x) sin pt. (20.16)
Решение уравнения (22.16) ищется в виде y(x,t) w(x) sn pt для функции w(x) получается следующее дифференциальное уравнение
dAw
El — — mpw q (дг),
которое отличается от уравнения изгиба балки дополнительным слагаемым — mp2w в левой части. Граничные условия, как правило, такие же, как и в статической задаче для балки, за исключением случаев, когда на свободном конце находится точечная масса, а на шарнирно опертом или свободном конце имеется элемент, обладающий моментом инерции масс. В этих случаях взамен условий равенства нулю поперечной силы и момента получим
dw
Q — тгрю (); М 1тр—,
dx х1
где т 1 — масса на конце; im — момент инерции этой массы.
Для интегрирования уравнения (20.16) воспользуемся методом начальных параметров. Обозначив
'1 — У Et
для случая, когда q(x) const, имеем
w(x) w0A ( ) 0O k
которое интегрируется так же, как и уравнение поперечных колебаний балки.
Для круглой пластинки задачу удобно рассматривать в полярных координатах; дифференциальное уравнение свободных симметричных колебаний круглой пластинки имеет вид
id2 1 d 2 ph(d2
м„
55-ад , 50®-
7
1 () кЕ
И;
е (х) щкй ф ей (D м0 — е()
rLj
D(bj’
(20.17)
hPEI ‘ ’ k3EI
M () w0E№C (I) EkD (I)
M0 A ( )y B)-C (I);
Q (x) w0Elk3B (I) 0oEftC (1)
M'fiD (I) Q0A ( ) В (I),
к
где lkx wx), 0(x) M(x) и Q(x) — амплитуды перемещений, угла поворота, изгибающего момента и поперечной силы; Wo, 0о, М0, Qo — значения этих амплитуд на левом'конце балки; и — функции, приве¬
денные выше.
Рассмотрим примеры.
1. Концы балки, имеющей длину, защемлены; нагрузка q распределена по всей длине балки; граничные условия: ш(0) ш00; 0(0) 0оО; ш()0; 0() 0.
С учетом условий на левом конце получим для w выражение
— №Гг®даГв® мГс,(в-1
из условий на правом конце получаем систему двух алгебраических уравнений (likl)
М0 — Q0 —
сУтг§гЛ(У k2EI
kEI
kEI
— М Ci) — 1 0;
kE
— с (,)
— D (k) 0,
kEl
решая которую, находим M0 и Q0.
2. Концы балки защемлены, в сечении ха приложена сила Psinpt. Обозначим ka а; если то
ш Wj
гЕГг® йав®
при нужно к функции W добавить такое слагае¬
мое, которое, удовлетворяя однородному дифференциальному уравнению в точке а, не нарушит непрерывности ад, ад' и М, но даст в поперечной силе Q скачок на величину амплитуды сосредоточенной_силы JP.
Из свойств функций 4( ), ( ) С(Е) D() следует, что__ этим слагаемым может быть только функция AD(—а); постоянную А подберем так, чтобы скачок поперечной силы имел нужную величину; нетрудно показать, что
EI
20.2. ЧАСТОТЫ СОБСТВЕННЫХ КОЛЕБАНИЙ
349
и окончательно:
wu
vl
P D(.
a).
С помощью этого приема можно рассмотреть задачу о балке с присоединенными массами (для чего, воспользовавшись принципом Даламбера, нужно учесть действие инерционных сосредоточенных сил, равных mp2w) и задачу о неразрезной балке.
Указанная схема и результаты непригодны в случаях, когда р совпадет с одной из частот свободных колебаний стержня; при этом имеет место резонанс, и при решении задачи следует учесть затухание.
Решение задачи о вынужденных колебаниях балки можно получить иначе, разложив решение в ряд по формам собственных колебаний 37.
Рассмотрим балку, шарнирно опертую по концам. Примем начало координат на левом конце и представим решение в виде
w
ппх
2—1
11
Ап —
я4л4
Если на балку действует нагрузка ях q0 sin — sin?, то i 7o; 0, пФ 1 и, следовательно:
w
Яо
П4Я4 14
sin — Л4
В задачах о колебаниях балки, лежащей на упругом винклеровом основании, сохраняются схемы расчета и выкладки, приведенные выше. Отличие заключается в том, что дифференциальное уравнение имеет вид
dw
El — — (тр — k0b) w q,
где ko — коэффициент постели (см. раздел 5.5.6 табл. 5.5); b — ширина балки; поэтому, применяя метод начальных параметров и метод разложения в ряд по собственным функциям, нужно вычислять k по формуле
тр2 — k0b
EI
Подставляя общий член этого ряда в дифференциальное уравнение форм вынужденных колебаний
dw
— — kw q dx4
и разложив нагрузку q(x) также в ряд по синусам
со
2 ппх
Вп sin —,
получим
Вопрос о вынужденных колебаниях в системе с затуханием, пропорциональным скорости, разобран в работе 68; для затухания, не зависящего от величины скорости, описываемого комплексной гипотезой Е. С. Сорокина, решение задачи дано в работе 58.
20.2. ЧАСТОТЫ СОБСТВЕННЫХ КОЛЕБАНИИ
20.2.1. Балки на жестких опорах
Частоты собственных поперечных колебаний балок постоянного сечения на жестких опорах определяются по формуле
ji
_ Е
(20.18)
где ai — характеристические числа (корни частотного уравнения); для однопролетных балок а принимаются по табл. 20.1; для двухпролетных балок с равными пролетами и одинаковыми в пролетах жесткостями и равномерно распределенными массами a принимаются по табл. 20.2.
Частоты собственных колебаний многопролетных балок с равными пролетами и одинаковыми в пролетах жесткостями и равномерно распределенными массами образуют бесконечное число так называемых зон сгущения. В каждой зоне имеется столько частот, сколько пролетов имеет балка.
При динамическом расчете неразрезных балок на периодические нагрузки число определяемых собственных
Значения а в формуле (20.18) для однопролетных балок на жестких опорах
Таблица 20.1 37, 47. 59
Условия закрепления
Корни частотного уравнения
левый конец
правый конец
1
а2
а3
а4
а
(i5)
Защемлен
Свободен
1,8751
4,6941
1,8548
10,996
14,137
2—1 л
2
Оперт j
Оперт
З.М16
6,2832
9,4248
12,566
15,708
1Л
Оперт (оаерт)
Защемлен (свободен)
3,9266
7,0685
10,210
13,352
16.494
4-fl
Л
4
Защемлен (свободен)
Защемлен (свободен)
4.7300
7,8532
10,996
14,137
17,128
2-fl —— л 2
350
РАЗДЕЛ 20. ДИНАМИКА СООРУЖЕНИЙ
Таблица 20.211.391
Значения а в формуле (20.18) для двухпролетных балок на жестких опорах с равными пролетами
Условия закрепления
Корни частотного уравнения
левый коней
правый конец
а,
а2
ая
а,
а
JR
V
СП
Оперт
Оперт
3,1416
3,9266
6,2832
7.0685
9,4248
'я—-при нечетном i
4 4-1
2
при четном i
Оперт
Защемлен
3,39
4,46
6,54
7,59
9,69
-
Защемлен
Защемлен
3,9266
4,7300
7,0685
7,8532
10,210
41-4-1
:— Л —
4
при нечетном i,
2-И —-L— Я —
2
при четном i
Примечание. Средняя опора при всех условиях шарнирно оперта.
Таблица 20.359
Значения а? 2я в формуле (20.18) для многопролетных балок с равными пролетами
Коли¬
Концы балки свободно оперты
Один конец балки свободно оперт, другой защемлен
Концы балки
защемлены
чество
проле¬
тов
а2
1н
1
1в
ос2
2Н
?
1н
1в
“н
а2
2В
“?
1н
ос2
1в
А
5.
2л
2я
2я
2я
2я
2я
2я
2я
2я
2л
2л
2я
3
1,57
2,94
6,28
8,78
1,69
3,37
6,54
9,50
2,01
3,56
7,16
9,82
4
1,57
3,17
6,28
9,17
1,64
3,45
6,43
9,63
1,83
3,56
6,82
9,82
5
1,57
3,30
6,28
9,38
1,62
3,49
6,38
9,70
1,74
3,56
6,64
9,82
6
1,57
3,37
6,28
9,50
1,60
3,51
6,35
9,73
1,69
3,56
6,54
9,82
00
1,57
3,56
6,28
9,82
1,57
3,56
6,28
9,82
1,57
3,56
6,28
9,82
При
i-й зоны)
м е ч а н и е. с-н соответствует 1.
частоте р
г-н (нижней границе
t-й зоны
сгущения), cc-Q —частоте р в
(верхней
границе
частот принимают равным удвоенному числу пролетов балки.
Для многопролетных балок с равными пролетами и одинаковыми в пролетах жесткостями и равномерно распределенными массами можно определять лишь четыре собственные частоты: Ящ и Ящ — низшую и высшую из частот первой группы; Ягн и Ягв — низшую
и высшую из частот второй группы. В этом случае в формулу (20.18) взамен а подставляются агн или а г в, принимаемые по табл. 20.3.
В табл. 20.4 для четырех случаев многопролетных балок с неравными пролетами приведены значения первого корня ai характеристического уравнения.
20.2. ЧАСТОТЫ СОБСТВЕННЫХ КОЛЕБАНИЙ
351
Таблица 20.41, 39 Значения at в формуле (20.18) для многопролетиых балок на жестких опорах с неравными пролетами Схема балки и первый корень частотного уравнения
f-
Г7ГГ7
' 0 0,1 02 0? 0,4 HbOfiOJOfi Ofi 1fl г,'гг.
lt l2
А.
а,
h
л
а,
1
1,50592
16
3,11752
34
1,90170
17
3,1267
12
2,51895
18
3,13148
13
2,94042
19
3,13449
14
3,05881
110
3,13641
15
3,09975
0
Л
При h- JL l 2
axf jl j л (погрешность 1)
УТГТП rfw
If —" я— 4 '
t
X
OLf
20.2.2. Балки на упругих опорах
Частоты собственных поперечных колебаний балок на упругих опорах вычисляются но формуле (20.18); при этом а г принимается из табл. 20.5 в зависимости от условий закрепления кондов балки.
Обозначения, принятые в табл. 20.5:
Cw—жесткость в кГсм опоры относительно поперечных перемещений;
— жесткость в кГсм опоры относительно угловых перемещений;
—опора, упругая относительно поперечных и жесткая относительно угловых перемещении;
— шарнирно подвижная опора, упругая относительно поперечных перемещений;
- шарнирно подвижная опора, упругая относительно угловых перемещений.
20.2.3. Балки с распределенными и сосредоточенными массами
Частоты собственных поперечных колебаний балок с равномерно распределенными массами га и сосредоточенными массами М вычисляются по формуле (20.18). При этом а г принимается по табл. 20.6.
Для однопролетных балок, имеющих различные граничные условия, и для многопролетных балок с шарнирным опиранием и с равными пролетами при наличии сосредоточенных масс М6, расположенных на расстоянии xs от ближайшей левой опоры, можно приводить сосредоточенные массы к эквивалентной равномерно распределенной массе тп по формуле
тп Щ
N1
К
(20.19)
где N — количество пролетов; т0 — равномерно распределенная масса; s0 — количество грузов на балке; п — номер частоты колебаний.
Коэффициенты k8 определяются: а) для однопролетных балок и при определении частот Яш и Ягн многопролетных балок — по табл. 20.7; б) для многопролетных балок при определении частот — по табл. 20.8; в) для многопролетных балок при определении частот А,2в — по табл. 20.9.
20.2.4. Балки, нагруженные продольными силами
Для балок, нагруженных продольными силами, частота поперечных собственных колебаний вычисляется по формулам и графику табл. 20.10. При сжимающей продольной силе знак силы Р в формулах табл. 20.10 меняется на обратный.
352
РАЗДЕЛ 20. ДИНАМИКА СООРУЖЕНИЙ
Значение в формуле (20.18) для балок на упругих опорах
Таблица 20.511
Схема балки и корни частотного уравнения
Схема балки и корни частотного уравнения
0W
Асимптота при а.9286
Асимптота при ct 7D685 W J
ил
ф
и
Ш1
У
Щ
и
щ
evr;
'ОН
—
у
S3‘
i
1
SQO
WOO 1500
rrb
-4
г
1
о
i
а
7
6
5
—1 1 — r—r— V-т- -1— Рп гмптптгг ппп У7Г
-4- 4— Ц— 1— 1—
Исновт
?й тон
50
100 150
CCW tyJ
Асимптота при а2тг
—
г±Н
перь
"Г
, т
ый 0
Яертон.
И
3,92SL
1
250
500 150
CnsCwl3EJ
Йа
шпп--—
юта при сх3,9
ЭШ-
Основной
25а
тон
10
20
50
щ
в
Vfli
т
ттота
npua7QS85 ТП
Tmttu.
Первый обертон
1
j
JO
20
30
Сф-Сф
Асимптота при схс
симметричные колебания
Упииптптп праск- 7Г ч- —_ 1
I Шписимметричные колебания
Лсимптота "“(TTj—Ц
Симметричные колебания
0 ГО 20 30 40 50 60 70 80 90 100
C'C.V fг,
Второй
обертон
Первый обертон (асимптота при а2П) Основной тон ('асимптота при а-Я)
10 20 30 Ш) 50 ВО 70 вО 90 100 cwcn, t3e.7
20.2. ЧАСТОТЫ СОБСТВЕННЫХ КОЛЕБАНИЙ
353
Продолжение табл. 20.51
Схема балки и корни частотного уравнения
Схема балки и корни частотлого уравнения
h
-
-1
-
-i
-
основной
тон
T3.9266
IS
IS
V
7,2
W
_
НС
им
птоп
nanpi
ч-78532 —1
— 1— т— т— t— “
тггг “ Первый
обертон
Т
0685
bxfd
C'Cg, l J
и с но а мои том симметричных колвфанЩ--
2J 5Q 75 100 125 150 т 200
С ft Суу'
Of
I,—f— I
354
РАЗДЕЛ 20. ДИНАМИКА СООРУЖЕНИЙ
Таблица 20.6(1
Значения а. в формуле (20.18) для весомых балок с сосредоточенными массами
20.2. ЧАСТОТЫ СОБСТВЕННЫХ КОЛЕБАНИЙ
355
Таблица 20.7591
Значения k s в формуле (20.19) для приведения сосредоточенных масс к равномерно распределенной массе в однопролетных и многопролетных балках при определении Я1н И 2H
Условия
закрепления
СО
й; Н
Коэффициенты ks для значени i
-L I
левый
конец
правый
конец
о v о. -
С а
О 2
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,4
0,45
0,5
0,55
0,6
0,65
0,7
0,75
0,8
0,85
0,9
0,95
1
Защем¬
Свобо¬
1Н
0
0
0
0,1
0,02
0,04
0,08
0,13
0,21
0,32
0,46
0,64
0,85
1,10
1,38
1,73
2,10
2,52
2,97
3,47
4
лен
ден
2Н
0
0
0,03
0,14
0,36
0,70
1,11
1,63
1,87
2,06
2,04
1,80
1,39
0,88
0,40
0,07
0,02
0,34
1,10
2,32
4
Оперт
Оперт
Я1н
0
0,05
0,19
0,41
0,69
1,00
1,31
1,59
1,81
1,95
2,00
1,95
1,81
1,59
1,31
1,00
0,69
0,41
0,19
0,05
0
Я2Н
0
0,19
0,69
1,31
1,81
2,00
1,81
1,31
0,69
0,19
0
0,19
0,69
1,31
1,81
2,00
1,81
1,31
0,69
0,19
0
Оперт
Защем¬
Ми
0
0,08
0,31
0,66
1,07
1,49
1,86
2,13
2,27
2,25
2,09
0,81
1,46
1,08
0,72
0,42
0,21
0,08
0,02
0
0
лен
2н
0
0,24
0,84
1,51
1,94
1,91
1,44
0,75
0,18
0,01
0,33
1,00
1,74
2,21
2,23
1,81
1,15
0,53
0,15
0,61
0
Защем¬
Защем¬
Я1н
0
0
0,04
0,15
0,37
0,74
1,20
1,69
2,12
2,42
2,52
2,42
2,12
1,69
1,20
0,74
0,37
0,15
0,04
0
0
лен
лен
Я2Н
0
0,02
0,21
0,72
1,46
2,09
2,27
1,86
1,07
0,31
0
0,31
1,07
1,86
2,27
2,09
1,46
0,72
0,21
0,02
0
Таблица 20.859
Значения ks в формуле (20.19) для определения А1вмногопролетных балок
Коли¬
ЛГ
Коэффициенты ks для значений чество
пролетов
про¬
лета
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,4
0,45
0,5
0,55
0,6
0,65
0,7
0,75
0,8
0,85
0,9
0,95
1
2
1
0
0,08
0,31
0,66
1,07
1,49
1,86
2,13
2,27
2,25
2,09
1,81
1,46
1,08
0,72
0,42
0,21
0,08
0,02
0
0
2
0
0
0,02
0,08
0,21
0,42
0,72
1,08
1,46
1,81
2,09
2,25
2,27
2,13
1,86
1,49
1,07
0,66
0,31
0,08
0
3
1
0
0,02
0,06
0,13
0,20
0,28
0,34
0,37
0,37
0,35
0,30
0,23
0,16
0,10
0,05
0,02
0
0
0
0
0
2
0
0,01
0,06
0,17
0,36
0,61
0,90
1,20
1,44
1,62
1,68
1,62
1,44
1,20
0,90
0,61
0,36
0,17
0,06
0,01
0
3
0
0
0
0
0
0,02
0,05
0,10
0,16
0,23
0,30
0,35
0,37
0,37
0,34
0,28
0,20
0,13
0,06
0,02
0
4
1
0
0,01
0,04
0,08
0,13
0,18
0,21
0,23
0,22
0,20
0,16
0,12
0,08
0,04
0,02
0
0
0
0
0
0
2
0
0,01
0,05
0,13
0,25
0,40
0,58
0,75
0,87
0,94
0,93
0,86
0,73
0,56
0,39
0,24
0,12
0,05
0,01
0
0
3
0
0
0,01
0,05
0,12
0,24
0,39
0,56
0,73
0,86
0,93
0,94
0,87
0,75
0,58
0,40
0,25
0,13
0,05
0,01
0
4
0
0
0
0
0
0
0,02
0,04
0,08
0,12
0,16
0,20
0,22
0,23
0,21
0,18
0,13
0,08
0,04
0,01
0
5
1
0
0,01
0,02
0,05
0,08
0,10
0,12
0,13
0,12
0,11
0,09
0,06
0,04
0,02
0,01
0
0
0
0
0
0
2
0
0,01
0,03
0,09
0,18
0,28
0,40
0,50
0,57
0,60
0,59
0,53
0,43
0,32
0,25
0,12
0,05
0,02
0
0
0
3
0
0
0,02
0,08
0,18
0,33
0,51
0,69
0,86
0,97
1,09
0,97
0,86
0,69
0,51
0,38
0,18
0,08
0,02
0
0
4
0
0
0
0,02
0,05
0,12
0,21
0,32
0,43
0,53
0,59
0,60
0,57
0,50
0,40
0,28
0,18
0,09
0,03
0,01
0
5
0
0
0
0
0
0
0,01
0,02
0,04
0,06
0,01
0,11
0,12
0,13
0,12
0,10
0,08
0,05
0,02
0,01
0
356
РАЗДЕЛ 20 ДИНАМИКА СООРУЖЕНИЙ
Таблица 20.959
Значения формуле (20.19) для определенияА,2в многопролетных балок
Коли¬
чество
пролетов
№
про¬
лета
Коэффициенты ks
для значений
-L 1
0
0.05
0,1
0,15
0,2
0,25
0,3
0,35
0,4
0,45
0,5
0,55
0,6
0,65
0,7
0,75
0,8
0,85
0,9
0,95
1,0
2
1
0
0,24
0,84
0,51
1,94
1,91
1,44
2,75
0,18
0,01
0,33
1,00
1,74
2,21
2,23
1,81
1,51
0,55
0,15
0,01
0
2
0
0,01
0,15
0,53
1,15
1,81
2,23
2,21
1,74
1,00
0,33
0,01
0,18
0,75
1,44
1.91
1,94
0,51
0,84
0,24
0
3
1
0
0,06
0,19
0,34
0,41
0,38
0,26
0,11
0,01
0,02
0,13
0,30
0,43
0,47
0,40
0,26
0,12
0,03
0
0
0
2
0
0,04
0,21
0,56
0,98
1,27
1,30
1,02
0,57
0,16
0
0,16
0,57
1,02
1,30
1,27
0,98
0,56
0,21
0,04
0
3
0
0
0
0,03
0,12
0,26
0.40
0,47
0,43
0,30
0,13
0,02
0,01
0,11
0,26
0,38
0,41
0,34
0,19
0,06
0
4
1
0
0,03
0,10
0,17
0,21
0,19
0,12
0,05
0
0,02
0,08
0,17
0,23
0,23
0,18
0,10
0,04
0
0
0
0
2
0
0,03
0,17
0,43
0,71
0,88
0,84
0,61
0,29
0,05
0,01
0,20
0,51
0,79
0,90
0,79
0,54
0,26
0,07
0,04
0
3
0
0,01
0,07
0,26
0,54
0,79
0,90
0,79
0,51
0,20
0,01
0,05
0,29
0,61
0,84
0,88
0,73
0,43
0,17
0,03
0
4
0
0
0
0,01
0,04
0,10
0,18
0,23
0,23
0,17
0,08
0,02
0
0,05
0,12
0,19
0,21
0,17
0,10
0,03
0
5
1
0
0,02
0,07
0,12
0,14
0,13
0,08
0,03
0
0,02
0,06
0,12
0,15
0,15
0,11
0,06
0,02
0
0
0
0
2
0
0,03
0,14
0,34
0,55
0,67
0,62
0,43
0,19
0,02
0,02
0,19
0,43
0,63
0,68
0,56
0,36
0,16
0,4
0
0
3
0
0,02
0,16
0,49
0,93
1,27
1,35
0,09
0,62
0,18
0
0,18
0,62
1,09
1,35
1,27
0,93
0,49
0,16
0,02
0
4
0
0
0,04
0,16
0,36
0,56
0,68
0,63
0,43
0,19
0,02
0,02
0,19
0,43
0,62
0,97
0,55
0,34
0,14
0,08
0
5
0
0
0
0
0,02
0,06
0,11
0,15
0,15
0,12
0,06
0,02
0
0,08
0,06
0,13
0,14
0,12
0,07
0,02
0
Таблица 20.10П1
Частоты поперечных собственных колебаний балок, нагруженных продольными силами
Продолжение табл. 20Л01)
Схема балки и формула или график для определения часто
t
1 ( 5Р2
1 m 14Е
0,562, EI (
-гУ ('
Р3
8EJ
Ж
1 w р-fEl i- pri
' 2 I2 у m IWEt
Схема балки и формула или график для определения частот
а
70
60
ио
3,0
2Р
W
о
“Г
-j
Ifep
вый
обе,
ото
н
JS0
Wo
Осн
Овной п
юн
аЛ PL
2
1
1
2 fJ
W 20 30 40 50 60 70 80 90 100 "mm Cja Ct J
i 2л
-i-
2 V m 9
где а( берется из графика. Примечание. Другие случаи см. в работе 69.
20.2. ЧАСТОТЫ СОБСТВЕННЫХ КОЛЕБАНИЙ
357
20.2.5. Рамы 1
Рамы без сосредоточенных масс
Здесь приняты индексы: стойки—1, ригеля — 2.
Для П-образной симметричной рамы с жестко защемленными стойками (рис. 20.12) частоты собственных изгибных колебаний вычисляются по формуле
1
тг
(20.20)
где аи — корни уравнения частот.
Симметричные
колебания
Ант и симметричные колебания
f
.1 1
1 O
tW 77
77? Пг
Рис. 20.12
Уравнение частот при симметричных колебаниях имеет вид
(?
' Vfr -TFT7- '- V if ' i
у Е1г D (аи) Y Ед D
где
о 1 ” m2El j
В (а) ch а sin а — sh а cos а;
С (а)-2 ch а cos а — 1 D(a)ch a cos а—1.
При li — l2l; Eli — El2 —El и rri — m2 — m ац а2г- — аг уравнение частот симметричных колебаний имеет вид
В (at) С (а,).
Корни этого уравнения:
аг 1,2326; а, 4,3906; сг3 7,5322;
5 з
а4 10,6738; аб 13,8154; аг- п (i 5).
5
Уравнение частот при антисимметричных колебаниях:
4 Jh аи В (аи) — Е (аи)
:) А (о
Sx (a2.)
El,
Eli D (an) A (au)
EJ2 B (a2i)
где
A (a) ch a sin a sh a cos a;
E (a) ch a cos a 1;
S (a) 2 sh a sin a.
Для трехпролетной симметричной рамы (рис. 20.13) частоты собственных изгибных колебаний вычисляются по формуле (20.20).
Симметричные
колебания
Антисимметричные
колебании
11 г:
ц
Рис. 20.13
При симметричных колебаниях ац определяются из уравнения частот:
k 2F (x2i) — Я (a9l) F (аи) —
k(a2i)
Пи) ЬР)
0,
где
h I m2F11
2 —. I Г7
, mvEl9
Л
sin a ch a — sh a cos a F (a) : ; a;
H( a)
1 — cos a ch a sha — sin a
1 — cos a cha Уравнение частот при 1 и ан а2 а
3F (otf) -НЦ)- 0.
2F (oLi)
Наименьший корень, соответствующий основному тону симметричных колебаний, равен а3,473.
При антисимметричных колебаниях ац определяются из уравнения частот:
-т1
L („) 2F (ц)
2 (eel.) (2F (ос„) („) F(a.u)
fe3f (,)-Я (,)
где
k 2F (аи) Я (ati)-(as)
1 93fTl 2 j
h.
sin a ch a sh a cos a e R (a) -—; a9;
1
L (a)
— cos a ch a sh a sin a 1 — cos a ch a
a2.
358
РАЗДЕЛ 20. ДИНАМИКА СООРУЖЕНИИ
Уравнение частот при k— 1 и аа.2 имеет вид L2 (Л 5F (,)-(af)
2F(at)3F(a )tf (а,) 0.
() )
-Я2(а,)
Наименьший корень, соответствующий основному тону антисимметричных колебаний, ai l,70.
Симметричные
колебания
Антисимметричные
колебания
-I
Рис. 20.14
Симметричные
колебания
Антисимметричные
колебания
k- 1 J
1
г
mi
777 I
га
Рис. 20.15
Для Т-образной рамы (рис. 20.14, 20.15) частоты собственных изгибных колебаний
X _L. A. -f IL
1 2я 2 V т
Если стержни рамы шарнирно закреплены по концам (рис. 20.14), то при симметричных колебаниях
ах 3,9266; а2 7,0685; а3 10,210;
4 i 1
а4 13,352; а5 16,494; а я (i 5);
4
при антисимметричных колебаниях: ai — in (1, 2,.). Если стержни рамы жестко защемлены по концам (рис. 20.15), то при симметричных колебаниях
ах 4,7300; а2 7,8532; а3 10,996; а414,137;
2i l
а5 17,279; а,- —— п (i 5);
при антисимметричных колебаниях:
аг — 3,9266; а2 7,0685; а3 10,210; а4 13,352;
4 1
аг 16,494; а,- л (i 5).
Рамы с сосредоточенными массами
Частоты собственных изгибных колебаний
v2
где a0 определяется из уравнений частот, приводимых ниже. В этих уравнениях приняты обозначения:
ь— II- 1 . 1
Т 1 0 I 1 л
1 0 2 т У М
где 0 — соответственно половина или одна треть пролета ригеля (см. рис. 20.16—20.18); 1 — длина стойки; г — длина ригеля; q — погонный вес стойки; q2 — по-
Рис. 20.16
гонный вес ригеля; М — присоединенная масса; м — момент инерции присоединенной массы М; f — амплитуда колебаний массы М f' — угол поворота при колебаниях массы Af; и ';
sin a ch a — sh a cos a F (a)-a;
1 — cos a ch a
sh a — sin a
H i — a
1 — cos a ch a
sh a sin a
1 (a) 1 й a2;
1 — cos a ch a
ch a — cos a N (a) — — — a2;
R(a)
1 — cos a ch a sin a ch a sh a cos a
Я (a)
1 — cos a ch a sh a sin a
1 — cos a ch a
-a3;
Ф( a)
2 cth a ctg a
a; G (a) — a2;
cth (a) — ctg a cth a — ctg a
Q (a)
tg a — th a
a.
20.2. ЧАСТОТЫ СОБСТВЕННЫХ КОЛЕБАНИЙ
359
Для П-образной симметричной рамы с защемленными стойками и присоединенной в середине ригеля массой (рис. 20.16, а) уравнения частот имеют вид: при симметричных колебаниях (рис. 20.16,6)
25АГо,а х_ кт (а 10.
R ( F (а) kF(a„) J ’
0 Mg 'v”0 F(x) kF(a„)
при антисимметричных колебаниях (рис. 20.16, в)
F(a)kF (о,)-
4 Р2
(а) — f
Mg Чг U
X
X 2R (а) — а
Mpf
Mg q21г I 2
4i к J
2.2 (а) 0.
fi) 77
лтгт
Рис. 20.17
Рис. 20.18
Для П-образной симметричной рамы с шарнирно опертыми стойками и с присоединенной посередине ригеля массой (рис. 20.17) уравнения частот: при симметричных колебаниях
Ф (а) kF („) jU? (0)-о-2WV („) 0;
при антисимметричных колебаниях
2kN2(a0)
Ф (а) kF (а„) 4-
2F (а) — аJ —
1с
Mg
X
X 2Q (а) — а4
7х
?2 4 J
?2 0 2G2 (а) 0.
