/







































































































































































































































































































































































































Author: Булдырев В.С. Павлов Б.С.
Tags: математика линейная алгебра алгебра естественные науки точные науки
Year: 1985




Text
В.С.Булдырев, Б.С.Павлов
ЛИНЕЙНАЯ АЛГЕБРА И ФУНКЦИИ МНОГИХ ПЕРЕМЕННЫХ
Л.: Изд-во Ленингр. ун-та; 1985,496 с.
В пособии, состоящем из двух тесно связанных частей: «Линейная алгебра» и
«Функции многих переменных», единым образом излагается теория
конечномерных линейных пространств, интегральное и дифференциальное
исчисление на областях и многообразиях, лежащих в этих пространствах. Для
пособия характерен преимущественно бескоординатный — геометрический —
способ изложения, наглядность и замкнутость, а также большая широта охвата
материала. Так, с учетом современных потребностей физика-теоретика в книге
изложены: внешняя алгебра, интеграл Лебега, дифференциальные формы,
первоначальные понятия теории многообразий, диаграммная техника в теории
возмущений для конечномерных операторов. Найденная авторами форма
изложения позволяет читателю быстро ориентироваться по всему объему книги,
выбирая индивидуальный темп продвижения. Авторы предусмотрели также
возможность использования книги как сборника задач, последовательное решение
которых существенно активизирует процесс обучения. Пособие предназначено
для студентов физических и математических специальностей университетов и
педагогических институтов, знакомых с началами анализа функций одной
переменной и аналитической геометрией.
ОГЛАВЛЕНИЕ
Предисловие, обращенное к неискушенному читателю 3
Предисловие, обращенное к искушенному читателю 5
Основные термины и обозначения 11
ЧАСТЬ I. ЛИНЕЙНАЯ АЛГЕБРА 13
Глава 1. Линейное пространство 13
§ 1. Алгебраические структуры 13
§ 2. Линейное пространство 16
§ 3. Линейная зависимость и независимость набора векторов. Базис, 19
размерность, изоморфизм линейных пространств
Глава 2. Подпространства 25
§ 1. Определения и примеры 25
§ 2. Геометрия подпространств 27
§ 3. Линейная зависимость над подпространством и коразмерность 30
Глава 3. Системы линейных алгебраических уравнений 32
§ 1. Основные теоремы 32
§ 2. Решение систем уравнений методом исключения неизвестных (Метод 37
Гаусса)
§ 3. Фундаментальное семейство решений. Общее решение однородной и 42
неоднородной систем
Глава 4. Линейные операторы 46
§ 1. Линейные формы и сопряженное пространство 46
§ 2. Линейные операторы и их матричная запись 52
§ 3. Линейное пространство операторов 56
§ 4. Умножение операторов и матриц 58
§ 5. Сопряженный оператор. Теорема Фредгольма 60
Глава 5. Полилинейные формы 64
§ 1. Полилинейные формы. Линейная структура 65
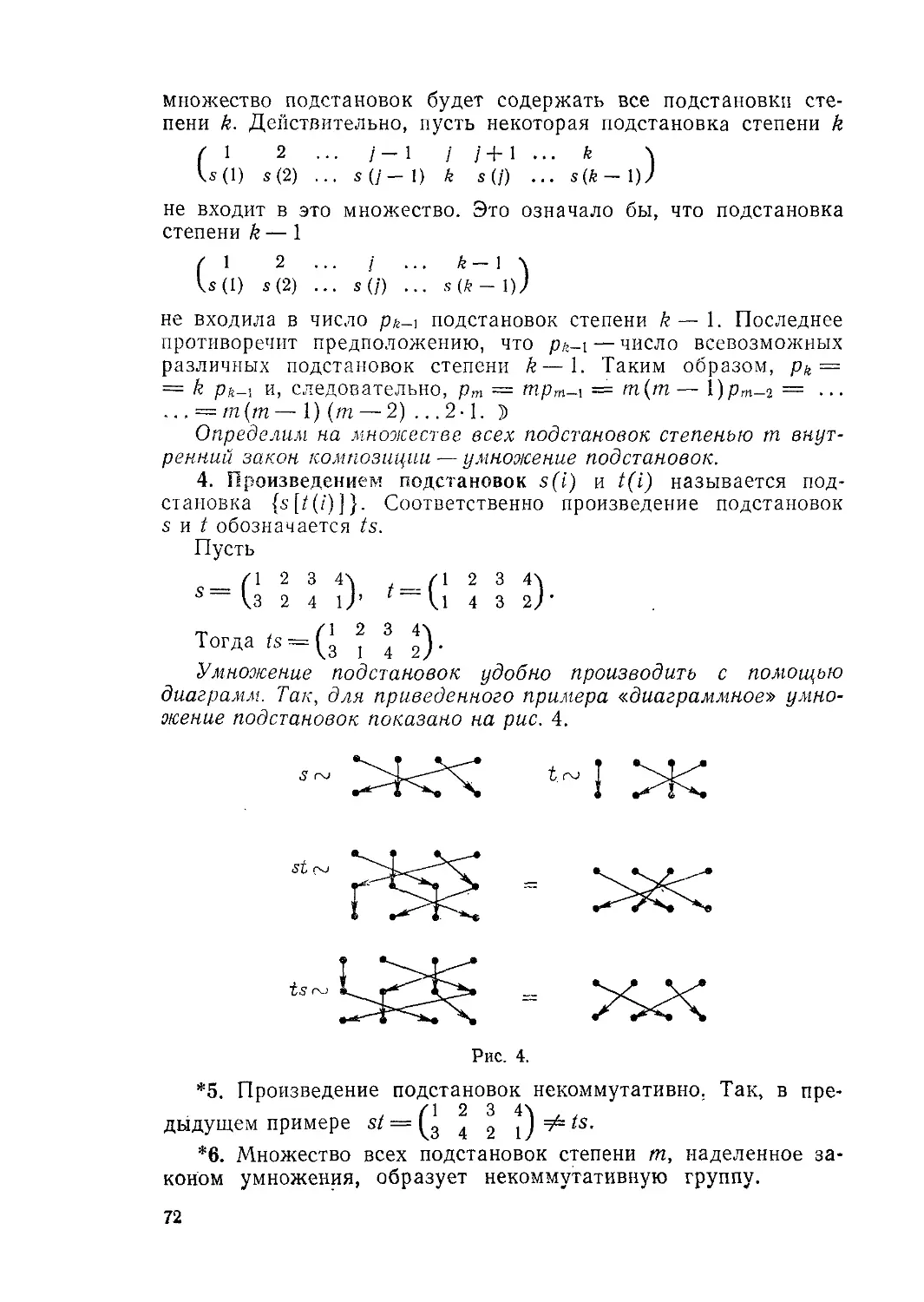
§ 2. Подстановки 71
§ 3. Антисимметризация и симметризация 74
Глава 6. Антисимметрические полилинейные формы 78
§ 1. Базис и размерность пространства антисимметрических полилинейных 78
форм
§ 2. Внешняя алгебра антисимметрических форм. Ориентация 80
§ 3. Определители и их свойства 85
§ 4. Применение аппарата антисимметрических форм к решению систем 93
линейных алгебраических уравнений
Глава 7. Линейные операторы и преобразование координат 100
§ 1. Алгебра операторов и алгебра матриц 100
§ 2. Обратный оператор 102
§ 3. Простейшие функции операторов и матриц 105
§ 4. Преобразование координат при замене базиса 105
§ 5. Преобразование компонент тензора при замене базиса. Свертка 109
тензоров
Глава 8. Спектральный анализ оператора в линейном пространстве 114
§ 1. Инварианты линейного оператора 115
§ 2. Собственные числа и собственные векторы 118
§ 3. Спектральный анализ операторов скалярного типа 120
§ 4 Спектральная теорема и полиномиальное исчисление 123
Глава 9. Спектральный анализ оператора в линейном пространстве 128
§ 1. Предварительные сведения и определения 129
§ 2. Некоторые факты из алгебры полиномов 130
§ 3. Алгебра операторных полиномов 132
§ 4. Минимальный полином и инвариантные подпространства. Основная 136
теорема
§ 5. Структура нильпотентного оператора 139
Глава 10. Вещественные псевдоевклидовы и евклидовы пространства 144
§ 1. Метрическая форма 144
§ 2. Ковариантные и контравариантные координаты вектора 146
§ 3. Геометрия вещественного евклидова пространства 147
Глава 11. Комплексное евклидово пространство 149
§ 1. Основные неравенства 149
§ 2. Ортогональность и ортонормированный базис 151
§ 3. Операторы 154
§ 4. Инвариантные подпространства эрмитовых операторов и спектральное 157
разложение
§ 5. Унитарные операторы. Спектральное представление 159
§ 6. Квадратичные формы в вещественном линейном пространстве 162
ЧАСТЬ II. ФУНКЦИИ МНОГИХ ПЕРЕМЕННЫХ 170
Глава 1. Функции на нормированном пространстве 170
§ 1. Нормированное пространство. Множества в нормированном 170
пространстве
§ 2. Непрерывные скалярные (числовые) функции на нормированных 178
пространствах
§ 3. Вектор-функции и оператор-функции 185
§ 4. Естественная нормировка пространств линейных форм и операторов 187
§ 5. Непрерывные функции на нормированных пространствах 192
§ 6. Линейное нормированное пространство непрерывных вектор-функций 199
на компакте
Глава 2. Дифференцирование функций многих переменных 201
§ 1. Дифференцируемые функции 202
§ 2. Старшие производные и дифференциалы 217
§ 3. Формула Тейлора для функции нескольких переменных. Экстремум 232
функции нескольких переменных
§ 4. Условный экстремум 237
Глава 3. Методы решения нелинейных уравнений. Теоремы 242
существования
§ 1. Принцип сжатых отображений 242
§ 2. Метод Ньютона 245
§ 3. Существование обратной функции 248
§ 4. Теорема о неявной функции 252
Глава 4. Интегрирование 258
§ 1. Объем и мера Лебега 258
§ 2. Интеграл Лебега 274
§3. Свойства интеграла Лебега 286
§ 4. Общее понятие меры. Произведение мер. Сведение кратного интеграла 302
к повторному
§ 5. Замена переменных в кратном интеграле 312
Глава 5. Дифференциальные формы в области 326
§ 1. Тензорные поля. Формы. Внешнее дифференцирование 327
§ 2. Замена переменных в полилинейных переменных формах (тензорных 333
полях)
§ 3. Ориентация вещественного линейного пространства и форма объема, в 340
ориентированном вещественном евклидовом пространстве
§ 4. Ориентация псевдоевклидова пространства и операция дополнения 344
антисимметрической формы
§ 5. Теория поля в евклидовом пространстве 357
§ 6. Интегрирование дифференциальных форм по области 368
§ 7. Цепи, границы и формулы интегрирования по частям 372
§ 8. Точные и замкнутые формы в области. Лемма Пуанкаре 379
§ 9. Уравнения Максвелла 384
Глава 6. Дифференцируемые многообразия 391
§ 1. Элементарное многообразие (клетка) и тензорные поля на нем 391
§ 2. Ориентация клетки и риманова метрика 404
§ 3. Интегрирование формы по клетке. Граница клетки и формула Стокса 415
— Пуанкаре
§ 4. Гладкие многообразия и многообразия с краем 431
§ 5. Циклы и границы. Независимость интеграла от пути 445
Глава 7. Приложения дифференциальных форм к теории функций 463
комплексной переменной. Интеграл Коши и теорема о вычетах
Глава 8. Теория возмущений конечномерных операторов 480
§ 1. Вычисление обратного оператора и резольвенты. Интегрирование 480
резольвенты по циклам
§ 2. Спектральная теория возмущений 483
§ 3. Поправки к собственным числам и собственным векторам 488
ПРЕДИСЛОВИЕ, ОБРАЩЕННОЕ
К НЕИСКУШЕННОМУ ЧИТАТЕЛЮ
Среди разнообразных функциональных зависимостей, встре-
встречающихся в природе, линейная зависимость — самая простая и
наиболее глубоко изученная. Идеи линейной алгебры — ветви
математики, исследующей общие линейные функции конечного
числа переменных, — пронизывают все другие разделы матема-
математики, начиная от теории чисел и кончая анализом и математиче-
математической физикой. Пользуясь языком линейной алгебры, выводят
изящные формулы, применяя ее методы, завершают трудоемкие
расчеты. Непосредственным обобщением линейной алгебры на
случай функций бесконечного числа переменных является функ-
функциональный анализ—¦ раздел современной математики, обслу-
обслуживающей все ее ветви. Казалось бы, курс линейной алгебры
естественно предпослать изучению таких традиционных разде-
разделов высшей математики, как дифференцирование функций не-
нескольких переменных, теория интегрирования, дифференциаль-
дифференциальные уравнения. Однако этот план построения курса высшей
математики не является общепринятым. Он таит в себе опас-
опасность, заключающуюся в том, что линейная алгебра со своими
специфическими идеями и техникой не имеет в настоящее время
достаточно близкого аналога в школьной программе. Тем не
менее преимущества этого плана настолько велики, что авторы
рискнули построить, исходя из него, изложение значительной
части курса высшей математики.
Мы сознаем, что первокурснику, только что окончившему
школу, будет непросто, преодолев барьер аксиом, сжиться с ли-
линейной алгеброй и ощутить ее удобным инструментом в умелых
руках. Легче будет тому читателю, который уже обладает до-
достаточно высокой общей математической культурой, знакомому
с началами векторной алгебры, аналитической геометрии и ана-
анализа функций одной вещественной переменной, например в
объеме, обычном для физико-математических школ: множества,
1* А
вещественные и комплексные числа, дифференцирование, инте-
интегрирование, ряды.
В то же время изложение линейной алгебры в первой части
нашей книги и анализа функций многих переменных во второй
строится последовательно с самого начала, не требуя от чита-
читателя каких-либо предварительных знаний, кроме перечисленных
выше. Более того, можно сказать, что мы рассчитываем не
столько на имеющуюся у читателя сумму знаний, сколько на его
определенную зрелость и общий математический уровень, со-
состоящий в привычке к аксиоматическим построениям. Испытав
на первых порах известные (быть может, и немалые) трудности,
читатель нашей книги, мы надеемся, выработает активное отно-
отношение к математике и приобретет опыт, который поможет ему
успешно продвигаться в изучении дальнейших ее разделов.
Наша книга сложилась как учебный курс па физическом
факультете Ленинградского университета, где мы читали его
более десяти лет для студентов, которые в дальнейшем соби-
собираются стать физиками-теоретиками. Подчеркнем, что говоря
о физике-теоретике, мы подразумеваем не только тех, кто зани-
занимается квантовой теорией поля и квантовой механикой. Физик-
теоретик может быть и радиофизиком, и геофизиком, и оптиком.
Поэтому и предлагаемая читателю книга предназначается для
всех тех, кто, не будучи математиком-профессионалом, всю
жизнь будет иметь дело с математикой как с рабочим инстру-
инструментом.
Для того чтобы сделать наиболее отчетливой логическую
сторону дела и в то же время упростить работу над книгой, весь
материал в ней мы разбили на отдельные максимально простые
предложения — «кирпичики», из которых складывается все зда-
здание линейной алгебры и функций многих переменных. Все опре-
определения и утверждения (только самые главные утверждения
называются теоремами) в тексте книги пронумерованы. При
ссылках внутри параграфа мы даем только номер пункта («кир-
(«кирпичика»), при ссылках на пункты другого параграфа впереди
добавляется его номер, а при ссылках на пункты другой главы —
и номер главы. Например, 5.1.3 — ссылка на пункт 3 первого
параграфа пятой главы. Звездочка, стоящая при номере, отли-
отличает утверждение от определения. Таким образом, предложение
со звездочкой нуждается в доказательстве, предложение без
звездочки — лишь в запоминании. Подавляющее большинство
утверждений снабжено доказательствами (начало отмечено зна-
знаком ©,а конец — 5), и читатель может их прочесть. Тем не ме-
менее более полезно, прочтя лишь утверждение, постараться дока-
доказать его самостоятельно или хотя бы обдумать возможный план
доказательства, используя предыдущее изложение. Во всяком
случае, читателю непременно следует попытаться это сделать;
если все же не получится — читайте доказательство. Проверьте
себя: доказательство не должно вызвать у Вас замешатель-
ства — правильная реакция, которой мы ждем, такая: «Ну, ко-
конечно, я так и думал» или наоборот: «Ах, вот в чем дело!»
Плохо, если Ваша реакция безразлична — это означает, что Вы
поторопились. Если утверждение со звездочкой не снабжено
доказательством, у читателя, как правило, нет выхода — он дол-
должен придумать его. Большинство таких утверждений достаточно
просты; тем не менее они должны быть доказаны. Исклю-
Исключение составляют несколько специально отмеченных фактов, до-
доказательство которых по трудности далеко выходит за пределы
нашего изложения (например, общая теорема де Рама). Таким
образом, нашу книгу можно (и нужно!) использовать как за-
задачник. Авторы убеждены, что это принесет несравненно боль-
большую пользу читателю, чем чтение подряд.
Между пронумерованными определениями и утверждениями
в тексте книги Вы встретите абзацы, не имеющие номеров, и
набранные светлым курсивом. В этих абзацах обсуждаются
связи последующего с предыдущим, определяются цели дальней-
дальнейшего изложения, ставятся задачи, к решению которых мы при-
приступаем.
ПРЕДИСЛОВИЕ, ОБРАЩЕННОЕ
К ИСКУШЕННОМУ ЧИТАТЕЛЮ
Опишем содержание и общее построение книги. В книге две
части: линейная алгебра и функции многих переменных. Боль-
Большая половина второй части посвящена теории интегрирования и
анализу на многообразиях, но в последней ее главе, снова обра-
обращаясь к линейной алгебре, мы излагаем элементарные факты
теории возмущений линейных операторов. При изложении ли-
линейной алгебры мы отказались от обычной последовательности
расположения материала: определители, системы, евклидово
пространство, линейные операторы и их спектральный анализ.
Мы начинаем курс линейной алгебры непосредственно с опреде-
определения линейного пространства (предполагается, что читатель
уже имеет представление об аналитической геометрии и вектор-
векторной алгебре). Изложив основные факты теории линейных про-
пространств, мы переходим к геометрическому исследованию систем
линейных алгебраических уравнений. Тем самым достигаются
две цели: демонстрируется применение методов линейной ал-
алгебры к такой важной в практическом отношении задаче как
решение линейных алгебраических систем и, с другой стороны,
обнажаются и делаются максимально наглядными факты, ле-
лежащие в основе теорем Крамера и Кронекера — Капелли. Для
практического решения систем развивается метод последова-
последовательного исключения неизвестных (метод Гаусса). Далее вво-
вводятся линейные формы и линейные операторы, излагаются про-
стейшие свойства сопряженного пространства и линейного про-
пространства операторов. Много места отведено изучению полили-
полилинейных и особенно антисимметрических форм. Полилинейные
формы позволяют наиболее естественным способом ввести поня-
понятие тензора и определить над тензорами основные действия:
сложение, умножение, свертку. Теория антисимметрических по-
полилинейных форм позволяет с минимальной затратой труда
изложить свойства определителей и дать короткие и неформаль-
неформальные доказательства теоремы Лапласа и теоремы об умножении
определителей — тех теорем, обычные доказательства которых
весьма утомительны. Антисимметрические формы, будучи приме-
применены к линейным алгебраическим системам, дают немедленно
формулы Крамера и формулы для общего решения произволь-
произвольной системы. Вслед за полилинейными формами рассматри-
рассматривается алгебра линейных операторов и алгебра матриц, в инва-
инвариантной форме приводятся условия обратимости линейного
оператора, изучается преобразование координат вектора и тен-
тензора при замене базиса. Здесь же дается определение тензора,
независимое от полилинейной формы. Спектральному анализу
операторов посвящены две главы книги (8, 9). В первой из них
вводятся основные понятия спектральной теории линейных опе-
операторов и проводится спектральный анализ диагонализуемых
(«скалярных») операторов. Вторая из глав, посвященных спек-
спектральному анализу, носит более утонченный характер. В этой
главе для произвольного линейного оператора строится базис
Жордана из собственных и присоединенных векторов, в котором
матрица имеет «жорданову нормальную форму». Центральной
здесь является теорема о расщеплении оператора на сумму диа-
гонализуемого и нильпотентного операторов. Ее доказательство
опирается на теорию идеалов в алгебре операторных полиномов
и свойства минимальных полиномов.
Первая часть, книги завершается изложением теории евкли-
евклидова пространства — главы 10 и 11. Первая из них посвящается
введению метрической формы в линейном пространстве и свя-
связанными с этим новыми геометрическими понятиями — угла и
расстояния. В определенном смысле эта глава служит кратким
конспектом аналитической геометрии в «-мерном вещественном
пространстве. Следующая глава посвящена изложению теории
комплексного евклидова пространства. Бесконечномерный ана-
аналог этого пространства — гильбертово пространство — служит
одной из основных структур современной математики и теорети-
теоретической физики. Так, алгебра наблюдаемых величин в квантовой
механике изоморфна алгебре операторов, действующих в гиль-
гильбертовом пространстве состояний физической системы. Поэтому
в центре нашего изложения теории комплексного евклидова про-
пространства стоит теория операторов, в частности спектральная
теория операторов в этом пространстве. Завершается глава 11
изложением теории квадратичных форм.
6
Вторая часть нашей книги посвящена теории функций мно-
многих переменных. Во всех ветвях этой теории ведущая роль при-
принадлежит методам линейной алгебры, развитым в первой части.
Первая глава второй части открывается изложением основ-
основных фактов из теории линейных нормированных пространств с
конечным числом измерений, в частности доказывается эквива-
эквивалентность различных норм в таких пространствах. Далее обсуж-
обсуждаются свойства непрерывных функций, заданных на таких про-
пространствах.
Начиная со второй главы методы и идеи линейной алгебры
играют решающую роль. Значительное место во второй главе
уделено изучению производных первого порядка числовых, век-
векторных и операторнозначных функций. Вводятся дифференциал
Фреше, дифференциал Гато (производная по направлению) и
обсуждаются существующие между ними связи. В качестве при-
примера вычисления производных выведены различные термодина-
термодинамические тождества.
Далее мы определяем производные высших порядков, строим
формулы Тейлора и решаем задачи об экстремуме функции
многих переменных. Анализ задачи об условном экстремуме
базируется на ее геометрической интерпретации.
В третьей главе излагается теория разрешимости «в малом»
нелинейных уравнений в конечномерных пространствах. Эта
глава могла быть помещена внутри второй главы, между па-
параграфами 1 и 2, тем более, что ее результаты нужны в конце
второй главы при обсуждении задачи об условном экстремуме.
Тем не менее, желая подчеркнуть идейную важность теорем су-
существования, мы посвятили им отдельную главу.
После этого мы переходим к теории интегрирования (гл. 4).
Исходя из того, что самые различные разделы математики и
математической физики (теория рядов Фурье, задача Штурма —
Лиувилля, теория вероятностей) допускают значительно более
прозрачное изложение на основе интеграла Лебега, мы выби-
выбираем именно эту концепцию интеграла. Затем на основании тео-
теоремы Фубини о сведении краткого интеграла к повторному мы
выводим формулу замены переменных. Описанный нами ва-
вариант вывода формулы замены переменных можно было бы
назвать алгебраическим — в отличие от обычного «метрическо-
«метрического» варианта, когда в центре внимания оказывается преобразо-
преобразование элемента объема. При нашем подходе формула замены
переменной «в малом» получается последовательным примене-
применением соответствующей одномерной формулы. Переход от за-
замены переменных «в малом» к замене переменных «в целом»
получается использованием леммы Бореля и разбиения единицы.
Пятой главой открывается часть, посвященная анализу функ-
функций многих переменных в инвариантной форме, т. е. теории диф-
дифференциальных форм в областях и на многообразиях, вложен-
вложенных в евклидово пространство. Вначале излагаются элементар-
ные сведения из теории дифференциальных форм в области (за-
(замена переменных в форма'х, внешнее дифференцирование) и
описывается согласование этих операций. Затем вводится по-
понятие о точных и замкнутых формах и об интегрировании форм
по области. Центральными местами здесь являются лемма Пуан-
Пуанкаре и формула Стокса—-Пуанкаре для куба. В качестве при-
приложения теории дифференциальных форм мы рассматриваем
инвариантные дифференциальные операции (градиент, дивер-
дивергенцию, ротор), записываем в ковариантной форме уравнения
Максвелла и доказываем с помощью выведенной ранее формулы
Стокса закон сохранения заряда в простейшей форме.
Важный технический материал сосредоточен в § 1—3 шестой
главы, где изучаются дифференциальные формы и структуры,
заданные на элементарном гладком многообразии (клетке) —
диффеоморфном образе куба. Здесь вводятся понятия римановой
метрики и ориентации клетки, определяется ее граница и дока-
доказывается для клетки формула Стокса — Пуанкаре, служащая
стержнем всей второй части нашего курса. В § 4 шестой
главы возникает, наконец, главный топологический объект —
многообразие с краем. К этому моменту все основные факты и
технические детали уже известны читателю на примере клетки,
и поэтому перенесение их на общий случай многообразия с
краем осуществляется без труда с помощью разбиения единицы.
Наконец, § 5 посвящен изложению теории полного дифферен-
дифференциала. Здесь мы знакомим читателя с некоторыми важными
и теперь уже широко употребляемыми в физике понятиями: го-
гомологией циклов и когомологией форм. Важный пример к этому
материалу — интегрирование аналитических форм — описан в
следующей главе. Одновременно она служит введением к по-
последней главе нашего курса, посвященной изложению элемен-
элементов теории возмущений в применении к конечномерным опера-
операторам. Здесь еще раз происходит объединение идей линейной
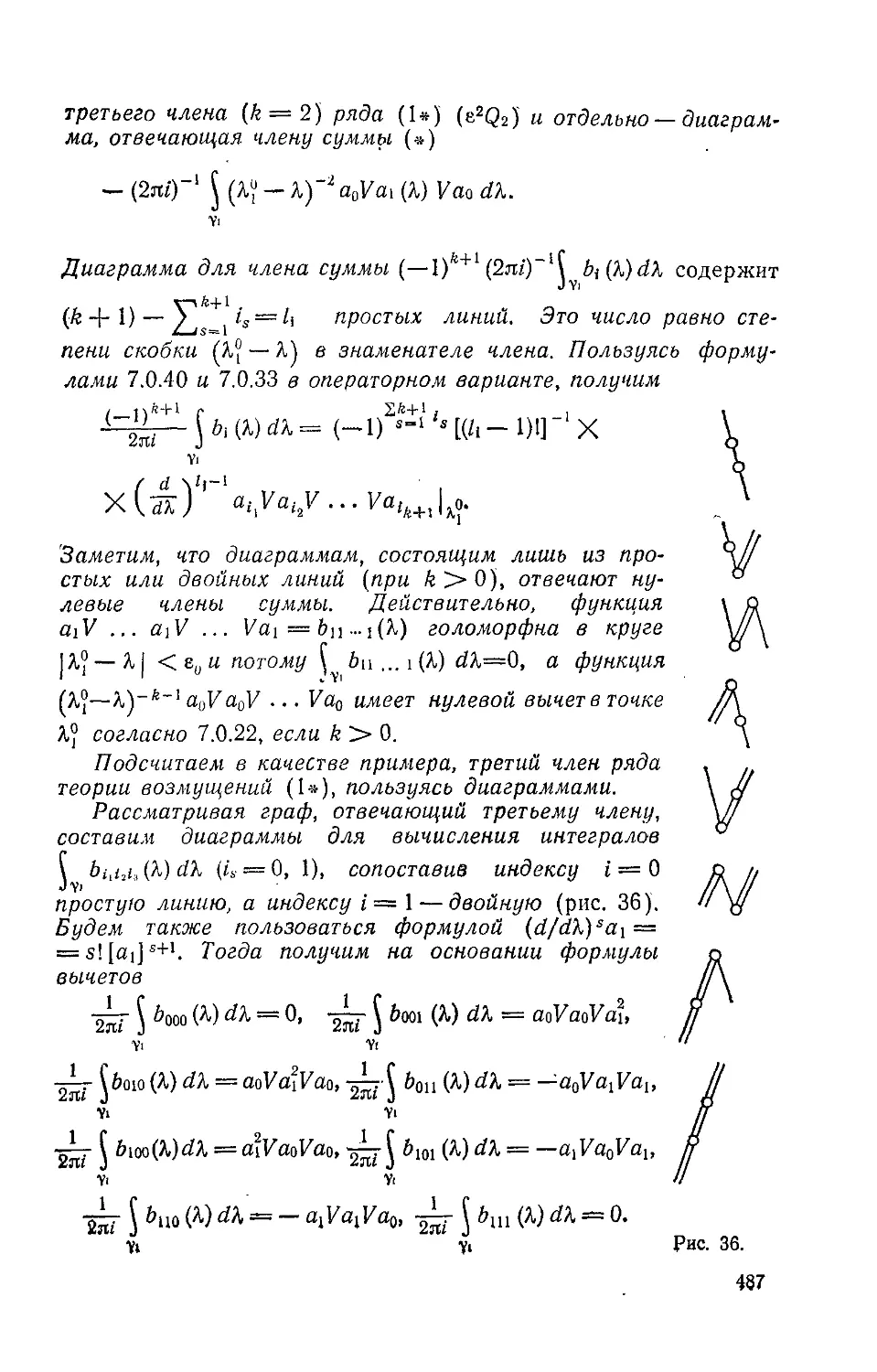
алгебры и анализа на многообразиях. Для упорядочения членов
рядов теории возмущений мы пользуемся диаграммной техни-
техникой, именно стационарным вариантом техники, предложенной
В. Н. Поповым и А. А. Киселевым *.
Материал, включенный в книгу, по объему превосходит тот,
что обычно излагается нами на лекциях. Все эти годы A966—
1982) параллельно лекциям на физическом факультете работал
математический кружок. Его программа в разные годы по-раз-
по-разному дополняла и расширяла лекционный курс. Наша книга
охватывает не только материал, который обычно включается в
лекционный курс, но и этот дополнительный материал. Именно
поэтому ее объем несколько превосходит объем стандартного
учебника. Однако мы надеемся, что как раз это обстоятельство
* П о п о в В. Н., Киселев А. А. Диаграммная техника в общей теории
возмущений. — Докл. АН СССР, 1973, т. 213, с. 70—74.
сделает нашу книгу полезной также и для внеаудиторной
работы.
Искушенный читатель, просмотрев второе предисловие, по-
видимому, отметит, что план нашей книги имеет мало общего
со стандартным планом «атомистического» преподавания мате-
математики, когда разные преподаватели по отдельности учат сту-
студента разным дисциплинам: алгебре, аналитической геометрии,
теории операторов в евклидовом пространстве, дифференциаль-
дифференциальному исчислению, интегральному исчислению, теории поля, тео-
теории дифференциальных уравнений и теории аналитических
функций, пользуясь при этом зачастую разными математиче-
математическими языками. Напротив, мы всюду стараемся подчеркнуть
связи, существующие между различными (формально выделен-
выделенными) разделами математики. Именно эти связи позволяют ком-
компактно уложить столь обширный материал в сравнительно не-
небольшой курс.
Работая над ним, мы имели перед собой пример нашего
учителя Владимира Ивановича Смирнова, для которого матема-
математика всегда была единой наукой, о чем свидетельствует, в част-
частности, и его замечательный «Курс высшей математики» *. В на-
нашей книге мы попытались подход Владимира Ивановича Смир-
Смирнова применить к изложению более современного материала,
который становится теперь нужным физику-теоретику. Об
успехе этого предприятия судить читателю.
При конструировании курса мы испытывали влияние со сто-
стороны известных авторов. Иногда это влияние отражалось на на-
нашем изложении положительным образом — это касается, в пер-
первую очередь, теории интегрирования,' где мы в существенном
следовали плану, предложенному А. Н. Колмогоровым и
С. В. Фоминым в'книге «Элементы теории функций и функцио-
функционального анализа» **. В некоторых случаях влияние было отри-
отрицательным, заставляя нас выбирать иной путь изложения. Во
всяком случае учет опыта предшественников был для нас очень
поучительным и, мы надеемся, полезным.
Наш курс входит как составная часть в единый курс высшей
математики, читаемый сотрудниками кафедры математической
физики физического факультета Ленинградского университета.
Мы благодарим всех сотрудников этой кафедры и ее заведую-
заведующего— академика Л. Д. Фаддеева — за внимание и поддержку
в нелегком деле подготовки этой книги.
Мы признательны студентам, участвовавшим в работе круж-
кружков по математике: им принадлежит много красивых и зачастую
неожиданных соображений, часть из которых использована в на-
нашей книге в виде теорем и задач.
* Смирнов В. И. Курс высшей математики. Т. 1—5. М., 1953—1959.
** Колмогоров А. Н., Фомин С. В. Элементы теории функций и
функционального анализа. Изд. 3-е, перераб. М., 1972. 496 с.
Авторы также благодарны сотрудникам кафедры анализа
математико-механического факультета Ленинградского универ-
университета за содержательное общение, приведшее к значительной
модернизации первоначального изложения теории интегриро-
интегрирования.
Наконец, авторы благодарны рецензентам Н. К. Никольскому
и М. В. Федорюку за ряд конструктивных предложений.
Авторы сознают, что текст книги, столь долго складывав-
складывавшейся, представляет все же их точку зрения только на данный
момент. Безусловно, через несколько лет эта точка зрения из-
изменится. Поэтому они будут искренне благодарны тем внима-
внимательным читателям, которые возьмут на себя труд сообщить о
своих впечатлениях от этой книги и о своих пожеланиях в части
выбора материала и способа изложения.
Корреспонденцию следует направлять по адресу: 199164,
Ленинград, Университетская наб., 7/9, Издательство Ленинград-
Ленинградского университета.
ОСНОВНЫЕ ТЕРМИНЫ И ОБОЗНАЧЕНИЯ
Введем стандартные обозначения и перечислим основные по-
понятия.
Мы исходим из того, что понятия множества, подмножества,
элемента и пустого множества не вызывают у читателя преврат-
превратных толкований. Под термином набор мы подразумеваем конеч-
конечное множество элементов, снабженных индексами. В аналогич-
аналогичном смысле употребляется термин семейство, однако семейство
может быть и бесконечным. Если элемент т принадлежит мно-
множеству М, (т из М), то пишем /леМ, Если множество Mi яв-
является частью множества М (его подмножеством), то пишем
Mi = М. В том случае, когда Mi -непусто и при этом в М еще
остаются элементы, не принадлежащие Мь говорят, что Mi —
собственная часть М и пишут М; cr M. Пересечением множеств
М и N называется их максимальная общая часть, т. е. мно-
множество всех элементов из М, принадлежащих также и множеству
N. Пересечение обозначается символом Mf|N. Множество
М П N очевидно совпадает с N П М, т. е. М Л N = N f] M. Объеди-
Объединением (или суммой) множеств М и N называется множество
всех элементов, принадлежащих М и (или) N. Объединение М и
N обозначается символом M(JN. Под разностью множеств М
и N понимают подмножество всех элементов М, не входящих
в N. Разность обозначается символом M\N. Очевидно, что
M\N = М\ {Mf]N}. Симметрической разностью множеств М
и N называется множество MAN= {M|JN}\ {Mf|N}.
Мы говорим, что задано отображение Т множества М в мно-
множество N, и пишем 7:M->-N, если каждому элементу m
(m e M) сопоставлен некоторый вполне определенный элемент
п (neN), называемый образом элемента m при отображении Т.
При этом не исключается возможность, что одному элементу п
из N отвечает при отображении Т несколько элементов т,- из М,
таких, что Tnii = п. Подмножество {т,} всех таких элементов
И
называется прообразом п при отображении Т. Аналогично обра-
образом подмножества Mi (Mi s М) при отображении Т называется
объединение образов всех элементов из М^ образ множества
Mi при отображении Т обозначают символом ГМь Если мно-
множество Ni из N служит образом некоторого множества Mi из
М, т. е. TMi = N1, то определено понятие прообраза множества
Ni при отображении Т, а именно прообразом множества Ni на-
называется объединение прообразов всех элементов, входящих в
Nb т. е. элемент m входит в прообраз, если TmeNi. Вообще
говоря, прообраз образа множества М] содержит Mi. Отобра-
Отображение 7": М—> N называется отображением «на», сюръекцией,
или эпиморфизмом, если всякое подмножество Ni из N имеет
непустой прообраз. Отображение 7:M->N называется инъек-
инъекцией, или мономорфизмом, если для всякой пары элементов пги
гаг из М (mi Ф m-i) выполнено Тгп.\ ф Тгпч- Отображение, являю-
являющееся одновременно инъекцией и сюръекцией, называется вза-
взаимно однозначным, или биекцией. Если задано отображение
Г:М->Ы и Mi — некоторое собственное подмножество в М, то
определено также и отображение 7\ : Mi -> N, называемое суже-
сужением Т на Mi, Г, = r|Mi и заданное условием T\m=-Tm
В первой части книги — в линейной алгебре — векторы обо-
обозначаются латинскими символами (скажем, х), а их координа-
координаты— «соответствующими» греческими (?'). Скаляры тоже обо-
обозначаются греческими буквами. Во второй части книги, следуя
обычаю, принятому в книгах по анализу, мы обозначаем век-
векторы латинскими символами (скажем, х), а их координаты —
теми же символами с индексами наверху (х1). Для обозначения
произвольного элемента какого-либо множества в книге часто
используется символ V.
Часть Л.
ЛИНЕЙНАЯ АЛГЕБРА
Глава 1
ЛИНЕЙНОЕ ПРОСТРАНСТВО
'Эта глава служит введением в теорию линейных пространств.
В ней формулируются основные определения, рассматриваются
центральные для всей теории линейных пространств понятия
линейной независимости и линейной зависимости набора век-
векторов, вводится базис линейного пространства. Теорема об изо-
изоморфизме линейных пространств позволяет сделать важный вы-
вывод о том, что изучение всевозможных линейных пространств
заданной размерности над одним и тем же полем скаляров
можно свести к изучению одного из них. Начинается глава с опи-
описания простейших алгебраических структур, с помощью кото-
которых строится определение линейного пространства.
§ 1. АЛГЕБРАИЧЕСКИЕ СТРУКТУРЫ
Основная задача этого параграфа — ввести и описать про-
простейшие свойства основных алгебраических структур, к которым
мы относим группу, кольцо и поле. Следует отметить, что каж-
каждая из названных структур имеет разветвленную теорию, кото-
которая может служить предметом, большой книги.
1. Пусть Е — множество с элементами а, Ь, с, ... Мы гово-
говорим, что множество Е наделено внутренним законом компози-
композиции, если каждой упорядоченной паре а, Ь элементов множества
Е сопоставлен третий элемент этого же множества, скажем с.
Для обозначения внутреннего закона композиции используют
знак умножения • или сложения +, а если важно подчеркнуть
отличие этого закона композиции от обычного умножения или
сложения, то — какой-либо специальный значок, например о.
Так, пишут а ° Ь = с.
2. Внутренний закон композиции называют коммутативным,
если а»6 = йоа для всех а, Ь из Е, и некоммутативным в про-
противном случае.
13
3. Внутренний закон композиции называется ассоциативным,
если (а ° Ь) ° с = а о (Ь о с).
4. Пусть множество Е наделено двумя внутренними законами
композиции ;<> и •. Закон ° называется дистрибутивным отно-
относительно закона *, если для любых элементов а, Ь, с из Е
имеют место равенства а° (b-c) = (a°b)-(a° с), (а-Ь)°с =
= (а о с) • (Ь о с).
*5. Сложение и умножение вещественных чисел коммутатив-
коммутативно и ассоциативно.
Умножение вещественных чисел дистрибутивно относительно
сложения: а(Ь + с) = аЪ + ас. Но сложение не дистрибутивно
относительно умножения.
Является ли возведение в степень коммутативным и ассоциа-
ассоциативным законом композиции!
6. Ассоциативный и коммутативный закон композиции назы-
называют обычно сложением и обозначают знаком -f-. Ассоциатив-
Ассоциативный, но не обязательно коммутативный закон композиции назы-
называют умножением и обозначают знаком °.
7. Элемент о, нейтральный относительно сложения, т. е. та-
такой, что а-\-о = о-\-а — а для каждого а из Е, называется
нулевым элементом (или нулем).
*8. Нулевой элемент единствен.
© Допустим, что существует два нулевых элемента о и о'. Тогда
для любых элементов а, Ь из Е имеем а-\-о — о-\-а = а и
Ь-\-о' = о'-\-Ь — Ь, Полагая а = о' и b = о, получим о'' + о=о'
и о' -+- о = о, откуда заключаем: о = о'. D
9. Если в множестве Е, наделенном законом сложения -f-> Для
элемента х из Е существует элемент у, такой, что х -f- у = о, то
элемент // называют противоположным элементу х.
*10. Противоположный элемент единствен.
© Доказательство основывается на ассоциативности сложе-
сложения. Э
11. Элементы ei, er, нейтральные относительно (некоммута-
(некоммутативного) умножения слева et°a=>a (Vа, веЕ) или справа
а о ег = а (У а, аеЕ), называются соответственно левым и
правым единичными элементами (левой и правой единицами).
*12. Если в множестве Е, снабженном внутренним законом
композиции °, существуют левая и правая единицы, то они
совпадают: ег = ег = е. Элемент е при этом называют единич-
единичным (единицей). В указанном случае любой левый (правый)
единичный элемент совпадает с е.
13. Если в множестве Е, снабженном законом умножения °
для элемента х (леЕ) существует элемент yi (либо уг), такой,
что yi°x = e (х ° у г = е), то элемент yi называют левым (уг —
соответственно правым) обратным элементом х.
*14. Если элемент х обладает левым обратным yi и правым
обратным уг, то они совпадают между собой: yi = yr. При этом
элемент x~l = yt = ут называется обратным элементу х. В ука-
14
занном случае любой левый (правый) обратный элемент совпа-
совпадает с Л.
© Доказательство основывается на ассоциативности умноже-
умножения, з
Существование правого обратного иногда следует из суще-
существования левого обратного (и наоборот):
*15. Если yi°x = e и элемент yt также имеет левый обрат-
обратный z (z°yi = е), то элемент х имеет правый обратный, совпа-
совпадающий с yt.
©Пользуясь ассоциативностью, имеем х о yt = (z ° yi) ° (x ° yt) =
= z о (yt о х) о yl = z о yi = e. D
16. Говорят, что множество Е, наделенное внутренним зако-
законом композиции о, есть группа, если а) закон о ассоциативен,
б) в Е существует единичный элемент, в) всякий элемент из Е
имеет обратный.
*17. Условия б) и в) в предыдущем определении могут быть
заменены следующими'/ б) существует левый (правый) единич-
единичный элемент, в) всякий элемент имеет левый (правый)
обратный.
© Воспользоваться утверждением 15. J
18. Подмножество Е' = Е, замкнутое относительно групповой
операции о (т. е. а'4'еЕ', если s'eE', 4'eE'), называется
подгруппой группы Е.
19. Если внутренний закон композиции коммутативен, то
группа называется коммутативной (или абелевой). Для записи
внутреннего закона композиции коммутативной группы обычно
используется аддитивная форма +• В коммутативной группе
единичный (нейтральный) и обратный элементы называются
соответственно нулевым и противоположным.
Примеры.
а). Множество целых чисел с обычной операцией сложения
есть коммутативная группа.
б). Рассмотрим множество Е единичных векторов на пло-
плоскости, исходящих из некоторой точки О. Каждый вектор этого
множества характеризуем углом, который он составляет с не-
некоторым заданным вектором, исходящим из точки О. Опреде-
Определим операцию вращения как операцию построения по двум век-
векторам третьего вектора с углом, равным сумме углов исходных
векторов. Докажите, что вращение есть внутренний закон ком-
композиции и множество векторов Е, наделенное операцией враще-
вращения, есть коммутативная группа.
в). Более сложный пример представляет собой группа под-
подстановок (см. § 2 гл. 5).
Если в группе Е выделена подгруппа G, то всякому элементу
аеЕ можно сопоставить «класс смежности» \а = aG =
= {х: х = a °g, g e G}. Ясно, что классы la, h либо не пересе-
пересекаются, либо совпадают. В последнем случае элементы a, b счи-
15
таются эквивалентными, а ~ Ъ. На множестве всех классов
смежности можно ввести закон композиции, положив
*20. Множество всех классов смежности, отвечающих данной
подгруппе, снабженное указанным законом композиции, явля-
является группой.
21. Построенная таким образом группа называется фактор-
факторгруппой по подгруппе G и обозначается символом E/G. .
Например, в рассмотренной ранее группе целых чисел можно
выделить подгруппу четных чисел. Соответствующая фактор-
факторгруппа состоит из двух элементов 1, 0 с законом композиции
1 +0 = 1, 1 + 1 =0.
22. Кольцом называется коммутативная группа, наделенная
вторым законом композиции, который ассоциативен и дистрибу-
дистрибутивен относительно первого закона.
23. Если второй закон коммутативен, то кольцо называется
коммутативным.
Приведем примеры коммутативных колец.
а). Множество Z целых чисел с обычными операциями сло-
сложения и умножения есть кольцо.
б). Кольцом является множество всех полиномов с вещест-
вещественными (целыми, рациональными, комплексными) коэффици-
коэффициентами и с обычными операциями сложения и умножения.
Примеры некоммутативных колец возникнут позже в линей-
линейной алгебре.
24. Коммутативное кольцо называется полем, если мно-
множество всех элементов кольца без нейтрального относительно
первого закона элемента составляет группу по отношению ко
второму закону.
*25. Множества рациональных, вещественных, комплексных
чисел с естественными операциями сложения и умножения суть
поля.
Заметим, что в поле рациональных (вещественных, комплекс-
комплексных) чисел не определено деление на нуль, и поэтому множество
рациональных (вещественных, комплексных) чисел образуег
группу относительно умножения только после исключения
нуля.
26. Условимся обозначать поле рациональных чисел буквой
Q, поле вещественных чисел — буквой R и поле комплексных
чисел — буквой С.
§ 2. ЛИНЕЙНОЕ ПРОСТРАНСТВО
1. Пусть Е — коммутативная группа с внутренним законом
композиции +• Элементы группы Е будем в дальнейшем назы-
называть векторами и обозначать латинскими буквами а, Ь, ..., х,
у, г. Нулевой элемент группы Е обозначим через о.
16
2. Пусть К — поле. Элементы поля будем в дальнейшем на-
называть скалярами и обозначать греческими буквами а, E, у, ...
..., со. Нулевой и единичный элементы поля К обозначим соот-
соответственно через 0 и 1.
3. Предположим, что на множестве Е определено также
умножение на скаляр, которое каждой паре {а, х) (а е К,
jeE) ставит в соответствие некоторый элемент z множества
Е: {а, х} ~ z. Элемент z, соответствующий паре {а, х}, будем
обозначать ах. Операцию умножения на скаляр будем считать
наделенной следующими свойствами:
а) дистрибутивность умножения на скаляр относительно сло-
сложения в Е: а(х -\- у) = ах -{- ау;
б) дистрибутивность умножения на вектор относительно сло-
сложения скаляров: (а-f- р)х = ах-\- (Зх;
в) ассоциативность умножения на скаляры: a(px) = (a|3)x;
г) \х = х, т. е. {1, х) ~ х.
Теперь все приготовлено для того, чтобы ввести основной
объект нашего изложения — линейное пространство.
4. Линейным пространством над полем К называется ком-
коммутативная группа Е, на которой определено умножение на
скаляры — элементы поля К — и это умножение согласовано с
внутренними операциями в группе Е и в поле К посредством
условий а—г, сформулированных ранее (п. 3).
5. Пусть {а'}"=1 — набор скаляров, {х,}"=1—набор векторов
линейного пространства Е. Линейной комбинацией векторов
{xi} с коэффициентами {а1} называется вектор, линейного про-
пространства Е, получаемый по правилу
п
х = а'х, + azx2 + ... + апхп = ? alxt.
i = \
Следующие факты непосредственно вытекают из общих поло-
положений § 1.
*6. В любом линейном пространстве существует единствен-
единственный нулевой элемент (нулевой элемент соответствующей ком-
коммутативной группы).
*7. В любом линейном пространстве всякий элемент а имеет
единственный противоположный элемент —а, при этом —а =
= (—\)а, где (—1) — элемент поля К, противоположный эле-
элементу 1.
*8. Для всякого элемента х линейного пространства имеет
место 0-х = о.
©Пусть уеЕ. Тогда 0-х + у = о + 0-х + у = — х-\- х + 0-х -f-
+ У = (-х)+\-х + 0-х + г/ = (-х) + A + 0)х + y = (-x)-f-
+ 1-х + г/=(—х) + х + у = о + у = у. Таким образом, 0-х+
¦-(- у = и, и в силу единственности нулевого элемента 0-х = о. ]>.
*9. Для всякого скаляра а имеет место сю = о.
«Экспериментальную базу» дальнейшего изложения дают сле-
следующие примеры A0—17) линейных пространств.
*10. Множество всех свободных векторов * на плоскости
(или в пространстве трех измерений) с естественными опера-
операциями сложения (по правилу параллелограмма) и умножения
на вещественные числа образует линейное пространство.
© Доказательство сводится к проверке аксиом коммутативной
группы 1.16, 1.19 и условий а—г из 3. Т>
*11. Множество всех векторов, исходящих из фиксированной
точки трехмерного пространства с естественными операциями
сложения и умножения на вещественные числа, есть линейное
пространство.
* 12. На множестве всех «-компонентных столбцов {х} с ве-
вещественными компонентами {E'}"=i определим операции сложе-
сложения и умножения на вещественные числа следующим образом;
Л2 1 х + у==[ ?+г\2
Указанное множество с определенными таким образом алге-
алгебраическими операциями является линейным пространством и
обозначается символом R".
Такое сложение и умножение называется покомпонентным.
*13. Аналогичным образом множество всех л-компонентных
столбцов с компонентами {?'} из поля К образует линейное
пространство, если определить на нем покомпонентные операции
сложения и умножения на скаляры из поля К. Это линейное
пространство обозначается терез К".
14. Матрицей размером пУСпг называется прямоугольная
таблица, имеющая п строк и m столбцов, следующего вида
Элементы {ajjj — скаляры, принадлежащие некоторому по-
полю,— называются матричными элементами матрицы s4-. При этом
пишут №)[ = а1к, ($)? = p'ft и т. д
* Напомним, что мы предполагаем у читателя знакомство с элементар»
ными сведениями rfS векторной алгебры и аналитической геометрии.
13
*15. Множество всех матриц размером пУСт с элементами
из поля К и поэлементными правилами сложения и умножения
на скаляры из поля К:
образует линейное пространство. Это линейное пространство
обозначается через К"-
*16. На множестве {Р"} всех полиномов степени не выше п
с вещественными коэффициентами {/?'} определим операции по-
поточечного сложения и умножения на вещественные числа. Имен-
Именно, для произвольных полиномов Р], Р2 из {Р"}, Р, = p°s + р\х +
+ р1х'-+ ... + pnsxn (s=l, 2) положим (Р1 + Р2)(х)=Р1(х) +
+ Р2(х), (аР,)(*) = аР,(*).
Множество {Рп} с указанной линейной структурой является
линейным пространством над полем вещественных чисел и обо-
обозначается символом Р".
*17. Множество всех вещественных непрерывных функций
{/}, заданных на промежутке [0, 1] с операциями поточечного
сложения и умножения на вещественные числа: (f-|-g) (•*)==
== / (х) + g (x), (af) (x) s= af (x), является линейным простран-
пространством. Это пространство обозначается С [0, 1].
*18. Вопросы. Является ли линейным пространством
а) множество комплексных «-компонентных столбцов над
полем вещественных чисел?
б) мнох^ество вещественных тг-компонентных столбцов над
полем комплексных чисел?
в) множество полиномов степени ровно п (п = 0, п > 0) ?
§ 3. ЛИНЕЙНАЯ ЗАВИСИМОСТЬ
И НЕЗАВИСИМОСТЬ НАБОРА ВЕКТОРОВ.
БАЗИС, РАЗМЕРНОСТЬ,
ИЗОМОРФИЗМ ЛИНЕЙНЫХ ПРОСТРАНСТВ
В этом параграфе и далее мы обозначаем линейное простран-
пространство через Е, его векторы—через х, у, ..., элементы соответ-
соответствующего поля скаляров через а, Р, у, ..., |, ц; если необхо-
необходимо, мы снабжаем эти объекты индексами i, k, I ...
1. Набор скаляров {а(}1 = 1 называется тривиальным, если все
элементы набора равны нулю а'= 0 (Vi). В противном случае
(когда хотя бы один из скаляров отличен от нуля) набор назы-
называется нетривиальным.
2. Набор векторов {^}i_1 cr E называется линейно независи-
независимым, если их линейная комбинация 2г=1а'е( равна нулю лишь
в случае, когда набор скаляров {а'}'=1 тривиален.
19
3. Набор векторов {^}[=1 называется линейно зависимым,
если существует нетривиальный набор скаляров {а'}'г=!1, такой,
что Yu\=ialei = o.
*4. Всякая часть линейно независимого набора векторов яв-
является линейно независимым набором.
0 Доказательство от противного. D
*5. Набор векторов, {х{}'1=1, содержащий нулевой вектор, ли-
линейно зависим.
0 Пусть-Хг„ = о A ^ /0 ^ 0 • Тогда ?'=1 a'xi — о, например,
если ас = 0 при I Ф i0 и ссг0 = 1. ])
*6. Набор ненулевых векторов {xt}j=:l линейно зависим тогда
и только тогда, когда среди векторов набора существует по
крайней мере один вектор, представимый в виде линейной ком-
комбинации предыдущих.
0 Необходимость. Набор, состоящий из одного вектора
Х\, линейно независим. Пусть при некотором / A < / < /) на*
бор Хи х2, ..., Xj линейно независим, а набор х\, х2, ..., х-и х!+\
уже линейно зависим. Тогда существует нетривиальный набор
скаляров а1, а2, ..., а'+1, такой, что ]CLoa'-*« + o,l+lxj+l = о.
Непременно выполнено а>+1 Ф 0, ибо в противном случае век-
векторы х\, х2 Xj были бы линейно зависимы, что противоре-
противоречит нашему допущению. Итак, */+i — ?|-_i (—a') (al+l)~l x{.
Достаточность. Если вектор х,+\ (/ < I) является линейной
комбинацией векторов {*;}'=1, то набор х\, х2, ..., xj,Xj+i, оче-
очевидно, линейно зависим, а с ним линейно зависим и набор
хи ..., Хи D
Фундаментальным вопросом теории линейных пространств
является вопрос о том, можно ли, а если можно, то как, произ-
произвольный вектор линейного пространства представить в виде ли-
линейной комбинации фиксированного набора векторов из этого
пространства. Далее будет получен полный ответ на этот вопрос
в случае так называемых конечномерных линейных пространств.
7. Набор векторов {si}i^{czE называется полным в линей-
линейном пространстве Е над полем К, если любой вектор х из про-
пространства Е может быть представлен линейной комбинацией
векторов ei с коэффициентами |' из поля К: х = ?г=1 Е'е,-.
*8. Если из полного набора вычеркнуть векторы, которые
линейно выражаются через предшествующие векторы этого на-
набора, то возникший набор по-прежнему будет полным.
9. Пространство Е называется конечномерным, если в нем
существует конечный полный набор векторов.
10. Полный линейно независимый набор векторов простран-
пространства называется базисом.
20
*11. Базис является максимальным линейно независимым на-
набором векторов: любой набор, содержащий его как собственную
часть, линейно зависим.
*12. Базис является минимальным полным набором: любая
его собственная часть не является полным набором.
¦ *13. Всякое конечномерное линейное пространство обладает
базисом.
©Пусть {е»}|=1 — конечный полный в Е набор векторов. Если он
линейно независим, то является базисом. Если же он линейно
зависим, то можно указать такой номер s, что набор векторов
{et)I=i линейно независим, а набор {et}slti уже линейно зависим.
Тогда вектор es+\ линейно выражается через предыдущие. Вы-
Вычеркивая его, получим все еще полный в Е набор. Если полу-
полученный набор линейно независим, то он является базисом. Если
же он линейно зависим — повторим прежнюю процедуру. После-
Последовательно вычеркивая векторы, которые линейно выражаются
через предыдущие, мы получим после конечного числа шагов
все еще полный в Е, но уже линейно независимый набор — ба-
базис пространства Е. D
*14. Всякий линейно независимый набор векторов конечно-
конечномерного линейного пространства можно дополнить до базиса.
0 Пусть (б,-}'=1 — рассматриваемый набор, {е'}"_ — некото-
некоторый базис пространства Е. Рассмотрим объединенный набор
е{, е2, ..., ер е', ..., е'п. Он, очевидно, полон и линейно зави-
зависим. «Проредим» его, вычеркивая из него элементы, линейно
выражающиеся через предыдущие. Полученный линейно неза-
независимый полный набор — базис — содержит набор в\, в2, ..., ei
в качестве части (собственной, если 1<Сп). ]>
В только что доказанном утверждении мы, пользуясь пред-
предложением 8, вычеркивали лишние векторы из набора, «проре-
«прореживая» его таким образом. Аналогичный прием был ранее ис-
использован в 13. Этот прием носит название «прополки» и по
сути дела похож на соответствующую сельскохозяйственную
операцию, ибо служит последовательному удалению «сорняков»,
портящих линейную независимость уже рассмотренной части
набора. Мы применим тот же прием в более изощренном виде.
*15. Если набор х\, х% ..., хт линейно независим, а набор
У и У2, • • • > Уп полон в-Е, то m ^ я.
© Предположим, что т> п. Рассмотрим набор хт, уи у2, ...
..., уп. Он, очевидно, полон и линейно зависим, так как хт
линейно выражается через у\, у2, ..., уп- Поэтому, согласно 6,
найдется вектор ySi, который линейно выражается через преды-
предыдущие хт, yv ..., ys _,. Вычеркивая его, получим полный на-
боР хт' У\> #2> •••> ySl-iySl+\ Уп- Дописывая к нему слева
элемент Хт-и снова получим полный и линейно зависимый на-
21
бор. Поэтому, согласно 6, в нем найдется вектор, который ли-
линейно выражается через предыдущие. Этим вектором не может
быть хт, так как хт, хт~\ линейно независимы. Следовательно,
этим вектором является некоторый вектор ys. Вычеркивая его,
снова получим полный и линейно зависимый набор xm_v хт, у{,
У2, •••> «/.,,_!, ySi+l, .... yS2_v yS2+v ..., уп и т. д. На л-м
шаге мы допишем вектор Х\+т-п и, вычеркнув последний из век-
векторов {г/г}"=1, получим все еще полный набор х\+т-п, х^+т-п, ¦¦¦
..., хт. Так как по предположению т> п, то т — п + 1 ^ 2.
Таким образом, у нас имеется еще по крайней мере один вектор
Хт-п, КОТОрЫЙ, ВВИДУ ПОЛНОТЫ набора Хт-п+1, ¦ ¦ ¦ , Хт, ЛИНвЙНО
выражается через хт-п+\, ¦. ¦, хт вопреки условию линейной
независимости набора {х,}^,. Полученное противоречие дока-
доказывает, что т ^ п. D
*16. Все базисы конечномерного линейного пространства со-
содержат одинаковое число векторов.
0 Пусть {е,}"^, {^}"_ —два базиса. Согласно предыдущему
утверждению должно быть выполнено одновременно т ^ п,
т ^ п. Следовательно, т = п. 5
Доказанное утверждение позволяет ввести еще одно фунда-
фундаментальное понятие:
17. Число векторов в базисе линейного пространства Е назы-
называется его размерностью и обозначается dim E.
18. Размерность линейного пространства, состоящего из
одного нулевого вектора, принимается равной нулю.
*19. Если размерность некоторого линейного пространства Е
равна нулю, то оно тривиально, т. е. состоит из единственного
нулевого вектора.
0 Пространство Е не содержит ни одного отличного от нуля
вектора. D
*20. Для того чтобы линейно независимый набор векторов
конечномерного линейного пространства Е был базисом этого
пространства, необходимо и достаточно, чтобы- число векторов
в этом наборе было равно dimE.
*21. Для того чтобы полный набор векторов конечномерного
линейного пространства Е был линейно независим, необходимо
и достаточно, чтобы число векторов в этом наборе было равно
dim E.
Приведем примеры базисов в пространствах Р" и R".
*22. Набор мономов: 1, t, t2, ..., /"-', tn является базисом
в Р".
0 Указанный набор полон в Р". Доказательство линейной не-
независимости сводится к проверке того факта, что всякий поли-
полином с нетривиальным набором коэффициентов не равен нулю
тождественно. Действительно, обозначая через аи старший от-
отличный от нуля коэффициент полинома Р, имеем при t ф 0;
22
(H+•••]. Выражение, стоящее в
скобках, заведомо отлично от нуля при больших значениях t.
Отсюда немедленно следует требуемый факт. 5
*23. Набор векторов
( \ (
J °
является базисом пространства R".
©Покажем, что набор (е,}"=1 линейно независим. Проверка ли-
линейной независимости набора {е,}"ет1 состоит в определении зна-
значений а1, а2,..., а", при которых возможно равенство 2"=i a'e< =t=
=о. Вычисляя коэффициенты линейной комбинации ]C"=ia'e<
и приравнивая их нулю, получаем систему линейных уравнений:
а1 • 1 + а2 • 0 + ... + ап ¦ 0 = О,
а1 • О + а2 • 1 + • • • + «" • 0 = О,
ai.0 + a2.0+ ... +ап- 1=0.
Непосредственно видно, что эта система имеет только одно ре-
решение а1 = а2 = ... = а" = 0. Таким образом, равенство
2(=оа'е*==0 возможно только при тривиальном наборе коэф-
коэффициентов {a'}"=i и, следовательно, набор {ег}"=1 линейно не-
независим. С другой стороны, всякий вектор х = (I1, |2, ..., |")
заведомо представим в виде линейной комбинации векторов
{et}: х = |'ei + l2e2 + ... + l"en и, значит, набор{е,}"=1 полон.5
*24. dim Р" = п + 1, dim Rn = п.
Введение базиса в линейном пространстве над полем К по-
позволяет абстрактные операции сложения элементов линейного
пространства и -умножения их на скаляры свести к операциям
сложения и умножения в поле К. Достигается это путем введе-
введения координат вектора.
*25. Пусть Е — линейное пространство размерностью п над
полем К, {ej"_i — базис пространства Е. Тогда любой элемент
х из Е единственным образом представляется в виде линейной
комбинации элементов базиса (разлагается по базису): х —
* = SL^ F'sK, /=1, 2, "..., п).
© Предположим, что существует иное разложение х =
^Zi-ii^li'5^ Вычитая одно разложение из другого,
получаем ^"^(Ц1 ~l')ei:=0> откуда в силу линейной незави-
23
симости набора {ei}i=l следует, что ?'= V'('— 1» 2 п). 5
26. Скаляры |'еК в разложении 25 вектора х по базису
(еЛ"=1 называются координатами вектора х в базисе {ej"=1 •
Координаты ?' вектора х будем записывать в виде столбца:
*27. Координаты ?' (/'= 1, 2, ..., п) вектора х в базисе
(еЛ"_1 определяются однозначно. При сложении векторов соот-
соответствующие их координаты складываются. При умножении
вектора на скаляр все координаты вектора умножаются на этот
скаляр.
Видимая необъятность множества всех п-мерных пространств
над данным полем, казалось бы, является препятствием для
развития сколько-нибудь общей теории таких пространств. Ока-
Оказывается, это не так. Мы покажем сейчас, что над данным по-
полем существует в некотором смысле [определяемом ниже) лишь
одно пространство данной размерности.
28. Два линейных пространства Е и Е' над одним и тем же
полем К называются изоморфными, если между ними можно
установить биекцию Т, Т: Е->Е', сохраняющую алгебраическую
структуру: Tax = аТх, Т(х -\- у)= Тх-\- Ту.
29. Биекция Т: Е->Е', сохраняющая алгебраическую струк-
структуру, называется изоморфизмом линейных пространств Е и Е'.
*30. Любое линейное пространство Е размерностью п над
полем К изоморфно линейному пространству К".
© Пусть {ej"=1— некоторый базис в Е и ?', |2, ..., |" — коор-
координаты произвольного элемента х в базисе {?*}"_,. Каждому
элементу х из пространства Е поставим в соответствие вектор-
столбец, образованный из координат {Е'}™=1 элемента х. Ото-
Отображение 7\*: = {|'}"=1 взаимно однозначно и сохраняет алгеб-
алгебраическую структуру в силу утверждения 27. 5
*31. В частности, любое «-мерное пространство над полем
вещественных (комплексных) чисел изоморфно R"(C").
Таким образом, изучение любого п-мерного пространства над
полем вещественных [комплексных) чисел полностью сводится
к изучению пространств столбцов R"(C") и может быть в прин-
принципе осуществлено методами теории систем линейных уравне-
уравнений [см. далее гл. 3).
32. В дальнейшем для краткости мы будем называть всякое
пространство над полем вещественных чисел вещественным,
а всякое пространство над полем комплексных — комплексным,
24
Глава 2
ПОДПРОСТРАНСТВА
Среди подмножеств линейного пространства можно выделить
некоторые, замечательные тем, что сложение и умножение на
скаляры элементов этих подмножеств не выводит за их пре-
пределы. Эти подмножества называются подпространствами линей-
линейного пространства. Простейшими примерами таких подпро-
подпространств служат прямая и плоскость, проходящие через начало
координат в трехмерном пространстве. Далее мы установим,
что многие важные свойства прямых и плоскостей присущи
и общим подпространствам конечномерных линейных про-
пространств. Мы покажем, как обобщается понятие проекции век-
вектора на прямую и плоскость, и введем в последнем параграфе
(§ 3) важное понятие линейной независимости набора векторов
над подпространством. При первом чтении этот параграф можно
пропустить, однако к нему придется вернуться при изучении
главы, посвященной жордановой форме оператора (гл. 9).
§ 1. ОПРЕДЕЛЕНИЯ И ПРИМЕРЫ
1. Подпространством линейного пространства Е над полем
К называется подмножество L из Е, замкнутое относительно
законов композиции, действующих в Е, иначе говоря такое, что
для любых х, у из L и а из К имеет место x + yeL и aieL.
*2. Подпространство L линейного пространства Е само яв-
является линейным пространством относительно законов сложе-
сложения и умножения на скаляры, действующих в Е (как говорят,
индуцированных в L из Е).
© Действительно, существование в L нулевого элемента и су-
существование для всякого х из L противоположного элемента
(—х) следует из лемм 1.2.8 и 2.7: о = Олг, (—х) = ( - 1)х. Вы-
Выполнение остальных аксиом линейного пространства следует из
того, что законы композиции в L индуцированы из Е. Э
*3. Подмножество, состоящее из одного нулевого вектора,
и все пространство Е являются подпространствами Е. Эти два
подпространства называются несобственными или тривиальными
подпространствами.
23
Приведем несколько примеров подпространств.
*4. Пусть Е — линейное пространство трехмерных векторов,
исходящих из фиксированной точки О. Рассмотрим какую-либо
плоскость, проходящую через точку О. Совокупность векторов,
лежащих в этой плоскости, образует подпространство L про-
пространства Е.
*5. Подмножество в Rm, состоящее из всех векторов, коор-
координаты которых {!'} (t > п, п •< т) равны нулю, является под-
подпространством в Rm, изоморфным R".
*6. Линейное пространство полиномов Рт степени не выше m
является подпространством линейного пространства полиномов
Р" степени не выше п для любого m ^ п.
Для подпространства сохраняют смысл понятия линейной
зависимости набора векторов, базиса, размерности.
*7. Если L — подпространство пространства Е, то его раз-
размерность не превосходит размерности пространства Е, т. е.
dim L ^ dim E.
© Действительно, линейно независимый набор векторов в L
будет линейно независимым и в Е, и поэтому число линейно
независимых векторов в L не может быть больше размерности
пространства Е. D
*8. Если ЬсЕи dim L = dim Е, то L = Е.
*9. Базис подпространства всегда можно дополнить до ба-
базиса всего пространства (см. 1.3.14). С другой стороны, базис
подпространства, вообще говоря, нельзя выбрать из векторов
данного базиса пространства.
10. Линейной оболочкой L (ег}|.=1 набора векторов {ег}г=1 на-
называется множество всевозможных линейных комбинаций век-
векторов {ei) с коэффициентами из поля К-
*11. Линейная оболочка L {е*}'г_, является подпространством
в Е, причем dim L <; /.
© Утверждение, что L есть подпространство, очевидно. По
построению линейной оболочки набор векторов {ег}"=1 является
полным в L. Однако этот набор не предполагается, вообще
говоря, линейно независимым. Поэтому dim L ^l. D
*12. Максимальный линейно независимый поднабор в {ег}|_,
является базисом линейной оболочки L{et}\_v Число векторов
этого максимального поднабора равно размерности линейной
оболочки.
13. Линейную оболочку векторов {е<}[_, будем называть так-
также подпространством, натянутым на векторы {e^t_y
*14. Подпространство, натянутое на векторы {в/}г_,, яв-
является наименьшим подпространством, содержащим эти век-
векторы.
26
15. Пусть L — подпространство в Е и х0 — фиксированный
вектор. Множество М всех векторов вида х — х0 + у (у ^ L)
называется линейным многообразием размерностью dim L
(рис. 1). О таком линейном многообразии говорят, что оно
параллельно подпространству
L, и обозначают его символом
16. Одномерное линейное
многообразие называется пря-
прямой, ^-мерное — ^-мерной пло-
плоскостью, если 1 < k < dim E —
— 1, и гиперплоскостью, если
k = AimE — 1.
*17. В пространстве трех-
трехмерных векторов, исходящих
из точки О, прямая и гипер-
гиперплоскость х = х0 + у (jeL)
суть обычные прямая и пло-
плоскость, смещенные относительно точки О на вектор х0 и парал-
параллельные прямой или плоскости L, проходящей через точку О.
*18. Линейное многообразие М является подпространством
(и притом совпадающим с L) только при условии х0 е L.
§ 2. ГЕОМЕТРИЯ ПОДПРОСТРАНСТВ
1. Пусть Li и Ьг — произвольные подпространства линейного
пространства Е. Совокупность L всевозможных векторов вида
х = Х\-\- хч, где jcigLi, jjeLj, называется суммой подпро-
Рис. 1.
Рис. 2.
странств (рис. 2) Li и L2. Сумма подпространств обозначается
знаком +: L = Li + W
*2. Сумма L подпространств Li и L2 из Е является под-
подпространством линейного пространства Е.
27
3. Совокупность N векторов, принадлежащих одновременно
подпространствам Ц и L2, называется пересечением подпро-
подпространств Li и L2 (см. рис. 2). Пересечение подпространств обо-
обозначается знаком ("): N = Li (] L2.
*4. Пересечение N подпространств Ц и L2 является подпро-
подпространством линейного пространства Е, а также подпростран-
подпространством в Li и L2. В то же время теоретико-множественное объ-
объединение Li U L2 подпространств не является подпростран-
подпространством в Е.
Следующая теорема устанавливает связь между размерно-
размерностями подпространств Lb L2> их суммы и пересечения:
*5. dim (Li + Ц) = dim Li -f dim L2 — dim (Li П L2).
0 Обозначим: dim(Li П L2) = k, dim Li = k + U, dimL2 =
== k-\-h. В этих обозначениях требуется доказать, что
dim(Li + L2) = k + h + h- Пусть {e\, e2, ..., ek}—базис
в Li П L2. Дополним этот базис до базисов подпространств
Li и
(*)
(**)
U:
ev
^2* • • • »
e2, ...,
efe' /p /2- •
efe, gv g2,
•¦' K~
••¦' Sh
- базис в
— б азис
Lp
в L2.
Покажем, что набор векторов
(***) ev e2, ..., ек, f{, f2, ..., f;_, g]t g2, ,.., gh
образует базис суммы Li + L2, откуда и будет следовать, что
dim (Li + L2) = k + l\ -j- h- Полнота набора векторов (***)
в сумме Li + L2 следует из того, что любой вектор х из Ц + L2
представим в виде Х\ + х2, где х\ g Lj и х2 е L2. В свою оче-
очередь, векторы х\ и х2 раскладываются по базисам (*) и (*¦*)
подпространств Li и L2. Линейная независимость набора (»*«)
доказывается от противного. Пусть существует нетривиальный
набор скаляров ар а2, ..., ак, рр р2, ..., рл, yv y2, ..., у/а,
такой, чтоа,е, + а2е2 + ... +afeefe+Pi/i+ ••• + Р j/,+Yi?i +• • •
• • • + Y/Д/, = С ТогДа вектор у = a^j + ... + afteft + P1/1 + ...
. .. + Pf//= — Yi^i— ••• —y^2S"/2 принадлежит одновременно
Li и L2, т. е. у е Lj f) L2. Поэтому при некоторых 6i, б2, ..., б^
должно выполняться равенство у = 61е1 + б2ег ~Ь • • • + 6feefe =
= — y^! — y2g2 — ... — Y/2g"/2- Поскольку набор векторов (**)
линейно независим, это равенство может выполняться только
при 6i=62=: ... = 6ft = 0. Следовательно, г/ = о иа^+.,.
. ••+a/fe+Pifi+ ••• + Рг^;, = о. что противоречит линейной
независимости набора (*). D
. * Для сокращения объема нумерация формул (*), (**) и т. д. стоит
слева перед формулой.
28
6. Подпространства Li и L2 называются дизъюнктными, если
их пересечение состоит из единственного вектора о, т. е. если
7. Сумма L = Li 4- L2 подпространств Li и L2 называется
прямой, если представление любого вектора х из L в виде
х = х\ 4- х2 (xieLi, ueL2) единственно. Прямая сумма обо-
обозначается знаком 4-: L = Li 4- L2.
*8. Для того чтобы сумма подпространства Li и Ьг'была
прямой, необходимо и достаточно, чтобы подпространства Li
и Ьг были дизъюнктны.
© Необходимость докажем от противного. Пусть zq e
«= Li П L2 и Zo ф о. Возьмем какой-либо вектор х из Li 4" L2
и представим его в виде х = х\ 4- *2, где xi е Li, x2 e L2. Если
20 т^ о, то наряду с построенным разложением существует раз-
разложение х = Х\ 4- Zo 4- х2 — zo, где jci+Zo^Li, х2 — ZjeLj.
Существование второго разложения противоречит тому, что
сумма Li 4- L2 — прямая. Следовательно, Zo = о.
Достаточность. Предположим, что разложение х = Х\-{-х2
не единственно. Пусть имеет место также разложение х =
= У\+ У2, где г/i е= Li и г/2 е L2. Тогда a;i — г/i 4- х2 — у2 = о
или *1 — г/i = г/2 — JC2- Так как х\ — t/i e Li, х2 — г/2 ^ L2, то
X] — у\ a Li f) L2, и из дизъюнктности Lj и L2 следует, что
Л = г/i и л:2 = г/2. D
*9. Для того чтобы пространство Е разлагалось в прямую
сумму своих подпространств Li и L2, необходимо и достаточно,
чтобы выполнялись два условия: a) dim Li 4- dim L2 = dim E,
6) Li П L2 = 0.
© Необходимость. Если Е = Li 4- L2, то согласно 8 Li П
П L2 = 0 и в силу 5 выполняется равенство dim Li 4- dim L2 =
Достаточность. Так как теперь Li П L2 = 0 по условию, то
достаточно доказать, что Е = Li + L2. Очевидно, что Li 4- L2
является подпространством пространства Е. В силу 5 имеем
dim (Li 4- L2) = dim Li + dim L2 и, следовательно, dim (Li 4-
4-L2)=dimE. Отсюда на основании 1.8 заключаем, что Li +
+ U = Е. D
Обобщим понятие прямой суммы подпространств на случай
произвольного числа слагаемых.
10. Подпространство L называется прямой суммой подпро-
подпространств Li, L2, .. ., Lft, если а) для всякого вектора х из L
существует разложение х = х\ 4- х2 4- ... 4- хк> где xi e L,-,
t = 1, 2, ..., k; б) это разложение единственно.
П. Пусть пространство Е разлагается в прямую сумму под-
подпространств Li и L2, т. е. Е = Li 4- L2. Тогда подпространство
L2 называется дополнением подпространства Ц и, наоборот,
подпространство Ц называется дополнением подпростран-
подпространства Ls.
29
*12. Для любого подпространства L из Е существует допол-
дополнение в Е. Дополнение нетривиального подпространства опре-
определяется неединственным образом.
*13. Если dim Е = п и dim L — k, то размерность любого
дополнения L равна п — к.
14. Число п — k называется коразмерностью подпростран-
подпространства L в Е и обозначается codimEL. По определению dim L+
т{- codimE L = dim E.
*15. Пусть Е = Lj -+- L2. Тогда для любого вектора х из Е
имеет место единственное разложение х — Х\ + х2, где х\ е Li,
х2 е= L2.
16. Векторы Х\ и л:2 называются компонентами вектора х в
подпространствах Li и L2 или проекциями вектора * на Li<2) па-
параллельно L2(i).
17. Операция нахождения компоненты Х\ вектора х назы-
называется проецированием вектора х на подпространство Li парал-
параллельно подпространству L2. Операцию проецирования на Li па-
параллельно L2 будем обозначать через РЦ'2. Таким образом,
v pULw y — р11 их
§ 3. ЛИНЕЙНАЯ ЗАВИСИМОСТЬ
НАД ПОДПРОСТРАНСТВОМ
И КОРАЗМЕРНОСТЬ
1. Пусть L — подпространство в Е. Набор {xi, ..., xk) из Е
называется линейно зависимым над L, если существует нетри-
нетривиальная линейная комбинация его элементов, принадлежа-
принадлежащая L.
Набор {^ь . .. , хК} из Е называется линейно независимым
над L, если не существует нетривиальной линейной комбинации
его элементов, принадлежащей L.
Обычная линейная независимость есть, очевидно, линейная
независимость над нулевым подпространством L = 0.
*2. Пусть Li, L2 — подпространства в Е, Li с L2. Тогда
а) всякий набор, линейно зависимый над Li, линейно зависим
над L2; б) всякий набор, линейно независимый над L2, линейно
независим над Lj. В частности, если набор линейно независим
над L с: Е, L ф о, то он линейно независим.
*3. Пусть {г/ь г/2, ..., ут) —линейно независимый набор в L,
{х\, Х2, ..., xk} —линейно независимый над L набор в Е. Тогда
набор {х\, х2 xk, у\, ..., ут} линейно независим.
© Пусть ?™_l aly{ + Z/=iP4 = о. Тогда Ej-i Р7*/=
= X/_i(—a')#ieL. Отсюда, в силу сделанных предположений,
следует, что |У = а' = 0, при всех значениях i и /. 5
*4. Пусть {уи ..., ут} — базис в L, {х\, .. ., xk) — линейно
независимый над L набор в Е и г — вектор из Е, такой, что
30
набор {г/ь г/г, ..., Ут, *\, ••¦, xk, z) линейно независим. Тогда
набор {х\, ..., Xk, z} линейно независим над L.
0 Пусть ??_, fi'x, + p°z s L. Тогда Xj_, РЧ + № = ЕГ-i «W
Последнее равенство возможно лишь при условии, что р° =
= р/ = а'=0 (/=1,2, ...,k, t=l, 2, .... m). 3
5. Линейно независимый над L набор в Е называется мак-
максимальным, если всякий более широкий набор линейно зави-
зависим над L.
*6. Если {у\ ут) — базис в L и {хи ..., xk} — макси-
максимальный линейно независимый над L набор в Е, то а) объеди-
объединенный набор {у\, ..., ут, хи ..., хк} является базисом в Е;
б) во всяком максимальном линейно независимом над L наборе
одинаковое число элементов, равное codimE L = dim E — dim L.
0 Построенный набор линейно независим в силу 3. Полнота
следует из 4. Действительно, допустим, что в Е существует век-
вектор z, такой, что набор {уи ..., ут, Х\, ..., Xk, z) линейно неза-
независим. Тогда согласно 4 набор {хь ..., Xk, z) линейно неза-
независим над L, что противоречит максимальности набора {хи ...
,,., xk). Утверждение б) следует отсюда непосредственно. 5
Глава 3
СИСТЕМЫ ЛИНЕЙНЫХ
АЛГЕБРАИЧЕСКИХ УРАВНЕНИИ
Системы линейных алгебраических уравнений дают благо-
благодатное поле для приложений линейной алгебры. В этой главе
мы построим теорию разрешимости и дадим алгорифмы реше-
решения таких систем. В отличие от обычного способа излооюения
теорем о разрешимости, основанного на теории определителей,
мы идем более прямым путем, основываясь на «геометрических»
построениях предыдущей главы и знаменитом методе Гаусса —
основном и универсальном вычислительном приеме линейной ал-
алгебры. Особенно ' полезной оказывается теория линейных про-
пространств при описании общего решения однородной и неодно-
неоднородной систем линейных уравнений. Обходясь в рассмотрении
систем без теории определителей, мы не исключили их из мате-
материала книги, а лишь перенесли на более естественное место —
в гл. 6, где рассматриваются антисимметрические полилинейные
формы.
§ I. ОСНОВНЫЕ ТЕОРЕМЫ
1. Алгебраической линейной системой п уравнений с m не-
неизвестными называется система уравнений
Здесь о\ A < i < m, l<C?s^rt), P* — заданные скаляры из
поля К; подлежат определению скаляры I1, |2, ..., %!" из
поля К.
2. Скаляры а? называются коэффициентами системы, обра-
образованная из них таблица, имеющая m столбцов и п строк:
32
— матрицей системы. Обращаем внимание читателя на то, что
верхний индекс указывает номер уравнения — номер строки
матрицы, нижний — номер неизвестного, при котором стоит ко-
коэффициент а* — номер столбца матрицы.
Скаляры рк называются свободными членами системы, под-
подлежащие определению скаляры |' — неизвестными системы.
Если число неизвестных равно числу уравнений, т — п, то
система A*) называется квадратной.
3. Решением системы A*) называется набор скаляров {?',
g2, ..., gm}, который, будучи подставлен в систему, обращает
все ее уравнения в тождества. Система, имеющая решение, на-
называется совместной, не имеющая решений — несовместной.
4. Если не все р* равны нулю, система A*) называется
неоднородной, если |3* = 0 (k — 1,2, ... , п), система называет-
называется однородной.
Однородную систему ?<_1а*?' = 0 (/г = 1,2, ..., п) с той же
матрицей коэффициентов |af||> что и у неоднородной системы
A*), называют однородной системой, соответствующей неодно-
неоднородной системе A*).
5. Две линейные системы уравнений:
*|' = р*, k = \, 2, .... п,
(**) ?a;V = P'*, *=1, 2, .... п,
i-\
называются эквивалентными, если все решения системы (*)
являются решениями системы (**) и, наоборот, все решения
системы (**) — решениями системы (*).
В дальнейшем мы ограничимся изложением теории систем
линейных уравнений над наиболее важными числовыми полями.
Именно, в качестве поля К мы будем представлять себе поле
комплексных чисел С или поле вещественных чисел R. В соот-
соответствии со сказанным скаляры поля К будут далее называться
числами.
Теория систем линейных уравнений в указанных полях наи-
наиболее развита и богата важными приложениями.
*6. Следующие три операции над системами приводят к си-
системам, эквивалентным исходным:
1) отбрасывание в системе уравнения, все коэффициенты ко-
которого и свободный член равны нулю;
2) умножение какого-либо уравнения системы на число, от-
отличное от нуля;
3) прибавление (почленное) к какому-либо уравнению си-
системы другого уравнения системы.
2 За к 193 33
*7. Примеры. Система трех уравнений с тремя неизвест-
неизвестными:
s'+g2 =2
имеет единственное решение — набор g1 = 1, ?2 — 1, I3 — 1.
Система четырех уравнений с тремя неизвестными
имеет бесконечное число решений — наборы ?'= О, |2=1,
Й-J 1. 61 _ 1 62 __ А 63 __ 1 . ?1 _ 1/ 62 _ 1/ ?3" 1 ,, т л
Каким условиям должны удовлетворять коэффициенты и сво-
свободные члены системы для того, чтобы система а) имела бы
единственное решение, б) имела бесконечное множество реше-
решений! Будут ли эти условия не только достаточными, но и необ-
необходимыми! Теория линейных систем дает исчерпывающие ответы
на эти вопросы. Кроме того, задачей теории является указание
достаточно эффективного практического способа решения систем.
Изящное и наглядное построение теории линейных систем
может быть дано на основе теории линейных пространств. Это
одно из многочисленных практических приложений теории линей-
линейных пространств.
*8. Положим
(•)fl. = | "' I- a2- ' "' ' - ' a"
и будем рассматривать а\. а2, ..., ат как векторы линейного
пространства Е над полем К, Е = К". Тогда система A*) может
быть записана в виде равенства, связывающего элементы линей-
линейного пространства Е:
Va, + l2a2+ ... +1тат = Ъ.
При такой записи системы ее решение с позиций теории ли-
линейного пространства состоит в построении всевозможных разло-
разложений вектора Ь по векторам а.\, а2: ¦ ¦ ¦, ат. Вначале рассмотрим
частный случай системы A*) — так называемую систему Кра-
Крамера.
34
9. Система A*) или (8») называется системой Крамера, если
т = п и набор векторов {а,\, а2, .. . , ап] линейно неза-
независим.
*10. Теорема Крамера: Система Крамера всегда (т.е.
при любом векторе Ь) имеет решение и притом единственное.
© Поскольку набор векторов {а\, а2, ..., ап} — линейно неза-
независим, векторы {а\, а2, ..., ап} образуют базис в пространстве
Е и, следовательно, любой вектор Ь из Е единственным образом
раскладывается по векторам а\, а2, ..., ап. D
Рассмотрим общий случай. Обозначим линейную оболочку
векторов а\, а2, ..., ат буквой L.
*11. Теорема Кронекера — Капелл и: Для того чтобы
система A*) (или (8*)) имела решение, необходимо и доста-
достаточно, чтобы вектор свободных членов принадлежал линейной
оболочке векторов а\, а2, ..., ат, т. е. чтобы JeL.
0 Необходимость. Если система имеет решение, то равен-
равенство (8*) выполняется при некотором наборе g1, g2, .. . , gm, и,
следовательно, 6eL.
Достаточность. Если deL, то вектор Ь представим линей-
линейной комбинацией (не обязательно единственной) вектороп
аи а,2, ¦ ¦ ¦, ат. Коэффициенты этой линейной комбинации и будут
решениями системы. D
Выясним вопрос о единственности решения системы в общем
случае.
12. Пусть r= dim L < m. Неизвестные |г', |Ч ..., |'г, стоя-
стоящие при векторах ati, aii2, ..., air, образующих линейно неза-
независимый набор, называются определяющими неизвестными си-
системы, остальные m — г неизвестных системы называются сво-
свободными неизвестными.
Разделение неизвестных на определяющие и свободные неиз-
неизвестные неоднозначно.
Условимся считать, что векторы а\, а2, ..., а, образуют ли-
линейно независимый набор, полный в линейной оболочке L, и, та-
таким образом, неизвестные g\ g2, ..., |г являются определяющи-
определяющими неизвестными системы. (Этого всегда можно добиться посред-
посредством должной перенумеровки векторов {at} и неизвестных.)
*13. Пусть freL Тогда система A*) (или (8*)) имеет един-
единственное решение в том и только том случае, когда dim L = m.
Если dim L < m, то система имеет бесконечное множество ре-
решений.
0 Если dim L = m, то векторы а\, а2, ..., ат образуют базис
в L и, значит, любой вектор Ь из L единственным образом раз-
разлагается по векторам а\, а2, ..., ат. Система имеет единственное
решение.
Пусть теперь dimL = г < т и векторы аи а2, ..., а, обра-
образуют линейно независимый набор. Мы выберем его в качестве
базиса в L. Фиксируем произвольным образом значения свобод-
2* 35
ных неизвестных {|r+1 gm} и построим вектор из L: Ь' =
= 6 — g'+'ov+i — Ъ,г+2аг+2— ... — ?,тат. Этот вектор разлагается
единственным образом по базису {а\ ... аг}, т. е. найдется набор
неизвестных {g1, |2, ..., 1Г}, такой, что 11а\ + 12а2 + ... -hlra, =
= 6'. Этот набор единственным образом определяется выбором
значений свободных неизвестных. Очевидно, что в рассматри-
рассматриваемом случае система имеет бесконечное множество решений. D
Сформулируем утверждения, вытекающие из 10, 11 и 13 для
однородных систем.
*14. Однородная система
m
(*) ?a*g' = 0, /г=1, 2, .... га,
или aig1 + «2|2 + • • • + amim = о
всегда имеет по крайней мере одно решение: I1 = |2 = ...
... = lm = 0.
15. Решение g1 = ?2 = ... = |" = 0 однородной системы на-
называется тривиальным.
*16. Для того чтобы система A4*) имела решения, отличные
от тривиального, необходимо и достаточно, чтобы набор векто-
векторов а\, п2, ..., ат был линейно зависимым, т. е. чтобы dim L <
<т.
*17. В частности, если m> n (т. е. число неизвестных боль-
больше числа уравнений), то однородная система заведомо имеет
решения, отличные от тривиального.
© Поскольку dim L ^ п, то из условия п < т следует, что
dim L < т. D
Это краткое введение в теорию систем линейных уравнений
мы заканчиваем доказательством теоремы, которая известна
под названием альтернативы Фредгольма. Эта теорема уста-
устанавливает соотношение между разрешимостью неоднородной
и соответствующей ей однородной системы в случае квадратных
систем, когда число неизвестных равно числу уравнений. Даль-
Дальнейшему исследованию систем линейных уравнений посвящена,
помимо второго и третьего параграфа настоящей главы, часть
следующей главы, где теорема Фредгольма будет доказана
в полном объеме. Именно там будут найдены условия разреши-
разрешимости (быть может, неоднозначной^.) общих неоднородных
систем.
*18. Альтернатива Фредгольма: Если квадратная
однородная система
(или ail1 ±_ «гё2 гЬ • • • di anl" = о),
36
отвечающая неоднородной системе
имеет только тривиальное решение, то неоднородная система
имеет единственное решение при любых свободных членах
(р\р2, ...,р»} = 6.
Если же однородная система (•») имеет решения, отличные
от тривиального, то существует такой набор свободных членов
{р1, Р2, ..., Р"} = Ь, при котором неоднородная система (*#)
не имеет ни одного решения.
© Если однородная система (*) имеет только тривиальное
решение, то согласно 16 набор векторов {аи а2, ..., ап} ли-
линейно независим, и, следовательно, неоднородная система яв-
является системой Крамера, имеющей единственное решение.
Во втором случае набор векторов {аи а2, ..., ап) по условию
линейно зависим, значит векторы а\, а2, ..., ап не образуют
базис пространства Е, и взяв вектор Ь, не принадлежащий L,
получим неоднородную систему, не имеющую решений. D
Прежде чем переходить к исследованию линейной структуры
бесконечного множества решений линейных систем (см. § 3),
мы разовьем практический способ решения линейных систем —¦
так называемый метод исключения неизвестных Гаусса.
§ 2. РЕШЕНИЕ СИСТЕМ УРАВНЕНИЙ
МЕТОДОМ ИСКЛЮЧЕНИЯ НЕИЗВЕСТНЫХ
(МЕТОД ГАУССА)
Метод Гаусса одинаковым образом применим к решению
как неоднородных, так и однородных систем. Решение неодно-
неоднородной системы A.1*) по методу исключения неизвестных со-
состоит из операций, описанных в 1—7. Для того чтобы перейти
к случаю однородной системы, свободные члены р1, р2, ..., р"
следует положить равными нулю.
Условимся сразу же о следующей рациональной системе обо-
значений:
1. Во-первых, закрепим раз и навсегда нумерацию неиз-
неизвестных. Это позволит нам вообще опустить неизвестные при
записи системы и писать ее в виде матрицы, отделяя столбец
свободных членов вертикальной чертой. Так, система A.1*),'
запишется теперь в виде матрицы:
«2 •¦• «т
37
которую будем называть расширенной матрицей системы.
Ясно, что система A.1*) восстанавливается по своей расши-
расширенной матрице однозначно.
2. Во-вторых, условимся, что первым в системе стоит урав-
уравнение, в котором коэффициент при первом неизвестном отличен
от нуля: а1 Ф 0.
Этого можно добиться перестановкой уравнений, если первая
неизвестная фактически присутствует хотя бы в одном из них.
В противном случае она исключается, т. е. ее можно просто от-
отбросить, считая ее значение произвольным, и заняться разыска-
разысканием других неизвестных.
Наконец, опишем стандартный способ построения и записи
эквивалентной системы.
3. Из каждой строки расширенной матрицы, начиная со
второй, вычтем почленно первую строку, помноженную предва-
предварительно на коэффициент X, выбранный с таким расчетом,
чтобы в строке, полученной в качестве разности, первый коэф-
коэффициент был равен нулю. Ясно, что для строки с номером k
этот коэффициент следует взять равным Я* — («I) af; при
этом результат вычитания получится в виде
0 ак ак ... а'
где 2а* = а* - Я-а'. 2$к = $к ~ ^Р'-
Из полученных таким образом строк, добавляя к ним неиз-
неизменную первую строку, образуем новую расширенную матрицу,
отвечающую некоторой системе, в которой все коэффициенты
при первой неизвесткой, кроме коэффициента в первом урав-
уравнении, равны нулю:
а!
0
0
0
4
2а2
2а2
2«2
ai
2аЗ
2«3
2*3
... а\п
¦¦¦ 2<4
• • • Л
... 2<
Р1
2Р3
Левые индексы выбраны здесь с таким расчетом, чтобы можно
было положить ^ = 01*, t|3fe = pfe. Нетрудно показать (сде-
(сделайте это!), что система линейных уравнений, отвечающая
построенной таким образом расширенной матрице, эквива-
эквивалентна исходной. Мы назовем ее эквивалентной системой вто-
второго порядка, а действия, которые мы произвели для ее построе-
построения,— исключением первой неизвестной.
4. Наряду с построенной системой рассмотрим не содержа-
содержащую первой неизвестной урезанную систему второго порядка,
38'
отвечающую расширенной матрице
2
a3
2«3 ••• 2
2<*3 ••• 2
•¦a? •¦• 2
2P2
2P3
2P"
*5. Из всякого решения {?2 ?ш} урезанной системы (-4)
получается решение {g1, g2, ..., im} исходной системы, если
выбрать 11=(а\у [р1 — 23=2а]^]- Обратно, из всякого реше-
решения {I1, ..., 1т} исходной системы путем отбрасывания первой
неизвестной g1 получается решение {g2, g3, ..., Ъ,т) урезанной
системы второго порядка.
Таким образом, исключив первую неизвестную, мы свели
задачу решения системы A.1*) к аналогичной для более про-
простой урезанной системы с меньшим числом уравнений и неиз-
неизвестных.
*6. Если в этой системе вторая неизвестная реально присут-
присутствует хотя бы в одном уравнении, скажем га% Ф О, то мы мо-
можем применить прежнюю процедуру и опять понизить число
неизвестных и уравнений. При этом на втором шаге у нас воз-
возникает эквивалентная система третьего порядка, имеющая рас-
расширенную матрицу вида
aj
0
0
0
a!
0
0
a.i
2
3
3«з"
... ,alm
••• 3«m
••• з<
P1
2P2
зР3
зР"
Ее решение очевидно сводится (докажите!) к решению соответ-
соответствующей урезанной системы третьего порядка:
3
3a3
a4
3«?
3
3al
4
3"?
.'i
•¦• 3°m
••¦ 3am
n
Й3
зР
зР4
зРг
*7. В альтернативном случае, когда переменные |', 2 ^ / ^
^ s2—1 < m исключаются сразу на первом шаге, имеем
;с^ = 2а3= ... =2а™ = 0 при всех i, 2 ^ j ^ S2—1, и только
среди коэффициентов {2^.}, k^2, стоящих в столбце с номе-
номером s2, есть отличные от нуля, скажем 2а^ ф 0. (Если это не
так, го теперь следует опять изменить нумерацию.) Таким об-
образом, в рассматриваемом случае на втором шаге возникает
39
эквивалентная система с расширенной матрицей вида
«4
о о
!«s, ¦•• 2um
Ясно, что ее решение сводится к решению соответствующей
урезанной системы, содержащей уже только т. — s2 + 1 неиз-
неизвестных. При этом всякое решение {I1, |2, . . . , \т} исходной
системы получается из решения урезанной {|ss gs"+l, ..., lm}
путем дописывания произвольным образом выбранных значе-
значений неизвестных ?' B ^Г i ^ s2—1) и значения g1, найденного
из первого уравнения g1 =(а{)~' [р, — ХГ=^а!^']; обратно, из
всякого решения исходной системы решение урезанной системы
получается просто вычеркиванием неизвестных с номерами *'
A ==?i==?s2— 1).
Теперь эквивалентная система третьего порядка строится
путем исключения неизвестной ?5' так же, как это было опи-
описано ранее для переменной g1.
*8. Повторяя описанную операцию необходимое число раз,
приводим исходную систему к следующему «трапецеидальному»
виду:
где
.., 2ars
s2 < s3< ... < s, «s
отличны от нуля.
т
и все коэффициенты ,aj,
*9. Если среди свободных членов rPr+1, r|3r+2, ..., г|3" есть
отличные от нуля — система несовместна (не имеет решений).
В силу теоремы 1.11 это означает.что у исходной системы вектор
свободных членов не принадлежит линейной оболочке L векто-
векторов {аи а.2, ¦. ¦, an): b <ф. L.
*10. Если r|3r+1 = rPr+2 = ... =г|3" = 0, то последние n—r
уравнений системы (8) обращаются в тождества: 0 = 0 и мо-
могут быть отброшены.
40
*11. В первых г уравнениях все члены, содержащие неиз-
неизвестные |' Aф\, s2, s3, ..., sr), перенесем в правые части
уравнений:
(
0
0
0
а2
0
0
.< -
а2
3
,< .-
0 ...
1
1 sr
2
sr
а3
sr
р'1
р'2
р'3
р*
ПОЛОЖИВ
I
1).
Полученная расширенная матрица отвечает системе Крамера
относительно переменных {g1, |S2, ..., |Sr},которая имеет един-
единственное решение при зафиксированных свободных членах:
{Р"} (i=l,2, .... л).
0 Пользуясь тем, что система имеет треугольный вид, ее
можно решать последовательно, начиная с последнего уравне-
уравнения, при произвольных Р'1':
Видно, что нулевому столбцу {|3''j отвечает лишь тривиальное
решение системы ?'=^2= ... =^ = о. Отсюда с помощью
альтернативы Фредгольма заключаем, что она является систе-
системой Крамера.
*12. Следствие: Построения, предпринятые в предыду-
предыдущем пункте, показывают, что неизвестные {g'} (i ф 1, s2, ...
..., sr) могут быть приняты за свободные неизвестные исходной
системы, а неизвестные {!'} (i = 1, s2, s3 ... sr) являются опре-
определяющими.
Обратим внимание читателя на следующее важное обстоя-
обстоятельство. При решении системы по методу Гаусса нет необхо-
необходимости заранее знать, совместна ли она, сколько у нее реше-
решений и какие неизвестные являются свободными, а какие —
определяющими. Все эти вопросы автоматически решаются в
процессе работы.
Отметим, что метод Гаусса доставляет эффективный алго-
алгоритм нахождения линейных зависимостей между векторами ли-
линейного пространства (или доказательства их линейной неза-
независимости). Действительно, чтобы найти линейную зависи-
зависимость между векторами {ah a2, ..., ат}, т. е. найти коэффи-
коэффициенты {?'}, такие, что 2^а,- = 0, необходимо решить одно-
однородную систему линейных уравнений, отвечающую расширенной
матрице:
<4
§ 3. ФУНДАМЕНТАЛЬНОЕ СЕМЕЙСТВО РЕШЕНИЙ.
ОБЩЕЕ РЕШЕНИЕ ОДНОРОДНОЙ
И НЕОДНОРОДНОЙ СИСТЕМ
Мы выяснили, что множество решений однородной и неодно-
неоднородной систем может быть бесконечным. В этом параграфе мы
исследуем структуру этих множеств. Именно, будет показано,
что множество решений однородной системы линейных урав-
уравнений мооюно представлять себе в виде некоторого линейного
пространства, а множество решений неоднородной системы —
в виде линейного многообразия — аналога плоскости или пря-
прямой в трехмерном пространстве. Мы будем пользоваться век-
векторной формой записи линейных систем. Так, например, неод-
неоднородную систему A.1*) мы запишем в виде
|1ai + S2a2+ ... +lmam = b,
полагая, что \1 — скаляры из поля К, и {а,, Ь) -у векторы ли-
линейного пространства Е над полем К. Решения л: = (g1, ?2, ...
..., gm) рассматриваемой системы мы будем считать элемен-
элементами линейного пространства Кт над полем К. Мы сразу же
отбросим случай систем Крамера, когда векторы {а\, а2, ...
..., а,,,} образуют базис своей линейной оболочки L, dim L =
= m, и займемся изучением случая, когда dim L < т, 6eL,
так что число решений системы A.1*) бесконечно.
*1. Множество всех решений однородной системы линейных
уравнений образует подпространство в Кт.
0 Пусть х, = (!}, 1% ..., 1™), х2 = (|>, Щ, ..., If) — два реше-
решения однородной системы Yj7=\Qai = 0.Тогда их сумма х\-\-хъ
также является решением, поскольку 2<-i (?} + 62)a* =
= 2^.i^ia« + YJi-QPi = 0.Кроме того, при любом значении а,
аеК, выполнено Z?Lt(a|')ai =aXfli|'a, = 0 и значит ax яв-
является решением вместе с х. Ъ
4?
2. Множество всех решений линейной однородной систе-
системы называется подпространством решений и обозначается далее
знаком N.
*3. Множество всех решений неоднородной системы линей-
линейных уравнений образует линейное многообразие в ?,т.
0 Пусть г/]=(л!. Л?> •••>ЛГ)> #2 = (Tl2>Tl2> •••> О —Два ре-
решения неоднородной системы линейных уравнений 2r=iVai =
=b. Образуем их разность х= (|1, ?2, ..., gm) = г/, — у2 =
= (л' ~ Лг» Л? ~~ Лг> • • • > ЛГ ~ Л™). Ввиду линейности системы
имеем ?"-iS'a*= EFfo ЕА
Таким образом, разность между любыми двумя решениями
неоднородной системы есть некоторое решение однородной.
Обратно, какое бы мы ни взяли решение х однородной системы
и решение у\ соответствующей неоднородной, их сумма у\-\- х
всегда окажется решением той же неоднородной системы. Дей-
Действительно, пользуясь линейностью системы, получаем
I (Л! + V) at = E 4ai + Z Vat = b + 0 = b.
Обозначив через N множество всех решений однородной
системы, а через М — множество всех решений неоднородной,
мы видим, что в силу первого замечания McN-f ^с К/",
а в силу второго N-fjicMc Km. Следовательно, М = r/i -f- N,
причем в качестве у\ можно взять любое решение неоднородной
системы. Э
4. Множество М всех решений неоднородной системы назы-
называется многообразием решений системы. Это многообразие па-
параллельно подпространству N решений однородной системы.
Доказанное утверждение сводит вопрос о структуре множе-
множества М решений неоднородной системы к вопросу о структуре
множества решений однородной. В первую очередь мы выде-
выделим базис в подпространстве N и подсчитаем его размерность.
5. Семейство решений однородной системы линейных урав-
уравнений, являющееся базисом в подпространстве N всех его ре-
решений, называется фундаментальным семейством решений.
6. Допустим, что I1, |2, ..., \г — определяющие неизвестные
данной однородной системы линейных уравнений, a |r+1, ...
..., |m — свободные неизвестные. Построим семейство {х\, х2, ...
. .. , Xm-r) решений этой однородной системы, выбирая значе-
значения свободных Неизвестных Ш} (i > г) решений xs из условия
_ ,.., если s ф i — r,
43
s \\, если s = i — г,
так что получим
*, = (!!. Щ Ц. U о, о, ...,о),
х.2 = A\, Щ, ..., Щ, О, 1, 0 0),
у
лт-г —
Семейство решений {лгь х2 хт-г) называется нормаль-
нормальным семейством решений рассматриваемой однородной системы
линейных уравнений.
*7. Нормальное семейство решений однородной системы ли-
линейных уравнений фундаментально.
© Сначала докажем, что построенное семейство решений полно
в N, т. е. всякое решение х = (?', ?2, ..., |г, ?'+', ..., 1т) пред-
ставимо в виде их линейной комбинации. Действительно, линей-
линейная комбинация г решений {xs} с коэффициентами {^r+s}, z =
— Yjs=\ &+Sxs' служит согласно 1 решением данной однород-
однородной системы. В то же время свободные неизвестные решения z
совпадают, по построению, со свободными неизвестными реше-
решения х. Поскольку решение системы линейных уравнений опре-
определяется однозначно заданием своих свободных неизвестных,
имеем z = х и, значит, любое решение х (jheN) представимо
в виде линейной комбинации решений {лг^} E=1, 2, ...
..., т — г).
Осталось убедиться, что решения {xs} линейно независимы.
Допустим, что некоторая их линейная комбинация тривиальна:
2js= 1|s+r^s = 0. Вычисляя компоненты этой линейной комбина-
комбинации с номерами i = г+ I, ..., т, находим |Л+1 = 0, 1Г+2 = 0, ...
... ,1т = 0. D
*8. Размерность пространства N равна т — г. Пространство
ешений однородной системы линейных уравнений изоморфно
*9. Пусть (хи х2, ..., хт-г)—произвольное фундаментальное
семейство решений однородной системы линейных уравнений.
Тогда всякое решение z соответствующей неоднородной системы
может быть представлено в виде z = zo+ Hs = \a$xs> где z°
фиксированное решение данной неоднородной системы, a as —
некоторые коэффициенты из поля К.
© Доказательство получается комбинированием 3 и 5. 5
*10. Вектор 2 из 9 при произвольных коэффициентах {as}
из К дает решение неоднородной системы.
11. Такая форма решения называется общим решением не-
неоднородной системы.
44
12. Параметрическое представление решения однородной си-
системы в виде линейной комбинации решений, входящих в фун-
фундаментальное семейство с произвольными коэффициентами, на-
называется общим решением однородной системы
*13. Отметим, что всякое конкретное (так называемое част-
частное) решение получается из общего выбором конкретных значе-
значений произвольных коэффициентов (или, как говорят, произ-
произвольных постоянных).
*14. Общее решение неоднородной линейной системы есть
сумма общего решения однородной системы и частного реше-
решения неоднородной.
Глава 4
ЛИНЕЙНЫЕ ОПЕРАТОРЫ
Наряду с линейными пространствами линейная алгебра изу-
изучает отобраоюения их друг в друга, сохраняюище линейную
структуру, т. е. такие, которые сумме векторов сопоставляют
сумму их образов, а произведению вектора на скаляр — произ-
произведение его образа на тот же скаляр. Такие отображения назы-
называют, вообще, линейными операторами, а в случае, когда речь
идет об отображении заданного линейного пространства в
одномерное пространство соответствующих скаляров, — линей-
линейными формами или линейными функционалами. Эти новые по-
понятия оказываются, между прочим, чрезвычайно удобными для
дальнейшего изучения условий разрешимости систем линейных
уравнений. В то же время и сами по себе алгебраические струк-
структуры — сопряженное пространство, алгебра операторов, — воз-
возникающие на линейных формах и множестве операторов, ото-
отображающих линейное пространство в себя, играют фундамен-
фундаментальную роль в наших дальнейших построениях.
§ 1. ЛИНЕЙНЫЕ ФОРМЫ
И СОПРЯЖЕННОЕ ПРОСТРАНСТВО
1. Пусть Еь Е2 — линейные пространства над одним и тем
же полем К. Заданное на всем пространстве Ei отображение
A: Ei—<-Е2 называется линейным, если оно сохраняет линейную
структуру в следующем смысле: 1) является аддитивным, т. е.
A(xi + х2) = кх\ + Алг2 для всех х\, х2 из Еь 2) является одно-
однородным первой степени, т. е. к(ах) — акх для любого скаляра
а из К и любого вектора х из Еь Иногда такие отображения
в литературе называют гомоморфизмами, а в случае, когда
Ei = Е2, — эндоморфизмами.
2. Если роль Е2 в предыдущем определении играет одномер-
одномерное пространство скаляров К, то соответствующее отображение
называется линейной формой. Линейные формы в отличие от
векторов, будем обозначать буквами /, g, h, ..., k, а действие
формы / на вектор х записывать в виде (/, х).
Приведем несколько примеров.
46
*3. Пусть {еи е2, ..., е„} — базис в Е и{?\ |2, ..., ^—ко-
^—координаты произвольного вектора х из Е в этом базисе. Отобра-
Отображение /' (i = 1, 2, ..., п), которое вектору х ставит в соответ-
соответствие его t-ю координату (f, x) = ?', есть линейная-форма.
*4. В пространстве полиномов Рп отображение ga, которое
каждому полиному p(t) ставит в соответствие его значение
в точке t — a: (ga, р)~ р (а), есть линейная форма.
*5. Для любого полинома q отображение fq:Pn-*~C, опреде-
определяемое равенством (fq, р) = \ q (/) р (t) dt (p <= Р"), есть линей-
линейная форма.
6. Линейную форму в бесконечномерном пространстве назы-
называют обычно линейным функционалом.
*7. Например, для любой непрерывной на промежутке
[—1,1] функции g равенство (fg, х) = \ gA)x{t)dt задает
линейный функционал fg на пространстве С[—1, 1].
8. Формы fag называются равными, и пишут f = g, если
совпадают их значения на любых векторах линейного простран-
пространства Е, т. е. (/, х) = (g, х), Ух е Е.
Таким образом, мы различаем линейные формы лишь с по-
помощью векторов, именно: f ф g в том и только в том случае,
если существует вектор х, такой, что (f, x) Ф (g, x).
*9. Пример. Покажите, что две линейные формы f, и ft,
заданные на линейном пространстве Р2 полиномов степени,
не выше 2, равенствами (flt р) = \_i g, (t)p(t) dt, (f2, p) =
Si
_xg2(t)p(t)dt, совпадают, если gi{t) — g2(t) — 5t3 — 3t.
*10. Всякая линейная форма /: E -v К однозначно опреде-
определяется своими значениями {/, е,} на векторах базиса {еи е2, ...
..., еп} пространства Е.
© Если форма / задана, то определено ее значение на любом
векторе х из Е и, следовательно, определены ее значения (/, е,)
на базисных векторах. Обратно, пусть (f, e,) — значения формы
на базисных векторах, и |' — координаты произвольного век-
вектора х в базисе {&;}"=1. Вычислим (f,x), используя свойства
линейной формы: (/, *) = (/, Е"_1^е0= 2"-ii'(/. ^)-
Таким образом, действительно, набор значений (/, е{) поз-
позволяет вычислить линейную форму на любом векторе х, т. е.
полностью определяет линейную форму f. Э
11. Величины ф, == (f, е;) называются коэффициентами ли-
линейной формы f в базисе {е;}"=1.
Далее мы увидим, что они играют роль координат формы f
в некотором базисе. Но прежде введем линейную структуру на
множестве линейных форм, превратив тем самым это множество
в линейное пространство,
47
12. Суммой линейных форм fug называется отображение
/г:Е->-К, определяемое равенством (h, х) = (/, х) + (g, x),
Vxe=E.
13. Произведением линейной формы / на скаляр а назы-
называется отображение /: Е-> К, определяемое равенством (/, х) =
= а(/, х), Ух е Е, аеК.
*14. Сумма линейных форм и произведение линейной формы
на скаляр являются линейными формами на линейном про-
пространстве.
15. Нулевой формой о называется линейная форма, сопостав-
сопоставляющая любому вектору х нуль поля К: (о,х) — 0 (VxeE).
*16. Множество всех линейных форм с законами сложения
12 и умножения на скаляр 13 и нулевым элементом о есть ли-
линейное пространство.
0 Доказательство состоит в проверке аксиом линейного про-
пространства. 3
17. Линейное пространство всех линейных форм на Е назы-
называется сопряженным с Е линейным пространством и обозна-
обозначается Е*.
Наша ближайшая целы— указать базис в сопряженном про-
пространстве и определить его размерность.
18. Построим набор линейных форм [ек}%=\' задавая каж-
каждую форму набора ек ее коэффициентами в базисе {еЛ"=1 по
формулам (ек, е;) = 6* (?= 1, 2, ..., п) для каждого k (k — 1,
2 п). Здесь 6^ = 0, / Ф k и bkt = 1 при i = k (df — символ
Кронекера).
*19. Формы набора {ек}пк=жХ совпадают с формами fk при-
примера 3.
*20. Набор линейных форм {екI^х из Е* является полным
в Е* и линейно независимым, т. е. служит базисом в Е*.
0 Полнота: Пусть / — произвольная линейная форма на Е
и ф,- — ее коэффициенты в базисе {еЛ"=1 пространства Е. Со-
Составим линейную комбинацию Х&=1ф?е форм ек и покажем,
что имеет место равенство
Для доказательства равенства (*) установим совпадение коэф-
коэффициентов ер,- формы f с коэффициентами \|л формы Y^k=i ^kek-
По определению коэффициентов формы и в силу 12, 13 и 18
имеем
N П
/ А-1
S Z
48
Линейная независимость: Покажем, что равенство
2s_i ake>i = о возможно лишь при тривиальном наборе коэф-
коэффициентов {с^}"^. Применяя левую часть последнего равенства
к элементам базиса {е,}, получаем X^-i а^б,- = 0, откуда видно,
что а,- = 0 (/= 1, 2, ..., n). D
*21. Размерность пространства Е* совпадает с размерностью
пространства Е.
22. Базис {ek}nk=x в Е* называется сопряженным (или биорто-
гональным, или взаимным) с базисом {#;}"=i пространства Е.
Из проделанных вычислений вытекают два простых соотно-
соотношения, которые будут нам полезны в дальнейшем.
*23. Координаты ср/г формы f в базисе {е4}, сопряженном
с базисом {е,-}"_|, совпадают с коэффициентами формы / в ба-
базисе {е,}"_, : <р* = (/, е*) (k= 1,2, ...', п).
Координаты q>k формы f будем записывать в дальнейшем
в виде строки: (ерь фг, ..., фя). В силу 19 верно утверждение:
*24. Координаты ?' вектора х в базисе (е,}"=1 равны значе-
значениям базисных форм ё на векторе х: \1 = (е',х), и справедливо
разложение х= 2,=! (е'> x)ev
*25. Сопряженный базис в пространстве Е* может быть по-
построен единственным образом для любого базиса простран-
пространства Е.
Основным свойством сопряженных базисов, благодаря ко-
которому вычисления в сопряженных базисах отличаются большой
простотой, является свойство, выражаемое равенствами 18:
(е\ е,)--=^ (i,k= 1, 2 /г).
*26. Если форма f из Е* и вектор х из Е в сопряженных ба-
базисах имеют координаты {ф,} и {?'} соответственно, то значе-
значение формы / на векторе х вычисляется по формуле (/, х) =
Рассмотрим теперь пространство, сопряженное с Е*. Это
пространство носит название второго сопряженного простран-
пространства и обозначается обычно Е**. Из предыдущих рассмотрений
немедленно следует, что dim Е** = dim Е* = dim E.
*27. Пространство Е** изоморфно пространству Е. Этот изо-
изоморфизм является естественным, т. е. может быть установлен
без помощи базисов пространств Е** и Е.
© Очевидно, что каждому вектору х из Е может быть сопо-
сопоставлена линейная форма х над Е* по правилу (х, /) = (/, х)
(V/eE*). Ясно, что выполнению линейных операций над векто-
векторами х отвечает выполнение соответствующих линейных опера-
операций над отвечающими им линейными формами х,
49
Таким образом, указанное соответствие задает линейное
отображение Е в Е**. Это отображение является мономорфиз-
мономорфизмом, ибо нулевая линейная форма о служит образом лишь ну-
нулевого вектора. Поэтому образ пространства Е при указанном
отображении есть подпространство в Е** размерностью п,
а значит оно совпадает с Е**, поскольку dim Е** = dim E. D
Разумеется, пространства Е и Е* также изоморфны. Однако
установление изоморфизма между ними требует дополнитель-
дополнительных конструкций (например, сопоставления базисов). Иными
словами, здесь изоморфизм уже не является естественным.
Обратимся к обсуждению свойств подпространств в Е и Е*.
28. Аннулятором множества L линейных форм, L cr E*, назы-
называется множество L1 всех векторов {х} из Е, которые аннули-
аннулируют все формы из L: (/, х) = О, V/ е L.
*29. Аннулятор является подпространством в Е.
*30. Аннулятор множества L совпадает с аннулятором ли-
линейной оболочки множества L.
© Очевидно, что аннулятор линейной оболочки множества L
содержится в аннуляторе самого множества. С другой стороны,
если вектор принадлежит аннулятору множества L, т. е. анну-
аннулирует все линейные формы из данного множества, то он анну-
аннулирует и произвольную их линейную комбинацию, т. е. принад-
принадлежит аннулятору линейной оболочки этого множества. D
*31. Пусть L — некоторое подпространство в Е*, LL — его
аннулятор. Тогда dim L + dim L1 = dim E.
© Для доказательства построим базисы в L и L-Ч Пусть
{е'}*=1, k = dim L — какой-либо базис в L. Дополним его лю-
любым образом до базиса в Е* (см. 1.3.14) и рассмотрим сопря-
сопряженный базис {e^iи , в Е. Очевидно, что линейная оболочка век-
векторов {еЛ"=й+1 принадлежит аннулятору LL. С другой стороны,
всякий вектор х из Е, принадлежащий аннулятору, может быть
разложен по базису {?»¦}"_( и заведомо имеет нулевые коорди-
координаты {Is} (s = 1, 2, ..., k), ибо аннулирует каждую из линей-
линейных форм \es} (s = 1, 2, ..., k). Таким образом, L1 совпадает
с линейной оболочкой векторов базиса {е,-}"„й+1. Отсюда сле-
следует, что dim L1 — dim E — dim L. Э
*32. (L-L)J- = L.
В заключение этого параграфа рассмотрим два способа вы-
выбора базиса в пространстве полиномов Р" с вещественными ко-
коэффициентами и в сопряженном пространстве.
На пространстве Р" рассмотрим отображение 6(s): P" —* R
(s = 0, 1, ..., п), сопоставляющее данному полиному р значе-
значение его производной порядка s в точке t = 0: 6<s'p = p(s)@).
*33. Отображение 6(s) является линейной формой.
*34. Формы {6(s)}j=Q линейно независимы и образуют базис
в (Р«)*,
5Q
© Возьмем какую-либо линейную комбинацию форм 6(s), рав-
равную нулю, Ss=1ots6<s> =о. Вычисляя ее на полиноме tk @ ^
^А^л), получим О = (?S==,as6(s\ /й) = а*&!. Отсюда следует,
что ак = 0, и, значит, взятая линейная комбинация линейных
форм тривиальна. Таким образом, формы {6(s)} линейно неза-
независимы и, поскольку их число равно размерности Р", образуют
базис в линейном пространстве (Рл)*. 5
*35. Базисом полиномов, сопряженным с {6<s)}, является на-
набор \,.t, t'2/2l, t3/3\, ..., tn/n\.
© Указанный набор линейно независим. Действительно, если
линейная комбинация а0 + a\t -f- a2t2/2\ -f- ... + antn/n\ = p(t)
равна нулю тождественно, то а0 = 0. В этом случае полином р
делится без остатка на t и pi(t) —p{t)/t = а\-{-a2t/2\ ¦+¦ ...
... + antn~l/nl = 0. Отсюда видно, что а\ = 0. Продолжая
рассуждать, по индукции находим последовательно ссг = О,
сс3 = 0, ..., ап = 0. D
*36. Формула Тейлора: Всякий полином степени не
выше п разлагается по базису {1, t, t2/2\, ..., tn/n\} согласно
формуле
p(t) = p@) + p'@)t + p"@)t*/2\+ ... +pW{0)t»/n\.
0 Доказательство следует из 34, 35 и 24. Э
Теперь рассмотрим отображение 8а: Рл-^-К, сопоставляющее
данному полиному его значение в точке а: 8ар = р(а).
*37. Отображение ба является линейной формой.
38. Пусть {а0, а\ ап} — какой-либо набор попарно раз-
различных точек вещественной оси. Тогда набор форм {^а/}г=,9 ли-
линейно независим и образует базис в (Рд)*.
Рассмотрим какую-либо линейную комбинацию указанных
форм, равную нулю, ^" аг6а.= о. Вычислим ее на поли-
полиноме pk'.
pk (х) = {х — а0) {х — а{)...(х — аА_,) (х — ak+1) ... (х — ап) =
^ТТ(^ — O-i)- ОчеВИДНО, ЧТО 0 =(Zj=oa^a(-. Pk) = O,k X
^ Т\.1?-к{ак ~~ai)- Отсюда следует, что ак = 0, поскольку все
точки а,- различны, Ц (ак — а,-) ф 0. Пользуясь произволом
в выборе k, заключаем, что набор форм {баг}"_ линейно неза-
независим. Если учесть то обстоятельство, что число форм в на-
наборе, п+1, равно размерности сопряженного пространства, то
становится ясно, что этот набор может служить базисом
в (Ря)*. Э
*39. Набор полиномов дм, Чь(х) = pk{x)Jpk{ak), k=\, ., п,
является базисом в Р", сопряженным с {ба>.}"_ .
© Поскольку число полиномов в указанном наборе равно раз-
51
мерности пространства, достаточно показать, что они линейно
независимы. Допустим обратное: пусть некоторая нетривиаль-
нетривиальная линейная комбинация полиномов qu равна нулю тожде-
тождественно, Yjk^,,akQk = <7 = 0. Тогда вопреки предположению вы-
выполнено условие ац = q{an) = 0. Значит построенный набор
полиномов линейно независим. Э
*40. Формула Лагранжа: Всякий полином степени не
выше п разлагается по базису qk согласно формуле р(х) =
= ? Lo P (ak) Рк (x)/pk (ak)-
О Доказательство следует из 38, 39 и 24. 5
Полученная формула носит название интерполяционной фор-
формулы Лагранжа, а полиномы рц называются интерполяцион-
интерполяционными полиномами. Эта формула позволяет строить полиномы,
принимающие заданные значения в указанной системе точек.
Вообще задача интерполяции состоит в построении функции
определенного класса, принимающей заданные значения на
указанном множестве точек. В случае, когда множество ко-
конечно, а класс функций — полиномы, степень которых не боль-
больше числа точек, решение задачи интерполяции дается формулой
Лагранжа.
§ 2. ЛИНЕЙНЫЕ ОПЕРАТОРЫ
И ИХ МАТРИЧНАЯ ЗАПИСЬ
В предыдущем параграфе были рассмотрены линейные фор-
формы и введено сопряженное пространство. Теперь мы изучим
свойства общих линейных отображений А: Е ->• F, где Е и F —
два линейных пространства над одним и тем же полем К, имею-
имеющие, вообще говоря, различные размерности. Как мы уже
знаем, линейная форма может быть задана набором, своих ко-
коэффициентов, которые совпадают с координатами формы как
вектора сопряженного пространства в сопряженном базисе.
Аналогичные понятия будут введены в настоящей главе для
линейных отображений А : Е ->• F. Роль набора коэффициентов
формы будет играть прямоугольная {или квадратная) матрица,
и параллельно с линейным пространством операторов А: Е ~> F
мы будем рассматривать линейное пространство матриц. Ли-
Линейные операторы будем обозначать большими буквами А, В,
С, ..., а отвечающие им матрицы — соответствующими руко-
рукописными буквами $Ф, $, <@, ... .
Напомним, прежде всего, определение линейного отобра-
отображения 1.1:
1. Линейным оператором (или гоморфизмом) А : Е —у F на-
называется отображение пространства Е в пространстве F, обла-
обладающее свойствами: А{х\ + x>i) = Ах\ + Ах2, V*i, х% е Е; А(ах)=
= аАх, VaeK, V^eE.
2. Множество 1mA векторов пространства F, представимых
52
в виде Ах, называется областью значений или образом опера-
оператора А.
*3. Множество Im А является подпространством в F.
4. Линейный оператор А : Е —*- Е называется эндоморфиз-
эндоморфизмом или линейным оператором в пространстве Е.
5. Операторы А и В равны, если Ах — Вх, VieE (срав-
(сравни 1.8).
Рассмотрим несколько важных примеров F—15).
*6. Оператор / в пространстве Е, определяемый формулой
1х = х, Vx e E, является линейным оператором.
Оператор I называется единичным (или тождественным) опе-
оператором.
*7. Оператор O:E->F, определяемый равенством Ох = о
(Vx е Е, о 6 F) является линейным оператором.
Этот оператор называется нулевым оператором. Заметим,
что А — В означает, что Ах— Вх — Ох = о.
*8. Зададим отображение А : R" —» Rm с помощью веществен-
вещественной таблицы
г\ с4 ... а),
А а22 ... а2п
ui. ui. in
a, a2 ... an
следующим образом. Пусть (g1, I2, ..., ?*) —координаты век-
вектора x из R". Каждому вектору х из R" сопоставим вектор у из
Rm, задавая координаты (тI, ц2, ..., цт) вектора у формулами
/ '1 ^"" / . » I »-v/ L, ) ГС 1 j ji j •••^ //Ь.
Нетрудно убедиться, что оператор А, определяемый формулами
(*), является линейным оператором из Rn в Rm.
Допустим, что пространство Е представлено в виде прямой
суммы пространств L\ и Ьг. Тогда, как известно B.2.15—17),
любой вектор х из Е представляется в виде суммы своих проек-
проекций на Li и L2: х = хх -f- % xi ~ ^% ^3 = ^>|[1,1^-
*9. Отображения p\f\ Pf", сопоставляющие вектору х его
проекции, являются линейными операторами.
10. Оператор Pf*2 называется оператором проецирования
или проектором на подпространство L( параллельно подпрост-
подпространству L2.
11. В пространстве полиномов Рп определим дифференциро-
дифференцирование D: P«_>P«-i формулой (Dp) (/) = dp(t) /dt.
*12. Дифференцирование D:P"->P"-' является линейным
оператором из Р" на Р"-'.
Важнейшим примером оператора является так называемый
одномерный оператор.
53
13. Одномерным линейным оператором из пространства Е
в пространство F называется линейный оператор Л, область
значений которого в F является одномерным подпространством,
т. е. dim Im A = 1.
*14 Пример. Пусть' f — вектор из пространства F, / -
линейная форма над Е. Рассмотрим отображение A: E->-F,
заданное формулой Ах = /(/, х). Отображение А есть линейный
одномерный оператор.
Указанная форма линейного одномерного оператора яв-
является общей. Именно, справедливо следующее утверждение:
*15. Всякий линейный одномерный оператор А, действующий
из пространства Е в пространство F, представим в виде Ах ==
= f(l,x), причем вектор f из F и линейная форма / из Е* опре-
определяются по оператору А однозначно с точностью до умноже-
умножения на скаляр.
© Ввиду одномерности области значений 1тп А оператор А
представим в виде Ах = f-g(x), где f—какой-либо фиксиро-
фиксированный нетривиальный, f Ф О, вектор из Im Л, а функция g—
скалярная функция на пространстве Е. Условие линейности опе-
оператора Л означает, что А(ах) = f-g(ax) = f-ctg(x), A(x-\-y) =
= f-g(x + y) = f-g{x)-\-f-g{y), откуда следует, что функция g
является линейной формой. Эта линейная форма определяется
однозначно после выбора вектора /. В свою очередь ввиду одно-
одномерности Im Л вектор / определяется однозначно с точностью
до скалярного множителя. Э
Введем понятие матрицы линейного оператора. Как мы уви-
увидим, матрица оператора позволяет эффективно задавать сам
линейный оператор.
16. Пусть задан линейный оператор Л: Е-> F и пусть
{e/)iLi ~~ базис в Е, {/а}Г=1 — базис в F. Разложим векторы
Aei (i = 1, 2, ..., «) по базису {/*}™=1:
Aei— ЕГ=1аг%> »=1,2, .. ., п.
Координаты akt векторов Ле,- в базисе {!к}^\ расположим
в виде таблицы размером m X п:
«{
«I
Таблица ,s# з= ||aj || называется матрицей оператора А относитель-
относительно пары базисов {е,}"=1, {f/J™_! или, короче, в базисах
случае, когда оператор А является эндоморфизмом,
54
можно положить ft = e,- (i = 1, 2, ..., п) и говорить о матрице
оператора в базисе {?*}"_,.
*17. Всякий линейный оператор А, действующий из Е в F,
однозначно определен своей матрицей относительно пары
базисов.
© Покажем, что задание матрицы оператора и соответствую-
соответствующей пары базисов однозначно определяет результат действия
оператора на любой вектор х из Е. Пусть {?'}"=1— координаты
вектора х в базисе {е,-}"^,. Действие оператора А на вектор х
ввиду линейности вычисляется по формуле
llei= tl'Aet=
i
Мы видим, что координаты вектора Ах однозначно опреде-
определяются матрицей оператора и координатами вектора х. D
*18. Матрица линейного оператора A: E-*-F относительно
пары базисов {е,-}"=1, {/*}^=1 может быть вычислена по формуле
a* = (/fe, Aei), где {fk}™=] — базис в F*, сопряженный с базисом
K
0 Следует воспользоваться утверждением 1.24. з
Вычислим матрицы некоторых из операторов, упомянутых
в примерах.
*19. Матрица тождественного оператора / в любом базисе
является единичной:
Э' =
1
0
0
0
0
0
1
0
0
0
0
0
1
0
0
... 0
... 0
... 0
... 1
... 0
0 1
0
0
1
*20. Матрица нулевого оператора О в любом базисе яв-
является нулевой:
( 0 0 0 ... О
о о о ... о
о о о ... о
о о о ... о
*21. Пусть Е = Li 4- L2, {e,} (i=l, 2, ..., dimLi)—базис
в Li, {ei) (i = dimLi + 1, ..., dimE) — максимальный линейно
независимый над Ц набор векторов в L2. Тогда набор {е,}
(/= 1, ..., dimE) является базисом в Е, и матрица оператора
'*•¦ в этом базисе имеет диагональный вид:
1 0 0 ... О О О ... О
О 1 О ... О О О ... О
О О 1 ... О О О ... О
О О О...О 1 О...О
о о о ... о о о ... о
0 0 0
0 0 0
о
причем на диагонали первые dim Lt элементов равны единице,
остальные — нулю.
*22. Матрица оператора дифференцирования Д D: Рга-+- Р"-1
в базисе {tk/k\}nk=0 имеет вид
О 1 О О ... О О
О О 1 О ... О О
О О О 1 ... О О
О О О О ... О 1
о о о о .... о
§ 3. ЛИНЕЙНОЕ ПРОСТРАНСТВО ОПЕРАТОРОВ
Рассмотрим множество всех линейных операторов: A: E^-F
и на этом множестве введем законы композиции — сложение
операторов и умножение операторов на скаляры из поля К.
1. Суммой линейных операторов A: E->F и В: E->F назы-
называется оператор C:E->-F, определяемый равенством Сх =
== Ах + Вх, VxgE.
2. Произведением линейного оператора А: Е—*F на скаляр а
из поля К называется оператор D:E->F, определяемый равен-
равенством Dx = aAx, Va e К, Vx e E.
*3. Сумма линейных операторов и произведение линейного
оператора на скаляр суть линейные операторы из Е в F.
*4. Множество всех линейных операторов с законами сло-
сложения 1 и умножения на скаляр 2 и нулевым элементом — ну-
нулевым оператором — является линейным пространством.
5. Линейное пространство операторов, действующих из Е
в F, называется прямым произведением пространств Е и F
и обозначается Е X F.
Построим базис в линейном пространстве операторов Е X F
и определим его размерность. Для этого введем специальные
одномерные линейные операторы Е[: E-»-F, которые в дальней-
дальнейшем будут играть роль базисных векторов пространства Е X F.
6. Пусть {ej"=1 и {/*}?,, — базисы пространств Е и F. Рас-
Рассмотрим линейные одномерные операторы Е^: E-*F (t=l,
59
2, ..., n; k = 1, 2, ..., m), действующие по формулам E|x =
= l'fft = ffc(e\ *)(V*e=E, i=\, 2, ..., „,- fc= 1, 2, ..., m).
Здесь, как обычно, {#'}— базис в Е*. сопряженный с {е,},
а |' — координаты вектора % в базисе {е*}-
*7. Операторы Е& действуют на базисные векторы е\ по
формулам E'kej — b'fk (/=1, 2, ..., и), и матрицы ^ опе-
операторов Ей относительно пары базисов {ei}, {/&} имеют вид
-(
о
0
0
0
0
1
0
0
0
0
... 0
... 0
... 0
единица стоит в пересечении /е-й строки и г'-го столбца, все про-
прочие элементы равны нулю.
*8. Одномерные операторы {Ей} (i = 1, 2, ... , п, k = 1, 2, ...
..., m) образуют базис линейного пространства операторов
EXF.
© Линейная независимость набора {е*} доказывается от про-
противного. Пусть существует нетривиальный набор скаляров
{pf}> такой, что оператор Xj',JLi Р*Е& является нулевым, т. е.
Z,'r^iP^U —о, Vxe E. Поскольку последнее равенство вы-
выполняется на любом векторе х из Е, то оно должно выполняться
и на всех базисных векторах, т. е. ^" kal Pi Е^е/ —о (/= 1,
2, ..., п). Отсюда на основании 7 получаем для /= 1, 2, ..., п
fe=,iP//A== °> чт0 противоречит линейной независимости век-
векторов /ь ..., \т.
Докажем полноту набора {El}i',k=i- Пусть ||af|—матрица
некоторого оператора A: E->-F и х= 2;„1^'е' — произвольный
вектор. Тогда (см. 6 и 2.16) Ах= Е""Г=1а^ &'f*= Z*T-i a; E**.
Vx s Е. Это равенство, поскольку значение л; произвольно, рав-
\-1 п, т ь i
носильно операторному равенству А = 2^( Аа1 «гЕ& • »
*9. Размерность линейного пространства операторов из Е
в F равна произведению размерностей Е и F, т. е. dim(EXF) =
= dim E X dim F = пт.
*10. Элементы матрицы оператора А : E-»-F в базисах {е;}"=1
и {/ft}™_j совпадают с координатами оператора А в базисе
одномерных операторов {Еа}"'^_, в пространстве EXF-
*П. Матрица суммы операторов А а В получается сложе-
сложением матриц этих операторов ($Ф + Я)\ == №)*! + @)\• Мат-
Матрица оператора аА получается умножением матрицы оператора
Л на о;(о^)? = о(^)г
67
*12. Линейное пространство операторов EXF изоморфно
линейному пространству матриц К1" размером т X п с линей-
линейными операциями, определенными поэлементно: у!1аг:|==1уа?11 >
|сс* ||+ || р< || = ||а* + Р/ IL @ — IIOil-
*13. Набор матриц вида
о о ... о ... о о
8\ ¦¦
о о ... о 1 о ... о о
о о ... о о о ... о о
каждая из которых имеет единственный отличный от нуля эле-
элемент, (&k)i = b's6{> является базисом в пространстве (шХп)-
матриц К™ (dim К™ — тп)-
§ 4. УМНОЖЕНИЕ ОПЕРАТОРОВ И МАТРИЦ
Введем новую алгебраическую операцию над операторами —
умножение. Проследив за тем, что происходит с матрицами
операторов при их умножении, мы определим операцию умно-
умножения и над матрицами. Это приведет к новым алгебраическим
структурам: алгебре линейных операторов в пространстве Е
и алгебре квадратных матриц.
