/















































































































Text
М.С. Дрозд, М.М.Матлин, Ю.И. Сидякин
ИНЖЕНЕРНЫЕ
РАСЧЕТЫ
упругопластическои
контактной
деформации
МОСКВА
-МАШИНОСТРОЕНИЕ-
1986
ББК 34.41
Д75
УДК 539.411.001.24
Рецензент Н. А. М а х у т о в
Дрозд М.С., Матлин МЛ1., Сидякин Ю.И.
Д75 Инженерные расчеты упругопластической контактной де-
формации. — М.: Машиностроение, 1986. — 224 с., ил.
70 к.
Излагаются разработанные авторами инженерные методы расчета ге-
ометрических параметров контакта гладких тел произвольной формы и
кривизны при наличии упругопластической деформации в зоне контак-
та. Описывается методика использования расчетных зависимостей для ре-
шения инженерных задач, связанных с анализом, интерпретацией и прог-
нозированием контактной деформации при статическом и ударном сило-
вом взаимодействии деталей машин. Приводятся базирующиеся на этих
зависимостях новые методы измерения твердости металлов, прогнозиро-
вания интенсивности деформации поверхностного слоя детали, подверга-
емой упрочняющей обкатке роликами или шариками, определения фак-
тической площади контакта и сближения шероховатых плоских и цилин-
дрических поверхностей, расчета прочности соединений с натягом.
Книга предназначена для инженерно-технических работников пред-
приятий машиностроения и других отраслей промышленности.
П 2702000000-041 ББК 34.41
Д 038(00-86 41’86 6П5.3
©Издательство ’’Машиностроение”, 1986 г.
ПРЕДИСЛОВИЕ
Контактное нагружение является одним из наиболее распространен-
ных случаев силового взаимодействия деталей машин и конструкций. Оно
возникает в процессе совместной работы сопряженных элементов машин
и механизмов (например, в опорах, передачах, соединениях с натягом);
при столкновении движущегося тела с преградой, если их поверхности не
совместимы; при осуществлении технологических процессов упрочнения
деталей машин поверхностным пластическим деформированием (ППД);
при выдавливании в материале углублений различной формы; в процессе
измерения твердости и в ряде других случаев. Чаще всего в зоне силового
контакта тел возникает местная упругопластическая деформация. Сопро-
тивление материала упругопластической контактной деформации являет-
ся одним из важнейших факторов, определяющих условия трения и изно-
са деталей машин, контактную жесткость элементов машиностроительных
конструкций, их прочность и эксплуатационную надежность, предпочти-
тельные режимы упрочняющей обкатки деталей роликами или шариками,
чеканки, дробеструйной обработки, качество и микрогеометрию поверх-
ности, подвергнутой ППД, и т. д.
Однако строгая математическая теория, позволяющая решать задачи,
связанные с упругопластической контактной деформацией, аналогичные
тем, которые применительно к упругому контакту объединяются терми-
ном ’’задача Герца”, еще не создана. Этим, в частности, определяется необ-
ходимость и практическая целесообразность разработки инженерных ме-
тодов расчета. Некоторые из них и составили содержание настоящей книги.
В ней описываются сущность и практическое применение инженерного ме-
тода расчета геометрических, силовых и деформационных параметров
упругопластического контакта тел, ограниченных гладкими криволиней-
ными поверхностями при их статическом и ударном взаимодействии.
Отличительная черта этого метода в сравнении с традиционным состо-
ит в том, что он базируется на понятии пластической твердости материа-
ла, впервые предложенном [ 7] одним из авторов. Это позволило рассмот-
реть с единых методологических позиций разнообразные и достаточно
сложные частные задачи, например, такие, как оптимизация режимов
упрочняющей обкатки деталей роликами; определение фактической пло-
щади касания номинально плоских и цилиндрических шероховатых по-
верхностей; анализ и расчет прочности соединений, собранных с натягом;
совершенствование динамических методов определения твердости метал-
ла; разработка методов измерения твердости металла на криволинейных
поверхностях и др.
3
Содержащиеся в книге расчетные зависимости подтверждены широ-
кой экспериментальной проверкой; приводимые экспериментальные дан-
ные имеют также самостоятельное значение и могут быть использованы в
дальнейших исследованиях, выходящих за рамки настоящей книги.
Гл. 1 написана М.С. Дроздом, гл. 2-4 и 7 — М.С. Дроздом и КХИ. Си-
дякиным, гл. 5 и 6 — М.С. Дроздом и М.М. Матлиным.
Все замечания по книге просьба направлять в адрес издательства.
4
ГЛАВА 1
ПЛАСТИЧЕСКАЯ ТВЕРДОСТЬ МЕТАЛЛА И
МЕТОДЫ ЕЕ ОПРЕДЕЛЕНИЯ
1. ОБЩИЕ ПОЛОЖЕНИЯ
При силовом контакте упругого сферического индентора с идеальной
плоской поверхностью упругопластического контртела (в частности,
толстой плиты, которую условно можно считать полупространством),
деформирующегося с упрочнением, последнее на начальной стадии нагру-
жения испытывает чисто упругую деформацию (пластическая деформа-
ция, которая может возникнуть в микрообъемах контртела до того, как
Рис. 1. Сближение в контакте в зависимости от контактной нагрузки (а) и схема
внедрения упругого шара в плоскую границу упругопластического контртела (б) :
I и II - участки упругой и упругопластической деформации; R, /?н и R' - радиус ша-
ра и радиусы кривизны поверхности вмятины поднагрузкой и после разгрузки; h -
глубина восстановленной вмятины; и W2 - упругое смятие шара под нагрузкой и
упругое восстановление контртела в центре контакта после разгрузки; t - полная
глубина вмятины под нагрузкой; ау и а - обратимое упругое и полное сближения
контактирующих тел; d и а - диаметр и радиус контура остаточной вмятины; Р -
контактная нагрузка; ф - угол вдавливания; с, сн и св - центры кривизны неде-
формированной исходной поверхности шара, поверхности вмятины под нагрузкой
(поверхности невосстановленной вмятины) и поверхности восстановленной вмя-
тины
5
расчетное напряжение в опасной точке достигнет предела упругости, не
учитывается). На этой стадии внедрения сферы напряжения, деформации,
а также перемещения материальных элементов индентора и контртела в
зоне контакта описываются решением Герца [ 40], причем их сближение
а является степенной функцией контактной нагрузки, т. е. а = кР2'3
(участок/, рис. 1,д). Согласно этому же решению максимальные касатель-
ные напряжения действуют на оси внедрения индентора в точке, отстоя-
щей от центра поверхности контакта на расстоянии, приблизительно рав-
ном половине радиуса площадки контакта. С возрастанием контактной
нагрузки Р в этой точке впервые возникает пластическая деформация,
которая затем постепенно распространяется как на глубину, так и к по-
верхности плиты. При некоторой величине нагрузки на поверхности контр-
тела образуется вначале кольцевая, а затем при Р ~Ps — сплошная вмяти-
на или отпечаток [7], вследствие чего зависимость Герца нарушается
(участок II, см. рис. 1,а). После снятия нагрузки происходит упругое вос-
становление индентора и материала контртела, упругое смятие инденто-
ра исчезает, а общая глубина t отпечатка (вмятины) уменьшается на
величину упругого восстановления И) контртела и становится равной Л,
т. е. глубине остаточной (восстановленной) вмятины (рис. 1,6).
1.2. ХАРАКТЕР ЗАВИСИМОСТИ МЕЖДУ НАГРУЗКОЙ
НА ИНДЕНТОР И ГЛУБИНОЙ ОСТАТОЧНОЙ ВМЯТИНЫ
Первые экспериментальные исследования этой зависимости примени-
тельно к внедрению сферического индентора в плоскую поверхность
контртела выполнены А. Мартенсом в 1905 г. [ 28]. Он же впервые обна-
ружил, что график функции Р(И), характеризующий зависимость между
нагрузкой Р на шарик и глубиной h остаточного отпечатка, проходит че-
рез начало координат и в некотором интервале глубин й представляет со-
бой прямую линию. Позднее эта закономерность подтверждена опытами
других исследователей.
Имеются также примеры использования указанной зависимости и для
решения конкретных задач. Так, линейная зависимость Р(й) положена
С.Д. Пономаревым и его сотрудниками [ 33] в основу исследования свя-
зи между динамической силой и перемещениями при ударном внедрении
упругой сферы в плоскую грань упругопластического тела. Л.И. Маламент
(1940 г.) принял линейный закон P(h), изучая динамику поперечного уда-
ра с учетом упругопластической контактной деформации.
В работе [7] приведены систематизированные экспериментальные дан-
ные, характеризующие зависимость Р(й) для различных материалов - угле-
родистых и легированных сталей, серого чугуна, а также некоторых цвет-
ных металлов и сплавов. Из этих материалов были изготовлены призмати-
ческие бруски квадратного поперечного сечения 25 X 25 мм. Испытуемую
6
грань шлифовали, а затем тщательно полировали до зеркального блеска.
На прессе Бринелля типа ТШ-2 или на машине УММ-10 (с гидравлическим
приводом) в указанную грань вдавливали шарик диаметром 0=10 мм.
Вдавливание при различных нагрузках производили как в один и
тот же отпечаток, так и в различные точки поверхности бруса (оба спо-
соба нагружения дали примерно одинаковые результаты). После каждой
ступени нагружения измеряли глубины Л восстановленных отпечатков,
применяя для этой цели индикаторный глубиномер часового типа с ценой
деления 0,01 мм. Каждое значение Л вычисляли как среднее из 8-10 из-
мерений.
Результаты экспериментов сведены в табл. 1 и показаны на рис. 2.
Между Р и Л — четко выраженная линейная зависимость. Позднее [ 48]
это было полностью подтверждено обширным исследованием, выполнен-
ным болгарскими специалистами. Наличие линейной зависимости P(h)
при испытании пластмасс установлено Л.П. Лагутиным (1968 г.).
Аналогичные эксперименты со сталями, применяемыми в тепло-
энергетике, проведены и при повышенных температурах. Испытания ве-
ли в специально сконструированной установке. Нагружение производили
с помощью прибора Роквелла; диаметр шарика 1,588 мм.
При каждом нагружении отсчитывали показания индикатора HR,
а глубину внедрения шарика в плоскую поверхность образцов под дей-
ствием нагрузки Р-Pi вычисляли из соотношения
ДА = h - h0 = (130 -HR)Cul,
где h и hQ — остаточные глубины внедрения шарика под действием полной
(Р) и предварительной (/\) нагрузок; сш = 0,002 - Дена деления шкалы
индикатора-на приборе Роквелла.
Данные, приведенные в табл. 2 и на рис- 3, свидетельствуют, что ли-
нейная зависимость между Р и И сохраняется и при повышенных темпера-
турах.
В то же время следует иметь в виду, что линейная зависимость Р(Л)
справедлива лишь в ограниченных пределах нагрузок [7]. Что касается
нижнего предела, то обнаружить его посредством обычных средств изме-
рения глубин (например, с помощью индикаторного глубиномера) труд-
но, так как при малых отпечатках возможные отклонения от прямой ока-
зываются в пределах ошибок измерения. Однако при особо высокой точ-
ности замеров становится заметной нелинейность диаграммы P(h) при ма-
лых нагрузках, когда эквивалентное напряжение в зоне контакта близко
к пределу упругости материала. В этом сказывается постепенность пере-
хода от чисто упругой (в макроскопическом смысле) к упругопластичес-
кой деформации. Кроме того, при очень малых глубинах внедрения ин-
дентора на характере линии P(h) и ее крутизне может сказаться разли-
чие свойств поверхностных и внутренних слоев материала испытуемого
7
ST
s
ID
8
тела (наличие упрочненного или ослабленного поверхностного слоя),
а также физическая и механическая неоднородность реального сплава.
Известное влияние на ход линии P(h) при малых нагрузках могут
оказывать также релаксационные процессы, протекающие в испытуемом
материале как в стадии ’’чисто упругого” нагружения, так и после появ-
ления пластического отпечатка. По мере развития последнего относитель-
ная доля упругой составляющей деформации материала постепенно умень-
шается, влияние указанных процессов на ход графика P(h) ослабевает,
и он приобретает строго прямолинейный характер.
С уменьшением размеров отпечатка относительная ошибка измерения,
как правило, возрастает. Поэтому применение малых нагрузок выдви-
гает особенно жесткие требования в отношении точности измерения глу-
бин отпечатка. В связи с этим отметим, что ’’критическая нагрузка” Ро,
показанная на рис. 4, получена пу-
тем экстраполяции прямойР(h) на
глубину h = 0.
Верхний предел нагрузок, при
которых линейный законР(Л) еще
Рис. 2. Зависимость силы вдавливания от глубины восстановленного отпечатка при
D = 10 мм [цифры у кривых - номера образцов (см. табл.1) ]
Рис. 3. Разности глубин восстановленных отпечатков в зависимости от разности сил
вдавливания при повышенных температурах (опыты В. Г. Давыдовой):
1—5 — стали марок 12Х1МФ, 4015ХМ, 20Х и 20 соответственно; Р\ = 98 Н
9
Глубины восстановленных отпечатков при различных
температурах испытания (по данным В.Г. Давыдовой)
Таблица2
у Н h - h 0 (мм) при температурах,.°C
20 200 300 400 500 600
Сталь 15 ХМ (НВ 177)
490 0,055 0,055 0,055 0,055 0,055 0,062
685 0,076 0,075 0,075 0,076 0,077 0,088
885 0,096 0,094 0,095 0,096 0,097 0,112
1080 0,120 0,120 0,120 0,120 0,120 0,134
1375 0,150 0,150 0,152 0,150 0,150 0,172
Сталь 12Х1МФ (НВ 160)
490 0,039 0,040 0,040 0,042 0,045 0,047
685 0,055 0,055 0,056 0,058 0,057 0,068
885 0,072 0,072 0,072 0,072 0,073 0,084
1080 0,088 0,088 0,089 0,091 0,090 0,106
1375 0,112 0,112 0,112 0,112 0,112 0,132
Сталь 40 (НВ 168)
490 0,050 0,050 0,050 0,052 0,052 0,058
685 0,069 0,070 0,072 0,071 0,073 0,080
885 0,087 0,088 0,089 0,090 0,093 0,105
1080 0,106 0,108 0,108 0,110 0,115 0,126
1375 0,134 0,138 0,138 0,140 0,145 0,160
Сталь 2 0Х (НВ 143)
490 0,060 0,060 0,060 0,060 0,062 0,065
685 0,084 0,085 0,085 0,086 0,085 0,092
885 0,110 0,110 0,110 0,110 0,110 0,120
1080 0,135 0,135 0,135 0,136 0,136 0,145
1375 0,173 0,170 0,168 0,180 0,170 0,185
справедлив, определяется тремя факторами [ 7]: размерами отпечатка,
твердостью испытуемого материала и прочностью шарика. Для мягкой
стали (армко-железо) линейный закон сохраняется вплоть до глубины
восстановленного отпечатка, составляющей 0,1£> (при D = 10 мм глубина
^max = 1 мм). Такая глубина достигается при нагрузке, равной 31—34 кН.
С ростом твердости материала величина /zmax становится меньше,
так как возрастает нагрузка, отвечающая данному приращению h. Так,
уже для средней твердости {НВ 300) глубине отпечатка h, равной 0,5—
0,7 мм, соответствует нагрузка в 70—90 кН, а для более твердых сталей
10
Рис. 4. Схематизированная диаграмма оста-
точного внедрения сферического индентора
в плоскую поверхность контртела
она еще выше. При такой нагрузке
I упругая деформация индентора стано-
вится весьма значительной, и началь-
ные параметры вдавливания заметно
изменяются. Кроме того, при боль-
ших нагрузках имеется реальная опас-
ность возникновения пластической
деформации или разрушения шарика.
Очевидно, что она может появиться при тем более низкой нагрузке, чем
тверже испытуемый материал, т. е. чем меньше размеры площадки кон-
такта и, следовательно, чем выше контактное давление.
В заключение отметим, что, поскольку прямые, отвечающие зависи-
мости P(h), получают экспериментальным путем, то в такой же мере, как,
например, прямые закона Гука, их нельзя рассматривать как выражение
строго математического закона.
1.3. ПЛАСТИЧЕСКАЯ ТВЕРДОСТЬ МЕТАЛЛА
Пусть сферические инденторы диаметром Dx и D2 = X&i под действи-
ем нагрузок Pi и Р2 внедряются в плоскую грань тела, причем
Р1 _ ^2 =
г\2 г\2 2 п2 ’
Ь>2 X
Т’ер2=х2Л. О»
Средние давления на поверхности контакта (их не следует смешивать
с твердостью НВ) будут равны соответственно
где Fi и F2 - площади контакта под нагрузкой сферических инденторов
с контртелом. При этом, как видно из рис. 1,
Fi = 2лЯн,1 &1 + 0,5^), F2 = 2лЯн,2 (h2 + 0,5^).
Так как
то
Fi = 2tt7?i (hi + W2) = я£>1 ti; F2 = 2irR2 (h2 + W2) = itD2t2.
11
Глубина остаточных вмятин h (мм) в зависимости от степени нагружения P/D2
(материал шарика - сталь)
А мм Р/Л», МПа Р, кН Значения h (числитель) и D/h
20 (НД1235) 40ХС/471470) 45 (НД 1780) 30ХГСА (НД 2160)
49 1,23 0,06/83,3 — 0,04/125
98 2,45 0,12/41,7 0,11/45,5 0,09/58,8 0,08/62,5
5,0 196 4,90 0,26/19,2 0,21/23,8 0,17/29,4 0,15/33,3
294 7,35 0,39/12,8 0,32/15,6 0,25/20,0 0,21/23,8
49 2,50 — 0,08/88,5 0,07/110 —
7,15 98 5,00 0,17/42,0 0,16/44,2 0,12/59,5 0,11/65
196 10,00 0,34/21 0,31/23,1 0,25/29,2 0,21/34,0
294 15,0 0,51/14 0,455/15,7 0,36/19,8 0,30/23,8
49 4,90 0,12/83,5 0,11/91 0,09/111 0,08/125
98 9,80 0,25/40 0,22/45,5 0,18/55,6 0,15/66,6
10,0 196 19,6 0,47/21,2 0,43/23,3 0,35/28,6 0,29/34,5
294 29,4 0,74/13,5 0,63/15,9 0,52/19,2 0,43/23,3
49 7,05 0,15/80 0,14/86 0,11/109 0,10/120
98 13,9 0,30/40 0,28/43 0,21/57,2 0,19/63,2
12,0 196 28,2 0,61/19,8 0,51/23,5 0,40/30,0 0,34/35,3
294 42,3 0,91/13,2 0,77/15,6 0,63/19,4 0,50/24,0
Если в обоих случаях углы вдавливания ф равны, то отпечатки геомет-
рически подобны иРф -р^р-Тогда имеем
Р1___= Р1 = xfl
nDxti nD2t2 nDit2 ’
откуда
О-2)
Рассмотрим случаи, когда упругие свойства материалов индентора и
контртела одинаковы. В этом случае величины упругого восстановления в
центре контакта (см. рис. 1,6), отвечающие диаметрам Dx = 2Rt и D2 =
= 2R2, равны (вывод этих формул см. с. 58 гл. 3):
W = 1,405 </ и И7" = 1,405 </— ,
^(1+^)
где к — коэффициент, зависящий от упругих свойств материала контак-
тирующих тел.
12
Таблица 3
(знаменатель) для сталей
ЗОХГСА (НИ 3140) Титановый сплав ВТЗ-1 Алюминие- вый сплав АД1 Алюми- ниевый сплав АК-4 Латунь ЛЦ40С Бронза БР АЖ9-4
0,025/200 0,02/250 0,08/62,5 0,08/62,5 0,065/77,0 0,08/62,5
0,05/100 0,04/125 0,15/33,3 0,15/33,3 0,13/38,5 0,16/31,3
0,10/50 0,08/62,5 28/17,9 0,33/15,2 0,28/17,8 0,33/15,2
0,15/33,3 0,12/41,7 - — — —
0,035/204 0,03/238 0,11/65 0,12/59,5 0,10/71,5 0,115/62,2
0,07/102 0,06/119 0,21/34 0,32/31,3 0,19/37,6 0,22/32,4
0,13/55 0,11/65 0,42/17 0,67/14,9 0,41/17,4 0,44/16,2
0,2/35,8 0,17/42 — — - -
0,05/200 0,04/250 0,16/62,5 0,16/62,5 0,13/77 0,16/62,5
0,10/100 0,08/125 0,32/31,3 0,34/29,4 0,27/37,1 0,32/31,3
0,20/50 0,15/66,6 0,64/15,6 0,71/14,1 0,56/17,8 0,60/16,7
0,31/32,3 0,24/41,7 — — - -
0,06/200 0,05/240 0,19/63,2 0,20/60 0,16/75 0,20/60,0
0,13/100 0,10/120 0,39/30,8 0,43/28 0,32/37,5 0,40/30
0,24/50 0,20/60 0,80/15,0 0,88/13,6 0,65/18,5 0,74/16,2
0,35/34,2 0,29/41,4 — — —
Имея в виду, что Л, + t2, ай2 + W" = t2, и учитывая зависимости
(1.1) и (1.2),находим_____
W" = = х
w' V 7»! ' R2 t2 w’ xW' ’
отсюда
W" = XW' и h2 =xhi. (13>
Результаты экспериментов свидетельствуют, что соотношения (1.3)
справедливы также и в том случае, когда упругие свойства контактиру-
ющих тел различны (табл. 3).
Если P'l = XDj и Р2 = XZ)2 - произвольные нагрузки, отвечающие глу-
бинам отпечатков h\ и Л2, то в соответствии с (1.1) и (1.3)
Р'г=Х2Р\-, h'2=xh\,
поэтому
Р2-Р2 = Х2Р, -Х2^ = (j 4)
О2(Л2-Л2) xDi (xhl ~ Xhi)
Этот результат получен для геометрически подобных отпечатков,
однако можно показать, что он справедлив и в общем случае, т. е. для лю-
13
бой пары отпечатков. Из диаграммы P(h), изображенной на рис. 4, нахо-
дим при D = Dt и произвольных нагрузках Р и Р’
----7 = —---г- = tg?-
h — h hi-hi
Это значит, что выражение (1.4) может быть продолжено и поэтому
Р2-Р2 _ _ Р-Р'
(1.5)
(1.6}
^2 (^2 — ^2) 1^1 — Лд) D (h — h )
Последнее соотношение распространяется на любые отпечатки и, сле-
довательно, вообще
Р-Р'
------— = const.
Р(Л-Л)
Таким образом, при данной разности нагрузок Р—Р’ разность глубин
h-h' обратно пропорциональна диаметру сферического индентора.
В качестве Р* можно взять нагрузку, отвечающую любой точке линей-
ного участка диаграммы Р(Л) или его продолжения. Приняв Р = Ро nh' =
= 0, получим из последнего выражения
Р-Ро
— = const
Dh
(1.7)
т. е. при данной разности нагрузок Р-Ро (условимся называть зту раз-
ность эффективной нагрузкой) глубина остаточной вмятины обратно про-
порциональна диаметру индентора.
Критическая нагрузка Ро численно равна отрезку, отсекаемому пря-
мой P(h) на оси Р (см. рис. 4), т. е. получаемому путем экстраполяции
графика функции Р(И) на нулевую глубину отпечатка h .
Описанные свойства зависимости (1.7) дали основание ввести в рас-
смотрение параметр, который по своему физическому смыслу представ-
ляет не условное давление в контакте (как, например, твердость НВ),
а модуль упрочнения материала при внедрении в тело сферического ин-
дентора — контактный модуль упрочнения.
Таким параметром является отношение
—^°=Ltgy, (1.8)
которое характеризует крутизну наклона прямой P(h) к оси Лив широ-
ком интервале глубин внедрения (по крайней мере до Л < 0,07£>) не за-
висит от диаметра штампа и контактной нагрузки.
Для удобства сравнения с твердостью по Бринеллю предложено счи-
тать числом пластической твердости отношение
//Л = Г_—0
-nDh
(1-9)
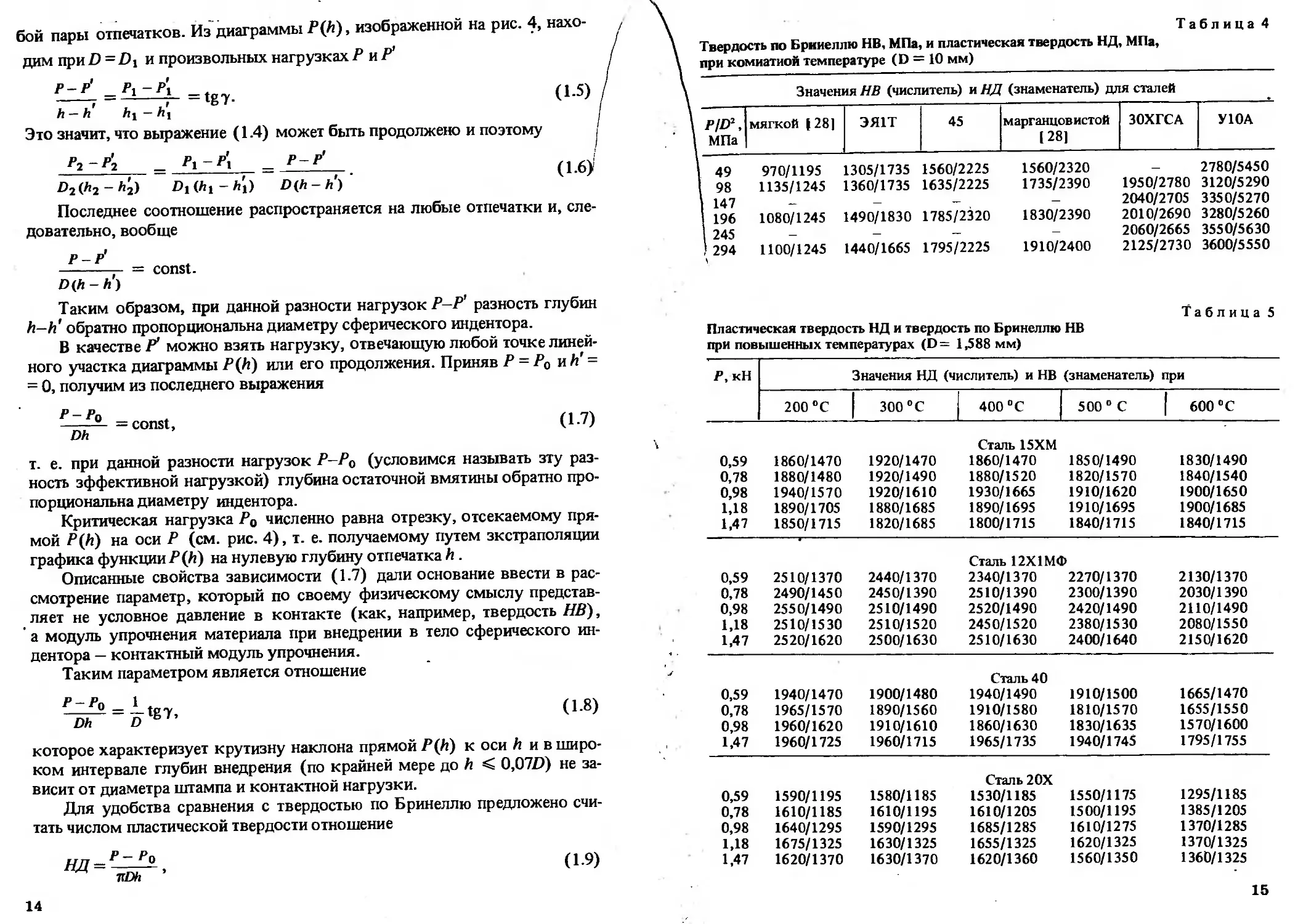
14
Таблица 4
Твердость по Бринеллю НВ, МПа, и пластическая твердость НД, МПа,
при комнатной температуре (D = 10 мм)
Значения НВ (числитель) и НД (знаменатель) для сталей
PjD\ МПа мягкой (28J ЭЯ1Т 45 марганцовистой (281 30ХГСА У10А
49 970/1195 1305/1735 1560/2225 1560/2320 — 2780/5450
98 1135/1245 1360/1735 1635/2225 1735/2390 1950/2780 3120/5290
I 147 — — — — 2040/2705 3350/5 2 70
196 1080/1245 1490/1830 1785/2320 1830/2390 2010/2690 3280/5260
245 — — — — 2060/2665 3550/5630
! 294 1100/1245 1440/1665 1795/2225 1910/2400 2125/2730 3600/5550
Таблица 5 Пластическая твердость НД и твердость по Бринеллю НВ при повышенных температурах (D= 1,588 мм)
Р, кН Значения НД (числитель) и НВ (знаменатель) при
200 °C 300 °C 400 °C 500° С 600 °C
0,59 1860/1470 1920/1470 Сталь 15ХМ 1860/1470 1850/1490 1830/1490
0,78 1880/1480 1920/1490 1880/1520 1820/1570 1840/1540
0,98 1940/1570 1920/1610 1930/1665 1910/1620 1900/1650
1,18 1890/1705 1880/1685 1890/1695 1910/1695 1900/1685
1,47 1850/1715 1820/1685 1800/1715 1840/1715 1840/1715
0,59 2510/1370 2440/1370 Сталь 12X1 МФ 2340/1370 2270/1370 2130/1370
0,78 2490/1450 2450/1390 2510/1390 2300/1390 2030/1390
0,98 2550/1490 2510/1490 2520/1490 2420/1490 2110/1490
1,18 2510/1530 2510/1520 2450/1520 2380/1530 2080/1550
1,47 2520/1620 2500/1630 2510/1630 2400/1640 2150/1620
0,59 1940/1470 1900/1480 Сталь 40 1940/1490 1910/1500 1665/1470
0,78 1965/1570 1890/1560 1910/1580 1810/1570 1655/1550
0,98 1960/1620 1910/1610 1860/1630 1830/1635 1570/1600
1,47 1960/1725 1960/1715 1965/1735 1940/1745 1795/1755
0,59 1590/1195 1580/1185 Сталь 20Х 1530/1185 1550/1175 1295/1185
0,78 1610/1185 1610/1195 1610/1205 1500/1195 1385/1205
0,98 1640/1295 1590/1295 1685/1285 1610/1275 1370/1285
1,18 1675/1325 1630/1325 1655/1325 1620/1325 1370/1325
1,47 1620/1370 1630/1370 1620/1360 1560/1350 1360/1325
15
которое определяется по глубине остаточного отпечатка h, измеренного
на поверхности испытуемого объекта после снятия рабочей нагрузки.
Переход от твердости как понятия, тождественного условному кон-
тактному напряжению (числа твердости НВ, НМ), к твердостиНД, интер-
претируемой как модуль упрочнения материала, позволяет рассматривать
эту величину как характеристику сопротивления материала контактной
пластической деформации.
Значения НВ и НД для сталей, исследованных при комнатной и повышен
ных температурах, приведены в табл. 4 и 5. Из таблицвидно, что число плас-
тической твердости при различных диаметрах шарика практически нечув4
ствительно к степени нагружения. В то же время с возрастанием P/D2
наблюдается закономерное увеличение твердости НВ (для стали У10А с
изменением Р/D2 от 49 до 294 МПа зто увеличение составило 29%).
Отметим, что данные табл. 4 и 5 приводятся не в качестве доказатель-
ства, а для наглядности, так как в основе независимости пластической
твердости от нагрузки и диаметра шарика лежит линейная зависимость
P(h), уже подтвержденная описанными выше опытами авторов книги и
других исследователей.
Знаменатель тгДЛ формулы (1.9) по виду сходен с величиной rrDt,
представляющей собой площадь поверхности невосстановленного отпечат-
ка с глубиной t. Тем не менее подчеркиваем, что nDh не является площа-
дью поверхности восстановленного отпечатка, так как процесс упругого
восстановления сопровождается не только уменьшением глубины отпе-
чатка, но и увеличением радиуса кривизны его поверхности.
1.4. МЕТОДЫ
ОПРЕДЕЛЕНИЯ
ПЛАСТИЧЕСКОЙ
ТВЕРДОСТИ НД
Основные методы
измерения пластической твердости
рассмотрены
в работе [ 7]. Приводим их краткое описание.
Метод двукратного вдавливания шарика (ГОСТ 18835—73).
Условие
линейности функции P(h) позволяет использовать следующий простой ме
тод вычисления твердости, основанный на двукратном вдавливании ша
рика. Как видно из рис. 4,
Р-Ро _ P-Pi
h h - hi ’
поэтому в соответствии с (1.9)
НД= р р'-~
TtD(h-ht)
(110)
(1.11)
В последнем выражении ? и Р, - произвольные силы вдавливания;
h и — отвечающие им глубины восстановленных отпечатков.
16
Вычисление твердости по методике, предусматривающей применение
формулы (1.11), предъявляет повышенные требования к точности изме-
нения глубин отпечатков h и . Точность должна быть тем выше, чем
утверже испытуемый материал и меньше разность нагрузок Р-Р,. При дос-
таточной величине этой разности достигаемая точность вычисления твер-
дости может быть весьма высокой. Так, при испытании материала твер-
достью НД 5000 номинальные значения глубин восстановленных отпечат-
ков при Dr = 10 мм, Р = 29,4 и Р\ - 4,9 кН равны соответственно: h =
=| 0,1805 и hj = 0,0245 мм. Если глубины h и hx измерены с точностью
дф 2 мкм, то в самых неблагоприятных случаях вычисленные по формуле
(1.11) значения твердости будут отличаться от номинальных на ± 3%. Для
более мягких сталей разница будет еще меньше, однако она резко возрас-
тет с переходом к малым нагрузкам Р и Рг. В особо ответственных слу-
чаях для повышения точности определяемых значений НД следует изме-
рить остаточные глубины h при четырех-пяти различных нагрузках, пост-
роить график Р(й) и вычислить пластическую твердость как
= (1.12)
где у — угол, образуемой линией P(h) с осью h (см. рис. 4).
Зависимость (1.12) можно представить как
- НД=—— у (1.13)
лОдй ’ v ’
откуда следует, что для определения твердости НД требуется знать лишь
приращение глубины восстановленного отпечатка Дй, вызванное прира-
щением силы ДР. Последнее заметно упрощает процедуру измерения и
повышает его точность, так как приращение Дй можно измерить с одной
установки образца аналогично тому, как зто осуществляется на приборе
Роквелла. Таким путем в значительной мере снижается влияние система-
тических погрешностей измерения. При соответствующей градуировке
шкалы есть возможность отсчитывать значения твердости НД непосредст-
венно по шкале индикатора, которым снабжен твердомер.
Такой метод при наличии хорошо выверенного прибора весьма прост,
надежен и производителен. Измерение твердости может быть легко авто-
матизировано.
Метод однократного вдавливания шарика. Критическая нагрузка
Ро как функция пластической твердости НД. Из условия независимости
пластической твердости НД от нагрузки следует, что для двух сил вдав-
ливания Р, и Р/+1 справедливо равенство
Pj-Pp = pi+1 ~ Рр , (1.14)
й/ Л/+ д
17
откуда
° ЛЙ-1-Л1
(115)
Согласно последнему выражению для вычисления нагрузки Ро достав
точно произвести двукратное вдавливание шарика в поверхность образна
силами Р, и Р& 1 и измерить соответствующие им глубины восстановлен-
ных отпечатков hj и А/+ ,. Однако, как показывают вычисления, вследст-
вие малой величины разностей, представляющих собой числитель и знаме-
натель выражения (1.15), величина Ро очень чувствительна к неточностям
измерения нагрузок и глубин отпечатков. При данных нагрузках Р,- иР1+ i
эта разность тем меньше, чем тверже материал. Следовательно, возможная
ошибка наиболее существенна для твердых материалов. Пусть, например,
при Р, = 4,9 и Р,+ ! = 9,8 кН действительные значения измеряемых глубин
отпечатков равны соответственно Л,- = 0,0245 и /г,+ 1 = 0,0557 мм, что со-
ответствует НД 5000. Нагрузка Ро, вычисленная по формуле (1.15), бу-
дет равна 1,05 кН. Однако, если измерение глубины производится с точ-
ностью до 2 мкм, то даже при условии, что действительные нагрузки Р,
и Рг+ j равны их номинальным значениям, вычисленные значения Ро мо-
гут находиться в широких пределах (0,37—1,77 кН).
Точность определения Ро заметно повышается при проведении боль-
шого числа повторных измерений с последующей статистической обработ-
кой их результатов.
В то же время нагрузку Ро можно определить, исходя из выражения
(1.9), согласно которому
Р0=Р- TtWJDh.
(1.16)
Отсюда видим, что нагрузка Ро определяется твердостью НД и глу-
биной восстановленного отпечатка, отвечающей силе Р и диаметру шарика
D. Однако неточности измерения h и НД также приводят к значительным
ошибкам значений Ро, вычисляемым по формуле (1.16).
Для повышения точности определения Ро проведены эксперименты, в
результате которых получены данные, аналогичные содержащимся в
табл. 1, для сталей самой различной твердости 1000 < НД < 8000. Расчет-
ные значения h и НД определяли как среднее арифметическое из резуль-
татов десяти нагружений. Опыт, специально поставленной при планирова-
нии эксперимента, показал, что дальнейшее увеличение числа измерений
(сверх десяти) не изменяет значения среднеарифметических величин.
Полученные результаты позволили установить следующую корреля-
ционную зависимость между нагрузкой Р0,ю и пластической твердостью
НД для конструкционных сталей при D = 10 мм:
НД, МПа .1000 1500 2000 2500 3000 4000 5000 6000 8000
Лио, Н .8 30 70 130 230 550 1120 1450 2210
18
Эта зависимость хорошо описывается уравнениями:
Лцо = 11 exp [ 1,9 (10' 3 НД - 1)] Н при НД 1000-4000;
Лцо ~ 0,45НД — 1224 Н при НЦ> 4000.
Для D #= 10 мм, как показано ранее [ 7],
(1.17)
I = Л>.ю(^) • (1.18)
Для сталей значения Ро, вычисляемые по этим формулам, весьма близки
к значениям критической силы Ps, имеющей смысл условной нагрузки,
при которой в центре контакта зарождается пластическая деформация,
т. е. Ро — Ps > 0. Условный смысл нагрузки/^ определяется рядом обсто-
ятельств: наличием микронеровностей на испытуемой поверхности, плас-
тически деформируемых при самых малых нагрузках [32]; неоднород-
ностью механических свойств материала по толщине исследуемого объек-
та; условностью принимаемых в расчет значений предела текучести и ис-
пользованием при определении Ps зависимостей теории упругости на та-
кой стадии нагружения, когда в локальном объеме (в точке с максималь-
ным касательным напряжением) уже имеется пластическая деформация, и
т. д. Все это приводит к тому, что в действительности остаточные смеще-
ния в центре контакта возникают при Р ФР$ (чаще всего при Р <PS).
Отметим, что условие Ро > 0 не является универсальным. Так, для ис-
следованных авторами меди, бронзы, латуней прямые Р(Л), экстраполи-
рованные на нулевую глубину, отсекают на оси Р отрицательные отрезки,
т. е. для них Ро < 0. Однако при Р = 0 глубина Л не может быть больше
нуля; поэтому очевидно, что в указанных случаях линии P(h) с прибли-
жением к оси Р также искривляются.
Вычисление пластической твердости. Если вид функции Ро (НД) из-
вестен, то задача определения пластической твердости путем однократно-
го вдавливания шарика решается весьма просто. В самом деле, исключив
Ро из выражения (1.9), приводим его с учетом соотношений (1.17) к ви-
ду, содержащему, кроме диаметра шарика, лишь НД и h, т. е. к виду
НД(Р, D, h). Так, при D = 10 мм получим для сталей с 1000 С НД < 4000
НД =
Р- И ехр[1,9(10 3ВД- I)0’668]
TtDh
а для более твердых сталей
нд=р+1™-
0,45 + ltDh
(119)
(1.20)
По этим формулам можно заранее построить номограмму или табли-
цу, выражающие функциональную зависимость НД (P/D1, h). Такая но-
мограмма или таблица позволяет отыскать значения пластической твер-
дости металла по результатам измерения глубины h одного восстановлен-
ного отпечатка, полученного под действием вдавливающей силы Р.
19
Согласно зависимости (1.3) для разных диаметров шариков D и Di,
но при одинаковой степени нагружения (P/D2 =idem)
h± _ *
Di D
(величины с индексами относятся к шарику диаметром 2),-; остальные —
к шарику диаметром £>), откуда
hi=^h. (1.21)
Таким образом, например, глубине hl0, полученной при некоторой
степени нагружения Р/D2 и диаметре шарика D = 10 мм, соответствует
’’приведенная” глубина—hj, где hi — глубина, образовавшаяся при той
Dj
же степени нагружения, но при произвольном (£>,) диаметре шарика. Сле-
довательно, номограмма или таблица, построенные для шарика диаметром
Р D
D, характеризуют обобщенную зависимость НД (—, h,). Числовое
Di Di
выражение этой зависимости для сталей дано в прил. 1. Следует подчерк-
нуть, что указанная таблица может быть применена только к сталям с
модулем нормальной упругости Е = 2- 10s МПа и коэффициентом Пуас-
сона д = 0,3. Для материалов с другими значениями упругих характерис-
тик все приведенные рассуждения сохраняют силу, однако номограммы
и таблицы НД (Р/D], А;) несколько изменяются, поскольку зависимость
Ро (НД) для них будет иной, чем для сталей.
Поскольку критическая нагрузка Ро для сталей является однознач-
ной функцией пластической твердости, то для них НД определяет не толь-
ко величину углового коэффициента прямой P(h), но и ее уровень; в
этом случае данным твердости НД и нагрузке Р соответствует единствен-
ная глубина h остаточного отпечатка.
Определение пластической твердости посредством сферических ин-
денторов большой кривизны. Отметим, что использование стальных за-
каленных шариков вполне надежно лишь в случае, когда твердость испы-
туемого материала не превышает НД 5000. При испытании более твердых
материалов шарик может получить пластическую деформацию, что недо-
пустимо. Кроме того, если твердость материала очень высока, то пласти-
ческая деформация в зоне контакта зарождается при значительной нагруз-
ке на шарик. Под действием этой нагрузки шарик деформируется, кри-
визна поверхности его контакта с испытуемым телом уменьшается. К
момен1у возникновения остаточного отпечатка радиус кривизны поверх-
ности внедряемого наконечника заметно превосходит 2>/2. Поскольку же
в пределах линейного участка диаграммы P(h) разность h—h1 обратно
Пропорциональна диаметру внедряемой сферы, то твердость НД, вычис-
ленная по формуле (1.11) без учета изменившейся кривизны контактной
20
поверхности шарика, окажется преувеличенной против действительной
твердости испытуемого материала.
Роль упругой деформации индентора при испытании материалов вы-
сокой твердости можно снизить двумя путями: либо путем перехода от
\стального к алмазному или твердосплавному наконечнику (посколь-
ку эти материалы имеют более высокие, чем сталь, значения модуля нор-
мальной упругости), либо путем увеличения кривизны вдавливаемого
индентора и снижения рабочей нагрузки. Последнее особенно эффектив-
но, так как критическая нагрузка Ро изменяется пропорционально квад-
рату диаметра наконечника [ см. формулу (1.18)].
Переход к сферическому индентору большой кривизны позволяет
применить обычную методику определения пластической твердости к ис-
пытанию высокопрочных материалов. Для этой цели можно, в частности,
использовать применяемый в приборе Роквелла конус, вершина которого
имеет форму сферического сегмента с радиусом кривизны RK = 0,2 мм.
Если проводить вдавливание таким образом, чтобы глубина проникнове-
ния индентора в металл не превосходила высоты сферического сегмента,
то будет осуществлена обычная шариковая проба. Пластическая твердость
при этом будет определяться формулами (1.9) или (1.11), в которых под
D следует понимать удвоенный радиус закругления вершины конуса
(D = 27? к). Наибольшая допустимая глубина вдавливания /гтах, при ко-
торой соблюдается указанное условие, равна высоте шарового сегмента,
т. е.
^тах=Як(1 -sin|), (1.22)
где 0 — угол при вершине конуса.
Описанные положения подверглись экспериментальной проверке,
выполненной совместно с Е.Н. Козыревой (1966 г.). На приборе Супер-
Роквелл в поверхность испытуемых образцов вдавливали алмазный ко-
нус. Измеренный радиус кривизны его вершины RK = 0,19 ±. 0,005 мм, а
угол конуса 0 = 120°. При этих значенияхRK ив глубина Лтах, вычислен-
ная по формуле (1.22), равнялась 0,0254 мм.
В качестве испытуемых образцов применяли плоские полированные
плитки размером 30Х30Х 12 мм, изготовленные из сталей различных
марок с твердостью от 30 до 69 HRC. Разброс значений твердости, изме-
ренной в различных точках поверхности образцов, не превышал одной
единицы HRC.
Вдавливание производили нагрузками Р, значения которых находи-
лись в пределах 57—490 Н. Предварительная нагрузка во всех случаях сох-
ранялась равной Pt - 29,5 Н. Таким образом, приращение нагрузки (АР-
= Р-Рг) находилось в области 27,5-460,5 Н.
Глубину Ah измеряли индикатором прибора Супер-Роквелл с ценой
деления 1 мкм и вычисляли как разность
ДЛ = 100 — HR мкм,
21
Рис. 5. Приращение глубины Ah восстанов-
ленной вмятины в зависимости от прираще-
ния силы вдавливания АР при внедрении
алмазного конуса с закругленной верши-
ной в плоские грани образцов из сталей
марок:
1 - ЗОХГСА (HRC 30) ; 2 - Р 18 {HRC
43,7); 3 - ШХ15 (HRC 50); 4 - ШХ15
(//АС 61); 5 - ХВГ (//АС 68 ...69)
где HR — показание прибора после
снятия основной нагрузки.
Каждое измерение повторялось
10—12 раз и в расчете принималось среднее арифметическое из всех изме-
рений.
Полученные данные (рис. 5) были подвергнуты статистической обра-
ботке, в результате которой установлено, что для всех исследованных ма-
териалов линейная зависимость ДА (ДА) подтверждается с коэффициен-
том корреляции, близким к единице. Однако, как видно из рис. 5, зави-
симость ДА (ДА) остается прямолинейной лишь до тех пор, пока глубина
внедрения меньше некоторого предельного значения.
Для установления границ, в которых указанная линейная зависимость
справедлива, приращения глубины отпечатка ДА', вычисленные из линей-
ного уравнения ДА' = ап + ЬпАР, были сопоставлены со значениями той же
• величины ДАОП, найденными из прямого опыта. В качестве примера в
табл. 6 приводится такое сопоставление для стали 45ХНМ (//АС38).
Как видно, для 4,3 < ДАОП < 32,4 мкм опытные точки располагаются
по обе стороны от прямой ДА (ДА), т. е. все зафиксированные отклонения
носят случайный характер естественного разброса результатов измерения
и не превышают погрешностей опыта: ДА'-ДА0П < 1 мкм. При ДА0П >
Таблицаб
Сопоставление расчетных (Ah' ) и экспериментальных
приращений глубин остаточных отпечатков
н дАоП . г Ah Ah -Ahon if’ ДАОП дй' Ah — Ahon
мкм мкм
27,8 4,3 4,7 +0,4 191,3 32,4 32,6 +0,2
52,3 9,0 8,9 -0,1 215,8 35,2 36,8 +1,6
76,8 13,0 13,1 +0,1 240,3 38,0 41,0 +3,0
101,3 17,0 17,3 +0,3 264,9 40,0 45,1 +5,1
117,7 20,3 20,0 -0,3 313,9 45,0 53,5 +8,5
142,2 24,5 24,2 -0,3 363,0 47,0 61,8 +14,8
166,8 28,4 28,4 0,0
22
> 32,4 мкм все отклонения положительны, и с ростом нагрузки они неп-
рерывно увеличиваются, обусловливая искривление линии ДР(ДЛ). Для
всех остальных материалов картина аналогична.
Предельные Aft™ значения ДЛ, после которых начинаются односторон-
ние, превышающие 1 мкм, отклонения опытных точек от прямой ДГ(ДЛ),
зависят от твердости испытуемого материала. Это положение становится
ясным при рассмотрении следующих данных:
HRC . . . . 30 38 44 46 50 56 61 64 68
ДЛ, мкм . 40 34 34 33 33 28 24 22 21
Итак, для всех исследованных материалов линейная зависимость
Р(Л) оказалась справедливой, по крайней мере в пределах глубин внедре-
ния, равных высоте сферической вершины индентора Лтах.
Сопротивление материала внедрению индентора возрастает, а линии
P(h) искривляются после того, как в контакт с ипытуемым телом всту-
пает коническая поверхность индентора. Ранее этот факт рассматривался
Г.П. Зайцевым (1958 г.) в связи с исследованием погрешностей измере-
ч ния твердости по Роквеллу. Чем круче происходит линия P(h), т. е. чем
тверже испытуемый материал, тем он более чувствителен к изменению
, формы индентора: если для стали с HRC 64-69 ДЛпр =214-22 мкм, то при
HRC 30 ДЛпр =40 мкм, что заметно превышает /zmax.
Таким образом, используя в необходимых случаях алмазные или
g твердосплавные инденторы большой кривизны, шариковую пробу с опре-
♦ делением пластической твердости по формулам (1.11) или (1.13) можно
распространить на все материалы — от самых мягких до самых твердых —
и получать числа твердости, отсчитываемые по одной и той же шкале.
Это свойство метода весьма важно для практики, поскольку позволяет
. свести к минимуму типаж необходимых измерительных устройств и пол-
? ностью исключить недоразумения и неточности, неминуемо возникающие
'f при переводе одних чисел твердости в другие.
Приближенные значения пластической твердости. Для материалов с
* разными свойствами (поскольку эти свойства, наряду со склонностью ма-
териала к релаксации напряжений в процессе внедрения шарика опреде-
ляют величину упругого восстановления) одинаковым нагрузкам Р на
шарик отвечают различные глубины h, а следовательно, и различные наг-
рузки Ро • В указанном случае использование одних и тех же номограмм
НД (P/D?, h) невозможно. Последнее обстоятельство заставляет отдать
предпочтение той методике определения пластической твердости, которая
основана на использовании формул (1.11) или (1.13). Такая методика
применима к любым металлам (черным и цветным) независимо от их
упругих свойств и значений критической нагрузки PQ, т. е. от уровня ли-
нии P(h) при данном значении твердости. Именно поэтому
ГОСТом 18835—73 предусмотрено измерение пластической твердости пу-
тем двукратного вдавливания шарика в испытуемую поверхность.
23
Отметим, наконец, что если Р > Ро, то вычитаемым в числителе
формулы (1.9) можно пренебречь, и она приводится к виду
НД = ~. (1-23)
ItDh
К такому же виду преобразуется и формула (1.11), если принять в
ней Pi и Л, равными нулю. Из рис. 2 видно, что для мягких сталей и неко-
торых цветных металлов прямые, характеризующие зависимости P(h),
практически проходят через начало координат. В этих случаях для определе-
ния твердости НД нет нужды в двух вдавливаниях, так как глубины восста-
новленных отпечатков пропорциональны силам вдавливания. Очевидно, что,
увеличивая нагрузку на шарик, можно распространить формулу (1.23) и на
более твердые материалы, получая путем измерения глубины одного от-
печатка приближенные значения твердости. Степень приближения этих зна-
чений к истинным будет тем выше, чем больше сила вдавливания Р.
Результаты вычислений, выполненных по формуле (1.23), свидетель-
ствуют, что, начиная с некоторого значения нагрузки Р, числа твердости
НД становятся практически постоянными. Для мягких сталей и цветных
металлов (армко-железо, сталь 10, алюминий, медь, латунь, бронза) от-
ношение РДР очень мало уже при самых малых нагрузках. Однако чем
больше абсолютная величина критической нагрузки Ро (для стали — наг-
рузка Ps), тем выше должно быть значение максимальной силы вдавлива-
ния, при которой числа твердости, определяемые по формуле (1.23), ста-
новится инвариантными относительно нагрузки и равными действитель-
ной твердости НД. Падение величины НД, вычисленной по формуле
. (1.23), наблюдается с ростом нагрузки для стали любой твердости, одна-
ко оно тем более резко, чем тверже сталь. При значительных нагрузках
эта величина постепенно приближается к твердости НД, но при любой
нагрузке разница между этими величинами тем меньше, чем ниже уровень
твердости материала. При этом существенно, что для Р/D2 > 294 указан-
ная разница для самого твердого из исследованных материалов (сталь,
НД 7800) не превышает 8%. Для более мягких материалов она еще
меньше.
В тех случаях, когда Ро < 0 (латунь, бронза, медь), с увеличением си-
лы вдавливания значение твердости, вычисляемое по формуле (1.23),
возрастает, также постепенно приближаясь к своему точному значению.
Итак, для материалов твердостью НД < 2700 приближенные значения
твердости, определяемые в соответствии с формулой (1.23) по глубине
одного восстановленного отпечатка, отличаются от истинных не более чем
На 10% уже при Р/D2 = 24,5. С увеличением степени нагружения до Р/D2 =
= 294 такая же точность достигается даже при испытании самых твердых
сталей.
24
1.5. ФОРМУЛЫ ПЕРЕСЧЕТА ТВЕРДОСТИ HRB И НВ
В ЗНАЧЕНИЯ ПО ШКАЛЕ НД
.V'
Наличие разнообразных, предусмотренных соответствующими стан-
дартами шкал твердости, вызывает необходимость пересчета одних чисел
твердости в другие. Если не говорить о твердости НД, то такой пересчет
производится исключительно на основе эмпирических зависимостей, по-
лучаемых чисто экспериментальным путем и, естественно, не вскрываю-
щих внутренних связей между различными числами твердости.
Очевидно, однако, что все методы измерения твердости, осуществля-
емые путем внедрения упругого индентора в поверхность испытуемого
объекта (изделия, детали), дают хотя и на разных ’’языках” информацию
об одних и тех же свойствах материала, а именно о его сопротивлении де-
формации. В то же время разница в способах выражения этой информации
Д: часто столь велика, что непосредственное сопоставление различных чисел
^ твердости оказывается просто невозможным: так, например, если твер-
дость НВ измеряется в единицах напряжения, то HRB — величина безраз-
мерная. С введением в обиход понятия пластической твердости НД
указанная несовместимость применительно к шариковой пробе устраня-
$
S’ ется.
| 1
%
(1.24)
Пересчет чисел твердости HRB и НД. Согласно ГОСТ 9013—59 число
Твердости по шкале В Роквелла
HRB = 130 - -
где h0 — глубина внедрения наконечника в испытуемый образец под
‘^ действием предварительной нагрузки Ро; — глубина внедрения наконеч-
Ника в испытуемый образец под действием общей нагрузки Р, измеренная
.после снятия основной нагрузки Pi, с оставлением предвари-
тельной нагрузки Ро, сш = 0,002 — цена деления (в мм) индикатора,
'i-измеряющего глубину внедрения шарика диаметром D = 1,588 мм.