Для П-образной симметричной рамы с защемленными стойками и двумя присоединенными массами (рис. 20.18) уравнения частот:
при симметричных колебаниях
а k lb — 2Н (а) —
ab — kN2 (об0) 0,
где
ЛГ2(а„) a — F (а)kF (а0);
л М Р2
b — 2F (а0) — Я (а0) — а0 —— ——;
?2 0 q
с2?(а0)-Я(а0)-а,
Mg я 2 А
при антисимметричных колебаниях с
' а кЬ 2Н (во)-
АГ(ао)
где
a — F (а) W7 (о) ofr — JV () 0,
2I2 (а)
2? (а) — а
Mg Й2 к
Яг к
b2FaQ) H(a0)-at
Mg
Яч
c2R (а0) П (а0)-а0
Mg Й2 К
I2
Частоты свободных горизонтальных колебаний многоэтажных рам можно вычислить по приближенным формулам (см. Справочник проектировщика. Сборные железобетонные конструкции, Госстройиздат, 1959, табл. XXV.2).
20.2.6. Фермы
Обычной расчетной схемой фермы является система с конечным числом степеней свободы. При этом предполагается, что масса стержней фермы сосредоточена в ее узлах и узлы соединены между собой упругими невесомыми стержнями, шарнирно связанными на концах.
Масса каждого узла равна половине масс сходящихся в данном узле стержней и массе узловой нагрузки.
Число степеней свободы фермы принимается равным удвоенному числу узлов за вычетом числа опорных стержней:
d2Vk v л - s Nkn sm akn;
mk
mk
dt2 dxk
2 Nkn cos оikn
где nik — масса, сосредоточенная в fc-м узле; Nkn— усилие в стержне, соединяющем узел k с каким-либо другим узлом n aun — угол наклона стержня kn к оси Хн, Ук — горизонтальная и вертикальная составляющие перемещений узла k при колебаниях.
Усилия Nkn выражаются через перемещения Xkt Ун по формуле
EFkn г,„ Nkn—, ( Ikn
n) cos akn (yk — yn) sin akn,
где E — модуль упругости; Fkn — площадь сечения стержня, соединяющего узлы k и n Ikn— длина этого стержня.
Решения дифференциальных уравнений колебаний разыскиваются в виде
хк ик sin (Kt ф); yk vk sin (Kt p).
Для определения амплитуд колебаний иц и Vh получаются алгебраические уравнения:
mk Vk № V Е
Uk
Е
X Skn sin akn;
П
5ftncosfen,
(20.21)
360
РАЗДЕЛ 20. ДИНАМИКА СООРУЖЕНИИ
р.
где S„ —2- (к — и„) cos акп (vk — оп) sin акп.
kn
Приравнивая нулю определитель, составленный из коэффициентов при амплитудах Uk и Vk, и раскрывая его, получим уравнение относительно Я2, которое даст возможность определить частоты собственных колебаний фермы, число которых равно числу степеней свободы.
Метод Польгаузена
Этот метод позволяет найти частоты собственных колебаний ферм путем последовательных приближений непосредственно из уравнений (20.21). Для этого Skn рассматриваются как некоторые усилия.
Полагая
Рк № тк “Гг Г,
8 Eg
прлучим PkVkV Skn sin akn-,
п
где
SS„cosa„.
(20.22)
Уравнения (20.22) выражают условия равновесия узлов фермы, несущей в узлах вертикальные и горизонтальные СИЛЫ PhVhty2 И PkUkty2.
В качестве нулевого приближения задаются значением 21, а за систему перемещений ыь, Vk принимают перемещения узлов от единичного груза, приложенного в середине пролета, находя их из построения диаграммы Виллио. По первым приближениям узловых нагрузок и PhUkty2 определяют Skn, например, с помощью диаграммы Кремоны. По этим усилиям находят новые значения перемещений узлов uk9 vk путем построения новой диаграммы Виллио.
Первое приближение для t?2 определяется из формулы
7T V ZPk“k)22(PkVkY- (20.23)
Щ r k к
Принимая за новые узловые нагрузки величины Pku'ktyy Pkvk и находя из новой диаграммы Кремоны отвечающие им усилия S, из очередной диаграммы Виллио определяем следующие приближения перемещений uk vk. Второе приближение для ф2 будет
ijs(pft;)2s(pA;)2 (20.24)
2 к к
И т. д.
При достаточно хорошем совпадении приближений частоту определяют через величину г
Поскольку влияние горизонтальных смещений на частоту незначительно, часто упрощают метод, для чего в формулах (20.23) и (20.24) не учитывают члены, содержащие перемещения uk, uk, uk и т. д.
Метод наложения
Частота определяется из формулы
Ik
ь-л
RI
Efk’
“1 22-
(20.26)
В формулах (20.25) и (20.26):
Ik — длина стержня k Fk — площадь поперечного сечения стержня k Е — модуль упругости; Шх — масса -го узла; Nki — усилие в стержне k or единичной силы, приложенной в узле i.
Формула (20.25) дает несколько преуменьшенное значение частоты.
Метод эквивалентной балки
Частота определяется по формуле
‘-’’lAs т
где
(20.27)
(20.28)
В формулах (20.27) и (20.28):
Npk — усилие в стержне k от действительной нагрузки Р; Nxk —усилие в стержне k от единичной силы, приложенной в середине пролета фермы; h — длина стержня k Fk — площадь поперечного сечения стержня k Е — модуль упругости; g — ускорение силы тяжести.
Формула (20 27) позволяет заменить экспериментальное определение частоты колебаний существующей фермы более простым определением ее прогиба под какойлибо нагрузкой. Так, если экспериментально измерен прогиб фермы 6Я от какой-либо распределенной нагрузки q, а действительный погонный вес фермы с нагрузкой равен р, то
1,13
ё
(20.25)
Методы Польгаузена, наложения и эквивалентной балки применяются для определения частоты основного тона колебаний фермы.
Частоты основного тона колебаний и одной-двух первых гармоник определяются приближенным способом, изложенным в приложении 7 19а.
Для определения всех частот многомассовой системы применяется метод, изложенный, например, в приложении 3 19а.
20.2.7. Арки, длинные своды, кольца
Круговые арки и своды постоянного сечения 57, 62
Обозначения:
R—радиус оси арки (или свода);
Ф — центральный угол;
г — площадь поперечного сечения.
За поперечное сечение свода принимается поперечное сечение вдоль образующей на единицу длины.
Малые колебания арок и длинных сводов могут происходить как аа счет изменения длины оси арки или свода (рис. 20.19, а) (радиальные колебания), так и вследствие изгиба (рис. 20.19,6) (изгибные колебания).
30.2. ЧАСТОТЫ СОБСТВЕННЫХ КОЛЕБАНИЙ
36;Ь
Частоты радиальных колебаний арок
( 1,2,3,.-.) (20.29)
1
л — ( а1 )
; V т V1 ф
Таблица 20.11
Значения af- в формуле (20.29)
Ус ювия закрепления
Корни характеристического уравнения
левый
конец
правый
конец
at
a2
a
a
a 5
a,- (i5)
Оперт
Оперт
3,1416
6.2832
9,4248
12.566
15,708
(Л
Защем¬
Защем¬
4.7300
7,8532
10,996
14,137
17,279
лен
лен
'I
Таблица 20.12 Значения коэффициента k в формуле (20.30)
Условия закрепления я формы колебаний
Коэффициент k
i
Зфа
4л2
V-
3803,2 —92,101 фа ф4 1 4 0,06054ф
9яд — (pJ
V
I 4- 01652 1.
14620 — 197.84фа -f Ф 1 4- 0,01227ф3
16тса — ф2
V
ii . 16 я3
V
39942 — 343,16ф2 4- ф 1 4- 0,02148ф?
Частоты изгибных колебаний арок
г-2-3- 2о-з Коэффициенты а и 6 приведены в табл. 20.11—20.12. При вычислении частот собственных колебаний длинных сводов необходимо в формулах (20.29) и (20.30)
жесткость Е1 заменить через j, где ц — коэффици¬
ент Пуассона.
Параболические симметричные арки переменного сечения (рис. 20.20) 9
Обозначения:
1— момент инерции сечения в замке;
1Х — то же, на расстоянии х от замка; ф — уГ0Л между касательной к оси арки и- горизонталью в сечении с абсциссой х
Рис. 20.20
f — стрела подъема арки;
радиус инерции сечения в замке;
Fs — площадь сечения в замке.
Момент инерции поперечного сечения изменяется по закону
х s sec фх.
Частоты антисимметричных собственных колебаний
.2
Значения а:
аг 3,9266; а3 7,0685; а3 10,210; а4 13,352;
1- 1 a5 16,494; at л.
Частоты симметричных собственных колебаний
-
Значения а, найденные из уравнения частот (ch a — fr) srn a (cos a — yr) sh a 0,
приведены в табл. 20.13.
362
РАЗДЕЛ 20. ДИНАМИКА СООРУЖЕНИИ
Таблица 20.13 Значения в формуле (20.31) для определения частот изгибных симметричных колебаний арок
flK
20
19.5 19
1,5
18
17.5 17
16.5 16
15.5
5,05
5,04
5,03
5,01
4,99
4,97
4,94
4,91
4,88
4,84
9,00
7,67
6.84 6,46
6,26
6,12
6,02
5,95
5,89
5.85
15
14
13
12
11
10
8
6
4
2
0
I
4,79
4,69
4,57
4,44
4,29
4,12
3,76
3.36
2,93
2,55
2.36
а2
5,81
5,75
5,71
5,67
5,64
5,61
5,57
5,54
5,52
5,51
5,50
изгиба из плоскости, при которых наряду с перемещениями, перпендикулярными плоскости кольца, происходит его закручивание.
Частота любого вида собственных изгибных колебаний в плоскости кольца
2л у mR t l
Величины р, у и г определяются формулами
e-Ih(l)l'“'ch4
JEL
2
Круговые кольца
Здесь приводятся формулы 62, 14 для колец постоянного поперечного сечения, одна из главных центральных осей инерции которого расположена в плоскости оси кольца.
Обозначения:
R— радиус осевой линии кольца; т— масса кольца на единицу длины;
—число волн по окружности кольца;
1Х— момент инерции поперечного сечения относительно оси х (рис. 20.21);
1р — полярный момент инерции поперечного сечения; F — площадь поперечного сечения кольца;
I — момент инерции поперечного сечения относительно главной оси, расположенной под прямым углом к плоскости кольца; jLi — коэффициент Пуассона.
Частоты радиальных колебаний кольца
h
—1
2 п V
EF mR2
( -1)21 (1,2,3,.).
Первая частота собственных крутильных колебаний для любого поперечного сечения кольца
х JL i iL h.
1 2л у mR2 lp
Частоты высших тонов колебаний в случае кругового поперечного сечения кольца
k — 1
1 2я V
EF 2 mR2
(21) (i 2,3,.).
Изгибные колебания кругового кольца разделяются на два вида: колебания в плоскости кольца и колебания
При i— 1 Я 0, т. е. кольцо движется как твердое тело. При 2 кольцо колеблется по основной форме; при 3 и 4 — по высшим формам колебаний. Крайние положения кольца при этих формах колебаний показаны на рис. 20.22, а, б, в сплошными линиями.
В случае изгибных колебаний из плоскости кольца кругового поперечного сечения, при которых наряду с перемещениями, перпендикулярными плоскости кольца, происходит закручивание стержня, частоты главных форм колебаний
—1 f
2 л у
EI
mR
t2 (2 — 1)2 2 i 1
Неполное кольцо. Рассматривается случай, когда часть кольца с углом а защемлена на обоих концах (рис. 20.23).
Рис. 20.23
Ы
Рис. 20.24
Частота собственных колебаний
2я у mR4
Значения коэффициента f(а) при а от 180 (полукольцо) до 360 (полное круговое кольцо, защемленное в одной точке) для колебаний по основному тону приведены на графике рис. 20.24.
Если кольцо имеет малые размеры в направлении, перпендикулярном его плоскости (направление оси цилиндра), то возможны колебания из этой плоскости. Система, приведенная на рис. 20.25 (вверху, справа), может рассматриваться как балка высотой h, защемленная на нижнем конце.
20.2. ЧАСТОТЫ СОБСТВЕННЫХ КОЛЕБАНИИ
363
Частота собственных колебаний
Коэффициент f рис. 20.25.
определяется из графика
20.2.8. Плиты
Обозначения:
а, b — соответственно длина и ширина плиты в м
(а Ь)
ху у — координаты точки срединной поверхности плиты;
относительные координаты точки
срединнои поверхности плиты;
Ms — сосредоточенная масса в кГ-сек2м; т — интенсивность распределенной по площади плиты массы в кГ-сек2м3; h — толщина плиты в м
ЕН
— цилиндрическая жесткость плиты
Рис. 20.25
где Eh — жесткость кольца на изгиб в плоскости, перпендикулярной плоскости чертежа; с — жесткость на кручение.
12 (1 — и2)
в кГ-м.
Частоты собственных колебаний прямоугольных плит вычисляются по формуле
—. — у—
2л
(20.32)
Значения и аг в формуле (20.32) для прямоугольных плит
Таблица 20.1457, 591
Условия закрепления краев плиты
2
9,87(1 п2)
9,87 (4 -f ту2)
9,87 V 1 2,332т2 -j- 2,440л4
УI 4- 0,583л2 -f 0,152г4
SSSS ' "УУУ
15,42 У 1,115л2 4- Л4
49,95 У 1 0,396л2 4- 0,095л4
у
7,87 V 1 4- 2,494л2 4 5,138л4
22,37 V 1 0,566л2 4- 0,475л4
12,56 V1 -f 0,623ла 0,321л4
61,70 У 1 4- 0,298л2 0,062л4
7?777?rW?77
22,37 У 1 4- 0,605л2 4- “П4
61,70 У 1 4- 0,298л2 4- 0,132л4
Обозначения:
— шарнирно опертый край;
— жестко заделанный край.
364
РАЗДЕЛ 20. ДИНАМИКА СООРУЖЕНИЙ
Таблица 20.15(76
Значения в формуле (20.32) для определения частот собственных колебаний квадратных и прямоугольных плит
Условия закрепления краев плиты
Дополнительный параметр плиты
аг
а2
□I
3,49
8,55
21,44
27,45
31,16
6,96
2408
26,79
48,05
63,14
и
а
19,73
49,33
78,95
98,67
128,28
167,78
□г
23,65
51,68
58,64
86,12
100.29
113,19
U I
it
I
’8,94
54.74
69,31
94,57
102,19
129,09
Я г
34
л5,9
73,40
108,28
131,58
132,28
165,18
1
15 2 Л2
П5
3,50
3,49
3,47
3,45
5,38
8,55
14,92
34,73
21,95
21,44
21,60
21,52
10,26
27,45
94,47
563,82
24,85
31,16
48,71
105,89
615 030 е45 3,60
3,96
4,82
8,87
10,19
13,75
20.2. ЧАСТОТЫ СОБСТВЕННЫХ КОЛЕБАНИЙ
365
Значения ос(t 1, 2) принимаются по табл. 20.14 и 20.15.
Если прямоугольные плиты имеют сосредоточенные массы М8, то приведенная равномерно распределенная масса тПрИв вычисляется по приближенной формуле 59
тприв
. ks (as) ks (Ps) Ms,
S—1
Для определения частот собственных колебаний прямоугольных плит по формуле (20.32) при отношении сторон аЬ0,2; 0,4; 0,6; 0,8; 1,0; 1,25; 1,6; 2,5; 5 и различном закреплении сторон плит (шарнирное опирание, жесткая заделка и свободный край) в работе 70 приведены таблицы значений коэффициентов а, где они обозначены через f. Подробные сведения (формулы и таблицы) о частотах и формах собственных колебаний пластинок можно найти также в справочном пособии 82.
Для многопролетных шарнирно опертых плит с количеством полей в направлении осей х и у соответственно N,с4 и Ny4 частоты собственных колебаний вычис ляются по формуле (20.32), в которую взамен а подставляются агн или агв (см. 20.2.3), принимаемые по формулам 59:
а1н 9,87 (lч2); “is 22,37 V 0,605 ч tj ;
агн 9,87 (4 Ч2); агв 22,37 17,57 2,27 ч2114-
Частоты собственных колебаний круглых плит определяются по формуле
(20.33)
где а( 1, 2,.) принимаются по табл. 20.16 в зависимости от условий закрепления краев плиты и от числа узловых диаметров д; число узловых окружностей равно i—1.
Таблица 20.16(761 Значения а в формуле (20.33) для круглых плит
где s0 — число масс на плите; a, ps — относительные координаты массы М8.
Коэффициенты ks(as) и зависящие от номера
определяемой частоты, значений относительных координат о У
массы as — и ps — и способа закрепления краев a b
плиты (рис. 20.26), определяются по табл. 20.7 так же, как и для однопролетных балок.
У словия закрепления плиты
п
а,
а2
ОС a
а
Гу
0
10,212
39,787
88,917
W
1
21,224
61,000
120,56
-
2
34,847
88,361
158,76
—
ПЛ
0
5,779
30,470
74.89
139,05
( J
1
14,684
49,224
103,49
177,50
4—У
?
26,368
70,846
135,02
218,92
3
40,692
95,258
169,44
263,22
7П
0
3,750
.0.914
60,692
119.72
20.2.9. Стержни переменного сечения
Частоты собственных колебаний имеют вид
2л2
l—
V PFo ’
(20.34)
где 0, F0 — момент инерции и площадь поперечного сечения стержня в начале координат.
Клинообразная консоль 16, 74 (рис. 20.27). Высота поперечного сечения 2h(x) пропорциональна расстоянию 2Ь
от вершины 2i — х, где 2b — высота в заделке; ширина консоли постоянна.
Значения коэффициентов а при i3 см. далее в табл. 20.19; при ‘3
(2 i 1) я 32
Эта формула применима к пустотелому конусу со стенкой постоянной толщнны.
Консоль в виде кругового конуса 16, 74 (рис.
20.27,6). Момент инерции и площадь поперечного сечения изменяются по законам
nd
nd2
64
1
i2n
РАЗДЕЛ 20. ДИНАМИКА СООРУЖЕНИЙ
Формула (20.34) применима к пустотелому конусу со стенкой, толщина которой меняется с высотой по линейному закону. В этом случае
ро(Di-d2)-
64 4
О)
где постоянная
-—-лг.
2h
1
ив-
')
конуса (рис. 20.27, в) вычисляется 77 как
_ J_ лёк.
" Cl V pF0 ’
С 0,719 1,069 — о. 14 — 2,24 (-J—1
или определяется по табл. 20.17.
Для консольного стержня, момент инерции и площадь поперечного сечения которого изменяются по линейному закону,
0(i-ny); F0(i-iy).
значения а, приведены в табл. 20.18. Начало координат принято в защемленном конце.
По табл. 20.19 (см. 76) определяются (Xi для различных случаев стержней переменного сечения.
Таблица 20.17 Значения коэффициента С в формуле (20.35)
Li
L
0 (конус)
0,264
0,501
0,754
1,00
(цилиндр)
С
0,719
1,101
1,368
1,695
1,788
Таблица 20.18
Значения а в формуле (20.34) для консольного стержня переменного сечения
усеченного
л
а,
Л
а
0
0,560
0,6
0,730
0,2
0,597
0,8
0,859
(20.35)
0,4
0,652
1,0
1,140
Таблица 20.19
Значения а- в формуле (20.34) для различных консольных стержней
20.2. ЧАСТОТЫ СОБСТВЕННЫХ КОЛЕБАНИЙ
367
Таблица 20.201
Значения в формуле (20.37) для крутильных колебаний стержней постоянного сечения
368
РАЗДЕЛ 20. ДИНАМИКА СООРУЖЕНИЙ
Продолжение табл. 20.20
Схема бруса и корни частотного уравнения
t
fi
zp
1,57
V
V ots 0
А
Ofi
Основной тон,
1 1 фй0,9
8KW
с:
— -
I
-
Г
Первый
обертон
trOJ
Zj-W
XcQ,8
IfO?
11-015 ZrlO
TrOf
ZrV
ZftJWI
0 1 2 3 1 5 6 7 8
№
20.2.10. Крутильные и продольные колебания стержня. Колебания струны
Крутильные и продольные колебания стержней и колебания струн приводятся к рассмотрению одного и того же дифференциального уравнения вида
(20.36)
где r(x, t) — продольное перемещение стержня или троса, или угол закручивания сечения стержня в точке х, или поперечное отклонение точки струны с абсцис-
GI кр
сой х; а2 — коэффициент, равный: ——для крутиль-
Р р
ных колебаний стержней, Ер — для продольных колебаний стержней, NpF— для колебаний струн; GIKP — жесткость поперечного сечения стержня при кручении; р — центральный полярный момент инерции поперечного сечения стержня; р— плотность материала; F — площадь поперечного сечения; N — натяжение струны; р F — m.
20.2. ЧАСТОТЫ СОБСТВЕННЫХ КОЛЕБАНИЙ
369
Частоты собственных крутильных колебаний стержней
(20.37)
--gкр
4 2л ‘ I р„
Значения коэффициентов принимаются по
табл. 20.20. Обозначения:
7 О
П1
п.г —-1
Рис. 20.29
п2
г
'Л
7-
а. тс
п-2
Рис. 20.28
Рис. 20.30
— жесткость опоры при кручении стержней в кг-см
г г ——— относительная жесткость опоры при круче01 кр
нии (для симметричных брусьев принимается половина г) м — момент инерции сосредоточенной массы в кГ ♦ сек2 см.
Некоторые случаи определения частот свободных крутильных колебаний стержней силовых установок методом трех крутящих моментов и методом деформаций (методом углов закручивания) можно найти в работе 69.
Частоты собственных продольных колебаний стержней определяются как
(я т)я
Частота собственных поперечных колебаний струны с закрепленными концами
п
21
v
N
где 11, 2, 3.
На рис. 20.30 показаны три первые формы поперечных колебаний струны.
20.2.11. Колебания жидкости в резервуарах 72, 73, 75
Прямоугольный резервуар 72
Частота основного тона собственных колебаний жидкости определяется формулой
где I — половина длины той стороны резервуара, вдоль которой происходят колебания; h — глубина жидкости.
Цилиндрический резервуар
По Лэмбу частоты собственных колебаний жидкости определяются формулой
л-)’ (20-39)
где а имеет значения:
с —0,586 я; 2 1,697 я; а3 2,717я;
а'(г'т)л;
R — радиус резервуара.
(20.38)
где EF — жесткость на растяжение.
Коэффициент сс зависит от условий закрепления и имеет следующие значения:
1) элемент, закрепленный на одном конце (рис. 20.28, а):
Рис. 20.31 I
где гс0, 1, 2, 3. — число узлов в форме колебаний.
2) элемент с обоими закрепленными концами (рис. 20.28,6): а ш, где п — число полуволн в форме колебаний;
3) элемент со свободными концами (рис. 20.29): а
птг, где п 1, 2, 3. — число узлов.
Рис. 20.32
Первые три формы свободных колебаний жидкости в цилиндрическом резервуаре представлены на рис. 20.31; вверху даны контурные линии (горизонтали).
370
РАЗДЕЛ 20. ДИНАМИКА СООРУЖЕНИЙ
Резервуар, имеющий в плане форму, изображенную на рис. 20.32
Частота собственных колебаний жидкости по первом форме относительно малой оси определяется формулой
®40,
где
20.2.12. Колебания трубопровода, по которому движется жидкость
Частота собственных малых поперечных колебаний гибкого трубопровода, по которому течет жидкость, вычисляется по формуле
У (т0 т) Н — т0 то2
„2о±тЯ)
т0 т
где — длина трубопровода; т0 — погонная масса трубопровода; га — погонная масса движущейся жидкости; v — средняя по сечению скорость течения жидкости; Н — продольное натяжение в трубопроводе, предполагаемое ввиду малости колебаний постоянным.
20.3. ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ СТРОИТЕЛЬНЫХ МАТЕРИАЛОВ И КОНСТРУКЦИЙ
20.3.1. Динамическая жесткость
Жесткость элементов строительных конструкций, вводимая в динамический расчет, определяется исходя из упругой стадии работы. Исключение представляют расчеты на действие мощных ударных и импульсивных нагрузок, при которых допускается появление пластических деформаций.
При динамическом расчете стальных и деревянных конструкций модули упругости принимаются равными статическим. При рассмотрении горизонтальных колебаний кирпичных зданий модуль сдвига кирпичной кладки принимается равным 0,3 , где Е — модуль упругости при сжатии кирпичной кладки, принимаемый по СНиП II-B.2-62.
Жесткость изгибаемых элементов монолитного или сборно-монолитного железобетонного каркаса зданий, а также железобетонных конструкций перекрытий и покрытий, плит и балок, лежащих на упругом основании, днищ и стенок резервуаров и других монолитных и
1 Предполагается, что течение ламинарное.
сборно-монолитных железобетонных конструкций можно определять по формуле
Bk б,
где Еб — модуль упругости бетона; I — момент инерции поперечного сечения без учета продольной арматуры.
20.3.2. Внутреннее поглощение энергии колебаний (затухание) в конструкциях и материалах сооружений
Вследствие неупругих свойств материала, излучения энергии колеблющейся конструкцией и т. д. происходит явление затухания свободных колебаний конструкций. Для поддержания вынужденных колебаний постоянной амплитуды необходимо непрерывно производить рабо¬
та б л и ц а 20.21
Коэффициент у
Материал
при динами¬
при динамиче¬
ческой на¬
ской нагруз¬
грузке I и И
ке III и IV
категории
категории
Железобетон обычный.
0,050
0,100
Железобетон предварительно
напряженный 0,025
0,050
Прокатная сталь.
0,010
0,025
Кирпичная кладка.
0,040
0,080
Дерево .0,030
0,050
ту, компенсируя ту энергию, которая рассеивается при колебаниях. Роль внутреннего поглощения при динамическом расчете конструкций очень велика, так как от нее зависят амплитуды колебаний в резонансном режиме.
В практических расчетах значение коэффициента He'll? 6
упругого сопротивления у — — рекомендуется
2дх л
принимать в соответствии с табл. 20.21.
Очевидно, что коэффициент у не зависит от категории динамической нагрузки; смысл дифференциации заключается в том, что она в соответствии с нормами приближенно учитывает зависимость у от величины динамических напряжений. Как показывают эксперименты при весьма малых напряжениях, у линейно зависит от амплитуды динамических напряжений и начиная с определенного значения напряжений у практически остается постоянным.
В случае составных, многослойных и комбинированных конструкций, выполненных из различных материалов, рекомендуется коэффициент у определять по формуле
т
2 Уп п т
т ——; Д
п1
где уп — коэффициент неупругого сопротивления п-го элемента или составной части; Dn — жесткость п-го элемента или составной части; D — суммарная (полная) жесткость конструкции; т — число элементов или составных частей.
20.4. ДИНАМИЧЕСКИЕ НАГРУЗКИ ОТ МАШИН
Жесткости составных частей для монолитного сечения определяются относительно нейтральной оси всего сечения; для немонолитного — относительно своей нейтральной оси.
20.3.3. Выносливость строительных материалов
При оценке прочности конструкций, на которые действуют одновременно статические и динамические нагрузки, различают два основных случая: первый соответствует учету периодической нагрузки, действующей в течение длительного периода эксплуатации сооружения, во втором учитываются динамические нагрузки, сравнительно непродолжительные (эпизодические) с малой повторяемостью. В первом случае на прочность влияют явления выносливости.
Предел выносливости представляет наибольшую по величине сумму статического напряжения и амплитуды динамического напряжения, при которой материал способен выдержать без разрушения бесконечно большое число циклов нагружения.
Расчетные сопротивления материала конструкций, подвергающихся одновременному действию статических и систематических динамических нагрузок, вычисляются путем умножения статических расчетных сопротивлений на понижающий коэффициент зависящий от отношения р наименьшего по абсолютной величине напряжения в рассчитываемом элементе оМин к наибольшему напряжению (Тмакс (каждое напряжение со своим знаком) и определяемый согласно СНиП. Величину р можно определять по формуле
МИН 1 s
амакс ls
где s — отношение абсолютной величины наибольшего динамического напряжения (усилия) к статическому напряжению (усилию).
20.4. ДИНАМИЧЕСКИЕ НАГРУЗКИ ОТ МАШИН
Различаются машины с конструктивно неуравновешенными движущимися частями и машины с номинально уравновешенными, а фактически неуравновешенными движущимися частями. Для первых определение динамических нагрузок производится по кинематическим схемам на основе расчета, для вторых (в этом случае неуравновешенность носит случайный характер) — по величинам эксцентрицитетов, коэффициентов и т. д., полученных на основе экспериментальных данных.
Ниже приведены данные для определения динамических нагрузок, взятые из инструкции 25.
Нормативная динамическая нагрузка развивается машиной в ее нормальном состоянии, отвечающем техническим требованиям по эксплуатации машин. Расчетная динамическая нагрузка вычисляется путем умножения нормативной динамической нагрузки на коэффициент перегрузки, который для машин первого типа принимается равным 1,3 и для машин второго типа — 4; в качестве исключения для виброинерционных грохотов и ковшовых элеваторов коэффициент перегрузки принимается равным 2.
Деление машин на группы по частотности, на категории по динамичности и на классы по чувствительности к колебаниям производится по действующим инструктивным материалам.
Отнесение машин к той или иной-категории по динамичности производится на основании ориентировочных данных табл. 20.22.
От динамических нагрузок, возникающих в машине и заданных амплитудами главного вектора и главного момента динамических сил, по формулам табл. 20.23 деляется переход к динамическим нагрузкам, передающимся на опоры.
Динамические нагрузки большинства машин непрерывного действия изменяются по гармоническому закону, а в отдельных случаях выражаются некоторыми периодическими негармоническими функциями времени.
Таблица 20.22
Ориентировочное деление машин на категории по динамичности
Категория машин по динамичности
Динамичность
машины
Наименование машин
I
Малая
Станки и автоматы фрезерные, зуборезные, зуборезьбошлифовальные, сверлильные, револьверные, расточные и доводочные; шлифовальные станки с весом шпинделя и камня менее 20 кг; токарные станки по металлу с весом шпинделя 20 кг; деревообрабатывающие станки; прядильные машины; упаковочные автоматы кондитерской, пищевой и вкусовой промышленности; папиросонабивные и другие автоматы табачных фабрик; автоматы для точки лезвий бритв; швейные машины; электромашины весом менее 100 кг; ротационные насосы весом менее 50 кг и т. п.
