/


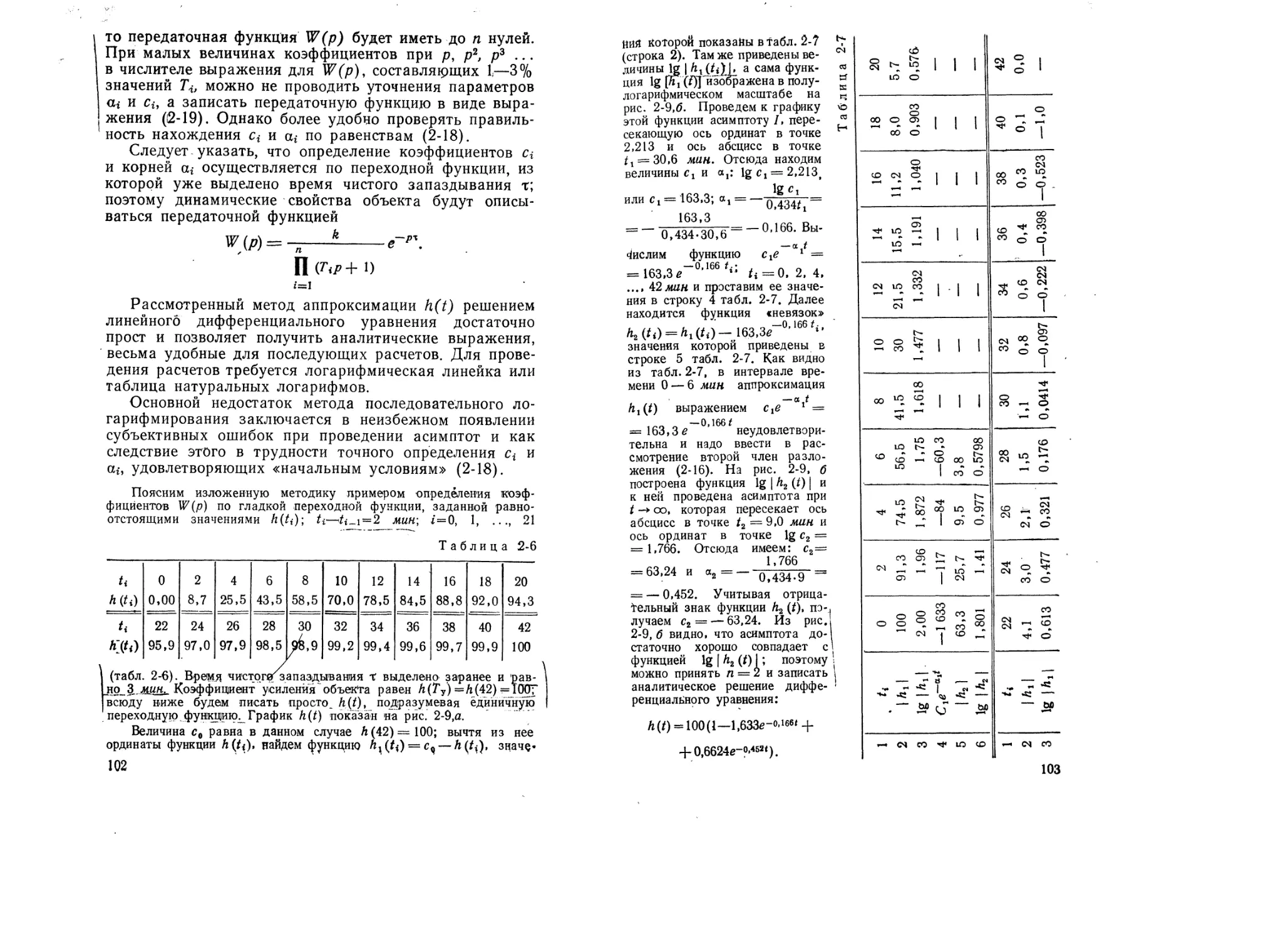

Author: Балакирев В.С. Дудников Е.Г. Цирлин А.М.
Tags: дифференциальные уравнения теория автоматического управления
Year: 1967
Similar




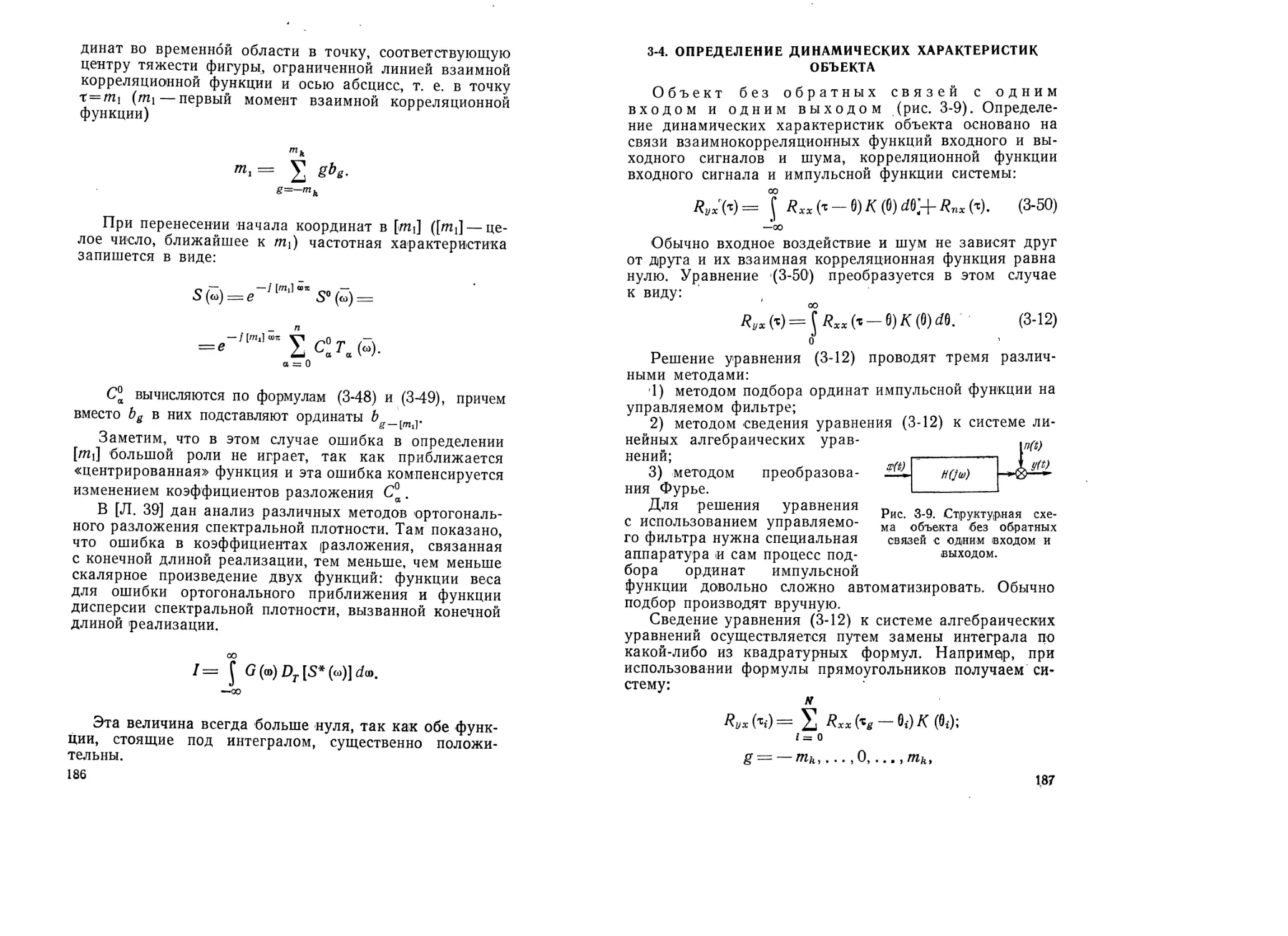
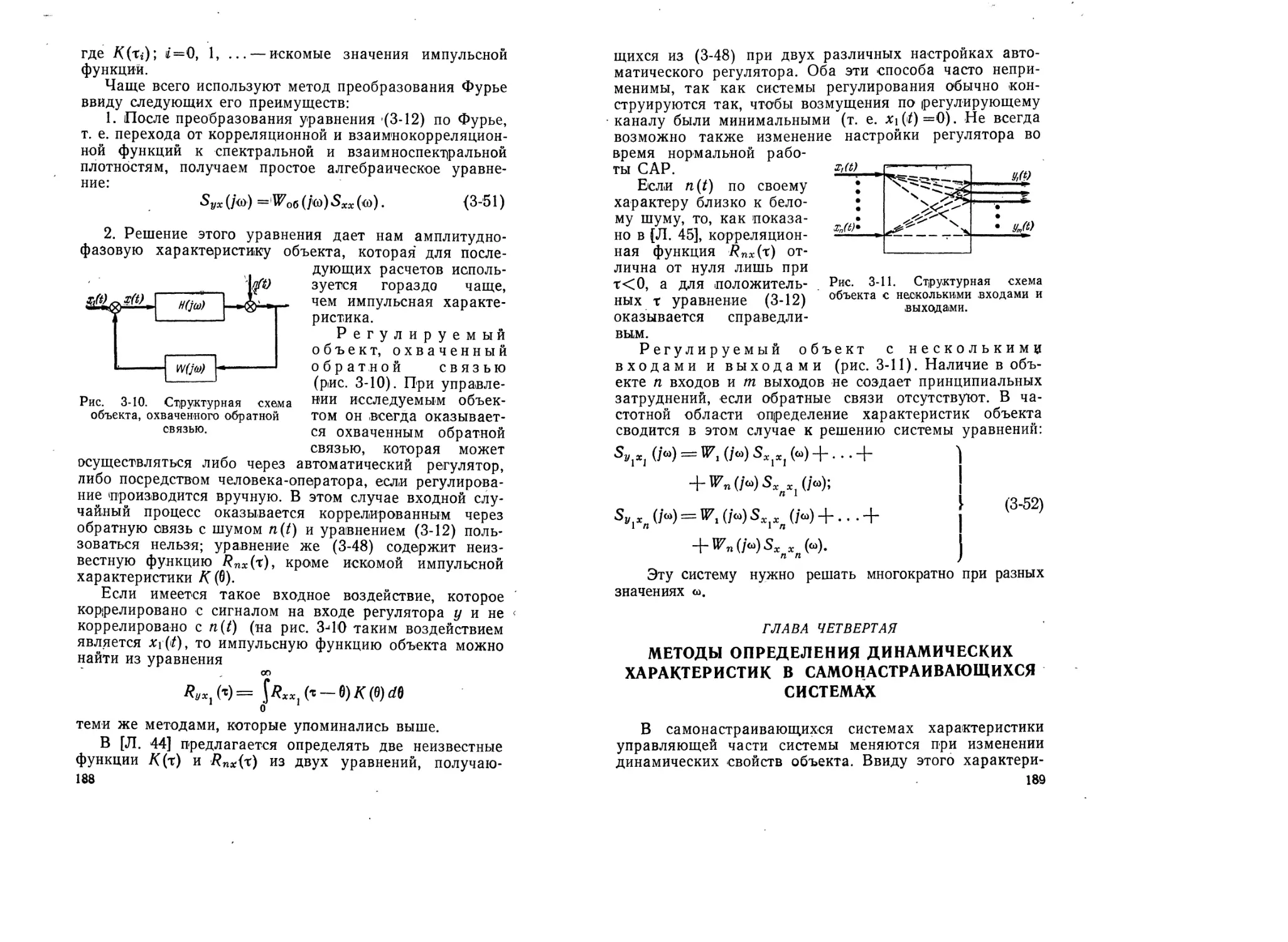
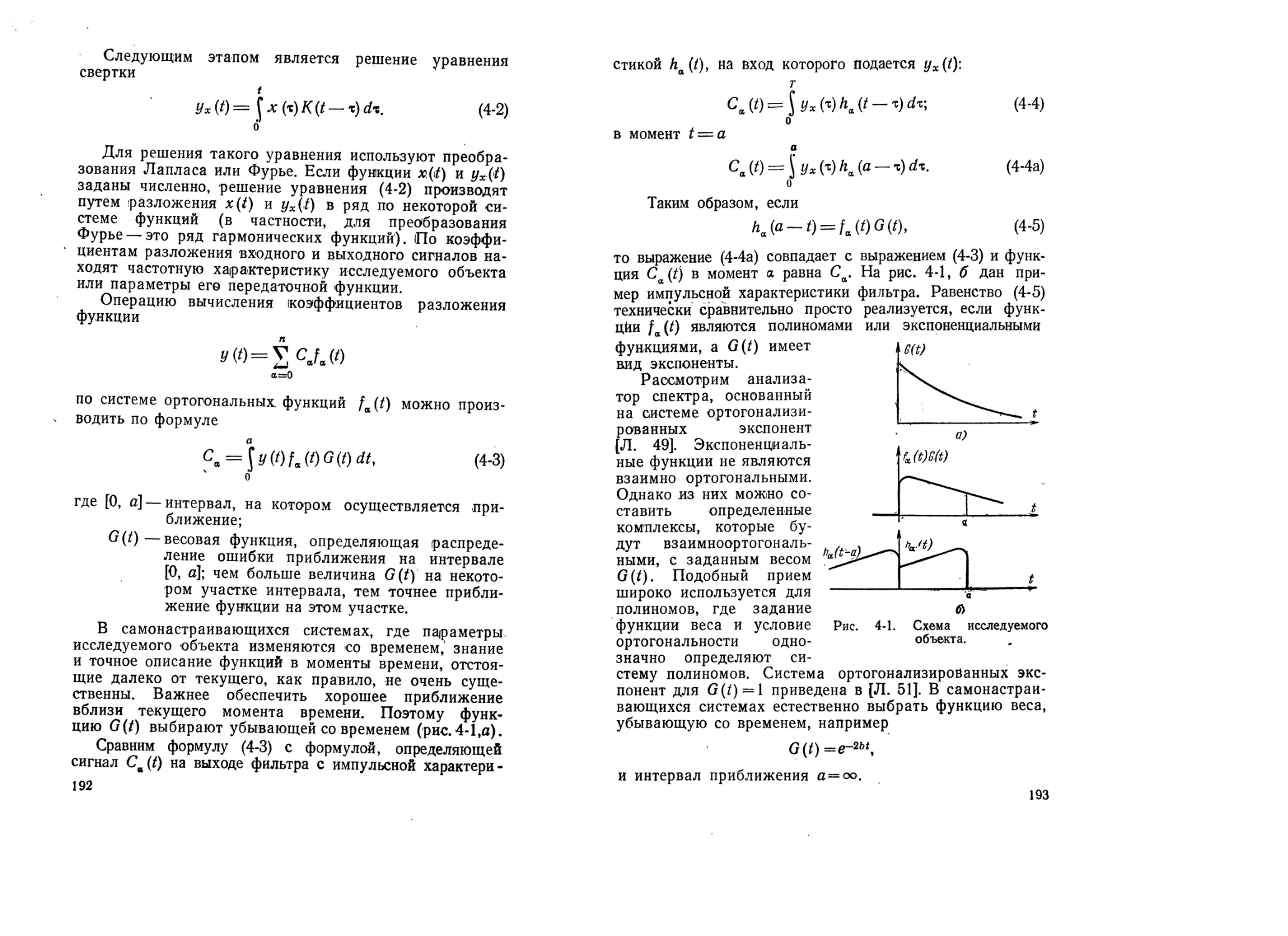
Text
В. С. БАЛАКИРЕВ, Е. Г. ДУДНИКОВ, А. М. ЦИРЛИН
ЭКСПЕРИМЕНТАЛЬНОЕ
ОПРЕДЕЛЕНИЕ
ДИНАМИЧЕСКИХ
ХАРАКТЕРИСТИК
ПРОМЫШЛЕННЫХ
ОБЪЕКТОВ УПРАВЛЕНИЯ
«ЭНЕРГИЯ»
МОСКВА 1967
В кйИге йеСьмй мало вниманий уделейо эксперимен-
тальным способам исследования статики линейных си-
стем, поскольку практика построения математических
моделей промышленных объектов показывает, что в по-
давляющем большинстве случаев статические характери-
стики представляют собой непрерывные монотонные
функции, допускающие кусочно-линейную аппроксима-
цию на небольших интервалах изменений входных коор-
динат.
Книга состоит из четырех глав.
В гл. 1 рассмотрены экспериментальные методы ис-
следования динамических свойств устойчивых линейных
или линеаризуемых объектов с помощью испытательных
сигналов периодической формы, а также изложены неко-
торые способы определения коэффициентов передаточ-
ных функций по амплитудно-фазовым характеристикам.
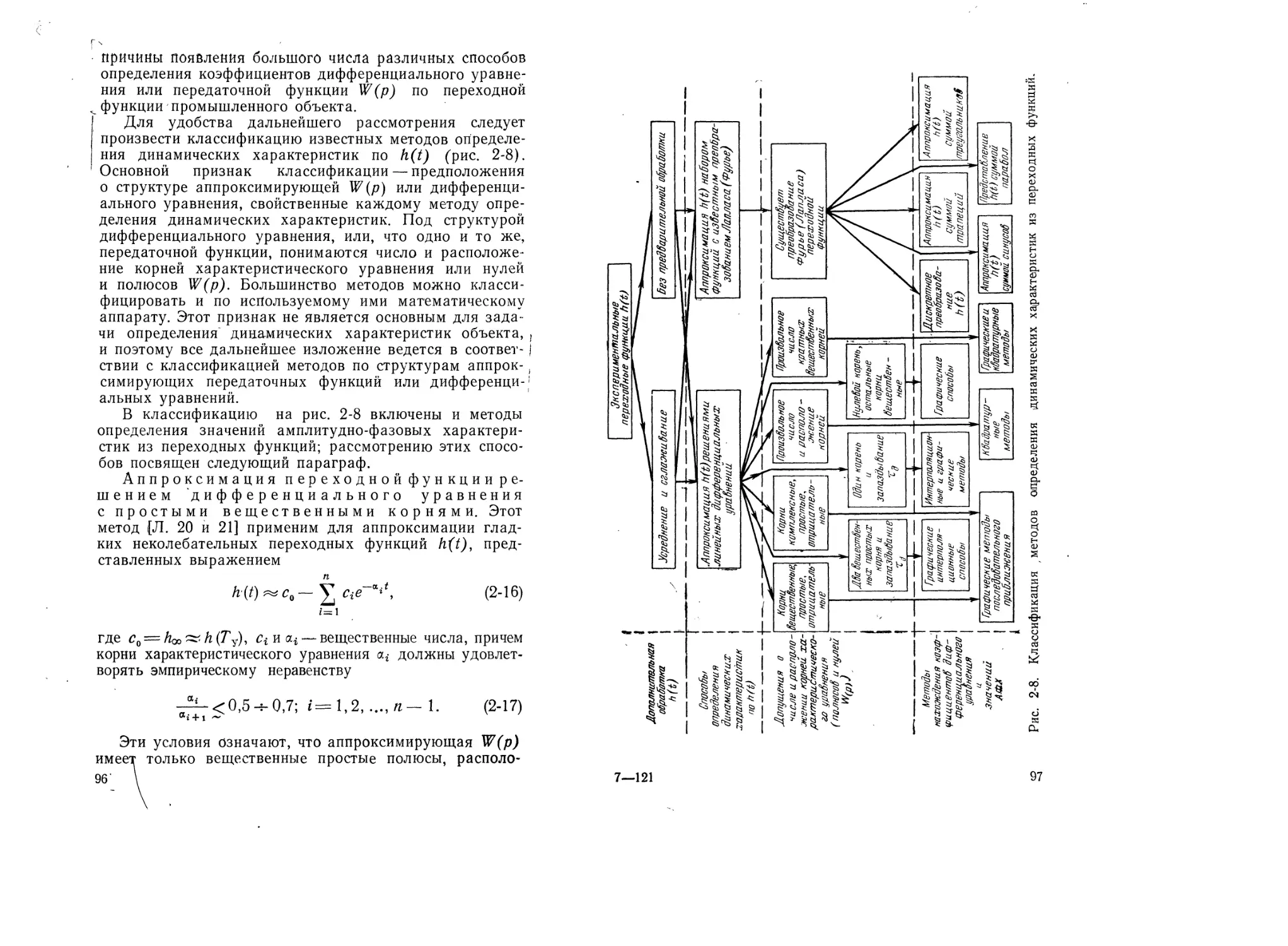
Глава 2 посвящена методике снятия переходных
функций и нахождения по ним коэффициентов линей-
ных дифференциальных уравнений. Большое внимание
уделено вопросам подготовки и проведения эксперимен-
та на действующем объекте, а также задачам предвари-
тельной обработки экспериментальных данных. Методы
определения коэффициентов передаточных функций клас-
сифицируются в зависимости от принимаемых допуще-
ний о числе и расположении нулей и полюсов.
Во многих случаях введение искусственных возму-
щений оказывается невозможным, и тогда динамические
характеристики определяют статистическими методами.
В гл. 3 рассмотрены вопросы получения реализаций
случайных процессов, центрирования их, вычисления
авто- и взаимокорреляционных функций и определения
весовых и передаточных функций объекта.
В гл. 4 разбираются некоторые задачи определения
динамических характеристик объектов в самонастраи-
вающихся системах автоматического управления.
Авторы благодарят Н. С. Райбмана за полезные сове-
ты и замечания, сделанные им при просмотре рукописи
книги, а также Ю. С. Попкова за тщательное редакти-
рование. Понимая, что книга не является свободной от
недостатков, авторы обращаются к читателям с просьбой
присылать критические замечания и пожелания в редак-
цию издательства «Энергия» по адресу: Москва, Ж-114,
Шлюзовая наб., д. 10.
"Авторы
ВВЕДЕНИЕ
Под промышленными объектами понимаются устой-
чивые объекты, в которых происходят непрерывные тех-
нологические процессы. Эти объекты достаточно инер-Л
ционны и в динамическом отношении представляют со-
бой фильтры низких частот с полосой пропускания от
нуля до нескольких десятых долей герца. К числу npo-j
мышленных объектов относятся химические реакторы
непрерывного действия, смесители, сушилки, подогрева-
тели, ректификационные и экстракционные колонны,
паровые котлы, деаэраторы, нагревательные печи и т. п.
Параметры промышленного объекта, изменяющиеся во
времени под действием внешних причин и не зависящие
от режима работы установки, называются входными
координатами. Другая группа параметров объекта за-
висит от его конструкции, режима работы и значений
входных координат Xi(Z), Х2СО, Эти параметры
#2(0, ... называются выходными координатами.
Зависимость изменения выходных координат объекта
от изменения входных параметров может быть описана
математической моделью. В нее входят уравнения ста-
тики и динамики. Первые описывают установившиеся'
состояния координат объекта, когда все производные1
функций %1(0, ^2(0, • • •, #1(0, #2(0, ••• равны нулю.
Уравнения статики есть алгебраические зависимости.
Уравнения динамики однозначно характеризуют поведе-
ние #1(0, #2(0, ••• во времени при изменении входных
координат и представляют собой дифференциальные или
интегральные соотношения.
Нахождение уравнений динамики промышленных
объектов может быть осуществлено экспериментальными
методами. Суть их заключается в следующем.
Каким-либо образом создается испытательное возму-
щение Axi(f), Длз2(О, ... одной или нескольким коорди-
5
ййтам x2(t), ... объекта й записываются соответ-
ствующие изменения во времени A#i(Z), А#2(/), ... вы-
ходных координат. Функции Л#1 (/), А#2(/), ••• есть Ре‘
шения искомых дифференциальных уравнений объекта
! с известными правыми частями ДхД/), Дх2(£), ... и на-
чальными условиями z/i(0), #1(0), .. #2(0), #2(0), ...,
которые определяются перед началом эксперимента (на
практике проводят исследование динамики между каж-
дой входной и каждой выходной координатами объекта,
поэтому ниже индексы у функций Xi(t), x2(t), ..., y\(t),
r#2(/), • • •, Axi(/), ..., A#i(/), ... опускаются). Затем под-
бираются дифференциальные уравнения, решения кото-
(рых наилучшим образом совпадают с экспериментальны-
ми функциями Д#(/).
Г Вопросы точности описания динамических свойств
1 объекта в данном методе сводятся к задаче приближе-
ния (аппроксимации) экспериментальных данных ана-
литическим выражением. Вследствие этого найденные
уравнения динамики не нуждаются в дополнительной
проверке на объекте, так как все его индивидуальные
особенности конструкции и режима работы уже учтены
формой переходного процесса Д#(0-
г В зависимости от способа введения испытательного
возмущения различают активные и пассивные методы
исследования динамики. (В активных методах экспери-
ментатор сам создает сигнал Дх(7). При исследовании
динамики пассивными методами в качестве испытатель-
ного сигнала Ах(/) используются естественные случай-
ные флуктуации входной координаты x(t). Здесь экспе-
риментатор выполняет роль наблюдателя.
Различные способы введения и виды испытательных
сигналов обусловливают и разные методики нахождения
уравнений динамики. Однако все экспериментальные ме-
тоды базируются на предположениях о сосредоточенно-
сти параметров объекта, стационарности во времени его
динамических свойств и линейности их при малых из-
менениях входных координат.
Допущение о сосредоточенности параметров объек-
та позволяет описывать его динамические свойства диф-
ференциальными уравнениями в полных (обыкновенных)
производных. Фактически все промышленные объекты
есть системы с распределенными параметрами и движе-
ния выходных координат удовлетворяют уравнениям
в частных производных. Однако практикой исследования
6
динамики установлено, что в большинстве случаев экспе- '
риментальные функции Ay(t) удовлетворительно аппрок- i
симируются решениями обыкновенных дифференциаль-
ных уравнений невысокого порядка и звеном чистогоД
запаздывания.
Динамические свойства почти всех промышленных
объектов изменяются во времени из-за образования
накипей на стенках, истощения катализатора и т. п.
Скорость изменения динамических свойств объектов
обычно невелика, и поэтому в первом приближении
их можно считать неизменными в интервале времени
наблюдения переходных процессов Допущение!
о стационарности динамических свойств объекта по-
зволяет аппроксимировать решениями обыкновен- |
ных дифференциальных уравнений с постоянными коэф- \
фициентами.
•Предположение о линейности в «малом» динамиче-
ских свойств промышленных объектов еще более су-
жает класс дифференциальных уравнений, решениями
которых аппроксимируются экспериментальные функции
Ду (7). Термин линейность «в малом» означает, что опи-
сание переходных процессов [координаты у(/)] линей-
ным дифференциальным уравнением удовлетворяет прин-
ципу суперпозиции в некотором интервале изменений
входной координаты x(t). Величина этого интервала за-
висит от кривизны статической характеристики кГ!
наличия в объекте нелинейностей, действие которых про- |
является только в переходных режимах. Опыт показы- J
вает, что статические зависимости большинства про-
мышленных объектов почти всегда могут быть линеари-
зованы в окрестности равновесного режима уо) в ин-
тервале изменений x(t) на ± (0,05-е-0,1) х0. Проверка
выполнения принципа суперпозиции в данном интервале
производится при постановке эксперимента на объекте.
Совокупность рассмотренных допущений позволяет
описать динамические свойства промышленного объекта
математическими выражениями следующего, вида:
1) дифференциальным уравнением
а ‘^ 4-
din +
d"- 'у (t)
dtn~l
&п -1
+... 4~«oy (0 =
у dmx (t — т) . . t .. . /п 1 ч
— Ь ••• 4"^ох — т)> (B-i)
1
где ап, an-t, а0; bm, bm_п Ьй — постоянные коэффи-
циенты; т<п\ т— постоянная положительная величина,
называемая временем запаздывания;
2) передаточной функцией
m
= (В-2)
где р = а+/со— комплексная переменная; а — веществен-
ная переменная; со — угловая частота, рад!сек\ j =
=’+' у/ —1; Х(р) и У(р)—преобразования Лапласа
функций Дх(/) и Ny{t)\
3) амплитудно-фазовой характеристикой (АФХ)
т
[1=0
= P^) + jQ^) = A^)e~lf{m\ (В-3)
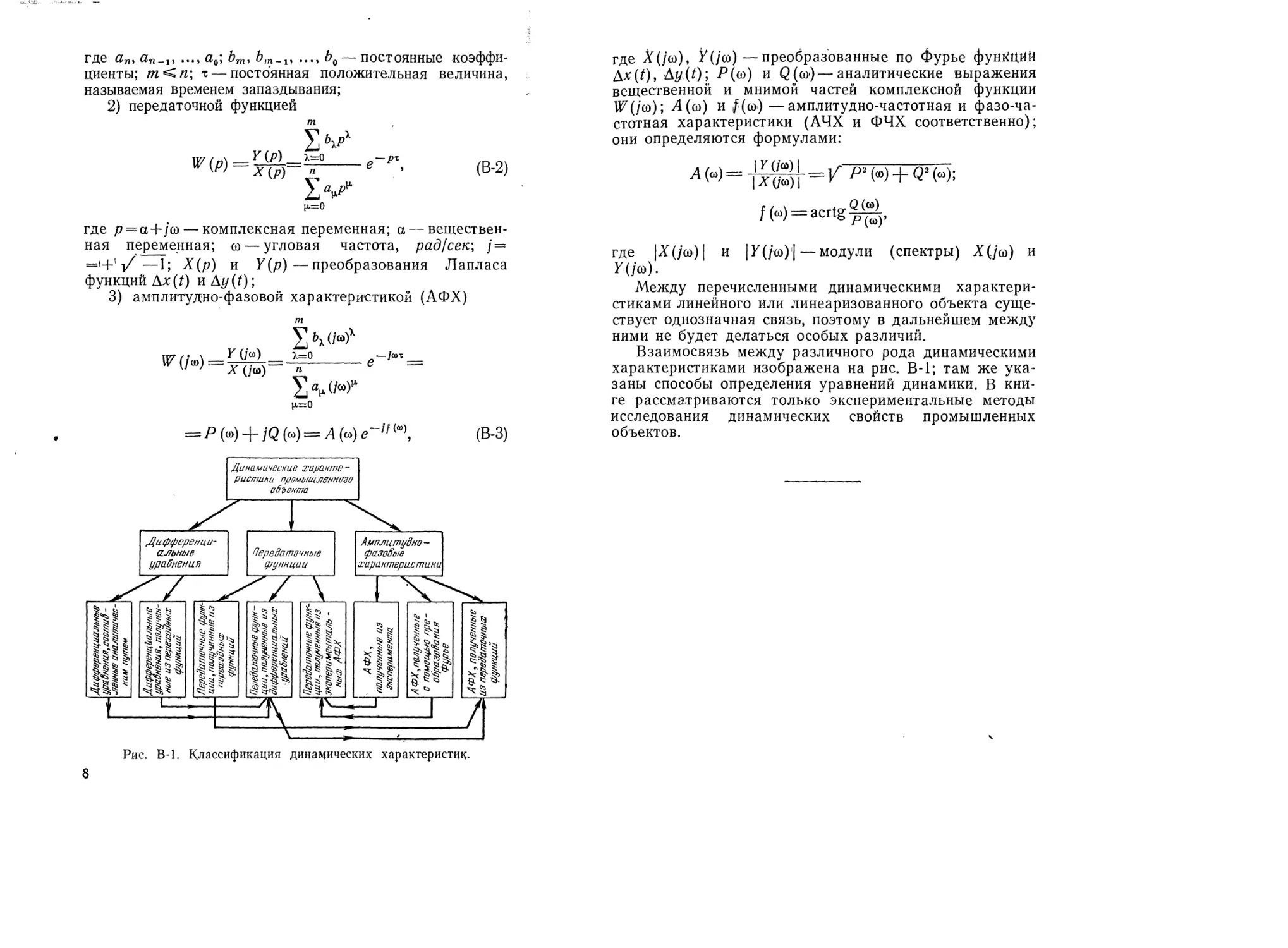
Рис. В-1. Классификация динамических характеристик.
8
где A'(jco), У(/(о)—преобразованные по Фурье функций
Дх(/), Ayjf); Р(<о) и Q(<o)— аналитические выражения
вещественной и мнимой частей комплексной функции
IF(/co); А (со) и /(со)—амплитудно-частотная и фазо-ча-
стотная характеристики (АЧХ и ФЧХ соответственно);
они определяются формулами:
А W = WT = KC-W + Q’W;
f(..) = acrtg^g,
где |Х(/со)| и |К(/(о)| — модули (спектры) Х(До) и
/(/со).
Между перечисленными динамическими характери-
стиками линейного или линеаризованного объекта суще-
ствует однозначная связь, поэтому в дальнейшем между
ними не будет делаться особых различий.
Взаимосвязь между различного рода динамическими
характеристиками изображена на рис. В-1; там же ука-
заны способы определения уравнений динамики. В кни-
ге рассматриваются только экспериментальные методы
исследования динамических свойств промышленных
объектов.
ГЛАВА ПЕРВАЯ .
ОПРЕДЕЛЕНИЕ ДИНАМИЧЕСКИХ
ХАРАКТЕРИСТИК ПРОМЫШЛЕННЫХ ОБЪЕКТОВ
С ПОМОЩЬЮ ПЕРИОДИЧЕСКИХ ВОЗДЕЙСТВИЙ
Динамические свойства линейного объекта с сосре-
доточенными параметрами однозначно описываются
амплитудно-фазовой характеристикой IFf/co):
J »(<)«’<“' м
= = (1-1)
I x(f)e~laidt
—00
где Х(/со), Y(/со)—преобразованные по Фурье входная
x(t) и выходная y(t) координаты; А (со)—амплитудно-
частотная характеристика; /(со) —фазо-частотная харак-
теристика. Амплитудно-частотная характеристика пока-
зывает степень ослабления или усиления амплитуды гар-
монического сигнала, проходящего через линейную
систему; значения фазо-частотной характеристики равны
фазовому или временному сдвигу гармонических коле-
баний координаты y(t) относительно колебаний x(t)
с частотой со.
Определение амплитудно-фазовых характеристик
промышленных объектов производится чаще всего экспе-
риментально. Суть экспериментальных методов нахож-
дения значений АФХ заключается в следующем.
Искусственным путем возбуждаются гармонические
или периодические колебания входной координаты x(t)
с частотой со и регистрируются установившиеся колеба-
ния y(t). Опыты проводятся при ряде значений частоты
со. Для нахождения А (со) требуется измерять амплитуды
10
x(t) и y(t), для вычисления /(со)—временные ,сдвиги
между гармониками входных и выходных колебаний.
Значения ФЧХ можно определять и путем непосредст-
венного измерения разности фаз между y(t) и x(t) спе-
циальным прибором — фазометром. Из-за необходимости
использования сложной аппаратуры (пиковых вольтме-
тров, счетчиков времени, фазовращателей и пр.) метод
определения АФХ путем измерения мгновенных значе-
ний y(t) через интервалы времени A'Z=^- k; А = 0, 1,
2, ..., а также компенсационный способ [Л. 1] не нашли
широкого применения в практике исследования динами-
ческих свойств промышленных объектов.
Определение АФХ экспериментальным путем основа-
но на допущениях о сосредоточенности параметров
объекта, стационарности и линейности в «малом» его ди-
намических свойств. Справедливость двух последних
предположений проверяется непосредственно во время
проведения опытов. Весь процесс экспериментального
исследования АФХ промышленного объекта условно
можно разбить на три основных этапа, рассмотренных
в последующих параграфах.
1-1. ПОДГОТОВКА И ПЛАНИРОВАНИЕ ЭКСПЕРИМЕНТА
ПО СНЯТИЮ АФХ
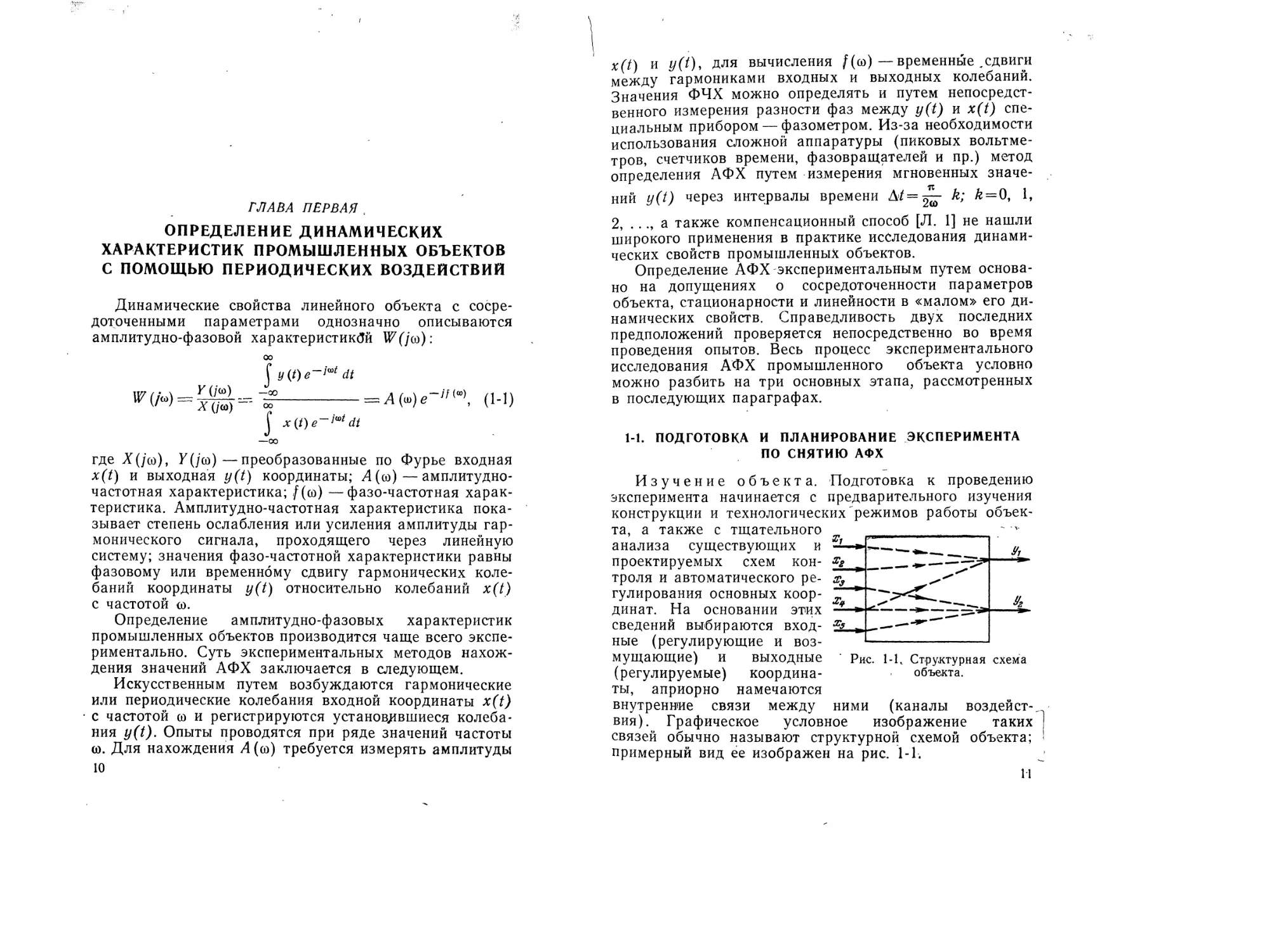
Изучение объекта. Подготовка к проведению
эксперимента начинается с предварительного изучения
конструкции и технологических'режимов работы объек-
та, а также с тщательного
анализа существующих и
проектируемых схем кон-
троля и автоматического ре-
гулирования основных коор-
динат. На основании этих
сведений выбираются вход-
ные (регулирующие и воз-
мущающие) и выходные
(регулируемые) координа-
ты, априорно намечаются
Рис. 1-Ц Структурная схема
> объекта.
внутренние связи между ними (каналы воздейст-,
вия).^ Графическое условное изображение таких 1
связей обычно называют структурной схемой объекта; !
примерный вид ее изображен на рис. 1-1.
11
Затем для каждой из входных и выходных координат
определяется уровень флуктуаций, имеющих место
при нормальной работе объекта, выявляются основные
источники нестабилизируемых помех. Для этих целей
следует ознакомиться с записями, сделанными в эксплу-
атационном журнале, просмотреть диаграммы регистри-
рующих приборов и т. п.
Определение статических характери-
стик. Статической характеристикой промышленного
объекта называется математическая зависимость
z/(/)=W)l
между входной и выходной координатами на отрезке
времени, когда все производные функций x(t) и y(t)
тождественно равны нулю. В частности, для структур-
ной схемы на рис. 1-1 это соотношение удобно предста-
вить в следующем виде:
х2, х4); У2=НХ^ х4, х5).
На практике чаще всего определяют статические ха-
рактеристики следующего типа:
^ = /(^1); х2 = const; х4 = const;
t/j = f (х2); Xi = const; x4 = const.
Знание подобных зависимостей не позволяет считать
известной статику промышленного объекта, но является
необходимым условием для предположения о линейно-
сти динамических характеристик в малом.
Для экспериментального определения статических за-
висимостей типа (1-2) применяют активный и пассивный
методы исследования.
Активный метод изучения статики заключается в сле-
дующем. Экспериментатор устанавливает минимально
возможное по технологическому регламенту значение
входной координаты хД/). Это значение хД/) обозначим
через хД!). После окончания переходных процессов
в объекте регистрируется установившееся значение вы-
ходной координаты у (t), которому присваивается номер
yi (1). Затем экспериментатор дает приращение Axi
входной координате Xi(t), получает новое ее значение
Xi(<2) =Xi(l)+ДХ1, регистрирует z/i(2), снова изменяет
Хг(/) на АХ] и т. д. Все остальные входные координаты
при этом поддерживаются постоянными. В результате
12
} (Ь2)
серии опытов получают таблицу соответствий
||xi(i)—»У1(011; i=l> 2, 3, п, где п — число различных
уровней входной координаты Xi (/). По данным таблицы
строится график, который аппроксимируется кусочно-
линейной, зависимостью. При существенном разбросе
значений yi(t) коэффициенты статической характери-
стики
У1 (/) =ao+aixi (О
определяют с помощью метода наименьших квадратов
[Л. 2]. Величины су> и «1 находятся из системы линейных
алгебраических уравнений:
п п
(0;
I =1 г\=1
п п п
а0 S х> (0 + S х\ (0 = X У* (о.х W-
/г=1 г =1 Z—1
Активный метод исследования применяют в тех слу-
чаях, когда уровень помех и флуктуаций входных и вы-
ходных координат невысок, а технологический регламент
допускает искусственные возмущения.
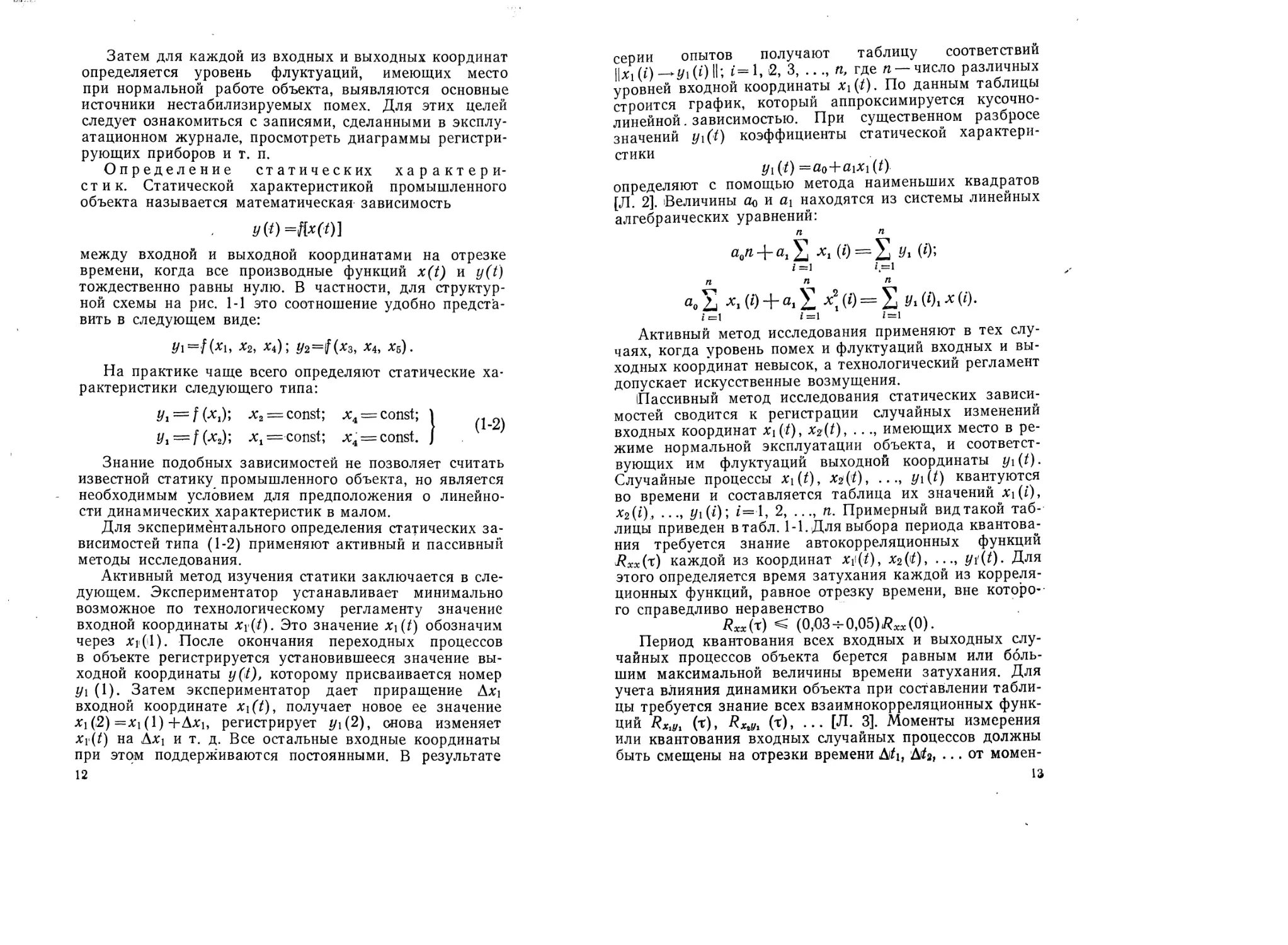
(Пассивный метод исследования статических зависи-
мостей сводится к регистрации случайных изменений
входных координат хД/), x2(t), ..имеющих место в ре-
жиме нормальной эксплуатации объекта, и соответст-
вующих им флуктуаций выходной координаты
Случайные процессы хД/), хД<), ..., квантуются
во времени и составляется таблица их значений хД/),
х2Д), •••> У1(0; z == h 2, ..п. Примерный вид такой таб-
лицы приведен втабл. 1-1. Для выбора периода квантова-
ния требуется знание автокорреляционных функций
Rxx(x) каждой из координат хД/), -МО» • Для
этого определяется время затухания каждой из корреля-
ционных функций, равное отрезку времени, вне которо-
го справедливо неравенство
Яхх(т) < (0,034-0,05)Лхх(0).
Период квантования всех входных и выходных слу-
чайных процессов объекта берется равным или боль-
шим максимальной величины времени затухания. Для
учета влияния динамики объекта при составлении табли-
цы требуется знание всех взаимнокорреляционных функ-
ций RXlf/l (т), Rx^ (т), ... [Л. 3]. Моменты измерения
или квантования входных случайных процессов должны
быть смещены на отрезки времени Mi, М?, ... от момен-
13
та регистрации выходной координаты Каждая из
величин Ы равна моменту времени, в который взаимно-
корреляционная функция достигает максимально-
го значения. Следует отметить, что на данном этапе ис-
следования экспериментатор обычно не располагает
Таблица 1-1
К определению статических
характеристик
Xt (0 X2 (0 «/1(0
x,(l) — Fi(l)
xt (2) У.(2)
1 • — —.
X, (n) У1(п)
столь обширной информацией о статистических характе-
ристиках возмущающих сигналов и взаимиокорреляцион-
ных функциях, что снижает достоверность статических
характеристик, определяемых пассивным методом.
Далее, используя формулы корреляционного анализа,
можно определить коэффициенты линейной статической-
зависимости [Л. 4]:
y\(t)=aQ+axxx(t)+a2x$(t) + ...
Несложно это сделать и с помощью метода наимень-
ших квадратов, для чего надо решить систему линейных
алгебраических уравнений:
п п п
W +а, £ xt (i) -|- а2 £ хг (/) +... = V У1
i=l i — 1 i=l
n n n
«0 S хч (0 + S (0 хч (i) + «2 S x* (0 Xq (/) +
z=l i = \
n
+ ...=£. -M0; <7=1,2,.:.
i == 1
14
Заметим, что для составления табл. 1-1 не обяза-
тельна постановка специальных опытов — часто можно
использовать записи в эксплуатационных журналах и
показания регистрирующих приборов.
Пассивный метод исследования статики следует при-
менять в тех случаях, когда технологический регламент
не позволяет наносить искусственные возмущения вход-
ным координатам или уровень помех и шумов высок по
сравнению с величинами допустимых воздействий Лхр
Д%2, • • •
После определения статических зависимостей выби-
раются рабочий режим объекта и диапазон изменений
входных и выходных координат. Этот диапазон должен
быть таким, чтобы максимальные отклонения фактиче-
ской статической характеристики от ее линейной аппрок-
симации не превышали погрешности эксперимента.
В случае кусочно-линейной аппроксимации статической
характеристики намечается несколько рабочих режимов,
в которых планируется проведение экспериментов по сня-
тию АФХ.
Подготовка аппаратуры. Необходимая для
эксперимента аппаратура состоит из генераторов гармо-
нических или периодических сигналов, измерительных
и регистрирующих приборов.
Генераторы предназначены для выработки синусои-
дальных электрических или пневматических сигналов
с частотой от нуля до нескольких десятых долей радиа-
на в секунду и переменной амплитудой. Конструкции ге-
нераторов подробно рассмотрены в приложении I.
При экспериментах желательно применять измери-
тельную и регистрирующую аппаратуру с линейными
статическими характеристиками и равными единице
АФХ в интервале частот от 0 до 0,2—0,3 padfceK. Так
как эти требования выполняются далеко не всегда, то
необходимо предварительно определить статические и,
частотные характеристики используемых приборов, а так-
же найти величины их зон нечувствительности и застоя,
так как последние ограничивают снизу амплитуду испы-
тательных воздействий x(t) при снятии АФХ.
При выборе измерительной аппаратуры следует
иметь в виду, что всегда целесообразнее регистрировать
непосредственно координату x(t), чем какие-либо кос-
венные параметры ее (давление воздуха, перемещения
регулирующего органа и т. п.), а для последующей об-
15
работки результатов — совмещать запись колебаний x(t)
й y(t) на одном приборе. Определенные требования
предъявляются к скорости движения диаграммной
бумаги регистрирующего прибора. С одной стороны,
с повышением частоты колебаний необходимо увеличи-
вать скорость Уб, с тем чтобы ошибка определения фа-
зового сдвига оставалась постоянной; с другой стороны,
чрезмерно большая скорость движения бумаги услож-
няет анализ и обработку результатов эксперимента. По-
этому в процессе снятия АФХ скорость Vq варьируется
в зависимости от конкретных условий в диапазоне от 60
до 21 000 mmJh. Для целей регистрации координат удоб-
но использовать станции ЦНИИКА или многоточечный
потенциометр типа ЭПП-09 с системой специальных
приставок (см. приложение I).
Чаще всего при снятии АФХ используют типовые
промышленные датчики для измерения координат х(/)
и y{t). Так как АФХ предназначены для расчета систе-
мы автоматического регулирования, то следует при про-
ведении экспериментов применять именно те датчики,
которые будут использоваться в будущей схеме автома-
тики. Это позволяет избавиться от необходимости экс-
периментального определения АФХ датчиков, предна-
значенных для измерения координаты y(t). Учет дина-
мических свойств датчиков для измерения х(/) все же
необходим и в этом случае, однако контроль входных
колебаний чаще всего осуществляется с помощью мало-
инерционных устройств — манометров, вольтметров,
расходомеров, указателей положения и т. п., что позво-
ляет иногда априорно полагать их АФХ равными еди-
нице в области низких частот.
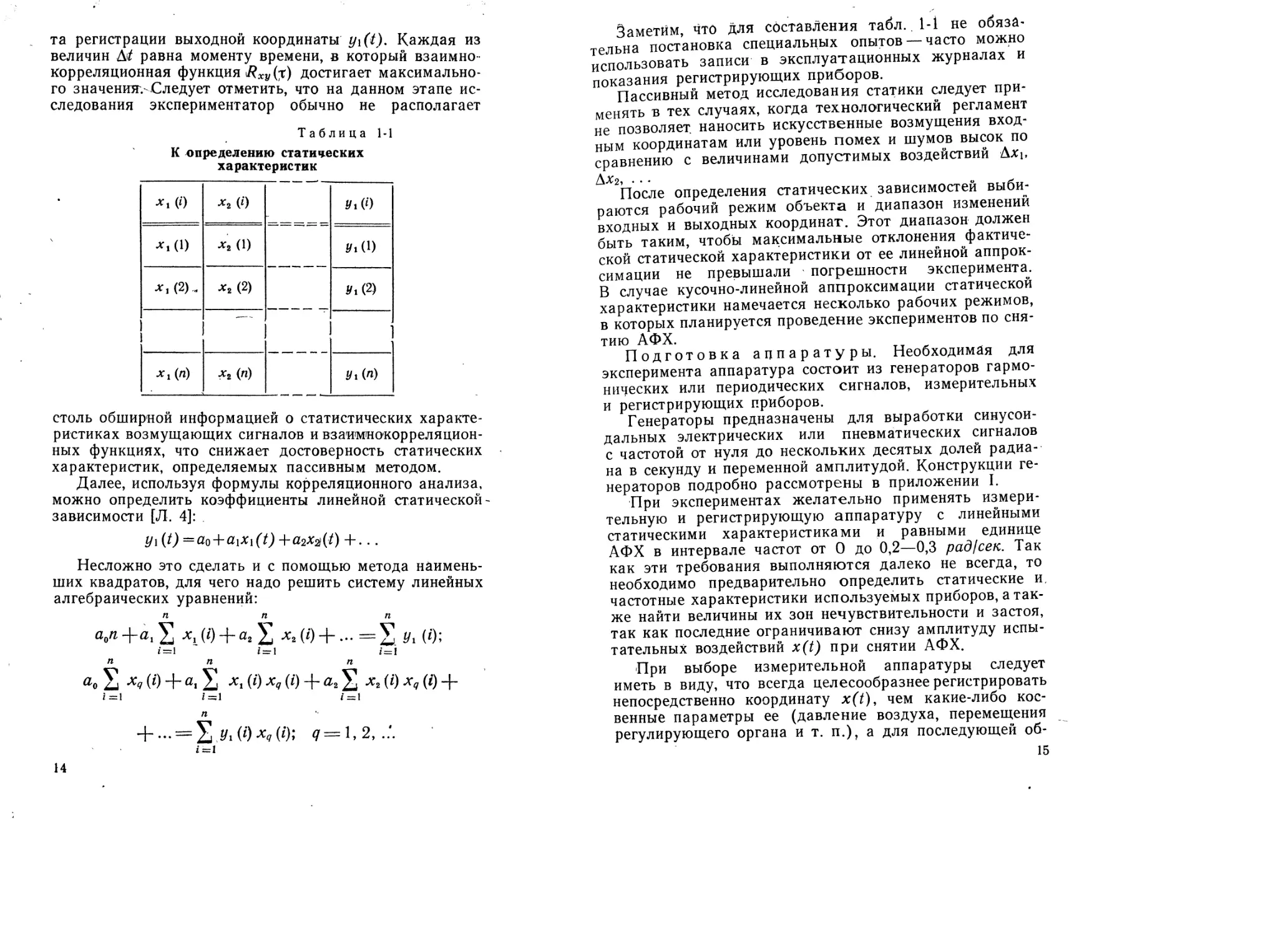
Планирование эксперимента. Планирова-
ние эксперимента по определению АФХ заключается
в основном в выборе вида испытательного периодиче-
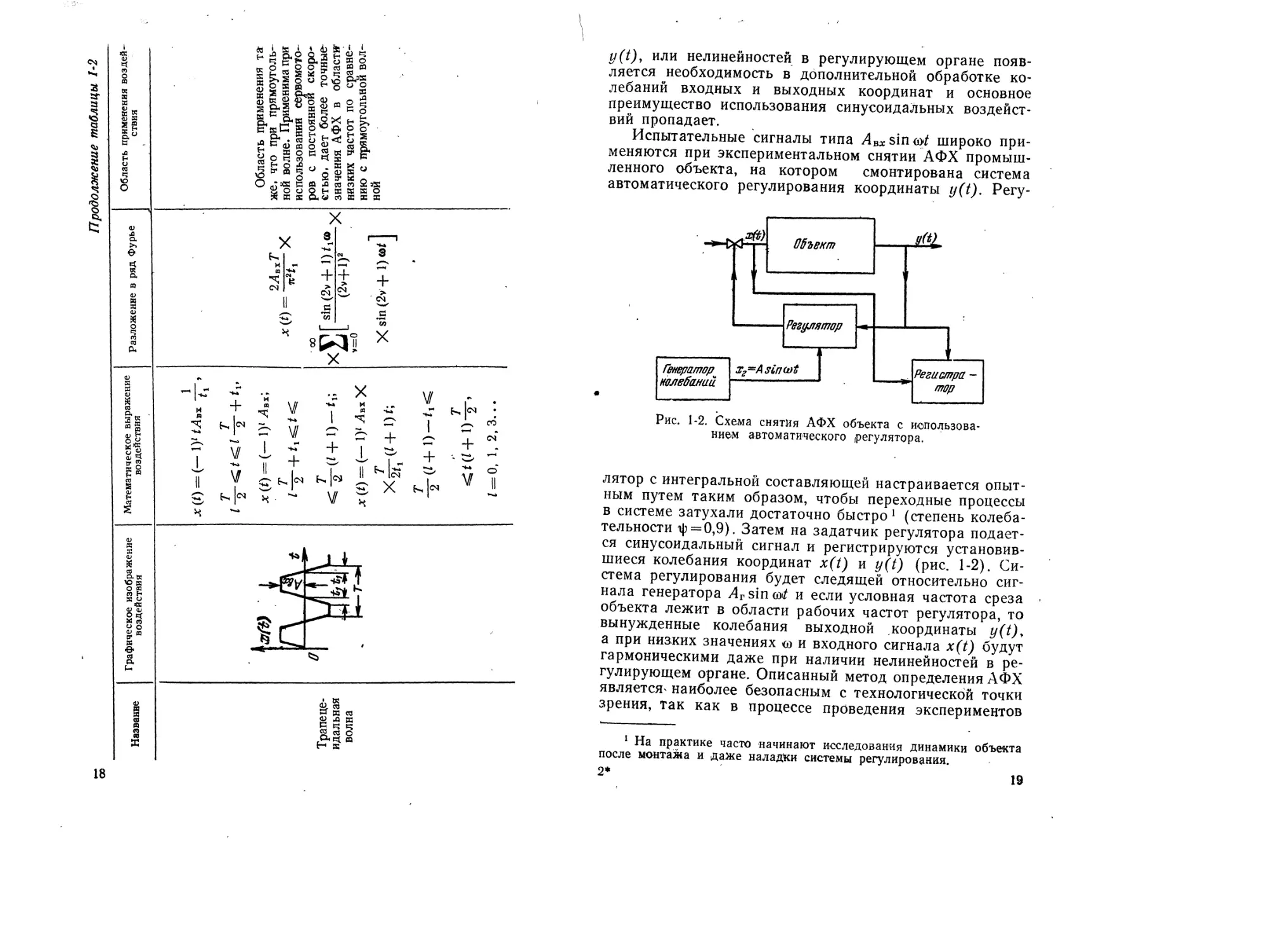
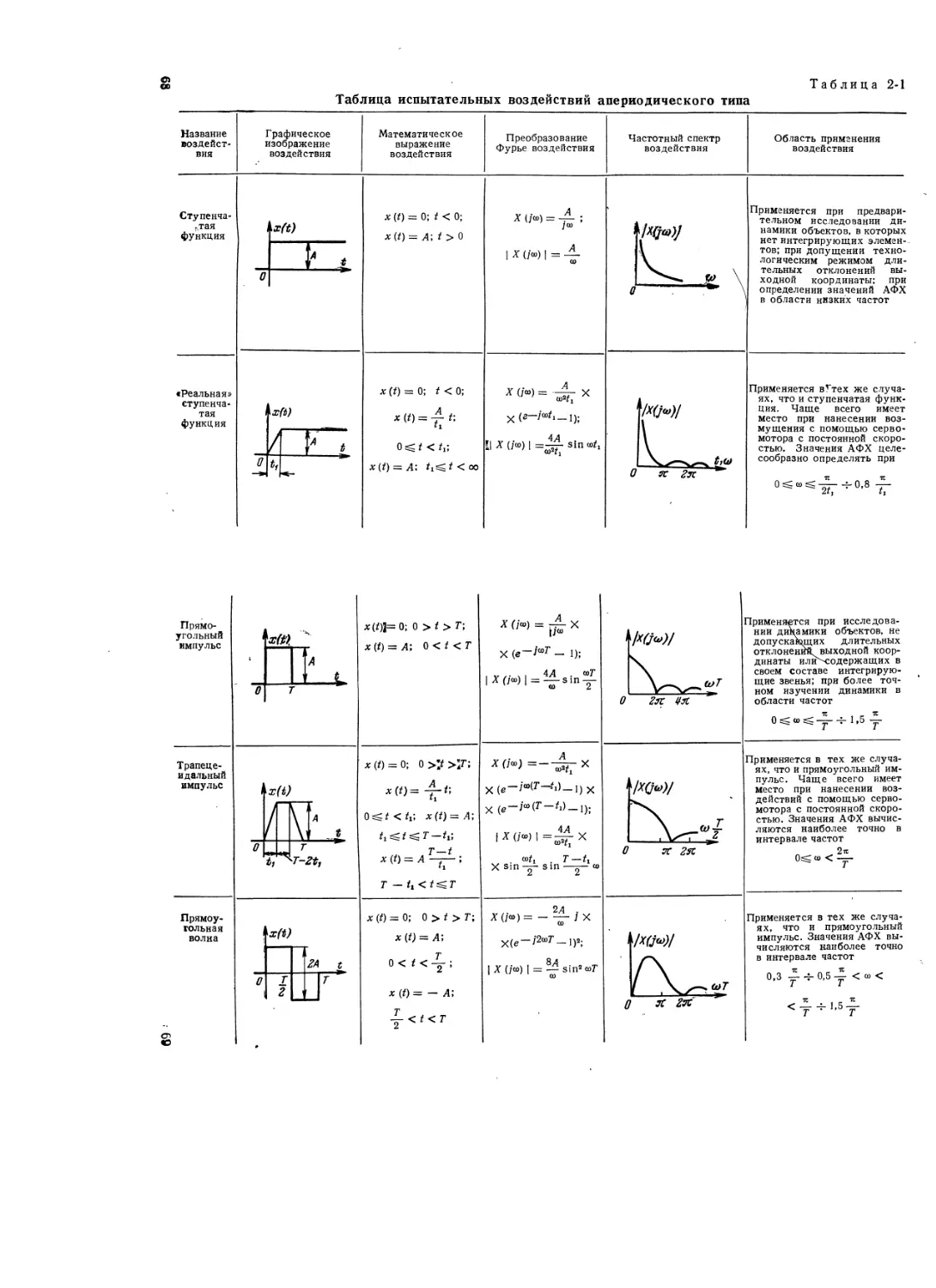
ского воздействия х(/). В табл. 1-2 показаны основные
виды испытательных сигналов и указаны области их
применения. Ниже рассматриваются более подробно
свойства трех типов периодических сигналов.
