/



































































































































































































































































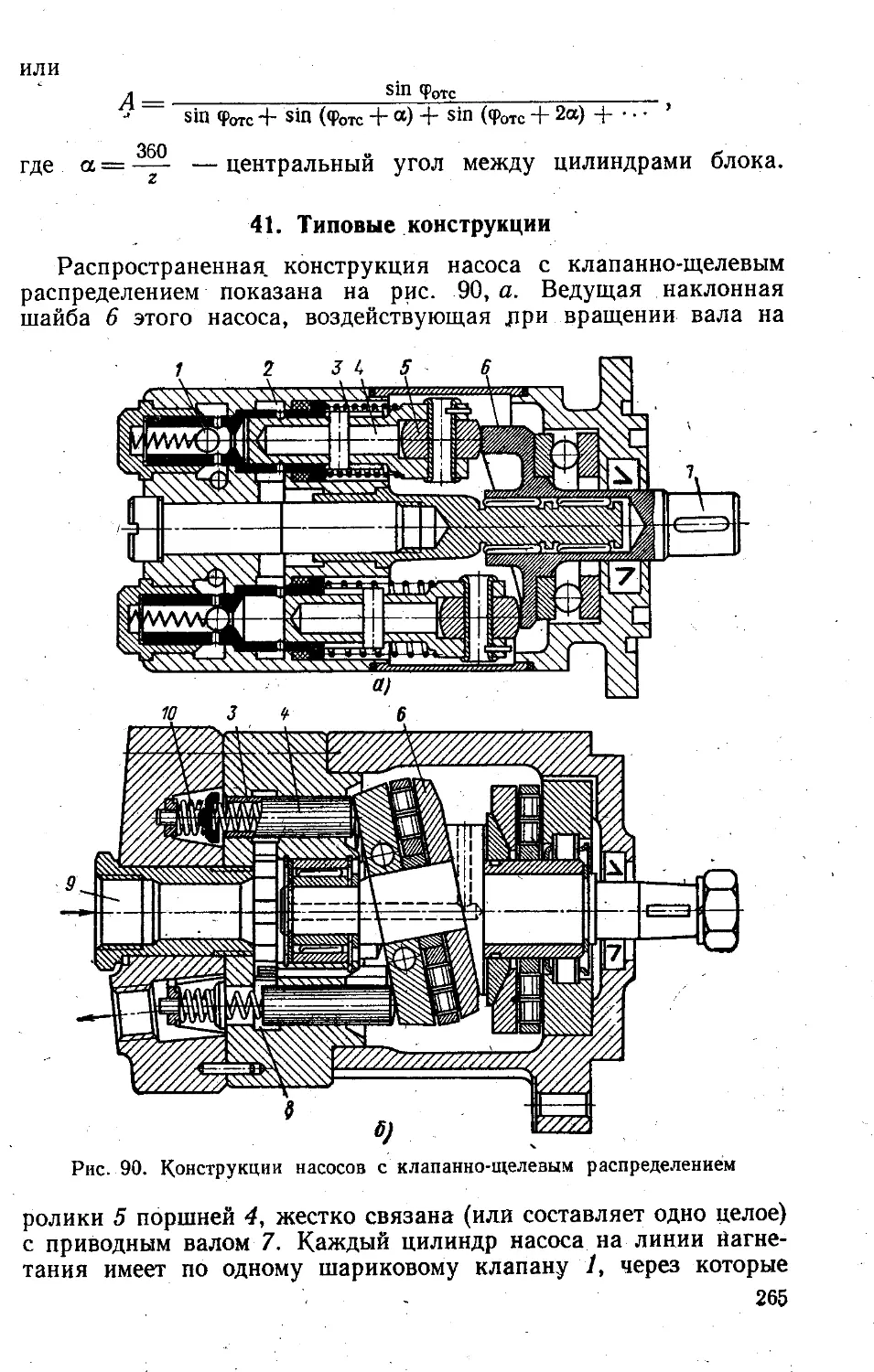











































































































































































































































































































































Author: Башта Т.М.
Tags: характеристика машин по способу привода машиностроение насосы издательство машиностроение вакуумные насосы
Year: 1974




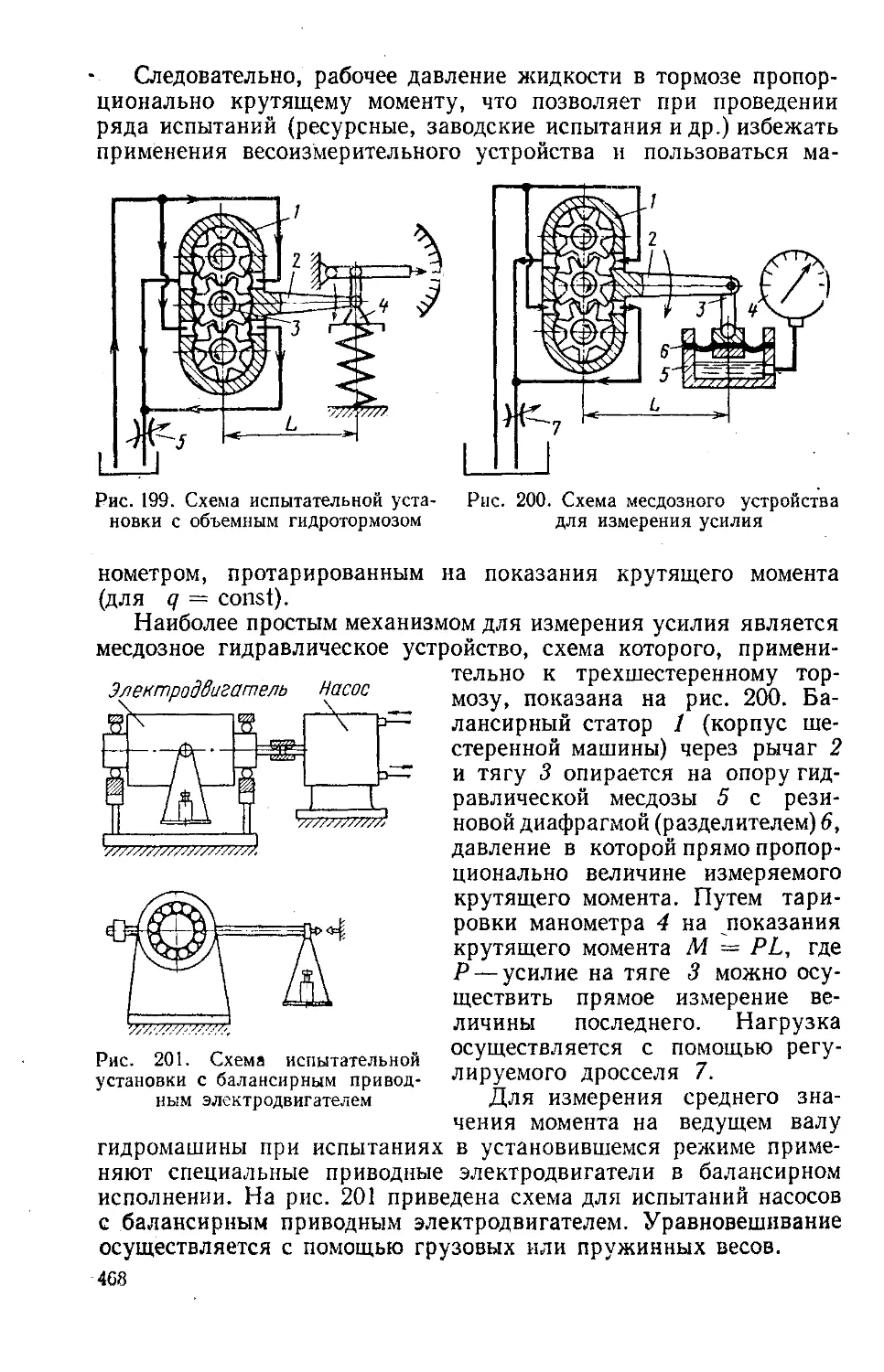
Text
Т. М. Башта
д-р техн, наук, проф.
ОБЪЕМНЫЕ НАСОСЫ
И ГИДРАВЛИЧЕСКИЕ
ДВИГАТЕЛИ
ГИДРОСИСТЕМ
Допущено Министерством высшего
и среднего специального образования СССР
в качестве учебника для студентов высших учебных заведений,
обучающихся по специальности
„Гидропневмоавтоматика и гидропривод**
С
Москва
«МАШИНОСТРОЕ Н И Е»
1974
6П2.3
БЗЗ
УДК 62-82 (075.8)
Башта Т. М. Объемные насосы и гидравлические двигатели
гидросистем.Учебник для вузов. М., «Машиностроение», 1974,
с. 606
В учебнике описаны конструкции, изложены вопросы рас-
чета, конструирования, изготовления и испытаний объемных
насосов и гидродвигателей, применяющихся в силовых гидрав-
лических системах машин и механического оборудования, Под-
робно рассмотрены роторные насосы и гидромоторы различных
типов, дай-ы их характеристики и приведены рекомендации по
конструированию. Дан анализ их качеств применительно к
конкретным случаям использования. Рассмотрены также вопро-
сы, касающиеся шума машин и даны рекомендации по его сни-
жению.
Описаны конструкции и приведены характеристики гидрав-
лических передач (трансмиссий) вращательного действия, в том
числе передач, обеспечивающих стабильные скорости выходного
вала, даны рекомендации по их конструированию и изготовлению.
Рассмотрены также гидродвигатели возвратно-поворотного
и возвратно-прямолинейного действия различных типов, приведен
их расчет и рекомендации по конструированию и изготовлению.
Книга предназначена в качестве учебника для специальности '
«Гидропривод и гидропневмоавтоматика»; может быть исполь-
зована специалистами машиностроительного и механического
профилей и также работниками, занимающимися проектирова-
нием, изготовлением, исследованием и эксплуатацией объемного
гидропривода.
Табл. 8, ил. 272, список лит. 15 назв.
Рецензенты:
Кафедра гидропневмоавтоматики и гидропривода
Киевского политехнического института
Д-р техн, наук проф Некрасов Б. Б.
31303—124
Б 038(01)—74
124—74
© Издательство «Машиностроение», 1974 г.
ПРЕДИСЛОВИЕ
Настоящий учебник предназначен для студентов высших тех-
нических учебных заведений по специальности № 0566 «Гидропри-
вод и гидропневмоавтоматика». Поскольку излагаемому здесь
материалу предшествует курс «Гидравлика и газовая динамика»
и последуют курсы «Гидропривод и гидропневмоавтоматика»,
«Динамика гидроприводов и теория автоматического регулирова-
ния», а также «Производство гидроприводов», в книгу не вклю-
чены вопросы, относящиеся к тематике названных курсов. Основ-
ное'внимание в учебнике уделено конструированию и расчету
объемных гидравлических машин и их элементов, а также вопро-
сам их: прямейший.
В вводной главе приведены сведения по применяемым рабочим
жидкостям гидросистем и их свойствам; в специальной главе
изложены вопросы обеспечения надежной работы гидромашин.
Наиболее подробно рассмотрены конструкции и расчет роторно-
поршневых насосов, радиальных и аксиальных гидромоторов,
а также их рабочие параметры и характеристики. Даны рекомен-
дации по последовательности расчета основных параметров этих
машин и примеры решения инженерных задач по расчетам.
Несколько глав посвящено описанию пластинчатых и шесте-
ренно-винтовых гидромашин, а также насосов сверхвысоких (бо-
лее 100 МПа или 1000 кгс/см8) давлений.
Подробна рассмотрены вопросы испытаний гидромащин, при-
чин шума при их работе и методы борьбы с ним. В отдельные главы
выделены вопросы регулирования подачи объемных насосов,
а также описание и расчеты объемных передач вращательного дви-
жения.
Учитывая широкую, распространенность гидросистем с двига-
телями прямолинейного и поворотного возвратно-поступатель-
ного движений, подробно рассмотрены гидродвигатели этих си-
стем, а также их характеристики и вопросы расчета.
В заключительной главе описаны пневматические объемные
машины и даны их основные расчеты.
Физико-технические величины выражены в учебнике в едини-
цах систем СИ и МКГСС с привлечением некоторых внесистемных
единиц. .
Давление выражено в паскалях (Па). Паскаль — давление,
вызываемое силой 1 Н, равномерно распределенной по поверх-
ности площадью 1 м2. Наиболее употребительные в тексте другие
единицы давления имеют следующие соотношения:
1 кгс/м2 — 9,80665 Па
1 кгс/cAi3 = 1 ат (техническая атмосфера) = 98066,5 Па
1 атм (физическая атмосфера) == 101325 Па
1 мм рт. ст. — 133,332 Па
1 бар = 105 Па
В расчетах для упрощения согласования экспериментальных
и теоретических параметров приближенно принято 1 кгс/см2 =
= Ю5 Н/ма = 0,1 МПа (мегапаскаля).
Мощность выражена в ваттах (Вт). Ватт — мощность, при
которой работа 1 Дж совершается за время 1 с. [Джоуль (Дж) —
работа силы 1 Н при перемещении ею тела на расстояние 1 м
в направление действия силы]. 1 л. с. (лошадиная сила) = 75 =
745,7 Вт.
Температура выражена в градусах Цельсия (°C). 0° С =
~ 273,15 К (кельвин). Кельвин—единица термодинамической тем-
пературы.
ГЛАВА /
ОБЩИЕ СВЕДЕНИЯ
§ 1. Основные термины и определения
л
Насос — машина для создания потока жидкой среды. Разли-
чают динамические и объемные насосы. В динамическом
насосе жидкая среда перемещается под силовым воздействием
на нее в камере, постоянно сообщающейся со входом и выходом
насоса,1. В объемном насосе жидкая среда перемещается
путем периодического изменения объема занимаемой ею камеры,
попеременно сообщающейся со входом и выходом насоса.
Объемный гидродвигатель — машина, предназначенная для
преобразования энергии потока рабочей среды в энергию движе-
ния выходного звена.
Объемные насосы и гидродвигатели (объемные гидромашины)
являются энергопреобразователями объемных гидравлических
приводов, под которыми понимают совокупность устройств, пред-
назначенных для приведения в движение механизмов машин по-
средством жидкой рабочей среды под давлением.
Объемный гидропривод определяется так же как гидравличе-
ская система, включающая объемные насос и гидродвигатель
с соответствующей аппаратурой (устройствами) управления. Эта
система служит для передачи посредством жидкости энергии на
расстояние, и преобразования ее в механическую работу на вы-
ходе системы с одновременным выполнением функций регулирова-
ния и реверсирования скорости выходного звена гидродвигателя,
а также преобразования одного вида движения в другой. Это
преобразование в объемных гидромашинах происходит в резуль-
тате вытеснения жидкости из рабочих камер насоса при движении
вытеснителей или наполнении этих камер жидкостью под давле-
нием в гидродвигателе, т. е. в этих машинах используется энер-
гия давления. Расчетный объем жидкости, вытесняемый в единицу
времени из рабочих камер насоса, или поступающий в рабочие
камеры гидродвигателя, называют теоретической подачей. Или,
1 Изучение этих насосов вынесено в специальный курс «Гидродинамические 1
передачи и лопастные машины».
5
иначе, под объемной подачей насоса понимают отношение объема
подаваемой жидкости к времени его подачи.
Подачей или расходом жидкости называется, в общем случае,
объем жидкости, прошедшей через данное сечение канала (трубо-
провода) в единицу времени. Величина его Q определяется как
произведение средней скорости течения и на площадь f попереч-
ного сечения канала:
л
Ч
Q = fu>
где V — объем жидкости;
t — время. 4
Применяют также термин «объемная гидропере-
дача», под которым понимают часть объемного гидропривода,
состоящую из объемного насоса, объемного гидродвигателя и со-
единяющих их гидролиний (магистралей).
Объемным насосом называют гидравлическую ма-
шину, преобразующую приложенную к входному его звену (валу)
внешнюю механическую энергию в гидравлическую энергию по-
тока жидкости. Объемной гидрома.шиной называют
машину, преобразующую механическую энергию привода в потен-
циальную энергию потока жидкости (рабочей среды) — при работе
машины в генераторном (насосном) режиме и обратно в механи-
ческую энергию на выходе гидродвигателя — при работе машины
в двигательном режиме. Под рабочей средой понимается
рабочая жидкость в объемном гидроприводе и рабочий газ в пнев-
моприводе.
Объемная гидромашина, предназначенная для работы как
в режиме объемного насоса, так и в режиме объемного гидро-
мотора, называется насос-моторбм. Насосный агрегат с комплек-
тующим оборудованием, смонтированным по определенной схеме,
обеспечивающей работу насоса, называют насосной установкой.
Всякая объемная гидравлическая машина имеет рабочий
орган, который состоит из нескольких взаимодействующих дета-
лей определенной геометрической формы, образующих полость
изменяемого объема, заполняемую рабочей жидкостью во время
нахождения ее во входной камере машины. При достижении по-
лостью выходной камеры объем этой полости уменьшается и
жидкость выталкивается (вытесняется) в выходную камеру. Для
осуществления указанных функций в объемной гидромашине
имеется устройство, которое герметично замыкает (ограничивает)
вытесняемый объем, а также вытеснитель, изменяющий этот объем
в процессе рабочего хода.
Детали, образующие полости изменяемого объема и отделяю-
щие входную полость от выходной, являются основными деталями
всякой объемной гидромашины. Требованиями к этим деталям
являются обеспечение герметичности изменяемого объема, пре-
пятствующей вытеканию жидкости из полостей высокого давле-
6
. ния, а также обеспечение жесткости конструкции этих полостей.
Форма вытеснителей и способ замыкания вытесняемого объема
определяет кинематику и конструктивный тип гидромашины.
В гидропередачах жидкостным звеном устанавливают геомет-
рические или силовые связи между соединениями или механи-
ческими звеньями. Геометрические связи жидкостным звеном
осуществляют при помощи определенного геометрически изолиро-
ванного объема жидкости, ввиду чего гидропередачи с этой связью
называются объемными. Кинематика таких механизмов может
быть независимой от нагрузок, и соотношения между кинемати-
ческими и нагрузочными показателями режима можно рассматри-
вать раздельно.
Если жидкостным звеном установлены между соединяемыми
им механическими звеньями силовые связи, то гидропередача
называется динамической. Кинематика ее существенно зависит
от приложенных нагрузок на выходном валу и не может рассмат-
риваться самостоятельно. Иначе говоря, такие механизмы не об-
ладают собственной кинематикой и обратная связь в них осу-
ществляется по нагрузке. Под нагрузкой понимается комплекс
статических и динамических сил, действующих на выходное звено
гидродвигателя при его движении по заданному закону.
Вытеснение жидкости из рабочих камер насоса и заполнение
ею всасывающих камер происходит в результате уменьшения
и соответственно^увеличения геометрического объема этих камер,
герметически отделенных друг от друга. Рабочим органом, непо-
средственно совершающим работу вытеснения, является в объем-
ном насосе вытеснитель — поршень (плунжер), пластины, зубча-
тое колесо, диафрагма и т. д.
Рабочий ход в гидродвигателе осуществляется в результате
увеличения объема рабочих камер под действием поступающей
в них жидкости под давлением. Под рабочей камербй насоса (или
гидромотора) понимается ограниченное изолированное простран-
ство, образованное деталями насоса с периодически увеличиваю-
щимся и уменьшающимся при работе насоса объемом и попере-
менно сообщающееся соответственно с нагнетательным и' всасы-
вающими каналами (с приемной или отдающей полостью гидро-
машины).
Применяется также термин объемная гидромашина; рабочий
процесс в такой машине основан на попеременном заполнении
рабочей камеры рабочей жидкостью и вытеснения ее из камеры.
В соответствии с этим объемная гидромашина определяется так же
как устройство, предназначенное для преобразования энергии
движения входного звена в энергию потока жидкости или энер-
гии потока жидкости в энергию движения выходного звена в про-
цессе попеременного заполнения рабочей камеры жидкостью и
вытеснения ее из камеры.
В гидравлических приводах (системах) применяют преиму-
щественно роторные насосы, под которыми понимают объемные
’.К'
ч
насосы с вращательным или вращательным и возвратно-посту-
пательным движением рабочих органов независимо от характера
движения ведущего звена насоса.
Реже применяют возвратно-поступательные насосы — объем-
ные насосы с прямолинейным возвратно-поступательным движе-
нием рабочих органов независимо от характера движения веду-
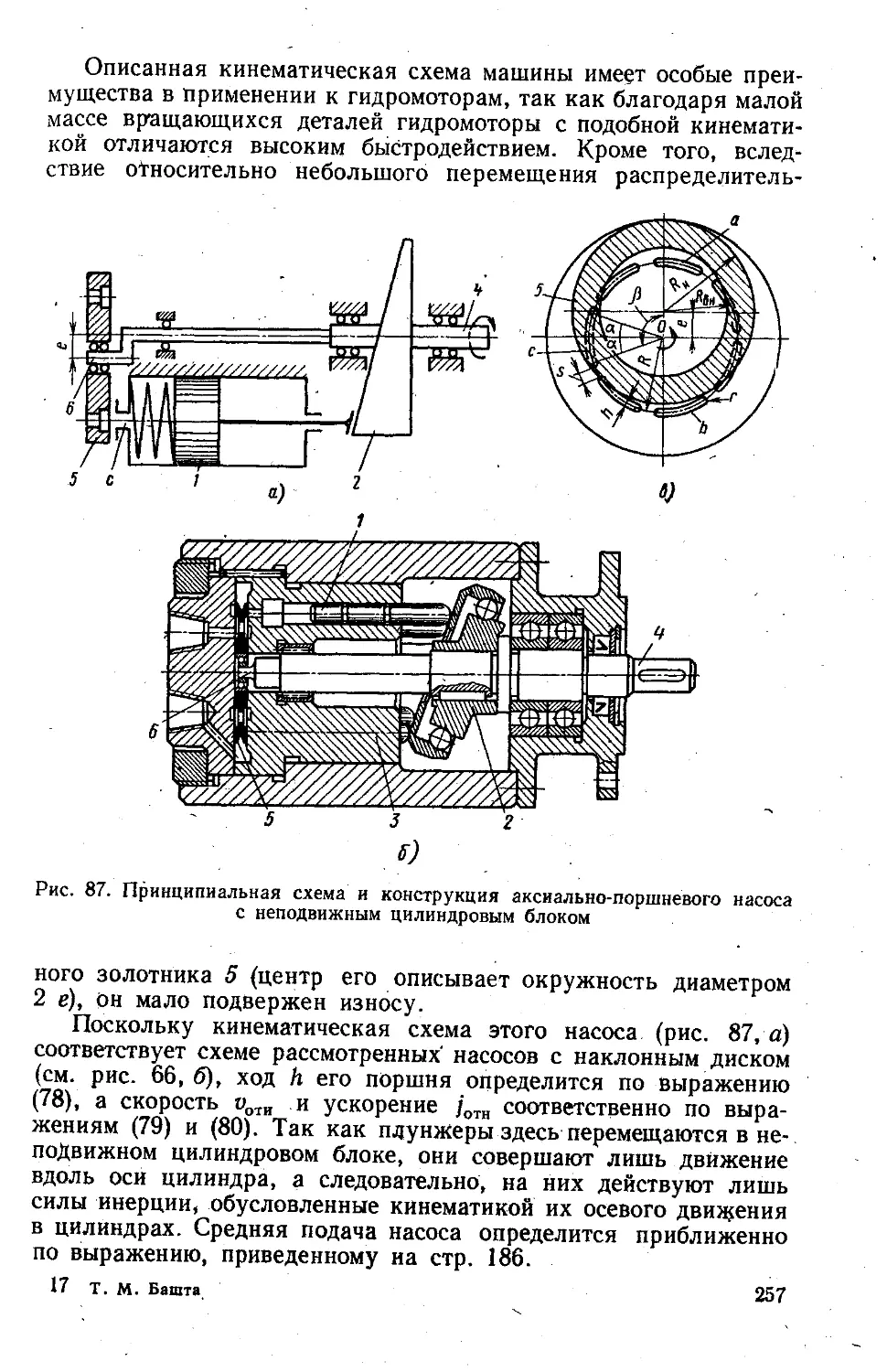
щего звена. В качестве перекачивающих распространены пря-
модействующие насосы, под которыми понимают
объемные насосы с возвратно-поступательным движением веду-
щего звена.
Используются также роторно-вращательные насосы — ротор-
ные с вращательным движением рабочих органов и роторно-посту-
пательные насосы — роторные с вращательным и возвратно-по-
ступательным движением рабочих органов.
В зависимости от типа применяемого гидродвигателя разли-
чают поступательный, поворотный и вращательный гидроприводы,
а также гидропривод смешанного движения, в который входят
не менее двух типов объемных гидродвигателей.
Гидропривод с автоматическим регулированием, в котором
параметр движения выходного звена объемного гидродвигателя
поддерживается постоянным, называют стабилизированным гидро-
приводом, а гидропривод с автоматическим регулированием, в кЬ-
тором параметр движения выходного звена гидродвигателя изме-
няется по заданной программе, называют программным гидропри-
водом.
Объемная гидромашина, предназначенная для работы как
в режиме объемного насоса, так и в режйме объемного гидродви-
гателя, называется обратимой объемной гидромашиной.
По характеру движения выходного звена различают объемные
гидродвигатели возвратного и вращательного движения. Первые
из них называются силовыми цилиндрами или гидроцилиндрами,
а вторые — гидромоторами. Под последним понимается объемный
гидродвигатель с вращательным движением выходного звена.
Различают нерегулируемый и регулируемый гидромоторы, под
которыми понимаются соответственно гидромоторы с постоянным
и с переменным рабочим объемом (см. стр. 76). Кроме того, раз-
личают нереверсивный и реверсивный гидромоторы, под которыми
понимается соответственно гидромотор с постоянным и с перемен-
ным направлением вращения выходного звена.
Гидропривод, управление которым осуществляется ручным
воздействием на регулирующий орган без подвода дополнительной
энергии извне, называют гидроприводом ручного управления.
При использовании же воздействия на регулирующий орган гидро-
машины сервомеханизма, а также в случае дистанционного упра-
вления, будет иметь место гидропривод автоматического управ-
ления.
Гидролин^ия (гидросеть) — устройство, предназначенное для
прохождения рабочей среды в процессе работы объемного гидро-
3
привода. Различают всасывающую и напорную гидро-
линии; по первой рабочая жидкость движется к насосу, а по
второй жидкость движется от насоса к распределителю или непо-
средственно к гидродвигателю. Гидролинию, по которой жидкость
движется от распределителя к объемному гидродвигателю, назы-
вают исполнительной гидролинией; гидроли-
нию, по которой жидкость движется в бак от гидроаппарата или
непосредственно от объемного гидродвигателя, называют слив-
ной гидролинией.
Под аппаратами управления понимают устройства, предназна-
ченные для управления параметрами гидросистемы (гидропри-
вода) Ч Насос и гидродвигатель связаны между собой и с аппа-
ратами управления гидролинией.
Ниже приводятся прочие определения и термины по основным
техническим показателям работы насосов. ’
Объемная подача насоса — отношение объема подаваемой
жидкости ко времени.
Рабочий объем насоса — разность наибольшего и наименьшего
значений замкнутого объема за один оборот.
Геометрическая (идеальная) подача — сумма подач и объем-
ных потерь насоса.
Давление на входе в насос и на выходе из насоса — соответ-
ственно давление рабочей жидкости на входе и на выходе из
насоса.
Подпор — разность высот уровня рабочей жидкости в опорож-
няемой емкости (баке, резервуаре) и центра тяжести сечения
входа в насос.
Высота самовсасывания — высота самозаполнения подводя-
щего трубопровода самовсасывающим насосом.
Мощность насоса — мощность, потребляемая насосом.
К. п. д. насоса — отношение полезной мощности насоса к его
приводной мощности.
Номинальный режим насоса — режим его работы, обеспечи-
вающий заданные технические показатели.
Оптимальный режим насоса — режим работы насоса при наи-
большем значении к. п. д.
Кавитационный режим насоса — режим работы насоса в усло-
виях кавитации, вызывающей изменение основных технических
показателей.
Помимо объемного гидропривода различают также гидродина-
мический привод (передачу), состоящий из гидродинамической
передачи и устройства управления, а также вспомогательных
аппаратов и гидролиний. Гидродинамическая передача соответ-
ственно состоит из лопастных (центробежных) насоса и гидродви-
1 Изучение этих устройств входит в специальный учебный курс «Гидро- >
приводы и гидропневмоавтоматика».
9
гателя (турбины). Энергия от насоса к турбине передается гидро-
динамическим взаимодействием потока жидкости и рабочих колес
машин. Следовательно, в этих передачах в основном используется
кинетическая энергия жидкости (скоростной напор), тогда как
в объемных гидропередачах в основном используется энергия
давления.
Гидропередачей также часто называют устройства, предназна-
ченные для передачи механической энергии посредством жидкости
независимо от типа передач (объемного или гидродинамического),
причем понятия «насос» и «гидродвигатель» объединяют в общем
названии «гидромашина», понимая под этим преобразователь
энергии — механической в гидравлическую и гидравлической
в механическую.
Гидродинамическим приводам посвящен специальный курс,
ввиду чего в настоящем учебнике он не затрагивается.
Сравнение мощностных характеристик гидравлических и элек-
трических приводов показывает аналогию между давлением жидко-
сти и напряжением тока, а также между расходом жидкости и
силой тока, что позволяет представить эти различные по своей
природе приводы одними и теми же по структуре дифференциаль-
ными уравнениями движения.
§ 2. Преимущества гидропривода
Основными преимуществами объемного гидравлического при-
вода являются его высокие •'Динамические качества, простота осу-
ществления' бесступенчатого? регулирования выходной скорости,
а также весовые характеристики (отношение веса машины к ее
мощности) и строительный объем, приходящийся на единицу пере-
даваемой мощности (энергоемкость). /
Динамические качества гидромотора оцениваются способ-
ностью сообщать инерционной (массовой) нагрузке большое, уско-
рение и определяются отношением момента, развиваемого гидро-
мотором, к моменту инерции вращающихся его частей. По вели-
чине этого отношения аксиально-поршневые гидромоторы (см.
стр. 179) более чем на порядок превосходят электродвигатели
той же мощности, что во многих случаях является решающим
фактором для характеристики гидросистемы и в частности — для
следящих гидросистем.
Преимущества гидродвигателей по этому показателю перед
электродвигателями обусловлены тем, что удельная сила их прак-
тически неограничена, а при давлении жидкости примерно 30 МПа
(300 кгс/см2) она в 20—25 раз больше, чем у электродвигателя.
Благодаря возможности получения в заданном ограниченном
пространстве больших крутящих моментов и усилий обеспечи-
вается высокая' приемистость и быстродействие гидропривода
и соответственно — малое время запаздывания при отработке
ю
командных сигналов, что особенно важно для быстродействующих.
следящих механизмов.
Под приемистостью гидродвигателя в общем случае понимают
его способность "развивать скорость при инерционной нагрузке
в течение малого времени. Практически реверс гидродвйгателя-
без маховых масс происходит мгновенно и запаздывание (если
оно есть) обусловлено лишь сжимаемостью рабочей жидкости
и составляет обычно всего несколько миллисекунд. Так, время
разгона гидромотора средней мощности 5—75 кВт) не превышает
0,1 с, для некоторых же моторов оно не превышает 0,03—0,04 с.
Для качественной оценки гидродвигателей по этому параметру
можно указать, например, что момент инерции ротора пластин-
чатого гидромотора (N — 2,5 кВт при п = 1000 об/мин и р =
= 6,5 МПа) равен 2-lQ-eH/ca (2-10’в кгс/с’).
Высокой приемистостью отличаются также и насосы. Напри-
мер, в лучших образцах насосов время достижения регулируемым
насосом максимальной подачи от нулевого ее значения не превы-
шает 0,04 с, а время снижения подачи от номинального значения
до нулевого — не более 0,02 с. В тяжелом машиностроении при-
меняют регулируемые насосы мощностью 2000 кВт, производя-
щие до 60 реверсов в минуту.
В силу сказанного, гидравлический привод более чем иной
тип при^АО^ пригоден для^р^^ьсд уелрвйя^^рльших ускоре-
ний, ____
При оценке гидромашины большое значение имеют также ве-
совые характеристики, которыми являются:
удельный вес (или коэффициент удельного веса) гидрома-
шины, под которым понимают вес, приходящийся 'на единицу
полезной мощности (обычно выражается в H/кВт или кгс/кВт)
вес на единицу развиваемого момента (в Н/(Н-м) или
кгс/(кгс • м) J
; г G -
~~ М ’
где G, N и М — соответственно вес и мощность гидромашины
и крутящий момент на ее валу.
Для гидромашин высокого давления (>20 МПа или
>200 кгс/сма) общего применения удельный вес обычно составляет
6 Н/кВт (0,6 кгс/кВт); дли авиационных насосов и гидромоторов,
работающих при высоких скоростях (2500—4000 об/мин), этот
вес составляет 3 Н/кВт (0,3 кгс/кВт).
Кроме того, для многих случаев применения, в частности,
в горных машинах, ракетах и пр., для которых объемный фактор
имеет чрезвычайно большое значение, гидромашины оцениваются,
также по удельной мощности (мощности, отнесенной к единице
' и
объема), или, как называют этот показатель, энергоемкости.
Наиболее высокую энергоемкость имеют высокооборотные акси-
ально-поршневые гидромашины, пригодные для работы при да-
влениях 70 МПа (700 кгс/см2) и выше. Их энергоемкость достигает
6,7 кВт/дм3 и выше.
Преимуществом гидравлических приводов является также
возможность бесступенчатого регулирования в широком диапазоне
выходной скорости, а также простота управления, плавность, рав-
номерность и устойчивость движения под изменяющейся нагруз-
кой и высокая надежность гидроэлементов. Срок службы при
работе под нагрузкой насосов и моторов достигает 20 000 ч и более.
Гидропривод может работать в любых климатических условиях.
Высококачественные моторы и насосы имеют на номинальном
режиме работы высокий к. п. д.: объемный т)об = 0,98^-0,99,
механический т]мех = 0,96^-0,98 и полный г]пол = 0,95-^0,96.
Диапазон регулирования гидропривода вращательного дей-
ствия или передаточное число, под которым понимается отноше-
ние минимальной частоты вращения вала гидромотора к макси-
мальной, составляет во многих случаях 1 : 1000. Нижний предел
частоты вращения большинства двигателей составляет 8—16 об/мин
у двигателей с малым крутящим моментом (3—20 Н-м) и 2—
3 об/мин у двигателей с большим крутящим моментом (более
100 Н-м).
При применении гидроприводов конструктивно просто ре-
шается задача защиты машины от перегрузок. Благодаря тому,
что передача энергии производится по.трубопроводам, гидроси-
стемы обладают хорошими коммутационными качествами.
Высокие модуль упругости рабочей жидкости и герметичность
гидроагрегатов обеспечивают гидросистеме механическую жест-
кость по отношению к нагрузке (минимальную податливость вы-
хода под нагрузкой), а также допускают неограниченную по вре-
мени работу при минимальных скоростях, сохраняя при этом
постоянство заданных характеристик зависимости скорости от
нагрузки. Кроме того, гидросистема обеспечивает высокую пози-
ционную точность реверсирования. Так, у силового органа металло-
режущего станка точность реверсирования при применении гидро-
привода может быть доведена до 0,01 мм.
§ 3. Принцип действия объемного гидропривода
Из известных по курсу гидравлики трех видов механической
/г, . р . и2 Е р . и2
энергии ЖИДКОСТИ (^£=2 + ИЛИ е ~~т + р + 2* ’
где и, тир — скорость, масса и плотность жидкости [9]) в рас-
сматриваемых гидромашинах используется удельная энергия
давления р/р, которая с помощью объемных гидравлических’
двигателей преобразовывается в механическую работу.
12
Удельной энергией положения (z) в объемных гидропередачах
обычно пренебрегают, поскольку разности высот отдельных
элементов гидросистемы несоизмеримо малы в сравнении с дей-
ствующими в ней статическими давлениями жидкости. Прене-
ц2
в виде скоростного напора жидкости используется часто в команд-
ных устройствах гидроприводов.
брегают также и кинетической энергией
к хотя эта энергия
♦
Рис. 1. Схемы, иллюстрирующие закон Паскаля
Гидропередачи, в которых энергия передается главным образом
за счет кинетической энергии жидкости, называются гидро-
динамическими и рассматриваются в специальном курсе «Гидро-
динамические передачи».
Принцип действия объемных гидроприводов основан на высо-
ком объемном модуле упругости (ничтожной сжимаемости) жидко-
сти и на законе Паскаля, гласящем, что всякое изменение давле-
ния в какой-либо точке покоящейся капельной жидкости, не
нарушающее ее равновесия, передается в другие точки без изме-
нения. Это можно наглядно иллюстрировать схемой, показанной
на рис. 1, а. Она состоит -из двух силовых цилиндров 1 и 3 с порш-
нями разной площади, нагруженных грузами, и ручного насоса 2,
выходной канал которого связан с цилиндрами. Если площадь
поршня цилиндра 1 равна 5 см2 и поршня цилиндра 3 — 12 см2,
то веса удерживаемых ими грузов при давлении жидкости, разви-
ваемой насосом, в 10 МПа (100 кгс/см2), соответственно будут
Gr = 5000 Н (500 кгс) и С2 = 12 000 Н (1200 кгс).
Равновесие сил, действующих в рассматриваемой схеме, можно'
сравнить с равновесием коромысла с нагрузкой и С2, прило-
13
женной на его концах (рис. 1, б). Длины плеч и £2 коромысла
и величины грузов Gx и G2 связаны здесь соотношением
G1 ^3
02 Li-
Соответственно для гидравлической схемы (рис. 1, в), состоя-
щей из двух цилиндров площадью Fx и F2, поршни которых
нагружены грузами Gx и G2, эти параметры связаны соотно-
шением
01 _ £1
са - f2 •
Отсюда следует, что при соответствующем выборе размеров
площадей цилиндров представляется возможным уравновесить
большой груз G2 малым грузом Gp •
Уместно отметить, что отсутствие надежных средств гермети-
зации длительное время служило препятствием к практическому
использованию в технике закона Паскаля, сформулированному
им еще в 1663 г. Лишь в XIX в., с появлением надежных уплотни-
тельных манжет появились гидромашины для передачи энергии
через жидкость, в промышленности получили распространение
гидравлические прессы, грузоподъемные гидромеханизмы и др.
Для нахождения основных кинематических и силовых зависи-
мостей гидропривода рассмотрим расчетную схему на рис. 2, а.
Цилиндры 4 и 5, заполненные жидкостью, соединены трубопро-
водом. Поршень первого цилиндра нагружен силой Ри развива-
емой внешним усилием R, приложенным к ручке 3, а поршень вто-
рого цилиндра (гидродвигателя) — внешней -нагрузкой в виде
силы Р2. х
При перемещении поршня 1 в направлении, показанном стрел-
кой, жидкость будет вытесняться из цилиндра 4 по соединитель-
ному Трубопроводу в цилиндр 5, приводя его поршень 2 в движе-
ние. При этом давление р = создаваемое в цилиндре 1
силой Ри будет действовать (по закону Паскаля) также и на
поршень 5 (потерями напора в трубопроводе пренебрегаем).
Из рассматриваемой схемы следует, что при полной герметич-
ности и отсутствии деформации цилиндров, а также при практи-
ческой несжимаемости жидкости перемещения поршней 1 и 2
будут связаны зависимостью
/ii£-1 = h2F 2,
где hlt h2, Ft и F2 — соответственно перемещения и площади
поршней 1 и 2.
На основании данного уравнения, а также принимая во вни-
л d? ' л do
мание, что =-7- и га = можно составить выражения
^2 Л F] dj ,
— = — = -г; п« = п, — = п, -я-.
hi F2 dj 2 Ч xdl
14
Пренебрегая гидравлическим сопротивлением и трением порш-
ней 1 и 2 при их движении, а также принимая во внимание, что
Pj = pFi и Р2 = рР2, можно также написать
Р2 . D n F2 d ^2
Р " „Р — И2 ’ ~ “ ^172 >
Pj рг\ di dt
X
где р — давление жидкости;
Рх и Р2 — силы статического давления жидкости соответ-
ственно на поршнях Iji 2.
Соответствующим выбором значений плеч а и Ь можно повы-
сить усилие Р2:
Ра _а4"^/^а\®. р _,
R a~\dj ’ •
На рис. 2, б показана принципиальная схема гидропресса,
соответствующая приведенной расчетной схеме, которая может
служить также и схемой гидродомкрата. Для случая домкрата
тело 10 — поднимаемый груз, для случая пресса — это неподвиж-
ная опора, связанная с фундаментом колоннами 8 (показаны,
штриховыми линиями), а тело 11 — прессуемый материал.
к
15
f
С помощью ручного насоса 13, снабженного всасывающим 12
и напорным 14 клапанами, создается давление в цилиндре 6,
которое действует на поршень 7 и вызывает усилие Р2 вдоль
поршня. Это усилие при R = 200 Н (20 кгс), alb = 1/9 и d2ldx ==
= 10 составляет
р =fll±2/W = 200.10-100 = 200 кН.
/ a \di/
Соответственно заданному соотношению -^-=10 путь пере-
«1
мещения поршня 7 будет меньше пути перемещения поршня 9
d22 <
в -п- раз. Допустим, требуется определить число ходов порш-
ня 9 (число качаний ручки) при работе рассматриваемой пере-
дачи в режиме домкрата для-поднятия груза (перемещения
поршня 7) на путь 100 мм при ходе поршня 9 в 50 мм. Пренебре-
гая утечками и сжимаемостью жидкости, находим искомое число
ходов ручки из условия равенства объемов, описываемых порш-
нем 7 за один ход длиной h2 и поршня 9 — за п ходов длиной hx
каждый:
Отсюда для перемещения поршня
двойных качаний ручки (поршня 7)
П = “9- .
7 на 100 мм потребуется
На рис. 2, в представлена схема простейшей модели гидро-
привода, состоящего из регулируемого реверсивного насоса 16
и последовательно соединенного с ним гидроцилиндра (гидродви-
гателя) 15. ^Жидкость, подаваемая насосом 16 под давлением р,
поступает в гидродвигатель 15. Если пренебречь потерями давле-
ния жидкости в трубопроводе, соединяющем насос и двигатель,
то на поршень последнего будет действовать давление р, равное
давлению на выходе насоса, которое будет развивать движущее
усилие на его штоке.
Пренебрегая трением и силами инерции движущихся частей,
уравнения сил, действующих на поршень гидродвигателя при
установившемся движении, имеет вид v
Р — pF или р — ,
где Р — нагрузка (сила сопротивления), действующая на пор-
шень;
F — рабочая площадь поршня гидродвигателя;
г л (£>2 — d2)
16
Эта сила приводит в движение «выходное звено» гидропривода
(поршень гидроцилиндра), преодолевая нагрузку и совершая
полезную работу.
С учетом трения в гидродвигателе выражение для давления
примет вид
где Ртр — сила трения в гидродвигателе.
Следовательно, давление жидкости определяется не только
внешней нагрузкой Р, но также и трением в гидродвигателе
(силы инерции не учитываем), причем на холостом ходу (Р = 0)
давление определяется лишь величиной трения в гидродвигателе.
Из приведенной формулы следует, что давление жидкости за-
висит при прочих равных условиях от геометрических размеров
рабочих элементов гидродвигателя. В соответствии с этим для
преодоления одной и той же внешней нагрузки можно уменьшить
размеры гидродвигателя путем соответственного повышения да-
вления. Ввиду того, что уменьшение размеров гидродвигателя
обычно существенно важно, стремятся к повышению рабочих
давлений жидкости. Величины давлений достигли в отдельных
случаях 70 МПа (700 кгс/сма) и выше.
Однако повышение давления предварительно требует решения
ряда технических проблем, как-то: усовершенствования конструк-
ции гидроагрегатов и технологии их изготовления, а также обеспе-
чения срока службы и их надежности. Ввиду этого выбор вели-
чины давления должен производиться с учетом всех этих, а также
экономических соображений.
Важным параметром, характеризующим работу гидравличе-
ского привода, является также подача жидкости, величина кото-
рой определяет скорость «выходного звена» привода. Пренебрегая
утечками и сжимаемостью жидкости, можем написать
Qh “ Од»
где QH — подача насоса;
— расход жидкости в гидродвигателе;
г» Ph г
Од — т
здесь v — hit — линейная скорость штока гидродвигателя;
h и t — путь и время перемещения штока.
Из последнего уравнения следует, что расчетная скорость
гидродвигателя v = прямо пропорциональна количеству
поступающей в него в единицу времени жидкости, т. е. повышение
скорости связано с повышением подачи жидкости.
Считая, что перемещение поршня 1 (рис. -2, а) на величину hr
произошло за время t. находим скорость его^движения
2 Т. М. Башта
17
I
Произведение силы Р1г действующей на поршень 1, на ско-
рость vх его движения даст выражение мощности
W7 = Р jVj = pF jt»!.
Поскольку произведение скорости поршня на его площадь Ft
есть объем, описываемый им в единицу времени, или, иначе,
расчетная подача QT жидкости, выражение для вычисления рас-
четной мощности можно представить в виде
W = pQT. (1)
Следовательно, мощность объемного гидравлического привода
определяется произведением давления на подачу. Если давле-
ние р выразить в кгс/см2 и расход Q — в см3/с, то расчетная мощ-
ность
N — PQt кВт- V — р^т — Р^т л с
" ~ 10,2-103 КИТ’/V 100-75“ 7,5-10» Л> С‘
Для распространенной размерности подачи Q л/мин эти выра-
' жения примут вад:
м — кВт* N — л с
612 ’ 450
Для подачи жидкости в галлонах (американских) в минуту
(1 галлон = 3,7^-л) и давления жидкости в фунт/кв. дюйм выра-
жения мощности имеют вид
N — р® - кВт- N — Ф л с
п ~ 2331 КОТ’ /V ~ 1714 Л> С’
В единицах системы СИ расчетная мощность выражается как
. N = 10"2QTp Вт,
где QT — подача жидкости в см3/с;
р — давление в Н/см2.
Из выражения (1) следует, что расчетная мощность гидропри-
вода растет при неизменной подаче пропорционально повышению
давления жидкости. Поскольку при увеличении давления масса
и габариты гидроагрегатов и их компонентов (трубопроводов
и пр.) увеличиваются незначительно (так как повышение размер-
ный их параметров обусловлено лишь условиями прочности),
рабочие давления с этой точки зрения целесообразно выбирать
возможно высокими. В настоящее время величины давлений до-
стигли 20—30 МПа (200—300 кгс/см2), а во многих случаях 70—
100 МПа (700—1000 кгс/см2) и выше.
Мощность единичного насоса и соответственно гидродвигателя
обычно не превышает в типовых гидросистемах 73,6 кВт (100 л. с.),
однако в отдельных случаях она достигает 2900 кВт (4000 л. с.)
и выше. По литературным сведениям за рубежом ведется разра-
18
ботка гребной установки с гидрообъемным приводом (передачей)
для судна на подводных крыльях с газотурбинными двигателями
мощностью'6500 кВт (9000 л. с.). Рабочее давление в гидро-
системе этой передачи принято в 70 МПа (700 кге/см2).
Ближайшей перспективой в развитии отечественных гидро-
приводов также является давление в 700 кгс/см2.
Следовательно, повышение давления жидкости и частоты вра-
щения машины является одной из основных задач технического
усовершенствования гидросистем. Однако применять машины
с экстремальными данными (например, насос с рабочим объемом
55 см8 и давлением 500 кгс/см2, имеющий при 5000 об/мин мощ-
ность 300 л. с.) без особой необходимости не рекомендуется,
поскольку следует учитывать сопровождающие отрицательные
факторы и, в частности, возникающий при столь высоких давле-
ниях и скоростях шум во время эксплуатации и снижение срока
службы машин. '
§ 4. Механизм гидравлической связи
<1
Часто представляется целесообразным применить гидравличе-
скую систему для связи ручки управления с управляемым агре-
гатом какой-либо машины вместо механической, системы управле-
ния, которая во многих случаях бывает чрезмерно сложной. Так,
клапаны, служащие для управления силовыми агрегатами само-
летной гидросистемы обычно устанавливаются в местах, удален-
ных от пилота, и чтобы привести в действие эти клапаны, приме-
няют различные устройства — механические тяги, гибкие тросы
и пр. Эти устройства имеют недостатки, например, качество ме-
ханической связи распределительного золотника с ручкой упра-
вления зависит от теплового расширения механической проводки,
от прогиба самолетной конструкции, от трения в механической
проводке, от сложности прокладки тяг (особенно сложной на
самолетах со складывающимися крыльями) и пр. Гибкие тросы
под действием нагрузки удлиняются и часто выходят из строя.
Учитывая это, во многих случаях целесообразно применить
гидравлическую связь между ведущим и ведомым звеньями.
К примеру, связь между ручкой управления и распределительным
золотником, управляющим движением поршня силового цилиндра,
и пр. Подобные механизмы могут быть применены для привода
приспособлений, требующих приложения силы не только в одном
направлении, но и в обоих направлениях.
К наиболее простым случаям подобного гидравлического упра-
вления можно отнести управление посадочными фарами самоле-
тов, управление дросселями авиамоторов и пр. Обычно эта* си-
стема управления состоит из датчика с ручным приводом и при-
емника, соединенных трубопроводом (диаметром 4—6 мм). При .
приложении усилия к рукоятке датчика на рычаге приемника
2* 19
создается сила, которая может быть использована для привода
соответствующего механизма.
На рис. 3 изображены датчик 2 и приемник 12, предназначен-
ные для привода узла, имеющего поворотное движение, напри-
мер, — дросселя мотора. При повороте влево рукоятки 1 датчика
Рис. 3. Схема механизма гидравлического дистанционного управ-
ления
поршень 5, связанный с рукояткой коромыслом 3, опустится вниз
и через штуцер 7 вытеснит жидкость в штуцер 18 приемника.
При этом поршень 15 приемника переместится вверх и через стер-
жень 14 и рычаг 13 повернет рукоятку 11, связанную с приводи-
мым узлом. При повороте рукоятки 1 датчика вправо поршень 5
датчика будет перемещаться вверх, а поршень 15 приемника под
действием пружины 16 — перемещаться вниз, осуществляя тем
самым обратный поворот рукоятки 11.
Пружины 6 датчика применены для уравновешивания пру-
жины 16 приемника. Помимо этого, благодаря взаимно противо-
положным направлениям действия указанных пружин, осуще-
20
ствляется распределение нагрузки при действиях рукоятки 1
датчика в обоих направлениях.
Корпус 2 датчика служит резервуаром жидкости; для попол-
нения ею цилиндров 10 и 17 в случаях утечек или отвода излишка,
могущего появиться при тепловом расширении жидкости, пре-
дусмотрен клапан 9, который в конце обратного хода (вверх)
поршня 5 соединяет полость цилиндра 10 с резервуаром; это осу-
ществляется при помощи рычага 4 и тяги 8.
Добавление или уменьшение объема жидкости в данной си-
стеме необходимо для восстановления синхронизации управления,
могущей нарушиться при изменении объема жидкости вследствие
изменения температуры и утечек. Благодаря наличию клапана 9
происходит в конце каждого обратного хода компенсация запер-
того объема жидкости.
Основным условием точности и надежности работы рассмотрен-
ного гидравлического механизма является герметичность дви-
жущихся и неподвижных соединений. С учетом практически абсо-
лютной герметичности (что достижимо при современных методах
герметизации) и высокого модуля объемной упругости жидкости
(практической несжимаемости при возможных здесь давлениях)
рассмотренный механизм гидравлической связи обеспечивает пол-
ную и надежную синхронность движений выходного (рычаг 11)
и входного (рычаг 1) звеньев.
§ 5- Схемы гидроприводов
Всякий объемный гидропривод состоит из объемных насоса
и гидродвигателя, а также распределительно-регулирующей и
предохранительной аппаратуры, связанных гидравлической ма-
гистралью (гидролинией).
Рассмотренная выше принципиальная схема (см. рис. 2, а) со-
держит основные элементы, присущие' всякому гидроприводу
(передаче): насос (цилиндр,/) и гидродвигатель (цилиндр 2).
Однако для превращения этой схемы в конструктивную она должна
быть снабжена насосом непрерывного действия и рядом дополни-
тельных гидроаппаратов, которые позволили бы управлять потоком
жидкости, поступающей о.т насоса к гидродвигателю и предохра-
нять систему от перегрузок. В соответствии с этим во всяком
гидроприводе различают три группы элементов: насос (источник
гидравлической энергии), гидродвигатель (приемник гидравличе-
ской энергии или исполнительный механизм) и распределитель-
ная и предохранительная гидроаппаратура. В настоящем курсе
рассматриваются первые две группы элементов, третья группа
отнесена к курсу «Гидропривод и гидропневмоавтоматика».
Проблема создания качественного насоса и обеспечения на-
дежности его работы является основной проблемой в комплексе
задач по гидроприводу. Обычно в гидроприводах машин приме- •
няют многокамерные роторные насосы той или иной конструкции,
21
вращательного движения и гидродвигатели вращательного дви-
жения (гидромоторы), а также двигатели прямолинейного воз-
вратно-поступательного движения (силовые цилиндры); реже
используют гидродвигатели возвратно-поворотного движения
(угол поворота менее 360°).
На рис. 4, а показана принципиальная схема гидропривода
(гидросистемы) с гидродвигателем прямолинейного возвратно-
поступательного движения. Привод состоит.из насоса 1 с резер-
Рис. 4. Принципиальные схемы гидросистем
вуаром 6 и гидродвигателя (силового цилиндра) 2, соединенных
трубопроводами, а также дросселя 4 и переливного клапана 5,
ограничивающего повышение в процессе дроссельного регулиро-
вания давления жидкости на выходе насоса. Реверсирование
гидродвигателя (изменение направления движения штока силового
цилиндра) осуществляется распределительным устройством (кра-
ном) 3, с помощью которого изменяется направление потока
жидкости от насоса к гидродвигателю.
При положении распределителя 3 как показано в схеме на
рис. 4, а, жидкость от насоса 1 поступает в левую полость ци-
линдра 2, перемещая его поршень вправо. Жидкость, вытесняемая
при этом поршнем из правой (нерабочей) полости цилиндра 2,
по сливным трубопроводам и через распределитель 3 удаляется
в резервуар (бак) 6. При установке (поврроте) распределителя 3
в противоположное положение жидкость от насоса 1 будет посту-
пать в правую полость цилиндра 2 и отводиться в бак 6 из левой
его полости; поршень цилиндра в этом случае будет перемещаться
влево. При повышении давления жидкости сверх установленной
22
величины откроется клапан 5 и жидкость от насоса будет посту-
пать (переливаться) через него в бак.
На рис. 4, б и в представлены схемы гидропередач (приводов)
с гидродвигателем (гидромотором) 7 вращательного движения.
Приведенные схемы снабжены предохранительным клапаном 5
и баком 6 для рабочей жидкости.
. Реверсирование гидродвигателя гидропередачи вращательного
движения осуществляется "либо с помощью распределительного
устройства 3 (рис. 4, б), либо изменением направления потока
жидкости, подаваемой насосом 1 (рис. 4, в). Гидросистема (гидро-
передача) в последнем случае должна быть снабжена обратными
клапанами 8, которые отсоединяют нагнетательную линию от
бака 6 и одновременно обеспечивают подпитку всасывающей
полости насоса 1 в случае, если в последней в результате утечек
жидкости образуется вакуум.
При условии герметичности гидроагрегатов и практической
несжимаемости жидкости выходное звено гидродвигателя должно
перемещаться (или вращаться) с определенной скоростью, для
того чтобы пропустить через свои рабочие камеры жидкость, пода-
ваемую насосом, т..е. должно быть соблюдено условие QH = (?д,
где QH и <2Д—теоретические подачи (расхода) насоса и гидродвига-
теля, т. е. величины изменения их рабочих камер в единицу времени.
В результате, при условии указанных допущений, получим жест-
кую кинематическую связь между насосом и гидродвигателем.
Регулирование скорости гидродвигателя, т. е. движения
поршня силового цилиндра 2 (на рис. 4, а) или вала гидромотора 7
(на рис. 4, б), в передачах мощностью более 5 л. с. осуществляется
изменением подачи насоса 1 (см. рис. 4, в) и в передачах меньших
мощностей — посредством дросселя 4 (рис. 4, б), с помощью
которого создается сопротивление на выходе из насоса, в резуль-
тате чего часть жидкости отводится (переливается) через предохра-
нительный клапан 5 в бак 6. При полном перекрытии трубопро-
вода дросселем 4 вся жидкость удаляется в бак, в результате
скорость гидродвигателя 7 будет равна нулю.
В гидроприводах в качестве источников подачи применяются
аксиально-поршневые щ реже — радиально-поршневые насосы.
Шестеренные и прочие шиберные насосы нашли в основном
применение в качестве вспомогательных насосов, а также, в
основных системах — при невысоких (до 100 кгс/см*) давлениях.
В качестве основного насоса они применяются в гидросистемах
строительно-дорожных машин, в сельхозмашинах и пр. '
*
ч_ ,
*
§ 6. Условные графические обозначения объемных
гидравлических и пневматических машин
В комплект технических документов на гидравлическую (или
пневматическую) систему входят схемы, в которых показывается' л
взаимодействие гидроаппаратуры (гидроагрегатов) управления
га
ь
• ♦
ч
4
с источником питания и силовыми исполнительными механизмами
(гидродвигателями).
Гидравлические схемы составляются либо в полуконструктив-
ных изображениях, либо в условных (символических) обозначениях.
Схема .первого вида обеспечивает удобство чтения и наглядность
в понимании взаимодействия входящих в схему гидроагрегатов.
В схемах же второго вида показывается лишь тип гидроагрегата
и даются линии тока жидкости. Достоинством этих схем является
их универсальность, а также простота исполнения (вычерчива-
ния). Каждой группе гидроагрегатов присваиваются определен-
ные обозначения (см. ГОСТ 2.782—68). Размеры и начертания
таких изображений выбирают в каждом отдельном случае сооб-
разно принятому габариту общей схемы гидросистемы.
Объемные насосы и гидромоторы. Насосы обычно обозначают
окружностями. Размеры окружностей не регламентируются и
берутся соизмеримыми с обозначениями прочих гидроагрегатов
данной гидросхемы. Направление потока жидкости показывается
острием жирной . стрелки (треугольника), помещенной внутри
контура символа, а потока воздуха — острием незачерненного
треугольника; регулируемость подачи показывается длинной
тонкой стрелкой, пересекающей этот контур под углом. Неревер-
сивный насос постоянной производительности изображают одной,
а реверсивный — двумя жирными стрелками (треугольниками)
внутри контура, направленными во внешнюю сторону (показы-
вает, что поток жидкости направлен из насоса в гидросистему).
- Обозначения гидро- и пневмомоторов такие же, как и насосов,
однако острие стрелок направляется внутрь контура (показы-
вает, что поток рабочей жидкости направлен из гидросистемы в
мотор).
Условные графические обозначения объемных насосов, гидро-
и пневмомоторов показаны в табл. 1. Допускаются также к при-
менению полуконструктивные условные обозначения насосов,
в которых показан их тип (табл. 2).
Гидроцилиндр является объемным гидродвигателем, в котором
ведомое звено совершает ограниченное прямолинейное возвратно-
поступательное (силовой гидроцилиндр) или возвратно-поворот-
ное (моментный гидроцилиндр) движение. В табл. 3 приведены
символические обозначения гидроцилиндров. Сильфон изобра-
жается как плунжерный гидроцилиндр.
Объемная гидропередача вращательного движения состоит из
объемных насоса и гидромотора неограниченного вращательного
движения, соединенных между собой магистральными линиями.
Обозначения этих передач (табл. 4) зависят от регулируемости
и реверсивности входящих в них насосов и моторов.
Условные изображения типов управления механизмами подачи
гидромашин приведены в табл. 5. Примеры распространенных
комбинаций условных обозначений, включающих регулируемые'
объемные насосы, приведены в табл. 6.
24
Таблица 1
Насосы
Гидромоторы
Постоянной подачи:
а —нереверсивный; б —
реверсивный
а) ё)
Регулируемой подачи:
а — нереверсивный;
б — реверсивный
Нерегулируемые: а —
нереверсивный; б —
реверсивный
Регулируемые: а — не-
реверсивный; б —
реверсивный
Неполноповоротный
(поворотник)
ё)
Насос-моторы
Пневмомоторы
Нерегулируемый: а —
при одном направлении
потока; б — при любом
направлении потока
<t) ё)
Регулируемый: а — при
одном направлении по-
тока; б — при любом
направлении потока
а) ё)
Нерегулируемый: а —
с постоянным направ-
лением потока; б—
с реверсивным потоком
а) ё)
Регулируемый: а —
с постоянным направ-
лением потока; б —
с реверсивным потоком
Неполноповоротный
а) ё)
4
Таблица 2
I,
«о
Насосы
Шестеренный
Пластинчатый
Радиально- поршневой
Аксиально-поршневой
Кривошип но-поршневой
Винтовой
>
Таблица 3
Гидроцилиндры
4
Двустороннего действия
с односторонним штоком
Двустороннего действия
с двусторонним ШТ0К0>4
Двустороннего действия,
двухкамерный
Двустороннего действия,
телескопический
Одностороннего действия,
плунжерный
Одностороннего действия,
возвратом штока пружиной
к/ z *
Двустороннего действия,
с подводом жидкости через
шток
С двусторонним
регулируемым демпфером
Продолжение табл. 3
Гидроцилиндры
С односторонним
регулируемым демпфером
Камера мембранная
одностороннего действия
Гидроусилитель (бустер)
однокамерный
%
С механическими замками
г
Таблица4
Гидропередача из нерегулируемых насоса и гидромотора
Реверсивная передача
Нереверсивная
Реверсивная
С регулируемым насосом
и нерегулируемым
гидромотором
С регулируемым насосом
и гидромотором
•о
h
Таблица 5
ю
00
Управление
Механическое (от
движущейся части)
Пружинное
Гидравлическое
Электрогидравлическое
Ручное
Таблица 6
Насосы в гидросистемах
Реверсивный регулируемый
с ручным управлением
Нереверсивный
с автоматическим
регулированием по давлению
Нереверсивный
с автоматическим
регулированием по давлению
Регулируемый
с гидравлическим
управлением
по ходу поршня
сервопривода
/
Гидроаппаратура управления и регулирования изображаются
в схемной символике в виде простых контуров (преимущественно
прямоугольников). Гидравлические аппараты, состоящие из не-
скольких простых элементов, объединяют в группу условных обо-
значений, относящихся к составному (комплексному) аппарату;
группа заключается в общую рамку, очерченную штрих-пунктир-
ными линиями (см. рис. 7, е), чем подчеркивается, что все эти
Рис. 5. Конструктивные и условные изображения распределительных
золотников
элементы размещаются в одном общем корпусе. Простые элементы
составного аппарата, которые объединены внешними связями,
в общую рамку не заключаются.
Размеры условных изображений гидравлических аппаратов
выбираются в каждом отдельнрм случае сообразно принятому
габариту общей схемы гидросистемы.
Направление потока рабочей жидкости (среды) условно изо-
бражается жирной стрелкой, течение жидкости в обоих направле-
ниях изображается двумя противоположно направленными стрел-
ками. Направление потока газов изображается такими же стрел-
ками с незачерченным острием (треугольником).
Распределители (устройства управления, предназначенные для
изменения направления движения рабочей жидкости) всех типов
условно изображаются прямоугольниками (квадратами), причем
количество фиксированных позиций подвижного элемента распре-
делителя показывается соответствующим количеством прямо-
угольных полей, а число ходов — числом подведенных к нему
внешних линий (входов и выходов трубопроводов).
На рис. 5, а—в показаны конструктивные схемы и условные
обозначения двухпозиционных распределительных золотников:
29
двухходового (а), трехходового (б) и четырехходового (в) (соот-
ветственно двух-, трех- и четырехлинейных) типов, а на рис. 5, г —
трехпозиционногб золотника четырехходового типа с положитель-
ным перекрытием. Буквенные обозначения соответствуют: Н —
насос, Б — бак, D х ц D 2 — полости гидродвигателя (силового
цилиндра). Стрелки показывают направление потока рабочей
жидкости по каналам распределителя для одной какой-либо
фиксированной позиции подвижного его элемента, причем положе-
ние стрелок каждого поля должно соответствовать расположению
внешних подводимых линий. - 1
Линии условного обозначения (внешние трубопроводы, соеди-
ненные с распределителем) показываются лишь в одной (исход-
ной) позиции распределителя. При переключении распределителя
в другую позицию поле (прямоугольник), соответствующее этой
новой позиции, как бы перемещается на место поля исходной
позиции, линии же условного обозначения подводов остаются
на прежних местах.
Перекрытия (блокирование) каналов распределителя показы-
ваются короткой чертой, на- внутренних концах линий этих кана-
лов, перпендикулярной j< их осям. В частности в трехпозиционном
четырехходовом (четырехлинейном) распределителе (рис. 5, е)
все внутренние каналы в среднем положении подвижного элемента
распределителя перекрыты и циркуляция жидкости в нем отсут-
ствует. Путь жидкости по каналам распределителя в двух других
позициях характеризуется совмещениями левого или соответ-
ственно правого квадрата (поля) со средним, на котором пока-
заны линии условного обозначения (внешние трубопроводы).
На рис. 5, д и е представлены схемы включения четырехходо-
вых двухпозиционного (д) и трехпозиционного (а) распределите-
лей с электромагнитным управлением и возвратными пружи-
нами в систему одностороннего и двустороннего силового ци-
линдра. /
В ряде конструкций распределителей часть или все внутрен-
ние их каналы в среднем положении подвижного элемента не пере-
крываются, а соединяются между собой или со, сливом (баком).
В частности, в распределителе с отрицательным перекрытием все
внутренние каналы соединены между собой (рис. 6, а). Стрелка
в среднем квадрате контура условного обозначения показывает
направление выхода жидкости из каналов распределителя. В рас-
. пределителе, представленном на рис. 6, б, перекрыт лишь канал Б
(бака), каналы же £>х и £>а гидродвигателя соединены о каналом
насоса (Я). В распределителе, представленном на рис. 6, в, со-
единены между собой все каналы, кроме канала Н (насоса),
который перекрыт.
В системах с разгрузкой насоса применяется в среднем поло-
жении распределитель, в котором перекрыты лишь каналы гидро-
двигателя (Dt и Da), канал же насоса (Я) соединен с каналом
бака (Б) (рис. 6, е).
30
На рис. Т приведены примеры комбинаций условных обозна-
чений распределителей с различными жидкостными коммуника-
циями. На рис. 7, а показан трехпозиционный четырехходовой
распределитель с ручным (рычажным) управлением и двумя вез-
Рис. 6. Конструктивные и
распределителя с
А
условные схемы трехпозиционного четырехходового
различными внутренними коммуникациями
вратными пружинами, устанавливающими подвижный элемент
распределителя в среднее положение, в котором все каналы его
соединяются между собой и баком. Распределитель того же типа,
но с перекрытыми в среднем положении каналами (рис. 7, б),
снабжен механическим фиксатором, используемым в этом поло-
Рис. 7. Примеры условных изображений распределителей
жении. Двухходовой двухпозиционный распределитель (перекрыв-
ной кран), изображенный на рис. 7, в, предназначен для открытия
или закрытия магистрали; управляется он обычно от подвижной
детали с возвратом в исходное положение с помощью пружины.
Четырехходовой трехпозиционный распределитель, изображенный
на рис. 7, г, приводится дистанционно с помощью подачи управ-
ляющего давления и устанавливается в среднее положение пру-
жинами. В этом положении канал насоса перекрывается, а все
прочие каналы соединяются с баком.
31
Управляющее давление (условно изображается тонкими сплош-
ными или штрих-пунктирными линиями) может быть подано от
различных аппаратов управления ручным или иными (механи-
ческим, электромагнитным и пр.) способами. Управляющим
давлением может быть также давление самой рабочей среды.
Наиболее широко распространены распределители с электро-
гидравлическим управлением (с электрогидравлическими сервозо-
лотниками). На рис. 7, д приведена схема с двумя сервозолотни-
Рис. 8. Конструктивные и условные изображения распространенных клапанов
давления
ками (пилотами), представляющими собой вспомогательные рас-
пределители (золотники) с электромагнитным управлением. На
рис. 7, е показана схема, в которой вспомогательный (пилотный)
распределитель выполнен в виде четырехходового двухпозицион-
ного золотника с двумя электромагнитами. Основной распреде-
литель в этой схеме управляется энергией давления рабочей
среды, подводимой к нему с помощью этого вспомогательного
распределителя.
Клапаны регулирования давления условно изображаются
в виде прямоугольника (прямоугольного поля) со стрелкой внутри
(рис. 8). Конструктивная схема и условные изображения предо-
хранительного клапана (клапана, ограничивающего максималь-
ное давление рвх) с регулируемой пружиной представлены на
рис. 8, а—г. Изменения под действием какой-либо силы (давле-
ния рабочей среды, управляющего давления и пр.) положений
регулирующего элемента (затвора), вплоть до полного открытия
или закрытия им проходного сечения, можно представить как
перемещение прямоугольного поля со стрелкой относительно
входной и выходной линий (рис. 8, в), которые сохраняют при
этом свое положение неизменным. Клапан открыт, когда стрелка
находится в положении, совпадающем с входной и выходной
32
Таблица 7
Элементы гидросистем
3
№
Башта
Дроссель:
а — нерегулируемый;
б — регулируемый
Обратный клапан:
а — одинарный
неуправляемый;
б — сдвоенный управляемый
Приборы:
а — термометр; б — манометр.
Бак:
а — без поддавливания;
б — с газовым подлавливанием
Масляный фильтр
(а) и терморегулятор (б)
а)
6)
Я
Ги др оа к к ум у л ятор:
а — общее обозначение;
б — гидрогазовый
а) 6)
Запорный кран (а)
и фиксирование
подвижных
соединений (б)
б)
Подогреватель (а)
и охладитель (б)
жидкости
линиями (рис. 8, в), и закрыт, когда стрелка смещена относительно
них (см. рис. 8, б). Сигнальным (управляющим) давлением в ти-
повом клапане является рабочее (входное) давление рвх среды
(рис. 8, б) или дополнительное управляющее давление рупр.
На рис. 8, д и е показаны конструктивная схема и условное
обозначение предохранительного клапана двухступенчатого типа
(клапана непрямого действия), состоящего из плунжерного кла-
пана (затвора) 2 (или перекрывного плунжера) и регулируемого
по давлению вспомогательного клапана-датчика 3, к которому
через дроссель 1 подводится жидкость из входного канала. Для'Л
дистанционной разгрузки (управления) предусмотрен канал k,
при соединении которого со сливной полостью (атмосферой) про-
изойдет отключение клапана (плунжер 2 переместится вправо,
открывая проход жидкости, практически без сопротивления от
насоса в бак). Схема такого клапана с дистанционной разгрузкой
дополняется сигнальной (управляющей) тонкой линией а. Ввиду
некоторой сложности вычерчивания последнего изображения
в практике обычно применяют изображения, представленные
на рис. 8, б, снабжая их, в случае необходимости, поясняющей
надписью.
В практике широко распространены редукционные клапаны,
предназначенные для поддержания постоянного давления на вы-
ходе (рвых = const) при изменении входного давления (рвх =/=
const) при условии, что рвых > рвх. Конструктивная схема
и условные обозначения такого клапана показаны на рис. 8, ж—и.
Сигнальным давлением здесь является давление рвых на выходе
из клапана (выходное или редуцированное давление), определяе-
мое усилием пружины. В клапане, условное обозначение которого
представлено на рис. 8, и, величина выходного давления опреде-
ляется (корректируется) управляющим давлением рупр отдельной
магистрали.
В табл. 7 приведены условные изображения распространенных
вспомогательных элементов гидросистемы.
ГЛАВА 11
РАБОЧАЯ ЖИДКОСТЬ ГИДРОСИСТЕМ
И ЕЕ СВОЙСТВА
Рабочая жидкость является рабочим телом гидропривода
и может рассматриваться как его элемент. Одновременно она
выполняет функции смазочного и охлаждающего агента, а также
защищает детали от коррозии, т. е. обеспечивает работоспособ-
ность и надежность узлов гидропривода.
Наиболее полно удовлетворяют требованиям, предъявляемым
к рабочей жидкости, минеральные масла нефтяного происхожде-
ния, представляющие собой жидкие дистиллаты, загущенные пара-
фином, церезином и другими твердыми углеводородами. Для спе-
циальных гидроприводов применяются также синтетические
жидкости на основе органических и кремнийорганических соеди-
нений. Основными показателями для оценки качества рабочей
жидкости, применительно к тематике настоящего учебника, слу-
жат вязкостно-температурные ее свойства, химическая и физи-
ческая стабильность, агрессивность по отношению к резиновым
уплотнительным деталям и смазочная способность.
§ 7. Вязкость жидкости
Характеристика вязкости. Вязкость рабочей жидкости, под
которой понимается ее свойство оказывать сопротивление дефор-
мации сдвига, является одной из наиболее важных характеристик
для расчета и проектирования объемных гидравлических машин
и их эксплуатации. От вязкости жидкости зависят объемные и
механические потери при работе насоса, возможность работы
гидропривода при низких и высоких температурах и пр.
Описание характеристики вязкости жидкости основано на
известной гипотезе Ньютона, согласно которой напряжение т
сдвига между соседними слоями жидкости бесконечно малой тол-
щины пропорционально градиенту скорости и сдвига в направле-
нии, перпендикулярном к направлению движения жидкости [91.
Механизм возникновения вязкости обусловлен тем, что при тече-
нии вязкой жидкости вдоль твердой стенки скорость движения
ее слоев в результате торможения потока различна, вследствие
чего между слоями возникает сила трения. Выражение для на-
з* 35
пряжения от силы трения (среза слоя жидкости) в дифференциаль-
ном виде, -известное как закон Ньютона, имеет вид
__ du
X~^dy’
где р — коэффициент пропорциональности; в практике назы-
вается коэффициентом динамической (или абсолютной)
вязкости жидкости;
и — скорость сдвига;
у — расстояние между слоями жидкости, измеренное пер-
пендикулярно направлению ее движения.
В соответствии с этим касательное напряжение Т слоя жидкости
площадью F будет
лт, г- du
Т = uF ~ ,
r dy
Следовательно, абсолютная вязкость р является силой, дей-
ствующей на единичную площадь плоской поверхности, которая
перемещается с единичной скоростью относительно другой пло-
ской поверхности, находящейся от первой на единичном рас-
стоянии.
В системе единиц МКГСС единицей абсолютной вязкости при-
нято считать касательную силу, с которой один слой жидкости
площадью 1 м3 действует на другой, когда один слой движется
относительно другого с градиентом скорости 1 м/с-м. Размер-
ность этой единицы кгс* с/м3. В системе единиц СГС вязкость
выражается в пуазах (П), причем вязкость жидкости равна 1П,
если сила, необходимая для того, чтобы перемещать одну относи-
тельно другой две параллельные пластинки из жидкости с пло-
щадью поверхности 1 см3 и градиентом скорости 1 см/с*см, соста-
вляет 1 дину. Эта единица коэффициента вязкости обозначается р
и имеет в системе СГС размерность дин*с/см2 или г/(см*с).
Для примера можно указать, что вязкость воды при 20° С равна
примерно 1П.
Для маловязких жидкостей р обычно выражают в сантипуа-
зах (сП).
Коэффициенты динамической вязкости связаны следующими
соотношениями:
1 кгс* с/м2 = 98,1 П = 9810 сП
1 П= дин • с/см2 = 0,010193 кгс с/м2
1 сП = 1,0193-10"4 кгс-с/м2 — 0,01 П
В системе СИ коэффициент динамической вязкости выражается
в Н*с/м2.
Кинематическая вязкость. В гидравлических расчетах обычно
применяют отношение коэффициента динамической вязкости р
к плотности р жидкости, которое называется коэффициентом ки-
нематической вязкости и обозначается
р
V = — .
р
36
В системах СИ и МКГСС v выражается в ма/с, а в системе СГС —
в см2/с. Величина вязкости, равная 1 см2/с, называется сток-
сом (Ст). В технической практике получили распространение
сантистоксы (сСт). Указанные единицы кинематической вязкости
связаны соотношением: 1 м2/с = 10 000 Ст = 1 000 000 сСт.
В технических характеристиках отечественных масел указы-
вается (если отсутствуют специальные оговорки) кинематическая
вязкость, выраженная в сантистоксах при температуре 50° С.
При выборе величины вязкости рабочей жидкости для гидро-
приводов приходится учитывать ряд противоречивых факторов.
С точки зрения упрощения герметизации уплотнительных соеди-
нений, и в особенности без применения эластичных уплотнитель-
ных средств, вязкость должна быть возможно высокой. Однако
повышение вязкости увеличивает механические потери при дви-
жении узлов гидравлических машин и потери напора в их каналах,
а также ухудшает режим питания (всасывания) насосов. Повы-
шение вязкости жидкости замедляет реакцию исполнительных
механизмов на сигналы регулирования (задающих устройств).
В общем случае для гидромашин, работающих с высокими
давлениями, следует выбирать жидкости более высокой вяз-
кости, чем для машин с более низкими давлениями.
На основании опыта можно рекомендовать для радиально-
поршневых насосов (см. стр. 107) с давлением от 20 МПа
(200 кгс/см2) и выше и работающих в стабильных температурных
условиях применять масла с вязкостью v = 60ч-150 сСт и для
насосов с давлением до 10 МПа (100 кгс/см2) — масла с вязко-
стью v = 30ч-60 сСт, причем для аксиально-поршневых насосов
(см. стр. 179) обычно применяются менее (на 25—50%) вязкие
масла, чем для радиально-поршневых.
Условные (относительные) единицы вязкости. На практике
обычно пользуются условными единицами вязкости, измеряемой
с помощью вискозиметров. В отечественной промышленности
применяются единицы условной вязкости, выражаемые в градусах
Энглера.
Отношение времени t истечения под собственным весом 200 см3
жидкости при данной температуре через калиброванное отверстие
определенного диаметра (2,8 мм) к времени tB истечения из того же
сосуда 200 см3 воды при 20° С выражает вязкость жидкости в гра-
дусах Энглера:
Пересчет условной вязкости в кинематическую и абсолютную
производится по приближенным эмпирическим формулам или
таблицам [2]. Для применяемых в гидросистемах масел при сред-
нем значении их плотности р = 100 кгс*с2/м4 (у = 900 кгс/м3) *
37
кинематическая v и условная вязкость в градусах Энглера свя-
заны соотношением
v = 0,0731®Е — смг/с.
Пересчет вязкости в градусах Энглера (°Е) в единицы абсо-
лютной вязкости (р,) может быть осуществлен для распростра-
ненных в гидросистемах жидкостей по упрощенной формуле р, —
= 0,00065° Е. Для пересчета динамической вязкости ц в единицы
условной вязкости можно также пользоваться графиком, пока-
занным на рис. 9, а.
Зависимость вязкости от температуры. С повышением темпе-
ратуры вязкость капельных жидкостей понижается. Чем меньше
изменяется вязкость с изменением температуры, тем выше каче-
ство и эксплуатационные свойства рабочей жидкости. Одним из
основных критериев этой зависимости является характеристика
по застыванию, условно оценивающая потери подвижности частиц.
При этом жидкость (масло) не превращается в твердое тело.
Выразить закон изменения вязкости жидкости от температуры
математическими уравнениями, пригодными для практического
применения, не представляется возможным, ввиду чего в практике
пользуются эмпирическими зависимостями. На рис. 9, б приве-
дены кривые зависимости вязкости распространенных масел от
температуры: 1 — трансформаторное, 2 — индустриальное 12,
3 — индустриальное 20, 4 — индустриальное 30, 5 — инду-
стриальное 50 и 6 — автотракторное.
Из применяемых в гидроприводах морозостойких минераль-
ных масел наиболее пологую вязкостную характеристику имеет
масляная смесь АМГ-10 (рис, 9, в), вязкость которой изменяется
в диапазоне температур ±60° С в пределах 8—2000 сСт. Еще бо-
лее пологую характеристику имеют жидкости на основе кремний-
органических соединений, для которых минимальное значение
вязкости в указанном диапазоне температур меньше максималь-
ного лишь в 40—50 раз.
При применении жидкостей, имеющих крутую кривую темпе-
ратурной зависимости вязкости, затрудняется работа гидроси-
стемы в зимних условиях. Это обусловлено в основном тем, что
при повышении вязкости жидкости при низких температурах
выше допустимых значений ухудшается ее прокачиваемость в ма-
гистралях и засасывание при открытых баках насосами.
Индекс вязкости. Для оценки влияния температуры на вяз-
кость рабочей жидкости (масла) в практике пользуются понятием
индекса вязкости, характеризующим соотношение вязкостей ма-
сел в некотором температурном интервале (например, от 0 до
100° С или от 50 до 100° С). Таким образом, индекс вязкости
является относительной величиной, показывающей степень изме-
нения вязкости масла в зависимости от температуры (рис. 9, б ив),
т. е. характеризующий пологость температурной кривой вязкости
38
\1,сСт
160
8)
500\
20
10
200
100
50
АГРМО
*0
oo
-00 -20 0 20 00 60 6°С
pn, pm. cm.
100
120
100
80
60
20
60 80 100 120 100 160 180 t,°G
Рис. 9. Характеристики рабо-
чих жидкостей гидросистем
39
масла (чем ниже индекс вязкости, тем более полога кривая вяз-
кости).
За эталон принимают два масла — одно с очень пологой тем-
пературной кривой вязкости, а другое — с очень крутой. Сте-
пень изменения вязкости первого масла от температуры называют
индексом вязкости, условно равным 100 единицам. Степень изме-
нения вязкости второго масла принята за индекс вязкости, рав-
ный нулю. Сравнивая температурное изменение вязкости указан-
ных эталонов, вычисляют индексы вязкости масел для данного
температурного интервала. В качестве эталонов масел с индексом
вязкости 100 и 0 принимают не одно какое-либо масло, а ряд ма-
сел, отличающихся друг от друга лишь вязкостью. Испытуемое
масло сравнивают с двумя эталонными маслами, имеющими ин-
дексы 100 и 0 и вязкость при 98,9° С, одинаковую с вязкостью
испытуемого масла.
В США индекс вязкости масел определяется сравнением испы-
туемого масла с условно выбранным из лучшей пенсильванской
нефти, индекс которого принят за 100. Чем больше приближается
испытуемое масло по этому показателю к условному маслу, тем
оно лучше.
Относительное изменение вязкости р на 1° С называют тем-
пературным коэффициентом вязкости; он выражается соотноше-
нием
, _ 1
м р dt *
Зависимость вязкости от давления. Вязкость жидкостец уве-
личивается с повышением давления. В пределах относительно
небольших давлений — от 0 до 30н-40 МПа (от 0 до 300—
400 кгс/см2) вязкость распространенных минеральных масел для
гидросистем изменяется с изменением давления р практически
линейно (рис. 9, г). При этом вязкость маловязких масел изме-
няется под давлением меньше, чем высоковязких.
В общем случае при приближенных практических расчетах
для определения зависимости вязкости минеральных масел, при-
меняемых в гидросистемах, от давления для диапазона от 0 до
50 МПа (от 0 до 500 кгс/см2) пользуются упрощенным эмпириче-
ским уравнением
VP = V0 (1 + kp),
где v- и v0 — кинематический коэффициент вязкости соответ-
ственно при давлении р и атмосферном (нулевом);
k — коэффициент, зависящий от сорта масла (для лег-
ких масел vB0 < 15 сСт, k — 0,002;
для тяжелых v80 «> 15 сСт, k = 0,003).
§ 8. Сжимаемость и стойкость жидкости
Сжимаемость жидкости. Капельная жидкость является упру-
гим телом, которое при давлениях примерно до 600 кгс/см2 под-
чиняется с некоторым приближением закону Гука.
40
ч
Сжатая жидкость подобна пружине, и жесткость tee можно
оценить коэффициентом относительной объемной сжимаемости Р,
который характеризует изменение единицы объема жидкости,
приходящееся на единицу изменения (приращения) давления:
Л У/Уо 1 . ДУ
Др Др ’ Уо ’
или
ДУ = рДрУо; У = (Уо — ДУ) = Уо (1 - рДр)
(2)
где
при изме-
0
AV = Vo
ДУ *
Р----относительное изменение объема
уо
нении давления на Ар;
Ар = рх — ра — изменение давления, действующего на
жидкость;
и У — начальный объем жидкости при атмосферном
давлении и объем при изменении давления
на Ар;
— У — изменение объема жидкости при изменении
давления на Ар.
обратная р, называется объемным модулем упру-
Величина
гости жидкости при всестороннем сжатии:
Объемный модуль упругости Е и соответственно коэффициент
сжимаемости р жидкости изменяется в широких пределах в зави-
симости от типа жидкости, давления и температуры. С повыше-
нием температуры объемный модуль упругости уменьшается,
а коэффициент сжимаемости повышается.
Сравнительные опытные данные по зависимости объемного
модуля упругости Е от температуры t при давлении 21 МПа
(210 кгс/см2) для минерального масла (кривая а), применяемого
в гидравлических системах, и силиконовой жидкости (кривая Ь)
приведены на рис. 9, д.
С повышением давления коэффициент сжимаемости р жидко-
стей уменьшается '(рис. 9, е, вогнутая кривая), особенно при
сравнительно низких давлениях. В среднем при изменении давления
от 0 до 100 МПа (до 1000 кгс/см2) коэффициент р уменьшается при
нормальной температуре: для минеральных масел на 30—40 % и для
синтетических жидкостей на 60—70 % своей первоначальной
величины. При дальнейшем повышении давления уменьшение Р
происходит менее интенсивно, и при давлении 250—ЗОО^МПа
(2500—3000 кгс/см2) р практически стабилизируется.
При изменениях давления жидкости от 0 до 60 МПа (600 кгс/см2)
изменением значений Е и р можно пренебречь; при этом условии
относительное изменение объема (объемная деформация жидкости) ’
41
AV -
у- в процессе сжатия будет пропорционально изменению да-
вления Ар:
AV г. AV 1
v-.E = v;-~f
Значение объемного модуля упругости Е (при температуре
20° С и атмосферном давлении) для легких минеральных масел,
используемых в гидросистемах, колеблется в пределах 1350—
1750 МПа (13 500—17 500 кгс/см2), что соответствует значениям
коэффициента 0 от 74 • 10” 11 до 57 • 10“ 11 м2/Н (от 74 • 10“ 6 до
57-10" • см2/кгс). Нижний предел приведенных значений модуля
упругости (£ = 1350 МПа) соответствует распространенному
в авиационных гидросистемах маслу АМГ-10, а верхний предел
(Е = 1750 МПа) — более тяжелым маслам типа «турбинное»,
SO»
применяемым в гидросистемах прочих машин (в гидросистемах
прессов и пр.). Для воды и рабочих жидкостей на водной основе
значение модуля упругости при относительно небольших давле-
ниях (до 20 МПа или соответственно до 200 кгс/см2) можно при-
нять равным 2000 МПа (20 000 кгс/см2).
С учетом изменения модуля упругости, происходящего при
повышении давления, среднее значение коэффициента сжима-
емости 0 масла АМГ-10 для диапазона давлений 0—20 МПа (0—
200 кгс/см2) и температуры 20° С можно принимать 0 =
— 7-10“ 10 м2/Н (7-10" 6 см2/кгс), а для более тяжелых масел
р = 6-10“ 10 м2/Н (6-10"6 см2/кгс).
Ввиду высокого значения объемного модуля упругости жидко-
стей в ряде технических расчетов сжимаемостью при типовых
давлениях (<200 кгс/см2) можно пренебречь, считая жидкость
несжимаемой.
Механическая и химическая стойкость жидкостей. Для прак-
тических целей важно, чтобы рабочие жидкости в условиях приме-
нения и хранения не изменяли своих первоначальных физических
и химических свойств, т. е. сохраняли физическую и химическую
стабильность.
• Основной причиной нарушения физической стабильности
жидкости является мятие ее при работе в условиях высоких давле-
ний, в особенности при дросселировании с большим перепадом
давления, вызывающее молекулярно-структурные изменения (де-
струкцию) жидкости. В результате вязкость жидкости может
понизитьсяг а ее смазывающие свойства ухудшиться.
Потеря вязкости особенно сильно проявляется в масляных
смесях типа АМГ-10, содержащих вязкостные добавки (загусти-
тели), состоящие из длинных углеводородных цепочек. Эти це-
почки при длительном мятии, в частности при многократном про-
давливании жидкости под высоким давлением через малые зазоры,
могут разрушаться. Происходит как бы постепенное «перемалы-
вание» высокомолекулярного загустителя, в результате чего вяз-
42
кость жидкости может понизиться до недопустимого значения. .
Наблюдаются случаи, когда «такие масляные смеси за 400—500 ч
работы насоса на испытательном стенде, нагружение которого
осуществлялось дросселированием жидкости с давлением до
20 МПа (200 кгс/см2) на выходе ее из насоса, наполовину теряют
первоначальную вязкость.
Важным фактором является также химическая стабильность
жидкости, или стойкость к окислению, в результате которого
происходит выпадение из нее отложений в виде смол, сопровожда-
ющееся понижением вязкости и потерей смазывающих качеств.
Воздействие жидкости на резиновые детали. Важным пара-
метром, характеризующим качество рабочих жидкостей для гидро-
систем, является степень воздействия их на применяемые мате-
риалы, в частности — на резиновые детали. Усадка, набухание
и размягчение резиновых деталей уплотнительных узлов под воз-
действием жидкости сопровождаются нарушением герметичности
и другими дефектами в работе гидроагрегатов. При длительном
контакте рабочей жидкости с резиновыми деталями происходит
сложный физико-химический процесс вымывания отдельных ком-
понентов резины и замещения их жидкостью. При этом изменяется
масса и объем резиновой детали и физико-механических свойств
резины.
Обычно требуется, чтобы твердость испытываемого резинового
образца после воздействия минерального масла не изменялась
больше чем на ±4-г-5 единиц по Шору. Разница между объемами
резинового образца в начале и в конце испытания не должна пре-
вышать ±3% первоначального объема, где плюс означает набу-
хание, а минус — усадку резинового образца. По техническим
условиям набухание синтетической резины в жидкостях допу-
скается до 5—6%. Масла на нафтеновом основании вызывают зна-
чительное набухание резины, а на парафиновом основании —
небольшое набухание и даже усадку.
Особо следует отметить влияние на резину синтетических
жидкостей, одни из которых вызывают либо чрезмерное набухание
уплотнительного материала, либо, наоборот, значительную его
усадку.
Объемный показатель набухания резины определяют взвеши-
ванием в воздухе и в дистиллированной воде образца резины до
и после испытаний. Этот показатель вычисляют по выражению
ду = - °,) - (°, -£) 100.
о,-с,
где ДУ — изменение объема образца резины после набуха-
ния, в %;
Gi и G1 — вес образца в воздухе и в воде до испытания;
Ог и Gi — вес образца в воздухе и в воде после испытания.
Растворение в жидкостях газов. Газы, находящиеся в жидкости .
в растворенном (дисперсном) состоянии, не оказывают суще-
1 43
ственного влияния на ее механические свойства, однако если давле-
ние в какой-либо точке объема жидкости уменьшается, газы выде-
ляются из раствора в виде пузырьков, которые ухудшают свой-
ства жидкости, уменьшая ее модуль упругости. Относительное
количество газа, который может раствориться в жидкости до ее
насыщения, прямо пропорционально давлению на поверхности
раздела. Этот объем можно вычислить по формуле
Vr = *%<<-.
г ЖР1
где Vr — объем растворенного газа, отнесенный к атмо-
сферному давлению (760 мм рт. ст.) и нулевой
температуре;
k = v1-•— — коэффициент растворимости газа в жидкости;
'ж Рг
Уж — объем жидкости;
Pi и р2 — начальное и конечное давление газа, находя-
щегося в контакте с жидкостью.
Коэффициент растворимости зависит от свойств жидкости и
газа. Объем растворенного в минеральных маслах воздуха, отне-
сенный к одной атмосфере, равен—10% (k = 0,10) объема масла.
Поскольку количество газа, растворенного в жидкости до
насыщения, прямо пропорционально давлению, то при уменьше-
нии последнего ниже величины, при которой произошло насыще-
ние жидкости газом, излишек газа выделится из нее.
Описанное свойство жидкости имеет важное значение для
работы гидросистемы, так как присутствие нерастворенного газа
ухудшает, а во многих случаях может полностью нарушить работу
гидросистемы и ее агрегатов. В частности, при наличии газа
ускоряется наступление кавитации (см. стр. 45). Газ, выделив-
шийся из жидкости в местах пониженного давления, может ча-
стично заполнить рабочие полости насоса, уменьшая тем самым
его производительность и ухудшая режим его работы.
Механическая смесь воздуха с жидкостью. Воздух (газ) может
находиться в жидкости в механической смеси, причем в зависи-
мости от размеров пузырьков воздуха (диаметр пузырька равен
—0,4—0,8 мкм) эта смесь обладает меньшей или большей устой-
чивостью. При определенных условиях, характеризуемых в основ-
ном размерами пузырьков и вязкостью жидкости, скорость вытес-
нения пузырьков воздуха становится столь малой, что воздух
может находиться в смеси с маслом длительное время.
Поскольку сжимаемость воздуха (газа) при невысоких давле-
ниях несоизмеримо выше (в тысячи раз) сжимаемости жидкостей
(модуль упругости воздуха равен приблизительно абсолютному
его давлению), наличие в них воздушных пузырьков значительно
понижает модуль их упругости. Вследствие этого жесткость гид-
равлического механизма понижается (повышается податливость
рабочих органов гидродвигателя, характеризуемая величиной
44
4
смещения выходного его звена под действием внешней нагрузки).
Так, при давлении 15 МПа (150 кгс/см2) модуль упругости гидро-
газовой смеси, содержащей 1 % газа (приведенного к атмосфер-
ному давлению), почти в 2 раза меньше модуля упругости одно-
родной жидкости.
При наличии в жидкости нерастворенного воздуха производи-
тельность насосов понижается, а также сокращается вследствие
гидравлических ударов срок их службы (см. стр. 87).
§ 9. Давление (упругость) насыщенных
паров и кавитация жидкости
Давлением или упругостью насыщенного пара жидкости назы-
вается установившееся -в замкнутом пространстве в результате
испарения жидкости при данной температуре давление пара,
находящегося в равновесии с жидкостью. С повышением темпера-
туры это давление повышается.
В практике пользуются экспериментальными данными по упру-
гости насыщенных паров. На рис. 9, ж приведена зависимость
давления рп насыщенных паров некоторых сортов минеральных
масел, применяющихся в гидравлических системах машин, от
температуры t масла.
Кавитация жидкости. В непосредственной связи с упругостью
насыщенных паров жидкости находится кавитация, под которой
понимается местное выделение из жидкости газов и паров (вски-
пание жидкости) с последующим разрушением (конденсацией
и смыканием) выделившихся парогазовых пузырьков, сопрово-
ждающимся местными гидравлическими микроударами высокой
частоты и большими «забросами» давления. В гидравлических при-
водах кавитация носит динамический характер и происходит
в отдельных местах гидродинамического поля, где растягивающие
напряжения достигают своего критического значения парообра-
зования. К примеру кавитацию можно наблюдать в насадках,
вблизи вибрирующих тел, в рабочих камерах насосов при быстром
движении замыкателей (поршней) и пр.
Кавитация нарушает нормальный режим работы объемного
насоса, в отдельных случаях оказывает разрушительное действие
на его элементы. Механизм такого действия упрощенно сводится
к следующему. При понижении давления в какой-либо точке по-
тока жидкости ниже давления насыщенных ее паров при данной
температуре жидкость вскипает (происходит ее разрыв) и выделив-
шиеся пузырьки пара увлекаются потоком и переносятся в об-
ласть более высокого давления, в которой они конденсируются
(смыкаются). Так как процесс конденсации парового пузырька
происходит мгновенно, частицы жидкости перемещаются к его
центру с большой скоростью; в результате кинетическая энергия,
соударяющихся частиц жидкости вызывает при завершении кон-
45
денсации (в момент смыкания пузырьков) местные гидравлические
удары, сопровождающиеся резкими «забросами» давления и темпе-
ратуры в центрах конденсации. Если эти процессы протекают
вблизи ограничивающих стенок каналов, то последние будут
подвергаться со стороны движущихся частиц жидкости непрерыв-
ным гидравлическим микроударам («бомбардировкам»). В резуль-
тате при длительной кавитаций, под действием, указанных гидра-
влических ударов и одновременном воздействии высокой темпера-
туры, развивающейся в центрах конденсации, происходит поверх-
ностное разрушение (эрозия) деталей.
Наблюдаются случаи выхода йз строя аксиально-поршневых
насосов (см. рис. 57) в результате кавитационного разрушения
распределительной пары, что сопровождается недопустимым па-
дением подачи, которое происходит за время работы от 20 мин
ДР 1 ч-
Кавитация в насосах наступает тогда, когда жидкость при
ходе всасывания отрывается от рабочего элемента (вытеснителя)
насоса (поршня, лопасти, зубьев шестерен). Возможность такого
отрыва зависит от величины давления жидкости на входе в насос
и его вязкости, от частоты вращения насоса, а также от конструк-
тивных его особенностей. Например, подобное явление наблю-
дается, если давление на входе во всасывающую камеру насоса
окажется недостаточным для того, чтобы обеспечить неразрыв-
ность потока жидкости в процессе изменения скорости ее движе-
ния в соответствии с изменением скорости движения (ускорением)
всасывающего элемента (вытеснителя). Предельно допустимой,
с этой точки зрения, частотой вращения насоса является такая,
при которой абсолютное давление жидкости на входе в насос
будет преодолевать без разрыва потока сумму потерь на всем
пути от входа до рабочего элемента. Для шестеренного и пластин-
чатого насосов к этим внутренним потерям добавляются потери,
обусловленные центробежной силой (см. стр. 322).
Очевидно, для того чтобы жидкость приобрела в рабочей
камере насоса (в цилиндре и пр.) необходимое ускорение, тре-
буемое для предотвращения отрыва ее от всасывающего элемента
(поршня и пр.), к ней необходимо приложить соответствующее
давление. Сила Рин инерции жидкости при этом определится как
^ин
где т — масса рассматриваемого объема движущейся жидкости;
/ — максимальное ее ускорение.
Для преодоления этой силы на входе во всасывающую камеру
насоса должно действовать давление р > где F — сечение
потока.
С появлением кавитации подача насоса понижается, появ-
ляется характерный шум, происходит эмульсирование жидкости,
46
а также наблюдаются резкие колебания давления в нагнетатель-
ной линии и ударные нагрузки на детали насоса, вызывающие
преждевременный выход его из строя (см. стр. 207 и 212).
§ 10. Вязкость применяемых жидкостей
и рабочие давления
В гидросистемах машин обычно применяют жидкости мине-
рального происхождения с диапазоном вязкости при 50° С при-
мерно 10—175 сСт (для сравнения следует иметь в виду, что вяз-
кость воды при 20° С приблизительно равна 1 сСт). Минеральные
масла, применяемые в качестве рабочих жидкостей гидросистем,
отличаются от минеральных смазочных (машинных) масел тем,
что они содержат присадки, придающие им специфические свой-
ства, отсутствующие у смазочных масел. Так, для обеспечения
минимальной зависимости вязкости от температуры применяют
вязкостные присадки.
При выборе величины вязкости учитывают при прочих равных
условиях применяемые рабочие давления. При более высоких
давлениях обычно выбирают более высокую вязкость. Так, в ги-
дросистемах машин, предназначенных для работы в стабильных
температурных условиях при давлениях менее 10 МПа (100 кгс/см8),
обычно применяют масла вязкостью 20—40 сСт (при 50° С), а
при давлении до 20 МПа (200 кгс/см8) — вязкостью 40—60 сСт.
В гидросистемах прессов с давлением 50—60 МПа (500—600 кгс/см8)
вязкость жидкости достигает значений 110—175 сСт.
В авиационных гидросистемах распространена жидкость АМГ-10
(ГОСТ 6794—53), являющаяся смесью двух нефтяных фракций
высокой степени очистки. Она пригодна для эксплуатации при
температурах от —60° до -|-100о С. Кинематическая вязкость ее
в диапазоне температур ±50° колеблется от 10 до 1250 сСт.
§ 11. Высокотемпературные жидкости
Гидросистемы ряда машин и установок работают при высоких
температурах, достигающих 300° С и выше. Помимо этого, гидро-
системы во многих случаях применения используются в широком
диапазоне температур. Так, для гидросистем жидкостно-реактив-
ных двигателей этот диапазон изменяется от —183° С (температура
жидкого кислорода) до 4-320° С и выше.
Применяемые в настоящее время в гидросистемах минеральные
масла и их смеси не удовлетворяют требованиям по плюсовым тем-
пературам (даже без учета отрицательных температур), так как
лучшие из минеральных жидкостей пригодны для длительной ра-
боты при температурах не выше 150° С.
Ввиду этого при высоких температурах (150° С и выше) можно
применять лишь синтетические жидкости и в частности полисило-
ксановые (селиконовые), которые сочетают в себе высокотемпера-
турные’и низкотемпературные свойства. В контакте с воздухом
они выдерживают длительное нагревание при температурах до
47
250° С, в закрытых же системах их можно длительно использовать
при температуре до 370° С. Одновременно эти жидкости пригодны
для эксплуатации при температурах минус 60° С и ниже.
Однако все синтетические жидкости, в том числе и полисилок-
сановые, имеют более низкий модуль объемной упругости, чем
у минеральных жидкостей, применяемых в гидросистемах. Кроме
того, модуль упругости синтетических жидкостей в большей сте-
пени зависит от температуры, чем у минеральных жидкостей.
Полисилоксаны значительно уступают минеральным маслам также
по противоизносным и смазывающим свойствам. Как и все синте-
тические жидкости, они имеют высокую текучесть, усложняющую
герметизацию гидроагрегатов.
§ 12. Требования к рабочим жидкостям
Рабочая жидкость гидросистем должна обладать:
хорошими смазывающими свойствами;
минимальной зависимостью вязкости от температуры в требуе-
мом диапазоне температур;
низкой упругостью насыщенных паров и высокой температурой
кипения;
нейтральностью к применяемым материалам, в частности к ре-
зиновым уплотнителям, и малым адсорбированием воздуха, а
также легкостью его отделения;
высокой устойчивостью к механической и химической деструк-
ции и к окислению в условиях применяемых температур, а также
длительным сроком службы;.
высоким объемным модулем упругости;
высокими коэффициентами теплопроводности и удельной тепло-
емкости и малым коэффициентом теплового расширения;
высокими изолирующими и диэлектрическими качествами;
жидкость и продукты ее разложения не должны быть токсич-
ными.
Важными параметрами характеристики жидкости являются тем-
темпер атуры застывания и замерзания.
Температурой застывания по ГОСТу 1929—51 называют такую
температуру, при которой поверхность уровня масла, залитого
в стандартную пробирку, не перемещается в течение 5 мин при на-
клоне пробирки на 45°. Эта температура характеризует жидкость
с точки зрения сохранения текучести, а следовательно, возмож-
ности транспортировки и слива в холодное время года. Темпера-
тура застывания масла должна быть на 10—17° С ниже наименьшей
температуры окружающей среды, в условиях которой будет ра-
ботать гидросистема.
Температурой замерзания называют температуру начала кри-
сталлизации, т. е. температуру, при которой в жидкости обра-
зуется облачко из мельчайших кристаллов. При этом не должно
быть^расслаивания жидкости и выделения из нее составных ком-
понентов.
ГЛАВА III
НАСОСЫ ДЛЯ ПЕРЕМЕЩЕНИЯ (ПЕРЕКАЧКИ
ЖИДКОСТИ)
§ 13. Насосы с ручным приводом
В объемных гидравлических приводах применяются разнооб-
разные типы насосов, конструктивное различие которых опре-
деляется в первую очередь условиями применения и предъявляе-
мыми к ним требованиями. Насосы в основном можно поделить на
две группы, отличающиеся характером процесса вытеснения жид-
кости. В поршневых насосах вытеснение рабочей среды происходит
из неподвижных камер вытеснителями, совершающими возвратно-
поступательное движение. В роторных насосах перемещаются
камеры, а вытеснители совершают вращательное движение, ко-
торое может сочетаться с возвратно-поступательным.
Наиболее распространены в гидроприводах роторные насосы,
из которых основными являются роторно-поршневые радиальных
и аксиальных типов, шестеренные и винтовые, пластинчатые и др.
Каждая из этих разновидностей, в свою очередь, делится на боль-
шое количество конструктивных типов по виду рабочих органов
и кинематике механизмов, передающих движение от вала насоса
к вытеснителям, по характеру движения ведущего звена насоса,
по характеру распределения жидкости и регулирования подачи,
по числу циклов вытеснения за один оборот ротора и прочим кон-
структивным и эксплуатационным признакам.
Наиболее простыми по конструкции являются насосы для пе-
рекачки жидкостей под невысоким давлением, которые являются
прототипом более совершенных насосов гидроприводов. Переме-
щение под небольшим напором жидкостей — один из наиболее
ранних процессов, освоенных человечеством для удовлетворения
своих практических потребностей еще в далекой древности. Из-
вестно применение в I—II вв. до нашей эры объемного насоса
двойного действия с ручным приводом, который имел все основные
элементы современных насосов < этого типа (поршни и цилиндры
деревянные, клапаны нагнетания и всасывания — кожаные).
Для выполнения элементарных функций — перекачки жидкости
и обеспечения различных вспомогательных операций в современ- ,
ной технике часто применяют поршневые насосы с ручным при-
4 T. М. Башта 49
водом (или ручные насосы), в которых жидкая среда перемещается
за счет мускульной силы человека.
Схема одного из таких насосов приведена на рис. 10, а. Насос
имеет цилиндр 7 и поршень 2, шток которого связан с приводной
ручкой 4. При качательных движениях этой ручки поршень со-
вершает поступательные перемещения в цилиндре. При движении
его вправо левая камера (полость) цилиндра будет увеличиваться,
в результате чего в ней, создается вакуум и жидкость через вса-
сывающий клапан 6 будет поступать в эту камеру; одновременно
Рис. 10. Схемы насосов с ручным приводом
правая полость цилиндра уменьшается, вследствие чего жид-
кость через нагнетательный клапан 3 вытесняется поршнем в на-
гнетательный трубопровод. При движении поршня влево полости
всасывания и нагнетания поменяются местами, и жидкость будет
засасываться через клапан 5 и нагнетаться через клапан /.
Ручные насосы являются самовсасывающими: заполнение
подводящего трубопровода жидкой средой в них происходит
самотеком. Жидкость, поступая в цилиндр насоса, занимает
в нем место, освобождаемое поршнем. Следовательно, если не учи-
тывать утечек жидкости и возможного неполного заполнения ею
цилиндра, теоретический объем жидкости, подаваемый насосом,
равен объему, описанному поршнем. В соответствии с этим рас-
четная (геометрическая) подача жидкости за один ход поршня
равна объему, описываемому* рабочей площадью поршня:
при ходе поршня вправо
<71 = 4 - d2)h-,
при ходе поршня влево
<72 = т D2/l-
где D и d — соответственно диаметры цилиндра и штока поршня;
h — ход поршня.
50
Подача за одно двойное качание (ход) ручки составит
9 х= А Я (2Д2 _ da).
Чтобы обеспечить равные подачи (вытеснение) жидкости при
движениях ручки в ту и другую стороны, применяют двухцилин-
дровые насосы (рис. 10, б). При повороте ручки в какую-либо
сторону жидкость из одного цилиндра вытесняется, а в другой
засасывается. Ввиду того, что рабочие площади обоих поршней
равны между собой, равными будут также вытесняемые объемы
и усилия на ручке. Величина этого усилия для последней схемы
определится из соотношения (трением и вакуумом в парном ци-
линдре пренебрегаем)
Fpa = Gb\ G — Fp-^,
где F ~ ----площадь поршня;
G — нагрузка на ручке, требующаяся для создания
давления;
а и б — плечи приложения действующих сил.
Подобным насосом можно при правильном выборе диаметра
цилиндра (30—40 мм) и кинематики привода поршня развить дав-
ление жидкости до 15—20 МПа (150—200 кгс/см2). Однако в прак-
тике их обычно применяют для вспомогательных установок с не-
большими давлениями (до 5 МПа или 50 кгс/см2) и расходами, для
основных же гидроустановок применяют насосы различных кон-
структивных исполнений с механическим или электрическим при-
водом.
Для этой же цели применяют насосы пластинчатых типов,
схема одного из которых, получившего название альвеерного
насоса, изображена на рис. 10, в. Насос имеет цилиндрический
корпус /, в котором помещен вал 2, несущий плотно пригнанные
к внутренней поверхности этого корпуса две пластины 3 с пло-
скими нагнетательными клапанами 4. На разделительный пере-
городке 7 находятся два плоских всасывающих клапана 8.
При качательных движениях рукоятки насоса пластины 3
будут совершать поворотные движения вокруг оси вала и тем са-
мым изменять объем камер, образованных этими пластинами и
уплотнительной перегородкой 7: объем одной из них будет умень-
шаться, а второй — увеличиваться. Жидкость из уменьшающейся
камеры через соответствующий клапан 4 будет выдавливаться
в верхнюю камеру и далее — в нагнетательный канал 6. В ка-
меру же, объем которой будет увеличиваться, жидкость поступает
под действием образовавшегося вакуума из всасывающего канала 5 .
через один из клапанов 8.
4* 51
Расчетная подача насоса за одно одностороннее качание равна
объему, описываемому рабочей высотой (/? — г) одной бесконечно
тонкой пластины при повороте на угол а <360°:
q = л (/?2 - г2) Ь
и подача в единицу времени
Qr = qn = лЬ (R* — г2)~ ,
тде п — число односторонних качаний в единицу времени.
Фактическая подача Qф с учетом объемного к. п. д. цоб (см.
стр. 77)
<3ф = ФтПоб-
Значение qo6 принимают при номинальном давлении (цоб —
= 0,804-0,85).
К недостаткам насосов этого типа относится трудность герме-
тизации рабочих камер, ввиду чего их применяют лишь при низких
давлениях (меньше 0,5 МПа или 5 кгс/см2).
§ 14. Насосы с механическим приводом
1. Схемы насоса
Рассмотренные насосы с ручным приводом могут применяться
лишь для перемещения (транспортирования) ограниченных объ-
емов жидкости, к тому же обычно под низким давлением; величины
подачи и давления здесь лимитированы возможностями (мощ-
ностью) ручного привода. Для более высоких значений указанных
параметров применяют насосы с механическим приводом, в ка-
честве которого распространен кривошипно-шатунный механизм
(рис. 11) и его модификации.
Ниже рассмотрены перекачивающие насосы с этим приводом.
Возвратно-поступательное движение поршня b в насосе по схеме
на рис. И, а осуществляется при помощи кривошипно-шатунного
механизма а, в котором роль ползуна выполняет поршень.
Насосы этого типа в одноцилиндровом исполнении применяют
преимущественно для перекачки воды, нефти и прочих жидкостей
под небольшим давлением и в отдельных случаях — для подачи
жидкости (масла) под сверхвысоким давлением (до 250 МПа или
2500 кгс/см2).
Из расчетно-кинематической схемы простейшего одноцилинд-
рового насоса этого типа, представленной на рис. 11, б, видно,
что при вращении кривошипа 1 вокруг оси О2 приводного вала, пор-
шень 4, шарнирно связанный с шатуном 2, будет совершать воз-
вратно-поступательные движения в цилиндре 3, причем за каждый
оборот кривошипа поршень совершит два хода, из которых один
52
может быть использован для всасывания и другой — для нагне-
тания .жидкости. Для обеспечения процессов нагнетания и вса-
сывания насос снабжен двумя самодействующими клапанами —
всасывающим 5 и нагнетательным 6, первый из которых соединен
с линией, ведущей в бак, и второй — с линией питания гидросис-
темы (нагнетательной линией).
При ходе поршня 4 вправо объем рабочей камеры (цилиндра)
уменьшается и жидкость вытесняется через клапан 6 в нагне-
тательную линию; при ходе влево объем рабочей камеры увели-
чивается, в результате чего в цилиндре создается вакуум, и ЖИД-
Рис. II. Принципиальная (а) и расчетная (б) схемы одноцилиндрового насоса
с кривошипно-шатунным приводом поршня
кость, открыв под действием атмосферного давления клапан 5,
будет засасываться из бака. Величина хода h поршня равна двой-
ной величине кривошипа г.
Средняя расчетная (геометрическая) подача рассматриваемого
одноцилиндрового насоса за один ход (рабочий объем насоса)
q = hF — 2rF,
где h = 2r — ход поршня при повороте кривошипа на 180°;
г — радиус кривошипа;
F — площадь поршня.
Средняя расчетная подача в единицу времени (без учета объем-
ных потерь)
QT = qn 2rFn, (3)
где n — частота вращения кривошипа.
Регулирование подачи осуществляется в основном изменением
радиуса кривошипа г, осуществляемое различными конструктив-
ными способами (см. стр. 145, в).
2. Вакуумметрическая высота всасывания
Рассматриваемые насосы являются самовсасывающими, т. е.
в них обеспечивается самозаполнение подводящего трубопровода
жидкой средой.
Необходимое абсолютное давление во всасывающем патрубке
насоса зависит от высоты всасывания и потерь напора во всасы-
53
вающей магистрали (при определении потерь следует учитывать и
ту часть всасывающего трубопровода, которая находится ниже
уровня масла в баке).
Из расчетной схемы установки такого .насоса (рис. 12, а)
следует, что в случае, если расходный резервуар (бак) 7 соединен
с атмосферой, то жидкость перемещается во всасывающем трубо-
проводе (магистрали) 9, преодолевая его сопротивление. При этом
она поднимается от уровня жидкости в резервуаре 7 до цилиндра 2
насоса под действием разности атмосферного давления р0, дей-
Мертвее положения поршня
Рис. 12. Расчетная схема установки одноцилиндро-
вого перекачивающего насоса с кривошипно-шатун-
ным приводом поршня
ствующего на поверхности жидкости в резервуаре, и переменного
давления рц в рабочей полости цилиндра (р0 — рц) при ходе
поршня <9 в режиме всасывания. Под действием этой разности
давлений отрывается всасывающий клапан 8, а также преодоле-
ваются силы инерции жидкости во всасывающем трубопроводе
и цилиндре насоса, обусловленные ускорениями поршня.
В случае расположения резервуара 7 ниже цилиндра 2 насос
при пуске будет некоторое время перекачивать воздух, постепенно
поднимая уровень жидкости во всасывающем трубопроводе 9
до уровня цилиндра насоса. При определенной высоте На от на-
соса до напорного бака 11 могут создаваться при пуске условия,
при которых давление вытесняемого из цилиндра 2 воздуха не
сможет преодолевать силу, развиваемую давлением столба жид-
кости (высота Ня — h) на нагнетательный клапан 1, в результате
чего насос не сможет вступить в работу (см. стр. 209). Поэтому
цилиндр насоса и всасывающую его трубу обычно заполняют перед
пуском перекачиваемой жидкостью, что облегчает его запуск,
а также устраняет работу поршневой группы насоса без жидкости
(на воздухе), при которой происходит интенсивный износ уплот-
нительных и прочих узлов. Для удержания жидкости во всасы-
вающей трубе при неработающем насосе в начале всасывающей
54
трубы, на участке, погруженном в жидкость, обычно устанавли-.
вают дополнительный обратный (пятовый) клапан 12.
Высота Явс для самовсасывающих насосов (р0 — 0), отсчиты-
ваемая обычно при практических расчетах от уровня жидкости
в резервуаре 7 до оси цилиндра 2 насоса (рис. 12, а), называется
вакуумметрической высотой всасывания
(соответствует разрежению в цилиндре), причем в насосах без
искусственного «поддавливания» (без избыточного давления на
всасывании; р0 = 1 ата) значение ее всегда ниже атмосферного
давления, выраженного в единицах высоты столба перекачиваемой
жидкости.
Допускаемая вакуумметрическая высота всасывания опреде-
ляется как высота всасывания, при которой обеспечивается ра-
бота насоса без изменения основных технических показателей и
вычислятся в общем случае по выражению (в м)
/ U2 \
/ Г ВХ \
I Рвх + Р”о~ I
//вс = ь _ -------£_ I,
с pg \ pg /
где р0 — давление окружающей среды в Па;
Рвх — давление на входе в насос в Па;
р — плотность жидкой среды в кг/м3;
ы8Х — скорость жидкой среды на входе в насос в м/с;
g— ускорение свободного падения в м/с3.
Без учета члена, заключенного в скобки и выражающего сумму
давлений на входе в насос и потерь скоростного напора, предель-
ная высота всасывания упрощенно определится зависимостью
Если р0 выражено в кгс/м2 и удельный вес уж = pg — в кгс/м3,
высота всасывания выразится в метрах столба перекачиваемой
жидкости.
Нетрудно видеть, что если пренебречь давлением паров жид-
кости и возможностью выделения из нее растворенного воздуха,
а также сопротивлением всасывающей магистрали, то предельная
высота всасывания (на уровне моря) при работе насоса на воде
равна 10 м. Однако практически с учетом упругости (давления)
паров жидкости предельная высота всасывания будет меньше на
величину, эквивалентную э'той упругости (считаем, что Жидкость
деаэрирована):
Явс = —— Ь,
Тж
где b — упругость паров жидкости, выраженная в единицах ее
столба при данной температуре.
Поскольку упругость паров жидкости зависит от температуры,
от последней будет зависеть также и высота всасывания, которая
будет уменьшаться с повышением температуры.
55
Кроме того, эта высота зависит от типа жидкости. Так, для
бензина, упругость паров которого выше упругости паров воды,
высота всасывания насоса при той же температуре будет ниже,
чем упругость паров воды, несмотря на то, что объемный вес бен-
зина ниже объемного веса воды.
Практически допустимая высота всасывания с учетом упруго-
сти паров, сопротивления всасывающей магистрали и прочих
потерь напора, а также вследствие расширения пузырьков нера-
створенного воздуха и выделения из жидкости растворенного
воздуха, будет ниже указанного предельного значения.
Величина разрежения Явс, которое способен создать насос при
пуске без предварительной заливки его жидкостью, когда камеры
его еще заполнены воздухом, существенно зависит от вредного
пространства камеры, под которым, например, для поршневого
насоса понимается объем VB, заключенный между левым мертвым
положением поршня и крышкой цилиндра (рис. 12, б). Принимая,
что в начальный момент хода поршня вправо давление во вредном
пространстве равно атмосферному (10 м вод. ст.), перемещение
поршня, вызывающее увеличение, объема камеры, приведет к по-
нижению давления воздуха, определяющему разрежение. При
изотермном процессе величина разрежения (в м вод. ст.) опреде-
лится как
Н _ 10/1___________?---V
вс 1и * 1/ I >
1 + —
\ V8 )
где Vn — объем, освобождаемый поршнем при его перемещении
из одного нейтрального (мертвого) положения в другое.
Из данного уравнения следует, что для увеличения разрежения
и обеспечения самовсасывания насоса необходимо максимально
уменьшать величину вредного пространства.
При известном значении разрежения перепад давления на
всасывании не может преодолеть сопротивлений всасывающего
клапана 8 (рис. 12, а) и обеспечить подъем жидкости на высоту Нвс-
в результате воздух, заполняющий вредное пространство, будет
расширяться при ходе всасывания и сжиматься при ходе нагнета-
ния. Ввиду этого насосы, камеры которых имеют большое вредное
пространство, плохо засасывают рабочую жидкость и нуждаются
при пуске в принудительной заливке (см. также стр. 209).
§ 15. Скорость и ускорение поршня
3. Скорость поршня
Из схемы, представленной на рис. 11, б, следует, что при пово-
роте кривошипа 1 из мертвого (горизонтального) положения в на-
правлении стрелки на угол у = cat поршень переместится в ци-
линдре на величину
х = (г + R) — (г cos у 4-1? cos а),
56
где г и R — соответственно длины кривошипа 1 и шатуна 2;
а — угол между шатуном 2 и осью цилиндра.
Текущая скорость и движения поршня определится как первая
производная пути поршня х по времени t:
dx
v=nr-
Так как текущая угловая скорость кривошипа & = то
последнее выражение можно представить в виде
V == со
dx
dy
Учитывая, что -у- = получим в результате дифферен-
цирования
y = ro(sinY + -2^rsin 2у).
Поскольку угол а мал, можно написать
(4)
Следовательно, графически скорость v движения поршня в ци-
линдре меняется по закону суммы полусинусоиды и полной си-
нусоиды.
При расчетах часто принимают шатун бесконечно длинным.
При этом допущении путь, пройденный поршнем, равняется про-
екции дуги, описанной кривошипом, на ось цилиндра. Следова-
тельно,
X — г — г cos у = г (1 — cos у), (5)
где х — путь поршня.
Скорость поршня (первая производная от пути по времени)
dx
dt
= г sin у
dy
dt
Если угол у выражен в радианах, то первая производная от него
есть угловая скорость со. Следовательно,
dy _ пп___
dT ~ lo “
Отсюда находим при принятом допущении
v = cor sin у. (6)
Кривая скорости v в функции у показана на рис. 13, а.
57
Часто бывает удобнее пользоваться формулой, в которой зна-
чение sin у выражено через положение х поршня. Из выраже-
ния (5) находим
)
cosy = 1 —
Подставив это значение в формулу для и, получим
П = |/ — (7)
Выражение (6) для скорости показывает, что в мертвых поло-
жениях поршня (у = 0 и у = л) скорость его равна нулю
Рис. 13. Кривые скорости (а) и ускорения (б) поршня насоса
(Л \
у = — 1 имеет место ма-
ксимальная скорость, так как sin = 1. Таким образом,
Утах =
Выражение для средней скорости можно переписать в виде
_________________________ hn _ 2гп __ т
иср — 30 --30-- 15’•
Следовательно, максимальная скорость поршня угаах превы-
шает среднюю ее величину* пср в отношении
Ртах _ пт . гп _ л ___ t
оСр “ 30 • 15 — 2 ,0Л
Подача жидкости
В теоретической схеме работы насоса жидкость неотрывно
следует за поршнем. Подача жидкости в текущий момент равна
скорости поршня, умноженной на его площадь. Поскольку эта
площадь для данного насоса постоянна, изменение текущей по-
дачи зависит лишь от изменения скорости, а следовательно, по-
дача изменяется по тому же закону, что и скорость, т. е. по закону
синуса.
58
Последнее может быть.также обосновано следующим. За бес-
конечно малый промежуток времени dt поршень площадью F
пройдет путь dh. За это время будет подан объем жидкости
dQ = Fdh.
Так как dh = v dt = tor sin у dt, имеем
dQ = Four sin у dt.
Принимая во внимание, что dt = ,
dQ = Fr siny dy.
Следовательно, подача жидкости одним поршнем в течение
одного его хода изменяется аналогично изменению скорости
поршня, т. е. по синусоиде.
Равномерность подачи. Мгновенная (текущая) подача пропор-
циональна относительной скорости поршня при рабочем ходе и
определяется произведением
Q = vF,
где F — площадь поршня;
v — мгновенная скорость поршня.
Подставив значение v из выражения (4), получим текущую
'расчетную подачу насоса
Q = vF — га (sin у
27?-Sin 2у) Л
(8)
Так как величина шатуна 7? значительно больше радиуса кри-
вошипа г, вторым членом выражения в скобках можем пренебречь
[см. так же выражение (6) J. В результате подача насоса будет уп-
рощенно представлена синусоидой
Q = vF = Fro» sin у. (9)
Из выражений (8) и (9) следует, что скорость поршня и подача
рассматриваемого одноцилиндрового насоса носит неравномерный
(пульсирующий) характер: ход нагнетания (подачи) такого насоса
будет чередоваться через каждые 180° поворота кривошипа с хо-
дом всасывания, причем в пределах самого рабочего цикла, соот-
ветствующего углу поворота кривошипа на 180°, текущая скорость
поршня [см. выражение (4)1 неодинакова по длине, его пути:
в крайних' положениях она равна нулю и примерно в среднем
положении (у «=? 90°) имеет наибольшее значение. Следовательно,
максимальная текущая подача однопоршневого насоса имеет место
при у = 90° (рис. 14, а\ см. также рис. 13, а).
59
Отношение а = характеризует неравномерность подачи.
Чср
Для насоса одностороннего действия
Fra 2лп
а ~ F-2гп 2п~~ Л’
гДе Qcp = F‘2гп — средняя расчетная подача [см. выражение (3) J;
Qmax = Ff(Si — максимальная текущая подача.
Рис. 14. Графики подачи насосов одинарного (а) и двойного (б) действия
Подобная неравномерная подача в большинстве случаев неже-
лательна, а в некоторых — недопустима.
Способы выравнивания подачи. Для выравнивания подачи
перекачивающих поршневых насосов применяют насосы много-
кратного (двойного и более) действия. Выполнив цилиндр по схеме,
Рис. 15. Схемы одноцилиндровых перекачивающих насосов
представленной на рис. 15, а, получим насос двойного действия,
в котором за один оборот приводного вала происходит два хода
всасывания и два хода нагнетания (вытеснения), причем при ходе
поршня вправо объем вытесненной (нагнетаемой) жидкости будет
меньше объема при ходе влево на величину объема, описываемого
штоком. В соответствии с этим различают насосы одностороннего
и двустороннего действия, под которыми понимают возвратно-
поступательный насос, у которого жидкая среда вытесняется из
замкнутой камеры при движении рабочего органа соответственно
в одну или в обе стороны.
1
Средняя теоретическая (идеальная) подача насоса двусторон-
него действия с кривошипным приводом
Qcp = 2т (2F -[),
где f — площадь штока.
Пренебрегая площадью штока (f <=« 0), среднюю подачу можно
выразить как Qcp = 4Fm. В соответствии с этим неравномерность
подачи выразится
__Qmax Fг® Д
Qcp ~ 4Frn ~ 2 •
Для повышения равномерности подачи применяют насосы дву-
стороннего действия с дифференциальным поршнем (рис. 15, б),
в которых подача равномерно распределяется между прямым и
обратным ходами (см. рис. 14,6). При ходе поршня 2влево (рис. 15, б)
жидкость вытесняется через клапан 1 в нагнетательный трубопро-
вод 3 и одновременно заполняет штоковую полость цилиндра.
При ходе поршня вправо клапан 1 закрывается и жидкость из што-
ковой полости вытесняется в нагнетательный трубопровод 3;
одновременно с этим происходит всасывание через клапан 5
жидкости в левую полость.
В соответствии с этим подача насоса:
при ходе поршня влево
nDa, л (О2 — da)
<71 =-7-л--
h
и при ходе вправо
При условии —т— = -т—, или D2 = 2d2, подача как при
прямом, так и обратном ходах будет
Г
nD2 . ad2h
Применяют также трехпоршневые насосы, представляющие
собой строенный насос одностороннего действия, а также насосы
четверного и шестикратного действия (соответственно сдвоенный
и строенный насосы двустороннего действия).
Воздушные колпаки насосов. Для выравнивания подачи при-
меняют также воздушные колпаки, представляющие собой цилин-
дрической или иной формы закрытый сосуд а (см. рис. 15, а),
в верхней части которого находится воздух, сглаживающий, бла-
годаря сжимаемости, пульсации подачи.
В зависимости от назначения устанавливают по одному кол-
паку на нагнетательной и всасывающей линиях (сторонах).
61
Сущность действия колпака нагнетательной стороны (рис. 15, а)
заключается в том, что в схеме с таким колпаком жидкость по-
дается насосом не непосредственно в напорный трубопровод, а
в колпак, частично заполненный воздухом, который при текущей
повышенной подаче сжимается и при уменьшенной расширяется.
Вследствие изменения объема воздуха от Утят до Ут|п и наоборот,
объём жидкости в колпаке изменяется в обратном отношении,
т. е. максимальному объему воздуха в колпаке соответствует ми-
нимальный объем жидкости и наоборот. Следовательно, воздушный
колпак принимает объем жидкости АУ = Vmax — УтШ при возра-
стающей подаче насоса и возвращает этот объем в нагнетательную
трубу при убывающей подаче насоса. В соответствии с этим дав-
ление в колпаке изменяется от pmln до ртах и вновь понижается
до pmln. Однако, так как объем воздуха в колпаке может быть
относительно большим, то при уменьшении его на величину ДУ,
равную объему аккумулируемой в колпаке жидкости, указанное
изменение объема не сопровождается заметным изменением дав-
ления, т. е. при достаточном воздушном объеме колпака давление
в нем во время работы насоса сохраняется практически постоян-
ным. Поэтому жидкость поступает в напорный трубопровод под
постоянным напором.
Степень неравномерности давления в колпаке характеризуется
Ртах — Pmln
Рср
Очевидно, чем больше разность (ртах — рт1п), а следовательно,
и величина б, тем сильнее колебания скорости жидкости, выте-
кающей из. колпака в нагнетательную трубу под действием давления
в нем. Практически полагают, что при 6 = 0,025 изменение ско-
рости жидкости в трубе настолько незначительно, что движение
можно считать установившимся.
Аналогичное рассуждение можно провести и применительно
к колпаку на всасывающей стороне (рис. 15, в), с той лишь разни-
цей, что в этом случае давление в колпаке изменяется по ходу
поршня в противоположном порядке.
В соответствии с приведенным, расчет колпаков сводится,
в основном, к определению его размеров, при которых степень
неравномерности не превосходит заданной величины.
Приняв процесс сжатия воздуха изотермным, можем написать
РтахУщШ Pmln^max Рср^ср
и далее
Ртах — Pmln Утах — Vmln
Рср Уср ’
где Уср = К™*+Ут1п. — среднее значение объема воздуха
в колпаке;
pCJ) Ртах + Ртш--среднее давление в колпаке.
62
Поскольку Pmax~Pmln = 6, a Vmax - Vmin = AV,
написать
или VCD
up
При наличии воздушных колпаков в обоих цилиндрах мож-
но принимать при расчете, что насос перекачивает жидкость из
нижнего (всасывающего) колпака в верхний (нагнетательный),
преодолевая разность давлений между ними.
Практически принимают:
для насосов одинарного действия
Vcp = ^- = 22Fft;
для насосов двойного действия
vcp = ^ = 9Fh-
для насосов тройного действия
Vcp = ^ = 0.5F/1,
где F и h — соответственно площадь и ход поршня.
Для всасывающих колпаков можно допустить более высокую
степень неравномерности давлений. Так, при короткой всасываю-
щей трубе и высоте всасывания до 5 м можно принять при работе
на воде б = 0,05. Однако с увеличением длины трубы и повыше-
нием высоты всасывания, величина б должна выбираться соот-
ветственно меньшей.
Следует заметить, что количество воздуха во всасывающем
колпаке с течением времени увеличивается вследствие его выде-
ления'из растворенного состояния в жидкости, а в нагнетательном
наоборот, — убывает, вследствие растворения его в жидкости.
Поэтому необходимо периодически удалять воздух из всасывающего
колпака и добавлять в нагнетательный, или же обеспечить разде-
ление воздушной и жидкостной сред с помощью резиновой мембра-
ны.
4. Ускорение поршня
Взяв первую производную от скорости поршня [см. выраже-
ние (5) J по времени, получим ускорение поршня
. dv dv
/ = „ = WCOSV-^.
т-г dv
Поскольку ~ (о, имеем
dv ?
1 — ~~тт = (0VCOSV.
s dt *
(Ю)
63
Подставив значение v из уравнения (4) и выполнив дифферен-
цирование, получим выражение с учетом конечной длины шатуна
(Н)
Заменяя в выражении (10) cosy на --------получим фор-
мулу для ускорения в зависимости от положения поршня в ци-
линдре (см. рис. 11,6)
f
dv о (1 х \
I — -тг = СО VI 1---.
1 dt \ г )
Из уравнения (10) следует, что ускорение поршня имеет ма-
ксимальное значение, когда угол у = 0 и у = я, т. е. в мефтвых
положениях поршня, в которых cos y = 1. В среднем положении
поршня у = л/2 имеем cos у = 0, а следовательно, ускорение
= 0.
dt
На рис. 13, б показан график изменения ускорения поршня
(принимаем шатун бесконечно длинным) на протяжении односто-
роннего хода поршня. Линия, изображающая изменение ускоре-
ния, является косинусоидой. В первой четверти окружности уско-
рение Поршня положительное, но уменьшается до нуля. Во второй
четверти ускорение отрицательное, так как скорость уменьшается,
но абсолютная величина ускорения растет. В третьей четверти
ускорение отрицательное, так как скорость направлена в обратную
сторону. В четвертой четверти ускорение положительное, так как
скорость имеет обратное направление и уменьшается по величине.
С учетом конечной длины шатуна получим
V = со
В приведенную зависимость входят знакопеременные поправки;
знак + относится к положению поршня, в котором палец кри-
вошипа находится между цилиндром и валом, знак — относится
к противоположному положению. Поправка для скорости имеет
л
максимальное значение, когда угол у = -j-; в среднем же и мерт-
вом положениях поршня поправка равна нулю.
Поскольку ускорение имеет максимальное значение в мертвых
точках поршня, то поправка, обусловленная конечной длиной
шатуна, для ускорения в этих точках равна (1 ±~j-\ Обычно
—Р" = 1/5 = 0,2, в соответствии с чем' численное значение по-
правки равно 1,2 и 0,8.