1. Пусть Е, F и G — линейные пространства над одним
и тем же полем К- Произведением линейных операторов
А: Е ->- F и В: F-»-G называется оператор С: E->G, действую-
действующий по формуле Сх = В(Ах), VxeE. Для записи произведе-
произведения операторов используется мультипликативная форма: С —
= В А, при этом порядок сомножителей существен (т. е., во-
вообще говоря, В А Ф АВ).
*2. Произведение линейных операторов есть линейный опе-
оператор.
0 Действительно: С{ах\ + а2х2) = В\А (аХ) + сИхг)] =
= В (aAxj + а*Ах2) = а1 В (Ах{) + а2в(Ах2) =
= аСх\ -\-аСх2, Va', a2e К, Vx<, 12еЕ. Т>
3. В частном случае Е = F = G, операторы А: Е-»-Е,
В: Е->Е суть операторы в линейном пространстве Е и равен-
равенство 1 определяет умножение операторов, действующих из
Е вЕ.
Выясним, что происходит с матрицами при перемножении
соответствующих операторов.
•4. Пусть {е,}"..,, {/*}"_, {/?/}/_, — соответственно базисы
пространств Е, F, G и ^' = |a*|, $ = Jp'fcJ, <g' = |Y/J —мат-
68
рицы операторов А, В и оператора С {С = В А) в этих бази-
базисах. Тогда
© Вычислим результат действия оператора С на базисные век-
векторы е« (i = 1, 2, ..., л):
Св| = ЩАег) = fi ^ I
Отсюда по определению матрицы оператора y* === Tuk=\
(i= 1,2, ...,n,j= 1,2, ...,p). 3)
Следующее определение произведения матриц в силу пре-
предыдущего утверждения согласовано с определением произведе-
произведения операторов:
5. Матрица ^ = 1^/1 называется произведением матриц
j^ = |af|| и ^ = |pi|> если ее элементы у[ задаются равен-
равенствами y'= Za=i Pfea^ (i= 1. 2, .. ., /=1,2, ..., p).
Произведение матриц записывается обычным образом: Я? =
= dUsi. Для того чтобы получить элемент матрицы Ч?, стоящий
в \-й строке и i-м столбце, следует согласно определению 5 пе-
перемножить соответствующие элементы \-й строки матрицы 2%
и 1-го столбца матрицы s4- и полученные произведения сложить.
В соответствии с этим правило умножения матриц 5 называется
правилом «строка на столбец». Подчеркнем, что две матрицы
могут быть перемножены только при выполнении условия: число
столбцов первой матрицы должно быть равно числу строк вто-
второй матрицы. При этом матрица-произведение будет иметь
число строк, равное числу строк первой матрицы, и число столб-
столбцов, равное числу столбцов второй матрицы.
При перемножении двух квадратных {пУ^п)-матриц полу-
получается квадратная (пУ^п)-матрица. Таким образом, на множе-
множестве всех линейных операторов в линейном пространстве Е и на
множестве всех квадратных (пХп) -матриц может быть введен
второй внутренний закон композиции — умножение. Это дает
возможность рассмотреть новые алгебраические структуры, на-
наделив линейные пространства операторов Е X Е и матриц К?
соответствующими законами умножения. При выполнении неко-
некоторых дополнительных условий такие структуры называются
алгебрами. Отложим изучение алгебр линейных операторов,
и квадратных матриц до гл. 7, отметив здесь лишь один факт:
*6. Произведение квадратных матриц некоммутативно, т. е.,
вообще говоря, $$-!% ф &зФ,
59
§ 5. СОПРЯЖЕННЫЙ ОПЕРАТОР.
ТЕОРЕМА ФРЕДГОЛЬМА
Наряду с эндоморфизмами данного линейного пространства
Е очень важно рассмотреть эндоморфизмы сопряженного про-
пространства Е*. Оказывается, между этими объектами может быть
установлена замечательная связь, называемая сопряжением и
заключающаяся в том, что каждому эндоморфизму А в Е
естественным образом ставится в соответствие некоторый эндо-
эндоморфизм А*: Е*->-Е*, причем соответствие это оказывается
линейным.
Рассмотрение сопряженного оператора оказывается чрезвы-
чрезвычайно полезным при исследовании условий разрешимости ли-
линейных уравнений. Именно, пользуясь понятием сопряженного
оператора, мы дадим в этой главе формулировку условий раз-
разрешимости операторных уравнений в линейном пространстве.
Эта формулировка носит название теоремы Фредгольма и отли-
отличается тем, что дается в терминах лишь внутренних свойств
оператора, а не в терминах матриц, как это было сделано для
систем линейных уравнений в гл. 3. Такая формулировка удобна
тем, что она практически без всяких изменений переносится на
случай более сложных уравнений—интегральных и дифферен-
дифференциальных.
*1. Пусть А: Е->-Е — линейный оператор-эндоморфизм ли-
линейного пространства Е. Тогда существует единственный эндо-
эндоморфизм А* сопряженного пространства, такой, что для любого
вектора х из Е и любой линейной формы / из Е* выполнено
A,Ах) = (А*1,х).
© Заметим прежде всего, что выражение (/, Ах) при фиксиро-
фиксированной форме I является скалярной линейной функцией век-
вектора х. Значит, найдется единственная линейная форма /* из Е*,
такая, что (/, Ах) — (/*, х). Положим I* = А*1. Остается пока-
показать, что введенное таким образом отображение А* оказывается
линейным. Это, в свою очередь, получается прямым вы-
вычислением: (А* (а,/1 + г/2/2), х) = (ml1 + а2/2, Ах) = а, (Л, Ах) +
+ а2(/2, Ax) = ai(A*l\ х) + а2{АЧ\ х) = (а,Л*/1 + а2Л*/2, х).
Отсюда заключаем, пользуясь произволом х, что А*(а\1х-\-
l A2
+ 2) +
2. Возникший в предыдущем пункте оператор А* называется
сопряженным к оператору А.
*3. (А*)* = А.
Иногда бывает важно знать матрицу оператора А*.
*4. Пусть^ = ||af|— матрица оператора А в базисе {ег};
тогда матрица сопряженного оператора в сопряженном базисе
{е'} имеет тот же вид, но действует она на координаты линей-
линейных форм по иному правилу — «столбец на строку».
© Напомним, что матрица оператора вычисляется через сопря-
сопряженный базис по формуле (см, 2.18): щ=(ек, Aei)- По опре-
60
делению сопряженного оператора его матрица (^*)f находите»
по аналогичной формуле^*)* = (А*ек, еЛ = а*: (i, k = 1, 2,...
..., п). При этом действие оператора А* на форму г/ может
быть записано с помощью матрицы оператора и координат
формы у = X Л/6' в следующем виде:
\ - n
i \ k v
Отсюда видно, что координаты {r\k} формы у' = А*у полу-
получаются перемножением прежней матрицы {с^} и координат r\i
формы у по правилу «столбец на строку». Ъ
Впрочем, в некоторых книгах, желая оставить в силе пра-
правило «строка на столбец», пишут строку из координат формы
слева от матрицы s&*: щ — 2;=>1 Ч^к-
Приступим теперь к исследованию условий разрешимости
операторных линейных уравнений.
5. Операторным уравнением в линейном пространстве Е
называется соотношение Ах = у, где линейный оператор А
(эндоморфизм пространства Е) и вектор у из Е заданы, а век-
вектор х требуется определить.
Очевидно, что квадратные системы уравнений естественно
интерпретируются как операторные уравнения в линейном про-
пространстве R".
При анализе условий разрешимости операторного уравнения
удобно пользоваться понятиями ядра и образа оператора,
6. Напомним (см. 2.2), что областью значений или образом
оператора А: Е->-Е называется множество векторов {у} из Е,
представимых в виде у — Ах (хеЕ), Образ оператора А обо-
обозначается символом InrA
7. Ядром оператора А : Е —у Е называется множество векто-
векторов {х} из Е, которые аннулируются оператором А: Ах = о.
Ядро оператора А обозначается символом К.ег А.
*8. Ядро и образ оператора суть подпространства.
*9. Между размерностями ядра и образа оператора А, дей-
действующего в пространстве Е, имеет место соотношение
dim Ker A + dim Im A = dim E.
© Пусть {еи ..., ей) — базис в Ker A, dim Ker A = k. Допол-
Дополним его до базиса {^}"=1 в Е, dim E = п. Рассмотрим набор
векторов {Aek+i, ..., Ае„). Эти векторы линейно независимы.
Действительно, если бы нашелся нетривиальный набор скаля-
скаляров {a%^k+i, такой, что Zs=fc + i a"Aes = o, то, ввиду линейно-
61
сти оператора Л, оказалось бы, что вектор ?s=1, , , а*е5 принад-
принадлежит Кег Л. Это возможно лишь в случае, когда все скаляры
as равны нулю. Покажем теперь, что набор векторов {Aek+i, ...
..., Аеп) полон в Im А. Действительно, всякий вектор у из
Im А получается в результате применения оператора А к неко-
некоторому вектору х из Е. Разложив последний по базису {е,},
получаем у = Ах = A ?г=1 ?'e< = ^Li=k+illAe{. Подводя итоги,
мы видим, что набор {Ле4}"=6+1 служит базисом в Im Л, и та-
таким образом, dim Im A = п — dim Ker А. 5
*10. dim Ker Л* + dim Im A* = dim E* = dim E.
П. Аннулятором множества L векторов, L cr E, называется
множество L1 всех форм, Lx cz E*, которые на всех векторах
jcgL принимают нулевое значение (/, х) = 0, VxgL.
*12. Ядро оператора Л* является аннулятором образа Л.
© Возьмем форму / из Кег Л*. Тогда для каждого х из Е
имеем (/, Ах) = (Л*/, х) — 0. Отсюда следует включение
Кег Л* cr (Im АI. Пусть теперь форма / аннулирует Im Л.
Тогда 0 = (I, Ах) = (Л*/, х) для любого х из Е. Это означает,
что Л*/ = 0 и, таким образом, (Im Л)х cz Ker Л*. D
*13. Ядро оператора Л является аннулятором образа опера-
оператора Л* (см. 1.28).
*14. dim Ker Л -f dim Im Л* = dim Ker Л* + dim Im Л = dim E
© Доказательство немедленно следует из 1.31. 5
*15. Теорема Фредгольма: 1. Размерности ядер опе-
операторов А и А* одинаковы: dim Ker Л = dim Ker А*. 2. Для того
чтобы уравнение Ах = у было разрешимо при произвольной
правой части у, необходимо и достаточно, чтобы соответствую-
соответствующее однородное уравнение Ах = о имело лишь тривиальное
решение х = о. 3. Для того чтобы уравнение Ах = у было раз-
разрешимо, необходимо и достаточно, чтобы вектор у принадлежал
аннулятору ядра сопряженного оператора: у е (Кег Л*I.
© Доказательства всех трех утверждений теоремы Фредгольма
получаются из выведенных ранее соотношений между ядрами
и образами операторов Л и А*. Первое утверждение следует из
сравнения 10 и 14. Разрешимость уравнения Ах = у при любой
правой части означает, что 1тЛ = Е. Это, в свою очередь, в
силу 10 и 14 эквивалентно условию dim Ker Л — 0. Последнее
утверждение следует из 12. D
*16. Отметим, что согласно теореме Фредгольма из суще-
существования решения уравнения Ах = у при любой правой
части у следует его единственность, и, обратно, если нам изве-
известно, что решение такого уравнения единственно, т. е. решение
соответствующего однородного уравнения Ах = о тривиально,
х = о, то неоднородное уравнение Ах = у разрешимо при лю-
любой правой части у. Короче это выражают словами: из един-
62
ственности решения операторного уравнения й конечномерном
линейном пространстве следует существование решения, и на-
наоборот.
Обсудим, наконец, связь полученных результатов с анало-
аналогичными результатами главы 3 (§ 1). Напомним в первую оче-
очередь, что операторное уравнение в линейном пространстве Е
после перехода к фиксированному базису сводится к квадрат-
квадратной системе, и наоборот, всякая квадратная система п уравне-
уравнений с п неизвестными может быть интерпретирована как опе-
операторное уравнение в R". Теперь уже легко увидеть, что старое
из доказанных нами утверждений, 15, совпадает с доказанной
в 3.1.18 альтернативой Фредгольма. В то же время в третьей
главе мы довольно формально {см. 3.1.11) описали класс пра-
правых частей, при которых неоднородное уравнение Ах = у было
разрешимо, если соответствующее однородное имело нетриви-
нетривиальное решение. Теперь мы умеем это делать гораздо более
геометрично: смотрите третье утверждение теоремы Фредгольма.
Все наше изложение в этом параграфе ограничивалось ис-
исследованием операторных уравнений в одном линейном про-
пространстве и отвечало случаю квадратных систем. Именно этому
обстоятельству обязано своим происхождением первое утверж-
утверждение теоремы Фредгольма. Можно было бы, разумеется, рас-
рассматривать более общие операторные уравнения Ах = у, где
А — оператор, действующий из одного линейного пространства
Ei в другое Е2, dimEi > dim E2. В этом случае теория значи-
значительно видоизменяется. В частности, вместо утверждения 1 воз-
возникает новое: dimKer/4—dim Ker A* = v, число v называется
индексом оператора А. В конечномерном случае оно равно
dim Ei — dim E2.
Глава 5
ПОЛИЛИНЕЙНЫЕ ФОРМЫ
В предыдущей главе мы познакомились с линейными функ-
функциями одной векторной переменной: скалярными {линейными
формами) и векторными {линейными операторами). Уже тот
небольшой набор сведений, который был предложен читателю,
позволил по-новому взглянуть на такие важные задачи, как
решение линейных уравнений и геометрическая интерпретация
их решений.
В физике и теоретической механике наряду с линейными
функциями одной переменной очень часто приходится иметь
дело с «полилинейными» функциями нескольких переменных.
Перед тем как перейти к формальному изложению мате-
материала, приведем пример физической величины, являющейся
полилинейной функцией или, как говорят, «формой». Хорошим
примером такой величины является работа, затраченная на пе-
перемещение заряда в однородном электростатическом поле
внутри диэлектрика. Как известно, работа против сил поля на
прямолинейном участке пути в этом случае выражается в виде
взятого с обратным знаком скалярного произведения вектора
электростатической индукции D на вектор пройденного пути Дл;
и на величину перемещаемого заряда а: А = —<D, Дх>а.
С другой стороны, вектор электростатической индукции яв-
является линейной функцией от напряженности внешнего поля.
Это означает, что существует линейный оператор е: R3->-R3)
который превращает Е в D: D = еЕ. В самом простом случае
изотропного диэлектрика оператор е представляется в виде
ео/, где I — единичный оператор, а го — некоторое число, назы-
называемое диэлектрической проницаемостью среды {диэлектрика).
Однако этот простейший случай практически реализуется очень
редко и фактически во всех кристаллических диэлектриках г
является нетривиальным оператором, чья матрица носит назва-
название «тензора диэлектрической проницаемости». Записывая вы-
выражение для работы в прямоугольной системе координат, по-
получим
А=> -а
1
64
где {if} — координаты поля Е, а \к — координаты вектора пути
Sx. В частности, величина (—ei2) имеет смысл работы против
сил поля электростатической индукции, которое наведено внеш-
внешним полем единичной напряженности, направленным вдоль оси
С\, когда единичный заряд перемещается на единицу длины
вдоль направления е2. В целом полученное выражение ясно
свидетельствует о том, что на участке пути в однородном поле
работа линейно выражается через координаты поля (т)'} и коор-
координаты пути {?*}.
В этой главе мы займемся общей алгебраической теорией
скалярных функций указанного сорта — теорией полилинейных
форм. Изложение здесь будет разворачиваться по плану, уже
привычному для читателя. Именно, на множество полилиней-
полилинейных форм будет введена естественная структура линейного про-
пространства, подсчитана его размерность и выделен базис. Затем
мы научимся раскладывать произвольную полилинейную форму
по этому базису и введем в рассмотрение набор ее координат —
тензор формы. Следует предупредить читателя, что в теории
полилинейных форм приходится пользоваться многоиндексными
величинами, обращение с которыми требует внимания и опре-
определенной привычки, — желаем читателю побыстрее ее приоб-
приобрести. В остальном же структура материала несложна и, по-
пожалуй, эта глава не содержит новых идей по сравнению с пре-
предыдущими.
§ 1. ПОЛИЛИНЕЙНЫЕ ФОРМЫ.
ЛИНЕЙНАЯ СТРУКТУРА
Пусть, как и в предыдущей главе, Е — линейное простран-
пространство размерностью п над полем К, Е* — сопряженное простран-
пространство, {<3/}/-i — базис в Е и {е'}"=1 — сопряженный базис в Е*.
Векторы линейного пространства Е будем обозначать через
Х\, х2, ..., хр, векторы сопряженного пространства (т. е. линей-
линейные формы) — через ух, у2, ..., yq.
1. Полилинейной формой, зависящей от векторных аргумен-
аргументов х\, Х2, ..., хр из Е и векторных аргументов у1, у2, ..., yq
из Е*, называется функция U(х\, х2, ..., хР\ у1, у2, ..., yq), при-
принимающая значения из поля К, линейная по каждому вектор-
векторному аргументу при фиксированных прочих, например; U(x\, ...
.. .ax't + $х"г ..., хр; у1, у2, ..., yQ) = aU(xi х[, ..,, хр, у\
У2 Уч) + №{хх, ..., х\, ..., хр; у\ у2, ..., у").
Полилинейные формы будем обозначать, как правило, по-
последними буквами латинского алфавита: U, V, W.
2. Если полилинейная форма зависит от р векторов линей-
линейного пространства Е и q векторов сопряженного пространства
Е*, то пару чисел (р, q) будем называть валентностью полили-
полилинейной формы.
3 Зак. 193 65
Приведем ряд примеров формального характера.
*3. Полилинейная форма валентностью A,0)— обычная ли-
линейная форма (см. гл. 4, § 1).
*4. Полилинейная форма валентностью @,1) — линейная
форма х: Е*->К, рассмотренная в гл. 4, § 1. Ввиду наличия
естественного изоморфизма между Е** и Е такую форму можно
отождествить с вектором х.
5. Полилинейная форма валентностью B,0) называется би-
билинейной формой в пространстве Е и встретится нам в гл. 10, 11.
*6. Пусть А: Е-»-Е—-линейный оператор. Функция, вычис-
вычисляемая на векторах х из Е и у из Е* по правилу (у, Ах), есть
полилинейная форма валентностью A,1), называется билиней-
билинейной формой оператора А.
7. Полилинейные формы одинаковой валентности V(х\, ...
..., хр; у1, ..., yq) и V{x\, ..., хр; у1, ..., yq) — считаются рав-
равными, если для любого набора векторов {х\, ..., хр} из Е и
{у1, ..., yq) из Е* выполнено равенство U(x\, ..., хр; у1, ...
..., yq) — V(x\, ..., хр\ у\ ..., у4). При этом не исключается,
что они заданы разными аналитическими выражениями.
*8. Полилинейная форма W(x\, ..., хр; у\ ..., yq) одно-
однозначно определяется своими значениями на векторах сопря-'
женных базисов {ej"_, и {е'}?=,; именно, если положить:
Р Р • р!\ pU el hhl
*1 '2 lp
p
и обозначить через {|М f1!^} координаты векторов xs, if, то
получим
W (xh x2 xp; y\ if y") = .t 11
Здесь каждый из индексов i и j принимает все значения от 1
до п.
© Покажем, что значение полилинейной формы W(xi, ..., хр;
у\ ..., yq) на любых векторах {х\, ..., хр} и {у1, ..., у4} вы-
вычисляется с помощью координат этих векторов и чисел
«>?;:;/«. Пусть {l\, l2t, ..., 14) и (Tjf, ^> •.., <}- координаты
векторов xi (/= 1, ..., р) я у' (/ = 1 q) во взаимных ба-
базисах. Тогда
W(xb .... хр\ у\ ..., уч) =
{%fi% |., ^Vf., л!/,-...X,
66
X,
Вследствие линейности полилинейной формы по каждому
аргументу имеем
W(xlt хр; yi «/') =
1Ч
lt хр;
п п п , , ,
*= S ¦¦¦ L ? • • ¦ L »/ Д/ • • • 1Ч- ¦ • • л, =
п п п п . , ,
S ¦¦¦ L ? • • ¦ L »/.. Д/
9. Набор яр+? скаляров ю/'"^ называется тензором полили-
полилинейной формы Wp. Каждое из чисел этого набора называется
компонентой тензора.
10. Набор индексов {iii2 ... ip), в котором каждый может
принимать все значения от 1 до п, будем называть мультиин-
дексом и обозначать ip. Число р элементов набора {j'i ... ip} —
='ip будем называть длиной мультииндекса \р. С помощью
мультииндексов тензор полилинейной формы со,1'",' записы-
вается в виде со.'7.
р
Очевидно, что тензор полилинейной формы зависит от вы-
выбора пары взаимных базисов. В дальнейшем {см. гл. 7) мы
выясним, что происходит с тензором полилинейной формы при
замене базиса.
Введем на множестве всех полилинейных форм заданной ва-
валентности линейную структуру. Таким образом, возникнет ли-
линейное пространство полилинейных форм. Определение линей-
линейных операций вполне стандартно (ср. 4.1.12—13).
11. Суммой полилинейных форм U и V и произведением по-
полилинейной формы U на скаляр а из К назовем соответственно
полилинейные формы W = U + V и Z = all, определяемые ра-
равенствами
W{xu .... хР; у\ ..., у")= U{Xi хр; у\ ..., у*) +
+ V(xu ..., хр; у1, ..., yi).
Z(xu ..., хр\ у\ ..., yi) = all(xu ..., хр, у\ ..., yi).
*12. Множество всех полилинейных форм заданной валент-
валентности с указанными законами сложения и умножения на ска-
скаляр образует линейное пространство. Нулевым элементом этого
линейного пространства является форма, равная нулю при лю-
любых значениях аргументов и обозначаемая через О.
13. Линейное пространство полилинейных форм валент-
валентностью (р, q) будем обозначать й'.
8* 67
*14. При сложении полилинейных форм их тензоры склады-
складываются покомпонентно; при умножении полилинейной формы
на скаляр все компоненты тензора полилинейной формы умно-
умножаются на этот скаляр.
15. Покомпонентное сложение тензоров и умножение каждой
компоненты тензора на скаляр определяют соответственно две
операции над тензорами: сложение тензоров и умножение тен-
тензора на скаляр.
*16. Определенные в предыдущем пункте операции сложе-
сложения и умножения на скаляр превращают множество всех тен-
тензоров данного строения в линейное пространство тензоров.
Нулевым элементом линейного пространства тензоров является
тензор., все компоненты которого равны нулю.
17. Линейное пространство тензоров Ы,"] будем обозна-
чать w?.
*18. Линейное пространство Qq полилинейных форм изо-
изоморфно линейному 'пространству тензоров w?. Этот изомор-
изоморфизм осуществляется формулами 8.
Построим базис в пространстве полилинейных форм.
¦ *19. Набор из пр+д полилинейных форм WF, заданных
'я
формулами
W)^-;;^(XU ...,xp; у\ ..., у«) =
образует базис в пространстве Q'.
0 Пусть а.1'" ч — нетривиальный набор скаляров, такой, что
п
Вычислим левую часть этого равенства на векторах сопря-
сопряженных базисов \е е. , ..., е, X и (е\ es\ ..., esq}. По-
l 'l J2 p)
скольку выполнено
'<7\ U 2 р
получаем
и следовательно, а*4 = 0. Перебирая всевозможные комбинации
68
индексов sQ, tp, заключаем, что равенство (*) может выпол-
выполняться только при условии ccts' = О, V sp, ta
Установим полноту набора{И7^}- Пусть W(x{ х ; у\...
..., уч\ — произвольная полилинейная форма из Q4 и Ы\ч\ —
ее тензор. Тогда
v; у1,
X л) Л? • • • ^ = Е <*№{. 5
1 J '<? ip, j^-i p ч
*20. Компоненты тензора <в|^ полилинейной формы 117 яв-
¦р
ляются ее координатами в базисе {wjp}-
*21. Размерность линейного пространства Qp равна np+q.
*22. Набор тензоров ('рсоМ (левые мультииндексы нуме-
руют тензоры набора, правые обозначают компоненты тензора),
определяемых формулами tsPCuV = 6^16^2 ... б^б''б^ ... Ь\р, обра-
образует базис линейного пространства тензоровw^ и dtmw' =пр
Ь<7
Очевидно, что в основу доказательства приведенных фак-
фактов 19—21 моэюно было бы положить утверждение 22 и теорему
об изоморфизме 18. Рекомендуем читателю пройти этот путь
самостоятельно.
Введем над полилинейными формами новую операцию —
произведение полилинейных форм. С помощью этой новой опе-
операции любые полилинейные формы могут быть изготовлены из
векторов и линейных форм.
23. Произведением двух полилинейных форм U валентно-
валентностью (pi, qt) и V валентностью (pi,qi) называется полилиней-
полилинейная форма W валентностью (р\ -f- p2, q\ + q<i), значение кото-
которой на векторах {xi, х%, ... хр„ хр, ь • • • хР[+р,} из Е и формах
{у\ у2, ... у, yi<+l, ... у1*+ъ) из Е* равно произведению
значений форм U и V, вычисленных соответственно на век-
векторах {х\, ..., хр} и формах {у1, ..., уч) и векторах {xPl+i, ...
...Хр+р,} и формах {у"'+1, ... у1^^}, т.е. W (хи х2, ... xPl+Pl;
у\ у2, ... уЧ'+ч>) = и(хи ... Хр,; у\ ... у«) • V (хЛ+1, ... xPl+Pi;
yq%+\ ... yq%+qi).
Введенное таким образом произведение полилинейных форм
называют иногда прямым или тензорным, чтобы отличать от
внешнего, о котором пойдет речь в § 3 настоящей главы.
24. Для записи произведения полилинейных форм исполь-
используется обычный знак умножения W = U • V или W = U®V.
69
*25. Произведение полилинейных форм обладает следую-
следующими свойствами:
1) W- {V¦ V) = (W-U) ¦ V — ассоциативность умножения;
2) W(U+V)=W-U+W-V, (U+V)W— U-W+V-W —
дистрибутивность умножения относительно сложения;
3) (aW)V=W-(aU)=a(W-V);
4) W-O = O-W = O.
© Свойства 1)—4) непосредственно следуют из определений
11 и 23. 3
*26. Умножение полилинейных форм некоммутативно, т. е.,
вообще говоря, UV ф VU.
О Действительно, пусть U(xb y1) = l\r\u а V (хъ у2) = ?%ц2п
т /т гт г т т t т\ / 1 24 «,!«.» 1 2 е.Дь.112 , г\
Тогда (UV — VU) (хи х2; у , у ) = gig?T]|Tb — sie^i'i1!! ^= 0, если ве-
векторы хи х2, у1, у2 такие, что е'^л'лт Ф l\lWn4<- D
*27. При умножении полилинейных форм их тензоры пере-
перемножаются так, что если тензоры форм U и V соответственно
равны vW, Щя\ то тензор вдъ+Ч' произведения UV получается
по правилу
28. Тензор со]'?1+'?2, компоненты которого определяются через
'pi+Рг
компоненты тензоров v}1?1 и О1'' по формуле 27, называется
7>i ip
произведением тензоров {vj'1! и |о|
*29. С помощью определенного в 23 произведения полили-
полилинейных форм базисный в Qp набор полилинейных форм \w\p\
может быть записан в виде W\p = eixei'i ... е'ре, ё, ...ё,, где
iq h h !q
{^Л"=1 — базис второго сопряженного пространства (Е*)*
(см. гл. 4), взаимный с базисом {ег}1=у. (es, e) — dt.
0 Действительно, вычисляя правую часть равенства 29 на век-
векторах {хь ..., Хр) и {у\ ..., у"), получаем ^ ' (х0е'Чх2) • • •
¦¦¦ei» (*р) % (У') *,ш (У") • • • eiq (У4) = t№ • • • I», < • • • 4"w что
совпадает с определением w\p (см. 19). 5
*30. Естественный изоморфизм пространств Е и (Е*)*, зада-
задаваемый равенствами (es, у) = (у, es) (s=l, 2, ..., п), позво-
позволяет равенства29 "переписать в видеИ?!р=е!1еB ... е'Ре. е. ... е, .
>q 'I h 'q
Здесь {ej} — векторы базиса, сопряженного с базисом
{е'}, действуют на векторы у из Е* по формуле (eit у) =
= %•
70
§ 2. ПОДСТАНОВКИ
' Этот параграф уведет читателя несколько в сторону от ма-
магистральной линии нашего изложения. Однако описываемые
в нем понятия окажутся чрезвычайно полезными для дальней-
дальнейших построений.
В этом параграфе мы сообщим элементарные сведения об
одной очень важной конечной группе — так называемой группе
подстановок. Применение этих сведений читатель найдет сразу
же в следующем параграфе, а затем в следующей главе и, на-
наконец, во многих местах второй части книги.
1. Всякое взаимнооднозначное отображение на себя конеч-
конечного множества, состоящего из m элементов, называется под-
подстановкой степени т.
Разумеется, безразлично, на каком конечном множестве изу-
изучать свойства подстановок. Мы возьмем в качестве такого мно-
множества отрезок натурального ряда
{1,2, ..... ш).
2. Подстановку {s(i)}, ставящую в со-
соответствие элементу I (г = 1, 2, ..., m)
элемент s(i) (s — 1, 2, ..., m), удобно
записывать в виде таблицы из двух стро-
строчек. В первой строке записываются эле-
элементы от 1-го до /и-го, а во второй —
соответствующие им элементы s(i). По-
Порядок элементов в первой строке несуществен, но при этом
порядок второй строки однозначно определен порядком первой;
например,таблицы
(\ 2 3 44 /3 2 4 П
U 4 1 2)' \\ 4 2 3J
определяют одну и ту же подстановку. Подстановки можно за-
задавать при помощи диаграмм. Например, указанную подста-
подстановку задает диаграмма, изображенная на рис. 3.
*3. Существует ровно пг\ различных подстановок степени т.
© Доказательство проведем, по индукции. Пусть pk — число
всевозможных различных подстановок степени k. Очевидно, что
Pi = 1. Найдем связь между рк и рк-\. Пусть {S (t)}*-/ — неко-
некоторая подстановка степени k—1. Исходя из нее, образуем k
различных подстановок степени k:
/1 2 ... k \ ( 1 ... /-1 / / + i ... k \
\k s(l) ...s(k-\)J, ..., \s(l) ...s(/-l) k s(j) ... s(k-l) ), ...
( 1 2 ... ft- 1 k\
.... Vs A) sB) ... s(ft- 1) ft/.
Общее число различных подстановок степени k, которое можно
получить указанным способом, перебирая по очереди все pk-\
подстановок степени k—1, будет равно pk-\-k. Построенное
71
множество подстановок будет содержать все подстановки сте-
степени k. Действительно, пусть некоторая подстановка степени k
( 1 2 ... / - 1 I j+\ ... k \
Vs A) sB) ... sU-l) k s{j) ... s(k-\))
не входит в это множество. Это означало бы, что подстановка
степени k — 1
\ 2 ... / ... k-\
8A) 8B) ... S(j) ... S(k-l)
-l))
не входила в число p&_i подстановок степени k— 1. Последнее
противоречит предположению, что рр„-\ — число всевозможных
различных подстановок степени k—1. Таким образом, Pk =
= k pk-\ и, следовательно, рт = трт-\ = т(т — \)рт-г = ...
... = т(т—\){т — 2) ...2-1. D
Определим на множестве всех подстановок степенью m внут-
внутренний закон композиции — умножение подстановок.
4. Произведением подстановок s(i) и t(i) называется под-
подстановка {s [/(/)]}. Соответственно произведение подстановок
s и t обозначается ts.
Пусть
A 2 3 4\ /1 2 3 4\
6~ V3 2 4 \У U 4 3 2Г
т ^ /1 2 3 44
Тогда (8 = ^ j 4 2).
Умножение подстановок удобно производить с помощью
диаграмм. Так, для приведенного примера «диаграммное» умно-
умножение подстановок показано на рис. 4.
Ж
st i
Рис. 4.
*5. Произведение подстановок некоммутативно. Так, в пре-
, (\ 2 3 44 , ,
дыдущем примере s/ = ^3 4 2 x)=?ts.
*6. Множество всех подстановок степени т, наделенное за-
законом умножения, образует некоммутативную группу.
72
© Доказательство состоит в проверке ассоциативности закона
умножения, существования единицы и обратной подстановки. Э
7. Всякое расположение чисел от 1 до т в некотором опре-
определенном порядке называется перестановкой из т чисел. Пе-
Перестановка из т чисел записывается в виде {/i, /2, ..., /т}, где
каждое /,• — одно из целых чисел 1, 2, ..., т, причем /,=?/*.
при 1Фк. Перестановку из т чисел {/ь ..., jm) часто будем
записывать с помощью символа пт.
*8. Между подстановками степени т и перестановками из т
чисел может быть установлена биекция.
© Сопоставим перестановке из т чисел {\\, /2, ..., jm} подста-
подстановку степени*/и по правилу s(/) = /,- (г=1, 2, ..., т.). Оче-
Очевидно, что построенное соответствие биективно. D
*9. Число различных перестановок из т чисел равно т\.
В дальнейшем все утверждения будут формулироваться,
и доказываться для перестановок. Ясно, что любое из этих
утверждений может быть переформулировано для подстановок,
10. Перемена местами двух каких-либо чисел в перестановке
называется транспозицией.
*11. Все т\ перестановок из т чисел можно получить из
некоторой исходной перестановки посредством конечного числа
транспозиций.
12. Беспорядком в перестановке {//, /2, ..., jm) называется
такое расположение чисел, при котором большее число /,• стоит
впереди меньшего /& (т. е. /; > \& при i < k).
13. Число беспорядков в перестановке {/'ь /2, ..., jm) обо-
значается символом [/ь/г, ..., jm]. Например, [1, 2, 4, 3] = 1,
[2, 1, 4, 3] = 2.
14. Перестановка называется четной, если число беспорядков
четное, и нечетной, если число беспорядков нечетное. Аналогич-
Аналогичным образом классифицируются и соответствующие подста-
подстановки.
*15. Четные подстановки образуют подгруппу группы под-
подстановок.
*16. Всякая транспозиция меняет четность перестановки.
0 Вначале рассмотрим случай, когда транспозиция выпол-
выполняется над соседними числами в перестановке, например /,•
и ji+\. При транспозиции \i и /г+i число беспорядков, которые //
и /г+i образуют с остальными числами перестановки, не изме-
изменится. Сама же транспозиция jt и /<+i либо уничтожает один
беспорядок, либо его создает. Таким образом, число беспоряд-
беспорядков в перестановке при транспозиции соседних членов изме-
изменяется на единицу, что влечет изменение четности переста-
перестановки.
Пусть теперь транспозиция выполняется над элементами ji
и ji+k. Сведем рассмотрение этого случая к предыдущему. Дело
в том, что транспозицию ji и /<+& можно получить, выполняя
последовательно транспозиции /( и /'»+а лишь с соседними чле-
73
нами. Подсчитаем число транспозиций, которое при этом при-
придется выполнить. Число /, нужно поменять местами с k после-
последующими членами: ji+u затем с ji+2 и т. д. и, наконец, с ji+ь.
После этого число ji+k нужно будет поменять местами с k — 1
предыдущими числами: ji+\, /,-+2, ..., ji+k-i- Таким образом,
всего необходимо выполнить k +(k — 1) = 2k — 1 (нечетное
число) транспозиций. Таким образом, используя предыдущий
результат,, видим, что окончательная перестановка имеет чет-
четность, противоположную исходной. 5
*17. Среди ml всевозможных перестановок из т чисел число
четных и нечетных одинаково и равно ml/I.
*18. Каким бы числом транспозиций мы ни перевели пере-
перестановку {/], /2, ..., }т) в исходную перестановку {1, 2, ..., т),
четность этого числа совпадает с четностью перестановки
{Л, /2, .-., jm}.
© Пусть перестановка {/i, /2, ..., jm} переведена в исходную
с помощью N транспозиций. При каждой транспозиции четность
перестановки изменяется. Так как перестановка {1, 2, ..., т}
четная, то четность перестановки {/ь /2, ..., jm} совпадает
с четностью числа N. D
§ 3. АНТИСИММЕТРИЗАЦИЯ И СИММЕТРИЗАЦИЯ
В этом параграфе мы рассматриваем симметрические и ан-
антисимметрические полилинейные формы валентности (р, 0) над
п-мерным линейным пространством Е. Основное внимание уде-
уделяется изучению антисимметрических форм.
1. Полилинейная форма W(xu •••, хр) называется симмет-
симметрической, если ее значение не зависит от порядка аргументов.
*2. Тензор ®t ...t симметричной формы W{x\, ..., хр) сим-
симметричен, т. е. со* Л =В(,(, ...ь при любой перестановке
1 Р '1 '2 >р
{/ь J2, ¦¦¦, }р) целых чисел 1, 2, ..., р.
3. Полилинейная форма W(xi,x2, ..., хр) называется анти-
антисимметрической (или кососимметрической), если она меняет
знак при транспозиции произвольной пары ее аргументов
W(XU ..., Xs Xt Хр)— —W(XU ..., Xt Xs, ..., Хр).
*4. Тензор (?>tt ...t антисимметрической формы W{x\, ...
...,xP) антисимметричен, т. e. &tv..ti...tk...tp = — ®tx ...tk...ti...tp
при любых i и k, 1 sg: i < k sg; p.
*5. Множества симметрических и антисимметрических форм
суть подпространства в Qp.
*6. Для того чтобы полилинейная форма W(x\, ..., хр) была
антисимметрической, необходимо и достаточно, чтобы она обра-
обращалась в нуль при совпадении любых двух ее аргументов.
© Необходимость. Пусть W — антнеимметрическая форма.
Тогда W{xu ,,,, xs, ..., xt, ..., Хр) — — W(xu ..., xt, ..., xs, ,,,
74
..., хг), откуда при xs = xt — a следует W(x\ xs-\, a, ...
..., xt-u(i, ¦.., xp)= 0.
Достаточность. Пусть W = О при xs =»= x«. Тогда №(xi, ...
. . . , A's + .v;, .. ., xs 4- А'ь ..., xp) = О, и в силу линейности
формы W по каждому аргументу W(xi, ..., xs, ..., xs, ...
..., Xp)+W(XU -.., Xs, ..., Xt, ..., XP)+ W (XU ¦ ¦¦ , Xt, ...
..., xs, ..., xp)-\- W(x\, ..., xt, ..., Xt, ..., Xp) — О, откуда
lF(jfb . . . , Xs, . . . , Xt, . . . , Xp) = —W{X\, ..., Xt, ..., Xs, ..., Xp).T>
*7. Антисимметрическая форма W(xu ..., xp) равна нулю,
если ее аргументы образуют линейно зависимый набор век-
векторов.
*8. Если валентность некоторой антисимметрической формы
превосходит размерность пространства, где она задана, то эта
форма тождественно равна нулю.
В дальнейшем нам придется часто иметь дело с перестанов-
перестановками аргументов полилинейной формы. Введем для переста-
перестановки аргументов полилинейной формы специальное обозна-
обозначение.
9. Пусть-дана перестановка np = {ji, /2, ..., jP} из чисел
{1, 2, ..., р). Переход от первоначального расположения аргу-
аргументов в полилинейной форме W(x\, x2, ..., хр) к расположе-
расположению W(xj{, Xj2, ..., Xj ), определяемому перестановкой %,, бу-
будем обозначать символом яр и записывать это действие сле-
следующим образом: (пр?/)(хь х2, ..., xp) = W(xlx, Х;2, ., ., х1р)
Аналогично будем записывать перестановку индексов тензора
полилинейной формы: (ярю)^2 ...<== atht, ...t} ¦
*10. Если форма W антисимметрична и пр = {/ь •••, /Л —
произвольная перестановка, то яр 1^=(—1)!л''1 Wn(npG>)tv t2 <р=>
= (—l)fnp] (ot t.t...t> где [яр] — число беспорядков в пере-
перестановке {/1, /2, ..., /р}.
© Пусть N — число транспозиций, переводящих перестановку
{/1, ..., /р} в исходную перестановку {1, 2, ..., р}. На осно-
основании 2.18 (_l)v = (_i)[ltpl, и, следовательно, npW = {—lfw=>
= (-l)^1^;Kco)v..^ = (-l)%i...^ =(_i)t"P](Bti...fp. 5
*11. Пусть W — произвольная форма валентности (р, 0).
Тогда форма С/ = (р!)~г Л (л ) Яр!?7 является симметрической,
а форма V = (р!)~'2(я ) Яр!?7 (—l)fnp1 антисимметрической.
Здесь символ Х(я ) обозначает суммирование по всем пере-
перестановкам Яр = {/ь . . . , /р}.
© Первое утверждение основано на том, что перестановка
любых двух аргументов формы U равносильна простой пере-
перемене местами слагаемых в сумме ?(Я ^npW. Для доказатель-
доказательства второго утверждения воспользуемся групповыми свой-
73
ствами подстановок. Имеем:
Обозначим через яр произведение подстановок п'я . Тогда
Г ' I
(_1)[йр] = (_1)[пр](_1Iяр! в силу 2.18. Кроме того, ввиду су-
существования обратной подстановки для всякой подстановки л't
ясно, что множество всех подстановок вида я = я n'h с фик-
фиксированной подстановкой яр и произвольной подстановкой яр
совпадает со всей группой подстановок степени р. Это позво-
позволяет переписать полученное выражение в виде
12. Указанный в 11 способ построения по форме W соответ-
соответствующей симметрической формы U называется симметриза-
симметризацией формы W. Симметризация обозначается символом sym;
таким образом, по определению
13. Указанный в 11 способ построения по форме W соответ-
соответствующей антисимметрической формы V называется антисим-
антисимметризацией (или альтернированием) формы W. Антисиммет-
Антисимметризация обозначается символом asyrn; таким образом, по опре-
определению
asym W = -i- ]T {-\)lnp)npw.
Р
*14. Для всякой симметрической полилинейной формы U
имеют место равенства sym U = U, asym U = О.
*15. Для всякой антисимметрической формы V имеют место
равенства sym V = 0, asym V = V.
Нормировочный множитель (р!)-' именно для того и введен
в определение операций симметризации и антисимметризации,
чтобы эти операции не изменяли соответственно симметриче-
симметрические и антисимметрические формы.
*16. Симметризация и антисимметризация являются линей-
линейными операциями, т. е. для любых форм U, V из Q,, и любых
скаляров а, р выполнено: sym(oc[/ -f- (ЗУ) = asym L^-f §sym V,
asym (aU + p V) — a asym U + P asym V,
76
*17. Операция sym является проецированием в пространстве
Ур на подпространство симметрических форм параллельно под-
подпространству антисимметрических. Операция asym является
операцией проецирования в Qp на подпространство антисиммет-
антисимметрических форм параллельно подпространству симметрических.
*18. Какой должна быть валентность р для того, чтобы
в пространстве Ур1 было выполнено sym °asym = /?
*19. Для полилинейных форм U и V произвольных ва-
валентностей (/,0) и (т, 0) выполняются равенства asym UV —
= asym (asym I)¦ V)= asym(?/ asym V).
© Используя определения антисимметризации 13, понятие про-
произведения полилинейных форм 1.23 и пользуясь свойствами ли-
линейности операции антисимметризации и дистрибутивностью
произведения 1.25, вычислим центральный член формулы на
векторах {х\, ..., х!у xi+u .... xt+m}:
asym (asym U-V) = asymf-i- ? (-l)[n'l U(xh х,г)У(х1+и
В силу свойства 10 антисимметрической формы asym
2h) ]
Xasymf/(x,, .... Xt)V(xl+u ..., xt+m). Поскольку индексы
{/ + 1, ..., l-\-m) не образуют беспорядков, то (—l)fIt/^X
Х(—l)^1' !r"" 'v Ul "' '+ntl = l. Таким образом, под знаком по-
последней суммы каждое из /I слагаемых равно asym UV. Следо-
Следовательно, asym (asym V • V) = asym (UV). Аналогично доказы-
доказывается равенство asym (U asym V)= asym UV. 5
Условимся, ради единства дальнейших построений, считать
скаляры и линейные формы антисимметрическими формами
валентностью 0 и 1 соответственно.
Глава б
АНТИСИММЕТРИЧЕСКИЕ
ПОЛИЛИНЕЙНЫЕ ФОРМЫ
Антисимметрические полилинейные формы являются одним
из самых универсальных инструментов алгебры и анализа. Они
обладают рядом удивительных свойств, ставящих их в такое
особое положение. Одно из них — и, пожалуй, самое важное —
это то, что подпространство антисимметрических форм валент-
валентностью п над п-мерным пространством одномерно, т. е. изо-
изоморфно пространству скаляров. Указанный изоморфизм по-
позволяет ввести ряд новых геометрических понятий, таких, как
ориентация пространства, ориентированный обьем {в евклидо-
евклидовом пространстве), а в дальнейшем позволяет построить инте-
интегральное исчисление на формах {см. гл. 5 второй части книги).
Уже в настоящей главе в связи с этим изоморфизмом возник-
возникнет понятие определителя оператора, которое в следующей главе
позволит нам описать так называемые «.инварианты» оператора,
действующего в линейном пространстве.
§ 1. БАЗИС И РАЗМЕРНОСТЬ ПРОСТРАНСТВА
АНТИСИММЕТРИЧЕСКИХ ПОЛИЛИНЕЙНЫХ ФОРМ
1. Подпространство антисимметрических полилинейных форм
в QP будем обозначать через Лр.
Построим базис линейного пространства Ач и определим его
размерность. Базис в Лр будет построен с помощью антисим-
антисимметризации форм WfP, W'p(xlt ..., xp) = |j422 • • • l'pp, образую-
образующих базис пространства Qp.
*2. Формы K'pss У*1'2 ¦¦¦1р=ж asym W7'1'2'" 1р обладают косой
симметрией относительно индексов \i\, i2, ..., iP}, т. е.
yh ¦¦¦ h•••'*:•••'¦p== _ v'l--lk•••'/••• 'p.
О В силу равенства Wi{ •¦¦lvlk---lP (Xl xt,...,xk, ...,xp) =
= Wli "¦ '* "' '' "¦ ip (*i> •••, Xk xt, ..., xp) имеем
.... xk xt
78
*»)¦ D
*3. Если среди индексов й, г2, .... tP есть равные, то
*4. Если все индексы набора {/i, i2, ..., гр} различны и лр =
= {/ь •••. /р}—некоторая перестановка целых чисел {1, 2, ...
..., р}, т. е. набор {//,, //2 г/} отличается от набора
{ti, ¦.., iP) лишь расположением индексов, то V >l l2'" h =
()
*5. Число формУ'г"'р с различными упорядоченными набо-
наборами индексов A ^ А < t2 ... < tp ^ n) равно числу сочетаний
С?, из п по р элементов, С? = м! [р! (я — р)\]~1-
*6. Формы V'i'"'p со всевозможными различными упорядо-
упорядоченными наборами индексов A ^/i < ... < tp ^ «) образуют
базис линейного пространства Лр.
Условится пользоваться следующими обозначениями для
суммирования: V означает суммирование по всем упорядо-
упорядоченным мультииндексам длины р, а ?,. . — суммирование по
\ р)
всем вообще мультииндексам длины р.
© Докажем полноту набора. Пусть U из Лр — произвольная
антисимметрическая форма и v; t t — ее тензор. Поскольку
Лр есть подпространство в Q°p, то форма V может быть разло-
разложена по базису {W'p} пространства QP: U ~ ^., . v\W1p. С дру-
дру,
. v\
гой стороны, asym U = И и, значит ?/=?,,.V) asym \F'0 =
== 2п vf ^'р- ^се слагаемые последней суммы, которые содер-
жат формы 1/г1'2"-гр, имеющие по крайней мере по два совпа-
совпадающих индекса, равны нулю. Поэтому U == ?( ^.я . v^^.,.,- X
XFVi'-'p, Здесь, как мы условились, внешняя сумма берется
по всевозможным различным упорядоченным наборам индек-
индексов A sg; h < t2, -.., ip^n), каждый из которых может при-
принимать все значения от 1 до п, а внутренняя — по всем р! пере-
перестановкам пр = {/ь ..., /р} индексов {/i, /2, ..., /Р}. Внутренняя
сумма легко вычисляется. Так как
то z,vh i V 12 p — p\V{ i i i
Таким образом, f/ = p! X vi V'p.
лр
79
Линейная независимость, набора {у'р} (l^fi<J2, ...
..., < iP ^ n) доказывается тем же способом, что и линейная
независимость набора W\p{cu. 5.1.19). }>
'р
*7. Размерность линейного пространства Ар антисимметриче-
антисимметрических полилинейных форм валентностью (р, 0) над линейным
пространством Е размерностью п вычисляется следующим об-
образом: dimAp(E) = n![p!(ra — p)!]-1 @<p<n), dimAp(E) =
= 0 (р > п).
*8. В частности, dim Ап-\ (Е) = dim Ai (E) = dim E = п,
dimAn = dim Ао = 1.
Последнее соотношение означает, что линейное пространство
An антисимметрических форм валентностью п (п — dim E) изо-
изоморфно полю К, над которым построено пространство Е.
Этот изоморфизм имеет весьма интересную природу, кото-
которая будет обсуждаться в § 4.
§ 2. ВНЕШНЯЯ АЛГЕБРА
АНТИСИММЕТРИЧЕСКИХ ФОРМ.
ОРИЕНТАЦИЯ
На множестве всех антисимметрических форм {разных ва-
валентностей), действующих в данном пространстве, можно опре-
определить операцию умножения. Это умножение называют внеш-
внешним, имея в виду то обстоятельство, что произведение двух
сомножителей из А.р, Aq не лежит, вообще говоря, ни в одном
из этих пространств. С помощью внешнего произведения мож-
можно, исходя из l-форм, построить базис в каждом из пространств
Ар, в частности в Ап- В свою очередь с выбором базиса в А„
можно связать классификацию базисов в Е и чрезвычайно важ-
важное в дальнейшем понятие ориентации.
1. Пусть U и V — полилинейные формы валентностью (р, 0)
и (г, 0) соответственно, вычисляемые на векторах л-мерного
линейного пространства Е. Внешним произведением форм U и V
называется форма W, определяемая равенством
Внешнее произведение полилинейных форм обозначается сим-
символом А: W=UAV.
*2. Внешнее произведение форм U из Q° и V из Q°r есть
антисимметрическая форма валентностью (р + г, 0), т. е.
t/AVe Ap+r.
*3. Если сумма валентностей форм U и V больше п, т. е.
р + г>п, то U'A V=O.
*4. Свойства внешнего произведения*
8Q
) ;
2) (U+ V)AW = U AW+V AW,
UA(V+W)=UAV+UAW;
3) (aU)AV=U A(aV) = a(U AV)
непосредственно вытекают из его определения, свойств произ-
произведения полилинейных форм и линейности операции asym.
Кроме того,
*5. Внешнее умножение ассоциативно: (U AV) AW =
= U A(V A W) и справедливы равенства
(*) (U Л V) Л W = (р ~^+ s)! asym Е/УГ = UA(V AW).
© Достаточно доказать равенства (*), так как ассоциатив-
ассоциативность является их следствием. По определению внешнего про-
произведения и в силу свойства 5.3.19 операции asym, имеем
(U Л V) Л W = i?±f±i)L asym [i?±f>L asym
Аналогично доказывается равенство
U Л (V Л Г) = (р + ; + s)! asym
*6. Внешнее умножение антикоммутативно: U AV =
*=(—l)p'V AU.
© По определению внешнего произведения1
+)(-¦)¦*'¦¦ ^-'^х
Xf/(-vftl, ..., xkp)V(xkp+l, ..., дсАр+г).
Переобозначим индексы kp+1=ii} kp+2 — i2, ..., kp+r = ir,
ki = ir+u k2 = ir+2, ..., kp = ir+p. Тогда
XU(xir+v ..., xir+p)V(x{l xlp).
Перестановка [tV+i, ..., ir+P, h, ¦¦¦, ir] посредством рг транс-
транспозиций (каждый индекс i, (j sg; г) переставляется с каждым
индексом ij (/^г+1)) переводится в перестановку {iu ...
,.., ir, ir+u ..¦, ir+p). Поэтому
u Л V = -W < " X?T Е(яг+р) ( - !>''• VWl Wpl X
81
*7. Для того чтобы линейные формы gl, g2, ..., gs из Ai
были линейно независимы, необходимо и достаточно, чтобы вы-
выполнялось условие g! A g2 Л ... Л gs ф О.
© Необходимость. Пусть линейные формы gl, ..., g3 —
линейно независимы. Дополним набор линейных форм gl, g2, ...
..., gs до базиса сопряженного пространства, и пусть е\, е-г, ...
..., es, ..., еп— сопряженный базис в пространстве Е. Вычис-
Вычисляя внешнее произведение на векторах в\, е2, ¦¦-, es, получим
gl Л g2 Л ... Лgs(еи е2 es)=\. Следовательно, gx Л g2 Л ...
... Л gs ф О.
Достаточность. Если g] Лg2 Л ... Л gs = О, то формы
&\ g2. ¦ • ¦, gs линейно независимы, так как предположение, что
они линейно зависимы, например?* = 2г=1аг§'(> влечет gl Л g2A
Л ... Ags==Zll! а,^'Ля2Л ... ЛГ'Лг' = О., D
*8. Набор всех антисимметрических форм вида р1р~е1' Л е'2 Л
Л ... Л е'р A s-S U <U, ..., < iP < п), где' {е'} (t = 1,..., «)—
базис в пространстве Е*, является базисным набором простран-
пространства Ар.
© В 1.6 было установлено, что формы Vll'"lp = asyme'1 ... eip
A ^ h < k ¦•¦ < ip s?i n) образуют базис в Лр. Покажем, что
asyme^e'2 ... е'р = (р\)~~1е^ Л е'! Л • • • Л е1р- Применяя фор-
формулу 5.3.19 и используя определение внешнего произведения 1,
последовательно получаем
'e'2 ... eV) = asym [asytn (ehel?)eh ... e'p) =
= B!)
= B!)
= C!)
-l
-l
-1
-1
asym [(e'1 Л ?
asym [asym {<
asym [(e'1 Л
e'' Л е'2 Л e's
>S)el*
У'Л
е'г А
A ••
e*o
e'»)<
. Л
el>
e'-
eli
J} el*eib
...e'p
...e'p
] = ••
(py
Последнее равенство имеет место в силу 5.3.15. Э
Напомним, что пространство Л« одномерно (см. 1.8), г. е.
существует лишь одна, с точностью до множителя, антисим-
антисимметрическая форма валентностью п (п-форма) над п-мерным
пространством Е. Очевидно, что такую форму можно построить,
взяв внешнее произведение произвольных п базисных форм,
скажем, е1 Л е2 Л ... Ле".
*9. В частности, для всякой я-формы U существует число а,
такое, что U = ае1 Л е2 Л ... Ле".
*10. Значения базисных форм Р*р(хь ..., хр) выражаются че-
через координаты^!], ..., Щ~) векторов xj(j=l, ..., р) по форму-
формулам
© Доказательство получается прямым вычислением F1p(#i, ...
.--,*„) = Pi {asym е''^ ... е'р} (хи х2 хр) =
*11. Значение формы е1 Ле2.Л ... Аеп на векторах {*],...,*„}
выражается через координаты {?/}"=i векторов {х$ по формуле
{е1 Л е2 Л • • • Л еп}(хи .... *„)= 5>„) ( - О^Д- •.??„,
где nn = {ii in}-
*12. Равенства Vjp(jclf я2, ..-, хр) = 0 для' всех базисных
форм {V'p} выполнены в том и только в том случае, когда
набор {х'ь ..., Хр} линейно зависим.
0 Если набор {xi,A, ..., хр} линейно зависим, то эти равен-
равенства выполнены в силу основного свойства антисимметрической
формы E.3.7). Пусть, наоборот, набор {х\, ..., хр} линейно не-
независим. Тогда векторы {хи ..., хр} образуют базис своей ли-
линейной оболочки Lp, который может быть дополнен до базиса
во всем пространстве Е: {xi,x2 хр,хр+и ..., хп}. Сопря-
Сопряженный базис в Е* обозначим через {у1, ..., уп}. Очевидно,
что {{у1 Л у" Л ... Л ур)} (xh х2, ..., хр) --= 1. С другой стороны,
форма у1 Л у2 Л ... /\ур заведомо является линейной комби-
комбинацией базисных форм {V'p}> поэтому среди последних найдется
хотя бы одна форма, скажемVip, такая, что V р(хи х2, ..., хр)Ф
ф 0. D
*13. Равенство {е'Ле2Л ... Л е'1} (хи х2, ..., хп) == 0 имеет
место тогда и только тогда, когда набор векторов {Х{, ..., хп)
линейно зависим.
Утверждения 11 и 13, относящиеся к одномерному простран-
пространству антисимметрических форм валентностью (п, 0)—простран-
0)—пространству Ап, — будут играть существенную роль в следующем па-
параграфе, посвященном определителям и их свойствам. Одномер-
Одномерность пространства Л„ используется также далее при введении
понятия ориентации базиса вещественного линейного простран-
пространства Е (dim E = п) относительно фиксированной антисимметри-
антисимметрической формы валентностью (п, 0).
14. Пусть U — фиксированная нетривиальная я-форма,
U Ф О. Будем называть базис {ег}п1=1 пространства Е положи-
положительно ориентированным или, просто, положительным относи-
относительно формы U, если U(ei,e2, ..., еп) > 0, и отрицательно
ориентированным (отрицательным), если имеет место противо-
противоположное неравенство. При этом говорят, что форма U задает
ориентацию в Е.
*15. Пусть {е<}"=1 и {У}"_,—сопряженные базисы в Е и Е*
и я-форма U задает ориентацию- в Е. Тогда множитель а, свя-
связывающий две /г-формы: U и е1 Л е2 Л ... Л еп (U = аех Л ...
83
... Л еп), положителен (а>0), если базис {е,}?_, положитель-
положительный, и отрицателен (а<0), если базис отрицательный.
© Для доказательства достаточно вычислить обе части равен-
равенства на векторах еи е2> ..., еп. 5
*16. Пусть {е(}"_, и {?'(}"„! — два базиса в пространстве Е;
U, V — произвольные нетривиальные n-формы. Тогда существует
число у (у>0), такое, что U(e{, е.,, ..., en)U (е', е'„ ..., е'п) =
= yV(ei> е2, ..., en)V(e[, <,..., е'п).
© Пусть U = aex Ле2 А ... Ле" и I/ = ре1 Л е2 Л ... Ле»,
где {е'}—базис, сопряженный с базисом {е,}. Тогда
U(ev e2, ..., en)U(e\, e'2> ..., e'n) = aV /\е-д...
Лвп(е1. < <),
К(е„ е2, .... en)V(e;, е2 <) = Р2е1 Л ег Д ...
Отсюда видно, что искомое равенство имеет место при
*17. Если два базиса {вс}"ет1 и {e,}"=i ориентированы оди-
одинаково относительно нетривиальной n-формы U (т. е. оба базиса
либо положительны, либо отрицательны), то они ориентированы
одинаково и относительно любой другой формы V.
18. Говорят, что два базиса {е(} и [е{} ориентированы оди-
одинаково, если для произвольной ориентирующей формы оба они
либо положительны, либо отрицательны.
*19. Ясно, что два базиса ориентированы одинаково, если они
ориентированы одинаково относительно какой-либо одной не-
нетривиальной п-формы.
*20. Для того чтобы базисы {е^ и {ei} были одинаково
ориентированы, необходимо и достаточно, чтобы выполнялось
по крайней мере одно из трех условий:
1) е1 Д е2 Л ... Д е" {е\, e'v ..., <) > О,
2) еп Л е'2 Д ... Д е'п (еь е2, ..., еп) > О,
3) еп Д е'2 Л ... Л е'п = ре1 Д е2 Д ... Д еп при 0 > 0.
© Условия 1) и 2) непосредственно следуют из утвержде-
утверждения 16. Условие 3) эквивалентно каждому из условий 1) и 2). ]>
Из доказанных утверждений следует важная теорема.
*21. Одинаковая ориентация базисов есть отношение эквива-
эквивалентности, т. е. оно рефлексивно: базис {е,} одинаково ориен-
ориентирован с самим собой, транзитивно: если базисы \еь} и {ejj и
базисы {e't} и {е"{} одинаково ориентированы, то базисы {е{} и
84
[е"\ также одинаково ориентированы, и симметрично: если
базис {е,} одинаково ориентирован с базисом \е'Л, то базис {е1^
одинаково ориентирован с базисом {е,}.
Аналогично пространству полилинейных форм с валентностью
(р, 0) можно рассмотреть пространство полилинейных форм
с валентностью @, р). В нем естественным образом выделяются
подпространства симметрических и антисимметрических форм.
Последние называются поливекторами. На них может быть опре-
определено внешнее умножение, свойства которого вполне аналогич-
аналогичны 4, 5, 6. Рекомендуем читателю выполнить эти полезные по-
построения — они понадобятся в дальнейшем.
§ 3. ОПРЕДЕЛИТЕЛИ И ИХ СВОЙСТВА
Определитель (детерминант) квадратной матрицы является
одним из основных инструментов конечномерного анализа. С его
помощью можно формулировать важные свойства наборов век-
векторов и форм, такие, как линейная независимость, зависимость,
ориентация, условия разрешимости линейных систем, разнооб-
разнообразные геометрические условия и понятия, возникающие в связи
с изучением так называемого евклидова пространства, в частно-
частности понятие объема. В этом параграфе основные свойства опре-
определителя устанавливаются с помощью аппарата антисимметри-
антисимметрических форм и внешнего умножения. Напомним, что простран-
пространство п-форм над п-мерным линейным пространством одномерно.
Отсюда вытекает корректность следующего определения:
1. Пусть {е\е2, ..., еп)—какой-либо базис в пространстве
Е*, {а1, а2, ..., а"} — набор линейных форм из Е*. Определи-
Определителем этого набора в указанном базисе называется число
det (а1, ..., ап), определяемое из соотношения о1 Л а2 Л ...
... л а" = det(a',a2, ..., а")е'Ле2Л ... Ле".
•2. det (а1, а\..., а")= ?( - 1)и!а},а?.
а1
Здесь {a'k}l=l — коэффициенты формы а1 в базисе {е\е2, ...
.... е»}, j = (/i, .... /я).
© Доказательство немедленно следует из определений 5.3.13
и 2.1. 5
В § 2 настоящей главы было отмечено, что все понятия
внешней алгебры (антисимметризация, внешнее произведение
и т. д.) переносятся на множество поливекторов, которые можно
рассматривать как антисимметрические полилинейные формы
уже над Е*. Это позволяет сформулировать понятие определи-
определителя набора векторов. При этом мы обозначаем внешнее про-
произведение векторов тем же значком Л, что и внешнее произве-
произведение линейных форм.
3. Пусть {ei,e2, ..., еп)—какой-либо базис в Ь и {ai,a2, ...
..., о,п}—набор векторов из Е. Определителем этого набора
85
в указанном базисе называется число det(ai,a2, ..., ап), опре-
определяемое из соотношения «! Л'а2 Л ... Aan = det(ai ...
... а«) ех Л е2 Л ... Л е„.
*4. det(ai, а2..., аа) = Z ( - l)lJla/ia/2.. .а'»
Здесь {а?}*=[ _ координаты вектора as в базисе {еь ..., е«},
j = (/i, ..., Ы).
5. Определителем оператора А (А: Е —>¦ Е) в базисе
{^ь ..., е,,} называется определитель набора векторов
{Аех,Ае2, ...,Аеп}, т. е. det A == det (Лёь Ае2, ..., Аеп). Иначе
говоря, определитель оператора определяется равенством
AeiAAe2A... А Аеп = det A -ех Ае2 Л ... Аеп.
*6. det А = Z ( ~ l)lJJa['fl^- • -ai'\
и)
Здесь {аД — матрица оператора А в базисе {еь е2, ..., еп}-
Совершенно аналогично вводится понятие определителя опе-
оператора, действующего в сопряженном пространстве. Предостав-
Предоставляем читателю возможность сформулировать его самостоятельно.
*7. Пусть {ei, ..., еп), {е1, ..., е"} —сопряженные базисы
в пространствах Е и Е* соответственно. Тогда определители
операторов Л и Л* в указанных базисах совпадают.
© Напомним, прежде всего, что матрицы операторов Л и Л*
совпадают (см. 4.5.4). Поэтому искомое доказательство сво-
сводится к проверке равенства
Это равенство немедленно следует из свойств перестановок (см.
гл. 5 § 2). Действительно, меняя местами члены произведения
а\а2, ... а",, мы можем превратить перестановку нижних ин-
h h U
дексов в основную; при этом перестановка верхних индексов
станет, скажем, } = {juJ2, ¦••, in}- Если для этого нам понадо-
понадобилось Nj транспозиций, то согласно 5.2.18 знаки перестановок
j и У определяются четностью числа Nj, так что( — \)^']а{,аг, ...
h h
...а'1, =( — l)!ila'iab ... а'п. Остается выполнить суммирова-
суммировали
ние. 3
У читателя могло создаться впечатление, будто определи-
определитель оператора зависит от базиса, в котором он вычисляется.
Покажем, что это не так. Этот важный факт легко может бить
получен элементарными выкладками, однако мы предпочтем
извлечь его из общих свойств антисимметрических форм. По-
Попутно возникнет важное понятие внешней степени оператора.
8. Внешней степенью k линейного оператора Л называется
линейный оператор AAk, действующий в пространстве Ak .всех
«6
поливекторов степени k и определенный на базисных поливек-
поливекторах {eh /\enf\ ... Aelkj равенствами
ЛЛ k (вд Л е,2 А ... Л е1к) = Лел Л Ле/2 Л ... Л Ае1к.
На все прочие поливекторы оператор ЛЛ* распространяется
с использованием свойства линейности. Аналогичным образом
определяется внешняя степень оператора, действующего в со-
сопряженном пространстве. Полагают ЛЛ* = О при k > п.
*9. Внешняя степень на произвольном поливекторе вида
Х\ Л х2 Л ... /\хк вычисляется с помощью той же формулы 8,
т. е. AAk(xiAx2A ... Ахк) = Ахх ЛАх2 Л ... AAxk.
© Вычислим сначала внешнюю степень на всех поливекторах
вида хх Aeh ... Л е!к. Имеем ААк (х, Л er, A • ¦ ¦ Ае1к) —
= ^ я xi'Aen ААе!2А • • -AAejk = Axx A Aeh Л ... Л Ае1к. Поло-
Положим теперь, что доказана формула АХк(ху А х2 А • • • Л xs_x A
A e/s Л • • • Л elk) = Ах, А Ах2 А ... Л Л*5_, Л Aels Л ... Л
Л Ае1к, Вычислим внешнюю степень на поливекторе
Х\ А х2 Л • • • Л xs A ejs+\ Л ••• Л ejk> пользуясь линейностью
A-"(xt А х2 А ¦ ¦ ¦ A xs A els+i А ... Л e/ft) =
= Т., x'ssAxl А Ах2 А ¦ ¦ • Л Axs_x А Ае Л • • • Л Ле ==
= Ах{ААх2А ... A Axs А Ле^+) Л ... Л Ае^.
Доказательство завершается по индукции. Э
*10. Если пространство Е и-мерно, то для всякого поливек-
поливектора X порядка п выполнено ААпХ = detA-X. В частности, оп-
определитель оператора не зависит от базиса.
© Пространство Ап поливекторов порядка п одномерно. По-
Поэтому согласно 9 достаточно проверить формулу на каком-либо
базисном поливекторе, скажем ех/\е2/\ ... /\еп, где она сов-
совпадает с определением 5. Э
*П. detAB =
© На базисном поливекторе е\ Ле2 Л ... 7\еп имеем по опре-
определению бив силу 9:
detAB •elAe2/\ ... Ле„ = ABeiAABe2A ... ЛАВе„ ==
= det А • Вех Л Ве2 Л ... Л Веп == det A • det В • еу А е2 Л ...
Л Э
12. Оператор, определитель которого отличен от нуля, на-
называется иногда неособым или невырожденным.
Следующие два результата понадобятся нам в последнем
параграфе настоящей главы при выводе формулы для решения
линейного уравнения,
87
*13. Пусть A — произвольный оператор в пространстве Е,
{xi,Xi, ..., хп} — набор векторов из Е. Для всякой м-формы F
над E(dirnE = п) справедливо равенство
F(AxuAx2, ..., Ахп)= det А • F (хи х2, ..., хп).
© Если набор {х\, ..., хп) линейно зависим, то и его образ
{Axi, ..., Ахп) также линейно зависим и формула превращается
в равенство 0 = 0. Рассмотрим случай, когда набор {х\, ..., хп)
линейно независим и является таким образом базисом в про-
пространстве Е. Пусть II о^Ц— матрица оператора А в этом базисе.
Тогда, пользуясь антисимметрией формы F, получим
F(Axu Ax2, ..., Ахп)=*
= Z al'a^ ... а« F (xSi, x<2, ..., xsj =
)lsla
= F (xu x2, ..., хя) Е ( - l)lsla>.> ... а*" =
(S)
= det A • F (хь х2 хп). 5
*14. Пусть L — некоторое подпространство в пространстве
Е (dim L = г), {xt}rl=x—набор векторов из L, F — произвольная
антисимметрическая /--форма над Е. Тогда для любого опера-
оператора А, действующего в L, справедливо равенство
F(AxuAx2, ..., Axr)= det A-F(xux2, . .. , xr).
© Достаточно заметить, что сужение формы F на подпро-
подпространстве L является там формой с максимальной валентностью,
а воспользоваться предыдущим результатом. Э
В приложениях линейной алгебры принято говорить не об
определителе оператора, а об определителе матрицы. Сформу-
Сформулируем определение и свойства определителей в терминах мат-
матрицы.
15. Пусть ^ = |а^||— матрица оператора А в некотором ба-
базисе; положим, по определению, определитель матрицы равным
определителю соответствующего оператора: det ^ = det Л.
*16. det st- = Z ( - ly'af'a^ ... a^ =
© Доказательство следует из 7.
17. Пусть дана матрица
Замена строк матрицы столбцами соответствующих номеров на-
называется транспонированием матрицы. Операция транспониро-
транспонирования обозначается символом Т. Таким образом, по опреде-
определению
_ I U2
Матрица Мт называется транспонированной по отношению к ,s/.
При записи транспонированной матрицы в виде таблицы из п
строк и п столбцов верхний индекс элемента а* обозначает
номер столбца, в котором стоит этот элемент, а нижний — но-
номер строки.
*18. det^ » det^.
Установим теперь основные свойства определителей. Они,
очевидно, являются прямыми следствиями соответствующих
свойств антисимметрических форм. Мы формулируем эти свой-
свойства по отношению к столбцам. В силу предыдущего утвержде-
утверждения в каждом из них слово «столбец» можно заменить словом
«-строка».
*19. Определитель матрицы есть линейная функция каждого
столбца. В частности, определитель матрицы равен нулю, если
она имеет нулевой столбец.
*20. Определитель матрицы меняет знак, если поменять ме-
местами два столбца матрицы.
*21. Если матрица имеет два одинаковых столбца, то ее
определитель равен нулю.
*22. Если к одному столбцу матрицы добавить линейную
комбинацию других, то определитель ее не изменится.
0 Доказательство следует из 5 и 15. Э
*23. Определитель матрицы,-столбцы которой линейно зави-
зависимы, равен нулю.
На практике одна из главных задач — вычисление опреде-
определителей. Лишь в очень редких случаях оказывается эффектив-
эффективной прямая формула 16. Обычно стараются свести дело к вы-
вычислению определителя меньшего порядка. Сейчас мы докажем
теорему Лапласа, которая сводит вычисление определителя по-
порядка п к вычислению определителей меньшего порядка k,
k < п.
24. Минором М^'"[й = М* матрицы s& называется определи-
определитель, составленный из элементов матрицы, стоящих на пересече-
пересечении строк с номерами /i, ..., jk и столбцов с номерами 1и ..., h',
при этом предполагается, что номера следуют в возрастающем
порядке (не обязательно подряд).
89
25. Дополнительным минором для минора М\ называется
минор М\', мультииндексы которого j', i' являются дополнитель-
дополнительными к мультииндексам j, i, т. е. j' = (/t+i> •••¦ /«} не содер-
содержит ни одного индекса, входящего в j ={/ь ...,/*}, а
1' = {'й+1*'а+2> ¦••. Q— ни одного индекса из i={ibi2, ..., ik}.
Индексы дополнительных миноров мы также будем выписывать
в возрастающем порядке.
26. Алгебраическим дополнением Л,' минора М\ назовем до-
дополнительный минор М\'> взятый со знаком е] = (—l)[il! X
X (- II"'1 = (- l)['«-'*'*+i-'»]( _ i)\iih-l/k+i ¦- С\ Где> как
обычно,квадратные скобки означают четность соответствующих
перестановок.
*27. Теорема Лапласа: Пусть {ц, t2, ..., ik}—номера
выделенных столбцов матрицы зФ, Af/— всевозможные миноры,
составленные из элементов матрицы, стоящих в этих столбцах,
и А\ —их алгебраические дополнения. Тогда
del a = Z М\А\.
Аналогичная формула оказывается справедливой, если заме-
заменить столбцы строками
dets4- = Z МЫ--
© Сопоставим матрице s€ оператор А, действующий в линей-
линейном пространстве Е с выделенным базисом {е\,в2, ¦¦-, еп}. Со-
Согласно определениям 15 и 5 имеем det s& ¦ е, Д е2 А • • • Л еп =
= Аех А Ае2 Л .. • ¦ Л Ле„==(-1)Ш'1Х {Aeh А Ае/2 Л • • • Л Ле!к}А
Л {АеГк+1Л АеГк+г Л ... Л АеГп). .
Вычислим теперь коэффициенты поливектора AeSx A Aej2 А ••¦ Л
А Ае!к в базисе из поливекторов {etl A ei2 A • • • Л е,й}. Поль-
Пользуясь тем, что Ав/ = 2]'.'_ afii, получим
Aelx A Aeh Л • • • Л Ае1к =
= У а8^ ... a.ke Л е Л • • • Л
sk
В сумме, стоящей справа, можно объединить слагаемые, содер-
содержащие один и тот же поливектор, избрав в качестве основной
перестановку {iu i2, ..., ik} с монотонно растущими индексами.
При этом получится
Аеп А Ае12 Л • • • Л Ае1к =
90
Здесь внутреннее суммирование выполняется по всем переста-
перестановкам s = га мультииндекса i, внешнее — по всем упорядочен-
упорядоченным мультииндексам i длиной k, а четность [si ... s&] пере-
перестановки s = m вычисляется относительно основной переста-
перестановки {i}. Пользуясь предложением 6, видим, что в резуль-
результате внутреннего суммирования получается минор М\, так что
Aeh А Ае^ А... А Ае^ = ZiM\% Л ^ Л • ¦ • Л ^.
Совершенно аналогичным образом получаем
Ае< А Ае- Л ¦ • • Л Ае/ = ? Щ& . Aet- Л • ¦ • Л е{ •
>k+l 'k + 2 >n V ' k+\ k+2 '»
Здесь суммирование распространяется уже на все упорядочен-
упорядоченные мультииндексы V— (i'k+v ..., i'nJ длины n — k.
Перемножим теперь полученные выражения для поливек-
поливекторов:
(Ае, А Ае. Л ... Л Ае. X А {Ае > Л Ае,- Л ... Л Ае/ Х=
X h h 'kj X 'k+i h+2 'n)
= ZE ЩМ\. let A e. Л ... Л ei X A {e,> A ... Л <?/ \.
i i' 'Ml 2 lk) X k+l n)
Очевидно, что произведение базисных поливекторов отлично
от нуля лишь в случае, когда мультииндекс V является допол-
дополнительным к мультииндексу i, и равно в этом случае
(—II1'']е{ Ае2 А • • • Аеп. Таким образом, имеем окончательно
det stet А е2 А ... Л еп = ? М\М\, (~ l)li> J#1 (-1) n X
X e, Л e2 A • • • Л en = e, Л е2 Л ¦ • • Л еп ? M\A\.
Вторая формула доказывается аналогично. 3
Практически пользоваться теоремой Лапласа в общем виде
приходится редко. Обычно в приложениях удовлетворяются ее
вариантом, который приведен ниже.
*28. Теорема о разложении определителя по элементам
строки:
Здесь <4 (k = 1, 2, ..., п) — элементы строки с номером i;
А\ — алгебраическое дополнение минора, состоящего из един-
единственного элемента a*,, Af = (— 1)'+*М?,; V, к'— мультиин-
мультииндексы, дополнительные к j, k соответственно.
© Следует лишь заметить, что (—1)U 12---nl(_l)lft 12•••") =
91
Аналогичное утверждение с заменой строки на столбец по-
получается, если воспользоваться тем, что определитель матрицы
не меняется при транспонировании. Теорема Лапласа и ее след-
следствие 28 позволяют легко вычислять определители для матриц
некоторых специальных классов. Условимся временно при гра-
графическом изображении матрицы штриховать те ее части, где
могут стоять элементы, отличные от нуля, а зоны, где все эле-
элементы равны нулю, оставлять незаштрихованными.
29. Матрица зФ такая, что а|, = 0 при с > k называется
верхнетреугольный (рис. Ь,а). Если а? = 0, при 1фк, то мат-
матрица называется диагональной (рис.
5,6). Пусть {As} — некоторое раз-
разбиение отрезка натурального ряда
на непересекающиеся отрезки,
' (JAs = A,2, ..., п). Матрица М на-
называется блочно-диагональной, если
все ее элементы равны нулю, кроме,
быть может, элементов a'k, индексы
которых принадлежат какому-либо
одному отрезку, т. е. а{= 0, если
i'eAs, /геД(, s ф t (рис. 5, в). При
этом блоком s4-s матрицы si на-
зывается ее
часть
и,
Матрица называется блочно-
верхнетреугольной, если при разбие-
разбиении на блоки выполнено с^ = 0 при
ieAj, АеД(, s>t (рис. 5,г).
(Предполагается, что отрезки зану-
Рис. 5. мерованы в порядке возрастания
содержащихся в них номеров.)
Аналогичным образом описывается нижнетреугольная и
блочно-нижнетреугольная форма матрицы (рис. 5, д, е).
*30. Для матриц описанных типов определители вычисляются
особенно просто.
а). Определитель треугольной (в частности, диагональной)
матрицы равен произведению ее диагональных элементов:
б). Определитель блочно-треугольной матрицы равен произ-
ведению определителей ее блоков s4s=
E=1,2, ...
..., m), стоящих на диагонали.
© Докажем лишь утверждение б) для блочно-верхнетреуголь-
ной матрицы. Выделив верхний блок матрицы •^i=||ai|| 4еД
имеем по теореме Лапласа det s4- = det «s^i det s4>\, где s4-\ —
матрица, полученная из исходной отбрасыванием столбцов и
92
строк, пересекающих первый блок. Дело в том, что дополнения
всех прочих миноров, отличных от s4>\ и пересекаемых строками
{ajj (/ e А,), непременно содержат какой-либо столбец
{а'А (k s Др / ф. ДД состоящий целиком из нулей. Теперь,
заметив, что матрица зФ\ также блочно-верхнетреугольная, мож-
можно к ней применить тот же самый прием. Сделав конечное
число шагов, получим det s& — det s4>\ det бФ2 ¦¦¦ det бФт. Э
*31. Метод Гаусса для вычисления определителей. Вычисле-
Вычисление определителя матрицы общего вида проводится следующим
образом. Пусть а| ф 0. (Если а} = 0, то прежде чем приме-
применить указываемую ниже процедуру к первой строке матрицы,
ее следует исправить, прибавив какую-либо другую строку
с отличным от 'нуля первым элементом.) Прибавим ко второй
строке матрицы первую строку, умноженную на —(a'V'ap
к третьей строке прибавим первую, умноженную на —(а})" ар
и т. д. Продолжая эту операцию, получим матрицу, у которой
первый столбец, за исключением первого элемента, состоит из
нулей. Затем, прибавляя к третьей, четвертой и т. д. строкам
новой матрицы исправленную (если требуется) вторую строку,
умноженную на соответствующие множители, получим матрицу,
у которой в первых двух столбцах ниже диагонали будут стоять
нули. Аналогичным образом могут быть получены нули ниже
диагонали в третьем и прочих столбцах матрицы. В результате
матрица Ja*|| окажется приведенной к треугольному виду:
'б,1 fig а\ ... а\
0 й^ из ... й;
о о й| ... й;
о о о ... й;.
На основании свойства определителя 22 и формулы из 30а
имеем det|a*||= det||a?| = a|c^ . . . а"п. Если на некотором
шаге мы получим строку, сплошь состоящую из нулей, то оче-
очевидно, что определитель исходной матрицы равен нулю.
*32. Подсчитайте число алгебраических операций, необхо-
необходимое для вычисления det зФ непосредственно с помощью опре-
определения 16 и методом Гаусса.
§ 4. ПРИМЕНЕНИЕ АППАРАТА
АНТИСИММЕТРИЧЕСКИХ ФОРМ
К РЕШЕНИЮ СИСТЕМ
ЛИНЕЙНЫХ АЛГЕБРАИЧЕСКИХ УРАВНЕНИЙ
В третьей главе нашей книги мы изложили самый прямой
и эффективный способ решения линейных систем — метод Гауе*
са, Однако этот метод неудобен для теоретических исследова-
93
ний, поскольку не дает явной формулы для решения. Для квад-
квадратных систем с ненулевым определителем (систем Крамера)
такие формулы были найдены Крамером, а для общих си-
систем— Кронекером и Капелли. В классических курсах линей-
линейной алгебры эти формулы излагаются в самом начале и слу-
служат первым приложением теории определителей. Мы выведем
их, пользуясь аппаратом антисимметрических форм.
*1. Для того чтобы оператор Л: Е->-Е переводил всякий ба-
базис пространства Е в базис, необходимо и достаточно, чтобы
его определитель был отличен от нуля.
Напомним, что такие операторы мы условились называть
неособыми.
© Пусть для всякого базисного набора {е\,е%, ..., е,,} его
образ {Ав\, Ав2, ..., Аеп} также является базисом. Это озна-
означает, что поливектор Ае\ ААе2 А ... /\Аеп нетривиален и зна-
значит ввиду одномерности пространства n-форм над Е (dim Е = п)
существует отличная от нуля постоянная d(A), такая, что
Ае\ААе2А ... AAen = d(A)eiAe2A ... Аеп. Согласно дан-
данному ранее в 3.5 определению d(A)= det А, причем det А не
зависит от выбора базиса (см. 3.10).
Обратно, пусть detA=/=Q. Тогда по определению 3.5 для
всякого базиса {еь ..., еп} поливектор Ав\ ААе^ А ...
... А Аеп = det Aey Ae2 A ... Аеп нетривиален, что возможно
лишь в случае, когда векторы {Аеи Ле2, • •., Аеп) линейно не-
независимы. Это означает, что они образуют базис в простран-
пространстве Е. 5
Отметим, что фактически мы доказали больше, чем утверж-
утверждалось. Именно, благодаря независимости определителя от ба-
базиса условие det А ф 0 нужно проверить лишь для какого-либо
одного базиса. Таким образом мы получили
*2. Следствие: если оператор А: Е-»-Е переводит некото-
некоторый базис пространства Е в базис, то он переводит любой ба-
базис пространства Е в базис.
3. Линейный оператор Л: Е-*-Е называется автоморфизмом
пространства Е, если он задает биекцию Е на себя, т. е. урав-
уравнение Ах = у однозначно разрешимо при любой правой части у.
*4. Для того чтобы оператор Л был автоморфизмом про-
пространства Е, необходимо и достаточно, чтобы он был неособым,
det Л фО.
© Достаточно показать, что уравнение Ах = у однозначно
разрешимо в том и только в том случае, когда оператор Л пе-
переводит некоторый базис пространства Е в базис, а затем вос-
воспользоваться предложением 1 и следствием 2.
Итак, пусть оператор А переводит некоторый базис про-
пространства Е, скажем {в\, ..., еп}, в базис {Ae\,Ae*i, ..., Аеп),
Разложим правую часть уравнения Ах = у по базису {Ав\, ...
,.., Аеп}: у = H"-itfAeh и образуем вектор х = ?"_,т)'^.
94
Очевидно, что х является решением уравнения Ах = у. Если
бы нашлись два разных решения х, х' {х! = 2"=1 ii"e/)> т0 ока'
залось бы, что ?"_i лМе^ = Ллг== у — Ах' = Х"=1 4nAet. По-
Последнее возможно лишь при совпадении координат векторов
т)' = г|'', поскольку набор {Ле«} линейно независим.
Обратно, пусть уравнение Ах = у однозначно разрешимо при
любой правой части. Тогда однородное уравнение Ах = о имеет
лишь нулевое решение. Образуем для данного базиса
{в\, #2> •••, еп) набор {Ae\,Ae<i, ..., Аеп). Он линейно незави-
независим. Действительно, равенство 2*=i tf Aet = A\Zj1:ssX ц'е^ = о
влечет Е"=) ц'е1 ==0> откуда, пользуясь лишь линейной неза-
независимостью набора {в\, ..., еи}, заключаем, что ц' — О
(/=1,2, ..., я). Таким образом, набор {Леь ..., Аеп} ли-
линейно независим, и число элементов в нем равно размерности
пространства. Значит он является базисом в Е. 5
*5. Формула Крамера: Пусть А: Е ->- Е — неособый
оператор и {ei, ..., е„}—некоторый базис в пространстве Е.
Решение уравнения Ах = у дается следующей формулой:
п
A:=E^(det/l)det(/le1, Ле2 г/, Ле,-+1, ..., Аеп),
г-i
где во втором определителе вектор г/ стоит на месте с номером I
(вместо вектора Лег).
0 Полагая # = X"..i?'ei> запишем рассматриваемое уравнение
в виде Ег=1 5'^г ==у. Теперь обе части уравнения умножим
внешним образом на поливектор Ае2 ЛАе3 Л ... ЛАеп. Ввиду
антисимметричности полученных поливекторов члены, содержа-
содержащие |2, |3, ..., |", обратятся в нуль, и получится равенство
1хАех А Ае2 Л ... Л Аеп = у Л Ле2 Л ... Л Аеп,
т. е. I1 det Л = det (у, Ае2, ..., Аеп).
Для вычисления координаты |2 следует умножить уравнение
слева на Леь а справа — на Ле3 Л ... ЛЛе„. При этом полу-
получим |2 det Л = det (/lei, У, А_е2, ..., Аеп). Вычислив все коэффи-
коэффициенты решения, окончательную формулу получим сложением
компонент. 5
Формулу в 5 можно переписать в ином виде, если восполь-
воспользоваться введенными ранее понятиями минора и алгебраиче-
алгебраического дополнения.
*6. Формула Крамера в координатном виде:
Здесь {y\k}, {lk}—координаты векторов у, х соответственно
95
в базисе {е(}; Alk — алгебраическое дополнение матричного эле-
элемента а*.
© Следует вычислить определитель (let(Лб],Лег, ..-, у, ¦¦¦
.... Аеп). Для этого воспользуемся теоремой о разложении
определителя по элементам столбца (аналогичное утверждение
с заменой столбца на строку приведено в 3.28):
(Ы(Ле,, Ае2 у, ..., Аеа)=
Здесь Alk — минор, дополнительный к элементу af, взятый со
знаком (—\)'+к, — алгебраическое дополнение элемента a*, j
Рассмотрим теперь общий случай. Пусть оператор А дей-
действует из пространства Е в пространство Е', у — данный вектор
из Е', х — искомый вектор из Е, Ах = у. Через {е,}, {е'Л обо-
обозначим выбранные базисы в Е, Е' соответственно, а через |аЛ| —
матрицу оператора А относительно этих базисов. В общем слу-
случае оператор А уже не превращает базис {е,} в базис: набор
векторов {Ле,} (?= 1, 2, ..., dim E) уже может оказаться ли-
линейно зависимым либо не полным в Е'. Действуя методом
«прополки» [см. гл. 1), выберем из них максимальный линейно
независимый набор lAei \ (s = 1,2, ..., г, r = dim АЕ). Оче-
Очевидно, что г sg; dim Е' и АеИ А Ае-Ч Л . • • Л Ае1г Ф 0.
*7. Для того чтобы уравнение Ах = у имело хотя бы одно
решение, необходимо и достаточно, чтобы выполнялось условие
Aeh Л Aei2 Л ... Л Aeir Л у ==0.
© Доказательство немедленно следует из 2.7, переформулиро-
переформулированного для поливекторов. Э •
Получим формулу для решения общего линейного уравне-
уравнения, аналогичную формуле Крамера 5. Воспользуемся для этого
следующим утверждением общего характера:
*8. Пусть L — подпространство в Е (dimL = /') и {е>, ...
..., еп)—произвольный базис в Е*. Тогда среди базисных форм
f' = e'i Де'г д ... д е'г в пространстве Аг найдется по край-
крайней мере одна такая, что ее значение на любом базисе
{х\, Х2, ..., Хг) в L отлично от нуля.
О Согласно 3.14 достаточно указать базисную форму, значе-
значения которой отличны от нуля на каком-нибудь базисе в L. Тогда
это требование будет выполнено и для любого базиса. Выбе-
Выберем, например, базис {х\, ..., хг}, дополним его до базиса во
всем пространстве {х\, x<i, ..., хг, хг+и ..., хп} и рассмотрим
сопряженный базис {yl,yi, ..., Уп}- Очевидно, что форма
F = г/1 Л у2 Л ... Л уг обладает нужным свойством: F(xi, x%, ...
... ( Хг)— 1, однако не является базисной. Но она может быть
разложена по базисным формам F\ F == ^j ajFJ. Если бы ока-
оказалось, что на данном наборе {xi,x2, ..., хг} все формы F1
96
аннулируются, то вопреки построению было бы выполнено также
и F(xi, ..., хг)=0. Следовательно, существует базисная форма
Fu, такая, что .FJo(*i, х2, ..., хг) Ф 0. Тогда согласно 3.14 на
веяком другом базисе (x*lt ..., х'Л в L выполнено F' (х[, х'2, ...
..., х'г)ф0. >
Базисную форму F] = е'1 Л е'2 Л • ¦ • Л е'г удовлетворяю-
удовлетворяющую условиям предыдущего утверждения, назовем определяю-
определяющей формой подпространства L. С ее помощью мы образуем
величину, аналогичную определителю в общем случае некраме-
ровских систем.
Рассмотрим линейное уравнение Ах = у, А: Е-»-Е'. Пусть
Im А Ф Е', dim Im А = г < dim E'. В этом случае, как мы знаем,
уравнение Ах = у разрешимо не при всякой правой части у,
а лишь при условии 1/е1тЛ. Пусть {е\,еъ, ..., еп), {е\е2, ...
..., еп} — некоторая пара сопряженных базисов в Е, Е*, а
\е\, е'2> ..., е'т}, {еп, е'2, ..., е'т} —пара сопряженных бази-
базисов в Е', Е'* соответственно. Обозначим через F какую-либо
определяющую форму подпространства 1mA из числа базис-
базисных форм i7' =е/;' Л е'1* Л ... Л е'1'.
*9. Если уравнение Ах = у разрешимо, то имеет место сле-
следующая формула для решения:
где|'р={^(Лег|, ..., Aeir)] F(Ле(] Aet _y,y Aeir)~
, \ * -ft T? ( A p, А о, Af> Лд \
~~~~ / л Y I *l^t t • • • > /~xt^i у /ictj » • * у /ic? к
если ipe(ii,B, ..., iV) и g* = v*, если k<?(ii,i2, ..., tV). Здесь
Y& — произвольные постоянные.
© Чтобы найти, скажем, Vp (ip s (/I( ..., /r)), вычислим
форму F на векторах {Aett, Aei^, ..., Aet\, воспользовавшись
тем, что Aei%ti1-= — У.,^,, &Ае,4-у. Имеем:
F(Aetl, Ле,2, .... Aeir)l'p = F(Aetl Aetp_lt У
Пользуясь полилинейностью и антисимметричностью, во втором
слагаемом в правой части мы можем вынести суммирование из-
под знака формы и ограничиться лишь членами с индексами
i,i^(ii,i2 ir), поскольку остальные дают нулевой вклад.
После этого остается поделить на F^Ae^, Aei2, ..., Аевг), и
обозначить \k — yk, k^(h, 12, ..., ir). T>
4 Зак 193 97
Возникшее в предыдущей формуле выражение F(Ae,t, ...
..., Aelr) = e'l> Ле''! Л ... Ae''r(Aeix, Ле^, ..., Л<?,г) играв! в
формуле 9 роль, аналогичную роли определителя в формуле
Крамера для решения квадратной системы. Оно и в самом деле
оказывается определителем в следующем смысле:
*10. Пусть II а* ||—матрица оператора А относительно пары
базисов в пространствах Е и Е': Ле. = ?/L"J E ale' (/=1,2, ...
..., dim E). Тогда значение определяющей формы F на базис-
базисных в ЛЕ векторах Aeit, ..., Aeir равно определителю мат-
матрицы ||а?|| (s, /== 1, 2, ..., г).
© Ввиду сопряженности базисов \e't}, {en} каждый из век-
векторов {Ле^} в выражении F(Aei^, Aet<i, ..., Ле,г) можно заме-
заменить урезанным вектором, ? =1а'(ре' , вычеркнув из него все
члены, содержащие базисные векторы e't (/ ф. (Д, /2, ..., /г)).
После этого рассматриваемое выражение принимает вид
F(Aeh Aeir) = е'^ А е"* Л ... Л *''(? а[р/,р> ¦ • •
°rl№ ¦¦¦<'¦
Очевидно, что полученное выражение есть не что иное, как опре-
определитель матрицы {М\\, составленной из элементов матрицы
оператора Л, стоящих на пересечении строк {ju /2, ..., /V} и
столбцов {t'i, i2, ..., ir}\ при этом выполнено det {Af{} ^= 0,
поскольку форма F является, по условию, определяющей. Э
*11. Матрицу {М\\ будем называть определяющей частью
матрицы $?, а ее определитель det {M\} — определяющим мино-
минором матрицы $Ф. Ясно, что определяющий минор матрицы мох<но
указать разными способами: это зависит от выбора базиса среди
векторов {Леи ..., Аеп} и базисной формы FK В то же время
порядок г определяющего минора фиксирован условием
г = dim ЛЕ = dim Irn Л.
*12. Если определяющий минор матрицы имеет порядок г,
то все ее миноры большего порядка равны нулю.
0 По построению det Mt=es' Д е Л • • • Л esp(Aet^ Л Aet% Л • ••
... A Aetp). Если р>г, то набор {Ле*]( ..., Aet \ заведомо
линейно зависим, и потому ввиду антисимметричности формы
es> Д ... Л е*р выполнено det М\ = 0. ]>
*13. Среди миноров матрицы порядка р при каждом
Р A ^ Р ^г г = dim Im А) существуют отличные от нуля.
98
© Легко видеть, что, предположив противоположное, мы при-
придем к противоречию: detMJ=O. j)
Сказанное позволяет определить размерность подпростран-
подпространства 1тЛ непосредственно из рассмотрения матрицы опера-
оператора А.
14. Число r(si), равное максимальному порядку отличного
от нуля минора матрицы si, называется рангом матрицы si.
*15. Ранг матрицы si совпадает с размерностью образа опе-
оператора А, г (si) = dim 1mA.
*16. dimlm/l = dim 1тЛ*, т. е. максимальное число линей-
линейно независимых строк и максимальное число линейно независи-
независимых столбцов матрицы совпадают между собою.
© r(s&) = r(s?*). D
В классических курсах линейной алгебры дается формули-
формулировка теоремы Кронекера — Капелли о разрешимости системы
линейных уравнений в терминах расширенной матрицы. Пусть
si: R^R.
17. Расширенной матрицей {si, у} системы Ах = у назы-
называется матрица, получаемая дописыванием к матрице si справа
столбца у.
*18. Теорема Кронекера — Капелли: Для того
чтобы система Ах = у имела решение, необходимо и доста-
достаточно, чтобы ранг расширенной матрицы r{si,у} был равен
рангу r(si) матрицы системы.
© Ранг расширенной матрицы согласно 14 равен размерности
суммы L подпространств 1тЛ и {ау}. Очевидно, что L гэ Im A.
Если известно, что dim L = dim Im Л, то очевидно, что L = Im A
и значит {ау} содержится в 1mA или, что эквивалентно, у вхо-
входит в Im Л.
Обратно, если система Ах = у имеет решение, то вектор у
лежит в подпространстве 1mA, и таким образом r(si) =
= dim Im Л = dim[Im Л + {ay}] = г№, У)- 3
Глава 7
ЛИНЕЙНЫЕ ОПЕРАТОРЫ
И ПРЕОБРАЗОВАНИЕ КООРДИНАТ
В этой главе мы продолжаем изучение линейных операто-
операторов, начатое в главе 4. Там шла речь о действиях над операто-
операторами и матрицами и их согласовании. В настоящей главе воз-
возникнет чрезвычайно важное и полезное понятие алгебры опера-
операторов. В частности, мы введем понятие обратного оператора и
опишем класс обратимых операторов, что позволит читателю
еще раз с высоты его теперешнего понимания взглянуть на оты-
отыскание решения уравнения Ах = у в линейном пространстве.
Класс обратимых операторов примечателен тем, что эти опе-
операторы переводят любой базис пространства в базис. Мы выяс-
выясним, что происходит с координатами вектора, линейной и поли-
полилинейной форм при такой замене одного базиса другим, ска-
скажем {е\,в2, ..., е„},— новым базисом {Аеи Ае2, ..., Аеп), и
запишем правила преобразования координат. Исследование за-
законов преобразования координат полилинейных форм — компо-
компонент тензоров — приводит нас к понятиям ковариантных и кон-
травариантных тензоров. Отметим, что обычный в теоретиче-
теоретической физике способ получения инвариантных — не зависящих
от базиса — величин состоит в свертывании ковариантных и
контравариантных тензоров.
§ 1. АЛГЕБРА ОПЕРАТОРОВ
И АЛГЕБРА МАТРИЦ
Вначале мы дадим общее определение алгебры. Алгебра опе-
операторов и алгебра матриц — частные случаи алгебры.
1. Линейное пространство Е над полем К, наделенное вто-
вторым внутренним законом композиции • (умножением), назы-
называется алгеброй & над полем К, если для любых элементов
х, у, z из Е и любого элемента а из К выполняются условия:
1) х- {y-z) = {х-у) -г — ассоциативность умножения;
2) (x + y)-z = x-z + y-z — дистрибутивность умножения
относительно сложения;
3) а(х-у) = (ах)-у = х-(ау).
При этом говорят, что пространство Е наделено мультиплика-
мультипликативной структурой' алгебры.
too
Если, кроме того, для любых,к, у из Е выполняется условие
ху = ух, т. е. умножение коммутативно, то алгебра & назы-
называется коммутативной.
2. Подпространство в Е, само являющееся алгеброй с тем
же законом умножения, называется подалгеброй в алгебре <?.
*3. Множество комплексных функций комплексного аргу-
аргумента с операциями поточечного сложения, умножения на комп-
комплексные числа и умножения друг на друга есть коммутативная
алгебра над полем комплексных чисел.
*4. Множество всех полиномов с коэффициентами из поля К
и обычными операциями сложения и умножения образует ком-
коммутативную алгебру над полем К.
*5. Линейное пространство квадратных матриц Кп» наде-
наделенное законом умножения «строка на столбец» 4.4.5, есть ал-
алгебра. При п > 1 эта алгебра некоммутативна.
© Доказательство состоит в проверке условий 1), 2), 3) из 1
и указаний (при п> 1) каких-либо двух матриц s& и 3%, для
которых s&3§ ф $s$-. 3
*6. Линейное пространство операторов ЕХЕ, наделенное со-
соответствующим законом умножения 4.4.1, есть алгебра. При
dim E > 1 эта алгебра некоммутативна.
7. Две алгебры & и <%' называются изоморфными, если со-
соответствующие линейные пространства изоморфны и, кроме
того, произведению элементов алгебры & отвечает произведение
соответствующих элементов алгебры &', т. е. существует биек-
ция &^>-&': х-*-х', у-*~у', сохраняющая линейную и мульти-
мультипликативную структуры: х + У^*-х'-\-у', ах-*-ах', ху^-х'у'.
*8. Алгебра линейных операторов в линейном пространстве
Е изоморфна алгебре матриц Жпп при п = dim E.
Введем понятия единицы и обратимого элемента алгебры &.
9. Элемент е называется двусторонней единицей или просто
единицей, если ех — хе == х для любого х из &.
10. Левым обратным к элементу у называется элемент х,
такой, что ху = е, где е — двусторонняя единица. При этом
элемент у называется правым обратным к элементу х.
11. Элемент, одновременно левый и правый обратный к эле-
элементу z, называется элементом, обратным к элементу г. Обрат-
Обратный элемент обозначается z~l. Элемент, имеющий обратный,
называется обратимым.
*12. Если элемент z имеет левый обратный элемент х и пра-
правый обратный элемент у, то он имеет единственный обратный
элемент z~l, z~l = x = у.
© Пусть х и у — соответственно левый и правый обратные
к элементу z, xz — zy = е. Тогда они совпадают в силу следую-
следующей цепочки равенств: х — хе = xzy = (xz)y — еу = у. 3
*13. Если оператор А обладает правым обратным, то урав-
уравнение Ах = у разрешимо при любой правой части.
101
© Пусть В — правый обратный, АВ = /. Тогда х=Ву яв-
является решением уравнения Ах —у. D
*14. Если оператор А обладает левым обратным, то решение
уравнения Ах = у, коль скоро оно существует, определяется
единственным образом.
© Пусть Х\,Х2 — два решения уравнения Ах —у. Тогда
A (xi — Х2) = Ах\ —Ах2 = о. Умножая слева на левый обратный
В, получаем отсюда В А (х\ — х2) = е(х\—х2) = Х\—х2 = о. D
Мы видим, что левый обратный отвечает за единственность
решения уравнения Ах = у, а правый обратный. — за существо-
существование решения. Если оба они существуют, то оператор А обра-
обратим, и решение уравнения Ах = у существует и единственно
для любой правой части.
Перечисленные факты носят абстрактный характер и не ис-
используют специфику конечномерного пространства. В конечно-
конечномерном случае, как мы знаем (см. гл. 4, § 5)), из существования
решения линейного уравнения следует его единственность, и
наоборот. Так что можно надеяться, что условия обратимости
линейного оператора окажутся проще.
§ 2. ОБРАТНЫЙ ОПЕРАТОР
Всякий ли оператор обратим"? Обращение оператора сво-
сводится к задаче о разыскании решения линейного уравнения
Ах = у при всяком у из пространства Е. Если решение суще-
существует для любой правой части у, то оператор В: у^-х заведомо
является правым обратным для оператора А. В предыдущей
главе было показано, что критерий однозначной разрешимости
уравнения Ах — у дается условием det А Ф 0. Нам остается от-
ответить еще на следующие вопросы: 1) является ли правый об-
обратный линейным оператором; 2) при каких условиях суще-
существует левый обратный? 3) когда он совпадает с правым, т. е.
когда оператор обратим} В настоящем параграфе мы ответим
на все эти вопросы. При этом мы будем пользоваться рядом
понятий и фактов из гл. 4, § 5 и гл. б, § 4.
*1. Для того чтобы оператор А: Е-»-Е был обратим, необхо-
необходимо и достаточно, чтобы он был автоморфизмом простран-
пространства Е.
© Если оператор А обратим, т. е. существует линейный опе-
оператор В : АВ = I = ВА, то он является биекцией пространства
Е. Действительно, в этом случае уравнение Ах = у имеет един-
единственное решение при любой правой части, вычисляемое по фор-
формуле х = By.
Обратно, пусть линейный оператор А является биекцией про-
пространства Е. Тогда оператор А переводит любой базис про-
пространства Е, скажем {еи ..., еп), в базис согласно 6.4.1, 6.4.2.
Построим обратный оператор В следующим образом. Разложим
произвольный вектор у по базису {Ае\, ..., Ae^:y = 2Li^ly\lAel.
102
Затем положим By — 21Ы1 ц'е{. Ясно, что построенный
таким образом оператор линеен, он является правым обратным,
так как АВу — S"=i 4lAei = У- Одновременно он является ле-
левым обратным. Действительно, взяв произвольный вектор
x = Xj = ilie/ из Е, получим В Ах = В Л .=1 |гЛе(- = 2"_i V^i = x>
т. е. ВА = 1. 5
Следствия.
*2. Обратный оператор автоморфизма линеен.
*3. Обратный оператор автоморфизма является автомор-
автоморфизмом.
Мы можем теперь использовать теорию линейных уравне-
уравнений для вывода условий обратимости оператора, действующего
в линейном пространстве.
*4. Для оператора, действующего в конечномерном линей-
линейном пространстве Е, следующие условия эквивалентны:
а) оператор А обратим, т. е. обладает (линейным) обрат-
обратным;
б) оператор Л является автомор-
автоморфизмом Е;
в) у оператора А существует пра-
правый обратный;
i) пил = с,
д) у оператора А существует левый
обратный;
е) КегЛ = 0,
ж) det Л =5^0.
© Утверждение об эквивалентности
а) <=$-б) доказано в 1, ж)-фф- б) —
в 6.4.4. Импликации в)=^б), г) =*- б)
е) =ф- б) следуют из формулы Рис. 6.
dim КегЛ + dim Im Л = dim ? D.5.9)
и п. 2 теоремы Фредгольма 4.5.15. Импликация д) =>- е) дока-
доказана в 1.14. Наконец, импликации а)=>в), г), д), е) очевидны.
Схема описанных импликаций изображена на рис. 6. D
*5. Если оператор Л обратим, то det Л det Л-1 = 1.
© Согласно 6.3.11 det Л det Л-1 = det ЛЛ-1 = det/= 1. 3>
Вычислим матрицу обратного оператора, пользуясь форму-
формулами Крамера F.4.6).
рр ()
*6. Пусть А — обратимый оператор и
¦= |а*|
его мат-
матрица. Элементы pf матрицы обратного оператора удовлетво-
удовлетворяют следующим двум системам равенств:
(*)
(••)
-в», i=l, 2,
n,
= \, 2,
n,
Z
= 6?, i= 1, 2 п, k = l, 2, ..., п.
103
© Заменив операторы в равенствах АА~] = I и А~1А = / соот-
соответствующими матрицами и выполнив умножения матриц, при-
приходим к искомым формулам. D
*7. Элементы р* матрицы опера.тора Л~' выражаются через
элементы матрицы оператора А по формулам p? = (det A)~ А\
(г = 1, 2 п, k—l, 2, ...,«), где А\— алгебраические
дополнения элементов а\ матрицы $Ф.
© При каждом фиксированном i (i= 1,2, ..., п) система ра-
равенств F.*) может рассматриваться как система п линейных
неоднородных уравнений относительно pj, p^, ..., р", а си-
система равенств F.**) — как система п уравнений относительно
неизвестных р|, р*, ..., р^. Так как по условию detЛ 7^=0, то
обе системы являются системами Крамера. Решая систему F.*)
(или систему F.**)) по формулам Крамера 6.4.6, получаем ис-
искомые формулы. 3>
8. Матрица 39, элементы которой выражаются через эле-
элементы матрицы s& (det А ФЩ по формулам 7 (или удовлет-
удовлетворяют системам равенств F.*) или F.**)), называется матри-
матрицей, обратной к матрице s&. Обратная матрица обозначается
через s?-x. Таким образом,
{&-1}* = (detЛ) А? A=1, 2, .... п, k=l, 2, ..., п).
*9. Матрица si и обратная к ней S&-1 связаны соотношениями
s$-s?-x = j#-'j^ = 2/, где 2/ — единичная матрица {•9'}f = 6*.
Приведем в заключение два свойства обратимых операторов,
которые будут часто использоваться в дальнейшем.
*10. Если операторы А и В, действующие в конечномер-
конечномерном линейном пространстве Е, обратимы, то их произведение
АВ — также обратимый оператор и (АВ)-1 = В-{А~1.
© Очевидно, что оператор В-'Л-1 является правым обратным
оператора АВ : АВ(В~1А~1) = I. Значит, согласно утверждению 4
оператор АВ обратим и его обратный совпадает с В~1А~К 3
*11. Если оператор А, действующий в конечномерном линей-
линейном пространстве, обратим, то и его сопряженный Л* обратим,
причем (Л*)-1 =(Л-')*.
© Обратимость сопряженного немедленно следует из равен-
равенства размерностей dim Кег Л = dim Кег Л* = 0 (теорема Фред-
гольма 4.5.15). Можно, однако, и непосредственно показать, что
оператор Л* обладает левым обратным. Попутно мы получим
искомую формулу.
Рассмотрим билинейную форму единичного оператора /* в
пространстве Е*. Взяв произвольный вектор х из Е и произволь-
произвольную линейную форму / из Е*, запишем (/*/, x) — (f, Ix) =
= (/, ЛЛ-'д:) = (Л*/, A~lx) = ((A~1)*A*f, x). Отсюда следует, что
104
(A-l)*A* = I* и, таким образом, (А-1)* служит левым обрат-
обратным для Л*. Отсюда в силу утверждения 4 заключаем, что
(Л-1)* = (Л*)-1. 5
§ 3. ПРОСТЕЙШИЕ ФУНКЦИИ
ОПЕРАТОРОВ И МАТРИЦ
Мультипликативная структура алгебры, определенная согла-
согласованным образом на пространстве операторов и пространстве
квадратных матриц соответствующей размерности, позволяет
согласованно определить простейшие функции от операторов и
матриц — натуральные степени, полиномы, а в случае обрати-
обратимых операторов и некоторые рациональные функции.
1. Для любого оператора А, действующего в линейном ко-
конечномерном пространстве Е, положим по определению Л° = /,
А1 = A, Am+l = ЛтЛ при всех натуральных т.
*2. Для любых натуральных m, k: Am-Ak = Am+k.
3. Если оператор Л обратим, то положим Л~* = (Л-1)* для
всех натуральных k.
*4. Для обратимого оператора Л утверждение 2 справедливо
при всех целых степенях m, k.
5. Пусть Л — оператор в конечномерном линейном простран-
пространстве Е над полем К, р — скалярный полином над полем К,
р(z) = апгп + an-iz"-1 + ••• + ai2 + «о. Операторным полино-
полиномом р(А) называется линейный оператор р(А) = апАп -|-
А1 И
*6. Если р, q — два скалярных полинома и pq — их произве-
произведение, то р(А) ¦q(A) — q(A)-p(A) = pq(A).
Ввиду установленного ранее изоморфизма между алгебрами
операторов и матриц все перечисленные понятия и факты сохра-
сохраняют значение и силу для матриц соответствующих операторов.
В частности
*7. Каким бы ни был полином р, матрица оператора р(А)
совпадает с полиномом p(st) от матрицы s4-.
Более подробно мы изучим соответствие между оператор-
операторными и скалярными полиномами в главе 9.
§ 4. ПРЕОБРАЗОВАНИЕ КООРДИНАТ
ПРИ ЗАМЕНЕ БАЗИСА
Мы знаем, что всякий вектор линейного пространства одно-
однозначно определяется своими координатами в фиксированном ба-
базисе. При замене базиса новым координаты испытывают преоб-
преобразование, которое мы опишем в настоящем параграфе. Мы ре-
решим здесь аналогичную задачу также и для линейных и поли-
полилинейных форм.
Договоримся относительно обозначений: первоначальный ба-
базис («старый») пространства Е мы будем обозначать через
{ей е2,.,., еп} (dimЕ—п}, «новый» базис — через {efv e'v . .->е^.
105
Соответственно координаты вектора х в старом и новом ба-
базисах обозначим через {11Л2, ..., !"} и ЦпЛ'2, ..., ?'"}. Ана-
Аналогичным образом обозначаются базисы сопряженного простран-
пространства, компоненты тензоров и матричные элементы операторов
в различных базисах.
Будем исходить из того, что всякая замена базиса в про-
пространстве Е может быть осуществлена с помощью линейного
оператора А : Е->-Е, именно:
*1. Какими бы ни были выбраны старый и новый базисы
{е\,в2, ..., еп} и \е\, е'2, •••, е'\, всегда существует линейный
обратимый оператор А : Е ->• Е, такой, что Ле(. = e\ (i = 1, 2, ...
..., я).
© Задав оператор А на старых базисных векторах указанным
соотношением, его можно продолжить на все пространство Е
с учетом требования линейности по формуле A (X/=i ?'ег) —
=2 1^1%'Aet — 2"=i S'eb Очевидно, что такое продолжение с со-
сохранением линейности можно выполнить единственным спосо-
способом. Полученный линейный оператор переводит базис в базис,
а потому является автоморфизмом пространства Е и, следова-
следовательно, обратим в силу утверждения 2.4. Э
*2. Если базисы {еь ..., еп) и {е[, ..., е'п} связаны с по-
помощью линейного обратимого оператора Д(е^ = ЛеЛ, то со-
сопряженные базисы {е\ ..., еп), {е'х, ..., ем) связаны с по-
помощью обратного сопряженного оператора еп = (А*)~1е!.
© Согласно утверждению 2.11 сопряженный оператор обра-
обратим, а потому набор векторов {(Л*)"^1, ..., (А*)~'еп) служит
базисом в Е*. Убедимся, что он является сопряженным к новому
базису. Действительно,((Л*) е', еА) = (е!, А~'е'к) = (е1, А~хАеъ)—
= (e',e,)=<J* (». *=1. 2, .... л). )
Возникшие два закона преобразования: е\ = Ле,-,е" = (Л ) 'е.
играют фундаментальную роль в дальнейшем. Именно по этим
законам, как увидим далее, преобразуются все тензорные ве-
величины.
В приложениях обычно имеют дело не с самими операто-
операторами А и (Л*)-1, а с их матрицами. Допустим, матрица опера-
оператора А в старом базисе есть \а\\, а матрица обратного опера-
оператора — |р*|, так что выполнено Щ=1а1Р/=6/- Тогда матрица
обратного сопряженного (А*)-] в базисе {е1, ..., еп), сопряжен-
сопряженном к старому, совпадает с матрицей оператора (Л-1)*, г. е.
с ||Р*|, с той лишь особенностью, что действует она на коор-
координаты форм по правилу «столбец на строку», а ее «рабочими-»
индексами — индексами суммирования — являются теперь
(в пространстве Е*) уже верхние, а не нижние, как это было
в пространстве Е,
106
*3 Законы преобразования базисов можно записать с по-
помощью матриц ||а<,| |р*| в виде е\ = Е*_, afeft; e'* = E"-i P*e'-
*4. Новые координаты {I71, ?'2, ..., %,'"} вектора х выра-
выражаются через старые {?', ..., ?"} по формулам l" = 2;LiPft?ft*
© Согласно предположению старый базис связан с новым
с помощью оператора А: е\ = Aet = E/Lia ie/;- Запишем выра-
выражение для произвольного вектора х в старом и новом базисе:
п п п
jt ' / с б --—— / Н е ——— / с ct' ^
Отсюда заключаем: |' = Ea_i a^'*- Желая получить выражение
новых координат через старые, мы должны обратить матрицу
Координаты линейной формы в базисе {е'\е'2, ..., е'п}, со-
сопряженном к новому базису ie'v ..., е'Л, будем называть для
краткости просто новыми, а координаты в базисе, сопряженном
старому, — старыми.
*5. Новые координаты (фр ..., ц>'\ линейной формы / выра-
выражаются через старые {ф,, ..., фя} по формулам ф^. = Е*.=|а*Фг
© Взяв произвольный вектор х из Е, запишем инвариантный
объект (/, х) через новые и старые координаты:
Отсюда, пользуясь произволом в выборе вектора х, заключаем,
что
п
4>'i = X о?Ф*. D
Мы видим, что координаты линейных форм преобразуются
точно так же, как элементы базиса основного пространства Е:
а координаты векторов — как элементы базиса сопряженного
пространства Е*:
Первый из этих законов называется ковариантным законом пре-
преобразования, а второй — контравариантным.
Физик обычно имеет дело не с абстрактным объектом, а с
«набором величин», которые он может, скажем, измерить, пред-
107
варительно выбрав систему координат. С этой точки зрения бы-
бывает важно понять, является ли этот набор набором координат
какого-либо инвариантного объекта — вектора, формы и т. д.
или не является. На этот вопрос отвечает следующее утверж-
утверждение.
*6. Пусть набор скаляров {?',?2, .-.., 1"} зависит от выбора
базиса в линейном пространстве Е (dim Е = п) и преобразуется
при замене базиса по контравариантному закону. Тогда этот
набор скаляров служит координатами некоторого вектора в Е.
© Если набор {I1, ..., ?"} отвечает базису {еи ..., е„}, то
образуем вектор jc == 52/=! Vei- Этот вектор остается неизмен-
неизменным при замене базиса. Действительно, построив соответствую-
соответствующий вектор в новом базисе х' = Y^k=\ ^*е*' имеем:
?(''-1, И*)''
*7. Если набор скаляров {cpi, ..., ф„} преобразуется при
замене базиса по ковариантному закону, то он служит набором
координат линейной формы.
Поскольку и вектор, и линейная форма являются элемен-
элементами линейных (векторных) пространств, то удобно их рассмат-
рассматривать с единой точки зрения, отличая их лишь по закону пре-
преобразования. Поэтому в физике принято называть набор «вели-
«величин» (скаляров), преобразующихся при замене вектора по ко-
ковариантному закону, «ковариантным вектором», а набор вели-
величин, преобразующихся по контравариантному закону, — «контра-
вариантным вектором». Предыдущие два утверждения показы-
показывают, что контравариантный вектор является собственно векто-
вектором, а ковариантный — линейной формой.
Если читатель знаком с элементами дифференциального ис-
исчисления для вектор-функций и функций нескольких перемен-
переменных, то ему полезно иметь в виду следующие два простых при-
примера:
*8. Градиент давления (набор частных производных скаляр-
скалярной функции — давления) есть ковариантный вектор.
© Если старые и новые направления осей координат (орты)
связаны соотношением е\ = 2!=,ia*e?> To ii===11k=\ a*?'ft> и сле-
следовательно:
*9. Набор координат скорости (параллельных проекций ско-
скорости на координатные оси) есть контравариантный вектор.
108
Совершенно так же, как мы вывели законы преобразования
координат вектора и формы, выведем сейчас законы преобра-
преобразования матричных элементов оператора и компонент тензора.
§ 5. ПРЕОБРАЗОВАНИЕ КОМПОНЕНТ ТЕНЗОРА
ПРИ ЗАМЕНЕ БАЗИСА.
СВЕРТКА ТЕНЗОРОВ
Начнем с простого примера, взяв в качестве тензора мат-
матрицу оператора Т, действующего в пространстве Е. Значение
соответствующей билинейной формы (/, Тх), будучи вычислено
для фиксированного вектора х и линейной формы /, является
инвариантом, т. е. не зависит от выбора базиса в Е (и выбора
сопряженного базиса в Е*). В то же время это значение выра-
выражается через координаты вектора и формы и матрицу опера-
оператора как в старом, так и в новом базисе. Равенство двух вы-
выражений для билинейной формы в старом и новом базисах как
раз и позволяет, с учетом произвольности вектора х и формы f,
получить выражение для новой матрицы оператора Ц/^'Ц через
старую | tlk I с помощью матриц преобразования.
п
*i t'i V aiisnr
k — ^-" Ps r ft*
© Обозначая по-прежнему через {ср;}, {%k} координаты формы
/ и вектора х в старом базисе и через {ф'Л, {?'*} — в новом, за-
запишем выражение для билинейной формы в старом и новом ба-
базисах:
П П
/ ? т* \ \ fj.f1 с /Ь \. * . ос, г.
\ Т I Y 1 ' / (П Т Г —¦• У ГГ\ f^i*1 — ' -
\1 у ¦* Л у { j т? Ь <5 € 4 * Ч г^
(, k = \ s, г = \
п п п п
Отсюда с учетом произвола в выборе f, x получается искомая
формула преобразования. Э
*2. Преобразование, испытываемое матрицей ?Г оператора Т
при замене базиса, можно записать в виде 0Г' — s&-x?Ts$>.
Такое преобразование называется преобразованием подобия
с помощью обратимой матрицы s&. Это преобразование играет
важную роль в задачах спектрального анализа операторов, о
которых пойдет речь в следующей главе.
Заметим, что при выводе «прямой» формулы преобразования
для матричных элементов (выражения новых через старые)
нам пришлось пользоваться «обратными» формулами преобра-
преобразования для координат вектора и формы: ?r = S"_i «?!'*> <PS =
= Xj-i Р^Фь т- е- выражениями старых координат через новые-
109
Этот же прием будет использован далее при выводе формул
преобразования компонент тензора общего вида.
Билинейная форма оператора Т имеет в качестве своих аргу-
аргументов один вектор и одну линейную форму. Ее валентность
равна A, 1), а ее тензор {t'A один раз ковариантен (по нижнему
индексу) и один раз контр•авариантен. (по верхнему индексу).
Рассмотрим теперь общий случай полилинейной формы W,
имеющей в качестве своих аргументов р векторов пространства
Е и q линейных форм из пространства Е*.
*3. Тензор со полилинейной формы W, зависящей от р векто-
векторов и q линейных форм, преобразуется при замене базиса по
правилу
Здесь предполагается суммирование по всевозможным мульти-
индексам: k = (&i&2 ... kq), e = (е\вч ... ер).
© Запишем выражение для значения полилинейной формы на
векторах х, у, ... и формах /, g, ... в старом и новом базисе:
Подставив сюда выражения для старых координат форм и век-
векторов через новые: V = Т?{=1а11п> Фй = S"=i РйФ/> получим
Отсюда, пользуясь произволом в выборе векторов и форм, из-
извлекаем искомую формулу. 3
Стоит отметить, что обозначения, в которых мы действовали
до сих пор, заведомо избыточны: легко видеть, что во всех слу-
случаях суммирование в формулах происходит по паре индексов,
один из которых верхний, а другой — нижний. Обычно, выпол-
выполняя действия с тензорами, содержащими много индексов, знак
суммирования опускают, считая, что по паре повторяющихся
индексов всегда производится суммирование. Индексы сумми-
суммирования называются немыми. При такой договоренности фор-
формула выглядит следующим образом:
<*''} ¦" (* = Pi1 Pi2 • • • юм2 '"."ча'М* ••••
В предыдущем параграфе были введены контравариантные
и ковариантные векторы, как наборы из п чисел, преобразую-
преобразующихся при замене базиса по контравариантному и ковариант-
ному законам. Эти понятия могут быть естественным образом
обобщены.
110
4. Набор из пр4" скаляров со/1 "" \ч (каждый индекс прини-
принимает все значения от 1 до п) называется ^-раз-контравариант-
ным и р-раз-ковариантным тензором, если этот набор при за-
замене базиса преобразуется по формулам 3.
Примеры.
*5. Матрица линейного оператора Т : Е —¦ Е есть 1-раз-кон-
травариантный и 1-раз-ковариантный тензор.
*6. Тензор полилинейной формы с валентностью (р, q) есть
g-раз-контравариантный и р-раз-ковариантный тензор.
Различные контра- и ко вариантные тензоры играют важную
роль как в математических, так и в физических науках: тензор
диэлектрической проницаемости — в электродинамике, тензор
инерции — в механике, тензоры деформаций и напряжений —
в теории упругости и т. д.
*7. Всякий ^-раз-контравариантный и р-раз-ковариантный
тензор |(о['!2" 'м\ порождает полилинейную форму W с ва-
валентностью (р, q) по формуле
\*) W | Л|, X2 . . -Xp, у , у , . . ., у j — j I ... / »1 =2 • ¦ •
где V, (/ = 1. 2, ..., n) — координаты вектора xi (/= 1,2, ...
.,., p)\ т](* (/=1,2, ..., n) — координаты вектора yk (k=\,
2, ..., q) в сопряженных базисах.
© Линейность функции W по каждому вектору при фиксиро-
фиксированных остальных очевидна. Основная часть доказательства —
проверка того, что форма, определенная равенством G.*), не
зависит от выбора сопряженных базисов в пространствах Е и
Е*. Пусть о»'/1/2'" jlq и \\>, г)';к — компоненты тензора и коорди-
координаты векторов в новых сопряженных базисах, так что в новых
базисах определена форма Ь:
(**) W(xx, x2, ..., хр; у\ у2, ..., уч) =
Докажем совпадение правых частей равенств (*) и (**)'. При
переходе от старых базисов к новым тензор со! преобразуется
по формулам 3, а координаты Щ и ц1? — по формулам 4.4 и 4.5.
Следовательно,
'2 ••¦ Ip "l
111
Поскольку а( и pf суть элементы взаимно обратных матриц,
имеем
= бЧ'* . . . бЧ'/б'з . . . б'.Ч,
Sl S2 Sp 'l 'l '(?
и правая часть равенства (**) приводится к виду
Это означает, что $' = W. D
Определим новую операцию над полилинейными формами и
тензорами — операцию свертывания или свертки.
*8. В полилинейной форме W(xux2, ..., хр; у\у2 у4)
заменим один из векторов х, например xs, и один из векторов у,
например yt, векторами сопряженных базисов е( и ft. Выполнив
суммирование по i от 1 до п, получим сумму2,-=i W (хх, хъ ...
..., еь ..., хр; у1, у2, ..., f, ... у4). Ее значение не зависит
от выбора пары сопряженных базисов: {ег}"=1, {Г})'=1.
© Пусть {е\}п1=х и {/"}"=1 — новые базисы, связанные со ста-
старыми базисами матрицей перехода s& и матрицей $ = s?-y.
Тогда
W(xlt ..., e't, ... хр; у\ ..., Г, ..., yq) = W(xx а*е4, ..., хр;
У1 Pjf yq) = ^i,W{xl, ..., ek хр; у\ ..., fi,
.... 0«) = б*Г(*„ ..., ек хр; у\ .... //, ...,уч)=>
= W(xx ek, ..., хр; у1 fk,...,yq). ])
9. Сверткой полилинейной формы W с валентностью р, q по
векторам xs и у' называется полилинейная форма V с валент-
валентностью р— \, q— 1, определяемая равенством
V(xu ..., xs_i, Xs+i, ..., хР; у1 у'~\ yt+l, ..., yi) =
— W(xi де«_1. et, Xs+u..-,xP; у1',...,у'-1, /', yt+l,... ,у").
*10. Определение свертки обладает свойством инвариант-
инвариантности (не зависит от выбора сопряженных базисов).
*11. Тензор %\l "' lt-i\t+i ¦•¦ lq свертки V определяется через
'1 •"¦ <s— l's+1 ••• lq
тензор ш',1 "" ,р полилинейной формы W по формуле
'1 '"• >q
xji •••;<-;*+• •"',=se,'i-w'«+i-v
ч •" 's—i's+i ¦•• 'p 'i ••• 's-r's+i ••• 'p
Здесь по индексу i выполняется суммирование от 1 до п.
112
•12. Набор п.»*"-3 скаляров и'1 "" ''-'J'+i ¦•• 1ч, получаемый
^ /I ... /s-l's+l ¦¦ /р '
из тензора о.1 "• '.« ^-раз-контравариантного и р-раз-ковариант-
ного по формуле И, есть (q — 1)-раз-контравариантный и (р — 1)-
раз-ковариантный тензор.
© Тензор со1, порождает полилинейную форму W (см. 7). По-
Полилинейная форма V, равная свертке формы W по векто-
векторам xs и у', имеет в силу 11 тензор, совпадающий с набором
скаляров и'1 '" U-ilt+i ••• [я. Следовательно, набор скаляров
h ¦¦ 's-ils+i ¦¦¦ 'р
к 1 ••• 't-iy+i ¦¦¦ я есть тензор (q — 1)-раз-контравариантный и
'1 •" 's—1's+l '" 'р
(р — 1)-раз-ковариантный. Т>
13. Тензор %} •" !'-^+1 ¦" ^ = га'1 - 1/~1"/+1 "'',« (по t сумми-
рование ведется от 1 до п) называется сверткой тензора га'1 "¦'*
по индексам t и s. Свертка тензора raj по индексам t и s обозна-
t As
чается через со' .
*14. Свертка 1-раз-контравариантного и 1-раз-ковариант-
ного тензора есть скаляр (величина, не зависящая от выбора
базиса).
© Пусть (oj. — 1-раз-контраварйантный и 1-раз-ковариант-
ный тензор в базисе {е\п и а/.' — тот же тензор в базисе
{е'^п_ ¦ Вычислим свертку©^ в базисе {e'J" :
*15. Свертка тензора по двум парам значков не зависит от
порядка свертывания, т. е.
*Л' tAs
(As kM
(О = @ .
*16. Тензор со| ранга р + q можно подвергнуть операции
свертывания т (m^min(p, q)) раз. Результат т-кратного
свертывания не зависит от последовательности выполнения свер-
сверток по каждой паре индексов.
17. Если р = q, то свертка по всем индексам ®Уу1я{
h Iq'" lq
называется полной сверткой тензора со. Здесь /i, /2, ..., }q —
некоторая перестановка индексов 1, 2, ... q, по повторяющимся
индексам происходит суммирование.
*18. Полная свертка тензора есть скаляр, зависящий от вы-
выбора пар свертываемых индексов.
113
Глава 8
СПЕКТРАЛЬНЫЙ АНАЛИЗ ОПЕРАТОРА
В ЛИНЕЙНОМ ПРОСТРАНСТВЕ
(Случай скалярного оператора)
В предыдущей главе мы определили простейшие функции
от оператора — натуральные степени и полиномы. Если опера-
оператор обратим, то удается определить все целые его степени и по-
построить квазиполиномы, являющиеся линейными комбинациями
положительных и отрицательных степеней. Этим исчерпывается
набор функций оператора, допускающих прямое алгебраическое
задание. Столь бедный набор явно недостаточен для целей раз-
развития анализа на пространстве операторов. (Так, даже решение
простейшего дифференциального уравнения df/dt = Af с по-
постоянным оператором А требует построения операторной экспо-
экспоненты, что лежит уже за пределами наших возможностей в на-
настоящий момент.)
Для того чтобы строить более сложные функции от произ-
произвольного оператора, следует более глубоко исследовать его
структуру. Дело в том, что для самых простых операторов,
кратных единичному, А = %], легко строить произвольные функ-
функции просто по правилу {(A) =f(x)/. Если бы оказалось, что
некоторый оператор представим в виде объединения простей-
простейших блоков указанного вида, то вопрос построения «функцио-
«функционального исчисления» для него значительно упростился бы.
Именно построение функционального исчисления является ко-
конечной целью спектрального анализа- Спектральный анализ опе-
оператора сводится к следующим шагам: 1) выявление так назы-
называемых «инвариантных подпространств» L оператора А, т. е.
подпространств, обладающих свойством: если ieL, to Лд:е L;
2) разложение линейного пространства Е в прямую сумму
«простейших» инвариантных подпространств; 3) представление
исходного оператора в виде суммы более простых операторов,
каждый из которых действует в отвечающем ему инвариантном
подпространстве', 4) построение функционального исчисления,
т. е. построение всевозможных функций от оператора А и опи-
описание правил действия с ними.
114
В первом параграфе настоящей главы определяются и изу-
изучаются инварианты линейного оператора, играющие существен-
существенную роль в спектральном анализе. Второй параграф содержит
основные сведения о так называемых «собственных векторах»
оператора. В третьем параграфе мы решаем задачу спектраль-
спектрального анализа для так называемых скалярных операторов, до-
допускающих разложение на блоки указанного вида Ksh, дей-
действующие в собственных инвариантных подпространствах Es,
прямая сумма которых дает все пространство Е. Затем мы
строим функциональное исчисление для скалярных операторов.
Рассмотрение общего случая оператора в линейном простран-
пространстве, не удовлетворяющего условию скалярности, проводится
в следующей главе.
§ 1. ИНВАРИАНТЫ ЛИНЕЙНОГО ОПЕРАТОРА
Мы уже знаем, что оператор может быть задан своей мат-
матрицей. Матрица оператора — таблица, составленная из скаля-
скаляров, — не является сама по себе инвариантным объектом — она
зависит от базиса, в котором мы действуем, и при замене ба-
базиса претерпевает преобразование подобия {см. гл. 7). Суще-
Существуют, однако, числовые {скалярные) функции оператора, не
зависящие от базиса.
1. Скалярная функция оператора, не зависящая от выбора
базиса, называется инвариантом оператора.
Далее мы построим полную * систему инвариантов линейного
оператора, т. е. такую, из которой можно изготовить любой {не
входящий в нее) инвариант оператора. Разумеется, наиболее
удобными являются инварианты, которые можно легко вычис-
вычислить, зная матрицу оператора. Именно такую систему инвариан-
инвариантов мы построим.
*2. Определитель det Л оператора А является инвариантом.
© В соответствии с определением, независимо от выбора ба-
базиса {еи ..., еп} (см. 6.3.5 и 6.3.10) выполнено Аех Л Ае2 Л ...
... ААеп= detЛв] Ле2Л ... Ле„. D
3. Характеристическим полиномом оператора А называется
функция det (Л —XI), где / — единичный оператор.
*4. Характеристический полином является инвариантом опе-
оператора.
*5. Коэффициенты характеристического полинома суть инва-
инварианты оператора.
© Два полинома от переменной Я совпадают тогда и только
тогда, когда совпадают все их коэффициенты. D
В последнем параграфе этой главы мы покажем, что коэф-
коэффициенты характеристического полинома образуют полную си-
*'Система инвариантов, о которой идет речь, оказывается в действитель-
действительности полной лишь в случае скалярных операторов, о которых идет речь в
этой главе (см. далее). В общем случае это не так.
115
стему инвариантов «скалярного» оператора. Сейчас обратимся
к их вычислению в терминах матрицы оператора. Для этого вос-
воспользуемся связью между определителем оператора и мат:
рицы 6.3.15 и правилом вычисления определителя матрицы
6.3.16.
*6. Пусть ||а^|| — матрица оператора А : Е —*¦ Е. Тогда ха-
характеристический полином оператора А имеет степень п= dim E:
п
Aе1(Л — Я/) = (—1)"А," + (—1)" ' Л" S«{+ ••• + detA.
«=i
© Воспользуемся правилом вычисления определителя 6.3.16:
det (А - %I) = det || ак - Щ J =
Покажем, что коэффициенты характеристического полинома
при степенях Я", Кп~1 и А,0 равны соответственно (—1)",
(— I)" Ц"=1а! и det А. Члены характеристического полинома,
содержащие две старшие степени Хп, %п~1, получаются из члена
суммы, отвечающего мультииндексу j = A,2, ..., п). Этот член
представляет собою произведение матричных элементов, стоя-
стоящих на диагонали:
at — Я;=(— 1) Я +(—1) Я Li={a.i+
Последний член характеристического полинома, содержащий
нулевую степень (А.0), равен в соответствии с теоремой Безу
значению полинома при К = 0, т. е. равен det А. 5
7. Сумма диагональных элементов матрицы М- называется
следом матрицы s& и обозначается Spur^ или Traced; обычно
пишут для краткости соответственно sp si- или tr s4-.
*8. След матрицы оператора является инвариантом.
Для того чтобы описать остальные коэффициенты характе-
характеристического полинома, дадим определение:
9. Главными минорами матрицы называются миноры, полу-
полученные вычеркиванием строчек и столбцов матрицы, имеющих
попарно совпадающие номера, т. е. миноры вида Ml.
*10. Коэффициент Zn-k характеристического полинома, стоя-
стоящий при (—1)Я-*А,"-* (l^k^n), равен сумме всех главных
миноров порядка k.
© Введем в рассмотрение векторы at = Aei = J™k_lafekri вос-
воспользуемся соотношением (см. 6.3.5)
(*) (а, - Яе:) Л (й2 — Яе2) Л • • • Л (а„ - Яе„) =
=det {А—XI) в, Л е2 Л ... Л е„=Е".о %Л— Wei Л е2,Л •. • Л в„.
116
Раскрыв скобки в левой части и приведя подобные члены, за-
заметим, что коэффициент Zs при (—k)s представляет собою сум-
сумму произведений вида Ь\ Л Ь2 Л ... Л Ьп, где bi равно at или
ей Обозначив через i произвольный мультииндекс длиной s и
через V дополнительный мультииндекс, получим
Zs = Zi(-l)"'-\' Aat> А ... Л а, Л е, Л et Л ¦ • • Л в, .