Применение синусоидальных воздействий %(/) =
=XBxSinciW упрощает последующую обработку резуль-
татов эксперимента и в общем случае является наибо-
лее целесообразным. Однако для создания подобных
сигналов,необходим специальный генератор колебаний.
Кроме того, при наличии шумов, налагаемых на x(t) и
16
СЧ
03
tf
S
C?
\o
03
s
«
4
\o
о
1ндустр1альиого шституту
«М. M. I. АРСЕНИЕВА
Продолжение таблицы 1-2
18
y(t). или нелинейностей в регулирующем органе появ-
ляется необходимость в дополнительной обработке ко-
лебаний входных и выходных координат и основное
преимущество использования синусоидальных воздейст-
вий пропадает.
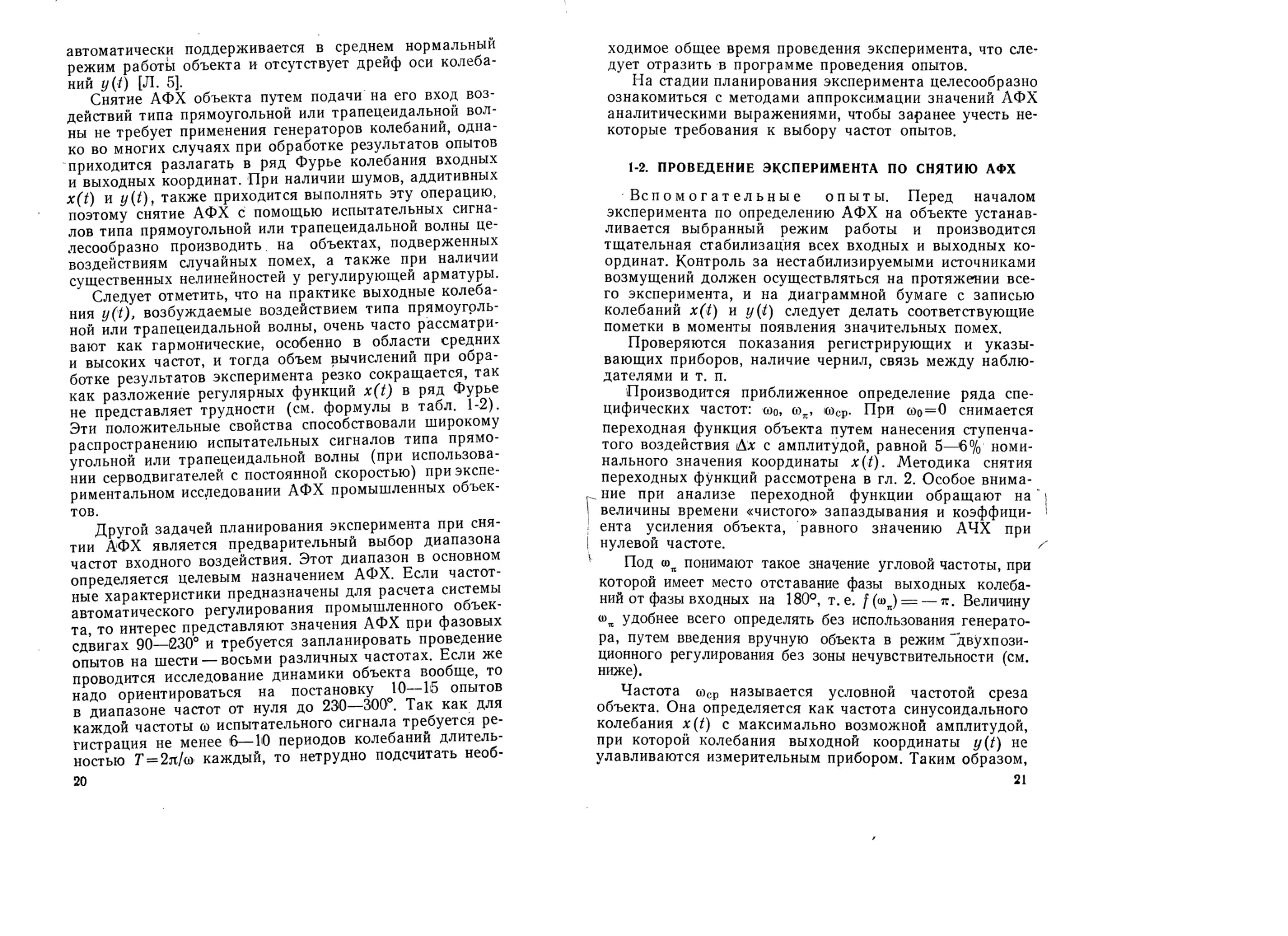
Испытательные сигналы типа ABXsin<o</ широко при-
меняются при экспериментальном снятии АФХ промыш-
ленного объекта, на котором смонтирована система
автоматического регулирования координаты y(t). Регу-
Рис. 1-2. Схема снятия АФХ объекта с использова-
нием автоматического регулятора.
лятор с интегральной составляющей настраивается опыт-
ным путем таким образом, чтобы переходные процессы
в системе затухали достаточно быстро1 (степень колеба-
тельности -Ф = 0,9). Затем на задатчик регулятора подает-
ся синусоидальный сигнал и регистрируются установив-
шиеся колебания координат x(t) и y(t) (рис. 1-2). Си-
стема регулирования будет следящей относительно сиг-
нала генератора Arsino)i/ и если условная частота среза
объекта лежит в области рабочих частот регулятора, то
вынужденные колебания выходной координаты y(t) +
а при низких значениях и входного сигнала x(t) будут
гармоническими даже при наличии нелинейностей в ре-
гулирующем органе. Описанный метод определения АФХ
является наиболее безопасным с технологической точки
зрения, так как в процессе проведения экспериментов
1 На практике часто начинают исследования динамики объекта
после монтажа и даже наладки системы регулирования.
2* 19
автоматически поддерживается в среднем нормальный
режим работы объекта и отсутствует дрейф оси колеба-
ний y(t) [Л. 5].
Снятие АФХ объекта путем подачи на его вход воз-
действий типа прямоугольной или трапецеидальной вол-
ны не требует применения генераторов колебаний, одна-
ко во многих случаях при обработке результатов опытов
приходится разлагать в ряд Фурье колебания входных
и выходных координат. При наличии шумов, аддитивных
x(i) и y(t), также приходится выполнять эту операцию,
поэтому снятие АФХ с помощью испытательных сигна-
лов типа прямоугольной или трапецеидальной волны це-
лесообразно производить, на объектах, подверженных
воздействиям случайных помех, а также при наличии
существенных нелинейностей у регулирующей арматуры.
Следует отметить, что на практике выходные колеба-
ния y(t), возбуждаемые воздействием типа прямоуголь-
ной или трапецеидальной волны, очень часто рассматри-
вают как гармонические, особенно в области средних
и высоких частот, и тогда объем вычислений при обра-
ботке результатов эксперимента резко сокращается, так
как разложение регулярных функций x(t) в ряд Фурье
не представляет трудности (см. формулы в табл. 1-2).
Эти положительные свойства способствовали широкому
распространению испытательных сигналов типа прямо-
угольной или трапецеидальной волны (при использова-
нии серводвигателей с постоянной скоростью) при экспе-
риментальном исследовании АФХ промышленных объек-
тов.
Другой задачей планирования эксперимента при сня-
тии АФХ является предварительный выбор диапазона
частот входного воздействия. Этот диапазон в основном
определяется целевым назначением АФХ. Если частот-
ные характеристики предназначены для расчета системы
автоматического регулирования промышленного объек-
та, то интерес представляют значения АФХ при фазовых
сдвигах 90—230° и требуется запланировать проведение
опытов на шести — восьми различных частотах. Если же
проводится исследование динамики объекта вообще, то
надо ориентироваться на постановку 10—15 опытов
в диапазоне частот от нуля до 230—300°. Так как для
каждой частоты со испытательного сигнала требуется ре-
гистрация не менее (6—10 периодов колебаний длитель-
ностью Т=2л/<о каждый, то нетрудно подсчитать необ-
20
ходимое общее время проведения эксперимента, что сле-
дует отразить в программе проведения опытов.
На стадии планирования эксперимента целесообразно
ознакомиться с методами аппроксимации значений АФХ
аналитическими выражениями, чтобы заранее учесть не-
которые требования к выбору частот опытов.
1-2. ПРОВЕДЕНИЕ ЭКСПЕРИМЕНТА ПО СНЯТИЮ АФХ
Вспомогательные опыты. Перед началом
эксперимента по определению АФХ на объекте устанав-
ливается выбранный режим работы и производится
тщательная стабилизация всех входных и выходных ко-
ординат. Контроль за нестабилизируемыми источниками
возмущений должен осуществляться на протяжении все-
го эксперимента, и на диаграммной бумаге с записью
колебаний x(t) и y(t) следует делать соответствующие
пометки в моменты появления значительных помех.
Проверяются показания регистрирующих и указы-
вающих приборов, наличие чернил, связь между наблю-
дателями и т. п.
Производится приближенное определение ряда спе-
цифических частот: <о0, <соСр- При о>о='0 снимается
переходная функция объекта путем нанесения ступенча-
того воздействия Ах с амплитудой, равной 5—'6% номи-
нального значения координаты x(Y). Методика снятия
переходных функций рассмотрена в гл. 2. Особое внима-
г ние при анализе переходной функции обращают на" ।
величины времени «чистого» запаздывания и коэффици- !
! ента усиления объекта, равного значению АЧХ при
I нулевой частоте. z
- Под <оте понимают такое значение угловой частоты, при
которой имеет место отставание фазы выходных колеба-
ний от фазы входных на 180°, т. е. f (coj = — тс. Величину
удобнее всего определять без использования генерато-
ра, путем введения вручную объекта в режим ""двухпози-
ционного регулирования без зоны нечувствительности (см.
ниже).
Частота соСр называется условной частотой среза
объекта. Она определяется как частота синусоидального
колебания x(t) с максимально возможной амплитудой,
при которой колебания выходной координаты y(t) не
улавливаются измерительным прибором. Таким образом,
21
величина <оср зависит не только от динамических свойств
объекта, но и от максимального значения амплитуды
испытательного сигнала и зоны нечувствительности
измерительного прибора. Приближенное значение а>Ср
также находится без использования генератора, путем
нанесения от руки больших по амплитуде воздействий
x(t) типа прямоугольной волны.
Далее намечаются рабочие частоты опытов, например:
Чс . . 9 . . 7<Ои . .
3 ’ 2 ’ 2 3 ’ 6 ’ 6 ’ 3 ’
3^.
2 ’
<Оср — СОТС
. Для
2
каждой из частот выбирается своя амплитуда испытатель-
ного сигнала; при этом следует помнить, что с ростом
частоты надо увеличивать и величину возмущения.
Линейность статической зависимости объекта явля-
ется лишь необходимым условием линейности динами-
ческих свойств. Поэтому при постановке вспомогатель-
ных опытов следует проверить выполнение принципа
суперпозиции. Для этого целесообразно на частоте
поставить два опыта с разными амплитудами входного
сигнала x(t) и проанализировать изменение амплитуд
Г колебаний выходной координаты y(t). Для доказатель-
ства линейности динамических характеристик на прак-
I тике, однако, довольствуются тем, что убеждаются
( в равенстве частот входных и выходных колебаний.
Снятие АФХ при синусоидальных воздей-
ствиях. Включается генератор синусоидальных коле-
баний с заданной рабочей частотой <о опыта и начинает-
ся регистрация входной и выходной координат объекта.
Целесообразно производить нумерацию всех периодов
колебаний x(\t) и y(t) и делать отметки об остановках,
изменениях в режиме работы, появлении возмущающих
воздействий и т. п. непосредственно на диаграммной
бумаге. Необходимо все время следить за тем, чтобы
отклонения координаты y(t) не превышали пределов
зоны безопасной работы объекта, а также за низко-
частотным дрейфом оси колебаний. Продолжительность
опыта на данной частоте со в среднем равна (64-10) Г,
где Т=2л/(о. Первые 3—4 периода колебаний обычно не
используются для определения АФХ, так как в объекте
еще не затухли переходные процессы. Переход на дру-
гую частоту опыта возможен только после получения
6—7 установившихся колебаний координаты y(t).
Снятие АФХ при воздействии типа прямо-
22
У?6ЛьНйя 6 0 л н а. Методика проведений опЫтй здесь
несколько сложнее, и возможны два варианта.
В первом случае экспериментатор вручную или с по-
мощью сервомотора изменяет через постоянные отрезки
времени 0,5Т входную координату х(1) на 5—10% номи-
нального (или равновесного) значения и вводит объект
в режим незатухающих колебаний. При этом не обра-
щают особого внимания на поведение координаты
разумеется до тех пор, пока последняя находится в зоне
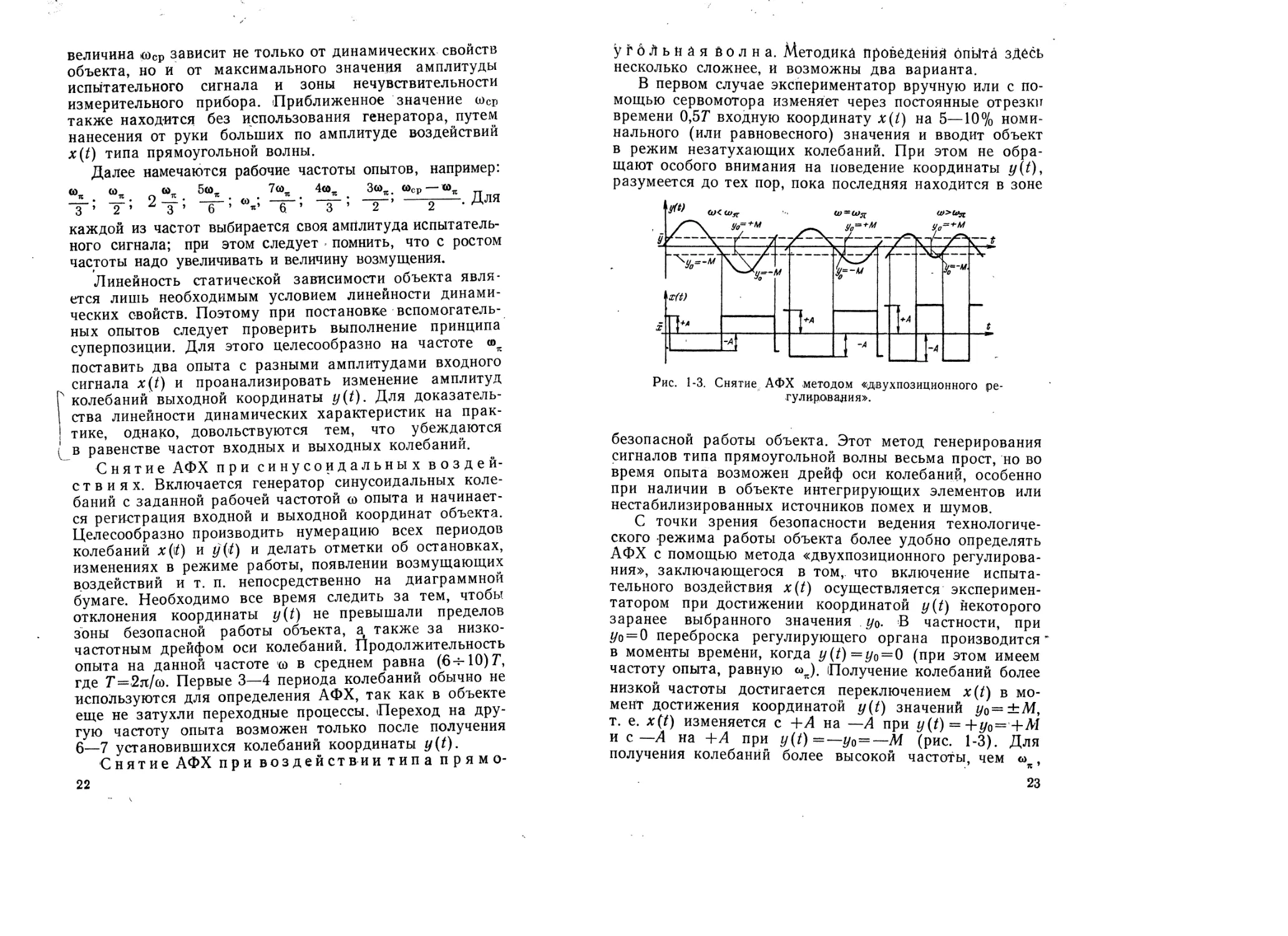
Рис. 1-3. Снятие АФХ методом «двухпозиционного ре-
гулирования».
безопасной работы объекта. Этот метод генерирования
сигналов типа прямоугольной волны весьма прост, но во
время опыта возможен дрейф оси колебаний, особенно
при наличии в объекте интегрирующих элементов или
нестабилизированных источников помех и шумов.
С точки зрения безопасности ведения технологиче-
ского режима работы объекта более удобно определять
АФХ с помощью метода «двухпозиционного регулирова-
ния», заключающегося в том, что включение испыта-
тельного воздействия x(f) осуществляется эксперимен-
татором при достижении координатой y(t) некоторого
заранее выбранного значения z/0. В частности, при
уо = 0 переброска регулирующего органа производится"
в моменты времени, когда у(О=Уо=О (при этом имеем
частоту опыта, равную %). Получение колебаний более
низкой частоты достигается переключением x(t) в мо-
мент достижения координатой y(t) значений г/0=±М,
т. е. x(t) изменяется с +Л на —А при у(t) = +у0= +AI
и с—Л на +Л при y(t)=— yQ = — М (рис. 1-3). Для
получения колебаний более высокой частоты, чем со ,
23
поступают наоборот: изменяют x(t) с +А на —А при
y(t)—— у0=—М и с —А на +А при y(i) = +yo—+M,
Величина М выбирается меньшей, чем допустимые тех-
нологическим регламентом значения отклонений выход-
ной координаты у($). Этим обеспечиваются безопасная
работа объекта и стабилизация оси колебаний коорди-
наты y(\t).
Ранее описывалась методика снятия АФХ объекта,
оборудованного системой автоматического регулирова-
ния координаты y(t). Совершенно очевидно, что это
наиболее удобный и безопасный способ определения
частотных характеристик, так как экспериментатор
освобождается от утомительного контроля за поведе-
нием координат объекта, дрейфом оси колебаний и т. п.
При отсутствии генератора синусоидальных сигналов
можно воздействовать на задатчик регулятора от руки,
создавая периодические колебания прямоугольной
формы.
1-3. ОБРАБОТКА РЕЗУЛЬТАТОВ ЭКСПЕРИМЕНТА
ПО СНЯТИЮ АФХ
В этом параграфе рассматриваются вопросы выделе-
ния гармонических составляющих из записанных коле-
баний х(/) и y(t) и определения значений амплитудных
и фазовых характеристик. Здесь можно указать четыре
основных случая, наиболее часто встречающихся в прак-
тике исследования динамических характеристик.
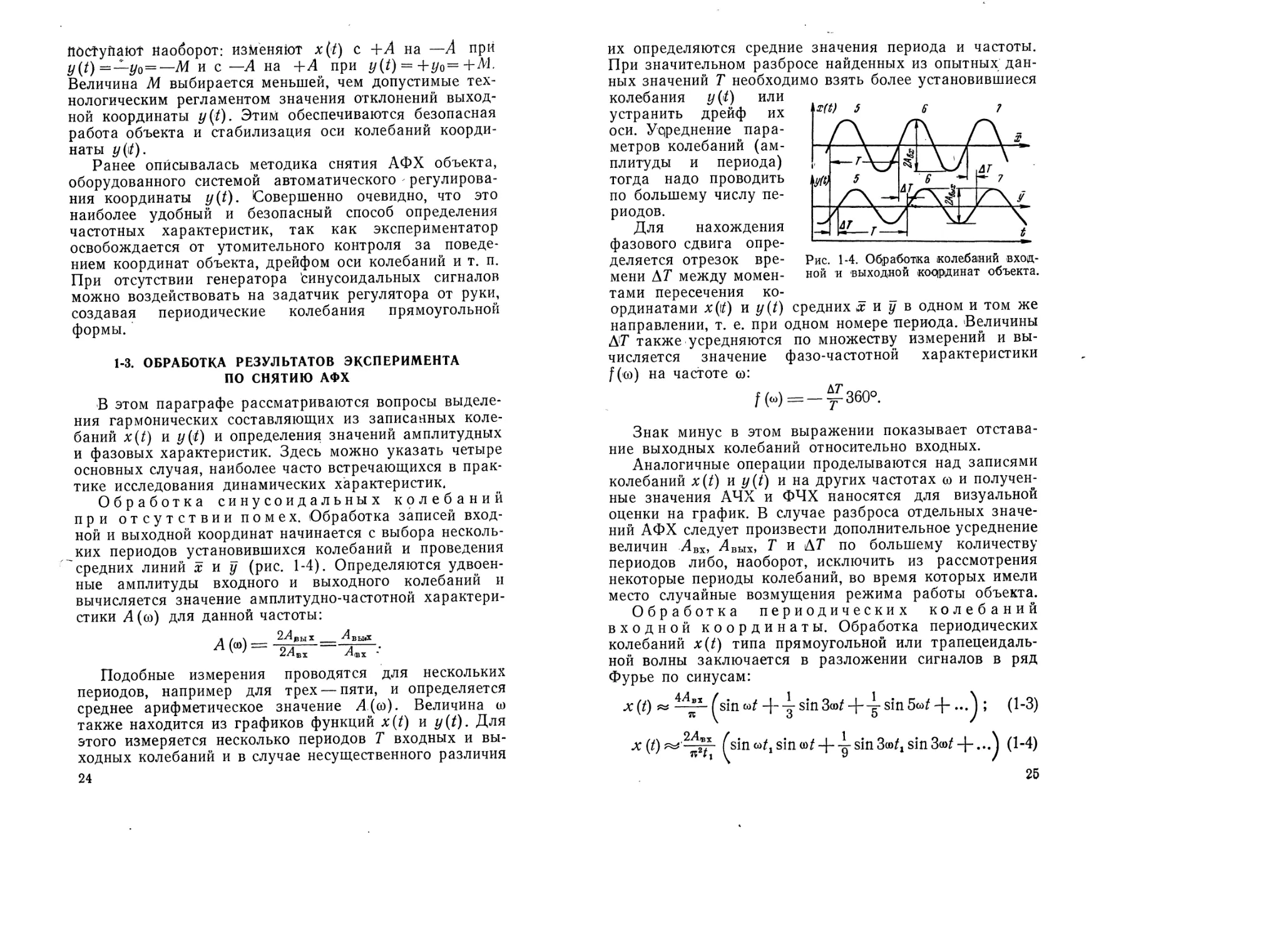
Обработка синусоидальных колебаний
при отсутствии помех. Обработка записей вход-
ной и выходной координат начинается с выбора несколь-
ких периодов установившихся колебаний и проведения
средних линий х и у (рис. 1-4). Определяются удвоен-
ные амплитуды входного и выходного колебаний и
вычисляется значение амплитудно-частотной характери-
стики А (со) для данной частоты:
д (,п\_ 2Лрых _ Лвыд
--
Подобные измерения проводятся для нескольких
периодов, например для трех — пяти, и определяется
среднее арифметическое значение А (со). Величина о)
также находится из графиков функций x(t) и y(f). Ц^ля
этого измеряется несколько периодов Т входных и вы-
ходных колебаний и в случае несущественного различия
24
их определяются средние значения периода и частоты.
При значительном разбросе найденных из опытных дан-
ных значений Т необходимо взять более установившиеся
колебания y(t) или
устранить дрейф их
оси. Усреднение пара-
метров колебаний (ам-
плитуды и периода)
тогда надо проводить
по большему числу пе-
риодов.
Для нахождения
фазового сдвига опре-
Рис. 1-4. Обработка колебаний вход-
ной и выходной координат объекта.
деляется отрезок вре-
мени ДТ между момен-
тами пересечения ко-
ординатами х(|/) и y(t) средних л и у в одном и том же
направлении, т. е. при одном номере периода. Величины
АТ также усредняются по множеству измерений и вы-
числяется значение фазо-частотной характеристики
f(co) на частоте со:
/(«) = —^360°.
Знак минус в этом выражении показывает отстава-
ние выходных колебаний относительно входных.
Аналогичные операции проделываются над записями
колебаний х(/) и y(t) и на других частотах со и получен-
ные значения АЧХ и ФЧХ наносятся для визуальной
оценки на график. В случае разброса отдельных значе-
ний АФХ следует произвести дополнительное усреднение
величин Авх, Авых, Т и ДТ по большему количеству
периодов либо, наоборот, исключить из рассмотрения
некоторые периоды колебаний, во время которых имели
место случайные возмущения режима работы объекта.
Обработка периодических колебаний
входной координаты. Обработка периодических
колебаний х(/) типа прямоугольной или трапецеидаль-
ной волны заключается в разложении сигналов в ряд
Фурье по синусам:
х (о +4sin +4 s*n ’ (1-3)
(0^'"5^ (sin<41sin<i>/4--g-sin3<o/iSin3«>/-|-... 1 (1-4)
25
и выделении первой гармоники. Совокупность гармоник,
определяемая выражением (1-3) или (1-4), поступает
на вход линейного объекта и вызывает на его выходе
колебания координаты y(t), принципиально состоящие
из точно таких же синусоид с фазовыми сдвигами f (со)
и измененными в А(<о) раз амплитудами. Поэтому для
нахождения значений АФХ требуется разлагать в ряд
Фурье также функцию y(t) и, используя принцип супер-
позиции линейной системы, определять Л (со) и f (co)
обычным приемом по первым гармоникам разложений
(в принципе можно найти значения A (со), f(co), А(Зсо),
f (Зсо) и т. д., но точность вычисления ординат А (Зсо),
А;(5со), ... будет низкой). Однако очень часто при иссле-
довании динамики промышленных объектов разложения
y(t) не приходится делать, так как с достаточной для
практики точностью выходные колебания можно рас-
сматривать как синусоидальные. Это допущение обосно-
вывается следующими соображениями: коэффициенты
разложения (1-3) и особенно (1-4) быстро убывают,
поэтому основная энергия сигнала x(t) содержится
в первой гармонике; амплитудно-частотные характери-
стики большинства промышленных объектов монотонно
убывают с ростом частоты, и поэтому амплитуды выход-
ных гармоник с частотами Зсо, 5со, 7о), ... уменьшаются
еще сильнее по сравнению с амплитудой первой сину-
соиды; объект обладает условной частотой среза, и
поэтому линейчатый спектр разложения y(t) не содер-
жит гармоник с частотами, большими соСр, т. е. уже при
ю^соср/З выходные колебания являются строго сину-
соидальными. При более низких частотах значения АФХ
искажаются из-за неучета второго и третьего членов
ряда (1-3). Стремление уменьшить эту ошибку застав-
ляет либо применять испытательный сигнал типа трапе-
цеидальная волна, либо разлагать y(t) в ряд Фурье.
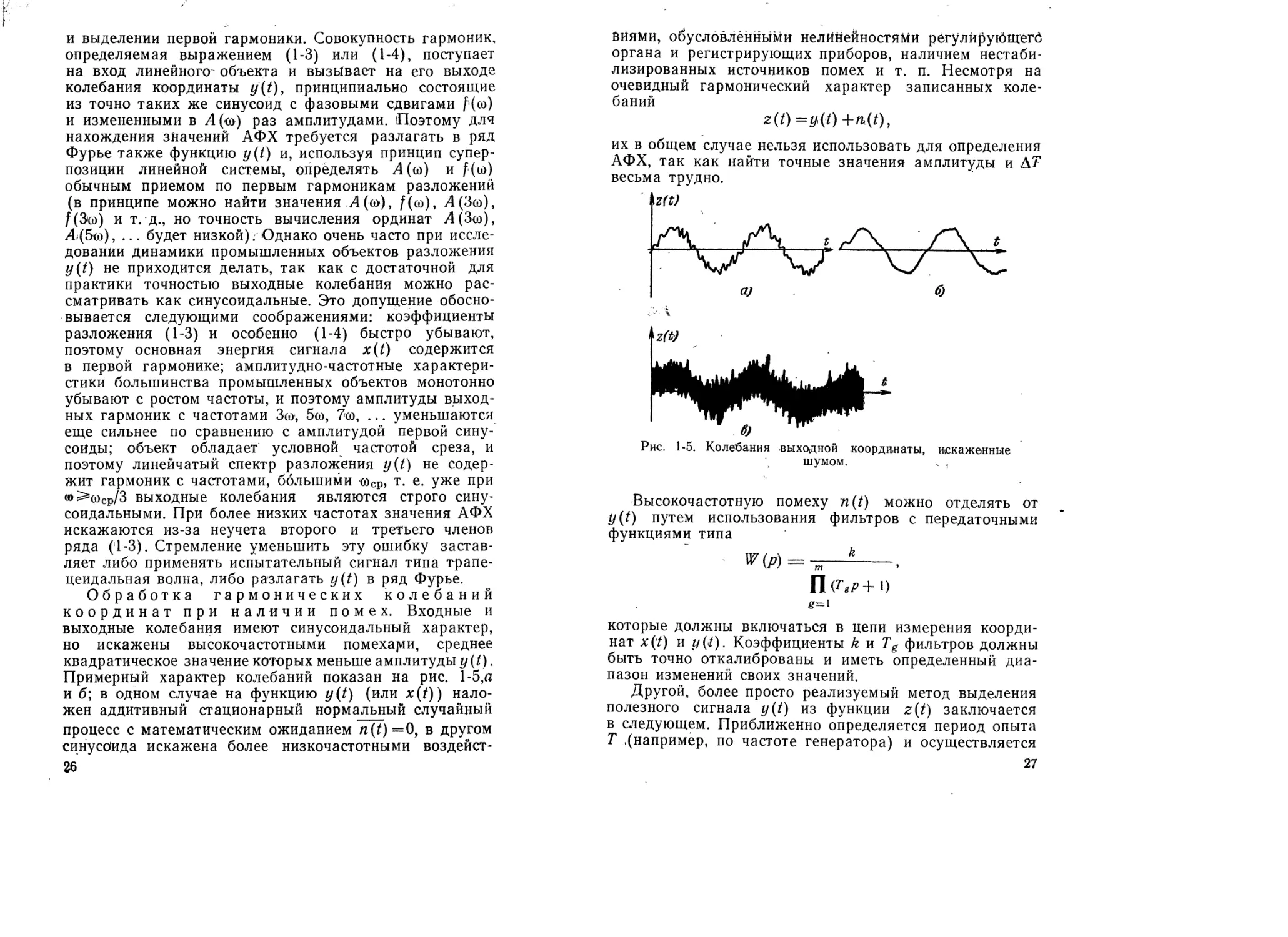
Обработка гармонических колебаний
координат при наличии помех. Входные и
выходные колебания имеют синусоидальный характер,
но искажены высокочастотными помехами, среднее
квадратическое значение которых меньше амплитуды у (t).
Примерный характер колебаний показан на рис. 1-5,а
и б; в одном случае на функцию y(t) (или х(/)) нало-
жен аддитивный стационарный нормальный случайный
процесс с математическим ожиданием п(/)=0, в другом
синусоида искажена более низкочастотными воздейст-
26
виями, обусловленными нелинейностями регулирующего
органа и регистрирующих приборов, наличием нестаби-
лизированных источников помех и т. п. Несмотря на
очевидный гармонический характер записанных коле-
баний
z(Z) =y(t) +ra(0,
их в общем случае нельзя использовать для определения
АФХ, так как найти точные значения амплитуды и Д7
весьма трудно.
а) б)
X
Рис. 1-5. Колебания выходной координаты, искаженные
шумом. . ,
Высокочастотную помеху л(/) можно отделять от
#(/) путем использования фильтров с передаточными
функциями типа
П <rtP +1)
5=1
которые должны включаться в цепи измерения коорди-
нат %(/) и y(t). Коэффициенты k и Тё фильтров должны
быть точно откалиброваны и иметь определенный диа-
пазон изменений своих значений.
Другой, более просто реализуемый метод выделения
полезного сигнала t/(/) из функции z(t) заключается
в следующем. Приближенно определяется период опыта
Т .(например, по частоте генератора) и осуществляется
разложение функции z(t) в ряд по синусам на отрезке
времени Т:
z(f) я»Ло+&1 sin (0/ + &2 sin 2®/+63 sin3®/+ ...
(1-5)
л—1 Л—1
Здесь: &, = -!-?] z(i); = z(i)sinki^-;
i=l i=l
£ = 1,2,...; -
z(i) — значения функции z(t) в n равноотстоящих точ-
ках интервала Т. Удобно выбирать п равным 12, 18 или
24, так как при этом упрощается вычисление значений
• 1 •
sinb —.
Коэффициенты ряда (1-5) быстро убывают, и поэто-
му можно ограничиться нахождением средней линии
z — bQ и bi, хотя для контроля полезно определить и Ь2.
Далее строится синусоида y(t) =bi sin co/ = ABbixSin и
обычными приемами находятся значения АФХ. Опера-
ция разложения производится для ряда периодов коле-
баний и найденные значения АГ и АВых усредня-
ются.
Далеко не всегда удается разложить z(/) в ряд по
синусам (из-за несовпадения значений z(0) и z(n) с Ьо),
и тогда используют обычный ряд Фурье:
г/(0 b0-j-a1 cos-^- /4-&iSin ••• [ (1-6)
Если период Т разбить на 11 равных частей, то фор-
мулы для вычисления &0, аг, Ьг становятся достаточно
простыми:
п
= й1=4^(11) + г(5) +
z=o
+ Нг (1) + г(9)-г(3)-г(7)] +
+ 0,866 [г (0) — z (10) — z (4) — г (6)]j>;
b , = -2-{г (2) - z (8) + 4- [г (°) + г (4) - z (6) ~z(10)] +
+ 0,866 [z (1) + z (3) — г (5) — z (9)]l
28
После вычисления коэффициентов Фурье на диа-
граммной бумаге с записью z(t) строится первая гармо-
ника (1-6), амплитуда которой определяется из графика
или по формуле Двьи = У а* -ф- b\
Аналогичным способом находятся коэффициенты
разложения входных колебаний x(t) и вычисляется зна-
чение АЧХ:
где а\х и b\x — коэффициенты Фурье для X\(t). Величина
временного сдвига ДГ определяется из графика.
Если интервал разложения Т разбит на произвольное
число равноотстоящих частей п, то коэффициенты Фурье
вычисляются по формулам:
я=1 п— 1
= -г Sz sin ki = S z ®sin ki V:
i=0 i=0
п— 1
&« = vEZ(0; ^—1,2,3,...
i=0
Обработка сильно искаженных помеха-
ми гармонических колебаний. Выходные или
входные колебания имеют синусоидальный характер, но
на функции y(t) или х(£) наложен стационарный нор-
мальный случайный процесс п(/) с нулевым математи-
ческим ожиданием, причем его среднее квадратическое
значение больше амплитуды полезного сигнала ДВых-
Пример такого рода колебаний показан на рис. 1-5,в.
В этом случае нецелесообразно использовать разложе-
ние функции z(t) в ряд Фурье, так как точное измере-
ние ее ординат осуществить весьма трудно, а определе-
ние амплитуды путем усреднения от руки может приве-
сти к большим ошибкам.
В подобной ситуации более точные результаты дает
применение статистических методов обработки результа-
тов эксперимента. Сущность их заключается в следующем
[Л. 6]. Подадим на вход объекта воздействие, изменяю-
щее по закону х(/) =ЛВХ sin со/, и будем записывать на вы-
29
хбдё колебания функции z(t) =y(t) +n(tt) =ЛВыХsin(®i(+
+jF(®)]+n('i). Вычислим оценки взаимных корреляцион-
ных функций между x{t) и z(t) при нулевом сдвиге:
Гн
Г (0) —— “j! " у Авх SIH ®/ABBix sin [(в/ f (®)] Л==
*о
==У -ДвхЛиых COS f (а>) (1-7)
и между z (t) и некоторой дополнительной функцией xt (/) —
= Авз) cos wt:
тп
R* г ДО) = Т 1 / ’ -^ВХ COS <ot dt Двых Sin (о/ f (®)] —-
1 1 Н - *0 J
= -у Двх-Деъхх Sin f (<в), (1*8)
где t„ и Та — начало и конец интервала наблюдения вы-
ходного сигнала, причем Та — ta во много раз больше ве-
личины Т =2'п/<л. Из формул (1-7) и (1-8) нетрудно найти
значения АФХ:
ам=^гУ^.(0)+n:\fir-
Лвх 1
(1-9)
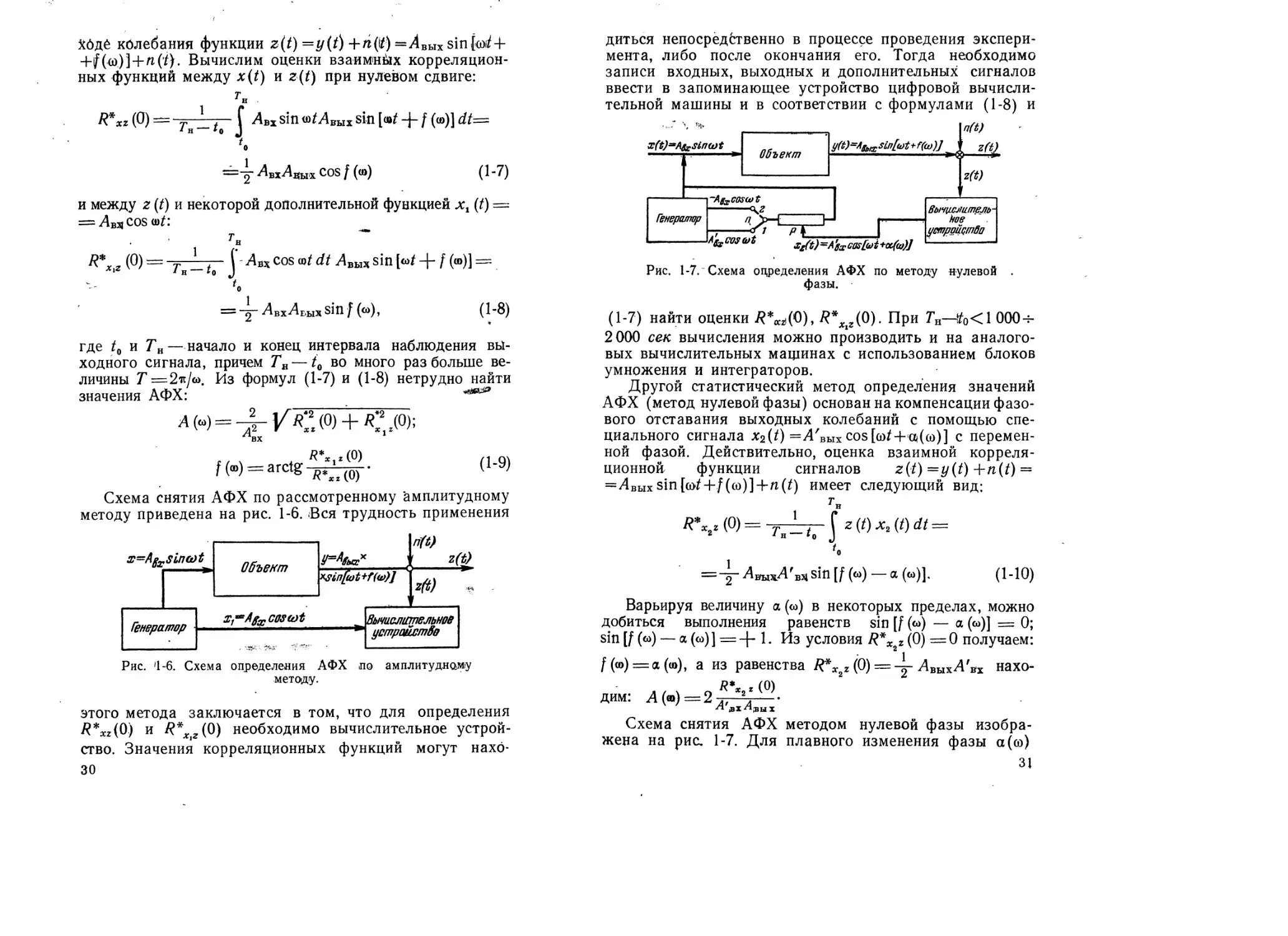
Схема снятия АФХ по рассмотренному амплитудному
методу приведена на рис. 1-6. .Вся трудность применения
Рис. '1-6. Схема определения АФХ по амплитуднаму
методу.
этого метода заключается в том, что для определения
/?*хг(0) и ^?\г(0) необходимо вычислительное устрой-
ство. Значения корреляционных функций могут нахб-
30
диться непосредственно в процессе проведения экспери-
мента, либо после окончания его. Тогда необходимо
записи входных, выходных и дополнительных сигналов
ввести в запоминающее устройство цифровой вычисли-
тельной машины и в соответствии с формулами (1-8) и
Рис. 1-7. Схема определения АФХ по методу нулевой
фазы.
(1-7) найти оценки Я^ДО), #\2(0). При Тн—£о<1 000ч-
2 000 сек вычисления можно производить и на аналого-
вых вычислительных мащинах с использованием блоков
умножения и интеграторов.
Другой статистический метод определения значений
АФХ (метод нулевой фазы) основан на компенсации фазо-
вого отставания выходных колебаний с помощью спе-
циального сигнала х2(/) =А'Выхcos[cd/+-ai(a))] с перемен-
ной фазой. Действительно, оценка взаимной корреля-
ционной функции сигналов z{t) —y(t) +n(t) =
=Лвыхsin[со/+/(со)] + п(/) имеет следующий вид:
/?*v (0) = J Z (0 Х2 (0 dt=
ч
==-2-ДвыхД,вл sin («) а (о)], (1-10)
Варьируя величину а (о) в некоторых пределах, можно
добиться выполнения равенств sin [f (<а) — a (<>)] = 0;
sin [f (<о) — a (<о)] = 4“ 1. Из условия R*x г (0) —Q получаем:
f(®) = a(a>), а из равенства 2?*^ (0) =-|- АвыхА'вх нахо-
... п
дим: А (я) = 2-^-------
Схема снятия АФХ методом нулевой фазы изобра-
жена на рис, 1-7. Для плавного изменения фазы a (и)
31
в пределах 0, ±л/2 служат потенциометр Р и переклю-
чатель /7.
Для определения АФХ промышленного объекта дан-
ным методом требуется генерировать sin со/ и cos соЛ
а также вычислять корреляционную функцию при нуле-
вом сдвиге и производить подбор фазы а1 (со) в процессе
проведения опыта. Для этого целесообразно применять
корреляторы или аналоговые вычислительные машины.
При наличии цифровой вычислительной машины запись
колебаний z(t) и квантуется во времени и по уров-
ню и в виде последовательности цифр вводится в запо-
минающее устройство машины. Затем производится мно-
гократное вычисление 2?*^ (0) при различных значениях
я (со), пока не будут получены равенства ^г(0)=0 и
Рх г (0) =0,5А'вхАвых. Метод нулевой фазы несколько
сложнее амплитудного метода, но дает более точные
результаты при определении значений АФХ в области
высоких частот.
Экспериментальным путе^ было установлено, что
при амплитуде выходного сигнала, большей среднего
квадратического значения шума п(/), точность опреде-
ления А) (со) и f(o>) примерно одинакова как при исполь-
зовании обычной обработки результатов опыта, так и
при применении статистических методов. Если же АВых
меньше среднего квадратического значения помехи, то
статистические методы обработки результатов экспери-
мента позволяют найти более точные значения АФХ.
1-4. ОБРАБОТКА РЕЗУЛЬТАТОВ ЭКСПЕРИМЕНТА
(АППРОКСИМАЦИЯ АФХ)
5 Полученные экспериментальным путем АФХ иногда
/используют в виде графиков или таблиц для расчета
'систем автоматического регулирования, но чаще всего
. / требуется найти аппроксимирующее аналитическое вы
! ражение IF(jco). Это выражение должнр удовлетворять
;требованиям реализации передаточной функции W (р)
! на аналоговых вычислительных машинах и удобству
выполнения ручных расчетов.
Р Аппроксимация АФХ имеет существенное отличие от
задачи приближения эмпирических данных приемлемой
для наших целей функцией вещественного переменного.
, Задача аппроксимации функции в области комплексной
ч переменной более сложна и сводится в наших условиях
32
к проблеме приближения АЧХ и ФЧХ функциями вещест-П
венной переменной со. Но амплитудная и фазовая харак- !
теристики связаны, и поэтому аппроксимация их должна j
осуществляться одновременно,
ристики большинства про-
мышленных объектов свя-
заны неоднозначно, что еще
более усложняет нашу за-
дачу. Поясним последнее
замечание несколько по-
дробнее.
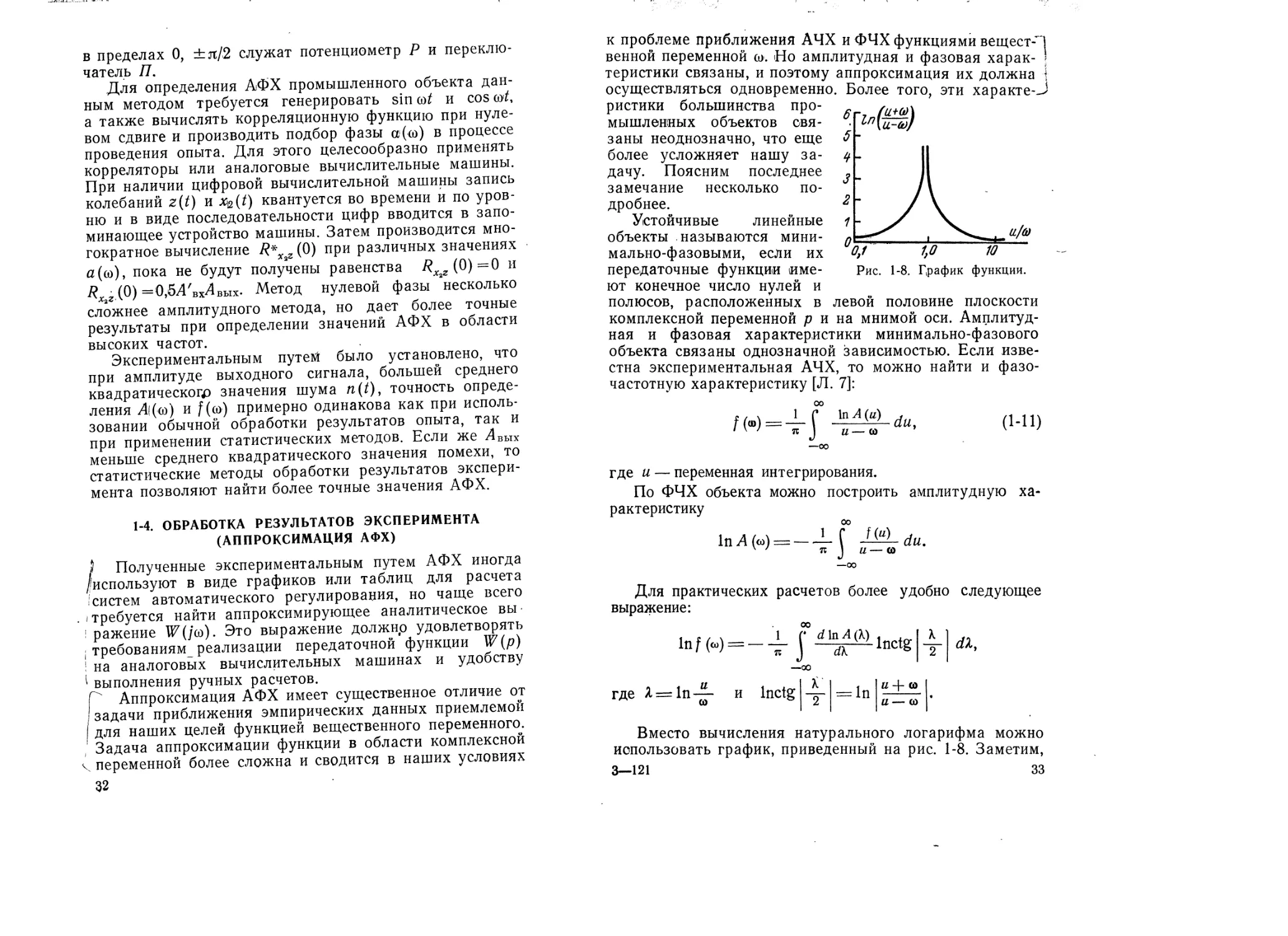
Устойчивые линейные
объекты называются мини-
мально-фазовыми, если их
Более того, эти характе-J
передаточные функции ИМе- Рис. 1-8. График функции,
ют конечное число нулей и
полюсов, расположенных в левой половине плоскости
комплексной переменной р и на мнимой оси. Амплитуд-
ная и фазовая характеристики минимально-фазового
объекта связаны однозначной зависимостью. Если изве-
стна экспериментальная АЧХ, то можно найти и фазо-
частотную характеристику [Л. 7]:
00
—00
In А (ц)
и— со
du,
(1-11)
где и—переменная интегрирования.
По ФЧХ объекта можно построить амплитудную ха-
рактеристику
00
In А (<>) ----— С J&- du.
' 7 тс J и — со
Для практических расчетов более удобно следующее
выражение:
lnf(„) = —L J ^«lnctg|4| Л,
где Я = 1п-^~
< X < и 4- <0
и Inctg — =1п —-—
° 2 а— со
Вместо вычисления натурального логарифма можно
использовать график, приведенный на рис. 1-8. Заметим,
3—121 33
что сдвиг фазы йа всех чйсТоФах Для объекта с миий-
мально-фазовыми свойствами будет наименьшим по
сравнению с другими системами, обладающими подоб-
ными АЧХ.
Метод определения АФХ по А (со) нашел некоторое
применение в теории цепей. Там чаще всего имеют дело
с минимально-фазовыми системами и стараются аппрок-
симировать с высокой степенью точности амплитудно-
частотную характеристику аналитическими выражения-
ми, которые могут быть реализованы с помощью пас-
сивных ЛлС-цепей.
Для передаточных функций неминимально-фазовых
объектов характерным является наличие нулей в правой
половине плоскости переменной р или существование
бесконечного числа отрицательных полюсов. Между АЧХ
и ФЧХ таких объектов нет однозначной зависимости,
т. е. два элемента с одинаковыми амплитудными харак-
теристиками могут иметь разные фазовые свойства.
Системы с элементами запаздывания обладают немини-
мально-фазовыми свойствами, так как число полюсов
UZ (р) = е~рх бесконечно; АЧХ звена запаздывания
всегда равна единице, а ^(со) =—кот и не зависит от ам-
плитуды.
Элемент с передаточной функцией типа
_Тр-1
Тр+\
также обладает неминимально фазовыми свойствами,
так как он имеет положительный нуль; АЧХ этого
объекта не зависит от частоты А(со) = 1, a
= —2arctg Гео.
Передаточная функция W\(p) =kfpl описывает дина-
мические свойства интегрирующего объекта. Хотя дан-
ную передаточную функцию нельзя отнести к немини-
мально-фазовым, однако между АЧХ и ФЧХ интегри-
рующего объекта также нет однозначности, так как
фазо-частотная характеристика есть постоянная величи-
на f (<о) = — I у, а амплитудная характеристика зависит
от частоты Л(о))=—Это обстоятельство также
затрудняет использование одной АЧХ или ФЧХ для ап-
проксимации экспериментальных АФХ.
34
и фазовой характеристиками.
Jm
30
//W
Промышленные объекты являются системами с рас-1
пределенными параметрами и обладают неминимально-1
фазовыми свойствами. При аппроксимации динамиче- I
ских свойств промышленных объектов передаточной I
функцией цида (В-2) почти всегда приходится вводить *
члене , учитывающий влияние распределенности па-
раметров или «транспортных» задержек сигналов. Эле-
менты, динамические свойства которых нужно или
можно описывать передаточной функцией типа W(p) =
» среди промышленных объектов встречаются
исключительно редко. Задача аппроксимации экспери-
ментальных АФХ промышленных объектов усложняется
при наличии в их составе интегрирующих звеньев.
Для большинства методов аппроксимации IF (/со)
требуется предварительно преобразовать эксперимен-
тальные АФХ к виду, обспечивающему однозначную
связь между амплитудной
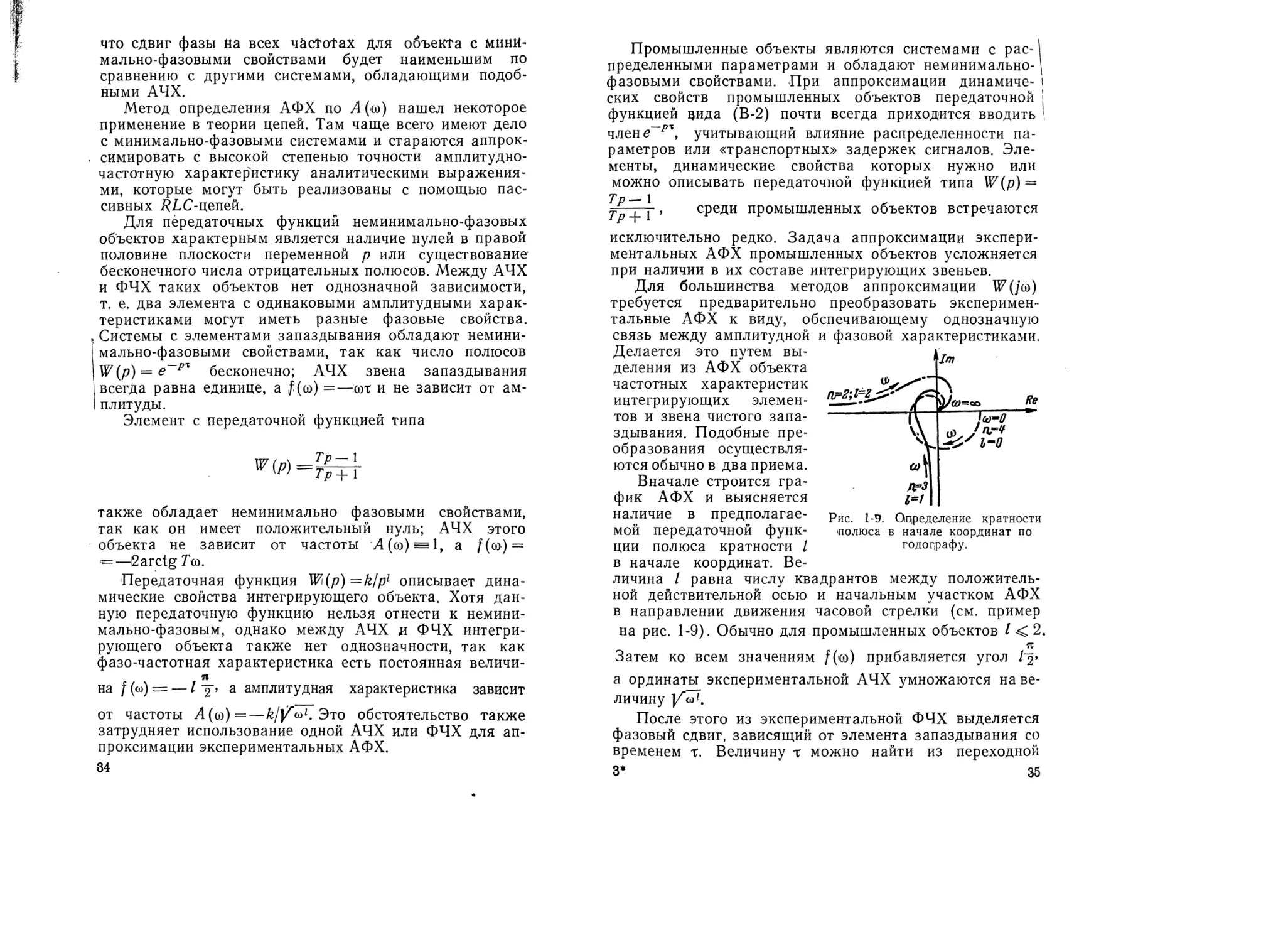
Делается это путем вы-
деления из АФХ объекта
частотных характеристик
интегрирующих элемен-
тов и звена чистого запа-
здывания. Подобные пре-
образования осуществля-
ются обычно в два приема.