64
§16. Инерционные потери напора
Давление в цилиндре насоса как в период всасывания, так и
в период нагнетания не сохраняется постоянным на протяжении
хода поршня. Последнее обусловлено изменением скорости (уско-
рением) жидкости в трубопроводах и цилиндре, которая соответ-
ствует изменению скорости (ускорению) поршня. Если бы площадь
сечения трубы f была равна площади поршня F, то скорость и уско-
рение жидкости в трубе были бы равны скорости и ускорению
поршня. Поскольку F обычно значительно превышает /, скорость
Vy и
жидкости в трубе соответственно больше ско-
рости и ускорения поршня в отношении
dvx __ dv F
dt dt f
Подставив в них из выражений (7) и (11) значения скорости и
ускорения, поршня получим
Следовательно, ускорение жидкости изменяется от ~~ =
F о /л dvr F л
— -у со2г при х = 0 до нуля при х - г и далее до =-----со2г.
Движение жидкости становится неустановившимся. Графическое
изображение этих изменений соответствует рис. 13, б.
В результате изменений скорости изменяется вследствие инер-
ционных сил и скоростной напор в трубопроводе, что может нару-
шить нормальный режим работы насоса.
Рассматриваемые инерционные потери, обусловленные уско-
рениями поршня, и, соответственно, неравномерность движения
жидкости в трубе и цилиндре достигают значительной величины,
могущей нарушить сплошность потока. Эти потери выражаются
как произведение массы движущейся в цилиндре и магистрали
жидкости на ее ускорение, при расчете которого можно исходить
из ускорения поршня в относительном его движении в цилиндре.
Последний фактор особенно важен для всасывающей маги-
страли, поскольку силы инерции жидкости в трубе могут значи-
тельно ухудшить режим всасывания насоса. В этом случае к дей-
ствующим в трубопроводе сопротивлениям добавляется сопро-
тивление сил инерции жидкости, которое определяется произве-
дением ее массы на ускорение (см. также стр. 212).
5 Т. М. Башта 65
Масса, жидкости в трубопроводе
т = Vp = //jp,
где f и — соответственно площадь сечения и длина всасы-
вающей трубы.
В соответствии с этим сила инерции, действующая на жидкость
в трубопроводе, определится
.W = mj = flxp j- <в2г (1— y) >
где / = ——-ускорение поршня [см. выражение (11)1.
U *
Отнеся эту силу к единице площади трубы и поделив резуль-
тат на у, получим дополнительный напор, выраженный в добавоч-
ной пьезометрической высоте, необходимой для преодоления инер-
ционных сил сопротивлений:
-1!
где L — 1г — приведенная длина всасывающей трубы.
Выражение для силы инерции, действующей на жидкость в ци-
линдре насоса, получим аналогично:
< w X 9 / 1 X \
hi =— ОГГ ( I---------
g \ г J
Суммарный инерционный напор
Нетрудно видеть, что с учетом прочих сопротивлений, дей-
ствующих во всасывающей трубе (высота подъема жидкости, гид-
равлические сопротивления потоку, сопротивления клапанов и
пр.), атмосферное давление (напор) в баке может оказаться' не-
достаточным для их преодоления, и поршень в положениях ма-
ксимального ускорения будет отрываться («уходить») от жидкости.'
После же того, как ускорение поршня уменьшится, жидкость,
поступающая в цилиндр, столкнется с поршнем', что вызовет удары
в насосе.
Следовательно, в результате действия сил инерции жидкости,
обусловленных неустановившимся ее течением во всасывающем
трубопроводе, возможно возникновение кавитации и отрыв жид-
кости от поршня. Под кавитацией здесь понимается выделение
пузырьков растворенного в рабочей жидкости воздуха и ее паров,
происходящее при некотором понижении давления. Начало этого
процесса характеризуется уменьшением подачи насоса, сопро-
вождающимся шумом и колебаниями давления нагнетания. Раз-
66
витая кавитация определяет наибольшую возможную высоту вса-
сывания.
Потери напора на преодоление сил инерции, возникающие
вследствие неравномерности движения жидкости во всасывающей
магистрали, можно уменьшить установкой на этой магистрали
(трубе) вблизи насоса воздушного колпака а (рис. 15, в), благо-
даря которому длина всасывающего трубопровода с неравномерным
движением жидкости может быть значительно сокращена (см.
стр. 61). В этом случае жидкость засасывается насосом из воздуш-
ного колпака, в который она поступает по длинной всасывающей
трубе примерно с постоянной скоростью и лишь на коротком уча-
стке между воздушным колпаком а и цилиндром Ь насоса жидкость
движется по закону, задаваемому поршнем [см. выражение (4)].
В соответствии с этим высота напора, идущего на преодоление
инерционных сил жидкости, соответственно уменьшается.
Эти потери значительно снижаются при применении насосов
многократного действия, что достигается благодаря выравнива-
нию потока жидкости во всасывающей магистрали (см. рис. 34, б).
Так как ускорение поршня [см. выражение (11)] и соответ-
ственно ускорение жидкости во всасывающей магистрали зависит
от угловой скорости насоса, то допускаемая высота всасывания
повышается с понижением частоты вращения коленчатого вала.
Номинальной, с этой точки зрения, частотой вращения одноци-
линдровогонасоса является 300—350 об/мин.
f
§ 17. Влияние сил инерции жидкости
на давление в цилиндре в период нагнетания
Силы инерции жидкости в нагнетательном трубопроводе ока-
зывают влияние также и на давление нагнетания. В этом случае
при некоторых условиях (при малой высоте подачи, длинных тру-
бопроводах и малых их сечениях, а также при высокой частоте
вращения насоса) может также возникнуть отрицательное давление
на поршень нагнетаемой жидкости (жидкость в положениях ма-
ксимального отрицательного ускорения поршня отрывается от
поршня). Появление этого давления сопровождается гидравли-
ческими ударами вследствие обратного потока и недопустимыми
колебаниями давления на выходе насоса.
Поскольку угловая скорость со вала насоса входит в выраже-
ние (10) в квадрате, она является одним из основных факторов,
влияющих на ускорение, а следовательно, и на силы инерции
жидкости, ввиду чего для уменьшения инерционных сил следует
в первую очередь уменьшить эту скорость. Анализ показывает,
что существует предельная частота вращения, которая лежит
на границе появления отрыва поршня от жидкости и превышение
которой нежелательно.
5* ' 67
В равной мере, поскольку радиус г кривошипа входит в выра-
жение (12), отражающее влияние инерционных сил, величину
этого параметра в тех случаях, когда действие инерционных сил
необходимо свести к минимуму, следует уменьшать, т-. е. приме-
нять малые относительные ходы поршня Л- < 1,5-н2, где h
и D — ход и диаметр поршня. Получение в этом случае заданной
подачи достигается в основном увеличением диаметра D цилиндра.
Высота нагнетания. Силой, под действием которой жидкость,
открывая нагнетательный клапан 1 (см. рис. 12, а), вытесняется
в нагнетательный трубопровод 10 и резервуар 9, т. е. поднимается
на требуемую высоту Ни, является сила, приложенная к поршню 3
от приводного вала 6 через кривошип 5 и шатун 4 (давлением вса-
сывания и инерционным сопротивлением жидкости пренебрегаем).
Высота Н„, на которую поднимается жидкость, называется
высотой нагнетания. Сумма Нвс + Н„ = И называется напрром
насоса.
Напор насоса — величина, определяемая зависимостью
РЯ
где р — давление насоса;
р — плотность жидкой среды;
g— ускорение свободного падения.
Под давлением насоса в общем случае понимается величина,
определяемая зависимостью
ч
2 2
U — U
_ 1 л ВЫХ ВХ ( „ _ / " \
ВЫХ ~ВХ/’
где Рвых и Рвх — давление соответственно на выходе и на входе
в насос;
р = — плотность, удельный вес жидкой среды;
мвых и ивх — скорость жидкой среды соответственно на вы-
ходе и на входе в насос;
g— ускорение свободного падения;
гвых и гвх — высота центра тяжести сечения соответственно
выхода и входа в насос в м.
Если выразить Н в см и у — в кгс/см3, размерность давления
нагнетания будет в кгс/см2.
§ 18. Индикаторная диаграмма поршневого
насоса
Рабочий цикл поршневого насоса характеризуется индикатор-
ной диаграммой, на которой графически изображают изменения
давления в цилиндре при различных положениях поршня за один,
оборот кривошипа (вала). Иначе индикаторная диаграмма насоса —
68
графическая зависимость изменения давления от времени или пе-
ремещения рабочего органа в замкнутом объеме, попеременно
сообщаемом со входом и выходом насоса.
На рис. 16, а изображена индикаторная диаграмма совершен-
ного поршневого насоса, т. е. насоса, в котором отсутствуют утечки
и клапаны (распределитель) не имеют перекрытий (отсутствует
запаздывание открытия и закрытия клапанов).- Процесс всасы-
вания такого насоса протекает по линии cd и нагнетания (вытес-
нения) — по линии Ьа. При условии отсутствия утечек и практи-
Р
Рис. 16. Индикаторная диаграмма одноцилиндрового насоса
ческой несжимаемости жидкости кривые повышения и снижения
давления db и ас располагаются вертикально.
При всасывающем ходе поршня (см. рис. 11, б) в цилиндре
насоса создается разрежение (абсолютное давление рвс во всасы-
вающей полости цилиндра будет ниже атмосферного р0), вследствие
чего жидкость под действием разности давлений (вакуума в ци-
линдре) рвак = ро— Рве будет следовать за поршнем. При вса-
сывании поршень совершает работу по поднятию столба жидкости
во всасывающем трубопроводе 9 (см. рис. 12, а) на высоту Нвс
(отсчет ведем условно от уровня жидкости в баке до оси цилиндра),
а также по преодолению сопротивления этого трубопровода при
движении жидкости, включая сопротивление всасывающих кла-
панов 8 и 12 и силы инерции жидкости. При нагнетании поршень
совершает работу по поднятию жидкости в напорном трубопроводе
на высоту Ни и по преодолению сопротивления нагнетательной
магистрали при движении по ней жидкости.
Линия, характеризующая абсолютное давление рвс в цилиндре
насоса при ходе всасывания поршня (допускаем равномерное дви-
жение поршня), расположена ниже линии атмосферного давления
(давления в резервуаре) р0, и линия, соответствующая давле-
нию рнаг при ходе нагнетания, расположена выше линии атмо-
сферного давления р0.
На рис. 16, б изображена индикаторная диаграмма насоса,
у которого имеет место запаздывание открытия и закрытия кла-
69
панов. Эта диаграмма также близка по форме к прямоугольнику,
но с небольшим наклоном линий давления, обусловленным тем,
что на процессы повышения и понижения давления в цилиндре -
затрачивается некоторое время (соответствует отрезкам пути tt
и /8). Колебания («всплески») давления, имеющие место в начале
хода всасывания (точка с) и в начале хода нагнетания (вытесне-
ния) (точка Ь), вызваны открытием и закрытием клапанов, а также
инерционностью жидкости в переходных процессах.
Площадь индикаторной диаграммы выражает работу, сообщае-
мую жидкости поршнем за один оборот вала (площадь, заштри-
хованная точками). Поделив площадь индикаторной диаграммы на
ход поршня h = 2г, получим среднее индикаторное давление pt,
определяемое выражением
+•
Pi == Рвак 1 Риаг>
где Рвак = Ро — Рве и рнаг — соответственно среднее по индика-
торной диаграмме значение разрежения (вакуума) в цилиндре на-
соса и давление нагнетания.
Значение рык соответствует без учета инерционных потерь и
гидравлического сопротивления трубопровода высоте всасывания
(см. рис. 12, а).
В соответствии с этим мощность, передаваемая жидкости от
приводного вала через поршень, называемая индикаторной мощ-
ностью, определится выражением
= PiFhn,
где F — рабочая площадь поршня;
h — 2г —> односторонний ход поршня;
Pi — индикаторное давление;
п — частота вращения вала. «
ГЛАВА IV
РАБОЧИЕ ПАРАМЕТРЫ И ХАРАКТЕРИСТИКИ
ОБЪЕМНЫХ НАСОСОВ И ГИДРОМОТОРОВ
ГИДРАВЛИЧЕСКИХ ПРИВОДОВ (СИСТЕМ)
§ 19. Определения
Насосы объемных гидроприводов, изучению которых посвящен
настоящий курс, отличаются от перекачивающих насосов тем, что
обычно выполняются многокамерными и рассчитываются, с целью
снижения габаритов и массы гидросистемы, для работы под вы-
сокими давлениями (до 70 МПа или 700 кгс/см2 и выше). С этой
же целью их рассчитывают на высокие частоты вращения, которые
в отдельных случаях достигают 30 000 об/мин.
Объемный насос с вращательным движением ведущего звена
насоса называют вращательным насосом,
При выборе скорости вращения насоса учитывают4 ряд фак-
торов. При малой скорости повышается надежность и срок службы
насоса, однако при этом увеличиваются его габариты и умень-
шается объемный к. п. д. При увеличении скорости уменьшаются
габариты насоса, однако при этом снижается его долговечность
вследствие интенсивного износа деталей, а также повышаются
гидравлические потери в каналах машины и возможности возник-
новения кавитационного режима работы.
Ввиду этого частоту вращения выше 5000 об/мин применяют
лишь в случаях, когда долговечность насоса не является для дан-
ных условий применения превалирующим фактором (требова-
нием). В частности высокооборотные аксиально-поршневые на-
сосы (20 000—30 000 об/мин) применяют в ракетных энергети-
ческих узлах, где основным требованием к насосам является их
малые габариты и масса, а также возможность установки их не-
посредственно на быстровращающемся валу газовой турбины, но не
предъявляются высокие требования по долговечности. Кроме того,
при скорости вращения более 4000—5000 об/мин возникают труд-
ности обеспечения динамической уравновешенности вращающихся
частей и в частности цилиндровых блоков в аксиально-поршневых
насосах. При наличии в этих насосах динамической неуравнове-
шенности блока произойдет отрыв его от распределительного
золотника (см. стр. 206). Повышение скорости вращения самовса-
сывающих' шестеренных насосов лимитировано центробежными
71
силами жидкости, заполняющей межзубовые впадины шестерен
(см. стр. 322). . - .
В связи с этим следует указать, что наблюдающаяся в настоя-
щее время в конструировании гидроприводов тенденция повышения
частоты вращения гидравлических машин и давлений рабочей
жидкости противоречит требованиям повышения надежности и
ресурса этих машин, ввиду чего должно быть найдено оптималь-
ное решение этого комплекса вопросов.
Объемный насос гидравлического привода служит для преоб-
разования механической энергии, прилагаемой к прив'одному
валу (входному звену) в энергию потока жидкости, величину ко-
торого стремятся при заданной мощности максимально умень-
шить.
В объемных гидромоторах происходит обратное преобразова-
ние энергии потока рабочей жидкости в механическую энергию
ведомого звена. В отличие от насоса (в котором входным параме-
тром является скорость вала и выходным — расход жидкости)
входным параметром гидравлического двигателя является расход
жидкости и выходным — перемещение или скорость выходного
его звена (вала или штока).
Следовательно, в объемных гидравлических машинах энергия,
заключенная в потоке жидкости, передается ведомому узлу за
счет статического давления жидкости.
В применяемых в гидроприводах роторных объемных насосах
и гидромоторах перемещение рабочей жидкости происходит в ре-
зультате вытеснения ее из рабочих камер при помощи вытесните-
лей, выполняемых в виде поршня^ пластины и пр. Рабочая камера
в таких гидравлических машинах представляет собой замкнутое
(изолированное) пространство, попеременно сообщающееся при
работе насоса с полостью всасывания (слива) или нагнетания.
По характеру процесса вытеснения жидкости объемные на-
сосы делятся на насосы с неподвижными рабочими камерами (их
часто называют поршневыми насосами) и на роторные насосы.
S
первых насосах вытеснение жидкости происходит из неподвиж-
ных камер вытеснителями, совершающими возвратно-поступа-
тельное движение; во вторых насосах (роторных) вытеснение
жидкости производится из камер, совершающих вращательное
движение, в результате которого происходит перенос вытесняе-
мого объема жидкости из всасывающей полости насоса в нагнета-
тельную. Вытеснители этих насосов совершают вместе с ротором
вращательное движение, которое может сочетаться с возвратно-
поступательным движением в камерах. Наиболее распространены
в гидроприводах роторные насосы.
В соответствии с указанным, роторной гидромашиной назы-
вают машину, у которой подвижные элементы, образующие ра-
бочую камеру, совершают вращательное движение.
По виду движения вытеснителей роторные насосы делятся на
роторно-поступательные и роторно-вращательные. Первые, в свою
72
очередь, делятся по форме вытеснителей и по способу замыкания
вытесняемого объема на роторно-поршневые (см. стр. 107) и ро-1
торно-пластинчатые (шиберные) (см. стр. 273) насосы, а вторые
делятся на зубчатые (шестеренные) и винтовые (см. стр. 311).
В гидроприводах высоких давлений нашли наибольшее при-
менение роторно-поршневые насосы, которые по расположению'
цилиндров делятся на радиальные (см. стр. 107) и аксиальные
(см. стр. 179).
В зависимости от вида распределения рабочей жидкости на-
сосы подразделяются на насосы с бесклапанным и клапанным
распределением.
Гидромоторы могут классифицироваться теми же показателями,
что и насосы, однако с учетом свойства их обратимости, под ко-
торым понимается пригодность машины для работы в качестве
как насоса, так и гидромотора.
Обратимым насосом называют насос, работающий также и
в режиме гидродвигателя. Объемная гидромашина, предназначен-
ная для работы как в режиме насоса, так и в режиме гидромотора,
называется насос-мотором.
К необратимым относятся гидромашины с самодействующими
распределительными клапанами (см. рис. И, а), а также автомати-
зированные насосы переменной подачи (см. стр. 388). В большин-
стве же случаев объемные насосы и гидромоторы бесклапанного
распределения являются обратимыми машинами, что позволяет
применять без какой-либо доработки или перемонтажа в качестве
насоса и мотора одну и ту же машину.
Учитывая обратимость большинства рассматриваемых машин,
общие вопросы расчетов и конструирования в настоящем учеб-
нике рассматриваются применительно к насосам с описанием
особенностей использования их в качестве гидромоторов.
Структурный анализ показывает, что все насосы и гидромоторы
компонуются из ограниченного числа узлов, каковыми являются
механизмы подачи, распределения жидкости и изменения (регу-
лирования) подачи (рабочего объема).'
Ввиду большой разновидности конструкций насосов и гидро-
моторов, в дальнейшем рассматриваются лишь конструкции ма-
шин, наиболее распространенные и типичные для современных
объемных гидроприводов.
Помимо гидродвигателей вращательного движения (гидромо-
торов) различают объемные гидродвигатели возвратно-поступа-
тельного (силовые цилиндры) и возвратно-поворотного (поворот-
ники) движений, в которых энергия потока жидкости преобра-
зуется в механическую энергию поступательного движения штока
или поворотного движения (с углом поворота <360°) вала.
Всякая объемная гидравлическая машина (насос и гидромо-
тор) работает на принципе вытеснения жидкости. Ее рабочий ор-
ган захватывает в приемной полости машины некоторый объем >
жидкости, который затем перемещается с рабочим органом машины
73
к выходной полости, где жидкость вытесняется под некоторым дав-
лением из рабочего органа в эту полость. В соответствии с этим
основными Параметрами объемных насосов и гидромоторов яв-
ляются: рабочий объем (<?), подача (Q), давление нагнетания (рн),
крутящий момент (Л4), мощность (N), а также объемный (т]Об) и
механический (т]иех) к. п. д.
Зависимость подачи Q насоса от давления рв при всех прочих
равных условиях (частоте вращения, температуре, вязкости
жидкости и пр;) Называют характеристикой насоса Q — f (р),
иначе характеристика насоса — графическая зависимость его ос-
новных технических показателей от давления при постоянных
значениях частоты Вращения насоса, вязкости и плотность жидкой
среды на входе в насос.
чь
Я
§ 20. Рабочий объем гидромашины
и расчетная подача жидкости
При вращении вала насоса объем камер последнего изменяется,
причем при рабочем цикле этот объем уменьшается и заполняю-
щая его жидкость вытесняется в нагнетательную полость; для
гидромотора объем камер при рабочем ходе увеличивается и жид-
кость, поступившая к нему от внешнего источника расхода, за-
полняет эти камеры.
Указанное изменение объемов камер насоса или.мотора за
один оборот является рабочим объемом q, а за единицу времени —
средней теоретической (расчетной) подачей, которую также назы-
вают геометрической или идеальной пода-
че й и обозначают QT. Иначе средняя расчетная подача насоса —
это суммарное изменение объема камер насоса в единицу времени
илй произведение рабочего объема насоса q на частоту вращения.
Минутную теоретическую подачу насоса QT н и гидромотора
QT. м рассчитывают по формуле
QT. И = Ст. м = Ст = Чп = vzn, (13)
где п — частота вращения гидромашины (насоса или мо-
тора) в об/мин;
q = vz— геометрическая подача — за один оборот (рабочий
объем машины);
v и г — соответственно объем одной рабочей камеры и
число камер.
Средняя подача обычно выражается в л/мин и, реже, в см3/мин,
см3/с и л/с.
Рабочий объем у ~ принят ГОСТ 13824—68 в качестве
основного параметра объемных гидромашин.
74
Не следует отождествлять частоту вращения вала насоса (ги- .
др омотор а) с числом рабочих циклов, поскольку рабочие элементы
(вытеснители) в некоторых конструкциях совершают за один
оборот вала несколько рабочих циклов нагнетаний и сбрасываний
(см. стр. 284). В соответствии с этим под одним рабочим циклом
понимают разовое изменение объема рабочих камер от максималь-
ного значения до минимального. Исходя из этого, различают на-
сосы однократного, двукратного и многократного действия, по-
нимая под этим роторный насос, у которого жидкая среда вытес-
няется из замкнутой камеры соответственно один, два и несколько
раз за один оборот ротора.
Расчет рабочего объема насоса q„ обычно представляет из-
вестные трудности, в частности расчет насосор шестеренных (см.
стр. 311), винтовых (см. стр. 353), пластинчатых (см. стр. 273)
и др., поэтому эту величину определяют по результатам про-
качки (подаче) в режиме нуле-
вого перепада (рх = р2 О, где
Pi и — давление на входе и вы-
ходе) и при малой скорости, когда
утечки и возможность недозапол-
нения насоса жидкостью практи-
чески отсутствуют: '
_ - Чхол
~~а~ *
'где <2ХОЛ — измеренный расход хо-
лостого хода (при ну-
левом перепаде);
п — частота вращения.
Для прокачки может быть рекомендована схема установки,
показанная на рис. 17, в которой для устранения утечек жидкости
из одной камеры насоса в другую обеспечено равенство статиче-
ских напоров на сторонах всасывания и нагнетания. Насос за-
бирает жидкость из расходного бака а и подает в мерный бачок Ь.
Прокачка производится при небольшой частоте вращения (п =
= 50-г-бО об/мин), при которой обеспечивается полное заполне-
ние рабочих камер насоса. Измерив подачу за несколько оборо-
тов (10—20) и поделив ее на п, получим рабочий объем q насоса.
Для обеспечения примерного равенства статических напоров вса-
сывания (Tfj) и подачи (п 2) применяется расходный бачок а с боль-
шой свободной поверхностью жидкости.
Рис. 17. Схема установки для руч-
ной прокачки насоса
§ 21. Характерный объем
Для расчета динамических‘характеристик подачу насоса (в см3/с)
удобно представить в виде
dy
dt
75
где = о — угловая скорость вращения вала гидромашины
U с
в рад/с;
w—характерный (удельный) объем в см3/рад.
Характерный объем представляет собой среднее значение гео-
метрической подачи несжимаемой жидкости при отсутствии уте-
чек, приходящееся на один радиан поворота ротора машины:
q
W = ~,
2л
Использование этого параметра упрощает во многих случаях
расчеты и анализ объемных гидромашин, сравнительную их оценку.
Средняя величина теоретической подачи QT нерегулируемого
насоса, выраженной через характерный объем представится
в виде
Qt (14)
где сон — угловая скорость вала машины в рад/с.
Характерный (удельный) объем w ~ является основным
параметром критерия механического подобия насосов различных
конструкций, и использование его при оценке машины имеет пре-
имущества в сравнении с использованием рабочего объема q.
При статических расчетах обычно пользуются величиной q и при
динамических — w.
Использование для сравнительной оценки машин коэффициента
характерного объема w вместо рабочего объема q частично обо-
сновывается также возможностями в этом случае избавиться при
расчетах от сопутствующего q множителя 2л, а также располагать
более общими методами анализа.
§ 22. Параметр регулирования
По способу регулируемости гидромашины делятся на машины
с регулируемым рабочим объемом (регулируемые) и машины с по-
стоянным рабочим объемом (нерегулируемые).
Под регулируемыми насосами понимаются насосы, обеспечи-
вающие в заданных пределах изменение подачи.
Для регулируемых гидромашин подача при повороте ротора
на один радиан и соответственно средняя расчетная подача QT
является для данной регулировки переменной величиной и может
быть оценена долей от наибольшей возможной величины коэффи-
циента регулирования (безразмерного параметра регулирования):
ли
^тек <7тек
- 1 ' - I
^max 9тах
(15)
где и>тек и, штах—значение характерного рабочего объема при
текущем (регулируемом) объеме <?тек и его
максимальное значение при <7тах;
е =_п®!<---безразмерный параметр регулирования;
етах
76
етек и 8max — текущее и максимальное значения .регулируемого
параметра; для радиальных машин этим параметром
является эксцентриситет (см. стр. 113), а для
аксиальных (см. стр. 381) — угол у наклона диска.
Безразмерная величина е может изменяться в регулируемых
машинах от +1 до —1 при помощи установки регулирующего
органа гидромашины (см. стр. 185).
В соответствии с приведенным, средняя теоретическая подача
регулируемого насоса, выраженная через характерный объем w
и безразмерный параметр регулирования е, примет вид
QT = qn = еаунсон.
f
Для нерегулируемых насосов параметр е равен положительной
единице (в = 1).
§ 23. Объемные потери и объемный к. п. д. насоса
5. Объемные потери
В реальных насосах имеют место объемные потери, в резуль-
тате которых фактическая подача жидкости будет меньше геоме-
трической.
В соответствии с этим различают, помимо теоретической,
фактическую (эффективную) подачу насоса (фэф) под
которой понимают подачу жидкости насосом при определенных
значениях перепада давления Д/>, частоте вращения п и при прочих
условиях, влияющих на объемные потери в насосе. Величина фак-
тической подачи (<2эф) будет меньше расчетной (QT) на величину
объемных потерь = QT — которые возникают в резуль-
тате перетекания (утечек) жидкости под действием перепада дав-
ления из рабочей полости в нерабочую (AQJ, а также потерь
(Д(?2), обусловленных неполным заполнением рабочих камер
жидкостью при проходе их через зону всасывания вследствие ги-
дравлического сопротивления входных каналов, кавитационных
процессов и выделения воздуха, а также действия, в ряде случаев,
на жидкость центробежных сил.
К последним потерям (AQ2) относят также потери, обусловлен-
ные сжатием жидкости во вредном пространстве и деформацией
его деталей. Потери Дф2 принято называть условными утечками
или потерями на всасывании насоса.
Для поршневых насосов с клапанным распределением (см.
рис. 47) существенное влияние на объемный к. п. д. оказывают
утечки через всасывающие и нагнетательные клапаны вследствие
их негерметичности, а также запаздывание закрытия клапанов.
Запаздывание закрытия всасывающего клапана к моменту начала
нагнетательного хода поршня приведет к тому, что некоторое ко-1
личество жидкости, заполняющей цилиндр, будет вытеснено в на-
77
чале нагнетательного движения поршня обратно во всасывающую
линию; запаздывание же закрытия нагнетательного клапана при-
ведет к тому, что в начале всасывающего хода поршня в цилиндр
будет поступать жидкость из нагнетательной линии,
Количественное сравнение непосредственных утечек жидкости
с условными (объемными потерями на всасывании) показывает,
что последние могут составить в некоторых случаях 75% всех
объемных потерь в насосе.
Основными причинами неполного заполнения жидкостью ра-
бочих камер насоса при прохождении ими всасывающей зоны яв-
ляются недостаточный напор (малое давление) на входе в насос и
большое сопротивление всасывающих каналов, подводящих
жидкость к распределительным окнам блока, а также сопротив-
ление в распределительных окнах и в самих цилиндрах. Для ше-
стеренных и пластинчатых насосов к указанным сопротивлениям
добавляется сопротивление, обусловленное центробежной силой
жидкости при вращении рабочих узлов насоса (см. стр. 322).
Сопротивление всасывающей линии (включающее инерционные
потери) может привести, в зависимости от величины абсолютного
давления на входе в насос, к разрыву потока жидкости (кави-
тации). Появление такого режима насоса особенно реально при
высокой частоте вращения. При увеличении частоты вращения
пропорционально увеличивается количество жидкости, проходя-
щей через подводящие каналы и узел распределения, а следова-
тельно, сопротивление потоку (потери напора). Очевидно для дан-
ного давления жидкости на входе в насос может быть достигнута
такая частота вращения, при которой в насос не будет поступать
при данном давлении на входе количество жидкости, требуемое
для заполнения рабочих камер. При дальнейшем повышении ча-
стоты вращения >па линейность повышения фактической подачи
насоса нарушается (рис. 18, а), а при некоторой большой ча-
стоте вращения она будет даже снижаться с увеличением п (насос
будет работать в кавитационном режиме).
В соответствии с указанным, фактическая подача насоса
выражается z
<2эф = От - AQh = От - (AQ1 + AQ2), (16)
где QT— теоретическая (геометрическая) подача;
AQH = AQX + AQ2 — объемные потери жидкости (включая и
потери на всасывании).
Ввиду того что внутренние зазоры в машине неизбежно имеют
местные сужения и расширения, а стенки, образующие эти за-
зоры, могут периодически колебаться перпендикулярно направле-
нию потока (вследствие чего сопротивление зазоров периодически
изменяется за один оборот вала), точный расчет утечек представ-,
ляет .известные трудности и учет их производится на основании
опытных данных. 4
78
Эксперименты показывают, что непосредственные утечки жид-
кости через зазоры гидравлических машин изменяются при всех
прочих равных условиях практически прямо пропорционально
перепаду давления. Поэтому выражение для этих утечек может
быть представлено в виде
AQi = гр, (17)
ч
где г—постоянный при. прочих равных условиях коэффициент
утечек.
На рис. 18, б приведены графики принципиальной зависимости
подачи Q насоса от величины перепада давления Др для случаев
Q
Перепад дайленах
18. Объемные характеристики
гидромашины
t
отсутствия условных утечек (при полном заполнении рабочих
камер в зоне всасывания) и такой жесткости конструкции насоса,
при которой зазоры при изменении давления не изменяются.
При повышении перепада давления фактическая подача такого
насоса <2Эф понижается практически линейно. В соответствии с этим
линейной будет также зависимость величины утечек жидкости Дфх
через зазоры в функции Др.
С другой стороны, так как зазоры при изменении частоты вра-
щения насоса практически не изменяются, а также учитывая,
что скорость течения жидкости через зазоры значительно больше
скорости скользящих пар, образующих эти зазоры, величина уте-
чек жидкости Дфх через зазоры практически не зависит от частоты
вращения до определенного его значения (ооп2). В соответствии •
С этим фактическая подача (фэф) изменяется при этих условиях
79
прямо пропорционально частоте вращения. Кривая подачи <2эф
будет при этом практически параллельна кривой QT, смещенной
относительно нее на величину AQr При частоте вращения, мень-
шей nmlrl насос не будет развивать требуемого перепада давления,
т, е. при этой частоте расчетная подача равна утечкам (рис. 18, а):
Фт ~’ rtmln Я ~~ AQi-
Следовательно, утечки через зазоры в насосе ограничивают
минимальную частоту вращения, при которой еще возможно
получение максимального давления на выходе.
Поскольку внутренние утечки увеличиваются с повышением
перепада давления в системе, насосы оцениваются по подаче при
заданном давлении.
6, Объемный к. п. д.
Указанные объемные потери в насосе характеризуются его объ-
емным к. п. д., который показывает, насколько фактическая (эф-
фективная) подача (фэф) насоса отличается от средней теоретичес-
кой (QT) и представляет собой отношение полезной (эффектив-
ной) мощности насоса к сумме полезной мощности и мощности,
потерянной с утечками или, что то же, отношение фактической
подачи к средней теоретической:
N эф Фэф
Поб. н = = -Q7 •
Полезная (эффективная) мощность насоса N3$ — мощность,
сообщаемая насосом жидкой среде и определяемая зависимостью
У эф ФэфР»
где —эффективная подача насоса;
р — давление насоса.
Среднюю теоретическую подачу определяют расчетным путем
по приведенным ниже формулам или измеряют при медленном (п =
= 20 ч-30 об/мин) проворачивании рукоятки насоса с (см. рис. 17)
при нулевом перепаде давления жидкости между полостями входа
и выхода (при нулевой разности уровней жидкости Нг Н2
в заборном л и сливном b резервуарах).
На основании формулы (16) можем написать
Фэф___. AQH ____1 _ &Qi,+ AQ2
i]o6-н <?т Qt <2т
(18)
Из приведенного следует, что объемные потери жидкости
в насосе уменьшают в т]об> я раз его подачу.
80
Фактическая подача насоса (с учетом объемного к. п. д.)
Сэф н ФтЛоб. н* .(19)
Из выражения (18) следует, что объемный к. п. д. регулируе-
мого насоса будет снижаться при уменьшении расчетной подачи,
достигая при QT — AQH нулевого значения.
Эффективная подача, выраженная через характерный объем ш
и параметр регулирования е для регулируемых насосов (см.
стр., 75), определится 4
Фэф н»
где т)об н — объемный к. п. д. насоса.
Рис. 19. Кривые к. п. д. насоса
Применительно к нерегулируемому насосу в данном выражении
значение параметра регулирования принимается равным положи-
тельной единице (см. стр. 76).
Зависимость объемного к. п. д. от различных факторов. На
рис. 19 приведены типовые кривые принципиальной зависимости
объемного к. п. д. насоса т]об н без учета условных утечек в функ-
ции перепада давления (допускаем, что зазоры с изменением дав-
ления не меняются) при постоянной скорости (график а) и в функ-
ции скорости (частоты вращения п) при постоянном давлении
(график б). Штриховая линия на рис. 19, а соответствует идеаль-
ному насосу с нулевыми утечками (т)об н — 1).
Анализ рассмотренных выше данных показывает, что измене-
ние объемного к. п. д. т]об н насоса практически находится в прямой
зависимости от перепада давления (рис. 19, а). Поскольку теоре-,
тическая подача насоса QT (см. рис. 18, а) при бескавитационном
6 Т. м. Башта
81
режиме всасывания (при отсутствии объемных потерь на всасы-
вании) прямо пропорциональна частоте eto вращения га [см.
также выражение (13)], а абсолютная величина утечек жидкости
AQi (см. рис. 18, б) при принятых условиях зависит лишь от пере-
пада давления жидкости и практически не зависит от п, объемный
к. п. д. т)об. н насоса с увеличением п в некоторых пределах, в ко-
торых соблюдается указанный режим работы, повышается
(рис. 19, б).
Однако подобное повышение подачи насоса при увеличении п
будет происходить лишь до определенных значений п, при которых
утечки (см, стр. 77), обусловленные недозаполнением рабочих
камер насоса, отсутствуют или столь малы, что ощутимо не изме-
няют подачи насоса. При некоторой высокой частоте вращения п
начнет сказываться влияние условных утечек (потерь на всасы-
вании) и поскольку с увеличением п эти утечки относительно воз-
растают, то линейность зависимости подачи Qait> в функции п бу-
дет нарушена (см. рис. 18, а), что вызовет стабилизацию и при
некотором увеличении п — снижение объемного к. п. д. (рис. 19, б).
При известном повышении п наступит кавитация (разрыв потока),
сопровождающаяся резким падением объемного к. п. д.
Кавитационная характеристика насоса — графическая зави-
симость основных технических показателей насоса от кавита-
ционного запаса или вакуумметрической высоты вса-
сывания при постоянных значениях частоты вращения насоса,
вязкости и плотности жидкой среды на входе в насос и давления.
Кавитация в насосе сопровождается пульсацией давления
жидкости на выходе и шумом. Эти пульсации обусловлены в основ-
ном наличием обратного потока жидкости из нагнетательной по-
лости насоса, который сопровождается гидравлическими ударами
и, в результате чередующихся ударов, — пульсацией давления
в нагнетательной магистрали насоса. Амплитуда этих пульсаций
может при известных условиях достигать величины, вызывающей
разрушение насоса и нагнетательной магистрали. Ввиду этого
должен быть обеспечен некоторый кавитационный запас, при
котором в работе насоса не наблюдалось бы изменения основных
технических показателей. ' '
Кавитационный запас насоса — величина, определяемая за-
висимостью
, вх
Рвх -г Р ~5-Рпар
АЛ —----------------,
Pg
где АЛ — кавитационный запас;
рвх — давление на входе в насос;
р — плотность жидкой среды;
ивх — скорость жидкой среды на входе в насос;
Рпар — давление паров жидкой среды.
82
Возможность возникновения кавитации можно уменьшить
рациональным выбором режимов работы гидравлической системы
и правильным конструктивным выполнением ее агрегатов, однако
полностью исключить это явление можно лишь применением
вспомогательных насосов подпитки (см. стр. 205) и прочих средств,
повышающих давления во всасывающей линии насоса. Так, повы-
шение давления во всасывающей линии насоса часто достигается
применением специального эжектора, устанавливаемого на слив-
ной линии гидросистемы (рис. 20, а), с помощью которого можно
повысить давление на входе в насос, используя скоростной напор
жидкости, выходящей из сопла 2 эжектора (1], Сливная маги-
Рис. 20. Схема повышения давления на входе в насос с помощью
эжектора (а) и расчетная схема вредного (мертвого) пространства (б)
страль 1 гидросистемы в этом случае соединяется с эжекторным
устройством, с помощью которого во всасывающий канал насоса
может дополнительно поступить под избыточным давлением неко-
торое количество жидкости через канал 3, соединенный с бачком.
Для улучшения условий всасывания и предотвращения попадания
воздуха насос часто размещают в баке гидросистемы.
Минимальное значение частоты вращения п насоса опреде-
ляется его герметичностью (утечками жидкости), а максималь-
ное— надежностью заполнения рабочих камер жидкостью. При
уменьшении частоты вращения его расчетная подача пропорцио-
нально уменьшается, в то время как утечки жидкости сохраня-
ются при прочих равных условиях практически постоянными;
в результате при известной частоте вращения полезная подача
и объемный к. п. д. насоса могут снизиться до нулевого значения
(Лоб. и = 0). Последнее произойдёт при уменьшении расчетной
подачи до QT — AQ, т. е. наступит при частоте вращения меньшей
«i (см. рис. 18, а), при которой насос не будет развивать требуе-
мого перепада давления (утечки жидкости будут равны расчет-
ной подаче). Иначе, минимальная частота вращения определяет
нижнюю границу устойчивости работы машин, а верхний предел
определяется полнотой заполнения изменяемых полостей рабочей
6* ’ 83
жидкости, причем для ряда машин оказывают влияние центро-
бежные и инерционные силы, нарушения в работе распредели-
тельного устройства и пр.
Опыт показывает, что величина утечек жидкости через зазоры
зависит также от вязкости жидкости, уменьшаясь с увеличением
последней, а следовательно, объемный к. п. д. насоса с повышением
вязкости (или соответственно с понижением температуры t)
жидкости увеличивается. Однако повышение вязкости жидкости
сказывается положительно на объемном к. п. д. лишь до того
момента, пока отрицательное влияние этого фактора на заполне-
ние насоса не превысит положительного эффекта от уменьшения
утечек через зазоры, обусловленных перепадом давления. Таким
образом, объемный к. п. д. насоса будет наибольшим при такой
вязкости жидкости, при которой суммарные объемные потери
вследствие ее утечек через зазоры и неполного заполнения рабо-
чих камер насоса будут минимальными. f
В соответствии с этим на величину утечек жидкости через
зазоры влияет также температура жидкости, причем, поскольку
теоретическая подача не зависит от температуры, объемный к. п. д.
с понижением температуры жидкости ниже той, при которой
обеспечивается заполнение насоса, уменьшается. С понижением
температуры повышается также сопротивление всасывающей ли-
нии насоса, что также приводит к уменьшению объемного к. п. д.
насоса.
График, приведенный на рис. 19, в, показывает, что в интер-
вале температур жидкости от— до /2 объемный к. п. д. т]об н со-
храняется в приемлемых значениях; при температуре выше /2
он уменьшается вследствие роста утечек жидкости через зазоры,
а при температуре ниже— tL — понижается вследствие не-
полного заполнения насоса, что обусловлено ростом сопроти-
вления всасывающей магистрали ввиду повышения вязкости
жидкости.
Объемный к. п. д. насоса при всех прочих равных условиях
будет, как правило, тем больше, чем меньше доля общей длины
зазоров, приходящаяся на единицу расчетной подачи насоса. Ввиду
этого объемный к. п. д. насоса большой подачи обычно выше объем-
ного к. п. д. насоса малой подачи. Очевидно, что по этой же при-
чине частоту вращения насоса желательно выбирать максималь-
ной, однако такой, при которой обеспечивается бескавитационный
режим всасывания.
Поскольку в регулируемых насосах (см. стр. 114) периметр
зазоров при регулировании не изменяется, утечки жидкости
через зазоры практически сохраняются постоянными при различ-
ных рабочих объемах q насоса. Теоретический же расход изменя-
ется при этом пропорционально рабочему объему q = ввиду
чего объемный к. п. д. такого насоса с уменьшением его рабочего
объема будет понижаться [см. выражение (18]. В соответствии
84
с этим кривая зависимости ^эф регулируемого насоса от рабочего
объема q будет аналогична кривой, представленной на рис. 18, а.
При расчетах гидросистем значение т|об н для роторных порш-
невых насосов можно принимать для номинальных режимов ра-
боты равным 0,96—0,98.
Обычно принимают, что снижение подачи насоса, приходя-
щейся на один оборот, в конце ресурса работы не должно пре-
вышать 10% от номинальной подачи в начале ресурса работы
насоса. '
Влияние на объемные потери сжимаемости жидкости и вред-
ного пространства насоса. Объемные потери, а следовательно, и
подача насоса в значительной мере зависят (в особенности при
высоких давлениях «а выходе) от упругости рабочей среды (жидко-
сти) и величины вредного пространства (мертвого объема) насоса
и жесткости его рабочих камер (см. также стр. 375).
Под вредным пространством понимают разность между геоме-
трическим объемом камеры вытеснения (включая объем каналов
распределителя) и расчетным вытесняемым объемом (без учета
утечек и сжимаемости жидкости).
Наличие вредного пространства отрицательно сказывается на
характеристиках насосов, в особенности при высоких давлениях.
Очевидно, если пренебречь сжимаемостью рабочей среды, вред-
ное пространство не будет сказываться на величине подачи на-
соса, однако с учетом сжимаемости оно оправдывает свое назва-
ние, так как известная часть жидкости, вытесняемая поршнем,
или иным вытеснителем, израсходуется на повышение давления
в нем до величины, соответствующей давлению жидкости на вы-
ходе из насоса. Следовательно, расчетный объем жидкости, вы-
тесняемой из изменяющейся полости насоса за один ход, всегда
несколько меньше максимального геометрическогр объема изме-
няемой полости, ввиду чего в последней в конце вытеснения будет
находиться некоторый объем жидкости.
Рассмотрим влияние этого пространства на объемные характе-
ристики однопоршневого насоса (рис. 20, б). Для оценки этого
влияния введем понятие теоретического объемного к. п. д. на-
соса, под которым будем условно понимать отношение расчетного
значения подачи насоса (без учета утечек через зазоры) в среду
с давлением рн к геометрической подаче QT, вычисленной по урав-
нению (13)
_ Qi
Лоб.т— QT •
Применительно к рассматриваемому однопоршневому насосу
это уравнение может быть представлено в виде
'Лоб. т Q >
7
85
где qt— объем вытесняемой жидкости за один ход в среду
с давлением /?н; •
q = hf —рабочий объем насоса (объем, описываемый порш-
нем за один ход);
h и f — ход и площадь поршня.
Рассмотрим влияние сжимаемости жидкости с учетом наличия
вредного пространства. Обозначим через с объем вредного про-
странства насоса, т. е. объем между поршнем и нагнетательным
клапаном (или распределительным устройством) в конце рабо-
чего хода поршня (отмечено точечной штриховкой). Пренебрегая
утечками жидкости и считая цилиндр насоса абсолютно жестким,
а заполнение цилиндра полным, находим объем Д^ сжатия
жидкости, необходимый для повышения давления жидкости в объ-
еме (с + q) от величины' давления всасывания (принимаем его
равным атмосферному) до давления р„ среды, в которой происхо-
дит нагнетание: _
A<7i = Рн₽ (с + <7),
где р — среднее значение коэффициента сжатия жидкости.
С учетом этого сжатия действительный объем qA жидкости,
вытесняемой поршнем за один ход в среду с давлением р„, будет
Д71 = <?—рн0 (с +<?).
В соответствии с этим расчетный объемный к. п. д. насоса
без учета влияния утечек и иных факторов, кроме сжатия жидко-
сти, определится из формулы
--= (20)
¥ * Ч
или, принимая во внимание что qx = hf, будем иметь
. ДЛ
. Лоб. т = 1----р •
/
Из приведенного следует, что чем больше отношение суммар-
ного объема (с +<?) к описываемому поршнем объему q, тем боль-
шая часть последнего будет потеряна на повышение давления
или, иначе, указанный к. п. д. зависит при прочих одинаковых
условиях от отношения пути Д/i перемещения плунжера, требую-
щегося для сжатия жидкости в цилиндре и во вредном простран-
стве до давления рп на выходе, к полной (конструктивной) вели-
чине его перемещения h. Очевидно, чем больше отношение этого
объема сжатия к объему, описываемому поршнем за один ход,
тем большая часть последнего будет потеряна на повышение да-
вления.
Для поршневых насосов, работающих при высоких давлениях '
(100 МПа или —1000 кгс/см2) (см. рис. 145 и 146) объем сжатия
86
жидкости с учетом вредного пространства, необходимый для по-
вышения ее давления до требуемой величины, может составите
более 50% объема, описываемого поршнем.
Теоретический объемный к. п. д. зависит также от жесткости
камеры насоса, образующей вредное пространство. Последнее
обусловлено тем, что увеличение объема этой камеры, вызванное
упругой деформацией ее стенок под действием давления жидкости,
будет сказываться на объемном к. п. д. в такой же мере, как и вли-
яние сжатия находящейся в ней жидкости.
При повышении давления с атмосферного до рн объем вредного
пространства насоса увеличится вследствие механической дефор-
мации его деталей на величину
Л?2 = срн6, (21)
где S — коэффициент, характеризующий изменение единицы
объема вредного пространства при изменении давления
на 1 ат;
с — объем камеры вредного пространства.
С учетом величины и жесткости камеры вредного пространства,
а также рассмотренного выше сжатия жидкости объемом (q + с),
выражение для объемного к. п. д. примет вид
— 1 ~ ~ [₽ (с + <7) +
Ч
(22)
Из данного выражения следует, что при проектировании на-
сосов высокого давления необходимо стремиться к уменьшению
значений
и 6, что достигается уменьшением объема вредного
пространства насоса й повышением жесткости его деталей, обра-
зующих это пространство. Кроме того, в системах высоких да-
влений следует применять жидкости с минимальным значением
коэффициента 0 объемного сжатия.
7. Влияние на подачу нерастворенного воздуха
При наличии в жидкости нерастворенного воздуха, последний
вместе с жидкостью поступает во всасывающую полость и цилиндры
насоса, давление в которых обычно значительно ниже атмосфер-
ного; поэтому воздух в них расширяется, уменьшая тем самым
объем жидкости в цилиндрах.
Допустим, что единица объема жидкой среды содержит при на-
чальном давлении (давлении в баке) р0 нерастворенного 'воздуха
в объеме Уо. Вследствие расширения этого воздуха во всасываю-
щей камере до давления рв объем его увеличится (принимаем, что
87
процессы расширения и сжатия воздуха происходят по изотермному
циклу, при котором уравнение, выражающее связь между давле-
нием р и объемом V, имеет вид pV — const):
= (23)
Mb
X
где Vo— содержание (объем) воздуха в единице объема жидкости
при начальном давлении р0 в жидкостном баке системы;
— то же при давлении рв(во всасывающей камере насоса.
При сжатии этого воздуха в нагнетательной камере до давле-
ния рн на выходе из насоса объем его уменьшится:
н в Рн
(24)
где VH — содержание воздуха в единице объема жидкости на
выходе из насоса в среду с давлением р„.
Разность между значениями VB и VH есть потеря подачи Vn
насосом, вызванная расширением воздуха и. отнесенная к единице
рабочего объема насоса:
V =У — V
*п *в г н*
Подставив из выражений (23) и (24) значения VB и VH, получим
Va = Vo — VB .
п ° Рв в Рн
Наличие воздуха отразится на объемном к. п. д. насоса:
При наличии в насосе вредного пространства влияние на объем-
ные характеристики нерастворенного воздуха будет более значи-
тельным, так как часть вытесняемой поршнями смеси жидкости
с воздухом израсходуется на повышение ее давления в этом про-
странстве до величины рп на выходе из насоса.
С учетом вредного пространства уменьшение объема воздуха,
содержащегося в жидкости и заполняющего объем (q + с) (объем-
ная потеря подачи насоса вследствие сжатия воздуха), при по-
вышении давления с р3 до может быть вычислено по выражению
&q — (р
Ра Рн \ Рн Рн /
В соответствии с этим полезная (эффективная) подача насоса
в среду с давлением рн уменьшится до величины
<7Эф = ^ —= Г(? + с)(У0 v
L . \ Рн
VB
88
В этом случае объемный к. п. д. будет
__ Яэф _ - _ Ад = _ д + с / Уоро
^об д q д \ Рв
^вРв
Рн
VвРв \
Рн /
где q3$ — полезная (эффективная) подача насоса в среду с да-
влением ру\
&q—изменение объема воздуха, содержащегося в жидко-
сти, заполняющей объем (q + с) при повышении
давления с.рв
Из этого уравнения
следует, что при соот-
ветствующих значениях
а также содержа-
ния воздуха и величи-
нах рн, pQ и рв, объем-
Рис. 21. Влияние на подачу
шестеренного насоса величи-
ны атмосферного давления и
содержания в жидкости не-
растворенного воздуха
ДО Рн-
I_____I-----I—----1------1-----L------1
140 596 462 353 266 198ммрт.ст
Атмосферное давление
ные потери, обусловленные сжимаемостью воздуха, могут
. достигать больших значений. Так, при 5%-ном содержании не-
растворенного воздуха объемный к. п. д. насоса при — = 0,1,
рн = 20 МПа (200 кгс/см2), р0 =0,1 МПа (1 кгс/см2) ирв = 0,05МПа
(0,5 кгс/см2) составит соО,89 (не учитывая возможности допол-
нительного выделения воздуха в камере всасывания).
Очевидно, при известном содержании воздуха подача насоса
станет равной нулю. Это насту питого г да, когда объем сжатого
во вредном пространстве воздуха, отнесенный к давлению во
всасывающей камере, будет равен объему, описываемому рабо-
чими элементами насоса за один оборот.
На рис. 21 приведены кривые, характеризующие рассматри-
ваемую зависимость подачи шестеренного насоса самолетной гидро-
системы в функции давления внешней среды.
§ 24. Объемные потери и объемный к. п.д. гидромотора
При работе машины в режиме гидромотора в приемную ее
полость подается под давлением жидкость, энергия которой пре- *
.образуется в механическую энергию вращения выходного вала,
89
1
а также расходуется на преодоление сопротивления сил трения
в машине.
Объемные потери жидкости в гидромоторе AQM отличаются
от потерь в насосе лишь тем, что в моторе практически отсутствуют
потери «на всасывании» (т. е. обусловленные неполным заполне-
нием рабочих камер жидкостью и пр.), а следовательно объемные
потери здесь сводятся в основном к утечкам жидкости через
зазоры. Эти утечки приводят к тому, что фактический (подводи-
мый) расход жидкости гидромотором (Спод) превышает геометри-
ческий, т. е. его теоретическое значение QT (см. рис. 18, в). В соот-
ветствии с этим объемные потери в гидромоторе уменьшают ча-
стоту его вращения по сравнению с теоретической и снижают
объемный к. п. д., который представляет собой отношение объема
QT, описываемого его рабочими элементами в единицу времени
(геометрическая подача, см. выражение (13)1, к фактическому
объему жидкости <2П0Д*> QT> подводимому к гидромотору за это
время:
Лоб. И = • (25)
Чпод
Поскольку QT ='Qnofl — AQM> где — объемные потери
' в гидромоторе, можем написать
Поб.м- 1 •
-d
Учитывая также, что <2П0Д = QT + AQM, выражение (25) пе-
репишется в виде
<26>
ь
Подставив в данное уравнение QT м = его можно пред-
ствить в виде
Лоб. м
Чпод
где wu и им — соответственно
скорость гидромотора.
Из приведенных уравнений
водимый) расход гидромотора
характерный объем и угловая
следует что фактический (под-
0 _0т_ — ™ ю .
я Лоб. м Лоб. м Лоб. м
(27)
Из сравнения формул (19) и (27) следует, что объемные пока-
затели режима будут общими как для насоса, так и для гидро-
- мотора, с той лишь разницей, что знак при показателе степени ,
к. п. д. изменяется на обратный.
9о
В соответствии с приведенным вал нагруженной гидромашины
(М„ > 0), работающей в режиме гидромотора, при подаче в ее
входную полость жидкости в объеме,' равному утечкам (Д<?м),
не будет проворачиваться, поскольку (см, рис. 18, в) вся подавае-
мая жидкость израсходуется на покрытие утечек. Эта подача
определяется как
* г
' Qmln м AQM = <7м^т1п Mi
где пш1п м — условная частота вращения мотора, соответствую-
щая внутренним утечкам (AQM).
Нетрудно видеть, что эта частота равна, при прочих равных
условиях, рассмотренной частоте вращения nm]tl насоса (пх на
рис. 18, а), при которой подача насоса равна нулю.
Следует заметить, что при незначительном увеличении подачи
выше указанной Qmtn м, вал гидромотора в начале будет вращаться
толчками (с периодическим повторением вращения и остановки)
и лишь при некотором значительном превышении этой минималь-
ной подачи (Qmln'M) вращение станет устойчивым. Указанная не-
устойчивость угловой скорости обусловлена колебаниями нагрузки
(в том числе от сил трения) и утечек, а также упругостью системы.
Минимальная устойчивая частота вращения зависит в первую
очередь от конструкции и герметичности машин и прочих факто-
ров (см. стр. 131). Многие машины аксиально-поршневого типа
обеспечивают устойчивую работу при частоте вращения сю5 об/мин.
§ 25. Мощность и крутящий момент
на валу гидромашины
•и
Теоретическая (индикаторная) мощность гидромашины (на-
соса или мотора) Мт, под которой понимается мощность, экви-
валентная при данном перепаде давления Др теоретической (рас-
четной) подаче машины Q =» qnt определится по выражению
Мт = QT&p ='&pqn, (28)
l
где QT— теоретическая подача;
q и п— рабочий объем и частота вращения машины;
Др — перепад давления.
Если принять Др в кгс/см2, q — в см8/об, п — в об/с,
QT — в см8/с, то мощность выразится в кгс-см/с. Для распростра-
ненной в практике размерности расхода QT в л/мин и Др в кгс/см2
выражения мощности примут вид
* •
= TST л- кВт- <29> '
91
На основании приведенного теоретический (индикаторный)
момент Мт на валу насоса (или гидромотора) можно выразить
ДЛ __ __ Q^P ___
т ~ 2лп “ 2л ” 2лп ~ со Vх7'
или
Мт== 0,159 Д w = 0,159.
Связь между теоретической мощностью Nr и крутящим мо-
ментом 7ИТ в практике обычно выражают уравнением
/И = 716,2 —— ктс-м; Мт=71 620 —
т ’ п ’ т п
кгс-см, (31)
--- Г1 • М,
где NT — теоретическая мощность в л. с.;
п — частота вращения в об/мин.
В системе единиц СИ
Nr = Qr\p Вт; NT = кВт; М
где со — угловая скорость в рад/с;
QT—расчетная подача в м3/с.
Если пренебречь трением, теоретический крутящий момент Л4Т
можно считать прямо пропорциональным величине перепада да-
вления Др = pt — р2 в гидромашинег
7ИТ
где £м — коэффициент момента, характеризующий удельный мо-
мент для давления, равного единице.
Этот момент можно определить из выражения 2VT = фтДр —
= соЛ1т; Мт — —или с учетом равенства QT ~ о>со,
Мт шЛр.
Из приведенного следует, что коэффициент kM численно равен
удельному (характерному) объему гидромашины:
Крутящий момент, создаваемый давлением жидкости, направ-
лен в насосе в сторону, противоположную вращению его вала,
т. е. он является реактивным моментом. Этот момент преодолева-
ется приводным двигателем.
В гидромоторе направление крутящего момента давления
жидкости совпадает с направлением вращения его вала и явля-
ется активным моментом, совершающим полезную работу на валу
гидромотора.
92
§ 26. Механические потери мощности и механический
к. п. д. гидромашины
8. Механические потери
Преобразование энергии в гидромашине (механической в гид-
равлическую— в насосе, или гидравлической в механическую —
в гидромоторе) обеспечивается движением рабочих элементов
(вытеснителей), которое сопровождается потерями энергии (мощ-
ности) на трение механических частей, а также на преодоление
вязкостного и инерционного сопротивлений жидкости в каналах
машины. Эти механические потери мощности характеризуются
механическим к. п. д. машины, величина которого выражает отно-
сительную долю механических потерь в машине. Указанный
к. п. д. равен отношению теоретической (индикаторной) мощности
к мощности, подведенной к машине извне. Для насоса подведен-
ной мощностью является приводная мощность 7Vnp на его валу,
для гидромотора— мощность, соответствующая фактическому
расходу <2П0Д при данном давлении [см. выражение (28)].
Иначе говоря, указанные механические потери определяются
как разность между теоретической (индикаторной) мощностью
и фактической мощностью на валу машины. Отличие насоса от
гидромотора, с этой точки зрения, заключается лишь в том, что
для определения потерь в насосе теоретическую мощность вычи-
тают из фактической (приводной) мощности на валу насоса, а в мо-
торе фактическую мощность на выходном валу вычитают из теоре-
тической его мощности.
Механические потери мощности могут быть также вычислены:
для насоса
ДМН = Мпр - Мт;
для гидромотора
ДМм = Мт-Мэф,
где Мпр — мощность (приводная) на валу насоса;
— мощность, снимаемая с вала гидромотора (эффек-
тивная мощность);
— теоретическая (индикаторная) мощность машины
(насоса или гидромотора);
ДМН и ДМм — механические потери мощности соответственно
в насосе и гидромоторе.
Следовательно, механические потери увеличивают мощность
и крутящий момент на валу насоса и уменьшают их на валу
гидромотора. В соответствии с этим фактический крутящий мо-
мент на валу насоса Л4пР или гидромотора Л4эф, т. е. крутящий
момент, требуемый для привода насоса, или момент, развиваемый
гидромотором, будет равен сумме крутящих моментов (или
сумме мощностей) (рис. 22):
для насоса Л4пр = Л1ТН + ДЛ4Н;
для гидромотора Л4эф = Л4Т.М— ДМм,
93
где ЛЛ1Н и ДЛ4М — потери момента соответственно в насосе
ив гидромоторе;
Мт. н —- теоретический (индикаторный) крутящий мо-
мент. насоса и гидромотора, под которым
понимается момент, развиваемый перепадом
Др давления жидкости в камерах насоса
или гидромотора без учета потерь на механи-
ческое трение и потерь сопротивления
жидкости;
Л1Т. нИ М ==
• * » '
здесь = 4^- и w№— -т-f-— удельный (характерный) объем соот-
ветственно насоса и гидромотора; и
насоса и гидромотора.
Ям —
Рис. 22. Крутящий момент
гидромашин в функции
перепада давления
Отрезок Др0 характеризует потери на страгивание ненагружен-
ного гидромотора.
Из приведенного вытекает, что момент трения в гидромоторе
не влияет на его кинематические характеристики (если пре-
небречь увеличением утечек, обусловленным повышением давле-
ния), а Влияет лишь на перепад давления в гидромоторе.
Пример. Рассчитать давление в гидромоторе, соответствующее расчетному
моменту Л4Т = 40 Н-м (400кгс-см) и фактическое давление с учетом момента
трения, затраченного на преодоление механических потерь в машине. Рабочий
объем гидромотора q = 25 см3 и момент трения Л4тр = 35 кгс-см.
Решение. Перепад давления Дрт, соответствующий расчетному моменту
[см. выражение (30)],
1
Дрт = 25^1 = -2^’“4° 10- 16е Н/м2«=40МПа & 100 кгс/см2.
f
Перепад давления Др с учетом момента трения Л1тр = 3,5 Н-м.
2-3,14 (40 4- 3,5)
2510-е
11 • 10е Н/мал* ИМПаяай ПО кгс/см2.
94
Расчетный (индикаторный) крутящий момент Мх на валу гидро-,
машины, развиваемый силой давления жидкости на рабочие ее
элементы, может быть выражен также в общем виде (без учета
потерь трения)
(32)
Мх = ku&p,
где Др = pi — р3 — перепад давлений;
#и = — коэффициент крутящего момента, характе-
ризующий удельное значение момента при
перепаде давлений, равном единице.
Из приведенных формул Nx — ApQT и Nx = <вЛ1т, выражаю-
щих мощность в гидравлических (расход Qt и давление Др жидко-
сти)^ механических (угловая скорость со и момент Л4Т) параметрах,
а также с учетом равенства Q = ано, можем получить
Afr = wkp,
где w — удельный (характерный) объем машины. '
Из анализа формул (32) и (33) следует, что коэффициент мо-
мента численно равен удельному объему машины:
' = w-
Расчетный (индикаторный) момент на валу регулируемой
гидромашины ~
(33)
где е — параметр регулирования.
9
9. Механический к. п. д. насоса
Из приведенного следует, что работа, передаваемая привод-
ным двигателем насосу, больше внутренней работы насоса на
величину работы преодоления трения в механизме насоса. В соот-
ветствии с этим механический к. п. д. насоса может быть выражен
Afиг ЛТг /О Л\
Т|нех< н v" ИЛИ Т]мех. н = , (34)
I* Л/ 1МСЛ* «» /\/1 * \ /
/vnp /ипр
где Мх и Л4пр — теоретический (индикаторный) крутящий мо-
мент на валу насоса и приводной момент, приложенный к его валу
(момент, требуемый для вращения вала насоса).
Выразив крутящий момент AL через теоретическую мощность
Nx = Apqn 1см. выражение (29) 1 и угловую скорость to — 2лп,
получим . '
Мт=-^ = -^
т со 2л
В соответствии с этим выражение (34) примет вид
п -ЛЕЗ. 1
Чмех-н 2л тИпр *
95
(35)
Следовательно, механические потери увеличивают в--------раз
м Пмех.н
теоретический момент Л4Т. на валу насоса,
С учетом механическогЬ к. п. д. приводной момент выразится
м =—^— = ^Р-Я------------
Лмех. н 2л 1]мех. н
или чзрез характерный объем = -fe-
М =JMPh .
Нмех. н
Приводной момент 7Ипр измеряют при снятии характеристик
насоса (см. стр. 466), а теоретический момент, развиваемый давле-
нием жидкости в рабочих камерах без учета потерь на механиче-
ское трение и потерь вязкого сопротивления жидкости, вычисляют
по формулам, приведенным ниже.
Выразив приводной момент на валу насоса через сумму крутя-
щих моментов 7Ипр = Мт + ДМН, а мощность, приложенную
к валу насоса (приводную мощность Afnp), через сумму мощно-
стей Nnp = NT + AAfH, выражения (34) можно представить в виде
_______ 1 _ 4 ДЛ/^Н
Чмех. н
Пмех. н = 1 — * ДЛ4Н + Мт ,
где А/Ин и A2VH—потери соответственно момента и мощности
в насосе, обусловленные механическим трением и гидравлическим
сопротивлением.
Из приведенных выражений следует, что при увеличении дроб-
ного числа правой части уравнения (в результате повышения по-
терь AAfH при постоянном NT или же при снижении NTi что имеет
место в насосах с регулированием подачи при регулировании
в сторону ее снижения) к. п. д. насоса будет уменьшаться.
Как видно из зависимости механического к. п. д. насоса т]меХ( н
от выходного давления р (см. рис. 19, а), при повышении давле-
ния до некоторого значения р± механический к. ri. д. увеличи-
вается практически пропорционально повышению давления. Это
обусловлено тем, что увеличение механических потерь мощности
A2Vh, наблюдающееся с повышением давления жидкости (см.
рис. 22), не пропорционально увеличению теоретической мощности
NT [см. выражение (35) ]. При давлениях от рх до р2 механический
к. п. д. практически стабилизируется, а при дальнейшем повыше-
нии давления снижается. Это снижение обусловлено интенсивным
увеличением при этом механических потерь A2VH, в результате
чего приводная мощность Nnp с увеличением давления повы-
шается более интенсивно, чем теоретическая мощность Nr.
96
ДЛ/н
Различают также гидравлический к. п. д. насоса, который
показывает, насколько манометрический напор, развиваемый
насосом, отличается от теоретического напора. Гидравлический
к. п. д. определяется отношением полезной мощности нассса
к сумме полезной мощности и мощности, затраченной на преодо-
ление гидравлических сопротивлений в насосе. Ввиду некоторой
сложности измерения потерь напора, обусловленных гидравли-
ческим сопротивлением, гидравлический к. п. д. обычно не рас-
считывается, а гидравлические потери учитываются механиче-
ским к. п. д.
10. Механический к. п. д. гидромотора
Механический к. п. д. гидромотора т]мех м равен отношению
эффективной мощности на его валу к теоретической Мт (инди-
каторной) мощности:
Пмех. м •
Поскольку Мэф = NT — ДМм, получим
Лмех. м
Nr
или
__ Мэф _ 1 ДМм
Лмех. м Мт “ 1 Мт ’
(36)
где
Л4Эф — эффективный (тормозной) мом нт на валу
гидромотора, определяемый опытным путем;
Мт = и»мДрм — теоретический расчетный момент [см, выра-
жение (30) ];
wu = ---удельный (характерный) объем гидромотора.
^•1
С учетом механических потерь выражение для фактического
момента на валу гидромотора (ЛТ9ф) примет вид [см. также выра-
жение (33) ]
Л4тт]мех< м кумЛ/?мт|
мех- м*
На рис. 23, а представлена кривая зависимости т]мех м от
нагрузки на валу мотора, выраженной в величинах подводимого
давления Др, необходимого для преодоления этой нагрузки.
Давление Др0 соответствует сопротивлению трения (сопротивле-
нию страгивания мотора) без внешней нагрузки. Для мотора регу-
лируемого типа величина Др0 будет тем большей, чем меньше рабо-
чий объем рм, при уменьшении которого ниже определенной вели-
чины произойдет самозатормаживание мотора [т]мех. м ~ О]-
7 Т. М. Башта 97
На рис. 23, б представлена кривая принципиальной зависимо-
сти механического к. п. д. мотора от частоты вращения п выход-
ного вала.
: Опыт показывает, что при качественном изготовлении гидро-
моторов поршневых типов можно обеспечить удовлетворительную
Ч мех. м Т[ мех. м
Рис. 23. Механические характеристики гидромотора
равномерность угловой скорости и устойчивость ее под нагрузкой
при частоте вращения п «== 5 об/мин. При некоторой малой ча-
стоте вращения наблюдается нарушение равномерности послед-
ней, причиной которого является в основном пульсация потока
жидкости, обусловленная синусоидальным изменением скорости
поршня (см. стр. 118) и развиваемого им момента, а также колеба-
ниями силы трения.
§ 27. Суммарные потери мощности в гидромашине
В соответствии с приведенным баланс мощности всякой гидро-
машины можно выразить уравнением
Увх
— JV 4- AN х 4- ДДТ
вых I об I мех»
где Увых — выходная или полезная мощность гидро-
машины;
/Увх— входная мощность, затраченная на работу
гидромашины;
A/Vo6 3 Д^об &Р — мощность объемных потерь;
ДЛ/мех — <о ДЛ4мвх — мощность механических потерь (вклю-
чая потери гидравлического сопроти-
вления);
Д(?об — объемные потери (потери расхода);
Др = pi — ра— перепад давления в гидромашине;
ДЛ1МВХ — механические (включая гидравлические)
потери, выраженные в потерях крутя-
щего момента, приведенного к валу гидро-
машины.
Для насоса входной мощностью является мощность на его
валу; она выражается через механические параметры
| Фц^Яр-
98
Входная мощность выражается с помощью гидравлических па-
раметров:
^вих- я sae
где сон и ЛТпр — угловая скорость и момент (приводной) на
валу насоса;
Ф9ф и А/?н “ полезный (фактический) расход и перепад да-
> влений в насосе.
Соответственно для гидромотора
^вых. м ==:= ^м^аф. м»
где Спод и Дрм — потребляемый (подводимый) расход жидкости
и перепад давлений в гидромоторе;
шм и Л1эф—угловая скорость и полезный крутящий мо-
мент на валу гидромотора.
N,KBm
О 5 10 15 МПа
О 50 100 150 Лр, кг с/сп
Рис. 24. Объемные и механические
потери в насосе (а) и гидромоторе (б)
На рис. 24 показаны кривые объемных и механических потерь
в насосе и гидромоторе в функции давления.
Полный или общий к. п. д. гидромашины (насоса или гидро-
мотора) учитывает все Потери мощности (энергии), как объемные,
так и механические, на которые различные факторы влияют по
разному. Этот коэффициент равен отношению отдаваемой мощно-
сти к подводимой. Полный к. п. д. гидромашины показывает.на-
сколько полезная (эффективная или отдаваемая) мощность отли-
чается от потребляемой (подводимой) мощности. Значение этого
к. п. д. вычисляется обычно как произведение соответствующих
объемного т]об и механического т]мех и к. п. д.:
Ппол НобЛмсх "м •
1 * под
99
Для насоса
Лпол* и Поб. нЛмех. н
Рэф
Qt
Nт МВЫХ, н
М1р А/вх. н
(37)
Этот коэффициент показывает
насколько мощность, соответ-
ствующая фактической подаче фэф насоса [см. выражение (19)],
меньше приводной мощности ?Vnp.
Кривые принципиальной зависимости т)пол н насоса от давле-
ния р и скорости п показаны на рис. 19, а и б.
Для гидромотора полный к. п. д.
QT А'эф
Лпол- м Лоб. мЛмех- м 7) ’ д/
ХПОД 2¥Т
__ Nвых, м
Nвх. м
Он показывает, насколько эффективная мощность 2Уэф = А^ВЫх. м
на выходном валу гидромотора меньше мощности 7VBX<м, соот-
ветствующей подводимому к гидромотору расходу жидкости фпод
под рабочим давлением.
Для гидропередачи, состоящей из насоса и мотора, полный
к. п. д. составит (без учета потерь напора в каналах, соединяю-
щих насос и мотор)
л __п п ___________ ^вых. н t А/вых. м
Чпол- пер Чпол* нЧпол* мл/ Л/ *
вх- н вх. м
При условии Дрн = Дрм и принимая во внимание (?эф н =
" Фпод. м» можем написать на основании уравнений (37) и (38)
Л^ВЫХ. м -Мэф. м С0м
Лпол- пер v дл м
^*ВХ, н 7Нпр. н шн
В соответствии с этим полезная мощность с учетом объемных
и механических потерь составит:
насоса
^ПОЛ ФэфДРн 0)нА1 пр Ц по Л- Н ^Н^нЛпоЛ- Ю (39)
гидромотора
^эф ^эф^м ФпОдАрмЛпОЛ- м»
где (он и сом — угловые скорости соответственно насоса и гидро-
мотора.
Для регулируемых насосов в выражение (39) подставляется
текущее значение = ешнтах, где е = —---------параметр регу-
Smax
лирования, изменяющийся от —1 до +1.
На рис. 25 приведена зависимость от давления характеристики
аксиально-поршневого насоса, показанного на рис. 65. Полный
к. п. д. зависит от вязкости жидкости, причем при оценке влияния
этого параметра на к. п. д. следует учитывать, что повышение
до известных пределов вязкости жидкости сказывается, благо-
даря уменьшению утечек, на объемном к. п. д. (см. стр. 84)
100
положительно. Однако, наряду с этим, повышение вязкости и вы-
зываемое этим увеличение трения отрицательно сказывается на
механическом к. п. д. Поэтому для обеспечения высокого значе-
ния полного к. п. д. вязкость жидкости должна быть такой, чтобы
суммарные объемные и механические потери были минимальными.
На рис. 26 приведены кривые потери мощности AN в зависи-
мости от вязкости жидкости, обусловленных жидкостным трением
[4] ANTP = и утечками жидкости AyVyT = где
и k2 — коэффициенты пропорциональности и р—коэффициент
динамической вязкости жидкости.
Рис. 26. Зависимость потерь
мощности в насосе от вязко-
сти рабочей жидкости
Рис. 25. Опытные характеристики поршне-
вого насоса
Общая потеря мощности составит
ДМ = ДМТ„ + ДМУТ = kirn2 + k2
тр I ут Г я и
Из этого уравнения следует, что минимальные потери имеют
место при вязкости
р = k—~.
г п
Следовательно, наибольшее значение к. п. д. при заданной
вязкости будет лишь в одной точке, соответствующей оптималь-
ному перепаду давления при п = const или оптимальной частоте
вращения при Ар = const.
При повышении вязкости увеличивается, помимо указанного,
сопротивление всасывающих каналов, что может привести к на-
рушению заполнения рабочих камер насоса жидкостью при про-
ходе ими зоны всасывания и к понижению фактической подачи
(см. стр. 78).
Обычно полный к. п. д. насосов, применяемых в гидравли->
ческих системах машин, колеблется от 0,75 до 0,94, причем более
101
высоким к. и. д. обладают поршневые насосы, средним по вели-
чине— пластинчатые (шиберные) насосы и минимальным из ука-
занных значений — шестеренные и винтовые насосы.
Теряемая в гидромашине энергия переходит в тепло, которое
вызывает нагрев рабочей жидкости, проходящей через внутренние
полости машины, и нагрев омываемых деталей, причем некоторые
детали изменяемых полостей машины нагреваются до температуры,
вызывающей поверхностное кипение жидкости на их стенках.
Для избежания такого явления в этих схемах часто применяют
охладители (теплообменники).
Из всей суммы потерь энергии в гидромашинах наибольшая
часть приходится на механические потери (до 90% общих потерь).
Ввиду этого на уменьшение этих потерь должно быть обращено
особое внимание.
Сложность процессов, составляющих рабочий цикл машины,
а также большое количество параметров, обусловливают извест-
ную приближенность расчетов. Следует также учесть, что даже
экспериментальные данные соответствуют некоторым средним
значениям конкретного экземпляра машины, тогда как реальные
машины одинаковой конструкции и даже размеров неизбежно
отличаются в большей или меньшей степени по характеристикам
друг от друга. Эта неидентичность объемных характеристик со-
ставляет у поршневых машин 2—4%, у шестеренных—-5—6%
и у винтовых — до 10%.
Ввиду этого усложнение методов расчетов для их кажущихся
уточнений в большинстве случаев практически неоправдано.
Нерасчетные режимы. Расчет машины производится так, чтобы
она в условиях эксплуатации работала на оптимальных режимах,
близких к режиму максимального полного к. п. д. Однако при этом
должна учитываться возможность работы машины на нерасчет-
ных режимах, при которых полный к. п. д. может быть сравни-
тельно низким. Подобные машины необходимы по характеру ра-
боты гидросистемы. К таким нерасчетным режимам относятся ре-
жимы, при которых частота вращения вала машины значительно
ниже оптимальной, однако обеспечивающая устойчивую работу
машины, хотя и при низком к. п. д. Подобные условия имеют место
например, в работе насосов самолетной гидросистемы при пони-
женной частоте вращения, имеющей место при рулении самолета
и пр. К нерасчетному режиму относится также случай работы
насосов с автоматически регулируемой подачей в функции давле-
ния при холостом ходе, когда подача насоса ограничивается вели-
чиной, необходимой лишь для компенсации утечек и охлаждения
насоса (см. стр. 400).
§ 28. Переходные процессы в гидроприводе
Помимо рассмотренных стационарных процессов в гидропри-
воде могут иметь место нестационарные процессы, возникающие
при переходе от одного состояния к другому, например, от оста-
102 х
новки к движению и наоборот, от одной частоты вращения к дру-
гой, от одного направления вращения к противоположному,
а также при изменении прочих механических и гидравлических
параметров (статического момента нагрузки, момента инерции
гидромотора и нагрузки' рабочего давления и пр.).
Гидравлический мотор в условиях переходного режима =£ О,
где о)м — угловая скорость мотора) будет дополнительно преодо-
левать, динамический момент, поэтому уравнение на-
грузки имеет вид
М
1 *1 пер
= Л4ГТ
W Л
dt ’
где Л4СТ — момент статической нагрузки, включающий трение
в передаточных механизмах;
J — момент инерции движущихся масс, приведенный к валу
гидромотора.
Произведение мгновенных значений результирующего мо-
мента Л1т на соответствующее мгновенное значение угловой ско-
рости со определяет мгновенное значение мощности [см. выра-
жение (30)1
мт(о.
С учетом механических потерь момент сопротивления будет
в соответствии с этим момент:
Ямех
для периодаразгона гидромотора
дл ____________________ Мет j J t d(£) t
Пе^ Лмех Чмех dt
для периода торможения
М
пер —
Мст _____ г d(£>
Лмех ,меХ dt ’
§ 29.
ифференциальное уравнение движения
гидропривода
Гидравлический привод представляет собой сложную дина-
мическую систему, в которой проявляются как линейные, так
и нелинейные факторы, ввиду чего дифференциальное уравнение
движения гидравлического привода является в общем виде нели-
нейным и для упрощения динамических исследований прибегают
к линеаризации этих уравнений.
Изучение динамики гидравлического привода вынесено в спе-
циальный курс «Теория автоматического регулирования и дина-
мика гидроприводов», ввиду чего в настоящем курсе даются лишь
некоторые элементы динамики, способствующие изучению настоя-
щей дисциплины.
103
Рассмотрим элементарную линейную динамическую модель
гидропередачи, состоящую из нерегулируемого гидродвигателя
и приложенной к нему нагрузки, причем пренебрегаем влиянием
нестабильности подачи жидкости, а также сухим трением и упру-
гостью жидкости.
Уравнение движения гидравлического привода при таких
допущениях можно представить в виде основного уравнения дина-
мики, описываемого вторым законом Ньютона.
Применительно к гидродвигателю прямолинейного движения
(гидроцилиндру) (см. стр. 490) это уравнение записывается
dv гл гл
т — — г — г
dt Д сопр>
где
т — масса движущихся частей гидродвигателя, на-
грузки и жидкости, приведенная к штоку сило-
вого цилиндра;
v — линейная скорость штока;
и Fconp — соответственно движущее усилие давления
жидкости на штоке и усилие сопротивления
на нем, обусловленное нагрузкой;
t — время.
Примем FA = + АГД и Fconp ^/'сопр + AFCOnP; учитывая,
что в статических условиях F\ = FcOnp, последнее уравнение
можно переписать
т
AF
сопр>
где Fjh и Fconp — значение соответствующих параметров
при установившемся режиме (до начала
переходного процесса или по окончании
его);
А^д и AFconp — приращения переменных, которые отсчи-
тываются соответственно от установив-
шихся значений Р'д и Fconp.
Для нагруженного гидродвигателя приращение движущего
усилия
ЛГд = А \ря,
где А и Ард — рабочая площадь цилиндра и перепад давления
на его поршне.
Приращение сил сопротивления в основном обусловлено вяз-
ким трением и выражается (без учета позиционной нагрузки)
AFCOnp b A v,
где b — коэффициент вязкого трения;
Au — приращение скорости поршня.
104
С учетом последних выражений уравнение движения в прира-
щениях m — — AFconp примет вид
U V
— А — b \v.
Л Г 'А
При использовании в качестве гидродвигателя гидромотора
уравнение динамики гидропривода запишется (без учета пози-
ционной нагрузки)
J 5^ = Дрд -- 4р л<ом,
где Ард = Pi — р2 — перепад давления на двигателе;
Pi и р2 — давление соответственно на входе в гидро-
двигатель и на выходе из него;
сом — угловая скорость вала гидромотора;
/м +~г — момент инерции вращающихся частей;
<7М и А — момент инерции соответственно ротора
гидромотора и нагрузки;
1ГМ = q/2n — удельный (характерный) объем гидромо-
тора;
i — передаточное число редуктора;
/тР — коэффициент вязкого трения, приведенный
к оси вала гидромотора.
Приведенные уравнения справедливы лишь для динамической
системы с одной степенью свободы (выход гидродвигателя жестко
соединен с нагрузкой).
Пример. Определить расчетную ЛГТ, выходную Л/эф и приводную Упр мощ-
ности насоса и крутящий момент Л4пр на его валу при расчетной подаче QT =
= 60 л/мин, если давление на выходе насоса рн = 15 МПа (150 кгс/см2) и на
входе рвх = 0,5 МПа (5 кгс/см2); объемный к. п. д. т]об = 0,95 и механиче-
ский к. п. д. т]мех = 0,92; частота вращения п = 1500 об/мин.
Решение. С учетом QT — 60 л/мин = 1000 см3/с расчетная мощность (см.
уравнение (28)] при перепаде давления Др = рн — рвх = 14,5 МПа (145 кгс/см2)
ЛГТ= QT Др = 0,001 (15Ю6 — 0,5 10е) = 14,5 • 103 Н-м/с = 14500 Вт =
= 14,5 кВт
или
СтДр _ 60(150—5)
450 “ 450
= 19,3 л. с.
Эффективная (фактическая) подача насоса Сэф — Ст Лоб > в соответствии
с чем мощность на выходе насоса (мощность потока) 4
ЛГЭф = ЛГтТ1об = 0,001 (15-10е — 0,5-10е) 0,95= 13 775 Н-м/с =
= 13 775 Вт^ 13,8 кВт
или
. 60 (150 — 5) nc 1 о о
ЛГэф = —------------ 0,95 = 18,3 л. с.
4oU
105
Мощность на валу насоса (приводная мощность)
Nnt> = =“ О-001 <15’ 10® — °>5’10в) ТТЬо" = 15 700 вт = 15,7 кВт
Лмех U,yz
ИЛИ
А7 — QT Др 60-145
450-0,92 -21>3 л‘ с'
Крутящий момент на валу
[см. выражение (30) ]
Мпр
[AfT = QTAp e 1 60000-145
Лмех. н Ямех 2-3,14’1500
= 1000 кгс-см.
Пример.
момент Л4эф.
Определить эффектиную мощность Л^ф. м
и эффективный крутящий
м на валу машины с указанными выше параметрами при работе
ее в режиме гидромотора.
Решение. Эффективная мощность определяется, исходя из вычисленной
выше теоретической мощности NT и механического к. п. д. т]мех:
А^эф. м — МгПмех
Qt Др
~45б~ Пмех -
60 ('450 ' 0,92 = 17,75 Л‘ С’ (13 кВт)'
В соответствии с этим крутящий момент на валу машины
.. 60 000-145 поо
= 2.3,14.1500 0,92 “ 864 КГС СМ-
ГЛАВА V
РАДИАЛЬНО-ПОРШНЕВЫЕ ГИДРОМАШИНЫ
(НАСОСЫ И ГИДРОМОТОРЫ)
§ 30. Общие сведения и типовые конструкции
Различают поршневой и плунжерный насосы, которые являются
возвратно-поступательными; в первом из них рабочие органы
выполнены в виде поршней, во втором —в виде плунжеров.
Впредь все насосы этих типов будем называть поршневыми, а их
рабочие органы — поршнями. Насосы, у которых число поршней
более трех, называются многопоршневыми.
В современных гидросистемах, в частности в гидросистемах
высоких давлений (выше 10—15 МПа или соответственно 100—
150 кгс/см2) применяют преимущественно роторно-поршневые
насосы и гидромоторы (гидромашины).
Роторно-поршневой гидромотор или на-
сос представляет собой гидромашину с подвижными элементами
в виде ротора, совершающего вращательное движение, и поршней
или плунжеров, вращающихся вместе с ротором и имеющих воз-
вратно-поступательное движение в цилиндрах машины. В общем
случае роторная машина (насос, гидромотор) определяется как
объемная машина с вращательным или вращательным и возвратно-
поступательным движением рабочих органов независимо^от ха-
рактера движения ведущего звена.
Возвратно-поступательный насос с вращательным движением
ведущего звена называют также вальным насосом, причем валь-
ный насос с кривошипно-шатунным механизмом передачи движе-
ния к рабочим органам называют кривошипным насосом, а насос
с кулачковым механизмом передачи движения к рабочим орга-
нам — кулачковым насосом.
Кулачковый насос, у которого ось вращения ведущего звена
параллельна оси рабочих органов или составляет с ним угол
менее или равный 45°, называют аксиально-кулачковым, а насос,
у которого ось вращения-ведущего звена перпендикулярна оси
рабочих органов или составляет с ними угол более 45° — радиаль-
но-кулачковым.
Следовательно, по расположению цилиндров этиТмашины де*
лятся на роторные радиально-поршневые с радиальным относи-
тельно оси вращения ротора расположением цилиндров и ротор-
107
ные аксиально-поршневые с аксиальным относительно оси вра-
щения цилиндрового блока расположением цилиндров. В первых
машинах движение поршней происходит в одной плоскости,
во вторых — в пространстве.
Роторно-поршневые насосы являются в большинстве случаев
насосами с реверсивным потоком (реверсивными насосами), т. е.
потоком, направление которого можно изменять на противопо-
ложное при том же направлении вращения насоса.
Роторная радиально-поршневая гидромашина представляет
собой гидромашину (насос или гидромотор), у которой оси порш-
ней или плунжеров перпендикулярны оси вращения ротора или
составляют с ней углы более 45°.
Рис. 27. Кинематические схемы роторно-поршневых насосов
В роторных радиально-поршневых насосах жидкость вытес-
няется из рабочих камер (цилиндров) в процессе вращательно-
поступательного движения вытеснителей (поршней, плунжеров).
Кинематической основой этого насоса является рассмотренный
выше кривошипно-шатунный механизм (см. рис. 11,6), преобра-
зованный так, что неподвижным звеном является кривошип 1
(рис.- 27, а), цилиндр же 3 вращается (приводится) с постоянной
угловой скоростью вокруг оси О2, а шатун 2 вращается с перемен-
ной скоростью вокруг оси ОР Расстояние е между этими осями
(соответствует размеру г кривошипа 1 исходной схемы) называется
эксцентриситетом.
Поскольку поршень (ползун) 4 этого кривошипно-шатунного
механизма связан как и в прежней схеме (см. рис. 11, 6) с шату-
ном 2, вращающимся вокруг той же оси 0ь он будет при вращении
цилиндра 3 совершать в нем возвратно-поступательные переме-
щения с ходом h = 2е, при которых камеры (полости) цилиндров
будут последовательно (через каждые 180° поворота) увеличи-
ваться и уменьшаться. Следовательно, и в этой схеме, движение
поршня в сторону увеличения камеры может быть использовано
108
для засасывания жидкости в цилиндр, а в сторону уменьшения
камеры — для вытеснения ее из цилиндра.
Ваяв не один, а несколько звездообразно расположенных ци-
линдров 3, оси которых пересекаются в общем центре вращения О2,
а шатуны 2 поршней 4 шарнирно связаны с осью 0ь получим кине-
матическую схему многопоршневого насоса с радиальным распо-
ложением цилиндров (рис. 27, б). Поскольку цилиндры 3 в этой
схеме вращаются вокруг неподвижной оси 02, представляется
возможным использовать ее в качестве распределительной цапфы
(золотника), в которой для этого выполняются каналы всасыва-
ния а и нагнетания b (рис. 28). Цилиндры 3 последней схемы поса-
жены своим основанием на распределительную цапфу и отвер-
rzzzzzzzzzzzzzzzzzzzzzzzzzj KZ/Z/Zd
7777777777777777777777777* 477777*
Рис. 28. Принципиальная схема роторно-поршневого
насоса радиального типа
стиями в своих донышках соединяются с осевыми сверлениями а
и Ь, через которые отводится и подводится к цилиндрам жидкость.
Кинематика механизма сохранится, если ведение поршней здесь
осуществлено с помощью кольца 2, радиус которого равен ра-
диусу R шатуна прежней схемы (см. также штрих-пунктирную
окружность на рис. 27, б). Для этого поршни связываются тем
или иным способом (с помощью пружин, давления жидкости
подкачивающих насосов и пр.) со статорным кольцом 2, ось кото-
рого смещена относительно оси вращения цилиндрового блока 1.
Из приведенного следует, что радиально-поршневой насос,
схема которого представлена на рис. 28, построен на базе ранее
рассмотренного кривошипного механизма (см. рис. 11 и 27, а),
в соответствии с чем выведенные выше кинематические зависи-
мости [см. выражение (4) на стр. 57] будут справедливы и для
насоса данной схемы. 1
Конструктивная схема радиального насоса этого типа изо-
бражена на рис. 29. Насос имеет свободно посаженный на цапфу 1
(диаметр D) цилиндровый блок 3 (рис. 29, а) с звездообразным
расположением нескольких (5—9) цилиндров (диаметр d), сме-
щенных один относительно другого на угол 360/г, где г — число
109
цилиндров. Поршни 4 прижимаются к статорному кольцу 2 под
действием центробежных сил и усилий пружин 5. Эти насосы
называют часто звездообразными, понимая под этим насосы,
у которых рабочие органы расположен^ на нескольких пересе-
кающихся осях.
Оси цилиндров блока этого насоса расположены в общей пло-
скости и пересекаются в центре О2 вращения блока. Распреде-
ление жидкости осуществляется через выполненные в цапфе 1
окна а и b (рис. 29, б), с которыми при вращении блока поочередно
соединяются цилиндры через отверстия в их донышках (размер k).
Распределительные окна через осевые каналы цапфы соединяются
с всасывающей и нагнетающей магистралями.
Рис. 29. Конструктивная схема многопоршневого радиально-поршневого
насоса
При ходе поршней 4 от центра блока 3 (величина хода порш-
ней равна двойной величине эксцентриситета е) жидкость будет
засасываться поршнями через окно а, а при ходе к центру — на-
гнетаться через окно Ь. При переходе цилиндров через нейтраль-
ное положение (вертикальную ось) они перекрываются уплотни-
тельной частью (перевальной перемычкой) распределительной
цапфы, ширина $ которой больше размера отверстия в донышках
цилиндров s > k.
При работе машины в качестве насоса поршни связываются
с барабаном при помощи различных механических устройств или
пружин, помещенных в цилиндры, а также при помощи сил давле-
ния жидкости вспомогательного насоса (насоса подкачки). В не-
которых конструкциях радиальных насосов эта связь осуще-
ствляется с помощью одной лишь центробежной силы поршней.
Поршни под действием указанной силы прижимаются к статор-
ному кольцу 2, вступая с ним во фрикционное взаимодействие.
Для снижения сил трения поршней о статорное кольцо по-
следнее выполняется обычно в виде обоймы роликового подшип-
ПО
ника 2 (рис. 29, а). Поршни при своем движении увлекают эту
обойму, благодаря чему трение скольжения головок поршней
заменено здесь трением качения роликов. В результате кольцо
будет следовать за ротором с угловой скоростью, практически
равной угловой скорости ротора.
Для обеспечения надежного ведения поршней сила прижима
их к статорному кольцу должна превышать суммарную силу про-
тиводействия, слагаемую из: а) силы трения поршня в цилиндре;
б) силы инерции поршня в возвратно-поступательном движении
его в цилиндре, в) силы отрицательного давления на поршень,
Рис. 30. Многорядный радиально-поршневой насос
возникающей в зоне всасывания в результате образования ва-
куума под поршнем (расчет ведется исходя из наличия полного
вакуума в цилиндре).
При работе гидромашины в качестве гидромотора поршни во
время рабочего хода перемещаются от центра под действием рабо-
чего давления жидкости, поступающей от источника питания
(насоса), а во время нерабочего (холостого) хода — к центру,
вследствие эксцентричного расположения ротора 1 относительно
статора 3.
Радиально-поршневые насосы и гидромоторы изготовляют
мощностью до 3000 кВт и выше с расходом жидкости до 8000 л/мин.
Насосы этого типа малых размеров выполняют для давлений до
100 МПа (1000 кгс/см2). Эти насосы выпускаются преимущественно
в регулируемом варианте. Цилиндры обычно располагают в не-
сколько (до шести) рядов (рис. 30), благодаря чему получают вы-
сокую подачу насоса или большой крутящий момент на валу
111
гидромотора. В одном ряду обычно располагают от 5 до 13 ци-
линдров.
Под многорядными насосами понимают объемный насос, у ко-
торого оси рабочих органов расположены в нескольких параллель-
ных плоскостях. Эти насосы отличаются большим сроком службы.
Так, некоторые зарубежные фирмы выпускают подобные насосы
(мощностью 580 кВт) на ресурс работы в 20 000 — 40 000 ч.
Рис. 31. Схемы компоновки радиальных
насосов с приводным электродвигателем
Эти насосы более громоздки, чем
Насосы обычно ком-
плектуют с электродвига-
телем, причем насос либо
прикрепляют к электро-
двигателю, установлен-
ному на фундаменте (рис.
31, а), либо вместе с элек-
тродвигателем устанавли-
вают на промежуточной
коробке (рис. 31, б и в).
Насосный агрегат, в
котором приводным двига-
телем является электро-
двигатель, называют элек-
тронасосным агрегатом,
насосы с аксиальным рас-
положением цилиндров (см. стр. 179) и имеют более высокие
моменты инерции вращающихся частей, поэтому они менее при-
емисты и более тихоходны. Ввиду этого аксиальное расположение
цилиндров предпочтительнее для высоких скоростей и малых
крутящих моментов, радиальное — для больших крутящих мо-
ментов (до 5-Ю3 Н-м или соответственно до 500 кгс-м и выше)
и малых скоростей, минимальное значение которых доводят до
5 об/мин и ниже. Аксиальные насосы, и в частности насосы сред-
ней мощности (—20—50 л. с.), имеют массу при всех прочих рав-
ных условиях меньше массы радиальных насосов примерно
в 2 раза.
В радиальных^машинах в основном применяется цапфовое
распределение жидкости (см. рис. 29, б), хотя в некоторых кон-
струкциях применяется и торцовое распределение (см. стр. 134).
Рекомендуемые величины диаметрального зазора между отвер-
112
стием втулки ротора и цапфой 0,04 мм — для малых (до 40 мм)
и 0,09 — для больших (>100 мм) диаметров цапфы.
Основными узлами насосов поршневых типов являются меха-
низм подачи и узел распределения жидкости; у насосов регули-
руемой производительности к ним относятся также механизм ре-
гулирования. Механизм подачи поршневого насоса обеспечивает
возвратно-поступательное движение поршней (вытеснителей).
Обычно эти механизмы построены на базе кривошипно-шатунных
или кулисных механизмов. Узел распределения жидкости обеспе-
чивает питание цилиндров жидкостью в процессе хода всасывания
и вытеснение ее при рабочем ходе в нагнетательную магистраль,
а узел регулирования — изменение величины и направления
подачи жидкости.
§ 31. Подача насоса
Средняя расчетная (теоретическая) подача такого насоса за
один оборот (рабочий объем насоса) равна объему, описываемому
его поршнями:
q = fhz = ~ hz, (40)
где d, h и z — диаметр, ход поршня и число поршней;
f= -------площадь поршня.
Учитывая, что ход h == 2е поршня равен двойному эксцентри-
ситету е (см. рис. 27 и 28), получим
jrd2 п nd2
Я = — 2ez = -у- ег
(41)
В соответствии с этим средняя теоретическая подача насоса
в единицу времени будет
nd2 nd2
QT = qn - -к- ezn = -г- <aez, (42)
где со и п — угловая скорость и частота вращения.
Регулирование величины и реверсирование подачи жидкости
насосом осуществляется изменением соответственно величины или
знака эксцентриситета е. В схеме, представленной на рис. 29, а,
это достигается смещением в направляющих корпуса со статор-
ным барабаном относительно оси О2 блока цилиндров 3, осуще-
ствляемым с помощью различных устройств. Нетрудно видеть,
что при е = 0 расчетная подача будет также равна нулю. При
отрицательном значении (при смещении центра Ог статорного ба-
рабана 2 ниже центра О2 цилиндрового блока) подача будет отри-
цательной, т. е. нагнетающая и всасывающая полости насоса
поменяются местами.
8 Т. М. Башта ИЗ
В схеме насоса, представленной на рис. 32, регулирование
достигается путем углового смещения качалки 6, несущей ста-
торное кольцо 7, с помощью силовых цилиндров 2 и 4, которые
размещаются обычно в корпусе насоса. При повороте статорного
кольца 7 относительно оси 8 изменяется положение центра кольца
относительно неподвижной оси ротора 9 (изменяется величина
эксцентриситета). Ход поршней, а следовательно — величина
эксцентриситета ограничивается винтовыми упорами 1 и 5. Для
управления обычно применяют электромагнитный распредели-
Рис. 32. Схема механизма^ре-
гулирования подачи радиально-
тель 5.
Рабочий, объем регулируемого
насоса можно представить, введя
безразмерное значение эксцентриси-
тета е = :
етах
Ят&к Ятах^у
где
е — относительный (без-
размерный) эксцен-
триситет, изменяю-
щийся от 0 до ±1;
Я max
~emajlfz и Ятек—максимальный и те-
кущий рабочие объ-
емы;
<?тах и — максимальное и те-
1114ЛЛ X
кущее значения экс-
центриситета.
В соответствии с этим расчетная
подача регулируемого насоса
Qr=qn = qmmne = -^^e. (43)
поршневого насоса _ - ,
Для нерегулируемого насоса е = 1.
При работе гидравлической машины в режиме гидродвигателя
(гидромотора) жидкость под давлением подается принудительно
в ее рабочую полость. Угловая скорость <о вращения Двигателя
зависит от подачи жидкости и определяется по формуле
где w — характерный (удельный) объем машины;
q d2
114
§ 32* Скорость и ускорение поршня
при движении в цилиндре
Скорость поршня. При вращении блока цилиндров гидрома-
шины поршни перемещаются в цилиндрах по законам кинематики
кривошипно-шатунного механизма.
Из расчетной схемы поршневой пары насоса, представленной
на рис. 33, а, следует, что при повороте цилиндра из верхнего
вертикального положения на угол у — (где со — угловая
скорость и t — время) поршень переместится на величину (до-
Рис. 33. Расчетные схемы радиально-поршневого насоса
пускаем, что точка контакта поршня со статорным кольцом нахо-
дится на оси поршня) (см. также стр. 56)
х = (е + /?) — (е cos у + 7? cos а).
Текущая (мгновенная) скорость относительного движения
поршня иотк в цилиндре при указанном допущении
• dx
роти — Х — "dT •
Так как угловая скорость w —
получим
dx
= Ш-г- .
отн dy
Учитывая, что ~ = 4^naГ, нах°Дим в результате дифференци-
рования и упрощений, обусловленных малостью некоторых вели-
чин, выражение для мгновенной скорости поршня:
8*
vOTh = е(й (sin У +
£sin 2?) •
(44)
115
Графически скорость иотн движения поршня меняется по за-
кону суммы полусинусоиды и полной синусоиды.
Пренебрегая последним членом этого уравнения (поскольку
значение ~~ обычно составляет <0,08—0,09), получим
votii = ею sin у.
Ускорение поршня в относительном движении в цилиндре
1см. также выражение (4)]
w — x = —ею2 ^cos у < -^-cos2y) , (45)
или пренебрегая последним членом этого уравнения, получим
w ~ г со2 cos у.
Ускорение поршня должно учитываться при расчете неразрыв-
ности потока жидкости, а сила инерции — при расчете действу-
ющих на него сил, и, в частности, при расчете давления подпи-
точных насосов (см. стр. 248).
Сила инерции. Максимальное значение силы инерции поршня
в относительном движении с достаточной точностью описывается
выражением
<7 = tnw == cos у, (46)
где т — масса поршня.
§ 33. Равномерность подачи (потока) жидкости
Равномерность подачи. Мгновенная расчетная (геометрическая)
подача одного поршня пропорциональна относительной ско-
рости v0TH его движения в цилиндре
q' = vOTHf. (47)
Подставив в данное выражение значение иотн из уравнения (44),
получим выражение для мгновенной подачи одного поршня:
q' = fem ( sin у + sin 2у) . (48)
Подача жидкости насосом имеет неравномерный пульсиру-
ющий характер. Она слагается из суммы подач отдельных порш-
ней, совершающих в текущий момент рабочий цикл:
Л
1=1
где QT и qi — текущие значения расчетной подачи насоса и
одного цилиндра;
п = 2.^2----число цилиндров, соединенных в текущий мо-
мент с полостью нагнетания.
116
Иначе, суммарная мгновенная подача всех поршней, находя-
щихся в рабочей полости, составит
QT = fea ( sin Vi
где Ti, ?2, • • > Tz — текущие углы поворота, образованные
осями цилиндров — осью мертвых поло-
жений.
Индекс п означает суммирование по всем поршням, одновре-
менно находящимся в полости нагнетания. Для четного значения z
индекс равен а для нечетного или -у- .
Выражение для подачи жидкости гидромашины может быть
представлено также в виде (см. стр. 75)
в,= (.= Г$,
где — — угловая скорость вала гидромашины в рад/с;
W — удельный (характерный) объем в см3 на 1 радиан.
В соответствии с этим [см. выражение (13)] удельный объем w
связан с рабочим объемом q соотношением
W 1
q 2л ‘
Отношение расхода QT жидкости к удельному объему w опре-
деляет угловую скорость вращения вала гидромашин:
При равномерном угловом размещении цилиндров в блоке 1
(рис. 33, а) положение их осей относительно нейтральной оси
(оси мертвого положения) определяется углами поворота у;
. 2л . , 2 л
71 + —, а для г-го поршня у{ = + (i — 1) —.
Z
В полости нагнетания (в одной полуплоскости относительно
нейтральной оси — вертикальной для рис. 29 и 33 и горизонталь-
ной — для рис. 28) может одновременно находиться поршней:
у 2 -+- 1
при нечетном числе цилиндров — k — —~;
при четном числе цилиндров — k = .
117
Из выражения (49) следует, что поскольку одновременно
действует несколько поршней (замыкателей), каждый из которых
принимает участие в процессе нагнетания в течение конечного,
весьма краткого промежутка времени, и подача каждого носит
дискретный характер, расчетная подача жидкости насосом будет
пульсирующей, причем чем больше число поршней, тем меньше
будет амплитуда и больше частота пульсаций подачи. Для одно-
рядных насосов с четным числом цилиндров число пик, приходя-
щееся на угол поворота 180°, равно числу цилиндров, а для на-
Время
в)
сосов с нечетным числом — удвоенному числу цилиндров. Ампли-
туда пульсаций подачи при нечетном числе цилиндров будет со-
ответственно меньшей, чем при четном.
Так как по окружности блока цилиндров расположено z порш-
ней, то образуется г сдвинутых по фазе 2л/z кривых подачи от-
дельных поршней. В результате колебание суммарного расхода
поршней составляет относительно небольшую величину.
На рис. 34, а приведены расчетные графики колебаний подачи
жидкости с числом цилиндров 2 = 5 и z = 6 в функции угла у =
118
со/ поворота цилиндрового блока, рассчитанные по формуле (49).
Заштрихованные участки характеризуют степень неравномер-
ности подачи. Более высокая неравномерность подачи при четном
числе цилиндров обусловлена тем, что цилиндры расположены
диаметрально противоположно, т. е. в мертвом положении здесь
одновременно будут находиться два цилиндра.
Поскольку величина г значительно превышает величину
эксцентриситета е, правым членом уравнения (44) можно прене-
бречь; в результате получим чисто синусоидальный закон мгно-
венной подачи одним поршнем
q' = fe& sin у. (50)
Применение этой упрощенной формулы отразится на харак-
тере пульсаций подачи, характер колебаний которых будет гар-
моническим.
На рис. 34, б приведены графики колебаний поДачи, построен-
ные по закону синуса по уравнению (50).
Пульсация подачи жидкости оказывает влияние на поведение
системы в переходных режимах работы, возбуждая колебания
давления жидкости. Колебания подачи являются одной из основ-
ных причин возникновения вынужденных колебаний гидропри-
вода, могущих привести к резонансу. Частота колебаний, рав-
ная Д = zn при четном числе цилиндров z и Д = 2zn — при не-
четном z (где п — частота вращения в об/с), называется коммута-
ционной частотой.
Неравномерность (пульсацию) потока жидкости обычно оцени-
вают коэффициентом, характеризующим отношение изменения
текущего расхода (амплитуды-волны мгновенной подачи) к сред-
нему его значению:
д 7тах — ffmln __ 2 fanax — <7 mln)
<7ср <7шах + <7min
(51)
где gm., и graln — максимальное и минимальное значе-
ния суммарной мгновенной подачи;
qcp = ?т1п-------среднее значение подачи.
Коэффициент неравномерности подачи, обусловленный пуль-
п
сирующим характером функции 2 sin у,, зависит как от количе-
<=1
ства z цилиндров, так и от четности или нечетности их числа.
При четном числе г цилиндров колебания подачи
А — 2 sin2 «=«
2г
119
при нечетном z
Дс\ . о зт 1,25
4г г2
(53)
Для практических расчетов коэффициента А однорядного
насоса можно также пользоваться упрощенными эмпирическими
выражениями:
при четном числе цилиндров
А = 1 — cos
180°
_____•
при нечетном числе цилиндров
а 1 90°
А — 1 — cos----.
Z
Коэффициент неравномерности (в %) в зависимости от числа
цилиндров z, вычисленный по этим формулам, имеет следующие
значения:
z . . . 3 4 5 6 7 8 9 10 11
Ав% 13,4 27 4,4 13,4 2,0 7,2 1,6 4,4 1,0
Более точные выражения для вычисления пульсации радиально-
поршневых насосов, получены из кинематических зависимостей:
для четного числа цилиндров
для нечетного числа цилиндров
При многорядном расположении цилиндров (см. рис. 30),
с рядами, не смещенными один относительно другого, величина
подачи и момента увеличивается пропорционально числу рядов,
однако коэ
ициент пульсации сохраняется таким же, как и в слу-
чае однорядного насоса.
Очевидно, что для получения минимальной пульсации реко-
мендуется располагать цилиндры так, чтобы все они работали
поочередно, со смещением фаз на угол
360°
<Р =
L2
где 2 2 — суммарное число цилиндров во всех рядах.
В некоторых литературных источниках пульсацию подачи
оценивают коэффициентом неравномерности
д __ Qmax — Qmin __ i _ Qmln
Qmax Qmax
120
где Qmax и Qmin — максимальное и минимальное значения те-
кущей подачи.
В некоторых гидросистемах применяют демпфирование вы-
нужденных колебаний давления, возникающих в гидросистеме
вследствие неравномерности (пульсации) подачи насоса. Демпфи-
рование осуществляется установкой непосредственно за насосом
демпфера колебаний (антипульсатора мембранного типа или гидро-
аккумулятора, а также иных емкостей и инерционных сопротив-
лений).
Однако при выборе параметров демпфера должен быть
учтен характер пульсирующего потока, чтобы избежать возмож-
ных волновых процессов (см. стр. 481).
Фактическая неравномерность. Исследования показывают, что
фактическая пульсация потока и давления определяется не
только рассмотренной расчетной неравномерностью подачи жидко-
сти насосом, но в значительной мере и несовершенством фазо-
распределения жидкости в гидромашине, а также гидродинами-
ческими процессами, возникающими при регулировании гидро-
привода. В частности при работе насоса под давлением фактиче-
ская неравномерность подачи может значительно превышать
определяемую кинематикой насоса. Последнее обусловлено сжа-
тиями рабочей жидкости, заключенной в камерах насоса, при ее
переносе из полости всасывания в полость нагнетания.
Кроме того, при приходе камеры с заключенной в ней жидко-
стью, находящейся под давлением всасывания, к полости нагне-
тания, соединенной с напорной магистралью, создается перепад
давления, и в эту камеру поступает из магистрали жидкость,
что вызывает «заброс» давления, сопровождающийся колебаниями
потока и давления. 1
Величина этой неравномерности, обусловленной обратным
потоком жидкости, зависит от перепада давления между полостью
нагнетания и всасывания и может значительно превышать рас-
четную неравномерность.
Опыт показывает, что соответствующим выбором параметров
узла распределения жидкости пульсацию можно значительно сни-
зить (см. стр. 136). В силу сказанного, в практике применяют
преимущественно насосы с нечетным числом цилиндров; распро-
странены насосы с z = 5; 7 и 9.
В отдельных случаях пульсация подачи может оказывать зна-
чительное влияние на динамические процессы гидросистемы (см.
стр. 103), хотя как правило это влияние незначительной им пре-
небрегают.
Пульсация давления. Колебания потока вызовут, вследствие
инерции и упругости жидкости, заполняющей нагнетательную
магистраль, а также вследствие гидравлического сопротивления
последней, колебания (пульсации) давления на выходе насоса,
амплитуда которых может значительно превышать амплитуду
121
колебания потока. Пульсации давления могут привести к усталост-
ному разрушению труб, а также вызвать вибрацию клапанов и
прочей гидроаппаратуры.
Пульсация давления представляет собой сложный негармони-
ческий процесс, и ее характер различен не только у разнотипных,
но и у однотипных насосов. Форма и величина пульсации зависят
от конструкции и режима работы насоса, свойств жидкости и про-
чих факторов, которые для точного расчета практически невоз-
можно учесть. Как показали испытания, колебания подачи и пуль-
сации давления, вычисленные с учетом лишь кинематики насоса,
могут значительно отличаться от фактических данных, получен-
ных при испытании (см. стр. 476).
Пульсация давления связана с колебаниями подачи зависи-
мостью, вытекающей из теории гидравлического удара [II:
dp = d<j, (54)
где dp и dq — изменение давления и расхода жидкости в не-
которой точке трубопровода;
р — плотность жидкости;
пр
пр
$ — площадь сечения канала;
— скорость распространения звука в трубопро-
воде, заполненном жидкостью;
— приведенный объемный модуль упругости
жидкости и трубопровода.
В пульсациях давления, создаваемого насосом, можно выде-
лить ряд составляющих колебаний, причем частота высокочастот-
ных составляющих часто превышает в 10—12 раз периодичность
работы плунжеров. Наличие в пульсирующем давлении насосов
составляющих колебаний с высокой частотой, в несколько раз
превышающей кинематическую (плунжерную) частоту, обусло-
влено тем, что на пульсации влияют прочие факторы, такие как
волновые процессы в напорном канале и пр.
На рис. 34, в приведена типовая осциллограмма волны (пуль-
сации) давления на выходе семипоршневого насоса. В общем слу-
чае допустимая пульсация потока жидкости на выходе насоса
(отношение величины размаха колебаний подачи к средней ее
величине) при номинальном режиме работы не должна превышать
5%; при этом пульсация давления не должна быть больше 15%
от средней величины давления.
Радикальным средством снижения пульсации подачи и, соот-
ветственно, давления является установка непосредственно на
выходе насоса жесткой емкости в виде отрезка трубы диаметром
примерно в 5 раз большим диаметра выходного канала; длина
этого отрезка 5—6 калибров трубы. Из выражения (54) следует,
122
что пульсации давления снижаются при тех же колебаниях подачи
пропорционально площади s. При определении расстояния от
насоса, ига котором должна быть размещена эта емкость, необхо-
димо учесть возможность появления резонансных колебаний [см.
выражение (134)1.
§ 34. Действующие силы и крутящий момент
11. Усилие давления жидкости
Усилие давления жидкости на поршень цилиндра, соединен-
ного в данный момент с рабочей полостью насоса, направлено
по его оси и равно (при нулевом противодавлении) Р = р
(см. рис. 33), где d — диаметр поршня и р — давление жидкости.
В точке контакта поршня со статорным кольцом (допускаем, что
эта точка находится на оси поршня и учитываем лишь усилие
давления жидкости) возникает в результате воздействия этой
силы нормальная к поверхности кольца сила N реакции кольца,
которую можно разложить на составляющие: Р, направленную
по оси поршня, и Т, направленную перпендикулярно к оси по-
следнего.
Из условия равновесия поршня следует, что составляющая Р
равна по величине и обратна по знаку алгебраической сумме сил,
действующих со стороны поршня по его оси. К этим силам отно-
сятся указанное усилие давления жидкости на поршень, усилие
сжатия пружины, сила инерции поршня в относительном движе-
нии, сила трения и др. В дальнейшем будем учитывать лишь силу Р
давления жидкости.
Нормальная (перпендикулярная) к оси поршня составляю-
щая Т создает крутящий момент, причем при работе гидрома-
шины в качестве насоса (направление вращения по часовой стрелке)
составляющая Т преодолевается приводным моментом, прило-
женным к его валу. При работе гидромашины в качестве гидро-
мотора (направление вращения против часовой стрелки) соста-
вляющая Тм создает крутящий момент, приводящий цилиндровый
блок во вращение.
Сила N реакции статорного кольца прижимает головки порш-
ней к статорному кольцу и нагружает его и распределительную
цапфу, а также определяет величину трения и контактных на-
пряжений на головке плунжера и поверхности этого кольца.
Пользуясь обозначениями, принятыми на рис. 33, можно на-
писать для одного цилиндра гидромашины
7’ = Ptga; W = —— . (55)
” ’ cos a ' ’
123
Согласно схеме на рис. 33
7? sin у
е sin а 3
(56)
откуда
а = arcsin ( sin у
е \
RP
где а и у = со/— текущие значения угла между осью цилиндра
и радиусом статорного кольца (барабана) и угла поворота блока
цилиндров относительно нейтрального положения.
Подставив значение а в уравнения (55), получим
Т — Р tg arcsin (
(57)
N =—
(?OS
( e
arcsin I sm у
\ A
(58)
Результирующая составляющая сил 2 всех цилиндров,
находящихся в данный момент в полости нагнетания, восприни-
мается подшипниками статорного кольца и распределительной
цапфой.
Следует заметить, что сила давления поршня на обойму ста-
тора, будет зависеть также от трения и ускорения поршня, с уче-
том чего эта сила вычисляется как
cos а
где Рп — осевая сила поршня;.
здесь — сила трения поршня о стенки цилиндра;
Fj — сила инерции, обусловленная относительным уско-
рением поршня.
От величины силы трения будет зависеть также и фактическая
тангенциальная составляющая, что имеет особенное значение
при пуске гидромотора. С учетом сил трения эта составляющая
для одного цилиндра гидромотора может быть вычислена по
формуле
Г = Ptg(a-(p),
где ф — угол трения.
124
12. Крутящий момент
Теоретический крутящий момент, развиваемый усилием да-
вления жидкости, представляет собой сумму моментов каждого
из поршней, находящихся в данный момент под рабочим давле-
нием. Среднюю величину этого суммарного момента определяют
по выражению (33), которое для радиально-поршневой машины
приобретет вид
d2
- Л1т = ui Ар = — ez Др
или
К = -5F = Т '*
где ад — характерный объем;
q d2
w=-£=-rez>
(59)
М — средний теоретический крутящий момент на
валу гидромашины;
Ар = Pi — р2 — перепад давления;
q — рабочий объем машины;
Tid2 л jt tn
q=- “2е -=
Равномерность крутящего момента. В соответствии с выраже-
ниями (30) и (49) величина крутящего момента будет переменной
по углу поворота у = <$t ротора. Текущее значение теоретиче-
ского крутящего момента 7ИТ, развиваемого одним поршнем гидро-
мотора или преодолеваемого моментом, приложенным к валу
насоса, равно произведению силы Т на плечо р (см. рис. 33, а):
Мт = Тр,
где р — мгновенное значение плеча, равное расстоянию от
центра О2 цилиндрового блока до места приложения (точка с) ука-
занной тангенциальной составляющей Т. Так как величина
плеча р при повороте цилиндрового ротора изменяется, то значе-
ние текущего крутящего момента не будет пропорционально
силе Т. Нетрудно видеть, что разность между максимальным
и минимальным значениями плеча р равна 2е:
Ртах Pmln ”
Поскольку сумма плеч ртах + рт1п = 27?, где R — радиус
ведущего статорного кольца 2 (см. рис. 28 и 33), имеем
2R + 2e п . 2R~2e п
Ртах £ Ч- Pmln ’ 2 ~~~
Согласно рис. 33, а можем написать
р = е + 7? — х; (60)
х — (е + 7?) — (е cos у + 7? cos а).
125
Учитывая, что
sin у __ У?
sin а е *
получим
cos а = У* 1 — sin2 а »
откуда
х = (е -j- R) — е cos у +
(е \3
-и- ] sin2 у в ряд, можем с доста-
точной для практических целей точностью написать
е
4R
Подставив это выражение в уравнение (60), получим после
преобразования
Текущее значение теоретического момента, развиваемого одним
поршнем машины, можно представить также в несколько ином
виде, полученным из расчетной схемы на рис. 33, а:
м т = pfp
sin а
cos а
где р — текущее значение плеча приложения силы.
С учетом выражения (56), а также учитывая малость значе-
ния (оно не превышает 0,08 4-0,09, а следовательно cos а
К
1), последнюю формулу можно упрощенно, переписать в виде
AlT = pfp-^-siny. (61)
Суммарный текущий момент Л4рез на валу гидромашины будет
равен сумме текущих моментов, развиваемых поршнями всех
цилиндров, находящихся в полости нагнетания:
Мрез = Mi + + ... +ML+ ... +Мп =
== 7\Р1 + ^гРз + • • . +ЛРо
где М; — текущее значение момента одного поршня;
п — число поршней, находящихся в данный момент в маги-
страли нагнетания.
Из выражения (61) следует, что крутящий момент гидромашины
с уменьшением эксцентриситета е снижается. Последняя зависи-
те
мость имеет большое практическое значение для гидромоторов,
поскольку при некотором малом значении эксцентриситета
—_£i£*L ^0,1; см. стр. 97) крутящий момент станет соизме-
\ ^шах /
римым с механическими потерями холостого хода, в результате
чего произойдет сахмоторможение гидромотора даже без нагрузки.
При выборе наибольшего значения эксцентриситета исходят
из условия обеспечения работы поршня без значительных пере-
косов и возможности заклиниваний в цилиндре. С учетом этого
обычно наибольшее значение эксцентриситета выбирают
^шах 0,097?; ^тах 5d,
где d — диаметр поршня;
R — радиус статорного кольца.
Текущее значение момента на валу гидромашины является
периодической функцией с периодом изменения для одного ряда
цилиндров, равным 2л/г— для четного числа цилиндров в блоке
и л/z — для нечетного числа цилиндров, где г — число цилиндров.
Графически результирующий момент будет иметь вид сложной
кривой с числом колебаний, равным nz (где п — частота враще-
ния) — для четного числа цилиндров и 2лг — для нечетного
числа цилиндров.
Расчетный коэффициент неравномерности крутящего момента
без учета влияния сжатия и инерции рабочей жидкости, посту-
пающей в цилиндры гидромотора, можно приближенно рассчитать
по эмпирическим выражениям (51) и (52).
Для гидромотора важным параметром является также наи-
меньшее значение результирующего крутящего момента
определяющее минимальную величину пускового его момента.
Эта величина соответствует некоторой доле среднего значения
момента Л4ср, вычисленного по выражению (30). Для гидромотора
при числе цилиндров, равном 5; 7 и 9, Л4т1п соответственно со-
ставляет 0,94Л4СО; 0,962ИСО и 0,98Л1со.
13. Влияние кривизны опорной сферы поршня
на кинематику и динамику его движения
В реальных конструкциях насосов этого типа поршни снаб-
жены сферическими головками (см. рис. 33, б), в результате чего
контакт их со статорным кольцом происходит в точке а, смещенной
относительно оси плунжера на величину Ь. В нейтральных (на
вертикальной оси насоса) положениях поршня точка а контакта
будет находиться на оси поршня, а в промежуточных — на не-
котором удалении от оси.
Перемещение точки а контакта при вращении блока цилиндров
отразится как на кинематике движения поршня, так и динамике
поршневой пары. В частности, в результате перекатывания
точки а контакта по сфере головки поршня исказится синусо-
идальный закон движения поршня, что вызовет дополнительную
127
неравномерность подачи по углу поворота. Однако, поскольку
это искажение кинематики движения поршня незначительное,
им обычно при расчетах пренебрегают.
Влияние сферичности головки на динамику поршня можно
видеть из рис. 33, б. Плечо рг приложения к поршню силы Т
определится в этой схеме расстоянием от центра О2 блока до
точки О пересечения вектора усилия N реакции статорного кольца
с осью поршня. Поскольку вектор этого усилия направлен по
нормали к статорному кольцу (по его радиусу) и к сфере головки
поршня, он будет пересекать ось поршня в центре сферы, а сле-
довательно текущим плечом приложения тангенциальной соста-
вляющей Т усилия реакции N будет служить расстояние О2О = р.
Из приведенной на рис. 33, б векторной диаграммы действую-
щих здесь сил следует, что плечо рх этой схемы меньше плеча р
схемы на рис. 33, а на величину, примерно равную радиусу г
сферы головки поршня.
Поскольку центр О сферы будет всегда находиться на постоян-
ном расстоянии г от статорного кольца 2, роль последнего в этой
схеме будет выполнять окружность, описанная при своем пере-
мещении центром О сферы, т. е. окружность, описанная радиу-
сом 7?! = R — г. Следовательно, при замене значения R на =
= R — г все приведенные выше зависимости, полученные для
заостренного поршня (для поршня с контактом в точке, находя-
щейся на его оси), сохранятся также и для поршня со сферической
опорой. В частности, выражение (61) для крутящего момента,
развиваемого одним поршнем, примет с учетом сказанного вид
М = pfpi sin у = р/р! sin у,
где г — радиус сферы опорной головки поршня.
Центр О сферы является точкой приложения силы Т, изги-
бающей поршень и перекашивающей его в цилиндре.
Сказанное справедливо также и для насосов, поршни которых
опираются о статорное кольцо через ролики (см. рис. 54, б).
В этом случае параметром г будет служить радиус ролика, а цен-
тром сферы — ось ролика (роликов).
Помимо этого, наличие сферической головки поршня скажется
на выражениях для расчетов относительной скорости (v0TH)
и ускорений (куотн) поршня, а также силы инерции «70тп в этом
движении, которые примут вид [см. выражения (44)—(49) и (56)—
(58)].
^отн
отн = х == ею ( sin у —
tr тн = есо2 ( cos у 4-
ЩП \ II
J0TH — ^отн = ГП(д2е ( cos у
128
§ 35. Колебания угловой скорости гидромотора
В ряде случаев к гидромотору предъявляются требования
эбеспечения строгой равномерности вращения. При равномерном
потоке питающей жидкости и нулевой нагрузке вала гидромотора
неравномерность его вращения обусловлена кинематическими и
конструктивными особенностями и теоретически аналогична рас-
смотренной выше расчетной неравномерности подачи конструк-
гивно подобного насоса (см. стр. 116). Величина и характер коле-
бания подачи, при работе машины в режиме насоса соответствуют
величине и характеру расчетных колебаний угловой скорости
машины при работе ее в качестве гидромотора. Как в том, так
и в другом случае эти колебания вызываются переменным по углу
поворота значением расчетной подачи машины.
Для гидромотора этот кинематический фактор выражается
в переменном значении потребляемого им объема жидкости,
в результате чего угловая скорость гидромотора будет колебаться
по углу поворота даже при абсолютно равномерном потоке пита-
ния, причем, если при высоких скоростях эта неравномерность
сглаживается силами инерции вращающихся масс и жидкости,
то при малых скоростях она проявляется заметно. Поскольку
гидромотор обычно работает при скоростях, значительно меньших
скоростей насоса, возможная фактическая неравномерность его
вала может превышать допустимую величину. Особые требования
по равномерности угловой скорости предъявляются к гидромото-
рам станков.
Величина неравномерности зависит от числа поршней и кине-
матической схемы данного Гидромотора, а также от момента тре-
ния и утечек жидкости. Она оценивается коэффициентом неравно-
мерности, равным отношению разности между максимумом и
минимумом суммы всех отдельных поглощаемых объемов к сред-
ней величине поглощаемого объема на радиан и описывается
уравнением
— со/—угол поворота гидромотора;
V
V
2л
— объем гидромотора на единицу хода;
— среднее значение поглощаемого объема
на
радиан;
— угловая скорость.
На рис.
поворота у
35, а показан расчетный
график изменения по углу
поглощаемого объема
на радиан,
а также
9 Т. М. Башта
129
угловой скорости и перепада давления Ар при постоянном
выходном моменте на валу и постоянной подаче источника питания.
Расчеты и. опыт показывают, что цикличность изменения угло-
вой скорости для нечетного числа г поршней определяется зна-
чением -у-, а для четного числа — значением 2n/z, т. е. шаг для
четных чисел поршней вдвое больше, чем для нечетных, в соответ-
ствии с чем равномерность хода гидромотора с нечетным числом
поршней больше, чем с четным (см. также стр. 118).
/777777777777777,
б)
а)
ЛУ
Рис. 35. Графики колебания давле-
ния и угловой скорости гидромотора \
12
В Г74Д|Зг5|4,^|74О|г,Я| 1в\1,53\^В\1Л2
ю -
ел
% ср
74
1=16
7 В 9 10 77
1
100четное z
т -100(°/о)-нечетное z
Oman —В mln
10 15
8)
п
11
20
С точки зрения равномерности угловой скорости гидромотор
с десятью поршнями равноценен гидромотору с пятью порщнями.
Расчетная неравномерность обоих этих моторов примерно равна
5%. При увеличении числа поршней до 7 и 9 неравномерность
составит соответственно 2,5 и 1,5%.
На рис. 35, в приведен расчетный график коэффициента 6
неравномерности угловой скорости аксиально-поршневого гидро-,
мотора (или, соответственно, неравномерности подачи насоса)
в зависимости от числа поршней г.
При необходимости обеспечения очень малой неравномерности
применяют машины с двухрядными роторами с нечетным в. каждом
ряду'числом поршней, один ряд которых смещается на четверть
поршневого шага (на угол л/2г) относительно второго.
Следует отметить, что поведение гидромоторов при пуске
под нагрузкой при разных положениях блока (при разных объ-
емах на радиан) будет различным. Иначе, если в положении пуска
рабочий объем на радиан максимален, т. е. при девятипоршневом
насосе пять поршней находятся на напорной стороне, то и пуско-
вой момент будет максимален; если же рабочий объем на радиан
~ минимален,, т. е. на напорной стороне находятся четыре поршня,
то и момент минимален.
130
С учетом возможного минимального объема на радиан, а также
с учетом трения покоя, полезный момент при пуске гидромотора
может быть значительно меньше среднего его значения.
Практически важным являются колебания угловой скорости
при малой частоте вращения вала гидромотора. Минимальная
частота вращения гидромоторов лимитирована тем, что при малой
частоте нарушается равномерность вращения выходного вала,
приобретая скачкообразный характер.
Механизм этого явления принципиально сводится к следу-
ющему. Вследствие упругости системы, обусловленной главным
образом сжимаемостью жидкости в трубопроводе и цилиндре,
гидромотор можно сравнить-с массой, которая приводится в дви-
жение пружиной (рис. 35,6). Приводимая масса т приходит в дви-
*
жение после того, как сила сжатия пружины превысит усилие
статического трения. Однако после того, как масса пришла в дви-
жение, коэффициент трения уменьшается, так как статическое
трение переходит в трение скольжения, при котором коэффициент
трения примерно в 2 раза меньше коэффициента трения покоя.
В результате масса т получает ускорение.
После того, как напряжение пружины понизится до опреде-
ленной величины и инерция приводимой массы будет поглощена
сопротивлением, масса останавливается и далее процесс повто-
ряется. В результате масса вступит в релаксационные колебания.
В гидромоторе пружиной в основном служит жидкостная
рабочая среда, заполняющая трубопровод и цилиндр. Эта гидра-
влическая пружина сжимается насосом до тех пор, пока будет
преодолено статическое трение в гидромоторе. После этого гидро-
мотор приходит в движение (проворачивается) и продолжает
вращаться до тех пор, пока гидравлическая пружина в результате
расширения жидкости не разожмется и напряжение ее упадет.
После остановки мотора давление в трубопроводе в результате
подачи насоса вновь повышается и при известной величине,
способной преодолеть нагрузку и силы сопротивления (сила тре-
ния и инерций), мотор вновь приходит в движение и процесс по-
вторяется. '
Минимальная скорость поршня гидромотора описывается
в общем виде выражением
где с — постоянная гидравлической пружины;
т — масса поршня;
R = pF— сила трения.
Очевидно, для снижения этого пружинного эффекта необхо-
димо уменьшать упругость системы и, в частности, удалять из
гидросистемы нерастворенный воздух.
Следует отметить также влияние на равномерность вращения
гидромотора утечек жидкости, в особенности при очень малых
9* 131
частотах вращения и при переменной внешней нагрузке вала.
Повышение и понижение напряжения гидравлической пружины
(колебания давления жидкости) сопровождаются изменением
утечек, которые скажутся на угловой скорости. Очевидно, при
повышении напряжения гидравлической пружины до величины,
способной преодолеть нагрузку статического трения, повышаются
также и утечки, влияние которых при малой частоте вращения
может быть очень значительным. Принципиально, при плохой
герметичности возможен такой скоростной режим гидромотора,
при котором пуск его вследствие этих причин станет невозможным.
Принято считать нижним скоростным пределом гидромотора,
при котором можно пренебречь влиянием указанных факторов,
минимальное число, равное nmln 0,2пшах, где nmax — макси-
мальная частота вращения.
Практически минимальная частота вращения гидромотора
(и в частности аксиально-поршневого типа) при достаточно равно-
мерной угловой скорости под нагрузкой, не ниже 25 об/мин. При
более низкой частоте вращения возможна неравномерность.
Сказанное выше по вопросу минимальной скорости гидромо-
тора справедливо и применительно к гидродвигателям иных ти-
пов (силовым цилиндрам и поворотникам).
§ 36. Контакт поршней со статорным кольцом
Схемы конструкций. В конструкциях насосов, применяемых
в гидросистемах, используют как схемы, в которых поршни опи-
раются о барабан своими сферическими головками (см. рис. 29, а),
так и схемы с опорными башмаками (рис. 36, а).
Для улучшения смазки и снижения трения поршня о стенки
цилиндра поршню в первой схеме часто сообщают поворотные
движения относительно его оси. Для этого поверхность статор-
ного кольца, на которую опирается своей сферой поршень, вы-
полняют под некоторым углом ф, равным 15°—20° (рис. 36, б),
или цилиндр располагают под таким же углом к плоскости вра-
щения цилиндрового блока (рис. 37, а). Поскольку точка контакта
сферической поверхности поршня в этом случае будет смещена
относительно его оси, поршень под действием силы трения будет
проворачиваться в цилиндре, причем направление его поворота
в течение одного оборота цилиндрового блока изменится 2 раза.
Указанное движение поршня, суммируясь с относительным воз-
вратно-поступательным движением цилиндра, приводит к тому,
что поршень будет двигаться в нем по спирали.
Чтобы уменьшить при проворачивании скольжение головки
поршня, необходимо увеличивать плечо приложения силы, чего
достигают, выполняя головку грибообразной (см. рис. 36,-в).
Диаметр головки (грибка) поршня обычно выбирают равным
(1,75—2) d, где d— диаметр поршня. Длину поршня L выбирают
не менее L — 2 (е + d).
132 .
Нагрузка на поршень. Усилие N реакции статорного кольца
(см. рис. 36, б и в) на сферическую головку поршня направлено
по нормали к образующей конуса, имеющей угол ф к горизонтали,
и проходит через центр сферы радиуса г. Это усилие может быть
разложено на радиальную силу F, статически уравновешивающую
давление жидкости на поршень, и силу Г, направленную пер-
пендикулярно оси поршня, которая изгибает поршень и прижи-
мает его к стенкам цилиндра.
Рис. 36. Схемы контакта плунжера со статорным кольцом
6)
Соотношение между этими силами может быть определено по
выражениям
N =----— ; Т = /71£ф.
COS ф '° т
Сила N создает контактные напряжения между поршнями
и статорным кольцом, а сила Т нагружает поршень в боковом
направлении и стремится сместить цилиндровый блок в осевом
направлении. •
В насосах с расположением цилиндров в несколько рядов
(рис. 37, б) действие последней силы на цилиндровый блок можно
компенсировать путем симметричной установки статорных колец
(обойм) 2 с опорной поверхностью под углом, причем при четном
числе рядов цилиндров может быть достигнута полная разгрузка,
а при нечетном — частичная; в последнем случае поршни распола-
гаются в шахматном порядке.
В точке соприкосновения головки поршня со статорным коль-
цом возникает под действием силы N контактное напряжение,
допустимая величина которого ограничивает максимальное уси-
лие, развиваемое поршнем. Ввиду этого диаметр d поршней вы-
бирают для насосов, работающих при давлении до 10 МПа
133
6)
Рис. 37. Радиально-поршневые
насосы с наклонными поршнями
(а) и наклонными статорными
кольцами (б)
(100 кгс/см2), не более 20 мм и для насосов, работающих при давле-
нии до 20 МПа (200 кгс/см2), не более 16 мм.
Для уменьшения контактного напряжения увеличивают ра-
диус г сферы головки (см. рис. 36, в).
Высокие контактные напряжения являются одним из недостат-
ков этих схем.
§ 37. Распределение жидкости
Узел (механизм) распределения насоса обеспечивает подвод
жидкости из магистрали низкого давления (из камеры всасыва-
ния) к цилиндрам насоса, в которых происходит в данное мгнове-
ние процесс всасывания, и направляет жидкость в магистраль
высокого давления из цилиндров, в которых происходит процесс
нагнетания. Узел распределения жидкости в описываемых маши-
нах определяет во многом их качество и надежность. В частности
механизм распределения насоса определяет такую важную его
характеристику, как фактический уровень пульсаций давления
в полостях нагнетания. Утечки жидкости через зазоры в распреде-
лительном узле определяют в основном объемные потери в насо-
сах и гидромоторах. •
В радиально-поршневых насосах распределение жидкости
обычно осуществляется с помощью цилиндрического золотника
(цапфы) (см. рис. 28) и, реже, с помощью плоского золотника
(рис. 37, б).
В насосах с плоским распределением (см. стр. 218) разделение
полостей высокой) и низкого давлений осуществляется непосред-
ственным контактом поверхностей распределения (между ними
134
отсутствует гарантированный зазор). Эти насосы Имеют высокий
объемный к. п. д. и отличаются надежностью.
На' рис. 37 приведены две конструкции радиально-поршневых
насосов с этим распределением. Насос, показанный на рис. 37, б,
представляет собой двухрядную конструкцию, в которой опор-
ные дорожки статорного кольца 2 выполнены под углом к ци-
линдру, благодаря чему обеспечивается проворачивание поршней.
Наличие двух рядов поршней с противоположными углами на-
клона дорожки обеспечивает разгрузку блока 3 от осевых сил.