1 2 n-s 1 2 s
Каждый из членов записанной суммы является главным мино-
минором матрицы, стоящим на пересечении столбцов и строк с ин-
индексами /р i'v ..., i'n_s. Действительно,
а,' Л «,¦ Л ¦¦• Л а,' Л et Л е- Л • • • Л е. =
'l 2 n-s 1 2 s
ft'( а' *' _
= Son a,- a ' ... a," se.' Л eft- Л .. • Л eft- Л е, Л е, Л • ¦ •
1 2 n-s 1 2 ra-s 1 2
... Aels.
В последней сумме отличны от нуля лишь те члены, в которых
мультииндекс к' получен перестановкой дополнительного к i
мультииндекса V, к' = п\'. Поэтому последнее выражение можно
записать в виде суммы по всем перестановкам к' = т' степени
п — s:
¦Е(л)(-if <y <V • • • <V"~4' Л е, Л • • • Л е{- A et A
1 2 n-s 1 2 n-s I
Л е,2 Л ••• Л eis.
Полученный числовой коэффициент представляет собой глав-
главный минор М\', матрицы s&. Если теперь упорядочить внешний
сомножитель и учесть возникающие знаки, то получим
^s = Ei M!'ei Л е2 Л • • • Л еп, i = (/,, lv ..., is).
Таким образом, равенство (*) может быть переписано в виде
- We\ Л е2 Л • • • Л еп =
= Z"=o zs (- ЛУ е, Л е2 Л ... Л е„,
откуда получаем Zs = Ei Mr ^
*11. Суммы всех главных миноров порядка k (k = 1,2, ...
..., я) являются инвариантами оператора. В частности, при
k = 1 имеем след матрицы, при k = n — определитель матрицы.
*12. Произвольные функции построенных инвариантов также
являются инвариантами оператора. В частности, корни характе-
характеристического полинома суть инвариантны оператора.
117
*13. Подсчитайте матрицу внешней степени оператора Лл*
в базисе из поливекторов е, = е. Л е. Л • ¦ ¦ Л е,; найдите ее
> h h 'к
след и убедитесь, что он совпадает с выражением Zs в п. 10.
Полнота полученной системы инвариантов будет доказана
позже D.17).
§ 2. СОБСТВЕННЫЕ ЧИСЛА
И СОБСТВЕННЫЕ ВЕКТОРЫ
Пусть А — линейный оператор, заданный в линейном про-
пространстве Е.
1. Подпространство L пространства Е называется инвариант-
инвариантным относительно линейного оператора А, если для каждого
вектора х из L вектор Ах также принадлежит L.
Примеры.
*2. Тривиальные подпространства линейного пространства Е
(т. е. все пространство Е и нулевой элемент) являются инва-
инвариантными для любого линейного оператора.
*3. Для оператора гомотетии Т, действующего по формуле
Тх = хх (хеЕ,т^0), любое подпространство является инва-
инвариантным.
*4. Для оператора А :Е-»-Е, имеющего в базисе {ег}"=1 мат-
матрицу
я, о о ... о
0 A.j 0 ... 0
0 0 Аз ... 0 I %1ф'Кк при 1фк,
О О О ... V.
все одномерные подпространства L,- (/= 1,2, ...,«), натяну-
натянутые на базисные векторы е,. являются инвариантными.
*5. Оператор проецирования Pf.,1" на подпространство Li па-
параллельно подпространству L2 имеет два инвариантных подпро-
подпространства: подпространство Li, для векторов которого выпол-
выполняется равенство Р\,^'Х—х, и подпространство L2, для векто-
векторов которого Ри*х = о.
*6. Для оператора А, имеющего в базисе {е^}"_х блочно-тре-
угольную матрицу
118
линейная оболочка векторов {et,e2, ..., е,п) является инва-
инвариантным подпространством.
*7. Если матрица оператора А имеет блочно-диагональный
вид:
а} ... а1т 0 ... О
а\ ... а2т 0 ... О
0 .
0 .
... ат
.. 0
.. 0
0
„т+1
ат+1 ••¦
„т+2
ат+1 •••
0
«Г1
О ... О <+1 ... <
то оператор А помимо инвариантного подпространства, натяну-
натянутого на векторы {в\,в2, ..., ет}, имеет второе инвариантное
подпространство — подпространство, натянутое на векторы
{ет+и ..., еп}-
Особое значение при исследовании линейных операторов
имеют одномерные инвариантные подпространства.
8. Всякий ненулевой вектор, принадлежащий некоторому
одномерному инвариантному подпространству, называется соб-
собственным вектором оператора.
*9. Для того чтобы ненулевой вектор х был собственным
вектором оператора А, необходимо и достаточно, чтобы при не-
некотором % выполнялось равенство Ах = %х.
10. Число X, при котором выполняется равенство 9, назы-
называется собственным числом оператора А, соответствующим соб-
собственному вектору х.
Примеры.
*11. Любой вектор х из Е является собственным вектором
оператора гомотетии Т = xl C) с собственным числом т.
*12. Рассмотрим оператор проецирования Ри. Любой век-
вектор х из Li является собственным вектором оператора проеци-
проецирования с собственным числом, равным единице, любой вектор
х из L2 является собственным вектором с собственным числом,
равным нулю.
13. Множество всех собственных чисел оператора А назы-
называется спектром оператора А и обозначается обычно через
а(А).
*14. Собственные векторы х\, х%, ¦ ¦ ¦, хт оператора А с раз-
различными собственными значениями Х1Д2, ..., Хт образуют ли-
линейно независимый набор.
© Доказательство проведем по индукции. При т = 1 утверж-
утверждение очевидно. Пусть векторы {х\,х2, ..., xm-i} образуют ли-
линейно независимый набор; докажем, что тогда векторы
119
{xi,x2, ...» xm-i,xm} также образуют линейно независимый на-
набор. Убедимся, что равенство
(*) а1*! + а2#2 + ... + атхт = о
возможно только при всех коэффициентах «*, равных нулю.
Подействуем на левую и правую части равенства (*) операто-
оператором А. Тогда
(**) a'XiXi + а2Х2*2 + ... + ат1тХт = о.
Умножим равенство (*) на Кт и вычтем равенство (**):
(***) а1 (кт — ki)*i+ ... +am-1(Km — Kin-l)xm-X=o.
Так как по предположению векторы {xi,x2, ..., xm~i} образуют
линейно независимый набор, то выполнено ак(%и— im) = 0 при
всех k (? = 1, 2, ..., т — 1). По условию %к — ЪтфО, следова-
следовательно, равенство (***) имеет место лишь в случае, когда все
коэффициенты ос* (I ^ k ^ т — 1) равны нулю. Тогда в силу
(*) и ат = 0. 3
*15. Линейный оператор в «-мерном линейном пространстве
не может иметь более п собственных векторов с различными
собственными значениями.
*16. Множество всех собственных векторов линейного опе-
оператора Л:Е-^Е, отвечающих одному и тому же собственному
значению К, является подпространством пространства Е.
© Обозначим указанное множество через Е*,. Если ^еЕц и
х2 е Ei, то в силу линейности оператора А вектор а}Х\ + а?х2
также принадлежит Е^ при любых а1 и а2. D
17. Подпространство Е* называется собственным подпро-
подпространством оператора А, отвечающим собственному значению К,
§ 3. СПЕКТРАЛЬНЫЙ АНАЛИЗ
ОПЕРАТОРОВ СКАЛЯРНОГО ТИПА
В предыдущем параграфе были введены понятия инвариант-
инвариантного подпространства, собственного вектора и собственного чис-
числа линейного оператора. Возникает важный вопрос: у всякого
ли оператора существуют инвариантные подпространства; в ча-
частности, существуют ли у данного оператора одномерные инва-
инвариантные подпространства. В этом параграфе мы дадим ответ
на эти вопросы для операторов, действующих в линейном про-
пространстве над полем комплексных чисел. Более того, мы укажем
схему практического построения инвариантных подпространств
линейного оператора в простейшем случае для так называемых
скалярных операторов.
*1. Пусть Л:Е->-Е — линейный оператор и ^=|а^|— его
матрица в некотором базисе пространства Е,
120
Координаты {?f}"=1 собственного вектора х удовлетворяют
следующей однородной системе уравнений:
aft1 + aft2 + ... + «-Л)|" = 0.
Здесь X— собственное число, отвечающее собственному век-
вектору х, Ах = Хх.
0 Указанная однородная система есть координатная запись
в исходном базисе векторного равенства (Л — Х1)х = о, кото-
которому в силу 2.9 должен удовлетворять собственный вектор х. D
*2. Собственные числа X оператора А являются корнями ха-
характеристического многочлена det (л — XI) = 0.
© Условие det (Л—XI) = 0 является необходимым и достаточ-
достаточным для существования нетривиального решения однородной
системы уравнений 1. 5
3. Уравнение det (Л—XI) = 0 для собственных чисел назы-
называется характеристическим или вековым уравнением.
Название «вековое» пришло из астрономии: вековые смеще-
смещения параметров перегелия орбиты планеты удовлетворяют урав-
уравнению того же типа, что и 3.
Существование инвариантных подпространств оператора вы-
вытекает из следующей теоремы, имеющей принципиальное зна-
значение для спектрального анализа операторов в конечномерных
линейных пространствах:
*4. Каждый оператор в конечномерном линейном простран-
пространстве над полем комплексных чисел имеет по крайней мере одно
собственное число и один собственный вектор.
0 Это утверждение следует из основной теоремы алгебры, со-
согласно которой всякий полином с комплексными (в частном
случае вещественными) коэффициентами имеет в комплексной
плоскости по крайней мере один корень Х\. Если X = Х\, то си-
система линейных уравнений 1 имеет нетривиальное решение, ко-
которое дает нам координаты соответствующего собственного век-
вектора. 5
В этой главе мы рассмотрим случай, когда оператор имеет
достаточно богатое множество собственных векторов.
5. Назовем оператор А : Е -*- Е оператором скалярного типа
или короче — скалярным, если в пространстве Е можно указать
базис, состоящий из собственных векторов оператора Л.
Выясним достаточные условия, при которых из собственных
векторов оператора А можно составить базис пространства Е.
Позже мы покажем, что скалярный оператор А допускает чрез-
чрезвычайно простое «спектральное» представление и для него мо-
может быть -легко построено «функциональное исчисление».
121
6. Собственное число Хо называется простым, если оно яв-
является простым корнем характеристического полинома, т. е. по-
полином det(Л — XI) (К — Хо)-1 = Q(^) не обращается в нуль
в точке Ко.
7. Если все собственные числа оператора А простые, то го-
говорят, что оператор имеет простой спектр.
*8. Если оператор Л:Е->Е имеет простой спектр,-то суще-
существует базис пространства Е, состоящий из его собственных
векторов, т. е. оператор А имеет скалярный тип.
© Оператор с простым спектром имеет в соответствии с основ-
основной теоремой алгебры ровно п различных собственных чисел.
Пусть {х\,Х2, ..., х„)—собственные векторы, отвечающие этим
собственным числам. Согласно предложению 2.14 они образуют
линейно независимый набор, который оказывается также и пол-
полным, поскольку dim Е = п. 3
Следующий факт объясняет особое место, которое занимают
скалярные операторы в нашем изложении:
*9. В базисе, состоящем из собственных векторов, матрица
скалярного оператора имеет диагональный вид.
© По определению матрица Jaffj оператора А в базисе {х(}"=1
определяется из условия Axt = 2"=ia^&- Поскольку Axt = %iXt,
имеем af = 6fA,r.. j)
Построим оператор, осуществляющий замену исходного ба-
базиса на базис, состоящий из собственных векторов.
*10. Пусть {Ц, Щ, ..., 11) — набор определенных из системы
уравнений 1 координат собственного вектора xt, отвечающего
собственному числу %i. Если оператор А обладает простым
спектром, то оператор X, заданный в исходном базисе матрицей
^ = 1^1 обратим, и преобразование подобия $в-хзФ$в превра-
превращает матрицу si- в диагональную.
© Обозначим через [X] диагональную матрицу, составленную
из собственных чисел Ki, ..., %п (следующих в том же порядке,
что и собственные векторы лс»). Проверим равенство &1-8в =
= 8G\k\: в координатах оно переписывается в виде 2ft=ial&f=
= Xfy и совпадает с системой уравнений 1. Теперь для за-
завершения доказательства остается проверить обратимость X.
Это, в свою очередь, следует из того, что оператор X переводит
исходный базис в базис из собственных векторов. Действитель-
Действительно, применяя матрицу $в к стандартному базису {е{}"=1, полу-
получаем 8?ei = Xi. 5
Очевидно, что в построении оператора X содержался некото-
некоторый произвол, возникающий в результате неоднозначности вы-
выбора собственных векторов. Покажем, что для операторов с про-
простым спектром этот произвол ограничивается выбором множи-
множителя для каждого из собственных векторов.
122
•11. Если спектр оператора А прост, то для всякого собствен-
собственного числа X выполнено dim Кег (Л — XI) = 1.
© Ранее мы показали, что оператор с простым спектром имеет
ровно я (я = dim E) собственных чисел. Каждому из них отве-
отвечает по крайней мере один собственный вектор, скажем xi, по-
поскольку dim Кег (Л — XI) ^ 1. Если допустить, что при X = Хр
dim Кет (А — ХР1)>\, то собственному числу Хр должно отве-
отвечать по крайней мере два вектора: х и х' причем по условию
х и х' линейно независимы. Тогда набор (х{, х2, ..., хп, х , х'\
также должен быть линейно независим. Действительно, равен-
равенство а1хх + ... -\-апхп-\~ (архр-\-а'рх'о) = о влечет согласно 2.14
равенства а'= 0, (г ф р), архр + <х/рх'р=о, поскольку выражение
в скобках также является собственным вектором оператора А.
Последнее возможно лишь при условии ар = а'р == 0, так как
векторы х., х' по предположению линейно независимы. Таким
образом, нам удалось построить линейно независимый набор
из я + 1 векторов в пространстве Е, вопреки предположе-
предположению, что dim Е = /г; следовательно, исходное предположение
dim Кег (Л — ХР1) > 1 неверно. 3
§ 4. СПЕКТРАЛЬНАЯ ТЕОРЕМА
И ПОЛИНОМИАЛЬНОЕ ИСЧИСЛЕНИЕ
Чтобы сформулировать спектральную теорему для оператора
скалярного типа, нам понадобится понятие спектрального про-
проектора. Мы введем это понятие сначала для одномерных соб-
собственных подпространств.
1. Оператор проектирования на собственное подпространство
скалярного оператора А, отвечающее собственному числу X, па-
параллельно линейной оболочке всех прочих собственных векторов
называется спектральным проектором оператора А и обозна-
обозначается через Pi.
*2. Пусть {el,e2, ..., еп)—базис, сопряженный базису из
собственных векторов {е\,в2, ¦¦¦, е„}, и Xs — простое собствен-
собственное число. Тогда Рх$ * = {es, *) es.
0 По определению спектральный проектор Pls аннулирует все
собственные векторы et (t ф s) и сохраняет собственный вектор
es, т. е. является идемпотентным: Р\ =РК ¦ Этими условиями он
определяется однозначно. Для оператора (es, *)es эти условия
проверяются путем непосредственного вычисления:
12з
*3. Если оператор А имеет скалярный тип, то векторы ба-
базиса {е\е2 еп), сопряженного к базису {e\,ei, ..., еп},
состоящему из собственных векторов, являются собственными
векторами сопряженного оператора А*.
© Вычислим билинейную форму:
(ЛУ, et) = (e', Aet) = Xt(e\ et) = Xtbst = Xs(es, et) = (xses, et)\
отсюда заключаем, что ((A* — ksl) es, et) = 0 (s, t = 1, 2, ..., я).
Это означает, что (Л* — KsI)es = 0 (s = l,2, ..., n). 5
Попутно мы доказали, что
*4. Операторы А и А* имеют скалярный тип одновременно
н наборы собственных чисел операторов А и А* совпадают.
В частности, если А имеет простой спектр, то оператор А*
также обладает простым спектром, а его собственные векторы
{es}^=1 биортогональны к собственным векторам {es}"=1 опера-
оператора A, (es, et) = б? • Cs. В этом случае выбором подходящих
нормирующих множителей as всегда можно добиться, чтобы
базис {а^'.ссге2, ..., апеп}, состоящий из собственных векторов
сопряженного оператора А*, был сопряженным к базису соб-
собственных векторов оператора А. Достаточно положить as = Cs.
В общем случае оператор скалярного типа может иметь крат-
кратные собственные числа. Это не мешает строить его собственные
проекторы прежним способом.
*5. Пусть {е,}"=! — какой-либо базис в пространстве Е, со-
состоящий из собственных векторов оператора А, имеющего ска-
скалярный тип. Тогда линейная оболочка La, всех собственных век-
векторов {е{'} из {е,}, отвечающих одному и тому же собственному
числу I, совпадает с собственным подпространством Е*,.
© Очевидно, что Lj, s Е^. Допустим, что в Е*. имеется вектор
е%, не принадлежащий L*, т. е. такой, что набор {... е^, ..., ек},
полученный из {е^} добавлением вектора е%, линейно независим.
В то же время мы знаем (см. 2.14), что собственные векторы,
отвечающие различным собственным числам, линейно незави-
независимы. Поэтому набор {... е;, ..., ei}, полученный добавлением
вектора е% к базису {е*}, также должен быть линейно независим,
вопреки исходному предположению, что оператор А имеет ска-
скалярный тип. Следовательно, L^ = E&. S
Построим спектральный проектор на собственное подпро'
странство Ея..
*6. Пусть {ei)ni=x — базис в пространстве Е, состоящий из
собственных векторов скалярного оператора А, и {е'}"=1 — со-
сопряженный базис в Е*. Если {erf — набор собственных векторов
из {ei}, отвечающих собственному числу X, а {е1} — отвечаю-
отвечающие им векторы сопряженного базиса, то спектральный проек-
проектор на собственное подпространство Е*, записывается в виде
Pi* =2('')(е' > *)?*'. Здесь суммирование распространяется на
124
все собственные векторы из {е,}, отвечающие собственному
числу К.
0 Так же, как и в 2, легко проверяется идемпотентность по-
построенного оператора:
Кроме того, для всякого вектора х из Е^ выполненох=^"=1 (е1,
x)ei==zli(i'){ei'> x)e{', поскольку все линейные формы,
кроме {е1'}, аннулируются на х. Отсюда же видно, что для вся-
всякого вектора х, принадлежащего линейной комбинации собст-
собственных векторов оператора А, не входящих в {е^}, выполнено
?(,<)(?', х)е{' = о. Таким образом, ?(»')(е''> *)е/ оказывается
проектором на Е\ параллельно линейной оболочке собственных
векторов, не входящих в ЕЛ, т. е. спектральным проектором. S
*7. Спектральная теорема: Всякий оператор А ска-
скалярного типа допускает спектральное представление А =
= 2<яДЛ|,1 гДе Рь — спектральные проекторы на собственные
подпространства ЕЛ, отвечающие собственным числам К.
© Для доказательства достаточно, пользуясь условием ска-
лярности оператора, разложить произвольный вектор х по
собственным векторам оператора А, образующим некоторый
базис в Е, и воспользоваться предыдущим утверждением: х =
X"=i (e'> x)et — H(MPbxfa- затем применить оператор А к обеим
частям равенства. 5
Наконец, перейдем к построению полиномиального исчисле-
исчисления для оператора скалярного типа. Мы понимаем под функ-
функциональным исчислением правила построения какого-либо до-
достаточно широкого класса функций от оператора и описание
действий над ними.
*8. Для всякого полинома q от оператора А скалярного типа
имеет место равенство q (A) = XibWM^A,- гДе Рь — спектраль-
спектральный проектор на собственное подпространство оператора А, от-
отвечающее собственному числу К.
© Для q{%) — I2 имеем
') E **)-?.
Аналогично проверяется соответствующее равенство для всех
натуральных степеней q(X)=Xm, а затем — для их линейных
комбинаций-полиномов. ?
125
9. Отображение одной алгебры в другую, сохраняющее ли-
линейную и мультипликативную структуру, называется гомомор-
гомоморфизмом алгебр.
10. Отображение SA: q -v ?(ь, q (Я) /\ алгебры скалярных^
полиномов в алгебру операторов является гомоморфизмом.
© Действительно, для всяких скалярных полиномов г, / и
комплексных чисел а справедливы соотношения
SA:rt-*-r{A)t{A), SA:ar-+ar(A),
Является ли гомоморфизм Sa биекцией} Ответ на этот во-
вопрос основывается на следующем важном факте, который мы
докажем здесь лишь для скалярных операторов:
*11. Тождество К э л и: Если %А(\х)= det(A— \x.I)—ха-
\x.I)—характеристический полином оператора А, то %л(А)~ О.
© Пользуясь предложением 8, получаем %А (А) = 2
= О, поскольку собственные числа служат корнями характери-
характеристического полинома %a(\i). Ъ
*12. Отображение Sa не является биекцией.
© Действительно, полиномы г и г -f- q%A при отображении SA
дают один и тот же оператор г (Л) = Х(Я)Г {К) Р%, поскольку
q%A{A)=O-q(A)=O. Ъ
Покажем в заключение, что построенный в первом пара-
параграфе набор инвариантов скалярного оператора — коэффициен-
коэффициентов его характеристического полинома — является полным. По-
Попутно мы получим сведения, полезные при практическом по-
построении спектрального представления скалярного оператора.
Начнем с общего определения.
13. Говорят, что собственное число % оператора А имеет спек-
спектральную кратность пг, если сПтКег(Л—XI) = т.
В частности, всякое простое собственное число (см. опреде-
определение 3.6) имеет спектральную кратность 1. Ясно, что спектраль-
спектральная кратность совпадает с максимальным числом линейно не-
независимых собственных векторов оператора А, отвечающих соб-
собственному числу К.
*14. Пусть А — скалярный оператор. Тогда его характери-
характеристический полином равен %А (X) = П(^) {К — X) s, где ms спек-
спектральная кратность собственного числа ta и произведение рас-
распространяется на все попарно различные собственные числа Xs
оператора А.
© Для доказательства достаточно записать матрицу опера-
оператора А—XI в базисе из собственных векторов и воспользовать-
воспользоваться инвариантностью характеристического полинома. 5
Отсюда видно, что спектральная кратность собственного
числа Xs совпадает с кратностью корня характеристического
полинома %а (X), т. е. равна степени, с которой скобка (Я — Xs)
126
входит в разложение %А (X) на простейшие линейные множители
(X, - XI).
*15. Ранг матрицы s4- — Xsl равен п — ть, ? rns = n-
*16. Матрица скалярного оператора определяется его харак-
характеристическим полиномом с точностью до преобразования по-
подобия.
*17. Коэффициенты характеристического полинома являются
полной системой инвариантов скалярного оператора.
© Матрица скалярного оператора по определению подобна
диагональной. Поэтому всякий его инвариант выражается через
параметры этого представления — через собственные числа и их
кратности {Xs, tns). С другой стороны, согласно предложению 14
все эти параметры возникают при разложении характеристиче-
характеристического полинома на линейные множители: Xa(X) = Y\{k ) (Я., — Я)
и таким образом однозначно определяются его коэффициен-
коэффициентами. З
Глава 9
СПЕКТРАЛЬНЫЙ АНАЛИЗ ОПЕРАТОРА
В ЛИНЕЙНОМ ПРОСТРАНСТВЕ
(Общий случай)
В предыдущей главе мы развили спектральный анализ ли-
линейного оператора в конечномерном линейном пространстве при
существенном дополнительном ограничении — мы считали, что
некоторая система собственных векторов этого оператора полна
в рассматриваемом линейном пространстве.
В настоящей главе мы рассмотрим общий случай линейного
оператора в конечномерном линейном пространстве над полем
комплексных чисел. Опишем структуру его спектральных ин-
инвариантных подпространств, которые теперь играют роль соб-
собственных, и изучим возможность представления оператора
в виде суммы спектральных компонент — частей оператора, дей-
действующих в спектральных инвариантных подпространствах. За-
Затем мы. изучим структуру спектральных компонент. Покажем,
что в соответствующих спектральных инвариантных подпро-
подпространствах можно таким образом выбрать базисы, чтобы мат-
матрица каждой спектральной компоненты рассматриваемого опе-
оператора имела, в некотором смысле, простейшую (не обязательно
диагональную]) форму — так называемую «жорданову».
Мы уже отмечали ранее, что спектральный анализ тесно
связан с описанием класса возможных функций данного опера-
оператора. Для реализации намеченной ранее программы спектраль-
спектрального анализа в случае общего линейного оператора нам пона-
понадобится значительно развить теорию операторных полиномов.
Поэтому мы начинаем с изучения идеалов в алгебре полиномов
одной комплексной переменной, затем переходим к описанию
идеалов в алгебре операторных полиномов. Центральное место
в главе занимает четвертый параграф, где доказана основная
спектральная теорема о разложении произвольного линейного
оператора на спектральные компоненты. Оказывается, что спек-
спектральные компоненты общего линейного оператора представ-
представляются в виде суммы оператора, кратного единичному, и ниль-
потентного оператора, т. е. оператора, некоторая натуральная
степень которого обращается в нуль. В последнем параграфе
128
исследуется матрица нильпотентного оператора и указывается
конструкция «базиса Жордана», в- котором матрица нильпотент-
нильпотентного оператора имеет простейший вид. Структура базиса Жор-
Жордана, выявленная с помощью общей теории, — один из важней-
важнейших результатов главы.
§ I. ПРЕДВАРИТЕЛЬНЫЕ СВЕДЕНИЯ
И ОПРЕДЕЛЕНИЯ
1. Пусть Л—линейный оператор в конечномерном линейном
пространстве Е Подпространство I.. L сг Е, называется инва-
инвариантным подпространством оператора Л, если для каждого
вектора х из L вектор Ах также принадлежит L. иначе говоря,
A]. crL.
*2. Сумма и пересечение инвариантных подпространств яв-
являются инвариантными подпространствами.
3. Пусть L — инвариантное подпространство оператора А.
Оператор Ль : L ->- L, определяемый равенством А\_х — Ах, heL,
называется частью оператора А в инвариантном подпростран-
подпространстве L.
4. Инвариантное подпространство L оператора А называется
ультраинвариантным подпространством, если существует его до-
дополнение L/, также ятз^яюшееся инвариантным подпростран-
подпространством оператора A: L Г! L' = О, L + L' = Е, /II/ с: L'.
*5. Инвариантное подпространство L', являющееся дополне-
дополнением ультраинвариантчого подпространства L, само является
ультраинвариантным подпространством.
6. Часть оператора AL в ультраинваоиантном подпростран-
подпространстве называется компонентой оператора А в ультраинвариантном
подпространстве.
7. Проектор P['L на ультраинвариантное подпространство L
оператора А параллельно его ультраинвариантному дополне-
дополнению U называется ультрапроектором.
*8. Если подпространство I. и его дополнение U являются
ультраинвариантными подпространствами оператора А. то опе-
оператор А может быть выражен через свои компоненты Л, и А'ь
по формуле А = <4lPi.l + Ль'РгА т. е. для любого вектора х
из Е имеют место равенства x = p'lLx-j- P'l>'x, Ax = Ai,PlLx +
+ AwPV-x.
9. Если L, L' — два подпространства, составляющие в пря-
прямой сумме все пространство Е, и если Лг., Aw—какие-либо опе-
операторы, действующие в L и L' соответственно, то -оператор
А = AlP'Il -f- Al'PU'' определенный во всем пространстве Е, на-
называют прямой суммой операторов А\ и Ль'. При этом пишут
A = AL + Av.
Данное определение прямой суммы операторов позволяет
сформулировать 8 следующим образом:
5 Зак. 193 129
*10. Линейный оператор представляется в виде прямой сум-
суммы своих компонент в дополнительных ультраинвариантных
подпростр анств ах.
11. Ультраинвариантное подпространство называется мини-
минимальным, если оно не содержит никакого другого нетривиаль-
нетривиального (отличного от нуля и его самого) ультраинвариантного
подпространства.
Ультрапроектор на минимальное ультраинвариантное под-
подпространство называется минимальным ультрапроектором.
*12. Минимальные ультраинвариантные подпространства опе-
оператора либо совпадают, либо имеют в качестве пересечения
нулевое подпространство, т. е. дизъюнктны (см. 2.2.6). Общее
число минимальных попарно дизъюнктных ультраинвариантных
подпространств линейного оператора, действующего в конечно-
конечномерном линейном пространстве, конечно.
§ 2. НЕКОТОРЫЕ ФАКТЫ
ИЗ АЛГЕБРЫ ПОЛИНОМОВ
1. Над полем С комплексных чисел рассмотрим линейное
пространство Р всех полиномов одной комплексной переменной
I. с комплексными коэффициентами. В этом пространстве вве-
введем внутреннюю операцию умножения полиномов (поточечное
умножение) (pq) (%) = p(X)q(X).
*2. Возникший таким образом объект является коммутатив-
коммутативной алгеброй.
© Доказательство состоит в проверке согласования умноже-
умножения полиномов с линейными операциями в пространстве поли-
полиномов: (p + q)r = pr + qr, a(pq) = (ap)q = p(aq). D
Алгебру полиномов будем обозначать так же, как и линей-
линейное пространство всех полиномов — символом Р.
3. Идеалом называется подпространство J из Р, обладаю-
обладающее свойством: для любых q из J, г из Р произведение qr также
принадлежит J: qr e J.
4. Идеалы J = О, J = Р называются тривиальными. Все про-
прочие — нетривиальными.
*5. Множество всех полиномов, обращающихся в нуль в фик-
фиксированной точке %, образует нетривиальный идеал.
*6. Множество J9 = qP полиномов вида qr, где q — фикси-
фиксированный полином и г — любой полином, является идеалом
(возможно и тривиальным) алгебры Р.
7. Полином q, по которому строится с помощью формулы 6
идеал iq, называется порождающим полиномом идеала Jq.
*8. Идеал, содержащий единицу (т. е. содержащий полином
нулевой степени, равный единице), совпадает со всем простран-
пространством (является тривиальным],
130
*9. Пересечение (и сумма)* двух идеалов является идеалом.
10. Всякий полином рз минимальной степени, содержащийся
в идеале J, называется минимальным полиномом идеала J.
*11. Минимальный полином нетривиального идеала имеет
положительную степень: р3 ф 0.
*12. Все полиномы, входящие в идеал J, делятся на мини-
минимальный полином ps без остатка.
© Предположим противное: пусть q из J не делится без ос-
остатка на р}, т. е. в равенстве q = q'p; + г полином г отличен
от нуля и его степень меньше степени полинома р]. Из этого
равенства следует, что reJ. Но это противоречит минималь-
минимальности полинома рз. Следовательно, г = 0. D
*13. Минимальный полином р: идеала J определяется един-
единственным образом с точностью до постоянного множителя.
0 Если рр р'} — два минимальных полинома, то они непре-
непременно имеют одинаковую степень и вследствие 12 делят друг
друга без остатка. D
Последнее утверждение оправдывает задним числом запись
рз, использованную уже в 10.
*14. Любой идеал порождается своим минимальным полино-
полиномом J — pjP.
© Включение J с: pj P непосредственно следует из 12. Обрат-
Обратное включение имеет место по определению, ибо pjeJ. D
*15. Пусть Ji, J2 — два идеала. Для того чтобы выполнялось
включение Зуа32, необходимо и достаточно, чтобы р^ делился
на р3 без остатка.
*16. Если Ji, J2 —два идеала и J3 = Jj П J2' т0 Pj3— полином
наименьшей степени, который без остатка делится на полиномы
рл и Pj, т. е. Pj — общее наименьшее кратное полиномов
Р.1 и Рз,-
© Согласно 9 пересечение J3 == Ji fl ^2 является идеалом.
В силу 15 р^ делится на pi , p^ без остатка. Следовательно,
рл является общим кратным ph, pi;
С другой стороны, если q есть некоторое общее кратное
р}, pj, то q^Jif\J2- Поэтому q делится на рЛч. Следовательно,
Pj является наименьшим общим кратным. D
*17. Если Jb i2 — Два идеала и J3 = J[ + J2, то р} — полином
наибольшей степени, на который без остатка делятся (все!) по-
полиномы идеалов J,, J2, т. е. р: — наибольший общий делитель
полиномов, входящих в Ji и J2.
© Согласно 15 полиномы pJ; и р3 делятся на рл без остат-
остатка. С другой стороны, если q есть некоторый общий делитель
* Имеется в виду линейная сумма идеалов как подпространств в Р (а
не теоретико-множественная!),
5* - 131
Pj,' Pjs то порожденный полиномом q идеал iq содержит pv ph,
т. e. JqZDJz- Следовательно, ps делится на q. Таким образом,
pJs есть наибольший общий делитель. 3)
*18. Если полиномы р\ и р2 взаимно просты, т. е. общий наи-
наибольший делитель полиномов pt и р2 является полиномом ну-
нулевой степени, то существуют полиномы qx и qi, такие, что
+ 1
W P7
© Пусть Ji = piP, J2 = р2Р. Сумма идеалов Ji и J2 в соответ-
соответствии с 17 является идеалом, чей минимальный полином равен
общему наибольшему делителю р, и р2, т. е. единице. Таким об-
образом, ввиду взаимной простоты рх и р2, имеем Jt + J2 = Р.
Следовательно, поскольку 1 е Р, найдутся такие полиномы г\,
г2, что pi<7i + р2<?2 = 1. D
Отметим, что полиномы q\ и q2 определяются неоднозначно.
*19. Если общий наибольший делитель набора полиномов
Р\, /?2, ¦ • •, Pi равен единице, то существуют полиномы q\, q2, ...
..., qu такие, что рк?1 + p2qi + ¦.. + Р/<7' = 1-
*20. Пусть р\, р2, ..., pi — попарно взаимно простые дели-
делители полинома р (р = pip2 ... р/) и р\ = р • рг1. Тогда суще-
существуют полиномы <7i, q2, ..., <7/, такие, что X*=i ^гРг == 1-
§ 3. АЛГЕБРА ОПЕРАТОРНЫХ ПОЛИНОМОВ
В предыдущей главе мы уже ввели понятие, полинома от од-
одной операторной переменной. Именно, всякому оператору А,
действующему в линейном пространстве Е над полем комплекс-
комплексных чисел, и всякому набору чисел «о, ось ..., осп мы сопоста-
сопоставили оператор р(А) = ао1 -Ь аИ -)- а2Л2 -f- ... + апА" и назвали
его полиномом от оператора А или операторным полиномом пе-
переменной А.
На множестве всех операторов, действующих в линейном
пространстве Е, мы определили алгебраическую структуру, сна-
сначала линейную, а затем мультипликативную, превратив его в
алгебру операторов (см. 7.1.6). Мы покажем, что множество
операторных полиномов данной переменной А замкнуто отно-
относительно алгебраических операций, т. е. в результате выполне-
выполнения этих алгебраических операций над операторными полино-
полиномами мы получаем снова операторный полином. Это будет озна-
означать, что указанное множество служит подалгеброй, описанной
ранее алгебры операторов. Структуру этой подалгебры мы изу-
изучим подробно, указав ее идеалы. Это послужит основанием
для построения спектрального анализа оператора А.
*1. Множество Р(А) всех операторных полиномов переменной
А с операциями сложения и умножения на комплексное число:
[ар(А)]х = ар(А)х, неЕ,
образует линейное пространство.
132
*2. Операция умножения по правилу [р(А)-q{A)]x—
= p(A)-q(A)x (j;gE) является внутренней на множестве опе-
операторных полиномов переменной А.
*3. Линейное пространство операторных полиномов Р(Л),
наделенное законом умножения 2, является коммутативной ал-
алгеброй.
© Доказательство состоит в проверке согласования умноже-
умножения с операциями сложения и умножения на комплексные чис-
числа, а также в проверке для любого х из Е равенства
p{A)q(A)x = q(A)p(A)x. D
Алгебру операторных полиномов переменной А будем также
обозначать Р(Л).
*4. Р(Л) служит подалгеброй алгебры операторов, действую-
действующих в пространстве Е.
5. Каждому полиному р(К) комплексной переменной X,
р(%) = а0 -f- aiA, -f- а2Х2 -f- ... -\-anXn, сопоставим операторный
полином р(А) переменной А с теми же коэффициентами,р(А) =
= а0/ + аИ + ¦ ¦ ¦ + ос„Л". Тем самым определено отображение
Sa :pCk)-^-p(A) алгебры Р всех полиномов комплексной пере-
переменной I (скалярных полиномов) в алгебру Р(Л) операторных
полиномов.
6. Напомним, что отображение 5 алгебры Р в алгебру Q,
сохраняющее алгебраические операции, т. е. такое, что из
Spi — <7i, Sp2 = <?2, следует S(p, + p2) =qt + qi, Sa.p\ = nSpx —
= aqu S(p\p2)= q\qi, называется гомоморфизмом алгебры Р в
алгебру Q.
*7. Отображение SA, определенное в 5, есть гомоморфизм
алгебры скалярных полиномов в алгебру операторных полино-
полиномов переменной А (см. 8.4.10).
Гомоморфизм SA позволяет использовать свойства алгебры
полиномов, установленные в предыдущем параграфе, для ана-
анализа алгебры операторных полиномов.
*8. Пусть р\{Х), р2(Х) — взаимно простые скалярные поли-
полиномы; тогда существуют полиномы q\(K), q2(X), такие, что
A(A) (A)(A)I
P()q() p()q()
© Достаточно применить гомоморфизм 5,1 к обеим частям
формулы 2.18 и воспользоваться тем, что SA(pi(X)qi{'k)) =
= pt{A)qt(A) (i= 1,2), ?,1 =/. D
*9. Пусть р(А) — произвольный операторный полином и
Pi(^), P2CX) — взаимно простые делители соответствующего ска-
скалярного полинома р(Х), р(Х) = pi(X)p2(X). Тогда подпростран-
подпространство Кегр(Л) разлагается в прямую сумму подпространств
Кегр,(Л) и Кегр2(Л):
Кег р (Л) = Кег р! (Л) + Кег р2 (Л).
© Пусть х = Х\ + х2, где хх е КегР\(А), х2^ Кегр2(А)- Тогда
р(А)х = Pi(A)p2(A)x2 + p2(A)pi(A)xi — о. Следовательно,
КегР1(Л)+ Кег р2(Л)Е Кег р{А\.
133
Покажем, что справедливо и обратное включение
Кегр(Л)Е Кегр!(Л)+ Кегр2(Л). Произвольный вектор х из
Кегр(Л) на основании тождества 8 может быть представлен
суммой х = хх + х2, где xY = p2{A)q2{A)x и х2 = pi (A)qi(A)x.
Так как р{(А)х, = q2(A)p(A)x = о, р2(А)х2 = qi{A)p(A)x = о,
то Xi<= Кет pi(A) и х2 <= Кегр2(Л). Таким образом, Кегр(Л) =
= Кегр! (Л) + Кег р2(Л). Нам осталось установить, что в пра-
правой части полученного равенства сумма является прямой.
Для этого докажем, что Кег рх(А)(] Кегр2(Л) = о. Пусть ze
е Кег pi(A)f]K.ev р2(А). Используя снова тождество 8, получаем
z = Z\-\-Zi, где Z\ — p2{A)q2(A)z, z2 = Р\ (A)qx (A)z. В то же
время согласно предположению pi(A)z = p2{A)z = о, поэтому
Z\ = Z2 = О И 2 = О. D
Последовательное применение утверждения 9 позволяет
обобщить его на случай произвольного числа сомножителей по-
полинома р(Х).
*10. Пусть р(А)—произвольный операторный полином и
pi(^), рг(Я), ..., Pi(k)— взаимно простые делители полинома
р(Х). Тогда
Кегр(Л)= Кегр!(Л)+Кегр2(Л)+ ... + Кег pt(A).
П. Нетривиальный (отличный от тождественного- нуля) по-
полином р(К) называется аннулирующим полиномом оператора Л,
если для любого х из Е выполняется равенство р(А)х = о, т. е.
если Кег р(Л) = Е или р (А) = О.
*12. Всякий оператор Л в конечномерном линейном простран-
пространстве имеет аннулирующий полином.
© Пусть dim E = п. Тогда размерность линейного простран-
пространства операторов, действующих в линейном пространстве Е, рав-
равна п2. Поэтому набор операторов Л° =/, Л, Л2, ..., Л ли-
линейно зависим, т. е. существует нетривиальный набор скаляров
ао, аь ..., а„г, такой, что Yjk=oabAk = 0. Следовательно, по-
полином р(Х) = Yuk=oak^k является аннулирующим полиномом
оператора Л. D
*13. Аннулирующие полиномы оператора Л образуют идеал iA
в алгебре скалярных полиномов Р.
14. Минимальный полином идеала J/i называется минималь-
минимальным аннулирующим полиномом оператора Л. Минимальный по-
полином оператора Л будем обозначать символом рА.
*15. В случае, когда все корни %\, ..., %„ характеристиче-
характеристического полинома %а просты, он оказывается аннулирующим, и
даже минимальным аннулирующим полиномом.
© Действительно, записывая спектральное разложение для
оператора Л (см 8.4.7—8), имеем Л = ?"=1 Я*Р/, р(А) =
=ELi Pi^i) pi- в частности, хд (Л) = Ег=,Хл (^) Р{ = О. Первое
утверждение доказано. Оно совпадает с 8.4.11.*
134
Пусть теперь %j— собственное число оператора А и х — де'
лит ель характеристического полинома %а, не содержащий мно-
множителя X — %f. ^(^)=х.М^-^)л.(М^0. Тогда
xWP/ и
при хе Кег (Л — %,!).
Таким образом, %(Я) уже не является аннулирующим поли-
полиномом оператора Л, тем более не являются аннулирующими
полиномами делители %. 5
Далее мы убедимся, что тождество Кэли%л(Л) = 0 справед-
справедливо и в общем случае. Иными словами, мы покажем, что ха-
характеристический полином оператора всегда является его анну-
аннулирующим полиномом (но уже не обязательно минимальным!).
Следующие два утверждения показывают, насколько алгеб-
алгебра операторных полиномов беднее алгебры полиномов одной
переменной.
*16. Для того чтобы операторные полиномы р(/1), q{A) со-
совпадали как операторы в пространстве Е, т. е. p(A)x = q(A)x
при всех х из Е, необходимо и достаточно, чтобы разность
р(К) — q(k) делилась без остатка на минимальный полином рА
оператора А.
*17. В частности, если гЩ есть остаток от деления поли-
полинома р(Х) на минимальный полином Ра(Ъ) оператора А, то
р(А)=г(А).
*18. Если рА — минимальный полином оператора А и ри
Pi, ¦¦•, Pi — взаимно простые делители полинома Ра, то про-
пространство Е разлагается в прямую сумму подпространств
(A (i= 1,2, ...,/), т. е. Е= Кегр,(ЛL- Кегр2(А)-\- ...
(
© Утверждение непосредственно следует из 10 с учетом того,
что Кегрд(Л) = Е. 5
*19. Пусть, pi, р2 — взаимно простые делители минимального'
аннулирующего полинома рА оператора Л, т. е. рД (Я) = Р\ (Я)р2(Я.).
Тогда Кег р,(Л)= р2(Л)Е = Im рг(Л).
© Поскольку Кегрл(Л)=Е, то р\(Л)р2(Л)Е = о; следова-
следовательно, р2(Л)Е cr Ker pi (Л). Для доказательства обратного
включения отметим, что согласно 18 Е = Kerpi (Л)+Кег р2(Л).
Тогда п — dim Кег р2(Л) == dim Кег р!(Л). С другой стороны,
согласно утверждению 4.5.9, п — dim Кегр2(Л) = dim 1тр2(Л).
Таким образом, подпространства 1тр2(Л) и Кегр](Л) имеют
одинаковую размерность и первое содержится во втором. Это
возможно лишь в случае, когда они совпадают. D
*20. Пусть Ра — минимальный аннулирующий полином опе-
оператора Л, {pi)li=l — его взаимно простые делители, р = р{р2 ...
... pt, p\ — p/pt, a qt — такие скалярные полиномы, что
135
?]• =] <7;р'= 1. Тогда разложение произвольного вектора х
(х??) на составляющие xt, лежащие в подпространствах
Кегр,(Л), дается формулой x = '?li^lxi, xi = ql{A)p'i{A)x.
© Непосредственно из формулы 2.20, применяя гомоморфизм
Sa, получаем ?'=1 qt (Л) р\ (Л) = 1, ?|=1 qt (Л) р, (Л) дс = х. Остает-
Остается заметить, что в соответствии с 19 каждый вектор qi(A)-
• p'i(A)x = p'i(A)qi(A)x = xi принадлежит Кег р,(Л). D
*21. Оператор p'l{A)qi (Л) является проектором на /(егр,(Л)
параллельно линейной оболочке остальных подпространств:
Кегр5(Л) (s?=i).
© Пусть л: е Кег р»(Л). Тогда p^{A)qs(A)x==o при s =^/.
В силу предыдущего утверждения имеем
А) Х = Р\ (А) Ь (А)х-
Таким образом, оператор р^(Л)<7г(Л) действует на векторы
подпространств КегрДЛ) как указанный проектор. Остается
воспользоваться тем, что согласно 18 система подпространств
L полна в Е: Кегр1(ЛL- Кегр2(Л) + ...
Кегр,(Л)=Е. D
§ 4. МИНИМАЛЬНЫЙ ПОЛИНОМ
И ИНВАРИАНТНЫЕ ПОДПРОСТРАНСТВА.
ОСНОВНАЯ ТЕОРЕМА
*1. Пусть Л:Е->-Е — линейный оператор и р(Л) —полином
от оператора Л. Тогда Кегр(Л) является подпространством в Е
(возможно и тривиальным), инвариантным относительно опера-
оператора Л.
© Пусть *еКегр(Л), т. е. р(Л)х = о. Тогда ЛхеКегр(Л),
поскольку р(А)Ах = Ар(А)х = о. Таким образом, Л К.егр(Л)сг
сгКегр(Л). D
*2. Если рА — минимальный полином оператора Л и рьРг, ...
..., р( — его взаимно простые делители pt Ф const, то инва-
инвариантные относительно оператора Л подпространства Кегр,(Л)
(i = 1,2, ..., /) нетривиальны.
© Если Ker pi (Л )=Е, то р; был бы аннулирующим полино-
полиномом вопреки минимальности рА. Если Кегр,(Л)= о, то опера-
оператор pi(A) был бы обратим. Это означало бы, что полином рл/pi
был бы аннулирующим. Действительно, вследствие обрати-
обратимости pi равенство о = рл(А)х = pi(A)[pA/pi](A)x влечет
[рл/pi] {А)х= о. Ввиду минимальности полинома рА последнее
возможно лишь при условии pi = const, что исключено условием
теоремы. D
136
*3. Подпространства Кегр,(Л) (i = 1,2, ...,/) являются
ультраинвариантными подпространствами оператора А и раз-
разложение
Е = КегР1(ЛL-Кегр2(ЛL- ... 4-Кегр,(Л)
является разложением пространства Е в прямую сумму ультра-
ультраинвариантных подпространств оператора А.
© Разложение в прямую сумму уже доказано в 3.18. С уче-
учетом 1 видим, что каждое из подпространств является не только
инвариантным, но и ультраинвариантным. 5
*4. Пусть рр р\, qt имеют тот же смысл, что .и в 3.20, 3.21.
Тогда оператор Pi = qi(A) р'с(А) служит ультрапроектором опе-
оператора А на ультраинвариантное подпространство Кегрг(Л) па-
параллельно подпространству Кегр^(Л).
*5. В частном случае 1 = 2 справедливы формулы Р\ =
= p2(A)q2(A) и Р2== pl(A)q1{A), где qx и ^ — какие-либо по-
полиномы, удовлетворяющие условию p\(X)q\ (Я) + p2(X)q2(X) = 1.
*6. Если Л,- (i=l,2, ..., /) — компоненты оператора А
в ультраинвариантных подпространствах L, = Ker р<(А), т. е.
Л,- = Л|и, то А = А1Р1 + А2Р2 + ... +AiPi.
*7. Полиномы Pi{A) являются минимальными полиномами
компонент Ai оператора Л.
В дальнейшем будем считать, что минимальный полином рА
оператора А разложен на простейшие множители вида (Я — Kt) ':
рД (я,) = Пг=1 (Я — Я,-) '. Такое разложение над полем комп-
комплексных чисел всегда возможно.
Предложения 1—6 этого параграфа, будучи сведены во-
воедино, составляют содержание следующей основной теоремы:
*8. Пусть Л — линейный оператор в линейном пространстве
Е и его минимальный полином рд разложен на множители
Рд(Я) = Г1,=1 (Я — Я;) ', и все корни Я,- различны {h Ф h,
1ф1). Тогда
а) подпространства L* = Кег (Л — %J) ', где I — тождествен-
тождественный оператор, являются ультраинвариантными подпростраства-
ми оператора А;
б) пространство Е разлагается в прямую сумму ультраин-
ультраинвариантных подпространств L,-: E = L!-f-L2 4- ... -+- Lk.
в) оператор А представим в виде суммы операторов Л,-/5*:
Л = ЛiPi + А2Р2 + ... -\-AkPk, где Ai — компоненты оператора
Л в подпространствах L,- и Р,- — ультрапроекторы на эти под-
подпространства.
9. Число nil называется рангом ультраинвариантного подпро-
подпространства L,.
10. Оператор Т называется нилыготентным, если его неко-
некоторая натуральная степень m (m > 1) есть аннулирующий опе-
137
ратор, т. е. Тт — О. Минимальное число т, для которого вы-
выполняется это равенство, называется порядком нильпотентного
оператора.
*П. Каждая из компонент Л, оператора Л в ультраинва-
ультраинвариантном подпространстве Lt = Кег (Л — Xjf1' представима
в виде Л,- = XJ + Ti, где Г,- = Л< — XJ — нильпотентный опера-
оператор порядка пи, Г/: L,-->-U, если т, > 1 и Tt — О при пи = 1.
0 По построению Tmli = O. Покажем, что т™'~[ Ф О. Действи-
Действительно, если оказалось бы, что f™rx = q, то полином
(X — Xi) ' являлся бы аннулирующим для части Л,- оператора
А в подпространстве L? = Кег (Л — XJ) l вопреки минималь-
минимальности аннулирующего полинома (А, — Xt) ' (см. 7). ]>
*12. Для оператора Л выполняется равенствоЛ = ?г=1(А,;/+
-\-Ti)Pt. Иными словами, оператор Л разложим в прямую
сумму операторов (см. 1.9) Я,7 ~f TV
Предложение 12 означает, что матрице оператора А может
быть придан диагонально-блочный вид с блоками (Xil -f- Ti)Pit
стоящими на диагонали. Дальнейшее упрощение матрицы опера-
тори А, по-видимому, зависит от того, насколько просто может
быть записана матрица нильпотентного оператора Т( в подхо-
подходящем базисе. Таким образом, теперь мы должны обратиться
к изучению нильпотентных операторов (см. § 5).
Отметим, наконец, особую роль ультраинвариантных под-
подпространств Кег (Л — XJ) ', отвечающих различным Хг. каждая
из соответствующих им компонент Ai = Xil-\-Tt оператора А
имеет единственную точку спектра Xi. Таким образом, разложе-
разложение пространства Е в прямую сумму указанных подпространств
решает задачу о разделении спектра оператора А.
13. Принято говорить, что Xi — элементарная порция спектра,
Л* — соответствующая спектральная компонента оператора,
L{ = Кег (Л — Xil) ' — соответствующее спектральное инвариант-
инвариантное подпростанство, а Рг — спектральный проектор, отвечаю-
отвечающий данной элементарной порции спектра. Объединение не-
нескольких собственных чисел [Д/ = ° называется порцией спект-
спектра, а прямая сумма соответствующих спектральных инвариант-
инвариантных подпространств {L,} — спектральным инвариантным под-
подпространством L<j, отвечающим данной порции спектра а. Со-
Соответствующим образом определяется спектральный проектор
Ра, отвечающий данной порции спектра, и спектральная компо-
компонента Аа:
если о = I) Xi, то La = 4- /L L/, Ра — L, Pi>
it) (О №
(I)
Именно спектральные инвариантные подпространства и свя-
связанные с ними понятия компонент и проекторов играют наиболее
важную роль в приложениях спектрального анализа.
§ 5. СТРУКТУРА НИЛЬПОТЕНТНОГО ОПЕРАТОРА
Начнем с рассмотрения важного примера.
1. Пусть {е»}"^! — некоторый базис в линейном простран-
пространстве Е. Рассмотрим оператор, заданный в этом базисе матрицей
о 1 о о о о ... о о
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
1
0
0
0
0
0
1
0
0
0
0
0
0
0
... 0
... 0
... 0
... 0
... 0
0
0
0
1
0
или, что то же самое, равенствами Тех = О, Те2 = е\, ..., Те„ =
*2. Оператор 7— нильпотентный, 7" = 0, его порядок ра-
равен п и Кп — минимальный полином 7.
*3. Подпространства L/, натянутые на векторы {ej'=1 базиса
(e/s"=i> являются инвариантными подпространствами (но не
.ультраинвариантными!) оператора Т при любом ;=1, 2, ...
..., п — 1, dim L/ = /, Ln = E.
*4. Имеет место цепочка включений Li с L2 с L3 cz ...
.. . с Ь„ = Е и справедливы равенства Ln_i — ТЕ, Ln_2 =
= Т2Е, . . . , L2 = Г"-2Е, Li = 7Я-'Е.
*5. Оператор Г имеет единственный (с точностью до постоян-
постоянного множителя) собственный вектор е\. Отвечающее ему соб-
собственное число равно нулю.
6. Матрица ?Г оператора Т в базисе {ег}"=1 называется жор-
дановой клеткой размером п.
7. Нильпотентный оператор, матрица которого в некотором
базисе является жордановой клеткой, называется одноклеточ-
одноклеточным нильпотентным оператором.
*8. Прямая сумма конечного числа одноклеточных нильпо-
тентных операторов есть нильпотентный оператор.
Наша ближайшая цель состоит в том, чтобы обратить
утверждение 8. Мы покажем, что любой нильпотентный опера-
оператор в конечномерном пространстве есть прямая сумма конеч-
конечного числа одноклеточных.
*9. Для любого линейного оператора Л:Е->-Е имеет место
включение Ker Ar-X s Ker Ar. Если Т : E->-E — нильпотентный
оператор порядка р, то Ker Т" = Е, и, следовательно,
о = Ker 7° != Ker Г <= ... <= Ker 7"-' s Ker Tp = E.
На самом деле для нильпотентного оператора, как мы сей-
сейчас докажем, каждое предыдущее подпространство цепочки
139
.строго содержится в последующем, т. е. dim Кег р-1 <
< dim Ker Р.
*10. Пусть Т — нильпотентный оператор порядка р. Тогда
1) неравенство dim Ker Tr-1 < dim Ker Tr справедливо при лю-
любом г = 1, 2, ..., р и 2) если векторы Х\, х2, ..., xSr+l из
КегТг+1(л = 1,2 р— 1) линейно независимы над Ker P, то
векторы Тхь Тх2, ..., Txs из Ker P линейно независимы над
Кег Т'-К
© При г = р неравенство 1) выполнено, так как порядок опе-
оператора Т равен р.
Положим г = р—1 и выберем векторы xlt x2 xs из
Кег Р = Е, линейно независимые над Кег Р-1. Доказательство
линейной независимости векторов Тхи Тх2, ..., Txs над
Кег Тр~2 проведем от противного.
Пусть существует нетривиальный набор {aj/^,, такой, что
ТлР=1 v'Txi е Кег Тр~' • Тогда Tp~'[tZ_iips,l аТхг)—о, следовательно,
1 = о и Y^/Li aixi e Ker Тр~1. Но это противоречит
предположению о линейной независимости х\, хг, ..., xs над
Ker P-1.
Линейная независимость векторов Тх\, Тх2, ..., Txs над
Ker Тр~2 влечет выполнение неравенства 1) при г = р — 1. Дей-
Действительно, пусть {еи е2 es>)— некоторый базис в Кег Р~2.
Векторы Тх\, Тх2, ..., Txs , еь е2, .. ., es- принадлежат
Ker P и в соответствии с 2.3.3 линейно независимы. Следова-
Следовательно, dim Ker P~2 < dim Ker Р-1. Для г — р — 2, ..., 1 дока-
доказательство повторяется. 3
Построим базис, в котором матрица нильпотентного опера-
оператора имеет простейший вид. Это будет сделано при помощи
следующего индукционного процесса.
П. Пусть Т — нильпотентный оператор порядка р (р > 1).
а) Выберем в Е максимальный линейно независимый над
Кег р-! набор векторов хръ и хр>2, • • -,хр,s , sp=codimE Ker Tp~l.
б) Набор векторов {Txpi,, Тхр<2, ..., Txp,s } из Кег Г'' до-
дополним в подпространстве Ker P-1 до максимального линейно
независимого над Кег Р~2 набора, присоединяя к нему векторы
jcp_i, I, jcp_i,2, ¦ • •, xp_Us принадлежащие КегР-1; здесь
sp-l = codimKer TP-[ Ker7p — sp^0.
в) Набор векторов из Ker Tp~r(p — r^l):
ТГY ТГ Y ТГY
xp-ui> Т хр-\,ъ •••> Т
*р-1>
140
дополним в подпространстве Кег Тр~г до максимального линейно
независимого над Кег Тр-Г~1 набора, присоединяя к нему век-
векторы хр_тЛ, хр_г>2, ..., xp_r,Sp_r из КегТр"г.
*12. На некотором шаге г набор векторов 11.в) может ока-
оказаться максимальным линейно независимым набором над
Кег Тр-Г~1. Тогда векторы хр_гЛ, хр_п2, ..., xo_ns_r отсут-
отсутствуют.
13. Расположим построенные в 11 векторы в таблицу:
• • • хр,
TxPil ... TxPiS; 7' -vp_i, i ... T xp_ljS ; ...; x
•p-I.sD_,. •• •> xP-l.\
Xp,i . . . I Xp, Sp, I Xp_u ! . . . 1 Xp_i, Sp_j
p-i,\
p
Гр— 1 — / rrP~ '>¦ — I
xp-i,\ ••• i
*14. Число векторов в таблице равно размерности простран-
пространства Е, т. е. 52й=1 ^sfe = dim E. Векторы таблицы 13 образуют
базис в пространстве Е.
© Доказательство следует из 2,3.6 и 10. 3
*15. Векторы е] k=Ti-xxiJl (i~p,p— I \,ki = \,
2, . . ., я,), стоящие в последней строке таблицы, являются соб-
собственными векторами оператора Т, отвечающими нулевому соб-
собственному значению; Те] k = 0.
16. Векторы е\ k =7'-'-%. ^ (г = 1, 2, .. ., р — 1, г = /?,
р — 1, ...,r-f-l; 6,-=1,2, ... S,), стоящие в строке с номером
р — г, называются присоединенными векторами порядк"а г.
17. Последовательность векторов е\ k =Ti~1xi fc , е\ k =
= Т''%, kt> ¦¦¦' eUt = */,h(« = P. P - !- ¦ • •. 2- ^. = 1,2, ..', st.),
стоящих в столбце над вектором T'~lx- . =ё'. ь, называется
цепочкой векторов, присоединенных к собственному вектору
е°. ь . Число i называется длиной цепочки.
*18. Векторы цепочки обладают свойством Tel к =е[~~\
(/= 1,2, .... f-1).
*19. Линейная оболочка векторов каждого столбца таб-
таблицы является ультраинвариантным подпространством опера-
оператора Т. Таким образом, оператор Т имеет sp ультраинвариант-
ультраинвариантных подпространств Н?в(/Р=1, 2, ..,, sp) размерностью р,
141
sp_i ультраинварпантных подпространств Н? (/,,_) = 1, 2, ...
..., sp_i) размерностью р — 1 и так далее, и, наконец, S\ ультра-
ультраинвариантных подпространств Нг, («i = l, 2 si) единичной
размерностью.
*20. На каждом из ультраинвариантных подпространств Htk
рассмотрим сужение Г* оператора Т: Tik =
Если в под-
подпространстве Н*. в качестве базиса взять векторы е\ к , е\ k ,...
..., е\~\ , то в этом базисе матрица оператора j\ приобретает
U, k
вид жордановои клетки:
(О 1 о 0 ... О О
О о 1 О ... о О
0 0 0 1 ... О О
О 0 0 0 ... О 1
о о о о ... о о
*21. Произвольный нильпотентный оператор в соответствую-
соответствующим образом построенном базисе представляется в виде блочно-
диагональной матрицы, состоящей из жордановых клеток; их
число равно размерности собственного подпространства Кег Т.
*22. Размер максимальной жордановои клетки, т. е. макси-
максимальная длина цепочки, равен порядку р оператора Т.
Сделаем в заключение замечание о полной системе инва-
инвариантов нильпотентного оператора Т, Тр = 0. Из проведенного
построения видно, что такой системой инвариантов являются
параметры жордановых клеток, к которым сводится действие
оператора в базисе, построенном в п. 13, т. е. числа Si, s2, ..., sp,
и, конечно, число р. Таким образом, набор коэффициентов ан-
аннулирующего полинома %р уже не является полной системой ин-
инвариантов нильпотентного оператора. Ясно, что это положение
сохранится и для общих {не скалярных) линейных операторов.
Решив задачу о приведении к простейшему виду матрицы
нильпотентного оператора, мы можем теперь, опираясь на пред-
предложения 4.8, 4.11, привести к простейшему виду матрицу про-
произвольного линейного оператора в конечномерном пространстве.
23. Пусть Ь; = Кег(Л — KJ) ' — инвариантное подпростран-
подпространство оператора Л, Л,- — собственное число оператора Л,- = Л/L,- и
Л,- — KJ = Ti — нильпотентный оператор порядка т,- (см. 4.11).
Тогда а) /п, называется алгебраической кратностью собствен-
собственного числа Xt; б) размерность собственного подпространства, от-
отвечающего Xi, т. е. dim Кег (Л — ^;/)=гг;, называется спектраль-
спектральной кратностью собственного числа X,; в) размерность подпро-
странства L,-, т. е. dim Кег (Л — XJ) l
кратностью собствейного числа %t.
¦ nt называется полной
142
*24. Числа mi, n, m определяются лишь самим оператором
At и не зависят от способа построения базиса в L,-. При этом
алгебраическая кратность собственного числа всегда равна раз-
размеру максимальной жордановой клетки оператора Ti, а спек-
спектральная кратность собственного числа равна числу жордано-
вых клеток.
*25. Пусть ?Г,- (/ = 1,2, ..., п)—блоки матрицы оператора
Tt, построенные при некотором выборе базиса {el}ps{ и имею-
имеющие вид жордановых клеток размером р,-. Тогда тг = тахр/.
*26. Справедливы неравенства n,- ^ m,, я,- ^ г,-, щ = X/=i Pi-
*27. Если tit = п, то pj = 1 (/= 1,2, ..., г,). Обратно,если
Pi = 1 (/=1,2, ..., гг), то л/ = п.
*28. Построив в каждом из ультраинвариантных подпро-
подпространств L; = Кег(Л — hi) ' г = 1, 2, ..., k (см. 4.8) операто-
оператора А базис (elsj, s = 1, ..., dim Li, в котором нильпотентный опе-
оператор Tt = А—hi имеет вид суммы жордановых клеток, рас-
рассмотрим семейство векторов (el\h=l, 2, . . .,k,s=l, ...,dimL?)
Указанное семейство векторов является базисом в простран-
пространстве Е; матрица оператора А в этом базисе имеет блочно-диаго-
нальный вид с блоками вида h7j-\-&~i, где Э\ — единичные мат-
матрицы р/Хр/, a STj — жордановы клетки с нулем на диагонали.
Для первых /•] блоков к = h и т. д.
29. Матрица оператора А в базисе, описанном в п. 28, назы-
называется жордановой формой оператора А.
*30. Укажите какую-либо полную систему инвариантов об-
общего линейного оператора в конечномерном пространстве.
*31. Характеристический полином оператора А имеет вид
1А (я) = Ц/=1 (Я. — А.;)'. Минимальный полином оператора А
имеет вид рА (К) = П<=1 (Я — Хг) '. Характеристический поли-
полином делится без остатка на минимальный.
*32. Характеристический полином является аннулирующим
полиномом оператора А, у^А(А)= О. Он совпадает с минималь-
минимальным в том и только в том случае, когда п = 1, т. е. когда мат-
матрица оператора Г,- при каждом I есть жорданова клетка.
Последнее утверждение представляет собою окончательный
и полный вариант теоремы Гамильтона — Кэли, которой мы
дважды коснулись ранее (8.4.11 и 3.15).
Развитый в этой главе подход к спектральному анализу,
основанный на понятии минимального полинома, оказывается
плодотворным также и для операторов, действующих в беско-
бесконечномерных пространствах, однако роль полиномов там играют
иные функции, имеющие более богатые множества корней. Это
отвечает тому обстоятельству, что множество собственных чи-
чисел операторов может быть бесконечным,
Ш
Глава 10
ВЕЩЕСТВЕННЫЕ ПСЕВДОЕВКЛИДОВЫ
И ЕВКЛИДОВЫ ПРОСТРАНСТВА
Линейное пространство, которое мы изучали до сих пор, об-
обладало сравнительно бедной структурой, задаваемой лишь все-
всевозможными линейными соотношениями. Наша ближайшая
цель состоит в том, чтобы обогатить эту структуру и ввести
понятия угла и расстояния. Возникающее при этом простран-
пространство полнее отвечает нашей геометрической интуиции, вырабо-
выработанной на привычном примере трехмерного евклидова, простран-
пространства. Можно сказать, что линейная алгебра в таком простран-
пространстве является аналогом трехмерной аналитической геометрии.
§ 1. МЕТРИЧЕСКАЯ ФОРМА
1. Метрической формой в линейном вещественном простран-
пространстве Е называется билинейная форма G, являющаяся
а) симметричной, т. е. G (х, у) = G (у, х) при всяких х, у
из Е;
б) невырожденной, т. е. равенство G (х, у) = 0 при всех у из
Е выполнено в том и только в том случае, когда х = о.
2. Вещественное линейное пространство Е с выделенной мет-
метрической формой G называется вещественным псевдоевклидо-
псевдоевклидовым пространством с псевдоевклидовой метрикой G и обозна-
обозначается через Ео.
3. Значение G(x,y) формы G на паре векторов х, у назы-
называется скалярным произведением векторов х, у в Ео и обозна-
обозначается далее угловыми скобками с индексами G: G(x,y) =
= <х, У)а-
4. Если метрическая форма G обладает, помимо свойств 1а
16, свойством положительности: G(x, х) > 0 при х ф о, то гово-
говорят, что она задает евклидову метрику в .?©. При этом про-
пространство Ео называется евклидовым, а величина л/(х, х)п
называется нормой вектора х в Ео и обозначается через \х\а.
Примеры, евклидова и псевдоевклидова пространств.
*5. В трехмерном пространстве R3 выберем стандартный ба-
базис <?i = A,0,0), е2 — @, 1,0), е3 — @, 0, 1) и определим метри-
144
ческую форму G через координаты векторов в этом базисе фор-
формулой G(x, y)= I't]1 + I2*!9 + Vrf- Возникшее пространство яв-
является евклидовым.
*6. В четырехмерном пространстве R4 выберем стандартный
базис и определим метрическую форму G через координаты
векторов в этом базисе формулой G(x, у) = ?°т]0 — 1'т]1 — |2тJ —
— ?3т]3. Возникшее пространство является псевдоевклидовым.
Это — так называемое пространство Минковского, лежащее
в основе построений специальной теории относительности. При
этом координата g° называется временной, а координаты g1, В,2,
I3 — пространственными.
7. Векторы х, у из Ео называются ортогональными (отно-
(относительно метрики G), если (х, г/>с = 0. Вектор, ортогональный
себе, называется нуль-вектором относительно G-метрики.
*8. В евклидовом пространстве единственным нуль-вектором
является вектор о.
9. Подпространства N, М из Е называются ортогональными,
если все принадлежащие им векторы попарно ортогональны, т.е.
<jc, у>о = 0 для всех х из N, у из М.
*10. Метрическая форма в псевдоевклидовом пространстве
задает линейное обратимое отображение G : Eo-vEo.
© При фиксированном у скалярное произведение (х, у)а яв-
является линейной формой над Ео. Иными словами, существует
единственный элемент y*Q из Е*а, такой, что (х, y)a = (y"Q, х).
Тем самым определено отображение G : E0-*-Eq, Gy = y"a. Это
отображение является линейным ввиду линейности формы G по
второму аргументу. Действительно,
(х, ау + ?>z)G = с (х, У)о + Р (х, z)Q =
= а (у*0, х) + Р Bq, х) = (ау'в + р%, Л'),
т. е. G (ay + 0z) = ay'Q + рг'о.
Докажем, что отображение G обратимо. Для этого доста-
достаточно показать, что область его значений Im G совпадает со
всем пространством Eg-Поскольку Im G является подпростран-
подпространством в Е5 (см. 4.2.3), достаточно убедиться, что dim Im G =
= dim Eg или dim Im G = dim?0. Пусть {eu e2, .. ., en) — не-
некоторый базис в Ес. Покажем, что набор векторов {Geh Ge2, ...
..., Gen} в Eg линейно независим. Пусть, напротив, он линейно
зависим. Тогда найдется нетривиальный набор скаляров
{а1, а2, ..., а"}, такой, что Хг=1 a'Gei = o. Это означает, что
для всякого х из Ео выполнено
f45
Отсюда, в силу невырожденности и симметрии формы G, выво-
выводим, что Х"_|а'е«г:=0 при нетривиальном наборе скаляров {а<},
что невозможно ввиду линейной независимости векторов {ei).
Значит, равенство X"=i a'Ge,- = o выполнено лишь при триви-
тривиальном наборе скаляров, а,- = 0, и, таким образом, векторы
{Gei) линейно независимы.
Проведенное рассуждение показывает, что dim Im G ^ я.
Вместе с условием Im G cr Eg оно означает, что Im G = Е*а. Та-
Таким образом, линейный оператор G отображает Eg на Ед. Бу-
Будучи слегка измененным, то же самое рассуждение показывает,
что рассматриваемое отображение взаимно однозначно. Дей-
Действительно, достаточно убедиться, что равенство Gy — о воз-
возможно лишь при у = о; последнее, аналогично предыдущему,
следует из цепочки равенств 0 = (Gy, х) = (х, у}а = G(x, у),
Ух, с учетом невырожденности и симметрии формы G, 5
§ 2. КОВАРИАНТНЫЕ И КОНТРАВАРИАНТНЫЕ
КООРДИНАТЫ ВЕКТОРА
1. Пусть {е,-}"=1, {е1I=\— пара сопряженных базисов в
Eg, ЕЬ соответственно; х — произвольный элемент из Еа.
Коэффициенты {1'}"=1 и {?*}"_, в разложениях x = 2"=i ?'ег>
Gx = хп = 2j=i hei называются соответственно контравариант-
ными и ковариантными координата-
координатами вектора х.
*2. Очевидно, что при замене
базиса координаты {^'} преобра-
преобразуются контравариантным обра-
образом, а координаты {|/} — ковари-
антным.
*3. Для контравариантных и ко-
вариантных координт справедливы
следующие выражения: V = (е\ х),
It — (х, е,->.
Рис. 7. © Первая из формул получена
ранее (см. 4.1.24) и является пря-
прямым следствием условия сопряженности базисов.. Докажем
вторую. Пользуясь сопряженностью базисов {ei), {e1} и сим-
симметрией формы G, имеем |,- = (ха, ei) = G(x, ei) = <х, ei)o. T>
На рис. 7 показан способ построения ковариантных и кон-
травариантных координат вектора х в нормированном базисе
{ei, e2}, \ei\= 1; отмечены ковариантные координаты gi и |2.
4. Базис {^}"_j называется ортогональным в Ео, если
<е„ eft>G =0 (i?=k).
5. Базис {ej/=s| называется ортонормированным в Ее если
*6. Базис {е!}, сопряженный к ортонормированному базису
{е,}, получается по формуле ZiGei = е'.
© (е'', е*) = Bi(Gei, ek) = е1-<е/, ей> == б«*. D
*7. Ковариантные и контравариантные координаты любого
вектора относительно ортонормированного базиса совпадают
с точностью до знака е,-.
© Доказательство немедленно следует из формул 3 и преды-
предыдущего утверждения. D
В общем случае ковариантные и контравариантные коорди-
координаты вектора связаны более сложным, однако линейным соот-
соотношением. Опишем эту связь (см. 11).
8. Тензор метрической формы G называется метрическим
тензором: (Geh ен) = (е„ ek}G = gik (i, k= \,2, ..., п).
*9. Действие оператора G записывается с помощью метри-
метрического тензора Ц^|| в виде Gx = 2" k^\Siklket- Здесь {lk} —
координаты вектора х в базисе {ek}, {е1}—сопряженный базис.
© Пользуясь формулой разложения по сопряженному базису
Gx = Yji^\(Gx, et)e\ линейностью и симметрией формы G, по-
получим {Gx, е{) = ZLi Sikt (i = 1. 2, • • •, л), Gx == Ц *_i gtitfe1. D
*10. Метрический тензор 11^,^11 является матрицей оператора
G относительно пары базисов { е,}, {е1}.
*11. Ковариантные {Ц) и контравариантные {?'} координаты
вектора х связаны формулой \i=='Yukw,xgi^ (i = 1, 2, . . ., п).
12. Операция замены контравариантных координат на кова-
ковариантные называется операцией опускания значка. Она приме-
применима очевидным образом не только к вектору, но и к любому
тензору, имеющему контравариантный (верхний) индекс.
13. Матрица оператора G~' обозначается через ||g'*|| и на-
называется обратным метрическим тензором.
*14. Имеют место соотношения
kt =
= 1,2,..., л),
xt=xb (k=\, 2 n).
Мы видим, таким образом, что с помощью обратного метри-
метрического тензора можно производить операцию поднятия значка,
заменяя ковариантные координаты контравариантными.
§ 3. ГЕОМЕТРИЯ ВЕЩЕСТВЕННОГО
ЕВКЛИДОВА ПРОСТРАНСТВА
В евклидовом пространстве имеют место следующие два не-
неравенства 1, 2:
* Позднее (см. 11.6.8) мы докажем, что во всяком псевдоевклидовом про
странстве существует ортонормированный базис.
147
*1. \(x,y}a\ ^\x\g- \y\c, (неравенство Коши— Буняковского).
© Для доказательства этого неравенства воспользуемся соот-
соотношением
\х + ау \а = \х fa + 2а (х, уH + а21 у ?Q.
Левая часть последнего равенства неотрицательна при любых
значениях параметра а и может обратиться в нуль лишь при
условии линейной зависимости векторов х, у. Таким образом,
квадратный трехчлен по переменной ос, стоящий в правой части,
не имеет вещественных корней, если набор {х, у} линейно не-
независим, и имеет единственный (двукратный) корень, если на-
набор {х, у) линейно зависим. Согласно известному утвержде-
утверждению элементарной алгебры эти факты эквивалентны соответ-
соответственно положительности дискриминанта трехчлена: \х\гв\у\'о —
— (х> У)'а~> О И обращению его в нуль: \х\а\у\а—(х, у)~а = 0.
Отсюда немедленно следует неравенство 1. D
*2. \х -f- y\o ^ |jc|g +|y|o (неравенство треугольника).
© Это неравенство является следствием неравенства 1, ибо
Знаки равенства в соотношениях 1 и 2 возможны лишь при
условии линейной зависимости пары х, у.
Неравенства 1, 2 позволяют определить в вещественном
евклидовом пространстве Ес понятия угла и расстояния.
3. Положим, по определению
cos{x, у} = \х\01\у\~](х, уH,
dist{x, у) = | х — у |0.
Введенные таким образом функции пары векторов обладают
естественными свойствами: dist{x, y}^ dist{.v, 2}+ dist{2, у};
|cos {х, у} | ^ 1; | cos {х, у} | = 1 в том и только в том случае,
когда векторы х, у линейно зависимы.
4. Расстояние от точки х до подпространства L в веществен-
вещественном евклидовом пространстве задается по определению форму-
формулой
dist {я, L) = inf | х— у\.
У е L
5. Угол между двумя подпространствами L и М (Lf)M = o)
в вещественном евклидовом пространстве задается по определе-
определению формулой
cos {L, М} = sup cos {x, у}.
148
Глава 11
КОМПЛЕКСНОЕ ЕВКЛИДОВО ПРОСТРАНСТВО
Комплексным линейным пространством называют обычно
линейное пространство над полем С комплексных чисел. Ко-
Конечномерное комплексное евклидово пространство — это уже
весьма богатый геометрическими и аналитическими свойствами
и в то же время наиболее доступный нашей интуиции объект
линейной алгебры. Замечательно, что большинство геометриче-
геометрических свойств таких пространств сохраняются в неизменном виде
и в случае бесконечной размерности. Особенно богата содержа-
содержательными фактами теория операторов в таких пространствах.
Она служит отличной моделью для квантовой механики.
§ 1. ОСНОВНЫЕ НЕРАВЕНСТВА
1. Пусть Е — комплексное линейное пространство. Форма G
двух переменных в Е, G(x,y), называется полуторалинейной,
если она линейна по первому аргументу: G (ax -f- fiz, у) =
= aG(x, y)-\- PG(z, у) (а, р е С) и антилинейна по второму:
G(x,ay + № = aG(x,y) + №{x,z) (а, Ре С).
2. Комплексное конечномерное линейное пространство Е на-
называется евклидовым, если в нем задана полуторалинейная фор-
форма G, обладающая также следующими свойствами:
а) эрмитовостью: G (х, у) = G (у, х) (х, 1/еЕ);
б) неотрицательностью: G{x,x)^0 (xeE);
в) невырожденностью: равенство G(x, х) = О возможно лишь
при х = о.
Свойство эрмитовости призвано заменить в комплексной си-
ситуации свойство симметричности. Остальные условия имеют
прежний смысл. Комплексное евклидово пространство с метри-
метрикой G обозначается через Eg.
3. Значение G(x, у) формы G на паре векторов х, у назы-
называется скалярным произведением и обозначается угловыми скоб-
скобками с индексом G: G(x, у) = <х, г/>0.
В случаях, когда не возникает недоразумений, мы будем опу-
опускать индекс G у скалярного произведения.
4. Неотрицательная величина л/(х, х)а называется нормой
вектора х в Еа и обозначается через \x\q.
149
Вектор х с единичной нормой, |я|с = 1, называется норми-
нормированным.
В случаях, когда не возникает недоразумений, мы будем
опускать индекс G у нормы.
*5. Для элементов комплексного евклидова пространства
справедливо неравенство Коши — Буняковского: \(х, у}о\^
^\х\а- \y\G, переходящее в равенство лишь в случае линейной
зависимости пары х, у.
© Запишем комплексное число (х, у} в показательной форме
(х, уУа = \(х, г/>о|е/ф и рассмотрим при вещественных А выра-
выражение
I х + е*»ку |о = | х f0 + (х, у)а te-'* + (у, хH Ке{* + Л21 у \\ =
Видно, что оно оказывается неотрицательным квадратным трех-
трехчленом относительно переменной X, —оо <; А <С оо. Следова-
тельно, дискриминант этого трехчлена неотрицателен: I x \Q | у \~а—
— \(х, ?/)G|2^0. Если дискриминант равен нулю — и только в
этом случае — у рассматриваемого квадратного трехчлена име-
имеется на оси один двукратный корень Ко- Очевидно, что в этом
случае векторы х, у линейно зависимы: х = —е'^Коу. Обрат-
Обратно, если векторы х, у линейно зависимы, то неравенство Коши
—Буняковского переходит в равенство. 5
*6. Для комплексного евклидова пространства справедливо
неравенство треугольника: |х + г/|о^|х|о+|у|о, переходящее
в равенство лишь в случае линейной зависимости х, у.
© В силу неравенства Коши — Буняковского имеем
Замена неравенства равенством здесь немедленно влечет ра-
равенство |<ХуУа\ = |*|о|#|о, которое возможно в силу 5 лишь
при условии линейной зависимости пары х, у. 5
*7. Теорема Рисса — Фишера: Всякая линейная фор-
форма в евклидовом пространстве ЕЬ представима в виде скаляр-
скалярного произведения с некоторым элементом из Ео; этот элемент
определяется формой единственным образом.
© Пусть (/, х) — данная линейная форма. Покажем, что су-
существует элемент у} из Ео, такой, что для любого х из Ео вы-
выполнено (f, x) = <jc, yf}a-
Разыскание элемента yf сводится к решению системы линей-
линейных уравнений.
Выберем какой-либо базис {?i,e2, ..., еп} в Ео и обозначим
через {е\ е2, ..., еп} сопряженный базис в Eg, через |', ф,- ->—
координаты вектора х и формы f в этих базисах, и через
WgikW—тензор метрической формы. При этом исходное соотно-
соотношение можно будет записать в видеХ^! Е'ф,-= Z-ч. k-\ Sn&'^f > ^Хш
150
Ввиду произвола в выборе х ясно, что координаты r\f вектора
yi должны быть определены из системы уравнений <р, =
—iLk-iSiifif (г==Ь 2, ..., п). Соответствующая однородная
система Yjkalgik4k = 0 имеет лишь нулевое решение. Действи-
Действительно, эта система может быть записана в виде Xa= tf
= <е<, г/>=0 (t = l,2, ..., п). Вектор у, являющийся ее реше-
решением, оказывается, таким образом, ортогональным ко всем
базисным векторам, а значит и к произвольному вектору х из EG.
Следовательно, ввиду невырожденности формы G у = о и зна-
значит г]* = 0.
Согласно известным теоремам о разрешимости линейных си-
систем (см. 3.1.18) рассматриваемая неоднородная система имеет
единственное решение iv\i)n , и значит существует единствен-
ный вектор у. = 2/j=i TlfeA. c помощью которого данная линей-
линейная форма записывается в виде скалярного произведения. 3
§ 2. ОРТОГОНАЛЬНОСТЬ
И ОРТОНОРМИРОВАННЫЙ БАЗИС
1. Векторы х, у называются ортогональными, если (х,у)а =
= 0.
*2. Набор попарно ортогональных ненулевых векторов ли-
линейно независим.
© Пусть {ей ...., ей) — набор попарно ортогональных нену-
ненулевых векторов. Если он линейно зависим, то найдется нетри-
нетривиальный набор скаляров {а1, ..., а*}, такой, что 2]г=1а'е,- ==о.
Умножая скалярно на себя построенное выражение, имеем
вследствие ортогональности векторов {е,}:
0 =
k
*/>„== Zla, I2|e,lo-
Ввиду нетривиальности векторов {e,} (je;|G;>0) и нетриви-
нетривиальности набора {а,} последнее равенство невозможно. Таким
образом, предположение о линейной зависимости набора
{еь е2, ..., ей) приводит к противоречию, и, следовательно,
ортогональный набор {еь ..., ек} линейно независим. D
*3. Координаты вектора к в ортонормированном базисе (ег}"=1
подсчитываются по формуле |' = {х, ei)G, так что имеет место
формула разложения
п.
х = ?, (х, etH e(
и равенство Парсеваля
= ?|<*, et)
\2
4. Базис, состоящий из попарно ортогональных векторов,
называется ортогональным. Если все векторы {е,} ортогональ-
ортогонального базиса нормированы: |е,|0 = 1, то базис называется орто-
нормированным.
*5. Во всяком (конечномерном) комплексном евклидовом
пространстве имеется по крайней мере один ортонормированный
базис.
© Пусть {в[, ..., е„)—некоторый базис в Ео. Нормируем пер-
первый элемент этого базиса и образуем набор {«i,e2, ..., е„},где
ai = е\/\е\\в. Первоначальный и построенный наборы связаны
между собою обратимым оператором Т\, которому в первона-
первоначальном базисе отвечает матрица
е, |д' 0 0 0 ... О
О 1 0 0 ... О
О 0 1 0 ... О
О 0 0 0 ... 1
Очевидно, что построенный набор является базисом. Будем на-
называть его базисом первого порядка. Базис второго порядка
построим, исходя из базиса первого порядка. Для этого заменим
сначала вектор е2 вектором е? — <е2, а\Уап\, ортогональным к а\.
Этот вектор заведомо ненулевой: е2 — (е2, a{)G щ=е2 — \ех}~ (е2,
е,H е, ф о, ибо в противном случае пара в\, е2 (а вместе с ней
и весь набор {ег}"в1) была бы линейно зависима. Послед-
Последнее обстоятельство позволяет заменить этот вектор нормиро-
нормированным: а2 = а.-' [е2 — (е,, с,Hс,], где а2 = |е2 — <е2, a\)Ga.\\G, и
рассмотреть набор {а\, а2, е3, ..., еп). Этот набор связан с ба-
базисом первого порядка оператором Т2, которому в базисе пер-
первого порядка отвечает треугольная матрица
1 О О
О 0 1
о о
Очевидно, что оператор Т2 обратим, а потому набор {аь а% е3, ...
..., еп} является базисом. Назовем его базисом второго по-
порядка. Продолжая действовать по индукции, построим базис
порядка к: {аи а2, ..., ak, ek+i е„}, в котором первые k
векторов ортогональны между собой, нормированы и являются
152
линейными комбинациями векторов {в[,е2, ..., ек}. При по-
построении следующего набора вектор ек+\ заменяется вектором
ек+\ — 2;=,i (ek+u ai)oat< заведомо ортогональным к {аиа2, ...
..., ак}. Этот вектор — ненулевой, ибо в противном случае ока-
оказалось бы, что вектор ek+i является линейной комбинацией век-
векторов {е\,е2, ..., ек). Нормируя построенный вектор:
где
о'
введем его в набор вместо ек+\. Полученный при этом набор
порядка k-\-\: {аь а2, ... ак, cik+i, ек+2, ¦¦¦, еп) также являет-
является базисом. Действительно, он связан с предыдущим базисом
{аиа2, ..., ак, ек+\, ек+2, ..., е„) посредством оператора Тк+и
которому отвечает (в базисе порядка k) треугольная матрица
1
0
0
(ek+v a,)
0
0
1
0
{ek+\
— а
0
¦«2>
k+l
0 ..
0 ..
1 ..
0 ..
0
0
0
1
ak+l
0
0
0
0
п
1
... и
... 0
... 0
о
... 0
0 0 0... 0 0...1
Очевидно, что оператор Тк+\ обратим, что и обеспечивает базис-
ность построенного набора порядка k + 1.
Отметим дополнительно, что возможность продолжить про-
процедуру построения на каждом шаге гарантируется линейной
независимостью каждого набора вида {е\,е2, ...,ек} (й=1,
2, .... л).
Ввиду конечномерности пространства, на л-м шаге исходный
базис {ей е2, ..., е„} исчерпается и окажется полностью пере-
перестроенным. Вместо него возникнет ортонормированный базис
{а\, а2, ..., а„}, связанный с исходным посредством оператора
Т, Т = Tn-Tn-i ... T2-Th Tei = at (t=l,2, ..., n). Каждая из
матриц операторов {7"J"=1 имеет нижний треугольный вид, по-
поэтому и матрица оператора Т в исходном базисе имеет нижний
треугольный вид. Зто соответствует тому, что каждый вектор
пк нового базиса является линейной комбинацией векторов е,-
с номерами не выше k (i = 1, 2, ..., k). В частности, отсюда
следует обратимость оператора Т и базисность построенного на-
набора {аиа2, ..., an). D
6. Оператор Т (Tei=~ a,) называется ортогонализатором ба-
базиса {ei,e2, .... enj.
153
Описанный процесс построения ортогонального базиса в
евклидовом пространстве называется ортогонализацией по
Штурму.
Так же, как мы ввели ранее понятие ортогональности для
векторов, можно ввести понятие ортогональности для подпро-
подпространств комплексного евклидова пространства.
7. Подпространства L, М называются ортогональными, если
(х, (/> = 0 для любой пары векторов х, у, .teM, jeN.
8. Ортогональным дополнением подпространства L назы-
называется множество всех векторов {х} из EGl удовлетворяющих
условию (х,у}а — 0, Vy, i/gL. Ортогональное дополнение под-
подпространства L обозначается символом L3-.
*9. Ортогональное дополнение подпространства является
подпространством.
*10. Пересечение подпространства с его ортогональным до-
дополнением состоит из единственного вектора о.
*11. Всякий ортонормированный базис в подпространстве
можно дополнить до ортонормированного базиса во всем про-
пространстве.
§ 3. ОПЕРАТОРЫ
*1. Всякая полуторалинейная форма М в евклидовом про-
пространстве Еа определяет единственным образом некоторый ли-
линейный оператор А в Ео по формуле ?Ф{х, у) = (Ах, у}а
(*,«/€= Ес).
© Пусть {ег}"=1 — некоторый ортонормированный базис в Ео.
Построим оператор А, чья матрица в базисе {e*}"=i задается
формулой alk = si'(ek, е{). Именно, положим Л* = Х" k=\akei X
X (х, еЛ. Учитывая полуторалинейность формы зФ и формулу
разложения 2.3, получаем
, У) = ,?.,•* (ер ek) Vrf = t Z [ a^r\k = (Ax, y)Q.
Существование искомого оператора А доказано.
Приступая к доказательству единственности, допустим, что
существует оператор К, отличный от построенного и удовлетво-
удовлетворяющий условию (Ах, у}а = (Ах, у}о = <s&(x, у) при любых х, у
из Ео. Отсюда по теореме Рисса — Фишера получаем Кх = Ах
и, следовательно, А — A. D
2. Форма (Ах, у)а называется билинейной формой оператора
А в евклидовом пространстве Ео.
Напомним, что в общей теории линейных пространств били-
билинейной формой оператора А мы называли билинейную форму
if. Ах) (*еЕ,/«=Е*).
154
*3. Для всякого линейного оператора А, действующего в EG,
соотношением {Ах, y}G = {х, Л+г/>о Ух, у е Ес, определяется
единственный линейный оператор А+, называемый эрмитовски
сопряженным к А или, короче, сопряженным.
© Сопряженный оператор А+ в соответствии с 1 единствен-
единственным образом определяется своей билинейной формой {у, АхH. D
4. (АВ)+ = В+А+; (А+)+ = А.
5. Линейный оператор А, совпадающий со своим сопряжен-
сопряженным, А = А+, называется самосопряженным или эрмитовым.
Чрезвычайно важным классом эрмитовых операторов яв-
является класс ортогональных проекторов, описываемый далее.
6. Пусть L — подпространство в Ее. Ортогональной проек-
проекцией вектора х на подпространство L называется вектор xL из
L, такой, что разность х — xL ортогональна L.
*7. Ортогональная проекция произвольного вектора х на лю-
любое заданное нетривиальное подпространство определяется един-
единственным образом и является линейной функцией от х.
© Докажем сначала существование проекции. Для этого в под-
подпространстве L выберем какой-либо ортонормированный базис
{ei}f=iL и построим вектор xL по правилу xL = ]L;=iL (x> ei)aei-
Тогда разность х — xL ортогональна к каждому из векторов е,-,
а значит, и к L.
Убедимся, что проекция на подпространство определяется
единственным образом. Действительно, если xL и x'L — две раз-
различные проекции одного и того же вектора на подпространство
L, то их разность принадлежит L. С другой стороны, она до-
допускает представление xL — х'^ = (х — х[) -(- (xL — х), и значит
лежит в ортогональном дополнении к L. Следовательно, она
в соответствии с 2.10 равна нулю.
Наконец, формула xL=Xi=i {x> ei)aei заДает xL как ли-
линейную функцию от х. 3
8. Линейный оператор, сопоставляющий всякому вектору х
его ортогональную проекцию на подпространство L, называется
ортогональным проектором (ортопроектором) на подпростран-
подпространство L и обозначается символом Pl-
*9. Если {ei}f^\L— какой-либо ортонормированный базис
в L, то ортогональный проектор на L задается формулой
dim L
PlX = Z {x, et)Q e,.
*10. Оператор PL эрмитов: Pl = Pl и идемпотентен: Pl = P-
© Эти факты проверяются непосредственно с помощью фор-
формулы 9. Э
*11. Всякий линейный идемпотентный эрмитов оператор Р
является ортогональным поректором на некоторое подпростран-
подпространство,
165
0 Пусть L — область значений оператора Р. Для всякого век-
вектора х из L выполнено вследствие идемпотентности Рх = х.
Для всякого вектора у из ортогонального дополнения L1 вы-
выполнено, благодаря эрмитовосги, {Ру, х}а = (у, Рх}0 =
= (у< *>о =. 0; следовательно, вектор Ру ортогонален L и, бу-
будучи в то же время по построению вектором из L, обращается
в нуль: Ру = о (i/eL1). Пусть теперь {et}f^l L—некоторый
ортонормированный базис в L. Дополнив его до ортонормиро-
ванного базиса во всем пространстве векторами {е,} (/ =
= dim L -f I, ..., dim Ео) из L1 можем записать:
dimL dimEG
х= ? (х, et)Q et + Е (х, е{)ае„
« = 1 dimL + l
и вследствие линейности Р
dim L
Z
1 = 1
Рх= ? (х, ei)Qet.
Таким образом, оператор Р является ортогональным проекто-
проектором на подпространство L — Im P. D
*12. Если L — подпространство в EG и L1 — его ортогональ-
ортогональное дополнение, то Ph-{- Phi_ = I, и справедлива теорема Пи-
Пифагора:
I v I2 I р х I2 -I- I Р i X I2
I X \G ~~ I rLX \Q + | rL±X \a'
Другим важным примером является эрмитов оператор с од-
одномерной областью значений или (короче) одномерный эрми-
эрмитов оператор.
*13. Всякий одномерный эрмитов оператор А\ представим
в виде Ахх = Х(х, х\)ох%, где X — некоторое вещественное
число, а х% — нормированный вектор из области значений А^.
0 Выберем какой-либо нормированный вектор Х\ из области
значений оператора А^. Согласно предположению об одномер-
одномерности оператор Ах переводит произвольный вектор х в вектор
вида f(x) -x\, где f(x) — линейная скалярная функция от х, т, е.
линейная форма. По теореме Рисса —Фишера (см. 1.7) она
представима в виде, f(x) — <x, ухУо с вполне определенным век-
вектором ух из Eg. Таким образом, Ахх = {х, уг,Уох%-
С другой стороны, пользуясь эрмитовостью оператора
\(\ — Ак)' ВИДИМ. что А\х= (x,yi>oxi = ук(х,л^>0. Отсюда
вектор у\ коллинеарен х%, т. е. у\ == А,^. Далее, положив х = х\,
находим
так что число Я является вещественным. Э
156
§ 4 ИНВАРИАНТНЫЕ ПОДПРОСТРАНСТВА
ЭРМИТОВЫХ ОПЕРАТОРОВ
И СПЕКТРАЛЬНОЕ РАЗЛОЖЕНИЕ
Напомним определение инвариантного подпространства
(8.2.1).
1. Подпространство L из EG называется инвариантным под-
подпространством оператора А, если ALcr L.
*2. Пусть L — инвариантное подпространство оператора А;
тогда его ортогональное дополнение L1 инвариантно относи-
относительно сопряженного оператора А+.
© Рассматривая определяющее А+ соотношение (Ах, у)а =
= (х, А+у}а, видим, что при всех х из L, у из L1 левая его
часть, а значит и правая, обращаются в нуль. Ввиду произволь-
произвольности х из L это означает, что A+y^L1, коль скоро i/eL1. Э
*3. Ортогональное дополнение всякого инвариантного под-
подпространства эрмитова оператора является инвариантным под-
подпространством того же оператора.
*4. Эрмитов оператор А коммутирует с ортогональным проек-
проектором Рь на любое его инвариантное подпространство L.
© Имея в виду, что PL + PL±=I, запишем: APL= {PL +
+PL±}APL=PLAPL+PL±APL=PLA(PL+PL±)-PLAPLX+PLXAPL.
Второй и третий члены здесь обращаются в нуль, ибо ALczL,
AL-1- cr IA Следовательно, APL = PhA(PL-\-PL±) = PLA. )
*5. Пусть L — инвариантное подпространство эрмитова опе-
оператора А и L^ — его ортогональное дополнение; тогда оператор
А можно записать в виде Л = PLAPL -f- PL±APLx- При этом опе-
операторы PLAPL и Р, ±APlX эрмитовы.
© Для доказательства снова воспользуемся соотношением
PL + PL± = /- Вследствие инвариантности L и L1 относительно
А имеем А = (PL + PL±) A (PL + PL±) = PLAPL + PLAPh± +
+ PL±APL + PL±APL± = PLAPL + PL±APL±. Кроме того, в силу
3.4 и 3.10(PI/PL)+ = PIM+P+ = PI/PL. D
*6. Если L — инвариантное подпространство эрмитова опера-
оператора А, то на подпространстве L оператор А совпадает с PiAPL.
Формула 5 дает разложение оператора А в сумму двух опе-
операторов более простого вида. Мы можем теперь применить те
же рассуждения к каждому из слагаемых и представить опе-
оператор А в виде суммы четырех членов вида PlAPl. Для этого
нужно лишь указать инвариантные подпространства L,-, содер-
содержащиеся в L a L1. Подобные построения можно было бы про-
продолжать до тех пор, пока мы не дойдем до одномерных подпро-
подпространств. При этом получится разложение оператора А в сумму
операторов простейшего вида — одномерных эрмитовых опера-
операторов вида 3.13: Ах=^$,)Х(х, хх)ах^. Проведем последова-
последовательно рассуждения, набросок которых был дан выше.
167
Начнем со следующего вспомогательного утверждения:
*7. Всякое собственное число эрмитова оператора веществен-
вещественно. Собственные векторы эрмитова оператора, отвечающие раз-
различным собственным числам, ортогональны.
© Обозначим через х нормированный собственный вектор эрми-
эрмитова оператора А, отвечающий собственному числу X. Тогда
имеем Я = (Хх,, x)g = {Ах, х}а = <х, Ах)а = Х(х, x)g = Я. Пусть
теперь у — собственный вектор, отвечающий другому собствен-
собственному числу (л того же оператора. Тогда
г/>с—(х, цг/>о} = (Я—\к)~1{{Ах, у}в—
- <х, Ау}в} = 0. 5
*8. Теорема о спектральном представлении
эрмитова оператора: для всякого эрмитова оператора А
в евклидовом пространстве Еа существует ортонормированный
базис {*(}"_! и набор вещественных чисел {Я,-}"=1, такой, что
справедливо представление Ах= J^i=llhi(x, Xi)QXi (xe EG). При
этом векторы xi являются собственными векторами оператора
А, а числа %i — его собственными числами.
© Приступим к доказательству теоремы 8. Согласно основному
факту спектральной теории (см. 8.3.4) всякий оператор, дейст-
действующий в конечномерном комплексном линейном пространстве,
имеет по крайней мере одно собственное число %\ и один соб-
собственный вектор Х\\ Ах\ = Х\Х\. Вектор х\ мы будем считать
нормированным. Одномерное подпространство Lb натянутое на
вектор л'ь инвариантно относительно оператора А, причем часть
оператора Л в L| действует просто как оператор умножения на
вещественное число %i. С другой стороны, в соответствии с 3 ор-
ортогональное дополнение Mj = Lf- также является инвариантным
подпространством оператора А, так что верна формула 5.
С ее помощью, учитывая, что одномерный проектор на Li запи-
записывается в виде Pi* = <*, х\)оХ\, мы можем представить дейст-
действие оператора А как Ах = Xl (x, x{}aXi -f- Pm^PMix. При этом
dim Mi = n— 1.
Теперь рассмотрим эрмитов оператор А{ =Рм^Рм,- Он сов-
совпадает с Л на Mi и аннулируется на Li. Согласно основному
факту спектральной теории оператор А\ имеет в подпростран-
подпространстве Mi по крайней мере один собственный вектор х2 и одно
собственное число %2: А\Х2 = Ах2 = Ъ2х2 (х2 е Мь х2 X Х\), яв-
являющиеся одновременно собственными и для оператора А. Это
позволяет разложить подпространство Mi в ортогональную
сумму подпространства L2, натянутого на х%, и ортогонального
дополнения М2, а затем, предполагая вектор х2 нормированным,
записать оператор А\ в виде А2 (х, х2)ах2-\-Рм:АРм<х. Теперь мы
имеем Ах =* Ki {x, x{)qXi -f- Я2 {х, x%)qX2-\- .
153
Продолжая аналогичным образом, построим ортонормиро-
ванный базис {хи х2, ..., хп}, состоящий из собственных век-
векторов оператора А, и получим спектральное разложение вида
Ах= Z,ni=lh(x, Xi)ax{. D
*9. Следствие: Всякий эрмитов оператор является ска-
скалярным.
Написанное спектральное представление можно преобразо-
преобразовать, объединяя члены с одинаковыми собственными числами
fa. При этом возникают агрегаты вида X X (s)Ot, xs)ax,, имею-
имеющие вид сумм по ортогональным наборам собственных векторов
xs, отвечающим одинаковым собственным числам Ks, равным К.
Вводя в рассмотрение линейную оболочку L* этих собственных
векторов, можно записать указанный агрегат в виде \Р\х, где
Pi — ортопроектор на Ц. Этот проектор называется спектраль-
спектральным. После проведения такой группировки спектральное пред-
представление переписывается в виде
*10. Лх=Х(Л,АРял: или Л=?(яДРЛ.
Сделаем замечание, полезное при практическом построении
ортонормированного базиса из собственных векторов эрмитова
оператора.
*11. Если оператор А эрмитов, то размерность инвариант-
инвариантного подпространства, натянутого на ортогональные собствен-
собственные векторы, отвечающие собственному числу fa оператора А,
равна кратности корня fa векового уравнения det(^—XI) и
совпадает с п — г,-, где г,- — ранг матрицы s& — fa9.
© Первое утверждение является прямым следствием инвариант-
инвариантности характеристического определителя det(/4—XI), ибо в
ортонормированием собственном базисе этот факт очевиден.
Второе утверждение является элементарным фактом теории си-
систем линейных уравнений. D
§ 5. УНИТАРНЫЕ ОПЕРАТОРЫ.
СПЕКТРАЛЬНОЕ ПРЕДСТАВЛЕНИЕ
1. Линейный оператор U, действующий в конечномерном
комплексном евклидовом пространстве Ео, называется унитар-
унитарным, если он сохраняет норму элемента |t/x|G =|д;|0.
*2. Если линейный оператор U сохраняет норму элемента,
то он сохраняет и скалярное произведение (Ux, Uy}e = (х, у}о.
© В евклидовом пространстве скалярное произведение может
быть выражено через норму с помощью так называемого поля-
поляризационного тождества: | х + у \%а — | х — у \2а = 2 (х, у)а +
+2 (у, х)а. Записав его также и для пары векторов к, iy, умно-
умножив результат на i и сложив оба тождества, получим \х + у \20—
159
— \x — у \l + i I x + iy \l — i I x — iy \% = A (x, y)G. Отсюда немед-
немедленно следует требуемое утверждение. 5
*3. Унитарный оператор обратим и обратный совпадает с
сопряженным U~l = U+.
© В соответствии со свойством 2 сопряженного оператора
имеем для произвольных векторов х, у: (Ux, Uy}a = (.U+Ux,y')a =
= (х, у)в- Отсюда видно, что < (U+U — /) х, у} = О, т. е. U+U =/.
Следовательно, оператор U+ служит левым, а значит и правым
(см. 7.2.4) обратным для U, т. е. выполнено U+ = ?/-'. D
*4. Оператор, обратный унитарному, унитарен.
Покажем теперь, что так же, как и в случае эрмитовых опе-
операторов, ортогональное дополнение всякого инвариантного под-
подпространства унитарного оператора U также является инва-
инвариантным относительно U. Предварительно докажем следующее
утверждение:
*5. Образ всякого инвариантного подпространства L унитар-
унитарного оператора U совпадает с ним самим: UL = L. Сужение
унитарного оператора на его инвариантное подпространство L
является унитарным оператором в L.
© Образ всякого инвариантного подпространства L является
подпространством, вложенным в L. Поэтому следует лишь убе-
убедиться, что dim t/L = dim L. Для этого выберем некоторый ба-
базис {еь е2, .. •, ek) {k = dim L) в L. Вследствие обратимости
оператора U набор {Ve\, Ue2, ..., Uek} линейно независим, и
значит dim UL ^ k. С другой стороны, из вложения t/L cz L
следует dim UL ^ k. Из последних двух неравенств видно, что
dim UL = k, UL = L. Второе утверждение теоремы очевидно. D
*6. Если подпространство L инвариантно относительно уни-
унитарного оператора U, то оно инвариантно относительно его
сопряженного U+ = U~\ и обратно.
*7. Ортогональное дополнение всякого инвариантного под-
подпространства унитарного оператора U также является его ин-
инвариантным подпространством.
*8. Всякое собственное число X унитарного оператора равно'
по модулю единице.
© Обозначим через х соответствующий X собственный вектор:
Ux = Хх. Тогда, полагая вектор х нормированным, имеем
X = {Ux, хУо = Ос, и-1х)о = Щ-1<х, х>а=(Х)-\
т. е. п=1. 5
Как и в случае эрмитовых операторов, утверждение 7 слу-
служит базой для построения спектрального представления. Имен-
Именно, верно следующее утверждение:
*9. Для всякого унитарного оператора U существуют орто-
нормированный базис {х\, х^, ..., хп} и набор комплексных чи-
160
сел %i, равных по модулю единице: |Я,|= 1, такой, что
UX — 2-i i=.i Xi \X, Xi/QXi, X €Е C,q.
При этом векторы xt являются собственными векторами опе-
оператора U, a Xi — его собственными числами. Унитарный опера-
оператор скалярен.
© Переходя к доказательству утверждения, выберем какое-либо
собственное число Xi (\X\\—1) и обозначим через Х\ отвечаю-
отвечающий ему нормированный собственный вектор оператора U.
Ортогональное дополнение подпространства Li, натянутого на
Х\, обозначим через Mi. Оно в силу 7 также инвариантно отно-
относительно U. Разложив произвольный вектор х в сумму х =
==(•*» Xi)aXi~\- PmiX, подействуем на него оператором U. При
этом
Ux = Я, (х, х1)ах1 + иРщх = Я, (х, хх)ахх + PKlUPMix.
Напомним, что сужение оператора Рм,?/ на Mi является уни-
унитарным оператором в Мь Это позволяет продолжить построение,
выделяя в Mi нормированный собственный вектор х2, и полу-
получить представление
ЦХ == К\ (X,
Здесь |А,2|=1 и М2 — ортогональное дополнение подпростран-
подпространства, натянутого на х\, х%. Если пространство Ео л-мерно, то,
сделав п шагов, получаем спектральное представление унитар-
унитарного оператора в виде Ux= ]C/=i ht(x, Xi)Qxt. 5
*10. Объединяя члены разложения, отвечающие одинаковым
собственным числам Я, и обозначая через Р% ортопроекторы на
соответствующие инвариантные подпространства, можно пере-
переписать формулу спектрального представления в виде U =
= На) AJV
Сделаем несколько заключительных замечаний о спектраль-
спектральных представлениях 4.10 и 5.10. Согласно этим формулам дейст-
действие эрмитова или унитарного оператора в евклидовом простран-
пространстве Eg можно представить следующим образом: все простран-
пространство Eg разбивается в сумму спектральных инвариантных под-
подпространств L%, отвечающих различным собственным числам X:
затем действие оператора сводится к умножению каждой ком-
компоненты разбиения на соответствующее собственное число X.
Это поясняет мотивы, по которым представления 4.10 и 5.10
названы спектральными. По тем же причинам называют спек-
спектральным и разложение (*). Оно может служить примером раз-
разложения по базису из подпространств. Ввиду того что подпро-
подпространства набора {L%} ортогональны (см. текст после 4.9) и в
6 Зак. 193 161
сумме дают все пространство ф?(Я)Ья = Еа, для разложения (*)
справедливо равенство Парсеваля, аналогичное 2.3:
Описанные спектральные разложения и представления назы-
называются ортогональными. Множество операторов, допускающих
такие представления, исчерпывается эрмитовыми, унитарными
операторами и функциями от них, которые легко определяются
с помощью спектрального представления так же, как это. было
сделано в 8.4.8 для общих скалярных операторов:
Отметим, что перечисленные классы операторов заведомо
относятся к числу скалярных, поскольку обладают полными
ортогональными наборами собственных векторов.
§ 6. КВАДРАТИЧНЫЕ ФОРМЫ
В ВЕЩЕСТВЕННОМ ЛИНЕЙНОМ ПРОСТРАНСТВЕ
До сих пор мы занимались исследованием линейных функ-
функций на линейном пространстве — форм и операторов. Нужды
анализа функций нескольких переменных требуют изучения не-
некоторых типов нелинейных функций на линейном пространстве.
Простейшими, после линейных, являются скалярные квадратич-
квадратичные функции — квадратичные формы. Квадратичная форма в
вещественном линейном пространстве Е получается, если в би-
билинейной форме s4- (х, у) положить х = у. Без ограничения
общности можно считать, что исходная билинейная форма —
симметрическая. Выбрав конкретный базис {ei}"=l в Е, можно
записать квадратичную форму через координаты вектора х в
этом базисе: si (x, x) = Y*i,k~\ aikVlk- В силу 1.3.31 пространство
Е можно считать совпадающим с К".
1. Симметричный тензор aik называется матрицей формы в
избранном базисе {е\,е2, ..., еп}.
2. Говорят, что квадратичная форма имеет нормальный вид
в данном базисе, если все внедиагональные элементы соответ-
соответствующей матрицы ||а,-й|| равны нулю: st-(x, *)=Z!/_i au (I'J-
Такая квадратичная форма называется нормальной.
Основной задачей теории квадратичных форм является при-
приведение их к нормальному виду. Для этого мы воспользуемся
уже развитым в евклидовом пространстве аппаратом спектраль-
спектрального анализа. Придадим рассматриваемому линейному про-
пространству какую-либо евклидову структуру, задав ее метриче-
метрической формой G{x, y)= Y,Hk)gikll4k = (x, У)а-
*3. Всякой квадратичной форме s4-(x, x) в вещественном
евклидовом пространстве Eg единственным образом сопостав-
162
ляется эрмитов в метрике G оператор Аа, такой, что его били-
билинейная форма на совпадающих аргументах совпадает с данной
квадратичной.
© Образуем из квадратичной формы s&(x, х) билинейную сим-
симметрическую форму
&(х. У) = j
Этой форме в соответствии с 3.1 отвечает оператор Аа, такой,
что $Ф(х, у) = (АаХ, у)а- Благодаря симметричности формы
оператор А оказывается эрмитовым. Действительно, вследствие
вещественности пространства имеем
s?(x, у) — (АоХ, у}о-=^-{у, х) = (Аау, х}а = (х, АоуУа- D
*4. Оператор Аа: Еа^-Еа задается следующей формулой:
Аа = G-'Ло, где G~'— оператор, обратный к оператору
G: Eg-»-Eq, определяющему метрику в Eg; Ао — оператор, дей-
действующий из EG в Eg, матрица которого относительно любой
пары сопряженных базисов совпадает с тензором формы si.
© Достаточно проверить, что билинейные формы операторов
Аа и G~]A0 совпадают. Билинейная форма оператора Ао по
определению в избранном базисе будет равна
(Аах, у) = si (х, у)=
Подсчитаем билинейную форму построенного оператора
i,k.t,s-\ l.s = l
*5. Квадратичная форма s?(x, x) имеет нормальный вид в
ортонормированном базисе, составленном из собственных век-
векторов оператора Аа.
© Поскольку оператор Аа эрмитов в метрике G, он обладает
ортонормированной системой собственных векторов {х?} и спек-
спектральным разложением Аах = ?)rt_ Xf (x, xf\oxf. Отсюда по-
получаем
п
Ж (х, х) = (Аах, х)а = J] Xf\ (x, x?)a\\
Здесь (х, х9\ = 1'а — суть координаты вектора х в базисе
a
i, х—
Собственные векторы xf и собственные числа if оператора
Ао определяются как решения задачи AGxf = G~lAoxf = Xfxf
(*f ф 0) или иначе; A^xf = XfGxf, Благодаря вещественности
6* - 163
Xf векторы xf можно считать вещественными. Собственные
числа Kf служат корнями «векового уравнения»: det(A0—XeG) =
= 0. Э
Сделаем замечания практического характера о приведении
формы к нормальному виду. При построении ортонормирован-
ного базиса собственных векторов оператора Аа поступают сле-
следующим образом:
Сначала находят корни векового уравнения. Все эти корни
непременно вещественны. Кратность rt корня векового уравнения
согласно 4.11 равна п — rang |Л3— XfG} и совпадает с размер-
размерностью соответствующего инвариантного подпространства, ri =
= dimPAcEG. Это означает, что для каждого корня Я? в под-
i
пространстве P%qEQ найдется ортонормированный базис из соб-
собственных векторов. Он получается ортогонализацией в G-мет-
рике какого-либо набора г, линейно независимых решений урав-
уравнения Аах = XfGx. Построив для каждого Xf набор собственных
векторов, полный в соответствующем собственном подпростран-
подпространстве РхаЕа, и объединяя наборы, отвечающие всевозможным
i
собственным числам A,f, получаем искомый базис, в котором
рассматриваемая квадратичная форма имеет нормальный вид.
Предложение 5 показывает, что данную квадратичную фор-
форму s?(x, х) можно привести к нормальному виду разными спо-
способами, используя различные евклидовы метрики G. Тем не
менее полученные в результате приведения нормальные формы
имеют следующее важное общее свойство {см. 7 далее).
Пусть s& {х, х) = Хг=1а/ (I1J — квадратичная форма в нор-
нормальном виде. Обозначим через п+, п~ и п° число положитель-
положительных, отрицательных и нулевых коэффициентов перед квадра-
квадратами переменных. Очевидно, что п+ 4- п° -(- пт = п.
6. Сигнатурой данной нормальной формы si-{x, x) =
= 2 i=i at (I'J называется тройка чисел (п+, п°, п~).
*7. Закон инерции квадратичных форм: сигна-
сигнатура нормальной формы, получаемой приведением данной фор-
формы к нормальному виду, не зависит от способа приведения.
© Пусть Ts (s = 1, 2) — две замены переменных Ts: Е ->- Щ,
x = T~lys (ys e R?, s = l, 2), выполненные с помощью обрати-
обратимых операторов Ts и приводящие форму sf(x, x) к различным
нормальным видам: ^ (х, jc)=2"_i "f^^^1!' 2).
Допустим, что сигнатуры полученных нормальных форм раз-
различны и равны соответственно (л+, «?, ns)(s~ ^' ^ ПРИ этом,
скажем, nf > п%. Обозначим через (N+, №s, N~) ^-прообра-
^-прообразы подпространств пространств R^, натянутых на элементы
L64
базиса, которым отвечают положительные, нулевые и отрица-
отрицательные коэффициенты а*. Очевидно, что N+ -\- N°-\- N~=E(s=
= 1, 2), причем s?{x, х) >0 при x<=N+, s?{x, x)<0 при лге
^№s-\-N~. Это означает, в частности, что подпространства
Л^+, N\-\-N2 имеют единственный общий элемент — нулевой.
С другой стороны, исходя из сделанного предположения
nf > п\, мы сейчас покажем, что их пересечение имеет поло-
положительную размерность. Действительно,
dim Nf==nf, dim (N° + N2~) = п — п+.
Кроме того.
п > dim {Nf + (№2 + N2)} = dim Nf + dim (№2 + N2) -
- dim {Nf fl (N1 + N2)} = n+ + (n - n+) -
Из последнего неравенства видно, что dim {jVi+ fi (^2 + Л^2~)} ^
^ nt — nt > 0, что и требовалось доказать.
Полученное противоречие показывает, что п+^п+. По-
Поскольку неравенство nt > nf исключено по тем же причинам,
что и обратное, остается единственная возможность: n+ = nf.
Рассматривая форму sii(x, x) — —бФ{х,х), мы видим, что
п~ = п? = nf ==nf. Суммируя это с первым результатом, за-
заключаем, что п\ = п\. Таким образом, сигнатуры обеих нормаль-
нормальных форм одинаковы. D
Доказанное утверждение позволяет классифицировать ква-
квадратичные формы в соответствии с сигнатурой. Именно, говорят,
что а) форма М-(х,х)—определенно-положительная, если сиг-
сигнатура ее нормального вида (п+, 0, 0), п+ = n = dimE; б) фор-
форма s?(x,x) — положительная, если сигнатура ее нормального
вида (п+,п°,0), п+, п° > 0; в) форма s?(x, х)— отрицательная,
если сигнатура ее нормального вида @, л°, п~), п°, п~ > 0;
г) форма s?(x,x)—определенно-отрицательная, если сигнатура
ее нормального вида @, 0, п~), n~ = n = dimE; д) форма
s?(x,x) — неопределенная, если сигнатура ее нормального вида
(п+, п°, п~), п+, п- > 0, п° ^ 0; е) форма s4- (x, х) — невырожден-
невырожденная, если сигнатура ее нормального вида такова, что п° = 0.
Мы уже встречались с определенно-положительной формой
в обличий метрической формы евклидова пространства. Невы-
Невырожденная квадратичная форма может служить метрической
формой псевдоевклидова пространства.
*8. В вещественном псевдоевклидовом пространстве Ео су-
существует ортонормированный базис'{е,-}"_р (е{, efe)G = eAft, е,=
= ±1. При этом количества (+1) и (—1) в последователь-
165
ности {б(}"„1 равны соответственно числам п+ и п~ в сигнатуре
(л+, 0, пг) невырожденной метрической формы < , ><з простран-
пространства Еа.
© Наряду с формой < , >g рассмотрим в пространстве Eg ка-
какую-либо вспомогательную евклидову метрическую форму
(х, у}о- Тогда форма < , >g отвечает эрмитов в метрике < , >о
оператор А, квадратичная форма которого совпадает с <, >о
(см. 3). Среди собственных чисел оператора А согласно
закону инерции нет нулевых. Пусть f\, f2, . ¦ ¦, fn+ — собствен-
собственные векторы, отвечающие его положительным собственным чис-
числам vp v2, ..., v2n+, a g[t g2 gn- — собственные векто-
векторы, отвечающие отрицательным собственным числам — щ,
— \i22 —ц2п_, образующие в совокупности ортонормиро-
ванный базис в пространстве Ео с метрической формой < , >о.
Для оператора А имеет место следующее спектральное пред-
представление:
п* п-
Лх = Z( v2 (х, fs) fs - Z I*? (x, gt) gt,
с помощью которого его билинейная форма (Ах, г/>0 = (х, у}0
записывается в виде
ft ft
2t(x, gt)(gt, У).
Векторы {\lf1, v2f2 vn+fn+; ц^,, \i2g2 ..., \in-gn-}, будучи
ортогональны в евклидовой метрике <,>о, одновременно обра-
образуют ортонормированный базис относительно метрической фор-
формы < , >0: (vsfs> vs'fsf)a = 8ss', (v-tgt, Vt'gt')o= ~ &tt', (\t>tgt, vsfs)a=-
= 0. 5
Оказывается, что спектральные характеристики оператора,
порождающего квадратичную форму, можно удобно выразить
через аналитические свойства квадратичной формы.
*9. Минимальный принцип: Пусть {ht}i = l, X\ < Х2 <
< Х3 • ¦ • < hk — занумерованные в порядке возрастания соб-
собственные числа эрмитова оператора А, порождающего квадра-
квадратичную форму s? (х, х) = (Ах, x)g, и Ni, N2 Nk — отвечаю-
отвечающие им собственные подпространства. Тогда
Xi= inf (Ax, x)Q(x, x)q\
Я2= inf (Ax, x)a(x, x)q\ ...
xl Ni
inf \ (Ax, x)a(x, x)qX
160
© Для всякого вектора х (х е Е) в соответствии с теоремой
о спектральном разложении эрмитова оператора квадратичную
форму можно записать в виде (Ах, х)о= E*-iM^«*lo- 3Десь
Pi — ортогональные проекторы на взаимно ортогональные соб-
собственные подпространства N,-, отвечающие различным собствен-
собственным числам Xi. В силу равенства Парсеваля имеем также
(х, х)а= X/=i \Pix \o- Отсюда непосредственно видно, что
так так PiX — О при (>l,*eNi. Далее:
(Ax, х)а\х\а2 = inf {^K\Pix\о
= l2 + i\Z
X v.i =3
Наконец,
inf (Ax,
*10. Для того чтобы форма $&(х, х) была определенно-но-
ложительной, необходимо и достаточно, чтобы при некотором
положительном а для всякого . вектора х было выполнено
<s4-{x, x)^a\x\2a. При этом наибольшее возможное значение а
в последнем неравенстве совпадает с минимальным собствен-
собственным числом оператора Аа, порождающего форму.
Мы видели, что, пользуясь минимальным принципом, можно
последовательно находить собственные числа оператора. Сле-
Следующее утверждение позволяет в принципе сразу найти соб-
собственное число Xs, не вычисляя предыдущие, путем решения так
называемой минимаксной задачи.
167
*11. Пусть {Xi) (Xi ^ X2 ^ ... ^Xn)— собственные числа
эрмитова оператора А, занумерованные в неубывающем поряд-
порядке; тогда
= тах min (Ах, х)в(х,
Здесь внешний max вычисляется по всевозможным подпростран-
подпространствам Lk-i (dim Lft-i = k—1); он достигается на подпростран-
подпространстве L^_1 = L {е,-}?г}, натянутом на собственные векторы
{еи е2, ..., eft-i}, отвечающие предыдущим собственным чис-
числам.
0 Взяв в качестве L^-i указанное подпространство Ь^_1( полу-
получим в силу 9 оценку
max min (Ax, x)Q (x, x)Z
-1.
: min (Ax, x)g(x, x)q
XXL
-1
л
"ft-1
С другой стороны, сузив множество векторов {х}, на кото-
котором вычисляется min, мы заведомо не понизим величину max
min. Именно, возьмем в каче-
качестве допустимого множества
{х} векторы, ортогональные к
{ек+\, ...,еп}. Среди таких
векторов при любом выборе
Lfc_i все же найдутся ортого-
ортогональные к Lft_j. Действительно,
это условие ортогональности
можно записать в виде одно-
однородной системы уравнений, ис-
используя базис {/ь/г, ••-, fk-i}
в W_i: <x,/s>G = 0 (s=l,2,...
...,k—1). Записывая эти
уравнения в базисе {?,}, полу-
полуРис. 8.
чим
«=» 1,2, ..., k—1). Поскольку число k неизвестных {?'} бо-
болев числа k—1 уравнений, эта система заведомо имеет нетри-
нетривиальные решения: {!*},-? — ][)i3=11 ?*• Эти решения образуют
подпространство, которое мы обозначим через {х}. Оценим ве-
величину max min (Ax, х)в(х, х)а на указанном подпростран-
Ч-\ х±Ч-\
0ТВ8 {х}, т. в. выбирая х из {х}:
max min
^{^m^w?}
168
Объединяя полученные оценки, находим max min {Ах, *HХ
Х(*. x)q ' = кк. Теорема доказана. 3
Доказанные результаты теории квадратичных форм имеют про-
простую геометрическую интерпретацию, которая становится осо-
особенно наглядной в случае определенно-положительных форм.
12. Эллипсоидом в евклидовом пространстве Ео (рис. 8) на-
называется множество всех векторов, на которых данная опреде-
определенно-положительная форма s?{x, x) обращается в единицу
st-(x, х) = 1.
*13. Всякое сечение эллипсоида подпространством является
эллипсоидом меньшей размерности.
© Пусть L — подпространство. Квадратичная форма $?(х, х)
очевидным образом порождает квадратичную форму на
L: s?{x, x) (xgL). Эта форма является.определенно-положи-
является.определенно-положительной, поскольку исходная форма была такой. 3
14. Величины
max (x, хУ!л — аь ....
min max (х, *)? = ak, ..
называются главными полуосями эллипсоида, а векторы {еи ...
,.., ен, •••}, на которых достигаются указанные экстремумы,—
главными ортами.
*15. aJ — V1» •••> а1 = К1>
© 0*= max (x, x)G = {min(Aax, х)в(х,
= / max mm (Аах, x)q(x,
Здесь Aq — эрмитов оператор в EG, отвечающий квадратичной
форме s?{x, x)\ {k^ —его собственные числа. D
Обсудим геометрический смысл последнего утверждения. Ве-
Величина
max (х, х)а= / min (AQx, х)а(х, х)
х J- Lk -1
равна максимальной полуоси эллипсоида, получаемого сече-
сечением исходного эллипсоида подпространством L^-_, размер-
размерностью п — k-\-\. Утверждение 15 показывает, что минималь-
минимальное значение максимальной полуоси получается в случае, когда
в качестве подпространства Lk-\ берут сумму собственных под-
подпространств, отвечающих собственным числам fa, Я,- < Л*,
169
Часть II.
ФУНКЦИИ МНОГИХ ПЕРЕМЕННЫХ
Глава 1
ФУНКЦИИ НА НОРМИРОВАННОМ ПРОСТРАНСТВЕ
В первой части книги мы сконцентрировали внимание исклю-
исключительно на изучении функций, обладающих простейшей алге-
алгебраической структурой, — линейных и полилинейных. Всякая
функция этого класса автоматически оказывается «непрерыв-
«непрерывной»: если аргумент ее претерпевает в некотором смысле «малое
изменение», то и значение функции меняется мало.
Собираясь заниматься изучением более широких классов
функций, придадим в первую очередь точный смысл словам
«малое изменение». Это можно сделать многими способами.
Мы выберем один из самых простых и наиболее близких нашей
«трехмерной» интуиции и в то же время тот, который окажется
пригодным для достаточно обширного класса ситуаций.
§ 1. НОРМИРОВАННОЕ ПРОСТРАНСТВО.
МНОЖЕСТВА В НОРМИРОВАННОМ ПРОСТРАНСТВЕ
1. Линейное пространство Е над числовым полем (полем ве-
вещественных или комплексных чисел) называется нормирован-
нормированным, если на нем задана числовая неотрицательная функция
| |: х—*\х\, обладающая следующими свойствами: a) Jjc| = О
выполнено лишь при х — 0; б) |са| = |а||х| (х е Е, а — эле-
элемент поля); в) |л:4-г/|«?:|*| + |г/|.
2. Величина | лг| называется нормой элемента х. Величина
\х — у\ называется расстоянием между элементами х, у и обо-
обозначается через dist (x, у).
3. Диаметром множества М называется число sup|x — */| =
х, !/еМ
= diam М. Множество М называется ограниченным, если
diamM < оо.
4. Множество {х: dist (я, г/)< е} называется е-окрестностью
элемента у и обозначается В (у, е).
170
5. Пусть {*„}*_, — некоторая последовательность элементов
пространства Е. Говорят, что она сходится к элементу у «по
норме» или «сильно», если для всякого е (е > 0) найдется та-
такой номер Ne, чтох„еВ(г/, е) (т. е. \хп — у\<г) при n>Nt.
При этом пишут: у = Нт хп.
6. Последовательность {хп}™=1 называется фундаментальной,
если для каждого е (е > 0) можно указать такое число NE, что
\хп — хт\ < е при п,т> Ne.
*7. Всякая сходящаяся по норме последовательность фун-
фундаментальна.
8. Последовательность {хп} называется стационарной, если
все ее элементы, начиная с некоторого номера, одинаковы:
хп = хт (п, т~> N).
9. Линейное нормированное пространство Е называют пол-
полным (банаховым), если всякая фундаментальная последователь-
последовательность в нем имеет предел.
*10. Линейное пространство R1 полно относительно нормы
|x[ = A:sgrix Это следует из построений Дедекинда *.
Полноту R1 обычно интерпретируют как отсутствие «дырок»
на числовой оси.
Свойства общих банаховых пространств во многих отноше-
отношениях аналогичны свойствам числовой оси, в частности в них
тоже отсутствуют «дырки». Таким образом, эти пространства
более полно, чем нормированные, отвечают нашему жизненному
опыту. В дальнейшем мы будем иметь дело, главным образом,
с банаховыми пространствами, а зачастую и с конечномерными,
например с нормированными соответствующим образом про-
пространствами вещественных и комплексных вектор-столбцов R"
и С".
11. Множество В@, R)= {x: \x\<.R} в банаховом простран-
пространстве называется шаром радиусом R с центром в точке 0. Поло-
Положительное число R называется при этом радиусом шара 6@,/?).
*12. Для того чтобы множество было ограниченным, необхо-
¦ димо и достаточно, чтобы оно содержалось в некотором шаре.
13. Множество G в банаховом пространстве называют от-
открытым, если вместе с каждой своей точкой х0 оно содержит
некоторую ее б-окрестность.
*14. Окрестность всякой точки есть открытое множество.
15. Множество F в банаховом пространстве В называется
замкнутым, если его дополнение B\F открыто.
*16. Следующие утверждения эквивалентны в банаховом
пространстве: 1) множество F замкнуто; 2) всякая фундамен-
фундаментальная последовательность элементов множества F имеет
предел в F.
* Мы уже отмечали в Предисловии, что рассчитываем на читателя, имею-
имеющего представление об элементарной теории вещественных чисел.
171
© Докажем, что из первого утверждения следует второе. Пусть
{xn)Z=\ — произвольная фундаментальная последовательность
элементов замкнутого множества F. Поскольку пространство В
банахово, последовательность {хп} имеет предел х0. Допустив,
что Хо содержится в открытом множестве B\F, мы придем к
заключению, что некоторая окрестность В(х0, е) не пересе-
пересекается с множеством F и тем более не содержит точек после-
последовательности {хп}, вопреки предположению \\т хп = х0. Сле-
га->°о
довательно, х0 е F.
Докажем теперь, что из второго утверждения следует первое.
Пусть Хо — произвольный элемент дополнения a:ogB\F. По-
Покажем, что некоторая его окрестность В(х0, е) целиком содер-
содержится в B\F. Действительно, допустив обратное, мы смогли бы
построить последовательность сжимающихся окрестностей
{В(хо, е„), е„->0}, каждая из которых содержит хотя бы одну
точку хп из F. Поскольку хо ф. F, то все элементы хп можно
считать различными и последовательность {хп} оказывается
сходящейся к х0. Но тогда в силу второго утверждения х0 е F
вопреки выбору х0. D
*17. Объединение любого числа открытых множеств явля-
является открытым множеством и пересечение любого числа замк-
замкнутых — замкнутым.
Пересечение конечного числа открытых множеств является
открытым множеством, и объединение конечного числа замкну-
замкнутых — замкнутым.
Требование конечности во втором утверждении является су-
существенным. Подберите соответствующие примеры.
*18. Пусть Fn— семейство замкнутых множеств, упорядо-
упорядоченных по вложению Fi гэ F2 гэ ... id F» id ..., diam Fn->- О
при rt->oo. Тогда пересечение этого семейства P|™=iFn состоит
из единственной точки.
© Действительно, выбирая в каждом из множеств Fn одну
точку хп, рассмотрим последовательность {хп}. Она является
фундаментальной, поскольку \хп — xm|^diamFn. Все точки
xm, m ^ п, этой последовательности принадлежат замкнутому
множеству Fn, поэтому и предел ее Хо содержится в Fn- Таким
образом, пересечение ("IJ^F,, непусто. Если бы оказалось, что
в пересечении содержится еще и точка г/о, то было бы выпол-
выполнено \хо — «/o|^diamFre для каждого п, т. е. \х0 — уо\=О. D
19. Точка х множества М называется внутренней, если она
содержится в М вместе с некоторой своей окрестностью:
В {'х, е) с= М.
20. Подмножество всех внутренних точек данного множества
М открыто. Оно называется внутренностью множества М и обо-
обозначается IntM.
172
21. Точка хеЕ называется точкой прикосновения множе-
множества М с Е, если в каждой ее окрестности содержится хотя бы
одна точка множества М.
22. Точка х <= Е называется предельной точкой множества
МсЕ, если в каждой ее окрестности содержится бесконечное
множество точек множества М.
23. Точка у множества М называется изолированной, если
существует такая ее окрестность, в которой нет точек множе-
множества М, отличных от у.
*24. Точка прикосновения множества М, не являющаяся пре-
предельной точкой, является изолированной.
25. Объединение всех точек прикосновения множества М на-
называется замыканием множества М и обозначается через М.
*26. Замыкание произвольного множества замкнуто.
0 Дополнение Е\М замыкания множества М состоит из точек
{х}, каждая из которых имеет окрестность В (х, ех), не пересе-
пересекающуюся с М. Тем более В (х, е,х/2) не пересекается с М, т. е.
содержится в Е\М. D
27. Множество дМ == М Г) Е\М называется границей мно-
множества М.
*28. dM =
© E\M = E\IntM. D
29. Множество F называется компактным (или компактом)
в банаховом пространстве В, если всякая последовательность
его элементов содержит подпоследовательность, сходящуюся
к элементу этого множества по норме В.
*30. Всякое компактное множество ограничено и замкнуто.
Приведенное определение 29 описывает самое существенное
свойство компактных множеств. Однако его трудно проверить.
Поэтому часто пользуются другим (эквивалентным) определе-
определением (см. 35). Чтобы сформулировать его и доказать эквива-
эквивалентность, введем ряд новых понятий.
31. Подмножество {хп} множества F называется е-сетью
(множества F), если для всякого элемент х (х е F) найдется
такой элемент хт, что dist (лг, хт) <С е.
32. е-покрытием множества F называется набор шаров
{B(ys,e)}, такой, что Fc={jB(ys, е).
S
*33. Если множество F имеет е-сеть {х„}, то набор шаров
{В(хп, е)} образует е-покрытие F.
Если множество F допускает е-покрытие {В(уп, е)}, то эле-
элементы {хп}, выбранные по одному из каждой непустой порции
FflB(«/n, e), образуют 2е-сеть множества F.
34. Множество F называется предкомпактным, если для
каждого е оно имеет конечную е-сеть (или конечное е-покрытие).
*35. Следующие утверждения равносильны: 1) множество F
компактно; 2) множество F предкомпактно и замкнуто.
173
© Докажем, что второе утверждение следует из первого. Оче-
Очевидно, что всякое компактное множество замкнуто. Допустим,
что данное компактное множество не является предкомпактным,
т. е. при некотором е не имеет конечной е-сети. Это означает,
что для всякого ./V при произвольном выборе ./V точек {хп}^1
из множества F всегда найдется точка xn+i, такая, что
\хп — xn+\\~^ e. Пользуясь этим обстоятельством и начиная с
N=1, легко можно построить бесконечную последовательность
{хп} точек множества F, отстоящих друг от друга не менее чем
на е: \х„ — хт\~^ г (пфт). Ясно, что такая последователь-
последовательность не содержит никакой сходящейся подпоследовательности,
вопреки предположению о компактности.
Докажем теперь, что первое утверждение является след-
следствием второго. Допустим, что множество F предкомпактно и
замкнуто. Пусть {В{ут, е)}—некоторое конечное е-покрытие,
а {хп} — произвольная бесконечная последовательность элемен-
элементов F. Очевидно, что один из шаров, скажем В(г/Ье), содержит
бесконечное число членов последовательности {хп}. Эти члены
{х^} образуют подпоследовательность, которую назовем под-
подпоследовательностью первого порядка. Взяв теперь некоторое
конечное е/2 покрытие {В (у^, е/2)}, отметим тот из его шаров,
скажем В (/Д", е/2), который содержит бесконечное число членов
подпоследовательности {х^} первого порядка. Эти члены {хЩ
образуют подпоследовательность второго порядка. Продолжая
построение по индукции, получим набор последовательностей
{хп}> W}- {х<п]}> • • • > кажДая из которых служит подпоследо-
подпоследовательностью предыдущей, причем \х{^— л;(Д'|<е/25. Выбирая
первый элемент из первой последовательности, второй — из вто-
второй и т. д., построим новую — «диагональную» подпоследова-
подпоследовательность {^п)}™„1> Для которой выполнено I х^ — ^)|<
<e/2max("'m). Последнее означает, что построенная «диагональная*
последовательность фундаментальна. Следовательно, в силу
замкнутости F она имеет предел в F. В то же время она слу-
служит подпоследовательностью исходной последовательности, ко-
которая была выбрана произвольным образом. Это означает, что
множество F компактно. D
Примененный в 35 прием построения «диагональной» после-
последовательности носит название «диагонального процесса»; он ча-
часто встречается в анализе.
Приведем несколько простых, но важных примеров компакт-
компактных множеств.
*36. Сегмент [0, 1] есть компакт в R1 относительно нормы
\х\ = х sgnx.
© Для доказательства следует воспользоваться полнотой К1
(замкнутостью сегмента [0, 1]) и построить его конечную е-сеть,
например: {хп}, хп = п([1/е] + 1)~!, п = 0, 1, ..., [1/е] + 1. 3
174
*37. Всякое замкнутое множество F с [О, 1] компактно в R1.
*38. Всякое ограниченное замкнутое множество в R1 ком-
компактно.
Следующие примеры связаны с пространством R*.