J. Из выражения (1.24) следует
(130 - HRB)cui = h-h0 = Lh, (1.25)
€ где Д/г — разность остаточных глубин отпечатков, отвечающих нагрузкам
Р = 100 кге и Ро = 10 кге, т. е. Д/г соответствует нагрузке ДР = Pt = 100 —
— 10 = 90 кге.
Имея же в виду выражение (1.13) получаем окончательно
9000 кге 88300
НД = ---------- —-— =---------- МПа.
*• 130-/7ЯЯ мм2 130 -HRB
, Формулы (1.26) и (1.27) описывают однозначную функциональную
зависимость между числами твердости HRB кНД, а следовательно, как бу-
дет показано ниже, и НВ. Таким образом, можно считать доказанным,
(1.26)
25
что отмечаемая обычно несопоставимость чисел твердости по Роквеллу с
результатами шариковых проб является лишь кажущейся: она полностью
устраняется, если рассматривать число твердости HRB не как-условную
величину, а как имеющую четкий физический смысл характеристику,
отражающую (как и все другие числа твердости, определяемые методом
вдавливания) сопротивление материала контактной деформации.
Очевидно, что возможен и обратный пересчет: если НД задано в
кгс/мм2, то
HRB = 130-
(1.27)
если НД задано в МПа.
Пересчет чисел твердости НВ и НД. Значение твердости по Бринеллю
определяют в соответствии с ГОСТ 9012—59 по формуле
2Р
НВ=---------- . (1.28)
7Г£>(£) - Vo - d2)
где D — диаметр шарика индентора; d — диаметр отпечатка на поверхнос-
ти испытуемого объекта.
Из геометрических соотношений (см. рис. 1) следует
d = 2x/Or = 2y/D{h+ It'D,
причем (см. гл. 3)
= 0Л96Р, (129)
10sd
где Р — в Н, Е — в МПа.
Таким образом,
d = yJ^Dh+ 2,7 10"4 мм при Р — в кгс;
d = y/lDh+ 2,75-10"5 ~ мм приР - вН
(1.30)
PD мм2
(здесь размерность числовых коэффициентов перед слагаемым —-------
и соответственно). Последние выражения описывают функционалы
н
ную зависимость между h nd при заданных значениях нагрузкиР и диа-
метра индентора D.
26
Из (1.28) и (1.30) следует
2Р
НВ=-------
TlDfD-
ПНД
Л РО
(1.31)
2 2
где Д = 2,7 -10-4 — = 2,75 10-5 — .
кгс Н
Это уравнение решается методом последовательных приближений
(в частности, с помощью ЭВМ) в следующем порядке: задавшись величи-
ной НД, по формулам (1.17) и (1-18) вычисляют Ро для данного D, из
зависимости (1.9) находят значение h для данных Р и /9; по формуле
(1.30) вычисляют диаметр отпечатка d и, наконец, по формуле (1.31) —
величину НВ. Последовательность обратного перехода такова. Зная НВ,
находят по ГОСТ 9012—59 диаметр отпечатка с?, соответствующий нагруз-
ке Р и диаметру шарика D. Выразив в соответствии с формулами (1.17)
и (1-18) Ро как функцию НД, из уравнения (1.31) методом последователь-
ных приближений находят НД.
Следует подчеркнуть, что для получения стандартных чисел твердости
НВ, определяемых согласно ГОСТ 9012—59 при определенной степени наг-
ружения X = Р/£>2, расчет по формуле (1.31) нужно вести при стандартных
значениях X = 30, 10 или 2,5 кгс/мм2 или соответственно X = 294, 98 или
24,5 МПа.
Существенно, что для НВ < 400 кгс/мм2 зависимость (1.30) удовлет-
ворительно аппроксимируется функциями:
НВ= 1,53 ЯД0,89 кгс/мм2 = 1,96 ЯД089 МПа,
где НД - в кгс/мм2 и в МПа.
Эти зависимости весьма
(1.32)
удобны, тем более что [ 28] в
указанном интервале значений
твердости НВ - НУ, и для
взаимного пересчета пласти-
ческой твердости и твердости
по Виккерсу можно также
пользоваться зависимостью
(1.31). Графики зависимос-
стей НВ (НД) и HRB (НД)
приведены на рис. 6.
Рис. 6. Значения твердости НВ и
HRB в зависимости от пластичес-
кой твердости НД
27
ГЛАВА 2
ОБЩИЙ СЛУЧАЙ УПРУГОПЛАСТИЧЕСКОГО КОНТАКТА ТЕЛ
С НАЧАЛЬНЫМ КАСАНИЕМ В ТОЧКЕ
В развитие результатов, изложенных в гл. 1, ниже рассматриваются
закономерности упругопластического силового контакта тел двоякой
кривизны, ограниченных в общем случае несферическими гладкими по-
верхностями, с их начальным контактом в точке. Считаем, что остаточный
отпечаток (как и упругий) ограничен при этом эллиптическим в плане
контуром.
Предполагается, что одно из контактирующих тел (индентор) нахо-
дится в упругом, а второе (контртело) — в упругопластическом состоя-
нии; плоскости главных кривизн обоих тел совпадают, а их главные ра-
диусы кривизны в зоне контакта постоянны; равнодействующая контакт-
ной нагрузки направлена по общей нормали к поверхностям соприкасаю-
щихся тел в точке начального контакта; силы трения в расчет не принима-
ются.
2.1. ХАРАКТЕР ФУНКЦИОНАЛЬНОЙ ЗАВИСИМОСТИ P(h)
Как в случае упругопластического контакта сферического индентора
с плоской поверхностью контртела, в рассматриваемом общем случае за-
висимость P(h) при внедрении несферических инденторов в поверхности
контртел двоякой кривизны установлена экспериментальным путем. В
качестве нагружающего устройства использовали прибор ТШ-2 (пресс
Бринелля) и разрывную машину УМЫ-10 с гидравлическим приводом.
В процессе каждого испытания, которое проводили при строгом соб-
людении сформулированных выше ограничений, фиксировали контакт-
ную нагрузку Р и отвечающее ей остаточное смещение h центра контакта
после разгрузки (а также полуоси остаточной вмятины а и Ь). Остаточное
смещение h , отсчитываемое от исходной поверхности образца в точке на-
чального касания его с индентором, измеряли с помощью индикаторного
глубиномера часового типа с погрешностью до 1 мкм, а полуоси контакт-
ной площадки — на малом инструментальном микроскопе ММИ-2 с точ-
ностью 10 мкм.
Был реализован упругопластический контакт полированных сфери-
ческих, цилиндрических и тороидальных инденторов, изготовленных из
28
Рис. 7. Исследуемые схемы контакта тел двоякой кривизны
29
Таблица 7
Геометрические характеристики рабочих поверхностей тел
Пози- ция по рис.7 Индентор Контртело А В А)В
Я.1 1 ^12 /?2 2
ММ мм 1
а f 5,0 5,0 оо 10,0 0,100 0,150 0,667
а 2,5 2,5 оо 10,0 0,200 0,250 0,800
б оо 2,5 10,0 оо 0,050 0,200 0,250
в 37,5 2,5 оо 10,0 0,013 0,250 0,053
г 1 10,0 5,0 оо оо 0,050 0,100 0,500
г 25,0 0,85 оо оо 0,20 0,588 0,034
д 5,0 10,0 8,5 оо 0,041 0,050 0,823
е 2,5 2,5 5,0 7,5 0,100 0,267 0,375
ж. 12,5 2,0 20,0 5,0 0,015 0,150 0,100
3 2,5 2,5 5,0 20,0 0,100 0,175 0,571
и 12,5 2,0 7,5 5,0 0,107 0,150 0,711
и 25,0 0,85 7,5 5,0 0,087 0,488 0,178.
к 37,5 2,5 10,0 оо 0,063 0,200 0,317 \ 0,400 '
1 к 10,0 2,0 10,0 оо 0,100 0,250
л 5,0 5,0 12,6 12,6 0,140 0,140 1,000
м 12,5 2,0 12,6 12,6 0,080 0,290 0,275-’
стали ШХ15, закаленных и отпущенных на твердость не wxxeHRC 60—62,
с контртелами, имеющими плоские, вогнутые и выпукловогнутые поверх-
ности в соответствии со схемами нагружения, показанными на рис. 7.
Геометрические характеристики рабочих поверхностей этих тел приведе-
ны в табл. 7.
Химический состав, режимы термической обработки и
механические свойства исследованных сталей
Таблица 8
Марка стали Химический состав, % Термическая обработка . НД Ов 6
С Мп Si Ст Ni
МПа %
20 0 19 0 41 019 0,10 0,10 Нормализация, 1440 285 450 28 62 ’ 900-930 ° С 4§Х 0,43 0,57 0,22 1,02 0,24 2530 530 785 12 47 ЗЙХГСА0,31 1,01 1,14 1,04 0,26 Закалка, 4710 1030 1180 10 44 880-900 ° С; отпуск 480 ° С
30
ж--
Й-рис. 8. Зависимости остаточных смеще-
ний h центров вмятин от контактной на-
__ стали марок 20 (НД 1440), 45X
/ (ЯД 2530), ЗОХГСА (ЛД4710) и ШХ15
i(HlI 2880); алюминиевый сплав АМг-6
/ (НД 900) и латунь Л63 (НД 1390) ;
- схемы контакта тел согласно
рис. 7
В качестве контртел использо-
' вали образцы из сталей разных
марок (табл. 8), прошедших пред-
варительную термическую обработ-
ку, а также из цветных сплавов.
Шероховатость рабочей поверхнос-
Е !й всех образцов после механичес-
/>*//
двгдбвидж б к л
кой обработки соответствовала
|№> 0,32-0,63.
ЕЕ? Полученные экспериментальные результаты приведены на рис. 8,
Е|из которого видно, что при упругопластическом контакте тел, ограничен-
ных поверхностями произвольной формы и кривизны, зависимость между
Эдсонтактной нагрузкой Р и остаточным смещением h центра вмятины
/ Практически линейна. Таким образом, и в общем случае контакта тел дво-
' якой кривизны основная закономерность, характерная для упругоплас-
Тического контакта упругого шара с плоской поверхностью контртела,
Е также сохраняется.
В зависимости от твердости материалов контртел и схем контакта от-
^Р^льные прямые, выражающие функцию Р(й), наклонены к оси абсцисс
различными углами yz-; для каждой схемы контакта наклон этих пря-
тем круче, чем выше твердость материала образцов. В то же время
А^глы yz зависят и от схемы нагружения, т. е. величины и сочетания кривиз-
ны поверхностей индентора и контртела в точке начального контакта.
! "
; ' i
2.2. ПРИВЕДЕННЫЙ РАДИУС КРИВИЗНЫ КОНТАКТИРУЮЩИХ
ПОВЕРХНОСТЕЙ И ЕГО ЭКСПЕРИМЕНТАЛЬНОЕ
' ОПРЕДЕЛЕНИЕ
< * V.
. 1 •
Э Наличие линейной зависимости между контактной нагрузкой Р и ос-
таточным смещением h центра вмятины при упругопластическом контак-
те тел произвольной формы и кривизны позволяет, по аналогии со случа-
< 31
- ’ л
V;'
ем контакта сферы, с плоскостью (см. гл. 1), представить пластическую
твердость НД материала как
НД = — 1----------= 0 = —~ _2___________. (2.1)
ЗтгЯцр (Л—Л1) 2TrR^jph irDjjph TtD-^Д,
В этом выражении под Л пр (или D^), впервые введенными в рас-
смотрение в работе [ 10], нужно понимать приведенный радиус (или при-
веденный диаметр) поверхностей контактирующих тел, представляющих
собой величины, которые определяются совокупностью геометрических
факторов, влияющих на остаточное смещение центра вмятины. Как видно,
введение понятия R^ позволяет моделировать контактное взаимодейст-
вие тел произвольной формы и кривизны контактом сферы радиуса R^,
с плоскостью путем замены в соответствующих расчетных зависимостях
(1.9), (1.11), (1.13), (1.18) и (1.30) величин R на или D на £>т,
[смысл остальных величин такой же, как и в формулах (1.9)—(1.11)].
Из соотношения (2.1) следует, что
R - 1 - Р~Р° 1 tE-y 12 21
пр 2 2тгНД (h-hi) 21ГНДИ 2ттНД lg7,‘
Выражение (2.2) может служить для определения приведенного ради-,
уса А пр кривизны сопряженных поверхностей по непосредственно изме-'
ренным значениям hx nh2. Для этого необходимо к телам, введенным в
соприкосновение, приложить последовательно две контактные нагрузки
Pi и Р2 и измерить на поверхности контртела отвечающие им остаточные
смещения Л, и h2 центров вмятин. Очевидно, что эти же величины либо
значения tg72- могут быть найдены из графика рис. 8.
Полученные таким путем значения Л11р для различных материалов и
разнообразных сочетаний кривизн поверхностей контактирующих тел за-
несены в табл. 9. Отчетливо видно, что R^ не зависит ни от контактной
нагрузки, ни от химического состава и физико-механических свойств ма-
териала деформируемых тел, а полностью определяется начальными гео-
метрическими параметрами тел в зоне их контакта. Достоверность этого
положения подтверждается экспериментом, результаты которого приве-
дены в табл. 10. Путем соответствующего подбора геометрии поверхнос-
тей тел, вводимых в контактное взаимодействие, удалось воспроизвести
самые разнообразные схемы нагружения, сохраняя постоянными значе-
ния геометрических параметров А и В. В качестве указанных парамет-
ров приняты соответственно меньшая и большая из следующих двух сумм
[33]:
Л = i (2— ± --);
2 41
(23)
в = 1(JL ± _L),
2 R 31 R 22
(2.4)
32
2-395
Таблица 9
Значения 1Цр (в мм) для схем контакта, показанных на рис. 7 Сталь 20, НД 144 0 4,05 4,90 -8,10 7,05 11,1 3,00 1 0,0 3,75 3,80 3,40 3,15 Сталь 45Х, НД 2530 4,10 4,85 7,95 7,15 1 0,9 3,05 - - 3,95 4,35 2,95 Сталь ШХ15, НД 2880 - - _ _ . _ _ ю,1 3,80 - Сталь 30ХГСА, НД 4710 4,15 4,95 8,10 6,95 11.1 3,10 - - 3,85 4,45 3,10 Алюминиевый сплав АМг-6, 4,00 5,00 8,05 7,10 11,0 3,05 - - 4,00 4,35 3,20 НД 900 Латунь Л-63, НД 1390 4,10 4,90 8,15 7,05 10,8 3,00 - - 3,90 4,50 3,05 Среднее значение Rnp 4,08 4,92 8,07 7,06 10,98 3,04 10,05 3,78 3,90 4,41 3,09
*
3
И
"О
«V
S I 9
о
€ я с я 5 !*
Примечание. Значения ЛПр найдены как средние арифметические из 10-15 опытов.
33
О
S
Экспериментальные данные, иллюстрирующие однозначную зависимость
меж . геометрическими параметрами (А и В) и приведенным
радиусом кривизны поверхностей контактирующих тел
а. в •Z) V) О О ’^,’1 «Л о о ОО О 04 Tt Tt 3,15 3,05 3,15
ж
•с 0,268 0,065 0,197 0,127 0,185 0,188 0,157 0,190 0,105
а, кН 9,81 2,45 7,36 9,81 14,72 14',72 14,72 17,17 9,81
НД МПа 1440 1440 1440 2530 2530 2530 4710 4710 4710
Я/У 1 0,667 0,667 0,667 «Л V) ООО О о о ООО
мм'1 0,15 0,15 0,15 0,20 0,20 0,20 0,25 0,25 0,25
< ООО ООО 0,05 0,05 0,05 ООО о о о
о 5 & еГ 10,0 3,75 5,0 8 8 8 о о 8 8 •-И
Конт at оо оо 7,5 о о о 8 «л Н Г-4 5,0 10,0 5,0
Ж
I оГ 5,0 30,0 2,0 гч гч гч *QO о ПГ4Г4
Инде Bi" 5,0 5,0 15,0 о °-°- 8 0 0 —4 m «2 8
такта h-
Схема кон тел, аналог показан! на рис. о <2 3 *© си * * * ю
су I© «
10,0 5,0 “ » 0,05 0,10 0,50 1 44 0 24,53 0,383 7,05
«• 5,0 10,0 » 0,05 0,10 ОДО 1440 19,62 0,303 7,15
10,0 10,0 « 10,0 0,05 0,10 0,50 1440 17,17 0,267 7,10
34
w
"л- Где Ry — главные радиусы кривизны поверхностей индентора и контрте-
ла (индексы /) в точке начального контакта; знаки ’’плюс” и ’’минус”
относятся соответственно к случаям контакта индентора с контртелом,
сечение которого в данной плоскости кривизны (индексы z) ограничено
выпуклым или вогнутом контурами.
Из табл. 10 видно, что если для данной пары контактирующих тел
соблюдается постоянство геометрических параметров Л и В, то величина
не зависит также и от схемы нагружения. Принципиальное значение
этого эффекта усиливается тем, что приведенный радиус кривизны Rщ, не
чувствителен и к характеру нагрузки (динамичности нагрузки, скорости
нагружения). Этот вопрос подробно рассмотрен в гл. 7.
Итак, очевидно, что величина R^ не зависит ни от химического сос-
тава и физико-механических свойств контактирующих тел, ни от схемы
нагружения, ни от скорости силового взаимодействия тел. Это значит, что
определяемый описанным выше методом приведенный радиус кривизны
.Rnp является чисто геометрической характеристикой, однозначно опреде-
' ляющей влияние формы и размеров контактирующих тел на глубину ос-
таточной вмятины, образующейся под индентором при данных нагрузке и
пластической твердости материала контртела. Иными словами, величина
Rfjp численно равна радиусу такого сферического индентора, при внедре-
нии которого в плоскую поверхность металлической плиты остаточное
смещение h центра вмятины, отсчитываемое от ее исходной поверхности,
будет таким же, как и при контакте рассматриваемых тел произвольной
: формы и кривизны, если контактные нагрузки и сочетание материалов
контактирующих тел в обоих случаях одинаковы.
2.3. РАСЧЕТНОЕ ОПРЕДЕЛЕНИЕ ПРИВЕДЕННОГО РАДИУСА
КРИВИЗНЫ КОНТАКТИРУЮЩИХ ПОВЕРХНОСТЕЙ
Прогнозирование геометрических параметров контакта возможно
только при условии, что приведенный радиус кривизны поверхностей кон-
тактирующих тел может быть найден чисто расчетным путем. Вывод соот-
ветствующей расчетной зависимости, позволяющей вычислять 7?^ (или
^пр) > не прибегая к опыту, который необходим при пользовании форму-
лой (2.2), излагается ниже.
Как видно из рис. 9, полное сближение в контакте тел двоякой кри-
визны
d2 . 1 1 . Ь2 . 1 1 ч
а ~--- (--- + ---) =---- (-- + —— ) -
2 Л и л 12 2 л 21 ^22
— V(—+ —)(—+—).
2 л и л 12 л 21 ^22
(2.5)
В обеих частях уравнения (2.5) дробями a1/Ry пренебрегаем как
весьма малыми по сравнению с a2/Ry, b2/Ry Ka^,/Rnp.
35
С другой стороны, для контакта шара D = 2/?пр с плоскостью
где «пр — радиус круговой площадки контакта шара диаметром D с
костью.
Приравнивая правые части последних двух уравнений, находим
_ ab
КПр / ^11^12-^21-^22
(К и + R 12 ) (R 21 + R 22 )
Одно из решений этого уравнения представляется в виде
«£р=«й; (2-8)
R = / R11R12R21R22 zo Q)
ИР (.R11 + R12)(.R21+R22)
С учетом соотношений (2.3) и (2.4) получим
Аф = =4 <il0>
(2.6)
плос-
(2-7)
Очевидно, что точность полученных приближенных формул, опреде-
ляющих D„p, тем выше, чем меньше эксцентриситет действительной пло-
щадки контакта, т. е. чем ближе к единице отношение Ь/ст. в общем случае
погрешности значений а и Ь, принимаемые в расчет при приближенном вы-
числении а, не одинаковы и не равны погрешности «пр, и эта разница
уменьшается при b/а 1. Указанная тенденция хорошо прослеживается
при сопоставлении (табл. 11) расчетных значений ^пр> вычисленных по
формуле (2.10), с величинами, найденными из зависимости (2.2) по не-
посредственно измеренным в опыте значениям НД и h для широкого
ряда отношений 0,017 <^А/В < 1 и разно-
образных сочетаний форм контактирую-
щих поверхностей.
Как видно, при А/В > 0,4 различие
расчетных и экспериментальных значений
7?пр не превышает 3%. Однако по мере
роста эксцентриситета эллиптического
контура остаточной вмятины, когда де-
Рис. 9. Схема упругопластического контакта
тел двоякой кривизны:
а и б - сечения контактирующих тел плоскос-
тями главных кривизн 1 и 2; /?гу - главные ра-
диусы кривизны поверхностей контактирую-
щих теп, первый ийдекс - номер плоскости*
кривизны, второй - тела 1 и 2
36
Таблица 11
Опытные и рассчитанные по формуле (2.10)
значения приведенных радиусов при
упругопластическом контакте тел двоякой кривизны
Индентор Контртело А Расчет Опыт
Ri 1 R21 Ri2 R22 В Ь Ш
мм • мм
2,5 2,5 -5,0 -5,0 1,0 5,0 5,0
5,0 5,0 12,6 12,6 1,0 3,6 3,6
5,0 10,0 —8,5 °° 0,823 11,0 11,0
5,0 5,0 “ 10,0 0,667 4,1 4,1
10,0 5,0 оо оо 0,500 7,1 7,0
2,5 2,5 -5,0 7,5 0,375 3,1 3,0
~ 2,5 10,0 0,250 5,0 4,9
37,5 2,5 » 10,0 0,053 8,7 8,1
25,0 0,85 оо оо 0,034 4,6 4,2
50,0 0,85 оо оо 0,017 6,5 5,8
формация в контакте все больше отличается от осесимметричной, разница
между опытными и расчетными значениями Rnp непрерывно возрастает,
достигая 12% приА/В = 0,017.
В связи с этим целесообразно использовать иной подход, в котором
расчетное определение R^p базируется на более точных значениях полу-
осей а и b площадки контакта.
Из рассмотрения схемы силового контактного взаимодействия сферы
радиуса R с плоскостью можно составить следующие геометрические
соотношения для диаметров d и d0 контуров контактных площадок:
а) при упругопластическом контакте тел (см. рис. 1)
d2 = 4R (а + Л) — (а + h)2 о±4Л (а + h) — 4Л 2; (2.11)
б) при чисто упругом контакте этих же тел
do = 4Ла0 ~ «о - 4Яа0. (2.12)
В указанных выражениях а и а0 — сближения центров масс тел при их
упругопластическом и чисто упругом контакте. Из совместного решения
Уравнений (2.11) и (2.12) следует
a0(d2+4/?) = 1 (2 13)
d0(а+ Л)
Соотношение (2.13) позволяет перейти и к общему случаю кон-
такта тел двоякой кривизны, когда площадка контакта (вмятина) огра-
ничена эллиптическим контуром с полуосями а и Ь. В самом деле, если а0
и Ьо, а и b — соответственно большие и малые полуоси указанных площа-
37
док при чисто упругом и упругопластическом контакте таких тел, то сог-
ласно известным [6,33] зависимостям
d2 = 4аЬ и dl = 4ао^о, (2.14)
а с учетом соотношения (2.13)
=1. (2.15).
fl0^0(а+ Л)
Достоверность последнего выражения подтверждена эксперименталь-
ной проверкой, охватившей некоторые из показанных на рис. 7 схем уп-
ругопластического контакта тел. Полное сближение а центров масс тел в
контакте измеряли с помощью прибора, конструкция которого аналогич-
на предложенной Н.Б. Демкиным [ 6], а величины a, b uh — соответствен-
но на инструментальном микроскопе ММИ-2 и индикаторным глубино-
мером.
Результаты экспериментов (табл. 12) свидетельствуют, что для всех
исследованных материалов контртел и схем нагружения условие (2.15)
выполняется с достаточно высокой для практики точностью.
Это значит, что и в случае контакта тел произвольной формы и кри-
визны справедливы соотношения, аналогичные (2.11) и (2.12), если в них
вместо R ввести 7?пр, т. е.
ab=Rnp(a + h) -1 (а+ й)2 ^Лпр(о+ h)-h\ (2.16)
ао^о ~ ^прао ~ — Кпр&о ? (2.17)
отсюда
*пр=^- (2.18)
«о
Полуоси а0 и Ьо площадки упругого контакта тел, а также сближение
а0 в контакте определяются [ 33] следующими выражениями:
(2.19)
(2.20)
а0 ^Р2 (кх + к2)2^к, (2.21)
где па, пь, «в — коэффициенты, зависящие от соотношения главных кри-
визн A/В, приводятся в справочных таблицах [ 33]: Як = 2(А + В) — сум-
ма главных кривизн поверхностей тел в точке их начального контакта;
ki кк2 — упругие постоянные, определяемые по формулам:
38
Таблица 12
4,90 0,091 1,465 0,885 0,119 0,810 0,425 0,057 1,03
7,86 0,072 1,335 0,805 0,113 0,930 0,485 0,075 0,97
9,81 0,050 1,280 0,775 0,119 1,025 0,535 0,091 0,98
39
Продолжение табл, 12 о0 (ab+h) a„b„ (а+й)
Упругий контакт <3° мм
«г
Упругопластический контакт d
<3
-s:
• Р, кН
Мате- риал
Контртело оГ мм
О?
Индентор оГ
ш о о о о -Г-7 о сь ч© еч ООО о о U' 0,97 1,03 1,04
0,062 0,081 0,098 0,054 0,054 0,086 0,038 0,060 0,079 § 5 & 2 Г) К
0,305 0,345 0,385 0,490 0,490 0,620 0,270 0,340 0,390 S ₽• о
1,650 0,735 0,157 0,880 1,570 0,700 0,145 1,005 1,425 0,635 0,141 1,105 1,335 0,935 0,103 0,780 1,080 0,755 0,079 0,780 1,220 0,855 0,105 0,980 1,135 0,560 0,080 0,680 1,250 0,615 0,095 0,855 1,225 0,605 0,100 0,980 45Х (НД2530) и 30ХГСА (ЯД4710). ы как средние арифметические из результат
0,125 • 0,108 0,070 Z) ГЧ О о 3 8 ООО 0,057 0,060 0,047 (ЯД 1440),' , Ъ, а найден
1 4,90 2 7,36 3 9,81 О О •—< Ch С* 00 чг -е с? »—• сч со V) О ч© ^Ch СП ’-ч еч m стали марок 20 ые значения й , а
10,0 8 8 1 1 т-Ч Р 3 е О гч
10,0 2,5 8 о о о »—< 10,0 2,5 Примечании
л
лУ
>ф
я
л,-
у-й»
10
¥
(2.22)
** 7iEi ’ 2 ттЕ2
в которых Д! и д2, El и Е2 - коэффициенты Пуассона и модули Юнга
материалов индентора и контртела.
Из уравнений (2.18) —(2.21) следует
1
„ _ папЬ
К\----------
или
где
ПР п6(Л+В) ирп6(А + В)
Япр 2А >
(2.23)
А
2в
А
прп6 (1+ д’)
вычисляется непосредственно по значениям величин, входящих в правую
часть этого уравнения, либо берется в готовом виде из прил. 2.
Учитывая важное практическое значение геометрического параметра
.Rnp в инженерных расчетах, связанных с заданием или прогнозирова-
нием микрогеометрии, а также физико-механического состояния по-
верхностного слоя деталей, испытывающих контактную упругоплас-
тическую деформацию, авторы выполнили обширную и тщательную экс-
периментальную проверку формулы (2.23).
В экспериментах были испытаны практически все применяемые на
практике схемы силового контакта тел двоякой кривизны, самые раз-
личные по своим физико-механическим свойствам материалы деформи-
руемых элементов (контртел) и нагрузки как статические, так и удар-
ные. Значения Rup, найденные по результатам прямого опыта в соответст-
вии с соотношениями (2.2) и (2.10), сопоставили с вычисленными по рас-
четной формуле (2.23). Полученные данные, сведенные в табл. 13, свиде-
тельствуют, что в широком интервале отношений А/В (0,034 < А/В < 1,0)
расчет по формуле (2.23) с удовлетворительной точностью подтверждает-
ся опытом. Вместе с тем этот эксперимент еще раз подтвердил чисто гео-
метрический смысл понятия и, следовательно, доказал правомерность
его использования при описании геометрии упругопластического контак-
та тел произвольной формы и кривизны независимо от характера кон-
тактной нагрузки, скорости нагружения (см. также табл. 43) и физико-
механических свойств деформируемых материалов.
Отметим одновременно, что при А/В > 0,5 результаты расчетов по
формулам (2.10) и (2.23) практически совпадают (см. табл. 11 и 13). По-
скольку соотношение (2.10) проще, то во всех случаях, когда А/В > 0,5,
его следует считать предпочтительным.
(2-24)
40
41
©7 2.4. ПЛАСТИЧЕСКАЯ ТВЕРДОСТЬ КАК ОБОБЩЕННАЯ ХАРАКТЕРИСТИКА
СОПРОТИВЛЕНИЯ МЕТАЛЛОВ УПРУГОПЛАСТИЧЕСКОЙ
Д КОНТАКТНОЙ ДЕФОРМАЦИИ
5>.
f. Описанные выше результаты подтверждены и другим, иначе постав-
‘ ленным опытом, который охватил ряд материалов и схем силового кон-
такта выпуклых и вогнутых поверхностей с различными радиусами и их
' соотношениями.
Инденторы (/?i 1,7? 21) внедряли в криволинейные поверхности образ-
цов /?12, R22. По глубине остаточного отпечатка h, полученного при Р =
; = 4,9 кн, и известному, т. е. измеренному ранее, значению пластической
твердости образца для каждой пары контактирующих поверхностей опре-
<’. деляли £)пр = 2/?пр в соответствии с формулой (2.2). Для сферического
V. индентора диаметром и плоской поверхности контртел по той же фор-
45" муле вычисляли значения восстановленных глубин отпечатков Лр, отве-
.V чающие всем другим ступеням нагрузки. Результаты опыта для стали СтЗ
Ч" приведены в табл. 14, из которой видно, что непосредственно измерен-
ные глубины h восстановленных вмятин при контакте несферических тел
произвольной кривизны и расчетные глубины Лр, отвечающие контакту
t шара приведенного диаметра с плоскостью при заданной нагрузке, прак-
4 тически одинаковы.
Аналогичный вывод следует из рис. 10, на котором кривые соот-
ветствуют значениям эффективной контактной нагрузки Р-Ро и Rmh,
.5 измеренным в эксперименте по внедрению шара диаметром D = 2Rnp
в плоскую поверхность образцов, а точками показаны значения тех же па-
‘ раметров, измеренные при других схемах силового контакта. Каждая из
у этих прямых однозначно характеризует зависимость (Р-Ро) = f (Rnph)
только для материала данной твердости, но справедливую для любых из
| - исследованных схем контакта и скорости нагружения. Последнее поло-
•f жение проверено и подтверждено экспериментами авторов при скорос-
& тях соударения тел v < 10 м/с.
ДС На рис. 11 линиями показаны зависимости h (R), построенные расчет-
д- ным путем по формуле (1.9) для случая внедрения шара в плоскую по-
л верхностъ образцов из стали ЗОХГСА при нагрузках 9,8; 19,6 и 29,4 кН.
Точками показаны экспериментальные значения h (R^,) при контакте тел
; различной кривизны (точки 1-9, см. рис. 11):
1 2 3 4 5 6 7 8 9
2R11, мм .. 10 10 10 10 5 10 10 10 10
27?21» мм .. 10 10 10 60 40 20 20 20 20
2/? 12, мм . . 15 20 -50 ОО ОО ОО 20 15 оо
2/? 22, ММ . . оо 20 ОО оо оо оо 20 ОО 15
43
Таблица 14
Сопоставление глубин восстанавливаемых вмятин при контакте
тел произвольной кривизны (h) и контакте шара диаметром
Цф, с плоскостью (h р; материал - сталь СтЗ, НД 1420
Я, кН 2,45 4,90 7,36 9,81 12,26 14,72 17,17 19,62
1.ЯИ ° 23 мм; Яа1 ' 20 мм; Я1а' Яаа ° <» Л, мм 0,035 0,080 0,135 0,160 0,205 0,240 0,285 0 315 Aj>.’MM 0,040 0,080 0,120 0,160 0,200 0,240 0,280 0320 Л/йр 0,88 1,0 1,13 1,0 1,03 1,0 1,02 6,98 2.Я,, * 5,0мм; Яа| ° 30мм; Я1а = Яаа 1 ~ А 0,020 0,044 0,068 0,091 0,115 0,140 0,163 ’ 0,190 Ап 0.022 0,044 0,066 0,088 0,110 0,132 0,154 0,176 А/Ар 0,91 1,0 1,03 1,03 1,05 1,06 1,06 1,08 5,0 мм; 30 мм; —7,5 мм; Л32 °® Л 0,050 0,102 0,157 0,205 0,260 0,310 0,355 0,405 Ар 0,051 0,102 0,153 0,204 0,255 0,306 0,357 0,408 Л/Лр 0,98 1,0 1,03 1,0 1,02 1,01 0,99 0,99
4.Яа1* Яа1" 5,0мм; Я,," -6,0мм; Я,,’ <»
h 0,018 0,045 0,062 0,087 0,110 0,135 0,162 0,190
Ар 0,022 0,045 0,067 0,090 0,112 0,134 0,156 0,180
А/Ар 6,82 1,0 0,93 6,97 0,98 1,01 1,04 1,06
5.Я.1" Я31 * 23 мм; Я 1а s - 3,6 мм; “
h 0,060 0,120 0,180 0,242 0,307 0,382 — —
hP 0,060 0,120 0,180 0,240 0,300 0,360 —
А/^р 1,0 1,0 1,0 1,01 1,02 1,06 -
6.ЯП * Яа1 * 5,0 мм; Я1а* 73 мм; Яаа ~
h 0,075 0,150 ОД 33 0,300 0,367 0,460 0328 0,610
А n 0,075 0,150 0,225 0,300 0,374 0,450 0,525 0,600
А/^р 1,0 1,0 1,04 1,0 0,98 1,02 1,01 1,02
Рис. 10. Зависимость ’’эффективной” контактной нагрузки (Р-Ро) от произведения
КпгД1:
I—III — стали марок 20, 45Х и 30ХГСА; 1—6 - схемы контакта тел согласно
рис. 1,а-е
Рис. 11. Глубины остаточных вмятин на образцах из стали 30ХГСА (НД 2880) в зави-
симости от приведенного радиуса кривизны поверхностей контактирующих тел (по
данным М. С. Дрозда и А. Н. Большова); кривые — расчет по формуле (1.9) ; точки
1 —9 - эксперимент
На графике видно, что для данного материала при постоянной кон-
тактной нагрузке глубина восстановленной вмятины однозначно опреде-
ляется величиной Ядр и пластической твердостью материала, оставаясь
одинаковой для различных кривизн поверхностей контактирующих тел.
Таким образом, очевидно, что пластическая твердость определяется
только физико-механическими свойствами материала и не зависит от наг-
рузки, а также формы и размеров контактирующих тел. А это значит, что
пластическая твердость является обобщенной характеристикой, опреде-
ляющей сопротивление материала упругопластической контактной дефор-
мации не только при внедрении сферического индентора в плоскость, но
и в общем случае контакта тел двоякой кривизны.
46
2.5. О ГРАНИЦАХ ЛИНЕЙНОГО УЧАСТКА ФУНКЦИИ P(h );
КРИТИЧЕСКАЯ НАГРУЗКА Ро
В условиях силового взаимодействия тел, ограниченных поверхностя-
ми произвольной формы и кривизны, диапазон нагрузок, при которых
зависимость P(h) линейна, определяется твердостью и прочностью иссле-
фемых материалов, а также величиной и соотношением кривизн поверх-
ностей контактирующих тел. Поэтому для расчетного определения h не-
обходимо найти значения предельных нагрузок, при которых указанная
зависимость справедлива.
В табл. 15 приведены значения нагрузок Ро, найденные для различных
случаев контакта и материалов контртел путем математической обработ-
ки (с использованием метода наименьших квадратов) эксперименталь-
ных зависимостей Р(Л), приведенных на рис. 8. В ту же таблицу для срав-
нения занесены значения Ро, рассчитанные для этих же условий нагруже-
ния по формулам (1.17) и (1.18) при D = 2Кпр. При этом основная расчет-
ная зависимость, применительно к контактному взаимодействию тел про-
извольной формы и кривизны, имела вид
^ю^)2. (2-25)
где нагрузка Р0,ю определяется для /Эщ, =10 мм по формулам (1.17).
Вполне удовлетворительное совпадение расчетных и опытных значе-
ний Ро позволяет с полным основанием применять формулу (2.25) при
Таблица 15
Значения предельной нагрузки Ро при упругопластическом
контакте тел произвольной формы и кривизны
Схема контакта тел согласно рис. 7 Материал (марка стали) НД, МПа Р0. кН
расчет опыт
45Х 2530 0,09 0,05
а 30ХГСА 4710 0,60 0,70
45Х 2530 0,13 0,15
б ЗОХГСА 4710 0,86 0,65
20 1440 0,08 0
в 45Х 2530 0,35 0,25
ЗОХГСА 4710 2,26 2,50
20 1440 0J)7 0
г 45Х 2530 0,27 0,20
ЗОХГСА 4710 1,78 1.55
20 1440 0,16 0,20
д 45Х 2530 0,67 0,55
ЗОХГСА 4710 4,37 4,70
20 1440 0,13 0,10
ж ШХ15 2880 0,79 1,00
47
решении задач, связанных с контактным взаимодействием не только сфе-
рических инденторов с плоскими плитами, но и тел двоякой кривизны.
Что касается глубин h, ограничивающих верхний предел линейной за-
висимости P(h), то экспериментами, выполненными А.Н. Волыновым
(1976 г.), а также дополнительными исследованиями авторов доказано,
что она сохраняется по крайней мере до значений h, не превышающих
0,14/?пр; при этом нагрузка на индентор
Р<0,9НДК^. (2.26)
Величина верхней предельной нагрузки определяется твердостью ма-
териалов деформируемых тел (деталей), а также величиной и сочетанием
кривизн поверхностей контактирующих тел, т. е. в принципе теми же фак-
торами, что и при упругопластическом контакте шара с плоской поверх-
ностью контртела [ 7].
Отметим, что сказанное справедливо, когда отсутствует выпучивание
свободной поверхности деформируемого материала вблизи контура ос-
таточной вмятины. Это положение соблюдается достаточно точно во всех
случаях контактного нагружения тел, когда иг = 2,5а и и2 = 2,5b (см.
рис. 9). Вопрос о боковом выпучивании при контакте тел подробно рас-
смотрен Д. Тейбором.
ГЛАВА 3
РАСЧЕТ ПАРАМЕТРОВ УПРУГОПЛАСТИЧЕСКОГО
КОНТАКТА ТЕЛ ДВОЯКОЙ КРИВИЗНЫ
Знание параметров упругопластического контакта гладких тел двоя-
кой кривизны необходимо в целом ряде важных для практики случаев,
какими являются, например, следующие: расчет прессовых соединений и
фактической площади контакта сопряженных поверхностей с учетом их
шероховатости; исследование и расчет сил трения в контакте; расчет ре-
жимов поверхностного пластического деформирования деталей машин с
целью повышения их сопротивления усталости; прогнозирование или
обеспечение необходимой микрогеометрии обработанной поверхности и
т. д.
Во всех этих случаях приходится иметь дело с упругопластическим
контактом индентора с телами, ограниченными гладкими криволинейны-
ми или плоскими поверхностями. В то же время закономерности упруго-
пластического контакта тел в систематизированном виде в литературе не
описаны [41]. Эти вопросы и рассматриваются ниже применительно к ус-
ловиям, сформулированным во вступлении к гл. 2.
48
3.1. ФОРМА ПОВЕРХНОСТИ ОСТАТОЧНОЙ ВМЯТИНЫ
Вследствие упругой деформации индентора (перемещения на
рис. 1 и 12) кривизна поверхности контакта под нагрузкой отлична от
кривизны поверхности недеформированного индентора, так что RH > R.
При снятии нагрузки происходит упругое восстановление, в результате
которого радиусы кривизны индентора восстанавливаются до исходных
величин, а радиусы кривизны поверхности вмятины (отпечатка) возрас-
тают до R'y > (RH)а >R.
Величину R'jj можно вычислить, рассмотрев схему силового упруго-
пластического контакта тел, ограниченных в общем случае поверхностями
двоякой кривизны.
Примем следующие допущения: 1) со снятием нагрузки эллиптичес-
кий в общем случае контур отпечатка не изменяется; 2) профили вмяти-
н!ы под нагрузкой и после разгрузки в плоскостях ее главных кривизн
оюрчены окружностями радиусов (RH)y и Я#; 3) поверхность контртела
вне контакта не деформируется.
Первое допущение принято по аналогии со случаем контакта сферы
с плоскостью, когда со снятием нагрузки происходит интенсивное упру-
гое восстановление глубины вмятины, а ее диаметр изменяется очень ма-
ло. Так, по данным О’Нейля [ 28] это уменьшение для самой твердой ста-
ли не превосходит 10%; аналогичные результаты получены и в наших опы-
тах [ 7].
Второе допущение подтверждается как литературными данными
[ 28], так и нашими экспериментами.
Третье допущение соответствует постулату, принимаемому в теории
пластичности и использованному А.Ю. Ишлинским [ 17].
В общем случае силового взаимодействия тел произвольной кривизны
площадка контакта очерчена сплошным контуром. Однако для дальней-
шего анализа примем в первом приближении, что ее проекция на плос-
кость, нормальную к направлению контактной нагрузки, имеет форму эл-
липса, полуоси которого в соответствии с рис. 12 определяются выраже-
ниями:
a=y/2R'l2ha-h^ (3.1)
а -^2Яи-(Лс+^)](Л0+4)’ С3-2)
b=y/'2R'22hb-h2b, (3.3)
Л=7[2Л21-(Лй + ^)](Лй+^). (3.4)
Здесь дополнительно R'i2 и R22 — главные радиусы кривизны поверхнос-
ти остаточной вмятины; ha и hb — расстояния, отсчитанные вдоль линии
49
Рис. 12. Схема силового упруго пластического контакта тел произвольной кривизны:
а-б - сечения контактирующих тел плоскостями плавных кривизн 7 и 2; /?7у - глав-
ные радиусы кривизны поверхностей индентора и контртела; (Ян)12. (Ян)г2 и^12,
А22 - главные радиусы кривизны поверхности вмятины под нагрузкой и после раз-
грузки; h - остаточное смещение центра контакта; «у и а - обратимое упругое и
полное сближение контактирующих тел; И'1 и И'2 - обратимое упругое смятие ин-
дентора под нагрузкой и упругое восстановление контртела в центре контакта после
разгрузки; 1а и 2в - большая и малая оси контура (в плане) остаточной вмятины
действия контактной нагрузки Р, от уровня 0 центра остаточной вмяти-
ны до наиболее удаленных от него (без учета наплыва) точек контура эл-
липтической (в плане) площадки контакта. Большая а и малая b полуоси
контактной площадки находятся в плоскостях, в которых полусуммы
главных кривизн поверхностей контактирующих тел, определяемые
выражениями (2.3) и (2.4), равны соответственно А иВ.
Из совместного решения уравнений (3.1) —(3.4) следует
(3.6)
Данные табл. 16 свидетельствуют о хорошем совпадении расчета, вы-
полненного по этим формулам, с опытом. Экспериментальные значения
главных радиусов кривизны T?i2 и R 22 находили по методу, описанному
в работе [12].
В случае внедрения тороидального индентора в плоскую поверхность
ha=hb=hw
50
Значения найденных из опыта и рассчитанных по формулам
(ЗЛ) и (3.6) главных радиусов кривизны R\a й Rf2;
поверхностей остаточных вмятин
Таблица 16
Схема контакта | тел сог- Материал Л кН я; 2,мм R* 2 2 , мм
опыт расчет опыт расчет
ласно рис. 7
1 9,81 5,34 5,43 5,73 5,67
а 3 19,62 6,76 6,65 8,03 8,23
5 7,36 5,85 5,78 6,25 6,30
2 19,62 75 71 2,87 2,91
б 3 9,81 145 152 2,93 2,88
4 9,81 106 112 2,76 2,74
1 19,62 38,2 39,4 2,75 2,70
в 2 19,62 40,2 40,8 2,85 2,81
5 9,81 42,4 41,7 3,15 3,21
2 29,43 12,6 13,0 5,81 5,77
г 3 29,43 14,1 13,8 6,15 6,08
4 19,62 13,5 14,0 6,25 6,19
2 29,43 13,2 12,9 5,41 5,25
д 3 29,43 15,5 15,1 5,92 5,85
5 19,62 12,0 12,2 5,53 5,40
1 7,36 2,58 2,61 2,86 2,80
е 3 9,81 2,83 2,88 3,77 3,80
4 4,90 2,60 2,61 2,73 2,78
Примечание. 1-5- соответственно сталь 20 (НД 1440) , сталь 45Х
(НД 2530), сталь 30ХГСА (НД 4710), алюминиевый сплав
АМг-б (ЯД 900) и латунь Л-бЗ (НД 1390).
если же при этом индентор имеет форму сферы (см. рис. 1) радиуса
R=Rn =Я21,то/?'12 = R'22 =Я'и
В том частном случае, когда индентор и контртело изготовлены из
материалов с одинаковыми упругими свойствами, формула (3.8) прини-
мает вид
/?' = *(! +~) = Я^
п п
(3.9)
51
R‘ Отношения — индентора в пло бруса (НД 3240 t и —при внедрении сферического h Табл и ц а 17
скую поверхность с тального
Р/£Я, 2Л,, р h <1 1 R" t
МПа ММ —_ — -—
кН мм R h
24,5 5,0 0,61 0,010 0,57 0,017 4,06 1,63 1,70
10,0 2,45 0,020 1,20 0,033 9,00 1,80 1,65
49 5,0 1,23 0,022 0,81 0,033 3,73 1,49 1,50
10,0 4,90 0,045 1,60 0,065 7,14 1,43 1,44
2,5 0,61 0,022 0,54 0,029 1,67 1,33 1,32
98 5,0 2,45 0,046 1,10 0,058 3,31 1,32 1,26
10,0 9,81 0,093 2,20 0,123 6,55 1,31 1,32
2,5 1,84 0,072 0,90 0,085 1,44 1,15 1,18
294 5,0 7,35 0,143 1,85 0,169 3,05 1,22 1,18
10,0 29,4 0,286 3,70 0,339 6,18 1,23 1,22
Расчетные значения радиусов кривизны поверхности восстановленных вмятин Таблица 18
(материал образцов — сталь; D = 10 мм)
Р, кН <1 h 1 | W t 2R' ММ
MM формула формула
(3.9) J (3.10)
Сталь 30 ХГСА, НД 6270
9,8 1,81 0,039 0,044 0,083 21,2 21,0
19,6 2,48 0,091 0,064 0,155 17,0 17,0
29,4 2,95 0,138 0,071 0,209 15,1 15,7
39,2 3,32 0,187 0,084 0,271 14,5 14,0
49,0 3,69 0,238 0,094 0,332 14,0 14,3
Сталь У7, НД 5640
9,8 1,89 0,050 0,040 0,090 18,0 17,9
19,6 2,48 0,102 0,054 0,156 15,3 15,2
29,4 2,94 0,151 0,069 0,220 14,6 14,4
Армко-железо, НД 1110
2,45 1,80 0,070 0,0094 0,079 11,3 11,5
4,9 2.50 0,141 0,14 0,155 11,0 11,2
9,8 3,40 0,282 0,020 0,302 10,7 10,8
19,6 4,69 0,564 0,028 0,592 10,5 10,3
Пр имечанис. Значения d. h и W найдены по результатам опытов; t - h+ W.
52
поскольку В7! = W2 = W и ау =2W. Зависимость (3.9) хорошо подтвержда-
ется экспериментальными данными, приведенными в табл. 17.
В связи с этим радиус кривизны поверхности остаточной вмятины
можно вычислить также из известного элементарного геометрического
соотношения
8й
(3.10)
2 ""*8Л
R' (табл. 18), вычисленные по формулам (3.9) и (3.10),
(3.11)
Значения
практически одинаковы.
Аналогично для эллиптического (в плане) отпечатка
2 па "Ь
Описанные результаты свидетельствуют о достоверности указанных
формул при условии, что в процессе нагружения индентор деформирует-
ся чисто упруго. Однако следует подчеркнуть, что они не распространяют-
ся на те случаи, когда значения твердости материалов индентора и контр-
тела близки по величине, а нагрузка такова, что индентор при силовом
контакте получает пластическую деформацию. При этих условиях поверх-
ность вмятины имеет несферическую форму [ 29].
3.2. РАСЧЕТ СБЛИЖЕНИЯ В КОНТАКТЕ
Полное сближение в упругопластическом контакте индентора с контр-
телом состоит из двух слагаемых: остаточного сближения h, равного глу-
бине восстановленного отпечатка, и упругого сближения ау, исчезающего
со снятием нагрузки вследствие упругого восстановления индентора и
контртела. Таким образом,
а = Л+ау, (3.12)
причем первое слагаемое находят из соотношения (2.2) как
вопрос о расчетном определении ау рассматривается ниже.
Согласно решению контактной задачи теории упругости [ 33] упругое
сближение а0 центров масс тел, ограниченных поверхностями двоякой
кривизны, описывается зависимостью (2.21), в которой фигурирует сум-
ма начальных кривизн поверхностей контактирующих тел Ък = 2 (Л + В).
Таким образом, здесь предполагается, что в процессе силового контакта
кривизна взаимодействующих тел остается неизменной.
53
С появлением на поверхности контакта остаточной вмятины упругие
деформации продолжают, как известно, подчиняться зависимостям теории
упругости; однако очевидно, что при этом обычные ’’упругие” формулы
должны быть скорректированы в соответствии с новыми условиями кон-
такта. Принципиальное отличие этих условий от условий чисто упругого
контакта тел состоит в том, что при наличии остаточной вмятины выпук-
лый индентор с радиусами кривизны Ru и R2J находится в контакте не
с начальной криволинейной поверхностью контртела, имеющего радиусы
кривизны А12 и Rи, а с поверхностью остаточной вмятины, радиусы кри-
визны которой, как показано в п. 3.1, равны значениям R'i2 и R22, опре-
деляемым формулами (3.5)—(3.9). Такой подход отвечает положениям,
сформулированным и подтвержденным экспериментально Тейбором.
Следовательно, если при силовом контакте упругого индентора с по-
верхностью контртела на ней образуется остаточная вмятина, то исполь-
зование зависимости (2.21), в которой принимается
ЕЛ = -5— + — + -L+-L.,
R 11 Л 12 « 21 «22
неправомерно. В этих условиях в указанной формуле следует принимать
в расчет сумму кривизн
ел = 2_ __L + _L _J_
Л11 /?12 Л21 Л 22
(здесь знаки ’’минус” указывают на то, что вмятина ограничена вогнутой
поверхностью).
Применительно к рассматриваемому случаю формула (2.21) запи-
шется в виде
ау = (*. + к2)2Р2Ък', (3.14)
где
ЕЛ' = 2(Л' + В'), (3.15)
причем параметры А' и В' определяются из соотношений, составленных на
основе формул (2.3), (2.4) и (3.5), (3.6):
л'=1г— - 4-) = — (________5-т—); (3.16)
2 R ц ^12 27? ц 1+ 2Лд/О!у
я'=1(-______—)=—(—Ц—)• (317>
2 /?21 R22 2/? 21 1 + 2Л/,/ау
Совместное решение уравнений (3.16), (3.17), (3.14) и (3.15) приво-
дит к выражению
п -'Л (к, + к.)2Р2\ 1 + 1 (318)
“у 2’4'* «и (1 + 2Лд/ау) Л21 <1 + 2Лй/ауГ
54
в котором неизвестными являются геометрические параметры вмятины
Иу, ha и hb-, последние могут быть определены из чисто геометрических
соотношений. В самом деле, как видно на рис. 12,
а = х/[ ±2/?п - (Л—Лв)] (Л—Ло); (3.19)
Ъ = V[ ±2/?22 “ (h-hb)](h-hb), (3.20)
где знаки плюс и минус выбирают по условию, принятому выше (см.
п. 2.2) для определения величины Rпр.
Решив совместно уравнения (3.2), (3.4), (3.19) и (3.20) относитель-
но ha и hb,найдем
// — nQy-^2 .
° 2(±Й12+Лц-Л) ’
(3.21)
(3.22)
. _ ±2R22h-R2iay-h2
>b 2(±R22+ R2l-h)
Числовой анализ показывает, что если в последних выражениях пре-
небречь величинами h и Л2, то погрешность определения av по формуле
(3.18) не превысит 3-5%; при этом
/, ~ ±2Ri2h-Rnay
а 2(Лц±Я12) ’
// ~ -2^22/г~^21 ау
* 2 (Л 21 ±R 22)
С учетом полученных соотношений из (3.16) и (3.17) найдем
л._ А В
1+2/;/ау И 1+2/»/ау’
а это означает, что А '/В' = А/В и, следовательно, n's = «6. Поэтому коэффи-
циент фигурирующий в уравнениях (3.14) и (3.18), находят непосред-
ственно по прил. 2 в зависимости от отношения А/В, принимаемого чис-
ленно равным А1/В'.
Таким образом, убеждаемся, что уравнение (3.18) содержит только
одно неизвестное ау и поэтому может быть решено методом последова-
тельных приближений.
После подстановки найденных соотношений в выражение (3.18) по-
лучим
а„ = а° - ^2
У <Л + 2Л/ау п ’
где П = (1 + 2А/ау)1/3 — поправка к формуле Герца, учитывающая влия-
ние пластической деформации контртела в зоне контакта на величину уп-
ругого сближения; а0 — сближение тел при наличии только упругой де-
формации, определяемое формулой (2.21).
(3.23)
55
Таблица 19
Найденные из опыта и рассчитанные по формуле
(3.23) значения обратимого упругого сближения
тел произвольной формы и кривизны при их
упругопластнческом контакте
Геометрические параметры контактирующих тел, мм Материал Контакт- ная наг- рузка Р, кН мм
расчет ОПЫТ
Индентор Контртело
*.1 R,. R.2 Rj2
1 4,90 0,031 0,034
оо 2,5 10,0 оо 2 7,36 0,049 0,048
3 9,81 0,070 0,066
1 4,90 0,030 0,028
со 3,75 10,0 оо 2 9,81 0,055 0,055
3 9,81 0,065 0,070
1 4,90 0,031 0,028
5,0 5,0 оо 10,0 2 7,36 0,048 0,051
3 9,81 0,071 0,075
1 2,45 0,022 0,020
2,5 2,5 оо 10,0 2 4,90 0,040 0,043
3 4,90 0,052 0,049
4 4,90 0,049 0,047
2 4,90 0,037 О',037
10,0 5,0 оо оо 1 4,90 0,030 0,028
4 9,81 0,065 0,069
10,0 2,5 оо оо 1 2,45 0,021 0,023
2 4,90 0,038 0,035
Примечания: 1.1-4 - стали марок 20 (НД 1440), 45Х (НД 2530),
30ХГСА (НД4710) и 30ХГСА (ЯД 4170).