Распределение осуществляется с помощью плоского золотника 1.
Питание осуществляется через поджимной стакан 4. Цилиндры
размещены в блоке 3 со смещением одного ряда относительно
другого на угол 2л/2г.
В насосе, представленном на рис. 37, б, проворачивание
обеспечивается с помощью пространственного (под углом к радиусу)
размещения поршней в блоке 3. Распределение осуществляется
с помощью плоского золотника /.
Питание осуществляется с помощью поджимных стаканов
(втулок) 4, нагруженных усилием рабочего давления жидкости
и пружин.
Расчет торцевого распределителя приведен далее в раздел
аксиально-поршневых машин (см. стр. 218).
14. Распределение с помощью
цилиндрического золотника (цапфы)
Цилиндровый ротор машины с этим распределителем поме-
щается на цилиндрической цапфе (золотнике) 1 (см. рис. 28 и 29),
которая имеет окна а и b питания, соединенные осевыми кана-
лами с магистралями всасывания и, нагнетания. Окна отделены
друг от друга двумя перемычками шириной s, которые обычно
расположены симметрично относительно нейтральной (для схемы
на рис. 29 — вертикальной) оси. Этими перемычками цилиндры
при переходе через нейтральное положение отсекаются как от
окон полости нагнетания, так и от окон всасывания.
Распределение цилиндрической цапфой (золотником) отли-
чается компактностью и простотой изготовления. Однако вслед-
ствие наличия в конструкции этого распределителя гарантиро-
ванного зазора, затруднена герметизация, в результате чего
давление насосов обычно не превышает 20—25 МПа (200г—'
250 кгс/см2). Скорости скольжения втулки ротора по распредели-
тельной цапфе обычно принимают для насосов до 3 м/с и для гидро-
моторов —1 до 4,5 м/с.
Диаметр D распределительной цапфы (рис. 38, см. также
рис. 29, б) зависит от количества и диаметра d0 выполненных
в ней осевых отверстий а и Ь, которые, в свою очередь, опреде-
ляются расходом жидкости, проходящей через машину..
Для самовсасывающих насосов площадь этих отверстий рассчи-
тывают, исходя из скорости потока жидкости, равной 3—4 м/с;
135
в гидромоторах, а также в насосах с поддавливанием, эта ско-
рость может быть доведена до 6 м/с.
В общем случае размеры окон всасывания выбирают обычно
такими, чтобы скорость жидкости в них была не выше, чем в 2,2—
2,5 раза средней скорости поршня.
Обычно диаметр D распределительной цапфы (в см) выбирают
по эмпирическому выражению, исходя из рабочего объема q
насоса (рис. 38):
э _ з _
D = nVq*+ bV^
где k = 0,206 и Ьо = 1,31 для давлений до 7,5 МН/м2 и k = 0,04
и Ьо = 1,5 для давлений , до 15 МН/м2.
Рис. 38. Опорно-распределительная цапфа радиально-поршне-
вого насоса
Диаметр цилиндрической направляющей статорного кольца 2
(см. рис. 28) принимается при предварительной конструктивной
проработке равным
DH = 2R = 0,075 + bH Y~q,
где Ьп = 0,9 для давлений до 7,5 МН/м2 и 7,8 — для давлений
до 15 МН/м2.
Расположение и размеры s разделительных перемычек (рис. 38)
выбираются такими, чтобы при переходе через них окон в до-
нышке цилиндров последние надежно отсекались от распреде-
лительных окон а и b цапфы, а также обеспечивалось надежное
заполнение цилиндров жидкостью при проходе зоны всасывания
и устранялась компрессия жидкости в цилиндрах в зоне нагне-
тания. Для этого ширина s перевальной перемычки должна быть
несколько (на десятые доли миллиметра) больше ширины k окна;
в свою очередь, эта ширина меньше диаметра d цилиндра (k <С d)
(см. также рис. 29).
Это условие обычно выражают углами перекрытия ср и 6 между
осями цилиндра при положениях, соответствующих полной от-
сечке его окна от окон а и b в начале (сплошные линии) и в конце
136
(штриховые линии) перехода зоны перемычки (рис. 39, а). Зна-
чения этих углов характеризуют величину перекрытия (s—k)
разделительными перемычками окон а и & в зонах нагнетания
и всасывания, т. е. определяют угол поворота цилиндра относи-
тельно неподвижной цапфы (золотника), необходимый для того,
чтобы его окно после отсечки одного какого-либо окна цапфы
Рис. 39. Расчетные схемы распределитель-
ной цапфы радиально-поршневого насоса
пришло к кромке противоположного окна.
Из рис. 39, а следует,
что углы перекрытия (для
наглядности представлено
большое превышение s > k)
будут:
для верхней перемычки
ф = <₽1 + ф2;
для нижней перемычки
б = бг + б2,
где 44 и б! — так на-
зываемые углы упрежде-
ния и ср2 и б2 — углы за-
паздывания (название этих
углов условное и опреде-
ляется направлением вра-
щения цилиндрового бло-
ка, которое в данном слу-
чае принято по часовой
стрелке).
Углы и бх упреждения показывают, насколько момент
перекрытия окон цилиндра опережает момент прихода его оси
в нейтральное положение, а углы <р2 и б2 запаздывания пока-
зывают, насколько момент открытия окон отстает от момента
прохода цилиндром нейтрального положения. При увеличении
углов (р2 и бх повышается компрессия (сжатие) жидкости в ци-
линдрах (см. стр. 138) перемещающимися плунжерами, а при
увеличении углов и 62 повышается разрежение в цилиндре
(недозаполнение цилиндра жидкостью).
В равной мере наличие в зоне всасывания угла упреждения
приведет к тому, что окно цилиндра будет перекрыто соответ-
ствующей перевальной перемычкой золотника еще до прихода
цилиндра в верхнее нейтральное положение, т. е. до окончания
процесса всасывания, в результате цилиндр не полностью запол-
нится жидкостью, что снизит объемный к. п. д. насоса. При неко-
торых же больших (5—8°) значениях угла фг недозаполнение
цилиндров жидкостью станет столь значительным, что в резуль-
тате возникновения при этом развитой кавитации появятся вибра-
ции и резкий шум, обусловленные гидравлическими ударами и
пульсациями давления на выходе, вызываемыми обратным пото-
ком жидкости при соединении недозаполненных жидкостью ци-
линдров с окном нагнетания (см. стр. 142).
137
Обратный поток жидкости из окна нагнетания в недозапол-
ненный жидкостью цилиндр будет также и в том случае, когда
угол запаздывания <р2 в зоне нагнетания будет меньше чем угол <рj
в зоне всасывания (<р2 < фх). Работа насоса в этом случае будет
сопровождаться резким шумом («выстреливанием» рабочих камер)
и пульсацией давления.
На режим работы отрицательно влияет также превышение
угла <р2 над углом <рх. Отрицательное действие перекрытий в этом
случае обусловлено тем, что при/наличии угла запаздывания <р2
поршень на некоторой части хода в процессе нагнетания (вытес-
нения жидкости) будет перемещаться при .перекрытом окне ци-
линдра. В результате, если <р2 > <px, поршень, выбрав недозапол-
нейное вследствие наличия <рх пространство цилиндра, будет при
дальнейшем движении сжимать жидкость в последнем (явление
компрессии). При этом, вследствие высокого модуля .упругости
жидкости, изменения давления в цилиндре могут достигать боль-
ших величин даже при очень малых перемещениях поршня в от-
сеченном цилиндре в направлении уменьшения его объема (см.
стр. 40). Давление в этом случае повысится до такого значения,
при котором будет обеспечен ход поршня за счёт утечки жидкости
через зазоры и за счет упругих деформаций жидкости в объемах
элементов насоса.
С этой точки зрения наиболее опасным является наличие
угла упреждения, при ротором распределительное окно блока
полностью перекроется, тогда как поршень будет продолжать про-
цесс нагнетания. Так как при этом скачок давления в запертом
, объеме происходит (будет отсчитываться) вверх от давления на-
гнетания, а объем жидкости в цилиндре будет минимальным,
в последнем могут развиться при качественной герметизации
недопустимо высокие давления. Ввиду этого угол упреждения
в полости нагнетания насоса должен отсутствовать или быть воз-
можно малым.
Рассмотренное повышение давления в запертом объеме рабо-
чей клетки, развивающееся при переходе ее из напорной зоны
в приемную и обратно, определяется величиной изменения объема
запертой рабочей клетки (степенью деформации жидкости) и ее _
герметичностью. Опыт показывает, что в зависимости от конструк-
тивного выполнения насоса и герметичности клетки давление
в цилиндре может скачкообразно повыситься до недопустимой
величины. Ввиду высокого модуля упругости жидкости (см.
стр. 42) (Е > 1,3-10*Н/м2) даже незначительное сжатие жидкости
приводит к возникновению значительных нагрузок.
Повышение давления Др жидкости в замкнутом объеме [см.
выражение (2)) определяется
А _AV р
1\р . -г—1 1/^ У
ДУ
-у----относительное сжатие замкнутого объема.
138
Ё тех случая#, когда увёлйчёние объема изменяемой полостй
начнется раньше соединения ее с всасыванием, в этой изменяемой
полости будет происходить понижение абсолютного давления
вплоть до величины, соответствующей упругости насыщенных
паров жидкости. В результате возникают явления локального
кипения и выделения растворенных газов.
Для устранения компрессии при одновременном устранении
соединения нагнетательной и всасывающей полостей необходимо
точное совмещение во времени начала й конца рабочего цикла,
что практически затруднительно. В реальных конструкциях всегда
имеет место некоторая неточность в таком совмещении, когда
отсечка изменяемой полости от выхода происходит раньше, чем
закончено уменьшение изменяемой полости, в результате чего
на оставшейся части изменения возникают компрессии (сжатие
замкнутого объёма жидкости).
Для устранения компрессии применяют различные способы.
В частности, в нереверсивных насосах (моторах) ее можно умень-
шить смещением уплотнительной поверхности (перемычки) рас-
пределительной цапфы относительно нейтральной оси (оси мерт-
вых положений) в сторону всасывающей (для насоса) или в сто-
рону нерабочей (для мотора) полости (рис. 39, б).
Из рис. 39, б видно, что если цилиндр при движении его плун-
жера в режиме нагнетания соединить с нагнетательным окном
сразу же после перехода его оси через верхнее нейтральное поло-
жение (<р2 “ 0; см. рис. 39, а), а отсоединить от этого окна лишь
в нижнем нейтральном положении (бх = 0), компрессия будет,
полностью устранена. Однако углы <рг и б2 при этом должны быть
в целях обеспечения герметичности, соответственно увеличены;
в результате подобная асимметрия перекрытий может привести
к появлению вакуума в цилиндре и к гидравлическим ударам
в момент соединения недозаполненного жидкостью цилиндра
с нагнетательным окном, обусловленного обратным потоком
жидкости из последнего. Для избежания этого необходимо преду-
смотреть устройство для плавного (безударного) дозаполнения
цилиндров в момент соединения их с окном нагнетания (см.
стр. 140).
Компрессию можно уменьшить, если окно в донышке цилиндра
выполнить в виде узкой щели k < d с расположением параллельно
оси цилиндрового блока (рис. 39, а). При этом соответственно
может быть уменьшена ширина s перевальной перемычки распре-
делительной цапфы.
Гидравлические удары, обусловленные «выстреливанием» ра-
бочих камер, могут также наблюдаться, хотя и более низкого
уровня также и в том случае, когда в цилиндрах будут отсутство-
вать как компрессия, так и вакуум жидкости, т. е. при бх ™ 62 “ 0.
Допустим, что цилиндр отсекается от полости нагнетания в ней-
тральном положении (6Х = 0); при этом в момент отсечки цилиндра
давление р невытесненного объема жидкости в нем (в объеме
г
139
вредного пространства) равно давлению рн в полости нагнета-
ния (р = рн). Очевидно, если соединить в это мгновение цилиндр
с полостью всасывания (62 = 0) с давлением рвс, жидкость под
перепадом давления Др = ри — рвс устремится («выстреливает»)
в полость всасывания насоса, включающую вредное пространство,
и вызовет гидравлический удар с забросом давления.
Для того чтобы устранить это явление, необходимо, чтобы
к моменту прихода цилиндра из полости нагнетания в полость
всасывания давление в нем было плавно понижено до давления
в последней (р = рвс). Это может быть достигнуто, если соединить
цилиндр с полостью всасывания лишь после того, как его поршень
при движении к зоне всасывания переместится на величину пути
(бг >> 0), при которой давление жидкости во вредном пространстве
уе снизится до давления всасывания. Угол 62, удовлетворяющий
этому условию, может быть вычислен, если известны объем вред-
ного пространства, характеристики сжимаемости жидкости и де-
формация камеры насоса.
Поскольку относительный объем вредного пространства регу-
лируемого насоса увеличивается с уменьшением подачи (см.
стр. 86), расчет угла 62 следует проводить для максимального
давления нагнетания и минимальной подачи, при которых объем
расширения жидкости, заключенной во вредном пространстве,
будет максимальным.
Нетрудно также видеть, что для улучшения заполнения ци-
линдра при проходе им зоны всасывания, угол упреждения фх
должен быть минимальным или даже отрицательным. В последнем
случае поршень после перехода цилиндра в зону нагнетания
будет выталкивать некоторое время жидкость обратно в полость
всасывания. Применение подобного распределения уменьшает
возможность появления кавитации, однако объемный к. п. д.
насоса при этом понизится; поэтому при отрицательном угле упре-
ждения ф! значение его не должно превышать Г.
Для устранения ударных явлений при переходе цилиндра из
зоны всасывания в зону нагнетания давление в цилиндре до при-
хода его к этой зоне целесообразно повысить до давления в по-
следней. Для этого размер k окна должен быть больше ширины s
перемычки (k > s), или, иначе, фг < 0 (рис. 39, а). Однако при.
переходе такого цилиндра через нейтральную зону он своим
окном на мгновение соединит полости (окна) всасывания и нагне-
тания, в результате чего жидкость будет перетекать из полости
нагнетания в полость всасывания. Поэтому этот способ устране-
ния ударных явлений связан с объемными потерями.
Повысить давление в цилиндре в конце входа всасывания до
давления нагнетания можно также несимметричным относительно
нейтральной оси расположением окна нагнетания. В этом случае
жидкость в цилиндре при ходе поршня в режиме нагнетания будет
сжата до величины давления в окне, с которым должен соединиться
цилиндр. Для этого принимают ф2 > фх; расчет требуемого зна-
140
чения угла ф2 производится, исходя из объемного модуля упру-
гости рабочей среды с учетом нерастворенного воздуха (см.
стр. 44) и возможного недозаполнения цилиндра при проходе
им зоны всасывания.
15. Индикаторная диаграмма поршневого насоса
Индикаторная диаграмма поршневой гидромашины, явля-
ющаяся записью.давления в цилиндре за один цикл, позволяет
судить о качестве распределения рабочей жидкости, а также опре-
делить потери в подпоршневом пространстве и причины возникно-
вения шума.
На рис. 40, а приведена теоретическая индикаторная диа-
грамма насоса с положительным симметричным перекрытием
Рис. 40. Теоретическая (а) и фактическая (б) индикаторные диаграммы цилиндра
поршневого насоса с положительным перекрытием
в среднем положении окон цилиндра (с предварительной отсечкой
цилиндра s > k\ см. рис. 39, а). На оси абсцисс диаграммы
(рис. 40, а) отложен ход х поршня (или объем V цилиндра), а на
оси ординат — давление р жидкости в цилиндре. Отсечка цилиндра
насоса от полости всасывания (питания) с давлением рвс про-
изошла при ходе всасывания в точке Ь; поскольку поршень после
отсечки будет перемещаться в том же направлении до прихода
цилиндра в нейтральное положение, давление в цилиндре на
оставшейся части пути до этого положения (до точки а) будет
понижаться вследствие увеличения замкнутого объема, достигая
минимального значения в точке а.
После же того, как цилиндр пройдет нейтральное (мертвое)
положение, замкнутый объем будет уменьшаться; в результате
давление в замкнутом объеме цилиндра будет повышаться по ли-
нии а—с, достигая в точке с максимального значения, опреде-
ляемого законом сжатия жидкости [см. выражение (2)].
В точке с произойдет соединение цилиндра с напорной (нагне-
тательной) камерой, в результате чего давление в нем практи-
141
чески мгновенно (ударно) повысится До величины рнаг (до точки сГ),
после чего происходит процесс вытеснения жидкости из ци-
линдра (отрезок d—f) при практически постоянном давлении рнаг.
В точке f, положение которой на диаграмме определится величи-
ной перекрытия канала цилиндра разделительной перемычкой
(см. рис. 37), произойдет отсечка цилиндра от напорной камеры
(замыкание цилиндра). Поскольку поршень на оставшейся части
пути до прихода цилиндра в нейтральное положение (точка е)
будет продолжать Двигаться в сторону уменьшения замкнутого
объема (поршень будет утапливаться в цилиндре), давление
в замкнутом объеме будет повышаться по прямой f—e', соответ-
ствующей закону сжатия запертдй жидкости, достигая макси-
мального значения в точке е, соответствующей нейтральному
положению цилиндра.
После того, как цилиндр пройдет нейтральное положение
(точке е), замкнутый объем будет увеличиваться; в результате
давление будет понижаться по линии е—g, В точке g цилиндр
соединится с камерой всасывания; в результате давление скачком
понизится до давления рвс в этой камере, которое и сохранится
до прихода поршня в процессе движения всасывания в точку Ь.
Далее описываемый процесс повторится.
В зависимости от величин перекрытий тип — при переходе
цилиндра из зоны всасывания в зону нагнетания и наоборот,
а также симметричности этих перекрытий, описанная теорети-
ческая диаграмма может изменяться.
Фактическая индикаторная диаграмма будет отличаться от
теоретической в основном тем, что при чередующихся соединениях
замкнутых объемов цилиндров с входной и выходной полостями
насоса будет происходить (вследствие наличия перепадов давле-
ния в соединяемых полостях) перераспределение энергии, сопро-
вождающееся забросами давления.
На рис. 40, б показана реальная индикаторная диаграмма
семипоршневого насоса с небольшим положительным перекрытием
(<р — 15е). Максимальная подача 200 л/мин; рабочий объем q =
= 142 см8/об; частота вращения приводного вала 1440 об/мин.
Давление в напорной магистрали рнаг = 4 МПа (40 кгс/см2) и в ма-
гистрали питания рвс = 0,69 МПа (6,9 кгс/см2).
Диаграмма показывает, что в конце хода всасывания наблю-
дается небольшое скачкообразное понижение давления, обуслов-
ленное увеличением, вследствие наличия положительного пере-
крытия, замкнутого объема (точка а). В момент соединения ци-
линдра, заполненного жидкостью под давлением всасывания рвс,
с зоной нагнетания с давлением рнаг (точка а) происходит «за-
брос» давления (гидравлический удар), вследствие наличия обрат-
ного потока, до величины Дуд, превышающей примерно в 2 раза
давление нагнетания риаг (точка Ъ) с последующим мгновенным
падением до величины рнаг, с которым и происходит вытеснение
жидкости. После соединения цилиндра с полостью питания с да-
142 '
влением рвс происходит скачкообразное (кратковременное) паде-
ние давления до величины ниже давления питания (р < рвс;
точка* с), после чего давление мгновенно восстанавливается до
величины рвс с последующим повторением цикла.
Происходящие забросы и последующие колебания давления
передаются в гидравлическую магистраль, вызывая в ней колеба-
ния давления, а такжес опровождаются звуковыми эффектами.
Величина (уровень) заброса давления определяется в основ-
ном величиной скачка давления (перепада между давлением
в цилиндре и камере, с которой он соединяется после прохода
разделительной перемычки), а также конструктивными особенно-
стями насоса (объемом вредного пространства, величиной и симме-
тричностью перекрытия цилиндров в узле распределения и пр.).
Путем конструктивных усовершенствований (см. стр. 140) пред-
ставляется возможным значительно уменьшить указанный эффект
и его последствия.
16. Расчет распределительной цапфы
Распределительная цапфа в рассматриваемых насосах обычно
несет на себе цилиндровый блок, воспринимая равнодействующую
усилий N реакции сил давления жидкости на нагруженные поршни
[см. выражение (58) 1, причем радиальная нагрузка на цапфу
может достигать несколькдх тонно-сил. Поскольку зазор в сопря-
гаемой паре цапфа—втулка блока составляет обычно несколько
сотых миллиметра, прогиб цапфы под действием этой нагрузки
может привести к заеданию скользящей пары. Ввиду этого цапфа
должна быть рассчитана на прогиб под действием указанной
нагрузки.
Величина прогиба не должна выходить за пределы, допуска-
емые по условиям возможности заклинивания во втулке ротора.
При этом допускаемое напряжение на изгиб принимают а =
~ 80-4-120 МН/м2. Расчет ведут обычным способом, рассматри-
вая цапфу как консольную балку (см. рис. 38).
При конструировании цапфы обычно выдерживают следующие
соотношения:
l2 & (2-4-2,5) D\ 1г (1,5-И,9) £>; b ~ (0,Зч-0,4) D.
Для уменьшения сил; действующих на цапфу, обычно приме-
няют гидростатическую разгрузку (гидравлическое уравновеши-
вание ротора), обеспечиваемое соответствующим направлением
утечек в зазорах между ротором и оськь Одна из схем этой раз-
грузки показана на рис. 41 , а. Составляющие силы давления
жидкости на поршни действуют на ротор прижимая его к рас-
пределительной цапфе. G противоположной стороны на втулку
ротора действует давление жидкости в зазоре между втулкой
и цапфой, отжимающее ротор от цапфы. Для достижения мини-
мального износа втулки ротора эти сиды должны? по возможности,
КЗ
быть уравновешены. Последнее частично достигается при приме-
нении круговых кольцевых канавок а, выполненных на цапфе
или на втулке. В верхней части рис. 41, а показан график распре-
деления давления жидкости по длине втулки ротора при наличии
этих канавок. Из графика следует, что на половину поверхности
всасы-
вание
Суммарная
зпюра
й)
в)
Рис. 41. Схемы распределитель-
ной цапфы с гидростатической
разгрузкой
втулки, находящуюся в зоне нагнетания, действует давление
жидкости, отжимающее втулку кверху (незаштрихрванная часть
эпюры), а на другую половину, находящуюся в зоне всасывания,
действует давление, отжимающее втулку вниз (часть /2 эпюры,
заштрихованная точками). В результате втулка нагружается
давлением, суммарная эпюра которого изображена внизу
рис. 41, а. Под действием этого давления ротор отжимается кверху
силой F, величина которой определяется выражением (влиянием
ширины канавок а пренебрегаем, а также допускаем, что среднее
давление в зазоре на участках с будет рср — р/2)
F — pDb + 2Dcp^ = pD (b + с).
144
Для уравновешивания ротора сила F должна быть
d2
где d и г—диаметр и число цилиндров.
Следовательно, можно записать
. pz = pD (b + с),
откуда ширина с уплотнительных перемычек
zd2
4D
Размер с указывает, на каком расстоянии от окон в распреде-
лительной оси следует проточить канавки а для уравновешивания
ротора.
Более совершенной является разгрузка с помощью некруговых
(на угле <180°), изолированных одна от другой канавок шири-
ной с, которые соединяют соответственно с полостями высокого
и низкого давлений, как это показано на рис. 41, б. Высокое да-
вление подводится к канавкам, выполненным симметрично на
стороне низкого давления, а низкое давление—-к таким же
канавкам на стороне высокого давления. Осевые размеры пара-
метров, определяющих баланс действующих сил, можно при-
ближенно представить в виде
b + bf - 2с + I + Ь".
Ширина с канавок выбирается возможно малой, однако та-
кой, чтобы при данном расходе утечек давление по всему пери-
метру (длине) канавки было постоянным. Канавки должны быть
расположены на минимальном расстоянии Ь" от распределитель-
ных окон цапфы, насколько это допустимо требованиями герме-
тичности.
Перекрытие т — s—k перевальной перемычкой канала k
цилиндра обычно выбирается равным т 0,037)-Н),057) (см.
рис. 37).
Для предотвращения возможности заедания распределитель-
ной пары насосов большой мощности ротор 1 (рис. 41, в) часто
устанавливают на двух подшипниках качения 2, воспринима-
ющих на себя нагрузку от сил давления жидкости.
Объемный к. п. д. радиально-поршневых насосов при номи-
нальном режиме работы равен 0,96—0,98 и выше, механический
к. п. д. — от 0,80 до 0,95.
Применяют также поршневые насосы и гидромоторы радиаль-
ного типа с торцовым распределением (см. рис. 37), анализ работы
которого приведен ниже (см. стр. 218). Плоский распределитель-
10 Т. М. Бащта 145
ный золотник 1 поджимается к торцу цилиндрового блока 3
с помощью пружин и давления жидкости. Это распределение
отличается высокой герметичностью» благодаря чему такие гидро-
моторы пригодны для работы при малых частотах вращения (до
I об/мин).
Пример. Требуется сконструировать насос на давление нагнетания рн =
= 175 кгс/см2, с подачей СЭф~75 л/мин и рассчитать основные его параметры.
Принимая полный к. п. д. ^полн =*= 0,85 (85%), находим приводную мощ-
ность
.. 10Сэф-175 10-75-175 k t
Wnp 75^^ 75-60-0,85 345 Л> C‘ <25'4 кВт^
Расчетная подача (объемный к. п. д. принимаем Чоб = 0,925) будет
Qt==^ = -6S5- = 81 Л/МИН-
Принимая п = 1200 об/мин и число цилиндров z = 5, имеем из преобразо-
ванного уравнения (42) секундную подачу
Qr~ зо •
Рабочий объем одного цилиндра
.. 30-1000-81 '
hf~ 60-1200-5 6,7 ’
' , nd2 ,
где f — -у- — площадь поршня диаметром а.
Принимая эксцентриситет е ~ 9,5 мм, получим f — 1,7 см2 и диаметр поршня
d 30 мм.
Площадь каналов питания JKaH в распределительной цапфе (см. рис. 29) рас-
считываем, исходя из скорости жидкости в них и = 2,5 м/с:
f- Qt _ 81-1000 _
/кан — и 60-250 . С ‘
Отсюда диаметр отверстия (см. рис. 29) при двух спаренных отверстиях
будет
. 1/ 4-81-1000 _ , _
d,taH “ V rt-60-250-2 ~ 1,9 СМ’
§ 38. Радиально-поршневые насосы
с плоской направляющей
17. Схемы насосов
Кинематической основой многих насосов (в частности, уста-
навливаемых в гидросистемах протяжных станков и в тяжелых
дорожных и строительных машинах и установках) служит пло-
ский куЛисный механизм (рис. 42, а), представляющий собой
рассмотренный выше (см. также рис. 11) кривошипно-шатунный
механизм, в котором длина шатуна бесконечно велика (угол
146
a = const ?= 0). Кривошип 3 этого кулйсйого механизма шар*
нирно* связан с ползуном (камнем) 2, скользящим в прорези ку-
лисы If штанга (шток) 4 которой несет поршень 5 цилиндра
При вращении кривошипа 3 вокруг оси ползун (камень) 2
будет совершать вместе с осью О2 кривошипа вращательное дви-
жение вокруг оси и одновременно перемещаться по вертикали
в прорезе кулисы /, приводя ее, и связанный с ней через шток 4
поршень 5 в возвратно-поступательное движение вдоль горизон-
тальной оси. Перемещение h кулисы 1 (и соответственно поршня
в цилиндре) при повороте кривошипа на угол у — 180° равно
Рис. 42. Кинематическая схема кулисного
механизма
перемещению проекции пальца ползуна 2 на горизонтальную
ось (й = 2г); такой же путь совершает ползун 2 в кулисе 1 по
вертикали.
Из приведенной схемы следует, что поршень 5 при повороте
кривошипа 3 из нейтрального (горизонтального) положения в на-
правлении стрелки на угол у совершит путь
х = г — а ~ г —г cos у = г (1 — cos у),
где х— ход поршня при повороте кривошипа на укол у = <*>/;
г—длина кривошипа /.
В соответствии с этим текущая скорость поршня 5
— х = ^~ corsiny. (62)
Текущая подача qx жидкости одним поршнем
91 = vnf = /юг sin у.
Следовательно, текущая скорость и соответственно подача
поршня определятся законом синуса.
Ускорение поршня в цилиндре определится как
* •
dVn *
w — x = vn s= ~ ~ rar cos у.
ю*
147
Кинематическая схема сохранится, если кривошип 3 и ось
ползуна 2 выполним неподвижными (рис. 42, б), а цилиндру 6
сообщим вращение вокруг оси 0^ В результате получим, как
и в рассмотренной выше схеме (см. рис. 27, а), вращающийся
вокруг неподвижных осей и 02 кулисный механизм, в котором
цилиндр 6 будет вращаться вокруг оси О19 а кулиса скользить
по фиксированному ползуну 2, посаженному на оси О2- Поршень 5
в этой схеме будет совершать во вращающемся вокруг оси
цилиндре 6 возвратно-поступательного перемещения вдоль его
Рис. 43. Схемы элементов насоса с плоской направляющей статорного
кольца
оси по закону, описываемому уравнением (62), а также будет
скользить кулисой 1 по камню 2, вращаясь одновременно с ним
вокруг оси О2.
Не нарушая-кинематической сущности, последний механизм
можно преобразовать в реальную плунжерную пару, схема ко-
торой представлена на рис. 43, а. Ползун 2 исходной схемы (см.
рис. 42, б) здесь преобразован в плоскую направляющую статор-
ного кольца 2, вращающегося вокруг неподвижной оси О2
(рис. 43, а), на которую опирается своей прямоугольной, грибо-
видной в сечении головкой 1 (соответствует кулисе 1 исходной
схемы) поршень 5, входящий в цилиндр блока 6, вращающегося
вокруг оси Ov Изменением положения последней относительно
оси О2 регулируется подача насоса.
Ввиду эксцентричного относительно ротора 6 расположения
статорного кольца 2 с плоскими опорами плунжер 5 будет совер-
шать возвратно-поступательные движения в цилиндре, а плоская
его головка будет перемещаться (скользить) по плоской направ-
ляющей статорного кольца (соответствует движению ползуна 2
в прорези кулисы /; см. рис. 42, б).
148
В соответствий с этим относительное перемещение х, текущая
скорость v и ускорение w поршня 5 в цилиндре при е = const
опишутся:
X = Ртах — Р = е (1 — cos у);
dx
v==x = —тг = е® sin v;
at •’
•• • dv 9
w = x~v — e&r cos v.
dt ’
Относительные перемещения хъ скорость и ускорение го-
ловки 1 поршня 5 по направляющей 2:
%! = е sin у;
— есо2 cosy.
dv± 9 .
= X} = Vi = = — ею2 sin у;
Взяв несколько цилиндров, расположенных радиально и рав-
номерно ло окружности, получим схему поршневого насоса,
механизм которого построен на базе кулисного механизма с пло-
ской направляющей (с шатуном бесконечной длины) (рис. 43, 6).
Блок 6 цилиндров посажен на цилиндрическую распределитель-
ную цапфу 5, через окна а и b которой производится питание
цилиндров насоса.
Для обеспечения самовсасывания насоса статорное кольцо
имеет двусторонние плоские направляющие, между которыми
помещены плоские головки 3 поршня (рис. 43, б). С целью
уменьшения трения этих головок о плоские направляющие статор-
ного кольца применены роликовые опоры 7.
Ведущим звеном (водилом) в этом насосе является статорное
кольцо с плоскими направляющими 2, вращающееся вокруг
оси О2, которое через узел плоских направляющих приводит
в синхронное вращение эксцентрично установленный цилиндро-
вый блок 6.
Конструктивные разрезы рассматриваемой машины приведены
на рис. 44.
Приводной вал 10 насоса (рис. 44, а) соединен со статором 6
через звено 5. Цилиндровый блок 12 помещен на распределитель- ,
ной цапфе (оси) 9, качающейся на люльке 2 относительно непо-
движной оси 11, При повороте люльки 2, несущей цапфу 9, изме-
няется эксцентриситет е насоса (см. также рис. 44, в и г) и
соответственно — ход поршней 7 и подача насоса.
Подвод и отвод жидкости от качающейся распределительной
цапфы 9 производится через каналы оси 3 и каналы 1 пово-
ротного соединения, связанные с внешними всасывающим и нагне-
тательным трубопроводами.
149
Поворот люльки 2 осуществляется с йОмоЩЬЮ следящего Ги-
дравлического усилителя (на рис. 44 не показан), поршневой
шток 5 которого соединен с серьгой 4 люльки 2, в которую за-
прессована левым своим конусом распределительная качающаяся
цапфа 9.
Рис.- 44. Насос с плоскими
направляющими статорного кольца
В случае использования гидромашины в качестве гидромотора
ведущей деталью будет блок 6 (см. рис. 43), который через плоские
головки поршней, нагружаемые изгибающим моментом, и плоские
направляющие приводит в движение статорное кольцо 2, связан-
ное с выходным валом.
150
Текущее значение теоретического крутящего момента, разви-
ваемого одним поршнем гидромашины, определится по выраже-
нию (61), а средний момент, развиваемый гидромашиной, — по
выражению (59).
1
18. Силовое воздействие водила
на плоскую головку поршня
*
Ведущей деталью рассматриваемого насоса является статор-
ное кольцо (водило) 2 (см. рис. 43), связанное с приводным валом
насоса. Из схемы, представленной на рис. 43, а, следует, что сила
реакции плоской опоры водила смещена относительно оси поршня,
вдоль которой направлено противодействующее усилие давления
жидкости ри на поршень (Р = pj), на величину е sin ylt где е —
смещение оси О2 вращения статорного кольца 2 относительно
оси Ох вращения блока 6 (величина эксцентриситета).
Пренебрегая потерями трения, находим момент на ведущем
статорном кольце, необходимый для преодоления (уравновеши-
вания) усилия Р = pj давления рв жидкости на один поршень
площадью f:
Mi — eP sin yt — epj sin у/.
Текущий расчетный крутящий момент, развиваемый всеми
поршнями,
М = epf У sin yit
н
где индекс «н» означает суммирование по всем поршням, одно-
временно находящимся в полости нагнетания.
Из рассмотренной схемы следует, что если пренебрегать тре-
нием, усилие реакции статорного кольца, противодействующее
усилию Р ~ pj гидростатического давления ря на поршень,
совпадает с осью поршня. Следовательно, на ротор насоса это
усилие при принятом допущении не будет действовать.
В соответствии с этим отсутсвовать будет (при пренебрежении
трением) также и момент воздействия поршня на стенки цилиндра.
С учетом трения ротора на оси (цапфе) поршень будет на-
гружен радиальными силами, необходимыми для преодоления
момента сил трения ротора.
В мощных насосах с тяжело нагруженным водилом приме-
няют гидростатическое уравновешивание поршня, принцип кото-
рого рассмотрен на примере применения башмачных опор го-
ловок поршней в аксиально-поршневых насосах (см. рис. 81).
Жидкость здесь поступает через осевое сверление в поршне
и далее через дроссель 4 (см. рис. 43, а) в камеру k и через
зазор s между опорными поверхностями удаляется на слив.
151
Наличие дросселя 9 позволяет снизить давление р0 в камере k
по сравнению с давлением питания рн за счет утечек жидкости
через зазор s. При этом давление р0 < рн рассчитывается таким,
чтобы была обеспечена возможность полной разгрузки при неко-
тором протоке жидкости через зазор s скользящей пары.
Практически сопротивление этого дросселя подбирается таким,
чтобы в зазоре s имел место небольшой поток жидкости, исклю-
чающий непосредственный контакт скользящих поверхностей,
т. е. чтобы разгружающее усилие F несколько превышало усилие
нагрузки Р. При этом условии трение пары будет жидкостным.
Расчет подобного гидростатического уравновешивания ана-
логичен расчету указанных выше башмачных опор поршней
аксиально-поршневых насосов с дополнительным учетом искаже-
ния эпюры давления, имеющего место вследствие прямоугольной
конфигурации разгружающей камеры и опоры, и с учетом асим-
метрии точки приложения усилия (см. рис. 43, а).
Расчет производится, из условия сохранения при выбранном
перепаде давления кр = рА — р0 равенства расходов через дрос-
сель 4 (<?др) и торцевую щель высотой s (фщ):
Ндр—Рн — Ро = Цщ-2(а + &)5Ур0,
где Дц = 2 (а + b) s— площадь торцевой щели;
Ндр и Нщ — коэффициент расхода дросселя 4 (см.
рис. 43) и торцевой щели s; можно при-
нять |Лдр — 0,64 и — 0,75;
йдр — диаметр отверстия дросселя;
а и b — стороны периметра прямоугольника ка-
меры k\
2 (а + Ь) — периметр прямоугольной камеры k (см.
рис. 43, а).
В практике обычно ограничиваются приближенными расчетами
действующих сил, при которых гидростатическое разгружающее
усилие F принимают (допускаем линейный закон падения в ка-
пиллярной щели s) равным сумме усилий давления р0 на площадь
камеры (ab) и среднего давления р0/2 на площадь ограничиваю-
щих ее поясков (de— ab) (см. рис. 43, а):
F = abp0 -|- (de — ab)F±=P± (ab + cd),
& £
где Pq — давление в камере k\
с и d — внешние стороны опорной прямоугольной головки
поршня,
152
(
Эпюра давления в разгружающем башмаке будет иметь вид,
федставленный на рис. 43, а (справа).
При уменьшении зазора s, обусловленного изменением на-
рузки Р на поршень, давление в камере k будет повышаться
ри сохранении протока вплоть до значения ри. Очевидно для
странения при увеличении нагрузки Р возможности контакта
юверхности скользящей пары необходимо обеспечить условие
19. Подача насоса
Скорость и текущая подача каждого поршня насоса опреде-
гится как [см. выражения (62)1
уп = (де sin у; q = fvn = [ые sin у,
де у — (dt— угол поворота рассматриваемого цилиндра;
е — величина эксцентриситета (етах — г).
Текущая (мгновенная) подача гидромашины (всех поршней,
саходящихся в рабочей полости) без учета динамической подачи
i—z
Qi = Я = № sin (у + .
1=1
Это выражение справедливо для положительного значе-
[ия sin у. Из сравнения его с выражением (49) следует, что коэф-
шциент неравномерности подачи гидромашины с плоской напра-
^ляющей^меньше коэффициента гидромашины с цилиндрической
[аправляющей, особенно при больших*подачах.
Средняя геометрическая (теоретическая) подача насоса, име-
эщего z цилиндров,
~ __ со ____ f<oez _rtd2ezn
Чт~~Я ~ ~л~~ ” ’
де q — 2efz— рабочий объем насоса.
Пульсация (неравномерность) подачи при нулевом давлении
г
д — Qi _ .л у sin (v i,
QT " TZj V + - 3 /
1=1
Расчеты показывают, что для насоса с шестью цилиндрами
шачение А = -—-= 1,045, что соответствует изменению подачи
Чт
ia 4,5%. Для насоса же с пятью поршнями А = -~-= 1,015,
[то соответствует изменению подачи на 1,5%.
153
§ 39. Насос с прямоугольными поршнями
Поиски возможностей увеличения подачи при минимальных
габаритах конструкции привели к созданию насоса, в котором
тело вытеснителя с (рис. 45) используется для образования второй,
полости, замыкаемой вытеснителем Ь. В результате объемное
устройство имеет четыре рабочих камеры, изменение циклов
которых сдвинуто на 90°.
Рис. 45. Схема насоса с прямоугольными поршнями
Кинематической основой этого насоса является рассмотренный
крестовидный (кривошипный кулисный) механизм (см. рис. 42, б).
Звено 6 этого механизма выполнено в виде вращающегося ро-
тора d (рис/ 45). В прорези этого ротора помещено звено с
(кулиса), в котором, в свою очередь, расположено звено b (ка-
мень). Путь звена с в прорези ротора d, а также путь звена b
в прорези звена с, согласно рис. 42 равны двойному эксцентриси-
тету е.
Привод насоса осуществляется через ротор d, при вращении
которого звенья (прямоугольные поршни)'с и b будут переме-
щаться, засасывая и нагнетая жидкость.
На рис. 46 изображены различные положения поршней с
и Ь. На рис. 46, а поршень с находится в крайнем верхнем поло-
жении, поршень же b — в среднем положении. Масло засасы-
вается через правый канал и нагнетается через левый .канал. На
рис* 46, б ротор и поршни с и b смещены относительно прежнего
положения на угол 45°. В этом положении поршень с движется
в направлении камеры С, а поршень d -—в направлении D. Вса-
сывание жидкости происходит в камеры А и В, а нагнетание из
полостей С и D — через левый канал.
154 •
На рис.< 46, в ротор повернут относительно первоначального
положения на угол 90°. Поршень с находится в среднем положе-
нии (движется в направлении С), а поршень b — в конечном.
Всасывание жидкости происходит в камеру А, нагнетание из
камеры С — в левый канал. На рис. 46, г изображено поло-
жение при смещении на угол 135°. Поршень с движется в напра-
влении С. Всасывание масла происходит в камеры А и D, а наг-
Рис. 46. СхёМы действия насоса с прямоугольными поршнями и график подачи
нетание из камер С и В — в левый канал. При дальнейших пово-
ротах процесс повторяется.
Подачу такого насоса определяют по формуле
QT = 4еп (xzt + yz2),
где х и у— ширина поршней cub (см. рис. 45);
•Zx и г2 — толщина поршня;
е — эксцентриситет (величина кривошипа);
п — частота вращения.
Рассматриваемый насос — двухпоршневой, каждый из порш-
ней двусторонний, т. е. насос как бы имеет четыре поршня.
Скорость поршня с относительно ротора d определится по фор-
муле (см. рис. 42, а)
vc = <ое sin а.
Следовательно, текущая подача
' q — vcf — coexz sin a,
где ct. — угол, образованный осью мертвых положений поршня
(ось центров) с осью поршня.
155
Скорость поршня b определяется по формуле
vb = ею cos а или q = ecoyzcosa.
Результирующий поток
Qpe3 = + ггУ) (S sin а + cos а),
где а — углы, образованные осями камер, находящихся в поло-
жении нагнетания, с осями центров.
Построив кривые подачи поршнями, получим график, изобра-
женный на рис. 46, д, из которого видно, что колебания потока
для этого насоса будут значительны. Подсчеты показывают, что
Д = ?рез тах ~ ?рез т1п 100 = 440/0.
4рез max
§ 40. Радиальнопоршневые насосы
с клапанным распределением
20. Конструктивные основы
Роторные насосы с цапфовым распределением обычно приме-
няют до давлений 25 МПа (250 кгс/см2), при более высоких давле-
ниях применяют нероторные радиально-поршневые насосы с рас-
пределением с помощью свободно посаженных клапанов; насосы
выпускаются на давления до 100 МПа (1000 кгс/см2) и выше.
Клапанное распределение распространено преимущественно
в плунжерных насосах с кулачковым (эксцентриковым) привод-
ным механизмом поршней.
Схема элемента такого насоса представлена на рис. 47, а.
Заполнение насоса жидкостью происходит через всасывающий
клапан /, а вытеснение из цилиндра (нагнетание) — через нагне-
тательный клапан 2. Привод поршня осуществляется эксцентрич-
ным кулачком (диском) 4, к которому поршень 3 поджимается
пружиной или иными средствами. Ось Оъ вокруг которой вра-
щается кулачок, смещена относительно его геометрической оси О2
на величину эксцентриситета е, в соответствии с чем геометри-
ческая ось (центр) О2 кулачка описывает при его вращении во-
круг оси Ох окружность радиусом, равным эксцентриситету е.
Поршень 3 при этом будет совершать в цилиндре возвратно-
поступательные движения на величину пути 2е.
Из рассмотренной схемы видно, что кинематика этого насоса
соответствует кинематике кривошипно-шатунного механизма (см.
рис. 11). Функции кривошипа 1 здесь выполняет эксцентриковый
кулачок (диск) 4 (рис. 47, а), ось Ох вращения которого (она со-
ответствует оси О2 схемы на рис. 11) смещена относительно гео-
метрической его оси О2 на величину е, равную радиусу криво-
шипа г.
156
При вращении эксцентрикового кулачка 4 вокруг оси 0г
приводного вала, с которым этот кулачок жестко соединен, гео-
метрическая ось (центр) О2 кулачка будет описывать окружность
радиусом г = е вокруг оси вала 0х. При этом поршень 3 насоса,
прижимаемый к эксцентрику пружиной 6 (или иными средствами),
будет перемещаться возвратно-поступательно в цилиндре, совер-
шая за один оборот два хода, каждый из которых равен h = 2е.
Рис. 47. Схемы кулачкового насоса с клапанным распределением (а—в)
и расчетная схема этого насоса (г)
При движении поршня 3 в левую сторону (соответствует для дан-
ного направления вращения верхней половине эксцентрика)
объем цилиндровой камеры уменьшается и жидкость, заполня-
ющая ее, вытесняется через клапан 2 в нагнетательную полость.
При обратном движении поршня (соответствует нижней по-
ловине окружности эксцентрика) объем цилиндровой камеры
будет увеличиваться и жидкость, преодолев усилие пружины 5
и открыв всасывающий клапан /, будет поступать в камеру насоса.
Выполнив кулачок из двух эксцентриков а и b (рис. 47, б)
с равными значениями эксцентриситета /г — /2, получим воз-
можность регулировать ход поршня путем изменения взаим-
ного расположения эксцентриков. В положении, представленном
на рис. 47, б, эксцентрики так расположены относительно друг
друга, что суммарный их эксцентриситет при вращении вокруг
центра Ох составляет е = 1Т + /2, где ZT и Za— соответственно
эксцентриситеты геометрических осей 02 и О3 кулачков а и b
относительно оси вращения 0v В положении, представленном
157
на рис. 47, в, эксцентрики расположены таким образом, что их
геометрические оси Ох и О2 совпадают, в результате чего суммар-
ный эксцентриситет е = — 12 = 0. При установке эксцентри-
ков в промежуточное положение, можем получить значение е
от нуля до- + /2, а следовательно, можно бесступенчато регу-
лировать подачу.
Из сравнения схемы рассматриваемого насоса (рис. 47, а)
и кривошипного механизма (см. рис. 11, б) видно, что величина е
соответствует радиусу г (кривошипу Г), в ^соответствии с чем
выведенные выше выражения для подачи жидкости [см. выра-
жение (42)1 и скорости движения поршня [см. выражение (44)]
будут справедливы также и для данного насоса при условии за-
мены параметра г величиной е.
• Средняя расчетная подача одноцилиндрового насоса
QT - 2efn,
где f и п —площадь поршня и частота вращения насо а.
Подобные насосы обычно предназначаются для работы под вы-
соким давлением (20 МПа или 200 кгс/см2). Поскольку при таких
давлениях возникают, при непосредственном контакте плунжера
с кулачком, недопустимо высокие напряжения, контакт осуще-
ствляют через специальную опору с (рис. 47, а). Опоры с обычно
также разгружаются гидростатическим способом — подводом
жидкости под давлением в камеру е (см. рис. 47, а и стр. 246).
Кроме того, для уменьшения трения башмаков о кулачок послед-
ний часто выполняется в виде игольчатого подшипника d.
21. Кинематика механизма
, Из расчетной схемы такого насоса с опорным башмаком с
на плунжере (рис. 47, г) [1 ] следует, что при повороте относи-
тельно оси О2 кулачка (эксцентрика) на угол ф по часовой стрелке,
плунжер, опирающийся на кулачок через опору с, переместится
на величину
х — (R + a) cos а — (1г + а) — е cos ф,
где <р = со/ — текущий угол поворота эксцентрика.
Принимая во внимание, что
sin (180° — ф) /?+а , , е
--------- — —!— • sin а = sin ф п-т
sin а
е №
81п2ф и cos а —
2 • 2
SIH2 ф ,
выражение для х можно представить в виде
х = (R + °) у 1 ( frya)* sin2 Ф — (г + ° + е cos ф)-
158
Подставив значение г == R — е, получим
Следовательно, перемещение и скорость плунжера изменяются
в зависимости от угла <р поворота эксцентрика (вала), как и в ра-
нее рассмотренных насосах, практически по закону синуса.
В равной мере будут сохранены также и кинематические зависи-
мости, выражающие текущую подачу и ее равномерность [см.
выражения (42) и (49)1.
И I
22. Особенности применения
клапанного распределения
Клапанное распределение отличается большой надежностью
и долговечностью, а также высоким объемным к. п. д. Кроме
того, насосы с этим распределением свободны от гидравлических
ударов и компрессии жидкости в цилиндрах, а также пригодны
для работы при высоких температурах и давлениях. Утечка
жидкости в таких насосах происходит в основном в результате
перетекания ее через проходные щели всасывающих клапанов
вследствие запаздывания их закрытия (опускания на седло)
и открытия в момент изменения направления хода плунжеров,
что обусловлено в основном инерционностью затворов клапанов.
Очевидно эти утечки отсутствуют лишь в идеальном клапане,
работа которого характеризуется тем, что его открывание и за-
крывание происходит точно при прохождении поршня в мертвых
точках, т. е. в момент реверса поршня.
Неизбежное запаздывание в закрытии всасывающего клапана
приводит к тому, что живость вытесняется плунжером на на-
чальной части нагнетатель$)!Г’р пу^и не в нагнетательную полость,
а возвращается во всасывающую, причем запаздывание будет тем
большим, чем больше масса клапана. Ввиду этого масса всасы-
вающего клапана при выбранной частоте вращения насоса опре-
деляет требуемый подпор навсасывании. Если этот подпор огра-
ничен, то следует в зависимости от массы ограничивать допу-
стимую частоту вращения насоса. Для уменьшения запаздывания
необходимо максимально’ Уад^шать массу клапана, а также уси-
ливать его приводную Пружину и уменьшать величину хода;
однако это может удудшить заполнение цилиндров жидкостью
и в особенности насосов самовсасывающего типа.
Особое влияние на надежность заполнения цилиндров жидко-
стью при ходе всасывания плунжеров оказывает запаздывание
открытия Всасывающего клапана. Причем это влияние будет
тем большим, чем больше' мертвое пространство насоса и меньше
рабочий объем. зД .
В насосах гидросистем 'Применяют самодействующие клапаны,
которые поднимаются в направлении, нормальном к опорной по-
' 159
, У •> ’• ’ '
:.
верхности, под действием потока жидкости и опускаются на эту
поверхность под действием пружины.
Движение и открытие нагнетательного клапана рассчитывается
по уравнению равенства объемов жидкости, вытесняемой порш-
нем и протекающей через каналы клапана: *
Мр, у = snvn — sKvK,
где k—периметр клапана, по которому происходит тече-
ние жидкости;
h— высота подъема клапана;
р — коэффициент расхода клапана; можно принимать
р - 0,75;
sn и ип— площадь и скорость поршня;
5к и ик—площадь и скорость затвора клапана.
При известных условиях может возникнуть стук клапанов,
вызванный ударами их о седло, в результате которых узел рас-
пределения может выйти из строя. Стук клапана, нагруженного
пружиной, обычно возникает при совпадении собственных колеба-
ний подвижных его частей с вынужденными колебаниями (пуль-
сацией) давления жидкости.
За критерий безударной работы клапана обычно принимается
с > то?,
где с — жесткость пружины;
т -— масса клапана;
ю — частота пульсаций давления.
Вероятность появления указанных дефектов в работе клапа-
нов повышается с увеличением частоты вращения насоса. Опыт
показывает, что при рациональном подборе параметров клапана
можно обеспечить надежную его работу при частоте вращения
вала до 6000—8000 об/мин.
С целью снижения сопротивления потоку жидкости скорость
ее течения через всасывающий клапан самовсасывающих насосов
выбирают примерно 1,5 м/с и лишь при применении в качестве
рабочей жидкости маловязких масел — до 3 м/с.
Следует отметить, что насос с клапанным распределением
не может быть использован в качестве гидромотора, т. е. машина
с клапанным распределением необратима. Кроме того, подобный
насос не допускает изменения направления вращения.
Для большей компактностирассматриваемых насосов цилиндры
обычно располагают звездообразно с пересечением их осей в об-
щем центре 5 (рис. 48, а). Привод поршней 1 осуществляется
кулачком 4, к которому поршни прижимаются пружинами 2
через проставки 3. Центр 5 вращения кулачка 4 смещен относи-
тельно геометрической оси на величину е, определяющую ход
поршня.
160
Выпускаются также многорядные насосы с расположением
цилиндров в ряд по оси кулачкового вала (рис. 48, б), несущего
соответствующее число эксцентриковых кулачков, фазы которых
смещены на угол 0 = 360/z, где z — число цилиндров. Средняя
расчетная подача этого насоса определится по выражению
QT = 2efzn.
В насосах с приводом поршней от коленчатого вала (рис. 48, б)
ввиду необходимости расположения цилиндров вдоль оси (в ли-
нию) увеличиваются габариты насоса в осевом направлении.
Кроме этого недостатка, при применении большого числа цилинд-
ров усложняются вопросы обеспечения жесткости вала. Ввиду
Рис. 48. Схемы насосов с кулачковым приводом
этого число цилиндров в насосах такого типа ограничено обычно
тремя-четырьмя.
Насос подобного типа может быть выполнен также по схеме,
изображенной на рис. 48, в. Привод поршней 6 в этом насосе осу-
ществляется при помощи эксцентрикового (кривошипного) ва-
лика 8, при вращении которого внешняя обойма 9 шарикопод-
шипника, посаженного на кривошип, сообщает качательные дви-
жения рычагам 7, которые, в свою очередь перемещают поршни 6.
Перемещение поршней к центру (ход всасывания) осуществляется
с помощью насоса подкачки.
Распределение жидкости осуществляется посредством либо
клапанов, либо цилиндрического золотника, приводимого во вра-
щение от эксцентрикового вала 8, который приводит в движение
поршни 6 насоса.
Эксцентриковые насосы с клапанным распределением строятся
также на базе кривошипного механизма с плоскими опорами
(с шатуном бесконечной длины) (рис. 49, а, см. также стр. 146).
На эксцентричной шейке приводного вала 4 помещен роликовый
подшипник 5; его внешняя поверхность выполнена в виде призма-
11 T. М. Башта 161
Рис. 49- Эксцентриковые насосы
с клапанным (а и б) и золотнико-
вым (в) распределением
162
тического элемента, к плоским граням которого прижимаются
с помощью пружин полые поршни 2. Жидкость поступает во вну-
тренние 'полости этих поршней и вытесняется в линию нагнета-
ния через шариковые клапаны 1 и 3. Размещение всасывающего
клапана 3 в поршне улучшает режим всасывания, поскольку сила
инерции клапана при движении поршня в этом режиме способ-
ствует его открытию.
Толщина стенок поршней выбирается такой, чтобы расширение
поршней под действием давления жидкости способствовало их
герметизации в цилиндрах при высоких давлениях. Отключением
одного или нескольких цилиндров, осуществляемым изъятием
поршней, можно соответственно снижать расход, однако при этом
повышается неравномерность подачи.
23. Эксцентриковые насосы с принудительным
клапанным и золотниковым распределением
С целью устранения недостатков простого клапанного распре-
деления в мощных гидромашинах применяют клапанное распре-
деление, приводимое в движение принудительно. Подобное рас-
пределение в гидромоторе, осуществляемое при помощи тарель-
чатых клапанов, приводимых в движение механически, пред-
ставлено на рис. 49, б. Рабочий поршень 7 и клапаны 6 и 9 при-
водятся в движение общим эксцентриковым валом 8 с соответ-
ственно смещенными кулачками.
Применяют также кулачковые насосы высокого давления (до
500 кгс/см2) с золотниковым распределением. Конструктивная
схема такого насоса показана на рис. 49, в. Распределительный
золотник связан с приводным валиком насоса с помощью шпо-
ночного соединения. Подвод жидкости от распределительного
золотника к цилиндрам и отвод из них осуществляется через
литые каналы корпуса насоса.
24. Насосы с полыми поршнями
С целью снижения контактного напряжения по месту кон-
такта поршня и эксцентрика применяют, и в частности при вы-
соких давлениях (350 кгс/см2 и выше), гидромашины с полыми
поршнями, называемые часто гидромашинами с жидкостными
поршнями [6]. Такие машины обычно применяют в качестве гидро-
моторов. Поршни 1 (рис. 50, а) здесь выполнены в виде втулок,
внутренние концы которых, обработанные по кривизне (радиусу)
эксцентрика 2, опираются на последний и, плотно контактируя
ч с ним, герметизируют рабочие камеры (цилиндры). При вращении
эксцентрика 2 полые поршни совершают возвратно-поступатель-
ные движения, и поскольку они плотно контактируют с эксцен-
триком, происходит изменение рабочих полостей (цилиндров).
Расчетная подача насоса и ее равномерность рассчитываются
по формулам (42) и (49).
11* 163
Нагрузка эксцентрика со стороны каждого цилиндра опреде-
ляется давлением р жидкости на площадь f сечения цилиндра:
nd?
причем часть этой нагрузки передается непосредственно через
жидкость, омывающую
эксцентрик:
Рис. 50. Гидромашины с полыми поршнями
а часть — через полый поршень:
где и d2 — внешний и внутренний диаметры поршневой
втулки.
Следовательно, выбором толщины втулки s =...... 2 - пред-
ставляется возможным уменьшить контактное напряжение до
любого малого значения, при котором была бы обеспечена проч-
164
ность полого поршня, нагружаемого внутренним давлением
жидкости.
Для" возможности снижения контактного напряжения без на-
рушения механической прочности поршневой втулки внутренний
ее конец, которым она опирается на эксцентрик, выполнен утол-
щенным с диаметром d3 > dt. Контактное давление в этом случае
определится из выражения
Применение полых поршней имеет преимущество также и в на-
сосах с плоскими опорами (рис. 50, б; см. также рис. 49, а).
Внутренний конец поршня / с плоским уширенным основанием
опирается на плоскую опору 3 эксцентрика. Соответствующим
выбором размеров уширенного основания поршня представляется
возможным уменьшить контактное напряжение до требуемого
значения при одновременном обеспечении прочности поршня.
Последние насосы, помимо отмеченных выше положительных
качеств (см. стр. 163), позволяют обеспечить высокую герметич-
ность торцового стыка поршня и плоской опоры. Распределение
жидкости производится обычно с помощью золотников 4, сидя-
щих на валу (рис. 50, б) или при работе в качестве насосов —
с помощью клапанов.
Высокомоментные гидромоторы этого типа работают при ча-
стоте вращения 300 об/мин и выпускаются на крутящий момент
до 1000 кгс-м при давлении 250 кгс/сма.
Дальнейшим усовершенствованием гидромашин с полыми
поршнями является применение телескопических поршней
(рис. 50, в). Машина имеет рабочий поршень 6, прижимаемый
с помощью пружины 8 к эксцентрику 10, и второй поршень 7,
надетый на поршень 6 и опирающийся на сферическую про-
ставку 5. Герметизация контакта торца поршня 6 с эксцентри-
ком 10 и торца поршня 7 по проставке 5 достигается приработкой
этих поверхностей, а герметизация поршней 6 и 7 между собой —
с помощью круглого резинового кольца 9.
Применение телескопической схемы упростило герметизацию
соединений.
§41- Эксцентриковые насосы
с клапанно-щелевым распределением
Ввиду того, что всасывающие клапаны ограничивают частоту
вращения насосов, а насосы с принудительным приводом клапанов
(рис. 51, а) громоздки, применяют насосы с клапанно-щелевым
распределением, в которых клапаны устанавливают лишь в на-
гнетательных гидролиниях цилиндров, всасывание же осуще-
ствляется через специальные окна (щели) в стенках цилиндров.
165
Схема поршневого элемента эксцентрикового насоса с подоб-
ным распределением показана на рис. 51, а. Поршни условно изо-
браженных двух цилиндров находятся в противоположно край-
них положениях, всасывание происходит через каналы а после
того, как плунжер b при своем движении откроет круговую про-
точку с в цилиндре, связанную с этим каналом. Величина эксцен-
триситета е приводного кулачка d в подобном насосе определяет
Рис, 51. Схема (а) и график подачи (б) насоса с клапанно-щелевым распреде-
лением
полный геометрический ход плунжера (h — 2e)f однако рабочим
ходом является лишь часть этого хода. Вытеснение жидкости
происходит (на пути /граб) после того, как плунжер, утапливаясь
в цилиндр, отсечет кромки всасывающей камеры с; всасывание
жидкости (на пути Лвс) — после того, как плунжер при движении
к оси эксцентрика отсечет кромки всасывающей камеры, соеди-
нив ее с цилиндром. Всасывание (заполнение жидкостью цилиндра)
будет продолжаться также и при обратном проходе поршнем этого
пути (Авс) и в цикле нагнетания (до перекрытия поршнем всасы-
вающего окна).
Поскольку вытеснение жидкости в нагнетательную линию
происходит в этом насосе лишь на части хода плунжера, подача,
а также характер потока, будут существенно отличаться от этих
параметров ранее рассмотренных насосов.
Из схемы на рис. 51, а видно, что рабочий ход плунжера
1G6
где /iBC = h — Лраб — ход всасывания, равный пути плунжера,
совершаемому им в режиме всасывания от места от-
сечки кромок камеры с до нейтрального (максималь-
ного выдвинутого) положения, или величина пути
плунжера от начала хода вытеснения жидкости до
перекрытия им кромок всасывающей камеры.
В воответствии е этим ередняя расчетная подача насоса
<?т = fhpa6zn = г (2е — hBC) п,
где г и п — число цилиндров и частота вращения насоса.
Практически ход всасывания выбирается в зависимости от
частоты вращения равным h3C = (0,2ч-0,3) йраб. При возраста-
нии Лвс уменьшается рабочий ход hpa6 плунжера, что приводит
к увеличению при заданной подаче габаритов насоса. Уменьше-
ние Лвс может привести к неполному заполнению цилиндра жид-
костью и соответственно к снижению подачи насоса и ухудше-
нию режима его работы.
Угол поворота эксцентрика (вала) от нейтрального (уплотнен-
ного) положения плунжера до положения, при котором торец
подходит в режиме хода всасывания к кромке всасывающей ка-
меры (проточки) с (или, иначе, угол от начала движения плун-
жера в ходе всасывания, в пределах которого жидкость в ци-
линдр не поступает и в нем развивается вакуум), обычно равен
55—60°. При уменьшении этого угла ухудшается всасывание
насоса, а при увеличении растут пульсации давления вследст-
вие наличия обратного потока жидкости в цилиндр.
Учитывая, что движение поршня происходит по закону синуса,
угол фвс поворота вала, на котором происходит процесс всасы-
вания (соответствует ходу /гвс), определится из выражения
h = е cos фас = 2 arccos 2/i.
Поскольку рабочий ход плунжера насоса с подобным распреде-
лением составляет лишь часть полного (геометрического) хода,
неравномерность подачи, а следовательно, и пульсация давления
будет выше, чем у насосов, в которых геометрический ход является
и рабочим ходом.
Связь плунжеров b с кулачком d осуществляется с помощью
пружин или иных средств.
На рис. 51, б представлен график потоков, создаваемый порш-
нями подобного насоса. Заштрихованная площадка характери-
зует подачу одним цилиндром на пути Араб, незаштрихованная —
ход всасывания Лвс.
Клапанно-щелевое распределение обеспечивает высокую гер-
метичность и по сравнению с другими видами распределения менее
167
4-Д
Рис. 52. Насос с клапанно-щелевым распределением
чувствительно к загрязнению жидкости. Однако такие распреде-
лительные устройства имеют большие габариты и не допускают
реверсивности работы насоса при высокой частоте вращения
(превышающей 4000—6000 об/мин). Отличительной особенностью
насоса с клапанно-щелевым распределением является его необра-
тимость, т. е. этот насос не может работать как гидромотор.
На рис. 52 представлена конструкция многопоршневого насоса
с клапанно-щелевым распределением. Цилиндры выполнены в виде
съемных сегментов 14, монтируемых на неподвижном цилиндро-
вом блоке. Каналы цилиндров, ведущие от клапанов нагнетания,
соединены круговым литым каналом 1 в корпусе 10 с каналом
нагнетания 11. Уплотнение в месте стыка этих каналов, т. е.
стыка сегментов 14 с плоскостью корпуса 10, осуществлено при
помощи резинового кольца 3. Сегменты 14 к корпусу 10 прикре-
пляются шпильками 9.
Жидкость из бака через всасывающий штуцер 12 поступает
во внутреннюю полость корпуса насоса, откуда через проточки
(окна) 5 в стенках цилиндров и сверления 15 всасывается в ци-
линдры при ходе поршней в направлении к центральной части
насоса.
Процесс всасывания и нагнетания происходит в следующем
порядке. При ходе какого-либо поршня 4 к центру насоса соответ-
ствующий клапан нагнетания 2 закрывается и поршень создает
в цилиндре вакуум. После того как поршень при дальнейшем
движении откроет проточку 5, жидкость из полости корпуса,
соединенной с резервуаром, поступит через нее в цилиндр. Пор-
шень 4 при движении от центра насоса после того как проточка 5
будет перекрыта, выдавливает жидкость через клапан 2 в канал 1
нагнетания насоса.
Привод поршней 4 осуществляется эксцентриковым валиком 8,
несущим кольцо 7, с которым при помощи пальца 6 и сухарей 13
связаны поршни.
§ 42. Радиально-поршневые высокомоментные
гидромоторы
При необходимости получения большого крутящего момента
применяют высокомоментные гидравлические двигатели (гидро-
моторы) однократного и многократного действия, причем в мо-
торах многократного действия в каждой рабочей камере совер-
шается за один оборот выходного вала соответственно несколько
рабочих циклов. Эти гидромоторы нашли применение в строитель-
ных и дорожных машинах, в горных машинах и др.
Благодаря малым габаритам и высоким динамическим каче-
ствам двигателя, а также простоте автоматизации управления
применение таких гидродвигателей особенно рационально в гор-
ных машинах, эксплуатирующихся в стесненных условиях
169
рабочего пространства (шахты). Гидропередачи здесь применяются
в механизмах подач угледобывающих машин, в угольных ком-
байнах, конвейерах и пр. Применение в этих машинах гидропе-
редач позволяет уменьшить габариты и упростить горную машину,
придавая ей во многих случаях новые технические качества,
а также повысить безопасность труда шахтеров. Последнее до-
стигается благодаря тому, что представляется возможным иметь
в забое лишь взрывобезопасный гидродвигатель, насосную же
установку с электродвигателем размещать вне забоя.
По силовым показателям и к. п. д. параметры высокомомент-
ных гидромоторов не уступают показателям наиболее совершен-
ных аксиально-поршневых машин. Благодаря относительно не-
высоким средним скоростям движения поршней выеокомомент-
ных гидромоторов, находящимся в пределах 0,2—0,5 м/с (для
сравнения следует указать, что средняя скорость поршня акси-
ально-поршневых низкомоментных гидромоторов общемашино-
строительного применения примерно 1,5 м/с), эти гидромоторы
отличаются высокой надежностью и длительным сроком службы.
Весовой показатель таких гидромоторов различных конструк-
ций находится в пределах 2—15 кг/кВт. Требуемый большой
крутящий момент здесь достигается за счет увеличения количе-
ства рабочих ходов (до десяти ходов) поршней за один оборот
и соответственно — увеличения рабочего объема машины.
Эти высокомоментные двигатели представляют собой одноре-
жимные машины, пригодные для работы лишь в режиме двига-
теля с малой частотой вращения, начиная с долей оборотов в ми-
нуту. Максимальная частота вращения на порядок ниже, чем
у обычных гидроприводов. Для машин четырехкратного действия
частота вращения обычно не превышает 400 об/мин.
Принцип действия такого гидромотора тот же, что и моторов
одинарного действия. Текущее значение тангенциальной соста-
вляющей Т усилия Р = pf давления жидкости р на каждый
поршень, находящийся в зоне нагнетания площадью / =
приложенной в точке контакта поршня со статором, развивает
крутящий момент (без учета потерь) Мj = 7р, где р — плечо
приложения силы Т относительно оси вращения блока цилиндров
(допускаем, что точка контакта находится на оси цилиндра).
Полный момент М равен сумме моментов всех поршней, находя-
щихся одновременно в зонах нагнетания.
Характер изменения момента каждого поршня и изменения
суммарного момента зависит от формы профиля поверхности ста-
торного кольца. Средний момент на выходном валу на установив-
шемся двигательном режиме определяется как
где q и Ар — рабочий объем и перепад давления.
170
Динамический момент
Л4 ar J
<Г1ДИН w
dco
1Г ’
где J — приведенный к приводному валу машины момент инер-
ции всех связанных с ним вращающихся масс;
со — угловая скорость.
Поскольку рабочий объем такого двигателя представляет со-
бой сумму изменений объемов рабочих полостей за один оборот,
применением большого числа рабочих камер (полостей) предста-
вляется возможным получить большое значение рабочего объема,
ZZJ б)
Рис. 53. Схемы высокомоментных гидромоторов двукратного (а) и пятикрат-
ного (б) действия
а следовательно, и большой крутящий момент, который достигает
12•103н-15-103 кгс • м.
На рис. 53 представлены схемы гидромоторов двукратного
и пятикратного действия, в которых поршни совершают за один
оборот соответственно два и пять рабочих ходов. От рассмотрен-
ных гидромоторов одинарного действия они отличаются профиль-
ной формой статорного кольца и конструкцией распределительной
цапфы, которая выполнена с учетом обеспечения многократного
питания цилиндров за один оборот. Для этого число уплотни-
тельных перемычек на распределительной цапфе увеличено
в сравнении с их числом у машин одинарного действия на коли-
чество рабочих ходов.
В гидромоторе двукратного действия (рис. 53, а} статорная
обойма выполнена в виде овала, а распределительная цапфа
имеет две перемычки, образующие две подводящие камеры.
В гидромоторе пятикратного действия (рис. 53, б) внутренний
профиль статорной обоймы образован пятью полуовалами, боль-
3600
шие оси которых расположены одна относительно другой на —
с округленными сопряжениями.
171
Объем, описываемый поршнями (рабочий объем) такого гидро-
мотора с числом цилиндров z, составит за один оборот
q — fhzk = hzk,
где k — количество ходов поршней за один оборот цилиндрового
ротора;
h — ход поршня; для гидромотора двукратного действия
(рис. 53, a) h = ——— и для мотора пятикратного дей-
ствия (рис. 53, б) h = т — п, где тип — координаты
оси опорного ролика с при максимально выдвинутом
и утопленном положениях поршня.
Рис. 54. Двухрядный высокомоментный радиально-поршневой гидромотор
Крутящий момент гидромотора многократного действия при
том же давлении в к раз больше, а частота вращения при том же
расходе жидкости в к раз меньше, чем у мотора одинарного дей-
ствия; расчетная мощность при этом сохраняется постоянной.
Для уменьшения трения поршней о статорное кольцо приме-
няют различные конструктивные способы и в частности поршни
снабжаются с внешней стороны опорными роликами а (рис. 54, а),
помещенными на игольчатых подшипниках.
Расчет действующих сил и теоретического крутящего момента,
развиваемого в этой схеме одним поршнем, производится по
выражениям (рис. 54, б):
172
усилие Р давления р жидкости на поршень
усилие Af реакции статорного кольца 1, воспринимаемой роли-
ковыми подшипниками 2,
N = —
cos а
текущее тангенциальное усилие Т, развивающее крутящий
момент,
Т = Р tga;
текущий крутящий, момент, развиваемый одним поршнем,
= 7р,
где d — диаметр поршня 3;
р — плечо приложения силы Т (расстояние от центра ролика 2
до оси вращения ротора 4).
Характер изменения момента по углу поворота вала зависит
от формы кривой статорного кольца. Среднее значение крутящего
момента, развиваемого всеми поршнями, определяется в общем
случае по выражению [см. также выражение (30)]
М =
2л *
где q — рабочий объем гидромотора (объем, описываемый его
поршнями за один оборот вала гидромотора).
Для увеличения крутящего момента применяют гидромоторы
с несколькими (двумя-тремя) рядами цилиндров; общее число
цилиндров во всех рядах доводится до 50—60.
При разработке рассматриваемых гидромоторов важным
является правильный выбор кривых, очерчивающих рабочие
части направляющих статорных колец. Хорошие динамические
свойства показали гидромоторы, у которых направляющая кольца
обеспечивает параболический закон перемещения поршня, а также
моторы, статорное кольцо которых выполнено по архимедовой
спирали.
Ускорение относительного движения поршня, в зависимости
от знака, будет либо прижимать ролик к направляющей, либо
отрывать его от нее. Отрыв ролика от направляющей наиболее
вероятен на участке, соответствующем сливу жидкости, когда,
кроме сил инерции, поршень прижимается к профилю лишь да-
влением в сливной магистрали или усилием пружины. Поэтому
при отсутствии принудительной связи между поршнями и на-
правляющими максимальное значение частоты вращения вала
гидромотора лимитируется возможностью отрыва поршней от
поверхности кольца.
173
Для гидромоторов с четырехходовым направляющим кольцом
в виде архимедовой спирали максимальная частота вращения
не должна превышать 100 об/мин. Коэффициент неравномерности
угловой скорости такого гидромотора обратно пропорционален
числу его поршней, находящихся в одной плоскости (в одном
ряду). Для гидромотора с направляющими, выполненными по
архимедовой спирали, коэффициент неравномерности можно вы-
числить по эмпирическому выражению
g К max. ^min 2
— пср ~ г ’
где z — число поршней, расположенных в одной плоскости вра-
щения.
р N
Рис. 55. Схемы разгрузки поршней гидромотора от тангенциальной составляю-
щей силы давления жидкости
Для уменьшения пульсации угловой скорости в многорядных
гидромоторах ряды поршней часто смещают один относительно
другого. Так, например, применяют трехрядное расположение
поршней в несовпадающих полостях, по 18 поршней в каждом
ряду. В подобных гидромоторах крутящий момент достигает
5000 кгс-м при частоте вращения 5—100 об/мин; в некоторых
случаях такие гидромоторы устойчиво работают при 1—2 об/мин.
Эти моторы отличаются высокой надежностью и длительным
сроком службы (6000 ч), что обусловлено небольшими скоростями
и малыми динамическими нагрузками. Полный к. п. д. такого
гидромотора составляет 90—94%. Крутящий момент при пуске
мотора составляет 90—95% от максимального момента, разви-
ваемого им в работе.
В гидромоторах многократного (четырех и более) действия
условия работы поршней ухудшены вследствие действия больших
тангенциальных составляющих Т сил давления жидкости. Для
улучшения условий работы в большинстве конструкций преду-
смотрены специальные направляющие, а головки поршней снаб-
174
жены для снижения механических потерь шарикоподшипнико-
выми каретками. На рис. 55, а показана схема разгрузки, приме-
ненная в насосе, представленном на рис. 54. Поршень а опирается
на ось Ь, несущую игольчатые подшипники, два из которых пере-
мещаются по направляющей прорези цилиндрового блока с
и два опираются на профильное статорное кольцо d. Распростра-
ненная схема разгрузки приведена также на рис. 55, б. Поршень а
соединен при помощи шарового толкателя е с опорным роликом
(шарикоподшипником) Ь, ось которого, в свою очередь, шар-
нирно связана с цилиндровым блоком е при помощи поводка с
и пальца d. В этом случае действующая на поршень а сида Р
давления жидкости р может быть разложена на две составляю-
щие: осевую 2V, проходящую через оси ролика b и шарового
шарнира е, и тангенциальную (перпендикулярную оси поршня а)
Т, значение которой определяет величину крутящего момента.
§ 43. Последовательность расчета основных параметров
радиально-поршневых гидромашин
Из приведенного ранее (см. стр. 74) следует, что основными
параметрами объемных гидромашин являются расчетная QT
и фактическая подачи, скорость вращения вала и, рабочее
давление р, крутящий момент М и мощность N.
При расчете насосов исходными являются параметры Q, п
и р, при расчете гидромоторов — параметры М и п. Кроме того,
при расчете гидропередачи, состоящей из насоса и гидромотора,
исходят из заданной мощности N, момента М на валу гидромотора
и скорости его вращения и.
Разработка рекомендаций по выбору параметров и рациональ-
ному конструированию гидромашин усложнена тем, что задача
проектирования новой машины даже в простейших случаях не
имеет однозначного решения, поскольку для заданных пара-
метров машины можно подобрать не одно, а несколько решений,
близких по к. п. д. и прочим параметрам, но отличающихся
другими данными. Кроме того, выбор того или иного конструк-
тивного варианта диктуется конкретными условиями производ-
ства.
При проектировании новой машины следует максимально
использовать данные отработанных прототипов машин, характе-
ристики которых известны, т. е. ограничить работу лишь специ-
фическими (характерными) для данного конструкторского задания
узлами машины. Во всех случаях вопросы проектирования новой
машины следует рассматривать с учетом тенденций и перспектив
их развития и расширения существующих параметров.
При выборе величины рабочего давления исходят из требова-
ний в части компактности и массы; когда минимальная масса
и компактность являются преобладающими факторами, обычно
175
выбирают давление 20 МПа (200 кгс/см2) и выше. Если насос при-
водится электродвигателем, скорость вращения его вала выбирают
в соответствии с данными электродвигателя. В других случаях
руководствуются наиболее важными для данного задания сообра-
жениями. Следует иметь в виду, что с увеличением скорости вра-
щения насоса ухудшаются условия заполнения его цилиндров
(рабочих камер). Скорость вращения вала гидромотора выбирают
в соответствии с условиями работы агрегата, для привода кото-
рого предназначен гидромотор.
При выборе давления и скоростей следует иметь в виду, что
повышение этих параметров предъявляет повышенные требования
к изготовлению деталей и к чистоте рабочей жидкости. Кроме
того, при высоких давлениях возникают дополнительные требо-
вания по прочности и жесткости конструкций.
Максимальная частота вращения и максимальное давление
насоса лимитируется недозаполнением рабочих камер жидкостью,
термическим напряжением деталей, снижением надежности и
срока службы.
Ниже описана рекомендуемая последовательность расчета
радиально-поршневого насоса с цапфовым распределением, ме-
тодику которого можно распространить также и на насосы иных
типов.
Обычно задается частота вращения и, эффективная (полезная)
подача <2эф давление нагнетания и величина к. п. д.
1. По заданной эффективной подаче фэф определяется теоре-
тическая (расчетная) подача QT [см. выражение (19) на стр. 80]
Величину объемного к. п. д. для рассматриваемых насосов
для номинальных условий принимают цоб ~ 0,96-ь0,98.
2. Исходя из заданной частоты вращения п, определяют
рабочий объем насоса [см. выражение (40)1:
nd2 f nd2 о QT
q = fhz = —r- hz = 2ez = —
' ' 4 4 60л
где n — частота вращения в об/мин.
Значение входящих в последнее уравнение параметров вы-
бирается из конструктивных соображений и данных практики.
В частности, число цилиндров z в одном ряду (в одной плоскости)
выбирают от 5 до Г1. Число рядов и цилиндров — от одного до
трех и редко — до пяти (см. рис. 30).
При выборе отношения i = где h = 2е и d — ход и диа-
tv
h
метр цилиндра, принимают для предварительных расчетов =
= 1-ь1,5. Число цилиндров выбирается, исходя из конструктив-
ных соображений с учетом диаметра поршня d.
176
3. На основании приведенных
поршня [см. выражение (40)1
3 /-1---—
данных определяют диаметр
zh
где i = h/d — конструктивный параметр (обычно i = 14-1,5).
Вычисленное значение d округляется до ближайшего значе-
ния по действующим ГОСТам, а значение h — до ближайшего
четного числа миллиметров, обеспечивая при этом минимальные
расхождения требуемого и полученного значений q.
4. Для машин с несколькими циклами работы (вытеснения и
всасывания) за один оборот (см. рис. 53) рабочий объем опреде-
ляется как
q' = kq = kfhz = k hz,
где k — число циклов за один оборот.
5. При расчете сечения каналов в распределителе исходят
из допустимой скорости потока жидкости во всасывающих ка-
налах, которая для самовсасывающих насосов обычно выбирается
равной 1,5—3 м/с.
6. Диаметр £>р распределительной цапфы выбирается из усло-
вий симметричного размещения каналов и прочности цапфы
под действием боковой нагрузки Т (см. рис. 38). После выбора
продольных размеров 1Г и Z2, производимого исходя из конструк-
тивных соображений, цапфа проверяется на прочность и дефор-
мацию для данной нагрузки Т.
7. При проектировании блока цилиндров необходимо обеспе-
чить заделку плунжера при крайнем выдвинутом его положении
(см. рис. 33, в), чтобы устранить возможность смятия цилиндра
под действием боковой силы и обеспечить герметичность соеди-
нения. Минимальная величина заделки L поршня в выдвинутом
его положении должна быть не менее L (1,54-2) d.
В соответствии с этим длина цилиндра (глубина расточки
в роторе) (см. рис. 33, в)
= 0,Id + h + (1,54-2) d.
Следовательно, для схемы цилиндрового блока, приведенной
на рис. 33 (см. также рис. 28), внешний диаметр блока цилиндров
D6 = D + 2/ц + 0,6d.
8. Общая длина поршня Ln плунжерного типа (см. рис. 33, б)
должна быть такой, чтобы он в утопленном положении выступал
из цилиндра на (0,1—0,2) d. В соответствии с этим длина поршня
Ln = h + (1,54-2) d + (0,14-0,2) d - h + (1,64-2,2) d.
12 T. M. Башта 177
9. Радиус сферы головки плунжера (см. рис. 33, б) обычно
принимают
г - (1,5-2,5) d.
При проектировании гидромотора по заданному эффективному
моменту Л1Эф на его валу и частоте вращения п сначала подсчиты-
вается теоретический момент
Л1т==Мэф _
^мех
Значение к. п. д. т]мех обычно выбирается равным 0,85—0,9.
Далее выбирается рабочее давление р и определяется рабочий
объем машины [см. выражение (59)]
2 л. ЛК
Расчет прочих параметров гидромотора производится так же,
как и расчет насоса.
ГЛАВА VI
РОТОРНЫЕ АКСИАЛЬНО-ПОРШНЕВЫЕ
ГИДРОМАШИНЫ
§ 44. Общая характеристика и принципиальная схема
Роторная аксиально-поршневая гидромашина — машина, у ко-
торой рабочие камеры вращаются относительно оси ротора, а оси
поршней или плунжеров параллельны оси вращения или соста-
вляют с ней угол меньше 45°. Насосы и гидромоторы с аксиальным
или близком к аксиальному расположением цилиндров, являются
наиболее распространенными в гидравлических системах (гидро-
приводах). По числу разновидностей конструктивного исполне-
ния они во много раз превосходят прочие типы гидромашин.
Эти насосы и гидромоторы получили широкое применение еще
в конце прошлого столетия на флоте многих стран (Россия, Ан-
глия, США, Япония), причем использовались они для выполнения
наиболее ответственных функций, как например, управление
кораблем и его вооружением.
Они обладают наилучшими из всех типов гидромашин габа-
ритами и весовыми характеристиками, отличаются компактностью,
высоким к. п. д., пригодны для работы при высоких частотах
вращения и давлениях, обладают сравнительно малой инерцион-
ностью, а также просты по конструкции.
Особо следует отметить их высокую энергоемкость на единицу
веса (удельный вес). В зависимости от конструкции и величины
рабочего давления удельные веса регулируемых насосов с руч-
ным управлением подачей находятся в пределах 3—10 кгс/кВт
(большее значение относится к насосам, работающим на более
высоких давлениях). В насосах же с высокой частотой вращения
(п = 20 000 об/мин) энергоемкость достигает 12 кгс/кВт. Вес
нерегулируемых насосов или гидромоторов равной мощности
меньше регулируемых в 2 раза; соответственно удельный вес
(т. е. приходящийся на единицу мощности) нерегулируемых насо-
сов находится в пределах 1,5—5 кгс/кВт. Весовое преимущество
гидромоторов этого типа по сравнению с электродвигателем со-
ставляет от —80 раз для малой до —12 раз для большой мощности.
Особенностью рассматриваемых машин является относительно
малый момент инерции вращающихся частей, что имеет существен-
ное значение при использовании их в качестве гидромоторов.
12* 179
Маховые массы аксиально-поршневого гидромотора мощностью
200 л. с. составляют менее 1/10 маховых масс электродвигателя
такой же мощности. Маховой момент гидромотора мощностью
80 л. с. равен при частоте вращения и = 1500 об/мин всего лишь
0,05 кгс/см2, вместо 3,1 кгс/м2 для трехфазного электродвигателя
такой же мощности и частоте вращения, т. е. в 62 раза меньше,
чем маховой момент электродвигателя.
Важным параметром для многих случаев применения является
также приемистость (быстродействие) насоса при регулировании
подачи. Изменение подачи от нулевой до максимальной осуще-
ствляется в некоторых типах этих насосов за 0,04 с и от макси-
мальной до нулевой — за 0,02 с.
Наиболее распространенное число цилиндров в аксиально-
поршневых машинах равно 7—9, диаметры цилиндров гидро-
машин (насосов, гидромоторов) обычно находятся в пределах от
10 до 50 мм, а рабочие объемы машин — в пределах от 5 до
1000 см3. Максимальный угол между осями цилиндрового блока
и наклонной шайбы обычно равен в насосах 20° и в гидромото-
рах 30°.
Частота вращения насосов общемашиностроительного приме-
нения средней мощности равна 1000—2000 об/мин; частота вра-
щения гидромоторов может быть выше примерно в 1,5 раза, чем
у насосов той же конструкции и мощности. Частота вращения
подобных насосов в авиационных гидросистемах обычно равна
3000—4000 об/мин, однако в отдельных случаях применяют на-
сосы со значительно большей частотой вращения. По данным ино-
странной печати изготовляются насосы с максимальной частотой
вращения 20 000 и 30 000 об/мин и минимальной —5 — 10 об/мин.
Для специальных целей созданы малогабаритные насосы на
рабочий объем q = 0,7-^1 см3/об (диаметр поршня d ~ 5-^-6 мм,
ход h = 4 мм, диаметр блока D = 20 мм); подача такого миниа-
тюрного насоса достигает (за счет большой п) 20 л/мин при р =
- 20 МПа (200 кгс/см2).
Насосы и гидромоторы с аксиальным расположением цилинд-
ров применяются при давлениях 21—35 МПа (210—350 кгс/см2)
и реже при — более высоких давлениях [насосы подачей до
400 л/мин часто выпускаются на рабочие давления до 55 МПа
(550 кгс/см2)]. Мощность уникальных насосов, выпускаемых для
некоторых отраслей промышленности (для прокатных станов
и пр.), достигает 4000—4500 л. с. (подача до 8700 л/мин) и более.
Насосы и гидромоторы этих типов имеют высокий объемный
к. п. д., который для большинства моделей достигает при опти-
мальных режимах работы значений 0,97—0,98. Многие зарубеж-
ные фирмы гарантируют для насосов с подачей 130—150 л/мин
объемный к. п. д. при давлении 35 МПа (350 кгс/см2) не менее
0,99; Общий к. п. д. этих насосов составляет примерно 0,95.
Различают гидромашины (гидромоторы и насосы) с наклон-
ным цилиндровым блоком и машины с наклонным диском, пони-
180
мая под первыми аксиально-поршневые гидромашины, у которых
ось ведущего звена и ось вращения ротора пересекаются (см.
рис. 57, а), и под вторыми — аксиально-поршневые гидромашины,
у которых ось ведущего звена и ось вращения ротора совпадают,
т. е. у таких гидромашин ведущее звено и ротор расположены
на одной оси (см. рис. 57, б). Помимо указанного, существует
много других конструктивных различий, однако они обычно не
являются принципиальными и предельные характеристические
возможности всех машин этого типа в большинстве случаев равно-
ценны.
Кинематической основой аксиально-поршневых гидромашин
является видоизмененный кривошипно-шатунный механизм
(рис. 56, а), цилиндр 3 в котором при повороте кривошипа 2
вокруг оси 1 совершает вместе со штоком 5 перемещения в верти-
кальной плоскости (в плоскости чертежа), двигаясь параллельно
самому себе и сохраняя осевое положение штока. Перемещение
поршня 4 при повороте кривошипа 2 на угол а — tat будет
х' = 7? — Я cos а = 7? (1 — cos а),
где 7? — длина кривошипа.
Очевидно, что полное перемещение (ход) h' поршня в цилиндре
при повороте кривошипа на угол а — 180° составит hr = 27?.
На это же расстояние переместится цилиндр вместе с поршнем
в плоскости чертежа.
Схема принципиально не изменится, если плоскость вращения
кривошипа повернуть (наклонить) вокруг вертикальной оси уу
относительно прежнего положения на некоторый угол £ меньший
90° С (рис. 56, б). В этом случае схема превратится в простран-
ственную, а следовательно, цилиндр для сохранения прежней
кинематики поршня (для обеспечения осевого положения штока)
должен перемещаться в пространстве по эллипсу, представляю-
щему собой след проекции центра шарнира, связывающего кри-
181
вошип 2 со штоком 5, на плоскость, перпендикулярную к оси
цилиндра.
При этом перемещение поршня
х = х' cos р = 7? (1 — cos a) cos р, (63)
где р — угол наклона плоскости вращения кривошипа.
Ввиду того, что перемещение цилиндра по подобной траекто-
рии практически неосуществимо, эту траекторию заменяют окруж-
Разрез окон а и b показан условно
Сечение окон условное
(Повернуто на ПО °)
Рис. 57. Схемы аксиально-порш-
невых насосов
R
ностью, описанной радиусом 7?, что вносит в расчет по данной
формуле некоторую неточность (нарушается, вследствие возник-
новения колебаний штока 5, синусоидальный закон перемещения
поршня).
Взяв вместо одного цилиндра несколько и разместив их равно-
мерно по кругу с расположением осей параллельно оси блока
цилиндров 2, а также заменив кривошип диском 5 (рис. 57, а),
ось которого наклонена относительно оси блока 2 на угол у =
~ 90° — р, получим принципиальную схему многопоршневой
машины (насоса или мотора) пространственного типа, вытеснители
которого выполняются либо в виде поршней, связанных с на-
клонным диском с помощью штоков 4 (рис. 57, а), либо в виде сво-
бодно посаженных плунжеров 2 со сферической головкой, кото-
рые прижимаются к наклонному диску 3 (рис. 57, б) с помощью
пружин 7 или давления подпиточных насосов (см. стр. 248).
182
Первые машины получили название аксиально-поршневых
гидромашин с наклонной люлькой или наклонным цилиндровым
блоком (рис. 57, а), вторые — аксиально-поршневых гидромашин
с наклонным диском (рис. 57, б). К этим основным двум типам
можно отнести практически все существующие конструкции
аксиально-поршневых гидромашин.
Конструктивно в аксиально-поршневой машине с наклонной
люлькой оси приводного вала и блока цилиндров расположены
под углом у друг к Другу, а в машинах с наклонным диском эти
оси составляют одну линию.
В машинах первого типа (рис. 57, а) поршни соединяются
с приводным наклонным диском с помощью шарниров (штоков) 4
(см. также рис. 58, б). Осевое усилие поршней, воспринимаемое
от приводной наклонной шайбы 5, преобразуется, вследствие
наклонного ее расположения, в крутящий момент, который затем
через карданные шарниры 6 передается на центральный вал.
Машины этого типа называются также машинами с передачей
крутящего момента на наклонную шайбу.
Крутящий момент в таких машинах снимается непосредственно
в месте его возникновения, т. е. — с приводной наклонной
шайбы 5; на поршни 3, как это будет показано ниже, этот момент
не передается. Через поршни в этой схеме передается на блок
цилиндров 2 лишь момент от сил трения и инерции (ускорения
или замедления). Поэтому поршни 3 скользят в цилиндрах здесь
практически без поперечных нагрузок, и их функции в этом случае
сводятся к герметизации цилиндров.
Благодаря этому фактически устраняется износ поршней и
цилиндров и обеспечивается высокий механический к. п. д. ма-
шины, а также хороший пусковой момент при работе машины
в режиме гидромотора. Однако угловое расположение приводного
диска и блока цилиндров и соответствующее ему распределение
действующих сил в приводном механизме требует применения
мощных опор и подшипников качения.
Конструктивно всякая машина этого типа (рис. 57, а) имеет
многоцилиндровый блок (барабан) 2, поршни 3 которого связы-
ваются при помощи шатунов 4 или иных средств с наклонным
диском (шайбой) 5, выполняющим в этой схеме роль кривошипа
ранее рассмотренной принципиальной схемы (см. рис. 56). Угол у
наклона этого диска относительно оси цилиндрового блока опре-
деляет для данного диаметра блока величину хода h поршня,
а следовательно и расчетную (геометрическую) подачу на-
соса.
Силовая и кинематическая связь цилиндрового блока 2 с при-
водным валом 8 осуществляется с помощью различных механи-
ческих средств, обеспечивающих приближенную синхронность
(равенство) угловых скоростей цилиндрового блока и вала. Наи-
более распространена связь с помощью двойного универсального
кардана 6 (см. стр. 195), который обеспечивает при соответствую-
183
щем выполнении практическую синхронность угловых скоростей
ведущего и ведомого (цилиндровый блок) валов.
В машинах второго типа (рис. 57, б) поршни (плунжеры) 2
непосредственно опираются на наклонную шайбу 3 через сфериче-
ские головки (см. рис. 66,6) или башмаки (рис. 58, а), а развивае-
мое ими при этом усилие вращения передается в результате
скольжения поршней по наклонной шайбе на блок цилиндров.
Крутящий же момент в этой машине передается через поршни
2
Рис. 58. Расчетные схемы поршней насосов с
наклонным диском (а) и наклонным цилиндро-
вым блоком (б)
непосредственно на ци-
линдровый блок и далее
на центральный вал.
В подобной схеме пере-
дачи момента поршни
работают на изгиб и
должны быть по проч-
ности рассчитаны на
передаваемый ими по-
лезный момент и момент
потерь, т. е. рассчитаны
на полный момент. В
частности длина I за-
делки поршней в цилин-
драх (см. рис. 66, в) долж-
на быть такой, чтобы
было устранено защем-
ление их и обеспечено
допустимое напряжение
сжатия материала.
Общим для обоих
конструктивных разно-
видностей рассматри-
ваемых машин является преобладающее применение торцового
распределения рабочей жидкости. Поскольку цилиндровый блок 2
у рассматриваемого насоса (рис. 57, а) вращается (цилиндры пере-
мещаются относительно корпуса), упрощается распределение
жидкости, которое обычно выполняется через серпообразные
окна а и & в распределительном золотнике 1 и каналы (отвер-
стия) 7 в донышках цилиндров блока 2 (на рисунке канал 7 пока-
зан условно). При работе насоса торец цилиндрового блока сколь-
зит по поверхности распределительного золотника (рис. 57, в).
При этом цилиндры попеременно соединяются с окнами а или b
золотника и через"них—с магистралями всасывания и нагнетания.
Поверхности торцов распределителя выполняются плоскими
(рис. 57) или сферическими (см. рис. 74, б). Преимуществом по-
следнего типа является то, что он не требует точного совпадения
осей скользящих поверхностей, а допускает наличие некоторой
несоосности (пересечения этих осей), чего не допускает плоский
распределитель. Однако последний обладает существенным пре-
184
( имуществом, заключающимся в отсутствии необходимости инди-
видуальной подгонки поверхностей скольжения.
i В нейтральных (мертвых) положениях цилиндров (в верхнем
и нижнем) отверстия 7 в донышках цилиндров (рис. 57, в) перекры-
ваются нижней и верхней перевальными (разделительными)
перемычками, расположенными между распределительными ок-
нами а и &; ширина s перемычек несколько превышает размер
отверстий 7 (t < s).
Применение насосов с наклонной люлькой (см. рис. 57, а)
предпочтительнее в открытом контуре и при высокой частоте вра-
щения. Насосы с наклонной шайбой (см. рис. 57, б) имеют пре-
имущества при очень высоких давлениях и быстрых процессах
переключения, которые здесь осуществимы благодаря малой массе
перемещающихся при этом деталей узла регулирования.
§ 45. Средняя подача насоса
; Расчетная средняя подача насоса равна объему, описываемому
поршнями насоса в единицу времени [см. также выражение (13)1
QT = qn = fhzn,
где q и п — рабочий объем и частота вращения вала насоса;
h, f и г — максимальный ход, площадь поршня и число
цилиндров.
Текущее значение хода поршня с учетом равенства р = 90°—у,
где у — угол, образованный осями цилиндрового блока и наклон-
ного диска, определится для первой схемы (см. рис. 57, а) по
выражению (63) (непараллельностыо штоков пренебрегаем):
х = Рд(1—cos a) sin у = -^-(1—cos a) sin у, (64)
где 7?д = ---радиус окружности заделки поршневых шату-
нов в наклонном диске;
a = at — угол поворота вала.
Максимальный ход h поршня получается при повороте от
нейтрального положения на угол at — 2л.
Учитывая, что cos 2л — 1, имеем h — 2R^ sin у, рабочий объем
1 одного цилиндра площадью f может быть выражен
' qUi = 2RJ sin у
и при z поршнях в блоке рабочий объем насоса
. q = 2RJz sin у = DRfz sin у.
Средняя расчетная подача насоса
QT = ?n= -%£- = ~DJzsitiy=~zDnslnyn, (65)
<в
где п = и со —частота вращения и угловая скорость насоса.
185
Соответственно для второй схемы (см. рис. 57, б) будем иметь
(допускаем, что точки контакта поршней находятся на их осях)
Л = 2/?б tg у = D6 tg у; QT = zD-n tgу,
где R6 и D6 — радиус и диаметр окружности на блоке, на ко-
торой расположены оси цилиндров.
Рис.^59. Схемы аксиально-поршневого насоса с карданным приводом (а и б)
и кривые пути, относительной скорости и ускорения поршня в цилиндре (в)
Подача регулируется изменением угла у наклона оси диска
относительно оси цилиндрового блока, которое осуществляется
либо изменением положения оси диска 3 относительно оси ци-
линдрового блока при неизменном положении последнего (см.
рис. 57, б), либо наклоном цилиндрового блока при неизменном
положении наклонного диска (см. рис. 57, а). В последнем случае
подвод и отвод жидкости к плоскому распределителю осуще-
ствляется через цапфы а поворотной люльки Ь, в которой разме-
щен цилиндровый блок (рис. 59, а).
Связь поршней 2 с наклонным диском 3 в насосе (рис. 57, б)
осуществляется пружинами 1.
Максимальный угол наклона насоса с цилиндровой люлькой
в каждую сторону от нейтрального положения составляет 25°,
а насоса с наклонным диском — 20°. От величины наклона
(угла у) зависит в значительной мере срок службы аксиально-
186
поршневых гидромашин. Так, например, при уменьшении этого
угла с 25° до 20° срок службы насоса повышается примерно
в 2 раза:
Введя безразмерный коэффициент (параметр) регулирования
Sin Утек
sin уП1ах ’
получим
выражение
подачи
регулируемых
на-
сосов первой схемы в виде
znDR sin Ymax е,
где утек и утах — текущий и максимальный углы наклона диска.
Часто представляется целесообразным секундную подачу на-
соса выразить через угловую скорость и характерный объем
(см. стр. 75):
QT = шоэ = £>д sin yzco, (66)
где w — характерный объем;
q d2 -
w = D*z sin v;
Од == 2/?д — диаметр окружности заделки шатунов в наклон-
ном диске (шайбе);
(о — угловая скорость.
Полагая sin у = у, последнюю формулу представим в виде
регулировочной характеристики насоса переменной
Qt ~
где kn — коэффициент усиления регулируемого насоса по рас-
ходу;
к=4"
С учетом утечек объемная характеристика насоса примет вид
(сжимаемостью жидкости и неполным заполнением насоса жидко-
стью при проходе камеры всасывания пренебрегаем)
Сэф = ~ г &Р,
где г — коэффициент утечек.
При работе гидромашины в режиме гидромотора частота вра-
щения его вала будет зависеть от подачи жидкости от источника
питания:
Q
и = об/мин
или угловая скорость
v Q 8Q
<о = — ~ н .— рад/с.
w d2 Dp? sin у r
187
Пример. Рассчитать величину хода поршней, рабочий объем и расчетную
подачу аксиально-поршневого насоса. Диаметр поршней d = 18 мм, диаметр
окружности расположения поршней в цилиндровом блоке D$ = 80 мм, угол
наклона диска у = 30°, число поршней z = 7, частота вращения п = 2500 об/мин.
Изменение угла между шатунами и осью вращения блока цилиндров, обуслов-
ленное кинематикой шатунного привода поршней, не учитывать (исходить из
синусоидального закона движения поршней).
Решение. Ход поршня (плунжера)
h ~ tg у = 8 tg 30° ~ 4,6 см.
Рабочий объем насоса
q = fhz = 1~nz = 3,24-4,6-7= 104,3 см3.
Расчетная подача насоса
QT ~ qn = 104,3-2500 = 260 750 см3/мин^ 260 л/мин.
§ 46. Кинематика и динамика
аксиальнопоршневых машин
д
Кинематика аксиально-поршневых гидромашин определяется
довольно громоздкими выражениями, которые при практическом
использовании приходится заменять более простыми аппрокси-
мирующими уравнениями. Эти уравнения получаются путем ана-
лиза упрощенных кинематических схем и зависимостей. Напри-
мер, при этих упрощениях не учитываются влияние на переме-
щение поршней конечной длины шатунов, дезаксиала (см. стр. 192),
угловой асинхронности цилиндрового блока и пр.
Скорость движения поршня. Перемещения поршня в цилиндре
аксиально-поршневой машины с наклонным блоком можно рас-
сматривать как сумму двух движений, одно из которых (часто
называемое основным) обусловлено лишь наклоном оси цилиндро-
вого блока относительно упорного диска й =
— cos а) ] и второе, обусловленное переменным угловым отклоне-
нием оси штока (шатуна) от оси цилиндра, а также асинхронностью
углового перемещения блока цилиндров относительно упорного
диска, определяемой кинематикой механизма связи цилиндро-
вого блока и наклонного диска.
Получение точных аналитических зависимостей между углом
поворота ведущего вала (или ротора гидромашины) и относитель-
ным перемещением поршня в цилиндре блока насоса в большинстве
случаев затруднительно вследствие громоздких вычислений, не-
оправдываемых практическими результатами, ввиду чего нами
будут рассмотрены приближенные зависимости (с учетом лишь
угла наклона диска), удовлетворяющие с достаточной прочностью
требованиям инженерной практики.
На основании выражения (63) перемещение поршня при угле
наклона упорной шайбы у = 90°—Р будет (нарушением парал-
188
лельности шатунов при 0 и влиянием асинхронности кардан-
ной связи пренебрегаем)
Г
h — х = R cos P (1 — cos a) = R sin у (1 — cos a), (67)
где R = Rд = ----радиус окружности центров заделки шату-
нов в найлоновой шайбе (диске) 5 (см. рис. 57, а и 59, б);
у = (90° — р) — угол между осями цилиндрового блока и
наклонной шайбы. '
При допущении синусоидального закона изменения скорости,
т. е. пренебрегая влиянием дезаксиала (см. стр. 192) и влиянием
конечной длины штоков (считаем шатун бесконечно длинным),
а также допуская, что угловая скорость цилиндрового блока и
вала (наклонного диска) равны <о2 = со1 = const, можно выра-
жение для мгновенной (текущей) скорости движения поршня
в цилиндре этой машины представить в виде
dx . da
«отн = ~аГ = Яя sin у sin a .
Поскольку
da
~dt
— со, можно написать
уотн “ RA«sinysina,
(68)
где a = (at — текущий угол поворота цилиндрового блока от
положения, соответствующего началу движения рас-
сматриваемого поршня;
w — угловая скорость вала.
Максимальный ход поршня
^шах = 2Яд Sin у = Од Sin у.
(69)
Из выражения (68) следует, что при постоянной угловой ско-
рости наклонного диска относительная скорость поршня в цилин-
дре представляет функцию угла поворота a = (at. За начало
отсчета угла а здесь, как и во всех последующих выкладках,
считаем положение цилиндра, когда для рассматриваемого поршня
начинается такт всасывания.
Максимальная скорость оОТ1. тах имеет место при угле поворота
а = (at, определяемом из уравнения
Ф;>тн
da
= 0 или 7?ли sin у cos а = 0.
Для соблюдения этого равенства значение cos а должно быть
равно нулю, что соответствует a = 90° и a = 270°; исходя из
этого имеем
^отн шах G>Rfl у.
189
Относительная скорость поршня аксиальных насосов обычно
не превышает при непрерывной работе насоса 3—3,5 м/с и при
периодической — 5 м/с.
Ускорение поршня. Ускорение любой точки поршня состоит
из ускорений относительно цилиндра и вращательного вместе
с последним движений, а также кориолисового ускорения (по-
следним пренебрегаем).
Ускорение относительного движения /отн может быть вычис-
лено при принятом допущении [см. формулу (68) ] по выражению
. d2X ^^000
Подставив из формулы (68) значение иотн и продифференци-
ровав, получим
/отн = Яд sin у cos а ; (70)
поскольку
da
dt
= со,
имеем
/отн = ^Д&)2 sin V cos a-
Ускорение будет максимальным при условии
ц/отн
da
= 0 или со2/?,, sin V sin a = 0.
Для соблюдения этого условия значение sin а должно рав-
няться нулю, что соответствует крайним положениям поршня
(ах = 0° и а2 = 180°):
/отн шах — — СО2/?Д Sin у.
Рассмотренное ускорение должно учитываться при расчете не-
разрывности потока жидкости во всасывающей трубе и в самом
цилиндре.
Ускорение любой точки поршня во вращательном (переносном)
движении направлено к центру вращения цилиндрового блока
и равно
/пер Ф Р»
где р — расстояние от выбранной точки до оси цилиндрового
блока.
Для точек, находящихся на оси поршня (р = /?б)
/пер Ю
На рис. 59, в показаны кривые пути (х), скорости (v0TH) и ус-
корения (/отн) поршня насоса с наклонным блоком, построенные
по приближенным уравнениям (при условии пренебрежения
190
углом между осью штока и осью поршня, т. е. при конечной длине
штока)
*
х = R„ sin V (1 — cos Ы);
t'oTH = X = = 7?Д(О sin Y sin co/;
/отн— * = = ядсо2 sin Y COS со/,
где R — радиус приводного диска (фланца) (см.
59, б).
При более точных расчетах учитывают влияние
ности штоков и асинхронность карданной связи. С
рис. 57, а и
непараллель-
учетом этого
получаем более сложные уравнения. При практических инженер-
ных расчетах ограничиваются приведенными выше упрощенными
уравнениями.
Силы инерции поршня. Силы инерции массы т поршня насоса
с наклонным блоком в относительном движении в цилиндре мо-
жно вычислить по уравнению
FOTH = — т/отн = — m^2R6 sin у cos ос. (71)
В насосах со свободно посаженными поршнями (с наклонным
диском (см. рис. 57, б) эта сила Ц70тн = учитывается при
расчете привода последних (упругости пружин и давления под-
питочных насосов).
Сила инерции массы т поршня во вращательном (перенос-
ном) движении (центробежная сила) рассчитывается по урав-
нению
^ц="г/пеР=/«Р(о2-
Допустив, что р (расстояние от оси вращения до центра тяжести
поршня) равно радиусу окружности, описываемой осью цилиндра
(последнее справедливо лишь для насоса, показанного на рис. 57, б),
можно написать
1ГЦ ~ mR бы2.
Для насосов с наклонным блоком (рис. 59, а) величина р
является переменной, однако при практических расчетах W„
D6
принимают р = -у--.
Наличие этой силы является специфической особенностью ра-
боты в аксиально-поршневой машине пары поршень—цилиндр:
эта пара вращается вокруг оси блока. Центробежная сила поршня
(а для схемы на рис. 59, а — и шатуна), возникающая при вра-
щении блока, нагружает поверхность цилиндра, причем величина
этой силы соизмерима с силой, обусловленной наклоном шатуна
191
к оси цилиндра. Вторым важным следствием вращательного
движения блока цилиндров является эффект центрифугирования
частичек загрязнителя жидкости (масла) в цилиндрах, приводя-
щий к тому, что на поверхности цилиндра осаждаются загрязняю-
щие частицы, повышающие износ пары.
Помимо того, эта сила будет воздействовать на механизм ре-
гулирования насоса с цилиндровым блоком (рис. 59, а), создавая
момент, действующий в сторону увеличения угла у наклона
люльки. Момент этой силы относительно оси поворота цапф а
M=W^—cos2 a sin у = т7?б<в2 ~ cos2 а sin у,
где I и L — координаты центра тяжести поршня с шатуном;
т — масса поршня и шатуна;
D6 и R6 — диаметр и радиус расположения осей цилиндров;
а = со/— текущий угол поворота блока цилиндров.
Суммируя момент, развиваемый центробежными силами всех
поршней, получим
X Мц = ГцD6sin у Scos2a,
2
где У cos2 a — сумма cos2 a для всех поршней ротора.
Принимая среднее значение величин
S cos2a = 4,
получим приближенное выражение момента от действия центро-
бежных сил:
Мu = т 4- ♦ со2 sin у.
4 Ъ о ’
Дазаксиал аксиально-поршневых гидромашин. Из рис. 59, б
следует, что при наклонном положении диска гидромашины
(у > 0) шатуны при вращении ротора будут перемещаться не
параллельно оси блока, а совершать качательное (колебательное)
движение, что отразится на кинематике движения поршней. Эти
колебательные движения шатунов обусловлены следующим.
Проекция окружности, на которой расположены на наклонном
диске центры сферических опор шатунов, на плоскость, перпенди-
кулярную оси цилиндрового блока, представляет собой при угле
наклона диска у > 0 эллипс. Большой радиус эллипса равен
обычно радиусу 7?д = окружности заделки шатунов в диске,
а малый радиус г <7?д зависит от угла у (рис. 60, а). В соответ-
ствии с этим центры заделок сферических опор шатунов в диске
192
будут перемещаться в этой плоскости по эллипсу, а центры порш-
ней при условии £)д — D6—по окружности радиусом R6 = n^.
Следовательно, при постоянной угловой скорости ведущего
вала будем иметь переменную (колебательную) в пределах каждого
оборота вала угловую скорость ведомого звена. Это угловое
рассогласование влияет на закон перемещения поршней в цилинд-
рах, а следовательно, и на закон подачи (увеличивает пульсацию
подачи).
Из рис. 60, а следует, что для текущих значений углов пово-
рота цилиндрового блока а — относительно нейтральной
Рис. 60. Схемы к расчету дезаксиала машины
оси, равных 90 и 270°,
угловые скорости ведомого и ведущего
валов выравниваются; максимальное рассогласование этих ско-
ростей имеет место при а = 0 и а — 180°.
Для уменьшения влияния на равномерность подачи насоса
наклона осей шатунов к осям цилиндров диаметр £>д окружности
расположения центров сферических опор шатунов в наклонном
диске часто выполняют больше диаметра D6 окружности осей
цилиндров в блоке (£>д > £>б), т. е. предусматривают так назы-
ваемый дезаксиал насоса, под которым понимают отношение
Рд
k ~ где Од и Об —диаметр окружности расположения сфер
шатунов в наклонном диске и диаметр окружности центров ци-
линдров в блоке.
Совмещение окружности радиуса R6 центров осей в блоке
цилиндров и эллипса с большим радиусом 7?эл, представляющего
собой проекцию окружности заделки сфер шатунов в наклон-
ном диске на плоскость, перпендикулярную оси блока, для слу-
чая £>д > D6 показано на рис. 60, б.
Величина h = R6— КЭлтт (г№ ^элтш — малый для данного
угла у наклона диска радиус эллипса), определяющая для дан-
ных значений RA и R6 и длины шатуна I (см. рис. 59, а) угол 0
отклонения шатуна, для углов а = (о/ = 0 и а = 180° будет
h = R6 — Rft cos у.
13 T. M. Башта
193
В соответствии с этим максимальное значение угла Р опреде-
лится (рис. 60, в)
sin р = = 7?б — /?д cos у
или
п . Яб — Rn cos у
(3 = arcsin--------,
где I — длина шатуна (между центрами заделок).
Для углов поворота вала а = at, равных 90 и 270°, имеем
о • Яд Яб
или — о = arcsin -----:---
Для максимального снижения колебаний шатунов значения /?д
и 7?б должны быть подобраны так, чтобы обеспечить условие
Яд cos у 7ч?д
или
2/?б
1 + cos у
В соответствии с этим наиболее рациональный дезаксиал на-
соса будет при условии
2
k = — =_______—______.
Яб 1 -р COS Утах
При дезаксиале, удовлетворяющем этому условию, колеба-
тельное движение поршней в цилиндрах практически обращается
в нуль и относительное движение их в цилиндрах приближается
к моногармоническому. Следовательно, для каждого значения угла
наклона у существует свое значение оптимального дезаксиала /?д,
при котором дополнительного движения поршней нет. Это позво-
ляет в насосах с нерегулируемой подачей (у = const) полностью
устранить это дополнительное движение. Однако для гидромашин
с регулируемой подачей не представляется возможным выбрать
из-за переменности значения у такое значение дезаксиала, при
котором дополнительная подача обращалась бы в нуль. Ввиду
этого для этих машин выбирают значение дезаксиала таким, чтобы
обусловленное им дополнительное перемещение Ah поршня при
наибольшем возможном угле у было равно по абсолютной вели-
чине максимальному изменению Ahmax, однако отличалось от
него по знаку.
Для насосов с у = 30° выбирают k = 1.055-?-1.072 и для ги-
дромоторов с у = 30° — k = 1,072.
194
§ 47. Механизм карданной связи
Типы карданов. В большинстве конструкций аксиально-порш-
невых насосов с наклонным блоком кинематическая и силовая
связи ведущего и ведомого валов осуществляются с помощью оди-
нарного (рис. 61, а\ см. также рис. 62, а) или двойного (рис. 61, б;
см. также рис. 57, а) карданов. Первый тип карданов (рис. 61, а)
обычно выполняет одновременно функции силовой и кинемати-
ческой связи, второй тип (рис. 62) осуществляет кинематичес-
кую связь, будучи нагружен лишь моментом трения блока цилинд-
Рис. 61. Кинематические расчетные схемы карданного механизма
ров, а также моментом инерционных сил. Первый тип кардана
принято называть силовым, второй — несиловым.
Одинарный (асинхронный) кардан (рис. 62, а) представляет
собой универсальный шарнир с двумя степенями свободы, обеспе-
чивающий возможность передачи вращения между двумя ва-
лами, оси которых пересекаются под некоторым углом. Равномер-
ное вращение входного вала /, связанного грибковыми шпонками 9
с цилиндровым блоком 5, преобразуется здесь в поступательное
движение поршней в цилиндрах блока. Такое преобразование дви-
жения происходит при помощи связанной с блоком через кардан 6
наклонной (качающейся) шайбы (диска) 2 с шарнирно заделанными
в ней шатунами 3 поршней 4. Входной (приводной) вал 1 (и соот-
ветственно цилиндровый блок), а также упорный диск 2 вращаются
в этой схеме вокруг разных осей, наклоненных одна относительно
другой на угол у. Возможность вращения этих деталей вокруг
разных осей обеспечивается наклонным диском 7, качающимся
при вращении вала вокруг осей 6 цапф, помещенных во втулках,
жестко закрепленных на упорном (наклонном) диске.
Благодаря применению грибковых шпонок цилиндровый блок
имеет некоторую возможность самоустанавливаться (выбирать
неперпендикулярность поверхности распределителя относительно
торца цилиндрового блока).
13* 195
Распределитель в большинстве случаев выполняется за одно
целое с крышкой 10. Первоначальный прижим блока к распреде-
лителю обеспечивается пружиной 8. Во время работы гидрома-
шины блок прижимается к распределителю гидростатическими
усилиями (см. стр. 225).
Рис. 62. Аксиально-поршневые насосы с асинхронным карданом (а)
и с шестеренной связью ведомого и ведущего валов (б)
Благодаря наличию кинематической связи упорного диска 7
с головками шатунов 5, основная часть приложенного к валу 1
внешнего момента затрачивается на поворот диска через асин-
хронный кардан, ввиду чего машины этого типа называются ма-
196
шинами с силовым карданом, хотя строго говоря это название от-
носится не к особенностям самого кардана, а лишь к кинемати-
ческой схеме самой машины. В машине этой схемы прочность
и конструкция кардана должны быть рассчитаны на передачу
всего рабочего момента (см. стр. 173). Момент же, затрачиваемый
на преодоление потерь, связанных с вращательным движением
цилиндрового блока 5 и передаваемый блоку через шпонки 7,
составляет небольшую долю от момента, нагружающего кардан.
а)
Рис. 63. Графики изменения угловой скорости со2 ведомого вала при постоян-
ной скорости (ot ведущего вала (а) и зависимости угла рассогласования Дф от
угла ср поворота вала (б)
Кинематика одинарного (асинхронного) кардана. Одинарный
кардан, который применяется в аксиальных насосах с передачей
силовых нагрузок (рис. 62 и 63, см. также рис. 61, а), обладает
свойством асинхронности, т. е. мгновенная угловая скорость дви-
жения ведомого вала (в данной схеме — наклонного диска 7)
при равномерном вращении ведущего вала / (и соответственно —
цилиндрового блока 5) будет неравномерной. Блок цилиндров
вращается с угловой скоростью, основная составляющая которой
равна скорости вращения вала, на которую накладываются со-
ставляющие, обусловленные этой асинхронностью.
Кинематика рассматриваемого кардана (см. рис. 61) описы-
вается известной из курса механики зависимостью между теку-
щим углом фх поворота ведущего (приводного) вала 1 (на рис. 62 —
блока 5) и углом поворота ведомого вала (на рис. 62—упор-
ного диска 7):
tg ф, = cos у tg ф2
или
tgT2=-g^-; <₽a = arctg-g^
(73)
где и <р2 — угловые координаты ведущего и ведомого валов;
у — угол между осями (цилиндрового блока и наклон-
ной шайбы).
197
Угловые скорости ведущего (блока) Wj и ведомого (упорного
диска) (о2 валов при применении этого шарнира связаны извест-
ной зависимостью
cos V
О ~ 1 ft * Л
2 1 cos*<p2 4- cos3 у sm3(p2
На рис. 63, а представлена зависимость угловой скорости
(о2 _= f (ф2) ведомого вала при постоянной скорости ведущего
вала (toj = const). Кривая показывает, что за каждый оборот ве-
дущего вала (и блока цилиндров) ведомый вал (здесь наклонная
шайба), расположенный под углом у к оси ведущего вала, дважды
опережает (при ф2 = 0 и ф2 = л) ведущий вал
него
и дважды отстает ( при ср2 =
от
cosy /
(со2 --
= (OiCOSy). Таким образом, максимальное (со2тах) и минималь-
ное (co2mln) значения угловых скоростей ведомого вала соответ-
ствуют
^2 max cos v ’ 0)2 min — COjCOSy.
WO If
Позиционная асинхронность валов определяется как разность
Дф = — Ф2 угловых координат ведомого (ф2) и ведущего
(фх) валов:
tg (ф2 ” Ф1) =
tgq>2 —tg?i (1 — cos у) tgcpa
I + tgcpj tg<p2 1 + cosy tg3<p2 *
На рис. 63, б показаны кривые углового рассогласования
Дф ” ф2—Фх приводного (ведущего) вала, отсчитываемого от
начального положения, в котором ось шарниров ведущей вилки
перпендикулярна плоскости расположения валов. Графики пост-
роены для различных значений угла у наклона диска.
График показывает, что рассогласование Дф повышается с уве-
личением угла у наклона диска, однако даже при максимально
возможном для этих машин значении этого угла у = 30° рассо-
гласование не превышает —4°, а при у — 20° рассогласование не
превышает 2°.
Рассмотренная асинхронность карданного сочленения обуслов-
ливает периодические колебания (пульсацию) угловой скорости
ведомого вала при постоянной скорости ведущего вала и соответг
ственно вызывает дополнительные к рассмотренным (см. стр. 202)
колебания подачи. Эти колебания, в свою очередь, вызывают зна-
чительные динамические нагрузки, обусловленные ускорениями,
которые могут сопровождаться вибрациями карданного сочлене-
ния. Ввиду этого кардан должен быть рассчитан как на статичес-
кие, так и на динамические нагрузки, которые при интенсивном
торможении вала гидромотора могут превысить статические на-
грузки. Поэтому при проектировании насоса с подобным шарнир-
198
ним приводом приходится ограничивать угол у и скорость вра-
щения вала.
Вследствие некоторой громоздкости карданной связи, гидро-
машины, в которых для передачи крутящего момента между валом
и кривошипным диском применен силовой карданный механизм,
строятся, начиная лишь с определенных размеров (мощностей).
Двойной (несиловой) кардан. Для устранения рассмотренной
асинхронности угловых скоростей ведущего и ведомого валов при-
меняют двойной универсальный кардан (шарнир) с двумя цент-
Ось длока
S)
Рис. 64. Конструк-
тивная (а) и рас-
четная (б) схемы
двойного универ-
сального кардан-
ного механизма
Ось дала
рами качения (рис. 64, см. также рис. 61, б). Этот кардан состоит
из двух последовательно соединенных одинарных карданов. При
условии, что оси входного и выходного валов образуют с осью
промежуточного шарнирного звена 2 одинаковые углы ух = у2 =
— ~~ (где у — угол между осями ведущего и ведомого валов),
а оси их шарниров параллельны и лежат в одной плоскости, этот
кардан практически обеспечивает синхронность движения ведо-
мого и ведущего валов. Последнее обосновано тем, что цикличес-
кие колебания угловых скоростей двух карданов находятся
в противофазе, благодаря чему можно обеспечить фактически
полную компенсацию пульсаций угловой скорости ведомого вала.
Иначе говоря «искажение» скорости в одном из шарниров практи-
чески компенсируется таким же «искажением», но с обратным
знаком во втором шарнире, в результате чего ведомый вал (в дан-
ном случае — цилиндровый блок) будет вращаться почти с той же
угловой скоростью, что и ведущий вал (вал насоса).
В действительности имеет место некоторая асинхронность,
которая периодически изменяется по углу поворота а веду-
щего кардана, становясь равной нулю при а = 0, а = 90,
а = 180° и т. д.
Конструктивно двойной кардан состоит из валика 2 (рис. 64),
на концах которого запрессованы пальцы с надетыми на них
199
сегментами 1 и 3. Сегменты входят в пазы буксы 6 блока цилинд-
ров 7 и буксы 5 вала (наклонного диска 4).
На рис. 65 представлена конструктивная схема машины с этим
карданом 4, получившим название «несилового кардана», поскольку
через него в этих машинах передается при установившемся ре-
жиме лишь момент, необходимый для преодоления потерь на тре-
ние, а в переходных режимах — дополнительно момент на пре-
одоление сил инерции вращающегося блока 1. Рабочий же момент,
Рис. 65. Конструктивная схема аксиально-поршневой гидромашины
с несиловым карданом
соответствующий мощности машины (Л4 = Л^со), создается здесь
в результате вытеснения жидкости поршнями 2, связанными шату-
нами 3 с наклонным диском 5, выполненным заодно с приводным
валом 6.
Связь между текущими углами поворота приводного вала 6
и блока 1 цилиндров выражается (рис. 64) известной из курса
механики зависимостью
, . COS Vo
(74)
где ф2 =
<Pi =
со2/— угол поворота цилиндрового блока;
—уГол поворота ведущего (приводного) вала;
(01—угловая скорость ведущего вала.
Дифференцируя это уравнение по времени Z, получим угловую
скорость <02 цилиндрового блока (ведомого вала):
COS Vo . 2 1 C0S 9 1 — 1
---— S1HZ 4------— COS2 ф!
cos yx 1 cos y2 ’
со2 = ю1
где у — угол между осями кардана и приводного вала;
?2— Угол между осями кардана и блока цилиндров.
200
Из приведенной формулы следует, что при ух =)= у2 имеет
место некоторая разница в текущих углах поворота ведомого
(ф2 = <о/)' и ведущего (<рг) валов ф2 ф Фп а также разница в их
угловых скоростях со2 =£ (о1 при (Oi = const. Следовательно,
в этом случае машина с двойным несиловым карданом будет ра-
ботать, с точки зрения кинематических соотношений, как машина
с одинарным (асинхронным) карданом, однако с несколько мень-
шим влиянием асинхронности, поскольку в выражениях tg фг =
— cos у tg ф2 [равенство (73) ]
[равенство
. I COS Ya
И tg <₽2 = tg <Рх
ииэ у 1
Рис. 66. Расчетные схемы аксиально-поршневого насоса с наклонным
диском
/^7л\ 1 COS Ya
(74)1 множитель много меньше, при прочих равных усло-
виях, множителя cosy.
Поскольку при этом возникают дополнительные силы в шар-
нирном узле привода, а также дополнительные пульсации давле-
ния, необходимо выдержать условие ух = у2 = -тр при котором
будут обеспечены примерные равенства а2 и <о2 со1,
т. е. двойной кардан становится синхронным.
Из рис. 64 следует, что это условие обеспечивается при
Sin У! =
г sin у; у2 = у — yv
Из приведенного следует, что двойной кардан может быть
полностью синхронным лишь для нерегулируемых насосов.
Для обеспечения полной синхронности вращения ведущего
и ведомого валов во многих случаях применяют между наклон-
ным диском и блоком цилиндров зубчатую связь (см. рис. 62, б),
осуществляемую с помощью двух конических шестерен а и &.
Насосы с подобной связью цилиндрового блока с наклонным диском
201
допускают высокие (до у — 45°) углы наклона осей блока и диска.
Однако такие гидромашины пригодны для работы лишь на сравни-
тельно небольших частотах вращения вала (п < 3000 об мин)
и не могут быть регулируемыми.
§ 48. Равномерность подачи (потока) жидкости
Подача жидкости аксиальным насосом имеет, как и подана
радиальным насосом (см. стр. 116) неравномерный, пульсирующий
характер. Она слагается из подач отдельных поршней, совершаю-
щих рабочий цикл в текущий момент (соединенных с полостью
нагнетания)
п
С = -----г ---------tqn=
Z —1
где Q и — текущие значения подач насоса и одного поршня;
2 4-1
п ~ ----число цилиндров, соединенных в данный момент
с полостью нагнетания.
Мгновенная подача одного поршня насоса с наклонным бло-
ком приближенно выражается
Я = Voruf ” sin Y sin (75)
f nd2
где f = -j---площадь поршня;
dx
vOTH= ——текущее значение относительной скорости поршня
в цилиндре [см. выражение (68)1.
Приведенное выражение справедливо для насоса с синхрон-
ным (двойным) карданом, обеспечивающим равные угловые ско-
рости ведущего и ведомого валов ~ а>2 = w = const.
Текущая максимальная подача одним поршнем соответствует
максимальной относительной скорости (при = 90е):
Vtnax — У у
где vmax = о)/?д sin у — максимальная скорость поршня.
Мгновенная (текущая) подача насоса определится суммой по-
дач всеми поршнями, находящимися в нагнетательной полости:
„(о/ sin 7 sin 04 /?„со/ sin у sin а2 ~г •
<=п
= RpUf sin у (sin а1 Ц- sin az
• ) = sinv У 51па(, (76)
I- 1
где au a2 и т. д. — текущие углы поворота осей цилиндров,
относительно исходной плоскости отсчета
(относительно оси, при совпадении с кото-
рой поршни находятся в крайних положе-
ниях);
п — число цилиндров, находящихся одновре-
менно в полости нагнетания.
202
Из формулы (76) следует, что неравномерность подачи акси-
ального .насоса, обусловленная неравномерностью подач отдель-
п
ных поршней, определяется характером функции sin и
приближенно изображается кусочно-непрерывной функцией в
виде отрезков синусоид.
Так как закономерность, выражающая мгновенную подачу
одного поршня и описываемая уравнением (75), не отличается от
уравнения (50), сведения, приведенные на стр. 116 применительно
к радиальным насосам, справедливы и для рассматриваемых здесь
аксиальных насосов. Графики суммарных подач поршней при ус-
ловии синусоидального закона их перемещения в зависимости от
угла поворота вала были рассмотрены на рис. 34, б.
Следует отметить, что в некоторых конструкциях насосов
предусматривается выравнивание потока (подачи) насоса различ-
ными конструктивными мерами. В частности, применяют метод
размещения цилиндров в блоке, а головок шатунов — в шайбе
на разных радиусах (дезаксиал насоса), а также метод «сгуще-
ния» поршней, заключающийся в неравномерном угловом распо-
ложении осей цилиндров в блоке. Применяют, кроме того, комби-
нированный метод, в котором одновременно осуществлены ука-
занные конструктивные меры. Параметры, определяющие подачу,
подбирают так, чтобы в момент максимальной угловой скорости
наклонной шайбы уменьшение подачи компенсировалось увели-
ченным значением диаметра того поршня, который в этот момент
обеспечивает наибольшую часть подачи, или увеличением ра-
диуса, на котором он расположен в блоке.
§ 49л Особенности расчета насоса с наклонным диском
При расчетах аксиальных плунжерных насосов с наклонным
диском (см. рис. 57, б) и опорой поршней через сферическую го-
ловку (рис. 66, б) и промежуточный башмак (см. рис. 58, а) до-
пускают, что при вращении блока цилиндров точки контакта
плунжеров с наклонным диском находятся на осях цилиндров,
что соответствует расчетной схеме, приведенной на рис. 66, а.
В этом случае все расчеты производятся исходя из диаметра D6
окружности, на которой расположены оси цилиндров блока.
В соответствии с этим максимальный ход h поршня со сферической
головкой (см. рис. 57, б) принимают с некоторой погрешностью
равным h == D6 tg у, где D6 — диаметр окружности блока, на
которой расположены центры цилиндров. При этом выражение (65)
для расчета средней теоретической подачи такого насоса примет
вид
Q1 = qn=^-D6\.gyzn. (77)
203
Соответственно для рассматриваемых машин (см. рис. 57, б)
уравнения перемещения х, скорости v0TH и ускорения /отн поршня
[см. уравнения (67), (68) и (70)1 при повороте относительно поло-
жения, соответствующего началу нагнетания, на угол а. = со/,
будут
х = ябtgy (1 —cosa)= tgу(1 —cosa); (78)
Чэтн
dx ___ Dq
dt
ю tg у sin a;
_______•• d2x
/отн ~~ X J/2 —
CO2 tg у cos a.
(79)
(80)
Ход, скорость и ускорение поршня машины с наклонной шай-
бой представляют чисто гармонические колебания.
Текущая подача гидромашины при повороте на угол a = wt
относительно положения, соответствующего началу нагнетания,
определится суммой подач поршней, одновременно находящихся
в напорной полости:
QT = 2 <7« = ® tg v S sin a-
(=1 4 z
где n — число цилиндров, соединенных в текущий момент с по-
лостью нагнетания.
За начало отсчета угла а — со/ считаем положение цилиндра,
при котором для рассматриваемого поршня начинается такт вса-
сывания.
Текущая подача изображается кусочно-непрерывной функ-
цией в виде отрезков синусоид (см. рис. 34, б).
При нечетном числе цилиндров расчетная подача
QT — D^y cos (4 -a.
л - ф \ 4 1
4 sin -Т
2л
гдеср = — центральный угол между двумя соседними цилин-
£
драми;
— угол поворота цилиндра, вступившего в область нагне-
тания последним.
Существенным недостатком конструкции с точечным контактом
(со сферической опорой) (рис. 66, б) является ограниченность
величины давления жидкости, поскольку вследствие точечного кон-
такта сферической поверхности опоры поршня с плоскостью
обоймы наклонной шайбы, в месте контакта возникает высокое
204
напряжение. Величина напряжения о определяется по формуле
Герца .
„ з Г PJP2
ст==0,388 |/
V ri
где У — нормальное усилие в точке контакта;
COS Otmax
Е — модуль упругости;
Г1 — радиус сферической поверхности.
§ 50. Предельные частоты вращения насоса
Согласно уравнению мощности (см. стр. 91) с целью уменьше-
ния габаритов и массы насоса выбирают возможно высокие (пре-
дельные) частоты вращения машины. Различают предельные ча-
стоты вращения насоса при работе его в режимах с подпиткой
и в режиме самовсасывания.
Режим с подпиткой. При определении частоты вращения насоса
для работы с подпиткой от внешнего источника, обеспечить на-
дежность всасывания не трудно, поскольку достаточное давление
на входе в насос гарантирует в этом случае полное (100%) на-
полнение жидкостью насоса.
При режиме с подпиткой часто преднамеренно выбирают
более высокое давление на входе, чем это требуется для заполне-
ния насоса. Это позволяет разгрузить узлы насоса, совершающие
в данный момент обратный ход, от сил инерции движущихся масс.
Обычнр/давление аксиально-поршневых насосов берут примерно
равным 10 кгс/см2. В случае закрытой гидросистемы (см. стр. 447)
подача подпиточного источника должна быть достаточной для ком-
пенсации всех утечек в гидроприводе.
В том случае, если это требуется по температурному режиму,
часть или вся направляемая в насос жидкость проходит через
охладительное устройство.
Однако допустимые высокие частоты вращения лимитированы
не только требованием обеспечения бескавитационной работы на-
соса, но и возможностью местного перегрева движущихся частей,
в результате которого понижается вязкость жидкости (масла) и
становится тоньше масляная пленка на трущихся деталях гидро-
машины, что может вызвать выход ее из строя. Этому способствуют
значительные динамические нагрузки, которым эти детали под-
вергаются при высоких скоростях движения. Так, например,
поршни, которые в аксиально-поршневых машинах с наклонной
люлькой разгружены в радиальном направлении от сил давления
жидкости, с увеличением частоты вращения прижимаются под
205
действием центробежной силы к наружным стенкам цилиндров.
При высоких частотах вращения нарушается также устойчи-
вость блока цилиндров; одной из причин этого служит динами-
ческий опрокидывающий момент Мд, обусловленный центробеж-
ными силами F массы т поршней (рис. 67). По достижении неко-
торой высокой частоты вращения осевое усилие пружины а
цилиндров блока не будет обеспечивать надежный прижим его
к распределителю, в результате может произойти опрокидывание
Рис. 67. Схема действия на насос
намического опрокидывающего
мента
блока. Поэтому частота враще-
ния типовых аксиально-порш-
невых насосов (давление до
32МПа или 320 кгс/см2) обычно
не превышает 4000 об/мин. При
этой скорости температура
масла в системе должна под-
держиваться не выше 80° С.
Для уменьшения центробеж-
ной силы поршни обычно вы-
полняются полыми (см. рис. 58).
Однако при этом мертвое про-
странство (объем) насоса повы-
шается на величину пустот в
поршнях.
Режим самовсасывания. В режиме самовсасывания предельная
частота вращения устанавливается при работе в открытом цикле,
т. е. когда насос сам всасывает жидкость из открытого бака и по-
дает потребителям, откуда она снова возвращается в бак (см.
рис. 186, б). Бак служит резервуаром и уравнительной емкостью,
компенсирующей возникающую разность объемов всасывания
и слива, обусловленную асимметричностью потребителей, в частно-
сти— работой дифференциальных гидроцилиндров (см. рис. 207, а).
В случае открытой гидросистемы рекомендуется, когда это
возможно, устанавливать насос ниже уровня жидкости в баке
и максимально укорачивать всасывающую магистраль, избегая
размещения на ней гидравлических сопротивлений (фильтров,
тройников и пр.), а также всемерно улучшать условия потока.