*39. Пространство R", снабженное нормой | х \ж = max {| х11},
является полным нормированным (банаховым) пространством.
0 Не представляет труда проверить аксиомы нормы. Предо-
Предоставим это читателю. Докажем лишь полноту пространства R".
Пусть {хк} — фундаментальная последовательность в R":
\хи — xm\ <. е, k, m>N(e). Тогда каждая из координатных по-
последовательностей {х1А (г = 1,2, ..., п) также является фун-
фундаментальной в R1:1 xlk — xlm I < е, k, m > N (е), и, следовательно,
имеет предел, скажем у1. При этом выполнено неравенство
\хс — У1\<ъ> k> Ы(ъ). Это означает, что последовательность
{Xk} имеет предел у = {у],у2, ..., у"). Вследствие произвольно-
произвольности фундаментальной последовательности {xk} доказанное утвер-
утверждение означает полноту пространства R" с нормой | |«>. 5
*40. Единичный куб Кл в R", Ki = {х: 0 ^ х' ^ 1}, компактен.
Следует доказать замкнутость единичного куба, затем по-
построить его е-сеть для данного е.
В конечномерных банаховых пространствах удобное описа-
описание компактов дается обращением предложения 30. Например
*41. Всякое ограниченное замкнутое множество в R" ком-
компактно.
В бесконечномерных пространствах ограниченность и за-
замкнутость уже не гарантируют компактности. Наиболее универ-
универсальной характеристикой компактных множеств является их
описание в терминах так называемых «открытых покрытий».
42. Семейство {Gv} открытых множеств называется откры-
открытым покрытием множества М, если для всякой точки множе-
множества х е М найдется такое множество Gv из этого семейства,
которое содержит ее, х е Gv.
43. Открытое покрытие {Gv} называется конечным, если оно
состоит из конечного числа множеств.
*44. Лемма Бор ел я: Для того чтобы множество М было
компактным, необходимо и достаточно, чтобы из всякого его
открытого покрытия можно было выделить конечное.
© Необходимость. Если множество М компактно, то для
каждого е существует его конечное е-покрытие {Вп (е)}^=1 от-
открытыми шарами В„(е) = В(хп, е) (см. 35). Наряду с этим по-
покрытием рассмотрим покрытие соответствующими замкнутыми
шарами В,г(е). Замкнутое множество Bn(e)f| М = М„(е) назо-
назовем порцией компакта М в шаре В„(е). Ясно, что каждая из
порций Мге(е) сама является компактом и каждому конечному
е-покрытию компакта М отвечает представление М в виде
№
суммы конечного числа порций М= (J^]Mn(e), диаметР каж-
каждой из которых не превосходит 2е.
Пусть теперь {Gv}— какое-либо открытое покрытие ком-
компакта М. Допустим, что из него нельзя выделить конечного.
Тогда, представив М в виде объединения конечного числа пор-
порций, отвечающих какому-либо е-покрытию {В„(е)}п=1, мы при-
придем к выводу, что по крайней мере одна из порций МЛо(е) та-
такова, что ее нельзя покрыть никаким конечным подсемейством
семейства множеств {Gv}. Назовем указанную порцию, исклю-
исключительно для краткости, необъятной. Являясь компактом, эта
порция допускает конечное покрытие семейством {В„(е/2)}
открытых шаров Вп(е/2) радиусом е/2. Этому покрытию отве-
отвечает представление Мге„ (е) в виде суммы компактных порций,
по крайней мере одна из которых должна быть необъятной,
скажем Mn,,ra, (е/2). Диаметр этой порции не превосходит е/2.
Продолжая построение, мы получим бесконечную последова-
последовательность необъятных компактных порций, упорядоченную по
вложению: M.nj> (е) гэ Мп,п, (е/2) гэ Мп^пг (е/22) гз . . . Согласно
предложению 18 пересечение этой последовательности состоит
из единственной точки хо-
Построенная таким образом точка х0 принадлежит множе-
множеству М и, следовательно, содержится в одном из открытых мно-
множеств GVo вместе с некоторой своей окрестностью В{х0, р). По-
Поскольку диаметр необъятной порции Мпо...п (е/2р) не превосхо-
превосходит е/2р-' и хоеМП()...п (е/2р), ясно, что эта порция при
е/2р~1 < р содержится в В (х0, р) и, следовательно, покрыта
множеством Gv» вопреки «необъятности». Значит, наше перво-
первоначальное предположение о невозможности выделить из дан-
данного открытого покрытия {Gv} компакта М конечного подпо-
подпокрытия было неверным.
Достаточность. Допустим, что множество М таково, что
из всякого его открытого покрытия можно выделить конечное.
Покажем, что в этом случае оно замкнуто и при всяком е имеет
конечную е-сеть, или конечное е-покрытие.
Проверим, что дополнение М' = В\М открыто. Пусть у—
некоторая точка из М'. Для каждой точки хеМ построим шар
В(х, \х — у|/2). Семейство {В(х, \х — у|/2)} является открытым
покрытием множества М и согласно предположению содержит
конечное подсемейство {B(xs, \ xs — у |/2}s=1, также являющееся
покрытием М. Ясно, что б-окрестность В (у, 6) точки у,
6 < min \xs — г/1/2 не пересекается с шарами B(xs, \xs — y\/2),
S
входящими в указанное конечное подсемейство. Поэтому точ-
точка у содержится в М' вместе со своей окрестностью В (г/, б),
и значит множество М' открыто.
Совсем легко проверить существование конечного е-покры-
тия М. Действительно, семейство всех открытых шаров (В (л;, е)}
176
является открытым е-покрытием множества М. Выбирая из него
конечное подсемейство, также покрывающее М, получаем- нуж-
нужное утверждение. D
Свойства открытости и замкнутости характеризуют «микро-
«микроскопическую» структуру множеств. Свойство компактности уже
описывает структуру множества «в целом»: компактные множе-
множества по своим свойствам близки к ограниченным замкнутым
множествам конечномерных пространств: для всякого компакта
в банаховом пространстве при каждом г существует конечно-
конечномерное (даже конечное!) множество, служащее его г-сетъю.
Выбирая это множество «наилучшим» образом, можно прийти
к важной числовой характеристике компактов в банаховом про-
пространстве В.
45. Число dn = inf inf | x — у \, где внешний inf вычис-
ляется по всем множествам М„, лежащим в n-мерных подпро-
подпространствах банахова пространства В, называется я-поперечни-
ком компакта М.
Оценки п-поперечников различных компактов дают наиболее
прямой способ исследования распределения собственных чисел
операторов, действующих в этих пространствах.
Часто оказывается полезной еще одна «топологическая» ха-
характеристика множеств в банаховом пространстве, описыва-
описывающая их структуру «в целом».
46. Назовем конечное семейство открытых шаров {В„} =
={В(яп, е)}^=1 последовательно сцепленным, если их попарные
последовательные пересечения непусты: Ъ\Г\^>2Ф0, В2 Л В3 ф
Ф0, ..., Влг-i Л Влг=й=0; при этом будем говорить, что точки
f
i, xN) соединены цепью {Bn}
47. Множество называется связным, если любая пара его
внутренних точек может быть соединена цепью, целиком при-
принадлежащей этому множеству.
48. Открытое связное множество называется областью.
*49. Граница области получается по правилу 6М = Л?\М.
В заключение этого параграфа предложим несколько задач.
*50. Поле комплексных чисел С превращается в полное нор-
нормированное линейное пространство, если ввести норму следу-
следующим «естественным» образом: | a: j = ([ Re ^ 12-f-1 Im г J2) '^.
*51. Каждое из перечисленных далее выражений, составлен-
составленных из координат вещественного или комплексного вектор-
столбца х, удовлетворяет всем аксиомам нормы:
|лг|0О = тах \х'\,
i
1, 2, ... п.
177
Пространство R" всех вещественных вектор-столбцов (и про-
пространство С" комплексных) полно при каждой из перечислен-
перечисленных нормировок.
§ 2. НЕПРЕРЫВНЫЕ СКАЛЯРНЫЕ
(ЧИСЛОВЫЕ) ФУНКЦИИ
НА НОРМИРОВАННЫХ ПРОСТРАНСТВАХ
В этом параграфе описаны самые общие свойства непрерыв-
непрерывных функций, заданных на множествах нормированного про-
пространства и принимающих значения в поле вещественных или
комплексных чисел ¦— функций многих переменных. Искушен-
Искушенный читатель легко заметит, что все доказываемые далее пред-
предложения являются обобщениями соответствующих «одномер-
«одномерных» утверждений (касающихся функций одной вещественной
переменной). Нам не понадобятся ссылки на эти утверждения.
Тем не менее читатель, знакомый с соответствующим «одномер-
«одномерным» материалом, окажется, очевидно, в преимущественном
положении.
1. Скалярной функцией f, заданной на некотором множе-
множестве U (в нормированном пространстве), называется отображе-
отображение этого множества в поле скаляров К: / : U —»- К. При этом
говорят, что данная функция принимает значения в поле ска-
скаляров. Множество значений функции f обозначают символом Kf.
Функция, принимающая значения в поле вещественных или
комплексных чисел, называется числовой и соответственно ве-
вещественной или комплексной.
Числовые функции (отображения]) будем обозначать латин-
латинскими малыми буквами f,g, ... . При этом значения этих функ-
функций при фиксированном аргументе х (числа) обозначаются сим-
символами f(x),g(x), ... .
Важнейшим понятием анализа является понятие непрерыв-
непрерывной функции.
2. Числовая функция /, заданная на множестве U в нормиро-
нормированном пространстве X, называется непрерывной в точке х0 этого
множества, если для всякого положительного е можно указать
такую окрестность В (х0, 6) точки х0, что для всех х из U[~)B (x0, 6)
выполнено |/(*)—f(xo)\<Zs. При этом точка х0 называется
точкой непрерывности функции f.
Отметим, что множество чисел {у:\у — f(*o)|<e} является
окрестностью в нормированном пространстве R1 (или С) точ-
точки f(xo). Это позволяет нам сформулировать понятие непрерыв-
непрерывности целиком в терминах окрестностей.
- 3. Числовая функция /, заданная на множестве U в норми-
нормированном пространстве X, называется непрерывной в точке Хо
этого множества, если для всякой окрестности В(/(л:о),е) чи-
числа, Д*ч) можно указать такую окоестаость В{хо,8) точки.xQ,
что образ ее части, лежащей в U, целиком содержится в
В(/(л-о),е):/(иПВ(хо,б))с=В(/(хо),е).
Следующее определение непрерывности эквивалентно двум
предыдущим:
4. Числовая функция /, заданная на множестве U в норми-
нормированном пространстве X, называется непрерывной в точке Хо
этого множества, если для любой последовательности {хп},
хп cz U, сходящейся к точке х0< \imxn — x0, предел lim f (xn)
П->оо ГС->оо
существует и равен f(x0).
*5. Определения 3 и 4 эквивалентны.
0 Если lim хп = х0, то для каждого е, е > 0, существует
номер Л^е), такой, что д'„еВ(а'о, e)f|U при n>N(e). Тогда
на основании 3 f(xn)^ В(/(л'о), е) при n>./V(e), т. е. опреде-
определение 4 выполнено.
Обратное утверждение докажем от противного. Предполо-
Предположим, что 4 выполнено, а 3 не имеет места. Это означает суще-
существование такого числа е0, что при каждом б (б > 0) в окрест-
окрестности В(хо,б) точки хо найдется хотя бы одна точка х&
(х6фхо), такая, что \f(x6) — f(xo)\'>eo. Выберем 6i > 0 и
укажем точку x6l из В {х0, б,), такую, что | f {xSi) — f (х0) | > е0,
а затем положим б2 = |л:б,—хо\/2. Действуя по индукции, по-
построим последовательность точек {хьЛ, x&k е В (хо, 6k), 6ft =
= jx6fe — лго |/2. Ясно, что lim x&k = хо. В то же время
\f{x(,k) — / (хо)| > е0, вопреки предположению, чтоПт f(xn) = f(x0)
для любой последовательности хп, сходящейся к Хо. Получен-
Полученное противоречие доказывает импликацию 4 — 3. 3
В анализе -наибольший интерес представляют функции, не-
непрерывные в каждой точке области, где они заданы,— области
определения.
6. Числовая функция / называется непрерывной на обла-
области U в нормированном пространстве X, если она непрерывна
в каждой ее точке.
7. Числовая функция называется равномерно непрерывной
на множестве (области) U в нормированном пространстве X,
если для каждого е можно указать такое б, что для всякой
точки л; из U выполнено /(U П В (х, б))с: В(/(л"), е).
Моокно попытаться характеризовать качество непрерывности
функции f в области U с помощью функции, сопоставляющей
данному е максимально возможное в данной области б, либо
с помощью «обратной» функции, сопоставляющей данному б
максимальное приращение /.
8. Колебанием o)f(U) числовой функции / на множестве О
назовем диаметр множества ее значений:
со, (U) = ^sup ц | f (x) - f (у) | - diam / U.
179
9. Пусть / — равномерно-непрерывная числовая функция на
области U. Модулем непрерывности функции f называется опре-
определенная на [0, diam U] функция
«fF) = , sup \f{x)-f{y)\.
\х-у\<&,
x.yeU
*10. Модуль непрерывности равномерно-непрерывной функ-
функции является монотонно возрастающей (неубывающей!), непре-
непрерывной в нуле функцией переменной б на отрезке [0, diam U]
и при дополнительном условии выпуклости области U удовлет-
удовлетворяет оценке а; (б + б') ^ ю/ (б) -f- a>f (б').
0 Монотонность следует из того, что при б << б'
sup |/(*)-/(г/)|< sup \f(x)-f(y)\.
\x-y\<& |x-jf|<a'
x, у eV x, у е и
Непрерывность в нуле следует из требования равномерной не-
непрерывности: согласно ему колебание функции на множестве
\х—?/|<б (х, yeU) может быть сделано сколь угодно ма-
малым, если выбрать достаточно малым число б. Следовательно,
limo)/F) = 0 = ©f @).
Выпуклая область вместе с каждой парой точек х, у содер-
содержит и всякую точку соединяющего их отрезка: и = \ix + vy.
jn —(— v = 1, |я ^ 0, v ^ 0. Это позволяет, пользуясь неравен-
неравенством треугольника, записать оценку: \f(x) — f (#) | =?^ |/(*) —
— f(u) l + lf (")— f(y) I. из которой следует, что 0/F) ^ со/(|лб) +
-f-o)f(v6), \x + v— 1, ц^зО, v^O. D
Ясно, что модуль непрерывности показывает максимально
возможную «скорость» изменения функции в данной области и
тем самым дает сведения о качестве непрерывности функции.
Более того, верно следующее утверждение:
*11. Если для данной функции /, заданной на области U
в нормированном пространстве X, неотрицательная монотонно
возрастающая функция со?F)= sup \f{x)—f(y)\
\xy]<6XyU
\y]<;,ya
@<6<diamU) непрерывна в нуле lim &f (б) = 0, то функ-
6->0
ция f равномерно непрерывна в области U.
*12. Следующие утверждения равносильны: 1) функция f,
заданная на области U, не является равномерно-непрерывной;
2) существует положительное число во, такое, что для любого S
найдется шар диаметром- б, на котором колебание функции /
превосходит е0.
Свойства непрерывности, равномерной непрерывности и огра-
ограниченности не являются независимыми. Их взаимные связи опи-
описываются следующими тремя утверждениями, которые справед-
справедливы в банаховом пространстве.
*13. Теорема Кантора: числовая функция, непрерывная
на компактном множестве (компакте), равномерно-непрерывна.
180
© Если непрерывная функция f, заданная на компакте М, не
была бы равномерно-непрерывной, то нашлось бы число ео, та-
такое, что для всякого б удалось бы в силу 12 указать пару то-
точек х, х'', \х — х'|<6 из М, таких, что \{(х) — f(xf)\^e0. Задав
последовательность {6k}, lim bk = 0, построим две
^
щиеся бесконечные последовательности точек компакта: {*&},
{**}> \xk — x'k\<6k, таких, что | f (xk) — /(*01*^ еэ- Пользуясь
компактностью, из последовательности {хк} можно выбрать
подпоследовательность {Xks}, сходящуюся к точке компакта хо.
Соответствующая подпоследовательность ix'ks} сходится к
той же точке. При этом по построению выполнено условие
/(*&)— / (*fes) | ^ еэ- В то же время согласно предположению
о непрерывности функции / должны иметь место равенства
lim / (xk) = / (*„), Hm / (xk) = f (*>).
Полученное противоречие показывает, что непрерывная
функция f, заданная на компакте, непременно равномерно-не-
равномерно-непрерывна. Э
*14. Теорема I Вейерштрасса: числовая функция, не-
непрерывная на компакте, ограничена.
© Предположив противное, построим последовательность {хп}
точек компакта М, на которой рассматриваемая числовая функ-
функция / неограничена: |/(х„)|>л. Пользуясь компактностью,
можно выбрать из {хп} подпоследовательность {хп j, сходя-
сходящуюся к точке компакта Хо. При этом вследствие непрерывно-
непрерывности должно быть выполнено равенство lim f (xn ) = f(x0). Это
означает, в частности, что последовательность f(xn\ ограни-
ограничена, в то время как по построению \f{xn\\>ns. Полученное
противоречие доказывает теорему. D
*15. Теорема II Вейерштрасса: вещественная непре-
непрерывная функция на компакте достигает своей верхней и ниж-
нижней грани.
© Пусть /—рассматриваемая функция, М — компакт, на ко-
котором она задана, а= sup f(x) — ее точная верхняя грань. То-
х<= М
гда существует последовательность {хп} точек компакта М, та-
такая, что lim f (xn) — а. Пользуясь компактностью, выберем из
гг-»оо
{хп} подпоследовательность {хПз}, сходящуюся к некоторой
точке х0 компакта М. При этом вследствие непрерывности
функции / выполнено равенство а = Hm f (xn ) = f {x0).
S-><x> V SJ
Аналогичным образом доказывается, что достигается и ниж-
нижняя грань. 3
Первым по важности применением доказанных свойств не-
непрерывных числовых функций является теорема об эквивалент-
181
ности различных нормировок в конечномерном нормированном
пространстве (над числовым полем).
В конце предыдущего параграфа были приведены примеры
различных нормировок в Rn(C"). Возникает естественный воп-
вопрос: всегда,ли сходимость последовательности векторов по од-
одной норме влечет сходимость по другой? Пусть X — линейное
нормированное пространство и \ |, | |'— две разные нормы
в X.
16. Нормы | | и | |' в X называются эквивалентными, если
существуют две положительные постоянные у, Г, такие, что
для всякого вектора х из X выполнено условие vl*l ^ 1*1'=?^
^Г|х|. При этом пишут | | X | |'.
*17. Если нормы | |, [ |' эквивалентны и |х„|->0 при л—>оо,
то и |хп|'->0 при п—> оо.
*18. Если пространство X полно при норме | |, то оно полно
и при любой другой норме, эквивалентной | |.
Если множество М замкнуто (открыто, компактно) при нор-
норме | j, то оно замкнуто (открыто, компактно) и при любой
другой норме, эквивалентной [ |.
Из перечисленных фактов видна важность описания классов
эквивалентных норм в конечномерном линейном пространстве.
*19. Все нормы в конечномерном линейном пространстве над
полем вещественных чисел эквивалентны.
© Пусть X — нормированное пространство, dim X = п, с нор-
нормой \х\, {?/}"„!—какой-либо базис в Х,х = Х,-=1 ?'е/> {?'}—коор-
{?'}—координаты вектора х. Сопоставим вектору х число \х\е = max \\1\.
Нетрудно проверить, что функция \х\е удовлетворяет всем ак-
аксиомам нормы. Например, пусть х = ^li=lllet, у = Х;„1 ц'е1-
Тогда | х -|- у \е = max | g'+V |^ max 11' | + max | г\' \. Аналогичным
1<< 1<< l<i<
образом проверяются и другие аксиомы. ,
Для доказательства теоремы достаточно убедиться, что
норма |х| эквивалентна норме )^|в. Прежде всего, заметим, что
функция \х\ ограничена и непрерывна по норме \х\е:
Поскольку единичная сфера {x:|x|e=l} есть ограниченное
замкнутое множество в той же норме, то по теореме II Вейер-
штрасса непрерывная функция \х\ достигает на ней нижней
грани а= inf |*| —l^l. Ясно, что а > 0, ибо в противном
случае оказалось бы |xi| = 0, т. е. ^ = 0. Это несовместимо
с |JCi \е = 1. Поэтому для всех х е X:
182
Вместе с (*) это дает нужное утверждение а|л:|е <; |*|=^
< 52"., \е,\-\х |e. D
При доказательстве последнего утверждения был использо-
использован координатный изоморфизм? в: *->{?'}, устанав-
устанавливающий взаимно однозначное соответствие, при выбранном
базисе, между вещественным пространством X и пространством
R". По сути дела, мы провели доказательство теоремы об экви-
эквивалентности норм, действуя в пространстве R". Другой при-
пример использования координатного изоморфизма дает следующее
утверждение.
*20. Всякое конечномерное вещественное нормированное про-
пространство полно (банахово).
0 Пусть {ег-}"=1 — фиксированный базис в X, * = X"=i Vei>
{xm}m = i — некоторая фундаментальная последовательность в X:
\xi — лгт|^е; l,m^N(e), N(s)-*-oo при е->0. Согласно пре-
предыдущей теореме \Txi — Txm\x ^ г/а; 1,т^Ы(г). Мы уже
знаем, что пространство R" полно относительно нормы | |от
(см. 1.39). Поэтому существует такой вектор io = (?j,iQ, • • ., Eq)>
что
Построив с помощью обратного координатного изоморфизма
вектор лг0 = Г~'?о = 2j=i 1оег ^ ^» получим на основании пре-
предыдущей теоремы при т ^ N(e) \ Т~% — T~llm | < X"=i I ei IX
X | lo — im L ^ X'-i' e'' e^a-¦'^аким образом, мы показали, что
фундаментальная последовательность хт = Т~1\т сходится к
вектору х0 = Т~1%0. Это означает, что пространство X является
полным. D
Не представляет никакого труда доказать утверждения, ана-
аналогичные 19 и 20, для комплексных конечномерных пространств.
Предоставим это читателю.
В заключение этого параграфа обсудим вопрос о связи
свойств непрерывности числовой функции на области, лежащей
в нормированном пространстве, и на сечениях этой области раз-
различными подпространствами. Приведем прежде всего пример,
показывающий, что сформулированный вопрос нетривиален.
Именно рассмотрим в квадрате Ki = {(х, у): — 1 ^ х, у ^ 1} на
вещественной плоскости R2 функцию
/(*> У) = х*+у2 >
доопределив ее значением 0 в точке @,0).
' *21. Функция f равномерно непрерывна на промежутке
\[— i, 1] по каждой из переменных х, у при фиксированной дру-
183
гой переменной. В то же время она не является непрерывной
функцией на Кь
0 Всюду, кроме точки @,0), на прямых y = tx функция /
принимает значения 2t/(l -\-t2). Отсюда следует, что в точ-
точке @, 0) она заведомо не является непрерывной. Непрерывность
на всех горизонтальных (у = с) и вертикальных прямых (х = с)
проверяется непосредственно. Э
Тем не менее непрерывность функции на сечениях («следов»
функции) при дополнительных условиях влечет непрерывность
«в целом».
22. Будем говорить, что функция f, заданная на квадрате
Ki = {(х, у): —1 ^ х, у ^ 1}, непрерывна по переменной х рав-
равномерно по переменной у, если она равномерно непрерывна по х
при каждом значении у и если соответствующий модуль непре-
непрерывности допускает равномерную оценку с помощью монотон-
монотонной непрерывной в нуле функции фх:
<»*(«)= sup { sup \f(x, y)-f(x', y)\), <M0)«0.
1<<1 l'\<6
*23. Следующие утверждения равносильны: 1) числовая
функция / равномерно непрерывна в R2 на квадрате Ki; 2) чис-
числовая функция f(x,y) непрерывна на квадрате Ki по перемен-
переменной х равномерно по у и непрерывна по у равномерно по х.
© Докажем импликацию 1->-2. Если функция непрерывна на
квадрате Кл, то она обладает модулем непрерывности cof(б).
При этом выполнено условие
со,(б)> sup { sup \f(x, y)-f(x' у)\} =
1<J/<1 \х-х'\<6
1< /<1
Поскольку функция со; (б) непрерывна в нуле, lim cof F) = 0, то
и функция <Вх(б) непрерывна в нуле; монотонность со* F) оче-.
видна. Проводя то же рассуждение с заменой у на х, получаем
искомое утверждение.
Обратное утверждение следует из того простого факта, что
шар {(х, у): dist{(x,y), (x', у')} < 6} содержится в каждой из
полос \у — г/'|<б, \х — *'|<6, и вытекающей из него оценки:
Мв)= sup \f(x, y)-f{x', у')\^
dist {{х, у), (*', уГ))<6
(х, у), {х', у') е Ki
< sup | f (x, у) — f (x, y') I + sup \f(x,yf) —
\У-У'\<6, \x-x'\<&,
- 1<X<1, -1<(/, !/'<l 1< <1 1<
-fix', У')\ = <»у
Действительно, монотонность функции со; заведомо имеет место.
Непрерывность в нуле следует из непрерывности в нуле функ*.
ций со* и сон, 5
184
Отметим, что формулировка утверждения 23 может быть
усовершенствована в следующем направлении: во втором ут-
утверждении достаточно требовать лишь непрерывности f(x,y)
по переменной у равномерно по х и обычной непрерывности по
переменной х при каждом у. Отсюда получается с помощью
прежней оценки непрерывность функции f в точке (х', у'), а за-
затем на ее основании с помощью теоремы Кантора 13 доказыва-
доказывается равномерная непрерывность функции f на замкнутом квад-
квадрате Кь из которой следует и наличие у функции f непрерывно-
непрерывности по х равномерно по у.
Предоставляем читателю провести самостоятельно полное
доказательство таким образом усовершенствованного утверж-
утверждения.
Разумеется, предложение 23 и его усовершенствованная
версия могут быть обобщены на функции большего числа пере-
переменных в различных областях. Предоставляем читателю и это
проделать самостоятельно.
§ 3. ВЕКТОР-ФУНКЦИИ И ОПЕРАТОР-ФУНКЦИИ
В дальнейшем мы будем иметь дело главным образом с
функциями, значения которых лежат в некотором конечномер-
конечномерном линейном нормированном * пространстве над числовым по-
полем. В случае числовых функций это пространство одномерно.
Функции, значения которых лежат в линейном (векторном)
пространстве, называются вектор-функциями. В дальнейшем из-
изложении встречаются и функции, значениями которых являются
линейные операторы, действующие из одного нормированного
пространства в другое. Они носят название оператор-функций.
Аналогично тому факту, что задание вектора в пространстве
с выделенным базисом сводится к заданию набора скаляров —
его координат, задание вектор-функции эквивалентно заданию
набора скалярных функций.
Вектор-функции в дальнейшем мы будем обозначать обычно
малыми полужирными латинскими буквами в отличие от ска-
скалярных функций, для которых сохраним прежние обозначения.
1. Пусть f — вектор-функция, заданная на области U и при-
принимающая значения в конечномерном линейном пространстве В.
Скалярные коэффициенты в разложении значения функции по
выделенному базису {ег}"=1 в пространстве В: f (х) = ?"_, fl [x) et
называются координатными функциями функции f.
*2. Задание на области U вектор-функции f со значениями
в конечномерном пространстве В эквивалентно заданию п =
= dim В скалярных функций, определенных на U, и указанию
базиса, в котором эти функции служат координатными функ-
• Т. в, банаховом в силу 2.20.
185
циями для f. В указанном базисе координатные функции \1
определяются однозначно.
Аналогичное утверждение справедливо и для оператор-функ-
оператор-функций, которые мы будем обозначать большими полужирными
латинскими буквами F, F(x).
*3. Задание на области U оператор-функции F, принима-
принимающей значения в пространстве операторов, действующих из од-
одного линейного пространства X в другое Y, эквивалентно зада-
заданию dim X X dim Y скалярных функций {flk} и указанию пары
базисов {е/} с: X, {gk} a Y, таких, что в каждой точке х обла-
области U матрица {f'k} служит матрицей оператора F(x) относи-
относительно этой пары базисов.
Наибольший интерес для нас представляют непрерывные
вектор-функции и оператор-функции. Нетрудно ввести понятие
непрерывной вектор-функции, действующей из одного нормиро-
нормированного пространства в другое.
4. Вектор-функция, заданная на множестве U в нормирован-
нормированном пространстве X и принимающая значения в нормированном
пространстве Y, называется непрерывной в точке Хо из U, если
для каждой окрестности B(f(*o),e) в пространстве Y можно
указать окрестность В(х0, б) точки х0, такую, что f (U[]B(x0, б)) с:
cB(f(*0),e).
*5. В случае, когда U — область, последнее условие можно
писать в виде f (В(*о, б))с: B(f (хо), е) для всех, достаточно ма-
малых б.
*6. Следующие утверждения эквивалентны: 1) функция f,
заданная на множестве U в линейном нормированном простран-
пространстве X и принимающая значения в линейном нормированном про-
пространстве Y, непрерывна в точке Хо (*0eU);2) lim Цхп)=
xn+xo-xnsV
= f(*o) для всякой последовательности хп, сходящейся к
точке Xq.
© Оставляя проверку прямой импликации 1->2 читателю,
обратимся к доказательству обратной импликации 2-»-1. Будем
рассуждать от противного, аналогично тому, как мы делали это
при доказательстве соответствующего скалярного утверждения
в 2.5. Предположив, что первое утверждение не выполнено, для
некоторого положительного е0 построим последовательность хп,
сходящуюся к точке х0, такую, что \Цхп) — f(xo)|>eo. Это
означает, что второе утверждение тоже не выполнено, т. е. от-
отсутствие первого свойства влечет отсутствие и второго. Таким
образом, из второго следует первое. 3
7. Вектор-функция называется непрерывной в области U,
если, она непрерывна в каждой ее точке.
Ранее мы уже отмечали, что эквивалентность всевозможных
нормировок конечномерного линейного пространства чрезвы-
чрезвычайно важна для описания класса непрерывных функций, нвпрв-
186
рывных в точках и на областях в этом пространстве. Придадим
этому замечанию точную форму.
*8. Пусть f — вектор-функция, заданная на множестве U
(U с: X) и принимающая значения в линейном нормированном
пространстве Y с нормой | |. Если | ['— какая-либо иная нор-
нормировка пространства Y, эквивалентная нормировке | |, и х0 —
точка непрерывности функции f относительно нормы | |:
lLm | f (x) — f (х0) | = 0, то х0 есть точка непрерывности функции f
также и относительно нормы | \'\ !im | f (х) — f {х0) Г = 0.
*9. Функция, принимающая значения в конечномерном ли-
линейном нормированном пространстве Y и непрерывная в обла-
области задания U при данной нормировке области значений, непре-
непрерывна и при всякой другой нормировке в области значений.
© Доказательство следует из предыдущего утверждения и
предложения 2.19. D
Последнее утверждение позволит нам в дальнейшем, не опа-
опасаясь недоразумений, говорить просто о непрерывных функциях,
принимающих значения в конечномерном пространстве над чис-
числовым полем.
В заключение этого параграфа сделаем замечание о том,
каким образом можно свести задание функции на конечномер-
конечномерном линейном нормированном пространстве X над числовым
полем R (С) к заданию набора числовых функций на простран-
пространстве R" (или С" соответственно) (/i = dimX). Для этого вос-
воспользуемся координатным изоморфизмом: T'.x->Rn (С) и за-
зададим функцию iRn на R" (соответственно fcn на С") формулой
*10. Следующие утверждения эквивалентны: 1) функция
iRn непрерывна на R"; 2) функция f непрерывна на X.
§ 4. ЕСТЕСТВЕННАЯ НОРМИРОВКА ПРОСТРАНСТВ
ЛИНЕЙНЫХ ФОРМ И ОПЕРАТОРОВ
На практике часто приходится рассматривать функции, зна-
значения которых лежат в пространстве линейных форм над дан-
данным нормированным пространством или в пространстве линей-
линейных операторов, действующих в нем. Прежде чем обсуждать
свойство непрерывности таких функций, мы должны нормиро-
нормировать указанные пространства. Разумеется, нормировку в них
можно ввести независимо, не связывая ее с нормировкой исход-
исходного пространства, тем более, что в случае, когда это простран-
пространство конечномерно, конкретный вид нормировки не играет роли
при описании класса непрерывных функций. Все же полезно вве-
ввести «естественную» нормировку указанных пространств,
187
1. Пусть X — конечномерное нормированное пространство,
/ — линейная форма над X. Определим величину [/]* формулой
I/1* = sup 1 (/, х)\.
\х\<1
*2. Определенная формулой 1 величина |/|* конечна для
всякой линейной формы над данным пространством X и удов-
удовлетворяет всем аксиомам нормы, а пространство всех линейных
форм над X превращается в полное линейное нормированное
пространство, если в этом пространстве принять |/|* за норму
элемента.
© Вследствие эквивалентности нормировок в X достаточно убе-
убедиться в конечности величины |/|* при каком-нибудь специаль-
специальном выборе нормы. Выбрав некоторый базис {е<} в X, опреде-
определим норму в X как максимум модуля координат вектора х
в этом базисе: I # L = max | \11. Получим оценку величины
|/|*. Разлагая / по базису {f'}, биортогональному к {е,},
/ = Xi=i'«f' (л = dim X), получим
\Ц* = sup I (/, x) I = sup
I x loo< 1 max|5'|«
I hi1
Неотрицательность величины |/|* очевидна. Невырожденность
следует из того, что всякая линейная форма, равная нулю на
единичном шаре пространства X, равна нулю тождественно.
Однородность проверяется с использованием свойства линей-
линейности:
|а/|= sup \{al, x)\= sup \a\\(l, *)| = |a||Z|\
Остается проверить неравенство треугольника
\l + l'\= sup \A + Г, х)\ = . sup I (/,jc)+.(/', *)K
< sup \(l, x)\+ sup |f, *)| = |/Г + |/'Г.
1*1Ю<1 i^i^1
Наконец, полнота полученного нормированного пространства
следует из 2.20. Э
3. Величина |/|*= sup | (/, х) | называется нормой линейной
формы /.
*4. Норма |/|* линейной формы / служит наилучшей (мини-
(минимальной) константой в неравенстве | A,х) \ ^ const |л:| (Vx).
0, Легко видеть, что
|(/, х)\=*\х\\A, л:/|л:|)|< sup \(l, z)\-\x\ = \ir-\x{.
188
Поскольку в определении нормы линейной формы стоит точная
верхняя граница sup | (I, г) |, то никакая меньшая постоян-
постоянная не обеспечивает оценки 4. Действительно, если d<C\l\*, то
всегда найдется вектор х (|л:|=1), такой, что | (/,х)\> d. >
*5. Норма вектора \х\ служит наилучшей константой в
оценке | (/, х) \ ^ const | /1 *.
© Доказательство основано на двойственности (Е*)* = Е. >
В дальнейшем мы всегда будем считать, что в пространстве
линейных форм над данным нормированным пространством уже
введена естественная нормировка с помощью соотношения 1.
Естественная норма (/(*, как видно из утверждения 4, является,
в сущности, максимальным «коэффициентом растяжения», от-
отвечающим данному линейному отображению I. Это наводит на
мысль ввести естественную норму линейного оператора, дей-
действующего из линейного нормированного пространства X в ли-
линейное нормированное пространство Y следующим образом:
6. Пусть X, Y —два линейных нормированных пространства;
А — оператор, действующий из X в Y. Обозначив нормы в этих
пространствах символами | |х, | |у соответственно, введем ве-
величину — «коэффициент растяжения», отвечающий данному опе-
оператору:
|| Л || = sup | Ах |у.
7. Если величина |И|| конечна, то оператор А называется
ограниченным.
*8. Множество всех ограниченных операторов, действующих
из линейного нормированного пространства X в линейное нор-
нормированное пространство Y над тем же числовым полем с есте-
естественными операциями сложения и умножения на скаляры, яв-
является линейным пространством.
© Следует проверить лишь конечность «коэффициента рас-
растяжения» линейной комбинации операторов: ЦосЛ + рВ|| ^
||||Д|||Р|||||
<||||||+|Р|
*9. Величина ||Л|| на линейном пространстве операторов, дей-
действующих из X в Y, удовлетворяет всем аксиомам нормы. Если
пространства X, Y конечномерны, то соответствующее простран-
пространство операторов, снабженное указанной нормировкой, является
полным нормированным пространством.
0 Свойства неотрицательности и невырожденности нормы за-
заведомо выполнены. Проверим лишь неравенство треугольника:
|| А + В || = sup | Ах + Вх |Y < sup (| Ах |Y +1 Вх |Y)
sup \Ax[Y+ sup
189
Если пространства X и Y конечномерны, то соответствующее
пространство операторов конечномерно, и его размерность равна
dim XX dimY. В силу теоремы 2.20 оно является полным. Э
10. Величина ||Л||= sup |Л*|у называется нормой опера-
тора А.
*11. Величина ||Л|| служит наилучшей константой в неравен-
неравенстве \Ax\y ^ const|x|x.
Следующее утверждение сводит вычисление нормы к оценке
билинейной формы оператора:
*12. Пусть А—оператор, действующий из одного конечно-
конечномерного нормированного пространства X в другое конечномер-
конечномерное нормированное пространство Y; | |х, | |y — нормы в этих
пространствах; 11^, I \\ — естественные нормы в сопряженных
пространствах. Тогда
\(l, Ax)\.
0 Доказательство этого утверждения нельзя считать вполне
тривиальным. Тем не менее мы предоставим его читателю, за-
заметив лишь, что следует воспользоваться двумя предыдущими
фактами, а также тем обстоятельством, что «естественная»
норма линейной формы над X* в пространстве (X*)* совпадает
с нормой соответствующего вектора исходного простран-
пространства X. 5
Практически очень важно уметь вычислить или оценить
норму линейной формы или оператора, зная ее координаты или
матрицу оператора. Ограничимся оценкой норм линейных форм
и операторов в вещественных пространствах R".
*13. Определим норму в пространстве R" формулой | х \х —
= тах]*Ч где х1 — координаты вектора в стандартном ба-
t
зисе {?,}"_[, е1 = $/ (I, s=l, 2, ..., п.).
Тогда естественная норма линейной формы /, заданной своим
разложением по биортогональному базису {/А}^=1, / = Х"=1 hfk»
вычисляется по правилу 1 / 1^ = X"=i I h I — 11 ii-
© Действительно,
\l L = sup | (/, x) | = sup
*14. Следствие;
J x L = sup | (l,x) \,
190
*15. Пусть {а*} — матрица оператора А, действующего из
пространства R" с нормой типа | |оо в пространство Rm с ана-
аналогичной нормой. Тогда
= max
© Получим сначала оценку нормы:
||j4|L= sup \AxL =
= max sup
I M
I "I
max
(=1
Для доказательства искомого равенства теперь достаточно ука-
указать вектор х Aх|оо=1), такой, что | Лл: 1^ = max 2;_ila*l"
Выберем k = k0 из условия Х/^ИМ^ max X;=ila?l и по"
строим вектор хй = (х\, х\, ..., х^) (^ = sgna*°). Легко про-
проверяется, что Ахо\ — max Xt=i|a?|- 5
1 < fe< m
Сформулируем несколько несложных утверждений, которые
можно рассматривать как задачи к настоящему параграфу.
*16. Пусть | |i и | |2 — две какие-либо нормы в R". Эти
нормы индуцируют в пространстве операторов R"XR" соответ-
соответственно две операторные нормы: [| А \\{ = sup \Ax\\ и ||Л||2==
= sup | Ах\2. Если Tl^li<kl2^r|x|b то ¦уГ1И111^НЛ||2^
I х ь<1
l\\A
*17. Определим норму в пространстве R" равенством
e;}i/
Покажите, что естественная операторная норма операторов,
действующих из R™ в себя, допускает оценку
*18. Для того чтобы последовательность операторов Л(т):
R"-vRra сходилась при щ—^оо к нулю по какой-то операторной
норме, необходимо и достаточно, чтобы все последовательности
\а\ (т)\ матричных элементов стремились к нулю при т->-оо:
{а^(т)}->-0> т-»-оо, 1<г, k^.n.
*19. Сформулируйте и докажите аналоги утверждений 13—18
для С".
Множество ограниченных линейных операторов, действу-
действующих из нормированного пространства X в нормированное про-
191
странство Y, благодаря введению нормировки превратилось
(см. 1.1) в линейное нормированное пространство.
Интересно, что естественная нормировка операторов оказы-
оказывается хорошо согласованной с алгебраической структурой этого
пространства операторов.
*20. Пусть X, Y и" Z — линейные нормированные простран-
пространства, пусть Л— линейный оператор из X в Y и В — линейный
оператор из Y в Z. Тогда норма оператора В A: X->Z удовлет-
удовлетворяет неравенству ||ВЛ||^||5|||И11
© Действительно,
= sup \(BA)x\= sup
< sup (||?||.[Л*|) = ||?|| sup \Ax | = || fl||-|| А ||. ]>
|*К 1 UK l
•21. Для оператора Л: Х-+Х имеем ||ЛК1|Л!|П (п =
= 1,2,3, ...).
Рассмотрим наиболее простой случай ограниченных линей-
линейных операторов, отображающих линейное нормированное про-
пространство в себя. При этом возникает новая алгебраическая
структура, которая часто встречается в математике и физике,
например в квантовой механике.
22. Банахово пространство, в котором введена ассоциатив-
ассоциативная бинарная операция умножения элементов, согласованная
с линейными операциями (осЛ -f- |3B)C = аАС -f- РВС, С(аЛ +
-f (Ш) = аСА + $СВ, называется банаховой алгеброй, если для
нормы произведения выполняется оценка |ЛВ| ^ |Л | • |В|.
*23. Алгебра линейных операторов А: Х->-Х, dimX = я •< схэ
с нормой 10 является банаховой алгеброй.
§ 5. НЕПРЕРЫВНЫЕ ФУНКЦИИ
НА НОРМИРОВАННЫХ ПРОСТРАНСТВАХ
Приступим, наконец, к обсуждению свойств непрерывных
вектор-функций и оператор-функций. Мы ограничимся рассмот-
рассмотрением лишь вектор-функций, поскольку для нас сейчас суще-
существенно лишь то, что рассматриваемая функция принимает
значения в некотором конечномерном линейном нормированном
(полном) пространстве над числовым полем.
*1. Для того чтобы вектор-функция, принимающая значения
в некотором конечномерном линейном нормированном простран-
пространстве X, была непрерывна, необходимо и достаточно, чтобы все
ее координатные функции были непрерывны.
0 Если функция f непрерывна и {ej^™ х—базис в простран-
пространстве X значений f, а {/г}Д™ — биортогональный базис, то коор-
координатные функции (см. 3.1 и 4.1.24 из первой части) находятся
с помощью формулы f' = (l\f). Оценивая приращение функции
192
при изменении аргумента, получим (см. 4.4)
I/'W-/'(* +А*) 1 = 1 (/'
Норма приращения функции стремится к нулю при Д*-»-0 со-
согласно условию непрерывности: \Цх)—f (x -f- Ах) | х -*¦ 0 при
|Дх|->0. Отсюда следует непрерывность координатных функ-
функций. Обратно, если координатные функции непрерывны, то
вследствие конечномерности пространства X имеем
dim X
I f (*) - f (x + №1 =
ei(fi(x)-ft(x
dim X
< max | et |x ? | f (x) - fl (x + A*) | -> 0
при Дх->0. ]>
Пусть {ег}™=1 — базис в пространстве, где лежит область
определения U функции f, х = ^1=1х'е1—разложение произ-
произвольного вектора х из U по этому базису.
2. Одномерным следом функции f на прямой, параллельной
оси х', назовем функцию одной скалярной переменной: f0 (я1) =
= f(*J, x\, ..., х'о'\ х1, x'Q+l xfy при фиксированных про-
прочих переменных: {х°3} {sф1).
*3. Если функция f непрерывна в точке х0, то все ее одно-
одномерные следы непрерывны. Обратное неверно.
0 | f0 (х'о + Дд;') — f0 (^) | = | f (л;0 + е.Ал"') — f (л;0) | -»- 0 при
Дх'-vO. Обратное заключение неверно, как показывает уже
скалярный пример 2.21. Ъ
Простейшей непрерывной вектор-функцией является линей-
линейная функция.
*4. Линейная функция, определенная на конечномерном ли-
линейном нормированном пространстве и принимающая значения
в конечномерном линейном нормированном пространстве, непре-
непрерывна.
© Пусть X, Y— конечномерные линейные нормированные про-
пространства (над числовым полем); f: X-vY — линейная функция
из X в Y. Благодаря конечномерности пространств X, Y доста-
достаточно доказать утверждение теоремы лишь при специальном
выборе норм в X и Y. Выделив в X и Y базисы {е,}, {gk}, опре-
определим нормы в X и Y следующим образом:
dim X
х • Z-1 х с/, | х jv — I х jY ^ max | x |,
m X
dim У
У— Z Ук8к, \Ук = \У hr,~= max |/|.
k=l I < к < dim Y
7 Зак. 193 193
Относительно пары базисов {е,}, {gk} функция f задается мат-
рицей {/?):
рицей }
dim Y dim X
Оценим норму
| f (лг) [Y ^ max
k < dim Y
dim X
I j
dim X
max I |f?|-l*|x.
dim Y i =
Отсюда следует, что функция f непрерывна в точке 0. Вслед-
Вследствие линейности она тогда непрерывна и в люббй другой
точке пространства X. Доказательство завершается примене-
применением 2.19. 1)
*5. Для того чтобы линейное отображение /4:X->-Y было
ограниченным (т. е. соответствующий линейный оператор А
имел конечную норму), необходимо, чтобы оно было непрерывно
в каждой точке пространства X, и достаточно, чтобы оно было
непрерывно хотя бы в одной точке этого пространства.
© Если соответствующий оператор А ограничен sup }Ax\y =
\х\ <1
=|| А || < оо.то отображение А :х-~*-Ах непрерывно в точке х — 0
в силу предложения 4.11: \Ах—0||y ^||Л|| |д;|х, а тогда оно не-
непрерывно и во всякой другой точке х': \Ах — Ах'\у^ЦЛЦ \х —
у'\ v
Обратно, пусть отображение А непрерывно в некоторой
точке х0. Тогда функция А :х—>-Ах вследствие линейности непре-
непрерывна во всякой другой точке х'. Действительно, \Ах — Ах'\ч=
= [Л (л: — х' + х0) — Ахо\ч-+О при х~*-х'. Следовательно, функ-
функция А:х-+Ах непрерывна на единичном шаре и по первой из
теорем Вейрштрасса ограничена на нем, т. е. sup | Ах |у=.-|| Л ||<
I х | < 1
< 00.
Таким образом, линейному непрерывному хотя бы в одной
точке отображению отвечает ограниченный линейный опера-
оператор. D
В дальнейшем нам будет полезен один признак обратимости
линейного оператора, формулируемый в «метрических» терми-
терминах,— в терминах нормы.
*6. Пусть / — тождественный оператор в линейном нормиро-
нормированном пространстве X. Если линейный оператор Г:Х->-Х удов-
удовлетворяет условию ИЛ|<< 1, то оператор /—Т обратим и для
нормы его обратного (/—Г)-1 выполнена оценка ||(/—jT)~'II
(imiI
^()
0 Согласно теореме Фредгольма (см. I, 4.5.15), чтобы убе-
убедиться в существовании обратного, достаточно проверить, что
уравнение (/ — Т)х = О имеет лишь тривиальное (нулевое) ре-
решение. Действительно, предположив, что справедливо равен-
равенство х = Тх (х Ф 0), можно" записать оценку 0 = | х\ — \ Тх | ^
194
^s(l — ||ГII) \x\, из которой следует х = 0 вопреки предполо-
предположению.
Значение обратного оператора (/—Г)-1 на любом векторе
уЕХ находится как решение иу уравнения (/ — Т)иу = у. Мы
уже знаем, что это уравнение разрешимо. Норма обратного мо-
может быть вычислена по правилу ||(/ — T)~l\\= sup | ии \ и слу-
жит наилучшей константой в оценке: \иу\ ^ const- \у\. Это по-
позволяет оценить ее с помощью неравенства A — ||Г||) \иу\ ^
< A — Т)иу\ = \у\, откуда следует, что || (/— Г)-'|К A —
- 1Л1)-1- D
Убедимся в том, что свойство непрерывности является в опре-
определенном смысле наследственным.
7. Пусть f — функция, область определения которой U ле-
лежит в линейном нормированном пространстве X, а значения —
в линейном нормированном пространстве Y (f : U —* Y) и g —
функция, область определения которой V лежит в Y и содержит
Ш, а значения — в линейном нормированном пространстве
Z(g : V—>-Z). Композицией g°f функций { и g называется опре-
определенная на области U функция: (g ° f) (х) = g(f (x)).
*8. Композиция непрерывных функций непрерывна.
© Пусть {хп} — произвольная последовательность из U, сходя-
сходящаяся к пределу х0 (xoeU). Тогда lim f (xn) = i (x0) и
limg[f(*n)]=g(f(*0)). D
*9. Линейная комбинация пары непрерывных функций, име-
имеющих общую область определения, непрерывна.
© Доказательство следует из 8 и 4. I
*10. Пусть f — непрерывная вектор-функция, заданная на об-
области U линейного нормированного пространства X и принима-
принимающая значения в линейном нормированном пространстве Y
(f:U->-Y), и G — непрерывная оператор-функция, заданная на
области U в пространстве X и принимающая значения в про-
пространстве линейных операторов, действующих из простран-
пространства Y в пространство Z (G:U->-YXZ). Тогда значение Gf
оператор-функции G на элементе f есть непрерывная функция
на области U.
© Используя линейность оператора G, запишем приращение
отображения Gf при переходе из точки хо {х0eU) в точку х
в виде
(Gf) (*) —(Gf) (*o) = O(jc)f (*)— G(jco)f (*<>)=¦
= [0(х)-0(х0)]Цх)+п(хо)[Цх)~ПхоI
Пользуясь оценкой 4.11, получим
(Gf) W-(Gf) (^oXIIGW- G(xo)\\\t(x) | +
193
В силу непрерывности G и f в точке х0 имеем G(x)— G(*0)-»-0
и Цх)— f(*0)->0 при х-+ хь. Следовательно, (Gf) (^)-^(Gf) (хо)-+О
при х-+х0. D .
Сформулируем важные частные случаи последней теоремы.
*11. Если функция f:U->Y и числовая функция A,:U->R
непрерывны в точке х0 е U, то их произведение Xi: U->-Y также
непрерывно в точке х0.
* 12. Если оператор-функции G:U-^YXZ и F:U->XXY
непрерывны в точке х0, то их произведение — оператор-функция
GF : U -*- X X Z — также непрерывно в точке х0.
В 2.7 мы ввели в рассмотрение класс числовых равномерно-
непрерывных функций. Совершенно аналогично определяется
равномерная непрерывность и связанные с ней понятия в общем
случае. Обозначим через Вх(х, б) ^-окрестность точки х в ли-
линейном нормированном пространстве X.
13. Функция f:U->Y называется равномерно-непрерывной
на множестве U, если для всякого е можно указать число б,
такое, что для всякой точки х из U выполнено f (Uf)Bx(x, б)) с:
cBY(fW,B).
Понятия колебания функции, модуля непрерывности и про-
простейшие свойства модуля непрерывности B.8—2.10) непосред-
непосредственно обобщаются на случай функций, принимающих значе-
значения в нормированном пространстве; нужно лишь заменить норму
типа «максимум модуля» в области значений, употребляемую
нами в случае числовых функций, на норму пространства Y.
Например:
14. Пусть f — равномерно-непрерывная функция на области
U (f:U->Y). Модулем непрерывности функции f называется
определенная на [0, diamU) функция o)f (ср. 2.9):
щ F)= sup |f(x)-f(Olv
\х-х' 1<6
*15. Следующие утверждения равносильны (ср. 2.12);
1) функция f: U->Y не является равномерно-непрерывной; 2) су-
существует положительное число е0, такое, что для любого б най-
найдется шар К диаметром б, на котором колебание функции f
превосходит во:
sup |f(x)-f(x')|Y>e0.
Доказанные в 2.13—2.15 фундаментальные факты теории
непрерывных числовых функций имеют прямые аналоги в тео-
теории вектор-функций и оператор-функций.
*16. Теорема Кантора: Непрерывная на компакте функ-
функция равномерно-непрерывна.
0 В соответствующем «скалярном» рассуждении 2.13 следует
заменить модуль \f(x) — f{x')\ на норму в пространстве значе*
ний функции f :|f(*) — f(*')|Y. 2
196
*17. Теорема I Вейерштрасса: Непрерывная на ком-
компакте функция ограничена.
0 В соответствующем «скалярном» рассуждении 2.14 заменить
модуль |f(*n)| на норму |f(*re)|Y. D
*18. Теорема II Вейерштрасса: Пусть f — непрерыв-
непрерывная функция, заданная на компакте М (МсХ) и принимающая
значения в пространстве Y. Тогда на компакте существует точ-
точка xsup, такая, что | f (лг3ир) Iy = sup | f (х) |Y, и точка xinf, такая,
х е=М
что I f (xin!) |Y = inf |f (x) \y.
xs=M
© Доказательство следует из непрерывности нормы (см. 2.19)
и скалярного варианта теоремы II Вейерштрасса B.15). Э
В заключение обсудим свойства функциональных последова-
последовательностей и рядов вектор-функций.
19. Последовательность вектор-функций {fn}, заданных на
области U конечномерного нормированного пространства X и
принимающих значения в конечномерном нормированном про-
пространстве Y, называется сходящейся в точке х0, если существует
предел f = limfrt(x0) в норме пространства Y.
20. Последовательность вектор-функций {in}, заданных на
области U в нормированном пространстве X, называется сходя-
сходящейся к функции Цх) на области U, если в каждой точке обла-
области х выполнено f (лг) = limfn(*), где предельный переход по-
П->оо
нимается в смысле нормы пространства Y.
21. Последовательность вектор-функций {fn}, заданных на
области U в нормированном пространстве X, называется равно-
равномерно сходящейся к функции f(*) на области U, если норма
разности \Цх) — $п(х)\ч равномерно стремится к нулю при
«->оо (#eU), т. е. для каждого е можно указать такое число
N(e), что \i(x) — h(x)\Y<e при n>N{e) одновременно для
всех х (xeU).
Определения сходимости для функциональных рядов вполне
аналогичны определениям 19—21. Именно, рассмотрим функцио-
функциональный ряд из вектор-функций, заданных на области V и при-
принимающих значения в пространстве Y: U[ (x) -\- щ (х) + • • • +
+ щ (х) + ... =2Г=1 uk (x)> частичные суммы которого обозна-
обозначим символами \п(х): T^k=i uk(x) =fnM-
22. Говорят, что функциональный ряд 2r=iu*(*) сходится
в точке Хо (в области U, равномерно в области U) к вектору f
(к функции f(*)), если последовательность его частичных сумм
f/iW = Zl=iui;W сходится в точке х0 к вектору f (в обла-
области U к функции f, равномерно в области U к функции f).
В следующем параграфе мы подробнее рассмотрим свойства
равномерно сходящихся последовательностей и рядов с более
197
общей точки зрения. Этот параграф мы завершаем доказатель-
доказательством самого простого признака равномерной сходимости.
.23. Говорят, что функциональный ряд X~=i u* W мажори-
мажорируется числовым рядом ?]"_i uk в области U, если в этой обла-
области выполнено условие |u/-.(x) |y < «а-
*24. Если функциональный ряд в области U мажорируется
сходящимся числовым рядом, то он равномерно сходится в об-
области U.
© Убедимся прежде всего, что при условии теоремы функцио-
функциональный ряд сходится в каждой точке области. Вследствие экви-
эквивалентности различных нормировок конечномерного простран-
пространства Y, где принимают значения члены ряда, мы можем считать
пространство Y нормированным с помощью координат {у1} век-
вектора в фиксированном базисе {е,}, /=1,2, ..., dimY: \y\ =
= \У\ОО= тах I У11- В этой ситуации условие мажорирова-
1 < *<dim Y
ния означает, что для каждого функционального ряда, состав-
составленного* из координатных функций членов ряда H°?=\Uk(x)
(/= 1, 2 dimY), выполнено такое же условие мажорирова-
мажорирования: | «Jj, (х) | < и*. (& = 1,2, ...)• Отсюда с помощью критерия
сходимости Коши * немедленно выводим, что каждый из рядов
Sa = im1W (i = 1,2, ..., dimY) сходится в каждой точке обла-
области U: '/L,'ko=luk(x) = ui (х). Это означает, что и первоначальный
функциональный ряд из вектор-функций ик{х) сходится и его
сумма равна Y<f™i Y "* (*) е{ = и (х).
Остается проверить, что он сходится равномерно. Это сле-
следует из оценки остатка с помощью мажорирующего ряда. D
*25. Предел равномерно сходящейся последовательности не-
непрерывных функций непрерывен.
© Пусть последовательность непрерывных функций fn(x) рав-
равномерно сходится в области U к функции f. Для функции f
выполнена следующая оценка:
+ \fn(x)-fn(x')\Y+ \in(x')-Hx')\Y.
Первый и третий члены в правой части могут быть сделаны
сколь угодно малыми равномерно в области U за счет выбора п,
например: |f (х) — f„(х) |у ^ е/3 (n^N(e)). Второй член мо-
может быть сделан малым за счет близости точек х, х' вследствие
непрерывности членов последовательности \in(x)—in(x') |y^e/3,
если [л; — *'|г=:б(я).
* Следует применить стандартный прием оценки отрезка ряда через от-
отрезок мажорирующего ряда, известный из элементарной теории числовых ря-
рядов.
198
Таким образом, выбрав сначала п (п>Л^(е)), а затем б(лI
так, чтобы оба эти неравенства выполнялись, получим оценку
\\{х) — f(x')|Y<e, если \х — х'|<6. D
§ 6. ЛИНЕЙНОЕ НОРМИРОВАННОЕ ПРОСТРАНСТВО
НЕПРЕРЫВНЫХ ВЕКТОР-ФУНКЦИЙ НА КОМПАКТЕ
Представим себе какой-либо компакт М, лежащей в конечно-
конечномерном линейном нормированном пространстве X. Рассмотрим
всевозможные непрерывные (и тем самым равномерно-непре-
равномерно-непрерывные 5.16) функции {Цх)}, заданные на этом компакте, кото-
которые принимают значения в конечномерном линейном нормиро-
нормированном пространстве Y. Очевидно, что это множество функций
замкнуто относительно операций линейного комбинирования,
принятых в пространстве Y, и тем самым, является линейным
пространством над тем же полем скаляров. Мы покажем, что
это пространство можно снабдить нормой, превратив его таким
образом в линейное нормированное пространство.
*1. Если Цх) — непрерывная вектор-функция на компакте М,
то вещественная неотрицательная величина |f(,v)|Y является
ограниченной равномерно-непрерывной функцией на этом ком-
компакте.
i(x) |Y следует из неравенства тре-
=^|f(x)— f(x')|Y и непрерывности
функции f. Пользуясь теоремами 5.16 и 5.17, 5.18, выводим равно-
равномерную непрерывность и ограниченность функции |f(x) | Y, а так-
также существование величины |f| = sup|f(x) |Y. D
x s М
*2. Величина | f | = sup | f (x) |Y удовлетворяет всем аксиомам
x e М
нормы (см. 1.1).
© Очевидно, что величина |f] неотрицательна, равна нулю
лишь для функции, тождественно равной нулю на компакте М,
и положительно однородна: |af| = |a| |f . Остается проверить
неравенство треугольника |f + g| ^ |f |+ g|. Оно, в свою оче-
очередь, следует из соответствующего неравенства в пространстве Y:
sup | f (x) + g (x) |Y <I sup (| f (x) \Y -+- \ g (x) \Y) ^
x & M x & M
© Непрерывность функции
угольника | |f (x) |Y — |f {x') | Y
<sup|f(x)|Y+ sup )g(x')|Y = |f| + lg|. D
x ^ M x' e= M
3. Величина | f |= sup | f(x) |Y называется нормой в простран-
х е= М
стве непрерывных функций. Пространство непрерывных на ком-
компакте М функций, снабженное указанной нормировкой, обозна-
обозначается символом С(М). Иногда, если есть опасность недоразу-
недоразумений, введенную норму обозначают символом |f|c или даже
|f|c(M).
109
*4. Сходимость последовательности {fn} по норме |f|c экви-
эквивалентна введенной ранее равномерной сходимости.
Напомним, что линейное нормированное пространство назы-
называется полным (банаховым), если всякая фундаментальная по-
последовательность его элементов имеет предел в этом простран-
пространстве (см. 1.9).
*5. Пространство С полно.
© Пусть {\п}—фундаментальная последовательность элементов
пространства С, т. е. для всякого е (е > 0) существует номер
N(e), такой, что |fn — fm|c^e при n,m^N(e). При этом все
последовательности координатных функций {/jj, г = 1,2, ...
..., dim Y, также являются фундаментальными. Действительно,
это очевидно, если в пространстве Y выбрана норма [ у L =
= max | у1 |. Для всякой другой нормировки нужный факт
1 < ' < dim Y
следует из доказанной (см. 2.19) эквивалентности норм в ко-
конечномерных пространствах.
Наконец, последовательность значений \fln (x)} координатных
функций f'n в точке х фундаментальна в R и, следовательно,
имеет lim fl (х) — f{{x). Тем самым определена вектор-функция!
(f (x) = (fl(x), f2(x), ...)) как поточечный предел последователь-
последовательности {fn}.
Легко убедиться, что построенная таким образом функция f
служит пределом последовательности {in} в норме простран-
пространства С. Действительно, выбрав для данного е число Л^(е), удов-
удовлетворяющее условию \\п — fm|c=^e при п, m ^ N(e), мы мо-
можем перейти к пределу т-^-оз в поточечной оценке: \$п(х) —
— fmM |y<! е. При этом получается |fn(*) — f (x) \ y ^ e при
п ^ Af(e), сразу для всех х из М. Это и означает, что
|f« — f |с ^ е при п ^ N(е), т. е. последовательность in сходится
к построенной функции f равномерно. Теперь, опираясь на пред-
предложение 5.25, заключаем, что функция f, являясь пределом рав-
равномерно сходящейся последовательности in, непрерывна. 5
Глава 2
ДИФФЕРЕНЦИРОВАНИЕ ФУНКЦИЙ
МНОГИХ ПЕРЕМЕННЫХ
Важнейшей целью анализа является вычисление. Поскольку
мы умеем явно проводить вычисления лишь с относительно уз-
узким классом элементарных функций — полиномами, экспонен-
экспонентами и тригонометрическими функциями, первой задачей ана-
анализа является задача приближения данной функции с помощью
комбинации элементарных. Задачи приближения функций были
предметом детального изучения математиков в течение послед-
последних двух веков. Выдающиеся достижения в теории приближе-
приближений принадлежат патриархам петербургской математической
школы — П. Л. Чебышеву и В. А. Стеклову.
Простейшей из задач аппроксимации является задача о при-
приближении данной функции на малом промежутке с помощью
линейной функции, решенная еще Исааком Ньютоном. Действи-
Действительно, дифференцирование функции сводится к разысканию
такой линейной функции — дифференциала первого порядка —
которая аппроксимирует рассматриваемую функцию вблизи
данной точки с точностью до «бесконечно-малых высшего по-
порядка». Аналогичным образом дифференциалы высшего порядка
возникают при попытке аппроксимировать функцию полиномом
степени I в малой окрестности данной точки.
Условимся далее рассматривать функции, заданные на мно-
множестве (области) U в конечномерном линейном нормированном
пространстве X и принимающие значения в конечномерном нор-
нормированном пространстве Y.
Часто в дальнейшем речь пойдет о числовых функциях не-
нескольких переменных. Если какое-либо утверждение доказыва-
доказывается лишь для вещественных функций, то мы сделаем специаль-
специальное указание.
Мы предполагаем, что читателю знакомо понятие производ-
производной вещественной функции одной вещественной переменной и
основные свойства производной в этом случае: линейность, фор-
формула конечных приращений, формула Тейлора с остаточным
членом в форме Лагранжа,
201
§ I. ДИФФЕРЕНЦИРУЕМЫЕ ФУНКЦИИ
1. Вектор-функция f :U->VcY называется дифференцируе-
дифференцируемой в точке xoeU, если ее приращение f(xo-fA)—f(*o) для
любого вектора АеХ, такого, что xq -f h e U, допускает выде-
выделение главной линейной части, т. е. представимо в виде
(•) f X, + А) - f (*0) = Ah + о (К),
где /4:X~>Y — линейный оператор и о (/г)—вектор-функция,
такая, что
lim = 0.
I А |х
*2. Линейный оператор Л в равенстве A*) определяется
единственным образом.
© Пусть существует линейный оператор B:X->Y, такой, что
Обозначим А— В = С и, вычитая B*) из A*), получим
Ch = o(h). Вычислим норму оператора С. Пользуясь его линей-
линейностью, получим
I Ch |v , | Cah |Y I о (<zA) |Y
I! С|| = sup \j-f- = sup lim -i-^ = sup lim ^т-—^ = 0.
ft IЛ Ix A a-*u l-a" Ix Л a->0 Iaft Ix
Таким образом, оператор С есть оператор аннулирования,
С = 0. D
3. Линейный оператор Л, определяемый равенством A*),
называется производной вектор-функции f в точке Хо. Она обо-
обозначается через f'(jto) или ОЦх0).
4. Главная линейная часть приращения дифференцируемой
функции Ah = i'(xo)h называется дифференциалом Фреше или
первым дифференциалом вектор-функции в точке Хо. Дифферен-
Дифференциал функции обозначается через df(x0). Таким образом, по
определению di (х0) = ? (х0) AeY. Если вместо буквы h исполь-
использовать традиционное обозначение приращения независимой пе-
переменной dx, то равенство 4 запишется в обычной форме, ха-
характерной для числовой функции одной переменной: df(xo=
= Г (xj dx.
Рассмотрим частный случай числовой функции f: X -*- R.
5. Числовая функция f:U->-Vc:R называется дифференци-
дифференцируемой в точке хо е U, если для любого вектора /ieX, такого,
что хо -\- h ^\J, приращение функции может быть представлено
в виде f(xo-\- h)— f(xo) = (A, A)+ о(/г), где (Л, h)— линейная
форма, вычисляемая на векторе h, и о (А)—функция, удовлет-
удовлетворяющая условию lim I,, ' а=0.
6. Линейная форма А называется производной функции f
в точке хо и обозначается через f'(xo).
7. Линейная функция переменной ft: df (х0) = (/' (х0), А) или
) = f'(xo)dx называется дифференциалом функции / в точ-
точке х0.
8. Функция f:U—>-VcrY называется дифференцируемой
всюду в области U, если она дифференцируема в каждой точке
области U.
Производная функции f : U —> Y, дифференцируемой в обла-
области U, зависит от выбора точки XoGU и, следовательно, в свою
очередь является функцией, определенной на области U.
В 9—11 устанавливается, каким линейным пространствам в раз-
различных частных случаях принадлежат значения производных,
рассматриваемых как функции, определенные на области U.
При этом отчетливо видна «эскалация структур», происходящая
с усложнением алгебраической структуры функции.
*9. Производная числовой функции f:U—>R есть вектор-
функция /': U—уХ*, принимающая значения в пространстве X*,
сопряженном с пространством X.
*10. Производная дифференцируемой вектор-функции f:U->
->-Y есть оператор-функции f':U->XXY, принимающая значе-
значения в пространстве XX Y линейных операторов, действующих
из X в Y.
*11. Производная дифференцируемой оператор-функции F:
:U->YXZ есть оператор-функция F': U—>-XXYXZ, прини-
принимающая значения в пространстве XXYXZ линейных операто-
операторов, действующих из X в пространство операторов Y X Z.
В предыдущей главе (см. 1.3.2) мы убедились, что задание
вектор-функции f: X -> Y эквивалентно заданию ее координат-
координатных функций /':X->R. Как связана дифференцируемость век-
вектор-функции с дифференцируемостью ее координатных функций?
*12. Для того чтобы вектор-функция f:U->Y была бы диф-
дифференцируемой в точке хо е U, необходимо и достаточно, чтобы
в точке х0 были дифференцируемы все ее координатные функ-
функции f;:U-vR относительно произвольно выбранного базиса
{ei)i=\Y пространства Y; при этом имеет место равенство
dim Y
df(x)= ? dfl(x)e't.
© Сформулированное предложение является простым след-
следствием легко проверяемого утверждения: для того чтобы век-
вектор-функция о: X-vY обладала свойством lim \h\^l\ o(h) |Y = 0/
ft>0
необходимо и достаточно, чтобы все ее координатные функции
o':X->R (относительно произвольно выбранного базиса) обла-
обладали аналогичным свойством lim | h ? | о1 (A) |R = 0 (следует
203
воспользоваться эквивалентностью норм в конечномерном про-
пространстве— см. 1.2.19). D
Установили основные теоремы о дифференцируемых функ-
функциях, вполне аналогичные соответствующим теоремам для функ-
функции одной переменной.
*13. Функция f, дифференцируемая в области U, непрерывна
в этой области.
© Для дифференцируемой функции справедлива следующая
цепочка неравенств:
I f (х + А) - f (х) |Y < | Г (х) A |Y + | о (A) |Y < || f' (х) || | А |х +
/ I о lh\ I., \
'X'
Здесь ||f(x)|| — норма оператора i'{x). Теперь ясно, что |f(x+"
+ А)— f(x) |Y —*-0 при \h\x-*-0, и, следовательно, f(x) непре-
непрерывна во всякой точке x e U.
*14. Пусть функции f и g имеют общую область определения
UeX, принимают значения в линейном пространстве Y и диф-
дифференцируемы в точке xoeU. Тогда их линейная комбинация
со скалярными коэффициентами также дифференцируема в
точке хо и D (of + f>g) (х0) = aDi (х0) + |3Dg (x0).
© Выделим главную линейную часть приращения линейной
комбинации af -f Cg:
(of + pg) (xo + h)- (af + pg) (x0) = a [f (x0 + h) - f (xQ)] +
+ P [g(*o + h) - g (x0)} =a [Dt (xo)h + о (A)] +
+ p [Dg (x0) h + о (A)] = [aDf (x0) + pDg (x0)] h + ao (A) + Co (A).
Этим завершается доказательство, поскольку ao(A)+ |3o(A) —
= о(А). 5
*15. Если функция f:U->VcrY дифференцируема в точке
xoeU и функция g:V->-Z дифференцируема в точке f(xo)eV,
то их композиция g°f также дифференцируема в точке х0, и
справедливо равенство
(Здесь g'-V — произведение линейных операторов f':X->Y и
g':Y-^Z.)
© Используя вначале дифференцируемость функции g в точке
f(x0), а затем дифференцируемость функции f в точке хо, по-
•лучаем
<g о f) (хо + А) - (g о f) (хо) ej(f (хо + А)) - g (f (x0)) =
= g' (f (*o)) (f («о + А) - f (*o)) + о (f (хо + А) - f (x0)) =
= g' (f (*o)) f (*о) А + В7 (f W) о (А) + о (f (х0 + А) - f (*0)).
204
Покажем, что g'(f(*0))o (A)+o (f (*0+ AJ—f (*<>)")'== о'(А)\ Оцен-
Оценка первого слагаемого элементарна:
(**) I g' (f (*о)) о (A) |z < || g' II | о (А) |у = а (А) | А |х,.,
где а(А)->0 при Л->0.
Для проведения оценки второго слагаемого положим
f (*о + А) — f (хо) = t (А) • Тогда
+ А) - f (*„)) lz = I о (t (A)) |z = Р (t) 11 |y,
где p(t)->0 при t->0. Ввиду дифференцируемости f
Следовательно, p(t)->-0 при А->0 и
(***) | о (f (*> + А) - f (*,)) |z = у (A) I A |x,
где y(^)~* при А->-0. Объединяя оценки (**) и (***), полу-
получаем нужное равенство. Таким образом, приращение компози-
композиции g ° f допускает выделение главной линейной части, и эта
главная линейная часть равна g'(f (*о)) -?(хо)п. 5
В дифференциалах равенство (*) записывается в следующем
виде:
или короче: dg(i) = g'(f)df.
Последняя запись по форме не отличается от записи диффе-
дифференциала функции g(f):Y->Z независимого переменного feY.
Таким образом, равенство dg(i) = g'(i)di справедливо как в
случае, когда f — независимый вектор из Y, так и в случае, ко-
когда f является вектор-функцией из X в Y. Это свойство называ-
называется инвариантностью формы первого дифференциала. Таким
образом, мы доказали следующее утверждение:
*16. Первый дифференциал обладает инвариантной формой.
*17. Если функция f : U -> Y и оператор-функция G : U -> YXZ
дифференцируемы в точке Xo^U, то отображение Gf:U->Z
также дифференцируемо в точке х0 и имеет место равенство
*) (Gf)' (*о) h = (С (*„) h) f Xj) + G (x0) (f (xq) h).
Здесь G'(jco) — линейный оператор, действующий из простран-
пространства X в пространство YXZ линейных операторов из Y в Z,
т.е. G'(*0)eXXYXZ.
205
© Используя линейность оператора G и дифференцируемость
G и f, имеем
G (х0 + h)i(xo + h)-G (х0)f (х0) --= [G (x0 + А) - G (x0)] f (xQ)
+ G (х0) [f (х0 + А) - f (*„)] + [G (x0 + h)-G (х0)] X
X [f (х0 + А) - f (*„)] = G' (х0) /if (х0) + G (xo) (Г (x0) А) + » (А),
(••) где <о (А) = oG (A) f (*0) + G (х0) of (A) + [G' (х0) А + oG (A)] X
of(A)sY, Urn
Из равенства (**) следует, что |to(A) ] = а(А) |А|, причем
а(А)->0 при А —* 0. Таким образом, приращение отображе-
отображения Gf действительно допускает выделение главной линейной
части, и эта главная линейная часть определяется равен-
равенством (*). 3
Отметим два частных случая утверждения 17:
*18. Если вектор-функция f:U-»-Y и числовая функция
A:U->-R дифференцируемы в точке Хо е U, то их произведение
Af: U->Y также дифференцируемо в точке хо.
Если оператор-функции G:U->YXZ и F:U->XXY диф-
дифференцируемы в точке Хое U, то их произведение — оператор-
функция GF:U->-XXZ — также дифференцируемо в точке х0.
*19. Запишите выражения для производных функций, о кото-
которых шла речь в предыдущем пункте.
Ранее мы определили производную функции i: X ->• Y как ли-
линейный оператор. Укажем способ вычисления этого оператора.
Для этого введем понятие дифференциала функции по задан-
заданному направлению. Дифференциал функции по заданному на-
направлению дает не только новую важную характеристику функ-
функции f, но и позволяет вычислять матрицу оператора производ-
производной V, зафиксировав пару базисов в пространствах X, Y.
Мы увидим далее, что множество функций, обладающих диф-
дифференциалом по заданному направлению, является более широ-
широким по сравнению с множеством функций, дифференцируемых
в смысле определения 1.
20. Пусть хо и А — фиксированные векторы линейного норми-
нормированного пространства X, т — вещественный параметр. Множе-
Множество точек i;eX, задаваемых равенством х == хо-\-xh @ ^
^т<оо), будем называть лучом в пространстве X, исходя-
исходящим из точки Хо в направлении вектора А.
*21. Сужение функции f: Х-> Y на луч х = xo-\-%h представ-
ля'ет собой функцию i{xo + xh) одной переменной т.
22. Функция f:U—>Y называется дифференцируемой по на-
направлению А в точке хо е U, если ее сужение на луч х = х0 + тА
206
дифференцируемо в точке т = 0, т. е. если существует предел
по норме пространства Y:
Нт * (*о + th)-l (xq)
г->0 т
23. Предел 22 называется дифференциалом Гато функции f
в направлении вектора h в точке х0 и обозначается через W()
Таким образом, по определению
M(o)
т-*о т
Функция f, имеющая дифференциал Гато в направлении век-
вектора h в точке Xq, называется дифференцируемой по направле-
направлению h в точке xq.
*24. Дифференциал в направлении h есть однородная пер-
первой степени (не обязательно линейная!) функция h, т. е.
daJ (xq) — arf/,f (xQ).
При каких дополнительных условиях дифференциал Гато
ё/гЦхо) так же, как и дифференциал Фреше d\(хо) = ? (xo)h, яв-
является линейной функцией й? Прежде чем получить ответ на
поставленный вопрос, выведем формулу конечных приращений
для числовой функции /:X->R. Эта важная формула будет
часто встречаться в дальнейшем.
25. Приращение числовой функции /:X->R при переходе
из точки х в точку х + h будем обозначать через ДЛ/(л;)з=з
^f(x + h)-f(x).
*26. Если дифференциал Гато в направлении h существует
в окрестности точки х, то для вещественной числовой функции
/:X->R имеет место формула конечных приращений:
© Приращение Ahf(x) можно рассматривать как приращение
вещественной функции F(a) = f(x -f- ah) одной вещественной пе-
переменной а при переходе из точки а = 0 в точку а=1. Если
дифференциал Гато dhf существует в окрестности точки х, то
функция F(a) при достаточно малых \h\ имеет производную на
сегменте 0 ^ а ^ 1 и к ней применима формула конечных при-
приращений Лагранжа. Таким образом:
5
*27. Если в окрестности точки х0 существуют дифференциа-
дифференциалы Гато числовой функции f:X-*-R по направлениям hi и h2
и оба дифференциала dhj (х0) и dhj (x0) непрерывны в точке
Хо, то в точке х0 существует дифференциал Гато по направле-
направлению h = ociAi + «2/12, где ai и ос2 — произвольные скаляры, и вы-
выполняется равенство
= v-idhj (x0) + ^dh,f (xg),
207
© Благодаря однородности дифференциала Гато dhf(x) по от-
отношению к h достаточно доказать равенство
= dhj (ха) + dhj (хй)
при достаточных малых \h\\ и \h2\.
Приращение Дл,+л,/ Xj) представим в виде суммы двух при-
приращений: Д&1+лj (х) = Ahj (х0 -f h2) + AhJ (x0) и применим фор-
формулу 26; при этом получается
Ah1+JJ (х0) = dhj {х0 + 6,A! + h2) + dk,f {x0 + Q2h2), 0 < 6, < 1,
0<62< 1.
Заменяя h\ на т/zi и h2 на %h2, приходим к равенству
(*) At {hl+hl)f (x0) = dxhlf {x0 + х (9,/г, + /г2)) + dxhj (х0 + т92/г2) =
= т [dhlf (хо + х {QA + h^) + dhj {x0 + xQ2h2)].
Поделим равенство (*) на т и перейдем к пределу т->0. В ре-
результате в силу непрерывности дифференциала Гато в точке х0
получим dhl+h2f(x0) = dhj(xQ) + dhJ(x0). )>
Утверждение 27 легко обобщается.
*28. Пусть {huh2, ..., hp}—некоторый базис в простран-
пространстве X (dim X = р) .Если в окрестности точки ха существуют
дифференциалы Гато dh.f(x) (/= 1, 2, ..., р) по всем направ-
направлениям h\, h2, ..., hp и все эти дифференциалы непрерывны
в точке Хо, то в этой точке существует дифференциал Гато
dhf(xo) по любому направлению А ион является линейной функ-
функцией /г, т. е.
при любых векторах /г', h" и скалярах а и р.
© Разложим произвольный вектор h по векторам набора
{/i(}?=1: h — Yai=\aihi- С помощью равенства
р / р \
Аа1+й2+ ... +hj {х0) = Z Ал^ ух0 + ^ | hkj
так же, как при доказательстве утверждения 27, получаем
Равенство (*) проверяется путем разложения левой и правой
части по формуле (**). 3
Аналогичное утверждение справедливо для вектор-функции
f:X->Y.
*29. Если в окрестности точки хо существуют дифференциалы
Гато dhlf(x0) (i—l, 2, ..., р) в базисных направлениях {/гг}?=1
(dimX = p) и все эти дифференциалы непрерывны в точке xQ,
2Р8
то в этой точке существует дифференциал Гато dh\(xo) по лю-
любому направлению А и он является линейной функцией А.
© Доказательство сводится к 28 с помощью перехода от век-
вектор-функции f к ее координатным функциям. 5
Укажем простое достаточное условие, при котором диффе-
дифференциалы Фреше и Гато совпадают.
*30. Если функция f :X->Y дифференцируема в точке х0, то
она дифференцируема по любому направлению А в этой точке,
и имеет место равенство Г(хо)А = dh\(x0).
© Поскольку функция f дифференцируема в точке х0> то
- т/г)— f {xo)~V(xo)rh -f о(тА) и, следовательно,
f (х0) = lim f {х° + хК} ~ f {х) =
т-»о %
Т-»0
Обратим внимание читателя на следующий факт:
*31. Утверждение, обратное 30, вообще говоря, несправед-
несправедливо, т. е. из существования в точке х0 дифференциала Гато
dhi(xo) по любому направлению h не следует дифференцируе-
мость функции f в точке х0 (т. е. существование дифференциала
Фреше).
© Для доказательства 31 достаточно привести пример функ-
функции, имеющей в некоторой точке х0 дифференциал Гато по лю-
любому направлению h, но не дифференцируемой в этой точке.
Зададим функцию f:R2->-R в естественном базисе R2 равен-
равенством f{x) = [(х'K-)-(х2K]1/з. Вычислим дифференциал Гато
функции / в точке хо = 0:
dhf @) =
где /г1 и А2 —координаты вектора h в естественном базисе.
Таким образом, дифференциал Гато функции / в точке
х0 = 0 существует при любом векторе п. Но функция / в точ-
точке Хо = 0 не дифференцируема, так как если бы она была диф-
дифференцируема, дифференциал Гато должен был бы согласно 30
совпадать с дифференциалом Фреше и быть линейной функ-
функцией h. D
Предложение 30 показывает, что для дифференцируемой
функции вычисление производной сводится к вычислению диф-
дифференциала Гато. Следующее за ним предложение 31 призвано
насторожить читателя (но не запугать!), обратив его внимание
на то обстоятельство, что дифференциал Гато, вообще говоря,
может существовать и тогда, когда соответствующая функция не
является дифференцируемой. Важно иметь условия, обеспечи-
обеспечивающие дифференцируемость функции и высказанные непосред-
непосредственно в терминах дифференциала Гато, Эти условия даются
следующим утверждением; у
203
*32. Если дифференциал Гато dhl{x) функции f:UcrX->Y
по любому направлению существует в окрестности точки Хо и
непрерывно зависит от х в этой окрестности, то функция f диф-
дифференцируема в точке Хо, т. е. имеет производную в смысле
определения 3 и дифференциал Фреше в смысле определения 4,
и при этом справедлива формула f(xo)A = dhi(х0).
© Допустим сначала, что f(x) = /(x)—скалярная веществен-
вещественная функция. Тогда на основании формулы конечных прираще-
приращений 26 можно записать ее приращение в виде
л*/= /(*<> +А)—/(*<>) = <У(*о + ейА), о<еЛ< 1.
Теперь, пользуясь тем, что дифференциал Гато функции / не-
непрерывен, мы можем заменить <4/(х0 -f- Qhh) на dhf(x0), до-
допуская погрешность порядка о (А). Действительно, положив
е = h/\h\, получим
def(xo + Qhh) — def(x0) = у (х0, А)-»- О
при П-+0. Далее, пользуясь однородностью дифференциала Гато,
получаем
dhf (х0 + 9„А) — dhf (хо) = | h | у (х0, А) = о (А).
Это позволяет записать приращение Ahf функции / в виде
Согласно 29 при условии непрерывности дифференциала Гато
член dhf(xo) является линейной функцией вектора Л, а с учетом
предыдущей оценки он же служит главной частью приращения.
Случай вектор-функций и функций, действующих в комплекс-
комплексных пространствах, сводится к разобранному путем перехода к
координатным функциям на основании 12. 5
На основании 28, 29 требование существования и непрерыв-
непрерывности дифференциалов Гато dhHxo) в точке х0 по любому на-
направлению h можно заменить условием существования и непре-
непрерывности дифференциалов Гато de(f no всем базисным направ-
направлениям et (i = 1, 2, ..., л, п = dim X).
*33. Если дифференциалы Гато de.f(x) числовой функции
f:\J-*~R (UcX) существуют в окрестности точки ioGUb на-
направлении каждого базисного вектора ei (i = 1, 2, ..,, я) и
непрерывно зависят от х в этой окрестности, то функция / диф-
дифференцируема в точке х0 и имеет место равенство
= nxo)h = ^hldeif(xo).
Равенство 33 без труда переносится на случай вектор-функ*.
у. 2. - V - \/
*34. Пусть {е}}^ (m — dim Y) — базис пространства Y и
f'(x) — координатные функции, отвечающие вектор-функции
f:U->Y(UcrX) в этом базисе: f (*) = ХГ=1 F (x)e'i- Если диф-
дифференциалы Гато deii функции f существуют в окрестности
точки JcoeU в направлении каждого базисного вектора е,- (t =
= 1,2, ..., п) и непрерывно зависят от х в этой окрестности, то
функция f дифференцируема в точке х0, и имеет место равенство
di(х0) = f (x0)h=ZZ h'de.f1 (x0)e).
Обратим внимание читателя на следующее достаточно тон-
тонкое обстоятельство. Если формула B8**) верна при условии
непрерывности дифференциалов Гато de.f (x) в точке Хо, то фор-
мулы 33 и 34 справедливы при более сильном предположении:
дифференциалы Гато dej(x) (в векторном случае dei(x)^ дол-
должны быть непрерывными не только в точке х0, но и в некоторой
ее окрестности!
Формулы B5*s), 33 и 34 имеют принципиальное значение:
они показывают, что вычисление дифференциала Гато в направ-
направлении любого вектора h и дифференциала Фреше сводятся
к вычислению дифференциалов Гато в направлении базисных
векторов ei.
35. Обозначим координаты вектора jceX в базисе {е,-}"=1
через (х\ х2 хп): x = '?l=lxtei. Дифференциалы Гато
de f (хо) числовой функции •/: U ->R в направлениях базисных
векторов ei называются частными производными функции / по
переменным х' в точке х0 и обозначаются через df(xo)/dx'. Та-
Таким образом, по определению
Не представляет труда переформулировать предложения 28,
33, 34 в терминах частных производных координатных функций,
например:
*36. Если f (x) = Yj^ifl(x)e'i и все частные производные
—'— (х) (/=1,2, ..., т, /=1,2, ..., п) существуют в окрест-
1
дх1
ности точки хо и непрерывны в этой окрестности, то функция f
дифференцируема в точке х0, и справедлива формула
т, п
(X)dxie'l
Если функция f дифференцируема в точке хо, то ее производ-
производная f' (лго) в этой точке, как известно, представляет собой линей-
211
ный оператор, действующий из пространства X в простран-
пространство Y: f'(A'o): X-> Y. Равенство 36{*) позволяет выписать мат-
матрицу оператора V (х0) в базисах {е(}"=1 и (e/}JLr
*37. Если функция f:U-»-Y (UcX) дифференцируема в
точке xosU, то матрица оператора производной ?(х0) относи-
относительно базисов {ег}"=1 и {e}};m=i вычисляется по формуле
Г
fr <*¦>} =
¦Ы
дх2
дх2
df
дх1
¦(х0)
дх2
дх
dfm
дхп
тг(Ха)
где —— (х0) — частные производные координатных функций от-
ОХ
носительно введенных базисов.
В частном случае числовой функции f : X ->- R ее производ-
производная Y есть линейная форма {или вектор сопряженного простран-
пространства X*).
*38. Если f:X-*-R — числовая функция, то координаты ли-
линейной формы f (хо) в базисе {g'}"=1 пространства X*, сопря-
сопряженном с базисом
равны
——
© Сформулированное утверждение является очевидным след-
следствием равенства 33, переписанного в терминах частных произ-
производных:
Г
, h) =
39. Матрица оператора производной ?(х0) вектор-функции
f ; U ->• Y (U с X), составленная из частных производных
дУ , . дУ
дх1
(х0)
дх1
дх2
дР
дх2
(хо)
дх"
вр
дхп
(хо)
df"
df"
(Хо)
df"
дх' v °' дх2 х~"' '•• дх"
называется матрицей Якоби относительно данных базисов.
*40. Если dim X = dim Y = п, матрица Якоби является квад-
квадратной, и существует определитель
detf (je0) == det
дх1
dfn
дхх
дх*
¦(*о)
(xa)
дхп
212
41. Определитель 40 называется якобианом функции f и обо-
обозначается через
Р(Г,
D{x\ х2 хп) ¦
Якобиан отображения f : X ->• X является важной характери-
характеристикой этого отображения и встретится в дальнейшем (см., на-
например, гл. 3) при решении нелинейных уравнений вида Ч/(л) =
= Хо (Хо s X).
Получим формулу для матрицы Якоби композиции двух
функций g о f.
*42. Рассмотрим композицию* gof:X->-Z двух функций
f:X->Y, и g:Y + Z. Пусть {ek}pk=v {е,}]^, {е'[)чЫ1 - базисы в
пространствах X, Y, Z; (х\ х2, ..., хр) — координаты вектора
хеХ и р(х) = р(х\х\ ...,хр) (/=1,2, .... г), g'(f) =
= ё'(Р> /2> • • • > Г) 0=1,2,..., q)-— координатные функции f
и g относительно введенных базисов. Тогда
© При умножении операторов их матрицы перемножаются,
поэтому формулы (*) и (**) непосредственно следуют из ра-
равенства (g of)'(х0) = g'(f(*o)) -V(x0) (см. 15). 5
Обычно при проведении конкретных вычислений функции,
заданные на п-мерном линейном нормированном простран-
пространстве X, заменяют с помощью координатного изоморфизма (см.
замечание после 1.3.9) функциями, определенными в Яп и
зависящими от п вещественных переменных. В частности,
такой переход к функциям, определенным в R", позволяет
свести вычисление частных производных к вычислению произ-
производных функций одной переменной. Тем самым возникает про-
простой и эффективный аппарат вычисления не только частных
производных числовых и векторных функций, но и дифферен-
дифференциалов Фреше и Гато от них.
Пусть f — числовая функция на конечномерном линейном
пространстве X над числовым полем R (dimX = n). Выберем
в X базис {#*}"_! и построим координатный изоморфизм Т: х =
==2]"=iх*е{-*~(х1, х2, ..., хп), сопоставляющий каждой точке х
линейного пространства X числовую последовательность (х\ х2,..,
..., хп) — элемент пространства R".
* Мы предполагаем, что области определения U, V функций f, g в про-
пространствах X, Y согласованы таким образом, что f: U ->¦ V.
213
43. Сопоставим данной функции f:U->R векторного аргу-
аргумента X вещественную функцию /r : 7U-*-R вещественных пере-
переменных хх, х2, ..., хп:
Функция fR(x\x2, ..., хп) называется координатным представ-
представлением функции f(x).
Опуская у функции /R значок R, будем в дальнейшем запи-
записывать равенство (*) в виде f(xx, х2, ..., х") = /(х), х =
—- 'Г—1 /д;1 д;2 ХП)
*44. Частная производная —~(хо) функции /:U->R в точке
xu = Tjk=\'xaek совпадает со значением производной функции
f(x\, ..., х10~\ х1, х10+\ ..., xfy одной переменной х' в точке
xt.
"' I.. \ «/l^0, ...,X0 , X , XQ X0
дх1 ч ш dxl
Ясно, что в определениях и утверждениях 36—42 в силу ра-
венства —г (ха) = —г (хо) частные производные —т (хъ) коор-
дх дх1 дх'
динатных функций р вектор-функции f могут быть заменены
dfL
частными производными —т- (х0) их координатных представле-
представлений f!(x) = f!R(xx, x2, ..., х"). Мы не будем переписывать соот-
dfL
ветствцющие утверждения и равенства в терминах —г(хо)>
дх
предоставляя сделать это читателю. Предложения 38—44 пока-
показывают, что вычисление производной функции нескольких пе-
переменных сводится, в сущности, к дифференцированию веще-
вещественных функций одной переменной.
В дальнейшем нам понадобится еще одно обобщение диф-
дифференциала Гато — дифференциал по подпространству.
45. Пусть Xi — подпространство линейного пространства X.
Функция f : U сг X -> Y называется дифференцируемой в точке
^elj по подпространству Xi, если приращение функции f
между точками х0 и хо-\- hi для любого вектора hi e Хь такого,
что хо -\- hi e U, допускает выделение главной линейной части
и может быть представлено в виде
f (Ч + h) — * (хо) = Ах А + о (hi),
где /4xr Xi->Y — линейный оператор.
46. Линейный оператор Ах, называется оператором част-
частного дифференцирования по подпространству Xi или частной
214
производной по векторному аргументу Xt от функции f в
точке х0.
Оператор частного дифференцирования по подпространству
Xi обычно обозначается di/dXi или f^.
*47. Если функция f:U->Y дифференцируема в точке Хо (в
смысле утверждения 1), то функция f дифференцируема в
точке х0 по любому подпространству X] сг X. В этом случае
оператор частного дифференцирования di/dXi по подпростран-
подпространству X] является сужением оператора производной i'(x0) на под-
подпространство Xj:
di = f' = f' I
<ЭХ,
Читатель видит из 45, что частная производная вектор-функ-
вектор-функции f :U->Y по подпространству Xi является оператором, дей-
действующим из Х\ в Y. В то же время частная производная вектор-
функции по некоторой координате, скажем х1, вектора х, di/dx1 =
= de f является вектором из Y.
*48. Пусть f — вектор-функция, действующая из области U
нормированного пространства X в пространство Y, X = Xi -j-
4- X2-f- ... -f-Xp,— разложение пространства X в прямую сумму
подпространств; h = ^?Ji_lhl— соответствующее разложение
данного вектора h (/г*еХ,). Тогда дифференциал функции f на
элементе h представим в виде
(=1
В частности, если h совпадает с вектором ek из базиса {еЛг!Л Х
Eft — одномерное подпространство, натянутое на вектор ей, и
Т — координатный изоморфизм, связанный с указанным бази-
базисом, Тх = (х1, х2 xdimX), f (x) = fR (Tx), то
de\ = (dt/dEk) ек = dtR (Tx)/dxk.
На практике единственный путь исследования свойств век-
вектор-функции — исследование ее координатных функций. В част-
частности, о гладкости (непрерывной дифференцируемости) функ-
функции можно судить по свойствам ее частных производных. Сфор-
мулирием и докажем соответствующий результат.
49. Функция f:U-»-Y называется непрерывно дифференци-
дифференцируемой в точке Хо е U, если ее производная V, рассматриваемая
как функция, определенная на U со значениями в XXY, не-
непрерывна в точке х0.
Функция f:U-vY называется непрерывно дифференцируе-
дифференцируемой в области U, если она непрерывно дифференцируема в каж-
каждой точке этой области.
215:
*50.Если функция f:X->Y обладает непрерывным диффе-
дифференциалом Гато в окрестности U точки хо, то она непрерывно
дифференцируема в этой окрестности.
© Дифференцируемость функции в этих условиях уже дока-
доказана в 32. Заметим, что существование производной и равенство
i'(x)h = dhi (x) имеют место не только в точке х0, но и в любой
другой точке х рассматриваемой окрестности. При этом, вслед-
вследствие приведенного равенства ясно, что V(х) является непре-
непрерывной функцией в U. D
*51. Для того чтобы функция f:U->Y была непрерывно
дифференцируемой в области U, необходимо и достаточно, что-
чтобы все е.е частные производные df'(x)/dx' были непрерывными
функциями (по совокупности переменных) в области U.
© Необходимость. Если функция f непрерывно диффе-
дифференцируема в области U, то все частные производные dfi/dx'
существуют и являются непрерывными функциями как коорди-
координатные функции непрерывной функции. (Действительно, легко
убедиться, что частные производные являются координатными
функциями V в базисе пространства XXY, составленном из од-
одномерных операторов А*, действующих по правилу А1,ек = Sj^e')
Достаточность. Дифференцируемость функции f в обла-
области U следует из 36. Следовательно, в области U существует
производная V (х) и дР(х)/дх1— ее координатные функции. Так
как по условию д^(х)/дх1 непрерывны, непрерывной в обла-
области U будет и оператор-функция ?(х). 5
В начале этой главы мы связывали дифференцируемость с
возможностью линейной аппроксимации функции в малой
окрестности данной точки. Следующее утверждение придает со-
соответствующим наводящим соображениям точный смысл, пока-
показывая, что на компакте дифференцируемость эквивалентна свой-
свойству равномерной линейной аппроксимации в малой окрестности
каждой точки компакта.
*52. Пусть f :'M->Y — непрерывно дифференцируемая функ-
функция, заданная на компакте МсгХ; ю — модуль непрерывности
ее производной на М. Тогда приращение функции f на М равно-
равномерно аппроксимируется ее дифференциалом. Именно, если все
точки отрезка {x-\-§h} @<6< 1) принадлежат М, то
|f(x + ft)-f(*)-f (*)А|у<ю(|А|)|й|х.
© Пусть /—произвольная линейная форма над Y. Пользуясь
формулой конечных приращений для скалярной функции
A,Цх)) с 8;с:@,1), получим на основании 26, 30, 1.4.4 и
1.4.11:
, | (/, f (х + h)—t{x) - Г (х) h)\ = \dh (I, f (x + Q,h)) - И, Г (х)п) | =
= \(U' (х + Qih) h - Г (х)п)\^\1\^\\Г (х + Qth) - Г (х)\\\ h\K^
Согласно 1.4.4 и вследствие произвольности формы I это озна-
означает, что |f(x + /z) — f(*) — Р(*)А|у<ю(|Л|)|Л|х. D
Тот же прием полезен для оценки приращения гладкой век-
вектор-функции:
*53. Если функция f:M->Y непрерывно дифференцируема
на компакте МсХ и все точки отрезка {х-\-Qh} @ < 8 < 1)
принадлежат М, то ее приращение допускает следующую оценку:
p|
M
© Фиксируя произвольную линейную форму / е Y*, оценим
приращение скалярной функции (l,i(x)) по формуле 26:
\{l, f(jc +A) —
<|/Гу||Г (* +9^I11 А|х, 0<9/<1;
отсюда на основании 1.4.11, пользуясь произволом в выборе /,
получаем нужную оценку. 5
Обе оценки 52 и 53 можно применять для оценки прираще-
приращений функции, когда ее аргумент изменяется в данном подпро-
подпространстве L сг X. В этом случае следует воспользоваться произ-
производной по этому подпространству (см. 45). Например:
*54. Если col — модуль непрерывности производной по под-
подпространству -jTj- f и п вектор из L, то
§ 2. СТАРШИЕ ПРОИЗВОДНЫЕ
И ДИФФЕРЕНЦИАЛЫ
В предыдущем параграфе было показано, что производная
функции f:X-»-Y есть оператор-функция f':X->XXY. Опера-
Оператор-функция V в свою очередь может оказаться дифференцируе-
дифференцируемой и иметь производную (V)'. Эту производную естественно на-
назвать второй производной функции \. Аналогичным образом
вводятся вторые дифференциалы Фреше и Гато. Затем по ин-
индукции могут быть определены производные и дифференциалы
более высоких порядков. Цель этого параграфа состоит в том,
чтобы ввести последовательно старшие производные и диффе-
дифференциалы и установить их свойства.
1. Пусть f: U ->-Y(U cr X) — дифференцируемая в области U
функция и f :U->XXY — ее производная. Если производная V,
рассматриваемая как функция, определенная на UcrX, со зна-
значениями в естественно-нормированном пространстве линейных
операторов XXY, дифференцируема в точке xo^U, то функ-
функция f называется дважды дифференцируемой в точке хо.
2. Второй производной в точке х0 дважды дифференцируе-
дифференцируемой функции f называется вычисленная в точке х0 производная
217
ее первой производной, т. е. (Г)'(х0). Вторая производная функ-
функции f в точке х0 обозначается символом f"(x0) или D2i(x0).
*3. Вторая производная f"(x0) есть линейный оператор, дей-
действующий из пространства X в пространство линейных операто-
операторов XXY. Таким образом, Г'(хо)еЕ XX (XX Y).
*4. В частном случае вторая производная ]"(х0) числовой
функции f :U->R есть линейный оператор, действующий из про-
пространства X в сопряженное пространство X*, т. е. f"(xo)eXXX*.
5. Вторым дифференциалом (Фреше) дважды дифференци-
дифференцируемой функции f: U-»-Y в точке хо называется дифференциал
ее первого дифференциала di(x) = V(x)h, вычисленный в точ-
точке Хо на приращении аргумента dx = h. При этом первый диф-
дифференциал di(x) рассматривается как функция, определенная
на U со значениями в Y при фиксированном векторе /г. Второй
дифференциал в точке х0 обозначается символом d2f(x0). Таким
образом, по определению, d2f (х0) = d (df (x)) \х„Хл.
*6. Имеет место равенство
dH (х0) = (Г (х) ft)' h \х=Хо = (Г (х0) h) h,
где /геХ — произвольный вектор. Заменяя вектор h традици-
традиционным обозначением dx, приходим к обычному для функции
одной переменной соотношению: d2i {х0) — (i" (хо) dx) dx или, фор-
формально, d2Hx0) = i"(x0) (dxJ.
7. Пусть f — дважды дифференцируемая в точке хо функция
и hi, hi — произвольные векторы из X. Определим форму вто-
второго дифференциала со (х0) hu h2) со значениями в Y равенством
(r'()h)
(,) )
*8. Форма (о(х0, h\, /i2) является линейной функцией по каж-
каждому вектору hi и hi.
*9. Второй дифференциал и соответствующая форма со свя-
связаны равенством d2i (xo) = co(x0l h, h).
*10. В частном случае числовой функции f:X->-R,
ю(хо, hi, h2)—билинейная форма векторов hi и h2, a d2f{x0) =
— ю(хо, A, h) — соответствующая квадратичная форма.
Построим «второй дифференциал по направлению»— второй
дифференциал Гато.
11. Предположим, что функция f:U->-Y имеет в области U
дифференциал dhti(x) по направлению вектора hi и этот диффе-
дифференциал, рассматриваемый как функция, определенная на обла-
области U со значениями в Y, имеет в точке х0 из U дифференциал
dhAdhMx0)) по направлению вектора h2. Дифференциал по на-
направлению h2 в точке Хо дифференциала d^f называется вто-
вторым дифференциалом Гато по направлениям векторов hi и А2.
Дифференциал по направлениям векторов hi и h2 в точке х0
обозначается символом dht,hMxa). Таким образом, по опреде-
определению
218
Определим по индукции производные и дифференциалы выс-
высших порядков для функции f: U -> Y. Удобно с самого начала
договориться относительно обозначений:
12. Пусть производная Dl~lf: U->XX(XX XXXY) по-
1-2
рядка /—1 как функция переменной х дифференцируема в
точке хо. Ее производная D (Dl~4) (x0) в точке х0 называется
производной функции f порядка / в точке Хо- Таким образом, по
определению D'f (х0) = D (Dl~lf) (х0).
13. Дифференциалом (Фреше) функции f порядка I в точке
х0 называется, дифференциал от ее дифференциала (Фреше)
порядка /— 1, вычисленный в точке х0 относительно прежнего
приращения независимой переменной:
14. Пусть функция f:U->Y имеет непрерывные и непре-
непрерывно дифференцируемые по переменной х дифференциалы
Гато порядков 1,2, ..., /—1 в направлениях h\\ hu h2; ...
..., hit h2, ..., /i;_i соответственно. Если дифференциал Гато
dhl_l hv A,f дифференцируем в точке х0 в направлении hi,
т. е. существует дифференциал dh[(dhl_x а2. ft,f)| . то он
называется дифференциалом Гато функции f порядка / в на-
направлениях hu ht-i, ..., hz, hu
Сформулируем два почти очевидных, но важных свойства
дифференциала Гато:
*15. Дифференциал Гато порядка / является однородной
функцией первой степени относительно векторов hi, hi, ..., hr.
daft, a^h^ a,ft,f = a/a,_, ...aI^,A/_i Ajf.
*16. Дифференциал Гато линейной комбинации функций ра-
равен линейной комбинации соответствующих дифференциалов
Гато этих функций:
dht, ht_x ft, (af + pg) == arfft,, лг_, ft,f + prfft,. ht_, A,g.
Между старшими дифференциалами Гато и Фреше функции
нескольких переменных существует связь, аналогичная соответ-
соответствующей связи между первыми дифференциалами. Эта связь
описывается далее предложением 21. Для ее формулировки нам
понадобятся вспомогательные сведения. Прежде всего обратим
внимание читателя, что возникшая при построении второго диф-
дифференциала билинейная форма о> (/гь Л2) принимает значения,
вообще говоря, в векторном пространстве — том же самом, в
котором принимает значения рассматриваемая функция. Ниже
нам встретятся аналогичные полилинейные формы. Вообще
17. Полилинейная форма, принимающая значения в вектор-
векторном пространстве (отличном от R, С) называется вектор-формой.
219
18. Пусть f: X-vY—функция, имеющая в точке х0 все про-
производные до порядка /. Определим вектор-форму ю, соответству-
соответствующую производной порядка /, равенством
> (*о5 А„ Л2, .... А,) = [...[ [f (х) hx\' h2]' ... А,_,Г А, \х=Ха =
со
*19. Значение вектор-формы a>(xo;hit ..., hi) лежит в про-
пространстве Y и линейно зависит от каждого вектора hi при фик-
фиксированных прочих. Если /:X->R — числовая функция, то
w(xo;ho, ..., hi)—полилинейная форма векторов hi, ...,ht.
*20. Если функция f дифференцируема до порядка / вклю-
включительно в точке х0 области U, то она имеет дифференциал
Гато порядка / в направлениях h\, ..., hi и справедливо ра-
равенство
dh, А/_, h,f (*„) = [. • • ЦГ (х) A,]' h2)' ... А,_,]' hi \x=Xo.
© Проведем доказательство по индукции. Первый шаг уже
был сделан в предыдущем параграфе, где была доказана A.30)
формула d/j,f (x) = Г (х) А[. Согласно предположению правая
(а значит и левая) часть последней формулы дифференцируема
по переменной х, причем вычисление ее дифференциала на
векторе h2 сводится к вычислению производной по направле-
направлению Л2:
(f (x) hi)' h2 \x^ = dh2 (f (x) h,) \x=x==dh3dht (x) \x=,x=dh2, Alf (x0).
Допустив существование производной порядка / и справедли-
справедливость формулы
dH_v hl_2 A,f (x) = [...[ [Г (х) A,]' h2]' ...}' А,_„
вычислим производные левой и правой частей в направлении hi.
Согласно 1.30 имеем
d4 h-x ">f (*«) = dhl (dh[_v hl_2 A(f (x)) \x^ =
= [...[[*/WA,]/A2r...Al_1l'AJ!,.v 3
*21. Если функция f / раз дифференцируема в точке х0, то
ее дифференциал Гато порядка / по направлениям hu A2, ...
..., Лг совпадает с вектор-формой ©(ад Ai,A2 hi) при лю-
любом выборе векторов h\,h-2, ..., he
u>(x0] А„ .... А,_1( Az).
Если функция f дифференцируема I раз не только в точке х0,
но и в некоторой окрестности точки х0, то вектор-форма
а(хо\ hi hi) оказывается не только линейной, но и симмет-
симметричной функцией векторов hu ..., hi.
Читателю полезно доказать это утверждение для I = 2, осно-
основываясь лишь на понятии дифференциала Фреще. Мы же
220
жем это важнейшее свойство вектор-формы со в общем случае
с помощью дифференциала Гато порядка I.
Вначале мы покажем, что при определенных условиях диф-
дифференциал Гато dh h h\(x) является симметричной полили-
полилинейной вектор-формой со аргументов h\,h2 hi, а затем уста-
установим, что при тех же условиях для дифференциала Гато по-
порядка I функция f имеет непрерывную производную порядка I
и дифференциал Фреше того же порядка, и между обоими диф-
дифференциалами существует равенство. Упомянутые условия обоб-
обобщают условия теоремы 1.32 на случай дифференциала Гато
порядка I и состоят в требовании существования дифференциа-
дифференциалов Гато dh h __ h f(x) в произвольных направлениях Ai,A2, •••
..., hi до порядка I включительно и их непрерывности.
Для проведения соответствующих доказательств мы вводим
операторы сдвига и приращения.
22. Пусть Тн — оператор сдвига аргумента функции f, задан-
заданной на пространстве X, на данный вектор А: ТнЦх) — i (x-{-h)
(х, ЛеХ); Ah = Т/г — / — оператор приращения функции при
сдвиге ее аргумента на вектор h:
*23. Операторы сдвига и приращения линейны в простран-
пространстве непрерывных функций, заданных на X.
Операторы сдвига и приращения, отвечающие векторам hi, А2)
коммутируют. В частности: А/г, (АцЛ) = Дл (Дй,г).
24. Приращением (или разностью) функции f порядка / при
сдвиге аргумента на векторы hi, ..., hi называют результат
последовательного применения операторов приращения при со-
соответствующих сдвигах аргумента:
*25. Приращение функции порядка / инвариантно относи-
относительно всевозможных перестановок векторов huh2 А/, т. е,
где {U,U-\, ¦•-, i\)—произвольная перестановка индексов
(U-l 1).
*26. Если функция f обладает дифференциалом Гато по на-
направлению h\ в окрестности точки х, то
© Согласно определению дифференциала Гато
—^ f (x + rAi) |t_01 = Aft2dA,f (x). 5
221
*27. Если дифференциалы Гато вещественной функции
f: X-*-R по направлениям hi, h2 hr.
dhj, dh2,hj dhl.hl_v....hlf
существуют и непрерывны в окрестности точки х0, то при до-
достаточно малых значениях |/ti|,|/i2|, ..., \Ы\ справедлива
формула конечных приращений, позволяющая выразить прира-
приращение функции f порядка / через ее дифференциал Гато, вы-
вычисленный в сдвинутой точке:
»,_,..... ,hf) (*„) = (dhl. hl_x Л,0 (-о +1 ел) •
Здесь 0, — числа из промежутка @, 1).
0 Доказательство достигается /-кратным применением фор-
формулы конечных приращений 1.26 и предыдущего утверждения:
=¦= {dhv ht_{ hj
Отметим, что применение формулы конечных приращений в на-
направлении вектора hp не приводит к изменению значений пара-
параметров 6i, ..., 0р-ь D
*28. Если вещественная функция / обладает непрерывными
в некоторой окрестности точки х0 дифференциалами Гато
dhj, dh2hj, •¦¦, dhl,hl^x hj, то справедлива следующая фор-
формула:
t,,t2, ...,tz->0 TIT2 ••• rl
0 Воспользуемся предыдущим утверждением и свойством од-
однородности дифференциала Гато 15, а затем перейдем к пре-
пределу Ti,T2, ..., тг->0:
г,,г2 Tj-^o
— lim
' = lim dh л й/ (дс0 + 6lTlAl + •••
222
Для вектор-функций формула конечных приращений, аналд-
гичная 27, неверна по тем же причинам, по которым неверна
соответствующая векторная формула конечных приращений
«первого порядка». В то же время предложение 28 полностью
сохраняет силу и в этом случае:
*29. Если вектор-функция f, принимающая значения в конеч-
конечномерном вещественном нормированном пространстве, обладает
непрерывными в окрестности точки х0 дифференциалами Гато
<4,f> dh^fij, •••> dhvht_x A,f, то справедливо соотношение
И i(,\— litn ^ih-
"л,, a, и1г(хо)= Jim
© Доказательство получается последовательным применением
предыдущего утверждения к координатным функциям р функ-
функции f. D
*30. Если все дифференциалы Гато функции f до порядка I
включительно в произвольных направлениях hi,h2, ..., hi су-
существуют в каждой точке х области U и непрерывно зависят
от х, то дифференциал Гато dhv а2 A,f (*) является симметрич-
симметричной функцией переменных пи h2, ..., hi.
0 Пусть n = (j\,J2, •••, ji)—произвольная перестановка ин-
индексов 1,2, ..., /. Согласно предложению 25 справедливо ра-
равенство
Дт и т h Tt,i \i hi , xi hi , ..., xi hi *
x\ni- T2n2, —xlnl >i h h !2 H 'I
Если функция / — вещественная числовая функция, то обе части
написанного равенства вычисляются с помощью теоремы 27:
Здесь {б»}, {б/} — два различных (вообще говоря) набора веще-
вещественных чисел, 0 <9i < 1, 0 <0/< 1. В силу однородности
дифференциала Гато получаем
\ *2 */ (Х + &в^) = \. */, ....*//(* + & V/Л.)'
Переходя к пределу и снова пользуясь непрерывностью диффе-
дифференциалов Гато порядка /, получаем нужное утверждение для
вещественной числовой функции.
Для того чтобы получить соответствующее утверждение для
ректор-функции, следует применить предыдущие рассуждения
к координатным функциям р, Т>
223
*31. Если все дифференциалы Гато функции f до порядка I
включительно в произвольных направлениях hi, h2, ..., hi су-
существуют в каждой точке х области U и непрерывно зависят от
точки х, то дифференциал Гато порядка / является полилиней-
полилинейной вектор-формой аргументов hith2 hi, т. е.
d
0 Достаточно доказать утверждение теоремы для числовых
вещественных функций, ибо общий случай (вектор-функций)
сводится к этому путем рассмотрения координатных функций.
Итак, пусть f — вещественная функция, имеющая непрерыв-
непрерывные дифференциалы Гато до порядка / в произвольных направ-
направлениях hi, h2, ..., hi. Воспользовавшись формулой
= Tah\'h'f + Aaft/'
aft/
запишем «разделенную» (деленную на х\, %ч, ..., %{) разность
порядка /, дающую в пределе дифференциал Гато, в виде
i • •' V/
V
и воспользуемся формулой конечных приращений. Это дает
+ <,. ft2 h ft/
Устремив xi к нулю и воспользовавшись непрерывной зависи-
зависимостью дифференциалов Гато от х, получим искомую фор-
формулу. D
Мы убедились, что в случае, когда все дифференциалы Гато
до порядка I включительно в произвольных направлениях
Ль Л2, ..., Ы непрерывно зависят от х, они оказываются авто-
автоматически симметрическими полилинейными формами аргумен-
аргументов hi,кг, ..., Ы. В действительности можно сказать большее.
Именно: в этом случае справедливо утверждение, в известном
сМысле обратное утверждению 20:
*32. Если функция f обладает в окрестности точки хо всеми
дифференциалами Гато в произвольных направлениях до по-
224
рядка I включительно и эти дифференциалы непрерывно зависят
от переменной х, то функция f в точке х0 имеет все производные
до порядка / включительно и справедливы равенства
d'f (Ai, h2 Az) = [..
© Доказательство проводится по индукции. Первый шаг уже
был сделан в предыдущем параграфе (см. 1.32), где было до-
доказано, что при наших условиях функция f дифференцируема
в точке хо, непрерывно дифференцируема в некоторой ее окрест-
окрестности и что справедлива формула ? {х) A, = dhlf (x). Допустим,
что уже доказано существование всех производных функции f
до порядка /— 1, их непрерывность в некоторой окрестности U
точки Хо и справедливость формулы
[...[[Г (х) А,]' AJ' ... А,_ J' А,_, = dh[_ihl_2 Aif (x), xm\J.
Покажем, что левая часть написанной формулы непрерывно
дифференцируема в некоторой окрестности точки х0. Действи-
Действительно, дифференциал Гато функции, стоящей справа, по лю-
любому направлению Ы существует и непрерывен в окрестности U
точки л;0. Следовательно, эта функция на основании 1,32 непре-
непрерывно дифференцируема по х и
X<== U.
С другой стороны, в силу сделанного предположения
[<V..*i-a *,*(*)]'А/= [[. • • [[?(*) А,]'А/ ... А,_2]' А,_,Г А,.
Таким образом, существование производных и нужная фор-
формула доказаны в некоторой окрестности точки х0. D
Суммируя предложения 29—32, можно сформулировать сле-
следующую важную теорему:
*33. Если функция f в области U имеет непрерывные диффе-
дифференциалы Гато в произвольных направлениях до порядка /
включительно, то она дифференцируема до порядка / (включи-
(включительно) в каждой точке области U и справедливы следующие
утверждения:
1) dl\ (ft,, hi,..., A,) = [...[[f МА,]'^]'...^]'^-
••• T/ %*,.*,_,*,_, t.A,1 *'>
2) дифференциал Гато dht, ht_x A,f(*) является симметри-
симметрической полилинейной вектор-формой переменных h\, h2 hi
и совпадает с вектор-формой ю(х; h\,h2, ..., Ы).
8 Зак. 193 225
Напомним (см. 21 и последующий текст), что симметрич-
симметричность вектор-формы ы(х; hi, hz, ..., hi) и ее совпадение с диф-
дифференциалом Гато dhv h^ h^f(x) могут быть установлены не-
непосредственно, если предположить дифференцируемость функ-
функции f no Фреше.
Теорема 33 открывает путь прямого вычисления дифферен-
дифференциалов высших порядков, основанный на полилинейности соот-
соответствующей вектор-формы. Известно, что всякая полилинейная
форма однозначно определяется своим тензором, т. е. набором
значений на базисных векторах.
*34. Пусть f:UcX->R — вещественная функция, непрерыв-
непрерывно дифференцируемая по Гато до порядка / в произвольных
направлениях, и (ei,e2, ..., е„)—произвольный фиксированный
базис в пространстве X. Тогда тензор формы ю(х; hu h2, ..., Ы)
в базисе (еь е2 еп) состоит из дифференциалов Гато в ба-
базисных направлениях d4 , ei e, /• При условиях теоремы этот
тензор симметричен.
С базисом (ei,e2, ..., еп) можно связать координаты
(х\х2, ..., хп), так что х = У?иП1=\Хге1.
35. Дифференциалы Гато в базисных направлениях называ-
называются частными производными функции / и обозначаются сле-
следующими символами:
A f ^
Тензор частных производных называется тензором Якбби функ-
функции /.
Совершенно аналогично определяются частные производные
вектор-функции: как частные производные ее координатных
функций. Соответствующий тензор Якбби состоит из величин
'tf1* дх^ ... дх1К
*36. Тензор Якоби числовой функции является ковариантным
тензором, и его валентность @, /) определяется порядком диф-
дифференцирования. Тензор Якоби вектор-функции имеет валент-
валентность A, /).
*37. Вычисление производных / раз непрерывно дифференци-
дифференцируемой по Гато функции сводится к вычислению ее частных
производных — компонент соответствующего тензора Якоби.
*38. Выражение для дифференциала Фреше порядка / через
тензор Якоби / раз непрерывно дифференцируемой по Гато чис-
числовой функции /: U с= X ->- R дается следующей формулой:
dlf = a{x; А, А, .;., А) =
х
х (л1)'1 (л2)'2 • • • т'п.
226
Здесь суммирование распространяется на все наборы из п неот-
неотрицательных целых чисел, в сумме дающих /, « = dimX.
© Доказательство сводится к группировке членов, содержащих
одинаковые вследствие симметричности частные производные.
Число этих членов равно Л [1\\ 12\ ..., W]- D
Отметим, что формула 38 может быть формально переписана
в виде
Аналогичная формула имеет место и для вектор-функций.
Она отличается лишь дополнительным суммированием по ин-
индексу, нумерующему координатные функции и соответствующие
элементы базиса (е\, е'г, ..., е'т) в пространстве значений Y:
f%.
Предыдущее изложение в существенной части основано на
предположении, что рассматриваемая функция имеет дифферен-
дифференциал Гато в произвольном направлении в некоторой окрестно-
окрестности рассматриваемой точки х0 области задания. Мы заменим
это условие более эффективным условием существования и не-
непрерывности дифференциалов Гато лишь в базисных направле-
направлениях {частных производных) аналогично тому, как это было
вделано для первых производных в 1.36. Пусть (ei,e2 еп) —
избранный базис в X.
*39. Если вещественная функция /:UcrX->R дифференци-
дифференцируема по Гато до порядка / включительно во всевозможных
базисных направлениях, и все соответствующие дифферен-
циалы Гато (частные производные) — т-щ- —г —¦ »
(дх ') х\дх2) 2 ...{9-х V п
(ki + k2 + • • • + kn = k ^ /) непрерывны в окрестности точ-
точки х0, то функция / дифференцируема (по Фреше) до порядка /
включительно в точке хо и полилинейная форма а(х0; hu h2, ...
..., hi), отвечающая дифференциалу Фреше порядка /, симмет-
симметрична и связана с дифференциалом Гато равенством ®(х0; hu
К М*" <**..*. */(*<>)•
© Достаточно проверить, что при условиях теоремы дифферен-
дифференциалы Гато в произвольных каправлениях существуют и непре
рывны в окрестности точки хо.
в* ¦ m
При k = 1 соответствующее утверждение уже доказано
(ем. 1.33, 1.35). Действуя по индукции, допустим, что предложе-
предложение доказано при k = l—1, и проверим, что при наших усло-
условиях оно оказывается справедливым и при & = /. Итак, допус-
допустим, что дифференциалы Гато порядка /— 1 в произвольных
направлениях существуют и непрерывны. Тогда в соответствии
с утверждениями 31, 34, 35 дифференциал Гато порядка /—1
в направлениях /ii,A2, ..., Ы выражается через частные произ-
производные по формуле
d'~]f к'Ф
~> ' 2 l~l
Вычислим дифференциал ГатосЦ,л2 ht_vh^ положив для опре-
определенности hi
ной разности
сделано в 31:
деленности hi = h\e\ + Л/в2. Запишем выражение для разделен-
разделенной разности х~х HsxhAdh^ h2 ^_,/) аналогично тому, как это
31
i
х а;'1 ... *;<_-г =
V /г' Л''-1
A "i • • • ";_] •
Осуществляя почленный предельный переход т->-0 так же, как
это уже было сделано в 31, получаем
X А,'1 • • • А)'П' +
, дх дх х ... дх '
•V '2 (—1
228 „
В общем случае, когда hi =2?_i h\ei получается формула
d», с*. *,.,о = t aiXj! яЧ w • • • #
lT? дх'дх2 dxl
Очевидно, что дифференциал Гато, стоящий в левой части, яв-
является непрерывной функцией точки х, будучи суммой конечного
числа непрерывных слагаемых. Следовательно согласно тео-
теореме 33 он оказывается симметричной полилинейной формой пе-
переменных hi, h2, ..., hi, функция f оказывается дифференцируе-
дифференцируемой по Фреше до порядка / и полилинейная форма со, отвеча-
отвечающая дифференциалу Фреше, совпадает с дифференциалом
Гато а>(х; hi, ...,h i)=dht hj (х). В частности dlf=dh,h hf- 5
*40. Если частные производные —з—1^1— существуют
дх *дх*... дх1
и непрерывны в окрестности точки х0, то они не зависят от по-
порядка дифференцирования.
0 Это утверждение эквивалентно симметрии тензора Якоби
(см. C9)). D
Совершенно очевидно, что результат, аналогичный 39, верен
и для вектор-функции f. Для доказательства этого утверждения
достаточно применить предыдущее рассуждение к соответству-
соответствующим координатным функциям f>'.
Симметрия тензора Якоби гладкой функции нескольких пе-
переменных является его важнейшим свойством. Продемонстри-
Продемонстрируем его полезность на примере вывода ряда важных термоди-
термодинамических тождеств — тождеств Максвелла.
Классическая термодинамика изучает квазистатические про-
процессы теплообмена. При таких процессах количество тепла, по-
полученное системой, работа, ею произведенная, и изменение
внутреннего состояния системы связаны простыми соотношения-
соотношениями, которые называются началами термодинамики. Состояние
системы описывается термодинамическими переменными, кото-
которые можно непосредственно измерить. Это — объем (У), давле-
давление (р) и эмпирическая температура (t). Эти три переменные
не являются независимыми, а связаны между собою одним урав-
уравнением, которое называется уравнением состояния: Ф(^, V, р) = \.
В различных задачах удобно считать парой независимых пере-
переменных t, V, либо V, р, либо р, t. Реальная возможность замены
одних переменных другими связана с разрешимостью уравнения
состояния относительно исключаемой переменной.
*41. Если уравнение состояния задается гладкой функцией Ф
и в данном состоянии t, V,p выполнено дФ/дгфО {дФ/дУф О,
дФ/дрфО), т. е. состояние t, V,p, как принято говорить в тер-
229
модинамике, не является критическим в отношении перемен-
переменной t (соответственно V,p), то переменная t(V, р) может быть
исключена и, таким образом, переменные V, р ((p,t), (t,V))
могут считаться независимыми.
0 Доказательство следует из теоремы о неявных функциях
(см. гл. 3)*. 3
Термодинамические переменные р и V имеют механическое
происхождение и могут бить измерены механическими способа-
способами. Температура t является величиной сугубо термодинамиче-
термодинамической. Она может быть определена как общее свойство систем,
находящихся в состоянии термодинамического равновесия при
тепловом контакте друг с другом. Ясно, что это определение еще
не дает масштаба для измерения температуры: каждому вы-
выбранному термометру отвечает своя «температура». Эта темпе-
температура называется эмпирической в отличие от абсолютной
температуры Т, которая будет определена при формулировке
второго закона термодинамики.
Важнейшим объектом термодинамики является элементарное
количество тепла cLQ, полученное системой при «квазистатиче-
«квазистатическом» теплообмене. Это элементарное количество тепла UQ не
является, вообще говоря, дифференциалом какой-либо функции.
Тем не менее оно может быть выражено через дифференциалы
термодинамических переменных и так называемые термодина-
термодинамические величины: теплоемкости cv, cp, скрытую теплоту уве-
увеличения объема lv (или давления /р) при постоянной темпера-
температуре и соответственно скрытую теплоту увеличения объема ту
при постоянном давлении или давления шр при постоянном
объеме:
dQ =-cvdt + lv dV,
dQ = mvdv + rnp dp.
Принято выделять три основных закона термодинамики, ко-
которые удобно формулировать в виде утверждений о существова-
существовании некоторых функций состояния — так называемых термоди-
термодинамических функций:
1) Первое начало термодинамики: существует тер-
термодинамическая функция U — внутренняя энергия системы, —
приращение которой (в квазистатических процессах) связано
с элементарным количеством тепла UQ, полученным системой,
равенством dU = UQ — pdV.
Таким образом, первое начало термодинамики утверждает,
что разность между количеством тепла, полученным системой,
* Поскольку излагаемые в этом пункте сведения нигде далее не исполь-
используются и играют лишь роль примера, нам не грозит опасность возникнове-
возникновения логического круга,
230
и произведенной ею работой pdV является дифференциалом
внутренней энергии.
2) Второе начало термодинамики; существует тер-
термодинамическая функция S — энтропия системы, — приращение
которой (в квазистатических процессах) связано с элементар-
элементарным количеством тепла, полученным системой, равенством dS =
= T~lUQ. Здесь Т — так называемая абсолютная температура
системы. Мы не будем далее различать эмпирическую и абсо-
абсолютную температуру и положим t — Т. Разумеется, измерение
абсолютной температуры само по себе является очень трудным
делом, ибо не существует термометра, который был бы одина-
одинаково хорош для всех температур сразу. Обсуждение этих тон-
тонких физических вопросов не входит в нашу задачу.
Второе начало термодинамики, в сущности, утверждает, что
нормированное с помощью абсолютной температуры элементар-
элементарное количество тепла T~lUQ является дифференциалом энтропии.
3) Третье начало термодинамики: энтропия систе-
системы стремится к конечному пределу при стремлении температуры
к абсолютному нулю, а ее частные производные по термодина-
термодинамическим переменным — к нулю.
Наряду с определенными ранее термодинамическими функ-
функциями U и S удобно пользоваться еще тремя термодинамиче-
термодинамическими функциями, это свободная энергия: F — U — TS, dF =
= — SdT — pdV; энтальпия: H = U + pV, dH = TdS+ Vdp;
термодинамический потенциал: G = Н — TS, dG = — SdT +
+ Vdp.
Важным техническим резервом в термодинамике является
то обстоятельство, что термодинамические функции могут вы-
выступать в роли термодинамических переменных, в частности мо-
могут служить вместе с последними переменными в уравнениях
состояния, связывающих какие-либо три из них. Так, например,
уравнение состояния идеального квантового газа удобно запи-
записывать в форме pV = g(U).
Непосредственно из первых двух начал термодинамики сле-
следует большой набор соотношений, связывающих термодинамиче-
термодинамические функции и переменные. Все эти соотношения получаются
из условия симметрии тензора Якоби термодинамических функ-
функций и носят название соотношений Максвелла.
*42. Обозначим через (dS/dV)i производную от S по V при
постоянном Г и т. д. Тогда справедливы следующие равенства:
\dv )т~ \дТ )v' \др )s KdSJp'
\ dp )т \ dT )p' \ dV M \ dS )у '
Эти соотношения вместе с уравнениями состояния позволяют
вычислить одни термодинамические величины через другие,
найти уравнения, описывающие квазистатические адиабатические
231
процессы (UQ = 0), подсчитать работу, производимую системой
при квазистатических процессах.
Предлагаем читателю вывести следующие соотношения:
*43. cv =
dT)v'
lpmv = — Tcp, lvmp = Tcv, lplv = — T (cp — cv).
*44. Уравнение состояния идеального классического газа
имеет вид pV — AT. Предлагаем читателю показать, что ср —
— Cv = А и для идеального газа справедлив закон Джоуля
(dU/dV)T=0.
*45. Для идеального классического газа с постоянной тепло-
теплоемкостью cv покажите, что адиабатический процесс (SQ = 0)
описывается любым из трех уравнений: pV* = В\ или TVv~1=B2
или Tp^-Wy = В3. Выразите Bi, Вг, В3 через энтропию.
§ 3. ФОРМУЛА ТЕЙЛОРА
ДЛЯ ФУНКЦИИ НЕСКОЛЬКИХ ПЕРЕМЕННЫХ.
ЭКСТРЕМУМ ФУНКЦИИ НЕСКОЛЬКИХ ПЕРЕМЕННЫХ
В первом параграфе настоящей главы мы связали свойство
дифференцируемости функции с возможностью ее локальной
аппроксимации при помощи линейной функции. После этого
старшие производные были определены по индукции. Тем не ме-
менее можно показать, что существование производных до поряд-
порядка I у функции f связано с возможностью ее аппроксимации
в окрестности рассматриваемой точки хо полиномом степени I
с точностью до бесконечно малых порядка о(\х — хо\1). Эта ап-
аппроксимация осуществляется с помощью формулы Тейлора. Мы
выведем эту формулу сначала для вещественной функции.
*1. Если в окрестности точки х0 все частные производные ве-
вещественной функции f:U-»-R (UcX) до порядка / включи-
включительно существуют и непрерывны, то справедлива формула
Тейлора
it df + ТГ d2f + • • • +lfdtf + °< I x ~ *° !')•
Здесь о(\х — х0\1) — величина, допускающая оценку о(\х —
— Хо\1)/\х — хо\'-^О при х-^-Хо и
dkf = e>(x0;h,h, ..., h)= У -4h5A-ir A'1 • • • А'*
— дифференциалы Фреше, п = х — хо {н+ ••• +tft = A).
232 .
© Согласно предложению 2.39 при условиях теоремы функция
дифференцируема до порядка / включительно в окрестности
точки х0 и все дифференциалы Гато до порядка / включительно
совпадают с соответствующими дифференциалами Фреше, т. е.
dx'
¦ f (*o + тА)
= dkf = со (*0; h, А, .... А).
Доказательство сформулированного утверждения основано на
формуле Тейлора для функции /(лг0 + t/i) одной вещественной
переменной* т, которая получается сужением функции f(x) на
луч х = х0 + тА:
sh)
2! rfs2
1 dlf(x0 +
l\
dsl
ds
Т2 + . . . +
;, о <e
(/-1)!
„Z-1
s=0
Здесь h = x — xq. Последний член суммы, записанный в форме
Лагранжа, можно переписать в виде
s=0
ds
;-0/
Если величина \h\ настолько мала, что шар радиусом \h\ с
центром в точке х0 целиком лежит в области, где функция не-
непрерывно дифференцируема по Гато до порядка /, то второе
слагаемое последней формулы переписывается при т=1 с по-
помощью частных производных в виде
77
дх 1 ... дх
и, очевидно, допускает в этом шаре необходимую оценку типа
о(|А|')> поскольку согласно теореме Кантора все частные про-
производные равномерно-непрерывны. Первое слагаемое фор-
формулы (*) при т = 1 согласно теореме 2.39 совпадает с диф-
* Напомним, что мы предполагаем знакомство читателя с элементами
теории функций одной вещественной переменной.
233
ференциалом Фреше порядка I:
s-o
Аналогичный вид имеют и все предыдущие члены:
fel
k\
_ ^ _, dxl ... dx
Таким образом, доказана формула
f (х'о + А) = / (х0) + -jj- df + 21" ^ / + • • - + 7Г d ' + ° (' Л''»
где
п .
в / = ш ^ло, /I, п, ¦ • ., /IJ == / -, -,— /\
X Л'1 ... hl\ h = x-x0. D
*2. Если вектор-функция f:U->Y (UcX) имеет все непре-
непрерывные частные производные до порядка / в окрестности точ-
точки хо из U, то в некоторой окрестности точки Хо справедлива
формула Тейлора:
11 1 /
Г (X) — Т \Х§) -р тт '¦l ~"Р "КГ ^ Г "Г" * * • ~\ ГГ ~"Г" ^ ( I -^ — -^0 I )•
© Доказательство получается применением предыдущего рас-
рассуждения к координатным функциям р. Э
Независимый интерес представляет оценка остаточного члена
в формуле Тейлора первого порядка для вектор-функции
(ср. 1.52).
*3. Если функция f : U -> Y непрерывно дифференцируема на
замыкании области U, то справедлива следующая оценка оста-
остаточного члена в формуле Тейлора:
\f(x')-f(x)-f'(x)(x'-x)k^(o(\x'-xl)\x'-x\,
A— 0)*'+ б*е= U, 0<9< 1,
гдеш(сО= sup \\?(x')—f'(x)\\—модуль непрерывности функ-
функции V на U. Аналогичная оценка с заменой Р на -гт- f справед-
справедлива при х — л'еЬ (ср. 1.54),
?34
Перейдем к исследованию необходимых и достаточных, усло-
условий наличия экстремума гладкой вещественной функции в дан-
данной точке.
4. Точка Хо называется точкой абсолютного минимума (мак-
(максимума) непрерывной вещественной функции f, заданной на
множестве UcX, если для всех х, х е U, выполнено условие
f (х) ^ f(x0) (соответственно f(x)^f(x0)).
Разыскание точек абсолютного минимума или максимума функ-
функции нескольких переменных представляет собою весьма трудную
задачу. Мы ограничимся анализом значительно более простой: о
разыскании точек локального минимума или максимума.
5. Если для всех точек х из некоторой окрестности внутрен-
внутренней точки Хо для непрерывной вещественной функции / выпол-
выполнено условие f(x)^.f(x0), то говорят, что в точке х0 функция f
имеет локальный максимум. Если же для всех точек х из неко-
некоторой окрестности точки х0 выполнено условие f(x)^f(x0), то
говорят, что в точке х0 функция / имеет локальный минимум.
В обоих случаях точку х0 называют точкой экстремума. Точка
экстремума называется строгой, если для всех х, х ф хо, имеют
место строгие неравенства (f{x)<if(x0)—-строгий максимум,
f(x)> f(xo) — строгий минимум).
Приведенное определение пригодно лишь для внутренних то-
точек области задания функции U. Если есть необходимость рас-
рассматривать и точки границы, то прежде всего следует позабо-
позаботиться о распространении функции на замыкание области зада-
задания. Если это окажется возможным с сохранением свойства не-
непрерывности, то полученная в результате функция будет непре-
непрерывной на замыкании области U. После этого для описания
точек экстремума (включая граничные) следует изменить опре-
определение 5, поставив вместо «окрестности точки х0» — «пересече-
«пересечение окрестности точки х0 с U». При этом за точками экстремума,
подпадающими под определение 5, закрепляют название внут-
внутренних точек экстремума.
*6. Теорема Ферма: если вещественная функция / не-
непрерывно дифференцируема в окрестности своей внутренней
точки экстремума х0, то f'(xo) = 0.
0 Рассмотрим вещественную функцию f(xo-\-th) одной пере-
переменной т., которая получается сужением функции / на прямую
x = xo-\-"ch (—оо<т<оо). Эта функция непрерывно диффе-
дифференцируема и имеет экстремум в точке т = 0, поэтому на осно-
основании теоремы Ферма ее производная при т = 0, т. е. диффе-
дифференциал Гато функции / в направлении вектора h, равна нулю:
dj — (d/d%) f (х0 -f- xh) |t=_o = 0- Пользуясь произволом в выбора
направляющего вектора h, заключаем отсюда, что /'(л;о)/г = 0
для каждого вектора h и, значит, f'(x<>) = 0. 3
7. Точка Хо, в которой производная функции обращается в
нуль, называется стационарной точкой функции.