2. Опытные значения ау найдены как средние арифме-
тические из результатов трех измерений.
Неполное кубическое уравнение (3.23) можно также решить отно-
сительно ау методом последовательных приближений. Однако для него
существует и точное решение, которое удобно представить в тригономет-
рической форме в зависимости от параметра
Q= 27 . (<*о) 1,213
V 32 1 h J
(3-24)
56
следующим образом:
а) при Q < 1
«у = [2 cos| arccos (2fi - 1) - 1 ]; (3.25)
б) при Q 1
“у = “ ^ [ 1 + 2sin"1 (2 arctg </tg-‘ arcsin (у-— )) ]. (3.26)
Приведенные в пп. 3.1 и 3.2 формулы в принципе исчерпывают зада-
чу расчета сближения в упругопластическом контакте тел произвольной
формы и кривизны.
В заключение отметим, что введенная ранее (см. п. 2.2) для расчет-
ного определения остаточного смещения h центра вмятины величина Лпр
может быть использована также и для нахождения а0. Для этого достаточ-
но воспользоваться зависимостью (2.21) и распространить ее на случай
контакта шара радиуса R= Rupc плоскостью; в результате этой операции
получим
Значения а0, найденные по формуле (3.27), меньше рассчитанных по урав-
нению (2.21) в \Jnp/n^ раз> что составляет при A/В 0,25 менее 3,5%.
Практическое преимущество зависимости (3.27) в сочетании с формулой
(2.10) перед аналогичными выражениями (2.21) и (2.23) состоит в том,
что она не содержит коэффициентов пр и и6, необходимость определения
которых несколько усложняет расчеты.
Выполненная авторами опытная проверка подтвердила вполне удов-
летворительную точность расчетного определения ау по формулам (3.23)
или (3.27), что видно из табл. 19. Содержащиеся в ней эксперименталь-
ные значения ау находим, пользуясь данными табл. 12, как разность меж-
ду измеренными значениями а и Л, т. е. в соответствии с зависимостью
(3.12). Данные табл. 20 свидетельствуют о достоверности расчетных зна-
чений й, вычисленных по формуле (3.13). Отметим, однако, что при из-
вестных условиях в процессе разгрузки не исключены вторичные пласти-
ческие деформации (стимулируемые, в частности, эффектом Баушинге-
ра), которые могут снизить точность расчетного определения ау.
3.3. УПРУГОЕ ВОССТАНОВЛЕНИЕ В КОНТАКТЕ
Описанные результаты позволяют также определить величины смятия
вершины индентора W и упругого восстановления в центре контакта W2.
В соответствии с теоремой о разгрузке последнее равно по абсолютной ве-
57
личине и противоположно по знаку смещению в той же точке при чисто
упругом контакте под действием силы Р, от максимального значения ко-
торой начата разгрузка. Значения и IV2 должны определяться соответ-
ствующими зависимостями теории упругости с учетом влияния упруго-
пластической деформации в зоне контакта, т. е. действительной кривизны
поверхности восстановленной вмятины.
Упругая составляющая полного сближения контактирующих тел, оп-
ределяемая выражением (3.23), представляет собой сумму Wi и W2 (см.
рис. 12), т. е.
Qy = + 1Г2 = =£, (3.28)
где Wo1 и %>2 — упругие смещения в центре контакта, вычисленные для
вершины индентора и для вмятины при чисто упругом контакте; а0 —
сближение контактирующих тел при тех же условиях, вычисляемое по
формулам (2.21) или (3.27).
Таким образом,
И/12=<!Ц21г2. (3.29)
Из известного решения Герца [ 36] следует, что
т. е.
И/, = ау и W2 = гЦ-ау, (3-31)
Л1 + Л2 3 kt + k2 3
где кх и к2 определяются формулами (2.22).
Поэтому с учетом зависимости (3.18)
И/, 2 = к. 2 [---------— + --------!--------]. (3.32)
1,2 1.2 2 v4(*1+*2) 1Л|, (1+2ftc/ay) «i2(l + 2ftfe/ay)
Заметим, что при силовом контакте индентора с плоской поверхнос-
тью контртела ha = hf, = h, а когда контактирующие тела имеют одинако-
вые упругие свойства, кf =к2 -к и = W2 = W = ay/2.
3.4. РАСЧЕТ ПОЛУОСЕЙ КОНТУРА ОСТАТОЧНОЙ ВМЯТИНЫ
Контур остаточной вмятины на поверхности контртела в общем слу-
чае очерчен замкнутой пространственной кривой, имеющей в плане эллип-
тическую форму с большой а и малой Ь полуосями. Геометрические пара-
метры остаточной вмятины являются важными характеристиками дефор-
мации материала в контакте. Так, в частности, при обкатке деталей роли-
58
ками (шариками) один из размеров отпечатка практически равен ширине
беговой дорожки рабочего инструмента и определяет протекание процесса
волнообразования на обрабатываемой поверхности и в конечном счете —
ее микрорельеф. Размеры полуосей а и b характеризуют также глубину
пластически деформированной зоны в контакте.
Расчетные зависимости, необходимые для определения полуосей кон-
тура остаточной вмятины при однократном нагружении, можно получить
на основе изложенных выше результатов.
В самом деле, для этого достаточно воспользоваться выражениями
(3.1) и (3.2), представив их с учетом (3.5) и (3.6) в удобной для практи-
ческих расчетов форме:
g =х4?и (2/>fl + ау) - (з.зз)
ъ = xAzi (-I'b + Оу) - >'2ь- (3-34)
при этом
Ь = /к21 (2hb+ay) - /7%~ гтлчч
а V/?n(2May)-Лс
В тех случаях, когда контртело в зоне контакта ограничено не криво-
линейной, а плоской поверхностью, hB = hb = h,'формулы (3.33)—(3.35)
упрощаются и преобразуются к виду
Ь _ h-lBh1) А _ ^Ja
“ V (Д+/1-2ЛА2) S В
(3.36)
(3.37)
(3.38)
Для экспериментальной проверки приведенных выше формул произ-
водили внедрение закаленных шариков и тороидальных роликов в плос-
кие, выпуклые, вогнутые и выпукло-вогнутые поверхности образцов из
сталей различных марок, а также цветных сплавов в соответствии со схе-
мами контакта, показанными на рис. 7. Полуоси а и Ъ контура контактной
поверхности, а также остаточное смещение Л ее центра измеряли после
каждого нагружения непосредственно на образцах по методике, описанной
в п. 2.1.
Из данных табл. 20 видно, что расчетные величины полуосей а и b кон-
тура остаточной вмятины, а также их отношения b/а вполне удовлетвори-
тельно подтверждаются экспериментом.
59
Таблица 20
Найденные из опыта и рассчитанные по формулам (3.13), (333) — (335)
геометрические параметры (мм) остаточных вмятин при
упругопластическом контакте тел двойкой кривизны
Схема Материал Р, кН h 2а 2Ь Ь/а h | 2а | 2Ь 1 Ь1а
контак- та теп Опыт Расчет
согласно
рис. 7
4,90 0,130 2,37 1,97 0,830 0,133 2,42 1,98 0,820
1 14,71 0,400 3,95 3,40 0,860 0,398 4,02 3,38 0,840
2 9,81 19,62 0,152 2,64 2,20 0,835 0,150 2,65 2,18 0,825
0,298 3,55 3,03 0,855 0,301 3,64 3,04 3,03 0,835 0,825
5 7,36 0,322 3,67 3,08 0,840 0,318 3,67
2 9,81 0,125 3,51 1,70 0,485 0,124 3,48 1,72 0,495
29,43 0,372 5,84 2,77 0,475 0,375 5,78 2,81 0,485
б 3 9,81 0,063 2,82 1,38 0,490 0,062 2,78 1,38 0,495
29,43 0.195 4,61 2,23 0,485 , 0,197 4,55 2,24 0,490
5 9,81 0,357 5,56 2,64 0,475 0,353 5,52 2,69 0,485
2 19,62 0,195 8,30 1,93 0,232 0,190 8,26 1,91 0,230
в 3 19,62 0,115 7,55 1,75 0,232 0,110 7,50 1,73 0,230
6 0,81 0,175 8,13 1,88 0,231 0,178 8,12 1,87 0,230
9,81 0,095 3,28 3,05 0,930 0,096 3,31 3,06 0,925
1 29,43 0,295 5,25 5,15 0,980 0,290 5,26 5,10 0,970
9,81 0/550 2,70 2,48 0,920 0,052 2,72 2,50 0,920
д 2 29,43 0,165 4,37 4.12 0.945 0.164 4.36 4.10 0.940
6 19,62 0,205 4,62 4,46 0,965 0,200 4,64 4,40 0,950
е 1 2,45 0,090 1,95 1,23 0,630 0,088 1,93 1,22 0,630 0,680
7.36 0,350 3,43 2,37 0,690 0,352 3,44 2,34
19,62 0,210 3,05 2,02 0,660 0,212 3,05 1,98 0,650
3 29,43 0,320 3.50 2.38 0,680 0.320 3.55 2.38 0.670
5 4,90 0,283 3,22 2,16 0,670 0,280 3,20 2,12 0,660
7,36 0,083 5,46 1,72 0,315 0,081 5,45 1,72 0,315
1 24,53 0,265 9,40 2,77 0,295 0,270 9,35 2,90 0,300
ж 9,81 0,052 4,60 1,45 0,315 0,054 4,67 1,47 0,315
4 29,43 0,167 7,70 2,35 0,305 0,164 7,55 2,34 0,310
2 9,81 24,53 0,140 0,360 3,22 5,20 1,85 3,10 0,575 . 0,585 0,142 0,355 3,25- 5,20 1,86 3,07 0,572 П 50Л
к 9,81 29,43 0,072 0,230 2,65 4,21 1,50 2,46 0,565 .0,585 0,075 0,225 2,71 4.24 1,53 2 4S 0,565
5 7,36 0,296 5,00 2,96 0,592 0,300 5,05 2,98 0,590
п р и м е ч а и и я : 1.1 - 6 - стали марок 20 (НД 1440), 45Х (НД 2530), ЗОХГСА (НД 4710), ШХ15 (НД 2880)
алюминиевый сплав АМг-6 (НД 900) и латунь л-63 (НД 1390). ’
2. Экспериментальные значения h , 2а w2b получены как средние арифметические из 3 - 5 измерений.
Ф
3.5. ЭКСЦЕНТРИСИТЕТ КОНТУРА ОСТАТОЧНОЙ ВМЯТИНЫ
В ЗАВИСИМОСТИ ОТ ЕЕ ГЛУБИНЫ И КРИВИЗНЫ
ПОВЕРХНОСТЕЙ КОНТАКТИРУЮЩИХ ТЕЛ
Форма (т. е. эксцентриситет или отношение полуосей b/а) контура
контактной поверхности заметно влияет на глубину пластически деформи-
рованного слоя hs материала детали. В связи с тем, что hs является весьма
важной характеристикой (обуславливающей, в частности, эффективность
ППД), необходимо устано-
вить характер зависимости
формы контура остаточной
вмятины от определяющих ее
факторов.
На рис. 13 приведены гра-
фики, которые иллюстрируют
изменение отношения полу-
осей Ь/ а контура восстанов-
Рис. 13. Зависимость отношения полуосей контура восстановленной вмятины от от-
носительной величины остаточного смещения ее центра:
1—4 стали марок 20 (НД 1440), 45Х (НД 2530), 30ХГСА (ЯД 4710) и 111X15 (НД
2880); сплошные линии - расчет по формуле (3.35); буквы у кривых - схемы
контакта тел согласно рис. 7,а-ж
Рис. 14. Отношение полуосей контактной площадки в зависимости от соотношения
главных кривизн соприкасающихся поверхностей в исходном состоянии:
I, II - контакт тел соответственно при чисто упругой и упругопластической деформа-
ции в зоне соприкосновения; 1 - данные работы [3]; 2 - опыты А. Н. Волынова;
3 - опыты авторов
62
ленной вмятины в зависимости от остаточного смещения ее центра для
различных схем контакта (см. рис. 7,а-ж) и твердости материала контр-
тел. Графики построены по экспериментальным данным, полученным из
прямых опытов по контактному взаимодействию тел двоякой кривизны
(см. пп. 2.1 и 3.4); часть этих данных содержится в табл. 20. Эксцентри-
ситет контура упруго пластического отпечатка определяется величиной
контактной нагрузки (или глубиной h ), а также сочетанием кривизны по-
верхностей контактирующих тел и практически не зависит от физико-ме-
ханических свойств деформируемых материалов. Таким образом, зави-
симость эксцентриситета отпечатка от контактной нагрузки представляет
собой принципиальное отличие упругопластического контакта тел от чисто
упругого, когда эксцентриситет (или отношение полуосей Ь/а) контура
площадки контакта инвариантен относительно нагрузки.
Очевидно, что при упругопластическом контакте тел, ограниченных
поверхностями двоякой кривизны заданных форм и размеров, раздель-
ное влияние на эксцентриситет контура остаточной вмятины таких факто-
ров, как контактная нагрузка Р и твердость НД материала контртела,
должно рассматриваться в зависимости от того, приводит ли их действие к
уменьшению или увеличению глубин h: если варьировать Р и НД так, что
величина И остается постоянной, то это практически не сказывается на
величине отношения bl а. Об этом свидетельствует анализ уравнения
(3.35), которое удовлетворительно описывает отмеченные выше законо-
мерности.
При относительно небольших размерах остаточных вмятин (h <
< 0,01/?пр), которые образуются, в частности, при упрочнении деталей
машин и инструментов ППД, вполне допустимо использование приближен-
ных зависимостей (3.36)-(3.38). Это видно на рис. 14, где показан гра-
фик зависимости b/a - f(A/B), построенный по формуле (3.38). Там же
точками нанесены экспериментальные значения для отпечатков с h -
= 0,01Япр и для сравнения приведена аналогичная зависимость в предпо-
ложении чисто упругого контакта тел, построенная с использованием со-
отношений (2.19) и (2.20). Форма контура остаточной вмятины сущест-
венно отличается от чисто упругой, особенно для вытянутых лунок, т. е.
для малых отношений А/В.
Таким образом, приведенное выше решение может быть использовано
для прогнозирования размеров остаточной вмятины при различных сочета-
ниях кривизн поверхностей контактирующих тел с первоначальным каса-
нием в точке. Для этого (как и при расчете ау), кроме геометрических
размеров тел в зоне контакта, упругих констант Е и д материалов этих
тел, необходимо знать дополнительно только пластическую твердость НД
материала деформируемого контртела.
3.6. УПРУГОПЛАСТИЧЕСКИЙ КОНТАКТ СФЕРИЧЕСКОГО
ИНДЕНТОРА С ПЛОСКОЙ ПОВЕРХНОСТЬЮ КОНТРТЕЛА
Этот частный случай весьма распространен в технике и, кроме того,
широко используется при исследовании с помощью ’’сферической моде-
ли” контактного взаимодействия шероховатых поверхностей. Все расчет-
ные зависимости, относящиеся к этому случаю, непосредственно получа-
ются из общих формул, приведенных в пп. 3.1—3.4, при условии, что
/?и =^i2 = Я, ^2i =^22 =ht) =h, п5 = 1; геометрические парамет-
ры контакта иллюстрируются рис. 1.
Упругое и полное сближение в контакте. В соответствии с выражения-
ми (3.18) и (3.23) при и® = 1
а _з/9тг2 (ki + k2)2P2 _ о.. _»о
“У V 16 R(l + 2h/ayf п’
(3.39)
где дополнительно а0 - сближение при чисто упругом силовом контакте
шара радиуса R с плоской поверхностью контртела, определяемое форму-
лой (2.21) при ХА = 2/R и л6 = 1, т. е.
«о
•я2 (к1 + к2)2Р2
16 ~R
(3.40)
Остаточную составляющую h полного сближения а тел находят из
формулы (1.9):
тгйНД
(3-41)
здесь D = 2R — диаметр индентора; Ро — критическая нагрузка, которую
для любого материала контртела можно найти из зависимости (1.16),
для чего предварительно измеряют НД методом двукратного нагружения
(см. с. 16). Для сталей значения Ро определяются формулами (1.17)
и (1.18). Приближенные значения h находят из формулы (1.23) как
h Р..
тгйНД
(3.42)
64
3-395
s
эг
у
65
Рассчитанные по формулам (3.39) и (3.43) (числитель) и экспериментальные
(знаменатель) величины сближения контактирующих поверхностей
Материал Армко- железо Сталь 20 Сталь 30 Сталь 45 Сталь У7 Сталь ЗОХГСА
НД, МПа 1160 1275 1765 2220 2880 5050
Р = 9,8 кН, D= 10 мм
h, мм 0,270 0,245 0,177 - 0,106 0,055
0,273 0,246 0,175 0,105 0,060
Су, мм 0,040 0,042 0,048 0,058 0,064
0,040 0,041 0,048 0,059 0,062
а, мм 0,310 0,287 0,225 - 0,164 0,119
0,313 0,287 0,223 0,164 0,122
Р 19,6 кН,£> = 10 мм
h , мм 0,540 0,550 0,490 0,482 0,352 0,352 0,280 0,280 0,210 0,205 0,117 0,120
Gy, ММ 0,055 0,054 0,061 0,061 0,070 0,069 0,077 0,078 0,085 0,084 0,100 0,099
а, мм 0,595 0,604 0,551 0,543 0,422 0,421 0,357 0,358 0,295 0,299 0,217 0,219
Р = 29,4 к11,£> 10 мм
h , мм 0,810 0,736 0,530 0,422 0,316 0,179
0,810 0,720 0,530 0,420 0,322 0,181
Gy, ММ 0,071 0,075 0,086 0,095 0,106 0,127
0,071 0,077 0,085 0,094 0,106 0,126
а, мм 0,881 0,811 0,816 0,517 0,422 0,306
0,881 0,797 0,815 0,514 0,428 0,307
Полное сближение в контакте определяют в соответствии с выраже-
нием (3.12) как сумму
Р-Ро з/9 л2 <^i + fc2>2f (3.43)
Ot — h tty цОНД * 16 R (1 + 2/i/tty)
Упругое восстановление в контакте. Согласно выражениям (3.31) и
(3.39) _________________________
£12 _ з/9л2 Р2________________________ _ (^0)1,2 (3.44)
= к(+ “у - 12''Лб (kt + k2)R (1 + 2Л/ау) fi
66
Таблица 22
Бр ОЦС 5-5-5 Мень М2 Титан ВТ-4 Армко-желсзо Сталь 35 Сталь У8А
735 490 4170 1200 2000 3120
Р = 0,85 кН, D = 5 мм
0,071 0,106 0,012 0,043 0,025 0,015
0,074 0,108 0,009 0,046 0,030 0,019
0,014 0,010 0,024 0,011 0,013 0,015
—_— — —. ———— — ———. —
0,013 0,010 0,023 0,010 0,013 0,015
0,085 0,116 0,036 0,054 0,038 0,030
— — — 1 - — -
0,087 0,118 0,032 0,056 0,043 0,034
Р — 2,45 кН, D — 5 мм
0,212 0,318 0,037 0,130 0,077 0,049
— — — —. ™—
0,211 0,323 0,032 0,134 0,084 0,052
0,025 0,017 0,043 0,019 0,023 0,028
— —
0,025 0,017 0,043 0,018 0,024 0,030
0,237 0,335 0,080 0,149 0,100 0,077
I - и 1| — , ,—_—__ - - —_>•—
0,236 0,340 0,075 0,152 0,108 0,082
Р —4,9 кН, D — 5 мм
0,424 0,637 0,074 0,260 0,155 0,100
— - — - — — - —
0,415 0,651 0,069 0,258 0,161 0,099
0,036 0,024 0,063 0,028 0,034 0,041
— —- — I — 1 - II
0,035 0,026 0,063 0,026 0,033 0,044
0,460 0,661 0,137 0,288 0,189 0,141
— - 1 II —. . — 1 1, -
0,460 0,677 0,132 0,284 0,194 0,143
Значения W2 (мм), вычисленные по формуле (3.44) Таблица 23
для D= 10 мм, Е, = Еа = 2 <- 105 МПа и ц1 = = 0,3
НД, МПа h , мм И4 h , мм
Р = 9,8 кН ; Wo =-- 0,049 мм Р = 29,4 кН ; = 0,102 мм
1000 0,312 0,0188 0,384 0,936 0,0329 0,322
2000 0,155 0,0255 0,520 0,467 0,0452 0,443
3000 0,102 0,0299 0,610 0,310 0,0536 0,525
4000 0,073 0,0333 0,680 0,230 0,0600 0,588
5000 0,056 0,0358 0,731 0,181 0,0652 0,639
6000 0,044 0,0379 0,773 0,148 0,0690 0,676
67
где (W'oJj j — смещения точек в контакте сферического индентора и
контртела при их чисто упругом взаимодействии.
При контакте тел, изготовленных из материалов с одинаковыми уп-
ругими свойствами, Д| = д2 = Р> ^1 = Ег=Е,кх = к2~ к и
а = 2,81 </ к2р2 , W. 2 = 1,405----------------, (3.45)
у ’ (1+2й/ау) 1’2 v«(l + ft/H’I2) ’ v
а если при зтом ц = 0,3, то
а = 1,23</ -------, И\2 = 0,615^/——^——-------. (3.46)
Л£2(1+2й/ау) RE2(l + h/Wl2)
Напомним, что приведенные уравнения решают относительно И\2
методом последовательных приближений. Вместе с тем они имеют и точ-
ное решение, аналогичное формулам (3.25) и (3.26), однако здесь
О — 27 r(Wo)l,2 р
L 4 1 h J ‘
Таким образом, при Q < 1
W12 = [2 cos | arccos (20-1) — 1 ],
а при Q > 1
^i,2 =5 [1 + 2sin'1 (2arctg</tgIarcsin))]-
(3.47)
(3.48)
(3.49)
Экспериментальная проверка формул (3.39) и (3.44) выполнена с
использованием специального приспособления, схема которого аналогич-
на описанной Н.Б. Демкиным [ 6]. Нагрузку на образец прикладывали с
помощью пресса Бринелля ТШ-2. Сближение в контакте измеряли индика-
тором с точностью 1 мкм.
Конструкция прибора позволяла свести к минимуму ошибки, обу-
словленные упругой деформацией индентора, основания и других элемен-
тов. Не устраненные же (хотя и очень малые) упругие перемещения опре-
деляли экспериментально и в результате опытов вносили соответствую-
щие поправки
Упругое сближение оу определяли как разность между полным сбли-
жением (под нагрузкой) а и остаточным смеп(ением Л (измеряемым пос-
ле снятия нагрузки), т. е. в соответствии с формулой (3.12). Время вы-
держки под нагрузкой было одинаковым во всех опытах и составляло
30 с. Каждый опыт повторяли 3 раза и вычисляли среднее значение изме-
ряемой величины. Частные значения отличались от средних не более чем
на 3—4%.
68
w/w„
О 2000 WOO 6000НД
Рис. 15. Отношение W/Wo в зависимости
от нагрузки, остато'иого смещения в
центре контакта и твердости стали [7)
(Е = 1,96-10s МПа; ц = 0,3;R = 5 мм)
Затем по формуле (3.39) опре-
деляли ау при данных значениях
Р и h. Различие экспериментальных
и рассчитанных значений обратимой
упругой составляющей ау (табл. 21
и 22) в большинстве случаев не пре-
вышает 3—6%. Отметим, что совпа-
дение расчетных и эксперименталь-
ных значений ау (см. табл. 22)
вполне удовлетворительно даже
при h > 0,2Л, т. е, в области,где
график функции P(h ) уже откло-
няется от прямой линии.
Полученные зависимости свиде-
тельствуют о том, что при наличии
остаточного отпечатка упругое вос-
становление в центре контакта, от-
вечающее данной нагрузке Р, опре-
деляется не только упругими
свойствами материалов контакти-
рующих тел, но также величиной
остаточного смещения h в той же
точке, т. е. твердостью материала
контртела: чем выше его твердость,
тем при данной нагрузке отношение JV2/1VO (а следовательно, и ау/а0)
ближе к единице. С ростом контактной нагрузки относительная разница
между W2 и IVo также возрастает (табл. 23 рис. 15).
Эта закономерность является прямым следствием того, что при Л #= 0
Я > 1; неравенство усиливается с увеличением Л . Ранее [ 7] это обстоя-
тельство нами не учитывалось, что и приводило к расхождению расчета и
эксперимента.
Прогнозирование размеров контактной площадки. Диаметр d конту-
ра остаточной вмятины определяется формулами (3.36) или (3.37) при
а = b = d/2. Таким образом, учитывая отмеченные выше особенности рас-
сматриваемого частного случая, находим, что А =В = 1/2R и
d = 2vk(a+ Л)-Л2 « 2v^?(a + й) = 2>Д(ау + 2й), (3.50)
69
где a, ay и Л должны определяться по формулам (3.43), (3.39) и (3.41).
Отметим, что последнее выражение тождественно формуле [ 40]
<1 = 2^(к} + кг)р4^~> 0-51)
4 R-R
определяющей диаметр площадки упругого контакта сферы с криволи-
нейной поверхностью, радиус кривизны которой равен R'. Это положение
вполне согласуется с принципом, положенным нами в основу метода рас-
чета упругого сближения тел при наличии в зоне контакта остаточной де-
формации (см. п. 3.2).
Поэтому, учитывая соотношение (3.8), получим
а = ~ (к, + ,
2 4 Oty
т. е. [5]
,_37Г (kt+k2)P
Оу ’
или, имея в виду соотношение (3.39),
(3.52)
(3.53)
(3.54)
d = Зтг (кх + к2)Р n=3ir_ (к1 + к2)Р з/1 + 2^
2 а0 2 а0 ау '
Из формулы (3.53) можно определить упругое сближение в контак-
те, если известен диаметр отпечатка:
Чтг
ау = £(к, + к2)Р. .(3.55)
1 2d
Для случая, когда материалы сферы и контртела — сталь (£'| = Е2 =
= 1,96-10® МПа,Д1 = д2 =д=0,3, = W2 = W= 0,5ay,
d = 1,393 —(3.56)
105ay
или иначе
d = 0,696 IO’® J- = 0,696• IO’® P </lt A-. (3.57)
W tv q И'
Зависимость (3.52) позволяет вычислять диаметр (радиус) контура
вмятины, которая образуется на плоской поверхности контртела при его
упругопластическом контакте с упругой сферой; по формулам (3.53)-
(3.57) можно производить также взаимный пересчет величин обратимого
упругого сближения (или упругого восстановления в центре контакта) и
диаметра площадки контакта (что весьма удобно в расчетах контактной
деформации).
70
Таблица 24
Расчетные (dD) и экспериментальные (d) значения диаметров отпечатков (материал индентора — сталь)
Материал Р, кН D, мм h “у d dP dp
ММ d
4,9 0,12 0,029 2,50 2,32 0,93
9,8 0,25 0,042 3,40 3,28 0,97
Армко-железо, НД 1245 14,7 10 0,37 0,051 4,10 4,00 0,98
19,6 0,49 0,060 4,69 4,56 0,97
24,5 0,62 0,066 5,15 5,14 1,00
29,4 0,74 0,073 5,60 5,74 1,02
4,9 0,10 0,032 2,33 2,14 0,92
9,8 0,21 0,045 3,20 3,05 0,95
14,7 10 0,32 0,055 3,85 3,73 0,97
Сталь 10, НД 1450 19,6 0,42 0,064 4,37 4,24 0,97
24,5 0,54 0,071 4,82 4,80 1,00
29,4 0,66 0,078 5,16 5,28 1,02
4.9 0,09 0,033 2,09 2,07 0,99
9,8 0,17 0,048 2,80 2,84 1,01
Сталь 35, НД 1900 14,7 10 0,25 0,061 3,48 3,36 0,97
19,6 0,33 0,072 3,80 3,80 1,00
24,5 0,41 0,080 4,34 4,26 0,98
29,4 0,49 0,088 4,55 4,62 1,01
7,35 0,20 0,048 2,20 2,12 0,96
12,25 5 0,31 0,065 2,75 2,64 0,96
Сталь 45, ЯД 2080 7,35 0,12 0,044 2,36 2,34 0,99
9,8 10 0,14 0,052 2,69 2,61 0,97
29,4 0,45 0,092 4,40 4,44 1,01
9,8 0,09 0,046 3,01 2,94 0,98
19,6 20 0,16 0,069 3,95 3,94 1,00
29,4 0,23 0,087 4,76 4,68 0,99
7,35 0,09 0,065 1,65 1,57 0,95
12,25 5 0,15 0,086 2,05 1,98 0,97
Сталь ЗОХГСА, НД 3950 7,35 0,04 0,061 1,68 1,67 1,00
9,8 10 0,06 0,067 1,93 1,98 1,02
29,4 0,23 0,060 3,12 3,25 1,04
9,8 0,03 0,062 2,10 2,22 1,06
19,6 20 0,06 0,093 2,85 2,92 1,02
29,4 0,085 0,120 3,40 3,41 1,00
2,45 0,25 0,040 2,24 2,32 1,04
7,35 5 0,73 0,072 3,55 3,92 1,10
Магниевый сплав МА2, ~ 2,45 0,15 0,038 2,43 2,46 1,01
Е= 4,2" 10* МПа, д= 0,3 4,9 10 0,23 0,058 3,44 3,22 0,94
7,35 0,37 0,070 3,93 4,00 1,02
9,8 0,49 0,084 4,42 4,62 1,04
71
Продолжение табл. 24
Материал Р, кН D, мм Л аУ d JP
мм d
Дюралюминий Д1, 2,45 0,15 0,035 1,81 1,83 1,01
НД 1115, 7,35 5 0,42 0,065 2,94 2,98 1,01
Е = 7 «• 104 МПа, д= 0,3 12,25 4,9 — 0,72 0,15 0,083 0,049 3,75 2,66 3,90 2,64 1,04 0,99
7,35 9,8 10 0,22 0,27 0,061 0,070 3,21 3,66 3,18 3,52 0,99 0,96
Титановый сплав ВТЗ-1, 7,35 0,12 0,079 1,63 1,78 1,10
F= 11, 3 ' 104 МПа, 12,25 5 0,20 0,104 2,07 2,28 1,10
д= 0,3 7,35 0,06 0,072 1,88 1,96 1,04
9,8 29,4 10 0,08 0,24 0,084 0,157 2,13 3,32 2,22 3,56 1,04 1,07
Примечание. Для сталей расчет вели при Е = 1,96 ° 10s МПа, д- 0,3.
Рис. 16. Графики зависимости W(l/d), построенные по формуле (3.57):
1-6 - по опытам Г. В. Гурьева (стали с твердостью НД 1080,1265, 2160, 2255, 3900
и 4460); 7 — по опытам М. П. Марковца; I—V — контактная нагрузка/7 = 49'7 35*
9,8; 19,6 и 29,4 кН ’ ’ ’
Рис. 17. Относительные величины смещений в центре контакта (t/W* и Wo/W*) и ра-
диуса контактной площадки (a/а*) в зависимости от нагрузки Р/Р*; кривые пост-
роены по результатам расчета; h и W вычислены по формулам (3.41) и (3.44); 1 -
радиус а площадки контакта вычислен по формуле (3.52); 2 - то же - по формуле
Герца; точки соответствуют данным, приведенным в работе [43]; звездочкой отме-
чены величины, отвечающие моменту зарождения пластической деформации под от-
печатком
72
\ Указанные зависимости представляют собой решение для общего слу-
' чая контакта упругого шара с упругопластическим полупространством.
В частном случае чисто упругого контакта h = 0, и все полученные соот-
ношения переходят в известные формулы Герца для контакта упругого
шара с плоской границей упругого полупространства.
Изложенное решение подтверждено экспериментальной проверкой,
которая состояла в следующем [ 5].
В плоскую поверхность призматических брусков, изготовленных из
ряда сталей и цветных сплавов, различными нагрузками внедряли шарики
диаметром 5, 10 и 20 мм. После снятия нагрузки измеряли индикаторным
глубиномером с точностью до 1 мкм глубину h и на инструментальном
микроскопе с точностью до 5 мкм — диаметр остаточного (восстановлен-
ного) отпечатка. Пользуясь измеренными значениями h, по формуле
(3.39) вычисляли величину ау, а затем по формуле (3.50) находили рас-
четный радиус (диаметр) площадки контакта.
Результаты, приведенные в табл. 24, указывают на достаточную бли-
зость расчетных и экспериментальных значений U; разницу между ними,
которая, как правило, не выходит за пределы ± 5%, можно объяснить вли-
янием наплыва, образующегося вокруг вмятины, что в данном решении не
учитывается.
На рис. 16 показана графически функциональная зависимость ^(tT1)
для различных нагрузок на сферу, отвечающая формуле (3.57). Точками
показаны экспериментальные значения обеих величин, которые оказа-
лись весьма близкими к теоретическим.
Отметим также, что результаты числового расчета по методу конеч-
ных элементов, выполненного [43] с помощью ЭВМ, с большой точнос-
тью соответствуют (рис. 17) приведенному выше общему решению.
Расчетное построение полной диаграммы вдавливания сферического
индентора. Найденные соотношения достаточны для построения расчетным
путем полной диаграммы внедрения упругой сферы в плоскую поверх-
ность упругопластического контртела, т. е. диаграммы P(t).
Диаграмма P(f) состоит из двух участков: первый отвечает стадии
чисто упругого внедрения сферы и в общем случае описывается выраже-
нием (3.44) при h = 0, а при Ех = Е2 = Е и ц = 0,3 — формулой (3.46).
При Р > Ро (второй участок) полная глубина внедрения t вычисляется
как сумма остаточной глубины (глубины восстановленной вмятины) h и
упругого восстановления W2, т. е.
t = h+W2. (3.58)
Первое слагаемое вычисляют по формуле (3.41), задавшись значени-
ями пластической твердости НД, нагрузки Р и диаметра D\ величину
И^2 — по формуле (3.44). Достоверность последнего выражения в сочета-
нии с формулами (3.41) и (1.18) хорошо подтверждается опытом (см.
рис. 17).
73
Рис. 18. Полные диаграммы вдавли-
вания шарика диаметром D = 10 мм
для различных сталей:
1-5 - соответственно стали марок
10 (НД 1420), 45 (НД 2230),
12ХНЗА (НД 3580), 18ХНВА (НД
5740) и 45ХНМФА (НД 6570);
I — участок чисто упругого внедре-
ния
Полные диаграммы P(t),
построенные для ряда сталей
расчетным путем, показаны на
рис. 18. Стадии чисто упругого
внедрения индентора соответст-
вует параболический участок 7,
являющийся общим для всех сталей. На участке, для которого Р > Ро, диа-
грамма P(t) также криволинейна (чем,'кстати, обусловлена зависимость
твердости по Бринеллю от нагрузки).
Отметим, что при анализе диаграмм следует иметь в виду, что пере-
ход от первого участка ко второму фактически происходит плавно, ибо
пластическая деформация в микрообъемах материала возникает задолго
до того, как расчетные напряжения в опасных точках достигают предела
упругости. Поэтому изображенный на диаграммах резкий излом в гранич-
ных точках, т. е. при переходе от упругой к упругопластической деформа-
ции, надо рассматривать как обычную схематизацию действительного про-
цесса на границе, которая сама по себе является условной.
Физическая интерпретация критерия геометрического подобия отпе-
чатков для одного материала. Обозначим через hx и h2, ау>1 и ау>2 оста-
точные и упругие сближения в контакте шаров с диаметрами Dx нЬ2, ко-
торые внедряются в плоскую грань полупространства силами Рх и Р2.
Тогда согласно соотношению (3.39)
(«y)u°(a.)UVC (3.59)
Z»if2+ (tty) 1,2
где («о )1д — упругие сближения в контакте шаров 7 и 2, вычисленные по
формуле (3.40), т. е.
ч <‘1+*2)2р1.2 ,, ,т
(«0)1.2-<^- ------<360)
г- Р-1
Если — - —— , т. е. отпечатки геометрически подобны, то в соот-
D22
ветствии с (1.1)
tto,2=Xtto,i, (3.61)
где х =P2/^i •
74
Пользуясь соотношениями (3.59) и имея в виду зависимости (1.1)
, и (3.61), получим
^2 = 2Л1 ^2
ау>1 «У.2+2Й2 fty.i'
Решением этого уравнения является
ау,2 — X'0!у,1 » (3.63)
т. е.
Qy,3 = у = ау,2~>~ 2^2 _ Рг .
Otyti ^у, i+2Aj Di
И
= аУ-?? = idem # F(D)
®y,l+2Aj ®у,2’*’^^2
ИЛИ
hi _ h2
ау,1 аУ,2
(3.64)
(3.65)
(3.66)
Таким образом (см. рис. 1), геометрическое подобие отпечатков (уг-
лы вдавливания = idem) при упругопластическом контактном деформи-
ровании одного материала сопровождается их физическим подобием, ус-
ловие которого описывается соотношениями (3.65) или (3.66): два ос-
таточных отпечатка, образующихся на плоской поверхности данного мате-
риала при внедрении в нее упругих шаров с разными диаметрами, геомет-
рически и физически подобны, если отношения остаточной глубины отпе-
чатка к упругому смещению в центре контакта у них одинаковы.
Поскольку рассматривается случай, когда упругие константы мате-
риалов индентора и контртела одинаковы, то
(tty) 1,2 — 21V 1,2 i + Л i = ^ ; IV 2 + Л 2 — ^2 ,
и условие (3.65) преобразуется к виду
— = — = idem#1 F(D) (3.67)
(здесь Wi и W2, ti и t2 — значения W и t при внедрении шаров 1 и 2),
т. е. указанное отношение (для данного материала) однозначно определя-
ется степенью нагружения Р/D2. Последнее иллюстрируется эксперимен-
тальными данными, приведенными в табл. 25.
Так как
то для материалов разной твердости отношения W/t могут быть одинако-
выми лишь при различных глубинах отпечатка Z, так как в этом случае
75
и
к
к:
ю
Примечание.Л, И'и/
76
одинаковые глубины t достигаются при различных значениях нагрузок,
а следовательно, и упругих смещений.
Поэтому, если для одного материала условия W/t = idem и P/D2 -
i= idem тождественны, то для различных материалов они, наоборот, несов-
'местимы.
3.7. ЗАКОНОМЕРНОСТИ УПРУГОПЛАСТИЧЕСКОГО КОНТАКТА
И ИЗМЕРЕНИЕ ТВЕРДОСТИ НА ДЕТАЛЯХ С ГЛАДКИМИ
КРИВОЛИНЕЙНЫМИ ПОВЕРХНОСТЯМИ
Стандарты на методы определения твердости металлов предусматри-
вают, что измерения должны производиться на плоских площадках или на
криволинейных поверхностях, кривизна которых не превышает некото-
рой предельной величины. Так, согласно ГОСТ 9013-59 ’’При измерении
твердости (по Роквеллу) на образцах с криволинейной поверхностью ра-
диус кривизны последней должен быть не менее 15 мм. При измерении
твердости на образцах с радиусом кривизны менее 15 мм числа твердости
имеют относительные значения - для сравнения твердости образцов, име-
ющих одинаковую кривизну испытуемой поверхности”.
ГОСТ 9012—59 вообще не допускает измерение твердости по Бринел-
лю на образцах или изделиях с криволинейными поверхностями и если
такая необходимость возникает, то на них должна быть подготовлена
плоская площадка регламентированных размеров.
Указанные ограничения создают значительные трудности, обусловлен-
ные следующими обстоятельствами. Прежде всего изготовление плоских
площадок является достаточно трудоемкой и в случае массовых испыта-
ний — дорогостоящей операцией. Кроме того, в процессе подготовки плос-
кой площадки металл подвергается наклепу, что может явиться источни-
ком существенных погрешностей измерения твердости. Снятие поверхно-
стного слоя (под плоскую площадку) лишает возможности получить дос-
товерную информацию о его свойствах и различии в твердости на поверх-
ности изделия и на некоторой глубине.
— В ряде случаев изготовление плоской площадки на поверхности го-
тового изделия приводит его в полную негодность; это делает невозмож-
ным массовый контроль твердости в таких ответственных местах изделия,
как галтели, выточки, другие фигурные выступы или углубления.
И, наконец, на объектах с малыми поперечными размерами (напри-
мер, на тонких цилиндрических деталях, на поверхности тонкой проволо-
ки) создать плоскую площадку необходимых размеров вообще невоз-
можно.
Как попытку в какой-то мере ослабить указанные трудности, можно
рассматривать выделение эмпирических поправок к значениям твердости
на поверхностях с малыми радиусами кривизны. Такие поправки, но толь-
77
ко для сферических и цилиндрических поверхностей содержатся, напри- /
мер, в Рекомендациях ИСО и стандартах СЭВ (Р 81—59, Р 409—64,^
PC 58—72). Очевидно, что указанная мера является ограниченной и пол !
ностью не решает проблему измерения твердости на криволинейных по-
верхностях. Однако ее можно решить в общем виде, базируясь на за-;
кономерностях упругопластического контакта, описанных выше в нас*
тоящей главе. Рассмотрим указанную проблему применительно к различ-
ным числам твердости.
Пластическая твердость НД. Как и при испытаниях на плоскости, ме-
тод может быть реализован путем двукратного или однократного вдавли-
вания шарика в испытуемую криволинейную поверхность. В первом слу-
чае расчет ведется в соответствии с формулой (2.2): пластическая твер-
дость
НД = -Р~Р1------, (3.68)
ТТРпрСЛ-Й!)’ v
где Р и Р, - произвольные нагрузки на сферический индентор (шарик);
Л и Л, — отвечающие им глубины остаточных отпечатков, отсчитываемые
от начальной точки касания индентора с испытуемой криволинейной по-
верхностью, a Dnp - удвоенный приведенный радиус кривизны шарика-ин-
дентора и испытуемой поверхности, вычисляемый по формулам (2.10)
или (2.23).
Учитывая, что при испытании шариком диаметром D 2ЛИ = 2/?2i =
= D, из формулы (2.10) получаем
^пр
' 12-^22_________
2Z? 12 2Л 22
(3.69)
Напомним, что Л12 и/?22 считаются положительными и берутся со зна-
ками плюс, если контур испытуемой поверхности в сечении главной плос-
костью кривизны обращен выпуклостью в сторону индентора; в против-
ном случае эти величины берутся со знаком минус. Поскольку испытания
возможны лишь в тех случаях, когда 12/?12 | > £>и |2Л221 >£>, то прилю-
бом сочетании знаков кривизн испытуемой поверхности приведенный ра-
диус кривизны — величина положительная, т. е. D„p > 0.
Метод измерения твердости НД на криволинейных поверхностях, пре-
дусматривающий однократное вдавливание индентора произвольной наг-
рузкой Р, базируется на зависимости (2.1), согласно которой
(3.70)
НД=?-^-.
яРпрЛ
здесь h — глубина остаточной вмятины, образовавшаяся под действием
силы Р и отсчитываемая от точки начального касания индентора с испыту-
емой поверхностью; Ро ~ условная критическая нагрузка, вычисляемая
по формуле (2.25).
78
Значения НД, определяемые по формуле (3.70), можно находить и
.по прил. 1, приняв в ней Dj - I)up.
\ Таким образом, процедура измерения твердости НД на любой вогну-
той, выпуклой или выпукло-вогнутой поверхностях посредством шари-
ковой пробы сводится к вычислению приведенного диаметра по формуле
(3.69), внедрению сферического индентора в испытуемую поверхность
произвольной нагрузкой, например, Р= (49-J- 294)Z)?Ip МПа, измерению глу-
бины h остаточной вмятины к нахождению НД по прил. 1.
Представив рабочую нагрузку на индентор как Р = ~KD2 и заменив в
фэрмуле (3.70) Ро его значениями из (1.17) и (2.25), получим для ЯД
1(100-4000 МПа
\ X- 0,11 exp Ц,9(10-3ЯД- 1)°-‘‘*12Г
TTDh
= ^0.01ехр[0Л(ВД--1рР)°-?]£:. кгс/мм2, (3.71)
TtDh
а для НД > 4000 МПа = 400 кгс/мм2
„„ . X+1224D2 Х+12552 . 2 __ч
НД = -^=-----------— МПа=—=------------— кгс/мм , (3.72)
тгЛЛ+0,45 • 10”2£> 7ГРй + 0,4510-2П
где D = Оцр/D, h = h/D; D — диаметр (удвоенный радиус кривизны) сфе-
рического индентора.
По этим формулам можно находить значения НД, зная относительную
глубину остаточной вмятины h.
Важная особенность описанного метода заключается и в том, что он
позволяет определять твердость НД на плоских и криволинейных поверх-
ностях, пользуясь также несферическим гладким индентором, ограничен-
ным в общем случае произвольной поверхностью двоякой кривизны. Для
этого могут быть непосредственно использованы формулы (3.68) и
(3.70), в которых значения вычисляют по формулам (2.10) или
(2.23), учитывающим главные радиусы кривизны Я,у индентора и испыту-
емой поверхности. В основе этого положения — описанная выше (см.
гл. 2, п. 2.1) линейная зависимость между рабочей нагрузкой Р на инден-
тор и остаточной глубиной его внедрения h при силовом контакте глад-
ких несферических тел произвольной кривизны.
Весьма существенным практическим приложением описанного мето-
да является возможность измерения твердости в случаях, когда другие
способы вообще не применимы. Как указывалось, одним из таких случа-
ев является измерение твердости тонкой проволоки диаметром менее
3 мм: изготовление на ее поверхности плоской площадки требует удале-
ния слоя относительно большой толщины, а обеспечение приложения наг-
рузки по нормали к испытуемой поверхности (без плоской площадки)
при внедрении сферического индентора затруднено практически не выпол-
79
нимым требованием точной установки образца или изделия на предмет-
ном столике.
Очевидно, что в этих условиях наиболее приемлемо использование
цилиндрического индентора в соответствии со схемой контакта, показан-
ной на рис. 1,6 (контакт цилиндров с перекрещивающимися под прямым
углом осями). Пренебрегая для этого случая величиной Ро < Р, из форму-1
лы (3.70) получаем
₽
где Дир вычисляют по формулам (2.10) или (2.23); в первом случае
^пр = >/^инд^об; (3-74)
во втором
(3.73)
£) — 2£>об___________•
ПР прпь ( 1 + 22 об/22 ИНД )
(3.75)
здесь £>инд и £>об — соответственно диаметры цилиндрического индентора
и испытуемого цилиндрического образца, в частности, проволоки.
Данные, приведенные в табл. 26, свидетельствуют об удовлетворитель-
ном совпадении результатов измерения твердости на специально подго-
товленной плоской площадке сферическим индентором и цилиндричес-
ким индентором непосредственно на цилиндрической поверхности одного
и того же образца. Удобство метода очевидно, поскольку установка ци-
линдрического индентора перпендикулярно образующей испытуемой ци-
линдрической поверхности не представляет каких-либо трудностей.
Твердость по Роквеллу (шкала В). Впервые задача измерения твер-
дости HRB на криволинейных поверхностях была поставлена и решена
экспериментальным путем А.Н. Моношковым, С.И. Пыховым, В.А. Свет-
лаковым, Л.В. Земской (1971 г.). Позднее эта же задача была решена в
общем виде [ 11]. В результате получена аналитическая зависимость, поз-
воляющая определять стандартные значения твердости HRB при испыта-
нии не на плоской, а на криволинейной поверхности с известными радиу-
сами кривизны. Метод измерения твердости основан на следующих поло-
жениях. Как известно [7], пластическая твердость связана с твердостью
по Роквеллу (шкала В), измеряемой на плоской поверхности, соотноше-
нием
= <3-76>
где Р и Ро — полная и предварительная нагрузки на индентор (шарик диа-
метром D = 1,588 мм); с^ - цена деления шкалы индикатора прибора.
80
Таблица 26
Значения пластической твердости, измеренной
на плоской н цилиндрической поверхностях
.(диаметр индентора ОИИд=3 мм)
(иаметр образца Эоб, мм Материал Р, кН 6, мм НД, МПа
на плоской на поверхности площадке цилиндра
Сталь 45 9,81 0,182 2250 2300 СтальЮ 9,81 0,275 1570 1520 20 Алюминиевый сплав 1 Д16 9,81 0,414 990 1010 \ Латунь Л68 9,81 0,292 1420 1440
1 15 9,81 0,216 2250 2210 10 „ ,, 9,81 0,246 2410 2370 5 Сталь 45 4>90 О172 2410 2350 3 2 4,90 0,202 2530 2490
В то же время, как показано в п. 2.1, и в случае силового контакта тел
двоякой кривизны между контактной силой и глубиной восстановлен-
ного остаточного отпечатка существует линейная зависимость, позволив-
шая представить пластическую твердость в обобщенной форме выражени-
ем (2.1), которое применительно к рассматриваемому случаю принимает
вид
НД = —, (3.77)
яОпрСВО-ЯЯВ )сЛ
где дополнительно HRB' — показание, отсчитываемое по шкале индика-
тора прибора Роквелла при испытании на криволинейной поверхности;
Агр — приведенный диаметр контактирующих тел (шарика диаметром
D = 1,588 мм и испытуемой поверхности с главными радиусами кривиз-
ны R12 hR22) определяется в соответствии с зависимостью (3.69) как
п = у/ _________ = 2х/_______----------=------- (3.78)
ПР V 2Я12 Ш22 V (1 + 1.26Я12) (1 + 1,26ЯИ)
(1 + —) (1 + —)
' 1,588 1.5887
Учитывая, что пластическая твердость не зависит от диаметра инден-
тора, приравняем правые части уравнений (3.76) и (3.77). В результате
получим
0(130 - HRB) = £>пр (130 - HRB'),
откуда (приО= 1,588 мм)
HRB= 130- (130 -HRB').
1,5оо
(3.79)
81
Последнее выражение описывает зависимость между отсчитываемым
по индикатору прибора Роквелла значением твердости данного материала,
измеряемой на плоской (HRB) и на криволинейной (HRB') поверхностях.
Наличие этой зависимости позволяет производить измерения непосред-
ственно на криволинейной поверхности и находить действительные значе-
ния твердости HRB, равные тем, которые были бы зафиксированы при ис-
пытаниях на плоской площадке, имевшейся или специально подготовлен-
ной на поверхности испытуемого изделия. Приводимые в работе [11]
экспериментальные данные свидетельствуют о хорошей сходимости зна-
чений HRB, вычисленных по формуле (3.79) и измеренных на плоских
площадках.
Рассчитанные по формуле (3.79) значения HRB = f(HRB') приведень
в табл. 27, которая служит для определения твердости HRB при испытани-
ях как на выпуклых, так и на вогнутых или выпукло-вогнутых поверх-
ностях.
Видно, что при измерении на выпуклых поверхностях Dn^/D < 1 и
HRB' < HRB, а на вогнутых — D^/D > 1 и HRB' > HRB, причем значения
HRB' могут отличаться от HRB больше, чем вдвое; с уменьшением твер-
дости испытуемого материала разница возрастает.
Твердость по Бринеллю НВ. Действующие стандарты предусматри-
вают, что при испытаниях твердости по Бринеллю должна выдерживаться
определенная степень нагружения, характеризуемая отношением X =
= Р/D2, где Р — рабочая нагрузка, D — диаметр шарика. Указанное усло-
вие, как известно, обеспечивает подобие испытаний одного и того же ма-
териала при использовании различных рабочих нагрузок.
Согласно ГОСТ 9012—59 ’’Металлы. Измерение твердости по Бри-
неллю”
IP 1Р
НВ =--------- —= —------------ ------------, (3.80)
TiD (D - \/D2-d2) я£2 (1-<1 - (d/£)2)
где Р — рабочая нагрузка; dhD- диаметр остаточного отпечатка на испы-
туемой плоской поверхности и диаметр шарика.
Учитывая зависимости, приведенные в гл. 2, по аналогии с (3.80)
имеем
НВ=--------2Р^-------- —,
ЯРпр (1 -л/1 - (^пр/^пр) 2 )
(3.81)
где дополнительно с?пр = а и b - полуоси эллиптического в общем
случае контура остаточного отпечатка; Ркр — рабочая нагрузка, приме-
няемая при испытаниях на криволинейных поверхностях.
Этот вывод хорошо подтверждается экспериментами, результаты ко-
торых показаны на рис. 19. При одинаковых степенях нагружения
р р
( -КР — ——) относительные диаметры отпечатков, полученных при внед-
п2 п2
пр и
82
Таблица 27
83
Рис. 19. Относительные диамет-
ры отпечатков в зависимости
от степени нагружения при раз-
личных сочетаниях кривизн
контактирующих тел (по дан-
ным А. В. Федорова и А. Н. Во-
лынова); кривые - экспери-
менты по внедрению шара диа-
метром D = 10 мм в плос-
кость; точки - результаты экс-
перимента (см. табл .28); 1-
5 - медь, алюминий, армко-
железо, стали марок 20 и
ШХ15 соответственно
рении тороидального ролика (Яп, Я21) в тороидальную поверхность об-
разца (7? 12, R2i) и шарика диаметром D = 10 мм в поверхность плоской
площадки, практически равны между собой (d^/D^ -d/D). Точки полу-
чены по результатам экспериментов для условий контакта, указанных в
табл. 28. О достоверности значений НВ, найденных путем испытания на
криволинейных поверхностях несферическими инденторами различной
формы, свидетельствуют и данные табл. 29.
Таким образом, для данного материала значение твердости Яр, вычис-
ленное по результатам измерения на криволинейной поверхности (в об-
щем случае и индентором несферической формы), равно ее значению НВ,,
I'
Таблица 28
Геометрические параметры контактирующих тел
Обозначение точки по рис. 19 я,. Я.2 7^2 2
мм
а ОО 10
б ОО - 10,5
в 5 5 9 9
г -20 - 20
д оо ОО
е оо 10
ж 2,5 10 -5 60
3 9 9
и -20 - 20
к оо 10
л 5 оо 9 9
84
1 Экспериментальные данные получены при участии А.В. Федорова и А.Н. Волынова.
86
(3.82)
найденному в результате испытания шариком диаметром D™ на плоской
р р
поверхности, т. е. при —® =Х = idem или при
D2
d™ d
—= _ = idem.
cnp D
При измерении твердости НВ на криволинейных поверхностях необ-
ходимо выполнить следующие операции: вычислить по формуле
(2.10), если испытания производятся индентором несферической формы,
и по формуле (3.69) при испытании шариком диаметром D\ произвести
внедрение индентора силой = XZ)^,, гдеХ — предусмотренная ГОСТом
степень нагружения (X = 2,5; 10 и 30 кгс/мм2 или X = 24,5; 98 и 294 МПа),
для чего можно использовать любой пресс с регулируемым усилием,
включая прибор Бринелля, снабженный дополнительным комплектом
грузов (разновесов); после снятия нагрузки измерить полуоси а и b эл-
липтического в общем случае отпечатка и вычислить его приведенный от-
dm, Isjab _
носительныи диаметр — . После этого значение НВ либо вычис-
ляют по формуле (3.81J^ либо находят непосредственно по таблице НВ =
- /(<Ло), содержащейся в ГОСТ 9012—59, пользуясь той ее строкой, где
drm
помещено значение di0 = 10 , и той колонкой, которая соответствует
примененной в испытании интенсивности нагружения X.