При такой схеме давление на входе в насос может быть равно
или близким к атмосферному.
Предельная частота вращения самовсасывающего насоса ори-
ентировочно определяется расчетным путем и уточняется опытной
проверкой. Обозначив подачу при нулевом давлении через QT,
гидравлическое сопротивление всасывающего канала (включая
местные сопротивления) — L, абсолютное давление в баке — рб
и абсолютное давление на торцевой поверхности поршней, нахо-
дящихся во всасывающей полости, через рп, находим (без учета
влияния кинематики поршней) в первом приближении
QT = L Vрб — рл.
206
Если рп равно нулю, что соответствует отрыву потока жидкости
от поршня в цилиндре, то получим выражение для предельной
подачи '
Qnp = i ИРб*
Отсюда гидравлическое сопротивление
т ________________________ Qnp
Величину предельной подачи Qnp экспериментально опреде-
лим, измерив ее при непрерывном увеличении скорости вращения
Рис. 68. Графики подачи насоса
насоса. Сперва подача изменяется примерно по расчетному урав-
нению (14):
2лГ ’
где q — максимальный рабочий объем;
со — угловая скорость.
При повышении частоты вращения до некоторого значения
возникает кавитационный шум (точка а) и в точке b нарушается
пропорциональность зависимости подачи от скорости (рис. 68, а):
(о > 2л —.
я
Точка b определяет предельную скорость и, соответственно, —
предельную подачу для данных условий.
Ввиду того, что отклонение кривой подачи от линейной зави-
симости происходит постепенно, установить абсолютное значе-
ние предельной подачи в виде математической зависимости не
207
представляется возможным. Кроме того, при работе это услож-
нено вследствие наличия в рабочих жидкостях гидросистем раст-
воренного воздуха, выделение которого начинается задолго до
достижения давления уровня насыщенных паров этих жидкостей.
Ввиду этого, предельную допустимую частоту вращения п в прак-
тике устанавливают с некоторым запасом. Так, для распростра-
ненных самовсасывающих аксиально-поршневых насосов с на-
клонной люлькой при давлении в баке 1 ата п принимают равным
2500 об/мин.
Практически, при уменьшении угла наклона люльки от мак-
симального, равного 25°, до 15°, частота вращения /zmin может быть
увеличена до nmax, при которой подача не будет превышать вели-
чины при наклоне люльки 25° и номинальной скорости. В соответ-
ствии с этим частота вращения при угле наклона люльки 15°
составит
__ tg 25°
^max mm ^150 •
Однако при работе насоса в режиме с подпиткой подобное
повышение предельных частот вращения в зависимости от угла
наклона люльки недопустимо.
Режим с наддувом питающих баков. Улучшить наполнение
самовсасывающего насоса жидкостью и, соответственно, повысить
допустимую частоту вращения можно путем повышения давления
в расходном герметичном (отделенном от атмосферы) баке. Это
достигается наддувом газа при некотором избыточном давлении.
В отличие от рассмотренной системы с подкачкой при этом спо-
собе не требуется специальный насос подкачки.
Подача фнад (рис. 68, б) при питании с наддувом определится
уравнением
О — О 1/
Ч'над ЧГатм I/ п
' Ратм
(81)
где QaTM — допустимая подача при атмосферном давлении
в баке.
Этот способ широко применяется в самолетных гидросистемах,
в которых атмосферное давление при подъеме самолета на высоту
недопустимо понижается.
В стационарных гидросистемах обычно принимают давление
наддува, равное 0,7 кгс/см2 сверх атмосферного. Повышение над-
дува в системе, не имеющей механического разделения газовой
и жидкостной сред, связано с повышением содержания в жидкости
растворенного воздуха (см. стр. 43) и повышением интенсивности
выделения воздуха (кавитации) в зонах гидросистемы с понижен-
ным давлением, сопровождающимся шумом высокой частоты.
208
§ 51. Процесс всасывания
25. Влияние на всасывание мертвого объема
Процесс всасывания всякого насоса, в том числе и аксиально-
поршневого, в значительной степени зависит от отношения по-
лезного объема к мертвому объему в цилиндре, под которым по-
нимается объем жидкости в последнем при утопленном поршне.
Для цилиндра, изображенного на рис. 69, а, к мертвому объему
относится объем, отмеченный точечной штриховкой, а к полез-
ному— объем, отмеченный штрих-пунктиром (на пути h). С точки
Рис. 69. Схема мертвого объема (а) и параллелограмм сил, действующих
на поршень гидромашины (б)
$)
зрения снижения влияния мертвого объема на всасывание приме-
нение полых поршней нежелательно.
При расчете насоса по этому параметру требуется определить
теоретическую величину перепада давлений в цилиндре во время
перемещения поршня при перекрытом входе в цилиндр на вели-
чину полного хода (Ji) при условии, что цилиндр заполнен газом
(воздухом) под атмосферным давлением (перетечками воздуха
пренебрегаем). Поскольку изменение объема цилиндра происхо-
дит с большой скоростью, при расчете исходим из адиабатного
изменения состояния газа, выражаемого уравнением
-to
pvk = const,
где k —• показатель адиабаты;
р и v — давление и удельный объем газа.
Максимально возможное при этом падение давления в полости
перекрытого цилиндра достигается (негерметичностью пренебре-
гаем), когда поршень совершает путь h от К — К до Н — Н при
максимальном угле наклона утах люльки. При этом принимаем,
что в положении Д — К торца поршня газ в цилиндре находится
под атмосферным давлением.
14 Т. М. Башта 209
Адиабатное изменение состояния газа описывается уравнением
Ратм^мер = Pl (VMep ^пол) = Р1^сум COOSt,
где Усум Упол 4" ^мер суммарный объем цилиндра в вы-
двинутом положении поршня;
яс[2 о
Упол ™ "j- — полезный объем цилиндра в выдвинутом
положении поршня;
VMep = Усум — Ктол — мертвый объем цилиндра.
В качестве примера рассмотрим цилиндр с параметрами:
Кгюл ~ 7 см3; Умер = 10 см3. Для этого случая абсолютное да-
вление в цилиндре в конце хода всасывания поршня при началь-
ном атмосферном давлении составит
Vk 1-101’4
—; :ер 4fe- = ~0,46 кгс/см2.
При уменьшении угла у наклона блока условия всасывания
насоса, как это видно из последнего уравнения, значительно
ухудшаются вследствие уменьшения полезного объема (уменьше-
ния хода h) и соответственно — увеличения мертвого объема.
Рассмотрим далее возможное повышение давления воздуха
в напорной полости закрытого цилиндра при ходе поршня на
сжатие. Если давление воздуха в полости цилиндра при положе-
нии его поршня в Н—Н равно атмосферному, а поршень переме-
щается в направлении К—К (сжатия), то максимально возможное
повышение давления при сжатии заключенного в цилиндре воздуха
по адиабате определится как
ратмУсум ===: P2VМер ==: COHSt.
Подставив принятые выше значение полезного и мертвого
объемов, получим абсолютное давление сжатия в конце хода
поршня
17I,
рг — --j 4 —2,1 кгс/см2 (или избыточное 1,1 кгс/см2).
Отсюда максимально возможное отношение давлений для слу-
чая адиабатного процесса и принятых прочих параметрах составит
6 = = 2,1.
Ратм Р1
17
Для изотермического процесса (&=1) имеем Р2='|л’=1,7 кгс/см2
или избыточное давление 0,7 кгс/см2. Пользуясь этими соотно-
шениями, можно определить путем измерения давления при сжа-
тии газа величину мертвого объема.
Из приведенного выше следует, что при перекачивании воздуха
из емкости с постоянным абсолютным давлением 1 кгс/см2 в закры-
тую магистраль, насос будет подавать при k = 1,4 воздух до тех
210
пор, пока абсолютное давление в магистрали не повысится до
2,1 кгс/рм2, после чего подача воздуха прекратится. Последнее
обусловлено тем, что воздух, находящийся в цилиндре в конце
хода поршня в мертвом объеме и сжатый до этого давления, рас-
ширяясь в дальнейшем, при движении поршня в сторону вса-
сывания, до исходного атмосферного давления, заполнит весь
объем (Умер + Упол). В этом случае воздух в цилиндре будет
при движении поршня в одну сторону сжиматься до абсолютного
давления 2,1 кгс/см2 и при движении поршня в другую сторону —
расширяться до исходного атмосферного давления, и так далее.
Следовательно, при наличии в момент запуска в полости на-
гнетания давления рнаг >1,1 кгс/см2 и при атмосферном давле-
нии воздуха на всасывании запуск этого насоса неосуществим.
В равной мере при бесконечно большом объеме воздуха в напорной
магистрали (соответствует случаю соединения этой магистрали
с атмосферой) абсолютное давление на стороне всасывания
данного насоса теоретически может быть понижено лишь до
0,46 кгс/см2, после чего движение воздуха прекратится.
В действительных условиях имеет место не рассмотренные
крайние случаи. Давление воздуха во всасывающей полости ци-
линдра в реальных условиях будет в конце всасывающего хода
поршня всегда несколько ниже атмосферного вследствие всасы-
вающего действия поршня, ввиду чего нарушение режима запуска
может произойти в воздушной среде при давлении в нагнетатель-
ной полости насоса ниже расчетной величины 1,1 кгс/см2. Для
обеспечения запуска в этих условиях необходимо соединить на
короткое время нагнетательный трубопровод с атмосферой (на
время, необходимое для отсасывания воздуха из всасывающего
трубопровода и заполнения нагнетательной полости жидкостью).
Кроме того, выше был рассмотрен теоретический случай
адиабатного процесса при абсолютной герметичности системы.
Очевидно при недостаточной герметичности минимальное расчет-
ное давление воздуха на стороне всасывания не будет достигнуто,
а следовательно, указанный расчетный вакуум (абсолютное да-
вление 0,46 кгс/см2) на всасывании не может быть создан. В связи
с этим следует отметить, что качественная, с точки зрения требова-
ний гидравлики, герметизация может совершенно не удовлетворять
требованиям по герметизации пневматики.
Объемные потери на стороне всасывания могут быть умень-
шены путем заполнения корпуса насоса жидкостью (маслом)
перед первым пуском. Наносимая при этом на скользящие поверх-
ности масляная пленка улучшает герметичность соединения.
Следует также отметить, что объемные потери на напорной
стороне сказываются на запуске положительно, поскольку утечки
воздуха в этом случае будут облегчать перекачку его из стороны
всасывания и способствовать созданию требуемого для всасыва-
ния жидкости перепада давления. С учетом этого, для облегчения
запуска насоса обычно оставляют открытым напорный трубопро-
14* 211
вод до тех пор, пока насос, перекачав воздух из полости всасыва-
ния, начнет подавать жидкость.
Запуск упрощается, если насос размещен ниже уровня
жидкости в баке. При этом устраняется необходимость заливки
насоса. Помимо этого детали насоса предохраняются .от коррозии.
Запуск насоса следует производить при максимальном угле
наклона блока, что облегчает образование требуемого разреже-
ния в цилиндре благодаря повышению полезного и уменьшению
мертвого объемов.
Следует также отметить, что вследствие сжимаемости жидко-
сти, величина отношения мертвого объема к полезному влияет
также и на объемный к. п. д., в особенности при высоком давле-
нии напора (см. стр. 377).
26. Всасывание в переходных процессах
При высоких скоростях регулирования подачи насоса на про-
цесс всасывания отрицательно влияют силы инерции столба жид-
кости во всасывающей магистрали (включая утопленную ее часть
в баке). Давление рин, соответствующее силе инерции столба
жидкости в трубе, определяется по выражению
Рин 4zuw 4ш121у Аи 1у /QOX
Рин — — — -^2 — — gt '
и
где Рин = tnw — сила инерции массы т жидкости при ускорении
ее в переходных режимах;
I — длина всасывающего трубопровода;
у — удельный вес жидкости;
t — время изменения угла наклона люльки в про-
цессе регулирования подачи;
Ап — повышение скорости жидкости при регулиро-
вании;
g — ускорение силы тяжести;
du
w = ---ускорение столба жидкости.
Из этого уравнения следует, что давление рин, необходимое
для ускорения столба жидкости, прямо пропорционально при всех
прочих равных условиях длине всасывающего трубопровода,
а также ускорению столба жидкости w = При некоторых
высоких значениях параметров I и w возникает кавитационный
режим, сопровождающийся шумом и возможным разрушением
насоса,
в
Пример. Определить дополнительное давление, соответствующее силе инер-
ции столба жидкости в трубе. Время изменения угла наклона люльки насоса от
исходного до максимального значения составляет t = 0,15 с; длина всасывающей
магистрали I ~ 250 см; максимальное повышение скорости жидкости при регу-
лировании и — 100 см/с; удельный вес жидкости у = 0,00136 кг/см3.
212
Пользуясь приведенным уравнением (82), находим потребное дополнитель-
ное давление во всасывающем патрубке насоса для создания заданного уско-
рения столба жидкости
/у Au 250 0,00136*100 Л оой . 2
Рни = =----98ьо:15- = 0,226 кгс/см*.
Очевидно для обеспечения бескавитационной работы насоса в заданном
динамическом режиме на всасывании должен быть запас давления в 0,226 кгс/см2
сверх давления при установившемся режиме работы насоса.
§ 52. Крутящий момент на валу машины
Осевое усилие давления жидкости на поршень (см. рис. 58)
развивает при расположении блока цилиндров и наклонного
диска под углом крутящий момент, передаваемый тем или иным
способом на центральный вал машины. В аксиально-поршневых
гидромашинах с наклонной цилиндровой люлькой (см. рис. 57, а
и 58, б) давление жидкости на поршни создает крутящий момент
на наклонном диске, а в машинах с наклонной шайбой (см. рис. 66
и 58, а) — крутящий момент на наклонном блоке цилиндров.
В насосах этот момент преодолевается приводным двигателем,
и в гидромоторах — используется для привода гидромеханизмов.
При подаче жидкости под давлением в цилиндры блока машина
будет работать в режиме гидромотора, развивая момент на выход-
ном валу. При приложении внешнего момента к входному валу
гидромашины она будет работать в режиме насоса. Расчетные за-
висимости для обоих режимов использования гидромашины будут
общими.
Из рассмотренной выше исходной кинематической схемы
(см. рис. 56, а) следует, что расчетный крутящий момент, разви-
ваемый силой Р = pf давления жидкости р на один поршень
площадью Д будет
М = Рр — PR sin а ~ pfR sin а,
где р = R sin а — плечо приложения силы.
При наклоне плоскости вращения кривошипа вокруг верти-
кальной оси уу на угол 0 меньше 90° (см. стр. 181) выражение для
крутящего момента примет вид (угловым кинематическим отклоне-
нием оси шатуна от оси цилиндра пренебрегаем)
М — Рр = PR cos р sin а = PR sin у sin а —
— pfR sin у sin а,
где у = 90 — р.
При р — 90 угол у — 0 и крутящий момент М — 0.
Изложенное справедливо и в применении к расчетной схеме
гидромашины с наклонным блоком цилиндров бескарданной схемы,
приведенной на рис. 69, б, где представлен параллелограмм сил
для одного поршня такой гидромашины. Усилие Р ~ pf, разви-
213
ваемое давлением р на поршень площадью /, может быть раз-
ложено в этой схеме сил на составляющие (см. такж$ рис. 58, б):
параллельную оси приводного вала (нормальную плоскости
наклонного диска)
N = Р cos 7 = pf cos у
и радиальную (перпендикулярную этой оси)
F = pf sin 7.
и
Произведение величины последней составляющей на перемен-
ное плечо р приложения ее к наклонному диску определяет мгно-
венный момент одного поршня гидромашины. Величина плеча
р = R sin а зависит от текущего угла вращения а = со/, перио-
дически увеличиваясь и уменьшаясь по углу а по закону синуса.
Поскольку плечо р, на котором приложена рассматриваемая ра-
диальная составляющая, изменяется по закону синуса, то по
этому же закону будет изменяться в пределах одного оборота
и момент, развиваемый одним поршнем.
В соответствии с этим текущий крутящий момент, развиваемый
одним поршнем,
М ~ Fp sin а = pfR sin 7 sin a.
Этот момент достигает максимума при со/ —
Мгаах = PfR SIH у.
И
Полный крутящий момент гидромашины является суммой
моментов отдельных поршней цилиндров, находящихся на стороне
давления. При этом следует учесть, что в машинах с нечетным
числом цилиндров число поршней, расположенных на стороне
давления, периодически колеблется от (z + 1) до 1/2 (г — 1).
Вследствие этого момент гидромотора, как и подача насоса, носит
пульсирующий характер.
Средний расчетный момент одного поршня с учетом, что область
давления распространяется лишь на угол поворота 180°,
Мер = 4- PfR sin у.
В соответствии с этим средний момент для аксиально-поршне-
вой машины с z цилиндрами
мг = 4- pfRz sin у.
Учитывая, что рабочий объем насоса (см. стр. 185)
q = 2Rfz sin у,
214
выражение для среднего значения крутящего момента примет
вид
г 2л
Равномерность (колебания) крутящего момента определится
практически теми же зависимостями, что и развномерность подачи
(см. стр. 202).
Рассмотренная расчетная схема справедлива и для гидромашин
с наклонным диском (см. рис. 66, а). Крутящий момент /И, разви-
ваемый одним поршнем, равен произведению нормальной к оси
поршня составляющей Т = Р tg у усилия Р давления жидкости
на поршень и переменного плеча р — 7?б sin
М = Тр — Р tg sin (о/.
Суммарный момент, развиваемый поршнями всех цилиндров,
находящихся в рабочей зоне,
Мрез = PRa tg Y 2 Sin
n
Следовательно, результирующий момент изменяется с пе-
2л
риодом — .
Нормальная к плоскости наклонного диска сила N нагружает
узлы машины (подшипники и пр.), а также определяет величину
контактного напряжения на головке плунжера и перекашивает
его. При сферической головке плунжера (соответствующей реаль-
ной конструкции), контакт которого с диском происходит в точке b
(см. рис. 69, б), смещенной относительно оси поршня на величину с,
трение, обусловленное этой силой, поворачивает так же поршень
вокруг его оси. Точкой разложения сил в этой схеме является
центр а сферической головки поршня. В этом центре приложена
и тангенциальная составляющая Т, развивающая крутящий мо-
мент и одновременно изгибающая поршень. Через центр а сферы
и точку b контакта проходит нормальная сила N реакции на-
клонного диска.
Величина силы N зависит при всех прочих равных условиях
от угла наклона диска у и практически не зависит от текущего
угла а ~ (dt поворота блока. Расчеты показывают, что эта сила
может достичь большой величины, могущей ограничить срок
службы упорного подшипника.
У конструкции гидромашины с наклонным диском (см.
рис. 58, а) нормальная сила N — ' реакции опоры больше,
а с наклонной люлькой (см. рис. 58, б) меньше (7V = Pcosy),
п лсР
чем сила давления жидкости Р = р на поршень, ввиду чего
угол наклона в первой схеме обычно меньше (со20°), чем во вто-
рой (оэ25°).
215
Пример. При заданном давлении рн = 20 МПа (200 кгс/см2) в., напорном тру-
бопроводе аксиально-поршневого насоса (см. рис. 69, б), диаметре поршня d' =
= 15 мм, количестве поршней г = 9 и угле установки наклонного диска у = 30°
рассчитать максимальную и минимальную величины суммарной составляющей
сил давления жидкости, воспринимаемых наклонным диском. Колебания давле-
ния во внутренних полостях насоса не учитывать.
Решение. Искомая составляющая сил давления, развиваемая одним плун-
жером, определяется (см. стр. 214 и рис. 58, б)
N — Р cos у =
nd2
рц cos у =
4
3,14-0,0152
4
20-106 cos 30° = 2380Н (238 кгс).
Минимальное (гтщ) и максимальное (zmax) количества плунжеров, нахо-
дящихся в полости нагнетания (см. стр. 117),
^min —
Максимальная (Ттщ) и максимальная (Ттах) величины суммарной осевой
составляющей
T^min = 4У = 4 2380 = 9520Н (952 кгс);
Ттах = 5-2380 = 11900Н (1190 кгс).
Изменения рассматриваемой составляющей происходят практически мгно-
п
венно с периодом а = — .
§ 53. Разгрузка поршня от действия боковых сил
Рассмотренная тангенциальная составляющая Т давления
жидкости вызывает перекос поршня в цилиндре (см. рис. 66),
в результате чего повышается его трение, а также увеличивается
контактное напряжение, могущее привести к смятию материала
цилиндра и поршня. Для предотвращения этого должно быть обе-
спечено соответствующее соотношение длины L поршня до точки а
приложения тангенциальной силы Т и длины I заделки его в ци-
линдре при максимально выдвинутом положении.
Для расчета пользуемся уравнением равновесия моментов от
действия тангенциальной силы Т = Р tg у:
Отсюда максимальное напряжение (?тах в точках контакта
поршня с поверхностью цилиндра
6Ptg-y (l — -у) 6PtgY (-у-- -у)
?max /2 / •
216
Для разгрузки поршней от действия боковых сил и улучшения
условий работы опорной торцовой поверхности, цилиндровый
блок часто выполняют из двух частей (рис. 70, а): левая (внешняя)
часть 2 является наставкой, в которой размещают толкатели 1,
связывающие рабочие поршни 3 с наклонной шайбой, и правая
(внутренняя) часть 4 — собственно цилиндровый блок, в котором
размещены рабочие поршни 3. Благодаря сферическим поверх-
ностям головок толкателей /, контактирующих с рабочими порш-
£7
б)
Рис. 70. Схема разгрузки
поршня гидромашины от дей-
ствия боковых сил (а) и
конструкции насосов с раз-
груженными поршнями (бив)
нями 3 (рис. 70, б), и надежному направлению их в отверстиях на-
ставки 2, цилиндры блока 4 и рабочие поршни 3 разгружены от
боковых сил.
Наставка 2 насоса, посаженная на валу на шпонке, имеет г
отверстий, в которых перемещаются толкатели /, передающие
движение рабочим поршням <?, размещенным в цилиндрах блока 4,
Последний посажен на вал свободно и прижимается к торцу рас-
пределительного диска давлением рабочей жидкости и пружиной
(на чертеже не показана). Момент, создаваемый силой Т(рис. 70, а),
передается через толкатель 1 на наставку 2 и далее — на подшип-
ники 6 вала. На поршень 3 и блок 4 этот момент не передается.
Связь наставки 2 с цилиндровым блоком 4 осуществляется с по-
мощью пальца 5, через который блоку 4 передается момент, до-
статочный для преодоления сил трения между его торцовой по-
верхностью и распределительным диском.
На рис. 70, в приведена схема подобного насоса, в котором уст-
ранен точечный контакт толкателя 1 с наклонным диском и рабо-
чими поршнями 5. Контакт толкателей с наклонной опорой (дис-
217
ком) осуществлен в этом насосе через опорные башмаки 9; с рабо-
чим поршнем 3 толкатель контактирует через сферическую
опору Ю. Наставка 2 и цилиндровый блок 3 связаны с валом 7
с помощью шпонок 8 и 11,
§ 54. Распределение жидкости
В большинстве конструкций аксиальных роторно-поршневых
насосов применяется торцовое распределение (см. рис. 57), осу-
ществляемое при помощи двух серпообразных окон а и Ь, выпол-
ненных на упорно-распределительном диске (золотнике), с кото-
рыми поочередно соединяются при своем круговом движении ци-
линдры через отверстия 7 в своих донышках. Эти окна соединены
каналами с соответствующими полостями (нагнетания и всасы-
вания) насоса. Опорные торцовые поверхности распределитель-
ного диска изготовляются плоскими и, реже, сферическими.
Распределительный золотник большинства насосов закреплен
неподвижно в корпусе насоса, а распределительный торец блока
цилиндров при работе насоса непрерывно вращается. За первую
половину оборота блока относительно оси симметрии распредели-
теля каждый цилиндр попеременно будет соединен с всасыва-
ющим окном, а за вторую половину оборота — с нагнетательным
окном.
27. Выбор перекрытий распределителя
и способы снижения пульсации давлений
Геометрические формы распределителя насоса выбирают так,
чтобы при всех положениях блока нагнетательные окна герметично
отделялись от всасывающих и каждый из цилиндров мог быть со-
единенным только с одним из них. Иначе, для создания герметич-
ности распределительной пары должно быть обеспечено надежное
разделение в каждый момент полостей высокого и низкого давле-
ний. Для этого в мертвых положениях поршней отверстия 7
в донышках цилиндров (см. рис. 57) перекрываются нижней и
верхней перевальными (разделительными) перемычками между ок-
нами а и Ь, ширина s которых несколько превышает размер этих
отверстий, т. е. обеспечивается условие s > при котором ци-
линдр перед концом хода поршня отсекается от полости, с которой
он был соединен. Надежность этой отсечки определяется величиной
перекрытия (s—/), в пределах которого необходимо переместить
ось цилиндра (повернуть блок) относительно неподвижного зо-
лотника, для того чтобы окно цилиндра после отсечки одного из
окон золотника пришло к кромке другого окна.
Практически ширина этой перемычки s выбирается равной
(1,1—1,2) /, где t — диаметр (или большая ось, если отверстие не
круглое) канала в донышке цилиндра, соединяющего цилиндр
с распределительным окном. В насосах одностороннего вращения
218
это превышение выполняется лишь с одной стороны в направле-
нии движения.
Для плоского распределительного золотника (см. рис. 57, в)
это условие обеспечивается выбором значений углов ф! и <р2
поворота блока из нейтрального положения до соединения ци-
линдра с одним из окон а или Ь. Обычно эти углы равны между со-
бой, хотя в некоторых насосах они различны. В общем случае
распределители насосов имеют небольшое положительное пере-
крытие, равное ф 1°, и распределители гидромоторов ср
1,5ч-2°. В практике верхнюю и нижнюю перевальные пере-
мычки s между окнами а и b распределительного золотника обычно
выполняют одинаковыми и располагают симметрично относительно
нейтральной (вертикальной) его оси.
Рациональный выбор размеров перевальных перемычек и
определение правильного положения окон по углу симметрии
имеет большое значение для рабочего процесса насоса. Однако
в ряде случаев, как и в ранее рассмотренном цапфовом распределе-
нии, в конструкцию вводится с целью устранения пульсаций да-
вления асимметричность (см. стр. 139).
В описываемых здесь насосах с торцовым (плоским) распреде-
лением различают угол упреждения (см. также стр. 136), на
величину которого следует повернуть цилиндровый блок, чтобы
цилиндр после отсечки окна золотника пришел в нейтральное
положение, а также угол запаздывания ср2, на который должен
быть повернут блок, чтобы цилиндр переместился из этого ней-
трального положения в положение, соответствующее началу его
соединения с противоположным окном золотника.
Углы запаздывания и упреждения выбирают в основном из
условия возможного устранения как вакуума, так и компрессии
жидкости и обеспечения минимального перепада давления между
полостями цилиндра и того окна распределительного золотника,
с которым цилиндр в текущий момент соединен, так как в против-
ном случае возникнут вредные, даже опасные для гидросистем
«забросы» давления в цилиндрах (см. также стр. 476).
Наличие большого угла запаздывания в зоне всасывания при-
водит к тому, что жидкость начнет поступать в цилиндр лишь
после того, как поршень совершит некоторый ход. В этом случае
при значительном угле запаздывания в цилиндре разовьется столь
высокий вакуум, что произойдет «вскипание» жидкости — интен-
сивное выделение из нее растворенного воздуха, а это может су-
щественно ухудшить всасывание.
Соображения и рекомендации по этому вопросу, приведенные
выше (см. стр. 137) для насосов с цапфовым распределением, рас-
пространяются и на рассматриваемое здесь торцовое распределе-
ние. Как и у насосов с цапфовым распределением, для устранения
«забросов» давления жидкость, находящаяся в цилиндрах, пре-
дварительно сжимается на участке перехода от всасывания к на-
гнетанию; при переходе от нагнетания к всасыванию давление
219
плавно снижается. В нереверсивных машинах это может быть
достигнуто угловым смещением напорного (или всасывающего)
окна до положения, при котором перемещение поршня вызовет
требуемое повышение (или понижение) давления.
Определим угол смещения окна а цилиндра, при котором
будет достигнуто требуемое сжатие жидкости в цилиндре. Поло-
жение окна будем определять углом <р = <at поворота блока ци-
линдров от начального положения (рис. 71, а), где ю — угловая
скорость вращения вала насоса, a t — время. За начальное при-
fl
Рис. 71. Схемы плоского распределительного зо-
лотника аксиально-поршневых машин
мем такое положение блока, при котором рассматриваемый ци-
линдр вступает в такт нагнетания. Скорость поршня выразится
приближенным соотношением (см. стр. 189)
v0TiI = sin у sin ф,
где 7?д = — радиус окружности, на которой расположены
центры головок шатуна в наклонном диске вала
(см. рис. 57, а);
у — угол наклона оси блока к оси ведущего вала.
Если при ф = 0 цилиндр не сообщается ни с зоной всасыва-
ния, ни с зоной нагнетания, то уравнение неразрывности для
замкнутого объема жидкости в цилиндре запишется в виде
^/?д(о sin у sin ф =
V dp
Е * dt
AQ,
(83)
где f — площадь сечения поршня;
Е — модуль упругости жидкости;
V — объем жидкости в цилиндре при ф — 0.
Левая часть данного уравнения определяет расход, обуслов-
ленный движением поршня; первый член правой части — расход,
обусловленный сжимаемостью жидкости, и второй член — утечки
из полости цилиндра.
220
Учитывая скоротечность процесса сжатия и малость утечек,
последним членом в уравнении (83) можно пренебречь; в резуль-
тате будем иметь
/со/?д sin у slncp = -^---J-.
Интегрируя это равенство и учитывая, что при ср = со/ = О,
значение р = рвс, где рвс — давление во всасывающей магист-
рали насоса, получаем
—//?flsinycoscp = — р — /Т?д81пу — ~рас (84)
или
! EfRK sin у (1 — cos ср)
Р Рас i у
Последнее соотношение представляет собой зависимость да-
вления в замкнутой полости цилиндра от угла <р = со/ поворота
ротора.
Переписав уравнение (84) в виде
cp = co/=arccos[l (р-Рвс)]
и подставив в него вместо р значение давления рн в нагнетатель-
ной магистрали, получим выражение для угла ср1; на величину
которого должен переместиться замкнутый объем от мертвого
положения до положения начала открытия нагнетательного окна
(в предположении нулевого начального перекрытия):
ср, = arccos [ 1 - (ри - Рвс)] •
При переходе этого цилиндра из области нагнетания в область
всасывания условия, с рассматриваемой точки зрения, более
благоприятны, поскольку в этом случае из области нагнетания
переносится лишь жидкость в объем вредного пространства.
Интегрируя уравнение неразрывности, для этого случая
сг>- V dp
/юУ?д81Пу81ПСр = -г--^,
где V — объем жидкости в цилиндре при со/ = л с начальным
условием, что при at ~ л значение р = рн, получаем
EfRA sin у (1 — cos g>)
Р Рн у'
ИЛИ
ср = со/ = arccos (Рн - Рвс) - 1 ] • (85)
221
Учитывая, что ф > О, т. е. ф = со/ — а + л, и подставив
вместо р в равенство (85) значение давления во всасывающей маги-
страли, получаем величину угла а2, на который должен пере-
меститься замкнутый объем V' от нейтрального (мертвого) поло-
жения до положения начала открытия всасывающего окна (при
условии, что сообщение цилиндра с зоной нагнетания прекратится
в точке ф = (at = л):
Г У' п
а2 = arccos 1 -——-•— (Р» — Ржг) •
L sin Y v м .
Для предотвращения ударного действия обратного потока
жидкости, наблюдаемого в момент соединения цилиндров с по-
лостью нагнетания, т. е. для обеспечения безударного перехода
цилиндра из полости всасывания в полость нагнетания в узле
распределения обычно выполняют дроссельные канавки малого
сечения («усы») (рис. 71, б), через которые цилиндры в начале хода
нагнетания предварительно соединяются до прихода к основному
окну с полостью нагнетания. Вследствие дроссельного (тормоз-
ного ) действия этих канавок происходит относительно плавное
дозаполнение цилиндров жидкостью и повышение давления (сжа-
тие) заключенной в них жидкости до давления нагнетания. При
этом снижаются «забросы» давления (гидравлические удары) и
шум насоса (см. стр. 475).
Длина указанных канавок определяется углом 6 = 84-10°,
ширина — 1—2 мм. Канавки часто выполняют сужающимися по
глубине и по ширине; расстояние между ними обычно выбирают
так, чтобы было обеспечено условие s > Однако в некоторых на-
сосах для обеспечения более высокой плавности соединения и сни-
жения шума принято s < t (рис. 71, в). В этом случае цилиндр
соединяется через эти канавки с полостью нагнетания еще до
прихода в нейтральное положение, т. е. когда он находится еще
в полости всасывания. При этом будет обеспечена максимальная
безударность (плавность) повышения давления в цилиндре до
давления нагнетания. Очевидно при этом условии повышаются
утечки жидкости.
Следует отметить, что поскольку перепад давления в канавке
в этом случае равен рабочему давлению (200—300 кгс/см2), в ка-
навке развиваются высокие скорости течения жидкости, сопро-
вождающиеся разрывом сплошности потока (кавитацией) и соот-
ветственно кавитационным разрушением (эрозией) поверхности
перемычки впереди «уса».
На рис. 72 приведена индикаторная диаграмма аксиально-
поршневого насоса, у которого на перевальных перемычках рас-
пределителя выполнены узкие канавки на углах, обеспечиваю-
щих нулевое перекрытие (s = /; см. рис. 71, б). Испытываемый
насос получал питание от вспомогательного (подпиточного) на-
соса с давлением рпод == 3 кгс/см2, обеспечивающим относительно
надежное заполнение (наполнение) цилиндров. Однако «заброс»
222
р^гс/сп
100
50
Рис. 72. Индикаторная диаграмма акси-
ально-поршневого насоса (я=2000 об/мин;
давления в цилиндре в момент соединения его с нагнетательной
полостью и в этом случае достигал практически двукратного зна-
чения номинального рабочего давления (—95 кгс/см2 при номи-
нальном рп = 50 кгс/см2).
Оценивая рассмотренные
способы снижения пульсации
давлений, следует указать,
что первый способ (соответ-
ствующим выбором углов за-
паздывания и упреждения)
является более эффективным,
однако применим лишь в не-
реверсивных насосах.
28. Расчет окон питания
узла распределителя
Размер окон 7 в донышке
цилиндров (см. рис. 57) вы-
бирают так, чтобы наиболь-
шая скорость рабочей жидко-
сти при полностью открытых нагнетательных окнах не превышала
7,5—8 м/с (для нерегулируемых насосов). Площадь всасываю-
щего окна выбирают такой, чтобы скорость рабочей жидкости в
нем не превышала в 2,2—2,5 раза средней скорости поршня.
Практически для самовсасывающих насосов скорость жидкости
во всасывающих каналах распределителя не должна превышать
2—3 м/с.
Для уменьшения скорости в окне необходимо увеличивать его
площадь, что приводит к уменьшению площади непрорезанной
части днища цилиндра (заштрихована точками на рис. 73, а) и
соответственно — к уменьшению усилия, прижимающего блок
цилиндров к распределительному золотнику. Для снижения по-
следнего фактора отверстия (окна) 7 в донышках цилиндров
(рис. 73, а\ см. также рис. 57) обычно имеют в сечении удлиненную
изогнутую форму, причем ширина их сг равна ширине с окон а
и b в распределительном диске, а длина t — диаметру d цилиндра;
кривизна равна кривизне окон в распределительном диске. Часто
также допускают t± > d (рис. 73, б). Обычно площадь окна пита-
ния выбирается равной 0,45—0,5 площади самого цилиндра.
Центральный угол а0 охвата окна в этом случае превышает угол ац
охвата окружности цилиндра на 4—6°.
В общем случае скорость жидкости umax в этом окне и относи-
тельная скорость поршня иотн при условии неразрывности струи
связаны уравнением
^шах® = ^отн^цил»
где s и «цил — площадь окна и площадь сечения цилиндра.
223
В отличие от течения через обычные каналы движение жидкости
через окна в донышке цилиндров имеет пульсирующий характер
(за каждый оборот вала поток жидкости в окнах блока 2 раза из-
меняет свое направление). Кроме того, поток жидкости переме-
щается в отверстии, которое, в свою очередь, движется вместе
с блоком по окружности.
Ввиду этого сопротивление движущихся окон потоку значи-
тельно превышает потери в каналах обычных местных сопротивле-
ний. Причем опыт показывает, что коэффициент сопротивления £
Рис. 73. Схемы к расчету золотника аксиально-поршневого насоса
этих окон повышается с увеличением частоты вращения в квадра-
тичной зависимости. Значение его для насосов распространенных
размеров и частот вращения 2000—4000 об/мин находится в пре-
делах Z = 2,6 4-3,5 [2].
Ширину с распределительных окон а и b в золотнике (см.
рис. 57, в) обычно выбирают равной 0,5d, а ширину уплотняющих
поясков b1 = b2 = 0,125d. Однако учитывая неравномерный из-
нос этих поясков, обусловленный различием их окружных скоро-
стей, можно принимать -у- = 0,8.
Материал для изготовления скользящей пары распределитель-
ного золотника должен иметь максимальную твердость. Лучшие
результаты показали детали с бронированными поверхностями
(твердость HRC 1500—2400). При столь высоких твердостях ча-
стицы загрязнителя, попав в зазор между поверхностями, разма-
лываются, не вызывая процесса резания этих поверхностей.
29. Силы, действующие в распределительном узле
Срок службы и герметичность аксиально-поршневой гидрома-
шины во многом зависят от сил, действующих в распределитель-
ном узле, ввиду чего правильное определение усилий, действую-
224
Цизс нй стыке между Цилиндровым блоком и золотниковым рйо
1ределительным диском, а также гидростатическое уравновешивав
ше этих сил, являются общей проблемой для всех типов этих
шд ромашин.
Расчет сил, действующих в распределительном узле, затруд-
нен, поскольку цилиндровый блок находится под сложным дей-
ствием: 1) сил давления жидкости в цилиндрах и в стыковом за-
юре между поверхностями контакта блока и золотника; 2) сил
трения поршней о стенки цилиндров и в шаровых опорах шату-
Рис. 74. Схемы к расчету торцового распределителя аксиально-поршневого
насоса
нов; 3) боковых составляющих сил давления, вызванных угло-
вым смещением блока по отношению к наклонной шайбе (диску);
4) центробежных сил поршней; 5) сил, обусловленных динамиче-
ской и статической несбалансированностью цилиндрового блока.
В регулируемых насосах действуют, кроме того, силы, обуслов-
ленные инерцией люльки механизма регулирования (см. стр. 393).
Из всех указанных основными являются силы, обусловленные
давлением жидкости в цилиндрах и в стыковом зазоре, поэтому
в первом приближении при расчетах учитывают лишь эти силы.
Цилиндровый блок 2 гидромашины с торцовым распределением
жидкости с неподвижным золотником 1 (рис. 74, а, см. также
рис. 57) находится под действием: а) сил Fnp давления жидкости
на донышки цилиндров, соединенных с нагнетательным окном а,
которые прижимают его к распределительному диску (золотнику /),
и б) противодействующих (отжимающих) им сил F0T3K давления
жидкости в рабочем окне айв стыковом зазоре, образованном
рабочей прверхностью (зеркалом) этого диска и торцом цилиндро-
вого блока. При этом должно быть обеспечено Fnp > FOTHC .
Площадь каждого цилиндра (на рис. 73, а отмечена точечной
штриховкой), на которую действует давление жидкости, прижи-
мающее блок цилиндров к распределительному диску (золотнику),
равна разности площадей поперечного сечения цилиндра диа-
метром d и канала 7, прорезанного в его донышке; с помощью
канала цилиндр соединяется с окнами распределительного диска.
15 Т. М. Башта 225
Кроме того, в большинстве конструкций цилиндровый блок при-
жимается к распределительному диску также усилием пружины 8
(см. рис. 62, а), однако это усилие выбирается наименьшим и_при
расчете действующих сил им обычно пренебрегают.
Недостатком пружинного поджима блока является то, что
усилия поджима сохраняются независимо от угловой скорости
блока постоянными. Вследствие этого, при небольших скоростях
и особенно в момент пуска машины смазка выдавливается_из ра-
бочего зазора усилием пружины.
Рис.75. Схемы к расчету торцового распреде-
лители
кет
Торцевая поверхность блока b цилиндров (рис. 74, б) должна
при всех нагрузочных режимах плотно прилегать к сферической
поверхности зеркала распределителя, причем силы, прижимающие
блок к зеркалу и силы, отжимающие его от зеркала, должны быть
сбалансированы так, чтобы блок цилиндров имел на распредели-
теле плавающую опору (плавающий подшипник).
Силы давления жидкости, действующие на цилиндровый блок
(в направлении отжатия его от золотника), складываются из сил,
действующих по площади распределительных окон ан b золот-
ника (см. рис. 57, б), ц сил давления в зазоре, образованном кон-
тактирующими поверхностями блока и золотника (по площади
поясков шириной Ьг и bj) (рис. 75, а).
Расчет в целях упрощения обычно проводят лишь примени-
тельно к полости высокого давления (пренебрегая противодавле-
нием во всасывающей полости). Кроме того, площадь каналов 7
питания цилиндров блока (см. рис. 73) учитывается полностью,
хотя в создании «раскрывающей» силы она не участвует.
Очевидно, чтобы не произошло «раскрытия» распределителя
(отжима блока от распределительного золотника), сила давления
жидкости на непрорезанную площадь донышек цилиндров (на
рис. 73, а показана точечной штриховкой), прижимающая блок
226
к зеркалу золотника, должна быть больше противодействующих
«раскрывающих» сил давления жидкости в стыковом зазоре. Иначе
говоря, Должно быть обеспечено некоторое регламентированное
превышение усилия, прижимающего цилиндровый блок к распре-
делительному диску (золотнику), над силами, отжимающими
блок. Однако это превышение должно быть таким, чтобы контакт-
ное давление и силы трения не превосходили допустимых зна-
чений.
Определение действующих здесь сил усложняется тем, что
вследствие эксцентричного действия сил давления жидкости в ци-
линдрах на блок, торцовые поверхности устанавливаются под
некоторым углом друг к другу, что отражается на распределении
давления в стыковом зазоре. Блок при этом совершает колеба-
тельные движения, обусловленные периодическим колебанием
результирующей прижимающей силы, которая к тому же 'дей-
ствует асимметрично (см. также стр. 494).
Вследствие эксцентричности точки приложения нагрузки
поршней на блок цилиндров, на последний действует опрокиды-
вающий момент (см. рис. 75, б). При четном числе z цилиндров
число поршней, находящихся под рабочим давлением жидкости,
постоянно и равно z/2. Следовательно, нагрузка, действующая
на золотник от сил давления жидкости в цилиндрах, здесь практи-
чески постоянна и изменяется положение центра результирующей
силы. При нечетном же числе цилиндров цилиндровый блок на-
ходится в равновесии под действием периодически изменяющихся
по величине и эксцентрично приложенных к нему сил. Изменение
величины силы обусловлено тем, что в этом случае число поршней,
находящихся одновременно под рабочим давлением жидкости,
меняется при вращении блока от - до - - •
Следовательно, при нечетном числе цилиндров на цилиндро-
вый блок действуют силы, изменяющиеся во времени в зависи-
мости от угла поворота блока относительно распределительного
диска. В соответствии с этим максимальное (Fnp тЭТ) и мини-
мальное (ГПрш1п) значения силы прижима изменяются в течение
z-f-1
цикла в отношении у-, причем в момент изменения числа
цилиндров, участвующих в прижатии блока к распределительному
золотнику, положения точки приложения этой силы изменяются
скачкообразно. Нетрудно видеть, что одному циклу изменения
положения этой точки соответствует угол поворота цилиндрового
блока, равный —.
Поскольку равнодействующая сила давления жидкости в ци-
линдрах не совпадает с осью цилиндрового блока (центр давле-
ния колеблется вокруг оси поворота наклонной шайбы), создаются
условия для возникновения жидкостного (гидродинамического)
клина, способствующего «раскрытию» уплотнительного узла.
15* 227
В равной мере несимметричной является нагрузка на цилиндро-
вый блок и со сторбны стыкового зазора. Часть поверхности рас-
пределительного диска прорезана окнами а и b (см. рис. 57, в),
в которых действуют давления жидкости, соответствующие ра-
бочей и нерабочей полостям насоса. На контактной (не прорезан-
ной окнами) части поверхности действует среднее давление жид-
кости, затекающей в зазор между распределительными диском
и цилиндровым блоком из окон а и Ь. В частности, для насоса,
питающегося без дополнительного подпора, жидкость под давле-
нием будет находиться лишь в одном из окон, соединенном-с на-
гнетающей полостью; во втором же окне, соединенном с всасываю-
щей полостью, будет вакуум.
В соответствии с указанным, суммарная площадь поясков ши-
риной и &а, расположенных по обе стороны распределительных
окон и непрорезанных перемычек между этими окнами, должна
быть такой, чтобы были уравновешены силы давления жидкости
на донышки цилиндров. Очевидно, что обеспечить постоянное
в течение этого цикла отношение этих сил можно лишь в том слу-
чае, если максимальное и минимальное значения сил, отжимаю-
щих блок от диска, будут изменяться в таких же пределах, как
и изменение прижимающей силы:
Fот max z + 1
Fот mln 2 — 1
Анализ показывает, что это условие достаточно обеспечивается
при угле (см. рис. 57, в)
2р = -£-(з----
г 2г \ г /
Учитывая, что площадь цилиндровых окон (каналов) 7
(см. рис. 57, б и 73, а) входит в выражение баланса действующих
сил со знаками как плюс, так и минус, а также пренебрегая влия-
нием давления в окне всасывания золотника и допуская, что дав-
ление в стыковом зазоре действует лишь со стороны окна нагнета-
ния (т. е. действует лишь на половину поверхности контакта;
рис. 75, б), условие равновесия сил, действующих на цилиндро-
вый блок, можно приближенно представить в виде (усилием пру-
жины, поджимающей блок, пренебрегаем)
^пр == ^отж» ^Рн/ц Рн/ок Ч о~ Рср/конт>
где /’др и Готж — усилия, действующие в направлениях прижа-
тия и отжатия блока;
п — минимальное число цилиндров, одновременно
соединяющихся с окнами нагнетания;
/ц — площадь сечения цилиндра;
228
fOK — площадь распределительного окна золотника
(на рис. 75, б отмечена крестообразной штри-
ховкой);
/конт— площадь контакта цилиндрового блока с рас-
пределительным золотником со стороны рабо-
чего окна;
/ко нт
/ок>
где /кол — площадь кольца, описанного радиусами Rx =
____________ и П ____ ^2 ♦
“2 и ^4 " 2 ’
f —n(j^ r>2\ _ я (Р1 — D2) .
/ кол — Л! (Ад А4/ — >
*
рн —давление нагнетания;
рср — среднее давление в стыковом зазоре.
При этом мы пренебрегаем давлением во второй половине сты-
кового зазора (со стороны окна всасывания), а также давлением,
обусловленным затягиванием (переносом) жидкости, движущейся
по поверхности цилиндрового барабана.
Когда давление жидкости в окне золотника, соединенном с не-
рабочей полостью, выше нуля, что, в частности, имеет место при
принудительном питании насосов жидкостью под давлением или
при работе гидромоторов с высоким давлением слива жидкости
из нерабочих полостей (при дроссельном регулировании скорости),
необходимо в баланс сил включить действие давления в этом окне.
Очевидно, для обеспечения надежного контакта требуется,
чтобы суммарная сила давления жидкости, действующая на ци-
линдровый блок со стороны поршней, превышала противодей-
ствующую ей силу давления жидкости в стыковом зазоре, стре-
мящуюся расширить (раскрыть) этот зазор, т. е. должно быть
соблюдено условие
пр
отж>
> Рн/ок I 2 Рср/КОНТ*
(86)
Превышение сжимающей силы над «раскрывающей» не должно
вызывать излишних сил трения и износа сопряженных деталей.
Оценку распределителя по этому параметру производят в прак-
тике по так называемому коэффициенту поджима т, под которым
понимается отношение разности гидравлической силы Рпр, при-
жимающей блок 2 к поверхности распределительного золотника 1
(см. рис. 74, а), и отжимающей силы Ротж к величине прижимаю-
щей силы Рпр в %:
т..
Рпр Ротж
Рпр
100;
100КОТЖ
ПР — юо _ т
229
Увеличение этого коэффициента сопровождается повышением
избыточной силы прижима и соответственно повышением контакт-
ного давления рабочих поверхностей распределителя и увеличе-
нием силы трения. При уменьшении коэффициента т повышаются
объемные потери и работа распределения становится неустой-
чивой.
Коэффициент т поджима выбирается в зависимости от давле-
ния жидкости и усилия прижимной пружины, а также от частоты
вращения и конструктивной схемы насоса. Из практики известно,
что при высоком и стабильном качестве изготовления деталей
уплотнительной пары можно ограничиться .
т^Гпр~Готж100^ 10%.
**пр
Однако, поскольку величина среднего удельного давления на
опорной поверхности распределителя в реальных насосах может
значительно колебаться, этот коэффициент доводят часто до т =
= 25ч-30%.
При расчетах торцового распределения основную трудность
представляет выбор среднего давления рср, действующего в сты-
ковом торцовом зазоре между золотником и торцом блока, вели-
чина которого зависит от точности обработки деталей уплотняю-
щей пары й в первую очередь от перпендикулярности их торцов
к оси вращения и качества материала, из которых они изготов-
лены, а также от качества самой жидкости и ряда прочих, подчас
трудно учитываемых факторов. Поэтому при колебаниях давле-
ния могут возникнуть непредусмотренные осевые силы в том или
другом направлении, которые могут вызвать колебания ротора
и привести к потере герметичности и к повышенному износу де-
талей скользящей пары.
При осевых колебаниях ротора в торцовый зазор могут про-
никнуть частицы загрязнителя, способствующие-износу рабочих
поверхностей распределителя.
При практических расчетах допускается линейное распре-
деление давления в зазоре, соответствующее параллельной щели
(рис. 75, а), при Котором среднее давление в зазоре будет
Pep ~
где рн и рсл
давление на входе в щель (давление нагнетания)
и на выходе из нее (давление слива).
При рсл = 0 среднее давление рсл =
Действующее усилие при подобной линейной эпюре давления
жидкости в зазоре составляет
n PF
----РнГО--Рп Я >
230
'Дё рн — давление йагиеТаййй;
Fo — площадь полукольцевой поверхности, Границы которой
проходят по окружностям уплотнительных поясков
и осевой линии перемычки (рис. 75, б; см. также
рис. 59).
В соответствии с этим давление по радиусу определится по
зыражению
z \ Fi — R'
. Р — (Pi — Ра) Л1_
'де — текущий радиус, на котором из-
меряется давление;
= -у- и Т?2 — % — внешний и внутренний радиусы по-
ясков.
В действительности. давление вдоль радиуса изменяется
В действительности. давление вдоль радиуса изменяется не
io линейному, а по логарифмическому закону. Величину этого
хавления можно с достаточной точностью определить по выра-
жениям:
для наружного пояска
ч
Р = Р1 + (Р1 —Ра)
а
для внутреннего пояска
Р = Ра + (Р1 —Ра)
’“X
Помимо рассмотренных статических сил давления жидкости,
в подшипнике скольжения блока действуют' переменные на-
грузки, обусловленные в первую очередь динамическими силами.
При расчете скользящих опор учитывают также опрокидывающий
момент, обусловленный дисбалансом центробежных сил поршней
(см. рис. 67).
Для уменьшения износа поверхностей распределительной пары
необходимо снижать окружную скорость Скольжения. С этой
целью отверстия питания цилиндров рекомендуется выполнять
на минимально допустимом прочими требованиями радиусе, т. е.
смещать их к оси цилиндрового блока.
Применительно к схеме приведенной на рис. 74, а, необходимо,
чтобы Do < D6, где Do — диаметр дуги распределительного окна
и D6 — диаметр окружности блока, на которой расположены
центры цилиндров. Износ снижается при применении сферических
поверхностей распределителя (см. рис. 74, б).
На герметичность рассматриваемой скользящей пары оказы-
вает влияние угловая скорость цилиндрового блока, с увеличе-
нием которой утечки увеличиваются. Это обусловлено, в основном,
дефектами в перпендикулярности его торца к оси вращения,
231
в результате чего при повышении частоты вращения насоса воз-
можен отрыв блока цилиндров от распределительного диска. При
повышении частоты вращения насоса (свыше 5000 об/мин) воз-
можность такого отрыва обусловлена также динамической не-
уравновешенностью вращающихся частей. Если при малой ско-
рости нарушение перпендикулярности частично компенсируется
возможностью цилиндрового блока совершать незначительные
колебательные движения в пределах конструктивных зазоров,
в результате чего обеспечивается контакт его торца с распре-
делительным диском, то при большой скорости этот контакт на-
рушится из-за наличия сил инерции блока, и между скользящими
поверхностями образуется щель в виде острого клина.
Ввиду этого важной проблемой создания высокооборотных
аксиально-поршневых насосов с торцовым распределением яв-
ляется обеспечение динамической уравновешенности цилиндро-
вого блока, нарушение которого вызовет отрыв блока от рас-
пределительного золотника и потерю герметичности насоса. Кроме
того, при больших скоростях в сочетании с некоторыми искаже-
ниями плоскостности контактирующих поверхностей, и, в част-
ности, с наличием на них уклонов, возникает эффект гидродина-
мического клина, под действием которого толщина масляной про-
слойки с повышением частоты вращения насоса может увеличиться^
настолько, что вызовет потерю герметичности («раскрытие») рас-
пределителя.
В связи с трудностью обеспечения строгой перпендикулярности
скользящих поверхностей торцового распределителя к оси вра-
щения цилиндрового блока применяют конструкции/допускаю-
щие самоустановку одной из уплотняющих поверхностей (дета-
лей) по другой. В частности применяют торцовый распределитель
со сферической контактной поверхностью золотника а и блока b
(см. рис. 74, б). Такой сферический самоцентрирующийся распре-
делитель способствует также образованию более равномерной
смазывающей пленки.
В связи с затронутым вопросом, следует отметить, что при
трении двух смазанных плоскопараллельных поверхностей гидро-
динамический режим смазки может возникнуть и в случае отсут-
ствия на них уклонов, обеспечивающих создание масляного клина.
Возникновение в этом случае гидродинамического эффекта обус-
ловлено неравномерным нагревом слоя масла между трущимися
поверхностями, в результате которого происходит неравномерное
его расширение и создание термодинамического клина. Нагрев,
а следовательно, и расширение масла на выходе из зазора между
трущимися поверхностями будет больше, чем на входе в зазор.
Вследствие этого объем масла в зазоре на выходе превысит зазор
на входе, в соответствии с чем образуется поток масла.
При рассмотрении работы торцового распределителя насоса
следует учитывать возможность возникновения в паре трения
высоких температур. Реальность этого обоснована тем, что утечки
232
з торцовом уплотнении (распределителе) могут быть очень ма-
лыми, а следовательно, отвод тепла, обусловленного работой тре-
яия пары; в окружающую среду происходит в основном через ее
поверхность. Перегрев жидкости в зазоре может привести к вски-
панию ее и к потере смазывающих способностей.
30. Разгрузка контактной поверхности
распределительной пары
Фактором, лимитирующим уменьшение площади уплотнитель-
ных поясков распределительного диска, - является возможность
смятия материала опорных поверхностей под действием сил Fnp
[см. выражение (86)] давления жидкости в цилиндрах. Чтобы
избежать этого, применяют схемы распределительного узла, в ко-
торых площадь уплотняющих поясков может быть уменьшена
при одновременном обеспечении требуемой по условиям прочности
площади контакта. Это достигается тем, что на внешнем контакт-
ном кольце (ширина h) выполняется глухая кольцевая канавка е
(рис. 75, в), делящая площадь этого кольца на две части, одна
из которых т (внешняя) дренажными пазами k. соединяющими
канавку е со сливом, разгружается от давления (давление в ка-
навке е равно сливному).
Поскольку в стыковом зазоре, образуемом торцом барабана
с внешним кольцом (пояском) /и, давление в этом случае практи-
чески отсутствует (равно давлению рсл слива), это кольцо служит
лишь опорой, и величина его поверхности не оказывает влияния
на силы, действующие в стыковом зазоре.
Применение указанного опорного пояска позволяет снизить
контактное давление в уплотнительно-распределительном узле до
требуемой величины.
!
31. Порционная смазка зеркала распределителя
Ввиду того, что скольжение в узле распределения гидромашины
происходит по одной и той же поверхности, последняя значительно
нагревается и условия работы, скользящей пары сильно ухуд-
шаются, в результате чего может произойти разрушение смазоч-
ной пленки и порча рабочих поверхностей пары. Кроме того, если
утечки жидкости отсутствуют, то масло в жидкостной прослойке
не обновляется и под действием высокой температуры и мятия
теряет вязкостные и смазывающие качества.
Для улучшения условий работы распределительного узла при-
меняют гидростатическую разгрузку и смазку скользящей пары:
на сферических опорах распределителя и блока цилиндров вы-
полняются разгрузочные канавки и глухие отверстия, в которые
впрыскивается рабочая жидкость из напорной полости с комму-
тационной частотой.
Схема подобного распределительного узла сферического типа
представлена на рис. 76, где на боковых проекциях показаны
виды со сторон стыка. Для обеспечения смазки в распределитель-
ном дискет (золотнике) 1 просверлены два отверстия 3, одно из
которых соединено с рабочей, а второе — с нерабочей полостью.
Кроме того, на рабочей поверхности этого диска выполнено боль-
шое количество неглубоких глухих отверстий 7, соединенных
между собой узкой круговой канавкой 6, которая несколько сме-
щена относительно отверстий <3 и с ними не соединяется.
Рис. 76. Схема каналов для порционной смазки распределителя
На торцовой поверхности цилиндрового блока (барабана) 2
выполнено семь глухих отверстий 8, которые так расположены
относительно канавки 6 и отверстий 3, что при вращении блока
каждое из них на мгновение соединяет отверстие 3 с канавкой 6.
Следовательно, за один оборот цилиндрового блока 2 каждое из
отверстий 7 семь раз кратковременно соединится последовательно
с полостями высокого и низкого давления, т. е. за один оборот
происходит семь кратковременных впрыскиваний масла под дав-
лением в отверстия 7 й, соответственно, в стыковой зазор между
распределительным диском 1 и цилиндровым блоком 2, и семь
разгрузок их от давления. В результате образуется пульсирую-
щая масляная подушка, которая значительно снижает силы тре-
ния без заметного увеличения расхода (утечек) жидкости.
Зеркало распределительного диска разделено на две части
канавкой 4, соединенной отверстием 5 со сливом. В стыковом за-
зоре, образованном внутренней частью диска, действуют рас-
смотренные выше закономерности. Жидкость, просочившаяся
в канавку 4 из внешнего и внутреннего колец стыковой поверх-
ности, по отверстию 5 поступает во внутреннюю полость корпуса.
Такая принудительная смазка имеет особое значение для гид{Л>-
моторов, запуск которых может происходить при максимальном
крутящем моменте нагрузки, в ртчччце от насосов, в которых
(айлёниё, а следовательно, й нагрузка на бйорныё йовёркносТй
взвиваются лишь после страгивания, т. е. после того, как в сты-
ковом зазоре устанавливается масляная пленка.
Опыт показывает, что обеспечение жидкостного трения при
]ринудительной смазке поверхности распределителя значительно
увеличивает долговечность (до 10 000 ч и более).
§ 55. Аксиальные роторно-поршневые насосы
бескарданной схемы
Универсальный шарнир (кардан) сложен в изготовлении и яв-
ляется наименее надежным узлом насоса. Кроме того, при при-
менении его увеличиваются габариты насоса. Поэтому широкое
распространение получили насосы (и гидромоторы) с бескардан-
ной связью цилиндрового блока с наклонной, шайбой (рис. 77),
в которых приводная шайба (Диск) 8 связана с цилиндровым ро-
тором 2 (см. также рис. 78г о) через шатуны 4 поршней 3,
Применение бескарданного механизма позволило уменьшить
диаметр цилиндрового блока, а также улучшить вибрационные
характеристики насоса. Кроме того, механизм бескарданной
схемы более прост в изготовлении.
Опорные поверхности распределителя в бескарданных насосах
обычно выполняют, в виде сферы (рис. 77). Центрирование блока 2
относительно распределительного золотника 1 осуществляется
центральным пальцем 7, а начальный прижим к нему блока —
пружиной 6, установленной на этом валике.
Применение сферической поверхности распределителя и цен-
трирующего пальца позволило устранить опорный подшипник
в блоке и обеспечить свободу его самоустановки относительно
распределительного 'золотника, необходимую для компенсации
возможных производственных неточностей.
Вращение блока и крутящий момент, передаваемый от вала
к блоку 2 (рис. 77, а), необходимый для преодоления сил трения
между торцами блока и распределительного диска, передается
от наклонной шайбы через юбки поршней 3, которые выполняются
в этом случае удлиненными, и через поршневые штоки (шатуны),
которые последовательно контактируют на определенных углах
поворота блока с внутренними коническими поверхностями расто-
чек (юбок) поршней 3 (рис. 78, а). Привод блока цилиндров осу-
ществляется здесь за счет непрерывного обкатывания поршневых
штоков 4 по внутреннему. конусу юбки поршней. При повороте
вала 5 из нейтрального положения на некоторый угол шток 4
приходит в контакт с юбкой поршня 3 и при дальнейшем повороте
вала ведет блок цилиндров 2.
На блок цилиндров в рассматриваемых аксиально-поршневых
гидромашинах с наклонной люлькой передается лишь момент,
обусловленный силой трения, а также динамические моменты,
235
соответствующие силам инерции при ускорении и замедлении.
Полезный же крутящий момент на блок цилиндров в этих машинах
не передается.
В рассматриваемой схеме насоса имеет место, как и в кардан-
ной схеме, некоторое рассогласование между углами поворота
/
Рис. 77. Сх^ма (а) и конструкция (б) бескарданного аксиально-
поршневого насоса
ведущего вала 5 и блока 2, обусловленное кинематикой ведения
последнего и зависящее от угла между осями вала и блока. По-
следнее вызвано тем, что при вращении центров и О2 шаровых
заделок штока в поршне и в наклонной шайбе они описывают
окружности в плоскостях, расположенных одна относительно
другой под углом 6, причем центр заделки шарнира в шайбе 8
вала 5 (см. рис. 77, а и 78, а) описывает окружность в плоскости,
перпендикулярной к оси вала.
236
Если бы ведение блока осуществлялось лишь однйм штоком
(в ведении блока участвуют одновременно несколько поршневых
штоков); то ось последнего при непрерывном контакте с поверх-
ностью юбки поршня при вращении блока образовала угол 26
при вершине (см. рис. 78, а).
Из схемы ведения шатуном поршня блока цилиндров, показан-
ной на рис. 78, а видно, что блок (цилиндр) отстает от ведущего
вала на некоторый угол 6, который изменяется при повороте вала,
т. е. при постоянной угловой скорости вала скорость блока будет
а)
Рис. 78. Схема ведения блока поршней в бескарданном насосе (а) и график зави-
симости угла поворота блока от угла поворота вала (б)
неравномерной. Поскольку в ведении блока цилиндров прини-
мают участие поочередно все шатуны, мгновенная угловая ско-
рость вращения блока определяется в каждый момент времени
тем шатуном, который менее других остает от вала насоса. Осталь-
ные шатуны при этом не будут касаться юбок своих поршней
и углы наклона их к оси цилиндра будут меньше, чем наклон
ведущего шатуна, контактирующего в данный момент с юбкой
поршня. В результате снижения скорости ведущего шатуна и
повышения скорости соседнего происходит смена в определенный
момент ведущего шатуна другим (очередным) шатуном. Таким
образом, за один оборот вала каждый шатун дважды участвует
в ведении блока, причем поршни шатунов, находящихся в одной
зоне ведения, выполняют ход нагнетания, а в другой — ход вса-
сывания. В соответствии с этим существует закономерное чередо-
вание вступающих в работу шатунов. При нулевом угле у наклона
диска (шайбы) все шатуны теоретически являются ведущими.
В соответствии с указанным наблюдается неравномерность вра-
щения блока при равномерном вращении ведущего вала, которая
будет повышаться с увеличением угла наклона шайбы. На угловую
скорость блока, основная составляющая которой равна скорости
вала, будут накладываться при постоянной угловой скорости
237
вала составляющие более высокого порядка, т. ё. блок при угле
наклона шайбы у > 0 будет вращаться с переменной (пульсирую-
щей) угловой скоростью, среднее значение которой равно скоро-
сти вала.
Из кинематической схемы бескарданного насоса, приведенной
на рис. 78, а следует, что кинематика поршня будет такой же, как
и в рассмотренной выше схеме насоса с несйловым асинхронным
карданом. Блок цилиндров приводится здесь шатуном того поршня,
который при данном значении угла поворота вала <рх = at, яв-
ляется наименее отстающим. Этот угол может быть установлен,
если построить, основываясь на уравнении <р2 = arctg
(см. уравнение (73) ] график зависимости углового рассогласова-
ния А<р = <рх — фа в функции угла фх = const. Для рассматри-
ваемого поршня этот график представлен на рис. 78, б жирной
(средней) линией, а для граничащих поршней—тонкими линиями.
Из графика следует, что рассматриваемый поршень ведет своим
шатуном блок за каждый оборот 2 раза: в диапазоне углов
я , з я . 3 я . 7 я , 7
2z
ли — -н-
2г
J
Построив подобные графики для остальных поршней насоса,
можем установить, что каждый поршень за один оборот ротора
ведет его также дважды, за счет чего и достигается непрерывное
вращение ротора.
Из приведенного следует, что характер движения поршня
в цилиндре может быть выражен для практических расчетов
теми же зависимостями, что и у насосов с карданной связью, а сле-
. довательно, кинематика и динамика поршня сохранились теми же,
что ив механизме с несиловым асинхронным карданом, и кине-
матические расчеты, приведенные выше для машин с несиловым
карданом, могут быть применены и в данном случае.
Колебания угловой скорости блока определяются углом его
отставания от вала, причем за один оборот угол отставания блока
от вала при одном цилиндре принимает 2 раза минимальное зна-
чение.
В распространенных насосах с нечетным числом цилиндров z
число колебаний равно 2z или, иначе, значение угла отставания
будет колебаться с частотой где <о — угловая скорость вдл£
Амплитуда колебания выходной скорости зависит при всех про-
чих? равных условиях от угла у наклона шайбы. Эта зависимость
является одной из основных причин ограничений в выборе вели-
чины этих углов.
Вследствие свободного (люфтового) перемещения шатуна в юбке
поршня будут наблюдаться при реверсе удары, ввиду чего исклю-
чается возможность выполнения реверсивных машин, и в част-
ности, гидромоторов этого типа.
238
В связи с этим следует указать, что в реверсивной гидрома-
шине любой конструкции не должно быть люфта между валом и
блоком цилиндров, при наличии которого возникают удары при •
изменении направления вращения вала.
Для устранения ударов при реверсе необходимо, чтобы шатуны
каждого поршня постоянно контактировали с конической по-
верхностью юбки поршня, обкатываясь по ней вне зависимости
от направления вращения гидромашины. Для обеспечения этого
угол наклона конической поверхности юбки поршня должен быть
строго равным углу наклона оси шатуна относительно оси поршня,
а также должна быть обеспечена точность изготовления контакти-
рующих деталей.
В общем случае для предотвращения удара при остановках и
изменении направления вращения (реверсах) гидромашины дол-
жен быть устранен или сведен к минимуму люфт между приводным
валом (шайбой) и блоком цилиндров.
Однако в рассматриваемой схеме люфт в кинематической паре
вал — блок цилиндров практически неизбежен, а следовательно,
неизбежно некоторое отставание блока от ведущего вала, ввиду
чего при смене ведущих штоков будут наблюдаться удары их
о поршни.
Для уменьшения люфта необходимо стремиться к устранению
или возможному уменьшению угла 6. Однако одновременно с этим
для предупреждения заклинивания штоков в поршне должна быть
обеспечена некоторая минимальная величина этого угла.
Возможность ударов штоков о поршни и большие нагрузки на
штоки и юбки поршней являются основным недостатком рассмот-
ренной схемы ведения блока через поршни, вследствие чего эти
насосы не пригодны для работы при больших (>3000 об/мин) ча-
стотах вращения. С точки зрения возможности обеспечения вы-
соких скоростей они уступают насосам с двойным карданом.
Необходимо также обеспечить прочность штоков 4 (рис. 78, а)
и юбок поршней, находящихся под действием тангенциальной
силы Т, соответствующей требующемуся для преодоления тре-
ния приводному моменту,гв частности, должно быть обеспечено
необходимое качество заделки сфер штоков в поршнях и в наклон-
ной шайбе.
В конструкциях этих машин обычно применяется гидроста-
тическая разгрузка сферических головок штоков (см. рис. 77, а).
Для снижения подводимого для этого давления и уменьшения
утечек, жидкость для питания механизма разгрузки отбирается
не из полости нагнетания, а из кольцевой проточки а, выполненной
на некотором расстоянии от торца поршня. ПриТэтой схеме на
разгрузку используется жидкость, утекаемая через зазор в порш-
невой паре до проточки.
АксиальнО-поршневые гидромашины бескарданного типа из-
готовляются различных мощностей — от самых малых (долей кВт)
до 3000 кВт и выпускаются практически во всех странах мира.
239
На рис. 79 представлена схема регулируемого насоса и нере-
гулируемого гидромотора этого типа. Наклонный диск регулируе-
мого насоса выполнен в виде сферической головки 12, помещен-
ной в сферическом гнезде 13 люльки 5, в которой установлен
б)
Рис. 79. Бескарданные регулируемый аксиально-поршневой
насос (а) и нерегулируемый гидромотор (б)
также и торцовый (сферический) распределитель 9. На поверх-
ности сферической головки 12 выполнены каналы 3, перекрывае-
мые 'обратными клапанами 2. Жидкость подводится к люльке
через штуцеры 4. Регулирование насоса осуществляется путем
поворота люльки 5 с блоком 7 относительно неподвижного
24Q
наклонного диска 12, жестко связанного с приводным валом /;
угол наклона люльки ограничивается штырем 6; цилиндровый
блок 7, центрируется валиком 10. Поршни 11 связаны с наклонным
диском 12 с помощью шатунов со сферическими головками.
В конструкции этого насоса предусмотрена разгрузка сфери-
ческих поверхностей распределительной пары, осуществляемая
обычно путем пульсирующей подачи в разгружающие камеры
рабочего давления. Для этого на торце цилиндрового блока вы-
полнены камеры 8, к которым периодически подводится жидкость
под давлением (см' также рис. 76).
Нерегулируемые машины отличаются от регулируемых боль-
шой компактностью; применяются они преимущественно в ка-
честве гидромоторов; угол наклона осей 20 и 25°.
В регулируемых машинах (рис. 79, а) блок цилиндров 7 встроен
в управляемую люльку 5, установленную перпендикулярно оси
приводимого вала на двух подшипниках качения 1. Величина и
направление угла наклона люльки определяют рабочий объем
и направление подачи масла.
§ 56. Аксиально-поршневые гидромашины
с неподвижным наклонным диском
32. Конструктивные основы
Возможность повышения скоростей и давления в гидромаши-
нах с шатунным приводом поршней ограничена устойчивостью
против вибраций, а также прочностью узлов этого привода,
в частности, значением удельного контактного давления в сфери-
ческой опоре шатуна 4 в теле поршня 3 (см. рис. 78, а), диаметр
которой ограничен размером поршня. Последнее ограничение
может быть снято, если устранить шатуны, а усилия поршней
на наклонный диск передать через какой-либо промежуточный
элемент с большой поверхностью контакта.
В соответствии с этим в системах с высокими давлениями по-
лучают распространение гидромашины бесшатунной схемы
(рис. 80) с неподвижным наклонным диском и вращающимся
ротором 1, обеспечивающим через кольцевые гидростатические
опоры (башмаки) 2 возвратно-поступательное перемещение порш-
ней 3. Этот диск выполняет, как и в рассмотренных гидромашинах
с подвижным наклонным диском, роль кривошипа, осуществляю-
щего ведение поршня (рис. 81, а). При вращении цилиндра вокруг
оси блока поршень, будучи связан через опору с наклонным
диском при помощи пружины, будет совершать возвратно-посту-
пательные движения в цилиндре, используемые в качестве рабочих
ходов машины.
Ведущее звено (вал) и ротор этого насоса расположены на одной
оси. Насосы такого типа принято называть насосами с наклонным
диском.
16 Т. М- Бащта 241
Насос регулируемой подачи рассмотренной схемы представлен
на рис. 81, а. Вращающий момент в насосе передается через шли-
цевое соединение приводного валика (рессоры) 7 на цилиндровый
блок 6, в цилиндрах которого свободно посажены поршни 4, опи-
рающиеся своими сферическими головками на гидростатически
уравновешенные опоры (башмаки) 2. Поршни 4 обычно поджи-
маются пружиной 5 через сферическую опору и упорное кольцо 3
к наклонному диску 1, угол наклона которого регулируется с по-
мощью винтовой пары 8. Усилием пружины 5 обеспечивается
Рис. 80. Кинематическая (а) и Конструктивная (б) схемы поршневого насоса
с наклонным диском-
также предварительная (при нулевом давлении) герметизация
стыка плоскостей ротора 6 и распределительного диска (золот-
ника). Поршни 4, находящиеся в зоне нагнетания,' дополни-
тельно прижимаются к наклонному диску давлением жидкости.
Пружинное ведение плунжеров позволяет насосу работать
в режиме самовсасывания. Кроме того, подобная схема ведения
имеет преимущество перед схемами, в Которых пружины, прижи-
мающие плунжеры к диску, размещаются в цилиндрах (см.
рис. 57, б), поскольку примененная здесь центральная пружина 5
(рис. 81, а) работает фактически при постоянном натяжении, а сле-
довательно, не подвержена усталостным разрушениям. В ряде
конструкций насосов поджатие поршней к наклонному диску и
герметизация торцов ротора и распределительного золотника в зоне
всасывания осуществляется с помощью подпора жидкости, пода-
ваемой насосом подпитки.
Описываемая машина отличается надежностью в эксплуатации
и простотой изготовления. В ней отсутствует такой сложный узел
как двойной кардан (см. рис. 64) и недостаточно надежный узел
(механизм) ведения блока через- юбки поршней (см. рис. 78, а).
Применение разгруженных гидростатических кольцевых опор
(башмаков), а также возможность применения сферических голо-
вок большего диаметра, нежели головок шатунов, расположенных
в Тёлё поршней (см. рис. 7?, а), позволило значительно ИовЫбйТЬ
давление жидкости (до 500 кгс/см2 и выше).
В рассматриваемой машине (рис. 81, а) применена шлицевая
связь рессорного приводного валика 7 с цилиндровым блоком 6,
Рис. 81. Аксиально-поршневые гидромашины с опорными башмаками поршней
(а и б) и схемы гидростатической опоры (в—3)
что разгружает последний от сил, обусловленных неточной уста-
новкой насоса на приводной коробке. Преимуществом этих насосов
является также то, что применение для передачи осевых усилий
поршней на наклонную шайбу гидростатически уравновешенных
16* 243
опор устраняет необходимость -в воспринимающих эти усилия
упорных подшипниках, которые применяются в аксиально-порш-
невых насдсах иных типов.
Опорные башмаки плунжеров изготовляются обычно из бронзы
с покрытием скользящих поверхностей для снижения трения
серебром.
Из бронзы обычно изготовляются и цилиндровые блоки с се-
ребряным покрытием торца.
На рис. 81, б показана конструкция нерегулируемого гидро-
мотора этого типа. Мотор отличается плавной и бесшумной работой
с устойчивостью в интервале частот вращения от минимальных
(по рекламным данным фирм 1 об/мин) до максимальных (1600—
2000 об/мин). Подобные моторы изготовляются мощностью от 1 до
60 л. с. и выше и имеют механический к. п. д. оо0,96 практически
на всем диапазоне частот вращения.
33. Кинематика гидромашины с наклонным диском
Рассматриваемая машина построена также на базе рассмотрен-
ного модифицированного кривошипного механизма (см. рис. 56),
ввиду чего приведенные выше кинематические зависимости спра-
ведливы также и для нее. Принципиальная схема поршневого
элемента этой машины, представленная на рис. 80, а (см. также
рис. 80, б), показывает, что проекция линии, соединяющей центры
сферических опорных гнезд, на плоскость, перпендикулярную
к оси вращения цилиндрового блока, является окружностью,
а следовательно, путь х [см. также выражение (78)1, который
пройдет поршень от крайнего положения до положения, соответ-
ствующего повороту кривошипа на угол а = со/, будет
* = #б tg V 0 — cos а), (87)
где R6 — радиус окружности блока, на- котором расположены
центры цилиндров (см. также рис. 81, в).
Центры сферических головок поршней с опорными башмаками
перемещаются (скользят) при вращении цилиндрового блока
в плоскости, параллельной плоскости наклонной шайбы, в соот-
ветствии с чем головки поршней перемещаются по эллипсу, боль-
шая ось которого
= 2/?б — диаметр
в блоке.
Следовательно,
синусоидальными
соответствует расчетной схеме
Исходя из этого, имеем:
максимальный ход поршня
^тах ”
ff = ... и малая ось = Z>6, где D6 =
1 sin у * o> * о
окружности, на которой размещены цилиндры
кинематика поршней этих машин описывается
зависимостями и поэтому пульсация подачи
представленной на рис. 66, а.
244
осевая скорость поршня [см. выражение (79)]
dx Da .
»отн = ST- = <° tg V Sin а;
(88)
ускорение поршня в относительном движении [см. выраже-
ние (80)]
<Рх D& <> .
1 ==-^ ®2 tg у cos а.
Текущая расчетная подача одного поршня на основании урав-
нения (88)
votJ = f = fa tg у sin а.
34. Средняя подача насоса
Средняя расчетная подача насоса
QT = qn = hfzn = DJ tg yzn
или, введя угловую скорость ю,
Если принять частоту вращения п в об/мин, диаметр D6 блока
цилиндров — в см и площадь поршня / — в см2, подача выра-
зится в см3/мин.
Так как скорость перемещения поршня, определяемая уравне-
нием (88), изменяется синусоидально, то пульсация подачи насоса
характеризуется графиком, приведенным на рис. 34, б.
Обеспечение контакта поршней с наклонным диском. Для на-
дежной работы машины необходимо, чтобы был обеспечен постоян-
ный контакт башмаков с наклонной шайбой. В зоне высокого дав-
ления поршни прижимаются к наклонной шайбе давлением жид-
кости. В зоне же всасывания при отсутствии или малом давлении
подпора силы давления жидкости в цилиндре могут оказаться
меньше сил трения и сил инерции, действующих на поршень.
В результате может произойти отрыв опоры поршня от шайбы,
что вызовет потерю герметичности, подсос воздуха и пульсацию
давления, а возможно и разрушение насоса.
Для исключения этого пружина 5 (рис. 81, а и б), прижима-
ющая башмаки к наклонному диску, должна иметь соответству-
ющее усилие (должна обеспечивать во всех случаях силовое за-
мыкание кольцевых опор поршней с наклонным диском и по-
верхностями цилиндрового блока и золотника).
В первую очередь усилие пружины, прижимающей блок 6
к распределительному золотнику, а поршни — к наклонной
шайбе 1, должно быть рассчитано на уравновешивание центро-
245
бежйык сйл йоршней и штоков в осевом йайравйёний йрй работе
в режиме холостого хода при максимальном угле у наклона шайбы.
Однако выбор излишне большого усилия пружины может привести
к повышенному трению опор по диску и цилиндрового блока 6
по распределительному золотнику.
35. Гидростатическая опора поршней
В равной мере должно быть ограничено также и контактное
напряжение, обусловленное давлением жидкости на поршни, на-
ходящиеся в полости нагнетания. Регулирование этого напряже-
ния достигается с помощью, гидростатической разгрузки поршня,
качество которой во многом определяет надежность работы рас-
сматриваемых машин. Совершенство разгрузки, в свою очередь,
определяется правильностью расчета кольцевых гидростатических
опор (башмаков), которые выполняются гидростатически уравно-
вешенными. .
Схема действия такой гидростатически уравновешенной опоры
показана на рис. 81, в. Рабочая жидкость из полости поршня
через дроссельное отверстие а в нем и сверление b в опоре 2 по-
ступает в выточку (камеру) с диаметром на торцовой ее поверх-
ности, благодаря чему в этой камере действует давление, частично
уравновешивающее осевое усилие давления на поршень 4, а также
обеспечивается смазка, трущихся поверхностей торца опоры и ша-
рового ее сочленения с поршнем.
Расчет кольцевых опор производится, исходя из того, что
в статических условиях опоры находятся в равновесии под дей-
ствием (давлением жидкости В корпусе насоса пренебрегаем):
а) усилия 'гидравлического прижима, противоположного реак-
ции N, действующей нормально к плоскости наклонного диска
(см. рис. 58, а):
Д7 — ? _ Р(
COS у COS у ’
где Р = pf — сила давления р рабочей жидкости на площадь
. nd® j
f——T- поршня диаметром а;
у -— угол наклона диска;
б) усилия центральной пружины 5 (рис. 81), приходящегося
на одну опору:
Р =z ?°Р
Пр1 2 COS у ’
где Рпр и z—соответственно усилие пружины 5 и число
поршней;
в) усилия отжима Рт кольцевой опоры, возникающего в ре-
зультате давления р жидкости на поверхности ее выточки
и среднего давления в зазоре опорного пояска. Усилие Рот опре-
246
J
деляется из условия, что в выточке опоры действует рабочее дав-
ление р, что обычно и соблюдается, так как утечка жидкости при
правильно сконструированной кольцевой опоре пренебрежимо
мала.
Практически можно принять, что в торцовом зазоре между
кольцевой поверхностью опоры, ограниченной диаметрами dx
и d2 и поверхностью наклонной шайбы, давление распределяется
по линейному закону. Тогда усилие Рот будет численно равно
объему усеченного * конуса высотой р с диаметрами основа-
ний dx и d2'
ч /
Для того чтобы максимально устранить утечки через торцо-
вый зазор кольцевой опоры, принимается
£•= 1,15-5-1,20,
Fo
г nd2
где F — площадь поршня;
Fo = = IT № + + dld^-
В схеме разгруженного поршня, представленной на рис. 81, в,
одновременно осуществляется также и частичная разгрузка сфе-
рической головки поршня 4, достигаемая тем, что рабочая жид-
кость одновременно подводится к камере е, образованной срезом
части сферы (см. также рис. 77, а). Усилие давления жидкости,
подводимой в камеру е (рис. 81, в) на площадь среза, а также дав-
ление жидкости, проникшей в зазор сферической пары, противо-
действуют усилию давления на торец поршня.
Фактором, лимитирующим возможность уменьшения площади
опорно-уплотнительного пояска башмака является допустимое
смятие материала. С целью увеличения контактной цлбщади
поясков башмака при одновременном обеспечении требуемрй раз-
грузки от силы давления жидкости, применяют башмаки, в ко-
торых на контактной поверхности выполняется дополнительная
разгрузочная канавка Ь, соединенная радиальными прорезями
(каналами) с со сливом (рис. 81, г). Эта канавка делит опорную
поверхность башмака на два кольца d и е. Поскольку в этом слу-
чае давление в канавке b и соответственно в стыковом зазоре
внешнего кольца d отсутствует, наличие этого кольца площадью
jid? — do
f — —т-— не будет влиять на баланс сил, действующих в сты-
ковом зазоре, а служит лишь опорой, позволяющей снизить кон-
тактное давление (напряжение смятия) до заданной малой ве-
личины,
247
При конструировании разгрузочной гидростатической опоры
поршня следует учитывать, что башмак нагружается опрокиды-
вающим моментом, обусловленным силами трения Ртр его по
наклонному диску. Этот момент стремится опрокинуть башмак
в направлении движения (рис. 81, д). Величина Ртр зависит для
данного коэффициента трения р от усилия R, которым башмак
прижимается к диску. Величина R определяется разностью сил
(без учета трения поршня в цилиндре):
R — N --- РОт»
р
где N = cos — нормальная составляющая (реакция опоры)
силы давления жидкости на поршень (см.
рис. 58);
Рот — усилие гидростатической разгрузки (грузо-
подъемность гидростатического подшипника).
Из рис. 81, д следует, что сила трения Ртр будет стремиться
развернуть башмак относительно центра сферы поршня, расстоя-
ние h которого от поверхности скольжения является плечом
приложения этой силы. В соответствии с этим опрокидывающий
момент башмака определится
М = PlVh = рРЛ.
При известных значениях, входящих в это выражение пара-
метров, возможно опрокидывание башмака.
Из рис. 81, д, на котором показаны действующие силы, следует,
что при увеличении угла у и высоты h положения центра резуль-
тирующая сил на скользящем башмаке может выйти за пределы
опорной его поверхности, что привело бы к опрокидыванию
башмака.
Для устранения этого стремятся понизить путем качественной
обработки и соответствующим подбором материала скользящей
пары коэффициент трения р, а также уменьшают/высоту h центра
сферы и силу R. Помимо этого, поскольку величина R зависит
при всех прочих равных условиях, от угла у наклона диска ве-
личину этого угла в практике, обычно, ограничивают значением
15—18°.
Помимо рассмотренных сил на скользящий башмак будут дей-
ствовать при вращении барабана центробежные силы, действие
которых пропорционально квадрату угловой скорости. Однако
при практических расчетах этими силами обычно пренебрегают.
36. Расчет насоса подпитки
С учетом высокого быстродействия переходных режимов со-
временных насосов (см. стр. 11) силы инерции поршня, и соот-
ветственно, движение подпитки могут достигать значительных
величин. Применяемый в системах с подпиткой многоступенчатый
насос, в котором первая ступень служит для улучшения условий
248
подвода жидкой среды ко второй ступени, называется насосом
с предвключенной, ступенью.
Подпиточный насос должен обеспечить такое давление под-
питки рв, которое с учетом потерь давления в окнах цилиндрового
блока Др0 = рв — р0 создает гидростатическое усилие на поршне,
способное преодолеть силу инерции Р; и силу трения поршня Ртр,
а также обеспечить при этом гарантированный прижим Рг го-
ловки поршня к поверхности опорной (наклонной) шайбы:
где f — площадь поршня.
В дальнейшем будем учитывать лишь гидравлическое сопро-
тивление окна и силу инерции Р; поршня с присоединенной массой
жидкости в относительном движении в цилиндре. Потери на тре-
ние Ртр, которые в основном обусловлены действием на поршень
центробежных и прочих радиальных сил, включим в усилие Рг,
которое с учетом сказанного обычно принимают Рг = 20 —
4-ЗОН (2 4-3 кгс).
Перепад давления Дро в окне, обусловленный его сопротивле-
нием, определяется через скорость и жидкости из равенства
и “ Н V -у ДРо >
где р — коэффициент расхода окна, который можно принять
равным 0,72.
Наибольшая скорость поршня из условия неразрывности по-
тока
Цтах ^шах tg V
где f0 — площадь сечения окна.
Решив совместно, получим выражение для сопротивления
окна
ДРо == (X® tg Т-у)2 •
Фактическая потеря напора Дрф в окне несколько больше
(на 10—15%) расчетной (Дрф > Др0), что обусловлено в основном
переменностью площади открытия окон в процессе хода поршня.
Максимальная величина силы инерции относительного дви-
жения в цилиндре поршня, имеющего массу т (с присоединенной
массой перемещающихся элементов),
Pj шах = т (y)max = -у- т£>б©2 tgу.
249
1
, Подача подпиточного насоса определяется исходя из следую-
щих соображений. Поскольку объемный к. п. д. гидропередачи
оценивает все виды объемных потерь, а не только внешние утечки
из рабочих полостей, необходимая подача вспомогательного на-
соса гидропередачи определится как
Фпод 0 Лоб mln) Qmax»
где Qmax—наибольшая подача насоса гидропередачи;
Лоб min — наименьшее значение объемного к. п. д.;
k ~ 0,65-5-0,75—коэффициент, определяющий долю
внешних утечек в общих объемных потерях, оце-
ниваемых ВеЛИЧИНОЙ Лоб mln*
Рис. 82. Аксиально-поршневой насос с шестеренным насосом подпитки
В качестве подпиточного насоса применяется обычно пла-
стинчатый или шестеренный насос (см. стр. 275 и 311),
который обычно устанавливается на оси основного насоса в общем
с ним корпусе. На рис. 82 показана подобная комплектная ма-
шина, состоящая из аксиально-поршневого насоса и вспомога-
тельного шестеренного насоса 4. Наклонный диск основного порш-
невого насоса выполнен в виде грибка 2. При вращении привод-
ного вала 1 грибок 2 совершает качательное движение, сообщая
плунжерам 3 возвратно-поступательное движение. Показанный
поршневой насос выполнен с двумя отводами жидкости — от двух
и от четырех поршней. Следует заметить, что при таком двух-
канальном отводе повышается неравномерность потока.
§ 57. Гидромашины с наклонным расположением
цилиндров
Чтобы облегчить перемещение поршня насоса при ходе вса-
сывания, оси цилиндров часто располагают под углом а 15°
к оси цилиндрового блока (рис. 83, а), благодаря чему на поршни
250
Рис. 83. Расчетная схема (а), конструкции аксиально-поршневых на-
сосов с наклонными цилиндрами (бив) и насоса с установкой блока
на подшипниках (г)
251
при вращении цилиндрового блока будут действовать не только
усилия пружины (или давление подпитки), а и центробежная
сила.
При наклонном расположении цилиндров упрощается также
компоновка насоса и увеличивается при прочих равных усло-
виях ход поршней.
Благодаря наклонному положению поршней может быть умень-
шен диаметр окружности распределительных окон, что позволяет
уменьшить окружную скорость торца цилиндрового блока или по-
высить при равных скоростях скользящей пары частоту вращения
насоса.
Максимальное значение центробежной силы инерции поршня
можно вычислить из выражения (см. рис. 83, а)
R ~ /ирсо2,
/ где р — расстояние между осью вращения цилиндрового блока
и центром тяжести поршня для верхнего положения
цилиндра значения;
т — масса поршня;
со — угловая скорость вращения цилиндрового блока.
Силу R можно разложить на составляющие: — нормаль-
ную к оси цилиндра и /?о — аксиальную (осевую), которая, скла-
дываясь с усилием пружины, способствует ведению плунжера.
Пренебрегая трением плунжера, можно принять
]?0 = Rsina.
Теоретическую подачу насоса можно рассчитать по общей
формуле 1см. стр. 2451 подстановкой в нее соответствующего
значения h хода плунжера. Если ось поворота упорного кольца
проходит через вершину его конуса О, а оси поршней перпенди-
кулярны поверхности конуса кольца в его нейтральном поло-
жении (что является наиболее распространенным случаем), то
можно несложным способом найти закон перемещения поршня
х = f (<р), где х — перемещение поршня в цилиндре, а <р = —
угол поворота цилиндрового блока.
Допуская, что точка контакта сферической головки поршня,
с конической поверхностью упорного (наклонного) диска лежит на
оси цилиндра, получим закон перемещения поршня при повороте
блока на угол <р
х — I sin a tg у (1 — tg а tg у sin <£»/),
где у и а — угол наклона упорного диска и оси цилиндра к оси
цилиндрового блока;
I — расстояние между точкой пересечения осей цилиндров
и вершиной конуса упорного диска.
252
Скорость поршня определится как
уотн = =1 sin a tg у (1 — 2 tg а tg у sin <р cos ср) со.
Текущая подача одного поршня площадью f
Я f^OTH*
Ход поршня при повороте блока на 180° от нейтрального по-
ложения
h = 21 sin a tg у
и, следовательно, рабочий объем q и средняя расчетная подача QT
насоса
q = fhz ~ hz ™ 2zl sin a tg у;
"Г **
QT = qn = -^-2zZ sin a tg у,
где z—число поршней.
Для приведенных выше условий конусности шайбы выражение
для хода поршня можно также приближенно вычислить
tg у
cos а ,
где у и а — углы наклона шайбы и цилиндров относительно оси
блока;
D — диаметр окружности, на которой находятся точки
контакта поршней с беговой дорожкой шайбы при
у — 0.
В соответствии с этим рабочий объем насоса определится выра-
жением
4 cos а
Регулирование подачи осуществляется изменением угла на-
клона упорного диска относительно оси, перпендикулярной к пло-
скости чертежа. Для схемы, представленной на рис. 83, а, регу-
лирование осуществляется с помощью тяги а. Распределение на-
соса обычно плоскостно-золотниковое, ввиду чего приведенный
расчет распределителя (см. стр. 218) применим и к этому насосу.
На рис. 83, б показаны конструкции регулируемого, а на
рис. 83, в—нерегулируемого насоса этого типа, в которых ци-
линдровые блоки установлены в двух подшипниках, причем в пер-
вом насосе один из подшипников — скольжения (а) и второй —
качения (6); во втором же насосе (рис. 83, в) оба подшипника —
качения.
253
'vl
л
i
На рис. 83, г показан регулируемый насос с фиксацией ротора
на двух подшипниках качения. Положительной особенностью
этого насоса является применение для вращения ротора 1 шлице-
вого валика 3 значительной длины, благодаря чему улучшаются
условия работы ротора, поскольку на него не передаются вибрации,
обусловленные неточной установкой насоса на приводном фланце,
и биения насоса на этом фланце/Ограничение угла поворота на-
клона диска осуществляется регулируемым упором 2.
§ 58. Насосы с распределением при помощи
осевой цапфы и цилиндрических золотников
На рис. 84 изображен нерегулируемый аксиально-поршневой
насос с неподвижным цилиндровым блоком и цапфовым распре-
делителем. Поршни 4 опираются на наклонный диск 2, сидящий
на валу /, через опорные башмаки 3. Распределение осуществ-
Рис. 84. Аксиально-поршневой насос с неподвижным цилиндровым
блоком и цапфовым распределением жидкости
ч
*
*
ляется через каналы а, Ь, с и d вращающегося цапфового распре-
делителя 6, к которому жидкость подводится через кольцо 5.
Для работы при высоких давлениях (40—50 МПа или соот-
ветственно 400—500 кгс/см2) применяют также насосы, в которых
распределение осуществляется цилиндрическим распределитель-
ным золотником 4 (рис. 85), приводимым в движение принуди-
тельно при помощи кулачковых дисков 1 и 5, сидящих на валу
насоса. Золотники размещаются в отверстиях неподвижного ци-
линдрового блока, располагаясь по окружности, концентричной
окружности, на которой расположены рабочие цилиндры.
254
Ведений АорШней 3 насосй 6суЩёс1вЛяёТёя с АдмбщШ йру*
жин 2, размещенных в цилиндрах блока.
Движения поршня и золотника согласуются таким образом,
что разделение полостей всасывания и нагнетания, осуществляе-
Рис. 85. Аксиально-поршневый насос с кулачково-золотниковымТфаспре-
делителем
мое золотником, происходит в момент, когда скорость поршня
равна или близка к нулю. Анализ показывает, что для безударной
работы насоса с этим распределением золотник должен быть сдви-
Рис. 86. Принципиальная схема насоса с распределением
с помощью рабочих поршней
нут относительно нагнетающего (всасывающего) поршня'на 90°,
т. е. крайним положениям поршня должно соответствовать”поло-
жение золотника, в котором он перекрывает канал питания. Пере-
крытие пояском плунжера золотника канала выбирается возможно
малым или нулевым.
Выпускаются также насосы с кулачковым приводом поршней
(рис. 86), функции распределителя в которых осуществляют не-
255
посредственно сами поршнй, снабженные для этого спедйалЬнЫмй
проточками. Цилиндровый блок b этих насосов выполняется не-
подвижным, а кулачковая шайба (диск) а соединяется с привод-
ным валом.
Из принципиальной схемы этого насоса (рис. 86) видно, что
при повороте кулачковой шайбы в направлении стрелки поршни /,
2 и 8 будут вытеснять жидкость в нагнетательную магистраль че-
рез щели, образованные соответственно поршнями 7, 8 и 6. Пор-
шень 7 в данный момент находится в крайнем верхнем (мертвом)
положении и в работе не участвует, причем обе щели поршня,
распределяющего жидкость (для последнего случая им является
поршень 5), в этом положении перекрыты.
В положении кулачковой шайбы, представленном на схеме,
поршни 4, 5 и 6 всасывают жидкость через щели, образованные
соответственно поршнями 2, 3 и 4, Поршень 3 находится в край-
нем нижнем (мертвом) положении, и обе щели поршня, распре-
деляющего жидкость (для последнего случая им является пор-
шень /), перекрыты.
Машины этого типа применяются также и для работы в ка-
честве гидромоторов.
§ 59. Гидромашины с качающимся плоским золотником
и неподвижным цилиндровым блоком
37. Принципиальная схема
Распространены также инверсированные аксиальные машины
с неподвижным цилиндровым блоком и вращающейся наклон-
ной шайбой (рис. 87, а и 6), в которых жидкость распределяется
с помощью плоского качающегося золотника 5 (см. также
рис. 87, в), представляющего собой кольцо прямоугольного се-
чения, посаженное на эксцентричный палец 6. Цилиндровый
блок 3, в котором находятся поршни /, жестко посажен в корпусе,
а наклонная шайба 2 вращается вместе с валом 4. Последний при
своем вращении приводит золотник с помощью эксцентричного
пальца 6, ось которого описывает окружность радиусом е; где
е — эксцентриситет пальца. При таком колебательном движе-
нии золотник 5 последовательно соединяет цилиндры насоса
с полостями всасывания и нагнетания. Канал (окно) с цилиндра
в нейтральном для данного цилиндра положении золотника 5
им полностью перекрывается (рис. 87, в).
Распределение обладает, благодаря ничтожной массе золот-
ника, малой инерцией, а также отличается простотой и надеж-
ностью в эксплуатации, однако, поскольку золотник помещен
в своей камере с зазором, затруднена его герметизация и поэтому
эти насосы применяют обычно при давлениях не выше 10 МПа
(100 кгс/см2).
256
Описанная кинематическая схема машины имеет особые преи-
мущества в применении к гидромоторам, так как благодаря малой
массе вращающихся деталей гидромоторы с подобной кинемати-
кой отличаются высоким быстродействием. Кроме того, вслед-
ствие относительно небольшого перемещения распределитель-
1
6)
Рис. 87. Принципиальная схема и конструкция аксиально-поршневого насоса
с неподвижным цилиндровым блоком
ного золотника 5 (центр его описывает окружность диаметром
2 е), он мало подвержен износу.
Поскольку кинематическая схема этого насоса (рис. 87, а)
соответствует схеме рассмотренных насосов с наклонным диском
(см. рис. 66, б), ход h его поршня определится по выражению
(78), а скорость ооти и ускорение /отн соответственно по выра-
жениям (79) и (80). Так как плунжеры здесь перемещаются в не-
подвижном цилиндровом блоке, они совершают лишь движение
вдоль оси цилиндра, а следовательно, на них действуют лишь
силы инерции, обусловленные кинематикой их осевого движения
в цилиндрах. Средняя подача насоса определится приближенно
по выражению, приведенному на стр. 186.
17 Т. М. Башта 257
При использовании этой машины в качестве насоса необхо-
димо обеспечить ведение его поршней /, которое осуществляется
либо пружинами, помещенными под плунжеры, либо давлением
жидкости, подаваемой от вспомогательного насоса подкачки,
размещенного обычно в корпусе основного насоса. Давление,
; развиваемое насосом подкачки, должно быть больше суммы воз-
можных сопротивлений на пути от этого насоса к основному на-
сосу, а также давления, необходимого для обеспечения надеж-
ного ведения его плунжеров с учетом сил инерции и трения.
38. Расчет распределителя
Расчет распределителя сводится к определению радиусов на-
ружной (/?й) и внутренней (7?вн) кромок подвижного золотника 5,
а также к выбору величины эксцентриситета приводного эксцен-
трика (см. рис. 87, в). Величины этих параметров выбираются
такими, чтобы золотник в верхнем и нижнем (симметричном)
положениях полностью перекрывал окно одного из цилиндров
и одновременно полностью открывал окна двух других цилин-
дров, отстоящих от первых двух цилиндров на 90°, по одному
из которых (Ь) происходит питание жидкостью цилиндра (вса-
сывание), а по второму (а) — вытеснение жидкости из цилиндра
в нагнетательную магистраль,
В положении золотника, представленном на рис. 87, в, пере-
крытым является окно с, а окна а и b полностью открыты, причем
первое соединено с полостью нагнетания и второе — с полостью
всасывания, которое разделяются пояском этого золотника. Для
обеспечения этого разделения радиус наружной кромки
(окружности) золотника должен быть
7?н = R + е —
Этот радиус может быть выражен также уравнением
Л»н = у 7?2 е2 — 2Re cos р + г,
где 7? — радиус окружности расположения распредели-
тельных окон цилиндрового блока;
г = h/2 — радиус сопряжения дуг окон питания цилиндро-
вого блока;
Р и а — углы согласно рис. 87, в (Р — а + 90°);
h— ширина окон в донышках цилиндров.
На основании этих выражений можем написать
/ + е2 — 2еЯсо&0 + -£- = е + R—
а
Произведя преобразования, получим
R (1 + cos Р) — h
258
Поскольку cos (J = cos (90° + а), можем написать
e R (1 — sin a) —ft ’
отсюда
“ V /?2 + £2 + %eR sin a +
h
Введя безразмерный геометрический коэффициент m =
получим
2mR (1 — т)
1 — sin a — 2т
С учетом этого радиус наружной кромки золотника опреде-
лится
7? =/? + е-----L = -Iff”(1 -Ч + (1 _.
н 2 1 — sin a —2т 1 ' 7
Значение т —
h
2R
обычно принимается равным 0,1—0,12.
Радиус /?вн внутренней кромки золотника определится
Явн=/ Я2 + е2 — 2еЯcos(90° — а) —-у =
= ]Z R* + е2 — 2Re sin а-.
Величина межоконной перемычки s определяется отношением
s/й; для бронзовых и стальных блоков это отношение выбирается
в пределах 0,2—0,3 и для чугунных — от 0,5 до 0,8.
Недостатком этого насоса, как и всех насосов с контактом го-
ловки плунжера с плоскостью диска по сфере (см. также рис. 66, б),
является то, что контакт происходит по очень малой поверхности
(пятну), вследствие чего головки плунжеров подвергаются при
высоких давлениях питинговому износу (со сферической поверх-
ности отделяются чешуйки материала), а на поверхности беговой
дорожки наклонного упорного диска появляются цвета побежа-
лости, свидетельствующие о наличии здесь значительных темпе-
ратур.
Кроме того, поскольку точка b контакта сферической головки
плунжера смещена относительно его оси, нарушаются кинема-
тические и силовые зависимости.
17* 259
§ 60. Насосы с клапанным и клапанно-щелевым
распределением
39. Принципиальная схема
Золотниковое распределение является, и в особенности при
высоких давлениях, наиболее слабым узлом машины и основным
каналом утечек. Ввиду этого при высоких давлениях применяет
насосы с клапанным распределением жидкости (см. также стр. 157),
. причем клапаны размещаются как в корпусе насоса (рис. 88, а),
Рис. 88. Аксиально-поршневой насос с клапанным распределением
' J
• . *
так и в его поршнях (рис. 88, б). Жидкость в последних насосах
засасывается в цилиндры насоса из внутренней полости корпуса
через осевые отверстия в плунжерах 3, на концах которых смон-
тированы всасывающие клапаны 2; при рабочем ходе плунжеров
жидкость вытесняется через нагнетательные клапаны 1.
Аксиальные насосы с неподвижным цилиндровым блоком и
клапанным распределением могут применяться при рабочей
260
жидкости (маслах) средней вязкости (20—25 сСт) при давлении
60-—70 МПа (600т-700 кгс/см2) и выше.
ВвиДу того, что клапанному распределению присущи отме-
ченные выше недостатки (см. стр. 159), применяют насосы с кла-
панно-щелевым распределением, принципиальная схема поршне-
вого элемента которого показана на рис. 89, а (см. также стр. 165).
Заполнение цилиндров насоса жидкостью при ходе всасывания
поршней осуществляется через специальные окна (щели) а в ци-
линдрах 3 и вытеснение — через клапаны 4. нагруженные пру-
жинами 5. Следовательно, в этом насосе устранено наиболее
Рис. 89. Расчетные схемы аксиально-поршневого насоса с клапанно-щелевым
распределением жидкости
слабое звено—всасывающие клапаны. Цилиндровый блок на-
соса неподвижен, а поршни (плунжеры) 2 утапливаются в ци-
линдры под действием вращающейся наклонной шайбы (кине-
тора) /; обратный ход поршней из цилиндров (ход всасывания)
происходит под воздействием пружин 6.
Поршни опираются на наклонную шайбу либо непосредственно
своими сферическими головками (рис. 89, а), либо через проме-
жуточные ползушки (рис. 89, б). В первом,случае насосу присущи
недостатки, отмеченные на стр. 204.
Заполнение жидкостью полостей цилиндров происходит при
движении поршня влево (в цикле, хода всасывания), причем при
проходе поршнем участка Лр жидкость в цилиндр не поступает
и в нем развивается вакуум; на оставшейся части пути Лвс (после
прохода правой кромки поршня всасывающего окна а) происхо-
дит заполнение цилиндра жидкостью, которое будет продол-
жаться и при проходе поршнем этого пути в цикле нагнетания
(при ходе вправо). Лишь после перекрытия окна а при ходе
поршня 2 вправо происходит вытеснение жидкости через клапан 4
в полость нагнетания.
Отличительной особенностью.насосов с клапанным и клапанно-
щелевым распределением является их необратимость, т. ё. на-
сосы с этим распределением не могут работать в качестве гидро-
моторов.
261
40. Подача насоса
Из приведенного следует, что полный (геометрический) ход
поршня h, определяемый кинематикой насоса, складывается из
двух частей: 1) обеспечивающей всасывание жидкости (Лвс) и
2) обеспечивающей подачу (нагнетание) жидкости в систему, т. е.
рабочего хода поршня после отсечки (перекрытия) им окна а
всасывания до крайнего правого положения (Яр):
/i hRC ~F Zip,
отсюда ход нагнетания
г
hG = h — hRC.
Р DV
Полный (геометрический) ход поршня определится по выра-
жению (79)
h = D tg у,
где D— диаметр окружности расположения цилиндров в блоке.
Ход всасывания определится как
^вс === 2 tg *V (t COS фотс),
где Фоте -— Угол поворота вала от исходного, при котором про-
исходит отсечка кромки всасывающего окна поршнем.
За начало отсчета угла фотс принимается положение наклон-
ной шайбы, при котором начинается ход нагнетания рассматри-
ваемого поршня (ход в направлении к клапану).
Ход нагнетания составит
hP = D tg у — -2- tg у (1 — cos <ротс) = -J- tg у (14- cos <ротс).
Ход нагнетания поршня йр соответствует углу а — (180° —
— а0), т. е. углу от положения отсечки плунжером всасывающего
окна а до конца хода вытеснения. Величина этого хода вычисляется
*
hp = ~ tgу (1 — cosa0), (89)
где а0—угол поворота вала от нейтрального (левого) положе-
ния до положения, при котором происходит отсечка
плунжером кромки всасывающего окна.
Угол а0 выбирается таким, чтобы было обеспечено заполне-
ние жидкостью полости цилиндра за время двойного хода от
угла а = а0 до а = 180°.
В соответствии с изложенным расчетная подача рассматри-
ваемого насоса определится не полным (геометрическим) ходом
плунжера, а лишь той его частью, которую плунжер проходит
после отсечки им кромки всасывающего окна а. Следовательно,
232
рабочий объем насоса (теоретическая подача за один оборот),
составляет
q = hpfz = ^-zDtgy(l — cosa0),
где d — диаметр плунжера.
Средняя расчетная подача насоса
<2Т = qn = —- znD tg у (1 — cos a0).
Практически принимают a0 = 65°. Ход нагнетания и диа-
метр поршня обычно связаны отношением h^ld = 0,8.
Всасывание (заполнение цилиндров) происходит на части
пути, соответствующем углу поворота а0 — 180 — а при ходе
всасывания, и на части пути, соответствующем углу а0 при ходе
нагнетания. Следовательно, всасывание происходит при суммар-
ном повороте на угол авс = 2а0 130°.
При увеличении угла а0 выше приведенного значения наблю-
дается (при работе без наддува баков сжатым газом) явление
кавитации, а при уменьшении а0—снижение подачи (рабочего
объема).
Для бескавитационнэй работы насоса должно быть обеспе-
чено соответствующее давление на входе в насос. Проходное се-
чение окна на всасывании меняется и является функцией угла
a = (о/ поворота вала. Текущий расход жидкости через окно
= рыл dhp,
(90)
где р — коэффициент расхода;
и — теоретическая скорость всасывания;'
h0 — величина текущего открытия всасывающего окна;
d — диаметр поршня.
Текущее перемещение поршня й, соответствующее углу по-
ворота вала а, равно согласно приведенному
k — 4г-tg Т (1 cosa). (91)
£
Вычитая равенство (89) из уравнения (91), находим величину
открытия всасывающего окна
I
hBC = h — hp = -£- tg у (cos a0 — cos a),
где a _> a0
263 -
Скорость всасываемого потока определится из равенства (да-
вление в полости цилиндра в процессе всасывания принимаем
постоянным)
и —
где Ар — перепад давления между внутренними полостями на-
соса и цилиндра;
у — объемный вес жидкости.
Подставляя и и Лвс в уравнение (90) и учитывая, что dt — —
(где <о — угловая скорость вала), получаем
tg /у (cos а0 — cos а) = dQ.
Цилиндр будет заполняться за йремя двойного (прямого и
обратного) хода h^, в. соответствии с чем равенство расходов
можно записать в виде
ЛР = I* V 2Я -V D tgT J (cos <x0 — cos a) da,
• a0
откуда
(л -—a0) cos a0 4~ sin a0 __ ad_.
1—cosa0 -j/ Дп
У 2g-у
Регулирование подачи насоса осуществляется изменением
величины рабочего хода hp плунжера, достигаемого тем, что на
части конструктивной величины этого хода полость нагнетания
цилиндра соединяется с всасывающей полостью. Тем самым из-
меняется соотношение между ходом всасывания и ходом нагне-
тания. Поскольку вытеснение, жидкости на этой части пути
происходит практически при нулевом перепаде давления (при
давлении слива), подобное регулирование не связано с потерей
мощности (энергии).
В большинстве этих насосов регулирование осуществляется
автоматически, в зависимости от выходного давлейия (см. стр. 407).
Кривая подачи насоса с учетом рассмотренной особенности вы-
теснения будет аналогична кривой, Представленной на рис. 51, б.
Перемещение поршня, его скорость и ускорение определятся
соотношениями (78) — (80).
Коэффициент неравномерности
__ Стах — Qmin
' л1 J
vtnax
264
или
д_____________________________s*n Фотс_______________
- — sin Фоте + sin (Фотс + а) + sin (ф0Тс + 2а) Н- ’
360 „ л
где а = —- — центральный угол между цилиндрами блока.
41. Типовые конструкции
Распространенная конструкция насоса с клапанно-щелевым
распределением показана на рис. 90, а. Ведущая наклонная
шайба 6 этого насоса, воздействующая .дри вращении вала на
Рис. 90. Конструкции насосов с клапанно-щелевым распределением
ролики 5 поршней 4, жестко связана (или составляет одно целое)
с приводным валом 7. Каждый цилиндр насоса на линии Нагне-
тания имеет по одному шариковому клапану 1, через которые
265
жидкость при утапливании поршней вытесняется в нагнетатель-
ную линию. Всасывание (заполнение цилиндров жидкостью)
происходит через окна 2 в боковых стенках цилиндра, выполнен-
ные на таком расстоянии от конца цилиндра, что поршни откры-
вают их лишь во второй половине своего хода всасывания (при
движении поршней). Поршни связаны с наклонной шайбой 6
при помощи пружин 3.
Аналогичный насос изображен на рис. 90, б. Питание насоса
осуществляется через осевой канал 9 и далее — через проточки 8
в боковых стенках цилиндров. В нагнетательных полостях ци-
линдров установлены плоские клапаны 10. Поршни (плунжеры) 4
с помощью пружин 3 прижимаются к наклонной шайбе 6, опи-
раясь на нее сферическими концами.
§ 61. Основные вопросы изготовления деталей
аксиально-поршневых насосов
Для изготовления скользящих пар аксиально-поршневых на-
сосов в большинстве случаев применяют пару сталь — бронза.
Упорно-распределительный диск (золотник) изготовляют в основ-
ном из стали Х12Ф1 в паре с цилиндровым блоком из оловянисто-
свинцовистой бронзы. В насосах больших размеров из бронзы
изготовляют лишь трущиеся поверхности блока (втулки цилинд-
ров и торцовую опору), сам же блок изготовляют из стали типа
12ХНЗА. В насосах малого размера цилиндровый блок изго-
товляют целиком из бронзы, в частности, из сурьмянистой бронзы
(НВ 60), в паре с распределительным диском (золотником) —
из стали ХВГ (HRC > 60).
Применяются также распределительные диски из нитрирован-
ной стали (HRC 60—62) в паре с цилиндровым блоком из свин-
цовисто-оловянистой или сурьмянистой бронзы. В этом случае
поршни изготовляют из цементируемой стали 12ХНЗА с твер-
достью рабочих поверхностей HRC 58 или из стали ХВ2, имею-
щей без специального поверхностного упрочнения твердость
HRC 55—60.
Для улучшения приработки и уменьшения износа торцы
бронзовых цилиндровый блоков и распределительных дисков
обычно покрывают тонким слоем (в несколько микрон) анти-
фрикционных материалов (серебром, индием с подслоем свинца
и свинцом). Для снижения трения и повышения стойкости к за-
грязнениям в насосах, предназначенных для работы при темпе-
ратуре жидкости от —54 до +427° С, стальные детали покры-
вают серебром.
Для обеспечения достаточной прочности цилиндрового блока
и для удовлетворения одновременно с этим антифрикционных
требований по качеству скольжения применяют стальные цилинд-
ровые блоки с наплавкой поверхностей трения (внутренних по-
266
верхностей цилиндров и торца) антифрикционным цветным ме-
таллом. Сопряженные с цилиндром детали (поршень и распреде-
лительной золотник) в этом случае изготовляются также из
стали.
Поршни изготовляют часто также из шарикоподшипниковой
стали ШХ15 с закалкой до HRC&2—64. Для стального цилиндро-
вого блока (HRC 60) поршни изготовляют обычно из бериллиевой
бронзы.
Для условий эксплуатации при высоких температурах (>150° С)
поршни и гильзы покрывают серебром. Для изготовления же на-
сосов, предназначенных для работы при температурах выше
500° С, применяют никелёвые сплавы.
Обработка торцов упорно-распределительного диска обычно
производится по 8—9-му, а цилиндрового блока—по 9—10-му
классам чистоты. Обработка рабочих поверхностей поршней и
цилиндров обычно находится в пределах 10—12-го класса чи-
стоты. Поршень помещают в цилиндр с диаметральным зазором
в пределах 0,010—0,015 мм. При обработке торцовых поверхно-
стей необходимо выдержать плоскостность опорных торцов ци-
линдрового блока и распределительного диска, а также их пер-
пендикулярность к осям вращения; непрямолинейность этих
поверхностей не должна превышать 0,005 мм.
Окружные скорости на трущихся торцовых поверхностях не
должны превышать 8—10 м/с, среднее значение скорости движе-
ния поршней в цилиндрах 4—6 м/с.
Особо следует указать на недопустимость Люфтов в поршне-
вой группе, которые могут образовываться при некачественной
завальцовке сферических головок шатунов в поршнях. Эти люфты
могут нарушить фазораспределение, а также вызвать в резуль-
тате ударного действия на поршни давления жидкости дополни-
тельные динамические нагрузки, снижающие механическую проч-
ность насоса. В частности наблюдаются случаи разрушения по
этой причине поршневых шатунов.
Поршень соединяют со сферическим поршневым штоком обычно
с помощью завальцовки (см. рис. 59, а). Это соединение должно
быть достаточно жестким и прочным, чтобы преодолеть действую-
щие в данном соединении силы, к которым относятся: усилие,
развиваемое вакуумом в цилиндре, силы инерции поршня и силы
трения его в цилиндре.
§ 62. Последовательность расчета основных параметров
аксиально-^поршневой гидромашины
Порядок и последовательность расчета основных параметров
аксиально-поршневых машин с плоским распределителем (см.
рис. 57) будут теми же, что и у радиально-поршневых машин
(см. стр. 175).
267
Диаметр поршня d насоса ориентировочно подсчитывают по
формуле
где <71= —4— h—рабочий объем одного цилиндра (d и h —
диаметр и максимальный ход поршня);
fas ; величину i выбирают обычно в пределах
1—2.
Для расчета диаметра d поршня гидромотора, исходя из его
рабочего объема q (расчетного расхода за один оборот) в см3,
используют практическое выражение
d = (1,4-4-1,5) \/ --- см,
V 7 V гг tgvnod
где у — угол наклона шайбы;
г — число поршней;
Лоб ~ объемный к. п. д. гидромотора.
Диаметр поршня гидромотора, исходя из крутящего момента
М '{в кгс-см) можно рассчитывать по формуле
“Ч
d = (2,7 -н 2,8) 1/ .7--^,---------см,
г 2 (рн — Рсл) tg УЧмех
где рн и рсл — давление в нагнетательной и сливной полостях
гидромотора в кг/см2;
т|мех — механический к. п. д. гидромотора.
Рекомендуемое число цилиндров гидромотора выбирают из
приведенного ряда:
Расход на один оборот в см3 ... До 100 100 — 250 Свыше 250
Рекомендуемое число цилиндров z 7 9 11
> Для улучшения условий подвода жидкости в цилиндры диа-
метр D6 окружности (см. рис. 74, а), на которой расположены
оси цилиндров, должен быть минимальным. Однако при этом
необходимо сохранить оптимальную толщину (а = 0,2d) стенки
между цилиндрами, чтобы была обеспечена жесткость цилиндро-
вого блока (см. рис. 74, в).
При расчете блока на прочность следует стремиться, чтобы
жесткость его во всех направлениях была примерно одинакова.
При расчете жесткости цилиндра необходимо учитывать также
действие внутреннего давления в соседних цилиндрах.
Диаметр £)б окружности цилиндрового блока, на которой
расположены оси цилиндров, и наружный диаметр Dp блока,
выбирают (рассчитывают) по формулам
jDe === (0,35 н— 0,4) dz\ Dp = 1,6d,
где d и z — диаметр и число цилиндров.
268
Эти соотношения получены из расчета, что толщина стенки
между цилиндрами составляет а — 0,2d,. а толщина стенки между
зеркалом цилиндра и наружной поверхностью цилиндрового
блока Ь = 0,3d, где d — диаметр цилиндра (см. рис. 74, а и в).
л
Пример. Требуется спроектировать аксиально-поршневой насос с пода-
чей фэф ~ 162 л/мин при перепаде давления Дрн = 70 кгс/см2 и рассчитать'
основные его параметры.
Принимаем величину полного к. п. д. Лполн = 0,9 (90%). В этом случае
приводная мощность .
ЮфэфАрн _ 10-162-70 OQ ,о„с п .
^пр 60-75т]полн 60-75-0,9 ' 28 Л' С’ ( 0,6 Вт>'
*
Величина расчетной подачи
при т]об = 0,95
162 .
VT —-------= 170 л /мин.
Лоб 0,95
*
Выбираем частоту вращения п ~ 900 об/мин и число цилиндров г ~ 7;
объем цилиндра для обеспечения этой подачи находим из уравнения QT f= qn =
fhzn ,
л/с
170.40
fh= eilgo—0,0135 дм3 =13.5 см3,
где / и ft ~ площадь ц ход поршня.
Диаметр осевой окружности блока = 27? и ход h поршня связаны соот-
ношением [см. выражение (77)]
h = R tg у = R tg 20° = 0.364R = 0,364
£
n
где ----радиус окружности, проходящей через оси цилиндров блока.
Предполагая, что,75% длины окружности 2л7? занято цилиндрами, получим
выражение для расчета диаметра поршня:
, . 0,75-360 арсп
dn — 27? sm —y-s— = 0,667?.
ndn
Учитывая, что fh ~
h= 13,5 см2, имеем после подстановки
-у (0,66R)3-0,364R = 13,5; R =У109 = 4,77 см;
dn = 3,15 cm.
z
Отсюда требуемый ход поршня h = 1,75 см.
Пример. Рассчитать основные параметры аксиально-поршневого насоса
с наклонным диском (см. рис. 57,6) с эффективной подачей Фэф ~ 100 л/мин
при давлении д = 200 кгс/см2.
Принимаем число цилиндров z = 9 и частоту вращения п — 1500 об/мин.
Выбрав величину объемного к. п. д. т]об = 0,95, находим расчетную подачу
насоса
Сэф юо
—— == == Ю5 л/мин — 105 000 см3/мин.
Лоб 0,95
269
Рабочий объем насоса
2т 105 000
“ “ ----1ЕПЛ — '0 СМ '
п 1500
Рабочий объем одного цилиндра
q 70 7 7 з
?ц = Z = “9“ = 7,7 СМ
Диаметр плунжера (поршня)
з
где дц ~ —— Дтах — рабочий объем одного цилиндра;
^тах и d — максимальный ход поршня и его диаметр;
i = - ™ах — практический коэффициент, величина которого находится
4 обычно в пределах 1—2.
целях создания благоприятных условий нагружения плунжеров боковой
останавливаемся на
силой
^шах
В
этом случае диаметр цилиндра
3,14-1,5
1,5 cm»=s 15 мм.
Выбрав по соображениям прочности толщину а стенки между цилиндрами
блока (см. рис. 74, в) а ~ находим приближенно диаметр Dq окружности
цилиндрового блока, на которой расположены оси цилиндров
£>б “ 0,4dz = 0,4 15 -9 = 52 мм.
Из выражения для вычисления
находим угол у наклона диска, при
метрах требуемый рабочий объем
рабочего объема насоса q = D& tg у —z,
котором будет обеспечен при данных пара-
насоса:
3,14Г>б-1,52-9 0,82'
Расчетная мощность насоса
N.
pQT 200-100 .. . /оп7 о \
= ~450~ = 414 Л' С- (32'7 КВТ)'
Приняв зпачение
водную мощность
механического к. п. д. равным т|мех = 0,9, находим при-
^пр
N 44 4-
_21_ = 50 л. с. (36,8 кВт).
Пмех 0,9
f
270
§ 63. Сдвоенные насосы
В ряде случаев применяются- сдвоенные аксиально-поршне-
ные гидромашины (насосы и гидромоторы), представляющие кон-
структивно объединение двух машин в общем корпусе. Примене-
нием их представляется возможность повысить подачу (мощность)
без существенного увеличения габаритов; кроме того, упрощается
Рис.
fi)
91. Сдвоенные аксиально-
поршневые насосы
обеспечение жесткости конструкции и устраняется надобность
в упорном подшипнике, который воспринимает осевые усилия,
действующие на наклонный диск.
Типовая конструкция сдвоенного гидромотора приведена на
рис. 91, а. Гидромотор состоит из общих корпуса 5 и статорного
кольца 4, а также цилиндрового блока 5, посаженного на вал 7.
Поршни 2 и 6 с грибовидными головками опираются на соответ-
ствующий наклонный диск 1 или S. Распределение жидкости (пи-
тание цилиндров и отвод жидкости из них) происходит через
индивидуальные для каждой пары цилиндров каналы Ь, соеди-
ненные с камерами а и с всасывания и нагнетания. Цилиндровый
блок 3 размещен на подшипниках качения, благодаря чему устра-
нен непосредственный контакт трущихся поверхностей распреде-
лительной пары. Диски 1 и 8 наклонены в противоположные один
к другому стороны, ввиду чего подача каждой пары поршней 2
и 6 обоих цилиндровых блоков машины йроисходит одновременно
(совпадает по фазе).
271
/
Недостатком этой схемы является трудность обеспечения гер-
метичности распределительного узла, а также высокие окружные
скорости скользящей его пары, обусловленные тем, что скольже-
ние деталей пары происходит по большому диаметру цилиндро-
вого блока 4. В более поздних конструкциях этих насосов поршни
опираются на наклонные диски через башмаки (см. рис. 81, в),
что позволяет повысить давление до 210 кгс/см2 и выше.
Сдвоенные гидромашины имеют.благодаря особенностям их
силовой схемы особые преимущества при применении их в каче-
стве тихоходных высокомоментных гидромоторов. Схема такой
сдвоенной машины аксиально-поршневого типа показана на
рис? 91, б. Каждый поршень 11 несёт на внешнем конце по одному
ролику 10, которым он опирается на ведущий кулачковый диск Р;
профиль диска выполняется таким, что обеспечивает несколько
(обычно три и более) рабочих ходов поршней. Движение выход-
ного звена осуществляется здесь благодаря качению роликов 10
по поверхностям торцовых дисков 9, представляющим собой по-
верхности переменной кривизны. Распределение жидкости осу-
ществляется через каналы 12.
Эти гидромоторы строятся на крутящие моменты от 10 до
2000 кгс-м и широкого диапазона частот вращения, минимальное
значение которых доводится до 1 об/мин.
ГЛАВА VII
ПЛАСТИНЧАТЫЕ ГИДРОМАШИНЫ
Роторно-пластинчатый насос и гидромотор по форме вытесни-
телей и по способу замыкания вытесняемого объема относятся
к группе машин, в которых вытеснители выполнены в виде пластин
(шиберов), помещенных в радиальных прорезях вращающегося
ротора, а вытесняемые объемы^замыкаются между двумя сосед-
ними вытеснителями и поверхностями статора и ротора. Следо-
вательно, пластинчатая (шиберная) гидромашина (гидромотор или
насос) это — роторная гидромашина с подвижными элементами
в виде ротора, совершающего вращательное движение, й пластин
(шиберов), совершающих вращательное и возвратно-поступатель-
ное или возвратно-поворотное движения.
Эти машины, получившие в практике так же название лопаст-
ных, являются наиболее простыми из существующих типов и
обладают при всех прочих равных условиях большим объемом
рабочих камер.
§ 64. Пластинчатые насосы
одинарного действия
42. Двухпластинчатый насос
Наиболее простым насосом пластинчатого типа является на-
сос с двумя пластинами 3 и 5, подвижно монтируемыми в общем
сквозном радиальном пазу ротора 7 (рис. 92, а). Эти пластины,
которые по существу являются одной пластиной, образуют с по-
верхностями ротора 7 и смещенного относительно него на вели-
чину е статора 1 с осью 0а две серпообразные камеры (полости)
а и. Ь.
При повороте ротора 7 относительно оси 0х в направлении,
указанном стрелкой, объем камеры а насоса (отмечено точечной
штриховкой), соединенной с всасывающей полостью 6, увели-
чивается, а камеры Ь, соединенной с нагнетательной полостью 4,
уменьшается, в соответствии с чем происходит всасывание (че-
рез канал 6) и нагнетание (через канал 4) жидкости. Поскольку
ротор 7 имеет плотный контакт с нижней частью статора /, одна
18 Т. М. Башта 273
7 1
a 2 3 b
Рис. 92. Принципиальная (а) и расчетная (б) схемы двухпластинчатого
насоса
из пластин 3 или 5 в любом положении ротора 7 отделяет всасы-
вающую полость 6 от нагнетательной 4. Для возможности радиаль-
ного перемещения пластин и обеспечения плотного контакта со
статором, пластины распираются пружиной 2, поджимаясь к ста-
тору 1.
43. Расчетная подача двухпластинчатого цасоса
% I *
Расчетная схема этого насоса представлена на рис. 92, б.
Подача каждой пластиной за один оборот определится площадью,
отмеченной точечной штриховкой, значение которой, определяем
из геометрических соотношений. Из рис. 92, б следует, что эта
площадь для случая угла ф = и толщины пластины Ь = О
будет
s = (₽2 — г2 — е2) + 2Re,
где R и г—радиусы статора и ротора;
е — эксцентриситет.
В соответствии с этим средняя расчетная подача насоса с уче-
том, что за каждый оборот вытеснится два объема, соответствую-
щих этой площади, будет
QT = 2Bsn = 2Вп
где В — ширина ротора;
п — частота вращения вала насоса.
274
С учетом объема пластин, равного q' = 4Bebn, подача опре-
делится как
QT = Вп
(/?2_г2_е2) + 2е(/?—6) ,
где b — толщина пластины.
Так как текущая площадь вытеснения в рассматриваемом
двухпластинчатом насосе значительно изменяется по углу пово-
рота вала, переменной по углу поворота ротора является также и
подача. Наличие пульсации подачи является одним .из факторов,
ограничивающих возможность широкого применения насосов этой
схемы. Кроме того, такой насос пригоден для работы при неболь-
ших давлениях, ввиду чего он применяется для вспомогательных
целей (подача смазки и др.).
44. Многопластинчатые насосы
Для снижения пульсации подачи применяют насосы с несколь-
кими пластинами. На рис. 93 приведена схема одного из таких
насосов, применяющихся в системах подпитки основных насосов
и в системах смазки. Насос состоит из вращающегося ротора 2,
в радиальных прорезях ко-
торого помещены пластины
(вытеснители) /, и статорного
кольца 5, ось которого сме-
щена относительно оси ро-
тора на величину е. Питание
насоса жидкостью (всасыва-
ние) осуществляется через
серпообразное окно а (для
данного направления враще-
ния), а вытеснение (нагне-
тание) — через окно Ь; окна
выполнены на боковых крыш-
ках насоса.
Поскольку геометрическая
ось цилиндрической поверх-
ности статорного кольца 3
эксцентрична относительно
оси ротора 2, объемы рабо-
чих камер, ограниченных
двумя соседними пластинами (шиберами) и поверхностями ротора
и статора, при вращении ротора изменяются. Так, при направле-
нии вращения, показанном стрелкой, объем камеры Ь, находя-
щейся в текущий момент по правую сторону вертикальной оси
(между пластинами 4 и 5), будет уменьшаться и рабочая
жидкость выдавливаться через нагнетательное окно Ь; объем
же симметричной камеры, находящейся в данный момент по
Рис. 93. Схема многопластинчатого на-
соса с гидравлическим поджимом пластин
18*
275
левую сторону вертикальной оси, будет увеличиваться, в резуль-
тате жидкость будет засасываться в нее из всасывающего окна а.
Важным фактором является надежное (герметичное) разде-
ление окон (полостей) всасывания а и нагнетания &, которое осу-
ществляется пластинами при проходе ими перевальной (разде-
лительной) перемычки между этими окнами. Для этого окна
располагают по обе стороны нейтральной (вертикальной) оси
на таком расстоянии, чтобы при лю0ом положении ротора между
рими находилось не менее одной пластины.
Рис. 94. Схема многопластинча-
того насоса
Рис. 95. Схема пластинчатого
насоса с цапфовым распределе-
нием
Для повышения герметичности пластины 5 некоторых насосов
снабжают сврбодно посаженным уплотнительным элементом 6,
кривизна внешней поверхности которого соответствует кривизне
статорного кольца.
В этих насосах обычно применяют положительное перекрытие,
при котором рабочая камера (на рис. 94 отмечена точечной штри-
ховкой) в ее среднем положении размещается на перевальной
(разделительной) перемычке, будучи отсеченной (изолирован-
ной) как от полости всасывания а, так и от полости нагнетания Ь.
Для избежания компрессии жидкости в рабочей камере при про-
ходе ее через перевальную перемычку, обусловленной измене-
нием при этом замкнутого объема камеры, и для уменьшения не-
равномерности подачи это перекрытие камеры перемычкой (пре-
дышение размера перемычки над раствором концов пластин)
волжно быть возможно малым, однако таким, чтобы было обеспе-
чено разделение полостей всасывания и нагнетания. Полное устра-
нение компрессии достигается при условии равенства угла 0
между двумя смежными пластинами (см. рис. 93) углу а между
окнами всасывания и нагнетания (а = |J). Подобное условие соот-
ветствует так называемому нулевому перекрытию.
Плотность контакта пластин со статором обеспечивается при
помощи пружин и прочих механических средств, или давлением
276
жидкости. В насосе, схема которого представлена на рис. 93,
жидкость под давлением подводится через осевое k и радиальные
сверления в прорези ротора под пластины.
Подобные насосы обычно имеют 6—12 пластин. При увели-
чении числа пластин уменьшается действующая на них танген-
циальная нагрузка и повышается равномерность потока нагне-
таемой жидкости.
Применяются также иные схемы распределения жидкости.
На рис. 95 изображена схема с цапфовым распределением. На-
порное а и всасывающее b окна размещены в неподвижной цапфе
(см. также рис. 29). С рабочими камерами (клетями) эти окна сое-
динены радиальными отверстиями d в роторе /. Ротор в этой схеме
соединяется с валом при помощи торцового соединения. Изме-
нение подачи осуществляется путем перемещения внешнего бара-
бана (статора) с.
45. Расчетная подача многопластинчатого насоса
Рабочий объем q (расчетная подача за один оборот) насоса
равен объему, описываемому рабочей частью пластины высотой
h = 2г, имеющей контакт с левой разделительной перемычкой а
за один оборот (рис. 96, а; условно показаны лишь две пластины;
кроме того, рабочая высота правой пластины принята равной
нулю).
Из приведенной расчетной схемы (см. также рис. 94) следует,
что рабочая высота h пластины изменяется при прохождении ею
перевальной перемычки, причем в нейтральном положении (при
расположении на оси симметрии) она будет максимальной, рав-
ной fi = 2г, где е — эксцентриситет насоса.
Допуская, что толщина пластины равна нулю и рабочая вы-
сота ее при повороте ротора на угол а, в пределах которого пла-
стина будет находиться в контакте с левой перемычкой а статора,
не изменяется и равна h = 2г, находим рабочий объем насоса
q = 2np/ib = 2npft2e, (92)
где р—расстояние от центра вращения ротора до центра да-
вления рабочей площади пластины
b — ширина ротора.
В соответствии с этим имеем
q =• nDhb = 2nDeb,
(93)
где D — диаметр колодца (расточки) в корпусе статора.-
Средняя расчетная (теоретическая) подача насоса за п обо-
ротов в единицу времени, будет
QT = 2nDenb или QT = wphb, (94)
ч
где со — угловая скорость.
277
В общем случае выражение для расчета подачи можно полу-
чить исходя из элементарного объема dq, вытесняемого при пово-
роте ротора на угол dtp:
dq = hbRdy,
Интегрируя в пределах 0 — 2л, получим величину рабочего
объема (без учета толщины пластин):
2л 2л
q = j hbR dq? = eRb J (1 — cos q?) dq) == 4ле/?&.
о о
Средняя подача насоса [см. также уравнение (94) ] будет
QT = qn — bneRbn = 2лОепЬ.