286
С учетом этого определения результат 6 можно сформулиро-
сформулировать в следующем виде:
*8. Каждая внутренняя точка локального экстремума глад-
гладкой вещественной функции является ее стационарной точкой.
*9. Если дважды непрерывно дифференцируемая веществен-
вещественная функция f принимает максимальное значение во внутренней
точке области U, то выполнены условия 1) f'(xo) = O; 2) квадра-
квадратичная форма второго дифференциала в точке хо неположи-
неположительна:
jidxdx
© Первое условие выполнено в силу 6. Для доказательства
второго утверждения предположим, что симметричная веще-
вещественная матрица Якоби второй производной имеет положитель-
положительное собственное число Ко. Обозначив отвечающий ему собствен-
собственный вектор через h0, получим df,0, aJ{х0) = KQ\h0 f (KQ > 0).
Согласно формуле Тейлора имеем
f (xQ + xhQ) — f (Xo) = dhj (x0) т + { dha, АJ (x0) x2 + о (т.2) =
= -i l01 Ao f t2 + о (t2) -12 [i- Ko | ho P + to (t2)] .
где т~2о(т2)->-0 при т->-0. Очевидно, что при некотором значе-
значении т выполнено условие /(хо + тЛо) — f(xo)>O вопреки пред-
предположению. 3
Предложения 6, 9 дают необходимые условия локального
максимума в точке х0. Следующее утверждение дает достаточ-
достаточное условие локального строгого максимума в точке хо. Чита-
Читатель легко заметит, что предложения 9 и 10 весьма близки по
формулировке.
*10. Если в окрестности точки хо е U функции / имеют непре-
непрерывные частные производные до второго порядка включительно
и в самой точке выполнены условия 1) /'(хо)=О; 2) квадра-
квадратичная форма второго дифференциала отрицательно опреде-
определенная:
==-c^\2' c>0>
jjB
то в точке хо функция / имеет локальный строгий максимум.
© Согласно формуле Тейлора имеем
Нхо + п) - / (*0) = | dh, J (х0) + о (Л) | h |2,
236
где o(h)->-0 при й-*-0. В соответствии с условием 2 справед-
справедлива оценка
С / I * \ i* / Ч -, 1 t
Поскольку o(t/i)-»-0 при т->0, то, начиная с достаточно малых
значений т, выполнено условие о(т/г)-<с/2 и, следовательно,
f(xo + ih)<f(xo). Э
Совершенно аналогично утверждениям 9 и 10 формулиру-
формулируются необходимые и достаточные условия локального мини-
минимума гладкой функции. Следует лишь заменить в условиях знак
перед формой второго дифференциала (т. е. рассматривать
—dhi hf вместо dhj hf).
§ 4. УСЛОВНЫЙ ЭКСТРЕМУМ
Зачастую приходится решать задачу об экстремуме функ-
функции, заданной не на области, а на множестве корней некоторого
уравнения (или системы уравнений). Примером такой задачи
является следующая:
найти максимальное значение суммарного потенциала тяго-
тяготения Луны и Солнца на поверхности Земли.
Аналитическая формулировка этой задачи выглядит следу-
следующим образом: найти максимум функции
на сфере \х\ — /? = 0 в R3 при условии \х\\ > R, \х2\ > R,
X, ф Х2
Прямой путь решения этой задачи состоит в том, чтобы вве-
ввести какие-либо координаты на сфере, например географические,
и, записав функцию f в этих координатах, применить к ней уже
разработанную теорию экстремума. Этот путь, идейно неслож-
несложный, приводит к громоздким вычислениям.
Более изящный анализ может быть основан на геометриче-
геометрических рассмотрениях в окрестности точки предполагаемого экс-
экстремума. Эти рассмотрения носят название метода неопреде-
неопределенных множителей Лагранжа и сводятся, в нашем случае,
к использованию того обстоятельства, аналогичного теореме
Ферма, что сужение оператора производной исследуемой функ-
функции f на касательную плоскость к сфере \х\ — /? = 0 в точке
экстремума х0 равно нулю.
Строгое исследование задачи об условном экстремуме может
быть проведено лишь с использованием теории обратных и не-
неявных функций, которая подробно излагается в гл. 3. Поэтому
мы рекомендуем чцтателю ознакомиться с содержанием гл. 3
237
перед проработкой материала настоящего параграфа, формаль-
формально вошедшего в гл. 2*.
Пусть Ф — непрерывно дифференцируемая функция, заданная
в области UcX « принимающая значения в пространстве Y,
dimX> dimY.
1. Ядром функции Ф называется полный прообраз нуля
{х:Ф(х) = 0}. Ядро функции Ф обозначается символом КегФ.
Пусть f — вещественная функция, заданная на области U.
Рассмотрим ее сужение /ф на Кег Ф.
2. Экстремум функции /ф называется условным экстрему-
экстремумом функции f при условии Ф = 0; функция Ф называется
связью.
Нашей ближайшей задачей является вывод необходимых
условий экстремума, призванных заменить собою в рассматри-
рассматриваемом случае теорему Ферма.
3. Точка Хо (хо е U) называется неособой точкой связи Ф,
если Ф'(хо)Х = Y.
*4. Если dim X > dim Y, то в окрестности всякой неособой
точки уравнение Ф(л:) = 0 можно разрешить относительно части
переменных.
0 Пусть х0 — неособая точка связи Ф (Ф'(л:о)Х = Y). Обозна-
Обозначим через Ы = КегФ'(л;о) подпространство решений уравнения
ф'(хоIг = о и через К — какое-либо подпространство в X,
К П N = о, дополняющее его до X, К + N = X. При этом вся-
всякий вектор х из X можно единственным образом представить
в виде суммы х = хк -f- х^ (#,< gK, xN e N). Покажем, что век-
вектор хк может быть найден как функция вектора хп из условия
Убедимся прежде всего, что оператор Ф'(*о) |К осуществляет
изоморфизм Ф'(х0) '• К->-Y. Достаточно показать, что некоторый
базис в К переходит под действием Ф'(хй) в базис простран-
пространства Y. Пусть {?;}J=i — базис в подпространстве К. По построе-
построению набор {ej}*=1 линейно независим над N, т. е. линейная ком-
комбинация ??=i clel этих векторов принадлежит N в том и только
том случае, когда все ее коэффициенты с1 равны нулю. Отсюда
следует, что векторы {Ф'(*о)еЛ^=1 линейно независимы. С дру-
другой стороны, эти векторы образуют полную систему в простран-
пространстве Y, поскольку точка лго — неособая:
Ф' (х0) (К + N) = Ф' (*о) К = Y.
Из проведенных рассуждений видно, что fe = dimK = dimY и
оператор Ф'(л;о) осуществляет изоморфизм К на Y.
Согласно теореме о неявных функциях (см. гл. 3) в этом
случае вектор хк может быть определен из уравнения Ф(хк-\-
* Результаты этого параграфа не понадобятся до конца третьей главы,
так что опасность логического круга не возникает.
233
-fxN) = O как функция вектора xN, xK = iKxN), заданная в
окрестности неособой точки xq: xqk = ¦ф(лгоы). Производная этой
функции может быть найдена согласно правилам дифференци-
дифференцирования неявных функций (гл. 3). Именно: если мы обозначим
сужение производной Ф' на подпространства К и N через Ф',
Ф^ соответственно, то ty'(х) = — [Ф'к (х)]~ Ф'п(х). В частности
/()|N 0
()|
Доказанное утверждение позволяет, разрешив уравнение
связи относительно хк, свести задачу об условном экстремуме
к задаче о безусловном экстремуме для функции f (х^) =
()
+ Ф (n))
*5. Если в неособой точке х0 гладкой связи Ф непрерывно
дифференцируемая вещественная функция / имеет локальный
экстремум, то для нее выполнено условие теоремы Ферма по
переменным Хи в точке Хо: fr = f'N + f'K • \|/ = 0.
Однако непосредственно в таком виде эти условия еще не-
неудобны для явного нахождения точек экстремума, так как тре-
требуют явного выделения «зависимых» переменных и обращения
матриц. Мы запишем их в симметричном относительно зависи-
зависимых и независимых переменных виде. Будем основываться на
следующей лемме:
*6. Пусть А— линейный оператор, действующий из простран-
пространства X в пространство Y, такой, что ДХ —Y, и F— линейная
форма из X*, удовлетворяющая условию Кег^гэКегЛ. Тогда
существует линейная форма G из Y*, такая, что F— GA =0.
© Пусть N = Ker/4 и K4-N = X — разложение простран-
пространства X в прямую сумму подпространств. Выделив базис {е,-}^
в К, заключаем аналогично рассуждению 4, что набор1
{Aei}1=l образует базис в Y. Это означает, что из уравнений
(G,Ax) = (F,x) при хеК форма G определяется однозначно.
С другой стороны, независимо от выбора формы G в силу усло-
условия КегЛсгКег/7 имеем (G,Ax) = {F,x) =0 при ^eN. Поль-
Пользуясь разложением пространства X в прямую сумму: X = К + N,
имеем для произвольного вектора х
(в, Ахк + Ахк) = (/% Xk) = (F, xk + Xk) = (F, x).
Это означает, что F — GA = 0. 3
С помощью леммы 6 мы докажем необходимый признак
условного экстремума, аналогичный теореме Ферма:
*7. Если в точке Хо области U непрерывно дифференцируе-
дифференцируемая вещественная функция / имеет локальный условный экстре-
экстремум с гладкой связью Ф(х) = 0, Ф:и~^ и точка хо является
неособой точкой связи Ф, то существует линейная форма G
(G a Y*), такая, что f (*<>)— GW(xo) = O.
© Доказательство основывается на лемме 6. Считая, что об-
область U лежит в линейном нормированном пространстве X, рас-
239
смотрим оператор А =Ф'(хо) :X-*~Y. Поскольку точка х0 не-
неособая, выполнено условие АХ = Y. Выделим в X подпростран-
подпространство N = Кег А и какое-либо дополнительное подпространство К,
такое, что К 4- N = X. Производная f функции / является ли-
линейной формой из X*. Согласно предложению 5 в точке услов-
условного экстремума Хо выполнено равенство f'N + /' ij/ = 0. С уче-
учетом доказанного в конце 4 равенства ф' (х0) | N = 0 имеем
/'м(*о) = °> т. е. Кег /'(х0) => N = Кег Ф'(х0). Таким образом, по-
положив f'(xQ)=zzF, мы оказываемся целиком в ситуации, описан-
описанной в 6. Следовательно, существует линейная форма G (G c= Y*),
такая, что в точке условного экстремума хо выполнено условие
//()СФ'() 0
)()
8. Форма G, удовлетворяющая условию 7, называется фор-
формой Лагранжа.
9. Если G — произвольная форма из Y*, то числовая функ-
функция w = f—GQ> называется функцией Лагранжа рассматривае-
рассматриваемой задачи.
Пользуясь координатной записью и частными производными
относительно переменных х1, служащих координатами векторов
jeXs базисе {еЛ^х, можно переписать условие 7 в виде
dim Y
¦Цг(*о)- Ц is ^j(xo) = O, /=1, 2, ..., dimX.
10. Числа g/ — координаты формы Лагранжа в базисе, со-
сопряженном с базисом пространства Y, которому отвечают коор-
координатные функции Ф' связи Ф, — называются множителями Лаг-
Лагранжа.
Таким образом, для разыскания точек условного экстремума
вещественной гладкой функции f при гладкой связи Ф следует
совместно решить два уравнения;
т. е. найти стационарные точки функции Лагранжа, удовлетво-
удовлетворяющие условию связи, и форму Лагранжа. Легко видеть, что
число неизвестных dim X + dim Y* в точности равно числу урав-
уравнений для координатных функций.
*11. Допустим, что функции f и Ф дважды непрерывно диф-
дифференцируемы вблизи стационарной точки Хо функции Лагран-
Лагранжа, удовлетворяющей условию связи (/'—GФ') (х0) = 0,
о)
Если квадратичная форма второго дифференциала функции
Лагранжа в точке х0, будучи суженной на подпространство
N = Ke^'(#o), оказывается положительно определенной, то в
точке Хо имеет место условный минимум функции /, если отри-
240
цательно определенной — то максимум, если же знакоперемен-
знакопеременной — то в точке хо нет экстремума.
В случаях, когда квадратичная форма второго дифферен-
дифференциала функции Лагранжа после сужения оказывается лишь
положительной (отрицательной), т. е. некоторые ее собственные
числа равны нулю, ничего определенного сказать нельзя (как
и в случае безусловного экстремума) и требуется дальнейшее
исследование.
0 Рассмотрим вспомогательную функцию Лагранжа w = f —
¦— СФ вблизи точки х0. Согласно условию связи в точках х, удов-
удовлетворяющих уравнению связи Ф(х) = 0, выполнено также
f = w. Поэтому достаточно исследовать характер экстремума
функции w. С другой стороны, вследствие двукратной непре-
непрерывной дифференцируемости функций /, Ф можно написать
формулу конечных приращений для произвольных x = x0Jrh
вблизи хо (АеХ):
w Us + h) = w (хо) + у «'„, н (f ~ СФ) (хо) + о (| h f).
Пользуясь билинейностью и симметричностью дифференциала
dh,hW и разлагая приращение h по составляющим в Ы = КегФ'
и К(й = hN + hK), запишем приращение w в виде
w (х0 + h)~ ,4J (x0) = y {<2An. hN (/ — <ЗФ) (лг0) -f
hK (/-СФ) (*0) + dhK, ak(/—GO) U0)}+o (| An I2 + I Лк I2)-
Учтем, что в точках х0 + h, удовлетворяющих условию
связи Ф(хо + h) = 0, компоненты /zN, ^к связаны равенством
х0к + hK =¦¦ f (лго,ч + hN), tyf (jcon) In = 0. Это означает, что hK =
= о(hN). Следовательно,
w (ха -г h) — w (xQ) = y dhN, hN (f — ОФ) (x0) + о (| hN f).
Из последней формулы вполне аналогично случаю безусловного
экстремума можно увидеть, что положительная определенность
формы d/,N, /,N (/ — СФ) (х0) влечет существование минимума в
точке Хо, отрицательная определенность — максимума, знакопе-
ременность — отсутствие экстремума. Э
Глава 3
МЕТОДЫ РЕШЕНИЯ НЕЛИНЕЙНЫХ УРАВНЕНИИ.
ТЕОРЕМЫ СУЩЕСТВОВАНИЯ
Читатель помнит, сколь важное место в линейной алгебре
занимает решение систем линейных уравнений. В анализе соот-
соответствующее место принадлежит задаче решения нелинейных
уравнений — задаче обращения функций. Основная цель гла-
главы — доказать теорему об обратной функции и теорему о неяв-
неявной функции. Первая отвечает на вопрос, при каких условиях
отображение f: X -> Y (X и Y — конечномерные нормированные
пространства равной размерности) допускает единственное об-
обратное f-1: Y -»-'Х, такое, что f ° f~' = /, где I — тождественное
отображение. Вторая теорема указывает условия, при которых
уравнение Ф (х, у) = О, где Ф : X + Y ->- X (X и Y — теперь не
обязательно равной размерности), определяет единственную
функцию ф: Y ->• X, обращающую уравнение Ф (х, у) = 0 в тожде-
тождество Ф(ф((/),у)== 0. Теоремы об обратной и неявной функциях
могут быть доказаны разными приемами. Теорему об обратной
функции мы доказываем, пользуясь методом Ньютона и прин-
принципом сжатых отображений (принцип сжатых отображений рас-
рассматривается в § 1, методу Ньютона посвящен § 2). Теорема
о неявной функции доказывается нами в круге совершенно иных
идей: доказательство базируется на теореме II Вейерштрасса
для непрерывных функций, определенных на компактных множе-
множествах. И если метод Ньютона и принцип сжатых отображений —
эти широко используемые в вычислительной математике прие-
приемы — позволяют не только доказать существование и единствен-
единственность решения соответствующего уравнения, но и построить по-
последовательные приближения, сходящиеся к искомому решению,
то метод, применяемый при доказательстве теоремы о неявной
функции, хотя и не дает приближенной конструкции решения,
отличается изяществом и демонстрирует мощь аналитических
подходов, использующих понятие компактности.
§ 1. ПРИНЦИП СЖАТЫХ ОТОБРАЖЕНИИ
Пусть М — замкнутое множество в линейном нормированном
пространстве X.
242
1. Отображение Ф:М->-М множества М в себя называется
сжимающим, если существует число q, О < q <; 1, такое, что
\{') {)\^q\x' ~х\, х',х<=М.
*2. Сжимающее отображение непрерывно.
Мы докажем, что всякое сжимающее отображение замкну-
замкнутого множества в себя имеет в этом множестве единственную
«неподвижную» точку Хос: Ф(хх,) = хх. Более того, мы укажем
«быстро сходящийся» итерационный метод отыскания этой не-
неподвижной точки — метод последовательных приближений.
3. Пусть х0 — произвольная точка из М. Точки Х1 = Ф(х0),
х2 = Ф(х\), ..., хп = Ф(хп-\) называют последовательными при-
приближениями. При этом Хо — нулевое приближение, Х\ — первое
приближение и т. д. Ряд xo + (*i—*о) + (аг2 — *i)+ ... называ-
называется рядом последовательных приближений.
*4. Последовательные приближения образуют фундаменталь-
фундаментальную последовательность в М.
© Поскольку х0 с= М, то любое приближение хн также принад-
принадлежит М. Кроме того, \хп+\ — хп\ < q\xn — хп~\\ < -
...<qn\xi— хо\.
Пусть п~> ш. Тогда
п п
< Z I** —*ft-il<l *, — *,) I Т, qk-l =
*б. Принцип сжатых отображений (принцип Бана-
Банаха): Всякое сжимающее отображение замкнутого множества
нормированного пространства в себя имеет единственную непо-
неподвижную точку в этом множестве.
0 Пусть Хо — произвольная точка ограниченного замкнутого
множества М. Последовательные приближения хг = Ф(хо), ...
..., хп = Ф(Хп-\) согласно 4 образуют фундаментальную после-
последовательность элементов множества М. Вследствие замкнутости
множества М эта последовательность имеет предел хх в М:
Хао = Хо + {х\ — хо)-\-{х2 — *i)+ ••• . Кроме того, из непрерыв-
непрерывности отображения Ф следует, что точка дг«, является его непо-
неподвижной точкой:
lira *B+i = хва= Нт ф (хя) = Ф (Нтхп) = Ф(xj.
П->оо П->оо П-*°о
Если бы в множестве М оказались две разные неподвижные
точки Хао, Хоа, то было бы выполнено условие
I*оо — *ос I = IФ(*J-Ф(^J \<Я\хеа — Хсв\,
что при q < 1 возможно лишь в том случае, если хх = хх. Ъ
Доказанный принцип имеет простую геометрическую интер-
интерпретацию. Отметим прежде всего, что
243
*6. Для всякого сжимающего отображения Ф множества М
в себя: Ф:М-»-М можно указать такое ограниченное подмно-
подмножество М' из М, которое также переходит в себя под действием
Ф : ФМ' с: М'.
0 Пусть jcosM, Ф(хо) = Х\. Обозначим символом Mr порцию
множества М, лежащую в шаре Ко = \х : | х — *о1^^}> М« =
= М П Ко- Под действием функции Ф порция М« перейдет в
шар KfR== {х : \ х — хх |=< qR}, который, в свою очередь, со-
содержится в шаре Ко*+1 *''"*'' = {х '¦ \ х — хо\ < qR + |a:0 — хх |}-
Если выбрать /?==(! — q)~l\xo — х\\, то окажется, что
Поскольку множество М переходит в себя под
действием отображения Ф,
мы заключаем, что Ф:М«->-
—»-Мя. D
Предложение 6 позволяет
при интерпретации принципа
сжатых отображений иметь в
виду лишь ограниченные за-
замкнутые множества.
7. Назовем сжатыми ото-
отображениями ограниченного за-
замкнутого множества М его об-
образы, полученные последо-
последовательными применениями
- отображения Ф: М = Мо,
Рис. 9 М, = Ф(М0), М2 = Ф(М1) =
(,)(,)
Обозначим символом us величину diamM.k— sup \x — x'\
диаметр множества M.k.
8. Справедливы следующие утверждения:
1) МоГэМч =эМ2гэ .. :э М„ :э М„+1 =э .. ;
2) dn^qnd0;
3) сжатые отображения Мо, Мь ..., МЛ/ „..
ную общую точку — неподвижную точку
(рис. 9).
© В доказательстве нуждается лишь первое утверждение. Со-
Согласно определению сжимающего отображения М1 = Ф(М0)с:
с: Мь. Положим что выполнены включения Мо ^> М^ ... о Мп.
Убедимся, что Mn+i = Ф (М„) а Мп. Действительно, М„+1 =
= фга+1(М0)--=Ф"(М1)сг Фга(М0) = М„, поскольку Mi сг Мо.
Второе утверждение следует из условия сжимаемости
()(/)||'|
имеют единствен-
единственотображения Ф
третье утверждение следует из второго и замкнутости мно-
множества М согласно 1.1.18. Т>
244
В дальнейшем для нас окажется полезным обобщение прин-
принципа Банаха 5, касающееся отображений, зависящих от допол-
дополнительного параметра.
*9. Пусть М — замкнутое множество в нормированном про-
пространстве X, отображаемое семейством сжатий {Ф5} в себя.
Если семейство сжатий {<DS} непрерывно зависит от параметра s,
O^s^l и если выполнено условие сжимаемости |Ф5(Х)—
— <bs {х') | ^ q | х — х'\, 0<^<1 равномерно при всех s, то на
множестве М существует единственная непрерывная кривая х$,
состоящая из неподвижных точек отображений Ф5.
0 Доказательство существования неподвижной точки отобра-
отображения <DS при каждом s проводится точно так же, как и при
отсутствии параметра. Следует лишь убедиться, что построенная
методом последовательных приближений неподвижная точка xs
непрерывным образом зависит от s. Воспользуемся тем, что
члены ряда последовательных приближений
(*) XS = Хо + (Ф3 (Хо) — Х0) + (ф1 (Хо) — Ф3 (JC0)) +
+ ... + (Ф? (*о)-ФГ'(*,>))+•••
непрерывно зависят от s и допускают равномерную по s оценку.
Действительно, функция <Ds(.*:o) непрерывна на промежутке
О ^ s ^ 1 и, как следует из теоремы I Вейерштрасса, ограничена
на нем:
Используя равномерную оценку сжатия, получим
I Ф?(*>) - ФГ1 {Хо) | < qn~l | Ф, (хо) - Хо | < (С + | Хо | J?".
Отсюда следует, что ряд последовательных приближений схо-
сходится в пространстве непрерывных функций на компакте
О sc: s ^ 1 (равномерно) и, значит, (см. 1.6.5) сумма ряда («¦)
является непрерывной функцией параметра s. D
§ 2. МЕТОД НЬЮТОНА
Круг задач, к которым принцип сжатых отображений при-
применим непосредственно, весьма узок. Обычно его применяют в
комбинации с так называемым методом Ньютона или каким-
либо иным методом, позволяющим ввести в задачу сжимающее
отображение.
Продемонстрируем классический метод Ньютона на простом
одномерном примере. Пусть f — вещественная непрерывно-диф-
непрерывно-дифференцируемая функция, заданная на промежутке [—1,1],
f(—1)<0, /A)>0; условимся также, что на всем этом про-
промежутке знак первой производной, а для наглядности и направ-
направление выпуклости сохраняются. При этом, не ограни швая общ-
245
ности, можно считать, что первая производная положительна на
всем промежутке и возрастает.
Мы решим уравнение /(х) = 0, построив методом Ньютона
последовательность точек {*„}°°=1, сходящуюся к единственному
на рассматриваемом промежутке корню этого уравнения:
/(хо) = 0. Последовательность хп строится по индукции: х\ = 1;
х2 находится как решение линейного уравнения /A) + /'A) (х—
— 1) — 0, и хп+\ — как решение f(xn)+ f'(xn) (x — хп) = 0. Гео-
хп хп^ х ^
Рис. 10.
1 х
метрический смысл этого построения виден из рис. 10, а. Он со-
состоит в последовательной замене графика функции прямой, ка-
касающейся его в точке (xn,f(xn)) и в явном построении корня
полученной линейной функции у = f(xn)-\-f'(xn) (х — хп): xn+i—
Поскольку первая производная функции f положительна и
возрастает, то график функции f всегда лежит выше касательной
и, следовательно, \'{хп)> 0, f(xn)^> 0. Отсюда видно, что после-
последовательность {хп} монотонно убывает с ростом п. Почти оче-
очевидно, что в точке а = —[/A) —/(—1)]-'[/A) + /(—1)] зна-
значение функции f при наших условиях отрицательно, f(a)<C.O.
Поэтому последовательность {хп} заведомо лежит на проме-
промежутке (а, 1] и, значит, имеет предел хо, Хо > а. Пользуясь не-
непрерывностью функций f и /', заключаем, что в точке хо выпол-
выполнено условие f(xo) — O.
С методом Ньютона можно было бы связать отображение
Ф{х) = х ~[f'{x)]-lf{x). Оно переводит в себя отрезок [х0, 1],
но, вообще говоря, не является сжимающим. Допуская наличие
хотя бы ограниченной второй производной у функции f во всех
точках промежутка [хо, 1], вычислим производную отображе-
отображения Ф: Ф'(х)= [f'(x)]-2f"(x)f(x).
Для того чтобы рассматриваемое отображение Ф было сжи-
сжимающим на промежутке [х0, 1], необходимо и достаточно, чтобы
выполнялось условие sup | Ф' | < 1. Простой пример показы-
Ха < X < 1
вает, что этого может не быть. Пусть в (х) = 1 при х ^ 0,
246
в(х) = О при *<0, ц(х) = в(х + 1HA — х). Положим
х
х
"(s)ds, f(x)=\f'(s)ds. ¦
о
Функция f"(x) отлична от нуля лишь на промежутках 1/л—
— 3~" ^ х ^ 1/л -f- 3~" (л = 1, 2, 3, ...) ы принимает на них
значение 2п. Поэтому выполняются неравенства l^f'(j;)^l +
+ Zr=>f B-3~") = 5, x^f (x)^5x, (x> 0).Отсюда для про-
производной отображения Ф на промежутках 1/п — 3~" ^ х ^
^ 1/л + 3~" следует оценка
из которой видно, что отображение Ф не является сжимающим.
Сглаживая функцию t\(x), легко привести пример бесконечно
дифференцируемой функции f, для которой соответствующее
отображение также не является сжимающим.
Интересно, что незначительная модификация отображения Ф
позволяет сделать его сжимающим. Именно: рассмотрим ото-
отображение
использующее снос точки (х, f(x)) графика функции на ось абс-
абсцисс параллельно касательной к графику в точке A,/A)) (а не
вдоль касательной в точке (x,f(x))), как это было в классиче-
классическом методе Ньютона (см. рис. 10,6). Произведем оценку сжи-
сжимаемости этого отображения, подсчитывая его производную:
VF'(*)=-[f(l)]-i [/'«-ГО)]-
Пользуясь положительностью первой производной функции f
и выпуклостью, заключаем, что на промежутке [хй, 1] выпол-
выполнено неравенство
[/'(!)]"'/'(*о)< [ПОГ1 П*)< 1.
Отсюда следует, что
sup |^/(д:)|-1-[/'A)]-1Г(*о)<1-[ГA)Г1Г(-1)<1. Та-
ким образом, отображение W переводит отрезок [х0, 1] в себя
и является сжимающим:
SUP |" '
S47
Следовательно, согласно принципу сжатых отображений по-
последовательные приближения .?i=vF(l), ... ,xn+i = W(xn), ...
сходятся к корню Хо функции f со скоростью геометрической
прогрессии (см. рис. 10,6):
1*„-*о1<{1 - (Г (i)] Г(-1)Г[/'(-ОГ'ГО)-
5га сходимость — значительно более медленная, чем сходимость
приближений хп, построенных классическим методом Ньютона
Хп+\ = Ф(х„). Описанный метод называется модифицированным
методом Ньютона.
*1. Оцените скорость сходимости последовательных прибли-
приближений, полученных классическим методом Ньютона.
*2. Пользуясь языком линейной алгебры, обобщите метод
Ньютона на случай уравнений в многомерном пространстве.
§ 3. СУЩЕСТВОВАНИЕ ОБРАТНОЙ ФУНКЦИИ
Доказательство существования обратной функции мы прове-
проведем, пользуясь модифицированным методом Ньютона и принци-
принципом сжатых отображений.
Пусть X и Y — два конечномерных линейных нормированных
пространства и f: U -*- Y — функция, определенная в окрестно-
окрестности U сг X точки хо^Х, i(xQ) = уо^Ч. Если dim X< dimY, то
обратная функция f~': Y-*-X, вообще говоря, не существует уже
в линейном случае (число независимых переменных х функции f
меньше ее координатных функций). Если же dimX > dimY, то
обратная функция, вообще говоря, неоднозначна. Поэтому тео-
теорему об обратной функции естественно формулировать в пред-
предположении dim X = dim Y.
Приращение f(xo + /i)—f(*o) дифференцируемой функции f
с точностью до бесконечно малой более высокого порядка о (Л)
может быть заменено ее дифференциалом \'(xo)h. Интуитивно
очевидно, что при условии обратимости линейного оператора
V (хо) в малой окрестности точки х0 будет обратима и функция
\(х). Иными словами, можно надеяться, что малая величина
o(h) не может существенно повлиять на свойство обратимости
отображения V (хо)п + о (/г).
Действительно, основным условием теоремы об обратной
функции является предположение об обратимости линейного
отображения V(хо)-
Прежде всего докажем одно вспомогательное утверждение об
обратимости оператора f'(*):X->Y, dim X = dimY в малой
окрестности точки Xq.
*1. Если производная i'{x) обладает модулем непрерывно-
непрерывности A.5.14) co(s) и обратима в точке Хо, то она обратима и в ее
окрестности Ue, определяемой из условия || [f (*o)]~'li(oF)=^ 1/4,
и обратный оператор [f'(A')] непрерывен с модулем непрерыв-
непрерывности ©(s):©(s)^ 16/9-||[Г(*о)]-Ч12о>($1.
248
0 Запишем значение производной в точке х в виде произведе-
произведения двух операторов:
Г (х) = {/ + (Г (х) - Г (х0)) • [Г (хо)Г1} Г (*„).
Второй сомножитель обратим по предположению. Обратимость
первого доказывается с помощью утверждения 1.5.6. Оценим
норму оператора (f'(x) — f'(x0)) [Г(хо)]~'. Поскольку норма про-
произведения операторов не превосходит произведения норм,
см. 1.4.20, в указанной окрестности выполнено условие
-1II <г
-11
< sup || f (x) — f' (jc0) II • II [*' (JCo)]
Это означает, что оператор, стоящий в фигурной скобке, обра-
обратим, норма его обратного согласно, 1.5.6 не превосходит A —
— 1/4)~" = 4/3. Пользуясь тождеством (АВ)~1 — В~1А~1, заклю-
заключаем, что
[Г (х)Г1 = [Г (хо)Г1 {/ + (Г (х) - Г (хо)) • [Г (хо)Г1У\
\\{Г(х)г1\\<*Ш'(хоТ11
' Для доказательства непрерывности функции [f'(x)]-1 вос-
воспользуемся следующим легко проверяемым тождеством, спра-
справедливым для любой пары А, В обратимых операторов: А~1 —
— В-1 = В-1 (В — А)А-\ Полагая A=i'(x), B — f'(x), оценим
норму разности обратных через произведение норм:
\\[Г(х)Г1-[Г(х)Г1\\<
Отсюда видно, что модуль непрерывности &(s) функции [f (х) ] —'
в окрестности Ue оценивается через модуль непрерывности
функции V(х) следующим образом:
Теорема об обратной функции указывает условия, при кото-
которых обратная функция существует, единственна, непрерывна и
дифференцируема.
*2. Теорема об обратной функции: Пусть f—непре-
f—непрерывно дифференцируемая функция, определенная в окрестно-
окрестности U точки Хо линейного нормированного пространства X и
принимающая значения в линейном нормированном простран-
пространстве Y, dimY = dimX, f(*o) = yo, yo^Y. Если оператор ?(х0)
обратим, то существует непрерывно дифференцируемая функ-
24Э
ция f-1, определенная в некоторой окрестности V точки у0 и
отображающая ее в окрестность U точки х0 так, что выполнено
тождество f (f-1 (у)) е= у (у е V). При этом производная функ-
функции f~l в точке у = Цх) определяется равенством (i~l(y))' —
© Доказательство сводится к построению решения уравнения
i(x)—у = 0. В отличие от ситуации, разобранной в предыду-
предыдущем параграфе, решение этого уравнения зависит от «парамет-
«параметра» у, т. е. является функцией. Иными словами, ситуация ста-
становится уже бесконечномерной. Тем не менее мы воспользуемся
модифицированным методом Ньютона и в этом случае. По ана-
аналогии с одномерным случаем рассмотрим отображение
Убедимся, что отображение Ф^, оказывается сжимающим в неко-
некоторой малой окрестности точки х0, если у лежит в малой окрест-
окрестности V точки t/o.
Проверим прежде всего, что некоторая достаточно малая
окрестность Ue точки х0 отображается действием Фу в себя. Для
этого воспользуемся тождеством:
Фу (х)-хо = х-хй~ [Г (хо)]-1 [f (x) -у} =
= [Г (*о)Г' {Г (Хо) (х - дсо) - f (х) + f (Хо) -Уо + У)=*
1 (х -xo)-t (х) + f
Мы должны теперь указать окрестности Ue точки Хо и окрест-
окрестность Ve точки у0 так, что Фу(х)cz U6, когда JtGU(jG Ve. Обо-
Обозначив через ю модуль непрерывности (см. 1.5.14) производной Р
в области U4, можно оценить с помощью 2.1.52 норму разности
\Фу(х) — хо\ следующим образом:
| Фу (х) - *„ | <I [f (Xo)Vl I(u> F) 6 + е), ieUj, у s Ve.
Выбирая б из условия II [f'(^o)]~1lloi)F)^ 1/4, а затем е из усло-
условия ||[f(*o)]-'IIег^б/4, заключаем, что Фу(х) переводит U6 в
себя, если только эти условия выполнены.
Проверим, что при тех же условиях отображение Фи явля-
является сжимающим. Запишем тождество:
, Фу (х) - Фи (х?) = If (ХоТ1 {Г (хо) {х-х*)-* (х) +1 (х1)} =
= I? (Хо)Г1 V (х/) (х -х')-\ (х) + t (х1)} +
+ [Г (хо)Г1 {Г (хо) - Г (л/)} (х - х').
250
Оценим каждый из членов выражения, стоящего в правой части,
пользуясь тем, что со B6) ^ 2со F) и х, х' cr Ue:
| Ф^, (х) - Фу (х') | < || [Г (хо)]-> ||се (| х - х' |) | х - х' | +
< II [Г (хо)]~1 \\ЗтF)\х-х/\^\х-х/\.
Таким образом, в окрестности Ue отображение Ф^, оказыва-
оказывается сжимающим.
Теперь, пользуясь параметрическим вариантом принципа
сжатых отображений 1.9 и непрерывной зависимостью отобра-
отображения Фу от у, заключаем, что в области U6, определяемой усло-
условием || [f/(A:o)]~1||oi)F)^ 1/4, существует единственная непо-
неподвижная точка х(у) отображения Фу, у е: Ve, || [f' (jc0) ]—1 lie sg: 6/4.
Очевидно, что неподвижная точка х(у) отображения Ф^, удов-
удовлетворяет уравнению i(x(y)) — у = 0, и всякое решение этого
уравнения служит неподвижной точкой отображения Ф^,. Тогда
из 1.9 следует единственность обратной функции. Согласно 1.9
неподвижная точка х(у) непрерывно зависит от параметра у
(^eVe). Тем самым существование непрерывной функции
f-1: y-*-x(y) доказано.
Остается убедиться, что функция х(у) является непрерывно
дифференцируемой функцией параметра у. Это мы сделаем,
явно выделяя главную линейную часть приращения этой функ-
функции. Пользуясь дифференцируемостью функции f в области Ue,
выделим в явном виде главную линейную часть приращения
функции у = f(x):
у-у' = Цх(у))~Цх(у')) = Г(х(у'))(х(у)-х(у')) +
+ о(х(у)-х(у')).
Здесь о(х(у) — х(у')) — функция пары точек х(у), х(у'), допу-
допускающая оценку \о(х(у)— х(у'))\^а(\х(у) — х(у')\)\х{у) —
— х(у') | через модуль непрерывности со производной ?(х).
Применяя полученную ранее (см. 2.3.3) оценку остатка в
формуле Тейлора, оценим норму разности \х(у) — х(у')\ через
\у-у'\.
Заметим, что в соответствии с 1 в окрестности U6 производ-
производная F обратима и выполнена оценка || [f'M]1|^ 4/3X
XII [f'^o)]!!- Это немедленно приводит к оценке
\х{у)-х (у') | = | [Г (х (у'))Г1 {у-у'-о{х (у) - х (/))} | <
< II [Г (х (у'))]~1 \\\y-yf\ + \[f(x (/))Г о (х (у) - х {у')) | <
< 7зIIV (хо)]-1 II \У ~ У' I + % ¦ II [f (^o)]-1 II со F) | х (у) - х (/) |,
из которой с учетом выбора окрестности Ue следует, что \х(у) —
— х(у')\^2\\[1'(хо)]-Ц\\у — у'\. Полученная оценка показы-
251
вает, что функция о (х(у)'— х'(у')) оценивается через норму
\у—у'\-
I о (х (у)-х (у')) |< 21| [f (xo)]-i ||со B1|[Г (*<,)]-' ||| у-у' |)| у-у' \.
Суммируя проведенные рассуждения, заключаем, что прираще-
приращение функции х(у) допускает выделение главной линейной части
х(у)-х (у') = [Г (х (г/'))] (У-У')+[Г (х (уЖ1 о (х (у)-х(у')).
причем остаток имеет высший порядок малости:
< 7з • II [Г (хо)}-1 II2 © B || [Г (хо)Г III у - У' I) I у - у'
Это вместе с предложением 1 означает, что функция f~' :y-^-x(y)
непрерывно дифференцируема, и ее производная вычисляется
по правилу (f-1 (у))'= [Г(х)} -\ у = f (x). D
§ 4. ТЕОРЕМА О НЕЯВНОЙ ФУНКЦИИ
В этом параграфе мы формулируем и доказываем теорему
о неявной функции, указывающую условия, при которых соот-
соотношение Ф(х, у) = 0 определяет функцию x = q>(y), обраща-
обращающую уравнение Ф(х,у) = 0 в тождество Ф(<р(г/),у) = 0 на не-
некоторой области изменения переменной у. При этом говорят, что
соотношение Ф (х, у) —0 неявно задает на этой области функцию
х = ф(г/). Доказательство будет основано, в отличие от доказа-
доказательства теоремы об обратной функции, на теореме 11 Вейер-
штрасса.
Если равенство Ф (х, у) = 0 имеет место при х = х0, у = г/о,
то в малой окрестности точки х0, г/0, используя гладкость функ-
функции Ф, его можно записать в виде *
- 0 = Ф(*, у) = Ф(х0, Уо) +-^-Ф(х0, Уо)(х — хо) +
+ -^-Ф(*о. Уо) (У — Уо) + о(х — х0, у — г/о)-
После этого разыскание зависимости x = q>(y) сводится к реше-
решению «почти линейного» уравнения
-J^-ФUo, Уо)(х — хо)->г-^Ф (х0, Уо) (У — Уо) + О = 0.
Можно ожидать, что при малых значениях у — г/о хорошим при-
приближением для решения этого уравнения будет решение соот-
* Здесь -jv~*D, -^гт-Ф — производные по подпространствам X, Y (см,
С/Л ОI
2.1.45, 46).
252
ветствующего линейного
^i=^«-[lO (*b, Уо)] зу Ф(х0, г/о)(у — Уо),
существующее при условии Крамера det -^ ф (х0, у0) Ф 0. Так
оно и оказывается на самом деле.
Пусть X, Y — конечномерные вещественные банаховы про-
пространства, X 4- Y — их прямая сумма, снабженная подходящей
нормой, G — область в Х-fY и Ф — гладкая функция, заданная
на G, принимающая значения в пространстве X и обращающаяся
в нуль в некоторой точке (х0, уо)<^ G, Ф(*о, уо) = 0.
*1. Теорема о неявной функции: Если в точке (х0, уо)
производная -^-Ф (х0, у о) по подпространству X обратима,
йег-^Ф{х0, уо)фО, то в некоторой окрестности Ку = {у: \у—
— yo\<dy} точки у о существует гладкая функция x — q>(y),
принимающая значения вблизи х0 в X и такая, что равенство
Ф(ф(#)>#) = 0 выполняется тождественно в К^. Производная
ее в точке у вычисляется по формуле
1-§тФ(х, у), x = <f(y).
© Домножив функцию Ф на "дх'с*)(л:о> ^о) > мы можем, не
ограничивая общности, свести дело к рассмотрению случая, ко-
когда -|^-Ф(*о, Уо)—!- Далее, на основании теоремы об эквива-
эквивалентности различных нормировок конечномерных пространств
A.2.19), можно с самого начала считать пространства X, Y ев-
евклидовыми, Х*=Х, Y*=Y, а их сумму — ортогональной: X-j-Y =
= X0Y. Мы сразу же запишем функцию Ф через ее координат-
координатные функции относительно некоторого ортонормированного ба-
базиса {б{}^х-
Ф(х, у)-?
Наметим план доказательства. Основная его идея состоит
в том', чтобы заменить задачу построения решения уравнения
Ф(х, у) = 0 задачей о разыскании минимума. Рассмотрим неот-
неотрицательное выражение
при каждом фиксированном значении у<^Ку—{у:\у — Уо\^
^ dy) как функцию переменной х на некотором компакте К* =
=={х:\х — Xo\^dx}, считая, что M = K*XKj,cG. Будем ис-
искать точку ху е К*, в которой реализуется минимум построен»
ного выражения
(х, у)?.
253
Согласно теореме II Вейерштрасса A.2.15), такая точка на
компакте К* существует. Если дополнительно известно, что она
является внутренней, то по теореме Ферма B.3.6) она стацио-
стационарна, т. е. производная функции \Ф(х,у)\2 по подпростран-
подпространству X в этой точке равна нулю:
Полученное необходимое условие экстремума можно теперь запи-
записать в виде
Если удастся показать, что на компакте М = К*ХКг/ оператор
-гг^-Ф(ху, у) обратим, то вместе с ним обратим и его сопряжен-
сопряженный [^-ф^, уЦ . Это означает, что Ф(ху, у) = 0, т. е. точках^
служит решением уравнения Ф(х, у) — 0. Теперь останется лишь
убедиться, что на компакте К* имеется единственная точка
минимума ху и она зависит от у гладким образом. 3
В соответствии с намеченным планом разобьем доказатель-
доказательство теоремы на пять этапов: 2—6.
*2. Пусть ^-Ф = Ф'|Х и -^-Ф==Ф'|У—производные
функции Ф по подпространствам X и Y соответственно. Пусть,
далее, со — модуль непрерывности производной Ф' функции Ф
на компакте М = К*ХК#. Тогда на компакте М выполнены
следующие оценки:
(*)
Ф(х, у) — {х — хо) — -^-Ф(хо, Уо)(у —
0 Для доказательства первых двух оценок достаточно вос-
воспользоваться определением производных по подпространствам
и неравенством треугольника. Например:
+ IIФ' (х0, у) - Ф' (х0, Уо) II < ю Ш + со (dy).
254
Аналогичным образом получается и последняя оценка:
\Ф(х, У) — (х- х0) --^т Ф(х0, уо)(у — г/о) <
Ф(х, у) — Ф(х0, у) — -ш
"д\Г Ф V-^O» У) \х Хо) — Ту" Ф (Xq,
дХ
„ у)(х — х0)
х х0)
х0, г/0) (у -г/0)
<со(dx)| х — х01 + со(dtf) | д; — х01 + со{dy)\y — yo\
*3. Если выбрать dx, dy из условий
< min
X) [8
, y0)
и так, чтобы компакт М = {(*, у): \х — Хо\ ^ dx, \y — yo\^dy}
содержался в G, то на его подмножествах выполнены следу-
следующие оценки:
sup |Ф
\y-yo\<dy, x-x0
inf
\y-Vo\<dy \х~хо1~ах
| Ф (х, у) | > dx/2.
© Доказательство немедленно получается из предыдущих оце-
оценок. Например, при \х — xo\ = dx имеем
Из доказанного предложения 3 видно, что при у^Ку мини-
минимальное значение выражения \Ф(х,у)\2 на компакте Кх =
= {х: \х — Хо| ^ dx} достигается внутри.
*4. Операторы -^Ф(л;, у) и ["^Ф^. У)\ на компакте М
обратимы и [|[-^Ф(*> У)] ||<3/2-
© Пользуясь оценкой B*) и выбором dx, dy, видим, что для
всякого вектора ЛеХна компакте М выполнено
д
дХ
Ф(х, y)h >2|A|/3.
Следовательно, равенство
h
Ф (х, у) h — 0 возможно лишь при
¦¦ 0. Согласно теореме Фредгольма A.4.5.15) это означает, что
оператор ^j-O(jr, у), а вместе с ним и сопряженный обратимы.
Оценка нормы получается, если воспользоваться тем, что об-
255
ласть значений обратимого оператора -г=- ф (х, и) совпадает со
О Л.
всем пространством X. Положив ¦^¦ф(х, y)h = g, запишем
1
предыдущую оценку в виде Г-^ Ф (х, уц g <! 3 | g |/2. Это
означает, что 7Гх~Ф(х> ^ ^3/г- ?
Суммируя предложения 3 и 4, заключаем, что при каждом
значении j/eR, минимальное значение выражения \Ф(х,у)\2
на компакте Кх достигается во внутренней точке ху, удовлетво-
удовлетворяющей уравнению Ф(ху, у) = 0.
*5. Уравнение Ф(х,у) = 0 при каждом jeKB имеет на ком-
компакте Кх единственное решение.
© Допустив, что Кх содержит две точки х\, х2, удовлетворя-
удовлетворяющие нашему уравнению, получим в силу оценки остаточного
члена в формуле Тейлора B.3.3)
Ф(*2. У) — Ф(хг, у) — -^?Ф(хи у)(х2 — х
Отсюда, используя неравенство 2(«) и условия Ф(л:,-, у) = О,
/=1,2, заключаем, что
Это возможно лишь при х\ = х2. 5
Последнее предложение показывает, что на компакте Ку
определена функция <р:у-*-ху, сопоставляющая каждому значе-
значению у е Ку внутреннюю точку ху компакта Кх, которая является
единственным на Кх решением уравнения Ф (х, у) = 0.
*6. Функция (р:у-+ху является гладкой и ее производная
вычисляется по формуле
ч'(у)=*-[жф(х' y^wvi*'
Здесь в правой части следует положить х = ху.
0 Пользуясь оценкой B.1.52) для пары точек у\,х\—ху^ и
у2,х2 — Ху2, получим
)
«э (| а-2 — хх |) | х2 — Xi | + со (| уг — г/, |) | г/2 — У\
\
Согласно 4 норма оператора |"ajf®(*. У)\ на М не превос-
превосходит 3/2, поэтому
(х2 — )\[ф( д\
256
Отсюда видно, что, во-первых, \х2 — Х\\ ^ const]y2 — у\\ и, во-
вторых, выражение—[-^-Ф (л;,, у{Ц -гр?-Ф(хи У\){у2 — У\) яв-
является главной линейной частью приращения х%— Х\. Это озна-
означает, что функция <р:у-*-ху дифференцируема и
ЧКу) = - [§?Ф (х, у)] ' -^г Ф {х, У). D
Предложением 6 завершается доказательство теоремы 1 о
неявной функции. Очевидно, что теорема об обратной функции
может быть получена из теоремы о неявной функции как ее част-
частный случай при Ф(х, y) = i (x) — у. С другой стороны теорема
о неявной функции может быть доказана так же, как и теорема
об обратной функции, с помощью модифицированного метода
Ньютона и принципа сжатых отображений.
Отметим, что обе теоремы без существенных изменений пере-
переносятся на комплексные конечномерные и даже бесконечномер-
бесконечномерные банаховы пространства. Однако для последнего случая из-
изложенный в этом параграфе способ доказательства, основанный
на компактности, уже непригоден.
Глава 4
ИНТЕГРИРОВАНИЕ
или
или
или
а1
а'
а'
'<Р
^ X1
<х'
^xi
', i
<
=
Р'»
рг
Рг,'
1,2, .
/ = 1,
/=1,
; = 1,
2,
2,
2,
§ I. ОБЪЕМ И МЕРА ЛЕБЕГА
Пусть Е — конечномерное вещественное евклидово простран-
пространство dim Е = п, {е,-}"=1 — ортонормированный базис в Е, х' —
координаты вектора х в этом базисе.
1. Брусом называется множество Р, выделяемое в Е какими-
либо неравенствами вида
п,
..., я,
..., л,
..., п.
В частности, брус, выделяемый в Е неравенствами «'<*'"< Э',
называется открытым; брус, выделяемый неравенствами а'^
^ л;' ^ Р', — замкнутым. Все прочие брусы называются полуот-
полуоткрытыми.
Брусы {х : а' ^ х' < Р' i = 1, 2, ..., п) называются ячей-
ячейками.
2. Разность Р' — а' называется t-й высотой бруса.
3. Всякому брусу Р сопоставляется число — произведение его
высот: (Р1 — а')(Р2 — а2) ••• (&" —а") = |Р|, называемое объ-
объемом бруса.
*4. Объем пустого множества равен нулю. Если брус Р пред-
представлен в виде конечного объединения непересекающихся бру-
сов: P,:P = UP<, то |Р|=*2*|Р*|.
0 Справедливость второй части утверждения очевидна из ин-
интуитивных представлений об объеме. Наметим ее строгое дока-
доказательство. Для специального разбиения бруса, задаваемого си-
системой плоскостей, параллельных координатным, утверждение
получается путем последовательного суммирования объемов
брусов. Сначала складываются объемы, которые лежат друг
над другом, образуя стержень постоянного сечения, вытянутый
в направлении базисного вектора ех. При этом оказывается, что
сумма объемов брусов, заполняющих стержень, равна объему
стержня. Затем следует суммирование объемов стержней, запол-
258
няющих слой, простирающийся в направлении базисных векто-
векторов еи е2 и т. д.
В общем случае следует сначала, продолжая грани брусов Р,-,
построить специальные разбиения исходного бруса Р и состав-
составляющих его брусов Р,- на более мелкие брусы Рц (/=1,2, ...
..., Ni). Тогда в силу проведенного рассуждения | Р |= ][] (_ у I Р;, /1
и I Р( I = Е /1 pf, /1- Затем, группируя должным образом сла-
слагаемые первой суммы, представим ее в виде I Р 1= Л' 2/IP* /1 ==
= Z«|P/|. j '
Распространим понятие объема на более широкий класс мно-
множеств.
5. Множество М называется элементарным, если его можно
представить в виде объединения конечного числа непересека-
непересекающихся брусов.
*6. Объединение, пересечение, разность и симметрическая
разность элементарных множеств являются элементарными мно-
множествами (симметрическая разность MAN множеств М и N
определяется равенством: М Л N = М U N\M П N).
© Пусть М и N — элементарные множества, представленные
объединением непересекающихся брусов Р,- и Q;-: M= U * Р/,
N=U/Q/-
Вначале докажем, что пересечение Mf]N — элементарное
множество. Пересечение М П N может быть записано в виде
MflN= U /, /(Р? П Q/)- Так как пересечение двух брусов есть
брус и брусы Р,-, равно как и брусы Q/, взаимно не пересекаются,
объединение [} i, / (Р,- П Q/) есть объединение непересекающихся
брусов в конечном числе. Следовательно, М П N — элементарное
множество.
Докажем, что разность M\N есть элементарное множество.
Рассмотрим сначала разность двух брусов P\Q, которая мо-
может быть представлена в виде Р П Q', где Q' — дополнение бру-
бруса Q. Дополнение Q' в свою очередь может быть представлено
как объединение конечного числа непересекающихся брусов Q,-,
часть из которых имеет бесконечные высоты, и, следовательно,
P\Q = (J i Р П Q'r Поскольку Р П Q] — непересекающиеся брусы
с конечными высотами, P\Q — элементарное множество.
Рассмотрим далее разность M\Q элементарного множе-
множества М и бруса Q. Так как М \ Q = [] i (Pt \ Q) и по доказан-
доказанному P*-\Q — элементарные множества, причем непересека-
непересекающиеся, то M\Q — элементарное множество. Наконец, М \ N =
= U i (M \ Qi), и поскольку M\Q,- — непересекающиеся эле-
элементарные множества, то M\N — элементарное множество.
Обратимся к доказательству того, что M|JN — элементарное
множество. Представим объединение элементарных множеств М
и N в виде М U N = М U Qi U Q2 U •. • UQ, U ,.. UQ*. Так как
9* 359
MUQi =(M\Qi)U Qi и M\Qi и Qi — непересекающиеся эле-
элементарные множества, то М U Qi — элементарное множество.
Следовательно, Ml) Qi U Q2 = (M|JQi)UQ2 — также элементар-
элементарное множество. Повторяя эту процедуру объединения элементар-
элементарного множества и бруса п раз, получаем требуемый результат.
Наконец, утверждение, что симметрическая разность MAN
является элементарным множеством, есть следствие равенства
МЛ N = (M\N)U(N\M) и уже доказанных утверждений. 3)
7. Если семейство множеств обладает тем свойством, что
объединение, пересечение и разность двух любых множеств се-
семейства также принадлежит семейству, то говорят, что это се-
семейство образует кольцо множеств.
*8. Семейство элементарных множеств образует кольцо мно-
множеств.
Рассмотрим семейство всех элементарных множеств, лежа-
лежащих в брусе Ki = {х : — 1/2 ^ х1 ^ 1/2}. Разумеется, это семей-
семейство является кольцом. Однако это кольцо в одном отношении
замечательно: существует выделенное элементарное множе-
множество— брус Кь—такое, что Kif|M = M для всякого элементар-
элементарного множества М из рассматриваемого кольца.
9. Элемент е кольца множеств {А} такой, что равенство
е Л А = А выполнено для всякого А е {А}, называется единицей
кольца {А}.
Кольцо множеств, обладающее единицей, называется алгеб-
алгеброй множеств.
*10. Кольцо всех элементарных множеств, лежащих в бру-
брусе Кь является алгеброй множеств.
Возможность распространить понятие объема на кольцо эле-
элементарных множеств основывается на следующем утверждении:
*11. Если элементарное множество М представлено в виде
объединения непересекающихся брусов двумя способами: М =
= u<p<=U/P/' то е*1р(|=Е/|я;|.
© Согласно замечанию, сделанному ранее (см. 6), пересечение
двух брусов Рь Р/ является брусом Р( П Р/ = Р«, /• Поэтому на-
наряду с представлениями M=[JtP< и М= [J/P/ можно по-
построить еще одно: М = U Л /Pj, /• Основываясь на предложе-
предложении 4, получим
p<I=?Zip<,/I=EEiPmI=
12. Объем элементарного множества М, являющегося объ-
объединением непересекающихся брусов Pt (M = {] с Рг). определя-
определяется равенством I М| = 2г[ Р; |.
Согласно 11 объем элементарного множества определен кор-
корректно, т. е. не зависит от способа разбиения его на брусы.
*13. Для любых двух элементарных множеств М, N выпол-
выполнено равенство |MUN| + |MflN| = |M|-f|N|. В частности, если
260
элементарные множества М, N не пересекаются, то |M1JN| =
|M| + |N|
*14. Если элементарное множество М содержится в элемен-
элементарном множестве N, то | М | ^ | N |.
*15. Если элементарное множество М покрыто конечным се-
семейством элементарных множеств {Ms} (s = 1, 2, ..., г), то
© По условию и в силу 14 | М | ^ | [} s Ms |. Для пары элемен-
элементарных множеств М и N согласно 13 справедливо неравенство
iMl)N|sg|M| + ]N|. Поэтому
Ums
U
и
, и мг
и, следовательно, | М |<I Xs=i|Ms|. j>
Из утверждений 6, 13 следует свойство объема, которое на-
зывается конечной аддитивностью объема на кольце всех эле-
элементарных множеств:
*16. Если элементарные множества Мь М2, ..., М, не пере-
пересекаются, то их объединение является элементарным множе-
множеством и выполняется равенство
= Eim(-i.
Для построения в дальнейшем интеграла Лебега важно, что
объем на кольце всех элементарных множеств обладает и зна-
значительно более сильным свойством — счетной аддитивностью.
Доказательству счетной аддитивности объема предпошлем не-
несколько вспомогательных предложений:
17. Пусть брус Р (открытый, полуоткрытый или замкнутый)
задан, например, системой неравенств а1^ х' < р' (/= 1,2, ...
..., п) и е >• 0 — произвольное число; е-растяжением бруса Р
называется открытый брус:
Р'={*ф'-*+|"
*18. Объем бруса Ре при достаточно малых е, скажем при
е ==С 1, удовлетворяет неравенству | РЕ | ==С | Р | A -f- e).
*19. Если элементарное множество М покрыто счетным се-
семейством элементарных множеств M.s, то | М | ^ ?s| Ms |.
© Поскольку каждое из элементарных множеств представимо
по определению в виде конечного объединения непересека-
непересекающихся брусов: М,, = U k PSi k, то множество М покрывается
счетным семейством брусов {Р;} :Mc|J(Pi. Проведем над
каждым брусом Р/ операцию е-растяжения, полагая е =
=2~<б(тах| Р; ^'.где б > 0— произвольное число, не превосхо-
превосходящее 2тах|Рг|. В силу утверждений 18
i
261
lp«l^|P»|[l +2-'б(тах|Р(|)-1]л<|Р;|+б2^. Счетное мно-
множество брусов {Р"} покрывает как элементарное множество М,
так и его замыкание М. По лемме Бореля A.1.44), из покрытия
\Pf} множества М можно выбрать конечное покрытие {Р?}(/ =
= /b /2. •••. /г). Тогда согласно утверждению 15| М К^/=1 |Р;|
и тем более
|M|<?|P/l=I|Pil + e?2-'<I|Pzl + e.
/ / 11
Так как б — произвольно малое число, отсюда следует, что
|М|^]Г[Рг|. Перегруппировав слагаемые, имеем | М |<[
<L E |PS,ft I, и, поскольку L|Ps,fe|=|Ms|,T0|M|<LslM,|. D
s к к
*20. Если {М;} — счетное семейство непересекающихся эле-
элементарных множеств, содержащихся в элементарном множе-
множестве М, то ?/|М,К|М|.
© Всякое конечное объединение непересекающихся элементар-
элементарных множеств |J/=,iM/ является элементарным множеством.
Согласно утверждению 14 | М |^| |J/=i M/1. С другой стороны,
в силу аддитивности объема на элементарных множествах
(см. 16) IUz-iMj^EI-iINU, так что ?«-i | Мг |<| М |. Пе-
Переходя к пределу г->оо, получаем искомый результат Х/|М;|^
<|М|. >
*21. Если элементарное множество М представлено в виде
объединения счетного числа непересекающихся элементарных
множеств {М;}: М = U ; М/, то | М | = ^t \ Мг |.
© Доказательство немедленно следует из утверждений 19,
20. D
Для множеств, не являющихся элементарными, вводятся по-
понятия верхней и нижней меры. Мы введем эти понятия сначала
для ограниченных множеств, лежащих в полуоткрытом брусе
(ячейке): Kj = {х : 1/2 < х! < 1/2, i = 1,2, ..., п). Множества
произвольной структуры, лежащие в Кь будем обозначать через
А, В, ..., а их дополнения в Кл — через А', В', ... соответствен'
но, так что А' = Ki\A и т. д.
22. Верхней мерой множества А называется число
inf ? | М, |,
где нижняя грань вычисляется по всевозможным покрытиям
множества А конечными или счетными семействами элементар-
элементарных множеств. {М;}. Верхняя мера множества А обозначается
символом |А|*. Такшм образом, по определению |А.|* =
= inf ?|М,|.
A<=(JMZ I
262
*23. Если А —элементарное множество, то |А|*=|А|, т. е.
верхняя мера множества А совпадает с его объемом.
© Поскольку множество А является элементарным, его можно
рассматривать как одно из элементарных множеств М;, покры-
покрывающих множество А, поэтому |А|*^|А|. Пусть {М/} — конеч-
конечное или счетное семейство элементарных множеств, покрыва-
покрывающих множество А. Тогда на основании утверждения 15 или 19
|А|^Х/|М;| и, следовательно, |А|^|А|*. Таким образом,
|А|*=|А|. D
*24. Если (произвольное) множество А покрыто каким-либо
конечным или счетным семейством множеств {А/}, то |А|*^
< I! А, |*.
© Каково бы ни было число е > 0, каждое из множеств А;
может быть покрыто согласно 22 объединением элементарных
множеств N/, таким, что | N;| =?^ | А/|* + е/2'. Объединение эле-
элементарных множеств {N/} покрывает множество А и поэтому
inf EIM/KZIN/I,
А с у Mz / /
т.е. |A|*^X/|N/|. Следовательно,
IА Г < S /1 Аг Г + Z / е/2' < Е /1 Аг Г + е.
Отсюда, поскольку е произвольно, и получается доказываемое
неравенство. D
25. Нижней мерой |А|» множества А называется число
|А|*—1 — |А'|*, т. е. нижняя мера множества определяется
как дополнение до единицы верхней меры его дополнения.
*26. Нижняя мера не превосходит верхней, т. е. |А|*^|А|*.
© Пусть {Mi}—конечная или счетная система элементарных
множеств, покрывающих множество А, и {N/} — конечная или
счетная система элементарных множеств, покрывающих множе-
множество А'. Очевидно, что { U / М/} U { [] k Nk} =э Ki и согласно ут-
утверждению 15 или 19 Yjil М; | + Yuk\ Nfe |^ 1- Отсюда следует,
что
inf ZlM,|+ inf ElNfe| = |Ar + |A'r>l.
Последнее неравенство равносильно |А|*^|А|*. D
27. Множество А называется измеримым по Лебегу, если
|А|*== |А|*, т. е. |А|*+ |А'|*= 1. Для измеримого по Лебегу
множества число |А|*= |А|» называется мерой Лебега множе-
множества А и обозначается символом |А|.
*28. Все элементарные множества измеримы и их лебегова
мера равна объему.
© Если А — элементарное множество, то и A' = Ki\A — эле-
элементарное множество. Поэтому в силу 23 |А|*=|А| и |А'|*=
= |А'[. Так как |А| + |А'|= 1, то и |А|*+|А'|*= 1. Последнее
263
равенство означает, что элементарное множество А измеримо,
и, поскольку |А|*=|А|, его лебегова мера равна объему. D
*29. Мера Лебега счетно-аддитивна на алгебре элементар-
элементарных множеств, принадлежащих брусу Кь
© Сформулированное утверждение есть следствие предложе-
предложений 21 и 28. D
Для того чтобы установить счетную аддитивность меры Ле-
Лебега в общем случае, докажем важный критерий измеримости
произвольного множества.
*30. Для того чтобы множество А было измеримо по Лебегу,
необходимо и достаточно, чтобы для любого е > 0 нашлось эле-
элементарное множество Ме, такое, что |АДМе|*<; е.
Прежде чем приступить к доказательству, заметим, что не-
неравенство |АДМе|*<е означает существование элементарного
множества, которое «сколь угодно точно» приближает множе-
множество А.
© Достаточность. Пусть условие критерия выполнено.
Убедимся, что А|*+|А'|*=1. Согласно предложению 26
|A|*+|A'|*5s|Ki *= 1. Получим обратную оценку: |А|*+
+ |А'|*^1. Будем считать, что Ме с: Кь (Если Ме Э Кь то
можно сразу заменить Ме на элементарное множество МеПКь)
Тогда | Ме| +|Ме| = 1 и | Ме f + I M'Г= 1. Из включений Ас=
с: Ме U (А А Ме), A' cr Me U (А А Ме), предложения 24 и неравен-
неравенства |АДМе|*<е следуют оценки | А|*<| Ме |* + e, |А'Г <
^|M«|* + e- Складывая эти оценки, приходим к неравенству
|А|*+|А'|*^ 1 + 2е. Вследствие произвольности е отсюда сле-
следует |А|*+1А']*^ 1. Ранее было установлено, что |А|*+
+ |А'|*^1. Таким образом, |А|*+|А'|*=1 и множество А
измеримо.
Необходимость. Предположим, что множество А изме-*
римо, т. е. |А|*+|А'|*= 1. Пусть {Р/} и {Q^} — счетные семей-
семейства брусов. Будем считать, что множества Р = (J г Pt и Q =
= [J k Qk содержатся в единичном кубе Ki и покрывают соответ-
соответственно множества А и А' так, что выполняются неравенства
IlP*KIAf+e и
Выберем число N с таким расчетом, чтобы выполнялись усло-
условия ?г1лг+11 P; |<е, 2"_дг+1| QfcKe.n образуем элементарные
множества Ре= (J^iP; и Qe— U^-iQft- Покажем, что сим-
симметрическая разность АДРе удовлетворяет оценке |АДРе|*<
< бе, и, следовательно, элементарное множество Ре может быть
предъявлено в качестве множества Ме, входящего в формули-
формулировку доказываемого утверждения. По определению симметри-
симметрической разности А А Ре =(A\P8)U(Pe\A). Пользуясь утверж-
утверждением 24, получаем оценку
|АДР,Г<|А\Р,Г + |Р,\А|\
?64
Очевидно, что А \ Ре с (J/Iat+i Pj; откуда, снова на основании
утверждения 24, имеем |А\Ре|*<е. Аналогично получается
оценка |A/\Qe|*<e, которая будет использована далее. Оце-
Оценим |Ре\А|*. Так как
Pe\Ac(Pe\QOu(Qe\A)c:(PenQe)U(Qe\A).
то I Ре \ А Г < | Ре П Qe Г + I Qe \ А Г =
= 1 Р. Г + I Q.J* -1 P. U Q8 Г + I A'\ Qe Г.
По построению |Ре|*+ |Qe |*< | А|*+ I А'|*+ 2е = 1 + 2е. Кроме
того, поскольку Р U Q = Кь выполняется неравенство | PsUQe | *+
+ 2е^1, и, следовательно, |Р8\А|*^1+2е — A — 2е) + е =
= 5е. Таким образом, действительно |ААРе|*^6е. D
*31. Объединение, пересечение, разность и симметрическая
разность измеримых множеств измеримы.
© Пусть А, В — измеримые множества, Me,Ne — элементарные
множества, такие, что |AAMs|*<e, |BANe|*<e. Образуем
элементарное множество Ре = Mg U N8. Тогда
(A U В) А Ре cr (A A Me) U (В A Ne)
и в соответствии с утверждением 24
|(AUB)APe|*<|AAMe|*+|BANE|*<2e.
Следовательно (в силу 30), множество A U В измеримо.
По определению множества А и А' измеримы одновременно.
Поэтому наряду с А, В измеримы множества А', В', A' U В' =
= (АПВ)' и А Г) В. Наконец, измеримость разности и симметри-
симметрической разности следует из соотношений А\В = Af| В', А А В=
= (АПВ')и(ВПА/). Э
Основываясь на доказанных утверждениях 24, 30, 31, иссле-
исследуем свойство аддитивности меры. Начнем с конечной аддитив-
аддитивности меры Лебега.
*32. Если Аь ..., Алг — измеримые множества, попарно не
имеющие общих точек, At (] Afe = 0, то множество U f=i A^ изме-
измеримо и
© Измеримость объединения конечного числа измеримых мно-
множеств следует из утверждения 31. Равенство мер достаточно
проверить для пары множеств. Допустим, что Aif]A2 = 0, М1е,
М2е — аппроксимирующие Ai,A2 элементарные множества:
| М,-6 А А,-1 ^ е (j = 1,2). Воспользуемся очевидными включе-
2Ь5
ниями:
А,сМ,6и(А,-ДМге),
Mle U М2е с (Ai U A2) U (A, A Mie) U (А2 Л М2е),
A1UA2c=(Ml8UM2e)U(A1AMlE)U(A2AM2e).
Отсюда на основании утверждений 24, 31 получаются оценки
для мер А,-, М,-е, Aj U A2, Mie U М2б:
Таким образом,
||Аг|-|М,е| |<е, | | A, U А21 — | Ml8 U М2е 11 ^ 2е.
С другой стороны, множества АЬА2 не пересекаются, а потому
мера пересечения аппроксимирующих множеств MiE, M2e мала:
MlenM2ec{[A,U(A1AMle)]n(A2AM2e)}U
U{[A2U(A2AM2e)]n(AiAMle)}c(A1AMle)U(A2AM28I
|М,вПМ2,|<2е.
Поэтому (согласно 13)
||M,.UM2e| —|М„| —|М2в||<2в.
Объединяя полученные оценки, запишем цепочку неравенств:
lA.UAH^IAil + ^KIMul + IM^H^e^
< I MlE U М2е | + 4е < | A, U А21 + бе.
Пользуясь произволом в выборе е, заключаем отсюда, что
I A, U А21 = | At | + ! А21. D
Доказательству более сильного свойства — счетной аддитив-
аддитивности — предпошлем вспомогательное утверждение:
*33. Сумма счетного числа измеримых множеств измерима.
© Пусть Ak — измеримые множества, [J™_iAfe = A. Предста-
Представим А в виде объединения непересекающихся измеримых мно-
множеств. Именно, рассмотрим множества A*\(AiL)A2|J ...
... LJA*-i) = B*. Они не пересекаются, измеримы и таковы, что
U*-.B*= U*-iA*. U*-iB*= иГ-1А*=А.Так как U"-iBftc
сг А, то в силу утверждения 24 |[Jft«.iBft| <|A|*. Отсюда
(согласно 31, 32) ][]/Ui | Bk |^ | А Г при каждом п, и, следова-
следовательно, ряд ?Г-11 Вй | сходится, а его сумма не превосходит
|А|*. Выберем число N из условия ^"-л-н ! Bfe| < e и рассмот-
рассмотрим измеримое в силу 31 множество AN = U ft'-iA* = (J ^_i Bfc
260
Элементарное множество, аппроксимирующее А", обозначим че-
через М^: |М^ Д А*| < е. Покажем, что это же самое элементар-
элементарное множество Ме хорошо аппроксимирует при достаточно
большом N и множество А. Действительно, Mf ДАс=(м^ AAW) U
m.»+i В4). Поэтому выполнено | М" Д А | < |Mf Д AN \ +
Ъ
*34. Пересечение счетного числа измеримых множеств изме-
измеримо.
© Следует воспользоваться равенством f~] ~=1 А^ = ( U ^=i A&)
и предыдущим утверждением. Э
35. Алгебра множеств, в которой можно выполнять опера-
операции счетного объединения и пересечения множеств, получая
снова множества из этой алгебры, называется а-алгеброй (сиг-
(сигма-алгеброй).
Таким образом,
*36. Алгебра ограниченных измеримых по Лебегу множеств
в Кл является а-алгеброй.
© Доказательство следует из утверждений 33, 34. Э
Докажем, наконец, счетную аддитивность меры Лебега.
*37. Если {Bk} — последовательность непересекающихся из-
измеримых множеств, то их объединение В= |J™_iBft измеримо
и |B|=?*-ilBk|.
© Измеримость объединения В следует из утверждения 33.
Переходя в неравенстве X/Uil Bft |s^| В |* (см. доказатель-
доказательство 33) к пределу /г->-оо, получим ?~=-ii Bft|^| В !*• С другой
стороны, согласно 24 справедлива обратная оценка: X&Li| ^* 1^=
2&|В|*. Так как множество В измеримо, то |В|*=|В|, и, сле-
следовательно, | В | = zlt-i I Bfe |. ]>
*38. Если {А,} — убывающая последовательность вложенных
друг в друга измеримых множеств, Ai :э А2 ^> • • ¦ =>А^э ...
то | ("I ~-i А* | = lim | А* |.
0 Множество n?-'iAfc = A измеримо в силу 34, причем
А1\А = (А1\А2)и(А2\Аз)и(Аз\А4)и ••• ¦ Согласно 37 выпол-
выполнено равенство | Ai \ А|= ?Пп| Аг \ Ai+i |. Поскольку
|Ai\A| = |Ai| —|А| и |A,\A,+i| = |Ai| —|A,+i|, последнее ра-
равенство может быть переписано в виде |Ai| — |А| =
= lim ?;»_,(! А, | — | A/+i|)==| Ail —lim I А„+, I. Отсюда видно,
П->оо П-+оо
что | А|= limI А„ |.
*39. Если {А/}—возрастающая последовательность вложен-
вложенных друг в друга измеримых множеств, т. е. Ai cz A2 cr ... cz
то
.У,
= lim |
ft->oo
267
0 Дополнения А*, множеств Ak образуют убывающую после-
последовательность вложенных друг в друга измеримых множеств.
Поэтому согласно 38 | f] ?=i А[ | == lim |а'й | или | ( U ~=i A/j)' | =
= lim |Ай |. Отсюда видно, что 1 — | |J ?-i Aj = lim A ¦—| Afe |) и
[ U ~-i A* I = lim | Aft I. D
&->oo
Предложения 38, 39 являются выражением свойства непре-
непрерывности меры Лебега.
Сформулируем несколько простых достаточных условий из-
измеримости множеств. Эти условия сводятся, в сущности, к опи-
описанию структуры их границ. Начнем с важного вспомогатель-
вспомогательного утверждения:
*40. Всякое открытое множество А представимо в виде счет-
счетного объединения непересекающихся брусов.
© Построим счетное семейство разбиений {Ps} пространства Е
на непересекающиеся полуоткрытые брусы (ячейки), занумеро-
занумерованные целыми мультииндексами 1=(/1,/2, ..., /") (/' — произ-
произвольные целые числа):
Ячейки {Pf} будем называть ячейками ранга s. Каждая ячейка
ранга s складывается из конечного числа целых ячеек любого
старшего ранга: Pf = (J Pr (/ > s).
(г: pJczP»)
Объединение ячеек нулевого ранга, содержащихся в множе-
множестве А, назовем элементарным множеством нулевого ранга и
обозначим через Мо.
Объединение ячеек первого ранга, содержащихся в А и не
пересекающихся с Мо, назовем элементарным множеством пер-
первого ранга и обозначим через Mi и т. д.
Продолжая построение, получим счетное семейство непере-
непересекающихся элементарных множеств Мо, Мь М2, ..., содержа-
содержащихся в А. Убедимся, что А — Us_i Ms. Для этого достаточно
убедиться, что всякая точка множества А принадлежит конеч-
конечному объединению множеств Ms.
Пусть х0 е А. Поскольку А — открытое множество, то суще-
существует окрестность этой точки \Je(xo) = {x: \х — ^ol^e}, цели-
268
ком содержащаяся в А. Если выбрать число s из условия, чтобы
ячейка Р|ь ранга s, содержащая х0, целиком принадлежала
Ue(xo): Vn2~s<e, то окажется, что Pjs с; А. По построению
U t=a Mt zd Рь и следовательно, х0 е \j t=o Mt.
Мы показали, что множество А представляется в виде счет-
счетного объединения элементарных множеств Ms. Остается заме-
заметить, что каждое из элементарных множеств Ms есть конечное
объединение брусов (ячеек). ))
*41. Всякое ограниченное открытое множество в Е измеримо.
*42. Всякое ограниченное замкнутое множество в Е изме-
измеримо.
Особую роль в теории меры Лебега играют множества, верх-
верхняя мера которых равна нулю. Такие множества заведомо изме-
измеримы, поскольку нижняя мера совпадает с верхней.
43. Множество А называется множеством меры нуль, если
|А|'=0.
*44. Любое подмножество множества меры нуль имеет меру
нуль.
*45. Объединение конечного или счетного числа множеств
меры нуль является множеством меры нуль.
*46. Если множество А представимо в виде объединения из-
измеримого множества Ао и множества Aj меры нуль, то оно из-
измеримо.
*47. Множество, граница которого есть множество меры
нуль, измеримо.
*48. Пусть F, Е — вещественные евклидовы пространства,
dimF = /n, dimE=rt (m<Zn); К Г— замкнутый единичный
куб в пространстве F, f : Ki ->E — непрерывно дифференцируе-
дифференцируемая функция. Тогда f-образ куба Ki в пространстве Е имеет
нулевую меру Лебега.
О Разобьем куб КГ на 6~т равных кубов {Кб, /} высотою б
и оценим лебегову меру образа каждого из этих малых кубов.
Легко видеть, что
sup \f(x)-i(y)\= sup \Г(х)(у-х) + о(у-
х. yeK^ ; x, У^К^ 1
< sup (ПП*I110-*1 + |о@--*)|) =
= sup {[\\i'(x)\\ + \o(y-x)\\y-x\-l\\y-x\}.
F
г
Поскольку функция V непрерывна на замкнутом множестве Ki,
то sup || f' (х) || = L < оо. Выберем б настолько малым, чтобы
было выполнено \о(у — х) \ \у — х\-1<L. Тогда f-образ куба
269
Кв. г можно поместить в некоторый куб Кд. i высотою Л =
= 4L6 д/п. Совокупность кубов Кд, i покрывает f-образ куба
Кь Поэтому согласно 24 верна оценка
Пользуясь произволом в выборе б, заключаем, что jfKf|* =
= |fKf| = O. D
49. Пусть F, Е — вещественные евклидовы пространства,
dim F = т < dim Е = п. Если непрерывно дифференцируемая
функция f : КГ -*¦ Е задает взаимно однозначное отображение
замкнутого единичного куба Kj=\x : 0 ^.х1 ^ l} на некоторое
множество А (АсЕ) и является неособой в каждой точке х
(х е КГ).то f-образ внутренности единичного куба называется
элементарным многообразием в Е.
Если п — т-\- \, то элементарное многообразие называется
элементарной гиперповерхностью.
*50. Элементарная гиперповерхность имеет нулевую меру
Лебега.
*51. Множество, граница которого является объединением ко-
конечного числа элементарных гиперповерхностей, измеримо по
Лебегу.
До сих пор мы обсуждали свойства меры Лебега на ограни-
ограниченных множествах. Можно распространить понятие меры Ле-
Лебега и на некоторые неограниченные множества.
Проведем следующее построение: разобьем все простран-
пространство Е на счетное число непересекающихся ограниченных изме-
измеримых множеств Е; ." Е = U Е/, Е; [~| Ег= 0, I ф /'•
i
52. Множество А назовем измеримым, если каждое из мно-
множеств At = Af)E( измеримо. При этом положим, по определе-
определению, |А|= Х»1А/|.
53. Измеримое множество А называется множеством конеч-
конечной меры, если | А| < оо, т. е. если ряд ?; | Аг | сходится.
Далее всюду, где не оговорено особо, мы будем употреблять
термин «измеримое множество» и «множество конечной меры»
именно в этом смысле.
*54. Свойства меры Лебега, выраженные утверждениями 24,
31—34, 37—39, имеют место и для измеримых множеств в смы-
смысле определений 52, 53.
Роль семейства {Е(} могут выполнять различные семейства
множеств. Укажем два наиболее употребительных:
*55. Пусть Ко—фиксированная ячейка вида Ко = {*:ао<
'<ао + б'}. Рассмотрим семейство ячеек, получающихся
270
из Ко путем сдвигов:
Кт = {х:а'й^х -тЬ1 <aln + d1}, т1 = i, 0, 1, ...
Тогда UmKm = E, Km Л Km =0, Ш=^т'.
*56. Рассмотрим семейство полуоткрытых шаровых слоев
/ = 0, 1, 2
Тогда U г Si == Е, S/ fl S,- = 0, I ф I'.
*57. Свойство измеримости множества и величина его меры
не зависят от выбора семейства множеств Е/, разбивающих Е.
Утверждения 55 и 56 полезны для исследования поведения
меры Лебега при различных преобразованиях пространства Е.
Обсудим свойства меры Лебега, связанные с простейшими
преобразованиями евклидова пространства: переносом, сжатием
и поворотом.
Напомним соответствующие определения:
58. Переносом (трансляцией) Ту множества А на вектор у
называется множество ТУА = {х : х = х' + у, /еА}.
59. Сжатием (растяжением) ау множества А относительно
точки у с коэффициентом а, 0 < а < 1 A < а < оо) называется
множество
(%А = {х: х = у -f- а(х' — у), /еА}.
60. Поворотом U мнол!ества А называется образ UA множе-
множества А при ортогональном преобразовании евклидова простран-
пространства с определителем, равным единице.
*61. Перенос ТУА измеримого множества А является измери-
измеримым множеством и | У^А | = | А |.
*62. Сжатие (растяжение) ан измеримого множества А явля-
является измеримым множеством и |ауА| = а"|А|.
Доказательства предложений 61, 62 следуют одному плану.
Сначала должно прямым вычислением убедиться, что оба факта
верны для брусов, затем — для элементарных множеств и для
множеств нулевой меры. После этого, аппроксимируя измеримое
множество элементарным, следует получить утверждения уже в
полном объеме.
Исследованию поведения меры Лебега множества А при по-
повороте предпошлем вспомогательное утверждение:
*63. Образ UK ячейки К при повороте U измерим и
| К
© Ячейка как до поворота, так и после него допускает пред-
представление в виде объединения открытого множества (внутрен-
(внутренности) и множества нулевой меры (части границы). Поэтому
она и после поворота остается измеримым множеством. Оценим
возможное искажение объема при повороте. Для этого рассмот-
рассмотрим сжатие аК данной ячейки К с коэффициентом а (а < ')•
271
Разбивая все пространство Е на ячейки, конгруэнтные аК, от-
отберем те из них, которые целиком содержатся в открытом еди-
единичном шаре Di: {|я|< 1} и допустим, что их число равно Na.
Они образуют элементарное множество Ма, которое, в свою оче-
очередь, заведомо содержит концентрический Di открытый шар Da
радиусом 1— a diam К. Оба шара Db Da измеримы, |Da| =
= A—adiam K)"|Di | и при повороте U превращаются в самих
себя. Следовательно, Da<=MacDi, UDa = Da с= i/Ma с UDi =
= D, и
| Di | A — a diam К) "< Naan |
Отсюда получаем
<[1—(l-adiamK)n]|Di|.
Учитывая, что при достаточно малом а элементарное множе-
множество Ма содержит брус К. = \х : | х' | < B д/л) }, получим нера-
неравенство |К| ^а"|К|Л^о, из которого следует оценка для
(anJVa)~'. Таким образом, при достаточно малых а выполняется
неравенство
||?/K|-|K||*?|K|lK|-1[l-(l-adiamK)B]|D,|.
Устремляя а к нулю и пользуясь тем, что левая часть послед-
последнего неравенства не зависит от а, заключаем, что | ?/К| = | К|. Э
*64. Образ произвольного бруса при повороте измерим и
мера Лебега его при повороте не меняется.
*65. Образ произвольного измеримого множества при пово-
повороте измерим, .и мера Лебега его при повороте не меняется.
© Покажем в первую очередь, что внешняя мера ограничен-
ограниченного множества А при повороте U не возрастет. Для этого рас-
рассмотрим счетное семейство открытых брусов {Pi}, покрыва-
покрывающее А и такое, что ?/| Р,1^ | А |* + е. После поворота каж-
каждый из брусов Р/ остается открытым множеством и может быть
представлен в соответствии с 40 в виде объединения счетного
числа открытых брусов {Рш}, UP, = [} mPlm, | Р, | = ? т \ Р1т |,
При этом очевидно, что UAcz [} и mPim, | UA Г< E/.ml Pim К
^ | А Г |?/А|*|А|*.
, } и mm
| А Г + е, и, поскольку е произвольно, ||||
Ввиду того, что преобразование U~l = i/+, обратное к U,
также является поворотом (ортогональным преобразованием с
определителем, равным единице), то очевидно, что выполнено
следующее неравенство: | А|*=| U^UAl*^ | UA\*; следователь-
следовательно, |А|*=|[/А1*.
Пусть D — шар в Е: D = {х : ^Lil** I2 < R }, такой, что
Ac:D. Если множество А измеримо, то D\A измеримо и
|A| + |D\A| = |D|. В силу предыдущего рассуждения
272
Jt/(D\A)|*=|D\AI*. Кроме того, D = t/D, |D| = |C/D|. По-
Поэтому
|[/A|*+|?/(D\A)|*=|[/D| = |D|.
Вместе взятое это означает, что множество С/А измеримо и
|С/А| = |А|.
Случай неограниченных множеств в соответствии с опреде-
определениями 52 и 53 сводится к уже разобранному, если разбить
все пространство Е на шаровые слои S; = { х '¦ I2 ^ 2г=11 *' Р <
<(/+1J| и воспользоваться измеримостью пересечений Ai —
= А П S/ и равенствами |?/А/| = |А/|. Э
Проследим, как наследуется свойство измеримости при глад-
гладких взаимно однозначных отображениях пространства R" с ме-
мерой Лебега.
66. Гладкое отображение Ф множества Q с R" в R" называ-
называется диффеоморфизмом, если оно взаимно однозначно и явля-
является неособым, т. е. rang<D/ = n.
Мы рассмотрим диффеоморфизмы, которые допускают про-
продолжение с сохранением класса гладкости и прочих свойств на
некоторое открытое множество Q, Q =5 Q. Для таких диффео-
диффеоморфизмов очевидно, что
*67. Образ ограниченного измеримого множества при диф-
диффеоморфизме ограничен и измерим.
© Покажем прежде всего, что образ А = ФР всякого бруса
Р a R" при диффеоморфизме Ф измерим. Граница бруса Р со-
состоит из 2п брусов ps (s=l,2, ..., 2п) размерностью ш =
= п—1. Рассмотрим сужение fs = Ф |Р;р диффеоморфизма Ф
на брус ps- Очевидно, что fs: ps-^Rn — непрерывно дифференци-
дифференцируемая функция и по утверждению 48 fs — образ бруса ps имеет
меру нуль. Таким образом, диффеоморфный образ границы бру-
бруса Р имеет нулевую меру. С другой стороны, диффеоморфный
образ внутренности Int Р бруса Р является открытым множеством
(проверьте!). Отсюда диффеоморфный образ куба измерим как
объединение двух измеримых множеств.
Нетрудно видеть также (см. 48), что мера бруса Р _при ото-
отображении Ф увеличивается не более чем в Г", Г = 2д/« А. раз:
|ФР|^Г"|Р|. Вообще для всякого, измеримого множества В
справедлива оценка для верхней меры:
(•) |фвг<гл|В|.
Мы знаем (см. 48), что гладкий образ границы куба покры-
покрывается элементарным множеством малой меры. Таким образом,
273
можно построить элементарное множество Me, аппроксимиру-
аппроксимирующее множество А = ФР изнутри с любой степенью точности:
Пусть теперь Q — произвольное ограниченное измеримое мно-
множество. По критерию 30 оно может быть с любой точностью
аппроксимировано элементарными множествами Ме в следу-
следующем смысле: |MeAQ|*<e. Для Ф-образов множеств Ме, Q
в силу (*) справедлива оценка
(**) |(ФМЕ)Д(ФЙ) |*<Г"е.
Множество ФМе, являющееся конечным объединением непере-
непересекающихся образов брусов, можно в силу сказанного аппрок-
аппроксимировать элементарным множеством М'& с любой степенью
точности:
(***) м; с Фме, | фм„ | -1 м; | < 6.
Намереваясь оценить верхнюю меру множества Мд
= (Мд \ФЙ) [J (ФЙ \ Mj), заметим прежде всего, что
м; \ фп а фм(. \ фо и
\ м; = (фо \ Фме} и {фо п [фм„ \ м;]}.
Отсюда видно, что
м;лфос{фм„ \фо} и ^q \фм6} и
и {фй п [фмс \ м;]}.
Пользуясь свойством 24 верхней меры и оценками (**) (***),
получим отсюда
| Мб Л ФЙ Г < Г"е + | ФМ, \ Мб | < Г"е + б.
Вследствие произвольности е и б последняя оценка означает, что
множество ФО может быть с любой точностью аппроксимиро-
аппроксимировано элементарными множествами М^ и, следовательно, явля-
является измеримым. D
§ 2. ИНТЕГРАЛ ЛЕБЕГА
В основе построений этого параграфа лежит мера Лебега,
заданная на а-алгебре всех измеримых множеств вещественного
конечномерного евклидова пространства Е.
Пусть М — измеримое (ограниченное или неограниченное)
множество *0Em/:M-*-R — вещественная функция, заданная
на М.
* В предыдущем параграфе буквами М, N обозначались элементарные
множества. В этом и следующих параграфах главы М, N — не обязательно
элементарные множества.
274
1. Подмножества Efa — {x; xe N[, f(x)<a, heR}, Ea c= M
называются лебеговыми множествами функции f (рис. 11).
2. Вещественная функция f: М -*¦ R называется измеримой,
если ее лебеговы множества Еа измеримы при любом aeR.
*3. Если функция / измерима на М, то измеримы также все
подмножества {х:х^М, f(x)^a), {х:хеМ, f(x)> a},
О Так как {f: f eR, /<а} = П°° , (f < а +4-). то справед-
П°° т-,/
Ьа+1/п- Из него в силу 1.34
следует измеримость множе-
множества {х: f(x)^.a}. Множества
{х: f(x)>a}, {x: f(x)^a} из-
измеримы, будучи дополнениями
измеримых множеств (см.
1.27). D
4. Множество М.а =
= {х : f(x) = а} называется
множеством уровня функции f.
Множество измеримых
гг
Рис. 11.
р
функций весьма обширно.
*5. Все непрерывные функ-
ции измеримы.
© Лебеговы множества непрерывных функций открыты, а по-
потому измеримы. Э
*6. Пусть N — множество в Е. Функция
-{
1,
0,
N',
измерима или неизмерима одновременно с множеством N.
7. Функция xn, определенная в предыдущем пункте, называ-
называется индикатором множества N (или характеристической функ-
функцией множества N).
8. Если некоторое свойство измеримой функции (или семей-
семейства измеримых функций), заданной на множестве М, имеет
место на М\М(), где Мо — множество меры нуль: |М0| = 0, го
говорят, что это свойство имеет место почти всюду на М.
9. Измеримая функция, заданная на множестве М, называ-
называется конечной, если в каждой точке х из М оно принимает ко-
конечное значение. Но измеримая функция называется почти
всюду конечной на М, если она принимает конечные значения
на множестве М\Мо (|Мо] = О).
10. Измеримая функция, заданная на множестве М, называ-
называется ограниченной, если существует постоянная С, такая, что
неравенства \f(х) \ < С выполняются в любой точке л- из М. Но
измеримая функция f называется ограниченной почти всюду или
276
существенно ограниченной на множестве М, если найдется та-
такая постоянная С, что неравенство \f(x) \ <i С выполнено на мно-
множестве М\М0 (| Мо | = 0).
*11. Если функция / задана на множестве М и совпадает
почти всюду на нем с измеримой функцией g, то функция /
также измерима.
Например, функция Дирихле d: [0, 1]->R, определяемая ра-
равенством
( 0, если х иррационально,
d{x) = { .
(. 1, если х рационально,
измерима. Таким образом, множество измеримых функций зна-
значительно шире множества непрерывных функций и множества
функций, интегрируемых по Риману (см. 45 далее).
В дальнейшем, станет ясно, что значение интеграла Лебега
определяется лишь тем, какие значения принимает измеримая
функция почти всюду. Поведение ее на множестве меры нуль
несущественно.
Перечислим простейшие свойства измеримых функций. Функ-
Функции будем считать заданными на некотором измеримом множе-
множестве М или на всем пространстве Е.
*12. Если / — измеримая функция, то функции — f, \f\, cf,
f ± с измеримы.
© Доказательство следует непосредственно из определе-
определения 2. Э
На совокупности всех измеримых функций, заданных на из-
измеримом множестве М, можно определить алгебраические опе-
операции: поточечное сложение, умножение и (с оговорками) де-
деление. Поскольку измеримые функции, вообще говоря, могут
принимать бесконечные значения, то, чтобы исключить операции
с бесконечностями, условимся, что рассматриваемые функции
принимают на М конечные значения либо будем их рассматри-
рассматривать лишь на той части множества М, где это условие вы-
выполнено.
*13. Если функции /, g, заданные на множестве М, измеримы,
то на множестве М измеримы также функции f ± g, f-g. Если,
кроме того, g{x)фQ на М, то измерима и функция f/g.
0 Докажем сначала, что при любим вещественном а выполня-
выполняется равенство
где объединение берется по всем рациональным числам г. Заме-
Заметим, что поскольку множество рациональных чисел счетно, то
мы имеем здесь объединение счетного числа множеств Ег П Е|-г-
Пусть х принадлежит множеству Ea+S. Это значит, что
f(x)-\- g(x)< а или f (х) < а — g(x). По свойству плотности
множества рациональных чисел найдется рациональное число г,
276
такое, что f (x) < г < а — g(x), и поэтому jcsEI |~| Е?-г- Тем
болеех <= (Jr {е? П Еа-Г}- Следовательно Ea+t!s' \J r {Ег П Е?_г}.
Обратно, если лге Ur {Ег П Е|-г}.то существует по край-
крайней мере одно множество Ег П Ef_r, такое, что ,teEfr f) Ef_r,
и, следовательно, f(x)<Cr и одновременно g(x)<.a—г, т. е.
^еЕ/8. Поэтому U г (Ег П Еа-Л s Еа+Й- Таким образом, ра-
равенство (*) доказано. Теперь, опираясь на утверждения 1.31 и
1.33, заключаем, что функция / -f g измерима. Измеримость раз-
разности / — g получается, если записать ее в виде f-\-{—g) и
воспользоваться утверждением 12.
Измеримость произведения f-g следует из формулы f-g —
= {(f + SJ—(f — .?J}/4> если предварительно доказать измери-
измеримость функции f2. Функция же f2 измерима в силу равенства
. ( 3, а<0,
Для измеримости f/g достаточно доказать измеримость
функции \/g при g ф 0. Ее измеримость следует из равенства
j Е§ П EIf/a, a<0,
E^^l Ef, a = 0,
| Ео~г П Elfto а>0. 5
Множество измеримых функций замечательно тем, что оно
замкнуто относительно поточечных предельных переходов. На-
Напомним, что множество непрерывных функций этим свойством
не обладает: оно замкнуто лишь относительно равномерных
предельных переходов.
* 14. Пусть {/п}"_| — счетное семейство измеримых функций.
Тогда функции Р" = sup fn (x), f — inf f„ (x) измеримы.
n n
© Доказательство следует из 1.33, 1.34 и равенств
еГ = 0 eJ\ еГ = П eI". d
*15. Поточечный предел монотонной последовательности из-
измеримых функций является измеримой функцией.
© Если, например, fn{x)^ fn+\(x), то lim fn(x) = sup/„(x). 5
П -> 00 U
*16. Если последовательность {/„}~=1 измеримых функций
поточечно сходится к функции f, то функция f измерима.
© Рассмотрим монотонную последовательностьf> (x)=supfk{x).
Так как последовательность {/й}^,! сходится, то сходится и по-
277
следовательность ff5*}00 . причем Mm f^(x) — f(x) Согласно
утверждению 15 lim f> (x) — измеримая функция, следователь-
но, и функция f(x) измерима. Аналогичные рассуждения можно
было бы провести с монотонной последовательностью:
ff(x)=ini fk(x). J>
При доказательстве многих теорем с измеримыми функциями
бывает удобно рассматривать измеримые функции как предел
последовательности более простых измеримых функций — так
называемых ступенчатых функций.
17. Измеримая конечная функция называется ступенчатой,
если множество ее значений конечно или счетно.
*18. Пусть {gi} — множество всех значений ступенчатой
функции g, заданной на множестве М. Тогда множества уровня
М|г = Mi = {x:^eM, g {x) = gi} измеримы при любом i, не пе-
пересекаются и в сумме дают М. При этом справедливо представ-
представление g(x)= ?г?Дм.' где хм — характеристическая функция
множества М/.
Для построения интеграла Лебега достаточно рассматривать
лишь неотрицательные ступенчатые функции, множество кото-
которых достаточно богато, чтобы аппроксимировать ими произволь-
произвольную конечную неотрицательную измеримую функцию.
*19. Для всякой конечной неотрицательной измеримой функ-
функции f, заданной на множестве М, существует неубывающая (не-
возрастающая) последовательность {§„}Г=1 ступенчатых функ-
функций, равномерно на М сходящаяся к /.
© Утверждение будет доказано, если по заданной функции /
мы укажем способ построения неубывающей последовательно-
последовательности ступенчатых функций, сходящейся к f равномерно на М.
Возьмем последовательность точек \2~nl}l=0 и разобьем полу-
полуось R+=[0, оо) на промежутки А/, „= [2~п1, 2~"(/+ 1)) дли-
длиной 2~п. Рассмотрим множества Е\, п = Е2-П(/+1) \ Щ-п, (/ =
= 0, 1, ...). Очевидно, что если .teE[n, то /(i)eAi, „ и
У,Е{, п=М. Ступенчатую функцию gn{x), соответствующую
системе множеств {е|, „}, зададим равенством
где % f —характеристическая функция множества Е(, п- Если
xeEf, „, то очевидно, что gn{x) = 2~nl (рис. 12), и по-
поэтому для любого х из М выполняется неравенство O^f(x) —
~gn{x)^2-n. Заменив в проделанных построениях п на п+1,
278
т. е. поделив каждый промежуток А/, „ на два равных проме-
промежутка, придем к ступенчатой функции
8
rt+1
Очевидно, что для любого х е М выполняются неравенства
gn+1 (x) ^gn{x) и 0 < f (х)- gn+l (х) < 2-"-1.
Таким образом, полагая я =1,2,3 ... , получаем неубыва-
неубывающую последовательность ступенчатых функций {g« (*)KT=i> Рав*
номерно сходящуюся к функ-
функции }(х) на множестве М.
Мы получим невозрастаю-
щую последовательность сту-
ступенчатых функций {Ап}™_,, схо-
сходящуюся равномерно на мно-
множестве М к функции f(x), если
ступенчатые функции hn(x) за-
зададим равенством
/—О
E
/, я
¦/г"
2/2"
7/2"
= *„(*)+ 2
Э1.И
\
¦Е1
2,7! •
Рис. 12.
Теперь мы переходим к по-
построению основного объекта
этого параграфа и всей главы — интеграла Лебега. Вначале мы
дадим определение интеграла Лебега для неотрицательных сту-
ступенчатых функций, затем — для неотрицательных измеримых
функций и, наконец, определим интеграл Лебега в общем случае.
20. Разбиение {М/} множества М на непересекающиеся изме-
измеримые подмножества М/ назовем допустимым для ступенчатой
функции g, если на каждом из подмножеств М( функция g по-
постоянна.
*21. Пусть {М/} и {Mm}—два допустимых разбиения, отве-
отвечающие неотрицательной ступенчатой функции g(x): g(x) = gt
(xt=Mi); g(x)=gm (x <= Mm). Тогда
© Рассмотрим допустимое разбиение {М/, m}, M/, m = M,flMm.
Ясно, что М, = U„ МЛ m, Mm = (J t МЛ „,' | М, |- ?„ | М,. ж |,
IMm|= E/IM/,т| и g, = gm, если М,,т^=0.
Пользуясь тем, что ряд с неотрицательными членами схо-
сходится или является расходящимся к (+°о), а любая переста-
перестановка его членов не нарушает его сходимости (расходимости)'
279
и не меняет его суммы, мы можем записать цепочку равенств:
Zg/.mZ
1. т Urn
22. Пусть g — неотрицательная ступенчатая функция, за-
заданная на измеримом множестве М; [} М/ = М — какое-либо
допустимое разбиение множества М: g{x) = gi (xeMi).
Интегралом ступенчатой функции g по множеству М назы-
называется величина / = Zzg/|M/|. Если / < оо, то ступенчатая
функция g называется суммируемой.
Интеграл / обычно обозначается символом \ g db\.
j м
*23. Величина интеграла \ g dM. ступенчатой функции g
не зависит от того, какое допустимое разбиение множества М
использовано для его вычисления.
© Доказательство основано на предложении 21. 5
Определим интеграл Лебега для измеримой неотрицатель-
неотрицательной функции.
24. Пусть f — неотрицательная измеримая функция, заданная
на измеримом множестве М. Интегралом \ fdN\ функции f
по множеству М называется точная верхняя грань интегралов
по М неотрицательных ступенчатых функций g, удовлетворяю-
удовлетворяющих на М условию g ^ f:
\/rfM=sup| \gdlft, 0<g^/, g — ступенчатая 1.
й ч 1м )
м
Функция f носит название подынтегральной функции.
25. Неотрицательная функция / называется суммируемой
на М, если \ / dN[ < оо.
*26. Неотрицательная ограниченная измеримая функция /,
заданная на измеримом множестве М (|М| < оо), суммируема.
© Измеримость функции [ обеспечивает возможность равно-
равномерной аппроксимации ее снизу ступенчатыми функциями.
Далее ограниченность функции / и конечность меры множе-
множества М гарантируют конечность верхней грани множества инте-
интегралов аппроксимирующих ступенчатых функций. 5
*27. Для всякой неотрицательной суммируемой функции {,
заданной на измеримом множестве М конечной меры |М|<;°о,
существует невозрастающая последовательность ступенчатых
Суммируемых функций hn {hn^hn+i), равномерно сходящая-
сходящаяся к /. .
© В качестве искомой последовательности можно взять невоз-
растающую последовательность hn{x) из утверждения 19:
280
К (х) = ? (/ + П 2-\nt (x) = ffn
Функции hn суммируемы, поскольку
M
Установим простейшие свойства интеграла Лебега неотри-
неотрицательной суммируемой функции: свойства позитивности и мо-
монотонности.
*28. Позитивность: если f — суммируемая неотрицательная
функция, то \
*29. Монотонность в отношении подынтегральной функции:
если /i — измеримая, f2— суммируемая неотрицательные функ-
функции, заданные на измеримом множестве М, и ft ^ /2, то fi также
суммируема и \ /] db\ ^ \ f2dM..
© Опираясь на почти очевидное свойство монотонности инте-
интеграла для ступенчатых функций g (оно будет доказано в 3.16),
напишем неравенство
sup
<f<
\gdM..
Отсюда в силу определения интеграла Лебега 24 следует, что fi
суммируема и \M/,dM< \f2dM.. 5
Теперь мы переходим к общему определению интеграла Ле-
Лебега.
30. Пусть /—произвольная вещественная функция, заданная
на множестве М. Положительной частью функции / назовем
функцию f+: f+(x) = max {/(ж), 0}. Отрицательной частью функ-
функции f назовем функцию /~: f-(x)= max{—/(a:),0}.
•31. Функция / измерима в том и только том случае, когда
измеримы ее положительная и отрицательная части.
32. Измеримая вещественная функция называется суммируе-
суммируемой на множестве М, если на М суммируемы по отдельности
ее положительная и отрицательная части.
• ¦: 33. Общее определение интеграла Лебега: пусть
f — вещественная суммируемая функция, заданная на измери-
измеримом множестве М. Интеграл Лебега функции / по множеству М
определяется равенством
м
м м
281
Откладывая изучение свойств интеграла Лебега до следу-
следующего параграфа, опишем предложенный самим Лебегом спо-
способ построения интеграла для измеримой функции, принима-
принимающей конечные значения. При этом основным моментом явля-
является построение верхнего и нижнего интегралов Лебега. В этом
пункте схема Лебега аналогична схеме построения интеграла Ри-
мана. Именно это обстоятельство позволит нам сравнить их. Мы
увидим, что определение нижнего интеграла Лебега совпадает
с данным ранее в 24 определением интеграла Лебега. Это не
приводит к каким-либо недоразумениям, так как для суммируе-
суммируемых функций эти понятия эквивалентны (см. 41). Мы проведем
соответствующие построения только для неотрицательных функ-
функций, поскольку свойство монотонности 29 доказано нами в этом
параграфе только для таких функций. В действительности свой-
свойство монотонности имеет место и для знакопеременных функций
(см. 3.3), поэтому выполненные далее построения остаются в
силе и в общем случае.
34. Пусть М—измеримое множество, / — заданная на нем
измеримая функция, принимающая конечные значения. Разо-
Разобьем ось R+=[0, oc5) на непересекающиеся промежутки [at, ai+\),
A = sup(a;+1 — at) < оо и рассмотрим семейство лебеговых мно-
жеств Еа/. Их разности Мг=Е^/+|\Еа/ образуют разбиение М
на непересекающиеся измеримые подмножества: (JiM; = M,
М/ П М* = 0. Это разбиение мы обозначим буквой Л. Ступен-
Ступенчатые функции, отвечающие разбиению Л:
назовем нижней и верхней лебеговыми функциями. Интегралы
функций gA и пА:
S~(f, Л)= $
м
S+(f, Л)=
м
назовем нижней и верхней интегральной суммой по разбиению Л.
*35. Если функция / суммируема, то нижняя и верхняя инте-
интегральные суммы S~(f, Л) и S+(/,A) конечны для любого раз-
разбиения Л.
© Ясно, что gA(x)z~:f(x)z~:hA(x). Вследствие суммируемости
функции / выполняется неравенство 1^^^^ = ^ а/|М/К
^ \ / dM. Верхняя интегральная сумма также конечна, по-
282
скольку
h dM — У al+l | M/1 = У {(a/+i — cii) | Mj1 + at | Mt\
M / . /
м
В теории интеграла Лебега нижняя и верхняя интегральные
суммы играют ту же роль, что и нижняя и верхняя интеграль-
интегральные суммы Римана — Дарбу в теории интеграла Римана.
*36. Если функция / суммируема, то
sup S'(f, A) = inf S+(f, Л)= [fdM..
А А м
© Согласно определению интеграла от неотрицательной из-
измеримой функции 24 supS~(/,A)<C fdM.. Так как f (х) <.
Л J М ' ' ' ^
^.пА{х),то в силу свойства 29 для любого разбиения Л выполня-
выполняется оценка \ /rfM<\ ЛЛ dM. Следовательно, \ fdM^
J М J М J М
<infS+(/, Л). Таким образом,
О < inf 5+ (f, Л) - sup 5- (/, Л) < inf {5+ (/, Л) - S" (f, Л)} <
Л Л Л
Разбиение Л можно взять таким, что величина Д будет меньше
любого наперед заданного числа. Поэтому
inf| М|Д==0 и supS-(/,A)=\ MM=infS+(/, Л), j
Л Л JM Л
Мы видели, что верхняя лебегова функция hA(x) суммируема
при любом разбиении Л, если функция f суммируема. Покажем,
что и, наоборот, из предположения о суммируемости функции
hA(x) при некотором разбиении Л вытекает суммируемость
функции f(x) и, следовательно, выполнение равенства 36.
*37. Если для измеримой неотрицательной функции /, за-
заданной на измеримом множестве М, верхняя лебегова функция
hA для некоторого разбиения Л суммируема, то функция f
также суммируема и выполняется равенство 36.
© Пусть {g} — множество всех измеримых ступенчатых функ-
функций, удовлетворяющих условию g ^ f. Тем более g ^ ЛЛ, и по-
поэтому в силу свойства 29 ступенчатые функции {g} суммируемы
и \ g dNi ^ \ hxdM. Это означает, что интеграл \ /dM =
JM JM r JM
=sup \ gdM конечен, т. е. функция f(x) суммируема. 5
283
Введем теперь понятия нижнего и верхнего интеграла Ле-
Лебега.
38. Пусть {g}, {Л} —множества всех измеримых ступенчатых
функций, удовлетворяющих соответственно условиям g(x)^
^f(x) и / (х) ^ h (x). Нижним интегралом Лебега функции f
называется число
(f) = sup Г
SI (f) =
g
Верхним интегралом Лебега функции f называется число
St(f)= inf [ hdM..
*39. Нижний и верхний интегралы Лебега связаны нера-
неравенством SE(f)^St(f).
*40. Для неотрицательной измеримой функции / выполня-
выполняются неравенства
sup 5 " (f, А) < SE (/) < St (/) < inf S+ (/, Л).
Л Л
•41. Для того чтобы неотрицательная измеримая функция /
была суммируема, необходимо и достаточно, чтобы нижний и
верхний интегралы Лебега были конечны и выполнялось равен-
равенство SZ{f)=SZ(f). При этом \iAfdM.=SZ{f) = St(f).
© Достаточность очевидна. Необходимость следует из утверж-
утверждений 36 и 40. D
Нижний и верхний интегралы Лебега позволяют доказать
важное свойство интеграла Лебега: если функция f интегри-
интегрируема по Риману, то ее интеграл Лебега существует и совпадает
с интегралом Римана. Мы проведем это доказательство для не-
неотрицательных функций, определенных на некотором конечном
брусе. В действительности обсуждаемый факт (см. 43, 44) оста-
остается справедливым для функций, заданных на любом измери-
измеримом по Жордану множестве, т. е. множестве, которое может
быть аппроксимировано с любой точностью снаружи и изнутри
элементарными множествами.
42. Пусть / — конечная функция на брусе Р, Л — произволь-
произвольное конечное разбиение бруса Р на элементарные множества М;,
Р= (] гмг, sup diam M(- = г (Л). Образуем верхнюю и нижнюю
i
суммы Римана — Дарбу по этому разбиению:
.., s*(f, л)=Едир /wiau
Si {f, Л)=Е inf
284
Верхним интегралом Римана функции / называется величина
л
Нижним интегралом Римана функции / называется величина
(/, Л).
p
л
Если Sr {f) = S~R if), то функция f называется интегрируемой
по Риману, а общее значение верхнего и нижнего интегралов
называется интегралом функции f по брусу Р и обозначается
символом (R) \ f dx.
*43. Для всякой неотрицательной измеримой функции /
справедлива оценка
© Достаточно заметить, что в определении интеграла Римана
используется значительно более бедный набор ступенчатых
функций. D
*44. Если неотрицательная функция f интегрируема в смысле
Римана, то она суммируема (в смысле Лебега) и \fdP =
. ( П\ I f Av
Приведем пример функции, не интегрируемой по Риману,
однако интегрируемой по Лебегу.
Функция d(x) — функция Дирихле — задается на промежут-
промежутке [О,1] равенством
( 0, если х иррационально,
d (х) = < ,
( I, если х рационально.
*45. Функция Дирихле не интегрируема по Риману.
© Действительно, для любого разбиения промежутка [0, 1]
на элементарные множества Si?(d) = 0, S«(of)=l. ])
*46. ФункцияДирихлесуммируема(по Лебегу), \ af(x)rfM=
J [°. 1]
0 Функция d кусочно-постоянна. Обозначив через Q и I\Q
множества рациональных и иррациональных чисел из проме-
промежутка I = [0,1]. получим
поскольку счетное множество Q рациональных чисел имеет
меру нуль, в силу счетноа аддитивности меры Лебега. D
285
Заметим, что необходимым условием интегрируемости функ-
функции в смысле Римана является ее ограниченность и ограничен-
ограниченность области интегрирования. Легко убедиться, что определе-
определение интеграла Лебега нечувствительно к этим техническим тре-
требованиям и в действительности дает конечное число каждый
раз, когда п + 1 -мерная лебегова мера «подграфика» А функ-
функции f на множестве М: A = {(x,j):xeM, 0 ^ у ^ /(*)} опре-
определена и имеет конечное значение |A|n+i<oo. Более того,
\МЫМ= | А |„+1. Этот вопрос мы обсудим подробнее в § 4
при доказательстве теоремы Фубини.
§ 3. СВОЙСТВА ИНТЕГРАЛА ЛЕБЕГА
Свойства интеграла неотрицательной суммируемой ступен-
ступенчатой функции, заданной на измеримом множестве М конечной
меры |М]<оо, легко выводятся из соответствующих свойств
положительных рядов.
*1. а) Позитивность и монотонность: если g — неотрицатель-
неотрицательная, суммируемая ступенчатая функция, то \ gdM.^0. Если
gi — неотрицательная ступенчатая функция, g2 — суммируе-
суммируемая ступенчатая функция и gi< g?, то gi суммируема и
5
б) Аддитивность по отношению к подынтегральной функции:
если gi, g2 — неотрицательные, суммируемые ступенчатые функ-
функции, то ступенчатые функции gi±g2 также суммируемы и
в) Аддитивность по отношению к области интегрирования:
пусть gi и g2 — неотрицательные, суммируемые ступенчатые
функции, заданные на измеримых непересекающихся множе-
множествах Mi, M2. Тогда функция
(х), х <
g2(x), х
суммируема на Mi U М2 и справедливо равенство
Mi U Mi Mi
Обратно, если неотрицательная суммируемая ступенчатая
функция g задана на измеримом множестве М и Mi, M2 — непе-
непересекающиеся измеримые подмножества М, такие, что Mi U М2=
= М, то сужения gi и g2 функции g на Mi, M2 соответственно
286
суммируемы и
= \gldN[]+
1
м, м3
г) Однородность: если g неотрицательная суммируемая сту-
ступенчатая функция, то при любом постоянном aeR произведе-
произведение ag является суммируемой функцией и\ agdM. =a\ gdM.
д) Если gi и g2 — неотрицательные ступенчатые функции,
gi ограничена на М, т.е. gi(x)^.C, jeM, а g2— суммируема,
то ступенчатая функция gi-g2 суммируема и
inf g}{x)- [ g2dM< \ gi -g2rfM< sup g\{x)- \ g2d!A.
*eM м A *sM м
е) Абсолютная непрерывность: если g — неотрицательная,
суммируемая ступенчатая функция, заданная на измеримом
множестве М, и {L*} — измеримые подмножества М, такие, что
lim | Lft | = 0, то \ gdLk->-0 при ^->оо. (Здесь и в дальней-
дальнейшем мы опускаем символ сужения подынтегральной функции на
множество, по которому происходит интегрирование.)
ж) Счетная аддитивность: пусть g — неотрицательная сту-
ступенчатая функция, заданная на измеримом множестве М, и
{Lfc} (? = 1,2, ...) — счетное семейство непересекающихся из-
измеримых подмножеств, исчерпывающее М, т. е. Us L* = М. Если
функция g суммируема на М, то ее сужения на подмножества
iU являются суммируемыми функциями и
.= \gd№.
м
© а) Позитивность непосредственно следует из определе-
определения 2.22 интеграла неотрицательной ступенчатой функции. До-
Докажем монотонность. Образуем, исходя из разбиений множе-
множества М = U М; = U Мй, отвечающих ступенчатым функциям
g\ и g2, новое допустимое разбиение M=U M.i,k,M-i, *=Мг f] M*.
i, ft
Тогда
i I t, к i, k k k i. к i, к
На всяком непустом множестве Mi, n функция gi принимает зна-
значение gu, функция g2 — значение g2k- Следовательно, gu^gut,
и поэтому Tli.kgn\№i,k\<lLi,kg2k\M.i k\. Полученное неравен-
неравенство означает, что ступенчатая функция gi суммируема и
287
б). Вначале проведем доказательство для суммы gi-f-
Воспользуемся разбиением {М/, *} и равенствами (*). Тогда
М 1. k L к
м
Рассмотрим разность g\ — g2. Множества M,, *, на которых
выполнено gu — g2k ^ 0, снабдим индексом плюс, а множества
M,-, k, где выполнено обратное неравенство,— индексом минус.
Тогда в соответствии с определением 2.33 интеграла Лебега
произвольной функции и согласно определению 2.22 интеграла
ступенчатой функции имеем
\ (ffi -
M
ПОСКОЛЬКУ РЯДЫ Si. ft ffu |М* ft I И Si, ft?2ft|Mf ft| СХОДЯТСЯ, TO
являются сходящимися и оба ряда в правой части последнего
равенства. При этом возможно почленное вычитание и произ-
произвольная группировка членов. Выполняя указанные операции,
получим
М. (, k
i, ft
\ [
m. м
в). Лебеговы множества функций g, gi и g2 связаны ра-
равенствами Ms П El = E8as (s = 1, 2); E| = E^1 U Ef*. Отсюда и
из 1.31 следует, что измеримость пары функций g\, g2 эквива-
эквивалентна измеримости одной функции g. Для доказательства ра-
равенства
> Mi U Мз Mi Мз
следует воспользоваться определением интеграла 2.22 и свой-
свойствами сходящихся рядов с неотрицательными членами.
288
г). Если а^0, то равенство \ agdM=a\ gdM непо-
средственно следует из определения интеграла 2.22. Если же
a < 0, то по определению 2.33 \ ag dM. = — \ | a | g dM и опять
д). Снова воспользуемся разбиением {Мг, *} и равенствами (*).
Тогда в соответствии с определением 2.22 \ gig2^M=V guX
X g2ft I Мг, k |. Последний ряд сходится и, поскольку его члены
неотрицательны, может быть перегруппирован:
и затем оценен сверху и снизу с использованием счетной адди-
аддитивности меры Лебега:
= sup ?, (ж) V g2ft | M2ft | = sup g, (x) \ g2 dM,
k M
2^н • «?2A | M4i 41 > inf g, (jc) 2^24 | M| I = inf ffi (*) \ ft
e). Так как ступенчатая функция g суммируема, ряд с не-
неотрицательными членами 2^г gd M; | сходится. Поэтому для
любого е > 0 можно указать такое число N, что?i>N+xgi\ М*К|
^е.Введем ограниченную ступенчатую функцию^ = ЕГ=1^Хм
и образуем интеграл функции g — gN — Y,{>N+i SiXMl no мно-
множеству Lft. Пользуясь определением интеграла 2.22, получим
\ (g — g^ dL* = Y, Яг1МгПЬА1<е. Отсюда на основа-
нии свойств а, б) имеем
sup gN(x)\Lk\.
Величина, стоящая в правой части последнего неравенства, мо-
может быть сделана сколь угодно малой за счет последователь-
последовательного выбора е и k. Это означает, что lim \
ж). Пусть g — Higi%M > игМ, = М. Рассмотрим ряд с не-
неотрицательными членами 2t (Sfe g"( 1 Mf П Lfe I). В силу счетной
аддитивности меры Лебега внутренний ряд сходится к значению
?<|М<| и, поскольку функция g суммируема, рассматриваемый
Ю Зак. 193 289
ряд сходится к интегралу \ g dN[. С другой стороны, пользуясь
J М
возможностью перестановки порядка суммирования, получаем
М к \ i / к М к Lk
Укажем полезное следствие свойства абсолютной непрерыв-
непрерывности 1с.
*2. Пусть М — измеримое множество и Li с: Ьг с: ...
... с: Li сг ... — расширяющаяся последовательность измери-
измеримых множеств, исчерпывающая М, т.е. U^L* = М. Если g — не-
неотрицательная ступенчатая функция, суммируемая на множе-
множестве М, то lim \ g dM. = 0.
© Достаточно показать, что lim | М\Ь^ | = 0. Поскольку
fc->oo
M\Li zd M\L2 =э ... =э M\Lft гэ ... — убывающая последова-
последовательность вложенных друг в друга измеримых множеств, то со-
согласно 1.38
lim
или lim | M\LA|= M\U
Отсюда видно lim | M\Lk | = | Q | = 0. 5
Теперь, пользуясь установленными предварительными фак-
фактами, мы приступаем к описанию свойств интеграла Лебега
произвольной суммируемой функцией, заданной на измеримом
множестве М конечной меры, |М|-<°°. Вначале мы формули-
формулируем и докажем те свойства интеграла Лебега, доказательства
которых не требуют выполнения предельного перехода под зна-
знаком интеграла.
*3. Позитивность и монотонность по отношению к подынте-
подынтегральной функции: если f суммируема и / ^ 0, то \ /ofM^O.
Если /i и ft суммируемы и Д ^ /2, то
( /[dM<( f2dM..
Jm Jm
© Позитивность и монотонность для неотрицательных функций
была доказана в 2.28, 2.29. Рассмотрим случай знакопеременных
функций. Как и в § 2, положим
f+(x) = max{f(x),0}, /-(*) = max {-f (x),0).
Возможны три случая:
1) /,>0, тогда /+ = /,</, = /+ и /Г = 0 = /2-;
и
2) /,<0, /2>0,,тогда /+ = 0
3) /,<0, /2<0, тогда /+ = 0 = /2+ и -/f = /, <f2 = - /2"\
/,<0, /2
290
Таким образом, во всех трех случаях /J1" < f* и /, ^ /2~, и зна-
значит согласно доказанному \ /;+ db\ ^ \ f2 dM. и — \ /Г dM^
Jm Jm Jm
^= \ /2"~dM. Складывая эти два неравенства и пользуясь
определением интеграла Лебега от произвольной суммируемой
функции 2.33, получаем \ f^dNi^X f2dNi. ])
Jm Jm
*4. Аддитивность по отношению к области интегрирования
для неотрицательных функций: пусть /i и /г — неотрицательные
суммируемые функции, заданные на измеримых непересекаю-
непересекающихся множествах Mi и М2. Тогда функция
суммируема на MillM2 и справедливо равенство
J fdN[=
Mi U M2 Mi Mj
Обратно, если неотрицательная суммируемая функция / за-
задана на измеримом множестве М и Mi, Мг — непересекающиеся
измеримые подмножества М, такие, что Mi U М2 = М, то суже-
сужения /i и /2 функции / соответственно на Mi, M2 суммируемы и
f2dNi2.
Jm2
© Пусть {gi} и {g2} — множества всех неотрицательных сту-
ступенчатых функций, определенных на Mi и М2 соответственно и
таких, что 0 ^ gi ^ f\ и 0 ^ ft ^ /2. Построим на множестве М
ступенчатую функцию
. . ( gi (x), х е= Mi,
§(х) = \ (х) хеМо
Подставляя в это равенство всевозможные функции g( и ft из
множеств {gi} и {ft}, получаем некоторое подмножество {g}
множества всех ступенчатых функций, определенных на М и
удовлетворяющих неравенству 0 ^ g ^ f. В действительности
это множество совпадает с множеством всех ступенчатых функ-
функций, заданных на М и удовлетворяющих условию 0 ^ g ^ /.
Действительно, всякая ступенчатая функция g на М может
быть задана в виде
_ ( gi №' х S Ml>
10* 291
где g, = g|Mi и g2 = g\M^ Поэтому на основании свойства 1в
интеграла ступенчатых функций заключаем, что
sup [ gi dtAi + sup [ g2 dM2 = sup [ g dM..
Если функции /i и f2 суммируемы, то левая часть последнего
равенства конечна, следовательно суммируема и функция /.
Если, наоборот, известно, что суммируема функция /, то конеч-
конечна правая часть равенства, и, следовательно, конечны оба не-
неотрицательных слагаемых в левой части, т. е. суммируемы функ-
функции /i и f2. В том и другом случае выполняется равенство
Mi M3 M, U M2-M
*5. Монотонность по отношению к области интегрирования:
если Mi и М —измеримые множества, Mi с: М, / — неотрица-
неотрицательная суммируемая функция, заданная на М, и /i = f|M —
ее сужение на множество Mi, то \ ДйМ^ \ /dM.
->Mi Jm
© Доказательство непосредственно следует из свойства 4. Э
*6. Счетная аддитивность по отношению к области интегри-
интегрирования для неотрицательной функции: пусть f — неотрицатель-
неотрицательная суммируемая функция, заданная на измеримом множестве М
и U;L; = М, L/f) Ls = 0 — разбиение множества на непересе-
непересекающиеся измеримые компоненты L;. Тогда
М I L,
© Согласно свойству 4 функции /, = / |L на каждом из под-
подмножеств L; измеримы и суммируемы. Следовательно, для вся-
всякого е существует ступенчатая функция gi, заданная на мно-
множестве L; и такая, что gi <; fi, но
Построим на множестве М ступенчатую функцию g:g(x) =
= gi (д:), х <= Li. В силу 1ж
м
Отсюда следует, что
292
поэтому
У (/zdL,<sup UdM + e* [fdM
м м
Вследствие произвольности е последнее означает, что
J/,dL,< \fdM.
M
Обратно, пользуясь оценкой V \ gtdLt ^/ \ ftdLi и
счетной аддитивностью интеграла от ступенчатой функции, по-
получим \ g dM. ^ У \ fidLi. Это неравенство справедливо
для произвольной ступенчатой функции g, g ^.f. Вычисляя sup
в левой части по всевозможным ступенчатым функциям g, g ^ f,
получим
sup \gdM.= \/dM<? \fidU.
e<*fM м г l,
Объединяя полученные оценки, заключаем, что
M
*7. Если f — неотрицательная измеримая функция и |М|==0,
то [ /dM=0.
Jm
© Для всех ступенчатых функций g (g ^ /) выполнено
\ g dM. = 0, и поэтому \ / dM = sup \ g dM. = 0. 5
Jm jm g<fJM
*8. Если измеримая функция /, определенная на измеримом
множестве М, суммируема на М, то функция (—/) также сум-
суммируема на М и выполняется равенство \ (—f)dM = — \ f dM.
Jm Jm
© Если f суммируема, то суммируемы ее положительная и отри-
отрицательная части: /+(x) = max{/(x), 0}, f-(x) = max{—f(x), 0},
а следовательно, суммируема и функция —{ = f~ — f+. По опре-
определению интеграла Лебега произвольной функции 2.33
J(-/)dM=
м
м мм \м м
м
*9. Измеримая функция f, определенная на измеримом мно-
множестве М, суммируема на М в том и только в том случае, когда
293.
суммируема функция |/|. При этом выполняется равенство
м
© Пусть f > 0 на множестве Mi, f = 0 на множестве М2 и
/ < 0 на множестве М3. Очевидно, что множества Мь М2, М3
измеримы, не пересекаются и Mi (J M2(JM3 = М.
Представим функции f+{x), f~(x) и \f(x) | «по кускам»:
/(*)|Mi, хеМ„ Г(х)=={°' ^eM,UM2>
(•)!/(*)!
О, х <= М2,
Допустим, что суммируема функция /. Тогда согласно 2.32 и 4
суммируемы /+(х) и f(*)|Mi, Г (х) и — fWIMs, а на основа-
основании 4 и равенства (*) суммируема на М также и функция \f\.
Пусть теперь суммируема функция \f\. Тогда на основании
свойства 4 суммируемы сужения / |м и /|м, а значит сумми-
суммируемы на множестве М функции f+ и f- и вместе с ними — функ-
функция /. Теперь нужное равенство следует из формулы (*) и свой-
свойства 4. 5
Нетрудно доказать следующий признак суммируемости:
*10. Если неотрицательная функция f\ суммируема на измери-
измеримом множестве М, а функция f2 измерима и |/г(л:) | ^ fi(x)
(^еМ), то функция f2 суммируема на М.
Базу для распространения свойств интеграла 16—ж на об-
общие измеримые функции дает теорема Леей, оправдывающая
возможность предельного перехода под знаком интеграла по
монотонной последовательности подынтегральных функций. Мы
докажем эту теорему в следующей «ослабленной» редакции:
*11. Пусть /л — неубывающая последовательность суммируе-
суммируемых функций, fn+\ ^ fn, сходящаяся поточечно на измеримом
множестве М (|М[< <х>) к суммируемой функции /. Тогда
lim \fndM.= \fdNi.
"-»°°м м
© При всех конечных значениях п в силу свойства 3 имеет
место неравенство \ fndM.^\ fdM.. Вследствие монотон-
Jm Jm
m
294
ности последовательности fn предел L = lim \ fn dM сущест-
П -» °о J М
вует и ясно, что L ^ \ / dM.
Покажем, что при условии поточечной сходимости fn к / в
действительности имеет место равенство L = \ f dM. Допустим
J м
сначала, что функция j неотрицательна. Пусть g — неотрица-
неотрицательная ступенчатая функция: 0 =sC g ^ f. Последовательность
fn, поточечно и монотонно сходящаяся к /, перерастает g в сле-
следующем смысле: при каждом е > 0 множества L« = {x: fn (x) ^
^A — e)g(x)} образуют расширяющуюся последовательность
Ц+idU, исчерпывающую М: [}п Len = М. Для интеграла
\ /„ dM выполняется в силу 3.3 следующая оценка:
M\LE
п
ИЛИ
\ J J
М М М \ Le
M\LE
п
Переходя в последнем неравенстве к пределу п->-оо, получаем
в силу свойства 2 lim \ fndM^{l—е) \ g dM. Вычислим
п-><х> Jm Jm
supremum в правой части по всевозможным ступенчатым функ-
функциям g, g</. Это дает L = lim [ /„afM>(l — еП fdM.
п_>.оо Jm Jm
Отсюда, 'пользуясь произволом в выборе е, заключаем, что
р р
\ f dM, и, следовательно, L = \ f dM..
Jm Jm
Установим теперь равенство L = \ / dM для суммируемой
Jm
функции /, меняющей знак. Представим / и /„ в виде / = /+ —
— Г и fn=rft-~-fn- Из fn+i>fn и llm fn^f следует (см. 3)
Л->оо
fti>ft> ??.% = ? и ^1</Г. Ит?-Г Рассмотренный
случай неотрицательной функции приводит к равенству
lim [ f+ dM = [ f+ dM..
n-*°° Jm " Jm
295
Получим аналогичное равенство для невозрастающей по-
последовательности f~. Очевидно, что для невозрастающей по-
последовательности/~ выполнено lim \ f~dM^\ f~4N[.
Покажем, что справедливо и обратное неравенство. Пусть
h— неотрицательная ступенчатая функция h ^ f~. Последова-
Последовательность множеств Lsn — {x: f~ (I + e)/t} (e > 0) возрастает и
исчерпывает множество М: \jnLsn= M.. Переходя к пределу
я-»- оо в неравенстве
$/zdM-(l+e) J /zdM + J ffdM,
M
M M M\L^ M\LS
получим в силу свойства 2 lim \ f~dM(l + е).
П->оо JM
Вычислим теперь inf в правой части по всевозможным сту-
ступенчатым функциям h (Л 2& /-). Так как f суммируемая функция
(см. 2.41), то inf \ hdb\=\ f~ ofM, и, следовательно,
lim \ f~dM^(l+e)\ f~dM., откуда, поскольку е произвольно,
lim \ f- dM ^ \ f~ dM.. Объединяя обе оценки для
rt-+oo JM п JM "
lim \ f~ dM, приходим к равенству lim \ f~ dM = \ f~ dM.
n-»<x> Jm n->oo Jj4 JM
Учитывая установленное ранее аналогичное равенство для по-
последовательности /*, получаем окончательно lim \ /^dM =
,1->оо Jm
= ( /dM. D
Jm
Свойства интеграла Лебега произвольной суммируемой функ-
функции, заданной на измеримом множестве М, |М|<;оо, выво-
выводятся {кроме уже доказанного свойства позитивности и моно-
монотонности) из соответствующих свойств интеграла ступенчатых
функций с помощью теоремы Леей:
*12. а) Позитивность и монотонность: если f суммируема и
f ^ 0, то \ / dM I> 0. Если fi и /г — суммируемы и /i ^ /2, то
Jm
/,<5 /2
m Jm
б) Аддитивность в отношении подынтегральной функции:
если функции /i и /г — суммируемы, то функция fi + /2 также
суммируема и
м мм
29&-
в) Аддитивность в отношении области интегрирования: если
fi — суммируемая функция на Мь /2 — на М2, M1f]M2 = 0, то
функция
суммируема на Mi U М2 и \ f<iM = \ /i^Mi + x f2dM.2.
J Mi U Mj J Mi J Mj
Обратно: если / — суммируемая функция на М, M = MilJM2,
М.1ПМ2 = 0, то сужения fs = / |м (s = l,2) функции / на
множества Mi и М2 суммируемы и \ /i^Mi + \ /г^М2 =
Jmi Jmj
= [ fdNL.
Jm
г) Однородность: если f суммируема, то при любом постоян-
постоянном aER произведение а/ суммируемо и \ afdM. = a \ f db\.
jm Jm
д) Если /i — измеримая существенно ограниченная на М
функция, а ^ — неотрицательная суммируемая функция, то про-
произведение U'fi суммируемо и выполняется неравенство
(*) inf/, (*) • \ f2dM< U • /2rfM < sup /,(х) • \ f2dNi.
Здесь имеется в виду вычисление sup и inf на множестве МХМо»
|Мо] = 0, где функция /i ограничена.
е) Абсолютная непрерывность: если / — суммируемая функ-
функция на М и {Lk} — измеримые подмножества М, такие, чтб
lim|Lft| = 0, то [fdLk-*O при ^-»-оо.
ж) Если f — суммируемая функция на измеримом множе-
множестве М и {Lk} (&= 1, 2, ...) — счетное семейство непересекаю-
непересекающихся измеримых подмножеств, исчерпывающее М, то сужения
f на подмножества L* суммируемы и / \ fdLk=\ fdM.
© а). Доказательство уже проведено (см. 3).
б). Прежде всего установим, что сложение суммируемых
функций дает суммируемую функцию. Если функции fi, f2 сум-
суммируемы, то по 9 суммируемы их модули \fi\, Цъ]. Очевидно,
что существуют (см. 2.19) суммируемые ступенчатые функций
hi, hi, удовлетворяющие неравенствам |fi|s^Ai, |fa 1=3^^2. По-
Поскольку j/i + h\ ^ hi + Л2 и функция fti + /z2 в силу 16 сумми*
руема, то по свойству а) суммируема функция I/1 + /2I, а вме«
сте с ней на основании 9 и функция fi + fz-
Докажем равенство
f2
m
m
Применим здесь теорему Леви. Построим так же, как в 2.19, не-
неубывающие последовательности ступенчатых функций {g^},
{<?*2n}> аппроксимирующие снизу суммируемые функции //" и /^
и невозрастающие последовательности {/гы}, {Лгп}> аппрокси-
аппроксимирующие сверху суммируемые функции/,"" и f2. Очевидно, что
последовательности ступенчатых функций {g^n—/гЗ, ig^n — /г^,}>
{(ёы ~ Kri) + (etn ~ ^2rt)} являются неубывающими, что по-
позволяет на основании теоремы Леви перейти к пределу «-><%>
в равенстве
\ (st - *Гв)т + \ (si - f
м м
м
которое выполняется в силу свойства 16 интеграла ступенчатых
функций. Так как по построению
- лг») = ft - П. "m fei - л2;) = /2+ - г2,
то в результате предельного перехода получаем
1
м м
в). Следует воспользоваться разложением суммируемой
функции на положительную и отрицательную части, свойством
б) и аддитивностью интеграла по отношению к области инте-
интегрирования для неотрицательных функций 4.
г). Доказательство для а ^ 0 проводится с помощью раз-
разложения суммируемой функции / на положительную и отрица-
отрицательную части, свойства б) и свойства однородности интеграла
для неотрицательных функций, которое легко выводится из
свойства однородности интеграла для ступенчатых функций
применением теоремы Леви. Если же а < 0, то предварительно
следует воспользоваться предложением 8.
д). Заметим прежде всего, что согласно а) функция fi/г сум-
суммируема. Пусть сначала /i ^ 0. В силу аддитивности инте-
интеграла 1в и свойства 7 можно с самого начала при интегри?
ровании \ fif^dtA ограничиться множеством М\М0) поскольку
•1м
1м
/,f
м\м„
= \ f{f2dM.. Поэтому мы можем, не теряя общно-
сти, доказывать неравенство (*)" в предположении ограниченно-
ограниченности fi на М. Построим неубывающие последовательности ступен-
ступенчатых функций {gm} и {g2n}> равномерно сходящихся к функ-
функциям fi и f2, и так, что
lim inf gln = inf ft и lim supgln = sup ft.
По свойству 1д интеграла ступенчатой функции имеем
inf gln - \g2ndM<\ Sm • gin <*M < supgla . \ g2n rfM.
M A M M M
Переходя в этом неравенстве к пределу я->оо, получим
inf A
м А А м м
Если функция /i меняет знак, то ее следует разложить на по-
положительную и отрицательную часть fl=f+ — f~, воспользо-
воспользоваться свойством 16 и выписать для интегралов \ //" • f2dIAvi
\ f~ • f2dNl неравенство (*). Вычитая затем из первого нера-
венства второе и принимая во внимание, что — sup Д~ =
м
=inf (—/["), — inf fj~ = sup (—/Г), получим нужный результат,
м м м
е). Так как \ / db\ = \ f+ db\ — \ f~ dM., доказательство
J м J м J м
достаточно провести лишь для неотрицательной функции /.
Пусть {gn}—неубывающая последовательность неотрицатель-
неотрицательных ступенчатых функций, равномерно сходящаяся к неотрица-
неотрицательной функции /. Пользуясь свойством 16, представим инте-
интеграл \ f dLk в виде
jLfe
\(f-gn)dLk+ \gndtk.