II
Средняя
Шепинги и другие строгальные станки; токарные станки с весом шпинделя более 20 кг; шлифовальные станки с весом шпинделя и камня более 20 кг, но менее 100 кг; точильные камни; маломощные поршневые насосы; неуравновешенные одноцилиндровые двигатели, произведение веса поршня которых на радиус кривошипа меньше 250 кгсм; горизонтальные и вертикальные центрифуги с весом заполненного барабана менее 100 кг; гребнечесальные машины прядильных фабрик; гладильные барабаны швейных фабрик; трансмиссионные передачи; вентиляторы с весом ротора менее 30 кг; электромашины весом более 100 кг, но менее 1000 кг и т. п.
III
Боль¬
шая
Центрифуги с весом заполненного барабана более 100 кг, но менее 300 кг; вентиляторы с весом ротора более 30 кг, но менее 100 кг; ткацкие станки; штампы и прессы с весом ползуна менее 200 кг; типографские машины; шлифовальные станки с весом шпинделя камня более 100 кг; электромашины весом более 1000 кг; неуравновешенные одноцилиндровые двигатели, произведение веса поршня которых на радиус кривошипа более 250 кгсм, но меньше 750 кгсм; поршневые насосы средней мощности и т. п.
IV
Очень
боль¬
шая
Штамп- и пресс-автоматы с весом ползуна более 200 кг (например, прессы шарикоподшипниковых заводов, штампы бисквитные); сотрясательные сита крахмальных и сахарных заводов; рассевы; дробилки; вибростолы и грохоты обогатительных и других фабрик и заводов; вентиляторы с весом ротора более 100 кг; центрифуги с весом заполненного барабана более 300 кг; неуравновешенные одноцилиндровые двигатели, произведение веса поршня которых на радиус кривошипа больше 750 кгсм; мощные поршневые насосы т. п.
372
РАЗДЕЛ 20. ДИНАМИКА СООРУЖЕНИЙ
Схема действия на конструкцию инерционных сил машиц
Т а б л и ц а 20.23
Кинематическая схема машины
т Ось элементо конструкции
6 у
ш
1и
Направление и точка приложения инерционной силы R
25
Схема действующих на конструкцию усилий при опирании машины в двух точках
4 6
0 С.6
А б
хг
4 г
ХГ
vt
W-) (fi а о
Схема действующих на конструкцию усилий при сплошном опирает
А 6
нии машины или при пролет)
-0.2 ( —
Rh
А
R 6
Rh
л f R
А 6
1Г "
При вращении ротора неуравновешенность приводится к центробежной силе R meсо2 и к моменту А1 meb(о2 (га— масса ротора; е — расчетный эксцентрицитет центра масс; 6 — расчетное плечо пары сил; со — круговая частота вращения), постоянных по модулю, но переменных по направлению.
При возвратно-поступательно движущейся массе динамическая нагрузка в общем случае может быть представлена тригонометрической суммой
R Е (а cos k(i'it bk sin k®t)9 k
в которой аь и bk — коэффициенты Фурье.
Кратковременно действующие (импульсивные) нагрузки по характеру действия во времени делятся на кратковременный импульс и мгновенный импульс. Кратковременный импульс определяется величиной, формой и продолжительностью действия; мгновенный импульс определяется только своей величиной.
20.4.1. Машины с конструктивно неуравновешенными движущимися частями
К числу таких машин относятся машины с кривошипно-шатунными и кривошипно-кулисными механизмами: поршневые компрессоры, металлообрабатывающие стро¬
гальные, плоскошлифовальные и тому подобные станки, щековые дробилки, вибрационные центрифуги, ткацкие станки, штампмашины, поршневые насосы, плоскопечатные типографские машины и т. п.
Динамические нагрузки от машин с кривошипно-шатунными и кривошипно-кулисными механизмами, щековых дробилок, ткацких станков, штампмашин, металлорежущих станков с гидроприводом и типографских машин можно найти в 25.
20.4.2. Машины с номинально уравновешенными, а фактически неуравновешенными движущимися частями
К числу этих машин относятся центрифуги, металлообрабатывающие токарные, точильные, шлифовальные и тому подобные станки с вращающимися шпинделями и камнями, вентиляторы, электромашины, турбины и т. п.
В таких машинах возникают динамические нагрузки, определяемые величиной центробежной силы
R те©2,
где R — нормативная амплитуда динамической нагрузки; т — масса движущихся частей машины; е —
20.5. О ДИНАМИЧЕСКОМ РАСЧЕТЕ ПЕРЕКРЫТИЙ И КАРКАСОВ ЗДАНИЙ
373
Значения е для некоторых машин
Таблица 20.24
№ п. п.
Виды машин
Примечание
Грохоты Центрифуги Молотковые дробилки
Металлорежущие станки с главным вращательным движением
Вентиляторы с горизонтальной осью, располагаемые на междуэтажных перекрытиях
Электромашины
Турбины
5
D
1000
I мм
d
10
0,5 мм
20-1-л2 60 250п2
а — амплитуда колебаний коробов в соответствующем направлении
D — диаметр ротора. Для вычисления амплитуды момента берется плечо силы, равное половине длины ротора
За расчетную амплитуду силы от молотковых дробилок принимается увеличенная в 4 раза центробежная сила, возникающая при отрыве одного молотка. Для вычисления нормативного момента (при рабочем режиме дробилки) берется плечо силы, равное половине расстояния между осями подшипников; для вычисления расчетного динамического момента (в аварийном режиме) следует принимать плечо силы, равное половине расстояния между крайними рядами молотков
d — диаметр обрабатываемой детали или инструмента; сила считается приложенной к центру тяжести вращающихся частей, динамический момент не учитывается
В вентиляторах, рабочие колеса которых подвергались лишь статической балансировке, учитывается динамический момент, вычисляемый при эксцентрицитете, разном в 0,30,001 D, где D — диаметр ротора в мм, и при ширине ротора b
п — число оборотов главного вала машины в 1 сек
эксцентрицитет движущихся масс; со — круговая частота.
Величина т представляет собой условную массу вращающихся частей: в грохотах это масса коробов и 25 массы обрабатываемого материала, находящегося одновременно на ситах грохота, в центрифугах — масса барабана и вала вместе с заполнением, в металлорежущих станках с главным вращательным движением (токарные, сверлильные и т. п.)—масса вращающейся заготовки или инструмента со шпинделем, в вентиляторах, электромашинах и турбинах — масса ротора и вала.
В табл. 20.24 приводятся значения величины е для некоторых машин.
20.5. О ДИНАМИЧЕСКОМ РАСЧЕТЕ ПЕРЕКРЫТИЙ И КАРКАСОВ ЗДАНИЙ
20.5.1. Расчетные схемы
При расчете на действие периодической нагрузки предварительно определяются частоты свободных колебаний конструкций сооружения. При этом обращается внимание на то, чтобы расчетная схема по возможности хорошо отражала действительную работу конструкций. В частности, для оценки частот свободных колебаний перекрытий следует правильно учесть условия опирания и заделки отдельных элементов. Для монолитных перекрытий вследствие большой крутильно-изгибной жесткости балочных элементов, обрамляющих плиты, последние следует считать защемленными
по тем сторонам, где плита примыкает к балкам. Балочные элементы обычно рассматриваются как разрезные или неразрезные балки без учета сопротивления колонн изгибу или балок — кручению.
Для сборных элементов условия заделки плит и балок зависят от степени и надежности замоноличивания и условий эксплуатации. Опыты показали, что в некоторых случаях плиты, недостаточно надежно замоноличенные, имели в начале эксплуатации частоты, близкие к условиям заделки, а затем, с течением времени, частоты снижались за счет того, что условия заделки под действием нагрузки изменялись.
При расчете покрытий и перекрытий рекомендуются расчетные схемы, приведенные в табл. 20.25.
Более подробные сведения о расчетных схемах перекрытий можно найти в инструкции 19.
При определении частот свободных колебаний обращается внимание на величину и расположение полезной нагрузки, так как в отдельных случаях значительное изменение (в том числе и снижение) полезной нагрузки может быть причиной появления резонансных колебаний.
При определении частот горизонтальных свободных колебаний зданий рамно-каркасного типа можно пренебрегать массой стоек, присоединять массу заполнения к массе соответствующего перекрытия и считать каждое междуэтажное перекрытие абсолютно жестким в своей плоскости. Жесткость перегородок, стен, лестничных клеток и т. д. может значительно (иногда во много раз) увеличить жесткость каркаса, поэтому нужно по возможности принимать во внимание жесткость всех элементов здания.
В связи с этим рекомендуются следующие расчетные схемы по табл. 20. 26.
374
РАЗДЕЛ 20. ДИНАМИКА СООРУЖЕНИИ
Таблица 20.25
Типовые расчетные схемы для динамического расчета перекрытий и покрытий
Тип конструкций
Элементы, для которых определяются частоты
Расчетные схемы
Возможная
погрешность
определения
частот
1. Плиты и настилы по балкам железобетонным, стальным и деревянным
Главные и вспомогательные балки. Плиты с пролетом более 1,5 м
Однопролетные или неразрезные многопролетные балки. Однопролетные или неразрезные балочные плиты (в зависимости от фактических условий)
0,25
2. Железобетонные ребристые перекрытия
Главные и вспомогательные балки. Плиты с пролетом более 2 м
Неразрезные многопролетные балки или рамы с несмещающимися узлами. Неразрезные балочные плиты
0,30
3. Железобетонные крупнопанельные плиты по стальным или железобетонным ригелям
Прогоны, плиты
Неразрезные многопролетные балки или рамы с несмещающимися узлами. Неразрезные многопролетные плиты по перекрестным балкам. Однопролетные плиты
0,35
4. Безбалочные перекрытия
Безбалочная плита
Плита, подпертая в точках, с учетом жесткости колонн и капителей
0,35
5. Покрытия по фермам
Фермы
Система с конечным числом степеней свободы
0,15
6. Железобетонные покрытия по балкам и фермам
Плиты и балки
Многопролетные и однопролетные балки, однопролетные плиты
0,15
Таблица 20.26
Типовые расчетные схемы для расчета зданий на горизонтальные колебания
Типы зданий
Расчетные схемы
Возмож ная погрешность определения частот
1. Каркасные здания с нежестким стеновым заполнением (например, со сплошным остеклением стен), без внутренних несущих стен. Каркасные площадки под машины
2. Каркасные здания с тяжелым стеновым заполнением и внутренними стенами. Здания с несущими стенами и монолитными перекрытиями
Этажерка с неподвижным основанием и недеформируемыми перекрытиями, с которыми жестко связаны вертикальные стойки. Перекрытия могут поступательно перемещаться и поворачиваться в своей (горизонтальной) плоскости. При этом стойки считаются работающими на поперечный изгиб и кручение Коробка с недеформируемыми перекрытиями, с которыми жестко связаны вертикальные стойки. Перекрытия могут поступательно перемещаться в своей (горизонтальной) плоскости. При этом стойки считаются работающими на поперечный изгиб, а наружные и внутренние стены на сдвиг в своей плоскости
0,25
0,30
При определении изгибной жесткости моменты инерции рекомендуется принимать следующим образом: для балок при немонолитном настиле — момент инерции поперечного сечения балки;
для балок при монолитной железобетонной плите — сумму моментов инерции сечений балки и плиты; при этом расчетная ширина сечения плиты принимается равной расстоянию между осями балок, но не более половины пролета балки;
для балок ребристого монолитного перекрытия (покрытия) — момент инерции монолитного таврового сечения с шириной плиты, указанной выше; если стальные балки обетонированы железобетонной плитой поверху или понизу, перекрытие рассматривается как ребристое монолитное;
для балочных плит — момент инерции поперечного сечения плиты.
При расчете крупнопанельных плит, плит безбалочных перекрытий и т. д. определяется цилиндрическая жесткость плиты.
Если постамент под машину или установку монолитно связан с перекрытием, он учитывается при определении жесткости соответствующего элемента перекрытия.
20.5.2. Частоты и формы свободных колебаний
Определение частот свободных колебаний составляет существенную часть динамического расчета.
При расчете сооружений на действие периодической нагрузки часто раскладывают решение в ряд по собственным функциям; определение частот свободных колебаний предшествует рассмотрению вынужденных колебаний. Если при расчете сооружений на действие нагрузку изменяющейся по гармоническому закону, непосредственно определяется частное решение неоднородного уравнения, определение частот свободных колебаний формально не нужно, однако и в этом случае рекомендуется определять частоты свободных колебаний с целью выяснения вопроса о том, насколыко вероятны явления резонанса, что в свою очередь зависит от соотношения частот свободных и вынужденных колебаний.
При расчете сооружений на действие импульсивной нагрузки необходимо определять несколько частот свободных колебаний по указаниям инструкции 26.
20.5. О ДИНАМИЧЕСКОМ РАСЧЕТЕ ПЕРЕКРЫТИЙ И КАРКАСОВ ЗДАНИЙ
375
Как правило, при расчете на периодические нагрузки всегда определяется частота основного тона и некоторое число высших частот; при этом следует учитывать, насколько близки частоты свободных колебаний к частоте вынужденных колебаний; как правило, в практических расчетах определяется следующее число частот и форм собственных вертикальных колебаний несущих конструкций: для однопролетных балок —2; для однопролетных нлит —4; для неразрезных балок —2N, для ферм — согласно инструкции 66, по которой число определяемых частот и форм определяется верхней границей той резонансной зоны, которая заключает в себе частоту возмущающей силы. Здесь N — число пролетов балки.
Для регулярных неразрезных балок, неразрезных плит и безбалочных перекрытий можно определять лишь четыре собственные частоты, соответствующие верхней и нижней границам первой и второй зон сгущения.
В практических расчетах можно не определять собственные частоты, большие, чем 1,5 п0 (где пп — частота динамической нагрузки) и соответствующие формы собственных колебаний. При этом минимальное число определенных частот должно быть не менее 2.
Определение частот свободных колебаний связано с неминуемыми погрешностями, возникающими вследствие того, что расчетная схема всегда является достаточно грубым приближением к действительности; значения параметров, от которых зависят жесткости, задаются неточно и т. д.; к тому же свойства конструкции могут существенно меняться в процессе ее эксплуатации из-за раскрытия трещин в железобетоне, изменения масс и закона их распределения по конструкции и т. д. В то же время это изменение может оказывать большое влияние в тех случаях, когда одна или несколько частот свободных колебаний близки к частоте вынужденных колебаний.
Указанная погрешность учитывается вводом частотных зон, границы которых определяются по формулам
n; (l— е)г ; rt' (le)rt® (20.41)
и т. д., где п г —г-я частота собственных колебаний элемента, определенная в результате расчета; пг —левая граница частотной зоны; пг — правая граница частотной зоны; е — расчетная погрешность в определении частот, определяемая по табл. 20. 25 и 20. 26.
Для конструкций, имеющих зоны сгущения частот, частотные зоны увеличиваются путем уменьшения низшей и увеличения высшей частоты каждой зоны по формулам:
п — (1 — 8) n?; п( 1 8) м
о (20’42
п2 (1 — 8) П2, п2 (1 8) п2у
0 0
где ij, ij, п2 п2— низшая и высшая частоты соответственно первой и второй зоны сгущения, полученные в результате расчета.
Для ферм эти рекомендации уточнены в инструкции 66.
Определение частот свободных колебаний может
производиться с помощью методов и таблиц этой гла¬
вы, материалов нормативного характера, нормативных документов 19, 26, 65, 66, 24, 49 и многочисленных материалов, опубликованных в литературе.
20.5.3. Результаты динамического расчета и нормативные требования
После определения динамических усилий и перемещений необходимо выяснить, являются ли полученные значения допустимыми. Допускаемые с физиологической точки зрения амплитуды скоростей и перемещений (табл. 20.27) определяются в соответствии с санитарными нормами (СН 245-71).
Таблица 20.2750)
Предельно допустимые амплитуды перемещений и скоростей при гармонических колебаниях рабочих мест в производственных помещениях
(п — частота в гц; а0 — амплитуда (пиковое значение) перемещения в мм)
п
а 1
л 1
0
1 л
1 До
1,4
3,11
5,6
0,13
22,4
0,02
1,6
2,22
6,3
0,09
25
0,018
2
1,28
8
0,056
31,5
0 014
2,5
0,73
10
0,045
40
0,0113
2,8
0,61
11,2
0,041
45
0,0102
3,2
0,44
12,5
0,036
50
0,009
4
0,28
16
0,028
63
0,0072
5
0,16
20
0,0225
80
0,0056
90
0,005
Среднеквадратичное значение скорости: при частоте от
1,4 до 2,8 гц—11,2 ммсек. от 2,8 до 5,6 гц — 5 ммсек и от
5,6 до 90 гц — 2 ммсек.
Более детальная классификация кинематических параметров гармонических колебаний по характеру их действия на людей содержится в табл. 20. 28.
Таблица 20.28
Характеристика воздействия колебаний на людей в зависимости от скорости и ускорения гармонических перемещений с амплитудой не более 1 мм
Характеристика воздействия колебаний на людей
Предельное ускорение колебаний ш0 в ммсек1
Предельная скорость колебаний v0 в ммсек
Не ощутимы .Слабо ощутимы Хорошо Сильно ощутимы (мешают) Вредны при длительном
воздействии Безусловно вредны.
Для частот от 1 до 10 колсек 10 40 125 400
1000 Более 1000
Для частот от 10 до 100 кол'сек 0,16 0,64 2,0 6,4
16
Более 16
Кинематические характеристики колебаний могут ограничиваться с технологической точки зрения; эти ограничения должны регламентироваться технологами; для ориентировки в этом вопросе можно пользоваться табл. 20. 29.
Таблица 20.29
Классы машин и приборов по чувствительности к гармоническим колебаниям основания
Класс машин и приборов
Характеристика машин и приборов по чувствительности к гармоническим колебаниям
Допускаемая амплитуда
ускорения w0 в ммсек2 для частот 1 — 10 гц
скорости v0 в ммсек для астот 10—100 гц
I
II
III
IV
Высокочувствительные. Среднечувствительные. Малочувствительные. Нечувствительные.
6,3 63 250 Более 250
0,1
1
4
Более 4
376
РАЗДЕЛ 20. ДИНАМИКА СООРУЖЕНИЙ
Проверка изгибаемых элементов на прочность производится по формуле
Ml ТИР МР;
проверка на выносливость производится по формуле
К ммт.
где М — изгибающие моменты: М — от расчетной статической нагрузки; М” — от нормативной статической нагрузки; — от расчетной динамической нагрузки; Мр — предельный момент, воспринимаемый сечением, определяемый по СНиП II-B. 1-62; Мвын — предельный момент, определяемый согласно СНиП по расчетному пределу выносливости.
В отдельных случаях, когда динамические перемещения малы, проверку на прочность (с учетом динамических воздействий) и на выносливость не производят. В частности, для изгибаемых элементов перекрытий, площадок и т. п. не учитываются динамические нагрузки от машин и установок всех категорий динамичности, если наибольшее динамическое перемещение от расчетных нагрузок за вычетом перемещений опор не превышает У50000 пролета элемента; для колонн и стен зданий, а также стоек площадок и этажерок от машин и установок всех категорий по динамичности проверку на прочность и выносливость не производят, если разность горизонтальных динамических перемещений нижнего и верхнего концов колонны (стены, стойки) в пределах этажа от расчетных нагрузок не превышает Vsoooo высоты этажа.
Если полученные в результате расчета динамические параметры колебаний или усилия недопустимы, то в тех случаях, когда превышение невелико, может оказаться возможным получить удовлетворительные результаты, изменив размеры сечений; это относится главным образом к тем случаям, когда не выполнены требования прочности.
Однако в большинстве случаев такой подход нельзя считать правильным, и нужно разрабатывать более радикальные и эффективные и в конечном итоге более экономичные методы снижения уровня вибраций (см. 20.6).
20.6. ВИБРОИЗОЛЯЦИЯ И ДРУГИЕ СПОСОБЫ БОРЬБЫ С ВИБРАЦИЯМИ
20.6.1. Виброизоляция
Виброизоляция — одно из наиболее простых и эффективных конструктивных решений, уменьшающих
вредное влияние вибраций.
Задачей активной виброизоляции является существенное уменьшение динамической составляющей сил, передаваемых неуравновешенной машиной на опорную конструкцию, в результате чего уменьшатся вибрации, передаваемые изолируемыми машинами на сооружение. При проектировании и расчете активной виброизоляции важную роль играет характер динамического
воздействия машины.
Пассивная виброизоляция предназначена для изоляции точных приборов, прецизионных станков, рабочих помостов и т. д. от вредного влияния колебаний поддерживающих конструкций. При расчете пассивной
виброизоляции необходимо знать характер колебаний по д дер ж и в а ю цс й ко нет ру кци и.
20.6.2. Принципиальная схема работы виброизолированной установки. Конструктивные схемы виброизоляции и виброизоляторов.
Содержание и задачи расчета
Если в состав машины входит направленный вертикальный вибратор с массой вращающихся частей ти чис-
nN
лом оборотов в 1 мин N (круговая частота экс-
uU
центрицитетом вращающихся частей еу то амплитуда силы, передаваемой вибратором, равна Рллтр2е. В вес виброизолированной установки P — mg включается полный вес машины, опорной рамы и постамента или блока. Постаментом или блоком называется часть фундамента под машину, жестко с ней связанная и соединенная с опорной конструкцией системой гибких опорных элементов — амортизаторов или виброизоляторов. Если суммарную жесткость виброизоляторов в вертикальном направлении обозначить через Сг, то круговая частота собственных колебаний виброизолированной установки
Сг
. При проектировании виброизолиро-
ш
ванной установки круговая частота со выбирается так, р
чтобы отношение v было достаточно большим —
со
порядка 4—5 и более. В этом случае при работе вибратора колебательная система установка — опорные пружины будет находиться в зарезонансном режиме, и согласно формуле (20.5) получаем, что пружины передают на основание силу, амплитуда которой, если пренебречь влиянием затухания, равна:
гг (20-43)
Так как уменьшение амплитуды силы, передаваемой на опорную конструкцию, в основном определяется отношением частотных характеристик, то для достижения должного эффекта виброизоляторы должны быть достаточно податливыми.
При проектировании виброизоляции следует учитывать прохождение через резонанс в процессе пуска или остановки машины.
Для уменьшения амплитуд колебаний при прохождении через резонанс нужно применять виброизоляторы, имеющие достаточно большое затухание (например, комбинированные — металлорезиновые или резиновые виброизоляторы). Затухание обычно мало сказывается на качестве виброизоляции в эксплуатационном режиме.
Виброизолированная установка может быть выполнена в опорном (рис. 20.33) и подвесном варианте (рис. 20.34 и 20.35). В первых двух случаях виброизоляторы работают на сжатие, в третьем — на растяжение (рис. 20.35).
Если отметка основания блока ниже уровня пола, то он опирается на днище железобетонного короба, называемого ванной (рис. 20.36).
Конструкция виброизоляторов с гибкими стальными пружинами показана на рис. 20.37. Для демпфирования колебаний в процессе пуска (остановки) используются: вязкие демпферы — системы, состоящие из поршня, который при колебаниях движется в сосуде, наполненном вязкой жидкостью (рис. 20.38); элементы, в которых возникает сухое трение, например рессоры (рис. 20.39), резиновые элементы.
20.6. ВИБРОИЗОЛЯЦИЯ И ДРУГИЕ СПОСОБЫ БОРЬБЫ С ВИБРАЦИЯМИ
377
Все демпферы включаются в конструктивную схему параллельно гибким опорным элементам.
В качестве гибких элементов могут быть приняты и резиновые виброизоляторы; в этом случае необходимое сопротивление для уменьшения амплитуд колебаний
Рис. 20.34
ВйННй
Рис. 20.37
Рис. 20.38
Рис. 20.39
в процессе пуска и остановки получается за счет внутреннего поглощения в материале виброизолятора.
Для нормальной работы виброизоляции необходимо, чтобы все примыкания трубопроводов и других соединительных элементов были достаточно гибкими, для чего применяются гибкие вставки.
Под расчетом виброизоляции подразумевается определение основных параметров виброизолированной установки — массы блока, моментов инерции массы блока, жесткости виброизоляторов, их количества и расположения в плане, установление необходимых параметров затухания. Расчет виброизоляции обычно проводится по проверочной схеме. До расчета задаются ориентировочно численными значениями соответствующих конструктивных параметров, а затем проверяют, насколько правильно были заданы эти значения.
Расчет виброизоляции состоит из проверки работы виброизоляции в двух режимах: а) эксплуатационном и б) переходном.
Для проверки виброизоляторов на прочность и податливость определяются напряжения и перемещения в гибких элементах; в необходимых случаях проводится проверка пружин на устойчивость.
20.6.3. Расчет виброизоляции
Активная в и бро изо л яци я при периодических нагрузках
При расчете активной виброизоляции необходимо определить, в какой степени уменьшается величина амплитуды силы Рк, передающейся на поддерживающую конструкцию, по сравнению с амплитудой заданной динамической нагрузки Рд. Эффективность активной виброизоляции определяется коэффициентом передачи силы
Рк
_L_. vJl
V2 — 1 (О
(20.44)
Обычно ц принимается равным V15—iUo- Если из тех или иных соображений задается х, то v определяется из формулы (20.44).
Изготовление виброизоляторов, обеспечивающих частоту свободных колебаний установки ниже 2 гцу затруднительно, поэтому виброизоляция наиболее эффективна и проста в изготовлении для машин, число оборотов которых превышает 500 обмин. В диапазоне 350—500 об)мин можно в качестве исключения допускать увеличение коэффициента ц, однако так, чтобы Ц’8-
Частота собственных колебаний установки не определяет однозначно размеров постамента и жесткости виброизоляторов.
После определения необходимой частоты свободных колебаний виброизолированного фундамента основные параметры виброизоляции — масса установки т и общая жесткость виброизоляторов с — определяются исходя из допускаемой амплитуды колебаний блока, которая назначается на основании технологических требований.
Подсчет амплитуды вертикальных колебаний производится по приближенной формуле
а02 —
тр2
(20.45)
В тех случаях, когда нужно учитывать горизонтальные и вращательные колебания фундаментов, амплитуды горизонтальных колебаний центра тяжести блока а0х, а0у определяются по формулам:
оу . (20.46)
mpz тр2
Амплитуды углов поворота срох, фоу, Фог, возникающих при вращательных колебаниях, находятся по приближенным формулам:
_ М х -
Фолг —
Фо у '
Фо 2:
J0л Р“
Мр у в
0у Ры М02
(20.47)
Принятые обозначения:
Рх Ру и Рг— амплитуды составляющих возмущающей силы в направлении осей х0у у о и 20 в сГ;
378
РАЗДЕЛ 20. ДИНАМИКА СООРУЖЕНИЙ
Мох Моу, М0г—амплитуды возмущающих моментов относительно осей х0, уо и z0 в кГ-см
Jох JoyUJoz—моменты инерции массы изолируемой установки относительно осей о, У о и z0 в кГ-см-сек2; m—Qig— масса всей установки, равная сумме масс изолируемой машины и постамента, в кГ‘Сек2-см1; р—2пп0 — круговая частота возмущающей силы;
?оА760—частота возмущающей силы в гц N — число оборотов (циклов) машины в 1 мин.
Оси х0, го, z0 являются главными центральными осями инерции виброизолируемой установки.
Ориентировочная величина амплитуды горизонтальных колебаний наиболее удаленной от плоскости х0Оу0 точки (точки с максимальной амплитудой горизонтальных колебаний) изолируемого объекта в направлении осей х0 и уо определяется по одной из формул:
аха0х (руог; ау айу цх v2, (20.48)
где vz — расстояние (в направлении оси z0) между плоскостью х0Оу0 и наиболее удаленной от этой плоскости точкой изолируемой установки.
Амплитуду горизонтальных колебаний i-й точки установки, для которой задано допустимое значение этой амплитуды, подсчитывают по формуле (20.48) с подстановкой вместо vz величины vzu равной координате t-й точки на оси z0.
Приближенные значения амплитуд колебаний -й точки установки, вызванных только вращательными колебаниями последней относительно осей х0, у о и г0 (без учета поступательных колебаний центра тяжести установки), допускается определять по формулам:
(ijx — Фодг их aJу Чоу aiz — Фог Щг
где UjX, UjV и UjZ — расстояния от соответствующей оси вращения х0, у0 и z0 до наиболее удаленной от нее -й точки установки.
В случае, когда вычисленные по формулам (20.45),
(20.46), (20.47), (20.48) амплитуды колебаний установки окажутся больше допустимых, необходимо увеличить массу т и моменты инерции путем устройства специального постамента или увеличения его размеров, если постамент был ранее предусмотрен.
Величина коэффициента неупругого сопротивления
'Фв,
Yb “Z— характеризующего демпфирующие
л; 2я
свойства (затухание) в виброизоляторах, определяется по графику (рис. 20.40) в зависимости от углового ускорения е (в гцсек) и отношения максимальной амплитуды колебаний установки при пуске или остановке машины аМакс (в см) к амплитуде вертикальных колебаний установки при рабочем режиме машины До (в см), где п0 — частота свободных вертикальных колебаний в гц.
Зная величину е и задавшись отношением амакса0г по графику определяют величину минимально необходимого значения ув. Если найденная по графику величина у в 0,03, то можно применять виброизоляторы из одних стальных пружин. При Yb0,03 необходимо применение резиновых виброизоляторов или комбинированных виброизоляторов, состоящих из стальных пружин и резиновых элементов.
Виброизоляция вентиляторов может выполняться с помощью одних пружин, так как гибкие патрубки, соеди¬
няющие вентиляторы с воздуховодами, обеспечивают достаточное затухание.