В работе [ 10] отмечено, что величина -©пр> определяемая по формуле
(2.10), весьма близка к той, которая вычисляется из условия равенства
давления р0 в центре контакта шара диаметром с плоскостью и в
центре контакта тел произвольной кривизны, если в обоих случаях кон-
тактные нагрузки Р и сочетание материалов контактирующих тел одина-
ковы. В то же время известно [ 43], что при достаточно развитой деформа-
ции в отпечатке, реализуемой, в частности, в процессе измерения твердос-
ти, давление по его поверхности распределяется практически равномерно
и равно среднему давлению Рср- Итак, в случае контакта тел произвольной
кривизны
Рь ^p'cp^P/Fo,
а при контакте шара диаметром £>пр с плоскостью
Ро ^Pcp^P/Fo,
где и Fo - площади поверхностей соответствующих площадок кон-
такта.
Таким образом, условию р'о = р0 отвечает/^ =F0, т. е. площади по-
верхностей сравниваемых эллиптического (в общем случае) и кругового
отпечатков одинаковы. Это принципиальное положение в дальнейших
исследованиях [ 13, 14] было подтверждено также для случаев внедрения
конического и пирамидального инденторов и положено в основу новых
методов определения твердости HRC и HV на криволинейных поверх-
ностях.
86
3.8. ПРИМЕРЫ РАСЧЕТА
Пример 1. Пусть стальной закаленный тороидальный ролик (индентор), имею-
щий диаметр Dp =50 мм и контурный радиус г = 5 мм, внедряется силой Р—10 кН
в поверхность цилиндрического вала диаметром DB = 100 мм (контртело), изготов-
ленного из стали с твердостью НД 2500. Требуется вычислить полное сближение тел
а в контакте, его составляющие - упругую оу и остаточную h, а также полуоси а и
Ъ контура остаточной вмятины, величины которых определяют, в частности, микро-
профиль поверхности вала, подвергнутого упрочняющей обкатке роликами. Упру-
гие постоянные контактирующих тел Ei =Е2=Е=2-105 МПа, Д] =m2=m = 0,3.
Решение. 1. Определяем значения геометрических параметров контактирующих
' поверхностей (см. схему контакта рис. 7, к):
D„ 50
«и =—Е-= — = 25 мм; «я=г = 5мм;
2 2
А = — (-^— + —) = i (— + —) =0,03 мм
2 «и «о 2 25 50
Я12
1
«12 =— = — = 50 мм; «22 = °°
2 2
Тогда, согласно формулам (2.3) и (2.4) :
1 . 1 1
2 '«н
1 . 1
" 2'«21
Поскольку — = 0,3 < 0,5, то при-определении «ц, воспользуемся выражением
(2.23): В
в= 1</г~+ ir~)= Н+0) =0-10мм“1-
L Л21 г<22 * э
А ________
0,538 g
— 0,7 / ММ J ММ,
Л,
_ LJ _ ___
пр~24 ~ 2-0,03
где согласно прил. 2 си = 0,538 (при А/В = 0,3).
2. Вычисляем остаточное смещение h центра контакта. Согласно формуле
(3.13)
й = ----°---,
гяяд/гц,
где [см. формулы (2.25) и (1.17)]
^о=А>,ю(^)2 =llexp[l,9(10"3fltf- I)0-668] (^ПЕ_)2 =
э 5 .
= И ехр [1,9 (10-3- 2500 - 1) °’668] (|) 2 = 431 н.
Следовательно,
. 10000-431
Л ~ „ = 0,068 мм.
2ТГ-2500-9
3. Определяем полное сближение а в контакте и его упругую составляю-
щую 0!у.
87
Вначале, используя формулу (2.21), находим сближение тел в предположении
их чисто упругого контакта:
«о = ~ (*i + krfP^k,
2 4
1 2 1 О З2
где кх =к2 = = 0,145 • 10“5 МПа-1;
л-2-10s
kt + к2= 0,29-10"5 МПа;
Хй = 2 (А + В) = 2 (0,03 + 0,1) =0,26 мм-1
и для А/В = 0,3 Hg = 0,9252 (см. прил. 2).
Таким образом,_________________________
а0 = (0,29 10-5)2100002-0,26 = 0,078 мм.
По зависимости (3.24) находим
27 а0 з 27 0,078 3 , „„
0 = —(—) = —(-^-—) = 1,27.
32 h 32 0,068
Поскольку Q > 1, то при определении ау используем формулу (3.26), согласно ко-
торой
2й „
ау =- — [1 + 2 sm 1 (2 arctg
-arcsintj—^-)] =
=~ 2 О’Об8 [1+2 sin 1 (2 arctg ^/tg | arcsin (-* ))] - 0,050 мм.
J it к —* X * 1 !
Следовательно, полное сближение тел в контакте
а=й + ау =0,068 + 0,050 =0,118 мм.
4. Расчет полуосей контура остаточной вмятины.
Вначале по формулам (3.21) и (3.22) определяем ha и
то ь г.2 2 50 0,068 — 25 -0,05 — 0.0682 „
= =0,037 мм;
Л = ---------12—д-----
° 2,(Л12+Лп -Л)
h — ^^22^ ~ ^21 ^у ~
2(R22 + Кц ~ к)
Согласно зависимостям (3.33)
2(50+25 - 0,068)
__ 2ft - 21/^22 ~~ Z^22 _
--------------7-------7----- = h = 0,068 мм.
2(1+ 2?21Z^2J _
и (3.34)
a = <2Л0 + ay) - *c = V25 <2 ’ 0,037 + 0,05) - 0,0372 = 1,76 мм;
b =\/Л21 (2Л& + ay) - =\/5 (2 • 0,068 + 0,05) - 0,0682 = 0,96 мм.
Пример 2. На поверхности плоской плиты требУется с помощью сферического
штампа (индентора) выдавить углубление диаметром d =6 мм и глубиной Л = 0,4 мм.
Штамп стальной (Ех = 2 • 10s МПа, д, = 0,3), материал плиты - медь техническая
(Е2 = 105 МПа, Д2 = 0,34, НД 800).
Определить необходимые диаметр индентора D и рабочую нагрузку Р.
Решение. Задача решается с использованием формул (3.8), (3.10), (3.41) и
(3.53).
1. Определяем радиус кривизны поверхности остаточной вмятины. Согласно за-
висимости (3.10)
fh_ 62
&h 2 8-0,4
0,4
--- —11,45 мм.
2
88
2. Совместное решение уравнений (3.8), (3.41) и (3.53) приводит к следующим
расчетным зависимостям для определения Р и £>.
р= 2d* / бя2 (Л, + к2)НДВ'
Зъ(к2 + к2) d J
D_ 2d ^/^Тпг (kx^ к2)НДРГ
37Г2НД(к! + к2) d
Вычислив предварительно по формулам (2.22)
(3.83)
(3.84)
2
кх + к2 =1 Д1 +
1 2 ТГЕ1
из зависимостей (3.83) и
Р= 2'60’4
Зя-0,427 -10-5
2-6
1 - М2 _ 1 - 0.32
1—0 342
о •—77S- = °>427‘ 10-5 МПа-1
я£2 я-2-105 я-10s
(3.84) найдем
(^^(WV-'O-’-SOOUMS _ ,) _ 21J5 кН.
р= --------------
Зя2 800 • 0,427 • 10 5
6
6я2-0,427• 10"5-800• 11,45 „
----------------------------1) = 21,0 мм.
6
г s
ГЛАВА 4
РАСЧЕТ ГЛУБИНЫ РАСПРОСТРАНЕНИЯ И ИНТЕНСИВНОСТИ
ПЛАСТИЧЕСКОЙ ДЕФОРМАЦИИ ПРИ СИЛОВОМ КОНТАКТЕ
ТЕЛ ДВОЯКОЙ КРИВИЗНЫ
4.1. РАСЧЕТ ГЛУБИНЫ РАСПРОСТРАНЕНИЯ ПЛАСТИЧЕСКОЙ
ДЕФОРМАЦИИ ПОД ЭЛЛИПТИЧЕСКОЙ ВМЯТИНОЙ
Если при внедрении упругого индентора в поверхность контртела в
зоне контакта возникает остаточная вмятина, то вокруг нее всегда имеет-
ся пластически деформированная область, распространяющаяся на неко-
торую глубину hs. Эта । область ограничена замкнутой поверхностью, на
которой удовлетворяется условие пластичности Генки—Мизеса (Pi-o-t)-
Параметр контакта hs имеет существенно практическое значение, по-
скольку прямо или косвенно характеризует механическое состояние
(упрочнение, запас пластичности, остаточную напряженность) локальной
пластической области при единичном контакте или поверхностного слоя
детали, подвергнутой упрочнению или выглаживанию путем обкатки ро-
ликами или шариками.
89
(4.1)
Первая попытка расчетного определения hs реализована С.Г. Хейфе-
цем [ 44], который предложил следующую зависимость
hs=J^-
s N2O,
где Р — контактная нагрузка; от — предел текучести материала контрте-
ла. Эта зависимость основана на решении задачи Буссинеска [ 40] и не учи-
тывает формы контактирующих поверхностей; она хорошо согласуется
с опытом лишь при достаточно малых радиусах кривизны упрочняющего
инструмента и размерах площадки контакта. Однако в тех случаях, когда
эти условия не соблюдаются (что на практике наиболее вероятно), расче-
ты по формуле (4.1) приводят к завышению значений hs по сравнению с
фактическими [ 19].
В работе [ 44] предлагается и более общая (базирующаяся на решении
Герца) зависимость для случая внедрения сферического индентора в плос-
кую плиту:
-^ = ^[-------Ц----- + 2(1-M)(^arctg^-1)]-1, (4.2)
3 Лс о а а
а ит 1+4 (—— )
d
где d — диаметр круговой контактной площадки; д — коэффициент Пу-
ассона.
Однако разрешить уравнение (4.2) относительно hs затруднительно.
Поэтому более удобным является выражение
-ьгф2, (4.3)
полученное в результате аппроксимации зависимости (4.2) при д = 0,3 и
учитывающее влияние размеров контактной площадки на глубину hs.
Необходимость уточнения формулы (4.1) впервые отметили И.В. Куд-
рявцев и Г.Е. Петушков [ 19]. Они ввели поправку, учитывающую влия-
ние на hs кривизны поверхностей контактирующих тел. С указанной поп-
равкой формула (4.1) приобрела вид
1 + 0’07!к
(4-4)
В то же время В.М. Браславский на основе общего решения контакт-
ной задачи теории упругости установил, что глубина распространения плас-
тической деформации под отпечатком существенно зависит также от его
90
формы. Им были получены зависимости-------=/(
аЬот
шений b/а (а и b — соответственно большая и ме1
) для различных отно-
b
ньшая полуоси проекции
эллиптической вмятины на плоскость, нормальную к направлению контак-
тной нагрузки, которые рекомендуется использовать для определения hs.
Как известно, в указанном решении принимается эллиптический за-
кон распределения давления по поверхности контактной площадки. Од-
нако, как уже отмечалось, в процессе упругопластического деформирова-
ния зто распределение близко к равномерному. Так, анализируя процесс
внедрения жесткой сферы в упругое идеально пластичное полупростран-
ство, С. Харди, К. Баронет, Д. Тордион [ 43] показали, что по мере раз-
вития деформации распределение давления по поверхности контактной
площадки трансформируется от сферического в упругой стадии внедрения
индентора к равномерному при развитой пластической деформации в зоне
контакта. К аналогичному выводу пришли Ж. Думас и К. Баронет
(1971 г.), исследуя процесс вдавливания бесконечно длинных жестких
круговых цилиндров в упругопластическую среду, деформирующуюся с
упрочнением.
Для неупрочняющихся материалов это положение экспериментально
подтверждено К. Джонсоном (1968 г.). Кроме того, С.Х. Ли, С. Масаки,
Ш.-Кобаяси (1972 г.) теоретически установили, что при внедрении шаров
в упругопластическое полупространство давление в центре контактной
площадки лишь незначительно выше, чем у ее контура. Поэтому естест-
венно предположить, что и в том случае, когда контур отпечатка имеет
эллиптическую форму, являющуюся промежуточной между круговой и
прямоугольной площадками, рассматриваемыми в указанных выше ра-
ботах, распределение давления по поверхности контакта также близко к
равномерному. Следовательно, приняв такое распределение, можно по-
высить точность расчетного определения глубины hs.
Ниже приводится решение задачи о глубине распространения пласти-
ческой деформации при равномерном (т. е. близком к реальному) давле-
нии р на контактной поверхности, которая в первом приближении счита-
ется плоской. Очевидно, что при этом
Р = <4-5)
В теории упругости [33] дается распределение напряжений, возни-
кающих в полупространстве, нагруженном давлением, произвольным об-
разом распределенным по поверхности эллиптической площадки. Сог-
ласно этому решению главные напряжения ах, оу и oz (начало,коорди-
нат — в центре контакта, оси х и у совпадают соответственно с большей и
меньшей осями симметрии эллиптической площадки, а ось z - с направ-
лением равнодействующей контактной нагрузки) определяются следую-
щими выражениями:
91
1 27Г r0
°x=^ J J [(
2Я 0 0 <
, 1 - 2M 3zr2 . . 2
------------— )sin +
p(p+z) p5
+ (1 — 2д)(-2--------J---) cos2 iplprdrd^;
p3 p(p + z)
1 27Г r0 1 __ in
ъ=~' h(-A-^v
2Я Q о p(p + <->
3zr2 4 2
------— )COS \p +
p
+ (1 - 2p)(-^------—— )sin2v]prdrdlp:
P3 p (p+z)
3 2тт 'о -3
°:=-^T f ! ^-zPrdrdip;
2* 0 0 Ps
здесь
• 2 2
_ fsin COS V’x
+ -71-)
a b
(4.6)
(4.7)
(4.8)
значение полярного радиуса г на контуре площадки контакта; р — давле-
ние в произвольной точке с полярными координатами г и \р — площадки
контакта (угол >р отсчитывается от оси у); р - коэффициент Пуассона
материала контртела.
В работе [ 40] содержатся результаты интегрирования уравнений
(4.6) при р = const только для нагрузки, распределенной по круговой пло-
щадке (r0 = const), взятой на поверхности полупространства. Выполнен-
ное нами интегрирование этих же уравнений по переменной г с учетом
(4.5), т. е. При р =Рср ~ const иг / const, привело к следующим выраже-
ниям:
°х = \ I [ 2(1 - 2д)In + 2(2 - д)Л -,£3 ] sin2^ -
- (1 - 2p)(L + In ^-)l Pcp;
°y = ~ /’ср T [ 2(1 - 2д)1п-^ + 2(2 - дУ, - L3 ]cos2^ - I
- (1 -2д)(£+
2 я/2 ,
°2=-Ра> 1 L JsP-/?cpi
я ** 0
(4.9)
92
здесь j
£ =L (----1------- iL) 7
b 1-е яп y b
где дополнительно e = \/l - (b/a)2 - эксцентриситет контура эллиптичес-
кой площадки, по поверхности которой распределено давление р. Как и
в работе [ 44], глубину hs найдем в соответствии с гипотезой пластичнос-
ти Генки-Мизеса из того условия, что на границе упругой и пластической
зон, т. е. при z = hs
1(°х - °у)2 + (°у - °г)2 + (°z - °х)2] = °т- (4.10)
Интегралы, входящие в выражения (4.9), не могут быть представле-
ны элементарными функциями. Поэтому с помощью ЭВМ ”Минск-32”
были вычислены напряжения ох, оу и oz для ряда значений b/а и z/b при
р = 0,3. Результаты расчетов для различных отношений b/а даны на рис. 20
в виде графиков от/Рср =f(bs/b), аналогичных приведенным в работе [ 3].
Вместе с тем оказалось возможным всю систему кривых для b/а > 0,1
аппроксимировать одним уравнением
°т _ п
р 3 ' ’
1[(5(V+ 3](^)2+»>21"<ft/“)+ V
4 а о о+ In (о/о)
из которого с учетом (4.5) получили следующую зависимость для расчет-
ного определения hs:
5
h -И 4 ( Р _ * 4 5 * * В * * * * * * * * 17 nlO+tn (b/a) (4 11)
S 5(i/e)W + 3 6+Ш(б/С)Я * 2
В интервале 0,1 > От/Рср ^^,5 относительная ошибка, связанная с аппрок-
симацией, не превышает 3—5%, причем ее максимальное значение прихо-
дится на границы указанного интервала.
Отметим, что в области 0,01 < Ь/а< 0,10 отношение °т/рС1) практичес-
ки не зависит от b/а. Поэтому для любых значений b/а, находящихся в
пределах 0,01—0,10, расчет й, следует вести по формуле (4.11), полагая
й/а = О,1.
В частном случае, когда b/а = 1 [ т. е. контур вмятины ограничен ок-
ружностью радиуса d/2, формула (4.11) ], существенно упрощается и при-
нимает вид
-1’42Ф2- (412)
Это выражение, как и (43), в отличие от формулы (4.1) учитывает
93
влияние диаметра отпечатка на глубину hs. Различие коэффициентов при
d/2 в формулах (4.3) и (4.12) отражает разницу в характере распределе-
ния контактного давления по поверхности вмятины, принятом в расчет
при выводе формул (4.3) и (4.12).
На рис. 21 показаны построенные расчетным путем графики функ-
ций hsfhs % = f(b/a, о^Рср). Глубины hs и hs распространения пластичес-
кой деформации под эллиптической и под эквивалентной ей [ 6, 27] круго-
вой (диаметром d = 2\/аЬ) вмятинами на данном материале при одинако-
вых контактных нагрузках вычислены по формулам (4.11) и (4.12).
Зависимость глубины hs от формы отпечатка (см. рис. 21) качествен-
но подобна установленной в работе [3]. Однако из выражения (4.11)
следует, что hs/hSt зависит не только от b/а, но и от соотношения между
пределом текучести от материала детали и средним давлением р^ в кон-
такте. Заштрихованная зона на рис. 21 соответствует интервалу 0,20 <
< о-г/Рф < 0,33, который охватывает большинство случаев, практически
встречающихся при обработке деталей поверхностным пластическим де-
формированием (ППД). Как видно, влияние отношения о^/р^ на hs осо-
бенно заметно в области малых значений b/а. Так, при Ь/а = 0,1 разница
отношений hs/hs> %, вычисленных
Для (h/Pcp ~ 0,20 и от/рср = 0,33,
достигает 25%, постепенно
’ снижаясь с уменьшением экс-
центриситета площадки контак-
та; при b/а >0,6 разница прак-
тически исчезает.
Рис. 20. Зависимость <JT/Pcp от bg/b для различных отношений
Рис. 21. Влияние формы контура остаточной вмятины на глубину пластически дефор-
мированного слоя:
кривые I и II соответствуют значениям от/Рср, равным 0,20 и 0,33; 1-4 - экспери-
ментальные данные, полученные на образцах из сталей марок 40 [3], 20,45Х и
ЗОХГСА
94
Достоверность приведенных расчетов проверена экспериментом, ко-
торый включал следующие операции. Вначале в поверхность (в общем
случае - криволинейную) стальных образцов внедряли полированные ша-
рики или тороидальные ролики из стали IUX15 (HRC 60—62). Затем в
плоскую площадку, изготовленную на поверхности тех же образцов, вдав-
ливали сферический индентор, радиус которого был равен/?пр, вычислен-
ному по формуле (2.10) или (2.23) для геометрических параметров кон-
тактирующих тел, использованных в первом опыте с тем же образцом.
Контактные нагрузки в обоих случаях были одинаковыми. Глубины hs
и hSf % определяли по распределению твердости под вмятиной. Как видно
из рис. 21, а также данных, содержащихся в табл. 30, аналитическое реше-
ние вполне удовлетворительно подтверждается опытом.
Из рис. 21 также следует, что при расчетном определении глубины hs
для b/а > 0,6 можно без_существенной ошибки пользоваться формулой
(4.12) при d = = 2\/ab. Что же касается интервала 0,1 < b/а < 0,6, то
для него зависимость hs = f(P, ат, а, Ь) может быть представлена более
простым, чем формула (4.11), выражением
1
р 1+Ь/а
(4.13)
2,2а о От 2
Вместе с тем в результате аппроксимации графика, показанного на
рис. 21, нашли следующий поправочный коэффициент к уравнению (4.12):
к = ^ = 1-|(1--)4, (4.14)
"s, к * а
который учитывает влияние формы контура пятна контакта на глубину
hs. В результате получили простую и удобную для практических расчетов
приближенную зависимость
hs = K'j£~ - (4.15)
которая справедлива при b/а > 0,15.
Как видно из выражений (4.11) —(4.15), для вычисления hs необхо-
димо знать полуоси а и b контактной площадки и их отношение. Расчет-
ное определение этих параметров производится по методике, изложенной
в гл. 3.
Использование всех приведенных выше формул, определяющих глу-
бину hs проникновения пластической деформации, требует знания величи-
ны контактной нагрузки Р и предела текучести от материала контртела.
Однако в ряде случаев, особенно при ударном нагружении, определение
Р и от затруднительно, ввиду чего желательно выразить hs через парамет-
ры, легко вычисляемые или определяемые из опыта. Покажем такую воз-
можность на примере формулы (4.15). С учетом зависимостей (2.1),
95
ф Экспериментальные значения h s для случая контакта тел двоякой кривизны
и значения h' ' й h's’ . рассчитанные по формулам (4,1) и (4.11)
Таблица 30
Индентор Образец Опыт Расчет Источник
R.1 и» Rj2 Р, кН Ь/а h s, мм "а
ММ ММ
л , Сталь 20, а- = 285 МПа 2-5 25 -5,0 7,5 9,8 0,680 3,5 4,2 3,7 2.5 10,0 =» 29,4 0,460 6,5 7,2 6,4 37,5 2,5 » 10,0 29,4 0,225 5,5 7,5 5,4 25.0 0,85 “ « 24,5 0,170 5,0 6,6 5,1 50,0 0,85 » « 245 0,125 45 6,6 4,4
Сталь 45Х, а„ = 5 30 МПа
5,0 10,0 -8,5 оо 39,2 0,950 5,5 6,1 5,3
ОО 2,5 10,0 00 19,6 0,480 35 4,3 3,6 Опыты авторов
37,5 2,5 оо 10,0 39,2 0,225 4,0 6,1 4,2
25,0 0,85 оо 00 29Д 0,175 3,5 5,3 3,7
50,0 0,85 оо оо 29,4 0,130 3,5 5,3 3,4
395
5,0 10,0 2,5 ЯЛ °° 10,0 Сталь ЗОХГСА, а_= 1030 МПа 4,2
49,0 0,86 4,0 4,9
5,0 оо ОО 39,2 0,68 4,0 4,4 3,5 3,8
23 -5,0 7,5 24,5 0,66 3,0 3,0
2,5 10,0 ОО 49,0 0,47 4,0 4,9 4,1
375 50,0 25 0,85 10,0 00 49,0 29,4 0,23 0,13 35 2,0 4,9 3,8 3,2 2,2
20 8,05 ОО ОО Сталь 40, От = 400 МПа 5,0 6,0 5,3
29,4 0,60
7 0 ОО СО 29,4 0,45 5,0 6,0 5,2
50 6,5 оо оо 29,4 0,33 5,0 6,0 4,9 13]
юо 6,1 оо оо 29,4 0,23 45 6,0 4,4
250 5,9 оо оо 29,4 0,125 35 6,0 3,6
600 5,8 ОО оо 29,4 0,08 3,0 6,0 2,8
Сталь 45, От = 3 35 МПа
7,5 75 .ОО ее 98,1 1,0 10 12,1 10,8
10,25 10,25 оо оо 122,6 1,0 10 13,6 12,1 [19]
4,75 4,75 00 оо 49,0 1,0 8,0 8,6 7,8
(3.36), (3.37) и данных работы [ 7], согласно которым для углеродистых
сталей от 0,2 НД, выражение (4.15) преобразуется к виду
hs “ К -Дц ) = 2>5 “ > (4.16)
содержащему лишь легко определяемые величины и h . Очевидно, что
аналогичным образом могут быть преобразованы выражения (4.1),
(4.11) и (4.12).
4.2. ИНТЕНСИВНОСТЬ ОСТАТОЧНОЙ ДЕФОРМАЦИИ НА ЛИНИИ
ВНЕДРЕНИЯ УПРУГОГО ШТАМПА ДВОЯКОЙ КРИВИЗНЫ
В ПЛОСКУЮ ПОВЕРХНОСТЬ КОНТРТЕЛА (ДЕТАЛИ)
Общие положения. Интенсивность деформации, возникающей в зо-
не контакта двух тел, характеризует физическое состояние материала в
локальном объеме и, в частности, определяет его запас пластичности, а
следовательно, и долговечность детали при контактном нагружении. При
контактном упругопластическом деформировании поверхности детали с
целью ее упрочнения интенсивность
деформации может оказаться од-
ним из главных факторов, опре-
деляющих эффективность процес-
са. В местах контакта заготовки с
рабочим инструментом также мо-
Рис. 22. Распределение деформации ez под остаточным отпечатком при внедрении
упругой сферы в плоскую поверхность упругопластического контртела
Рис. 23. Значения коэффициента пропорциональности pz в формуле (4.23) для раз-
личных точек оси внедрения сферы (с обильной смазкой) в плоскую грань бруса:
кривые отвечают расчету по уравнению (4.25), точки - эксперименту; 1 - D =
= 20 мм,Р = 245,3 кН, h = 1,8 мм; 2 - D = 15 мм, Р = 157,0 кН, Л = 1,5 мм; 3 -
D = 12 мм,Р = 83,4 кН, Л = 1,0 мм
98
гут возникнуть очаги пластической деформации, которую необходимо
учитывать при определении нагрузочной способности детали в период экс-
плуатации.
Между тем мнения о характере распределения интенсивности дефор-
мации в районе упругопластического контакта весьма разноречивы. Мно-
гие исследователи отмечают, что при отсутствии трения в контакте макси-
мум деформации находится в центре контакта и непрерывно убывает по
мере удаления от поверхности в глубь тела (линия а на рис. 22). Так,
Т.П. Зайцев, применив метод делительных сеток, нашел, что на линии
вдавливания шарика зона максимально деформированного металла рас-
полагается в непосредственной близости от дна отпечатка. Исключение
составляет лишь очень тонкий поверхностный слой, что можно объяснить
влиянием контактного трения. Такой же вывод следует из данных
И.В. Кудрявцева [20], С.Г. Хейфеца [44] и др. И.В. Виккер (1952 г.)
провел рентгеновское исследование распределения наклепа в головке же-
лезнодорожных рельсов и установил , что максимальная интенсивность
пластической деформации наблюдается на поверхности рельса.
В решении контактной задачи, изложенном в упомянутой выше ра-
боте Ли, С. Масаки, Ill. Кобаяси, так же указано, что расчетные деформа-
ции ’’увеличиваются по направлению к отпечатку”, хотя закон их распре-
деления не установлен.
В то же время по данным других авторов, например [37], интенсив-
ность деформации в ряде случаев максимальна на некоторой глубине (ли-
ния b на рис. 22).
Таким образом, очевидно, что на практике встречаются различные рас-
пределения контактной деформации, зависящие, по-видимому, от конк-
ретных особенностей контактного взаимодействия тел (состояния кон-
тактирующих поверхностей, наличия смазочного материала, скорости
нагружения и т. п.).
Вывод расчетных формул. Рассмотрим приближенное аналитическое
решение задачи о распределении интенсивности остаточной деформации в
точках оси вдавливания z, проходящей через центр поверхности контак-
та упругого, в общем случае несферического, индентора двоякой кривиз-
ны с плоской границей упругопластического контртела. Предполагается,
что трение в контакте отсутствует, а вне контакта граница среды остается
плоской [17]. Имеется в виду такая стадия деформирования, когда ос-
таточная вмятина (ограниченная в общем случае эллиптическим в плане
контуром) полностью сформировалась на всей поверхности контакта.
Возьмем начало координат в центре остаточной вмятины, совместив
оси х и у с полуосями а и b ее внешнего контура, а ось z направим вдоль
линии действия контактной силы, т. е. перпендикулярно плоскости хоу.
По аналогии с предложением А.Ю. Ишлинского [17] представим остаточ-
ные перемещения их, иу и uz в точках пластически деформированной об-
ласти под вмятиной в виде разложений:
99
их — atx + а2х2 + ... + а[у + а'2у2 + ...;
иу — Ъ2у + Ь2у2 + ... + b\x + Ь'2х2 + ...; >
uz = со + cix + с2х2 + ... + с\у + с2у2 + ...,
(4-17)
где коэффициенты при переменных х и у в общем случае зависят только
от координаты z, т. е. с0 =с0 (z), av =at(z),bl = bt (z) и т. д.
Учитывая условие постоянства объема при пластической деформации
duz du г du v
и имея в виду, что ez = —— . ех = = и ev = —L, получим
“z “х dy
Но из (4.17) для точек оси z (х = у = 0) следует
= <h (z), =bt (z), uz = c0(z). (4.19)
ax ay
Поэтому
=ez=-[fll(z)+Mz)]. (4.20)
Разделив обе части последнего равенства на uz, получим
«г со <*>
Отсюда, в общем случае,
=ez=-pz(z)Mz, (4.22)
az
где
Таким образом, характер зависимости деформации от перемещения
и деформации от координаты z определяется видом функции vz (z). Рас-
сматриваемая задача применительно к сферическому индентору была ре-
шена одним из авторов ранее [ 7] в предположении, что интенсивность ос-
таточной деформации ег в данной точке тела пропорциональна перемеще-
нию uz в той же точке, а коэффициент пропорциональности vz не зависит
OTZ.
В дальнейшем эта гипотеза получила прямое подтверждение в экспе-
риментах, выполненных при участии В.Л. Шевченко (1975 г.): установле-
но (рис. 23), что при обильной смазке на поверхности контакта индентора
с контртелом найденные из эксперимента значения vz не зависят от коор-
100
динаты z и определяются только нагрузкой и диаметром шара, т. е. vz =#
^vz (z), и, следовательно, как и предполагалось в работе [7],
cz=-»'zWz (4.23)
(здесь принят знак минус, поскольку ez < 0).
В тех случаях, когда конкретное деформирование протекало в усло-
виях сильного трения на поверхности контакта, значения коэффициента
vz для различных точек оси z также оказались различными. Однако и в
этом случае зависимость vz от z прослеживалась лишь в тонком слое,
непосредственно примыкающем к поверхности контакта, а уже при z >
> 0, lhs (hs — глубина пластически деформированного слоя) значения
vz не зависят от z и равны тем, которые были получены при минимальном
трении.
Таким образом, для осесимметричной контактной деформации опи-
санные выше результаты являются прямым экспериментальным подтверж-
дением пропорциональности интенсивности пластической деформации в
каждой точке оси z перемещению в той же точке и независимости коэф-
фициента пропорциональности vz от координаты z при отсутствии трения
в контакте. Справедливость указанного положения для общего случая
контакта тел двоякой кривизны (в условиях неосесимметричной дефор-
мации) также подтверждена экспериментом, описанным ниже (см.
рис. 26).
Следовательно, и в рассматриваемом случае
= «1 (*)+&,(*) р (4.24)
со CO 4
В связи с этим, интегрируя уравнение (4.22), получаем
In uz = - vzz + с.
Постоянная с определяется из граничного условия: при z = 0 uz = h,
с = in h. Таким образом,
• “z
In = ~VzZ,
h
откуда
uz=he~VzZ, (4.25)
где h — остаточная глубина внедрения индентора.
Следовательно, если vz =# vz (z), то осевое смещение точек оси z изме-
няется по экспоненциальному закону, и наибольшее смещение отвечает на-
чалу координат (z = 0). В соответствии с соотношением (4.22) находим
осевую деформацию
101
t^ec = vzhs.
В центре вмятины, т. е. приз =0,
(ez)z=l, = ez,o = -vzh=-c^~, (4.27)
ns
и выражение (4.26) приводится к виду
Q=cz.oe",'z2=cz.oe h* . (4.28)
При z = 0 и Л = 1 мм е2 = — vz, т. е. коэффициент vz численно равен ин-
тенсивности остаточной деформации в центре отпечатка (z = 0) при оста-
точном смещении в нем, равном 1 мм. Найдем значение этого коэффи-
циента.
В рассматриваемом общем случае эллиптической в плане площадки
контакта в точках оси z, совпадающей с направлением равнодействующей
контактной нагрузки, компоненты тангенциальной деформации равны ну-
лю, и интенсивность деформации
Ч = Уfee - Су)2 + fey - ez)2 + fez - ex)2, (4-29)
где ех, еу и ez - главные линейные деформации.
Пусть остаточная площадка контакта ограничена эллиптическим кон-
туром, оси которого равны 2д и 26. В работе [ 12] показано, что в плос-
костях главных кривизн поверхности остаточной вмятины ее профиль
очерчен дугами окружностей 1Х и ly. С известным приближением можно
считать, что эти дуги образовались в результате деформации линейных эле-
ментов с начальными длинами 2а и 26 соответственно, поэтому их сред-
нюю деформацию найдем как
€x cd — ln ~ И ev cn = In --!- .
cp 2fl yep 2b
Иэ геометрических соотношений следует
-2 + h2 2ha / ГТ
-— arctg — - 2с VI + ^ (-
Л %2-Л2 З а
/
I,
b2+h2 2hb
—-----arctg —-----
h b2 - h2
-(-
3 Ч
поэтому
1 1 Г1 4-4
ех,ср = 2 М1+J
-)2];
а
1 1 Ox4
Cv = т In 1 +-
Л.2
(4.30)
(4.31)
102
Допустим, что в точках оси z деформации ех
же соотношении, как и средние деформации на
определяемые формулами (4.30) и (4.31), т. е.
и еу находятся в таком
поверхности контакта,
£*_ ^ех, ср
еу еу, ср Тогда, используя зависимости (4.30) и (4.31), найдем
' е Ш[1ЛД2] ь х - . ~ ( )2, (4.32) fp «г “ 2i 3 о
ж* .£• > Л е ь2 ех+ еу = еу(1 +~^) = еу(1 + —). (4.33) а Но по условию постоянства объема
1- 4 W Ц ех+еу=-ег, (4.34) поэтому еу--те2, (4.35) где 1
т = . 1+ (*Л)2 С учетом (4.32) и (4.35) найдем вторую компоненту интенсивности
деформации ех = еу (b/а)2 - -пе2, (4-36)
Где
(Л/а)2 , п = -- - = 1 - т;
1 + (*Л)2
t- Таким образом, интенсивность деформации в точках оси z, определя- емая выражением (4.29), будет
е/ |ег| 7(ш - й)2 + (т + I)2 + (л + I)2 =^гф|ег|, (4.37)
• v Л Г 2г* ’ ч а с учетом (4.26) 2 tl. F(5 y,h е- F(i )<£ е’ , (4.38) 5 а • a ns где дополнительно /?(-)= V(»i -л)2 + (т + I)2 + (л+ I)2. (4.39) а 103
т
*1
В центре вмятины (z = 0)
<Ч=о = ei0 = ^F(^)c~ = F(-) |ez01 (4.40)
3 a ns 5 a
и, следовательно,
Если принять, что граница пластически деформированной области под
остаточной вмятиной проходит на уровне z - hs, где интенсивность плас-
тической деформации равна заданному допуску Де, то из (4.38) следует
^Г(^)с-е-с = Де. (4.42)
3 a hs
Таким образом, выбрав допуск Де и задавшись значениями Л, b/а и
hs или вычислив их по формулам (3.13), (3.38) и (4.11), из последнего
уравнения находят коэффициент с, а затем и vz. Графическое выражение
функции (4.42) для Де = Дет = 2 • 10-3 приведено на рис. 24.
Положив в (4.41) z = hsnej = Де, найдем
с = 1пе-ЬР-, (4.43)
а при Де = е012 = 2 • 10-3
с = In 5OOejo-
При с = 1 функция (4.42) имеет максимум, равный
(4.44)
(4-45)
0 /2345с
т. е. величина этого мак-
симума изменяется обрат-
но пропорционально допус-
ку Де остаточной деформа-
ции. График функции
hsjh(c'j располагается тем
ниже, чем ближе форма
вмятины к круговой, ког-
да Л/ а =1. Наличие мак-
симума функции (4.42)
свидетельствует о том, что
отношение hsl h не может
превысить некоторую пре-
дельную величину, опреде-
ляемую отношением b/а и
заданным допуском Де
fhic. 24. Графическое решение-
уравнения (4.42)
104
^Значения F (b/a ) в зависимости от эксцентри-
ситета контура эллиптической вмятины
Ь/а 0,1 0,2 0,3 0,4 0,6 0,8 1,0
F(b/a) 2,44 2,40 2,35 2,30 2,20 2,14 2,12
Ф-fQ. ) Т" (а) 1,15 1,13 1,11 1,08 1,04 1,01 1,0
/. Так, для Л/д = 1 и Де =0,002 (hsl Л)п1ах =184. Значениям с < 1 соответст-
'Л вует восходящая ветвь кривой hs/h (с), которая,однако, лишена фиэичес-
кого смысла, так как ее использование приводит к результатам, противо-
7»< речащим очевидному факту роста степени деформации с увеличением глу-
. бины отпечатка: если, например, при b/a = 1 и hs/h = 184, с = 1 и е0 =
, ’ = 0,0054, то при большей глубине Л , когда hs/h = 80 с =0,2 и е0 =0,0025.
Из приведенных ниже данных (табл. 31) видно, что при b/a -* 1 функ-
> ция'у/• (/;/«)-> 1.
й С достаточной для практики точностью при b/a 0,25 можно считать
Й/ ^(Л^-гДСЛ/д)"0’1 =2,1(В/Л)0’05. (4.46)
Для круговой площадки контакта формулы (4.26) и (4.27) совпада-
5 ют соответственно с (4.38) и (4.40); при этом
К
1 Z
М (е/)г = I ег I = vzhe~vZ = с е (4.47)
Яг.' п8
и
Ж £ i.o = ^z.o |= vzh = с £-. (4-48)
4
S’ На рис. 25 и 26 эпюры ег (z), построенные по уравнению (4.26), сопос-
тавлены с экспериментальными, полученными в результате испытания раз-
41 резных образцов с применением метода делительных сеток. Когда трение
на поверхности контакта минимально, теоретический расчет, учитываю-
ший пропорциональность деформации перемещению, удовлетворительно
подтверждается результатами опыта и в общем случае контакта тел двоя-
кой кривизны.
7 В тех же случаях, когда деформация сопровождается значительным
"" трением, опытные точки вблизи поверхности образца заметно удалены
7 от теоретической кривой, образуя максимум ez при z « 0,lhs. Однако для
.7 z > 0,1Лу влияние трения уже не сказывается, а распределение деформации
ег (z) следует зависимости (4.26).
105
Рис. 25. Распределение дефор-
мации ez при статическом внед-
рении упругой сферы в поверх-
ность плоской стальной плиты:
черные точки - обильная смаз-
ка в контакте; светлые - ин-
тенсивное трение в контакте;
1-3 - то же, что и на рис. 23;
кривые - расчет по формуле
(4.26)
Описанный экспери-
ментальный факт согласу-
ется с данными теоретичес-
ких исследований процесса
внедрения сферического
штампа в полупространст-
во. Так, А.Д. Томленое
(1963 г.), анализируя кар-
тину линий скольжения,
приходит к выводу, что
при наличии трения на по-
верхности контакта около центра контакта образуется область плас-
тического равновесия, внутри которой деформация на определен-
ной стадии развития стабилизируется. По мере дальнейшего углубле-
ния пуансона область пластического равновесия движется вместе с ним
как жесткое тело, не претерпевая каких-либо дополнительных деформа-
ций (исключение составляет лишь тонкий граничный слой материала).
Итак, одна из причин появления максимума на экспериментальных
кривых ez (z) обусловлена влиянием трения на поверхности контакта, ко-
торое препятствует свободному перемещению частиц металла в процессе
внедрения шара и искажает траектории их движения на некотором рассто-
янии от поверхности. На наличие значительных сил трения на поверхнос-
ти контакта при внедрении индентора без смазочного материала указы-
вал и Г.П. Зайцев (1949 г.).
В обычных инженерных расчетах процедуру вычисления интенсивнос-
ти контактной деформации можно существенно упростить. В самом де-
ле, учитывая зависимости (4.27), (4.16), (4.46), (4.44) и полагая (с до-
. пустимой погрешностью), что в общем случае контакта тел двоякой кри-
визны отношение b/а определяется формулой (3.38), преобразуем выра-
жение (4.40) к виду
е/,о = 0,28 \/А//? Пр 49ч
In 500 о к (А/В)0,05
106
Рис. 26. Распределение относительной деформации ez вдоль линии действия контакт-
ной нагрузки при статическом внедрении рабочих инструментов разной формы при
. 4 ^пр = 5,25 мм = const:
кривые — расчет по формуле (4.28) \а — сталь 20 (НД 1470) ,Р = 4,90 кН; б - сталь
(НД 2250), Р = 9,81 кН; 1-5 - контакт сферического индентора (R = 5,25 мм) с
плоскостью; сферического индентора (R =6,3 мм) с цилиндром (DB = 30 мм);
й- тороидального ролика (Dp = 25 мм, г = 4,1 мм) с цилиндром (DB = 30 мм) ;торо-'
> цдального ролика (Dp = 19 мм, г = 3,0 мм) с плоскостью; двух цилиндров (Dj =
Т = 4,0 мм и DB — 30 мм)
Эта функция достаточно точно аппроксимируется уравнением
’ в4о = 2,4^/(^-)2(^)0’2, (4-50)
I/ z R А
к лпр
из которого интенсивность деформации в центре контакта вычисляют не-
посредственно по глубине h остаточной вмятины.
Глубина h , при которой равна заданной величине, будет
Л = 0,27 к2/?пр (А/В) 04 . (4.51)
Для круглого отпечатка, например, в случае внедрения сферы диа-
метром D = 2R в плоскую поверхность или при контакте двух цилиндров
(из которых один — индентор) одинакового диаметра D = 2R со скрещи-
вающимися под прямым углом осями Т^пр =Я, А/В = 1, к = 1 и
, €4О = 2,4(Л//?)2'3; (4-52>
г h=0,Z7Rfffi.. (4.53)
Ь V
Нагрузку на индентор, обеспечивающую ’ получение необходимых
глубин h , вычисляют в соответствии с зависимостью (3.13) как
- Р = пНДОпрЬ+(4.54)
107
а интенсивность деформации в произвольной точке оси z (в пределах,
О < z < hs — по формуле (4.41), в которой
с _ 1п500е, о
(4.55)
hs 3,55к\4?прА
Приведенные выше соотношения дают возможность прогнозировать
и программировать физико-механические (глубину hs и интенсивность
деформации е,- материала) и геометрические (глубину h и полуоси а и
b остаточной вмятины) параметры упругопластического контакта. Это
позволяет решать важные практические задачи, возникающие при проек-
тировании технологических процессов, предусматривающих применение
различных видов обработки деталей путем их контактного пластического
деформирования.
В п. 4.3 приводится решение одной из наиболее интересных задач та-
кого рода.
4-3. РАСЧЕТ ОПТИМАЛЬНЫХ ТЕХНОЛОГИЧЕСКИХ ПАРАМЕТРОВ
РЕЖИМА УПРОЧНЯЮЩЕЙ ОБКАТКИ ДЕТАЛЕЙ РОЛИКАМИ
Оптимальным режимом поверхностного пластического деформиро-
вания (ППД), проводимого с целью упрочнения, является такой, который
обеспечивает максимальное приращение предела выносливости детали
До- j по сравнению с его исходным значением. Задача оптимизации про-
цесса упрочнения имеет два аспекта: физический и технологический.
Первый заключается в выборе и обосновании параметра оптимизации, а
второй — в технологическом обеспечении условий деформирования по-
верхностного слоя детали, отвечающих выбранному значению этого па-
раметра. Рассмотрим последовательно указанные аспекты.
В общем случае для материала с данными физико-механическими
свойствами величина Да- t, обусловленная ППД, зависит от следующих
главных физических факторов: глубины hs и физического состояния плас-
тически деформированного слоя детали; величины и распределения ос-
таточных сжимающих напряжений оост в детали после ППД [ 20].
Вопрос о необходимой глубине hs нашел принципиальное решение в
работе [ 36]. В литературе приводятся также многочисленные эксперимен-
тальные данные, позволяющие достаточно обоснованно назначать глубину
hs в зависимости от диаметра упрочняемого вала. В отношении же опти-
мального физического состояния поверхностного слоя детали таких ре-
комендаций нет. Это состояние формируется в процессе обкатки детали
и определяется конкурирующим влиянием двух протекающих одновре-
менно процессов - физического упрочнения (наклепа), с одной стороны,
и разупрочнения, обусловленного образованием и последующим развити-
ем микродефектов в деформируемом металле — с другой. Наибольшие ос-
108
\ таточные напряжения сжатия близки к повышенному за счет наклепа
\пределу текучести материала детали, непрерывно возрастающему по мере
увеличения интенсивности деформации, поскольку истинные диаграммы
Реформирования конструкционных металлов представляют собой плавно
восходящие кривые. Это значит, что в интересах усиления благоприятных
аакторов (т. е. остаточных напряжений сжатия и степени физического уп-
рочнения материала) нужно стремиться к тому, чтобы интенсивность де-
формации поверхностного слоя была возможно большей. Однако [15, 24]
с ростом интенсивности деформации процесс разупрочнения также посте-
пенно усугубляется; поэтому очевидно, что приращение предела вынос-
ливости детали будет наибольшим при оптимальной е,. опт интенсивности
деформации ет < е(; опт < еразд, где ет и еротд — интенсивности деформации
на предел текучести и непосредственно перед разрушением.
В настоящее время можно считать установленными следующие поло-
жения: 1) главная часть деформационного упрочнения материала исчер-
пывается [31] на стадии равномерной деформации, т. е. при е)0 < ер;
2) наиболее интенсивный рост количества и размеров микродефектов в
металле наблюдается за пределами равномерной деформации [15], т. е.
при ej о > ер. Таким образом, при е,- 0= ер упрочнение материала близко к
предельному, сжимающие остаточные напряжения близки к максималь-
ным, а дефекты (микротрещины) не получают еще опасной степени раз-
вития [ 15, 31]. Из сказанного следует, что оптимальной интенсивностью
деформации должна быть е, 0 ~ elont ~ еР •
Предельная равномерная деформация ер является одной из механи-
ческих характеристик материала детали и определяется по результатам
стандартных испытаний образцов на растяжение как
'>-‘"^=2^. («6)
где фр = 1 - (dp/d0)2 - предельное равномерное сужение; d0 и dp - диа-
метры образца до испытания и на участке равномерной деформации.
Приближенные, но достаточно точные для практики значения ер мож-
но находить из простой зависимости
_ 245
еР НД ’
предложенной в работе [ 7]; здесь НД - пластическая твердость материа-
ла детали (МПа), определяемая по ГОСТ 18835-73.
Из условия существования обобщенной диаграммы деформирова-
ния материала о,- (е,), не зависящей от вида напряженного состояния
[ 38], следует, что величина ер имеет физический смысл критической ин-
тенсивности деформации [15] не только при одноосном растяжении, но
также при других, включая и весьма сложные, способах деформирования,
реализуемых, в частности, в процессе обкатки деталей роликами.
109
При обкатке детали роликами (шариками), кроме линейных дефор- '
мадий ех. et и ег (оси х, t, z соответствуют осям х. у, г в и. 4.2), обуслов-,
ленных внедрением ролика, материал поверхностного слоя детали претер/
певает также сдвиговые деформации в тангенциальном (?2Г) и осевом
(7гл) направлениях (т. е. в направлении, противоположном окружной
скорости детали, и в направлении подачи). Таким образом, интенсивность
контактной деформации на поверхности вала после его обкатки роликом
может быть представлена выражением [ 38]
ei. о = \/(ev,o ~er,o)2+ о “ ez, о)2 + (ez, о ~ex. о )2 + j (7д о + 7« о )
(4-58)
(здесь индексы ”0” указывают на то, что деформации относятся к точкам
поверхности вала).
Как установлено в п. 4.2, при определении радиальной (по отношению
к валу) компоненты контактной деформации ez упругопластический кон-
такт тел произвольной кривизны (когда плоскости главных кривизн обо-
их тел совпадают) можно с достаточной для практики точностью модели-
ровать более простым случаем контакта шара приведенного диаметра
£>пр с плоскостью, что равносильно (допустимому в инженерных расче-
тах) принятию в формуле (4.40) ~ f-(b) ~ 1. Тогда, учитывая соотно-
3 а
шения между линейными деформациями, вытекающие из условия посто-
янства объема (ех = er = — 0,5ez), выражение (4.58) можно преобразовать
к виду
Чо = \/Й.о + | (72,.о + 72д-о), (4-59)
где в соответствии с формулой (4.27)
ег,о=-с\-- (4.60)
,г S
линейная деформация сжатия в точках обкатанной поверхности, отсчи-
тываемая в направлении радиуса поперечного сечения вала; й и йх — глу-
бины остаточной вмятины и пластически деформированной области вала.
Что касается сдвиговых деформаций при обкатке деталей роликами,
то сведения об их величине в литературе отсутствуют. Авторы исследова-
ли их экспериментальным путем. На цилиндрических составных образцах
из сталей 20 и 45 с помощью делительных сеток установили (табл. 32),
что сдвиговые деформации 7zf,o и7гх о на поверхности вала пропорци-
ональны линейной деформации ег 0, т. е.
7zr, о — 7гл, о — (4.61)
где ку 0,70-^0,75 — усредненное значение коэффициента пропорциональ-
ности, вычисленное по данным табл. 32.
110
gr.
'.ди,
2gS SSS
ООО 000
Примечание. Числитель и знаменатель - обкатка роликом соответственно со смазочным материалом и без него.
111
В то же время (по-видимому, под действием сил трения) измеренная /
деформация (е2>о)изм оказалась несколько меньше (для исследованных/
сталей приблизительно на 15—20%) расчетной, вычисляемой по формулу
(4.60) без учета трения в контакте инструмента с деталью, т. е. (см;
табл. 32) /
~ ^z.o = кес т~ > (4.62)
ns
где ке я» 0,804-0,85.
Имея в виду соотношения (4.61) и (4.62), из (4.60) и (4.59) находим
h
в/,о ~ le2,ol =с~. (4.63)
"S
Поскольку согласно соотношению (4.44)
с = In 500 ег0 = In 500 lez 0 I, (4.64)
то из (4.63) следует, что глубина остаточной вмятины, образуемой роли-
ком на поверхности обрабатываемой детали при заданном значении е/0,
будет
Установлением зависимостей (4.62) —(4.65), определяющих механи-
ческое состояние поверхностного слоя детали, подвергнутой обкатке ро-
ликами или шариками, и завершается рассмотрение физического аспекта
задачи. Перейдем к ее технологическому аспекту.
Для данного материала и размеров детали эффективность упрочнения,
достигаемая в результате ППД, обеспечивается определенным сочетанием
следующих технологических факторов: рабочей нагрузки на ролик Р, диа-
метра Dp и профильного радиуса г ролика, продольной подачи s, числа
проходов пп, скорости обкатки V.
Влияние трех последних факторов изучено достаточно хорошо; в
литературе имеются однозначные рекомендации [3, 21, 30, 46], согласно
которым обкатку целесообразно выполнять за один проход при скорости
v < 100 м/мин и подаче s < (0,20 4-0,24) где h — полуширина следа роли-
ка на обрабатываемой поверхности. Диаметр ролика Dp не имеет сущест-
венного значения, и из конструктивных соображений, а также для умень-
шения волнистости обкатанной поверхности его рекомендуется прини-
мать возможно меньшим и кратным диаметру вала £>в.
Таким образом, факторами, подлежащими варьированию с целью оп-
тимизации процесса ППД, являются рабочая нагрузка Р и профильный
радиус ролика г: задача состоит в отыскании таких значений Риг, кото-
рые при данных DB и Dp, а также механических свойствах материала ва-
ла обеспечивают получение желательной глубины слоя hs и, одновремен-
но, оптимальной интенсивности деформации £j0, определяемой выраже-
нием (4.63).
112
(ci
С 3
(4.66)
и в= —
Dp 2г
\ Приводим решение этой задачи.
\ Применительно к случаю обкатки вала роликами или шариками ве-
личины Л и hs вычисляют с учетом особенностей силового контакта ра-
бочего инструмента (ролика, шарика) с цилиндрической поверхностью
. гл. 3 и п. 4.1): для рассматриваемого общего случая в соответствии
висимостью (3.13)
L= р~р° ,
1 ^HUDjjp
где Ро — условная критическая нагрузка, вычисляемая по формуле (2.25);
Дпр1- приведенный диаметр (удвоенный приведенный радиус кривизны)
контактирующих тел, т. е. рабочего инструмента и вала, определяемый вы-
ражением (2.10):
* п =2.
Mip А v£,
В котором
: А~^
Из зависимостей (4.65) и (4.66) с учетом (2.10), (2.25) и (4.44)
следует г
р- р~р03° «пТ /Т
__ 50Л / А
In 500 е/ о ~ V 2r
Глубина hs связана с рабочей нагрузкой Р, пределом текучести от
материала детали (вала) и геометрическими размерами (полуосями а и
Ь) контура остаточной вмятины, образующейся на поверхности детали при
.однократном внедрении в нее ролика, уравнением (4.11):
5
Л
hs = 6[--2----- (JL______Е__ )]10+1Па ,
5(-)3/2 + Э “ЬОТ ь+^ъ
а а
в котором согласно (3.36) и (3.37)
(4-67)
a =
'2й + ау
2В
где дополнительно ау — упругое сближение в контакте рабочего инстру-
мента (ролика, шарика) с деталью, определяемое по
учетом (2.10), (2.21) и (4.65),т.е.
формуле (3.23) с
l + *2)2f2
av ___________
(1+JL hsei.o
2A ay hi500e^o'
(4-68)
113
В последнем выражении кх и к2 находятся из соотношений (2.22);
при обработке стальных валов стальным инструментом Pi = Pi ~ Р " Ор
и£\ -Е2 = Е = 2• 10s МПа. ,
Приняв во внимание зависимости (4.65), (4,68), (3.38), {3.25)
(3.27) и (2.10) при ejo ~ ер, из совместного решения уравнений (4.67) и
(4.11) получают следующие расчетные зависимости, определяющие иско-
мые (оптимальные) значения параметров г и Р : 1
й?1п 500 6р
2/’ер
4 1
10
Р 0,10 hl 500 ер _______17____10+— 1п(2Лг)
100eD/iv V А ’ 2 > (4.69)
Р ' 6+-1п(2Лг) ' '
p_-nHUevhs /2г + Р0,юг
1п500ер V А 50Л ’
_ , Ov
где дополнительно F= 1 + — параметр, вычисляемый в зависимости от
zjo ш 5UU Ср zr 1UU
следующим образом:
а) при Q < 1
2 1
F = g (cos - arccos(2£?-1) + 1 ];
б) при С > 1
2
F = ~[l - sin
3 1
^arcsin(fT^))b
(4.70)
3 (4.71)
(4-72)
(4-73)
Следуя изложенной выше методике, получим выражения, определяю-
щие оптимальные значения рабочей нагрузки Р и диаметра шарика D при
обкатке вала шариком. Приняв для этого случая в формуле (2.10) А =
= 2 и Б = -^ + 2- (поскольку А < В), найдем
пНДерН5Р / Ов + PQ'IoDb /£\1.