ч ч
В силу свойства монотонности по отношению к области интегри-
интегрирования 5 и на основании пункта д)
\
M
M
(f - gn)dM^ sup (f-gn)\
M
p
M
Так как последовательность {gn} равномерно сходится к /, мо-
может быть указан . такой номер п, что sup (/ — gn) | М | ^ е/2.
м
299
После этого, опираясь на свойство абсолютной непрерывности
для ступенчатых функций 1е, выбираем число k так, чтобы
\ gndLfc<e/2. В результате для интеграла [ fdM получаем
оценку \ fdMs^e, которая вследствие произвольности е
означает, что lim \ fdM = 0.
*¦" Ч
ж) В силу свойства 6 для положительной и отрицательной
частей функции f выполняются условия
= ]Г \f~dM.
k
k Lk M k Lk
Вычитая из первого равенства второе и пользуясь свойством б),
получаем \ /ЙМ = У> \ fdM..
Jm *-*ъ Jhk
Приведем еще один простой признак суммируемости.
*13. Если функция / суммируема на измеримом множестве
М, то она суммируема и на всяком его измеримом подмно-
подмножестве L.
Полезна бывает следующая оценка П. Л. Чебышева:
*14. Если \ — неотрицательная суммируемая функция, опре-
определенная на измеримом множестве М, то
м
© Ступенчатая функция ? = a%M\Ef удовлетворяет условию
g ^ /, поэтому \ g dM < \ / dfA. 5
Следующие два утверждения, наряду с теоремой Леей 10,
описывают свойства интеграла Лебега, касающиеся предель-
предельного перехода:
*15. Если последовательность неотрицательных суммируемых
функций fn сходится к суммируемой функции / на М поточечно,
fn(x)-+f(x) (*еМ),то \ /dM<lim \ fndM.
© Рассмотрим неубывающую последовательность /< (х) «=>
== inf /А (лс). Она сходится к функции f поточечно, причем
м
300
rafn [fkdM.
По теореме Леви \ f^dM-*-\ fdM. при n-t-oo. Поэтому
Jm Jm
м
f^\
m Jm
inf [fkdM.= lim \fndM.
*16. Следствие. Если последовательность неотрицатель-
неотрицательных суммируемых функций /„ сходится поточечно на М к сумми-
суммируемой функции / «снизу», 0^fn(x)^f{x), fn(x)-+f(x),x<=M.,
то
м м
0 Ясно, что \ /„ dM. ^ \ / dM.. Поэтому
jm Jm
Пт [ fn dM. == lim sup [fkdM^\fdM.
Вместе с предыдущим утверждением это дает искомый резуль-
результат, поскольку вообще всегда
lim J fn dM < lim J /„ dM.
*17. Теорема Лебега. Если последовательность /„ из-
измеримых функций сходится поточечно к измеримой функции /,
fn(x)-*-f(x), «еМ, и существует суммируемая функция tp, та-
такая, что |/„(х) | ^ ф(х), леМ, то все функции fn и / сумми-
суммируемы и lim [ fn dM = \ / dM.
п-*со Jm Jm
0 Суммируемость функций /„, / очевидна. Рассмотрим неотри-
неотрицательные функции фп = ! / — fn | • Ясно, что 0 <: ф„ ^ 2ф,
$п(х)-+0, леМ. Функции 2ф — ф„ сходятся поточечно снизу
к функции 2ф. Поэтому согласно 16 \ Bф — т|э„) dM ->- \ 2фй?М,
Jm Jm
и, следовательно, \ о(з„й?М=\ |/ — L|rfM->-0. Это означает,
Jm Jm
(\
m Jm
что
lim [f^dM^i^dM и lim \ fn dM = \ f dM.
M M M
Всюду в теоремах о предельном переходе поточечную схо-
сходимость и поточечные условия подчиненности / ^ 0, / ^ ф
можно заменить соответствующими требованиями, выполняющи-
выполняющимися почти всюду.
301
§ 4. ОБЩЕЕ ПОНЯТИЕ МЕРЫ.
ПРОИЗВЕДЕНИЕ МЕР.
СВЕДЕНИЕ КРАТНОГО ИНТЕГРАЛА К ПОВТОРНОМУ
Пусть 91— алгебра множеств.
1. Неотрицательная аддитивная функция, заданная на мно-
множествах, входящих в алгебру 91, называется мерой.
Примеры:
*2. Пусть / — неотрицательная суммируемая функция, за-
заданная на брусе Ко, Ко е R", % — а-алгебра измеримых (по Ле-
Лебегу) подмножеств бруса Ко. Тогда функция множеств (х(а) =
= \ f da, ael, является мерой. Эта мера обладает свойством
счетной аддитивности.
© Доказательство основано на предложениях 3.3, 3.6. Э
*3. Пусть {*(}~=1 — семейство точек в брусе Ко, [Ч — поло-
положительные числа, ?]°° Iхi= 1- Функция, определенная на под-
подмножествах а с: 91 равенством
М- (а) = Е Vh
i :*f e a
является мерой. Эта мера обладает свойством счетной аддитив-
аддитивности.
Если на некоторой а-алгебре множеств % в R" задана счет-
счетно-аддитивная мера ц, то можно определить понятие интеграла
вещественной функции, заданной на множестве М, М с: 91. Ин-
Интеграл определяется сначала на множестве неотрицательных
ступенчатых функций, затем посредством тех же приемов, что
и в § 2, распространяется на все ^-измеримые функции. Все
факты, доказанные для интеграла по мере Лебега в § 2, 3,
остаются верными и в этом случае. Мы будем пользоваться ими
без дальнейших пояснений.
В этом параграфе мы обсудим способ конструирования слож-
сложных мер из более простых.
Очевидно, что исходя из двух мер ць Ц2, заданных на одной
и той же алгебре множеств 31, можно построить новую меру
ц = щ -)- fx2, положив ц(а) = [xi (а) + [и(а).
Более интересной конструкцией является произведение мер.
4. Рассмотрим два пространства Xj = R и Х2 = R, допу-
допустим, что в них выделены cr-алгебры множеств: 9(i = {Ai} в Xi
и |2= {А2} в Х2 соответственно. Произведением, пространств
X = Xi<8)X2 называется множество упорядоченных пар (х\, х%),
XisXi, fc?X2, Произведением множеств Ai ® А2, Ai с: Xi,
А2 с: Х2 называется множество Р = {(xi, х2): Х\ е Ai, x2 e А2}.
Для сокращения дальнейших формулировок введем, основы-
основываясь на аналогии с брусами и элементарными множествами
в R", следующие термины:
302
5. Множество вида Р = Ai <8> A2 будем называть брусом; ко-
конечное объединение непересекающихся брусов М= [f:_iPs —
элементарным множеством.
*6. Семейство всех лежащих в некотором кубе элементарных
множеств (с введенными на нем обычным образом операциями
объединения, пересечения и разности) является алгеброй.
Определим произведение мер вначале на брусах и элементар-
элементарных множествах, а затем так же как и в § I, продолжим это
понятие на более широкий
класс множеств в X = Xi <8> Хг.
7. Допустим, что на а-алгеб-
рах 5Ii={Ai} и 512={А2} в
пространствах Х[ и Х2 опреде-
определены счетно-аддитивные меры
Hi и |л2. Меру [1 на множестве
брусов {Ai <8> А2} определим
равенством [x(Ai <8> А2) =
= m(Ai)n2(A2). Мера ц назы-
называется произведением мер (Хь
ц2 и обозначается через ц =
= m X Ц2-
Для того чтобы введенная
функция могла считаться ме-
мерой, нужно проверить, что она обладает свойством аддитив-
аддитивности.
В следующем пункте мы докажем сразу же счетную аддитив'
ность меры ц = [xi X № на множестве брусов.
*8. Если меры ц,ь ц2 счетно-аддитивны, то мера jx = ц\ X М-2
счетно-аддитивна на семействе брусов {А? ® Аг}, s = l, 2
© Допустим, что брус Р = {Ai <8> А2} представлен в виде счет-
счетного объединения непересекающихся брусов Р* = \А? ® А|}:
Р = USPS, Р' П Р;' = Q (* Ф /)• Заметим, что Ai = UsА? и А2 =
= UsA?- Построим неотрицательные ступенчатые функции
x2
A2
i_
н
1
1
1
%
%
-+Af-i
А,
Рис. 13.
(i2(A|),
0,
Af,
Af.
Лебеговы множества этих функций щ-измеримы, поскольку они
совпадают с ^-измеримыми множествами Af либо являются их
объединениями. Рассмотрим ряд ?sfs(*i)- В этом ряду при
фиксированном х\ отличны от нуля только те члены, номера ко-
которых s удовлетворяют условию Af^Xi, при этом их сумма
постоянна и для любого Х\ равна ц2(А2) (рис. 13):
2M*i)= S |*2(А0
§Q3
Последовательность частных сумм ^Ar(*i) = Zf_i/s(*i) (N =
= 1. 2, ...)является неубывающей последовательностью сумми-
суммируемых по мере jxj функций, равномерно сходящейся на мно-
множестве Ai к постоянной (Х2(А2). Поэтому по теореме Леви
\ FN(xl)diil=*\ ^2 (A2) fiffXj = м-2 (А2) }х, (А,).
J A, JAi
lim
N-*oo
Очевидно, что левая часть этого равенства может быть запи-
записана в виде
N
lim [ FN (Xi) dpi = lim Y
s-1 A,
zs
)W(A!).
s-1 as s—1
Таким образом, ^"
*9. Если элементарное множество М представлено в виде
объединения непересекающихся брусов PS = A?®A2 и Р1 =
=Ai ® А| двумя разными способами М = UsPs = LJ(P'. то
© Пересечение двух брусов Ps и Р' есть брус: Psfl P' = (Aifl
П AJ)<8)(A2 П Аг). Построим всевозможные пересечения {Ps П Р'}
брусов {Ps} и {Р'}. Элементарное множество М можно пред-
представить как объединение всевозможных непересекающихся бру-
брусов {Р*ПР(}: М = 1ЫР5Г)Р')-
Рассмотрим сумму ?s, t \л (Ps (] Р'). Сгруппируем слагаемые
этой суммы так, чтобы в каждую группу входили только те
брусы Ps П Р(, объединение которых дает брус Ps. Пользуясь
аддитивностью меры ц на множестве брусов, получим
Е
S, t
Если сгруппировать слагаемые суммы так, чтобы в каждую
группу входили только брусы Ps П P'i составляющие Р', то по-
получим
Доказанное утверждение позволяет ввести меру уже на эле-
элементарных множествах.
10. На элементарном множестве M=Us=.iPs> образован-
образованном объединением непересекающихся брусов Ps = Ai®Af,
304
Р'П Р* = 0 (i Ф Щ, мера u = ^i X Цг определяется по формуле
и (М) = Z и (р') = t m (А!) ц2 (As2).
*11. Если меры (хь (Х2 счетно-аддитивны, то мера и = Hi X (Aj
счетно-аддитивна на алебре элементарных множеств.
© Доказательство опирается на счетную аддитивность меры
И = М-1 X На на семействе брусов и проводится так же, как и в
случае лебеговой меры (см. 1.29). 3
Счетная аддитивность меры ц на элементарных множествах
позволяет определить ^-измеримые множества. Определение
[^-измеримых множеств вполне аналогично определению мно-
множеств, измеримых по Лебегу (см. 1.22, 1.25, 1.27): множество
А с: Xi <8> Х2 называется ^-измеримым, если его верхняя и ниж-
нижняя [i-меры совпадают. При этом мера множества А принима-
принимается равной совпадающим значениям верхней и нижней \1-мер.
Мера ix-измеримого множества А, построенная по указанному
рецепту, носит название лебегового продолжения jx-меры. Ле-
Лебегово продолжение меры для элементарного множества сов-
совпадает с мерой [I = p,i <8> \12 этого множества. Именно поэтому
описанное распространение ц-меры элементарного множества на
более широкий класс ^-измеримых множеств и носит название
продолжения. Лебегово продолжение ц-меры будем обозначать
прежним символом: щ Х^2- В дальнейшем всегда под символом
(х =ж (X! X (Хг будет подразумеваться именно лебегово продолже-
продолжение меры.
Множества, измеримые по мере jx = Ц\ X М* так же, как и
множества, измеримые по Лебегу, образуют а-алгебру множеств.
Имея несколько пространств Хи Хг, ..., Xjv, на которых за-
заданы счетно-аддитивные меры \i\, Ц2, ..., jxjv, можно построить
последовательно произведение мер: jxi X (Хг, (|Xi X M-s)X Из =
= Hi X М-2 X М-з. • • • «, наконец, меру щ X м* X • • • X И*-
*12. Мера [x = mXH2X ••• X 1*n не зависит от порядка, в
котором происходит ее последовательное построение и после
выполнения лебеговой процедуры продолжения оказывается
счетно-аддитивной, заданной на а-алгебре всех jx-измеримых
множеств в пространстве Xi <8> Хг ® ... ® Х#.
© Независимость меры ц от порядка построения очевидна для
брусов Р = Ai ® Аг® ... ® AN в произведении пространств
Xi ® Х2® ... ФХ^, поскольку |x(P)=(Xi(Ai) -^2 (А2) • ... •цлг(Алг)-
Следовательно, независимость меры ц от порядка построения
имеет место и для элементарных множеств. При лебеговом про-
продолжении это свойство сохраняется. Сохранение свойства счет-
счетной аддитивности доказывается по индукции на основании II. 5
Рассмотрим произвольное ^-измеримое множество А, лежа-
лежащее в произведении пространств X®Y. Несколько ближайших
305
предложений будут посвящены выводу интегральной формулы
для вычисления ц-меры множества А.
13. Сечениями множества АсХ® Y называются множества
Ау(х) czY и Ax(y)czX, определяемые равенствами (рис. 14):
Ау(х)={у:(х, у)(
А* (У) ={*:(*, «/)«
е А, х — фиксировано},
;А, у — фиксировано}.
Y
Оказывается, вычисление меры ц(А) множества А может
быть сведено либо к интегрированию цу-меры множества Ау(х)
(т.е. функции цу(Ау(х)), зави-
зависящей от х) по мере цх, либо
к интегрированию \1Х-меры мно-
множества Ах(у) (т. е. функции
М-л:(Аг(г/))) зависящей от у) по
мере \1У.
Выводу соответствующих
формул в 15 мы предпошлем
построение воспомогательного
множества В id А, которое иг-
играет важную роль в этом вы-
выводе.
*14. Для любого ц-измери-
мого множества А существует
множество В, содержащее А,
id А, ц(В)= ц(А), и представи-
id ..., id М„ id ..., где М„ —
рис
имеющее ту же меру, что и А: В
мое в виде В = fUMn, Mi id M2
элементарные множества.
© Согласно определению измеримого множества для всякого
е > 0 существует элементарное множество N8, такое, что Ne id A
и (x(Ne) ^ ц(АL- е. Выбирая е=1/&, построим элементарные
множества Mn= [}k=xNlk- Очевидно, что последовательность
элементарных множеств {Мл} является невозрастающей:
М! id М2 :э .'.. id М„ id ... и при любом п выполнены условия
MniD А и n(A)s?: [i(Mn)s?; |.i(AL- 1/л. Переходя в этих соотно-
щениях к пределу п-*-оо, получим В id А и ц(В) = ц(А). D
*15. Сечения Ау(х) и Ах(у) ^-измеримого множества А явля-
являются измеримыми множествами в Y по мере щ, и в X по мере
[лх соответстренно, и справедливо равенство
(*) ц (А) =
, (Ay (x)) d[ix = \ цх (Ax (y)) d\iu,
Y
© Сформулированное утверждение докажем вначале для бруса.
Пусть А = АХ®АУ. В этом случае сечение Ау(х) при любом
фиксированном шА, совпадает с множеством Ау. Если же
хф Ах, то Ау{х)= 0. Поэтому функция \иу (Ау (х)) является сту-
пенчатой функцией:
у(Ау), х<==Ах,
О, хфАх,
= I*» (А„)
ц„ (Ау) рх (Ах),
Аналогично
(Ал; (г/)) d\iy = ^ Цх (Ал;) <% = fi
y= \lx (Ах) [1у (Ау).
По определению 7 меры ц = цЛ X fXy бруса имеем jx(A) =
= Цх(Ах) \ху(Ау), поэтому равенство (*) для брусов выполняется.
Y
Ay'J
1
1—
F
21
А5
Рис. 15.
Рис. 16.
Пусть теперь А — элементарное множество. Построим раз-
разбиение элементарного множества на «слои» Qs, «параллельные
пространству Y» и состоящие из брусов А^ ® Ау'', т. е. пред-
представим элементарное множество А в виде А= UsQs> Qs==
® Aj>y (рис. 15). Тогда
[iy (Ay (x)) й\кх = Y, \ Py (Ay (x)) d\ix =
. A.
Z ^ f U A»') S ^=E Z ^ ^A^ о м* (as*)-
307
С другой стороны, по определению 10 меры ц= ^Xft элемен-
элементарного множества А имеем ц (А) = ?,. t у,х (А*) ру (А? 0- Таким
образом, первое равенство (*) выполняется и для элементар-
элементарных множеств. Аналогично проверяется второе равенство (*).
Для доказательства равенства (*) в общем случае устано-
установим его сначала для вспомогательного множества В = ЛлМ„,
построенного в пункте 14. Так как Мп — невозрастающая по-
последовательность, то вследствие непрерывности меры выполнено
условие ц(В) = lim ц(М„). Пусть Ву(х) и М.п,у(х)—сечения
га-» со
множеств В и Мл при фиксированном х. Очевидно, что при каж-
каждом х последовательность множеств {М„)У(х)} является невоз-
растающей и выполняется равенство Ву(х) = ЛлМп, у(х). Поэтому
Напишем равенство (*) для элементарного множества М„:
(**)
Поскольку {цу (МЛ) у (х))} (п = 1,2, ...)— невозрастающая огра-
ограниченная снизу последовательность измеримых функций, то ее
поточечный предел м-у(Ву(х)) согласно 2.15 является ограни-
ограниченной измеримой функцией и значит суммируемой. Это дает
возможность на основании теоремы Леви перейти в равенстве
(**) к пределу п->- оо под знаком интеграла:
lim ( ц,г (М„, у (х)) dnx = \цу {Ву {х)) dy.x.
С другой стороны, в силу свойства непрерывности меры
lim \ цу (М„, у (*)) d\ix = lim ц (М„) = у. (В),
А
и, следовательно,
(***) n(B)
Остается полученное равенство перенести на множество А.
Поскольку ц(А)= (х(В), множество А=>В\А имеет нулевую
меру. Построим для множества А в соответствии с 14 множе-
множество В. Из ц(А) = ц(В) следует, что ;х(В) = 0, а значит почти
все сечения Ву(х) множества В также имеют нулевую меру.
308
Поскольку Ky(x)cz Ву(х), то и подавно щ\Ку\х))= О, а потому
(****) lx(A)
Ясно, что множество Ау (х) = Ву (х) \АУ (х) является (Х
римым. Пользуясь аддитивность меры и равенствами (***) и
(****), получаем
ц (А) = ц (В) - ц (А) = J [iiy (Ву (х)) - fly (Ау (x))] dpx =
x
x
Аналогично доказывается равенство
ц (А) = J цх (Ах (у)) d[iy. 5
16. Пусть f(x) — неотрицательная функция, заданная на мно-
множестве D в пространстве X и принимающая значения в R
(рис. 16). Множество А= {(х, у): JieD, 0 ^Zy ^.f(x)} в про-
пространстве XX R называется подграфиком функции f(x).
Важным следствием формулы A5*) является формула, по-
позволяющая вычислять меру (и следовательно, площадь или
объем) подграфика функции f(x).
Пусть X — пространство с мерой цх, D — \кх-измеримое мно-
множество в X и f: D-»-Y=sR — неотрицательная, суммируемая
по мере цх функция. Введем в пространстве X <8> R меру \i =
= [ix X Цг/, где iay — мера Лебега в R.
*17. В указанных обозначениях jx-мера подграфика А функ-
функции f(x) вычисляется по формуле ц (А) = \ f(x) d\ix.
D
© Сечением Ау(х) множества А служит множество Ау(х) =
= {«/: 0 ^ У ^ f(x)}- Очевидно, что iiy(Ay(x)) = f(x), и поэтому
на основании формулы A5*)
li(A)=\lXy(Au(x))dlix=\f(x)diix. т>
X D
Докажем теперь основную для этого параграфа теорему
Фубини.
*18. Теорема Фубини: Пусть f(x,y)—функция, опреде-
определенная на множестве А, лежащем в произведении X <8> Y про-
пространств X, Y с мерами цх, \iy и принимающая вещественные
значения. Если множество А измеримо по мере ц = ц*Хиг/ и
функция / суммируема по мере ц, то
1) функция f(x, у) при фиксированном х как функция пере-
переменной у суммируема по мере ц^ при почти всех значениях х;
309
При фиксированном у функция f(x, у) как функция переменной
х суммируема по мере цх при почти всех значениях у;
2) функции \ ,./(*, y)d\iu, \ f (x, y)d\ix суммируемы
по мерам \ix, \iy соответственно;
3) имеет место равенство
f(x,
\ (
Y \А
X \Ау(х)
© Прежде чем приступить к доказательству, заметим, что в ин-
интеграле по X интегрирование фактически производится по мно-
множеству \]уАх(у), вне которого подынтегральная функция равна
нулю. Аналогично, в интеграле по Y интегрирование фактически
производится по множеству \]хКу{х).
Вначале проведем доказательство для неотрицательной функ-
функции f(x, у). Рассмотрим пространство X<8>Y<8>R с мерой 1 =
= ц* X 1% X Ць где (.ii — мера Лебега на R и пространства
Y <8> R, X <8> R с мерами Ху = цу'Х щ, Ьх = ц* X M-i соответствен-
соответственно. Пусть DcrX<8>Y<8>R — подграфик функции f(x, у):
D= {х, y,z: (х, у)^А, 0^z^f(x,y)}.
Его сечения
Dy,г(х) — {у, z: (x,y,z)<=D, x — фиксировано},
Dx,z(y)= {x, z: (x, у, z)eD, у — фиксировано}
являются одновременно подграфиками функции f(x, у) при фик-
фиксированных х и у соответственно:
&у,г(х)'={у, %¦¦ У^Ау(х), 0<2</(х, у), х — фиксиро-
фиксировано},
D*.z(«/) = {*> z: xeEAx(y), 0<z<f(x, у), у — фиксиро-
фиксировано}.
Согласно 15 сечения Dy,z(x) и Dx,г{у) суть измеримые мно-
множества й выполняются равенства
(*) к (D) = \ку <раа (х)) diix = \ кх {Ъх,г (у)) dp,.
X Y
310
Согласно 17 мера Ку подграфика Dy_z(x) и мера %х подграфика
Dx,z(y) выражаются равенствами
(**) Ь„(Ъу,г{х))= J f(x,
АуМ
= \ fix,
Х(У
а мера X подграфика D — равенством
(***) Л (D) = $/(*, у) dp.
Подставляя равенства (**) и (***) в равенство (*), получаем
\(х, у) d\K = \( \ f (х, у) dny] d\ix =
A X \A (x) /
if
\ fix, y)d>
AJy)
Заметим, что суммируемость функции f(x,y) по мере цу
при почти всех х и по мере цх при почти всех у следует из
равенств (-»*), а суммируемость функций \ f(x, y)d\iy и
\ах(.у) f(x> y)d\ix по мерам рх и \iy соответственно — из ра-
равенств (*).
На функцию, меняющую знак, доказательство распростра'
няется с помощью равенства
где f+ = (|/| + /)/2 и f~ = (\f\ — f)/2 — положительная и отри-
отрицательная части /. При этом следует использовать свойство
аддитивности интеграла по отношению к подынтегральной функ-
функции. 3
Для функции f, зависящей более чем от двух переменных,
ограничимся лишь формулировкой теоремы Фубини.
*19. Пусть функция / определена на множестве А, лежащем
в произведении пространств Хь Х2,..., XN с мерами щ, \i2,..., цн
соответственно. Если множество А измеримо, а функция / сум-
суммируема по мере [i = hi X № X ... X Ц/v, то при почти всех
(по мере цР X Цр+i Х • • • X Цл?) значениях переменных
(хр, Хр+и ..., xN) (р — 2, 3, ..., N) существуют интегралы
функции f по множествам АХр = (J А* (х{, х2, .. ., х _()
XV Х2 *р-1
г г \ (п — 2 N П
kXi = kXl{x2 xN), Ax — U Ax (xb x2, ...,xN_l
* X*JV1
и имеет место равенство
Равенство (*) остается справедливым и при любой другой ну-
нумерации переменных.
20. Интеграл, стоящий в правой части формулы A9*), на-
называется повторным (в отличие от интеграла в левой части ра-
равенства, который называется кратным).
Таким образом, теорема Фубини дает способ вычисления
кратного интеграла путем сведения его к повторному.
§ 5. ЗАМЕНА ПЕРЕМЕННЫХ
В КРАТНОМ ИНТЕГРАЛЕ
Мы исходим из того, что читателю известна следующая фор-
формула замены переменной в однократном интеграле Римана:
*1. Пусть ф-. V-vU — гладкое неособое отображение замкну-
замкнутого промежутка VcR1 на замкнутый промежуток U; <р(и)= и,
ф'(у)=й:0, tieV. Тогда всякой кусочно-непрерывной ограничен-
ограниченной вещественной функции /(«), заданной на промежутке U,
отвечает кусочно-непрерывная ограниченная вещественная функ-
функция g(v) = /(ф(и)), заданная на промежутке V, и справедливо
равенство
J
Убедимся прежде всего, что аналогичная одномерная фор-
формула замены переменных справедлива для интеграла Лебега.
*2. Пусть ци, fxv — меры Лебега на промежутках U, V соот-
соответственно, ф — гладкое неособое взаимно однозначное отобра-
отображение ф: V->-U, ф(у) = и. Тогда для всякой суммируемой функ-
функции f, заданной на промежутке U, справедлива следующая
формула замены переменной:
при этом функция, стоящая под знаком интеграла в правой
части, суммируема. В частности, для всякого измеримого под-
подмножества Act U справедливо равенство
(**)
312
© Мы ограничимся выводом формулы замены переменных при
условии ф'(у)>0. Читатель с легкостью приспособит наше из-
изложение для общего случая.
Докажем вначале частный случай формулы замены пере-
переменных— формулу (**). Очевидно, что формула (**) справед-
справедлива для элементарного множества, поскольку в этом случае
интеграл можно понимать как римановский. Поэтому, в част-
частности, мера элементарного множества McU оценивается че-
через меру своего прообраза <p~'Mc:V по формуле inf <p'- |<p-'M| ^
^ |М| <: supq/> |ф-'М|. Если некоторое множество В покрыто
счетным семейством промежутков {6s}, ЛГ=11^1^е> т0 его
прообраз ф-'В также покрыт счетным семейством промежутков:
Для всякого измеримого подмножества A cr U найдется эле-
элементарное множество Ме, такое, что |ААМе|*<8. Это озна-
означает, что множество АЛМ8 можно покрыть счетным семей-
семейством промежутков {6S}, таких, что ]Cr=ilSsl<8- Прообраз
ф-'Мц всякого элементарного множества Ме является элемен-
элементарным множеством. Значит, в силу сказанного множество ф~'А
также может быть аппроксимировано элементарным множест-
множеством ф~'Ме в следующем смысле:
(**¦) |ф~' А Д ф~' Ме |*^(inf ф') е.
Следовательно, множество ф-'А измеримо (ср. 1.67).
Мера элементарного множества Ме подсчитывается на осно-
основании формулы замены переменных (**) следующим образом:
| Ме | = \ 1 • dua = \ ф' d\iv.
Здесь ^iu, м-v — меры Лебега на промежутках U, V соответ-
соответственно. При этом согласно оценке |АДМе|*<Се, и в силу
аддитивности меры Лебега справедлива формула
1 • d\i\j — е < | А | < \ 1 • d[iu -+¦ е.
Выполнив замену переменной, запишем эту оценку в виде
Ф du,v — е < IAI < \ a/ du,v + е.
Пользуясь оценкой (***) и аддитивностью интеграла Лебега,
можно заменить интеграл непрерывной функции ф' по множе-
множеству tp~'Me интегралом по измеримому множеству ф-1А:
— \ ф' dp
1
313
Отсюда получается оценка
\ | — \ ф' d\i
из которой благодаря произвольности е следует равенство (**).
Равенство (**) позволяет записать формулу замены перемен-
переменных для ступенчатой функции. После этого, записывая произ-
произвольную суммируемую функцию f в виде /+ — /- и аппроксими-
аппроксимируя функции /+, f~ равномерно сходящимися к ним последова-
последовательностями ступенчатых, получаем
. D
Пусть теперь ф: V->-U — гладкое неособое взаимно одно-
однозначное отображение ограниченной области V пространства Rn
на ограниченную область U, лежащую в том же пространстве.
Обозначив переменную точку области V буквой v, а точку об-
области U — буквой и, будем писать <р(у) = и. Если декартовы ко-
координаты точек и, v в некоторых ортонормированных базисах
обозначить через (и\ и2 и"), (v\ v2, ..., vn) соответствен-
соответственно, то в координатной форме отображение ф запишется в виде
<p'(v\ v2, ..., v«) = ul (»= 1, 2, ..., п).
Мы условимся, что отображение q> допускает продолжение'
с сохранением всех своих свойств на некоторую область V,
V => V. При этом ф"С = 0 => 0.
Эта договоренность не является принципиальным местом,
однако она несколько облегчает изложение ряда конструкций в
дальнейшем
При обсуждении замены переменных в кратном интеграле
принципиальное значение имеет предложение 1.67, которое во
введенных обозначениях формулируется следующим образом:
*3. Образ фй всякого измеримого подмножества Q (QcV)
измерим.
*4. Прообраз ф-'Q всякого измеримого множества Q из U
измерим.
*5. Пусть f—измеримая функция, заданная в области U.
Тогда функция f ° ф, заданная в области V формулой (/ о ф) (у) =
= Дф(и)), измерима.
0 Действительно, все лебеговы множества этой функции служат
прообразами лебеговых множеств функции f, а потому изме-
измеримы. 3
Пользуясь измеримостью образа измеримого множества при
гладком неособом взаимно однозначном отображении^^ {см. 3),
можно каждому измеримому множеству Qv (QvCzV) сопоста-
314
вить число (l(Qv), равное лебеговой мере его образа Qu=<P&v
при отображении q>: V->-U, и = ф(у): A(QV) = м-и.(йи).
Иначе говоря, положим р,(йу) — \ d\i.u.
аи
*6. Функция множества \х, задаваемая на измеримых по Ле-
Лебегу подмножествах Qv из V формулой ja(Qv) = \ Фи, &и =
= cpQv, является счетно-аддитивной мерой.
© Доказательство немедленно следует из 3, 3.1а и 3.1 ж. 3
Основной целью этого параграфа является вывод формулы,
по которой мера )i (Qv) выражается через меру Лебега [iv, и
соответствующей формулы замены переменной в интеграле Ле-
Лебега суммируемой функции:
*7. Мера Д (Qv) выражается через меру Лебега p,v по фор-
формуле
jx(Qv)= \ |detq>'(o)№v.
*8. Если функция / суммируема в области U, то в области
V суммируема функция (/„°ф) | det ф'| и справедливо равенство
/ (и) dixv =\\f° Ф) (v) I det <p' (v) | фу.
QV
Доказательство основных предложений 7 и 8 этогб параграфа
получится в виде суммарного результата цепочки предложе-
предложений 9—20. Центральной идеей доказательства является пред-
представление замены переменных <р в виде суперпозиции последова-
последовательных отображений tyu (k — 1, 2, ..., п), затрагивающих
лишь одну переменную. Сделав это и сводя на основании тео-
теоремы Фубини кратный интеграл к повторному, можно выпол-
выполнить в нем п последовательных «одномерных» замен перемен-
переменной, основываясь на формуле B*) и «одномерном» предложе-
предложении 2.
*9. В каждой точке vq области V можно указать такую ну-
нумерацию переменных {v'}, что все главные миноры
ф") ' , , о ч -
-^ (s=l, 2, ..., п) якобиевои матрицы ото-
ото¦ Т s s+1 -^
бражения ф будут отличны от нуля.
315
© По условию отображение ф является неособым, т .е. его яко-
якобиан
?>(ф", ф" ф1)
D{vn, vn~\ ..., о1) °
d(f"
dv11
dff"'1
dv"
(Эф1
dv"
dq>"
dvn~l
dq,"-1
dv"~l
d<fl
dv"~l
(Эфя
• " 17
йф"
* * ' dv1
d<fl
' ' ' dv1
отличен от нуля. Записывая его в виде разложения по верхней
строке, замечаем, что в этом случае хотя бы один из миноров
Ms, полученных вычеркиванием верхней строки и столбца с
номером s (содержащего dyn/dvs), отличен от нуля. Если s = /г,
то оставим прежнюю нумерацию переменных, в противном слу-
случае обозначим переменную Vs через vn. Разлагая по верхней
(п—1-й) строке отличный от нуля минор Ms, выберем номер
/ переменной v* из условия, чтобы минор Ms',"~l был отличен
от нуля, и обозначим переменную v' через vn~l. Продолжая по-
построение, получим через п шагов новую нумерацию переменных
(vn, у", ..., у1), удовлетворяющую сформулированному ранее
условию. 5
Для того чтобы не загромождать изложение новыми обозна-
обозначениями, будем считать, что первоначальная нумерация пере-
переменных {vn, у", ..., у1) уже удовлетворяет в точке vq указан-
указанному условию.
*10. Каждая точка vq, принадлежащая области V, обладает
окрестностью Ves=V(yo, е) = {и: \v — Уо|<б}, такой, что все
главные миноры якобиевой матрицы отображения <j> отличны от
нуля на Ve:
п
© Этот факт следует из утверждения 9 и непрерывности глав-
главных миноров. 5
Приступим теперь к построению семейства отображений
{^р}1Р"п, каждое из которых сводится к замене одной перемен-
переменной. Именно, сначала рассмотрим семейство отображений
{q>D}p1=n окрестности Ve в пространство R" с декартовыми коор-
316
динатами (и\ и2, ..., и"), заданное следующими формулами:
%¦
о1
V2
"I
vn
(v\ v2, ..., оп)
ф" + 1(^^ vn)
(fn (Vl, V2 Vn)
*11. Число е0 может быть выбрано столь малым, что отобра-
отображение фр: V (uo,eo)=VEo -*¦ q>pVe, = Up является взаимно однознач-
однозначным при каждом р (р — п, п— 1, ..., 1).
© Действительно, якобиан отображения <рр совпадает с глав-
главным минором якобиевой матрицы:
06 Ф"
D(v», v?+l vn) "
Поскольку он отличен от нуля в точке vo, то согласно тео-
теореме существования обратной функции 3.3.2 найдется малая
окрестность Vep = V(y0, бр), которая взаимно однозначно ото-
отображается функцией фр на область <jppV8 . Число е0 следует
выбрать из условия: eo = min(ei, г%, ..., е„). 5
Пользуясь отображениями фР, образуем семейство отобра-
отображений $Р:
$п = Ф« : V8o -*¦ Un,
• p+I
= (Pj о (f~ '
:U0
¦иГ
*12. Каждое отображение \j3p (р = п, п—1, ..., 1) является
гладким и взаимно однозначным отображением Up+i на Up
Un+i = Veo, UisU). При этом ф = tpi = г|з i о г|з 2 ° ... °tyn.
Каждое из отображений i|5p переводит точку и с координа-
координатами (и1, и2, .... и", ..., ип) в точку й, все координаты кото-
которой, кроме йР, совпадают с координатами точки и (us = us,
8фр), а координата пР равна фр(у1, у2, ..., у"), где v =
= (ФР+,)-'(«).
Используя координатные функции оEР (t=l, ••¦, п) отобра-
отображения фр последнее утверждение можно выразить следующим
317
образом:
Таким образом, мы представили отображение <р на Veo в виде
суперпозиции отображений {4>}р=п, каждое из которых сво-
сводится к замене лишь одной переменной ир.
Для дальнейших построений удобно координаты точек в об-
области Up снабдить индексами р внизу. Это позволяет придать
координатной записи отображения фр следующую форму:
= («„+.. "
•р+1' Р+1'
где и'р =
И И?==(ф"о(фр+1)-1)(Ир+1).
Такая запись позволяет очень легко подсчитать якобиан отобра-
отображения г|)р.
*13.
1, ..., ф") Г?>(ФР+'
l оя) L D(vP+
..., vn)
при этом точку v в правой части нужно выбрать так, чтобы
<рр+1(г/)= «eUp-fi.
С другой стороны,
рт 1 р+1
где dvs/dup+l — элементы матрицы. (ф~|Л'.
© Первая формула следует из определения отображения %,:
ipp = фр о (фр+1)~ и правила дифференцирования сложной функ-
функции 2.1.42. Вторая формула использует тот факт, что при
отображении г|зр происходит замена лишь одной переменной
! на
up; поэтому
1
0
0
0
0
1
0
Щ
^«p+i
0
0
0
1
д?р
0
0
0
0
dVp
диР+1
0
0
0
0
dVp
1
0
0
0
«Зфр
^«р+1
0
318
Частные производные д$/ди*р+1, стоящие в р-й строке, вычис-
вычисляются по правилу
Заготовив необходимый вспомогательный материал, присту'
пим к выводу формулы замены переменных.
*14. Пусть Q — измеримое подмножество U = Ui = <pVe,•
Тогда мера \Q\ множества Q может быть вычислена по фор-
формуле
Здесь ф-'Q — прообраз Q при отображении ф, лежащий в ок-
окрестности Уе„.
© Рассмотрим наряду с множеством Q его прообразы в обла-
областях Up: ?2р = фр°ф~1О (р = п, п—1, ..., 1, ф1 = ф, Qi = Q).
Пользуясь теоремой Фубини, можно записать интеграл \ d\iu
а
в виде повторного:
\ dfxu = \ \ \ du\ du\.. .du^.
Пределы интегрирования по каждой переменной зависят от
значений предыдущих переменных. В частности, пределы инте-
интегрирования по переменной и[ зависят от значений и^, uf~\ ...
..., щ- Выполним в правой части замену переменных с по-
помощью отображения i|)i: U2->Ui. При этом в соответствии со
сказанным все переменные u\{s = 2, 3, ..., п) остаются неиз-
неизменными: us2==u\, а переменная и\ заменяется на и\: и\ =
=(ф; о ф^ ') (и\, и\,... ,11%). Это позволяет, принимая во внимание
постоянство всех прочих переменных, воспользоваться форму-
формулой B**), заметив предварительно, что почти всякое сечение
fii,i множества Qi прямой, параллельной оси и\, измеримо
(см. 4.15):
ди\
\\..\du\du\...du4 =
*Г'е
ди,
du\da\.. .
819
Функция, стоящая под знаком интеграла в правой части, яв-
является непрерывной, тем самым она заведомо суммируема, что
позволяет понимать этот интеграл как кратный. Запишем его
снова как повторный, но поменяем в нем порядок интегриро-
интегрирования, вынося на первое место интеграл по переменной wf:
JS-S
ди\
du\ du\ du\ ... dWi,
а затем выполним замену переменных с помощью отображения
(). При этом, как и ранее, все переменные, кроме
й й \
р р р
и\, останутся неизменными, а замена этой переменной на и\
сведется на основании формулы B««) к замене дифференциала:
du\-
ди\
dul
Разумеется, следует также сделать замену переменных в подын-
подынтегральной функции:
ди\
Hul
(u2)-
ди
Г (^2 («3
После этого рассматриваемый интеграл запишется в виде
а,
= SS...J
°3 -
dul
du\ du\ du\...
Продолжая рассуждать аналогичным образом, получим выра-
выражение для меры множества Q через п шагов в виде
ди\
т4Х
";-2 ... du\ dun_
Наконец, выполним завершающую замену переменных ип =
= \$n(v). При этом фактически заменяется лишь последняя
оставшаяся переменная ипп переменной vn, так что вместо du1^
г
Q
X
ди23
<:!
К'1
ди\
ди\
п
п
в интеграле возникает член
dvn
dvn. После этого рассматри-
320
ваемый интеграл приобретает вид
и...
ди\
ди\
ди2
К
dvn dvn~l ... dvl.
Следует иметь в виду, что в подынтегральном выражении
нужно перейти к переменным v. Это можно сделать на основа-
основании предложения 13, заменив
на
?>(фр,
K .... vn)
, ..., vn)
в соответствующей точке v = (q>p+l)-lup+i. Производя очевид-
очевидные сокращения и пользуясь тем, что в силу 12 Ф"'0»!1"^ ° . •.
... о г|}-'=(р-1, получаем искомое равенство сначала для повтор-
повторных интегралов, а затем, на основании теоремы Фубини и для
кратных:
5
*15. Пусть f — суммируемая функция, определенная на из-
измеримом множестве Q cz U. Тогда
u= \ f(<t(v))\det<f'(v)\dnv.
При этом функция, стоящая под знаком интеграла в правой
части, суммируема.
© Для всякой ступенчатой функции gn равенство
v= \ gn(<t(v))\det<t'(v)\diiv
является непосредственным следствием предыдущего утвержде-
утверждения. Произвольную суммируемую функцию f следует равно-
равномерно аппроксимировать ступенчатыми функциями gn:
sup | f (и) — gn (и) | -*• О при п —> оо
и, пользуясь ограниченностью множеств Q и cp-'Q, перейти в ра-
равенстве (*) к пределу при ra-voo. Суммируемость функции,
стоящей под знаком интеграла в правой части получается с уче-
учетом ограниченности |det<p'|, если рассмотреть сначала отдельно
положительную и отрицательную часть f* функции f и каждую
из них аппроксимировать монотонными последовательностями
ступенчатых функций снизу. D
Зак. 183
321
Мы доказали локальный вариант формулы замены перемен-
переменных, действуя в малой окрестности избранной точки v<j, где су-
существует единая нумерация переменных (у1, у2, .... v"), такая,
что все главные миноры якобиевой матрицы отображения <р
отличны от нуля. Мы знаем также, что всякая точка v0 об-
области V обладает в силу 10, 11 такой окрестностью Ve0, в кото-
которой возможна указанная нумерация переменных и выполнены
прочие свойства, перечисленные в 11.
*1в. Существует конечное семейство точек {vs}"=l, u,eV,
таких, что некоторые их окрестности Vs в V (см. текст, пред-
предшествующий 3), обладают следующими свойствами:
1) в каждой из окрестностей. Vs возможна нумерация пере-
переменных (и1, v2, ..., vn), такая, что все главные миноры яко-
якобиевой матрицы отображения <р отличны от нуля;
2) на каждой из окрестностей Vs отображения {<$р}р=п уста-
устанавливают взаимно однозначное соответствие между Vs и q>pVs;
3) семейство {VS}^L! покрывает замыкание V области V.
© На основании леммы Бореля A.1.44) из семейства всех
окрестностей точек vs (oseV), содержащихся в V и обла-
обладающих свойствами 1), 2), можно выбрать конечное под-
подсемейство, обладающее также и свойством 3). 5
Пусть Vs = V(Vs, es)= {v. \v — vs\<ea} (s = I, 2, ..., N) —
окрестности точек vs, обладающие указанными свойствами
1)-3).
*17. На замыкании V области V можно задать семейство
{?Л"=1 неотрицательных бесконечно дифференцируемых функ-
функций, обладающее следующими свойствами:
з) Ze,(p)=i.
© Ясно, что функция Tjs(t»), заданная формулой
Гехр { — [es — \v — vs I]}. |o-os|<
положительна на Vs разна нулю на дополнении Vs в R" и бес-
бесконечно дифференцируема, какую бы норму в R" мы ни выбрали
из числа норм |у[р A г?[р<оо). Образуем функции ?s:
С (о)-
21
322
Поскольку окрестности Vs покрывают V, ясно, что знаменатель
siv) положителен на V и даже в силу теоремы II Вейер-
штрасса A.2.16) отделен от нуля. Поэтому функции ?s беско-
_ N _
нечно дифференцируемы на V и ]С?Ла)=1 (sev) Первые
два свойства функций ?s — положительность на Vs и равенство
нулю вне V« — очевидны. 3
18. Вообще всякое семейство гладких (не обязательно бес-
бесконечно дифференцируемых) функций, обладающее свойствами
1)—3) (см. 17) относительно данного покрытия компакта V ко-
конечным семейством открытых множеств {Vs}f=b называется
разбиением единицы этого компакта, подчиненным данному по-
покрытию {V,}s_i-
Мы еще не раз встретимся в нашем курсе с такими семейст-
семействами. Обычно их используют, желая перейти от какого-либо ло-
локального утверждения к соответствующему глобальному
(т. е. справедливому для всего рассматриваемого множества).
Вот и теперь построенное нами разбиение единицы позволит до-
доказать глобальный вариант формулы замены переменной на
основании соответствующего «локального» утверждения, полу-
полученного ранее A4, 15). _
*19. Для произвольного измеримого множества ScU вы-
выполняется равенство
\ б?ци = \ I det <p' (v
0 Пусть {?« (u)}sv=1 — разбиение единицы на множестве V,
подчиненное покрытию {Vs}f=1. Тогда {?s (ф~' (и)}"=\ ~ разбие-
разбиение единицы на множестве cpV, подчиненное покрытию {<pVs}f=1.
Вводя характеристическую функцию (индикатор) %д мно-
множества Q и пользуясь свойствами разбиения единицы, свойст-
свойством аддитивности интеграла и локальным вариантом A4) фор-
формулы замены переменных, запишем следующую цепочку ра-
равенств:
N
|Q|« \ \ 5
Q tJ U s
N N
s-l U «-1 <tVs
U* 323
с х_,
N
s-i Vs Ф~'п s-I
= J |detq>'U>)l<*nv. J
Совершенно аналогично на основе локальной формулы замены
переменных доказывается теорема о глобальной замене пере-
переменных в интеграле Лебега суммируемой функции:
*20. Пусть f — суммируемая функция^определенная на про-
произвольном измеримом множестве Q a U. Тогда справедлива
следующая формула замены переменных:
lu= J f(q>(tt))|detq>'(tO|d|iV.
При этом функция, стоящая под знаком интеграла в правой
части, суммируема.
Иногда приходится пользоваться формулой замены перемен-
переменных при более слабых условиях на отображающую функцию ф.
Приведем в качестве примера следующий результат:
*21. Пусть ф — гладкое взаимно однозначное отображение
ограниченной области V на ограниченную область U, ф(и) = м,
такое, что в области V (но не обязательно на ее границе!) вы-
выполнено условие |detq>'(u) | > 0 (tieV), Тогда для всякой за-
заданной на U суммируемой функции / справедлива формула за-
замены переменных
J f (и) d\iu = J f (ф (о)) | det <р' (о) | <fyv,
и v
при этом функция, стоящая под знаком интеграла в правой
части, является суммируемой.
© Для доказательства следует сначала воспользоваться фор-
формулой замены переменной при наших, более жестких, условиях
для всякой строго внутренней подобласти Vе (V8c:V)> а затем
перейти к пределу при es | 0 по расширяющейся последователь-
последовательности областей У^так, чтобы |U\<pVl|->-0. При этом получим
в силу счетной аддитивности интеграла Лебега (см. 3.12ж)
нужное равенство:
XI det ф' (v) 14tv = \f (ф (o)) I det q/ (v)
v
В заключение определим часто встречающееся в приложе-
ниях понятие объема измеримого множества,
324
22. Объемом произвольного измеримого множества Q назы-
называется его лебегова мера. Объем измеримого множества Q обо-
обозначается (так же, как и его лебегова мера) символом_|?2|.
*23. Объем произвольного измеримого множества QcU вы-
вычисляется по формулам
|Q|=JrfHu= J | detq>'
где [iu, [iv — лебеговы меры на множествах U и V==qr"'U соот-
соответственно.
Глава 5
ДИФФЕРЕНЦИАЛЬНЫЕ ФОРМЫ В ОБЛАСТИ
Читатель помнит, сколь полезной оказалась алгебра анти-
антисимметрических форм при исследовании геометрических и алге-
алгебраических свойств объектов, лежащих в линейном простран-
пространстве, и для решения линейных уравнений (см. часть первую).
Можно ожидать, что столь же полезным объектом окажутся
переменные антисимметрические формы — дифференциальные —
при исследовании свойств различных объектов, заданных на по-
поверхностях и вообще в искривленных пространствах, а также
при исследовании условий разрешимости дифференциальных
уравнений. В нашей книге речь пойдет о более простом — пер-
первой части этого круга вопросов.
Наша ближайшая цель — ввести дифференциальные формы,
изучить их свойства и определить главные операции анализа
в применении к ним.
Мы начнем с определения векторного и тензорного полей в
области конечномерного вещественного нормированного про-
пространства, например U. Векторные и тензорные поля понадо-
понадобятся при конструировании дифференциальной формы. Опреде-
Определению векторного поля в области предпошлем описание его
физического аналога.
Представим себе, что в области U (U с Е = R3) происходит
течение жидкости. Тогда в каждый момент времени в точке х
определен вектор Н скорости течения. Разным течениям отве-
отвечают различные пары (х, Н). Таким образом, вообще говоря,
возникает необходимость рассматривать множество всевозмож-
всевозможных пар (x,ff),JteU, ЯеЕ.'
Представим себе теперь растекание очень тонкого однород-
однородного слоя жидкости по кривой поверхности G. Здесь с самого
начала ясно, что в паре (х, Н) каждой точке х (х е G) отве-
отвечает свое подпространство Тх — «касательное пространство»,
в котором лежит вектор Н. Слова «касательное пространство» мы
поставили в кавычки, желая подчеркнуть, что в действитель-
действительности пространство параллельно касательной плоскости в обыч~
ном смысле слова и, конечно, содержит точку Н = 01,
326
Множества пар (х, Н) в обоих рассмотренных случаях пред-
представляют собою примеры так называемых расслоенных про-
пространств. Во втором примере поверхность G является базой
расслоенного пространства, Т* — слоем, и в разных точках слои
разные. В первом случае слои в разных точках одинаковые —
это одно и то же пространство Е. В этом случае расслое-
расслоение (расслоенное пространство) называется тривиальным. Та-
Такое' расслоенное пространство представляется в виде прямого
произведения базы на слой U X Е.
Задавая отображение базы в слой, т. е. указывая по точке х
единственный вектор из слоя V=V(x), мы задаем «сечение
расслоения» (расслоенного пространства) — вектор-функцию,
определенную на базе расслоения.
Математические понятия, возникшие при рассмотрении при-
приведенного примера, относятся к числу фундаментальных поня-
понятий анализа. Тем не менее мы не будем рассматривать их в пол-
полной общности: слой у нас обычно является линейным простран-
пространством, а базой — множество в евклидовом пространстве.
§ 1. ТЕНЗОРНЫЕ ПОЛЯ. ФОРМЫ.
ВНЕШНЕЕ ДИФФЕРЕНЦИРОВАНИЕ
В этом параграфе мы определим так называемое внешнее
дифференцирование дифференциальных форм и установим его
простейшие свойства. В частности, выясним, как внешнее диф-
дифференцирование согласовано с алгебраическими операциями.
Всюду здесь Е — конечномерное вещественное линейное нор-
нормированное пространство, dim E = п. Далее иногда нам при-
придется считать его евклидовым или псевдоевклидовым — это бу-
будет отмечено специально.
1. Пусть U — область в пространстве Е, neU, йбЕ. Пара
(я, Н) называется линейным элементом в области U.
2. Множество {(х, Я)} всех линейных элементов в области
U называется векторным расслоенным пространством или про-
просто расслоением с базой U и слоем Е, {(х, Я)} =UXE,
3. Отображение F:U->-E— «сечение расслоения UXE» на-
называется векторным полем или вектор-функцией, заданной на
области. Вектор-функция называется гладкой (порядка г), если
ее координатные функции являются скалярными гладкими (по-
(порядка г) функциями.
При построении расслоенного пространства можно в каче-
качестве слоя взять не пространство Е, а любое другое линейное
пространство, скажем пространство Q^ всех полилинейных форм
данной валентности (р, q) над Е или пространство Ар всех анти-
антисимметрических форм валентностью р над Е.
4. Расслоенное пространство U >< Qflp называется тензорным
расслоением над областью U. Сечение F; x-*-Q% этого расслое-
327
ния называется тензорным полем * в области U. В частном слу-
случае, когда, речь идет о расслоении UXAP> его сечение Q. х->{Лр}
называется дифференциальной формой валентностью р или (ко-
(короче) р-формой, заданной на области U.
Иными словами: дифференциальная форма Q — это перемен-
переменная антисимметрическая форма, Q = Q(x), т. е. антисимметрич-
антисимметричная форма, тензор которой <0j (х) (в фиксированном базисе)
зависит от точки х (^eU).
Переменная полилинейная форма валентностью р вычисля-
вычисляется, как обычно, на р векторах пространства Е. Таким обра-
образом, переменная полилинейная форма валентностью р ставит
в соответствие точке х eU и р векторам Ни Я2, ..., Нр про-
пространства Е вещественное число. Поэтому переменную поли-
полилинейную форму (тензорное поле) можно рассматривать как
отображение расслоенного пространства UX(E)" в поле веще-
вещественных чисел.
Напомним (см. 1.5.1.19), что пространство QP конечномерно
(dimQp = пр) и базис в нем образуют всевозможные тензорные
произведения линейных форм f из Е*: /'' ® fIr> ® • • • ® flp A <
^s/s^rt, 1^S^P)- Всякое поле Q(x) полилинейных форм ва-
валентностью р (всякое тензорное поле) может быть записано в
фиксированном базисе следующим образом:
Z( „
Здесь и ниже суммирование по всем js от 1 до п обозначается
символом Z-
Пространство антисимметрических форм Ар имеет размерность
dim Л = Срп и базис в пространстве Лр образуют всевозмож-
всевозможные внешние произведения линейных форм р с упорядоченными
индексами: f = f/( Л fh Л •. • Л flp, A < h < h < ¦ ¦ ¦ < /Р < «)'
Дифференциальная форма п(х) в фиксированном базисе
может быть записана в виде
Здесь и далее суммирование по всем упорядоченным мультиин-
дексам обозначается символом ? . J = (/i. /2. •••» /р)- Разуме-
Разумеется, дифференциальная форма Q(x) может быть разложена и
по базису /'' (8) f'2 <8> • • • ® flp:
(,,) Q (х) = ? а, (х) f7« ® f'2 ® ... ® f'p.
()
* Строго говоря, следовало бы назвать эти объекты расслоением поли-
полилинейных форм и полем полилинейных форм. Тем не менее ради краткости
стоит принять предложенные в тексте термины.
328
Но в этом случае тензор формы &-, (х) оказывается антисимме-
антисимметричным: &ni(x) = (— \)lnn<bj{x). Поскольку при наличии в на-
наборе j одинаковых индексов &j = О, в сумме (**) отличны от
нуля лишь те слагаемые, для которых мультииндекс j не содер-
содержи! одинаковых индексов. Если в сумме (**) сгруппировать
слагаемые, содержащие одни и те же наборы индексов, затем
расположить индексы в возрастающем порядке и воспользо-
воспользоваться равенством
? (- i)[«j]/Wi ® /м]2 ® ... ® !шр = ft л f'2 л ... л f»,
(Л)
то сумма (**) примет вид
(***) Q (х) = ? ©jf'1 Л //а Л ... Л f'p.
Символ j ио(Э знаком суммы указывает на то, что здесь, как и
в сумме (*), суммирование выполняется по упорядоченным на-
наборам индексов. Сравнение формул (*) и (**) приводит к ра-
равенству <Oj = <5j.
Таким образом, мы убедились, что
*5. Изменяя способ суммирования, можно заменить тензор-
тензорное умножение в представлении (**) внешним умножением в
представлении (***):
? cojf'' ® f/2 ® • • • ® f^ = Z «if'1 Л f/2 Л • • • Л f7 *
(j) j
Здесь в левой части суммирование проводится по всем мульти-
индексам j, а в правой — только по упорядоченным.
Если в формуле (*) распространить суммирование на все-
всевозможные мультииндексы, то получится
р\ 0(*) = 2>,(*)/лЛ ft> Л ... Л fV
(J) '
Для того чтобы иметь возможность обсуждать свойство
гладкости дифференциальных форм, условимся считать про-
пространство Лр нормированным каким-либо образом, скажем,
введем норму типа | |<х>:
| со !„ = max | со. |,
0) '
где coj — тензор формы со в каком-либо фиксированном базисе,
6. Дифференциальная форма Q, заданная в области U;
называется гладкой (порядка г), если ее тензор coj (x) (в фик-
фиксированном базисе!) является гладкой (порядка г) по норме
пространства Лр функцией в области U,
329
Данное определение очевидным образом согласовано с 3.
В дальнейшем мы рассматриваем главным образом гладкие
дифференциальные формы. Порядок гладкости г мы специально
не фиксируем, считая его таким, чтобы выписываемые формулы
имели смысл.
Замечание относительно обозначений: часто
в дальнейшем мы будем использовать при записи дифферен-
дифференциальных форм символ dx' вместо fl.
Такая замена вполне оправдана по следующей причине:
*7. Пусть {х'} — координаты, связанные с базисом {ei) в Е,
{f'} — сопряженный базис в Е*. Тогда производная Df скаляр-
скалярной функции f(x) = x', заданной на Е, совпадает с f: Dxi = fi.
© Действительно, отображение /: х-*-х1 является линейным и
задается действием линейной формы f1: f(x) = x'=(fi, x), так
что главная линейная часть этого отображения совпадает с ним
самим: Dx' = f. 5
Удобнее вместо обозначения производной Dx1 использовать
обозначение дифференциала dx'. Замена производной Dx' диф-
дифференциалом dx' оправдана, поскольку при замене базиса
п
е\ = ^ tfek дифференциалы dx1 преобразуются в точности так
те, как и формы Dx' = fl:
-1
т. е. по контравариантному закону, и вычисляются по тем же
правилам, что и производные. В дальнейшем мы будем систе-
систематически базис пространства Ар записывать в виде
dxli Л dx'2 Л ••• Л dx'p — dx1, i = (/,, ..., ip),
а разложение дифференциальной формы Q по формам dx1 в виде
Q = ]? coj dxK
i
Мы увидим далее, что для дифференциальных форм многие вы-
вычисления, главным образом связанные с заменой переменных,
значительно сокращаются, если, выполняя их, с формами dx1
обращаться так же, как с обычными дифференциалами.
Аналогично тому, как это было сделано при рассмотрении
постоянных антисимметрических форм в первой части, условимся
считать скалярные функции дифференциальными формами с ва-
валентностью р = 0, а ковариантные векторные поля (поля ли-
линейных форм) дифференциальными формами с валентностью
Иногда нам придется наряду с ковариантными антисимме-
антисимметричными формами рассматривать их контравариантные ана-
аналоги,
ЗЗС
8. Формы вида
? «>J (х)еп Л е/2 Л • • • Л е/р= ?
будем называть поливекторами или контравариантными диф-
дифференциальными формами.
Чтобы отличать поливекторы от стандартных (ковариант-
ных) дифференциальных форм при их записи можно иногда
пользоваться символом dxt вместо е\ соответственно символом
dxj вместо ej. Алгебраические свойства контравариантных и
ковариантных дифференциальных форм совершенно аналогич-
аналогичны, подобно свойствам контравариантных и ковариантных век-
векторов, а в случае валентности р = 0 просто совпадают. Далее
мы ведем изложение для ковариантных форм.
Линейные операции над дифференциальными формами од-
одной и той же валентности вводятся поточечно. Именно:
9. Пусть Q, Q'— дифференциальные формы одинаковой ва-
валентности, определенные в области U, а, р — скаляры, отвечаю-
отвечающие пространству Е. Тогда, по определению
*10. Множество AP(U) всех дифференциальных форм валент-
валентностью р, определенных в U с линейными операциями, введен-
введенными в 9, при каждом р (р = 0, 1, ..., п) образует беско-
бесконечномерное линейное пространство.
11. На множестве всех дифференциальных форм A(U) =
p поточечно вводится операция внешнего умноже-
умножения: (йЛП)(х) = О(х)ЛП(х).
Таким образом, множество всех дифференциальных форм
A(U), наделенное линейными операциями 9 и операцией внеш-
внешнего умножения 11, приобретает алгебраическую структуру,
аналогичную структуре множества всех антисимметрических
форм,— становится так называемой градуированной алгеброй
(алгеброй Грассмана).
Наряду с алгебраическими операциями 9 и 11, введенными
на множестве всех дифференциальных форм, аналогично тому,
как это было сделано на множестве всех антисимметрических
полилинейных форм, на мноокестве дифференциальных форм
может быть определена операция анализа — внешнее дифферен-
дифференцирование. Вначале при определении операции внешнего диф-
дифференцирования будем считать базис {ej"=1 пространства Е и
сопряженный базис {dxi}"_l пространства Е* фиксированными.
В следующем параграфе будет установлено, что операция внеш-
внешнего дифференцирования не зависит от выбора базиса. Это
позволит записать операцию дифференцирования в криволиней-
криволинейных координатах, т. е. относительно переменного базиса. В еле-
331
дующей же главе определим дифференцирование в расслоенном
пространстве, связанном с данной поверхностью в R".
12. На дифференциальных формах нулевой валентности
(скалярных функциях) внешнее дифференцирование d определя-
определяется по формуле
дх1
i—i
Обратим внимание читателя на то, что операция внешнего
дифференцирования скалярной функции эквивалентна операции
вычисления ее производной, а результат вычисления по форме
совпадает с ее обычным дифференциалом.
13. На дифференциальных формах
валентностью р внешнее дифференцирование определяется по
формуле
<й2(*)=Е(Ао, (x))Adxi.
!
*14. Внешнее дифференцирование увеличивает на единицу
валентность дифференциальной формы.
Пример:
d (со12 (х) dxl Л dx2 + со,з (х) dxl Л dx3 + <о2 3 (х) dx2 Л dx3) =
д dxl д dx2 + ^_dx2 д dxy д
Л dx2 Л ^3 =
Слагаемое (dca^/dx^dx1 Л dx1 Adx2 и подобные ему не выпи-
выписаны, поскольку внешнее произведение, содержащее одинаковые
линейные формы {сомножители), равно нулю.
Перечислим основные свойства внешнего дифференциро-
дифференцирования.
*15. Операция внешнего дифференцирования линейна:
d(aQ + рП) = adQ +
*16. Пусть Q и П — дифференциальные формы валентностью
0 и </ соответственно. Тогда
d(Q Л П) = dQ Л П + (—l)pQ Л dU.
©• Вследствие линейности внешнего дифференцирования равен-
равенство 16 достаточно проверить на дифференциальных мономах,
т. е. на формах вида Q^adx1' Л dx1 Л • • • Л dxlp =co dxlp,
П = л dxi(i = л dx!i Л dx1* Л • • • Л йх'ч. Поскольку Q ДП =
332
д Jx4 то согласно определению 13
d (Q Л П) = d(соя) Д dx'° Л dx*» = {da ¦ л + со da) Л ^'р Л
Л dx?4 — d(o Л ^'р Л я fi?*J</ + и dx]p A dn A dx^ .( — [)" =
U. D
*17. В частности, если Q = <о — скалярная функция (диффе-
(дифференциальная форма с нулевой валентностью), а П — некоторая
р-форма, то Q Л П = <оП и d (соП) = da Л П + ©rfll.
*18. Для всякой гладкой дифференциальной формы Q спра-
справедливо равенство d(dQ) = 0.
© Для форм нулевой валентности это равенство выполнено в
силу независимости вторых частных производных гладкой функ-
ции от порядка дифференцирования (см. 2.2.40):
^Adx^ f
2 i-i
2 ^^г-1, дхлдх' 2 .,
=^- f
2 V
f C^r
2 .VA^dx' дх1дхк
Для форм старших валентностей имеем
% d(dati) A dxi =0,
поскольку в силу только что доказанного утверждения
rf (rfcoj) == 0 для любого значения мультииндекса j. 5
*19. Задача. Запишите равенство ddQ = 0 в терминах тен-
тензора <о, формы Q для 2-форм в пространстве R4.
§ 2. ЗАМЕНА ПЕРЕМЕННЫХ
В ПОЛИЛИНЕЙНЫХ ПЕРЕМЕННЫХ ФОРМАХ
(ТЕНЗОРНЫХ ПОЛЯХ)
В этом параграфе мы проведем замену переменных в кова-
риантных полилинейных формах валентностью р, зависящих от
точки области (тензорных полях). В частности, мы получим
формулу замены переменных в дифференциальных формах.
Пусть U и V — области в линейных пространствах Е и G со-
соответственно, dim Е = п, dim G = m, и <р — гладкое отображение
V на U. Пусть {ег}"_| — базис пространства Е и {gj\™=l — ба-
базис пространства G. Будем обозначать переменную точку об-
333
ласти U буквой х и через (xi, хй хп)—ее координаты в ба-
базисе {ej"_j; переменную точку области V обозначим буквой у
и (У1, У2, • ••> у) —ее координаты в базисе {gj}™^.
В дальнейшем отображение * = ф(г/), которое в координат-
координатной форме записывается в виде х' = (р'(у\ у2, ..., ут)
U' = 1, 2, ..., п) будем называть гладкой заменой переменных.
Мы с самого начала не требуем, чтобы отображение <р: V-vU
было взаимно однозначным или хотя бы локально взаимно
однозначным, оно лишь гладкое. Считая, что в области U опре-
определена некоторая 'полилинейная форма Q, мы построим по ней
новую форму Ф*п, заданную в области V, и такую, что значения
форм Q, <D*Q в «соответствующих» точках на «соответствующих»
векторах равны.
Начнем с пересчета линейных элементов, отвечающего ото-
отображению ф: V -*¦ U.
1. Определим отображение ф расслоенного пространства
V X G на расслоенное пространство U X Е, отвечающее отобра-
отображению ф, следующей формулой пересчета линейных элементов:
Ф: (у, Я)->(ф(г/), D<$(y)H).
Таким образом, линейному элементу {у, Н) при отображе-
отображении Ф сопоставляется линейный элемент (q>(y), Dq>(y)H) =
= Ф(у, Н), а линейному элементу {у; Ни Н2, ..., Нр) — линей-
линейный элемент (q>(y); Dq,(y)Hu Dq>(y)H2, ..., Dq>(y)Hp).
Как мы видели в предыдущем параграфе, полилинейная фор-
форма задается на расслоении, т. е. ее аргументом является, в сущ-
сущности, линейный элемент вида {у; Ни Я2, ..., Нр). Поэтому
естественно считать, что форма G)*Q, возникающая в области V
при отображении ф, принимает на линейном элементе (у; Яь
#2, • ¦ •, Яр) то же самое значение, что и форма Q на его образе:
(ф(у); Dq>(y)Hu Dqs(y)H2, ..., D(f(y)Hp). Это естественное со-
соображение реализуется в следующем определении «встречного»
отображения Ф*:
2. Переменная ковариантная форма (тензорное поле)
(Ф*О) (у) в области V, соответствующая при отображении ф
форме (тензорному полю) Q(x), заданной в области U, опреде-
определяется равенством
(O'Q)(y)(Hu Н2 Яр) = Й(ср(у))(D<p(*/)#!, .... D<t(y)Hp),
которое должно выполняться для произвольного набора векто-
векторов Ни #2, .... Нр <= G.
3. Тензор полилинейной формы (Ф*п) (у) в базисе {htyJLu
сопряженном с базисом {gj}?^, будем обозначать символом
й/,«=1, 2, .... от):
(Ф'О) (у) = Z ®1 (У) Л;' ® Л'2
834
•4. Справедливы следующие формулы преобразования тензо-
тензоров a>j (x) и a)j(y) полилинейных форм Q(x) и Ф*п(у) при за-
замене переменных ф для 0-формы:
«(*/) = (о (Ф (у));
для 1-формы:
fflt (Ч>(у)) —^]-< У=1» 2, ..., т;
для форм валентностью р:
' <Эф 2 Э р
Щ (У) = А Ю| («Р (У)) -/ /" ' • • ~V
i = (/i> /2. •••. /р).
© Доказательства записанных формул получаются, если заме-
заметить, что тензор формы совпадает с ее значением на базисных
векторах ©)(^) = (Ф*й)(г/)(§/1, g/2 gip), а затем восполь-
воспользоваться правилом пересчета линейных элементов;
и полилинейностью:
l, D(p(y)g,2, ..., Dq>(y)g!p) =
V
5У ' ду'2 ду'Р
*5. Следствие. Если переменные преобразуются по фор-
формулам x = q>(y) или, в базисах {ej"_p {g/}7=i> п0 формулам
л;г = ф'(г/1, г/2 ут) (i = 1, 2, ..., я), то полилинейные фор-
формы преобразуются следующим образом:
«)
где <Dj(y) = 2, <в,(ф(^)) ф у; ... ;ру;
/и{/г/}^_1 — базис в пространстве G*, сопряженный базису
ЫГ-."
Формулы 5 становятся особенно наглядными, если, восполь-
воспользовавшись принятым ранее обозначением, заменить f' на dxl
и п1 на dy1.
*6. Ф* ( X
V A)
»)¦)¦
ш
а/'
*7. Связь между полилинейными формами Q и Ф*О можно
получить на формальном уровне, подставляя вместо dx' его вы-
выражение через дифференциалы dy':
^dy.
Uду
При этом получаем
(*) (ф'О) (у) = J] <о, (Ф (у)) ^'« (у) ® ... ® dxp (у) =
* (у) Зф р (г/)
= V <Ojdy/
Таким образом, мы фактически оправдали возможность «фор-
«формальной» замены переменной.
Проверьте, что
*8. Тензор coj (г/) антисимметричен, если антисимметричен
тензор <oj(x).
*9. Все выведенные формулы замены переменных остаются
справедливыми для дифференциальных (антисимметричных)
форм.
© Это утверждение следует из 7 и того факта, что дифферен-
дифференциальные формы Q и Ф*О могут быть разложены соответственно
по базисам f' (8) .,. (8) fp, h'1 ® ... (8) А'р. D
Если в равенстве G*) на основании 1.5 заменить тензорное
умножение внешним умножением и перейти к суммированию nq
упорядоченным мультииндексам, то в силу 8 придем к формуле
*10. Ф*(? щ{х)с1х^ Л ... Л dx'p\ = Z <»j (</)^/'' Л ••• Л ^Ур>
У ду'1 ду'* ду'Р
Таким образом, и здесь можно действовать формально: при
замене переменных х' = ср'(у1, ..., у) в дифференциальной
форме (как и в тензорном поле) следует просто заменить диф-
дифференциалы dx' no обычным правилам дифференцирования
сложной функции:
m i
jy j=l, 2 п?
Операция замены переменных обладает следующими свой-
свойствами:
*11. Операция замены переменных является линейной:
( р) Р
Иными словами, оператор Ф* задает линейное отображение ли-
линейного пространства всех тензорных полей (в частности, диф-
дифференциальных форм) данной валентности, определенных в об-
области U, в линейное пространство всех тензорных полей (диф-
(дифференциальных форм) данной валентности, определенных в об-
области V. Заметим, что указанные пространства (например
Ap(U), AP(V)), вообще говоря, не изоморфны друг другу
(в частности, векторная размерность AP(U) равна С%, а вектор-
векторная размерность Ap(V) = Cm).
*12. Операция замены переменных согласована с тензорным
и внешним умножением. Именно, для любых полилинейных
форм Q, Q, заданных на области U, выполнено равенство
Ф*(О <8> Q) = Ф*О <8> Ф*й, и для любых дифференциальных 4юрм
П, П, заданных в области U, выполнено равенство Ф* (П Л П) =
= Ф*П Л Ф*П.
0 Доказательство проведем лишь для случая дифференциаль-
дифференциальных форм. Согласно правилу замены переменных 7 следует под-
подставить в формы П = J]j щйх*, fi=J]1niC?xi вместо «диффе-
«дифференциалов» dx' их выражения через переменные yk:
При этом получим
Ф* (П Л П) = X я, (<Р (у)) ft, (q> (у)) </*'• (у) Л dx1* (у) Л .. •
i. i
.. • Л dx'p (у) Л dx'1 (у) Л dx1* (у) Д ... Л dx'i (у).
937
Пользуясь ассоциативностью внешнего произведения и его ди-
дистрибутивностью относительно линейных операций, последнее
выражение перепишем в виде
{ ? я, (ф (у)) dxh {у) Л dx'* (у) Л ... Л dx'p (у)} Л
Л { Z fti (ф (У)) dx1* {у) Л dx1' (у) Л ... Л dx'i (г/)} =
= Ф*П Л Ф*П. D
Указанные свойства означают, что операция замены пере-
переменных порождает гомоморфизм как линейных пространств
Ap(U) на AP(V), так и грассмановых алгебр (внешних) диффе-
дифференциальных форм A(U) на A(V).
Следующее утверокдение описывает согласование операции
замены переменных с дифференцированием:
*13. Если- ф — гладкая (дважды непрерывно дифференци-
дифференцируемая) замена переменных, то для произвольной гладкой диф-
дифференциальной формы выполняется равенство d<D*Q = <D*dQ,
т. е. операции внешнего дифференцирования и замены перемен-
переменных перестановочны.
© При замене переменных x = q>{y) в 0-формах (функциях]
получаем, с одной стороны:
а с другой стороны:
При замене переменных в 1-формах уже возникает новый мо-
момент— дифференцирование выражений дср'/ду{. Пусть аз(х) =
2Г
) \ = J] dat
4Ф*<о = d\)^ со, (ф (у)) dxl М| = 2, *°< (ф (у)) Л dxl (у) +
2-1
iD>(y)) Л -~rdyk~\-
7 —ь I dy1 Л dws,
Я, 1т\ " У
г, ft-i
Во втором члене правой части выражение
обращается в нуль при каждом значении i, поскольку (см.
2.2.40) смешанные производные не зависят вследствие гладко-
гладкости отображения ф от порядка дифференцирования д2(р'1дукду'==
= д\1/ду'дук, а произведение ду1 Л дук антисимметрично:
dy1 Л dyk = ~dyk Л dyl. Это позволяет записать преобразован-
преобразованную форму в виде
(ф(у))Л^(у) =
l<k, Km, I < /, / < п.
С другой стороны,
ф* d® = Ф* У ^ (х) dxl Л dxl =
ui дх
так что на 1-формах йФ*о = Ф*йи>.
В общем случае очевидно, что достаточно ограничиться про-
проверкой обсуждаемого равенства лишь для мономов: ю = ю (х) dxl
i = (h, k, .... iP), поскольку обе операции Ф* и d линейны-
Пользуясь уже доказанными фактами, имеем
йФ*ю = d {со (ф (у)) dx^ (у) Л dxl> (у) Л ... Л dxp (у)} =
= dco (ф (у)) Л dx*> (у) Л dx' (у) А ... A dx'? (у) +
+ ю (Ф (у)) {dV> (г/) Л rfjc'» (У) Л ... Л rf^(> (У) +
Все члены выражения, стоящие в фигурных скобках, равны
нулю, поскольку dV* (у) = d {dxis (r/)) == 0. Следовательно, с од-
339
ной стороны:
</Ф'ш = dco (Ф (у)) л dx1' {у) Л dxl> (у) А ... Л dx'p (у) =
П
= Z 17*((р ^ <**' (У) Л d*'1 («/) Л dx'? (г/) Л • • • Л d*'" (г/) =
— — • • • —— dy Л dy ' Л ••• Л di
Легко усмотреть, что, с другой стороны, полученное выраже-
выражение является результатом замены переменных в дифференциаль-
дифференциальной форме da>. Таким образом, йФ*а> = Ф*йсо. D
к* м
СР*?Г
d
Рис. 17.
Ф*
Коммутация операций внешнего дифференцирования d и за-
замены переменной Ф* может быть проиллюстрирована диаграм-
диаграммой, представленной на рис. 17.
Оба пути из верхнего левого угла диаграммы в нижний пра-
правый приводят к одному и тому же результату.
*14. В частности, операция внешнего дифференцирования
коммутирует с линейной заменой переменных.
§ 3. ОРИЕНТАЦИЯ ВЕЩЕСТВЕННОГО
ЛИНЕЙНОГО ПРОСТРАНСТВА И ФОРМА ОБЪЕМА
В ОРИЕНТИРОВАННОМ ВЕЩЕСТВЕННОМ
ЕВКЛИДОВОМ ПРОСТРАНСТВЕ
В первой части книги (ч. I, 6.2.18) было введено понятие
одинаково ориентированных базисов в R". Это было сделано
с помощью антисимметрической формы валентностью п. Были
также указаны необходимые и достаточные условия одинаковой
ориентации двух базисов. Теперь мы введем понятие одинаково
ориентированных базисов несколько иначе — с помощью опре-
определителя матрицы перехода от одного базиса к другому, и уста-
установим связь его со старым способом определения ориентации
произвольного базиса, основанным на вычислении знака формы
f' Л Р Л ... Л fn на векторах испытуемого базиса. Затем мы
340
установим геометрический смысл абсолютной величины значе-
значения этой формы на базисе в евклидовом пространстве.
Пусть Е (dimE = n) — вещественное линейное пространство,
{ei), {е'Х— различные базисы в Е. Разлагая элементы базиса
{е'\ по базису {е,}, образуем матрицу %Г:
Ей можно, конечно, сопоставить оператор Т, переделывающий
элементы «старого» базиса {е,} в элементы «нового» базиса
{е'Х с теми же номерами Ге/ = е'. Очевидно, что
Z
В силу 1.7.4.1 и 1.7.2.4 оператор Т обратим и его определитель
отличен от нуля, т. е. положителен или отрицателен. Это позво-
позволит ввести на множестве всех базисов линейного вещественного
пространства следующее понятие ориентации:
1. Будем говорить, что базис {e'.j ориентирован, одинаково
с базисом {е*}, если det 7" > 0. При этом будем писать {e'j) ~ {е{}.
Если det T <С 0, то будем говорить, что базис {e'j) ориентирован
противоположно базису {ei}.
*2. Ориентация является отношением эквивалентности.
Именно, имеет место {ei) ~ {ei) (рефлексивность); далее,
если {<?/} ~ {е/}> т0 {ei} ~ {е/} (симметричность), а если
К/} ~ {ei} и {е") ~ Iе/}' т0 {e'k} ~ {ei} (транзитивность).
0 Поскольку det/ > 0 (где / — тождественный оператор), то
{е,}~{ег.}. Если {е^} - [е^, то e\ = Tei и det7>0. Тогда
ei = T~[e'i и (см. 1.6.3.11) det Т'х = (detГ) > 0. Далее, если
{е',}~Ы> К}~(е;}' то e\=Txei (detr,>0), <=72< (det72>0).
При этом el^=T,Txek и согласно 1.6.3.11 det Г/^det r.detr^O,
так что {e"k} ~ {e;}. D
Выделив в Е некоторый базис, скажем {е?}, и пользуясь опи-
описанным отношением эквивалентности — ориентацией, можно
разбить множество всех базисов линейного вещественного про-
пространства на два класса: класс положительных базисов, ориен-
ориентированных одинаково с {е°}, и класс отрицательных базисов,
ориентированных противоположно (е°|.
3. Линейное вещественное пространство Е, в котором выде-
выделен класс положительных базисов (и тем самым класс отрица-
отрицательных базисов) называется ориентированным.
*4. Задание ориентации в линейном вещественном простран-
пространстве производится путем указания некоторого базиса [е^]) ко-
341
торому по определению приписывается положительная ориента-
ориентация. После этого любой другой базис {е'^ оказывается входя-
входящим в класс положительных базисов, если {e's} ~ {е°}, либо в
класс отридательных базисов в противном случае.
Утверждение 4 дает, в сущности, признак, по которому можно
сравнивать ориентации базисов в ориентированном простран-
пространстве Е. Этот признак можно записать в несколько ином виде.
Сопоставим каждому базису {е<} антисимметрическую поли-
полилинейную форму * с максимальной валентностью п — dim E:
V. = fl Л/2 Л ... Л/я.
Пространство Ап всех п-форм одномерно, и форма Уе„ =
= /о Л • • • Л /о» отвечающая выделенному базису {е,} в Е,
служит базисом в Л„. Поэтому всякая форма Ve отличается от
Vec лишь множителем, который легко найти, вычисляя эти
формы на каком-либо наборе векторов.
*5. Если Te°j = ej, то Ve = (detT)~ Ve,.
© Действительно, применяя левую и правую части доказывае-
доказываемого равенства к набору{et}, et= /_,k=.itfe°k, получаем Ve(e{,...
*6. Следствие. Если пространство Е ориентировано с по-
помощью базиса {е^}, то ориентация всякого другого базиса {ei}
определяется знаком величины УеМь еъ ••••О: если Keo(ei, ...
..., еп) > 0, то базис {е,} ориентирован так же, как базис (ег}>
если W(ei, .... еп) < 0, то базис {е,} ориентирован противопо-
противоположно базису {е°}.
В евклидовом пространстве с выделенным ортонормирован-
ным базисом {е°} не только знак числа Ve« {в\, . ¦ ¦, еп), но и его
абсолютная величина несет важную информацию.
Рассмотрим евклидово пространство Е. Пусть |е°} — неко-
некоторый ортонормированный базис в Е. Обозначим через {х*0} ко-
координаты вектора х в этом базисе. Координаты этого же вектора
в другом базисе {е,} обозначим через х':
п п п
у > ~1пУ > via у* > г*у*
Рассмотрим в пространстве Е призму П, натянутую на век-
векторы {ei}: П = {х: 0 < х1 < 1, I = 1, 2, .... «}.
* В этом и в следующем параграфе не используется операция внешнего
дифференцирования. Поэтому мы можем вернуться к старым, более кратким
обозначениям: /' вместо dx'. Начиная с § 5 мы снова будем пользоваться
обозначением dx' для базисных форм в Е*.
342
•7. Призма П является образом единичного куба: По =
={х:0<х10<\,1=1, ...,«} при отображении Т: П = {х: х = Ту,
|/бП0}.
*8. Объем |П| призмы П равен |det^~|, T =={/!}.
© По определению 4.5.22 объем призмы П (т. е. ее лебегова
мера) равен интегралу по области (П) функции, равной еди-
единице тождественно: | П | = \ l\dV\. Здесь \dV] = dx\ dx\ • • •
...dx% — лебегова мера,связанная с ортогональными координа-
координатами {ха}1=1' Ввиду того, что призма П наиболее просто за-
задается в координатах {*'}"_!» П = [х: О < х' < 1} в интеграле
S11 dV | следует перейти именно к этим координатам по фор-
муле: Xq= 2/-i *[*'• Согласно формуле замены переменных в
кратном интеграле (см. 4.5.23) получаем
Доказанное утверждение позволяет дать следующую интер-
интерпретацию значению формы Vee на векторах {ei}'-=!.
*9. Значение формы V'«„ на произвольном линейно независи-
независимом наборе векторов (в\, вч, ..., еп) равно по абсолютной ве-
величине объему призмы П, натянутой на эти векторы:П = {л;: х—
= 'Z,?-iXlel, 0 <х' < I, i= 1, 2, .... п}; т. е. Fc,(eb e2 е„) =
= ±|П|. Плюс относится к случаю, когда набор (ей в2 еп)
имеет ту же ориентацию, что и базис {e°}"_,. а минус — к слу-
случаю, когда ориентация его противоположна.
В случае, когда набор векторов (е\ е«) линейно зави-
зависим, равенство VeMu ¦•-, еп)— ±|П| сохраняется, но стано-
становится тривиальным: |П| = 0, Ve№\ •-• бп) = 0.
© Доказательство утверждения в части, касающейся линейно
независимых наборов, получается комбинированием предложе-
предложений 5, 6, 8:
В части, касающейся линейно зависимых наборов, обращение
в нуль левой и правой частей равенства проверяется по отдель-
отдельности. В частности, равенство |П| = 0 следует из того, что раз-
размерность подпространства L(ef, е?, .,., е„), содержащего приз-
943
му П, в этом случае не превосходит п— 1, и множество IT огра-
ограничено. Поэтому |П| = 0 согласно 4.1.48. 3
10. Форма Feo, ассоциированная в евклидовом пространстве
Е с положительным ортонормированным базисом {е°}" . назы-
называется формой объема в ориентированном вещественном евкли-
евклидовом пространстве Е.
Форму объема можно, разумеется, связать со всяким орто-
ортонормированным базисом.
*11. Пусть {е?}, {е?}— два ортонормированных базиса в ве-
вещественном евклидовом пространстве Е. Тогда соответствую-
соответствующие им формы объема Ve,, и- V&а связаны равенством Ve, = ± Vec,
где знак плюс стоит в случае, когда базисы {е?}, |е°} ориенти-
ориентированы одинаково, а минус — когда их ориентации противо-.
положны.
0 Доказательство следует из 5 и 9. D
Роль формы объема в вопросах, касающихся ориентации,
может играть, как мы знаем, любая выделенная п-форма. Во-
Вообще, имея дело с общим (не евклидовым) вещественным ли-
линейным пространством Е (dimE==n), можно задавать его
ориентацию, выделяя и фиксируя некоторую п-форму. Этот спо-
способ ориентации пространства, эквивалентен классификации бази-
базисов и в практическом отношении даже более удобен. Мы вос-
воспользуемся им в следующем параграфе для задания ориентации
неевклидова пространства.
§ 4. ОРИЕНТАЦИЯ ПСЕВДОЕВКЛИДОВА ПРОСТРАНСТВА
И ОПЕРАЦИЯ ДОПОЛНЕНИЯ
АНТИСИММЕТРИЧЕСКОЙ ФОРМЫ
Мы знаем, что размерности пространств антисимметрических
форм Ар, Л«_р одинаковы. Это позволяет в принципе построить
линейное взаимно однозначное отображение т: Ар-*-Ап-р. Его
построение мы осуществим в два этапа.
Сначала мы обсудим операцию опускания и подъема индек-
индексов в псевдоевклидовом и, в частности, евклидовом пространстве.
Принятая степень общности связана с тем, что мы намерены
пользоваться операцией дополнения для антисимметрических
форм в так называемом пространстве Минковского при записи
уравнений Максвелла.
Напомним некоторые определения и элементарные факты из
геометрии конечномерного вещественного псевдоевклидова про-
пространства (см. ч. I, гл. 10).
1. Псевдоевклидовым пространством будем называть всякое
линейное вещественное пространство, в котором задана били-
билинейная форма (х, уУ, обладающая свойствами симметричности
<лг, г/.> = (у, Xs) и невырожденности (х, у} = 0 для всех у в том
и только в том случае, если х = 0.
2. Если, помимо симметричности и невырожденности, били-
билинейная форма определенно положительна: <х, х> > 0 при хфО
и <л;, х) = О, только если х = 0, то псевдоевклидово простран-
пространство называется евклидовым.
Если билинейная форма (х, х} знакопеременна, то метрика
в Е, отвечающая скалярному произведению <, >, называется
индефинитной, а само пространство Е в этом случае — соб-
собственно псевдоевклидовым.
Таким образом, евклидово пространство и собственно псевдо-
псевдоевклидово пространство (с индефинитной метрикой) являются
частными случаями общего псевдоевклидова пространства. Это
дает нам возможность, не рассматривая порознь пространства
с положительной и индефинитной метрикой, установить ряд
фактов, которые имеют место как в том, так и в другом случае.
*3. Билинейную форму <*, г/> в конкретном базисе {ег}г=1
можно задать с помощью симметричной матрицы {gik}, пола-
полагая <ег, ek> = gik.
© Пусть х1, у' — координаты векторов х, у в базисе {e»}/=i>
тогда
п
(х, У) = Z gtkX'y". ^
!. k = \
4. Билинейную форму (х, у}, задающую псевдоевклидову
структуру линейного пространства, и соответствующую ей в
конкретном базисе матрицу gik будем называть (так же, как и
в евклидовом пространстве) скалярным произведением и соот-
соответственно метрическим тензором.
Метрический тензор мы будем далее иногда обозначать, ради
краткости, буквой g.
*5. Если два базиса {е,}"_ , {е,}" связаны с помощью ма-
матрицы перехода ST: ep = J^=i'pe?> то метрические тензоры
g, g', отвечающие этим базисам, связаны равенством
8,к = 5J t[tlkg'n.
© Для доказательства нужно непосредственно использовать
определение метрического тензора:
*6. Следствие: detg = (det#~Jdetg'.
*7. Свойство невырожденности билинейной формы эквива-
эквивалентно условию обратимости матрицы {gik}, т. е. условию
det{g*}=?0
345
© Действительно, переходя с помощью неособого линейного
преобразования х' — ?s *s|s, detST =;? 0 к переменным, в которых
форма <х, у} имеет канонический вид:
заметим, что условие невырожденности в новых переменных сво-
сводится к тому, что равенство ?s (i,iSins = О для всех {?} выпол-
выполняется лишь при условии {ц} = 0. Это означает, что все коэф-
коэффициенты Us отличны от нуля, т. е. определитель матрицы ^ =
— {Hi*} (Ц'А — 6«*Ц<) отличен от нуля. Используя связь между
матрицами g и ц: \i = 0~*g0~, detц == det^(det^J, приходим
к нужному утверждению. D
8. Введем обозначение sgn det g = е.
*9. Знак определителя метрического тензора не зависит от
выбора базиса псевдоевклидова пространства.
Знак е является важной инвариантной характеристикой
псевдоевклидова пространства.
10. Базис |е°| псевдоевклидова пространства Е называется
ортогональным относительно билинейной формы <*, уУ, если
(е?> e°k) — Q (i?=k, i, k= 1, 2 n), и ортонормированным'
если (e°t, eok) = efi{k, ei = ±l. (В случае евклидова простран-
пространства все коэффициенты е* = 1.)
*11. Во всяком псевдоевклидовом пространстве можно ука-
указать ортонормированный базис {е°}.
© Такой базис можно легко изготовить из канонического ба-
базиса {ei} квадратичной формы (х, х}, в котором она выглядит
как сумма квадратов с коэффициентами %t, {x, x) = 2_it_l%i{x1J.
Невырожденность билинейной формы (х, уУ обеспечивает вы-
выполнение условия %i Ф 0, симметричность — вещественность %i.
Для получения ортонормированного базиса |е°) следует поло-
положить e°t = ei\ и Г1/2. Т>
*12. Метрический тензор g псевдоевклидова пространства
в ортонормированном базисе диагоналей и его диагональные
элементы равны либо +1, либо —1.
*13. В ортонормированном базисе {ety билинейная форма
(х, уУ имеет вид
где xlQ n Уд — координаты векторов к и у в базисе
346
•14. Обратно, если в некотором базисе {е?} скалярное произ-
произведение двух произвольных векторов х = ?"_i х[е\, у = Х"_, у'йе\
вычисляется по формуле^*, */) = ]C,=1 ?(ХоУо> ег = ±1. базис {ej}
является ортонормированным.
15. Обозначим через п+, п,- число положительных, и отрица-
отрицательных коэффициентов е/. Пара чисел {п+, п~) ьазывается сиг-
сигнатурой базиса псевдоевклидова пространства.
Конечно, в псевдоевклидовом пространстве существует бес-
бесконечное число ортонормированных базисов, в которых скаляр-
скалярное произведение (х, у}, задающее псевдоевклидову структуру,
имеет канонический вид (х, y}~'/LJi={?iXiyi. Однако в силу за-
закона инерции квадратичных форм (ч. I, 11.6.7) сигнатура всех
ортонормированных базисов будет одинаковой или, что то же
самое, число положительных и отрицательных коэффициентов
в каноническом виде билинейной формы будет всегда одним
и тем же.
16. С матрицей {gik}, задающей скалярное произведение
псевдоевклидова пространства в конкретном базисе {е*}, мож-
можно связать обратимый оператор G: Е-»-Е*, отображающий
линейное пространство Е на сопряженное пространство Е* по
правилу
Здесь {/'}— базис в Е*, сопряженный базису {ей}, т. е.
В частности,
п
Gek^ZgikP, k=\, 2 п.
Таким образом, оператор G сопоставляет вектору х с коор-
координатами {хк} форму h = Gx с координатами hi = ^lk=lgikxk,
т. е., формально говоря, «опускает» индекс у координат и соот-
соответственно «поднимает» у векторов базиса.
*17. Условие невырожденности скалярного произведения
<, > эквивалентно условию обратимости оператора G. При этом
оператору G~l: E*->-E в прежних базисах {ей}, {f1} отвечает
матрица (обратный метрический тензор) g = {gik}, элементы
которой вычисляются по правилу g!lt =(detg)-1G/ii, где Gki —
алгебраическое дополнение элемента gki метрического тензора g.
Оператор G~l сопоставляет форме h== 2lk^lhJk вектор х =
= О-1 А с координатами х1 = 2а=1 gikhk. Таким образом, опе-
оператор G~ : fl->-Yik=igl ek> наоборот, «поднимает» индексы у
координат и «опускает» индексы у вектора базиса.
847
*18. Справедливо равенство (Gx, G-Xh) = (h, x).
© По определению (h, x) = ?"_, h'Xi и, так как
то (А, *) = ? gikxkg"ht =
Доказанное равенство иногда интерпретируется как свой-
свойство симметрии оператора G.
Особенно просто выглядит действие операторов G, G~l на
векторы ортонормированных базисов.
*19. Для векторов ё\ ортонормированного базиса (е\, е^) =
= 8j6,-ft (е,= ±1) справедливы равенства Get = e,Jl0, G~ fl0 = eiei.
Для векторов {е,} ортогонального базиса <е(-, е*> = gibik спра-
справедливы аналогичные равенства: Gel=glfl, G~lf = g~iei. (Сум-
(Суммирование по i в правых частях выписанных формул не про-
проводится!)
Рассмотрим пример псевдоевклидова пространства. Псевдо-
Псевдоевклидово пространство Минковского М4 с сигнатурой A.3)
служит пространством событий в специальной теории относи-
относительности и поэтому играет важную роль в физике. Сопостав-
Сопоставляя каждому вектору х из М4 событие, происходящее в момент
времени t в точке евклидова пространства R3 с декартовыми
(ортогональными) координатами х1, х2, х3, и вводя вместо вре-
времени t соответствующую временную координату х° = ct (с —
скорость света), записывают вектор х в виде (х°, х\ х2, х3).
20. В указанной системе координат скалярное произведение
(х, х)Л, пространства Минковского М4 определяется равенством
(х, х)м, = (х0J — (я1J — (лг)- — (х3J, т. е. оператор G задается
матрицей
Выбор такого скалярного произведения является не плодом
абстрактных построений, а следствием экспериментальных фак-
фактов: оказывается, именно «квазиинтервал» между «.событиями»
х, х, вычисленный по формуле
(х — х, х — х>= {х° — х°12 — (л;1 —х1J —ix2 — x2J —
— (Х3—Х3J,
остается инвариантным при замене указанной системы коорди-
координат другой аналогичной системой, движущейся относительно
нее с поступательно постоянной скоростью [см. § 9 настоящей
главы),
34S
Аналогично тому, как мы задали ранее операцию G пере-
пересадки вектора Е в Е* и соответствующую обратную опера-
операцию G~l:
можно определить соответствующее отображение пространства
Qo полилинейных контравариантных форм в пространство QP
полилинейных ковариантных форм и обратное отображение. Эти
отображения мы также обозначим символами G, G~] соответ-
соответственно. Зададим их в базисах пространств Q$, Qp, порожден-
порожденных данной парой сопряженных базисов {et}, {/'} пространств
Е и Е*.
21. Положим по определению:
п
h •¦• ip" '
Q~xfx 0 f2 ® • • • ® fp =
и затем распространим действие оператора G(G~]) на все про-
пространство Qo (fip) по линейности.
Произведения вида gklttgk2i2 ¦ • ¦ gkpip мы будем иногда в
дальнейшем для краткости обозначать символом gk v
Перед тем как определить операцию дополнения в псевдо-
псевдоевклидовом пространстве, покажем, что в таком пространстве,
так же как и в евклидовом, можно ввести единственную п-форму
Ve, — аналог формы объема евклидова пространства, — которая
позволит определять ориентацию базиса {е,} по знаку выра-
выражения Veo(eb е2> ¦ ¦ •' еп)-
Пусть Е — ориентированное псевдоевклидово пространство,
(е°Л — какой-либо ортонормированный положительный базис
в Е: (е\, 6fe) = e.6ife (е/= ± 1). Обозначив через {/?} сопряжен-
сопряженный базис в Е*, образуем форму, аналогичную форме объема
Veo = PoAf20A ••• Л /".
*22. Пусть {ei}—произвольный положительный базис, {/'} —
сопряженный базис, g = {gm} — связанный с базисом {е,} ме-
метрический тензор. Тогда в базисе {ei) форма Ve0 записы-
записывается следующим образом:
l/eo = |detg|1/2/'A/2A... Л Г.
© Допустим, что базис е, связан с положительным ортонорми-
рованным базисом {е°А с помощью матрицы ^" = {^} по фор-
349
муле el = Yji^\^ie)- Тогда векторы сопряженных базисов свя-
связаны равенством
faif
?0 Л /о Л ... A/o = ft I _Afi2...tlfi Л ... Af*» =
=det^./'A/2A ... Л Г,
причем по условию det ^7" > 0.
С другой стороны, в силу 6 detg = (det?TJe (e = 8ie2
... en = ± 1). Следовательно,
det Г = (е det ?)'/2 = | det g I1/2,
A/2A ... ЛГ-
*23. Если базис {e,} отрицательный, то в формуле 22 сле-
следует поставить знак минус перед правой частью.
*24. Пусть {е°}, {е;} — два ортонормированных базиса в
псевдоевклидовом пространстве Е, |fjj, {/'} — отвечающие им
сопряженные базисы в Е*. Тогда /о Л /о Л • • • Л /о = ± /' Л
Л/ А • • • A fn> причем знак плюс имеет место в случае, когда
оба базиса принадлежат к одному классу ориентированных ба-
базисов; а знак минус — в противоположном случае.
Предложение 24 показывает, что в ориентированном вещест-
вещественном псевдоевклидовом пространстве имеется естественный
аналог формы объема — форма 1Л>„ = /0 Л • • • Л ^ассоциирован-
^ассоциированная с любым из положительных ортонормированных базисов.
Мы будем называть ее также формой объема и обозначать Vo.
Видно, что она определяется не конкретным базисом, а классом
положительных ортонормированных базисов.
25. Определим операцию дополнения антисимметрической
формы Qp в ориентированном вещественном псевдоевклидовом
пространстве Е — операцию т — формулой
Здесь Q~x — операция, превращающая антисимметрические фор-
формы в соответствующие поливекторы, * — обозначение свертки
тензоров (форм) по первым индексам и Vo — форма объема,
отвечающая классу положительных ортонормированных бази-
базисов в Е.
Вычислим операцию дополнения т на р-формах, записанных
в конкретном положительном ортонормированном базисе {efy в
МО
псевдоевклидовом пространстве со скалярным произведением:
k-\
Ясно, что достаточно произвести вычисления для случая,
когда Qp — базисный моном Qp = /J; для определенности будем
считать набор индексов j == (/ь /г, ..., /Р) упорядоченным.
Пусть, далее, /J — базисный моном с дополнительным к j
мультииндексом к = (k\, k2, ..., kn-P), который также будем
считать упорядоченным. Тогда
*26. Tfi = (-
где [j, к] — число беспорядков в перестановке [j\, /2, ..., у,
k\, ki, ..., kp\. При этом справедливо равенство
© Согласно 19 G~lf! = e,e°. Поэтому в силу 21
«п)
В первом сомножителе правой части суммирование распростра-
распространяется на всевозможные перестановки пп основного набора ин-
индексов A, 2, ..., п), во втором сомножителе — на всевозможные
перестановки рр набора (/ь /г, ..., jp). Условие «свертка про-
производится по первым индексам» означает, что на векторах
ep,t ?р2, •••> ерр вычисляются соответственно формы /"', f, ...
• • •. /qpi стоящие на местах первых р сомножителей. Таким об-
образом,
(я), (р)
X /ор+1 ® Л+1 ® ... ® Г"
(С. О
Если среди первых р индексов в перстановке я есть индексы
дополнительного набора к, то соответствующие слагаемые в пра-
правой части (*) обращаются в нуль, так как по крайней мере
одна из скобок (/*«, еМ = б"я, s=l, 2 р, будет равна
351
нулю. Поэтому в сумме (*) остаются только те члены, для
которых перестановка л имеет вид л == (/', /', .. ., }' k\, k2, ...
«... ^п-р)> гДе (/"i> U ¦••> /р) — перестановка набора индексов
(/ь /г, ..., jP) и (й,, k'2, ..., k'n_p} — перестановка дополни-
дополнительного набора индексов (ku k2, ..., kn-P). Представим сумму
2^{я} по всем перестановкам л в виде двойной суммы Z^koZlo')-
Во внутренней сумме суммирование происходит по всем пере-
перестановкам набора (/[, /г, ..., /Р) при фиксированном наборе
(ku k2, ..., kn-p), во внешней сумме — по всем перестановкам
набора (ku k2, ..., kn-p). Далее, общее число беспорядков [л]
в перестановке л можно представить в виде суммы трех слагае-
слагаемых: числа беспорядков в наборе первых индексов [j'], числа
беспорядков в наборе последних индексов [к'] и числа беспо-
беспорядков [j', k'], образованных первым набором относительно вто-
второго: [л] = []"] + [к'] + [j', к']. Очевидно, что [к'] не зависит от
вида перестановки [j'], a []*', к'] не зависит от вида перестано-
перестановок как [j'], так и [к'], и равно числу беспорядков, образован-
образованных индексами (/], /г, ..., /Р) с индексами дополнительного на-
набора: [j', k'] = [j, k]. Поэтому множитель (—l)|k| можно вы-
вынести за знак внутренней суммы, а множитель (— I)'1'- к'] =
= (— 1L' к] — за знак обеих сумм. В результате получим
/ ,ч[к'! V1
'k') (j'). (pi
n
Так как ^ (- l)»"-(ff. <) • • • (^ <) =
о
и Z (If'1/1® ® ftn-p l
(k'l
Умножая полученное выражение слева на up — fl, приходим
к равенству
Г, А т/<, = (-1)"'к' Пе,/ Л /ок = ЙеЛвЦе'Л-
*27. Для всякой ковариантной р-формы Qp выполняется ра-
равенство ттД, = е(—1)p(«-p)Qp.
352
© Доказываемое равенство достаточно проверить на базисных
формах /j0. Пользуясь предыдущим утверждением, получаем
П
s=l
Число беспорядков в перестановке [j, k] не может превосходить
Р(п — р). Если [j, k] = N, то [к, }] = p(n-p)-N и [j, к]+
+ 1К )\ = Р(п — р)- Кроме того, очевидно, что Hs=1 es = e. Та-
Таким образом, тхро = е(—l)p("~p)/i. D
Иногда бывает полезно использовать для построения допол-
дополнения не форму объема Va — f'Л f20 Л ••• Л f" ассоциирован-
ассоциированную с положительным ортонормированным базисом {е°}, а не-
непосредственно сам базис, точнее контравариантную п-форму
тгО 0.0. . 0
U =е\ Ле2 Л • • • Леп-
*28. Формы Vo и U0 связаны соотношениями U° ~ sG-]VOt
°
*29. Форма U0 так же, как и форма объема Vo, сохраняется
при замене одного положительного ортонормированного базиса
другим, а при переходе к произвольному положительному ба-
базису {ei\, которому отвечает метрический тензор {gik}, преоб-
преобразуется к виду
Uu = e{ Л е°Л • • • Ле° =|detg'r1/2e1 Л е2 Л • • • Л еп.
*30. Операция дополнения с помощью и-формы U0 задается
формулой
в которой производится полная свертка Qp по первым р индек-
индексам поливектора U0. ¦
© Заметим, что выражение (Qp*f/°) представляет собой кон-
контравариантную п — р-форму, и поэтому G(Qp*t/°)—антисим-
G(Qp*t/°)—антисимметрическая ковариантная п — р-форма. Преобразуем правую
часть доказываемого равенства так, чтобы она совпала с пра-
правой частью 25 в основном определении. Поскольку оператор G
симметричен (см. 18), для полной свертки ковариантной формы
fip с контравариантной формой Ар выполняется равенство
Qp * Ар = GAP * G-l?ip. Поэтому G(QP * U°) = G(GU°* G~lQp).
Здесь оператор G в круглых скобках действует только на первые
р индексов U0, а оператор G перед скобками — на последние
п — р индексов U0. Таким образом, G(QP* U°) — (GU°* G-'Qp),
где уже оба оператора G и G~l в правой части действуют на все
12 Зак. 193 353
индексы U° и dp.' Отсюда на основании 28 заключаем, что
*31. Убедитесь, что равенство 30 верно, рассуждая иным
способом: вычисляя левую и правую части на мономах какого-
либо положительного ортонормированного базиса.
Найдем теперь формулу, задающую операцию дополнения
в произвольном базисе {ei}. Из общих соображений ясно, что
дополнением базисного монома f длиною р окажется линейная
комбинация базисных мономов /' длиною п — р с некоторыми
коэффициентами. Конечно, эти коэффициенты можно найти и
исходя из формул 25 и 30. Для того чтобы воспользоваться фор-
формулами 25 и 30, необходимо предварительно вычислить в про-
произвольном базисе результат действия операторов G и G~y соот-
соответственно на базисные поливекторы ек и формы /', отвечаю-
отвечающие данной паре сопряженных базисов {в/г}, {/'}.
*32. На базисные поливекторы и формы пространств Лр и Лр
операторы G и G~l действуют по формулам
В первой из них суммирование ведется по всем упорядоченным
мультииндексам i длиною р, Gk, i— минор метрического тензора,
образованный строками с номерами к = (йь й2, ..., kp) и столб-
столбцами с номерами i=(t'i, ..., iP); во второй суммирование ве-
ведется по всем упорядоченным мультииндексам к длиной р,
quк — минор обратного метрического тензора, образованный
строками с номерами i и столбцами с номерами к.
© Выведем лишь первую формулу; вторая доказывается ана-
аналогично. Рассмотрим всевозможные перестановки (?/,, kj, ¦¦¦
.. .,kj )упорядоченного набора индексов k = {k\, k%...,kp).
В дальнейшем для сокращения письма перестановку (&/,, &/2, ...
•••> к/р) будем записывать в виде j = (/i, /2, ..-, /р)- Поливек-
Поливектор вк тогда можно записать в виде
ек «= ? (- 1)ш е, 0 е, 0 ... ® е,
Вычислим р-форму Get, пользуясь линейностью оператора G и
равенством Gey = 2" ?
(«) Gek = X (- D"' Z ft. if'1 ® f'2 ® • • • ® f'"•
(j) (t)
Здесь внутреннее суммирование распространяется на всевоз-
всевозможные мультииндексы i длиною р, а символом gj, 1, в согласии
с договоренностью 21, обозначено произведение gililgj2i2 •••
354
•••Si i .Из последнего равенства видно, что тензор полилиней-
полилинейной формы Gek равен Etj) (—l)U1gj, '• Ф°Рмз Gek является, ко-
конечно, антисимметрической: ведь она действует на векторы
{#ь #2 Нр) по правилу Gek (Hu H2 Нр) =>
=E(j)(— l)W(eh> н\)- • •(%> Нр)- Поэтому (см. I, 5.3.4) ее тензор,
только что вычисленный, также антисимметричен. Это озна-
означает, что отличны от нуля лишь его элементы, отвечающие
наборам (i\, 12, ..., ip) с неповторяющимися индексами, при-
причем элементы, отвечающие разным перестановкам i', i одного
и того же набора V = м, отличаются лишь знаком (— l)'nJ. Это
позволяет перейти в формуле (*) для Gek к суммированию по
всевозможным упорядоченным мультииндексам i, предвари-
предварительно выполнив, с учетом указанного правила знаков, сумми-
суммирование по всем перестановкам тй каждого упорядоченного на-
набора i:
Е й.( ) ) Е ( ) П Г
(j) / (л)
= EEai(-i)m/W2A... л/'р.
1 а)
Остается заметить, что выражение Еш ?i. i (— 1)IJ1 = Gk, 1 пред-
представляет собою минор метрического тензора, образованный пе-
пересечением строк с номерами (k\, ki, .. ¦, kp) и столбцов с но-
номерами (м, /г, • ¦ •, ip)- 5
*33. Операция дополнения в произвольном базисе вычисля-
вычисляется по формулам
т/J = | det g \1'2 E GJ> k (- l)lk> k] ff
k
или T/j = |d
Здесь j — произвольный упорядоченный мультииндекс длиною
р, j — дополнительный упорядоченный мультииндекс. В первой
формуле суммирование проводится по всем упорядоченным
мультииндексам к длиной р, во второй — по всем упорядочен-
упорядоченным мультииндексам i длиной п — р, к — упорядоченный мульти-
мультииндекс, дополнительный к мультииндексу к.
© Докажем первую формулу. Воспользуемся определением 25
операции дополнения т, равенством 22 и второй формулой 32.
Тогда получится
^AfA ... ЛГ*
12* 355
Свертка —у- (/' Л f А .../"* ей) была вычислена в ортонорми-
ортонормированием базисе при доказательстве 26. Для произвольного ба-
базиса вычисления проводятся точно так же, поэтому
-^(/'л/2л ... лг*ек) = (-1Iк'к1р.
Таким образом,
¦tfi = | det g I'/2 У. Gi-k (- l)[k-kl fi.
к
Вторая формула доказывается на основании равенств 30 и 29.
Свертка р * е{ Л е2 Л ¦ • • Л^л вычисляется аналогично свертке
/'Л/2 Л ••• A fn * вк и оказывается равной (—lIJ>Jie~. При-
Применяя первую формулу 32, получаем
Заметим, что вторая формула может быть получена и непосред-
непосредственно из первой с помощью теоремы Лапласа о вычислении
определителей (см. ч. I, 6.3.27). D
Следствием формул 33 является, в частности, красивое тож-
тождество:
*34. GJ'I = (
0 Действительно, к этому тождеству приводит равенство коэф-
коэффициентов при / ^ в формулах 33 и соотношение | det g | = е det g.
*35. Если базис {ei} является ортогональным, но не .норми-
.нормированным: <е,-, ей) = giSik, то
г? = I det(j
© В случае ортогонального базисаGf г = TLt=i ё^^^г и detg"=
= П"=1 ^t = ПГ=1 §is iVtJgy Поэтому на основании второй
формулы из 33 имеем
базис {е,} является ортоноржированным, то gj = e;-
±1, и формула 35 <Эаег:
356
Этот результат совпадает с равенством 26. Таким образом, об-
общие формулы 33 в частном случае ортонормированного базиса
переходят в формулы 26.
36. Введенные в этом параграфе операции G и G~l: Get =
= Yi gikf> G"lfk = 2] gklei> удобно обозначать символами *
k i
Ф (диез), b (бемоль) соответственно:
Например, для ортонормированного базиса {е°\, удовлетво-
удовлетворяющего условию (е°, e°k^ = Bk6lk (е& = ±1), можно записать
равенства:
*37. (е°)#^Ое» = еД,
В этих обозначениях операция дополнения р-формы может быть
записана в виде
*38. xQp = jfVQ* (Q/ = -^e(U0* Q*)".
Аналогичным образом вводится операция дополнения поли-
поливектора.
39. tQp-=-^-?/°*GQp =-^-U°pf
*40. Исследуйте свойства операции дополнения поливектора.
В частности, убедитесь, что в ортонормированном базисе она
переводит каждый базисный поливектор вида е°. в дополнитель-
дополнительный поливектор e*L, такой, что e°.Asi. = U°.
§ 5. ТЕОРИЯ ПОЛЯ
В ЕВКЛИДОВОМ ПРОСТРАНСТВЕ
В этом параграфе мы определим инвариантные дифференци-
дифференциальные операции над векторными полями, сводящиеся к опера-
операции внешнего дифференцирования. Затем мы выпишем их в де-
декартовых и в произвольных криволинейных координатах. Мы бу-
будем систематически пользоваться введенными в конце предыду-
предыдущего параграфа обозначением ф для операции преобразования
вектора в форму и обозначением Ь для операции преобразова-
преобразования формы в вектор. Кроме того, будем обычно писать dx' вме-
вместо /'.
* Диез (фр. diese) — в нотном письме — поднятие, повышение. В му-
музыке знак ф употребляется для повышения на полтона ноты, на уровне и
впереди которой он стоит. Бемоль (фр. betnoll) — в музыке знак b — пони-
понижение на полтона той ноты, на уровне которой он стоит.
357
Пусть U — область в пространстве Е и f — гладкое скаляр-
скалярное поле (О-форма), f: U-^-R1; A — векторное поле в U.
1. Градиентом скалярной функции / (/: U-^-R1) называется
векторное поле, вычисляемое по формуле grad / = V/ = (df)b.
Ротором векторного поля A (A: U->R3, UcR3) называется
векторное поле, вычисляемое по формуле rot A = [v X А] =
= (rdA#N.
Дивергенцией векторного поля A (A: U->E) называется
скалярное поле (О-форма), вычисляемое по формуле* divAs=
*
(
Операции вычисления градиента, ротора и дивергенции на-
называются операциями векторного анализа.
Докажем простейшие свойства операций векторного анализа.
*2. Пусть U — область в R3, /: U->R' — скалярное поле в U,
A: U->-R3 — векторное поле в U. Тогда rot grad /=0, divrotA—
= 0.
© Эти равенства являются непосредственным следствием дока-
доказанных ранее свойств операции d и т: dd = 0, ттйр=(—1)р("-р)?2р
(см. 1.18, 4.27). Действительно: rot grad f = (xddf)ь == 0,
#
Проще всего выглядят операции векторного анализа в декар-
декартовых координатах {х'}, связанных с положительным ортонор-
мированным базисом |е?}. Напомним, что в таком базисе опе-
операции т, # и Ь задаются равенствами (е?)# = fi0 = dxi, (dx'f =
— (fo)b — e1> тД == (— l)ti-?J /^, г^е j — мультииндекс, дополнитель-
дополнительный к j. При этом /о Л т/о = /о Л /о Л • • • Л /" и'оба мульти-
индекса считаются упорядоченными.
*3. Пусть / — скалярное поле, А=?г==1ае( — векторное
поле, записанное в ортонормированном базисе. Тогда
rotA = detl -^r -ZZ2 -tt
* Мы считаем, что операция дополнения форме объема в ортонормирован-
ном базисе ставит в соответствие единицу. ,
358
3 s \»
—-г dxk A dxl
дх* дх3 ) ei ^ V ал;3 д*1 J е2 "Г ^ ,5^! дх2 ) е3,
П
= TdTA* = Td^a'(-l)'-1dA;1 Л ¦•• Л^'"'Л^+1 Л
X dx" A dx A • • ¦ Л dxl~{ A dxi+l A
Иногда для вычисления ротора удобно пользоваться следую-
следующим выражением, в основе которого лежит операция дополне-
дополнения поливектора (см. 4.39).
*4. rotA = B!r1t/°*dA#. Здесь ?/° = е? Л el А ¦¦• A el — ба-
базисный поливектор, аналогичный форме объема, который был
введен ранее, п = 3.
© Достаточно проверить, что это выражение приводит к тому
же результату, что и прежнее:
1 ?/° * dk* =
Бо многих задачах теоретической и математической физики
важно бывает Записать операции векторного анализа в коорди-
координатах, естественным образом связанных с задачей. Определе-
359
ния 1, использующие операции #, Ь, т и внешнее дифференци-
дифференцирование, значительно облегчают вывод соответствующих
формул.
Пусть по-прежнему U — область в евклидовом пространстве
Е = R", {е^} — стандартный ортонормированный базис в Е,
{х1} — координаты вектора {точки) х в этом базисе. Пусть да-
далее V — другая область в R" и {е,} — некоторый фиксированный
базис в R", с которым связаны координаты {у'} точки у (jeV),
Пусть, наконец, q>: V->U — гладкое неособое взаимно однознач-
однозначное отображение области V на область U. В координатной фор-
форме, отвечающей базисам \et} и {е°Х отображение ф записыва-
записывается в виде х' = ч>1(у\ у2, ..., у") (i—1, 2, ..., п). Ясно, что
каждое такое отображение сопоставляет произвольной точке х
из U единственный упорядоченный набор чисел {у1, у2 у") —
координаты соответствующей точки у = ф-1 (х) из V.
5. Будем говорить, что отображение ф задает криволиней-
криволинейную систему координат в области U.
Числа (у1, у2, ..., уп) будем называть криволинейными ко-
координатами ТОЧКИ X.
6. Множества {х: у'(х) = const} (i = 1, 2, ..., п), задавае-
задаваемые координатными функциями у'(х) обратного отображения
у = (р~1(х), называются координатными поверхностями криво-
криволинейной системы координат.
Рассмотрим, наряду с точечным отображением ф: у-*-х, со-
соответствующее отображение линейных элементов:
Мы знаем (см. 1.2), что множество всех линейных элементов
(у, Н) над областью V образует расслоенное пространство
V ® R" с базой V и слоем Е = R". Описанное отображение Ф
линейных элементов является, таким образом, отображением
расслоенных пространств:
(D:V<8>R"->U<8iR'\
Построим в слое R" над точкой х=*(р(у) области U набор
векторов
{Dq>eb D(f(y)e2 Dq,(y)en}.
*7. Векторы ef — Dq>(y) et (r=l, 2 n) образуют базис
в слое (т. е. в пространстве R"). Они выражаются через коорди-
координатные функции ф' отображения ф следующим образом:
ei = L^r^e°r /=1.2,....я.
8. Возникший таким образом объект — зависящий от точки
базис в пространстве Е = R" — базис в слое Е — называется
репером.
360
Нам понадобится также репер сопряженного пространства
Е*, биортогональный к ef. Его можно изготовить, исходя из
пары биортогональных базисов {е,}, {dyi} путем пересадки их
с помощью отображения Ф из области V в область U.
Согласно правилам замены переменных в дифференциальных
формах (см. 2.2) «точечное» отображение ф: у-*-х =ц>(у) по-
порождает, наряду с отображением линейных элементов
Ф:(у, Я )->(*, К) = (у(у), Dy(y)H),
отображение линейных форм Ф*\ f-*-<t)*f, задаваемое равенст-
равенством (f,Dff(y)H) = (<b*f,H).
*9. Репер {dy^ сопряженного пространства, биортогональ-
биортогональный к реперу (е?\, связан с базисом {dy>}, биортогональным к
базису {е,}, соотношением Ф* dytx = dyi и с базисом {dx1}, би-
биортогональным к {ety, формулой
© Согласно правилам замены переменных
6< = (dyl, е,) = (dyx, Dye,) = (Ф* dyx, е,).
Отсюда следует, что dyl = Ф* dyx. Разлагая форму dyx по ба-
базисным формам dxs с неопределенными коэффициентами: dyx =
-—¦ \^ п1 п Vs тгг\п\7ии\л
» получим
t-l
к
Это означает, что матрица aj является обратной к матрице
, т.е. , . ,
1=1 *
Впрочем, последнее равенство на формальном уровне непЬ'
средственно очевидно: оно выражает свойство инвариантности
дифференциала.
Построив биортогональные реперы {е?}, {dyx} в расслоенных
пространствах U ® E, U ® Е*, мы можем, записывая скалярное
произведение пространства Е в координатах, связанных с ба-
базисом {е°}, подсчитать метрический тензор g(x), отвечающий
.361
базису {е*}. Это в свою очередь позволит задать в каждом слое
операции Ф, Ь, т относительно базисов (ef\, {dylx\, после чего,
на основании общих определений 1 мы можем вычислить опе-
операции векторного анализа в указанных реперах.
При вычислении операций векторного анализа мы будем за-
записывать все векторные поля и дифференциальные формы в
«естественных» базисах: {е?}, {Лу'Л.
*10. Метрический тензор g{x) основного пространства Е в
базисе {ef} имеет вид
Скалярное произведение двух векторов Н =¦= XiLi^'e*, K
= ?"-i k!eXj равно
Квадратичная форма ^л /-i (§')г/^/ является положительно
определенной и detg'(A;) > 0.
Допустим, что пространство Е ориентировано и ортонорми^
рованный базис \ety, с которым связаны, декартовы координаты
{х'}, является положительным.
*11. Если репер {ef} положителен хотя бы в одной точке хо
области U, то он положителен и во всякой другой точке х и
форма объема Fo = dxx Л dx2 Л ... Л dx" записывается через
биортогональный репер {dy'xj следующим образом:
Vo = (det gf dy\ A dy\ A .... A dynx.
© Поскольку отображение q>: y-+x является неособым, то век-
векторы
линейно независимы в каждой точке х = ц>(у) области U. Это
означает, что якобиан / = йеЦд<$'/ду>) не обращается в нуль.
По условию он положителен в точке г/о. *о = фA/о). Тогда вслед-
вследствие вещественности он положителен и в любой другой точке.
Следовательно, репер {е?} положителен в каждой точке х =s
= ф(#) области U,
363
Подставляя вместо dx' их выражения через dy[,
получим
Остается заметить, что согласно 10(*) det{d<fl/dy'} = (detg'I/2. D
Опираясь на полученные сведения, уже нетрудно записать
выражения для инвариантных дифференциальных операций в
произвольных криволинейных координатах.
*12. gradf =
ef
д
ду1
ду2
S-1
s-l
div
= (det gy
/-1
Всюду в этих формулах мы считаем, что в правой части скаляр-
скалярные функции /, a1, got, g'1 уже выражены через переменные у,
х = (р(у), а все векторные поля заданы в подвижном репере
И}-
© Для того чтобы помнить о локальности наших рассмотрений,
снабдим временно операции #, Ь, т индексом х внизу: #,, Ьх,
%х, подчеркивая тем самым, что при вычислении этих операций
в слое над точкой х (xeU) следует пользоваться метрическим
тензором g(x) в "данном слое и соответствующей формой
объема 11. В то же время мы помним, что все перечисленные
объекты инвариантны.
Пусть f — скалярное поле @-форма), заданное в области U.
Тогда по определению grad / = (dxf)bx. Вследствие инвариант*
ности операции внешнего дифференцирования правую часть по-
последнего равенства можно записать в виде ¦(Ф*~1йг,ф7N*- Здесь
запись dyff*f показывает, что в функции f следует перейти к ко-
координатам у: (q>*f) (y) = f(*f(y)), а затем f(q>(y)) продифферен-
продифференцировать по переменным у. Имея это в виду и в согласии с при-
принятой при формулировке утверждения формой записи, будем
363
вместо dtff/dy1 просто писать df/dy{. Выражение Ф*-'^уф*/ вы-
вычисляется следующим образом:
Теперь на основании (dylx)bx = 2"-1^"е/ получаем
Для вычисления ротора удобно воспользоваться выражением
из 4:
rot А = B!)-' U° * dk# = Bp U° * Ф* rfq)*A*-
Вычислим поливектор U0 в терминах репера {е*\. Очевидно, что
еХ А рХ Д рХ flpf J (. р® Л Р Л Р Hpt ) К II
I ду' ) К ду' )
Пользуясь положительностью репера и формулой 10(«), полу-
получаем
Дифференцируя форму ф*А# по переменным у1 и пользуясь
тем, что Ф ~ dyl = rft/x, получим (в согласии с нашей догово-
договоренностью) :
rot А = B!)-' (det g)-''1 (ef Л el Л el) *
/-1
i, k=l
w- (Z
-ъ
(detg)~/2det
ду1
ду2
ду3
364
Для вычисления дивергенции поля А=Х"=1а'е/ воспользу-
воспользуемся равенством div A = TdxA# — x{dVo*A}. Подсчитаем сна-
сначала Уо*А:
Vo * А = ? (-I)' (detgf a1 dy\ Adyl Л • • • Л
Л dylx-1 Л dyl+x Л ... Л dyx.
Следовательно, ^
п
A = Yjjr [(det gf a1] dyx A dyl A ¦ • • Л dy% =
Отсюда следует искомый результат, поскольку тУо = 1. 5
Часто в приложениях встречается дифференциальная опера-
операция div grad f, называемая оператором Лапласа. Она обозна-
обозначается обычно символом А.
*13. В криволинейных координатах оператор Лапласа запи-
записывается в виде
Особенно часто в приложениях встречаются ортогональные
криволинейные координаты, характеризуемые тем, что отвечаю-
отвечающий им метрический тензор gik имеет диагональный вид:
gik = diag (Яр Щ,..., Н2п).Положительные функции Ht называ-
называются коэффициентами Ламе соответствующей системы коор-
координат.
*14. Найдите коэффициенты Ламе для простейших ортого-
ортогональных криволинейных координат в R3 (цилиндрической, сфе-
сферической и т. д.)- Постройте форму объема, отвечающую ориен-
ориентации R3 с помощью правой тройки, запишите ее в этих криво-
криволинейных координатах. Рассмотрите, как действуют операторы
#, Ь и оператор дополнения. Запишите операции gradf, rot A,
div А, Д/ в указанных ортогональных криволинейных коорди-
координатах.
365
*15. Покажите, в частности, что в сферической системе ко-
координат
* z / к \ df . \ df i I df
grad I (r, 6, ф) = -0p er + j-gQee + - -jn e -щ ev,
div A (r, Э, Ф) = 2 '. a [^- (r2 sin 0 Ar) + -4 (r sin 0 Ae) -f
г sin О L or CO
rot A (r, 0, ф) =
1
r2 sin 6
er гее г sin йеф
_a_ _э_ _а_
6r dQ dcp
Ar rA9 rsinGA*
^ 5ф V sin 8 д
где Ar, A9, A* — координаты вектора А в ортонормированном
базисе е,, ев, еф {(ег, егу = 1, <е9, ее) — 1, <еф, еФ> = 1) и ска-
скалярное произведение определено формулой A0**).
*16. Вычислите операции векторного анализа в вытянутых
эллипсоидальных координатах, связанных с декартовыми коор-
координатами соотношениями
х = a sh и • sin v • cos ф,
у = a sh и ¦ sin v • sin ф,
z = a ch м-cos и,
Яо форме градиент скалярного и ротор векторного полей
являются векторными полями, а дивергенция векторного поля —
скалярным полем. Обратим в связи с этим внимание читателя
на следующие свойства операций векторного анализа:
*17. При произвольной замене переменных, сохраняющих
метрику, т. е. скалярное произведение, градиент скалярной функ-
функции не изменяется. (Иными словами, градиент не чувствителен
к ортогональной замене переменных.) Ротор векторного поля не
изменяется при произвольной линейной замене переменных, со-
сохраняющей метрику и ориентацию, т. е. при вращениях системы
координат. Дивергенция векторного поля не изменяется при
произвольной линейной замене переменных, т. е. ведет себя как
скаляр.
© Первое и второе утверждения следуют прямо из определе-
определений. Действительно, для построения grad f — (df)b использу-
используются лишь инвариантная операция внешнего дифференцирова-
366
ния и операция G~! = Ь, задаваемая метрической структурой
пространства. Операция rot А выражается через инвариантную
операцию внешнего дифференцирования, операции #, Ь, кото-
которые зависят от метрики пространства и остаются инвариант-
инвариантными при всех ортогональных преобразованиях координат, и
операцию дополнения, зависящую от ориентации через посред-
посредство формы объема, которая умножается на detf/=±l при
ортогональной замене переменных U: х-*-х' с определителем
det?/ = ±l. В частности, при замене, сохраняющей ориента-
ориентацию (det U = 1), этот множитель можно опустить.
Наконец, дивергенция векторного поля divA = TdtA* по
форме определяется метрической структурой и ориентацией, по-
поскольку содержит операцию дополнения. Но в действительности
она остается инвариантной при любых линейных преобразова-
преобразованиях переменных. Заметим, что при ортогональных преобразо-
преобразованиях дивергенция сохраняется независимо от ориентации но-
нового базиса, поскольку при ее вычислении операция дополне-
дополнения, содержащая форму объема, встречается дважды и (—1J=
= 1. Записывая дивергенцию в произвольных координатах, свя-
связанных с постоянным базисом, получим
поскольку det g = const. Таким образом, дивергенция сохра-
Е" да1
—г- в произвольных координатах, т. е. ведет
себя как скалярное поле при произвольных линейных заменах
переменных. 5
Из того факта, что координаты ротора ведут себя так же,
как и координаты вектора при ортогональных преобразованиях
координат, сохраняющих ориентацию det U = 1, мы сделали вы-
вывод, что сам ротор остается при таких преобразованиях неиз-
неизменным. При ортогональных преобразованиях координат, ме-
меняющих ориентацию (det U = —1), координаты ротора приобре-
приобретают дополнительный множитель (—1), и, следовательно, сам
ротор при таких преобразованиях меняет знак.
18. Векторные величины, координаты которых ведут себя
как координаты вектора (как скаляр) при ортогональных пре-
преобразованиях координат, сохраняющих ориентацию, и приобре-
приобретают дополнительный знак (—1) при преобразованиях, меняю-
меняющих ориентацию, называются псевдовекторными (псевдоскаляр-
(псевдоскалярными).
*19. В частности, ротор является псевдовектором, а форма
объёма — псевдоскаляром,
367
§ 6. ИНТЕГРИРОВАНИЕ
ДИФФЕРЕНЦИАЛЬНЫХ ФОРМ ПО ОБЛАСТИ
До сих пор мы имели дело с гладкими дифференциальными
формами, заданными в области. Операцию интегрирования форм
удобно с самого начала ввести на более широком классе изме-
измеримых ограниченных т-форм.
Пусть U — ограниченная область в вещественном евклидо-
евклидовом пространстве Е, dim E = п.
Зададим декартовы координаты {м'}"=1 точки и из V в не-
некотором ортонормированном базисе {е°}"_г Считая этот базис
положительным, мы вводим тем самым ориентацию области U.
Условимся в этом параграфе снабжать ориентированную об-
область U индексом того положительного базиса {ej}"=1, с которым
связана ее ориентация. В данном случае, когда ориентация за-
задана положительным базисом {е?}, будем обозначать ориенти-
ориентированную область U символом Uo. Область U как множество
мы будем по-прежнему обозначать символом U. Как обычно,
обозначим через {dul\ni=\ сопряженный базис в Е*. Форма
объема, отвечающая указанной ориентации области, записы-
записывается при этом в виде Vo (и) = du /\ du Л • • • Л dun-
Допустим, что в области U задана некоторя п-форма ю.
Вследствие одномерности пространства п-форм она представима
с помощью некоторой скалярной функции fo{u) — координаты
формы в базисе V0(u)—в следующем виде: (?>(u) = fo(u)Vo(u).
Имея в виду построение интеграла Лебега от п-форм, пред-
предпошлем определению интеграла определение суммируемой диф-
дифференциальной п-формы.
1. Дифференциальная л-форма со(м) называется суммируе-
суммируемой в области U, если функция fo(u) в равенстве со(м) =
= Ы«)^о(и) суммируема в области U.
2. Интегралом суммируемой л-формы со (и) = fo(w) V0(u) no
ориентированной области Uo называется интеграл Лебега функ-
функции /o(w) по области U. Интеграл формы со(м) = /о(«) Vo(u) по
области Uo обозначается символом \ со. Таким образом, по
определению
Здесь duv — мера Лебега на области U.
Если форма со ограничена и непрерывна на области U, т. е.<
ограничена и непрерывна функция fo(u), то интеграл в правой
части равенства 2 можно понимать как интеграл Римана
SfQ (u)d\J, dU = du' du2 ... du11 — элемент объема.
и
363
Конечно, мы могли с самого начала связать декартовы коор-
координаты в области U с другим ортонормированным базисом, ска-
скажем с {е^1„х, и= Хг=1 и\е\> и назвать положительным именно
его. Обозначив, в согласии со сказанным, область U, ориенти-
ориентированную с помощью базиса {е)}"=1> символом Ui и записав фор-
форму со через форму объема Vi (и) = du\ Л du\ Л • • • Л du1> отве-
чающуюэтомубазису.а(и) = fi(u) Vi(u), получим \ «= \fi(u)d\iu.
и, и
Верно следующее простое утверждение:
*3. Интеграл формы по области зависит от ориентации об-
области следующим образом:
(-.4 .. . . p 1 J-.Ч
Ui Uo
Здесь ею — определитель ортогональной матрицы, связывающей
ортонормированные базисы {etj и {etyn .
О Если базисы {е^} и {е!} одинаково ориентированы, то ею=1,
если они ориентированы противоположным образом, то ею=— 1.
Вследствие ортонормированности рассматриваемых базисов
Fo = eioFi. Поэтому и(ы) = foVo = ею/oVi = fiVi, откуда fi =
= siofo- Таким образом:
= 8
ю
и
*4. При интегрировании формы объема по области U, ориен-
ориентация которой согласована с этой формой объема, получается
мера области: \ Vo (и) = \ d\iu = ци(U).
ил и
В то же время \ Vo (и) =17, (и) = е1аци (U).
U U
U,
Выясним, как изменяется интеграл от формы при замене
переменных.
Рассмотрим наряду с областью U другую область Q в ев-
евклидовом пространстве Eq, dim EQ = dim E = п. Ее точкам при-
припишем декартовы координаты qx, q1, ..., qn, связанные с неко-
некоторым ортонормированным базисом {&?}, который мы называем
положительным. Тем самым задана ориентация области Q и
определена форма объема Vo (q) = dql Л dq1 Л • • • Л dqn. Ори-
Ориентированную так область Q обозначим символом Qo. Меру Ле-
Лебега на области Q обозначим символом \iQ.
Пусть (p:Q-vU; м = ф(<7), ы' = ф'(<71. <72. •••> Яп)—гладкое
неособое взаимно однозначное отображение области Q на об-
36»
ласть U; Ф — соответствующее отображение линейных элемен-
элементов: ФН = Dq>H, //g?q; Ф* — «встречное» отображение форм:
Ф*ёи{ = 2_j-^j dq1. 'Пусть далее со— некоторая п-форма, за-
заданная в области U; Ф*со — отвечающая ей п-форма, заданная
в области Q.
Проследим сначала за наследованием свойства измеримости
форм при гладких взаимно однозначных неособых отображениях
(диффеоморфизмах) областей определения.
*5. Если форма со=/^м1 Adu2 Л ..• /\dun измерима в об-
области U, то форма Ф*со измерима в области Q.
© Согласно правилам замены переменных (см. 2.10)
(Ф'со) {а) = f (Ф («/)) det { |?} dtf Л dq2 Л • • • Л dqn =
... A dqn, f (?) = f (ц> (q)) det |^-
Согласно 4.2.13 функция f(q) измерима одновременно с функ-
функцией /(и)., поскольку якобиан detjdcp'/d?'} представляет собою
гладкую функцию. 5
*6. Если форма со суммируема в области U, то отвечающая
ей в области Q форма Ф*со также суммируема, и справедливо
равенство
е \ со= \ Ф*оа,
U Q
где е = sgn det {dtp'/dq'}—знак якобиана отображения, запи-
записанного в координатной форме и' = Ф'(<7\ <72> •••> Яп) в данных
базисах {ей\, {Щ\, задающих ориентацию областей Uo, Qo.
© Производя замену переменных в форме со, получим
Ф* (fV0) = / (Ф (q)) dul (q) Adu2(q)A---A dun (q) =
Поэтому согласно определению 2
det
Qo
С другой стороны, пользуясь тем же определением, можно
свести интеграл формы со по области Ug к интегралу от функ-
37Q
Ции f по области U, а затем выполнить замену переменных В
кратном интеграле (см- 4.5.20):
qT"'u
Заметим, что, по условию, замена переменных u = <p(q) явля-
является неособой. Поэтому определитель det{<9cp'/d<7'} не обраща-
обращается в нуль и, следовательно, вследствие вещественности, сохра-
сохраняет знак, т. е. e = sgn det{d<p'/dqi} = const. Поэтому
Q.
Q
Заметим, что знакомый читателю по началам анализа инте-
интеграл от функции по промезюутку в действительности является
интегралом 1-формы. Действительно, согласно формуле Нью-
Ньютона — Лейбница
Так что [ f (x) dx = - Г /' (*) dx.
Ja Jb
Здесь в действительности происходит интегрирование 1-формы
df = f'(x)dx no области (а,Ь), ориентированной вектором*
е = Ь — а в случае, когда интеграл записывается в виде \ f dx,
и вектором — е = а — b в случае, когда интеграл записывается
в виде\ I' dx. Из предыдущего ясно, что при изменении ориен-
Jb
тации области интеграл от формы меняет знак, что и утверж-
утверждает формула Ньютона — Лейбница. В то же время интеграл
\ f dx, реализованный как предел интегральных сумм., не
содержит никакой информации об ориентации области — отрез-
отрезка (а,Ь) и, конечно, не зависит от нее. Правильнее было бы
обозначать его \ f \dx\ или \ f \ d\i [.