Вначале строится гра-
фик АФХ и выясняется
наличие в предполагае-
мой передаточной функ-
ции полюса кратности I
в начале координат. Ве-
личина I равна числу квадрантов между положитель-
ной действительной осью и начальным участком АФХ
в направлении движения часовой стрелки (см. пример
на рис. 1-9). Обычно для промышленных объектов I < 2.
Затем ко всем значениям /(со) прибавляется угол hb
а ординаты экспериментальной АЧХ умножаются на ве-
личину ]/ы1.
После этого из экспериментальной ФЧХ выделяется
фазовый сдвиг, зависящий от элемента запаздывания со
временем т. Величину т можно найти из переходной
3* 35
1=1 I
1-9. Определение кратности
Рис.
полюса в начале координат по
годографу.
функции, которая снимается при постановке вспомога-
тельных опытов для определения А(0). Время запазды-
вания можно найти и из ФЧХ, проведя к последней
асимптоту при частотах, стремящихся к бесконечности.
Тангенс угла асимптоты равен величине т. Если асимп-
тота близка к горизонтали и пересекает ось ординат
графика ФЧХ в точке у, где р = 1, 2, 3, ..то в дина-
мическом отношении объект можно рассматривать как
цепочку из ц апериодических звеньев и считать т = 0.
Возможен и другой подход к определению величины
т. Экспериментальная амплитудная характеристика
Лэ(со) аппроксимируется каким-либо заданным выраже-
нием Ар (со), например следующего вида:
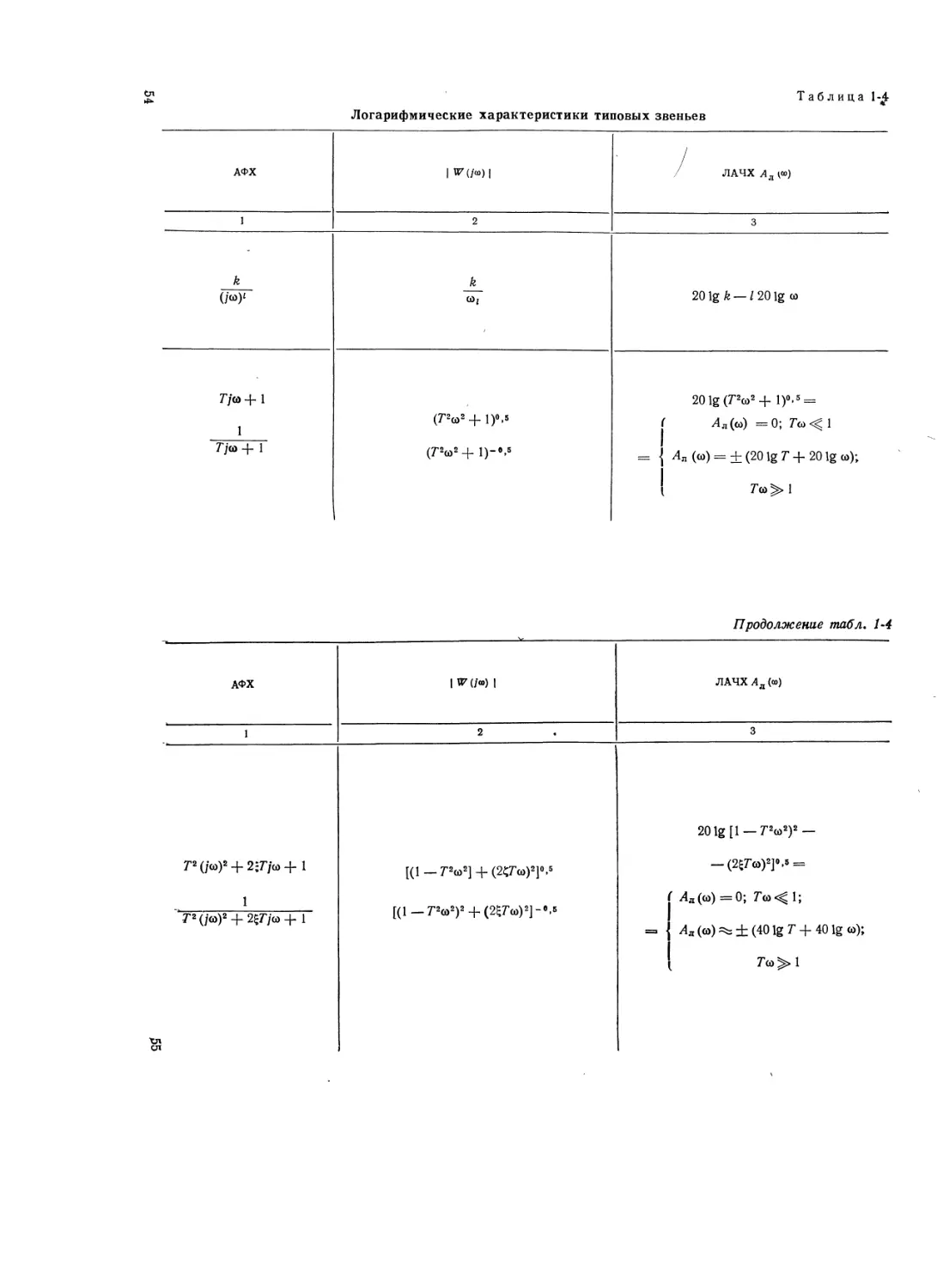
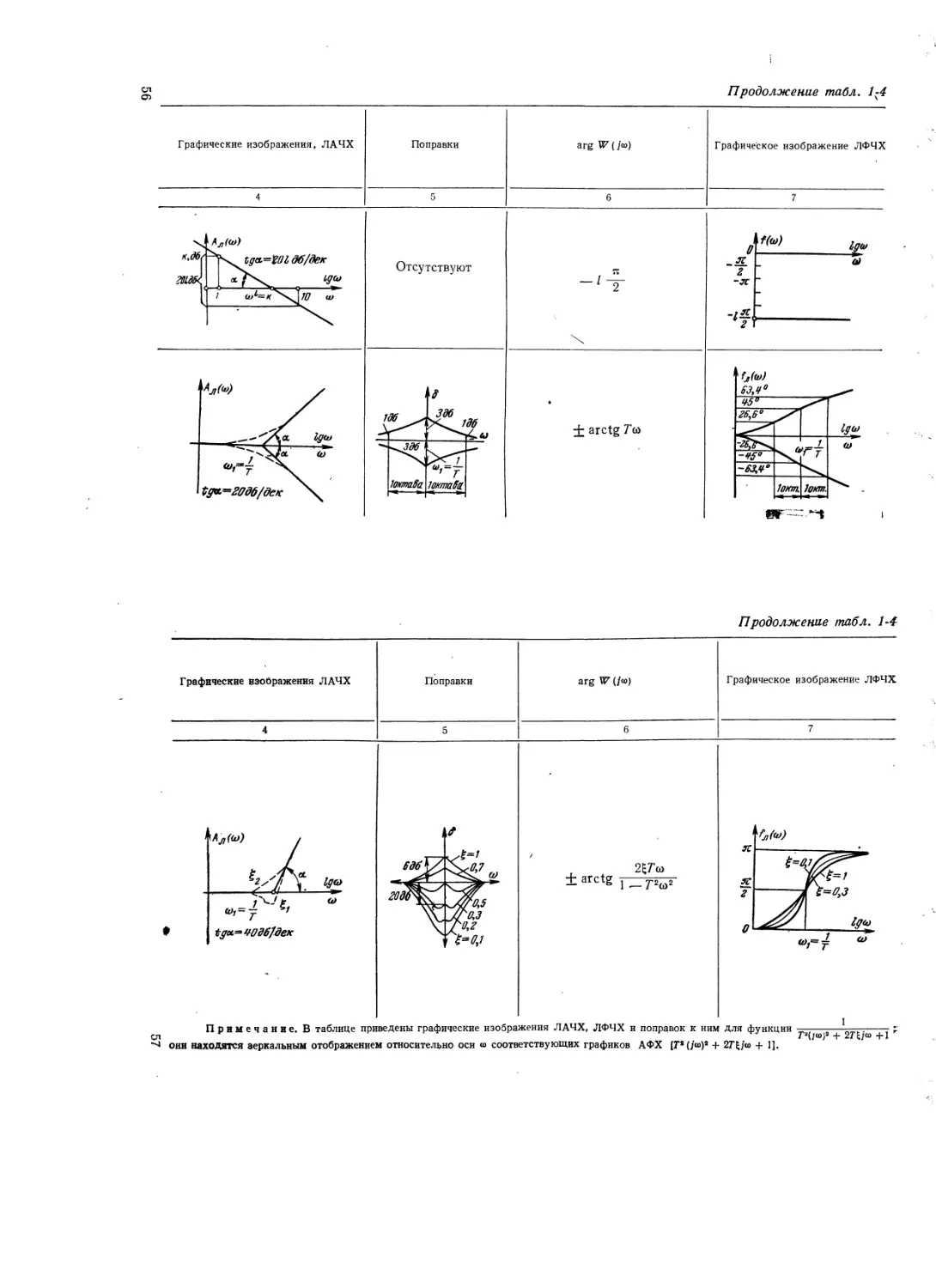
Л (ш) = П (7>2 + I)2 П (7>2+ 1) 2
Х=1 |1 = 1
(т и п — известные' числа); по этому выражению нахо-
дится ФЧХ:
т п
fv (“) = X arcts — S arctg
1=1 11=1
которая сравнивается с экспериментальной фазовой
характеристикой на всех частотах со:
^('«) /р(®).
Если функция df(co) близка к прямой линии, то тан-
генс угла наклона ее равен времени запаздывания т.’При
существенном отличии б/(ко) от прямой необходимо из-
менить вид функции Ар(ко). Рассмотренный способ
может оказаться трудоемким, однако здесь одновремен-
но с определением т находится и И^(/со).
г При аппроксимации экспериментальных АФХ про-
мышленных объектов обычно не требуется высокая точ-
ность приближения во всем диапазоне частот, так как
найденные значения АЧХ и ФЧХ недостаточно надежны
в области малых со из-за дрейфа оси колебаний и малого
числа периодов наблюдения, а при высоких частотах —
I из-за трудности выделения полезных сигналов x(t) и
y(t) из смеси с шумом. Вследствие этого определенный
j интерес представляют простые методы аппроксимации
[ АФХ на заранее заданном интервале частот или в окре*
36
стности какой-либо частоты. Рассмотрим ряд наиболее
распространенных способов нахождения W(ja>).
Определение коэффициентов IFi(jcd) по
начальному участку АФХ. Этот метод аппрокси-
мации АФХ почти не связан с предположениями о струк-
туре передаточной функции, за исключением обычного
условия, что порядок числителя меньше порядка знаме-
нателя [Л. 8]. Экспериментальная АФХ должна быть
достаточно гладкой и иметь определенное количество
значений в области низких частот.
Идея метода заключается в представлении искомой
амплитудно-фазовой характеристики
т
£ bd (jay
«70(/«)=-/=2-----------; П>т (М2)
У, а> а^у +1
S=1 >
в виде цепной дроби । 1
Wo (/“’) = Л + = А» Ч Г~ =
1 + /<о + Ц72 (/со)
и последовательном нахождении неизвестных коэффи-
циентов Ao, Ai, ..Во, Bi, ... путем проведения асимптот
к вещественным и мнимым частям экспериментальной
АФХ. Разложение типа (1-13) часто встречается в тео-
рии цепей при реализации заданной передаточной функ-
ции и называется разложением Кауэра. В нашем случае
переход от (1-12) к (il-13) осуществляется следующим
образом: числитель и знаменатель функции (1-12) умно-
жаем на (/«в)~п и получаем после деления:
то / -X fro(/M)~,, + t>i(/<o)1~n + .:bm(ia)m-n
— (/“) А» .
37
Далее IF, (/ш) разлагается таким же приемом на сумму
A + + Ф2(/®). Функция Ф2(/со) имеет степень числи-
теля 2 — п, а степень знаменателя 1 — п. Дальнейшие
операции аналогичны описанным.
Комплексные функции IFv(/<o); v = 0, 1,2, ..., п можно
представить в следующем виде: (/<>) = А (°0) "Ь /Qv(<o);
затем, устремив <о 0, получим, что | IFO (/ш) | асимптоти-
чески стремится к Ра, т. е. к | А 1: | (jw) | -* | Q, (<о) | ->
-* IА (/«О'*1; | (» — — IА (“) I, Т. е. к IД, |, и т. д.
Вследствие этого практическое определение коэффи-
циентов начинается с построения в логарифмическом
масштабе по одной или обеим осям начального участка
вещественной части АФХ, т. е. |Ро(о))|. Затем проводит-
ся асимптота, к которой стремится Р0(<о) при со—>0.
Отрезок, отсекаемый асимптотой на оси ординат, будет
равен |&о| = Но|. Знак Ло, а также всех последующих
коэффициентов определяется по знаку соответствующих
мнимых или вещественных частей АФХ (операция лога-
рифмирования производится над модулями). Вычисля-
ется функция Wf(/co) = \—у, которая разлагается
на вещественную и мнимую части Pi (со) и Qi(w). Стро-
ится в логарифмическом масштабе график Qi(co) и
к нему проводится асимптота при со—>0. Угол наклона
асимптоты—45°, а отрезок, отсекаемый ею на оси
ординат, равен logB0. По графику функции |Pi(co)|
определяется |Л11, а затем вычисляется передаточная
функция W2 (/<о) =------ъ------- и т. д.
Об окончании расчета свидетельствует близость к
1
. нулю значения очередной функции в интересую-
щем нас интервале частот.
Следует заметить, что при вычислении функций
IFn(/co) с номерами п>3-ь4 может иметь место суще-
ственный разброс отдельных значений Рп(<о) и Qn(co),
так как при некоторых частотах со разность Фп-1(/<о) =
= IFn_i(/co)—Ап-\— может быть малой величиной.
Поэтому рекомендуется все расчеты проводить с повы-
шенной и постоянной точностью, удерживая до ЧО'
33
тырех — шести значащих 2
разрядов. Наиболее дей- я
ственным методом устра- и
нения «колебаний» функ- ®
ций Рп(со) и Qn('O>) яв- ®
ляется, очевидно, свое- н
временное приравнивание
НуЛЮ ФУНКЦИИ Фп_] (/<£>)
в интервале частот, где
ее значения малы и зна-
копеременны.
Определив коэффици-
енты Л о, Во, А1, Bi..., не-
трудно снова преобразо-
вать цепную дробь (1-13)
к выражению (1-12).
Укажем основные не-
достатки рассмотренного
метода аппроксимации:
проведение асимптот к
ФУНКЦИЯМ Pn('ft>) и Qn(co)
не может быть алгорит-
мизировано применитель-
но к вычислению’на ЦВМ
и приводит к появлению
субъективных погрешно-
стей; процесс расчета ма-
лоустойчив, т. е. появле-
ние малых ошибок при
нахождении коэффициен-
тов на данном этапе при-
ближения может привести
к существенному увеличе-
нию «невязок» между
эмпирическими данными
и значениями аппрокси-
мирующей IFn(7®) на по-
следующем шаге прибли-
жения; наконец, опреде-
ление коэффициентов пе-
редаточной функции руч-
ным счетом требует весь-
ма больших затрат вре-
мени.
1 ь 1 1 1 м | е
| 5,0 —0,037 —0,063 —2,310 0,34 Ь- ио сч си 7-° о о о о о о
О си ° о о 1 1 О СО т-ч сч ю сч о — 1,27 1,19 I 00*0 00*0
о со —0,025 —0,159 —2,120 0,82 сп оо сч ю 7" —0,02 0,00
2,5 о о о О СЧ оо —2,050 1,08 00 сч СЧ СП 1 1—0,01 0,02 |
о ю о сч оо оо СП СП СО сч 'Ф СЧ ю о о
сч о о 1 7“ у сч 7°
ю СЧ 00 ю ю сч о сч СП ,29 ,17 ,02 -01
1 о о у СЧ у СО о о 1
о сч ю со сч сч сч о о —1,860 3,41 — 1,20 4,71 t- -Ф о о о о [
0,8 0,302 —0,195 ю 00 СО 7^ 1 1 1 1
0,6 0,336 —0,155 о СО О 00 СП у Ю 1 1 1 1
0,4 0,362 —0,107 — 1,820 8,95 1 1 1 1
0,2 0,380 —0,055 —1,810 18,00 1 1 1 1
о ю о 00 О СО о 1 1 1 1 1 1
о о о
3 о о сч сч 0,0* «Q «г» о,су
,—ч сч со ю СО ь- оо сп
39
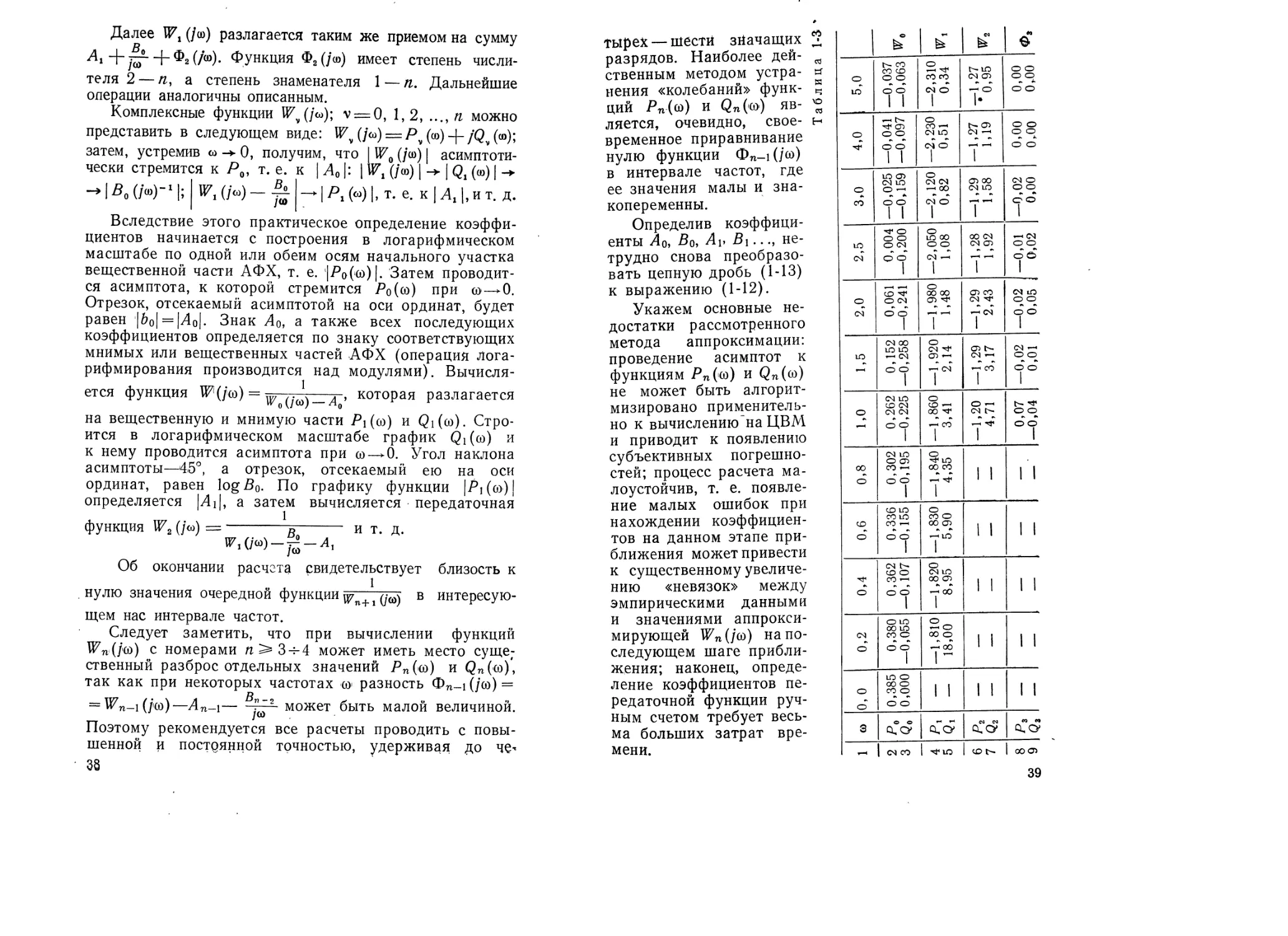
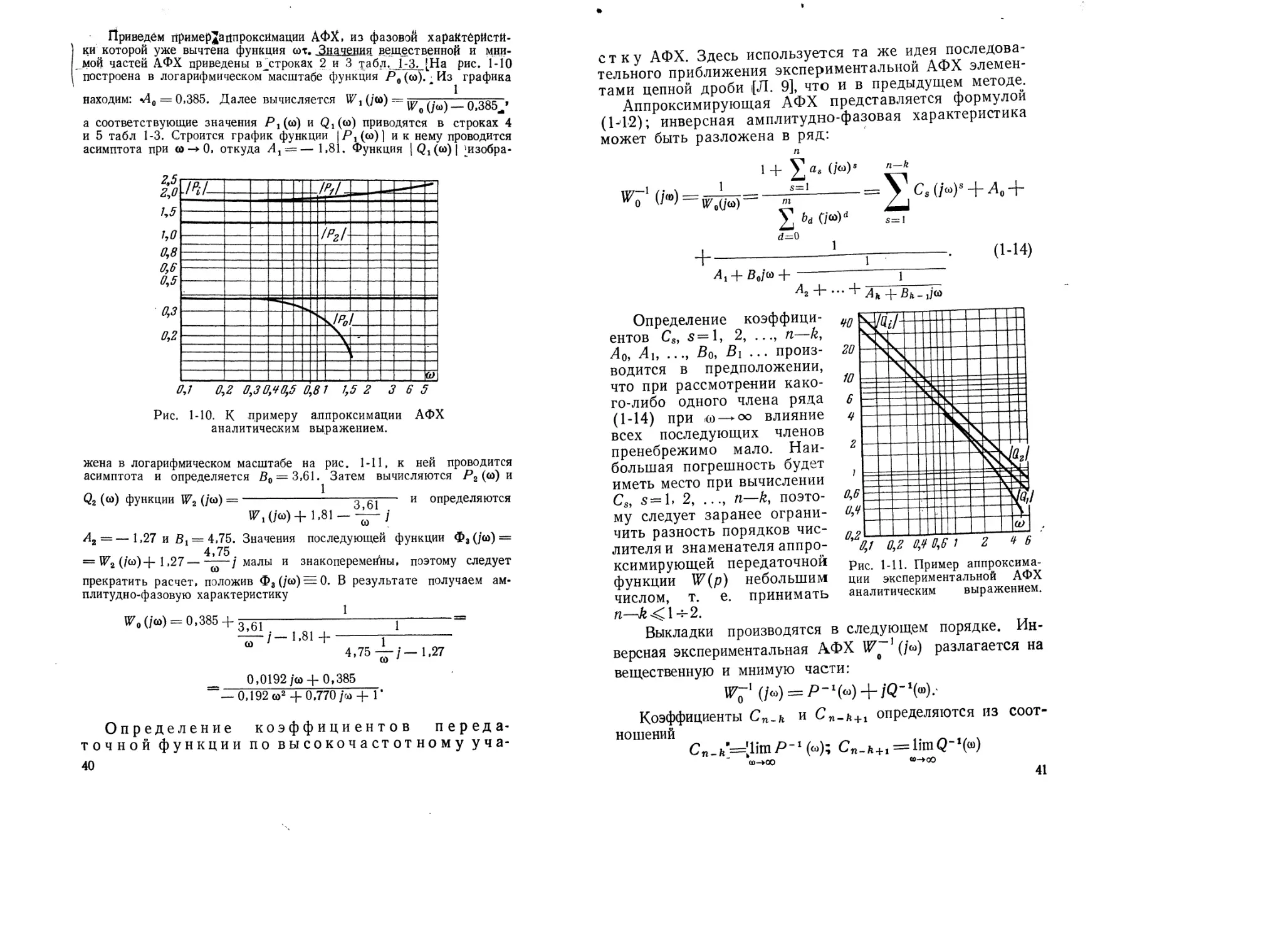
Приведем примерХацпроксймации АФХ, из фазовой хараКтёрйстй-
ки^которой уже вычтена функция сот. Значения вещественной и мни-
мой частей АФХ приведены в ^строках 2и 3 табл. 1-3. [На рис. 1-10
построена в логарифмическом ^масштабе функция Р0(со). лИз графика
находим: -Л0 = 0,385. Далее вычисляется (/<о) — ~(/ш) — б 385 9
а соответствующие значения Pi (со) и Qy(co) приводятся в строках 4
и 5 табл 1-3. Строится график функции | Pt (со)) и к нему проводится
асимптота при <о-*0, откуда А1^=— 1,81. Функция | Q1 (со) | [изобра-
жена в логарифмическом масштабе на рис. 1-11, к ней проводится
асимптота и определяется ВО = 3,61. Затем вычисляются Р2 (со) и
Q2 (<°) функции 1Г2 (/со) =-------------— и определяются
1^,(7^)+ 1,81 — /
Л2 ==—1,27 и В1 = 4,75. Значения последующей функции Ф3(/со) =
4 75
= (/со)+1,27—-^—/ малы и знакоперемен'ны, поэтому следует
прекратить расчет, положив Ф3(/со)“0. В результате получаем ам-
плитудно-фазовую характеристику
1
Го (/со) = 0,385 + -------------------J------
То~ / — 1.81 + j
4,75-/-1.27
_ 0,0192/ш 4-0,385
0,192 с»2 4- 0,770 /<о 4- 1'
Определение коэффициентов переда
точной функции по высокочастотному уча
40
с т к у АФХ. Здесь используется та же идея последова-
тельного приближения экспериментальной АФХ элемен-
тами цепной дроби {Л. 9], что и в предыдущем методе.
Аппроксимирующая АФХ представляется формулой
(1-12); инверсная амплитудно-фазовая характеристика
может быть разложена в ряд:
п
1 + as (jto)s n-k
W = g^> = -------= У c- + л- +
У t>d (»d £7
+------------------!----—---------. (1-14)
A 1 + ^o/W + 1
A 4- ••• +
Определение коэффици-
ентов CSl 5=1, 2, ..., n—k,
Ao, Ai, ..., Bo, Bi ... произ-
водится в предположении,
что при рассмотрении како-
го-либо одного члена ряда
(1-14) при i(o—>оо влияние
всех последующих членов
пренебрежимо мало. Наи-
большая погрешность будет
иметь место при вычислении
Cs, s=l, 2, ..., п—k, поэто-
му следует заранее ограни-
чить разность порядков чис-
лителя и знаменателя аппро-
ксимирующей передаточной
функции W(p) небольшим
числом, т. е. принимать
п—k 14-2.
Рис. 1-11. Пример аппроксима-
ции экспериментальной АФХ
аналитическим выражением.
Выкладки производятся в следующем порядке. Ин-
версная экспериментальная АФХ IF'1 (/со) разлагается на
вещественную и мнимую части:
w-' (/w) = p->)+/Q-‘(®).'
Коэффициенты Сп_к и Сп.к+1 определяются из соот-
ношений
Cn.r^limP-1 (о); Cn_ft+1 = lim(?-*(«>)
to->ОО ®->оо
41
Величина I определяется из годографа эксйерймей-'
тальной АФХ; порядок знаменателя п равен числу квад-
рантов плоскости комплексной переменной, которые
охватывает годограф при росте частоты со от 0 до +оо
(см. рис. 1-9). В качестве интерполяционных узлов
% удобно использовать точки пересечения годографа
экспериментальной АФХ с мнимыми и вещественными ося-
ми, так как в этих точках то P9(«v), то Q3(oJ пооче-
редно обращаются в нуль. Число таких пересечений рав-
но п — 1 (не считая точки Н73(0) при Z = 0), а количест-
во неизвестных коэффициентов п -J- 1. Поэтому возьмем
дополнительный узел при таком значении частоты <оп, при
которой f (<оп) = 45°.
Выражение (1-17) преобразуется к виду IF(/co) =
= £>(со)+/Q(co) и интерполяционные уравнения будут:
W - Wg = 0, или 1А ~ Лэ(“ } = °
V К)-fa («•»,)=о.
Обозначив = — tg [ f (®„) +1 у- ] > получим п — 1
уравнение: \
/К)+^1=~1; 1)1 (1-18)
и еще одно условие при <о = шп:
Коэффициент усиления k может быть найден по пере-,
ходной функции или формуле
k = Аэ (%) <>' / Р2 (®0) + QW =
= I (/®о)1 “о |/ Р2 (®о) + Q2("o),
где <о0 — произвольный узел интерполяции; co0^<ov;
v=l,2,..., iV; М = п—1.
Заметим, что неизвестные коэффициенты а19 а2, ..., ап
„спрятаны* в функции f (<%) и раскрытие последней делает
44
систему (1-18)\ весьма громоздкой, что не позволяет ре-
комендовать изложенный метод аппроксимации для
п 4 -ь 5.
Рассмотренный метод применим и для аппроксимации
АФХ объекта, динамические свойства которого описы-
ваются передаточной функцией типа
то?/ \ ke рх
"" ~Р1 (1 + «1Р)
Обозначив через а>1( а>2 частоты, при которых =
= —тг (z + !) и А> (®з) = — -у(^+т)’ ПОЛУВДМ Уравне-
ния для нахождения неизвестных:
“2/Лэ(®2) 1— )
\ 1 /
'4э(®г)/<о2 у<+»
1 Z k2 arctgOifli
A=q/ да-1'—
Величина I определяется обычными методами.
Основным преимуществом интерполяционных мето-
дов являются простота аппроксимации при низком по-
рядке знаменателя п<4-?-5, а также возможность полу-
чать точные значения частотных характеристик в узлах.
Вместе с тем подобная аппроксимация не позволяет га-
рантировать близость экспериментальных и вычисленных
по аналитическому выражению (1-15) или (1-17) значе-
ний АФХ на частотах вне узлов интерполяции cov; v =
= 1,2,..., N. Особенная опасность появления существен^
ных расхождений между значениями W (/со) и Wd (/со) вне
узлов связана с эквидистантным выбором величин <ov (так
называемое явление Рунге [Л. 12]).
Связь порядка аппроксимирующего выражения
И7(/со) с числом экспериментальных данных зачастую не
позволяет использовать все найденные значения АФХ.
Для определения порядка п знаменателя функции (1-17)
45
Требуется снятие АФХ в широком Диапазоне частот, что
затрудняет проведение опытов. Требование о проведении
экспериментов на частотах, при которых Рэ(о) или
(?э(со) обращаются в нуль, практически нереализуемо
при исследовании динамики промышленных объектов.
Наконец, аппроксимация интерполяционными метода-
ми становится вообще невозможной, если значения АФХ
были определены во время опытов с некоторой погреш-
ностью. Из-за перечисленных выше недостатков интер-
поляционные методы не нашли широкого применения
при аппроксимации экспериментальных значений АФХ
промышленных объектов.
Определение коэффициентов переда-
точной функции из экспериментальной
АФХ методом наименьших квадратов. Сущ-
ность метода [Л. 13] заключается в том, что коэффициен-
ты аппроксимирующей амплитудно-фазовой характери-
стики (1-15) вначале определяются интерполяционным
способом, а затем уточняются с помощью метода наимень-
ших квадратов по всем экспериментальным значениям
АФХ. Общее число неизвестных равно n + m+1, где п и
т — порядки числителя и знаменателя — суть известные
числа. Количество экспериментальных значений АФХ
при значениях частот равно N, причем 7V>0,5 (тг-]—zn—j—1).
Выберем такие коэффициенты k, bv, Ь2, ...,Ьт, ах,
ап в выражении (1-15), чтобы сумма квадратов модулей
невязок экспериментальной и аппроксимирующей АФХ при
всех значениях частоты 1,2, ...,7V была минималь-
ной:
az
£ IF3(/4)|2 = min; /V> 1+^+1,
1
или
AZ
S { (%) - P. J]2 + [Q (<%) - Qa («J} = min.
v= 1
Считаем, что коэффициенты k = b0, b\, ..., &m, a\, ..
an уже найдены интерполяционным методом по
0,5 (/г + т +1) значениям эмпирической АФХ; с помощью
же метода наименьших квадратов требуется определить
лишь малые поправки к этим коэффициентам A&d иДав.
46
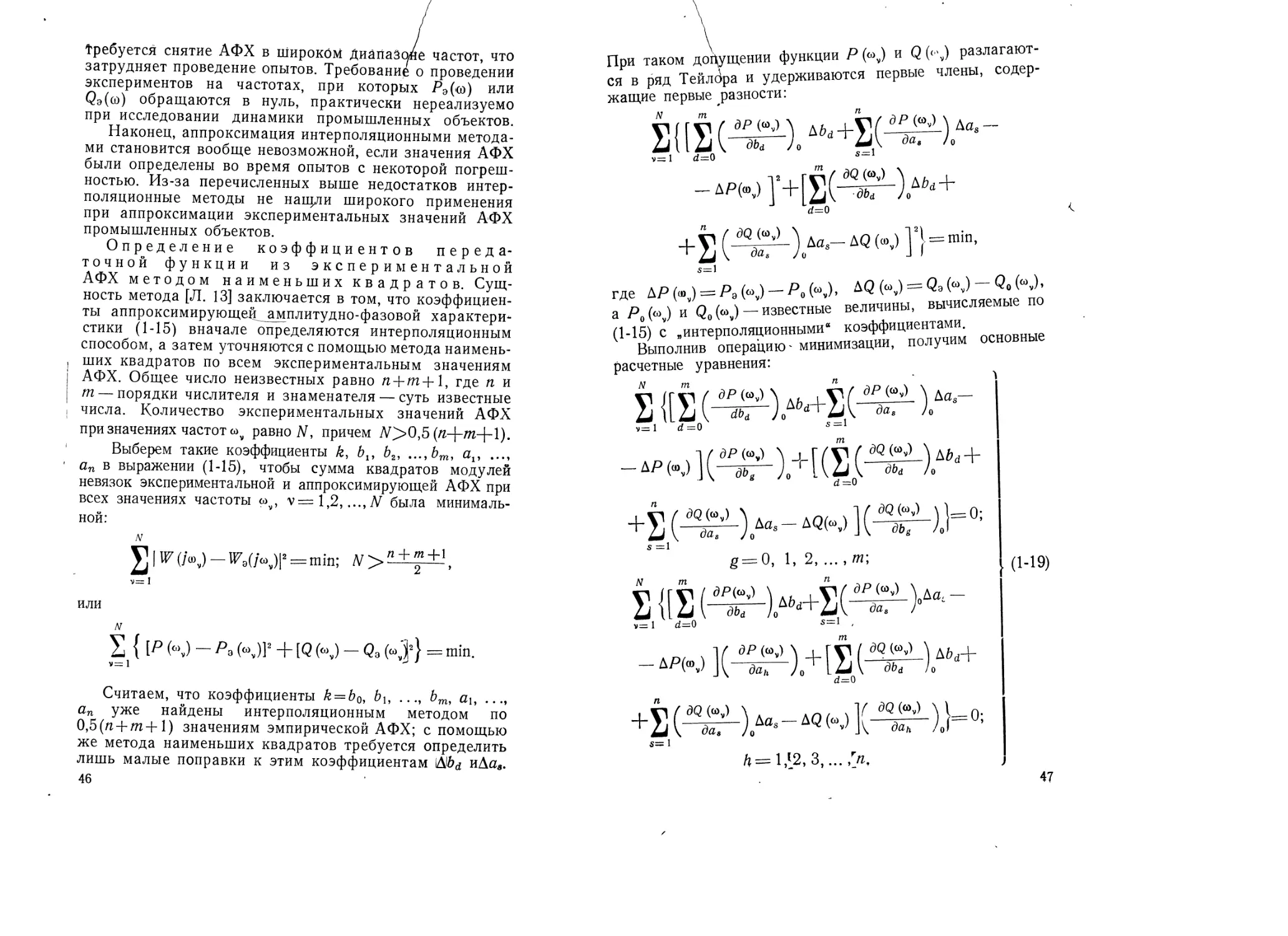
При таком допущении функции Р (o>v) и Q (<-'v) разлагают-
ся в ряд Тейлора и удерживаются первые члены, содер-
жащие первые разности:
N т п
I I JmJ \ J 0 / 0
1 rf=0 s=l
-^н]’+[Е(тЬ+
L«z=o
min,
+ 1 к da,
5=1
где APO«V) = P3K)-P0(<ov), AQK) = Q3(%)-Q0(o)v),
a ^o(%) и Qo(wv) — известные величины, вычисляемые по
(1-15) с „интерполяционными" коэффициентами.
Выполнив операцию' минимизации, получим основные
расчетные уравнения:
/V т
S/ГW
iLZjk dbd
d=0
П/ dP(u„) \
Li\ da, )„
dP (<ov)
dbg
dQ (wy) \
Li к dbd A'
d=0
Г! ( dQ (®y)
Li I da.
dQ (<>,) \'
dbg / о
N m
SHV / dP(a>4)
llLk dbg
v=. 1 d=Q
g — О, 1, 2, ..., m;
S = 1 ,
lZj\ dbg )0
d=G
dP (<>,)
dah
(M9)
n
TV dQ (<OS) \
2jI da, )fas
s= 1
< dQW \
к dah )0
4=1,[2,
J
47
I Система уравнений (1-19) линейна, иг определение
I Aas и Abd производится обычными приемами, не вызы-
j вая особых затруднений. Если полученн/я точность ап-
j проксимации недостаточна, то процесс Нахождения по-
правок следует повторить или изменить порядки знаме-.
нателя и числителя в выражении IF(/<o). Кроме того,
надо внимательно проанализировать величины найден-
ных поправок; в частности если отношения Aasla3,
(&bdlbd сравнительно велики для некоторых номеров s
! или d, то необходимо выбрать новые порядки п и /пдля
Необходимость предварительного определения коэф-
фициентов интерполяционным методом и разложение ве-
щественной и мнимой частей в ряд Тейлора вызваны тем
обстоятельством, что/в функции Р(<о) и Q(co) входит
1 произведение asbdt где s, d=0, 1,2, ... n, m. Поэтому при
! использовании метода наименьших квадратов не удает-
ся получить линейную относительно и bd систему нор-
мальных уравнений. Нахождение же корней системы не-
линейных алгебраических уравнений представляет зна-
чительные трудности даже при использовании цифровых
вычислительных машин.
Однако при выборе аппроксимирующей АФХ типа
v 7 ^n(fw)w + an_1(/co)«-i + . . - + + v. 7
можно найти неизвестные коэффициенты а0, а19 ..., ап
непосредственно методом наименьших квадратов (так же
как и раньше, считаем ti известным из каких-либо сообра-
жений).
Найдем для всех значений cov; v= 1, 2, ... , N при
N > ”величины инверсных экспериментальных функ-
ций <??'(<%) ~ Q» (ь>.) и перейдем от
зависимости (1-20) к инверсной АФХ
Г-1 (/«) = ап(J<&) + ап-, (/<>)*-* +... + aj’co + а0 =
= P-1(“) + /Q-l(4 '
где о '
р-1 (<о) = V (_ 1)»а2хз;
s=0
48
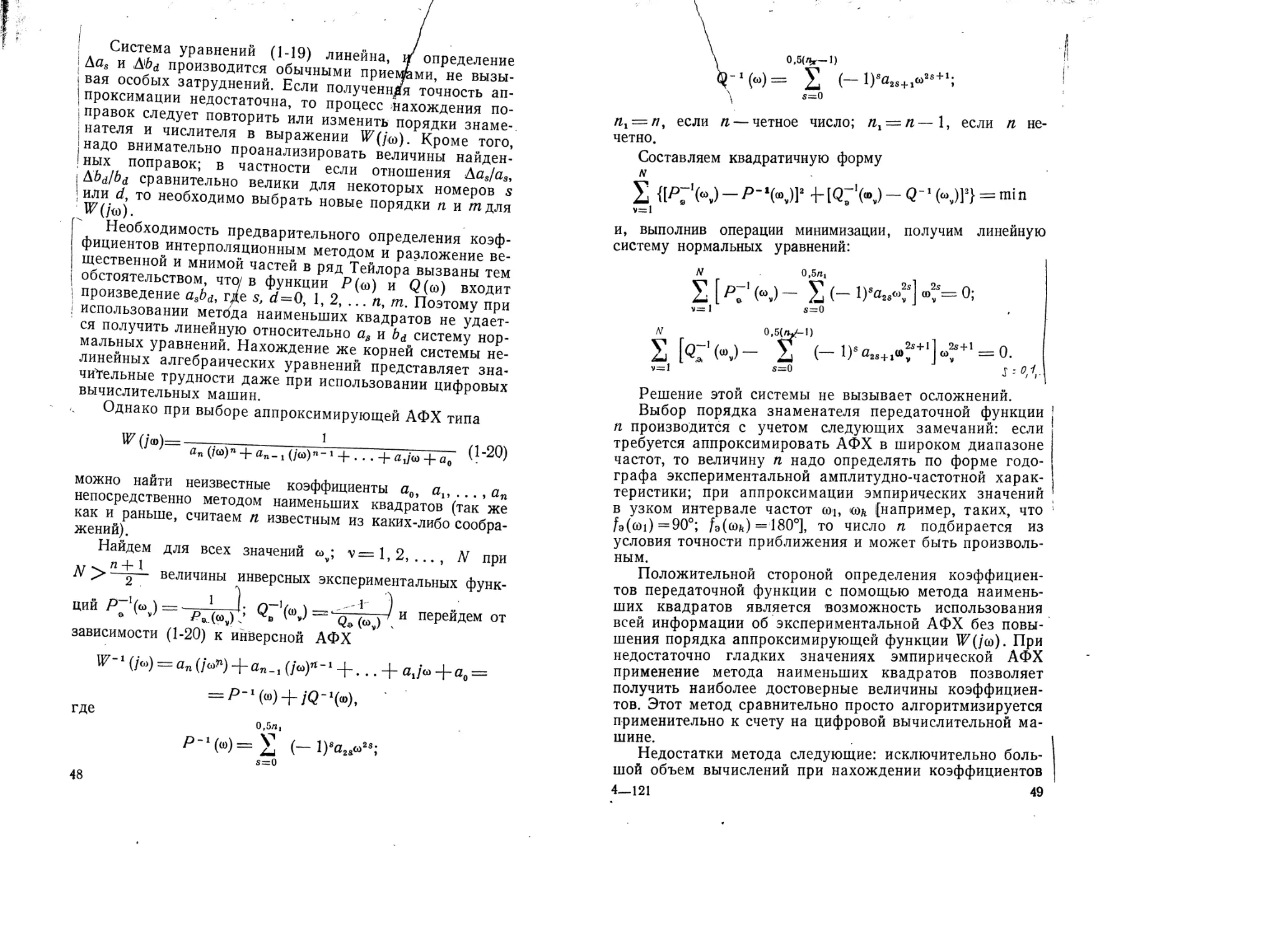
\ 0,5(Лг-1)
V(“) = £ (- l)sa2s+i“2s+1;
s=0
пх = п, если п — четное число; пх = п—1, если п не-
четно.
Составляем квадратичную форму
АГ
S 4-IQr1W-Q-IK)]2}=min
V=1
и, выполнив операции минимизации, получим линейную
систему нормальных уравнений:
N 0,5/21
S [ Р> Ю ~ X °;
v= 1 s=0
АГ 0,5(j^Z-1)
S fc'w- L (-’)S«23+XS+I]%+1 = °-
v=1 s=0 г - 0 1
Решение этой системы не вызывает осложнений.
Выбор порядка знаменателя передаточной функции
п производится с учетом следующих замечаний: если
требуется аппроксимировать АФХ в широком диапазоне
частот, то величину п надо определять по форме годо-
графа экспериментальной амплитудно-частотной харак-
теристики; при аппроксимации эмпирических значений
в узком интервале частот о>1, коь (например, таких, что
fa(coi) =90°; /э(сол) = 180°], то число п подбирается из
условия точности приближения и может быть произволь-
ным.
Положительной стороной определения коэффициен-
тов передаточной функции с помощью метода наимень-
ших квадратов является возможность использования
всей информации об экспериментальной АФХ без повы-
шения порядка аппроксимирующей функции При
недостаточно гладких значениях эмпирической АФХ
применение метода наименьших квадратов позволяет
получить наиболее достоверные величины коэффициен-
тов. Этот метод сравнительно просто алгоритмизируется
применительно к счету на цифровой вычислительной ма-
шине.
Недостатки метода следующие: исключительно боль-
шой объем вычислений при нахождении коэффициентов
4—121 49
as, ba и поправок к ним; трудность выборд правильной
структуры аппроксимирующей передаточной функции.
Определение коэффициентов переда-
точной функции по экспериментальной
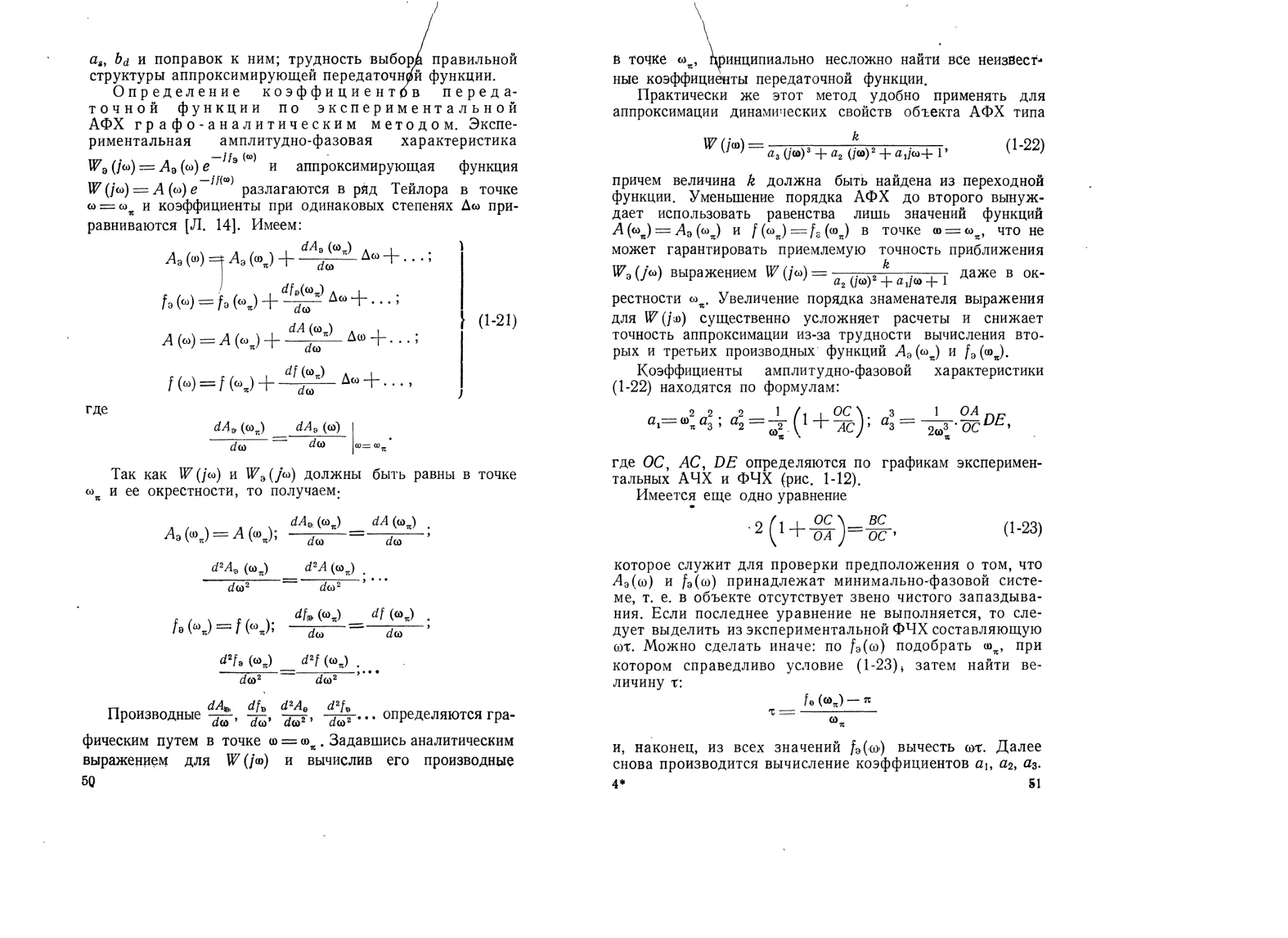
АФХ графо-аналитическим методом. Экспе-
риментальная амплитудно-фазовая характеристика
Wq (/со) = Аэ (со) е //э (<0) и аппроксимирующая функция
ЦТ’(/со) = Д (со) е } разлагаются в ряд Тейлора в точке
со = сол и коэффициенты при одинаковых степенях Дсо при-
равниваются [Л. 14]. Имеем:
Лэ (®) =1 Аэ (®л——д" + • • •:
/ <if₽(co ) А I
Л (.)=Л (<_) + А» +...;
\ / \ 1С/ I
. С00 J Л I
Н“) = Ж) + Ч^л” + ""
1
(1-21)
где
dA„ (<отс)
d со
dAs (со)
dm
Так как W (ju) и (/«) должны быть равны в точке
и ее окрестности, то получаем;
Лэ К) = Л (®я);
_ dA(<s>^ .
J со dm
d'2AB (<ок) _ d2A (со J .
dm2 dm2
df* Ю df (<oTC) .
dm dm
d2h (<oTC) d2f (coJ .
dm2 dm2
dAfr d^ d2Ae d2fv
Производные определяются гра-
фическим путем в точке w = . Задавшись аналитическим
выражением для W (/®) и вычислив его производные
5Q
в точке принципиально несложно найти все неизвест-
ные коэффициенты передаточной функции.
Практически же этот метод удобно применять для
аппроксимации динамических свойств объекта АФХ типа
уМ = мм>- + А>» + ^+.. <b22>
причем величина k должна быть найдена из переходной
функции. Уменьшение порядка АФХ до второго вынуж-
дает использовать равенства лишь значений функций
= и /(<oj=/s(<oj в точке <» = <%, что не
может гарантировать приемлемую точность приближения
Гэ(/“) выражением W (]») = ^^>+1 даже в ок-
рестности Увеличение порядка знаменателя выражения
для W существенно усложняет расчеты и снижает
точность аппроксимации из-за трудности вычисления вто-
рых и третьих производных функций A3(wJ и f9(a>J.
Коэффициенты амплитудно-фазовой характеристики
(1-22) находятся по формулам:
2 2 2 1 Л . ОС \ з 1 ОА
а1— аз ’ а2 — ( 1 + ~АС ) ; ОС
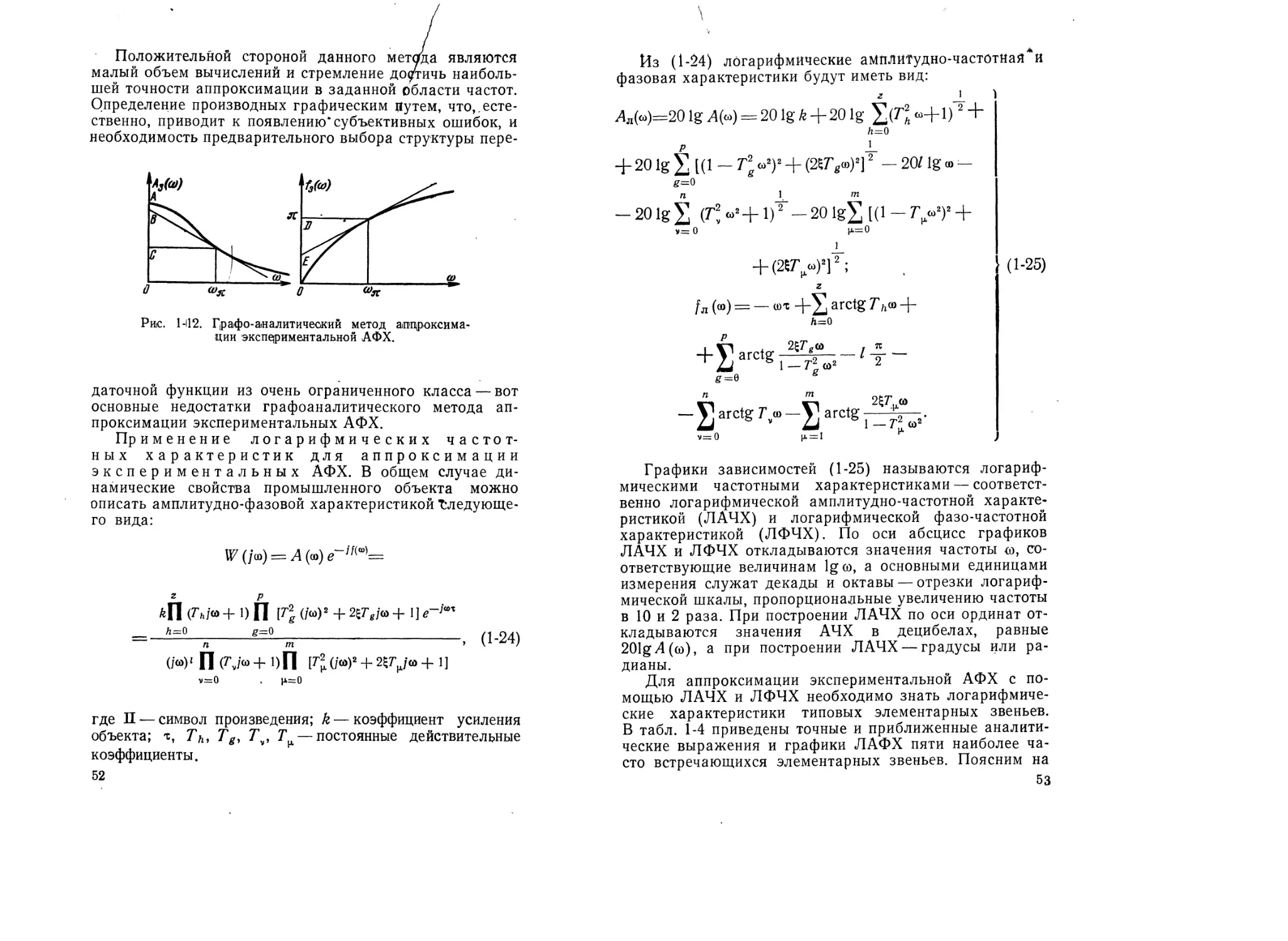
где ОС, AC, DE определяются по графикам эксперимен-
тальных АЧХ и ФЧХ (рис. 1-12).
Имеется еще одно уравнение
ОС \ ВС
ОА ОС ’
(1-23)
которое служит для проверки предположения о том, что
Аэ(со) и f9(co) принадлежат минимально-фазовой систе-
ме, т. е. в объекте отсутствует звено чистого запаздыва-
ния. Если последнее уравнение не выполняется, то сле-
дует выделить из экспериментальной ФЧХ составляющую
сот. Можно сделать иначе: по f3(co) подобрать при
котором справедливо условие (1-23)* затем найти ве-
личину т:
/е (<атс) — «
Т — ----------
и, наконец, из всех значений /э(о>) вычесть сот. Далее
снова производится вычисление коэффициентов а\, а2, я3.
4* 51
Положительной стороной данного метода являются
малый объем вычислений и стремление до^ичь наиболь-
шей точности аппроксимации в заданной области частот.
Определение производных графическим Путем, что,,есте-
ственно, приводит к появлению* субъективных ошибок, и
необходимость предварительного выбора структуры пере-
Рис 1-И2. Графо-аналитический метод аппроксима-
ции экспериментальной АФХ.
даточной функции из очень ограниченного класса — вот
основные недостатки графоаналитического метода ап-
проксимации экспериментальных АФХ.
Применение логарифмических частот-
ных характеристик для аппроксимации
экспериментальных АФХ. В общем случае ди-
намические свойства промышленного объекта можно
описать амплитудно-фазовой характеристикой Следующе-
го вида:
№ (/ш) == Л (<о)
2 Р
fefl (ГЛ/а> + 1) П Fg (/“)2 + + 1]
W1 П (TJo + 1)П О®)2 + 25ТИ/® + 1]
где П — символ произведения; k — коэффициент усиления
объекта; г, Th, Tg, Тч, — постоянные действительные
коэффициенты.
52
Из (1-24) логарифмические амплитудно-частотная*и
фазовая характеристики будут иметь вид:
л 1 )
Лл(<о)=201g ЛИ = 201g k + 201g JX co-j-1)2 +
Л=0
P 1
+ 201g £ [(1 — T2 O2 + (2!=7»2]2 — 20/ 1g o> —
£=0
n \ m
- 20 lg £ (T2 ®2 + 1)T - 20 IgX 1(1 - T^y +
v= 0 |x=0
1
+ (2*7»+;
z
fn. (®) = — ШТ +^ a
ft=0
£=0 8
n m
- J] arctg 7> - J arctg
v=0 |x = 1
(1-25)
-1- —
1 2
Графики зависимостей (1-25) называются логариф-
мическими частотными характеристиками — соответст-
венно логарифмической амплитудно-частотной характе-
ристикой (ЛАЧХ) и логарифмической фазо-частотной
характеристикой (ЛФЧХ). По оси абсцисс графиков
ЛАЧХ и ЛФЧХ откладываются значения частоты <о, со-
ответствующие величинам 1g со, а основными единицами
измерения служат декады и октавы — отрезки логариф-
мической шкалы, пропорциональные увеличению частоты
в 10 и 2 раза. При построении ЛАЧХ по оси ординат от-
кладываются значения АЧХ в децибелах, равные
201g А (со), а при построении ЛАЧХ — градусы или ра-
дианы.
Для аппроксимации экспериментальной АФХ с по-
мощью ЛАЧХ и ЛФЧХ необходимо знать логарифмиче-
ские характеристики типовых элементарных звеньев.
В табл. 1-4 приведены точные и приближенные аналити-
ческие выражения и графики ЛАФХ пяти наиболее ча-
сто встречающихся элементарных звеньев. Поясним на
53
Логарифмические характеристики типовых звеньев
Таблица 1-£
АФХ 1 w (/«>) 1 У ЛАЧХ Ал V»)
1 2 3
k k 201g k — I 201g co
Tjv+l 1 Г/® 4-1 (7-2Ш2 4- 1)0,5 (Ли2 4- I)-*.5 201g (Г2ш24- 1)«.5 = f Дл(<о) =0; ?to< 1 = j Ад (<o) = + (201g T 4- 201g w); { 7в>> i Продолжение табл. 1-4
АФХ 1^(7®) 1 ЛАЧХ Ал (СО)
1 2 3
Т2 (/to)2 + 2;Г/М + 1 1 У2 (/to)2 4- 2$r/to 4- 1 [(1 — 7’2to2] 4- (2S7to)2]»>5 [(1 — T2®2)2 4-(2$7'to)2]-’.5 20 lg[l —72<о2)2 — — (2^r<D)2]°>6 = Лл (со) =0; Тео 1; = Лл (со) i (401g Т + 401g со); Тсо>1
сл
СП
Продолжение табл, 1-4
Продолжение табл, 1-4
Графические изображения ЛАЧХ Поправки arg W (/<о) Графическое изображение ЛФЧХ
4 5 6 7
tga.=* ЦОдб]дек
iga
а>
г ~ 2$ТЪ
± arctg । ,______р2(л)2
Примечание. В таблице приведены графические изображения ЛАЧХ, ЛФЧХ и поправок к ним Для функции
сл
они находятся зеркальным отображением относительно оси «> соответствующих графиков АФХ (Тя(/«>)2 + 2Т^]‘ю +1].