1п500ер VDb+D Db+D 10
(4.74)
114
,е
D=------
DBW-1
(4-75)
Л$1л 500 Ср
4
5(J7JL)<W
[J- (яДД +
Ж (J J’
ю
io+ -in( -JL)
2 Ов+Л
. (4-76)
Р рдрР • In 500ср / DB
100CD/!e V D +D' | D
p s B 6+-ln(-----------2-)
2 £>B+£>
Параметр F, входящий в выражение (4.76), определяется соотноше-
;Ь. ниями (4.72) и (4.73) в зависимости от
Q = (fc, + к2)2 (^^
№. 256 41 27 4£>ln500ep v DB
/л
ж
17
(4-78)
(4-79)
,3
B+£> 7 '
(4-77)
t Задача определения P, г и D решается с помощью ЭЦВМ или методом
‘ последовательных приближений; в качестве первого приближения можно
|> принять:
при обкатке вала роликом
Г = z7iS°T \2 ^р+^В
у/ё^нД ’ dpdb ’
L а при обкатке шариком
[) = ^^hsu-i + 2,2hsoT
I аде°’75 £>вВДе£75
Системы уравнений (469), (4.70) и (4.74)-(4.76) представляют
1 окончательное решение поставленной задачи. Они позволяют вычислить
Г такие значения искомых технологических параметров режима ППД — про-
•: фильного радиуса ролика г, диаметра шарика D и рабочей нагрузки Р,
( которые обеспечивают получение желательной глубины пластически де-
) формированного слоя hs, а также оптимальной интенсивности пластичес-
| кой деформации е,0 = ер, отвечающей максимуму упрочняемой де-
Ь тали.
г Если в приведенном выше решении представить hs выражением
t (4.16) вместо (4.11), то можно существенно сократить объем вычисле-
I ний, связанных с определением D, г и Р. Тогда из совместного решения
! уравнений (210), (4.16), (4.40), (4.54) и (4.65) при е,0 = ер с учетом
г соотношений (4.14), (4.46), (4.49) и (4.50) получим
1 о=
(4.80)
2,2hs aT
НД - Of
115
Рис. 27. Долговечность гладких образцов диаметром Do = 10 мм в зависимости от
интенсивности деформации ej о наклепанного слоя:
1 - сталь 45ХН2МФА (ер =0,04); hs = 0,35 мм; номинальное напряжение изгиба
аи = 645 МПа; 2 - сталь 20 (ер = 0,15);*s = 1,0 мм; аи = 295 МПа
Рис. 28. Долговечность гладких образцов диаметром D = 10 мм в зависимости от
глубины hs наклепанного слоя при вц 0 = ер и Dp = 20 мм:
1 - сталь 45ХН2МФА (ДД 59*50); аи = 645 МПа; 2 ~ ^тъ 30ХГСА 28ОО) ?
аи = 505 МПа
/Эр+ЛВ Asln500ep ->2 г 2?pZ)g
5ПрПв 1 кер ЦД-О? 12г(Вр+Пв)
(4-81)
2*1
к2 (—
CJ-
(4.82)
где согласно (4.14) и (338)
Хг
(Z)p + Z)B))4.
При обкатке вала шариком можно принять к = 1.
Для выбора необходимой глубины наклепанного слоя (когда к это-
му параметру не предъявляются специальные требования) при DB <
< 600 мм можно рекомендовать следующую зависимость
116
\ nni / ^9 1 В \
\ 57=0’01fe gTb <4S3>
которая получена путем систематизации и математической обработки на-
шйх данных, а также экспериментальных данных других авторов [3, 20,
2Ц30,45,46].
Таким образом, изложенное решение учитывает совместное влияние
на выбор рабочей нагрузки Р, профильного радиуса ролика г и диаметра
шарика D большого числа различных факторов, а именно: упругопласти-
ческих свойств материала детали (Е, д, НД, ер), диаметров детали (£)в)
и ролика (Dp), а также желательной глубины пластически деформирован-
ного слоя hs.
Результаты экспериментов подтвердили, что как долговечности
I (рис. 27 и 28), так и пределы выносливости (рис. 29 и 30) оказываются
максимальными для образцов, которые подвергнуты упрочняющей об-
катке роликами по режимам, определяемым выражениями (4.69) и
(4.70). Такой же вывод следует из анализа многочисленных эксперимен-
£ тальных данных, опубликованных в литературе другими исследователя-
J ми. Так, например, автор [45], выполнивший сравнительные усталостные
Рис. 29. Кривые усталости образцов диаметром Do = 10 мм из стали 40Х, неупроч-
Ненных и обкатанных роликами (Dp = 25 мм) при hs = 0,75 мм — idem; q, о — var:
1—5 — режимы обкатки, при которых интенсивность деформации ед о ~ 0; 0,4ер;
Ф»6ер; ер и 1,3 ер
Рис. 30. Приращение предела выносливости гладких образцов диаметром Do — 10 мм
из стали 40Х при hs = 0,75 мм - idem; ед 0 ~ var
117
Расчет интенсивности деформации поверхностного
слоя деталей, подвергнутых обкатке шариками
и роликами при оптимальных режимах (45]
Таблица 33
Марка стали ЯД, МПа еР Dp, мм Г <мм Р,кН е i , о ei, оАр
45 2250 0,11 9,52 4,76 1,9 0,105 0,96
15,08 7,54 3,2 0,095 0,86
20,00 10,00 5,1 0,095 0,86
80,00 2,10 2,4 0,130 1,18
40Х 4300 0,105 15,08 7,54 3,4 0,100 0,95
испытания образцов, упрочненных по различным режимам, отмечает, что
максимальная эффективность упрочнения отвечала случаю, при котором
параметрМ = = мм~*’гдеи~неПОСРеДстаснноизмерен-
ные в процессе обкатки высота волны металла, бегущей впереди ролика,
и углубление ролика относительно обрабатываемой поверхности. Расчет
свидетельствует, что в описанных здесь оптимальных вариантах интенсив-
ность деформации поверхностного- слоя доводилась именно до уровня,
близкого к предельной равномерной деформации (табл. 33), а это зна-
чит, что параметру М = 1 мм-1 отвечает ер.
Специально выполненные (совместно с Н.В. Асеевым и В.Л. Шевчен-
ко) эксперименты показали также, что условие Cj 0 « ср является опти-
мальным и в тех случаях, когда обкатку деталей роликами проводят
с целью повышения их износостойкости.
Отметим, что приведенное решение может служить для программиро-
вания не только оптимальных в отношении предела выносливости режи-
мов обкатки, но и таких, которые обеспечивают получение любой жела-
тельной или заданной интенсивности деформации е,; 0 поверхностного слоя
детали. Для этого, задавшись глубиной hs, нужно в расчетные формулы
(4.69), (4.70) или (4.74)—(4.76) вместо ер подставить необходимое зна-
чение е(;0-
4.4. ПРИМЕРЫ РАСЧЕТА
Пример 1. В задаче, рассмотренной в примере 1 к гл. 3, требуется дополнительно
определить интенсивность пластической деформации 6, 0 в центре контакта ролика
с валом и глубину hs распространения пластической деформации под вмятиной. Си-
лой трения в контакте пренебречь.
118
Решение. 1. Глубина наклепанного слоя hs определяется по формуле (4 Ц) ес-
ли положить в ней [7] '*
ат=0,2ВД = 0,2 2500 =500 МПа;
4 10000 17
0,96 , 0.96 1,76 500 ~ 096 }
_5<U6> ,3 ‘”’□5
5
“ 0^96
10+1п-----
1,76
— 2,7 мм.
Отметим, что результаты расчета hs по формулам (4.11) и (4.16) весьма близ-
ки. Так, согласно (4.16) и (4.14)
/Р 1
= К у — ( —
1 v 2 От
_J_)=0,98v/^(JL__L)=2,8mm.
НД v 2 500 2500
Где
к = 1
0.96 4
1,76 '
= 0,98.
к. 2. Для определения интенсивности пластической деформации е, 0 в центре кон-
такта могут быть использованы зависимости (4.40) и (4.44) либо (4.50). Согласно
/ (4.50)
е/.о = 2.4 V(-^—)2 Л) °’2 = 2,4 </(-^) 2 (£-£)°'2 = 0,1.
К2Япр А 0,982-9 0,03
Пример 2. Подобрать оптимальные значения геометрических параметров рабо-
1 чих инструментов (тороидального ролика и шарика), а также рабочей нагрузки Р
для упрочняющей обкатки вала диаметром DB = 50 мм из стали 45, для которой
I НД 2250, Oj. =440 МПа, ер =0,11.
(. Решение- В соответствии с зависимостью (4.83) назначаем желательную глуби-
ну наклепанного слоя вала
*,= 0.01£>b(-!£- -lg^-) = 0,0l 50(-^- - 1Л = 2.25 мм.
ig-MB 2 1п50 2
а. Обкатка вала роликом. Для уменьшения волнистости обработан-
ной поверхности вала примем диаметр ролика в плоскости обкатки равным диамет-
ру вала, т. е. Dp —DB =50 мм.
Профильный радиус г ролика определяем из зависимости (4.69). Для этого
предварительно по формулам (2.3), (2.22) и (1-17) находим
1 1 _ 1 1 -1
4 — — + —----—- + ——0,04 мм 1;
Ов ^р 50 50
t + t -1-Я1 1-м2 _ 1-0,32
яЕг я-2-10®
/о,1О = Иехр[1,9(10"3ад- 1)0,в68] = 11 ехр[1,9 (10~3-2250 — I)0’668] = 100 Н.
1 0,3 = 0,29- 10"® МПа"
т-2 -10®
119
По формуле (4.74) вычисляем профильный радиус в первом приближении
12 ,2,25 -440 ч2 50+50
( 2250 > 50-50
= 2,6 мм,
а из выражения (4.71) приг = Г| находим отвечающее ему значение параметра:
е- ^я\0.29 10-Ъ\“'2И°'2'И °J1 yg.™
256 In (500 0,11) *2-2,6 100
v чц-'оии.и/ /Z Z.0 э
( 0,11-2,25 *0,04 -о’77-
Так как Q < 1, то согласно зависимости (4.72)
2 1
Fj=-[cos-arccos (2-0,77-1) - 1] =1,3.
Таким образом, из (4.69) следует
' = 2,25 1п (500-0,11)1___4_____________ 1
1 2-1,3-0,11 J 5 (2 - 0,04 - 2,6) 3,4+ 3 1,3-440 (Я 2250 +
10
1001п(500-0,11) /2°2,6Ч 17
100-0,11 2,25 * 0,04 5 1
6 + - In (2 0,04 • 2,6)
10+’ In (2 -0,04 -2,6)
— 3,2 мм ¥=Г[.
Во втором приближении примем гц = 3,4 мм. Тогда: £)ц = 0,86, Fjj =1,31 и Гц =
= 3,5 мм ¥= гц. Следующее приближение Гщ = 3,6 мм является последним. Таким об-
разом, окончательно г=гщ = 3,6 мм.
По зависимости (4.70) определяем рабочую нагрузку на ролик
Я-2250 0,11-2,25 fTTb 100-3,6
In (500 -0,11) * 0,04 50 -0,04
= 6040Н кН.
б. Обкатка вала шариком. В качестве первого приближения принима-
ем значение Dj = 11,2 мм, найденное по формуле (4.79). Далее, по формуле (4.77)
определяем С] = 0,68, а по зависимости (4.72) Tj = 1,28; наконец, По формулам
(4.75) и (4.76) вычисляем = 15 мм =# D,. Поэтому во втором приближении
примем £)ц = 0,5 (Pj + Z^) =0,5(11,2+ 15) =13,1 мм. Тогда Сц = 0,78, Рц = 1,30 и
= 14,7 мм. Следующее приближение, согласно которому Рщ = 14,5 мм, считаем
последним. Следовательно, окончательно D = Pjjj = 14,5 мм.
Рабочая нагрузка на шарик, вычисленная по формуле (4.74), составляет Р =
= 5740 Н* 5,7 кН.
Очевидно, что приведенные расчеты могут быть легко выполнены с помощью
ЭВМ.
Отметим, что в рассмотренных случаях приближенные формулы (4.80) - (4.82)
дают следующие результаты: при обкатке вала роликом (при Dp = 50 мм) г =
=3,75 мм, Р =5,7 кН и шариком D= 14,3мм,Р =5,5 кН.
120
ГЛАВА 5
К РАСЧЕТ СБЛИЖЕНИЯ И ФАКТИЧЕСКОЙ ПЛОЩАДИ
К’ КОНТАКТА (ФПК) ШЕРОХОВАТЫХ ПОВЕРХНОСТЕЙ
Г 5.1. РАСЧЕТ ПОЛНОГО СБЛИЖЕНИЯ И ФПК ЕДИНИЧНОЙ
СФЕРИЧЕСКОЙ НЕРОВНОСТИ С ПЛОСКОЙ
> ПОВЕРХНОСТЬЮ КОНТРТЕЛА
Полное сближение в контакте. Современные исследования закономер-
ностей контактного взаимодействия шероховатых поверхностей твердых
fe- тел основаны на моделировании единичных выступов телами правильной
№а геометрической формы: эллипсоидом, сферой, стержнем, конусом, пира-
мидой, клином. Подробный анализ этих моделей, выполненный Н.Б. Дем-
Иу’ киным [ 6], свидетельствует о предпочтительности использования в ука-
Дй занных задачах сферической модели выступов. Такой же вывод содер-
жу жится в работах И.В. Крагельского [18], Н.М. Михина [26], которые по-
казали также, что характерным для'контакта твердых тел является внед-
Ш-1' рение выступов, а не их смятие.
Поскольку вершины выступов шероховатой поверхности располо-
ЯЬ жены на разных уровнях, сближения в контакте отдельных выступов су-
Ду, щественно различны. С ростом нагрузки упругая деформация в контакте
Др единичного выступа с кснтртелом переходит в упругопластическую, при-
Чем на разных стадиях нагружения соотношение между обратимой упру-
Ejff гой и остаточной составляющими сближения неодинаково.
ДЕ?. Для расчета сближения и фактической площади контакта шерохова-
R’ тых поверхностей в этих случаях все контактирующие выступы разбива-
Др? ют обычно на две группы: считают, что выступы одной группы деформи-
Ж^ руются чисто упруго, а другой — упругопластически [ 41 ]. Для каждой
ДЕ1- из этих групп применяют свои формулы, определяющие сближение в кон-
Як такте. Однако выше было отмечено (см. с. 62), что критерии перехода
К- от чисто упругой к упругопластической контактной деформации носят
Др условный характер, а деформация в контакте, строго говоря, является
Ж? Упругопластической с самого начала нагружения. С увеличением нагруз-
ки изменяется лишь соотношение между упругой и пластической состав-
Д? ляющими деформации. Как показано в работах [4, 15, 24], такой подход,
соответствует современным представлениям о наличии очагов микроплас-
тической деформации в теле даже на самых ранних стадиях его макроуп-
2ругого деформирования.
121
Очевидно, однако, что этот подход может быть реализован в расчетах
лишь в том случае, если полное сближение а в контакте на всех стадиях
внедрения индентора в контртело определяется единой зависимостью,
справедливой как на стадиях макроупругой, так и упругопластической
деформации. При этом условии была бы устранена главная трудность рас-
чета полного сближения, состоящая в необходимости установления грани-
цы и использования критерия перехода (всегда условного) от ’’чисто уп-
ругой” стадии деформации к упругопластической.
Авторами подробно исследованы количественные соотношения, опи-
сываемые формулой (3.43), в которой первое слагаемое определяет глу-
бину внедрения и содержит величину Ро, полученную [7] экстраполяцией
прямой Р(Л) на ось нагрузок. При Р > Ро пренебрежение величиной Ро
в формуле (3.43) не вносит значительных погрешностей в определение
составляющих полного сближения h и ау. Например, уже при а > 0,01 R
величина Ро < ОДР (табл. 34) даже при твердости материала контртела
НД 2900 (твердость большинства конструкционных материалов, исполь-
зуемых в машиностроении, обычно не превышает НД 5000). При меньших
значениях НД величина Ро еще меньше. Как видно из рис. 31—33, при
НД 2900 и а > 0,004 R = 20 мкм, разница значений h и ау, найденных из
опыта и рассчитанных без учета Ро, не превышает 15%. При твердости ма-
териала контртела НД 1300 расчетные и опытные значения h и ау практи-
чески совпадают во всем исследованном диапазоне нагрузок.
Итак, если в формуле (3.43) принять Ро = 0, то рассчитанные по ней
глубины h возрастут до величин, несколько превосходящих действитель-
Соотношение усилий Ро и Р при различных значениях НД и R и заданном а = 0,01 R в контакте упругой сферы с упругопластическим полупространством Таблица 34
НД /?, мкм Ро ° 10Р, Н а = 0,01 R
а, мкм h , мкм по Qyt МКМ ПО Р, Н J2n
формуле формуле Р
(3.41) (3.39)
20 0,335 0,2 0,142 0,058 0,0024
1300 100 8,38 1 7,08 0,292 0,588 0,0142
200 33,5 2 1,416 0,584 2,352
20 1,09 0,2 0,119 0,081 0,031
2000 100 27,4 1 0,597 0,403 0,777 0,0353
200 109 2 1,190 0,810 3,100
20 3,92 0,2 0,097 0,103 0,0392
2900 100 98 1 0,480 ОД20 0,980 0,100
200 392 2 0,970 1,030 3,920
122
Рис. 31. Полное сближение а и его составляющие h и ау в контакте стальной сферы
(R = 5 мм) с гладкой стальной плитой (НД 6500) :
кривые - расчет по формуле (5.1) ; точки - эксперимент
Рис. 32. Полное сближение а и его составляющие h и ау в контакте стальной сферы
(R = 5 мм) с гладкой стальной плитой (НД 2900) :
кривые - расчет по формуле (5.1); точки — эксперимент
ные, но в то же время значения ау, вычисленные по формуле (3.39) с
учетом глубины h, завышенной в результате пренебрежения величиной
Ро, становятся меньше действительных (см. рис. 31—33). В результате
полное сближение, рассчитанное по формуле
0=0 tA (5Л)
y v 16 /?(1+2Л)ау) ШКНД v 7
без учета Ро, оказывается весьма близким к экспериментальным для всех
испытанных сталей (см. рис. 31—33). Наибольшее различие расчетных и
экспериментальных значений не превышает 6%.
Была проверена также возможность использования формулы (5.1)
- для расчета сближения при чисто упругом контакте. Поскольку в этом
случае остаточная вмятина полностью отсутствует, то очевидно, что слага-
t емые в формуле (5.1) теряют присущий им физический смысл и стано-
вятся величинами чисто условными. Однако в той области, где экспери-
ментальные значения а совпадают с вычисленными по формуле Герца
(сплошная линия на рис. 34), расчет по формуле (5.1) дает погрешность
не более 5%.
123
Рис. 33. Полное сближение а и его составляющие h и ау в контакте стальной сферы
(R = 5 мм) с гладкой стальной плитой (НД 1300) :
кривые - расчет по формуле (5.1); точки - эксперимент
Рис. 34. Полное сближение а в зависимости от нагрузки Р в контакте стальной сферы
R = 5 мм с гладкой стальной плитой:
штриховые линии - расчет по формуле (5.1), сплошная - расчет по формуле Г. Гер-
ца; точки - эксперимент; 1-3 — НД 1300, НД 2900, НД 6500
Таким образом, формула (5.1) дает достоверные (с максимальной
погрешностью 6%) значения полного сближения в контакте упругой сфе-
ры с полупространством как в случае чисто упругой, так и упругйплас-
тической деформации материала полупространства независимо от соотно-
шения нагрузок Ро и Р. В связи с этим указанная формула применена в
дальнейших приближенных расчетах сближения в контакте сферического
индентора с плоской поверхностью контртела.
Фактическая площадь контакта. Вследствие упругой деформации не-
ровности кривизна поверхности 1/Ян ее контакта с контртелом под наг-
рузкой отличается от кривизны 1//? ее исходной поверхности, так что
RU>R.
Из геометрических соотношений (см. рис. 1) следует
2irRH (h + 0,5Из) = 2яЯ[Л + 0,5 (^ + W2)],
(5.2)
откуда
Л+ОЛСИ^+И'г)
(53)
124
|рде Wi и W2 ~ обратимые упругие смещения в центре контакта, вычислен-
ные соответственно для сферы и полупространства и определяемые фор-
мулой (331).
ч Так как
то
R = Р A+Q,5Qy г .
н Л+ОЗИ'г (5’5)
Фактическая площадь упругопластического контакта упругой сфери-
ческой неровности с плоской поверхностью контртела
А, = 2 • яЯн (Л + 0,5 W2) = 2 • яЛ (А + 0,5ау). (5.6)
В частных случаях выражение (5.6) принимает вид:
а) при ’’чисто упругом” контакте (А = 0)
^г,у Я^Лу, (5«7)
б) при ’’чисто пластическом” контакте (ау =0)
А г, пл = 2я/?А. (5.8)
Экспериментальная проверка формулы (5.5) выполнена следующим
Iобразом. Поскольку прямое измерение радиуса в контакте металли-
ческих сферы и плитки практически невозможно, то непосредственно из-
меряли величины сближений а, А и ау, а также диаметр dn невосстановлен-
ного отпечатка и высоту наплыва Анаш1 вокруг отпечатка. Затем вычисля-
ли экспериментальные значения Ян>э по формуле, выражающей очевидные
^геометрические соотношения (см. рис. 1) :
| _ 0»25<?н+ (А + 0,5 W2 + Анапл)2 .
( Н,э ЗСА+ОЗИ'а+Анапл) ’ '
где W2 находили из выражения (3.31) при измеренных в данном опыте
'значениях ау.
Ь. Величины а, А, ау определяли на специальном приспособлении (см.
64), позволявшем производить одновременное внедрение в поверх-
|Ность контртела трех сферических сегментов, которые предварительно
Йюкрывали тончайшим слоем копоти [7, 24]. После нагружения образец
^снимали с приспособления и с помощью микроскопа ММИ-2 на поверхнос-
ти сегментов измеряли диаметры dH невосстановленных отпечатков. Как
уже отмечалось, вокруг отпечатка может образоваться наплыв, который,
W изменяя величины Ян, приводит к увеличению диаметра dH и площади
Mr- Высоту наплыва Анапл вокруг отпечатка измеряли на вертикальной
^стойке от исходной поверхности образца, пользуясь индикатором часово-
го типа (с ценой деления 1 мкм).
Эксперимент проводили на сферических сегментах радиусом 2.5 мм
В образцах из армко-железа, сталей 45 и ЗОХГСА. В качестве нагружаю-
5Ших устройств использовали црибор для измерения твердости ио Роквел-
125
лу ТК-2 и пресс Бринелля ТШ-2. Каждый опыт повторяли 5 раз и вычисля-
ли средние значения измеряемых величин.
Как видно из табл. 35, разница рассчитанных по формуле (5.5) значе-
ний Лн и найденных из опыта 7?н,3 в большинстве случаев не превыша-
ет 5%.
Результаты описанного опыта были использованы также для сопостав-
ления (табл. 36) значений фактической площади контакта А'г, рассчитан-
ных по формуле (5.6), с экспериментальными Л^3, определяемыми (см.
рис. 1) из выражения
3 =2я7?Н1Э (Л + 0,51^2 + Лнапл). (5.10)
Отметим, что все экспериментальные значения A°r 3 для армко-железа
и стали 45 на 5—10% превышают рассчитанные по формуле (5.6). Это свя-
зано с влиянием наплыва, которое не учитывалось при выводе формулы
(5.6). Лучшее соответствие А'г и А’г 3 (см. табл. 36) получено на стали
ЗОХГСА, поскольку в этом случае величина наплыва вокруг отпечатков
была незначительной.
Таким образом, формулу (5.6) можно рекомендовать для инженер-
ных расчетов фактической площади контакта с вполне достаточной для
практики точностью 5—10%.
Таблица 35
Экспериментальные (Аи-Э) и рассчитанные (Лн) по формуле
(5.5) значения радиуса кривизны поверхности контакта под
нагрузкой стальной сферы (Л = 2,5 мм) с плоской поверхностью образца
Р, Н dH, мм Л, мкм И^2, мкм ^напл» мкм RH, мм «н, з, мм *н,э
980 1,13 53 Армко-жепезо, НД 1200 5 2 2,61 2,81 0,93
1470 1,36 79 7 5 2,60 2,69 0,97
2450 1,69 130 9 11 2,58 2,53 1,02
4900 2,32 260 13 23 2,56 2,47 1,04
9800 3,15 520 18 50 2,54 2,43 1,05
980 0,81 23 Сталь 45, 8 НД 2690 1 2,87 2,94 0,98
1470 0,98 35 10 2 2,81 2,88 0,98
2450 1,23 58 13 5 2,75 2,76 1,00
4900 1,69 116 19 13 2,69 2,65 1,02
9800 2,33 233 27 29 2,64 2,60 1,02
980 0,71 15 Сталь ЗОХГСА, НД 4106 8 3,03 3,33 0,91
1470 0,82 23 11 — 2,98 2,96 1,01
2450 1,02 38 15 — 2,91 2,88 1,01
4900 1,40 76 22 2 2,82 2,80 1,01
98 00 1,92 153 31 4 2,73 2,76 0,99
126
Экспериментальные Аг, э н рассчитанные Аг по формуле
0.6) значения фактической площади в контакте стальной сферы
= 23 мм) с плоской поверхностью образца
Р, н
Аг, мм2 А'Г, з, мм2
, 980 0,91
1470 1,35
2450 2,18
i 4900 1,29
9800 8,45
Армко-желеэо, НД 1200
1,02
1,49
2,31
4,49
8,84
980 0,49
1470 0,71
',/2450 1,12
4900 2,12
9800 4,08
Сталь 45, НД 2690
0,52
0,76
1.21
2,31
4,49
- 980 0,36
'.-1470 0,53
г 2450 0,83
' 4900 1,54
9800 2,89
Таблица 36
Аг!^г, э
0,89
0,91
0,94
0,96
0,96
0,94
0,93
0,93
0,92
0,91
0,92
1,00
1,01
0,99
0,96
Сталь ЗОХГСА, ЯД 4106
0,39
0,53
0,82
1,56
3,00
5.2. РАСЧЕТ СБЛИЖЕНИЯ И ФПК НОМИНАЛЬНО ПЛОСКИХ
ШЕРОХОВАТЫХ ПОВЕРХНОСТЕЙ
Общее решение. Рассматривается случай, когда одна из сопрягаемых
Номинально плоских поверхностей является гладкой, а на второй имеются
(Ыступы, вершины которых в общем случае расположены на различных
'ровнях и имеют разную кривизну (рис. 35). Принята ’’сферическая мо-
дель” неровностей при следующих допущениях: силы взаимного прижа-
тия тел нормальны к номинально плоской поверхности стыка: сдвигаю-
щие силы на этой поверхности отсутствуют; взаимное влияние выступов
Незначительно; твердость шероховатой поверхности выше, чем гладкой,
Так что на всех стадиях нагружения выступы деформируются чисто упру-
го, а контртело (с гладкой поверхностью) при определенной нагрузке —
упругопластически (т. е. выступы внедряются в плоскую поверхность
’Контртела); номинальные контактирующие поверхности в течение всего
Периода контакта остаются взаимно параллельными.
127
Рис. 35. Схема контакта шерохова-
той и гладкой поверхностей:
I-III - уровни вершин выступов;
Si ц ... - разница этих уровней;
R\, I. r2, III и ац I, a2fm ... -
радиусы кривизны и сближения
единичных выступов в контакте;
первый индекс - радиус кривиз-
ны, второй - уровень вершин вы-
ступов
Найдем при указанных условиях значения нагрузок, действующих
в контакте отдельных выступов с контртелом. Этот вопрос возникает, в
частности, при изучении силовых взаимодействий твердых тел в условиях
граничного трения. Некоторые исследователи полагают [ 26], что в диапа-
зоне относительных внедрений 0,02 < a/R С 0,17 средние нормальные дав-
ления одинаковы для всех микронеровностей. При этом, однако, отмеча-
ют [23], что указанное предположение является приближенным, так как
в общем случае распределение вершин микронеровностей неравномерно
по высоте и часто носит случайный характер.
Итак, если вершины выступов, находящихся в контакте с плоскостью,
расположены на Л^у уровнях, то число подлежащих определению состав-
ляющих Ру общей нагрузки Р, сжимающей стык, равно
Ny
М = кт+ кп + ... + kj + ... + kN = S kj, (5-11)
y /=1
где kj — число выступов по радиусу закругления вершин, находящихся
на /-м уровне.
Учитывая, что в общем случае распределение выступов по уровням и
по номинальной поверхности неопределенно, воспользуемся для рассмат-
риваемой системы сил одним уравнением равновесия:
к Ny
S ^Рц=Р, (512)
i=l/-1
где суммирование производится по радиусам вершин Ry и по их уровням;
Ру- — нагрузка, воспринимаемая группой выступов, вершины которых
имеют равные радиусы Rj и расположены на/-м уровне.
При этом условии рассматриваемая задача М— 1 раз статистически не-
определима; для ее решения можно составить Ny— 1 уравнений совмест-
ности вида
7Vv-l
aj = aN + 2 St,t+1> (5.13)
' У t-j
где ocj и едг ~~ полное сближение в контакте выступов произвольного,
/-го и наиболее низкого из находящихся в контакте Л^-го уровней;
128
' Sf,t+l — разница уровней, на которых находятся вершины r-го и г+1-го
выступов, а также M-Ny уравнений совместности, вытекающих из усло-
вия равенства упругопластического внедрения в зоне контакта выступов,
имеющих разные радиусы закругления вершин (первый индекс) и нахо-
дящихся на данном уровне (второй индекс), т. е.
• = 0!Л1,
а1П = а2П = - = = - = алц;
(5.14)
L а17Уу-а27Уу---^у = ...=а„^у.
Таким образом имеем систему уравнений:
к Ny
S Г.
Л\,-1
= aNy
(5-15)
all-- ‘-«д-.-. -ал1;
a17Vy---tt/7Vy = -.. =an7Vy,
общее число которых равно М и, следовательно, достаточно для определе-
ния всех неизвестных сил Ру- Нагрузка на единичный выступ
i} "Ц
где rtjj — число выступов данного радиуса (первый индекс), расположен-
ных на /-м уровне.
Фактическая площадь контакта Аг всех О выступов, находящихся во,
взаимодействии с плоскостью (т. е. под нагрузкой), равна сумме площа-
дей единичных контактов А*Гг ,у, т. е.
в ,
~ Ar.ijt
где согласно формулам (5.3), (5.6), (1.23) и (3.39)
Л г> у- = 2'nRij (hij + 0,5 Gy t ij ).
остаточная глубина вмятины
пи
(5.16)
(5.17)
(5.18)
11 2тгИцНД ’
(5-19)
5-395
129
обратимое упругое сближение
_з/97Г2 (ki+k2)2(Pjj)2
y,lJ V 16 /2//(l+2Aiy/ay,f/)
С учетом выражения (6.19) формула (5.18) примет вид
/>.. Q .. р'..
Ar’ij = ~НД (1 = ~НД + ^ЧРУ' V ~ Апл,Ч + АУ, И’
(5.20)
(5.21)
где А'пл ц и Лу>1у — доли A'r ij, обусловленные соответственно остаточной
и упругой деформациями в контакте.
Среднее давление в контакте единичного выступа следует, вообще го-
воря, вычислять как отношение
<,7=4-- <5-22)
As,ij
где A'^ij — проекция поверхности единичного контакта на плоскость, пер-
пендикулярную линии действия контактной нагрузки.
Однако как при внедрении, так и при смятии выступов не учитывает-
ся некоторое увеличение диаметра площадки контакта за счет наплыва.
Поэтому более точные, хотя и формально менее строгие значения средне-
го давления в контакте получим, пользуясь формулой, учитывающей со-
отношение (5.21):
» _ р'ч _ НД поЧ
.1 1 + п ‘ (5.23)
Arjj 1 + ay,ij!2hij
Напомним, что даже при максимально возможных величинах сбли-
жения в контакте разница значений qs у и q^, вычисленных по последним
двум формулам, не превышает 11%.
Приведенные зависимости исчерпывают решение задачи об определе-
нии всех параметров, характеризующих общий случай силового контак-
та шероховатой поверхности с гладкой: их фактическую площадь каса-
ния, распределение контактных нагрузок и давлений по номинальной по-
верхности контакта. При этом учитываются упругопластические свойства
материалов контактирующих тел, распределение вершин выступов по вы-
соте, а также величина нагрузки в стыке.
На базе предложенного общего решения может быть рассмотрен ряд
частных случаев: вершины выступов, имеющие разные радиусы кривиз-
ны, находятся на одном уровне; вершины выступов имеют одинаковые
радиусы и расположены на одном уровне; вершины выступов, имеющие
одинаковые радиусы, расположены на различных уровнях. Последний слу-
чай наиболее часто используется в методах расчета.
Полученное решение достаточно универсально и позволяет:
1) рассчитать параметры контакта гладкой плоскости с реальной ше-
роховатой, выступы которой ограничены гладкими поверхностями произ-
130
•W^hc. Сближение а в зависи-
мости от нагрузки Р для модели
N 1> материалы коитртел:
1-3 - стали марок У8А (НД
W. 3000), 45 (НД 1780), 10 (НД
Ш< 1180); 4- бронза БРОЦС 5-5-5
Ж (НД 755); 5 - медь М2 (НД
Ж' 470); кривые - расчет по. урав-
Ж нениям (5.15); точки - экс-
ЯЬ. перимент
Для
£ вольной кривизны;
( этого в выражениях (5.18) —
(5.23) необходимо вместо
^ радиусов сфер Ry учитывать приведенные радиусы У?IIpzy контактирующих
^поверхностей, определяемые формулами (2.10) или (2.23);
['. 2) в соответствии с данными работ [6, 26] производить расчеты в
( случае, когда гладкая поверхность остается в упругом состоянии, а высту-
пы шероховатого тела подвергаются пластическому сплющиванию;
< 3) производить расчет параметров контакта двух шероховатых по-
| верхностей, используя понятие эквивалентной шероховатой поверхности.
. Рис. 37. Сближение а в зависимости от нагрузки Р для модели № 2:
р 1—5 - то же, что и на рис.36; кривые - расчет по уравнениям (5.15); точки -
(( эксперимент
Дч’’. ®>ис- 38. Сближение а в зависимости от нагрузки Р в контакте:
1 ~ шероховатой поверхности (медь, НД 784) с гладкой твердой поверхностью
(сталь); 2 - двух шероховатых поверхностей (медь, НД 784) ; кривые - расчет по
Вт Уравнениям (5.15), заштрихованные зоны - эксперимент Н. Б. Демкина
131
Достоверность изложенного решения [см. уравнение (5.15)] была
подтверждена экспериментально на двух моделях шероховатой поверх-
ности:
модель № 1 — на каждом из трех уровней располагали по три стальных
(с твердостью HRC 62—65) сферических сегмента с радиусом 2,5 мм; раз-
ницы уровней составляли Sj п = 0,120 мм; Sn щ = 0,050 мм;
модель № 2 — стальные (с твердостью HRC 62—65) сферические сег-
менты, вершины которых были расположены на трех уровнях I, II, III;
на каждом уровне находились вершины трех сегментов одного из следую-
щих радиусов кривизны: R^j = 2 мм, Т?2 ц.~ 3 мм, Rj ш = 5 мм (наибо-
лее высоким был уровень I); разницы уровней составляли: Sj =
= 0,160 mm,Sj ц = 0,080 мм.
Измеряли сближение в контакте ’’шероховатой”, моделированной
сферическими сегментами, и гладкой поверхностей. Каждый опыт повто-
ряли 5 раз и вычисляли среднее значение измеряемой величины. Частные
значения отличались от среднего не более чем на 4-5%.
Экспериментальные и рассчитанные значения а оказались достаточно
близкими (рис. 36 и 37) : наибольшая разница между ними не превышает
3-6%.
На рис. 38 аналитическое решение в соответствии с системой уравне-
ний (5.15) сопоставлено с экспериментальными данными Н.Б. Демкина.
Видно, что совпадение тех и других результатов вполне удовлетвор-
тельно.
Пример расчета. Имеется номинально плоская шероховатая поверхность с выс-
тупами, расположенными на четырех уровнях I, II, III, IV’, на каждом уровне имеют-
ся выступы двух различных радиусов кривизны /? j j = К\Ц = ^1 III цу = ^1=
= 0,180 мм и /?2,/ = ^2,J = ^2,2Z7:=^2,/K=^2 = 0,100mm; разницы уровней вершин
выступов (см. рис. 35) Sj ц= 0,005 мм, Sjj щ = 0,003 мм, jy= 0,002 м^и; чис-
ло выступов данного радиуса (/?i и Л2) • расположенных на каждом из четырех уров-
ней, Л| j = 20, Л| 21 = 40, J2I ~ 70, 2У ~ 100, и2 2 = 30, л2 21 ~ 50, п2 2Ц “
= 120, л2 2V ~ 150; пластическая твердость материала гладкого контртела НД 2000;
упругие константы материалов шероховатой и гладкой поверхностей Ег = Ег =
= 2,06 • 10s МПа, Mi =мг =0,3, т. е. [см. формулу (2.22)] kt =к2 =0,141 • IO""5 МПа-1.
Требуется рассмотреть два варианта задачи.
Вариант 1. Определить нагрузку Р, сжимающую стык, под действием которой
сближение в контакте заданной шероховатой поверхности с гладкой плоской поверх-
ностью контртела равно а— 0,006 мм.
Решение. Так как Sj д <а= 0,006 мм <<Sj д + Sjj jjj, то в контакте будут
находиться лишь выступы уровней I и II. В соответствии с (5.15) имеем
"1,IP'1,I+ "2,1Р2,1 + "1,ПР'1,П+ "2,ПР'2,П=Р;
а = otj = ап + Siji; (5.24)
al,I = a2,I=0!I:
а1,П = а2,П = 0!П-
132
; Здесь а1Л=Л1Л+ Оу, lj; а2,1 = й2,1+ “у, 2,1й т-и-нрн^^и^,.. опре-
деляют по формулам (5.19) и (5.20).
Таким образом, учитывая заданные параметры, из (5.24) получаем
2(У>1,1+ 307>2,1+ 40^1,П+ 50Р2,П=РН; (5.25)
0,00б = <4 = <4j + 0,005 мм; (5.26)
Р1,1 , A2 (/(.J)2 (0,141 + 0,141)210"10
27Г-0,180* 2000 + V 16 0,180(1 + 2й11/ауд д)
Pti , А2 (р2 I)2 (0,141 + 0,141) 210“1и
=------—----------- + V-------—-------------------------- = 0,006 мм; (5.27)
2тг-0,100-2000 v 16-0,100(1 + 2Л2д/<^ 2 р ’
6,П
271-0,180-2000
+ 0,141)210 10
6,11
16-0,180(1+ 2й|д|/ауддр
2Я -0,100 -2000
141 + 0,141)2 Ю"10
= ап = 0,006 - 0,005 — 0,001 мм. (5.28)
16 • 0,100(1 + 2^2jj/ttyj 2,П3
Из четырех уравнений (5.27) и (5.28) определяем значения четырех нагрузок
5 6 I* 6 II» ?2 I’ ?2 IT Действующих в контакте отдельных выступов. Расчет прово-
дим методом последовательных приближений, предварительно выразив величины
hg через Ру в соответствии с формулой (5.19) • Рассмотрим, например, одно из урав-
нений (5.27): •--------------------
0,442 • 10“3Pi , + 0,625 • 10"3 ;-- = 0,006 мм. (5.29)
1,1 2-0,442-10“3 Pi J
1 +---------------iii-
°у. 1,1
В качестве первого приближения примем значение Р^ j, отвечающее глубине
/д j = 0,5 aj=0,003мм; тогда Pj j = 0,5 • 2-77-R\ НД<4 = 0,5 2я-0,180• 2000• 0,006=
= 6,8 Н. Затем вычисляем соответствующее этой величине значение Оу( । j = <4 -
-*1 1 = 0,006 - 0,003 = 0,003 мм. Если при подстановке в (5.29) значений Pj д и
Оу 1 I правая часть уравнения окажется равной левой, то зто значит, что выбранное
первое приближение является решением задачи. Если же правая часть окажется мень-
ше или больше левой, то следует во втором приближении принять соответственно
большее или меньшее, чем было принято в первом приближении, значение Pj j.
В данном случае 0,0046 < 0,0060. Поэтому во втором приближении принимаем
Pj j > 6,8 Н и повторяем решение в изложенном выше порядке. В результате найдем
окончательно Pj j = 10,1 Н. Аналогичным образом найдем Р'2 j = 6,1 Н, ^j, II =
= 1,2 Н, Р2 (j = 0,9 Н. Нагрузку, сжимающую стык, определяем из (5.25) :
Р=20 -10,1 + 30-6,1 +40-1,2 + 50 0,9= 478 Н.
Вариант 2. Требуется вычислить сближение О. в контакте гладкой и шерохова-
той поверхностей при заданной нагрузке Р= 1497 Н.
Решение. В данном варианте задачи неизвестно, выступы скольких уров-
ней вступают в контакт с контртелом при заданной нагрузке. Расчет проводим ме-
тодом проб. Для первой пробы принимаем, что в контакте находятся выступы толь-
ко первого уровня. Тогда из (5.24) с учетом заданных значений получим систему
уравнений
133
2OP1,Z+ 30^2 z= 1497 Н;
0,442 • 10-3/>i /+ 0,625 • 10“ 3 <Z-Z> ---- = 0,796 1(Г3Л ,+
2 0.442Р1/ ’
1+ 104,i.z
.2
+ 0,760 IO-3
(5-31)
----:----------- a}= a,
2 0,796-Z^z
1()3Qy,2,Z
откуда определяем P\ 39,8 H, // ~ 23,4 Н, а также a = а/ = 0,021 мм. Посколь-
ку а > S] ц = 0,005 мм, то это значит, что при заданной нагрузке в контакте нахо-
дятся выступы не только первого, но и второго уровней. Поэтому во второй пробе
принимаем, что в контакте находятся выступы первого и второго уровней и исполь-
зуем систему уравнений (5.24). В результате решения определим у = 20,3 Н,
р2,/= 12,0Н,Р'1>я= 1(И H’P2,ZZ=6’3 Н’ «=<*/= 0,011 мм-
/ Так как здесь + Sjj jy^ 0,005 + 0,003 + 0,002 ~0,010 мм, то
убеждаемся, что в контакте находятся выступы по крайней мере трех уровней, поэ-
тому в третьей пробе систему уравнений (5.15) запишем в виде
"l.Z^l.Z* "2,ZP2,Z+ п\.Пр\,П* n2J&jr
+ П1.ШР\,Ш* п2.Шр,2,Ш=р'>
°9=аШ+ SI,1I+ SII,IIP aII=aIHt sII,IIfi
(5.32)
a\,I ~ a2,Z- °1,ZZ “ a2,ZZ- al,ZZZ-0!2,ZZZ-
Решая эту систему уравнений, получим: Р\ j = 16,1 Н, Р\ j = 9,5 Н, Р\ п =
- 6,6 Н, У2, п ~ 3’9 н- Л.Ill = 2-9 н- Р2, III= 1-9 Й" «1=а= 0-009 мм, ап= 0,004 мм,
Ощ = 0,002’ ММ. z
Таким образом, найденное значение а = 0,009 мм ц + Sjj щ + jV =
= 0,005 + 0,003 + 0,002 =0,010 мм, а это значит, что при заданной нагрузке Р= 1497 Н
в контакте действительно находятся выступы трех уровней I, II, III. Следовательно,
последнее решение является окончательным, т. е. искомое полное сближение а —
= 0,009 мм.
Инженерный метод [А.с. 741093 (СССР)]. В изложенном выше об-
щем решении число необходимых уравнений, которое определяется чис-
лом неизвестных сил Ру, может оказаться весьма значительным (как,
например, в случае контакта реальных шероховатых поверхностей). Хо-
тя применение ЭВМ позволяет решить практически любую систему урав-
нений, целесообразность упрощения расчетов очевидна, поскольку при
этом они становятся доступными для широкого круга технологов, конст-
рукторов, расчетчиков.
Если требуется определить сближение и фактическую площадь кон-
такта (ФПК) для всей шероховатой поверхности (а не для отдельных
единичных выступов), то такое упрощение может быть достигнуто путем
134
(5.33)
использования предложенного И.В. Крагельским и Н.Б. Демкиным урав-
‘ нения начального участка кривой опорной поверхности
л
где Аа — номинальная (а при наличии волнистости — контурная) площадь
<• контакта; — коэффициент, зависящий от характера деформации в кон-.
такте, равный 0,5 при чисто упругом и 1 при пластическом контакте;
К’ Ьк и v — коэффициенты, зависящие от вида обработки; ejt = a/Rmax —
Е“ относительное сближение (Ртах — наибольшая высота неровностей про-
К филя).
В расчетах обычно принимают, что вершины всех выступов имеют оди-
Н наковые радиусы закругления, которые соответствуют способу обработки
к; поверхности и ее параметру шероховатости. Это допущение существенно
рА упрощает задачу, однако она все же остается достаточно трудоемкой, по-
скольку на реальных шероховатых поверхностях число выступов велико:
е’’” часто считают даже, что функция распределения выступов по высоте неп-
» рерывна. Между тем кривая опорной поверхности не содержит раздель-
ES ной информации о радиусе вершин выступов и их число п/ на каждом
уровне, а учитывает зти параметры лишь в интегральной форме. Это дает
к основание предложить для описания шероховатой поверхности с непре-
KJ рывной функцией распределения выступов по высоте ’’одноуровневую”
|| модель, т. е. такую, в которой все выступы имеют одинаковые радиусы
KJ- вершин и расположены на одном уровне; каждому сближению отвечает
Е-,: свое условное (расчетное) число выступов п =АГ/А'Г, которое определяет-
Р ся из условия равенства фактических площадей контакта в реальном сты-
У ке и в модели; значения А'г и Аг находят из выражений (5.18) и (5.33)
при соответствующем относительном сближении ек.
I* До тех пор, пока рассматривается чисто геометрическая задача, сос-
К тоящая в описании функции АДе^), для использования такой модели нет
К: каких-либо принципиальных препятствий. Что же касается силовых зави-
f симостей а (Р) и Ar (Р), то их тождественность для реальных поверхнос-
и тей и для предлагаемой модели не является очевидной.
Ё. В связи с этим рассмотрим вначале случай, когда контртело деформи-
К руется в зонах фактического контакта чисто пластически (ау>/ = 0) с уп-
Е- рочнением. Пусть шероховатая поверхность с выступами радиуса R, рас-
г положенными на Ny уровнях, прижимается к гладкой поверхности контр-
тела (твердость материала которого НД) силой фактическая пло-
Г щадь контакта при некотором сближении а = /ij согласно (5.17), (5.18),
| (5.21) будет
I Ar,Ny = (hj/zj + ... + njhj + ... + nNJiNJ =
I = ^-”7V/jvy = PJ^
F НД ~ НД ’
(5-34)
135
где дополнительно л/ и й/ = а/ = /ц - Sjj — число выступов /-го уровня и О
их сближение в контакте.
В то же время фактическая площадь контакта в стыке ’’одноуровне- ;
вой” модели шероховатой поверхности при том же сближении а = hi
будет
Аг.М = и2яЯЙ1 = - (5.35)
пд ид
Из уравнений (5.34) и (5.35) видно, что приЛг^у ~ Ar М равны и
силы, сжимающие стык, т. е. Рд/у = Рм- Этот результат закономерен, пос-
кольку при чисто пластической деформации в контакте как площадь ка-
сания A'r j единичного выступа, так и сближение hj =aj прямо пропорцио-
нальны контактной нагрузке.
Поскольку для чисто упругого и упругопластического контактов та-
кой пропорциональности нет, то в этих случаях Р^у Ф Рм, а функции I
а(Р) и АДР), относящиеся к модели, не могут быть распространены на
моделируемую поверхность.
Перейдем теперь к случаю, когда контртело деформируется в зонах
фактического контакта упругопластически с упрочнением. Пусть реаль-
ная шероховатая поверхность с выступами радиуса R (вершины которых
расположены на различных уровнях так, что разницы высот соседних
уровней одинаковы между собой и равны aj/7Vy прижимается к гладкой
поверхности контртела силой Рму, причем в контакте находятся высту-
пы Ny уровней. ;
Пусть имеется также модель шероховатой поверхности с выступами '
радиуса R, расположенными на одном уровне, которая прижимается к ;
гладкой поверхности контртела (с твердостью материала НД) такой си- ।
лой Рм, при которой сближения и фактические площади контакта для
этой модели и для реальной шероховатой поверхности равны, т. е. ам -
= «Д' = «I. АГ1 м=АГ'Му =АГ.
При указанных условиях соотношение сил будет
K=PJ^ = ^^iP'r-^NyP'Ny (5 36)
РМ nl\
где nj и P’j — число выступов /-го уровня шероховатой поверхности и наг-
рузка на единичный выступ этого уровня.
Так как
«/ = «1-0-1)^. (5.37)
136
То нагрузка на любой единичный выступ будет
рг__pf т 1
г/ “ П
0,0957
(5.38)
где
(5.39)
(5.40)
тк=-----------
к НД(к^к2)
Число выступов п/ на каждом уровне определяют из условия равенст-
k ва суммарной площади сечений выступов при некотором сближении и ее
, значения, получаемого из уравнений кривой опорной поверхности при том
же сближении:
и/ = Аа Ь-К^ [Г - 2 (/ - 1)” + (/ - 2)"].
27T/?apVy 1
1 Число выступов п ’’одноуровневой” модели определяют из условия
( равенства площадей сечений шероховатой поверхности и модели при сбли-
’ жении ам = aN^ = Oj:
п _^д1>кек
2-nRdi
J Подставляя полученные выражения для Pj, rij и п в формулу (5.36),
найдем
Лу
7Vy+ (mK+1) Д [/* - 2 (j - 1)" + 0 - 2)"]
Лу
(3.40
тк
PNv
К = -^=------------------
РМ
Расчеты, выполненные по формуле (5.41) с помощью ЭВМ ЕС-1020,
ь показывают, что с увеличением Ny, когда Рууу отношение
' PNV
i уровень которого зависит от v и (см. рис. 39), т. е.
PNV Р
Kvn = lim —2- = -— = const.
Г УП Ny-+~PM РМ
Зависимость Р(а) в реальном стыке получим из выражения (5.42) с
. учетом (5.21) и (5.33):
(5-42)
р- г Р — к' „р> — к Аг р’ —
р - КупРм - КуппР\ - Куп- 1+Qy/2A
(5-43)
137
Коэффициент дк, который, как известно, учитывает разницу между
площадью сечения выступов As при некотором сближении и площадью
контакта Аг при том же сближении, для принятой ’’одноуровневой” мо-
дели можно представить в виде
Ar _ n2KR (й+0,5ау) _ h+0,5(Xy
Лу n2irR cty) а
(5.44)
Решая совместно уравнения (5.33), (5.43) и (5.44), получим сближе-
ние в контакте
а = -----у-1
'ЬкАаДДКуп Ь ’
и фактическую площадь контакта
(5-45)
= (546>
лАМ Л уп ХЛ
Коэффициент Куп определяется по формуле (5.42) или из графика
рис. 39. С возрастанием тК, т. е. с увеличением доли пластической дефор-
мации в общем сближении в контакте, Куп -> 1.
В частном случае, когда тк = 0 (что соответствует НД=°°, т. е. чисто
упругому контакту), выражение (5.43) принимает вид
(5-47)
где Ку = (Ку11)тк=0-
Заменяя в последнем выражении величину ее значением, найден-
ным из формулы (5.20) при Л = 0, получим абсолютное сближение для
случая чисто упругой деформации в контакте:
1 _2_
_г71’2^тах^ 1 *г)Р 12ч+ 1 (5 48)
у 1 0ЬЪ5ЬкАаКу J
и его относительную величину
е _ /n2R\ki+k2)P -2v+ 1
0,665йд;/4д- KyRmax.
(5-49)
С учетом (5.33) фактическая площадь контакта при чисто упругой
деформации
1 1 1
— 2р
_I0.25K2R2b2^Alv(kl + k2)P2^~l
71 г, у “ L------------------J * -50)
jh pl/2
2 ЛуЛшах
138
Рис. 39. Функциональная зависимость
коэффициента Куп от параметра шк:
1-9 -v =1; 1,25; 1,5; 2,0; 2.5; 3,0;
4,0; 5,0; 6,0
Отметим, что выражения
(5.49) и (5.50), являющиеся
частными случаями общего
решения (5.45), (5.46), а также
числовые значения коэффициен-
та Ку для чисто упругого кон-
такта (табл. 37) совпадают с
формулами и соответствующим
коэффициентом, полученным
ранее Н.Б. Демкиным для чисто
упругого контакта при условии,
что функция Аг (//) непрерывна.
В другом частном случае при
щк = °° (что соответствует Е\ =
- Е2 ~°°, т. е. чисто пластическо-
му контакту) выражение (5.43)
принимает вид
Таблица 37
Значения коэффициента Ку в зависимости от параметра V
V Ку V ку V Ку
1 1 1,5 0,884 2,5 0,737
1,1 0,973 1,6 0,865 3 0,686
1,2 0,948 1,7 0,847 3,5 0,645
1,25 0,937 1,8 0,831 4 0,610
1,3 0,925 1,9 0,815 5 0,554
1,4 0,904 2 0,800 6 0,512
Р-К Р - пР\ - Ьке^АаР/
P-Km^M~n4 iirRh
(5.51)
гдеЛ^пл _ (^уп),„к = оо — 1-
Заменяя в последнем выражении величину Р/ ее значением, найден-
ным из формулы (5.19), получим
Р = АаЬк&НД-
(5.52)
139
Сближение в контакте в соответствии с (5.45)
1
h = ^maxС b шУ'
AqD кпд
Фактическая площадь контакта определяется из (5.46) как
(5.53)
Л.ИЛ-вд-
(5.54)
Определение по предлагаемому методу сближения и фактической пло-
щади контакта шероховатых поверхностей при одновременном учете уп-
ругой и остаточной частей полного сближения, а также упрочнения мате-
риала в процессе пластической деформации производится в следующем
порядке.
1. Определяют известными способами [ 41 ] геометрические парамет-
ры шероховатости: bK, v, R, Rmax- В случае контакта двух шероховатых
поверхностей рассчитывают параметры шероховатости эквивалентной
поверхности [ 41 ].
2. Определяют номинальную (а при наличии волнистости - контур-
ную) площадь контакта Аа.
3. Определяют значения коэффициентов Пуассона и модулей
Юнга Ех , Ё2 материалов обоих тел.