J(a, о) J(a, b)
Таким образом, в действительности уже в самом начале
изучения анализа мы встречаемся с интегралом формы. На
свойствах интегралов от форм основаны все формулы интегри-
интегрирования по частям, простейшей из которых является формула
Ньютона — Лейбница. Мы выведем в нашем курсе общую фор-
* Мы считаем, что читатель знаком со следующей векторной интерпре-
интерпретацией вещественной оси: каждому вещественному числу а сопоставляется
вектор с началом в точке 0 и концом в точке а. Этот вектор обычно обозна-
обозначают той же буквой, что и число о.
371
мулу интегрирования по частям — так называемую формулу
Стокса — Пуанкаре. В следующем параграфе мы сделаем это
для простейшей области — ориентированного куба в простран-
пространстве R", и для семейства кубов одной размерности — цепи.
В дальнейшем (см. 6.4.33) мы получим формулу Стокса — Пуан-
Пуанкаре на многообразии.
§ 7. ЦЕПИ, ГРАНИЦЫ
И ФОРМУЛЫ ИНТЕГРИРОВАНИЯ ПО ЧАСТЯМ
Доказательству многомерного варианта формулы интегриро-
интегрирования по частям мы предпошлем подробный анализ формулы
Ньютона — Лейбница в одномерном случае.
Определим сначала понятие границы одномерного куба.
1. Под границей одномерного куба @.1), ориентированного
с помощью единичного вектора 1 — 0 = е, будем понимать фор-
формальную сумму точек @), A), снабженных знаками ±:
д@, 1) = (+ 1) + (—0), т. е. точка (+1) входит в границу
куба @, 1), ориентированного с помощью вектора е= 1— 0, со
знаком плюс, а точка @) — со знаком минус.
При обратной ориентации куба A,0)—с помощью вектора
— е = 0—1 следует положить дA, 0) = (+ 0) + (—1), т. е.
взять точку @) со знаком плюс, а точку A) — со знаком минус.
Можно дать эквивалентную формулировку правила вычисле-
вычисления границы одномерного куба, пригодную сразу для обеих
ориентации.
2. Если задающий ориентацию одномерного куба свободный
вектор, будучи перенесен в точку а границы, направлен вовне
куба, то эту точку при вычислении границы следует брать со
знаком плюс, если вовнутрь — то со знаком минус.
Предложенный способ вычисления границы куба позволяет
дать изящную запись формулы Ньютона — Лейбница-
Пусть f — гладкая функция, заданная на ориентированном
одномерном кубе А=(аи а2) (стрелка указывает ориентацию
интервала (а\, а2)).
3. Суммой У-> f этой функции по границе куба назовем
выражение ?2 (±) f (as), где as — точки границы, а знаки ±
выбраны так, как предписывает правило вычисления границы 2:
если точка as входит в границу Л со знаком плюс (минус), то
в сумме ей отвечает член -\-f(as)(—f(as)).
*4. В принятых обозначениях, уже независимо от выбора
ориентации одномерного куба Д, формула Ньютона — Лейбница
записывается в виде \ /' dx = 2J !•
t ?
t ?
372
Запись формулы Ньютона — Лейбница в виде 4 для одного
одномерного куба мало облегчает реальные вычисления. Иное
дело, если предполагается интегрировать функцию f no семей-
семейству ориентированных кубов {А,}. В этом случае предложенная
алгебраизация операции вычисления границы может внести не-
необходимую ясность в громоздкие выкладки.
Рассмотрим формальную линейную комбинацию ориентиро-
ориентированных кубов {А*} с целочисленными коэффициентами: П =
— 2-ii=\aAi> причем куб —А/ понимается как куб А, с противо-
¦> ¦<- ->
положной ориентацией: —А,- = А,-, произведение тА(- с целым
->
неотрицательным коэффициентом указывает, что куб А; следует
взять в количестве m экземпляров.
5. Формальная линейная комбинация П = Х^=1агАг- одно-
одномерных ориентированных кубов с целочисленными коэффициен-
коэффициентами называется одномерной цепью, а линейная комбинация
<ЭП = Xf=i at dAj их границ — границей цепи.
6. Интеграл функции f по цепи n = Xf=iai^ определим ра-
равенством
N
п
Здесь \ fdx — \ fdx, если А = (а, b). Сумму функции по гра-
л
нице цепи определим равенством
N
где Yj ¦> f — f Ф) — f (a)> если A = (a,6), при этом ^А = (+6) +
+ (-a)A.
Используя приведенные определения, можно записать фор-
формулу Ньютона — Лейбница для цепи в виде
•7. \
п ап
*8. Рассмотрим семейство одномерных кубов A;'=(at, al+l),
ориентированных с помощью векторов (a,+i — а,), и образуем
373
цепь П = Xf=/ Д«- Тогда справедлива формула \ f dx = f(aN) —
— f (ai) независимо от того, как расположены точки {а,} на
вещественной оси.
© Достаточно заметить, что при всех i Aф\,Ы) точка а,
входит с разными знаками в границы кубов Дг-ь Л<, так что
<Ш = (+а„)+(-а,). 5
Формула 8 представляет собою в действительности формулу
Стокса — Пуанкаре для одномерной цепи. Приступим к доказа-
доказательству многомерного ее варианта.
Пусть Е — вещественное евклидово пространство, {е°}"=1 — не-
некоторый ортонормированный базис в нем, {х{}"=1 — отвечающие
этому базису декартовы координаты точки х из Е-
9. Стандартным кубом К в пространстве Е назовем открытое
множество К = {х: О < х1 < 1}.
Припишем стандартному кубу К ориентацию, считая базис
{е1}"- положительным. Ориентированный таким образом куб
обозначим символом Ко- На кубе Ко определена форма объема
Vo = dx1 Л dx2 Л ... /\dxn, отвечающая положительному ба-
зису {е^.
Напомним, что выбор ориентации куба однозначно опреде-
определяет форму объема.
*10. Если Ко, Ki — два экземпляра стандартного куба, ори-
ориентированные соответственно с помощью ортонормированных
базисов {е?}, {ej}, связанных матрицей 11: е° = Х"=,м{е}, то от-
отвечающие им формы объема Vo, V\ связаны равенством Vo =
1/ ( dt3/ dt<2/)
11. Множества К^ = {х: х1 = а, 0 < Xs < 1, s = 1, 2, ..., п
s=7^/},/= 1, 2, ..., п, а = 0, 1, назовем гранями стандартного
куба К-
*12. Грани К? являются кубами размерностью п—1, лежа-
лежащими в (гипер)шюскостях Е' = {л:: х> — а}.
Рассмотрим в пространстве Е семейство (п— \)-форм:
Vi = dx1 Л dx2 Л ... Adx'~l Л dx'+l Л ... Л dxn.
Нам понадобится интегрировать формы V1 по граням куба.
В связи с этим рассмотрим сужения F'lEg форм V1 на подпро-
подпространства В10.
*13. Справедливы следующие равенства: F/|E^ = 0, j ф i.
В то же время для любого линейно независимого набора
(ЯР #2> •••> Hn-i)(—El0 выполнено условие V>{H\, H2, ...
НH
© Рассмотрим базис (ер е\, ..., e\_v e]+v .... е°) подпро-
подпространства Е^. Убедимся, что на этом базисе форма V (/ ф i)
374
аннулируется:
el) = g (-
4_u e°i+u
Здесь я = (я1,я2, ..., nn-i)—произвольная перестановка индек-
индексов A,2, ..., /—1, /+1, ..., п). Ясно, что всегда (яьЯг, ...
..., пп-\)ф{\, 2, ..., i— 1, i -\- 1, ..., п — 1), поэтому все чле-
члены последней суммы равны нулю. Поскольку форма V1 обра-
обращается в нуль на базисе подпространстваЕ'3, ясно, что V1 \Е'й —
= 0 AФ1).
Подсчитаем теперь форму V1 на базисе (е\, е\, ..., eot_u
e°j+l, ..., е°) подпространства Е^. Положив i = j в предыдущей
выкладке, получим V1 (е\, е\, .... е^_р е°]+1, .,., е°) = 1. Если
Н\,Н2, ..-, Нп-\ — произвольный набор векторов из Е?, связан-
связанный с указанным базисом по формулам Hs = 2p^/^ep, то
v'(Hu Нч Wn_i) = detfcp}. D
14. Замечание. Если задать ориентацию подпростран-
подпространства Е? с помощью ортонормированного базиса {е\, е% .. ¦,euj_u
е°+1 е°а), то форма V = dxl Adx2A ... Лdx'-1 Л
/\dx>+1 Л ... /\dxn будет играть на EJ роль формы объема.
Поэтому, пользуясь предложением 3.9, можно утверждать, что
значение формы V' на векторах {Hs} равно с точностью до знака
sgndetf/s} ((n— 1)— мерному) объему натянутой на эти век-
векторы (п— 1)-мерной призмы,
В принципе, мы, могли бы приписать каждому из кубов К^
ориентацию такую же, какую имеет подпространство Е1а, парал-
параллельное соответствующей грани, т. е. "ориентацию, связанную
с формой объема V1, отвечающей базису (е\, е% ..., ей;_х, е°/+1,...
..., е°Л, который принимается за положительный. Однако в вы-
вычислительном плане это неудобно. Выводимая далее формула
Стокса — Цуанкаре приобретает изящную форму, если догово-
договориться об ориентации граней куба, составляющих его границу,
следующим образом:
15. Припишем кубу К? (на рис. 18 К}) ориентацию, вы-
выбрав положительный базис на ней с таким расчетом, чтобы,
375
Рис. 18.
будучи дополнен спереди единичным вектором е;- (на рис. е\)
или —в/, направленным вовне стандартного куба (выходящим
вектором), он превращался в положительный базис в Ко (срав-
(сравните с правилом выбора ориен-
ориентации границы одномерного
куба в 2).
Эквивалентная формули-
формулировка правила ориентации гра-
граней получается с помощью
форм объема.
*16. Правилу ориентации
граней 15 отвечает следующий
выбор формы объема V!a на
j^/. у/—( iy+ayl
© Форма объема^, отвечаю-
отвечающая положительному базису
грани Ка> определенному по
правилу 15, может отличаться
от формы объема V' = dx1 Л ... /\dx'~l Л dxl+l Л ... /\dxn
лишь множителем е/ = ±1: V>a = z^VK Заметим, что выходя-
выходящим вектором на грани К!а является базисный вектор (—iy~aej.
Записав правило ориентации грани с помощью выходящего век-
вектора в терминах форм объема, получим условие
(-l)l~adx' AeLv!=(-l)l-aeldx' Adx1 A ¦¦¦ A dx1'1 A
A dx'+l А ••• Л dxn = Vo,
из которого множитель е'а определяется однозначно, еа = (— 1)/+а.
Следовательно Fa = (—l)l+aVl. ])
17. Границей стандартного куба назовем формальную сумму
ориентированных граней (— l)i+aKa'
a="o, 1
Здесь каждая из граней (—1)г+аКа ориентирована своей фор-
формой объема Fa = (—1)' aV •
В 6 было дано определение одномерной цепи. Граница куба
может рассматриваться как многомерный аналог одномерной
цепи. Ближайшая наша задача — дать определения р-мерной
цепи и интеграла по цепи. Затем мы докажем формулу Сток-
са — Пуанкаре для стандартного куба. Она послужит основа-
основанием всех прочих формул интегрирования по частям, о которых
пойдет речь в нашей книге.
18. Цепью размерностью р или р-цепью называется формаль-
формальная конечная линейная комбинация ориентированных р-мерных
376
кубов К/ с целочисленными коэффициентами:
N
При этом — К = (—1)К интерпретируется как куб, совпада-
совпадающий с кубом К в теоретико-множественном смысле, но име-
имеющий противоположную ориентацию, 2К — как два экземпляра
куба К и т. д.
Граница п-мерного куба дает пример (п—\)-мерной цепи.
19. Если на каждом из ориентированных кубов Кг задана
форма со,-, то говорят, что на цепи n = 2ji=,ia'K; определена
форма ш, сужения которой на кубы Кг совпадают с а>г. сог=со | Кг.
Определим интегрирование р-формы по р-цепи. Заметим,
прежде всего, что каждая из форм ш,, будучи формой старшей
валентности на кубе Кг, единственным образом представляется
в виде (Hi = fiVt с помощью формы объема Vi, отвечающей
ориентированному кубу Кг, и скалярной функции ft.
20. Интеграл формы со по цепи П = Х(=1 а'К2-определяется
формулой
со
Формула 20 означает, что операция интегрирования распро-
распространяется с кубов на цепи как операция, аддитивная по отно-
отношению к области интегрирования. Пользуясь определением ин-
интеграла формы по области, можно записать правило вычисления
интеграла j ю в виде
|j со == Yj at \ftdfl,
П l-l Kj
где (j, — мера Лебега на кубе Кг.
Докажем формулу Стокса — Пуанкаре для стандартного куба
размерностью п-
*21. Пусть со — гладкая (п—1)-форма, определенная на за-
замкнутом кубе К. Тогда справедлива следующая формула инте-
интегрирования по частям:
i = \ CO.
© Поскольку обе части равенства зависят от гладкой
(п— 1)-формы со линейно, то достаточно проверить его для мо-
мономов вида a=fidx1A Adx*-1 Лdxi+l Л Лdxn Тогда
()фр , д рр д
номов вида a=fidx1A ... Adx*-1 Лdxi+l Л ... Лdxn. Тогда
377
и по определению 6.2
Здесь (j, — и-мерная мера Лебега на кубе К. По теореме Фубини
D.4.18) последний интеграл сводится к повторному, что дает
возможность выполнить интегрирование по переменной х1. В ре-
результате получим
\
к/ к/
Здесь \х — мера Лебега размерностью (п— 1). С другой стороны,
сужение формы ш на любую грань Kla (i?=j) равно нулю в
силу предложения 13. Поэтому на основании 20
(**) J(D= J
к(+(-1)/+° К/ |_К{
Щ Ч -I И к/
Сравнивая выражения (*) и (**), заключаем, что для всякого
монома валентностью (п—1) формула Стокса — Пуанкаре в
кубе верна. Следовательно, она справедлива и для любой глад-
гладкой (л— 1)-формы. 5
Мы доказали формулу Стокса — Пуанкаре для стандартного
ориентированного куба. Совершенно ясно, что она верна для
произвольного ориентированного куба К размерностью р и про-
произвольной гладкой (р— I)-формы, заданной на К-
Запишем теперь формулу Стокса — Пуанкаре для цепи.
22. Пусть П = 2f_i агК/ — р-цепь с целочисленными коэф-
коэффициентами. Границей цепи П назовем (р,— 1)-цепь дП:
*23. Для всякой гладкой (р—1)-формы ш, заданной на
р-цепи П, справедлива формула Стокса — Пуанкаре
5
© Формула немедленно следует из определения границы 22,
определения интеграла по цепи 20 и формулы Стокса —Пуан-
—Пуанкаре для куба 21. })
378
§ 8. ТОЧНЫЕ И ЗАМКНУТЫЕ ФОРМЫ В ОБЛАСТИ.
ЛЕММА ПУАНКАРЕ
Формулы rotgrad/ = 0, divrotA = 0, выведенные в преды-
предыдущем параграфе для векторных полей, явились следствием со-
соотношения dd = 0. В настоящем параграфе мы обсудим факты,
связанные с этим важным свойством внешнего дифференциро-
дифференцирования. В частности, будут определены понятия потенциального
и соленоидального векторных полей и указаны необходимые и
достаточные условия потенциальности и соленоидальности век-
векторного поля.
Дадим два определения.
1. Гладкая форма со называется замкнутой в области U,
если равенство dw = О выполнено тождественно в области U-
2. Форма со называется точной в области U, если существует
другая форма й, определенная в той же области, и такая, что
dQ = со. При этом форма Q называется первообразной формы со.
Упомянутое свойство операции внешнего дифференцирования,
dd = 0, формулируется теперь следующим образом:
*3. Всякая гладкая точная форма, заданная в области U,
замкнута в этой области.
Естественно возникает вопрос, всякая ли замкнутая форма
точна?
Этот вопрос в действительности является одним из самых
глубоких вопросов теории дифференциальных форм. В этом па-
параграфе мы укажем простые, но, к сожалению, слишком жест-
жесткие условия, при выполнении которых ответ на него оказывается
утвердительным. Этот ответ и составляет содержание знамени-
знаменитой леммы Пуанкаре. В дальнейшем, при обсуждении интегри-
интегрирования замкнутых форм на гладких многообразиях (поверхно-
(поверхностях), мы сформулируем необходимые и достаточные условия
точности замкнутой формы (теорему де Рама), однако доказа-
доказательство ее (и конструкция
первообразной) будет предло- а П ^
жено. в этой книге лишь для
I-формы.
4. Область LJ называется
звездной, если внутри нее най-
найдется точка, которую можно
соединить с любой другой точ-
точкой области LJ отрезком пря-
прямой, целиком лежащим в U
(рис. 19, а; на рис. б для срав«
нения приведена область, не ¦
являющаяся звездной).
Мы докажем сначала {см. рис. 19), что в звездной области
всякая замкнутая форма точна. Это будет сделано путем пря-
прямого построения первообразной данной формы, которое опи-
379
рается на некоторую вспомогательную конструкцию, называе-
называемую прямым стягиванием области.
В пространстве Е <8> R1, dim E = п, рассмотрим цилиндр
UX [0,1], опирающийся на рассматриваемую звездную об-
область U с выделенной точкой хо.
5. Отображение цилиндра U X [0, 1] в пространство Е, за-
задаваемое формулой ц>:(х, t)-*-xt = Хо + A— t) (х — хо), называ-
называется прямым стягиванием области U в точку х0.
Подчеркнем, что в силу звездности области U при сделанном
выборе точки Хо стягивание происходит «по себе», т. е. XfeU
(O^^^l). При этом нижнее основание цилиндра отобража-
отображается на область U тождественным образом: <р(х, 0)= х, а верх-
верхнее— в точку х0: q>(x, \) = х0 (Ух, xeU).
То обстоятельство, что стягивание происходит «по себе», по-
позволяет, выполняя замену переменных <р согласно 2.2, распро-
распространить всякую р-форму со, заданную в области U, на весь ци-
цилиндр UX[0, 1].
Рассмотрим р-форму Ф*со, определенную в цилиндре
ux[o,i].
*6. Если ю (*) = Z coj (x) dxi, то
j
(Ф'со) [х, t) = Z «j (xt) dxi (t) =
j
= Z «>j (xt) (i - ifdx* - Z i a, (xt) (i - op"' x
X (x's — xk)dxil Adxl2A---A dx1^ Л dt Adx1^ Л ...
© Действительно, действуя согласно 2.7, достаточно подста-
подставить формально вместо dx> (t) 1-форму A—t) dx1 — (х>—xj\dt
и собрать по отдельности члены, содержащие нулевую сте-
степень dt и первую степень. Члены, содержащие dt в старших
степенях, обратятся в нуль в силу антисимметричности внеш-
внешнего произведения. D
Конструкция первообразной замкнутой формы использует
своеобразную операцию К интегрирования формы, заданной в
цилиндре, по переменной t-
7. Линейный оператор К, переводящий формы, заданные в
цилиндре, в формы, заданные в области U, определим сначала
лишь на мономах вида а (х, t)dx> и а(х, t)dt A dx* равенствами
(х, t) dt Adxi = \ja (x, t) dt dx\
о
а затем распространим по линейности на все формы, определен-
определенные в цилиндре UX[0, 1].
380
*8. Для любой формы Q, заданной в цилиндре, справедливо
равенство
()
Здесь символом Q(x,t0) обозначен результат сужения формы п
на сечение цилиндра UX Аз-
Замечание. При сужении формы на сечение U X ^о сле-
следует сделать подстановку / = 4в тензоре формы, а в качестве
аргументов брать векторы Н, параллельные сечению, т. е. век-
векторы, составляющие которых в направлении оси / равны нулю:
Н — X(=i h'ei- Таким образом,
а (х, t) dt Л dx* 1и х и = О,
а (х, t) dxi\u x h = а {х, t0) dxK
© Достаточно проверить справедливость формулы 8 на моно-
мономах двух типов: п = а (х, t) dx> и Q = а (х, t) dt Л dxK Для мо-
мономов первого типа имеем
Ка\х, t) dxi = 0, da (x, t) dx* =
К da (x, t) dxi = \-~ (x, t) dt dxi = Q A) — Q @)
о
Таким образом,
{dK + Kd)a{x, t)dx> = a{x, l)dx> —a(x, 0)dx'.
Для мономов второго типа имеем
1
Ка {х, t) dt A dx* = ^ а (х, t) dt dxK
о
п 1
dKa {x, t) dt A dx) = У [ да {х\ t] dt dx1 A dx\
*~' J dx
п
da {x, t) dt Adxi = Y da {x\ t] dx1 A dt A dx\
n 1
\~* Г дп (х t)
К da {x, t) dt A dx> = — > \ — ' dt dx1 A dx
¦\ о
Таким образом,
{dK + Kd) a{x, t) dt Л dxi = 0.
381
С другой стороны, формы a(x,t)dt Adxi, будучи сужены на
сечения UXfc цилиндра UX[0, 1], обращаются в нуль со-
согласно сделанному предварительно замечанию. Э
*9. Всякая замкнутая форма, заданная в звездной области,
точна.
© С помощью прямого стягивания ф по замкнутой форме Q,
заданной в области U, построим форму Ф*?2, заданную в ци-
цилиндре U X [0, !]• Эта форма тоже замкнута, поскольку о!Ф*?2—
= Ф*(й2 = 0. Действуя на нее оператором К, образуем форму
КФ*&. Покажем, что она с точностью до знака является перво-
первообразной формы Q- Действительно, в силу предыдущего утверж-
утверждения
d№*Q = — Кс1Ф*п+(Ф*п)(х, 1) — (Ф*Й)(х, 0) =
= (Ф*п)(х,\)-(Ъ*п)(х,0).
Форма (Ф*й)(лг, 1) равна нулю по построению, см. 6. Форма
(Ф*О) (х, 0) также в соответствии с 6 имеет вид
(Ф'О) {х, 0) = ? <о, (х) dxi-Zt «I (x) X
i i s=i
X (Vs — хУ) dx'i Л dx'* Л ... Л dx'*-> Л dt Л
Л dx1^1 Л ... Л dx'p.
Второе слагаемое обращается в нуль в силу сделанного предва-
предварительного замечания, а первое дает форму Q. J
Условия, которые мы наложили на область U при доказа-
доказательстве предложения 9, в действительности слишком жестки.
Покажем, что это предложение верно для любой области, кото-
которая получается с помощью гладкого неособого взаимно одно-
однозначного отображения звездной области.
*10. Лемма Пуанкаре: Пусть V — область в веществен-
вещественном линейном нормированном пространстве, являющаяся обра-
образом звездной области U при гладком неособом взаимно одно-
однозначном отображении if. Тогда всякая замкнутая форма oj, за-
заданная в области V, точна, и ее первообразная может быть по-
получена с помощью квадратур и замен переменных.
© По форме о построим форму W*a, заданную в звездной об-
области U. Пользуясь тем, что операция замены переменных ком-
коммутирует с дифференцированием, заключаем, что форма Ч?*ф,
заданная в области U, замкнута: dW*a> = W*da = 0, и, следо-
следовательно, в соответствии с 9 точна: W*a> = ^/(Ф*^*©. Делая об-
обратную замену переменных, построим форму
Эта форма является первообразной формы со. Действительно,
382
Замечание. При доказательстве леммы Пуанкаре в общем
случае мы заменили прямое стягивание <р области U стягиванием
области V вдоль гладких кривых, являющихся образами прямых
xt = xo-\-(\ — t)(x — х0) при отображении ф. Это стягивание
задается отображением цилиндра VX[O. 1] «# область V по
формуле yt = y[xo + (l — t)(ty-1y — xo)]. Вообще удобно поль-
пользоваться следующим определением:
11. Область U называется стягиваемой по себе в точку лг0,
если существует такое гладкое отображение ф цилиндра
UX [0, 1] в область U, что <$(х, 0) = х, ц>(х, 1) = х0.
Мы показали, что звездная область и ее гладкий образ стя-
стягиваемы по себе.
*12. Используя стягивание y->yt, проведите доказательство
леммы Пуанкаре непосредственно для области V, стягиваемой
в точку г/о — Ч> {хо) «по себе».
Лемма Пуанкаре и возникшая при ее доказательстве кон-
конструкция первообразной полезны для решения задач векторного
анализа. Напомним, что в 5.2 были доказаны два простейших
свойства операций векторного анализа: rot gradf = 0, div rot A=
= 0.
13. Векторное поле А, заданное в области U, называется
потенциальным, если в области U существует гладкое поле f,
такое, что А г= grad /. Поле f называется при этом потенциалом
поля А.
14. Векторное поле В, заданное в области U, называется
соленоидальным, если в области U существует векторное поле С,
такое, что В = rot С. При этом поле С называется векторным
потенциалом поля В.
Упомянутые свойства операций векторного анализа можно
понимать как необходимые условия потенциальности и соответ-
соответственно соленоид а льности векторного поля:
*15. Если поле А потенциально, то rotA = 0. Если поле В
соленоидально,то div В = 0.
Являются ли эти условия одновременно и достаточными усло-
условиями потенциальности и соленоидальности поля? Аналитиче-
Аналитическую основу для ответа на этот вопрос дает лемма Пуанкаре-
*16. Во всякой области, являющейся образом звездной обла-
области при гладком неособом взаимно однозначном отображении,
всякое поле А, удовлетворяющее условию rot А = 0, является
потенциальным, а поле В, удовлетворяющее условию div В = 0,
соленоидальным. При этом потенциал / поля А и векторный
потенциал С поля В восстанавливаются с помощью конструк-
конструкции первообразной, использованной при доказательстве леммы
Пуанкаре.
© Пусть А — векторное поле в области U, rotA = 0. Это в
силу обратимости операций Ъ,х означает, что dA# = 0. Согласно
лемме Пуанкаре существует 0-форма /, такая, что А# = df, т. е.
383
A='(df)b. Форма f — потенциал поля А восстанавливается по
полю А# с помощью формулы 10(*): / = Ч/>-1*/(Ф*Ч/1*А*.
Если векторное поле А удовлетворяет условию div А = О,
т. е. тй?тА# = 0, то вследствие обратимости оператора т 2-форма
тА# является замкнутой в области U. По лемме Пуанкаре
форма является точной, т. е. имеет первообразную 1-форму Q:
тА# = dU. Применяя операцию Ь, переделаем форму Q в век-
векторное поле В = пь. Это векторное поле и служит векторным
потенциалом поля А: А = (та!В#)ъ. Векторный потенциал В вос-
восстанавливается по полю А на основании формулы A0*): В =
()
*17. Запишите формулы для восстановления потенциала и
векторного потенциала в звездной области в явном виде с по-
помощью операций прямого стягивания и интегрирования К-
§ 9. УРАВНЕНИЯ МАКСВЕЛЛА
Рассмотрим четырехмерное пространство-время: М4^^1®
<g> R3 = {(х°, х1, х2, х3)}. Здесь х° = с( — временная координата
(t — время, с — скорость света в пустоте); {х'} (/=1,2,3) —
пространственные декартовы координаты. Пространство М4,
снабженное индефинитной метрикой (х, //) = 2г k=oSikxiyk> за-
задаваемой тензором
A 0 0 0
0—100
0 0-1
0 0 0
называется пространством-временем Минковского или прост-
пространством Минковского (см. 4.20).
Уравнения Максвелла, описывающие распространение элек-
электромагнитных волн в пустоте при наличии зарядов и токов, за-
записываются в координатах {х1} в следующем виде:
rotE + |J- = 0, divH = O;
rotH—-jp- = -^-j,
Здесь Н =(Н1, Н2, Я3) — напряженность магнитного поля; Е —
~(Ег,Е2,Е3) — напряженность электрического поля; j =
— О'1»/2./3) — плотность тока; р — плотность заряда, являющиеся
функциями координат и времени.
Напряженности электрического и магнитного полей и плот-
плотность тока ведут себя как векторные поля лишь при ор-
ортогональных преобразованиях пространственных координат
{х\х2, х3) с определителем, равным единице, т. е. при обычных
384
вращениях системы координат. При этих же преобразованиях
плотность заряда ведет себя как скалярное поле.
Можно показать, что метрика пространства Минковского со-
сохраняется не только при вращениях пространственной части
координат, но и при более общих преобразованиях пространства
Минковского в целом — преобразованиях Лоренца.
1. Линейные ортогональные преобразования в пространстве
Минковского, т. е. преобразования L:x-*~x', сохраняющие мет-
метрическую форму: (х, у) = (х',у'), называются преобразованиями
Лоренца.
*2. В частности, преобразованием Лоренца является переход
от старых координат (х°, х1, х2, х3) к новым (Хд, х[, х'2, лТд), оси
которых движутся относительно старых координат поступа-
поступательно с постоянной скоростью v (\v\<Cc). Если это движение
происходит в направлении старой оси х1, то формулы преобра-
преобразования имеют вид
X2 = /2, X3 = х'3.
3. Преобразование Лоренца называется собственным, если
оно задается матрицей с определителем, равным единице.
Можно показать, что любое собственное преобразование Ло-
Лоренца получается комбинацией преобразований типа 2 по раз-
различным переменным и трехмерных поворотов. Чтобы получить
общее преобразование Лоренца, можно еще выполнить одно-
однократное отражение, скажем, xl ->- хп — — xl, xl = xn (i = 0, 2, 3).
Наша задача заключается в том, чтобы записать уравнения
Максвелла в ковариантном виде в терминах дифференциальных
форм с тем, чтобы выявить тензорный характер входящих в них
величин Е, Н, j, p. Это позволит на основании общих правил за-
замены переменных, вычислить напряженности Е, Н и плотно-
плотности ), р в любой новой системе координат, движущейся относи-
относительно старой поступательно с постоянной скоростью, т. е. вы-
вывести правила преобразования напряженностей электрического
и магнитного полей при замене переменных с помощью преоб-
преобразования Лоренца.
Пусть (eo,ei,e2,e3)—ортонормированный базис в простран-
пространстве Минковского М4, (х°, к1, х2, х3)—координаты точки д:еМ4,
(dxo,dx\dx2,dx3)—биортогональный базис сопряженного про-
пространства М4* и V = dx° Л dx1 Л dx2 Л dx3 — отвечающая ему
форма объема. Будем считать, что базис {eo,ei,e2,e3) положи-
положителен и тем самым форма объема V задает положительную
ориентацию пространства Минковского.
*4. Скалярное произведение векторов х, у пространства Мин-
Минковского в координатах, связанных с базисом (е0, е\, е2, е3), за-
13 Зак. 193 385
писывается в виде (х, у) = х°у0 — х*ух — х*у2—*V = Х
(е0 = 1, г1 = — 1, / ===== 1, 2, 3), а операции # и i действуют
на его элементы и элементы сопряженного базиса (dx°,dxl,dx2,
dx3) по формулам 4.37: (е{)# == zidx1, (dx1)ь — еге,-.
*5. Операция дополнения т в пространстве Минковского дей-
действует следующим образом:
т dx" = dx1 Л dx2 Л d*3, т Лк1 == dx° A dx2 A dx3,
х dx2 = dx° A dx3 A dx1, x dx3 == dx° A dx1 A dx2,
т dx° Adxl = — dx2 A dx3, x dx° dx2 = - dx3 A dx1,
x dx° Adx3= — dx1 A dx2, x dx1 A dx2 = dx° A dx3,
x dx2 A dx3 == dx° Adx\ x dx3 A dx1 = dx° A dx2,
x dx1 A dx2 A dx3 = dx°, x dx° A dx1 A dx2 = dx3,
x dx° A dx2 Adx3 = dx\ x dx1 A dx3 A dx] = dx2.
© Записанные соотношения легко проверить, пользуясь об-
общими формулами для ортонормированных базисов в псевдо-
псевдоевклидовом пространстве 4.38. Например:
т(dx1 A dx2) = 4" V * (dx1 A dx2)b = \v* г,г2(ех Ае2)= '
х (dx° A dx1 A dx2) = -i- F * (eoe^) (e0 Л «i Л e2) =
= e0eie2 dx3 == dx3. ]>
6. Пользуясь координатами (хо,х\х2,х3), формально обра-
образуем из полей Е, Н дифференциальную 2-форму:
Здесь через #' и х' обозначены операция пересадки векторов в
сопряженное пространство и операция дополнения, распростра-
распространяющиеся только на пространственную часть пространства-вре-
пространства-времени Минковского и отвечающие декартовым координатам, т. е.
единичному метрическому тензору gih = §ik и форме объема'
у = dx1 Л dx2 Л dx3.
. Дифференциальная форма F имеет вид
F = Eldx° Л dxx + E2dx° Л dx2 + E3dx° Л dx? —
— НЧх2 Л dx3 + НЧх1 Adx3 — H3dxl Л dx2.
8. Дифференциальная форма F называется основной диф-
дифференциальной формой электромагнитного поля, а ее тензор в
386
базисе {dxl®dxk}:
СО Е1 Е2 Е3
-?• О -Я3 Я2
-Я2 Я3 О -Я1
— Е3—Н2 Я1 О
— основным антисимметрическим тензором электромагнитного
поля.
9. Образуем также 3-форму:
J = — cpV + dx° Л т'/= — cpdx1 Л dx2 Л dx3 +
+ dx° Л (/Ух2 Л dx3 + /2rfx3 Л dx1 + /W Л
Эта форма называется формой C-формой) плотности тока в
пространстве Минковского.
10. Наряду с 3-формой J иногда рассматривают соответ-
соответствующую 1-форму I = tJ:
з
I = TJ = - ср dx° + 2 f dx1,
t=i
которую также называют формой A-формой ) плотности тока.
Применяя операцию Ь, из нее можно изготовить соответствую-
соответствующее векторное поле (tJN — четырехмерное поле тока.
Обсудим физический смысл формы, J, предполагая, что ток
создается движением зарядов, которое определяется полем ско-
скорости v, так что js = pvs (s = 1,2,3), где р — плотность заря-
зарядов. В действительности мы обсудим физический смысл инте-
интеграла формы J.
*11. Интеграл формы J по границе четырехмерного простран-
пространственно-временного куба К = {х: 0 < х' < 1, i = 0, 1, 2, 3},
равен
J J=c $р@, х\ х2, x3)dn-c Jp(l, x\ х2,
ак ко ко
а=0, 1 а
© Для доказательства нужно вспомнить определение границы
куба. Так как индекс i меняется теперь от 0 до 3, то дК. =
===2?=о;а=о i(—1)а+(г+ 'Ка- Затем следует воспользоваться опре-
определением 7.20 интеграла по цепи, заметив, что
V°a = (-l)a+1 dx1 A dx2 A dx3, Vl = (-1)" dx° A dx2 A dx\ V2a =
= (-\)adx°Adx3Adx\ Vl = (-l)adx°AdxlAdx2. 5
Члены, стоящие в правой части равенства 11, допускают
13* 387
простую физическую интерпретацию: интеграл \ р@, х\ х2,
о
X3)d\i равен заряду, содержащемуся в трехмерном кубе П =
= {л::О<х'<1, i = l,2,3} в момент времени t — O (xo = O),
интеграл \ о р A, xl, x2, x3) d\n равен заряду, содержащемуся
в том же самом трехмерном кубе в момент времени t=\/c
,(хо= 1), а каждый из членов \ v'{x)p(x) dp равен умножен-
а
ному на скорость света с количеству заряда, которое покидает
трехмерный куб П за время 1/с, вытекая «наружу» через грань
х' — а со скоростью (— l)a+ivl(x) (t = l, 2, 3). Разумеется,
компонента скорости v'(x) в действительности может иметь раз-
разные знаки, так что слово «наружу» следует понимать в алге-
алгебраическом смысле.
Разделив все выражение на скорость света, мы видим, что
число с \ J представляет собою разность между первона-
чальным зарядом, содержащимся в области, и суммой заряда,
оставшегося в области к моменту времени t = 1/с, и заряда,
вытекшего из области (в алгебраическом смысле!) за промежу-
промежуток времени 0 < / < 1/с.
Физическая интуиция диктует нам, что эта величина должна-
быть равна нулю. Мы убедимся далее, что так оно и есть в са-
самом деле, т. е. верен закон сохранения заряда. Мы выведем его
из уравнений Максвелла, пользуясь формулой Стокса — Пуан-
Пуанкаре. Придадим теперь уравнениям Максвелла ковариантную
форму.
*12. Первая пара уравнений Максвелла rot Е + дН/дх° = 0,
div H = 0 эквивалентна однородному уравнению для основной
дифференциальной формы электромагнитного поля
Вторая пара уравнений Максвелла rot Н — дЕ/дх°= Dn/c)j,
div E = 4лр эквивалентна неоднородному уравнению для основ-
основной дифференциальной формы электромагнитного поля
(**) tc(t.F = Djx/c)I.
Здесь I — 1-форма плотности четырехмерного тока (см. 10).
© Операция внешнего дифференцирования в пространстве
Минковского представляется в виде суммы d = do + d' опера-
операции do дифференцирования по временной координате х° и опе-
операции d' дифференцирования по пространственным координа-
координатам. Пользуясь определениями 6 и 5.1, получаем в «неподвиж-
388
ной» системе координат:
dF = - d'E*' Л dx° - d0E*' Л dx° - dox'H*' - й'х'П*' =
= - т' (rot Е)#' Л dx° - V ^- Л dx° - d'x'W* =
= ~т' (ш+rot Е) * л dx° ~div H •v>-
Видно, что в последнем члене цепочки равенств получилась ли-
линейная комбинация базисных 3-форм: V = dx1 Л dx2 Л dx3 и
dx'AdxkAdx° (/, А =1,2,3). Она может обратиться в нуль
лишь в случае, когда все ее коэффициенты равны нулю. Следо-
Следовательно, требование dF = 0 эквивалентно первой паре урав-
уравнений Максвелла.
Продифференцируем теперь выражение tF= — т'Е* — dx° Л
ЛН*':
= - dox'E#l - dVE*' + d'H *' A dx =
+ d'H*' A dx° =
= - div E • V + dx° A x'[- Ц- + rot H]#',
Согласно второй паре уравнений Максвелла divE = p
— dE/dxQ + rot H = Djx/c)J. Поэтому вторая пара уравнений
Максвелла, с учетом линейной независимости базисных форм V,
dx1 Л dx1 Л dx° (/,/=1,2,3) эквивалентна единственному урав-
уравнению для F: dxF = Dn/c)i. Применяя оператор дополнения т
к обеим частям последнего равенства, получаем xdxF =
= Dя/сI. 3
Видно, что уравнения Максвелла в пространстве Минков-
ского могут быть записаны для 2-формы F также в виде
dF — 0, dxF = Dn/c)J. Эта запись так же, как и A2*), A2**),
дает ковариантную форму уравнений Максвелла.
Отметим специально, что первое из написанных уравнений
не содержит метрического тензора {gik} пространства Минков-
ского, т. е- не зависит от метрики. Наоборот, вторая пара зави-
зависит от метрики через посредство операции дополнения, вклю-
включающей опускание индекса базисных форм.
При записи уравнений Максвелла в ковариантной форме
A2*), A2**) нам встретилась операция xdx—так называемое
кодифференцирование. Эта операция часто возникает в анализе
дифференциальных форм и для нее принято стандартное обо-
обозначение xdx гз б. Например, дивергенцию векторного поля
можно записать в виде 6А#, а оператор Лапласа скалярного
поля f— в виде 8df.
Мы рекомендуем читателю самостоятельно исследовать свой-
свойства операции кодифференцирования, аналогичные свойствам
операции дифференцирования, изученным в § 1.
389
*13. Уравнения d? = 0, drF = Dn/c)J сохраняются при лю-
любой замене переменных в пространстве Минковского, сохраня-
сохраняющих метрику и форму объема, т. е. для собственных преобра-
преобразований Лоренца (с- определителем, равным единице).
© Действительно, при такой замене переменных сохраняется
оператор дополнения, а операция дифференцирования коммути-
коммутирует с любой заменой переменных. 3
Теперь видно, что определение, данное в 6, 8, действительно
оправдано, и закон преобразования электрического и магнит-
магнитного полей при переходе к новой системе координат определя-
определяется правилами преобразования тензора {Fik}i ьо, а не прави-
правилами преобразования трехмерных векторных полей.
*14. При собственном лоренцевом преобразовании коор-
координат
?//*"> / = 0, 1, 2, 3
(сохраняющем форму объема (det{7j}=l) и метрику — скаляр-
скалярное произведение), антисимметрический тензор {Fik}3t ft=0 основ-
основной дифференциальной формы электромагнитного поля преоб-
преобразуется ковариантным образом;
з
F' — У iHlF
ik~~ !,iLo ik ll'
*15. Запишите закон преобразования напряженностей элек'-
трического и магнитного поля для преобразования Лоренца
(см. 2) х'~*-х, указанного в начале этого параграфа.
При обсуждении физического смысла формы тока речь шла
о законе сохранения заряда. Этот закон вытекает из уравнений
Максвелла и формулы Стокса — Пуанкаре.
*16. Закон сохранения заряда*: Пусть К — произвольный
4-мерный куб: К = {х : а' < *' < Ь1 = а1 + А}. Тогда первона-
первоначальный заряд, содержащийся при t — 0 в трехмерном кубе:
П = {х : а1 < х1 < а' + A} (i = 1, 2, 3), равен сумме заряда, со-
содержащегося в том же кубе в момент времени t = 1/с плюс
суммарный заряд, вытекший (в алгебраическом смысле!) из
куба П через грани х' = а (/=1,2,3) за то же время, а = 0, 1.
© Для доказательства этого утверждения, принимая во вни-
внимание 11, нужно убедиться, что интеграл формы плотности
тока по границе куба К равен нулю. Действительно, согласно
формуле Стокса — Пуанкаре для куба К имеем
дК
* В настоящий момент мы располагаем формулой Стокса — Пуанкаре для
куба и для цепи. Поэтому и закон сохранения заряда доказывается нами
лищь для куба. Пользуясь материалом, изложенным в следующем главе, не-
нетрудно перенести закон сохранения заряда на случай произвольной замкну-
замкнутой 3-мерной поверхности в М4,
Глава 6
ДИФФЕРЕНЦИРУЕМЫЕ МНОГООБРАЗИЯ
Все предыдущее изложение в нашей книге было посвящено
алгебре и анализу в конечномерных линейных пространствах.
Однако потребности теоретической физики, прежде всего меха-
механики, не ограничиваются аналитическим аппаратом линейных
пространств. Уже простейшая задача теоретической механики
о движении материальной точки по поверхности требует усовер-
усовершенствования и обобщения этого аппарата. В первую очередь
это касается операций дифференцирования и интегрирования.
В шестой главе будут определены простейшие операции анализа
на так называемых дифференцируемых (гладких) многообра-
многообразиях, к описанию которых мы приступаем.
При изучении гладких многообразий можно было бы сделать
сначала лишь минимальные предположения об их структуре,
введя понятие гладкости, затем, оставаясь в рамках многообра-
многообразия, добавить ориентационную структуру и, наконец, метриче-
метрическую (риманову)—аналогично тому, как это было сделано при
построении теории линейных пространств. Однако, желая дать
читателю возможность пользоваться всей его геометрической
интуицией, мы с самого начала будем рассматривать многооб-
многообразия, леокащие в каком-либо линейном конечномерном веще-
вещественном пространстве Е, г. е- поверхности в обычном смысле
слова. В качестве Е вполне можно представлять себе R". Все
структуры на многообразии мы будем вводить согласованно с
соответствующими структурами в Е.
§ 1. ЭЛЕМЕНТАРНОЕ МНОГООБРАЗИЕ (КЛЕТКА)
И ТЕНЗОРНЫЕ ПОЛЯ НА НЕМ
Пусть G — линейное конечномерное вещественное простран-
пространство, dim G = m; {gi}?^ — некоторый базис в G, {g1}™^ сопря-
сопряженный базис в G*, {иг}™=1 — координаты вектора и, связанные
с базисом {gt}™al- Пространство G мы будем предполагать нор-
нормированным, поскольку нам придется почти с самого начала
рассматривать дифференцируемые функции на G.
391
Наряду с пространством G рассмотрим пространство Е,
dim Е = п, п ^ пг. В нем выделим базис {ej"_p а сопряженный
базис в Е* обозначим, через {/'}"_!• Координаты вектора х, свя-
связанные с базисом {ei}"={, обозначим через х1. Пространство Е
также будем предполагать нормированным.
Вследствие эквивалентности всевозможных нормировок в ли-
линейных конечномерных пространствах (см. 1.2.19) мы можем,
не ограничивая общности, с самого начала считать, что в обоих
пространствах выбрана следующая нормировка:
|и|оо= та* \и'\, \х\оо= max \xl\.
1<I< m 1< f<«
В случаях, когда потребуется иная нормировка, скажем евкли-
евклидова, мы сделаем специальное указание.
1. Множество Ko = {w:O<w'< I}, KoCiG, будем называть
стандартным кубом, связанным с системой координат {и1}.
2. Диффеоморфизмом стандартного куба Ко в Е, <р: Ко —* Е,
назовем гладкое неособое (rangD(q(u) —m, we Ко) взаимно
однозначное отображение стандартного куба Ко на некоторое
множество Мо = фКо с= Е.
Если диффеоморфизм ф имеет гладкость порядка k, т. е. его
координатные функции х' = ф'(ы1,ы2, ..., ит) (/ — 1,2, ..., п)
k раз непрерывно дифференцируемы, то будем говорить, что ф
является диффеоморфизмом класса С*.
Для обоснования проводимых далее вычислений удобно пред-
предполагать, что диффеоморфизм ф может быть продолжен с со-
сохранением всех перечисленных свойств на несколько больший
куб К, который содержит замыкание Ко куба Ко- Мы будем
рассматривать только диффеоморфизмы, удовлетворяющие это-
этому требованию.
3. Образ Мо = фКо стандартного куба Ко при диффеомор-
диффеоморфизме ф:Ко->-Е класса С называется элементарным диффе-
дифференцируемым многообразием или клеткой класса С*.
Иногда, для краткости, такое многообразие называют глад-
гладким. При этом, если необходимо, указывают класс гладкости.
4. Диффеоморфизм ф называется параметризацией элемен-
элементарного многообразия (клетки) Мо, Ко — параметризующим
кубом, переменные и1, и2 ит — параметрами или криво-
криволинейными координатами точки х е Мо.
5. Отображение if, обратное к ф (f : Мо ->¦ Ко), называется
координатным отображением. Пара {Мо, if} называется картой
элементарного многообразия (клетки) Мо.
Диффеоморфизм Ко на Мо порождает, конечно, соответству-
соответствующее отображение множества линейных элементов (и, Н),
и е Ко, Н е G из куба Ко на множество линейных элементов
клетки {х, К), х е Мо, /(еЕ:
Ф:(и, Н)-+(х, /С)
392
6. Касательным пространством ТФ (х) клетки Мо в точке х =
= ф(ы) называется подпространство в Е, состоящее из всех век-
векторов вида D(p(u)H, I/gG:
ТФ (х) = ?)ф (и) G.
*7. Касательное пространство не зависит от параметризации
и является m-мерным подпространством пространства Е.
© В силу предположения о том, что отображение ф является
неособым, rang ?)ф (u) = m, Vи с= К, множество ТФ [х) = ?)ф (и) G
является m-мерным подпространством пространства Е.
Допустим теперь, что имеются две разные параметризации
дг = ф(ы), х = ф(и) клетки Мо. Не ограничивая общности, все-
всегда можно считать, что им отвечает один и тот же параметри-
параметризующий куб Ко (и, иеКо, Мо = фКо = фКо) • Вследствие взаим-
взаимной однозначности отображений ф:Ко-*-Мо, ф:Ко->Мо равен-
равенство ф(и) = ф(и) задает взаимно однозначное отображение куба
на себя; я: ы->- v = я (и). Каждое из отображений ф, ф является
гладким и неособым, rangОц>(и) = rang Dq>(v)= m = dim G.
Поэтому согласно теореме о неявной функции 3.4.1 отображе-
отображение я также является гладким класса С*, и существует гладкая
функция я~' : v -*¦ и = я~1 (v), такая, что ля-1 == I. При этом для
производных Dn(u), Dn^iv), вычисленных в соответствующих
точках, о = я(м), справедливо равенство Dn(и) • Dn~x (v) — I,
где / — тождественный оператор в G. Отсюда немедленно сле-
следует, что операторы Dn(u), Dn~l(v) обратимы, т. е. каждое из
отображений я, я~х является неособым, det Dn~l(v) =
= [detDn(M)]-1, и справедливы равенства ^°ф = я, ф = фоя.
Вычисляя касательное пространство Тф (х) с помощью парамет-
параметризации ф, можно воспользоваться теоремой о производной
сложной функции:
ТФ (х) = D(f (и) G = ?>ф (v) • D% (и) G.
Вследствие обратимости оператора Dn{u) его образ совпадает
с G: Dn(u)G = G. Поэтому
T,(x) = D$(o)G = Tf{x). 5
Доказанный факт независимости касательного пространства
от параметризации клетки позволяет в дальнейшем считать
Тф(х) инвариантным объектом, который определяется лишь са-
самим элементарным многообразием — клеткой Мо, и обозначать
его символом Тм0 (х) или просто Т(х).
Множество всех линейных элементов {(х, Тм„ (х)), х е Мо}
образует расслоенное пространство с базой Мо и слоем Тм„(*).
Обычно этот объект называют касательным расслоением клет-
клетки Мо. Наряду с ним можно рассмотреть расслоенное простран'
ство {(х, Тм„ (х)), х е Мо}, где Тм,, (*) — пространство всех ли-
393
нейных форм над Тм„ (х) (сопряженное пространство). Этот
объект называется кокасательным расслоением Мо.
По образцу построенных двух расслоений можно построить
различные тензорные 'расслоения, например: {[х, Ор(ТмДя).
Тм0 (*))]> хе Мо)—расслоение всех полилинейных форм ковари-
антной валентностью р и контравариантной валентностью q над
ТмД*), Тмо(*). Базой этого расслоения также является клетка
Мо, а слоем в каждой точке х — линейное пространство всех
полилинейных форм данной валентности (р, q) над Тм„ (х)
Тмо(*)- Частным видом описанного расслоенного пространства
является расслоение антисимметрических ковариантных (или
контравариантных) форм данной валентности: {[х, Ар (Тщ (х))],
j;eM0} (соответственно {[х, А4 (Тм„ (хЩ, х еМ0}.
Заметим, что описанные расслоения, вообще говоря, явля-
являются нетривиальными. Слой в каждом из них на самом деле
зависит от точки базы, и поэтому соответствующее расслоенное
пространство нельзя представить в виде прямого произведения,
как это удавалось ранее, когда мы рассматривали расслоения
над областью линейного нормированного пространства.
8. Векторным полем на клетке Мо называется функция
А: х-*- A(x)f= Тм„(*), заданная на Мо и принимающая зна-
значение А (х) в слое ТмДх), отвечающем точке х.
Такая функция является частным видом сечения расслоения.
Аналогичным образом образуются сечения других описанных
расслоений. Например:
9. Сечение расслоения всех полилинейных форм валент-
валентностью (р, q)
со: х -^ со (х) s QqP (Тм„ (*), Тм, (х))
называется тензорным полем валентностью (р, q) на клетке Мо.
В частности,
10. Сечение расслоения антисимметрических форм {[х,
Лр(Тм,,(*))], хеМ0} называется дифференциальной формой, за-
заданной на клетке Мо.
Иными словами, дифференциальной формой на Мо называ-
называется функция со: х-*- а(х) е Лр(Тм, (х)), определенная на Мо и
принимающая при каждом х из Мо значение со (х) в слое
Лр (Тм„ (*))> отвечающем точке х. В частном случае, при /7 = 0,
получается скалярная функция, заданная на Мо.
Мы видим, что задание тензорного поля, в частности диффе-
дифференциальной формы на клетке Мо, сводится к заданию пере-
переменной формы, зависящей от точки х, х е Мо, и вычисляемой
на векторах из касательного или кокасательного пространства.
По существу это означает, что тензорное поле или дифферен-
дифференциальная форма задаются на касательном расслоении. Имея это
в виду, мы тем не менее будем большей частью говорить, что
«форма задана на клетке»,
394
Тензорные поля на клетке Мо можно получать сужением тен-
тензорных полей, заданных в Е или в некоторой области из Е,
содержащей Мо.
11. Пусть © — ковариантное, для определенности, тензорное
поле, заданное в некоторой области U из Е, содержащей клет-
клетку Мо. Сужением этого поля на Мо называется тензорное поле
ш = й|Мо, вычисляемое в точках х (хеМ0) по правилу
w(x)(Ki,K2, .... КР) = п(х)(КиК2, .... КР);
Къ К2 Кр
Другим способом задания тензорного поля на клетке явля-
является пересадка его из параметризующего куба с помощью коор-
координатного отображения -ф: Мо->-Ко-
12. Пусть и — ковариантное, для определенности, тензорное
поле валентностью р, заданное в кубе Ко. Определим отвеча-
отвечающее ему тензорное поле со, заданное на клетке Мо, следующим
образом: ш — VPco, где
|ЯЬ D<p(u)H2, ..., D<p(u)Hp) =
Иногда важно, наоборот, по полю ш, заданному на клетке,
построить отвечающее ему поле в параметризующем кубе. Это
можно сделать с помощью параметризации-
13. Пусть со — тензорное _поле, заданное на клетке. Опреде-
Определим отвечающее ему поле ю, заданное в кубе Ко, следующим
образом: со = Ф*со, где
(Ф*со) (и) (ЯЬЯ2, ..., Яр) =
= ш(ф(«)) (?>ф(ы)Яь D(f>(u)H2, ..., Dy(u)Hp), меКо;
Н\, Н2, ..., Нр е= G.
Эти определения находятся в полном соответствии с данным
ранее определением пересадки тензорного поля с помощью за-
замены переменных из одной области в другую {см. 5.2.2).
Вычислим сужения базисных форм dxl на клетку Мо, задан-
заданную с помощью параметризации х = (р{и), Мо = фКо. Соответ-
Соответствующее координатное отображение, как обычно, обозначим
символом if, ^{x) = u, f : Мо-*- Ко-
*14. d:
s=l
s=l
© Согласно определению сужения 11 для всякого вектора К
из ТмДл:) должно быть выполнено условие (dx'\M.o, К) =
395
— (dx{,К). Записывая вектор К в виде Оф(и)Я (#eG, «e Ко)
с учетом договоренности dx' = р (см. с. 330), получим
Сравнивая второй и последний члены равенства, получаем
в соответствии с определениями 13, 12:
*15. Для всякого тензорного поля со, заданного на клетке Мо,
справедливо равенство 1Р*Ф*(й = со.
Обратно, для всякого тензорного поля ю, заданного на кубе
Ко, справедливо равенство Ф*1?*© = ю.
На множестве всех ковариантных тензорных полей валент-
валентностью р, заданных на данной клетке Мо, можно поточечно
определить линейные алгебраические операции:
, Kt, .-., КР) =
, К2, ¦¦¦, Кр) + а2<о2(х)(Ки К2, ¦¦-, Кр),
Ки %2> • • •> Кр е Тмо (^)- После этого указанное множество пре-
превращается в линейное пространство, которое мы будем в даль-
дальнейшем обозначать символом Qp (Мо). Из предложения 15 сле-
следует, что пространство QP(MO) изоморфно линейному простран-
пространству Qp(Ko) всех тензорных полей, заданных в кубе Ко- Этот
изоморфизм осуществляется с помощью замен переменных, ис-
использующих параметризацию и координатное отображение.
Пользуясь установленной связью между тензорными полями,
заданными на клетке Мо и на соответствующем параметризу-
параметризующем кубе, мы можем определить понятие гладкого тензорного
поля.
16. Ковариантное поле со, заданное на клетке класса С*,
называется непрерывным, соответственно / раз непрерывно диф-
дифференцируемым (/ < k), если при пересадке в параметризую-
параметризующий куб по правилу 13 оно порождает непрерывное (/ раз не-
непрерывно дифференцируемое) ковариантное тензорное поле
Ф*ш.
*17. Определенные таким образом понятия непрерывности и
гладкости тензорного поля не зависят от выбора параметриза-
параметризации клетки в данном классе гладкости.
396 '
В дальнейшем мы будем иметь дело главным образом с
гладкими тензорными полями. Класс гладкости обычно предпо-
предполагаете» таким, чтобы выписываемые соотношения имели смысл.
Все сказанное относительно общих тензорных полей на
клетке относится, конечно, и к антисимметричным тензорным
полям — дифференциальным формам. Мы не будем формулиро-
формулировать предложения, аналогичные 11—17, применительно к этому
частному случаю отдельно, а при необходимости будем ссы-
ссылаться прямо на доказанные общие факты и определения.
С помощью тензорных полей разной валентности на клетке
можно ввести ряд важных структур. Самой простой из них яв-
является так называемая риманова метрика. Она вводится с по-
помощью переменной ковариантной билинейной формы, заданной
на клетке.
18. Билинейная симметричная переменная форма (о =
='(. > Ух, заданная на клетке Мо, называется невырожденной,
если отвечающая ей в каждом из касательных пространств
Тм (х) матрица {#$} не имеет нулевых собственных чисел.
Хотя условие невырожденности формулируется примени-
применительно к конкретному базису касательного пространства, од-
однако оно имеет инвариантный смысл. Действительно, в силу за-
закона инерции (ч. I, 11.6.7) число положительных, отрицатель-
отрицательных и равных нулю собственных чисел симметрической матри-
матрицы {gl$}, отвечающей данной квадратичной (билинейной) фор-
форме (К, K)x — Hi k-iSfk KlKk, не зависит от выбора базиса:
iei}T-[ е Тм0, Я — 2г=1 K'et- Задав на клетке Мо билинейную
симметричную невырожденную форму и рассматривая ее как
скалярное произведение в касательном пространстве ТмАх)
при каждом х, мы превращаем Тм, [х) в псевдоевклидово про-
пространство,
19. Если на клетке — элементарном многообразии Мо — за-
задана непрерывная невырожденная билинейная форма < , >*, то
элементарное многообразие Мо называется римановым, а форма
< , >* называется римановой метрикой.
Если форма < , }х удовлетворяет также и условию положи-
положительности в каждой точке хеМ0: </С, КУх > 0, /Се ТмД*),
К Ф 0, то риманова метрика < , >* называется локально евкли-
евклидовой или положительной.
Конечно, естественно попытаться задать риманову метрику
на клетке, вложенной в псевдоевклидово пространство Е, путем
сужения скалярного произведения, заданного в Е, на касатель-
касательное расслоение.
*20. Если пространство Е евклидово, то и каждое из каса-
касательных пространств Тм,. (х) является евклидовым со скалярным
произведением {К, К'}х, К, К' е Тм„ (х), которое получается су-
сужением на Тм»(д;) скалярного произведения в пространстве Е.
© Ясно, что билинейная симметрическая форма </С, К'Уе, опре-
397
деленная в пространстве Е, после сужения на Тмо(*) остается
билинейной и симметрической. Выполнено также условие поло-
положительности: {К, КУх > 0. 'Наконец, условие невырожденности
также выполнено, поскольку равенство {К, КУе = 0, К е Тм„ (х),
возможно только при К = 0. 3
Все вычисления, связанные с метрикой, удобно производить,
пользуясь конкретной параметризацией клетки: ty(x)=u, x =
= <р(и). Пересадим риманову метрику с клетки в параметри-
параметризующий куб Ко, положив согласно определению 13
(Я, H')l^(Dy{u)H, D<p(u)H')x.
Подсчитаем форму (Н, Я')*.
Допустим, что скалярное произведение в Е в координатах,
связанных с базисом {е,}, задается формулой (К, К')Е =
= 2" k=\?ikKlK'k> a отображение ф в тех же координатах за-
задается уравнениями х1 = Ф'(ы1. > • ¦ • > ит) (г == 1,2, ..., п),
где {и'}—координаты точки u — ty(x) параметризующего куба,
связанные с базисом {g,-}f=1. Тогда
*21. Скалярное произведение, пересаженное из слоя Тм^х)
над точкой х клетки Мо в слой G над соответствующей точкой
w = if(x) параметризующего куба, вычисляется по правилу
(Я, Н'I = (?>Ф (и) Я, ?ф (и) Н')х =
© Вычисляя производную/Зф отображения q>: и->-2/_1ф'
по правилу
и пользуясь обычным правилом вычисления метрического тен-
тензора: gst = (es,ety, получаем нужный результат. 3
Из утверждения 21 видно, что риманова метрика, возника-
возникающая на параметризующем кубе при пересадке локально евкли-
евклидовой метрики с многообразия, также является «локально ев-
евклидовой», т. е. евклидовой в слое над каждой точкой и из Ко.
В случае, когда пространство Е является псевдоевклидовым,
внешний вид формул 21 сохраняется. Однако теперь уже нельзя
398
гарантировать сохранение свойства невырожденности. В дей-
действительности оно может быть утрачено.
Рассмотрим соответствующий пример: световой конус и про-
пространственно-подобные поверхности в пространстве Минковского
(см. 5.4.20) (Утверждение, которое будет доказано в 22, важно
в идейном отношении, но не будет использоваться в последу-
последующем изложении).
В пространстве Минковского рассмотрим поверхность, зада-
задаваемую в стандартных координатах уравнением (х0J— (х'J+
+ (*2J + (я3J. Это — так называемый световой конус (рис. 20),
Рис. 20.
отвечающий событию @,0,0,0). Легко видеть, что световой ко-
конус разбивает все пространство Минковского относительно
этого события на следующие области:
I: х° > V(WTWTW~ "будущее";
II: - V(*'J + (х2J + (х3J < х° < V(*'J + (*2J + (х3J - об-
ластъ, состоящая из событий, на которые событие @,0,0,0)
не может влиять, поскольку всякое возмущение распространя-
распространяется со скоростью, не превосходящей скорости света;
III: х° < - л/(х1J+(х2J + (х3J - "прошлое".
Прошлое и будущее образуют вместе область влияния со-
события @,0,0,0).
*22. Индефинитное скалярное произведение, задающее мет-
метрику в пространстве Минкордкого в стандартном базисе фор-
399
мулой (К, Г)м, = Е?=оеД^" (во=1. е, = -1, /=1, 2, 3),
вырождается на световом конусе и не вырождается ни на ка-
каком конусе па. вида (х°J = а2[(х>J-\-(х2J -\-(х3J] (аф1).
На конусах, отвечающих значениям а < 1, т. е. на конусах
Qa, лежащих в области II, форма (К, /С')м, становится отрица-
отрицательно определенной, а на конусах, отвечающих значениям
a > 1, т. е. лежащих в «прошлом» и «будущем»,— индефинит-
индефинитной (знакопеременной).
0 Рассмотрим часть Мо светового конуса, которая посред-
посредством прямой проекции if: (л;0, хх,х2, х3)-»-@, х1, х2, х3) отобра-
отображается на некоторый трехмерный куб Ко, лежащий в подпро-
подпространстве х° = 0:
Ko={x:x° = O, a'<*'< а' + Д, i = 1,2,3}.
Эта часть светового конуса является клеткой, куб Ко служит ее
параметризующим кубом, а прямая проекция — координатным
отображением. Параметризация клетки Мо задается отображе-
отображением Ф: (х\ х2, х3)^(х°, х\ х2, х3), где х° = ± [(л:1J + (*2J +
4-(л:3J]'/2. Знаки плюс и минус выбираются в зависимости от
того, в каком из полупространств: х° > 0 или х° < 0 — лежит
рассматриваемая клетка; для определенности далее ограничимся
рассмотрением первого случая: х° > 0. Касательное простран-
пространство Т(х) к световому конусу натянуто на векторы: ef = (х1/х°,
1, 0, 0), е*2 = (х2/х°, 0, I, 0), е* = №°, 0, 0, 1), где х°=[(х^ +
+ (х2J + (х3J]112.
Рассмотрим сужение индефинитного скалярного произведе-
произведения, заданного в пространстве Минковского, на касательное
пространство Т(х)- Поскольку заранее ясно, что после сужения
полученная билинейная форма останется симметрической, огра-
ограничимся лишь вычислением «квазиинтервала» (см. с. 348)
(К, К>м« = ?*-ое*(Я*J (ео= 1, е, = -1, ?= 1,2,3). Произ-
Произвольный вектор К из касательного пространства Т(х) к свето-
световому конусу в точке х =(x°,x\x2,x3), jc° = [(a;1J + _(jc2)_2-j-
-\- (х3J]'1* имеет вид
Следовательно, квазиинтервал (К, K)№ запишется на касатель-
касательном пространстве Т(х) через координаты \1 в виде
(К, К\х) - (хГ2 [( Z t'x'J - g A7
400
Видно, что квадратичная форма (К,Юх является вырожден-
вырожденной: отвечающая ей матрица
/,& = 1,2,3, имеет нулевое собственное число, которому отве-
отвечает собственный вектор go: go=*' (/=1,2,3) и двукратное
собственное число (—1), которому отвечает двумерное подпро-
подпространство векторов g в R3, ортогональных к вектору (х1, х2, хъ).
Случаи а > 1, 0 < а <с 1 читатель легко проанализирует само-
самостоятельно, пользуясь приведенными выкладками. Э
Конус Qa (а < 1) является примером пространственно по-
подобного многообразия в пространстве Минковского. Вообще
23. Элементарное многообразие Мо, лежащее в простран-
пространстве Минковского, называется пространственно подобным, если
сужение метрической формы (К, ЛТ)М< на каждое его касатель-
касательное пространство Тм,. (*) является отрицательно определенной
квадратичной формой.
Пространственно подобные многообразия играют важную
роль в построениях специальной теории относительности *.
Определим операцию внешнего дифференцирования для
форм заданных на клетке. Это определение будет сначала дано
в терминах конкретной параметризации, затем мы докажем его
инвариантность.
Пусть Мо — клетка, ф:Ко-*-Мо — ее гладкая параметриза-
параметризация, (f(u) = x, if>:Mo->Ko — соответствующее координатное ото-
отображение, if> (х) = и, так что \<р о ф = 1к„, ф о f = 1м» и согласно 15
цг*ф* = /, ф*у* = /.
24. Операцию дифференцирования на формах со, заданных
на клетке, определим равенством
da =
Здесь du — дифференцирование по переменным и1 в параметри-
параметризующем кубе-
Очевидно, что последняя формула эквивалентна формуле
ф*й?со = du(t>*(o. В правой ее части происходит дифференцирова-
дифференцирование по переменным и'.
Убедимся, что результат дифференцирования формы, задан-
заданной на клетке, не зависит от выбора переменных (от парамет-
параметризации).
Пусть ф:Ко-*-Мо — какая-либо другая параметризация
q/(v) — x, я — связывающий их диффеоморфизм: n{u) = v, <p =
= ф о я.
*25. Операция внешнего дифференцирования, определенная
формулой 24, не зависит от параметризации, т. е. для всякой
* См. В. А. Фок. Теория пространства, времени и тяготения, М., 1955,
504 с.
401
гладкой дифференциальной формы со справедливо равенство
0 Воспользуемся равенствами (см. 7) ф = фоя, ф* = П*Ф*,
if = я оф, Ч* = Чг*(я~1) *. Из них следует, что
Цг*ЛиФ* = W* (П*)- Чи П*Ф*.
Ввиду того что операции дифференцирования и замены пере-
переменных коммутируют: ^цП* = П*й?ц, выполнено равенство
(U*)-lduU* = dv. Отсюда немедленно следует, что
*26. Операция d внешнего дифференцирования на клетке,
определенная формулой 24, обладает всеми свойствами опера-
операции внешнего дифференцирования, которыми обладает соот-
соответствующая операция в области (см. 5-1.14—5.1.18).
Пользуясь римановой метрикой на клетке, можно ввести
обычным образом E.4.25) в каждом слое операцию дополнения
формы х и операции подъема и опускания индексов базиса,
#, Ь. Это позволит определить на полях, заданных на клетке,
т. е. на соответствующих расслоениях, инвариантные дифферен-
дифференциальные операции. Например,
27. Пусть / — скалярное поле (функция), заданное на клет-
клетке Мо. Положим, по определению, grad/ = (df)b.
28. Пусть А — векторное поле, заданное на клетке Мо. По-
Положим, по определению, div A = xdxk*.
Аналогичным образом может быть определена операция
rot А для поля, заданного на трехмерной клетке: rotA =
= [xdk#]b.
В реальной ситуации обычно удобно производить все вычис-
вычисления в локальных координатах и —ty(x), пересаживая рассмат-
рассматриваемые поля в параметризующий куб- При этом приходится
пользоваться формулами, связывающими операции Ь, :#:, т на
клетке с соответствующими операциями в кубе.
Напомним, что при пересадке скалярного произведения
< , )х из касательного пространства клетки в пространство G
(G => Ко) на кубе Ко возникает {см. 21) риманова метрика,
задаваемая метрическим тензором:
glk (и) - <g» gk)l = ШФ?„ D<tgjx = 0 (и),
*29. Пусть со — дифференциальная 1-форма, заданная на
клетке Мо. Тогда [а (х)]^ = /)ф [Ф*со]*о. Здесь [ ]^, [ ] Jo - опе-
операции опускания индексов (базиса) соответственно в кокаса-
тельном пространстве клетки с помощью римановой метрики и
в пространстве G* — с помощью метрического тензора {?«*(")}•
402
*30. Пусть A(x)— векторное поле на клетке Мо. Тогда
Ф* [А]^ = [DqA\lo. Здесь [ ]*о, [ ]*о — операции подъема индек-
индексов (базиса) соответственно в касательном пространстве клетки
с помощью римановой метрики и в пространстве G — с по-
помощью метрического тензора {g'k(u)} = {gik(u)}~\
*31. Операция дополнения тЧо на клетке относительно ри-
римановой метрики < , >* связана с операцией дополнения тКо
на кубе относительно соответствующей метрики < , >ц по фор-
формуле Ф*тМо = тКоФ*.
Доказательство перечисленных фактов предоставим чита-
читателю.
< Заметим, что определенное выше векторное поле grad / на
клетке обладает естественными свойствами, характерными для
соответствующего поля в области. Основываясь на формуле
*32 gradMo f = D<$ [<*иФ7]?о = D<p gradKo Ф*/=/)ф gradKo / (Ф («)),
нетрудно доказать формулу Тейлора на клетке, вложенной в
евклидово пространство.
*33. Пусть Мо — лежащая в евклидовом пространстве Е
клетка с римановой метрикой < , }х, полученной сужением на
касательное пространство скалярного произведения < , >е. То-
Тогда для всякой гладкой вещественной функции /, заданной на
клетке Мо, справедлива формула Тейлора первого порядка:
f(x)—f(xo)=<gradf(xo), x — xq)e + о(х — х0).
О Рассмотрим определенную в кубе Ко функцию Ф*/, соответ-
соответствующую функции f- Запишем для нее формулу Тейлора
(см. 2.3.3):
(Ф*/) («)-(Ф*/) М = (<*(Ф*/) (ио), «- ио) + о(и-и0).
Значение формы d(Q)*f)(uo) на векторе (и — и0) можно заме-
заменить скалярным произведением в метрике < , )и, а затем ска-
скалярным произведением < , >.г:
(d (Ф7) («о), и - и0) = ([d (Ф7) («о)]к0, и ~ ио)а =
= (/)ф [d (Ф7) (Ио)С ДФ («о) (U - Щ))х.
Согласно 32 последнее выражение при хо=<р(«о), x = q>(u)
совпадает с выражением
(grad / (х0), Dq> (щ) (и — ио))х = (grad / (х0), х — хо)Е + о (и — щ).
Наконец, пользуясь тем, что диффеоморфизм <р производит
лишь конечное искажение длин: vl" — «о|^|ф(")—<p(wo)|=?S
^ Т\и — «0|. можно заменить выражение о (и — «о) на о(х — лг0).
Это дает окончательно:
= <grad/(A;o), х — хо}е + о(х~ х0). Э
403
*34. С л едет в ие. Пусть grad /(хо)=5^ 0. Тогда приращение
f(x) — f(x0) скалярной функции, заданной на клетке, является
положительным при движении в направлении, образующем ост-
острый угол с направлением gradf(x0), и отрицательным при дви-
движении в направлении, образующем тупой угол с направлением
grad/(*<,)•
Можно показать, что для заданной на клетке функции f,
удовлетворяющей в точке х0 условию grad f(xo) ?=0, локально
(вблизи точки Хо), существует «поверхность уровня» — образ
при отображении ф поверхности уровня функции Ф*7, построен-
построенной вблизи точки «o = iH*o). Утверждение 34 показывает, что
grad/(jc0) ортогонален к этой поверхности уровня так же, как
в случае скалярных функций, заданных в области.
§ 2. ОРИЕНТАЦИЯ КЛЕТКИ
И РИМАНОВА МЕТРИКА
В этом параграфе мы покажем, что применительно к клетке
можно ввести понятие ориентации- Очевидно, что отдельно взя-
взятое касательное пространство Тм \х) == Т {х) клетки может быть
ориентировано, т. е. множество всех базисов {е,} в Т(х) может
быть разбито на два класса в соответствии с ориентационным
отношением эквивалентности (см. 5.3.2).
Два базиса {е,} и {е^} считаются одинаково ориентирован'
ными ({е,} ~ {ei})> если матрица Т = {/,}, связывающая их,
е', =г 5^ /,'е;, имеет положительный определитель, det Э~ > 0.
Трудность, возникающая при попытке ввести ориентацию на
всей клетке (точнее, на ее касательном расслоении), заключа-
заключается в том, что касательные пространства Т(х), отвечающие
разным точкам клетки, различны. Эту трудность можно обойти,
используя уже знакомое нам понятие репера (см. 5.5.8).
1. Набор непрерывных векторных полей {е*}^., на клетке Мо
называется репером на Мо, если при каждом х из Мо векторы
ei(x))T-\ образуют базис касательного пространства 1(х)
(рис. 21).
*2. На клетке класса С* (k ^ 1) существует репер.
0 Пусть {gi}^i,i — базис в пространстве G, с которым связаны
координаты {м'}^,!- Векторы {?><р (ы) g*}7-i при каждом значе-
значении и (и е Ко) образуют базис в пространстве Т(х), поскольку
отображение <р является неособым, -rang Z?<p(w) = m. Векторные
поля iDq> (и) gi}^ являются гладкими класса С*-1. Следова-
Следовательно, набор векторных полей (Dqi (ы) gi}^,^ u = ^{x) (^еМ0)
является репером на Мо. 5
•3. Если два репера: {е,} , (e)}1 — одинаково ориентиро-
404
ваны в какой-либо одной точке х0 клетки Мо> т. е.
', (*„) = % *] (*о) ei Ы> det Г (*0) > О,
то они одинаково ориентированы в любой другой точке этой
клетки-
© Действительно, функция detST(x) по условию нигде на Мо
не обращается в нуль. Тогда она вследствие вещественности со-
сохраняет знак на Мо. D
Предложение 3 позволяет, задав ориентацию какого-либо од-
одного касательного пространства, скажем Т(х0), распространить
ее с помощью репера на всю
клетку.
4. Допустим, что каса-
касательные пространства Т(*)',
Т(у) в точках х, у клетки Мо
ориентированы. Они назы-
называются ориентированными
согласованно (или когерент-
когерентно) , если на клетке Мо су-
существует репер {е,}, та-
такой, что базисы
iet(y)}T-\> являющиеся зна-
значениями этого репера в ука-
указанных точках, положитель- Рис. 21.
ны в Т(х) и Т(у) соответст-
соответственно.
Из предложения 3 следует, что
*5. Все касательные пространства клетки могут быть ориен-
ориентированы согласованно с помощью какого-либо репера; при
этом их ориентация не зависит от выбора репера.
0 Пусть {еЦ^ — некоторый репер на клетке Мо. Задав ка-
каким-либо образом ориентацию некоторого касательного про-
пространства, скажем Т(хо), назовем репер положительным или
отрицательным на Мо в зависимости от того, превращается ли
он в положительный или отрицательный базис {et (-*0)}Jli каса-
тельного пространстваТ(лг0). После этого всякий базис Ц (</) }™и1
в любом другом касательном пространстве Т(у), одинаково
ориентированный с базисом {е{(у)\ > еЛу) = 2^i-\4ei (У)>
det 9~ > 0, назовем соответственно положительным или отри-
отрицательным.
Легко убедиться, пользуясь предложением 3, что заданные
таким образом ориентации касательных пространств клетки Мо
405
не зависят от конкретного выбора репера {et(x)}™^ и по опре-
определению 4 являются согласованными. D
6. Клетка называется ориентированной, если задана согласо-
согласованная ориентация всех ее касательных пространств.
Очевидно, что это определение эквивалентно следующему:
клетка ориентирована, если на ней указан положительный репер.
7. Параметризация <р:Ко->-Мо ориентированной клетки Мо
называется положительной, если репер {Dygt}™^ = {ду/ди'}™^
является положительным. В противном случае параметризация
называется отрицательной.
Практически более удобно задавать ориентацию клетки Мо
(dimM0 = m) с помощью некоторой дифференциальной ш-фор-
мы, аналогично тому, как это делалось для области E.3.6).
8. Говорят, что дифференциальная форма сор обращается в
нуль в точке х0 клетки Мо, если а>Р(х0) (Ki, К2, ¦¦-, КР) = 0 при
любом выборе векторов {Ki} (/=1,2, ¦.., р) из T(xo).
Дифференциальная форма сор называется невырожденной на
клетке Мо, если она не обращается на ней в нуль.
*9. Непрерывная невырожденная дифференциальная форма
валентностью пг, заданная на клетке Мо (diinM0 = m), на дан-
данном репере принимает значения одного знака во всех точках
клетки. Этот знак определяется лишь классом ориентации ре-
репера и не зависит от конкретного выбора репера из числа оди-
одинаково ориентированных.
0 Пусть со — рассматриваемая m-форма, {^(л:)}^,; (х е Мо) —
некоторый положительный репер. Рассуждая от противного, до-
допустим, что на клетке Мо существует пара точек хо, уо, таких,
что
со (хо) (ei (хо), е2(х0), ..., ет(х0))>0,
), е2(уо), ¦¦-, ет(уо))<0.
Рассмотрим на Мо скалярную функцию со (х) (et (x), е2(х),...
..., em(x)) = f(x). Эта функция непрерывна и принимает значе-
значения разных знаков в точках хо, г/о- Отвечающая ей непрерывная
вещественная функция (/°q>) (ы) = /(<р(ы)), заданная в кубе Ко,
принимает значения разных знаков в соответствующих точках:
мо = ч|)(л:о), Vo = ty(yoh Следовательно, на прямой, соединяющей
точки «о, Vo, найдется, по теореме Коши, точка w0, такая, что
/(ф(ауо)) = О. В соответствующей точке zo = <p(ffi>o) на клетке Мо
выполнено равенство
со(г0) (ei(г0), е2(г0) em(z0)) = 0.
Отсюда следует, что на произвольном наборе векторов {ej}?=l
из Т(г0) антисимметрическая форма <o(zo) обращается в нуль.
406
Действительно, разложив векторы {e/}JL; по базису
получим со(z0) (ei,е2, • • •, ёт) = det^со(z0) (ei(z0), .... ет(го)).
Это означает, что (о(г0) = 0 вопреки предположению о невырож-
невырожденности формы со.
Рассуждая от противного, мы показали, что на данном по-
положительном репере форма со принимает во всех точках клет-
клетки Мо значения одного знака. Всякий другой положительный
репер {?/}"' связан с репером {ег} с помощью переменной мат-
матрицы с положительным определителем е' (х) = ?™_, t{t (х) et (х),
det вГ (х) > 0. Поэтому выражение ю (х) (е[ (х), е'2 (х), ..., е'т (л:)) ==
= detT(x)f (x) имеет тот же знак, что и f(x) = a(x) {ех(х),
е2(х), ..., ет(х)). D
*10. Следствие. Непрерывная невырол<денная на ориен-
ориентированной клетке дифференциальная форма старшей валент-
валентности, принимающая положительное значение на каком-либо
положительном базисе в одном из касательных пространств,
принимает также положительное значение на любом положи-
положительном базисе в каждом из касательных пространств.
Предложение 10 позволяет задать согласованным образом
ориентацию всех касательных пространств клетки с помощью
данной непрерывной невырожденной пг-формы, определенной на
клетке- Действительно, если на клетке Мо задана невырожден-
невырожденная форма (о{х), то, вычислив ее на некотором базисе {е^™=х
в том или ином касательном пространстве, по знаку получен-
полученного выражения мы можем отнести базис {eJ^L] к определен-
определенному классу.
*11. На клетке Мо существует непрерывная невырожденная
дифференциальная форма старшей валентности.
0 Рассмотрим постоянную m-форму соо(и) = dul /\du2 Л ...
... /\dum на параметризующем кубе. С помощью формы coo(w)
и координатного отображения « = ч|з(л;) определим на клетке Мо
форму Q (х), положив
^ (х) (Ки К2 Я,»)=®о («) (Яф (*) tfi. Я* (х) К2 ?h|) (x) Кт),
Kj^TrA,(x), j=\, 2, ..., m. По определению 1.16 форма Q —
= 1Р*соо непрерывна на Мо. Она не обращается в нуль на М0)
поскольку при каждом х существует набор векторов из каса-
касательного пространства, скажем репер ei{x) — D(p(u)gt (i =
= 1, 2, . •., m), такой, что
{W*(o0)(x){e1{x),e2(x), ..., em(x)) =
gug2 gm)=\. D
407
*12. Пусть Mo — ориентированная клетка, x = q>(u)—некото-
q>(u)—некоторая ее параметризация, х1 = q>< (u1, и2,..., ит) (i = 1, 2,..., п).
Тогда эквивалентны следующие утверждения:
а) параметризация х = <р(и) положительна;
б) форма 4*{dux /\du2 Л ... /\dum) принимает положи-
положительное значение на всяком положительном базисе в каждом
касательном пространстве:
в) форма 4*(dux /\du* /\ ... /\dum) принимает положи-
положительное значение на некотором положительном базисе в одном
из касательных пространств.
13. Непрерывную невырожденную форму старшей валентно-
валентности, заданную на ориентированном элементарном многообразии
и принимающую положительное значение на положительном
репере во всякой точке многообразия, называют ориентирую-
ориентирующей формой.
Ясно, что роль ориентирующей формы может играть, напри-
например, форма 1F*coo, построенная в 11 {при всякой параметризации
клетки), или любая форма вида а(х)*?*щ, где а(х) — непрерыв-
непрерывная функция, положительная на рассматриваемой клетке- По-
Построенная таким образом ориентирующая форма несет инфор-
информацию, конечно, лишь об ориентации клетки, но не о ее метри-
метрических свойствах (ср. текст, следующий за 3.5.6).
Если элементарное многообразие (клетка) Мо (dim Мо = пг)
является римановым, а риманова метрика на нем — локально
евклидовой, то оказывается (см. далее 18), что ориентирующую
форму на Мо можно согласовать с римановой метрикой так,
чтобы значение ориентирующей формы на векторах Ки /Сг.
..., Km сТмоМ совпало с точностью до знака с объемом приз-
призмы, натянутой на эти векторы.
14. Формой объема на клетке Мо назовем ориентирующую
форму, которая на каждом положительно ориентированном на-
наборе векторов Къ Kz> •••> Km из ТмДя) (хеМ0) принимает
значение |П|, равное объему призмы П, натянутой на эти век-
векторы. Объем подсчитывается в римановой метрике, заданной
на клетке Мо. Форму объема обозначим буквой V, так что
V(KuK2 Кт) = \Щ.
Точнее, форму объема V следовало бы назвать римановоЯ
формой объема, подчеркивая тем самым ее происхождение, свя-
связанное с римановой метрикой на клетке. Но ради краткости мы
называем ее просто формой объема.
*15, Для всякого отрицательно ориентированного набора
(/(,, К.2 Km) c Тм. (х), выполнено равенство
V(Kl,K2 Ят)=-|П|.
Поскольку пространство всех антисимметрических форм ва-
валентностью m в Тмо (х) одномерно, то построение римановой фор-
формы объема сводится лишь к выбору коэффициента а(х) в пред'
408
ставлении
V = a(x)W*{du> Л du2 Л ...rAdum).
Получим формулу для объема tn-мерной призмы, которой мы
воспользуемся при выборе коэффициента а.
16. Определителем Грама Т(К\, К2, •••) Кп)векторов Ки
Дг, .... Кт в линейном евклидовом пространстве Е называется
определитель, составленный из скалярных произведений этих
векторов по правилу
\Аь АО \Аь А2/ ••¦ \Аь Am/
V 1К К К ) (К-2, К\) (Кг, Кз) ¦ • • (Кз, Кт)
1 VAl» A2> • • • 1 Am/ —
(Km, Ki) (Km, Kz) ••• (Km, Km)
«adet{</C,, /С*».
*17. Объем т-мерной призмы П, натянутой на векторы
Ки Ki, • •¦, Km, выражается через определитель Грама
Т(КиК2, ..., Km) по формуле
(*) | П | == л/Г (/Ci, Ki. •¦•> Km)-
0 Линейное пространство Т, натянутое на векторы {Ki}, яв-
является подпространством в Е. Пусть {^JfLi— какой-либо орто-
нормированный базис в Т, Ка — координаты векторов Kt в этом
базисе,
m
Ki = Z Ale,, /С? = (Kt, es), i = 1, 2, ..., m.
s-l
Очевидно, что для любых j, /= 1,2, ..., m выполняется равен-
равенство
m m
'' 7 s, s'-l S' S js-l
называемое обычно равенством Парсеваля (см. I. 11.2.3.). Со-
Согласно 5.3.8 объем призмы П выражается через координаты
К* векторов Ki по формуле | П | = | det {/С!}|. Так как произве-
произведение определителей двух матриц равно определителю их про-
произведения A.6.3.11), то
| п f = | det {/С!}' det {/Ci} I = det { E /Ci/C?}.
и, следовательно,
| П |2 = det {(Kt, Кi)} = Г (/С„ /С* ••••*,»)• T>
Заметим, что определитель Грама подсчитывает m-мерный
объем призмы независимо от того, в пространстве какой раз-
размерности эта призма лежит и независимо от ориентации набора
векторов, на которые натянута призма. Действительно, все вы-
вычисления, приведшие к формуле 17(«), мы проводили просто
в линейной оболочке векторов {Ki}.
409
*18. Пусть Mo — ориентированная клетка, снабженная ло-
локально евклидовой римановой метрикой (К, К')х. Если ее пара-
параметризация х=ф(м) положительна, то соответствующая дан-
данной метрике форма объема всюду на Мо задается формулой
V = д/det {(Ц- (и), -Ц- (м))J ЧГ (du> Л du* Л ... Л аи),
где « = i|> (х).
В случае, если параметризация х = q>(«) отрицательна, в по-
полученном выражении перед знаком радикала нужно поставить
минус.
0 Считая, что параметризация клетки х = <р(и) положительна,
т. е. репер {^(pg';} = {ду/ди'} (/=1,2, ..., т) является поло-
положительным, вычислим функцию а(х) исходя из того условия,
что значение формы объема на базисе {Dq>gi(u)} должно быть
равно объему натянутой на него призмы П:
и1 ' ди2 дит) ' |#
Согласно правилу пересадки формы 1.12 получим
v \ ди1 ' ди2' " *'' дит )
= а (х) ЧГ (dul Л du2 Л ... Л d
• С другой стороны, объем призмы П в силу 17 равен корню из
определителя Грама:
Таким образом, равенство (*) для положительной параметри-
параметризации приводит к нужному результату.
В случае, когда параметризация х = ц>(и) отрицательна,
репер {DtfgA^ отрицателен и потому
. ди1 ' ди2 '
Осюда получаем
о(х) = -
В случае, когда пространство Е, где лежит рассматриваемая
клетка Мо, является евклидовым, риманову метрику <,>* на
клетке можно задать, сужая согласно 1.20 на касательное про-
пространство ТмД*) скалярное произведение <,>е. Полученная та-
таким образом риманова метрика локально евклидова и отвечаю-
отвечающая ей форма объема вычисляется по правилу 18, с тем лишь
410
изменением, что при подсчете матрицы Г рама под знаком ра-
радикала следует вычислять скалярные произведения в простран-
пространстве Е.
Выражение 18 лишь по внешнему виду зависит от параметри-
параметризации, а в действительности является инвариантным, поскольку
его вывод основан на инвариантном определении формы объ-
объема 14.
Заметим, что пересаживая форму объема V с клетки в куб,
мы получим форму
ФТ
= ± д/det {(Ц-(и). -Ц- (и)) } с№ Л du2 A ... Л du
лишь коэффициентом отличающуюся от формы объема Vg в
евклидовом пространстве G. Учитывая, что базис {gi} является
ортонормированным в G (г. е. координаты {и1} — декартовы),
форму объема Vg можно записать в виде ±:dulAdu2A ...'
... 'Adum, выбрав знак в соответствии с ориентацией базиса
19. Будем говорить, что ориентации клетки Мо и куба Ко со-
согласованы, если
и не согласованы, если
Имея в виду, что параметризующий куб играет в наших по-
построениях лишь вспомогательную роль, мы условимся ориенти-
ориентировать его всегда таким образом, чтобы его ориентация была
согласована с ориентацией соответствующей клетки.
Выведем формулы * для сужения базисных форм на двумер-
двумерную и одномерную клетки в трехмерном пространстве, которые
нам понадобятся в следующем параграфе.
Пусть Мо — ориентированная двумерная клетка в ориенти-
ориентированном трехмерном евклидовом пространстве с декартовыми
координатами х, у, z, Ко — отвечающий ей параметризующий
куб, ориентированный согласованно с Мо, w ф — соответствую-
соответствующая (положительная) параметризация. Вычислим сужения ба-
базисных 2-форм dx A dy, dy Л dz, dz Л dx на Мо. Введем предва-
предварительно понятие единичной положительной нормали на клетке.
* Мы рассматриваем дальнейшие выкладки как хорошее упражнение к
развитой ранее теории внешних дифференциальных форм. Разумеется, те же
самые результаты могут быть получены и элементарными методами на «инту-
«интуитивном» уровне строгости,
411
20. Единичный вектор п = n(x,y,z) в Е, ортогональный к
j (х, у, г) и направленный таким образом, что положитель-
положительный базис {ej, ej) в ТМо(х, у, г), дополненный спереди векто-
вектором я, превращается в положительный базис в Е, называется
вектором положительной нормали на клетке Мо в точке
(х, у, z) gM0 или просто положительной нормалью (рис. 22).
*21. Пусть п — вектор по-
з - . ложительной нормали в точке
п (х, у, г)еМл, V — форма объ-
объема на Мо, отвечающая рима-
новой метрике на Мо, получен-
полученной сужением евклидовой мет-
метрики в Е. Тогда
их A dy\ Мо = cos (n, ег) • V,
dy'Adz\M.0 = cos(n, ex)-V,
dz A dx | Mo = cos (n, e2) ¦ V,
Рис. 22.
где {еи е2, ез}— базис, связан-
связанный с декартовыми координа-
координатами х, у, z.
0 Исходя из конкретной положительной параметризации
клетки ф(«) вычислим сначала векторное произведение базис-
базисных векторов д(р/ди\ д(р/ди2:
<3ф1 _ f_5ф_
диЧ~ \ди>
. _?фД
Здесь т —операция дополнения в пространстве поливекторов
(см. 5.4.39). Обозначив через {еь е2, е3} ортонормированный по-
положительный базис в Е, связанный с декартовыми координатами
(х, у, z), и через ср' — координатные функции параметризации
ф(и)= ХгмФЧ» и2)е(, получим
«Эф
<Эф <Эф 1 г
I, А=1
= Г-!
(Эф1
<?ф3
<Э«2
ди1
(Эф1
д(р3
ди> <Эн2
«Эф1 «Эф2 «Эф2
ди1 ди2 ди1
И'
Читателю стоит обратить внимание на то, что индексы коор-
координатных функций и векторов {е^=1 образуют в приведенных
формулах циклические перестановки. Это определяется пра-
в'илами дополнения поливекторов:
x(eiAe2) = es, x{e2'A е3) = е\, т(ез Ае\)= е2,
так что, например, в\ Ае2 Ах{е\ А е2)= ei'A е2 Ле3 и т. д.
412
Убедимся, что базис {[д<р/ди\ ду/ди2], ду/ди\ ду/ди2} по-
положителен. Для этого покажем, что det{[dq>/du\ ду/ди2],
ду/ди1, ду/ди2} > 0. Действительно, вычисляя поливектор
Г 5ф ^ф "I д 5ф д ^ф
дч д
получим с помощью прямой выкладки следующее:
L <Э«' ди2 ди1 диг \ + L
ди2 ди' ди2
Это означает, что uet{[dq>/dux, ду/ди2), д(р/ди\ д(р/ди2}> 0, и,
таким образом, базис \[д(р/ди\ ду/ди2], dq>/dul, дц>/ди2} поло-
положителен.
Наконец, убедимся, что первый вектор этого базиса ортого-
ортогонален к остальным. Вообще, скалярно-векторное произведение
векторов может быть записано в терминах внешней алгебры
в виде
(••) ([А, В], С) = т (AABAC) = det {А, В, С].
Поэтому
Таким образом, нормированный на единицу вектор
nW—[~dur> дичЦди* • ди2]\
представляет собою единичный вектор положительной нормали
к касательной плоскости x-\-TlVi,,(x) (x — q>(u)), и базис (и, ду/ди1,
ду/ди2) является положительным. Составляющие вектора п(х)
суть направляющие косинусы п = ? Li (n, et) eu (n, et) = cos (n,et).
Теперь обратимся к вычислению сужений базисных форм на
клетку. Согласно 1.14 для этого просто следует пересадить из
параметризующего куба на клетку формы dy'(и) Л dcpk (и)
(t, k = 1, 2, 3). Поэтому, например,
dx A dy | Тп. (х, у, z) = ЧГ (dy1 (и) A d<p2 («)) =
#¦»-S S) м ^
413
Коэффициент, стоящий перед формой объема в последнем выра-
выражении, представляет собою направляющий косинус <и, е3). Дей-
Действительно, очевидно, что в числителе стоит третья составляю-
составляющая вектора [ду/ди1, ду/ди2]. Чтобы проверить, что в знаме-
знаменателе стоит его норма, нужно произвести несложные выкладки.
Во-первых, дополняя пару векторов дц>/ди1, дц>/ди2 нормалью
п, nJ_d(f/dus (s = 1, 2), заметим, что
. W(, Щ г(п, . Щ
dus ди* IJ \дих ди2) \ ди> ди2)
С другой стороны, с учетом положительности базиса {/г,
д(р/ди2} в Е имеем:
d(f ^±.\V'2 — dpt(« d(t JlX
и согласно (**)
_ <3<P л Зф / д<р
л
<ЭФ <Эф 11-1 _
1 ¦ ~W\\ —
В силу (*) коэффициент в последнем выражении равен норме
вектора [dq>/du\ ду/ди2].
Для проверки оставшихся двух утверждений следует лишь
заметить, что в коэффициентах, суженных на клетку форм
dy Л dz, dz Л dx, числитель представляет собой соответственно
первую и вторую составляющую вектора [д(р/ди1, д(р/ди2], а в
знаменателе по-прежнему стоит его норма. 5
Часто приходится рассматривать сужение l-формы на одно-
одномерную клетку Мо. При этом также получается форма, пропор-
пропорциональная форме объема на Мо.
22. Пусть Мо — ориентированная одномерная клетка. Еди-
Единичным вектором положительной касательной t(x) или просто
положительной касательной одномерной клетки Мо называется
нормированный положительный репер на Мо.
*23. Пусть t (x) — положительная касательная на одномерной
клетке Мо, V — соответствующая ей форма объема,
= Vl^r
2
<Эф2
ди
2
+
<Эф3
ди
ди
ЧГйи.
Тогда dx ItMo=cos (t, ex) V, dy |tMo=cos (t, e2) V, dz\ tMo=cos(/, e3)V.
0 Пусть К — произвольный вектор из Тм„(*)- Он пропорцио-
пропорционален единичному касательному вектору t: К = ±\K\t. Знак
следует выбирать в зависимости от того, является ли вектор К
положительно или отрицательно ориентированным. Учитывая,
414
что ±|/С|= V(K), где V — риманова форма объема на Мо, по-
получим
K = tV(K),
= cos (/, ei) • V.
Аналогично доказываются остальные равенства. D
§ 3. ИНТЕГРИРОВАНИЕ ФОРМЫ ПО КЛЕТКЕ.
ГРАНИЦА КЛЕТКИ И ФОРМУЛА СТОКСА — ПУАНКАРЕ
Пусть Mo (dimMo = tri) — ориентированная клетка в Е, снаб-
снабженная локально евклидовой римановой метрикой, V(x)— ри-
риманова форма объема на Мо, Ко — отвечающий ей параметри-
параметризующий куб, лежащий в евклидовом пространстве G и ориенти-
ориентированный согласованно с Мо, {и'}—декартовы координаты в кубе
Ко, х = ц>(и) — параметризация клетки Мо, и = %^(х)— соответ-
соответствующее координатное отображение, г|з ° ф = Ig.
*1. Всякая m-форма (о(х), заданная на ориентированной
клетке Мо, может быть записана в виде а (х) = а (х) V(х).
О Утверждение является простым следствием того факта, что
пространство m-форм, заданных на клетке Мо (dim Мо = пг) од-
одномерно. D
*2. Знак скалярной функции а(х) в равенстве со(х)=:
= a(x)V{x) зависит не только от формы со(х), но и от ориен-
ориентации клетки Мо.
© При изменении ориентации клетки меняется форма объема:
новая форма объема, если ее записать в старом базисе, будет
знаком отличаться от формы объема, отвечающей старому ба-
базису. Поэтому, поскольку форма со(л;) задается безотносительно
к ориентации клетки Мо, при изменении ориентации клетки Мо
функция а (х) должна изменить знак. 3
Наряду с формой со рассмотрим ее образ Ф*со в параметри-
параметризующем кубе:
ф'со = Ф*аК = а (ф («)) Vdet g (и) Va,
где g(u) — матрица Г рама, отвечающая параметризации ф:
Если параметризация ф является гладкой функцией класса
Ck (k^l), то скалярная функция detg(u) является гладкой
функцией класса Ck-1 и не обращается в нуль на Ко-
415
3. Назовем форму со измеримой на клетке Мо, если функция
) = a(q>(u))(detg(u))t/l является измеримой функцией в
кубе Ко-
*4. Определение 3 корректно в том смысле, что свойство
измеримости формы не зависит от параметризации клетки.
0 Действительно, функция (detg(u))l/* является гладкой и не
обращается в нуль на кубе Ко при любой параметризации, а
функции (а = ф) (и) и (а о ф) (и), отвечающие двум гладким пара-
параметризациям ф и ф = ф°л, одновременно измеримы или неиз-
неизмеримы, поскольку согласно 1.7 получаются одна из другой глад-
гладкой заменой переменных (<х°ф) (и) = (а °ф=>л) (и) = (а °ty)(v),
а такая замена переменной сохраняет в силу 4.5.5 измеримость
функции. D
Интеграл формы со по клетке Мо мы определим через ин-
интеграл формы Ф*со по параметризующему кубу Ко- Именно:
5. Интеграл m-формы а(х) — a(x)V(x) по ориентированной
клетке Мо = фКо (dim Ко = #0 определяется равенством
jj со =Д ф'ш == ^ а (ф (и)) Vdet g («) Vq.
Мо Ко Кг
При этом предполагается, что куб Ко ориентирован согласо-
согласованно с клеткой Мо (см. 2.19).
Пользуясь определением интеграла формы по ориентирован-
ориентированной области в евклидовом пространстве G (см. 5.6.2), можно
выразить интеграл формы непосредственно через интеграл Ле-
Лебега.
*6. Интеграл формы ю(х) — а(х) V(x) по ориентированной
клетке Мо = фКо вычисляется по формуле
со = jj а (ф (и)) Vdet g (и) d\a.
Мо Ко
*7. Интеграл формы по ориентированной клетке, снабженной
локально евклидовой римановой метрикой, линейно зависит от
интегрируемой формы и является псевдоскаляром. Иными сло-
словами, он не зависит от выбора параметризации клетки и меняет
знак при изменении ее ориентации (совершенно аналогично
тому, как ведет себя интеграл формы по области).
0 Линейность интеграла относительно интегрируемой формы
очевидна.
Свойство интеграла формы по клетке менять знак с измене-
изменением ориентации клетки является следствием предложения 2.
Убедимся, что интеграл формы по клетке не зависит от пара-
параметризации. Пусть х = ф(ы), д; = ф(у) — две параметризации
клетки Мо, я(ы) = у, ф = ф°я. Сравнение матриц Грама набо-
416
ров векторов {ду/ди1}, {д<р/дик} дает следующий результат:
=det{?
дл> I <?Ф _дф\_дяМ'п
<Эи' \ dv' dv I dvfi ) i, k—i
Поэтому согласно обычному правилу замены переменной в ин-
интеграле Лебега 4.5.20 получим, переходя от параметров v к
параметрам и по формуле v = я (и), я : Ко -*¦ Ко:
Ко
-$а(Ф(и))
Ко
= ^ а
Ко
С учетом определения 5 это дает требуемый результат. Он в дей-
действительности не зависит от знака параметризаций, поскольку
согласно договоренности ориентация параметризующего куба
согласована с ориентацией клетки. В частности, мы всегда мо-
можем свести дело к рассмотрению положительных параметриза-
параметризаций, выбирая подходящую нумерацию переменных. D
Определив интеграл измеримой формы по клетке, мы можем
ввести на клетке меру, аналогичную лебеговой.
8. Подмножество М' с: Мо назовем измеримым подмноже-
подмножеством клетки или куском клетки, если М' есть образ измери-
измеримого по Лебегу подмножества параметризующего куба.
*9. Факт измеримости М' с Мо не зависит от выбора пара-
параметризации.
0 Согласно 4.5.3, 4.5.4 диффеоморфный образ измеримого
множества измерим. Э
10. Мерой (х(М') куска М' клетки Мо называется интеграл
по клетке от формы Хм- (х) V, где V— риманова форма объема;
Хм- — индикатор куска: хм- С*) = 1, ^ М', xw (у) = 0, у&
е М0\М'. Таким образом, по определению
Заметим, что мера куска клетки определяется римановой
метрикой, заданной на клетке. Если риманова метрика на клетке
14 Зак. 193 " 417
получена путем сужения на ее касательное расслоение скаляр-
скалярного произведения евклидова пространства Е, содержащего клет-
клетку, то соответствующую меру на клетке называют лебеговой.
•11. Для всякой измеримой m-формы aV на клетке справед-
справедливо равенство \ aV = \ а (х) с1цх.
Мо M»
0 Выражение, стоящее в правой части, представляет собою
инвариантную запись не зависящего от параметризации инте-
интеграла по параметризующему кубу: \ а (ф (и)) [det g (и)]'1' а"ци. }>
Ко
*12. Лебегова мера куска М" = ф(К") двумерной клетки Мд'
в трехмерном евклидовом пространстве Е равна
— [ Л /I д<?
К"
<Э«2
_ / д<? д<? \2
Если клетка Мо параметризуется декартовыми координатами
ф1 =х, q>2 = y,<i>3 = z(x,y), то
Лебегова мера куска М' = ф(К') одномерной клетки М? в
трехмерном евклидовом пространстве Е вычисляется по формуле
I
К'
Если параметризация ф в декартовых координатах записывает-
записывается в виде х = ф1 (и), у = ф2 (и), z = ф3 (и), то
К'
йи
dq>2
йи
2
Йф3
du
Мера, заданная на двумерной клетке формулой (*), назы-
называется площадью поверхности, а мера, заданная на одномерной
клетке формулой (**) — длиной дуги.
Теперь приступим к выводу формулы Стокса — Пуанкаре для
клетки, которая аналогична соответствующей формуле для куба.
Пусть Мо — ориентированная клетка, снабженная локально
евклидовой римановой метрикой < , >, Ко — параметризующий
куб, ориентированный согласованно с Мо, ф : Ко -*¦ Мо, х =
= ф(и) — соответствующая положительная параметризация
клетки. Напомним, что согласно нашей договоренности диффео-
диффеоморфизм ф допускает продолжение на несколько больший от-
открытый куб К, содержащий замыкание Ко куба Ко- Это позво-
413
ляет, наряду с клеткой Мо = фКо, рассмотреть граничные клетки
Ма> являющиеся образами граней Ка куба Ко:
{x:x = (f{u), неКУ, /=1, 2 т.
Обратим внимание на то, что параметризация граничной клетки
Ма осуществляется с помощью того же самого диффеомор-
диффеоморфизма ф, что и параметризация клетки Мо. Поэтому мы можем
говорить о диффеоморфных образах граней Ка куба Ко-
*13. Касательное пространство Тм/ (х) граничной клетки яв-
является подпространством касательного пространства Тм(#)
клетки М = фК в той же самой точке.
© Действительно, поскольку q> является как параметризацией,
клетки М, так и граничной клетки Ма, то
Тм^ (х) = Dq> {L (gIf ..., gt_v gi+l gm)} cD(fG = TM (x). >
Здесь L(gu ..., gt-u gi+\> •••> gm) линейная оболочка векторов
gl, ¦•-, gl-h gi+\y ••-, gm. 3
Аналогично тому, как граница куба составляется из ориен-
ориентированных специальным образом граней Ка (см. 5.7.17), гра-
граница клетки Мо составляется из ориентированных граничных
клеток Ма- Именно: пусть ф : и-*-* = ф(н)—какая-либо поло-
положительная параметризация ориентированной клетки Мо. Это
означает, что базис {gAfti, связанный с координатами {«'}> яв~
ляется положительным в К, а репер
— положительным в Тш{х) (х = ф(и)). При этом роль ориенти-
ориентирующей формы на кубе К может играть, например, форма
[detg(u)]-4*<b*V = dux Adu2A ... Adum, полученная из фор-
формы объема V на клетке М путем пересадки ее в куб с помощью
параметризации ф.
Задав на гранях Ка куба Ко априорную ориентацию с по-
помощью форм V = dux 'A.du2 Л ... Л dul~x Л dui+1 Л ... Л dum,
запишем границу куба Ко в виде цепи 5Ко= Ц«. а(~1)'+аКа
(см. 5.7.17). Клетки (—1)'+аКа в составе границы куба ^ориен-
^ориентированного с помощью формы dulAdu2A ... Adum, ориен-
ориентированы согласованно на основании правила «выходящего век-
вектора» с помощью форм (—1)'+аУ. Пользуясь положительной
параметризацией q> и соответствующим координатным отображе-
отображением, зададим на каждой граничной клетке Ma = q>Ka anpuop-
14* 419
ную ориентацию с помощью формы Vi(x) = xV*Vi и рассмотрим
клетки (—l)i+aMa> ориентированные с помощью форм
A)«V'()
()()
14. Будем говорить, что указанная ориентация граничных
клеток (—l)'+aMa задается правилом выходящего вектора.
15. Определим""границу 5М0 клетки Мо формальной суммой
i, a
считая, что она состоит из ориентированных клеток (—l)*+aMa
(t = 1,2, ..., т, а = 0, 1).
Вообще говоря, следует доказать, что определение 15 кор-
корректно, т. е. все элементы, входящие в него, являются инва-
инвариантными объектами, не зависящими от выбора параметриза-
параметризации. Читатель, склонный принять этот факт без доказательства,
может пропустить пункты 16, 17 и перейти непосредственно к
общему определению цепи 18, интеграла по цепи 19, 20 и фор-
форшу ле Стокса — Пуанкаре 21.
Итак, пусть х — <р(и), x = q>(v) — две разные параметриза-
параметризации клетки Мо. Не ограничивая общности; будем считать их
положительными. Согласно 1.7 они связаны посредством диф-
диффеоморфизма я, n(u)=v, отображающего замкнутый куб Ко
на себя и обладающего в силу условия положительности пара-
параметризаций ф, ф положительным якобианом: det{dv'/duk}> 0.
Доказательство корректности определения 15 содержится в
следующих двух утверждениях: __
*16. Пусть я:Ко->-Ко — диффеоморфизм замкнутого куба Ко
на себя. Тогда образом внутренности куба Int Ко = Ко является
внутренность, образом границы — граница, и каждая грань куба
переходит в некоторую грань: я Int Ko= Int Ко, л(Ко\Ко) =
= (Ко \ Ко), . лКа = Kj •
© По условию якобиева матрица диффеоморфизма я является
гладкой и равномерно обратимой в замкнутом кубе. Восполь-
Воспользуемся формулой конечных приращений 2.3.3: v = я(и) =
= я(«о) + Ья(«о) (и — «о) + 0(м — «о); здесь |0(и —мо)|<
<е|и —«0|, если |« —ио|<б(е) равномерно в кубе Ко- Тогда
I» — о0К!|Я«(и0)|||ы — "о 1A +е sup ||[D«(и')] II).
|| [Dn (ио)Г1 III v - v01 > | и - «о 1A — е sup || [D% (и')] II).
Это означает, что в каждой достаточно малой окрестности
|и —«0|<б(е) произвольной точки ы0 справедлива двусторон-
двусторонняя оценка
¦(•) у\и — мо|^|я(м)_—я{но)|^Г|м — «о|
420
с постоянными:
Г = sup || Dn (и) || A + е sup || [Dn («)]"¦ |
u<=Ko K
= { sup || [Die («)]"> II} A - e sup || [Die (и)]
1
Размер окрестности определяется единым образом во всем кубе
из требования: б = б(е),е < [sup || [Dn («)]"' II]. Из оценки (*)
K
немедленно следует, что диффеоморфизмы я, я-1 отображают
всякое замкнутое множество на замкнутое, а открытое — на от-
открытое. Отсюда следует, что Ко = лг'яКо с: яКо с: Ко, и, значит,
яко = Ко, яако = ак0-
Образ всякой грани Ка при диффеоморфизме я целиком
содержится в силу гладкости я в некоторой граниKj: «Ka^Kj-
Тогда в силу обратимости л, я К? с Ка и Kj =яя~'К^ с:
сяКаСгК^. Это означает, что яКа = К^. )
Утверждение 16 показывает, что граница клетки как мно-
множество определена инвариантным образом, т. е. инвариантным
образом определена каждая ее компонента Ма = фКа- Замена
параметризации ф приводит лишь к изменению нумерации (/, а)
клеток Ма- Убедимся, что
*17. Ориентация клеток Ма> заданная с помощью форм
y? = (-i)'+VyJ,
Vu = dux A du2 A • • ¦ A dul~x A dui+l Л ... Л dum,
не зависит от параметризации.
© Пусть x = q>(u) и x = q>(v)—две разные параметризации
ориентированной клетки Мо, я:Ко->-Ко, n(u)=v — связываю-
связывающий их диффеоморфизм, ф = ф°я. Условимся сначала, что обе
указанные параметризации положительны, и, следовательно,
диффеоморфизм я сохраняет ориентацию куба Ко, detDn =
{d7dft}
{7}
Допустим теперь, что диффеоморфизм я переводит грань
Ка в грань Ка'- Убедимся в том, что это соответствие сохраняет
ориентацию. Точнее, нужно показать, что построенная по пра-
правилу выходящего вектора ориентирующая форма(— l)l+aVl (и) =
= 7а(и) грани Ка лишь положительным множителем отли-
отличается от П*-образа ориентирующей формы (—\)i+aV' (v) =
= 7a',(w) грани Ka:.
Согласно правилам замены переменных 5.2.7 для построе-
построения формы П*Уа' дифференциалы dvk, входящие в форму
( — l)'+aVl {и), следует заменить выражениями V -^jdu1
421
(k = 1, 2 m, k Ф i'). При этом получается
ГГ[(-l)''+aV (v)] = detЯ(яу • (-l)''+eV(и)
или ПТ? (о) = det D (it \K? (-1) l'+a' (- l)i+a Vla (и).
Здесь
f
detDf*b\ = det
at,1
ди'
at,1 at,1
du
'~'
at,1
du
dv''-' dv1'-'
do
*'
аи1
ди'
du1 dtr
аи'-» a«'+1 ¦"
du1-' dul+1 "¦
ди'
da
at,
"a?
dv
at,m at,"
аи2 '" du'-' dui+' "' du
dvm
——m
— якобиан диффеоморфизма я, суженного на грань К„. Чтобы
установить знак якобиана det D (к |кЛ, вычислим определитель
диффеоморфизма к в точках грани К„:
йч1 at,1 ач1
(•) (det О«) |к4 = det
at,1
du'
dv''-'
du'
0
du1
dvm
du'
du'
du'
0
du'
dvm
du'
•"¦ du' "
ot)
dv''
'" df '
du'
dvm
du'
dum
dv''-'
dum
0
dum
dvm
" 'я m
du
В матрице под знаком определителя все элементы в строке
с номером /', кроме dv''/ди1 обращаются в нуль, поскольку
в точках грани К? функция v'' принимает постоянное значе-
значение: v''(u', и', ..., и1'1, a, ui+\ ..., ит) — а'. Разлагая опре-
определитель в формуле (*) по элементам строки с номером i, по-
получаем
(detDn)l !=. (-D'^'detPfw
.422
а'
Здесь я Li — сужение диффеоморфизма я на грань
а
det D Ы |КЛ — минор матрицы Dit, получаемый вычеркиванием
столбца с номером i и строки с номером /'. Множитель dvl'/du'
заведомо отличен от нуля. Его знак определяется следующим
образом: если а — а' = 1, то значениям v1' < 1 отвечают значе-
значения и' < 1, поэтому дю1'1ди1 > 0. Аналогично, если а = а' = 0,
то значениям v1' > 0 отвечают значения и* > 0, поэтому и в
этом случае dvl/dul>0. В случаях а = 0, а'= 1 (а=1,
а' = 0) значениям v1' < 1 отвечают значения и1 > 0 (соответ-
(соответственно у'' > 0, и' < 1). Поэтому дь1'1ди1 < 0 в обоих этих слу-
случаях. Вместе взятое это показывает, что
d//<3«'=(-l)a+aV7dM'| и
(det D«) \Ki = (-l)i+a (- \f+a' det Z) Ся |КЛ •
a 4 a/
dv1'
Учитывая условие положительности параметризаций, det Оя > О,
заключаем отсюда, что формы V'a и ПТ?, отличаются на Ка
лишь положительным коэффициентом:
detDi
Проследив за произведенными выкладками, нетрудно прове-
проверить, что последнее соотношение остается справедливым, даже
если не договариваться о том, что диффеоморфизм я сохраняет
ориентацию куба. Таким образом, справедлива формула
n*vt',=
а
ди1
показывающая, что диффеоморфизм я сохраняет или меняет
ориентацию куба Ко и его границы одновременно. D
Таким образом, мы убедились, что объект, введенный фор-
формулой 15, — граница клетки — является инвариантным.
18. Клеточной цепью называется конечная формальная ли-
линейная комбинация априорно ориентированных клеток одной
размерности, dimM, = m, с целыми коэффициентами: П =
=^]2=1а'М;. При этом символом (—Мг) обозначается клетка М*
с ориентацией, противоположной ее априорной ориентации, сим-
символами 2М<, ЗМ,- и т. д. обозначаются клетки, включенные в со-
состав цепи в количестве двух, трех и т. д. экземпляров.
Границей цепи П называется цепь дП = ?f=ia'C.M*-
Пример. Граница клетки Мо = фКо есть цепь дМо =
= Z;, a (—1)г+а Ма- Здесь Ма — (ш — 1)-мерная клетка, Ма=
= фКц, снабженная соответствующей априорной ориентацией.
423
Пусть и — форма, заданная на клетках М,-, входящих в со-
состав рассматриваемой цепи П = V а'М^. Образуем выраже-
выражение У а' \ со,
19. Конструкция V а'\ со называется интегралом формы©
по цепи П = 2^ о'М,-, и обозначается символом \ со, так что
\ со = V сх( \ со.
Определение 19 позволяет вычислить интеграл по границе
клетки.
*20. Интеграл от (т—1)-формы со, заданной на границе
<ЭМ0 клетки Мо = фКо (dim Ко = /"). вычисляется по формуле
ем '•а м' '•а к'
О а а
где М? — грань клетки и KJ — грань куба, снабженные ориен-
тациями, отвечающими формам W*Vl и V' = dul Л ...
... /\ du'~l Л dui+l Л ... Лdum соответственно.
0 Первое равенство имеет место в силу того, что граница
клетки Мо есть цепь dM.0 = Y,La(—l)i+aMa> в которой перво-
первоначальная ориентация Ма задается формами Ч?*у', второе — по
определению интеграла по клетке Ма (см. 5). D
Теперь все приготовлено для того, чтобы сформулировать
основную в этом параграфе теорему.
'21. Для. всякой гладкой дифференциальной (гп—1)-формы
со, заданной на замыкании ориентированной клетки Мо
(dimMo=m), справедлива следующая формула интегрирования
по частям — формула Стокса — Пуанкаре:
\ со = \ da.
ам,
© Пусть <р: Ко->-Мо — некоторая, скажем положительная, па-
параметризация клетки Мо, гр:Мо-»-Ко — соответствующее коор-
координатное отображение, ty(x)= и, ф («) = *. Рассмотрим гладкую
форму Ф*со, заданную на параметризующем кубе, ориентирован-
ориентированном согласованно с Мо. Для этой формы справедлива формула
интегрирования по частям (см. 5.7.21):
J ф'ю = J йф'со.
эк. к.
424
Запишем интегралы, стоящие в обеих частях последнего ра*
венства, как интегралы по клеточной цепи и клетке. В соответ-
соответствии с определением интеграла по цепи 19 имеем:
_ г
со.
ек '•а к' '•а м< ам.
О а а О
С другой стороны, в силу перестановочности операций замены
переменной и внешнего дифференцирования и определения ин-
интеграла по клетке
Ко Ко
da.
Mo
Сравнение конечных формул дает искомый результат. >
Доказав формулу Стокса — Пуанкаре для единичной клетки,
можно без труда обобщить ее на случай цепи.
*22. Пусть П —клеточная цепь (dimll = m), П=][]агМг;
ю — заданная на Пи<ЗП гладкая дифференциальная форма за-
лентностью m—1. Тогда справедлива следующая формула
интегрирования по частям:
\ со = \ da>.
аи й
О Для доказательства этой формулы следует скомбинировать
определения 15, 19 и предложения 20, 21. 5
Используя введенную ранее меру ц на клетке, можно запи-
записать выведенную формулу интегрирования по частям в виде
равенства интегралов от скалярных функций, заданных на Мо
и дМо. Сделаем это для трехмерной и двумерной клетки в трех-
трехмерном евклидовом пространстве. В результате мы получим
классические формулы Гаусса — Остроградского и Стокса. Эти
формулы имеют широкое применение в самых разных областях
физики. Обычно. их записывают в векторной форме, используя
при этом так называемую внешнюю нормаль. Внешняя нормаль
на клетке определяется не только ориентацией самой клетки, но
и ориентацией евклидова пространства, в котором лежит клет-
клетка. Таким образом, вывод формулы Гаусса — Остроградского
и позднее — формулы Стокса — из формулы Стокса — Пуанкаре
мы начнем с построения внешней нормали к границе трехмерной
и двумерной клетки.
Стандартный ортонормированный положительный базис в Е
обозначим через {si}zi=v а отвечающие ему декартовы коорди-
координаты— через {*'},_,• Пусть Мо — ориентированная трехмерная
клетка в Е, Ко — параметризующий куб, ориентированный со-
согласованно с Мо; x=(f{u)—некоторая положительная пара-
параметризация клетки, дМо — граница клетки, ориентированная co-
corn
гласно правилу выходящего вектора, п(х) — положительная
(единичная) нормаль на дМ.о. Согласно 2.20 и построению 2.21,
вектор п(х) представляется в виде нормированного векторного
произведения п(х) = \[е[, е2] |~' [е[, е2] базисных векторов {е\, е2)
касательного пространства Тамо(-*0,, взятых в правильном по-
порядке, т. е. так, что базис 1е[, е'Л положителен в Тамо(*)- Отме-
Отметим, что по определению векторного произведения тройка
{е[, е'2, п (х)\ ориентирована одинаково со стандартным базисом
*23. Положительная нормаль на границе трехмерной клетки
в трехмерном пространстве всюду совпадает с единичной внеш-
внешней нормалью, т. е. направлена вовне клетки Мо.
© Рассмотрим какую-либо определенную клетку границы, ска-
скажем М{. Используя координатное отображение ф, образуем ска-
скалярную функцию (ярI — l = ul(xl, х2, х3)—1. Вблизи Mj и вне
клетки Мо выполнено неравенство ul(x\x2,x3)—1 > 0, внутри:
их(х1,х2,х3)— 1 < 0, а на самой граничной клетке М}: их(х\
л:2, л:3) = 1. Кроме того, справедливы следующие равенства:
и1 (х\ х2, x3)—l= (gradи1 (х0), х — х0) + о(х — х0), х0е= Mj,
'дит== 1 ='Тхт~д1Г^'д1^Тй1Г']г~дхт~дпг = \^гаАи1
ди1 п ди1 дх1
ди' dxi ди1 дх2 ди1 дх3 ди* \ ' ди1
Из последних двух равенств (/ = 2,3) непосредственно видно,
что вектор grad и1 (х) в точках лгеМ} ортогонален к Тамо(я).
Первое равенство — формулы Тейлора — показывает, что вектор
grad «' (х) в точке х е MJ направлен вовне клетки — в ту сто-
сторону, где и1 (х1, х2, х3)> 1.
Наконец, используя второе равенство, (gradu1, ду/ди1} = 1,
можно показать, что единичная внешняя нормаль grad и1-
• | grad и11 положительна.
По условию положительности параметризации базис {ду/ди1,
ду/ди2, d(f/du3} положителен в Е. Убедимся, что базис {grad и1,
d(f/du\ d(f/du2} также является положительным (рис. 23). Для
этого нужно проверить лишь, что определитель матрицы пере-
перехода от одного базиса к другому положителен. Запишем правило
перехода в виде линейной системы с пока что не полностью оп-
определенными коэффициентами /*:
42Q
Умножая первое уравнение на gradw1, получим (gradw1,
а" -'" '¦'> = /{ |grad«42, и так как (gradu1, дфих)=1, то
*24. Пусть A^^^^jc'^ej — гладкое векторное поле на
I. Тогда справедлива формула Гаусса — Остроградского:
div А (х) dn (х) = \ (А (х), п (х)) d\i M (х).
Мо
дМ„
Здесь л — единичная внешняя нормаль на 5М0; ц^, цаМо — меры,
заданные согласно 10 на клетке Мо и ее границе дМо и связан-
связанные с римановыми формами объ-
объема на Мо и <ЭМо, отвечающими
евклидовой метрике в Е.
© Построим по полю А диффе-
дифференциальную форму
тА# ==аЧх2 A dx3 +
+ a2 dx3 Л dx1 + a3 dx1 Л dx2.
Согласно формуле Стокса — Пу-
Пуанкаре для клетки 21 справед-
справедливо равенство \dxA# =
— \ тА*. Интеграл, стоящий в
левой части на основании 11 мо-
может быть еведен к интегралу Лебега:
да' . да2 , дс
дх1 "+¦ дх2 +Тм
Рис. 23.
Интеграл, стоящий в правой части, следует преобразовать, ис-
используя равенства 2.21:
dx1 Adx2\dM0 = cos(n, e3)V, dx2 A dx31 <3M0 = cos (n, e{) V,
dx3 A dx11 dMo — cos (n, e2) V, и тот факт, что положительная нор-
нормаль п совпадает с внешней на 5М0. Сводя полученный интег-
интеграл на основании 11 к интегралу Лебега по мере \iSN,, полу-
получаем искомую формулу:
з
= [
SMo f
(A, n)d\id
а*{х) cos (л,
i
м,- Э
427
Пусть теперь Мо — ориентированная двумерная клетка в
трехмерном пространстве, п — положительная нормаль на Мо.
Граница 5Мо клетки Мо представляет собою одномерную цепь
из четырех клеток Wa (/= 1, 2, а = 0, 1). Ее ориентация одно-
однозначно определена ориентацией клетки и задается в терминах
выбранной параметризации правилом выходящего вектора. Этот
способ задания ориентации бывает неудобен тем, что приводит
к вычислениям, связанным с конкретной параметризацией. Мы
предложим «геометрический» способ задания ориентации гра-
границы двумерной клетки, в некотором смысле аналогичный спо-
способу задания ориентации границы трехмерной клетки с по-
помощью внешней нормали. Заметим прежде всего, что
*25. Касательное пространство границы клетки Тамо(х) (х е
е дМ.о) является одномерным подпространством двумерного ка-
касательного пространства Tmo(jc) клетки в той же точке.
Формально говоря, точка границы х не принадлежит клетке,
но согласно нашей договоренности (см. § 1) считаем, что пара-
параметризация л; = ф(и) допускает продолжение за пределы куба
Ко на более широкий куб К. При этом касательное пространство
Тм0 (х) оказывается уже обычным касательным пространством
расширенной клетки М = срК.
Очевидно, что в Тк(х), х^ <ЗМо, существует единственное од-
одномерное подпространство, ортогональное к подпространству
Там» (*)• Базисный вектор этого подпространства естественно на-
назвать вектором нормали к дМ.о в точке х. Из двух возможных
направлений этого вектора мы выберем одно следующим об-
образом:
26. Единичный вектор v(x), лежащий в касательном про-
пространстве клетки Тмо(л:) в точке границы х (х е Шо), ортого-
ортогональный к касательному пространству Там0 (*) и направленный
вовне клетки Мо, назовем единичным вектором внешней (поло-
(положительной) нормали или положительной (внешней) нормалью
в точке границы х (рис. 24).
Термин «вовне клетки», будучи геометрически ясным, тем
не менее требует пояснения, которое будет дано далее.
27. Будем говорить, что вектор К = Dq>(uo)H e Тм(#о) на-
направлен вовне клетки в точке границы Хо, если при всех доста-
достаточно малых положительных значениях а точка ц>(ио-\-<хН) ле-
лежит на клетке М вне клетки Мо.
28. Единичный вектор / (х) s Таом (х) называется положитель-
положительным вектором касательной или положительной касательной в
точке х границы дМ0 двумерной клетки Мо, если ортонорми-
рованный базис {п(х), v(x), t(x)} ориентирован так же, как и
стандартный базис пространства Е (см. рис. 24).
Для вывода классической формулы Стокса из общей фор-
формулы Стокса — Пуанкаре существенно установить, что направ-
направление положительной касательной t(x) совпадает с направле-
направлением базисного вектора в касательном пространстве к границе
428
Рис. 24.
им в точке х.
в Т
Там-(*), определенного по правилу ориентации границы — пра-
правилу выходящего вектора. Пункты 29, 30, 31 будут посвящены
доказательству этого важного утверждения. Читатель, склонный
считать этот факт очевидным, может при первом чтении непо-
непосредственно перейти к пункту 32.
Пользуясь координатным отображением яр, зададим на рас-
расширенной клетке М функции и!: х-*-ty'(x) (i = 1,2), сопостав-
сопоставляющие каждой точке клет-
клетки М ее криволинейные ко-
координаты и1, и2 в расширен-
расширенном параметризующем ку-
кубе К. При этом клетка Мо
выделяется внутри клетки М
условиями 0 < u'(jt) < 1,
г—1,2. Вне клетки Мо на
клетке М по крайней мере
одно из этих условий нару-
нарушено.
Рассмотрим границу
клетки Мо. Она состоит из
клеток Ша = {х : и1 (х) = а}
(а = 0, 1, i= 1,2). Постро-
вектор
ортогональный в Е к Тмг (л:0) и направленный вовне
а
клетки. Для этого зададим на клетке М риманову мет-
метрику, суоюая на Тм(х) скалярное произведение, определенное
в Е, и построим с ее помощью векторные поля grad и' (i =1,2)
на М.
Напомним, что координатное отображение и = гр(х), по пред-
предположению является неособым. Поэтому всюду на клетке М вы-
выполнено условие grad и1 ф 0.
*29. Вектор (— l)'+agrad«*(*e Ма) ортогонален к каса-
касательному пространству клетки М? и направлен вовне клетки Мо
в соответствии с определением 27.
© Рассмотрим для определенности граничную клетку
MJ = {х '¦ и1 (х)= 1, 0 < и2(х) < 1}. Выбрав некоторую точку
xoeMJ, xo = ф(н0), запишем произвольный вектор К касатель-
касательного пространства TMi (л;0) в виде K—Dq> (u0) (H2g2) = (ду/ди2) И2.
По определению
(grad ы1 (дс0), ?>фЯ)Тм (Хо) = (du\ H)u == Я1.
В частности, отсюда следует, что
429
м
(хЛ,
так что выполнено условие gradw1 (д:0) J. TMi (л;0).
Запишем теперь формулу Тейлора первого порядка 1.33 для
функции и1 вблизи точки Ха = ф(«о), положив ха = <р(«о + аЯ):
«' (ха) — «' (х0) = и1 (ха) — 1 = (<W>V («о). аЯ) + о (а) =
= а (grad и1 {х0), Dy (и0) Я)Тм ы + о (а).
Если вектор Я выбран так, что D(f(uo)H = gradM'^o), то
«' (ха) — и1 (х0) = «' (ха) — 1 = ct | grad и1 (х0) |2 + о (а) =
/ I J ..1 / .. \ Ю I _/(\Ч
Видно, что при всех достаточно малых положительных а точка
и}\ха) лежит вовне клетки Мо, поскольку и}{ха)> 1. D
*30. Тройка векторов {п, gradu^dif/du2} образует положи-
положительный базис в Е.
0 Убедимся прежде всего, что <grad ul,dy/du1') > 0, <grada',
ду/ди2} = 0. Действительно, <grad«', d(f/duly=(W*dul, D(fgi) =
= {dul,gi) = 61. Разлагая вектор ду/ди1 по ортогональному ба-
базису {grad и1, ду/ди2}, получим
Таким образом, матрица перехода от положительного базиса
{п, d(f/du\ ду/ди2} к базису {п, grad и1, ду/ди2} имеет вид
/10 0 4
= О 1 gl2 ,
40 0 1 /
Следовательно, базис {/г, grad«',^/^«2} положителен вместе
с базисом {п, d(f/dul, ду/ди2}. D
Заметим, наконец, что на граничной клетке MJ базис
{n,gradu\d(f/du2} является ортогональным и положительным.
Он лишь нормировкой векторов отличается от положительного
базиса {«, Igradu'T grad и1, | дц/ди2 \~ ду/ди2}. Обозначив че-
через v нормированный вектор нормали к М{: | grad и11~ grad«' = v
и через t единичный положительный касательный вектор:
\ду/ди2\~хд($/ди2 = t, запишем этот базис в форме {n,v,t}. Ус-
Условием ортонормированности и положительности базиса {п, v, /}
единичный вектор t определяется однозначно: ( = tE{n/\v} =
= [n,v]. Таким образом, доказано следующее утверждение:
*31. На границе дМ0 клетки Мо положительный базис {t(x)}
определяется по правилу t =[n, v], где п — положительная нор-
нормаль на клетке Мо; v — вектор внешней нормали на дМ0.
*32. Пусть А= 2i=ifli (x)ei — гладкое векторное поле, за-
заданное в области Q трехмерного евклидового пространства Е,
содержащей ориентированную клетку Мо. Пусть далее
430
лебеговы меры, определенные на клетке Мо и ее границе
Го = <ЗМ0 с помощью римановой метрики, полученной сужением
на касательное расслоение клетки скалярного произведения
<, >Е. Пусть, наконец, п — единичная положительная нормаль
на клетке Мо, t — единичная положительная касательная на ее
границе Го. Тогда справедлива следующая формула Стокса ин-
интегрирования по частям:
Го= J(rotA, n
Мо
© Применим формулу Стокса — Пуанкаре к форме А* =
= Х1;=1а* (x)dxl, суженной на касательное расслоение клетки Мо:
\ А# = \ d\#. Интеграл, стоящий в правой части, можно
J ам0 J м,
вычислить, пользуясь формулами 2.21 и 11;
з
\ dk# — \ V —2у dx1 Л dx1 — \ (rot А, я)^^.
Мо Me i, / = 1 Mo
С другой стороны, согласно утверждениям 2.23, 11 и 31 интег-
интеграл, стоящий в левой части, преобразуется к виду
о
= \
ам0
Поскольку равны интегралы в левых частях двух последних
равенств, равны и их правые части. Тем самым формула Стокса
доказана. D
Входящие в формулы 24, 32 выражения
Mo
, п) dii^, dim Ma = 2, J (A, t) rfцГ|
Го
имеют простой физический смысл, отражаемый их названиями.
33. Первое из них называется потоком поля через поверх-
поверхность Мо, а второе —циркуляцией поля А по контуру Го.
§ 4. ГЛАДКИЕ МНОГООБРАЗИЯ
И МНОГООБРАЗИЯ С КРАЕМ
Мы уже знаем, что путем суммирования клеток получаются
более сложные геометрические объекты — цепи. Задав на эле-
элементах цепи дифференциальные формы, можно выполнять над
ними операции анализа: дифференцирование и интегрирование,
в частности вывести формулу интегрирования по частям. Од-
Однако при всех этих операциях приходится в сущности действо-
431
вать по отдельности на каждой клетке, поскольку на цепи
еще нет единого понятия гладкости и единой ориентации.
В этом параграфе, сцепляя клетки друг с другом специаль-
специальным образом, мы построим новый объект, называемый гладким
многообразием. На гладком многообразии уже можно определить
единое понятие гладкости, единую риманову метрику, а иногда
и единую ориентацию.
Пусть {М (/)}f=1 — конечное множество клеток одинаковой
размерностью dimM(f) = m, лежащих в конечномерном евкли-
евклидовом пространстве Е (dimE = п ^ пг). Не ограничивая общ-
общности, можно считать, что параметризующие кубы {К @}?=1 этих
клеток лежат в одном евклидовом пространстве Q и не пересе-
пересекаются между собой. В каждом из кубов К (г) введем свои де-
декартовы координаты {«s(/)}m — локальные координаты, ассоции-
ассоциированные с ортонормированным базисом {gs(i)}™=i-
K(i) = {u(i): 0<us(i)< 1, s = 1,2, ..., m}.
Функцию, задающую параметризацию клетки М(/), обозна-
обозначим через ф(г); ф@ [u(i)] = x(i)&M.(i); соответствующее коор-
координатное отображение обозна-
обозначим символом ^ (i); ^ (i) [x (i > ]=
= ы(/). Пару {М(г), -ф </)> на-
назовем картой клетки M(i).
Условимся с самого начала,
что рассматриваемые коорди-
координатные отображения и пара-
параметризации имеют класс глад-
гладкости Ск.
1. Будем говорить, что
клетки М(/), М(/) сцеплены,
Рис. 25.
если их пересечение М(//) =
= М(/)ПМ(/) непусто, а его
= ^(/)M(i/) в кубах K(i),
К(/) соответственно являются открытыми множествами.
Имея пару сцепленных клеток (рис. 25), можно рассмотреть
отображения К(/7) на К (ij) и обратно:
прообразы K(t/)=4>(OM(t/).
я (//) = * (О ф (У) IК (/О,
Ясно, что эти отображения имеют класс гладкости Ck и, будучи
композицией диффеоморфизмов, сами также являются диффео-
морфизмами: л(ij): К(ji)->K(ij), л(/7): К(ij)-*¦ К(//), л(ij)n(ji) =
= 1к@. я(/0 я(»7)= !««/)•
2. Отображения я(//), я (//) называются сцепляющими диф-
диффеоморфизмами или сцеплениями клеток M(i), M(/).
*3. Если клетки M(j'), M(/') сцеплены, то в их общих точках
касательные пространства совпадают.
© В общих точках клеток M(i), M(/), т. е. на их пересечении,
имеются две параметризации: cp(i) и ср(/), согласованные с по-
помощью сцеплений: ф(г) |К(//) = ф(/) °n(ji) |К(»"/)Л Пользуясь
правилом дифференцирования сложной функции, вычислим ка-
касательное пространство Тм(<)(-*0 В точке x^M.(ij), х =
[()] () [()]
Ф@ [()] Ф(/) [(/)]
Тм(о(*) = Dtf(i) [«(О!G = Dq>(/) [u(j)]Dn(ji) [u@]G.