Рис. 96. Расчетные схемы пластинчатого насоса
Геометрическая подача пластинчатого насоса (машины) может
• быть также определена из условия равенства подведенной к нему
механической энергии и энергии, отданной рабочей жидкости за
время dt:
(рн — pB)dV = ApdV = Mda = Meudt, (95)
где рн и рв— давление нагнетания и всасывания;
dV—объем жидкости, поданный за время d/;
da — угол поворота ротора за время dt\
со — угловая скорость ротора;
М — крутящий момент на валу насоса.
При нахождении разделительных пластин на оси симметрии
(средней оси) обоих перевальных перемычек крутящий момент
определится (без учета толщины пластин) (рис. 96, б)
Af -^(|,; /) . (96)
4W &
где b и г— ширина и радиус ротора;
Ар — рн — Рве — перепад давления;
Pi и р2— радиальные размеры расточки статора, от-
считываемые от оси О± ротора.
278
Подставив значение М. из выражения (96) в формулу (95)
da
~dt
и учитывая
= GJ,
получим выражение теоретической (гео-
метрической) подачи
dV &CD / 2 2\
= ~Т <pI - р2'-
1
Рис. 97. Расчетная схема пла-
стинчатого насоса с поджатием
пластин давлением жидкости
С учетом толщины s пластин, жидкости будет вытесняться
меньше на величину объема, занимаемого пластинами; в резуль-
тате средняя подача будет [см. вы-
ражение (94) ]
QT = 2 ben (л£) — zs). (97)
Снижение подачи обусловлено в
этом случае тем, что часть вытес-
няемой жидкости расходуется на
компенсацию объема пластин, нахо-
дящихся в нагнетательной зоне при
утапливании их в пазы ротора. Иначе
говоря, при толщине пластин s> 0 в
подаче будут участвовать также и
пластины, вышедшие за пределы
перевальной перемычки, поскольку
их погружение (утапливание) в пазы
ротора изменяет объем отдающей
(нагнетающей) камеры, в соответ-
ствии с чем величина мгновенной подачи будет уменьшена.
В некоторых конструкциях насосов полости прорезей ротора
под пластинами последовательно соединяются с помощью под-
ковообразных каналов с и d с нагнетательным b и всасывающим а
окнами (рис. 97), благодаря чему пластины создают дополнитель-
ную' подачу, действуя в этом случае как прямоугольные поршни
и тем самым восполняют расход на компенсацию объема утапли-
ваемых пластин. Очевидно, подача’такого насоса
QT = 2nDben.
Регулирование производительности QT и изменение напра-
вления подачи осуществляются соответствующим изменением ве-
личины и знака эксцентриситета е (рис. 98). В положении / на-
сос установлен на максимальный эксцентриситет +е, что соот-
ветствует максимальному расходу +QTmax; в положении II зна-
чения е = 0ифт~0ив положении III имеет место максималь-
ный эксцентриситет обратного знака (—етах) и соответственно —
максимальная подача противоположного направления (—Qmax).
Эксцентриситет изменяется обычно с помощью винтового меха-
низма (рис. 99) или иных механических и гидравлических уст-
ройств (см. стр. 381).
279
Предварительный выбор основных размеров насоса ведется
по рабочему объему q, пользуясь следующими практическими
соотношениями: (
а) наибольший эксцентриситет в см
з/-—
^max = k у —— , (98)
т Чоб
< +e(+Qmm() e~O(Q~O) -e(-Qmax)
л
Рис. 98. Схемы регулирования подачи пластинчатого насоса
где k.= 1 при q 200 см3, k = 0,8 при 200 < q 500 см3 и
k = 0,6 при 500 < q 4000 см3. -
б) диаметр направляющей (статора) в мм
D = 27?
Рис. 99. Схема пластинчатого насоса
с ручным регул ированием^лодачи
500g
Ло^^х^тах ’
где kr = 0,2-4-0,55 и увеличи-
вается с уменьшением пара-
метра;
в) ширина ротора и пластин
b — kD; радиальная длина пла-
стин / Ь^тах; ЧИСЛО ПЛЗСТИН—
от 7 до 16.
Пример. Требуется спроектиро-
вать и выбрать параметры пластин-
чатого насоса на подачу СЭф“75 л/мин
при давлении р = 70 кгс/см2. Предпо-
лагаемые значения механического и объемного к. п. д. равны 0,9.
В этом случае расчетная подача
Сэф 75
-----— __ =- 8з,з л/мин или 1;4 л/с.
/Лоб 0,9
Приводная
Mip
мощность
10<2эфР 10 1.25-70 ,.п.п.
75 0,9 0,9 ~ 4,5 Л‘ с- <10'7 кВт)-
75т|об'1мех
280
Принимая я = 1200 об/мин и учитывая
формуле (98) эксцентриситет е = 4 мм. Тогда,
2nDenb _.
— —™’ см3/с, имеем
ЬО
QT = 1,4 л/с, выбираем по
учитывая уравнение (94) QT =
_ 60QT 60-1,4.103
Db =
-—— — » zx л — 28 см2.
2пеп 2л.1200-0,4 .
Диаметр статора D = 2R определяется (см. рис. 96 б):
D d
^=^ + e + c^R + e + ct
где с —- зазор между статором и ротором.
Диаметр ротора d= 2г определяется суммированием минимально допустимой
длины заделки шибера в прорези ротора, а также его рабочего хода, равного 2г,
и зазора с между статором и ротором с учетом толщины роторной втулки и ра-
диуса вала. Принимая с = 1 мм, толщину втулки 5,5 мм и радиус вала 17, 5 мм,
имеем для случая радиального расположения пластин
= г = 16 + 1 + 5,5+ 17,5 =40 мм; d = 80MM HD = d+e + c = 90 мм.
Тогда Ь = 28/9,0 = 3,1 см = 31 мм.
Нагрузка давления жидкости на валик ротора
Р = pDb = 70 -28 = 1960 кгс.
46. Равномерность (пульсация) подачи
При расчете подачи было принято допущение, что рабочая .
высота h пластины при проходе ею всего участка перемычки
равна 2е. В действительности же, поскольку центр 0х вращения
ротора смещен относительно центра О2 направляющего кольца
(статора), который представляет круг диаметром D = 2R (см.
рис. 96, б), принятое условие h =2е будет справедливо лишь
для мгновенного (среднего относительно разделительной пере-
мычки) положения пластины, в иных же положениях ее рабочая
высота будет переменной и меньше 2е.
Из рассмотренных схем (см. рис. 93—96) следует, что кинема-
тика пластинчатой гидромашины построена, как и кинематика
поршневых машин, на основе ранее рассмотренного ,кривошипного
механизма (см. рис. 42). При этом механизме перемещение
рабочего элемента соответствует приращению в пределах от pmln до
Ртах переменного радиуса р, представляющего собой расстояние
от оси, проходящей через центр О, пластинчатого ротора, до
окружности касания пластин со статором:
р —ecos<p|/?~ ^— +~cos2q>.
Следовательно
281
4
где е — эксцентриситет насоса (расстояние между центрами Ог
и О2 ротора и обоймы);
R — расстояние от точек касания пластины со статором
до оси последней.
Из треугольника О^а^с расчетной схемы, представленной на
рис. 96, б, следует, что текущее значение рабочей высоты h' пла-
стины
К = р — (7? — е), (99)
где R — радиус статора;
е — эксцентриситет насоса;
р ;— текущая радиальная координата пластины (текущее
значение расстояния точки с
Рис. 100. График подачи Q пластин-
чатого насоса в функции угла пово-
рота вала а
контакта пластины со статором от
оси вращения ротора OJ;
р = R cos р '+ е cos (180 —
— ф) — R cos р — е cos ф,
где <р ~ со/— текущий угол по-
ворота ротора от
нейтральной го-
ризонтальной оси.
Подставив это значение р в
уравнение (99), находим выраже-
ние для вычисления текущего
значения рабочей высоты пла-
стины:
h' = R cos р — е cos ф — (R — ё) = е (1
— cos ф) + R (cos р — 1).
Поскольку величина относительно мала, угол 0^0 и
соответственно cos 0^1, можно упрощенно написать
h' = е (1 — cos ф).
Следовательно, значение hf и соответственно подача изме-
няется так же по закону синуса, т. е. изменение объема в процессе
вытеснения жидкости одной пластиной носит, как и у роторных
поршневых насосов (см. стр. 116), синусоидальный характер.
График подачи насоса с четным числом пластин и нулевым
перекрытием в форме кусочно-непрерывной функции, составлен-
ной из косинусоид, показан на рис. 100 в виде кривой abcdef,
построенной в предположении, что момент вступления в работу
очередной пары пластин совпадает с моментом выхода предыду-
щей пары (с моментом выхода за пределы окна), что соответст-
вует нулевому перекрытию (а = 0). При положительном же пере-
крытии (а > 0) (см. рис. 93) очередная пара пластин вступит
в работу лишь после того, как предыдущая пара выйдет за пре-
делы окна, т. е. откроет замкнутый ею объем жидкости. Иначе
говоря замкнутый в этом случае между двумя пластинами объем
(на рис. 93 отмечен точечной штриховкой) будет отсечен на не-
котором угле поворота ротора как от окна всасывания, так и
окна нагнетания (см. рис. 97).
Поэтому участок Ьс кривой' подачи (рис. 100) должен быть
продлен до некоторой точки с' (показано пунктирной линией),
ввиду чего в момент выхода рабочей пары пластин за пределы
окна подача перейдет скачком на новый участок с de. Ввиду того,
что подача QTmin при этом уменьшится, коэффициент неравно-
мерности (пульсации) подачи повысится. Кроме того, при этом
давление в замкнутом между двумя пластинами объеме может
существенно измениться.
Нетрудно видеть, что обусловленная этим пульсация подачи
будет тем меньше, чем больше пластин г ( чем меньше значение .
При нечетном числе пластин равномерность подачи повышается
(амплитуда колебания подачи уменьшается).
Расчеты показывают, что в насосе с числом пластин 17 и 12
колебания подачи, обусловленные изменением рабочей высоты
пластины, соответственно равны 1,7 и 3%.
Помимо рассмотренных причин, нарушающих равномерность
подачи, это нарушение вызывается также тем, что некоторая
часть вытесняемой жидкости расходуется на компенсацию ее
сжатия до рабочего давления в камерах при проходе их из по-
лости всасывания в полость нагнетания. Влияние сжатия жидкости
на равномерность подачи обусловлено следующим: при соедине-
нии замкнутых камер, заполненных жидкостью под давлением
всасывания, с окном нагнетания, в эти камеры будет поступать
из окна некоторое количество жидкости, необходимое для повы-
шения давления в камерах до давления нагнетания. Это вызо-
вет дополнительную пульсацию подачи с частотой nz, где п и
г — частота вращения и число пластин.
Поскольку переход рабочей камеры (на рис. 97 отмечена то-
чечной штриховкой)х из полости всасывания в полость нагнетания
происходит за ничтожное малое время, исчисляемое миллисе-
кундами, обратный поток из полости нагнетания вызовет высо-
кие «забросы» давления в камере, обусловленные гидравличес-
кими ударами, а также — пульсации давления на выходе насоса.
Уровень пульсации подачи и соответственно «забросов» да-
вления зависит при всех прочих равных условиях от объема ка-
меры и сжимаемости жидкости (расчеты, связанные с этим см.
на стр. 290).
Колебания подачи и ударные явления, обусловленные обрат-
ным потоком жидкости в камеру из полости нагнетания, можно
частично снизить выполнением на перевальной перемычке щеле-
видных прорезей малого сечения (см. рис. 97), с помощью которых
достигается плавное соединение камеры с полостью нагнетания
(см. также стр. 219).
283
47. Нагрузка пластин
В большинстве конструкций насосов пластины прижимаются
к статору давлением жидкости, подведенным под ее торец; в ре-
зультате возникает повышенное трение пластин о статор. Уси-
лие, с которым пластина, находящаяся в полости всасывания
(с нулевым давлением), поджимается к статору, в этом случае
будет v
Р = pbs, (100)
где р — давление жидкости в камере под нижним торцом пла-
стины;
s и b — толщина и длина пластины (ширина ротора).
Пластины, находящиеся в полости нагнетания, будут пол-
ностью разгружены от радиальных сил давления жидкости, а пла-
стины, разделяющие полости всасывания и нагнетания, будут
разгружены частично^ Практически при расчетах нагрузки от
давления жидкости, действующего на пластину в положении ее
между полостями всасывания и нагнетания, условно относят
к площади, равной 1/3 произведения толщины пластины на ее
длину: -
Р = ~ pbs.
Для повышения герметичности пластины часто снабжаются
свободно посаженным в гнездо уплотнительным цилиндрическим
элементом 6, кривизна внешней поверхности которого соответ;
ствует кривизне статорного кольца (см. рис. 93).
Г
§ 65. Пластинчатые насосы двукратного действия
48. Основы конструкции
Описанные выше пластинчатые насосы одинарного (однократ-
ного) действия в основном применяются для гидросистем, не
требующих высоких давлений (до 4—5 МПа или 40—50 кгс/см2).
В гидроприводах машинного регулирования их применяют пре-
имущественно в качестве вспомогательных насосов (насосов под-
питок и пр.).
Недостатком пластинчатых гидромашин является трудность
герметизации вытеснителей, особенно герметизации со стороны,
торцов, а также большая нагрузка на ось ротора и пластины от
сил давления жидкости. Поэтому в практике распространены
нерегулируемые пластинчатые насосы двукратного (и реже, —
четырехкратного) действия, которые обладают более высоким
рабочим объемом и к. п. д.
Преимуществом насосов дву- и четырехкратного действия
является уравновешенность радиальных сил давления жидкости
284
на пластинчатый ротор, благодаря чему они пригодны для работы
при более высоком, чем у насосов однократного действия, давле-
нии жидкости (14 МПа или 140 кгс/см2 и выше).
Насос двукратного действия фактически состоит из двух на-
сосов, размещенных в одном корпусе. В корпусе 5 насоса (рис. 101)
помещены боковые диски 2 и статор 4, внутренняя поверхность
которого (фасонного профиля) выполнена так, что участки кри-
вой, расположенные между окнами питания ох, а2, &х и Ь2, про-
Рис. 101. Пластинчатый насос дву-
кратного действия
резанными в дисках 2, являются дугами окружностей, описан- ’
ных из центра ротора, а участки, приходящиеся на эти окна,
выполнены плавно сопрягающимися кривыми (см. также рис. 102).
Окна аг и а2 соединены литыми каналами корпуса с полостью
всасывания, а окна Ьг и Ь2— с полостью нагнетания.
При вращении ротора 2 без давления или при малом давлении
жидкости пластины 3 прижимаются к поверхности статора 4
под действием центробежной силы; при наличии давления на пла-
стину дополнительно действует сила давления жидкости, под-
водимой через кольцевые проточки сна боковых дисках 2в радиаль-
ные пазы ротора под торцы пластин 3 (рис. 102, а).
Из расчетной схемы, приведенной на рис. 103, а, следует, что.
пластины, копируя при вращении ротора, форму статора, дважды
увеличивают (всасывание) за один оборот объем камеры между
двумя смежными пластинами (показано точечной штриховкой) и *
дважды его уменьшают (нагнетание). Поскольку рабочее давле-
ние жидкости действует на диаметрально противоположные сто-
роны ротора (со стороны окон 6Х и д2), подшипники ротора прак-
тически разгружаются от сил давления жидкости. Для более
ч
285
полной уравновешенности радиальных сил давления жидкости
на ротор число камер (число пластин) должно быть четным; рас-
пространены насосы с 12 и 16 пластинами.
Благодаря тому, что междуоконные участки кривых статора
(соответствуют углу s; рис. 103, а) описаны из центра О вращения
&) в)
Рис. 102. Схемы пластинчатого насоса с наклонным (tz) и радиальным
(б) расположением пластин
ротора, практически устраняется компрессия жидкости при
проходе этих участков пластинами и уменьшается пульсация
подачи. Пульсация в этом случае определяется разницей в рас-
а)
Рис. 103. Расчетная схема пластинчатого насоса (а) и его характеристика (б)
б)
ходах жидкости, идущей на заполнение прорезей ротора под пла-
стинами при их выдвижении, и жидкости, вытесняемой пласти-
нами при их утапливании, а также сжимаемостью жидкости в ка-
мерах насоса и деформацией его корпуса. Кроме того, благодаря
концентричности межоконных участков статора, пластины в пе-
286
риоды, когда они находятся под боковой односторонней гидра-
влической нагрузкой, не перемещаются в пазах, благодаря чему
уменьшается их трение и износ.
Пазы (прорези) в роторе, в которых помещаются пластины 3,
обычно выполняют наклонно под углом а к радиусам (см. рис. 101
и 102, а) и реже — с радиальным расположением (см. рис. 102, б).
Наклонное расположение пазов обусловлено тем, что подбором
величины угла а > 0 можно изменить в желаемом направлении
действие силы реакции, которая в этом случае будет действовать
на пластину так, что силы трения практически не будут вызы-
вать изгибающих напряжений (угол а стремятся выполнить рав-
ным углу трения).
Следовательно, благодаря наклону пластин улучшаются усло-
вия движения их в пазах ротора, однако наклонное их положе-
ние исключает возможность реверса насоса. Ввиду этого в ревер-
сивных насосах и гидромоторах прорези под пластины выпол-
няются строго радиально (см. рис. 102, б).
Угол а наклона пазов ротора под лопасти к радиусу ротора
обычно принимают равным 13—15° при малых диаметрах ротора
(до со80 мм) и 7—8° при больших диаметрах. Увеличение угла
наклона пазов может вызвать вибрации пластин и шум яри ра-
боте насоса.
Плотность контакта между пластинами 3 и статором при ра-
боте под давлением обеспечивается давлением рабочей жидкости,
подводимой в пазы ротора под пластины через кольцевые про-
точки с, выполненные на крышке корпуса (см. рис. 102, а и 103, а).
Пластинчатые насосы выпускаются в основном на давление
7 МПа (70 кгс/см2) и, реже, 10 и 14 МПа (100 и 140 кгс/см2). Ог-
раничения по давлению обусловлены тем, что при более высоком
давлении пластины при проходе зоны всасывания (в которой они
не разгружаются противодавлением, действующим со стороны
статорного коЛьца) прижимаются с большим усилием к его поверх-
ности, в результате чего быстро изнашиваются. Усилие, с кото-
рым пластина прижимается к статору, в этом случае вычисляется
по выражению (100).
При последовательной установке двух насосов (см. стр. 298),
рассчитанных на давление 14 МПа (140 кгс/см2), результирующее
давление может быть повышено до 22 МПа (220 кгс/см2).
Объемный к. п. д. гидромашины, в зависимости от качества
изготовления и частоты вращения, составляет цоб — 0,60ч-0,95;
механический к. п. д. — цмех = 0,7ч-0,9. Общий к. п. д. насоса
средней мощности равен 0,85 практически на всем рабочем диа-
пазоне давления.
Частота вращения насоса — от 500 (для насосов большой мощ-
ности) до 1500—3000 об/мин (для насосов средней и малой мощ-
ности). Миниатюрные пластинчатые насосы выпускаются на по-
дачу 1 л/мин и менее и работают при частоте вращения до
30 000 об/мин.
ч
287
" 1
Срок службы пластинчатых насосов двукратного действия при
работе на номинальном давлении составляет по гарантии заводов
изготовителей несколько тысяч (3000) часов. Однако практика
показывает, что насосы, особенно малых- размеров, работают при
качественной фильтрации .жидкостей без заметного снижения
к. п. д. в течение 6000—8000 ч и более.
Благодаря высоким качествам рассматриваемого насоса его
принципиальная схема положена в основу стандартных насосов
многих сотен типоразмеров (в США свыше 500). Особенно широко
эти насосы применяются в металлорежущих станках. Ряд загра-
ничных фирм выпускает эти модифицированные насосы на давле-
ния; 7; 10; 14 и 17,5 МПа (70; 100; 140 и 175 кгс/см2) и подачу
от 3 до 950 л/мин. Весовая отдача, приходящаяся на 1 л. с., у этих
насосов доведена до 0,5—0,4 кгс/л. с.
Эти насосы пригодны для работы на рабочих жидкостях (мас-
лах) вязкостью 20—30 сСт при высоте всасывания до 5 м.
На рис. 103,6 приведена характеристика мощного насоса
этого типа. Вязкость масла 72 сСт при температуре 38° С; рабочая
температура 54° С. На графике соответственно обозначено: —
фактический расход насоса; Nnp и Л/эф — приводная и эффектив-
ная (полезная) мощности насоса; г]об и т]полн — объемный и
полный к. п. д.
49. Расчетная подача
По принципу действия рассматриваемый насос можно сравнить
с поршневый'насосом с изогнутым по дуге цилиндром и поршнями
прямоугольного сечения, в котором роль поршня выполняет ра-
бочая часть пластины высотой h = г2 — гг (см. рис. 102 и 103).
Пластина при перемещении по концентричным участкам между
окнами ах и или а2 и Ь2 (в пределах угла е) вытесняет объем Q',
' по величине равный произведению площади рабочей части пла-
стины f = hb на окружную скорость v ее центра-давления:
Q' = vf = vhb.
Подставив значения v = <о —“tГ1 и h = г2 — получим
' А
V
К л “I™ Т "1 / \ / С0& / 2 2\
Q' = со (г2 - и) b = -у- (г2 — г{),
где b и h — ширина и высота рабочей части пластины;'
г2 и fj — большой и'малый радиусы (полуоси) статора;
<о — угловая скорость ротора.
Подставив значение <о и учитывая, что одновременно происхо-
дит вытеснение жидкости двумя пластинами (из двух камер),
получим приближение (без учета толщины пластин) для вычисле-
ния расхода (подачи) насоса:
Q = 2ппЬ (гг — rf). - (101)
288
С учетом толщины пластины (см. стр. 279) и их наклона
Q=2bn[n (rl — г?) — ,
L v cos a J J
где а — угол пластины к радиусу (см. “рис. 102, а).
Для насосов с радиальным расположением пластин послед-
нее выражение примет вид
Q — 26и[л(г2 — г?) —(г2 — и) sz]. (102)
Влияние толщины пластин на подачу обусловлено тем, что
при утапливании пластин во время прохождении ими зоны на-
е
Рис. 104. Схемы к расчету пульсации давления пластинчатого насоса, обуслов-
ленной сжимаемостью жидкости
гнетания часть подачи расходуется на восполнение освобождае-
мого ими объема, т. е. имеет место как бы отрицательная подача.
Выражение для расчетной величины подачи подобного на-
соса может быть также получено из формулы (92) путем под-
становки в нее значения рабочей высоты пластины Л = г2 — ri и
Ч Гл
р — зс у t а также о и fi, учитывая при этом, что Одновременно
происходит вытеснение жидкости двумя пластинами (каждая
пластина за один оборот совершает два рабочих хода.)
50. Равномерность подачи
Анализ приведенных выражений показывает, что поскольку
рабочая высота пластины при условии концентричности рабочих
участков статора (соответствует углу е, рис. 103, а) сохра-
няется в пр'оцессе нагнетания постоянной, рассматриваемые на-
сосы по своим геометрическим параметрам могут обеспечить прак-
тически равномерную подачу. Однако опыт показывает, что даже
при самом оптимальном выборе параметров насоса наблюдается
неравномерность (пульсация) подачи. Она вызыйается в основном
1) сжатием жидкости в рабочих камерах при переходе их из по-
лости всасывания в полость нагнетания, 2) неравномерностью
Ч *
19 Т. М. Бцшта 289
I
подачи, обусловленной изменением объема Пластин в процессе
хода нагнетания в результате утапливания их в прорези ротора
и 3) возможной несимметричностью профиля статора. Частота
колебаний подачи и давления равна произведению числа пластин
на частоту вращения (об/мин), а амплитуда пропорциональна
перепаду давления.
Влияние на равномерность подачи сжимаемости жидкости.
Основным фактором, влияющим на равномерность подачи при
работе под высоким давлением, является сжатие жидкости в ра-
бочих камерах насоса при соединении их с полостью нагнетания.
Из схемы, представленной на рис. 104, а, видно, что при мгновен-
ном переходе (время измеряется миллисекундами) камеры а
(отмечена точечной штриховкой) объемом VK = (rj — Гр) yb,
заполненной жидкостью под давлением всасывания, из полости
всасывания в полость нагнетания, происходит сжатие жидкости
в камере за счет обратного потока. Величина сжатия определяется
как
ДУк = ~ уЬр'
где гр — радиус ротора;
г2 и гг — большой и малый радиусы статора;
b — ширина ротора;
2л:
у -------угол между соседними пластинами;
Е — модуль упругости жидкости (см. стр. 40);
р — давление сжатия под действием обратного по-
тока жидкости в камере.
Давления р может превысить, вследствие гидравлического
удара, обусловленного скоростью процесса и высоким перепа-
дом давления, в 2 и более раз давление рн в нагнетательном окне.
В соответствии с изложенным в каждую камеру при соедине-
нии ее с нагнетательной полостью будет поступать из этой полости
жидкость в объеме АУК, вследствие чего ч теоретическая подача
насоса уменьшится на величину объема обратного потока
<*(ДУк) _ ^к) d<P _ G) / 2 r2\ , dp
dt “ dtp ~dF ~ 2E V 2 dq >
(103)
насоса.
d (AVK)
где <p = (tit — угол поворота вала
Следовательно, закономерность изменения расхода ц k обу-
словленная сжатием жидкости, является функцией изменения
давления в камере в зависимости от угла поворота ср = <о7, опре-
деляемого производной .
290
Исходя из приведенного, коэффициент неравномерности можно
представить в виде
d (АУк)
§ ™ . 100 %,
чт
Подставив в это уравнение значение
л
(103) и значение QT, определяемое из
= (г2 — г!), получим после преобразования
уравнения
у dQ
Zj dt
из
at
выражения
Приняв, что радиус ротора гр равен малому радиусу ста-
тора (гр *=« гг), можно приближенно записать
6 = bdP/^. .100%.
С
Л
На рис. 104, б показан график зависимости 6 от рабочего
давления р для пластинчатого насоса с подачей 70 л/мин.
Рассматриваемый процесс сопровождается пульсацией давле-
ния в рабочих камерах и на выходе насоса, которая по величине
амплитуды может значительно превосходить пульсацию подачи.
Из приведенного следует, что для уменьшения неравномерности
подачи насоса следует уменьшать значение
dp
dtp ’
что частично
может быть достигнуто постепенным соединением камер с полостью
нагнетания обычно — с помощью щелевидной прорези (усика) b
малого сечения (см. также рис. 97 и стр. 220). Уменьшение нера-
вномерности может быть достигнуто также уменьшением угла у
(увеличением числа пластин).
Для уменьшения влияния на равномерность подачи и пульса-
ции давления сжимаемой жидкости профиль статора на участках,
описанных большим радиусом, часто выполняется таким обра-
зом, что при переносе рабочей камеры из полости всасывания в по-
лость нагнетания осуществляется незначительное сжатие жидко-
сти (преднамеренная компрессия), что способствует снижению
пульсации давления жидкости.
Для этого профиль статорного кольца насоса (рис. 105) вы-
полняется таким, что при проходе замкнутой камеры объемом q±
(отмечена точечной штриховкой) через перевальные перемычки,
очерченные большим радиусом (7? > г), происходит некоторое
уменьшение объема камеры до прихода ее к нагнетательному
окну а, вследствие чего заключенная в ней жидкость подвер-
гается предварительному сжатию. В этом случае в запертой
19*
291
камере также создается предварительная компрессия жидкости
(<7i> подбором величины которой может быть обеспечено
полное выравнивание давлений в камере и нагнетательном окне а.
Указанное уменьшение объема камеры достигается смещением
центра 02, из которого описываются образующие профиль ста-
торного кольца дуги кругов радиусом R относительно ,оси
вращения ротора.
Влияние на равномерность подачи прочих факторов. Источни-
ком неравномерности подачи является также изменение объема
(рабочей высоты) пластин, происходящее в результате переме-
Рис. 105. Схема создания преднамеренной компрессии
жидкости в рабочей камере пластинчатого насоса для
снижения пульсации давления .
42<Cll
щения их в пазах ротора. Из рис. ЮЗ следует, что каждая плас-
стина при утапливании в паз ротора (при движении к центру
ротора) вытесняет из него жидкость в нагнетательную полость,
а при движении от центра ротора к периферии — забирает из
нее жидкость. Иначе говоря, неравномерность подачи пластин-
чатых гидромашин двойного действия определяется в основном
внесением в поток поправки на перемещение пластин в пазах
ротора. К примеру, если текущая геометрическая подача пластин-
чатой машины определяется выражением где dV — объем
» dV / / 2 2\
подачи за время dt, равный — = со& (/i— rz), то при учете
U*
влияния объема пластин текущая геометрическая подача
QT (г? — ri) — k 6
где Ь — ширина ротора;
k — число пластин, одновременно находящихся в полости
нагнетания;
и — скорость относительного перемещения пластин в пазах
ротора;
б — толщина пластин.
292
Влияние объема пластин на нарушение равномерности подачи
описывается равенством
n'_dV dV±
Wt dt dt ’
где
q;
dV
dt
dVr
dt
— расчетная подача с учетом перемещения пластин
в пазах ротора;
— подача гидромашины при бесконечно тонких плас-
тинах;
— отрицательная подача (расход), обусловленная на-
гружением (утоплением) пластин в прорези ротора
при их нахождении в полости нагнетания.
Для снижения влияния на равномерность подачи этого насос-
ного действия пластин необходимо, чтобы объем жидкости, вы-
тесняемой в каждый данный момент из прорезей ротора утапли-
вающимися пластинами, был равен объему жидкости, требую-
щемуся дЛя заполнения пространства, которое освобождается
пластинами, перемещающимися от центра. Или иначе, вытесняе-
мые и забираемые объемы за один оборот должны быть скомпен-
сированы, для обеспёчения чего должны быть выбраны соответ-
ствующее число пластин и форма (профиль) статорного кольца,
обеспечивающая закон перемещения пластин.
Из схемы, приведенной на рис. 103, а, вытекает условие
(104)
где а — угол, охватывающий отрезок кривой профиля статрра,
соответствующий распределительному окну;
8 > у — угол, охватывающий уплотняющие перемычки;
2л
у --------угол между двумя смежными пластинами.
Из приведенного следует, что для четного числа пластин
наименьшее их число может быть шесть. Однако это число не
удовлетворяет условию равенства расходов всасывания и нагне-
тания пластинами для любого положения ротора, т. е. расход
всасывания пластин при указанном их числе не компенсируется
расходом нагнетания пластин, что приводит к дополнительным
колебаниям потока жидкости на выходе насоса.
Анализ показывает, что для обеспечения равенства указан-
ных расходов отношение а должно быть равно любому целому
числу п:
293
Подставив в это выражение значение а 4-8 из уравнения (104)
и значение у =-------, найдем необходимое число пластин
2*
2 — 4/1.
Следовательно, число
должно быть кратным 4,
2 - 12.
пластин для рассматриваемой схемы
т. е. 8, 12 и т. д. Обычно принимают
Помимо этого условия профиль кривой статора должен быть
строго симметричен.
Следует заметить, что расчетная неравномерность подачи
пластинчатых машин одинарного действия (см. рис. 94) обусло-
м / dV,
влена кинематикой движения пластин (вычитанием ~~ из
, \ at
dV \
-гг) и приводит к некоторому уменьшению коэффициента неравно-
14 4 j
мерности подачи. Иными словами подача вследствие перемещения
пластин в роторе выравнивается, причем это выравнивание будет
тем существенней, чем больше пластин и чем больше их толщина.
Однако средняя подача такого насоса при увеличении* числа пла-
стин и их толщины уменьшается.
51. Выбор основных параметров насоса
Для обеспечения герметичности насоса расстояние между
соседними всасывающим и нагнетательным окнами (размер пере-
вальной перемычки), охватываемое углом а, должно быть не-
сколько больше, чем наибольшее возможное расстояние между
концами двух соседних пластин, определяемое углом у, в поло-
жении их на этой йеремычке (см. рис. 103).
При выборе разности радиусов г2 и гг профильных участков
статора между окнами, определяющих величину рабочей высоты
пластин h = г2 — гъ исходят из того, что увеличение высоты
приводит к повышению опрокидывающего момента от давления
жидкости, защемляющего пластину в пазу ротора, а уменьшение
высоты пластин — к понижению подачи и объемного к. п. д.
насоса. Для насосов небольшой подачи максимальная величина h,
может быть равной или меньше 0,4 полной высоты пластины.
Для предохранения уплотнительного узла от возможности
повышения перепада давления камеру перед ним соединяют ка-
налом с с всасывающей (входной) полостью (см. рис. 101).
Чтобы устранить возможность отрыва пластин от статора при
копировании ими его профиля, отношение радиусов профиля
статора у- для числа пластин 8; 12 и 16 не должно превышать
соответственно 1,15, 1,27 и 1,34.
Для улучшения динамических качеств насоса, а также повы-
шения равномерности подачи, статор в местах, где происходит
сопряжение указанных межоконных участков (соответствует
294
г
углу а), должен выполняться так, чтобы было обеспечено постоян-
ное ускорение пластины при движении в пазах ротора и соответ-
ственно постоянное ускорение жидкости в каналах.. Обычно эти
участки выполняются по архимедовой спирали.
Равномерность перемещения пластин обеспечивается тем, что
направляющие (профиль статора) выполняются, за исключением
участков перевальных пространств, по архимедовой спирали
с координатой
р — п -4--а,
где р и а — полярные координаты профиля;
гг — наименьший радиус направляющей статора (при-
нимается близким к радиусу ротора);
v ~ const — скорость перемещения пластины в пазах ротора;
со — угловая скорость ротора.
Применяется также профиль, обеспечивающий синусоидаль-
ное изменение ускорения пластин.
При выборе зазора между поверхностью статора, описанной
малым радиусом гг и поверхностью ротора, описанной радиусом гр
(т. е. гу — гр), следует иметь в виду, что увеличение этого зазора
увеличивает вредное пространство насоса и ухудшает его вса-
сывающие качества, а также повышает тангенциальную нагрузку
давления жидкости на пластины, ввиду чего этот зазор должен
быть возможно малым (<0,1—.0,2 мм).
В рассматриваемом насосе двукратного действия всасывание
(и соответственно нагнетание) происходит на сравнительно неболь-
шом участке кривой статора, ввиду чего создаются неблагоприят-
ные условия питания насоса. Время прохождения пластиной
зоны всасывания t — —, где а — угол, охватывающий отре-
зок кривой профиля статора, соответствующей окну всасывания,
и со — угловая скорость вала.
Для улучшения питания насоса жидкость обычно подводят
через расположенные друг против друга окна в боковых дисках,
которые сообщаются между собой каналами в корпусе. Средняя
скорость течения жидкости во всасывающих каналах не более
2 м/с.
Ротор 1 и статор 4 (см. рис. 101) изготовляют из легирован-
ных сталей с цианированием, боковые диски 2 — из кремнистой
или марганцовистой бронзы, корпус и крышки — из чугуна.
Подшипники скольжения изготовляют из медносвинцовистых
или серебрянокадмиевых сплавов, допускающих давление до
100 кгс/см2. Хорошие результаты показали подшипники сколь-
жения с вкладышами, покрытыми слоем серебра толщиной 0,5 мм.
Такие подшипники допускают давление до 140—150 кгс/см2.
Пластины 3 изготовляют из вольфрамистых (быстрорежущих)
сталей и калят до твердости HRC63—65. Применение быстро-
295
режущей стали обусловлено необходимостью Предотвратить тер-
мический отпуск конца пластины, контактирующей со статором,
поскольку это ведет к быстрому ее износу. Ввиду того,-что пла-
стины прижимаются к статорному кольцу рабочим давлением
жидкости, подводимым в камеры под пластины, толщина по-
следних обычно ограничивается 2 мм. Пластины по толщине
и ширине и ротор по ширине обрабатываются по одной и той же
посадке (D или X), паз в роторе по ширине обрабатывается по
посадке А. Трущиеся поверхности обрабатываются с чистотой у9.
Роторы наиболее распространенных насосов имеют ширину
от 10 до 40 мм; значение г2 — г± = 24-10 мм. Размеры окон пи-
тания выбирают такими, чтобы средняя скорость жидкости в них
не превышала 0,25—0,30 м/с. Частота вращения насосов с по-
дачей более 1250 см8/с не превышает п = 1200 об/мин (<о = 40л),
с подачей до 1250 см8/с п = 1500 об/мин (<о = 50л) и с подачей
до 830 см8/с п — 1800 об/мин (<о — 60л)./
52. Разгрузка пластин
Выше было указано (см. стр. 287), что ограничения по давле-
нию в пластинчатом насосе обусловлены тем, что при высоком
давлении пластины при проходе зоны всасывания (в этой зоне
они не разгружаются давлением, действующим со стороны статор-
ного конца) прижимаются с большим усилием к поверхности ста-
тора, в результате чего жидкость, находящаяся между пластинами
и статором, выдавливается и между ними возникает сухое тре-
ние. Последнее приводит к нагреванию поверхностного слоя пла-
стины в месте контакта' ее со статором до температуры, которая
может превышать температуру отпуска стали.
Усилие, с которым пластина прижимается к статору, вычи-
сляется по выражению (100). Элементарные расчеты показывают,
что эти усилия могут при давлениях примерно 140 кгс/см2 дости-
гать недопустимых величин, при которых происходит интенсив-
ный износ пластин.
Для уменьшения силы прижатия пластины к статорному
кольцу предусматривают разгрузку путем размещения в каждом
пазу ротора двух свободно Посаженных пластин (рис. 106, а),
скошенные концы которых, прилегающие к статорному кольцу
по двум кромкам, образуют с ним замкнутую камеру а. Эта ка-
мера соединяется каналом малого сечения (имеющим большое
сопротивление) с полостью под пластиной, в результате чего
в камере возникает разгружающее давление, величина которого,
вследствие сопротивления соединяющего' канала и некоторой
утечки из камер, будет меньше, чем давление в полости под пла-
стиной.
Часто насосы выполняются так, что полости пазов под пласти-
нами сообщаются на рабочих участках соответственно с всасы-
ванием и нагнетанием и 'отсекаются от них лишь в промежуточ-
296 Х
них положениях (рис. 106, б). При прохождении этих проме-
жуточных участков, спрофилированных в насосах двукратного
действия по радиусу из центра ротора, происходит разгрузка пла-
стины, так как давление в верхней камере, образованной скошен-
ными ее кромками, и давление в камере под пластиной становятся
равными среднему арифметическому (р/2) между давлениями вса-
сывания и нагнетания.
i
Всасыдание Нагнетание
Рис. 106. Схема разгрузки рабочих пластин от сил давления жидкости
Нетрудно видеть, что в насосах последней схемы пластины,
работая одновременно по схеме радиально-поршневого насоса,
всасывают и нагнетают жидкость, что компенсирует объем, за-
нимаемый пластинами. Поэтому производительность подобных
насосов следует рассчитывать по выражению (101).
Для снижения ударного действия обратного потока жидкости
в конце прохода рабочей клети разделительной перемычки, со
стороны нагнетательного окна выполняется щелевидная прорезь
(«усик») (рис. 106, в).
§ 66. Конструктивные варианты пластинчатых машин
Для упрощения изготовления пластинчатого насоса и повыше-
ния его к. ih д. один из дисков (диск 2 на рис. 107) часто выпол-
няют плавающим с поджатием его к торцу статора 4 давлением
жидкости и несколькими спиральными пружинами 3. Усилие
прижима в этом случае увеличивается с повышением давления.
В тот момент, когда насос не работает и в системе отсутствует
давление, начальное усилие прижима, необходимое для пуска
насоса в ход, обеспечивается пружинами 3. Камера а перед уплот-
нительной манжетой валика соединена через нагрузочный клапан 1
небольшого давления (1—1,5 кгс/сма) с всасывающей полостью,
благодаря чему манжета предохраняется от возможности повыше-
ния давления и одновременно устраняется возможность подсоса
через нее воздуху,
297
Широкое применение в промышленности нашли сдвоенные
(объединенные) пластинчатые насосы (рис. 108), причем оба на-
соса обычно имеют различную подачу и могут работать с объеди-
ненной или разделенными
(независимыми) подачами.
Объединенные насосы нашли
широкое применение в гидро-
системах прессов, в которых
начальная подача происхо-
дит при большой скорости
и с малой нагрузкой и по-
следующая — с небольшой
скоростью, но с большой на-
грузкой. Насос I с малой по-
дачей используется на давле-
ние до 65 кгс/см2, а насос II
с большей подачей — на дав-
ление до 25 кгс/см2. Насос I
обычно применяют для холо-
стых (быстрых) перемещений
рабочих органов машин, а
Рис. 107. Пластинчатый насос двойного
действия с плавающим боковым диском
насос II —для рабочих перемещений рабочих органов.
Насосы обычно снабжаются автоматической системой управле-
ния (контроля), причем насос большой подачи при достижении
некоторого высокого давления
автоматически переводится на ре-
Рис. 108. Сдвоенный пластинчатый насос
жим холостого хода, после чего подачу под высоким давлением
обеспечивает лишь насос малой подачи.
Нашли распространение также схемы, в которых оба насоса
равной подачи соединены либо параллельно, либо последова-
тельно, причем переключаются на последовательную работу авто-
матически. Такие насосы работают до достижения заданного давле-
298
ния параллельно, а по достижении его переключаются на после-
довательную работу с уменьшенной вдвое подачей, но с удвоен-
ным по, отношению к первоначальному давлением.
На рис. 109, а и б показаны принципиальная и конструктивная
схемы такой двухступенчатой машины с последовательным соеди-
нением двух насосов / и 2 (первой и второй ступеней), благодаря
чему обеспечивается удвоенное давление на выходе. Схема
(рис. 109, а) имеет ступенчатый клапан а, обеспечивающий задан-
Рис. 109. Схемы двухступен-
чатого сдвоенного пластин-
чатого насоса с автоматиче-
ским переключением с одной
ступени на другую
R ступень | I ступень
б)
ное соотношение давлений этих насосов. Для этого площадь по-
перечного сечения плунжера 6 малого диаметра, на которую дей-
ствует выходное давление насоса 2, в 2 раза меньше площади се-
чения плунжера 7 большого диаметра, на которую действует дав-
ление насоса 1 первой ступени. Подачу насоса 1 обычно выбирают
такой, чтобы она несколько превышала подачу насоса 2 второй
ступени. В этом случае избыток жидкости, подаваемой насосом /,
будет отводиться по внутреннему каналу во всасывающую полость
насоса.
Поскольку плунжеры 6 и 7 находятся под действием двух
давлений (рх и р2), давление рг на входе в насос 2 второй ступени
будет, в результате дросселирования потока правым торцом
плунжера 7, автоматически поддерживаться при заданных со-
отношениях площадей плунжеров 6 и 7, равным половине выход-
ного давления этого насоса.
Приведенная схема допускает также работу и в том случае,
если подача насоса 1 меньше, чем насоса 2. При этом плунжеры 6
и 7 под действием выходного давления насоса 2 сдвигаются вправо,
перекрывая канал, соединяющий нагнетающую магистраль на-
соса 1 с каналом 3. В результате избыточная жидкость от насоса 2
299
будет поступать (возвращаться) по каналам 4 и 5 во всасывающую
его линию, которая является нагнетающей линией насоса 1, при-
чем равновесие плунжеров 6 и 7 автоматически обеспечивается
дросселированием потока, кромкой плунжера 6. В результате
подача насоса 2 автоматически понижается до величины подачи
насоса 1, давление же на выходе насоса 2 будет равно сумме дав-
лений обоих насосов.
• Получили распространение видоизмененные пластинчатые (ши-
берные) насосы, в которых пластины 1 (рис. НО, а) размещаются
Рис. 110. Схемы пластинчатых насосов с неподвижным пластинчатым ротором
и вращающимся статорным кольцом
в радиальных прорезях статорного цилиндрического кольца 2,
выполняемого в этом случае неподвижным. Ротор же выполняется
в виде вращающегося кулачка 3, с которым контактируют пла-
стины 1. Кулачок — овальный или круглый, со срезанными по
дуге противоположными сторонами (заштрихован условно). Сле-
довательно, схема этого насоса является видоизмененной (отра-
женной) схемой ранее рассмотренного насоса (см. рис. 102, б).
Насосы обычно изготовляются так же, как и насосы двукрат-
ного действия, с двумя пластинами 1, размещенными в пазах
неподвижного статорного кольца (рис. 11.0, а). Диаметрально про-
тивоположные стороны фигурного ротора (кулачка) 3 выполнены
в форме дуг круга, описанного из центра ротора радиусом, равным
радиусу г2 расточки статорного кольца 2, а две другие стороны
описаны дугами меньшей кривизны (гг < г2). При вращении в на-
правлении, Показанном стрелкой, ротор 3, контактирующий одно-
временно со статорным кольцом 2 и пластиной 1, будет засасывать
жидкость из двух противоположных камер е и нагнетать в ка-
меры d.
Для повышения равномерности подачи и разгрузки вала при-
меняют насосы с двумя роторами 3 и 4, посаженными на общий вал
и смещенными на 90°. г
300 -
Максимальная расчетная подача двухроторного насоса ойрё*
деляется по выражению, полученному так же, как и выражение
(102) .
QT— 2bn [л ~ ^1) — (г2 — и) 2s],
где г2 и ri — большая и малая полуоси ротора;
bus — ширина ротора и толщина пластины.
Рассмотренные насосы предназначены для работы при давлении
до 100 кгс/см11 и при частоте вращения до 2500 об/мин. Подача
насосов — до 200 л/мин. Они пригодны для работы в качестве,
гидромоторов. Выпускаются подобные, насосы в варианте трой-
ного действия (рис. ПО, б),
и
\
§ 67. Пластинчатое гидромоторы
Пластинчатые гидромашины описанных типов применяют также
для работы в качестве гидромоторов, для чего в насосах без при-
нудительного ведения пластин необходимо предусмотреть лишь
механизм прижима пластин к статору при пуске мотора. Этот
механизм может быть как в механическом (пружинном), так и
гидравлическом исполнении (см. стр. 305). Пружины (1—3 шт.)
обычно размещаются в пазах под пластинами.(см. рис. 95). х
Гидромоторы однократного (одинарного) действия выпус-
каются реверсивными как в регулируемом, так и нерегулируемом
исполнении, а моторы двукратного действия — нерегулируемыми
и преимущественно нереверсивными. Однако при известном кон-
структивном исполнении они допускают реверсирование.
53. Крутящий момент пластинчатого
гидромотора одинарного действия
Теоретический крутящий момент гидромотора может быть
определен по выражению (30) на стр. 92.
Механизм действия пластинчатого гидромотора одинарного
действия показан на рис. 111, а (см. также рис. 96, а). При подводе
жидкости от какого-либо источника расхода (насоса) давление р
будет действовать на площадь, соответствующую рабочей высоте
пластины h (которая для текущего положения ее, представленного
на рис. 111, а, равна h = 2ё), развивая при этом крутящий мо-
мент М = phbp, где Ь — ширина ротора, р и h — переменные зна-
чения плеча приложения силы давления жидкости и рабочей вы-
соты пластины.
Максимальное значение (соответствует положению пластин
на горизонтальной оси) теоретического момента пластинчатого мо-
тора одинарного действия (см. также рис. 96, а) рассчитывают при-
ближенно, без учета влияния объема пластин и с учетом /imax = 2е
по выражению
^тах 2рЬвр.
' , 301
Поскольку в этом случае р = где D — диаметр раСточкй
статора, можем написать
> -^шах = Dpbe,
где b — ширина, статора.
Минимальное значение момента соответствует положению
пластины в начале ее контакта с перевальной перемычкой.
Принимая во внимание выражения (30) и (93), получим с уче-
том толщины s пластин:
Рис. 111. Принципиальная (а) и расчетная (б) схемы пластинчатого гид-
ромотора одинарного действия
максимальное значение момента
м _ pbe (nD — zs),
минимальное значение момента
кя pbe(nD-zs) л
-------------------------------- COS-
где D — диаметр расточки статора;
s и z — толщина и число пластин.
При расчетах гидромотора величину среднего теоретического
крутящего момента часто определяют из условия равенства мощ-
ностей на валу и гидравлической (индикаторной) мощности:
2«MTn = pQ; Мт = ^,
ъ J v IЬ
где 7ИТ — теоретический крутящий момент;
р — перепад давления;
п — частота вращения;
Qx — геометрический расход гидромотора.
302
i
Пользуясь понятием рабочего (удельного) объема
(см. стр. 74), получим
М =
т 2л
С учетом потерь трения крутящий момент на валу гидромотора
выразится уравнением
М ~
^эф 2л Чмех»
где т]Мех — механический к. п. д. гидромотора (см. стр. 95).
54. Пульсация (неравномерность) момента
Поскольку геометрическая (теоретическая) подача машины
носит пульсирующий характер, аналогичный характер будет иметь
и расчетный крутящий момент.
Для исследования величины текущего значения момента вос-
пользуемся расчетной схемой, представленной на рис. 111, б.
Из схемы видно, что расчетный крутящий момент, развиваемый
гидромотором, равен разности моментов от давления р рабочей
жидкости на две пластины, находящиеся в контакте с противопо-
ложными уплотняющими перемычками. Крутящий момент, раз-
виваемый усилием давления жидкости на выдвинутую (правую)
пластину
АГ. = рЬ (Р1 - rp) к + = 4 (р‘ - к
\ Л / &
и на утопленную левую пластину
Результирующий расчетный момент
м = Mi - м2=4 (pi - pi), о °5)
где b и гр — ширина и радиус ротора;
Pi и р2 — текущие радиальные размеры (радиусы) статора.
В полярных координатах радиусы рх и р2 могут быть выра-
жены, исходя из геометрических соотношений:
Pi = еcos<р + уе^или
p1==^cos(p + /? j/1 — (1 — соз2ф);
р2 = е cos Ф (ф + Ф) + Vе2 cos2 (ф + Ф) + R2 — е2 или
р2 = еcos(<р4-1|>) + R j/1 — (-j|-)2[l —cos2(<p+ ф)],
303
где ф — угол между радиусами рх и р2; __
ф — угол смещения пластины относительно оси симметрии
перемычки; <
R — радиус расточки статора;
е — эксцентриситет осей статора и ротора.
Пренебрегая ввиду малости значениями и
можем записать приближенно
рх = е cos ф + R; р2 == е cos (ф 4- ф) 4- R.
Подставив эти значения в уравнение (105), получим выражение
для текущего момента
t
М = pbRe [cos ф — cos (ф + Ф) + -^ [cos2 ф—cos2 (ф + ф) .
I J
Для гидромотора с четным числом пластин последнее уравне-
ние примет вид
М — 2pbRe cos ф. .
Из данного уравнения следует, что крутящий момент в этом
случае изменяется по закону косинуса при изменении угла ф
от — до где ~ и в — угол, охватывающий уп-
лотняющую перемычку.
Для гидромотора с нечетным числом пластин при условии.
~ 0,1 момент может быть приближенно выражен
А
' М = pbRe [cos ф — cos (ф +ф)1,
где ф = л----— — при изменении ф от — до 0;
ф = п 4- —----при изменении ф от 0 до------.
Z 4 Z
Степень неравномерности крутящего момента обычно оцени-
вается коэффициентом
"• шах mln 1 лл п/
----ЛК-------100%-
Этот коэффициент позволяет оценить насколько велико изме-
нение момента по отношению к развиваемому гидромотором тео-
ретическому моменту Л4Т.
Для гидромоторов с четным числом пластин
6 = tg^--V100°/o-
Принимая tg «г , получим приближенное выражение
для определения степени неравномерности крутящего момента
3Q4
пластинчатого гидромотора однократного действия с четным числом
пластин,
6 = (1.06)
£
Для гидромоторов с'нечетным числом пластин
<•
6 = tg-^-^ 100%. .
Принимая tg
для гидромоторов с
получим приближенное
нечетным числом пластин:
о 125 _
выражение
z2
(Ю7)
Из уравнений (106) и (107) следует, что степень неравномер-
ности крутящего момента для гидромоторов с нечетным числом
пластин меньше в 4 раза, чем для гидрдмоторов с четным числом
пластин, причем в обоих случаях степень неравномерности обратно
пропорциональна квадрату числа пластин.
Из приведенных выше зависимостей следует, что для одно-
типных насосов и гидромоторов, имеющих равное число вытесни-
телей (пластин), степень неравномерности подачи рабочей жидкости
насосом соответствует степени неравномерности крутящего момента,
развиваемого гидромотором, т. е. пульсация (неравномерность)
момента будет зависеть в основном от тех же факторов, что и пуль-
сация подачи насоса.
55. Пластинчатые гидромоторы двойного действия
В гидромоторах этого типа пластины располагаются радиально
и поджимаются к статорному кольцу давлением жидкости. Прин-
цип действия гидравлического устройства для прижима пластин
виден из схемы, приведенной на рис. 112, а.
На пути подвода жидкости в рабочие камеры гидрбмотора
установлен подпорный клапан 7, отрегулированный на давление,
достаточное для перемещения пластин. В кольцевой же канал 2,
питающий камеры под пластинами, подведена жидкость в обход
этого клапана. В результате рабочая жидкость сперва поступит
по обводному каналу 2 в пазы под пластины и лишь после того,
как последние будут выдвинуты из пазов и прижаты к статору,
откроется подпорный клапан /, через который рабочая жидкость
будет поступать в нагнетательные (рабочие, приемные) камеры
гидромотора. Настройкой (регулированием) пружины клапана 1
обеспечивается требуемый для надежного поджима пластин к ста-,
тору перепад давления в пазах и камерах мотора (обычно это дав-
ление не превышает 2 кгс/см2).
20 T. М- Бащта. 305
На рис. ИЗ показан типовой реверсивный гидромотор двукрат-
ного действия с радиальным расположением пластин. Изменение
направления вращения вала 1 осуществляется изменением подачи
Слаб Нагнетание
жидкости в штуцер 4 или 9. Чтобы обеспечить при реверсировании
постоянное прижатие пластин 10 к статорному кольцу 3 и диска 6
к торцу ротора 5, применено клапанно-золотниковое устройство 5,
с помощью которого жидкость, независимо от направления вра-
А
_ _ «
Рис. 113. Пластинчатый гидромотор двойного действия
щения вала, подводится через систему каналов в полость 2, со-
единенную с пазами пластины, в камеру 7 прижатия плавающего
диска 6 к ротору 8.
В гидромоторах двойного действия развиваемый крутящий
момент равен удвоенной разности моментов от давления жидкости
на две взаимноперпендикулярные пЛастины, из которых одна
306
контактирует со Статором на радиусе г2, а вторая — на радиусе
(см. рис. 112, а). Расчетный крутящий момент на пластине радиу-
сом г2 (без учета толщины пластины и при радиальном ее распо-
ложении)
где гр — радиус ротора.
Крутящий момент на второй пластине радиусом г19 противо-
действующий моменту, развиваемому пластиной радиусом г2,
будет
= £ (г? - г?).
Результирующий расчетный крутящий момент с учетом двой-
ного действия мотора (без учета толщины пластин)
М = 2 (М1 — Л12) = pb (rl — г,).
Для учета толщины пластин подставляем в уравнение (105)
значение рабочего объема (удельного расхода), определяемого по
выражению (102) q = 2b [л (г| — п) — (г2 — ri) sz]; в резуль-
тате получим
Влияние толщины пластин на величину момента обусловлено
противодействующим моментом (торможением), развиваемым пла-
стинами, находящимися в нерабочей полости, которые, поджи-
маясь рабочим давлением р жидкости к профильной поверхности
статора, будут действовать как поршни гидромотора, направление
момента которого противоположно направлению момента, раз-
виваемого рабочими пластинами, т. е. эти пластины будут оказы-
вать тормозящее действие.
Момент торможения, создаваемый двумя диаметрально распо-
ложенными пластинами, находящимися в полости слива, опре-
делится (без учета сил трения) как
Мп = 2Тр - 2Рр tg X,
где Р ~ pbs — радиальная составляющая реакции от силы давле-
ния пластины на профиль статора (рис. 112, б);
s и Ь — толщина и ширина пластины;
Т — составляющая силы реакции статора, перпенди-
кулярная к оси пластины;
20*
307
1 — угол Ме)кду радиусом р и нормалью к касательной
проведенной в точке касания пластины с криво
статора;
1 в dp
р dtp ’
где <р = at — угол поворота ротора.
С учетом последнего тормозной момент составит
Mn = 2p6s^.'
§ 68. Комбинированные насосы
В гидроприводах, где требуются нерегулируемые большие по-
дачи жидкости при низком давлении (до 2,5 МПа или 25 кгс/см2)
и малые подачи при высоком давлении (до 32 МПа или 320 кгс/см2),
применяют комбинированные насосы. В качестве ступени высокого
давления в них обычно используется аксиально-поршневой на-
сос; для создания ступени низкого давления применяется нагне-
тательный элемент пластинчатого насоса (см. рис. 101). Поршневые
насосы применяются как одностороннего (рис. 114, а), так и дву-
стороннего (рис. 114, б) действия. Ниже приведено описание на-
coca двустороннего действия.
На приводном валу 1 насоса на шпонках расположены наклон-
ные диски 12 и 16, на которые через подпятники 6 опираются
поршни 5. Поршни перемещаются во втулках 14, запрессованных
в корпус 2 насоса. Прижимной диск 15 опирается на сферическую
опору 4 и посредством пружины 3 поджимается к подпятникам.
Усилие пружины, а также осевая сила, возникающая при работе
насоса, воспринимается замками, расположенными в проточках
вала насоса и состоящими из двух полуколец 8, стопорного коль-
ца 9 и пружинного кольца 10. В насосе одностороннего действия
осевое усилие воспринимается упорным подшипником.
Два кольцевых канала а в корпусе насоса образуют полости
нагнетания. Каждый из каналов соединен посредством сверлений
лишь с тремя из шести нагнетательных клапанов 13, что обеспе-
чивает деление потока рабочей жидкости на две равные части для
обеспечения двух ступеней подачи насоса.
К корпусу насоса с помощью болтов 7 присоединена передняя
крышка 11, в которой расположен один из опорных подшипников
вала насоса (в насосе одностороннего действия в крышке распо-
ложен также упорный подшипник). В этой же крышке выполнено
отверстие для всасывания масла (на чертеже не показано). Второй
опорный подшипник вала поршневого насоса расположен в рас-
точке проставки 18, к которой крепится корпус насоса с помощью
болтов 17. К проставке же с противоположной стороны крепится
ступень низкого давления — лопастной насос, состоящий из кор-
308
пуса, дисков, лопаток,Патрубков всасывания и нагнетания с при-
жимными фланцами.
Поршневой насос снабжен механизмом деления подачи на две
равные части (на чертеже не показан) при достижении величины
рабочего давления 16 МПа (160 кгс/см2). При этом три пары плун-
19 18 17 16 15 16 13 й 12 11
б)
Рис. 114. Комбинированные насосы
жеров из шести продолжают нагнетать масло в систему, а осталь-
ные разгружены от давления.
Валы обоих насосов (пластинчатого и аксиально-поршневого)
соединяются между собой посредством крестовидной муфты 19.
Насос работает следующим образом. Вращение наклонных
дисков преобразуется в возвратно-поступательное движение порш-
ней, причем ход всасывания осуществляется благодаря наличию
309
йрйжимного диска, качающегося вокруг сферической опоры. Бла-
годаря наличию вакуума в полостях под поршнями происходит
засасывание масла из расходного бака через всасывающее отвер-
стие в передней крышке во внутренние полости насоса. Далее
масло через шесть отверстий Ь, выполненных по периметру рас-
точки под сферическую втулку, и через кольцевой коллектор с
в корпусе насоса поступает к щелям, профрезерованным во втул-
ках поршней и далее в поршневые полости.
Выход из каналов нагнетания осуществляется двумя сверле-
ниями в корпусе поршневого насоса, с помощью которых масло
подводится к механизму деления подач.
ГЛАВА VIII
ШЕСТЕРЕННЫЕ
И ВИНТОВЫЕ ГИДРОМАШИНЫ
Различают зубчатый насос, под которым понимают роторно-
вращательный насос с перемещением жидкой среды в плоскости,
перпендикулярной оси вращения рабочих органов, и винтовой
насос, под которым понимают роторно-вращательный насос с пе-
ремещением жидкой среды вдоль оси вращения рабочих органов.
К группе зубчатых насосов относится шестеренный насос
с рабочими органами в виде шестерен, обеспечивающих гермети-
ческие замыкания рабочей камеры и передающих крутящий мо-
мент. Шестеренный насос является одним из старейших' предста-
вителей роторных гидромашин с вытеснителями в форме зубчатых
колес.
Эти машины получили в практике название коловратных.
Конструктивной их особенностью является наличие лишь враща-
тельного движения деталей рабочего органа. Ввиду этого в маши-
нах данного типа (шестеренных и винтовых) полностью устранено
ограничительное влияние на работу инерционных сил узлов ма-
шины (исключая ограничительное влияние инерционных сил
жидкости).
По характеру процесса вытеснения эти насосы относятся
к классу роторно-вращательных машин с переносом вытесняемого
объема жидкости из всасывающей полости насоса в нагнетатель-
ную, причем вытеснители совершают лишь вращательное движе-
ние, а перемещение вытесняемой жидкости происходит в плоско-
сти, перпендикулярной оси вращения шестерен (роторов). К этому
же классу относится и винтовой насос, в котором перемещение
жидкости в отличие от шестеренного насоса, происходит вдоль
оси вращения ротора.
Шестеренные и винтовые машины используются как в качестве
насосов, так и гидромоторов. Ввиду этого выкладки, произведен-
ные применительно к насосу, могут быть распространены и на
гидромоторы.
§ 69. Шестеренные насосы
Шестеренные насосы выполняются с шестернями внешнего и
внутреннего зацепления. Наиболее распространенным является
насос первого типа, который состоит из пары зацепляющихся
311
цилиндрических шестерен, помещенных в плотно обхватывающий
их корпус, имеющий каналы в местах входа в зацепление и выхода
из него (рис. 115, а), через которые осуществляется подвод (вса-
сывание) и отвод (нагнетание) жидкости.
При вращении шестерен жидкость, заключенная во впадинах
зубьев, переносится из камеры d всасывания в камеру с нагне-
тания, которая образована корпусом насоса и зубьями alt blt
Pi
Рис. 115. Схема шестеренного на-
соса (а) и график нагружения ше-
. стерев (б)
а2 и Ь2. Поверхности зубьев av и а2, омываемые жидкостыд под
давлением р2, вытесняют при вращении шестерен больше жидкости,
чем может поместиться в пространстве, освобождаемом зацепляю-
щимися зубьями bi и Ь2. Разность объемов, описываемых рабо-
чими поверхностями этих двух пар зубьев, вытесняется в нагне-
тательную линию насоса.
Следует заметить, что поскольку жидкость вытесняется не
телом зубьев, а в результате смыкания двух вращающихся колец,
одно из которых имеет переменные по углу поворота сечения, по-
дача не зависит от объема зубьев, или иначе, подача не нарушится,
если зубья заменить пластинами эвольвентного
(рис. 116, а), зацепляющимися в точке О.
пр
иля
Эти насосы, в частности насосы с шестернями внешнего зацеп-
ления, просты по конструкции и отличаются надежностью, ма-
лыми габаритами и массой. Максимальное давление, развиваемое
этими насосами, обычно 10 МПа (100 кгс/см*) и, реже, 15—20 МПа
(150—200 кгс/см2). Созданы также насосы, пригодные для работу
31?
при давлении 30 МПа (300 кгс/см2). Подача насоСой, йредназиа*
ченных для работы на низких давлениях, доходит до 1000 л/мин
(1 м’/мин). Насосы отличаются большим сроком службы' который
для качественных образцов серийного исполнения доведен до
5000 ч.
L
a) S) Р'
Рис. 116. Схемы к расчету подачи шестеренного насоса
В шестеренных (и винтовых) гидромашинах отсутствует эф-
фект действия на конструкцию инерционных сил движущихся
деталей. Они допускают относительно высокие частоты вращения,
а также кратковременные перегрузки по давлению, величину и
длительность которых определяют в основном размеры подшипни-
ков. Максимальные частоты вращения составляют обычно 2500
и 4000 об/мин, для насосов небольших подйч допускаются более
высокие частоты вращения. Например, одна из иностранных фирм
выпускает эти насосы на подшипниках скольжения.с частотой
вращения 12 000 и 18 000 об/мин.
Весовая отдача (весовой объем) авиационных шестеренных
гидронасосов, под которой понимается вес, приходящийся на еди-
313
йицу мощности, составляет 11—18 Н/кВт (0,8—1,3 кгс/л. с.) и
в отдельных конструкциях доходит до 7 Н/кВт (0,5 кгс/л. с.)
при давлении 21 МПа (210 кгс/см2). Объемный к. п. д. шестеренных
насосов современных образ-
цов при номинальных режи-
мах работы доведен до 0,95—
0,96 и общий к. п. д. — до
0,87—0,9. В насосах с кон-
структивно улучшенными
I узлами радиальной и торцо-
; вой герметизации объемный
к. п. д. достигает при номи-
нальном давлении 10 МПа
(100 кгс/см2) значения 0,98, а
механический к. п. д. — зна-
чения 0,94.
Рис. 117. Компоновка шестеренного на- Шестеренные насосы при-
coca с электродвигателем годны для работы при само-
всасывании на рабочих жид-
костях (маслах) с широким
диапазоном вязкостей — от 10 до 800 сСт и выше.
Гидронасосы выпускаются как в виде автономных машин, так
и в комбинации с приводным электродвигателем (рис. 117).
Сравнение габаритов равновеликих по мощности насоса и электро-
двигателя трехфазного тока (мощность 40 кВт), показанных на
рис. 117, характеризует габаритные качества насоса.
56. Расчетная подача
Рабочий процесс подачи жидкости шестеренным насосом отли-
чается большой сложностью по сравнению с рабочим процессом
в насосах иных конструкций. Ввиду этого существующие рас-
четные формулы для определения подачи таких насосов дают
погрешность от 5 до 30%.
Расчет теоретической (геометрической) подачи в общем случае
обычно производят, пользуясь балансом энергий на шестернях.
Допустим, что отделение всасывающей камеры от напорной про-
исходит лишь в одной текущей точке зацепления О (принимаем
коэффициент перекрытия т — 1), находящейся на расстоянии х
от оси Ох ведущей шестерни и на расстоянии у от оси О2 ведомой
шестерни (рис. 116, б).
Энергия, сообщаемая рабочей жидкости, выразится при рав-
номерном вращении шестерен, как
А - (р2 - Pi) dV - Ар dV,
где dV — объем жидкости, вытесняемый в напорную маги-
страль за время dt;
р2 и рх—давление на выходе и на входе.
314
Этой энергии соответствуют крутящие моменты Мх и Л42,
подводимые от приводного вала к шестерням для преодоления на-
грузок, обусловленных силами давления нагнетаемой жидкости,
причем
Др dV ~ Л4Х 4- М% da2 =
= 7Ихюх dt -j- ТИ2со2 dt,
где М i и М 3 — крутящие моменты на ведущей и ведомой ше-
стернях;
п2._у2 п2 ..2
2Й! = — & Др; М2 = -Ц— b \р;
Ri и R 2 — радиусы головок ведущей и ведомой ше-
стерен;
dar = сох dt
и daа = со 2 dt — углы поворота ведущей и ведомой шестерен;
со х и со 2 — угловые скорости ведущей и ведомой ше-
стерен.
Для насоса с шестернями с равным числом зубьев
dax = da2 = da и сох = со2 = со.
~ a dV
Сократив последнее равенство на Др и учитывая, что ~п-----
( dV \
текущая подача насоса (--- = QT) и со2=—соъ получим выра-
жение текущей геометрической подачи
L *2
где г, иг, — радиусы полоидных окружностей шестерен.
В инженерной практике обычно пользуются приближенными
расчетными формулами.
Механизм подачи насоса может быть иллюстрирован схемами
(см. рис. 116, в и г), на которых показаны лишь те зубья, которые
образуют в данный момент рабочую камеру насоса. При расчетах
принимаем, что продолжительность зацепления шестерен (коэффи-
циент перекрытия) равна единице (т = 1) и что шестерни имеют
равные числа зубьев, а зацепление нормальное эвольвентное.
Мгновенная подача насоса будет зависеть от текущего поло-
жения точки зацепления О, которая при повороте шестерен на
2л
угол р = — (где z — чмый зубьев) из положения, соответствую-
щего началу вступления очередной пары зубьев в зацепление,
переменится по профилю одного зуба от его основания до вершины,
а по профилю второго зуба — от вершины до основания, пройдя
при этом'путь по высоте каждого зуба, равный 2/п, где т — модуль
зацепления.
315
Из рис. 116, в следует, что текущая подача в общем случае
будет
Qi = Я1 + <7а = + &®p2/i2, (108)
где и qz — мгновенные объемы, вытесняемые соответственно
рабочими зубьями (вытеснителями) левой и правой
шестерен;
hi и Л2 — текущие рабочие высоты соответственно зубьев at
и с2 (проекции расстояний от точки зацепления
до вершин зубьев на оси симметрии последних);
Pi и Рг — текущие расстояния от осей вращения шестерен
до центров давления нескомпенсйрованных по-
верхностей зубьев ах и аг, высоты которых равны
и Л2,
ю и b — угловая скорость и ширина шестерен.
При положений точки зацепления О на оси симметрии (см.
рис. 116, в) значения
- - /
•ч
Pi=Рг='’н + и h^h^m,
где ги и т — радиус начальной (делительной) окружности и
модуль зацепления.
Учитывая это, выражение (108) для данного положения точки
закрепления (соответствует максимальному мгновенному расходу)
примет вид
== 2тЬы (гя + 5
\ *
При повороте шестерен изменятся как положение точки за-
цепления О, так и рабочие (нескомпенсированные) высоты зубьев
и Л2, а также параметры рх и р2. Например, при повороте шестерен
в положение, соответствующее концу зацепления рассматриваемой
пары зубьев и 62 (см. рис. 116, г), мгновенные значения этих
параметров будут
fti = 0 и р! = г„ 4- т; ft2 = 2m и р2 = гв.
Следовательно, величина в конце зацепления будет равна
нулю, в соответствий с чем мгновенная подача в этом положении
зубьев (минимальное значение мгновенной подачи)
Qa — Ян =? 2Ь&гат. (110)
Нетрудно видеть, что этому положению зацепляющихся зубьев
соответствует минимальное значение мгновенной подачи.
Эта же подача соответствует для принятого условия i — 1
началу зацепления очередной пары, с той лишь разницей, что
hi = 2m и р2 — г,. 4- т; Л2 = 0 и pj = ги.
(Ю9)
316
При перемещении (подходе) точки зацепления этой пары зубьев
к оси симметрии мгновенная подача вновь повысится до макси-
мального значения [см. ^выражение (109)1.
Таким образом, мгновенная подача для любого промежуточ-
ного положения точки зацепления будет находиться в интервале Qr
и Q2, причем характер изменения подачи по углу поворота в пре-
2гс
делах угла 0 — — определится законом перемещения по линии
зацепления точки зацепления О и соответственно с этим — законом
изменения параметров pi и р2.
Разность между максимальным значением мгновенной подачи,
соответствующей положению точки зацепления на оси симметрии, и
минимальной подачи, соответствующей концу зацепления пары
зубьев или началу зацепления очередной пары, равна амплитуде
колебания подачи:
AQ = Qi — Qi ~ т2ь®.
Среднее значение подачи насоса может быть приближенно вы-
числено по выражению
( гн + тг ) + 2&(ог„т
\ П I * J / I «
= 2лпЬт (dH + tn)
или, учитывая, что dH = mz,
Qcp ~ 2nnbm2 (z + 1),
(111)
где z — число зубьев;
(0
2~ — частота вращения шестерен;
dH = 2rH — диаметр начальной окружности.
Последнее выражение для распространенных конструкций на-
сосов с числом зубьев 8—15 и углом зацепления 20° с достаточной
точностью (2—3%) характеризует среднюю расчетную подачу
(при условии обеспечения отвода запираемой в межзубовых впа-
динах жидкости в нагнетательную полость). Если число зубьев
ведомой шестерни не равно числу зубьев ведущей, то при расчетах
следует исходить из данных ведущей шестерни.
Из приведенного следует, что подача шестеренного насоса
определяется лишь параметрами зацепления и не зависит от объ-
емов впадины и тела зуба. При сохранении условий зацепления
любое уменьшение толщины зуба будет сопровождаться лишь
увеличением вредного пространства без изменения расчетной
подачи насоса.
Для расчета средней и текущей подач шестеренных насосов
'Предложен ряд иных формул, которые учитывают такие параметры,
как угол зацепления, корригирование зацепления и прочие фак-
торы, однако все они, в отличие от приведенной выше формулы,
317
малопригодны для практического пользования и не обеспечивают
требуемой точности расчета.
В практике для точного определения средней теоретической
подачи пользуются измерением (прокачкой) при нулевом перепаде
давления и малой скорости шестерен (см. стр. 75).
Точное определение величины расчетной подачи (рабочего
объема) шестеренного насоса может быть произведено также путем
вычерчивания зубьев шестерен в увеличенном масштабе и плани-
метрирования площади рабочей камеры при ее изменении с пово-
ротом шестерен.
Рис. 118. Упрощенная схема механизма подачи шестерен-
ного насоса
Для приближенных расчетов средней подачи насоса с шестер-
нями равных размеров применяют также упрощенную формулу,
полученную при допущении, что насос за каждый оборот подает
количество жидкости, равное сумме объемов впадин (камер)
обеих шестерен за вычетом объемов радиальных зазоров в зацеп-
лении. При этом считается, что объемы впадин и зубьев высотой
h = 2т равны между собой. Расчетная подача насоса составит
Q = qn = 2ndHmbn, (112)
где q = 2ndnmb — рабочий объем;
dH — диаметр начальной (делительной) окружности
ведущей шестерни;
т и b — соответственно модуль зацепления и ширина
шестерни (см. рис. 115, а);
п — частота вращения.
Приведенное равенство легко запомнить, если учесть, что ра-
бочий объем q при этом условии равен объему кольца шириной Ь,
средний диаметр которого равен dHt а радиальная высота равна
рабочей высоте зуба h — 2т (рис. 118, а).
Преобразовав уравнение (112) в вид
Q = (огн2/п&,
318
где rH
— радиус начальной окружности и со — угловая
скорость шестерни, подачу насоса можем представить в виде
бесконечного ремня шириной Ь и толщиной h = 2m, сматываю-
щегося (сбегающего) с барабана диаметром d ~ 2r ~ 2/v — h
(средний радиус этого ремня составляет гл ~ (рис. 118, б).
Подставив в формулу (112) значение = mz, получим
Q ~ 2nzm2bti.
Сравнение данных практических измерений с данными расчета
по последнему выражению показывает, что практические данные
несколько превышают расчетные. Последнее свидетельствует о том,
что принятое в приведенном выражении допущение равенства
объема жидкости, вытесняемой из межзубовых впадин, объему
рабочей части их зубьев не соответствует действительности. Дан-
ные измерений насосов, имеющих числа зубьев z = 8-s-16, ока-
зались близкими к расчетным при условии замены в выражении
(112) значения 2л коэффициентом 6,5. В результате получена сле-
дующая формула, рекомендуемая для шестерен с этими числами
зубьев:
Q = b^djnbn или Q — 6,5m2z&n.
Данные расчетов по этой приближенной формуле практически
совпадают с результатами расчетов по выражению (111) и доста-
точно точно — с данными опытов.
Путем рационального выбора значений n, z, b и т можно
подобрать удовлетворительные габариты насоса при заданной
подаче.
Для расчета подачи двухшёстеренных насосов с углом зацеп-
ления а — 20° применяют также формулу
Q — b<o ( dRm т2
(ИЗ)
где I — длина линии зацепления; для шестерен с углом зацеп-
ления а = 20° I — пт cos а.
Расчет подачи насоса с корригированными зубьями произво-
дят по уравнению .
Г / 7 \2 /м2
л2 cos2 а
где L — расстояние между осями шестерен (колод-
цев в корпусе под шестерни) (см. рис. 115, а
и 117, а);
R = — /?2 — радиус окружности головок;
а — угол зацепления.
319
57. Объемные потери
Фактическая подача насоса будет меньше расчетной на вели-
чину объемных потерь, которые определяются как разность между
расчетной (геометрической) и фактической (измеренной) подачами.
Эти потери, в свою очередь, состоят из утечек (перетечек) жидкости
через зазоры из камеры нагнетания в камеру всасывания и во
внешнюю среду, а также потерь на всасывании.
Утечки. Объемные потери в шестеренном насосе обусловлены
при нормальном (номинальном) режиме работы в основном утеч-
ками жидкости через радиальный зазор между дуговой поверх-
ностью корпуса и внешней цилиндрической поверхностью шестерен,
а также через торцовый зазор между боковыми стенками корпуса 2
и торцами шестерен 1 (см. рис. 115, а). Кроме того, при дефектах
профиля зубьев и их монтажа значительные утечки жидкости
могут происходить по линии контакта О зубьев (см. рис. 116),
находящихся в зацеплении, а также по более сложным каналам.
Точный расчет объемных потерь в шестеренных машинах, прак-
тически невозможен ввиду множества факторов, влияющих на эти
потери, и сложности каналов, по которым происходит утечка.
- Сложность расчетов утечек усугубляется еще и тем, что во
впадинах действует переменное по направлению вращения давле-
ние, а также тем, что указанные зазоры имеют сужения и расши-
рения, и сопротивление их периодически изменяется за один обо-
v рот вала машины. Жидкость, протекающая по пути радиального
зазора, от полости нагнетания к полости всасывания последова-
тельно проходит через все межзубовые впадины, давление в ко-
торых понижается в зависимости от удаленности впадин в их теку-
щем положении от полости нагнетания. Степень плотнбсти точеч-
ной штриховки межзубовых камер характеризует изменение вели-
чины действующих в них давлений для текущего положения
шестерни.
На рис. 115, б изображена эпюра давления в радиальном за-
зоре для текущего положения шестерни при концентричном рас-
положении ее в колодце корпуса. Наклонные участки кривой
характеризуют падение давления для текущего положения ше-
стерни в самом радиальном зазоре между вершинами зубьев
. щестерен и корпусом. Это давление при концентричном положений
шестерни будет примерно линейным. Горизонтальные участки
соответствуют да^лрнию на участке открытых впадин.
Характер изменения давления в случае эксцентричного по-
ложения шестерни в колодце (для случая непараллельной радиаль-
ной щели) будет степенным. В частности, для сужающейся по
направлению движения щели, которая имеет место вследствие
радиального давления жидкости на шестерню, изменение давле-
ния на участке щели можно представить штрихпунктирной кри-
вой е. Горизонтальные участки b кривой соответствуют давлениям
жидкости на,омываемые поверхности шестерни в зонах нагнета-
ния (ра) и всасывания (рх).
320
При практических расчетах обычно исходят из линейного за-
кона изменения давления между полостями нагнетания (р2) и
всасывания (pj, причем давление в последней может быть как
положительным, так и отрицательным.
Основным каналом утечек в насосе с некомпенсированным тор-
цовым зазором является утечка через этот зазор, которая соста-
вляет около 75—80% всех утечек в насосе.
Потоки утечек жидкости в шестеренных насосе и моторе от-
личаются лишь знаком градиента давления: в гидромоторе он
совпадает с направлением окружной скорости, а в насосе он об-
ратен. В том случае, когда градиент давления действует в том же
направлении, что и вектор скорости, потоки жидкости, обуслов-
ленные перепадом давления и переносным движением шестерен,
будут складываться, а в случае, когда направление градиента
давления противоположно вектору скорости, потоки будут вы-
читаться.
Значение минимального радиального зазора определяется
в основном возможной величиной зазора в подшипниках и их не-
соосности, а также величиной эксцентричности поверхностей ше-
стерен. Учитывая возможность неблагоприятного совпадения про-
изводственных допусков, радиальный зазор выбирают относи-
тельно большим (до 0,03—0,05 мм на сторону). Торцовый зазор
обычно выдерживается с точностью до нескольких (двух-трех)
сотых милл иметр а.
Потери на всасывании. К объемным потерям относятся также
потери на всасывании, которые определяются в основном, и в осо-
бенности при высоких частотах вращения, полнотой заполнения
жидкостью его рабочих камер (впадин между зубьями) при проходе
ими зоны всасывания. Эти потери снижают подачу насоса как при
работе на высоких, так и на низких давлениях. По этой причине
частоту вращения насоса обычно ограничивают значением
4000 об/мин.
Неполное заполнение камер жидкостью приводит к понижению
объемного к. п. д. насоса, а также к возникновению пульсаций
давления на выходе, которые обусловлены тем, что при соединении
такой камеры с полостью нагнетания возникает обратный поток
жидкости из полости в камеру, который вызывает гидравличе-
ский удар, распространяющийся по жидкости в магистраль. Опыты
показывают, что давление жидкости в рабочей камере насоса при
этих ударах может значительно превышать (в 2 раза и более)
рабочее давление, в результате чего насос может выйти из строя.
Частота этих ударов f = Гц.
Чтобы смягчить гидравлический удар, обусловленный обратным
потоком, необходимо обеспечить постепенное заполнение рабочих
камер жидкостью и сжатие ее до величины рабочего давления до
момента соединения камер с нагнетательной полостью. Для этого
на цилиндрической поверхности колодцев под шестерни со стороны
21 Т. М. Башта 321
Полости нагнетания прорезают узкие (0,5—0,6 мм) щели, через
которые жидкость под давлением поступит в камеру до того, как
последняя соединится с полостью нагнетания (см. стр. 279).
Для надежного заполнения рабочих камер жидкостью (маслом)
при проходе через полость всасывания необходимо обеспечить со-
ответствующее давление в последней. Опыт показывает, что ми-
нимальное абсолютное давление в полости всасывания должно быть
для распространенных сортов масел и режимов работы не ниже
300—400 мм рт. ст. Во многих случаях давление должно быть выше
атмосферного, что достигается повышением давления в баке
гидросистемы путем заполнения его газом под давлением, а также
применением насосов подпитки и прочих средств.
Площади сечений всасывающего и напорного каналов шесте-
ренных насосов выбирают из условия обеспечения заданной ско-
рости жидкости и ~ у, где Q и f — расход жидкости и площадь
сечения канала; при вязкости масла v — 10ч-20 сСт скорости
выбирают 1,5—2,0 м/с для всасывающей магистрали и 5—8 м/с
для напорной магистрали. Длина всасывающей трубы должна
быть возможно малой.
58. Влияние на подачу центробежных сил жидкости
г*
Заполнению рабочих впадин шестеренного насоса препятствуют
развивающиеся при вращении шестерен центробежные силы, дей-
ствующие на жидкость во впадинах. Жидкость, поступающая из
всасывающей полости в междузубовую впадину вращающейся
шестерни, приобретает угловую скорость последней, вследствие
чего появляется центробежная сила, стремящаяся выбросить ее
из впадины и препятствующая заполнению этой впадины жидко-
стью. Помимо этого, в результате действия центробежной силы
на жидкость абсолютное давление у основания впадин будет ниже
давления на входе в насос, вследствие чего во впадинах может
возникнуть локальное кипение (кавитация) жидкости (выделение
из жидкости и расширение паров и газов).
Рассмотрим схему распределения давления во впадине вращаю-
щейся шестерни, заполненной маслом и перекрытой стенками ко-
лодца. На-элементарную частицу жидкости а (рис. 119) толщи-
ной dr, шириной b и длиной r'dt, будут действовать в радиальном
направлении силы Рх и Р2 давления жидкости, а также центро-
бежная сила Рц. Эти силы соответственно будут
Рх = p’brdt;, Р2 = (р' + dp) f dtjr,
Рц = т<й2г' = pr'd^b dr as2г',
где <в — угловая скорость шестерни;
р — плотность жидкости;
р' — давление, действующее в точке а, отдаленной от
центра на' расстояние г'; *
322
4
br'dc, — площадь, на которую действует давление />*;
р’ dp — давление, действующее в точке на расстоянии
т — масса рассматриваемой частицы жидкости.
При вычислении силы Р2 мы приняли площадь (г* + dr) d^bt
равную площади r'dt>b.
Проектируя эти силы на ра-
диус, получим
p’r'dtb dra^r' =
= (pf + dp) r'd^b, i
I
После преобразования будем {
иметь
dp = р(й?г' dr,
откуда
Ггол
Для определения значения кон-
станты С этого уравнения прини-
маем, что давление р0 у основа-
ния впадины (на радиусе гнож
окружности ножек)
Ро ® ^*нож »
нож-
Рис. 119. Схема действия на жид-
кость центробежной силы
Давление в точке на радиусе окружности головок (гГ0л) будет
максимальным:
Р 2 2
£ (О Ггол
Р 2 2
р
2 2 \
'’гол ^нож/*
Так как сог есть окружная скорость игол внешней поверхности
шестерни, можем написать
« „ I Р 2 2 \ . /Лп\2 »
Р—• Ро Т“ л («гол «нож ) “ Ро + Р ( ) /И Z,
где т и z — модуль зацепления и число зубьев;'
^гол и «нож — окружные скорости на радиусах ггол и Гн0Ж.
Давление на радиусе ггол окружности головок, обусловленное
действием центробежных сил,
2 2
ГОЛ Ицож
21*
323
Из приведенного следует, что давление рц в радиальном на-
правлении растет по закону параболы (см. кривую b на рис. 119).
Чтобы жидкость надежно заполняла впадины, ее абсолютное
давление р во всасывающей полости должно превышать величину
рассмотренного давления рц, создаваемого центробежной силой,
иначе жидкость не сможет поступить во впадину. Это наступит
тогда, когда абсолютное, давление р0 жидкости у основания впа-
дины (на радиусе гнож окружности ножек) настолько понизится
вследствие действия центробежной силы, что это приведет к выде-
лению воздуха и паров жидкости.
Рис. 120. Способы улучшения питания насоса
Иначе говоря, предельно допустимой частотой вращения кон-
кретного насоса, с рассматриваемой точки зрения, является та,
при которой абсолютное давление р жидкости во всасывающей
полости (на входе в насос) будет способно преодолеть с известным
запасом указанную сумму давлений сопротивления. Если давление
в камере всасывания будет недостаточным для преодоления этого
давления, то действие центробежных сил ухудшит заполнение
впадин жидкостью вплоть до полного прекращения питания на-
соса. Кроме того, развиваемый при этом вакуум во впадинах спо-
собствует выделению из жидкости нерастворенного воздуха.
С учетом последнего фактора окружную скорость иг ограничи-
вают для распространенных вязкостей рабочей жидкости (10—
50 сСт) величиной 5—6 м/с, при этом абсолютное давление р0
на радиусе окружности ножек не должно быть ниже 0,3—0,4 ат.
59. Методы улучшения питания насоса
Заполнение межзубовых впадин шестеренного насоса можно
улучшить, выполняя входной канал в виде диффузора (рис. 120, а),
входная часть которого в поперечном направлении плавно расши-
ряется до размера ширины шестерен.
Для улучшения питания насоса жидкостью можно использо-
вать поток жидкости сливной магистрали, применив эжектор
(рис. 120, б). Используя энергию скоростного напора жидкости,
324
выходящей из сопла 2 эжектора, соединенного со сливной маги-
стралью гидросистемы, можно значительно повысить статическое
давление на входе в насос. Во всасывающий канал насоса посту-
пает некоторое дополнительное количество жидкости через ка-
нал 1, соединенный с баком.
С этой же целью в нереверсивных насосах камера всасывания
выполняется более широкой (с большим углом охвата), чем камера
нагнетания (рис. ’120, в).
§ 70. Нагрузка подшипников
60. Усилия давления жидкости
Наиболее нагруженными узлами шестеренного насоса являются
его подшипники, на которые действуют радиальные статические
силы Lr перепада давления жидкости на внешние цилиндрические
поверхности шестерни (см. рис. 115, а) и механические силы LM,
обусловленные реакцией от вращающего момента, причем первые
из этих сил значительно превышают последние.
Из схемы, представленной на рис. 115, б, следует, что некоторая
часть цилиндрической поверхности шестерен, непосредственно
омываемая жидкостью со стороны нагнетательной и всасывающей
полостей, находится под давлением, имеющимся в этих полостях.
На поверхности же впадин, отделенных от данных полостей зубь-
ями, действует давление, снижающееся по некоторому закону
от максимального, равного давлению жидкости р2 в полости на-
гнетания, до давления рг в полости всасывания (эпюра сил давле-
ния представлена на рис. 115, а). При концентричном положении
шестерен относительно колодцев корпуса (соответствует кольце-
вой щели с параллельными стенками [II) эта зависимость будет
ступенчато-линейной (см. рис. 115, б) и при эксцентричном их
положении (что является наиболее вероятным) — ступенчато-сте-
пенной (кривая е).
В результате такого распределения давления по наружным
поверхностям шестерен возникают неуравновешенные усилия,
которые воспринимаются подшипниками их валиков. При этом
мы не учитываем нагрузки, обусловленные компрессией жидкости
во впадинах зацепляющихся зубьев. * «
При приближенных расчетах допускают, что статическая на-
грузка Lr на шестерни от давления жидкости равна произведению
проекции боковой площади f шестерни на величину перепада дав-
ления Ар (рис. 121):
LT — f &р — bdr&p, (114)
гДе b и dr — ширина и диаметр окружности головок
шестерни;
Ар = р2 — Pi — перепад давления;
Рг и Pi — давление жидкости соответственно в полости
нагнетания и всасывания.
325
При этом также не учитываем радиальные нагрузки на валики
шестерен, обусловленные компрессией жидкости во впадинах
зубьев, находящихся в зацеплении.
Принятое допущение дает некоторое завышение (на 15—20%)
нагрузки по сравнению с действительной, поскольку на поверх-
ность шестерни действует не полное рабочее давление, а некоторое
среднее егр значение. Кр°мё того, это убывающее давление дей-
ствует на дуге —270° по .окружности, в результате чего нагрузка
на шестерню частично уравновешивается. С учетом этого, а также
если пренебречь тем, что составляющая усилия, действующего
Рис. 121. Схема гидравличе-
[ ского нагружения шестерни
%
на шестерню, не проходит через ее
ось, то нагрузка на ось шестерен от
давления жидкости при условии ли-
нейного падения давления в ради-
альном зазоре от р 2 до рь может
быть вычислена по выражению (см.
рис. 115, а).
Lr = 0,75Ар/ — 0J5bdr (р2 — рх).
Однако, испытания показали,
что вследствие сужающейся по по-
току утечек конусностью развертки
радиальной щели распределение дав-
ления в закрытых впадинах шестерен не следует линейному за-
кону, а будет более близким к выходному давлению насоса (на
рис. 115, б показано штриховой кривой е). С учетом этой нели-
нейности статическую нагрузку обычно рассчитывают по прибли-
женному эмпирическому выражению
Аг = 0,8ДрМг. (115)
Последнее выражение справедливо, в частности, для изно-
шенного насоса, шестерни которого в результате износа подшип-
ников могут прийти в контакт с нижней частью колодца, тогда
«ак в верхней части колодца образуется зазор. В этом случае
нагрузка подшипников определится давлением жидкости факти-
чески на радиальную проекцию шестерни [см. выражение (114)1.
Помимо указанной нагрузки [см. выражение (115)1, на ше-
стерни будут действовать механические силы, обусловленные вра-
щающим моментом. Ввиду этого, к гидростатической силе должна
быть добавлена сила Рх, обусловленная крутящим моментом:
М = 716,2 —
’ п
Анализ показывает, что сила реакции от этого момента уве-
личивает радиальную нагрузку на подшипники ведомой шестерни
и уменьшает ее на подшипники ведущих шестерен.
326
С учетом сил реакций от вращающего мбмента величина райНб-
действующей радиальных сил, действующих на ведомую шестерню,
вычисляется обычно по выражению
L = 0,85рМг.
Жесткость валов должна быть такой, чтобы при их деформации
(прогибе) не происходило при данных радиальных зазорах между
шестернями и корпусом насоса задиров корпуса, а также не нару-
шались условия зацепления шестерен.
При расчете приводных валиков на скручивание следует, иметь
в виду, что из-за пульсации давления и возможных гидравличе-
ч) Я)
Рис. 122. Схемы разгрузки шестерен от сил давления жидкости
ских ударов, а такж!е «забросов» давления вследствие возможного
защемления жидкости во впадинах (см. ниже), мгновенная дей-
ствительная нагрузка может значительно превышать нагрузку,
вычисленную по среднему крутящему моменту. Поэтому при рас-
четах валиков насоса предусматривают запас прочности (20—25%)
в сравнении с расчетом по среднему крутящему моменту.
Для разгрузки подшипников шестерен от усилий давления
жидкости применяют схемы с гидравлическим противодавлением.
Для этой цели полость нагнетания соединяется каналом с камерой
(рис. 122, а), расположенной диаметрально противоположно к этой
полости. В реверсивных насосах подобная канализация преду-
сматривается и со стороны, противоположной всасывающей по-
лости.
Более совершенной является разгрузка с помощью радиальных,
не пересекающихся каналов, которые соединяют между собой
каждую пару диаметрально расположенных междузубовых впадин
(рис. 122, б).
Подобная разгрузка особенно целесообразна в агрегатах, ис-
пользуемых в качестве гидромоторов. .
61. Компрессия жидкости во впадинах шестерен
При известных конструкции и исполнении шестеренного на-
соса некоторый объем жидкости может быть заперт (защемлен)
во впадинах между зацепляющимися зубьями. Вследствие измене-
327
ния запертого объема при вращении шестерен в этих впадинах
может возникнуть высокое пульсирующее давление (компрессия)
жидкости, которое вызовет дополнительную нагрузку подшипни-
ков, приведет к нагреванию жидкости и повышению шумности.
Возрастание давления в запертом объеме вызывает увеличение
крутящего момента, мгновенные значения которого могут намного
превышать величину момента, вычисленную по номинальному ра-
бочему давлению.
Явление компрессии в шестеренной машине с продолжитель-
ностью зацепления т >> 1 возникает в тот момент, когда при зацеп-
лении новой пары зубьев перекрывается выход рабочей жидкости
из изменяемой полости, в то время, как объем ее еще продолжает
уменьшаться. При этом в замкнутом объеме в результате сжатия
жидкости может развиваться высокое давление, нагружающее
валы шестерен. Увеличение («заброс») давления Др = р, — р2
в замкнутом объеме
А AV с AV
Др у Е у
1
₽ '
где -у-------относительное уменьшение замкнутого объема;
Р — среднее значение коэффициента сжатия жидкости;
£ =“— объемный модуль упругости жидкости;
Pi и Рг — давление соответственно в начале и в конце ком-
прессии (сжатия) жидкости.
Компрессия жидкости во впадинах шестерен может возникнуть
при плотном замыкании одной или нескольких впадин зацепляю-
щимися зубьями. В частности, если зуб, входящий во впадину при
повороте шестерен, имеет плотный контакт с сопрягаемыми поверх-
ностями двух других зубьев, образующими эту впадину по двум
точкам с и d, произойдет запирание (блокирование) в ней неко-
торого объема жидкости (на рис. 123, а отмечено точечной штрихов-
кой). Поскольку этот запертый объем при повороте шестерен
уменьшается и жидкость будет выдавливаться из него через
зазоры, во впадине при известной плотности контакта в точках с
и d и герметичности соединения по торцам шестерен может раз-
виться недопустимо высокое давление.
Если в конструкции насоса не предусмотрена разгрузка от
запертого объема, то большая часть жидкости при изменении за-
пертых объемов будет выдавливаться во всасывающую камеру,
так как давление в ней меньше, чем в напорной. В результате
защемленная жидкость будет теряться, что понизит объемный
к. п. д. насоса.
Из схемы, показанной на рис. 123, а, видно, что замкнутый
объем достигает наименьшего значения при положении его, сим-
метричном относительно межцентровой оси, т. е. когда точки с
и е зацепления обеих пар зубьев расположены симметрично отно-
’ *
328
сительно полюса зацепления. При дальнейшем вращении шесте-
рен, когда в зацепление входят обе пары зубьев, происходит уве-
личение замкнутого объема и, в связи с этим, резкое падение дав-
ления в замкнутой полости, при котором может произойти вскипа-
ние (кавитация) жидкости, находящейся во вредном (остаточном)
объеме.
Очевидно, если уменьшив толщину зуба, устранить контакт
в точке с, обеспечив зазор s по нормали к профилю (рис. 123, б).
а) 6)
Рис. 123. Схемы, иллюстрирующие запирание жидкости во впадинах
шестерни ,
блокирования жидкости в этой впадине не произойдет. Чтобы
облегчить при одновременном зацеплении двух пар зубьев пере-
текание жидкости из одной части защемленного объема в другую,
боковой зазор по нормали к профилю увеличивают до s = 0,1 мо-
дуля.
Однако при большом коэффициенте перекрытия (г > 1) и
плотном контакте второй пары зацепляющихся зубьев компрессия
будет наблюдаться, хотя и в меньшей степени, и в последнем случае.
Из рис. 123, в видно, что при плотном контакте двух пар сцепляю-
щихся зубьев в точках е и / образуется замкнутая полость (отме-
чена точечной штриховкой), состоящая из двух соединенных за-
зором s впадин зацепляющихся зубьев ведущей и ведомой шестерен.
Нижняя часть этой полости при повороте шестерен в направлении,
указанном стрелкой, будет уменьшаться, а верхняя — увеличи-
ваться; в результате объем замкнутой полости изменяется.
Очевидно, что если бы происходило равное изменение объемов
этих полостей при повороте шестерен (чтобы общий объем замкну-
той полости не изменялся), то компрессия жидкости отсутствовала.
В действительности же объем замкнутой полости изменяется,
достигая минимального значения в положении, когда геометри-
ческий центр замкнутой площади совпадает с осевой линией
(рис. 123, г). м
С целью уменьшения вредного влияния запираемой во впади-
нах шестерен жидкости, наблюдаемого при одновременном зацеп-
лении двух пар зубьев, коэффициент перекрытия стремятся умень-
шить, доводя его до т < 1,1.
62. Методы устранения запертого объема
Запертый объем обычно разгружается с помощью глухих ка-
нализационных канавок k небольшой глубины, выполненных на
боковых крышках насоса (рис. 123, г). Запертый объем, уменьшаю-
щийся при вращении шестерен, соединяется канавкой с полостью
нагнетания, а увеличивающийся — с полостью всасывания. Рас-
положение этих канавок относительно оси симметрии должно быть
таким, чтобы при любом положении шестерен полости всасывания и
нагнетания не соединялись между собой и было бы обеспечено не-
которое положительное перекрытие. Для этого отсечка от полости
нагнетания замкнутой камеры с объемом, уменьшающимся при
вращении шестерен, должна происходить в момент, когда этот
объем близок к минимальному, а соединение с полостью всасы-
вания — когда он больше минимального. Канавки рекомендуется
располагать так, чтобы отсеченное межзубовое пространство со-
единялось с зоной нагнетания лишь при уменьшений своего объема,
а при увеличении его ;— связывалось с зоной всасывания для пре-
дотвращения кавитации.
Расстояние b между разгружающими канавками выбирается
наименьшим из возможных (рис. 123, г), при котором обеспечи-
вается надёжное разделение канавок текущим зубом:
b — Icosa = р/гн,
где ги и р — радиусы делительной и основной окружностей;
а— угол зацепления;
I — шаговая длина линии зацепления.
cos2 otp
где т и z — модуль зацепления и число зубьев;
а0 “ угол зацепления резьбы нарезного инструмента;
L—расстояние между центрами шестерен.
Практически расстояние b между канавками определяется
кратчайшим расстоянием между профилями двух соседних зубьев
330
или шагом йо основной окружности. Для нормального зацейле-
ния (а = 20°) это расстояние будет
где da — диаметр начальной
центрами шестерен с
Длина канавки
окружности (расстояние между
одинаковым числом зубьев).
h = I sin a — I 1 — cos2 a = rancos a0
m2z2 cos2 Oq
Обычно выбирают
X
Практически принимают
Ширина а канавки при числе зубьев от 10 до 17 а — (1,2-ь 1,5) т.
Глубина с канавки (см. рис. 123, г) принимается при 10 z d
; ; 17 и тг$3 мм равной с = 0,05/п при т равном 4; 5 и 6 мм.
Глубина канавки соответственно равна 2,5; 4 и 5,5 мм.
При расчете сечения канализационных канавок, предназна-
ченных одновременно и для подвода жидкости в межзубовое про-
странство из камеры всасывания, скорость течения жидкости сле-
дует принимать не более 4,5—5 м/с.
1
§ 71. Пульсация подачи
Из приведенного выше (см. стр. 315), а так же из схемы, по-
казанной на рис. 117, следует, что текущая подача жидкости
шестеренным насосом носит пульсирующий характер и является
2л
периодической функцией с периодом, равным р = —, т. е.
пульсация подачи повторяется при повороте шестерни на угол,
соответствующий одному шагу (за один оборот происходит число
колебаний, равное числу зубьев ведущей шестерни). Соответст-
венно частота пульсаций
zn п
60 Гц-
Форма периодической кривой пульсации зависит от ряда
факторов и в первую очередь от коэффициента т перекрытия и
давления жидкости.
Коэффициент неравномерности потока (отношение максималь-
ной амплитуды пульсации к среднему значению потока) шесте-
ренного насоса с цилиндрическим эвольвентным зацеплением
331
ь
может быть определен для шестерен с коэффициентом перекры-
тия т = 1, пользуясь выражениями (109)—(111)
_ , / . т \
п 2mbti> I гн 4- — ) — 2Ьюгнт
6 = ЮО =-------------Л---------------= Ч-r Ю0%.
Qcp 2лпЬт2 (z + 1) z + 1 z
Неравномерность подачи насосов с т > 1 может быть вычис-
лена по эмпирическому выражению
5 = ттта-100%-
Фактическая неравномерность подачи значительно превышает
расчетную вследствие обратного потока рабочей жидкости в ка-
Лв^^Зсм^/с
Рис. 124. Графики пульсации потока шестеренного насоса
4
меры насоса при переходе их из полости всасывания в полость
нагнетания (см. стр. 321), причем эта дополнительная пульсация
в зависимости от полноты заполнения этих камер жидкостью
под давлением всасывания может значительно (в 2—3 раза) пре-
вышать расчетную. Опыт и подсчеты показывают, что расчетная
неравномерность подачи шестеренных насосов значительно пре-
вышает неравномерность насосов прочих типов.
На рис. 124, а показана расчетная кривая подачи, изобра-
жаемая кусочно-непрерывной функцией и характеризующая не-
равномерность подачи для насоса т = 1 и Qcp — 24,2 см3/с.
Заштрихованная площадь характеризует подачу по углу 0 по-
2л
ворота шестерен, где 0 = —.
Степень неравномерности подачи жидкости увеличивается
с повышением коэффициента перекрытия и уменьшается с ростом
числа зубьев. Однако при увеличении числа зубьев затрудняется
отвод жидкости, запираемой во впадинах.
В качестве иллюстрации на рис. 124,6 показана расчетная
кривая к подаче насоса, шестерни которого имеют заведомо
высокий коэффициент перекрытия (т = 1,36). Кривая отличается
от рассмотренной выше тем, что в момент вступления в зацеп ле-
332
нйе очередной пары зубьев она резко обрывается. ПлощаДКй,
заштрихованные крестообразно, характеризуют запирание жид-
кости во впадинах в момент входа в зацепление очередной пары
зубьев.
Как видно из графика, неравномерность подачи в этом случае
существенно увеличивается. Однако от того как будет исполь-
зован объем запертой жидкости будет зависеть величина по-
дачи и ее равномерность. Если запертая жидкость отводится
специальными каналами в камеру нагнетания, неравномерность
подачи уменьшается, приближаясь к значению, показанному
на рис. 124, а.
Пульсация подачи жидкости вызывает пульсацию давления,
причем вследствие инерции жидкости и высокого ее модуля
упругости, амплитуда пульсации давления (в особенности при
высокой герметичности насоса) может значительно превысить
амплитуду пульсации подачи.
§ 72. Насосы со ступенчатыми шестернями
Для уменьшения пульсации потока, а также улучшения усло-
вий контакта пары зацепляющихся зубьев по образующей про-
филя, применяют шестерни, составленные из двух смещенных
половинок, полученных путем разрезания шестерни плоскостью,
перпендикулярной оси вала (рис. 125, а). Смещение одной поло-
Qi Qt
Рис. 125. Сдвоенная шестерня насоса.
винки относительно другой на угол, соответствующий половине
шага зацепления (рис. 125, б), равноценно, с этой точки зрения,
увеличению вдвое числа зубьев, в соответствии с чем повысится
частота и уменьшится амплитуда пульсаций. Расчетные кривые
пульсации такого насоса для случая т = 1 представлены на
рис. 125, в (см. также рис. 124, а). Кривая подачи одной по-
ловинки* шестерни (жирная линия) смещена относительно кри-
вой подачи Q,2 второй половинки (тонкая кривая) на угол .
В соответствии с этим частота пульсации в подобном насосе по-
высится в 2 раза и амплитуда пульсации уменьшится более чем
вдвое.
ззз
На рис. 125, а показайа скёма ИбнСтрукТивиого выПбЛнёййй
шестерни. Половинка шестерни выполнена в виде зубчатого
венца /, посаженного на хвостовик 2 основной шестерни. Венец
ведомой шестерни посажен на хвостовике свободно, а ведущей
шестерни — на шпонке 3, которая и определяет угловое смещение
зубьев основной шестерни и венца L
§73. Крутящий момент на валу шестеренной
гидромашины
Рис. 126. Схема, рабочей камеры шесте-
ренного гидромотора
Из схемы замкнутой рабочей камеры шестеренной гидрома-
шины, представленной на рис. 126, видно, что давление рг
жидкости в камере k (отмечена точечной штриховкой), равное
давлению на входе гидромотора (или на выходе насоса), действуя
на омываемые поверхности зубьев шестерен, образующих эту
камеру (до точки а зацеп-
ления), развивает крутящий
момент. Величина его равна
произведению указанного
давления на проекцию площа-
дей рабочей части зубьев на
плоскости их симметрии и на
расстояние от центра давле-
ния этой площади до осей
шестерен. В гидромоторе этот
момент ’ является выходным
моментом на его валу, а в
насосе он преодолевается
приводным моментом внеш-
него источника (привода),
приложенным к валу насоса.
Следовательно, теоретический момент на валу ведущей ше-
стерни слагается из суммы собственного момента ,Мг этой ше-
стерни и момента М2 ведомой шестерни, который передается на
ведущую шестерню с помощью зацепляющихся зубьев.
Мгновенное значение момента определится произведением
равнодействующей сил перепада давления Др = рг — р2 на
проекции г — а также хх — Ога и х2 = О2а поверхностей
зубьев (давлением р2 в нерабочей полости пренебрегаем):
для ведомой шестерни
м 1 = (Г—X,) ЬЬр = 4^- - *?);
для ведущей шестерни .
- %.
334
Суммарный мгновенный момент насоса (на валу ведущей
шестерни)
- Л4 = М1+Л12 = -^-(2г2—
£
Изменение параметров и х2 в функции угла поворота ше-
стерен а ~ со/ определяет меру пульсации момента, обусловлен-
ной геометрическими параметрами машин.
Помимо этого тТульсация момента может возникнуть в резуль-
тате запирания (компрессии) жидкости в рабочих впадинах (см.
стр. 327); при этом «забросы» давления в них могут значительно
превышать номинальное давление. Поэтому валы насосов, а также
шестерни приводного механизма должны обладать большей (на
20—25%) прочностью, исходя из среднего значения расчетного
крутящего момента. Эта дополнительная нагрузка должна быть
также учтена при расчете валов.
Расчетное значение среднего крутящего момента (см. также
стр. 92) получим, подставив из выражения (111) в формулу (30)
величин расхода:
Мг = kpbm (dl{ + m), (116)
или
= Apbtn\(z -|- 1),
где т и b — модуль зацепления и ширина шестерен;
z и dH — число зубьев, ведущей шестерни и диаметр началь-
ной ее окружности.
Колебания момента подобны как по величине, так и по харак-
теру колебаниям подачи насоса.
Пользуясь выражениями (113) и (30) расчетный крутящий
момент при т = I можно также представить в виде
Мг — АрЬ (т2г.+ т2 —
12 /’
где I — шаговая длина линии зацепления.
Крутящий момент в общем виде может быть выражен через
удельный объем насоса w = q/2n (см. стр. 76):
Л1Т = wbp = djnbkp,
ZJl
где w — удельный объем насоса;
w = ~ djnb-,
2л 2л н ’
V
Г
Др = Pi —— перепад давления;
k9 — коэффициент, ч •
995
Подставляя значения Qcp [см. выражение (111)1 в формулу (28),
получим уравнение средней расчетной мощности мотора или
насоса
NT = ApQcp = 2n&pnbm (dH + m)
или
Nr ~ 2nApnbm2 (z2 -f- 1).
При изготовлении щестеренных машин, особенно предназна-
ченных для работы в качестве моторов, следует максимально
уменьшать зазоры в подшипниках и обеспечивать нужный ра-
диальный зазор между корпусом и шестернями при нагружении
шестерен давлением. Целесообразно также применять разгрузку
подшипников от радиальных усилий давления жидкости на
шестерни (см. рис. 122), что уменьшает трение и облегчает пуск
мотора под нагрузкой.
Кроме того, давление на выходе гидромотора (сливное давле-
ние) не должно превышать величины, допускаемой уплотнением
валика (если перед уплотнением не предусмотрена дренажная
канавка).
Фактический момент с учетом механических потерь на валу:
для насоса
м =__________^1—
ПР Ч глех.и
м^ = м
гидромотора
где т]мех. н и 'Пмех. м — механический к. п. д. соответственно на-
соса и гидромотора; для стандартной
машины средней мощности можно при-
нять 7]Мех. н ~ Чмех. м = 0,7-^ 0,85.
В шестеренной машине потери трения имеют место в под-
шипниках, уплотнениях вала, вращающихся шестернях (вязкост-
ное и механическое трение) и, в основном, в узле предназначен-
ном для компенсации торцевых зазоров; механические потери
в шестеренной машине составляют основную часть (до 90%)
теряемой мощности.
§ 74. Выбор параметров шестеренного насоса
Для предварительного выбора модуля зацепления т при
окружной скорости шестерни и = 10-?-20 м/с и отношения —
(где & — ширина шестерни), в пределах 6—10 часто пользуются
эмпирическим выражением
1 т = (0,3-ь0,5) мм,
где QT — расчетная подача насоса в л/мин,
336
Ддя уменьшения габаритов насоса число зубьев желательно
выбирать при всех прочих равных условиях возможно малым,
а модуль — большим [см. выражение (111)]. Это наглядно видно
из рис. 127, на котором приведено сравнение размеров насосов
одной и той же производительности при различных числах (соот-
ветственно при различных модулях) зубьев (7; 12 и 18).
Однако при уменьшении числа зубьев уменьшается прочность
зубьев из-за подрезания их ножек, а также увеличивается не-
j » z * Zz*
Рис. 127. Сравнительные габариты шестеренных насосов
равной подачи при различных числах зубьев
равномерность подачи. Для устранения подрезания (ослабления)
ножек зубьев производят коррекцию (корригирование) зацепле-
ния путем увеличения угла зацепления.
С целью уменьшения мертвого объема выбирают такое соотно-
шение размеров головки и ножки зуба, при котором остаточный
объем (объем зазора между внешней поверхностью зуба и внутрен-
ней поверхностью впадины) или объем жидкости, переносимый
из полости нагнетания в полость всасывания, был бы минималь-
ный. Для этого радиальный зазор между вершиной одной ше-
стерни и донышком впадины уменьшают во многих случаях до
0,05 модуля.
Ширина шестерни (длина зуба) Ь (рис. 115, а) обычно не пре-
вышает десяти модулей [распространено b = (4-ьб) /и]. Прак-
тикой установлено, что отношение ширины в шестерни к диа-
метру ее начальной окружности в насосах высоких давлений
составляет для насосов с подшипниками качения — 0,54-0,6
“н
и для насосов с подшипниками скольжения -т-= 0,4 4-0,5.
При меньших значениях этого ртношения объемный к. п. д.
насоса понижается, а при больших затрудняется герметизация
места контакта сцепляющихся зубьев,
22 Т. М. Бащтз
QQ-7
Поскольку ошибки изготовления по ширине зуба могут вы-
звать значительные утечки жидкости и снижение объемного
к. п. д, за счет междузубовых перетечек, целесообразно приме-
нять (в особенности при высоких требованиях к герметичности)
шестерни небольшой ширины (в,некоторых миниатюрных насосах
доводится до 1,5—5 мм). При таких шестернях деформации в зоне
контакта зубьев, обусловленные высокими удельными нагрузками,
способствуют обеспечению герметичности по линии зацепления
зубьев.
Шестерни изготавливают из " сталей, упрочненных химико-
термической обработкой (цементацией, цианированием, азотиро-
ванием). Твердость верхнего слоя металла после закалки состав-
ляет HRC 60—62. Корпусные детали изготовляют в основном
из алюминиевых сплавов,
а
Пример. Определить параметры шестеренного насоса внешнего зацепления
с номинальной-(расчетной) подачей QT — 0,4 л/с при частоте вращения вала п =
= 25 об/с для работы при давлении ри = 1,25 *107 Н/м2 (125 кгс/см2).
Рабочий объем насоса
q = -Qr = = 0,016 л/об = 16 см’/об = 16 000 мм»/об.
/I ^3
Учитывая, что q = 2n6m2(z-h I) [см. выражение (111)1, находим модуль
зацепления
т
Приняв г = 9 и Ь = 4/п, находим
т
16000 л
=——-7— 4 мм.
Ширина шестерни b •= 4m = 16 мм.
В соответствии с этим получим:
диаметр начальной окружности шестерен (принимаем некорригированный
зуб с углом зацепления 20°)
4Н = 4.9 = 36 мм;
шаг на начальной окружности
3,14 3,14-36 ......
н —
номинальный расчетный момент на валу насоса [см, выражение (30)J
.. орн 16-1,25-107
М — -zpL = -— * я—= 32 Н-м или '
2п 2л. 10е
16.125 обл
М = д о .. ^320 кгс-см.
" 2-3,14
Расчетный момент можно вычислить также и по выражению (116):
М = АрЬт (dH + m) = 1,25- IO7-0,016 0,004 (0,036 + 0,004) 32 Н'М.
Расчетная мощность
NT = 2л6дт (d% -\-т)&р= = *0 = 6т60 Д - с. (4Т9 кВт),
?3§
Приводной момент Л1Пр й привбДнай Мощность Л/пр на валу насоса
' М 320
Млр = —------= т-о_ — 38 Н м = 376 кгс-см;
Пмех 0,85
Л/-
#Пр = -----— = 7,83 л. с. (5,76 кВт),
Лмех
где Ямех ~ механический к. п. д. (принимаем Лмех — 0,85).
Эффективная подача- насоса
Фэф = ФтЛоб = 0,4 0,9 = 0,36 л/с — 360 см3/с,
%
где т]об — объемный к. п. д. (принимаем Лоб “ 0,9).
Пример. Требуется рассчитать основные параметры шестеренного насоса
с подачей фэф — 1>25 л/с при давлении нагнетания ря — 70 кгс/см2.
Принимаем величину механического к. п. д. т]мех = 0,85 и объемного к. п. д.
Лоб = 0,90.
Расчетная подача в этом случае составит
1,25
0,9
= 1,4 л/с.
Мощность на валу насоса
_ 10(2зфрн 10-1,25.70 ,110 п.
ПР ЧмехЧоб-75 0,85-0,9-75 5,2 Л‘ С' (П’2 кВт)’
Выбираем шестерни с эвольвентныК< профилем и углом зацепления 20°.
Модуль зацепления т рассчитываем по эмпирическому выражению
т = 0,5 J^QT = 0,51^84^ 5 мм,
где QT — расчетная подача в л/мин.
Выбираем число зубьев z = 13. При таком г диаметр начальной окружности
= тг = 65 мм; выбираем Пй = 66 мм. В этом случае внешний диаметр ше-
стерен dr = 76 мм и диаметр, соответствующий рабочей глубине впадины зубьев
dH = 56 мм.
Расчетная подача и параметры шестерен связаны формулой [см. также
выражение (И2)]
= 1400 см3/с.
Выбираем частоту вращения п = 1200 об/мин. При этом расчетная подача
QT = 415 b, а ширина шестерни, при которой обеспечивается эта подача, составит
Ь =
1400
415
— 3,3 см —- 33 мм.
При этой ширине обеспечивается распространенное отношение диаметра DH
начальной окружности к ширине шестерни bt равное — 2.
Пример. Рассчитать параметры шестеренного гидромотора с диаметром
начальной окружности шестерен dn = 66 мм, шириной шестерен 33 мм при
перепаде давления рн = 70 кгс/см2. Внешний диаметр (диаметр головок) шесте-
рен dr — 76 мм и диаметр, соответствующий рабочей глубине зубьев (диаметр
ножек) dHOJK „ 4т — — 2m — 56 мм (модуль зацепления m = 5 мм).
339
Рабочий объем Гидромотора вычисляем по приближенной формуле
/ л4г л^нож
3,14.76* 3,14-56* \ ft7 _
----_----------------। 3,3 — 67 см3.
4 4 /
Расчетный момент на валу гидромотора
qp 67-70 _ _ .
М[ ~ *20бл" ~ 200-3,14 ~ 7,6 КГС'М (76 Н‘М)’
При частоте вращения п — 1200 об/мин расчетная мощность составит [см. *
также выражение (50)1
Nt = 7 716^ = 12,8 л- с‘ (9’4 кВт)
или по подаче и давлению
л/ РФ1 70-67-1200 1О _ /п л п \
“* 45-104 “ 450 000 “ 2,8 Л* С’ (9|4 кВт)’
Приняв величину механического к. п. д. т]мех = 0,85, получим значение
эффективной (полезной) мощности на валу гидромотора:
Аэф “ ^тЛмех = 12,8-0,85= 10,9 л. с. (8 кВт).
Эффективный момент на валу гидромотора
л. 716,2-10,9 с -о /сс о и \
Мэф =------толк = 6,52 кгс-м (65,2 Н-м).
-1 4Uv
Расчетный расход (подача)
67-1200
1000
= 80,5 л/мин.
Принимая
жидкости)
Лоб = 0,90, получим фактическую подачу (подведенный объем
Полный к.
Опод = ~п= 89,5 л/мин = 1,49 л/с.
и,у
п. д. гидромотора (см. стр. 99)
_ Мэф _ ^эф-75-ЮО __
Пполн Допод ЮУподРн
где А^под — подводимая (входная) мощность;
1 ОСподРн
под = 75-100
10,9.75-100
10-1,49-70^ = °-^5’
Пример. Определить параметры электродвигателя для привода насоса
с полезной подачей <?эф — 500 см3/с и рабочим давлением 10 МПа (100 кгс/см2).
Конструктивные размеры насоса: модуль шестерни т = 2,8 мм; диаметр началь-
ной окружности Z)H=28 мм и ширина шестерен b = 16 мм. Объемный к. п. д.
насоса = 0,85.
Расчетная подача насоса
Оэф 500
~~ 0,85
588 см3/с.
340
Угловую скорость со насоса определим из формулы подачи ф == 2л£)нт6ю
[см- выражение (112)]:
“ ’ -b&jiib = 2Я~-2Д28-1,6~ 75 раД/с~ 750 0б/мИН-
Момент на валу насоса (момент на валу электродвигателя), необходимый
для создания заданного давления, определим по формуле М = D^mbp [см.
выражение (116)]
М ~ DHmbp ~ 2,8-0,28* 1,6^ 125 кгс-см (12,5 Н-м),
I
где DH — диаметр начальных окружностей шестерен в см;
т и b — модуль зацепления и ширина шестерен в см;
р — перепад давления в насосе в кгс/см2.
Следовательно, момент на валу насоса (приводной момент) должен быть не
менее 125лкгс/см, а частота вращения электродвигателя — не менее 750 об/мин.
§ 75. Насосы с автоматическим регулированием
торцовых зазоров
Из уравнения (17) на стр. 79 и опытных кривых (см. рис. 18, б)
видно, что перетечки рабочей жидкости в объемной гидро-
машине из полостей высокого давления в полости низкого давле-
ния через зазоры между деталями рабочего органа практически
пропорциональны перепаду давления между этими полостями.
Следовательно, для снижения величины перетечек при увеличении
перепада давлений необходимо уменьшать зазоры, что связано
с необходимостью повышать точность изготовления деталей
рабочего органа. Однако уменьшение зазоров между скользя-
щими деталями возможно лишь до известного предела, поскольку
допустимые погрешности при изготовлении этих деталей могут
стать соизмеримыми с регламентированной величиной зазоров,
что может привести к заклиниванию деталей. Возможность за-
клинивания особенно реальна по стыкам торцовых поверхностей
шестеренных машин.
Зазоры, образованные торцами шестерен 1 и боковыми поверх-
ностями корпуса 2 (см. рис. 115, а) и являются основным каналом
утечек жидкости в рассмотренных выше шестеренных насосах.
Это обусловлено тем, что величина торцового зазора должна
обеспечивать возможность легкого вращения шестерен при не-
благоприятных сочетаниях допусков на геометрическую точность
деталей, что может иметь место при их изготовлении. К тому же
следует учесть, что шестерня при работе будет по различным
причинам смещена в одну какую-либо сторону и зазор по другую
сторону увеличится. Поскольку утечка жидкости AQ == f (s3).
где s — зазор [1], любое малое смещение сопровождается боль-
шим повышением утечек.
Ввиду этого в современных насосах, предназначенных для
работы при высоких давлениях (более 10 МПа или 100 кгс/см2),
применяют устройство для автоматического уплотнения шестерен
341
fiO йк Горцам, С помощью которого Предотвращается заклинййа-
ние шестерен при одновременном обеспечении малых торцовых
зазоров, которые автоматически уменьшаются с увеличением
перепада давлений. Это устройство получило название системы
4
Рис. 128. Схемы (а, б) и конструкция (в) шестеренного насоса с компенсацией
торцового зазора
автоматической компенсации торцовых зазоров. Принципиальная
схема насоса с такой системой показана на рис. 128, а. Две по-
движные плавающие втулки 1 й 2 из антифрикционного материала
давлением жидкости р, подводимым в камеру а, прижимаются
к торцовым поверхностям шестерен 3 и 5, поджимая их к подоб-
ным же неподвижным втулкам 4 и 6. При работе насоса с нуле-
вым давлением поджатие втулок к шестерням осуществляется
342
пружинами 7 и 8. Втулки посажены в колодцы корпуса с мини-
мальным радиальным зазором.
Из рис. 128, а следует, что последний узел можно рассматри-
вать как обычный подпятник скольжения, работающий, однако,
в более неблагоприятных условиях, вызванных тем, что одна из
поверхностей деталей этого подпятника имеет вырезы (впадины
зубьев). Кроме того, давление в этих впадинах переменное (см.
рис. 115), ввиду чего нагрузка подпятника несимметрична.
Плавающие втулки 1 и 2 рассчитываются так, что они поджи-
маются к торцам шестерен 3 и 5 с усилием, обеспечивающим на-
дежное уплотнение, однако не слишком большим, так как это
увеличивает трение и понижает механический к. п. д. насоса.
Указанное усилие рассчитывают по выражению
/ г^2_^2 \
р = РпР + рК = рпр + р-а 4-
где D п d1 — диаметры буртика (или диаметр головок шестерни)
и внешней поверхности втулки; D в схеме, при-
веденной на рис. 128, равен внешнему диаметру
плавающих втулок / и 2;
fr — омываемая площадь втулки (со стороны камеры а),
на которую действует рабочее давление р жидко-
сти, прижимающее втулку к торцу шестерни;
_ n(O2-d?)
'1------4 ;
Рпр — усилие затяжки пружин 8 и 7.
Усилию Р противодействует усилие Ротж давления жидкости
на плавающую втулку в торцовом зазоре между втулкой и ше-
стерней, величину которого рассчитывают на основании экспери-
ментальных данных.
Чтобы предотвратить отжим втулок 1 и 2 от шестерен 3 и 5,
отношение усилия Р к усилию Ротж, развиваемому давлением
в этом торцовом зазоре на площадь /2 контакта втулки и ше-
стерни, должно быть (рис. 128, а)
а —& 1 2
Л)тж /2Рср ’ ’
где
л(О2-^) Ji(D2-dl)
11 ~ 4 > 12 —----4---->
Рср — среднее давление в торцовом зазоре; для предвари-
тельных расчетов можно принимать рср = ;
d2 — диаметр окружности валика шестерни;
< dj — внешний диаметр шейки втулок / и £
343
Усилие Рпр пружины должно обеспечивать начальный контакт
(прижим) плавающих втулок с шестернями при нулевом давле-
нии. Это усилие обычно выбирают равным Рпр= 50-^-80Н (5-J-8 кгс).
Насосы с подобными разгрузочными устройствами отличаются
большим сроком службы и имеют высокий объемный к. п. д.,
величина которого для насоса средней мощности (Q = 60 л/мин
и р ~ 124-15 МПа или 120—150 кгс/см2) достигает 0,94—0,96;
механический к. п. д. подобного насоса равен 85%. В отдельных
случаях эти насосы удовлетворительно работают при давле-
ниях 20 МПа (200 кгс/см2) и выше. Некоторое иностранные фирмы
выпускают подобные насосы на максимальное давление 28 МПа
(280 кгс/см2).
Конструктивная схема такого насоса представлена на рис. 128, б
с сохранением тех же позиций, что и на рис. 128, а. Утечки жид-
кости отводятся по каналу 10 во всасывающую полость насоса;
клапан 9 создает незначительное противодавление и тем самым
препятствует проникновению в насос воздуха.
В описанной выше схеме насоса плавающие втулки одновре-
менно служат подшипниками скольжения для цапф шестерен,
однако при высоких давлениях жидкости применяют игольчатые
подшипники (рис. 128, в).
§ 76. Обеспечение реверсивности шестеренного насоса
Шестеренный насос в принципе является реверсивной маши-
ной, однако в реверсивных вариантах насоса должна быть пре-
дусмотрена защита уплотнения выходного валика от возможности
повышения перед ним давления сверх допустимого значения,
что может произойти в результате утечек. Для этого камера с
перед уплотнением (рис. 128, б) должна быть соединена внутрен-
ними сверлениями со всасывающей полостью или через дренажный
штуцер (см. рис. 256) и трубопровод — с баком. Если этого не
предусмотреть, то в указанной камере при известном направле-
нии подачи давление может повыситься до величины рабочего
давления на выходе, при котором уплотнение выйдет из строя.
Для предотвращения этого, полости всасывания и /Нагнетания
насоса соединяются с камерой с перед уплотнением через два
обратных клапана 1 и 2 (рис. 129, а), один из которых отсекает
камеру перед уплотнением полости нагнетания при любом на-
правлении вращения насоса, пропуская одновременно утекаемую
жидкость в полость всасывания.
Для обеспечения реверсивности насосов с плавающими под-
жимаемыми втулками применяется более сложная коммуникация,
при которой должны быть обеспечены как предохранение уплотне-
ния от возможности повышения давления, так и обеспечение
питания камер поджимных втулок. Схема такого насоса показана
на рис. 129, б. Жидкость под давлением подводится от надоед
344
к втулкам 4 и 5 в зависимости от направления вращения его
шестерен; либо через канал 6, запорный клапан 9 и канал 7 (для
случая направления вращения, показанного на рис. 129, б),
либо при изменении направления вращения через канал 3, запор-
ный клапан 10 и канал 7.
Утечки жидкости отводят-
ся через канал 8 и далее,
в зависимости от направ-
ления вращения шестерен:
либо через клапан 11 в
канал 3 (для направления
вращения, показанного на
рис. 129, б), либо через
клапан 12 в канал 6 —
для противоположного на-
правления вращения. Все
указанные на схеме ка-
налы и клапаны размеще-
ны в корпусе насоса.
9
Рис. 129. Схемы обеспечения реверсивности шестеренного насоса
При одностороннем вращении необходимость в клапанах отпа-
дает, и в этом случае применяют лишь один клапан на линии
утечек для создания небольшого подпора (0,5—1 кгс/см2) перед
уплотнением валика (см. рис. 128, б). Для уплотнения шеек
втулок применяют резиновые уплотняющие кольца.
345
§ 77. Способы обеспечения равномерного прйжйма
плавающих дисков
Из схемы, приведенной на рис./128, а, видно, что результи-
рующая сила давления р жидкости в камере а, прижимающая
диски к шестерням, действует практически в их центрах (по оси
шестерен). Однако результирующая сила, отжимающая диски от
шестерен, будет смещена от центра, поскольку имеет место не-
. равномерное распределение давления в зазоре между дисками
и шестернями — со стороны зоны нагнетания оно будет выше,
Рис/130. Схемы обеспечения равномерной нагрузки шестерен по торцам
чем со стороны зоны всасывания. В результате возникнет перекос
этих дисков, сопровождающийся несимметричным распределе-
нием контактного давления (удельной нагрузки).
С целью исправления этого дефекта и обеспечения более рав-
номерного износа шестерен и боковых дисков применяют диффе-
ренциальный поджим уплотняющих поверхностей к шестерням
в соответствии с характером фактического распределения давле-
ния в торцовом зазоре. Для этого в насосах некоторых конструк-
ций втулки выполняют тдр, что равнодействующая давления
жидкости, прижимающая их к торцам шестерен, смещена относи-
тельно оси в сторону рабочей камеры насоса, благодаря чему
уменьшаются перекос и неравномерность прижима втулок к тор-
цам шестерен.
Применяют также и иные способы дифференциального под-
жима. На рис. 130 изображены схемы, в которых поджим втулок
осуществлен с .помощью нагружённых рабочим давлением спе-
циальных поршней, расположенных по окружности втулок.
Дифференциальный поджим втулок в этом случае достигается либо
соответствующим выбором диаметров поршней k (рис. 130, а),
либо раздельным питанием каждого из них (рис. 130, б), которое
обычно осуществляется из соответствующей зоны окружности
шестерни.
Рис. 131. Насос с равномерной нагрузкой шестерен по торцам
Конструкция такого насоса представлена на рис. 131. Нагру-
зочные поршеньки k этого насоса питаются жидкостью из раз-
личных мест зазора по окружности шестерен,
м
р
§ 78. Вопросы конструирования шестеренных насосов
Шестерни в большинстве существующих насосов обычно
выполняются заодно со своими осями (см. рис. 128). Такое вы-
полнение имеет ряд преимуществ, особенно при шестернях ма-
лого размера, в которых размещение шпоночного или иного
соединения шестерйи с валиком представляет известные труд-
ности, а подчас и невыполнимо.
Однако в некоторых случаях шестерни выполняются отдельно
от валиков (см. рис. 115), что имеет технологические преиму-
щества. В этом случае облегчается обработка торцов шестерен
и значительно упрощается выдерживание размера по высоте
шестерни, достигаемое путем совместного шлифования спарен-
ных шестерен и проставки корпуса на плоско-шлифовальном
станке. Соединение шестерни с валиком может,быть осуществлено
с помощью шпонок, шлицев, шариков и др.
347
Уплотнения выходных валиков шестеренных насосов обычно
выполняются в виде двух стандартных уплотнительных узлов,
пространство между которыми соединено с атмосферой или по-
лостью всасывания насоса дренажным отверстием. Практически
допускается некоторая негерметичность уплотнения валиков ше-
стеренных насосов; оно может пропускать жидкость в количестве
10 см3/ч.
Во многих насосах предусмотрен шариковый предохранитель-
ный клапан, который размещается в корпусе самого насоса.
Наряду с преимуществами расположения подобного клапана, при
длительной его работе возникает опасность перегрева жидкости
и насоса (главным образом уплотнения), поскольку выделяемое
при работе клапана тепло остается в жидкости, заполняющей
насос. По этой причине указанное размещение клапана допустимо
лишь при условии, что он работает только эпизодически в ка-
честве предохранительного.
§ 79* Многоступенчатые и многошестеренные насосы
Для повышения давления или подачи жидкости применяют
многошестеренные насосы. Путем последовательного или парал-
лельного соединения в одном корпусе нескольких (до шести)
пар шестерен можно либо повысить давление или увеличить
подачу, либо получить несколько автономных ступеней (потоков)
подачи. В последних,, многопоточных насосах жидкая среда
подается не через один отвод, как это имеет место в рассмотренных
однопоточных насосах, а через два и более отводов.
На рис. 132, а показаны конструкция и схема трехступенча-
того шестеренного насоса с последовательным соединением. Для
отвода излишка жидкости каждая ступень имеет переливной
клапан, отрегулированный на соответствующее давление.
Применением двух- и трехступенчатого насоса можно прак-
тически удвоить и утроить давление, однако при этом понижается
общий к. п. д. агрегата, так как первые ступени должны быть
рассчитаны на превышение потребной подачи, необходимое для
обеспечения надежного (с запасом) питания последующих сту-
пеней.
Для повышения подачи или получения нескольких ступеней
ее применяют многошестеренные насосы с тремя (рис. 132, б)
и более шестернями (до семи), размещенными вокруг центральной
ведущей шестерни.
§ 80. Насосы с косозубыми (спиральными)
и шевронными 4пестернями
Контакт рабочих поверхностей (пр
sail
илей) зубьев при прямо-
зубом зацеплении происходит по линии по всей их ширине (длине
зуба), ввиду чего при неточном изготовлении шестерен движение
ведомой шестерни становится толчкообразным и наблюдается
348
г
Рис. 132. Многошестеренные гидромащины
349
быстрый износ рабочих поверхностей зубьев. Эти недостатки
практически устранены в косозубых (спиральных) и шевронных
(рис. 133, а и б) шестернях. Вход зубьев в зацепление и выход
из него в этих шестернях происходит постепенно, благодаря чему
уменьшается влияние погрешностей в профиле зуба. Кроме того,
в насосах с косозубыми шестернями пульсация подачи и крутя-
щего момента значительно ниже, чем в насосах с цилиндрическими
шестернями.
Для снижения пульсации необходимо обеспечить условие,
чтобы произведение Ь tg ср равнялось t, 2t, 3t и т. д., где <р —
V 6)
Рис. 133. Схемы насосов с косозубыми (а) и шеврон-
ными (б) шестернями
ч
угол наклона зубьев и b — ширина шестерни. Угол <р выбирают
таким, чтобы сдвиг зубьев по окружности на торцах шестерен
составлял половину шага. Этот угол обычно не превышает 7—
10°. практически в этих насосах отсутствует также запирание
(компрессия) жидкости во впадинах.
При работе косозубых шестерен (рис. 133, а) возникают осевые
усилия, которые прижимают шестерни к торцам корпуса, что
может вызвать интенсивный, их износ. Ввиду этого при больших
значениях удельного давления на торцы необходимо фиксировать
шестерни в осевом направлении с помощью упорных подшипни-
ков. Этот недостаток устранен применением шевронных шестерен
(рис. 133, б), при которых указанные усилия уравновешиваются.
Угол наклона зубьев таких шестерен обычно 20—25°.