Пассивная в и бро изол яция
При проектировании пассивной виброизоляции необходимо знать частоту колебаний основания (о0. Для определения частоты свободных колебаний виброизолированной установки о2 задаются коэффициентом передачи
Г
0,21 0?0
0,18
0,16
0,14
0,12
0,10
0,08
0,06
ОМ
о,ог
о
Рис. 20.40
fx, равным отношению амплитуд перемещений установки и основания,после чего находят отношение
. Обычно соосо24; коэффициент
неупругого сопротивления принимается равным уж 0,044-0,05. Расчет виброизоляции подробно рассмотрен в руководстве 49а.
20.6.4. Другие способы борьбы с вибрациями строительных конструкций
В тех случаях, когда при проектировании сооружений полученные в результате динамического расчета характеристики колебаний строительных конструкций не удовлетворяют требованиям норм с точки зрения прочности, воздействия на людей или влияния на приборы или машины, следует уменьшать расчетный уровень колебаний в запроектированном сооружении.
Имея в виду трудности, возникающие при борьбе с вибрациями в эксплуатируемом сооружении, необходимо обратить внимание на учет динамического фактора при проектировании. В случае, если вибрации возникли, то всякие меры по борьбе с ними возможны только после тщательного обследования, сопровождаемого инструментальным замером величин, характеризующих колеба¬
20.6. ВИБРОИЗОЛЯЦИЯ и ДРУГИЕ СПОСОБЫ БОРЬБЫ С ВИБРАЦИЯМИ
379
ния, и внимательного изучения источников колебаний и динамических характеристик строительных конструкций. Нельзя дать общих правил для выбора наилучшего мероприятия по борьбе с вибрациями. В каждом отдельном случае наилучший способ будет найден в результате инженерного анализа, учитывающего как теоретическую, так и практическую сторону дела, т. е. эффективность, простоту и экономичность рекомендуемых мероприятий.
Выбор мероприятий сопровождается динамическим расчетом, позволяющим в ряде случаев надежно установить, насколько уменьшатся при измененных условиях величины, характеризующие колебания (амплитуды, скорости, ускорения и т. д.). Во многих случаях речь идет главным образом об уменьшении амплитуд перемещений, так как обычно нас интересуют колебания с заданной частотой.
20.6.5. Мероприятия по уменьшению вынужденных колебаний, передаваемых машинами
Один из способов уменьшения колебаний — снижение амплитуды динамических нагрузок. В тех случаях, когда машины принадлежат к числу номинально уравновешенных, для уменьшения колебаний рекомендуется провести балансировку, в первую очередь статическую.
В машинах с конструктивно неуравновешенными движущимися частями рекомендуется динамическое уравновешивание, а также спаривание (или страивание) отдельных кривошипно-шатунных механизмов. Если колебания сооружений вызваны работой близко расположенных мощных низкочастотных компрессоров, спаривание может быть эффективным средством борьбы с вибрациями только при проведении жесткой синхронизации работы машин для исключения возможности возникновения биений; рекомендуется также устройство антивибраторов.
При ярко выраженном резонансном характере колебаний можно попытаться изменить число оборотов маыиь ны (уменьшить или увеличить), если это допустимо по технологическим соображениям, избегая совпадения новой частоты возмущающей силы с другой частотой собственных колебаний конструкции.
Виброизоляция наиболее эффективна для машин с числом оборотов в минуту 500 и более; степень эффективности растет с числрм оборотов. В отдельных случаях применение правильно рассчитанной виброизоляции не дает положительных результатов. Причиной этого могут быть дефекты конструирования и монтажа, приводящие к тому, что жесткость виброизоляторов будет значительно выше проектной. Например, при резиновых виброизоляторах любые боковые обоймы (рис. 20.41) или стенки резко повышают жесткость виброизоляторов, так как не дают резине возможности расширяться в поперечном направлении; при пружинных виброизоляторах сильная предварительная затяжка может полностью ликвидировать податливость, т. е. нарушить основное условие работы виброизолятора. Наконец, отсутствие или малая податливость гибких вставок в местах примыкания труб и других конструктивных элементов к изолируемой машине также может быть причиной плохой работы виброизоляции.
Вертикальные колебания перекрытия могут быть уменьшены, если машины, передающие вертикальные динамические нагрузки, поместить вблизи опор. Горизонтальные колебания здания можно уменьшить, расположив машины так, чтобы горизонтальные динамические силы были ориентированы в том направлении, ко¬
торому соответствует большее значение произведения с1—v2), где с — жесткость, равная lбц; Ьп — статическое перемещение каркаса от единичной силы на отметке перекрытия; v — отношение частоты вынужденных колебаний к частоте собственных.
При изменении расположения машин на перекрытии изменяется спектр частот; при приближении машин к опорам частоты свободных колебаний перекрытия повышаются.
Рис. 20.41
WW?MWW№wffl7MW,7Z Рис. 20.42
Увеличение жесткости сооружения служит при определенных условиях одним из эффективных способов борьбы с вибрациями, поскольку при этом возможно также существенное уменьшение колебаний за счет изменения частоты свободных колебаний, при которой конструкция выходит из состояния резонанса.
Частоты основного тона междуэтажных перекрытий обычно составляют 8—15 гц, что соответствует часто встречающимся числам оборотов машин (480— 900 обмин).
Для предупреждения резонансных колебаний можно в отдельных случаях увеличивать жесткость балок, с тем чтобы частота основного тона свободных колебаний стала значительно выше частоты вынужденных колебаний. Для того чтобы изменение жесткости было достаточно большим, рекомендуется в случаях, когда это возможно, уменьшить пролет, например путем устройства дополнительных опор, применения легких порталов или усиления шпренгелями (рис. 20.42). При стальных балках возможно увеличение жесткости путем приварки дополнительных элементов или обетонирования. В железобетонных балках для увеличения жесткости рекомендуется обетонирование, а если уменьшение высоты помещения нежелательно — устройство больших вутов по концам балки на протяжении ее крайних третей (о недостатках метода см. стр. 376).
В отдельных случаях, когда машины стоят на перекрытии и их постамент имеет значительную протяженность по сравнению с пролетом балки, связь этого постамента с балкой может заметно повысить жесткость.
При горизонтальных колебаниях рамного стального или железобетонного каркаса следует учесть, что в этих сравнительно низкочастотных конструкциях (порядка
380
РАЗДЕЛ 20. ДИНАМИКА СООРУЖЕНИЙ
3—5 гц) колебания могут возникать вследствие работы сравнительно низкочастотных машин с горизонтальными инерционными силами, установленных на перекрытиях или близлежащих фундаментах. В ряде случаев очень хорошие результаты дает применение крестовых связей в плоскости рам (рис. 20.43), которые резко повышают частоту, увеличивая общую жесткость здания.
Колебания, о которых идет речь, при проектировании усиления обычно имеют весьма малую амплитуду. Поэтому прикрепление всех усиливающих элементов — крестов, порталов и др. — должно быть жестким, без каких-либо малейших зазоров или люфтов; рекомендуется эти элементы приваривать, хорошо обетонировать стыки и т. д.
В отдельных случаях, когда колебания носят ярко выраженный резонансный характер, с большим коэффициентом резонансного увеличения, можно уменьшать жесткость, с тем чтобы попытаться перевести конструкцию в зарезонансный режим. Однако этот вариант требует особо тщательной проверки, так как возможные резонансы с обертонами будут более опасными, чем в неизмененной конструкции, и, кроме того, может ухудшиться работа конструкции на действие статических нагрузок; в этом случае необходим расчет на прохождение через резонанс.
20.6.6. Мероприятия по уменьшению колебаний при прохождении через резонанс
Для уменьшения колебаний при прохождении через резонанс рекомендуется: повышать скорость прохождения через резонанс, которая характеризуется значением углового ускорения в момент, когда угловая скорость равна частоте собственных колебаний. Обычно скорость прохождения при остановке значительно ниже, чем при пуске; ее можно повысить устройством тормоза — механического, основанного на трении, или электрического, основанного на использовании контртока в момент остановки;
применять демпфирующие приспособления. Наряду с демпферами сухого и вязкого трения желательно использовать устройства, включающиеся в работу только во время прохождения через резонанс и не влияющие на работу в эксплуатационном режиме. К числу этих устройств относятся:
1) ударные и динамические гасители колебаний, настроенные на частоту собственных колебаний;
2) демпферы сухого и вязкого трения, включающиеся при больших амплитудах и не принимающие участия в колебаниях при небольших амплитудах в эксплуатационном режиме; демпферы можно включать последовательно через упругий элемент.
ЛИТЕРАТУРА
1. Ананьев И. В. Справочник по расчету собственных колебаний упругих систем. ОГИЗ. Гостехиздат, 1946.
2. А н д р о н о в А. А., Хайкин С. Э. и Витт В. И. Теория колебаний. Гостехиздат, 1958.
3. Б а р к а н Д. Д. Динамика оснований и фундаментов. Стройвоенмориздат, 1948.
4. Б е з у х о в Н. И. Динамика сооружений в задачах и примерах. Госстройиздат, 1947.
5. Б е л о у с А. А. Метод деформаций в динамике рамных конструкций. Сб. Исследования по теории сооружений, вып. 3. Госстройиздат, 1939.
6. Б е л о у с А. А. Колебания и статическая устойчивость плоских и пространственных рам. Сб. Расчет пространственных конструкций, вып. III. Гос. изд. лит. по стр. и арх., 1955.
7. Бернштейн С. А. Основы динамики сооружений. Госстройиздат, 1941.
8. Б о л о т и н В. В. Динамическая устойчивость упругих систем. Гостехтеоретиздат, 1956.
9. Б о н д а р ь Н. Г. Устойчивость и колебания параболических арок. Инженерный сборник, т. XIII, АН СССР ОТН, 1952.
10. Б ы х о в с к и й В. А., К а р а п е т я н Б. К. Библиографический справочник по инженерной сейсмологии и сейсмостойкости сооружений. Ереван. Изд-во АН Арм.ССР, 1964.
11. Власов В. 3. Тонкостенные упругие стержни. Гос. изд. строительной литературы, 1940.
12. Г о л ь д е н б л а т И. И. Динамический продольный изгиб тонкостенных стержней. Инженерный сборник, т. V, АН СССР, 1948.
13. Гольденблат И. И., Сизов А. М. Справочник по расчету строительных конструкций на устойчивость и колебания. Гос. изд. лит. по стр. и арх., 1952.
14. Ден-Г артог Дж. П. Теория колебаний. Перевод со второго американского издания А. Н. Обморшева. Гостехтеорегиздат, 1942.
15. Д и н н и к А. Н. Устойчивость упругих систем. Изд. АН СССР, 1950.
16. Д и н н и к А. Н. Избранные труды, т. II, Киев, 1955.
17. 3 а в р и е в К. С. Динамика сооружений. Трансжелдориздат, 1946.
18. Изменение JVe 1 к разделу СНиП II-А.И-62. (Бюллетень строительной техники № 4, 1965).
19. ЦНИИСК им. В. А. Кучеренко. Инструкция по расчету несущих конструкций промышленных зданий и сооружений на динамические нагрузки. Стройиздат, 1970.
19а. Инструкция по расчету покрытий промышленных зданий, воспринимающих динамические нагрузки. ЦНИИСК им. В. А. Кучеренко Госстроя СССР. Стройиздат, 1967.
20. Инструкция по проектированию и расчету виброизоляции машин с динамическими нагрузками и оборудования, чувствительного к вибрациям (И-204-55МСПМХП). Минметаллургхимстрой, ЦНИПС, Гос. изд. лит. по стр. и арх., 1956.
21. Инструкция по устранению вредных воздействий вибраций рабочих мест на предприятиях железобетонных изделий (СН 190-61). Госстройиздат, 1962.
22. Инструкция по определению расчетной сейсмической нагрузки для зданий и сооружений. Госстройиздат, 1962.
23. Инструкция по проектированию железобетонных дымовых труб. Стройиздат, 1962 (НИИЖБ АСиА СССР. Теплопроект Мин. стр-ва РСФСР).
24. Инструкция по расчету жилых, гражданских, промышленных и сельскохозяйственных зданий и сооружений на сейсмические воздействия. Стройиздат, 1963.
25. Инструкция по определению динамических нагрузок от машин, устанавливаемых на перекрытиях промышленных зданий. Стройиздат, 1966 (ЦНИИСК им. Кучеренко Госстроя СССР).
26. Инструкция по расчету Перекрытий на импульсивные нагрузки. Стройиздат, 1966 (ЦНИИСК им. Кучеренко Госстроя СССР).
27. Инструкция по мерам борьбы с вибрационными воздействиями технологического оборудования при проектировании зданий и сооружений промышленности нерудных строительных материалов. Стройиздат, 1968.
28. И ори ш Ю. И. Измерение вибраций. Машгиз, 1956.
29. Карман Т. иБио М. Математические методы в инженерном деле. Перевод с английского. Гостехтеоретиздат, 1946.
30. К а ц А. М. Вынужденные колебания при прохождении через резонанс. Инженерный сборник, т. 3, вып. 2. Изд. АН СССР, 1947.
31. К и р н о с Д. П. Некоторые вопросы инструментальной сейсмологии. Изд. АН СССР, 1955.
32. К о р е и е в Б. Г., Сысоев В. И. Метод гашения колебаний сооружений башенного типа. Бюллетень строительной техники, 1953, № 5.
33. Коренев Б. Г. Некоторые задачи теории упругости и теории теплопроводности, решаемые в бесселевых функциях. Физматгиз, 1960.
34. Коренев Б. Г., Пановко Я. Г. Динамический расчет сооружений. В кн.: Строительная механика в СССР. 1917—1967. Под ред. И. М. Рабиновича. Стройиздат, 1969.
35. Коренев Б. Г. Расчет промсооружений на действие эксплуатационной динамической нагрузки. Строительная механика и расчет сооружений, 1962, № 4.
36. Корчинский И. Л. Расчет строительных конструкций на вибрационную нагрузку. Стройиздат, 1948.
ЛИТЕРАТУРА
381
37. К р ы л о в А. Н. Вибрация судов, т. X. Изд. АН СССР, 1948.
38. Лойцянский Л. Г. иЛурье А. Н. Курс теоретической механики, т. II. Гостехтеоретиздат, 1955.
39. J1 у р ь е А. И. Методы динамического расчета сооружений. Справочник инженера-проектировщика промсооружений, т. II, расчетно-теоретический. Госстройиздат, 1934.
40. М а к а р и ч е в В. В. Фундаменты под турбогенераторы. Госэнергоиздат, 1951.
41. Медведев С. В. Инженерная сейсмология. Госстройиздат, 1962.
42. М е д в е д е в С. В. и др. Сейсмические воздействия на здания и сооружения. Стройиздат, 1968.
43. П а н о в к о Я. Г. Основы прикладной теории упругих
колебаний. Машгиз, 1957.
44. П а н о в к о Я. Г. Состояние и перспективы проблемы
учета гистерезиса в прикладной теории колебаний. Труды научно-техн. совещания по изучению рассеяния энергии при колебаниях упругих тел. Киев, 1958.
45. Подольский В. Г. Вибрация конструкций при сухом трении между элементами. Харьков, изд. Прапор, 1970.
46. Поляков С. В. Сейсмостойкие конструкции зданий.
Высшая школа, 1969.
47. Пфейффер П. Колебания упругих тел. Гостехтеоретиздат, 1934.
48. Рабинович И. М., Синицын А. П., Тере нин Б. М. Расчет сооружений на действие кратковременных и мгновенных сил. Изд. ВИА, ч. I, 1956, ч. II, 1958.
49. Расчет каркасных зданий на сейсмические воздействия с учетом высших форм колебаний (таблицы и графики), М., 1964. Напечатано на ротапринте.
49а. Руководство по проектированию виброизоляции машин и оборудования. ЦНИИСК им. В. А. Кучеренко Госстроя СССР. Стройиздат, 1972.
50. Санитарные нормы проектирования промышленных предприятий (СН 245-71). Стройиздат, 1972.
51. Смирнов А. Ф. Устойчивость и колебания сооружений. Трансжелдориздат. 1958. См. также Теория сооружений, т. III. Трансжелдориздат, 1948.
52. СНиП II-А. 11-62. Нагрузки и воздействия.
53. СНиП II-А. 12-62. Сейсмостойкое строительство.
54. СНиП И-В.1-62. Бетонные и железобетонные конструкции.
55. Рекомендации по экспериментальному определению ди. намических характеристик машин предприятиями машиностроительной промышленности. ЦНИИСК им. В. А. Кучеренко. Госстроя СССР. Стройиздат, 1972
56. Солодовников В. В. Введение в статистическую динамику систем автоматического регулирования. Гостехиздат, 1952.
57. С о р о к и н Е. С. Динамика междуэтажных перекрытий. Госстройиздат, 1941.
58. С о р о к и н Е. С. Метод учета неупругого сопротивления материала при расчете конструкций на колебания. Сб. Исследования по динамике сооружений. Стройиздат, 1951.
59. С о р о к и н Е. С. Динамический расчет несущих конструкций, зданий. Госстройиздат, 1956.
60. С т р е л к о в С. П. Введение в теорию колебаний. Гостехтеоретиздат, 1950.
61. СНиП П-Б.7-70. Фундаменты машин с динамическимй нагрузками. Стройиздат, 1971.
62. Т и м о ш е н к о С. П. Теория колебаний в инженерном деле. Гос. научно-технич. изд., 1932.
63. Указания по определению сейсмической нагрузки для вертикальных аппаратов и примеры расчета. Стройиздат, 1961
64. Указания по проектированию конструкций крупнопанельных жилых домов (СН 321-65). Стройиздат, 1966.
65. Указания по проектированию конструкций крупнопанельных жилых домов, строящихся в сейсмических районах (СН 328-65). Стройиздат, 1966.
66. Инструкция по расчету покрытий промышленных зданий, воспринимающих динамические нагрузки. Стройиздат, 1967.
67. Указания по расчету на ветровую нагрузку технологического оборудования колонного типа и открытых этажерок. Стройиздат, 1965.
68. Ф и л и п п о в А. П. Колебания деформируемых систем. Машиностроение, 1970.
69. Ч у д н о в с к и й В. Г. Методы расчета колебаний и устойчивости стержневых систем. Киев. Изд. УССР, 1952.
70. Чудновский В. Г. Исследование колебаний и устойчивости пластинок. Сб. Расчет пространственных конструкций под ред. С. А. Алексеева, В. В. Новожилова,
A. А. Уманского. Вып. XI. Стройиздат, 1967.
71. В у е г 1 у Perry, Seismology, New York, Prentice—Hall, Inc., 1942.
72. Housr.er G., Dynamic Pressures on Accelerated Fluid Constainers, Bulletin of the Seismological Society of America,
47, № 1, January, 1957.
73. J а с о b s e n L. S. Impulsive Hydrodynamics of Fluid Inside a Cylindrical Tank and of a Fluid surrounding a Cylindrical Pier, Bulletin of the Seismological Society of America, vol. 39, 1949.
74. Kirchhoff G. Uber die Transversalschwingungen eines Stabes, Wied. Ann. 10. 501—512, 1880.
75. Lamb H., Hydrodynamics, Cambridge University Press, 1932, or Dover Publications, New York, 1945.
76. M a с d u f f Y. N. and F e 1 g a r R. P., Vibration Frequency Charts, Machine Design, February, 7, 1957.
77. M о n о n о b e N. Zeitschrift fur angew. Math. Bd. 1,
S. 444, 1921.
78. Рекомендации по уменьшению вредных вибраций рабочих мест на предприятиях железобетонных изделий. ЦНИИСК им.
B. А. Кучеренко Госстроя СССР. Стройиздат, 1972.
79. Санитарные нормы проектирования промышленных предприятий СН 245-71 (Госстрой СССР). Стройиздат, 1972.
80. Справочник по динамике сооружений. Под ред. Б. Г. Коренева и И. М. Рабиновича. Стройиздат, 1972.
81. К о р е н е в Б. Г., 3 е в и н А. А., Р е з н и к о в Л, М. Сравнительный анализ эффективности динамического и ударного гасителей колебаний. Строительная механика и расчет сооружений, 1972, № 3.
82. Г о н т к е в и ч В. С. Собственные колебания пластинок и оболочек. Справочное пособие. Киев, Наукова думка, 1961.
РАЗДЕЛ 21
РАСЧЕТ КОНСТРУКЦИИ (СТЕРЖНЕВЫХ, ПЛАСТИНОК И ОБОЛОЧЕК) ПО ПРЕДЕЛЬНОМУ РАВНОВЕСИЮ И УЧЕТ ПОЛЗУЧЕСТИ
21.1. ОСНОВНЫЕ ПОЛОЖЕНИЯ ПО РАСЧЕТУ КОНСТРУКЦИЙ В СОСТОЯНИИ ПЛАСТИЧНОСТИ
Учет неупругих свойств материалов позволяет надежнее оценивать поведение конструкции под нагрузкой и в большинстве случаев получать более экономичное решение по сравнению с расчетом конструкции как уп ругой системы.
Отклонения от идеально упругих свойств связаны с образованием остаточных пластических деформаций и развитием деформаций ползучести (см. раздел 12). Расчет с учетом пластических деформаций в первую очередь связан с оценкой несущей способности элементов конструкций или всей конструкции в целом. При этом основное внимание уделяется определению максимально возможной нагрузки, которую еще может нести конструкция без разрушения, а развивающиеся к этому моменту деформации имеют второстепенное значение.
По современным строительным нормам определение несущей способности является расчетом по первому предельному состоянию.
Предельной нагрузкой на конструкцию называется такая нагрузка, которую конструкция может выдержать без разрушения ее основных элементов.
Напряженное состояние всех элементов конструкции в такой стадии называется состоянием предельного равновесия.
В конструкциях, в которых предельное равновесие определяется свойствами пластичности, исчерпание несущей способности означает возможность развития чрезмерных деформаций при постоянной предельной нагрузке.
Основным объектом приложения теории предельного равновесия являются статически неопределимые конструкции из различных материалов — строительных сталей, железобетона, синтетических материалов. Эта теория применяется для определения несущей способности самых разнообразных конструкций: от простейших
стержневых систем до сложных оболочек.
21.1.1. Поведение конструкций в пластической стадии
До тех пор, пока напряжения во всех элементах конструкции не превосходят предела текучести ат, зависимость нагрузка—деформация практически линейная и конструкция рассматривается как упругая. С появлением напряжений, равных пределу текучести, рост на¬
грузки отстает от роста деформаций. На рис. 21.1 показана балка, загруженная увеличивающейся равномерной нагрузкой. До нагрузки qi — SoWII2 напряжения по сечению распределены линейно и кривизна изогнутой оси балки постоянна по длине (1р 7 7). С увеличением нагрузки распределение напряжений все более отличается от линейного, и зоны пластичности (участки сечения с напряжением ат) увеличиваются. При этом на участке, охваченном пластическими деформациями, кривизна увеличивается (линия 2 на рис. 21.1). Часть
сечения между зонами пластичности называется упругим ядром, которое с ростом нагрузки уменьшается; кривизна изогнутой оси обратно пропорциональна высоте это1 ах
го упругого ядра: — -. При малых значениях Р
кривизна становится очень большой величиной, а изгибающий момент незначительно отличается от момента, который может воспринимать все сечение, находящееся в состоянии пластичности (состояние 3 на рис. 21.1). Несмотря на то что полного состояния пластичности достичь не удается, однако при нагрузках, очень близких к такой теоретической величине, развиваются столь значительные деформации, что конструкция практически выходит из строя. При этом размеры упругого ядра так малы, что зоны пластичности заполняют треугольники acb и a'cb а развившиеся в среднем сечении пластические деформации приводят к прогибам, очень близким к тем, какие были бы при переломе оси балки в среднем сечении. В такой стадии работы балка не в состоянии воспринимать дополнительную нагрузку, и происходит движение балки с переломом оси в середи¬
21.1. ОСНОВНЫЕ ПОЛОЖЕНИЯ ПО РАСЧЕТУ конструкций в состоянии ПЛАСТИЧНОСТИ
383
не и увеличением угла 0. Эта картина такая же, как движение кинематического механизма, состоящего из двух жестких дисков, соединенных шарниром в точке С, только в балке на месте шарнира в точке С действует
от h2
постоянный изгибающий момент Мпл. Поэтому
4
в предельном состоянии балка, или любая другая конструкция, называется пластическим кинематическим механизмом. Нагрузка, приводящая к образованию такого пластического механизма, называется предельной.
Превращение жесткой конструкции в пластический кинематический механизм, состоящий из жестких дисков, соединенных пластическими шарнирами, сопровождается исчерпанием несущей способности конструкции из упруго-пластического материала.
21.1.2. Основные положения теории предельного равновесия
Теория предельного равновесия конструкций основана на следующих положениях, в определенной степени идеализирующих свойства материала и условия работы отдельных элементов конструкций.
а) Элементы конструкций обладают идеально упругопластическими свойствами, что выражается в зависимости сила — перемещение, показанной на рис. 21.2, а. Такая зависимость называется диаграммой Прандтля. Под термином сила следует понимать любое усилие: от продольной силы до изгибающего или крутящего момента. Термин перемещение соответствует деформации по направлению действия силы от линейного удлинения до изменения кривизны оси или закручивания.
б) Деформации упругого характера достаточно малы, чтобы не учитывать их в изменениях геометрических размеров конструкции (геометрическая схема не изменяется), но деформации пластичности могут быть любой величины, необходимой для реализации перераспределения напряжений.
Это предположение о так называемых идеально жестко-пластических свойствах фактически приводит к идеализированной диаграмме напряжений (рис. 21,2,6), когда считается, что при усилиях NNnл никаких деформаций нет (0 0), а при усилии N — NUJl могут быть любые деформации. Усилий NNnjl быть не может
Строго говоря, подобная идеализация находится в противоречии с действительными физико-механическими свойствами элементов конструкций. Тем не менее она существенно упрощает исследование стадии исчер¬
пания несущей способности, и дает результаты весьма близкие к экспериментальным, получаемым для конструкций из различных материалов.
В статически неопределимой конструкции возможны различные равновесные (удовлетворяющие уравнениям равновесия) распределения внутренних сил. Если степень статической неопределимости s, то будет 5 линейно независимых распределений внутренних сил, уравновешивающих внешнюю нагрузку.
Любое равновесное напряженное состояние, уравновешивающее заданную внешнюю нагрузку, называется статически возможным.
Для идеально упруго-пластической системы все внутренние силы ограничены условиями пластичности (прочности).
В общем виде эти условия, отражающие природу материала и его физико-механические свойства, задаются в виде одного неравенства или системы неравенств, которые могут быть линейными или нелинейными:
где Nu., Nm — внутренние силы.
Если для некоторого набора внутренних сил Л,
Nm все неравенства выполняются строго, т. е. Фа (N') 0 (а1,., t), то это означает, что пластические деформации не образовались и конструкция может рассматриваться как идеально упругая.
Если для некоторого набора внутренних сил,., Nm часть неравенств обращается в строгие равенства Фа()0 (а1,., t), а остальные неравенства будут строгими Фр(А")0 (Р 11,., 0 то это означает, что в конструкции частично или полностью развились пластические деформации, а часть или даже все внутренние силы достигли предельного значения.
Статически возможное распределение внутренних сил, удовлетворяющее условиям пластичности (прочности), называется статически допустимым.
Любое деформированное состояние системы, не нарушающее условий закрепления, называется кинематичически возможным. Принимается, что при исчерпании несущей способности жесткая система превращается в кинематический механизм (перемещения всей системы определяются перемещением одной характерной точки) или кинематическую цепь (перемещения всей системы определяются перемещениями нескольких характерных точек). Кинематически возможные перемещения, образующие кинематический механизм или цепь, называются кинематически допустимыми.
Кинематический механизм предполагает образование достаточного числа пластических шарниров, в которых выполняются уравнения пластичности и вследствие этого известны действующие в шарнирах усилия Ы1ПЛ (i — номер шарнира). Определение нагрузки, сообщающей перемещения механизму с k шарнирами, производится приравниванием вариаций работы внутренних
(6 2 ЛР 60О и внешних сил (6Л 2 PjUj). Здесь 11 1 0г — перемещения в шарнирах по направлению действия силы Ал; Uj — перемещения по направлению силы Pj.
Когда все силы пропорциональны одному параметру PjiPkjt тогда из уравнения 6Л6 определяется зна-
384
РАЗДЕЛ 21. РАСЧЕТ КОНСТРУКЦИИ ПО ПРЕДЕЛЬНОМУ РАВНОВЕСИЮ И УЧЕТ ПОЛЗУЧЕСТИ
чение параметра нагрузки Р, соответствующего выбранному кинематическому механизму: k
kj duj l
Три основные теоремы предельного равновесия
I. Предельная нагрузка не ниже той, которую может уравновесить статически допустимое распределение внутренних сил.
II. Предельная нагрузка не больше той, которая может быть определена из рассмотрения кинематически допустимого распределения перемещений (кинематического механизма).
III. Предельная нагрузка является максимальной из всех нагрузок, которые могут быть уравновешены статически допустимым полем напряжений, вместе с тем предельная нагрузка является минимальной из нагрузок соответствующих всем пластическим механизмам.
Первые две теоремы определяют два основных метода теории предельного равновесия — статический и кинематический.
Статический метод заключается в установлении распределения внутренних сил N, уравновешивающих внешнюю нагрузку Рс т и нигде не нарушающих условий пластичности Ф(А) 0. Первая теорема утверждает, что РстР, где Р — предельная нагрузка.
Кинематический метод. По этому методу назначается кинематический механизм с k пластическими шарнирами, в которых действуют внутренние силы Nlnjl(i 1, 2,., k), удовлетворяющие уравнениям пластичности ф(Лпл)0. Из уравнения (21.1) определяется нагрузка Ркину а из второй теоремы следует, что РРКИн. Этот метод получил широкое распространение благодаря своей наглядности при выборе схем разрушения.
Третья теорема устанавливает, что если некоторое равновесное распределение N в необходимом числе точек образует пластические шарниры (выполняются условия Ф(М)—0, а в остальных точках Ф(А)0, то нагрузки Рст и Ркип равны предельной Р. Для произвольных статически допустимых распределений внутренних сил и кинематических механизмов При применении кинематического метода всегда следует иметь в виду, что получается верхняя оценка предельной нагрузки, а при статическом методе — нижняя оценка.