Поскольку Dn(ji)[u(i)]G = G и ?ф(/) [m(/)]G = Тщп(х), полу-
получаем отсюда: Tmi)(x) = Тм(/>(л:). D
4. Набор клеток назовем связным, если для каждой пары
клеток этого набора М, М' существует конечная последователь-
последовательность попарно сцепленных клеток, {М (i)},_i (M(i) сцеплена
с M(t—1), M(i+ 1)), первый элемент которой совпадает с М,
а последний — с МЛ
5. Связный конечный набор попарно сцепленных клеток
{M(i)} размерностью т называется гладким многообразием раз-
размерностью т. Набор всех карт (M(i), ф@} клеток. входящих
в рассматриваемое многообразие (локальных карт многообра-
многообразия), называется атласом данного многообразия. Если все коор-
координатные отображения {^(i)} имеют класс гладкости Ск, то го-
говорят, что рассматриваемое многообразие имеет класс глад-
гладкости С*.
*6. Пример. Трехмерная единичная сфера (в R3) является
многообразием класса С00.
© Трехмерная сфера х2 -f- у2 + z2 = 1 представима в виде объ-
объединения двух клеток, каждая из которых отображается с по-
помощью стереографической проекции соответственно из северного
и южного полюса сферы на квадраты К+i = {—3 < х, у < 3,
2 = +1}, лежащие соответственно в плоскостях г = Ч:1
(рис.26).
Предоставляем читателю самостоятельно записать соответ-
соответствующие параметризации, координатные отображения и сцеп-
сцепления и убедиться в их гладкости. D
Ясно, что одно и то же многообразие можно разными спосо-
способами представить в виде объединения попарно сцепленных кле-
клеток. Например, в предыдущем примере мы могли бы строить
клетки с помощью стереографической проекции на плоскости
г/ = ±1 или х=±\. Каждому представлению многообразия
в виде объединения сцепленных клеток М(/) отвечает свой атлас
{M(t)ii|>@} локальных карт.
7. Два атласа (M(i), tf(i)}> {М'(/г), ^'(&)} называются экви-
эквивалентными, если их объединение также является атласом.
433
Требование, сформулированное в 7, в сущности сводится
к тому, что координатные отображения, отвечающие рассматри-
рассматриваемым атласам (и тем самым сцепления и параметризации),
имеют общий класс гладкости. Теперь можно сформулировать
инвариантным образом понятие гладкости многообразия:
8. Множество всех эквивалентных атласов называется диф-
дифференциальной структурой гладкого многообразия. Если все
рассматриваемые атласы имеют класс гладкости С*, то говорят,
что многообразие является гладким класса Ck.
В точности так же, как мы вводили понятие касательного (ко-
касательного, тензорного) расслоения (расслоенного простран-
пространства) клетки, можно ввести понятие касательного (кокасатель-
ного, тензорного) расслое-
расслоения многообразия. Вслед-
Вследствие инвариантности каса-
касательных пространств — не-
независимости их от парамет-
параметризации — все эти расслое-
расслоения являются инвариантны-
инвариантными объектами: они опреде-
определяются не конкретным атла-
атласом многообразия, а лишь
рис 26 его дифференциальной струк-
структурой. Среди всевозмож-
всевозможных расслоений, которые
можно связать с данным многообразием, наиболее интерес-
интересными являются наряду с касательным расслоением Тм расслое-
расслоения ЛР(М) антисимметрических полилинейных форм валентно-
валентностей р = 0, 1 m и расслоение симметрических билинейных
форм. Сечения этих расслоений суть функции, заданные на мно-
многообразии и принимающие значения в слое. При р = О это —
скалярные функции, f:M->-R. Функции, заданные на многооб-
многообразии Жив каоюдой точке х принимающие значения в слое
Тм(^), называются векторными полями, а функции, принима-
принимающие значения в слое Ар(х)— пространстве всех антисимметри-
антисимметрических форм над Тм(х)—дифференциальными формами — в
полном согласии с терминологией, принятой для единичной
клетки A.8—1.10).
9. Функция /, заданная на многообразии M = U(i)M(j) и
принимающая значения в пространстве вещественных чисел
(или каком-либо другом конечномерном линейном нормирован-
нормированном пространстве) либо в слое какого-либо расслоенного про-
пространства с базой М, называется непрерывной (гладкой), если
ее сужение на каждую клетку M(i) является непрерывной
(гладкой) функцией.
Напомним, что непрерывность (гладкость) функции f на
клетке согласно 1.16 устанавливается путем пересадки функции
f в параметризующий куб. Например, для вещественной функ,-
№
ции f(x) эта пересадка осуществляется просто заменой перемен-
переменной с помощью параметризации х = у(и) данной клетки М:
Для функций, принимающих значения в пространстве полили-
полилинейных форм, заданных на касательном расслоении клетки, за-
замена переменных происходит по формуле
(Ф*ш) (и) (Я,, Я2, ..., #р) = со(ф(и)) (D(f(u)Hu D(f(u)H2, ...
..., D(f(u)Hp);HuH2, ..., Нр еЕ G, D(fHs е= Тм(х), s = 1,2 p.
Сказанное позволяет сформулировать 9 в удобной форме:
10. Функция /, заданная на многообразии М, называется
непрерывной (гладкой) относительно данной дифференциаль-
дифференциальной структуры класса Ck, если для какого-либо атласа
{M(i), гНО} из числа эквивалентных все функции
{Ф* (/) [f | М (г) ]} являются непрерывными (гладкими) на соот-
соответствующих параметризующих кубах. Если эти функции имеют
один и тот же класс гладкости С1, I ^ k, то говорят, что функ-
функция f I раз непрерывно дифференцируема.
Ясно, что класс гладкости функции f не зависит от выбора
атласа из числа эквивалентных.
На множестве всех дифференциальных форм, заданных на
данном гладком многообразии, можно определить поточечно ли-
линейные алгебраические операции, внешнее умножение и внешнее
дифференцирование; на каждой составляющей клетке диффе-
дифференцирование определяется формулой 1.24, г. е. сводится к диф-
дифференцированию по соответствующим локальным координатам;
согласно 1.25 результат дифференцирования не зависит от вы-
выбора локальных координат.
На каждой из клеток, составляющих многообразие, могут
быть, помимо дифференциальной, введены и другие структуры —
ориентационная и метрическая. Распространение их на все мно-
многообразие является непростым делом. Основным инструментом
для распространения локальных структур на все многообразие
служит разбиение единицы.
11. Семейство {?@}f_i вещественных неотрицательных глад-
гладких функций, заданных на многообразии М, называют гладким
разбиением единицы, подчиненным атласу (М(г), ty(i)}lmml, если
Sf=i ?(') М = 1 f ? @ Iх] > 0 ПРИ х^М. (/), ? (/) [х] = 0, когда
*«=М\М@-
*12. На гладком многообразии класса Ck существует разбие-
разбиение единицы того же класса гладкости.
© Считая каждый из параметризующих кубов К@ единич-
единичным: K(i) = {u{i): 0 < us{i) < 1, s=l,2, ..., m}, можно за-
задать на нем функцию
го
f) (/) [и @] = П ехр {- [us (t) (l-us (/))]-'}.
s-l
435
Очевидно, что эта функция является бесконечно дифференцируе-
дифференцируемой и стремится к нулю вместе со всеми производными, когда
точка «(/) приближается к границе куба. С помощью коорди-
координатного отображения ф(/) [x]= u(i) можно пересадить функ-
функцию fj (i) на соответствующую клетку M(i): л(ОМ =
= Л (О {4@ [х]}, а затем продолжить ее нулем на M\M(i).
Нетрудно убедиться, что полученная этим путем веществен-
вещественная функция, которую мы, не опасаясь недоразумений, обозна-
обозначим через л (ОМ. является гладкой функцией на М в смысле
определения 9. Действительно, рассматривая клетку М(/), сцеп-
сцепленную с клеткой М(г), исследуем функцию
( Г[ ii) о п (ii) \u (/)], и (/) €= К (it),
(Ф (/) л (t)) (щ) == | 0> и {j) е к j х к (до_
Эта функция имеет, по меньшей мере, класс гладкости Ск на
К (/0 и все ее производные до порядка k включительно обра-
обращаются в нуль на границе <?К(/0 множества K(/t)> ^K (/'/)==
== {К(/0\К(/0} П К(/), поскольку она является образом части
границы куба К(г') при отображении я(/7). Далее, по правилу
дифференцирования сложной функции имеем
Отсюда видно, что первые производные функции f\(i) °n{ij) об-
обращаются в нуль на <ЭК(/О, поскольку n(ij):dK(ji)-*-dK(i) и
Dx\(i) |5К.@ —0- Вычисляя последовательно старшие производ-
производные сложной функции f)(i) °n(ij) до порядка k, убеждаемся, что
они также обращаются в нуль на dK(ji). Поэтому они мо-
могут быть продолжены нулем на K(/)\K(/i) с сохранением глад-
гладкости. Итак, функция Ф*@т1 @—гладкая функция класса Ск
на К(/).
Искомое разбиение единицы можно скомбинировать из не-
неотрицательных функций г) (г) следующим образом:
Ясно, что знаменатель является положительной функцией наМ.
Поэтому составленное отношение есть неотрицательная гладкая
функция, положительная на клетке М(г) и равная нулю на до-
дополнении M\M(i). Кроме того, справедливо равенство
Разбиение единицы понадобится нам в первую очередь для
задания ориентации на многообразии.
j 13. Сцепленные клетки М, М' называются согласованно
(или когерентно) ориентированными, если на общей их части
МAМ' касательные пространства Тм(я) и Тм'(*) ориентиро-
ориентированы одинаково.
436
14. Многообразие М называется ориентируемым, если можно
таким образом приписать ориентацию составляющим его клет-
клеткам, что каждые две сцепленные клетки оказываются ориенти-
ориентированными согласованно.
15. Если все клетки, составляющие многообразие М, ориен-
ориентированы таким образом, что каждая пара сцепленных клеток
ориентирована согласованно, то говорят, что на многообразии
М задана ориентация, или многообразие М ориентировано.
*16. Для того чтобы многообразие было ориентируемым, не-
необходимо и достаточно, чтобы на нем существовала непрерыв-
непрерывная невырожденная дифференциальная форма со старшей ва-
валентности. При этом ориентация каждого из касательных про-
пространств Т(х), т. е. разбиение всех базисов в Т(х) на два клас-
класса эквивалентности, осуществляется в соответствии со знаком,
который имеет величина со(еье2, ..., ет) на данном базисе
О Достаточность. Если на многообразии М (dimM = т)
существует непрерывная невырожденная m-форма со, то ее су-
сужение co(i') = со]М(г) на каждую из составляющих клеток M(t)
также является непрерывной невырожденной формой. С ее по-
помощью можно указанным ранее способом задать согласованную
ориентацию всех касательных пространств клетки M(t') (см. 2.9,
2.10). При этом автоматически оказываются согласованными
ориентации сцепленных клеток.
Необходимость. Допустим, что ориентации сцепленных
клеток согласованы. Это означает, что на каждой из клеток
М(/) существует непрерывная невырожденная m-форма co(i)>
причем на пересечении М(г')ПМ(/) сцепленных клеток формы
со (г), со(/) отличаются разве лишь положительным непрерывным
функциональным множителем: a(i)[x] = a(ij)[x]a>(j)[x],
a(ij)[x]>0.
Пусть (?(t)}—разбиение единицы, отвечающее атласу (M(i),
t|)(i)}. Построим m-форму Ef^^CO*0 @- Эта форма заведомо не-
непрерывна на многообразии М. Покажем, что она является не-
невырожденной. Действительно, рассмотрев ее значение в точке х,
лежащей на клетке М(/), видим, что
? I @ [х] со (i) [х] = { ? ? (/) [х] а Щ) [х] } со (/) [х].
В точках х, принадлежащих лишь клетке М(/), следует поло-
положить по определению a(i/) = 6,/. Тогда вообще при всех х из
М(/) коэффициент, стоящий в фигурных скобках, оказывается
положительным, поскольку
N
T а(Щх]>0.
0
437
Таким образом, форма 2f=i?@O)(i) является невырожденной
и, следовательно, может играть роль ориентирующей формы на
многообразии М. Э
Выкладки, которые мы проводили при доказательстве по-
последнего утверждения, становятся особенно наглядными, если
на многообразии задана локально евклидова риманова метрика.
17. Если на многообразии М задана непрерывная невырож-
невырожденная симметричная билинейная форма < , }х ковариантной ва-
валентностью 2, то говорят, что на многообразии задана риманова
метрика.
Если форма < , }х положительна, то риманову метрику назы-
называют локально евклидовой или положительной.
Исходя из локально евклидовой римановой метрики, можно
построить на каждой ориентированной клетке М(г) риманову
форму объема V(i) (см. 2.14).
Пользуясь разбиением единицы, соберем из римановых форм
объема на клетках M(i) риманову форму объема на ориенти-
ориентированном многообразии М, составленном из этих клеток.
18. VmM = Z?@MK@.
Определение 18 римановой формы объема ориентированного
многообразия, снабженного локально евклидовой римановой
метрикой, корректно, поскольку не зависит от конкретного вы-
выбора атласа (M(i), i])(i)} из числа эквивалентных; действитель-
действительно, на общей части сцепленных и согласованно ориентирован-
ориентированных клеток М(/)ЛМ(/) вследствие независимости римановой
формы объема от конкретной параметризации выполнено усло-
условие V(i) [х] = V(j) [х] —- Ум[х]. Последнее равенство, V(j) [x] =
= Via [x] , следует из основного свойства разбиения единицы
На основании определения 18 можно построить понятие
интеграла формы по многообразию.
19. Форму старшей валентности ю, заданную на ориентиро-
ориентированном римановом многообразии М, составленном из сцеплен-
сцепленных клеток {M(i)}, назовем измеримой, если ее сужение на
каждую клетку есть измеримая форма в смысле определения 3.3.
Согласно замечанию, сделанному после 3.3, свойство формы
быть измеримой не зависит от выбора параметризаций и, следо-
следовательно, не зависит от выбора атласа (M(j), г|з(г)} многообра-
многообразия М из числа эквивалентных. Используя разбиение единицы
{?(/)}, подчиненное данному атласу (M(i), t|>(/)}, можно опре-
определить интеграл формы по многообразию:
N
20. \ ю = ]TJ j в? (/).
438
Этот интеграл может быть сведен к сумме интегралов Лебега
по параметризующим кубам с помощью формулы 3.6. Он яв-
является линейной функцией суммируемой формы со согласно 3.7.
На ориентированном римановом многообразии можно ввести
меру, аналогичную лебеговой, исходя из соответствующей меры,
определенной на отдельных клетках (см. 3.10). Именно:
21. Назовем часть М' многообразия М измеримой, если ее
индикатор — форма
Км [х], х е М',
о, xe=M\M"
является измеримой. Измеримую часть М' сг М назовем куском.
Мерой* куска многообразия назовем число \ %м' = М*(М')-
Мера (i(M') является аналогом площади поверхности. Для
двумерных и одномерных многообразий, лежащих в евклидовом
пространстве Е, риманова метрика на которых получена суже-
сужением на касательное пространство скалярного произведения в Е,
мера (х(М') совпадает с площадью поверхности и длиной дуги
в общепринятом смысле (см. 3.12). Мера, введенная на много-
многообразии определением 21, обладает всеми естественными свой-
свойствами меры Лебега (см. гл. 4, § 1), а интеграл по ней — свой-
ствами интеграла Лебега.
Нашей ближайшей целью является вывод формулы Стокса—¦
Пуанкаре для многообразий и запись ее в виде равенства интег-
интегралов по мере \i. Мы будем пользоваться, конечно, уже получен-
полученной ранее формулой Стокса — Пуанкаре для клетки 3.21 и ее
частными случаями 3.24, 3.32.
Введем прежде всего понятие замкнутого многообразия и
понятие многообразия с краем.
22. Многообразие М, лежащее в пространстве Е, называется
замкнутым, если оно представляет собою замкнутое множество
в Е.
Напомним, что многообразие есть объединение клеток, каж-
каждая из которых является образом открытого куба в G. Опреде-
Определение 22 указывает на то обстоятельство, что всякая точка х,
лежащая на границе клетки M(t), принадлежит какой-либо дру-
другой клетке М(/). Если это не было бы выполненным, то объеди-
объединение клеток уже не было бы замкнутым множеством.
Важным классом многообразий являются так называемые
многообразия с краем. Точному их определению предпошлем их
неформальное описание.
Напомним, что границей клетки М = <рК мы назвали (см.
3.15) цепь, состоящую из клеток M* = <pK* меньшей размерно*
* Вводя меру на многообразии несколько иначе, можно задать ее и для
неориентируемых многообразий (см. Л. Шварц. Анализ. Т. 2. М., 1972,
528 с).
439
Mf(j)
сти: dimM— l, являющихся образами граней Ка параметризую-
параметризующего куба К. Клетки Ма мы назвали граничными. Пусть
{Ма@} — набор всех граничных клеток, отвечающих данному
атлйсу (M(i), ty(i)} многообразия М. Мы ограничимся рассмот-
рассмотрением лишь таких атласов, которые обладают следующим свой-
свойством:
23. Всякая граничная клетка, содержащая хотя бы одну
точку (внутренности) многообразия М, целиком принадлежит
многообразию М.
24. Составляющую клетку M(t) многообразиям назовем син-
сингулярной, если некоторая ее граничная клетка Ма (/) не пересе-
пересекается с многообразием М. Граничную клетку Ма(/), не принад-
принадлежащую многообразию
М, назовем сингулярной,
а отвечающую ей грань
параметризующего ку-
куба — сингулярной гранью.
25. Мы еще раз сузим
рассматриваемый класс
атласов, ограничившись
такими, в которых каж-
каждая клетка М(г') имеет не
более одной сингулярной
граничной клетки Ма(/).
Опишем правила сцеп-
Рис 27. ления сингулярных кле-
клеток.
26. Если сингулярные и обычные клетки М(г), М(/) пересе-
пересекаются так, что их сингулярные граничные клетки не имеют
общих точек, то будем называть их сцепленными, если они сцеп-
сцеплены в обычном смысле 1.
Если сингулярные клетки M(i), M(/) пересекаются так, что
их сингулярные клетки Ма (О, Mjj (/) имеют общие точки
(рис. 27), то будем называть клетки М(/), М(/) сцепленными
в том случае, когда сцеплены и клетки Ма (i), Mp (/). При этом
отображение я(//) = Ф@ф(/)> распространенное, по договорен-
договоренности (см. начало § 1), на граничные клетки, называется сцеп-
сцепляющим отображением.
27. Многообразие М называется многообразием с краем,
если оно представляет собою связное объединение обычных и
сингулярных клеток, сцепленных согласно правилам 26. При
. этом объединение (сцепленных) сингулярных граничных клеток
называется краем многообразия М и обозначается символом дМ.
Ясно, что край многообразия не обязательно связен. Однако
*28. Каждая связная компонента края многообразия
М (dimM = m) является многообразием с размерностью п%— 1.
440
Согласно нашим определениям точки края многообразия М
не входят в М. Однако в этих точках можно определить каса-
касательное пространство Тм(я), считая, что оно совпадает с каса-
касательным пространством Тм' (х) расширенной клетки М', на ко-
которую в соответствии с договоренностью может быть продолжена
параметризация. При этом согласно 3.13
*29. Касательное пространство Тзм(лг) в точке края много-
многообразия является (пг—1)-мерным подпространством в Тм(лг)
(ЭМ)
()
Допустим, что многообразие с краем М ориентировано. Тем
самым ориентирована каждая его сингулярная клетка, а вместе
с ней, по правилу выходящего вектора 3.14, и ее сингулярная
грань.
*30. Пусть M(s), M(^)—две сцепленные и согласованно
ориентированные сингулярные клетки. Если их сингулярные гра-
граничные клетки Ma (s), Ма' (/) также сцеплены, то ориентации,
задаваемые на них по правилу выходящего вектора, являются
согласованными.
© Пусть K(s), К@~паРаметРизУюЩие кубы, отвечающие
рассматриваемым клеткам; <p(s), <p(t)— соответствующие пара-
параметризации: <p(s) [м]= x(s)& M(s), keK(s), q>(t) [v] = *(/)<=
eM(/), !)ёК@, a ^(s), if(/)—координатные отображения:
$ (s) = q>-1 (s), $(t) = q>-1(t). Обозначим через я(/,s) = if(/)<p(s)
диффеоморфизм, сцепляющий как сами клетки, так и их гра-
границы: n(t,s)[u]= v. Введем обозначения M(s, /) = M(s)f|M(f),
дМ (s, t) = Ma (s) П Ma' (/). Диффеоморфизм n{t, s) устанавливает
гладкие взаимно однозначные соответствия между прообразами
множества M(s, t) в кубах K(s), K@ и между прообразами
множества <5M(s, t) на границах кубов: лЦ, s):i|3(s)M(s, <)=>¦
=>¦ 1|з (t) M (s, t), л (t, s): i|) (s) дМ. (s, t) =J- -ф (/) дМ. (s, t). Ориентируем
кубы K(s), K(/) согласованно с клеткой, т. е. будем считать обе
параметризации <p(s), <p@ положительными. Обозначив через
VG(s), V°(t) соответствующие такой ориентации евклидовы фор-
формы объема в G, можно записать их в виде Va(s)= dul A du2rA...
... /\dum, VG(t)= dvl Adv2'A ... Л dvm. По условию о согла-
согласовании ориентации кубов K(s), К@ диффеоморфизм n{t, s)
сохраняет ориентацию кубов:
П* {t, s) VG(t)= det Dn {t, s)[u]-V°(s), u<=\p (s) M (s, /),
detDn(t,s)[u]>0.
Мы должны убедиться, что диффеоморфизм я(/, s) сохраняет
также и ориентацию границ кубов. Мы уже решали подобную
задачу ранее (см. 3.17), когда рассматривали диффеоморфизм
куба на себя, сохраняющий ориентацию. Способ рассуждений
в рассматриваемом случае остается прежним, можно даже оста-
оставить прежними обозначения, однако теперь следует проводить
рассмотрение не во всем кубе, а лишь на прообразах пересече-
441
ния клеток \|)(s)M(s, t), ty(t)M.(s,t) и на прообразах пересече-
пересечения сингулярных граничных клеток i|)(s)<9M(s, t), ^{t)dM.(s, t).
Обозначая через V?, (t), V'a (s) положительные формы объема на
гранях К?,(/), K?(s) кубов К@> K(s), определенные по правилу
выходящего вектора (см. 3.14):
Va'(t) = (-lf+a' dv1 Л dv- Л • • • Л dv1''1 Л dvl'+l Л ... Л dvm,
Vi (s) = (- l)'+e du Л du2 Л • • • Л du'-1 Л dui+l Л ... Л dum,
и рассуждая так же, как в 3.17, получаем на множестве
4>(s)M(s,0:
П* (t, s) F^', @ = det Dn (t, s) [и] \ dv^/du1 \~l Vla (s).
С учетом равенств a(t,s) = $(t)y{s), Il*(t, s) = Ф*(s)W\(t) —
= [W* (s)]~lxP*(t) и условия detDit > 0 это означает, что формы
f'(/O[,(/) и Ч;* (s) K^ (s) задают на куске dM.(s,t) одинаковую
ориентацию.
Таким образом, оказываются согласованными ориентации
сцепленных сингулярных граничных клеток М? (s), M?, (t), опре-
определенные с помощью правила выходящего вектора на парамет-
параметризующих кубах, если согласованы ориентации клеток M(s),
М(О. J)
Доказанное утверждение в применении к связной компоненте
края многообразия означает, что
*31. Каждая связная компонента края ориентированного мно-
многообразия М (с краем) сама является ориентируемым многооб-
многообразием. Ее ориентация однозначно определяется" по правилу
выходящего вектора, если задана ориентация многообразия М.
Сформулируем отдельно правило выходящего вектора для
определения ориентации края.
Рассмотрим в точке х края многообразия М касательное
пространство Тм(л;), совпадающее по определению с касатель-
касательным пространством какой-либо расширенной клетки, содержа-
содержащей точку х. Если при координатном отображении точка х пере-
переходит в точку и = if (x) грани К'а сингулярного куба, ориенти-
ориентированного согласованно с многообразием (г. е. так, что локаль-
локальная параметризация <р является положительной), то определим
выходящий вектор ееТм(#) как образ е = (—l)aDq>(u)gi вы-
выходящего вектора (—l)agt на грани К? параметризующего куба.
После этого ориентация касательного пространства Там (я) как.
подпространства Тм(.»0 определяется следующим правилом: ба-
базис {ей ег, .... ет-\) в Там (я) считается положительным, если
базис {е, ей е2 ет-\) положителен в Тм(лг).
442
Этот способ ориентации эквивалентен следующему: базис
{ей е2, .... em-i} положителен в Тдк(х), если на нем принимает
положительное значение форма W (У1а), полученная пересадкой
на многообразие из куба формы объема Va — (— \)г+а dux Л
Л du2 Л • • • Л du''1 Л dut+1 Л • • • Л dum ориентированной грани
На ориентированном многообразии, снабженном римановой
локально евклидовой метрикой, правило выходящего вектора
можно сформулировать в виде правила положительной нормали,
аналогичного соответствующему правилу, описанному в 2.20 в
применении к двумерным и трехмерным многообразиям в R3.
При доказательстве формулы Стокса — Пуанкаре нам пона-
понадобится единое разбиение единицы для многообразия с краем,
пригодное как для самого многообразия, так и для его края.
*32. Пусть {М(г)> *|>@}—атлас многообразия с краем М,
{M.d(i), i|)(i)}—соответствующий атлас края <ЗМ (т. е. №d(i)—
сингулярная граничная клетка клетки М(г)). Тогда существует
семейство гладких неотрицательных функций ?(г)[х], заданных
на многообразии М и на его краю <ЗМ и обладающих следую-
следующими свойствами:
а)
? (г) М =
/) U
б)
Класс гладкости функций ?(г) совпадает с классом гладкости
многообразия М.
© Для каждой обычной клетки M(i) построим отвечающую ей
функцию r\(i) так, как было указано в 12. Для сингулярных
клеток построение несколько модифицируем.
Пусть М (i) — сингулярная клетка, Жд (г) = Ma @ — соответ-
соответствующая ей сингулярная граничная клетка, К@ — параметри-
параметризующий куб и Ka (i) — грань этого куба, отвечающая клетке
Ма (г) = Ма (*')• Рассмотрим функцию
ехр [— р-1 A — р)-1
а=1,
ехр[-и'A-и')Г1.
= 0.
443
Эта функция бесконечно дифференцируема в кубе K(i) и обра-
обращается в нуль вместе со всеми производными на всех гранях
куба, кроме Ка@- На грани Ка(О и внутри куба K(t) функция
положительна.
Пересадив функцию f]sa (i) на многообразие, продолжим ее
нулем на дополнение сингулярной клетки М (i) [} М? (i) в М U сШ:
¦п (г) [х] — <
{ О, х е= M U <5М \ {М (О U MJ @}.
Используя гладкость сцеплений л (/г) и рассуждая в точности
так же, как и в 12, нетрудно убедиться, что функция ti(/)[x]
является гладкой на многообразии с краем Ж[]дМ. и ее класс
гладкости совпадает с классом гладкости многообразия.
Образуем семейство функций
Это семейство функций является искомым разбиением единицы,
т. е. обладает указанными ранее свойствами.
Действительно, на многообразии с краем М (J дМ. знамена-
знаменатель функции не обращается в нуль; поэтому функция ?(i) яв-
является гладкой. Свойства а), б) очевидны. ' D
*33. Формула Стокса — Пуанкаре для ориен-
ориентированного многообразия с краем. Пусть со —
(т—1)-форма, заданная на ориентированном многообразии
с краем MU<3M. Тогда справедлива следующая формула интег-
интегрирования по частям: \ dm= \ со.
© Используя построенное в 32 разбиение единицы, запишем
форму со в виде Xf-i ? @ М ш (*)• Пользуясь линейностью интег-
интеграла относительно интегрируемой формы (см. 3.7) и формулой
Стокса — Пуанкаре для клетки 3.21, получим
М
Ввиду специальных свойств построенного разбиения единицы,
интегралы по всем клеткам M.sa (/), не являющимся сингуляр-
сингулярными граничными клетками, обращаются в нуль. Поэтому
== Е
*34. Пусть М — трехмерное ориентированное многообразие
в евклидовом пространстве R3; Г — его край — конечное объ-
444
единение двумерных ориентированных многообразий; А(д;) =
= Xi-i a' (x)et — гладкое ве_кторное поле,заданное на некоторой
области в R3, содержащей М; п — вектор положительной (внеш-
(внешней) нормали на дМ(см. 2.20); fx — лебегова мера в R3; цг —
площадь поверхности. Тогда справедлива формула интегриро-
интегрирования по частям, носящая название формулы Гаусса — Остро-
Остроградского:
\ div A d\i = \ (А, п) d\iT.
м г
© Доказательство сводится к применению формулы Стокса
— Пуанкаре в локальных координатах и переходу к интегралам
Лебега аналогично 3.24. 3
*35. Пусть М — двумерное гладкое ориентированное много-
многообразие с краем Г в трехмерном пространстве R3; А(х) —
= 2?=ia' (x)ei — гладкое векторное поле, заданное на некоторой
области в R3, содержащей М. Если п — вектор положительной
нормали на М и t — вектор положительной касательной на Г,
тогда справедлива следующая формула интегрирования по ча-
частям, носящая название формулы Стокса:
jj(rotA, n)rf(iM=j<A, t)d\iv.
м г
Здесь цм — площадь поверхности на М, а цг—длина дуги на
= Г (см. 3.12).
§ 5. ЦИКЛЫ И ГРАНИЦЫ.
НЕЗАВИСИМОСТЬ ИНТЕГРАЛА ОТ ПУТИ
В физике часто встречаются ситуации, когда интегралы от
1-форм по путям, лежащим на многообразии, на самом деле не
зависят от пути. Например, работа, затраченная на подъем груза
массой m с нулевой отметки х3 = 0 на высоту хъ = Н в поле
тяжести, представляется интегралом по пути L от 1-формы
\ а\ dx1 + а2 dx2 + а3 dx3 = mg \ dx3,
но в действительности не зависит от пути и равна mgH.
Исследование соответствующей общей ситуации оказывается
совсем не простым делом. Решающее значение здесь имеет зна-
знаменитая теорема Ж. де Рама, указывающая условия, при кото-
которых замкнутая форма, заданная на многообразии, является точ-
точной и, следовательно, интеграл от нее может быть преобразован
по формуле Стокса — Пуанкаре,
445
Основная часть параграфа посвящена изложению материала,
необходимого для понимания теоремы Ж. де Рама, но имеющего
важное и самостоятельное значение. В первую очередь мы изу-
изучим подробнее операцию вычисления границы д, введенную ра-
ранее. Будет развит алгебраический аппарат, позволяющий иссле-
исследовать свойства операции д для цепей. Затем мы рассмотрим
«правильные полиэдры» и с их помощью перенесем полученные
результаты на случай многообразий. При этом будет установ-
установлено, что край многообразия М имеет пустую границу ддМ. =
= 0 — факт интуитивно очевидный, но не простой для доказа-
доказательства. В этом параграфе мы также построим для полиэдров
и многообразий классы гомологии, характеризующие их тополо-
топологическую структуру. Именно в терминах базисных циклов груп-
группы гомологии формулируется теорема Ж. де Рама. В конце па-
параграфа рассматривается интегрирование 1-форм по одномерным
путям, лежащим на многообразии, и доказывается теорема
Ж. де Рама в частном случае 1-форм.
В 5.7.17 мы определили границу п-мерного куба, лежащего
в п-мерном пространстве. Когда при ориентации его граней нам
понадобилось ввести понятие выходящего вектора, мы назвали
выходящим всякий вектор, прикрепленный в точке х границы
куба и направленный вовне куба. Такое определение было удов-
удовлетворительным лишь в ситуации, когда AimK,ia==n — 1. В об-
общем случае, когда рассматривается m-мерный куб в п-мерном
пространстве (m<n), требуются некоторые почти очевидные
уточнения, касающиеся определения границы, которые мы сей-
сейчас сделаем.
В евклидовом пространстве Е (dimE = n) введем декартовы
координаты {х\х2, ..., хп}, связанные с ортонормированным
базисом, {в\, б2, ..., еп}, x = zli^lxiei. Пусть p = (pi,P2, ¦•¦
..., pm) — упорядоченный набор индексов р сг A, 2, ..., п),
m < п.
1. Стандартным m-мерным кубом КР в Е называется множе-
множество
КР == {х: О < хр' < 1, i=l, 2, . .., пг; х' = xl t<? p},
. 2. Стандартный куб называется ориентированным, если ба-
базису {ePl, ер2, ..., epj в подпространстве Ер = {х: х = ^iSf,xlet}
приписана ориентация. Если базис {ePl> еРг, ..., ePm} (pi <
< р2 < ... < Pm) считается положительным, то соответствую-
соответствующая ориентация куба Кр называется стандартной.
*3. Стандартной ориентации куба Кр отвечает форма объема
]/р = d/. Л dx^ Л • ¦ ¦ Л dx9™.
446
4. Границей стандартного куба КР называется цепь стан-
стандартных кубов с меньшей размерностью:
р ? ()р.а,
а=о, 1; г=1
где Кр, а — грани стандартного куба КР: К1,а = {х: 0<хР;<1,
/= 1, 2, . . ., 1—1, / + 1, .. ., т, xPl = а, х* = х\, ( ф р}, стан"
дартно ориентированные с помощью базисов {еР], еРг, ..., ePl_x>
еР[+1, ..., еРт} или, эквивалентно, с помощью форм объема
Vl „ = dxp' Л dxp* Л • • • Л d*"'-1 Л dxpi+> Л • • • Л ^р«.
*5. Ориентация стандартных граничных кубов Кр, а, задавае-
задаваемая дополнительными множителями (—1)'+а, эквивалентна
ориентации, задаваемой правилом выходящего вектора.
© Действительно, учитывая, что роль выходящего вектора на
грани Кр, а играет (—1)а~ еи видим, что
(-1H-1 dxp' А (-1)а+г Vi.a= (-\)'~l dx^ A dx^ Л dx?* Л
... Л dx0'-! Л dxPi+l А ¦ ¦ ¦ Л dxp™ = V». 5
Наряду со стандартными кубами в пространстве Rn можно
рассматривать нестандартные кубы — образы стандартных при
ортогональных преобразованиях и преобразованиях подобия.
Границей нестандартного куба естественно назвать образ гра-
границы стандартного при соответствующем преобразовании. Оче-
Очевидно, что для всякого единичного нестандартного куба всегда
можно указать ортонормированный базис, относительно кото-
которого он выглядит как стандартный.
6. Пусть П = J]p=i арКр — произвольная (/n-мерная, m < п)
цепь в евклидовом пространстве Е (dimE = n). Границу цепи
дИ определим равенством <ЗП = ?p=i ap<3Kp-
*7. Для всякого куба К выполнено равенство ддК = 0.
© Доказательство достаточно провести для некоторого стан-
стандартного куба. Более того, можно с самого начала считать, что
р= 1,2, ..., m и п = ш, поскольку во всех дальнейших по-
построениях координаты xf (t ф р) сохраняют постоянные значения
х* = х\. Фиксируя стандартную ориентацию куба К с помощью
стандартной формы объема V = dxx Л dx2 Л ... 'Л dxn, а ориен-
ориентацию стандартных кубов К'а = {х: xl = a, 0<r'<l, s Ф /}
(/=1,2 п, а = 0, 1) — с помощью п—1-форм V =
—dxx Л dx2 Л ... Л dxl~x Л dxi+x Л ... Л dxn, запишем в соот-
соответствии с определением 4 границу куба в форме цепи:
? (O
a=0, 1; i=l
447
Компоненты границы (—1)'+"Ка оказываются при этом ориен-
ориентированы с помощью выходящего вектора, роль которого играет
(—1)а-'е/, так что форма объема Vla= (—1)!+а V1, домноженная
спереди на 1-форму (—l)a-ldxl, отвечающую «выходящему» век-
вектору, превращается в основную форму объема:
(-IH dx' Л [(-1)'+а dx Л dx Л • • • Л dx1-1 A dx'+l Л ¦ • •
Вычислим границу куба К'а- Она является линейной комби-
комбинацией с коэффициентами (±1) кубов:
К& —{*: *< = а, *' = р, 0 < х= < 1, s=l, 2 s&i, /},
ориентированных с помощью форм объема V11 которые полу-
получаются из основной формы объема V = dx1 Л dx2 Л ... Л dx"
вычеркиванием членов dx', dx1:
3=0. l
Коэффициенты (—l)/+psgn(t —/) выбраны здесь с таким рас-
расчетом, чтобы на каждой компоненте К„'ц границы J^
форма (— 1)'+Psgn(i — j) V'l, домноженная спереди на 1-форму
(—l)P-'dx', которая отвечает выходящему вектору (—1)р~'е/,
превращалась в форму объема V' стандартно ориентированной
грани К(. Если i < /, то sgn (i — /) = —-1 и
(-1) (-1)е~1 (-1)/+(J dx1 A dx1 А ... Л dx1-1 A dxi+l ...
... dx'~l A dxl + l A ¦•• Adxn=dxl Adx2 A •-. A dx'"] Л
Л dx T A ¦ • • Л dx = V ,
поскольку для того чтобы переставить dx1 на свое место, нужно
сделать j — 2 транспозиций. Если же i > /, то для этого тре-
требуется /—1 транспозиция. Поэтому с учетом условия
sgn(/ — /)== 1 получаем
(—1)е~' (— 1)/+е dx1 Л dx А ¦ • • Л dx'-x A dxl+] A •••
... Л dx'~l A dxi+l А ¦¦• Adxn = dx{ Adx2... A dx{-1 A
Л dxl+l Л ••• Adxn = Vi.
Таким образом, вообще:
ддК — Z (-
I, /-I, i ф-j; а. Р=0. 1
Заметим, что каждый куб К^р = К^а (/</) входит в построен-
построенную цепь дважды (рис. 28): с коэффициентом (—1)*+/-к*+Э в гра-
448
ницу куба К„ и о противоположным коэффициентом}
(—1)'+/+<х+р+1 в границу куба К{(- Следовательно, ддК = 0. Э
*8. Для всякой цепи П справедливо равенство ддП = 0.
Рассмотрим теперь клеточные цепи, являющиеся гладкими
неособыми взаимно однозначными образами цепей, составлен-
составленных из кубов. Именно, пусть М = <рК — ориентированная
клетка в Е, являющаяся гладким неособым взаимно однознач-
однозначным образом ориентированного куба К (dimK = w). Ориен-
Ориентации клетки и куба удобно считать согласованными таким об-
образом, что положительному базису {gs}^li в кубе отвечает поло-
жительный репер {?<pgs}™=1 на клетке.
Относительно диффеоморфизма <р мы условимся, как и
прежде (см. § 1), что он допускает продолжение с сохранением
всех своих свойств на более широкий
куб К', так что образом этого куба яв-
является клетка М' = <рК', содержащая
рассматриваемую клетку М. Это по-
позволяет, как мы уже знаем, рассматри-
рассматривать касательные пространства клетки
в точках ее границы. Напомним, что
9. Клеточной цепью П в Е называ-
называется формальная линейная комбинация
клеток одной размерности с целыми
коэффициентами: П = 2]р=1 аРМ„.
10. Границей клетки М = фК на-
назовем клеточную цепь, являющуюся
<р-образом границы соответствующего
параметризующего куба:
дм = Ф<Ж =
Рис. 28.
При этом каждая клетка границы Wa = (fKla считается ориенти-
ориентированной согласованно с соответствующим граничным кубом
К.?- В частности, клетка (—1)/+а Ма ориентирована так, что по-
положительный базис в точке х е М?, дополненный «выходящим»
вектором (—1)а-1Дф(ы)е,(ф(м) = л;), становится положительным
базисом касательного пространства Т(х) клетки М в той же
точке.
11. Границу цепи П. = ?%=,) арМ.р определим равенством
p=i
Отметим, что вследствие сформулированного условия продол-
продолжимости диффеоморфизма ф, граница дП является цепью ориен-
ориентированных клеток, т. е. клеточной цепью размерностью m—1.
15 Зак. 193
449
*12. Для всякой клеточной цепи справедливо равенство
ддП = 0.
© Достаточно воспользоваться линейностью операции вычис-
вычисления границы и перестановочностью <9ф = ф<3. 3
Рассмотрим множество {П} всевозможных m-мерных цепей,
являющихся линейными комбинациями данного фиксированного
конечного набора ориентированных клеток Мь М2, ..., М«
с целыми коэффициентами II = 2/Li a ^-i ¦
13. Определим на множестве {П} операцию сложения цепей
по правилу
N \ / N \ N
1=2>Чр')м,.
*14. Множество {П}, снабженное операцией сложения 13,
оказывается коммутативной (абелевой) группой с образующими
{M.iI=l и нулевым элементом По = ^f=1 0 • М/. Роль обрат-
обратного элемента для цепи U = ^Jl_lalM.i играет цепь —П =
= I?-i(-a')M,.
Далее мы вводим понятие правильного полиэдра. Этот объект
занимает промежуточное положение между цепью и многообра-
многообразием. Тем самым мы подготовим
почву для исследования края много-
многообразия и его топологических ха-
характеристик.
15. Полиэдром Q называется
объединение конечного числа непе-
непересекающихся ориентированных
клеток (вообще говоря, разных раз-
размерностей).
17. Цепь Qm, состоящая из всех
клеток размерностью пг, входящих
в состав данного полиэдра Q, назы-
называется его m-мерным остовом. Абе-
лева группа Cm(Q), образующими
элементами которой служат все
клетки, составляющие Qm, называ-
называется группой m-мерных цепей дан-
данного полиэдра.
17. Полиэдр Q будем называть
правильным, если он является замк-
замкнутым множеством в Е и для вся-
всякой m-мерной клетки MeQm ее
граничные клетки совпадают с гра-
граничными клетками соседних либо не пересекаются с ними.
Примеры, правильного (а) и неправильного (б) полиэдра
изображены на рис, 29,
450
Рис. 29.
Далее мы рассматриваем лишь правильные полиэдры, кото-
которые наиболее близки по своему устройству к гладким много-
многообразиям.
*18. Операция д вычисления границы задает отображение
группы цепей Cm(Q) правильного полиэдра Q в группу цепей
G(Q)
д: Cm(Q)->C,n_,(Q).
При этом ddCm(Q) = O.
© Доказательство следует немедленно из определения 10, если
воспользоваться тем, что в силу условия замкнутости граница
каждой клетки MeQm содержится в Cm_i(Q); равенство
ddCm(Q) = 0 для каждого m следует из 12. D
19. Цепь Пс Cm(Q) называется циклом, если сШ = 0. Цепь
П a Cm (Q) называется границей, если существует такая цепь
n'c=Cm+i(Q), что П = <Э1Г.
Наша ближайшая задача — выявить структуру множества
rm(Q) — множества всех циклов размерностью ш, построенных
из клеток правильного полиэдра Q. Циклы в дальнейшем будем
обозначать символами у, уь Y2, •••. границы — символами
б, бь бг
*20. Множество Fm(Q) всех циклов размерностью пг является
группой относительно операции сложения цепей 13 и образует
подгруппу в Cm{Q).
© Доказательство следует из определения цепи 9. D
*21. Всякая граница является циклом.
© Доказательство следует из 12. D
*22. Множество всех границ Am(Q) размерностью m является
подгруппой группы циклов rm(Q).
23. Циклы y> y' называются гомологичными, если их раз-
разность у — у' есть граница: y — у'= 8. Цикл, являющийся гра-
границей, называется гомологичным нулю.
*24. Описанная в 23 «гомология циклов» есть отношение эк-
эквивалентности.
© Доказательство предоставляется читателю. D
Гомология позволяет разбить множество rm(Q) всех циклов
размерностью m на классы эквивалентности—классы гомоло-
гомологии, относя к одному классу {у} все циклы, гомологичные циклу
у и, конечно, друг другу.
*25. На множестве всех классов гомологии {y} размерностью
m можно определить операцию сложения: {y} + {y'} = {у + y'}»
которая является коммутативной: {y} + {y'} —{y'} + {y}-
Снабженное этой операцией множество всех классов гомоло-
гомологии данной размерности оказывается коммутативной (абелевой)
группой — фактор-группой (см. 1.1.1.21) группы циклов по
группе границ rm(Q)/Am(Q). Роль нулевого элемента в этой
группе играет класс Am циклов, гомологичных нулю, т. е. границ.
15* 451
26. Построенная таким образом абелева группа носит на-
название группы гомологии размерностью т данного полиэдра Q
или группой /n-мерных гомологии. Она обозначается символом
Я„,т. е. rYm(Q)=rm(Q)/Am(Q).
27. Если в абелевой группе Н можно указать такой конеч-
конечный набор элементов h\, h%, ..., hp, что всякий другой ее эле-
элемент представляется в виде линейной комбинации /г = Sj_ia'^
с целыми коэффициентами а', и в то же время ни один из эле-
элементов h\, /гг, ..., hp не может быть выражен в виде линейной
комбинации прочих, то говорят, что группа Н имеет конечное
число образующих h\, h2, . ¦., hp и ранг р.
*28. Группы гомологии полиэдра Q имеют конечное число
образующих.
© Согласно определению m-мерный остов Qm полиэдра Q со-
состоит из конечного числа клеток. Поэтому группа Cm(Q) всех
цепей размерностью т имеет лишь конечное число образую-
образующих. Следовательно, ее подгруппы Fm(Q), A,n(Q) также имеют
лишь конечное число образующих. Предоставляем читателю са-
самостоятельно проверить, что при этом фактор-группа
rm(Q)/Am(Q) также имеет конечное число образующих. 5
С каждой образующей h абелевой группы можно связать
одномерную подгруппу H(h), состоящую из элементов О, Л,—h,
h + h = 2h, —h — h = —2h, ... и т.д.
29. Элемент h называется элементом конечного порядка,
если группа H(h) конечна, т. е. среди элементов h, h + h, h+
+ h + h, ... имеется нулевой Если все суммы вида h-\-h-\-
-\-h ... -\-h, содержащие не более г — 1 элементов, отличны
от нуля, а сумма, содержащая г элементов, равна нулю, то го-
говорят, что элемент h имеет порядок г. В этом случае группа
H{h) также называется группой порядка г.
Если среди элементов h, h + h, h -\- h -\- h, ..., нет равных
нулю, то элемент h называется элементом бесконечного порядка
или свободным. Соответствующая группа H(h) называется сво-
свободной абелевой группой.
*30. Пример: группа деления окружности {Z}m.
Отметим на единичной окружности @ ^ ф < 2я) пг точек
(ps = 2ns/m (s = 0, 1, ..., m—1). На множестве {cps} введем
операцию сложения «по модулю /п»: ф5 + ф, =<P|S+<1 . где
[s-f/]ffl = s-f <, если s -f t < m и [s + t)m = s + t~ tnp, где
p — целая часть (s + t) /m. Множество {ф5}, снабженное указан-
указанной операцией, является конечной абелевой группой с одной
образующей фь Ее порядок равен пг.
*31. Пример. Множество всех целых чисел {Z}oo, снабжен-
снабженное обычной операцией сложения (+), является свободной абе-
абелевой группой ранга 1, т. е. с одной образующей.
Можно показать, что всякая группа гомологии имеет обра-
образующие конечного либо бесконечного порядка и таким образом
462
представляется в виде так называемой «прямой суммы» одно-
одномерных подгрупп конечного порядка и одномерных свободных
подгрупп *.
32. Число рт свободных образующих — ранг свободной под-
подгруппы группы гомологии Нт — называется m-мерным числом
Бетти; порядки ги прочих образующих называются коэффициен-
коэффициентами кручения размерностью т.
Циклы, входящие в классы гомологии, которые служат обра-
образующими группы Нт, называются базисными циклами группы
гомологии Нт.
Рис. 30.
Рассмотрите следующие простейшие полиэдры 33—36. По-
Постройте на них базисные циклы, найдите числа Бетти и коэффи-
коэффициенты кручения.
Все эти полиэдры получаются из стандартного квадрата
(куба) путем отождествления сторон.
*33. Квадрат К = {х = (х\ х2): 0 < х1 < 1, 0 < х2 < 1}.
Указание. В К все циклы размерностью 0 гомологичны
нулю: любые две точки можно соединить одномерной клеткой,
лежащей в К. Это означает, что 0-мерная группа гомологии есть
{Z},», |3о = 1; Pi = 0; Рг = 0, поскольку двумерная клетка не яв-
является циклом.
*34. Клетка любой размерности пг имеет тривиальные группы
гомологии: Но ={Z}oo, Hs = 0, s = l,2, ..., m.
*35. Top: Q = {x = (x1, x2): 0 < x1 < 1, 0 < x2 < 1, (*', 0) =
= (x\ 1); @,x2) = (l,*2)} (рис.30).
Указание. Базисные циклы суть yi = {(xl, 0), 0 ^ xl < 1},
у2 ={@, х2), 0 ^.х2 <С 1} и соответствующие образующие груп-
группы гомологии Нх имеют бесконечный порядок; р0 = 1, поскольку
каждая точка тора гомологична другой, ибо любые две точки
можно соединить одномерной цепью (даже одной клеткой);
р, == 2, р2 = 1, поскольку единственным циклом размерностью 2
является сам тор.
*36. Бутылка Клейна: Q = {х = (х\ х2): 0 < х1 < 1,
0
1; @, Х2)=(\,х*), (х\0)=A-х\ 1)} (рис.31).
* См.: А. Г, Курош. Теория групп. 3-е изд. М., 1967, 648 с.
453-
Указание. Базисные циклы суть yi ={(д;!, 0), 0 ^ х1 < 1},
Y2={@,хг), 0^д;2<1}. Образующая группа гомологии Ни
отвечающая циклу уи имеет порядок 2; образующая, отвечаю-
отвечающая циклу 72, имеет бесконечный порядок; р0 = 1, р, = 1,
Рг = 1. Коэффициент кручения г\ равен 2.
Тор может быть вложен в трехмерное пространство без само-
самопересечений. Бутылка Клейна не допускает такого вложения —
она не является ориентируемым многообразием. Оба эти объекта
формально можно представить себе в виде поли-
полиэдров в R2.
Алгебраическая теория, развитая нами для
циклов и границ, составленных из клеток поли-
полиэдра, может быть применена к исследованию
свойств циклов и границ, лежащих на гладком
многообразии. Первым шагом в этом направле-
направлении является представление многообразия в виде
правильного полиэдра.
37. Клеточным разбиением многообразия^ М
называется представление его замыкания М в
виде правильного полиэдра.
Следующее важное предложение мы приве-
приведем без доказательства.
*38. Всякое гладкое многообразие в R" допу-
Рис 31 екает клеточное разбиение.
Практически, для большинства интересных
многообразий клеточное разбиение удается по-
получить прямым построением. При этом достаточно построить
остов старшей размерности Qm (m = dimM). Остовы низших
размерностей набираются по индукции из граничных клеток
остовов предыдущей размерности. При этом, если многообразие
имеет край, то он также оказывается представленным в виде пра-
правильного полиэдра.
*39. Постройте клеточное разбиение шара в трехмерном про-
пространстве.
Более того, можно установить взаимно однозначное соответ-
соответствие между краем многообразия и границей отвечающего ему
полиэдра.
*40. Пусть М —гладкое ориентированное многообразие раз-
размерностью m в евклидовом пространстве Е, дМ. — его край,
ориентированный согласованно с М при помощи выходящего
вектора, Q — клеточное разбиение М, представляющее собою
правильный полиэдр.
Если все клетки {М„} полиэдра Q, входящие в остов Qm
старшей размерности пг, ориентированы согласованно с много-
многообразием, то его граница dQm состоит из тех и только тех кле*
ток остова Qm-i, которые лежат на краю многообразия. Они об-
образуют клеточное разбиение края,
454
© Поскольку разбиение Q является правильным, всякая клетка
М^_1 его остова Qm-i либо целиком лежит внутри многообра-
многообразия М, либо целиком принадлежит его краю. Клетка M^-i
лежащая внутри, входит в состав границ двух примыкающих
друг к другу клеток м!т, М^. которые она разделяет. Однако
знаки, с которыми она входит в состав их границ, противопо-
противоположны. Действительно, ориентация клетки М^_, как части гра-
границы клетки Мт, определенная с помощью выходящего (из Мт)
вектора, противоположна ориентации клетки M^-i как части
границы клетки Мт, определенной с помощью выходящего
(из Mm) вектора, поскольку эти векторы можно выбрать с по-
помощью параметризации так, чтобы они отличались лишь зна-
знаком. Поэтому в составе границы dQm клетка Mm-i содержится
с нулевым коэффициентом.
Всякая клетка Mm-i остова Qm-i. лежащая на краю много-
многообразия, входит в границу лишь одной клетки М™ , и ее ориен-
ориентация в составе dMjjf определяется правилом выходящего век-
вектора. Таким образом, ориентация клетки, лежащей на краю мно-
многообразия, совпадает с ориентацией края. Клетки Mm-i по по-
строению образуют остов старшей размерности клеточного раз-
разбиения края. Итак, с учетом ориентации справедливо равен-
равенство
<?Qm= Е ЛС1,.
/Mext = ам\
V т-\ )
Здесь суммирование распространяется на все клетки M^li осто-
остова Qm_i, лежащие на краю многообразия. D
*41. Край гладкого многообразия М является замкнутым
многообразием (в смысле определения 4.22) или объединением
конечного числа замкнутых многообразий, дд!А = 0.
© Поскольку край дМ. гладкого многообразия М сам по себе
является гладким многообразием или объединением гладких
многообразий, то проведенное в 40 рассуждение можно приме-
применить также и к нему. Обозначив через Qm-i остов старшей раз-
размерности правильного полиэдра Qd, образующего клеточное раз-
разбиение края <ЗМ, получим формально
где суммирование распространяется на все клетки Мт1г остова
Qm-2 полиэдра Qd, лежащие на краю многообразия <ЗМ
(или на одной из связных компонент края). С другой стороны,
Qm-i = dQm, поэтому <3Qm-i = дdQm = 0. Сумма в правой части
равенства обращается в нуль только в том случае, когда она
455
т. е. Am(M)c
не содержит ни одного слагаемого, т. е. когда граница края не
содержит ни одной клетки и, следовательно, является пустым
множеством. 3
Рассмотрим группу Ст(М) всевозможных клеточных цепей
П размерностью пг, принадлежащих многообразию М, m = О,
1, ..., dimM.
42. Цепь П называется циклом, если <ЗП = 0, и границей,
если существует такая цепь П', что дП' = П. Циклы будем обо-
обозначать по-прежнему буквами у, уи у2, ..., границы—буквами
б, бь бг. Множество всех цик-
циклов размерностью m на много-
многообразии М обозначим симво-
символом Гт(М), множество всех
границ той же размерности —
символом Дт(М).
*43. Всякая граница являет-
является циклом,
сгГт(М).
© Для всякой цепи П е
еДт(М) выполнено условие
ддП = 0. Э
Мноокество всех циклов,
принадлежащих многообразию
М, конечно необъятно. Однако
оно так же, как и множество
циклов полиэдра, обладает замечательной алгебраической
структурой, которая легко выявляется, если ввести уже известное
нам отношение го по логичности.
44. Циклы yi. Y2 называются гомологичными друг другу на
М, если их разность есть граница: ух—72 = ?S e Am(M).
Имеет место следующее важное предложение:
*45. Если Q — клеточное разбиение многообразия М, то для
всякого цикла уеСш(М) найдется гомологичный ему цикл
7'eCm(Q).
Мы не приводим здесь доказательства этого наглядно ясного
предложения (рис. 32). При необходимости для конкретного
цикла уеСя(М) соответствующий цикл y'eCm(Q) может
быть получен прямым построением. В общем случае доказатель-
доказательство этого предложения основывается на тривиальности групп
гомологии tn-мерной клетки (см. 34): цикл у любой размерности
пг (пг ф 0, m < dimM), лежащий в замкнутой клетке М, гомо-
гомологичен нулю в М.
Предложение 45 позволяет свести исследование гомологии
циклов на многообразии к исследованию гомологии циклов на
соответствующем полиэдре. Из него, в частности, следует, что
группы гомологии отвечающего многообразию полиэдра в дей-
действительности определяются лишь самим многообразием и не
зависят от способа построения клеточного разбиения. Поэтому
Рис 32. •
456
далее мы не делаем различий между гомологическими свой-
свойствами многообразия и соответствующего полиэдра. В частности,
мы будем говорить о группах гомологии многообразия, о базис-
базисных циклах многообразия и т. д.
Л. Эйлер ввел важную инвариантную характеристику ориен-
ориентируемых многообразий. Эта характеристика вычисляется сле-
следующим образом:
dimM
где bp—число клеток размерностью р в составе полиэдра Q.
Почти через полтора века после этого А. Пуанкаре показал, что
для ориентируемых многообразий имеет место замечательное
равенство
dim M
х(М)= Z (-npfv
p=i
еде (Зр—р-мерное число Бетти.
Другой важной характеристикой, которую часто принимают
в теории двумерных поверхностей, является род р (М) — число,
равное количеству ручек, которые нужно приклеить к сфере,
чтобы получить поверхность, гомеоморфную данной поверхности
М. Для двумерных поверхностей род и характеристика Эйле-
Эйлера— Пуанкаре связаны равенством %(М) = 2— 2р(М).
В математике, в математической и теоретической физике ча-
часто возникает потребность в интегрировании различных замк-
замкнутых р-форм Q, dQ = 0, по р-циклам, лежащим на многооб-
многообразии М. Оказывается, получаемые интегралы не зависят от ин-
индивидуальных свойств формы и цикла, а лишь определяются об-
общими свойствами класса гомологии, которому принадлежит дан-
данный цикл, и аналогичного класса р форм.
46. Пусть со, со' — две замкнутые р-формы, заданные на мно-
многообразии М, dm = da' = 0. Если их разность точна, т. е. су-
существует р — 1-форма Q, такая, что со' — со = dQ, то говорят, что
форма со' когомологична форме со (или, наоборот, со когомоло>
гична со' или, наконец, со и со' когомологичны друг другу).
*47. Когомология форм является отношением эквивалент-
эквивалентности.
Используя когомологию форм, можно разбить множество
всех замкнутых р-форм, заданных на многообразии М, на клас-
классы когомологий, аналогичные классам гомологии циклов.
48. Чтобы подчеркнуть возникающее соответствие между
этими объектами, иногда называют замкнутую форму коцик-
коциклом, а точную— кограницей.
Рассмотрим интеграл от р-коцикла со по р-циклу у на много-
многообразии М: \ ю. Справедливо следующее важное утверждение*
457
*49. Интеграл \ <o определяется лишь классом гомологии
цикла у и классом когомологий коцикла со.
© Всякий коцикл со', когомологичный со, имеет вид со' = со -f-
+ dQ, а всякий цикл у', гомологичный у, имеет вид у' = у -j-
+ <Ш. Мы должны доказать равенство
(со + dQ) = <j со.
: v
Пользуясь аддитивностью интеграла по отношению к форме и
формулой Стокса — Пуанкаре, получим
I = \ СО +
Y+OT Y+дП V+Sll
J Q=
со.
Далее, используя аддитивность интеграла по отношению к об-
области интегрирования и снова формулу Стокса — Пуанкаре, про-
продолжаем цепочку равенств:
j j J J J J
y+dll v <ЭП у П Y
50. Интеграл \ со, рассмотренный в предложении 49, на-
называется периодом формы со по циклу у или у"пеРИ0Д°м
формы со.
Очевидно, что период точной р-формы по любому р-циклу на
многообразии М равен нулю. Французский математик Ж. де Рам
установил, что имеет место и обратное утверждение.
*51. Если все периоды замкнутой р-формы со на многообра-
многообразии М, отвечающие базисным циклам группы гомологии #Р(М),
равны нулю, то форма со точна.
Читатель может найти доказательство этой глубокой теоремы
в оригинальной книге Ж- де Рама *. Мы докажем ее только для
1-форм (см. 57).
Предложения 49 51 показывают, что в определенном смысле
аналитические объекты — коциклы —¦ являются объектами, двой-
двойственными топологическим объектам — циклам. Эта двойствен-
двойственность является предметом глубокой теории. Развитие этой тео-
теории показало, что разрешимость дифференциальных уравнений
на многообразии также связана с его топологическими свой-
свойствами. Советский математик В. П. Маслов обнаружил, что на
языке топологии решаются многие вопросы о свойствах решений
уравнений, описывающих высокочастотные колебания. Наконец,
* Ж. де Рам. Дифференцируемые многообразия М., 1956. 231 с.
458
в последнее десятилетие обнаружились глубокие связи между
теорией интегрирования нелинейных уравнений и топологией так
называемых римановых поверхностей и анализом на них. Каж-
Каждая из упомянутых связей может быть предметом отдельного
большого курса или даже нескольких курсов.
Мы завершим рассмотрение интегралов от форм по подмно-
подмногообразиям изучением важных для физических приложений во-
вопросов об интегрировании полных дифференциалов и о независи-
независимости интегралов от пути.
Далее, до конца этого параграфа всюду, если не указано
особо, со — это l-форма, со(х) = ?<_i <вг (х) dx', заданная на М —
ориентированном гладком многообразии в R", dim М = m ^ п;
х, у, ... — точки на многообразии М.
52. Путь, идущий на многообразии М из точки х в точку
у, — это одномерная ориентированная цепь Г, такая, что дТ =
= (у) — (х); точка х называется началом пути, а точка у —
концом. Путь Г называется замкнутым, если дТ = 0, т. е.
х = у.
53. Точная на многообразии М 1-форма со называется пол-
полным дифференциалом, а 0-форма (функция) /, такая, что
со = df, называется ее первообразной.
Ясно, что df = d(f + const). Поэтому, наряду с первообраз-
первообразной f существует еще бесконечное множество первообразных,
отличающихся от нее на постоянную. С другой стороны, един-
единственной 0-формой, имеющей нулевой дифференциал, является
тождественная постоянная, поэтому две первообразные /i — f2
одной и той же формы отличаются на постоянную.
Одну из первообразных точной l-формы можно восстановить,
интегрируя ее по разным путям. Базу для этого построения дает
следующее утверждение:
*54. Интеграл точкой 1-формы по замкнутому пути равен
нулю. Интеграл точной формы по пути Т(х,у), идущему из точ-
точки х в точку у, зависит лишь от выбора начала пути х и конца
пути у, дТ = (у) — (х), и не зависит от выбора конкретной фор-
формы пути Г.
© Согласно формуле Стокса — Пуанкаре для одномерных це-
цепей имеем \ со=\ df~f (у) — f (х). В частности, если х = у,
jr Jr
р
то \ а> = 0. 3)
*55. Всякая первообразная f(x) точной 1-формы со восста-
восстанавливается по своему значению fo = f(xo) в данной точке мно-
многообразия единственным образом посредством интегрирования
1-формы по какому-либо пути, соединяющему точку х0 с точ-
точкой х:
г {х,, х)
459
© Убедимся прежде всего, что 0-форма f, построенная по точ*
ной 1-форме со с помощью интегрирования по путям (см. 54),
является ее первообразной. Для этого нужно проверить на мно-
многообразии равенство df = ш.
Имея в виду воспользоваться координатным отображением,
запишем формулу представления / (х) = / (х0) + \ со для
точек х, принадлежащих данной клетке Mi cz M, в виде
Г (Ко Xi) Г (х,. х)
зафиксировав предварительно точку клетки Х\ е Mb Теперь,
пользуясь координатным отображением ^}:х-^и на клетке М],
мы можем перейти к рассмотрению функции ФГ/ в параметри-
параметризующем кубе:
(ФЦ) (и) = / (*o) + \ со + \ Ф!©.
J J
Г (Хо. хО ФгГ (JS|, х\
Таким образом, дело свелось к проверке того, что функция
f = Ф*^, представленная в кубе интегралом по пути Г(щ,и),
соединяющему точки и\ =ty(x\), н = 1|з(х):
(*) f(«) = const+ \ ю, 6 = Ф1т,
Г (ы, и)
является первообразной формы со; df = &. В действительности
соответствующее утверждение уже получено нами ранее (по-
(попутно)— при доказательстве леммы Пуанкаре (см. 5.8.10). На-
Напомним читателю соответствующее рассуждение. Соединим точ-
точки Иь и прямым путем: Г(щ, и)— {щ : ut = и\ A — /)-f uty
0^;^ 1}. Это позволяет заменить в представлении (*) интег-
интеграл формы & по пути Г(«ь и) интегралом функции по проме-
промежутку ГО, 1]:
1 т
== const +
^ Yj
Обозначив аргумент подынтегральной функции их + t{u — u\))
через v, получим
m 1
k-\ о
Преобразуем первый член в правой части, воспользуемся усло-
условием замкнутости 1-формыйв виде d&t/dvk = 6&к/ди> и выпол-
460
ним интегрирование по частям:
т 1 т
fe-1 0 /-1
—tj— (и' — u\)idt duk =
duk
~ Z \&k (v) di duk-
fe1 г
Вместе с предыдущей формулой это дает искомое равенство
df = й. Возвращаясь на многообразие, получим df = со. Нако-
Наконец, пользуясь тем, что две первообразные fhf2 1-формы со отли-
отличаются разве лишь на постоянную и непрерывностью функции
f (*) = /(*о) + \ w при х-+хо, получаем нужный результат
J г «о, х)
в окончательном виде. 5
Бывав! важно знать, является ли данная р-форма точной.
На клетке этот вопрос всегда решается положительно на осно-
основании леммы Пуанкаре 5.8.10:
*56. Всякая замкнутая форма со, произвольной валентности,
заданная на клетке М = фК, точна.
© Для доказательства следует рассмотреть соответствующую
замкнутую форму & = Ф*со в параметризующем кубе и построить
там ее первообразную Q, пользуясь конструкцией, предложен*
ной при доказательстве леммы Пуанкаре, а затем возвратить
форму Q на многообразие: Q = (Y)*Q. Форма Q оказывается
первообразной формы со:
dQ = (W) *dU = *F*cD*co = со. 5
На произвольном гладком многообразии решение вопроса
дается утверждением 51, доказательство которого в общем слу-
случае р ф 1 мы не приводили. Замечательно, что этот глубокий
факт оказывается почти тривиальным при валентности р = 1:
*57. Для того чтобы данная 1-форма со, заданная на гладком
многообразии М, была точна, необходимо и достаточно, чтобы
она была замкнута и все ее периоды, отвечающие базисным
циклам одномерной группы гомологии, были равны нулю.
© Необходимость утверждения очевидна вследствие независи-
независимости интеграла точной формы от пути E4),
Допустим теперь, чтосо—замкнутая 1-форма на многообразии
М, и все ее периоды равны нулю. Для такой формы также вы-
выполнено условие независимости интеграла от пути. Действи-
Действительно, всякий замкнутый путь Г гомологичен линейной комби-
комбинации базисных циклов с целыми коэффициентами: Г ~ V аЛу".
Поэтому \ co=Vas\ со —0. Для двух произвольных путей
T\{Xq,x\, Г2{хо,х), имеющих общее начало хо и конец х, имеет
х 461
место равенство
\ со— \ со = \ ©= \ со=0,
поскольку путьГ,(л:0> х)-{-Г'2(х, х0) замкнут, Г'2—— Г2. Неза-
Независимость интеграла 1-формы со от пути позволяет определить
на всем многообразии М единую 0-форму f:
/(*)= J
CO.
Она является первообразной формы со, поскольку в окрестности
каждой точки у (у е М) выполнено равенство df = со. Доказа-
Доказательство последнего утверждения проводится аналогично соот-
соответствующему рассуждению в 55. 5
В следующей главе мы применим разработанный здесь ап-
аппарат для вычисления интегралов от так называемых голоморф-
голоморфных функций. В свою очередь это послужит базой для построе-
построения диаграммной техники в теории возмущений конечномерных
линейных операторов, которую мы опишем в последней главе.
Глава 7
ПРИЛОЖЕНИЯ ДИФФЕРЕНЦИАЛЬНЫХ ФОРМ
К ТЕОРИИ ФУНКЦИЙ
КОМПЛЕКСНОЙ ПЕРЕМЕННОЙ.
ИНТЕГРАЛ КОШИ
И ТЕОРЕМА О ВЫЧЕТАХ
В предыдущих главах мы рассматривали дифференциальные
формы, принимающие значения в поле вещественных чисел. Не
составляет труда перенести значительную часть полученных там
результатов на формы, заданные, например, в области комплекс-
комплексного пространства и принимающие комплексные значения. Мы
рассмотрим здесь самый простой случай: формы, заданные в
области на комплексной плоскости.
Роль основного поля скаляров при этом будет играть поле Z
комплексных чисел, которые мы понимаем как упорядоченные
пары вещественных чисел (х, у) == г. Умножение и сложение
комплексных чисел определяется формулами
Z\Z4 = (*1*2 — Уф, Хф + X2yi),
zi+z2 = (xi + х2, ух + \ji);
деление и вычитание комплексных чисел определяются как дей-
действия, обратные умножению и сложению; роль нулевого эле-
элемента играет О = @, 0), роль единичного 1 =A, 0). Поле ве-
вещественных чисел вложено в поле комплексных: R э х-*-(х, 0)е
gZ. Число i = @, 1) называется мнимой единицей. Всякое
комплексное число z единственным образом представимо в виде
линейной комбинации чисел 1, i с вещественными коэффициен-
коэффициентами z — (х, у) = х- 14- у- i. Таким образом, поле комплексных
чисел Z представляет собою двумерное вещественное линейное
пространство С с базисом 1, i — комплесную плоскость. Это
позволяет, не делая различий между комплексным числом 1 и ве-
вещественным числом 1, пользоваться записью: г = л: 4- Щ- Веще-
Вещественные числа х, у называются соответственно вещественной и
мнимой частью комплексного числа г : х <= Re z, у = \mz. Число
z = х — iy называется сопряженным к комплексному числу
г = л: 4- iy, неотрицательное число \г\= V*2 + Ф — модулем
463
комплексного числа г, а вещественное число q> = Arctg y/x —
его аргументом, х = |2|cosq>, у — |гjsin ф.
Для модуля комплексного числа справедливо неравенство
треугольника | z\ + z21 ^ j z\ | +1 г21. Это позволяет считать про-
пространство С нормированным с нормой \г\. Будучи изоморфно
евклидовой плоскости, оно оказывается полным.
Выражение х -\- iy называется алгебраической формой записи
комплексного числа (х, у). Выражая х, у через \z\, ф, можно
записать комплексное число z в тригонометрической форме
z =\z\ (cos ф + i sin ф). Поскольку аргумент ф определен лишь
с точностью до угла, кратного 2л, одно и то же число может
быть представлено в тригонометрической форме бесконечным
числом способов: г = \z\ [coscp -f- i sin ф] = |г| [cos(9 -|-2я/) +
+ isin{q> + 2nl)], 1= ±1, ±2, ...
1. Комплексной функцией называется функция, принимаю-
принимающая значения в поле комплексных чисел. Задание комплексной
функции g эквивалентно заданию двух вещественных функций
и, v — вещественной и мнимой части функции g = и + iv,
и = Reg, v = Img.
Комплексная функция, заданная на области в линейном нор-
нормированном пространстве, называется непрерывной (гладкой),
если ее вещественная и мнимая части суть непрерывные (глад-
(гладкие) функции. При этом производная гладкой комплексной
функции g вычисляется по правилу Dg = Du + iDv.
Для комплексных функций остаются справедливы все ре-
результаты главы 2, касающиеся векторных функций. В частности:
*2. Производная комплексной гладкой функции является
комплексной 1-формой:
ди , . dv \ , . (ди , . dv \ . dg , , да ,
Здесь, в согласии с нашей прежней договоренностью, мы обо-
обозначили через dx, dy базис в С*, сопряженный базису 1, i, гак,
что (dx, 1)=1, (dx, i) = 0, (dy, l) = 0, (dy,\)=l, и каждый
вектор Н = (hi, й2)еС представим в виде
Н = {dx, Н) 1 + {dy, H) i = /г, + ih2.
Легко убедиться, что комплексная функция cos ф -f- i sin ф ^
== е(ц>) одной вещественной переменной ф является гладкой и
служит решением функционального уравнения экспоненты
Можно показать, что
*3. Функция е(ф) является единственным гладким решением
уравнения (*), удовлетворяющим условию (d/dq>)e(<p) — ie((p).
Это дает основание называть функцию е(ф) комплексной
464
экспонентой и принять для нее обозначение ехр(кр) = е'ч>. Та-
ким образом
(**) cos ф + i sin ф — е'ф.
Равенство (**) позволяет преобразовать тригонометрическую
форму комплексного числа в показательную: z = \г\ехр(щ).
4. Вообще, экспонента комплексного аргумента z — х -\- iy
определяется формулой ег = exeiy — evcos у-\- iexsiny.
Экспонента ez дает пример гладкой комплексной функции
комплексной переменной z; ex cos у, ех sin у — ее вещественная
и мнимая части.
В двумерном пространстве С можно рассматривать комплекс-
комплексные антисимметрические формы, т. е. формы, тензор которых
является комплексным. Переменные антисимметрические комп-
комплексные формы назовем комплексными дифференциальными фор-
формами. Определив на множестве A(U) всех комплексных диффе-
дифференциальных форм, заданных в области U е?. С, линейные алгеб-
алгебраические операции и внешнее умножение обычной формулой
(см. 1.6.2.1), мы превращаем A(U) в грассманову алгебру.
На гладких дифференциальных формах можно определить также
и операцию внешнего дифференцирования.
5. Для 0-форм — комплексных гладких функций g(x, у), за-
заданных на области U с С, положим
для комплексных гладких 1-форм со(х, у) = а(х, y)dx -f- b(x, y)dy:
da = da Adx + db /\dy= (-^ — —^ dx A dy.
Формально определение внешнего дифференцирования мож-
можно распространить и на формы с валентностью 2, но вследствие
двумерности пространства С внешние дифференциалы таких
форм заведомо равны нулю.
Наряду с вещественными координатами х, у комплексного
числа z в базисе 1, i, рассмотрим пару комплексных чисел z,2,
связанных с вещественными числами х, у формулами
x = {z + z)/2, y = {z — z)/Bi), z = x + iy, z = x — iy.
6. Комплексные числа z, z называются комплексными коор-
координатами точки (х, у).
*7. Всякая комплексная функция g, заданная на области U
в комплексной плоскости С, g(x,y)= u(x,y)-\- iv(x, у), может
быть представлена как функция комплексных координат g{(z-\-
+ 2)/2, (z-z)/Bi))^f(z,z).
*8. Комплексные 1-формы dz^dx + idy, di = dx — idy ли-
линейно независимы и образуют базис в С*.
© Формы dx, dy выражаются через формы dz, di по форму-
формулам dx = (dz-\-di)/2, dy=*(dz — dz)/Bi), поэтому набор форм
15 Зак. 193 465
dz, dz полон в двумерном пространстве С* и, следовательно, мо-
может служить базисом в нем. В этом случае он автоматически
линейно независим (см. ч. 1.1.3.21). D
9. Набор {dz4 dz} называется комплексным базисом в С *.
*10. Форма объема V = dx Л dy выражается через комплекс-
комплексные 1-формы dz, dz следующим образом:
V = dxAdy = (dzA dz)/Bi).
*11. Внешний дифференциал 0-формы g(x,y) в комплексном
базисе имеет вид
дх ду ) ' 2 V дх ^ " ду
© Достаточно в E*) выразить dx и dy через dz и dz. D
Равенство 11, поскольку g(x, у) = f(z, z), может быть пере-
переписано в виде
eoe dz 2 V дх ду )' dz 2 V дх ^ ду
12. Координаты формы df в базисе {dz, dz}
dz 2 \dx ду ) dz 2 \дх "т" ду)
называются производными от формы f(z,z) = g(x,y) по комп»
лексным переменным z и z соответственно.
13. Гладкая функция f(z,z) называется голоморфной в об-
области U, если форма f(z, z)dz замкнута.
*14. Для того чтобы гладкая функция f(z, z) была голо-
голоморфной в области U, необходимо и достаточно, чтобы было вы-
выполнено условие
*15. Функции zn, п = 0, 1, ..., ег, голоморфны на всей комп-
комплексной плоскости С и выполнены равенства dzn = nztl-ldz,
dez = ezdz.
*16. Теорема Морера: Для того чтобы гладкая функция
f была голоморфной в области U, необходимо и достаточно,
чтобы интеграл формы fdx по любому циклу, гомологичному
нулю, был равен нулю.
© Допустим, что функция f голоморфна. Тогда d(fdz) = O. По-
Поэтому ее интеграл по любому циклу у, гомологичному нулю,
у = дИ, равен нулю по формуле Стокса — Пуанкаре:
466
Обратно, пусть интеграл от гладкой формы fdz по любому
циклу, гомологичному нулю, равен нулю. Покажем, что тогда
форма fdz замкнута. Пусть, напротив, форма fdz не замкнута,
т. е. в некоторой точке ZogU выполнено условие
d (fdz) U = -fj (z0) dzAdz^ 0.
Это означает, что в некоторой окрестности {z : | z — 201 < 6} = К6
указанной точки выполнено по крайней мере одно из четырех
неравенств:
<•) e?<_e <0 ^Я<-е
He ограничивая общности, можно считать число б выбранным
так, что круг Кб целиком лежит в U. Тогда цикл у— {z:\z —
— 2о| = б} гомологичен нулю. Допустив, для определенности,
что выполнено первое из неравенств (*), проинтегрируем форму
fdz по циклу у, ориентированному в положительном направле-
направлении (против часовой стрелки), т. е. по границе круга К6 с цен-
центром в точке го'.
Видно, что мнимая часть выражения, стоящего в правой части,
не менее чем 2лб2ео > 0, вопреки предположению, что интеграл
fdz = O. 5
у
Рассмотрим простейшую «нестягиваемую» область U на
комплексной плоскости, которая получается из некоторой стяги-
стягиваемой (см. 5.8.11) области Uo выбрасыванием нескольких ее
внутренних точек z\,z2, ..., zn-
Пусть у — произвольный ориентированный цикл в U. Наша
.цель состоит в том, чтобы научиться вычислять интегралы вида
\ fdz для любой функции, голоморфной в области U. Эту за-
дачу можно рассматривать как иллюстрацию к последнему па-
параграфу предыдущей главы.
16* 467
Построим циклы ys = {z:\z-Zs\ = e}, e < min [| zs — zt \,
s, t
2 dist (zs, dU0) ] и ориентируем их в направлении против часовой
стрелки. Ясно, что каждый из циклов ys не гомологичен нулю
в U, ибо не является границей никакого двумерного многообра-
многообразия, лежащего в U.
*17. Циклы 7s являются базисными циклами (см. 6.6.32) на
многообразии U. В соответствии с этим группа гомологии #i (IJ)
распадается в сумму п свободных абелевых групп Н\ (s = 1,
2, ..., п) ранга 1.
Доказательство этого утверждения использует важную чис-
числовую характеристику циклов, которую мы сейчас введем.
Для каждого s можно подсчитать приращение аргумента
комплексного числа z — zs, когда точка z однократно пробегает
цикл у в положительном направлении. Очевидно, что это прира-
приращение кратно 2л.
18. Целое число
называется индексом цикла у относительно точки zs.
Следующие предложения 19, 20 наглядно ясны:
*19. Индекс цикла dU0 относительно любой точки zs равен
единице. Для всякого цикла у, гомологичного нулю в U, выпол-
выполнено pJ — 6, s=l, 2, ..., п. Обратно, если pJ = O для всех s,
то цикл у гомологичен нулю.
Для пары циклов у\, 72 и пары целых чисел /п\, т.ч. справед-
справедливо равенство р/^ +^v3 = mjpv' -f m2pf.
Вычислив для данного цикла у все индексы рг> образуем но-
новый цикл у' — линейную комбинацию циклов ys с целыми коэф-
фициентами ps\ y'= 2jS_iPJYs- Следующее утверждение экви-
эквивалентно 17;
*20. Цикл у' гомологичен циклу -у*
© Мы не будем проводить формального доказательства этого
утверждения. Для каждого конкретного цикла читатель без
труда проверит его справедливость, выполнив геометрические
построения, аналогичные тем, что изображены на рис. 33: соеди-
соединив точки а, Ь, с цикла у прямолинейным отрезком abc, пред-
представим у в виде суммы клеток, ориентированных стрелками:
Y = Yac -)- усь + Уьь + Уьа- Добавляя к этой сумме и вычитая из
нее клетки cb и Ьа, мы можем записать цикл у в виде циклов
у = уьь -\- (Уас + сЪ + Ъа)-\-{усь + Ъс) + {уьа-\- ab), каждый из
которых гомологичен одному из циклов ±7! или ±72- Напри-
Например, цикл усь + be гомологичен у\ поскольку их разность
468
уеь -{-be — v1 служит границей заштрихованной двумерной клет-
клетки. Заменяя в формуле все циклы гомологичными им базисными
циклами,получаем
уьь у2, у ас + cb + ba ~ v2.
Усь -\-Ьс ~ у\ уьа + аЬ ~ v1,
При доказательстве формулы вычетов 34 мы будем пользо-
пользоваться предложением 17 в форме 20. Затем мы обсудим их экви-
эквивалентность.
Рассмотрим теперь семей- . ^сЬ
ство комплексных \-форм cos,
заданных в области U
s== 1, 2, ..., п.
*21. Формы cos замкнуты и
удовлетворяют следующим
условиям биортогональности
\ (Л$ = 6s.
Рис. 33.
© Замкнутость форм cos следует из голоморфности каждой из
функций (z — zs)~l при z ф zs. Подсчитаем периоды форм по
циклам ys. Это удобно сделать, переходя к новой переменной ф
на цикле ys, z = zs + е ехр (/ф), 0 ^ ф < 2л:
2я
В то же время форма a>s, будучи доопределена по непрерыв-
непрерывности в точках zt (t?*s), оказывается замкнутой в каждом
круге: К< = {z :\z — zt\ < е} (t^s), где она не имеет особен-
особенностей. Поэтому
dco, = 0.
*22. Формы вида со« =» (г — zs)mdz (s =¦ 1,2 п, m Ф
ф—1, m — целое) замкнуты и имеют нулевые периоды по всем
циклам у1 (/=1,2, ..., п).
© Поскольку форма со™ замкнута на каждом круге K<(/?=s),
469
имеет место равенство \ со™ = 0(/ ф s). Если же t = s, то
iexp{i(m-f
Из 17 в силу теоремы Ж. де Рама (см. 6.5.57) следует, что
формы &™ — (z—z\mdz (m ф—1) когомологичны нулю (т. е.
являются точными на области U.
*23. Пусть /—голоморфная функция в стягиваемой области
Uo. Тогда форма
замкнута на Uo\^ и когомологична форме f(?)<>>\, <л\ =
= Bni)-i(z-0~idz.
0 Очевидно, что форма coj?—-/(?) юр замкнута на LJ0\?, а по-
потому точна на любой стягиваемой области U'o a Uo \ t,- Чтобы
проверить, что она когомологична нулю, достаточно убедиться,
что ее интеграл / по циклу \1 = {г '. \ z — ? | = г) — период отно-
относительно цикла Yg — равен нулю для всех достаточно малых в.
Запишем его в виде интеграла по углу:
2я
о
Последний интеграл оценивается с использованием гладкости
функции f следующим образом:
df
~^ ф ^~ и dz
и может быть сделан сколь угодно малым посредством выбора
радиуса е окружности у|. С другой стороны, он в действитель-
действительности не зависит от е, ибо циклы у\ при всех достаточно малых
8 гомологичны. Следовательно, период / рассматриваемой формы
относительно у\ равен нулю:
J {cuS-/(?)co$} = 0, е<1.
Поскольку цикл у\ является единственным базисным цик-
циклом одномерной группы гомологии области UQ\?, мы видим на
470
основании теоремы Ж. де Рама, что форма cot — f(?)®\ точна
т. е. формы ш^ и f(Q(o\ когомологичны- D
*24. Теорема Коши: Пусть ? — внутренняя точка области
U, y\ = {z:]z — Z>\ = E) — гомологичный нулю в U цикл, ориен-
ориентированный против часовой стрелки, у — цикл, гомологичный у\
в области U. Тогда для всякой голоморфной в U функции /
справедлива следующая формула Коши:
V
© В силу утверждения 23
О =
Поэтому согласно 21
1
2nl
V
VJ
Формула Коши является основным инструментом в теории
голоморфных функций. Сейчас мы с ее помощью докажем,
что всякая голоморфная функция бесконечно дифференцируема.
*25. Если функция / голоморфна в области U, то она беско-
бесконечно дифференцируема в каждой точке внутри U, и имеют
место формулы
и оценки |Р(Е)|< ПА'В, А, В > 0, / = 0, 1, 2
© Построив гомологичный нулю в U цикл Ye> запишем фор-
формулу Коши:
Пользуясь бесконечной дифференцируемостью функции (z — ?)'~!»
получим
i
471
*26. Если функция f голоморфна в области U, то
|a)| 1 sup | / (г) |.
и
© Радиус цикла y|* можно выбрать близким к dist(?, d\J). D
*27. Если функция / голоморфна в области U, то в каждом
круге Kt = {z:\z — Е;| < dist(Jj, d\J)} она разлагается в ряд Тей-
Тейлора по степеням (z — ?)'; этот ряд сходится равномерно в
каждом внутреннем круге К^ = {г '• | z — ? | < р, р < dist (?, dU)}.
© Воспользуемся формулой Коши, выбрав в качестве цикла
окружность yl = {z :\z — g| = 6 = dist (?, d\J) — e}, где 0 < 2e <
< dist(Jj, dU). Тогда для всякой внутренней точки w круга, огра-
ограниченного указанным циклом, имеет место равенство
к
Вследствие того, что на рассматриваемом контуре выполнено
неравенство \(w — ?)/(z — ?)|<, величина [1—(w — ?j)/(z —
— ?)]-' есть сумма ряда Yt7=o[(w ~&/(z ~Q]l< который схо-
сходится абсолютно и равномерно, если \w —1,\ < dist(Ej, <3U) — 2e.
Это позволяет нам переписать формулу Коши следующим об-
образом:
г=о
Последний ряд с учетом выражения для производных функций
(см. 25) принимает вид ряда Тейлора:
Он сходится равномерно в каждом круге Kic={z'-\z — ?|^
<dist(^,<3U)—2е}при произвольном е @ < 2е<dist(g, d\J)). Дей-
Действительно, пользуясь оценкой для производных (ем. 26), полу-
получаем в круге Kf при достаточно больших /:
[sup1 *м |1/;
zeU
djgt (g, dU) - 2e
Таким образом, полученный ряд мажорируется в круге К*
сходящейся геометрической прогрессией и значит сходится там
равномерно (см. 1.5.24), Пользуясь произволом в выборе е, за-
заключаем, что областью сходимости ряда (*) является круг
Кг ={z:|z —?|<dist(?,dU)}. 3
Следующее предложение не понадобится нам в оставшейся
части курса, роль его чисто идеологическая: оно показывает,
что множество всех голоморфных
функций является достаточно бога-
богатым.
*28. Всякая функция представи-
мая абсолютно и равномерно сходя-
сходящимся степенным рядом f{z) —
= ^i=oai{z ~ zoI B некотором
круге \z — z01 < Ro, голоморфна в
каждом внутреннем круге \г — z01 ^
< R < Ro"
© Следует проверить, что форма
f(z)dz в круге \z—zo\^ R являет-
является гладкой и замкнутой. Ее глад- Рис. 34.
кость следует из теоремы Абеля, до-
доказываемой для степенных рядов в элементарных курсах
анализа. Для того чтобы проверить замкнутость достаточно
убедиться, что рассматриваемая форма точна. Но это прямо сле-
следует из того, что гладкая (по теореме Абеля) 0-форма F (г) =
~ Х/_о(^ ~Ь 1)~' ai (z—zo) +1 является ее первообразной. D
*29. Функция f, голоморфная в кольце;
Kj1' f'== I21 • Pi "С 12 — ? | <! Рг}» 0 ^ Pi <C Рг <С °о»
разлагается во всяком внутреннем кольце:
в равномерно и абсолютно сходящийся ряд Лорана f (w) =
© Рассмотрим цепь Пе, составленную из двух циклов:
•ОС, ^ s ч к. * s \
< min (р2 — р2), (р[ — р!)) и отрезка o—{z : z—t, — s, p[ — е < s <
<Ро + е},ориентированных в направлении возрастания парамет-
параметров arg(z — t), s: Пе = y^ — <? — Y^ + cr = y\ ~ y^ (рис. 34).
Цепь Пв является циклом. Он гомологичен ориентированному
против часовой стрелки циклу yf = {г : | z — w \ = е}, если точка
473
w лежит внутри области, ограниченной циклом П8. Поэтому
2ш ) г-w аг~2Ш ) г-w dZ
Если р{ < | w — ? | < p2, то можно выполнить аналогично 27 сле-
следующие преобразования:
Коэффициенты написанных рядов допускают оценки:
1
2ш J (г -
dz
:(Р2+е)'
SUp |/B)|, / = 0,1,2, ....
2ш' J. (г - Г
rrfz
sup |/B) |,/=.-1,-2, ...
которые обеспечивают абсолютную и равномерную сходимость
этих рядов в кольцах \w — ? | ^ р'2> \w — ? | ^ р[ соответственно.
Следовательно, их общая область равномерной сходимости есть
кольцо р[ ^ | да — ? | ^ р2- Т>
*30. Пусть /—функция, голоморфная в области U. Тогда
она голоморфна в каждом кольце: Kz^P = {z: 0<|z—2^|<р}
(s=l, 2, ..., п, p = min[|zs — zt I, distfo, dU0)]) и согласно 29
s, t
разлагается внутри кольца Кг^Р в сходящийся ряд Лорана.
31. Коэффициент /-\ при (z — zs)~l в ряде Лорана f(z) =
= XzL-oJ'S)B — zsf функции / около точки zs называется выче-
вычетом'функции / в точке zs и обозначается символом /A\ = res/ \Zs.
32. Если разложение функции / в ряд Лорана в окрестности
точки z—Zs начинается со степени (z — zs)~m, то говорят, что
функция / имеет в точке г« полюс порядка т.
*33. Вычет функции f в полюсе zs порядка т определяется
по формуле
© На основании утверждения 29
и, следовательно, в силу 21 и 22
гез/U^oM Нг).{г
1 lxa 2ni J (z —
zs)
dz-
1
(m-l)l dzm~
Приступим к вычислению интегралов по произвольным цик-
циклам.
Пусть f — функция, голоморфная в области U с выколотыми
точками. Рассмотрим замкнутую форму со = fdz.
*34. Форма со когомологична (см. 6.5.46) линейной комбина-
комбинации форм cos: со ~ ?"=1 2ш/(?\со,, = Yi"=\2яг' res / |^cos.
© Рассмотрим форму Q = со — ?"=12nif^\(as. Докажем, что все
ее периоды по базисным циклам vf равны нулю. Тогда из тео-
теоремы де Рама будет следовать ее точность.
Рассмотрим интеграл этой формы по циклу Ye:
Ряд, стоящий в правой части последней формулы, сходится на
основании 30, а в силу 22 каждый из интегралов, входящих
в последнюю сумму, равен нулю, так что \ 5й = 0. Вследствие
произвольности выбора базисного цикла все периоды формы Q
равны нулю и, значит, форма Q точна. 3
Дадим рецепт вычисления интеграла голоморфной функции
по произвольному циклу, лежащему в области.
*35. Формула вычетов: Пусть у цикл, лежащий в об-
области U с выколотами точками zs, и его индексы относительно
точек zs равны р^. Пусть, далее, f—голоморфная в области U
функция е вычетами res/|z —rs. в точках zs,s= 1,2, ... п.
475
Тогда имеет место следующее равенство — формула вычетов:
© Согласно результату 6.5.49, интеграл замкнутой формы fdz
по циклу у определяется лишь классом гомологии цикла и клас-
классом когомологий формы. Поэтому при его вычислении можно
заменить форму fdz линейной комбинацией форм o)s на основа-
основании 34, а цикл у — линейной комбинацией циклов ys согласно
20. Тогда, пользуясь линейностью и аддитивностью интеграла,
а также условием биортогональности 21, получим:
п п п
. s~\ s, t—\ vt s=l
Из выведенной формулы хорошо видна замечательная двой-
двойственность, связывающая классы гомологии и когомологий.
Действительно, индексы pj одинаковы для всех циклов, гомо-
гомологичных друг другу; более того, равенство соответствующих
индексов pj = pj' означает что циклы у и у' гомологичны. От-
Отсюда видно, что каждый целочисленный вектор р== {ps}"=i одно-
однозначно определяет класс гомологии НР, при этом линейной ком-
комбинации классов гомологии minV + тъН&, т. е. классу гомоло-
гомологии, содержащему цикл m\ 2s»i PsVs + m2^s=\^s* отвечает це-
целочисленный вектор т.р1 + т2р2!
Вообще
Y — Н
Это означает, что структура множества всех классов одномер-
одномерных гомологии области U такая же, как и структура множества
{Z}^ всех целочисленных векторов р = {рь р2 р«}, наделен-
наделенного правилом сложения: р1 -J- р2 = р3: р^ = р' + Р«-
Видно, что {Z}1^ представляет собою свободную коммута-
коммутативную (абелеву) группу, в которой роль нулевого элемента иг-
играет вектор р° = @, 0, .,,, 0). Векторы ef с координатами
476
es~&i (s = 1, 2, ..., п) могут быть выбраны в качестве обра-
образующих группы {Z}",: любой вектор р с координатами ps пред-
представляется в виде линейной комбинации образующих:
p=2s=iPseS- Связывая с каждой образующей es подгруппу
Е$ в {Z}^ : Es = {'"es}^__oo — свободную абелеву группу с об-
образующей es, — мы можем представить группу {Z}^ в виде
суммы свободных абелевых групп Es ранга 1 (с одной образую-
образующей): {ZYl = E{ + E2+ ... +Еп.
Возвращаясь от целочисленного представления к классам го-
гомологии, видим, что изоморфная {Z}^ группа гомологии Н1 (U)
представляется в виде суммы своих свободных подгрупп Hs
ранга 1, для которых образующими являются классы гомологии
базисных циклов {у„}.
С другой стороны, предложение 34 позволяет сопоставить
каждой замкнутой форме со = fdz комплексный вектор га =
= (res/|Z], res/|z2, ..., res f \Zfi). Ясно, что этот вектор опре-
определяется лишь классом когомологий, которому принадлежит
форма fdz. Используя это соответствие, можно дать описание
структуры множества всех классов когомологий замкнутых глад-
гладких форм в области U.
*36. Классы когомологий замкнутых в области U форм вида
fdz, образуют линейное комплексное пространство размерностью
п. В качестве базиса в этом пространстве можно взять набор
форм {^s}"^! (точнее говоря, классы форм, когомологичных
формам Ws).
0 Заметим, прежде всего, что когомологичным формам со, со'
согласно теореме Ж- де Рама отвечают одинаковые векторы
ra = tv, а форме, когомологичной нулю, — нулевой вектор.
Кроме того, в силу линейности интеграла для всяких двух замк-
замкнутых форм со = fdz, я = gdz и произвольных комплексных чи*
сел m, k справедливо равенство
= у (яг/ + kg) dz — (r«)s m + (г„)8 k,
т. е. rmu>+kn = ^rco + кгя, и вообще для всяких замкнутых форм
Q1, О2, ..., Qp (р< оо)
Это равенство означает, что множество всех классов когомоло-
когомологий замкнутых форм в области U изоморфно линейному л-мер,-
ному комплексному пространству С", при этом естественному
базису в пространстве С", состоящему из векторов r^, (i"p) = ^,
отвечает базис классов когомологий, отвечающих формам cos. D
477
Возвращаясь к формуле вычетов 35, мы видим, что интеграл
формы fdz no циклу у записывается как результат действия ли-
линейной формы р, характеризующей класс гомологии цикла у,
на вектор г, характеризующий класс когомологий формы fdz.
Поэтому принято говорить, что классы гомологии задают линей-
линейные формы на пространстве когомологий. Здесь эта замечатель-
замечательная двойственность выступает в облике формулы вычетов.
В следующей главе мы увидим, как эта формула (при
Pj=l) используется для построения спектральных проекторов
возмущенного конечномерного оператора. При этом придется
сделать еще один шаг в сторону обобщения наших результатов.
Дело в том, что нам понадобится интегрировать не только ска-
скалярные комплексные {-формы, но и операторно-значные, точнее,
формы, значения которых лежат в пространстве Е X Е конечно-
конечномерных операторов, действующих в комплексном евклидовом
пространстве Е. Введем необходимые для этого определения и
укажем, каким образом модифицируются полученные резуль-
результаты.
Заметим прежде всего, что пространство Е X Е допускает
естественную нормировку:
\\A\\ = max | Ах L, А е= Е X Е,
и является полным относительно этой нормировки (см. 1.4.9).
Поэтому понятия непрерывности и гладкости комплексной опе-
оператор-функции g сохраняют прежний вид, а вместе с ними и
формула
представляющая собою по сути определение частных производ-
производных dg/дх, dg/dy. Заменяя вещественные координаты х, у комп-
комплексными, запишем дифференциал комплексной функции
g(x,y) = \(z,z) в виде
"' 2 V дх - ду ) ~~ ' 2 V. дх ' * <Эг/
<5f й
5га формула служит, в сущности, определением частных произ-
производных комплексной функции по комплексным координатам.
37. Функция f называется голоморфной, если df/dz — (dgjdx +
-f- idg/ду) = 0, т. е. является нулевым оператором в Е.
Пользуясь матричной записью оператор-функции g в неко-
некотором фиксированном базисе {ei), можно сформулировать усло-
условие голоморфности функции \ в ином виде.
*38. Для того чтобы оператор-функция f была голоморфной
в области U, необходимо и достаточно, чтобы каждый ее
478
матричный элемент Ц (z, z) был голоморфной функцией
(д/дг) f{ (z, z) = 0 A ^ i, / ^ dim E).
Предложение 38 показывает, что голоморфность функции f
эквивалентна замкнутости всех l-форм f[(z)dz. В этом смысле
можно по-прежнему говорить, что оператор-форма \(z)dz замк-
замкнута в том и только том случае, когда функция f голоморфна.
39. Интегралом комплексной замкнутой оператор-формы
fdz по пути y называют оператор, матричные элементы кото-
которого в некотором фиксированном базисе {е;} совпадают с ин-
интегралами по пути у замкнутых форм f'l(z)dz. Этот оператор
обозначают символом \ \{z)dz.
Для интеграла замкнутой оператор-формы i(z)dz no пути
справедливы все теоремы, доказанные ранее для комплексной
замкнутой формы. При этом сходимость матричных рядов можно
понимать поэлементно. Это понимание сходимости эквивалентно
сходимости по операторной норме, поскольку все нормы в конеч-
конечномерном пространстве Е X Е эквивалентны. Далее, можно
ввести понятие периода /Y формы i(z)dz по циклу у, не гомо-
гомологичному нулю: Iy = \ f (z) dz, и, определив периоды формы
по базисным циклам у", можно вычислить интеграл этой формы
по любому циклу.
*40. Пусть у — произвольный цикл в области U, описанный
в 35, y ~ 2Г=1 PjYs, fdz — произвольная замкнутая оператор-
форма, заданная в области U и имеющая периоды Is по циклам
ys. Тогда
1) периоды Is совпадают с умноженными на 2т' вычетами
оператор-функции i в точках zs, которые могут быть вычислены
поэлементно с помощью определения 31:
/s = 2Ш res f | = 2ni {res Ц |^};_ y = 2m rf;
2) справедлива формула вычетов:
Глава 8
ТЕОРИЯ ВОЗМУЩЕНИЙ
КОНЕЧНОМЕРНЫХ ОПЕРАТОРОВ
В этой главе мы опишем одно из полезных приложений ана-
анализа к алгебре. Именно, пользуясь теми минимальными сведе-
сведениями из теории функций комплексной переменной, которые
были сообщены в гл. 7, мы разовьем теорию возмущений для
конечномерных операторов.
На практике часто приходится заниматься обращением или
спектральным анализом операторов (матриц), которые в каком-
либо смысле мало отличаются от хорошо изученных — «стан-
«стандартных». В этом случае стандартный оператор Ао называют
невозмущенным, изучаемый оператор А — возмущенным, а их
разность А — Ло — возмущением. Далее мы опишем процедуры
приближенного обращения и вычисления спектральных харак-
характеристик для линейных операторов в конечномерных евклидовых
пространствах.
§ 1. ВЫЧИСЛЕНИЕ ОБРАТНОГО ОПЕРАТОРА
И РЕЗОЛЬВЕНТЫ.
ИНТЕГРИРОВАНИЕ РЕЗОЛЬВЕНТЫ ПО ЦИКЛАМ
Сначала в этом параграфе Е — конечномерное линейное нор-
нормированное пространство, dim E = п. Норму элемента х обозна-
обозначим через \х\, норму линейного оператора А:Е->-Е обозначим
через
||Л||= sup \Ax\.
Множество всех линейных операторов {А} (А :Е->-Е) образует
конечномерное линейное нормированное пространство {А}в
с нормой \\A\\. Это пространство полно (см. 1.4.9). В качестве Е
можно представить себе пространство R" с какой-либо нормой,
например
480
При этом норма оператора А, задаваемого матрицей {alk}, оце-
оценивается следующим образом (см. 1.4.17):
Р/9 } Ир
}
Мы начнем с простого утверждения, доказанного ранее (см.
1.5.6):
*1. Пусть В-.Е-+Е— оператор с малой нормой, ||В||<;1.
Тогда оператор I — B обратим, причем || (/ — Б)-1||г^ A —
III
*2. Допустим, что Л — обратимый оператор в Е. Если опе-
оператор В имеет малую норму, ||В|| < ЦЛ-'Ц-1, то оператор Л — В
также обратим, причем \}(А — B)-x\\s^]\A~-x\\[\ —\\А-[ЦВ\\]-1.
© Оператор / — ВА~Х обратим в силу предыдущего предложе-
предложения, поскольку \\ВА-1\\^\\В\\\\А-Щ< 1:
[/ — ВА]'Х = I + ВА~1 + ВА~1ВА~1 + ...,
ци-вл-ч-Чк^-цвиЦл-1!].
Проверим, что оператор А —В имеет левый обратный А-1 [I —
— ВА~Х\. Записав А — В в виде Л — В = [/ — ВЛ-1] Л, получаем
Л-1 [/ — ВА~1]-1[1 — В А-1] А = I. Отсюда следует обратимость
оператора А — В: (А — В)-1 = А-х [I — ВА~Х\-Х. Оценку его нор-
нормы читатель легко проведет самостоятельно. Э
Далее в этом параграфе Е — конечномерное комплексное
евклидово пространство, dim Е = п; А— эрмитов оператор в нем.
Спектр а такого оператора, как мы уже знаем, состоит из конеч-
конечного числа собственных значений (собственных чисел) ст = (JA,,-,
все они вещественны (см. I. 11.4.7).
3. Пусть Л—эрмитов оператор в конечномерном евклидовом
пространстве Е. Резольвентой оператора Л называется опера-
оператор-функция комплексной переменной X:(А—Х1)~х == %ъ, комп-
комплексное число X называют спектральным параметром.
*4. Резольвента эрмитова оператора Л есть оператор-функ-
оператор-функция, голоморфная в комплексной плоскости X на дополнении
спектра ст. Ее полюсы совпадают с собственными значениями
оператора и справедлива формула
Здесь Р, — спектральные проекторы, отвечающие собственным
числам Xj, X ф Xj.
© Утверждение получается прямой проверкой. Пользуясь
спектральным разложением эрмитова оператора (Л= Х'^г^г)
и ортогональностью проекторов (PiP,- = StjPi), получаем
481
С другой стороны, каждая из функций (к/ — Ц~1Р/ является при
к ф к; голоморфной, поскольку скалярная функция (kj— Я,)-1
голоморфна при Я, ф kj, поэтому и резольвента голоморфна при
кфк, (/=1,2, ...). 5
Ясно, что резольвента является бесконечно дифференцируе-
дифференцируемой функцией при к Ф kj (/ = 1,2, ...). Замечательно, что
*5. Для производных резольвенты по переменной Я, верна
формула
*6. Пусть o(A) = []ki — спектр оператора А, к^а. Тогда
верна оценка для его резольвенты:
© Используя равенство Парсеваля (см. ч. I, 11.2.3), оценим
R
< [min | A - A, |]~2 Ц | Ptx f = {dist [А, а (Л)]}'21 x f.
I i
Следовательно,
|)/?ЛЦ = sup | RKx ]< {dist [k, a(A)]}~1- D
*7. Пусть U — ограниченная область на комплексной пло-
плоскости с гладкой границей д\], ориентированная с помощью
(положительного) базиса A, i). Допустим, что граница д\3
ориентирована с помощью выходящего вектора и ни одно соб-
собственное число эрмитова оператора А не лежит на ней. Тогда
оператор-форма со = (А — kl)~ldk замкнута на и\сг(Л) и ее
интеграл по циклу сШ равен умноженной на (—2ш) сумме про-
проекторов, отвечающих собственным числам k-L оператора А, лежа-
лежащим в области U, т. е. спектральному проектору, отвечающему
«порции спектра» оператора А, попавшей в область U:
-=г$—
© Собираясь воспользоваться формулой вычетов 7.0.40, вычис-
вычислим предварительно вычеты резольвенты оператора в точках
спектра. Заметим, что в каждой точке kj лишь одно слагаемое
суммы
о(Л)=2(^г-^)^^.
именно (kj — ky-iPjdk, имеет особенность — полюс первого по-
порядка функции (kj — k)-lPj с вычетом Р\. Прочие слагаемые яв-
являются голоморфными функциями в малой окрестности точки
к;. Цикл ОН согласно 7.0.17 гомологичен в и\сг(Л) при доста-
точно малом е0 сумме циклов у, = (А :|А, — Х\= во}, ориентиро-
ориентированных против часовой стрелки, поскольку индекс цикла dU от-
относительно каждой точки Аг, A,- a U, равен единице. Поэтому со-
согласно 7.0.40
грс \ (У, 1 \ D \<х —- . ._ Отт/ Л 0 ^
1 Со / 1Лi /w j* / |А/ ¦¦¦— — j?,jtjt у * /• *^
§ 2. СПЕКТРАЛЬНАЯ ТЕОРИЯ ВОЗМУЩЕНИЙ
В этом, параграфе Е — евклидово пространство, А0 — эрмитов
оператор в Е, играющий в дальнейшем роль невозмущенного,
V — произвольный эрмитов оператор, гУ — возмущение и Ае =
= Ад -\- гУ — возмущенный оператор. Малое число г мы будем
называть константой связи.
Всюду далее мы считаем, что спектральный анализ невозму-
невозмущенного оператора уже произведен, т. е. его собственные числа
А° и соответствующие им ортогональные спектральные проекторы
Pi известны: А = 2»^Л- Наша цель состоит в построении соб-
собственных чисел Щ и собственных проекторов Р* для возмущен-
возмущенного оператора As при малых значениях г. Очевидно, что при
е = 0 выполнено А^ = А^. Интуитивно ясно, что при малых е
картина спектра оператора АЕ не должна сильно отличаться
от картины спектра оператора А0: собственные числа оператора
Д8 должны лежать вблизи соответствующих собственных чисел
оператора А°, в которые они переходят при г -> 0.
Это предположение оказывается верным. Мы докажем его
точно в случае, когда речь идет о простом собственном числе
оператора А0. Для кратных собственных чисел (кратности г)
также имеет место аналогичное утверждение, но ряды для соб-
собственных чисел возмущенного оператора строятся уже не по це-
целым степеням е, как в случае простого собственного числа, а по
дробным д/е •
Сначала мы построим формулу для вычисления спектраль-
спектрального проектора произвольного эрмитова оператора. Здесь мы
пока что не будем требовать простоты собственного числа не-
невозмущенного оператора. Окружим собственное число К\ про-
простым циклом Yi = {^ '¦ I ^ — ^i I = ео}> ориентированным против
часовой стрелки, и проинтегрируем по нему резольвенту возму-
возмущенного оператора. Если некоторые собственные числа Kes воз-
возмущенного оператора Ае действительно попали вовнутрь круга
| А — А? | < 8э, то в результате интегрирования должен полу-
получиться согласно 1.7 спектральный проектор, отвечающий порции
спектра, попавшей в этот круг, — сумма собственных проекторов
Р° = J] Pi* отвечающих указанным собственным числам Af>
I As Ai| <С 80.
433
* 1. Пусть {%i} — собственные числа невозмущенного опе-
оператора, Р°. — отвечающие им спектральные проекторы. Если
константа связи е удовлетворяет условию
то сумма Р\ спектральных проекторов возмущенного оператора,
отвечающих собственным числам, лежащими круге \X\\X— Х\ <
< е.о}, представляется сходящимся • по норме рядом теории
возмущений по степеням е:
Если дополнительно выполнено условие |e|||F || < ео/2, то
Р\ФО. Формулы для вычисления коэффициентов ряда (*) при-
приводятся далее.
0 Обозначив через R'l резольвенту невозмущенного оператора,
запишем резольвенту возмущенного в виде
= {(Л° - XI) (I + eRiV)}-1 = (/ + eRIV)-1 Rl
Рассмотрим Rk на цикле \>i = {Я: | X — Xi\ = e0}. Так как вы-
выполнено условие dist [Я, сг(Л0)] = е0, то, согласно 1.6, |/^Ц^е
при X е 7i и вследствие специального выбора е справедлива
оценка: |е||| 7||| R°x\\ < 1. Поэтому резольвента R% представима
сходящимся по норме рядом
...+(-l)kBkRlVRlV...
В общем члене этого ряда оператор V встречается к раз, a Ri —
k -f 1 раз. Образуем интеграл от формы to = R%d% по циклу у\,
равный согласно утверждению 1.7 сумме Pi спектральных проек-
проекторов оператора As, отвечающих его собственным числам, лежа-
лежащим в круге IЯ — Х\ I < ео:
где Qk =
Члены полученного ряда оцениваются следующим образом:
|8*Q*I<eo|e|*||K||*8o~* = ||F||*(|8|/80)*, что согласно условию
484
|е|<е0 обеспечивает его сходимость по норме. Видно
также, что Р?=^0, если ||V|||e| < ео/2, ибо при этом условии
первый член ряда является доминирующим: |]?Ге*Ф*1<
<1, |/>°Ц=1. J
Полученная форма ряда теории возмущений для проектора
принципиально позволяет производить вычисление спектральных
характеристик возмущенного оператора в общем случае. Однако
для получения конкретных формул полезно вычислить интег-
интегралы, входящие в выражения членов ряда. Для этого запишем
резольвенту невозмущенного оператора в виде суммы двух сла-
слагаемых:
K W)l+ Z B)(?)о + 1()
*2. Оператор-функция cii(X) является голоморфной в круге
| X — А° | < 2е0 и допускает в круге | X — X® | <! е0 оценку по норме
HfliWIKeo.
Оператор-функция (А,° — X) 1 аа голоморфна на плоскости
C\A,J комплексной переменной X и имеет простой полюс в точке
© Оператор-функция а\ голоморфна в указанном круге, бу-
будучи конечной суммой голоморфных функций. Вследствие орто-
ортогональности проекторов P°s для оценки а\ в круге \Х — Я°|^е0
можно воспользоваться тем же приемом, который был применен
для оценки резольвенты оператора Л (см. 1.6), с той лишь раз-
разницей, что вместо равенства Парсеваля: 2%>iH
нужно воспользоваться неравенством Бесселя: ^ s>21
Это приводит к оценке
| ах (X) х I < max I X°s — X 11 х |,
>2
f
'<U
которая и дает нужный результат: Ja, (Ajll^ej, в круге]Л — ^?|^
<е0, где dist (A, K)>e0, s?>l.
Утверждения, касающиеся оператор-функции (Aj — X\~lа0,
очевидны. ])
Опуская множитель ek, запишем член ряда A#) с номером
k в виде
Наша задача заключается в том, чтобы вычислить последний
интеграл. Мы сделаем это, раскрыв предварительно скобки в
485»
подынтегральном выражении и записывая его в виде суммы
членов:
где li = (k + 1) — 2*-i '»~ количество нулей в последователь-
последовательности индексов; i = (ч, /2, ..., t's+i), ^ = О, 1, «i = #i(A). Тогда
он примет вид
(*)Qk
Я/ж вычислении последней суммы удобно пользоваться так на-
называемыми диаграммами, которые дают наглядный способ ну-
нумерации членов рассматриваемой суммы,
позволяющий выписывать их независимо
друг от друга. Описываемая здесь диаграм-
диаграммная техника является вариантом техники,
развитой А. А. Киселевым и В. Н. Поповым
в статье «Диаграммная техника в общей
теории возмущений» *.
Сопоставим каждому члену ряда A*)
граф, составленный из простых и двойных
прямых линий, соединенных узлами таким
образом, что в каждый узел слева приходит
одна линия {простая прямая или двойная),
а направо выходят две линии: простая
прямая {направо вниз) и двойная {на-
{направо вверх). Каждому члену суммы (*)
отвечает путь в графе, состоя-
состояр
f \
Рис. 35.
щии из прямых и озонных линии, переме-
перемежаемых узлами. Этот путь и называется
диаграммой. По диаграмме легко восста-
восстановить соответствующий член суммы (*):
каждой простой линии следует сопоста-
сопоставить множитель ао, каждой двойной — а\, каждому узлу — опе-
оператор V. При чтении диаграммы слева направо соответствую-
соответствующий ей член суммы (*) восстанавливается в обратном по-
порядке — справа налево. Все диаграммы, отвечающие члену ekQk
ряда A*), содержат k узлов. На рис. 35 изображен граф для
* Киселев А. А., П о п ов В. Н. Диаграммная техника в общей теории
возмущений. — Вести. Ленингр. уи-та, 1972, № 22, с. 31—40; 1973, № 1,
с. 16-27.
486
третьего члена (k = 2) ряда A*) (e2Q2) и отдельно — диаграм-
диаграмма, отвечающая члену суммы (*)
— BяО ^(X^-Xy'aoVaiiX)
Yi
Диаграмма для члена суммы (—1)й+1Bя/)~'\ bi{X)dX содержит
(ft+I)— > «s==/i простых линии, ото число равно сте-
степени скобки (Х\ — А) в знаменателе члена. Пользуясь форму-
формулами 7.0.40 и 7.0.33 в операторном варианте, получим
U\ \*ч/ WA; ^^^ If [\ ^^ / J /\
2га
'Заметим, что диаграммам, состоящим лишь из про-
простых или двойных линий {при k > 0), отвечают ну-
нулевые члены суммы. Действительно, функция
aiV ... a\V ... l/ai = 6ц...i(A,) голоморфна в круге
|Я° — А,| < е0 ы потому \ bn...i(l) dl=0, а функция
[%\—X)~k~x a0Va0V ... Va0 имеет нулевой вычет в точке
X] согласно 7.0.22, если k > 0.
Подсчитаем в качестве примера, третий член ряда
теории возмущений A*), пользуясь диаграммами.
Рассматривая граф, отвечающий третьему члену,
составим диаграммы для вычисления интегралов
\ bi,i,i% (X) dX (is = 0, 1), сопоставив индексу i = О
простую линию, а индексу /=1 — двойную (рис. 36).
Будем также пользоваться формулой (d/dX)sa\ =
= s![ai]s+1. Тогда получим на основании формулы
вычетов
2^ \ bm (X) dX = O, —^ 6ooi {X) dX =
Yi
¦g^- ^бою (X) dX = aoValVao, ~^ bon (X) dX = — a0VaxVau
Yi
¦^ J bm(X)dX = atyaoVao, ^J bm (X)dX = -
Y.
¦ J 6U0 (Л) rfA = - ajl/fliFao, ^ J ftm (Л) dA -= 0.
V» Yi РИС. 36.
487
Объединяя вклады, отвечающие разным диаграммам, приходим
к следующей формуле:
е% = е2 \а{у (aQVa\ - a{Va{ + a\V%) +
+ a, {a\Va0VaQ — Va0Va] — VaiVaoj],
В физических работах обычно представляют возмущение V
матрицей {Vst} в базисе собственных состояний (собственных
векторов) невозмущенного оператора. Тогда матрица e2{Q2}^,
отвечающая поправке второго порядка к спектральному проек-
проектору, записывается в этом базисе в виде суммы матриц, соот-
соответствующих отдельным слагаемым. Например, в случае про-
простых собственных чисел
и т. д. Предоставляем читателю самостоятельно выписать остав-
оставшиеся члены и матрицу (<ЗгЬ< в целом.
Построив для спектральных проекторов разложение в ряд
теории возмущений по степеням е, мы можем, в принципе, счи-
считать задачу решенной. Тем не менее в следующем параграфе мы
получим формулы для поправок к собственным числам и соб-
собственным векторам, которые представляют особый интерес в
физических приложениях.
§ 3. ПОПРАВКИ К СОБСТВЕННЫМ ЧИСЛАМ
И СОБСТВЕННЫМ ВЕКТОРАМ
Проведем теперь, пользуясь развитой теорией возмущений,
вычисление собственного числа и собственного вектора возму-
возмущенного оператора, предполагая, что собственный проектор Р^
невозмущенного оператора одномерен, т. е. собственное состоя-
состояние (собственный вектор efj является, как говорят физики, не-
невырожденным.
*1. Если собственное состояние^, отвечающее собственному
числу Х\ невозмущенного оператора А0, является невырожден-
невырожденным, то при малых значениях е, когда| е||| V || < 4~VninU? — A,s|=
s= eo/2, в круге | X — Л? | < 8a лежит в точности одно соб-
собственное число А,! возмущенного оператора А0 -\- гУ и отвечаю-
отвечающий ему собственный проектор Р^ одномерен. При этом соб-
собственное состояние е\ возмущенного оператора отличается от
нормированного собственного состояния e?(|e'?l = l) невозму-
невозмущенного поправкой Ъс\ = ее\ — е1= ^Л=\ ekQke'l- Соответствую-
Соответствующая поправка к собственному числу вычисляется по формуле
)
(У
е\,
0 Заметим прежде всего, что благодаря одномерности проек-
проектора Р° все операторы Qk, стоящие в ряде B.1*) теории возму-
возмущений, являются одномерными. Кроме того, производя оценку
членов ряда B.1*), легко убедиться, что
||
Таким образом, спектральный проектор Р?, отвечающий пор-
порции спектра возмущенного оператора, лежащей в круге
| А, — А°|<е0, отличается от одномерного спектрального проек-
проектора Pf невозмущенного оператора слагаемым А=ХГ~1 ekQk>
норма которого строго меньше единицы (||А||< 1). Покажем, что
в этом случае оператор Р\ также одномерен. Действительно,
если dimPfE>l, то можно указать нормированный вектор
е\ s E (|ei|=l), ортогональный к собственному вектору е°
невозмущенного оператора, и такой, что Ргв\ = е\. Тогда в силу
полученной оценки окажется, что
ei = Phi - Plei = heu 1 = I ei |< || Д ||< 1.
Значит, вопреки сделанному предположению в\ = 0. Тем самым
доказано, что проектор Р\ одномерен.
Областью значений этого проектора является одномерное соб-
собственное подпространство возмущенного оператора. Образуем
вектор Р\е\ == е\ = е? + 2Г-18*^*е°- (-)н отличен от нуля, по-
поскольку
и является собственным. Следовательно, он удовлетворяет од-
однородному уравнению (Л° -f- eV) e\ = \\е\ при значении спект-
спектрального параметра А = А?, равном собственному числу возму-
возмущенного оператора. Умножая обе части последнего равенства
скалярно в Е на вектор е[ и пользуясь тем, что (е\, е°ЛфО, по-
получим ((Л° + еУ)е|, ej) = Af (ef, ej). Воспользовавшись сим-
489
метрией оператора Л°, можно придать этому равенству форму
Наконец, подставив в полученное равенство выражение для е\,
е\ = в\-\- 52~=oeAQfeeL, приходим к сформулированному в условии
результату. 5
*2. Следствие. Если невозмущенное состояние ё\ невы,-
рождено, то поправки к собственному вектору и собственному
числу разлагаются в равномерно сходящиеся степенные ряды по
константе связи е в круге |е| ^ (||F|i)-1e0(l — б), б > 0.
© Доказательство следует из 2.1 и предыдущего утвержде-
утверждения. D
Хотя формулы 1 для поправок Деь ДА? получены, остается
еще довольно далекий путь до реального вычисления этих по-
поправок. Можно, например, провести это вычисление, пользуясь
разработанной диаграммной техникой. Мы пройдем до конца
указанный путь лишь для поправки к собственным числам. Вы-
Вычисление поправки к собственным состояниям (векторам) чита-
читатель может проделать самостоятельно.
При вычислении поправок к собственным числам требуется
подсчитать члены ряда, стоящего в знаменателе: eft(QfteJ, etyt и
члены ряда, стоящего в числителе: ek(VQke°v ef). С помощью
равенства (Се?, еТ) = sp P\CP\, справедливого для любого опе-
оператора С, эти члены могут быть записаны в форме следов:
(9А Ф в
(VQA *?) - ЧЁ^ \ sp foW*; • • • vR\) d%.
Здесь в первом выражении сомножитель V встречается k раз,
во втором — k + 1.
Пользуясь разложением R^^(X\ — X)~laQ-\-o-i{X) резоль-
резольвенты невозмущенного оператора на сумму двух операторов,
ац — Р°и й1(Л)= ^1$>2(К~~^У1 Р°, действующих в ортогональ-
ортогональных подпространствах, можно заметить, что выражения для
коэффициентов обсуждаемых рядов упрощаются:
X sp {a0VRlV ... RlVa0) dX, (VQk e*. e?):
2ni
J (Л? - Л) sp {ajnqv ... RlVa0] dX,
490
и приобретают одинаковый вид. При вычислении полученных
интегралов нужно представить стоящие под интегралом следы
в виде суммы слагаемых:
Рис. 37.
где U — количество нулей в последовательности индексов
(i\, 12, ...). Учет слагаемых в рассматриваемых суммах удоб-
удобно производить также с по-
помощью диаграмм, сопоставляя а
каждому члену теперь уже
замкнутую диаграмму, кото-
которая получается из рассмотрен-
рассмотренной ранее разомкнутой диа-
диаграммы, отвечающей про-
произведению bi = ai{Vai2V ¦•• g
... Va{ (Л° — Я)" ', добавле-
добавлением узлов в начале и в конце
и простой линии, соединяю-
соединяющей эти узлы. Это в точности
соответствует добавлению со- г
множителей V спереди и по-
позади члена bi, затем добавле-
добавлению сомножителя а0 = Р\ и
свертке полученного выраже-
выражения при вычислении следа. На-
пример, слагаемому {hi — К) sp (aoVaiVao) отвечает замкну-
замкнутая диаграмма (см. рис. 37,а). В замкнутой диаграмме не вы-
выделена начальная точка, поэтому замкнутые диаграммы, отве-
отвечающие, например, произведениям aoVa\VaoVaiVaiVao и a0FaiX
X VaiVaqVaiVao, выглядят одинаково (см. рис. 37,6). При на-
наших построениях совершенно автоматически получилось, что два
слагаемых, стоящих в числителе (или в знаменателе) и имеющих
одинаковые диаграммы, дают одинаковый вклад. Это следует
из возможности циклической перестановки операторов под зна-
знаком следа: sp uQVa\VaoVa\Va\Vao = sp aoVa\Va\VaoVaiVau. В то
же время, если два члена, отвечающие одинаковым диаграм-
диаграммам, стоят в числителе и в знаменателе поправки Д>Л> то им
отвечают разные вклады. Именно, степень множителя (A,J — А)
в таком члене, стоящем в числителе, равна числу простых ли-
линий в рассматриваемой диаграмме, и перед ним стоит множи-
множитель (—l)kek~l, где k — число узлов в замкнутой диаграмме.
В знаменателе в соответствующем члене степень множителя
Ск\ — Я) на единицу превосходит число простых линий в рас-
рассматриваемой замкнутой диаграмме, а перед ним стоит множи-
множитель [—1)к+хе,к, где k~ число узлов,
491
Описанная процедура позволяет независимо строить члены
рядов теории возмущений, стоящих в числителе и в знаменателе
поправки ДА,?, перечисляя всевозможные диаграммы. Напри-
Например, вычисляя сумму ряда, стоящего в знаменателе, с точностью
до е3, мы должны учесть следующие замкнутые диаграммы, изо-
изображенные на рис. 37, в. При этом член, отвечающий второй
диаграмме, должен быть взят дважды, поскольку эта диаграмма
получается замыканием двух разных разомкнутых диаграмм
{см. рис. 37,г). В итоге поличаем выражение для знаменателя
поправки
2Ш
fi.A.
1j — /
1 - е2 (Ка?7е?, ej) + e3 [{Va\Va,Ve\,
^) - 2
Аналогичным образом получается выражение для членов, стоя-
стоящих в числителе:
(гУе\, в») = е {Ve\, в?) - е2 (Ка^в?, е?)
2я/ J (A,? — AJ
Va{Vu\Veu e\) I
e\) - 2 {Va\Ve\, e\) {Ve\, ej)] + ...
Обычно физики записывают возмущение V в базисе соб-
собственных состояний {векторов) невозмущенного оператора в виде
матрицы Vst. Это позволяет придать выражениям, входящим в
полученные формулы, уже «окончательный», привычный для фи-
492
зиков, вид:
(уе\, е{[) = Vn, (Vatfel e?) = ? (^ -
(я°-я?)(я»-я?)'
(Va\Va{Ve», e\)=
,o\2
и т. д.
Диаграммная техника не является единственным способом
построения рядов теории возмущений. В нашем случае, когда
состояние в\ невозмущенного оператора является невырожден-
невырожденным, можно, основываясь на доказанной разложимости функций
е\, Л? по степеням переменной г, сразу же искать их в виде фор-
формальных степенных рядов: е\ = е\-\- ХГ=1е^' ^ — Л? + S^ie^s-
Векторы /п и числа \\s можно найти, последовательно решая ли-
линейные уравнения, которые получаются, если подставить фор-
формальные ряды в уравнение для е\: (А0 -}- еУ) е\ = хЧе] и срав~
нить коэффициенты при одинаковых степенях е. Этот формаль-
формальный прием также может быть строго оправдан. Но в отличие от
указанной техники он приводит к вычислениями, громоздкость
которых быстро растет с увеличением требований к точности
приближения.
Мы рассмотрели подробно случай невырожденного основного
состояния. Наши рассуждения справедливы и для вырожден-
вырожденного состояния в части, касающейся построения спектральных
проекторов возмущенного оператора Ай-\-г? {теорема 2.1).
В вырожденном случае: г = dim PiE > 1 — и собственные числа
Аз уже не могут быть найдены с помощью обычного ряда тео-
теории возмущений A*). В этом случае они должны нахо-
находиться непосредственно из решения «секулярного» уравнения!
det (А0 + гУ — Л/) Р\ = О, которое при е = О имеет корень крат-
кратности г. В такой ситуации, даже с учетом того, что коэффи-'
циенты уравнения представляются рядами по степеням перемен-
переменной е, корни его уже могут не допускать аналогичного представ-
представления, как показывает пример уравнения (Я—l)r = s. В дей-
действительности можно показать, что в рассматриваемом случае
собственные функции и собственные векторы разлагаются, вооб-
вообще говоря, в ряды по степеням переменной v = Vе •
Для построения элементов секулярной матрицы {оператора)
(Л° + eV — А/) Р\ используется обычная диаграммная техника.
Найдя корни К\ (v) секулярного уравнения, например, в форме
разложений по степеням v, далее оСччным образом находят
493
собственные векторы ees = Рг\е\ возмущенного оператора из урав-
уравнения (A° + eV-ltl)es = O.
Теория возмущений и диаграммная техника для вырожден-
вырожденного случая подробно описана, например, во второй из цитиро-
цитированных (см. с. 486) статей А. А. Киселева и В. Н. Попова. Со-
Современное изложение содержится в статье В. И. Арнольда
(Усп. мат. наук, 1983, вып. 4, с. 189—203)'.
Вообще, в реальных физических задачах невозмущенный и
возмущенный операторы имеют обычно сложную структуру. Не-
Невозмущенный представляет собою ортогональную сумму несколь-
нескольких операторов Л°= ?<р, @А°Р, действующих в разных про-
пространствах Ер, а возмущение (его называют взаимодействием)
представляется в виде матрицы, элементы которой zstVs/ суть
операторы, действующие из пространства Е; в пространство Е5.
В этом случае возникает значительно более разнообразное мно-
множество диаграмм, каждая из которых имеет ясный смысл, бу-
будучи символическим изображением определенного физического
процесса. Коэффициенты est — константы взаимодействия —
имеют обычно разный порядок малости, поэтому члены ряда тео-
теории возмущений не равноправны. Желая построить выражения,
например, для спектральных проекторов с некоторой точностью,
отбирают из всего множества диаграмм те, которым отвечают
члены, дающие решающий вклад. При этом иногда приходится
частично суммировать ряд теории возмущений, учитывая даже
и бесконечное число диаграмм. Это бывает в тех случаях, когда
нужно воспользоваться рядом теории возмущений для значений
спектрального параметра X, таких, что разность X—К\ уже не
удовлетворяет условию Я[ — Я <^ es; для всех констант связи.
Весь этот материал заслуживает обстоятельного изложения
применительно к конкретной физической задаче. Мы рекомен-
рекомендуем читателю попытаться самостоятельно построить, пользуясь
изложенной программой, технику теории возмущений для про-
простейшей матрицы третьего порядка с малыми (но разными])
внедиагональными элементами:
Л—
я? о о
О Яо О
/О 1 0\ /0 0 0\ /0 0 1\
8,2 1 0 0 +е23 О О 1 +83, 0 0 0,
п л ,и \0 0 0/ 40 1 0/ \1 О О/
U U Лз j
скажем, предположив, что по порядку величины e,2~(e3iJ,
?23~(e3iK> а собственные числа Я?, А,3 лежат близко друг
к другу: | А." — А,?| <С вз1. Указание: воспользоваться явным
видом собственных чисел и собственных векторов матрицы
я?
0
е31
0
Яо
0
е31
0
.0
Л3 1
взяв ее в качестве невозмущенного оператора.
( е31 ° ^3 J
494
ОГЛАВЛЕНИЕ
Предисловие, обращенное к неискушенному читателю C).
Предисловие, обращенное к искушенному читателю E).
Основные термины и обозначения A1).
ЧАСТЬ 1. ЛИНЕЙНАЯ АЛГЕБРА A3).
Глава 1. Линейное пространство A3).
§ 1. Алгебраические структуры A3). § 2. Линейное пространство A6).
§ 3. Линейная зависимость и независимость набора векторов. Базис,
размерность, изоморфизм линейных пространств A9).
Глава 2. Подпространства B5).
§ 1. Определения и примеры B5). § 2. Геометрия подпространств (7).
§ 3. Линейная зависимость над подпространством и коразмерность C0).
Глава 3. Системы линейных алгебраических уравнений C2).
§ 1. Основные теоремы C2). § 2. Решение систем уравнений мето-
методом исключения неизвестных (Метод Гаусса) C7). § 3. Фундаменталь-
Фундаментальное семейство решений. Общее решение однородной и неоднородной си-
систем D2).
Глава 4. Линейные операторы D6).
§ 1. Линейные формы и сопряженное пространство D6). § 2. Линей-
Линейные операторы и их матричная запись E2). § 3. Линейное простран-
пространство операторов E6). § 4. Умножение операторов и матриц E8).
§ 5. Сопряженный оператор. Теорема Фредгольма F0).
Глава 5. Полилинейные формы F4).
§ 1. Полилинейные формы. Линейная структура F5). § 2. Подстановки
G1). § 3. Антисимметризация и симметризация G4).
Глава 6. Антисимметрические полилинейные формы G8).
§ 1. Базис и размерность пространства антисимметрических полилиней-
полилинейных форм G8). § 2. Внешняя алгебра антисимметрических форм. Ориен-
Ориентация (80). § 3. Определители и их свойства (85). § 4. Применение
аппарата антисимметрических форм к решению систем линейных ал-
алгебраических уравнений (93).
Глава 7. Линейные операторы и преобразование координат A00).
§ 1. Алгебра операторов и алгебра матриц A00). § 2. Обратный опе-
оператор A02). § 3. Простейшие функции операторов и матриц A05).
§ 4. Преобразование координат при замене базиса A05). § 5. Преоб-
Преобразование компонент тензора при замене базиса. Свертка тензоров
A09).
Глава 8. Спектральный анализ оператора в линейном пространстве A14).
§ 1. Инварианты линейного оператора A15). § 2. Собственные числа
и собственные векторы A18). § 3. Спектральный анализ операторов
скалярного типа A20). § 4 Спектральная теорема и полиномиальное
исчисление A23).
Гла в а 9. Спектральный анализ оператора в линейном пространстве A28).
§ 1. Предварительные сведения и определения A29). § 2. Некоторые
факты из алгебры полиномов A30). § 3. Алгебра операторных полино-
полиномов A32). § 4, Минимальный полином и инвариантные подпростран-
подпространства. Основная теорема A36). § 5. Структура нильпотентного опера-
оператора A39).
Глава 10. Вещественные псевдоевклидовы и евклидовы пространства A44).
§ 1. Метрическая форма A44). § 2. Ковариантные и контравариант-
ные координаты вектора A46). § 3. Геометрия вещественного евклидо-
евклидова пространства A47).
495
Глава 11. Комплексное евклидово пространство A49).
§ 1. Основные неравенства A49). § 2. Ортогональность и ортонорми-
рованный базис A51). § 3. Операторы A54). § 4. Инвариантные под-
подпространства эрмитовых операторов и спектральное разложение A57).
§ 5. Унитарные операторы. Спектральное представление A59). § 6. Квад-
Квадратичные формы в вещественном линейном пространстве A62).
ЧАСТЬ П. ФУНКЦИИ МНОГИХ ПЕРЕМЕННЫХ A70).
Глава 1. Функции на нормированном пространстве A70).
§ 1. Нормированное пространство. Множества в нормированном про-
пространстве A70). § 2. Непрерывные скалярные (числовые) функции на
нормированных пространствах A78). § 3. Вектор-функции и оператор-
функции A85). § 4. Естественная нормировка пространств линейных
форм и операторов A87). § 5. Непрерывные функции на нормирован-
нормированных пространствах A92). § 6. Линейное нормированное пространство
непрерывных вектор-функций на компакте A99).
Глава 2. Дифференцирование функций многих переменных B01).
§ 1. Дифференцируемые функции B02). § 2. Старшие производные и
дифференциалы B17). § 3. Формула Тейлора для функции нескольких
переменных. Экстремум функции нескольких переменных B32). § 4. Ус-
Условный экстремум B37).
Глава 3. Методы решения нелинейных уравнений. Теоремы существова-
существования B42).
§ 1 Принцип сжатых отображений B42). § 2. Метод Ньютона B45).
§ 3. Существование обратной функции B48). § 4, Теорема о неявной
функции B52).
Глава 4. Интегрирование B58).
§ 1. Объем и мера Лебега B58). § 2. Интеграл Лебега B74). §3. Свой-
Свойства интеграла Лебега B86). § 4. Общее понятие меры. Произведение
мер. Сведение кратного интеграла к повторному C02). § 5. Замена
переменных в кратном интеграле C12).
Глава 5. Дифференциальные формы в области C26).
§ 1. Тензорные поля. Формы. Внешнее дифференцирование C27).
§ 2. Замена переменных в полилинейных переменных формах (тензор-
(тензорных полях) C33). § 3. Ориентация вещественного линейного простран-
пространства и форма объема в ориентированном вещественном евклидовом
пространстве C40). § 4. Ориентация псевдоевклидова пространства и
операция дополнения антисимметрической формы C44). § 5. Теория
поля в евклидовом пространстве C57). § 6. Интегрирование дифферен-
дифференциальных форм по области C68). § 7. Цепи, границы и формулы ин-
интегрирования по частям C72). § 8. Точные и замкнутые формы в об-
области. Лемма Пуанкаре C79). § 9. Уравнения Максвелла C84).
Глава 6. Дифференцируемые многообразия C91).
§ 1. Элементарное многообразие (клетка) и тензорные поля на нем
C91). § 2. Ориентация клетки и риманова метрика D04). § 3. Инте-
Интегрирование формы по клетке. Граница клетки и формула Стокса — Пуан-
Пуанкаре D15). § 4. Гладкие многообразия и многообразия с краем D31).
§ 5. Циклы и границы. Независимость интеграла от пути D45).
Глава 7. Приложения дифференциальных форм к теории функций комплекс-
комплексной переменной. Интеграл Коши и теорема о вычетах D63).
Глава 8. Теория возмущений конечномерных операторов D80).
§ 1. Вычисление обратного оператора и резольвенты. Интегрирование
резольвенты по циклам D80). § 2. Спектральная теория возмущений
D83). § 3. Поправки к собственным числам и собственным векторам
D88).
496