Расчетная подача шестеренных насосов с косозубыми и шеврон-
ными шестернями может быть приближенно определена по выра-
жению (112). '
р
§ 81. Насосы с шестернями ^внутреннего зацепления
При небольших давлениях (7 МПа или 70 кгс/см3) применяют
насосы с шестернями внутреннего зацепления (рис. 134, а),
которые отличаются компактностью и малыми габаритами в сравне-
нии с насосами с шестернями внешнего зацепления той же про-
350
изводительности. Преимуществом зтих насосов является такжё
симметричное расположение приводного вала относительно кор-
пуса.
Принцип действия этих насосов такой же, как и насосов с ше-
стернями внешнего зацепления (см. стр. 312). Жидкость, запол-
няющая междузубовые впадины шестерен, переносится в полость
нагнетания, где и выдавливается через серпообразные окна,
выполненные в боковых крышках корпуса (рис. 134, а) или
через радиальные сверления в донышках впадин внешней (коль-
цевой) шестерни (рис. 134, б и в). Ведущей шестерней является
шестерня с внутренними зубьями, связанная с приводным валом.
Рис. 134. Схемы насосов с шестернями внутреннего зацепления
Эта шестерня посажена по своей внешней поверхности в подшип-
ник скольжения. Для отделения полостей всасывания и нагнета-
ния в насосах, представленных на рис. 134, применен серпооб-
разный разделительный элемент а. При развороте этого элемента
на 180° (рис. 134, в), происходит реверсирование подачи.
Зацепление рабочих зубьев в рассматриваемых насосах про-
исходит на значительно большем угле, чем у насосов внешнего
зацепления, благодаря чему улучшается заполнение рабочих
камер жидкостью и снижается пульсация подачи и давления,
а следовательно — и уровень шума при работе насоса.
Расчетную подачу такого насоса можно определять по выра-
жению (112), причем все входящие в него параметры должны быть
взяты по ведущей (кольцевой) шестерне (с внутренними зубьями).
Число зубьев внутренней шестерни (с внешними зубьями) обычно
на 2—3 зуба меньше, чем кольцевой шестерни. Насосы пригодны
Для работы при частоте вращения до 5000 об/мин и давлении до
7 МПа (70 кгс/см2).
Применяются также насосы с шестернями внутреннего зацеп-
ления со специальным профилем зуба (рис. 135, а), в которых
отсутствует разделительный элемент. Эти насосы получили на-
звание героторных. Зубья шестерен, показанных на рис. 135, а,
351
находятся ё симметричном относительно вертикальной оси поло-
жении. Оси шестерен смещены одна относительно другой на
величину е, обеспечивающую зацепление. Отделение полости нагне-
тания от полости всасывания (герметизация) здесь достигается
путем непрерывного контакта зубьев внутренней и внешней (коль-
цевой) шестерен в зонах разделительных перемычек между окнами
всасывания и нагнетания. Для обеспечения этого контакта рабочие
Всасывание Нагнетание t -.г-ж
Рис. 135. Героторный насос
поверхности этих зубьев должны иметь такой профиль, чтобы они
обкатывались одна по другой, причем контакт зубьев при проходе
ими нижней разделительной перемычки заменяет собой раздели-
тельный элемент а, применяемый в предыдущей схеме (см. рис. 134).
Межзубовые впадины сообщаются с всасывающими и нагнетатель-
ными каналами с помощью серпообразных окон на боковых
крышках. Кольцевая шестерня своей внешней поверхностью ;
вращается в подшипнике скольжения. J
На рис. 135, б—г показана конструкция четырехзубого насоса j
этого типа. Ротор 5 насоса представляет собой шестерню внутрен- ।
него зацепления с зубьями особой формы. Ротор помещен в сталь- 1
ном или бронзовом цилиндре 6, который, в свою очередь, запрес- 1
сован в корпус 2 из алюминиевого сплава. С роторной тестер- 1
ней 5 находится в зацеплении ведущая цилиндрическая шестерня 31
с внешним зацеплением, у которой количество зубьев меньше
на один, чем у роторной шестерни. Шестерни 3 и 5 имеют одина-
ковую ширину и ограничены с торцов двумя чугунными дисками
352
в которых выполнены серпообразные всасывающее и нагнета-
тельное окна 1. Жидкость засасывается и нагнетается через то
или другое окно в чугунных дисках 4.
Эти насосы пригодны для работы при давлениях до 14 МПа
(140 кгс/см2), частота их вращения 1800 об/мин для малых (до
100 л/мин) и 1200 об/мин для больших (150 л/мин) подач. Подоб-
ные машины пригодны также для работы в качестве гидромоторов.
По литературным сведениям они в отдельных случаях строятся
на давление 30 МПа (300 кгс/см2) и частоту вращения до
4000 об/мин.
§ 82. Винтовые насосы
Увеличив угол наклона зубьев насоса с косозубыми шестер-
нями, получим винтовой насос, который отличается надежностью,
компактностью и бесшумностью в работе, равномерной подачей
жидкости. Винтовые гидромашины можно рассматривать, как
машины с косозубыми шестернями, число зубьев которых умень-
шено до числа заходов винтовой нарезки. Эти машины могут
работать как в режиме насоса, так и гидромотора.
Винтовой насос представляет собой одну или несколько пар
зацепляющихся винтов, плотно посаженных в расточки корпуса
(рис. 136). Нарезка одного винта входит во впадину другого, в ре-
зультате объем между нарезками оказывается разделенным на
несколько (в зависимости от того, во сколько раз длина винта
превышает величину шага нарезки) замкнутых полостей. Часть
23 т. М. Башта 353
впадин между витками нарезки, открытых для данного положе-
ния во входящую полость, заполняется жидкостью и после того,
как в результате поворота винтов эти впадины отсекаются от
входной полости, жидкость вытесняется выступом вдоль оси
в выходную камеру. За один оборот винта жидкость, заполня-
ющая замкнутые впадины между витками перемещается вдоль
оси винта в сторону выходной камеры машины, на длину, равную
шагу нарезки винта. Иначе нарезки создают через каждый шаг
винта замкнутые полости, непрерывно перемещающиеся от вход-
ной камеры к выходной. г-
После того, как жидкость замкнутой полости впадин пере-
местится к выходной камере, нарезки винтов, образующие эту
полость, выходят из зацепления. Вследствие уменьшения объема
раскрывшейся полости впадин винтов, жидкость выдавливается
из нее в выходную полость.
Поскольку выступы нарезки винтов в этих насосах, выпол-
няющие роль поршней, движутся непрерывно в одном направле-
нии, расчетная пульсация подачи в насосе, обусловленная кине-
матикой (при полном заполнении насоса жидкостью и нулевом
давлении), практически отсутствует. Однако при работе под
высоким давлением наблюдается пульсация подачи, обусловленная
сжимаемостью жидкости и обратным потоком в момент перехода
очередной рабочей камеры из полости всасывания в полость нагне-
тания. Периодичность соединения этих камер с полостью нагне-
тания приводит к некоторой пульсации давления.
Винтовые насосы и гидромоторы отличаются надежностью,
компактностью и относительной бесшумностью в работе. К их
преимуществам относится также равномерность расчетной по-
дачи.
Насосы выпускаются в двух- и трехвинтовом исполнении.
63. Трехвинтовой насос
В практике распространены преимущественно трехвинтовые
насосы. Такой насос (рис. 136) состоит из трех винтовых роторов,
средний из которых является ведущим, а два боковых — ведо-
мыми, служащими в качестве уплотнителей ведущего винта
(замыкателей). Ведомые винты вращаются за счет действия гидро-
статических сил давления жидкости на витки винтов. При этом
угол подъема винтовой линии выбирается таким, чтобы обеспечить
вращение ведомых (боковых) винтов за счет давления рабочей
жидкости, благодаря чему не требуется специальной силовой
шестеренной передачи, связывающей ведомые винты (боковые)
с ведущими. Кроме того, машины с большими углами подъема
винтовой линии пригодны для работы как в насосном, так и мо-
торном режимах.
Если гидромашина предназначается для работы лишь в ка-
честве насоса, можно путем уменьшения угла подъема винтовой
354
линии нарезки увеличить при той же общей длине винтов число
замкнутых полостей винта в уплотнительной зоне машины (между
полостями нагнетания и всасывания) и соответственно повысить
герметичность. Однако в этом случае потребуется специальная
силовая шестеренная передача для вращения (привода) ведомых
винтов и теряется обратимость машины, т. е. возможность ее
работы в режиме гидродвигателя.
Герметичность мест контакта винтов с циклоидальным зацеп-
лением . обеспечивается тем, что профили их соприкасаются по
точкам, образующим непрерывную линию, начиная от внутрен-
него до наружного диаметра зацепляющихся винтов. В сечении
винтов, показанном на рис. 136, а, контакт происходит по вну-
тренней поверхности £>в ведущего винта и наружным поверх-
ностям dH ведомых винтов равных диаметров; указанные поверх-
ности обкатываются одна по другой.
В сечении винтов, представленном на рис. 136, б, контакт
происходит по окружности выступов ведущего винта £>н и окруж-
ности диаметром da ведомых винтов, а также по точкам контакта
боковых поверхностей выступов ведущего винта и впадин ведомых
винтов.
Взаимные уплотнения по всему периметру сечения винтов
образуются в начале зацепления со стороны входной полости;
при вращении винтов эта система уплотнений поступательно пере-
мещается от входной полости к выходной (нагнетательной), при
подходе к которой уплотнение раскрывается и замкнутая камера
соединяется с этой полостью. Нарезка винтов обычно двухзаход-
ная, с углом подъема винтовой линии 30—45°. Двухзаходной
нарезка выполняется с целью динамического уравновешивания
винтов. Передаточное отношение между ведущим и ведомыми
винтами равно единице.
Винтовые машины обычно выпускаются с винтами циклоидаль-
ного профиля, который обеспечивает более высокую герметич-
ность, чем при винтах иных профилей (прямоугольного и трапе-
цеидального).
Трехвинтовые насосы допускают высокие частоты вращения,
доходящие до 18 000 об/мин, и выпускаются на подачу до
15 000 л/мин с приводной мощностью до 2000 л. с. Насосы при-
годны при многоступенчатом перекрытии для работы при давле-
нии до 20 МПа (200 кгс/см2). Некоторые иностранные фирмы
выпускают винтовые насосы на давление 35 МПа (350 кгс/см2).
Объемный к. п. д. насоса в зависимости от подачи и прочих пара-
метров составляет 0,75—0,95.
64. Подача насоса
При вращении винтов насоса жидкость, заполняющая их
впадины, перемещается по ним на величину одного шага за один
оборот ведущего винта. В соответствии с этим расчетная подача
трехвинтового насоса за один оборот ведущего винта (рабочий
23* 355
объем) равна объему каналов, по которым жидкость движется
вдоль винтов в пределах одного шага.
На рис. 136 незаштрихованная площадь представляет собой
сечение рабочей клетки (камеры) гидромашины Fp — F — f, где
F — площадь поперечного сечения расточек корпуса, в кото-
рых размещены винты;
2я</„ nD„ w / о \
F —____2. -I___— — _ H _L Гг I •
4 4 “ 4 \ 2 H/’
f — площадь сечения винтов в том же сечении рас-
точек (заштрихованная площадь);
DH и dn — диаметры сечения расточек (внешние диаметры
ведущего и ведомых винтов).
Рабочий объем насоса
q = tFp = t (F - f),
где t — шаг винта; обычно принимают t — -у- d„;
dH — наружный диаметр ведомых винтов.
Расчетная подача насоса при вращении со скоростью п об/ътн
QT = qn = t(F — f)n.
Скорость перемещения рабочей клетки сечением Fp при угло-
вой скорости ротора со будетВ соответствии с этим средняя
теоретическая подача гидромашины QT и характерный объем w
могут быть представлены как
FD/co 1 „
2я ’
где со — угловая скорость винтов.
Для расчета трехвинтовых насосов площадь сечения потока
принимают исходя из приближенных геометрических соотно-
шений сечения винтов:
Fp = F — f = 1,24dt
Рабочий объем
9 = Fp/==4,l^.
Теоретическая подача
QT = qn — 4,1 анп.
В соответствии с этим величина d„ определится по заданной
расчетной минутной производительности QT по выражению
- Iх к <117>
где п — частота вращения винтов;
tjo6 — объемный к. п. д. (можно принимать т)о6 = 0,90-*-0,95).
356
Диаметр наружной окружности ведомых винтов принимают
в качестве исходной величины при расчетах прочих параметров
трехвинтовых насосов. Наиболее рациональными соотношениями
между отдельными параметрами винтов можно принять:
где DB и £>н — внутренний и наружный диаметры нарезки ве-
дущего винта.
Чтобы при любом положении винтов выходная полость была
отделена от входной, что необходимо по требованиям обеспечения
минимальных объемных потерь, необходимо, чтобы в тот момент,
когда уплотнения винтов начинают раскрываться в выходной
полости, со стороны входной полости образовывались соответ-
ствующие уплотнения. Это условие будет выполнено, если длины
винтов будут больше расстояния по оси между двумя последова-
тельными уплотнениями винтов. Практически длина винта с одно-
местным перекрытием (с одним замкнутым объемом) выбирается
Lmln = (1,2-^ 1,3) t, где t — шаг винтовой нарезки.
При этой длине обеспечивается лишь одно перекрытие каналов
(впадин) винтов. Для обеспечения герметичности при высоких
давлениях предусматривают несколько перекрытий (многоступен-
чатость машины), в соответствии с чем длина винта увеличивается,
причем для давлений 15—20 МПа (150—200 кгс/см2) длина винтов
принимается равной (6ч-8) что соответствует 6—8 ступе-
ням. Число ступеней обычно выбирается таким, чтобы на каждую
из них приходился перепад давлений не более 2—3 МПа (20—
30 кгс/см2).
Следовательно, в винтовых насосах при соответствующей
длине винтов (L > 2/, где t — шаг нарезки) достигается много-
ступенчатость в одном агрегате, число ступеней которого опре-
деляется количеством мест перекрытия выступом одного винта
впадины другого, парного винта.
Увеличение количества замкнутых камер уменьшает перетечки
жидкости, так как перепад давления между соседними замкну-
тыми объемами становится меньше. Давление в этих объемах
(камерах) будет ступенчато понижаться от выходного (рн) в ка-
мере, соединенной в данное мгновение с напорной магистралью,
до давления всасывания на входе в насос. Благодаря этому пред-
ставляется возможным обеспечить работу насоса при высоких
Давлениях (200 кгс/см2 и более).
Запас перекрытия на каждой ступени выбирается равным 0,1/;
в соответствии с этим общая длина винтов многоступенчатых
машин
L = (п +0,1) /, (118)
где п — число ступеней.
Для компенсации осевых сил, которые при высоких перепадах
Давлений могут достигать больших значений, применяют гидро-
357
статическую разгрузку. Для этого у торцов винтов предусматри-
вают разгрузочные поршни а и b (см. рис. 136, а), под которые
подводят жидкость с рабочим давлением, что создает на винтах
усилия, обратные по знаку основным.
Применяют также винтовые насосы с несколькими (тремя
и четырьмя) парами замыкателей. В общем случае число ведомых
винтов для динамического уравновешивания ведущего (среднего)
винта должно быть не менее двух. Кроме того, эти винты должны
быть расположены симметрично относительно ведущего винта;
при этом будет устранена поперечная составляющая давления
ведущего винта на ведомый винт. Ведущий винт в этом случае
уравновешивается давлением жидкости в радиальном направле-
нии, а ведомые винты отжимаются к стенке колодцев, в которых
они размещены.
Совместно работающие винты имеют нарезки различного
направления. Отношение угловых скоростей винтов есть вели--
чина, обратно пропорциональная числу их заходов.
Для предупреждения возможности возникновения кавита-
ционных явлений во всасывающей зоне осевые скорости рабочей
жидкости во впадинах винтов должны быть не больше 8 м/с.
Пример расчета трехвинтового насоса. Определить основные конструктив-
ные параметры трехвинтового насоса с расчетным расходом QT = 4,75 л/с при
Яном ~ 25 об/с, предназначенного для работы при перепаде давления Др = 7 МПа
(70 кгс/см2).
Из уравнения (13) на стр. 74 находим рабочий объем насоса
= 0,19 л/об = 190 смз/об.
По формуле (117) находим диаметр наружной окружности ведомых винтов
= 3,6 см = 36 мм.
По рекомендуемым выше соотношениям между отдельными параметрами,
находим:
внутренний диаметр ведущего винта DB = — 36 мм;
5
наружный диаметр ведущего винта DH = = 60 мм;
*
внутренний диаметр ведомого винта dB = -5- dH = 12 мм;
шаг винта t = -у- — 120 мм.
Исходя из заданного давления 7 МПа (70 кгс/см2), выбираем число перекры-
тий 3; при этом длина винтов [см. выражение (118)]
L = (п + 0,1) t = (3 + 0,1) 120 = 372 мм.
Выбрав объемный и механический к. п. д. равными т]эб = 0,95 и Пмех =
= 0,9, находим фактическую подачу ((?эф) и приводную мощность (ДГПр) [см.
уравнения (19) и (34)]:
СЭф = СтЧоб = 4,75 0,95 = 4,5 л/с (270 л/мин);
= = Др(?т 70-270
Чмех 450-0,9 450 0,9
= 46,6 л. с. (34,2 кВт).
358
65. Двухвинтовой насос
В двухвинтовом насосе замкнутая камера образована двумя
винтами, находящимися в зацеплении, и неподвижной обоймой.
Такие насосы (рис. 137, а) обычно выпускаются на относительно
небольшие подачи (20—40 л/мин) при давлении до 10 МПа
(100 кгс/см2). Однако известны случаи применения таких насосов
на более высокие подачи. Так по литературным данным в ФРГ
Рис. 137. Конструктивная и расчетная схемы двухвинтового
насоса
построен насос для перекачки нефти из танкеров на подачу Q =
== 20 000 л/мин.
Двухвинтовые насосы выполняются обычно с прямоугольной
резьбой, что упрощает их изготовление, однако при этой резьбе
ухудшается герметичность насоса. Кроме того, поскольку винты
при прямоугольной резьбе не могут быть сопряженными, они
должны быть связаны друг с другом при помощи зубчатой пары,
размещаемой обычно в общем с винтами корпусе.
Расчетная подача двухвинтового насоса определится как
Fin,
359
где t — шаг винта;
и — частота вращения винта;
F — площадь сечения канавки винта;
где Он и — внешний и внутренний диаметры винта;
а — угол пересечения нарезки винтов.
Значение а определяют из геометрических соотношений по
выражению
а
COS -к-
а
2 а
Рн Рн
2
где а =
Значение F с достаточной точностью
также по выражению, основанному на
впадины равен объему выступа (нитки)
5---расстояние между осями винтов.
может быть определено
доп у щен и и, что объем
винта
В соответствии с этим расчетная подача двухвинтового насоса
может быть приближенно определена по формуле
Q = 4 (£)2 - £>2) tn.
Для компенсации осевых сил, возникающих в результате
действия крутящего момента, применяют гидравлическую раз-
грузку. Для этого рабочая жидкость через каналы а и b подво-
дится к соответствующим торцам (рис. 137, а). Разгрузка дости-
гается также применением сдвоенных винтов (рис. 137, б), одна
половина которых имеет правую и вторая — левую нарезки.
Связь ведущего винта с ведомым обычно осуществляется с по-
мощью шестеренной пары k.
66. Однороторный (одновинтовой) насос
Для перекачки жидкостей под невысоким давлением часто
применяют однороторные (одновинтовые) насосы (рис. 138, а),
которые отличаются простотой изготовления и надежностью
в эксплуатации. Насос имеет всего лишь одну движущуюся
деталь в виде винтоподобного ротора.
Замкнутая камера насоса образована ротором и неподвижной
обоймой. Подача жидкости насосом происходит практически без
пульсаций, благодаря чему в таких насосах отсутствуют инер-
360
ционные потери, что улучшает условия всасывания. Ввиду того,
что в местах герметизации деталей имеет место не чистое скольже-
ние, а скольжение с качением, насосы пригодны для работы на
загрязненных жидкостях, их применяют при добыче нефти из
скважин, для откачки воды из угольных шахт, при транспорти-
ровании патоки и пр. Широкое применение они получили в сель-
ском хозяйстве, на пастбищах и скотоводческих фермах. Насосы
применяют обычно при давлениях до 10 кгс/см2 и, реже,—до
30 кгс/см2 и расходов от 3 до 700 л/мин; частота вращения 1000—
15 000 об/мин.
Рис. 138. Схемы однороторного (а) и мембранного (б) насосов
12
Винтовой ротор 2 (рис. 138, а) насоса обычно однозаходный;
поперечные его сечения в любом месте представляют собой окруж-
ность диаметром d. Поверхность его образуется вращением сину-
соиды профиля bed вокруг оси О и одновременным перемещением
ее вдоль оси. В соответствии с этим при повороте ротора на 360°
осевое перемещение образующей синусоиды равняется шагу t
ротора. Центр сечения ротора смещен относительно его оси О
симметрии на величину е. При вращении он совершает движения,
в прорези корпуса высотой h.
Обойма 3 представляет собой полый цилиндр с профилирован-
ной внутренней поверхностью т двухзаходного винта. Шаг
винтовой поверхности обоймы /об равен удвоенному шагу t ро-
тора. В поперечном сечении двухзаходная винтовая поверхность
обоймы 3 представляет собой два полукруга k радиусом, равным
радиусу сечения винта (-у), центры которых Ot и О2 находятся
на расстоянии один от другого, равном 4е.
Общая площадь F проходного сечения обоймы равна сумме
площадей двух указанных полукругов и площади прямо-
угольника, равной 4ed, т. е. составляет F = ied-\-^—.
361
Внутреннюю поверхность обоймы можно представить как
поверхность, образованную сложным перемещением указанного
сечения при его вращении вокруг оси обоймы и при одновременном
движении вдоль этой оси. При этом все точки на периферии сече-
ния обоймы описывают винтовые линии, в результате при повороте
ротора на угол ср = 2л сечение перемещается на величину шага to6.
Осевое перемещение h при этом
Л = -Й-ф.
Принцип действия насоса (рис. 138, а) основан на плотном
контакте профильного винтового ротора 2 с обоймой 3 корпуса L
При вращении ротора между его поверхностью и внутрен-
ней винтовой поверхностью обоймы 3 образуются замкнутые
полости а, объем которых при вращении насоса непрерывно
изменяется. При этом происходит непрерывное вытеснение жид-
кости.
При вращении ротора любое его поперечное сечение переме-
щается в соответствующем поперечном сечении обоймы, образуя
лунообразные замкнутые полости (отмечено точечной штриховкой).
Общая площадь двух поперечных сечений этих полостей равна
разности площадей внутреннего сечения обоймы и внешнего сече-
ния ротора, которая равна 4ed. Замкнутые полости распростра-
няются на длину шага to6 обоймы, имея контуры витка по спи-
рали с переменной площадью поперечного сечения, изменяющейся
от нуля до 4ed. Для любого углового положения ротора в попереч-
ное сечение пары обойма — ротор попадают две замкнутые
полости переменного сечения, причем когда одна полость исче-
зает полностью (положение, изображенное на рис. 138, а), вторая
полость имеет наибольшую площадь сечения, равную 4ed. Изме-
нение сечений двух замкнутых полостей при различном положе-
нии ротора представлено на рис. 138, а.
Подача такого насоса определяется общим изменением объемов
замкнутых полостей в единицу времени. При этом, когда полость
на одной стороне увеличивается в объеме, в ней развивается ва-
куум и она заполняется жидкостью (происходит цикл всасыва-
ния). В некоторый момент эта полость замыкается (отсекается от
полости всасывания) и начинает перемещаться к нагнетательному
концу обоймы, вытесняя в нее, в результате уменьшения своего
объема, заполняющую ее жидкость. За один оборот жидкость
в замкнутом объеме перемещается вдоль оси обоймы на величину
ее шага /об и вытесняется через постоянное проходное сечение 4ed.
Ввиду этого расчетная подача такого насоса при установившемся
вращении не будет иметь пульсации.
Поскольку ось ротора перемещается при вращении относи-
тельно оси внутренней профилированной поверхности обоймы,
привод его должен осуществляться с помощью кардана.
362
В соответствии с приведенным расчетная подача насоса опре-
делится как
QT = 2 (h — d) dtn = 4edtn,
где h — высота сечения обоймы;
d и п — диаметр поперечного сечения ротора и частота его
вращения.
При выборе параметров насоса можно пользоваться опытными
соотношениями:
20^ —«£35 и 1,5<4-<3,5.
Эффективная подача меньше на величину объемных потерь,
учитываемых объемным к. п..д. (цоб):
Фэф = «ЗтПоб ===
Значение этого к. п. д. при работе на давлении до 10 кгс/см2
(на нефти) можно принимать т]об = 0,75ч-0,85.
С целью повышения герметичности и соответственно — объем-
ного к. п. д. внутреннюю поверхность обоймы покрывают тонким
слоем резины, благодаря упругости которой представляется
возможным обеспечить посадку ротора в обойме с некоторым
натягом (0,3—0,5 мм). Давление в этом случае можно принимать
равным 20 кгс/см2 и выше (до 50 кгс/см2).
§ 83. Мембранный насос
Для нагнетания под небольшим давлением (2—3 МПа или
соответственно 20—30 кгс/см2) агрессивных или загрязненных
жидкостей применяют плунжерно-мембранные насосы (рис. 138, б),
в которых резинотканевая мембрана 3 применена в качестве раз-
делителя сред и плунжер 9 — в качестве вытеснителя.
В камере 11 корпуса 5 насоса находится перекачиваемая жид-
кость и в камере 6 — рабочая жидкость (обычно минеральное
масло), с помощью которой осуществляется рабочий ход мем-
браны 3. Связь плунжера 9 с мембраной происходит через жид-
кость, заключенную в запертой камере 6. При утапливании плун-
жера в камеру (показано штриховой линией) рабочая жидкость
вытесняется из нее через отверстия перфорированной жесткой
опоры 4 и деформирует (прогибает) мембрану 13, которая вытес-
няет, в свою очередь, жидкость из камеры 11 через клапан 12
и занимает положение, показанное штриховой линией. Объем
жидкости, вытесняемой при этом мембраной в нагнетательную
магистраль (подача за один ход), равен объему, описываемому
поршнем:
яс/2 ,
q = —h,
где d и h — диаметр и ход плунжера 9.
363
При обратном ходе (перемещении вправо) плунжера 9 в ка*
мере 6 создается вакуум, под действием которого мембрана 13
ложится на перфорированную жесткую опору 4\ под действием
образовавшегося при этом в камере 11 вакуума последняя запол-
няется перекачиваемой жидкостью через клапан 10. Пополнение
камеры 6 жидкостью осуществляется из резервного бачка 8 через
подпитывающий клапан 7.
§ 84. Насосы с вращающимися поршнями
Для вспомогательных целей и, в частности, для перекачки
больших объемов вязких жидкостей под небольшим напором
(давлением), применяют насосы с зубчатыми роторами (поршнями
специальных профилей), которые получили название насосов
с вращающимися поршнями (рис. 139). Профили роторов таких
насосов выполнены так, что они плотно замыкаются между собой
Рис. 139. Схемы насосов с вращающимися поршнями
и с колодцами корпуса. При направлении вращения роторов,
указанном на рис. 139, а, объем верхней камеры а (отмечено
точечной штриховкой) будет уменьшаться и жидкость из нее
вытесняться, а объем нижней камеры — увеличиваться и жидкость
будет в нее засасываться.
Поскольку подобные роторы не могут передавать момент с ве-
дущего ротора на ведомый, они соединяются между собой шесте-
ренной парой, расположенной вне корпуса насоса.
Рабочий объем (подача за один оборот) двухроторного насоса
(рис. 139, а) может быть приближенно приравнен объему прямо-
угольного кольца высотой Ь, описанного окружностями ра-
диусами R и г
q ~ л (7?2 — г2) Ь,
где R — внешний радиус (радиус расточки корпуса);
г — радиус внутренней части (впадин)^ротора;
b — ширина ротора.
В соответствии с этим расчетная подача
QT « qn = л (7?2 — г2) Ъп.
364
В насосе, состоящем из двух роторов с тремя зубьями (вы-,
ступами) (рис. 139, б), контакт каждого из роторов происходит
по двум точкам end. Профили выступов образуются в этом на-
сосе кривыми, выполненными так, чтобы контакт выступов при
их повороте происходил на возможно большем угле.
Рис. 140. Схемы насоса (а) и гидропривода (б) с вращающимися
поршнями
На рис. 139, в показана схема насоса с вращающимися порш-
нями в виде двух обкатывающихся роторов а и b иного профиля.
Роторы соединены внешней шестеренной связью и обкатываются
по окружностям, образованным соответственно диаметрами D
и d. Подача такого насоса определится как
Ьп>
где & и /г — высота роторов и частота их вращения.
365
Ввиду того, что в приведенное выражение входят лишь пара-
метры с постоянными размерами, расчетная подача жидкости про-
исходит без пульсаций.
К насосам с вращающимися поршнями относится также трех-
роторный насос, схема которого представлена на рис. 140, а.
Два вращающихся ротора (поршня) 1 и 3 приводятся в движение
через внешнюю механическую связь от среднего ротора 2. Гер-
метичность обеспечивается непрерывным контактом цилиндриче-
ских поверхностей поршней 1 и 3 с ротором 2 и их выступов
с внутренней поверхностью корпуса.
Насос допускает работу при окружных скоростях поршней
до 10 м/с; в некоторых случаях их строят на скорости до 20 м/с.
Эти насосы пригодны для длительной непрерывной работы при
давлениях до 200 кгс/см2, при эпизодической работе они допу-
скают работу при давлении до 350—400 кгс/см2. Объемный к. п. д.
насоса при р = 200 кгс/см2 составляет 90—95%. Машины этого
типа строятся на мощность от 5—10 до 1000 л. с.
Расчетная подача этого насоса в единицу времени будет равна
объему, описываемому за это время выступающими частями
обоих поршней высотой h = R — г:
QT - 2юр/.
О I
Подставив значения р = —~~; f — (R — г) b и со = 2ли,
будем иметь
QT = 2nnb (R2 — г2),
где f — площадь выступающей части поршня высотой h =
- R - г;
R — радиус расточки в корпусе насоса (см. рис. 140, а);
г — радиус цилиндрической части поршней 1 и 3;
b — ширина насоса (длина поршней);
со — угловая скорость поршней;
р — расстояние от центра поршня до центра давления вы-
ступающей части поршня.
Ввиду постоянства значения (R2—г2) расчетная подача жид-
кости таким насосом происходит без пульсации.
Гидромашина этого типа может работать как в качестве на-
соса, так и в качестве мотора, из которых комбинируется гидрав-
лический привод. Для увеличения подачи в общем кожухе может
быть расположено несколько насосов. Частота вращения гидро-
мотора этого типа обычно 6000 об/мин.
На рис. 140, б изображена гидравлическая схема гидропри-
вода, состоящего из гидромотора 7, питаемого четырьмя насосами 4.
Питание может производиться как одновременно всеми насосами,
так и частью их. В последнем случае часть насосов соединяется
с помощью распределителя 5 с баком 8. Управление осуществ-
ляется от задающего устройства через золотник 6 с дистанционным
управлением.
366
§ 85. Насос с роликовыми вытеснителями
Для перекачки жидкостей под небольшим давлением приме-
няются насосы, в которых в качестве вытеснителей служат ро-
лики (рис. 141). .Насос состоит из статорного кольца 2 и ротора 3,
в прорези которого свободно помещены ролики 1. Ось статора
смещена относительно оси ротора на величину (эксцентриситет) е,
значение которой определяет подачу насоса.
Подбод
Рис. 141, Насос с роликовыми вытеснителями
При вращении ротора 3 ролики 1 будут прижиматься центро-
бежными силами к статорному кольцу 2 и силами сопротивле-
ния — к боковой стенке прорези ротора, благодаря чему обеспе-
чивается необходимая герметичность. При своем движении ро-
лики будут частично скользить и частично катиться по цилин-
дрической поверхности статора и одновременно по поверхности
контакта прорезей ротора.
•Всасывание жидкости осуществляется через сдвоенные окна,
выполненные в боковых крышках насоса. Расчетная подача
насоса определится по формуле (97) с заменой объема пластин
объемом роликов.
ГЛАВА IX
ГИДРАВЛИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
И НАСОСЫ СВЕРХВЫСОКИХ ДАВЛЕНИЙ
В практике применения гидроприводов часто возникает по-
требность в устройствах, с помощью которых производится изме-
нение величин давления или расхода. Подобные устройства полу-
чили название гидравлических преобразователей или гиротранс-
форматоров. В общем случае гидравлическим преобразователем
Рис. 142. Схема преобразователей давления вращательного (а)
и поступательного (б и в) движения
объемного типа называют устройство, изменяющее (повышающее
или понижающее) расход и давление жидкости в гидросистеме
при условии обязательного разобщения магистралей высокого
и низкого давлений. Или, иначе, гидропреобразователем назы-
вается объемная гидромашина, предназначенная для преобра-
зования энергии одного потока рабочей жидкости в энергию
другого потока с иными значениями давления и расхода.
Преобразователь состоит из двух ступеней: двигательной и
насосной. К первой ступени подводится рабочая жидкость гидро-
системы, а вторая подает жидкость с преобразованным давлением
или расходом к исполнительным механизмам (потребителям).
368
Применяют гидропреобразователи роторного типа, в виде
двух роторно-поршневых машин (рис. 142, а) или машин воз-
вратно-поступательного действия (силовых цилиндров) (рис. 142,6),
§86. Вращательный гидропреобразователь
Такой преобразователь составлен из гидромотора и насоса
с разными рабочими объемами; валы их жестко связаны между
собой. В частности, распространенный вращательный гидро-
преобразователь роторно-поршневого типа (трансформатор)
(рис. 142, а) состоит из двух связанных валами 1 и 2 машин с раз-
ными рабочими объемами. При использовании машины 1 в ка-
честве гидромотора расчетная подача в единицу времени насоса 2
будет превышать подачу гидромотора в отношении (утечками и
сжимаемостью жидкости пренебрегаем)
I = = & или Q, = (Qi,
П1Я1 Q.1 2
где и 91 — рабочие объемы (расчетная подача за один
оборот) машин 2 (насоса) и 1 (гидромотора);
л2 = «1 = п — частота вращения валов гидромашин;
Qi и Q2 — расчетные подачи машин.
Соответственно расчетное давление р2 насоса 2 при условии
равенства теоретических мощностей (Pi^iOi = р292^а) машин
будет ниже давления р± источника питания гидромотора 1 в отно-
шении (механическими потерями пренебрегаем)
Рг 91 Q1
Pi Ял Qs
Отсюда
= = или Q2=Q1&.
¥2 Уз Ра
При использовании же машины 2 в качестве гидромотора
подача Qx насоса 1 будет меньше подачи Q2 гидромотора 2 в отно-
Qi*
шении i = а давление рх, развиваемое насосом, больше
при условии равенства мощностей машин, давления р2 гидро-
мотора в отношении (механическими потерями пренебрегаем)
Pi__Qg
Р3 “ Qi ‘
Отсюда
Pi = Рг Я1 или Qi = Q2 .
41 Р1
24 т. М. Башта
369
§ 87. Поступательные преобразователи
В гидросистемах особенно распространены возвратно-посту-
пательные преобразователи, составленные из двух гидроцилин-
дров разных диаметров, поршни которых жестко связаны между
собой (рис. 142, б). Применение их особенно целесообразно в слу-
чаях, когда необходимо развить большие давления при малых
расходах жидкости.
Принципиальная схема преобразователя, повышающего давле-
ние, одинарного действия приведена на рис. 142, б. Давление Pi
лР?
подводимой жидкости действует на площадь Fj = —j- сечения
цилиндра, выходное же давление р2 жидкости действует лишь на
л ^2
площадь F2 — —т- штока.
Коэффициент усиления давления (при пренебрежении трением)
= £? = р_2
f2 d22 Pl ’
(П9)
где и D2 — диаметры цилиндра и штока.
Коэффициент усиления подобного преобразователя прямо-
линейного движения, повышающего давление, представляет собой
отношение выходного давления к входному. Он находится в пре-
делах от 2 : 1 до 1000 : 1.
На рис. 142, в приведена схема преобразователя с дифферен-
циальным поршнем, с помощью которого можно получить требуе-
мую для высоких давлений небольшую полезную площадь при
одновременном обеспечении жесткости и прочности конструкции
преобразователя. В этом случае
_ Рг
г\2 j2
D2 d pi
где d — диаметр хвостовика штока.
Распространенная схема преобразователя дифференциального
типа представлена на рис. 143, а. Если пренебречь трением и ве-
сом подвижного цилиндра 1, давление рг на выходе определится
из выражения (119):
где Е2’"и — площади штока 2 и подвижного цилиндра 1.
Управление преобразователем обычно осуществляется ручным
переключением с помощью четырехходового золотника.
370
Применяют также преобразователи с автоматическим пере-
ключением (рис. 143, б). Преобразователь состоит из нагружен-
ного пружиной 8 поршня 3 с шариковым обратным клапаном 4,
через который система заполняется жидкостью. Поскольку коль-
цевая камера 6 соединена с атмосферой, поршень 3 будет на-
ходиться под неуравновешенным давлением жидкости, действую-
щей на верхнюю (со стороны камеры 7) и нижнюю (со стороны
л£>|
камеры 5) поверхности. В результате при р± —> Рпр -]-
♦Л
Рис. 143. Преобразователи
давления
(где Рпр — усилие пружины 8) клапан сядет в свое гнездо
и поршень 3 будет перемещаться вверх, выдавливая жидкость
из камеры 7. В этом случае коэффициент усиления определится
также из выражения (119).
Для устранения холостого хода, который имеется в преобра-
зователях одинарного действия, применяют преобразователи двой-
ного (непрерывного) действия. Таким преобразователем служит
двухсторонний гидроцилиндр, каждая из полостей которого пред-
ставляет собой преобразователь одинарного действия (рис. 143, в).
При вытеснении жидкости из одной какой-либо полости высокого
давления р2 противоположная полость заполняется через соот-
ветствующий обратный клапан 9 й 10 жидкостью питания. Пита-
ние полостей низкого давления рг осуществляется распредели-
тельным золотником, приводимым поршнем преобразователя
в конце каждого хода.
Преобразователи этого типа строят на подачу до 110 л/мин
с усилением давления от 3 : 1 до 7 : 1.
Применяют также преобразователи, понижающие давление и
соответственно повышающие при всех прочих равных условиях
расход жидкости. В частности, для питания тормозов авиацион-
ных колес обычно требуется относительно низкое давление в срав-
нении с давлением общей гидросистемы самолета, тогда как для
24* 371
обеспечения быстродействия тормозов требуется большой расход
жидкости.
Схема подобного понизителя показана на рис. 144. Жидкость
под высоким давлением подводится из гидросистемы в цилиндр 1
малого сечения и вытесняется в магистраль потребителя жидкости
низкого давления из цилиндра 5 большого сечения. Для возвра-
щения поршней в исходное положение после прекращения пита-
ния цилиндра 1 (при /7 = 0) применена пружина 4.
Рис. 144. Схема понизителя давления
Коэффициент понижения давления (редукции) определится из
соотношения (трением и усилием пружины пренебрегаем)
. d2 р2 d2
1 Р2 Pi D*>
где d и D — диаметры цилиндров малого и большого сечения.
Соответственно расходы Q2 жидкости, вытесняемой из ци-
линдра 2 большого сечения, и жидкости, подаваемой в ци-
линдр 1 малого сечения, определятся без учета утечек из соотно-
шения
—1 — — О — О ~
Q, ~ £>2’ Чг~ 41 4» •
Для регулярной компенсации возможной утечки жидкости из
замкнутой магистрали, соединенной с полостью цилиндра боль-
шого сечения, применен шариковый клапан 2, который в конце
хода поршня влево отжимается штырем 3 и открывает проход
жидкости из магистрали высокого давления рх в количестве, не-
обходимом для восполнения утечек. Как только давление р2
в полости цилиндра большого сечения превысит расчетное зна-
чение, условие равновесия поршня нарушится, и он сместится
вправо на величину, позволяющую клапану 2 сесть в свое гнездо.
372
§ 88. Насосы сверхвысоких давлений
67. Принципиальные схемы
На базе рассмотренных цилиндровых преобразователей по-
строен ряд насосов (мультипликаторов) сверхвысоких давлений.
Принципиальная схема преобразователя давления, применяемого
в качестве насоса сверхвысокого давления, показана на рис. 145, а.
Высокое давление создается с помощью плунжера 3, связанного
с поршнем 1 приводного силового цилиндра (гидродвигателя).
Плунжер герметизирован в цилиндре кольцами 2. Коэффициент
усиления достигает в подобных
чений j = 5! = £? = ЮО : 1 и
d2 Pi
преобразователях (насосах) зна-
выше. Преобразователь (насос)
снабжен питающим (всасывающим) 6 и нагнетательным 4 кла-
панами, причем для повышения надежности применяют по два
последовательно расположенных клапана на линиях нагнетания
и питания. Клапаны обычно снабжаются устройствами для авто-
матического отвода воздуха, присутствие которого резко ухуд-
шает режим работы насоса.
Поскольку нагнетание жидкости одноцилиндровым насосом
происходит лишь при движении плунжера в одну сторону, по-
дача жидкости будет прерывистой, что во многих случаях неже-
лательно, а иногда и недопустимо. Для выравнивания
подачи применяют насосы — преобразователи двойного действия
(рис. 145, б). Преобразователь имеет силовой цилиндр (гидравли-
ческий двигатель) //, приводящий в движение плунжеры 13 на-
сосной части, каждый цилиндр которой снабжен дублированными
нагнетательными 9 и всасывающими (питающими) 10 клапанами.
373
При подаче жидкости от источника питания в соответствующую
полость гидродвигателя 14 она одновременно поступает в смеж-
ную полость цилиндра 12 насоса, обеспечивая надежное заполне-
ние этой полости жидкостью. Ввиду этого выражение (119) для
вычисления коэффициента усиления будет справедливым и для
данного случая.
Очевидно, что насос с этой системой питания пригоден лишь
для случаев, когда нагнетаемая им жидкость является рабочей
средой гидродвигателя.
Реверсирование движения плунжеров осуществляется с по-
мощью электромагнитного распределителя 11, управляемого от
концевых выключателей (на схеме не показаны), на которые воз-
действует в конце ходов поршень 15 силового цилиндра. Приме-
няются также схемы, в которых распределитель переключается
непосредственно поршнем силового цилиндра.
Насосы такого типа применяют на давлениях до 300 МПа
(3000 кгс/см2) и выше при расходе 20—40 л/мин; число рабочих
ходов обычно составляет 120—150 двойных ходов в минуту. При
давлениях порядка 300 МПа (3000 кгс/см2) диаметр d плунжера
составляет 50—60 мм, а его ход — 200 мм. Диаметр D привод-
ного силового цилиндра обычно равен 200—250 мм. При более
высоких давлениях диаметр плунжера обычно не превышает 15—
20 мм и ход — 100—120 мм.
Применяются также одно- и многоцилиндровые насосы сверх-
высоких давлений с приводом от электродвигателя через пони-
жающий механический редуктор и кривошипный механизм. Прин-
ципиальная схема типового одноцилиндрового насоса с таким при-
водом показана на рис. 145, в. Насос представляет собой жесткую
плунжерную конструкцию с клапанным распределением 7. Для
восприятия боковых сил применяют направляющие буксы 5.
Подача такого насоса происходит по синусоидальному закону.
Для выравнивания и увеличения подачи применяют двухцилиндро-
вые насосы с приводом от общего электродвигателя. Насосы с кри-
вошипным приводом обычно применяют при давлениях до 300 МПа
(3000 кгс/см2).
Подача насоса регулируется изменением числа ходов его
поршня (плунжера) при постоянном рабочем объеме или измене-
нием хода плунжера при постоянном числе ходов. Последнее до-
стигается с помощью регулирования хода поршня приводного
гидравлического двигателя насоса (рис. 145, а) или регулирова-
ния величины е кривошипа (рис. 145, в),
68. Объемные характеристики
Основными факторами, влияющими на объемные характери-
стики насоса сверхвысокого давления, являются сжимаемость
жидкости и упругость рабочих камер насоса, а также размеры
вредного (мертвого) объема 5 (рис. 145, а).
374
В первую очередь объемные характеристики насоса зависят
от сжимаемости рабочей жидкости (см. стр. 40) и особенно при
больших размерах мертвого объема, под которым для одноци-
линдрового насоса понимается объем жидкостной камеры 5, вклю-
чая каналы до нагнетательного клапана в конце рабочего хода
плунжера (на рис. 145, а отмечено точечной штриховкой). Влияние
мертвого объема обусловлено тем, что некоторая часть рабочего
хода плунжера расходуется на сжатие жидкости, заключенной
в этом объеме для повышения ее давления с начального р0 на
входе до рн на выходе из насоса. При известных условиях, завися-
щих в основном от величины мертвого объема и сжимаемости
жидкости, потребный для этого сжатия ход плунжера может со-
ставить значительную часть полного хода (см. также стр. 85).
Для оценки влияния мертвого объема введем понятие теоре-
тического объемного к. п. д. насоса, под которым будем условно
понимать отношение расчетного значения вытесненного объема
(подачи) жидкости в среду с давлением без учета утечек через
зазоры к описанному плунжером геометрическому объему (по-
даче) за то же время:
Лоб. ,т
Qp
Qr >
где Qp — расчетная подача при давлении рн;
Qr — геометрическая подача.
Указанный к. п. д. зависит при всех прочих одинаковых усло-
виях от отношения пути перемещения плунжера, требующегося
для сжатия жидкости во вредном пространстве до давления рн,
к полной величине его перемещения. Очевидно, чем больше отно-
шение этого объема сжатия к объему, описываемому поршнем за
один ход, тем большая часть последнего будет потеряна на повы-
шение давления.
Обозначим через q объем, описываемый плунжером одноци-
линдрового насоса за один ход, и через с мертвый объем насоса.
Пренебрегая утечками и считая насос абсолютно жестким, а за-
полнение цилиндра жидкостью при ходе всасывания поршня
полным, находим объем сжатия жидкости, необходимый для по-
вышения ее давления в камере насоса объемом q + с с началь-
ного ро до давления нагнетания рн:
д<71 = (Рн — Ро) Р (<7 + с),
где р — среднее значение коэффициента сжатия для рассматри-
ваемого диапазона давлений (см. стр. 40).
Для случая, корда начальное давление р0 жидкости в камере
насоса равно атмосферному или близко к нему, последнее выра-
жение может быть представлено в виде
д<7 = Рн₽ (<7 + с)-
375
Теоретический объемный к. п. д. подобного насоса без учета
влияния прочих факторов определится по приведенной ранее
формуле (20) на стр. 86:
Поб.т=1—Ph₽(£Y£)«
Введя в это уравнение параметр г — , можем написать
Поб. т = 1 — РнРг-
На рис. 146, а приведены расчетные кривые, характеризующие
влияние параметра г на величину г)об т, вычисленную по при-
Рис. 146. Графики зависимо*
ста расчетного объемного
к. п. д. насоса от различных
факторов
й)
веденной формуле в зависимости от давления для жидкости на
водной основе (см. стр. 42).
Из графика следует, что при распространенном в практике
г = 14 теоретический объемный к. п. д. при вытеснении жидкости
в среду с давлением рн = 900 кгс/см2^равен^50% или, иначе, вы-
тесненный в эту среду объем составит лишь половину объема,
описанного плунжером. При построении рассмотренных кривых
сжатие жидкости принималось по изотермному процессу (при по-
стоянной ее температуре). Поскольку в действительности сжатие
жидкости будет сопровождаться повышением температуры, по-
нижение коэффициента 0 (см. рис. 9, д) и соответственно пониже-
ние теоретического объемного к. п. д. в действительности будет
еще более значительным.
На рис. 146, б приведены расчетные кривые, характеризующие
влияние на величину объемного к. п. д. давления нагнетания ри
376
ILII
г----- т 1 - •
выполнены для насоса с плунжером диаметром 11 мм и ходом
поршня 75 мм; объем камеры насоса 26,8 см3 и объем, описывае-
мый плунжером за один ход, 7,4 см3 (г = 3,6).
Из приведенного следует, что при работе в условиях высоких
давлений следует максимально уменьшать мертвый объем и при-
менять жидкости с высоким объемным модулем упругости
(см. стр. 42). С этой точки зрения осевые каналы в поршнях на-
сосов (см. рис. 28 и 29), выполняемые с целью уменьшения массы
поршней и размещения пружин, нежелательны, поскольку объем
этих каналов добавляется к мертвому объему насоса и может со-
ставить значительную его долю.
69. Влияние на объемные характеристики
способа регулирования подачи
Поскольку величина параметра г зависит от объемов q и с,
объемный к. п. д. (см. стр. 376) при регулировании подачи насоса
изменением рабочего хода h поршня будет переменной величиной,
т. е. объемный к. п. д. насоса при регулировании его подачи
изменением рабочего объема понизится по сравнению, с его зна-
чением при максимальной подаче.
Кроме того, объемные характеристики насоса зависят также
от способа регулирования подачи, которое в основном осуществ-
ляется изменением хода h его плунжера (поршня).
В схемах с гидравлическим приводом (см. рис. 145, а) это до-
стигается ограничением обратного хода плунжера при сохране-
нии крайнего (утопленного) положения последнего (с = const),
а в схемах с приводом от электродвигателя постоянной частоты
вращения (см. рис. 145, в) — изменением хода плунжера относи-
тельно центра вращения кривошипа (с ~ const). Поэтому от спо-
соба регулирования будет зависеть и величина параметра г и,
соответственно, величина теоретического объемного к. п. д. на-
соса. Например, при уменьшении хода плунжера в 2 раза описы-
ваемый им объем также уменьшится вдвое как при регулировании
по первой, так и по второй схеме. Однако изменение параметра г
будет при этом различным. При регулировании по первой схеме
(с = const) он повысится до величины
2
На рис. 146, в показаны кривые, характеризующие влияние
на теоретический объемный к. п. д. хода h плунжера при регули-
ровании по первой схеме. Расчеты произведены для жидкости со
средним коэффициентом сжимаемости при давлении 100 МПа
377
(1000 кгс/см2), равным 0 = 5,4-10" 11 м2/Н (5,4-10" 8 см2/кгс) (без
учета деформации камеры насоса).
В большинстве конструкций поршневых насосов регулирование
подачи осуществляется изменением величины хода поршня h = 2е
(см. рис. 145, в) относительно центра О вращения кривошипа
механизма, т. е. осуществляется по второй схеме. При регулиро-
вании по этой схеме изменение величины хода поршня вызовет
также изменение величины мертвого объема, так как поршень
в этом случае не будет занимать в конце рабочего хода того поло-
жения, которое он занимал при максимальном ходе.
Из рис. 145, в (см. также рис. 20, б) следует, что мертвый
объем при этом регулировании изменится на половину величины
изменения объема, описываемого поршнем (на половину изменения
при регулировании рабочего объема):
Лл___4 Чтек___^тек_____„___р
2 2 * стек>
где q, h, дтек, йтек, е и етек — соответственно максимальные и
текущие значения рабочего объема, хода поршня и экс-
центриситета.
С учетом безразмерного параметра регулирования е =
[см. выражение (15) на стр. 761 последнее выражение может
быть представлено в виде
Ас = е (1 — е).
В соответствии с этим мертвый объем при регулировании по-
дачи по второй схеме определится выражением
сх = с 4- Ас = с + е (1 — е),
где с — мертвый объем при максимальном рабочем ходе h поршня
(при максимальном эксцентриситете с).
Соответственно мертвый объем при рассмотренном выше умень-
шении хода поршня (в 2 раза по сравнению с максимальным зна-
чением) увеличится до значения Cj = с Ч--4-, а следовательно,
величина параметра г определится при этом способе и величине
регулирования из выражения
2
Следовательно, влияние сжимаемости жидкости на теоретиче-
ский объемный к. п. д. при регулировании по второй схеме будет
более значительным, чем по первой.
378
70.
Влияние на объемные характеристики
прочих факторов
На величину теоретического объема к. п. д. насоса влияют
также жесткость его жидкостной камеры и присутствие в жидкости
нерастворенного воздуха.
При повышении давления с атмосферного до рн мертвый объем с
насоса увеличится вследствие деформации его деталей на вели-
чину [см. выражение (21) на стр. 87]
Д?2 = сбрн,
где S — коэффициент, характеризующий изменение единицы
мертвого объема при изменении давления на
0,1 МПа (1 кгс/см2).
Аналогичным будет и влияние наличия в жидкости нераство-
ренного воздуха (газа), при котором коэффициент сжимаемости
жидкости, в особенности при низких давлениях, будет более вы-
соким, чем у чистой жидкости.
Допустим, что при начальном давлении (в начале рабочего
хода плунжера) р0 в единице объема жидкости содержится не-
растворенный воздух в объеме Vo. При этом содержание воздуха
в жидкости объемом (д -f-c) при давлении р0 составит
wo = vo(q + с).
При сжатии этого воздуха до давления рн объем его умень-
шится до величины (принимаем, что процесс сжатия пузырьков
воздуха происходит по изотермному циклу)
^H = Vo(<7 + c)f-°.
Рн
Разность A W ~ Wo — Wn определяет объемную потерю на-
соса, обусловленную сжатием воздуха до давления рн:
ДГ=У0(9 + с)(1-^).
\ Рн/
Поскольку величина р0 мала в сравнении с рн, можем принять
ДГ = Уо (<? +с).
С учетом потерь, обусловленных деформацией камеры мерт-
вого объема и сжатием жидкости и воздуха, объем вытесняе-
мой жидкости в среду с давлением рн (без учета утечек) со-
ставит
Я' = 9 — — AIF = 9— [(9 + с) (Р/?н + Vo) — сбр„1.
379
В соответствии с этим теоретический объемный к. п. д. для
этого случая определится как
wt=^=i-[?4£^h+f»>+Is/’h •
7 L 7 7
Очевидно, при известных соотношениях рассмотренных пара-
метров т]об т насоса может понизиться до нулевого значения. Это
наступит (без учета утечек жидкости через зазоры) при такой
минимальной величине регулируемого хода плунжера, когда опи-
сываемый им объем q будет равен сумме объемов сжатия жид-
кости и газа во вредном пространстве и расширения камеры этого
пространства при давлении рн.
ГЛАВА X
РЕГУЛИРОВАНИЕ ПОДАЧИ ОБЪЕМНЫХ НАСОСОВ
§ 89. Регулирующие устройства
Регулирование скорости гидродвигателя в гидравлических
приводах объемного типа достигается изменением расхода посту-
пающей в него жидкости. Одним из способов этого изменения
является регулирование подачи объемных насосов, для чего по-
следние снабжаются механизмами, регулирующими подачу от
максимального значения до заданного без изменения скорости
вращения машины. Изменение подачи обеспечивается изменением
рабочего объема путем регулирования объема рабочей камеры
(клети) машины.
Гидросистемы с насосами регулируемой подачи имеют лучшие
динамические, весовые и эксплуатационные характеристики, чем
системы с насосами постоянной подачи.
Изменение рабочего объема поршневого насоса обычно осуще-
ствляется изменением геометрического хода поршня или же из-
менением рабочего хода, т. е. той части хода, на которой поршень
вытесняет жидкость из замкнутого объема цилиндра в нагнета-
тельную линию. В практике распространен первый способ регу-
лирования подачи — изменением геометрического хода поршня.
Второй способ менее распространен и применяется преимуще-
ственно в насосах с клапанным распределением. В этом случае
на части хода нагнетания жидкость с помощью специальных
устройств перепускается без давления в линию всасывания. В бес-
клапанных насосах этот перепуск жидкости осуществляется по-
воротом распределительного золотника.
Подача насоса изменяется обычно путем линейного или угло-
вого смещения регулируемого элемента, с помощью которого из-
меняется ее рабочий объем. В частности, аксиально-поршневые
насосы (см. стр. 179) регулируются изменением угла у между
осями блока цилиндров и ведущего диска [см. выражение (65)1.
На рис. 147 показана принципиальная схема регулирования
скорости поршня гидроцилиндра путем изменения рабочего объема
аксиально-поршневого насоса. При изменении угла ±у наклона
оси шайбы относительно оси блока изменяется ход h поршней и,
соответственно, скорость и направление движения гидродвига-
381
ротора на один
(параметром ре-
Рис. 147. Принципиальная схема
гидропередачи с регулируемым
н асосом
теля. В радиально-поршневых и пластинчатых насосах (см.
стр. 113) регулирование подачи осуществляется изменением экс-
центриситета [см. выражения (42) и (94)1.
Подача регулируемых насосов при повороте
радиан оценивается безразмерной величиной 8
гулирования, см. стр. 76), меняющейся для реверсивных гидро-
машин в пределах от +1 до —1.
Следует отметить, что при реверсе машины входная и выходная
ее полости меняются местами, а следовательно, меняются также
и давления в этих полостях, ввиду чего к реверсивным машинам
предъявляются дополнительные кон-
структивные требования. В част-
ности, у поршневых радиальных и
аксиальных, а также пластинчатых
машин в этом случае требуется стро-
гая симметричность в расположении
распределительных окон (см. рис. 29, б
и 57, в).
В ряде случаев обеспечить ревер-
сирование невозможно, как напри-
мер в винтовых машинах, в которых
опорные устройства для винтов вы-
полняются с учетом определенного
направления действия сил. У неко-
торых насосов (шестеренных и пр.)
тем, что уплотнение штока при одном
реверсивность затруднена
направлении вращения будет находиться под рабочим давлением.
Очевидно, что без специальных клапанных устройств, предо-
храняющих уплотнения от действия рабочего давления реверс
такого насоса невозможен.
Для изменения параметра регулирования и соответственно —
величины подачи применяют различные устройства, с помощью
которых смещают и фиксируют регулируемый элемент (регули-
рующий орган). Наиболее простыми из них являются ручной
(рис. 148, а) или электромеханический (рис. 148, б) механизмы
регулирования. Изменение регулируемого параметра производится
ввертыванием винта в гайку. Изменяя с помощью такого меха-
низма, например, угол у наклона диска насоса (см. рис. 147),
можно изменять и реверсировать подачу.
Радиально-поршневые насосы с механизмами ручного регули-
рования показаны на рис. 149. Регулирование производится путем
изменения эксцентриситета е, достигаемого смещением центра оси
опорного эксцентрика 1 (рис. 149, а) относительно неподвижной
оси цилиндрового ротора 7. Это смещение производится махович-
ком 4 через винтовую пару <?, с помощью которой смещается цап-
фа 2, несущая опорный эксцентрик 1. Распределение жидкости
осуществляется посредством цилиндрической втулки 8, в которой
выполнены полукруговые распределительные окна. Ведение порш-
ней 6 (прижатие их к ведущему эксцентрику) осуществляется
давлением жидкости подпитки, подаваемой в камеру 5.
На рис. 149, б приведен насос, в котором изменение эксцен-
триситета осуществляется поворотом вокруг оси 13 статорного
кольца 15 относительно неподвижной оси цилиндрового блока 15.
Этот поворот производится с помощью пальца 10 и винта 9. Ве-
дение поршней 12 (прижатие к статорному кольцу 14) осуществ-
ляется с помощью давления подпитки. На статорное . кольцо
поршни „ опираются через ползушки 11.
Рис. 148. Схемы механизмов объемного регулирования подачи насоса
На рис. 150 показан внешний вид радиально-поршневого на-
соса с ручным регулированием подачи, осуществляемом с по-
мощью маховичка.
На рис. 151 изображена конструктивная схема аксиально-
поршневого насоса, регулирование подачи которого осуще-
ствляется путем поворота наклонного диска 3 (изменения угла у)
вокруг центра О (боковых цапф). Поворот диска осуществляется
с помощью шестерни 1 и шестеренного венца 2, установленного
на поворотном диске.
Распространены механизмы регулирования с гидравлическим
приводом регулируемого элемента. Если требуется обеспечить
реверс насоса или движение в одном направлении при двух ско-
ростях, либо движение в двух направлениях с одной скоростью
перемещения в каждом направлении, применяют гидравлические
устройства с двумя гидроцилиндрами 1 (рис. 152, а), которые
в большинстве случаев размещаются в корпусе насоса. Ход порш-
ней ограничивается механическим ограничителем 3. Для управ-
ления гидроцилиндрами обычно применяют электромагнитные
распределители 2. В случае необходимости установки и фиксации
регулируемого элемента в промежуточном положении (обычно
нулевой подачей) применяется схема с тандем-цилиндрами, при-
веденная на рис. 152, б. Для установки в указанное положение
жидкость подводится в оба внешних цилиндра, поршеньки 4
которых фиксируют регулируемый элемент в соответствующем
положении.
383
a)
Рис. 149. Радиально-поршневые насосы с ручным регулированием подачи
Типовые конструкции таких регуляторов применительно к ра-
диально-поршневому насосу приведены на рис. 153, а и б. Для
установки регулируемого элемента в промежуточное (среднее)
положение жидкость в регу-
ляторе, представленном на
рис. 153, б, подводится одно-
временно в оба цилиндра. Пло-
щади цилиндров должны быть
достаточными для перемещения
регулируемого элемента в на-
правлении, противоположном
действию на этот элемент силы
давления жидкости, а также
сил трения и инерции движу-
щихся частей.
Рис. 150. Радиально-поршневой насос
с ручным регулированием
Если требуется обеспечить бесступенчатое регулирование, для
смещения регулируемого элемента 1 (например, люльки насоса)
(рис. 154, а) применяют следящие сервомеханизмы (гидроусилители)
Рис. 151. Аксиально-поршневой насос с регулированием подачи
с помощью шестеренного механизма
с жесткой обратной связью, в которых контролируемой перемен-
ной величиной является положение поршня 3 сервомеханизма,
следящего за перемещением плунжера золотника 8 [1]. При
25 Т. м. Башта 385
' смещении тяги 6 управления смещается связанный с ней плунжер 8
распределительного золотника 7, в результате жидкость посту-
пает в соответствующую полость гидроцилиндра 2, поршень 3
которого связан с' рычагом 1 регулируемого элемента насоса.
Благодаря наличию дифференциального рычага 5 обратной связи,
связанного со штоком 4 поршня 3, последний будет «следить» за
перемещением тяги б [II. Такой регулятор позволяет обеспечить
любые усилия на выходе при малых усилиях на входе и соот-
ветствённо на рычаге /. Как показывает практика, момент на
валике управления не превышает 10—30 кгс-см.
°) " 6)
Рис. 152. Схема гидравлических23<еханизмов регулирования подачи насоса
Для повышения чувствительности следящих систем автома-
тического регулирования подачи насоса (систем поворота люльки)
в их распределительных устройствах применяют вибраторы, с по-
мощью которых распределительному золотнику сообщают высоко-
частотные (50—60 Гц) колебания малой амплитуды [1 ].
Для обеспечения постоянной подачи насоса при изменении
частоты его вращения, что, например, имеет место в транспортных
машинах и.самолетах, при изменении режима движения машины
применяют также регулятор, схема которого показана на рис. 154, б.
Люлька-насоса 10 устанавливается пружиной 4 регулятора в по-
ложение максимального угла наклона, соответствующего макси-
мальной подаче насоса. Щтоковая полость / цилиндра 3 регуля- ,
тора соединена непосредственно с напорной магистралью, а по- ?
лость 5, противоположная штоку, соединена с этой магистралью
через золотниковый клапан 6 и дроссель 8-, ,
В напорной магистрали установлен диафрагменный дроссель 9,
причем штоковая полость / цилиндра 3 регулятора соединена
с этой магистралью перед дросселем 9, а противоположная ей
полость — после дросселя. Подача жидкости сохраняется по- >
стоянкой до того момента, пока сохраняется постоянным перепад ;
Давления на диафрагменном дросселе 9, который устанавливается
регулируемым натяжением пружины 7 золотникового клапана 6. |
386 • .
Ось статора Ось ротора
\ /е
6)
Рис, 153. Гидравлические механизмы
насоса
регулирования подачи
Рис. 154. Принципиальная схема следящего бесступенчатого регулятора
подачи (а) и схема регулятора постоянной подачи (б)
25*
387
При увеличении частоты вращения насоса 10 подача жидкости
насосом повышается и перепад давления на дросселе увеличи-
вается. В результате этого плунжер клапана 6, сжав пружину 7,
перемещается вправо, отсекая при этом плоскость 5 цилиндра 3
от напорной магистрали и соединяя ее с баком 11. При этом дрос-
сель 8 будет поддерживать давление в полости 1 цилиндра, под
действием которого поршень 2, сжав пружину, уменьшит наклон
люльки насоса.
При уменьшении частоты вращения насоса 10 перепад давления
на дросселе 9 уменьшается, в результате плунжер клапана 6
под действием пружины 7 сместится влево, вследствие чего порш-
невая полость 1 цилиндра 3 регулятора отсекается от бака 11 и
соединяется с напорной магистралью; при этом наклон люльки
насоса 10 увеличивается.
При постоянной частоте вращения поршень клапана 5 зани-
мает промежуточное положение.
Очевидно насос с подобным регулятором составит в сочетании
с нерегулируемым гидромотором привод постоянной скорости,
который будет обеспечивать при изменении частоты вращения
насоса постоянную скорость вала гидромотора.
§ 90. Автоматическое регулирование подачи
по давлению
В практике распространены системы автоматического регу-
лирования с обратной связью по давлению (системы предельного
давления), при котором выходное давление насоса используется
в качестве сигнала для ограничения подачи им жидкости.
На рис. 155, а показана принципиальная схема системы такого
регулирования. В нагнетательную магистраль 2 регулируемого
'аксиально-поршневого насоса 1 включен пружинный регулятор
предельного давления, гидроцилиндр 3 которого связан с наклон-
ным диском 6 насоса. При повышении давления на выходе насоса
сверх величины, на которую отрегулирован регулятор, усилие
давления жидкости, сжимая пружину 5, перемещает поршенек 4
регулятора, который через свой шток уменьшает угол у наклона
диска 6 насоса, изменяя тем величину его подачи.
Чувствительным элементом рассматриваемого регулятора яв-
ляется пружина 5, стремящаяся удержать регулируемый эле-
мент 6 насоса в положении максимальной подачи QmaK, а испол-
нительным — гидроцилиндр 3, в который подводится рабочее дав-
ление р насоса, противодействующее усилию пружины 5.
На рис. 155, б представлена конструктивная схема подобного
регулятора с обратной связью по давлению применительно к ра-
диально-поршневому насосу. Рабочее давление р подводится через
дроссель 9 в камеру а и действует на плунжер 10. нагруженный
пружиной 7. При заданном давлении усилие пружины преодоле-
вав
вается и поршень смещает регулируемый элемент (статор) насоса,
уменьшая его подачу.
Условие равновесия действующих сил (без учета трения и
неуравновешенных в направлении перемещения статора сил дав-
ления рабочей жидкости) имеет вид
р ___ nd2
*пр Р >
где Рпр — усилие предварительной затяжки пружины;
d — диаметр цилиндра 3 регулятора.
Ось ротора Ось регулируемого
Рис. 155. Схемы механизмов автоматического регулирования подачи
насоса по давлению г
Регулятор снабжен шариковым обратным клапаном 8, а также
дросселем 9 (рис. 155, б), с помощью которого осуществляется
регулирование скорости изменения подачи (быстродействие) на-
соса.
В насосах с подобным регулированием подача при повышении
давления на выходе из насоса сверх заданного (номинального) рно^
уменьшается и при некотором максимальном (предельном) давле-
нии ртах снижается до нуля. В последнем случае насос поддер-
живает заданное предельное давление ртах, расчетная же подача
равна утечкам жидкости в питаемой гидросистеме и в самом на-
сосе.
На рис. 156, а представлена статическая характеристика на-
соса [Q — f (р) ], снабженного таким механизмом регулирования.
Кривая QT графика выражает расчетное, а Qф—фактическое
значения подачи насоса. В пределах изменения давления от 0 до
Рном теоретическая подача QT сохраняется постоянной. По дости-
жении давления рном (соответствует точка а) подача снижается
по закону сжатия пружины механизма регулирования, достигая
при Ртах нулевого значения (рабочий объем насоса q ~ 0).
При жесткой пружине получим крутую кривую (а — ртах),
а при мягкой пружине — более пологую (см. также рис. 156, б).
Кривые 1—5, показанные на рис. 156 б, характеризуют подачу
для различных жесткостей пружин регулятора. В практике рас-
389
пространены насосы, у которых отношение —-“ом состав-
J ' Ртах
ляет от 40 до 80% .
Кривая фактической производительности наклонена к оси
абсцисс под некоторым углом, величина которого зависит для
изолированного насоса от его герметичности. При давлении ртах,
соответствующем фактической нулевой подаче, рабочий объём
насоса равен объему QyT утечек жидкости в нем (наклонный уча-
сток пунктирной кривой построен без учета трения в механизме
регулирования).
Рис. 156. Статическая характеристика пружинного регулятора предельного
давления (а) и зависимость характеристики от жесткости пружины регулятора (б)
. . • . . . d J
• Г
На рис. 157, а представлен пластинчатый насос с подобным
механизмом регулирования. Статорное кольцо 1- насоса, могущее
перемещаться вдоль оси симметрии, находится под воздействием
противоположно действующих пружин 3 и 2. Поскольку усилие
пружины 3 превышает усилие пружины 2, это кольцо удержи-
вается в нижнем положении (воздействия на статорное кольцо
неуравновешенных сил рабочего давления жидкости не учиты-
ваем), соответствующем максимальному эксцентриситету, пру-
жиной 3.
Жидкость под давлением подводится под поршень в камеру 4;
при заданном давлении пружина 3 сжимается и статорное кольцо 1
под действием второй пружины 2 занимает положение, которое '
соответствует новому равновесию Сил, действующих На это кольцо.
Для уменьшения сил трения при перемещении статора применены
игольчатые опоры 5. - J
На рис. 157, б показана принципиальная схема подобного ме-|
ханизма регулирования прямого действия применительно к рас-
пространенному аксиально-поршневому насосу со свободно по-
саженными поршнями (См. также рис. 83). Жидкость из нагнета-
тельной магистрали насоса подводится в силовой цилиндр 5,
390 Ч
. - - .
поршень 1 которого; нагруженный пружиной 2, связан при по-
мощи штока 3 с наклонной шайбой 4 насоса. Усилие пружины
направлено в сторону поворота шайбы 4 в положение максималь-
ной подачи, в котором эта шайба будет удерживаться до давле-
ния, превышающего р^и (см. рис. 156), после чего угол у наклона
шайбы будет уменьшаться, й при некотором максимальном зна-
чении давления ртах шайба установится в положение, близкое
к нейтральному (у 0), в котором производительность насоса
6)'
157. Схема автоматического ре-
Рис.
гулирования подачи по давлению пла-
стинчатого (а) и аксиально-поршне-
вого (б) насосов
w/s/sss/a
будет равна утечкам жидкости в системе при этом давлении. При
уменьшении давления пружина 2 (рис. 157, б) будет смещать пор-
шень 1 в обратном направлении (в сторону восстановления угла у)
и при давлении <рном шайба вновь установится в положение
максимального угла.
Условие равновесия регулятора (статическая характеристика)
при смещении его поршня 1 под действием давления рн жидкости
на величину у выражается (без учета трения и неуравновешен-
ных относительно оси поворота сил давления рабочей жидкости)
Рн® = Fp + FnP + Су, (120)
ч
где Fp —.сила, действующая на. поршень 1 цилиндра регу-
лятора со стороны регулируемого элемента
(шайбы 4); :
Fnp и С — усилие предварительного натяжения и жесткость
пружины 5 при смещении поршня регулятора
У = 0;
<»> — площадь поршня / цилиндра регулятора;
рн — давление нагнетания;
* 391
Принимаем у ~ 0 при угле Отклонения шайбы на максималь-
ный угол утах. В этом случае зависимость между ходом поршня
и величиной угла поворота шайбы для заданного промежуточного
положения может быть приближенно выражена
У (tg Ymax tg у) р,
(121)
где р — расстояние между осью поворота шайбы и осью силового
цилиндра 5.
Сила Fp, действующая на поршень 1 регулятора со стороны
наклонной шайбы 4, определяется результирующим моментом 7Ирез
на шайбе, развиваемым действующими на нее силами (силами
давления жидкости, силами инерции поршней и механизма, силами
трения), в соответствии с чем можем написать
^рез
(122)
Действующие на механизм регулирования силы могут быть
определены на основании опытных зависимостей, полученных при
исследовании механизмов подачи.
Угол у наклона шайбы можно приближенно определить для
рассматриваемой схемы насоса из соотношения (77):
(123)
где QT — теоретическая подача насоса;
f, D6, z и п — параметры насоса (см. выражение (77)].
В случае насоса с шатунной связью поршней с наклонной шай-
бой (см. рис. 57, а) этот угол определится из выражения [см. также
выражение (59) ]
Qt
sm у = С1г ,
• fDAzn
где Da — диаметр окружности заделки шатунов в наклонной
.шайбе.
Подставив выражения (121)—(123) в уравнение (120), получим
+ ^пр + Ср (tg Ушах ^D&[n ) .
Произведя преобразования, получим уравнение наклонного
участка кривой статической характеристики регулятора
(см. рис. 156)
Qt = арн + Ь,
где а и b — постоянные для данных условий параметры:
_ fpgzn» . b = (M_ , F _L.Cotev \ №.
° Ср ’ \ Р l^rnp-t-bp IgYtnaxJ Ср
Следовательно, имеем при всех прочих равных условиях
Qt = f (Pah
392
Располагая данными по подаче при утах и рном и по давле-
нию ртах при нулевой производительности, можем написать
ft = fl£pmax; Qmax & (Рном Ртах) •
Отсюда находим
Qmax
Рном Ртах
QmaxPmax
Phom Ртах
Соответствующим подбором характеристики пружины и усилия
ее предварительной затяжки. (Fnp) можно обеспечить разные
углы наклона участка кривой характеристики регулятора (см.
рис. 156, 6), обеспечивающих требуемое номинальное (рном) дав-
ление (кривым 2, 3 И 4 соответствуют рном, Рном И Рном). Кривая 1
соответствует регулятору, пружина которого не имеет предвари-
тельной затяжки (Fnp = 0 и рном — 0). Кривая 5 соответствует
работе регулятора в режиме ограничителя давления (см. стр. 422).
§ 91. Влияние на регулирование трения в механизме
Поскольку распределительный золотник механизма регулиро-
вания находится в равновесии под действием усилия пружины и
усилия перепада давления, важным условием надежной работы
этого механизма является отсутствие или минимальное трение
золотника.
Наличие здесь трения приводит к устойчивым колебаниям дав-
ления в насосе, особенно при нулевой и малой подаче.
Большое значение имеет трение в паре сервоцилиндр—пор-
шень, наличие которого приводит к устойчивым колебаниям с ма-
лой частотой давления в системе.
Ввиду того, что при работе насоса давление пульсирует с ча-
стотой а = nzt где п и г число оборотов и число поршней насоса,
при проектировании насоса следует избегать совпадения собствен-
ных частот колебания системы золотник—пружина с частотой
пульсации до второй гармоники. При совпадении основных или
кратных частот возникает вибрация (зуд) пружины, которая при-
водит ее к разрушению.
§ 92.
динамическая характеристика
Динамическая характеристика регулятора определяется сов-
местным решением уравнений '
расхода (подачи) жидкости
движения чувствительного элемента
393
движения регулирующего элемента
= M -М •
Р. Э ,rlp lrlft
расходов через чувствительный элемент
Qson == Смех “Ь Сут> ~
где Qi — расход в отдельных элементах механизма и
системы;
Мр и Fp э — момент и действующая сила на регулирующем
элементе, обусловленные давлением жид-
кости;
Смех — расход жидкости в механизме изменения про-
изводительности; ,
Fi — динамические и статические силы на чувстви-
тельном элементе;
Мг — момент на регулирующем элементе от меха-
низма подачи;
Jp э — момент инерции регулирующего элемента;
QyT —г утечки в механизме регулирования подачи на-
соса;
Сзол — расход на чувствительном элементе.
§ 93. Момент (или усилие) на регулирующем органе
0 ’ь
Практический интерес (в частности, для насосов с автомати-
ческим регулированием подачи} представляет момент (или усилие),
которые должен преодолевать механизм регулирования при пере-
мещении регулирующего органа (при изменении рабочего объема
насоса). Величина этого момента (усилия) определяет мощность
исполнительного механизма системы управления, перемещающего
орган управления и удерживающего его в покое. Для этого мо-
мент исполнительного механизма должен превышать сумму мо- :
ментов сил давления жидкости на смочейные поверхности рабочих ,
узлов машины, а также сил реактивного сопротивления и сил .
трения в местах скольжения. i
В частности, в аксиально-поршневом насосе регулирующим
органом является наклонный диск (см. рис. 57, б) или люлька J
цилиндрового блока (см. рис. 57, с), поворотом которых регули-'
руется подача насоса. Момент на регулирующем органе в этой 4
машине затрачивается на: уравновешивание момента гидростати-
ческих усилий давления жидкости на поршни; преодоление мо-.
мента сил трения в цапфах люльки или в узле поворота диска ИJ
в головках шатунов; преодоление трения между головками порш- *
ней и поверхностью упорного диска, а также между поршнями и
поверхностями цилиндров (включая трение, обусловленное дей-J
ствием на поршни центробежных сил, прижимающих поршни
.394'" " '<1
' -
it стенкам ЦйЛйнДров); преоДоленйё момёнта сйл ййерции поршней;
преодоление гидростатических сил вращающегося цилиндрового
блока или деталей упорного диска, а также момента инерции,
пропорционального их ускорению. Для быстродействующих ма-
шин и машин с значительными массами регулирующего органа
(см. рис. 59) последний вид потерь является преобладающим.
Из расчетной схемы нагружения упорного регулирующего
диска насоса силами давления жидкости на поршни, представлен-
ной на рис. 158, следует, что при нечетном числе z цилиндров под
Рис. 158. Схема к расчету нагрузки на Рис. 159. Схема регулятора мощ-
регулирующий орган ности
рабочим давлением одновременно будет находиться в зависимости
от угла поворота вала (при вращении блока) - и ци-
линдров попеременно.. Кроме того, при вращении блока цилиндров
будет изменяться положениег центра давления результирующей
силы давления жидкости на поршни относительно оси х—х по-
воротных цапф (см. также стр. 227).
При четном числе цилиндров число поршней, находящихся
под действием рабочего давления жидкости, постоянно и равно -4-,
а изменяется лишь положение центра давления относительно оси
результирующей силы.
Для симметричного относительно оси х—х поворотных Цапф
расположения цилиндров (Pi = р« и ps = р3) в зоне нагнетания
(рис. 158) момент, развиваемый силами Р давления р на каждый
поршень (Р — pf, где f — площадь поршня), расположенный
уравновешивается моментом соответствую-
выше оси х—х цап
щего цилиндра, расположенного ниже оси х—х (давлением вса-
сывания пренебрегаем). При этом считаем, что гидростатические
силы действуют на поршни вдоль их осей; кроме Того, принимаем,
что ось О поворота диска находится в его плоскости. При любом
ином расположении цилиндрового блока относительно оси х — х
цапф(рх=£р4 и р2¥=Рз) указанная уравновешенность моментов
395
Нарушится й диск будет стремиться Повернуться вокруг оси х—je
в ту или иную сторону. Величина неуравновешенности в этом
случае будет определяться (считаем перекрытие цилиндров рас-
пределительным золотником в мертвых положениях нулевым)
суммарной разностью ординат (плечей) р с учетом их знака (рас-
положения относительно оси х—х).
Из приведенной схемы видно, что указанные плечи приложе-
ния силы давления жидкости на поршни будут изменяться от
Д° (—(эти положения соответствуют нахождению
цилиндра на вертикальной оси), где D6 — диаметр окружности
блока, на которой расположены оси цилиндров. В соответствии
с этим момент равнодействующей силы давления на поршни отно-
сительно оси цапф является знакопеременной графически пило-
образной функцией с периодом колебания Т = -^-. При этом
среднее значение момента будет равно нулю.
Ввиду мгновенности изменения давления в каждом из цилин-
дров (от давления всасывания до давления нагнетания и наоборот)
эта функция в зависимости от угла поворота а = блока будет
иметь графически мелкозубчатый пилообразный вид с острыми
зубьями.
Вследствие высокой частоты колебаний величины и знака мо-
мента, определяемого частотой вращения насоса (200—400 Гц) и
сравнительно большой массы регулирующего органа, а также
вследствие трения в опорах, этот пульсирующий момент не в со-
стоянии привести регулирующий орган в колебательное движение.
Однако при наличии геометрической неточности в изготовлении
деталей регулирующего органа (при несимметричности располо-
жения осей цапф распределителя и пр.) могут возникнуть по-
стоянно действующие силы, стремящиеся сместить регулирующий
элемент (люльку насоса) в ту или другую сторону. Эти силы могут
вызвать «сползание» люльки, если не предусмотрено ее фиксиро-
вание, что должно быть учтено при расчете и конструировании
регулирующего органа. Направление действия этого неуравно-
вешенного момента определяется точностью изготовления и на-
правлением вращения вала машины. При качественном изготов-
лении насоса этот момент обычно ничтожен.
Помимо рассмотренного воздействия на регулирующий орган
сил давления жидкости и сопровождающих их сил трения, давле- ,
ние нагружает также шатуны поршней, развивая в местах заде-
лок их головок трение, величина которого будет пропорциональна
давлению.
Расчет указанных параметров представляет практические труд-
ности, ввиду чего при выборе мощности исполнительного меха-
низма регулирующего органа исходят из опытных данных. Прак-
тика показывает, что момент на регулирующем органе, необходи-
мый для преодоления указанного сопротивления, обычно не пре-
396
вышает 0,10 момента йа балу машины. При применении же
в управлении следящего усилительного привода (см. рис. 154)
усилие (или момент) на управляющем органе может быть умень-
шено до требуемой малой величины.
§ 94. Регулятор мощности с отсечкой давления
В практике распространены регуляторы, в которых для огра-
ничения, мощности при повышении давления подача уменьшается
в такой зависимости, при которой произведение подачи и давле-
ния (величина мощности) сохраняется постоянным. При достиже-
нии максимального давления люлька насоса приходит к упору и
излишки подачи отводятся через предохранительный клапан. Те-
ряемая при этом мощность приводит к нагреву жидкости, что вы-
зывает необходимость введения в систему охлаждения.
Для избежания этого применяют регуляторы мощности с от-
сечкой давления при некоторой малой подаче. Схема такого регу-
лятора представлена на рис. 159. Штоковая полость 6 цилиндра 3
регулятора постоянно соединена с напорным трубопроводом на-
соса 7. Усилие пружины 4 в цилиндре 3 регулятора направлено
в сторону увеличения угла наклона люльки насоса. На поршень 5
регулятора действует давление жидкости, поступающей либо от
золотника 1 с гидравлическим управлением, либо от подпорного
клапана 2, включенного между золотником 1 и цилиндром 3 ре-
гулятора. Как золотник /, так и клапан 2 имеют регулируемые
пружины.
Если давление на выходе насоса превысит величину настройки
регулируемой пружины золотника /, то рабочая (правая) полость
цилиндра 3 регулятора соединяется через золотник 1 с баком <?.
В этом случае давление на поршень 5 этого цилиндра действует
на пружину 4 и сжимая ее, уменьшает угол наклона люльки на-
соса 7 по закону изменения усилия сжатия пружины (см.
рис. 156, б).
Применяя в рассмотренной схеме вместо одной пружиньгком-
плект пружин с соответствующими характеристиками, можно по-
лучить иные характеристики регулирования подачи в функции
давления. В частности, применением соответствующего комплекта
пружин получают при постоянном крутящем моменте гиперболи-
ческую зависимость между подачей и давлением, т. е. гиперболи-
ческую характеристику мощности.
В схеме, представленной на рис. 159, для получения этой ха-
рактеристики мощности при сохранении постоянного крутящего
момента предусмотрена возможность дополнительного натяжения
пружины золотника 1 с помощью кулачка 9.
При достижении давления, на которое отрегулирована пру-
жина клапана 6, правая полость цилиндра 3 соединяется через
клапан 2 с баком S, вследствие чего люлька насоса 7 отклоняется
в сторону уменьшения угла наклона и насос обеспечивает лишь
397
Ьодачу, необходимую для поДдер>каййЯ давления В Системе (на
выходе насоса). Если давление вновь понизится, то правая по-
лость цилиндра 3 регулятора соединяется через клапаны 2 и 1
с напорной магистралью, что приведет к увеличению угла наклона
люльки насоса,
ь *
л
§ 95. Двухступенчатые (дифференциальные)
ч регуляторы
Рассмотренные регуляторы простого действия конструктивно
просты и надежны в эксплуатации, однако применение их целесо-
образно лишь в насосах, в которых диапазон давлений (ртт —
— Рном) ПРИ изменении подачи от максимальной до нулевой не
превышает—35% номинального значения давления (см. рис. 156):
• *1
Ртах — Дном q gg
Рном - ’
Указанное ограничение обусловлено тем, что при уменьшении
диапазона давлений (рт„ — рном), в котором происходит изме-
нение производительности насоса, пружина механизма регули-
рования становится практически неприемлемых размеров. Для
избежания этого, а также для повышения чувствительности регу-
лирования применяют двухступенчатые механизмы регулирования
с обратной связью по рабочему давлению жидкости или по поло-
жению регулирующего .органа.
В практике распространены-регуляторы по давлению (диф-
ференциального типа). Одна из схем такого регулятора примени-
тельно к аксиально-поршневому насосу показана на рис. 160, а.
Регулирование подачи здесь достигается изменением угла у на-
клона люльки 2 (несущей цилиндровый блок 3), осуществляемого
с помощью гидроцилиндра 7, который питается от клапанно-зо-
лотникового устройства 10, соединенного с нагнетательной по-
лостью насоса. Подвижный цилиндр 7 связан через серьгу 4
с люлькой 2 насоса. Пока давление жидкости, нагнетаемой насо-
сом, не достигнет расчетного (р рном), силовой цилиндр 7
удерживается пружиной 5 в крайнем левом положенйи, соответ-
ствующем максимальному углу наклона и соответственно макси-
мальной производительности насоса. При повышении давления
до величины рн > р1!оы плунжер 10, преодолевая усилие пру-
жины 1, перемещается вверх и открывает канал 9 питания ци-
линдра 7. Последний, сжимая пружину 5, перемещается вправо,
уменьшая тем самым угол наклона у люльки и соответственно
уменьшая его подачу. В результате установится значение подачи,
соответствующее новому -текущему давлению.
При дальнейшем повышении давления люлька будет повора-
чиваться в том же направлении до нового равновесного поло-
жения и так далее, пока давление не повысится до pmT
(см. рис. 156), при котором подача насоса снизится до минималь-
398 -
ной, необходимой лишь для компенсации утечек жидкости при
этом давлении.
При снижении давления до рд <рном плунжер 10 (рис. 160, а)
под действием пружины 1 переместится в обратную сторону,
Рис. 160. Механизм регулирования подачи дифференциального типа
отсекая канал 9 от нагнетательной линии и соединяя его со
сливной. При этом пружина 5 будет поворачивать люльку 2
в сторойу увеличения подачи до установления нового равновес-
ного положения.
Равновесие цилиндра 7 регулятора в текущем положении у
может быть выражено уравнением
Р ~ ^пр. 2 4~ ~
где Р — усилие, с которым регулирующий механизм (эле-
мент) действует на цилиндр 7;
399
^пр 2 —усилие пружины 5, нагружающей цилиндр 7; для
положения его у == 0 величина Fnp 2 является пред-
варительным натяжением пружины;
С2 — жесткость пружины 5;
со2 — площадь сечения цилиндра 7 регулятора;
— давление в полости 6 цилиндра 7.
Условие равновесия плунжера 10 регулятора
Рн®1 = Р1®1 + Л1Р 1! Pi = ри — ,
где co-l — площадь торца плунжера /0;
FnP х — текущее усилие пружины 1.
Текущее положение у цилиндра 7 и угол поворота регулирую-
щего элемента 2 связаны отношениями
У Р Ушах tg у),
где р — расстояние между осями поворота люльки и силового
цилиндра регулятора;
Утах — максимальный угол отклонения люльки.
Угол у наклона люльки можно определить из приближенного
выражения
tg v = —5г— в
® У fD^zn
Требуемый для заданного диапазона давлений наклон кривой
статической характеристики обеспечивается выбором жесткости С %
пружины 5. Усилие пружины Fnp 2 должно развивать момент от-
носительно оси поворота люльки, превышающий момент М сил,
действующих на механизм регулирования при максимальном
угле (ушах) наклона люльки:
^ПР2 ~ ~ J
где Л4р — момент сил давления жидкости в насосе, разворачи-
вающих люльку;
7Итр — момент сил трения в цапфах и шарнирах механизма.
§ 96. Введение искусственной утечки
а
При работе насоса в режиме подачи, близкой к нулевой, воз-
можен перегрев насоса (в особенности при высокой герметичности)
за счет тепла, обусловленного механическими потерями и вну-
тренними перетечками (утечками), канализация которых обычно
осуществляется во входную (всасывающую) полость, вследствие
чего отвод тепла циркулирующей рабочей жидкостью практически
отсутствует. В результате температура на поверхностях трения
деталей может достигнуть точки кипения и выгорания рабочей
400
жидкости. Последнее может привести к нарушению режима ра-
боты машины и вывести ее из строя.
Для эвакуации тепла из насоса предусматривается некоторая
циркуляция жидкости, достигаемая путем введения искусствен-
ных перетечек. Для этого в стенке неподвижной скалки (поршня) 8
(рис. 160, б) выполняется небольшое отверстие а (диаметр отвер-
стия обычно 0,5—0,6 мм), расположенное на таком расстоянии от
края поршня, чтобы гидроцилиндр 7 открывал это отверстие при
своем движении в положении, близком к нулевому наклону
люльки. При этом на большей части пути хода цилиндра в режиме
а) б)
Рис. 161. Статическая характеристика подачи по давлению регулятора
с искусственными утечками (а) и кривая характеристики устойчивости
регулятора (б)
снижения производительности отверстие а будет перекрыто стен-
кой цилиндра и лишь при некотором небольшом наклоне люльки
(в конце хода) оно откроется. В результате возникнут искусствен-
ные перетечки жидкости из рабочей полости насоса в сливную
магистраль, добавляющиеся к утечкам через неплотности. В итоге
суммарные утечки в системе после открытия отверстия а ступен-
чато возрастают.
Очевидно, наличие этого отверстия изменит статическую ха-
рактеристику насоса. Увеличение утечек приведет к тому, что для
повышения давления в цилиндре регулятора потребуется допол-
нительное смещение плунжера 10, а следовательно, и увеличение
давления (угол наклона люльки при повышении давления сохра-
няется постоянным).
В соответствии с этим на наклонном участке расчетной кри-
вой а — b характеристики насоса (рис. 161, а) появится при из-
вестном расположении этого отверстия в стенке поршня ступен-
чатый переход при Q = const на более высокое давление, после
чего (см. точку с) наклон кривой восстановится прежним. Длина
участка (Ь — с) определится сечением отверстия а. В диапазоне
давлений (р' — р") подача насоса Q постоянна и далее вновь сни-
жается по закону сжатия пружины регулятора.
26 T. М. Байта 401
Угол наклона диска, требуемый для обеспечения заданных
искусственных перетечек жидкости, выбирается равной —4%
максимального значения угла у.
Опыт показывает, что при полностью перекрытом выходном
канале (трубопроводе) насоса зачастую наблюдаются колебания
(пульсации) давления в системе и перед золотником регулятора
(рис. 161, б). «Забросы» давления при этих пульсациях могут
достигать значения 30 МПа (300 кгс/см2) и выше при номинальном
рабочем давлении 22 МПа (220 кгс/см2) и амплитуде колебания
(перемещения) золотника до 1,5 мм.
Л . 8
Ж»?
Рис. 162. Схема регулятора по-
дачи и его опытная диаграмма
Нарушение устойчивости наблюдается преимущественно при
большом расходе жидкости через указанное отверстие а (рис. 160, б)
порядка 500 см8/мин и выше. При уменьшении диаметра отвер-
стия а амплитуда вибрации золотника снижается благодаря дем-
пфирующему его действию и при диаметре, равном 0,3 мм, ко-
лебания практически прекращаются.
На рис. 162, а показана схема подобного регулятора давления,
предназначенного для поддержания постоянного давления в гид-
равлической системе в пределах регулирования подачи насоса.
Регулятор обеспечивает подачу насосом жидкости в соответствии
с потреблением и обеспечивает расход приводной мощности в соот-
ветствии с отдаваемой гидравлической мощностью. Регулирование
наклона люльки насоса осуществляется поршнем 3 гидроцилиндра,
управляемого золотником 8. В цилиндре установлена, пружина /,
усилие которой направлено в сторону увеличения угла наклона
люльки насоса, связанной со штоком б.
Рабочее давление жидкости насоса ря постоянно действует
на поршень 3 со стороны штоковой полости и одновременно, через
дроссель 5 и золотник 8 действует со стороны полости 2, противо-
положной штоку. Под рабочим давлением находится также ле-
вый торец плунжера управляющего золотника 8. При повышении
давления сверх величины, на которую отрегулирована пружина 7
402 '
этого збЛотййка, левая Полость 2 цилиндра отсекается от рабб-,
чей магистрали системы (от выхода насоса) и через пазы на пояске
золотника 8 соединяется со сливом; при этом давление в этой
полости падает. Благодаря наличию дросселя 5, установленного
между полостями 2 и 4 цилиндра, создается перепад давления
в них, под действием которого пружина 1 сжимается, в резуль-
тате шток 6 перемещается влево, уменьшая при этом наклон
люльки.
Отводимая в процессе регулирования управляющая жидкость
попадает в корпус и из него — в сливную полость с давлением рсл.
При понижении давление в системе (на выходе насоса) золот-
ник 8 перемещается под действием пружины 7 влево и поршневая
полость 2 цилиндра вновь соединяется с напорной магистралью;
в результате наклон люльки насоса увеличивается.
Время перемещения люльки на сброс (уменьшение) подачи при
рабочем давлении 350 кгс/см2 составляет 50 мс, а время наклона
люльки при увеличении подачи составляет 100 мс. Давление по-
требления не должно быть меньше 20 кгс/см2.
Представленная на рис. 162, б опытная диаграмма показывает
высокую стабильность давления при разных подачах.
§ 97. Регуляторы с обратной связью по положению
На рис. 163, а (см. также рис. 163, б) представлена схема меха-
низма регулирования с обратной связью по положению, регули-
рующего органа. Дифференциальный поршень 2 механизма через
тягу 6 связан с органом управления подачей насоса (с наклонной
шайбой и пр.у. Жидкость, поступающая через камёру 11 и ка-
нал 3 под давлением нагнетания рн в камеру^, действует на пра-
вый торец плунжера 4, нагруженного пружйной 1. После того,
как давление повысится до величины, при которой пружина 1
сожмется, камера 5 соединится через канал 8 с каналом 10 и
жидкость поступит в полость 7 цилиндра, где, действуя на пор-
шень 2, будет перемещать его в том же направлении, что и плун-
жер 4. При этом будет устраняться рассогласование, создавшееся
вследствие смещения плунжера под действием давления жид-
кости. Таким образом, поршень 2 будет «следить» за движением
плунжера 4.
Пока давление рн на выходе из насоса с таким регулятором не
повысится до некоторого номинального рном (см. рис. 156, а),
которому соответствует приход кромки отверстия 8 к кромке
канала 9, подача насоса будет максимальной, определяемой для
аксиального насоса максимальным углом у наклона шайбы (за
вычетом утечек) (см. рис. 158) или для радиальных насосов соот-
ветственно — максимальным эксцентриситетом е (см. рис. 29).
После того, как плунжер 4 (рис. 163, а) переместится под дейст-
вием давления жидкости в положение, при котором отверстие 8
26* 403
СОеднйтся с каналом 9, жидкость поступит в полость Ё резуЛЬ*
тате поршень 2 с тягой 6 придет в движение, воздействуя на ме-
ханизм регулирования в сторону уменьшения подачи насоса.
В случае, если прирост давления прекратится, плунжер 4
остановится и поршень, набегая на него, разъединит каналы 8
и 9, фиксируя механизм регулирования в положении промежу-
точной подачи насоса.
В &ак
В система
15161718 19 20
7 74
Рис. 163. Следящий механизм регули- *
рования подачи н асоса с обр атной
связью по положению (а) и схема ме-
ханизма регулирования подачи (б)
Рсл
Рн
При повышении давления до значения р1Пах (см. рис. 156)
плунжер 4 (рис. 163, а) придет к упору 12. и поршень 2, набегая
на него, установится в положение, при котором подача будет равна
расходу жидкости; необходимому для компенсации утечек ее
в насосе и регуляторе. В нагнетательную линию жидкость при
этом поступать не будет.
Условие равновесия плунжера 4 регулятора при некотором
его положении выразится уравнением, аналогичным рассмотрен-
ному выше [см. выражение (120)1
® (Рн Рсл) Лф “Ь
где Fnp и С — усилие предварительного сжатия пружины 1
и ее жесткость;
Рн и Рсл — давления нагнетания и слива;
(о и у — площадь сечения плунжера 4 и координата его
текущего положения.
Приняв за у = 0 положение плунжера 4 (рис. 163), соответ-
ствующее максимальному углу поворота шайбы (см. рис. 157;
Ушах) или максимальному эксцентриситету (см. рис. 29; етах), за-
висимость между перемещением этого плунжера и перемещением
404
регулирующего элемента (наклона шайбы), связанного СО што-
ком 6 поршня 2, можно приближенно выразить для насоса с на-
клонным диском (см. рис. 157) как
У = Р (tg Утах — tg У).
Угол наклона шайбы можно определить из уравнения (77):
tg ~ ~[Б&п •
Пользуясь приведенными выражениями, находим усилие пред-
варительной затяжки пружины
Fnp = Рсл) — Ср (tg ymax — tg у) =
= м (Рн Рсл) ~ О’ (tg ушах /5^7) •
Произведя преобразования, находим уравнение наклонного
участка статической характеристики (см. рис. 156)
Qr = аРн + *>
где а и 6 — постоянные для данных условий параметры;
fD^zna
~С^~’
fD6znF„p
+ fD6ztl tg уmax-
На рис. 163, б показана схема радиально-поршневого насоса
с регулятором этого типа. Внешняя обойма (статор) 26 насоса мо-
жет поворачиваться вокруг оси 13 при помощи сервомеханизма 25,
связанного с поршнем 19. При этом повороте изменяется эксцен-
триситет насоса, величина которого равна расстоянию между осями
обоймы 26 и цилиндрового блока 14. В крайнем правом положе-
нии поршня 19, соответствующем максимальной подаче насоса,
обойма 26 удерживается пружиной 15 и давлением жидкости в ка-
мере 17 на неуравновешенную торцовую поверхность левой части
поршня 19. В камеру 17 жидкость поступает из рабочей магист-
рали через канал 2.
При повышении давления выше номинального жидкость, по-
ступающая по каналу 20 из камеры 17 в камеру 21, действует на
правый торец плунжера 22 и, сжимая цружину 18, перемещает
его влево. При определенном положении этого плунжера жидкость
под рабочим давлением поступает через осевое сверление плунжера
и канал 24 в полость 23. Действуя на правый торец поршня 19
и перемещая его влево, жидкость преодолевает (из-за разности
площадей правой и левой сторон поршня) усилие давления в ка-
мере 17 и усилие пружины 15. В результате величина эксцентри-
ситета уменьшается.
405
Движение поршня 19 влево будет продолжаться до feX flop,
пока рабочее давление не достигнет номинального значения, при
котором плунжер 22 займет нейтральное положение, отсоединив
правую и левую йолости цилиндра поршня 19 от магистралей
давления и бака. При этом поршень будет находиться в некотором
промежуточном положении, соответствующем потреблению в дан-
ный момент жидкости.
При понижении давления в камере 17 ниже номинального пру-
жина 18 возвращает плунжер 22 в прежнее (правое) положение,
в котором полость 23 через каналы 24 и левое осевое сверление
плунжера соединяется с баком. В результате этого поршень 19
под действием пружины 15 и давления жидкости в камере 17 пере-
местится влево,
в.
§ 98. Регулирование подачи насоса
с клапанно-щелевым распределением
Принципиальная схема механизма регулирования прямого
действия применительно к насосу с клапанно-щелевым распреде-
лением, неподвижным цилиндровым блоком и нерегулируемым
углом у наклона упорной шайбы 8 показана на рис. 164. Плунжер 3
регулятора, нагруженный пружиной /, связан (через диск 9) с ре-
гулирующими (отсечными) втулками 5, от положения которых за-
висит объем жидкости, вытесняемой плунжерами 7 насоса через
клапаны 2 в линию нагнетания, т. е. зависит, какая часть геоме-
трического хода плунжеров является их рабочим ходом.
На плунжер 3 регулятора со стороны камеры 4, соединенной
с нагнетательной магистралью насоса, действует рабочее давление
жидкости, при известной величине которого пружина / сжимается,
в результате в плунжерах 7 открываются отверстия 6, через кото-
рые часть жидкости, вытесняемой плунжером, перетекает (сбрасы-
вается) без давления во всасывающую полость насоса.
Если до начала смещения золотник# втулки 5 перекрывали от-
верстия 6 в плунжерах на всей длине рабочего хода, то при смеще-
нии золотника эти отверстия будут сообщать на части хода камеру
цилиндра с внутренней (сливной) полостью насоса, т. е. подача
насоса будет уменьшаться.
При нулевой величине подачи, которой соответствует мак-
симальное давление, втулки занимают положение, при котором от-
верстия 6 поршней на всем ходе (за исключением части хода, кото-
рая обеспечивает расход, компенсирующий утечку жидкости)
соединены со сливной всасывающей полостью.
При понижении давления нагнетания ниже< рном пружина
перемещает плунжер 3 в обратном направлении, в результате по-
дача насоса будет повышаться. Следовательно, регулятор обеспе-
чивает работу насоса в режиме, характеристика которого рассмо-
трена выше (см. рис. 156). ,
406
г
Изменяя затяжку пружины /, можно обеспечить ту или иную
величину давления нагнетания (рном), при которой насос начнет
изменять подачу. Крутизна падения последней будет зависеть от
жесткости пружины.
Рис. 164. Схема механизма автоматического регулирования подачи
насоса с клапанно-щелевым распределением
Равновесие плунжера 3 (рис. 164) регулятора соответствует
условию (силами трения пренебрегаем)
tO (рн Рсл) = (^24)
где со и у — площадь и текущее положение поршня 3 регуля-
тора;
и С — усилие предварительного сжатия пружины / и ее
жесткость;
Рн и Рсл —давление в нагнетательной и всасывающей (слив-
ной) полостях.
Принимаем, что значение у ~ 0 соответствует максимальной
подаче насоса, которая определяется в этом случае по выражению
[см. также выражение (77)]
Оттах = fhZil^
где / и z — площадь плунжера насоса и число плунжеров;
п — частота вращения вала насоса;
h — максимальный рабочий ход плунжера в процессе
нагнетания.
Текущая расчетная подача (QT) при любом промежуточном по-
ложении плунжера 3 регулятора (# > 0) и его осевая коорди-
ната у связаны соотношением
QT = 0 — у)fzn-t y^h--^-.
407
Подставив значение у из последнего выражения в уравнение
(124), получим
® (Рн Рсл) = ^ПР (h "iZZ) •
С учетом приведенных выражений статическая характеристика
насоса примет вид (принимаем рсл = 0)
J
QT = (Ли, + Ch) -™Грв = аря + Ь,
где а и Ь — постоянные для данных условий параметры;
а = b = (Fnp + Ch).
Площадь со плунжера 3 регулятора выбирается в соответствии
с конструктивными требованиями, а жесткость С и начальное сжа-
тие Fuv пружины вычисляются с учетом заданного диапазона регу-
лирования (рГОах — Рном) п0 ВЫраЖвНИЯМ
со/ги (ртах — Рном) .
' = - СртахФт
лР (ртах — Рном) fzn
Учитывая, что QT = hfzn, получаем
q___ СО (ртах — Рном) . р ___ Ртах^С
h ’ пр Ртах — Рном
На рис. 165 изображена схема (а и б) и конструкция (в) такого
насоса с регулятором двухступенчатого действия (с серводей-
ствием). Выходное давление в этой схеме действует на нагружен-
ный регулируемой пружиной 9 плунжерный клапан 8 первой сту-
пени, управляющий поршеньком 6, который через диск 5 приводит
в движение отсечные втулки 4 регулятора. Пока усилие давления
жидкости меньше усилия сжатия пружины 9, поршенек 6 нахо-
дится в крайне правом положении, что соответствует максималь-
ной подаче насоса (рис. 156, а). После же того, как усилие давле-
ния жидкости преодолеет усилие пружины 9, плунжер 8 переме-
стится влево и откроет проход жидкости к поршеньку 6, который
перемещается влево, смещая при этом отсечные втулки 4.
Положение максимального смещения этих втулок, соответ-
ствующее нулевой подаче насоса, представлено на рис. 165, б.
В этом положении жидкость, вытесняемая поршнем, удаляется
через неперекрытый канал а во всасывающую полость (в емкость
корпуса).
Регулирование натяжения пружины 9 осуществляется с по-
мощью винта 10. Для демпфирования возможных колебаний регу-
лятора на пути потока жидкости к поршеньку 6 установлен мно?о-
шайбовый дроссель 7,
4Q8
Рис. 165. Схема и конструкция насоса с клапанно-щелевым распределением
409
В рассматриваемой схеме применено устройство, облегча-
ющее посадку в конце хода поршня клапана 2 на свое гнездо
(рис. 165, а, изображение 1 вверху слева). Этим устраняются
перетечки жидкости из нагнетательной полости во всасывающую
в начале хода всасывания плунжера. Для этого в поршне 3
предусмотрены радиальные отверстря Ь, с помощью которых под-
клапанная полость соединяется в конце хода плунжера 3 со сливом,
обеспечивая мгновенный сброс давления в этой полости и мгно-
венное закрытие клапана.
Для гашения пульсаций давления на выходе, обусловленных
колебаниями подачи насоса, предусмотрена небольшая емкостью,
отделенная от выходной камеры d дроссельным каналом. Наличие
этой емкости уменьшает возможность возникновения на выходном
трубопроводе вол новых.процессов (см. стр. 481).
р
§ 99. Регулятор с чувствительным элементом
типа сопло — заслонка
Конструктивные схемы. Получили также распространение ме-
ханизмы дроссельного регулирования с чувствительным элементом
типа сопло—заслонка [1].
Схема подобного двухкаскадного механизма (гидроусилителя)
управления подачей аксиально-поршневого насоса с пружинной
, обратной связью по перемещению, представлена на рис. 166, а.
Входом первого каскада усиления является управляемая электро-
механическим преобразователем 5 заслонка 4,'расположенная
между двумя соплами 6. Выходом первого каскада служит плун-
жер 3 распределительного золотника, являющийся одновременно
входом второго каскада усиления. Питание первого каскада осу-
ществляется от вспомогательного насоса, подающего жидкость
в канал 10. Выходом второго каскада усиления являются цилин-
дры 9 механизма поворота люльки насоса, осуществляющие пово-
рот ее относительно оси 12 на угол ±у.
Плунжер 3 зажат с помощью пружин 8 двумя поршнями 11,
связанный между собой через жесткую раму 2, которая соединена
с качающимся коромыслом, укрепленным на оси 12 вращения
люльки насоса. Рама 2 и поршни 11 с пружинами 8 осуществляют
обратную связь выходного элемента второго каскада гидроуси-
лителя (люльки насоса) с плунжером 3.
Для обеспечения работы сопла-заслонки в гидросистеме уста-
новлены два дросселя 7 постоянного сопротивления. При подаче
на управляющую обмотку электромеханического преобразова-
теля 5 электрического сигналу поворотный его якорь вместе с за-
слонкой 4 отклонится на некоторый угол в ту или Другую сторону,
в результате на торцах плунжера 3 (в полостях пружин 3) соз-
дастся перепад давления, который переместит плунжер 3 в соот-
ветствующую сторону, осуществляя питание жидкостью одного из
410 ’
цилиндров 9. При этом люлька насоса повернется вокруг оси 12
и через раму 2 и поршни 11 изменит сжатие пружин 8, увелйчив
силу сжатия одной и уменьшив силу сжатия другой. В результате
нарушения действующего на плунжер 3 усилия перепада давления
жидкости в полостях пружин 8, вызванное смещением заслонки,
будет скомпенсировано и плунжер 3 установится в нейтральное
положение.' В этом положении он перекроет питание силовых ци-
линдров 9 и тем самым люлька 1 насоса будет зафиксирована.
Рис. 166. Механизмы гидроусилительного регулирования подачи насоса с пру-
жинной (а) и жесткой (ff) обратной связью
Таким образом, путем изменения величины и полярности управ-
ляющего электрического сигнала, подаваемого в электромехани-
ческий преобразователь 5, представляется возможным обеспечить
отклонение люльки 1 насоса на угол, пропорциональный этому
сигналу. -
На рис. 166, б представлена схема подобного механизма управ-
ления с электромеханическим преобразователем 5 и жесткой (ры-
чажной) обратной связью 2. При возникновении разности давлений
в междроссельных камерах 13 сопел 6, обусловленной смещением
заслонки ^приводятся в действие плунжеры 9, воздействующие
. через механическую связь на плунжер 3 золотника питания сило-
вых цилиндров 8 механизма поворота люльки 1 насоса.
Конструктивная схема аксиально-поршневого насоса с регуля-
тором типа сопло—заслонка представлена на рис. 167, а. Шток 14
поршня 10, нагруженного пружиной 9 (см. также рис. 167, г),
411
связан через тягу 11 с рычагом 12 механизма (шайбы) узла изме-
нения величины подачи насоса. Полость b цилиндра регулятора
со стороны штока соединена с нагнетательной магистралью,
а противоположная ей полость а — с соплом 4 (см. также
рис. 167, б и в). Кроме того, эти полости соединены между собой
каналом 7, в котором установлен дроссель S.
Поскольку площадь поршня 10 со стороны штоковой камеры b
меньше площади со стороны поршневой камеры а, он давлением
поршневого насоса с регулятором подачи типа 14 b 10 (19
сопло—заслонка
жидкости и усилием пружины 9 удерживается при перекрытом
сопле 4 в крайнем левом положении, соответствующем максималь-
ной подаче насоса. При повышении давления до величины >рном
поршенек 5 цилиндра 6 перемещается вверх и через толкатель 3
сжимает пружину /, поворачивая при этом заслонку 2 в сторону
открытия сопла 4. При этом давление в полости а силового ци-
линдра вследствие сопротивления дросселя 8 снижается, в резуль-
тате создается перепад давления между полостями а и Ь, под дей-
ствием которого поршень 10 сжимает пружину 9 и перемещает
наклонную шайбу 13 насоса в сторону снижения подачи.
На рис. 168 представлена схема насоса аксиального типа с на-
клонным расположением поршней с регулятором подачи типа
сопло—заслонка. Чувствительным элементом, реагирующим на
повышение давления, здесь служит мембрана 5, воздействующая
при повышении давления выше заданной величины на распреде-
412
лительное устройство 4 типа сопло—заслонка, управляющее дав-
лением в правой полости силового цилиндра 3 регулятора, пор-
шень которого изменяет угол наклона шайбы /. При открытии
отверстия сопла давление в правой полости этого цилиндра, в ко-
торую жидкость поступает из полости нагнетания насоса через
дроссельное отверстие 2 в поршне, понижается и поршень переме-
стится вправо. При этом подача насоса падает. При закрытии
сопла давления в правой и левой полостях силового цилиндра вы-
Рйс. 168. Схема насоса с наклонным расположением ци-
линдров, снабженного регулятором подачи типа сопло —
заслонка
равниваются, и поршень его, перемещаясь влево под действием
пружины и давления жидкости на неуравновешенную площадь,
поворачивает наклонную шайбу 1 в положение максимального
угла, а следовательно, устанавливает насос на максимальную по-
дачу.
Статическая характеристика регулятора. Условие равновесия
поршня 10 исполнительного цилиндра регулятора (см. рис. 167, а
и г) имеет вид
^*шт “F Лф Рсоп^а Рн^Ь 4“ ^тр ~ О»
где (дь и — площадь поршня регулятора со стороны камер b
и а;
Рсоп И Ра
’ _ М
шт~ р
— усилие сжатия пружины 9;
— сила трения поршня 10 в цилиндре;
— давление жидкости перед соплом 4 и давление
нагнетания (см. также рис. 167, бив);
— усилие на штоке поршня 10, обусловленное
суммарным моментом М сил, действующих на
наклонную шайбу 13\
р — плечо приложения силы Fm (расстояние между
осью поворота диска 13 и осью поршня 10),
413
Связь между смещением у поршня 10 и углом у наклона регу-
лирующего органа (наклонного диска) насоса может быть прибли-
женно выражена как
У = Р tg Т-
Усилие натяжения пружины 9
Л₽ Лр. и “Ь Су — Fпр н -J- Ср tg у,
где С и Fnp н — коэффициент жесткости и усилие предвари-
тельного (начального) сжатия пружины 9.
Тяговое усилие FmT на штоке поршня 10, уравновешивающее
силы, действующие на регулирующий орган, определяется пере-
падом давления в полостях цилиндра: ' z
Ря^Ь
Выполнив упрощения и подстановки, получим уравнение рав-
новесия поршня 10
м
-7Г + Лр. н + СР tg У — + Рсоп®а + Fnp = 0. (125)
Уравнение равновесия заслонки. Величина щели х между соп-
лом 4 и заслонкой 2 определится из уравнения равновесия послед-
ней ’(см. рис^ 167, б и в)
. кл
соп
кл — Рн®кл — усилие, развиваемое поршеньком 5;
— усилие пружины 1;
—'усилие воздействия на заслонку струи жид-
[ кости, вытекающей из сопла 4\
®кл — площадь поршенька 5.
Величина обжатия пружины 1
где х — расстояние сопла 4. от заслонки 2.
С учетом приведенного можем написать
р _______р -i-C f— Р Д-Р -h- г
Г пр. КЛ- ГПр. Н I Г пр. Н Г 1
*1
где — жесткость пружины /;
Рпр н — усилие начального сжатия пружины / клапана.
Приняв упрощенно, что усилие давления жидкости на заслонку
Лас = рсол®соп, где рсоп й шсоп — давление жидкости на выходе
из сопла и площадь его сечения [1], уравнение равновесия за-
слонки можно представить в виде
414
откуда находим йёЛичййу Щели
Рщ>. н^2 Рнюкл^2 PconwconG \ / /х \
£1 / \ ^2 /
(126)
Расход жидкости через дроссель 8 (см. рис. 167, а и в) опреде
лится по известному из курса гидравлики выражению [1 ]
Фдр НдрЮдр р У^Ря Ре >
где й>др — площадь сечения дросселя;
рдр — коэффициент расхода дросселя;
Р — ПЛОТНОСТЬ- жидкости.
Расход через щель шириной х между срезом сопла 4 и заслон-
кой 2
Qc — Рсоп^^соц-Г
где dcon и цсоп — диаметр и коэффициент расхода сопла;
Peon — давление перед соплом.
Поскольку в рассматриваемой схеме дроссель 8 и сопло 4 соеди-
нены последовательно, расходы Qp через них в установившемся
режиме будут (см. рис. 167, в)
НдР^ДР Рн Рсоп НсОПЯ d con* VPeon’
отсюда
- (127)
где
ч _____________________________Нсопя ^соп
СОП ~ Рдр ’
' Решая уравнения (125)—(127У, получим статическую характе-
ристику насоса с таким регулятором. При расчете задаемся значе-
нием угла у и определяем по нему QT и давление нагнетания ря,
соответствующее этому положению поршня сервоцилиндра 10.
§ 100. Регулирование подачи путем изменения
внутренней циркуляции жидкости
Применяют схемы регулирования, в которых изменение подачи
достигается за счет создания соответствующей внутренней цирку-
ляции жидкости в рабочих камерах йри сохранении величины
хода поршней (у = const). Для этого наклонному диску 1
415
(рис. 169, а) придается возможность поворота вокруг его оси (изме-
нения положения относительно распределительного золотника 4),
осуществляемое с помощью червяка 3 и связанного с диском чер-
вячного колеса 2. При повороте диска 1 происходит угловое сме-
Рис. 169. Регулирование
подачи путем изменения внутренней циркуляции
жидкости в насосе
щение оси мертвых положений цилиндров (оси симметрии наклон-
ного диска) относительно распределительных окон золотника 4,
что равносильно повороту (смещению) оси симметрии b—b золот-
ника и соответственно — его уплотнительной перемычки относи-
Рис. 170. Схема регулирования по-
дачи путем поворота распределитель-
ного диска (золотника)
тельно неизменного положения
оси а—а симметрии неподвиж-
ного наклонного диска, как это
условно показано на рис. 169, б.
В результате поршни будут
подавать жидкость на части
своего хода вытеснения, опреде-
ляемого углом а, не в нагнета-
тельную полость, а перегонять
ее без давления во всасываю-
щую полость. Вытеснение же в
нагнетательную полость начнет-
ся лишь после прохода цилинд-
ром перевальной перемычки
между окнами золотника.
При повороте наклонного
диска / относительно нейтраль-
ного положения (относительно
оси а — а) на угол а ~ 90°
(рис. 169, в), что соответствует
условному повороту на этот
угол золотника при неподвиж-
ном наклонном диске, подача насоса будет равна нулю. По-
следнее обусловлено тем, что в этом положении наклонного
диска ход вытеснения жидкости во всасывающую полость будет
равен ходу всасывания из этой полости. При а = 0° и а = 180°,
что соответствует нормальной схеме с симметричным относительно
416
нейтральной оси расположением окон наклонного диска, подача
будет максимальной, но противоположной по знаку подаче, имею-
щей место при а = 90° и а = 270°. Следовательно, путем изме-
нения угла а от 0 до 180° подача насоса изменяется от +Qmax Д°
— Стах-
Чтобы избежать компрессии жидкости в цилиндрах при пере-
ходе их через перевальную перемычку, желательно иметь нулевое
или близкое к нему перекрытие.
В насосах с вращающимся наклонным диском подобная кана-
лизация достигается поворотом распределительного диска 1
(рис. 170) относительно мертвого положения наклонного диска и
цилиндрового блока 2. В частности, этот способ применяется для
корректирования индикаторной диаграммы (фаз распределения)
с целью снижения шума насоса (см. стр. 483).
§ 101. Регулирование подачи путем дозирования
объема питания насоса
В некоторых случаях регулирование подачи осуществляется
ограничением (дозированием) количества жидкости, поступающей
в полость всасывания насоса. Схема регулятора подобного типа
применительно к насосу с
клапанным распределе-
нием показана на рис. 171.
Вспомогательный шесте-
ренный насос 1 питает
жидкостьюпод небольшим
давлением, определяемым
настройкой клапана 9, ра-
диально-поршневой насос
с клапанами — впускным 2
и нагнетательным /. Между
шестеренным и поршневым
насосами расположен ре-
гулирующий золотнико-
вый клапан 5, который под
давлением жидкости пе-
ремещается в направле-
нии против действия пру-
жины 3. Пока давление на
выходе из поршневого на-
соса не достигает задан-
о
Ю 9
Рис. 171. Схема радиально-поршневого насоса
с регулятором подачи, основанным на прин-
ципе дозирования питания
нои величины, цилиндры насоса полностью заполняются жидко-
стью и поршни 8 насоса совершают под действием эксцен-
трика 10 максимальный ход. При достижении этого заданного
давления клапан 5 преодолевает усилие пружины 5, смещается
вправо, и поток жидкости от шестеренного насоса поступает ча-
стично к впускному окну 6 поршневого насоса, а частично —
27 T. М. Башта 417
к сливному окну 4, пока впускное окно 6 при заданном максималь-
ном давлении (21 МПа или 210 кгс/см2) полностью не закроется, и
поток жидкости будет направлен в бак через сливное окно 4.
В этом случае поршни 8 насоса не будут перемещаться (будут нахо-
диться в крайнем выдвинутом положении). При промежуточных
между крайними положениях клапана 5 поршни будут совер-
шать лишь часть максимального хода.
Поскольку при регулировании подачи путем дозирования пи-
тания соответственно изменяется ход поршней, устраняется воз-
можность появления в цилиндрах вакуума, который неизбежен
при регулировании по схеме, приведенной на рис. 164, а следова-
тельно, устраняется возможность кавитации жидкости.
§ 102. Регуляторы с двойным давлением
Выпускаются также насосы с двойным регулированием по дав-
лению. На рис. 172, а приведена схема пластинчатого насоса с по-
добным регулятором. Переключение регулятора с одной ступени
на другую осуществляется вручную
или с помощью электромагнита через
золотник 1.
Я 13 14
Рис. 172. Схемы насоса с двойным^регулированием по давлению (а) и двумя
ступенями подачи (б)
16
17
Давление рном жидкости первой ступени определяется нагрузоч-
ной пружиной 4, к усилию которой может быть добавлено усилие
регулируемого давления жвдкости на поршень. 6 цилиндра 3. '
Для работы насоса на первой ступени плунжер 1 золотника
переводится в верхнее положение, в котором полость силового
цилиндра 3 соединяется через канал 2 с всасывающей магистралью.
Ввиду того, что питание этого цилиндра осуществляется через
418
Г
1
дроссель 5, давление в нем практически отсутствует и нагрузка на
статорное кольцо 7 осуществляется лишь одной пружиной 4, ко-
торая и будет воспринимать усилие Р давления жидкости на пор-
шень цилиндра 8. При переводе плунжера 1 в нижнее положение
канал 9 перекрывается, в результате в цилиндре создается давле-
ние, величина которого определяется настройкой переливного
клапана 10. Вследствие этого статорное кольцо 7 насоса будет
удерживаться в положении максимального эксцентриситета сум-
марным, усилием (трение и воздействие на статорное кольцо не-
уравновешенных сил давления жидкости не учитываем)
= ^пр Рпер/пор»
где Рпер — давление настройки переливного клапана 10;
/пор — площадь поршня 6;
Р„р — усилие затяжки пружины 4.
Для обеспечения заданного регулируемого давления в цилин-
дре 3 площадь предохранительного клапана 10 должна быть значи-
тельно больше площади дросселя 5.
§ 103. Насос с”двумя ступенями подачи
В гидравлических системах некоторых машин (металлорежу-
щих станков и др.) применяют насосы с двумя ступенями подачи,
переключение которых обычно осуществляется с помощью гидрав-
лического механизма, управляемого электрогидравлическим рас-
пределителем. Схема одного из таких механизмов применительно
к аксиально-поршневому щасосу показана на рис. 172, б. Измене-
ние подачи здесь осуществляется ступенчатым регулированием
угла у наклона диска 11, связанного с поршнем 16.
> Переход с одной подачи на другую осуществляется с помощью
поршней 16 и 17, находящихся под действием пружины 12 и сил
давления жидкости, подводимой к каналам & или с. При подаче
жидкости через канал b в камеру а давление действует в противо-
положных направлениях на оба поршня, удерживая поршень 16
в верхнем относительно поршня 17 положении. В этом положении
усилия давления на поршни 16 и 17 взаимно компенсируются
(уравновешиваются) и усилию пружины 12 противодействует
лишь сила давления жидкости в камере d на поршень 17. Если
давление в этой камере отсутствует, поршни 16 и 17 под усилием
пружины 12 сместятся вниз до прихода установленного на пор-
шне 17 ролика 13 к эксцентричному кулачку 15, поворотом кото-
рого совместно с установочным лимбом^ 14 регулируется текущее
положение наклонного диска 11 (величина угла у).
При одновременной подаче давления в камеры’а и d поршни 16
и 17 совместно переместятся в крайнее верхнее положение, кото-
рое соответствует максимальному углу наклона диска 11 (Увия —
='25°), а следовательно, и максимальной подаче. При соединении
каналов 6 и с с атмосферой (давление в камерах а и d равно нулю),
27* 419
поршень 15 устанавливается под действием пружины 12 в крайнее
положение, соответствующее у = 0, что соответствует нулевой
подаче.
§ 104. Ограничители мощности насоса
В гидросистемах с автоматически регулируемым насосом сред-
ней мощности и выше (>10—20 л. с.) часто применяют ограничи-
тели мощности, устраняющие возможность работы насоса в режиме
максимальных подач при давлении выше заданного. Одна из схем
подобного ограничителя показана на рис. 173, а. Ограничитель
представляет собой два цилиндра, поршни которых 2 и 4 нагру-
2 3 1 П 12
Рис. 173. Схемы ограничителя мощности насоса (а) и стабилизатора давления (б)
жены пружинами 3, противодействующими силам давления рн
жидкости на выходе насоса, подводимой в левые полости 1 цилин-
дров. Орган регулирования насоса связан с валом 5, на оси кото-
рого посажено коромысло 6.
Пока давление р„ на выходе насоса не достигнет некоторой вели-
чины, на которую рассчитаны пружины 3, поршни 2 и 4 отжи-
маются ими влево и дают возможность поворота вала 5, и соответ-
ственно, органа регулирования (например, наклонной шайбы)
в требуемом для регулирования насоса диапазоне. После того, как
давление ри в напорной магистрали повысится до расчетной макси-
мальной величины, пружины 3 сжимаются и штоки поршней 2 и 4
будут ограничивать угол поворота коромысла 6, а следовательно
и регулирующего органа насоса, лимитируя тем самым при даль-
нейшем повышении давления подачу насоса. Следовательно,
подача насоса будет зависеть от нагрузки на его выходе, умень-
шаясь с увеличением последней. Соответствующим подбором пара-
метров регулятора (характеристики пружины и кинематики меха-
420
низма) можно обеспечить постоянство приводной мощности на-
соса N — pQ*
Следовательно, для того чтобы при изменении давления по-
требляемая насосом мощность осталась постоянной, необходимо,
чтобы этот ограничитель обеспечивал прямо пропорциональную
зависимость регулируемой подачи QT в функции давления р.
В рассматриваемой схеме применено также устройство (нуль—
установитель) 9, предназначенное для защиты приводного электро-
двигателя от перегрузок при пуске. Устройство представляет со-
бой два цилиндра, поршни 7 и 8 которых нагружены пружи-
нами, отжимающими их в левое положение, в котором они через
коромысло 6 ограничивают подачу насоса. Цилиндры питаются от
вспомогательной гидросистемы подпитки с давлением рупр, усилие
которого противодействует пружинам поршней 7 и в, отжимающим
их от коромысла 6.
В момент пуска гидропривода давление подпиточного насоса
равно нулю, пружины удерживают поршни 7 и 8 в крайнем левом
положении. Поршни, в свою очередь, удерживают рычаг 6 регули-
рующего органа насоса в положении нулевой (или близкой к ней)
подачи. После же пуска (раскрутки) насоса жидкость от насоса
подпитки поступает в левые полости цилиндров 9, в результате
пружины сжимаются, допуская установку регулирующего органа
насоса на любую требующуюся подачу.
При остановке гидропривода давление рупр понижается и пру-
жины через поршни 7 и 8 при помощи ограничивающего коро-
мысла 6 устанавливают насос в положение нулевой подачи.
Нуль-установитель действует на регулирующий орган насоса
непосредственно или через гидроусилитель. В последнем случае
система должна иметь гидроаккумулятор, который при падении
давления подпитки обеспечивал бы подачу жидкости. Обычно ис-
пользуется аккумулятор пружинного типа.
§ 105. Стабилизатор давления
При питании одним насосом нескольких периодически включае-
мых потребителей (гидродвигателей) с дроссельным регулирова-
нием применяют стабилизаторы давления, схема одного из которых
показана на рис. 173, б. Регулирующий орган (наклонный диск) 10
насоса 13 в этом регуляторе находится под давлением жидкости
на выходе насоса, подаваемой в цилиндр 12 стабилизатора, и пру-
жины 11, действующей' в сторону установления регулирующего
органа насоса в положение максимальной подачи (максимального
угла у).
Выключение какого-либо из потребителей вызывает избыток
в расходе, в результате давление на выходе насоса повышается,
что приводит к соответствующему сжатию пружины 11 и сниже-
нию подачи насоса.
421
§ 106. Ограничители давления
Во многих случаях требуется при повышении давления до номи-
нального значения риои выключить насос полностыб (перевести
его в режим нулевого расхода). Схема подобного регулятора
представлена на рис; 174, а. При достижении в системе заданного
максимального давления ришах плунжер 4 переместится вверх и
। I I I । 2524 23 22 Рис. 174. Схемы .ограничителя давле-
* '/ д) ния насоса (а) и регуляторов давле-
ния (б ив),
соединит правую полость цилиндра 5 с источником давления рн,
одновременно отсоединив ее от линии слива, в результате чего
поршень 1, связанный с узлом регулирования насоса; переместится
влево. Так как усилие пружины 2 регулятора не зависит от поло-
жения поршня 1 (а следовательно, и от величины регулируемого
параметра), последний не остановится в промежуточном положе-
нии, как это было в ранее рассмотренных схемах (см. рис. 162),
а переместится в крайнее левое положение (до упора), соответ-
ствующее значению регулируемого параметра, близкому к нуле-
вому. Следовательно, регулятор подобной схемы после достижения
422
номинального давления полностью выключает насос (переводит
его на режим, близкий к нулевому расходу) в отличие от рассмо-
тренной выше схемы, которая благодаря пружинной обратной
связи допускает работу насоса на промежуточных расходах. Иначе
говоря, в этой схеме рном = ртах (см. кривую 5 на рис. 156, б).
При уменьшении давления ниже номинальной величины рном
плунжер 4 под действием пружины 2 опустится вниз и соединит
полость цилиндра 5 со сливом, в результате поршень 1 переме-
стится в крайнее правое положение (показано на рис. 174), в соот-
ветствии с чем расход насоса увеличится до максимального.
При обеспечении нулевого перекрытия пояском плунжера 4
канала 3 (а = Ь) любое малое нарушение равенства сил давления
жидкости и натяжения пружины 2 вызовет соответствующее изме-
нение подачи. Однако схема с подобным перекрытием будет не-
устойчивой, ввиду чего применяют распределитель с положитель-
ным перекрытием канала (Ь >• а), величина которого (с — Ь.— а)
определяет диапазон давлений (ршах — рном).
Применяют также схемы регуляторов с отрицательным пере-
крытием золотника (Ь <а), которые отличаются плавностью ра-
боты, однако имеют постоянную утечку жидкости через зазор,
обусловленный разностью (—с = а — Ь).
§ 107. Регулятор давления с разгрузкой насоса
При регулировании давления аксиально-поршневого насоса
его люлька обычно совершает полное отклонение в пределах диапа-
зона регулирования под действием пружины регулятора. Следова-
тельно, насос при запуске работает в такой схеме на максимальной
подаче, что может привести к нежелательной перегрузке привод-
ного двигателя при запуске. Для избежания этого в системах
управления мощных насосов применяют специальные разгрузоч-
ные клапаны, с помощью которых насос при заданном малом давле-
нии устанавливается в положение нулевого угла у наклона. Схема
такого регулятора представлена на рис. 174, б.
Между подпорным клапаном 9 и поршневой полостью (со сто-
роны пружины 13) силового цилиндра 12 регулятора, поршень б
которого осуществляет изменение угла наклона люльки насоса в,
установлен электромагнитный трехходовой золотник (клапан) 10,
с помощью которого эта полость может быть соединена либо с ба-
ком 7 (соответствует положению, представленному на рис. 174, б),
либо с подпорным клапаном 9.
При обесточенном электромагните золотника 10 цилиндр 12 сое-
диняется с баком 7, а насос 8 при минимальном давлении 20 кгс/см®
устанавливается практически на нулевую подачу (на нулевой на-
клон люльки). Благодаря этому, приводной двигатель преодоле-
вает при запуске насоса лишь незначительный момент. Насос соз-
дает'давление, регулируемое клапаном 9.
423
§ 108. Регулятор давления насоса
с электродистанционным управлением
Широко применяется дистанционное управление насосом, кото-
рое обычно осуществляют с помощью электрогидравлических
систем.
Одна из таких схем приведена на рис. 174, в. Угол наклона
люльки регулируемого насоса 26 изменяется здесь поршнем 24 си-
лового цилиндра 22, связанным с люлькой. Со стороны поршневой
полости поршень загружен пружиной 23. Управление осущест-
вляется трехходовым золотником 16 с дистанционным гидравличе-
ским приводом плунжера. Штоковая полость 25 цилиндра 22
питается непосредственно из нагнетательного (выходного) канала
насоса, а противоположная полость соединена с нагнетательным
клапаном через дроссель 15 или через золотник 16 в левом положе-
нии его плунжера. Правая сторона приводного цилиндрика этого
золотника, нагруженного пружиной 18, соединена с напорным тру-
бопроводом через дроссель 17, а противоположная ей левая сто-
рона — непосредственно с напорным трубопроводом.
Дистанционное управление золотником 16 осуществляется с по-
мощью электромагнитного клапана 21, включаемого ручным пере-
ключателем 19. На рис. 174, в представлено положение этого пере-
ключателя, соответствующее дистанционному управлению с по-
мощью клапана 21, которое допускает управление при любой уда-
ленности командного и исполнительного аппаратов. В этом поло-
жении клапан 21 перекрывает канал, ведущий к резервуару,
в результате чего давления до и после дросселя 17, а следовательно,
в правой и левой сторонах золотника 16, выравниваются и плунжер
золотника под действием пружины 18 перемещается влево (пред-
ставлено на рис. 174, в). Жидкость под давлением нагнетания посту-
пает как в левую, так и в правую полости цилиндра 22. Пор-
шень 24 в этом случае будет перемещаться под действием пру-
жины 23 И разности усилий давления жидкости на поршень
в левую сторону, увеличивая угол наклона люльки, и, соответ-
ственно, подачу насоса.
При переключении электромагнита клапана 21 он соединит
правую полость цилиндрика золотника 16 с баком. В этом случае
плунжер золотника переместится вправо и соединит правую по-
лость цилиндра 22 с резервуаром. Ввиду наличия в трубопроводе,
соединяющем поршневую и штоковую полости цилиндра 22, дрос-
селя 15, в полости 25 будет рабочее давление, под действием ко-
торого поршень 24, сжимая пружину 23, переместится вправо,
уменьшая тем самым угол наклона люльки насоса
При переключении ручного золотника 19 в верхнее положение
клапан 21 дистанционного управления отключается и включается
пружинный подпорный клапан 20, настроенный на заданное давле-
ние.
424
§ 109. Сравнительная оценка механизмов распределения
и регулирования поршневых насосов
Механизм клапанно-щелевого распределения (см. рис. 89 и 164)
обычно сочетается с неподвижным цилиндровым блоком (с неро-
торным механизмом подачи). Это обосновано тем, что применение
такого распределения в конструкциях роторных насосов потре-
бует дополнительного узла герметизации при передаче жидкости
высокого давления с вращающегося блока в полость высокого дав-
ления в неподвижном корпусе. Этими же соображениями обосно-
вывается и применение распределения с помощью плоского по-
движного золотника (см. рис. 87). В равной мере в блоках пи-
тания с самовсасывающими насосами высокого давления целесо-
образно применять неподвижные блоки цилиндров и клапанное
распределение.