____________1_____________
Га(;<о)з + 2Т£;о> +1 г
примере функции fjco + 1 процесс построения графика
ЛАЧХ. Амплитудная характеристика этой функции име-
ет вид:
1
Ал (со) =201g (ГW+ I)2 ,
и при Тео < 1 можно приближенно считать, что Ал (со) ~0;
0<со < у-, а при 7\о> 1 получаем:
Ад (со) 201g <о; < со < оо,
т. е. ЛАЧХ представляется отрезками двух прямых линий
Ал (°) = 0; О^со < -^г-; Ал (<о) = 201g у- <CW °°,
пересекающимися в точке koi = 1/T. В табл. 1-4 эти две
прямые проведены толстыми линиями, а пунктиром изо-
бражена точная ЛАЧХ. Максимальная ошибка подобной
кусочно-линейной аппроксимации составляет 3 дб в точ-
ке icoi = 1/Т и 1 дб при значениях частот, отстоящих на
одну октаву от сор Для построения точной ЛАЧХ надо
прибавить к линеаризованной характеристике поправку
(табл. 1-4). На нижней половине графиков показаны
ЛАЧХ и поправка д для функции yj~py, получае-
мые как зеркальные отображения ЛАЧХ звена Т/<о+1
относительно оси частот со [Л. 15].
Построение логарифмических ФЧХ не имеет особен-
ностей по сравнению с построением обычных фазовых
характеристик [Л. 15].
Используя простые кусочно-линейные зависимости
ЛАЧХ от частоты, можно провести приближенную ап-
проксимацию экспериментальной АЧХ набором аналити-
ческих выражений
|, I № +1)*11,| [Г + 2$Г/<о 4- 1 ]** |.
Логарифмическая ФЧХ используется для определе-
ния структуры передаточной функции (определяется ве-
личина т, кратность нулевых полюсов I, иногда порядок
знаменателя и т. п.) и проверки правильности аппрок-
58 *
симации всей АФХ. Последнее производится с помощью
2£Тсо
шаблонов функций arctg arctg 1|—/2(О2~ или ПУ-
тем прямого вычисления величин ?л(а>) для ряда значе-
ний частоты i(o.
Поясним на простом примере последовательность
действий при аппроксимации экспериментальной АФХ
логарифмическими характеристиками.
стик.
Заданные экспериментальные АЧХ и ФЧХ строятся
в логарифмическом масштабе на графике (рис. 1-13)
(йз ФЧХ предварительно выделена составляющая тсо).
По виду фазовой характеристики выбирается примерная
структура аппроксимирующей функции, например:
w=-^—*—.
П(у>+1)
где п — известное число.
Проводим асимптоту / к ЛАЧХ при со—<-0 и опреде-
ляем величину коэффициента усиления k из уравнения
k^g =201g£. Находим значение частоты ©1} при которой
59
разность между асимптотой / и ЛАЧХ составляет 3 дб;
далее проводим через точку Сх касательную // к ампли-
тудной характеристике с наклоном —20 дб/дек. За-
тем определяется точка со2, в которой разность между
линией II и ЛАЧХ составляет 3 дб, снова через точку С2
проводится касательная III с наклоном — 40 дб)дек
к последующей части логарифмической Ал(со) и т. д.
Значения неизвестных постоянных 7\ (v= 1,2,zz) легко
находятся из соотношения 7\=l/<ov.
При невозможности проведения касательных к ЛАЧХ
с наклонами —20, —40, —60 дб/дек, следует ввести
в числитель аппроксимирующей функции выражение
Т/со+1. В заключение проверяется точность аппроксима-
ции экспериментальной АФХ логарифмическими ампли-
тудными и фазовыми характеристиками.
Метод логарифмических частотных характеристик
связан с графическими построениями и позволяет осу-
ществлять лишь приближенную аппроксимацию экспе-
риментальных АФХ, не освобождая инженера-расчетчи-
ка от необходимости априорного выбора структуры пе-
редаточной функции. Логарифмические частотные харак-
теристики часто используются при синтезе следящих си-
стем регулирования и не нашли широкого применения
для целей аппроксимации экспериментальных АФХ про-
мышленных объектов.
ГЛАВА ВТОРАЯ
ОПРЕДЕЛЕНИЕ ДИНАМИЧЕСКИХ
ХАРАКТЕРИСТИК ПРОМЫШЛЕННЫХ ОБЪЕКТОВ
С ПОМОЩЬЮ АПЕРИОДИЧЕСКИХ ВОЗДЕЙСТВИЙ
Переходные процессы в линейном объекте с сосредо-
точенными параметрами однозначно описываются диф-
ференциальным уравнением типа
= (2-1)
60
или передаточной функцией вида
ОО
f У (0 dt
де (р\ _ у _®____________
w Х(р) «
Г х (t) e~pi dt
о
_ ЬтР’п + Ьт-1Р”‘~1+ —+
апрп + «n-iPn_1 + ... + а»'
(2-2)
где Х(р) и У(р)—преобразованные по Лапласу вход-
ная x(t) и выходная y(t) координаты; ап, ап-ь • • •, ао,
Ьт, ..Ьо — постоянные коэффициенты; т. Нахож-П
дение уравнений (2-1) и (2-2) промышленных объектов
может производиться экспериментальным путем. На
практике для исследования динамики объекта чаще все-
го применяют метод переходных функций.
Переходной функцией h(t) объекта называется кри-
вая изменения выходной координаты y(t) во времени
при ступенчатом изменении входной координаты x(t).
'функция h(t) есть приращение iA!y(O координаты «/(/),
обусловленное. мгновенным изменением х(<) от значе-
ния х(0 = Хо до величины х0+А в момент времени t =
=0, т. е.
X (/) — Хо,
л(/) = х04-Л;
/<0;1
t>0,l
(2-За)
где всюду А — постоянная величина.
Функция x(t), удовлетворяющая уравнению (2-За),
называется ступенчатой.
Экспериментальное определение переходной функции (
осуществляется при условии, что при t < 0 координата i
i/(0 =l/o=const, и все ее производные равны нулю при j
/=0. Обычно функция h(t) задается в виде графика или 1
таблицы значений. J
Если дифференциальное уравнение движений коорди-
нат объекта линейно, то величины х0 и у0 связаны ли-
нейным алгебраическим уравнением статики и выбор их
не оказывает влияния на динамические свойства. Поэто-
му удобнее формально положить Хо=Уо=О и ступенча-
§1
тую функцию определять как изменение входной коор-
динаты по закону
х (t) = 0;
x(f) = A;
(2-36)
а переходную функцию h(t) рассматривать как прираще-
ние координаты y(t) во времени, вызванное изменением
x(t) по уравнению (2-36).
Переходная функция h(t) связана интегральным со-
отношением с импульсной функцией k(t):
t
h(t)=^k (/) dt.
Q
Импульсная или весовая функция k(t) объекта есть
кривая изменения во времени выходной координаты y(t)
при входном возмущении типа дельта-функция б(/):
8(0 =
( 0;
I
/=/=()
t = 0.
(2-4)
Преобразование Лапласа L{6(/)} равно единице,- по-
этому L{k(t)} = W(p) есть передаточная функция объек-
та. Экспериментально k(t) найти нельзя, однако ее
можно вычислить путем дифференцирования переходной
функции h(t):
Переходная функция есть решение неизвестного диф-
ференциального уравнения, описывающего динамические
свойства объекта, при нулевых начальных условиях и
* определенном возмущающем воздействии типа ступен-
чатой функции.
г Экспериментальный метод определения динамических
, характеристик промышленного объекта — дифферен-
; циального уравнения или передаточной функции — за-
ключается в снятии переходной функции и аппроксимации
। ее решением линейного дифференциального уравнения
I (2-1) с постоянными коэффициентами и нулевыми на-
62
ййльньшй условиями. Зная аналитическое йырйжёййё1
решения и начальные условия, нетрудно найти и все ко- i
эффициенты ап, ап-\, ..aQ, bm, bm_i, ..bQ.
Исследование динамики методом переходных функ-
ций основывается на предположениях о сосредоточенно-
сти параметров объекта, неизменности во времени его
динамических свойств и выполнении принципа суперпо-
зиции при незначительных отклонениях x(t) и y(t) от
равновесных значений х0 и у0. Справедливость второго
и третьего предположений проверяется эксперименталь-
но на объекте; на обосновании первого следует остано-
виться подробнее.
Реальные промышленные объекты есть системы с расП
пределенными в пространстве параметрами и снятые
с них переходные функции являются решениями диффе-!
ренциальных уравнений в частных производных. Поэто-
му точная аппроксимация такого Л(/) решением урав- ’
нения (24) возможна лишь при п, т—+оо. Вместе с тем |
использование дифференциального уравнения высокого г
порядка, например с и, т>5-т-6, практически затрудне-
но. Осложнение с выбором порядка аппроксимирующе-
го уравнения преодолевается следующим образом. J
Явление распределенности параметров объекта про-
является в основном в медленном изменении экспери-
ментальной функции h(t) при малых значениях време-
ни t, поэтому для точной аппроксимации этого участка
требуется бесконечно большое число составляющих типа
С*е 1 , являющихся решением уравнения (2-4) (здесь —
число или полином от /; — вещественное или комплек-
сное число). При t->0 модуль |оц|->оо и эти составля-
ющие не оказывают заметного влияния на фор- ;
му h (/) при больших значениях времени. 1
Это означает, что полюсы передаточной функции, ’
аппроксимирующей динамические свойства объекта, бу- '
чдут удаляться сколь угодно далеко от мнимой оси при !
росте номера i. Поэтому начальный участок эксперимен- |
тальной переходной функции можно аппроксимировать |
t звеном чистого запаздывания, передаточная фуцкция
; которого W(p) =е~рх также имеет бесконечное число I
~ полюсов. Эта аппроксимация допустима, и в силу того, |
что на начальном интервале времени (0, т) значения i
h(t) малы и соизмеримы с зоной нечувствительности из- I
мерительного прибора и его максимальной вариацией
63 ;
(классом точности). Введение в правую часть уравнения
(2-1) запаздывания преобразует его к виду:
= +...+М0—.); ,»0
и позволяет с приемлемой для инженерных приложений
точностью аппроксимировать экспериментальную h(t)
суммой двух — пяти экспонент, т. е. ограничить величи-
[ны п,
Для некоторого класса объектов явление распреде-
ленности их параметров по длине проявляется в резком
«изломе» экспериментальной h(\t) в момент времени
t=tB, где tB— время нахождения рабочих веществ (вход-
ных координат) в объекте. Чаще всего величина tB близ-
ка ко времени установления (затухания) Ту * переходной
функции и приближенная аппроксимация «излома» осу-
ществляется одной экспонентой с корнем эд, рас-
положенным близко к мнимой оси. Такой прием озна-
чает неточное определение АФХ в области низких ча-
стот, что, однако, несущественно для задач расчета
систем автоматического регулирования.
Весь процесс определения динамических характери-
стик промышленных объектов удобно разделить на три
основных этапа, которые подробно разбираются в бли-
жайших параграфах.
2-1. ПОДГОТОВКА И ПЛАНИРОВАНИЕ ЭКСПЕРИМЕНТА
ПО СНЯТИЮ ПЕРЕХОДНЫХ ФУНКЦИЙ
Изучение промышленного объекта. Под-
готовка к проведению исследований динамики начинает-
ся с изучения технологического процесса, конструкции
объекта, особенностей его работы, оснащения контроль-
но-измерительной аппаратурой и регуляторами. Необ-
ходимо ознакомиться с технической литературой, в кото-
рой описан исследуемый объект или ему подобные, про- .>
анализировать работу объекта в режиме нормальной экс-
* Время установления Т7 переходной функции определяется как
момент времени, начиная с которого h(t) —const; А(/)~0; h (/)«0
и т. д.
64
плуатации и записи регистрирующих приборов. После
этого составляется структурная схема объекта с указа-
нием основных входных и .выходных координат объекта.
Эта схема обсуждается и согласовывается с технолога-
ми, эксплуатирующими данный объект.
Далее осуществляется изучение статики объекта.
К непосредственному эксперименту следует прибегать
лишь в^ех случаях, когда при нормальной эксплуатации
объекта имеют место частые смены режима его работы
и при этом входные и выходные координаты изменяются
в широком диапазоне, а сведения о статических харак-
теристиках отсутствуют. Краткая методика изучения
статических зависимостей промышленного объекта при-
ведена в § 1-1.
Если в соответствии с технологическим регламентом
работы выходная координата изменяется в незначитель-
ном диапазоне, например ±(104-15)% равновесного или
номинального значения r/о, или из опыта исследования
объектов, однотипных с данным, известно, что свойства
их близки к линейным, то экспериментального опреде-
ления статических характеристик можно не производить.
Точнее говоря, изучение статики в малом можно совме-
щать с экспериментами по определению динамических
характеристик объекта.
После анализа статических зависимостей совместно
с технологами намечается ряд значений х0, уо входных и
выходных координат, удовлетворяющих уравнению ста-
тики. Хотя при линейных статических характеристиках
выбор величин х0, Уо принципиально неважен, все же
всегда следует планировать снятие переходных функций
в рабочих режимах объекта.
Производится обнаружение возможных источников
шумов и возмущений, а также изыскиваются способы j
стабилизации и устранения их. Эксперименты по снятию}
переходных функций чаще всего длятся незначиталь- j
ный промежуток времени (по сравнению со временем j
снятия АФХ), поэтому иногда можно стабилизировать *.
часть «неприятных» входных координат и тем самым
упростить последующую обработку результатов экспери-
мента. При невозможности стабилизации возмущающих
воздействий следует попытаться установить среднюю ча-
стоту появления их и сравнить с грубой оценкой величи-
ны времени установления (затухания) переходного про-
цесса Ту, которая определяется из анализа диаграмм
5—121 65
j эксплуатационных регистрирующих приборов, с тем что-
। бы выяснить возможность снятия h(t) между момента-
! ми возникновения возмущений.
Подготовка аппаратуры для провед е-
дия эксперимента. На этом этапе следует правиль-
но выбрать датчики для измерения координаты x\t) и
приборы для регистрации z/(/) (специальной аппарату-
ры для создания возмущающих воздействий х(/), как
правило, не требуется). Если динамические характери-
стики предназначены для обсчета системы автоматиче-
ского регулирования, то Измерения координаты y(t) сле-
дует осуществлять именно тем датчиком, который будет
. использован в схеме автоматики. В противном случае
требуется знание динамических свойств датчика в усло-
виях, близких к рабочему режиму работы объекта. Же-
лательно, чтобы АФХ датчика были близки к единице
в полосе частот от 0 до 0,2—0,3 рад/сек. Регистрирую-
| щие приборы для записи координаты y(t) должны иметь
широкий диапазон скоростей движения V$ бумаги (при-
мерно от 60 до 21000 мм/ч). Величина Уб подбирается
в процессе проведения опыта в зависимости от динами-
ческих свойств объекта, с тем чтобы вся переходная
функция размещалась на отрезке диаграммной бумаги
длиной 200—350 мм. Так как предположение о линейно-
сти динамики в «малом» ограничивает величину откло-
нения координаты y(t) при снятии переходной функции,
то целесообразно применять регистрирующие приборы
с «утопленным нулем» и растянутой шкалой. Коэффи-
циент передачи регистрирующего прибора следует вы-
бирать в каждом конкретном случае таким, чтобы мак-
симальная величина h(t) равнялась 100—200 мм по за-
писи на диаграммной бумаге. Точность последующей
обработки переходных функций во многом зависит от
класса точности аппаратуры, предназначенной для из-
мерения и регистрации координаты y(t). Если экспери-
менты осуществляются в условиях, когда нельзя стаби-
лизировать источники случайных помех и шумов, или
динамические свойства существенно изменяются во вре-
мени, то для записи h(t) можно довольствоваться стан-
дартными регистрирующими приборами класса 1—2,0
и скоростью пробега кареткой шкалы за 0,5—1 сек.
Вообще же целесообразно применять автоматические
регистрирующие приборы класса 0,2—0,5 с прямоуголь-
ной шкалой и минимальной зоной нечувствительности.
66
Этим требованиям удовлетворяют станции ЦНИИКА,
описанные в приложении I.
Планирование оп ы т о в. Прежде всего оцени-
вается время проведения одного опыта по снятию пере-
ходной функции, т. е. находится приближенная величи-
на времени установления Ту координаты y(t) при резких
изменецйях x(t). Если динамика объекта исследуется
в условиях отсутствия помех и случайных флуктуаций, |
то на каждом рабочем режиме следует снимать не менее i
четырех переходных функций, а при наличии шумов ре-
комендуется записывать до 8—10 переходных процессов. '
Подобные серии опытов должны быть проведены на
всех намеченных режимах работы объекта. Затем опре-
деляется минимально необходимое время проведения
всего эксперимента по снятию переходных функций,
с учетом чего и составляется программа исследований
на объекте.
Одним из важнейших вопросов стадии планирования
является выбор вида испытательного, воздействия и его
амплитуды. Здесь приходится учитывать следующие фак-
торы: назначение динамических характеристик, наличие
в объекте источников помех и шумов и уровня послед-
них, возможность создания определенных испытатель-
ных сигналов, квалификацию инженеров и т. п.
Для удобства выбора все основные апериодические
испытательные сигналы показаны в табл. 2-1; там же
указаны области их наиболее целесообразного приме-
нения. Частотные спектры этих сигналов различны, по-
этому точность определения из переходных функций зна- .
чений АФХ также будет различной в каждой конкретной
полосе частот со. Поэтому в таблице указаны приближен-
ные границы частотных областей, внутри которых данные
виды сигналов x(t) обеспечивают вычисление наиболее
точных значений АФХ. Например, ординаты частотного
спектра ступенчатого воздействия с ростом частоты со
быстро стремятся к нулю, следовательно и в спектре пе-
реходной функции наиболее значимыми будут низкоча-
стотные составляющие, а поэтому значения АФХ можно
определить наиболее точно лишь в области низких ча-
стот (все сказанное справедливо и для случая нахожде-
ния по h(t) коэффициентов дифференциального уравне-
ния). Для воздействия типа прямоугольная волна частот-
v 3 тс
ныи спектр имеет максимум при == f-y, поэтому и
5*
67
Таблица 2-1
Таблица испытательных воздействий апериодического типа
Название
воздейст-
вия
Графическое
изображение
воздействия
Математическое
выражение
воздействия
Преобразование
Фурье воздействия
Частотный спектр
воздействия
Область применения
воздействия
Ступенча-
тая
функция
№ft)
1 х № । = "V
Применяется при предвари-
тельном исследовании ди-
намики объектов, в которых
нет интегрирующих элемен-
тов; при допущении техно-
логическим режимом дли-
тельных отклонений вы-
ходной координаты; при
определении значений АФХ
в области низких частот
«Реальная»
ступенча-
тая
функция
I \x(t)
х (t) = 0; t < 0;
*(*) = -£ f’
x (f) = A; fiC t < oo
A
x (e-/W,_i);
4A
!| X (j<o) 1 =— sin wfi
ti(t)
О я: 2л *
Применяется вУтех же случа-
ях, что и ступенчатая функ-
ция. Чаще всего имеет
место при нанесении воз-
мущения с помощью серво-
мотора с постоянной скоро-
стью. Значения АФХ целе-
сообразно определять при
4-0,8 —
Прямо-
угольный
импульс
х(01=0; 0 > t > Т;
х (t) = Al Q < t < Т
4A <oT
Применяется при исследова-
нии динамики объектов, не
допускагсицих длительных
отклонений, выходной коор-
динаты илг^содержащих в
своем составе интегрирую-
щие звенья; при более точ-
ном изучении динамики в
области частот
Т
Трапеце-
идальный
импульс
х (f) = 0; О >:/ >1Т;
x(t)=
О t < ti, x(t)~ А;
T — t
x{t) = A —;
T —tx<ts^T
x (!«>)=—^-x
x x
X (e — 1);
4Д
!*(/<») i=^x
. т— fl
X Sin у sin —— <0
Применяется в тех же случа-
ях, что и прямоугольный им-
пульс. Чаще всего имеет
место при нанесении воз-
действий с помощью серво-
мотора с постоянной скоро-
стью. Значения АФХ вычис-
ляются наиболее точно в
интервале частот
69 ‘
Прямоу-
гольная
волна
х (t) = 0; 0 > t > Т; X (>) = - — / X
x(e-j2WT_lr.
0< * <~2' | X (/«) | = ~ sin2 <«Г
X (0 = — А;
т
'T<t<T
Применяется в тех же случа-
ях, что и прямоугольный
импульс. Значения АФХ вы-
числяются наиболее точно
в интервале частот
0,3 У 4-0,5 у < И <
4- 4-1,5-=-
т т
значения АФХ, полученные из переходных функций, бу-
дут наиболее точными в окрестности частоты соь
Из подобного анализа спектров следуют рекоменда-
ции по применению различных видов испытательных
воздействий: если динамические свойства объекта со-
вершенно неизвестны или интерес представляет низко-
частотная часть годографа АФЧ, то используют возму-
щение типа ступенчатая функция; если же известна
область частот, в которой требуется знание частотных
характеристик, то применяются сигналы типа прямо-
угольный импульс или волна.
На точность определения динамических характери-
стик существенное влияние оказывает не только форма
испытательного воздействия, но и его амплитуда А,
Максимальная величина А выбирается с учетом нелиней-
ности статической зависимости, требований технологиче-
ского регламента о допустимой скорости и интервале из-
менений некоторых координат объекта, уровня случай-
ных помех и шумов. Если статическая зависимость
объекта имеет кусочно-линейный характер, то желатель-
но выбирать величину А такой, чтобы при увеличении
x(t) от х0—1,5А до х0+1,5А изменения выходной коор-
' динаты подчинялись в статике линейному закону. Обыч-
но допустимый диапазон отклонений ±Ду координаты
y(t) от равновесного состояния Уъ задан технологиче-
ским регламентом эксплуатации объекта. Зная коэффи-
циент усиления объекта k, можно найти оценку сверху
амплитуды А < —Если на координату #(/) нала-
гается случайный процесс п(/), некоррелированный
с x(t), то величину А всегда следует выбирать макси-
мально возможной. Возможность использования регуляр-
ных испытательных сигналов для определения динамиче-
। ских характеристик объекта ставится под сомнение в том
случае, когда среднее квадратическое значение шума
; n(t) составляет примерно 20—15% величины Ak. ибо об-
1 работка экспериментальных переходных функций стано-
вится крайне трудоемкой, а точность найденных значе-
ний АФХ — весьма низкой.
На оценку величины А снизу в основном влияют
уровень помех и класс точности аппаратуры для измере-
ния и регистрации координаты y(t). Практика исследо-
вания динамических характеристик различных промыш-
ленных объектов показывает, что как правило, ампли-
70
туда А испытательного сйгнала выбирается в интервале
от (0,03—0,05) до (0,10—0,15)хм, где хм— максимально
возможное значение входной координаты х(/), опреде-
ляемое расчетной производительностью (нагрузкой) дан-
ного объекта.
Вопросы оптимального выбора испытательного сигна-
ла x(^f с конечной амплитудой А, позволяющего наи-
более точно.определить коэффициенты известной импульс-
ной функции k(t) или ее Фурье-преобразования
= W(ju)) в условиях, когда на выходе объекта измеряет-
ся функция z(t) +n(t), рассмотрены в работе
[Л. 16]. Предполагается, что n(t) есть нормальный белый
шум с нулевым математическим ожиданием; запись слу-
чайного процесса г(/) осуществляется на отрезке време-
ни Тн, в течение которого наносится несколько испыта-
тельных воздействий по входной координате х(/), и
функция й(/) есть реакция линейного объекта на них.
Кроме того, принимается, что импульсная функция
аддитивна относительно всех входящих в нее коэффи-
циентов пг-; i=l, 2, ..., и, bg\ g=l, 2, ..., т, т. е. вариа-
ция одного из ai или bg ни в коей мере не отражается на
величинах других параметров k(t). Коэффициенты аг-
определяют масштаб k(t) по оси времени /, a bg— мас-
штаб по оси ординат. При сделанных предположениях
вычисляются дисперсии коэффициентов импульсной
функции:
Dcii =
dW (/со)
да{
2
da
Г dW(ja) I2 t
(2-5)
и после ряда упрощений оценка снизу среднеквадратиче-
ских ошибок
л_ VNjrT-.
I dW (jv) I ‘ A
I dat |макс
- wr2?r~- • (2-6)
|макс
71
где | X (fa) | — спектр испытательного Сигнала х (/); AZ0 —
уровень спектральной плотности шума п(/);
dW (/со)
даг
— max
макс
(Ж (Jto)
ddi
Хотя из-за чрезмерных упрощений в структуре k(t)
формулы (2-5) и (2-6) нельзя использовать для практи-
ческих расчетов, все же атализ их позволяет сделать
некоторые рекомендации по/выбору вида испытательного
воздействия.
Очевидно, что среднеквадратическая ошибка определе-
ния коэффициента а* или bg зависит от отношения шум/
сигнал, равного величины времени наблюдения Гн
и максимального значения частной производной АЧХ по а*
или bg. Поэтому экспериментатор должен в первую очередь
выбирать максимально возможное значение амплитуды А
входного испытательного сигнала, а затем стараться умень-
шить уровень помех. Увеличение времени Гн означает
увеличение числа опытов по определению динамических
характеристик объекта. Кроме того, оценки снизу и
&bg получены из условия, что А2ТИ — const, и поэтому
время Гн следует увеличивать обратно пропорционально
квадрату амплитуды испытательного воздействия. Нако-
нец, для уменьшения Даг- следует стремиться совмещать
максимумы спектров сигнала x(t) и , что видно из
OCLI
анализа знаменателя формулы (2-5). Другими словами, для
определения каждого сц или Ьё испытательный сигнал х (t)
должен быть такой формы, чтобы основная его энергия
концентрировалась на тех же частотах, на которых дости-
. dW (/со) dW (/со) п
гается максимум спектра функции—7или —Вчаст-
OCL 00 g
ности, если — то наилучшие результаты даст
использование сигнала x(t) — Asinco/, так как вся энергия
его сосредоточена в окрестности частоты со, при которой
d dW (/со) I п о 1
имеем =0. При зависимости импульсной функ-
ции от коэффициентов аг и Ьг эффективность применения
синусоидального
мумы спектров
воздействия снижается, так как макси-
dW (/со) dW (/со)
da t db ц
лежат на разных ча-
стотах (здесь необходимо вводить возмущения с разными
72
значениями частоты, т. е. снимать АФХ). В этом случае
более удобно воздействие типа прямоугольный импульс,
ширину спектра которого можно и нужно варьировать
в зависимостей от интервала частот, на котором функции
IW О) /-
/ достигают своих максимумов. Сту-
dw (»
даг
пенчатое' воздействие х (/) = А, существующее во всем
интервале наблюдения Тн, целесообразно применять лишь
для определения коэффициентов bg1 в частности начальных
условий в [Л. 16] и коэффициента усиления й, для кото-
рых максимумы спектров
ких частот (см. § 4-3).
dW (/со)
dbg
лежат в области низ-
2-2. ПРОВЕДЕНИЕ ЭКСПЕРИМЕНТА ПО СНЯТИЮ
ПЕРЕХОДНЫХ ФУНКЦИЙ
На объекте устанавливается и стабилизируется
выбранный режим работы, характеризуемый значениями
%о, уо входной и выходной координат. Проверяется пра-
вильность подключения и показаний измерительной и ре-
гистрирующей аппаратуры, предназначенной для записи
координаты у (Г). Затем налаживают регуляторы, осу-
ществляющие стабилизацию некоторых возмущающих
координат объекта.
Экспериментатор вручную или с помощью сервоме-
ханизма наносит несколько пробных кратковременных
возмущений x(t) заданной формы.
Опыты по снятию переходных функций заключаются
в следующем. Экспериментатор внимательно анализи-
рует график координаты у (t), и, убедившись, что на не-
котором небольшом отрезке времени y(t) = const = z/0;
i/(/)=0; ~0, вводит испытательное возмущение, на-
пример ступенчатую функцию с амплитудой А. Помимо
регистрации y(t), желательно записывать изменения
основных возмущающих координат объекта. Окончание
переходного процесса определяется экспериментатором
визуально — опыт считается законченным, если, начиная
с некоторого момента времени Гу, выходная коорди-
ната остается практически неизменной, или — при на-
личии в объекте интегрирующих элементов, после уста-
новления постоянной скорости изменения y(t), В про-
цессе проведения опыта следует внимательно наблюдать
за тем, чтобы изменения y(t) не превысили норм допу-
73
стимых отклонений ±\у выходной координаты объекта.
После стабилизации координаты у (4) наносится но-
вое возмущение х(/) =—А и снова записывается пере-
ходная функция (рис. 2-1). Затем опять устанавли-
вается рабочий режим объекта и наносится испытатель-
ное воздействие с амплитудой —Л, а спустя время Гу
снимается следующая, четвертая, переходная функция
при возмущении x(t) = +А.
Описанная серия опытов повторяется при увеличен-
ной в 1,5—2 раза амплитуде испытательного сигна-
ла х(/).
Линейный или линеаризованный характер статиче-
ской зависимости еще не позволяет считать линейной ди-
намику объекта. Для подтверждения гипотезы о линей-
ности динамических свойств объекта в малом необходимо
убедиться в выполнении принципа суперпозиции, для
чего опыты проводятся при различных знаках и ампли-
тудах апериодических входных воздействий. Первона-
чальная проверка осуществляется экспериментатором
непосредственно при проведении опытов; для этого вы-
числяются величины коэффициентов усиления объекта
k = h(Ty)/A и сравниваются. При существенном различии
коэффициентов k в разных опытах, достигающем, на-
пример, 20—40%, следует уменьшить амплитуду А и
снова провести снятие переходных функций. Более тща-
тельная проверка принципа суперпозиции осуществляет-
ся на стадии обработки результатов.
Вообще говоря, проверку принципа суперпозиции
следует проводить при возмущающих воздействиях раз-
личной формы, например: х(/)=Л; x(t) =А sin со/; х(/) =
=Л0+Д1'/ и т. п. Это объясняется тем, что фактическое
74
дифференциальное уравнение объекта может иметь чле-
ны следующего типа:
dny(t) Г j dhy (t)~\ dny (i)
dtn ’ dth ' \ dt* ) ’ [Un~Fu^ dth J dt* 9
где p, k, n — вещественные числа, и тогда при использо-
вании испытательного сигнала одной формы эффекты от
действия подобных нелинейностей могут оставаться не-
замеченными. Однако практика исследования динамики
широкого класса промышленных объектов показывает,
что нелинейности, связанные с производными, встречают-
ся исключительно редко и поэтому выполнение принципа
суперпозиции достаточно проверить путем нанесения
возмущений типа ступенчатая функция с амплитудой
разного знака и величины.
В некоторых случаях гладкие переходные функцциД
снимаемые при одном и том же режиме работы объекта,!
имеют существенные отличия, заключающиеся в раз- j
бросе ординат h(t) при фиксированных значениях вре-
мени. Этот разброс можно объяснить незаметными или !
неконтролируемыми изменениями некоторых входных -
координат, ненулевыми начальными условиями при сня-
тии переходных функций, проявлением неизвестной низ-
кочастотной помехи и т. п. Для получения более досто-
верных сведений о динамических свойствах такого рода
объектов требуется снятие большего количества пере-
ходных функций.
Для проверки стационарности динамических свойств
объекта эксперименты по снятию переходных функций
следует повторить еще несколько раз через определен-
ные большие промежутки времени (по сравнению с вели-
чиной Ту). При этом крайне важно все опыты проводить
на одном и том же рабочем режиме, т. е. при одинако-
вых равновесных значениях х®, yQ входной и выходной
координат объекта.
2-3. ОБРАБОТКА РЕЗУЛЬТАТОВ ЭКСПЕРИМЕНТА
ПО СНЯТИЮ ПЕРЕХОДНЫХ ФУНКЦИЙ
Обработка гладких переходных функ-
ций. Переходные функции hg{t)\ g=l, 2, ..., q, не ис-
каженные помехами и случайными флуктуациями, стро-
ятся в одном масштабе на графике. Так как при прове-
дении эксперимента амплитуды Аё, g=l, 2, ..., q вход-
75
ных испытательных сигналов могли быть различными,
то следует определить единичные переходные функции
<(Ф " / '
A°(Z)=_M0.
«v ’ Л z
Если разброс между функциями Л°(/) незначителен и
соизмерим с точностью регистрации координат x(t)vt y(f),
например не превышает 2—3%, то для последующей об-
работки выбирается одна из переходных функций. В про-
тивном случае производится усреднение /г° (7) по множе-
ству номеров g, т. е. находится усредненная единичная
Переходная функция
Далее из 7г° (/) или h? (/) определяются величины ко-
эффициента усиления k объекта и времени чистого запаз-
дывания т. В данном случае & = /г°(Гу), а если имеем дело
с неединичной переходной функцией, то k — ^-h(Ty).
Величина т определяется как отрезок времени, внутри
которого выполняется неравенство 0</г° (/)< Д, где ве-
личина Д зависит от погрешности аппаратуры для изме-
рения //(/), класс точности которой обычно 1—2. Поэтому
следует полагать Д < (0,01 0,02) И? (Гу), учитывая, что
погрешность прибором с „утопленным нулем" и растяну-
той шкалой почти всегда выше, чем у аппаратуры нор-
мального исполнения. При выборе т следует учитывать и
форму переходной функции на ее начальном участке.
На рис. 2-2 в качестве .примера приведены четыре переходные
функции hg(t) пароводяного смесителя (здесь {/(/)—температура
горячей воды после смесителя; x(t) —расход греющего насыщенного
пара). Возмущающие воздействия при этом были следующими: Ai —
= 4-23 кг!ч\ Л2=4-18 кг/ч; А3--=—18 кг/ч; А4=—27 кг!ч. В табл. 2-2
приведены ординаты hg{t)\ g=l, 2, 3, 4, соответствующие значения
g= 1, 2, 3, 4 и которая дополнительно изображена на
рис. 2-2,6. Коэффициент усиления объекта по каналу расход пара —
температура воды равен 0,253 кг/ч. Для определения величины т
укажем, что измерение x(t) осуществлялось расходомером перемен-
ного перепада с классом точности 1,5, а температура y(t) регистри-
ровалась мостом типа ЭМП с утопленным нулем и шкалой 0—30° С;
76
при этом погрешность из-
мерения не ниже 1—1,5%.
Поэтому выбираем Д =
==О,О15Л°(7’У) =0,015 • 0,253=
= 0,0038° С и получаем из
графика на рис. 2-2,6 ве-
личину т=1 мин.
Обработка получен-
ных кривых, являю-
щихся реакциями ли-
нейного объекта на
возмущение типа пря-
моугольного импульса
или волны, сводится к
преобразованию их к
переходным функциям.
Прямоугольный им-
пульс можно рассма-
тривать как сумму двух
ступенчатых функций
с амплитудами +А и
—А. Моменты нанесе-
ния возмущений раз-
личаются на величину
Г, равную ширине им-
пульса (рис. 2-3). От-
Рис. 2-2. К примеру обработки пере-
ходных функций бойлера.
сюда ясна и после-
довательность нахождения h(t) из импульсной кри-
вой На отрезке времени [0, Т] функ-
ция = затем, очевидно, при T<t<^2T из h(t)
вычиталась переходная функция, являющаяся реакцией
объекта на возмущение —Д, т. е. уже известная h(t)\
(ХКТ. Для „восстановления" Л(/); Т <1^2Т следует
использовать зависимость
В интервале времени 2T<t<3T для восстановления
h(t) требуется прибавить к Ли(/); 2T^t<3T вычислен-
ную ранее функцию h(t)\ T^t<2T, т. е.
Л (о=ли(0 4-Л(0 = ли(0 4-л (^ — П-
2Г^^ЗГ 2Г^/<ЗГ 2T^t^3T
77
Таблица 2-2
4-23 кг/ч 3» М 00 + з* г? 00 3* го* сч 1
| t, мин О 00 LO in CD I СП т 0,252 LO СМ о 0,255 0,256 0,25а
LO ю 00 CD 0,248 0,244 0,250 0,252 00 сч о
о CD. ю со т CD CD 0,243 0,239 сч о 0,244 0,242
00 LO сч со CD 0,235 0,233 0,239 0,237 0,236
г- сч ю о т co 1 0,226 0,222 0,228 0,226 Ж‘0
СО 00 со со 1 CD UO 1 603*0 0,205 0,216 0,207 0,209
ю со со со ио со о о LO 1 00 о со 00 о 0,194 0,185 00 о
со CD со см 00 ci 1 СЧ T 0,156 A о ю о 0,155 0,155 0,154
LQ сч о си О СЧ cn СЧ 60Г0 ю о о о о о 0,108
CN LQ 00 о 00 о CO 7 00 о о о о 00 о о 00 о о 00 о о
LQ О о о о о LO О 0,008 о о г о о г 900‘0 о о о
hit) | со й4 (0 л?(0 О О1 ОСО о
Для любого интервала времени тТ\ т=1,2,... полу-
чаем:
h(t) = ha(t)+h(t-T); (2-7)
с начальной функцией h(t — Г) = 0 при т=1, т. е. при
Q<t<T.
Пример построенной таким образом переходной функции паро-
водяного бойлера показан на рис. 2-3, где x(t)—расход греющего
пара; 4 = 100 кг/ч; Т=4 мин; y(t) — температура воды после бой-
лера.
Рис. 2-3. Построение переходной функции по
импульсной кривой.
Прямоугольная волна есть сумма трех ступенчатых
функций: x(t) с амплитудой +А и моментом приложения
/=0; x(t) с амплитудой —2А в момент /=0,5Т; x(t)
с амплитудой +А в момент t—T. Используя принцип су-
перпозиции, будем рассматривать экспериментальную
кривую /гв (/) как сумму реакций объекта на перечислен-
79
78
ные ступенчатые возмущения, и тогда для определения
переходной функции следует использовать! формулу
h(t) = hB (/) + 2Л(/ — 0,5Г) —
где т — любое целое число, а начальные функции для
h(t) с запаздывающим аргументом следующие: h(t —
— 0,5Г) = 0; 0</<0,5Т; /га = 1; h(t — T)=Q; 0<t<T;
т=1 и т = 2.
На рис. 2-4 показан пример построения h(t) по эксперименталь-
ной кривой hB(t), снятой с Пароводяного бойлера при нанесении воз-
мущения по расходу пара типа прямоугольная волна с амплитудой
4 = 100 кг/ч и 0,5Г=4 мин.
Рис. 2-4. Обработка кривой, являющейся
реакцией объекта на возмущение типа прямо-
угольная волна.
Сглаживание экспериментальных пере-
ходных функций. Достаточно часто при исследовав
( нии динамических характеристик промышленных объек-
тов измеряется не выходная координата z/(/), а сумма
I ее с некоторой случайной функцией (помехой) п(/). Та-
80
ким образом, экспериментатор при снятии переходных
функций регистрирует случайную функцию £(/):
z(/) =й(/) + n(\t).
Стационарный случайный процесс n(t) генерируется
непосредственно в самом исследуемом объекте либо пред-
ставляет собой случайную наводку в цепях измерения
y(t), либо приносится в объект некоторыми входными
координатами. Как правило, n(t) имеет нормальный
Рис. 2-5. Переходная функция, искаженная по-
мехами.
закон распределения с нулевым математическим ожи-
данием; спектральная плотность его близка к постоян-
ной величине в полосе пропускания (0, сос) объекта.
Примерный вид такой переходной функции, искаженной
помехой, показан на рис. 2-5. Определение по ней коэф-'
фициентов дифференциального уравнений возможно
лишь после соответствующей обработки, заключающей-
ся в выделении из функции г(/), называемой ниже экс-
периментальной переходной функцией, истинной h(t).
Принципиально возможен следующий путь нахожде-
ния переходной функции h(t). Надо снять q экспери-
ментальных переходных функций Zg(/); £=1, 2, ..., q и
найти оценку математического ожидания по мно-
жеству номеров g. Так как п(/) стационарен и его ма-
тематическое ожидание равно нулю, то при достаточно
большом q получим:
M*z (0 Л (0, или Л (0 у J] (0.
g=I
Однако для получения более или менее достоверных'
результатов число экспериментальных переходных
функций q должно быть больше 40—100, что, естествен-
но, является невыполнимым условием при исследовании
6—121 81
динамических характеристик промышленных объектов.
(Поэтому больший интерес представляют инженерные
методы сглаживания экспериментальной переходной
функции, заданной таблицей равноотстоящих друг от
друга значений z(ti)=zit где Ц—/{_j=i2W=const; i=
; =0, 1, 2, ..., n. Обычно число ординат z(ti) невелико:
1 n < 204-40, .Все (рассмотренные ниже методы сглажива-
{ ния применимы, если известно, что h.(t) имеет неколеба-
тельный характер, т. е. передаточная функция объекта
обладает только действительными полюсами?
Сглаживание переходных функций
скользящим усреднением. Суть этого метода
[Л. 17] заключается в последовательном осреднении ор-
динат zt; i = 0, 1, 2, ..., п на некотором интервале време-
ни /А/, 1<п, I — любое целое число; удобнее брать /чет-
ным. Операция осреднения выполняется по формуле
‘'=0' '-2......п-‘’ <2-8>
/ Т* п
2 р=о
где Л* — ординаты оценки переходной функции h(t).
Интервал /А/ называют памятью линейного фильтра,
обладающего АФХ следующего вида:
* sin —2
W (]<*) =--.
Г
। Подобный фильтр не пропускает или существенно
‘ослабляет гармонические составляющие функции z(t)
с частотами выше 2л//А/, поэтому правильный выбор ве-
личины I определяет качество отделения высокочастот-
ного шума n(t) от более низкочастотной функции Л(/).
Занижение памяти /А/ ведет к недостаточному выравни-
ванию экспериментальных данных, а завышение —
к искажению существенных особенностей Л* (/) и потери
’части ординат h*i с номерами / = 0, 1, ..., Z/2—1 и
/=п—//2+1; п—1/2 + 2, ..п. Так как начальный уча-
сток Л(/) определяет структуру искомой передаточной
функции, а конечный — коэффициент усиления объекта,
то для сглаживания скользящим средним надо начинать
регистрацию z(t) несколько раньше момента нанесения
‘возмущения и прекращать при t>Ty. Из-за этих же со-
ображений для сглаживания z(t) вначале берут /=
= 2^-4, затем визуально оценивают й*(/) и, если это не- J
82
обходимо, увеличивают /. Эмпи-
рический метод подбора' памя-
! ти фильтра обусловлен тем, что
I на стадии обработки обычно
। неизвестен частотный спектр
,h(t) и фактическая спектраль-
ная плотность помехи n(t).
В табл. 2-3 приведены результаты
измерений концентрации серной кис-
лоты на выходе из смесителя кислот при
ступенчатом изменении расхода мелан-
жа; величина А/ равна 40 сек. Все зна-
чения Zi даны в делениях шкалы с «утоп-
ленным нулем» полуавтоматического
концентратомера; размах шкалы равен
50 делениям, или 5% изменения концен-
трации H2SO4. Экспериментальная пе-
реходная функция z(ti) показана на
рис. 2-6; там же крестиками изображены
значения h*i, полученные в результате
сглаживания с |/*=4. Эти же значения
h*i приведены и в табл. 2-3 (строка 3).
Сглаживание переход-
ных функций четвертыми
разностями. Сглаживание
четвертыми разностями заключа-
( ется в аппроксимации с помощью
метода наименьших квадратов
каждых пяти соседних значений
параболой второго порядка
[Л. 12], При этом вычисляется
лишь разность (поправка) между
параболой и значением средней
из пяти ординат z^ затем осуще-
ствляется сдвиг вправо на один
номер i и опять определяется по-
правка для значения функции
Zi+i. Величина этой поправки
пропорциональна центральной
четвертой разности д4гг- функ-
ции Zi.
^Zi=Zi-2~—^Zi-\ + б2г-—4гг-+1 +гг-+2;
1 = 2, 3, ..., п—2.
83
Значения оцейкй переходной ^функции /г\- вычисля-
ются по формуле /
h*i » zi — 84.
(2-9)
Чтобы избежать потери четырех значений h*t при
i = 0, 1, п—1, и, следует использовать следующие фор-
мулы:
= го —84/2 + 84;
h\ = г, + 84/2 — - j- 84;
h*=2n-l—V 84-2 + 84zn _ 2;
п—1
Лп 1 = 2'«-«-1-84-2---|-84г-2
— 1 <9 -- /
П— 1
где §3г р, — центральная третья разность;
рь+ 1
о3г р. = z . — Зг„ 4- Зг . — г , „;
Р-+1 j
1,2, ..., п —2.
Операцию сглаживания экспериментальной переходной
функции z (/) по формуле (2-9) можно повторять несколько
раз, рассматривая ординаты Л*г- как исходные значения г,.
Рис. 2-6. Пример сглаживания переходной функции.
о — экспериментальные данные; X и □ — результаты сглаживания
скользящим средним и четвертыми разностями.
Результаты сглаживания экспериментальной переходной функ-
ции, заданной табл. 2-3, показаны на рис. 2-6 квадратиками.
В табл. 2чВ приведены значения четвертых разностей d4Zi; f=2, 3,...,
..., 18 и ординаты i=0, 1, 2, ..., 20. Для вычисления /1*1,
84
/г*19, Л*2о требуются третьи разности 6sZi/2= l—3 • 4 + 3 • 0—5=—16 и
d3^8/i9=37-3.33 + 3.30—38=—10. Далее определяются: Л*о=1 +
,11 2 1
+ —16 —-J2 ,33== 1’45’’ /г*1==4 —-^-.16 + -у.ЗЗ = 2,ЗО; Л*19 —
2 1 11
= 30 + -g-.10 + -y-.l =34,143; Л*20 = 38 — -у. 10 — -&•1 = 35,92.
Сглаживание переходных функций ря-
дами Фурье. Этот метод сглаживания основан на
различной скорости убывания коэффициентов разложе-
ния Фурье для функций с различными аналитическими
свойствами [Л. 12].
Для непрерывных функций разложение Фурье схо-
дится достаточно хорошо в среднеквадратическом смыс-
ле и при конечном числе членов ряда. Если непериоди-
ческая непрерывная функция отображена как четная,
то на краях интервала ее задания могут иметь разрывы
первой производной и поэтому скорость убывания коэф-
фициентов ak будет пропорциональна величине IJk2;
&=1, 2, 3... (здесь k — номер члена разложения функ-
ции в ряд по косинусам). При нечетном отображении
непериодической функции возможны лишь разрывы вто-
рой производной и скорость убывания коэффициентов
bk становится пропорциональной величине 1/й3. Нако-
нец, скорость убывания коэффициентов разложения
функции, имеющей разрывы первого рода, будет не вы-
ше величины 1/7? или даже равна нулю.
В силу различий в частотных составах функций
( h(t) и n(t) коэффициенты разложений их в ряд Фурье
! будут также убывать с различными скоростями. Оче-
( видно, что скорость убывания bk переходной функции
\Л(/), отображенной нечетно, будет пропорциональна
1/&3, а коэффициенты разложения шума будут умень-
! шаться пропорционально величине 1/k либо вообще не
будут убывать, причем знаки их могут изменяться слу-
чайным образом. Если разложить таблично заданную j
экспериментальную переходную функцию г(/г) в ряд
Фурье по синусам, то первые, быстро убывающие коэф-
фициенты будут относиться к разложению а прак-
тически неубывающие bk со случайной сменой знака
есть коэффициенты Фурье шума n(t). Обрывая ряд по
коэффициенту Ьт> относящемуся к разложению гладкой
функции Л(/), можно в основном отфильтровать более
высокочастбтный случайный процесс n(t). Величины
&2, b3, ..., Ьт разложения z(t) будут, конечно, отличать-
85
ся от коэффициентов Фурье гладкой переходной функ-
! ции h(t), так как на интервале частот Го, т орди-
< паты линейчатых спектров h (t) и п (/) не могут быть раз-
i делены без дополнительных сведений о статистических
j характеристиках шума.
Эта ошибка, очевидно, пропорциональна отношению
шум/сигнал, т. е. качество сглаживания ухудшается при
увеличении среднеквадратического значения n(t) и
уменьшении ординаты h(T7). Выбор номера т произ-
водится эмпирическим путем — вычисляются 6—10 ко-
эффициентов и анализируются их величины и знаки.
Практически методика сглаживания эксперименталь-
ной переходной функции z(t) с помощью рядов Фурье
заключается в следующем:
а) Из значений z(ti)\ i=0, 1, п вычитается ли-
нейный двучлен а + р/;:
z(ti) =z(ti)—ia—fiti,
коэффициенты которого находятся из уравнений:
z(0)=z(0)— a—р0=0;
z(nAt) =z(Ty) =z(Ty)—a—pTy=O.
б) Функция z(Zi); z = 0, 1, 2, ..., n разлагается в ряд
по синусам:
г (/) Ьг sin-^-t-\- b2 sin-^-2t-\- ... = bk sin-^- kt,
k=\
где Ал
H—1 .
bk = -y sin ^77- (2-Ю)
i=l
в) Анализируются величины и знаки коэффициентов
bk и определяется число т.
г) Вычисляется оценка переходной функции h* (0:
= bk.smk~t; (2-11)
k=i
86
Нахождение коэффици-
ентов Ьк по формуле (2-10)
и значений А*(0 по завися- »
мости (2-11) связано с боль- ®
шим объемом выкладок, и
поэтому все расчеты по н
сглаживанию эксперимен-
тальных переходных функ-
ций рядами Фурье сле-
дует осуществлять на циф-
ровых вычислительных ма-
шинах.
Следует указать на одну
практически важную деталь
применения рядов Фурье
для сглаживания переход-
ных функций. Из приведен-
ной методики нетрудно уви-
деть, что значения 2(0) и
2(пД/) =2(ГУ) всегда равны
нулю, т. е. ординаты Л*(0)
и Л*(Ту) функции бу-
дут равны соответственно
величинам г(0) и г(Гу) экс-
периментальной переходной
функции <?(/). Это обстоя-
тельство заставляет тща-
тельно определять «начало»
и «конец» переходного про-
цесса перед сглаживанием.
Целесообразно осуществлять
выравнивание скользящим
усреднением эксперимен-
тальных значений на на-
чальном и конечном уча-
стках задания переходной
функции и визуально наме-
чать интервал времени
[0, пД/] или [0, Гу].
'В качестве примера осуще-
ствим сглаживание рядами Фурье
экспериментальной переходной
функции, заданной табл. 2-4, стро-
ки 2. Из уравнения 2 —а—0-0=
=fy317—а—9600=0 определяем ко-
О 0° 1 О сч tr ОО СО о О 1
со со О ОО О ОО о о г—Н *—•< ООО о - - - CD N N О) со со со
О - ~ 2 ю НО сч О) о о 00 СО со о сч сч CD СЧ СО СО
о сч о о m S S S 880 133,0 132,6 130,0
о О) СО U0 6 ю О Ь N со —< ю о тг СЧ О 00 00 со со сч т—1 т—1 т—<
о ~ ® * S «2 3 g о сч ю О О О 00 00 сч сч сч
О °? г- ю ю СО Ь- о - Г СО Ь" ь- со сч сч
О 2 2 ю но сч гГ СО Ю о сч оо сч ю ь, сч сч сч
о о UO ь- 2 00 СЧ СО СО СО со О 00 о 00 СП — со СО т-н сч сч
о со со 00 £2 сч сч сч сч сч ь- 00 о со а> сч со со сч
~ Ю о 00 оо со сч СО ю О О об СП СО
о о ю ю 00 UO СО СО оо о - - СО О Ю Ю ~ ~
0,0 2,0 2,0 —1,0 S сч U0 О 1
*** *** /г*’**’*
—< сч со ’Ф — сч со 'чг
87
эффициенты а=2 и р= 135/960. Далее из всех ординат z(ti) вычтем
двучлен 24-135/960/г; /г=0, 40, 80, ..960 сек, после чего с по-
мощью цифровой вычислительной машины найдем коэффициенты
разложения z(ti) по синусам: Ь\=28,99; Ь2=\,11\ 63=6,27; &4=0,5;
&5=—1,96; 66=0,63; 67=—3,05; &8=4),92 и т. д. Очевидно, что сле-
дует учитывать лишь коэффициент//?], т. е. положить т=1, и тогда
оценка переходной функции будет описываться формулой
135 тс
^*(0 = 2 + ^/+ 28,99 sin Ogg t\ 0<f<960 сек.
Значения h*(t) приведены в табл. 2-4 (строка 3) и на рис. 2-7.
Сглаживание переходных функций по-
линомами Чебышева. Полиномы Чебышева пер-
вого рода Tk(t) =cos k arccos t\ A = 0, 1, 2, 3, ... обла-
дают рядом интересных свойств [Л. 18]:
a) ортогональны с функцией веса B(t) =
= (1—Р) 2; —
б) Весовая функция B(t) придает большее значение
ординатам разлагаемой функции по мере приближения
аргумента i к краям интервала [—1, +1].
. м •
х о
fOO-
О •
1
го- о 4
I - ।___।__।___।__।___। — ।_।---1--1---1—L
О80^60200320 МО180 560 МО 720 800 880 сек
Рис. 2-7. К -примеру сглаживания переходной функции.
О—экспериментальные данные; X и ф—результаты сглаживания
рядами Фурье и полиномами Чебышева.
в) Полиномы имеют наименьшее отклонение от
нуля в интервале времени [—1, +1] по сравнению со
всяким другим многочленом, имеющим коэффициент при
старшем члене, равный единице.
88 •
Свойство «а» полиномов существенно упрощает вы-
числение коэффициентов Ск разложения функции z(l)
в ряд:
z(0 = fcft^(0. (2-12)
k=0
Свойство «б» позволяет аппроксимировать функции
с существенными изменениями первой производной по
краям интервала [—1, +1] сравнительно небольшим чи-
слом членов ряда. Заметим, что переходные функции
также характеризуются существенными изменениями
производной в начальной или средней части интервала
времени [О, Ту]. В последнем случае необходимо пред-
варительно построить четное отображение z(t) и раз-
лагать новую функцию в ряд (2-12) или использовать
полиномы Чебышева второго рода с весом В (t) =
1
= (1—Z2)2; —
Наконец, свойство «в» полиномов позволяет произво
дить оценку ошибки усечения ряда {(2-12) по слагаемому
с номером т, т. е.
m
(2-13)
/2=0
Оценка осуществляется по величинам коэффициентов
разложения Ск; & = 0, 1, 2, ... так как базисные функции
Тк(0 по модулю всегда меньше единицы.
Полиномы Чебышева находятся по простой рекур-
рентной формуле
rfe+1(^)=2/Tfe(0-^-i(0; k=\, 2, з ...
при начальных условиях То (/) = 1; 1\ (/) = t и — К t < 1.
Непосредственное разложение экспериментальной пере-
ходной функции z(t) в ряд (2-13) требует предварительной
интерполяции ее значений каким-либо аналитическим вы-
ражением. Поэтому функция г (Z) разлагается в ряд Фурье
по синусам, которые в свою очередь разлагаются с по-
мощью функций Бесселя по полиномам Чебышева. Произ-
ведения коэффициентов Фурье и функций Бесселя вычис-
ляются заранее и задаются в виде числовой матрицы || С ([
(см. приложение 2).
89
Методика сглаживания эксйериментальной переходной
функции с помощью полиномов Чебышева заключается
в' следующем:
а) Интервал [О, Гу] задани>0)ункции z(/j); i — 0,1, 2,..
центрируется и нормируется к отрезку [—1, -[-Г
преобразованием tg = у (ti —10); g — i —у (га—четное
число); g =----j-; —lr —; Y==
б) Из значений z(tg) вычитается линейный двучлен
a+'₽Fg; х,
2(tg) =2(Fg)— a—₽ig,
где аир находятся из уравнений г(—1)—а + р=/0;
z(l)—а—>р=0.
в) Функция z(tg) разлагается на четную Ug:
^g=z(ig).+z(t-g); g=0, 1, 2, -J—1
и нечетную Vg:
Vg=z(tg) — g=l, 2, -f-—1
последовательности.
г) Значения Ug и Vg умножаются на соответствую-
щие элементы матрицы ||СП ||; эти произведения сумми-
Т k
руются и находятся коэффициенты разложения с чет-
ными и нечетными номерами k.
Все сказанное в предыдущем пункте о величинах
коэффициентов &ь&2, &з,... разложения z(t) в ряд Фурье
легко применяется и при анализе коэффициентов Ск;
£ = 0, 1, 2, 3, ..т. е. первые, большие по модулю значе-
ния Со, Ci, С2, ... Ст относятся к разложению h(t),
а Cm+i, Ст+2, ... — к разложению шума n(t). Поэтому
' можно написать:
+ + Q7>(2); - 1< ?<1,
&=0
или, переходя к натуральному аргументу / и приводя по-
добные члены, получаем:
Л* (Z) cLq CL^t -j- a2Z2 -j--... —[-* amtmy 0 t Уу,
где tio, ^2, ...» cim — известные постоянные коэффи-
циенты.
90
Поясним методику применения полиномов Чебышева
на примере сглаживания экспериментальной функции,
заданной табл. 2-4.
Определим вначале /о = 96О/2=48О сек и у= 1/480 сект1 и осу-
ществим центрирование и нормирование всех значений /г:/г- = 0, 40,
80, ..., 960 сек по формуле tg = l/480(C-—480); g=i—24/2=/—12.
Значения g =—12, —11, ..10, 11, 12 и tg приведены в табл. 2-5.
Из уравнений 2—а—£(—1)=0 и 137—id—£ • 1=0 находим коэффици-
енты а=69,5 и р=67,5 и, вычитая из всех ординат z(tg) '(см. табл. 2-4)
линейный двучлен 69,5+67,5 • tg, tg =—1, —0,916, —0,833, ..., +1,
получаем значения z(tg), которые показаны в строках 3 и 6
табл. 2-5. Затем вычисляем величины Ug\ g=0, 1, 2, ..., 11 четной
последовательности, например: Uo=z(O) +2(0) = 61,3+61,3= 122,6;
1/1 = 2(0,083)+2(—0,083) =24,0 + 22,63 = 46,63 и т. д. (см. строку 7
табл. 2-5). Ординаты Vg нечетной функции определяются для £=1,
2, 3, ..., 11, например: 1Л=2(0,083)—2(—0,083) =24,0—22,63=1,37»
«1,40; V2=z(0,166)—z(—0,166) =27,5—35,3=—7,8 и т. д. Величины
Vg приведены в строке 10 табл. 2-5.
Далее каждое значение Ug умножаем на числовой множитель,
расположенный в g-й строке первого столбца таблицы || С12.01| (при-
ложение 11); сумма этих произведений У, UgCn^ равна коэффициенту
о
разложения Со. Для примера возьмем: Со=|122, 6 • 0,011344+46,6X
Х0,03049+62,8 • 0,022928 + 69,8 • 0,03155+50,8 • 0,0237+51,3 • 0,034014+
+ 63,7 • 0,02521 +16,7 • 0,03895+16,8 • 0,02794 +‘14,1 • 0,05006 + 8,6 X
X 0,03338—9,7 • 0,094339= 11,871.
Сумма произведений Ug\ g=0, 1^2,..., 11 на числа IIC12.2II в g
строках второго столбца матрицы ЦС12.2Ц образует коэффициент С2
и т. д. Произведения Ci2.0 Ug и С12.2 Ug приведены ;в строках 8 и 9
табл. 2-5. Нечетные коэффициенты Сь С3... определяем аналогичным
путем, только вместо Ug берем значения Vg и умножаем _на числа,
расположенные в соответствующих столбцах матрицы ||Ci2.J| для
нечетных функций (см. строки 11 и 12 табл. 2-5). После подобных
операций получим последовательность коэффициентов разложения:
Со='11,871; С2=—20,3377; С4=3,3; С6=1,12;...; ^=—1,041; С3=
=—1,789; С5=0,744 ... Нетрудно видеть, что следует учитывать
лишь три первых четных коэффициента Со, С2, С4, и тогда, перейдя
от z(t) к z(t), получим после приведения подобных членов:
Л* (I) = 107,01 + 67,5t—83,07412+42,414; _ 1 <7< +1.