При ассоциированном законе пластического течения (см. раздел 12), если принять статическую формулировку в качестве исходной, кинематическая формулировка получается как производная, и, наоборот, если принять в качестве основной кинематическую формулировку, статическая получается как производная 21, 32.
21.1.3. Основные ограничения теории
Наиболее важные-результаты теории предельного-равновесия следующие.
Любое самоуравновешенное распределение внутренних сил не влияет на величину предельной нагрузки. Самоуравновешенными внутренние силы называются тогда, когда они удовлетворяют уравнениям равновесия при отсутствии внешней нагрузки. Частные -случаи са-
моуравновешенной нагрузки — температурные усилия и усилия в основной системе от лишних неизвестных. Отсюда следует, что предварительное напряжение не сказывается на несущей способности, так как создает самоуравновешенную систему внутренних сил.
Недостаток теории предельного равновесия состоит в полном игнорировании деформаций, которые играют существенную роль при оценке геометрических эффектов деформирования и исчерпания предельной деформативности. В 21 делается попытка устранить это г недостаток.
Важной проблемой в теории предельного равновесия является установление действительных условий пластичности (прочности), некоторые примеры которых см. в разделе 12. Создание этих условий требует большой экспериментальной и теоретической работы, и не для всех материалов и конструкций такие условия имеются.
21.1.4. Типы нагрузок и классификация задач
Теория предельного равновесия применяется с большими или меньшими усложнениями для определения несущей способности конструкций, подверженных действию следующих внешних нагрузок.
Нагружение, пропорциональное одному параметру. В этом случае все внешние силы Pi (1, 2,., t) изменяются пропорционально одному параметру Р и могут быть представлены в виде Pi Pki (i 1, 2,., t)y где ki — интенсивность силы Pi. В этом случае силы своей ориентации не изменяют, а изменяется их величина.
Нагружение системой внешних сил, зависящих от нескольких параметров Я1, Я2, Р8. Каждая группа сил
в таком случае задается в виде Pikiy где — номер группы сил, зависящих от одного параметра Р ( 1,
2,., s), a ki—интенсивность i-й силы в этой группе (il,2,.,).
Внешние силы пропорциональны одному параметру Р, но происходит многократное изменение этого параметра; однако число таких изменений не столь велико, чтобы приводить к усталостному разрушению.
Внешние силы зависят от нескольких параметров Р (1, 2,., s), которые могут многократно изменяться, не вызывая усталостного разрушения.
Динамическое приложение внешней нагрузки, приводящее к рассеиванию энергии вследствие образования пластических деформаций.
Характер внешней нагрузки определяет задачи, которые могут быть поставлены в рамках теории предельного равновесия: определение максимальной несущей способности запроектированной конструкции (основная задача проверочного расчета);
определение невыгодного распределения внешней нагрузки, зависящей от ряда параметров. Обычно эта задача решается при дополнительных условиях, что нагрузка задана в виде ресурса или на нее наложены какие-тр особые ограничения;
определение наивыгоднейшего распределения внешней нагрузки, заданной в виде какого-то ресурса. Это задача оптимального распределения нагрузки;
определение границ приспособляемости конструкции при многократно изменяющейся нагрузке;
оптимальное проектирование конструкций под заданную нагрузку. Такая задача не всегда решает проблему проектирования, так как в строительных конструкциях очень часто размеры определяются вторым и третьим предельным состоянием, а не первым (несущей способностью).
2. НЕСУЩАЯ СПОСОБНОСТЬ СЕЧЕНИЙ
385
21.2. НЕСУЩАЯ СПОСОБНОСТЬ СЕЧЕНИЙ
21.2.1. Чистый изгиб сечений в плоскости симметрии
Прямоугольное сечение. При чистом изгибе в плоскости симметрии на крайних гранях возникают напряжения: а на нижней грани и а- на верхней. До тех пор, пока аСат и —(5Т, напряжения можно опреде¬
лять по обычной формуле сопротивления материалов
Му
о —-—. При M or W на крайних гранях напряжения
будут равны пределу текучести (рис. 21.3). Увеличение изгибающего момента сверх этой величины сопровождается образованием зон пластичности высотой Л2. Средняя часть сечения высотой (1— )i называется упругим ядром. Момент, воспринимаемый таким сечением,
отН2ЬГ 2 I
лс - ;-? 2-0 Т -© .
При ?0 в состоянии пластичности находится только верхняя и нижняя грани. При 1 в состоянии пластич-
h2b
ности все сечение. Величина МПл От —г” называется
4
предельным пластическим моментом сечения, для которого широко используется запись
МПл ат Гпл, (21.2)
где Wnn bh24 — пластический момент сопротивления.
Кривизна изогнутой оси стержня при чистом изгибе определяется высотой упругого ядра:
2ат
Eh( 1-0
Идеальный двутавр. Идеальным двутавром называется условная модель двутавра с материалом, сконцентрированным только в его полках площадью F и F, При чистом изгибе продольные усилия в полках равны: Wmin(of F' сгт F), т. е. N равняется меньшей из величин 0F или ат F. Напряжения в полках равны:
N N а ; о as —— g одно из этих напряжений равно
ат с соответствующим знаком, т. е. или а ст; о о7, или аа; а 07. Равенство аа:
I а о возможно только при F : F a :о.
Для двутавра высотой h пластический момент Мпл Nh; Nmin(x F, F).
Для симметричного двутавра при aa“ Mnn oTFht где F — площадь полки.
Железобетонное прямоугольное сечение
Деформирование и характер разрушения при изгибе железобетонного стержня существенно отличаются от поведения под нагрузкой стержней из других материалов. Однако исчерпание несущей способности железобетонных (не переармированных) стержней можно опреде-
Рис. 21.4
лять теми же методами, что и однородных пластических стержней, так как это состояние для железобетонных стержней определяется достижением текучести в арматуре. Схема сечения в предельном состоянии показана на рис. 21.4. Высота сжатой зоны определяется из условия
С уменьшением высоты упругого ядра кривизны стремятся к бесконечности. Когда 1 сечение становится пластическим шарниром с моментом Мпл и вся изгибаемая балка может вращаться вокруг центра этого сечения без изменения момента.
Прямоугольное сечение с различными пределами текучести при сжатии и растяжении
Пусть и т“ — пределы текучести при растяжении и сжатии. Предельная несущая способность прямоугольного сечения определяется из условия равенства нулю равнодействующей напряжений в сечении: hGh"G (h-h-h), где Л и — высота растянутой и сжатой зон сечения. Предельный момент определяется следующим образом:
о- a
Al о Г„„; о 2 т т. (21.3)
ПЛ Ф ПЛ’ Ф, ' '
aaT
х—
RFa
Rb
(21.4)
Если 0,55о, то это не переармированное сечение, в котором разрушение происходит при напряжениях в бетоне, равных пределу прочности при изгибе Rи и напряжениях текучести в арматуре а. Предельный момент сечения
MrtJl — Ra F.
(21.5)
Для сечения с двойной арматурой высота сжатой зоны определяется из тех же условий:
Rb
(21.6)
Если оказывается, что х2а', предельный момент
Лпл (л0- -5) К К (Ао-О- 2Ь7
386
РАЗДЕЛ 21. РАСЧЕТ КОНСТРУКЦИИ ПО ПРЕДЕЛЬНОМУ РАВНОВЕСИЮ И УЧЕТ ПОЛЗУЧЕСТИ
Таблица 21,1
W
Отношения для некоторых типов поперечных сечений
W
Форма сечения
Ш
W
пл
1,15—1,17
1,27
1.5
1.7
17
2 ЬН—№ (Ь—6)
3
h2
ьн-— Ь—6)
Пластические моменты сопротивлений швеллеров А по ГОС1 8240—56
Таблица 21.2
Г™ tb — 0,5d)(h — t) 0,25d (А —О2. если 2 (b — d) hd; W™ 0,5t(b — 0,5d)2 dKb — 0,5d)(ft— t) — 0,25dtl(h — ), если 2(b—d)hd; IF™ tb(b — d) 0,2uf t2hl (b — df; W™ 0,25 (ft — t)t (b — 0,5 df 0,5d (b — 0,5d) X (ft — t) — 0,0625fal(A — if J;
W™ 0,5 2t2 (b — 0,5d) df (ft — )J.
Центр изгиба
21 (6 — 0,5d)2
4t(b — 0,5d) d(h — t)
№
профиля
Размеры в мм
Пластические моменты сопротивления
h
b
d
t
W™, см
W™, см3
, с
W™, см3
5
50
37
4,5
7,0
12,54
6,92
12,34
2,138
1449
6,5
65
40
4,5
7,4
19,82
9,03
21,41
2,650
1,532
8
80
45
4,8
7,4
29,21
12,09
35,98
3,169
1,669
10
100
50
4,8
7,5
43,29
15,78
55,93
3,743
1,816
12
120
54
5,0
7,7
60,30
19,55
90,74
4,457
1,902
14
140
58
5,0
8,0
80,39
23,83
130,53
5,202
2,023
14a
140
62
5,0
8,5
88,12
28,25
152,78
5,943
2,245
16
160
64
5,0
8,3
106,20
30,36
191,08
6,133
2,242
16a
160
68
5,0
8,8
115,73
35,52
220,96
6,962
2,466
18
180
70
5,0
8,7
137,28
38,19
270,98
7,250
2,473
18a
180
74
5,0
9,2
148,82
44,14
310,04
8,187
2JS99
20
200
76
5,2
9,0
173,60
46,99
372,87
8,528
2,667
20a
200
80
5,2
9,6
188,60
54,31
425,76
9,707
2,903
22
220
82
5,3
9,6
218,93
58,27
508,08
10,27
2,905
22a
220
87
6,3
10,2
238,83
68,03
586,87
11,72
3,J88
24
240
90
5,6
10,0
274,62
73,44
700,50
12,33
3,184
24a
240
95
5,6
10,7
299,82
85,41
805,55
14,15
3,478
27
270
95
6,0
10,5
351,69
87,20
947,59
14,81
3,279
30
300
100
6,5
11,0
443,29
102,26
1255,6
17,81
3,356
33
330
105
7,0
11,7
555,30
120,45
1647,9
21,69
3,455
36
360
110
7,5
12,6
691,37
142,49
2145,1
26,64
3,574
40
400
115
8,0
13,5
877,93
167,30
2837,2
32,60
3,661
21.2. НЕСУЩАЯ СПОСОБНОСТЬ СЕЧЕНИЙ
387
Таблица 21.3
Пластические моменты сопротивления двутавров по ГОСТ 8239—56
,
с
h
д
—
7"л tb(h — t)—(h — if; х 4
tb2 tb2
W™ —; IF™ —- (ft — 0; T 0,5d2 (ft — t).
G3
№ профиля
Размеры в мм
Пластические моменты сопротивления
h
Ъ
d
t
W™. см3
W™, см-3
с 3
см9
10
100
70
4,5
7,2
56,46
17,64
81,85
4,568
12
120
75
5,0
7,3
77,58
20,53
115,69
5,406
14
140
82
5,0
7,5
103,43
25,22
167,05
6,269
16
160
90
5,0
7,7
134,54
31,19
237,47
7,240
18
180
95
5,0
8,0
167,70
36,10
310,46
8,230
18а
180
102
5,0
8,2
180,59
42,66
366,42
9,006
20
200
100
5,2
8,2
205,10
41,00
393,19
9,317
20а
200
110
5,2
8,3
222,80
50,22
481,31
10,17
22
220
110
5,3
8,6
259,20
52,03
549,96
11,10
22а
220
120
5,3
8,8
282,13
63,36
669,08
12,26
24
240
115
5,6
9,5
326,20
62,82
723,99
13,99
24а
240
125
5,6
9,8
356,18
76,56
881,23
15,61
27
270
125
6,0
9,8
420,30
76,56
996,08
16,69
27а
270
135
6,0
10,2
458,99
92,95
1207,4
18,72
30
300
135
6,5
10,2
535,53
92,95
1346,8
20,17
30а
300
145
6,5
10,7
584,85
112,48
1627,1
22,71
33
330
140
7,0
11,2
677,74
109,76
1749,6
25,37
36
360
145
7,5
12,3
846,80
129,30
2247,9
31,72
40
400
155
8,0
13,0
1079,3
156,16
3021,7
38,58
45
450
160
8,6
14,2
1398,5
181,76
3960,6
48,38
50
500
170
9,3
15,2
1799,2
219,64
5324,1
60,24
55
550
180
10,0
16,5
2296,1
267,30
7130,2
75,68
60
600
190
10,8
17,8
2884,2
321,29
9352,8
94,15
65
650
200
11,7
19,2
3586,2
384,00
12 111
116,90
70
700
210
12,7
20,8
4431,4
458,64
15 575
145,63
70а
700
210
15,0
24,0
5120,7
529,20
17 887
197,01
706
700
210
17,5
28,2
5952,9
621,81
20 887
269,87
Если x2a сечение рассматривается как идеальный двутавр с площадями полок Fa и fа и пределами текучести R а и Ra.
Общий случай изгиба. Для сечения произвольной формы, но с плоскостью симметрии, в которой действует изгибающий момент, предельное значение Мал определяется из условия равенства нулю равнодействующей:
Р (С) F ( ) о— N min (f а, F а),
где — координата нейтральной растянутую и сжатую зоны:
линии, разделяющей
мш, s) a- (О; о
N
F
(21.8)
где 5 и — абсолютные значения статических моментов растянутой и сжатой зон относительно нейтральной оси, имеющей координату L
388
РАЗДЕЛ 21. РАСЧЕТ КОНСТРУКЦИИ ПО ПРЕДЕЛЬНОМУ РАВНОВЕСИЮ И УЧЕТ ПОЛЗУЧЕСТИ
21.2.2. Косой изгиб стержня
В тех случаях, когда плоскость действия изгибающего момента не совпадает с осью симметрии сечения, положение нейтральной оси определяется из решения системы уравнений, фактически являющихся уравнениями статического равновесия:
tg е -, tg в — - ; My Sy
Здесь Мх и Му — изгибающие моменты, отнесенные к некоторой системе координат ху у; F и F — площади сжатой и растянутой частей сечения: Sx и v — статические моменты сечения, определяемые с учетом знака напряжений; 0 — угол между выбранными осями координат ху у и нейтральной осью. В новых осях координат х' и у направленных вдоль и перпендикулярно нейтральной оси, предельный изгибающий момент определяется по формуле
м _ тFh
Мпл— 2 где F — площадь сечения; h — расстояние между центрами тяжести сжатой и растянутой частей сечения.
Пластические моменты сопротивления двутавров, согласно 28, определяются следующим образом:
при угле между горизонтальной осью и плоскостью изгиба 0 от 5 до 20 t (h — t)2 4 cos 0
— -4tg0
Й?ПЛ (0)
2u (ft — t) —du (ft — 02 (0,56 u)l 6
cos 0
g-wxl)x
-2 F— (fc —0,5d) a
В этой формуле вспомогательные величины следующие: F
-it
Y(tsine
Wx — F -j (b — 0,5d) cos 0;
L— (— sin 0 — cos 0
d Г
F — 2t (b — 0,5d) d(h — t);
Wx t(b — 0,5d) (h — t) 0,25d (h — f)a.
21.2.3. Внецентренное растяжение (сжатие) в плоскости симметрии
Прямоугольное сечение. Предельное состояние прямоугольного сечения при внецентренном растяжении (сжатии) и при различных пределах текучести на растяжение и сжатие показано на рис. 21.5. Положение ней-
N
6
Рис. 21.5
Рис. 21.6
(п-t)2
где h — высота двутавра; b — ширина полки; d — толщина стенки; t — средняя толщина полки; при 02О тральной оси (величина ) определяется из уравнения равновесия относительно продольной оси
д. N
ohZ-o-h( - ) —.
о
Величина изгибающего момента определяется из уравнения равновесия моментов относительно центра сечения
-лаС1
м
где hy b, d и t имеют те же значения, а величина и является положительным корнем кубического уравнения
2,027и3 и2 1,04Ь2 2 (h — t)
и (А -1) tg0 б b-d-(k- - -0,48Ь — 0,246763 0.
Пластические моменты сопротивления швеллера определяются по формуле
Исключая из этих двух уравнений величину и считая, что изгибающий момент может быть как положительным, так и отрицательным, получим предельное услоN и М:
вие для I 2 М
bh2 о
(-4
bho j
N
7 — ГГ“
о2
Если alt"—сг
bho
а а ъ условие пластичности имеет вид М
М п
UnJ
10,
- 0; (21.9)
(21.10)
где Мил определяется по (21.4), а Nnjl — Oibh.
Графическое представление зависимости (21.9) показано на рис. 21.6, где по оси М введен масштаб 1МПл; Мпп определено по (21.4); на положительном луче оси N введен масштаб 1N и на отрицательном луче — масштаб 1 N (N Gbh; N- Gbh). Это две параболы, выделяющие выпуклую область. Если в сечении действуют N и М и точка а, определяемая этими координатами находится внутри области, ограниченной пара-
21.2. НЕСУЩАЯ СПОСОБНОСТЬ СЕЧЕНИЙ
389
болами, сечение не достигло предельного состояния. Если с — точка с координатами N и М — находится на параболах, сечение находится в предельном состоянии. Значения N и М, задающие точку b вне области, ограниченной параболами, не имеют смысла.
Двутавровое сечение. Условие пластичности для идеального двутавра с пределами текучести о" и и площадями полок F и F2 определяется четырьмя неравенствами:
2
— M N oF
п 11
М—А ат Рг;
MNaF2.
Сечение будет находиться в состоянии пластичности тогда, когда хотя бы одно неравенство превращается в строгое равенство.
Область, ограниченная этими условиями, является прямоугольником, показаннЫхМ пунктиром на рис. 21.6.
Для симметричного двутавра при огГ условия (21.11) упрощаются:
М
Мп
N
N п
1.
(21.12)
Здесь МплОтРк; A2Gt7.
Рис. 21.7
Сечение железобетонного внецентренно
растянутого (сжатого) элемента
Предельные состояния железобетонного внецентренно растянутого (сжатого) сечения определяются поверхностью фигуры, показанной на рис. 21.7. Точки на осях координат м и М соответствуют предельному моменту при чистом изгибе; N и N соответствуют центральному растяжению и сжатию. Точки а и а' разграничивают несущую способность сечения по первому и второму случаю. Точки bub' соответствуют случаю, когда высота сжатой зоны равна 2а'. За исключением двух параболических участков ab и а'Ь', соответствующих первому случаю с высотой сжатой зоны более 2а остальные участки линейные. Если сечение армировано симметрично, точки с и с'
лежат на оси N. Замена параболических участков ab и а'Ь' прямыми вносит погрешность порядка 5, которая идет в запас прочности. Поэтому несущая способность внецентренно растянутого (сжатого) железобетонного сечения может быть описана шестью неравенствами вида
уц М Vi N-ki 0 (t 1, 2,., 6). (21.13)
Значения коэффициентов ц, Vi и ki зависят от рассматриваемого участка. Считается, что сечение находится в предельном состоянии, если хотя бы одно из шести неравенств (21.13) превратилось в строгое равенство для некоторых N и М, а остальные неравенства не нарушаются. Максимальное число равенств может быть два, что соответствует угловой точке многоугольника на рис. 21.6, например точка а. При любых реальных значениях N и М ни одно неравенство (21.13) не может быть нарушено. Более подробно по этому вопросу см. 9, 20.
21.2.4. Учет поперечной силы при изгибе
Если в сечении действует изгибающий момент М и поперечная сила Q, то при ао7 ат удобно использовать условие пластичности Мизеса: а23т2 (т. При отсутствии изгибающего момента (а0) предел текучести на сдвиг Тт (Тт VS. В прямоугольном сечении касательные напряжения распределены по параболе
1
м
Мпл
г
1 Q
Я
Рис. 21.9
с максимальным напряжением в середине сечения. В этом случае максимальная величина поперечной силы
Фпл — TUT bhoT.
V 4
Распределение касательных напряжений возможно только в пределах упругого ядра (рис. 21.8). Уравнение пластичности для изгиба с поперечной силой имеет вид (по Н. И. Безухову) 22
I М
U„,
1. (21.14)
Область прочности для этих выражений показана на рис. 21.9.
21.2.5. Предельные состояния сечения при кручении
Чистое кручение. Напряженное состояние сечения при чистом кручении характеризуется только касательными напряжениями, а нормальные напряжения равны нулю.
Применительно к задачам предельного равновесия предельной величиной касательных напряжений является тт атКз при условиях пластичности Мизеса и Тт (Тт2 при условиях Треска.
Предельный крутящий момент можно вычислить как удвоенный объем, ограниченный поверхностью равного ската, построенной на сечении (табл. 21.4).
Для тонкостенного открытого профиля с постоянной толщиной отношение МплА1упр 1,5 (Мупр тт№крупр), а для замкнутого профиля МплМупр 1.
Совместное действие кручения и продольной силы. Предельное равновесие круглого сечения при кручении и центральном растяжении (сжатии) приближенно определяется уравнением
Ю :;
2л
Лпл — R3 т;
Апл — От 71.
(21.15)
390
РАЗДЕЛ 21. РАСЧЕТ-КОНСТРУКЦИИ ПО ПРЕДЕЛЬНОМУ РАВНОВЕСИЮ И УЧЕТ ПОЛЗУЧЕСТИ
Т а бл и ц а 21.4
Более точное предельное условие имеет вид R2N2 Nz 2я о 9
— тА,2 Т- (2Ь,6)
Предельное равновесие полосы при кручении и нормальной силе устанавливается уравнениями
У,и Ы
tyh—sh I
—ют
Г
,(г)0.
V 6ьот j
м ТГ — "У 1 t2 г2 0.
N boT h
V гГ f ' ' 12
Из первого уравнения определяется подстановка
этого значения во второе уравнение дает уравнение пластичности.
Совместное действие изгиба и кручения. Для тонкой полосы предельное равновесие определяется уравнением
12 М 12 Л12 гтЬ2Л2.
Предельное равновесие двутавра при изгибе с кручением определяется уравнением
("vYfrY1’ (21л7)
где
Кл тПл;
Здесь h — высота стенки; d — толщина стенки; Ъ — ширина полки; 6 — толщина полки.
Уравнение (21.17) может быть использовано для приближенной оценки предельного равновесия произвольного сечения при изгибе с кручением.
21.2.6. Условия пластичности для изгибаемых плит
Изгиб плиты в двух направлениях. В изгибаемой в двух плоскостях плите действуют в общем случае три момента — два изгибающих Мхх и Муу и крутящий момент МХу.
Условия пластичности формулируются для этих моментов, отнесенных к единице длины сечения плиты плоскостью, нормальной к срединной поверхности. Таким образом, размерность моментов равна размерности силы, например кГ смсм — кГ.
Для плит, выполненных из однородного материала с изотропными свойствами, условия пластичности аналогичны рассмотренным в разделе 16.
Условия пластичности Мизеса. Условия Мизеса для пластинки имеют вид
Mix-хх Муу Ку ЗМ К, 21 8)
№
где Мпл Ь—г"—пластический момент единицы дли 4
ны поверхности пластинки.
Это уравнение задает поверхность эллипсоида вращения с осью вращения, лежащей в плоскости МХхОМуу и равнонаклоненной к обеим осям.
В осях главных моментов, в которых крутящий момент равен нулю, уравнение (21.18) описывает эллипс, пока-
21.2. НЕСУЩАЯ СПОСОБНОСТЬ СЕЧЕНИЙ
391
занный на рис. 21.10. Главные оси эллипса равнонаклонены к обеим осям.
Условия пластичности Треска. Это условие формулируется в главных значениях моментов
maxfliVfjl, Aft, МХ — М2) Мпл. (21.19)
Здесь Мх и М2 — главные изгибающие моменты. Условия Треска задает шестигранник, вписанный в эллипс
где
4 Мг
(21.20)
Мизеса (рис. 21.10). В общем случае условия Треска в произвольной системе координат записываются значительно сложнее условий Мизеса.
Условия Иогансена. Эти условия следует рассматривать как условия прочности, а не пластичности (см. 21.2.7):
Фх пл 0;
Ф2 Myyf Мпл
Ф3 М,-Ф,Ф20.
При превращении хотя бы одного неравенства в строгое равенство Ф(М)0, для остальных условий должно выполняться условие Ф,(М)0 0V0
Неравенства (21.20) описывают фигуру типа конусов, сложенных основаниями (рис. 21.11). В главных осях MiM2 — это прямоугольник. Из условий (21.20) следует, что если МжЛ1пл или МУУ—МПЛ, то обязательно Мху —0. Если МхуМпп, тогда Мхх 0 или Муу0.
21.2.7. Несущая способность плиты при совместном действии изгиба и плоского напряженного состояния
В оболочках плита находится не только в состояний изгиба по двум плоскостяхМ, но на нее действуют нормальные и касательные напряжения в срединной поверхности.
Задача существенно осложняется, если главные направления плоского напряженного состояния (мембранные) не совпадают с главными направлениями изгибающих моментов. Общее условие пластичности Мизеса записывается для такого случая двумя уравнениями:
пхх пхх пуу “Ь пуу "Ь тхх “Ь туу
3n2xy 3m2xy 1;
3 №хх ПХХ 2Wjf,У nXy Шуи Пуу) тXX пхх
туу пуу тхх пуу туу пхх
:0,
Различные упрощения для этих условий состоят в следующем 26, 27.
Мембранные и изгибающие усилия разделены:
nxx nxx nyy “f пуу Н” п“ху
тхх тхх туу туу “Ь пху
Наиболее простое представление при v ja1. Более сложное при v-fn, l и условиях, что v0 и ц0 или
V2Lt2 1.
Модификация условий Треска для сложного напряженного состояния плиты в главных осях плоского и изгибного напряженного состояний заключается в удовлетворении неравенств
шах (Wi, N2, А7 — ЛГ2) сгт hv (v 0); max M2, Мг — М2) -oTh2 i (i 0)
при дополнительном требовании v2n2l.
Можно для v и ц предложить условия, аналогичные условиям Треска: max (v, fx, v—u) l, что несколько нарушает предыдущее условие. По этому вопросу см. 27.
Для осесимметричных железобетонных оболочек, в которых действуют меридиональные усилия М8 и по параллелям принимается, что действуют только растягивающие усилия Аф, а изгибающие моменты равны нулю (Мф0). Усилия Аф, если они растягивающие воспринимаются арматурой по параллелям и, следовательно, не оказывают влияния на предельные усилия по меридиану. Поэтому для меридиональных усилий сохраняют силу условия (21.13), а усилия по параллелям ограничены условием
пр Ra F Ra Fа
где Fa — площадь арматуры на единицу длины сечения в плоскости меридиана; h — толщина оболочки.
21.2.8. Ассоциированный закон пластического течения для конструкций
Действующие в сечении и в самой конструкции силы, изгибающие и крутящие моменты в общем случае объединяются термином обобщенные внутренние силы, которые обозначаются Nи N2,., Nm. Условия пластичности задают некоторые уравнения для этих сил в виде Ф (Nu., Nm)0 (1, 2, п). Если при
некоторых значениях NN2,., Nm справедливо равенство для какого-то i-го уравнения пластичности Ф0, то состояние пластичности характерно для обобщенных сил, входящих в это условие. Если выполняются неравенства ФС0 для всех 11, 2,., п, то конструкция не достигла еще состояния пластичности. Неравенств типа Фг0 быть не может.
Основные положения теории идеальной пластичности, называемой также теорией жестко-пластического тела, состоят в следующем.
1. Если в конструкции выполняются условия Ф0 для всех 11, 2,., п, то конструкция находится в жестком состоянии, которое является идеализацией упругой
392
РАЗДЕЛ 21. РАСЧЕТ КОНСТРУКЦИЙ ПО ПРЕДЕЛЬНОМУ РАВНОВЕСИЮ И УЧЕТ ПОЛЗУЧЕСТИ
конструкции при малых упругих деформациях.
2. Условия ФгО выделяют некоторую выпуклую область в пространстве обобщенных внутренних сил N.
3. Перемещения конструкции могут быть только ортогональными к огибающей поверхности, заданной условиями Ф0 (1, 2,., п), т. е. перемещение по направлению действия силы Nj определяется как
6 А,-
11
Ц
dNj
(21.21)
где Яг0, если Фг(А00, и Яг0, если Ф(Л00.
В итоге перемещения конструкции могут быть определены с точностью для некоторого, общего для всей конструкции, множителя или группы множителей. Поэтому величину 0j называют обобщенной скоростью перемещения по направлению действия силы Nj.
Функции Фг(А) по аналогии с теорией упругости (см. раздел 12, теорема Кастильяно) называют пластическими потенциалами, а уравнение (21.21) называют уравнением ассоциированного закона пластического течения. Например, для прямоугольного сечения с одинаковыми пределами текучести при растяжении и сжатии условие пластичности (21.10) переходит в следующее:
Ф(М, Д')
М
м.
пл
N_
Дпл
Скорости линейных деформаций 0 и угловых 0м определяются при условии Ф(М, М) 0:
1
Mr
если М 0;
вм х тр.если м УК1ПЛ
N
0 если М 0; — 2Х —.
пл
Таким образом, если уравнение пластичности выполняется, то Х0. В ряде случаев может оказаться, что выполняется уравнение пластичности и при этом Я,0. Поэтому общим случаем следует считать Х0 при Ф(М, М) 0. Расстояние мгновенного центра вращения от центра тяжести сечения будет c QnQm 2NMunN1Jl. Как видно, эта величина не зависит от неопределенного множителя X. Если в предельном состоянии N 0 (чистый изгиб), то мгновенный центр вращения совпадает с центром тяжести сечения. Если М 0, тогда 0м 0 и вращения нет, а происходит только поступательное перемещение всего сечения по направлению действия силы.
В любом случае определяются только скорости перемещений, а не их действительные значения.
Кроме того, теория идеальной пластичности рассматривает только такие скорости перемещений, которые вызывают скорости деформаций в пластических областях, а в жестких областях скорости деформаций равны нулю.