4. Измеряют (одним из способов, описанных в гл. 1, или в соответст-
вии с ГОСТ 18835—73) пластическую твердость НД материала того тела,
которое в процессе нагружения деформируется пластически в зонах фак-
тического контакта.
5. Для заданной нагрузки Р, нормальной к поверхности стыка, опре-
деляют по формуле (5.45) сближение а в контакте. При этом имеют в ви-
ду, что с учетом (5.1), (5.19), (5.20) формула (5.45) принимает вид
(при P’ij = А)
р' з/^2 (*!-*• ^2)2(Р')2
2-пЯНД V 16 Л(1+2Л/ау)
1
^тахР____у>— 1
’Ь кЛа^Д К уцН
(5.55)
где Ё — условная нагрузка, передаваемая единичным выступом ’’одно-
уровневой” модели.
Задаваясь рядом последовательных значений Р', из уравнения (5.55)
методом последовательных приближений находят Р' и полное сближение
в контактке а = h + ау, отвечающие заданной нормальной силе Р. При
этом значения коэффициента ЛуП определяют по формуле (5.42) или по
графику (см. рис. 39) при данных значениях v и
0,0957 /Л+0,5а
ть- =---------- V— ------
к НД(к\+к2} v R
(5.56)
140
Рис. 40. Полное сближение а и его составляющие h и оу в зависимости от давления
q в контакте гладкой поверхности образца (сталь 10, ВД 1520) с твердой шерохова-
той поверхностью стальной плитки; кривые - расчет по формулам (5.55) и (5.19);
точки - эксперимент
41. Относительная площадь контакта = Ау/А^ в стыке гладкой и шероховэ-
той (стальной) поверхностей в зависимости от нормального давления q;
1-5 - способы механической обработки и параметры шероховатости поверхности
•стальной плитки {1 - фрезерование, 2 - шлифование, 3-5 - фрезерование); кри-
вые — расчет по формуле (5.46); точки — эксперимент
Рис. 42. Соотношение величин полного сбли-
жения а и а в зависимости от давления q в
контакте гладкой поверхности образца с
твердой шероховатой поверхностью сталь*
ной плитки (шлифование); значения а рас-
считаны по формуле (5.45), а а - по ме
тоду [41]:
1 - титан ВТ-4; 2 - сталь45; 3 - сталь 10;
4 - латунь Л-63; 5 - дур алюмин Д16;
6 — медь
„ Таблица 38
Характер изменения основных параметрон
упругопластического контакта номинально плоских
шероховатых поверхностей при нозрастании
определяющих факторон q, НД, Е, bK, v и R
Характеризуемые параметры Q НД . Е вк V R
”ч t * 1 Г * t
ек t г 1 Г t t
еку/екпп 1 г 1 t 1 t
Примечание.! — увеличение; I — уменьшение.
В качестве первого приближения можно принять значение Р, опреде-
ляемое зависимостью
/y=(0,1...0,8)Tr/?W?max (5 57)
(меньшие значения соответствуют меньшим значениям задаваемой силыР).
6. По формуле (5.46) вычисляют фактическую площадь контакта.
Результаты расчета сближения и фактической площади контакта по
описанному выше инженерному методу сопоставлены с эксперименталь-
ными данными (рис. 40и41).Удовлетворительная сходимость расчетных и
опытных величин сближения установлена также при испытании контртел
из меди, титана, латуни.
Интересны результаты сопоставления расчетов сближения в контак-
те, выполненных по формуле (5.45) и по известным формулам, приведен-
ным в работе [41] (в последнем случае расчетную формулу выбирали в
соответствии с рекомендуемыми [41] критериями, определяющими ха-
рактер деформации в контакте). Эти результаты показывают (рис. 42),
что расчет сближения по формулам [41] без учета упругой составляющей
сближения в контакте может дать систематически заниженные в 1,2—Зра-
за величины полного сближения в контакте. Наибольшая разница отме-
чается для титана, имеющего сравнительно высокую твердость и малый
модуль нормальной упругости. Для мягкой стали и меди (кривые 3 и 4
йа рис. 42) разница при расчете по формуле (5.45) и по данным работы
[ 41 ] не столь существенна, поскольку доля упругой составляющей в пол-
ном сближении в этих случаях невелика.
Характер влияния различных факторов на параметры контакта шеро-
ховатых поверхностей, вычисляемые по формулам (5.45)-(5.46), виден
по табл. 38.
142
‘ 5.3. РАСЧЕТ СБЛИЖЕНИЯ И ФПК ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ,
' СОБ РАННЫХ С НАТЯГОМ
\ Общее решение. Расчет ведется применительно к случаю, когда одна
из сопрягаемых, номинально цилиндрических поверхностей является
гладкой, а на второй имеются выступы, вершины которых в общем слу-
чае расположены на различных уровнях.
Как и в п. 5.2, здесь принята ’’сферическая модель” неровностей при
следующих ограничениях: соединение собрано с натягом тепловым спо-
собом, плотность распределения выступов достаточно велика, а вершины
выступов различных уровней статистически равномерно распределены по
цилиндрической поверхности; в связи с этим возникающее при сборке ра-
диальное давление в стыке рассматривается как равномерно распределен-
ная осесимметричная нагрузка; общая (т. е. объемная) деформация эле-
ментов соединения (толстостенные цилиндры) чисто упругая и, следова-
тельно, подчиняется решению Ляме; локальная деформация в зонах фак-
тического контакта сопряженных поверхностей является в общем случае
упругопластической; твердость шероховатой поверхности выше, чем глад-
кой, вследствие чего в процессе тепловой сборки соединения с натягом
выступы шероховатой поверхности, деформируясь чисто упруго, внедря-
ются в гладкую поверхность; сдвигающие силы в контакте отсутствуют;
взаимное влияние выступов незначительно; волнистость и погрешности
формы поверхностей отсутствуют.
Если и U2 — радиальные перемещения точек сопряженных поверх-
ностей охватываемой и охватывающей детали, а 6 — натяг, то при тепло-
вой сборке гладких цилиндров
|£А I + |£72 | =|.
При этом согласно решению Ляме
2М 1 - (di/dY
qd 1 + (d /d2 )2
|t/2 i = — [-----------Г + Ь
l-(d/d2}2
(5.58)
(5.59)
(5.60)
где q — среднее расчетное давление на поверхности сопряжения цилинд-
ров; £'1, Д1,6'2 > Р2 — упругие постоянные материалов; d - номинальный
диаметр посадочной поверхности; dt, d2 — внутренний диаметр охваты-
ваемой (вала) и наружный диаметр охватывающей (втулки) деталей.
При охлаждении наружной (или нагревании предварительно охлаж-
денной внутренней) детали происходит внедрение выступов в гладкую
поверхность контртела. Вследствие этого начальный натяг уменьшается
(рис. 43) на удвоенную величину полного сближения а (на рис. 43 а =
= а1.1)-
143
Рис. 43. Схема контакта шерохо-
ватой (вал) и гладкой (втулка)
поверхностей цилиндрических де-
талей, собранных с натягом:
SI, II - разница уровней; /,
&2, III и Qi, у, «2, III - радиусы
кривизны и сближения единичных
выступов в контакте (первый и
второй индексы - соответственно
радиусы и уровни вершин вы-
ступов)
Таким образом, в рассматриваемом случае вместо формулы (5.58)
имеем
б б
КЛ1+ |t/2l = - -<\i = - - (Л,;I+ ау ! i), (5.61)
4*
где hY j, ayi j — остаточное и обратимое упругое сближения в контакте
выступов наиболее высокого (первого) уровня.
Для произвольного выступа
Q.. = h .. + Q
I] rilJ у, I]'
(5.62)
Если вершины выступов, находящиеся в контакте с гладкой цилинд-
рической поверхностью, расположены на Ny уровнях, то число подлежа-
щих определению сил Ру, обусловленных натягом и распределенных по
поверхностям единичных контактов выступов с гладкой поверхностью,
равно М и определяется формулой (5.11).
Среднее расчетное давление в контакте сопрягаемых цилиндрических
поверхностей равно
к *у
ndl
(5.63)
где I — длина сопряжения.
В тех случаях, когда вал выступает за торцы втулки, распределение
давления по длине сопряжения становится неравномерным, возрастая по
мере приближения к торцам соединения. Неравномерность давления обыч-
но учитывается введением безразмерного коэффициента х, который опре-
деляется по графикам в зависимости от d\ Id и lid [47].
С учетом коэффициента х и формулы (5.63) выражение (5.61) при-
нимает вид
d$ к Ny
S Z Ру = 6 ~ j,
Aa i=i/=1
(5.64)
144
е
4г
к Ответим, что уравнение
воряет условию равновесия.
Составляя также М — 1
fe жениям (5.13) и (5.14),
(5.64), отвечающее решению Ляме, удовлет-
уравнений совместности, аналогичных выра-
I - «1,1 - •••I ” ••• аи,Г>
• ...............................
«1^у = - = а?,^д = — =07?,^у’ (5.66)
Б:получим вместе с (5.64) систему из М уравнений, достаточных для опре-
Ьделения всех неизвестных сил Ру. Нагрузка на единичный выступ Ру,
фактическая площадь контакта, остаточное hy, обратимое упругое ау у
сближение, среднее давление q\j в контакте единичного выступа опреде-
жГ ляются по формулам (5.16) — (5.23).
Изложенное решение позволяет чисто расчетным путем определять
сближение и фактическую площадь контакта сопряженных поверхностей
ДУёцилиндрических деталей, собранных с натягом тепловым способом. Для
реализации указанного решения необходимо располагать данными о кри-
визне веРшин выступов Ry и плотности их распределения на каждом уров-
ДК'не. а также о физико-механических свойствах материалов: кроме упругих
W| констант Е и д, используемых в решении Ляме, требуется знать дополни-
жй тельно пластическую твердость НД материала той детали, которая в про-
Ш^цессе тепловой сборки соединения пластически деформируется в зонах
Ж! фактического контакта.
Как и для контакта плоских поверхностей (см. п. 5.2), полученное
решение можно распространить и на те случаи, когда в контакте находят-
ся дае шероховатые цилиндрические поверхности; когда выступы не вне-
Жл Дряются, а сплющиваются; когда выступы ограничены поверхностями
произвольной кривизны.
W; Методика решения системы уравнений (5.64), (5.66) аналогична опи-
санной в п. 5.2.
Ш: Рассмотрим частный случай, когда вершины выступов имеют одинако-
Ж? ВЬ1е радиусы кривизны R и находятся на одном уровне. Такой регулярный
Ж микрорельеф можно получить, например, при вибрационном обкатывании
Ж поверхности детали.
Усилие, передаваемое единичным выступом:
(5.67)
где п - число выступов, приходящееся на единицу номинальной площади
поверхности контакта Аа.
Среднее расчетное давление на поверхности контакта с учетом (5.67)
и (5.19) будет
q = 1тДНД11п'. (5.68)
Из совместного решения уравнений (5.59) — (5.61), (5.65) и (5.68)
после преобразований следует
£
Т " “у
------- =-пКНДп'(Д + 1. (5.69)
h
Из выражения (5.69) с учетом (5.20) методом последовательных
приближений определяют h и ау, а затем из формулы (5.19) находят Р'.
Фактическую площадь контакта определяют из выражений (5.17),
(5.18), (5.21):
вР'
Ar = I'nROfJi + 0,5ау) = — + OnRoiy =
вР1 av
=----(1 + — ) = Лпл + Ау. (5.70)
НД v 2Л пл у
Относительная площадь контакта
Аг
ла
OP' BnRay q
ндД + =
(5.71)
Сближение контактирующих поверхностей вычисляют по форму-
ле (5.62).
Представляет практический интерес случай, когда зазор между ци-
линдрами, собранными с натягом (рис. 44) заполнен шариками (дробин-
ками) , твердость которых выше твердости поверхностей как вала (НДХ),
так и втулки (//Д2)- Тогда после сборки шарики будут одновременно
внедряться в обе указанные поверхности. Полное сближение цилиндричес-
ких поверхностей
=0£j + а2 =(Л1 + ау i)+ (h2 + «у,2) = + ау Е,
где
+ h2
2^/?цр1ЯД1
р' р'
+-----------— =------------
2тгЛпр2//Д2 2тгЯ*//Д* ’
(5.72)
( (5.73)
146
Рис. 44. Схема соединения с натягом
Рис. 45. Распределение суммарной остаточной глубины li s- = 1ц + 1ц отпечатков
по длине сопряжения вала и втулки при средних значениях натягов 6j = 45 мкм
(1),б2 — ЮО мкм (2); основные параметры соединения (см. рис.44):
^в ~ 32 мм. d = 40 мм. d2 = 80 мм, I = 60 мм, D = 4 мм, п = 0.0625 мм-2-
кривые - расчет по формуле (5.76); точки - эксперимент
К пр 1 НД 1 п р2 НД 2
Д*НД* = -------------------- , (5.74)
^npi^TZi + R
ayv = Лу 1 + ау 2 - (5.75)
Здесь /?пр! — приведенный радиус кривизны поверхностей шарика и
вала в точке а (см. рис. 44) их начального контакта; /?пр2 — тоже, для
контакта шарика и втулки (точка Ь).
Япр1,ЯПр2 находят по формулам (2.10) или (2.23).
Таким образом, с помощью зависимостей (5.72) — (5.75) реальные
условия задачи приведены к расчетной схеме, эквивалентной (по сближе-
нию в контакте) случаю, когда шарики с радиусами R* внедряются в
плоскую поверхность тела, твердость материала которого равна НД*.
С учетом сформулированных выше особенностей задачи из формулы
(5.69) находят
6
,dh d 1 + dlldi
ттК*НД*п[---(1-ац)+ (---------—— +д2)1+ 1
Ь’1 Ь’2 \-d2/dj
Эта зависимость удовлетворительно подтверждена прямым опытом
(рис. 45).
147
Инженерный метод [А. с. 815593 (СССР)]. Понятие ’’одноуровневой”
модели шероховатой поверхности, введенное в п. 5.2, можно использовать
также для упрощения расчетов, относящихся к цилиндрическим поверх-
ностям.
По аналогии с формулой (5.43) среднее расчетное давление в контак-
те цилиндрических поверхностей, собранных с натягом тепловым спо-
собом:
, , , п , Аг ЬкНДЬКупа~1
q = =купр; - = куп/>; -—г = ——у----------
-Л Л Zi f
u u max
(5.77)
где п = п/Аа — число выступов модели, приходящееся на единицу номи-
нальной поверхности сопряжения цилиндров. При этом, как следует из
(5.59) — (5.61), сближение в цилиндрическом стыке
1 „ idbKmiKynhav-'
& = — (6----------------
2 V Rv
max
(5.78)
где J определяется по формуле (5.65) как функция диаметров вала и
втулки dt, d2, d, а также упругих свойств материалов соединяемых де-
талей.
Фактическая площадь контакта в цилиндрическом стыке определится
из уравнения кривой опорной поверхности (5.33) с учетом выражений
(5.78), (5.44):
(Л + 0,5а,,)АаЬк №ЬкНДКупка1' 1 и— 1
37-,-Л --------------------------). -(5-79)
2. t\
max max
Определение сближения, фактической площади контакта и среднего
расчетного давления в сопряжении цилиндрических деталей, соединенных
с натягом тепловым способом, при одновременном учете упругой и оста-
точйой частей полного сближения, упрочнения материала в процессе
упругопластической деформации, а также снижения начального натяга (за
счет внедрения или смятия шероховатостей) производится в следующем
порядке:
1. Вычисляют номинальную площадь контакта
Аа = mil, (5.80)
где/ — длина сопряжения.
2. Определяют известными способами [41] геометрические параметры
шероховатости bK, v, К, Атах. В случае контакта двух шероховатых по-
верхностей рассчитывают [41] параметры шероховатости эквивалентной
поверхности. С целью одновременного учета как шероховатости, так и
волнистости снимают профилограммы большой протяженности (базовая
148
'"длина профилограммы в этом случае должна быть более 5/ гпр /
шаг волны) [35]. где-
3. Определяют упругие константы материалов вала >М]) и втулки
(Е2, М2) и пластическую твердость НД материала той из сопрягаемых де-
талей, которая в процессе сборки пластически деформируется в зонах
фактического контакта.
4. Из выражения (5.78) для соединения, собранного с заданным натя-
гом, определяют сближение в стыке сопрягаемых цилиндрических шеро-
ховатых поверхностей. При этом сближение в контакте представляют
в виде
а = Л+ау, (5.81)
где h и «у определяются соответственно по формулам (5.19) и (5.20) при
Л/ ~ ’ Кц ~ ^ij ~ ау ij ~ -
С учетом (5.81), (5.19), (5.20) формула (5.78) принимает вид
р' з/9тг2 <*1 + к2)2(.Р')2 * X
г-«рнд ' v 16 «(1 г 2й/ау) 2
НЬКНДКуп11 р’ 3 /этт2 (kx + к2)2(Р')2 v-i
» 1 — + V ] R( 1 + 2Л/ау)
2Я max 2-пРНД 16
где Р' — условная нагрузка, передаваемая единичным выступом ’’одно-
уровневой” модели.
(5.82)
Из уравнения (5.82) методом последовательных приближений нахо-
дят Р', а затем по формуле (5.81) вычисляют полное сближение в контак-
те а = h + ау, отвечающее заданному натягу 6. Необходимые для этого
значения коэффициента Куп определяют по формуле (5.42) или по графи-
ку (см. рис. 39) при данных значениях v и
0,0957 h + 0.5а у
= V —~ —
НД{кх + Л2) Р
Для первой пробы значения Р' можно найти из выражения
/’'=(0,1 ...0,8)rrWZ«max
(меньшие значения соответствуют меньшим величинам задаваемого
натяга).
Затем по формулам (5.77) и (5.79) определяют среднее расчетное
давление и фактическую площадь контакта.
Экспериментальная проверка зависимости (5.79), выполненная на
реальных соединениях цилиндрических деталей (табл. 39), собранных с
натягом тепловым способом, подтвердила приемлемость приведенного
решения для инженерных расчетов (рис. 46). Отметим, что поскольку при
планиметрировании непосредственно измеряли не фактическую площадь
149
Параметры деталей соединений с натягом
№ партии соеди- нений Деталь Способ обработки сопряженных поверхностей Материал НД, МПа Упругие танты
М
Вал Полирование Латунь Л63 920 0,33
I Втулка Растачивание Сталь 45 3000 0,3
Вал Полирование ЛатуньЛ63 920 0,33
II Втулка Растачивание Сталь 45 3000 0,3
контакта, а площадь ее проекции As,
то с учетом выражения (5.44) расчет
вели по формуле
As Аг Аг
Vs = — = --------- = -----— ,
Аа акАз aKirdl
(5.83)
где Аг определяли из (5.79).
Для практики существенно, что
приведенные расчетные зависимости
Рис. 46. Относительная площадь контакта
ns в соединении цилиндрических деталей,
собранных с натягом тепловым способом,
в зависимости от начального натяга:
1-2 - номера партий соединений (см.
табл.39); кривые - расчет по формулам
(5.79) и (5.83); заштрихованные зоны -
эксперимент
позволяют проанализировать влияние различных факторов на величины
среднего давления [формула (5.77)], сближения [формула (5.78)], факти-
ческой площади контакта [формула (5.79)].
Качественные результаты выполненного анализа приведены в табл. 40,
которая наглядно иллюстрирует влияние различных факторов на величи-
ны ек, г)г, q, а также на отношение упругой ек, у и остаточной ек> Пл час-
тей полного сближения в контакте.
150
Таблица 39
коне- Геометрические размеры деталей Параметры шероховатости
£40“s, МПа мм ^2. ММ d, ММ ММ2 b - ^тах» мкм R, мкм
0,98 7 — 20 565 — — — —
2.06 — 40 1.37 1,36 18 35
0,98 14 — 40 ИЗО — — — —
2,06 — 80 1,66 1.55 10 54
Характер изменения основных параметров упругопластического Таблица 40
контакта шероховатых поверхностей и прочности цилиндрических соединений,
собранных с натягом тепловым способом,при возрастаний определяющих факторов
Характери- зуемые па- раметры Г' ' Определяющие факторы
6 Ч d НД E dild d/d2 R Я max ^K V
Пг 4 4 4 4 t 4 4 4 4 4 4 4
Ч t — 4 4 t 4 4 t 4 4 4 4
ек, yl€k, пл t 4 4 4 4 4 4 4 4 4 4
ек t 4 4 4 4 4 4 4 4 4 4 4
Л>с> ^кр t t t 4 t 4 4 4 4 4 A t
Примечание, 4 - увеличение; ; - уменьшение; наличие максимума.
ГЛАВА 6
ПРИМЕНЕНИЕ ЗАКОНОМЕРНОСТЕЙ УПРУГОПЛАСТИЧЕСКОГО
КОНТАКТА К РАСЧЕТУ ПРОЧНОСТИ СОЕДИНЕНИЙ С НАТЯГОМ
6.1. ОБОБЩЕННЫЙ МЕТОД ОПРЕДЕЛЕНИЯ НАГРУЗОЧНОЙ
СПОСОБНОСТИ СОЕДИНЕНИЙ С НАТЯГОМ [А. с. 926578 (СССР) ]
Принципиальные результаты, описанные в гл. 5, позволяют решать за-
дачи, связанные с определением нагрузочной способности цилиндрических
соединений с натягом, собранных тепловым способом.
151
Обычно расчет прочности цилиндрических соединений с натягом про-
водится по формулам:
PQC<wllqfoc, (6.1)
d
MKp<mllqfKp — , (6.2)
где d и I - диаметр и длина сопряжений; q — среднее давление в стыке
сопрягаемых цилиндрических поверхностей; /ос, /кр — коэффициенты
трения (сцепления) в осевом и окружном направлениях.
Для заданного сочетания материалов й способа сборки соединения
коэффициент трения считают постоянным. Между тем, как видно на гра-
фиках рис. 47, коэффициенты трения зависят также от давления (натяга)
в стыке, параметров шероховатости контактирующих поверхностей и
твердости материала деталей.
Излагаемое ниже решение учитывает совместное влияние указанных
факторов на коэффициент трения покоя.
Задача решается при следующих условиях:
1) соединение собрано с натягом тепловым способом;
2) плотность распределения выступов достаточно велика, а вершины
выступов различных уровней статистически равномерно распределены по
цилиндрической поверхности: в связи с этим возникающее при сборке ра-
диальное давление в стыке рассматривается как равномерно распределен-
ная осесимметричная нагрузка;
3) общая деформация деталей соединения (толстостенные цилиндры)
является чисто упругой и, следовательно, подчиняется решению Ляме;
4) местная деформация в зонах фактического контакта сопряженных
поверхностей является в общем случае упруго пластической;
5) взаимное влияние выступов отсутствует;
6) шероховатая цилиндрическая поверхность образована одним из
характерных для деталей соединения видов механической обработки: точе-
нием, шлифованием, растачиванием;
7) относительный осевой сдвиг де-
талей всегда происходит в направле-
нии, перпендикулярном следам обра-
ботки, а их относительный поворот —
вдоль этих следов.
Согласно молекулярно-механичес-
кой теории трения можно выделить
Рис. 47. Коэффициент трения покоя foc при
осевом сдвиге в зависимости от среднего
давления в стыке:
1-8 - номера партий соединений (см.
табл.41), подвергнутых испытанию
152
следующие существенные факторы, определяющие удельную силу трения
покоя Руд в соединении деталей, собранных с натягом: давление в стыке
(q), твердость менее твердого из материалов соединяемых деталей сбли-
жение в контакте шероховатых поверхностей (а), наибольшая высота не-
ровностей профиля (Лтах) и их распределение по высоте (b^./v), соотно-
шение упругой и остаточной деформации в контакте, характеризуемое
коэффициентом ак [ см. формулу (5.33) и (5.44)].
Таким образом,
Руд = a>^max> »ск)- (6-3)
В соответствии с теорией размерности из переменных параметров вы-
ражения (6.3) составлены следующие безразмерные комплексы:
_' bw а
» ’ “К’ „л »
Л гп ах У
Первые три комплекса объединяются в один, имеющий вид [см. фор-
мулу (5.33)]:
к max
Отношение ц!НД рассматривается как комплекс-аргумент, ~
как комплекс-функция, а функциональная связь между ними представля-
ется степенной функцией
1/р
(6.4)
(6.5)
4.
1 ( q
vK {нд }
Отсюда коэффициент трения покоя
/=vk4‘-(—ГК. <6-7)
q
где vK и wK — коэффициенты удельной прочности, учитывающие взаимное
расположение следов обработки сопрягаемых поверхностей и направление
их относительного сдвига.
Для определения vK и wK необходимо вычислить по формуле (5.78)
контактное сближение а. в стыке сопрягаемых шероховатых поверхнос-
тей, а также относительную фактическую площадь контакта т]г и среднее
давление q в цилиндрическом стыке деталей соединения по формулам
(5.77), (5.79), преобразованным с учетом выражений (5.33), (5.46) к
виду:
(6.6)
6 - 2а
(6.8)
q
rir = ------
ЯДКуп
Qy
2h
(6.9)
153
ГЗ
я
X
к
ю
Я
Параметры деталей соединений, подвергнутых испытанию на осевой сдвиг
2 £ R, мкм
S
§•& G S X
О сЗ S о max
Е о • OS
О СХ
5 я Я 3 а
X
§ X
г> ф
ъ
6 S
я <3 *
2
сх
V
S м сз i
°*в 4s
§1 а мм
£ &
S S
S о S
г<1> 4Г
•> С^З
ч И г«ье
о S о Е | 5 Ч-sg
В* я.
>> ° я
Твер- дость НД, МПа
3
X
сх
н
сЗ
S
б обра- сопря- ой по- 1 О я
Спосо ботки жени верх:
Деталь
X я
х о
Е Я
СХ м
СЗ СЗ
я о.
0. & О
О «Л О о
еч еч m xj-
О «Л о О
еч еч ел тг
О I О I О I О |О |O I О
«Л 1 40 'оо 1 тг 1 1 \о >00
r'iooi2iSir-i°oi2iSi
40 40 40 40 40 40 40 40 00 40 00 40 40 00 00 40
0000000004,00000000^0
ечечечечечгчгчечоечоечечооеч
Сц *
X X
=1 X g ~
в§
я •S*
е*| о с
1 « я Я <D V
« X О
I s 2
&я s
gii ! - а н Р 5 о
Hi
Й 1 5
° ЙЗ
е* ей hi
ggg
1 £ L
4,-3^
154
Рис. 48. Усилие выпрессовки (сила трения покоя) РоС в зависимости от начального
натяга 6:
1-8- номера партий соединений, испытанных на осевой Сдвиг; сплошные линии -
эксперимент, штриховые - расчет по формуле (6.13) при коэффициенте запаса
прочности «з=1
Коэффициент трения при сдвиге в осевом направлении определяют по
формуле
/ос = • (6.10)
Расчетные зависимости, определяющие прочность соединений, полу-
чили следующим образом.
Для каждого соединения (из числа указанных в табл. 41) по графи-
кам экспериментальных зависимостей Рос(6) (рис. 48) нашли силу тре-
ния покоя Рос при данном значении натяга. Эти графики построены по ре-
зультатам испытаний соединений на прочность. В процессе испытания фик-
сируют максимальное усиление сдвига (силу трения покоя) Рос, соответ-
ствующее началу осевого перемещения вала. Как и /ос, значения Рос для
различных соединений также отличаются в несколько раз.
Принципиально иная картина обнаруживается при построении графи-
ков зависимостей безразмерного комплекса ^v{foc от относительного
Давления ц!НД-. для всех соединений, подвергнутых испытанию, графики
зависимости т?г1/р//Ос ~ практически совпадают, а разброс не пре-
вышает величин, характерных для испытаний соединений с натягом
(рис. 49).
155
1
Рис. 49. Безразмерный комплекс п ? Яос
в зависимости от относительного давления
в стыке цилиндрических поверхностей:
1-8 — номера партий соединений, испытан-
ных на осевой сдвиг; кривая — расчет по
формуле (6.11)
Указанные графики, перестроен-
ные в логарифмических координатах,
представляют собой прямые линии.
Путем их математической обработки
методом наименьших квадратов на-
шли значения коэффициентов удель-
ной прочности vK и входящих в
выражение (6.7); для соединений с па-
раметрами, указанными в табл. 41,
vjt.oc = 4,59, = 0,58. Таким
образом, в соответствии с формулой
(6.7) коэффициент трения покоя в
осевом направлении
(6.11)
1
*
/ос =
Я
Аналогичным образом определяют коэффициент трения покоя в ок-
ружном направлении:
/Kp=0,178<(^V“
(6.12)
Расчет показывает, что максимальный разброс экспериментальных
значений /Ос и /кр около вычисленных по формулам (6.11) и (6.12) не
превышает 20 % с вероятностью 0,95. С целью компенсации возможных
погрешностей расчета в формулы (6.11) и (6.12) необходимо вводить
коэффициент запаса прочности и3, минимальное значение которого равно
амплитуде разброса экспериментальных данных. Очевидно, что для иссле-
дованных соединений п 3 > 1,2.
Наибольшие значения осевой силыРос и крутящего момента 7Икр, ко-
торые может передать соединение с натягом, определяются выражениями
Рос = "Woe = vdlq ; (6.13)
Мк. = «tfWkp - = .О.ОвЭпУЧ— )°’S54 — • (6.14)
кр , 2 ' д „з
156
На рис. 48 расчет по формуле (6.13) сопоставлен с экспериментальны-
ми данными. Аналогичные результаты получены и при испытании соедине-
ний на скручивание. Характер функциональных зависимостей, описывае-
мых формулами (6.13) и (6.14), виден из табл. 40.
Отметим, что количественные зависимости, описываемые формулами
(6.13) и (6.14), безусловно справедливы для различных соединений, пара-
метры которых укладываются в исследованные границы (см. табл. 41)
Однако очевидно, что описанный метод может быть распространен и на
соединения, у которых поверхности деталей обработаны другими спосо-
бами, но для них необходимо дополнительно определить эксперименталь-
ным путем коэффициенты удельной прочности vK и wK.
В табл. 42 приведены значения Рос, вычисленные по традиционному
( формула (6.1) ] и по описанному методу. Данные табл. 42 свидетельству-
ют о лучшей сходимости последнего с опытом.
Это позволяет уменьшить удельную металлоемкость соединяемых
г деталей, сохранив при этом требуемую нагрузочную способность соеди-
нений.
Так, например, для обеспечения Рос = 62,3 кН (см. последнюю строку
, табл. 42) при расчете традиционным методом потребовалось бы увели-
чить осевые и диаметральные размеры деталей против заданных; при этом,
: если увеличить длину сопряжения, то металлоемкость соединения возрас-
тает в 2,86 раза, а при увеличении диаметральных размеров — в 8,2 раза.
. Для других условий, показанных в табл. 42, снижение удельной металло-
<емкости еще более значительно. При этом,однако, следует иметь в виду,
Что выражения (6.11) и (6.12), определяющие величины коэффициентов
трения foc и fKp, получены для условий статического нагружения сбеди-
, нения осевой силой или крутящим моментом. Если характер нагружения
более сложен, например, при наличии радиальной циркулирующей силы,
Т а б л и ц а 42
Сопоставление вычисленных и найденных из опыта
Значений РоС для соединений, параметры
. деталей которых соответствуют партии № 4 в табл. 41
Начальный натяг 6, мкм Pq>c>
по традиционному методу при /=0,14 по методу, описанному в п. 6.1. [формула (6.13) ] из опыта (линия 4 на рис. 48)
20 2,63 15,6 15,5 40 9,04 29,0 31,3 60 13’5 40,Z S’? 80 21,9 52,8 62,3
157
то относительный сдвиг деталей может наблюдаться при нагрузках более
низких, чем вычисленные по формулам (6.13) и (6.14). В этом случае
снижение несущей способности соединения может быть рассчитано в соот-
ветствии с методикой, изложенной в работе [34].
В тех случаях, когда требуется определить начальный натяг 6, обеспе-
чивающий заданные величины Рос и Л/кр, формулы (6.13) и (6.14) (не
содержащие S в явной форме) записывают [с учетом (6.8) и (6.9) ] в виде
1+^-
~K2h (6 - 2«),+0>42^ = (-^-да^’«7^)'^Л2,. (615)
—к 2h (5 " Уинд?-0.554^^0.446, (616)
Л уп и,ОоУЛЛ
Начальный натяг 6, отвечающий заданным Рос или Л/Кр, находят из
уравнений (6.15) или (6.16) методом последовательных приближений.
Необходимые при этом значения полного сближения в контакте а и его
составляющих h и ау, а также коэффициента Куп определяют из выраже-
ний (5.78), (5.19), (5.20) и (5.42).
6.2. ПОРЯДОК И ПРИМЕР РАСЧЕТА НАГРУЗОЧНОЙ
СПОСОБНОСТИ СОЕДИНЕНИЙ С НАТЯГОМ
Порядок расчета. Пусть заданы следующие величины:
геометрические размеры деталей (d, dx, d2, /);
упругие константы материалов (/?i, Д], Ег. д2 )>
пластическая твердость НД менее твердого из материалов деталей;
эквивалентные параметры шероховатости сопрягаемых поверхностей
6К, г'.Л, Атах, определенные с учетом волнистости.
Рассматриваемая задача может быть представлена и решена в одном
из следующих трех вариантов, определяющих порядок решения.
Вариант 1. Задан начальный натяг 6, необходимо определить осевую
силу Рос и крутящий момент Л/кр, которые может передать соединение.
Из выражений (5.78), (5.19) и (5.20) определяют (в порядке, указан-
ном в п. 5.3) полное сближение в контакте а и его составляющие Л и ау,
а по формуле (5.42) (или по графику рис. 5.9) соответствующее значение
коэффициента Куп.
По формуле (5.77) находят среднее расчетное давление q, а в соответ-
ствии с (6.9) — относительную фактическую площадь контакта qr.
Затем по формуле (5.80) вычисляют номинальную площадь контак-
та Аа, а из выражений (6.13) и (6.14) - осевую силу Рос и крутящий мо-
мент Л7кр.
158
Г;. Вариант 2. Необходимо определить наименьший начальный натяг 5
обеспечивающий заданную прочность соединения (Рос или Мк ) и вы’
брать необходимую посадку.
Начальный натяг 6, отвечающий заданной величине Рос (ил'и М )
находят из уравнения (6.15) или (6.16) методом последовательных приб-
лижений в порядке, изложенном в п. 6.1.
По этому натягу подбирают ближайшую посадку по единой системе
допусков и посадок СЭВ (ЕСДП СЭВ).
Далее проверяют прочность соединяемых деталей при наибольшем
табличном натяге 6тах. Для этого по формуле (6.8) находят давление
i, ®max — 2“max
flmax ~
чь di
При этом величину полного сближения в контакте атах, отвечаю-
,щую натягу 5тах> находят из выражений (5.78), (5.82).
Условие прочности деталей соединения заключается в отсутствии их
^пластической деформации, что обеспечивается, когда qmax <?доп. Допус-
каемое давление <?доп на сопряженной поверхности втулки [47]
*7доп ~ (~ ) L
“2
(6-17)
(6.18)
а на поверхности вала
(6-19)
<7допСО,58ат[1 - (—)2],
а
где ат — предел текучести материала деталей при растяжении.
Вариант 3. Выбор посадки по наибольшему допустимому начальному
। Натягу 6Наиб> вычисленному исходя из условия прочности соединяемых
‘ Деталей. Такой подход, предложенный А. И. Якушевым [47], позволяет
полнее использовать несущую способность соединений с натягом.
Согласно (6.8)
^наиб = ?доп^ + 2а, (6.20)
где допускаемое давление <7ДОП отвечает меньшему значению из вычисле-
ния по формулам (6.18) и (6.19).
Полное сближение в контакте а, соответствующее величине <?ДОп>
определяют из выражения (5.77), которое записывают в виде, аналогич-
ном (5.45):
П V —
. тах^доп
“ = (---------
(6.21)
ькндик уп
Порядок вычисления а по формуле (6.21) такой же, как и по фор-
муле (5.45).
159
Затем по наибольшему начальному натягу 6Наиб [формула (6.20)]
выбирают (по ЕСДП СЭВ) посадку, при которой создавался бы запас
прочности как соединения с натягом, так и его деталей.
Пример. Приведем расчет соединения с натягом, параметры которого приведены
в табл. 41 для партии № 4.
Вариант 1. Задан начальный натяг 6 = 22-10"* м, необходимо определить Рос и
^кр-
Из уравнений (5.82), (5.19), (5.20) и (5.42) определяем а = 1,8-10-* м, й =
= 1,5-10-* м,ау = 0.3-10-* м,Л'уп = 0.93.
По формуле (5.77) находим среднее расчетное давление
10-1710-1.5-10-*-0.93(1,810-*)2-6~1
q ------------------—----------------- = 38,6 МПа,
(17-10-*)2-6
а по формуле (6.9) — относительную фактическую площадь контакта
38,6 0.3-10-*
щ =-----------(1 + --------- = 0,0267.
1710-0,93 2-1,5-10-*
Осевую силу определяем по формуле (6.13):
Рос = 0.218-0.02672,6 -38.6-1.13 1(Г3( 1Z12.jO.S8 J_ _ 0 0177 мн = 17 7 кН
38.6 1.2
а по формуле (6.14) - крутящий момент
Л/кп = 0,0888-0.02672-6 -38.6-1.!3-1О~3-О.О4(-^%0’554 — = 2.62-10-4 МН-м =
Р 38.6 1.2
= 262 Н-м.
Вариант 2. Необходимо определить наименьший натяг 6, обеспечивающий Рос =
= 7,5 кН.
Подставляя в выражение (6.15) числовые значения заданных параметров и вы-
численное по формуле (5.65) f = 1,235-10-5 МПа-1. получим
1+ —
____— (6 _ 2а?+0'42’2’6 - ( 7’5 -1-0 ~~—7?2’6-17101 —°’58'2’6 X
К ( ~ (0.218-1.13 10~3
Луп
X (0,04-1,235-10-5)1 + О’42'2’6 = 0,174-Ю-10,
откуда методом последовательных приближений определяем 6 = 9-10-* м (при этом
согласно (5.82) а = 1,24 -10-* м, й = 1,0-10 -* м, Оу = 0,24-10-* м, Kyn = 0,917].
По этому натягу подбираем ближайшую посадку по СТ СЭВ 144-75. Выбираем по-
садку с натягом в системе отверстия ф 40 Н7/гб, для которой наименьший натяг ра-
вен 6mjn = 9-10"*, анаибольший - 6max = 50-10-* м.
Далее проверяем Прочность соединяемых деталей. Из уравнения (5.82) при
6max = 50-10-* м находим атах = 2.49-10-* м, а по формуле (6.17) вычисляем
50-10“*- 2-2,49-10-*
flmax ~ -------------------- = 9М МПа.
0,04-1,235-10-5
160
Находим допускаемое давление на контактирующих поверхностях втулки
0,04 _
<7доп < 0,58-352(1 - 1 = 153 МПа
и вала
0,014 -
?доп< 0,58-352(1 - 1= 179 МПа,
где от = 352 МПа - предел текучести материала деталей из стали 45.
Итак,
fl max ~ 91,1 МПа < Адод — 153 МПа,
т.е. прочность деталей соединения обеспечена.
Вариант 3. Выбор посадки по наибольшему допустимому натягу бдаиб-
Согласно (6.18) и (6.19) <7Д0П = 153 МПа; при этом давлении из формулы
(6.21) находим а = 3-10"6 м, а по формуле (6.20)
8наиб = 153-0,04-1,235-Ю*5 + 2-3-10‘*= 81,6-Ю*6 м.
По СТ СЭВ 144-75 выбираем посадку Ф 40 Н6/д7, для которой 5min = 44Х
X 10-6 м, a 6max = 85-Ю-6 м. Отметим, что при 8п1ах = 85 -10-6 м давление на по-
верхности контакта превысит Адоп на 3 %. Однако, учитывая, что вероятность полу-
чения максимального натяга в соединении мала, применение этой посадки допус-
тимо.
Затем для минимального и максимального натягов находим (в порядке, изло-
женном в варианте № 1) /’о cm in = 31,4 кН, /’остах ~ 36,1 кН.
6.3 АЛГОРИТМ И СТРУКТУРНАЯ БЛОК-СХЕМА ПРОГРАММЫ1
ДЛЯ ЭВМ ’’РАСЧЕТ НА ПРОЧНОСТЬ ЦИЛИНДРИЧЕСКИХ
СОЕДИНЕНИЙ С НАТЯГОМ”
Назначение программы. Программа (рис. 50) предназначена для рас-
четов прочности цилиндрических соединений, собранных с натягом тепло-
вым способом.
Программа позволяет производить следующие три варианта расчетов:
1) при заданном начальном натяге 8 определить крутящий момент
Л/кр и осевую силу Рос, которые может передать соединение без взаимно-
го сдвига деталей;
2) при заданном крутящем моменте Мкр или заданной осевой силе
Рос определить необходимый для их передачи начальный натяг 8;
3) определить наибольший натяг, допустимый по условиям прочности
деталей соединения, а также соответствующие ему силу Рос и момент
^кр-
В 1-ми 2-м вариантах предусмотрена проверка прочности деталей
соединения.
1 В составлении программы принимал участие М. Я. Иткис.
6-395
161
Кбод исходных данных
Рис. 50. Структурная схема программы
Описание входной информации*
Номер варианта расчета задается как
целое число к* = 1-^3.
В ЭВМ вводятся следующие
исходные данные как числа с плаваю-
щей запятой:
d — диаметр сопряжения, мм;
dt — внутренний диаметр вала, мм;
d2 - наружный диаметр втулки, мм;
I - длина сопряжения, мм;
Ei, Е2 — морупъ Юнга материала вала
и втулки, МПа;
162
gi, Д2 — коэффициент Пуассона для вала и втулки;
НД — пластическая твердость менее твердого из материалов деталей, МПа;
oTi, оТ2 — предел текучести материала вала и втулки, МПа;
1, &к2 > — параметры кривой опорной поверхности;
Ri, Rz — радиус кривизны выступа (соответственно для вала и втул-
ки) , мм;
^maxi, ^max2 — наибольшая высота неровностей профиля вала и втул-
ки, мм;
S — начальный натяг, мм;
Л/кр — крутящий момент, Н-м;
?ос ~ осевая сила, Н.
При расчете по первому варианту (к* = 1) вместо 7Икр и Рос записы-
ваются нули; при к* = 2 нули заносятся вместо 6,7Икр (илиРое); при
к* = 3 нули записываются вместо 6, AfKp,Рос.
Описание выходной информации. Результаты расчета выдаются на пе-
чать. Если давление в стыке меньше допустимого по условиям прочности
деталей (д < <7ДОП), то для 1-го и 2-го варианта расчета печать имеет вид
5 = ... мм; 7Икр = ... Н-м; Рос — ... Н.
Если при решении выясняется, что при заданных исходных данных
q > <7доп» т0 принудительно принимается q = ^ДОп, и Для этого значения
q определяется новая (максимально возможная) величина начального
натяга 5Наиб> а также соответствующие ей значения 7Икр и Рос, которые
выдаются на печать в виде
6Наиб = — мм> -^кр наиб = — Н-м; Рос наиб = — Н.
Для 3-го варианта расчета печать имеет вид:
^наиб =
Алгоритм программы. В соответствии с изложенной в п. 6.2 методи-
кой расчета составлен алгоритм программы. _
Для удобства вычислений коэффициент х в формуле (5.65) аппрок-
симирован выражением
мм; наиб ... Н-м; -Рос наиб
(6.22)
1 W1 0,08
х 2Slid i/d d2
При всех вариантах расчета значение условной нагрузки Р1 [см. фор-
мулу (5.82) ] определяется методом хорд из уравнения
= 0.
Для первого варианта расчета
<р(Р')= А - 5,
(6.23)
(6.24)
163
где
fdb^Kyahav 1
= la------------. (6.25)
^max
Здесь аргумент Р' входит в величины a,h,Kyn, определяемые по фор-
мулам (5.78), (5.19), (5.42). Величина ау определяется методом итера-
ций из выражения (5.20).
При решении задачи по 2-му варианту вид функции <ХР') зависит от
заданных параметров. Если задан крутящий момент 2Икр, то
1+^
<ХР')= ----—{Ъ - 2а)1 + 0,446г - )^и-о,44бРХ
Куп 0,089л/
X (с?/ОД1"0’5541'. (6.26)
Если задана осевая сила Рос, то
“у
1 + ——
<ХР') =----— (б - 2а)1 + °>42 v - ( —--УНД1 ~ °-58 v X
Куп 0,218Лс
X(df)1 + 0’421’. (6.27)
При решении задачи по 3-му варианту в уравнение (5.82), из которого
определяется условная нагрузка Р, вместо 6 подставляется величина наи-
большего допустимого натяга 6Наиб> определяемая по формуле (6.20).
ГЛАВА 7
РАСЧЕТЫ СОПРОТИВЛЕНИЯ МЕТАЛЛА КОНТАКТНОЙ
УПРУГОПЛАСТИЧЕСКОЙ ДЕФОРМАЦИИ ПРИ УДАРНОМ
НАГРУЖЕНИИ
7.1. ОБЩИЕ ПОЛОЖЕНИЯ
Проблема контактного удара имеет первостепенное практическое зна-
чение. Это понятно, поскольку в современных машинах и технологичес-
ких процессах силовое взаимодействие контактирующих тел часто явля-
164
Чается ударным. При известных условиях в зоне контакта могут возни
Уместные пластические деформации. Такие условия реализуются 1^?ПГЬ
йжМер» в тяжелонагруженных зубчатых передачах, подшипниках качения при'
ударной штамповке, при упрочнении деталей машин поверхностным плас
тическим деформированием и в ряде других случаев.
№ Классическая теория Герца контактной деформации упругих тел поз-
Ж воляет установить расчетным путем зависимость величины контактной си-
лы и длительности соударения тел от их масс и относительных скоростей
Ж- движения, а также от их геометрии в области контакта. В решении этой
•а задачи обычно используется гипотеза о том, что связь между контактной
Ж, силой, напряжениями и деформациями тел при чисто упругом ударе такая
К^же, как и при статическом нагружении.
И Что касается пластической контактной задачи, аналогичной упругой
•Вг'задаче Герца, то она в полном объеме пока не решена, хотя за последние
Ж. годы исследователями получены весьма существенные результаты.
Большинство исследований в области упругопластического контакт-
Якного соударения тел посвящено определению таких параметров, как
Kf ударная твердость, динамический коэффициент, продолжительность соуда-
bi рения тел, интенсивность и скорость деформации, распределение давления
Вина поверхности контакта.
Ду Важное место в исследовании проблемы контактной прочности метал-
Жлов при ударе занимают широко известные работы Н. Н. Давиденкова,
Дф. Ф. Витмана, Н. А. Златина, Б. С. Иоффе, В. А. Степанова. Учитывая, что
При высоких скоростях деформирования к ’’главному” силовому полю
Ж-Добавляется ’’местное” и что разделение этих эффектов оказывается не-
Ш'возможным, авторы указанных работ предложили изучать влияние ско-
I ррсти удара на сопротивление деформированию металлов, исследуя толь-
Ж^ко местный эффект. Ими были установлены закономерности, характери-
Кзующие влияние скорости удара (до 1000 м/с) на сопротивление внедре-
Яганию конического наконечника с углом при вершине 90°. Показано также,
V -о сопротивление внедрению при скоростях удара до 100 м/с может быть
ЯрПринято равным динамической твердости, а при более высоких скоростях
Як'оно возрастает под влиянием инерционного фактора. Более поздними ис-
® (Следованиями [39] это положение оспаривается. Возможный метод реше-
НИя динамической контактной задачи рассмотрен в работе [33]. Решение
Ж?, основано на линейной зависимости между контактной силой и глубиной
Жвнедрения штампа. Принято также допущение, что при данной нагрузке
’^’.Остаточное сближение определяется статической твердостью НВ.
• Л. И. Маламент на основании закона Мейера нашел соотношение меж-
:®к Ду силой удара и глубиной отпечатка шарика. Правда, показатель степени
В формуле Мейера был принят здесь равным 2, хотя это не всегда под-
jo тверждается прямыми экспериментами. Кроме того, автор несколько
«fc упростил схему вдавливания и последующего восстановления отпечатка,
Ж'- Предположив, что после снятия нагрузки отпечаток представляет собой
165
£
шаровой сегмент с кривизной поверхности, равной кривизне поверхности
шарика.
Имеется исследование К. Мока и Дж. Даффи (1966 г.), в котором
авторы предложили приближенный теоретический анализ процессов,
происходящих при ударе твердого шара о поверхность большого металли-
ческого образца. При этом выражение для давления под шариком выведе-
но на основании эмпирической степенной зависимости между скоростью
удара и диаметром отпечатка. Напряжения и деформации за пределом
упругости определяли по эмпирическим формулам, а влияние упругих
свойств материала на его сопротивление упругопластическому внедрению
твердого шара при ударе не исследовалось.
Авторы работы [16] для исследования контактного соударения тел
применили экспериментально-теоретический подход, в котором использу-
ется степенная зависимость между нагрузкой и сближением тел в контак-
те, а постоянные, входящие в эту зависимость, определяются из опыта. Та-
кой подход позволяет выполнять ряд важных инженерных расчетов, свя-
занных с контактным соударением тел, сопровождающимся местной
пластической деформацией в зоне контакта.
Таким образом, в области сопротивления материалов контактной
упругопластической деформации за последние годы достигнут известный
прогресс, однако многие вопросы еще ждут своего решения.
В частности, значительный интерес представляет расчетное прогнози-
рование геометрических, силовых, деформационных и временных пара-
метров упругопластического контактного соударения тел двоякой кри-
визны.
Излагаемый ниже инженерный метод расчета параметров контактного
удара с учетом упругопластической деформации в зоне контакта базиру-
ется на понятии пластической твердости материала при ударе, т.е. его ди-
намической твердости НДа, статический вариант которой подробно рас-
смотрен в гл. 1.
7.2. ПЛАСТИЧЕСКАЯ ТВЕРДОСТЬ МЕТАЛЛА ПРИ
УДАРНОМ НАГРУЖЕНИИ
Случай соударения упругой сферы с плоской поверхностью контр-
тела. В работе [7] экспериментально установлено существование и описа-
ны основные закономерности динамической шариковой пробы, не зави-
сящей от диаметра индентора и силы удара. Показано, что, как и стати-
ческая нагрузка, сила удара Рд связана с глубиной Лд остаточного отпе-
чатка упругого шарика на плоской поверхности контртела линейной зави-
симостью, справедливой в значительном интервале нагрузок и глубин
отпечатков.
166
Рис. 51. Принципиальная схема экспериментальной установ-
ки для испытания на вертикальном копре:.
1 - ударяющий груз массой т; 2 - боек; 3 - тензорезис-
тор; 4 - индентор; 5 - контртело; 6 — основание; s - вы-
сота подвеса ударяющего груза
Позднее зависимости, приведенные в работе
[7], уточнены авторами в экспериментальном ис-
следовании, выполненном с применением совре-
менных методов и технических средств регистрации
параметров ударных
процессов.
Описанные ниже эксперименты проводили на
вертикальном копре со свободно падающим грузом
по схеме, показанной на рис. 51. Копер имеет мас-
сивную станину, две вертикальные направляющие,
по которым скользит груз, и траверсу с устройст-
вом для закрепления груза перед нанесением удара.
Начальную скорость удара варьировали в пре-
делах 1—10 м/с путем изменения высоты подвеса
ударяющего груза. Выбранные скорости соответст-
вуют тем, которые реализуются при эксплуатации
большинства деталей машин и механизмов; неко-
торые технологические процессы, такие, как штамповка на прессах удар-
ного действия, поверхностное упрочнение методом чеканки и др., также
осуществляются в указанном, скоростном режиме. Согласно данным
Ю. Я. Волошенко-Климовицкого (1965 г.) дальнейшее увеличение ско-
рости нагружения (свыше 5—8 м/с) не приводит к существенному изме-
нению твердости и предела текучести материала тела, испытывающего в
процессе соударения упругопластическую деформацию.
Образцами служили цилиндрические бруски круглого поперечного се-
чения с плоскими торцами, по одному из которых (верхнему) наносили
контактный удар. При этой схеме процесс удара протекает так, что в мо-
мент соприкосновения падающего груза (имеющего к этому моменту
Скорость \i) с торцовой поверхностью бойка оба тела приобретают общую
скорость v0, которая и рассматривается как начальная скорость удара.
Согласно закону количества движения
vi
т
(7.1)
где m ИИ] - массы падающего груза и бойка. В описываемом опыте ли —
= 0,07 -г 0,09 кг, т = 0,14- 6,0 кг.
167
Рис. 52. Зависимость между глубиной восстановленной вмятины Ьд и силой удара
а - D = 5 мм; б - D = 15 мм, 1-3 - стали марок 20 {НД 1440); 45Х {НД 2530) ;
ЗОХГСА {НД 4710); сплошные линии - v0 = 4 м/с. штриховые - v0 — 2 м/с
Необходимую для реализации нужных скоростей удара v0 высоту под-
веса грузов находили как
vo 1
s = -- (1 + --
2я ш
(7.2)
Силу удара Рд регистрировали с помощью тензорезисторов и осцилло-
графа С1-19Б; глубину Лд остаточной вмятины измеряли индикаторным
глубиномером часового типа с погрешностью до 1 мкм.
Из экспериментов получены значения Ра и Лд для сферических инден-
торов диаметром D = 5 и 10 мм при скоростях удара v0, равных 2, 3, 4
и 5 м/с.
На рис. 52 нанесены экспериментальные точки и по ним построены ли-
нейные графики зависимости Pa(hp). Статистический анализ показал, что
корреляция экспериментальных значений Ра и йд весьма высока: коэффи-
циент корреляции равен 0,96—0,98, а среднеквадратичное отклонение зна-
чений Рд от прямой Рд (йд) составляет 0,2 кН.
Таким образом, вновь подтверждена установленная в работе [7]
устойчивая линейная зависимость между Рд и Лд, наличие которой являет-
168
(7.3)
ся принципиальной основой существования пластической твердости НД
' материала при ударе, не зависящей от силы удара и диаметра индентора Д
В полном соответствии с формулами (1.9) и (1.11)
“ Ро, д Рц. ~ Т’д 1
- нда=—----------— = —-----------—
7г/)Йд я£)(Йд — Йд, 1)
где Рд и Рд, j — максимальные значения силы удара при двух последова-
тельных нагружениях, создаваемых грузами т > ; йд и/г;ь1 _ отвечаю-
щие им глубины восстановленных отпечатков на плоской поверхности
j контртела (плиты, детали); D — диаметр или удвоенный радиус кривиз-
ны сферического индентора; Ро, д — нагрузка, численно равная отрезку
(взятому в масштабе сил на графике РД(ЛД))> отсекаемому прямой
Рд(Лд) наосиРд.
Значения Ро, д для D = 10 мм определяются по формулам (1.17) при
(7.4)
(7.5)
(7.6)
Ро, 10 = 11ехр[1,9(10-3НДд - I)0’668] Н =
= ехр[0,1(Жд - ЮО)0’647]^,
1 если ЯДд = 1 000 4- 4000 МПа = 100 -г 400 кге/мм2, и ►
Ро, ю = 0,45ЯДд - 1224 Н = 0,45ЯДд - 125 кге
при НДа > 4000 МПа = 400 кге/мм2.