Переход к натуральному аргументу — времени t — в данном
примере нецелесообразен из-за малых - величин коэффициентов при
членах с t2 и t4. Значения приведены в строках 4 табл. 2-4,
а также изображены на рис. 2-7.
Следует заметить, что сглаживание эксперименталь-
ных переходных функций полиномами Чебышева связано
с большим объемом выкладок, вследствие чего все рас-
91
1 ё — 12 —11 — 10 —9 —8 —7
2 G 1,0 —0,916 —0,833 —0,75 —0,666 —0,583
3 Z(<«) 0,0 0,5 4,0 3,3 13,5 —5,3
4 ё 0 1 2 3 4 5
5 tg 0,0 0,083 0,166 0,25 0,333 0,416
6 z(tg) 61,3 24,0 27,5 31,3 38,1 19,0
7 __Ug 122,6 46,6 62,8 69,8 50,8 51,3
8 С 12.0^ g 1,384 1,403 1,420 2,175 1,185 1,732
9 С12.2^ g —3,68 —2,07 —3,615 —2,76 —2,61 — 1,475
10 Vg 0,0 1,4 —7,8 —7,2 —25,4 —13,3
И 6\2.1^ g 0,0 0,0108 —0,055 —0,118 0,374 —0,391
12 C 12.&g 0,0 —0,0245 0,2215 0,243 —1,347 0,661
четы целесообразнее выполнять на цифровой вычисли-
тельной машине.
Анализ методов сглаживания переход-
| ных функций. Рассмотренные способы сглаживания
' z(t) основаны на разных идеях и допущениях и приме-
! нение их, очевидно, приводит к разным результатам. Это
достаточно отчетливо.видно и из примеров сглаживания
экспериментальных переходных функций. Поэтому воз-
никает естественный вопрос: как оценить качество
сглаживания экспериментальных переходных функций
с шумом и какой из приведенных ранее методов обеспе-
чивает лучшее качество сглаживания?
Будем характеризовать качество сглаживания z(t)
величиной дисперсии
D = М J [F* (/<о) — W(/<о)]2 da»,
<00
(2-14)
где fit — символ математического ожидания по множе-
ству переходных функций, сглаженных одним и тем же
способом; W(/co)—амплитудно-фазовые харак-
теристики, найденные из и h(t)\ [coo, coi]— интервал
частот, в котором требуется знание наиболее точных
D2
Таблица 2-5
—6 —0,50 41,4 —5 —0,416 32,3 —4 —0,333 12,7 —3 —0,250 38,5 —2 —0,166 35,3 — 1 —0,083 22,63
6 7 8 9 10 11 12
0,50 0,583 0,666 0,750 0,833 0,916 1,0
22,3 22,0 3,3 8,1 4,3 — 10,0 0,00
63,7 16,7 16,8 11,1 8,6 —9,7 0,00 S
1,590 0,662 0,447 0,55 0,2665 —0,943 0,0 11,871
—2,575 —0,152 —0,358 0,318 0,0767 — 1,437 0,0 —20,337
— 19,1 27,3 —10,2 4,8 0,3 —10,0 0,0 S
—0,438 1,293 —0,343 0,3915 0,0234 —1,768 0,0 — 1,041
1,292 — 1,45 0,696 —0,144 —0,009 —0,936 0,0 —0,789
значений АФХ. Для практических целей будем исполь-
зовать оценку D*:
q d
К)-Re,юг +
£=1 r=l
+ [Im? Ю-Im₽ ЮГ},
(2-15)
где q — число переходных функций, сглаженных одним
и тем же методом; d — число значений АФХ в интервале
частот [coo, koi]; Re*((or), R‘e(cor), Im*i(cor), Im(cor)—ве-
щественные и мнимые части W* (/со) и W(j(o) при со = сог;
г=4, й, ..d.
( Критерий качества сглаживания типа (2-14) или'
1 (2-1*5) тесно связан с частотными характеристиками
’объекта. Это объясняется как отсутствием приемлемых
! критериев сравнения переходных функций во временной
области, так и тем, что именно АФХ являются исходным
материалом для расчета систем автоматического регули-
рования и наиболее точное знание их в определенном
/интервале частот является основной задачей исследова->
ния динамики объекта»
93
। Качество сглаживания экспериментальной переход-
ь ной функции каким-либо методом будет тем лучше, чем
L меньше величина D*, т. е. чем ближе АФХ, найденные
из к частотным характеристикам, определенным
из h(t). Конечно, для уменьшения дополнительных оши-
! бок нахождение АФХ из h(i) и ft*i(f) должно осущест-
; вляться одним и тем же способом, который учитывал бы
j форму всей переходной функции (в работе [Л. 19] для
1 этого .применялся метод «площадей», рассмотренный
в § 2-4)......
Вёличины оценок дисперсий D* для сглаживания
z(t) скользящим средним, четвертыми разностями, ряда-
ми Фурье и полиномами Чебышева были определены
эмпирическим путем в работе (Л. 19] для случая, когда
среднеквадратическое значение шума n(t)
т
п = lim I п2 (/) dt
Г->оо ( 1 '
О
составляет 6—10% й*(Гу). Анализ величин D* позволяет
сделать некоторые выводы о качестве сглаживания z(t)
этими методами.
Наилучшее качество сглаживания z(t) обеспечивает
применение полиномов Чебышева. Причина этого факта
заключается как в хорошей t фильтрующей способности
рядов Фурье, что позволяет отделить все составляющие
линейчатого спектра функции z(t\ с частотами со>т~4
1 <У
так и в удачном выборе весовой функции В(/), повы-
шающей точность аппроксимации на краях интервала
[0, Гу]. Последнее обстоятельство, как уже отмечалось,
имеет большое значение при определении АФХ из
Определенную роль играет и связь полиномов Чебышева
с методом наименьших квадратов, так как при сделан-
ных предположениях о природе шума n(f) последний
обеспечивает максимум критерия максимального прав-
доподобия.
На второе место по результатам приближения АФХ
следует поставить метод сглаживания переходных функ-
ций с помощью рядов Фурье. Качество сглаживания ря-
дами Фурье и отчасти полиномами Чебышева в сущест-
венной степени зависит от выбора начальной z(0) и ко-
нечной z(Ty) ординат функции z(t)> Этот метод следует
94
Применять для сгЛйжийАИйя переходных функций, у ко-
торых достаточно отчетливо видны «начало» и «конец»
переходного процесса. В противном случае требуется
предварительно определить z(0) и г(Ту) с помощью чет-
вертых разностей или скользящего среднего, а затем
разлагать z(t) в ряд Фурье.
Хорошие результаты дает сглаживание переходных
функций, искаженных шумами и помехами, методом
четвертых разностей, значительно худшие — скользящим
средним. Объясняется этот факт тем, что первый метод
основан на предположении о близости математического
ожидания М z(t) в интервале времени 4Д1/ к параболе
второго порядка, а сглаживание скользящим средним
базируется на гипотезе о близости Mz(t) на отрезке
1№ к прямой линии. Это условие более жестко для дан-
ного класса функций, и поэтому результаты сглажива-
ния скользящим средним хуже, чем при сглаживании
четвертыми разностями. Вместе с тем объем выкладок
в последнем методе примерно в 3—4 раза больше, чем
при сглаживании скользящим средним, что в некотором
смысле уравнивает положительные и отрицательные сто-
роны этих двух способов.
2-4. ОПРЕДЕЛЕНИЕ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК
ПО ПЕРЕХОДНЫМ ФУНКЦИЯМ (ОБРАБОТКА РЕЗУЛЬТАТОВ
ЭКСПЕРИМЕНТА)
Известно, что решение линейного дифференциального
уравнения с постоянными коэффициентами и нулевыми
начальными условиями существует и единственно. Одна-
ко утверждать Обратное, т. е. что всякому таблично или
графически заданному решению соответствует единст-!
ственное линейное дифференциальное уравнение, очевид-1
но, нельзя, особенно если под решением подразумевается 5
переходная функция h(t) промышленного объекта..
В этом случае всегда осуществляется приближенная
аппроксимация h(t) решением дифференциального урав-
нения, а следовательно, по одной и той же переходной
функции можно получать разные динамические харак-
теристики. Более того, сами методы аппроксимации пе-
реходной функции решением линейного дифференциаль-
ного уравнения базируются на различных допущениях
о его структуре и используют разнообразнейший матема-
тический аппарат. Указанные обстоятельства объясняют
95
причины появления большого числа различных способов
определения коэффициентов дифференциального уравне-
ния или передаточной функции W(p) по переходной
функции промышленного объекта.
Для удобства дальнейшего рассмотрения следует
произвести классификацию известных методов определе-
ния динамических характеристик по h(t) (рис. 2-8).
Основной признак классификации — предположения
о структуре аппроксимирующей W(р) или дифференци-
ального уравнения, свойственные каждому методу опре-
деления динамических характеристик. Под структурой
дифференциального уравнения, или, что одно и то же,
передаточной функции, понимаются число и расположе-
ние корней характеристического уравнения или нулей
и полюсов W(p). Большинство методов можно класси-
фицировать и по используемому ими математическому
аппарату. Этот признак не является основным для зада-
чи определения динамических характеристик объекта, ?
и поэтому все дальнейшее изложение ведется в соответ- |
ствии с классификацией методов по структурам аппрок- (
симирующих передаточных функций или дифференци-1
альных уравнений.
В классификацию на рис. 2-8 включены и методы
определения значений амплитудно-фазовых характери-
стик из переходных функций; рассмотрению этих спосо-
бов посвящен следующий параграф.
Аппроксимация переходной функции ре-
шением 'дифференциального уравнения
с простыми вещественными корнями. Этот
метод {Л. 20 и 21] применим для аппроксимации глад-
ких неколебательных переходных функций h(t), пред-
ставленных выражением
п
(2-16)
где с0 — ha, ~ h (Гу), Ci и — вещественные числа, причем
корни характеристического уравнения аг- должны удовлет-
ворять эмпирическому неравенству
-^-<0,5-г-0,7; i=l,2, — 1. (2-17)
Эти условия означают, что аппроксимирующая W(p)
имеет только вещественные простые полюсы, располо-
96’ \
Рис. 2-8. Классификация методов определения динамических характеристик из переходных функций.
7—121
97
И»'
жеииые на достаточно большом расстоянии друг от дру-
.га по действительной оси.
Выражение (2-'16) есть решение линейного диффе-
ренциального уравнения порядка га с возмущающим воз-
действием (правой частью) типа ступенчатая функция.
Требуется по таблично или графически заданной пере-
ходной функции промышленного объекта определить ве-
личины коэффициентов i= 1, .2, ..., п, корни харак-
| теристического уравнения а,, i= 1, 2, ..., п и порядок
' уравнения п.
Идея метода заключается в последовательном прибли-
жении h (t) вначале решением уравнения первого порядка,
т. е. функцией cte~aii, и если эта аппроксимация неудов-
летворительна на каком-либо отрезке времени [0, ТС], то
вводится в рассмотрение вторая составляющая с2е“ , т. е. •
порядок аппроксимирующего уравнения принимается рав-
ным 2, и т. д. Неизвестные «£ и Ci определяются на каж-
дом этапе аппроксимации с помощью операции логариф-
мирования, вследствие чего этот способ получил название
метода последовательного логарифмирования. Последова-
тельность действий при его применении следующая.
По условию (2-17) все корни а{ различны, поэтому
скорость убывания функций Ci6~aii также будет различной
при увеличении аргумента — времени/. Скорость убывания
определяется величиной и так как а, — самый малый
из корней, то cte~a,i уменьшается медленнее всех прочих
составляющих . Поэтому можно предположить,
что h (/) есть решение линейного дифференциального урав-
нения первого порядка, и написать приближенное равен-
ство
/г(0^со — с\е или с0 — h(t) = h1(t)v^ с^е a,t.
Это соотношение верно при больших значениях вре-
мени t, когда влиянием других составляющих можно
пренебречь. Прологарифмируем функцию | h^t) | и получим
уравнение прямой линии в полулогарифмическом масштабе
по оси ординат:
/ (/)1 ~1ПС1—ait
Отсюда/нетрудно определить неизвестные величины
ai и С[. Для этого вычисляется функция hl(t)=co—h(t)
и строится график ln|/ii(f)| в зависимости от времени t.
98
К функции ln]Ai(/)] проводится асимптота при tz±°°
^й;Ги“вЗконкретных условиях при больших значениях..вре-
мени /. Асимптота отсекает на оси ординат некоторый от-
резок, равный 1пГ1. Величина корня си равна тангенсу
угла наклона асимптоты к оси абсцисс:
7*
где /1—точка пересечения асимптоты с осью времени
(рис. 2-9,б).
J---1___I___I__I___L < I- 1, 1. J t 1 I 1 1 1. J 1 I j 1
/7 2 4 6 8 W 12 14 16 18 20 22 24 26 2830 32 3436 38мин
Рис. 2-9. К примеру определения коэффициентов пере-
даточной функции методом последовательного логариф-
мирования.
99
Если h(t) действительно является решением диффе-
ренциального уравнения первого порядка, то функция
= (0 — cie~a‘'t
равна нулю при всех, а не только больших, значениях
времени t, т. е. асимптота совпадает со всей функцией
ln|/zi(/)|. В общем случае п#=1, поэтому /г2(7)=И=0 при
малых значениях /, и, зная теперь С\ и аь можно найти
функцию /г2(/), порождаемую неучетом влияния состав.
—а
ляющих de и особенно медленно убывающей, компо-
ненты с2е~“2*.
Можно построить функцию h2(t) на графике в полу-
логарифмическом масштабе по оси ординат, провести
к ней асимптоту и определить величины с2 и а2. Если
асимптота не^совпадает со всеми значениями 1п|Ла(/)|,
то, очевидно, порядок аппроксимирующего дифференци-
ального уравнения должен быть выше второго и надо
найти очередную функцию „невязок* h3(t) = h2(t)— c*e'~*2t
и учесть влияние на h (/) следующей составляющей
и т. д.
. Процесс приближения h(\t) выражением (2-16) пре-
кращается тогда, когда функция hn(\t)^O с точностью
J—2% величины h(T7), причем значения ее будут зна-
копеременными. Знаки переменных интегрирования а
определяются по знакам соответствующих функций
j Практика применения метода последовательного
I логарифмирования для определения динамических ха-
1 рактеристик по переходным функциям промышленных
объектов показала, что в подавляющем большинстве
случаев h(t) можно аппроксимировать суммой из двух—
1 четырех экспонент.
При правильном определении параметров щ и
Ci должны выполняться следующие «начальные» усло-
вия:
(2-18)
При большом п все равенства (2-18) выполнить очень
трудно, так как проведение асимптот, а по существу —
касательных, связано с погрешностями субъективного
100
характера. Кроме того, изменение какого-либо или
щ требует пересчета всех остальных ci+i, Сг+2, ... и аг+ь
аг+2. Следствием невыполнения условий (2-18) является
образование нулей передаточной функции, что противо-
речит сделанным предположениям о структуре W(p)
или дифференциального уравнения. Действительно, пре-
образуем (.2-16) по Лапласу:
i = l
п п п п
Со П (Р + »«) — У, РСг П (Р + я«) Со П “<
I * = 1_________/ = 1_____________________________
1 ' п п
рП (р + “*) р П (р + а<)
t=l i=l
п
Здесь символ П означает произведение всех сомножи-
телей 1,2,i — 1, i -\- 1,п, кроме р-|-аг-
Равенство
п п п п
с0 П (p + ai) — р £ а П (р+аё) = СоП Лг
1=1 i = l g^i г = 1
следует из условий (2-18), что для малых п показывает-
ся непосредственно и распространяется на случай боль-
ших п по индукции. Далее нетрудно получить передаточ-
ную функцию объекта, положив x(t)=A:
п
Со П
w (p) — H(J}>
yp> X(p)
А П (/’+««)
1=1
------• (2-19)
+ П <riP+ 1)
г=1 ' * ' >=1
Если же
п п п п
П (/? р У Ci П (р -{- Cig) Cq П ,
i=l t=l g&i
101
то передаточная функция W(p) будет иметь до п нулей.
При малых величинах коэффициентов при р, р2, р3 ...
в числителе выражения для W(p), составляющих 1—3%
значений Tif можно не проводить уточнения параметров
щ и Сг, а записать передаточную функцию в виде выра-
жения (2-19). Однако более удобно проверять правиль-
ность нахождения Ct и щ по равенствам (2-18).
Следует-указать, что определение коэффициентов Ci
и корней щ осуществляется по переходной функции, из
которой уже выделено время чистого запаздывания т;
поэтому динамические свойства объекта будут описы-
ваться передаточной функцией
^Sp} = -—---------
П(^+1)
1=1
Рассмотренный метод аппроксимации h(t) решением
линейного дифференциального уравнения достаточно
прост и позволяет получить аналитические выражения,
весьма удобные для последующих расчетов. Для прове-
дения расчетов требуется логарифмическая линейка или
таблица натуральных логарифмов.
Основной недостаток метода последовательного ло-
гарифмирования заключается в неизбежном появлении
субъективных ошибок при проведении асимптот и как
следствие этого в трудности точного определения сх и
«г, удовлетворяющих «начальным условиям» (2-18).
Поясним изложенную методику примером определения коэф-
фициентов W(p) по гладкой переходной функции, заданной равно-
отстоящими значениями /?(/,); ti—/i_i=2 мин; j=0, 1, ..., 21
Таблица 2-6
ti h(tj) 0 0,00 2 8,7 4 25,5 6 43,5 8 58,5 10 70,0 12 78,5 14 84,5 16 88,8 18 92,0 20 94,3
h 22 24 26 28 30 32 34 36 38 40 42
95,9 97,0 97,9 98,5 ^,9 99,2 99,4 99,6 99,7 99,9 100
| (табл. 2-6). Время чистог0/запазды’ван1ия т выделено заранее и рав-
|но_ 3. мин,- Коэффициент усиления~объекта равен h(Т7) = h. (42) =1007
[всюду ниже будем писать просто_ h(t), подразумевая единичную
переходную функцию. График h(t) показан на рис. 2-9,а.
Величина равна в данном случае Л (42) = 100; вычтя из нее
ординаты функции найдем функцию = — Л(^), значе-
102
ййй которой показаны в табл. 2-7
(строка 2). Там же приведены ве-
личины 1g | (/i).j> а сама функ-
ция 1g рц (/)!’"изображена в полу-
логарифмическом масштабе на
рис. 2-9,6. Проведем к графику
этой функции асимптоту I, пере-
секающую ось ординат в точке
2,213 и ось абсцисс в точке
/1 = 30,6 мин. Отсюда находим
величины сj и a,: lgc1 = 2,213t
lg ci
или сг = 163,3; ai = 0,434/ =
163,3 ’ *
= — 0,434-30,6 0,166. Вы-
Числим функцию схе 061 =
= 163,3°’166 **'• ^=0, 2,4,
..., 42лшн и проставим ее значе-
ния в строку 4 табл. 2-7. Далее
находится функция «невязок»
А, (/{) = /I, (ti) — 163,Зе~°’166 •
значения которой приведены в
строке 5 табл. 2-7. Как видно
из табл. 2-7, в интервале вре-
мени 0 — 6 мин аппроксимация
—
hl(t) выражением схе 1 =
— 0,166 г
= 163,3 £ неудовлетвори-
тельна и надо ввести в рас-
смотрение второй член разло-
жения (2-16). На рис. 2-9, б
построена функция 1g | h2 (/) | и
к ней проведена асимптота при
/ -> оо, которая пересекает ось
абсцисс в точке /2 =9,0 мин и
ось ординат в точке 1g с2 —
= 1,766. Отсюда имеем: с2=
п 1,766
— 63,24 и а2 ------ 0,434-9
= — 0,452. Учитывая отрица-
тельный знак функции h2 (/), по-,
лучаем с2 = — 63,24. Из рис.
2-9, б видно, что асимптота до-
статочно хорошо совпадает с
функцией 1g | h2 (/) I; поэтому
можно принять л = 2 и записать |
аналитическое решение диффе- '
ренциалйяого уравнения:
h(t) = 1ОО(1—1,633е-о.^ +
+ O,6624e-o>452t)
103
Произведем проверку «начальных условий»:
h (0) = со—Ci—с2 = 100— 163,3 + 63,24 = —0,06;
h (0) = aici + a2c2= 163,3 • 0,166—0,452 • 63,24 =—1,35.
Относительная ошибка невелика: несколько больше 2%, поэтому
уточнения величин щ и сг делать не будем. Для контроля вычислим
несколько значений h(t) по аппроксимирующему выражению при
/=2 лшн, / = 6 мин и /=20 мин. Получим соответственно: Л(2) =
= 8,5; Л(6)=43,9; /г(20) =94,11. Ординаты экспериментальной функ-
ции h(t) при этих же значениях времени равны 8,7; 43,5 и 94,3.
Погрешность измерения и регистрации переходной функции h(t)
не менее 0,5%, поэтому достигнутая точность приближения ее сум-
мой двух экспонент вполне удовлетворительна и динамические свой-
ства объекта можно описать передаточной функцией
100с-3р
W = (1+ 6,03/>)(1 +2,22рр
Аппроксимация переходной функции ре-
шением дифференциального уравнения
с простыми корнями. Этот метод аппроксимации
применяют в тех случаях, когда переходная функция
имеет колебательный характер, а поэтому можно пред-
положить, что динамические свойства промышленного
объекта описываются передаточной функцией, не имею-
щей нулей и обладающей несколькими парами простых
комплексных полюсов. Здесь также используется * идея
последовательного приближения h(t) решением линей-
ного дифференциального уравнения, поэтому предпола-
гается, что отрицательные вещественные части полюсов
аппроксимирующей W(p) отличаются друг от друга при-
мерно в 1,5—2 раза. Последовательность действий на-
хождения коэффициентов W(p) такова [Л. 21].
Из переходной функции h(t) (рис. 2-10) выделяется
время чистого запаздывания т и затем определяется
функция /ir(/)=Co—h(t)9 которая разлагается в ряд
W Bi/sm(₽i/+<Pi), (2-20)
\ 1=1
где аг — вещественная часть, а рг-— коэффициент при
мнимой части комплексного корня р = а-Н‘Р характери-
стического многочлена линейного дифференциального
уравнения; cQ=h (оо) Как уже отмечалось, метод
104
последовательного логарифмирования дает хорошие ре-
зультаты, если выполняется условие
<0,5 4-0,7; /=1, 2, ..., /г-1.
аг + 1
Полагая временно п=\ и учитывая, что величина
ai — наименьшая из всех корней щ, напишем соотноше-
ние
МО ~ cIe~e,<sin(31/ + 'P1),
\ обращающееся в равенство при t —>оо. Определению
1 подлежат коэффициенты аь 0Ь epi.
Рис. 2-10. Переходная функция колебательного объекта.
Величина Pi находится достаточно просто, если изве-
стен период Г1 колебаний ЛД/), так как Pi = 2jt/Ti. В точ-
ках g=0, 1, 2 ..., в которых функция h\(t) проходит
через нуль, справедливо равенство
sin (pi^og + cpi) —0,
что позволяет найти cp-i = —’РДо^+^л; £ = 0, 1, 2...
(рис. 2-10). В точках tmg\ g = 0, 1, 2, ... колебания h\(t)
достигают экстремумов и, следовательно, можно напи-
сать:
sin(Pi/mg+<pi) = (—1И; §=0,1, 2, ...
Для значений времени t^=tmg\ g=0, 1, 2, ... справед-
ливо равенство
I К (tme) \ = \c0 — h (tms) | ~ cxe~a'tms,
105
ШЯВ
или после логарифмирования
1п|й1 (/mg) | «In ci—aiimg.
Построив в полулогарифмическом масштабе значе-
ния функции определим известным способом Ci
и
Далее вычисляется функция «невязки» h2(tmg):
ht (/) = ht (0 — с2е~а,‘sin -f- ?,),
учитывающая влияние других составляющих ряда (2-20)
на форму h(f). Наиболее медленно затухающей функцией
будет c2e~“’<sin(|3i/-}-<p2), так как величина а2 наименьшая
из всех корней <х4; i = 2, 3, ..., п. Поэтому полагаем п=2
и пишем:
h2 (/) c2e~aai sin (p2f + <р2).
Коэффициенты с2, а2, рг, <рг определяются описанны-
ми выше приемами. Процесс последовательного прибли-
жения й(/) решением дифференциального уравнения
с простыми комплексными корнями продолжается до тех
пор, пока очередная функция «невязки» hi(t) не станет
близка к нулю.
После аппроксимации h(t) рядом (2-20) находится
преобразование Лапласа Н(р):
14 (п\__ VI г cos я + (Р + gj) Sin ft , Со
Р>~ If' (Р + .О- + Й +v
и выписывается уравнение передаточной функции W (р) =
— -Н-Рд Р . Если коэффициенты ci, ait найдены до-
статочно точно, то должны выполняться следующие п
«начальных условий»:
\п
£ CiSin?i4-eo = ft(0)=0;
п
2 ci а« sin ** + ₽*cos = А (0) = 0;
1=1
п
Ci (a2. — p2)sin<p^— 2^aiptCos<Pi = /i(0) = 0 и т. д.
i=i *
106
Нетрудно видеть, что определение ряда коэффициен-
тов опирается на знание периода колебаний функции
h(t), который находится непосредственно из ее графика.
Для этого необходимо, чтобы переходная функция име-
ла несколько (не менее 2—3) периодов колебаний, что
довольно трудно получить при исследовании динамики
промышленных объектов.
Определение коэффициентов переда-
точной функции методом «площадей». Тре-
буется по таблично или графически заданной переход-
ной функции h(i) определить коэффициенты Ь^, i==l,
2' 3, ..., п и число п аппроксимирующей передаточной
функции
W(p)
или
£ flip1 +1
(2-21)
Некоторые из коэффициентов &n, bn-i, Ьп-2, • • • мо-
гут быть равны нулю, так что всегда порядок числителя
W(р) меньше или равен порядку знаменателя.
Суть метода заключается в разложении функции
W~x(p) в «усеченный» ряд по степеням р при р = 0
[Л. 22]:
п
= \ + (2-22)
2=1
и последующем определении коэффициентов ai и поряд-
ка п путем последовательного^ приближения №(t) реше-
ниями линейного дифференциального уравненияТтервого
порядка. -Коэффициент ai находится из следующих сооб-
107
ражений. Вычислим площадь под кривой с0—h°(t) =
— k—:
S^llk — h.0 (t)\dl = lim J e~p* [6 — h° (/)] dt =
0 p->oo о
= lim L {k — ha},
p-*oo
где l {k — h°} — преобразованная по Лапласу функция
k — h(t).
В то- же время имеем:
k __________
r->(p) p — W-'(P)
Предел последнего выражения при р—>0 равен ka\,
и в результате получаем:
S1 = ka\.
Введем аппроксимирующую переходную функцию
/^(Z), снятую со звена, передаточная функция которого
Преобразование Лапласа функции hx (t) имеет вид:
Я(р)
k 1
Р ’
и можно найти изображение функции «невязок»:
ь{л\о-л°(О}
Г-1 (р) — а,р— 1 k_
(,-,/>+ 1)Г-1 (Р) > ~
п
У Pip*-1
__________
— 'W+niF-’G’)'
108
Площадь «второго порядка»"равна:
00 t
•$2 = J J [ht (t) — h° (/)] dt dt=
0 0
= lim 4- L {A. (0 - h° (t)} = ka2,
p->0 P
n
k £ atpi-2
так как функция -у L {h, (ty—h° (/)} = (i)
\ стремится при p -> 0 к величине ka2.
Далее вводится переходная функция Аг(/), по анало-
гии находится а3 и т.^д. В общем случае получаем зави-
симость для определения коэффициентов разложения
а,' г= 1, 2, ..п:
I раз
kap,
i— 1, 2, . . ., п,
где Л°(оо) =k = hQ(Ty) при единичном воздействии х(/) =ИL
Практическое использование последнего выражения’
затрудняется как сложностью вычисления так и
появлением накапливающихся ошибок при неточном
определении ординат hi(\t) и приближенном интегриро-
вании. Поэтому величины обычно определяются по
формуле
00
о
v V Si-i-g (- *)«]
а (г- _ 1}, т (/ _ 2), -т- 2j з'-1-* е । ’
L g=o J
i t
где х = ------------
J [й - (/)] di
оо
В частности, при п = 2 имеем: S2 = S, j [£—Л° (/)] (1 —
6
00
— %)</%, а при /г = 3 получаем: S, = — h° (/)] X
/ v2 \ О I
(1 —2x+^-J dx. !
109
Коэффициенты исходной передаточной функции (2-21)
связаны с величинами или, точнее, с «площадями» S4
соотношениями:
1—1
ai = ^- + bi+Ylbe ; 1=1 ’ 2’ ’ 2П’ (2'23)
g=l
где некоторые Ь& i=n, п—1, ... и всегда bi, i=n+l,
п+2, .2п равны нулю.
Хотя в общем случае при определении коэффициен-
тов W(p) методом «площадей» не накладывается особых
ограничений на порядки числителя и знаменателя, одна-
ко разложение /(2-22) может расходиться, что чаще всего
имеет место при Л (4-0) =# 0; - Л (-|-0)=^= 0 и т. д. Для
улучшения сходимости процесса следует заранее пола-
| гать Ьп=.0; Ьп^г=^=0, если й(4-0) = 0, но h (4~0)У= 0;
! bn = bn_1=O, если Л (Ц-0) = 0; /г(Ц-О) = О и, наконец,
i при h (-{-О) = h (4-0) = 0; А (4-0) 0 можно принимать
I bn^—^ bn-i Ьп_2 == • • • bt = 0.
Порядок передаточной функции п определяется пр
величинам «площадей»: если Si мало по сравнению
1 с Si-1, то и=х—1; если 5г<?0, то n = i—1 и необходимо
I увеличить порядок числителя “аппроксимирующей W(p).
На практике чаще всего задаются следующими структу-
* рами W(p):
W(P)=r^~+a-^+ap+l’ W^=aP*AP + T’
изР -j- u,2P аъР а1Р ч 1
* Ьгр 4- k__
агр3 + a2p2 + a1p+V
Метод «площадей» не связан с графическими по:^
строениями и может быть применен для определения^
динамических характеристик по недостаточно гладким I
переходным функциям. В этом случае требуется осущё- ,
ствить сглаживание лйшь начального и конечного участ- )
ков h(t), так* как именно по ним определяются порядок ;
W(p) и величина k. Процесс вычисления Si и решения
системы линейных алгебраических уравнений (2-23) лег-’
ко алгоритмизируется применительно к счету на цифро-
вых вычислительных машинах. Для 2-е-З определе-i
ние коэффициентов W(p) может быть проведено и в руч-1
ную, хотя затраты времени на это в несколько раз боль-
110
ше, чем при использовании метода последовательного
логарифмирования. Аппроксимация динамических
свойств объекта передаточной функции типа (2-21) срав-
нительно часто приводит к* появлению комплексных по-
люсов W(p), что не согласуется с формой переходной
функции и физическими представлениями о законах дви-
жений выходной координаты y(\t) объекта. Эта особен-
ность свойственна самому методу аппроксимации, и на-
личие комплексных полюсов W(p) нельзя связывать
с конструкцией объекта. Коэффициенты при мнимых ча-
, стях комплексных корней обычно малы по сравнению
с величинами вещественных частей, и колебательный ха-
рактер h(t) будет проявляться только при t > Т7, т. е.
значения ДФХ, найденные по аппроксимирующей W(p),
будут отличаться от истинных частотных характеристик
объекта при очень низких значениях частоты <о, что не
имеет особого значения для задач расчета систем авто-
матического регулирования.
Приведем пример определения коэффициентов передаточной
функции (2-21) методом «площадей» по переходной функции, задан-
ной табл. 2-6 и изображенной на рис. 2-9,а. По виду h(t) можно
предположить, что Л(4-0)=0; Л( + 0)=0; й(+0)'~0, и поэтому поря-
док числителя передаточной функции принимается равным нулю.
Для удобства вычисления „площадей" произведем нормировку пере-
ходной функции Л° (/) и воздействия х (/) = ~д~ — ~j~ = 1.
Затем одним из известных методов численного интегрирования нахо-
дим величину Si — J [1 — h° (t)]dt — 8,357 мин. В нашем примере Sj
о
вычислялось по формуле Симпсона с помощью цифровой вычислитель-
ной машины. Произведем изменение масштаба времени х =//8,357;
0<х<5,025/
Далее по приведенным формулам находятся S2—15,631 мин\
S3<0. Так как ни по виду начального участка h(t), ни из анализа
физических процессов, происходящих в исследуемом объекте, не
следует, что надо увеличивать порядок числителя передаточной
функции, то прекращаем вычисление «площадей» и находим коэф-
фициенты fli ==Si=8,357 мин\ a2—S2 • 1 = 15,631 мин.. Здесь &=1;
di и а2 — коэффициенты нормированной передаточной функции
W “ 15,631 />а+;8,357/>+ 1 ’
от которой нетрудно перейти к обычной функции W (р):
h<> (Гу) 100
'^(Р) = «7(Р) А “ 15,631/>2+8,357 р+ 1’
111
или с учетом заранее выделенного запаздывания t = 3 мин
ЮОе-ЗР»
15,631jP2 + 8,357р + 1 ’
Значения функции у(1), являющейся решением урав-
нения 15,631z/(/) +8,357z/(/) +y(t) = 100х(/—3) при нуле-
вых начальных условиях; x(t) = \ при />0 и х(</)=0 при
/<0; с приемлемой для практики точностью совпадают
со значениями h(i), приведенными в табл. 2-6 (ртноси-
тельная ошибка не превышает долей процента).
Аппроксимация переходной функции ре-
шением дифференциального уравнения
второго порядка. Динамические свойства промыш-
ленного объекта приближенно описываются передаточ-
ной функцией следующего вида:
W = (7',р+1)(7'2/,+ 1)’ W’= (Г,р4-1)(Гг/2+1)’ (2’24)
где т — время чистого запаздывания; k — коэффициент
усиления объекта; 1\ и Т2 — коэффициенты, называемые
постоянными времени.
-Переходная функция объекта должна быть аппрокси-
мирована решением линейного дифференциального урав-
нения второго порядка
( р —L р —L
/ у' £ т т _____\
й(/) = й(оо)11 —р^е +т^=т-2е р>*.(2-25)
Так как время чистого запаздывания т и коэффи-
циент усиления k определяются обычными приемами по
переходной функции, то во всех рассматриваемых ниже
методах ставится задача нахождения и ТУ
Совершенно понятно, что далеко не все переходные
функции можно аппроксимировать подобными выраже-
ниями с приемлемой точностью. Вместе с тем большой
опыт автоматйзапии различных промышленных объектов
показывает, что весьма часто их динамические свойства
«в малом» можно описать в первом приближении выра-
жениями типа (2-24), достаточно удобными для выпол-
нения вручную расчетов систем автоматического регу-
112
лирования. Заранее заданная структура передаточной
функции (2-24) всегда вызывает сомнения в справедли-
вости подобной аппроксимации. Поэтому после нахож-
дения неизвестных 7\ и Т2 всегда требуется вычисление ।
нескольких значений h(\t) по формуле (2-25) при разных
t и сравнении их с ординатами экспериментальной пе-
реходной функции hz(ty.
= .1QOo/o|
“в V у)
где g=l, 2, ...,lg; q обычно не более 5—6. Если величи-
ны 6g не превышает 2—3%, то можно считать допусти-
мой аппроксимацию динамических свойств данного про-
мышленного объекта передаточной функцией (2-24).
(Нения второго порядка с помощью графических построений.
Ниже приводятся наиболее распространенные методы
определения коэффициентов дифференциального уравне-
ния второго порядка по переходной функции объекта;
обоснование этих методов и непринципиальные выклад-
ки опущены.
а) Определение постоянных времени й Т2 с по-
мощью графических построений. Исходная переходная
функция нормируется путем деления на величину
h(Ту) ~hoo'.
L. (±\ _ (О
h — h (7У) ’
На графике h(t) определяется точка перегиба w
[на рис. 2-11, 2-16 и 2-19 функция Л(0 обозначена h(t)],
через которую проводится касательная до пересе-
чения с осью абсцисс и линией h(Ty)^Ak или
8—121 113
просто h(Ty) =k, если мы имеем дело ^’единичной пере-
ходной функцией. Под точкой перегиба здесь понимается
такая точка h(t), в которой производная dh/dt имеет
максимальное значение. Так как переходные функции
многих промышленных объектов не имеют явно выра-
женной точки перегиба, то определение ее координат на-
до осуществлять следующим образом. В средней, наи-
более быстро изменяющейся части графика h(\t) берется
Рис. 2-12. Номограммы для определения коэффициен-
тов дифференциального уравнения.
несколько ординат h(tg)=hg; g=0, 1, 2, ..., q; q обычно
не более 6—7; tg—Zg-i=Atf=const и вычисляются первые
разности Ahg — hg—hg-i; g=0, 1,2,..., q—1. Далее нахо-
дятся максимальная величина Aftg и соответствующее ей _
значение времени tw—tg—0,5Atf и, наконец, ордината
Далее возможны два варианта определения 7\ и 1\.
Из графика h(t) находятся величины Ти, Та, Tw
(рис. 2-11,6) и с помощью номограмм, приведенных на
рис. 2-12, определяются 1\ и Ь, где Т\ = ТчЬ {Л. 23].
Во втором варианте [Л. 24] из графика h(t) непосред-
ственно находятся величины Tf, Тсяа (см. рис. 241,а).
Затем из точки 1 пересечения касательной А с осью
абсцисс восстанавливается перпендикуляр высотой g:
[2,73.+1 + (jsoa)-»]-
Через точку 3 проводится прямая линия В, парал-
лельная касательной А, и находится время Ть. Предпо-
114
ложив, что Tz<Tr, вычисляют их значения из эмпириче-
ских соотношений:
7'2 = 7’b[l-J-Юа-4- 1,73 (30а)2]2 при а<0,005;
Т^=- (Гь + Tf) Я — 200 (0,032 — а) Г1 + f0,086 +
Ьда) ПРИ а>0’005; 7\=Тс-7\.
Более удобно определить постоянные времени 1\ и
Г2 с помощью номограмм, изображенных на рис. 2-13.
Рис. 2-il3. Номограмма для ' нахождения по-
стоянных времени 7\ и Т2 по Ольденбургу и
Сарториусу.
Обозначив отношение T2/Ti = x, где Т2<Л; 0<х<‘1,
можно написать два уравнения:
Гс = Г1 + Т2=(1+х)Т1;
X
1 / 1 Х1""*
т^тЛ—] ,
1 V х j
получаемые из зависимости (2-25).
т
Величина 0,73 < < 1,0 известна, и по графику
* а
8*
115
на рис. 2-13 находим координаты двух точек пересечения
линии Гс/7\х = const (пунктирная линия под углом —45е
к оси абсцисс) и кривой L. Далее по координатам лю-
бой из этих точек пересечения можно найти величины
и Т2 [Л. 26].
Недостатки рассмотренных графических методов
аппроксимации переходной функции решением уравне-
ния второго порядка очевидны: не всегда можно опреде-
лить точку перегиба проведение касательной связа-
но с субъективными ошибками определения Л и 7g, по
существу не учитываются форма и характер всей осталь-
ной переходной функции. Вместе с этим следует при-
знать, что графические методы очень просты в примене-
нии и требуют мало времени для нахождения постоян-
ных Т{ и Т2.
Приведем пример нахождения 1\ и Т2 по переходной функции
hQ(t), показанной на рис. 2-14. Определить точку перегиба визуаль-
но довольно трудно, поэтому вычислим первые разности AAg на
Рис. 2-14. К примеру определения динамических ха-
рактеристик по переходной функции.
участке времени 0—12 мин, -т. е. там, где скорость изменения А°(/)
максимальна. Получим:
tg 0 2 4 6 8 10 12
Lhg 8,7 16,8 18,0 15,0 11,5 8,5 6,0
В качестве точки перегиба w переходной функции следует взять
точку с координатами {4 мин, 0,25}. Проведем касательную через
точку w и найдем величины Г/= 2,8 мин; Гс = 8,2 мин; 7\ = 11 мин;
7\ = 1,1 мин; а = 0,035 (значение Tw~4 мин),
116
та и
Вычисляем отношение = j-j-= 10 и по графику на рис. 2-13
находим: ^{ = 0,8, &п=1,8. Затем по номограмме определяем величины
Tw 4
Ту Гщсоответствующие bL и &п. В частности, получаем =
Т 4
= 0,8 и Л = 5 мин; — =1,2 и = 3,33 мин. Полагая по-
11 7 п
стоянную времени Тх равной Т1 или Т1Х и учитывая, что ТХ = ЬТ2,
находим две передаточные функции:
100
W1= (4jt?+ 1)(5р + 1) ’ rП (/>) = (З.ЗЗрН- 1)(6р+ 1) •
100
Определить, какая из двух передаточных функций более точно
описывает динамические свойства объекта, можно лишь путем вы-
числения ряда значений h(t) по формуле (2-25) и сравнения их
с ординатами переходной функции. Подобный просчет и сравнение
для данного примера показывают, что при малых значениях времени
0^ / 6 мин лучшее приближение дает вариант II (7\ = 3,33 мин;
Г2=6,0 мин), при больших же величинах t — вариант I (Ti==4 мин;
Г2=5 мин). Так как нам неизвестна область частот, в которой
следует наиболее точно определять значения АФХ, то практически
можно использовать любую из полученных передаточных функций.
Для определения Тх и Т2 другим способом вычислим величину
I 0,53 I
g — 0,035 2,73 + —jp (150.0 бз5)~у = 0,1139 и восстановим пер-
пендикуляр высотой 0,1139 из точки пересечения касательной с осью
абсцисс. Проведем через вершину перпендикуляра прямую линию, па-
раллельную касательной, и найдем величину Тъ= 1,2 мин. Далее
вычислим Т2 и Т{. Г2=(1,2 + 2,8) ^1 —200(0,032— 0,035) 1 +
. / Л Л „ МО*5 \-Ц-Ц
"Ч 0,086 + 0,032—0,035 ) J ? —3,144 лин;
Тх — 8,2 — 3,144 = 5,086 мин.
Передаточная функция имеет вид:
100
^(Р)- (3> 144р+р (5,086р + 1)*
Для нахождения постоянных времени методом Ольденбурга и Сар-
Л Гс 8,2
ториуса [Л. 25] вычисляем отношение = уу-р =0,746 и по номо-
Тз Т2 Тх Т1
грамме на рис. 2-13 определяем -у = у = 0,465 и — = ТТ~ ~
= 0,275. Отсюда получаем 7\ = 3,015 мин и Т2 = 5,12 мин, и пере-
/ даточная функция объекта будет:
100
(3,015^ +1)(5,12р+1) •
117
б) Определение постоянных времени Т\ и Т2 интерпо-
ляционными методами. Эта весьма многочисленная груп-
па методов нахождения динамических характеристик
объекта основана на измерении нескольких значений
h(\t) и составлении интерполяционных уравнений с дву-
мя-тремя неизвестными (здесь иногда в качестве неиз-
вестного рассматривается время дополнительного запаз-
дывания тд, не имеющее никакой связи со временем чи-
стого запаздывания т). Решение уравнений осущест-
вляется чаще всего графическими способами из-за нали-
чия в них трансцендентных членов.
Рассмотрим' наиболее полно разработанную методи-
ку аппроксимации по Орманну [Л. 26]. _
Обозначим Т1 + Т2 — Т; Т\ — Т\!Т\ Т2 = Т2]Т;
Хд—Хд/Т и, разделив h(t) на Лоо~Л(Ту), преобразуем вы-
ражение i(2-25) к виду:
7-~» _ ~~у
‘1'> = 1~Дг r- ’ -t2'26»
I
Кривая hit) строится в обычном масштабе времени на
графике и по ней определяются величины й4, Л8, й20, яв-
ляющиеся ординатами h (t) при соответствующих аргу-
ментах t = t4, ta, ti0 (см. ниже), а также tt, t3, ts, t,—
значения времени t в моменты равенства функции &(/)
величинам 0,1; 0,3; 0,5 и 0,7 соответственно.
Далее возможны четыре варианта аппроксимации. При
аппроксимации переходной функции решением дифферен-
циального уравнения второго порядка без дополнительно-
го запаздывания вначале вычисляются величины 2
и ^ = 0,4Г= t7 и по графику h(t) — ордината й4. Со-
отношение Т ж /7/1, 2 получено эмпирическим путем, так
как при различных соотношениях 7\ и 7\ оказалось, что
равенство Л(/7) = 0,7 имеет место почти при одном и том
же значении равном 1,2±0,015 (рис. 2-15) Зная Л4,
нетрудно по диаграмме на рис. 2-16 определить величину
z2, связанную с искомыми постоянными времени соотно-
шениями:
Г*=й(1+2г);
Проверка справедливости аппроксимации заданной функ-
ции h(t) выражением (2-26) притд=0 выполняется путем
118
определения по найденной бе личине z значений Л2о, Л8 и
уравнением их с ординатами переходной функции при /=
=Х^2о = 2Г и /г = /8 = 0,8Г. Если ошибка аппроксимации
превышает 2—3% или й4< 0,19, то надо полагать Тд^О.
Рис. 2-15. Зависимость
?7=«г2).
Рис. 2-16. Номограмма для на-
хождения коэффициентов диффе-
ренциального уравнения интерпо-
ляционным методом.
Во втором варианте метода Орманна определяются не-
известные величины 7\, Г2 и тд. Из графика.нормирован-
ной переходной функции находятся время f7, являющееся
корнем "уравнения Л(/,) = 0,7\ а также величина /"4, удов-
летворяющая равенству h 0,191. Если то
имеем эмпирическое соотношение
3/"4 —^7<2тд<3/4 —f7,
из которого находим:
~3'"4-/7
-----2
Далее все операции по определению 7\ и Т2 выпол-
няются по первому варианту, однако всюду вместо вре-
мени t подставляется новая переменная /*=/ —тд. При
проверке может оказаться, что й8 и Л20 существенно от-
личаются от соответствующих экспериментальных значе-
ний. В этом случае необходимо аппроксимировать h (t)
решением дифференциального уравнения второго порядка
с кратными корнями. При Л4>0,33 переходная функция
может быть аппроксимирована решением дифференциаль-
ного уравнения первого порядка с запаздыванием.
119
Приведем пример аппроксимации нормированной переходной функ-
ции, изображенной на рис. 2-14, методом Орманна. Из рис- 2-14 на-
/7 10
ходим /7 = 10 мин и определяем Т = j—р-^=8,333 мин\ t4=QAT=
— 0,4-8,333 == З>333 мин. По нормированной функции h (/) находим
Л4 (/4) = Л4 (3,333) = 0,195, а по номограмме на рис. 2-16 — величину
z=0,04. Далее вычисляем постоянные времени 7\ и Г2:
10 10
7\ = G + 0,2) == 5,0 мин\ 7\ = ^-4 (1 — 0,2) = 3,333 мин.
Для проверки но этой же номограмме определяем Л20 = 0,9055
и /г8=0,4825, соответствующие величине г2 = 0,04. Из графика пере-
ходной функции имеем: h (/20) = h (2Г) = h (2-8,333) = 0,897, h(t8) =
= h (0,8-Т) = h (0,8-8,333) =h (6,6664) = 0,49. Относительные ошибки
приближения не превышают одного процента и поэтому динамику объ-
екта можно описать. передаточной функцией
100
W = (5р + 1) (3,333 р + 1) ‘
Аппроксимируем эту же переходную функцию решением уравне-
ния второго порядка с ф 0. Из графика имеем t1= 10 мин\ t'\ =
= 3,25 мин и получаем расчетом тд == — 0,25 мин. Следовательно,
такой вариант аппроксимации невозможен.
Имеются еще два варианта аппроксим ации по Орманну,
использующие найденные из h(t) величины t3, ts, t7, t9.
В первом полагается tr = 0 и определяются постоянные
времени Г, и Т2. Предварительно вычисляются отношения
/,/?„ £,//,, /6//7, (9/(7 и по графику, изображенному на
рис. 2-17, находятся величины z2, г^, г^, соответст-
вующие этим отношениям. Определяются г2 — 0,5 X
и г2 = 0,5(г2-|-2ф. Если эти величины близки
между собой, то с помощью номограммы на рис. 2-15
получаем значение /7. Теперь нетрудно найти и постоянные
времени:
T, = -^(l+z); Тг = £-(1-г).
" Г 7 Z Г 7
Во втором варианте тдТ^О, поэтому вводится новая
переменная г* = t — составляются три эмпирических
неравенства:
Г,818 /3 — 0,819 /7 < < 1,420 /3 — 0,419 /7;
3,2051 — 2,206 /7 < < 2,346 /5 — 1,345 г7;
1,278 tt — 0,2791, < тд С1,097 t, — 0,096
120
из которых находятся оценки тд сверху и снизу. Нижняя
граница тд бывает отрицательной или близкой к нулю,
поэтому в качестве запаздывания целесообразно прини-
мать верхнюю оценку. Далее определяются постоянные
времени 7\ и Т2 изложенным выше способом.
Рис. 2-17. Графики для определения постоянных вре-
мени Ли Т2 интерполяционным методом Орманна.
Проиллюстрируем методику определения 7\ и Т2 по Орманну
примером. Переходная функция Л°(/) приведена на рис. 2-14; из нее
определяем /1=2,2 мин; мин; мин; /7=10 мин; tg=*
= 17,12 мин и вычисляем отношения ЛЛ? = 0,22;/3//7 = 0,44; /б//7=0,675;
/9//7=1,712. Из номограммы на рис. 2-17 имеем 2^=0; =0,1; z^ =0,12;
2g = 0,28 и находим средние z2 = 0,5 (0 + 0,28) =0,14; z2=0,5 (0,1 +
12) = 0,11. Учитывая близость средних значений г2, определяем
= 0,5 (0,14 + 0,11) = 0,125 и по графику на рис. 2-15 находим
7, = 1,205. Получаем значения 7\ и Т2:
10
Т\ = .205(* + 0,3535) = 5,616 мин;
10
Т2 = 2. । 205 — 0,3535) = 2,68 мин.
Передаточная функция объекта будет:
100
w^~ (5,616р+ 1)(2,68/?+ 1) •
Предположим, что тд=/= 0; тогда «е0|б|ходимо составить нера-
венства:
1,818-4,4 —0,819-10 1,42-4,4 —0,419-10;
3,205.6,75 — 2,206.10 < < 2,346-6,75— 1,345-10;
1,278-2,25 — 0,279-10 < гд < 1,097-2,25—0,096-10,
121
или
— 0,2 < тд < 2,06:
— 0,46 тд 2,35;
0,08 ид < 1,51.
Принимаем величину дополнительного запаздывания тд равной
средней из оценок сверху, т. е. тд= у (2,06+2,35+1,51) = 1,973 мин.
Теперь необходимо найти величины /*i = /i—тд=2,25—1,973=
=0,277 мин\ /*3=4,4—1,973=2,427 мин\ /*5=6,75—1,973=4,777 мин\
/*7=10—1,973=8,027 мин\ /*д= 17,12—1,973=15,147 мин. По аналогии
с выше рассмотренным примером находим z2cp=0,885 и /7= 1,1986,
после чего получаем:
8,027
Гj = 2. } , 1986 + 0’9405) = 6,5 мин\
„ 8,027
Г2 = ~2 |-~j-ggg (1 — 0,9405) = 0,199 мин.
Передаточная функция будет иметь следующий вид:
100^"1>973р
W, = (6,5^+ 1) (0,199 р+ 1) ’
Аппроксимация переходных функций решением урав-
нения типа (2-26) с помощью интерполяционных прие-
мов обладает положительным свойством: измерениеh(t)
в нескольких точках увеличивает информацию о харак-
тере переходного процесса, а использование приближен-
ного соотношения t7 ~ l,2(7'i + 7’a) делает операцию ин-
терполяции нестрогой и в некотором смысле эквивалент-
ной приближению. Недостаток метода Орманна: зара-
нее фиксированные значения узлов интерполяции не
всегда позволяют осуществлять аппроксимацию таблич-
но заданных переходных функций; последние, кроме то-
го, должны быть гладкими.
в) Определение постоянных времени Ti и Гг и тд с ис-
пользованием асимптоты переходной функции. Идея ме-
тода [Л. 127] заключается в аппроксимации начального
переходной функции.некоторой кривой, два значения ко-
торой могут быть легко вычислены при определенных
величинах времени t. Третье уравнение получается' из
условия, что интеграл функции -гЛ-г[/г(7у)—й(7)] равен
П V У/
сумме постоянных времени и тд.
122
Передаточная функция (2-24), преобразуемая к виду:
ke~p^
W = [ЛЛР2 + (Л + Л)Р+ 1]
при больших значениях р близка к передаточной функции
W(p) = —.
(ГГЛР+ 1)2
Так как большим значениям р в изображении соответ-
ствуют малые значения t оригинала, то начальный участок
функции (2-25) близок к кривой
Воспользуемся выражением (2-27) для определения
неизвестных Г„ Тг и тд. При t = /, = YT + тд и t =
= t2 = 0,5 у ТД\ Тд функция h (t) принимает значения:
/i(6) =h(Ty) (1—2е->) =0,26й(Ту);
h(t2)—h(Ty) (1— Зе-1) =0,09/i(Ту).
Для нахождения величин t\ и t2 достаточно провести
горизонтальные прямые на расстояниях 0,26/i(Ty) и
0,09/г(Ту) от оси абсцисс и из точек пересечения их
с h(t) опустить перпендикуляры на ось времени. Найдя
величины /1 и t2, вычислим время дополнительного
запаздывания
тд=2/2—/ь
а также получим уравнение
Для определения 7\ и 7в используем известное соот-
ношение:
Q
123
Обозначив S—Тд=В, построим полуокружность диа-
метром В и проведем параллельную ему прямую на
расстоянии \ГТ1Т2. Перпендикуляр, опущенный из точ-
ки пересечения этой прямой с окружностью, разделит
диаметр на отрезки и Л2 (рис. 2-1'8).
Можно найти 7\ и Tl2 аналитически, для чего необхо-
димо решить квадратное уравнение
Т2—РГ + С=О,
где D=S + ti—2\t2, C = —\t2).
Постоянные времени вычисляются по формулам:
т _D — /D2 — 4С . r _D + /О2 —4С*
/ 1 — 2 > 1 2— 2
Методу частично свойственны недостатки интерполя-
ционных способов определения величин Т\ и Т2, однако
Рис. 2-18. Нахожде-
ние коэффициентов
Ti и Т2 графическим
путем.
он обладает и положительными от-
личиями от последних: использова-
ние уравнения 5 = 7\+Т2+тд позво-
ляет в некоторой мере учесть фор-
му всей переходной функции h(t).
Вместе с тем возрастает объем вы-
числений, необходимых для опреде-
ления S методами численного инте-
грирования.
Приведем пример определения 7\, Т2
и тд рассмотренным методом по переход-
ной функции Л°(/), которая изображена на рис? 2-14. Графическим
путем находим корни уравнений h(t\) =0,26 • 100=26 и h(t2) =
= 0,09-100=0, в частности получаем: ^ = 4,1 мин; t2=2,l мин. Опре-
деляем время дополнительного запаздывания тд=2-2,1—4,1 =
= 0,1 мин и по формуле трапеций находим 5=8,355 мин. Получаем
два уравнения:
У7\1\ = 2 (4,1 — 2,1) = 4 мин;
Тх + Т2=8,355—0,1=8,255 мин,
откуда Л = 3,113 мин; Т2—5,144 мин. Передаточная функция объекта
имеет следующий вид: \
, 100^-°Лр Х
W “ (3,113/2 + 1) (5,144/2 + 1)’
Аппроксимация переходной функции
решением дифференциального уравнения
первого порядка с запаздыванием, Аппрок-
124
симирующая передаточная функция будет иметь вид:
ke~p'*
(2-28)
а решение линейного дифференциального уравнения
первого порядка с запаздывающей правой частью и
нулевыми начальными условиями будет:
А (/) = 0;
,h (t) =h (оо) [1—e т J’
(2-29)
h't)
Рис. 2-19. Аппроксимация переход-
ной функции решением дифферен-
циального уравнения первого по-
рядка.
где постоянная време-
ни Т и дополнительное
время запаздывания
тд подлежат определе-
нию из эксперимен-
-талБНОй переходной
функции h(t). Коэф-
фициент усиления &
находится обычным
способом: = (Ту) /А
или fe = /i°(Ty), если
имеем дело с единич-
ной переходной функ-
цией. Считаем, что вре-
мя чистого запаздывания заранее выделено из h(t).
Интерполяционный метод определения Т и тд заклю-
чается в следующем [Л. 28].
На нормированной переходной функции h (/) = h (t)/h (Гу)
выбираются две точки Л и Б с координатами Лл, tA ,
Л£, tB (рис. 2-19). Желательно, чтобы точка А была рас-
положена около точки перегиба, а ордината hB равнялась
0,8 — 0,9. Рассматривая точки А и Б как интерполяцион-
ные узлы кривой (2-29), определим неизвестные величины
последней:
tB^(\-hA}-tA ЫХ-h^
''д— 1п(1 - йд)1п(1 - кБ) ’
т=~
1п(1 —Лл) •
Аппроксимирующая кривая будет пересекать экспе-
риментальную переходную функцию в начале координат,
125
точках Л и Б и в принципе в бесконечности, т. е. при
/ = оо. Этим самым обеспечивается приемлемая точность
описания динамических свойств объекта передаточной
функцией типа i(2-28).
Развитием метода Орманна служит следующий интер-
поляционный прием аппроксимации h(t) решением (2-29),
изложенный в работе [Л. 28]. По нормированной h (t)
определяются время t7, являющееся корней уравнения
й(/7) = 0,7, и время Г4, соответствующее равенству
Л(Г4) = 0,33. Далее вычисляются время дополнительного
запаздывания
Ъ = °.5(3/'4 —/7)
и постоянная времени Т |
Т = *г=^=1,25(/7-/'4).
Для проверки сравниваются ординаты заданной пере
ходной функции при /4 = 0,4Г4"тд; = + /20 =
= 2Г + хд с соответствующими Значениями аппроксими-
рующей кривой Л4 — 0,33; Л8 = 0,5507 и Л20 = 0,865.
Существует еще один приближенный метод аппрокси-
мации h(t) решением линейного дифференциального урав-
нения первого порядка при тд = 0. В этом случае опре-
делению подлежит лишь величина „интегральной" [по-
стоянной времени Г:
00 п
7 = Л(М [А (Г>) ~ h(01 dt = S (2’30)
О 7=1
где п — порядок линейного дифференциального уравнения,
фактически описывающего движения выходной координаты
объекта; l/T —корни характеристического уравнения
[Л. 29]. .
Приближенной проверкой \допустимости подобной ап-
проксимации служат неравенства
0,5947г (Гу) <7г(Г) < 0,632/г (Гу).
Для грубой оценки динамики объекта из этого нера-
венства можно, наоборот, находить величину Г, полагая
h(T) =0,6134А(7’у).
126
Все эти методы аппроксимации А (/) решением (2-2Ф)
весьма просты и требуют малых затрат времени, однако
точность описания динамических свойств промышлен-
ных объектов передаточной функцией (2-28) далеко не
всегда удовлетворительна.