Оценивая опыт создания и применения поршневых насосов,
следует отметить, что с точки зрения габаритов и весовой отдачи,
преимуществом обладают аксиально-поршневые машины со сво-
бодно опертыми поршнями (см. рис. 81), а также аксиально-порш-
невые машины с неподвижным блоком цилиндров и свободно
опертыми поршнями и клапано-щелевым распределением (см.
рис. 165).
В этих типах машин отсутствует такой сложный и уязвимый
узел, каким является кардан, а также отсутствует неравномер-
ность, обусловленная карданным приводом блока.
Оценивая механизмы распределения с точки зрения объемного
к. п. д., габаритов, долговечности, чувствительности к загрязне-
ниям жидкости и работоспособности насоса в кавитационном ре-
жиме, следует отметить, что наиболее рациональными являются
механизмы, в которых разделение полостей низкого и высокого
давлений осуществляется непосредственным контактом поверхно-
стей распределителя (см. рис. 57), т. е. когда между поверхностями
распределителя отсутствует гарантированный зазор. Машины с та-
ким распределением являются обратимыми, т. е. могут работать
в качестве насоса и гидромотора.
В тех случаях, когда основным критерием работы насоса яв-
ляется удельная весовая отдача и не требуется высокий ресурс ра-
боты (гидросистемы ракет и иных летательных аппаратов, в кото-
рых частота вращения вала достигает 20 000—30 000 об/мин),
целесообразно применять роторные аксиально-поршневые насосы
со свободно опертыми поршнями с распределением неподвижным
плоским золотником и автоматическим механизмом изменения
подачи дифференциального типа (см. рис. 160).
В жидкостях с повышенной загрязненностью более устойчиво
работает клапанно-щелевое распределение. Однако этот механизм
распределения имеет относительно большие габариты и не может
работать на скоростях выше 5000—8000 об/мин; кроме того, ма-
шины с таким распределением необратимы.
425
Механизм распределения цилиндрическим неподвижным золот*
ником (цапфой) позволяет создать компактную конструкцию ма-
шины, однако наличие гарантированного зазора приводит к необ-
ходимости статической разгрузки золотника и вызывает при высо-
ких давлениях значительные объемные потери.
Анализ механизмов ^автоматического регулирования позволяет
заключить, что наиболее компактную конструкцию имеет диффе-
ренциальный механизм (см. рис. 160), который к тому же,обеспечи-
вает наиболее приемлемую характеристику изменения подачи в ши-
роком диапазоне. Перепад давления, в пределах которого работает
этот механизм, не превышает 6—7% от ршах. Достаточно узкий
диапазон давлений, в котором происходит изменение подачи,
имеет дроссельный дифференциальный механизм, регулирования
(см. рис. 167), однако при применении его неизбежен постоянный
расход жидкости в пределах 1—2 л/мин, т. е. этот механизм тре-
бует постоянных объемных потерь.
Для случаев,у когда требования, ограничивающие габариты и
массу насоса, не являются основными, а частота вращения не пре-
вышает 3000 об/мин, можно применять аксиально-роторные ма-
шины с шарнирными связями поршней и двойным несиловым кар-
даном или бескарданные машины с неподвижным плоским (или
сферическим) распределительным золотником; для регулирования
подачи в этом насосе целесообразен дифференциальный механизм,
с помощью которого изменяется угол наклона люльки.
ГЛАВА XI
ОБЪЁМНЫЕ ГИДРАВЛИЧЕСКИЕ ПЕРЕДАЧИ
ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
✓
§ ПО. Принципиальные схемы
Объемная гидропередача (гидропривод) с вращательным движе-
нием выходного звена гидродвигателя, которую часто называют
гидравлической трансмиссией, состоит из объемных насоса и гидро-
мотора регулируемого или нерегулируемого типов, соединённых
трубопроводами, а также различной гидроаппаратуры управле-
ния. В гидропередачах этого типа энергия давления жидкости,
подаваемой насосом, преобра-
зовывается с помощью гидро-
мотора в механическую работу
на выходном его валу.
Механизм передачи можно
сравнить с шариковой связью
ведущего и ведомого валов
(рис. 175), в которой ведомая
звездочка Ь (соответствует гид-
ромотору) приводится во вра-
Рис. 175. Схема шариковой связи ве-
дущего и ведомого валов
щение шариками, вытесняемыми
по шарикопроводу с ведущей звездочкой а (соответствует насосу).
На рис. 176 представлена принципиальная схема объемной
гидропередачи, состоящей из регулируемого насоса а и нерегули-
руемого гидромотора b аксиально-поршневых типов, соединенных
трубопроводами. Жидкость, подаваемая насосом а, поступает
в гидромотор b и приводит во вращение его вал, связанный
с нагрузкой. Регулирование скорости гидромотора в этой схеме
достигается регулированием подачи насоса . (хода h = D tg ун
поршней) путай изменения угла ун наклона диска 2, осуществляе-
мым вручную или автоматически с помощью тяги 1.
Конструктивно гидравлическая передача может быть выпол-
нена либо в виде отдельных насосов и гидромоторов, соединенных
гидропроводами (раздельное исполнение) (рис. 176; см. также
рис. 4, бив), либо в виде единого агрегата, включающего насос
и гидромотор, размещаемых в общем корпусе (нераздельное ис-
полнение) (рис. 177).
427
1
Рис. 176. Принципиальная схема гидропередачи вращательного движения
Рис. 177. Гидропередачи вращательного движения нераздельного исполнения
аксиально-поршневого (а) и пластинчатого (б) типов
428
На рис. 178, а изображена конструкция нераздельного гидро*
привода, состоящего из радиальных поршневых насоса Н и гидро-
мотора 7И, выполненных на базе механизма с плоскими направ-
ляющими (с бесконечно длинным шатуном). В отличие от рассмо-
тренного насоса этой схемы, описанного на рис. 44, плоские на-
правляющие здесь уменьшены до размера граненого кулачка
(камня) 2, насаженного на шарикоподшипнике на валик 3, ось
которого смещена относительно оси ротора 1 на величину е.
Поршни 4 опираются внутренними торцами на плоские грани
кулачка 2, прижимаясь к ним действием давления, развиваемого
насосом 6 подкачки, который размещен на оси основного насоса.
В соответствии с указанными особенностями конструктивной
компоновки машин питание их осуществляется не из центральной
части, как в насосах, показанных на рис. 44, а из периферии, через
окна а и b распределительных цапф насоса Н и мотора М
(рис. 178, б).
Регулирование привода осуществляется изменением эксцентри-
ситета е насоса с помощью маховичка 5 (рис. 178, а).
Преимуществом машин последнего типа, как и рассмотренных
выше (см. рис. 44), является отсутствие боковых сил рабочего
давления поршней на стенки цилиндров, величина которых здесь
обусловлена лишь моментом сил трения.
429
§ ill. Регулирование частоты вращении
вала гидромотора
Объемная гидропередача вращательного движения выполняется
как в регулируемом, так и в нерегулируемом вариантах. Регули-
руемая гидропередача допускает при постоянной частоте вращения
вала насоса регулирование частоты вращения вала гидромотора;
в нерегулируемой передаче частоты вращения валов насоса и ги-
дромотора постоянны.
В практике широко распространены регулируемые гидропере-
дачи, которые разделяются на передачи дроссельного регулирова-
ния и передачи объемного регулирования (изменением рабочего
объема насоса. Реже применяют гидропередачи ступенчатого
регулирования, осуществляемого поочередным или параллельным
включением нескольких нерегулируемых насосов, а также гид-
ропередачи с объемно-дроссельным регулированием, в котором
сочетаются объемное и дроссельное регулирование.
71. Дроссельное регулирование
Выбор той или иной схемы регулирования скорости гидравличе-
ского привода определяется многими факторами, основным из кото-
рых является величина мощности. Наиболее распространено
дроссельное регулирование, с помощью которого обеспечивается
ручное или автоматическое изменение подачи жидкости и соот-
ветственно — скорости гидродвигателя.
В гидропередачах дроссельного регулирования частота враще-
ния нерегулируемого гидромотора, питаемого от насоса постоянной
подачи или иного источника, регулируется дроссельными устрой-
ствами, устанавливаемыми обычно на входе или на выходе рабочей
жидкости из гидромотора. Дроссель представляет собой местное
гидравлическое сопротивление, устанавливаемое на пути течения
жидкости для ограничения (регулирования) ее расхода или созда-
ния сопротивления (перепада давления). В гидроприводах дроссели
применяют главным образом для регулирования скорости выход-
ного звена гидродвигателей прямолинейного движения (штока
силовых гидроцилиндров) или частоты вращения вала гидромо-
торов.
В схемах дроссельного регулирования требуемый расход ги-
дромоторов достигается отводом в бак части потока жидкости, по-
даваемой насосом при постоянном его рабочем объеме. В соответ-
ствии с этим гидропривод такого типа работает по схеме с открытой
циркуляцией (см. стр. 447).
Поскольку дроссельное регулирование основано на превраще-
нии части энергии в тепло, гидравлические схемы с этими регуля-
торами применяют обычно в системах небольшой мощности (до
5 л. с.). Это ограничение обусловлено в основном возможностью
недопустимого повышения температуры жидкости.
430
Дроссель может быть установлен как в линии питания гидро-
мотора (на входе) (рис. 179, а), так и в сливной магистрали (на вы-
ходе) (рис. 179, б). Излишек жидкости, подаваемой насосом, от-
водится в бак через переливной клапан а насоса, т. е. давление
на выходе насоса рн = const.
Схемы с регулятором в сливной магистрали (рис. 179, б) обес-
печивают двустороннюю жесткость системы^(рабочие элементы
ЖЖ а
1ГОТ
IВ бак
АРвх~Рн~Рр I .
рн=const
АРвых =Рп Рсл
Рис. 179. Принципиаль-
ные схемы дроссельного
регулирования скорости
гидромотора
гидромотора находятся под действием двустороннего давления).
Они могут применяться для работы в режиме больших ускорений
выходного звена (мотора), для которых схема с регулятором,
установленным на линии питания (рис. 179, а), непригодна, так как
при уменьшении подачи жидкости в гидромотор в процессе регули-
рования скорости ротор его может вращаться под действием силы
инерции движущейся массы, поскольку дроссель этому здесь не
противодействует.
Испытания гидромотора при установке дросселя в магистрали
питания показали, что при наличии значительного момента инер-
ции вращающихся масс дросселирование на входе фактически не
эффективно. Так, даже при мгновенном полном перекрытии маги-
страли питания вал, вращающийся с распространенной для гидро-
моторов скоростью, совершает под действием момента инерции
вращающихся масс до полной остановки 11—13 оборотов.
При установке дросселя в сливной магистрали (рис. 179, б)
повышению («забросу») скорости выгодного звена при таком регу-
431
лировании, а также движению этого звена под действием сил инер-
ции вращающихся масс оказывает противодействие, сопротивле-
ние дросселя. При полном же перекрытии дросселем сливной маги-
страли, не имеющей предохранительного клапана, гидромотор
останавливается практически мгновенно, однако при резком тор-
можении (при мгновенном перекрытии) участок сливного трубо-
провода от гидромотора к дросселю нагружается гидравлическим
ударом [1], а также давлением, обусловленным гашением момента
инерции вращающихся масс. z у
При расчете следует учитывать, что гидропривод позволяет
получить высокую частоту реверсирования, которая для ненагру-
женного гидромотора аксиального типа может быть доведена до
500 реверсирований в минуту. В результате «забросы» давления
при таком торможении могут достигнуть величин, способных раз-
рушить трубопровод и вывести гидромотор из строя.
Испытания показали, что при этих торможениях «заброс»
давления на сливе приводит к рывку вала гидромотора в сторрну,
противоположную направлению вращения при работе. Как пока-
зывают опыты, при частоте вращения 2000 об/мин и рабочем давле-
нии 100 кгс/см2 давление при резком торможении составляло
260 кгс/см2. Для оценки рассматриваемого явления следует учесть,
что в некоторых схемах гидропривода требуется обеспечить очень
резкие остановки вала гидромотора, при которых скорость
нарастания давления достигает 5-104 кгс/см2 в секунду. Наблю-
даемые в этом случае выходы гидромотора из строя вызываются
в основном тем, что при возникающем «забросе» давления акку-
мулируется энергия сжатой жидкости, которая после окончания
торможения отдается системе, вызывая рывок (отдачу) вала в про-
тивоположную сторону. Поскольку энергия сжатой жидкости от-
нимается мгновенно, ускорение вала может быть значительным,
способным вызвать повреждение гидромотора.
Практика показывает, что при длительности торможения по-
рядка 0,15—0,2 с опасных «забросов» давления не наблюдается.
Для предохранения системы и гидромотора'от подобного давле-
ния в сливной линии устанавливают быстродействующий предо-
хранительный клапан b прямого действия (рис. 179, б). Примене-
ние двухкаскадных (двухступенчатых) предохранительных клапа-
нов в этом случае недопустимо ввиду присущего им обычно отно-
сительно большого времени срабатывания [11. Для избежания
возможности такого «заброса» в выходной линии гидромотора часто
устанавливают специальный клапан торможения (подпорный кла-
пан), настройкой которого представляется возможность регулиро-
вать замедление мотора. Понизить «заброс» давления можно также
разгрузкой перед торможением (сбросом давления) питающей ма-
гистрали.
При установке дросселя в линии питания (на входе) (рис. 179, а)
имеем (давлением на сливе в бак пренебрегаем)
Рн = Ардр ^Рм»
432
питания;
где рн = const — давление
Ардр — перепад давления в дросселе;
Лрм — перепад давления в гидромоторе, обусловленный его
нагрузкой.
Отсюда находим
&РДР Рп ^Рм*
Из приведенного ранее (см. стр. 92) известно
л Мт
^Рм w >
где w — — характерный объем гидромотора;
£ «II
Мт и q — расчетный момент и рабочий объем гидромотора.
В соответствии с этим можем написать
Ардр Рн
м.
w
(128)
При установке дросселя на выходе из гидромотора (рис. 179, б)
Рн ^Рм Н” Рвых»
где рвых — давление на выходе гидромотора, создаваемое дросселем
при пренебрежении сливным давлением в линии бака
Рвых АРдР‘
Выполнив подстановки, получим
АРдр=Рн-АРм = Ри-Л1т^. (129)
ч
Из выражений (128) и (129) следует, что при нулевой нагрузке
вала гидромотора (/Ит = 0) расчетное давление рвых на выходе
мотора будет равно давлению ра питания. Ввиду этого, при регу-
лировании гидромотора дросселем в сливной магистрали в ряде
случаев должно быть предусмотрено предохранение уплотнения
валика от действия повышенного давления сверх допустимого для
данного типа уплотнения. В частности, это относится к шестерен-
ным (см. рис. 128) и пластинчатым (см. рис. 113) гидромоторам.
Для предохранения уплотнения от высокого давления перед ним
обычно выполняется дренажная камера, соединенная каналом 11
с атмосферой (см. рис. 113).
Из выражений (128) и (129) также следует, что перепады давле-
ния в схеме с дросселем на входе и на выходе будут при всех про-
чих равных условиях равны между собой и что перепад давления
на дросселях, а следовательно, и расход жидкости через них будет
изменяться в зависимости от крутящего момента 7ИТ, обусловлен-
ного нагрузкой гидромотора. В соответствии с этим при увеличе-
нии нагрузки угловая скорость гидромотора будет понижаться,
а при уменьшении нагрузки — повышаться. Это снижение скоро-
28 Т. М. Башта 433
ста с увеличением момента нагрузки («скольжение гидропривода»)
обусловлено утечками жидкости в насосе и гидродвигателе,
а также в аппаратуре жидкостной магистрали.
Указанная зависимость выражается уравнением расхода Q
жидкости через дроссель с квадратичной зависимостью между рас-
ходом и перепадом давления (шайбовый дроссель) площадью f
П ₽ 1 /ДДдР2# £ 1 /~2 дРдр
'С = н/|/ -у- = н/|/ —•
где |л — коэффициент расхода; для дросселей типа отверстия
в тонкой стенке можно принимать р. = const 0,62;
р и у —^плотность и удельный (объемный) вес жидкости;
g — ускорение силы тяжести.
Учитывая, что Q = wa [см. выражение (14) на стр. 76] рас-
четная угловая скорость гидромотора может быть выражена как
r W у р
Чтобы исключить влияние нагрузки гидромотора на расход
жидкости, а следовательно, и на его скорость, применяют регуля-
торы с гидравлическим редукционным клапаном (рис. 179, в), кото-
рые позволяют обеспечить при |изменении нагрузки гидромотора 3
постоянный перепад давления (постоянное редуцированное давле-
ние рред) на дросселе 2 и соответственно этому — постоянный рас-
ход жидкости. Величина рред = const определяется настройкой
пружины 4, уравновешивающей действие рред на плунжер 1 регу-
лятора.
Конструктивная' схема подобного регулятора, предназначен-
ного для установки в сливной магистрали гидромотора М, приве-
дена на рис. 180, а. Регулятор представляет собой редукционный
клапан поддержания постоянного давления с дросселем 5 постоян-
ного сопротивления на выходе. Рабочая жидкость с давлением рвх
Подводится к редукционному клапану и, пройдя через его щель 3,
поступает с редуцированным давлением рред к дросселю 5 постоян-
ного сопротивления. Редуцированное давление действует через
поршень 1 на плунжер 2 редукционного клапана, смещению кото-
рого противодействует пружина 4. Усилие сжатия пружины
определяет величину редуцированного давления. Л
При изменении входного давления рвх (соответствует давлению
на выходе гидромотора) изменится мгновенный расход жидкости
через щелевой канал 3 автоматического дросселя. Это вызовет
Изменение сопротивления дросселя 5 постоянной настройкой (из-
менение редуцированного давления рред), в результате чего равно*
весне плунжера 2 нарушится И он переместится в новое положение,
в котором потери (перепад) давления Дрщ в щелевом канале 3
дросселя вновь не будут равными разности нового входного рвх
и редуцированного рред давления.
434
Величина реДуййрййаййОго Дайленйя без учета Сил трёнйй
в регуляторе, а также реактивных сил потока жидкости и давле-
ния рсл, обусловленного сопротивлением сливной магистрали,
ведущей в бак, определится по выражению
?пр
Рред= р •
где Рпр — усилие пружины 4;
ndj •
г = -т---площадь поршня 1.
Чтобы устранить влияние на регулятор сливного давления
рсл, действующего на плунжер 2 в направлении действия пружины
а)
Рис. 180. Схемы- регулирования скорости гидромотора с двойным дрос-
селированием
4, сливную магистраль соединяют через осевой канал в плунжере 2
с полостью 6. В этом случае будет обеспечен постоянный перепад
давления на дросселе 5 при всех возможных изменениях давления
рред и перепада давления Дрдр = рред — рсл, которые для этой
схемы определяются выражениями
Для повышения устойчивости регулятора против автоколеба-
ний жидкость с давлением р^ подводится к поршню 1 через
демпфер (дроссель) 7.
В целях повышения чувствительности регулятора следует
уменьшать диаметр d2 плунжера 2 и увеличивать диаметр
поршня 1, отношейие которых доводят до ~ — 5. Кроме того,
“а
следует уменьшать трение подвижных частей.
Величину рред выбирают для случаев установки регуля-
тора в сливной магистрали двигателя не более 0,1—0,2 МПа
(1—2 кгс/см2).
28*
435
Принципиальная схема аналогичного регулятора, предназна-
ченного для установки в напорную магистраль, представлена на
рис. 180, б. Регулятор состоит из соединенных в общем корпусе
двух дросселей 8 и 9. Дроссель 8 представляет собой клапан (ре-
дуктор) с автоматической настройкой сопротивления (перепад
давления Дрх const) в зависимости от редуцированного давле-
ния рред на выходе из него и нагрузки гидромотора /И, а дрос-
сель У — дроссельную шайбу с постоянной (ручной) настройкой
сопротивления (перепад давления на этой шайбе при постоянном
расходе и вязкости жидкости Др3 = const). Жидкость с постоян-
ным входным давлением рн — const поступает (от насоеа или иного
источника расхода) через входное окно 12 и щель, образованную
плунжером автоматического дросселя 8, в проточку (камеру) 10
можру двумя поясками этого плунжера и от нее — к дросселю 9,
пройдя который, направляется к гидромотору.
Для приведенной схемы (рис. 180, б) выходное давление дрос-
селя 9 является рабочим давлением рм гидромотора, которое равно
(тре нием пренебрегаем)
Рм w *
где М и w— момент внешней нагрузки, приложенной к валу
гидромотора, и характерный объем.
Плунжер дросселя 8 в этой схеме находится под действием,
с одной стороны, усилия пружины 11 и силы давления рм на пло-
f2)2 ______________
щадь AFn — —-—j стремящихся сместить его в положение
максимального открытия щели проходного окна 12, а также про-
тиводействующей им силы редуцированного давления рйед =
~ Др3 4~ рм на ту же площадь, где Др2— перепад давления
(сопротивление) в дросселе 9, а ДРП — неуравновешенная площадь
плунжера дросселя 1.
При установившемся режиме будем иметь
Рред ^пр 4“ Арм
ИЛИ
Рред ^Рм 4~
AFn ’
где Рпр — усилие сжатия пружины 11.
На основании последних выражений можем написать
Др2 4“ АРм Арм 4“ •
Откуда перепад давления на дросселе 9
Др2 =
= const.
436
f
Очевидно, при условии сохранения постоянства перепада
давления Ар2 постоянными будут при всех прочих равных усло-
виях и расходы жидкости, независимо от величины момента на-
грузки М гидромотора и входного давления рвх, которое должно
лишь быть несколько больше Арм. Повышение давления рм на
входе в гидромотор, обусловленное увеличением нагрузки М,
нарушит равновесие плунжера дросселя 8, в результате послед-
ний, переместившись вверх, увеличит открытие щели и соответ-
ственно уменьшит сопротивление дросселя (уменьшит перепад
давления ApJ, компенсируя тем самым повышение нацэузки. При
снижении нагрузки М процесс будет протекать в обратном по-
рядке.
72. Объемное регулирование
Для увеличения к. п. д. гидропривода и соответственно —
улучшения энергетических его характеристик необходимо, чтобы
мощность источника питания (насоса) примерно соответствовала
(была несколько больше) полезной мощности привода. Для этого
при мощностях порядка >10 л. с. распространены гидроприводы
с объемным регулированием выходной скорости и реже — с объем-
нодроссельным регулированием (здесь не рассматривается).
Гидропривод с объемным регулированием — объемный гидро-
привод, регулирование которого осуществляется изменением рабо-
чего объема гидромашины.
Объемное регулирование угловой скорости гидропривода (ги-
дропередачи) вращательного движения может осуществляться
изменением рабочего объема насоса при постоянном рабочем объеме
гидромотора (регулирование насосом) (см. рис. 176 и 177, а), либо
изменением рабочего объема гидромотора (регулирование мотором)
при постоянной подаче (рабочем объеме) насоса или же одновре-
менным изменением рабочих объемов как насоса, так и гидромо-
тора, которые в этом случае являются регулируемыми машинами
(см. рис. 177,,б).
В практике распространены гидроприводы, в которых,регули-
рование скорости гидродвигателя осуществляется изменением
лишь подачи насоса путем подачи сигнала управления на «входное
звено» регулируемого насоса.
Гидравлический привод с объемным регулированием, как пра-
вило, имеет закрытую циркуляцию жидкости: жидкость совершает
замкнутый цикл насос — гидродвигатель—насос (см. стр. 447).
Зависимость угловой скорости вала гидромотора от параметра
регулирования, которым для аксиально-поршневых насосов яв-
ляется угол поворота у люльки насоса (см. стр. 182), а для радиаль-
ных насосов — величина эксцентриситета е (см. стр. 113), опреде-
ляет скоростную характеристику гидропередачи.
Теоретическая (расчетная) частота вращения выхода (гидро-
мотора) гидропередачи вычисляется из условий равенства объемов,
описываемых рабочими элементами насоса и гидромотора (порш-
t
437 -
нямн, пластинами и др.) в единицу времени (без учета объемных
потерь):
Qt. н = Qr. м ИЛИ 9н«н==9м«м-
Отсюда теоретическая частота вращения гидромотора
= (130)
Чм
где QT н и QT м — объемы, описываемые рабочими элементами
насоса и гидромотора в минуту (см. выраже-
ние (13)];
п — частота вращения насоса в об/мин;
qH и qM — рабочие объёмы насоса и гидромотора (расчет-
ная подача за один оборот).
Подставив значения qH и qM [см. выражение (41) и (77)], полу-
чим:
а) для гидропривода с машинами радиально-поршневых типов
, (см. стр. 429)
(fi 2
„ ** Н Н__ ' /1О1\
^т. м р ’ »2 Пн ~Г~ К* (1^1)
ин а„гм ем
где k — постоянный для данной передачи коэффициент, характе-
ризующий конструктивные ее параметры;
d2z
\ г н н
с чем
Для передачи, у которой конструкция и размеры насоса и ги-
дромотора одинаковы, коэффициент k. = 1, в соответствии
Ит М=ПН
1 • М П
б) для гидропривода с машинами аксиально-поршневых типов
(см. стр-. 428)
О,..--СМ)
где k — коэффициент, характеризующий конструктивные пара-
метры передачи
D. Л2г'
б. м м м
Из приведенного следует, .что осуществить регулирование
угловой скорости вала гидромотора можно в том случае, если хоть
одна из машин (насос или гидромотор) является регулируемой.
Расчетная (без учета объемных потерь) угловая скорость вала
гидромотора:
а) аксиально-поршневого типа [см. рис. 57, а, а также выраже-
ния (14) и (66)]
(Л = ^т- м — 8Qf. м
Wu ^мгм^д s*n Vm
где — удельный (характерный) объем аксиального гидро-
мотора;
L
= 2л ” 8 м Sin Тм»
От. м ~ Qt. и — теоретическая подача гидромотора;
пм и <ом — частота вращения и угловая скорость вала
гидромотора;
zM — число цилиндров гидромотора;
б) радиально-поршневого типа (см. рис. 28 и 29)
/Л _ Qt. м _ м
где wK = 2л — м * м — удельный (характерный) объем ради-
ального гидромотора.
При регулировании выходной скорости (вала гидромотора)
путем изменения рабочего объема qH насоса при постоянном рабо-
чем объеме qM гидромотора (рис. 181, а) получим при постоянном
перепаде давления жидкости переменную расчетную мощность
NT „ и постоянный крутящий момент Мт м на валу гидромотора
(потерями мощности пренебрегаем) [см. выражения (28)—(30)].
А при регулировании рабочего объема гидромотора при постоян-
ном рабочем объеме насоса (рис. 181, б) получим постоянную
мощность и переменный крутящий момент на валу гидромотора.
При применении насоса и гйдромотора переменных (регулируе-
мых) рабочих объемов расширяется диапазон регулирования,
а также возможность выбора выходных характеристик передачи
по крутящим моментам и мощностям (рис. 181, в). Регулирование
в диапазоне а скоростей осуществляется изменением рабочего
объема насоса при постоянном рабочем объеме гидромотора, а ре-
гулирование в диапазоне b — изменением рабочего объема гидро-
мотора при постоянном рабочем объеме насоса.
Нетрудно видеть, что если выходную скорость аксиально-
поршневого привода регулировать изменением углов наклона
шайбы насоса и гйдромотора или радиально-поршневого насоса —
изменением эксцентриситетов, то• теоретически подобный привод
будет иметь неограниченный диапазон выходных скоростей гидро- х
мотора (частоты вращения) — от бесконечно малого до бесконечно
большого [см. выражения (131) и (132)]. Бесконечно малая частота
вращения соответствует бесконечно малому рабочему объему на-
439
coca (?н) при конечном значении этого параметра для гидромотора
(</м), а бесконечно большая частота вращения — бесконечно ма-
лому рабочему объему гидромотора (</м) при конечном значении
рабочего объема насоса (?н).
К недостаткам привода объемного регулирования относится
большая сложность системы автоматизированного управления ме-
Рис. 181. Принципиальные схемы объемного регулирова-
ния гидр оперед ачи
ханизмом регулирования насоса, для осуществления которого
обычно применяют мощные двухкаскадные гидроусилители, в то
время, как управление золотником в схеме дроссельного регулиро-
вания осуществляется обычно с помощью маломощных и быстро-
действующих однокаскадных гидроусилителей. Поэтому примене-
ние в гидросистемах гидравлического привода с объемным ре-
гулированием может быть целесообразным лишь при больших
(>5000 Вт) мощностях.
+ .
§ 112. Потери мощности и к. п. д. гидропередачи
Скоростные и силовые характеристики гидропередачи в значи-
тельной мере зависят от потерь мощности.
Потери мощности в нераздельной гидропередаче, состоящей из
насоса и гидромотора, равны сумме объемных и механических
потерь, а следовательно, полный к. п. д. передачи равен произве-
ло
дению соответствующих к. п. д. насоса и мотора [см. выражения
(18), (26), (35) и (36):
Лполн == Лоб. нЛоб. мЛмех. нЛмех. м*
Следует иметь в виду, что объемные потери в некоторых пере-
дачах обусловлены также не только утечками, но и отбором части
подачи насоса на обслуживание систем кбнтроля и управления.
Объемные потери определяют соотношения кинематических,
а механические потери — соотношения нагрузочных показателей
режима.
Подставив в последнее выражение значения входящих параме-
тров, получим величину полного к. п. д. нераздельной гидропе-
редачи
__ ^эф. м тор. м Qt.m ^тор. М qM Лэф. м
Лполн Апр. н А4Пр. н QT, н Afnp> н <7Н пн
где
И ^пр. и
— мощности соответственно э
Jill
ективная на
’ эф. м
валу гидромотора и приводная насоса;
пэФ. м и пн — соответственно эффективная (измеренная),
частота вращения гидромотора и привод-
ная частота вращения насоса;
qM и qH — рабочий объем гидромотора и насоса;
Л1тор. м и Л4пр> н — фактический крутящий момент на валу
гидромотора (тормозной момент) и насоса
(приводной момент).
Тормозной момент гидромотора Л/тор м измеряется путем испы-
таний (см. стр. 466).
В
соответствии с этим э
ни
ективная мощность на выходном валу
гидромотора.
N
эф. м
пр. нЛполн*
В передачах раздельного исполнения (см. рис. 176) потери мощ-
ности. вызываются также гидравлическим сопротивлением маги-
стралей (включая местные сопротивления), по которым циркули-
рует жидкость, и в особенности при больших их длинах.
Вследствие этих потерь в соединительных магистралях перепад
давления насоса Дрн = рн — pBt превышает перепад давления
гидромотора Дрм = ри — рсл, т. е. Дрн > Дрм, где рвс, рн, рм
и рсл — соответственно давление на входе в насос (давление вса-
сывания), давление на выходе (давление нагнетания), давление
на входе в гидромотор и давление на сливе гидромотора (рис. 182).
Отношение этих величин, которое оценивает гидравлические
потери в соединительных магистралях, может быть обозначено
Т) = ^0-
|г“ДР Дрн
441
В соответствии с приведенным, общий (полный) к. п. д. гидро-
передачи раздельного исполнения с учетом гидравлического
к. п. д. передачи будет
'Пполн “Лполн. нЛполн. мЯгидр-
В передачах нераздельного исполнения (см. рис. 177) ги-
дравлический к. п. д. не вводится (не рассчитывается). В этом
случае гидравлические потери на пути от точек, в которых измеря-
лись давления, до рабочих камер на-
соса и гйдромотора, а также потери
в Сливных и всасывающих каналах,
войдут в механические потери по-
следних, учитываемые механическим
к. п. д.
Практический интерес предста-
вляет объемный к. п. д. всей пере-
дачи, который вычисляется [см. также
выражения (18) и (25)1
Рн>Рм
я
pff
Рис. 182. Схема к расчету по-
терь мощности
Рп
Рсл
Лоб. пер Лоб. нЛоб. м
<7млэф. м
9
• «
где п9ф.м
и пн — эффективная (измеренная) частота вращения
гйдромотора и приводная частота вращения
насоса (соответствующая QH т);
и qn — рабочие объемы гйдромотора и насоса;
См. т = 7мпэФ. и и Си. т — Янпн — теоретическая подача
соответственно гйдромотора и насоса.
О 500 1000 1500 Z000цианин
Мгкгс п
Н,лс
10
Нзш
500 1000 1500 Z000 fifli/miH
крутящего момента при регулировании
насоса (а) и гйдромотора (б) >
Рнс. 183. Графики потерь мощности и
изменением рабочего объема
На рис. 183 приведены кривые, характеризующие потери
мощности W и крутящего момента М гидропривода при регулиро-
вании скорости выхода изменением рабочего. - объема Насоса
(рис. 183, а) и гйдромотора (рис. 183, б).
При расчетах йоршневого насоса или гидромотора средней
мощности (10—30 л. с.) механический к. п. д. можно принимать
равным 90—96% и объемный к. п. д.—равным 96—98% при
номинальных режимах работы и давлении 150—200 кгс/см2.
Полный к. п. д. передачи обычно равен 80—85%, хотя в отдель-
ных случаях он достигает 90—94%.
§ ИЗ. Характеристика гидропередачи
с учетом объемных потерь
С учетом потерь мощности и величины нагрузки вала гидро-
мотора регулирование может происходить лишь в определенном
диапазоне рабочих объемов машин.
Из уравнений (130) и (30) следует, что при уменьшении рабо-
чего объема qu гидромотора скорость его гиперболически увели-
чивается (при <7И = const; влиянием утечек пренебрегаем), а раз-
к'
Рис. 184. Графики регулирования гидромотора
виваемый им расчетный крутящий момент Л4Т м линейно умень-
шается (рис. 184, а). Минимальный рабочий объем гидромотора
при поппбном регулировании и соответствующая ему максималь-
ная скорость гидромотора ограничивается даже при нулевой
нагрузке вала явлением самоторможения, наступающим в гидро-
моторах при известном уменьшении рабочего его объема до ве-
личины, при которой момент сил трения превышает средний мо-
мент, развиваемый гидромотором. При этом скорость вращения
и крутящий момент гидромотора снижаются до нулевых значений
(см.1|1^^С№ые кривые на рис. 184, а). С учетом же нагрузки
минимялмтяя величина рабочего объема гидромотора ограничена
значением, при котором развиваемый им крутящий момент спо-
преодолеть при.заданном давлении не только сопротивление
тремся в самом гидромоторе, но и нагрузку, приложенную к его
вал
с
I. t
•' ч ч
•' • у? -X '
t
1 1 Г * • •’ V,
443
В равной мере при некоторой малой величине рабочего объема
насоса </н (малом угле ун наклона его диска или малом эксцентри-
ситете е„) вращение вала нагруженного гидромотора (при qM =
— const) может прекратиться вследствие перетекания жидкости
из рабочих полостей насоса и гидромотора в нерабочие, а также
в результате утечек ее в резервуар. Это наступит, как было ука-
зано, при такой величине рабочего объема насоса, при которой
объем Q„ т, описываемый его рабочими элементами, будет равен
утечкам AQH жидкости через зазоры агрегатов гидропривода при
данном давлении [см. выражение (18)1.
Сказанное справедливо для любого направления вращения
насоса. Поэтому рассматриваемый гидропривод будет иметь «мерт-
вую зону» с в положении регулирующего узла насоса, при про-
ходе которой гидромотор не будет вращаться (рис. 184, б).
При работе в режиме холостого хода, когда давление в гидро-
системе близко к нулю (р 0), скоростная характеристика
(кривая а) близка к линейной, проходящей через начало коорди-’
нат. При нагружении мотора и соответственно — повышении
давления в скоростной характеристике (кривая Ь) появляется,
в результате утечек, зона нечувствительности с, характеризуемая
для аксиальных машин углами ±у0, в пределах которых измене-
ния параметра регулирования (угла наклона люльки или эксцен-
триситета) насоса не сопровождается вращением вала гидро-
мотора.
Однако частота вращения пм вала гидромотора задолго до
полной остановки станет неустойчивой вследствие колебания
величин трения и утечек и влияния при малой частоте вращения
пульсации подачи и крутящего момента (см. стр. 129). Следова-
тельно, диапазон регулирования в режиме постоянного крутя-
щего момента (q„ = const) зависит также от минимальной устой-
чивой скорости вращения вала гидромотора.
С учетом указанного явления самоторможения, требования
обеспечения приемлемого к. п. д. и устойчивой частоты вращения
диапазон регулирования гидромотором при постоянной подаче
насоса qH — const обычно не превышает
В машинах общего назначения минимальная скорость вала
гидромотора ограничена частотой вращения п„ = 10 об/мин.
Однако в специальных конструкциях гидромоторов получают
частоту вращения выходного вала до одного и менее оборотов
в минуту.
Статические характеристики при различных способах регули-
рования скорости гидропривода аксиально-поршневого типа (см.
рис. 177, а) представлены на рис, 185, б. Кривые М, N и п соот-
ветственно выражают изменения крутящего момента, мощности и
частоты вращения выходного вала передачи в зависимости от
параметров и —И—, причем индексы «т» и «эф» соответ-
Ym max Yh max
444
ственно обозначают теоретические и эффективные (фактические)
значения. Расчетные значения рассматриваемых параметров изоб-
ражены сплошными, а практические — штриховыми линиями.
Зона а соответствует регулированию по насосу при = const,
а зона б — регулированию гйдромотора при ун = const. При
совместном применении обоих способов регулирования одновре-
менно изменяются две величины — выходная скорость и крутя-
щий момент, развиваемый на валу гйдромотора.
Если рабочие объемы насоса и гйдромотора постоянны, то
скорость вала гйдромотора будет также постоянной, и при полной
герметичности гидросистемы и жесткости ее компонентов не будет
зависеть от величины нагрузки, приложенной к валу гйдромотора,
а также от частоты его вращения. В этом случае изменение на-
грузки вызывает лишь изменение давления в трубопроводе, соеди-
няющем насос и гидромотор (изменение перепада давления Ар
в гидромоторе). Этот перепад давления согласно выражению (30)
2этЛ1
пропорционален величине нагрузки: Ар = ——L.
7м
Если угловая скорость насоса постоянна, то перепад Ар
давления определяется отношением полного момента нагрузки на
выходном валу к рабочему объему гйдромотора. В статическом
режиме полный момент сводится, если пренебречь трением,
к моменту внешнего сопротивления, к которому при динамическом
режиме добавляется момент инерционной нагрузки.
Подачу (рабочий объем) насоса можно регулировать, при
обеспечении удовлетворительного к. п. д., в диапазоне 50:1,
а гидромотор — в диапазоне 10 : 1. Однако часто общий диапазон
регулирования передачи с регулируемым насосом и гидромотором
выполняют (при практически допустимом снижении к. п. д.)
равным 1000 : 1.
Для изменения направления вращения гйдромотора необхо-
димо изменить направление потоков жидкости к его каналам
445
питания и слива на противоположное. В схеме передачи с насосом
постоянной подачи это может быть осуществлено изменением
направления потока жидкости от насоса к гидромотору с помощью
какого-либо распределительного устройства 3 (см. рис. 4. б),
а в схеме с регулируемым насосом — изменением направления
подачи жидкости насосом (см. рис. 4, а). В последней схеме должны
быть предусмотрены обратные (запорные) клапаны подпитки 8,
автоматически отсоединяющее рабочие полости машин от резер-
вуара.
В практике распространены гидроприводы с регулируемым
насосом и. нерегулируемым гидромотором. Однако такой привод
оказывается нерациональным (излишне тяжелым), если необхо-
димо передать большую мощность при широком колебании мо-
мента на валу гидромотора, что требуется, например, в трансмис-
сиях транспортных машин (тракторов и пр.). Ввиду этого в таких
случаях применяют, в основном, приводы как с регулируемым
насосом, так и с регулируемым гидромотором (см. рис. 181, в).
Пример. Рассчитать по заданным мощности на валу гидромотора и частоте
его вращения наибольшую величину регулируемых рабочих объемов гидромо-
тора (gM max) и насоса (qn Иах) гидропередачи с учетом объемных и механиче-
ских потерь в машинах (гидравлические потери в трубопроводах не учитывать).
Давление в напорной линии гидропередачи (на входе в гидромотор) рм = 15 МПа
(150 кгс/см2); полезная эффективная мощность гидромотора Л/эф “ 20 л. с.;
частота вращения пм = 2500 об/мин; фактическое передаточное отношение гидро-
передачи при максимальной величине рабочих объемов насоса , и гидромотора
i ~ — = 2; объемный к. п. д. насоса (Лзб. н)> гидромотора (Лоб. м) и механиче-
Лн
ский к. п. д. гидромотора (тЫех. м) на номинальном режиме работы равны: т]об. н—
= 0,92;, ты. м = 0,95; qMex. м ” 0,95.
Решение. Поскольку величина регулируемого рабочего объема гидромотора
(<ум) определяется, при всех прочих равных условиях, величиной момента нагрузки
(полезным сопротивлением), а рабочий объем насоса — потоком жидкости,
потребляемой гидромотором, можем написать [см. выражение (31) J.
^м. эф
Мм. эф = 71 620——
^7=86,5 кгс см (8,65 Н-м).
Пользуясь выражениями (30) и (36), можем написать
м, эф 2лЛ1уф эф
'Пиех, ы MMt т щахрм
*
4
Отсюда искомый максимальный объем гидромотора
г
2яЛ4к, эф
qu = ЙЛмех-м " 15-10’ 0,95
2.3,14-8,65 =12>65.10-»m’
или
2яМм.эф 2.3,14-86,5 .„ск .
“ РмПмех. м ~ 150-0,95 “ 12,65 СМ ’
446
Передаточное отношение рассматриваемой гидропередачи
?н шах
<7м шах
Лоб. нПоб. it-
Отсюда искомый рабочий объем насоса
л = Смитах __ 2-12,65»10 6 __ -
9ншах W нПоб. и 0,92.0,95 29 °
или
2-12,65 ,
9нтах 0,92-0,95 29 С ’
§ 114. Открытые
и закрытые гидропередачи
Гидропередачи выполняются по открытой и закрытой (замкну-
той) схемам, причем могут регулироваться изменением рабочего
объема как насоса, так и Гйдромотора.
В открытой схеме гидропередачи всасывающая полость на-
соса 1 и сливная полость гйдромотора 2 соединены непосредственно
с баком 5, сообщающимся с атмосферой, в который отводится
(сливается) без давления жидкость гйдромотора (рис. 186). В таких
схемах питание насосов жидкостью обеспечивается атмосферным
давлением ратм. Последняя система с самовсасывающим насосом
и свободным сливом масла из гидродвигателей в бак (система
открытой схемы) конструктивно проста и требует, кроме насоса
и гидродвигателя, лишь клапана ограничения давления для за-
щиты от перегрузки, а также переключающегб клапана для
включения и выключения гидродвигателя и для реверсирования.✓
Однако такие системы пригодны лишь в том случае, когда не
требуется во время эксплуатации реверс направления вращающего
момента.
Закрытые схемы гидропередач — системы, в которых про-
странства с низким давлением (всасывающая полость насоса и
сливная полость гйдромотора) отделены от атмосферы. В этой
схеме (рис. 186, б) в бак отводится лишь часть циркулирующей
В системе жидкости, магистрали же всасывания насоса и слива
гйдромотора находятся под постоянным давлением насоса под-
качки.
Для этого магистрали соединены ^вспомогательным насосом 4,
который через обратные клапаны 8 подает в них жидкость под
постоянным давлением, устанавливаемым переливным клапаном 5.
Для избежания чрезмерного нагревания циркулирующей в си-
стеме рабочей жидкости предусмотрен некоторый обмен ее, дости-
гаемый .перепусканием части жидкости из полости низкого давле-
ния в резервуар через золотник 7 и подпорный клапан 6. В за-
висимости от направления вращения гйдромотора золотник 7
447
'I
автоматически соединяет полость низкого давления с резервуа-
ром 5. Благодаря ограниченной циркуляции жидкости объем
резервуара в этих схемах может быть значительно (в 1,5—2 раза)
меньше объема бака открытых систем.
К гидропередачам по закрытым схемам относят также системы
с герметичными баками, в которых создается путем искусственного
наддува их каким-либо инертным газом давление выше атмосфер-
ного. В частности, такие системы применяют в высотных самоле-
тах. Давление наддува, как и давление жидкости вспомогатель-
Рис. 186. Схемы открытой
и закрытой гидросистем
кого (подкачивающего) насоса, должно обеспечивать надежное
заполнение (питание) рабочих полостей основного насоса, а в схе-
мах насосов, где не предусмотрено принудительное механическое
перемещение (ведение) поршней (см. рис. 84), — обеспечить также
и перемещение последних.
Применяются также баки, в которых жидкость отделена от
газа плавающим поршнем 9, нагруженным пружиной 10 или
давлением сжатого газа (рис. 186, в). Жидкость под давлением,
создаваемым пружиной, поступает к насосу /, питающему гидро-
двигатель 2. Применение подобной закрытой системы устраняет
возможность попадания газа в жидкость, а применительно к са-
молетным гидросистемам допускает перевернутый полет самолета.
К преимуществам закрытой системы также относится более
высокая возможность применения гидропривода в стесненных
габаритных условиях и, в частности, когда установка насоса
448
и бака в одном месте затруднена. Закрытая система позволяет
размещение насоса и гидродвигателя в разных местах и на разных
уровнях.
При закрытой системе проще обеспечить качественное регули-
рование частоты вращения гидромотора, а также лучшую, благо-
даря применению здесь реверсируемого регулируемого насоса,
управляемость гидропривода.
§ 115, Гидропередачи с постоянной выходной
скоростью
Регулирование выходной скорости гидропередач осуществ-
ляется вручную или автоматически с обеспечением заданных
параметров. В практике широко распространены передачи, авто-
матически обеспечивающие постоянную (стабильную) частоту
вращения выходного вала при переменной частоте вращения вала
насоса и переменной на-
грузке на валу гидромо-
тора. Такая передача ис-
пользуется, например, в
гидроприводе генератора
переменного тока самоле-
тов, частота вращения
двигателей которых может
изменяться в широком диа-
пазоне (примерно 4 : 1) в
зависимости от условий
полета самолета. Подоб-
ная передача называется
стабилизированной.
Т ребуемая стабилиза-
Рис. 187. Принципиальная схема гидропе-
редачи стабильной выходной частоты вра-
щения
ция выходной скорости
может быть осуществлена с помощью центробежного или элек-
трогидравлического регулятора, воздействующего через усили-
тельное звено на механизм, управляющий подачей насоса.
Принципиальная схема гидропередачи с центробежным регу-
лятором скорости приведена на рис. 187. Передача состоит из
насоса 5, устанавливаемого на авиационном двигателе, и гидро-
мотора 6, вал которого соединен с приводимым электрогенера-
тором (нагрузкой). При изменении выходной скорости гидромо-
тора связанный с ним центробежный регулятор 1 воздействует на
распределительный золотник 2, который, подавая жидкость в ги-
дроцилиндр 3 механизма регулирования подачи (угла наклона
диска 4) насоса, устраняет рассогласование, поддерживая тем
самым выходную скорость постоянной.
На рис. 188 представлена конструктивная схема подобного
гидропривода постоянной скорости с центробежным регулятором 9
29 Т. М. Байта
449
и датчиками регулирования скорости типа сопло — заслонка.
Источником подачи является сдвоенный насос аксиально-поршне-
вого типа с наклонными цилиндрами, питаемый из бака 1.
Один из насосов (6) — нерегулируемый, а второй (7) — регу-
лируемый путем изменения угла наклона диска 8 с помощью
поршня 4 сервоцилиндра регулятора. Сигнал на изменение ре-
жима подачи насоса 7 подается центробежным регулятором 9,
сидящим на валу нерегулируемого гйдромотора 11 той же кон-
Рис. 188. Конструктивная схема гидропередачи стабильной частоты вращения
струкции, что ^нерегулируемый насос 6. При изменении частоты
вращения вала гйдромотора 11 центробежный регулятор 9 воз-
действует через рычаг 10 на заслонку 13 датчика. В результате
изменяется давление в правой полости сервоцилиндра 5, пор-
шень 4 которого приводит в движение наклонный диск 8 насоса.
Поршень 4 снабжен дросселем 3 для гашения колебаний. Пру-
жина 12 возвращает заслонку 13 по прекращении сигнала регу-
лятора в закрытое положение.
Эта схема аналогична ранее рассмотренной схеме автоматиче-
ского регулятора подачи насоса (см. рис. 167), отличаясь лишь
тем, что перемещение заслонки 13 здесь осуществляется сигналом
центробежного регулятора 9, тогда как в насосе, схема которого
приведена на рис. 167, осуществляется по сигналам датчика
давления.
Гидравлическая система привода снабжена пружинным демп-
фером (аккумулятором) 14 для демпфирования возможных коле-
баний и «забросов» давления в системе регулирования.
Система снабжена также предохранительным клапаном 2,
который при перегрузке гйдромотора воздействует на механизм
управления диском 8 регулируемого насоса 7.
450
§ 116. Гидромеханические (дифференциальные)
передачи постоянной выходной скорости
К. и. д. гидропередачи, состоящей из регулируемого насоса
и нерегулируемого гидромотора, достаточно высок лишь при
оптимальных режимах работы (см. стр. 180), при отклонении от
которых он уменьшается. Следовательно, для многих случаев
применения рациональной будет такая схема привода, в которой
передача мощности происходит в основном через механические
звенья (по механическому каналу) и лишь небольшая ее часть,
требующаяся для регулирования, передается по гидравлическому
Гидрвмогтюр
насос
Рис. 189. Схема гидромеханической передачи вращательного движения
каналу. При этом стремятся к тому, чтобы мощность, передавае-
мая по последнему каналу, составляла возможно малую часть
общей мощности. Этой минимальной частью является мощность,
требуемая для устранения отклонений скорости выхода привода
от заданной. Это достигается тем, чтр при таком отклонении
скорости выходному валу передачи добавляется положительная
или отрицательная скорость, требующаяся для поддержания
номинального ее значения.
Схема распространенной гидромеханической передачи подоб-
ного типа с регулируемым насосом и нерегулируемым гидромото-
ром, валы которых 7 и 3 связаны через планетарный механизм,
показана на рис. 189. Собственно гидравлический привод (насос
и мотор) обеспечивает в этом механизме лишь подачу на выходной
вал 3 дифференциальной скорости в случае ее отклонения от но-
минального значения (повышения или понижения).
Это достигается тем, что механизм регулирования насоса —
наклонный диск 6 (см. рис. 189) связан через рычаги и гидроуси-
литель с центробежным регулятором 5, реагирующим на измене-
ние скорости выходного вала 3. Если этот вал вращается с задан-
ной скоростью, центробежный регулятор удерживает с помощью
гидроусилителя диск 6 насоса в положении нулевого угла на-
клона (у = 0), что соответствует нулевой подаче насоса и нулевой
451
скорости вала 4 гидромотора. В этом случае передача скорости
и мощности с входного 7 на выходной 3 валы будет происходить
лишь через механический канал: коронная шестерня 2 планетар-
ного механизма будет находиться в покое, а сателлитные шестерни
этого механизма, перекатываясь по внутренним зубьям коронной
шестерни, будут сообщать вращение зацепляющейся с ним ше-
стерне 5, находящейся на выходном валу 3,
При уменьшении скорости выходного вала 3 ниже заданной
центробежный регулятор установит наклонную шайбу 6 насоса
в положение у > 0, в результате гидромотор и связанная с ним
коронная шестерня 2 планетарного механизма придут во враще-
ние в противоположном направлении, повышая скорость выходного
вала 3 до заданной (номинальной) величины.
При превышении выходной скоростью ее номинального зна-
чения центробежный регулятор уменьшит угол у наклона .диска,
в результате скорость выходного вала понизится до заданной.
Иначе говоря, гидромотор, питаемый от насоса, находящегося
на входном валу 1 (см. рис. 189) планетарного механизма 2,
вращаясь в ту или иную сторону, ускоряет или замедляет по
сигналам центробежного регулятора частоту вращения выход-
ного вала 3 планетарного механизма.
§ 117. Гидродифференциальные передачи
Рассмотренное выше дифференцирование передаваемой мощ-
ности можно осуществить также применением специальных ги-
дродифференциальных передач, где оба канала, по которым на
выходной вал передается мощность, являются жидкостными.
Принципиальная схема одной из таких передач представлена
на рис. 190. Передача состоит из двух аксиально-поршневых машин
с наклонными дисками, заключенных в общий корпус 4, уста-
новленный на подшипниках 3 и 7 и получающий вращение через
шестерни 5 и 9 от приводного (входного) вала 6. Распределение
осуществляется плоскими золотниками, жестко установленными
в корпусе 4, а питание жидкостью — через вращающееся соеди-
нение (на схеме не показано).
Выходным является вал 1 левой машины, связанный с наклон-
ным диском 2; эта машина обычно выполняется нерегулируемой
(у2 ~ const), тогда как противоположно расположенная машина
(с регулируемым наклонным диском 8) выполняется регулируемой
(yi const). В практике первую машину (с у2 = const) условно
называют гидромотором, а вторую (с ух =4 const) — насосом, хотя
строго говоря это не точно, поскольку каждая из машин работает,
в зависимости от заданного режима, как в насосном, так и в мо-
торном режимах.
Рассмотрим принцип действия этой передачи. Если наклонный
диск 8 будет установлен в нулевое положение (уг = 0), произойдет
вследствие устранения возможности циркуляции жидкости в си-
452
стеме насос — гидромотор жесткое соединение с корпусом 4
через запертую (защемленную) жидкость в цилиндрах блоков
обеих машин. В результате обеспечивается жесткая связь вход-
ного 6 и выходного 1 валов (корпус 4 и выходной вал 1 вращаются
как одно целое). Расчетная скорость выходного вала явых в этом
Рис. 190. Принципиальная схема передачи гидродифференциального типа
случае определится лишь передаточным числом пары шестерен 5
и 9 (утечками жидкости пренебрегаем):
»^вых
где пвх — скорость входного вала;
z5 и л, — числа зубьев шестерен 5 и 9,
При равном числе зубьев шестерен z5 = zQ имеем
^вых ^вх*
В действительности будет иметь место некоторое отставание
вала 1 от вала 6 (рис. 190), величина которого будет зависеть от
утечек жидкости, запертой в цилиндрах машин.
При наклоне диска 8 насоса в какую-либо сторону вал 1 ги-
дромотора будет получать, помимо основного движения вместе
с корпусом 4, еще и относительное движение, которое в зависи-
мости от направления подачи насоса (в зависимости от знака
будет либо увеличивать, либо уменьшать основную скорость вы-
ходящего вала 1. В первом случае (в ускоряющем режиме) регу-
лируемая машина с диском 8 работает в качестве насоса и подает
жидкость в рабочую полость нерегулируемой машины с диском 2.
В результате связанный с этой машиной выходной вал / будет
453
получать, помимо основной скорости, с которой вращается кор-
пус 4, дополнительную скорость.
При изменении знака рабочая полость машины с диском 8
соединяется с нерабочей (всасывающей) полостью машины с ди-
ском 2 и часть жидкости из рабочей полости первой машины
будет забираться второй машиной (гидромотор работает в этом
случае в режиме насоса, а насос — в режиме мотора). Вследствие
этого выходной вал 1 будет «проскальзывать» относительно вала 6
насоса, в результате частота его вращения уменьшится.
Скорость пвых выходного вала 1 при работе регулируемой
машины в качестве насоса и нерегулируемой — в качестве гидро-
мотора, определится как (передаточное число шестерен 5 и 9
принимаем равным единице и размеры машин одинаковыми)
Соответственно крутящий момент Л1вых на выходном валу
будет
Л4ВЫХ = Мпп — AfM,
ddIA iip
где Л1М — крутящий момент, развиваемый гидромотором (в дан-
ном случае нерегулируемой машиной);
Л4пр — крутящий момент, передаваемый на корпус 4 привод-
ным валом 6\
Мпр = Мвых
При работе нерегулируемой машины в качестве насоса и ре-
гулируемой — в качестве гидромотора скорость выходного вала 1
будет меньше скорости входного вала 6 (передаточное число
шестерен 5 и 9 принимаем равным единице) -и определится по
выражению
^вых
tgy2 \
tgyi /
Крутящий момент Л4ВЫХ на выходном валу 1 в этом режиме
при той же входной мощности равен сумме моментов гидромотора
(в данном случае — регулируемой машины) 7ИМ и момента Л4пр
на корпусе 5, передаваемым приводным валом:
/Ивых = ^пп + Мм.
DDIA * М.
Из приведенных уравнений следует, что при ух = О выходная
скорость равна (без учета утечек) входной скорости:
^вых ^вх*
Мощность ЛГТ, передаваемая потоком рабочей жидкости (без
учета механических потерь в передаче), выразится:
454
при работе гидропередачи в режиме повышения выходной
скорости
AL = N ( 1 —
\ ЛВЫХ
при работе гидропередачи в режиме уменьшения этой скорости
где ЛГТ — теоретическая мощность, передаваемая через по-
ток жидкости;
N — общая мощность гидродифференциальной пере-
дачи;
Мвх И пвых — скорость входного и выходного валов.
На рис. 191 показана конструктивная схема передачи гидро-
дифференциального типа с аксиально-поршневыми машинами
(насосом и гидромотором) с наклонным расположением цилиндров.
Одна из машин (насос) 2 связана с входным валом 1 и имеет регу-
лируемую подачу (рабочий объем), а вторая 3 связана с выход-
ным валом 4 и имеет нерегулируемую подачу. Распределение
жидкости осуществляется с помощью плоских золотников 5.
Насос 2 питается от вспомогательного насоса подпитки жид-
костью (на рис. 191 не показан) под давлением 7 кгс/см2.
На рис. 192 показана схема гидродифференциальной передачи
самолетного электрогенератора. Цилиндровый блок 2 насоса
приводится во вращение от двигателя через входной вал 6 и ше-
стерни 7 и 1 с частотой вращения, пропорциональной частоте вра-
щения приводного (входного) вала 6. Производительность насоса
зависит от изменения угла наклона шайбы 4, которое осуществ-
ляется гидроусилителем 3. Датчиком рассогласования служит
золотник с электромагнитным приводом 5, который реагирует на
изменение частоты вращения насоса. Тахогенератор электро-
гидравлического регулятора приводится в действие от червячной
шестерни 3.
Насос 10 обеспечивает смазку, а насос 9 служит для под-
качки и питания механизма регулирования расхода основного
насоса. В силовой линии передачи установлен переливной кла-
пан (давление 1,7 МПа или 17 кгс/см2), благодаря которому
в ней поддерживается давление, необходимое для регулирования
подачи насосной части и перемещения ее поршней.
Частота вращения выходного вала 11, связанного с нагрузкой
приводимым электрогенератором, равна 6000 об/мин; частота
вращения входного вала 6, связанного с двигателем, переменная —
от 2400 до 9000 об/мин.
Преимуществом
гидродифференциальной
передачи рассма-
триваемой схемы является возможность применения в гидравли-
ческой части высокой частоты вращения, что позволяет значи-
455
2.
Рис. 191. Конструктивная схема гидродифференциальной передачи
тельно, уменьшить ее массу и габариты. Для получения высоких
частот вращения насосную часть снабжают шестеренной парой.
На выходном валу 11 применена шестеренная пара 12, понижа-
ющая частоту его вращения до требуемой.
Рис. 192. Конструктивная схема гидродифференциальной передачи постоянной
выходной скорости
Опыт показал, что дифференциальная гидропередача с центро-
бежным регулятором и жесткой обратной связью обеспечивает
стабильность частоты вращения в пределах ±5%.
§ 118. Электрогидравлическое дистанционное
управление гидропередачей
Для регулирования подачей насоса и, соответственно, вы-
ходной скоростью гидромотора гидропередачи используются ги-
дравлические усилители с дистанционным электрогидравлическим
457
управлением. В частности, широко распространены двухкаскадные
гидроусилители с соплом-заслонкой и электрическим входом [1].
Привод заслонки обычно осуществляется с помощью электро-
механического преобразователя с поворотным якорем электро-
магнита, связанным с заслонкой усилителя. Преобразование
электрического сигнала, управляющего углом поворота заслонки,
обычно осуществляется с помощью электромеханического преоб-
разователя, принцип действия которого основан на взаимодей-
5 б
7J
Рис. 193. Схема автоматического дистанционного управления гидро-
передачи вращательного движения с использованием двухкаскадного
гидроусилителя с соплом—заслонкой
ствии двух магнитных потоков, создаваемых токами, протека-
ющими по обмоткам возбуждения и управления электромагнита.
В случае равенства токов в катушках управления, магнитный
поток управления будет равен нулю. При нарушении же равен-
ства этих токов возникнет магнитный поток, пропорциональный
разности токов, под действием которого якорь, а вместе с ним и
заслонка усилителя поворачиваются.
На рис. 193 представлена принципиальная схема подобной
гидропередачи регулирования. Она состоит из: а) регулируемого
рабочего насоса 9, который управляется с помощью питаемого вспо-
могательным насосом гидроусилителя 2 типа сопла—заслонки
с электромеханическим преобразователем 1 и б) нерегулируе-
мого гидромотора 12. При смещении заслонки 2 из среднего
положения равенство давлений между поршнями 4 и 15 и золот-
ником будет нарушено и плунжер 3 сместится на некоторую ве-
личину, пропорциональную углу поворота заслонки, подавая
жидкость в соответствующий цилиндр 5 или 14, поршни 6 и 13
которых осуществляют поворот люльки насоса.
458
При среднем положении плунжера 3 жидкость в цилиндры 5
и 14 поступать не будет. Если давление в цилиндрах 5 и 14 оди-
наково, то рычаг 8 управления поворотом люльки насоса будет
находиться в среднем положении. Жесткая обратная связь на
поршни осуществляется с вала 11 люльки насоса с помощью
качающегося рычага 10 и жесткой рамы 7.
Опыт показывает, что в электромеханическом преобразова-
теле, выполненном в виде поворотных электромагнитов, угол
поворота якоря (1°) строго пропорционален напряжению на
управляющей обмотке электромагнита.
ГЛАВА XII
ИСПЫТАНИЯ ГИДРОМАШИН
И ШУМ ПРИ ИХ РАБОТЕ
Одним из важных этапов создания конструкций гидромашин
является их исследование в лабораторных и производственных
условиях с целью: а) определения рабочих характеристик; б) изу-
чения внутренних процессов и влияния их на потери мощности
и силовой режим гидромашины; в) выявления зависимости на-
дежности гидромашин от различных факторов и изучения эксплуа-
тационных качеств машин. Основными параметрами, исследуе-
мыми при испытаниях гидромашин, являются расход и давление
жидкости, величина крутящего момента, частота вращения вала
и температура жидкости, а также к. п. д. машины.
При оформлении результатов испытаний в форме графиков
значения функции определяются не менее, чем в пяти точках.
За результат измерения обычно принимается среднее арифмети-
ческое не менее трех повторных измерений.
§ 119. Снятие объемных характеристик гидромашин
Снятие объемных характеристик [Q = f (р, и, /), где р, п
и t — давление, частота вращения и температура! обязательно
для всякой гидромашины. Испытания насосов и гидромоторов
производятся раздельно.
Измерение потока жидкости производится либо прямым ме-
тодом — непосредственно специальными приборами, либо косвен-
ными методами — объемным и весовым.
При объемном методе определяют объем жидкости мерами
вместимости и одновременно — время заполнения мерного со-
суда. В целях повышения точности измерения время, в течение
которого заполняется мерный сосуд, должно не менее, чем в 25 раз
превышать время, необходимое для ввода и отвода потока жид-
кости (время срабатывания устройства, переключающего поток).
Величина расхода (потока) Q жидкости в единицу времени опре-
деляется при этом методе по формуле
где V — объем жидкости, заполнившей
t — время заполнения жидкостью
мерный сосуд;
объема мерного сосуда.
460
При весовом способе на весах устанавливают измерительную
емкость и определяют время ее заполнения измеряемым потоком
жидкости. Общее количество взвешиваемой жидкости должно
быть таким, чтобы вес ее был не меньше, чем вес пустой измери-
тельной емкости. Весы подбирают по грузоподъемности и точ-
ности. Величина потока жидкости определяется по формуле
____ G __
" ty /р ’
где G и т — вес и масса жидкости, заполнившей измерительную
емкость;
t — время заполнения рабочей жидкостью измеритель-
ной емкости;
?ир — удельный вес и плотность жидкости.
Рис. 194. Схемы расходомерных устройств
Для измерения расхода применяют также различные расхо-
домерные устройства (счетчики) поршневых и дисковых типов
(рис. 194, а), счетчики с овальными шестернями (рис. 194, б),
а также приборы без вращающихся частей, наиболее распростра-
ненными из которых являются ротаметры, расходомеры — диф-
ференциальные манометры и пр. [12].
Простейшим из расходомерных устройств является ротаметр
(рис. 195), представляющий собой дроссельный измеритель с пере-
менным сечением щели и постоянным сопротивлением. Перемен-
ность проходного сечения достигается тем, что в вертикально
461
установленную конусную стеклянную или металлическую трубку
помещают поплавок плотностью, большей плотности жидкости.
При подаче жидкости в нижнюю узкую часть трубки поплавок
займет такое положение по высоте, при котором перепад давления,
создаваемый сопротивлением кольцевого сечения, образованного
поплавком и трубкой, уравновесит разницу в весе поплавка и
весе жидкости в объеме поплавка.
Рис. 195. Схема ротаметра
В результате каждому расходу будет
соответствовать определенное поло-
жение поплавка по высоте.
Применяя закон Архимеда, можно
написать
откуда
Q
НИМ .. ..* *' J _ J J
(рп ~~ Рж)
F пРж
где
Q — расход жидкости;
/ — проходное сечение кольцевой щели, образованное
бортиком поплавка и трубкой;
Уп — объем поплавка;
Рп и Рж — плотность поплавка и измеряемой жидкости;
Fn — площадь поперечного (лобового) сечения поплавка
в широкой его части;
р — коэффициент расхода (для первоначальных рас-
четов можно принимать р = 0,62).
Путем выбора соответствующей конусности трубки можно
обеспечить при прочих равных условиях приемлемое для точности
отсчетов соотношение между измеряемым расходом жидкости
и перемещением поплавка. Градуирование прибора производится
тарированием.
Испытания показали, что прибор имеет удовлетворительную
точность измерения при относительно широком диапазоне вяз-
костей жидкости. Для повышения точности измерения приборы
можно градуировать для жидкостей определенной вязкости.
Для уменьшения влияния вязкости жидкости на точность
измерения поплавок конструктивно выполняют так, чтобы про-
ходная щель имела острые кромки. Кроме того, необходимо
обеспечить концентричное положение поплавка в трубке, что
может быть обеспечено принудительным направлением его в трубке
при помощи концентрично расположенной металлической струны
(рис. 195, а) или иных средств. В некоторых случаях центрирова-
ние осуществляется сообщением поплавку вращательного движе-
ния, для чего на верхнем буртике поплавка выполняют наклонные
462
(винтовые) канавки (рис. 195, б). Вращение поплавка повышает
также чувствительность ротаметра.
При конструировании ротаметров необходимо свести к мини-
муму влияние изменения плотности измеряемой жидкости. Для
этого рекомендуется выдержать соотношение рп = 2рж.
Ротаметры допускают большо.1 интервал отношения расходов
, который достигает 10 : 1. Расход жидкости можно опре-
ЧЛ11П
дел ять по шкале, нанесенной непосредственно на приборе, или же
с помощью электро- или пневмодатчиков.
Из прочих измерительных устройств в гидросистемах распро-
странены счетчики с дисковым поршнем (см. рис. 194, п). Жид-
кость, расход которой измеряется, приводит в колебательное
движение дисковый поршень 6, число колебаний которого, про-
порциональное количеству протекающей жидкости, учитывается
счетным механизмом а.
Приборы этого типа обладают высокой чувствительностью
и точностью измерения. Характеристики этих измерительных
устройств приводятся в заводских технических документах.
Счетчики с овальными шестернями для измерения расхода
(см. рис. 194, б) пригодны для жидкостей с вязкостью от 6 до
60 сСт при расходе до 1000 л/мин. Погрешность этих счетчиков
не превышает ±0,5%.
В испытательных заводских лабораториях широко применяют
для этой цели стандартные объемные гидромашины, преимуще-
ственно аксиально-поршневых типов, которые работают в этом
случае в качестве гидромоторов с нагрузкой валика, практически
равной нулю. Расход Q в этом случае определяется измерением
частоты вращения и:
Q = tiq,
где q — рабочий объем машины.
Поскольку перепад давления в таких расходомерных маши-
нах ничтожен (часто составляет долю атмосферы), утечки жид-
кости практически отсутствуют (rjo6 1), в соответствии с чем
точность прибора определяется лишь точностью измерения частоты
вращения. При требованиях особо высокой точности применяют
для измерения скорости специальные импульсные счетчики, при
использовании которых ошибка измерения может быть доведена
до 0,1—0,2%.
Рабочий объем гидромашины определяют при испытаниях
путем перекачивания при медленном вращении вала (10—
20 об/мин) рабочей жидкости из подпитывающего бака, в мерную
емкость (см. рис. 17). Жидкость в баке находится при этом на
уровне или несколько выше уровня входного патрубка насоса.
Размеры бака должны быть достаточными для того, чтобы пони-
жение в нем уровня жидкости при измерении рабочего объема
не превышало 150 мм. Открытый конец сливной трубы должен
463
находиться на одной высоте со средним уровнем рабочей жид-
кости в баке.
Принципиальная гидравлическая схема простейшей уста-
новки для снятия объемных характеристик насоса показана на
рис. 196, а. Насос /, приводимый через бесступенчатый редук-
тор 15, забирает жидкость из бака, снабженного охладительным 11
и нагревательным 13 устройствами. Регулирование количества
охлаждающей воды производят дросселем S. Температуру масла
в баке измеряют термометром 14. От насоса рабочая жидкость
Рис. 196. Схемы установок для испытаний насосов (а) и гидро-
моторов (б)
через дроссель 5 и кран 6 переключения направляется либо
в расходный бак 9, либо в расходомерный бак 7 или иное расходо-
мерное устройство, включаемое после нагрузочного дросселя 5.
Из измерительного бака (расходомера) 7 жидкость через кран 10
сливается в расходный бак.
На всасывающей магистрали насоса установлен дроссель 12
для регулирования сопротивления (вакуума) на всасывании, ве-
личина которого измеряется с Помощью ртутного манометра 2.
Давление на выходе измеряют манометром 4, *в линии которого
установлен для устранения колебаний стрелки демпфер (дрос-
сель) 3.
При испытаниях гидромоторов 17 (рис. 196, б) количество
жидкости, подаваемое насосом 16, измеряется расходомером 18,
включенным в сливную магистраль гйдромотора. При таком
способе измерения утечки жидкости через зазоры гйдромотора,
которые обычно измеряются мензуркой 19, должны быть добав-
лены к показаниям расходомера.
При этом способе измерения не учитывается объем сжатия
жидкости, поскольку расходомером измеряется жидкость под
нулевым, а не рабочим давлением. Однако при точных исследова-
ниях, например характеристик гйдромотора высокого давления,
464
часто требуется измерить расход на входе в него, который будет
меньше расхода на выходе на величину сжатия жидкости под
действием перепада давления. В этом случае необходимо ввести
поправку с учетом сжатия жидкости:
Qp - Сд(1 +₽Ар),
где Ср •— расход жидкости, измеренный расходомером, уста-
новленным в магистрали низкого давления;
Qa действительный расход жидкости через магистраль
высокого давления;
Ар — перепад (разность) между давлением в магистрали
высокого давления и в магистрали, где установлен
расходомер;
0 — коэффициент объемного сжатия жидкости (см. стр. 40);
для рабочих минеральных масел можно принимать
для давления 7—20 МПа (70—200 кгс/см2) в среднем
60-10“6—56-10“6 см2/кгс.
Ошибку в измерения вно-
сит также наличие в жидко-
сти нерастворенного воздуха.
Недостаткомдроссельного
нагружения насоса является
низкая стабильность регули-
рования и, в частности, то,
что давление нагрузки зави-
сит от температуры (вязко-
сти) жидкости. С этой точки
зрения более совершенным
Рис. 197. Схема испытательного стенда
насосов с нагрузочным клапаном
является нагружение с по-
мощью пружинного клапана,
при использовании которого
колебания температуры прак-
тически не сказываются на стабильности регулирования. Приме-
нение такого клапана упрощает также испытание по заданной
программе, которая обеспечивается с помощью подбора профиля
кулачка, воздействующего на пружину клапана. Очевидно испы-
тание по программе задающего кулачка может производиться
и в случае дроссельного нагружения путем воздействия 'кулачка
на проходное сечение дросселя, однако добиться стабильности в
этом случае затруднительно.
Одна из схем испытательного стенда с нагрузочным кдапаном
представлена на рис. 197. Насос 1 подает рабочую жидкость по
трубопроводу 3 через нагрузочный клапан 6, распределитель 8
и фильтр 5 в бак 11. Нагрузка (давление на выходе насоса) регу-
лируется с помощью нагрузочного клапана 6, настройка которого
может осуществляться как вручную, так и по заданной программе
от управляющего кулачка 10, воздействующего на пружину
клапана.
30 T. М. Башта
465
Помимо нагрузочного клапана 6, в рассматриваемой системе
применен также предохранительный клапан 4.
Перепад давления на насосе измеряется с помощью маномет-
ров 2 и 12. Расход замеряется с помощью мерного бака 9 или
расходомера; переключают расход на мерный бак посредством
распределительного золотника 8 с электромагнитным управле-
нием. Стенд снабжен также фильтром 7 и оборудован охлади-
телем жидкости 5, установленным в сливной линии.
§ 120. Снятие механических характеристик
гидропередачи
Исследование механических характеристик объемной гидро-
передачи в основном заключается в определении зависимости
крутящего момента на входном и выходном валах гидромашин
и к. п. д. передачи от частоты вращения.
Структурная схема стенда для снятия механических харак-
теристик приведена на рис. 198, а. Стенд состоит из приводного
электродвигателя /, испытываемой гидромашины 3 с системой
Рис. 198, Структурная (а) и принципиальная (б) схемы уста-
новок для снятия механических характеристик гидромашин
управления 2 и тормозного устройства 4, Задачей последнего
является поглощение подводимой к стенду мощности при испыта-
нии по открытой схеме или передача этой мощности приводной
части в случае испытания по замкнутой схеме (см. ниже).
В качестве тормоза в современных испытательных установках
гидросистем используются преимущественно объемные гидравли-
ческие устройства, а для измерения момента, развиваемого испы-
тываемой машиной, — балансирное устройство, усилие на ры-
чаге которого, соответствующее реактивному моменту испытывае-
мой машины, передается на какое-либо весоизмерительное устрой-
ство механического или гидравлического типа.
Гидравлические тормоза с машинами объемного типа устой-
чиво поддерживают заданный момент и способны развить большой
тормозной момент при относительно небольших габаритах. Они
466
отличаются простотой снятия и отвода выделяемого при торможе-
нии тепла. Принципиальная схема испытательной установки
с нагрузочным устройством такого типа показана на рис. 198, б.
Вал испытуемой машины 5 соединен с валом гидромашины
(тормозом) 6, работающей в насосном режиме. Давление на выходе
тормозной гидромашины регулируется дросселем 7, настройка
которого определяет величину момента на валу гидромашины.
Для охлаждения жидкости применен теплообменник 8, после
прохода через который жидкость направляется в бак 9.
В качестве объемного гидротормоза может быть использована
любая объемная гидромашина, пригодная для работы в насосном
режиме. На рис. 199 представлена схема испытательной уста-
новки, в которой в качестве тормоза применен трехшестеренный
(многопоточный) насос, ось 3 ведущей (центральной) шестерни
которого жестко связана с валом испытываемой машины. Кор-
пус 1 насоса-тормоза жестко установлен на качающемся весоиз-
мерительном устройстве 2 так, что ось вала ведущей (центральной)
шестерни 3 тормоза совпадает с осью качания этого устройства.
Из схемы следует, что приводной момент, приложенный к валу
испытываемой машины, будет восприниматься корпусом 1 тор-
моза, т. е. будет уравновешиваться реакцией весоизмерительного
устройства, на котором крепится тормоз.
Реактивные моменты всегда направлены навстречу враща-
ющему моменту, т. е. препятствуют вращению (являются тормо-
зящими). Поскольку при работе машины момент на роторе (ве-
дущей шестерне 3) равен (без учета трения) моменту на статоре
(корпусе /), то последний стремится повернуться в своих под-
шипниках в направлении вращения ротора. Этому повороту
препятствует весовой механизм 4, на который опирается рычаг 2,
жестко связанный со статором. В данной схеме измерение реак-
тивного момента на валу машины сводится к измерению силы,
действующей на весовое устройство со стороны статора. В ка-
честве такого устройства распространены пружинные весы.
Момент на валу испытываемой машины определится как
М = PL,
где Р — показания весов;
L — длина плеча между осью поворота тормозной гидро-
машины (осью шарнира весового устройства) и точкой
приложения силы Р весового механизма.
Рабочее давление жидкости в объемном тормозе, регулируемое
дросселем 5, и развиваемый расчетный крутящий момент, опре-
деляющий нагрузку испытываемой машины, связаны уравнением
[см. выражение (30) ]
Мт — = k Ьр,
где k — коэффициент крутящего момента, характеризующий удель-
ное значение момента при давлении, равном единице.
30* 467
Следовательно, рабочее давление жидкости в тормозе пропор-
ционально крутящему моменту, что позволяет при проведении
ряда испытаний (ресурсные, заводские испытания и др.) избежать
применения весоизмерительного устройства и пользоваться ма-
Рис. 199. Схема испытательной уста-
новки с объемным гидротормозом
Рис. 200. Схема месдозного устройства
для измерения усилия
нометром, протарированным на показания крутящего момента
(для q ~ const).
Наиболее простым механизмом для измерения усилия является
месдозное гидравлическое устройство, схема которого, примени-
Электродвигатель Насос
Рис. 201. Схема испытательной
установки с балансирным привод-
ным электродвигателем
тельно к трехшестеренному тор-
мозу, показана на рис. 200. Ба-
лансирный статор 1 (корпус ше-
стеренной машины) через рычаг 2
и тягу 3 опирается на опору гид-
равлической месдозы 5 с рези-
новой диафрагмой (разделителем) 6,
давление в которой прямо пропор-
ционально величине измеряемого
крутящего момента. Путем тари-
ровки манометра 4 на показания
крутящего момента М = PL, где
Р — усилие на тяге 3 можно осу-
ществить прямое измерение ве-
личины последнего. Нагрузка
осуществляется с помощью регу-
лируемого дросселя 7.
Для измерения среднего зна-
чения момента на ведущем валу
гидромашины при испытаниях в установившемся режиме приме-
няют специальные приводные электродвигатели в балансирном
исполнении. На рис. 201 приведена схема для испытаний насосов
с балансирным приводным электродвигателем. Уравновешивание
осуществляется с помощью грузовых или пружинных весов.
468
При необходимости точных измерений применяют специаль-
ный тензометрический измеритель момента (торсиометр), устанав-
ливаемый непосредственно на валу, соединяющем насос с привод-
ным двигателем.
В качестве тормозов применяют также электрические машины
постоянного тока, снабжаемые обычно балансирным статором,
благодаря которому измерение момента на валу можно выполнить
при помощи обычного весового механизма. Недостатком их яв-
ляется то; что они непригодны для работы при малых скоростях.
В случае необходимости измерения больших крутящих момен-
тов применяют электромагнитные (электроиндукционные) тор-
моза с твердым и жидким наполнителем, которые могут стабильно
поддерживать необходимый тормозной момент и изменять его
по заданной программе, если частота изменения нагрузки не
превышает 10 Гц. Действие такого тормоза основано на известном
явлении, заключающемся в том, что если пространство между
двумя параллельными стальными пластинами заполнить ферро-
магнитным порошком (карбонильное или распыленное железо)
или взвесью ферромагнитного порошка в минеральном масле и
поместить эти пластины в магнитное поле, направленное перпен-
дикулярно их поверхности, то частицы порошка свяжут эти
пластины, препятствуя их сдвигу в направлении, перпендикуляр-
ном магнитному полю.
Эти тормоза выпускаются для высоких тормозных моментов,
достигающих 13 000 кгс-м.
§ 121. Испытание высокомоментного гидромотора
Для испытания высокомоментных малооборотных гидромото-
ров применяется стенд, в котором нагружение испытываемого
гидромотора 1 обычно осуществляется вторым тормозным одно-
типным высокомоментным гид-
ромотором 2, работающим в ре-
жиме насоса (рис. 202). Вал ис-
пытываемой машины 1 связан
с валом нагрузочной (тормоз-
ной) гидромашины 2, которая,
Рис. 202. Схема стенда для испытания
высокомоментных малооборотных гид-
ромоторов
1 1 J Ч 5
работая в насосном режиме, подает жидкость по трубопроводу 3
к регулируемому дросселю 4\ с помощью последнего регули-
руется нагрузка (нагрузка может быть осуществлена также
нагрузочным клапаном 5, установленным параллельно дросселю).
На выходной магистрали установлены охладитель 6 и фильтр 7.
469
Поскольку высокомоментные гидромоторы не могут работать
в качестве самовсасывающих насосов, в схеме применен насос
подкачки 9, осуществляющий питание машины 2 под небольшим
(0,2—0,3 МПа или 2—3 кгс/см2) давлением, определяемым ре-
гулировкой предохранительного клапана 8. Расход подпитыва-
ющего насоса должен несколько превышать (на 10—15%) рас-
ход машины 2.
§ 122. Испытательная установка с регенерацией
мощности
Недостатком рассмотренных испытательных установок, в ко-
торых насосы нагружают дросселированием жидкости на выходе
из насоса, а гидромоторы — при помощи какого-либо тормозного
устройства, является то, что мощность машины превращается
в тепло. Поэтому при длительных испытаниях необходимо пре-
дусматривать охлаждающие устройства. Кроме того, в случае
испытаний гидромашин большой мощности непроизводительно
расходуется значительное количество энергии.
Ввиду этого получили распространение испытательные устрой-
ства, построенные на принципе взаимного нагружения гидромашин
(насоса и гйдромотора) по замкнутому контуру. Очевидно, при-
менение этого способа взаимного нагружения возможно для
испытаний лишь обратимых гидромашин. При нагружении по
замкнутому контуру отпадает необходимость в тормозных устрой-
ствах, а также значительно сокращается потребление электро-
энергии, которая в этом случае расходуется лишь на компенса-
цию потерь ее в испытательной установке.
Энергия, требующаяся для компенсации потерь, подводится
либо к валам гидромашин, либо в соединяющие их жидкостные
магистрали. В первом случае подача энергии извне осуществляется
путем подведения механической энергии к кинематически свя-
занным между собой валам испытуемых гидромашин, а во вто-
ром — путем подачи в гидромагистрали жидкости под давлением.
Применяются также схемы, в которых энергия подводится извне
одновременно обоими способами.
Принципиальная схема испытательной установки с регенера-
цией мощности показана на рис. 203, а. Установка применяется
в тех случаях, когда не требуется регулировать частоту вращения
испытуемой машины. Валы обеих гидромашин Н и М соединены
с валом приводного электродвигателя 4. Соединение гидромашин
произведено так, что одна из них работает в насосном (Н), а вто-
рая — в гидромоторном (М) режиме; мощность, развиваемая
последней машиной (Л4), суммируется на валу первой машины (Я)
с мощностью приводного электродвигателя 4, Для этого жидкость
от машины (насоса) Н направляется в машину (гидромотор) М,
которая будучи механически связана через вал электродвига-
теля с машиной Н, приводит ее во вращение, возвращая тем самым
470
энергию рабочей жидкости (за вычетом потерь) на вал машины Н.
В соответствии с этим приводной электродвигатель 4 в этом слу-
чае развивает мощность, затрачиваемую лишь на компенсацию
потерь в системе испытательной установки; основная же мощность,
развиваемая гидромашинами, циркулирует от насоса в виде
энергии потока рабочей жидкости к гидромотору и от него возвра-
щается в виде механической мощности вновь к насосу.
Рис. 203. Схемы испытательных установок с регенерацией мощности
Для обеспечения работы подобной системы рабочий объем
машины (насоса) Н должен быть несколько больше (на 5—8%)
объема машины (гидромотора) М на величину, необходимую
для компенсации (с некоторым запасом) утечек жидкости в си-
стеме.
Для измерения расхода жидкости применен расходомер 3.
В случае необходимости в баке 2 устанавливается охладитель
жидкости.
Расчеты установки сводятся в основном к определению объем-
ных и механических характеристик испытываемых машин. Урав-
нение неразрывности потока жидкости в напорной магистрали
может быть записано в виде
От. нТ)об. н =
Чоб. м
471
или
9Wlo6. н
ЯмПМ .
Лоб. м ’
поскольку в рассматриваемом случае /?н = лм, имеем
9нЛоб. н
Ям
Лоб- м
где QH и QM — расчетные подачи машин (насоса
и гидромотора);
qB и qM — регулируемые объемы машин;
мп, пм и Лоб. н, Лоб. м — частоты вращения и объемные
к. п. д. машин.
Из этого выражения находим рабочий объем qH насоса Н\
Ян
Лоб. нЛоб. м
Поскольку знаменатель правой части выражения представляет
собой объемный к. п. д. всей установки г|об = лоб. нт]об> м полу-
чим
Яп Ям
Лоб
(133)
т. е. требуемое отношение рабочих объемов гидромотора (М) и
насоса (Я) определится объемным к. п. д. испытательной уста-
новки.
При непосредственном соединении приводного электродвига-
теля с валом гидромашин развиваемый им крутящий момент
(момент на валу насоса или приводной момент) будет
М = М-н--------М -П = -Арн-
э Лмех.к м1мех‘м 2лт]мех. н
<7м АрмЧмех. м
2л
где Мн и /Им — расчетные значения крутящего момента насоса
(Я) и мотора (М) [см. выражение (30) J;
__Ян &Рн . д | Ям &Рм .
н“ 2л ’ 2л ’
Лмех. н и Лмех.м — механйческие к. п. д. насоса и гидро-
мотора.
Принимая приближенно Дрн = Дрм = Др, получим
&РЯн
2лт)мех, н
Ян
Чмех. н
?мЛмех. м
Лмех. мЛмех, н
Мн / । Ям
Нмех. н X Ян
472
Поскольку 7]мех. мт]мех н = т)мех, где пмех — полный меха-
нический к. п. д. всей установки (насоса и гйдромотора), а также
учитывая выражение (133), можем написать
Я Я / » S Л1 i J
Л1Э =------------(1 — Лоб Л мех) =--------------(1
Пмех. н V 106 1 ех Пмех. н V
Лполн/»
где Лполн ЛобЛмех — полный к. п. д. обеих машин.
Если рабочий объем гйдромотора не регулируется, то он
должен быть меньше рабочего объема испытываемого насоса на
величину утечек жидкости в установке.
Мощность на валу приводного электродвигателя определится
выражением
. . (1 __ Т] )
Чполн/j
Пмех. н
где Ан — расчетная мощность испытываемой гидромашины (на-
соса) //.
Аналогично можем получить выражения для вычисления
момента и мощности через параметры гйдромотора:
М =М и 1 ~~ Пполн
шэ 7КХм1мех. м п >
Чполн
М = 1 ~ Чполн М я
*** э п /¥мЧмех. м*
Чполн
Следовательно, мощность на валу гидромашины, работающей
в моторном режиме, в т)полн Раз меньше мощности гидромашины,
работающей в насосном режиме.
Если привод машин осуществляется через промежуточные
звенья (редукторы и пр.), необходимо учесть механические потери
в них.
На рис. 203, б приведена схема гидросистемы замкнутого типа
с подводом в испытательную систему гидравлической энергии.
Система состоит из связанных валами двух регулируемых объем-
ных насоса Н и гйдромотора М, а также вспомогательного
насоса 1 с приводным электродвигателем 2, с помощью которого
в систему подается внешняя энергия.
Располагая фактическими отношением
рабочих объемов —
можно опреде-
машин и отношением перепадов давления
лить по этим данным объемный (лОб) и полный (т1полн
испытательной установки:
_ у-| »J
д„ ,о6 Арм Чполя-
Установка применяется при давлениях 35 МПа (350 кгс/см2)
и выше.
Рассмотренные системы не могут быть применены для испыта-
ния двух нерегулируемых гидромашин с равными рабочими
473
объемами, так как в основе принципа их работы заложено нера-
венство qn+ <?м.
Для испытаний нерегулируемых насосов применяется система
дроссельного регулирования с механической компенсацией и
параллельным питанием (рис. 203, в), а также система с сочета-
нием параллельного и последовательного питания (рис. 203, г).
Первая система (рис. 203, в) состоит из двух нерегулируемых
гидромашин (насосов) 3 и 5, жестко связанных с приводным
электродвигателем 4, Вспомогательный насос 2, приводимый
электродвигателем /, включен в рабочую магистраль гидрома-
шин 3 и 5 параллельно. Нагрузка осуществляется с помощью
подпорного клапана б. Эта система не допускает регулирования
скорости вращения испытываемой машины. В схеме с параллель-
ным и последовательным питанием (рис. 203, г) испытываемые
регулируемые гидромашины 7 и 8 связаны между собой валами,
а также жидкостной магистралью. Система снабжена регулируе-
мым насосом 12, приводимым электродвигателем 13, и вспомога-
тельным насосом 10 малой подачи, приводимым электродвигате-
лем 11, Нагружение испытываемых машин 7 и 8 осуществляется
дросселем 9 и подпорным клапаном, служащим для слива избытка
жидкости, поступающей от машины 8 в насос 12,
Нетрудно видеть, что путем изменения рабочих объемов
машин, а также регулирования клапана 14 и дросселя 9 представ-
ляется возможным создать требуемые скоростной и силовой ре-
жимы работы испытываемых гидромашин 7 и 8, Практика пока-
зывает, что подобная установка допускает регулирование частоты
вращения от 5 до 1500 об/мин.
§ 123. Оценка ошибки при измерениях
Достоверность снятых внешних характеристик гидромашины
во многом зависит от правильного выбора и точности примененных
приборов, а также от способов измерения различных параметров,
число которых может быть значительным. Например, для того
чтобы определить полный к. п. д. гидромотора, необходимо изме-
рить давление на входе (рх) и выходе (р2)> частоту вращения
вала (пм), момент на валу (Мм) и расход жидкости (QM), т. е.
пять различных величин, точность измерения каждой из которых
оказывает влияние на общую ошибку в определении данной ве-
личины.
Ошибка в измерении каждой из этих величин, в свою очередь,
суммируется* из ошибки тарировки и ошибки самого прибора,
а также при отсчете. Значение полного к. п. д. определяется на
основании этих данных по выражению
'Пполи — 2л
Ммпм
(Pi — Pt)iQu
474
Абсолютная ошибка определится арифметической суммой про-
изведений ошибок при измерении каждой составляющей и про-
изводной данного выражения по этой составляющей:
Диполи — 2л
(Pi Р2) Qm (Pi Рг) См
МмПы
(Р1 — Рг)2 См
—-~м^ — AQ
(Р1 - Рг) QM
В соответствии с этим относительная ошибка при определении
полного к. п. д. будет
Ат]полн _ АЛ!М Дпм , A (pt — р2) | AQM
Лполн pt р2 См
§ 124. Шум при работе объемных гидромашин
Работа объемных гидромашин, и в особенности быстроходных
насосов, сопровождается воздушным шумом, уровень которого
является, в большинстве случаев, показателем совершенства
конструкции их элементов, а также характеризует качество
изготовления и монтажа машины. В частности, показатель по
шуму, издаваемому насосом, носит столь закономерный характер,
что по нему представляется возможным оценивать качества
насоса дополнительно к обычным методам контроля по гидравли-
ческим и механическим параметрам. С этой точки зрения шум
насоса является обобщающим показателем динамических свойств
последнего. При некотором же значении уровня и характере
шум служит сигналом о наличии в рабочем процессе гидромашины
дефектов, могущих нарушить надежность ее функционирования.
Снижение уровня шума гидромашин, как правило, повышает
надежность и увеличивает ресурс ее работы.
Воздушный шум порождается физическими свойствами ма-
шины, и характером ее рабочего процесса, т. е. является формой
отражения определенных свойств машины, ввиду чего рабочий
ее процесс и порождаемый шум взаимно связаны, а часто и взаимно
обусловливают друг друга. Второй по значимости категорией
шумов являются шумы аэродинамического происхождения, возни-
кающие в результате нестабильности потоков жидкости, а также
вследствие пульсации потока, возникающей при срыве вихрей.
Поскольку шум отрицательно влияет на работоспособность
человека в производственных условиях и может представить
угрозу для его здоровья, при оценке интенсивности шума учиты-
вают также санитарные требования в части допустимых уровней
громкости (высоты тонов) и частот. Ввиду указанного, борьба
с шумом является важной производственной и социальной зада-
чей и эта проблема должна учитываться при создании и эксплуа-
тации гидромашин.
475
Для измерения уровня шума (звукового давления) принята
относительная единица, так называемый децибел (дБ), равная
двадцати логарифмам отношения измеряемого звукового давле-
ния к условному (эталонному) давлению. Эта относительная
единица определяет не абсолютное значение громкости звука,
а различие в громкостях.
Для сравнения с бытовыми шумами можно указать, что уро-
вень шума внутри турбовинтового лайнера соответствует — 110 дБ;
внутри автомобиля при скорости движения 70 км/ч — 80 дБ
и разговорной речи на расстоянии 1м — 60 дБ. Уровень шума
роторных поршневых насосов аксиальных и радиальных типов
средней мощности (15—20 кВт) при давлении жидкости'20 МПа
(200 кгс/см2) и частоте вращения 2000—2500 об/мин составляет
80—90 дБ.
Для определения уровня воздушного шума применяют спе-
циальные приборы. Испытания машин проводят в специальных
акустических камерах, изолированных от воздушного шума
извне; в камере обеспечивается поглощение (а не отражение)
звуков, создаваемых испытуемой машиной [12].
Основным возбудителем шума в гидравлических системах
является в большинстве случаев насос. Источниками возникнове-
ния в нем воздушного шума являются любые колебательные про-
цессы, причем, поскольку всякая машина представляет собой
систему напряженных элементов, имеющих различные частоты
собственных колебаний, процесс возникновения шума может
обусловливаться взаимным влиянием друг на друга разных,
весьма сложных по рабочему процессу факторов и элементов.
Частотный спектр шума, возбуждаемого насосом, состоит из
составляющих, вызванных колебаниями (пульсацией) потока и
соответственно — давления жидкости в рабочих камерах и на
выходе насоса. Эти колебания, в свою очередь, обусловлены
законом перемещения рабочих органов (вытеснителей) насоса
(см. стр. 118), а также особенностями рабочего процесса, в част-
ности величиной обратного потока жидкости, имеющего место
в момент перехода рабочих камер насоса из всасывающей зоны
в нагнетательную (см. также стр. 218).
На рис. 204 показана диаграмма изменения давления в ци-
линдре (индикаторная диаграмма) во время процесса переключения
(перехода цилиндра из зоны высокого в зону низкого давления)
при симметричном расположении дуговых окон распределителя
и положительном перекрытии окна цилиндра (см. рис. 71, в)
для случаев работы гидромашины в насосном (а) и моторном (б)
режимах.
Ввиду высокой окружной скорости блока цилиндров и боль-
шого перепада давления в дуговых окнах распределителя, соеди-
ненных с полостями высокого и низкого давления насоса, изме-
нение давления в цилиндре при проходе им разделительной
перемычки шириной s (соответствует углу фпер; см. рис. 57, в)
476
между этими полостями происходит скачкообразно и сопровож-
дается сильным гидравлическим ударом и шумом. При входе
цилиндра с жидкостью под низким давлением в зону окна высо-
кого давления происходит скачкообразное повышение («заброс»)
давления в цилиндре, а при входе цилиндра с жидкостью под
высоким давлением в зону другого окна низкого давления про-
исходит такое же резкое падение («выстреливание») давления.
Кроме того, как это было уже отмечено, поршни совершают
при положительном перекрытии цилиндров на некотором отрезке
Рис. 204. Диаграмма изменения давления в цилиндре насоса (а) и гидромо-
тора (б) за время цикла переключения
времени (на угле поворота српер) перед сменой давления еще
небольшое движение вперед и назад в зоне перемычки при пере-
крытом (блокированном) цилиндре; при котором запертая в ци-
линдре жидкость подвергается соответственно сжатию или растя-
жению. Так, например, при работе машины в режиме насоса
(рис. 204, а) цилиндр, заполненный жидкостью с давлением
всасывания, перекрывается (точка а) разделительной перемычкой
(отсекается от всасывающего окна); поскольку поршень в этой
точке еще продолжает движение в направлении всасывания,
давление в цилиндре на оставшейся части пути всасывания падает
на Лрт1п.
После того, как поршень пройдет нейтральное положение
(точка Ь), он будет перемещаться в направлении вытеснения (на-
гнетания) жидкости. При этом давление до точки т будет повы-
шаться медленно, а после прохода поршнем этой точки — скачко-
образно до величины давления в полости нагнетания (рнаг), под
которым жидкость и будет вытесняться при дальнейшем движе-
нии поршня до перекрытия цилиндра второй разделительной
перемычкой (точка п). Поскольку поршень после перекрытия
цилиндра продолжает перемещаться в направлении вытеснения
жидкости, происходит сжатие запертого объема жидкости и
477
«заброс» давления на величину Лртах (точка с). Эта точка соответ-
ствует моменту соединения цилиндра с полостью всасывания.
По проходе этой точки давление в цилиндре резко понижается
до величины рвс. В дальнейшем процесс повторяется.
При работе машины в режиме гидромотора (рис. 204, б) давле-
ние нагнетания рнаг (давление потока питания гидромотора)
после отсечки цилиндра от полости нагнетания (точка d) пони-
жается вследствие продолжающегося движения поршня в том же
направлении до точки е, соответствующей нейтральному поло-
жению поршня. Далее происходит некоторый «заброс» давления
на величину Дрт1п, обусловленный смещением поршня при за-
пертом цилиндре в сторону вытеснения (отвода) жидкости в слив-
ную полость. После этого давление падает до уровня сливного
давления рсл, под которым и происходит вытеснение жидкости
в сливную магистраль.
После перекрытия цилиндра при дальнейшем его движении
разделительной перемычкой (точка О) происходит сжатие жид-
кости вследствие продолжающегося перемещения поршня в на-
правлении вытеснения запертого в цилиндре объема жидкости.
Это сопровождается «забросом» давления до уровня, определяе-
мого точкой f, которая соответствует концу сжатия запертой
в цилиндре жидкости. После прохода цилиндром этой точки на-
чинается перемещение поршня в направлении рабочего хода,
однако, поскольку цилиндр на участке, соответствующем
углу фпер перемычки, остается запертым, происходит понижение
давления. В точке k цилиндр соединяется с напорной полостью
и давление скачкообразно понижается до напорного рнап. В даль-
нейшем процесс повторяется.
Резкие колебания давления и сопровождающее эти колебания
сжатие и расширение масла в закрытом поршневом пространстве
вызывают нежелательные пики нагрузки и шум.
Колебания давления, сопровождающие пульсацию потока,
возникают вследствие гидравлического сопротивления напорной
магистрали и сил инерции заполняющей ее упругой жидкостной
среды, а также в результате гидравлических ударов [21, разви-
вающихся в рабочих камерах насоса, обусловленных указанным
обратным потоком жидкости из этой магистрали. Колебания давле-
ния сопровождаются вибрациями узлов и деталей насоса и,
соответственно, механическим шумом.
Исследования высокочастотных спектров воздушных шумов
роторных насосов показали, что составляющие простые тона,
имеющие наиболее высокие уровни, кратны частотам «выстрели-
вания» рабочих камер. В соответствии с этим наибольший уровень
шума возникает на высоких гармониках основной («плунжерной»)
частоты
f = nz/60,
где z и п — число рабочих камер и частота вращения насоса
в об/мин.
478
Иначе говоря, частотная составляющая этого шума, кратная
числу вытеснителей (поршней) г и частоте вращения насоса и,
является в большинстве случаев основной в спектре шума на-
соса. На эту основную частоту накладываются частоты, обуслов-
ленные прочими факторами, в том числе кавитацией жидкости
в рабочих камерах, вибрацией подшипников и иных механиче-
ских узлов и пр. В результате развивается сложный колебатель-
ный процесс и соответственно — сложный звуковой спектр с ши-
роким диапазоном частотных составляющих, многие из которых
в несколько раз превышают периодичность работы плунжеров
(плунжерную частоту).
Размах колебаний давления в указанном процессе и, соот-
ветственно, уровни вибраций деталей насоса и звука зависят
в основном от величины энергии (мощности) обратного потока
жидкости при выравнивании давления, значение которой опре-
деляется в основном перепадом давлений в цилиндре и окне
нагнетания, а также сжимаемостью жидкости и тем, насколько
полно был заполнен цилиндр жидкостью при проходе зоны вса-
сывания. Очевидно, если отсечка цилиндра при всасывающем
ходе поршня от окна всасывания произошла задолго до прихода
цилиндра к нейтральному (мертвому) положению, то он придет
в это положение, не будучи полностью заполненным жидкостью.
В этом случае «заброс» давления (гидравлический удар), вызван-
ный обратным потоком жидкости, может превысить величину
номинального рабочего давления в несколько (3 и более) раз.
Этим неблагоприятным условиям соответствует превышение угла
упреждения (для данного направления вращения цилиндро-
вого блока) над углом запаздывания <р2 (<Pi > Ф2 см- стр. 136).
«Забросы» давления вызывают вибрации нагруженных деталей
насоса, причем образование волны давления повторяется с перио-
дичностью 2лАг.
Аналогичное явление будет наблюдаться также в любом ином
случае работы насоса в режиме жидкостного «голодания» при
всасывании, при котором рабочие его камеры в момент соединения
с полостью нагнетания также не будут полностью заполнены
жидкостью.
Колебания давления на выходе насоса, обусловленные обрат-
ным потоком жидкости, распространяются через жидкость в на-
порную магистраль гидросистемы и ее отводы, возбуждая в них
волновые процессы и вибрации механических элементов (трубо-
проводов и пр.). Следует отметить, что при этом «забросы» давле-
ния в глухих (перекрытых) отводах могут в 1,5—2 раза превы-
шать давление на выходе насоса [1 ].
На рис. 205, а показаны характеристики шума (звуковых коле-
баний) в пластинчатом (2) и аксиально-поршневом (<?) насосах.
На рис. 205, б представлены результаты измерения шума в дБ
аксиально-поршневого самовсасывающего насоса в зависимости
от давления при разной частоте вращения. Распределитель
479
насоса снабжен дроссельными треугольными усиками (см. рис. 71, б
и стр. 222); рабочий объем насоса 60 см3, угол наклона люльки
у = 15°, высота всасывания 0,4 м.
Особую роль в образовании и характере шума играют «забросы» •
давления в рабочих камерах, наблюдаемые в момент перехода
их через перевальную перемычку распределителя, разделяющую
окна всасывания и нагнетания, которые происходят с так назы-
ваемой плунжерной частотой, равной произведению частоты вра-
щения на число вытеснителей. Эти «забросы» могут возникнуть
Частота
а)
Рис. 205. Характеристики
Давление
б)
шума в типовых насосах
также и при полном заполнении рабочих камер насоса при пере-
ходе ими всасывающей зоны.
Механизм возникновения последних колебаний применительно
к роторным аксиально-поршневым насосам с плоским распреде-
лительным диском (см. рис. 57) можно схематически представить
в следующем виде. После того как цилиндр с замкнутой в нем
жидкостью с давлением всасывания р8С пройдет через переваль-
ную перемычку и вступит в соединение с окном нагнетания с дав-
лением ркаг, которое значительно превышает давление всасы-
вания, произойдет мгновенное выравнивание давления за счет
обратного потока из нагнетательного окна в цилиндре. Обратный
поток в этом случае вызывается тем, что для сжатия заключенной
в цилиндре жидкости с давлением рвс с возможным содержанием
в ней нерастворенного воздуха до давления на выходе в цилиндр
из полости нагнетания насоса должен поступить некоторый объем
жидкости. Величина его определится в основном перепадом дав-
ления (Др — рнаг — р8С) в полостях всасывания и нагнетания
насоса, а также упругостью рабочей среды и объемом цилиндра,
включая мертвое пространство (см. стр. £5).
Описанный механизм образования шума применим к насосам
всех иных типов, в частности — к пластинчатым насосам (см.
стр. 273). Колебания давления, обусловленные неравномерностью
480
потока (законом вытеснения жидкости рабочими органами),
а также гидравлическими ударами, вызванными обратным по-
током жидкости из нагнетательной полости в камеры насоса,
заполненными жидкостью под давлением всасывания, являются
и в этом случае основными факторами возбуждения шума.
Наибольший уровень звука соответствует основной (плунжерной)
частоте где г — число рабочих клеток.
Значительное место в спектре шума насосов занимают состав-
ляющие, обусловленные вибрациями нагруженных деталей (при-
водных валиков, подшипников, рычагов и пр.). В частности, в акси- .
альных поршневых насосах возбудителем шума могут быть узлы
привода блока цилиндров и поршней и в особенности при на-
личии в них люфтов (см. рис. 59).
Источниками шума насосов этого типа с автоматическим регу-
лированием подачи в функции давления (см. рис. 155) часто слу-
жат также колебания механизма регулирования, которые сопро-
вождаются пульсацией подачи и, соответственно, — колебаниями
давления на выходе насоса.
Возбудителями шума могут также служить волновые про-
цессы в нагнетательном трубопроводе (на выходе насоса) при на-
личии в них местных сопротивлений. Характер и частотный спектр
пульсаций давления на выходе насоса и вибраций напорного тру-
бопровода и сопровождающие их звуковые колебания опреде-
ляются в основном упругостью жидкости и некоторыми конструк-
тивными параметрами гидросистемы. При известных условиях
такой процесс может привести к разрушительным для насоса
последствиям. Вероятность этого особенно реальна в том случае,
когда на начальном участке нагнетательного трубопровода рас-
положены на некотором расстоянии от насоса какие-либо емкости
(фильтры, гидроаккумуляторы, расширенные каналы), цри про-
хождении которых повышается скорость волны пульсирующего
давления.
Из теории гидравлического удара [11 известно, что в таком
нагнетательном трубопроводе можно выделить прямые волны дав-
ления, возникающие у источника пульсирующей подачи (насоса)
и движущиеся от него, и волны, отражаемые от местных сопро-
тивлений (и в частности — от емкостей), расположенных на маги-
страли, и движущиеся к насосу. Мгновенные значения давления
в каждой точке рассматриваемого участка трубопровода пред-
ставляют собой сумму давлений прямой и отраженной волн, при-
чем наибольший размах давления наблюдается в точках, где
максимумы и минимумы прямых волн совпадают с соответствую-
щими максимумами и минимумами отраженных волн.
Если в напорной магистрали находятся полости значитель-
ного объема (фильтры, аккумуляторы и пр.), импульсы давления,
отражаемые от них, будут находиться в противофазе, т. е. макси-
мум давления прямой волны перемещается в обратном направле-
31 Т. М. Башта 481
нии как минимум отраженной волны. В этом случае, если пуль-
сация давления, возбуждаемая насосом, носит гармонический
(или близкий к нему) характер, совпадение максимальных зна-
чений прямой и обратной волн на выходе насоса приводит к воз-
никновению волнового резонанса.
При практических расчетах принимают в первом приближе-
нии, что условию возникновения подобного волнового процесса
соответствует длина участка Lpe3 между насосом и указанными
полостями (емкостями), равная длине полуволны пульсирующего
давления:
(134)
где
— длина волны пульсирующего давления;
а= у —— — скорость звука в жидкости плотностью р,
заполняющей трубу;
Епр —‘приведенный (эквивалентный) объемный мо-
дуль упругости трубопровода, заполненного
данной жидкостью;
f — преобладающая частота возмущений (импуль-
сов давления); для насоса этой частотой яв-
ляется частота колебания потока, определяе-
мая законом перемещения его вытеснителей
(плунжерная частота) f — nz, где п и z — ча-
стота вращения и число рабочих камер (ци-
линдров).
Приведенный объемный модуль упругости жидкости для слу-
чая тонкостенного трубопровода (-j- 1б), заполненного жид-
костью, можно приближенно вычислить по выражению
пр
sE
где D и s — средний диаметр и толщина стенки трубопровода;
Еж — объемный модуль упругости жидкости (см. стр. 41);
Етр — модуль упругости материала трубы.
Действительный характер пульсации давления по длине
трубы Lpe3 зависит от того, какое число полуволн укладывается
на этой длине. ,
Наибольшее значение Пульсации давления наблюдается в вы-
ходной полости насоса, причем «забросы» давления на выходе
насоса при волновом резонансе могут в несколько раз (3 и более)
превышать номинальное рабочее давление, а частоты пульса-
ций— в 10 раз и более превышать плунжерную частоту насоса.
482
В соответствии с этим при резонансных явлениях повышается
уровень звуковых колебаний и изменяется их частотный спектр.
Следует иметь в виду, что при размещении в нагнетательном
трубопроводе насоса гасителя пульсации в виде баллона, пуль-
сации за баллоном уменьшаются, однако на участке между гаси-
телем и насосом могут, в зависимости от места расположения
гасителя, значительно повыситься.
Следует отметить, что учет рекомендованного выше прибли-
женного условия для выбора длины участка £рез [см. выраже-
ние (134)1 не исключает возможности возникновения в реальных
условиях волнового процесса, так как каждой из составляющих,
частот соответствует свое критическое расстояние между насосом
и рассматриваемым < сопротивлением. Ввиду этого при выборе
расстояния, на котором не рекомендуется*размещать местные со-
противления и емкости, следует исходить из всего диапазона
составляющих частот.
§ 125. Конструктивные меры по снижению
шума насоса
В практике ослабление шума в основном достигают устране-
нием источников его возбуждения. В частности, при конструиро-
вании насосов в первую очередь совершенствуют узел распределе-
ния с целью регулирования защемленного объема жидкости,
а также совершенствуют процесс перехода рабочей камеры (ци->
линдра и пр.) насоса через перевальную перемычку распредели-
теля шириной s (см. рис. 57, в). С этой точки зрения важное зна-
чение имеет величина перекрытия а = s — t окон цилиндров при
проходе ими перевальной перемычки, а также расположение этой
перемычки относительно оси нейтрального (мертвого) положения
цилиндров. .
Указанные параметры в общем случае подбираются так, чтобы
максимально снизить скачок давления при переходе цилицдра
через зону перемычки. Для конкретного заданного режима ра-
боты гидромашины представляется возможным так подобрать мо^
мент отсечки и открытия окон распределителя за счет изменения
объема цилиндра при его прохождении через перемычку, чтобы
давление в нем к моменту открытия было равно давлению в ка-
мере, с которой он соединяется.
Однако в случае' необходимости работы цилицдра в противо-
положном направлении вращения необходимо,'чтобы при кон-
струировании распределительного узла была предусмотрена воз-
можность изменять индикаторную диаграмму в соответствующую
сторону. '
Обеспечение выравнивания давления особенно важно при про-
ходе цилиндра из зоны всасывания в зону нагнетания. Выравни-
вание в этом случае может быть достигнуто, если соединение ци-
линдра с окном нагнетания задержать после перехода переваль-
31* 443
ной перемычки до момента, когда давления в цилиндре и нагне-
тательной полости не уравняются в результате нагнетательного
движения поршня.
В нереверсивном аксиально-поршневом насосе это достигается
смещением на некоторый угол оси симметрии распределительного
золотника (ф! =£ ф2; см рис. 57, в) по направлению вращения
блока цилиндров (фг > ф2) относительно мертвых точек поршней.
Конструктивно это достигается путем поворота зеркала распре-
делителя при монтаже; при этом его ось симметрии смещается
на несколько градусов относительно оси симметрии корпуса.
Этим способом достигается выравнивание давлений в цилин-
драх и соответствующих окнах питания как при переходе от зоны
всасывания к зоне нагнетания, так и наоборот. Выравнивание про-
исходит вследствие создания в цилиндрах насоса в начале нагне-
тательного хода поршня4 (до соединения цилиндра с нагнетатель-
ным окном) некоторой компрессии жидкости, 'достигаемой путем
соответствующего выбора угла перекрытия фг и ф2. Благодаря
подавлению при этом в спектре шума ряда гармоник, общий его
уровень может быть значительно понижен.
Следует заметить, что гидромашина с повернутым распредели-
телем может .применяться лишь для одного направления враще-
ния и лишь для работы в одном режиме; либо в режиме насоса,
либо в режиме гидромотора.
Ввиду сложности расчетов рациональное смещение распреде-
лительного золотника обычно подбирается путем опытного из-
мерения импульсов (пульсаций) давления на выходе из насоса.
Преднамеренная компрессия жидкости в рабочих камерах за-
частую вводится также и в конструкцию нереверсивных пластин-
чатых насосов двойного действия (см. рис. 105). Для этого про-
филь статорного кольца насоса выполняется таким, чтобы при
проходе замкнутой камеры объемом (отмечена точечной штри-
ховкой) через перевальные перемычки, очерченные большим ра-
диусом (/? > г), происходило некоторое уменьшение объема ка-
меры до прихода ее к нагнетательному окну, вследствие чего
заключенная в ней жидкость будет подвергнута сжатию. В этом
случае в запертой камере также создается предварительная ком-
прессия жидкости (^ •> q2), подбором величины которой может
быть обеспечено достаточно полное выравнивание давлений в ка-
мере и нагнетательном окне.
Указанное уменьшение объема камеры достигается при разра-
ботке конструкции смещением центра О2, из которого описы-
ваются образующие профиль статорного кольца дуги кругов ра-
диусом R относительно оси Од вращения ротора (см. рис. 105).
Широкое распространение в практике получил способ сниже-
ния скачка при выравнивании давления, достигаемый путем пред-
варительного соединения рабочей камеры (цилиндра и пр.) с рас-
пределительным окном через сопротивление (дроссельный канал),
с помощью которого представляется возможным достаточно плавно
484
повысить давление в запертой камере до требуемой величины еще
до того, как эта камера соединится с окном нагнетания.
Это предварительное соединение для аксиально-поршневых
насосов обычно осуществляется выполнением на перевальной пере-
мычке распределителя между окнами всасывания и нагнетания
дроссельных канавок (усиков) малого сечения (см. рис. 71). Рас-
стояние s между этими канавками обычно выбирается таким, чтобы
в среднем положении каждого из цилиндров было обеспечено не-
которое минимальное перекрытие окон (s > f). Однако для без-
ударного выравнивания давления вводится некоторая регламен-
тированная утечка жидкостй через эти канавки применением
отрицательного перекрытия (s <0, при котором полости нагне-
тания и всасывания насоса кратковременно соединяются в ней-
тральном положении цилиндра через канавки между собой.
Очевидно можно подобрать такое отрицательное значение пере-
крытия, при котором на заданной частоте вращения и перепаде
давления Ар = рх — р2 скачки давления практически не будут
наблюдаться.
Следует отметить, что при отрицательном перекрытии распре-
делителя повышаются утечки жидкости, ввиду чего сечение дрос-
сельной канавки выбирают обычно меньше 1 мм2, причем канавку
часто выполняют переменного сечения. Подобные дроссельные ка-
навки («усики») применяют также в пластинчатых и шестеренных
насосах.
В некоторых аксиально-поршневых насосах для облегчения
распределителя с целью устранения скачков давления в конструк-
ции предусматривается возможность поворота наклонного (см.
рис. 169) или распределительного (см. рис. 171) диска относи-
тельно оси симметрии, что облегчает рациональный подбор
углов ф! и 2 перекрытия. Известны также насосы, в которых
положение распределительного диска относительно нейтральной
оси автоматически регулируется по сигналам импульсов («за-
бросов») давления на выходе насоса.
Уровень шума поршневых насосов значительно снижается при
применении клапанного распределителя жидкости, ввиду того,
что при этом отсутствуют возбудители шума, обусловленные не-
совершенством индикаторной диаграммы. Следует, однако, иметь
в виду, что само клапанное распределение может явиться возбу-
дителем шума, в особенности при наличии в машине большого
вредного пространства. Это обусловлено тем, что расширение
сжатой во вредном пространстве жидкости, происходящее по окон-
чании ее вытеснения, вызывает задержку открытия всасывающего
клапана, ввиду чего возбуждаются^колебания давления, пере-
дающиеся на детали машины.
При известных условиях работы насоса клапаны, в особен-
ности напорные, могут вступить в автоколебания, что вызовет
колебания давления на выходе насоса. Ввиду этогд, для снижения
шума насосов с клапанным распределением необходимо макси-
485
мально уменьшать объем вредного’ пространства (см. стр. 85)
и силы инерции затвора клапанов. Кроме того, необходимо устра-
нять нерастворенный в жидкости воздух, наличие которого по-
вышает упругость системы.
В целях снижения шума предусматривают при конструирова-
нии гидромашин устройства, препятствующие передаче в систему
механических колебаний путем применения эластичных проме-
жуточных звеньев, а также снабжают насосы звукопоглощающим
кожухом. Радикальным, с этой точки зрения, является размеще-
ние на пружинной подвеске насоса вместе с приводным электро-
двигателем в баке ниже уровня масла .в нем.
Недостатком: подобного размещения электродвигателя яв-
ляется необходимость применения в этом случае вместо жестких
трубопроводов гибких шлангов-, что особенно' нежелательно при
высоких давлениях.
§ 126. Оценка надежности гидромашин
- Под надежностью понимается в общем случае свойство изде-
лия обеспечивать Заданные функции, сохраняя свои эксплуата-
ционные показатели в заданных пределах при заданных режимах
и условиях эксплуатации в.течение требуемого промежутка вре-
мени или требуемой наработки.
' В теории надежности рассматриваются вероятные закономер-
ности нарушения работоспособности системы или комплектую-
щих ее элементов и на этой основе создаются методы расчета и
прогнозирования отказов, а также изыскиваются способы повы-
шения надежности при конструировании, обеспечения заданного
уровня надежности в процессе производства и сохранения на-
дежности. В процессе эксплуатации. . .
• ' Практически можно, достичь, достаточно высокого уровня
надежности системы, однако это приобретается ценой известных
. затрат,’ ввиду чего при решении вопроса надежности большую
рдль играют. оптимальные (рациональные соотношения между
требуемыми характеристинами гидросистемы, надежностью и тех-
нологичностью , конструкции, а также условиями эксплуауации
. системы. Для нахождения таких оптимальных соотношений не-
обходимо установитьколичественные показатели, оценивающие
, . надежность. . 1
Для оценки гидросистемы по этому показателю необходимо
располагать данными о надежности составляющих ее элементов,
основными из-которых являются изучаемые в настоящем курсе
объемные, насосы и гидродвигатели.:
- В данном; разделейрийодятся краткие сведения о методике
определения надежности и даются ее ориентировочные числовые
оценки, которые^ ыогу$ ;ШтЫ полезными при проектировании и
отработке элементов'гидросистем. г.-р
' 486 .'л ~
73. Основные расчеты надежности
Количественные характеристик надежности изделия опреДё-
ляются характером распределения среднего времени безотказной
работы и параметрами этого распределения.
Основными параметрами оценки надежности является вероят-
ность безотказной работы в течение заданного интервала вре-
мени Р (0 и частоты отказов а (/). Допустим, в процессе испыта-
ний серии одинаковых изделий, число которых перед началом ре-
сурсных испытании было Af0, чМсть изделий отказывает в работе,
причем за время А/ число вышедших из строя изделий состав-
ляет Если обозначить через t время безотказной работы, то
вероятность исправной работы в течение заданного промежутка
времени Т > t может быть вычислена по приближенному равен-
ству
где п (t) — число отказов, происшедших к моменту вре*
мени G;
О р (/) 1 — вероятность безотказной работы.
Следовательно, надежность определяется как вероятность
того, что время Т безотказной работы изделия будет больше за-
данного времени. Это утверждение записывается в форме
Р (0 - р [Т >
Вторым критерием надежности принята частота отказов а (/),
представляющая собой отношение числа отказавших в единицу
времени изделий nt к общему числу испытуемых изделий:
N0&t1 •
Вероятность безотказной работы в течение заданного времени
характеризуется также интенсивностью отказов к (t), под которой
понимают отношение числа отказов в единицу времени а (О
к числу изделий Р (t), безотказно работающих к началу рассматри-
ваемого промежутка времени. Интенсивность отказов выражается
Последнее равенство, определяющее интенсивность отказов,
выражает собой экспоненциальный закон надежности. Обратная
величина параметра к, характеризующего интенсивность отка-
зов, является средним временем безотказной работы Тср.
С учетом выражения Тср = -у- экспоненциальный закон на-
дежности может быть описан равенством
t
P(t)=S Т'ср.
Для объемных гидравлических машин заводы-изготовители
указывают ресурс данного изделия в часах (ч) или в числе рабочих
циклов, т. е. указывают время, истечение которого рассматривае-
мое изделие обладает долговечностью не менее h часов или цик-
лов. Положив в последнем равенстве t = h, получим
__й_
Р (/) = е ГсР.
Соотношение между средним временем исправной работы Тср
и ресурсом h определяет надежность. Высокое значение надеж-
ности может быть получено лишь для малого времени эксплуа-
тации.
Таблица 8
Интенсивность отказов 10~вА, (/) —
ч
Наименование гидроэлементов
наибольшая
средняя
наименьшая
Гидравлические двигатели . .
Насосы с механическим приводом
Насосы с электроприводом . .
Гидроцилиндры........... .
Пневмоцилиндры ........
7,15
31,3
27,4
0,12
0,013
4,3
13,5
13,5
0,008
0,004
1,45
3,33
2,9
0,005
0,002
В табл. 8 приведены статистические данные по интенсивности
отказов гидравлических машин (по данным зарубежной печати).
а
У
74. Срок службы насосов
Опыт показывает, что долговечность качественных насосов и
гидромоторов исчисляется при соблюдении требований в части
чистоты и качества жидкости многими тысячами часов работы.
Ряд фирм выпускает насосы и гидромоторы с гарантийным сроком
службы от 5000 до 20 000 ч и выше.
Срок службы насосов и гидромоторов в значительной степени
зависит от режима эксплуатаций и, в частности, от давления
жидкости и частоты вращения.
Практика показывает, что при работе насосов на пониженном
против номинального давлении срок их службы может быть
488
Рис. 206. График зависимости срока
службы аксиально-поршневых насосов
от частоты их вращения и давления
жидкости
увеличен по сравнению со сроком службы при работе на номиналь-
ном давлении в несколько раз, и наоборот. При увеличении ча-
стоты вращения против номинального долговечность снижается
примерно пропорционально повышению частоты вращения. Учи-
тывая это, для обеспечения
долговечности насоса следует
превышение одного из ука-
занных параметров (частоты
вращения или давления) над
номинальным значением ком-
пенсировать соответствую- ’
щим снижением другого па-
раметра.
На рис. 206 приведен гра-
фик зависимости срока служ-
бы от частоты вращения п и
давления р, рекомендуемый
одной из иностранных фирм
для руководства в эксплуа-
тации применительно к вы-
пускаемым ею аксиально-
поршневым насосам. Вели-
чины пир выражены в процентах от номинальных величин.
График может быть принят за основу ориентировочных оценок
рассматриваемой зависимости применительно и к насосам про-
чих типов.
Кривая N выражает номинальную долговечность, остальные
кривые — соответственно увеличенные (27V, 3N и 4N) и умень-
шенные (0,57V и 0,27V) долговечности. Так, при увеличении давле-
ния против номинального значения на 25% частота вращения для
сохранения нормальной долговечности должна быть снижена
примерно в 2 раза.
ГЛАВА XIII
ГИДРОДВИГАТЕЛИ ПРЯМОЛИНЕЙНОГО
И ПОВОРОТНОГО ДВИЖЕНИЯ
§ 127. Гидроцилиндры
75. Схемы работы
Гидроцилиндр — объемный гидрбдвигатель с прямолинейным
возвратно-поступательным движением выходного звена относи-
тельно корпуса. Объемный гидропривод, где гидродвигателем
является гидроцилиндр, называют поступательным гидроприво-
дом. Гидроцилиндром часто также называют гидродвигатель с воз-
вратно-поворотным движением (см. стр. 528).
Гидроцилиндр имеет корпус 1 (рис. 207, а), в котором на-
ходится поршень 3; шток 5 поршня выходит наружу и соединяется
с нагрузкой. Для устранения наружных утечек рабочей жид-
кости по неподвижным и подвижным разъемам (соединениям),
а также внутренних перетечек жидкости из одной рабочей по-
лости в другую, указанные разъемы герметизируются при помощи
уплотнительных колец 2 и 4 или иных уплотнительных устройств
(см. стр. 550). Жидкость, поступающая в цилиндр под некоторым
давлением, действуя на его поршень, развивает усилие, преодоле-
вающее тление и внешнюю нагрузку, приложенную к штоку 5.
Различают гидроцилиндры с односторонним и двусторонним
штоком, понимая под первыми поршневой гидроцилиндр со што-
ком с одной стороны поршня (рис. 207, а) и под вторым — гидро1-
цилиндр со штоком, расположенным по обе стороны поршня
(рис. 207, б). Часть рабочей камеры а (рис. 207, а) гидроцилиндра,
.ограниченная корпусом, поршнем и крышкой, называется порш-
невой полостью, а часть рабочей камеры b гидроцилиндра, огра-
ниченная рабочими поверхностями корпуса, поршня, штока и
крышкой, называется штоковой полостью.
Помимо приведенного, различают гидроцилиндры односторон-
него (рис. 207, в) и двустороннего действия (рис. 207, а и б): у пер-
вого — движение выходного звена в одну сторону происходит
за счет давления рабочей среды, а в противоположную — за счет
иных каких-либо.сил (пружины, веса приводимого узла и пр.),
у второго движение выходного звена в обе стороны происходит
за счет давления рабочей среды.
Поршневой гидроцилиндр с заданным соотношением площадей
поршня 3 и штока' 5 называют дифференциальным гндроцилин*
с
1.
дром (рис. 207, а), а гидроцилиндр с рабочей камерой, образован-
ной рабочими поверхностями корпуса и плунжером, — плунжер1
ним гидроцилиндром (рис. 207, в). Последние отличаются про-
стотой изготовления, поскольку отработке с точностью, требую-
Рис. 207. Схемы гидроцилиндров
щейся для обеспечения герметичности, подлежат лишь поверх-
ности d штока и буксы под шток и отпадает необходимость в обра-
ботке внутренней поверхности цилиндра.
Нередко целесообразно соединять с движущейся (перемещае-
мой) частью машины не шток, а корпус цилиндра. Жидкость
в цилиндр в этом случае подводят через гибкие трубопроводы
(шланги), либо через каналы в штоке (рис. 207, г).
76. Движущее усилие, скорость поршня
и схемы включения гидроцилиндра
Расчетное движущее, усилие Р на штоке, развиваемое давле-
нием жидкости на поршень (трением поршня и штока, а также
противодавлением в нерабочей полости и силой инерции прене-
брегаем), упрощенно подсчитывается по выражению
P-pF, (135)
где р — давление жидкости;
F — рабочая (эффективная) площадь поршня.
Если давление жидкости выражено в кгс/см2 и площадь
поршня — в см2, усилие будет иметь размерность в кгс.
Рабочая площадь F поршня вычисляется по выражениям:
для цилиндра, представленного на рис. 207, а, при подаче
жидкости в поршневую полость
Р _ п£>2 .
для цилиндра, представленного на рис 207, а, при подаче
жидкости в штоковую полость й для цилиндра, представленного
491
< -.г ' '
на рис. 207, б (при условии равенства диаметров правого и левого
штоков)
р _ я (D* - d*)
где D и d = dj = d2—диаметры поршня.
Для случая di =F d2 эта площадь вычисляется:
г я (£
при подаче жидкости в левую полость г = ——
при подаче жидкости в правую полость F
Рис. 208. Схемы к расчету гидроцилиндров
Для цилиндра одностороннего действия (рис. 207, в) рабочей
/ \ n nd2
площадью является площадь сечения штока (скалки) гшт = —
Расчетную скорость поршня v (без учета утечек жидкости)
определим, приравняв объем, описываемый поршнем в единицу
времени, объему Q жидкости, поступающей в цилиндр
(рис. 207, а). Поскольку объем, описываемый поршнем,
Q-vF,
скорость поршня
v=4- <136>
Если объем жидкости Q выражен в см3/с и рабочая площадь
поршня F в см2, скорость поршня будет иметь размерность в см/с.
Из приведенного следует, что при одинаковой подаче жид-
кости в обе полости цилиндра (рис. 207, а) скорость штока при
поступлении жидкости в штоковую полость будет больше скорости
при подаче в поршневую полость в отношении
D2
D2 —d2 ' ..
492
В соответствий с приведенным диаметр поршня (внутренний
диаметр цилиндра) рассчитывают без учета потерь трения и про-
тиводавления по выражению
Г Лр ’
S
р
где р ~ -р----рабочее давление жидкости;
Р = pF — усилие, развиваемое цилиндром;
F — рабочая (эффективная) площадь поршня.
Объем цилиндра
W = FH= — H,
ц Р ’
где Н — ход поршня.
Следовательно, при использовании гидроцилиндра, схема ко-
торого приведена на рис. 207, а (см. также рис. 208, а) представ-
ляется возможным путем выбора размеров D и d иметь большие
усилия при ходе штока в одном направлении (при подаче жид-
кости в левую полость цилиндра) и большие скорости при обратном
ходе (при подаче жидкости в правую полость цилиндра). Скорость
поршня этого гидроцилиндра при подаче жидкости в левую (ил)
и правую (ипр) полости определяется как
_ 4Q „ _ 4Q
jiD2 ’ УпР““ jt(D2 — d2) '
что если площадь сече-
движении в левую сто-
в 2 раза
Из приведенных выражении следует,
/ jtd2 \
ния штока (—j-) будет равна половине площади сечения гидро-
/ л£)2 \
цилиндра скорость поршня при
рону будет в 2 раза больше, а развиваемое усилие
меньше, чем при движении поршня в правую сторону. Этому ус-
, . Р п j \ F)
ловию соответствует d = При d Z> скорость поршня
при движении в левую сторону при том же расходе жидкости Q
будет превышать его скорость при движении в правую сторону
более, чем в 2 раза. В соответствии с этим развиваемое усилие
при ходе в левую сторону будет при том же давлении вдвое
меньше усилия при ходе в правую сторону.
77. Расчет движущего усилия
с учетом сил инерции и трения
На поршень гидроцилиндра действуют силы нагрузки:
статическая (расчетная) сила Рст = pF, развиваемая давле-
нием р жидкости на эффективную площадь поршня F;
сила трения 7?тр поршня и штока в буксе;
493
сила йнёрЦйй &ин движущихся частей в переходных режимах
(при ускорении и замедлении);
противодействующая сила К, равная произведению давления рсл
в сливной полости на эффективную площадь Fcn поршня этой
полости:
К Рсл^сл*
В соответствии с этим эффективная сила на поршневом штоке
Сила трения 7?тр состоит из трения покоя (/?пок) и трения
движения (7?дв).
Трение покоя (трение при пуске)
^пок Нпок®>
гДе Инок — коэффициент трения покоя;
G — вес подвижных частей цилиндра (при горизонталь-
ном расположении последнего).
Трение движения
^дв
где рдв <Нпбк — коэффициент трения движения.
Сила инерции движущихся частей = —mwt
где т ~ — масса движущихся частей (включая
кость);
2Л
w = — ускорение движущихся частей;
I1
ЖИД-
G — вес подвижных частей;
V — объем рабочей жидкости в цилиндре со сто-
роны сливной полости;
у — удельный вес жидкости;
h и t — путь и время.
Этот вид нагрузки приобретает особенно важное значение
ввиду повышения в современных машинах быстродействия гидро-
систем. Так, число ходов гидравлического 10-тонного пресса
с гидродвигателем прямолинейного движения достигает. 400 в ми-
нуту. Число же реверсирований гидроприводов прямолинейного
движения с относительно небольшой массой и ходом достигает
1000 в минуту. В этом случае гидропривод сравним лишь с пнев-
матическим инструментом ударного действия, допускающим до
1500—1700 реверсов в минуту.
В соответствии с приведенным вводят понятие Пускового к. п. д.,
который представляет собой отношение полезной силы Р^, со-
здаваемой давлением жидкости, к теоретической (расчетной)
силе Р.-:
л
494
ь
^1пуск
ст
или
При равномерном движении сила инерции /?ин = 0, в соот-
ветствии с чем
— Р ст — Р?Тр + Л).
Противодействующая сила в рабочем цилиндре двустороннего
действия различна для противоположных сторон поршня. Для
цилиндров с односторонним Стоком (см. рис. 207, а) сила К имеет
при одинаковом противодавлении на противоположных сторонах
поршня различную величину в зависимости от направления дви-
жения. Это обусловлено разницей в эффективных площадях
поршня. При втягивании (ходе влево) штока
v с nD3
K = pCJ,F1^p—r,
И
где У7! = ---полная площадь поршня (площадь сечения ци-
линдра). При выдвижении (ходе вправо) штока
„ Г- Л(О2 — /Р)
К — PcnF2 — Р 4-----»
где F2 = (D2 — d2) — площадь штоковой полости цилиндра;
рсл — противодавление (давление в сливной
полости).
Следовательно, эффективная сила:
при равномерном выдвижении штока (2?ин = 0)
= Рсг — #тр — К = FjP! — — Fгрся-,
при втягивании штока
Р3ф 2P1 И® F 1рсп,
где pi — рабочее давление.
Вследствие различия эффективных площадей поршня различ-
ными будут, в зависимости от направления движения, и объемы
вытесняемой жидкости.
В рабочем цилиндре одностороннего действия (плунжерном
цилиндре; см. рис. 207, е) вытесняемый объем жидкости равен
нулю, в соответствии с чем имеем при равномерном движении
и к. п. д. цилиндра при равномерном движении определится как
495
При пуске двигателя противодействующую силу /С можно
считать равной нулю, в соответствии с чем усилие при пуске
^эф. пуск -^ст' ^тр ^ин*
78. Прочие схемы включения гидроцилиндра
Широко используются схемы, в которых ускоренное переме-
щение поршня требуется лишь на части прямого хода Для обес-
печения такого движения поршня дополнительно используется
жидкость, вытесняемая из штоковой полости. Подобная схема
представлена на рис. 208. В этой схеме штоковая полость по-
стоянно соединена с напорной магистралью и поршневая —
попеременно с нагнетательной и сливной. Для перемещения
поршня 1 влево жидкость подается через распределитель 3 в пра-
вую полость цилиндра 2, а левая полость соединяется с баком
(рис. 208, а). Движущее усилие Р2 и скорость v перемещения
поршня в этом случае определяются из выражений
~ — d2) р; = -я .
Для обеспечения же движения поршня 1 в правую сторону
обе полости цилиндра 2 соединяют через распределитель 3 между
собой и с насосом (рис. 208, б). В результате жидкость, вытесняе-
мая из правой полости цилиндра 2, поступает в левую его по-
лость вместе с жидкостью, подаваемой насосом. Усилие Ръ раз-
виваемое поршнем, в этом случае определяется как разность уси-
лий, развиваемых давлением р жидкости на левую (Рл) и пра-
вую (Рир) эффективные площади поршня:
л п п л!)2 л (D2— d2) р nd2
Р1 = Рл ~Рпр^=-ГР —- = — Р-
Следовательно, эффективной площадью поршня в рассмотрен-
ной схеме является площадь сечения f = —т— штока диаметром d.