21.3. РАСЧЕТ ПЛОСКИХ СТЕРЖНЕВЫХ СИСТЕМ
21.3.1. Пластические шарниры в стержневых системах
Основные внутренние силы, рассматриваемые при расчете плоских стержневых систем, это изгибающие моменты (М), продольные силы N) и перерезывающие
силы (Q). В расчетах статически неопределимых систем учитываются только М и N, для которых составляются основные уравнения.
В соответствии с этими внутренними силами рассматриваются шарниры пластичности в стержневых системах в виде вращательного и линейного шарниров.
Вращательный шарнир. Если в каком-либо сечении стержня действует только изгибающий момент М Мал, то это сечение рассматривается как шарнир, вокруг которого возможно вращение остальных частей стержня, рассматриваемых как жесткие диски. Центр вращения располагается в центре тяжести сечения.
Линейный шарнир. Если в каком-либо прямом стержне действует только продольная сила N — Nnn, приложенная в центре тяжести сечения, весь стержень считается линейным шарниром, допускающим только сближение концов стержня.
Рассматривая стержень достаточно малой длины, приходим к определению сосредоточенного линейного шарнира как предела линейных шарниров с уменьшающейся длиной стержня.
Сосредоточенный линейный шарнир может возникать в криволинейном стержне. Последовательность сосредоточенных шарниров может целиком охватывать криволинейный стержень.
Смешанный шарнир. Это комбинация вращательного и сосредоточенного линейного шарниров, сообщающая сечению вращение и поступательное перемещение. Смешанный шарнир можно рассматривать как вращательный шарнир относительно мгновенного центра вращения (см. 21.2.8).
21.3.2. Расчет статически определимых стержневых систем
В статически определимой стержневой системе все внутренние силы являются линейной функцией нагрузки
N(x, Р) Р№(х), М (, Р) РМ (х), (21.22)
где Р — параметр изменения нагрузки; №(х) и М (х) — продольная сила и изгибающий момент от единичной внешней нагрузки в сечении, определяемом координатами х.
Предельная нагрузка определяется как решение уравнения пластичности Ф(М, М) ФР№(), РМ (х)0 относительно параметра Р. Минимальное значение параметра Р как корня такого уравнения есть предельная нагрузка.
Пример 21.1. Рама (рис. 21.12) составлена из элементов прямоугольного сечения с площадью F.
Усилия в ригеле МР(:с, Р)—Рх Np(y, Я) 0. Усилия в стойке Мс(х, Р)Р1, Nc(y, Р)—Р. Уравнение пластичности имеет вид (21.10). Для ригеля это уравнение
Рх
Мп
1, откуда Рi Мпл
ми
и минимальное значение
р- Для стойки уравнение пластичности принимает вид
1,
м,
(р
М п
откуда
2 пл
W п.
2 Мп
Г 12 Ni
у
3. РАСЧЕТ ПЛОСКИХ СТЕРЖНЕВЫХ СИСТЕМ
393
Учитывая (21.12), получаем
41
P2oTbh(- jlT ) Очевидно, Р. Р Следователььо, предельная нагрузка P min(P, Р) и предельное равновесие конструкции определяется прочностью стойки.
р 1111 rfaui —1—б г
Т-1-
Рис. 21.12
Рис. 21.13
21.3.3. Расчет неразрезных балок
Кинематический метод. Расчет кинематическим методом многопролетной неразрезной балки заключается в исследовании возможных пластических механизмов, в которых действуют изгибающие моменты Mi —Miпл, где i — номер пластического шарнира. Некоторые возможные схемы пластических механизмов для трехпролетной неразрезной балки показаны на рис. 21.13. Если сообщить какому-нибудь шарниру перемещение м, то углы перелома во всех шарнирах определяются как 0i0?M. Работа внутренних сил
и и м1пл е?,
i
где знак Mi пл соответствует знаку 0. Работа внешних сил является функцией и—A — uP'ZpjUгде Р — па-
раметр измерения внешней нагрузки; Ppj—-я внешняя
ui
Из уравнения U—Л0 определяется параметр
p SM njIeoSP(U,
(21.23)
соответствующий выбранной схеме кинематического механизма.
Рассматриваются все возможные схемы образования пластических шарниров и для каждого определяется сила Рк (1, 2,., m), т — число пластических механизмов. Предельная нагрузка является минимальной из всех этих сил: P min (Яь Р2, Рт).
В табл. 21.5 представлены предельные нагрузки для защемленных балок.
Статический метод. Определение предельной нагрузки производится в соответствии со статической теоремой, по которой ищется статически допустимое распределение моментов. Пусть требуется рассчитать двухпролетную неразрезную балку (рис. 21.14, а). Для ее расчета строятся эпюры пролетных моментов в пред¬
положении разрезности по всем пролетам. Затем строится эпюра моментов Мх от опорного момента Х . Эпюру Мх увеличивают во столько раз, чтобы она коснулась в точке b эпюры пластических моментов Мл К полученной таким образом эпюре моментов подвешивают эпюру М и увеличивают ее координаты в Р
раз так, чтобы получающаяся в итоге эпюра коснулась эпюры предельных моментов но не пересекла ее.
Получающееся значение параметра Р есть предельное его значение Р. Касание подвешенной эпюры РМ с эпюрой Л1, произошло в точке а. Эта точка определяет положение пластического шарнира с положительным изгибающим моментом, а точка Ь — вторая точка образования пластического шарнира — с отрицательным моментом.
В самом общем случае для -пролетной балки строят эпюры М и систему эпюр Mxi от единичных опорных моментов. Необходимо, чтобы выполнялось условие
- М- РМ 2 Xt Mxi М, (21.24)
i
Таблица 21.5 Предельные нагрузки для защемленных балок
Схема балки
Предельная нагрузка
, vs
АС.О Е) 5(1-6)
2 Мп
0-С)
1
9,58Мл
Р
16 Мп Р
394
РАЗДЕЛ 21. РАСЧЕТ КОНСТРУКЦИЙ ПО ПРЕДЕЛЬНОМУ РАВНОВЕСИЮ И УЧЕТ ПОЛЗУЧЕСТИ
при любых допустимых значениях лишних неизвестных Х (il, 2, k— 1).
В ряде случаев такая задача решается графически 22, но лучшее решение может быть получено с помощью аппарата линейного программирования.
Может оказаться такой случай, когда решение будет не единственным для распределения моментов, но единственным для предельной нагрузки Р. На рис. 21.14,6 показана трехпролетная балка, в которой предельное
Pri Ргг' 1 РгпП М-
1 2
г
i-1
-i
Г
С,
Lr
Я'
h i h2
hlyi h() tin?
ui ui
32 nS3
34
nr nc_i,'nini
Это симметричная трехдиагональная матрица вторых разностей, диагональные элементы которой 1 1_1_1 а элементы слева и справа ty у j ty r- —
-14-
Полная кинематическая матрица Я составляется из блоков Я и дополнительных k—1 строк: л
Рис. 21.15
состояние образовалось в левом крайнем пролете — в точках а и b возникли пластические шарниры. При недостаточно большой интенсивности равномерно распределенной нагрузки в среднем пролете может не оказаться предельного состояния (линия 1) или может образоваться пластический шарнир в точке с. Однако его образование не отразится на схеме пластического механизма балки. В любом случае как для эпюр, соответствующих линиям 1 или 2У величина предельной нагрузки Р неизменна, гак как она определена из условия разрушения левого крайнего пролета.
Использование линейного, программирования. Расчет сложной многопролетиой неразрезной балки со сложной формой внешней нагрузки и неравномерном распределением материала требует очень большого объема вычислений, которые вручную реализовать невозможно. Привлечение ЭВМ требует специальных подходов, которые для неразрезной балки выглядят следующим образом.
Пусть неразрезная балка имеет k пролетов с опорами, пронумерованными от нуля до k. Номер пролета считаем по номеру правой опоры. На рис. 21.15 показан
i-й пролет балки, в котором назначены д опасных пролетных сечений и два сечения над опорами i—1 и. Там же показаны распределения положительных и отрицательных предельных моментов и. Вся нагрузка собирается в выделенные сечения в виде сосредоточенных сил РгУ Рг., Рт1Пт. Число и расположение опасных сечений назначается из следующих соображений:
а) под точками приложения сосредоточенных сил;
б) вблизи места резкого изменения предельных моментов Мл или Мл ; в) для пролета с равномерной нагрузкой по всей длине расстояние между всеми сечениями одинаковое и их число можно принять п 8-М0, при этом 11т (, sl, 2,., rii).
В итоге для -го пролета можно составить векторы г1 (г, 4,. г);М-(МТпл, М7ПЛ,. Мпл) и
М1 (МЛ Л4л, Мпл). Затем составляется матрица размером ппц
Я
h
Я
ЯА
1
k — 1
В первой дополнительной строке на месте под стыком матриц Н и Я2 расположены элементы — 1,-j-i и —lf. Во второй строке под стыком матриц Я2 и Яз расположены элементы —11, —-1 (см. пример 21.2) и так
далее.
Уравнение равновесия имеет вид
И' т — Рг 0. (21.25)
Здесь Я'—матрица транспонированная к Я, а т — вектор неизвестных моментов в выбранных сечениях для
k
всей балки, причем первые л компонент — это про-
i1
летные моменты, упорядоченные по пролетам, и затем k—1 опорных моментов:
т
(mj,., тп,. п™,).
k—
Вектор г составляется из k векторов г г (г1, г2,. rh) и имеет всего п компонент.
Если есть постоянная нагрузка G, то она, так же как временная нагрузка Р, собирается над сечениями в виде сил ( , §2 — 8п.) и из них составляется вектор
ё— (ё1 g2 gk)- Уравнение равновесия записывается
так:
Я'т —V —g 0. (21.25а)
Условия пластичности для -го пролета записываются так: —ММЭти же условия можно распространить на все моменты, составляющие вектор т:
-МлтМ, (21.26)
где векторы К,- составляются из л и М1-:
Af± (М1 М2 Mk М
тпл шпл пл тпл оп оп ) Задача предельного равновесия заключается в опреде-
21.3. РАСЧЕТ ПЛОСКИХ СТЕРЖНЕВЫХ СИСТЕМ
395
лении максимального значения Я тах Р(т) при условиях (21.25) или (21.25а) и (21.26). Такая задача решается методами линейного программирования.
Пример 21.2. Трехпролетная неразрезная балка (рис. 21.16) имеет одинаковые по длине предельные моменты М и М
пл
тшяг,р
X
t-
X
-4-
-
4 2 3
?UU
JaI А_у. x
"5
-4
Рис. 21.16
Для этой балки: вектор неизвестных — I Л 9 2 _2 _3 1 2 у
Ш— 2 3 ’ 19 29 3 4 1 он9 оп
т2
т вектор интенсивностей внешней нагрузки '( , 0, 0, ku ku ku ku 0)', kqL2lb векторы пластических моментов М (AI,. уИ)'. М- (М- Мл)'
10
10
или
м м л( 1. Л- Л1“ (1,., 1)'.
Матрица Н имеет вид
-Т- 0
I, Li
_4_
0 —
__8_
1
4
Li
_8_
-1
I 1 1 sj
2
0 0
0
i
i
10
U
5
-i- о
Ц
10 5
0
L2
L
0
0
5 10
L2 2
0
_4_
L3
0
4
0 x
5
“ L
0
0 0
0
0
0 0
0
0
j о
1 i ;Гсл
I
Число строк матрицы Я равно десяти — по числу компонент вектора т, а число столбцов (восемь) равно числу пролетных сечений и размерности вектора г. В итоге уравнения равновесия (21.24) состоят из восьми уравнений относительно десяти неизвестных. В любой неразрезной балке с k пролетами будет таких лишних неизвестных k—1 по числу статической неопределимости системы.
Если каждый пролет разбивается равномерно сечениями, то можно ввести матрицы Я по правилу:
2 —1
Hi
Л1
—1 2 —1
—1 2 —1 —1 2
щ.
Матрица Н будет составляться из однотипных матриц.
Решение сформулированной задачи возможно, как правило, с помощью ЭВМ по стандартным программам задач линейного программирования. Рекомендуется использовать программы, учитывающие слабую заполненность матрицы п ненулевыми элементами
21.3.4. Расчет статически неопределимых рам
Расчет рам, как правило, должен проводиться с учетом возможности образования вращательных и линейных пластических шарниров. Если рама составлена только из вертикальных стоек и горизонтальных ригелей, то можно не учитывать возможность образования линейных пластических шарниров, а ограничиться только вращательными шарнирами (рис. 21.17, а). При более строгом расчете необходимо учитывать образование линейных пластических шарниров (рис. 21,17,6). Это имеет особое значение для рам с наклонными элементами.
Кинематический метод. Этот метод применяется для расчета рам только с вращательными шарнирами. В раме назначается несколько схем пластических механизмов, для которых по формуле (21.23) определяется нагрузка, соответствующая этим механизмам. Меньшая из нагрузок принимается в качестве предельной.
Пример 21.3. Портальная рама нагружена силами Pk и Pk2 (рис. 21.18). Очевидно, что если стойки и ригель имеют постоянные сечения, то пластические шарниры могут образоваться в отмеченных на рис. 21.18, а шести сечениях. На рис. 21,18,6, в, г показаны три пластических механизма, из которых можно образовать любой пластический механизм с шарнирами в точках 1—6. Эти механизмы называются базисными. Пусть в стойках условия пластичности имеют вид —MCtMMCt, а в ригеле —МРММР. Работа внутренних и внешних сил определится для каждой из схем следующим образом:
РК и Т Мг (т Hi)
м3 и2 Af 0 Mt 02 М3 в3;
Pk 1 Ul (Мз М4 ) М5 ) “4
a a I — a I I — a M3 0з -f- M ©4 M 0;
Pk2 U3 — (Mi M3 Mq Me) jj- Us —
Mx 0i М3 03 M6 0e.
396
РАЗДЕЛ 21. РАСЧЕТ КОНСТРУКЦИЙ ПО ПРЕДЕЛЬНОМУ РАВНОВЕСИЮ И УЧЕТ ПОЛЗУЧЕСТИ
В этих уравнениях Mi ( 1, 2, 6) равны Мст или
Мр и их знак совпадает со знаком угла перелома оси
—0г. Сокращая в уравнениях и и решая их относительно Р, получаем три различных значения Рь Рг и Рз, соответствующих схемам б, в или г.
Предельная нагрузка будет минимальной из трех Р min(Pb Рг Рз), и этой нагрузке будет отвечать одна из приведенных выше схем. Если окажется, что Р
Л' n .N
AlJ Atf N
N N .N
; M
Mi Mj2 Nl Л ш M1 Ml lm m
Рис. 21.17
Рис. 21.18
Pi P2, то схема пластического механизма будет состоять из комбинации схем бив (рис. 21.18). Такой подход учитывает только изгибающие моменты, действующие в раме. В этом методе весьма сложно учесть влияние продольных сил.
Метод основной системы. Этим методом можно рассчитывать любую статически неопределимую раму, в которой назначено т опасных сечений, где действуют продольные силы N1, N2,., Nm и изгибающие моменты М, М2у., Мщ
Можно учесть и влияние поперечных сил Qi, Q2,., Qm, однако это приведет к чрезвычайно сложным вычислениям и не даст существенных уточнений.
Статически неопределимая система превращается в статически определимую отбрасыванием лишних связей. Число отброшенных связей равно 5 — степени статической неопределимости. Усилия в отброшенных связях обозначаются Хи Х2,., А'в.
Усилия и моменты в сечениях образованной статически определимой основной системы записываются в виде
Nt PN1 2 X. N; 1
S
м. pm? х. м 1
(21.27)
(1,2,., т).
Здесь Mf и Nf — усилие в i-м сечении от единичной внешней нагрузки; N и М — усилия в i-м сечении от единичного усилия Xj 1.
Фактически Nf, Mf, AM и М— это ординаты единичной грузовой и единичной эпюр от -го неизвестного в -м сечении.
Уравнения (21.27) удобно записывать в матричной форме: __
N PNPNX Л4 РМр МХ, (21.28)
где N(Nf,.VJ,., ЛГ )', MP(Mf,Мр2,., М)'— это векторы-столбцы: Х(ЯЬ X2i., Xs)' — вектор-столбец неизвестных
Условия пластичности в общем виде записываются для каждого сечения в отдельности:
фM, лад0 (1,2,., т). (21.29)
Можно в каждое такое условие подставить соответствующее выражение Ni и Mi через Р и X и получить условия пластичности относительно этих величин:
Ф (PNP s xj Ni- РМ1 х,. М’Л 0.
1 1
Когда условия пластичности линейные и, в частности, имеют вид (21.12), тогда каждое условие (21.29) записывается так:
Ni
Nm
Mi
м
1пл
— 1 0 (1,2,
т). (21.30)
Введя две диагональные матрицы
ЛГ"1
1V пл
м1
1У1пл
N
—1 1пл
NZ
МТп
м:
2пл
можно все т условий пластичности (21.30) представить в компактном виде:
пл Ипл-П1ш0. (21.31)
где 1т — вектор с компонентами, равными единице. В итоге получаем следующую систему условий относительно s-J-1 неизвестных Р и Хи., Х8:
I К”' (PAP N Х) М-ДРЛ 7ЙХ)-1,
I т
0.
(21.32)
21.3. РАСЧЕТ ПЛОСКИХ СТЕРЖНЕВЫХ СИСТЕМ
397
Эти условия записываются иным образом при помощи четырех неравенств
0; —PI1—С1 X—lm 0;
РР СХ — 1т 0; -P2-CX—1т 0,j
(21.33)
где ' W- Мр М' Мр; I2 NT N-М1 М
пл ПЛ ‘
векторы размерности т
пл __ А'-1 N 4- Мх AL
пл ‘Ппл iri
'пл ‘
с'
щ
1
777
1
ГГТ7
Рис. 21.19
Ml P(k-ia kih) — X1 — X2HМ2 Р а) — X — Х2 (H — h)М3 — Pki a — — Х3 л;
Щ xi:
Мъ Хг— Х3(1- а);
Mt Хг- ХгН — Х3 (I — а);
Лг Pkt — Х3;,V2 Pkx-А'3;
Л'з Pk1 — Х3 (по стойке);
Nt Xt; Л'5 А'3; h Xa.
Х3а
Х3а
(21.34)
Матрицы и векторы, входящие в (21.33), имеют вид
кЛ
л,р15
ч§
С2 NnJ N — — матрицы размером тХ- Вы¬
числение этих матриц особого труда не представляет.
В итоге для s-И неизвестного Р,
Xj, Х2, Х8 имеется 4т неравенства (21.33) и требуется определить максимальное значение Р, удовлетворяющее этим неравенствам. Это задача линейного программирования, которая с успехом может быть решена с помощью ЭВМ.
Пример 21.4. Рассмотренную выше раму (рис. 21.18) заменим основной системой (рис. 21.19) с тремя неизвестными силами Хи Х2, Х3. Запишем:
0 0—1
0 0—1
0 0—1
0 1 0
0 0 1
0 0 1
1 —н
—о
1 — (И—Н) —а
1 0
—а
1 0
0
1 0
(-
1 —Я
( —
М
Условия (21.33) показаны далее в таблице, которую следует читать сначала с верхними знаками, что соответствует первому условию (21.33), затем со вторыми знаками, что соответствует второму условию, и так четыре уровня знаков. Такая система имеет четыре неизвестных Ру Х, Х2 и Л'з, для которых имеется 4-624 ограничения в виде неравенств.
Решение этой задачи, например, симплекс-методом приводит к так называемому оптимальному плану Р, Xv Хо, Х3. Здесь Р — оптимальное значение параметра внешней нагрузки, а X —значения лишних неизвестных. Определение моментов и продольных сил в предельном состоянии производится подстановкой Р и X в выражения (21.28).
Подобным образом могут быть решены задачи с более сложными условиями пластичности, например для железобетонной рамы 9.
Любые выпуклые условия пластичности вида Ф(Аг, Мг)0 можно с достаточно высокой степенью точности и по крайней мере безопасно заменить системой вписанных линейных условий. Так, условия (21.12) являются линейными и вписанными в условия (21.10). Всегда одно нелинейное условие пластичности может быть заменено системой t линейных условий aNibjMi —
Р
Х2
3
k ki GL -f-
1
1
н
. 1
а
— 10
кп
ж'
пл
Кл
Л
kt
ki а
_±_
1
1
н
- 1
1
а
— 1 0
± A’L
М2
1 пл
Г
м2
1Г1пл
м2
11 пл
t N2
-f- 1 пл
кг
kx я
1
1
0
- 1
1--
ц_
а
— 1 0
N3 Т
— '¥пл
м3
'Г1пл
Кл
Nпл
М3
7КХпл
1
1
1
0
— 1 0
0
г
Кл
Л’пл
1
1
0
1
— а
— 1 0
0
"Г
М5
1¥1пл
дг5 — iV пл
м5
1Г1пл
0
1
н
- 1
_ 1
1 — а
— 1 0
м6
1Г1пл
N6
iV пл
Кл
“Г
М6
1 Лпл
398
РАЗДЕЛ 21. РАСЧЕТ КОНСТРУКЦИЙ ПО ПРЕДЕЛЬНОМУ РАВНОВЕСИЮ И УЧЕТ ПОЛЗУЧЕСТИ
10(1, 2,., о и эти условия будут достаточно
полные и самое главное безопасные, если задан многогранник, вписанный в область, ограниченную поверхностью пластичности.
21.4. ПРЕДЕЛЬНОЕ РАВНОВЕСИЕ ПЛАСТИНОК
21.4.1. Общие положения расчета
Предельное равновесие пластинок при их изгибе подчиняется общим теоремам предельного равновесия и может рассматриваться со статических и кинематических позиций.
Для успешного применения статического метода определения предельной нагрузки существенную роль играют условия пластичности (п. 2.8).
Фактически для решения этой задачи необходимо определить поле изгибающих и крутящих моментов Мхх, Муу и МХу, удовлетворяющее уравнениям равновесия и условиям пластичности и сообщающее параметру нагрузки Р максимальное значение:
а мл
дМи
дх2
дхду У) -
Ф (мхх,
ду -
(21.35)
Рис. 21.20
определяемый по нормали к линии шарнира L; Мпл — пластический момент в шарнире, вектор которого направлен вдоль касательной к линии шарнира.
На рис. 21.21 показана многоугольная плита, нагруженная в точке а сосредоточенной силой. Плита шарнирно оперта по контуру. Линии а-±-а6 — линейные
ууу ху) ®
При этом поле моментов должно удовлетворять граничным условиям, зависящим от способа опирания пластинки.
Эта задача в редких случаях имеет единственное решение для поля моментов, тогда как для экстремальной нагрузки Р задача всегда имеет единственное решение.
Использование кинематического метода основывается на анализе различных схем излома пластинки, превращающих эту систему в пространственный кинематический механизм из дисков, соединенных линейными пластическими шарнирами.
Линейные пластические шарниры в плитах — это аналог вращательного шарнира в стержневых системах и характеризуются тем, что на некоторой линии изгибающие моменты вдоль нее удовлетворяют уравнениям пластичности, т. е. по величине равны пластическим моментам.
На рис. 21.20 показан прямолинейный пластический шарнир, образовавшийся вдоль линии ab. Линейные пластические шарниры могут образовываться как на прямых, так и на кривых линиях. Широко используется название криволинейный пластический шарнир.
21.4.2. Кинематический способ определения несущей способности плит
По этому методу выбирается некоторый кинематический механизм или группа механизмов, для которых определяется работа внутренних и внешних сил:
J MnJI QdL; А Р j uq (х, у) dx, dy. (21.36)
L S
Здесь и — перемещение точек поверхности пластинки; Q(x У) — интенсивность нагрузки; 0 — угол перелома,
Рис. 21.21
пластические шарниры, позволяющие этой плите превратиться в пирамиду с вершиной в точке а' и высотой и. При такой схеме жесткие диски вращаются вокруг опорных шарниров и линейных пластических шарниров. Так, диск 1а2 повернулся на некоторый угол вокруг опорного шарнира 1—2, вокруг шарнира а1 относительно диска 6а1 и шарнира 2а относительно диска 2аЗ. Линии шарниров стали вершинами двугранных углов. Величина этих углов определяется по следующей формуле (рис. 21.22):
е-у- (ctg а ctg Р) и,
(21.37)
где и — вертикальное (из плоскости чертежа) перемещение точки а. Приняв обозначения и нумерацию углов по рис. 21.21 и обозначив через г длину шарнира ciili (1, 2,., 6), получим выражение для работы внутренних сил
6
и Мпл и S (ctg аг ctg pt). i1
Работа внешних сил А — Ри. Отсюда предельная нагрузка по формуле (21. 22)
р Мпл 2 (Ctg а I ctg Р,). (21.38)
i 1
Для правильной многоугольной плиты, имеющей k сторон, предельная нагрузка
Р 2МПЛ k tg —
к
(21.39)
Криволинейные пластические шарниры. Образование криволинейного пластического шарнира с появлением по контуру шарнира изгибающих моментов Мл с вектором, направленным по касательной к шарниру, вызывает в области, ограниченной криволинейным шарниром, появление пластических моментов Мл, вектор которых направлен к вершине конуса пластического ме¬
21.4. ПРЕДЕЛЬНОЕ РАВНОВЕСИЕ ПЛАСТИНОК
399
ханизма (рис. 21.23). Работа внутренних сил на площади, ограниченной криволинейным шарниром:
и Мл j l 2 (yj- у 4в
м-
0.
dQ.
Рис. 21.23
V № л) ( 01 —0о) Л-0.5Л1-) X г'(вп) г' (0,) ,. _ Л
х (гфо) г(01)) (Л1пл Л'пл) х
х
J7
г" (0)
(.0)
dQ.
(21.41)
Если криволинейный шарнир определен по кругу, тогда г'(0) 0 и и(Мл МЛ )(01—0О).
Для произвольно расположенного шарнира оптимальной формой, сообщающей V максимальное значение, является логарифмическая спираль г(0)ое
св
21.4.3. Статический способ определения несущей способности плит
Применение статического способа расчета тесно связано с методами линейного программирования и использованием ЭВМ. Дифференциальное уравнение рав-
0 12 j п-1 п х
1
2
i
mb
т
Рис. 21.24
новесия плиты (21.35) заменяется какой-либо конечной системой линейных уравнений. Например, это может быть конечно-разностное уравнение, составленное для какой-либо сетки на плите (рис. 21.24).
Плита разбивается прямоугольной сеткой со сторонами пх ап и пу Ьт. Для каждого узла сетки
составляется конечно-разностное уравнение, которое для внутреннего узла ij имеет вид (i — номер узла по горизонтали; — номер узла по вертикали):
2M‘JX- М‘1-'
—4- 2М11
XYluv ии luu
(21.40)
Это выражение записано в полярных координатах
(г, 0), центр которых помещен в вершину конуса; г(в)— уравнение криволинейного шарнира. Для замкнутого шарнира интегрирование проводится в пределах от 0 до 2я. Подынтегральные выражения в
(21.40) можно упростить и записать как
м‘'-'
2Д Ау -f Pq‘j 0,
где q — интенсивность нагрузки в точке ij. Таких уравнений будет (л— 1) (m— 1) — число, равное количеству внутренних точек.
При необходимости к этим уравнениям добавляют уравнения граничных условий (см. раздел 15). Для этотого вводятся законтурные точки, обеспечивающие надежный учет граничных условий.
Введя вектор неизвестных в виде М лп,т,
-АМ™, М,М
мпт мп,т
XX iYlyy
tfyVlXtJ7
М9™ ) и обозначив коэффициенты конечно-разностных уравнений как элементы матрицы Л, получим матричное представление дифференциальных уравнений равновесия
AM Pq 0. (21.42)
Присоединяя к этому уравнению условия пластичности, составленные для каждой внутренней точки сетки, получаем полную систему условий задачи
Ф(М, м, м) о
(1,2,., п — 1, 1,2,., т — 1). (21.43)
Можно каким-либо способом линеаризовать эти условия, представив нелинейные условия пластичности в виде системы линейных неравенств:
akM bkM ckM- 1 0
(k 1,2,., t). (21.44)
Здесь t — число линейных условий, приближенно представляющих условия (21.43); оно зависит от выбранной точности линеаризации.
В первом приближении можно считать, что аь
ЬкМпл и ch-(МПл3)-1. Это задает так на¬
зываемый вписанный симплекс в условия пластичности Мизеса. Здесь 8—по числу октантов трехмерного пространства моментов. Знаки щiy Ьь. и с назначаются из следующей таблицы:
1
1 1 1
1 2 1
1 3
1 4
1 5
1 6
1 7
8 1
Як
—
—
—
—
ьк
—
—
—
—
Ск
I
400
РАЗДЕЛ 21. РАСЧЕТ КОНСТРУКЦИЙ ПО ПРЕДЕЛЬНОМУ РАВНОВЕСИЮ И УЧЕТ ПОЛЗУЧЕСТИ
Условия пластичности (21.44) в матричной форме записываются так:
Мп
1 1 Уз
1 —1 хУз
—1 —1 iКз
—1 1 1 Уз
I 1 1 Уз
1 _1 ljз
к
—1 —1 1 Уз
—1 —1 Уз
0.
Р
Из матриц р, как из блоков, составляется блочная система условий пластичности всей задачи
Мп
Р
Р
М- 1 0.
Блочно-диагональная матрица имеет (ti—1 )(т—1) блоков и весьма удобную форму записи; вектор 1 имеет 8(п—1 )(т—1) компонент, и все они равны единице. Поэтому хранение всех таких условий в памяти ЭВМ не обязательно, так как матрица условий имеет регулярную структуру, всего заполнено нулевыми элементами около 10, среди которых фигурируют только два числа: Мпл и Л4ПЛ
Если известно, что в результате решения всей задачи моменты Мхх и Муу только положительные, то число условий можно сократить, исключая в матрице Р строки 2, 3, 4, 6, 7, 8. Тогда
р
11 1 Уз
1 1 —1 Уз'
Объем условий (21.45) при этом сокращается в 4 раза, но добавляются такие условия, как MlJx 0 и MJy 0, которые только облегчают решение задачи методами линейного программирования.