Определим -величины Т и тд передаточной функции (2-28)
по функции Л°(/), показанной на рис. 2-9,а. Выберем на нормирован-
ной переходной функции две точки А и Б с координатами {4 мин,
0,255} и {18 мин, 0,92}. Далее вычислим время дополнительного за-
паздывания
, 18 In (1-0.255)-4 In (1-0,92)
I д“ ln(l — 0,255) — In (1—0,92)
и постоянную времени 7:
\ 4 — 2.155
Т-----In (1—0,225)“ + 6,27 мин' ,
Передаточная функция объекта:’
юо^2-155'
W(P) = 6,27р+ 1
В качестве проверки вычислим несколько значений h(t) по выра-
жению
/-—2,155
h(t) = юо(1 — е 6127 )
и изобразим их на рис. 2,9,а кружками. Из рисунка видно, что
подобная аппроксимация дает приемлемое приближение к заданной
переходной функции в интервале времени 7ч-42 мин при незначи-
тельных затратах времени на определение Т и тд.
Аппроксимируем эту же переходную функцию решением (2-29)
путем нахождения величин /7=-10 мин-, /'4=4,75 мин, вычисления
времени дополнительного запаздывания тд = 0,5(3 • 4,75—10) —
10 — 2,125
= 2,125 мин и постоянной времени Т—-------- =6,563 мин. Для
проверки находим: /4—0,4 • 6,563+2,125=4,75 мин-, /8—0,8X6,563+
+2,125=7,475 мин; /20=2-6,563+2,125=15,25 мин и соответствующие
им ординаты переходной функции: Л4 = 0,33; Л8 = 0,55; Л2в = 0,87.
Значения аппроксимирующей кривой в моменты времени /4, /8 и /20
соответственно: 0,33; 0,551 и 0,865.
Наконец, найдем величину постоянной времени Т передаточной
функции (2-28) при тд=0 по формуле (2-30):
42
Г j[l°° —Л(0]Л = 8.Э55 мин.
о
127
Значения h(t), вычисленные по выражению /i(/) = 100X
/______г__\
8,357
Хм—# / для ряда величин /, показаны на рис. 2-9,а крести-
ками. Вычисление интеграла занимает довольно много времени
(примерно 15—20 мин); качество приближения при этом плохое.
Аппроксимация переходной функции
решением дифференциального уравнения
с кратными действительными корнями.
Переходная функция промышленного объекта аппрок-
симируется решением линейного дифференциального
уравнения порядка п с нулевыми начальными усло-
виями
п—1 t
/г(/) = /г(оо)р —(2-31)
i=0
Аппроксимирующая передаточная функция будет
иметь такой вид:
Требуется определить всего лишь две неизвестные:
Тип, сохранив цри этом все преимущества и точность
аппроксимации h(t) суммой экспонент с весом
i = 0, 1, 2, п—1.
Известно, что
\ 0 7 = 1
где Т ; Y = l, 2, 3,..., п — постоянные времени некото-
рого фактического дифференциального уравнения объекта.
Предположим, что все Т равны, и найдем величину „ин-
тегральной“ постоянной времени Т:
р __ S ‘
. п
Для проверки правильности выбора порядка п надо
вычислить ряд значений h(t) по формуле (2-31) и
сравнить их с ординатами заданной переходной функ-
ции. При неудовлетворительной аппроксимации следует
изменить величину и, 1<п<3-М.
128
Существуют методы определения Т и п, основанные
на графических построениях в точке перегиба w пере-
ходной функции [Л. 23]. Через точку w проводится каса-
Рис. 2-20. Номограммы для нахождения коэффи-
циентов дифференциального уравнения с кратными
корнями.
(см. рис. 2-11,а), определяются величины Та, Tw, Ти и
по отношению Та1Ти находятся п, а затем Т (рис. 2-20,а
и б). Проверка точности аппроксимации осуществляется
путем вычисления ряда значений А(/) и сравнения их
с Экспериментальными величинами.
Приведем пример аппроксимации переходной функции, показан-
ной на рис. 2-14, решением дифференциального уравнения с крат-
ными корнями.
Методом трапеции находим интеграл 5=8,355 мин и, положив
п—2, определяем постоянную времени Г=4,1775 мин. Аппроксими-
рующая функция:
h (0=100 ( 1 — cQe
L — L
т t т
— c i p в
Нетрудно убедиться, что при нулевых начальных условиях кон-
станты с0=С1 = 1. Вычислим ряд значений Л(0, т. е. А (2) =8,5;
Л(4) =24,95; Л(6)=41,3; Л(10)=69,1; Л(16)=85,6; h(30) =99,4. Сравни-
вая найденные значения с данными табл. 2-6, убеждаемся в доста-
точно хорошем совпадении заданной и аппроксимирующей переход-
ных функций. Поэтому можно написать передаточную функцию
объекта в таком виде:
100
^(?) - (4,1775/?+ I)2 ’
9—121
129
Определим величины п и Т с помощью графических построений.
Из графика n(t) «находим: Ти = 1,1 мин-, Tw = 4 мин-, Га = 11 мин. По
Та 11
отношению 1=40 определяем величину ц=2 (см. номограмму
на рис. 2-19). В тех случаях, когда п дробное число, его надо
округлять до ближайшего целого. Затем по номограмме находим
Tw __ 4
-у-----р =1; Т—4 мин. Передаточная функция будет иметь следую-
щий вид:
100
= (4р+ I)2 ’
Аппроксимация переходных функций
объектов, содержащих интегрирующие
звенья. При известной форме испытательного вход-
ного воздействия x(t) нетрудно по виду переходной
функции установить наличие в исследуемом объекте
интегрирующих звеньев.
Переходные функции по-
добных объектов изобра-
жены на рис. 2-21.
В общем случае диф-
ференциальное уравнение
движений выходной ко-
ординаты объекта с инте-
грирующими свойствами
y(t) может быть написа-
но в таком виде:
„ 6/^(0 , „ dn-'y(t) j
“п dtn "'-“"“-''-Inn-' ‘
+ • • -Л~а1
dly(t) _
dt1 ~
Рис. 2-21. Переходные функции _____< dmx(t) . . ,
объектов с интегрирующими свой- dtm ' ’ ’ ’ *
ствами.
(2-32)
где m; 0<l<n; ai+\, ..., an — постоянные коэф-
фициенты; b2l b3, ..., bm — постоянные величины;
некоторые из них могут быть равны нулю, однако bi#=0.
Заметим, что в задачах исследования динамических
характеристик промышленных объектов величина /
обычно не больше 2. Аппроксимирующая передаточная
130
функция имеёт йолюс кратности / в начале координат й
может быть представлена в следующей форме:
ьёрё -р 1
у 1=1
где т — время /чистого запаздывания, определяемое
обычными приемами из переходной функции.
Уравнение |(2~32) принципиально легко свести
к обычному для нас уравнению типа (2-4); это достига-
ется подстановкой dly (/) ldtl = z(t). Порядок нового урав-
нения будет равен п—\1, и для определения его п—1+т
неизвестных коэффициентов можно применять все рас-
смотренные выше способы аппроксимации переходных
функций. Однако подобное преобразование означает
/-кратное дифференцирование исходной переходной
функции промышленного объекта, что связано с появле-
нием субъективных ошибок.
Вследствие этого большее применение находят гра-
фические методы аппроксимации переходных функций
объектов с интегрирующими свойствами.
В тех случаях, когда переходная функция изменяет-
ся с постоянной скоростью, начиная с момента нанесе-
ния возмущения х(/)=Д (или спустя время т), динами-
ческие свойства объекта можно аппроксимировать пере-
даточной функцией
^(р)=у.
Величина k есть отношение тангенса угла наклона
функции h{t) к амплитуде испытательного ступенчатого
воздействия А (рис. 2-22,а).
Если скорость изменения выходной координаты уста-
навливается не сразу (рис. 2-22,6), то динамику объекта
следует описывать передаточной функцией типа
где fe = tgaM; tga— тангенс угла наклона асимптоты
к h(t); г равно отрезку оси абсцисс, отсекаемому асимп-
9* 131
тотой. Этот метод применим тогда, когда значения k(t)
при не превышают величины Д; определяемой,
как указывалось выше, классом точности регистрирую-
щей аппаратуры.
В более общем случае в качестве аппроксимирующей
передаточной функции следует принимать следующее
выражение:
Для нахождения неизве-
стных Л, Т и п из графика
переходной функции опре-
деляют угол наклона а
асимптоты к оси абсцисс,
величины hu и Ти=х (рис.
2-22,6). Затем вычисляется
& = tgaA4, где А — амплиту-
да ступенчатого воздействия,
а из номограмм, приведен-
ных на рис. 2-23, находятся
Т и п [Л. 23].
Наконец, к задаче ап-
проксимации переходной
функции объекта с ин-
тегрирующими свойствами
можно подойти и таким об-
разом. Проведем асимптоту
к h(t) при t—>оо и постро-
им разность z(t) между ни-
ми на отдельном графике
Рис. 2-22. Определение коэф-
фициентов «передаточной функ-
ции объекта с интегрирующи-
ми свойствами.
(рис. 2-!24). На основе принципа суперпозиции можно
отдельно аппроксимировать асимптоту уравнением
(/—т)£; A = tga/4, а функцию ?(/)—решением какого-
либо дифференциального уравнения. Передаточную
функцию объекта можно представить суммой двух
функций:
W(p) = Wz(p)+±e-p',
где Wz(p) найдена известным методом по «переходной»
функции z(i). Наличие трансцендентного члена е~рх
в качестве слагаемого в числителе передаточной функ-
ции №i(p) затрудняет использование последней для
132
практических расчетов. Разложение функции е~р* в ряд
Тейлора по ступеням рх или в ряд Падэ [Л. 32] хотя и
позволяет избавиться от трансцендентности, но приводит
к повышению порядка передаточной функции и отнюдь
Рис. 2-24. Представление переход-
ной функции суммой двух
функций.
Рис. 2-23. Номограммы для на-
хождения коэффициентов диф-
ференциального уравнения
объекта с интегрирующими
свойствами.
не уменьшает объем выкладок при использовании по-
следней при расчетах систем автоматического регулиро-
вания.
2-5. ОПРЕДЕЛЕНИЕ АМПЛИТУДНО-ФАЗОВЫХ
ХАРАКТЕРИСТИК ПО ПЕРЕХОДНЫМ ФУНКЦИЯМ
(ОБРАБОТКА РЕЗУЛЬТАТОВ ЭКСПЕРИМЕНТА)
Для определения динамических характеристик про-
мышленных объектов экспериментальные переходные
функции, заданные на отрезке времени [О, Ту], можно
аппроксимировать временными функциями двух родов.
К функциям первого рода относятся экспонента
С^“а<*и асимптота к h(t) при'/—>оо. Каждая из этих~
133
Ж
функций существует на бесконечности; коэффициенты их
находятся по значениям h.(f) на конечном участке ее
задания, однако полученное аналитическое выражение
решения дифференциального уравнения Сбудет справед-
ливо для отрезка времени [0, оо]. Это свойство экспонен-
ты и асимптоты существенно упрощает вид преобразо-
вания Лапласа от h(t) и позволяет получить удобное
для расчетов выражение передаточной функции W(p).
Методы представления Л(/) суммой экспонент и асимп-
тот рассматривались в предыдущем параграфе.
Экспериментальные можно аппроксимировать
функциями и другого рода. Математическое выражение,
составленное из таких функций, будет со сколь угодной
точностью приближать h(t) на интервале ее задания
[О, Ту], но неприменимо для описания переходной функ-
ции вне этого интервала. Преобразование Лапласа от
Л;(0, аппроксимированных такими функциями (полино-
мами, трапециями, треугольниками, решетчатыми функ-
циями, гармоническими выражениями и т. п.), имеют
сложный характер и содержат обычно трансцендент-
ные члены. Передаточная функция W (р) также имеет
трансцендентный характер, что усложняет ее использо-
вание в аналитической форме. Поэтому обычно задача
’ сводится к вычислению табличных интегралов Фурье
от аппроксимированной Я(/) и возмущения х(/) и на-
хождению значений АФХ. Преимуществом такого спо-
соба аппроксимации А(/) является значительное расши-
рение класса испытательных воздействий, так как теперь
в качестве возмущающих сигналов можно применять
практически любые изменения координаты х(0, а не
только ступенчатую функцию. Это обстоятельство по-
. зволяет применять данный метод для определения и
уточнения динамических характеристик промышленного
объекта в процессе его нормальной эксплуатации.
: В дальнейшем, однако, будем говорить об определении
передаточных функций или АФХ по переходным функ-
циям являющимся реакциями на регулярные апе-
риодические воздействия x(t) типа ступенчатая функ-
ция,. импульс или прямоугольная волна.
Как известно, прямое одностороннее преобразование
Лапласа можно осуществлять лишь над такими функ-
00
циями f(t), для которых интеграл J ] f (t) | р 1 * dt суще-
о
134
ствует, т. е. равен любому конечному значению, либо при
всех /7, либо для некоторой области изменений перемен-
ной р\ Re(p)>c0; с0 — вещественное число.
Поэтому на форму йвцытательного сигнала x(t) и
реакции объекта на него накладываются опреде-
ленные ограничения, обеспечивающие сходимость интег-
рала Лапласа и особенно Фурье. Учитывая практические
условия проведения эксперимента по снятию переход-
ных функций на промышленных объектах, легко убеж-
даемся в выполнимости этих ограничений. Действитель-
но, изображения воздействия />0; х(/)=0 при
t<0, и типовой переходной функции будут такими
00
Г А
L {х (/)} = X (р) = J Ае-р* dt =—,
О
L {h (0} = Н(р)= ^h(t) e-P^t +
О
+^h(TJe-P* dt = е~рТ? +
т
у
+ j h (/) в'?' dt=-^- +
О
Интеграл 1\ всегда существует, так как функцию h(t)
можно приблизить суммой функций с известным пре-
образованием. Лапласа, например экспонентами, что и
делалось в предыдущем параграфе, или трапециями
и т. д. Ниже рассматриваются вопросы аппроксимации
h(t) в интервале времени [0, Гу] совокупностью функций
второго рода, т. е. описываются способы вычисления
интеграла Ц.
У Определение значений АФХ по дискрет-
ной переходной функции. Переходная функция
промышленного объекта задается в п'+ 1 равноотстоящих
точках ti\ i = 0, 1, 2, ..., п; =A—i-НА£ значениями йг=
=/г(/г). Величина А/ выбрана из условия
(2-33)
135
где Юс — условная частота среза объекта,\ с которого
снята h(t). Выбор величины по условию/(2-33) озна-
чает, что по ординатам <=0, 1, 2, ..., п можно с любой
точностью восстановить «непрерывную» функцию h(t)
с помощью интерполяционного ряда Котельникова.
Функция Л (/) абсолютно интегрируема или приводится
к такой форме, что интеграл Фурье от нее существует;
кроме того, напомним, что переходная функция снята'
при нулевых «начальных условиях».
Преобразование Лапласа дискретной (решетчатой)
функции hi—h)(iAlti), у которой Л(ГУ) ==й(/п) =0, имеет
вид:
Н* (р) = Д t Уе~р“1 h (АН) = At У hie~pbtl, (2-34)
/=о 1^0
а амплитудно-фазовая характеристика объекта вычисляется
по формуле
п—1
W (ia) = ------- (2-35)
u ' X(jv>) X(ja) ’ oo'
где X(jto)—преобразование Фурье входного испыта-
тельного воздействия.
Формула дискретного преобразования (2-34) приме-
нима и к переходным функциям, у которых й(7’у)=#0,
/2—1
однако ряд h, будет очень плохо сходиться. Для
/=о
улучшения сходимости разложения (2-34) следует продиф-
ференцировать переходную функцию: найти первые разно-
сти Ah(ti) =Ahi [Л. 30]’
Ahi—'h[At(i+1)]—h(Ati) =hi+i — hf, /=0, 1, ..., n—1;
Ло=0
и соответствующее им преобразование Лапласа
L {Ahi} = Д^ £ ё~рМAhf = Д* £ е~рШ (hi+i — h{).
i=Q
136
'i
Функция L {Д/г$} связана с //* (р) соотношением
L {Дй,} = (ерЫ - I) И* (р) - Ые“р h (0) =
= (е^-1)Я*(р).
Отсюда можно найти Н* (р):
Н*(р) =
п—\
At£ ^'(Ai + .-AO
z±=o_____________
еР^- 1
и, наконец, амплитудно-фазовую характеристику объекта
п—1
At^^^'^+.-AO
v
(2-36)
Если исследуемый объект содержит интегрирующее
звено и его переходная функция при /—оо есть асимпто-
та kt (см. рис. 2-22), то для вычисления по h(f) значе-
ний АФХ необходимо продифференцировать ее дважды.
Проведя необходимые преобразования, получим:
/2—2
i=0
где Д/г0=^1—Ло=Лг, —Ahi = hi+2—2hi+\+h^
Амплитудно-фазовая характеристика объекта
с интегрирующими свойствами при Х(/(о) =Л//о) будет
такой: \ —-
я—2
= [S А,/“ + Л‘е'“'] <2-37)
i=0
Формулы i(2-35) — (2-37) можно использовать для вы-
числения АФХ не только по переходным функциям h(t)
или hu(t), hb(t), но и по изменениям входной и выход-
ной координат произвольной формы.
Для удобства выполнения расчетов следует ввести
некдторый'параметр а—чо/ыс. и тогда при х(/)=А завй-
137
сймости (2-35) — (2-37) преобразуются к виду-.
i=0
i=0
n—2
W (/a) = У [Ь^е4™1 + /г1е'та ].
Л (<?'*“ — l)2 4J
i=0
Хотя параметр a может изменяться от нуля до еди-
ницы, но при расчетах нецелесообразно брать а>0,5, так
как точность определения значений АФХ снижается
в области высоких частот. Величина сос заранее неизве-
стна, поэтому выбор интервала At производится эмпири-
ческим путем: вначале At находится из условия, чтобы
на участке с наименьшим радиусом кривизны функция
h(t) была как можно ближе к прямой линии; затем
после вычисления ряда значений АФХ Д1/ увеличивается
вдвое и снова находятся значения частотных характери-
стик. При правильном выборе At значения АФХ, найден-
ные в обоих случаях, не должны существенно отличаться
друг от друга.
Обозначая множители перед символами 2 в форму-
лах W(ja) буквами k\ и k2:
ъ __, . д, _ j™
и учитывая, что — cosauz— /sinarcz, можно суще-
ственно упростить процесс вычисления значений АФХ для
каждого фиксированного а. Для этого составлена таблица
синусов и косинусов для ряда значений а: 0<а<0,5
(см. приложение III). Все вычислительные операции сво-
дятся к перемножению ординат hi или их разностей Ahi
на табличные значения синусов и косинусов и суммирова-
нию произведений. Множители kx и k2 также приведены
в приложений III для ряда значений аргумента а.
Помимо трудности выбора интервала At. рассмотрен-
ный метод предъявляет повышенные требования к глад-
138
!кости и монотонности
переходной функции,
। так как при вычисле-
I нии первых и особен-
I но вторых разностей
! все «скрытые» неглад-
f кости h (t) проявляют-
; ся особенно сильно,
1 что может привести
в конечном счете к ко-
Рис. 2-25. К .примеру вычисления
значений амплитудно-фазовых харак-
те)ристик с помощью дискретного
лебательному характе-
ру найденных АФХ.
Вычисление АФХ с
ПОМОЩЬЮ дискретного преобразования Лапласа,
преобразования Лап-
! ласа связано с большим объемом однообразных выкла-
I док истребует применения цифровой вычислительной
; машины или по крайней мере полуавтоматических элек-
трических арифмометров.
Приведем пример определения значений АФХ по переходной
функции, заданной табл. 2-6. Интервал квантования в данном слу-
чае равен 2 мин, поэтому определяем <ос как. базовую частоту, (ос =
л 3,14
=д^-= 120*= 0,026166 рассек, и, выбрав максимальную величину
а = 0,5, находим диапазон частот [0; 0,0_13083] рад/сек, в^котором
целесообразно вычислять значения АФХ. Далее находятся первые
разности АЛг —Лг+i—hp, i=0, 1, '2,..., 20 и проставляются во втором
столбце табл. 2-8. С помощью таблицы значений sin леи и cos ла*
(см.- приложение III) находятся произведения Ahi sin лш и
A/Zicosnoj для величин « = 0,03125; 0,0625; 0,125; 0,1875; 0,25;
0,3125; 0,375; 0,5 и номеров z = 0, 1, 2,..., 20; некоторые из этих
произведений приведены в табл. 2-7. Произведения Ahi sin л«г и
Ahi cos лол суммируются порознь по всем Z-м номерам, суммы умно-
жаются на значения коэффициента kt для соответствующего а (см.
приложение III), а также на АФХ звена чистого запаздывания
е~18о/«> =cos 180(0—/sin 180(0 *. Окончательные значения Re и Im ча-
стей АФХ объекта собраны в табл. 2-9, а ее годограф показан на
рис. 2-25.
Y Определение значений АФХ путем
аппроксимации переходной* функции
трапециями. Переходная функция h(t) задается
в_тг+1 равноотстоящих точках 1/г-; z = 0f, 1, 2, п; Ц =
* Из переходной функции предварительно было выделено время
чистого запаздывания т=3 мин.
139
Таблица 2-9
Таблица 2-8
СТ> О) 00 00
00 со 00 ю
Re
Im
0,03125
8,16-IO-4
81,1
—49,98
0,0625
16,3.IO"4
41,26
—73,8
0,125
32,7-Ю-4
—20,8
—56
0,1875
49,2-IO"4
—35,38
—21,4
0,25
65,4*1О"4
—30,36
4,86
0,3125
816-IO’4
—17,8
11,1
0,375.
98,IO'4
—7,64
13,14
0,5
131,10'
1 ,66
8,36
=ti_\ +'At ординатами h(ti)=hi. Соединив вершины
йрямыми линиями'
t- t.
t "
получим п прямоугольных трапеций. Изображение пере-
ходной функции Н (р) распадается на два интеграла:
Ту 00
Н(р) = h(t)e~pt dt + dt =
0 Ту
где Ty — tn. Подставив в первое слагаемое вместо h(t)
п—1
ее приближение Л* = ^ Si и поменяв местами операции
интегрирования и суммирования, получим [Л. 31]:
^у Гу П—1
/,= j/г*(/)<?-?= J £ Sie-^dt =
О О f=0
=J [(hi+* ~ <e~pti*' — e~pti) —
z=0
1 /f ~Pti + l L.
(Лг + 1# hiC ) J.
Если переходная функция h(t) есть реакция объекта
на ступенчатое воздействие л(7) = Л, то передаточная
функция принимает вид:
п—1
i=0 L
+ - hi^e~pti + ’] е~рТ*.
141
140
При возмущающих сигналах типа прямоугольного им-
пульса или волны и h (Ту) передаточная функ-
ция (2-38) преобразуется соответственно к виду;
п—Л
(1 — е-Р^)^ (hi + 1 — hi)e~pti
____________i=zO_________
Мр (1 — е~~рТ) А
Г"”=---
Ошибка вычисления W (р) или W (/«>) может быть
оценена по приближенным неравенствам
Т Т '
| J [h (/) — h*(t)] e~pt dt | < Jy| h (t) — h* (t) 11 e’p* | dt <
0 0
T
0
Из неравенств следует очевидный вывод: для умень-
шения погрешности необходимо выбирать интервал Д/
таким, чтобы переходная функция была как можно бли-
же к прямой на каждом отрезке [tif
Для практических расчетов формулу (2-38) можно
несколько преобразовать, что и сделаем на примере
определения АФХ по переходной функции h(/), задан-
ной табл. 2-5 Из ft(tf) заранее выделено время чистого
запаздывания т, равное 3 мин.
Произведем подстановки в формуле (2-38): p — j^
_а) = <па/Д^; 0<а<1 и после ряда очевидных преобразо-
ваний получаем:
п— 1
W (ja.) — {[Л„ cos ал/z hi cos ат.1 —
— ht+1 cos ла (i 1)] cos кал — Dt sin лаг] —
— j ]/in sin алл 4- h{ sinaitz— hi+i sin ла (z'4~ 1)) +
4* ДА, cos itai!— Эг sin лаг]},
где pi==;.L-.cosAg ; o2 = s-^“.
1 «a • «a
142
Учитывая, Что при h0 — Q выражений
vi n—i
V [hnsina7zn-]~hi^m^ai—/ц+1 sinrca(/-[-1)];
i=0
n—\
V [Ancosa7m-[- Ai.cosKai — hi+l cos тел (Z-j- 1)]
i~0
равны нулю, окончательно имеем:
(А п~^
W (/со) — "X {(^hiD2 cos тех/ — MiiD^ sin теа/) —
i=0
— j (^hiPi cos теа^‘ 4- D2khi sin теа/)} = Re* — / l*m.
.Функции cosiwa, sin теш для ряда значений a: 0<a<
<0,5 приведены в приложении III; вспомогательные мно-
жители Dn D2 нетрудно вычислить для выбранных a
(табл. 2-10, строки 2 и 3). Выражения f _ .
п— 1 п—1 < 4 < (
у Дй< cos таг и У Д/г,- sin лаг
Г = 0 1=0
обозначены в данном примере символами 2, и Е2. Значе-
ния их приведены в табл. 2-10. Значения Re* и 1m* со-
браны в строках 2 и 3 табл. 2-11. После учета влияния
чистого запаздывания т = 3 мин по соотношениям
Re = cos Л- ita Re* 4- sin Л- ®z Im*;
£ Z /
Im = cos теа Im* — sin теа Re*
получим величину реальных Re и мнимых Im частей АФХ
объекта (строки 4 и 5 табл. 2-11).
Т аблица 2-10
1
2
3
4
5
a
Dt
О2
S2
0,03125
0,04885
0,997
89,41
33,199
0,0625
0,0976
0,9935
66,063
52,22
0,125
0,1935
0,976
24,68
53,81
0,1875
0,286
0,943
6,13
4),33
0,25
0,3735
0,901
—0,474
29,76
0,3125
0,452
0,847
—3,3
19,77
0,375
0,522
0,785
—3,63
13,77
0,500
0,636
0,636
—1,500
7,500
Определение значений АФХ путем
аппроксимации переходной функции
треугольниками. Аппроксимация переходной
функции треугольниками применима в тех случаях, ког-
143
Таблица 2-11
a 0,03125 0,0625 0,125 0,1875 0,25 0,3125 0,375 0,5^
Re* 87,56 60,5 17,6 —5,76 —11,6 —11,72 — 10,0 —5,72
Im* —39,46 —58,30 —57,0 —39,76 —26,64 —15,26 —8,92 —3,82
Re 81,14 40,90 20,32 —34,38 —14,6 — 16,32 —6,8 1,38
Im 49,9 —73,32 —55,0 —20,8 —13,92 10,20 11,58 6,78
да Л(0) =й(Гу) =0, т. е. преимущественно при испыта-
тельных воздействиях типа прямоугольная волна и прямо-
угольный импульс. Интервал задания переходной функции
разбивается на п равных частей /о=О, tiy ..., /п,
где tn=Ty\ ti—a z=0, 1, 2, п. В точках
/г имеем ординаты /го = О, Лл = 0. Соединив вершину
Рис. 2-26. Аппроксимация (переходной функции суммой тре-
угольников.
каждой ординаты hi прямыми линиями с точками /г_1 и
получив при этом равнобедренный треугольник
fi(t) с основанием 2А/ и вершиной Лг- (исключение со-'
ставляют лишь точки hQ и hn) {Л. 32] (рис. 2-26). Такая
аппроксимация эквивалентна в смысле величины разно-
му п—1
сти £ h(f) dt~ как нетрудно заметить, приближе-
нию h (t) прямоугольными трапециями. Преобразование
Лапласа отдельной функции fi выглядит следующим об-
разом:
°О х ' , М
Fi(p)=[fi(t)e-Ptdt = e Pi f fi(t) e~Pf dt =
-ДО- —’д/ ^hie-ptdt.
144
\ Учитывая, что ft — четная функция, Перейдем к Фурье -
преобразованию и упростим предыдущее выражение:
Fi ()<•>) = 2е iwti hi ^ (1 —^-) cos a>t dt =
о
. ~i”tt
= Mhi.e
sin-g-
соД/
Т
2
Преобразование Фурье всей функции h (t) получаем на
П—1
основании приближенного равенства fi~ {h(f)dt:
i=l о
//(/«>) = Д/2 hie >mt
CoAf з
Sin —
соД/ ,
а амплитудно-фазовая характеристика объекта опреде-
ляется обычным способом:
Г(/<о) = ^т-
v ' X (ja>)
(2-38)
Выбор интервала А1/ производится так же, как при
аппроксимации h(t) прямоугольными трапециями. Опре-
деление значений АФХ по последней формуле связано
с трудоемкими расчетами, однако легко алгоритмизи-
руется применительно к счету на цифровой вычислитель-
ной машине.
Определение значений АФХ путем
аппроксимации переходной функции
тригонометрическими выражениями. Пе-
реходная функция задана в п+1 точке 1=0, 1, 2, ..., п
ординатами 1=0, 1, 2, п, причем Ло=/гп=О. Тогда
h(t) можно разложить в ряд Фурье по синусам~на по-
лупериоде времени Ту:
m
h(0~ bKsink^t-, Ту. (2-39)
А=1
10—121
145
Длй гладких переходных функций ряд (2-3$) xopoiiifc
сходится, и обычно достаточно вычислить не более трех-/
четырех коэффициентов Ьь: )
п-*1
bk — hi sin ki ; k = 1, 2,..., т.
Z=1
Преобразование Лапласа функции /г (Z) будет таким
* т
н =Lbk
k~\
1 — (— 1)ке ТуР
Значения АФХ объекта при испытательном входном
воздействии типа прямоугольный импульс шириной Т вы-
числяются по формуле
= bh
1 — (— l)ft (cos &TV — j sin co7\y) .
[/ П \2 ~i(0T J ’
—j A(e J - 1)
а для воздействия типа прямоугольная волна определяются
зависимостью
IF (/со) == V bh I1 — (cos wTy — isin ,
Й k 2А(е~^- iy [<0= - ^тг)2]
Для аппроксимации переходной функции, у которой
h (Г?) 0, необходимо предварительно вычесть из нее
линейный двучлен а04~р/:
h(t) = h(t)— ай — fit: (Xt<Ty,
где а0 и р находятся из условий
h (0) = h (0) — а0 — р • 0 = 0; h(7\) = h(Ty) — aQ —
~fiTy = 0.
Затем функция h (t) разлагается в ряд (2-39) и переходная
функция представляется выражением
Л (/) q,q -j- sin k -jT-1\ 0 t Ту.
k-\
146
\ .
\ Предполагая входное испытательное воздействие х (t)—
= Д, найдем импульсную функцию k(t):
tn
k{t)=^-^k^coskf;i’Q<t<Ty
и соответствующее ей изображение — передаточную функ-
цию W (р):
w(p)=^(^-e~PT^ +
Подобный* метод определения динамических харак-
теристик целесообразно применять в тех случаях, когда
переходная функция нуждается в предварительном сгла-
живании с помощью рядов Фурье. Импульсная функция
k(t) может иметь разрывы первого рода при ^=0 и / =
= ТУ и мало пригодна для выполнения аналитических
расчетов. Значения АФХ, вычисляемые по формуле
(2-40), могут иметь большие ошибки в области низких
частот из-за наличия полюса W(p) при р=0.
При рассмотрении методов сглаживания экспериментальных пере-
ходных функций в § 2-3 приводилось в качестве примера аналитиче-
ское выражение для h(t):
t 135 тс
Л(/)^2 + ^г + 28,99з1Пдэд/; 0</<960.
Сама переходная функция показана на рис.2-7. Определим ряд зна-
чений W (/со) по формуле (2-40), для чего произведем подстановку
р = /(о; = cos 960со— /sin 960со; 7'у = 960 сек; А = 27;
_ 135
₽ = 960-
После очевидных преобразований получим: ,
Г 135 28,99^.960(0 ] sin 960со ,
Г (7<0) [960(йГфтс2 — (960со)2 J 27 +
Г 135 28,99тс • 960со . Кх
+ 7 [960(о (cos 960^ О + п2______(960(0)2 (1 + cOS 960со) J X
1
X-27“ = Re* + /Im*.
10*
147
Значения Re* и Im* амплитудно^ф^'зовой характеристики для ряда I
значений частоты со даны в табл.-^2Ц2. /
Таблица 2-12
со 0,001 0,002 0,003 0,004 0,005
Re* 4,21 3,10 1,832 0,763 0,160-
Im* —1,49 —2,85 —2,92 —2,63 —2,03
Определение значений АФХ путем
преобразования переходной функции
в сумму парабол. Метод основан на использовании
простого вида Фурье-преобразования дельта-функции
&(/—Действительно, при преобразование
Фурье от —ti) будет таким:
Переходную функцию Л(/) всегда Можно представить
суммой парабол. Для этого разобьем отрезок задания
h(P) на ряд произвольных интервалов [0, 6], (6, У,
(<2, *з], .... (fn-i, ^п=Ту] и аппроксимируем переходную
функцию на каждом участке (/г, /г+1] параболой ц-го
порядка, где ц<2ч-3 [Л. 32]. Чаще всего принимают
ц—I, т. е. производится графическая кусочно-линейная
аппроксимация; если же ц>1, то для нахождения коэф-
фициентов парабол типа
а0+а^+а^2; а0+arf+arf2 + a3t3
необходимо применять интерполяционные методы, что
резко усложняет расчеты.
Обозначим аппроксимирующую параболу на участке
(ii, #i+i] функцией и тогда можно будет написать:
п п рь
i=0 i=0X=0
где h(tn+i) =>h(ttn). Продифференцируем P(t) p+l раз и
получим последовательность дельта-функций высотой bi
в моменты времени /»:
Р* 1‘+1 (/)= £ b$(t — ti); i = 0, 1, 2, ..., /г*.
i=0
п п ОФ
♦V (t — ti) =V f b(t) t. e. 6» являются ди-
i =0 -io
скретами некоторой функции b(t) в моменты времени Ц.
148
Коэффиценты bt находятся из графика как тангенсы
угла наклона прямых линий на соответствующих участ-
ках времени (/<, /f+i] при кусочно-линейной аппроксима-
ции h(t) (рис. 2-27) или в общем случае по выражению
= (ах, i— ах, г,-1)Л!; ах-1—0; Z=0, 1, 2,..., п.
Преобразование Фурье аппроксимирующей функции
Р (t) находится достаточно просто:
Р ()•») = '{£ 6,8 ((- Ме-'" Л = j 6,Г'“'‘.
О i=0 1=0
Комплексная функция Р (/®) связана с преобразованием
Фурье h(t) соотношением
Н*(io) —----------P(jo) =_____1 V ь е**'
V (/w)|i+1 U (io))i+l 2j
i=0
n
Чем ближе аппроксимирующая функция Л(0
i=i
к h(t), тем и ближе к точному преобразованию
Рис. 2-27. Представление переходной функции сум-
мой дельта-функций.
149
Фурье Н (/-со). Отсюда надо стремиться осуществлять
кусочно-линейную аппроксимацию h(t) таким образом,
чтобы прямые ao + 0i'(O как можно ближе совпадали
с переходной функцией на участках (/г«, Этому спог
собствует неэквидистантный выбор точек tu что, однако,
усложняет расчеты.
При кусочно-линейной аппроксимации h(t) можно
найти значения АФХ и при помощи таких рассуждений.
I Функция P(t) при р=1 имеет следующий вид:
п п
.1 = + 0<t<tn = Tv,
i =0 i =0
где
п __ + \ + . __ ^г + 1 hi
’ ав— Д^
Д/ ---- ^14-1
/ = 0, 1, 2,...,^+1;
h (tn+1) = h (/п). Продифференцируем P (t) 1 раз и, учиты-
вая, что исходная переходная функция h(t) есть реакция
на ступенчатую функцию л(/) = А, получим:
i=Q
Найдем преобразование Лапласа от импульсной функ-
ции k(t):
= ,(1e~Ptdt =
О i=0 t.
=~vSa,i(e pii+'~e pti)- (241)
z==o
Учитывая, что а1?=-^-Д/^ и Ло = 0, нетрудно преоб-
разовать найденное выражение к формуле трапеций (2-38)
(см. упрощенный вариант ее в примере). Действительно,
подставив
pz=j<nt ==cosW —/sin<4; <оД/ = тса; =
150
в формулу $-41) и производя нёкоторые Простые йреоб- <
разования, получаем: |
W (ja) = Re* + / Im* = Ыг* [D2 cos — Dx sin irca] —
z=o
n
— j' У [^iC0s^a*H~^2sin7caz] Дйг-,
Z=0 1
где
p _____1 —- cos Tea t p sin na
1 тса * 2 ла
Таким образом, рассмотренный способ определения
АФХ сводится к методу трапеций.
Приведем пример нахождения значений АФХ по переходной
функции путем преобразования ее к сумме парабол первого порядка.
Переходная функция задана табл. 2-6 и показана на рис. 2-27.
Разобьем интервал времени [0, 42] мин на 13 неравновеликих уча-
стков, внутри которых функция h(t) близка к прямой линии
hi л., — hi
+ где ац~-----------; М < i = 0, 1, 3,4,...,
11, 13, 15, 21 (для удобства выполнения расчетов сохраним старую
нумерацию интервалов tia пропуская, однако, индексы t = 2, 12, 14,
16 — 20).
Затем графическим путем или по формуле находим коэффициен-
ты ац, величины которых приведены в столбце 2 табл. 2-13. Опре-
деляем коэффициенты bi при дельта-функциях bi = ai, i—a^i-f,
i=0, 1, 3,..., 11, 13, 15, 21, предполагая при этом, что ai,-i = 0 (см.
столбец 3 табл. 2-13).
Данная переходная функция есть реакция объекта на возму-
1
щающее воздействие с Фурье-преобразованием X (jai) = Пред-
ставляя в виде выражения cos пай — j sin nai; 0<a<l; i — 0,
I, 3, . . ., Il, 13, 15, 21 и переводя ht в секунды путем деления ве-
личин bi на 120, получаем при р. = I:
21
F* (/<о) = J- bi sin таг —
Z=0
2!
— "тиГ C0S = ^е* “Ь 1
4=0
Произведения bi cos та/, sin та/ проставлены в столб-
цах 4—11 (приведены лишь результаты счета для а —
151
= 0,03125; 0,0625; 0,215; 0,5), а их суммы по /-м номе-
21
Таблица 2-13
рам—в последней строке табл. 2-13, Умножая у bi sin на/,
21
7, bi cos па/ на 1/па и учитывая влияние запаздывания н =
z=o
= 189 сек. вычисляем значения реальных и мнимых ча-
стей АФХ объекта, приведенных в табл. 2-14.
Таблица 2-14
а 0,03125 0,0625 0,125 0,1875 0,25 0,3125- 0,375 0,50
Re 79,58 40,24 —19,14 —34,22 —28,06 — 16,34 —7,33 0,92
[щ —49,1 —72,66 —55,84 —21,33 — 1,37 9,466 ' 11,31 7,32
2-6. АНАЛИЗ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ
ХАРАКТЕРИСТИК ПО ПЕРЕХОДНЫМ ФУНКЦИЯМ
В предыдущих параграфах были рассмотрены основные методы
нахождения коэффициентов передаточных функций <и значений АФХ
по переходным функциям. Часть этих методов основана на прибли-
жении исходной h(t) решением линейного дифференциального урав-
нения с заданной структурой, другие базируются на предположении,
что и порядок п аппроксимирующего уравнения также можно опре-
делить по переходной функции. Нахождение коэффициентов W(p)
и числа п осуществляется с помощью различных математических
приемов — интерполяционных, графических, графо-аналитических,
квадратуры и т. д.
Эти факторы, очевидно, предопределяют то, что точность опре-
деления динамических характеристик по переходной функции раз-
ными способами будет неодинаковой, причем выявление наиболее
точных методов какими-либо аналитическими приемами не пред-
ставляется возможным. .
Вследствие этого на стадии обработки результатов эксперимента [
перед исследователем возникает сложный вопрос о выборе доста--
точно точного метода определения коэффициентов Немало-
важное значение при этом играет и трудоемкость нахождения дина- i
мических характеристик [ниже под трудоемкостью какого-либо, ме-
тода понимается время, необходимое для определения коэффициен-
тов дифференциального уравнения или 8—10 значений АФХ по за-
данной h(t) опытному инженеру, выполняющему расчеты с помощью
логарифмической линейки и арифмометра].
Для сравнительной оценки точности методов определения ди-
намических характеристик можно воспользоваться следующим эмпи-
рическим приемом.
Будем характеризовать точность метода величиной дисперсии D
амплитудно-фазовой характеристики. Если из одних и тех же пере-
ходных функций определять разными способами динамические ха-
рактеристики, то множество значений АФХ для ряда фиксированных
частот можно рассматривать как совокупность случайных величин
и найти оценки математического ожидания и дисперсии. Однако при
153
152
малом числе методов оценки будут слишком грубыми и с прак-
тической точки зрения более удобно заранее найти истинные АФХ,
которые принимаются за математическое ожидание [Л. 33]. Для
этого предварительно находятся q решений линейных дифференци-
альных уравнений высоких порядков (8—12-го) с достаточно про-
извольным расположением корней на действительной отрицательной
оси при нулевых начальных условиях и ступенчатом возмущении
х(/)=А. Эти решения, обозначаемые i=l, 2,..., q, весьма
похожи на гладкие переходные функции инерционных промышлен-
krft) ч-
Рис. 2-28. Переходные функции к примеру оценки точ-
ности определения динамических характеристик.
ных объектов: у них имеется «чистое запаздывание» т, отсутствует
очевидная точка перегиба (рис. 2-28). После выделения из hi (/)
по изложенному в § 2-3 правилу времени чистого запаздывания
можно достаточно уверенно считать, что /ii(O)=O; /ii(O)=O;
A\(O)«o.
Далее по каждой из q переходных функций рассмотренными
выше методами определяются соответствующие W*i (р) и вычисля-
ются значения реальной Re*$ (cov) и мнимой Imf (cov) частей АФХ для
ряда фиксированных частот cov; v= 1, 2,. . . ,т. Так как фактиче-
ские дифференциальные уравнения „объектов" известны, то нетрудно
вычислить и значения Ret (cov), Im* (cov) истинных АФХ. Дисперсия
каждого метода определения - динамических характеристик находится
по формуле
q т
D = rv jj 5 W- Rei (w»)]2 +
Величины D, подсчитанные для ряда методов, приведены в
табл. 2-15 [Л. 33]. Там же показаны средние значения максимальных
154
Таблица 2-15
| № п/п. 1 Структура дифференци- ального уравнения Метод определения динамических характеристик по переходным функциям D-10-e b-10-e Время расчета ГР
1 Произвольное Метод „площадей" [Л. 22] 991 670 3—4 ч
2 число корней характеристи- ческого урав- Метод кратных корней с исполь- зованием „интегральной" посто- янной 1 023 440 40—50 мин
3 нения Метод последовательного лога- рифмирования [Л. 21] 1 374 527 40—50 мин
4 Метод кратных корней с исполь- зование м точки перегиба [Л. 23] 2 528 722 10 мин
5 Два вещест- венных корня Метод Ольденбурга и Сартори- уса [Л. 25] 1 209 437 10 мин
6 характеристи- ческого урав- Интерполяция в двух точках при хд=0 (метод Орманна [Л. 26]) 1 426 501 10 мин
7 нения Графо-аналитический метод с использованием точки перегиба [Л. 24] 1 521 . 530 20 мин
8 Интерполяция в пяти точках при тд=0 по Орманну [Л. 26] 1 745 574 15 мин
9 Графические построения в точке перегиба [Л. 23] 2 610 830 40 мин
10 Метод Цирлина [Л. 27] 3 953 904 30 мин
11 Интерполяция в пяти точках при Тд=0 по Ормзнну [Л. 26] 4 488' 833 40 мин
12 Один корень характеристи- ческого урав- Интерполяция в двух точках с использованием номограмм [Л. 28] 4 041 842 10 мин
13 нения Интерполяция в двух точках [Л. 28] 5 945 904 15 мин
14 „Интегральная" постоянная вре- мени [Л. 29] 6 256 1 082 25 мин
15 Численное преобразова- Дискретное преобразование Лап- ласа переходной функции [Л. 30] 1 612 590 33 ч
16 ние Фурье Аппроксимация переходной функ- ции трапециями [Л. 31] 1 795 603 3,5 ч
17 Представление переходной функ- ции суммой парабол [Л. 32] 1 813 610 3 ч
ошибок определения ординат W*i (Mv) каждым методом в данном
диапазоне частот [w1( cow]:
8=т S max {lRe*' ~ Re< (“)Г+
г=1
1
+ [Im*f(%)- 2,
где (01 и (От — корни трансцендентных уравнений
тг Зл
fi (®1) == "4" > f г (®т) — 2 ’
fi (tov) — истинная фазо-частотная характеристика.
155
В табл. '2-15 приведены й оцЪйкй трудоемкости рассмотренных
методов.
Использование дисперсии и уклонения, вычисляемых в частотной
области, как меры точности метода определения динамических ха-
рактеристик основано на двух соображениях. Во-первых, почти всег-
. ^да „конечной целью исследования динамики является нахождение
частотных характеристик объекта; во-вторых, для расчета систем
" автоматического регулирования требуется, точноеlзнание АФХ в опре-
деленном интервале частот. Это требование легко учесть при оценке
'точности метода по дисперсии в частотной области, как это и
делается в настоящей случае, и очень трудно — по дисперсии во
временной области.
> Перейдем к обсуждению результатов расчета; при этом для
краткости изложения вместо полного названия метода определения
динамических характеристик будем указывать номер строки таблицы,
в которой приведены соответствующие величины D, б и Гр — время
расчета. При этом будем помнить, что все эти результаты, а сле-
довательно, и выводы относятся к гладким монотонным переходным
г функциям, у которых Л(0) =А(0) =0; А(0) ~0.
Из группы методов определения коэффициентов W(р) с зара-
нее не заданным числом полюсов наилучшие результаты (в смысле
минимума величины D) дали методы 1 и 2. Они легко алгоритми-
зируются для вычислений на цифровой вычислительной машине,
однако метод 2 применим и для ручного счета. Несколько худшие
результаты дал метод 3, что объясняется возможностью появления
субъективных ошибок при проведении асимптот, а также вынуж-
денным ограничением порядка аппроксимирующей W(p).
Из семи методов определения W(p) с двумя полюсами самую
высокую точность имеет метод 5, основанный на проведении каса-
тельной в точке перегиба w переходной функции. Абсцисса точки w
находилась следующим образом. В средней, наиболее изменяющейся
части h(t) вычислялись первые разности Ah. В качестве точки w
использовалась та точка h(t), в которой величина Ah максимальна.
Метод 5 мало «чувствителен» к неточному проведению касательной
в точке ш, так как основан на использований величины V:
где Zw — абсцисса точки w; to, too — абсциссы точек пересечения
касательной с прямыми Л=0, h=hoo. Этими обстоятельствами объяс-
няются сравнительно малые величины D и б при использовании
метода 7, отличающегося от способа 5 применением громоздких
расчетных формул и более сложными графическими построениями.
Приемлемые результаты дает применение методов 6, 8 и значи-
тельно худшие — метода 11. Последнее объясняется тем, что опреде-
ление постоянных времени 7\ и Тг с помощью методов 6 и 8 можно
производить не по всем переходным функциям, а лишь по тем, ко-
торые близки к решениям дифференциального уравнения второго
порядка. Метод 11 позволяет находить W(p) по любой h(t), но
при этом, естественно, снижается точность. Это замечание относится
и к методу Ю, точность которого существенно увеличивается по
мере приближения h(t) к решению дифференциального уравнения
второго порядка. Точность в определенной степени снижается и от
слишком близкого расположения интерполяционных узлов, что не
позволяет учитывать характер всей переходной функции.
156
В методе 9 используется отношение
ф = ^00~~~^°
величина которого очень сильно зависит от правильности проведения
касательной в точке перегиба, вследствие чего дисперсия возрастает
более чем в 2 раза по сравнению с D метода 5.
Методы определения динамических характеристик 5—11 приспо-
соблены для ручного счета и позволяют найти коэффициенты W(p)
за 10—40 мин.
Аппроксимация h(t) решением дифференциального уравнения
первого порядка с запаздывающей правой частью (методы 12 и 13)
дали плохие результаты. Из рис. 2-21 отчетливо видно, что пере-
ходные функции существенно отличаются от решения уравнения
первого порядка. (
Абсолютные значения D и б методов 15, 16 и 17 зависят от
выбора величины интервала At квантования hj(t) во времени.
Хорошие результаты дает метод 15, однако он наиболее «чувстви-
телен» к неправильному выбору At и предъявляет повышенные тре-
бования к гладкости h(t). Все эти методы трудоемки, однако легко
алгоритмизируются для счета на цифровой вычислительной машине.
Несмотря на весьма условный характер описанного приема,
анализ его результатов позволяет сделать некоторые ориентировоч-
ные рекомендации о целесообразности применения ряда методов
определения динамических характеристик.
Для нахождения АФХ объекта п^тем обработки переходной
функции на цифровой вычислительной/машине целесообразно ис-
пользовать следующие методы: L («площадей»); 2 (кратных корней
с использованием интегральной постоянной Т) и 15 (дискретного
преобразования Лапласа). При ручном счете следует ориентировать-
ся на использование методов 5 (Ольденбурга и Сарториуса), 6
(интерполяции в двух точках при тд = 0, метод Орманна) и 3 (после-
довательного логарифмирования).
Еще раз отметим, что сделанные рекомендации относятся к об-’
работке гладких монотонных переходных функций, снятых с инер-
ционных объектов, и для h(t) другого характера эти качественные
и количественные оценки могут в определенной степени измениться.
Однако знание на стадии планирования и обработки эксперимента
даже таких грубых оценок точности определения АФХ помогут более
правильно и просто организовать исследование динамики объекта.
ГЛАВА ТРЕТЬЯ
ОПРЕДЕЛЕНИЕ ДИНАМИЧЕСКИХ
ХАРАКТЕРИСТИК ПРОМЫШЛЕННЫХ ОБЪЕКТОВ
ПРИ ВОЗМУЩЕНИЯХ В ВИДЕ СЛУЧАЙНЫХ
СИГНАЛОВ
Выше рассматривались методы определения динами-
ческих характеристик регулируемых объектов с по-
мощью подачи на вход исследуемого канала испыта-
157
ТёЛьного воздействия. Однако во Многих случаях йбзму-
щения, действующие на другие каналы объекта, не
удается стабилизировать или хотя $ы измерить и их
влияние может существенно исказить результаты экспе-
римента. Кроме того, на некоторых объектах крайне не-
желательным является подача специальных возмуще-
ний.
В этих случаях для определения динамических ха-
рактеристик могут быть использованы статистические
характеристики сигналов на входе и выходе объекта,
имеющих место в процессе его нормальной эксплуата-
ции. Задача разбивается при этом на два этапа:
1. Определение статистических характеристик слу-
чайных процессов, действующих на объект.
2. Вычисление по ним характеристики исследуемого
объекта.
3-1. СВОЙСТВА И ХАРАКТЕРИСТИКИ СТАЦИОНАРНЫХ
СЛУЧАЙНЫХ ПРОЦЕССОВ
Ход технологического процесса характеризуется зна-
чениями фиксированного числа параметров, большая
часть которых непрерывно изменяется относительно
своих средних значений. Эти изменения носят случайный
характер и называются случайными процессами. Зная
ход такого процесса за некоторый пром~”:уток време-
ни Т (реализацию случайного процесса) шльзя пред-
сказать точно, каково будет его поведение в дальней-
шем. Однако для некоторого класса случайных процес-
сов можно по достаточно длинной реализации опре-
делить их статистические характеристики. Естественно,
что эти характеристики будут иметь ценности лишь
в том случае, если они останутся неизменными для до-
статочно большого числа реализаций.
Процессы, статистические характеристики которых не
изменяются во времени, называются стационарными.
Статистические характеристики случайного процесса
находятся посредством усреднения значений случайных
величин, зависящих от ординат процесса. Такое усред-
нение может быть проведено по времени, если имеется
лишь одна реализация процесса, и по множеству для
фиксированного момента времени, когда в распоряже-
нии исследователя имеется множество независимых реа-
лизаций. Случайный процесс, для которого результаты
158
осреднения, проведенного тем и другим способом, оказы-
ваются одинаковыми, обладает свойством эргодич-
ности.
Ниже будем рассматривать стационарные, эргодиче-
ские случайные процессы.
Среднее значение такого процесса
т
М [л (/)] = lim 2^- j л (/) dt (3-1)
—т
постоянно. При вычислении других статистических ха-
рактеристик случайного процесса обычно удобно предва-
рительно центрировать его, т. е. вычесть из ординат про-
цесса его среднее значение.
Вся необходимая для расчетов линейных систем ста-
тистическая информация для стационарных процессов
содержится в их корреляционной функции,
вычисляемой по формуле
т
Rxx w = lira 27- j X (/) x (t 4- -t) dt. (3-2)
— т
Физически величина корреляционной функции для
некоторого момента т показывает, насколько значение
случайного процесса в момент t связано со значением,
отстоящим от него на время т. Если две эти величины не
зависят друг от друга и среднее значение каждой из них
равно нулю, то равно нулю и среднее значение их произ^
ведения.
Из формулы (3-2) следуют основные свойства корре-
ляционной функции:
'1. ^хх'(т) является четной функцией.
2. /?хх(0) равно среднему значению квадрата откло-
нения случайного процесса от его математического ожи-
дания и всегда больше нуля. Эту величину называют
дисперсией случайного процесса.
з. | Rxx (т) | < Rxx (0) при |т|>о.
4. Rxxfy) стремится к нулю при |т|—-оо.
Третье и четвертое свойства корреляционной функции
непосредственно вытекают из определения ее как меры
связи двух ординат процесса, отстоящих на т друг от
друга.
159
В тех случаях, когда исследуется связь между двумя
случайными процессами x(t) и «/(/), характеристикой
этой связи является взаимнокорреляционная
функция
т
Rxy W = lim 27- J X (t) yjt + т) dt. (3-3)
T-»oo — T
Подобно величине корреляционной функции величина
взаимнокорреляционной функции показывает, как зави-
сит ордината процесса y (t) в момент /+т от ординаты
процесса x(f) в момент t. Основные свойства Rx^(x):
1- /?хИ(т)\=,RyX(—т) (RXy(y) не является четной функ-
цией].
2. RXy(t) стремится к нулю, .когда т^оо.
Автокорреляционная функция сигнала представ-
ляющего собой сумму двух случайных сигналов m(t) и
n(t), может быть выражена через корреляционные функ-
ции составляющих:
— 'Rnn (т)+7? пт (т) + ^тпп’(т) +lRтт (т). (3-4)
Если n(t) и m(t) не коррелированы друг с другом,
то взаимнокорреляционные функции в '(3-4) равны ну-
лю и
Rff(n) — ^Rnn (r)+Rmm (т).
Расчет линейных систем часто проводят, пользуясь
преобразованием Фурье и полученными с его помощью
частотными характеристиками линейных звеньев. В этом
случае вместо корреляционных функций удобнее исполь-
зовать их преобразования по Фурье — спектральную и
взаимную спектральную плотности. Спектральная
плотность подсчитывается по формуле
$«« (<>) = J Rxx^)e~imdz. (3-5)
—оО
Она является четной функцией ®; для любой частоты
5хх(®)>0. Физически величина спектральной плотности
для частоты со показывает, какая доля мощности случай-
ного процесса приходится на эту частоту. Общая же
мощность случайного процесса может быть подсчитана
160
как интеграл его спектральной плотности. Из обратного
преобразования Фурье следует, что
ОО
Rxx W == ^7 j 5ХХ (®) d<a'
—ОО
а дисперсия
ОО
/?хх(0) = -^ jsxx(®)^« (3-7)
—ОО
т. е. равна суммарной мощности случайного процесса.
Преобразование Фурье взаимной корреляционной
функции называется взаимной спектральной
плотностью:
SXy (<*•) = J Rxv (х)>“/ФХ Л. (3’8)
—оо
Она не является четной функцией частоты и обла-
дает тем свойством, что
Sxy (со) =!S?/x,( со).
При. прохождении случайного сигнала через линей-
ную систему его характеристики изменяются. Формулы
связи между характеристиками системы и характеристи-
ками сигнала на ее входе и выходе особенно просты, если
пользоваться спектральными плотностями случайных
процессов и частотными характеристиками системы.
Пусть x(t) и y(t) —соответственно случайные процессы
на входе и выходе системы с амплитудно-фазовой ха-
рактеристикой IFQ’co); тогда
5w((d)=^((d)|F(/cd)|2. (3-9)
Среднее значение квадрата сигнала на выходе систе-
мы в соответствии с (3-7) может быть вычислено по
формуле
со
М [у2 (/)] = i рхх (<>) IW (Я Is d<*. (3-10)
—ОО
В том случае, когда Sxx(,co) и —рациональные
функции, интеграл (3-10) может быть вычислен с по-
мощью таблиц, приведенных в [Л. 7].
П-121 161
Взаимная спектральная плотность процессов на вхо-
де и выходе линейной системы связана со спектральной
плотностью процесса на входе и частотной характери-
стикой системы выражением
(3-11)
Выражение (3-11) соответствует связи между
взаимной корреляционной функцией сигналов на входе
и выходе объекта, корреляционной функцией входного
сигнала и импульсной характеристикой объекта:
Rv* (О = р (/ - х) Rxx (г) dt. (3-12)
*~QO
Уравнения (3-11) и (3-12) служат основой для
определения динамических характеристик объекта ста-
тистическими методами.
Аналогия между характеристиками
случайных и регулярных сигналов. Для
лучшего понимания свойств случайных процессов, а так-
же для выработки единой точки зрения на расчет систем
при регулярных и случайных возмущениях полезно про-
вести аналогию между характеристиками случайных и
регулярных сигналов. Эта аналогия позволяет также при
моделировании систем, подверженных случайным воз-
действиям, заменять эти воздействия эквивалентными
им регулярными.
Передающей функцией (регулярного сигнала х(/) бу-
дем, следуя (Л. 34], называть функцию
/?ж(г)= J x(t-\-t) x(t)dt, (3-13)
*-оо
а взаимной передающей функцией сигналов x(f) и y(t)
Rxy (-с) = J х (t + г) у (0 dt. (3-14)
—00
Подобно корреляционной функции передающая
функция инвариантна к смещению сигнала x(t) по оси
времени. Если преобразованием Фурье корреляционной
функции является спектральная плотность, то преобра-
зованием Фурье передающей функции, как нетрудно
162
убедиться является квадрат модуля преобразования
Фурье сигнала x(t). Среднее значение квадрата функ-
ции х(/) может быть подсчитано по формуле
Ц = , j х2 (/) dt = ± J IX (/о) |Ш. (3-15)
—оо —оо
Сравнение с формулой (3-7) для среднего значения
квадрата случайного процесса показывает, что роль
спектральной плотности играет в формуле 1(3-15) квад-
рат модуля Фурье-изображения сигнала x(t).
Если на систему, таким образом, действует регуляр-
ный сигнал, квадрат модуля Фурье-изображения которо-
го равен спектральной плотности случайного процесса
(передающая функция равна корреляционной функции),
то среднее значение квадрата отклонения на выходе си-
стемы будет таким же, как при воздействии случайного
процесса. Подобная аналогия существует между взаим-
ной передающей и взаимнокорреляционной функциями
и их изображением по Фурье.
3-2. ПОСТАНОВКА ЭКСПЕРИМЕНТА ПО ОПРЕДЕЛЕНИЮ
ХАРАКТЕРИСТИК СЛУЧАЙНЫХ ПРОЦЕССОВ 1
Чтобы воспользоваться уравнениями (3-11) и (3-12)
для определения характеристики линейного объекта, не-
обходимо определить статистические характеристики
процессов на его входе и выходе. При этом следует
учесть ряд обстоятельств.