Для D Ф 10 мм в соответствии с выражением (1.18)
D
Ро,д -Ро, 1о(~) •
Таким образом, как и в случае статического нагружения, пластическую
твердость ЯДд можно определять как путем однократного [первая из
формул (7.3)], так и двукратного [вторая из формул (7.3)] внедрения
сферического индентора. В приближенных инженерных расчетах допусти-
мо величинойРо, д пренебречь, и тогда
Основанием к этому являются положения, отмеченные в гл. 1 при рас-
смотрении формулы (1.23), а также то, что при ударном нагружении вели-
чина Ро t д оказывается соизмеримой с ошибками экспериментального
. определения силы удара [25].
Общий случай соударения тел двоякой кривизны. В дополнение к
ограничениям, сформулированным в гл. 2, применительно к статическому
нагружению считаем, что в соударении с умеренными относительными
скоростями (до 10 м/с) участвуют короткие массивные тела, вследствие
чего [16] пренебрегаем волновыми явлениями и общими деформациями
169
Рис. 53. Приспособление к вертикальному копру со свободно падающим грузом
этих тел по сравнению с местными. Однако наличие (правда, незначитель-
ных) колебаний, частично связанных с волновыми процессами, четко
просматривается на осциллограммах контактного удара, приведенных
ниже на рис. 61.
Соответствующим подбором геометрии поверхностей, вводимых в
контактное взаимодействие, в эксперименте воспроизвели многообразные
формы контактных площадок, подобных тем, которые встречаются на
практике в различных случаях обработки (в частности, методом ППД) и
эксплуатации деталей машин. Исследованные схемы контакта и геометри-
ческие характеристики поверхностей контактирующих тел приведены на
рис. 7 (см. гл. 2).
В качестве нагруженного устройства также использовали вертикаль-
ный копер со свободно падающим грузом; начальную скорость удара
v0 и необходимую высоту s подвеса груза определяли по формулам
(7.1) и (7.2).
Для осуществления необходимых схем контакта (см. рис. 7), а также
регистрации силы и продолжительности удара в процессе испытаний ис-
пользовали специальное приспособление, конструкция которого показана
на рис. 53. Приспособление устанавливали на станине копра между двумя
вертикальными направляющими. Оно смонтировано на основании 7, на
котором помещалась призма 2 с цилиндрическим образцом 77 из иссле-
дуемого материала, предварительно поджатым к граням призмы специаль-
ным устройством для придания необходимой жесткости ударяемой сис-
теме (на рис. 53 в качестве примера показана схема контакта тел по
рис. 7, а и один из вариантов крепления цилиндрического образца на приз-
ме) . Сменный индентор 10, с помощью штифта 9 стопорящийся в полой
170
Поправке 6, имеет возможность свободно перемещаться вместе с ней в на-
О правляющей втулке 5, которая неподвижно соединяется с планкой 5.
Ж Крепление этой планки С помощью гаек 4 на шпильках 12 обеспечивает
строгую перпендикулярность оси втулки 8 к поверхности основания 1 и
й совпадение этой оси с направлением силы удара. Для осуществления цент-
[ рального удара индентором 10 по рабочей поверхности образца на одной
| из вертикальных направляющих копра перед нанесением удара закрепля-
| ли оправку с микронным индикатором часового типа, с помощью которо-
го го добивались такого положения подставки 3 с призмой и образцом, ког- ’
Г да индентор касался образца в одной из экстремальных по отношению к
Б плоскостям основания точек его поверхности. В этом положении подстав-
К ку с призмой закрепляли на основании 1 приспособления (крепежное
В устройство на рис. 53 не показано), после чего оправку с индикатором
^удаляли.
Продолжительность и наибольшее значение силы ударного импульса
® определяли путем осциллографирования процесса соударения с примене-
нием проволочных тензорезисторов и осциллографа С1-19Б. Свойствен-
ные этому методу погрешности [16], неизбежно возникающие при записи
В осциллограммы ’’усилие — время”, были заметно снижены благодаря то-
К му, что в качестве упругого динамометра (см. рис. 53) использовали по-
o' лую цилиндрическую оправку 6, йа наружной поверхности которой в сред-
Ь ней части имелись четыре грани для размещения проволочных тензорезис-
Ifc торов 7. В трубчатом динамометре обеспечивается более равномерное, чем
р в сплошном, распределение напряжений в поперечных сечениях, располо-
В женных вблизи его торцов, и (при одинаковых рабочих сечениях) умень-
। шение погрешностей, связанных со случайно возникающими изгибающи-
Ц ми моментами.
Е Параллельно, с целью проверки достоверности значений силы удара,
Е найденных путем осциллографирования, применили комбинированное
gy динамометрическое устройство (рис. 54). Устройство включает в себя
описанный выше трубчатый упругий эле-
мент с четырьмя тензорезисторами и упру-
гий контактный динамометр [ 22]. По-
следний представляет собой комплект из
упругого бойка 1 со сферической поверх-
ностью 2 и находящегося с ним в контак-
те стального бруса высокой твердости с
. плоской рабочей поверхностью.
При определении силы удара посредст-
вом упругого контактного динамометра ис-
пользовали известное решение Г. Герца,
.Рис. 54. Комбинированное динамометрическое
устройство
171
Рис. 55. Зависимости остаточных смещений Ид центров вмятин от нагрузки Рд (силы
удара) при ударном нагружении:
а, б - схемы контакта тел согласно рис. 7, а и в; 1-4 - значения /’д (Лд) при скорос-
тях соударения v0, равных 2, 3,4 и 5 м/с; /-/// - стали марок 20,45Х и ЗОХГСА
0,1. 0,2 0,3 hA,MM
б)
а также результаты, приведенные в работе [ 22]. Согласно [ 33] сила со-
ударения сферы радиуса R с плоскостью
Лх = М >
где d0 — диаметр площадки упругого контакта;
Е
кп 9
д 12(1
Для получения четкой границы упругого отпечатка одну из полиро-
ванных контактирующих поверхностей перед соударением покрывали
тонким слоем парафина или копоти (сажи). Ввиду сложности точного
измерения радиуса R сферического индентора коэффициент к^ находили
путем статической тарировки, поскольку упругие свойства материала
контактирующих элементов практически не зависят от скорости нагру-
жения [42].
Динамометр устанавливали так (см. рис. 53 и 54), что общая нормаль
к поверхностям индентора и образца в точке начального контакта совпа-
дала с линией действия ударной нагрузки.
Остаточные смещения Лд центров вмятин измеряли после каадого
опыта посредством часового индикатора с точностью до 1 мкм. По резуль-
172
татам экспериментов строили графики зависимостей Рд (Лд) для различ-
ных сочетаний кривизн поверхностей контактирующих тел и начальных
скоростей соударения v0 (значения Рд и Лд вычисляли как средние ариф-
метические из результатов трех измерений); в качестве примера некото-
рые из таких графиков показаны на рис; 55.
Как видно, и при ударном взаимодействии несферических тел двоя-
кой кривизны, как и при контакте шара с плоскостью, графики функций
Рд (Лд) также прямолинейны и в зависимости от твердости НД исследуе-
мых материалов, начальных скоростей соударения v0 и схем контакта
имеют различные углы наклона уд, । к оси абсцисс. Для каждой схемы
контакта и твердости материала образцов эти углы тем больше, чем выше
начальная скорость соударения, хотя с ее увеличением интенсивность их
роста заметно снижается. Чем выше твердость материала образцов, тем
круче наклон линий Рд(Лд). Углы ?д> / существенно зависят и от схемы
нагружения, т.е. от величины и сочетания кривизн поверхностей индентора
и контртела в точке начального контакта. Для всех остальных схем кон-
такта, показанных на рис. 7, результаты аналогичны.
Отметим, что, как и при статическом [7], при ударном контактном
взаимодействии тел произвольной формы и кривизны диапазон нагрузок,
при которых зависимость Рд (Лд) линейна, определяется не только твер-
достью и прочностью исследуемых материалов, но также величиной и соот-
ношением кривизн контактирующих тел.
В связи с этим очевидно, что пластическая твердость материала НД^
при соударении тел произвольной кривизны может быть представлена вы-
ражением, аналогичным (2.1),в котором ’’статические” параметры (Р/
Ро, НД,К) заменяются соответствующими ’’динамическими” величинами
(7д, д, Д#д, Лд) - Тогда,с учетом указанных преобразований, приве-
денный радиус ЯПр (или диаметр Р)пр) кривизны поверхностей контакти-
рующих тел в условиях динамического нагружения может быть найден
как
_ ,^ПР = РД Д
2 2яЯДдАд
(7.7)
Результаты опытов и последующих расчетов, выполненных по этой
формуле для различных скоростей соударения v0, материалов и схем
контакта, показанных на рис. 7,я-е, приведены в табл. 43. Данные, содер-
жащиеся в этой таблице, свидетельствуют, что приведенный радиус кри-
визны поверхностей контактирующих тел (введенный в рассмотрение в
гл. 2) не чувствителен не только к схеме контакта и виду материала контр-
тела, но также к динамичности нагружения и скорости удара: величины
ЛПр постоянны при 0 < v0 < 10 м/с и практически совпадают с расчетными
величинами (см. табл. 13),определяемыми по формулам (2.10) и (2.23).
Таким образом, еще раз показано,что /?пр является чисто геометрической
характеристикой, однозначно определяемой только величиной и соотно-
173
Экспериментальные значения Rnp, найденные
по результатам статического н ударного
контактного взаимодействия тел двоякой кривизны
Таблица 43
Материал Скорость соударения v0,M/c Нпр (мм) для схем контакта, показанных на рис. 7
а б в г д е
Сталь 20, 0 4,05 4,90 8,10 7,05 11,1 3,00 НД 1440 2 4,00 4,95 8,10 7,10 11,2 3,05 3 4,05 4,75 8,25 7,00 11,0 3,00 4 4,15 4,80 8,15 7,15 10,9 2,95 5 4,10 5,00 8,15 6,95 11,0 3,10
0 4,10 4,85 7,95 7,15 10,9 3,05 2 4,05 4,90 8,20 6,90 10,8 2,90 Сталь 45Х, 3 3,95 4,95 8,15 7,00 11,1 3,05 НД 2530 4 4,10 5,00 8,05 6,95 11,0 3,05 5 4,15 4,90 8,10 7,05 10,9 3,00
0 4,15 4,95 8,10 6,95 11,1 3,10 Сталь ЗОХГСА, 2 4,20 5,05 8,15 6,85' 10,9 3,05 НД 4710 3 4,10 4,95 7,95 7,15 11,0 2,90 4 4,05 4,95 8,20 7,10 11,2 3,10 5 4,15 4,80 8,10 7,05 11,1 2,95
Алюминиевый 0 4,00 5,00 8,05 7,10 11,0 3,05 сплав АМг-6, 2 4,15 4,80 8,20 7,05 10,9 3,10 НД 900 4 4,05 4,85 8,10 6,90 11,0 3,15
Латунь Л63, 0 4,10 4,90 8,15 7,05 10,8 3,00 НД 1390 2 3,95 5,05 8,15 7,10 11,2 2,90 4 4,05 4,95 8,25 7,10 11,1 2,95
Среднее значение Rnp 4,08 4,92 8,13 7,03 11,0 3,02
шением начальных кривизн поверхностей контактирующих тел. В связи
с этим экспериментальные его значения проще всего могут быть найдены
по статической твердости НД в соответствии с формулой (2.2) как
R = f ~
пр 2 2тгНД(й - й,)
Линейность функции Ра (Лд), а также описанные свойства приведенно-
го радиуса контактирующих тел позволяют по аналогии с выражениями
174
(73) и (7.6) представить твердость НДЛ в общем случае силового взаимо-
действия тел произвольной формы и кривизны как
Л, - Ро д Рд - Рд. 1 Рд
НД„ = —-------— = —-----------------=“ —-----, (7.8)
^пр^д ^пр (Лд ~ ЛД, 1) п^пр^д
где Рц и РД1 1 - значения ударной нагрузки (или максимальные значения
силы в контакте, нарастающей в процессе соударения от 0 до Р = Рд);
Лд и Лд, 1 — отвечающие им глубины остаточных отпечатков, отсчитанные
от точек начального контакта индентора с контртелом; Л>, д — ’’крити-
ческая” нагрузка, вычисляемая по формулам (7.4) и (7.5) при Л =£>пр.
7.3. ДИНАМИЧЕСКИЙ КОЭФФИЦИЕНТ ПЛАСТИЧЕСКОЙ
ТВЕРДОСТИ СТАЛИ
С переходом от статического нагружения к ударному уровень твер-
дости материала возрастает, вследствие чего динамическая твердость Яд
оказывается больше статической Н. Количественной мерой возрастания
твердости, обусловленного динамичностью нагрузки, служит [7] динами-
ческий коэффициент твердости, который представляет собой отношение
~ Н
(7.9)
В работах Ф. Ф. Витмана и др. исследовано сопротивление материалов
вдавливанию конуса с углом при вершине 90° в большом диапазоне ско-
ростей удара. Применению для этой цели ударников со сферическими на-
конечниками препятствовали трудности, связанные с необходимостью
соблюдения условий подобия нагружения при ударном вдавливании.
Эти трудности, практически неопреодолимые при измерении твердости
по Бринеллю или Мейеру, полностью устраняются с переходом к пласти-
ческой твердости. Динамический коэффициент пластической твердости
определяется в соответствии с формулой (7.9) как
адд
(7.10)
В литературе имеются систематические сведения [7] о значениях
Чад только для случая внедрения сферического индентора D = 10 мм в
плоскость. Разнообразие реальных случаев контакта, встречающихся в
технике, требует изучения этого вопроса применительно к общему случаю
упругопластического контакта тел произвольной формы и кривизны.
175
Представим пластическую твердость при статическом и ударном на-
гружениях как
НД = —-— tgi и НДЛ = —— tgyH. (7.11)
я-Dnp я"пр
где дополнительно у и ?д — углы наклона прямых P(h) и 7д(Лд) к осям
h и Лд (см. рис. 8 и 55). Тогда динамический коэффициент твердости
_ *8Тд
(7.12)
В табл. 44 и 45 содержатся данные о значениях Чад, вычисленных по
формуле (7.12); расчеты выполнены на базе экспериментально построен-
ных линий Р(Л) и Т'д(Лд), аналогичных показанным на рис. 8 и 55. По
крайней мере в пределах точности опыта динамические коэффициенты
твердости не зависят от радиуса сферического индентора, внедряемого в
плоскую поверхность, или от приведенного диаметра несферических тел
двоякой кривизны.
В обоих случаях характер зависимости т]Нд от скорости соударе-
ния аналогичен описанному в работе [7]: динамические коэффициенты
твердости стали больше единицы, причем для всех сочетаний кривизн
контактирующих тел их значения тем выше, чем мягче сталь. Это значит,
что с переходом от статического нагружения к ударному относительная
разница в уровнях твердости испытуемых сталей уменьшается, т.е. проис-
ходит сближение твердости мягких и твердых сталей. Последнее особен-
но заметно при больших из исследованных скоростей удара. Так, если от-
ношение статических чисел твердости сталей ЗОХГСА (ЯД 4710) и армко-
железа (НД 1180) составляет 4,0, то при ударном нагружении с начальной
скоростью v0 = 5 м/с это отношение снижается до 2,9 (см. табл. 44).
Динамические коэффициенты твердости 7?НД
при внедрении сферического индентора в плоскую
поверхность контртела
Таблица 44
Материал Скорость соударе- ния vo, м/с ЪНД при испытаниях шариком диаметром D, мм Среднее значение <ЧВД>ср
5,0 10,0 16,0 22,1
Армко-железо, 2 1,43 1,17 1,45
НД 1180 3 1,60 1,64 1,62
4 1,73 1,75 1,74
5 1,85 1,79 1,82
176
Продолжение табл. 44
’ Материал Скорость со ударе- ния,Vo, м/с т?дд при испытаниях шариком диаметром £), мм Среднее значение <чад>ср
5,0 10,0 16,0 22,1
Сгаль20, 1 - 1,20 - 1,24 1,22 ЯД1440 2 1,42 1,41 1,40 1,38 1,40 3 1,52 1,54 1,51 1,56 1,53 4 1,65 1,62 1,66 1,64 1,64 5 1,71 1,73 1,76 1,73 1,73 10 - 1,95 - - 1,95 1 - 1,16 - 1,20 1,18 Сталь 45Х, 2 1,27 1,30 1,26 1,28 1,28 УЗД 2530 3 1,38 1,36 1,35 1,40 1,37 4 1,47 1,43 1,46 1,44 1,45 5 1,53 1,53 1,50 1,53 1,52 10 - 1,80 - - 1,80
1 - 1,08 - 1,11 1,10 •Сталь ЗОХГСА, 2 1,16 1,21 1,16 1,20 1,18 ад 4710 3 1,24 1,25 1,22 1,22 1,23 4 1,30 1,28 1,33 1,30 1,30 5 1,34 1,32 1,36 1,32 1,33 10 - 1,50 - - 1,50 Алюминиевый 2 1,05 1,08 1,04 - 1,06 сплав АМг-6, 4 1,10 1,11 1,08 - 1,10 ОД 900 ЛатуньЛбЗ, 2 1,15 1,12 1,15 - 1,14 ад1390 4 1,25 1,23 1,20 - 1,23
Примечание. Значения тщд найдены как средние арифметические из 8-10
опытов.
Таблица 45
Динамические коэффициенты твердости
для различных сочетаний кривизн
поверхностей контактирующих тел
Материал Скорость соударения V0, м/с ^НД для схем контакта, показанных на рис. 7
а б в г д е
1 1,25 — 1,20 1,27 —
2 1,41 1,37 1,38 1,43 1,44 1,40
Сталь 20, 3 1,54 1,52 1,56 1,57 1,57 1,52
ОД 1440 4 1,67 1,65 1,62 1,64 1,65 1,63
5 1,76 1,77 1,71 1,73 1,72 1,71
10 — 2,05 - 2,0 — —
177
Продолжение табл. 45
Материал Скорость соударения v0, м/с ^ЯЛ для схем контакта, показанных на рис. 7
а б в г д е
1 — 1,20 1,14 1,15 —
2 1,30 1,25 1,24 1,29 1,26 1,31
Сталь 45Х, 3 1,39 1,36 1,35 1,42 1,37 1,40
ЯД 2530 4 1,45 1,48 1,42 1,50 1,44 1,48
5 1,50 1,56 1,52 1,55 1,51 1,53
10 — 1,75 — 1,80 — —
1 — 1,07 1,12 1,07
Сталь 30ХГСА, 2 1,15 1,18 1,16 1,20 1,19 1,14
ЯД4710 3 1,24 1,23 1,21 1,26 1,27 1,22
4 1,28 1,31 1,27 1,33 1,31 1,28
5 1,34 1,38 1,33 1,36 1,33 1,31
10 — 1,50 — 1,45 — —
Алюминиевый 2 1,02 — 1,05 1,07 — 1,05
сплав АМг-6, ЯД 900 4 1,07 — 1,09 1.11 1,08
Латунь Л63, 2 1,10 1,16 — 1,16 — 1,15
ЯД 1390 4 1,22 • 1,20 1,25 1,20
Примечание. Значения найдены как средние арифметические из 8-10
опытов.
С увеличением v0 динамический коэффициент твердости монотонно
возрастает, а интенсивность этого роста постепенно затухает. Процесс за-
тухания начинается при тем меньших скоростях соударения, чем тверже
сталь.
Для различных схем контакта значения г]дд одних и тех же материа-
лов при одинаковой скорости v0 в пределах погрешностей опыта (до 5—
8 %) совпадают, и, следовательно, величины не зависят от формы и
кривизны поверхностей контактирующих тел. В связи с этим становится
очевидным, что при описании закономерностей контактного соударения
тел, ограниченных в общем случае поверхностями произвольной формы
и кривизны, могут быть использованы динамические значения твердости
НД^, найденные с помощью сферических инденторов любого диаметра, в
том числе и равного 10 мм.
Для аналитического описания функциональной зависимости ^нд (v0,
НД) использовали метод, предложенный в работе [7]. В этом методе вмес-
то начальной скорости соударения v0 введена в рассмотрение величина
’’приведенной” скорости удара
НДГ
vn = vo----
п
178
7г
Рис. 56. Зависимость динамического коэф-
фициента твердости сталей от приведенной
скорости соударения:
а-е — схемы контакта тел двоякой кривиз-
ны согласно рис. 7; остальные точки - кон-
такт сферических инденторов с плоской по-
верхностью образцов; 1-6 - стали марок
20 (НД 1440), 45Х (НД 2530), 30ХГСА
(НД 4710), армко-железо (НД 1170), 45
(ЯД 2110) иЗОХГСА (ЯД 4170)
которая однозначно характеризует
= скоростной режим ударного нагруже-
ния различных по твердости материа-
лов
"нД
эталонного с твердостью
| НД1 и произвольного с твердостью
|ДД/. В качестве ’’эталонного” мате-
| риала нами была принята сталь 20
[ («Д1440).
На рис. 56 для ряда сталей дан
г График функции г]Нд (vn), который
j по своему характеру аналогичен опи-
Уп^/с
? санному в работе [7] для контакта сферы с плоской плитой. С достаток
ной для практики точностью скоростная зависимость динамического ко-
г эффициента твердости как для случая контакта сферы с плоскостью,
так и для тел произвольной формы и кривизны описывается единым гра-
фиком функции Т1НД (Vn).
’ В результате математической обработки график рис. 56 был аппрок-
| симирован следующей функцией (при ДД в МПа):
&
f'V •
(’К4-,
г ш
„ 137v0
^НД -0,5(1 - ——
нд
2250vo
~нд >
(7.13)
w-
р
справедливой по крайней мере при скоростях соударения К vn < 10 м/с
Оюзднее было показано, что при v0 < 3 м/с эта зависимость справедлива
также для титанового сплава ВТ6). Это выражение с учетом формулы
Х^1?°3-В0ЛЯеТ ВЬ1™СВЯТЬ Динамическую твердость НД сталей по их
статической твердости НД и начальной скорости удара v0:
в
$
(7.14)
лу”5
Ы-1
о,-
от,
ь.
179
7.4. ДИНАМИКА СОУДАРЕНИЯ ТЕЛ ДВОЯКОЙ КРИВИЗНЫ
ПРИ НАЛИЧИИ МЕСТНОЙ ПЛАСТИЧЕСКОЙ
ДЕФОРМАЦИИ В ЗОНЕ КОНТАКТА
Расчет основных параметров соударения. Излагаемое решение предс-
тавляет собой развитие метода расчета чисто упругого контактного удара
[33] и распространяет его на случай, когда в зоне контакта возникает
местная пластическая деформация.
Задачу соударения индентора с криволинейной в зоне контакта по-
верхностью тела, установленного на массивном основании, рассматриваем
как чисто контактную, в которой общие перемещения ударяемой системы
во внимание не принимаются. Обоснованность такого подхода подтверж-
дена осциллографированием процесса удара, выполненным Г. В. Гурье-
вым (1967 г.). Этот эксперимент показал, что процесс роста и спада силы
удара в области контакта полностью завершается задолго до появления
общих перемещений достаточно массивной опоры.
Итак, пусть соударение индентора и массивного контртела, ограничен-
ных регулярными гладкими поверхностями двоякой кривизны (в част-
ных случаях — сферическими или сферической и плоской) с приведенным
радиусом 7?пр — осуществляется в соответствии со схемой, пока-
занной на рис. 51. В некоторый момент времени освобожденный от за-
крепления груз G, обладая скоростью V!, приходит в соприкосновение с
бойком, и с этого момента груз и боек с запрессованным в него инденто-
ром общей массой mt приобретают общую скорость v, начальное значение
которой v0 определяется зависимостью (7.1).
В течение активного периода соударения та индентор внедряется в по-
верхность контртела, масса которого равна т2. Так как по условию зада-
чи шарик деформируется чисто упруго, то сближение центров масс mi и
т2 в произвольный момент времени 0 < т < та, обусловленное только
местной (т.е. контактной) деформацией тел, равно
а = И+ау, (7-15)
где h — остаточное смещение центра площадки контакта в произвольный
момент времени т (процесс внедрения начинается при т = 0 и завершается
при т = т0); «у — часть сближения, обусловленная только обратимой мест-
ной упругой деформацией шарика и контртела.
Уравнение движения центров масс соударяющихся тел имеет вид
d2a 1
— =----------Р(«), (7.16)
dr tn
mitn2
где т = -------- — приведенная масса тел, участвующих в соударении;
т 1 + т2
Р - текущее значение силы удара, возрастающее непрерывно от нуля до
Рд в течение периода 0 < т < та; при этом соответственно 0 < а < ат ах.
180
Здесь рассматривается уточненное решение (аналогичное полученному
ранее автором совместно с Г. В. Гурьевым) задача о соударении индентора
с контртелом, масса которого т2 > т^. Для этого случая т = mY - сум-
марная масса падающего груза и оправки с запрессованным в нее инденто-
ром (см. рис. 53), условно сосредоточенная в некоторой точке оси бойка.
Таким образом
Go + Gj
m = ---------,
где Go и Gi — сила тяжести падающего груза и бойка.
После интегрирования из уравнения (7.16) находим
1 da „ v2 1 а
7 = V------X + cv, (7.17)
2 ат 2 т о
где v - переменная скорость сближения центра масс соударяющихся тел,
обусловленного только контактной деформацией (общими деформация-
ми соударяющихся тел по-прежнему пренебрегаем).
Из условия, что при т = 0 а = 0 и v = v0, следует, что постоянная
cv = v§/2 и
da . „ 2 “
(—) =v§---------fP[a)da, (7.18)
ат т о
отсюда
da
dr
1. 2 а
М--------f P(pi)da.
т о
(7-19)
Разделяя переменные и интегрируя, найдем продолжительность актив-
ной деформации
0 Л 2 а
Vv0 - —/ P(a)da
т о
Как известно [33, 40], при чисто упругом контактном соударении тел
сближение а связано с мгновенным значением силы удара зависимостью
Герца:
Р(а)~Ьмс?'\ (7.21)
где Ьм -^постоянная, зависящая от радиусов кривизны поверхностей и
упругих свойств материалов соударяющихся тел.
Очевидно, что с возникновением местной пластической деформации
указанная зависимость нарушается. Вследствие этого для рассматривае-
мого общего случая примем соотношение
P(a) = fcMa"M, (7.22)
181
которое по своей структуре аналогично формуле (7.21), но отличается от
нее смыслом и значениями коэффициента Лм и показателя лм.
При этом предполагается, что на протяжении всего периода та постоян-
ные ftM и лм остаются неизменными.
Таким образом, при упругопластическом контактном ударе
а Ьм-а”м+>
JP(a)da = ------
о «м+ 1
и согласно (7.20)
“max
Та= f
О
(7.23)
da
(7-24)
2 Ьм“"м+1
Vo ------------—
m nM+ 1
В момент наибольшего местного сжатия а = amax, dafdr = 0. Поэто-
му из уравнений (7.18) и (7.22) получаем
“max и„
J a Mda,
о
_ 2 “max 2ЬМ
Vo = — f P(a)da = ----
то т
(7.25)
а после интегрирования
rmv0, ,«M+1
amax = [ —(И+ 1)]
2йм
Если обозначить^ = a/amax> то выражение (7.24) примет вид
Т, . “max
’а=7(им)-----
vo
(7.26)
(7.27)
где
1 dy
—р==
0 X«м+1
(7.28)
Г- г(-----------V
У”м Им + 1
"м+ 1 т./ 1 1 ч
«м + 1 2
В интервале реальных расчетных значений 1,0 < им < 1,5 график функ-
ции J («м) близок к линейному и с погрешностью менее 1 % аппроксими-
руется зависимостью
J(nM)«l,77 - 0,2им, (7.29)
полученной с использованием табличных значений гамма-функции Г (им).
182
Учитывая (7.22) и (7.26),находим
1
г, т Ям + 1 1-ЛМч 1+”м
Га=Лям)(т----------v0 м) ;
Ом 2
1 ям
mvri п.. |+"м
^д=[-уЧлМ+ 1)*мМ]
(7.30)
(7-31)
В соответствии же с выражениями (7.8) определяется также макси-
мальное остаточное сближение в контакте или глубина восстановленной
вмятины 1 им
. рд-ро, д Рд ™v0 ."м 1 + ям I <ям + 1)*мМ1 2
^пр^Дд ^Пр^^Д • ( / ) яРпрЯДд
Разность
ау, max- amax (7.33)
представляет собой максимальное упругое сближение в контакте, исчезаю-
щее в процессе разгрузки.
Из выражения (7.32) следует
---- "м
*мм+1 O1V0 1 + лм
ДДд = “tHt («м + D1 (7-34)
^прЛд 2
i Последнее выражение описывает функциональную зависимость плас-
тической твердости материала при ударе от определяющих параметров:
Приведенной массы соударяющихся тел т, начальной скорости удара v0,
приведенного диаметра Рпр, а также упругих свойств материалов контак-
тирующих тел, поскольку (как показано ниже) постоянная Ьм и показа-
тель им зависят от упругих констант Е и д.
Таким образом, значение твердости при ударе определяется не только
уровнем ударной диаграммы упрочнения, т.е. сопротивлением материала
пластическому деформированию, но и упругими свойствами материала
(Е, (1). Такая мысль в виде предположения высказана в работе К. Мока
и Дж. Даффи (1966 г.), однако там же указано, что характер влияния мо-
дуля Е не ясен. Формула (7.34) позволяет в сочетании с зависимостями
(7.37), служащими для определения постоянных Ьм и им, количественно
оценить зто влияние.
183
В выражениях (7.26), (7.30) — (7.32) и (7.34) остаются неизвестны-
ми параметры Ьм и пм. Однако соотношения, приведенные в гл. 3, позво-
ляют определить их расчетным путем. В самом деле, логарифмируя выра-
жение (7.22), получим
W) = lgftM + nMlga. (7.35)
В конце активной стадии удара Р(а) = Рд> а = атах = йд + ау> тах;
поэтому
Wд = lg*M + «1ё(Ад + «у, max). (7-36)
где «у max определяется по формуле (7.33), а Лд — по формуле (7.32).
Чтобы установить вид функциональных зависимостей пм (НД, Dap)
и Ьм (НД, £>пр), задаются двумя произвольными нагрузками Рд> i и Рд . 2
ддя различных уровней твердости НДа и значений £>пр, вычисляют отве-
чающие им величины атах, а затем находят
Рп, 2 ж. Рд. 1 РД.2 -ЛА
Им =----------- > »м - -------- - --------- (7.37)
“max, 1 «м пм
1g------- “max, 1 “max, 2
“max,2
Из приведенного анализа видно, что коэффициент Ьм и показатель
степени им зависят от диаметра индентора (хотя для величины пм зта
зависимость проявляется слабо) и являются функциями упругих свойств
материалов индентора и контртела, а также твердости последнего. С уве-
личением твердости значения Ьм и им непрерывно возрастают. В пре-
деле, для чисто упругого контакта, им = 3/2, что соответствует решению
Г. Герца.
На рис. 57 показаны графики функции им (НД) и Ьм (НД) для кон-
такта стального индентора со стальным контртелом (Et = Е2 = 1,96Х
ХЮ® МПа, = д2 ~ 0,3). Для £>пр = 2,5-НО мм зти графики хорошо
аппроксимируются выражениями:
Ьм = 2,ЗЗЯД(£>пр + 1), Н/мм"м; (7.38)
им = 0,44 6НД°11 (£>пр + 2) °’028, (7.39)
где диаметр Dnp — в мм, а НД — в МПа.
Поскольку Е и ц не зависят от скорости нагружения, то последние
зависимости в равной мере относятся как к ударному, так и к статичес-
кому нагружению. В первом случае Ьм и им определяют по НДа, во вто-
ром — по НД.
Вычислив коэффициенты Ьм и пм по формулам (7.37) или (7.38) и
(7.39), можно из зависимостей (7.26), (7.30) — (7.33) чисто расчетным
путем определить максимальную силу удара Рд, максимальные полное
184
Рис. 57. Зависимость показателя степени пм и коэффициента Ъм от твердости мате-
риала коитртела (материал шарика и коитртела - сталь) :
1—3 — и 4—6 - значения fcM и пм при D = 2,5; 5,0 и 10 мм
Рис. 58. Сила удара Рд в зависимости от статической твердости стали:
D = 10 мм; т = 2,2 кг; 1-3 - скорость соударения v0 = 1,5; 3,0 и 4,5 м/с соот-
ветственно
(ашах), остаточное (йд) и упругое (ау тах) сближения в контакте, а
также продолжительность активной стадии соударения та, отвечающие
определенным значениям массы т ударяющего тела, приведенного диа-
метра £>Пр, начальной скорости соударения v0 и твердости НД материала
контртела.
Расчетные и экспериментальные значения параметров соударения
практически совпадают (табл. 46 и 47), подтверждая надежность приве-
денных формул.
При анализе зависимостей (7.26), (7.30) и (7.31) можно заметить не-
которые интересные закономерности. Так, при данной кинематической
энергии ударяющего груза в момент соударения сила удара тем больше,
чем выше твердость материала контртела (рис. 58), т.е. здесь проявляется
аналогия с характером влияния модуля Юнга при чисто упругом ударе.
Если варьировать массу т и начальную скорость удара v0 так, чтобы кине-
тическая энергия индентора оставалась неизменной, то (по крайней мере
для v0 < 5 м/с) сила удара будет возрастать с увеличением скорости со-
ударения (табл. 48). Это значит, что относительная роль приведенной мас-
сы индентора и квадрата начальной скорости v? в формировании силы уда-
185
186
Расчетные и опытные значения параметров упругопластического
контакта прн соударении тел произвольной кривизны
Та б л и ц а 46
Схема кон- такта по рнс. 7 Мате- риал контр- тела VQ> м/с W1, кг Расчет Опыт
'д. кН та-106, С “max Ад 2д 26 да Та-Ю6, С АД 2а 2Ь
ММ мм
2 0,44 8,6 170 0,212 0,164 2,72 2,23 7,9 190 0,155 2,68 2,21 1 4 130 33,8 255 0,652 0,548 4,78 4,07 32,4 270 0,530 4,70 4,10 а II 3 0,26 12,3 110 0,208 0,135 2,61 2,14 11,3 120 0,130 238 2,13 III 5 0,76 45,6 140 0,460 0,275 3,80 3,16 44,2 150 0,280 3,75 3,20 , 2 130 16,7 255 0,331 0,263 4,85 2,38 15,7 260 0,252 4,80 2,34 1 5 0,44 26,7 135 0,438 0,343 5,55 2,71 273 130 0,352 5,65 2,70 б II 4 0,76 32,8 155 0,406 0,282 5,22 236 31,4 160 0,275 5,18 230 III 3 1,30 37,0 180 0,355 0,198 4,69 2,32 37,3 180 0,200 4,78 2,32 . 2 2,22 27,2 270 0,348 0,262 935 2,18 28,5 260 0,270 9,65 2,23 1 4 0,26 19,4 90 0,236 0,160 7,70 1,77 18,6 100 0,155 7,60 1,76 в II 5 0,44 38,0 100 0,321 0,188 8,73 2,00 37,3 100 0,185 8,75 2,02 III 3 1,03 38,8 135 0,272 0,120 7,66 1,76 39,2 140 0,117 735 1,74 . 3 1,03 273 185 0,363 0,273 5,01 33 2 273 190 0,280 5,15 3 30 1 4 0,76 32,4 155 0,400 0,300 5,28 3,70 30,4 170 0,296 5,35 3,65 г II 2 2,22 29,9 245 0,320 0,213 4,60 3,24 28,4 260 0,194 437 3,17 III 5 0,44 42,2 90 0,300 0,132 4,15 2,93 40,2 100 0,135 4,20 2,90
] 4 0,44 28,9 100 0,262 0,170 4,42 4,14 30,4 90 0,185 4,45 4,20
5 0,76 503 125 0,408 0,283 5,45 5,23 48,1 130 0,275 5,35 5,20
о II 5 0,26 32,4 70 0,228 0,112 3,96 3,68 33,4 70 0,117 3,95 3,73
III 3 0,76 35,8 ПО 0,215 0,074 3,68 3,37 38,3 100 0,076 3,70 3,40
I 3 0,75 16,2 225 0,445 0,375 3,60 2,44 15,7 230 0,370 3,55 230
5 0,43 21,1 165 0,520 0,435 3,80 2,63 19,6 180 0,415 3,70 235
е П 2 1,02 14,2 230 0,306 0,228 3,04 2,00 13,7 240 0,225 3,05 2,00
Ш 4 0,75 31,4 160 0,415 0,263 3,38 2,24 30,4 170 0,255 3,33 2,22
Примечания.1. Материалы контртел: I -< сталь 20 (НД 1440); II - сталь 45Х (НД 2530): III - сталь ЗОХГСА 166747101.
z. экспериментальные значения/д, та, йд. . 2д и 2Ь найдены как средние арифметические из пяти измерений.
Расчетные н опытные значения параметров упругопластического
контакта при соударении сферических инденторов
с плоскими поверхностями коитртел
D, мм Материал контртел . v0, м/с т, кг Расчет Опыт
кй rff-106, “max АД dn КЙ Tff-106, ЛД da
ММ С м м
I 3 0,75 13,6 . 265 0316 0,452 2,98 14,0 260 0,465 3,05
11 2 1,02 10,8 305 0,393 0,337 2,62 10,5 310 0,330 2,66
5 III 5 0,43 23,5 105 0,496 0,384 2,87 223 160 0,375 2,84
IV 4 0,43 21,9 135 0,352 0,225 2,36 21,5 150 0,220 2,33
Продолжение табл. 47
188
ра различна. Последнее обусловлено тем, что динамическая твердость, а
следовательно, и параметры им и Ьм не зависят от массы т, но возраста-
ют с увеличением v0. В то же время видно, что отмеченный рост силы уда-
ра при переходе от v0 = 0,5 м/с к v0 = 5 м/с (т.е. с ростом начальной ско-
рости удара в 10 раз) при wvq = const даже для самой мягкой стали сос-
тавляет всего 19 %. Наибольшее сближение атах изменяется в противопо-
ложном (по сравнению с Рд) направлении, однако при тех же условиях
это изменение не превышает 14 %.
Очевидно, что по мере сближения статической и динамической твер-
дости (что наблюдается с ростом твердости НД) относительное влияние
массы сферы и начальной скорости удара также выравнивается, а величи-
ны Рд и атах постепенно становятся однозначными функциями кинети-
ческой энергии бойка.
Как видно на рис. 57, показатель степени им для НД 1000—6000 со-
держится в узких пределах 1,04 < им < 1,24; при этом интеграл 7(им),
определяемый выражением (7.28), изменяется незначительно и равен
[см. формулу (7.29)] 1,52 </(им) < 1,56. Если принять в расчет среднее
значение Дпм) «= 1,54, то получим следующую простую формулу для та:
, “max Ta ~ 1,54 vo - (7-40)
Изменение силы удара и наибольшего сближения при соударении сферического индентора диаметром D - 10 мм с коитртелом mvo ( const = 0,75 Дж; m и v0 - var) 2 Таблица 48
vo. м/с m, ЯДд, МПа «м ЙМЮЛ “max. & а max, 5 Pn,S
кг Н/мм"м ММ Qmax, Q5 РД, 0,5
0,5 5,0 6,0 0,06 1380 2160 1,06 1,12 Армко-железо, НД 1180 39,6 0,207 7,45 61,1 0,179 8,90 0,86 1.19
0,5 5,0 6,0 0,06 1650 2520 1,08 1,13 Сталь 20, 47,1 68,5 НД 1440 0,194 0,171 8,05 9,35 0,88 1.16
0,5 ' 5,0 6,0 0,06 2750 3870 1,15 1,19 Сталь 45Х, НД 2530 76,0 0,167 9,70 101,3 0,152 10,80 0,91 1,11
0,5 5,0 6,0 0,06 4940 6350 1,21 1,25 Сталь 30ХГСА, НД 4710 121,0 0,144 11,55 146,0 0,138 12,25 0,96 1,06
189
“у, max
vo
7р = 1,47
Рис. 59. Продолжительность периода актив-
ного нагружения в зависимости от началь-
ной скорости удара для сталей разной твер-
дости:
1—4 — твердость НД^ 2940, 3920, 4900 и
5880 МПа; 5 — график tc(vq) для периода
упругой разгрузки, построенной по форму-
ле (7.41) при Et = Е2 = 210s МПа, щ =
= М2 = 0,3 и D = 10 мм
Полная продолжительность Т про-
цесса удара складывается из периода
активного нагружения та и следую-
щего за ним периода упругой разгруз-
ки Тр, определяемого решением
Г. Герца.
Для чисто упругого соударения
шаров [40] справедлива зависимость
(7-41)
которая по своей структуре совершенно аналогична формуле (7.40).
Это значит, что появление локальной пластической деформации в зо-
не контакта существенно не изменяет характер зависимости та(у0), отно-
сящейся к чисто упругому соударению. Это положение наглядно иллюст-
рируется графиками (рис. 59), построенными по формулам (7.40) и
(7.41) ддя сталей разной твердости при наличии местной пластической де-
формации (кривые 1-4) и при чисто упругом соударении с плоской по-
верхностью массивной стальной плиты (кривая 5). Из рис. 59 видно, что
уменьшение активного периода соударения, с ростом начальной скорости
удара является общей закономерностью, которая проявляется не только
при чисто упругом ударе, но и при наличии контактной пластической де-
формации. Продолжительность удара тем больше, чем мягче сталь.
Итак, с учетом соотношений (7.40) и (7.41) находим
Т—т0+Тр— [1,54атах+ 1,47<Ту тах], (7.42)
v0
гдеатах иау, max определяются формулами (7.26) и (7.33).
Дифференциальные зависимости. Имея в виду соотношения (7.22)
и (3.39), преобразуем зависимость (7.15) к виду
*_(_л- ум ‘ (7.43)
йм 8 Рпр(1 + 2й/ау)
Тогда после дифференцирования последнего уравнения и некоторых
преобразований получим
190
dP _ Рпм(а + 3h)___________
dh (й + За)а-2лм(а2-Й2) (7.44)
В соответствии с рекомендацией [16] представим зависимость Р(т)
в форме
Р = sin"M( у 7) (7.45)
(где Р = Р1Рр_, т = т/та), которая хорошо подтверждается экспериментами.
При этом выражение (7.44) преобразуется к виду
пм(а + 3/i)/lnsin"M(—т )
dP 2
— = --------------------?--Г~ > (7-46)
dh (Л + За)а - 2лм(а2 - Л2)
где дополнительно h = h/ha.
Обозначив а = а/атах, из выражений (7.22) и (7.45) получим
=лмй”м-1 = nMsin"M-1(y7). (7.47)
dot 2
Представим скорость остаточного внедрения индентора выражением
dh dP dh
1 Тогда с учетом (7.46) и найденной в результате дифференцирования i (7.45) зависимости
dP dr [ получим . п = sin 2 м(у T)ctg(y т) (7.49)
ж (й + За)а - 2им(ог2 -h2)ctg(—т) •
dh 7Г 7
= (7-50)
2 (а + 3/1 )йд
Интегрируя уравнения (7.46) и (7.50), можно установить вид функ-
ций Р(й) и Л(т).
Дифференциальные зависимости (7.46) — (7.50) описывают динами-
Ej ку процесса упругопластического контактного удара; их графики предс-
Е,- тавлены на рис. 60. При упругопластической контактной деформации и
принятой степенной зависимости Р(«) контактная нагрузка, полное сбли-
Жение тел и остаточное смещение центра вмятины (соответственно кривые
Е. 1, 2 и 4) монотонно возрастают в течение всего периода та активного де-
Кд формирования. Очевидно, что количественные значения этих функций
191
Рис. 60. Изменение параметров упругопластического контакта тел (Rnp = 7,1 мм,
____________________________________________________________— dli -.
НД 1440; v0 = 4 м/с; m = 1,3 кг); 1-9 - соответственно Р(т), а(т), v(t), Н(т), —- (т),
dP
d(h)’
dP -
Р(Н), О!у(т), — (т)
da
Рис. 61. Сравнение экспериментальных (кривые) и расчетных (точки) графиков
ударного процесса:
а — соударение двух цилиндров (Dj = 5 мм и = 20 мм) со скрещивающимися
под прямым углом осями (НД 4710, vo = 2 м/с, т = 1,03 кг); б — соударение торои-
дального ролика (£)р = 20 мм, г = 5 мм) с плоскостью (НД 1440, v0 = 4 м/с,
т = 1,3 кг)
определяются в каждом случае коэффициентами им и Ьм, а следователь-
но, диаметром Z>np, упругими свойствами и твердостью материалов (д,
Е и НД) и начальной скоростью удара v0. Различие в характере указан-
ных зависимостей отчетливо видно из приведенных на рис. 60 графиков
производных: если скорость полного сближения (кривая 5) непрерывно
снижается до момента остановки индентора (г = та), подчиняясь в первом
приближении косинусоидальному закону, то скорость остаточного внедре-
ния индентора (кривая 5) вначале резко возрастает и, достигнув макси-
мального значения, плавно снижается.
Такой ход графика зависимости (7.50) объясняется тем, что на на-
чальной стадии внедрения индентора в зоне контакта преобладает упругая
деформация (ау > Л), доля которой в полном сближении контактирую-
щих тел в дальнейшем резко уменьшается (кривые 8 и 4). Так (см.
192
рис._60), если при т = 0, 025 h = 0,1а, то уже при т = 0,5 h = 0 76а а
при т = 1 h = ha = 0,78amax.
Видно также, что производная —=- (Л) практически не зависит .от h
dh
и, следовательно, отражает приблизительно линейную зависимость Р(й).
Этот результат совпадает с описанными выше экспериментальными дан-
ными. С учетом выражения (7.48) и постоянства производной макси-
dh
dh
мум функции — может быть найден из условия
dr
d2P
“ГТ =0.
dr2
Отсюда определяется момент времени, соответствующий наибольшей ско-
рости остаточного внедрения индентора:
“* 2 1
т * = — arccos----
(7.51)
Таким образом, основные параметры динамики упругопластического
контакта тел двоякой кривизны могут быть определены расчетным пу-
тем. Для этого, кроме величин, используемых в расчетах чисто упругого
контакта, требуется знать дополнительно только пластическую твердость
НДа материала при ударе или ее значение НД при статическом нагружении
и динамический коэффициент "Пцд-
Достоверность изложенного аналитического решения подтверждена
экспериментальной проверкой. Расчетные кривые, построенные по фор-
муле (7.45) с учетом соотношений (7.26), (7.30), (7.31), (7.39) и (7.40)
сопоставили (рис. 61) с осциллограммами ударных импульсов. Экспери-
ментальные графики функций Р(т) весьма близки к расчетным.
Существенно, что это совпадение наблюдается для всей активной ста-
дии соударения, т.е. во всем временном интервале 0 < т <та. Это значит,
что коэффициенты Ьм и «м, вычисленные по описанному выше методу
(см. с 184) и использованные для расчета Рд и атах (применяемых при
определении ДДд), сохраняют свои значения во всем указанном интерва-
ле. Однако очевидно, что в этом случае должна соблюдаться линейная за-
висимость между текущими значениями контактной нагрузки Р и отве-
чающими им остаточными смещениями h центра вмятины (поскольку,
исходя из этого условия, вычисляются значения Ьм и им). Это положение
проверено путем двукратного численного интегрирования осциллограмм
ударного импульса, т.е. экспериментальных кривых ускорения при ударе.
В результате получили графики зависимостей а(т) для различных теку-
7-395 193
щих значений Р. Затем вычисляли остаточную глубину по формуле (7.15):
h = а - ау,
в которой текущее значение обратимой упругой составляющей ау полного
сближения рассчитывали по уравнению (3.39). Линейная зависимость
Р(й) во всем интервале 0 < т < та подтвердилась с большой точностью.
7.5. ПРИБЛИЖЕННЫЕ РАСЧЕТНЫЕ ЗАВИСИМОСТИ
Приведенные выше формулы можно существенно упростить, учиты-
вая, что показатель степени им для сталей различной твердости близок к
единице и слабо зависит от диаметра сферы (пуансона).
Приняв им = 1, из выражений (7.26), (7.31) и (7.40) получим соот-
ветственно:
vox/whM;
га-1,54^,
(7.52)
(7-53)
(7-54)
где в общем случае постоянная Ьм определяется по формуле (7.37) при
им = 1, а для стали (£>пр = 2,5-НО мм) — по формуле (7.38) при-ВД =
= ДДд.
Расчеты показывают, что в наиболее неблагоприятных случаях макси-
мальная ошибка, вносимая введенными упрощениями, не превышает
15 %. Это позволяет использовать простые формулы (7.52) — (7.54) для
приближенной оценки основных параметров соударения, а также величи-
ны динамической твердости.
7.6. ПРОГНОЗИРОВАНИЕ ПОЛУОСЕЙ КОНТУРА
ОСТАТОЧНОЙ ВМЯТИНЫ
Установленные выше закономерности позволяют определять расчет-
ным путем размеры полуосей контура остаточной вмятины, образующей-
ся на поверхности контртела двоякой кривизны при его соударении с
индентором, для чего непосредственно используются расчетные зависи-
мости (3.33), (3.34). Единственное дополнительное условие, которое при
этом должно быть соблюдено, состоит в том, что во всех случаях, относя-
щихся к ударному взаимодействию тел, следует вместо пластической
твердости материала НД принимать в расчет ее значение НДЛ = цдд.НД
194
при ударном нагружении. Последняя, как было показано, зависит от уп-
ругих свойств материалов соударяющихся тел, а тйкже от скорости соуда-
рения и благодаря этому учитывается влияние указанных факторов также
на размеры остаточной контактной площадки при соударении.
Величины полуосей остаточной вмятины, вычисленные по формулам
(3.33) и (3.34), хорошо согласуются с непосредственно измеренными в'
эксперименте, о чем свидетельствуют данные табл. 46 и 47. Таким обра-
зом, введение в обиход понятия ударной пластической твердости 7ЗДД
позволяет прогнозировать чисто расчетным путем как динамические, так
и геометрические параметры, характеризующие процессы соударения тел
и формирования остаточной вмятины.
7.7. СОВЕРШЕНСТВОВАНИЕ МЕТОДОВ ИЗМЕРЕНИЯ ТВЕРДОСТИ
СТАЛИ ПРИБОРАМИ УДАРНОГО ДЕЙСТВИЯ
Применение ударных нагрузок при обычных измерениях твердости це-
лесообразно только в переносных приборах, для которых существенными
являются следующие качества: малые габариты и масса; отсутствие необ-
ходимости в закреплении на исследуемом объекте; способность выпол-
нять свои функции при любом положении в пространстве.
Именно благодаря указанным качествам приборы ударного действия
служат основным техническим средством оперативного контроля твердос-
ти металла в условиях производства, монтажа и эксплуатации конструк-
ций и оборудования.
Динамические твердомеры с эталонными брусками. В отечественной
промышленности широко применяются разработанные в Волгоградском
политехниче.ском институте (ВПИ) приборы типа ВПИ-1 и ВПИ-2 со сфе-
рическим индентором (шариком) (рис. 62). В этих приборах совмещены
принцип измерения твердости, присущий известному прибору Польди-
Хютте, и способ нанесения удара по бойку, характерный для пружинного
ударника Баумана. Каждый из этих методов в отдельности имеет сущест-
венные недостатки, ограничивающие возможности их использования в
промышленности. Принципиальный недостаток метода Польди—Хютте об-
наруживается при рассмотрении соответствующей расчетной формулы, ко-
торая применительно к числам твердости НВ и НД имеет вид
D - Jd2 -d} ...
НВО = НВЭ ------7 , I ; (7.55)
D - /jD2 -di
НДО = НДЭ~~^~, (7.56)
йд,о
где НВ0 и НВЭ, НДО и НДЭ — значения твердости испытуемого объекта и
эталонного бруска; do и d3, hR< о и ^д, э — диаметры и глубины восстанов-
195
Рис. 62. Схема прибора ВПИ-1:
1 - пружинный ударник; 2 - эталон-
ный брусок
Рис. 63. Значения коэффициента К
ПНД
в зависимости от соотношения твердос-
тей эталона и испытуемого объекта
(цифры у кривых - скорости удара
Vo,м/с)
ленных отпечатков на поверхностях
испытуемого объекта и эталона; D —
диаметр шарика.
Эти формулы получены в
предположении, что соотношение
статической и динамической
твердости для испытуемого
объекта и для эталона одинако-
вы. Однако, как видно из фор-
мул (7.13) и (7.14), динамический
коэффициент т?Нд (а следовательно, и 1?нв) зависит от твердости испы-
туемого материала, и поэтому выражения (7.55) и (7.56) достоверны
только при том условии, что твердость эталона близка к твердости испы-
туемого объекта; в противном случае возникает систематическая ошибка,
величина которой (могущая достигнуть 50 %) тем больше, чем заметнее
разница между ними. На это обстоятельство в свое время обратил внима-
ние Д. Б. Гогоберидзе (1952 г.). Возможный способ учета указанного,
фактора при определении твердости НВ был впервые предложен одним из
авторов совместно с В.С. Сапрыкиным [8], а позднее ими же с участием
Ю. И. Славского [9] применен к определению твердости НД и HV с по-
’ мощью приборов ударного действия. Сущность этого способа заключается
в следующем. Согласно формуле (7.14)
дао =
нда, о . _ я^д, 3
’ ^нд, э
196
откуда
НДО = НД3
"Лд.0
ЯДд.э
ОД,э
^НД,о
Пользуясь приближенной формулой (7.6), получаем окончательно
ВДо = ВДэ-^- =НД3^-К
ha,o ^НД,о ha,o
(7.57)
Как видно, последнее выражение отличается от формулы (7.56) тем,
что оно содержит отношение динамических коэффициентов твердости
• эталона (Дид, э) и испытуемого объекта (Днд, о) • Именно благодаря это-
му устраняется основной недостаток метода Польди. С учетом зависимос-
ти (7.13) получаем следующие расчетные формулы для определения твер-
дости сталей ударниками типа Польди—Хютте с эталонными брусками:
ВДо=ВДэ
НДО=НД3
137vo / 2250vo
1 - --— + VI + ------
НД3 НДэ Л д э
-------э----- ----МПа
137v0 /2250vo Ад, о
1 - ---- + V1 + -----
НД° НД°
14vo / 230vo
1 - --- + V1 + ----
НД3_______НД3 hRt э кгс
14vo j 230vo йд> о мм2
“ НДО + ндо
(7.58)
(7-59)
Графики рис. 63 дают представление о величине погрешностей, обус-
ловленных пренебрежением разницей значений динамических коэффи-
центов ^нд, о и ^НД, э- С ростом отношения НД3(НДС коэффициент
^НД ~ з^НД, о уменьшается и проходит через значение ^-пНд —
== 1 при НД3 = НДО. Вследствие этого при НД3)НДО > 1 значения твер-
дости НДО, определенные по формуле (7.56), окажутся выше, а при
НД31ИДО < 1 — ниже действительных. По мере усиления неравенства
НД31НДО и увеличения скорости удара v0 эта разница возрастает. Как
известно, такая тенденция неизменно наблюдается на практике.