Матрица А в уравнениях равновесия (21.42) имеет удобную ленточную структуру. Поэтому ее хранение полностью также не обязательно. В итоге оказывается, что, несмотря на кажущийся очень большой числовой материал для задачи в целом, можно обойтись переработкой на ЭВМ сравнительно небольшого объема числовой информации, обрабатывая только ненулевые значения исходных матриц.
Решение задачи статического метода заключается в определении Р — тахР(М) при ограничениях (21.42) и (21.45). Такой подход практически не зависит от формы пластинки и наличия в ней разного рода отверстий. Так же просто учитываются неоднородные и анизотропные свойства материала пластинки.
21.4.4. Некоторые частные решения для пластинок, загруженных сосредоточенной силой, при шарнирном опирании
Прямоугольные пластинки. Основная схема пластического механизма для пластинки, загруженной сосредоточенной силой, принимается в виде линейных шарниров, идущих от точки приложения силы (точка с) в углы пластинки (рис. 21.25).
Из уравнения работ для такого механизма получается значение предельной нагрузки
— I-
Т
sf
4
)
J
— а Рис. 21.25
— 1К(1-
——1 ах(1 — rj)J
О
(21.46)
(21.45)
Для квадратной пластинки с силой, приложенной в центре, Р8МПЛ.
С приближением точки с к одной из сторон пластинки получается Р- оо при С-0 или т-0. В таком случае возможно образование местных криволинейных шарниров, показанных на рис. 21.26.
Механизм разрушения будет как на схеме а тогда, когда окружность радиусом и V2 не пересекает смежной стороны пластинки. По схеме а криволинейный шарнир образуется по окружности; по схеме б криволинейный шарнир — логарифмическая спираль. В дополнение к этому шарниру образуется линейный шарнир с, выходящий в угловую точку пластинки. Предельная нагрузка для обеих схем вычисляется по формулам
с 2
: М
Я:11,42МПЛ;
( U V
(ттв,
(0,5я а р)2
(21.47)
0, 5л —- os —j- р Окончательно предельная нагрузка определяется как P min(P1, Ра), если имеют место схемы, показанные на рис. 21.25 и 21.26, а, или p mnp, Pq ), если возможны схемы рис. 21.25 и 21.26,6.
21.4. ПРЕДЕЛЬНОЕ РАВНОВЕСИЕ ПЛАСТИНОК
401
Пластинки со свободным опиранием по контуру. Такое опирание допускает возможность приподнимания краев пластинки над опорами, что существенно сказывается на схемах пластических механизмов и предельной нагрузке. На рис. 21.27, а показана прямоугольная пластинка, нагруженная сосредоточенной силой. Пунктиром показаны участки контура, которые приподнимаются над опорами.
б)
Определение точек выхода пластических шарниров на контур пластинки определяется по формуле 4
(21.48)
Все обозначения показаны на рис. 21.27,6, где с точка приложения сосредоточенной силы; сВ — биссектриса угла; kcl — перпендикуляр к биссектрисе сВ cf и cd — линии пластических шарниров.
Рис. 21.30
В горизонтальной плоскости остается только контур, отмеченный цифрами 1—4. Внутренняя часть контура опускается вниз, а внешняя приподнимается вверх. Для центрально нагруженной квадратной пластинки Р 6,63 А1п л.
Рис. 21.28
На рис. 21.28 показана прямоугольная пластинка с отношением сторон 2а61, нагруженная в центре, у которой разрушение происходит так же, как у квадратной пластинки, тоже нагруженной в центре, но в которой невозможно приподнимание контура; и Я 8МПЛ.
Здесь происходит вращение частей 1—2—3—4 и 1'—2'—3'—4' вокруг осей 1—2 и 4'.
Бесконечная пластинка, шарнирно опертая по двум параллельным сторонам. Схема разрушения такой пластинки показана на рис. 21.29. Здесь образуются кольцевые пластические шарниры; предельная нагрузка Р 10,28 Мпл.
Кинематический механизм прямоугольной пластинки при свободном опирании. Для прямоугольной пластинки с отношением длинной стороны к короткой меньше 3 (аb 3) при свободном опирании контура возможно приподнимание в углах по схеме, аналогичной рис. 21.27.
Для сосредоточенной силы, приложенной в произвольном месте и при условии, что механизм не образуется по схемам рис. 21.26, пластический механизм показан на рис. 21.27. Пластинка превращается в восемь жестких дисков. Диски —IV вращаются вокруг осей I—, 2—2, 3—3 и 4—4, а диски V—VII — вокруг осей 1—2,
2—3, 3—4 и 4—1, лежащих на контуре пластинки. Внешние участки, отсекаемые осями вращения 1—ч4—4, приподнимаются над опорным контуром.
После определения положения осей вращения 1—4-
4—4 пластинка может рассматриваться как многоугольник с шарнирным закреплением по всему контуру и без возможности приподнимания краев. Предельная нагрузка для такого многоугольника определяется по формуле (21.38). Н 7
Частные решения для квадратной пластинки с расположением сосредоточенной силы на четверти диагонали (Л С0,25, см. рис. 21.25) дают Р8,4Л1пл.
Треугольная пластинка. Схема пластического механизма треугольной шарнирно опертой пластинки показана на рис. 21.30,а, а со свободным шарнирным опиранием— на рис. 21.30,6.
В первом случае образуются криволинейные шарниры, очерченные по логарифмической спирали, а во втором случае — только линейные шарниры с возможностью вращения жестких дисков и приподнимания углов. В этом случае положение линейных шарниров определяется в соответствии с формулой (21.48). В частном случае для равносторонней пластинки по схеме 21.30, а Р9,14МПЛ, а для свободно опертой по схеме 21.30,6 Р 6,92 Мпл.
21.4.5. Пластинки, загруженные равномерно распределенной нагрузкой
Схемы возможных пластических механизмов шарнирно опертых пластинок при равномерно распределенной нагрузке со свободным и несвободным опиранием практически одинаковы и погрешность составляет 5—7. На рис. 21.31 показан ряд возможных схем образования пластических механизмов.
Пример 21.5. Расчет прямоугольной пластинки при шарнирном опирании и равномерной нагрузке Р производится следующим образом. Приняв схему пластического механизма (рис. 21.32), определим прежде всего объем призмы со скошенными гранями, получающуюся при опускании точек с и с' на единицу:
V -ab( 2 1).
(21.49)
Работа внешней нагрузки будет равна A PV. Затем определяем работу внутренних сил, считая, что в пласти-
402
РАЗДЕЛ 21. РАСЧЕТ КОНСТРУКЦИИ ПО ПРЕДЕЛЬНОМУ РАВНОВЕСИЮ И УЧЕТ ПОЛЗУЧЕСТИ
ческих шарнирах действуют изгибающие моменты Л1Пл U Мпл (4 ctg а 4 ctg Р 0 ). (21.50)
Углы аир определим из условий
ctgtt ctgp-—. (21.51)
a ctg а
Угол 0 4а — двухгранный угол в шарнире сс'.
6)
С Су
о)
Рис. 21.31
Рис. 21.32 Введем отношение k—bja и запишем
(2.52)
Нагрузка определяется из уравнения UA:
1
P(Q- 24Жпл (1-Qfe
P(l) ab iЁ (2153
Обозначим
тогда
(0
1 fe2 —. (1 — ) (2 )’
P(Z f(Q- (21.54)
ab
Теперь требуется определить минимальное значение Р(С) при 0 С 1 т. е. определить положение точек с и с'у при которых Р(С) минимальное. Для этого достаточно решить уравнение
4S-0.
что приводит к квадратному уравнению
1 —;
№
0
с решением
Подставляя это значение в (С), получаем 24МПЛ
(S) minP( ).
(21.55) Для квадратной пластинки ( 1) 0 24МПлд2. Условие С0 приводит к схеме пластического механизма, показанного на рис. 21.31,6.
Для правильной многоугольной плиты с к сторонами схема пластического механизма показана на рис. 21.31, в. Объем пирамиды с высотой, равной единице
1 n9t. 2п
TRksm
где R — радиус описанной окружности.
Работа внутренних сил на системе радиальных пластических шарниров
и Мпл 2S ctg а 2МП„ к tg .К
Предельная нагрузка после простых преобразований приобретает вид
Р
Шп
Для равностороннего треугольника ?а сторона треугольника) и
Р:
УГ
(а —
8МП
Для квадрата получается приведенный выше результат. В пределе для круга (k- оо)
Р :
6МП R2
Определение схем, показанных на рис. 21.31, г и д, сложнее. Для треугольника можно ввести две координаты точки пересечения шарниров (точки с) и и и. Как функции этих переменных можно определить объем пирамиды V(u, v) и работу внутренних сил на линейных шарнирах u — MUnL(u, v). Тогда предельная нагрузка будет функцией двух переменных
Р(и, о) Лпл
(. V) V (и, о)
21.4. ПРЕДЕЛЬНОЕ РАВНОВЕСИЕ ПЛАСТИНОК
403
Положение точки с (координаты и и v) найдем как решение системы двух нелинейных уравнений
dL (и, у) L (и, у) дУ (и, у)
dw V (а, у) dw
dL (иу у) L (и, у) дК (и, у)
0;
dv
V (и, у)
ди
0.
Аналогично решается задача для трапеции. В этой задаче уже три переменных. Две — координаты точки с (и, и). В силу того что точка с' находится на прямой са, достаточно ввести одну координату для этой точки (о) — расстояние точки с' от с или а. В вертикальной плоскости точки с и с' лежат также на прямой ас, следовательно, в качестве характерной точки можно взять только точку с. Если ее перемещение приравнять единице, то перемещение точки с' будет ас'lac.
Объем усеченной пирамиды для такой фигуры будет функцией трех переменных У(, v w), точно так же, как работа внутренних сил на углах переломов в пластических шарнирах UMUnL(u, у, w). Координаты иу у, w находятся из решения нелинейной системы трех уравнений
L(UyVyW) L(u,v,w) дУ (иу vt w)
dl
V (и у Vy w)
di
0 ( Uy Vy w).
Решение такой задачи без использования вычислительной техники требует больших затрат времени, в основном на простые алгебраические операции.
21.4.6. Предельное равновесие пластинок, защемленных по контуру
Образование пластических механизмов в пластинках, контур которых целиком или частично защемлен, происходит с образованием пластических шарниров около защемленных частей контура. Должен образоваться замкнутый криволинейный пластический шарнир (рис. 21.33), для того чтобы образовался пластический кинематический механизм. Этот шарнир может быть расположен целиком внутри пластинки, но может касаться контура пластинки.
В радиальных шарнирах текучести работа внутренних сил
2я
Рис. 21.33
где r(Q)—уравнение контура криволинейного шарнира в полярной системе координат с центром в точке с. Работа в криволинейном шарнире
?я
) о
где Мпл — предельный момент в криволинейном шарнире.
26
Для плиты с защемленным контуром, нагруженной сосредоточенной силой, предельная нагрузка
2л
Р Мпл М'пл J (l dB. (21.56)
б
Для защемленной пластинки при Мпл—М’пл работа радиальных предельных моментов равна работе моментов по криволинейному шарниру. Очертание криволинейного пластического шарнира —это логарифмическая спираль с уравнением г(в)?0есв.
Для любой пластинки, защемленной по всему контуру и нагруженной сосредоточенной силой, предельная нагрузка Я 4яМпл.
Пластинки, защемленные по контуру и нагруженные равномерно распределенной нагрузкой
Прямоугольная пластинка имеет схему пластического механизма, показанную на рис. 21.34. В дополнение к линейным пластическим шарнирам в поле пластинки образовались пластические шарниры вдоль защемлений. Работа внешних сил определяется с учетом (21.49). Работа внутренних сил по формуле (21.52) должна быть дополнена работой контурных пластических шарниров
Д17 4Д4ПЛ' к
где k ba.
Рис. 21.34
Общее уравнение для предельной нагрузки:
м(- .)(7ГГч7)
Р
(2 ) аЬ
2Кл АС)
ab
7(0-
Это уравнение практически не отличается от уравнения (21.54) для шарнирно опертой плиты, за исключением слагаемого Мпл — предельного момента у защемления. Из этого следует, что положение точек с и с' не зависит от способа опирания пластинки. Если Мпл МПЛу то работа изгибающих моментов на линейных пластических шарнирах внутри пластинки равна работе изгибающих моментов на контуре. Последние имеют знак, обратный моментам по линейным шарнирам внутри пластинки.
Общий случай. Предельная равномерная нагрузка на защемленную по всему контуру пластинку определяется из формулы
2я
. з- -т)“в
Я — 6Л1ПЛ -
2л
(21.57)
г2 dd
404
РАЗДЕЛ 21. РАСЧЕТ КОНСТРУКЦИИ ПО ПРЕДЕЛЬНОМУ РАВНОВЕСИЮ И УЧЕТ ПОЛЗУЧЕСТИ
Таблица 21.6
Предельные нагрузки для круглых и эллиптических пластинок
Схема
пластинки
Предельная нагрузка
Схема механизма и примечания
2г
6Л1ПЛ
Пэ
rR — 2r‘
2г
mint 1 buillii Р
rr" 1
Ь 2ft 6Мпл
' (’-’г)
f 2r t
iiniiliiiiil P
6Mn
ПЛ
При r — R 11,26МПЛ
R2
р определяется как решение уравнений
г 0,606?
“Tt-
- in —) 0;
Р г 0,606?
1, R 1 In —
Р
з1 „-
Р3 г
№
?яАпл
1
4
VR2 — r2
2Мпл (JI“ P sin
Шарнирное опирание на часть контура
2я
b
Сила в одном из фокусов. Формула действительна при
ъ
Продолжение табл. 21.6
Схема пластинки
Предельная нагрузка
Схема механизма и примечания
КЁР
я М„
а? 62 1 аЬ
При равномерной нагрузке
2Af
пл х
За2
x(l3S-i)
Формулы действительны при
JLI VT
Р min (Р1э Рг); Рх
6М„
I1-—
I (1—Т))(
R? (1-ЗСЧ)
6МПЛ (1-С)
2(1 — Зса 2с3)
Уравнение линейного пластического шарнира г(0) йо-
’ ch Ь (0 а) ’
где b и а — постоянные;
Криволинейный шарнир проходит вдоль контура; при этом
(г')2
- гг
рТ4
12МП
Если знак неравенства обратный, то криволинейный шарнир отходит от защемленного контура.
Равносторонний 6-угольник, описанный вокруг окружности радиуса R имеет ту же предельную нагрузку, что и круглая пластинка радиусом Rt защемленная по контуру:
Р :
12 Мп R2
Эта нагрузка в два раза выше предельной для шарнирно опертой пластинки.
В табл. 21.6 приведены предельные нагрузки для некоторых типов пластинок.
21.4.7. Пластинка с отверстием при равномерно распределенной нагрузке
Квадратные пластинки с квадратными отверстиями
Пластинки с отверстиями рассчитываются так же, как пластинки без отверстий, — выбираются схемы пластических механизмов, для которых определяется нагрузка.
21.4. ПРЕДЕЛЬНОЕ РАВНОВЕСИЕ ПЛАСТИНОК
405
В квадратной пластинке с центральным отверстием (рис. 21.35, а) предельная нагрузка
24Мпл,
где
Р -
а2
h (0;
1
1 -2 2
а) Са
Если отверстие расположено между диагоналями (рис.
21.35,6), то схема пластического механизма не отличается от
схемы для пластинки без отверстия Р
—“МО;.(0
1
1- 1.5Р
пластинки (рис. 21.35, г), определяется также сравнением двух схем:
(21.58)
Функция (С, tj) определяется при помощи функции ME. П) и 5(Е, г), F2(E, r)min ME, г), 5(С, т),' где
h (E, Л)
(1,5 —л— О
1-зр (1-о-(2л С- I)2 (2-4л Е)
Если пластинка защемлена по контуру, то учитывается работа изгибающих моментов в защемлении.
Предельная нагрузка для пластинки с центральным отверстием (см. рис. 21.35, а)
р _.
24Afn а2
U (Е)
7i (Е)
24М„
а2
в (0;
1
1-ЗР 2Е3
Предельная нагрузка для пластинки с отверстием между диагоналями (см. рис. 21.35,6)
а2
а (О
24 М„
а2
(О.
Предельная нагрузка для пластинки с отверстием на диагонали, но не перекрывающим центр пластинки, определяется как минимальная из двух:
94 М 24М„П
Pi fa (Е Л) ; h (Е л);
л)
1
1-6т)Е2 Е3 ’ 24 Afl
В случае, когда отверстие расположено на диагонали и не пересекает центра плиты (рис. 21.35, в), возможны две схемы пластических механизмов: с центром в точках с и с'. Действительная предельная нагрузка определяется по формуле
Р. а2
где
Fi( , ti) min t3(S, Ч), М ,Т1);
1 — 0,5 fa (? Л), _ 6tiS2 3 :
ft ( . Л) J _ 3-2 2;3 (1 0.5(l-DH-2n)(l-t)-CO-0.5Ol 1 Я (1 — Л) — 0.5C (1 — 0,50 J'
Функция f3(C, r) соответствует первой схеме с центром в точке с, функция ч(С, Ц) —второй схеме с центром в точке с'.
Предельная нагрузка для пластинки с отверстием, расположенным на диагонали, но перекрывающим центр
р. 2т2- и (С. ч ft (S. ч);
fs (S. ц)
1
T)(l-Ч)(1-ЗР 2 )
Р min(Px Ра).
Предельная нагрузка для пластинки с отверстием, перекрывающим центр (см. рис. 21.35,г):
94 М-24 Mrtn
т ПЛ g f v
Pi ——— 5 К. л) —— h ( . n);
(t. л) 1 З г (1-0-(2n 5-1)2X X (2—41 — 0Г1;
f (Ct h (C a2 a2
P min (Px, P2).
В тех случаях, когда не все стороны пластинки защемлены, Мпп учитывается с коэффициентами 0,25; 0,5 или 0,75, если защемлены соответственно одна, две или три стороны.
406
РАЗДЕЛ 21. РАСЧЕТ КОНСТРУКЦИЙ ПО ПРЕДЕЛЬНОМУ РАВНОВЕСИЮ И УЧЕТ ПОЛЗУЧЕСТИ
Круглая пластинка с круглым отверстием (р и с. 21.35, д)
Предельная нагрузка определяется как минимальная из двух:
бМпЛ
Pl
fю (С. ч);
Ь (С. л) i-3 (1—3 2 чГ1;
1-С
и (S) ' J _ 3 2 _j_ 23 ’
р niin (Р1у Р2).
Первая нагрузка соответствует пластическому механизму в виде конуса в центре пластинки, вторая нагрузка соответствует конусу с вершиной в центре отверстия.
Если края пластинки защемлены, то Pi и Рг определяются с добавочными членами
Pi
6МП
R2
Чю(1 Л)
R2
fi а. л)
1
1 — 3 2 т) ’ 6М'
Я2
1
и (С)
7i3 (О;
1-3 2 2 3
Я2
Р min (Pi, Р2).
Безмоментные оболочки. Для безмоментной статически определимой оболочки задача решается просто. В этой оболочке действуют только нормальные силы Nа, Атр и перерезывающие силы Т (см. раздел 14). Эти силы могут быть определены как функции параметра внешней нагрузки Na PN af —PIVp, T PT .
Подстановка этих выражений в какие-нибудь условия пластичности дает предельное условие Ф(Р,N , Лгр,Т )0. Фактически задача заключается в решении алгебраического уравнения Ф(Р)0, корень которого Р дает величину предельной нагрузки.
Моментные оболочки. Расчет оболочек прежде всего должен проводиться с учетом возможных разрывов внутренних сил и скоростей деформаций. Если на какой-то линии происходит разрыв сил, то деформации должны быть непрерывными и, наоборот, разрыв деформаций может происходить только по линии, где внутренние силы непрерывны.
Возможен приближенный расчет оболочек кинематическим методом. Для этого по каким-либо соображениям выбирается схема пластического механизма, для которого определяется соответствующая нагрузка. Основными соображениями по выбору пластического механизма являются данные эксперимента. Однако следует иметь в виду, что пластический механизм оболочки является пространственным в отличие от стержневых систем и пластинок. Наиболее удачные результаты получены для цилиндрических, конических и пологих оболочек.
21.5.2. Расчет осесимметричных оболочек
Общие уравнения. В осесимметричной оболочке (оболочка вращения) при осесимметричной внешней нагруз-
21.5. ПРЕДЕЛЬНОЕ РАВНОВЕСИЕ ОБОЛОЧЕК
21.5.1. Общие положения расчета оболочек
Определение несущей способности оболочек связано с большими трудностями вычислительного порядка. Точные решения могут быть получены и представлены в конечном виде только для ограниченного числа простейших оболочек. Например, определение предельной нагрузки для пологой оболочки на прямоугольном плане при равномерной нагрузке связано с очень большими вычислениями.
В целом общая задача точного расчета может быть сформулирована так: определить максимальное значение параметра внешней нагрузки Р при выполнении дифференциальных уравнений равновесия оболочки для внутренних усилий с одновременным соблюдением условий пластичности в виде неравенств.
Большинство решений проводится следующим образом: задаются системой дифференциальных уравнений равновесия оболочки (см. раздел 14) и уравнениями пластичности P(N, М0. Часто эти уравнения называют конечными соотношениями. Затем задаются возможными полями скоростей перемещений, согласуя их с ассоциированным законом пластического течения. Совместное определение внутренних уравновешенных сил и скоростей перемещений, связанных с ассоциированным законом пластического течения, дает предельное их распределение (третья теорема предельноо равновесия).
ке действуют внутренние силы, показанные на рис. 21.36. Уравнения равновесия следующие:
— (гЛУ- -SJ-Q P7u 0; r т Ks
(rQy- ±-н.
1
‘ S PQw — 0
(г му — —Tr — Q 0.
г
(21.59)
Здесь Р — параметр внешней нагрузки; qu и hc — интенсивность внешней нагрузки по касательной к образующей и по нормали к ней. Исключение из этой си©не-
21.5. ПРЕДЕЛЬНОЕ РАВНОВЕСИЕ ОБОЛОЧЕК
40 7
мы перерезывающей силы Q приводит к системе двух уравнений
(rN)' — г' S
— UrMY-r'T Prqu 0;
а
(rMyirTY-rN g-S'
Граничные условия могут быть такие: шарнирное опирание M(R) — 0, скользящая заделка N(R) 0, защемленный край — граничные условия произвольные.
Обозначим u(s) и ш(5) скорости перемещения по касательной к образующей (вдоль qu) и по нормали (вдоль qw). Скорости деформаций, соответствующие силам N, М, S и Ту выражаются через скорости перемещений так:
1
о j Prqw 0.
eN u
(21.61)
Г U г.
хт —— — И'.
rRs г
Граничные условия для перемещений: шарнирное опирание и защемление — u(R) w(R) 0, скользящая заделка ш(?)0, шарнирно подвижное опирание u(R) cos a-w(R) sin а0.
Совместное решение систем (21.60) и (21.61) невозможно, так как отсутствует связь между силами и скоростями перемещений.
Большинство задач решается в предположении, что по всей поверхности оболочки выполняются уравнения пластичности и ассоциированного течения:
дФ. дФ
Ф(Л-, М, S, Т)—0; гКю’
дФ
а®
м дМ т дТ
(21.62)
В ряде случаев такая задача может быть решена. Произвольное распределение нагрузки вдоль образующей обычно приводит к весьма сложным исследованиям режимов течения, описываемых формулами (21.62).
Решить задачу можно, ограничившись статической постановкой в виде уравнений равновесия (21.60), соответствующих граничных условий и условий пластичности в виде неравенства Ф(, М, S, Т)0. Определение предельной нагрузки Р — это задача математического программирования.
Приведение к задаче математического программирования
На образующей оболочки назначается и-И точка, лучше всего с одинаковым расстоянием между ними Д (рис. 21.37). Уравнения равновесия записываются в конечных разностях. Для этого вводятся векторы неиз вестных N(N0., Nn) S(S0, )', M(M0,. Mn) Т— (Г0,. Тп)'. Вектор всех неизвестных состав ляется из этих векторов X'(N S', М', Г'). Всего век тор X имеет 4(n-fl) компонент. Дополнительно вводит ся точка усилия в которой равны усилиям в тсше 1
Это нужно для составления 2п уравнений в конечных разностях для точек 0, 1,., п— 1.
Уравнения равновесия (21.60) приводятся к эквивалентной матричной форме
(21.60)
А В С D
N
р
lo-P
s
G К L V
IW
р
(21.63)
Подматрицы А, В,., V являются конечно-разностными аналогами дифференциальных операторов, составляющих уравнения (21.60):
7и(7 .
„П—1
Пп— 1
w 0
), Qw — (qw ,
).
Рис. 21.37
По конкретным граничным условиям вводятся дополнительные уравнения. Например, при шарнирном опирании Мп0.
Условия пластичности записываются для каждой точки отдельно. Например, условия Треска записываются для каждой точки в матричной форме
1
1
0
1
0
1
0
—1
0
0
1
0
1
0
1
0
—1
0
—1
0
—1
0
—1
0
1
Агп
1
пл
X
(Nt Г
feh
Объединение таких условий для точек 0, дает блочную форму матрицы условий
tT
X —
0.
(21.64)
п—1
(21.65)
L'IULyJ 1
В итоге вся необходимая информация сформулирована в виде линейных равенств и неравенств (21.63) и
(21.65). Определение предельной несущей способности сводится к нахождению Р макс Р (X) при условиях (21.63) и (21.64). Это задача линейного программирования.
21.5.3. Некоторые типы оболочек вращения
Сферическая оболочка при равномерном внешнем давлении 27. Схема оболочки показана на рис. 21.38. Безмоментное решение в соответствии с уравнениями (21.60) будет
М Т 0; -V — S; Р .R
408
РАЗДЕЛ 21. РАСЧЕТ КОНСТРУКЦИЙ ПО ПРЕДЕЛЬНОМУ РАВНОВЕСИЮ И УЧЕТ ПОЛЗУЧЕСТИ
Решение с учетом изгибающих моментов имеет вид
Р
8МП
Rh L V 4 RS (a) где ft — толщина оболочки;
12
(21.66)
S(a)
я a
1пЧтт)
sin a
к
0
1
2
3
4
5
6
6,7
ч
1,877
1,894
1,955
2,048
2,178
2,355
2,565
2,743
р
0,73
0,73
0,728
0,726
0,723
0,715
0,702
0,681
MHljlllllllU
Пологая оболочка вращения с шарнирным опирани-
ем. Для пологой оболочки отклонения от сферической формы несущественно сказываются на величине предельной нагрузки. Предельная нагрузка для оболочки, показанной на рис. 21.39,
R
zcp- §z(r)dr.
(21.67)
Решение А. Р. Ржаницына 24 для пологой оболочки, поверхность вращения которой задана уравнением
з (верхняя енной к вер
2 п h
(—1 т) - Предельная нагрузка (верхняя оценка) для сосредоточенной силы, приложенной к вершине,
Р — TtNпл
Для равномерно распределенной нагрузки 3AU 2м h
Р U1 ) ; (Лпл тЛ)-
о ми hil U
mi in mm
ЛТП
у
.-у
Пологая коническая оболочка (рис. 2 1.4 1)
При обозначениях
Р — tg ф; a R0R
предельная нагрузка
Р 2лМпл Р),
где
ЗР8 (1 — ) (1 — 5aa-f38)
3 (1—) (ltg2 ф)
Если окажется, что i(a, Р)1, то следует принимать ij(a, Р) 1.
Решение А. Р. Ржаницына для такой оболочки 24 (верхняя оценка при R0 — 0) дает
(21.68)
♦ (. Р)
P Aw(i y).
енной нагр'
Ьт)-
Для равномерно распределенной нагрузки ЗЛГПЛ f j
Р
R2
Несущую способность пологой сферической оболочки при действии сосредоточенной силы, приложенной в вершине, можно оценивать по следующим формулам (верхняя оценка):
а) шарнирно неподвижное опирание (рис. 21.41)
Р от п№ (0,5 0,09 Г);
714,0 V т-;
б) шарнирно подвижное опирание: при ri2
Р 5 ах л № 1 г4 ;
при г12
Рис. 21.40
Пологая оболочка с защемленным краем (рис. 21.40). Пластические шарниры образуются по радиусу pR. Для
1
оболочки с размерами А, 4 —6,7 предельная на
Rh
грузка
6AfnJI Р-—— (Я).
Я2 YV '
1 2
р ат л№ I 1- — t2 4 5
4 Vl
45 VI
в) защемленный опорный контур
1 v(4 — 6v — 3v2)
р — aT лЛ 11 — —.
2 Cl — 2v) 4 Ч- т)'
Параметр у определяется как решение уравнения V2 (7-'г
) Т)
2(1— 2Y)
21.5. ПРЕДЕЛЬНОЕ РАВНОВЕСИЕ ОБОЛОЧЕК
409
Пологая оболочка на прямоугольном плане с шарнирно подвижным опиранием при действии равномерно распределенной нагрузки. Обозначив отношение большей стороны к меньшей и —bа, получим уравнение срединной поверхности
г(, У)
i-
2а2
1Л
и2 '
Главные кривизны можно приближенно определить как
J_ k. kx а2
а2
Пусть приведенная нагрузка определяется в виде
Q'22
Р , где -М — предельный момент вдоль оси х,
Мх
1Г1пл
а — предельный момент вдоль оси у. Введем параметр ортотропии
пл
ы
При условии, что 1224 —, предельное значение
Г
приведенной нагрузки:
6 (и2 Р2) 2ыр (2fe 3) Зи2
Р
Если 61224 —,то (при Р1) предельное значеР
Р
80 (к)2
к2 126324
21.5.4, Пологие оболочки с отверстием 7
На рис. 21.42 показаны пологие оболочки на квадратном плане и сферические. Оболочку на квадратном плане примем в виде эллиптического параболоида с урав-
6)
й)
а а
б)
г)
1
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
ф,
1,72
1,73
1,77
1,82
1,92
2,10
2,34
2,87
ф2
2,0
1,98
1,92
1,82
1,68
1,50
1,28
1,02
К
0,4
0,5
0,5
0,6
0,6
0,6
0,7
0,7
Аналогично возможны две схемы пластических механизмов для оболочки на круглом плане (рис. 21.42, в, г), для которых
Рв 8яМпл-(-Фз, Рг 8яМплФ4. (21.70) п п
Здесь Р — суммарная нагрузка на оболочку.