1. Вычисление корреляционных функций и спектраль-
ных характеристик может быть проведено лишь по за-
писям процессов, имеющих конечную продолжитель-
ность Т. В этом случае формулы (3-2) и 1(3-3) примут
вид:
Т—х
(г) = С х (0 х (I + г) dt-, (3-16)
Т—х
R*xy W = j X (t) у (t + т) dt. (3-17)
О
1 При (написании § 3-2 авторы использовали результаты
Ю. Л. Клокова.
н* 163
Результат вычисления пб этйм формулам, сфрбгб гб-
воря, является случайной, а не регулярной функцией или
оценкой искомой корреляционной функции. Если мате-
матическое ожидание оценки равно истинной величине
корреляционной функции, оценка называется несмещен-
ной. j
Оценки, полученные согласно выражениям (3-16) и
(3-17), являются несмещенными, однако их отклонение
Рис. 3-1. Вид оценок корреляционной функции (а) и
спектральной плотности (б).
от истинных характеристик может быть весьма значи-
тельным. Это особенно относится к ординатам корреля-
ционной функции, соответствующим большим значениям
т, и ординатам спектральной плотности, соответствую-
щим малым значениям частоты. Оценки могут, напри-
мер, иметь вид, показанный на рис. 3-1,а и б. Для обос-
нованного выбора длины реализации Т необходимо
знать статистические характеристики процесса, т. е. как
раз те характеристики, которые по этой реализации вы-
числяются. Выход из этого «заколдованного круга»
состоит в том, чтобы выбрать Т по какой-то грубой
оценке характера случайного процесса, которую легко
вычислить до вычисления спектральной плотности и
корреляционной функции.
2. Слишком длинные реализации часто нельзя
использовать еще и потому, что в промышленных систе-
мах автоматического регулирования процессы не явля-
ются строго стационарными. От времени могут зависеть
как коэффициенты корреляции, так и математическое
ожидание процесса. Если коэффициенты корреляции
меняются настолько медленно, что в исследуемом интер-
вале времени их можно считать постоянными, а матема-
тическое ожидание меняется существенно медленнее
самого случайного процесса, то при центрировании с по-
164
мощью фильтра низких частот подобный процесс может
быть приведен к стационарному. При этом фильтр, не
искажая высокочастотных составляющих процесса, дол-
жен выделять как постоянную, так и медленно меняю-
щуюся составляющие.
В силу сказанного выше о малой точности определе-
ния характеристик процесса в диапазоне низких частот
фильтрацию целесообразно провести и в случае строго
стационарного процесса, причем интервал частот, выре-
заемых фильтром, должен быть тем шире, чем короче
используемая реализация.
3. При обработке случайных процессов на цифровой
вычислительной машине непрерывная реализация заме-
няется конечным числом ординат случайного процесса,
соответствующих дискретным, обычно равноотстоящим
моментам времени. Ошибка, возникающая при этом, объ-
ясняется как дискретизацией процесса по времени, так
и дискретизацией вводимых ординат по уровню. Послед-
него обстоятельства обычно можно не учитывать, так
как число разрядов в вычислительных машинах и точ-
ность съема ординат достаточно велики. Ошибка же,
возникающая от дискретизации по времени, зависит от
интервала дискретизации \tiit и статистических характе-
ристик процесса, которые при выборе Alf, естественно,
неизвестны.
Таким образом, Цри определении статистических ха-
рактеристик необходимо первоначально выбрать длину
реализации Т и шаг дискретизации Aif, исходя из некото-
рых предварительных сведений о характере процесса.
После этого рационально провести центрирование про-
цесса фильтром, полоса пропускания которого связана
с выбранной длиной реализации. Вслед за этим вычис-
ляются оценки корреляционных функций и спектраль-
ных характеристик центрированных процессов.
Прежде чем приступить к эксперименту, нужно
изучить технологическую схему и конструкцию исследу-
емого объекта. При этом выясняют, исходя из имеющих-
ся сведений о механизме исследуемого процесса:
1) являются ли входные воздействия взаимно неза-
висимыми и связаны ли они с неконтролируемыми воз-
мущениями и шумами;
2) можно ли считать исследуемый объект стационар-
ным; на основании изучения объекта составляют его
структурную схему с указанием входных, выходных и
165
возмущающих неконтролируемых величин и причинных
связей между ними, а также схему регистрации.
Использовать для определения динамических харак-
теристик статистическими методами диаграммы эксплуа-
тационных регистрирующих приборов, как правило, не
удается по следующим причинам:
1. Малый масштаб записи флуктуации параметров по
величине. Шкала эксплуатационных приборов выбирает-
ся из условия удовлетворительной регистрации среднего
значения параметра, а отклонения от среднего значения
обычно имеют порядок 1—10%, что соизмеримо с по-
грешностью регистрирующих приборов.
2. Скорость диаграммной бумаги также обычно выби-
рается для наглядной записи среднего значения, в ре-
зультате чего флуктуации оказываются записанными
в слишком сжатом виде.
3. Неточная установка и плохая синхронизация по
времени диаграмм различных регистрирующих прибо-
ров.
4. Большое число неудобных для обработки круглых
диаграмм, а также диаграмм с нелинейной сеткой.
(Поэтому диаграммы эксплуатационных приборов
удается использовать, как правило, лишь для планиро-
вания эксперимента, а для регистрации нормального
режима устанавливается специальная регистрирующая
аппаратура (см. приложение I).
Как указывалось во введении, до начала эксперимен-
та желательно по диаграммам эксплуатационных регист-
рирующих приборов оценить среднюю скорость изменения
случайного процесса, с тем чтобы приближенно опреде-
лить время между соседними отсчетами (интервал диск-
ретизации), скорость диаграммной бумаги, время запи-
си реализации. Таким показателем средней скорости из-
менения случайного процесса может служить среднее
число пересечений процессом линии своего математиче-
ского ожидания. Ниже мы подробнее остановимся на
определении и физическом смысле этого показателя.
Масштаб записи находится по максимальным преде-
лам изменений изучаемых параметров, определяемых на
основании анализа эксплуатационных диаграмм. Мас-
штаб записи определяется таким образом, чтобы предел
изменений каждого параметра занимал на диаграммной
бумаге не менее 20—’30% диапазона шкалы прибора,
166
Для регистрации режима нормальной эксплуатации
можно рекомендовать аппаратуру, разработанную
ЦНИИКА |(см. приложение I). Эта аппаратура состоит
из шеститочечного регистратора и устройств для изме-
нения в широких пределах масштабов записи, средних
значений параметров, а также скорости диаграммной бу-
маги и времени цикла. Можно использовать также стан-
дартный многоточечный потенциометр ЭПП-09 с набо-
ром специальных приставок.
Определение средней скорости изме-
нения случайного процесса. Чем больше
средняя скорость изменения случайного процесса, тем
«шире» кривая его спектральной плотности. В [Л. 35]
показано, что среднее число пересечений случайным про-
цессом линии математического ожидания равно:
/00
f <o2S (<о) dco
О “И /о 1й\
---------==— (3-18)
S (<о) da>
6
где S(w)—спектральная плотность случайного про-
цесса.
Если из однородной пластины вырезать плоскую
фигуру, ограниченную кривой спектральной плотности,
то. интеграл, стоящий в числителе выражения (3-18),
представляет собой момент инерции этой фигуры отно-
сительно оси «>|=0, а интеграл, стоящий в знаменате-
ле,— ее площадь/Квадратный корень из отношения
этих интегралов является среднеквадратичным отклоне-
нием 5(®) от оси ©=0 и характеризует, таким образом,
среднюю скорость изменения случайного процесса. Фор-
мула (3-18) справедлива для стационарных дифферен-
цируемых случайных процессов с нормальным законом
распределения значений ординат.
Чтобы подсчитать пСр, нужно провести на диаграмме
эксплуатационного прибора линию математического
ожидания случайного процесса. Если процесс строго
стационарен, то математическое ожидание его постоян-
но и равно среднему арифметическому из ординат про-
цесса. По диаграмме подсчитывают число пересечений
процессом линии своего математического ожидания N.
Промежуток времени должен быть таким, чтобы N было
167
порядка ilOO. После этого подсчитывается среднее число
нулей
иСР = Л (3-19)
1 N
в единицу времени. Здесь TN — время, в течение которо-
го произошло АГ пересечений.
Выбор частоты дискретизации случай-
ного процесса. Для выбора величины шага дискрет-
ности по времени часто пользуются понятием частоты
среза случайного процесса 'сос, т. е. частоты, на которой
ордината спектральной плотности процесса равна нулю.
В таком случае при выборе шага дискретности
Д/ =
(3-20)
не возникает никакой дополнительной ошибки. Однако
спектральные плотности обычно асимптотически стре-
мятся к нулю при со—>оо и не имеют, собственно говоря,
частоты -среза. Кроме того, наивысшую частоту случай-
ного процесса практически по виду реализации опреде-
лить невозможно.
Подавляющее большинство случайных процессов
в промышленных системах . автоматического регулиро-
вания имеет монотонный характер изменения спектраль-
ной плотности, которая удовлетворительно аппроксими-
руется выражением вида:
V=1
При фиксированной частоте <оп оказывается, что из
всех кривых (3-21) наиболее „растянутой* будет
s(m) = T^+T (3-22)
(рис. 3-2,а), а наиболее „сжатой*
s М П 11№)w + 1) = В^Т’ (3-23)
у=0
(рис. 3-2,6).
Представление случайного процесса в виде таблицы
его ординат, отстоящих друг от друга на расстоянии Д1/,
приводит к тому, что вместо истинной спектральной
плотности мы получим спектральную плотность дискрет-
ного случайного процесса:
S (ш)= V S (<о — 2^тг<),
/г——оо
где а>тр=л:Д// — частота транспонирования.
Для процессов с монотонными спектральными плот-
ностями относительная ошибка в диапазоне частот
[—'(Отр, соТр] достигает максимума при <о=котр. Задавшись
Рис. 3-2. к определению частоты квантования случай-
ного процесса.
величиной максимальной погрешности, равной, напри-
мер, 0,02, можно подсчитать шаг дискретности по вре-
мени в зависимости от частоты icon или среднего числа
нулей пСр для процессов со спектральными плотностями
(3-22) и i(3-23). Для всех остальных процессов с моно-
тонными спектральными характеристиками величина
имеет промежуточное значение. Расчет [Л. 36] дает для
процесса со спектральной плотностью (3-22):
___0,043
а для процесса со спектральной плотностью (3-23)
макс —
0,325
В среднем можно рекомендовать выбирать шаг рав-
ным
(3-24)
169
Если время между двумя пересечениями математиче-
ского ожидания условно назвать «полупериодом» слу-
чайного процесса, то формула (3-24) рекомендует выби-
рать шаг Д1/ так, чтобы в среднем на такой «полупе-
риод» приходилось около семи ординат таблицы.
Выбор скорости диаграммы регистра-
тора [Л. 37]. Скорость движения диаграммы при за-
писи процессов на многоточечном регистраторе должна
выбираться по тому из регистрируемых процессов, для
которого пСр оказалось наибольшим (самому «быстро-
му»). За интервал дискретности этого процесса должно
протягиваться одно деление диаграммы. Если это деле-
ние слишком велико и скорость получается большой,
то ее нужно выбрать во всяком случае так, чтобы за
время А/ диаграмма проходила не меньше 2—3 мм.
Выбор времени регистрации. Если выбор
скорости диаграммы производится по наиболее быстро-
действующему процессу из тех, которые регистрируются
в данном эксперименте, то выбор времени регистрации
производится по наиболее медленному из регистрируе-
мых процессов. В [Л. 7] рекомендуется выбирать время
регистрации, исходя из самой низкой частоты случай-
ного процесса. Однако как определить эту частоту,
в свою очередь далеко не всегда бывает ясно.
Погрешность определения спектральной плотности
зависит от времени регистрации и различна для разных
ординат спектральной плотности.
В том случае, когда исходную конечную реализацию
искусственно периодизируют и вычисляют спектральную
плотность по полученной бесконечной, но периодической
реализации [Л. 38], среднеквадратичное значение отно-
сительной ошибки определения спектральной плотности
у s(«)
Задавшись допустимой величиной ошибки в опреде-
лении энергии составляющих случайного процесса,
имеющих период Та = 2л/со, можно вычислить отноше-
ние
= 4О82.'(а>), (3-25)
170
Если, например, на среднеквадратичной частоте слу-
чайного процесса допустима ошибка не больше 2%':
8 (<»п) <0,02,
то
Т^62,5ГМ,
или через среднее число нулей
. (3-26)
Яср
Аналогичное соотношение можно получить и для
случая, когда периодизации исходной реализации не
производят. Выражение для б (со) при этом несколько
сложнее [Л. 39], однако при выборе Т согласно (3-25)
б (со) практически не отличается от 0,02.
Таким образом, на исследуемом отрезке реализации
процесс пересекает линию своего математического ожи-
дания приблизительно Г25 раз.
Учитывая формулу (3-24), видим, что для ввода
в вычислительную машину используется не менее
850 ординат случайного процесса. Если же используют
многоточечный прибор, то шаг дискретности выбирается
по самому высокочастотному из регистрируемых процес-
сов, а время регистрации — по самому низкочастотному.
В этом случае число ординат процесса, используемых
для вычислений, всегда окажется большим.
3-3. ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИК СЛУЧАЙНЫХ
ПРОЦЕССОВ
Центрирование случайных процессов.
Когда в расположении исследователя имеется реализа-
ция процесса конечной длины Т, практически трудно
сказать, является ли процесс строго стационарным.
Спектр процесса, как правило, непрерывен и содержит
частоты, период которых соизмерим с длиной реализа-
ции. Так что трудно определить, меняется ли математи-
ческое ожидание процесса, ибо его нельзя отделить от
этих низкочастотных составляющих. Мы будем исходить
из того, что при центрировании процесса нам нужно вы-
делить и математическое ожидание, и все составляющие
процесса, меняющиеся столь медленно, что на длине Т
171
нельзя достаточно точно вычислить их характеристики.
Центрирование случайного процесса в этом случае
производится путем фильтрации по схеме на рис. 3-3.
Процесс пропускается через фильтр низких частот с ха-
рактеристикой на выходе которого выделяется
математическое ожидание
процесса x(t) (туда же
включаем низкочастотные
составляющие процесса),
вычитаемое из x(i) в сум-
маторе.
, Ж)
Wfto)
Границу для полосы ча-
Рис. 3-3. Схема центрцрова- стот, которую желательно
иия случайного процесса. выделить при помощи филь-
тра, определим, задавшись
той погрешностью, с которой могут быть определены
соответствующие этим частотам ординаты спектральной
плотности.
Если в (3-25) - положить максимально допустимую
относительную погрешность равной 0,3, то такая погреш-
ность будет достигаться на частоте
(3-27)
Таким образом, отфильтровать следует все те со-
ставляющие случайного процесса, период которых укла-
дывается в общей длине реализации Т меньше, чем
11 раз. Интересно сравнить эту частоту со среднеквадра-
тичной частотой спектральной плотности случайного про-
цесса ®п, связанной с числом нулей пср выражением
шп = ®пср.
Если длина реализации выбирается по формуле
(3-26), то полоса частот, выделяемая фильтром, состав-
ляет приблизительно шестую часть адц.
Впервые центрирование процессов с нестационарным
математическим ожиданием предложил производить
В. С. Пугачев [Л. 4, 8]. Фильтрацию предлагалось про-
водить с помощью текущего среднего1 с памятью &1Т,
1 Фильтр реализует операцию текущего усреднения, если орди-
ната процесса на его выходе, соответствующая моменту I, равна
среднему значению процесса на входе фильтра в интервале
Г ДГ. ДТ -1
Г . дт 1
р— 2 , t 4- -g-J.
172
чтд эквивалентно использованию фильтра с частотной
характеристикой.
sin со-g*
=------дг- (3-28)
ы~2
К фильтру, используемому для центрирования слу-
чайных процессов, предъявляются следующие требова-
ния:
1. Фильтр должен выделять заданную полосу частот,
возможно меньше искажая спектральную плотность слу-
чайного процесса за пределами этой полосы.
2. *П|ри этом продолжительность импульсной харак-
теристики фильтра (его память) должна быть возможно
меньшей.
Последнее требование связано с тем обстоятельством,
что при центрировании в начале и конце интервала Т
реализация искажается за счет переходного процесса на
выходе фильтра, вызванного случайными начальными
и .конечными условиями. Поэтому при подсчете вероят-
ностных характеристик процесса приходится отбрасы-
вать в начале и конце его участки, общая длина которых
равна памяти фильтра.
Чем меньше память импульсной характеристики
фильтра, тем шире полоса частот, им выделяемых. Это
объясняется свойством преобразования Фурье, согласно
которому уменьшение масштаба времени оригинала
приводит к пропорциональному увеличению масштаба
изображения и обратно. Таким образом, для функ-
ции Ji(iZ) заданной формы произведение
Д1/ Дсо = С,
где С — некоторая постоянная, зависящая от формы f(t)
и не зависящая ют масштаба времени. Определим такую
функцию, которая при заданной памяти Alt имела бы ми-
нимальную ширину в частотной области Дсо, т. е. функ-
цию, которой соответствовало бы минимальное значе-
ние С. Очевидно, что при заданном Дсо* функция будет
иметь минимальную память. В качестве меры ширины
спектра примем величину
(3-29)
6
17§
где Ф(<о) —чйстоФная характерйстика фильтра, и буДём
рассматривать импульсные характеристики f(t), симме-
тричные относительно оси / = 0, для которых также
среднее значение сигнала на выходе фильтра равно
среднему значению сигнала на входе.
Последнее приводит (к условию
Ф(0) = 1, (3-30)
которому во временнбй области соответствует
J = (3-31)
—00
Пользуясь формулой Релея, выражение i(3-29) мож-
но записать в виде:
Д<о = 15 J (3-3£)
—оо
Память фильтра примем постоянной и равной Alf=2.
Таким образом, требуется найти функцию f(t), ми-
нимизирующую функционал (3-29) при дополнительном
условии (3-31). В соответствии с процедурой решения
вариационных задач на условный экстремум составим
вспомогательный функционал, заменяя бесконечные пре-
делы в (3-31) и (3-32) конечными:
И = Д<о + АФ (0) = j (я [Г (OP + Af (t))dt. (3-33)
Здесь Л — неопределенный множитель Лагранжа.
Уравнение Эйлера для функционала (3-33) имеет
вид:
А—2лГ(/)=0
при граничных условиях /(—l)=f(l)=O. Решение этого
уравнения
после исключения произвольных постоянных записывается
в виде:
1).
174
Множитель Лагранжа А найдем, подставив f (/) в (3-31):
1
4- f(/!—1)^=—4-=i,
Л
откуда Л=—Зя
и
ftf) = 0,75(l-H при р|< 1; J
f (/) — 0 при р | > 1. /
Функцию (3-34) можно представить как произведе-
ние прямоугольного «окна»£(/) )(рис. 3-4) на 0,75(1—<t2):
fp)=0,75[g(0-/2g(0]. (3-34а)
Изображение по Фурье-функции gi(Z) равно:
0^) = 2^-. (3-35)
Подставив (3-35) в (3-34а), получим:
Ф («)= 0,75
d2G (со) \______. г Г sin. со । cos со
Jco ) ’ |_ со ‘ со2
sinjco 1
со3 ]’
(3-36)
Для полученной характеристики фильтра (3-36) ве-
личина О='СМин=Зл:.
Импульсная характеристика дискретного фильтра,
соответствующего функции (3-32), имеет вид:
Л(£) =
0,75 ( 1 — при |kl<L
О при | & | >• L.
(3-37).
Здесь L — память фильтра, которая связана с шири-
ной выделяемых им частот соотношением
<3-38)
Ординаты импульсной характеристики h(ik) могут
быть вычислены для заданного L и введены в память
цифровой машины, которая по стандартной программе
175
произведет «Свертку» ординат случайного процесса
. с ординатами фильтра.
С точки зрения реализации на ЦВМ представляет
интерес возможность аппроксимации фильтра (3-34)
с помощью последова-
тельных применений
к реализации опера-
ции текущего осредне-
ния, Оказывается, что
результаты, весьма
близкие к результа-
там, полученным с по-
мощью фильтра (3-34),
могут быть получены,
если последовательно
Рис. 3-4. Импульсная характеристи-
ка фильтра для центрирования.
применить к реализации дважды операцию текущего
усреднения. Для этого по формуле (3-38) находят па-
мять фильтра L. Затем проводят текущее осреднение
фильтром с памятью 0,58L по формуле
Л+0,291
yWj (k) — х W ’
i=k— 0.29L
(3-39)
э
результат первого текущего осреднения еще раз осред-
няют, но теперь уже с памятью фильтра О,42Л по фор-
муле
А? + 0,21£
J (3-40)
l-k— 0.21Д
и получившиеся после усреднения ординаты вычитают
из исходного Процесса в соответствии со схемой на
рис. 3-3. На рис. 3-4 изображена пунктиром функ-
ция fi(0, соответствующая применению последователь-
ного текущего осреднения. Она мало отличается от f(t).
Чтобы избежать фазовых искажений, память, филь-
тра должна быть нечетным числом. (При вычитании вы-
хода фильтра M(k) из ординат исходной реализации
нужно ординату Л4(1). вычитать из —ф— -й ордина-
ты х(п), М(2) —из —+1-й и т. д.
Центрирование реализаций случайных процессов ме-
тодом фильтрации приводит к некоторому искажению
176
статистических характеристик процесса. В том случае,
когда нужно получить истинную корреляционную функ-
цию процесса по корреляционной функции центрирован-
ного процесса, к последней следует прибавить оригинал
по Фурье выражения
S(<d) =S (icoo) W (cd) .
S(cDo) подсчитывается по формуле
S(®0)= J
—CO
Вычисление „оцен ок корреляционных
функций. Вычисление оценок корреляционных и
взаимнокорреляционных функций производится по сле-
дующим формулам:
т—N
Rxx (т) = NJm+~ х (п)х (п 4- /п); (3-41)
N‘—m
1 er-w ° 6
Ryx (rn) — N_m + \- У т). (3-42)
/2—1
Здесь: N — количество дискретных ординат реализации;
т — дискретный аргумент корреляционной функ-
ции;
0 — знак центрирования.
Вычисления по формулам 1(3-41) и (3-42) производят
до значения аргумента tnk, равного (0,14-0,05) N. При
вычислении оценок взаимнокорреляционных функций ть
выбирается по М для наиболее низкочастотного из двух
процессов. Вычисления производят как для положитель-
ных, так и для отрицательных т.
Определение оценок корреляционных функций по
формулам (3-41) и (3-42) требует применения ЦВМ
с достаточно большим объемом запоминающего устрой-
ства (ЗУ). Действительно, помимо хранения в ЗУ про-
грамм для центрирования реализации по формулам
(3-37) и i(3-38), необходимо запомнить N ординат цен-
трированного процесса и гпь ординат корреляционной
функции Rxx(m). При вычислении же взаимной корре-
ляционной функции требуется вдвое большее число
ячеек памяти. Потребный объем памяти машины можно
12—121 177
существенно сократить, если для вычисления корреля-
ционных функций применять рекуррентные формулы
[Л. 41]. Каждая из ординат корреляционной функции
представляет собой -среднее значение произведения двух
, случайных величин. Это произведение само является
случайной величиной и для вычисления его среднего зна-
чения может быть использована рекуррентная формула
№„ = — №„., + -^(4 (3-43)
п— 1
где j-x[(i)—среднее значение случайной ве-
2=1
личины х (/) в опытах, предшествующих я-му; х(п)—
значение случайной величины в п-м опыте.
Действительно, имеем:
п—1
П П 1 1 tl V 7 П /2—1 1
2=1
п
2=1
Используя рекуррентное представление (3-43), можно
переписать формулы (3-41) и (3-42) в виде:
Rn (щ) = —п~~т Rn~} (tn) Н---* - ,-т х (п) х (п + т),
' п — т-\-\ хх v 7 1 п—т-\-\ v 1 ' 1 7
(3-44)
где
п—т— 1
= J] x(Z)x(z + /n)
2=1
И
К. W = С' <") + х !'(» + ”")•
(3-45)
Программа ЦВМ для вычисления оценок корреля-
ционных функций организована следующим образом.
В ЗУ машины хранятся значения Rn~ (т) для т—0,
1, ... значения ординат процесса х(п—т^—2),
178
х(п—mh—1), х\(п—Шь), х(п—1) и число п. При по-
ступлении значения х(п) по формуле (3-42) находятся
ординаты (т); /п = 0, 1, ..тк. Эти значения выво-
дятся на печать и засылаются в ЗУ, где из номеров их
индексов вычитается единица,
в результате чего число
х(п—mk—2) пропадает, а зна-
чение х(п) запомнится под
номером х(п—1). Цикл вы-
числений должен быть мень-
ше интервала дискретности Д/
случайного процесса. Таким
ш
100
1000
о
100
1000
380
192
100
96
12
п^08
1=08
72
96
100
192
Рис. 3-5. Оценки автокорреляционной функции, вычислен-
" ные по рекуррентной формуле.
200
образом, при расчете по рекуррентным формулам
требуется без учета ячеек, в которых хранится про-
грамма вычислений приблизительно 2mh + 2 + 2 ячеек
памяти; при использовании же обычных формул потреб-
ное число ячеек составляет N+mk + 2, т. е. на порядок
больше. Использование рекуррентных соотношений,
кроме того, дает возможность получать сведения
о изменении характеристик процесса без «чистого за-
паздывания», что существенно в самонастраивающихся
системах. На рис, 3-5 показаны оценки автокорреля-
12* 179
ционной функции, определенные по формуле (3-44) для
тй=40 и п=48, 72, 96, 144, 192, 384, ,-1000.
Вычисление спектральных плотностей.
Для решения уравнения (3-12) и расчетов систем регу-
лирования приходится переходить к -Спектральным ха-
рактеристикам случайных процессов. Эти характеристики
могут быть получены двояко: по предварительно вы-
численным корреляционным функциям и непосредствен-
но по реализациям. Обычно предпочитают первый путь,
так как количество вычислительных операций приблизи-
тельно одинаково; между тём оценка спектральной
плотности, вычисленная непосредственно по реализации,
не всегда сходится к истинной спектральной плотности
[Л. 17].
Вычисление оценки спектральной плотности по
оценке корреляционной функции возможно тремя раз-
личными способами:
1) численным выполнением преобразования Фурье
оценки корреляционной функции;
2) аппроксимацией оценки корреляционной функции
аналитическим выражением и выполнением преобразо-
вания по Фурье с помощью таблиц;
3) вычислением непосредственно но оценке корреля-
ционной функции коэффициентов разложения спектраль-
ной плотности в ряд по некоторой системе ортогональ-
ных функций.
Остановимся подробнее на каждом из этих способов.
Численное выполнение преобразова-
ния Фурье. Исходными для получения формул чис-
ленного преобразования являются выражения:
оо
Sxx(w)= Rxx(x) cos vtdx;
—00
(3-46)
— /сот
'ух (7е0) J Ryx (т)
dT-^Re^^ + jIm^ (о).
(3-47)
При численном интегрировании пределы в этой фор-
муле заменяются конечными, что эквивалентно усече-
нию корреляционной функции в интервале [—Г, Т].
В случае, если корреляционная функция известна точно,
такое усечение ведет к появлению добавочной погреш-
ности. Если же вычисления производят по оценке корре-
ляционной функции, то эффект такого усечения двоя-
180
> 4 ь - •
кий. С одной стороны, оно вносит добавочную погреш-
ность, но, с другой стороны, «хвосты» корреляционной
функции вычисляются наименее точно при использова-
нии реализации конечной длины и усечение их умень-
шает дисперсию ординат оценки спектральной плот-
ности. Действительно, усечение корреляционной функции
можно считать умножением ее на некоторую функцию
конечной ширины, а в частотной области такое умноже-
ние преобразуется в свертку, т. е. оно эквивалентно
фильтрации спектральной плотности фильтром, импульс-
ная характеристика которого является Фурье-изображе-
нием усекающей функции.
Пределы интегрирования в формулах (3-46) и ,’(3-47)
следует брать приблизительно равными времени затуха-
ния корреляционной функции.
В качестве квадратурной формулы при вычислении
интегралов может быть использована формула трапе- .
ций.
1
$хх (°) = Rxx (0)4-2 £ Rxx (/n)cos/n®4-
tn —1
-\-Rxx(mh)co&mk^,
SBx (“) = Ryx (— cos (— znfto) -j-... 4- Ryx (m) X
X cos m<a 4- • • • 4" Ryx (fnk — 1) cos (mk — 1) <> 4-
4" 2 Ryx {ttik) cos ^mk j — / Ryx (— mk) sin (— 4-
+ • • • + Ryx — 1) sin (/ftfc; — 1) ° "F • • • +
+ Ry x(mh) sin
Вычисления следует производить до частоты (отр.
Ординаты -спектральных характеристик вычисляются
обычно для дискретных равноотстоящих значений аргу-
мента Ако. Расстояние между соседними значениями со
(шаг дискретности по частоте) можно выбирать по фор-
муле
— ———
1О/72Л *
13—121
181
Использование таблиц преобразова-
ния Фурье. Ввиду линейности преобразования Фурье
можно корреляционную функцию представить как сумму
Рис. 3-6. Элементарная
треугольная функция.
нескольких функций, преобразо-
вания Фурье для которых изве-
стны. Тогда спектральная плот-
ность может быть представлена
как сумма преобразований Фурье
этих элементарных функций.
Для процессов с монотонны-
ми корреляционными функция-
ми, которые чаще всего встреча-
ются в промышленных системах
регулирования, подходящими
элементарными функциями мо-
гут служить треугольные [Л. 41]. Корреляционную функ-
цию представляют в виде суммы треугольных функций
вида рис. 3-6. Каждой такой функции соответствует
спектральная плотность, равная:
Si (“) = 2Я I I
\ “2“ /
Треугольнику с единичными высотой и основанием
соответствует спектральная плотность
Имея график функции А (со), легко найти спектраль-
ную плотность для произвольного треугольника -с высо-
той Hi по формуле
Si (со) = А(со7\)//г.
На рис. 3-7 приведены пример аппроксимации тре-
угольниками корреляционной функции и соответствую-
щая спектральная плотность. Таблица значений функ-
ции А (со) приведена в приложении IV.
Разложение спектральной плотности
в ортогональный ряд. В случае численного цре-
образования корреляционной функции по Фурье мы по-
лучаем дискретную последовательность ординат спек-
тральной плотности. Чтобы получить спектральную
182
плотность в аналитической форме, необходимо аппро-
ксимировать эту таблицу дискретных значений какой-то
функцией. Часто можно существенно сократить объем и
повысить точность вычислений, если вместо отдельных
ординат спектральной плотности вычислять ее в форме
разложения по системе ор-
тогональных функций. При
таком способе определения:
1) искомая характери-
стика получается сразу в
аналитической форме;
2) выбором подходящей
функции веса для ошибки
приближения можно при не-
большом числе членов до-
биться удовлетворительного
приближения в нужном диа-
пазоне частот;
3) величина последнего
коэффициента разложения
во многих случаях дает гру-
бую оценку точности при-
ближения.
С точки зрения трудоем-
кости расчетов на ЦВМ
удобнее всего представлять
спектральную плотность в
виде разложения по системе
ортогональных полиномов,
так как вычисление полино-
мов требует лишь операций
сложения и умножения, а в
память машины засылаются
\R(t)
Рис. 3-7. Пример аппроксима-
ции корреляционной функции
треугольниками.
только значения коэффициентов полинома. Использова-
ние полиномов позволяет выбрать нужную весовую
функцию для ошибки в частотной области.
Весовая функция ошибки определяет, на каких ча-
стотах приближение окажется точнее, а на каких оно
будет менее точным, так как ошибка приближения сум-
мируется после умножения на величину весовой функ-
ции. Так что выбор функции веса имеет большое значе-
ние. Этот выбор определяется двумя обстоятельствами:
с одной стороны, теми требованиями, которые предъ-
являются к точности спектральной плотности использо-
13*
183
ванием ее в последующих расчетах, с другой — той точ-
ностью, которой обладает оценка корреляционной функ-
ции, служащая для вычисления спектральной плотности.
Остановимся на втором обстоятельстве. Как уже ука-
зывалось выше, точность спектральной плотности, каким
бы способом ее ни вычисляли, падает с уменьшением
частоты, ввиду того что при вычислении используется
не бесконечный процесс, а реализация конечной длины.
Если за меру точности принять среднеквадратичную
относительную ошибку, то эта ошибка будет обратно
пропорциональна корню квадратному из произведения
длины реализации на частоту. Естественно, не имеет
никакого смысла добиваться точного приближения
к спектральной характеристике в диапазоне низких ча-
стот, где точность самой этой характеристики очень
мала. Между тем именно так поступают некоторые
исследователи [Л. 42, 45], использующие моменты кор-
реляционной функции
00
Гй,= J Rxx W d-t,
—оо
которые являются, как легко показать, коэффициентами
разложения спектральной плотности в ряд Тейлора
(с точностью до постоянного множителя), определяю-
щимися производными спектральной плотности при
<о=О.
Одним из самых подходящих видов полиномов для
приближения спектральных характеристик являются по-
линомы Чебышева первого рода, весовая функция
ошибки которых
G («) = . 1 -
' 7 У1 —<оа
имеет минимум при со=О. Методика разложения по этим
полиномам изложена ниже.
Так как корреляционная функция задана в виде таб-
лицы значений ее ординат в ряде равноотстоящих то-
чек, то спектральная плотность, ей соответствующая,
имеет периодический характер и приближать ее нужно
лишь в диапазоне [—сотр, сотр], где <£»тр=л/Д/; А/ — рас-
стояние между соседними дискретами корреляционной
функции. Пусть ординаты корреляционной функции обо-
значены b—mk, ..., b0, ..., bmh. Коэффициенты
разложения спектральной плотности по полиномам Че-
184
бышева вычисляются непосредственно через эти орди-
наты по формулам:
X (3-48)
s=-mk
mk
+ ~ <3'49)
s=-mk
Здесь С2а и С2а + , — коэффициенты разложения дей-
ствительной и мнимой частей спектральной плотности
(мнимая часть появляется при вычислении взаимной спек-
тральной плотности); <р2а^ и ?2a + i,g— коэффициенты,
которые могут быть рассчитаны заранее (они приведены
в таблице приложения V).
Пример. Если вычисляется приближение спектральной плотности
по корреляционной функции, то C2a + j = 0 и формула (3-48) прини-
мает вид:
mk
£*2a ~ + 2 V bg<?2a,g ’
g=l
так как <p2a (0) = 0 при a =f= 0 и (Ф = 1 •
На рис. 3-8,а показана корреляционная функция, а на рис. 3-8,6
сплошной линией — соответствующая ей спектральная плотность и
пунктиром — ее приближение. Коэффициенты разложения вычисля-
ются по таблице приложения V:
Со= 1 +2(—0,368 • 0,3044 +0,135 • 0,2202—0,05.0,1813) =0,818.
Подобным же образом вычисляются другие коэффициенты:
С2=—0,502; С4=0,340; С5=—0,194; Clo=O,O38; С12=0,008.
Так как полиномы Чебышева
по модулю не превосходят едини-
цы, то величина коэффициента
указывает, какую максимальную
добавочную погрешность мы по-
лучим, отбросив соответствующий
член разложения. Так, при отбра-
сывании Тю и 7*12 погрешность
меньше или равна |Сю| + |С12| =
=0,046, или 2,3% S(0)=2.
Если ищется приближе-
ние взаимнокорреляционной
функции, то сходимость
можно существенно улуч-
шить, перенеся начало коор-
Рис. 3-8. Приближение спек-
тральной плотности полинома-
ми Чебышева.
185
динат во временной области в точку, соответствующую
центру тяжести фигуры, ограниченной линией взаимной
корреляционной функции и осью абсцисс, т. е. в точку
х=гп\ (гп\ — первый момент взаимной корреляционной
функции)
J gbs.
g=~mk
При перенесении начала координат в [гщ] ([mJ — це-
лое число, ближайшее к mi) частотная характеристика
запишется в виде:
о (со) = е о (со) =
— / [Ml]
= е
п
S с°.тим,
а = О
С°а вычисляются по формулам (3-48) и (3-49), причем
вместо bg в них подставляют ординаты bg_[nhr
Заметим, что в этом случае ошибка в определении
[mJ большой роли не играет, так как приближается
«центрированная» функция и эта ошибка компенсируется
изменением коэффициентов разложения CQa .
В [Л. 39] дан анализ различных методов ортогональ-
ного разложения спектральной плотности. Там показано,
что ошибка в коэффициентах (разложения, связанная
с конечной длиной реализации, тем меньше, чем меньше
скалярное произведение двух функций: функции веса
для ошибки ортогонального приближения и функции
дисперсии спектральной плотности, вызванной конечной
длиной реализации.
1= J G (со) Dr[S* (со)] dm.
—00
Эта величина всегда больше нуля, так как обе функ-
ции, стоящие под интегралом, существенно положи-
тельны.
186
3-4. ОПРЕДЕЛЕНИЕ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК
ОБЪЕКТА
Объект без обратных связей с одним
входом и одним выходом (рис. 3-9). Определе-
ние динамических характеристик объекта основано на
связи взаимнокорреляционных функций входного и вы-
ходного сигналов и шума, корреляционной функции
входного сигнала и импульсной функции системы:
J 0)K(0)dfl;+J?n:c(T). (3-50)
—00
Обычно входное воздействие и шум не зависят друг
от друга и их взаимная корреляционная функция равна
нулю. Уравнение (3-50) преобразуется в этом случае
к виду:
Rvx W = J Rxx (х - 0) X (0) db. (3-12)
6J
Решение уравнения (3-12) проводят тремя различ-
\n(t)
ными методами:
1) методом подбора ординат импульсной функции на
управляемом фильтре;
2) методом сведения уравнения (3-12) к системе ли-
нейных алгебраических урав-
нений;
3) методом преобразова-
ния Фурье.
Для решения уравнения
с использованием управляемо-
го фильтра нужна специальная
Рис. 3-9. Структурная схе-
ма объекта без обратных
связей с одним входом и
аппаратура и сам процесс под- выходом,
бора ординат импульсной
функции довольно сложно автоматизировать. Обычно
подбор производят вручную.
Сведение уравнения (3-12) к системе алгебраических
уравнений осуществляется путем замены интеграла по
какой-либо из квадратурных формул. Например, при
использовании формулы прямоугольников получаем си-
стему:
лг
Ryx (тг) = #хх ®г) К (®г)»
1 = О
g = —
187
где К(Тг); i=0, 1, ... — искомые значения импульсной
функций.
Чаще всего используют метод преобразования Фурье
ввиду следующих его преимуществ:
1. После преобразования уравнения (3-12) по Фурье,
т. е. перехода от корреляционной и взаимнокорреляцион-
ной функций к спектральной и взаимноспектральной
плотностям, получаем простое алгебраическое уравне-
ние:
Syx = Wоб (/со) Sxx (со). (3-51)
2. Решение этого уравнения дает нам амплитудно-
фазовую характеристику объекта, которая для после-
дующих расчетов исполь-
зуется гораздо чаще,
чем импульсная характе-
ристика.
Регулируемый
объект, охваченный
обратной связью
(рис. 3-10). При управле-
нии исследуемым объек-
том он всегда оказывает-
ся охваченным обратной
Рис. 3-10. Структурная схема
объекта, охваченного обратной
связью.
связью, которая может
осуществляться либо через автоматический регулятор,
либо посредством человека-оператора, если регулирова-
ние производится вручную. В этом случае входной слу-
чайный процесс оказывается коррелированным через
обратную связь с шумом n(f) и уравнением (3-12) поль-
зоваться нельзя; уравнение же (3-48) содержит неиз-
вестную функцию ₽пх(т), кроме искомой импульсной
характеристики К (0).
Если имеется такое входное воздействие, которое
коррелировано с сигналом на входе регулятора у и не <
коррелировано с n(t) (на рис. 3-*10 таким воздействием
является Xf(i/), то импульсную функцию объекта можно
найти из уравнения
ОО
теми же методами, которые упоминались выше.
В [Л. 44] предлагается определять две неизвестные
функции К(т) и ЯпИт) из двух уравнений, получаю-
188
щихся из (3-48) при двух различных настройках авто-
матического регулятора. Оба эти способа часто непри-
менимы, так как системы регулирования обычно кон-
струируются так, чтобы возмущения по |регулирующему
каналу были минимальными (т. е. Xi (/) =0). Не всегда
возможно также изменение настройки регулятора во
время нормальной рабо-
ты САР.
Если n(t) по своему
характеру близко к бело-
му шуму, то, как показа-
но в (Л. 45], корреляцион-
ная функция Rnx(x) от-
лична от нуля лишь при
т<0, а для положитель-
ных т уравнение (3-12)
оказывается справедли-
Рис. 3-11. Структурная схема
объекта с несколькими входами и
выходами.
вым.
Регулируемый объект с несколькими
входами и выходами (рис. 3-11). Наличие в объ-
екте п входов и т выходов не создает принципиальных
затруднений, если обратные связи отсутствуют. В ча-
стотной области определение характеристик объекта
сводится в этом случае к решению системы уравнений:
(/<*>) — w 1 (/<*) sXlXl (<•>) 4-... 4-
+ ^n(/to) Sx x (/co);
zz 1 .
sVl*n (/«)=sX]Xn (M+... 4- (3'52)
+ WV>). )
Эту систему нужно решать многократно при разных
значениях со.
ГЛАВА ЧЕТВЕРТАЯ
МЕТОДЫ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ
ХАРАКТЕРИСТИК В САМОНАСТРАИВАЮЩИХСЯ
СИСТЕМАХ
В самонастраивающихся системах характеристики
управляющей части системы меняются при изменении
динамических свойств объекта. Ввиду этого характери-
189
стики объекта необходимо достаточно часто измерять,
причем время измерения должно быть как можно
меньше. Как и в обычных, в самонастраивающихся си-
стемах могут быть применены методы введения испыта-
тельных сигналов и использования сигналов на входе и
выходе объекта, имеющих место при нормальной работе
системы.
В последнем случае в зависимости от уровня шума
могут быть использованы сами сигналы на входе и вы-
ходе объекта или их статистические характеристики.
Метод введения испытательных воздействий при за-
данной точности требует меньшего времени, но приводит
к нарушению нормального режима объекта. Использо-
вание статистических характеристик значительно более
трудоемко и потребное время также существенно уве-
личивается, однако при наличии шума этот метод обес-
печивает большую точность определения характеристик.
Кроме того, при его использовании не нарушается нор-
мальный режим работы системы.
4-1. ИСПОЛЬЗОВАНИЕ СИГНАЛОВ НА ВХОДЕ И ВЫХОДЕ
ИССЛЕДУЕМОГО ОБЪЕКТА
Ниже рассмотрим два метода, в которых для опре-
деления характеристик используются сигналы на входе
и выходе объекта при нормальной работе системы.
Разложение сигналов на входе и вы-
ходе объекта в ряд по системе ортого-
нальных функций [Л. 49]. В случаях, когда влия-
нием шума можно пренебречь, характеристика исследуе-
мого объекта определяется характеристиками сигналов
на его выходе и входе. Последние удобно получать в виде
ряда по выбранной системе ортогональных функций.
В этом случае при изменении любого из коэффициен-
тов ряда не приходится менять другие его коэффици-
енты.
Выходной сигнал объекта y(t) связан с входным воз-
действием формулой
y(f)= £ л(-с)К(/—
—ОО
Для определения динамических характеристик вход-
ной сигнал нужно представить в виде двух компонент:
190
y(t) = yc (t)+yx (t) =
0 f
= J x (t) % (t — -r) dt + J x (t) К (t — t) d-t.
Первая из них yc(i} соответствует энергии, запасен-
ной объектом в период, предшествующий началу опыта.
Вторая составляющая выходного сигнала у At) является
реакцией на входное воздействие %(/)., приложенное по-
сле момента /=0. Чтобы найти эту вторую составляю-
щую выходного сигнала, необходимо определить ус(0
и вычесть ее из суммарного сигнала y(t). Необходи-
мость определения ус(0 является одним из существен-
ных недостатков рассматриваемого метода, так как рас-
считать эту составляющую можно лишь очень прибли-
женно.
Выделение сигнала, обусловленного собственной
энергией системы, в [Л. 49] предлагается производить
следующим образом:
1. Задаются видом функции yc(t) в виде некоторого
ряда с конечным числом членов п.
2. п коэффициентов ряда определяют из условия, что
до момента /=0 производные всех порядков от нулевого
до п—1-го суммарного сигнала y(t) равны соответ-
ствующим производным ус(/):
Ус (°)=у (О—);
у'с (0) = /(0-);
! (4-1)
у(с"_1)(О) = у(п-1)(О—)• J
• Пример. Пусть у с (О можно представить в виде суммы двух
экспонент: ус (t) = Cie~f + C2e~5f и начальные условия при t=Q слева
равны: у (0—) = 1; у'(0—) =0. Согласно (4-37) получим два уравнения:
Ус (0) = Ci + C2= 1;
/с (0) =-С1+5С2=0,
откуда
^=4,2; С2=—0,2;
= 1,2е-*—0,2е-0’Б*.
Вычтя г/с (0 из у (/), получим используемую в даль-
нейшем составляющую yx(t), вызванную входным воз-
действием х.(/) дри />6.
.191
Следующим этапом является решение уравнения
свертки
t
Ух (t) = J (*) К (t — т) dt. (4-2)
б’
Для решения такого уравнения используют преобра-
зования Лапласа или Фурье. Если функции х(/) и ухЦ)
заданы численно, решение уравнения (4-2) производят
путем разложения x(t) и ух(1) в ряд по некоторой си-
стеме функций (в частности, для преобразования
Фурье — это ряд гармонических функций). По коэффи-
циентам разложения входного и выходного сигналов на-
ходят частотную характеристику исследуемого объекта
или параметры его передаточной функции.
Операцию вычисления коэффициентов разложения
функции
а=0
по системе ортогональных функций fa(t) можно произ-
водить по формуле
Ca=\y(t)fa(f)G(t)dt, (4-3)
4 о
где [0, а] — интервал, на котором осуществляется при-
ближение;
G(t)—весовая функция, определяющая распреде-
ление ошибки приближения на интервале
[О, а]; чем больше величина G(t) на некото-
ром участке интервала, тем точнее прибли-
жение функции на этом участке.
В самонастраивающихся системах, где параметры
исследуемого объекта изменяются со временем,’ знание
и точное описание функций в моменты времени, отстоя-
щие далеко от текущего, как правило, не очень суще-
ственны. Важнее обеспечить хорошее приближение
вблизи текущего момента времени. Поэтому функ-
цию G(t) выбирают убывающей со временем (рис.4-1,а).
Сравним формулу (4-3) с формулой, определяющей
сигнал Св(0 на выходе фильтра с импульсной характера-
192
стикой ha(t), на вход которого подается yx{t\.
т
с« (0 = J Ух W л« (z — х) dv> (4-4)
о
в момент t = a
а
с« (0 = J Ух (х) л« (° — х)dx- (4-4а)
О
Таким образом, если
0=f«(0<3(0. (4-5)
то выражение (4-4а) совпадает с выражением (4-3) и функ-
ция Ca(t) в момент а равна Са. На рис. 4-1, б дан при-
мер импульсной характеристики фильтра. Равенство (4-5)
технически сравнительно просто реализуется, если функ-
цйи fa(f) являются полиномами или экспоненциальными
S(t)
функциями, a G(t) имеет
вид экспоненты.
Рассмотрим анализа-
тор спектра, основанный
на системе ортогонализи-
рованных экспонент
[Л. 49]. Экспоненциаль-
ные функции не являются
взаимно ортогональными.
Однако из них можно со-
ставить определенные
комплексы, которые бу-
дут взаимноортогональ-
ными, с заданным весом
G(t). Подобный прием
широко используется для
полиномов, где задание
функции веса и условие
ортогональности одно-
ft
Рис. 4-1. Схема исследуемого
объекта.
значно определяют си-
стему полиномов. Система ортогонализированных экс-
понент для О(/) = 1 приведена в [Л. 51]. В самонастраи-
вающихся системах естественно выбрать функцию веса,
убывающую со временем, например
G(0=e-2b‘,
и интервал приближения а=<х>.
193
Сами же ортонормированные функции fa(t) удобнее
определить через их преобразования по Лапласу. Пусть
z=o
Условие их ортонормальности
(t)e~2btdt = bie
О
в комплексной области согласно теореме Парсеваля запи-
шется в виде:
с 4*/оо
2^- j Фг^+^ФЛ— p + b)dp = Zig, (4-6)
c—joo
где Фг(р) и Фй(р)—преобразования по Лапласу соот-
ветственно по fi(t) и
f>ig — символ Кронекера (6;g=il при i=g\
при i=£g).
Уравнение (4-6) позволяет определить Фа(р).
В [Л. 49] получено это выражение для случая действи-
тельных показателей экспонент &
_______(Р - 26 - 5,) (р - 26 - 50- • • (р - 26 -
Ф»^) — /2(/> — 6,) (р + Ь)(Р-Н0..-(р + и
При бесконечном интервале приближения формула для
коэффициента Са примет вид:
оо
CB = px(Of»(OG(O dt.
о
Ойнако в самонастраивающихся системах прибли-
жают не функцию yx(t), а функцию yxa(t), равную нулю
за пределами интервала [0, а]. Поэтому формула (4-3),
а значит, и выражения (4-4а) и (4-5) остаются справед-
ливыми. Из этих выражений получим:
h e-<ti + 2b)ae&+2b)t_^" e-^ + 2b)a еал + 2Ь)1^
(4-7)
194
Соответствующая импульсной характеристике (4-7) пе-
редаточная функция
И __________I____L аа-__________
Задавшись конкретными значениями b, а, получим
передаточные функции фильтров, осуществляющих ука-
занное разложение.
Например, для £г = Z; I — 1, 2, ..b = 5; а = 0,5.
0,0142
р— 13,9 „ р— 13,9
^2 (р) = — 0,0632 4,45 ’ р__12 тЛр)~
= Т\ (рУГ^р)
И т. д.
Блок-схема такого анализатора показана на рис. 4-2.
После того как изложенным способом вычислены ко-
эффициенты разложения Са для входного и выходного
сигналов, можно или вычислить амплитудно-фазовую
Рис. 4-2. Блок-схема .получения оптимального сиг-
нала.
характеристику исследуемого объекта как отношение
преобразований по Фурье входного и выходного сигна-
лов, или получить коэффициенты разложения в ряд этой
характеристики через вычисленные коэффициенты раз-
ложения входного и выходного сигналов. Если сигнал
на входе в объект имеет одинаковый вид на каждом из
интервалов продолжительностью а, то коэффициенты Са
для. yx(t) полностью характеризуют динамические свой-
ства объекта и самонастройку можно производить по
значениям этих коэффициентов.
Определение параметров объекта с по-
мощью самонастраивающейся мо-
дели/ В тех случаях, когда видом передаточной функ-
ции объекта или его переходной характеристики зада-
195
ются, оставляя свободными лишь значения параметров,
мы будем говорить, что характеристики объекта опреде-
ляются с использованием подстраивающейся «модели».
Последняя может, существовать лишь номинально, опре-
деляя тот алгоритм, согласно которому перерабатывает-
ся входной сигнал объекта. Результат обработки (выход
фактическим выходным
сигналом y(’t) и пара-
метры «модели» под-
бираются так, чтобы
минимизировать сред-
нюю разницу между
этими двумя сигнала-
ми за определенный
период времени.
Здесь можно выде-
лить два подхода:, в
первом из них пара-
метры модели заранее
модели) ym(t) сравнивается
Рис. 4-3. Фильтр.
а — весовая функция приближения; б —
определение импульсной характеристики
фильтра.
рассчитываются так,
чтобы при произвольных сигналах на входе и выходе
объекта добиться минимума критерия ошибки. Получен-
ные формулы связывают параметры «модели» с харак-
теристиками сигналов на входе и выходе объекта; при
втором подходе параметры «модели» подбираются ме-
тодом поиска таких значений, при которых достигается
минимум выбранного критерия ошибки между y(t) и
Ут(Ю-
Примером расчета коэффициентов модели по заранее
выведенным формулам может служить метод Калмана
[Л. 52]. Согласно этому методу коэффициенты переда-
точной функции объекта выбираются из условия мини-
мума рредней квадратичной ошибки между выходом мо-
дели и объекта при подаче на их входы одинакового
сигнала.
Метод подбора параметров модели путем поиска
оптимальных значений параметров [Л. 54] очень прост
с точки зрения своего алгоритма (рис. 4-3). На вход мо-
дели и объекта подается один и тот же сигнал, сигналы
же с их выходов подаются на вычислительное устрой-
ство, которое непрерывно вычисляет критерий, опреде-
ляющий их различие, например рреднеквадратичную
ошибку, и в некоторой последовательности меняет пара-
метры модели, добиваясь минимума критерия ошибки /0.
196
При этом желательно, чтобы параметры модели были
взаимно ортогональны в смысле выбранного критерия,
т. е. значение параметра модели ag, при котором дости-
гается минимум Io(aQ, ..., ag), не зависело от значе-
ний других параметров. В этом случае поиск мини-
мума /о при последователь-
ном движении по п пере- ----- //<f)
менным может быть завер-
шен за и шагов.
Определение
упрощенных показа-
телей качества за-
мкнутых САР. Во многих
практически осуществлен-
ных системах характеризу-
ют наиболее существенные Рис 4.4 Блок.схема анализа.
свойства системы. Так, в ТСра.
[Л. 55] определяется резо-
нансная . частота системы.
При изменении коэффициента усиления регулируемого
объекта перемещаются ближайшие к оси корни харак-
теристического уравнения системы, оказывающие наи-
большее влияние на переходный процесс. Положение
этих корней приближенно определяется резонансной ча-
стотой системы. При расчетном расположении корней
коэффициент усиления разомкнутой системы
<аз = М*Г-. (4-8)
Изменение АОб приводит к необходимости такого
изменения kp, чтобы равенство (4-8) не нарушалось. Си-
стема определения динамических характеристик крайне
проста (рис. 4-4) и состоит из двух фильтров Ф1 и Фг
низких и высоких частот. Постоянные времени и коэф-
фициенты усиления этих фильтров выбираются так, что-
бы при расчетном коэффициенте усиления (а, значит,
и расчетной резонансной частоте) сигналы на их выходах
были равны. Разность сигналов подается на интег-
рирующую следящую систему, которая меняет коэффи-
циент усиления регулятора, поддерживая таким обра-
зом равенство (4-8) при изменении йОб-
В системе, описанной в [Л. 53], в качестве показателя,
определяющего правильность настройки регулятора,
принято отношение положительной площади импульсной
характеристики S+ к отрицательной 5- (рис. 4-5). Для
197
системы второго порядка
это отношение однознач-
но связано со степенью
затухания ф формулой
ф=1 -(4?) • <4'9)
*£. Более сложную си-
Рис. 4-5. Определение параметров стему МОЖНО Приближен-
объекта с использованием модели, но охарактеризовать си-
стемой второго порядка.
В условиях непрерывно действующих на систему воз-
мущений ее импульсную характеристику подсчитывают
как взаймнокорреляционную функцию между входным
сигналом и белым шумом, генерируемым специальным
генератором и подаваемым на вход системы по исследу-
емому каналу.
Рис. 4-6. Упро-
щенное устройство
для определения
динамических ха-
рактеристик си-
стемы.
4-2. ИСПОЛЬЗОВАНИЕ СТАТИСТИЧЕСКИХ ХАРАКТЕРИСТИК
СИГНАЛОВ НА ВХОДЕ И ВЫХОДЕ ИССЛЕДУЕМОГО
ОБЪЕКТА
Определение статистических характеристик.
Определение статистических характеристик в самонастраивающихся
системах необходимо как для коррекции характеристик управляю-
щего устройства при изменении свойств регу-
, ’ лируемого объекта, так и для оптимизации ре-
жима работы самого объекта.
Пусть на входе объекта имеется N незави-
симых каналов (рис. 4-6), для каждого из ко-
торых необходимо получить коэффициент уси-
ления
Дг/(оо) Г
о
где у — величина на входе объекта;
хп — воздействие по n-му входу;
hn (О — импульсная характеристика объекта по
n-му каналу.
Сигналы хп будем считать случайными стационарными процес-
сами. В этом случае взаимнокорреляционная функция
N оо к
яХпУю=S 5hn (/) Rvm - °di- (44
т=\ б
Интегрируя обе части равенства (4-11) по т, получаем:
оо N оо оо
- J R^) dt = £ J hn (0 J (г-t) dtdx. (4-12)
—оо 0 —oo
198
Откуда можно определить коэффициент усиления:
М оо
J Л- (4-13)
/71=1 —00
Элементы матрицы а~^ находятся путем инверсии матрицы
«11 «12 . • • «|#
«21 «22 • • •
)
аЛ71 ®V2 • • • aMN
с элементами
оо
“mn = J RXnXmb) d-c.
—оо
В случае, когда сигналы xg не коррелированы друг с другом,
матрица а диагональна и
О
О
откуда
оо
{ W *
—оо
f Rx х (*) dt
J nm
—io
(4-14)
В случае регулярных сигналов в формуле (4-14) вместо корре-
ляционных могут использоваться передающие и взаимнопередающие
функции.
Определение динамических характеристик.
В тех случаях, когда влияние шумов существенно или когда нет
возможности подавать пробные сигналы большой амплитуды для
определения характеристик промышленных объектов в самонастраи-
вающихся системах, используют статистические методы. При этом
непрерывно определяют текущую взаимнокорреляционную функцию
входа и выхода, а по ним — текущие параметры импульсной пере-
ходной или передаточной функции.
Как правило, в самонастраивающихся системах нет необходи-
мости определять ординаты корреляционных функций, достаточно
199
определить лишь небольшое число их существенных параметров.
Такими параметрами могут служить коэффициенты разложения кор-
реляционной функции или соответствующей ей спектральной плотно-
сти в ряд по заранее выбранной системе ортогональных функций.
Последняя должна выбираться таким образом, чтобы обеспечить
быструю сходимость приближения в диапазоне частот, важном для
определения параметров регуляторов. Выбор вида разложения и
оценку его сходимости удобнее производить в частотной области.
Покажем, как по виду ортогонального разложения, выбранному
в частотной области, перейти во временную область, чтобы по корре-
ляционным функциям непрерывно вычислять коэффициенты разло-
жения. Причем выкладки будем^ производить для взаимной спект-
ральной плотности; при этом результирующие формулы для спект-
ральной плотности входного сигнала упростятся.
Будем вычислять взаимную спектральную плотность входного
сигнала х и выходного сигнала у в форме
00
$,,(«) = ЗХ?». (4-15)
а=0
' где Са — коэффициенты разложения:
«я
сл = J Sxy (ш) («) G (w) dco; (4-16)
Та (w) — некоторые ортогональные функции со
[—со], сог]— интервал, в котором осуществляется приближение; с
G(co) —функция веса ортогонального разложения.
Чтобы найти коэффициенты Са по взаимнокорреляционной
функции являющейся оригиналом изображения по Фурье
функции (со):
00
$«„(<»)= J £«„(*) г-'*" dt,
—00
подставим последнее в (4-16). Меняя порядок интегрирования, получим
са — J Rxv (т) dt j (<o)t?(w) dco. (4-17)
—00 —<01
Обозначив в (4-17)
<оа
М’) = J d«>,
формулу (4-17) можно переписать в виде:
• 00
J ЛхДг)^(г) dt. (4-18)
200
Из сравнения (4-53) и (4-54) следует, что fa(y) являются коэф-
фициентами разложения функции по системе (со) в интервале
[—со1э со2] с весом G (со).
Заметим, что если получены fa(t), то трудоемкость вычисления
коэффициентов Са по формуле (4-55) приблизительно такая же, как и
при вычислении отдельных ординат спектральной плотности по фор-
муле Фурье-преобразования.