Непосредственное использование последних формул в производст-
венной практике затруднительно и поэтому нецелесообразно. Однако с
помощью ЭВМ они легко разрешаются относительно искомых значений
твердости НД0, по которым строятся номограммы или таблицы, выра-
Лд Э е»
жающие функциональную зависимость НДС (НД3, —'— , v о). Такие таб-
Ад, о
лицы для vo = 0,75-М,5 м/с и НД = 1ОО-5-ЗОО кгс/мм приведены в ГОСТ
18661—73 ’’Сталь. Измерение твердости методом ударного отпечатка”.
197
Там же содержатся аналогичные таблицы, служащие для определения
твердости по Бринеллю, а также твердости по Виккерсу методом внедре-
ния двустороннего конического индентора. <-
Отметим, что замена удара, наносимого ручным молотком, нагруже-
нием посредством пружинного ударника (что осуществлено в приборах
типа ВПИ-1 и ВПИ-2), устраняет и второй источник погрешностей методя
Польди, состоящий в нестабильности и неопределенности скорости удара
в испытаниях, выполненных различными операторами.
Описанные меры полностью устраняют основные несовершенства тра-
диционного метода Польди—Хютте и приводят к тому, что погрешности
измерений приобретают случайный характер двустороннего разброса,
свойственного динамическим методам, и не превышают, как правило,
6-8 %.
Безэталонные приборы ударного действия. Из динамических методов
определения твердости наиболее простым и производительным является
метод, предусматривающий использование приборов типа пружинного
ударника Баумана. При этом процедура измерения твердости сводится к
нанесению удара по шарику диаметром £>, устанавливаемому на испытуе-
мой поверхности, измерению глубины Лд или диаметра dn остаточного от-
печатка и отысканию значения статической твердости по тарировочным
таблице или графику, выражающим зависимость 7/2? от диаметра отпечатка.
Однако в традиционном варианте указанные таблицы или графики
строят экспериментальным путем для каждого экземпляра прибора, а
так как в процессе его эксплуатации упругая характеристика рабочей пру-
жины, а также условия тренйя подвижных частей изменяются, то экспери-
менты необходимо повторять периодически. Это весьма затруднительно и
неудобно, тем более, что прибор предназначен в основном для работы в
производственных или полевых условиях.
Очевидно, что этот недостаток метода может быть устранен путем за-
мены экспериментального построения тарировочных графиков или таблиц
расчетным построением, как это было сделано впервые О. А. Бакши,
А. Н. Моношковым и Р. А. Власовым [2,27], исследовавшими закономер-
ности динамической твердости НД^. Аналогичная задача, но применитель-
но к статической твердости была решена авторами совместно с Г. В. Гурь-
евым [А. с. 932371 (СССР) ].
В основу решения положены динамические зависимости, приведенные
выше-
Поскольку твердость закаленного шарика (индентора) HRC 60—63
значительно больше твердости испытуемого материала, не превышающей
НВ 400, то при соударении шарик деформируется чисто упруго, а на испы-
туемой плоской поверхности образуется остаточный отпечаток глубиной
йд. Максимальная сила удара Рд, возникающая при соударении, определя-
ется зависимостью (7.31), а входящие в нее постоянные Ьы и пм — форму-
198
Рис. 64. Схема пружинного ударника Баумана
лами (7.37)—(7.39). Что касается содержащихся
в формуле (7.31) величин v0 и т, то их расчет-
ные значения находили следующим образом.
При схеме прибора, приведенной на рис. 64,
процесс нанесения удара протекает следующим
образом. После освобождения предварительно
поджатой пружины 1 груз 2 начинает двигаться
и в некоторый момент времени, обладая ско-
ростью Vi, приходит в соприкосновение с бойком
3. С этого момента груз и боек с запрессованным
в него шариком 4 приобретают общую скорость,
начальное значение которой будет
1 + шг/тб
где тТ и — массы ударяющего груза 2 и
бойка 3 вместе с шариком 4 соответственно;
обозначим тг + = тх .
Под действием удара шарик внедряется в
поверхность испытуемого объекта 5, масса
которого равна т3.
Поскольку предполагается, что пружинный ударник используется
для испытания массивных объектов или мелких деталей, устанавливае-
мых на массивной подставке, то т2 нт = ------------ = тх.
т 1 + т2
Из формул (7.8) и (7.14) следует (при7)Пр =D)
Рд — Р 0 п
(7.60)
пип д
откуда окончательно
Я27=---Р-^д , (7.61)
где г1Нд и Ро д определяются соответственно выражениями (7.13) и
(7-5).
Итак, уравнение (7.61) представляет собой функцию
Р(НД, т, v0, йд, D, Ео, Еш, д0, Дш) = 0- (7-62)
Применительно к рассматриваемому случаю (Ео =ЕШ = 1,96 -105 МПа,
До — дш =0,3) число варьируемых переменных в выражении (7.62) рав-
но пяти; из них т определяется конструкцией прибора, а величина D
199
обычно выбирается заранее. В результате функция (7.62) упрощается и
приводится к уравнению вида
F(HH,^,hR) = Q, (7.63)
которое с учетом зависимостей (7.4), (7.31), (7.37) — (7.39), (7.61) ре-
шают с помощью ЭВМ относительно твердости НД испытуемого объекта.
Этим исчерпывается сформулированная выше основная задача, сос-
тоящая в получении аналитического метода построения тарировочных таб-
лиц или графиков НД (йд). В то же время наличие такой возможности
позволяет освободиться и от необходимости проведения периодической
повторной тарировки (требующей перерыва в испытаниях), потребность
в которой обусловлена вероятной флуктуацией скорости vo. Для этого по
формуле (7.61) в описанной выше последовательности заранее строят таб-
лицы (или графики) НД (hR) как для номинального, так и для несколь-
ких последовательных значений v0, меньших и больших номинального
(расчет целесообразно вести с помощью ЭВМ).
В прил. 3 приведены значения НД (hR), рассчитанные для пружинного
ударника с т = 0,6 кг и 1,8 < v0 < 2,2 м/с. Для выбора необходимой гра-
фы таблицы необходимо сделать следующее. С помощью принятого к экс-
плуатации пружинного ударника массой т наносят на поверхность любой
образцовой меры твердости (с известным значением твердости), установ-
ленной на массивной подставке, 3—5 отпечатков, измеряют их глубину
1 к
nR i и находят среднее значение hR = —ZhR ,, где к - 3-^5 — число отпе-
к 1
чатков. Затем в таблице НД (hR) отыскивают ту графу, в которой содер-
жится значение НД, отвечающее найденной глубине hR и наиболее близкое ,
к твердости НД использованной образцовой меры. Этой графой НД (hR~)
и следует пользоваться при данном состоянии прибора. Учитывая отмечен-
ную выше вероятность флуктуации v0, такую операцию (занимающую все-
го несколько минут) можно повторять периодически.
Для установления зависимости между диаметром dR остаточного
ударного отпечатка и твердостью НВ испытуемого материала необходимо
‘ прежде всего .перейти от hR к dR. Для каждого значения ЯД и йд, содержа-
щихся в прил. 3, зта операция выполняется с использованием зависимости
(1.30), в которой следует принять
Р = PR = Т1НдНД-пР)Ь + Ро д;
с/ dR. h hR.
Таким образом,
/ PnD
dR = 74ЛЙД + Д-^- , (7.64)
200
где Д = 2,70-Ю-4 мм2/кге при PR - в кге и Д = 2,75-Ю-5 мм2/Н при
Рд-вН.
Учитывая особенности динамического нагружения (в частности, спе-
цифику деформирования наплыва вокруг отпечатка), значения dR, вычис-
ленные по формуле (7.64), следует умножить на эмпирический поправоч-
ный коэффициент кэ = 1,043 - 1,3 10-5 -НД.
Переход от значений НД, содержащихся в прил. 3, к.стандартным зна-
чениям твердости НВ выполняется в порядке, подробно описанном на
с. 26. Полученные таким путем (с помощью ЭВМ) результаты сведены в
таблицу (прил. 4), выражающую функциональную зависимость НВ (da),
которой и следует пользоваться для определения твердости по Бринеллю
посредством пружинного ударника Баумана.
Выбор необходимой ’’рабочей” графы значений НВ производится так
же. как описано выше применительно к НД (см. прил. 3).
Итак, для определения твердости по предлагаемому методу достаточно
с помощью пружинного ударника произвести внедрение индентора (шари-
ка) в испытуемую поверхность, измерить глубину йд или диаметр dR
остаточного отпечатка и в выбранной ’’рабочей” графе прил. 3 или 4 найти
значения твердости НД или НВ. Реализованная в методе ’’гибкая схема”
отсчета обеспечивает получение достоверных значений твердости даже при
неизбежном изменении во времени динамических свойств пружинного
ударника. Этим и устраняется основной недостаток метода Баумана. Как
показала экспериментальная проверка, точность измерения твердости по
описанному способу имеет тот же порядок, что и для приборов, снабжен-
ных эталоном.
В заключение отметим, что безэталонный прибор типа ударника Бау-
мана предельно просто может быть трансформирован в прибор типа ВПИЛ,
снабженный эталоном; для этого достаточно заменить один свинчиваю-
щийся наконечник другим, также входящим в комплект прибора. Транс-
формация может потребоваться при необходимости определения твердос-
ти на деталях и элементах малой жесткости (подвергаемых испытанию
без массивной опоры), когда безэталонные приборы ударного действия
не применимы.
73. ПРИМЕР РАСЧЕТА
Стальной закаленный тороидальный ударник (индентор) массой т = 2 кг дви-
жется со скоростью v0 = 3 м/с по нормали к поверхности массивной плоской плиты
из титанового сплава ВТ-6 с твердостью НД 3600, модулем Юнга Е2 = 2'-105 МПа и
коэффициентом Пуассона д2 = 0,33. Главные радиусы кривизны индентора Лц =
= 25 мм и Rи = 5 мм. Требуется вычислить: силу удара Рд, полное атах. упругое
“у, max и остаточное йд сближения в контакте; полуоси а и b остаточной вмятины;
продолжительность Т процесса соударения, а также периодов активного нагружения
тв и упругой разгрузки тр.
201
Решение. 1. По формулам (7.13) и (7.14) определяем соответственно динами-
ческий коэффициент твердости материала плиты.
137-3 / 22503
Чцп = 0,5(1- ------- +V1+ ---------) = 1,29
М 3600 3600
и пластическую твердость этого материала при ударе
НДК = 1,29-3600 = 4645 МПа.
2. Вычисляем постоянные им и Ьм, входящие в формулу (7.22) :
а) поскольку согласно зависимостям (2.3) и (2.4)
11 -ill 1
А - ------ — --- - 0,02 мм , В = -------- =----= 0,10 мм
2Лц 2-25 2ЯИ 2-5
А 0,02
---------- =0,2 <0,5,
0,10
И -
В
то приведенный радиус кривизны Лпр поверхностей контактирующих тел определя-
ем по формуле (2.23), отыскав предварительно по прил. 2 для А [В = 0,2 значение
ы = 0,4331:
ы 0,4331
Rпр =----= ------- = 10,8 мм;
р 24 2-0,02
б) задаемся двумя произвольными нагрузками Лд i = 40 кН и Лд 2 = 12,5 кН
и, используя формулу (7.8), определяем отвечающие им’ значения йд> j и йд> 2:
40000
ЙП. 1 —
* 2w 10,8-4645
= 0,127 мм';
йп 2 =-------------- = 0,040 мм
2я-10,8-4645
и далее по формулам (3.23) и (2.21) при
1-0.32 ч
ki =------ = -------— = 0,145-Ю"5 МПа;
я-2-105
1-М2 1-0.332 ,
к2 =------=---------;—= 0,142-10 МПа;
я₽2 я-2-105
£к = 2(А + В) = 2(0,02 + 0,10) = 0,24 мм'1
и ng = 0,8749 (см. прил. 2) вычисляем_____________________________
0,8749 з АЛО.НЗ Ю"5 + 0,142-Ю"5)400002-0,24
(av max)i — v — 0,125 мм;
У’ 2 4(1 + 2-0,127/(ау>тах)1]________________
^9я2(0,145-Ю”5 + 0,142-Ю"5)212 5002-0,24
= 0,063 мм;
4[1+ 2-0,127/(аУ) max)il
(av гпах)2 — ▼
У’ 2 4f 1 + 2-0,040/(аУ1 тах)2]
в) находим значения полных сближений в контакте под действием нагрузок
PR, 1 иРД,2:
атах, 1 = ^д, 1 + (ау, тах)1 = 0,127 + 0,125 = 0,252 мм;
атах,2 — ^д, 2 + шах) 2 — 0,040 + 0,063 — 0,103 мм;
202
г) по формулам (7.37) определяем
40000
1g------
12500 40000 ,
пм =----------- = 1,30 и Ьм = --------— = 2,4-Ю5 Н/мм м
0,25 2 0.2521’3
1g------
0,103
3. Пользуясь зависимостями (7.26), (7.31), (7.27) и (7.32), находим соот-
ветственно:
а) полное сближение в контакте
232-103 1,3 + 1
“max — I е (1,3 + 1)] — 0,345 мм;
2-2,4-Ю5
б) силу удара
1,3
2-32-Ю3 , 13 1,3+1
Рп = [----------(1,3+ l)(2,4-105) J =60 кН;
2
в) продолжительность активной стадии соударения
0,345-10-3 ,
та= -----------(1,77 - 0,2 1,3) = 0,174-Ю-3 с;
3
г) глубину остаточной вмятины
60-103
йп =--------------- = 0,190 мм;
д 2тг-10,8-4645
д) продолжительность упругой разгрузки определяется формулой (7.41), в
которой согласно (7.33)
Оу max ” “max — йд — 0,345 — 0,190 = 0,155 мм;
0,155-Ю-3 ,
rD = I,47----------Г -= 0,076-Ю-3 с;
F 3
е) продолжительность соударения тел
Т = та+ тр = 0,174-Ю"3 + 0,076-Ю-3 = 0,25-Ю-3 с.
4. Полуоси ей b контура остаточной вмятины определяют в том же порядке, что
и при статическом взаимодействии (см. пример расчета к гл. 3), но в соответствую-
щих формулах вместо й и а используют йд и «max- Поэтому согласно (3.36) и (3.37)
/“max + ^д о /0,345 + 0,190 . ,
в=>/---------- -h2=-J---------;-- - 0,1902 = 3,65 мм;
24 д
20,02
/“max + ^д 2 /0,345 + 0,190 ,
b=>J--------— - h2=y/~-------------- 0.1902 = 1,62 мм.
2В д ----------
20,1
203
7.9. ПРОГНОЗИРОВАНИЕ КИНЕТИКИ РАЗВИТИЯ
ОСТАТОЧНОЙ ВМЯТИНЫ ПРИ УДАРНО-ЦИКЛИЧЕСКОМ
КОНТАКТНОМ НАГРУЖЕНИИ ТЕЛ ПРОИЗВОЛЬНОЙ КРИВИЗНЫ
В гл. 3 и 7. описаны закономерности упругопластического контакт-
ного деформирования тел, ограниченных поверхностями произвольной
формы и кривизны, при их однократном статическом и ударном сжатии.
Вместе с тем на практике часты случаи, когда контактирующие тела под-
вергаются воздействию повторных нагрузок, которые могут привести к
возникновению остаточных деформаций в контактной зоне уже после пер-
вого нагружения. В таких условиях находятся, например, тяжело нагру-
женные подшипники качения, всевозможные толкатели, вибрирующие
опоры, детали ударных пневмоинструментов, полиграфического и горного
оборудования и тд. Подобное положение (правда, при ограниченном чис-
ле циклов нагружения и большой степени деформации) реализуется при
упрочнении деталей поверхност-
ным пластическим деформиро-
ванием: дробеструйным накле-
пом, чеканкой и другими мето-
дами, осуществляемыми посред-
hN,MM
К ____
W? 1 Ю 10г . 103 10* 1Q5 N
1
Рис. 65. Принципиальная схема стенда для исследования упругопластического кон-
такта тел при ударно-циклическом нагружении:
1 - образец; 2 - прижимные пружины; 3 - индентор; 4 - боек; 5 - ударник; 6 -
шток; 7 - рабочая пружина; 8 - кулачок; 9 - ролик; 10 - вертикальный вал; 11 -
гибкий валик; 12 - счетчик СК-1; 13 - опорная плита; 14 - выпрямитель; 15 -
электродвигатель; 16 - клиновой ремень
Рис. 66. Остаточные смещения центров вмятин на образцах из сталей 20 (I, III), 45Х
(II) и 30ХГСА (IV) в зависимости от числа повторных соударений:
1-7 - схемы контакта тел согласно табл. 49
204
ством ряда последовательных ударов упрочняющих элементов (шариков,
пуансонов) по обрабатываемой поверхности деталей. При этом не исклю-
чена вероятность как единичных ударов по свободной поверхности, так
й повторных, наносимых по уже имеющимся вмятинам.
Опубликованные в литературе сведения о сопротивлении материалов
циклическому контактному нагружению относятся преимущественно к
упругому взаимодействию тел и лишь в отдельных работах приведены
результаты исследования упругопластического контакта сферических и
цилиндрических бойков с плоскими поверхностями стальных плит.
Вопросы кинетики накопления контактных деформаций и поврежде-
ний при повторных соударениях тел произвольной формы и кривизны из-
лагаются ниже в соответствии с результатами исследований авторов.
Испытания проводили на специальном стенде, принципиальная схема
которого показана на рис. 65. Отличительной особенностью этого стенда
является возможность варьирования частоты и энергии ударов в широких
пределах, исключая неконтролируемые повторные соударения, а также
простота и надежность в эксплуатации.
Исследовали контакт сферических и тороидальных инденторов, изго-
товленных из стали ШХ15 и закаленных до твердости HRC 60—62, с контр-
телом различной формы и кривизны (табл. 49).
В качестве контртел использовали образцы, изготовленные из терми-
чески обработанных сталей марок 20 (ЯД 1440), 45Х (НД 2530) и ЗОХГСА
(НД 4170). Рабочая поверхность образцов имела шероховатость не ниже
Ra = 0,02—0,04 мкм.
Для различных схем контакта сохраняли одинаковыми приведенные
радиусы кривизны Япр, равные 4,0 и 7,0 мм Одновременно ставили опы-
ты по повторному ударному внедрению сферических инденторов радиу-
_ Таблица 49
Геометрические параметры (мм) контактирующих
поверхностей
Схема контакта . (см. рис. 66 и 67) Индентор Образец Rtv
Л.. 7?2 2
1 4,0 4,0 сю оо
2 5,0 5,0 9,0 оо
3 3,0 3,0 -6,8 оо 4,0
4 11,0 1,5 со оо •
5 7,0 7,0 оо оо
6 10,0 5,0 оо оо 7,0
7 20,0 2,5 оо оо
205
сом R = Rnp в плоскую поверхность образцов, изготовленных из тех же
материалов. Такое сочетание удалось осуществить путем надлежащего
подбора геометрии рабочих поверхностей контактирующих тел в сОответ-,
ствии с изложенной в гл. 2 методикой. Отношения полуосей образовав»
шихся при этих условиях остаточных вмятин находились в диапазоне
0,34 <Л /а <1.
Испытания проводили без смазочного материала в зоне контакта при
начальной скорости соударения тел v0 = 2 м/с и с постоянной энергией
удара 1 Дж, достаточных для возникновения на поверхности образца
остаточной вмятины при первом же ударе; частота ударов составляла
400 циклов в минуту.
Предварительные результаты испытания показали, что изменение час-
тоты нагружений в пределах 100—400 циклов в минуту не оказывает су-
щественного влияния на кинетику роста остаточной вмятины.
Глубина и размеры полуосей остаточных вмятин измеряли на разных
стадиях циклического нагружения с помощью соответственно индикатор-
ного глубиномера с погрешностью до 1 мкм и инструментального микро-
скопа ММИ-2 с точностью до 0,05 мм в периоды кратковременных остано-
вок стенда.
По результатам экспериментов, проведенных по описанной выше ме-
тодике, построены графики функциональных зависимостей остаточных
смещений hN центров вмятин от числа циклов нагружения N- (рис. 66). Из
графиков видно, что при данной массе ударника и скорости его соударе-
ния с контртелом кривые hN (N), построенные для самых различных со-
четаний кривизн контактирующих поверхностей, совпадают при условии,
что во всех случаях 7?пр одинаковы. Иными словами, для данного мате-
риала при данных энергии и скорости единичных ударов кинетика роста
глубины hN остаточной вмятины однозначно определяется приведенным
радиусом кривизны /^р поверхностей контактирующих тел и, как и при
однократном соударении (см. табл. 14), не зависит от формы (т.е. экс-
центриситета) площадки контакта. Это положение подтвердилось при чис-
ле повторных контактных соударений, достигавшем нескольких десятков
и даже сотен тысяч.
Для любого из представленных на рис. 66 графиков hN (N) характер-
ны два участка: участок интенсивного роста глубины-Лд, остаточной вмя-
тины, протяженность которого при данном уровне энергии и скорости
единичных ударов определяется твердостью материала контртела и вели-
чиной Япр и исчерпывается первыми 20—80 ударами; второй участок ха-
рактеризуется незначительной и стабильной скоростью роста hN (что ста-
новится очевидным при перестройке графиков рис. 66 в обычных, нело-
гарифмических, координатах). Чем тверже испытуемый материал и плот-
нее первоначальный контакт тел (т.е. чем больше /?пр) > тем ниже прохо-
дит график Лд, (7V) и тем раньше стабилизируется темп роста'глубины ос-
таточной вмятины.
206
Отметим, что сказанное в полной мере относится и к функциональ-
уым зависимостям dnp> N (N~), где dnp N - приведенный диаметр конту-
ра остаточной вмятины,’принимаемый равным [6]
dnp,N ~^\faNbN- (7.65)
В самом деле, в соответствии с зависимостью (3.50) при однократном
внедрении упругой сферы радиуса R в упругопластическое полу простран-'
ство статической или ударной нагрузками диаметр d остаточной вмятины
может быть рассчитан по формуле
d = 2y/R(a+ h). (7.66)
Однако согласно данным гл. 2 последнее выражение справедливо и
при упругопластическом контакте тел произвольной формы и кривизны.
Поэтому, положивR = Rnp,d = dN uh = (7.66) получим
dN = 2x/Rnp(a+ /2Л). (7.67)
Отсюда видно, что для каждого материала данным значениям ЛПр и
hN (независимо от формы контактной поверхности) отвечает лишь одно
значение а, а следовательно, и dnp> д/. Сравнивая выражения (7.65) и
(7.67), приходим к выводу, что при R = 7?пр графики функциональных
зависимостей dN (N) и dnp N (N) должны полностью совпадать.
Справедливость этого положения подтверждается рис. 67, на котором
кружки соответствуют результатам экспериментов по циклическому со-
ударению шарика радиуса R с плоской плитой, а остальные точки — тако-
му же соударению тел произвольной формы и кривизны при R = /?пр (ма-
териалы инденторов и контртел в обоих случаях одинаковы).
Таким образом, экспериментальный график функциональной зависи-
мости диаметра dN отпечатка шарика с радиусом R от числа соударений
N, т.е. график dN (Д') фактически является обобщенным графиком
dnp N (N), относящимся к эллиптической (в общем случае) остаточной
площадке контакта, и может быть использован для прогнозирования ки-
нетики соударения неограниченного семейства тел произвольной формы и
кривизны с /\’пр = R. При этом полуоси и bN контактных площадок на
данной стадии циклического нагружения (т.е. при данном значении Д') вы-
числяются с достаточным приближением по формулам
dN dN *Гд~ tn
aN =-----у/— , bN =-----у/ — , (7.68)
Л 2 А п 2 В
полученным из уравнения (7.65) с учетом соотношения (3.38), по ана-
логии с которым
— = . (7-69)
ON в
207
^Ni ^nptN.MM
103 10ч
Рис. 67. Диаметры контуров остаточных вмятин на образцах из сталей 20 (I, III), 45Х
(II) и 30ХГСА (IV) в зависимости от числа повторных соударений:
1—7 — схемы контакта тел согласно табл .49
Рис. 68. Сопоставление найденных из опыта (точки) и рассчитанных (сплошные ли-
нии) по выражениям (7.68) с использованием предварительно построенной (III) за-
висимости d^(h^) больших 2а™ 0, II) и малых 2Ьц^ (IV, V) осей эллиптических
вмятин на образцах из стали 45Х:
1—3 — схемы контакта тел согласно табл .49
Хорошая сходимость рассчитанных по формулам (7.68) значений ^и
bN с опытом подтверждается данными, приведенными на рис. 68.
ЗАКЛЮЧЕНИЕ
Систематическое исследование основных закономерностей сопротив-
ления материала упруго пластической контактной деформации при их
силовом взаимодействии в условиях статического и ударного нагружения
позволило разработать инженерный метод расчета упругопластического
контакта (с начальным касанием в точке) реальных твердых тел, дефор-
мирующихся с упрочнением.
Метод базируется на введенном ранее [7] понятии контактного моду-
ля упрочнения (или пластической твердости НД, определяемой по ГОСТ
18835—73), который в известном интервале деформаций не зависит от
208
^нагрузки и диаметра пуансона. Полученные решения распространяются *
как на случай контакта упругого шара с упругопластическим, полупрост- ‘
ранством, так и на общий случай упругопластического контакта гладких
тел двоякой кривизны, когда плоскости главных кривизн обоих контак-
тирующих тел совпадают. Расширено понятие пластической твердости ЯД,
показано, что эта характеристика определяет сопротивление материала
упругопластической контактной деформации не только при внедрении
упругого сферического индентора в плоскость, но и в общем случае
контакта тел двоякой кривизны.
Обоснована возможность моделирования упругопластического кон-
тактного взаимодействия тел двоякой кривизны контактом сферическо-
го индентора приведенного радиуса Апр с плоской поверхностью. Разра-
ботанная ’’сферическая” модель позволяет использовать при определении
силовых и деформационных параметров упругопластического контакта
тел произвольной формы и кривизны расчетные зависимости, относящие-
ся к случаю контакта шара приведенного радиуса с плоскостью.
Найденные соотношения позволяют решать такие важные для теории
и практики задачи, как прогнозирование и целенаправленное формирова-
ние геометрических параметров (глубины, размеров полуосей контурно-
го эллипса контакта, кривизны поверхности) углублений, образуемых на
поверхности контртела при внедрении в него упругого индентора заданной
формы; расчетное определение контактной нагрузки, обеспечивающей по-
лучение необходимого эффекта; прогнозирование полной величины сбли-
жения, а также его остаточной и обратимой упругой составляющих, глуби-
ны распространения интенсивности деформации на оси внедрения инденто-
ра в упругопластическое полупространство и др. Все эти вопросы рассмот-
рены применительно к статическому и ударному силовому взаимодейст-
вию тел.
Подробно исследована динамика процесса соударения тел при наличии
местной пластической деформации в зоне контакта. Показано, что роль
динамической твердости в процессе упруго пластического контактного
удара аналогична роли модуля Юнга в чисто упругой контактной задаче.
Приведены аналитические зависимости, позволяющие определить
чисто расчетным путем максимальную силу соударения, полное остаточ-
ное и обратимое упругое сближение соударяющихся тел, размеры остаточ-
ной вмятины, а также продолжительность активного периода соударения в
случае упругопластического контакта тел двоякой кривизны. Показано,
что для этого, помимо параметров, характеризующих условия соударения -
(масса и скорости контактирующих тел), требуется знание лишь упругих
констант материалов этих тел, а также пластической твердости НД мате-
. риала того тела, которое испытывает при соударении местную пластичес-
кую деформацию.
На основе указанных общих решений рассмотрены важные практичес-
кие задачи, в частности, следующие.
209
Изучены закономерности упругопластической деформации поверх-,
ностного слоя детали, подвергнутой упрочняющей обработке роликам}/
или шариками. Проанализировано и описано в аналитической форме влия-
ние кривизны поверхностей рабочего инструмента (шарика или ролика)
и детали, а также давления в контакте на глубину и интенсивность дефор-
мации упрочненного слоя детали.
Введен обобщенный критерий оптимизации режимов ППД деталей
обкаткой их роликами или шариками. Показано, что в оптимальном ва-
рианте интенсивность деформации поверхностного слоя детали должна
быть близка к предельной равномерной деформации ее материала; выяс-
нена и описана взаимосвязь параметров, определяющих рациональные ре-
жимы обкатки, и разработан инженерный метод их расчетного опреде-
ления.
Описаны закономерности упругопластического контакта шерохова-
тых номинально плоских и цилиндрических поверхностей. Приведено ана-
литическое решение задачи о сближении, фактической площади контакта
и давлении в плоском и цилиндрическом стыках шероховатых поверх-
ностей для общего случая, когда выступы с разными радиусами кривизны
расположены на различных уровнях.
Экспериментально подтвержден разработанный авторами инженерный д
метод расчета полного сближения в контакте, его упругой и остаточной •
составляющих, фактической площади контакта и давления в стыке плос-
ких шероховатых поверхностей и в соединении цилиндрических деталей,
собранных с натягом тепловым способом. Предложенные методы позво-
ляют повысить точность расчета, поскольку одновременно учитывают
упругую и остаточную части полного сближения в контакте, а также де-
формационное упрочнение материала.
Разработан уточненный метод расчета прочности соединений с натя-
гом, учитывающий влияние физико-механических свойств материалов де-
талей, их геометрических размеров, параметров шероховатости сопрягае-
мых поверхностей, а также среднего давления в контакте.
Возможности общих закономерностей упругопластического контакта
нашли отражение также в разработке новых методов определения твер-
дости металла на криволинейных поверхностях; эти методы имеют особое
значение для испытаний на поверхностях большой кривизны, в частности,
тонкой проволоки. Описаны принципиальные основы нового метода опре-
деления твердости металла приборами ударного действия с эталонными
брусками (типа ВПИ-1 и ВПИ-2), а также модернизированного авторами
метода Баумана.
Таким образом, описанные в книге общие закономерности упруго-
пластического контакта являются принципиальной основой для решения
с единых позиций многих внешне различных конкретных задач (в том
числе и не рассмотренных авторами), выдвигаемых современной техни-
кой и технологией.
210
ПРИЛОЖЕНИЯ
Приложение 1
Пластическая твердость НД в зависимости
от глубины восстановленного отпечатка
при различных степенях нагружения (D и h - диаметр
шарика и глубина восстановленного отпечатка, мм)
IQh D Значения НД (МПа) при степенях нагружения р]£)2 (МПа), равных
294 245 196 147 98 49
0,010 8020
0,015 6650
0,020 5680
0,025 4960
0,030 7920 4400
0,035 7110 3950
0,040 6460 3590
0,045 5920 3260
0,050 7880 5460 2980
0,055 7310 5070 2730
0,060 6820 4720 2530
0,065 6390 4430 2290
0,070 7860 6020 4170 2190
0,075 7430 5670 3930 2050
0,080 7030 5380 3720 1920
0,085 6670 5110 3530 1810
0,090 7850 6360 4860 3350 1720
0,095 7500 6070 4640 3190 1630
0,100 7160 5800 4440 3050 1550
0,110 7840 6590 5330 4080 2780 1410
0,120 7260 6100 4940 3800 2570 1290
0,130 6760 5670 4600 3510 2400 1200
0,140 6320 5310 4300 3270 2210 1110
0,150 5940 4990 4040 3070 2070 1040
0,160 5600 4700 3800 2880 1940 970
0,170 5290 4450 3600 2720 1820
0,180 5020 4210 3400 2580 1720
0,190 4770 4010 3230 2440 1640
0,200 4550 3820 3080 2320 1560
0,210 4350 3660 2940 2210 1480
0,220 4170 3500 2810 2120 1410
0,230 3990 3350 2700 2030 1350
0,240 3830 3210 2580 1940 1290
0,250 3690 3090 2480 1860 1240
0,260 3560 2970 2390 1790 1200
0,270 3430 2870 2300 1720 1160
0,280 3310 2760 2220 1670 1120
0,290 3190 2680 2150 1610 1080
0,300 3100 2590 2070 1560 1040
0,320 2900 2430 2940 1460 970
211
Продолжение прил. 1
29L D Значения НД (МПа) при степенях нагружения р/р2 (МПа), равных
294 245 196 147 98 1 49
0,340 2730 2280 1830 1370
0,360 2590 2150 1730 1290
0,380 2450 2050 1640 1230
0,400 2330 1940 1560 1170
0,420 2230 1860 1480 1120
0,440 2130 1770 1420 1060
0,460 2030 1700 1350 1020
0,480 1950 . 1630 1300 970
0,500 1870 1560 1250
0,520 1790 1500 1200
0,560 1670 1400 1120
0,600 1560 1300 1040
0,650 1440 1200 1000
0,700 1330 1120
0,750 1240 1040
0,800 1170 970
0,900 1040
Приложение 2
Значения коэффициентов со и Пд в зависимости
от соотношения главных кривизн А/В
поверхностей контактирующих тел
А/В’ Рб О> 1 А /В. "6 CJ
0,005 0,3793 0,0590 0,230 0,8932 0,4666
0,010 0,4581 0,0845 0,235 0,8959 0,4720
0,015 0,5067 0,1055 0,240 0,8986 0,4774
0,020 0,5438 0,1234 0,245 0,9012 0,4827
0,025 0,5736 0,1394 0,250 0,9038 0,4879
0,030 0,5987 0,1541 0,255 0,9063 0,4931
0,035 0,6206 0,1676 0,260 0,9087 0,4982
0,040 0,6400 0,1803 0,265 0,9110 0,5033
0,045 0,6574 0,1919 0,270 0,9132 0,5084
0,050 0,6731 0,2036 0,275 0,9154 0,5134
0,055 0,6873 0,2145 0,280 0,9175 0,5184
0,060 0,7002 0,2250 0,285 0,9195 0,5234
0,065 0,7120 0,2351 0,290 0,9215 0,5283
0,070 0,7230 0,2448 0,295 0,9234 0,5332
0,075 0,7333 0,2542 0,300 0,9252 0,5380
0,080 0,7429 0,2633 0,305 0,9270 0,5427
0,085 0,7519 0,2723 0,310 0,9287 0,5474
0,090 0,7604 0,2809 0,315 0,9304 0,5521
0,095 0,7684 0,2894 0,320 0,9320 0,5568
0,100 0,7760 0,2975 0,325 0,9336 0,5614
0,105 0,7832 0,3055 0,330 0,9351 0,5661
0,110 0,7899 0,3134 0,335 0,9366 0,5707
0,115 0,7963 0,3212 0,340 0,9381 0,5752
0,120 0,8025 0,3289 0,345 0,9396 0,5797
0,125 0,8085 0,3363 0,350 0,9410 0,5842
0,130 0,8143 0,3436 0,355 0,9424 0,5886
0,135 0,8200 0,3506 0,360 0,9438 0,5930
0,140 0,8255 0,3575 0,365 0,9452 0,5973
0,145 0,8308 0,3643 0,370 0,9465 0,6016
0,150 0,8359 0,3709 0,375 0,9478 0,6058
0,155 0,8407 0,3774 0,380 0,9491 0,6101
0,160 : 0,8453 0,3838 0,385 0,9504 0,6143
0,165 0,8496 0,3902 0,390 0,9516 0,6185
0,170 0,8536 0,3966 0,395 0,9528 0,6226
0,175 0,8574 0,4030 0,400 0,9540 0,6267
0,180 0,8611 0,4092 0,405 0,9552 0,6307
0,185 0,8647 0,4153 0,410 0,9564 0,6347
0,190 0,8682 0,4214 0,415 0,9575 0,6387
0,195 0,8716 0,4273 0,420 0,9586 0,6427
0, 200 0,8749 0,4331 0,425 0,9597 0,6466
0,205 0,8782 0,4389 0,430 0,9608 0,6505
0,210 0,8814 0,4445 0,435 0,9619 0,6544
0’215 0,8845 0,4501 0,440 0,9629 0,6582-
0,220 0,8875 0,4557 0,445 0,9639 0,6620
0,225 0,8904 0,4612 0,450 0,9649 0,6658
0,455 0,9659 0,6696
213
Продолжение прил. 2
А/В LJ А/В п6 ы
0,460 0,9669 0,6733 0,665 0,9908 0,8137
0,465 0,9678 0,6770 0,670 0,9911 0,8169
0,470 0,9687 0,6807 0,675 0,9914 0,8200
0,475 0,9696 0,6847 0,680 0,9917 0,8231
0,480 0,9705 0,6881 0,685 0,9920 0,8262
0,485 0,9714 0,6917 0,690 0,9923 0,8293
0,490 0,9722 0,6954 0,695 0,9926 0,8323
0,495 0,9730 0,6990 0,700 0,9929 0,8353
0,500 0,9738 0,7025 0,705 0,9932 0,8383
0,505 0,9746 0,7061 0,710 0,9935 0,8413
0,510 0,9754 0,7096 0,715 0,9938 0,8443
0,515 0,9761 0,7132 0,720 0,9941 0,8473
0,520 0,9768 0,7167 0,730 0,9945 0,8533
0,525 0,9775 0,7202 0,740 0,9949 0,8593
0,530 0,9782 0,7237 0,750 0,9953 0,8653
0,535 0,9789 0,7271 0,760 0,9957 0,8711
0,540 0,9796 0,7306 0,770 0,9961 0,8769
0,545 0,9802 0,7341 0,780 0,9965 0,8826
0,550 0,9808 0,7375 0,790 0,9969 0,8882
0,555 0,9814 0,7409
0,560 0,9820 0,7443 0,800 0,9973 0,8937
0,565 0,9826 0,7477 0,810 0,9977 0,8992
0,570 0,9832 0,7511 0,820 0,9980 0,9047
0,575 0,9837 0,7545 0,830 0,9982 0,9104
0,580 0,9842 0,7579 0,840 0,9984 0,9160
0,585 0,9847 0,7612 0,850 0,9986 0,9215
0,590 0,9852 0,7645 0,860 . 0,9988 0,9270
0,595 . 0,9857 0,7678 0,870 0,9990 0,9323
0,600 0,9862 0,7711 0,880 0,9992 0,9377
0,605 0,9866 0,7744 0,890 0,9994 0,9429
0,610 0,9870 0,7778 0,900 0,9995 0,9483
0,615 0,9874 0,7812 0,910 0,9996 0,9536
0,620 0,9878 0,7845 0,920 0,9997 0,9589
0,625 0,9882 0,7877 0,930 0,9998 0,9641
0,630 0,9886 0,7909 0,940 0,9998 0,9694
0,635 0,9890 0,7941 0,950 0,9999 0,9746
0,640 0,9893 0,7974 0,960 0,9999 0,9798
0,645 0,9896 0,8007 0,970 0,9999 0,9850
0,650 0,9899 0,8040 0,980 0,9999 0,9901
0,655 0,9902 0,8073 0,990 1,0000 0,9950
0,660 0,9905 0,8105 1,000 1,0000 1,0000
Пр иложение 3
Твердость НД в зависимости от глубины Ьд
ударного отпечатка (D = 5 мм; m = 0,6 кг; 1,8 < Vq < 2,2 м/с)
ЛД’ мм Значения НД
0,150 3300 3480 3650 3830 4005 4200 4400 4600 4790
0,160 2920 3085 3235 3400 3555- 3735 3900 4085 4255
0,170 2600 2755 2890 3030 3170 3330 3475 3645 3795
0,180 2325 2455 2585 2720 2840 2990 3125 3270 3410
0,190 2090 2210 2320 2445 2560 2695 2820 2960 3080
0,205 1790 1900 2000 2105 2205 2315 2420 2540 2660
0,220 1535 1630 1720 1820 1905 2000 2095 2200 2300
0,235 1325 1400 1480 1570 1655 1745 1820 1915 2010
0,250 1150 1220 1285 1350 1440 1520 1590 1670 1750
Приложение 4
Твердость НВ при Р = 294 D1 Н в зависимости
от диаметра d„ ударного отпечатка (D = 5 мм;
m = 0.6 кг; 1.8 < v0 < 2.2 м/с)
«V- ММ Значения НВ
1,90 2760 2910 3065 3200 3340 3485 3630 3775 3925
1,95 2500 2640 2775 2905 3030 3160 3295 3435 3580
2,00 2265 2385 2510 2640 2760 2875 2995 3120 3245
2,05 2060 2160 2275 2395 2510 2620 2730 2840 2960
2,10 1865 1960 2060 2175 2285 2385 2480 2590 2690
2,15 1675 1765 1860 1970 2070 2170 2260 2355 2455
2,20 1500 1590 1680 1775 1875 1965 2050 2140 2225
2,25 1350 1430 1510 1595 1685 1775 1860 1945 2030
2,30 1210 1280 1355 1435 1520 1600 1680 1765 1855
21Б
СПИСОК ЛИТЕРАТУРЫ
1. Алехин В. П. Физика прочности и пластичности поверхностных слоев материа-
ла. М.: Наука, 1983. 280 с.
2. Бакши О. А., Моношков А. Н., Власов Р. А. Метод определения ударной твер-
дости материалов. - Заводская лаборатория, 1968, № 8, с. 1005-1007.
3. Браславский В. М. Технология обкатки крупных деталей роликами. - М.:
Машиностроение, 1975. 160 с.
4. Гурьев А. В. Неупругость, пластическая деформация и разрушение металлов,
рассматриваемые с позиций структурно-неоднородного деформируемого твердого
тела. - В кн.: Металловедение и прочность материалов. Вып. X. Волгоград: ВПИ,
1979, с. 26-42.
5. Гурьев Г. В., Дрозд М. С. Соотношение между размерами пластического от-
печатка и упругим восстановлением при разгрузке. - Вкн.: Металловедение и проч-
ность материалов. Волгоград: ВПИ, 1974, с. 56-64 (Тр. ВПИ; вып. VI (68)).
6. Демкин Н. Б., Рыжов Э.В. Качество поверхности и контакт деталей машин.
М.: Машиностроение, 1981.244 с.
7. Дрозд М. С. Определение механических свойств металла без разрушения. М.:
Металлургия, 1965. 171 с.
8. Дрозд М. С., Сапрыкин В. С. Уточненный метод определения статической
твердости динамическим способом. - В кн.: Тезисы докладов научной конферен-
ции. Волгоград: ВПИ, 1966, с. 293-295.
9. Дрозд М. С., Сапрыкин В. С., Славский Ю. И. Повышение точности динами-
ческого метода определения твердости стали. - Заводская лаборатория, 1968, № 10,
с. 1242-1246.
10. Дрозд М. С., Федоров А. В., Сидякин Ю. И. Расчет глубины распределения
пластической деформации в зоне контакта тел произвольной кривизны. - Вестник
машиностроения, 1972, № 1, с. 54-57.
11. Дрозд М. С., Федоров А. В., Волынов А. Н. Определение твердости метал-
лов по Роквеллу на образцах с криволинейными поверхностями. - Заводская лабо-
ратория, 1973, №4, с. 457-459.
12. Дрозд М. С., Шевченко В. Л. Исследование геометрических параметров вмя-
тин, образованных инденторами двоякой кривизны. - В кн.: Металловедение и
прочность материалов. Волгоград: ВПИ, 1975, с. 67-80 (Тр. ВПИ; вып. VII).
13. Дрозд М. С., Славский Ю. И., Барон А. А. Метод определения твердости
HRC с учетом кривизны испытуемой поверхности. - Заводская лаборатория, 1976,
т.42, № 7, с. 876-879.
14. Дрозд М. С., Славский Ю. И., Барон А. А. Измерение твердости по Виккер-
су на деталях с криволинейными поверхностями. — Измерительная техника, 1977,
№7, с. 53-55.
15. Иванова В. С., Гуревич С. Е_, Кольев И. М. Усталость и хрупкость металли-
ческих материалов. М.: Наука, 1968. 215 с.
16. Инженерные методы исследования ударных процессов / Г. С. Батуев,
Ю. В. Голубков, А. К. Ефремов идр. М.: Машиностроение, 1977. 240с.
17. Ишлинский А. Ю. Осесимметричная задача пластичности и проба Бринел-
ля. Изв. АН СССР. Прикладная математика и механика, 1944, T.VIII, вып. 3,
с 201-224.
18. Крагельский И. В., Добычин М. Н., Комбалов В. С. Основы расчетов на тре-
ние и износ. М.: Машиностроение, 1977.526 с.
216
19. Кудрявцев И. В., Петушков Г. Е. Вляние кривизны поверхностей на глубину
пластической деформации при упрочнении деталей поверхностным наклепом. —
Вестник машиностроения, 1966, № 7, с. 41-43.
20. Кудрявцев И. В. Внутренние напряжения как резерв прочности в машино-
строении. М.: Машгиз, 1951.278 с.
21. Кудрявцев И. В. Основы рационального выбора режимов упрочнения малых
галтелей валов поверхностным пластическим деформированием. - В кн.; Вопросы
прочности крупных деталей машин. М.: Машиностроение, 1976, с. 190-200 (Тр.
ЦНИИТМАШа, № 112).
22. Леваиов Н. А., Савицкий Ф. С. Исследование методов определения ударной
твердости. - Заводская лаборатория, 1974,т.40,№ 9, с. 1131-1135.
23. Литвинов В. Н., Михин Н. М., Мышкин Н. К. Физико-химическая механика
избирательного переноса при трении. М.: Наука, 1979.187 с.
24. Макклинток Ф., Аргон А. Деформация н разрушение материалов / Пер.
с англ. Под ред. Е. И. Морозова и Б. М. Струнина. М.: Мир, 1970.443 с.
25. Маркочев В. М., Житенев В. В., Воробьев А. М. Расчетно-экспериментальное •
получение диаграммы нагрузка - деформация при ударных испытаниях. - Заводс-
кая лаборатория, 1979, т.45, № 10, с. 944-949.
26. Михин Н, М. Внешнее трение твердых тел. М.: Наука, 1977. 221 с.
27. Моношков А. Н., Власов Р. А. Метод определения числа твердости по
Бринеллю при ударном нагружении. - Заводская лаборатория, 1970, т.36, № 2,
с. 225-227.
28. О*Нейль Г. Твердость металлов и ее измерение. М.-Л.: Металлургиздат,
1940. 376 с.
29. Орлов А. В., Пикет ин С. В. Остаточные деформации при контактном нагру-
жении. М.: Наука, 1971.62 с.
30. Папшев Д. Д. Отделочно-упрочняющая обработка поверхностным пластичес-
ким деформированием. М.: Машиностроение, 1978.152 с.
31. Пашков П. О. Пластичность и разрушение металлов. Л.: Судпромгиз, 1950.
259 с.
32. Петрусевич А. И. Контактная' прочность деталей машин. М.: Машинострое-
ние, 1970.64 с.
33. Расчеты на прочность в машиностроении / С. Д. Пономарев, В. Л. Бйдерман,
К. К. Лихарев и др. М.: Машгиз, т.1,1956,884 с.; т.2,1958,974 с.; т.3,1959,1118 с.
34. Решетов Д. Н., Хачияи Г. А., Лейках Г. И. Скорость сползания в циркулярно-
нагружаемых соединениях с натягом. - Изв. вузов. Машиностроение, 1980, № 12,
с. 53-57.
35. Рыжов Э. В., Суслов А. Г., Федоров В. П. Технологическое обеспечение экс-
плуатационных свойств деталей машин. М.: Машиностроение, 1979.176 с.
36. Сервисен С. В. Сопротивление усталости в связи с упрочнением и конструк-
тивными факторами. — В кн.: Повышение усталостной прочности деталей поверх-
ностной обработкой. М.: Машгиз, 1952, с. 5-28.
37. Смирнов В. А. Аналитическое определение остаточных напряжений и дефор-
маций в процессе обработки деталей. — Изв.вузов. Машиностроение, 1977, № 1,
с. 150-155.
38. Смирнов-Аляев Г, А. Сопротивление материалов пластическому деформиро-.
ванию. Л.: Машиностроение, 1978. 368 с.
39. Степанов Г. В., Ващенко А. П. Определение коэффициента вязкости алюми-
ниевого сплава Д16 при внедрении конуса. - Проблемы прочности, 1984, № 10,
с. 109-113.
40. Тимошенко С. П., Гудьер Дж. Теория упругости. М.: Наука, 1975. 576 с.
41. Трение, изнашивание и смазка. Справочник. В 2-х кн. /Под ред. И. В. Кра-
гельского, В. В. Алисина. М.: Машиностроение, кн.1,1978,400 с.; кн.2,1979. 358 с.
217
42. Фридман Я. Б. Механические свойства металлов. М.: Машиностроение, 1974,
т.1.471 с.; т.2. 368 с.
43. Харди С., Баронет С. Н., Торднон Д. В. Вдавливание жесткой сферы в упру-
гопластическое полупространство. - В кн.: Механика. Периодический сборник пере-
водов иностранных статей. М.: Мир, 1972, № 2 (132), с. 126-136.
44. Хейфец С. Г. Аналитическое определение глубины наклепанного слоя при об-
катке роликами стальных деталей. М.:.Машгиз, 1952, с. 7-17 (ТрДНИИТМАШа,
№49).
45. Чена II. А. Технологические основы упрочнения деталей поверхностным де-
формированием. Минск: Наука и техника, 1981.128 с.
46. Школьник Л. М., Шахов В. И. Технология и приспособления для упрочнения
и отделки деталей накатыванием. М.; Машиностроение, 1964.184 с.
47. Якушев А. И. Взаимозаменяемость, стандартизация и технические измере-
ния. М.: Машиностроение, 1979. 343 с.
48. Балевски Т., Иванов Б., Паунов Б. Една возможност за постигане на оценка
на твъердостта на метали в с плави, инвариантна по отношение на внедряваната сила
и диамегьра на индентора. - Машиностроене, 1974, № 3,с. 114-119.
218
ОГЛАВЛЕНИЕ
Предисловие........................................................ 3
Глава 1. Пластическая твердость металла и методы ее определения.... 5
1.1. Общие положения.......................................... 5
1.2. Характер зависимости между нагрузкой на индентор и глубиной
остаточной вмятины............................................ 6
1.3. Пластическая твердость металла........................... 11
1.4. Методы определения пластической твердости ЯД............. 16
1.5. Формулы пересчета твердости HRB и НВ в значения по
шкале НД..........................................'........... 25
Глава 2. Общий случай упругопластического контакта тел с начальным ка-
санием в точке..................................................... 28 ,
2.1. Характер функциональной зависимости Р(й)................. 28
2.2. Приведенный радиус кривизны контактирующих поверхностей
и его экспериментальное определение........................... 31
2.3. Расчетное определение приведенного радиуса кривизны контак-
тирующих поверхностей......................................... 35
2.4. Пластическая твердость как обобщенная характеристика сопро-
тивления металлов упругопластической контактной деформации ... 43
2.5. О границах линейного участка функции P(h); критическая на-
грузкаЛ)......................................................
Глава 3. Расчет параметров упругопластического контакта тел двоякой
кривизны........................................................... 48 •
3.1. форма поверхности остаточной вмятины..................... 49
3.2. Расчет сближения в контакте.............................. 53
3.3. Упругое восстановление в контакте........................ 57
3.4. Расчет полуосей контура остаточной вмятины............... 58
35. Эксцентриситет контура остаточной вмятины в зависимости от
ее глубины и кривизны поверхностей контактирующих тел......... 62
3.6. Упругопластический контакт сферического индентора с плоской
поверхностью контртела........................................ 64
3.7. Закономерности упругопластического контакта и измерение
твердости на деталях с гладкими криволинейными поверхностями . . 77
3.8. Примеры расчета.......................................... 87
Глава 4. Расчет глубины распространения и интенсивности пластической
деформации при силовом контакте тел двоякой кривизны............... 89
4.1. Расчет глубины распространения пластической деформации под
эллиптической вмятиной........................................ 89
4.2. Интенсивность остаточной деформации на линии внедрения упру-
гого штампа двоякой кривизны в плоскую поверхность контртела
(детали)...................................................... 98
4.3. Расчет оптимальных технологических параметров режима упроч-
няющей обкатки деталей роликами............................... 108
4.4. Примеры расчета......................................... 118
219
Глава 5. Расчет сближения и фактической площади контакта (ФПК) ше-
роховатых поверхностей............................................121
5.1. Расчет полного сближения и ФПК единичной сферической неров-
ности с плоской поверхностью контртела ...................... 121
5.2. Расчет сближения и ФПК номинально плоских шероховатых по-
верхностей .................................................. 127
5.3 Расчет сближения и ФПК цилиндрических деталей, собранных с
натягом...................................................... 143
Глава 6. Применение закономерностей упругопластического контакта к
расчету прочности соединений с натягом............................151
6.1. Обобщенный метод определения нагрузочной способности сое-
динений с натягом............................................ 151
6.2. Порядок и пример расчета нагрузочной способности соединений с
натягом..................................................... 158
6.3. Алгоритм и структурная блок-схема программы для ЭВМ ’’Рас-
чет на прочность цилиндрических соединений с натягом”........'161
Глава 7. Расчеты сопротивления металла контактной упругопластической
деформации при ударном нагружении...............................' 164
7.1. Общие положения...........................................164 '
7.2. Пластическая твердость металла при ударном нагружении... 166
7.3. Динамический коэффициент пластической твердости стали .... 175
7.4. Динамика соударения тел двоякой кривизны при наличии мест-
ной пластической деформации в зоне контакта.................. 180
7.5. Приближенные расчетные зависимости.......................194
7.6. Прогнозирование полуосей контура остаточной вмятины .... 194
7.7. Совершенствование методов измерения твердости стали прибо-
рами ударного действия........................................ 195 .
7.8. Пример расчета........................................". 201
7.9. Прогнозирование кинетики развития остаточной амятины при
ударно-циклическом контактном нагружении тел произвольной
кривизны..................................................... 204
Заключение........................................’.............. 208
Приложения....................................................... 211
Список литературы................................................ 216
Марк Соломонович ДРОЗД, Михаил Маркович МАТЛИН
Юрий Иванович СИДЯКИН
ИНЖЕНЕРНЫЕ РАСЧЕТЫ УПРУГОПЛАСТИЧЕСКОЙ
КОНТАКТНОЙ ДЕФОРМАЦИИ
Редактор Я. П Ошерова
Художественный редактор И. К. Капралова
Обложка художника В. Д. Димитриади
Технический редактор Л. М. Суковатова
Корректор л. В. Тарасова
ИБ№4757
Сдано в набор 8.10.85. Подписано в печать 20.06.86. Т-14165.
Формат 60X84/16. Бумага офсетная № 2. Гарнитура Пресс Роман.
Ротапринт Усл.печ.л. 13,02 Усл.кр.-отт. 14,25. Уч.-издл. 13.80.
Тираж 4000. Заказ 395 .Цена 70 к.
Ордена Трудового Красного Знамени издательство ’’Машиностроение”,
107076, Москва, Стромынский пер,, 4
Отпшатано в Московской типографии № 8 Союзполиграфпрома
при Государственном комитете СССР по делам издательств, полиграфии
и книжной торговли 101898, Москва, Хохловский пер., 7, с оригинал-макета,
изготовленного в издательстве "Машиностроение” на наборно-пишущих машинах