1
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
Ф,
0,458
0,461
0,463
0,420
0,429
0,5
0,527
0,565
Ф
1,0
0,99
0,96
0,91
0,84
0,75
0,64
0,51
0,8
0,8
0,8
0,8
0,8
0,8
0,8
0,8
нением срединной поверхности z—f(x2-y2)a2, где 2 — высота оболочки в вершине. Схемы пластических механизмов могут быть такие, как на рис. 21.42, а и б. Предельные нагрузки, соответствующие схемам а и б, определяются по формулам
Ра 32 Мт 4" Ф„ Рб 32 Мпл Ф-2- (21 -69)
п п
Здесь Р — суммарная нагрузка на оболочку, предельное значение которой выбирается как меньшее из Ра и Ро.
21.6. МЕТОДЫ РЕШЕНИЯ ЗАДАЧ ПОЛЗУЧЕСТИ
21.6.1. Уравнения состояния для задач ползучести
В тех случаях, когда деформации ползучести линейно зависят от напряжений, уравнение состояния имеет вид
t
е (0 еУ () j L (t, т) ат, (21.71)
to
где Ev(t) —a(t)E(t) -упруго-мгновенные деформации; выражение L(t, т) называется функцией влияния и в зависимости от конкретного типа теории ползучести имеет различный вид.
Для уравнения состояния упруго-вязкого тела ( () const)
Е—Н H(t — т) rtl
1(Лт) 1Гехр—(2К72)
где Е — мгновенный модуль упругости; Я — длительный модуль упругости; ц — коэффициент вязкости.
Ползучесть многих полимерных материалов удовлетворительно может быть описана функцией влияния ( (0 const):
1 ’ т а 21 -73
410
РАЗДЕЛ 21. РАСЧЕТ КОНСТРУКЦИЙ ПО ПРЕДЕЛЬНОМУ РАВНОВЕСИЮ И УЧЕТ ПОЛЗУЧЕСТИ
Это так называемая функция со слабой особенностью: при т—t L(t,) оо,
Для железобетона наиболее широко распространено представление функции влияния при помощи другой функции:
1м- мвдс(,'4 (2ь74)
Здесь Е(т)—переменный модуль мгновенных деформаций, который часто принимается в виде
Е (т) Едл (1 — ае-рт) (0 а 1).
В начальный момент, когда т0, начальный модуль деформаций равен: Е(0)ЕДЛ(1—а), при очень больших т (старый бетон) Е ЕДЛ.
Функция C(t, т), наиболее удачно описывающая свойства линейной ползучести бетона, предложена А. В. Яшиным:
С (t, х) Аг (1_ о еъ (“т)
Аа (1-e-v. ).
Функция L(t, т), которая определяется видом теории ползучести, отражает влияние на деформации ползучести приращений напряжений Да(т), приложенных в момент x(xoxOt эффект от которых наблюдается в момент времени t.
Функция C(t, т), определяемая из функции L(t,x):
ВЬ75)
называется мерой ползучести материала и имеет размерность (см2кг), обратную размерности модуля деформаций. Физический смысл этой функции виден из уравнения (21.71), если считать напряжения постоянными а(т) а(0) —const и обозначить деформации ползучести как
еп () а (0) С (, 0)-е (t0). (21.76)
Здесь еп(0—деформации ползучести; e(t0) — мгновенно-упругие деформации, образовавшиеся в момент приложения напряжений o(t0). Обычно принимают С(, t) 0. Тогда функция C(tftQ)En(t)o(to) равна деформации ползучести в момент, приходящейся на единицу напряжения, приложенного в момент t0.
Испытаниями материалов на ползучесть может быть определена только мера ползучести C(t,r). Часто используется эквивалентная мере ползучести величина, называемая характеристикой ползучести:
Ф(, t0) E(t0)C(t, t0). (21.77)
Характеристика ползучести — это отношение деформаций ползучести, проявившихся ко времени t от напряжения, приложенного в момент времени t0 к упругим деформациям, образовавшимся в момент t0 от этих же напряжений. Деформации ползучести при помощи характеристики ползучести записываются как
еп (0 в(о)ф(Л tQ).
Как правило, решение задач линейной ползучести связано с решением уравнения состояния (21.71) относительно напряжений. Это уравнение называется интегральным уравнением Вольтерра второго рода. Его
решение в общем виде записывается при помощи резольвенты R (t, т), определенным образом связанной с функцией L(t, т), которая в математике называется ядром интегрального уравнения:
t
Е() бУ (0 J R (t' Т) 8У (Т) dX (21 ‘?8)
to
Ядро и резольвента связаны уравнением
t
L (t, т)-Я (, т) Jl (t, s) R (s, т) ds.
X
Во многих случаях решение этого уравнения затруднительно и возможно только для относительно простых выражений.
В тех случаях, когда L(ty т) есть функция только разности t—т—времени выдержки под нагрузкой, наиболее удобно пользоваться преобразованием Лапласа для нахождения резольвенты. Преобразование Лапласа для ядра выглядит таким образом:
ОО
L (s) j L (0) eL9 dQ. b
В этом выражении b0 при одностороннем преобразовании, Ь— оо при двустороннем преобразовании. Изображение резольвенты записывается так:
Более подробно о применении преобразования Лапласа см. 6, 7.
Задача релаксации. Эта задача решается для постоянных деформаций е , вызывающих мгновенные напряжения а Ее . С течением времени эти напряжения уменьшаются (релаксируют) по закону
t
a (t) сто 1 — р (). p(t) Е () f R (t, т) dx. (21.79)
U
Функция р(0 называется функцией релаксации. Для упруго‘Вязкого тела с ядром (21.72) функция релаксации имеет вид
Если мера ползучести имеет вид С(, т)С0(1—
— е"“т(т)), то ядро интегрального уравнения такое:
L(t, т) EC0Ye-v(T).
Его резольвента R(tyi) также имеет вид экспоненты R (t, т) —ЕС0 ve-V(iEC0)(-x)
Величина ЕС0 обычно обозначается как предельная характеристика ползучести фоо С0. Функция релаксации при этом такая:
Р(0Т—(l — e-v(Ip)). (21.80)
I Фоо
Подстановка ее в (21.79) дает выражение для релаксации напряжений
,0-—— -J-).
1Ф 1 ф, )
21.6. МЕТОДЫ РЕШЕНИЯ ЗАДАЧ ПОЛЗУЧЕСТИ 4Ц
Для времени t— о©
СТ(оо)
О
1 Р„
(21.81)
Такая зависимость достаточно хорошо описывает различные законы релаксирования и может быть испольэовона при приближенных оценках решений задач линейной ползучести.
Обобщенная задача релаксации. Если деформации являются вынужденными и изменяются во времени по закону е (t), то определение напряжений является задачей обобщенной релаксации. Напряжения находятся по формуле (21.78).
Для ядра (21.72) при e (t) e f равномерное увеличение деформаций
о(0 Ц( — H)l — е 71).
Задача обобщенной релаксации чаще всего встречается при определении температурных напряжений, когда распределение температуры T(t) вызывает температурные деформации e(t) aT(t).
Линейная теория старения. Эта теория постулирует параллельность кривых, иллюстрирующих меру ползучести С (f, т). Суть ее в следующем: если известна кривая C(t,ti), то кривая Ct, t2) при i может быть получена как разность C(t, tx)—C(t2,t 1), т. е. кривая C(tyt2) получается из уравнения кривой C(tytx) при помощи параллельного переноса (рис. 21.43). Заштрихованные на этом рисунке площади одинаковы и кривые аЪ и а'Ь' подобны. В этой теории часто оперируют характеристикой ползучести как функцией одного аргумента ф(0 — EC(t,t0). Уравнение состояния по этой теории такое:
г(1)
d
Обычно это уравнение приводится к дифференциальному вида
± j-(.a).
dtp Е В это уравнение вместо переменной t вводится новая переменная ф, играющая роль условного времени. Решение относительно напряжений будет:
t
а (0 Ее (t) — Е С е(х)ех) dx.
J ат
U
Уравнение релаксации e(f)const имеет вид
а () о (1 — (21.82)
Эта теория достаточно проста в части математических решений, но в ряде случаев она не в состоянии правильно описать явление ползучести, в частности при резко изменяющихся напряжениях или деформациях.
Нелинейные теории ползучести. При расчете.строительных конструкций часто используются интегральные уравнения состояния типа (21.71), но учитывающие нелинейные свойства ползучести.
Уравнение нелинейной ползучести в теории Маслова — Арутюняна:
t
о (t) С
®'0 -Щц J '- (. т) q а (т) dx. (21.83)
to
Здесь ф(сг)—нелинейная функция напряжений. Например, ф(ог)ат при га1 приводит к обычной линейной ползучести.
Уточненная нелинейная зависимость для бетона использует нелинейную меру ползучести C(t, т, а) ф(а, t—т)Х XC (t, т), где ф(а, t—т) — функция, зависящая от уровня напряжений; с увеличением длительности действия напряжений (ростом t—т) эффект нелинейности сглаживается.
Уравнение состояния
ею
-Чтят
f С((.,.Й2Л.
щ иТ
и
Нелинейное уравнение состояния по Ю. Н. Работнову 41:
t
q8(0 (J()J L(t — x)a(x)dx.
to
Другие типы теории ползучести приведены в разделе 12.
21.6.2. Методы решения задач линейной ползучести
Расчет статически определимых систем производится при условии, что напряжения от ползучести не изменяются а(07 где а0 — начальные напряжения или напряжения, изменяющиеся во времени. Учет ползучести производится только для деформаций по формулам:
если а0const, то
и(0 а (1Ф(0),
где и0 — начальные деформации, определяемые упругим расчетом;
если Go функция времени, то деформации определяются вычислением интегралов
А N(t.Гг (Г)
“(0 Т7Г 1 L’ т)
B(t)
В( т)
dx.
Здесь N(t) —изменяющееся во времени усилие; Bt) — жесткость; L(ty т)—функция влияния.
Расчет статически неопределимых систем. Перераспределение усилий в статически неопределимой системе от действия внешних сил возможно только тогда, когда система составлена из элементов с различными свойствами ползучести (неоднородная система).
412
РАЗДЕЛ 21. РАСЧЕТ КОНСТРУКЦИЙ ПО ПРЕДЕЛЬНОМУ РАВНОВЕСИЮ И УЧЕТ ПОЛЗУЧЕСТИ
В однородной системе при действии внешней нагрузки перераспределения внутренних сил не происходит.
В однородной статически определимой системе усилия от вынужденных деформаций (температура, осадка опор) релаксируют по закону
дг (t) N (t0) (1 — р (f),
где N(t0) — начальные усилия; р(0 — функция релаксации.
Применительно к железобетонным конструкциям это означает, что перераспределение внутренних сил возможно в основном вследствие неодинакового армирования отдельных элементов.
Устойчивость стержня при ползучести 40, 42. Для однородного стержня устойчивость при ползучести может быть оценена по формуле
РЛлТГ- (21.84)
1 Р
XX
m-f-1
5() 3 2
m—1.
(21.88)
Одноосное напряженное состояние. Уравнение состояния установившейся ползучести для скоростей полных деформаций (упругих и ползучести) имеет вид
е (0 Вх (0 а" (0 . (21.89)
Здесь е — скорость деформаций ползучести и упругих; Bi(t)—монотонно убывающая функция времени, стре¬
мящаяся к некоторому пределу Bk. В случае B(t)H.и m— 1 получается уравнение ползучести Максвелла.
Задача о релаксации при постоянных вынужденных деформациях е0 имеет решение
2
“1 (21.90)
а (0 ао 1 —Р (01
где Со ео — начальные напряжения;
р (0 (1-т) EQl () t
Qj (t) J Bx (t) dz. о
(21.91)
Здесь P9 — критическая сила по Эйлеру.
Устойчивость армированного стержня при линейной ползучести материала и идеальной упругости арматуры см. 40.
21.6.3. Методы решения задач нелинейной установившейся ползучести
Основные уравнения. Уравнения состояния для сплошного тела записываются относительно скоростей деформаций ползучести и имеют вид
ехх — i () (ахх — ); ; еХу (at) аху,., (21,85) 1
где о OxxGyyGzz) —гидростатическое давление;
и
Gi — интенсивность касательных напряжений; ехх,. еху,. — компоненты тензоров скоростей деформаций ползучести.
Обратное представление уравнений состояния такое:
gxx о 2g ( ) еХХУ., оху g (е) еХу,. (21.86)
где ei — интенсивность скорости деформаций сдвига. Функции f(Gi) и g(ei), как правило, определяются экспериментально при одноосном растяжении или сжатии и в ряде случаев при кручении. Например, из одноосного растяжения (сжатия) получена зависимость для установившейся ползучести
(21.87)
В уравнениях состояния (21.85) фукция (а) будет иметь вид
Эта формула обычно дает некоторое занижение релаксированных напряжений для металлов по сравнению с экспериментальными данными.
В теории старения принимается такое уравнение состояния, которое записывается относительно деформаций, а не их скоростей:
e(0 Qx (0 о"
а
Ё
1 (0
I
-J
Вг (т) йт.
(21.92)
Такое уравнение можно использовать только при постоянных или очень плавно изменяющихся напряжениях.
Релаксация напряжений определяется из решения нелинейного уравнения
EQX (t)Gm G (J0. (21.93)
Решение этого уравнения приводит к несколько большим значениям напряжений, чем решение по теории течения (21.90).
Теория старения существенно проще теории течения и наиболее широко используется в приложениях. Особенно это относится к методу изохронных кривых 41. Изохронная кривая — это зависимость напряжение — деформация, построенная для некоторого фиксированного времени. Фактически это есть зависимость а—е по (21.90) при Qi()const. Ha рис. 21.44 показана серия изохронных кривых, где первая кривая (0) есть кривая упруго-мгновенных деформаций, которая для идеально линейно упругого материала будет прямой линией, показанной на рис. 21.44 пунктиром.
Пользуясь изохронными кривыми, задачу ползучести для каждого момента времени tt можно решить как некоторую нелинейно-упругую или упруго-пластическую задачу. Для каждого момента времени будет своя нелинейная зависимость а — 8. Существенно уменьшаются сложность задачи и объем вычислений, если изохронные кривые подобны, т. е. справедлива зависимость е() zf(t)F(o). Тогда задача может быть решена как нелинейно-упругая с зависимостью e F(a), а деформации будут функцией времени. Постоянные нагрузки не будут вызывать изменения напряженного состояния установившейся ползучести, тогда как деформации будут изменяться пропорционально функции ().
Сложное напряженное состояние. Задача ползучести при сложном напряженном состоянии может быть реше-
21.6. МЕТОДЫ РЕШЕНИЯ ЗАДАЧ ПОЛЗУЧЕСТИ
413
на вариационными методами, весьма близкими к вариационным методам нелинейной теории упругости и деформационной теории пластичности.
Пусть скорости перемещений точек объема обозначены как компоненты трехмерного вектора их, иу, иг. В этих обозначениях мощность внешних сил, приложенных к части поверхности,
А (Хих Yuy Ztt) dS, s
a
где Sa — площадь поверхности, на которой действуют внешние силы X, У, 2.
Удельная мощность, т. е. мощность, приходящаяся на единицу объема, рассеиваемая внутренними силами, вследствие деформаций ползучести
У
Oi det
в l f
. 1
П(а)
J'
et dot
В
т
- оГК
Мощность, дополнительно рассеиваемая телом объемом V,
Т (а) — J П (а) dV. (21.95)
v
Второй вариационный принцип: действительное напряженное состояние а является статически возможным и сообщает минимальное значение мощности дополнительного рассеивания Т(з) min (a).
В задачах ползучести существует обобщение теоремы Кастилиано на случай установившейся ползучести статически неопределимых систем:
а) если в s раз статически неопределимой системе выделены неизвестные Х Х2,., Ха, то уравнения статического метода запишутся так:
дТ
dXt
0 (i 1, 2,., s);
(21.9)
б) скорость перемещения по направлению действия силы Рк равняется частной производной дополнительной мощности рассеивания по этой силе, т. е.
vk
дТ
дРк
(21.97)
Приближенное решение задачи. В некоторых случаях можно достаточно просто получить решение задачи 40ри тех же граничных условиях, но в предположении упругой работы — линейной или нелинейной. Обозначим это решение а0. Пусть о решение задачи с позиций идеальной пластичности при тех же граничных условиях. Например, это может быть решение по методу предельного равновесия, хотя нагрузка не предельная. Тогда а это какоето статически допустимое поле напряжений. Решение задачи ползучести разыскивается в виде линейной комбинации этих двух решений
а (К) Яао (1-Я) а. (21.98)
В этом выражении 0Я1, а оптимальное значение А определяется на основании второго вариационного принципа о минимуме мощности дополнительного рассеивания:
dt а (Я)
dX
0.
(21.99)
Полная мощность системы внутренних и внешних сил
U (u) f WdV — А. (21.94)
V
Скорости перемещений являются кинематически возможными, если они удовлетворяют на некоторой части поверхности кинематическим условиям. Наиболее часто это условие несмещаемости.
Первый вариационный принцип: из всех кинематически возможных распределений скоростей действительные скорости перемещений иХУ иу иг сообщают полной мощности минимальное значение
U (tt) min (и).
Удельное дополнительное рассеивание мощности внутренними силами при степенной зависимости в уравнении состояния имеет вид
Другой прием приближенного решения заключается в использовании упругой аналогии, когда распределение напряжений при ползучести приближенно представляется как сумма решений задач нелинейной упругости с заранее заданной степенью нелинейности:
o Cla (mx) с2 a (m2) Н b cna (mn), (21.100)
где rrii (il, 2,., n) — различные показатели нелинейности.
Коэффициенты Ci определяются в соответствии со вторым вариационным принципом
дТ (а)
0 ( 1,2, и). (21.101)
Возможно также применение вариационных методов, аналогичных методам Ритца и Галеркина, применяемых в теории упругости.
21.6.4. Расчет стержневых систем при нелинейной ползучести
Статически определимые фермы. Напряжения в статически определимой форме находят обычным статическим расчетом. Скорости деформаций находят из уравнения состояния
е (t) sign (a) Вг (t) aOT. (21.102)
Деформации (перемещения) конструкции определяют интегрированием
t
е(0 f sign a (t)J Bi (T) a (r)m d, о
При постоянной нагрузке
e (t) sign (a) om (0; t
Qx() j Bi (t) dr.
(21.103)
Пусть в ферме имеется k стержней с усилиями 2,., k). Дополнительно рассеиваемая мощ¬
ность
к
Т —Bt ) Y-4- МГ1, (21.104)
m 1 pm
i
414
РАЗДЕЛ 21. РАСЧЕТ КОНСТРУКЦИЙ ПО ПРЕДЕЛЬНОМУ РАВНОВЕСИЮ И УЧЕТ ПОЛЗУЧЕСТИ
где Fi и U — площадь поперечного сечения и длина i-ro стержня.
Систему внешних сил, действующих на ферму обозначим Ри Рп. Усилие в каждом стержне это ли-
п
нейная функция этих сил Ni 2aijPj, где ац— усилие
в Uм стержне от -й внешней силы, равной единице (Pj— 1). Выражение дополнительной мощности рассеивания
Вг (t)
h
-тт У-г
11
рт
у1 ац Pi
1
т1
дТ (Р)
Ifr
i
1
Uj Вг (t) S a li Oim,
i
где oNiFi — напряжение в i-м стержне.
Статически неопределимые фермы. Расчет статически неопределимой фермы в условиях ползучести начинается так же, как и расчет упругой фермы, с выбора основной статически определимой системы. Естественно, что расчет производится методом сил. Усилия в стержнях основной системы записываются как линейные функции внешней нагрузки и лишних неизвестных
N. ATf Е
1
а.Хг
(21.108)
(21.105)
где —усилие от внешней нагрузки; Xj (;' 1, 2 s) — лишние неизвестные; s — степень статической неопределимости.
В соответствии с выражением (21.96) составляется нелинейная система уравнений для скоростей деформаций ползучести. Это система, как и в методе сил, соответствует отсутствию перемещений по направлениям лишних неизвестных. После сокращения на В система уравнений приобретает вид
Перемещение точки приложения силы Pj по направлению действия этой силы определяется в соответствии с обобщением тборемы Кастилиано:
i
Fm
Np aikXk
ац (21.106)
(21.107)
и
kl 1,2,.
ац
s).
(21. 109)
Решение системы А,. X приводит к распределению внутренних сил при установившейся ползучести. Полное решение задачи дает ХЛ0Х, где Х — решение упруго-мгновенной задачи.
Система (21.109) может быть решена приближенным способом (см. 21.6.3). Более подробно см. 37.
Рекомендуемая точность различных приближенных методов может быть ограничена 5—10. Решение сложных задач возможно только с помощью ЭВМ. Поэтому благодаря невысоким требованиям к точности с успехом можно применить методы случайного поиска. Эти методы рекомендуется применять не для непосредственного решения системы нелинейных уравнений метода сил, а для отыскания минимального значения дополнительной мощности рассеивания.
ЛИТЕРАТУРА
К п. 21.1—21.5
1. Ахвледиани Н. В. К расчету железобетонных арок по методу предельного равновесия. Строительная механика и расчет сооружений, 1962, № 2.
2. В а р в а к М. Ш., Ду бинский А. М., Дехтярь А. С. Предельное равновесие оболочек, подкрепленных ребрами. Прикладная механика, 1966, вып. 9. т. 2.
3. Г в о з д е в А. А. Определение величины разрушающих нагрузок для статически неопределимых систем, претерпевающих пластические деформации. Труды конференции по пластическим деформациям. Изд. АН СССР, 1938.
4. Гвоздев А. А. Расчет несущей способности конструкций по методу предельного равновесия. Госстройиздат, 1949.
5. Г е н и е в Г. А. Вариант деформационной теории пластичности. Бетон и железобетон, 1969, № 2.
6. Дехтярь А. С., Дубинский А. М. Несущая способность пологих железобетонных оболочек с нерастяжимым контуром. Строительная механика и расчет сооружений, 1966, N9 4.
7. Дехтярь А. С., В а р в а к М. Ш. Несущая способность пологих оболочек с центральным отверстием. Прикладная механика, 1968, вып. 3, т. 3.
8. Дубинский А. М. Расчет несущей способности железобетонных плит. Госстройиздат, УССР, 1961.
9. В л а с о в В. В. Расчет железобетонных конструкций, работающих по второму случаю внецентренного сжатия. Строительная механика и расчет сооружений, 1969, № 2.
10. К У п м а н Д., Ланс Р. О линейном программировании и предельном равновесии. Механика, 1965, № 2.
11. Листрова Ю. П., Потапов В. Н., РудисМ. А. Предельное равновесие некоторых оболочек вращения, выполненных из материала с различными пределами текучести при растяжении и сжатии. МТТ, 1969, № L,
12. М и р з а б е к я н Б. Ю. К определению нижней границы несущей способности оболочек. Строительная механика и расчет сооружений, 1968, № 3.
13. Мирзабекян Б. Ю., Рейтман М. И. Определение несущей способности оболочек при помощи линейного программирования. МТТ, 1968, № 1.
14. Немировский Ю. В., Ра бот но в Ю. Н. Предельное равновесие подкрепленных цилиндрических оболочек. Изд. АН СССР. ОТН. Серия механика и машиностр., 1963, № 3.
15. О в е ч к и н А. М. Расчет железобетонных осесимметричных конструкций. Госстройиздат. 1961.
16. О л ь ш а к В., Савчук А. Неупругое поведение оболочек. Мир, 1969.
17. И л ь ю ш и н А. А. Пластичность. ОГИЗ, 1948.
18. П р а г е р В., Ходж Ф. Теория идеально пластических тел. ИЛ., 1956.
19. П р о ц е н к о А. М. Статический метод предельного равновесия и связанные с ним задачи оптимального проектирования. Сб. НИИЖБ Особенности деформаций бетона и железобетона и использование ЭВМ. Стройиздат, 1969.
20. Проценко А. М., Власов В. В. Применение линейного программирования к расчетам железобетонных статически неопределимых конструкций. Бетон и железобетон, 1969, № 6.
21. П р о ц е н к о А. М. Некоторые вопросы теории предельного равновесия строительных конструкций. Строительная механика и расчет сооружений, 1970, № 2.
22. Ржаницын А. Р. Расчет конструкций с учетом пластических свойств материалов. Госстройиздат, 1954.
23. Р ж а н и ц ы н А. Р. Расчет оболочек методом предельного равновесия. Сб. ЦНИИСК Исследования по вопросам теории пластичности и прочности строительных конструкций. Стройиздат, 1968.
24. Р ж а н и ц ы н А. Р. Пологие оболочки и волнистые на¬
ЛИТЕРАТУРА
415
стилы. Научное сообщение ЦНИИСК, вып. 14. Госстройиздат, 1960.
25. Р ж а н и ц ы н А. Р. Расчет цилиндрических сводов-оболочек методами линейного программирования. Строительная механика и расчет сооружений, 1966, № 4.
26. Р о з е н б л ю м В. И. Об условиях пластичности для тонкостенных оболочек. ПММ, 1960, № 2.
27. Розенблюм В. И. О расчете несущей способности идеально-пластических осесимметричных оболочек. Сб. Исследования по упругости и пластичности. Изд. ЛГУ, 1965, № 4.
28. Стрельбицкая А. И. Информационное письмо Ин-та строительной механики АН УССР, 1957, № 20; 1958, № 29.
29. X и л л Р. Математическая теория пластичности. ИЛ., 1956.
30. X о д ж Ф. Расчет конструкций с учетом пластических деформаций. Машиздат, 1963.
31. С о к о л о в с к и й В. В. Теория пластичности. Наука, 1969.
32. Ч и р а с А. А. Методы линейного программирования при расчете упруго-пластических систем. Стройиздат, 1969.
33. Greenberg Н., Р г a g е г W. On limit design of beams and frames. Trans. ASCE, 1952, 117, 447.
34. Massonet Ch., Save M. Calcul plastique des constructions, v. II, Bruxelles, 1963.
35. N e a 1 B. The plastic method of structural analysis, New York, 1956.
К П. 21.6
36. A p у т ю н я н H. X. Некоторые вопросы теории ползучести. Гостехиздат, 1953.
37. Качанов Л. М. Теория ползучести. Физматгиз, 1960.
38. Малинин Н. Н. Основы расчетов на ползучесть. Машгиз, 1948.
39. П р о к о п о в и ч И. Е. Влияние длительных процессов на напряженное и деформированное состояния сооружений. Госстройиздат, 1963.
40. П р о ц е н к о А. М. К расчету железобетонных стержней с учетом линейной ползучести бетона. Сб. НИИЖБ Прочность и жесткость железобетонных конструкций. Стройиздат, 1968.
41. Р а б о т н о в Ю. Н. Ползучесть элементов конструкций. Наука, 1966.
42. Р ж а н и ц ы н А, Р, Теория ползучести. Стройиздат, 1968.
В книге 1-й Расчетно-теоретического справочника проектировщика промышленных, жилых и общественных зданий и сооружений дополнительно обнаружены следующие опечатки:
Стр.
Строка
Напечатано
Должно быть
219
Правый столбец 12-я сверху
в табл. 7.4
в табл. 7.5
580
Формула (11.9)
г Ус
„ _ Yba (1 — а) У с
580
Левый столбец 7-я и 6-я снизу
fn, то при равномерно распределенной нагрузке вместо
при равномерно распределенной нагрузке, то вместо
582
Левый столбец 1-я снизу
тм2в
Т2М
СПРАВОЧНИК ПРОЕКТИРОВЩИКА ПРОМЫШЛЕННЫХ, ЖИЛЫХ И ОБЩЕСТВЕННЫХ ЗДАНИЙ И СООРУЖЕНИИ
РАСЧЕТНО-ТЕОРЕТИЧЕСКИЙ
под редакцией А. А. У майского Издание второе переработанное и дополненное в двух книгах Книга 2
Стройиздат Москва, К-31, Кузнецкий мост, д. О Редакторы издательства И. С. Бородина и Э. М. Осипова Технический редактор Т. М. Кан Корректоры Е. Н. Кудрявцева, М. Ф. Казакова
Сдано в набор 71—1972 г. Подписано к печати 23XI— 1972 г Т-18190. Бумага № ЫФормат 84xl087ie—13 бум. л. 43,68 уел. печ. л (уч.-изд. 52,47 л.). Тираж 50.000 экз. Изд. № X—593. Зак. № 26 Цена 3 р. 18 к.
Владимирская типография Союзполиграфпрома при Государственном комитете Совета Министров СССР по делам издательств, полиграфии и книжной торговли Гор. Владимир, ул. Победы, д. 18-6,
ОПЕЧАТКИ
Стр.
Строка
Напечатано
Должно быть
130
209
Табл. 14.29, 5-я графа,
1-я строка снизу
2-я графа, 5-я строка снизу
0,866
EI
(и)
1з
—0,866 FI
Н — и (и)
3
241
Правый столбец, 22—20-я снизу
усилиям N и М. Приняты следующие обозначения: при односторонней (рис. 17.76, а) и двусторонней (рис. 17.76,6) текучести.
усилиям N и М при односторонней (рис. 17.76, а) и двусторонней (рис. 17.76, б) текучести. Приняты следующие обозначения:
244
Ф-ла (17.290)
(з -. фг3 V
(з р Д.
1' 1-фГ
Г 1-фГ
268
Правый столбец, 9-я снизу
1969.
1968.
324
Ф-ла (19.77)
Ма-2МбМв
Af .пр 4
М В. пр
339
Правый столбец, 13-я снизу
Т со2я
Т 2 я©
340
Левый столбец, 8-я и 7-я снизу
ст
ст
347
Левый столбец 6-я снизу
—kx
—VX