(/со)06
Пример. Пусть (со) = —; G(co) = 8(co); со1 = со2=оо, что
соответствует разложению Sxy (со) в ряд Тейлора в окрестности со = 0.
Чтобы найти /а(т:), следует произвести такое же разложение функции
= 1 _|_ /сот
(М)2^2 , ,(М)ата
2 * * "*" а! *"
Коэффициенты этого ряда |а(т) = та. Согласно (4-18) коэффи-
циенты разложения спектральной плотности могут быть получены по
взаимнокорреляционной функции
оо
Са= J Rxv(^adx.
—00
Выбор функции веса G(со). Нельзя дать универсальных
рекомендаций по выбору функций <ра(со) и 6(со), так как на него
существенно влияют и вид искомой спектральной плотности, и тот
диапазон частот, в котором требуется обеспечить наиболее точное
приближение. Мы остановимся на влиянии такого общего для всех
случаев определения характеристик фактора, как ограниченность
длины используемой реализации [Л. 39]. В самонастраивающихся
системах характеристики объекта нужно определить с заданной
точностью за возможно более короткое время. Поэтому длина реа-
лизации существенно ограничена. При этом коэффициенты вычис-
ляются не по истинным корреляционным функциям, а по их оцен-
кам. Как указано выше, эти оценки можно считать несмещенными.
Обозначим через S(co) приближаемую функцию, через Si(c«)) =
=S(g)) 4-'Дг-(<о)—ее оценку, полученную в результате t-го экспери-
мента. S*j((d)—приближение Si (со), полученное при конечном
числе членов ряда (4-15). Выбирать 0(со) нужно так, чтобы 5*<(со)
было возможно ближе к истинной функции S(co), хотя коэффициен-
ты разложения вычисляются по формуле (4-16), где вместо S((o)
подставляется Si (со), или, что эквивалентно, по формуле (4-18),
в которой стоит оценка корреляционной функции. Погрешность при-
ближения будем оценивать величиной интеграла
/= Л4 J [S (ш)-$%(<->)]= d®, . (4.19)
(Oj
где М — знак математического ожидания при усреднении по i.
По условию несмещенности
ЛЦДх(со)]==0. (4-20)
201
14—121
Обозначим дисперсию оценки
М[Д? (®) ] = D(®).
Выражение (4-19) можно теперь переписать:
<Оа П Wj
1= М J ( S (®) — fa(®) J Is (®) + Д< (®)1 ?л(®) ° (») rf®}2 d® —
—<Pi а =0 —(Oj
®a , П ®2
= Л4 { S (co) — S* (co) — ffc (co) J (co) ya (to) G (co) dco J- dco,
—a=0 —a>i
где
n ©Д n
•S* (®) = У fa (<") J S (®) fa(®) ° (®) rf® Cafa (®)
a=0 —<0j a=0
представляет собой приближение S(co), которое может быть полу-
чено, если функция S (со) известна точно.
Учитывая условие (4-20) и меняя местами операции математи-
ческого ожидания и интегрирования, получим:
«а «
/= J [S(<O)-S* (®)Г <*<>+ J £fa(®)X
—®i —(Oj a=0
®а
XA1[ J Ai (co) <f>a (co) G (co) dco ]2^co = Z0+Z1. (4-21)
—
Первый из записанных выше интегралов представляет собой
квадратичную погрешность приближения функции S(co) при отсут-
ствии погрешности А,(со). Так как приближение осуществляется
не по самой функции, а по ее оценке, появляется добавочная по-
грешность /1. Эта погрешность непосредственно связана с диспер-
сией коэффициентов разложения С/а:
«я
О [Qa 1 = м. 1С?а] - м2 [С1а 1 = м { у д, (®) ?а (®) о dw}2,
—
(4-22)
так как
®а ®а
М У [S (со) + А< (со)] (со) G (со) с/со = j S (со) <pa (со) G (co)’d&>.
—а>х
Учитывая (4-22), выражение для добавочной погрешности h
можно переписать в виде:
п <Оа
Л= £о[Сг«] J fl(®)rf®. (4-23)
a=0 —<ох
202
Покажем, что верхняя граница для дисперсии коэффициентов
разложения зависит от скалярного произведения функций D(co) и
G (т). Для интеграла в (4-22) можно записать неравенство Буня-
ковского:
I j (со) КG (со) уа(со)/ G (со) с/со j <
---<0,
«Я
J Д? (со) G (со) dm J <ра (со) G (со) dm. (4-24)
—<Oj —(Oj
Пэ условию ортогональности второй интеграл в первой части не-
равенства (4-24) равен единице, С учетом этого получим:
<О2 (О2
£ A?G(<o)d<o= j £>(<o)G(<o)d®. (4-25)
4 —(Oj —(Oj
Дополнительная погрешность приближения
<O2 n <o2
Ii j D (co) G (co) dm J (co) dm. (4-26)
—co, a —0 —
Чтобы уменьшить эту погрешность, нужно выбирать G (со) малым
на тех частотах, для которых велика дисперсия оценки спектральной
плотности. Ii обращается в нуль, если G (со) и D (со) взаимноортого-
нальны. Однако особенности этих функций: Z)(co)^=0; G(co)^0;
<°2
J G(m)dm~l обычно не позволяет добиться их взаимной ортого-
—О)1
нальности.
Дисперсия оценки спектральной плотности, полученной по реали-
зации конечной длины, растет с уменьшением частоты приблизитель-
но обратно пропорционально [Л. 56]. В свете сказанного выше до-
бавочная погрешность, вызванная неточностью оценки спектральной
плотности, может быть особенно велика, если О(со) =6(со). При
использовании метода моментов [Л. 42, 43] имеет место именно этот
случай. Действительно, моменты корреляционной функции случайного
процесса с точностью до постоянного множителя равны коэффициен-
там разложения спектральной плотности в ряд Тейлора:
(da [S(m)] )
т = I ---------- s • •
Весовая же функция разложения в ряд Тейлора
G(co) =б(со).
Таким образом, моменты целиком определяются^ характером
оценки спектральной плотности в окрестности нулевой частоты, т. е.
там, где эта оценка наименее точна.
При той же длине реализации точность вычисления моментов
будет значительно меньше, чем, например, точность вычисления
14* 203
плотности при тех же условиях в
Рис. 4-7. К определению показа
теля качества.
ординат спектральной плотности [G (со) = const], а при одинаковой
точности придется существенно увеличить длину реализации. Этот
вывод подтверждается экспериментально. Так, при определении
первого момента случайного процесса, полученного пропусканием
белого шума через инерционное звено первого порядка с постоянной
времени с точностью порядка 10% потребовалась длина реали-
зации около 2 400 Ti [Л. 42]. Между тем для ординаты спектральной
[Л. 7] рекомендуется длина реа-
лизации, равная 3071, т. е. в 80
раз меньшая. Такое резкое уве-
личение потребной длины реа-
лизации является результатом
неудачного выбора функции ве-
са ортогонального разложения.
Улучшение сходи-
мости р а з л о ж е н и я в з а-
имной спектральной
плотности. Химико-техноло-
гические, тепловые и многие
другие объекты регулирования
часто обладают запаздыванием.
Наличие запаздывания в объек-
те приводит к тому, что взаим-
ная спектральная плотность входного и выходного сигналов
носит колебательный характер, ибо включает множитель
К подобному же результату приводит и инерционность объекта,
состоящего из ряда последовательно включенных апериодических
звеньев. И та, и другая причины во временной области соответству-
ют сдвигу кривой взаимнокорреляционной функции вправо. Чем пра-
вее расположен центр тяжести площади взаимно-корреляционной
функции относительно оси т=0, тем с большей частотой колеблются
действительная и мнимая части взаимной спектральной плотности.
Между тем практически при всех разложениях вида (4-15) первые
их члены имеют монотонный характер. Чтобы обеспечить хорошее
приближение взаимной спектральной плотности при небольшом чи-
сле членов разложения, удобно перейти от приближения функции
Sxy (со) к приближению функции
которая носит плавный характер, а получившееся разложение умно-
жить на е1<йт. Во временной области это соответствует подстановке
в формулу (4-18) вместо Rxy(x) функции Яху(х+т). Величину т
удобно выбирать таким образом, чтобы ось т=0 проходила через
центр тяжести площади, ограниченной кривой /?Х2/(т+т) (рис. 4-7),
т. е. т должен быть равен первому моменту взаимнокорреляционной
функции, вычисляемому по формуле
а
т— (4-27)
~ъ
Коэффициенты, полученные по формуле (4-18) для Саш, зави-
сят от т.
4
Общая схема определения динамиче-
ских характеристик. Определение динамических
характеристик объекта по -статистическим характеристи-
кам входного и выходного сигналов в самонастраиваю-
щейся системе состоит
из следующих опера-
ций (рис. 4-8):
1. Центрирование
сигналов на входе и
выходе объекта.
2. Вычисление пер-
вого момента взаимно-
корреляционной функ-
ции.
3. Вычисление ко-
эффициентов разложе-
ния спектральной плот-
ности входного сигна-
ла.
4. Вычисление ко-
эффициентов разложе-
ния взаимной спек-
тральной ПЛОТНОСТИ Рис. 4-8. Объект с несколькими вхо-
5х?/(<о), соответствую- дами-
щей взаимнокорреля-
ционной функции входного и выходного сигналов, цен-
трированной относительно своего первого момента т.
После проведения этих операций амплитудно-фазо-
вая характеристика исследуемого объекта получается
в виде:
S (®)
W (jv. t) = е->^т ---
(»)
а=0
Если параметры объекта можно считать неизмен-
ными; то параметры управляющей части системы зави-
сят от коэффициентов da(/), определяющих характер
возмущающего воздействия. Эти зависимости могут быть
заранее подсчитаны и введены в систему самонастройки.
Если же возмущения неизменны, а меняются лишь пара-
метры объекта, то эти изменения характеризуются из-
205
менением т\ (t) и С*аот (/). В этом случае следует связать
перестройку управляющей части с этими параметрами.
Таким образом, значения частотной характеристики
Wijca, t) приходится вычислять лишь тогда, когда пере-
менны и характер возмущения, и параметры регулируе-
мого объекта.
4-3. ВЫБОР ИСПЫТАТЕЛЬНЫХ СИГНАЛОВ
В этом параграфе будет рассмотрена задача о выборе испы-
тательного сигнала, который за заданное время позволяет определить
некоторый параметр объекта с максимальной точностью. (В само-
настраивающихся системах часто изменяются со временем не все
параметры объекта, а некоторая
их комбинация aj, которую можно
считать одним из параметров).
Испытательный сигнал не мо-
жет быть очень велик и ввиду
ограниченности энергии источника
возмущений и из-за возможности
выхода испытуемого объекта из
зоны линейности.
Рис. 4-9. Центрирование . Наличие случайных возмуще-
взаимнокор,реляционной нии’ шУма измерения и других
функции помех не позволяет за время Т
определить точно параметр щ.
Можно определить лишь его оцен-
ку, являющуюся случайной величиной. Лучшим испытательным сиг-
налом является такой, который дает возможность получить несме-
щенную оценку параметра а\, обладающую минимальной дисперсией.
Зависимость дисперсии параметра от харак-
тера шума и входного сигнала. Будем рассматривать
линейные объекты с передаточной функцией 1Г(р, аь...» ап), зави-
сящей от параметров Помеху, приведенную к выходу объекта
п(/), считаем стационарной, имеющей нулевое математическое ожи-
дание (рис. 4-9), не коррелированной с х(/) и достаточно малой,
чтобы зависимость функции y(ai, t) от можно было считать
линейной. Обозначим через aQi истинные параметры объекта, через
ai = a°i+Aai — рассчитанные параметры. Нужно так выбрать х(/),
чтобы ai возможно меньше отличались от истинных. Причиной ошиб-
ки является наличие шума n(t). Так как среднее значение n(t) рав-
но нулю, то и ikai можно считать в среднем равной нулю. Поэтому
ошибку в определении параметра ai можно характеризовать дис-
персной величины Aflv
Параметры объекта будем определять из условия минимума
среднеквадратичного за время наблюдения Т значения разности
е(/) между фактическим сигналом f(t) и расчетным:
У (t» #1» • • • » , • • • , ^m) J
T T
Е = у J «2 (0 dt = ^(П ~ «(')- 0° (ОТ Л- (4-28)
О, о
206
Учитывая малость n(t), можно записать:
т
/=1
(4-29)
Подставив (4-29) в (4-28) и дифференцируя по Да», получим
условие ’минимума Е в виде системы п уравнений:
т m
|!<й=
О /=1
2 Г/<1 ду* ду*
Т J 11 да* да* ~~ ” даг) dt~°
о i=l
(g= 1, 2, ..m),
или
т
1 № ..
T }даг dag at
С ду' dt
О
(4-30)
Т~
1 Г
(4-32)
Обозначив через
т
d<s= —ya^\ifun bg=y-j«w
0 О
систему (4-30) можно записать в матричной форме:
II Да< || \\die П |1CJ|.
Здесь t/О (/) =— функция чувствительности координаты у
относительно параметра аг [Л. 46].
Параметры и ag линейно независимы, если линейно неза-
висимы соответствующие им функции чувствительности? Для линей-
но независимых параметров определитель Д матрицы lldfgll, являю-
щийся определителем Грамма для системы функций чувствительно-
сти, не равен нулю и система (4-32) имеет единственное решение:
(4-31)
т
(4-33)
где
m
£=1
а — алгебраические дополнения матрицы lldigll.
(4-34)
207
Чтобы найти дисперсию величины Дйг, нужно вычислить среднее
значение ее квадрата при усреднении по множеству:
т т
D [Дя$] = Da. == (О A* (tt) n (/) n(t^dt dtx~
о 0
T T T
= ~f2 J ?»(’) ^Ai{tl+-z)Ai(t)dtldi=^-^ У?п(х)?л. (t)dt. (4-35)
оо о
Здесь черта над интегралом означает осреднение по множеству.
?п (*) — корреляционная функция шума; <рА (т) — передающая функ-
ция сигнала А{ (f); v — t—
В частотной области при достаточно большом Т дисперсия при-
мет вид:
00
^ai ~ 2пТ2 J 5Л (w) (4-36)
—00
где Sn(co)—спектральная плотность шума; 5А((о) = |Л(/со) [2;
А (/(о)—преобразование Фурье функции ЛД/).
Выражения (4-35) и (4-36) позволяют сравнить значения дис-
персии параметра ai при различных входных сигналах, не» делая
предположения об ортогональности параметров, как это было сде-
лано в [Л. 47].
Функция чувствительности уа (/) зависит от входного сигнала
х (0 и функции чувствительности Ка (t) импульсной характеристики
к параметру а^.
00
^.(0 = jKfl,(T)x(/-T)^. (4-37)
о
В частотной области
dW (/со)
Ya. да; ~ Х № = Wa. * №)• (4*38)
Элементы матрицы || зависят от спектра сигнала x(f):
00 00
ir If
= “2лГ J Yag 0'®) Уа4 V®) J S<« । Л I2
—oo —oo
(4-39)
Здесь
Sig(j^ = WaiQw)Wag(j«>).
(4-40)
208
Во временной области
^«=7^ ^x(t)Kie(i)dt, (4-41)
О
оо
где Kie = \ка№а
иг g
о
В случае независимости параметров а»- матрица || dig || диаго-
нальна и
Уа< Ю Уа{ (О
Ai ~ = --------------------------• (4'42)
T'J'P* (t)Kig{f)dt
о
Дисперсия параметра л» после подстановки (4-42) в (4-35) равна:
т
(•’) fyaf dz
. (4-43)
(j fx(t)Kii(t)dt j2
Здесь
.(О =J<fx (0 Kii (г - О dt. (4-44)
О
Подставив выражение (4-44) в числитель (4-43)~и изменив поря-
док интегрирования, получим: *
т т т
(oj <fn^)Kn^ — t)dtdx= [мОм(()Й.
Oo о
Окончательно во временной области
т
^x(t)<tnh(t)dt
' Dat = -4---------------- . (4-45)
( J МОКн (о«)г
Так Ka(t) и (рп'(О—'четные функции, то и српь(О четно.
В ^частотной области при достаточно большом Т получим:
00
J |Х(М)|2|Га. (/со)|25п(со)^
о_________________г__________________
00
1 / f V
-2^^1^(М)|2|Га. (/<o)|2^J
(4-46)
о
20Q
Если, шум n(f) белый и его спектральная плотность S„ (<о) = ЛГв,
то выражения (4-45) и (4-46) упрощаются:
п К» N„
Dat=-f----------------=----»---------2-------------♦ (4-47)
jVc (O*<« (i)dt J_ J|^'(M)|2|W'fl. (jai) pd®
0
Выбор формы исходного воздействия при огра-
ничении на энергию x(t) вида:
00 оо
jxa(0d<=v j|X(/<o)|ad<o<C. (4-48)
О о
Так как с ростом амплитуды входного сигнала при постоянной
его форме величина Dai монотонно падает, то в (4-48) можно оста-
вить знак равенства.
Рассмотрим случай ортогональных параметров объекта. Для
белого шума минимум Dai соответствует максимуму интеграла от
произведения | X (/») |2 и 1(/со) |2, причем согласно (4-48) пло-
щадь | X (/<в) |2 задана. В этом случае максимальную точность обеспе-
чивает гармоническое входное воздействие с частотой сото, равной ча-
стоте, на которой модуль W а (ja) достигает максимума:
|X0(/co) |2=С6(со—сот). (4-49)
В том случае, когда шум имеет спектральную плотность Sn(©),
нужно минимизировать функционал (4-46) при условии (4-48). Легко
показать [Л. 48], что минимизация этого функционала эквивалентна
минимизации функционала
Я = J I X (/®)Р I Wa, (j®) |а S„ (®)d®- Л, J| -Y(/®)|21 Го< (/®) р d®,
О * о
(4-50)
причем
f |X0(/®)a|]U7 (j®)pSn(«)d®
Л. = 2-Ц-------------------------------• (4-51>
j (/«) l2d®
Из (4-50) следует, что и в этом случае Хо(/а>) имеет вид (4-49),
с той разницей, что сош— частота, для которой произведение
|IF(/co)|2(Sn(co)~Ai) минимально. Подставив оптимальный входной
сигнал (4-49) в (4-51), получим:
Ai = 2Sn((0m).
Таким образом, в случае шума со спектральной плотностью
Sn((o) и ограниченной энергии входного сигнала оптимальным будет
210
гармоническое входное воздействие частоты со, для которой вы-
ражение
R (<о) = J Wai (/со) |2 [Sn (<о) - 2Sn (©„)] (4-52)
минимально.
Дифференцируя R(co) по со и приравнивая нулю производную,
получаем уравнение для определения сот:
/ d \ f d \
Sn (««.) | Wat и.) I* )e= Шт = I waf (j<om) |2 S„ (е)
(4-53)
Пример. Пусть частотная характеристика объекта имеет вид:
&
Определим оптимальную по отношению к параметру Т частоту
входного воздействия.
a) Sn (со) =М). Ищем частоту, на которой выражение
&2со2
| WТ (/®) |2 = 0 72(02)2
1
максимально; сот == -у- •
б) Спектральная плотность шума
Sn(C0)— Q2_|_p2 •
Из (4-53)
2D? 2К2<от(1—Т2®^) _ К*<л2т 4Рр®го
<+?2' (1+ГЧ)’ (1+Г2<)‘ (<^ + Г)‘ ’
откуда
* Р
m у 72^2 __ 2 ’
Ортогонализация параметров исследуемого
объекта. Степень взаимосвязанности параметров а» и ag можно
оценить нормированным коэффициентом корреляции соответствую-
щих им функций чувствительности
ОО
J Уа( (t)yag(t)dt
О_____________________
г— оо •
(0dt
о 6 е
(4-54)
Эта величина равна нулю, когда ai и ag ортогональны, и еди-
нице, если они пропорциональны друг другу.
211
том случае, когда входное воздействие выбирается, исходя
из т^бования наибольшей точности определения одного из пара-
метР^ объекта (их комбинации) аь и коэффициенты корреляции
вь#^Ного параметра с остальными значительны, необходимо про-
вес^ ортогонализацию параметров относительно а\. При этом мо-
же< §ыть использована известная процедура ортогонализации
Ш^а.
мУсть исходные параметры системы а2,..., ат. Ортогонали-
ЗИрРв^нные относительно «1 параметры 02=^1, а2,..., ат могут
бьгг Найдены по формулам:
1
“2 ~а2— д21(Х1»
т— 1
Z=1
^эффициенты Aig определяются последовательно из условий
орт^алиэзции:
Уа~Уа2^ +Уа1-^-Уа2-^У^ (4-55)
(Уа1> У а) = (Уа1Уа^ - Л2 1 0/а1’ У а) >
отк/^
00
. О
^2 1 — 00
(0 <#
о
^^iaлогично для других коэффициентов
оо
\Уа. (^Уа (0 &
J г g
Mi=°—----------------. <4-56>
f y2ai (О dt
6
^^ожность выбора оптимального сигнала для случая неортого-
нал/^х параметров заключается в том, что коэффициенты Aig
зав^**г от входного сигнала, который нужно находить одновременно
с в^^слением этих коэффициентов. Задача несколько облегчается
при Граничении энергии входного сигнала, когда его оптимальной
фор^^ является гармоническое колебание, характеризующееся ча-
стой
21?
Пример. Вычислим коэффициент корреляции между параметра-
ми /С и Г передаточной функции W(p) =К/Тр + \ для гармонического
воздействия x(7)=sincomZ и cow = l/T. В формуле (4-54):
yT(t) =МТ sinfcOmZ+^T);
Ук(1) =МК sin((Ozn^ + <PA),
где MTi Мк, <рт, фк—соответственно модули и фазы №г(/со) и
WK(j®) на частоте сот. Подставив эти функции в (4-54), получим:
2те/%п
J sin (umt + <рк) Sin (u>mt 4- fr) dt
______________0
ГТК “ / 2и/Фт 2те/"т_________*
у j* sin2 (<amt 4- ^J^dt sin2 4- yr) dt
6 0
Вычисление этого выражения с учетом того, что (©т) = —"4,
а <рг (Ют) =—я, дает:
~4=~ = 0,71.
тк У 2
Чтобы найти вид оптимального по отношению к Т сигнала, нуж-
но провести ортогонализацию этих параметров. Обозначим: ai — T;
а2=К. Тогда ортогональные параметры
ai=ai = T;
°2 = /< —лГ,а*’
a
“2 + лг1“’
Г(/о>) =------—г-,—
v 7 04/(04-1
где
2”/mm
Г sin (сот/ 4- Мт sin (<от/ + <рг) di
0 __ ТчОуп
(1+Г24)‘
A21
2it/ar
' ш
J Мр sin2 (comf 4- dt
о
В случае белого шума оптимальная частота входного сигнала со-
ответствует частоте, на которой |^2i(/©)|2 максимально
- "'гОЧ + г, </»>-g=
IF nvd2 ^(Г-КА21)2+1_ 1 1 / КТ® У
I “*V }l A|t (Г2®2 4.1) Т2®2 "г 7Ц' “ 1 + Г2®2 ) •
213
Эти функции максимальны при низких частотах. Следовательно,
оптимальным входным воздействием будет скачок, величина которо-
го выбрана так, чтобы его полная энергия за время наблюдения
была равна заданной.
Ограничение на максимальную амплитуду
входного сигнала. Рассмотрим случай, когда на входной
сигнал х(/) наложено ограничение вида:
|х(0|<С (4-57)
и помеха n(t) имеет равномерный спектр.
Для белого шума оптимальным входным воздействием по от-
ношению к параметру а согласно (4-43) будет такое воздействие,
которое обеспечит максимум среднеквадратичного отклонения сиг-
нала на выходе динамической системы с передаточной функцией
№а(р) и импульсной характеристикой (0.
Таким образом, нужно решать вариационную задачу о поиске
функции x(t) при ограничении (4-57), доставляющей максимум функ-
ционалу
т
(4-58)
oJ
при условии1
т
ya(V^x(i)Ka(6-t)dt. (4-59)
О
Записав уравнение (4-59) в виде дифференциального уравне-
ния, можно было бы использовать для решения задачи принцип
максимума. Однако, помимо усложнения выкладок, такое решение
неудобно в случае, когда импульсную характеристику получают
экспериментально. Поэтому приведем поставленную задачу к про-
стейшей изопериметрической задаче, т. е. задаче с дополнительными
условиями типа изопериметра, причем подынтегральная функция
в максимизируемом функционале и интегралах, представляющих
дополнительные условия, не зависит в этой задаче от производных
x(t) и y(t). Перепишем условие (4-59) в виде множества условий:
т т
— — ^x(i)/(a(9 — t)dt = 0, (4-59а)
О о
выполняющихся при любом 9. Здесь 6(0—функция Дирака.
Согласно процедуре Лагранжа образует функционал S, равный
сумме максимизируемого функционала и дополнительных условий,
каждое из которых суммируется со своим коэффициентом А, завися-
щим от 0:
1 Так как при t > 9 функция (9 — 0 равна нулю, а в Т, то
верхний предел в (4-58) можно принять равньщ 7\
2Ц >
т т т
S=p«(O^ +jA(0)depa(O«(9-O^-
обо
оо оо
- Ja (9) М fх (t) ка (9 — t) dt.
О о
Меняя порядок интегрирования в последних двух слагаемых этого
выражения, перепишем его в виде интеграла:
г т
S = J [ (0 dt + Ул (0 Л (0 - х (0 j Л (6) Ка (9 - 0 de] dt. (4-60)
о 1 о
не зависящего от и y(t). Максимум функционала (4-60) дости-
гается в том случае, когда подынтегральное выражение в каждый
момент времени максимально по г/а и х. Так как на функцию уа не
наложено ограничений, то необходимое условие максимума имеет вид!
2ул (0 + Л (0 = 0; Л (0 = - 2уа (/).
По х подынтегральное выражение в (4-60) в каждый момент
времени должно быть'максимально, откуда
т
X(0=5ign jt/a(9)^a(9-0d9. (4-61)
О
Схема получения на модели оптимального сигнала показана на
рис. 4-10.
В случае небелого шума, как это было сделано для ограничения
энергии входного сигнала, задача сводится к минимизации выра-
жения (4-50). Задача эта при ограниче-
нии (4-57) аналогична рассмотренной aft)'
выше для белого шума, с той разницей, ] ~
что вместо функции Ка (0 нужно под-
У^(Р)
ставить в выражение (4 61) функцию
Kas (0 = Ф-1 {Wa [Sn (/со) - At]+},
(4-62)
где [Sn (/со) — AJ+ — тот из двух сомно-
жителей разложения
Рис. 4-10. Блок-схема
определения ' динамиче-
ских характеристик.
5П(®)-Л1 ==[5П(<©)—AJ+ [Sn(coJ-AJ-,
полюсы и нули которого лежат в верх-
ней полуплоскости комплексного пере-
менного. (Коэффициент же Л определяет-
ся по формуле (4-51).
Для ограничения максимальной
ординаты входного воздействия про-
цедура ортогонализации параметров
усложняется. Можно в этом случае
/ — исследуемый объект;
2 — фильтр для центрирова-
ния; 3 — вычислительное
устройство для определения
коэффициентов разложения;
4 — вычисление первого мо-
мента взаимнокорреляцион-
ной функции; 5 — определе-
ние частотной характери-
стики.
ограничиться приближенной ортогонализацией параметров отно-
сительно входного сигнала с ограниченной энергией, что значи-
тельно проще, и функции чувствительности ортогонализйрованных
параметров использовать для определения оптимального х(/), огра-
ниченного по модулю.
215
приложение I
АППАРАТУРА ДЛЯ СНЯТИЯ ДИНАМИЧЕСКИХ
ХАРАКТЕРИСТИК ПРОМЫШЛЕННЫХ ОБЪЕКТОВ
ходе объекта i/ii(0, #2 (О
искомую характеристику.
Для экспериментального определения динамических характери-
стик промышленных объектов необходимо на вход объекта подать
некоторый сигнал x(t) (рис. П-1),зарегистрировать реакцию на.вы-
и т. д. и рассчитать по этим сигналам
В соответствии с этим для снятия дина-
мических характеристик требуются реги-
стрирующая аппаратура, аппаратура для
нанесения возмущающих воздействий и
вычислительные устойства для определе-
ния искомых характеристик.
1. РЕГИСТРИРУЮЩАЯ АППАРАТУРА
Рис. П-1. Объект с не-
сколькими входами и
выходами.
В подавляющем большинстве слу-
чаев используемый объект оснащен при-
борами и датчиками систем авто-
матического регулирования, которые
для регистрации параметров в про-
заметить, что эксплуатационные ре-
снятия динамиче-
слишком малы чувствительность и
могут быть использованы
цессе испытаний. Следует
гистраторы непосредственно неприменимы для
ских характеристик. У них
скорость движения бумаги. Для того чтобы использовать эти при-
боры, необходимо увеличить скорость бумаги до 1 200—5 000
в зависимости от свойств исследуемого объекта и изменить чув-
ствительность таким образом, чтобы отклонения параметров в про-
цессе испытаний составляли приблизительно третью часть шкалы
прибора. Так как параметр имеет некоторую постоянную составляю-
щую, такое увеличение чувствительности вызывает иногда выход
среднего значения параметра за пределы шкалы, что приводит к не-
обходимости в специальном устройстве для смещения среднего зна-
чения параметра. Применение одноточечных регистраторов неудобно
в том отношении, что интересующие нас отклонения параметров
записываются на разных шкалах и требуют последующего совмеще-
ния по оси времени. Значительно удобнее использовать многоточеч-
ный прибор, на который сигнал поступает с датчиков через специ-
альные приставки, унифицирующие этот сигнал и позволяющие
изменять его среднее значение. В качестве датчиков стремятся ис-
пользовать датчики систем автоматического регулирования, так как
при этом полученные характеристики учитывают и динамические
свойства датчиков.
Во Всесоюзном теплотехническом институте и ЦНИИКА раз-
работаны такого рода регистраторы на основе многоточечных элек-
тронных потенциометров [Л. 57]. Сигнал с электрических датчиков
переменного или постоянного тока, а также с пневматических дат-
чиков преобразуется при этом в сигнал постоянного тока.
На рис. П-2 приведены схемы приставок для преобразования
сигнала и изменения его среднего значения.
Схема рис. П-2,а предназначена для измерения переменного
напряжения индукционных датчиков, питающихся напряжением не
216
свыше 25 в. Изменение масштаба записи производится сопротивле-
нием 7?, а смещение среднего значения — сопротивлениями Ra и
Схема рис. П-2,б обеспечивает измерение постоянной э. д. с. от
маломощных источников. Масштаб записи в этом случае изменить
нельзя, а среднее значение сигнала изменяется сопротивлениями Ra
и Йъ.
Для регистрации пневматических сигналов использованы пнев-
моэлектрические преобразователи. Давление воздуха на мембрану
преобразователя деформирует плоскую пружину, на которую накле-
Рис. П-2. Схема унифицирующих приставок.
ены четыре тензодатчика, соединенные по мостовой схеме. Небаланс
мо|ста через приставку типа показанной на рис. П-2,б подается на
регистратор.
В ЦНИИКА создан комплект устройств для снятия динами-
ческих характеристик, куда, кроме специального шеститочечного
регистратора, отличающегося от серийных потенциометров ЭПП-09
лучшими динамическими свойствами унифицирующих приставок,
входят еще генераторы синусоидальных и прямоугольных колеба-
ний. Время пробега кареткой шкалы регистратора составляет при-
близительно 0,7 сек. Диапазон частот, регистрируемых прибором,
0,00075—0,327 Мсек.
В последнее время для обработки результатов эксперимента по
исследованию динамических характеристик все шире применяются
универсальные ЦВМ. Ввод данных в машину существенно облегчает-
ся, если результаты эксперимента получены в цифровой форме.
В связи с этим желательно шире использовать цифровые регистра-
торы.
2. АППАРАТУРА ДЛЯ ГЕНЕРАЦИИ ВОЗМУЩАЮЩИХ
ВОЗДЕЙСТВИЙ
А. Генераторы регулярных сигналов. Нанесение
возмущающих воздействий типа единичной ступенчатой функции
или прямоугольного волнового Импульса производится обычно вруч-
ную и не требует специальных устройств. Генерирующие устройства
используются при снятии частотных характеристик объекта, когда на
его вход нужно подавать гармонический сигнал. Если снятие частот-
ных характеристик производят в замкнутой системе (см. § 3-7), то
15—121 217
колебания поДаются На задатчик регулятора; если же регулятор
отключен, то выход генератора через устройство дистанционного
управления соединяется с исполнительным механизмом.
Существует множество конструкций генераторов синусоидаль-
ных колебаний, рассчитанных на диапазон генерируемых частот
0,0001—0,31 рад/сек. Большинство из них основано на преобразо-
вании вращательного движения электродвигателя в электрический
или пневматический сигнал синусоидальной формы.
В генераторе ВТИ [Л. 58] электродвигатель через зубчатый и
фрикционный редукторы вращает кулачок, преобразующий поворот
вход
вала редуктора в синусоидальные колеба-
ния плунжера индукционного датчика, сиг-
нал с которого подается на вход регулято-
ра ВТИ. Фрикционный редуктор состоит из
двух катящихся друг по другу дисков, оси
которых взаимно перпендикулярны. Меняя
расстояние малого диска от оси вращения
большого, можно плавно в широких преде-
лах менять скорость вращения последнего.
Недостатками генератора являются возмож-
ность проскальзывания дисков редуктора и
высокие требования к форме кулачка и точ-
ности механических передач. В [Л. 59] опи-
сан генератор такого же типа, в котором
эти недостатки устранены за счет того, что
скорость электродвигателя меняется путем
торможения его постоянным током, а ин-
дукционный датчик заменен вращающимся
трансформатором или сельсином, вал которого связан с валом зуб-
Рис. П-3. Схема пнев-
матического генера-
тора.
чатого редуктора.
В станции ЦНИИКА изменение частоты генерируемых колебаний
изменяется многоступенчатым редуктором, имеющим 40 фиксирован-
ных передаточных чисел, причем одновременно во столько же раз
меняется скорость бумаги, так что период записанных колебаний
на диаграмме остается тем же самым. В качестве преобразователя
вращательного движения в электрический сигнал применен пово-
ротный трансформатор, дающий на выходе переменное напряжение
частотой 50 гц с амплитудой огибающей до 1 в. В случае необхо-
димости генерирования переменного напряжения сигнал с вращаю-
щегося трансформатора пропускается через фазочувствительный вы-
прямитель. Амплитуда сигнала постоянного напряжения до 10 мв.
Для получения пневматических колебаний в станции имеется
устройство (рис. П-3), состоящее из диска /, наклоненного под не-
которым углом к оси своего вращения, и пневматической следящей
системы. Сопло 2 укреплено на плоской пружине 4. Увеличение дав-
ления в сопле приводит к повышению давления в полости мембран-
ной коробки 3 *и отжатию сопла вверх; при этом сопло, а значит,
и выходное давление преобразователя следят за положением диска.
Амплитуда пневматического сигнала не превосходит 0,2 ат и изме-
няется путем изменения расстояния сопла 2 от оси вращения диска.
Постоянная составляющая равна 0,2—1,0 ат и зависит от жесткости
пружины 4.
Упомянутые выше генераторы могут быть использованы и для
генерации прямоугольных периодических импульсов, если на их
выходе установлено устройство релейного действия.
218
Б. Генераторы случайных сигналов. При исследова-
нии систем и объектов автоматического управления статистическими
методами в ряде случаев возникает необходимость в генерировании
случайного процесса с заданными характеристиками (обычно в ра-
бочей полосе частот желатель-
но иметь равномерную спект-
ральную плотность). Сложность
состоит в том, что сигнал по-
добного генератора должен
иметь достаточную мощность в
диапазоне инфранизких частот
10“4—0,3 гц, характерном для
большинства промышленных
объектов. Использование же
дополнительных усилителей
вводит нестационарность амп-
литуды и среднего значения сигнала и может исказить его спект-
ральную характеристику.
В [Л. 60] дается описание генератора, основанного на измерении
флуктуаций процесса радиоактивного распада сверхмаломощного
источника, например крупинки светящегося состава, которым покры-
ваются шкалы приборов, тумблеры и т. д. Источник устанавливает-
ся на расстоянии нескольких сантиметров от газоразрядного счет-
чика (типа СТС-5, например). Импульсы со счетчика, интервал меж-
ду которыми случаен, подаются на вход мультивибратора. Каждый
импульс перебрасывает мультивибратор в новое состояние, так что
на его выходе образуется телеграфный сигнал (рис. П-4). Спектраль-
ная плотность такого сигнала
о, х 4«2 1
£(<>)— пД • / и у •
1 + I л /
Здесь: и — уровень напряжения на выходе мультивибратора;
Л — среднее число частиц в 1 сек, которое можно менять,
меняя расстояние между источником излучения и
газоразрядным счетчиком.
В диапазоне малых со функция S((o) практически постоянна.
Так как на скорость радиоактивного распада не влияют какие-либо
физические условия (температура, давление, освещенность и т. д.),
то первичный флуктуационный процесс строго стационарен.
Другая конструкция генератора шума, основанная на выделении
с помощью полосового фильтра равномерного участка спектра коле-
баний тока газоразрядной лампы, описана в [Л. 61]. Этот участок
обычно находится в сравнительно высоком диапазоне частот, и по-
лучающийся шум приходится преобразовывать в низкочастотный
путем гетеродинирования.
3. АППАРАТУРА ДЛЯ ОБРАБОТКИ РЕЗУЛЬТАТОВ
ЭКСПЕРИМЕНТА
А. Вычисления частотных характеристик. Для
определения частотных характеристик объекта непосредственно в пе-
риод его испытаний разработаны приборы, осуществляющие разло-
жение в ряд Фурье сигнала на выходе объекта. Найдя отношение
15* 219
амплитуды первой гармоники этого сигнала к амплитуде входного
гармо(нического сигнала, а также фазу первой гармоники y(t) для
некоторой частоты <og, получим одну точку амплитудно-фазовой
характеристики. Блок-схема такого прибора (гармонического ана-
лизатора) показана на рис. П-5.
Вещественная и мнимая части первой гармонической составляю-
щей сигнала определяются по формулам:
' т
Re У (/со) = у (/) cos со/ dt\
о
т
Im Y (Ju) = J У (0 sin со/ dt,
О
где Т=2л/<о — период анализируемой функции.
В приборе, разработанном в ЦНИИКА [Л. 62], y(t), преобразо-
ванная в электрическое напряжение, подается на первичные обмотки
поворотных трансформаторов, с вторичных обмоток которых сни-
маются напряжения, пропорциональные произведениям y(f) cos со/ и
y(t) sin (dt, которые выпрямляются (они модулированы частотой
50 гц) и подаются на интеграторы. Выход интеграторов регистри-
руется на двухкоординатном самописце.
Рис. П-5. Блок-схема гармонического анализатора.
Использование подобного прибора-сильно сокращает время про-
ведения эксперимента. Точность определения характеристик по мо-
дулю 2,5%, а по фазе 2°.
Б. Вычисление корреляционных функций. Вычис-
ление корреляционных функций случайных процессов (см. гл. 3)
является очень трудоемкой операцией. Ввиду этого' имеется множе-
ство конструкций специальных приборов — коррелографов, предна-
значенных для ее выполнения. Структурная схема коррелографа
изображена на рис. П-6. Прибор содержит устройство памяти /,
в котором запоминается на .в’ре^я г исследуемый процесс, устрой-
ство 2 для перемножения координат процесса, соответствующих
моментам t и t+r, и интегрирующее устройство 3, усредняющее
величину этого произведения для всех значений t.
Устройство памяти является основным узлом, определяющим
конструкцию коррелографа. Так, в фотоэлектрическом коррелографе
220
[Л. 63] исследуемый случайный процесс наносится на фотопленку
и площадь над процессом зачерняется. Ток фотоэлемента, освещае-
мого через узкую щель, частично заслоненную движущейся пленкой,
пропорционален ординате процесса для некоторого момента t. Ток
второго фотоэлемента, сдвинутого относительно первого на время т,
пропорционален ординате процесса для момента /4-т. В схеме
коррелографа эти токи перемножаются и результат перемножения
усредняется интегратором.
Рис. П-б. Блок-схема коррелографа.
Подобным же образом работает магнитный коррелограф [Л. 64],
в котором запись процесса осуществляется на магнитную ленту.
Чтобы уменьшить влияние магнитных помех, неточностей в изготов-
лении головок и т. п., процесс перед записью подвергают частотной
модуляции.
Для промышленных систем регулирования, случайные процессы
в которых обычно регистрируются на бумажной ленте, интерес пред-
ставляет коррелограф, у которого устройством памяти является
непосредственно бумажная лента регистратора. В таком коррелогра-
фе ординаты процесса с помощью фотоэлектрических следящих си-
стем, сдвинутых друг относительно друга на расстояние т, преобра-
зуются в электрические напряжения, поступающие в устройства пе-
ремножения и осреднения.
ПРИЛОЖЕНИЕ II
МАТРИЦА ЦСп [| ДЛЯ ВЫЧИСЛЕНИЯ КОЭФФИЦИЕНТОВ
— k
РАЗЛОЖЕНИЯ В РЯД ПО ПОЛИНОМАМ ЧЕБЫШЕВА
Четные функции )
g Со с3 с* св с8 С ю С12
0 0,016656 —0,024817 0,032213 —0,027288 0,028078- —0,032821 0,022764
1 0,024638 —0,065480 0,047686 —0,052993 0,045107 —0,027805 0,039226
2 0,033986 —0,046377 0,050633 —0,023412 0,004566 0,006902 —0,047221
3 0,025270 —0,060263* 0,019820 0,001567 —0,034004 0,064401 —0,045676
4 0,036261 —0,035903 0,012886 0,042138 —0,063299 0,042768 —0,029841
5 0,026706 —0,049020 —0,028905 0,057472 —0,050171 0,009798 0,069210
6 0,041192 —0,015398 —0,035391 0,070649 —0,009167 —0,071840 0,036492
' 7 0,029451 —0,029462 —0,081759 0,034481 0,057001 —0,047272 —0,007926
8 0,052619 0,024610 —0,067949 —0,006292 0,078571 0,006239 —0,109018
9 0,035040 0,005211 —0,100895 —0,099390 0,022613 0,124033 0,091632
10 0,098695 0,146280 0,025659 —0,089188 —0,132603 —0,092591 —0,014586
221
оюоомосл^оэкэ»—
0,004044 0,013231 0,012471 0,028127 0,022074 0,047592 0,034379 0,080075 0,053432 0,183434 О
11111 111 1 о о о о о о о о о о о'оо’оооороо p
Illi оооооооооо Ssgssysssi 883858g»2S28 о
оооооооооо to 2 8 о S 8 S p
0,043136 0,057319 0,038800 —0,015812 —0,054054 —0,066528 0,001351 0,063510 0,085511 —0,120867 e>
—0,047442 —0,056309 —0,001420 0,043909 0,066720 —0,016345 —0,056299 —0,060290 0,123727 —0,053386 p
Кэ| J*
Продолжение прилож. 2
ТАБЛИЦА ЗНАЧЕНИЙ sin jita и cos jna
ПРИЛОЖЕНИЕ III
a 0,03125 0,0625 0,1250 , 0,1875 0,2500 0,3125 0,3750 0,5000
X» Юе-/95°37' 5>Ie-/10ri5' 2>45e-/l 12° 30' 1.735е-/124° 1,336^-/135° l,12e“/146°J5' 0,975e~^57°30' 0,8е-Л80°
Xi l,0e-2°48' 1,004t?~ Z5°37 1,OU-P1°15' 1,012e—Л9°00' 1,025e"~/22°30' 1,045^-/28’07' l,07e~/33°45* I,115e“/45°
i sin Zea cosZxa sin гжа cos Zita sin Zita cosZita sin Zita cosZita sin Zita cosZita sin ina cos Zita sin Zita cos inn sin Zita cos Zita.
0 1 0 0,098 1 0,995 0 0,195 1 0,981 0 0,383 1 0,924 0 0,554 1 0,831 0 0,707 1 0,707 0 0,831 1 0,556 0 0,924 1 0,383 0 1 I 0
2 0,195 0,981 0,383 0,924 0,707 0,707 0,924 0,383 1 0 0,924 —0,383 0,707 —0,707 0 1
3 0,290 0,957 0,556 0,831 0,831 0,383 0,981 —0,195 0,707 —0,707 0,195 —0,981 —0,383 -0,924 1 0
4 0,383 0,924 0,707 0,707 1 0 0,707 —0,707 0 —1 -0,707 —0,707 —1 0 0 1
5 0,471 0,882 0,831 0,556 0,924 -0,383 0,195 —0,981 —0,707 —0,707 —0,981 0,195 —0,383 0,924 1 0
6 0,556 0,831 0,924 0,383 0,707 —0,707 —0,383 —0,924 —1 0 —0,383 0,924 0,707 0,707 0 —1
7 0,634 0,773 0,981 0,195 0,383 —0,924 —0,831 —0,556 ^4) ,707 0,707 0,556 0,831 0,924 -0,383 —1 O'
8 0,707 0,707 0 0 0 —1 —1 0 0 1 1 0 0 ' 1 0 —1
9 0,773 0,634 0,981 —0,195 —0.383 —0,924 —0,831 0,556 0,707 0,707 0,556 —0.831 —0,924 —0,383 1 0
10 0,831 0,556 0,924 —0,383 —0,707 —0,707 —0,383 0,924 1 0 —0,383 —0,924- —0,707 0,707 0 г
11 0,882 0,471 0,831 —0,556 —0,924 —0,383 0,195 0,981 0,707 —0,707 —0,981 -0,195 0,383 0,924 —1 0
12 0,924 0,383 0,707 —0,707 —1 0 0,707 0,707 0 —1 —0,707 0,707 1 0 0 1
13 0,957 0,290 0,556 —0,831 —0,924 0,383 0,981 0,195 —0,707 —0,707 0,195 0,981 0,383 —0,924 1 0
14 0,981 0,195 0,383 —0,924 —0,707 0,707 0,924 —0,383 —1 0 0,924 0,383 —0,707 —0,707 0 —1
15 0,995 0,098 0,195 -0,981 —0,383 0,924 0,556 —0,831 -0,707 0,707 0,831 -0,556 —0,924 0,383 —1 0
16 1 0 0 —1 0 1 0 —1 0 1 0 — 1 0 1 0 I
17 0,995 —0,098 —0,195 —0,981 0,383 0,924 -0,556 -0,831 0,707 0,707 —0,831 —0,556 0,924 0,383 1 0
18 0,981 —0,195 —0,383 —0,924 0,707 0,707 —0,924 —0,383 1 0 -0,924 0,383 0,707 -*0,707 0 —I
19 0,957 —0,g90 —0,556 —0,831 0,924 0,383 -0,981 0,195 0,707 —0,707 -0,195 0,981 -0,383 -0,924 —1 0
20 0,924 —0,383 —0,707 —0,707 1 0 —0,707 0,707 0 —1 0,707 0,707 —1 0 0 I
21 0,882 —0,471 —0,831 —0,556 0,924 —0,383 —0,195 0,981 —0,707 —0,707 0,991 —0,195 —0,383 0,924 1 0
22 0,831 —0,556 —0,924 —0,383 0,707 —0,707 —0,383 0,924 —1 0 0,383 —0,924 0,707 0,707 0 —1
23 0,773 —0,634 —0,981 —0,195 0,383 -0,924 0,831 0,556 —0,707 0,707 —0,556 —0,831 0,924 —0,383 —1 0
24 —0,707 —0,707 — 1 0 0 —1 1 0 0 1 —1 0 0 1 0 1
к 223 0,634 —0,773 —0,981 0,195 —0,383 -0,924 0,831 -0,556 0,707 0,707 —0,556 0,831 —0,924 -0,383 1 0
ПРИЛОЖЕНИЕ IV
СПЕКТРАЛЬНАЯ ПЛОТНОСТЬ,
СООТВЕТСТВУЮЩАЯ ЕДИНИЧНОЙ
1 1 sin -5-
ТРЕУГОЛЬНОЙ ФУНКЦИИ А (®) = тг~| _-
\ ®/2
СО А(со) со А (со) (0 А (со)
0,0 0,159 2,3 0,100 4,6 0,017
0,1 0,159 2,4 0,096 4,7 0,015
0,2 0,159 2,5 0,092 4,8 0,013
0,3 0,158 2,6 0,088 4,9 0,011
0,4 0,157 2,7 0,083 5,0 0,009
0,5 0,156 2,8 0,079 5,5 0,003
0,6 (Г, 155 2,9 0,075 6,0 0,000
0,7 0,153 3,0 0,070 6,5 0,000
0,8 0,151 3,1 0,066 7,0 0,002
0,9 0,149 3,2 0,062 7,5 0,004
1,0 0,146 3,3 0,058 8,0 0,006
1,1 0,144 3,4 0,054 8,5 0,007
1,2 0,141 3,5 0,050 9,0 0,008
1,3 0,138 3,6 0,047 9,5 0,007
1,4 0,135 3,7 0,043 10,0 0,006
1,55 0,132 3,8 0,040 10,5 0,004
1,6 0,128 3,9 0,036 11,0 0,003
1,7 0,124 4,0 0,033 11,5 0,001
1,8 0,121 4,1 0,030 12,0 0,000
1,9 0,117 4,2 0,027 12,5 0,000
2,0 0,113 4,3 0,024 13,0 0,000
2,1 0,109 4,4 0,021 13,5 0,001
2,2 0,104 4,5 0,019 14,0 0,001
ПРИЛОЖЕНИЕ V
ПОЛИНОМЫ ЧЕБЫШЕВА
Л, = 1_;
7\ = со;
7’2=2®2—1^_
Т3 = 4<о3 — 3(0;
74 = 8®* — 8ш2_+ 1; _
Т3 =16®’— 20®3 + 5<о£
Т, = 32®’ — 48®* + 18®2 — 1; _
Г, = 64®’ —112®’+ 56®3 — 7®; _
Т, = 128®8 — 256®’ + 160®* — 32®2_+ Г, _
Т, = 256®’ — 576®’— 432®’ — 120®’ -^9®;
Tit = 512®2’ — 1 280®8 + 1 120®8 — 400®*+ 50®2 — 1;
Ги = 1 024®" —2 816®’ + 2 816®2— 1 232t?! + 220®3—11®;_
Т12 — 2 048®12 — 6 144®10 + 6 912®8 —3 584®’ + 840®* — 72m2+1.
224 ’ ' ' ' ' .
Продолжение прилож. V
ВЫЧИСЛЕНИЕ КОЭФФИЦИЕНТОВ Ga
ПО ОРДИНАТАМ ВРЕМЕННОЙ ХАРАКТЕРИСТИКИ
А. Четные коэффициенты
g Фо <₽2 9* <Рв <Рв Фю Ф12
0 1,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000
1 —0,3042 —0,9708 —0,3030 —0,0291 0,0014 0,0000 0,0000
2 0,2203 0,5758 0,6314 —0,5554 0,1466 —0,0202 0,0018
3 —0,1812 —0,4374 —0,5440 —0,2322 0,6438 —0,3176 0,0801
4 0,1575 0,3638 0,4563 0,3764 —0,1322 —0,5486 0,4712
5 —0,1412 —0,3170 —0,3922 —0,3922 —0,1250 0,3648 0,3122
6 0,1291 0,2748 0,3466 0,3718 0,2310 —0,1360 —0,4190
7 —0,1196 —0,2626 —0,3134 —0,3464 —0,2724 —0,0151 0,3132
8 0,1117 0,1400 0,2828 0,3218 0,2878 0,1222 —0,1720
9 —0,1056 —0,2248 —0,2626 —0,3198 —0,2880 —0,1700 0~,0680
10 0,1002 0,2102 0,2438 0,2800 0,2826 0,2020 0,0120
11 —0,0956 —0,1980 —0,2300 —0,2634 —0,2720 —0,2184 —0,0720
Б. Нечетные коэффициенты
g Ф1 Фз Ч>5 ф7 ?9 913
1 —0,5692 0,6669 —0,1043 0,0068 —0,0002 0,0000 —0,0000
2 0,4248 0,0582 —0,7456 0,3150 —0,0582 0,0063 —0,0005
3 —0,3534 —0,1678 0,2842 0,5897 —0,5034 0,1703 —0,0337
4 0,3091 0,1931 —0,0974 —0,4592 —0,2902 0,5827 —0,3181
5 —0,2780 —0,1971 0,0031 0,3018 0,4262 —0,0402 —0,5139
6 0,2548 0,1943 0,0470 —0,1898 —0,3859 —0,2400 0,2917
7 —0,2366 —0,1891 —0,0755 0,1137 0,3132 0,3296 —0,0107
8 —0,2218 0,1833 0,0925 —0,0613 —0,2447 —0,3344 —0,1625
9 —0,2094 —0,1774 —0,1028 0,0245 0,1875 0,3067 0,2472
10 0,1989 0,1718 0,1092 0,0019 —0,1415 —0,2691 —0,2783
И —0,1899 —0,1665 —0,1130 —0,0214 0,1048 0,2309 0,2801
Значения полиномов Чебышева
<0 7\ га г3 г5 тв
0 0 —1 0 0 0 1
0,25 0,25 —0,325 —0,687 0,531 0,953 —0,505
0,5 0,5 —0,5 —1 —0,5 0,5 1
0,75 0,75 0,125 —0,567 —0,97 —0,89 —0,366
1 1 1 1 1 1 1
225
Продолжение при лож, V
«0 Т, Ге т9 Ло Тп Г,я
0 0 1 0 —1 0 1
0,25 —0,953 —0,436 0,760 0,82 —0,355 —0,99
0,5 0,5 —0,5 0,876 —1 —0,5 0,5 1
0,75 0,34 0,98 0,585 —0,095 —0,73
1 1 1 1 1 1 1
ЛИТЕРАТУРА
1. Вавилов А. А., Солодовников А. И., Эксперимен-
тальное определение частотных характеристик автоматических си-
стем, Госэнергоиздат, 1963.
2. Л и н н и к Ю. В., Метод наименьших квадратов и основы
теорий обработки наблюдения, Физматгиз, 1962.
3. Бородюк В. П., Круг Г. К., Некоторые вопросы органи-
зации эксперимента по сбору статистического материала, Труды
МЭИ, вып. 51, 1963.
4. М и тр о п о л ьс к и й А. К., Техника статистических вычи-
слений, Физматгиз, 1961.
5. Дудников Е. Г., Основы автоматического регулирования
тепловых процессов, Госэнергоиздат, 1956.
6. Л е о н о в Ю. П., Липатов Л. Н., Применение статисти-
ческих 'методов для определения характеристик промышленных объ-
ектов (обзор), «Автоматика и телемеханика», т. XX, 1959, № 9.
7. Солодовников В. В., Статистическая динамика линей-
ных систем автоматического управления, Физматгиз, 1960.
8. Д у д н и к о в Е. Е., Определение коэффициентов передаточ-
ной функции линейной системы по начальному участку эксперимен-
тальной амплитудно-фазовой характеристики, «Автоматика и теле-
механика, т. XX, 1959, № 5.
9. Г о л а н т А. И., Дудников Е. Е., Метод определения па-
раметров линейной системы по высокочастотному участку экспери-
ментальной АФХ, «Автоматика и телемеханика», т. XXV, 1964, № 12.
10. Раб кин Г. Е., Митрофанов Б. А., Штерен-
б е р г Ю. О., Об определении численных значений коэффициентов
передаточной функции линеаризованных звеньев и систем по экспе-
риментальным частотным характеристикам, «Автоматика 'и телеме-
ханика», т. XVI, 1955, № 5.
11. Sz we da Т., Methode zur Messung der Koeffizienten von
Ubertragungsfunktionen dynamischer Glieder, Archiwum Automatyki
i Telemechaniki, Warszawa, 1958, № 1—2.
12. Ланцош К., Практические методы прикладного анализа,
Физматгиз, 1961.
13. К а р д а ш е в А. А., К а р н ю ш и н Л. В., Определение пара-
метров системы по экспериментальным (заданным) частотным ха-
рактеристикам, «Автоматика и телемеханика», т. XX, 1959, № 4.
14. Ротач В. Я., Определение аналитического выражения для
экспериментальных частотных характеристик регулируемых объектов,
Известия вузов, «Энергетика», 1962, № 6.
15. Кузовков Н. Т., Теория автоматического регулирования,
основанная на частотных 'методах, Оборонгиз, 1960.
227
6X1-?
ОТИКтТН
Б 20
УДК-6230
Балакирев В. С. и др.
Б 20 Экспериментальное определение динамических
характеристик промышленных объектов управле-
ния. М., «Энергия», 1967.
232 с. с илл. 8000 экз. 73 к.
Перед загл. авт.: В. С. Балакирев, Е. Г. Дудников,
А. М. Цирлин
В книге рассмотрены методы экспериментального определения
динамических характеристик объектов регулирования. Особое вни-
мание уделено вопросам планирования эксперимента и статисти-
ческим методам исследования динамики промышленных объектов.
Книга предназначена для широкого круги специалистов, ра-
ботающих в области автоматизации технологических процессов,
конструирования средств измерения и управления, проектирова-
ния новых схем регулирования. Она будет полезной для студен-
тов, специализирующихся в теории автоматического управления.
3~3'13 6П2.154
178-67 ....... ----------------
_________________Б1ьлотек д
ДнШродзержинсько о
Гнаустрц < Шстнтуту
< Л. L ЛР^ЕШЧЕВА
Балакирев Валентин Сергеевич, Дудников Евгений Георгиевич,
Цирлин Анатолий Михайлович
Экспериментальное определение динамических характеристик
промышленных объектов управления.
Редактор Ю. С. Попков
Художественный редактор Д. И. Чернышев
Технический редактор В. В. Зеркаленкова
Корректор В. С. Антипова
Сдано в набор 10/Ш 1967 г. Подписано к печати “21/VI 1967 г. Т-06998
Формат 84Х108’/82 Бумага типографская № 2
Усл. печ. л. 12,18 Уч.-изд. л. 12,31
Тираж 8 000 экз. Цена 73 коп. Зак. 121
Издательство .Энергия*. Москва, Ж-114, Шлюзовая наб., 10.
Московская типография № 10 Главполиграфпрома
Комитета по печати при Совете Министров СССР.
Шлюзовая наб., 1Q.
ПРЕДИСЛОВИЕ
Для автоматизации технологических производств и
промышленных объектов требуется определение их ста-
тических и динамических свойств, которые реализуются
в их моделях. Построение математических моделей
объектов может производиться аналитическим или
экспериментальным методом.
В первом случае уравнения динамики и статики со-
ставляются на основе анализа физико-химических про-
цессов, происходящих в объекте, и применения законов
сохранения энергии и вещества. Для определения коэф-
фициентов уравнений требуется постановка специаль-
ных трудоемких лабораторных исследований.
Экспериментальные методы требуют минимальных
сведений о сущности процессов, протекающих в иссле-
дуемых объектах, однако позволяют с приемлемой для
практики точностью определять коэффициенты диффе-
ренциальных уравнений динамики. Эти методы просты
в применении и позволяют сравнительно быстро полу-
чить математическое описание объекта. Вследствие этого
они получили исключительно широкое распространение
при исследовании динамики объектов для целей автома-
тизации.
Важность и актуальность вопросов эксперименталь-
ного исследования динамики промышленных объектов
и отсутствие достаточно систематического рассмотрения
методики проведения эксперимента и способов определе-
ния коэффициентов уравнений побудили нас написать
данную книгу. В ней мы попытались в какой-то мере
классифицировать известные методы исследования, бо-
лее четко указать области их применения, а также при- !
вели ряд новых результатов, относящихся главным обра- 1
зом к изучению объектов статистическими методами и
обработке результатов эксперимента, искаженных влия-
нием случайных помех.
3