При определении скорости поршня учитываем, что жидкость,
вытесняемая из правой (штоковой) полости цилиндра, поступает
в левую полость и заполняет при движении поршня часть осво-
бождаемого им объема. Следовательно, скорость поршня опре-
делится нескомпенсированной площадью поршня, равной раз-
ности эффективных площадей левой и правой полостей цилиндра:
nd2 x(D2 — d2) nd2 x
"4--------4---L=~r = f-
В соответствии с этим скорость поршня
Q 4Q
vi— f ~ •
496
Подбором величин диаметров поршня D и штока d можно
получить требуемые соотношения усилия и скоростей движения
поршня. В частности, из схемы (рис. 208, а) и приведенных расче-
г / лЬ2\
тов видно, что если площадь цилиндра ( = вдвое больше
площади штока ( / = —), т. е. гц — 2/, что соответствует
d = скорость Vi движения поршня и развиваемые им усилия
на штоке Р при движении поршня как в правую (ux; 7\), так и
в левую (ц2; Р2) стороны будут равны и определятся как
л£)2 nd2
1. Q _ 4<?
2 Fa f nd2 •
n f D
При a рабочая
(эффективная) площадь будет:
при движении поршня
влево
f _ n(D2-d2)
/1 — — 4 >
при движении поршня
вправо
с л</2
/2 — •
б)
а)
г
Рис. 209. Гидравлическая схема включе-
ния гидроцилиндра в гидросистему с газо-
гидравлическим аккумулятором
В схемах с постоянным питанием штоковой полости силового
цилиндра в системе питания часто применяют газогидравлический
аккумулятор.
На рис. 209, а показана гидравлическая схема включения
гидроцилиндра в гидросистему с аккумулятором. Аккумулятор
включается в штоковую полость цилиндра, противоположная
(поршневая) полость которого соединена с трехходовым золотни-
ковым распределителем 4 и с его помощью периодически соеди-
няется с баком или насосом.
При подаче жидкости от насоса через распределитель 4 в пра-
вую полость цилиндра 2 его поршень будет перемещаться влево,
вытесняя жидкость из левой полости цилиндра в газогидравли-
ческий аккумулятор 3, При соединении же правой полости ци-
линдра 2 со сливной линией (баком) (рис. 209, б) его поршень
32 т. м. Бащта 49?
1
будет перемещаться вправо под действием жидкости, вытесняемой
из аккумулятора 3.
При питании правой полости цилиндра жидкостью под давле- •
нием р„ усилие, развиваемое поршнем в конце хода, будет
*1 гн 4 Как max •
>3*
S)
Рис. 210. Схемы к расчету габари-
тов гидроцилиндров
При питании цилиндра аккумулятором это усилие
2 4 Рак min’
г >
где . рн — давление питания (нагнетания);
Раклах и рак mm — максимальное и минимальное давление
в аккумуляторе при изменении его газо-
вого объема в результате вытеснения
жидкости из полости цилиндра и на-
оборот.
Скорость перемещения поршня цилиндра при питании его
насосом с подачей Q определится как
4Q
Vl~ ho*
При питании цилиндра от аккумулятора скорость устанавли-
вается регулируемым дросселем 1.
В случаях, когда требуется получить в обычной схеме вклю-
чения цилиндра одинаковые усилия при постоянном давлении
или одинаковую скорость при постоянном расходе жидкости при
движении в обе стороны, цилиндр снабжают ложным штоком
того же диаметра, что и силовой шток (см. рис. 207, б). Однако
применение подобных цилиндров увеличивает габариты машины,
так как движущийся шток выходит за цилиндр по обе стороны.
Нетрудно видеть, что если при цилиндре с односторонним 'штоком
при ходе Н требуется обеспечить для его размещения простран-
ство длиной больше 2Я (рис. 210, а), то при цилиндре с двусторон-
498
ним штоком ata Длина tip и Тех Жё условиях будет больше 3//
(рис. 210, б). Однако, если в схеме с двусторонним штоком по-
движным выполнить цилиндр, а неподвижным — поршень
(рис. 210, в и 207, г), то длина этого пространства будет равна
длине цилиндра с односторонним штоком.
Цилиндры с двусторонним штоком более сложны в изготовле-
нии, так как необходимо выдерживать строгую концентричность
трех поверхностей — внутренних в цилиндре и внешних на
поршне И штоках.
§ 128. Регулирование скорости гидроцилиндра
и
Гидроцилиндры применяются в основном в системах, в. ко-
торых скорость выходного звена регулируется с помощью дрос-
сельных устройств и лишь в отдельных случаях (при больших
мощностях) —с помощью регулируемого насоса (рис. 211, а;
см. также рис. 148). Путем изменения знака и величины регули-
руемого параметра насоса 2 представляется возможным обеспе-
чить требуемое направление и скорость движения поршневого
штока цилиндра 1.
79. Дроссельное регулирование
Системы дроссельного регулирования гидроцилиндров можно
разделить как и в случае гидромоторов (см. стр. 430) в зависи-
мости от вида источника питания на системы: а) с постоянным
давлением источника питания (насоса) (ря = const), устанавли-
ваемым регулированием переливного клапана (рис. .211, б—г);
б) с переменным давлением (рн =# const), которое определяется
рабочими условиями. Реже применяются комбинированные си-
стемы. .
Наиболее распространенной является система с постоянным
давлением источника питания. В этом случае особенные преиму-
щества имеют системы, в которых несколько гидроприводов
питаются от одного источника.
Дроссель (регулятор) в системах с рн = const может быть
установлен на линии питания (на входе) гидроцилиндра
(рис. 211, б) и в сливной магистрали (на выходе) (рис. 211, в).
Излишек жидкости, подаваемой насосом, отводится в бак через
переливной клапан а.
Схемы с регулятором в сливной магистрали (рис. 211, в) обес-
печивают двустороннюю жесткость гидросистемы и поэтому мо-
гут применяться в системах с знакопеременными нагрузками
гидродвигателя. Для этих систем схемы с регулятором, установ-
ленным на линии питания (рис. 211, б), менее пригодны, так как
при изменении знака внешней нагрузки двигателя скорость дви-
жения выходного штока может значительно увеличиться, по-
скольку этому не противодействует дроссель. Эти схемы не при-
32* 499
и
f одни также для работы в режиме больших ускорений выходного
звена (штока поршня) с массовой нагрузкой. Из схемы, представ-
ленной на рис. 211, б, видно, что при резком снижении подачи
жидкости на входе в цилиндр путем дросселирования поршень
будет перемещаться под действием силы инерции движущейся
массы.
Кроме того, схемы с регулятором в сливной магистрали более
устойчивы против автоколебаний (в особенности при малых ско-
ростях движения гидроцилиндра), чем схемы с регулятором
в линии питания.
рн = const
Рис. 211. Принципиальные схемы объемного (а) и
дроссельного (б—г) регулирования скорости гид-
роцилиндра
Условие равновесия сил, действующих на поршень, в схеме
гидроцилиндра с двусторонним штоком при установке дросселя,
на входе (рис. 211, б) может быть выражено уравнением (см. также
стр. 493)
PpF — PcnF + Р + Т.
Поскольку /?р = рн — АрВх, можем написать
* Р + Т
АРвх' Рн“ Рсл р •
При установке дросселя на выходе (рис. 211, в)
Поскольку Pi = Арвых + Рсл> можем написать
АРвых Рн Рсл
4
(137)
(138)
500
гдо А^вх рн рр?
АРвых = Pi — Рсл — перепад давления на дросселе при уста-
новке его соответственно на входе и на
выходе;
рн = const — подводимое давление (давление на-
соса);
рр — рабочее давление в цилиндре для схемы
с дросселем на входе (рис. 211, б);
рсл — давление в сливной магистрали;
Pi — противодавление в нерабочей полости
цилиндра для схемы с дросселем на вы-
ходе (рис. 211, в);
Р — внешняя нагрузка, приложенная к што-
ку цилиндра;
Т — сила трения в цилиндре;
т (D2 — d2)
— площадь живого сечения цилиндра;
D и d — диаметр поршня и штока.
Из выражений (137) и (138) следует, что перепад давления на
дросселях, а следовательно, и расход жидкости через них зависят
от величины нагрузки Р на штоке гидроцилиндра, причем пере-
пады давления в схеме с дросселем на выходе и на входе будут
при всех прочих равных условиях равны между собой. В соот-
ветствии с этим зависимость скорости от нагрузки в этих схемах
будет одинаковой.
Необходимо отметить, что системы дроссельного регулирова-
ния обладают относительно низким к. п. д., что обусловлено зна-
чительными потерями энергии, поскольку в насосе подобной си-
стемы независимо от мощности, потребляемой исполнительными
двигателями, расходуется мощность, соответствующая полной
производительности насоса и давлению, определяемому настрой-
кой (регулировкой) переливного клапана. В соответствии с ука-
занным к. п. д. при уменьшении нагрузки понижается, прибли-
жаясь при малой нагрузке к нулю.
Пример. Рассчитать усилие /? на штоке гидроцилиндра и скорость w его
перемещения при дроссельном регулировании. Сечение регулирующего дрос-
селя /дР = 3 мм2; давление в напорной магистрали рн ~= 12 МПа (120 кгс/см2)
(объемные и механические потери и давление в сливной магистрали не учиты-
ваем). Рабочая площадь поршня У7 — 25 см2; коэффициент расхода дросселя
р = 0,7, удельный вес жидкости у = 0,85 гс/см3.
Решение. Расчетное усилие на штоке
У? = 12 • 106-2,5 • 10"3 = 3-103 кгс= ЗЮ4 Н.
Расчетную скорость штока определяем по выражению [ 1 ]
1/2^
501
ГДе фдр — расход Через дроссель:
^др == И/др 1/"2 ’
* 4
Л
р — плотность жидкости; для данной жидкости
р = 850 Н-с2/м4 (85 кгс-са/м4).
Подставив значения входящих параметров, будем иметь с учетом размер-
ностей:
310-« 1/ 2-12-10» пплк..,_. лс ....,-
2,5-10"8 V 850 — 0,045 м/с — 45 мм/с.
80. Системы с переменным давлением
*
Реже применяются гидросистемы с переменным давлением
(Рл ¥= const), в которых давление питания зависит от нагрузки
гидродвигателя (см. рис. 211, г). Излишек жидкости в этой схеме
отводится в бак через дроссель, установленный параллельно
с гидродвигателем (на линии, соединяющей магистраль подводи-
мого давления с баком). Жидкость, подаваемая наСосом в объ-
еме QH, делится в этой схеме на два параллельных потока, один
из которых Qu поступает в гидроцилиндр, а второй (2ДР перели-
вается через дроссель в бак, причем количественно эти
обратно пропорциональны сопротивлениям ветвей:
потоки
хи Хц I Хдр-
Выразив гидравлическое сопротивление дросселя через
= (где Сдр и Дрдр — расход и перепад давления
'др “
в нем)
и пренебрегая давлением в сливной магистрали, можем написать
П — ГДР - Р г _ п Р + т
хц р. хн ,рг
гг№ ГГДР
Основным недостатком последней системы является понижен-
ная жесткость и необходимость индивидуального для каждого
потребителя источника питания. Кроме того, точность регулиро-
вания скорости й ее стабильность при этом способе регулирования
ниже, чем в предыдущих схемах с ра = const, однако жидкость
нагревается меньше. Последнее, обусловлено тем, что давление
в этой системе пропорционально нагрузке,'й лишь при макси-,
мальной ее величине оно достигнет значения, на которое отрегу-
лирован переливной клапан насоса.
81. Дроссельные регуляторы
с постоянным перепадом давления
Чтобы исключить влияние нагрузки на расход жидкости,
а следовательно, и на скорость гидроцилиндра, применяют, как
и в системах с гидромотором (см, стр. 434), дроссельные регуля-
502
торы, которые позволяют обеспечивать при изменении нагрузки
практически постоянный перепад давления и соответственно
этому постоянный при прочих равных условиях расход жидкости.
Сведения-по этому вопросу, приведенные на стр. 434, справедливы
и для рассматриваемых здесь гидроприводов.
На рис. 212 представлены распространенные схемы дроссель-
ного регулирования скорости гидродвигателя прямолинейного
движения путем установки дросселя в сливной (рис. 212, а) и
напорной (рис. 212, б) линиях.
Рис. 212. Схемы автоматических дроссельных регуляторов скорости
гидроцилиндра
Из рис. 212, а видно, что противодавление рг в нерабочей
полости цилиндра при постоянном подводимом давлении рн и
отсутствии сил трения поршня будет в зависимости от величины
приложенной нагрузки Р [см. также выражение (138)1 равно
рнЛ - Р D2 Р
Р1 г2 D2 —da f2 9
где D — диаметр цилиндра;
d — диаметр штока;
Л = и — ~г (Р2 — d?) — площади рабочих сечений ле-
вой и правой полостей ци-
линдра.
При нулевой внешней нагрузке Р = 0 поршня противодавле-
ние рх достигает максимального значения
D _
Pimm ’
503
* * >.
а при максимальной нагрузке Pmax имеет минимальное значение
п _______________________ PhD2 Р щах
Pl min — D2 _ d2 p •
A
Регулятор состоит из связанного с поршнем 3 дросселя 4
с переменным проходным сечением и дросселя 2 с постоянным
сечением» настроенного на заданную скорость поршня двигателя.
Сверху на поршень 3 регулятора действует сила Рпр упругости
пружины /, а снизу — давление жидкости р2 перед дросселем:
4Рпр
гЦ,
где dn — диаметр поршня 3.
При уменьшении противодавления рг в цилиндре, вызванном
увеличением нагрузки Р, количество жидкости, проходящей
через дроссель 4, уменьшится, в результате чего давление
понизится и дроссель под действием пружины 1 будет переме-
щаться вниз, увеличивая проходное сечение щели до тех пор, пока
давление перед дросселем 2 не восстановится.
При применении схем, в которых стабилизация скорости дви-
жения поршня достигается установкой регулятора на напорной
линии (рис. 212, б), на поршень гидродвигателя действует пере-
менное давление при постоянном давлении рн = const в на-
порной линии, поддерживаемом переливным клапаном насоса.
Связь между перепадами давления, создающимися дроссе-
лями т и п переменного и постоянного сечений, имеет вид
Рн = АРл + Apm + Ра,
где Дрл и Дрт — перепады давлений, создаваемые дроссе-
лями п и т.
Если обеспечить постоянство одного из этих перепадов, по-
стоянным будет также расход (подача) жидкости.
Для сохранения постоянной подачи жидкости в цилиндр не-
обходимо выдержать условие
Рн — Ар« = р2 + Apm = const,
что может быть достигнуто соответствующим регулированием
перепада давления на дросселе т при обеспечении условия
Арт == Р„ — Ар„ — р2.
§ 129. Гидроцилиндр с демпфером
Гидроцилиндры часто используются для возвратно-поступа-
тельных перемещений тяжелых деталей с большими отрицатель-
ными ускорениями, при которых силы инерции достигают значи-
тельных величин. В качестве примера можно привести случай
движения со скоростью v стола строгального станка, несущего тя-
желую (массой т) обрабатываемую деталь,
504
Если не предусмотрен^ средства замедления й конце ХОДЯ,
кинематическая энергия движущихся частей, определяемая
Г, ти-
должна поглотиться деформацией концевого упора, что вызовет
жесткий удар стола о последний.
Ввиду возможности получения при этом значительных пере-
грузок -скорость поршня обычно ограничивают величиной 0,1 м/с.
При более высоких скоростях для предупреждения удара в конце
хода поршня применяют гидроцилиндры с тормозными устрой-
ствами для поглощения (демпфирования) кинетической энергии
движущейся массы путем изменения ее состояния (превращения
механической энергии в тепловую) и обеспечения заданного плав-
ного замедления поршня в конце хода и, соответственно, — обес-
печения заданной перегрузки.
Демпфирующее (тормозное) устройство обычно, состоит из спе-
циального пружинного тормозного клапана, который соединяет
полость демпфирования со сливом, или из демпфирующего поршня
в виде продолжения поршневого штока, который в конце хода
входит в расточку головки днища цилиндра с минимальным за-
зором в несколько сотых миллиметра, дросселируя на оставшейся
части пути поршня замкнутую им в цилиндре жидкость.
Одна из возможных схем подобных демпферов простейшего
типа представлена на рис. 213, а. Поршень 4 снабжен цилиндри-
ческим выступом 3 (с одной или с обеих его сторон), который перед
концом хода поршня входит в камеру б, запирая тем самым в слив-
ной полости 5 гидроцилиндра некоторый объем жидкости. Не-
трудно видеть, что скорость дальнейшего движения поршня 4
будет ограничена, поскольку блокированная (запертая) в полости 5
цилиндра жидкость должна быть выдавлена через дроссель 1
и через узкую радиальную щель (зазор), образованную высту-
пом 3 и стенками камеры 6. В результате в этой полости создается
противодавление, препятствующее движению поршня. С помощью
дросселя 1 осуществляют регулирование эффективности демпфи-
рования.
При обратном ходе поршня жидкость поступает в полость 5
(в этом случае она является рабочей) до того, как выступ 3 выйдет
из камеры 6 через обратный клапан 2 в обход дросселя /, ввиду
чего на скорость обратного перемещения поршня демпфер не
влияет.
Применяются также иные схемы демпфирования большей или
меньшей сложности и, в частности, демпферы с переменным по
ходу поршня сопротивлением (дросселированием), а в некоторых
случаях — дроссели переменного сопротивления в зависимости
от температуры.
При правильном выборе параметров демпфера кинетическая
энергия движущихся частей, перемещающихся перед торможе-
505
нием с некоторой скоростью, должна быть поглощена при Дроссе-
лировании жидкостью, вытесняемой из замкнутой полости 5 си-
лового цилиндра через указанный демпфер. При этом величина
давления в этой замкнутой полости и путь торможения (до полной
остановки движущихся частей) зависят при всех прочих равных
условиях от размера и закона изменения сопротивления дроссе-
лирующей щели по пути поршня. z
Рис. 213. Схемы к расчету гидроцилинд-
ров с демпфированием (а—в) и их про-
дольной устойчивости (г)
Кинетическая энергия движущихся масс т (рабочего ци-
линдра и нагрузки) весом G определится как
г? Go2 mv2
. “ 2g 2 ’
J
где v — средняя'no пути демпфирования скорость поршня.
Энергия, поглощаемая демпфером (работоспособность демп-
фера), определяется из уравнения
Л — FpL — P4a^L,
где
л(р2 — <Р) . ,
——*------ — площадь демпфирования (рис. 213, а);
р — давление в камере 5 демпфирования;
L — путь демпфирования;
Ртор — среднее по ходу усилие демпфирования
('торможения).
506
Приравнивая кинетическую энергию энергии,
демпфером, получим
поглощаемой
£ = Л;
При условии Е >РтоР L энергия движущихся масс полностью
не будет поглощена демпфером, в результате возникнет жесткий
удар упора.
Текущее значение перепада давления Др в запертой полости
цилиндра (в камере торможения) при выдавливании из нее через
радиальную щель (дроссель 7 полностью перекрыт) жидкости дви-
жущимся поршнем находим, пользуясь выражением для расхода
через кольцевую концентричную щель (приравниваем средний
диаметр-радиальной щели диаметру d выступа) [II:
a nd kps3 \ ~ 12ц IvFu
У 12ц/ ; ~ nds* ’
где Q = vFK — расход жидкости, вытесняемой поршнем
через щель;
р— динамическая вязкость жидкости;
/ —длина части выступа (хвостовика) 3, утоп-
ленной в текущий момент в камере 5
(путь торможения) (рис. 213, а)\
D — диаметр силового цилиндра;
v — текущая скорость поршня;
гц ~ . -------площадь кольцевой полости 5 цилиндра,
в которой заперта жидкость;
—номинальный радиальный зазор (dK—
диаметр камеры 5);
d и dK — диаметры хвостовика 3 и камеры 6, в ко-
ч торую он входит.
'Этому перепаду давления соответствует текущее усилие на
поршне, развиваемое демпфером (при перекрытом дросселе):
D ГЛ .
ч
*
Из приведенного выражения следует, что усилие, развиваемое
обратно пропорционально величине зазора
этим
демпфером,
в третьей степени. Кроме того, сопротивление демпфера зависит
также от концентричности его зазора. Ввиду трудности обеспече-
ния стабильности этих параметров подобный демпфер не обеспе-
0
чивает постоянного сопротивления.
С этой точки зрения имеет преимущество схема демпфера,ко-
тором радиальный зазор полностью устранен применением метал-
лического уплотнительного кольца 7 (рис. 213, б), расход же
. 507
жидкости из запертой камеры демпфера обеспечивается лишь
дросселем 1. Величина этого расхода вычисляется как [II
Q — /др J? ’
где /др — сечение канала дросселя;
| — коэффициент сопротивления (можно принять £ =
р — плотность жидкости.
С учетом приведенного выше, уравнение для расчета текущего
усилия (сопротивления), развиваемого демпфером, получит вид:
F3t>2p
Р =F Ьр= ц -
J Д ' О112й
/ др
Конструкция цилиндра с таким демпфированием показана на
рис. 213, в.
§ 130. К- п. д. гидроцилиндров
Рассмотренные выше величины движущего усилия [см. выра-
жение (135)] вычислены без учета потерь от трения дви-
жущихся частей. С учетом этих потерь фактическое движущее
усилие
л Ф * '1мех>
гДе Лмех ~ ---механический к. п. д. силового цилиндра;
в зависимости от различных факторов т]мех колеблется от 0,97
до 0,85; среднее значение ~ 0,95.
Сила трения зависит главным образом от конструкции ци-
линдра и качества материала и изготовления уплотнений поршня
и штока, причем во многих случаях она достигает больших зна-
чений (многих десятков кгс). Сила трения при трогании поршня
с места в 2—3 раза превышает силу трения в установившемся его
движении.
Чистота обработки зеркала цилиндра (трущейся поверхности)
должна быть не ниже \?8; посадка поршня в цилиндре — по
классу Х3.
Фактический «расход жидкости С?ф, расчетная скорость v
движения поршня цилиндра и рабочая площадь f поршня свя-
заны зависимостью
Чоб ’
где — расход жидкости в рабочем цилиндре;
1106 = ^4- —объемный к. п. д. силового цилиндра;
vT
1>ф и ит — фактическая и расчетная скорости поршня.
508
В цилиндрах, поршни которых уплотнены резиновыми или
кожаными манжетами, либо резиновыми кольцами, утечки жид-
кости практически отсутствуют, поэтому объемный к. п. д. можно
принять равным единице. При уплотнении поршня разрезными
металлическими кольцами (см. стр. 554) объемный к. п. д. может
составлять 0,98—0,99. Герметичность часто оценивается коэф-
фициентом утечек
Пример. Рассчитать мощность (N), подводимую к гидроцилиндру с пара-
метрами: нагрузка на штоке 7?н = 22 • 103 Н — (2200 кгс); скорость штока v ~
--- 10 см/с, рабочая площадь поршня F = 14 см2, сила трения в подвижных
сочленениях 7?тр = 1200 Н (120 кгс), коэффициент перетечек через уплотнение
поршня 0,001 см3/(Н-мин) (0,01 см3/(кгс-мин).
Решение. Полезная мощность
лг __ 2200-10 _Q '
Nn— 75 100.75 —3 л. с.(2,2 кВт).
Расчетная подача жидкости
QT= vF = 10-14 — 140 см3/с = 8,4 л/мин.
Фактическая подача Фф — QT — Рут!
л ____ t, “1“ ^тр __
Рут — «уТгр, р — —--------
22-103 + 1,2-103
14-10-4
= 16,6-Ю6 Н/м2- 16,6 МПа — 166 кгс/см2.
Отсюда находим утечку жидкости
QyT = 0,01 -14 -166 = 23 см3/с.
Фактическая подача жидкости в гидроцилиндр
Фф = 140 + 23 = 163 см3/с или Фф = 9,78 л/мин.
Подводимая к цилиндру мощность (мощность потока жидкости)
лгт = ~йг = = 33 л- с-(2’3 кВт)-
§ 131. Расчет гидроцилиндров
Гидроцилиндры испытывают в процессе работы воздействие
внутреннего давления рабочёй жидкости и внешней нагрузки.
Расчет цилиндров на прочность производится по отдельным
элементам, основными из которых являются цилиндрический кор-
пус и шток. В первом приближении при расчете гидроцилиндров
на прочность в большинстве случаев ограничиваются расчетом
напряжений, возникающих от внутреннего давления жидкости,
не рассматривая сложных напряжений от действия внешних сил,
а также не учитывая прочих факторов (температуру и пр.).
Отношение длины L хода поршня к диаметру D обычно вы-
бирается -^-<15.
509
Ниже приводятся (без выводов расчетных формул) основные
данные для расчетов корпуса цилиндра и поршневого штока из
курса «Сопротивление материалов».
Для определения толщины t стенки тонкостенных цилиндров
пользуются расчетной формулой
j__t ДиРтах
2ООт0/п ’
где d„ — наружный диаметр;
о — напряжение материала;
Ртах — максимальное давление;
п — запас прочности; в общем машиностроении прини-
мают п = 3,2;
т — коэффициент; для цельнотянутых труб т = 1.
Величина <т/п приближенно соответствует допустимому пери-
ферийному напряжению опер. С учетом этого последнее уравнение
упрощается и принимает вид
f__ * , картах
200 Опер
Принимая во взимание, что отношение наружного dH к вну-
треннему dB диаметру -у- для тонкостенных цилиндров состав-
ляет обычно 1,1—1,2, часто расчеты производят, исходя из вну-
треннего диаметра: z
4__ ' , daPmax j__ ^вРтах
~ 200 стпер ИЛИ ~ 200<Тдоп ’
где стдоп — допустимое напряжение стенки цилиндра.
Расчет цилиндров на устойчивость. Гидроцилиндры под дей-
ствием давления жидкости и внешней осевой нагрузки работают
на сжатие как балки переменного сечения, причем прочность их
зависит от характера нагружения и вида заделки концов цилиндра.
Наиболее распространенным на практике случаем является на-
гружение шарнирного закрепления цилиндра продольно сжимаю-
щей силой Р, направленной по оси цилиндра. При известном
(критическом) значении этой силы может возникнуть прогиб ци-
линдра, который при дальнейшем увеличении нагрузки приводит
к его разрушению.
Расчет на продольный изгиб при длине L > 10dH производят
по известной формуле Эйлера:
где Р — разрушающая сжимающая нагрузка;
Е — модуль упругости материала; для стали можно принять
Е — 22-105 кгс/см®;
510
I
/ = “64- (di — dl) — момент инерции;
L — общая длина цилиндра с выдвинутым
штоком (рис. 214, г);
dti и dB — наружный и внутренний диаметры;
k — коэффициент, зависящий от способа за-
делки концов штока, х
В нашем случае, считая, что оба конца заделаны на шарнирах,
можно принять k — 1,0; в случае, когда один конец заделан,
а другой свободен (соответствует жесткому креплению цилиндра
на станине), k = 2,0. „ ' '
При расчете напряжения в штоке на продольный изгиб его
расчетную длину принимают равной 0,8 расстояния между бук-
сами при полностью выдвинутом штоке.
Для расчета напряжения (сжатия) о коротких штоков, длина
которых не превышает десяти диаметров, можно пользоваться
выражением
где Р — нагрузка на шток;
f — площадь поперечного сечения штока.
Запас прочности для цилиндров, работающих при давлении
до 300 кгс/см2, принимают п = 3.
t Толщину t стенки тонкостенного однослойного цилиндра можно
также вычислить по формуле Ляме для расчета цилиндров, на-
груженных внутренним давлением:
(139)
где d — внутренний диаметр цилиндра;
о — допускаемое напряжение для материала цилиндра по
окружности.
Под тонкостенным понимают цилиндр, минимальная толщина
стенок которого составляет (для распространенных диаметров)
не более 6—8 мм. В общем случае тонкостенным считают цилиндр,
у которого отношение -— 1,2, где гн и гвн —наружный и
внутренний радиусы стенок цилин,
Формулу (139) применяют преимущественно для расчетов ци-
линдров из хрупких материалов (чугун и пр.). При расчете ци-
линдров из вязких материалов, например, из стали и цветных ме-
таллов, следует пользоваться формулой ; *
а + р(1—2р)
где р — коэффициент Пуассона (для стали р — 0,3, для латуни
р = 0,35).
511
Толщину донышка Цилиндра можно определять по формулам:
для плоского донышка /пл = 0,405d
для сферического донышка ic$ = •
В соответствии с приведенным, напряжение в стенке цилиндра
можно определить по формуле
П2+ d2
а—' D2 — d2 р'
где Dud — внешний и внутренний диаметры цилиндра.
Допустимые максимальные напряжения материала цилиндров:
для серого чугуна 25 МН/м2 (250 кгс/см2), для высокосортного
чугуна 40 МН/м2 (400 кгс/см2), для меди и бронзы 42 МН/м2
(420 кгс/см2); для стального литья 80—100 МН/м3 (800—
— 1000 кгс/см2); для кованой углеродистой стали 100—120 МН/м2
(1000—1200 кгс/см2); для легированной стали 150—180 МН/м2
(1500—1800 кгс/см2).
Кроме напряжений от внутреннего давления жидкости, ци-
линдры подвергаются изгибающим нагрузкам, напряжения от
которых могут в некоторых случаях превосходить напряжения
разрыва от давления жидкости. Расчеты на. эти напряжения про-
изводят раздельно и выбирают максимальное значение.
Расширение корпуса цилиндра. В целях предохранения уплот-
нений от разрушения и преждевременного износа необходимо, по
возможности, . устранять расширение корпуса цилиндра, с тем
чтобы избежать увеличения радиального зазора между ним и
поршнем. Изменение диаметра Ad (см) цилиндра определяется
по следующему уравнению, основанному на законе Гука:
где Е — модуль упругости; для стали Е = 2-10е кгс/см2;
р — коэффициент Пуассона; для стали р = 0,3.
Расчет штоков. Поршневые штоки рассчитывают по формулам
для напряжения на продольный изгиб, а при наличии боковых
усилий и по формулам для напряжения при поперечном изгибе.
Однако последних усилий следует избегать.
§ 132. Гидроцилиндр со ступенчатым поршнем
Для получения нескольких скоростей применяют гидроци-
линдры со ступенчатым поршнем. Цилиндр (рис. 214, а) имеет
три рабочих камеры, вместо двух, имеющих место в рассмотрен-
ных выше схемах. Третья камера оборазована скалкой 6, входя-
щей в цилиндр 4 и являющейся одновременно штоком поршня 5.
512
При подаче жидкости через канал 1 в эту камеру получим макси-
мальную скорость
4Q
nd2
и минимальное усилие
рЛб/2
В)
Рис. 214. Схемы гидроцилиндра со ступенчатым поршнем (а)
и включения его в гидросистему (б и в)
При подаче жидкости в канал 2 получим среднюю скорость
Vi л (D2 — (Р)
и усилие
р _ x(D2 — d2)
^2 — 4 Р-
При подаче жидкости одновременно в канал 1 и 2 получим
минимальную скорость
33 Т. М. Башта 513
^3 =
4Q
л£>2
и максимальное усилие
п лМ2
Рз = — р.
Скорость обратного хода (при подаче жидкости в канал 3)
4Q
4 л(£2 — D2)
и усилие при этом
л (D2 — d])
р4=_^__------£р.
Цилиндр последней схемы применяется в машинах (например,
в станках и прессах), где требуется обеспечить ускоренный подвод
и отвод режущего инструмента и медленный рабочий его ход.
Схема включения такого цилиндра в гидросистему показана на
рис. 214, б.
На основе схемы последнего многокамерного гидроцилиндра
могут быть построены автоматические системы электрогидра-
влического дискретного регулирования скорости гидромеха-
низмов.
На рис. 214, в представлена схема одной из возможных дискрет-
ных систем с двумя подобными многокамерными гидроци-
линдрами 7 и Р, поршни которых находятся на общем штоке 8,
связанным с нагрузкой. Регулирование скорости выходного звена
гидромеханизма достигается подключением к питающему насосу
с постоянной подачей, соответствующей комбинации камер (поло-
стей) гидроцилиндров 7 и 9, имеющих различные объемы. Эти под-
ключения осуществляются электромагнитными золотниками 10,
управляемыми по заданной программе с помощью блока управле-
ния. Путем соответствующих комбинаций этих камер представ-
ляется возможным изменять в широких пределах текущую ско-
рость выходного звена (штока 3) и осуществлять любой характер
его движения — от разрывного до непрерывного.
Описанный гидромеханизм может быть использован самостоя-
тельно, например, в разомкнутых гидроприводах подач станков,
либо в контуре однокоординатной релейно-импульсной следящей
гидросистемы. Благодаря практической безынерционное™ элек-
тронной связи управления и гидравлической исполнительной
части, а также малому (оо0,001 с) времени переключения электро-
магнитов, механизм допускает работу на высоких частотах —
порядка 100 Гц и выше.
514
§ 133, Тандем-цилиндры
В некоторых случаях и в частности, когда ограничена возмож-
ность применения цилиндров больших сечений, но не ограничена
длина цилиндра, применяют сдвоенные (тандем) (рис. 215, а и б),
а также строенные, последовательно соединенные цилиндры.
Развиваемое усилие Р и скорость v перемещения такого двух-
поршневого та идем-цилиндр а с односторонним штоком (рис. 215, а)
определяются по выражениям
Р = Р (^1 + РгУ, V = -р-л р - <
Г1 I Г 2
где Z7! и f2 — площади рабочих сечений поршней;
и
л (D2 — d2)
4
Тандем-цилиндры также распространены в гидроусилителях
систем путевого управления машин (самолетов и пр.), где тре-
буется дублирование управления. Для обеспечения этого каждый
из цилиндров имеет автономное питание и управление.
а)
Рис. 215. Схемы сдвоенных гидроцилиндров с односторонним (а) и двусторон-
ним (б) штоками
При проектировании тандемных (двухкамерных) гидроусили-
телей следует учесть возможность перегрузки цилиндра по давле-
нию: при неблагоприятных условиях перекрытий плунжером
окон золотника в сочетании с изменением направления действия
внешней нагрузки давление в цилиндре может достигать четырех-
кратной величины рабочего давления. Допустим, что для преодо-
ления внешней нагрузки Ртах (рис. 215, б) давление в камерах с
и b должно быть равно ртах. Иначе говоря, Pmax = 2pmaxF,
где F — площадь сечения поршня. Очевидно, что при неблаго-
приятных условиях перекрытия плунжером окон золотника и сни-
жении внешней нагрузки Ртах до нуля давление в камере а
при подаче давления ртах в камеры с и b будет ра = 2ртах.
В том же случае, если этим неблагоприятным условиям будет
сопутствовать изменение знака нагрузки при сохранении ее вели-
чины (например, аэродинамической нагрузки на органы управле-
ния самолетом), давление в камере а будет рг = 4ртах.
33* 515
§ 134. Телескопические гидроцилиндры
Для возможности получения больших ходов при ограниченном
пространстве, недостаточном для размещения рассмотренных
цилиндров, применяют телескопические цилиндры, состоящие
из совмещенных двух и более цилиндров.
Телескопический гидроцилиндр — силовой цилиндр с несколь-
кими (для каждого направления движения) рабочими камерами,
Рис. 216. Схемы телескопических гидроцилиндров
образованными корпусом, поршнем или плунжерами, расположен-
ными концентрично. Ход выходного звена цилиндра равен сумме
ходов поршней или плунжеров. Телескопический гидроцилиндр
определяется также как цилиндр с рабочими поверхностями кор-
пуса и нескольких концентрично расположенных поршней (плун-
жеров), перемещающихся относительно друг друга; сумма их
ходов равна ходу выходного звена.
В общем случае под телескопическим гидроцилиндром пони-
мают силовой цилиндр, общий ход штоков которого превышает
длину корпуса цилиндра. Очевидно, это осуществимо лишь в том
случае, если внутреннюю полость поршневого штока использо-
вать в качестве цилиндра для поршня второй ступени, внутреннюю
полость штока поршня этого второго цилиндра — для последую-
щего (третьего) цилиндра и т. д. Число цилиндров в подобной
«штативной» схеме доходит до шести.
На рис. 216, а представлена схема двухцилиндровой машины.
Внутренняя полость штока 2 поршня 5 большого диаметра яв-
516
ляется цилиндром для поршня 4, шток 1 которого связан с нагруз-
кой. При подаче жидкости в правую полость е большого цилиндра 3
она одновременно поступит через отверстие 6 в донышке поршня 5
в полость с малого цилиндра 2; в результате оба поршня 4 и 5
будут перемещаться влево. При этом, поскольку шток 2 в началь-
ный момент (при положении поршней 4 и 5, показанном на ри-
сунке) не несет нагрузки, которая приложена к штоку /, поршень 5
будет перемещаться до соприкосновения с донышком поршня 4
вхолостую при неподвижном поршне 4. После упора поршня 5
в поршень 4 они будут в дальнейшем перемещаться совместно.
Усилие Р определится при этом силой давления р жидкости
на эффективную площадь Fr=^ (Ь[ — D%) поршня 5 и площадь
Р2 и определится как
Соответственно скорость выходного штока 1 будет
.tD?
V =
После того как поршень 5 придет к левой крышке цилиндра 5,
дальнейшее движение штока 1 будет происходить под действием
давления жидкости лишь на поршень 4, в соответствии с чем про-
изойдет скачкообразное изменение усилия и скорости, которые
определятся как
Для обратного движения штока 1 жидкость одновременно
подается в штоковые полости а и b цилиндров 2 и 3. При этом на
первой части пути (считаем, что поршень 4 находится в контакте
с левой крышкой цилиндра 2) усилие Р на штоке / определится
лишь площадью штоковой полости b цилиндра 3 (давление в што-
ковой полости а цилиндра будет уравновешено):
и соответственно скорость штока 1
где £>3 — диаметр штока 2 поршня 5.
После того как поршень 5 закончит свой ход (придет к правой
крышке цилиндра 3), усилие Р и скорость v выходного штока 1
517
скачкообразно изменятся, поскольку эти параметры в этом слу-
чае будут определяться площадью одного лишь поршня 4. В соот-
ветствии с этим будем иметь
Принцип и последовательность действия сохранятся и при
числе цилиндров больше двух. На рис. 216, б изображена схема
четырехцилиндровой машины. Движение поршней будет происхо-
дить последовательно, соответственно с приложенной нагрузкой,
начиная с поршня большого сечения. Скорость движения будет
изменяться при переходе от одного поршня к другому также
скачкообразно.
§ 135. Гидроцилиндр с фиксацией положения поршня
Практический интерес представляет гидроцилиндр, поршень
которого может фиксироваться в промежуточном между крайними
положении. ЦилиндрПрис. 217, а) имеет два поршня, из которых
поршень диаметром Dr соединен со штоком 4, а другой (плава-
7 8 9 10 12 11
е)
1 2 5 Ь 3 4
\ \ | Слив I 1 I
Рис. 217. Схемы гидроцилиндров
с фиксацией промежуточного поло-
жения штока
ющий) 2 свободно скользит в цилиндре 1 и на штоке 5. В крайних
правом и левом положениях распределителя (золотника) 6 жидкость
поступает соответственно в левую или правую полость силового
цилиндра и, действуя на поршень, перемещает его в соответствую-
щую сторону. При этом рабочей площадью при подаче в левую
j г? Л
полость цилиндра 1 будет вначале движения площадь г2 — 4 >
а после прихода плавающего поршня 2 к уступу цилиндра 1 — пло-
518
Л^2 —
щадь /2 = ~4~* При переключении распределителя на подачу
жидкости в правую полость цилиндра 1 рабочей площадью будет
площадь ?! =------т-----.
В рассматриваемой схеме применен трехпозиционный золотник
с отрицательным перекрытием (/ > Л), который в среднем положе-
нии плунжера 6 перекрывает лишь каналы слива. Жидкость от
Л
насоса под давлением рп поступает в этом положении плунжера
как в левую, так и правую полости силового цилиндра 1. При
этом, поскольку суммарная площадь поршня с левой стороны
(включая и площадь плавающего поршня
с правой стороны
S
будет перемещаться вправо. Жидкость,
2) превышает площадь
поршень со штоком 4
вытесняемая при этом
поршнем, будет через открытые щели золотника 6 поступать в ле-
вую полость цилиндра и, суммируясь с подачей насоса, увеличи-
вать скорость перемещения поршня (см. стр. 496). По£ле при-
хода плавающего поршня 2 к уступу в цилиндре 1 поршень диа-
метром остановится, и поскольку его полезная площадь с ле-
rtd? л (Ь\—dj)
вой стороны уменьшится до величины < —-—г——~ > он бу-
*г
дет зафиксирован разностью сил давления на неуравновешенную
площадь:
-Л2
- л „ / гЛ ,2 .2\
~4~ Р ~^Р (Di —’ di — dz) .
Промежуточное фиксированное положение поршня может быть
обеспечено в цилиндре, схема которого представлена на рис. 217, б.
Схема состоит из двух соосно расположенных цилиндров 8 и 10.
Основной цилиндр 8 обеспечивает при питании правой или левой
полости перемещение его поршня 9 в крайние положения. Вспо-
могательный цилиндр 10 обеспечивает фиксирование поршня 9
основного цилиндра 8 в заданном, промежуточном между край-
ними, положении (он выполняет функции плавающего поршня
в рассмотренной выше схеме на рис. 217, а). Для фиксирования
поршня 2 жидкость подается через щестиходовый распределитель
одновременно в левую полость цилиндрами правую полость ци-
линдра 10 (правая полость цилиндра 8 и левая цилиндра 10 при
этом должны быть соединены со сливом). Ввиду того, что эффектив-
ная площадь поршня 9 со стороны его штока меньше на величину
площади штока 7, чем площадь правой полости цилиндра 10,
последний, переместившись влево, зафиксирует поршень ци-
линдра 9 в некотором положении, определяемом длиной штока
(хвостовика) 12 поршня 11.
519
§ 136. Испытания гидроцилиндров
На рис. 218,^"изображена типовая схема^установки для^сня-
тия тяговых характеристик силовых цилиндров. Шток испыты-
ваемого цилиндра 1 соединен со штоком нагрузочного цилиндра 4,
сопротивление (нагрузка) которого регулируется дроссельными уст-
ройствами 3 с обратными клапанами и измеряется динамометром 2.
В каждом^из полостей испытываемого цилиндра установлено по
манометру 5.
Рис. 218. Схемы установок для испытаний гидроцилиндров
Для проверки герметичности цилиндров применяют установку,
схема которой показана на рис. 218, б. Система снабжена распре-
делительным золотником 6 и краном переключения 7. Утечки
жидкости измеряют при помощи мензурки 9. Перед измерением
утечек поршень 8 прогоняют для выравнивания температуры не-
сколько раз из одного крайнего положения в другое. Полость
цилиндра, утечки из которой будут замеряться, должна быть
заполнена жидкостью. Во избежание самопроизвольного слива
жидкости трубопроводы располагают выше цилиндра.
§ 137. Мембранные и сильфонные гидроцилиндры
В ряде систем и, в частности, в гидроавтоматике, распростра-
нены мембранные и сильфонные гидроцилиндры (исполнительные
механизмы). У первых рабочая камера образована корпусом и эла-
стичной мембраной, у вторых — внутренней поверхностью силь-
фона.
Конструктивно мембранный гидравлический (или пневмати-
ческий) цилиндр (исполнительный механизм) имеет защемленное
по периферии круглое эластичное (преимущественно — резино-
тканевое) кольцо, связанное по центру с выходной нагрузкой
(рис. 219, а). Как правило, это кольцо имеет жесткий центр а,
диаметр d, по которому кольцо защемлено в корпусе, составляет
0,75—0,85 диаметра D. Давление, в случае резинотканевой мем-
браны обычно не превышает 1 МПа (10 кгс/см2).
Упругая часть мембраны выполняется плоской (рис. 219, а)
или тороидальной (гофрированной) (рис. 219, б). Первая конструк-
тивно проще второй, однако эффективная ее площадь изменяется
при перемещениях центра интенсивнее, чем у мембраны с торо-
520
ч)
Рис. 219. Схемы мембранного гидро-
цилиндра с мембраной плоского (а) и
гофрированного (б) типов
Кроме того, плоская мембрана допу-
хбд центра в сравнении с гофрирован-
идальной упругой частью,
скает значительно меньший
ными или тарельчатыми.
82. Усилие на жестком центре мембраны
Важным параметром мембранного гидроцилиндра является
эффективная площадь мембраны, величина которой определяется
для заданного перепада давления, развиваемого на центре мем-
браны, усилие в направлении, перпендикулярном плоскости ее
защемления. Стабильность эффективной площади мембраны по
ее ходу имеет важное значение, так как изменение этой площади
является одной из основных источников погрешностей мембран-
ных механизмов.
Под эффективной площадью мембраны в общем случае пони-
мают такую площадь, величина которой, будучи умноженной на
перепад давления, действующий на мембрану, определяет усилие,
развиваемое на ее центре. Очевидно, такое определение не вскры-
вает физической сущности эффективной площади, поскольку на
мембране отсутствуют очертания (границы) фигуры, геометри-
ческая площадь которой определяла бы эффективную площадь.
Эта площадь является переменной величиной, зависящей от кон-
структивных параметров ряда прочих факторов (хода центра мем-
браны и жесткости ее материала, перепада давления и пр.). Ввиду
того, что учет влияния этих факторов обычно затруднен, расчет
эффективной площади мембраны производят по приближенным
формулам при допущении малых (близких к нулевому) прогибов
с последующей экспериментальной проверкой.
Рассмотрим расчетную схему, в которой плоская круглая
мембрана не имеет жесткого центра (рис. 220). Площадь мембраны
в этом случае можно условно разбить на ряд элементарных равно-
бедренных треугольников, связанных вершинами в центре мем-
браны и основаниями — у контура ее закрепления. Равнодейству-
ющая сила давления рабочей среды на каждый треугольник при-
521
ложена в этом случае на расстоянии 1/3 высоты треугольника от
его основания. При этом опорная реакция элементарного тре-
угольника площадью Fq будет обратно пропорциональна расстоя-
нию от опоры до точки приложения равнодействующей. Очевидно,
что сумма опорных реакций при этом будет примерно равна 2/3 pFQ
у контура защемления и 1/3 pF$ — в центре мембраны.
В соответствии с этим усилие F, передаваемое на опору круг-
лой мембраной без жесткого центра, закрепленной по внешнему
контуру, для приложения ее в плоскости разъема определится как
Рис. 220. Расчетная схема пло-
ской мембраны
P — JFL
3 ’
где р — избыточное давление
под мембраной;
s = —-7---общая площадь мем-
браны по диаметру D
закрепления контура
в корпусе.
Эффективная площадь s мембра-
ны для этого случая
F _ i __ л£>2
" р ““ 3 s“~ 12 *
Остальная часть площади мембраны, равная разности
____ __ л£)2 nD2
— 5 5эф — ”4 12“ >
в передаче усилия на центральную опору не участвует. При этом
расчете мы пренебрегли жесткостью материала мембраны (изги-
бающими моментами материала) и допустили постоянство физи-
ческих его параметров (модуля упругости и коэффициента Пуас-
сона).
83. Расчет мембраны с жестким центром
Для увеличения полезного усилия мембраны в ее центре обычно
устанавливают жесткую опору, образующую жесткий центр диа-
метром d (см. рис. 219, а). Расчет величины полезного усилия
и соответственно — эффективной площади производим также
в предположении, что мембранное полотно обладает совершенной
эластичностью, а прогиб мембраны в центре равен (близок) нулю.
Выделим на рабочей поверхности плоского мембранного кольца
элементарную кольцевую площадку 2npdp, удаленную от центра
мембраны на расстоянии р. Усилие от воздействия давления жидко-
сти на эту элементарную площадку, равное 2nppdp, будет пере-
даваться на подвижный в осевом направлении жесткий центр
и неподвижные шайбы (корпус) наружного защемления в отно-
522
шении, обратно пропорциональном расстоянию от них до рас-
сматриваемой площадки.
Из схемы, приведенной на рис. 219, следует, что элементарное
усиление давления жидкости на эту площадку, передаваемое на
жесткий центр, определится как
dFi = 2лРР
где г и R — радиусы жесткого центра и окружности защемле-
ния мембраны в корпусе.
В соответствии с этим полное усилие, передаваемое на жесткий
центр от рабочего участка мембранного полотна (без учета жест-
кого центра), определится как
~—- 2лрр dp.
После интегрирования будем иметь
р _ 2лр Г/ R3 Rr*\ / R3 г» \-]
R — Г L\ 2 2 / \ з 3 /_ •
Заменив R — D/2 и г — d/2 и преобразовав, получим
Dd d2 \
4 2 J
Следовательно, усилие будет зависеть от отношения диамет-
ров d/D.
Давление среды, которое действует на полотно мембраны,
будет действовать также и на жесткий центр, развивая усилие
г^~Р.
В соответствии с этим полное усилие мембраны при принятых
условиях бу^ет
F = F14- F2 = -^ (D2 4- Dd 4- d2).
(140)
84. Влияние на величину эффективной площади
перемещения жесткого центра
Приведенный расчет относится к случаю, когда мембрана на-
ходится в среднем положении, т. е. когда плоскость заделки мем-
браны в жестком центре совпадает с плоскостью заделки ее по
периметру. При перемещении же жесткого центра из нейтрального
положения усилие, развиваемое мембраной, изменяется, причем
при перемещении этого центра от нейтрального положения
523
в направлении давления среды оно понижается, а при перемеще-
нии в противоположном направлении — увеличивается.
Изменение эффективной площади обусловлено изменением формы
участка свободного провисания мембранного полотна. Поскольку
линия провисания полотна определяется в основном механиче-
скими свойствами материала, из которого оно изготовлено, эта
линия у различных материалов будет при всех прочих равных
условиях различной. Приближенно принимают, что для эластич-
ных мембран линия провисания представляет собой дугу окруж-
ности.
Рис. 221. Схемы, иллюстрирующие влияние на
мембрану давления жидкости
Эффективная площадь мембраны $эф определяется диаметром
£>1Эф окружности той части площади, где силы натяжения (счи-
таем материал абсолютно гибким, т. е. таким, в котором никаких
иных сил, кроме сил натяжения, не возникает) направлены перпен-
дикулярно оси вращения упругой поверхности мембраны, т. е.
диаметром окружности наивысших точек упругой поверхности
(рис. 221, а):
дэф 4
Практически считают, что эффективная площадь мембраны
определяется площадью окружности, проведенной по вершине
линии провисания (прогиба) мембранного полотна.
Опыты показывают, что гофрированные мембраны (рис. 219,6)
практически сохраняют линейность характеристики эффектив-
ной площади 5эф и соответственно усилия F в функции хода х
в более широких пределах хода, чем плоские. При небольшой
толщине полотна (сс0,25—0,3 мм) гистерезис таких мембран не
превышает 2—3% диапазона изменения эффективной площади.
При нейтральном положении жесткого центра (когда его пло-
скость совпадает с плоскостью защемления мембранного полотна)
524
(рис. 221, а) эффективная площадь не будет зависеть от формы
гофра и перепада давления и определится (без учета вытяжки)
выражением
М = Р2
Dd + d2).
(141)
При смещении же жесткого центра из нейтрального положе-
ния (рис. 221, б) наблюдается изменение эффективной площади,
обусловленное изменением геометрии мембраны под действием
перепада давления при ее смещении, которое будет тем больше,
чем больше смещение х. Из рис. 219, б (см. также рис. 221, в)
следует, что предельно возможная величина х]ТК!Х перемещения
жесткого центра (соответствует положению мембраны, показан-
ному штрихпунктирной линией а) определяется (без учета вы-
тяжки материала полотна) как
1 1
где I — длина дуги гофра.
При
этом значении х э
Ml
ективная площадь мембраны и соот-
ветственно усилие на ее жестком центре равны нулю (рис. 221, в).
Очевидно, при величине перемещения жесткого центра, близкой
к указанной, расчет по приведенным формулам [см. выражения
(140) и (141)1 дает значительные погрешности (вследствие влияния
усилия растяжения мембранного полотна).
Понижение усилия, передаваемого мембраной, обусловлено
изменением геометрии эффективной площади упругого кольца,
а также тем, что по мере увеличения прогиба мембранного полотна,
оно упруго деформируется, на что расходуется часть усилия,
развиваемого давлением рабочей среды. Это в первую очередь отно-
сится к плоским мембранам (см. рис. 219, а), ввиду чего при рас-
чете этих мембран по формуле (141) вводят поправочный коэффи-
циент k\ в результате расчетная формула приобретает вид
5д = k ~ (О2 + Dd + d2),
* iZ
где —действительная и расчетная эффективная пло-
5эф
щади мембраны.
Коэффициент k зависит от свойств материала и отношения-^-.
d d
Для случаев = 0,5 и -р- = 0,8 этот коэффициент для прорези-
ненной эластичной ткани может быть принят равным соответ-
ственно 0,97 и 1,03. Для распространенного в практике отноше-
ния — 0,6 значение k 1.
525
1
85. Зависимость эффективной площади мембраны
от перепада давления
Второй по значимости причиной изменения эффективной пло-
щади, мембраны и, соответственно, нарушения стабильности их
характеристик является изменение перепада давления. Зависи-
мость эффективной площади мембран от перепада давления в основ-
ном обусловлена деформацией (вытяжкой) мембранного полотна
под действием сил натяжения, определяемых перепадом давления.
При нагружении эластичных мембран перепадом давления они
приобретают, вследствие изменения эффективной площади при
перемещении жесткого центра, заметную жесткость. С увеличе-
нием перепада давления жесткость мембран повышается.
На рис. 221, г показана абсолютно гибкая мембрана, находя-
щаяся под некоторым малым давлением (сплошная линия). Эффек-
тивная ее площадь определяется для данного положения жесткого
центра.
Q эф
При повышении давления при неизменном положении жесткого
центра упругая
ную штриховой
щадь мембраны
поверхность мембраны примет форму, показан-
линией. В соответствии с этим эффективная пло-
увеличится и определится как
__ эф
^2 эф д
86. Сильфонные гидроцилиндры
Для малых прямолинейных перемещений применяют также
эластичные гармоникообразные цилиндры—сильфоны (рис. 222, а).
Сильфоны изготовляют из металлов, а при небольших давлениях —
и из других материалов (резины, фторопласта).
Металлические сильфоны бывают однослойные и многослойные
(до пяти слоев), причем многослойные сильфоны при той же общей
толщине, размерах и нагрузке имеют значительно больший ход.
Применяют сильфоны с наружным диаметром от 5 до 250 мм. Для
однослойных сильфонов малых диаметров допускается давление
до 30 кгс/см2 и больших диаметров — до 2 кгс/см2. Многослойные
сильфоны из нержавеющей стали применяют для давлений до
150 кгс/см2. Максимальная величина перемещения металличе-
ского сильфона обычно не превышает 25% его свободной длины,
причем из них 15% отводится на сжатие и 10% на растяжение.
При большом числе ходов изменение длины сильфона не должно
превышать 10%.
Сильфоны предпочтительнее нагружать внешним
давлением,
причем допустимое значение давления в этом случае превышает
давление при внутреннем нагружении на 25—30%.
526
За эффективный диаметр сильфона можно приблизительно
принять средний диаметр гофров, в соответствии с чем усилие Р,
развиваемое цилиндром — сильфоном при действии внутреннего
давления жидкости, может быть приближенно (пренебрегая вли-
янием жесткости сильфона) вычислено как произведение давле-
ния р на площадь круга со средним диаметром:
Р = Fp = -J PD2cp,
где £>ср = _ средний диаметр гофров сильфона;
nD2D
---полезная (эффективная) площадь сильфона;
Dx и Da — внешний и внутренний диаметры гофра.
Рис, 222. Схемы
Практически отношение
диаметров составляет
сильфонных гидроцилиндров
внешнего (DJ и внутреннего (О2)
2
Полезная площадь сильфонов с внешним диаметром 30 мм и выше
обычно составляет (0,3—0,4) Ро, где Ро — общая площадь силь-
фона, вычисленная по внешнему диаметру гофров.
Сильфоны в основном изготовляют развальцовкой тонкостен-
ной бесшовной трубы (рис. 222, а) или сваркой по торцам отдель-
ных фасонных колец (мембран) (рис. 222, б).
Изготовление сильфонов развальцовкой осуществляется гид-
равлическим или механическим способом путем обкатки, причем
гофры получаются параллельными и U-образной формы. Разваль-
цовкой нескольких расположенных один на другом слоев полу-
чают многослойные сильфоны.
Материал исходных дисков (мембран) для изготовления силь-
фонов сварным способом должен хорошо свариваться. При этом
способе изготовления можно получить гофры любой высоты,
тогда как в сильфонах, изготовленных развальцовкой из труб,
высота лимитируется возможностью вытяжки материала трубы.
Сварные сильфоны допускают более высокую общую деформацию
на один гофр, а следовательно, при одной и той же длине допу-
скают более высокое обжатие (ход), чем сильфоны из труб.
527
§ 138. Поворотные гидродвигатели
87. Конструктивная схема
Для возвратно-поворотных движений (угловых перемещений)
приводимых узлов на угол, меньший 360° применяют поворотный
гидродвигатель (моментный гидроцилиндр или гидроцилиндр
поворотного действия) с возвратно-поворотным относительно кор-
пуса ограниченным движением выходного звена (рис. 223). По-
воротный гидродвигатель определяется в общем случае как объем-
ный гидродвигатель с ограниченным углом поворота выходного
Рис. 223. Схемы пластинчатых
поворотных (моментных) гидродвигателей
звена, причем, в зависмости от типа рабочего органа (исполнитель-
ного звена) различают шиберный поворотный, поршневой поворот-
ный и мембранный поворотный гидродвигатели. Объемный гидро-
привод с поворотным гидродвигателем называют поворотным
гидроприводом.
В практике распространены пластинчатые поворотные гидро-
двигатели, в которых рабочим органом является пластина, жестко
заделанная в вал двигателя. Гидроцилиндры поворотного действия
можно практически считать безынерционными двигателями, спо-
собными развивать большие крутящие моменты, достигающие для
трехпластинчатых двигателей значения 70 МН-м (7-104 кгс/м).
Применяющиеся давления жидкости — 20 МПа (200 кгс/см2)
и, реже, — 30 МПа (300 кгс/см2). В качестве рабочей среды при-
меняются воздух, масла и водные эмульсии.
Применение подобных гидроцилиндров (гидродвигателей) упро-
щает во многих случаях кинематику приводных механизмов.
Поворотный гидродвигатель состоит из корпуса 1 и поворот-
ного ротора (вала) 2, несущего пластину (лопасть) 3 (рис. 223, а).
Кольцевая полость между внутренней поверхностью цилиндра
и ротора разделена уплотнительной перемычкой 4 с пружинящим
поджимом к ротору уплотнительного элемента 5. При подаче
жидкости под давлением рр в верхний канал пластина 3 с втул-
528
кой 2 будет поворачиваться по часовой стрелке. Угол поворота
вала цилиндра с одной рабочей пластиной обычно не превышает
270—280°.
Поворотные гидродвигатели выпускаются в однопластинчатом
(рис. 223, а), а также двух- (рис. 223, б) и трехпластинчатом
д
Рис. 224. Пластинчатый моментный гидроцилиндр с двусторонним
валом
(рис. 223, в) исполнениях с односторонним (рис. 223) или дву-
сторонним (рис. 224) валом.
При конструировании этих цилиндров необходимо обеспечи-
вать жесткость их деталей, чтобы предотвратить выпучивание
плоских поверхностей боковых крышек, в результате чего может
быть нарушена внутренняя герметичность агрегата.
88. Расчет крутящего момента и угловой скорости
Расчетная величина крутящего момента М на валу рассматри-
ваемого гидроцилиндра с одной пластиной равна произведению
силыР, развиваемой перепадом давления жидкости Ар = р? — рСл
на рабочую площадь F пластины, на плечо р приложения этой
силы (расстояние от оси вращения до центра давления рабочей
площади пластины, см. рис. 223, а):
М ~ Рр ~ ApFp.
Из рис. 223, а видно, что рабочая площадь пластины
и плечо приложения силы
34 т. м. Байта
529
В соответствии с этим расчетная величина крутящего момента
м = Рр = bpFp = ^Р(О-^Ь .D±d = fyb D2 #
2 4 ох 7
ИЛИ
М ~ w&p = pFAp,
где М — крутящий момент, развиваемый цилиндром;
D и d — внутренний диаметр цилиндра и диаметр
ротора;
Ар = рр — рсл — перепад давления между рабочей (рр)
и сливной (рсл) полостями цилиндра;
b — ширина пластины по оси цилиндра (длина
цилиндра);
w — удельный объем гидродвигателя;
D2 —d2
А Угловая скорость со вала однопластинчатого цилиндра опре-
делится из условия равенства расхода жидкости Q и объема,
описываемого пластиной в единицу времени:
Q =
где --- Ь — рабочая площадь пластины;
vOK — окружная скорость центра давления пластины.
Подставив значения
D — d .
г — — — ь и v0K = сор = со
получим
D 4- d D — d сой /г\9
(D2-d*).
Из этого выражения находим
8Q Q Q
03 — г>2—к - или (о = — = .
(D2 — d2)b w pf
Фактические момент Л1ф и угловая скорость соф будут меньше
расчетных на величину потерь трения и утечек жидкости, харак-
теризуемых механическим т|мех и объемным т]об к. п. д. гидро-
цилиндра:
. Л1ф=^-(£»2-^)Лмех;
_ 8Q
® (D2 —d2)6 ^об’
530
Угловую скорость вала
также выразить
и крутящий момент на нем можно
Q Q , „л
раД/С; M==WP>
где Q — теоретический расход;
w — удельный объем гидроцилиндра;
D2 — (Р
8
89. Многопластинчатые поворотные гидроцилиндры
Распространены также двух- и трехпластинчатые поворотные
гидроцилиндры (см. рис. 223, б и в), при применении которых
можно соответственно увеличить крутящий момент; однако угло-
вая скорость при том же расходе жидкости и угол поворота при
этом уменьшаются. Для многопластинчатого гидроцилиндра будем
иметь
М = w _______§0___
8 ' h zb(D2 — d2) ’
где z — число пластин.
Подобные многопластинчатые гидродвигатели применяют для
больших крутящих моментов, которые для трехпластинчатого
типа (см. рис. 223, в) достигают при давлении 30 МПа (300 кгс/см2)
величины 6-Ю4 Н-м (60 тс*м).
Углы поворота ротора при одной, двух и трех пластинах
соответственно равны оо280, 140 и 70°.
Основная трудность при создании многопластинчатых дви-
гателей заключается в обеспечении их герметичности. Уплотнение
здесь осуществляется как по торцу, так и по радиальному зазору
с помощью резиновых манжет, приклеенных к пластине, или колец
круглого сечения. Для улучшения герметичности пластина а
(рис. 225, а) зачастую выполняется подвижной и нагружается
в радиальном направлении спиральными пружинами, помещае-
мыми под торец пластины, а также давлением жидкости, подво-
димой через осевой канал b в прорезь ротора под пластину. Уси-
лие, с которым пластина а будет прижата к поверхности цилиндра
f (Рр Рср) (Рр Рср)»
где b и s — длина и толщина пластины;
Рср — среднее давление в радиальном зазоре между пласти-
ной и внутренней поверхностью цилиндра, которое
может быть принято равным .
Прижатие пластины к цилиндру иногда выполняется за счет
утечек жидкости через радиальный зазор. На пластине по площади
34* 531
контакта с цилиндром выполняют канавку с (рис. 225, б), которую
соединяют с помощью канала d с камерой е. В камере е будет дей-
ствовать давление \р = -р "t-—-, где рр и рсл — рабочее давле-
ние и давление в сливной линии.
а)
Рис. 225. Схема поворотного
гидроцилиндра с гидравлическим поджатием
пластин
Для снижения трения пластину часто выполняют по схеме,
представленной на рис. 225, е. Разгрузка достигается тем, что
рабочее давление подводится через жиклерное отверстие в про-
дольную прорезь (канавку), выполненную на торце пластины,
контактирующем с цилиндром.
90. Прочие типы гидродвигателей
возвратно-поворотного движения
Угловое перемещение (обычно в пределах угла ср = ±30°)
выходного вала можно получить путем преобразования посту-
пательного движения с помощью кривошипно-шатунного меха-
низма (рис. 226). Подобные механизмы распространены в рулевых
машинах автопилотов самолетов. При попеременной подаче жидко-
сти в правую или в левую полости цилиндра 1 поршни последнего
будут совершать возвратно-поступательное движение, поворачи-
вая через рычаг 2 выходной вал 3.
Расчетная угловая скорость выходного вала
где Q — расход жидкости;
w ~ Ful — удельная подача (расход) жидкости на
радиан поворота вала;
Fn = —-----площадь сечения поршня диаметром d;
I — радиус кривошипа 2.
один
532
Теоретический крутящий момент
/И — wSp = Fnl&p,
где Ар — перепад давления в цилиндрах.
Механизм аналогичного назначения представлен также на
рис. 227.
Рис. 226. Схемы преобразования поступа-
тельного движения в поворотное с по-
мощью кривошипно-шатунного механизма
Рис. 227. Схема преобра-
зования поступательного
движения в поворотное
с помощью коромысла
Для преобразования прямолинейного движения силовых ци-
линдров в поворотное используют также шестеренные и винтовые
механизмы. В частности, для привода поворотных столов металло-
режущих станков, а также платформ и конвейеров погрузочных
Рис. 228. Схемы преобразования поступательного движения в поворотное
с помощью реечно-шестеренных пар
а)
машин и пр. применяют поворотные гидроцилиндры с реечно-
шестеренными механизмами (рис. 228, а). Угол поворота вала
в схемах с реечно-зубчатой передачей обычно не превышает 360°.
При передаче больших крутящих моментов применяют двухци-
линдровые схемы (рис. 228, б), где штоки цилиндров являются
рейками.
533
Расчетный крутящий момент М± и угловая скорость о1 на
выходном валу шестерни определится для однореечной схемы
(рис. 228, я) (без учета трения) как
8Q
nD2D ’
где
Пш —диаметр делительной окружности шестерни;
Dn — диаметр поршня (скалки);
р — перепад давления на поршне;
Q — расход жидкости.
Рис. 229. Схема преобразования поступательного движения поршня в поворот-
ное выходного вала с помощью винтовых пар
Для двухреечной (двухцилиндровой) схемы момент и угловая
скорость будут (рис. 228, б)
М2 = 2М1;
£
Для этой же цели применяют схемы с винтовой парой, в кото-
рых прямолинейное движение поршня силового цилиндра преобра-
зовывается в поворотное с помощью винта и гайки.
На рис. 229, а приведена одна из схем подобного механизма.
Поршень 1 с нарезанной внутри осевого отверстия резьбой сво-
бодно посажен на винтовом валике 2, выходной конец 4 которого
связан с нагрузкой. Валик 2 может свободно вращаться, но за-
фиксирован от осевых перемещений, поршень 1 может перемещаться
вдоль оси, но зафиксирован от поворота с помощью штыря 3,
При перемещении поршня 1 в цилиндре винтовому валику 2
сообщается поворотное движение.
Для увеличения (в 2 раза) крутящего момента применяют
цилиндр с двумя поршнями, штоки которых имеют противополож-
ные нарезки (рис. 229, б).
На рис. 230 приведена иная схема механизма. Правый шток
здесь выполнен в виде винта 3, который входит в гайку 4, связан-
ную с выходным валиком 5 и могущую совершать лишь поворот-
ные движения. Поршень 2 зафиксирован от поворотных движений
с помощью шлицевого соединения левого его штока 1 со шлице-
вой втулкой 6 цилиндра.
534
Из схемы следует, что путь, проходимый винтом 3 (поршнем 2)
вдоль оси за один оборот гайки 4. будет равен шагу резьбы t:
t = nd tg a,
где d n a — средний диаметр и угол нарезки винта.
1 2 3 *
Рис. 230. Схема преобразования поступательного движения
поршня гидроцилиндра в поворотное выходного вала с по-
мощью винтовой пары
Или, иначе, поворот гайки 4 (и валика 5) на произвольный
угол ф соответствует перемещению поршня вдоль оси на путь
/, Ф „ _ d tfj аф
2л 2
Чтобы обеспечить обратимость винтовой пары, угол подъема
резьбы а должен быть больше угла трения р : a > р. Практи-
чески применяют <%,= 60°-н70°. j
Рис. 231. Конструктивные схемы винтовых механизмов для преобразования
поступательного движения в поворотное
Т>
Крутящий момент М на гайке и усилие F на поршне связаны
отношением
М ~ ~~<Г~ tg (ct + р)
535
F — - p—усилие давления жидкости на поршень диа-
метром D.
К. п. д. винтовой пары
11 tg(« + p)’
Оптимальная величина к. п. д. соответствует углу а — 45°
и крутящего момента — углу сс = 90°, Практически, чтобы полу-
Рис. 232. Винтовой механизм для пре-
образования поступательного движе-
ния в поворотное
чить по возможности малый
ход и высокий крутящий мо-
мент, угол а должен прибли-
жаться к 70°.
Угловая скорость выход-
ного валика определяется как
ли
“зоГ’
где v — линейная скорость
поршня.
Конструктивные схемы гид-
роцилиндров этого типа приве-
дены на рис. 231. Гайкой вин-
товой пары цилиндра, предста-
вленного на рис. 231, а, служит
левая часть рабочего поршня а,
сопряженная с винтом d, ко-
торый выполнен за одно целое
с выходным валиком Ь. В пра-
вой части поршня а выполнены
прямолинейные шлицы м, кото-
рые входят в зацепление со
шлицами втулки с, зафиксиро-
ванной в корпусе.
Схема цилиндра подобного
типа представлена также на
рис. 231, б. Прямолинейные фиксирующие шлицы f здесь выпол-
нены на внутренней поверхности цилиндра е и соответственно
на внешней поверхности рабочего поршня g. Винтовые шлицы k
выполнены на внутренней поверхности поршня g и выходного
валика т.
На рис. 232 показана конструкция цилиндра, схема которого
рассмотрена на рис. 231, а. В нижней части поршня 5, служащей
гайкой, выполнены винтовые шлицы (нарезка) 6, соединенные
с подобными шлицами ’Винтовой части вала 4. В верхней части
поршня выполнены фиксирующие прямолинейные шлицы 3,
сопрягающиеся со шлицами, выполненными на направляющей
буксе 2 корпуса 1, Камеры а и b гидроцилиндра соединены соот-
ветственно с магистралями питания.
536
ГЛАВА XIV
ВСПОМОГАТЕЛЬНАЯ ГИДРОАППАРАТУРА
Качество и надежность изучаемых в настоящем курсе объем-
ных гидромашин в значительной мере зависит от надежности пре-
дохранения гидросистемы от загрязнения и от качества очистки
жидкостей в процессе работы, а также от надежности герметиза-
ции узлов этих машин. Дефекты по этим параметрам являются
основными причинами отказов в работе машин.
Подробно эти вопросы рассмотрены в учебном курсе «Гидро-
приводы и гидропневмоавтоматика» [1], здесь же приведены,
с целью облегчения изучения настоящего курса, лишь общие
сведения по этим вопросам.
§ 139. Фильтрация рабочей жидкости
91. Требования к фильтрации
Концентрация загрязнений в масле АМГ-10 в состоянии
поставки составляет от 88-10” 5 до 13-10"4 % по весу.
Опыт показывает, что скопление в гидросистеме загрязняющих
веществ вызывает истирание трущихся поверхностей гидроагре-
гатов, приводящее к дополнительному загрязнению гидросистемы
частицами износа этих пар. В результате износ быстро прогрес-
сирует и срок службы гидромашин быстро сокращается. Можно
утверждать, что в зависимости от качества очистки жидкости
срок их службы может быть увеличен или понижен в несколько
раз.
Обычно рабочее масло содержит в действующей гидросистеме
механическое загрязнение в количестве от 5 до 20 мг на 100 мл
жидкости.
Отделение от жидкостей твердых загрязняющих примесей
осуществляют механическим и силовым методами. В первом слу-
чае очистка (фильтрация) производится за счет применения раз-
личных щелевых и пористых^фильтрующих элементов (материалов),
а во втором— за счет использования силовых полей— магнит-
ного, центробежного и др.
В гидросистемах машин применяют преимущественно первый
метод очистки, при котором от жидкости отделяются частицы
537
посторонних веществ вследствие отличия размеров этих частиц
от размеров проходных капиллярных каналов фильтрующего
элемента. В качестве фильтровальных материалов применяют
в основном металлические сетки, пористые металлы, а также раз-
личные ткани и фильтровальные бумаги.
Очевидно, абсолютной чистоты жидкости при существующих
методах очистки достигнуть нельзя. При решении вопроса о ка-
честве фильтрации руководствуются практическими данными:
фильтрацию считают удовлетворительной, если размер капил-
лярных каналов материала фильтрующего элемента не превы-
шает половины наименьшего зазора в скользящих парах гидро-
машины, для которого предназначен фильтр. Однако подобные
требования трудно выполнимы, поэтому фильтрацию можно считать
удовлетворительной, если размер капиллярных каналов фильтро-
вального материала не превышает наименьшего зазора в сколь-
зящих парах машины. Исходя из этой концепции, для насосов
с торцовым распределением (см. рис. 57) необходима более тонкая
фильтрация, чем для насосов с радиальным распределением (см.
рис. 29), поскольку масляная пленка в узле торцового распределе-
ния имеет меньшую толщину, чем в распределительном узле ра-
диального типа.
Для качественных условий работы скользящих пар торцового
распределителя насоса очистка жидкостей должна быть такой,
чтобы твердые частицы загрязнителя были скрыты в толще
граничной масляной пленки, которая обладает свойствами ква-
зитвердого тела [1 I. Толщина этой пленки крайне различна и за-
висит в основном от вязкости масла и контактных давлений сколь-
зящих поверхностей. Измерения показывают, что толщину этой
пленки для рабочих жидкостей гидросистем можно принимать
равной со 1 мкм, а следовательно, твердые включения в рабочей
жидкости размером больше 1 мкм нежелательны. Однако обеспе-
чение такой тонкости фильтрации существующими промышлен-
ными средствами крайне затруднительно, поэтому требования
по тонкости фильтрации обычно ограничивают размером частиц
<5 мкм.
Материал фильтрующих элементов должен быть максимально
проницаемым, но способным задерживать возможно малые ча-
стицы твердых веществ. В соответствии с этим такой материал
должен иметь мельчайшую однородную сетку с максимальной
площадью проходных ячеек и количеством их на единицу поверх-
ности материала. Число этих ячеек на единицу фильтрующей
поверхности в основном и определяет тонкость фильтрации, ко-
торая характеризуется размерами пор в фильтровальном матери-
але или, что то же самое, размерами частиц загрязнителя, кото-
рые удерживаются очистителем.
В соответствии с видом применяемых фильтровальных матери-
алов фильтры можно разделить на два основных типа: в первом
частицы загрязнителя задерживаются в основном на поверхности
фильтровального материала, а во втором—в порах капилляров
последнего, расположенных на большей или меньшей глубине
от поверхности. Фильтры первого типа получили название по-
верхностных, а второго—глубинных.
92. Фильтры с бумажными фильтрующими элементами
В современных гидросистемах распространены в основном
фильтры с бумажными фильтрующими элементами, которые при
качественной бумаге задерживают за один проход 75% твердых
частиц размером больше 4—=5 мкм. Такой элемент обычно выпол-
няется в виде цилиндра, стенки которого для увеличения фильтру-
Рис. 233. Бумажный фильтр и его типовые фильтрующие элементы
ющей поверхности собирают в складки, поддерживаемые метал-
лическим каркасом (рис. 233, а), а бумага подвергается крепиро-
ванию. Для повышения тонкости фильтрования применяют много-
слойные фильтры, в которых жидкость проходит последовательно
через несколько слоев бумаги.
Применяются также щелевые бумажные фильтры, фильтрую-
щие элементы которых состоят из штампованных бумажных колец,
уложенных в стопку и сжатых пружиной. Зазор между бумажными
кольцами, а следовательно, и тонкость фильтрации этих фильтров
определяются усилием сжатия пружины.
Детали распространенных бумажных фильтрующих элементов
показаны на рис. 233, б.
Фильтры обычно снабжаются перепускным клапаном3 (рис. 234),
который при повышении перепада давления, сопровождающем
засорение фильтрующего элемента, открывается, и жидкость
поступает к выходному штуцеру, минуя фильтрующий элемент.
539
Чтобы исключить попадание в систему при открытии пере-
пускного клапана нефильтрованного масла, фильтры снабжают
дополнительным фильтроэлементом грубой очистки. Типовая кон-
струкция такого фильтра с комбинированным фильтрующим
элементом, состоящим из элементов тонкой 2 и грубой 1 очистки,
Рис. 234. Схема комбинированного фильтра
представлена на рис. 234. До открытия перепускного клапана 3
(рис. 234, д') жидкость последовательно проходит через оба филь-
трующих элемента.
При засорении фильтрующего элемента тонкой очистки откры-
вается перепускной клапан 3 (рис. 234, б) и жидкость поступает
через фильтрующий элемент грубой очистки к выходному шту-
церу, минуя фильтрующий элемент тонкой очистки.
Фильтрующий элемент тонкой очистки обычно изготовляется
из фильтровальной бумаги или сеток саржевого плетения,
а элемент грубой очистки — из сеток квадратного переплетения
или проволочных элементов. Фильтрующие элементы из бу-
маги и сеток саржевого плетения усиливаются металлическим
каркасом.
93. Глубинные фильтры
В глубинных фильтрах жидкость проходит через толщу по-
ристого материала фильтрующего элемента (текстиля, войлока,
бумаги, целлюлозы, обожженной глины, пластмассы, пористого
металла и др.). Фильтры этого типа, каждый капилляр которых
имеет большое количество последовательно расположенных пор,
доходящее до сотни и более, можно сравнивать по эффективности
фильтрования с многослойными поверхностными фильтрами
с той же длиной капилляров и количеством в них пор.
Ввиду того, что загрязнитель задерживается в глубинных
фильтрах в основном в толще материала, эти фильтры при одина-
ковой загрязненности жидкости имеют по сравнению с поверхно-
стными типами более высокие грязесъемность и сроки службы.
Широко распространены фильтры с наполнителями из пори-
стых металлов и керамики, получаемыми либо спеканием метал-
лических или керамических порошков, либо способом порошковой
540
металлургии. В практике распространены металлические фильтру-
ющие элементы из спеченных сферических порошков различных
металлов (сталь, бронза, титан, никель, серебро и пр.) и соеди-
нений, обладающих свойствами металла.
Схема пористой структуры металлического фильтровального
материала из сферических порошков представлена на рис. 235, а.
^Жидкость очищается, протекая по длинным и извилистым каналам
между шариками, причем задержанный загрязнитель распреде-
Рис. 235. Структурная (а) и расчетная (б) схемы
фильтровального материала из спеченных металличе-
ских шариков
ляется практически равномерно по этим каналам и порам, благо-
даря чему фильтры имеют высокую грязесъемность.
Размеры пор фильтровальных элементов из сферических ме-
таллических порошков и керамики выбирают исходя из макси-
мального диаметра частицы загрязнителя, которая может пройти
в зазоре между тремя плотно уложенными шариками. При сфери-
ческой форме зерен исходного порошка и точечном контакте ша-
риков максимальный линейный размер пор (максимальный услов-
ный диаметр частицы загрязнителя, которая может пройти через
пору) можно вычислить по выражению, полученному из геометри-
ческих соотношений (см. рис. 235, б):
d-0,1550,
где D — диаметр зерна (шарика) исходного порошка.
В действительности линейный размер пор, вследствие шеро-
ховатости зерен, отклонения их от правильной шарообразной
формы несколько меньше указанного. С учетом этого фактиче-
ский размер пор может быть приближенно определен по выра-
жению
d~O,lD.
Можно получить минимальный размер (диаметр) D сферы ме-
таллического исходного материала сх> 5 мкм, что соответствует
541
условному диаметру d пор фильтрующего элемента 0,5 мкм. Этот
условный диаметр поры и определяет номинальную точность
очистки жидкости. Однако опыт показывает, что такие фильтры,
благодаря извилистости каналов и переменности их сечений,
задерживают значительное количество частиц, размеры которых
меньше номинального (условного) размера пор. •
Лучшие из существующих промышленных 5-микронных филь-
тров задерживают 100% частиц размером 5 мкм и 98% частиц
размером 2 мкм.
Рис. 236. Фильтр из пористых металлических дисков
Фильтры с фильтрующими элементами из спеченных металли-
ческих и керамических порошков (стекла, кварца, фарфора и др.)
пригодны для работы при1 высоких температурах, соответствую-
щих термостойкости исходных материалов (порошков). Фильтры
из нержавеющей стали пригодны для работы при температуре 350—
400° С.
В большинстве случаев фильтрующий материал изготовляют
в виде листов толщиной 0,4—1,0 мм. Из таких листов может быть
изготовлен фильтрующий элемент, аналогичный по конструкции
бумажным (см. рис. 233).
Распространены также фильтрующие элементы в виде набора
пластин (дисков) а (рис. 236), которые имеют малые габариты
при относительно большой фильтрующей поверхности. Фильтр
оборудован перепускным клапаном и контрольным индикатором,
срабатывание которого свидетельствует о недопустимом засорении
фильтра.
94. Фильтры из металлических
сеток сложного плетения
В гидросистемах некоторых машин применяют никелевые
фильтрующие сетки сложного плетения (саржевого и иного),
которые отфильтровывают частицы размером до 2—3 мкм. Эти
сетки сплетены из нескольких (от 4 до 20) слоев витой проволоки,
диаметр которой равен нескольким микронам.
542
Конструктивно эти элементы выполняются так же, как и филь-
тры с бумажными элементами (см. рис. 233) и обычно взаимоза-
меняемы. В зависимости от материала, из которого изготовляется
сетка, фильтрующие элементы могут использоваться при темпе-
ратурах от —240 до +800° С.
§ 140, Силовая очистка рабочей жидкости
95. Магнитные очистители
Для улавливания ферромагнитных частиц применяют магнит-
ные очистители, которые обычно комбинируют с каким-либо по-
ристым фильтром. Первой ступенью таких комбинированных очи-
стителей является магнитный элемент, задерживающий (улавли-
Рис. 237. Магнитные (а и б) и электростатический (в) очистители
жидкости
вающий) ферромагнитные частицы, и второй— пористый фильтр,
который задерживает диамагнитные загрязняющие частицы, а
также ферромагнитные частицы, оторвавшиеся от первой («маг-
нитной») ступени.
Применение магнитного поля в подобном комбинированном
очистителе повышает коэффициент отфильтровывания пористым
фильтром и в особенности мелких (2—6 мкм) частиц. Магнитное
поле создается с помощью нескольких (двух-трех) постоянных
магнитов, прикрепляемых обычно с внешней стороны корпуса
Е43
фильтрующего элемента, который в этом случае изготовляется
из материала с высокой магнитной проницаемостью.
На рис. 237, а показан комбинированный фильтр, состоящий
из сетчатого фильтрующего пакета 2, на входе и выходе из кото-
рого установлены два постоянных магнита 1 и 3, создающих
магнитное поле, способствующее улавливанию ферромагнитных
частиц. Жидкость проходит через щели нижнего магнита внутрь
цилиндра с сетчатым фильтрующим пакетом и удаляется через
щели верхнего пакета. Магнитное поле, которое создают эти маг-
ниты, повышает также фильтрующие свойства пакета 2 металли-
ческих сеток.
Конструктивная схема подобного магнитного очистителя пред-
ставлена на рис. 237, б. Жидкость последовательно проходит
через механический (пористый) фильтр 4 и пластинчатый магнит-
ный элемент 6 и удаляется через кольцевую камеру между этим
элементом и антимагнитным стержнем 5.
Магнитные очистители задерживают мельчайшие ферромаг-
нитные частицы (размером 0,5 мкм и менее), которые невозможно
отделить механическими фильтрами, причем улавливает так же
и диамагнитные неметаллические частицы.
96. Электростатические очистители
Перспективными для очистки диэлектрических жидкостей
являются электрические методы. Жидкость пропускается в элек-
трическом поле, создаваемом электродами, в результате чего
суспендированные в ней механические частицы загрязнителя,
имеющие электрический заряд, притягиваются к противополож-
ному по знаку заряда электроду. Частицы загрязнителя полу-
чают заряд статическим электричеством при их движении в ди-
электрической жидкости в результате электризации трением
или заряжаются искусственно.
Принципиальная схема устройства подобного очистителя пока-
зана на рис. 237, в. В корпусе 8 помещены два изолированных
друг от друга электрода 9 и 10, на которые подается постоянный
электрический ток под напряжением ~300—500 В и выше. Пре-
дельно допустимая разность потенциалов зависит от расстояния s
между электродами и не должна превышать 90—95% напряжения
пробоя жидкости. Практически расстояние s между электродами
равно примерно 0,1—0,3 мм. Между пластинами электродов про-
пускается загрязненная жидкость, частицы 7 загрязнителя кото-
рой, попадая в электрическое поле, притягиваются к тому или
другому электроду, в зависимости от знака электрического заряда
частицы.
Поскольку в момент прикосновения заряженной частицы к элек-
троду с противоположным знаком заряд частицы нейтрализуется
и силы электрического притяжения теряются, необходимо обес-
печить удержание частиц на электроде. Для этой цели применяют
541
различные изоляционные средства, в частности, пористые кера*
мические пластины 11 переменной плотности, прикрепляемые
к электродам, которые препятствуют смыванию притянутых
к ним частиц жидкостью и предотвращают их контакт с электро-
дами. Пластины имеют переменную по толщине пористость с умень-
шением пор в направлении к электроду. Частицы углубляются
под действием притяжения электрода в поры пластины, однако
на некоторой глубине, на которой величина пор меньше линейного
размера частиц, последние задерживаются, не приходя в контакт
с электродом, благодаря чему сохраняется заряд частицы. Воз-
можны также иные способы» изоляции электродов.
Очистители рассматриваемого типа выполняют в виде набора
нескольких (12—16), изолированных друг от друга плоских
прямоугольных или дисковых стальных электродов толщиной
—3—5 мм, зазор между ними 0,1—0,2 мм. Обычно размер прямо-
угольных электродов составляет 100 X 400 мм и диаметр диско-
вых — 220 мм. Жидкость Подводится к очистителю под давле-
нием 0,8—1,0 МПа (8—10 кгс/см2) через сетчатый фильтр (сетка
№ 004), задерживающий крупные частицы загрязнителя. Для
устранения нейтрализации зарядов частиц при их контакте с про-
тивоположно заряженными электродами последние часто фосфа-
тируются. Электростатическое поле создается с помощью источ-
ника питания постоянного тока с напряжением до 15 000 В при
силе тока 5 мА.
По зарубежным литературным данным, жидкость за 10 циклов
(проходов) очцщается примерно на 98% от твердых частиц практи-
чески любого происхождения и размеров.
97. Центробежные очистители
В гидросистемах некоторых машин, в частности тракторов,
автомобилей и пр., применяют центробежные очистители жидко-
сти, представляющие собой центрифугу с тем или иным приводом,
которые обладают высокой избирательной способностью к-загряз-
нениям, очищая масло от частиц с плотностью, превышающей плот-
ность жидкости (плотность загрязняющих частиц обычно равна
2,5—3 г/см8 и выше).
Принципиальная схема очистителя (центрифуги) представлена
на рис. 238, а. Очищаемая жидкость подается через полую ось
под давлением 0,3-^-0,6 МПа (3—6 кгс/см2) во вращающийся ротор,
в котором она раскручивается до некоторой угловой скорости,
близкой к скорости ротора. При этом грязевые примеси (Частицы)
с плотностью, превышающей плотность жидкости, отбрасываются
действием центробежной силы к стенкам ротора й осаждаются
на них. Поскольку на тех же стенках осаждаются и смолистые
загрязняющие вещества, твердые частицы загрязнений связы-
ваются ими, образуя на стенках ротора плотную корку.
35 Т. М. Башта 545
Центробежная сила, действующая на механическую частицу а
загрязнителя, вращающуюся вместе с ротором, заполненным жидко-
стью, выражается как
= (т3 — тж) га2 = (р3 — рж) m2V,
Рис. 238. Расчетная схема и типовая конструкция центробежного фильтра
(очистителя)
где /п3 и тж — масса г, частиц загрязнителя и жидкости в том же
объеме;
Рз и Рж—плотность частиц загрязнителя и жидкости;
г — текущий радиус, т. е. мгновенное расстояние
центра тяжести частицы до оси вращения ротора;
V — объем частицы загрязнителя;
со—угловая скорость вращения частицы загрязни-
теля вокруг оси ротора очистителя (принимают
равной угловой скорости ротора).
Допуская, что угловые скорости жидкости и ротора равны,
можем написать
т
где п — частота вращения ротора в об/мин.
546
Под действием центробежной силы частица загрязнителя,
преодолевая сопротивление жидкости, будет перемещаться в ра-
диальном направлении с некоторой скоростью осаждения ир.
Одновременно с этим частицы перемещаются вместе с жидкостью
через ротор в осевом направлении со скоростью vo:
v
о
S
где Q — расход жидкости через ротор;
s—площадь проходного сечения ротора (площадь его се-
чения в свету).
В итоге частица будет перемещаться с результирующей ско-
ростью v под некоторым углом к оси ротора, при достижении стенки
которого частица оседает на ней.
Для вращения ротора (центрифуги) применяют реактивные
и активные приводы, причем наиболее распространены центри-
фуги с гидрореактивным приводом, работающим по принципу
сегнерова колеса. Очищенная жидкость поступает из ротора через
заборные трубки, расположенные на полой выходной оси ротора,
к двум расположенным тангенциально к оси ротора и диаметрально
противоположно друг к другу насадкам (соплам) b (рис. 238, а).
Реактивные силы потока жидкости, вытекающей из этих сопл,
создают момент, приводящий ротор с заполняющей его жидкостью
во вращение с частотой 6000—7000 об/мин.
Типовая конструкция центробежного очистителя с реактивным
приводом показана на рис. 238, б. Жидкость подводится к ка-
налу /, из которого через боковые отверстия поступает под ста-
кан 2. Заполнив внутреннюю полость ротора, она попадает в на-
клонную трубку 3 и через нее к двум противоположно расположен-
ным соплам 4 реактивного привода. Реактивная сила потока
жидкости, вытекающей из одного сопла, вычисляется по выраже-
нию
R «сот) = ^-(и— «соп).
где т = Qp — масса жидкости, расходуемой на привод сопл
(вытекающей из обоих сопл) в 1 с;
р — плотность жидкости;
Q — расход жидкости на привод центрифуги (через
оба сопла) в 1 с;
и — скорость струи потока жидкости на выходе из
сопла;
t»con — окружная скорость сопла.
Принимая во внимание равенства
35* 547
можем написать -а
____ J
Р _ Qp (1 [ 2 Ар ап , \ Qp / Q an f \ i
* 2 \ У р 30 Ь/ ~ 2 \ |х/ 30 /’ 1
' I
где р — коэффициент расхода сопла (можно принять равным 0,9); |
f—площадь сечения выходного отверстия сопла; |
п — частота вращения ротора (центрифуги) в об/мин; j
4 L — расстояние от оси сопла до оси вращения ротора. -з
Крутящий момент, развиваемый гидроактивнцм приводом, '
состоящим из двух СОПЛ, J
. ' *1
Mp = 2/?L = m(u-vcon)L = Qp(-^---------g-L). j
Преимуществом реактивного привода является простота кон- .1
струкции и высокая надежность. Однако очистители с таким при- /
водом не могут обеспечить высоких угловых скоростей ротора :
(скорость ротора с жидкостным реактивным приводом практи- ?
чески ограничена величиной 6000—7000 об/мин), а следовательно,
и требуемой тонкости очистки жидкости (менее 20—30 мкм).
98. Очистка обработкой в кавитационном поле
В соответствии с указанным выше, частицы загрязнителя,
размер которых не превышает толщины граничной пленки рабо-
чей жидкости, практически не будут вызывать износа, находясь
в пленке.
Для большинства рабочих- жидкостей гидросистем толщина
пленки равна 0,5—1 мкм. Подобная тонкость очистки жидкостей
явилась бы практически идеальной, с точки зрения современных
требований, однако обеспечить такую очистку чрезвычайно за-
труднительно. В связи с этим представляют интерес перспектив-
ные методы очистки жидкости, основанные на дроблении частиц
загрязнителя До такого малого размера, при котором они, будучи
скрыты в толще граничного слоя, практически не влияют на тре-
ние и износ скользящих пар гидроагрегатов.
Одним из таких перспективных методов является дробление
частиц до размера меньше 1 мкм в ультразвуковом поле» получае-
мом путем местной кавитации жидкости. Эго дробление произво-
дится в специальном кавитационном генераторе, представляющем
собой сопло Вентури а (рис. 239). При подаче жидкости во вход-
ную полость этого сопла, в суженной его засти развиваются
высокие скорости, приводящие при известной величине скорости
к местной кавитации жидкости, под которой понимается, наруше-
ние сплошности потока жидкости, вызывающее образование
в зонах пониженного давления паро-газовых пузырьков. При
попадании этих пузырьков вместе с потоком жидкости в зонудо-
вышенного давления (в нашем случае — в расширяющуюся часть
диффузора) происходит смыкание (разрушение) пузырьков.
548 .
Процессы смыкания пузырьков происходят с очень высокими
скоростями и сопровождаются гидравлическими ударами локаль-
ного характера с высокими «забросами» температуры и давления
в центре пузырька, вызывающими при известных условиях кави-
тационную эрозию (разрушение) поверхностей каналов, вблизи
которых происходит смыкание этих пузырьков. Поскольку ука-
занные смыкания пузырьков происходят с чрезвычайно высокой
повторяемостью,
этих гидравлических
разрушающему
эффекту
b
Рис. 239. Схема установки ультразвукового кавита-
ционного генератора
ударов («бомбардировок») подвергаются и находящиеся в масле
твердые частицы загрязнителя, в результате чего при многократ-
ном (25—50 циклов) проходе жидкости через кавитационный ге-
нератор присутствующие абразивные и металлические частицы
загрязнителя (размер частиц 10—20 мкм, концентрация 0,01 %)
при соответствующей эффективности кавитационного поля дро-
бятся до размера < 1 мкм. При этом весовое содержание частичек
в жидкости практически не изменяется, а изменяется их число.
Кавитация сопровождается шумовым эффектом высокой частоты.
При визуальном наблюдении кавитационного эффекта в гене-
раторе с прозрачными стенками начало кавитации характери-
зуется появлением в диффузоре светлого облачка (факела) дли-
ной которое при повышении перепада давления растягивается
по длине диффузора. При этом с наступлением развитой кавита-
ции происходит процесс стабилизации расхода жидкости незави-
симо от передачи давления, обусловленного изменением давления
на выходе жидкости из диффузора [1].
Повышение при этом входной мощности генератора обусло-
влено не_увеличением потока (подачи), а затратами энергии на
549
кавитацию, в результате зона кавитации расширяется (удли-
няется) по диффузорной части, начиная от суженного его сече-
ния, т. е. увеличивается размер t факела. Следовательно, длина
кавитационного факела, равно как и уровень шума, характери-
зуют степень развитости кавитации. Наиболее эффективная кави-
тация наблюдается при угле конусности диффузора а 12°.
,С повышением перепада давления, при котором повышается
эффективность кавитации, интенсивность дробления частичек
загрязнителя повышается. Практически дробление происходит
с достаточной эффективностью при перепаде давления в 4—6 кгс/см2.
Кавитационный очиститель целесообразно устанавливать
в выходной линии гидродвигателя с параллельно с более грубым
очистителем, например, центробежного типа Ь (рис. 239; см. также
рис. 238). В этом случае последний очиститель удаляет крупные
частицы, а кавитационный дробит оставшиеся. Эффектив-
ность действия кавитационного очистителя в этом случае значи-
тельно повышается. Перепад давления на кавитационном генера-
торе равен перепаду, требующемуся для гидравлического реактив- ,
ного привода центрифуги очистителя (4—6 кгс/см2) (на рис. 239
реактивные сопла показаны условно).
§ 141. Герметизация (уплотнение) соединений
99. Типы уплотнительных устройств
Герметичность стыка двух перемещающихся одна относительно
другой или неподвижных жестких поверхностей деталей дости-
гается созданием малого зазора s между стыкуемыми поверхно-
стями этих деталей (бесконтактное уплотнение) (рис. 240, а)
или устранением зазора между ними с помощью уплотнения из
какого-либо мягкого эластичного материала (рис. 240, б).
- В первом случае требуемая герметичность обеспечивается
сопротивлением щели, по которой течет жидкость, без примене-
ния каких-либо уплотнителей. К подобным уплотнительным сое-
динениям относятся плунжерные пары объемных машин. Эти
соединения выполнены с гарантированным малым зазором, обес-
печивая взаимное перемещение деталей и определенную степень
герметичности без применения каких-либо уплотнительных мате-
риалов и средств.
Это уплотнение, получившее название щелевого, представляет
собой гладкую капиллярную щель а (рис. 240, а), при соответ-
ствующей величине и длине которой может быть обеспечено при-
емлемое сопротивление перетеканию жидкости II ]. Гидравличе-
ское сопротивление течению жидкости в этом случае создается
в основном обеспечением малого зазора. К этому сопротивлению
при высоких числах Рейнольдса (преимущественно в случае
уплотнения газовой среды) добавляется дополнительное сопро-
тивление лабиринта b с расширением и сжатием струи жидкости.
Применение лабиринта повышает сопротивление щели.
550
Механизм герметизации в последнем случае заключается в мно-
гократном дросселировании рабочей среды, протекающей через
щель b с резко меняющимися проходными сечениями, в которых
создается сопротивление перетеканию вследствие потери энергии
при расширениях и сжатиях потока.
Подобные бесконтактные уплотнения применяют в тех случаях,
когда к соединениям не предъявляется требований обеспечения
высокой герметичности.
Второй тип уплотнительного соединения, получившего назва-
ние беззазорного (рис. 240, б)7 достигается с помощью уплотни-
тельного элемента с из мягкого материала, помещаемого между
Рис. 240. Схемы герметизации стыкуемых поверхностей
уплотняемыми поверхностями end, Уплотнительный элемент с
под действием внешней силы F или силы давления жидкости
поджимается к поверхностям end, обеспечивая плотный контакт.
На рис. 240, в схематически показаны возможные каналы (не-
плотности) в узле уплотнения подвижного штока g, которые
должны быть плотно перекрыты мягким уплотнительным эле-
ментом с. Очевидно, что наибольшую трудность представит пере-
крытие канала й, т. е. герметизация стыка подвижного соедине-
ния, ввиду чего точность и чистота обработки поверхностей,
образующих этот канал, должны быть достаточно высокими. Гер-
метизация (перекрытие) каналов f, образованных уплотнительным
элементом с и неподвижными поверхностями уплотнительного
узла, обеспечивается значительно проще.
Процесс герметизации резиновыми деталями осуществляется
за счет внедрения сжатой резины в неровности контактирующих
с ней поверхностей; при этом происходит заполнение резиной
микроканалов уплотняемой поверхности и перекрытие этих ка-
налов. Очевидно, что при движении контактирующих с резиной
поверхностей процесс перекрытий микроканалов, по которым
происходит утечка герметизируемой среды, затрудняется и тем
сильнее, чем выше при всех прочих равных условиях скорость
движения. При движении уплотняемого движущегося штока
резиновая деталь, находящаяся в сжатом состоянии, стремится
принять изменяющуюся по ходу конфигурацию уплотняемой
поверхности, сжимаясь на ее выступах и восстанавливаясь на впа-
динах.
551
Ниже рассмотрены основные типы уплотнительных устройств
объемных гидромашин. Они разделяются в основном на уплотне-
ния неподвижных привалочных поверхностей корпусов и уплот-
нения подвижных штоков и поршней гидроцилиндров и валиков
гидромашин.
100. Уплотнение стыков (соединений)
неподвижных узлов
Полная герметичность соединения может быть достигнута
лишь в том случае, когда точки контакта поверхностей сопрягае-
мых пар образуют неразрывную (замкнутую) линию. Поскольку
обеспечить подобный контакт путем взаимной приработки этих
поверхностей затруднительно (практически невозможно), уплот-
нение зазора между сопрягаемыми деталями осуществляют при
Рис. 241. Схемы герметизации (уплотнений) неподвиж-
ных стыков'
требованиях высокой герметичности лишь с помощью эластичных
прокладок (рис. 240, б и в; см. также рис. 241, а и б), герметиза-
цию же приработкой (рис. 240, а) применяют лишь для внутрен-
них соединений, не требующих высокой герметичности.
В качестве уплотнительных прокладок применяют различные
эластичные материалы, способные компенсировать неровности
и другие производственные дефекты поверхностей деталей. Мягкие
прокладки должны быть предохранены от выдавливания, для
чего их помещают в канавки, образующие замкнутые полости
(рис. 241, в — е), Если эти средства не предусмотрены (см.
рис. 241, а и б), необходимо, чтобы сила трения прокладки о кон-
тактные поверхности была больше силы от давления жидкости
на ее боковую поверхность, что в основном достигается выбором
толщины s и ширины прокладки.
552
Уплотнительные прокладки с прямоугольным поперечным
сечением, изготовленные из эластичного материала и размещаемые
в канавках, рассчитываются на полное с- некоторым- избытком
заполнение канавок (рис. 241, в); для этого поперечное сечение
канавки должно быть на 30% меньше поперечного сечения уплот-
нительного кольца (прокладки).
Рис. 242. Герметизация неподвижных соединений с помощью
резиновых колец круглого сечения
Если требуется обеспечить точное взаимное расположение
деталей соединения, а также разгрузить прокладку от усилий за-
тяжки, применяют соединение, показанное на рис. 241, г ид.
Объем прокладки (кольца) в этом случае должен быть несколько
меньше (на 10—15%) объема канавки, однако сечение ее в свобод-
ном состоянии должно быть таким, чтобы при сборке происхо-
дило сдавливание резины по высоте на 20—25%.
В последние годы начали повсеместно применять уплотни-
тельные кольца (прокладки) круглого сечения. Конструктивные
варианты уплотнительных узлов этого типа приведены на
рис. 242, а—е. Резиновые кольца круглого сечения применяют
для герметизации неподвижных соединений до давлений 150 МПа
(1500 кгс/см8) и выше. Применение их устраняет необходимость
сильной затяжки болтов соединений как при обычных прокладках.
Особые преимущества эти кольца имеют при использовании
их в узлах с регулируемым положением деталей. К подобным
узлам относится уплотнение регулировочного винта предохрани-
тельного клапана насоса (рис. 242, д). Изменение положения
553
J"
регулировочного винта 1 при его повороте не нарушает герметич-
ности уплотнения 3. Стопорение винта 1 осуществляется контр^
гайкой 2.
101. Герметизация штоков и поршней гидроцилиндров
Герметизация штоков гидроцилиндров осуществляется пре-
имущественно с помощью резиновых колец круглого сечения,
и реже, — с помощью манжет различных сечений. Поршни ци-
линдров уплотняются манжетами, а также металлическими раз-
резными кольцами.
Схема действия уплотнения разрезными поршневыми метал-
лическими кольцами показана на рис. 243. Кольцо из положения,
AP=Pi-p?
Рис. 243. Схема герме-
тизации подвижных
соединений с помощью
упругих разрезных ко-
лец
представленного на рис. 243, а, под действием давления жидкости
устанавливается в одно из рабочих положений (рис. 243, бив).
Уплотняющий контакт кольца с поверхностью (зеркалом) ци-
линдра создается упругостью кольца, развивающейся в процессе
обжатия его при монтаже, а также давлением жидкости на вну-
. треннюю (нижнюю) поверхность (со стороны канавки) кольца,
а в осевом направлении — давлением жидкости на боковую по-
верхность.
Эти уплотнения пригодны для работы при относительно высо-
ких давлениях и в широком диапазоне температур. К недостаткам
этих колец относятся более жесткие, чем для колец из эластичных
материалов, допуски на изготовление сопрягаемых деталей,
а также чувствительность к нарушениям качества и точности об-
работки.
554
В уплотнительном узле применяется одно или несколько ко-
лец (рис. 243, г и д) с расположением каждого из колец в своей
канавке.
Опыты показывают, что при качественном изготовлении
указанные кольца (2—3 кольца в уплотнении) обеспечивают
высокую герметичность при давлении 21 МПа (210 кгс/см2);
в отдельных же случаях их успешно применяют при давлениях
до 50—70 МПа (500—700 кгс/см2).
Если'диаметр цилиндра равен внешнему диаметру поршневого
кольца при его обжатии (при котором обрабатывалась внешняя
поверхность кольца), такое кольцо обеспечивает достаточно, рав-
номерное радиальное давление по периферии и хорошую плот-
$0-^
г)
Рис. 244. Схемы
стыков (замков)
S)
разрезных поршне-
вых колец
ность контакта с поверхностью (зеркалом) цилиндра. Однако,
если кольцо установлено в цилиндр, диаметр которого отличается
от указанного номинала, равномерность распределения радиаль-
ного давления нарушится и кольцо в некоторых точках может
потерять контакт с поверхностью цилиндра. Это наблюдается
также и при нарушении цилиндричности зеркала цилиндра.
Уплотнительные кольца изготовляют из материала, облада-
ющего упругостью и антифрикционными свойствами (серого чу-
гуна, бронзы, текстолита, графита и металлографитовой массы).
Наиболее широко распространены кольца из серого чугуна;
твердость этих колец после термической обработки составляет
HBR 98—106.
Применяют прямой (рис. 244, а), косой (рис. 244, б) и ступен-
чатый (рис. 244, в) стыки (замки). Прямой стык применяют при
средних давлениях (до 5 МПа или 50 кгс/см2), косой (угол 60°)
при средних давлениях (от 5 до 15 МПа или от 50 до 150 кгс/см2)
и ступенчатый — при более высоких давлениях. Благодаря тому,
что в ступенчатом замке (рис. 244, в) стыкующиеся ступенчатые
концы кольца перекрывают друг друга, уменьшается стыковой
зазор и соответственно повышается герметичность соединения.
Часто одну из сопряженных поверхностей в замке выполняют
плоской (параллельной торцовой поверхности), а вторую—вы-
пуклой (рис. 244, г), благодаря чему повышается удельное давле-
ние в стыке кольца под нагрузкой, способствующее повышению
герметичности.
555
Рис- 245. Силы, действующие на порш-
невое уплотнительное кольцо
* ,>>
-.J
Величина стыкового зазора / + /0 коЛьца (рис. 244,а) в свобод
ном его состоянии и величина f, на которую этот зазор уменье
шится при монтаже поршня с кольцом в цилиндре, определяю!'
напряжение кольца в сжатом положении и при надевании его нг
поршень. Для практических расчетов можно пользоваться вели»
чиной выреза f = 3,4/, где t—радиальная толщина (высота!
сечения кольца.
Кроме того, вырез должен быть таким, чтобы в смонтированном
кольце в замке был сохранен зазор f0, необходимый в основном
для компенсации неточностей изготовления цилиндра и искаже-
ний его диаметра по ходу поршня. Величину этого параметра
выбирают равной f0 — 0,05-г?
-=-0,1 мм для цилиндров диа-
метром ДО 50—70 ММ и /о =
=0,1-=-0,4 мм для цилиндров
диаметром больше 250 мм.
При выборе ширины коль-
ца 6 обычно пользуются
практической зависимостью
b < (0,75-И) t.
Необходимо обеспечивать
плоскостность торцовых по-
верхностей колец и канавок
поршня и строгую их перпен-
дикулярность к оси поршня (или другой детали, на которой вы-
полнена канавка). Чистота обработки контактных поверхностей
канавки под металлическое кольцо должна соответствовать
V9—10.
Для обеспечения герметичности соединения усилия, развива-
емые давлением жидкости на кольцо в радиальном и осевом напра-
влениях, должны быть достаточно высокими, чтобы обеспечить
перемещение кольца в канавке в рабочее его положение и создать
требуемый контакт его с граничащими поверхностями. Поэтому
эти усилия должны преодолевать силы трения, возникающие
на всех поверхностях контакта. Очевидно, преобладание сил,
действующих в радиальном направлении, может привести к столь
плотному прилеганию кольца к зеркалу цилиндра, что стык
торцовых поверхностей кольца со стенкой канавки не будет уплот-
нение другой стороны, значительное превышение осевых сил над
радиальными и развивающиеся при этом большие силы трения
по торцовым поверхностям могут препятствовать созданию плот-
ного контакта между внешней поверхностью кольца и зеркалом
цилиндра. Практика показывает, что усилия в осевом и радиаль-
ном направлениях должны быть примерно равны.
На рис. 245 показана эпюра сил давления жидкости, действу-
ющих на кольцо (упругостью кольца пренебрегаем). На поверх-
ности hub кольца действует полное рабочее давление жидкости
(противодавление принимаем равным нулю), а на противополож-
556
йыё им Поверхности — Давление, понижающееся ot рабочего
давления р до нуля (зазором s пренебрегаем).
При параллельной щели (зазоре) падение давления в ней будет
линейным. При этом среднее контактное давление может быть
принято равным рср — р/2, в соответствии с чем усилие, действу-
ющее в осевом направлении на
жет быть вычислено как j
и в радиальном направлении
^рад = Pcp/l = -у- >
где b и h— ширинам радиаль-
единицу длины окружности, мо-
Рис. 246. Герметизация с помощью
двух колец, размещенных в одной
канавке
ная высота кольца.
Этим силам соответствуют силы трения (на единицу длины)
в осевом Дос и в радиальном Драд направлениях:
^ос -- Ч^*ОС»
рад
рад»
где я — коэффициент трения.
При условии, что коэффициенты трения в обеих парах по-
верхностей равны между собой, уплотняющее усилие в радиаль-
ном направлении будет Град = r]Foc и в осевом Гос = т]Град.
Соотношения между радиальным и осевым усилиями опреде-
ляются в основном размерами сечения поршневого кольца. Оче-
видно, для соблюдения при одних и тех же материалах деталей
условия Град = Гос необходимо, что b = ft.
Часто в общей канавке устанавливают два узких кольца с пря-
мым замком (рис. 246, а) или одно над другим (рис. 246, б). Стыки
(замки) колец смещаются один относительно другого, что практи-
чески равноценно с точки зрения обеспечения герметичности
применению ступенчатого стыка (замка).
В уплотнительном соединении со слойным расположением
колец (рис. 246, б) должна быть обеспечена строгая цилиндрич-
ность в рабочем (сжатом) положении наружного и внутреннего
колец.
102. Манжетные уплотнители
Для герметизации подвижных соединений гидросистем в основ-
ном применяют уплотнения с эластичными (резинотканевыми,
кожаными и пр.) герметизирующими элементами, прижатыми
к уплотняемым поверхностям так, чтобы давление в зоне контакта
превышало давление рабочей среды (жидкости). Наиболее распро-
страненными уплотнениями такого типа являются различные
манжеты, которые применяют для узлов прямолинейных и вра-
щательных движений.
557
^-образные манжеты выполняют с закругленным (рис. 247, а)
и плоским (рис. 247, б) основанием, причем манжеты первого
типа изготовляют из резины, прорезиненных тканей и кожи,
а второго — преимущественно из резины. Последнее обусловлено
тем, что выполнение манжет с плоским основанием из кожи и про-
резиненной ткани более сложно, чем с закругленным основанием.
Преимуществом манжет с плоским основанием является то, что
устраняется опасность разрыва нижней ее части под действием
давления жидкости, что наблюдается в манжетах с круглым
Рис. 247. Распространенные формы уплотнительных манжет
основанием, если не применить фасонное опорное 1 и распорное 2
кольца (рис. 247, а).
Манжетные кольца из прорезиненных тканей обладают боль-
шой прочностью и долговечностью (в 2—3 раза выше, цем манжет
из кожи, резины или полихлорвинила), а также стойкостью в усло-
виях работы при высоких давлениях (до 50 МПа или 500 кгс/см2)
и температурах (до 100° С). Толщина материала для изготовле-
ния манжет составляет в зависимости от размера манжеты 2,5—
8 мм. ,
Манжеты 2 (рис. 248, а) монтируют на плотной посадке по
плунжеру 1 (рис. 248, б) и по поверхности расточки канавки
(проточки) 3. При этом упругость манжеты обеспечивает герметич-
ность соединения при нулевом и близком к нему давлениях
жидкости. При наличии в системе давления р губки а манжеты под
распорным действием этого давления плотно поджимаются к уплот-
няемым поверхностям (рис. 248, в).
Герметичность соединения ухудшается с повышением скорости
движения штока, что обусловлено в основном расклинивающим
действием затягиваемой в зазор жидкости, а также ухудшением
восстанавливаемости формы поперечного сечения уплотнительного
кольца, в результате чего ухудшается заполнение резиной микро-
впадин и компенсация неровностей на штоке.
558
С повышением давления восстанавливаемость формы кольца
улучшается, в результате при высоком давлении утечки жидкости
с повышением скорости скольжения растут медленнее, чем при
низком давлении.
Для улучшения начального контакта манжеты с уплотняемыми
поверхностями, а также для сохранения ею формы манжету при
2
а< Ь <с
а)
Рис. 248. Схема действия
манжетного уплотнительного кольца
монтаже уплотнительного пакета помещают между фасонным
опорным 1 и распорным 2 кольцами (манжетодержателями)
(см. рис. 247, а) из металла или текстолита.
Для улучшения плотности контакта применяют также ман-
жеты, в которых пространство между уплотнительными губками
заполняется мягкой резиной
(рис. 249).
Чистота обработки уплот-
няемой поверхности при приме-
нении U-образных манжет долж-
на быть не менее V9.
Число манжет выбирают в
зависимости от величины рабо-
чего давления. Обычно реко-
мендуется применять от двух
до трех и лишь в отдельных слу-
чаях до четырех манжет. Одна
манжета рекомендуется для давления 3
Манжеты изготовляют из резиновых смесей, кожи, пластмас-
совых материалов и их комбинаций с различными тканями, про-
резиненных хлопчатобумажных материалов и пр. Наиболее ши-
Зазор
Рис.
Мягкая резина
Прорезиненная
ткань
249. М а н жеты с у вел и чен н ой
поперечной упругостью
,5—4МПа (35—40 кгс/см2).
и
роко применяют манжеты из резины и прорезиненных хлопчато-
бумажных тканей.
Получили распространение шевронные манжеты (см. рис.
247, в—д), применяемые главным образом для уплотнения
деталей с возвратно-поступательным и, реже, с вращательным
движением. Уплотнительный узел выполняют в виде колец, со-
бираемых в пакет пб нескольку штук (см. рис. 247, вид).
i
559
Шевронные манжеты изготовляют из тех же материалов, что
и U-образные. На рис. 247, г показано сечение манжеты из ре-
зины, а на рис. 247, д — из кожи. Для повышения стойкости
резиновых манжет -их с двух сторон армируют прорезиненной
хлопчатобумажной тканью. Опор-
ные и распорные кольца шеврон-
ных манжет изготовляют с углами,
превышающими на 50° угол гу-
бок манжет.
а.)
Рис. 251. Уплотнения поршня гид-
роцилиндра с помощью шевронных
манжет
Рис. 25Q. Схемы уплотнений ше-
вронными манжетами
Затяжка регулируется соответствующим подбором шайб а
(рис. 250, а) или пружинами (рис. 250, б). Применение пружин
устраняет необходимость регулирования затяжки уплотнения:
нажимную втулку в этом случае можно затягивать до соприкосно-
вения торца зажимной буксы с корпусом.
На рис. 251 показано уплотнение поршня гидроцилиндра шев;
ронными манжетами.
103. Уплотнения резиновыми кольцами
круглого сечения
Уплотнения резиновыми кольцами круглого сечения являются
наиболее распространенными в гидроцилиндрах, как и в гидро-
механизмах вообще. Кольца в таких уплотнениях помещают в кру-
говые канавки (рис. 252, а), которые выполняют в зависимости
от условий применения либо на штоке поршня (рис. 253, а),
либо на поверхности буксы цилиндра (рис. 253, б).
Герметичность уплотнения при нулевом и малом давлениях
жидкости обеспечивается упругостью резины, достигаемой пред-
варительным сжатием кольца при монтаже, под действием кото-
рого кольцо будет контактировать ро родосре шириной I (см.
5<?0
4
рис. 252, б). Для этого канавка выполняется так, что кольцо
при монтаже получает радиальное обжатие, равное 10—15%
диаметра сечения кольца. При подводе давления жидкости по
Рис. 252. Герметизация с помощью резиновых колец круглого
сечения
одну из сторон кольца оно смещается к боковой стенке канавки
в направлении действия давления и, деформируясь под действием
этого давления, создает плотный контакт по трем поверхностям
(рис. 252, в).
Рис. 253. Схемы размещения канавок для уплотнительного кольца на штоке (а)
и в буксе (б) и предохранение уплотнительных колец от выдавливания в зазор
'с помощью защитных колец (в—г)
Распространяя с некоторыми допущениями на резину закон
Паскаля, можем считать, что плотность контакта резинового
кольца с уплотняемыми поверхностями будет увеличиваться
практически пропорционально повышению давления жидкости.
Для обеспечения при монтаже требуемого предварительного
сжатия кольца диаметр d поперечного его сечения в свободном
состоянии и глубину b канавки (см. рис. 252, а) выбирают такими,
чтобы кольцо, помещенное ц канавку между уплотняемыми
т. B41JJT4 55)
поверхностями поршня и цилиндра, было обжато по поперечному
сечению на величину k = d— b (см. рис. 252, б). В практике
уплотнение оценивается по этому параметру коэффициентом пред-
варительного (монтажного) сжатия сечения кольца в радиальном
направлении:
ш = ^=А1оо%.
Указанным предварительным сжатием создается герметичность
соединений до появления давления жидкости, под действием
которого кольцо, деформируясь у внешней стороны канавки,
создает плотный контакт с уплотняемыми поверхностями (см.
рис. 252, в). В распространенных конструкциях величина диа-
метрального обжатия поперечного сечения обычно составляет
примерно w = 10%.
Уплотнительная кольцевая прокладка деформируется под
действием давления жидкости и при соответствующих условиях
(при большом зазоре s и низкой твердости резины) может быть
выдавлена в зазор уплотняемыми поверхностями (рис. 252, г).
Выдавливание кольца в зазор является основной причиной его
выхода из строя. Это обусловлено тем, что острый угол кромки
канавки врезается в кольцо, разрушая его поверхность
(рис. 252, д и е).
Для предохранения уплотнительных колец от выдавливания
в зазор при давлениях более 10 МПа (100 кгс/см2) с одной или
по обеим сторонам уплотнительного кольца устанавливают за-
щитные кольца (рис. 253, в и г). При установке защитных колец
резиновые уплотнительные кольца можно применять при давле-
нии со 100 МПа (1000 кгс/см2) и выше. Однако защитные кольца
(особенно кожаные) значительно повышают трение уплотнитель-
ного узла.
Защитные кольца изготовляют из эластичных материалов,
обладающих достаточной жесткостью, чтобы противодействовать
выдавливанию жидкости в зазор. Наиболее распространены
кольца из кожи, твердой резины, фторопласта, текстолита и пр.
Наилучшими свойствами обладают фторопластовые кольца, ко-
торые пригодны для температур от —60 до +150° С. Толщина
колец из этого материала 1 мм при d < 100 мм и 1,5 мм при d >
> 100 мм, где d— средний диаметр поперечного сечения кольца.
В гидросистемах машин в основном применяют прямоуголь-
ные канавки для колец (см. рис. 252, а), размеры которых должны
быть такими, чтобы при наихудшем сочетании отклонений раз-
меров сопрягаемых деталей кольцо имело монтажное сжатие.
Глубина канавки, в которую помещают кольцо, вместе с зазором
между уплотняемыми поверхностями должна быть меньше диа-
метра d поперечного сечения свободного кольца на величину k,
значение которой определяет величину предварительного сжатия
кольца. Для распространенных колец подвижных соединений k
&6?
принимают со 10% диаметра поперечного сечения кольца, для
уплотнений неподвижных соединений k может быть увеличен,
если это допускается условиями монтажа, до 15—25%. Диаметры
поперечного сечения колец обычно принимают d = 3-нб мм.
Ширина а канавки должна быть примерно на 20—25% больше
диаметра d поперечного сечения кольца в свободном его состоя-
нии или равна ширине кольца в обжатом состоянии.
Так как наличие острых кромок канавки может привести при
пульсирующем давлении к разрушению уплотнительного кольца
вследствие подреза, то эти кромки не закругляют, а лишь приту-
пляют без применения режущего инструмента. Практически ра-
диус гг закругления внешних кромок канавки должен быть равен
0,02—0,03 мм; увеличение этого радиуса недопустимо, так как
при этом увеличивается вероятность выдавливания материала
кольца в зазор.
104. Уплотнение вращающихся валиков
Уплотнение вращающихся валиков объемных гидромашин
осуществляется в основном двумя способами: по окружности
вала (радиальное уплотнение) и по торцовым поверхностям (тор-
цовое или механическое уплотнение).
Уплотнение радиального типа. В объемных гидромашинах
широко применяют (80—85% всех уплотнений этого назначения)
уплотнения радиального (манжетного) типа. Эти манжеты в ос-
новном изготовляют из резины и резиноподобных материалов
Рис. 254. Схемы манжет для уплотнения вращающегося валика
и, реже, из кожи. Конструктивные схемы типовых манжет из
резины представлены на рис. 254, а и б, а из кожи — на рис. 254, в.
Уплотнения с резиновыми манжетами в основном отличаются
друг от друга местом расположения металлического каркаса с,
служащего для увеличения жесткости манжет. Каркас распола-
гается с внешней (рис. 254, а) и внутренней (рис. 254, б) сторон
манжеты или заделывается внутрь тела манжеты.
Особенностью работы уплотнений вращательных соединений
является то, что контакт уплотнительной манжеты с поверхностью
вала происходит по постоянной небольшой поверхности шири-
36* 563
ной е, вследствие пего На этой Поверхности И контактирующей;
с ней уплотняющей кромке манжеты развивается высокая темпер
ратура, которая при окружных скоростях вала более оэ4 м/с
может превышать температуру рабочей жидкости на 40—50° С;
и выше. После того, как температура кромки манжеты достигнет',
некоторого критического значения, уплотнение теряет герметич-/
ность вследствие затвердения резины. 5
Температура в контакте манжеты с валом зависит также от^
давления рабочей среды, повышаясь с увеличением последнего.^
Это обусловлено тем, что давление р нагружает кромки манжеты, i
а) 6) 8)
Рис. 255. Схемы двухступенчатых уплотнений внешних валиков
прижимая их к поверхности вала. Поэтому уплотнительные
манжеты применяют при давлениях жидкости перед уплотнением .
обычно не выше со0,2 МПа (2 кгс/см2).
Поскольку все эластичные материалы, применяемые в уплот- ,
нительных соединениях, обладают свойством релаксации напря-
жений под действием продолжительной нагрузки, для обеспече-
ния надежного контакта кольца с валом манжету дополнительно
прижимают спиральной (браслетной) пружиной b (см. рис. 254, а
и б).
Двухступенчатые уплотнения. Для снижения давления перед ;
манжетой и, соответственно, для повышения надежности герме-
тизации внешних валиков гидромашин часто применяют двухсту-
пенчатые уплотнения, которые состоят из двух последовательно
установленных герметизирующих элементов а и & (рис? 255, а).
Герметизирующий элемент а первой ступени, обычно предста-
вляющий собой плотно посаженную на шток антифрикционную
металлическую втулку, лишь снижает давление перед вторым
герметизирующим элементом Ь, граничащим с внешней средой,
не обеспечивая при этом полной герметичности. Камера с между
этими ступенями уплотнения сообщается (обычно через обратный
клапан) со сливной линией гидросистемы, благодаря чему внеш-
ний герметизирующий элемент b находится под действием лишь
малого давления, примерно равного давлению в сливной линии.
564
Сказанное в равной мере относится и к уплотнениям внешних
штоков гидроцилиндров (рис. 255, б), к внешней герметичности
которых часто предъявляются очень высокие требования. В ка-
честве первой ступени уплотнения в последних схемах применяют
как металлические втулки, так и иные герметизирующие устрой-
ства.
Для повышения герметичности внешних валиков вращатель-
ных соединений часто применяют дополнительные динамические
(винтовые, лопаточные и пр.) устройства, которые обычно исполь-
зуются в качестве первой ступени уплотнения. В практике рас-
пространены винтовые устройства (рис. 255, в). Это уплотнение
выполняется в виде многозаходного винта, нарезанного на валу
насоса и устанавливаемого перед второй ступенью — резиновой
манжетой. Направление нарезки выбирается таким, чтобы при
данном направлении вращения вала жидкость возвращалась бы
(отбрасывалась) фрикционным действием в уплотняемую по-
лость.
Принцип действия динамического винтового уплотнения осно-
ван на использовании сил трения (фрикционного действия) жидко-
сти, заполняющей винтовую канавку вращающегося винта,
о неподвижную втулку, в результате чего создается напор, дей-
ствующий вдоль оси винта. В зависимости от направления вра-
щения и направления нарезки винта (вала) этот напор будет либо
противодействовать напору, обусловленному перепадом давления
на концах винтовых канавок, либо суммироваться с ним. В пер-
вом случае при вращении винта возникают силы, которые будут
отбрасывать жидкость, заполняющую канавку, в уплотняемую
камеру. При этом нагнетательный эффект такого устройства мо-
жет превысить утечки жидкости через винтовую канавку и ра-
диальную щель между винтом и втулкой, обусловленные пере-
падом давления. Следовательно, перетечки жидкости из уплот-
няемой полости насоса в предманжетную камеру с при этом пол-
ностью прекратятся.
Поскольку действие этого устройства основано на гидродина-
мическом трении жидкости, уплотняющие устройства этого типа
эффективны лишь при достаточно высокой окружной скорости
(порядка 1 м/с).
Ввиду сложности гидродинамических явлений, которые воз-
никают при работе такого динамического дросселя, точный расчет
потока жидкости через канавку вращающего винта затруднителен,
поэтому ограничиваются приближенным расчетом с последующей
проверкой. При этом допускают, что поскольку радиальные за-
зоры между поверхностями втулки и винта небольшие, перетеч-
ками через них жидкости можно пренебречь.
Принципиальная зависимость создаваемого при вращении
винта перепада давления от действующих здесь
акторов вы-
ражается
Др = р<а£>/кс,
565
где g — динамическая вязкость Жидкости;
со — угловая скорость винта;
D и 1К — диаметр и длина винтовой канавки;
с—безразмерный коэффициент, зависящий от шага
винта, ширины впадины и профиля резьбы; числен-
ные значения этого коэффициента могут быть опре-
делены лишь опытным путем.
Надежность действия подобного винтоканавочного уплотни-
тельного устройства зависит от глубины и ширины канавки,
числа канавок и шага резьбы.
Число k канавок в направлении оси винта, длина канавки
(каждого винта) 1К и число заходов резьбы z определяются в за-
висимости от длины L нарезанной части вала (винта):
ь __ L . . ___ L . Jidtgg _
t а 4- с ’ к sin а’ t ’
где t—шаг нарезки;
а и с—ширина канавки и выступа винта;
а—угол наклона образующей винтовой поверхности
к плоскости, перпендикулярной к оси вращения
винта (вала).
Из приведенного выражения следует, что эффективность уплот-
нительного устройства повышается с увеличением длины канавки,
что обусловлено повышением жидкостного трения (фрикционного
эффекта). Так, например, уменьшение длины винтовой канавки
на 20% привело к увеличению потока жидкости (при п =
— 500 об/мин) в 3 раза.
Учитывая сказанное, длину винтовой части вала следует вы-
бирать возможно большей, а заходов резьбы — с максимальным
На эффективность действия уплотнительного устройства влияет
форма и размеры канавки. В практике обычно применяют канавки
прямоугольного сечения при соотношении глубины b и ширины а,
равном — < 0,5, доводя это соотношение до — = 6,1.
CL Л
При уменьшении относительной глубины канавки alb повы-
шается влияние подвижной стенки на поле скоростей по глубине
канавки и соответственно повышается фрикционный эффект.
Опыт показал, что для распространенных размеров рассма-
триваемых уплотнительных устройств они обеспечивают напор,
обусловленный фрикционным эффектом при частоте вращения
п 1000 об/мин, равный со2 кгс/см2. Следовательно, когда да-
вление в сливном маслопроводе ниже 2 кгс/см2, обеспечивается
нулевое давление в камере с (рис. 255). При частоте же вращения
порядка 3000—4000 об/мин напор, развиваемый рассматриваемым
винтовым устройством, может быть 20 кгс/см2 и выше.
Рис. 256. Экс-
центричное рас-
положение оси
вращения вала
относительно
геометрической
его оси
При снижении перепада давления соответственно понизятся
и минимальные скорости.
Применение этих динамических устройств имеет особые пре-
имущества в случае жестких требований в части полного устране-
ния внешних утечек жидкости.
Окружная скорость и температура на поверхности тела. Наибо-
лее важными факторами, влияющими на работу рассматриваемого
уплотнения и определяющими его долговечность, являются
окружная скорость и связанная с ней температура, развиваю-
щаяся на поверхности трения. Например, уплотнения из резины
обеспечивают при температуре 50—70° С не-
сколько тысяч часов работы, тогда как при тем-
пературе 120° С срок их службы ограничивается
несколькими десятками часов.
Кожаные манжеты можно применять для
окружных скоростей вала до 10 м/с и темпера-
туры на поверхности трения до 110°G. Уплотне-
ния из синтетических резин можно применять при
окружных скоростях на поверхности трения до
20 м/с, а в отдельных случаях и до 25 м/с. В за-
висимости от сорта резины они могут быть при-
годны для работы при температуре на поверхно-
сти трения 150° С и выше.
Качество обработки рабочих поверхностей. По-
вышение чистоты обработки валика уменьшает
износ уплотнительной манжеты. При увеличе-
нии средней высоты неровностей обработанной
поверхности потери на трение возрастают, причем
тем интенсивнее, чем выше рабочее давление.
. Испытания показали, что с увеличением шерохо-
ватости (неровностей) поверхности валика с 0,1 до 2 мкм коэф-
фициент трения уплотнительной манжеты увеличивается на 30%.
Для надежной работы манжетных уплотнений рабочая поверх-
ность шейки валика, контактирующая с манжетой, должна иметь
чистоту обработки не ниже V9—10.
При радиальном биении уплотняемого вала герметичность
уплотнения неизбежно нарушается. Это обусловлено тем, что для
сохранения плотности контакта манжеты с валом необходимо
обеспечить непрерывное Сопряжение кромки манжеты с поверх-
ностью вала при его вращении. Из схемы, показанной на рис. 256,
видно, что при эксцентричном расположении оси вращения вала
относительно геометрической его оси вал совершает круговраща-
тельное движение с амплитудой, равной эксцентриситету е.
При этом точки соприкосновения кромки манжеты с поверхностью
вала совершают в результате эксцентричности,.его оси вращения
движения по овальной траектории. Если кромка манжеты не
успевает в результате действия сил инерции и трения, а также
недостаточной упругости уплотнительного элемента, следовать
за поверхностью вала, то между ней и валом образуется зазор $,
положение которого будет меняться за каждый оборот вала на
360°. Возможность образования такого зазора и его величина
определяются эксцентриситетом е и угловой скоростью вала со.
105. Уплотнения торцового типа
Виды уплотнений. При повышенных требованиях К уплотне-
ниям валиков гидромашин в части пригодности их для работы
при высоких давлении и частоте вращения вала в сочетании с вы-
сокими температурами применяют уплотнения' торцового типа
(рис. 257, а), в которых движущаяся уплотняющая поверхность
контактирует с внешней поверхностью вала в плоскости, перпен-
у
Рис. 257. Схемы элементов торцового уплотнения
дикулярной к оси вала. Эти уплотнения отличаются простотой —
их уплотняющие поверхности имеют самую простую геометри-
ческую форму— плоскость. Уплотнения обеспечивают при ка-
чественном изготовлении высокую, практически полную герме-
тичность и долговечны, а также обладают относительно малыми
потерями мощности на трение (0,1—0,5 потерь мощности в ман-
жетных уплотнениях). Уплотнения торцового типа можно приме-
нять при окружных скоростях, уплотняемого узла до 60 м/с (соот-
ветствует 15000 об/мин) и давлениях среды до 40 МПа
(400 кгс/см2).
На рис. 257, « показана схема типового торцового уплотнения,
которое состоит из нагруженного пружиной 1 уплотнительного
кольца 2, изготовленного из мягкого антифрикционного мате-
риала, и контактирующего с ним по торцу металлического опор-
ного кольца (буксы) 4 высокой твердости. Уплотнительное кольцо
крепитсй либо к вращающемуся валу, либо соединяется с непо-
движным корпусом, а опорное кольцо в первом случае крепится
в корпусе и во втором — на вращающемся валу. При этом одно
из колец должно иметь свободу перемещения вдоль оси, благодаря
чему оно с помощью пружины 1 может быть прижато к парному
кольцу. Пружина создает предварительное контактное давление
на поверхностях Колец, достаточное для предотвращения утечек
жидкости при нулевом или близком к нему давлении рабочей
среды. По мере увеличения давления к усилию пружины 1 доба*
вляется усилие неуравновешенного давления жидкости в камере
со стороны пружины, вследствие чего контактное давление (удель-
ная нагрузка) скользящей пары будет повышаться пропорцио-
нально увеличению этого давления. Уплотнение подвижного
элемента (кольца 2) по поверхности осевого скольжения осуще-
ствляется с помощью круглого резинового кольца 3 (рис. 257, а)
или иных уплотнительных колец и манжет, а также сильфонов
(мембран) (рис. 257, бив).
Хорошие свойства имеют уплотнения с клиновидным уплот-
няющим элементом 8 из фторопласта (рис. 257, г), нагруженным
пружинами 9, усилием которых обеспечивается требуемая плот-
ность контакта между этим элементом и валом*, а также между
конусной поверхностью элемента и торцовым уплотнительным
кольцом 7. Для герметизации крышки этого уплотнения приме-
няют кольца (сальники) 5. В промежуточную камеру 6 подводится
жидкость, которая служит разобщающим затвором, а также
охлаждает трущийся узел. При работе со средой с плохими сма-
зывающими свойствами в камеру 6 подводится смазка.
При высоких температурах и давлениях рабочей среды до
0,7—-1,0 МПа (7—10 кгс/см2) применяют уплотнения с металли-
ческими сильфонами (рис. 257, бив), а при давлениях до 0,1 МПа
(1 кгс/см2) — уплотнения с фторопластовыми и резиновыми силь-
фонами .
Контактное давление уплотнительных колец. С целью сниже-
ния контактного давления площадь f, на которую действует да-
вление жидкости, прижимающее подвижное кольцо к неподвиж-
ному, принимается меньше площади F, на которой происходит
контакт скользящей пары. Правильным подбором отношения k —
f
= -ф-, которое называется коэффициентом уравновешивания уплот-
нения (обратная ему величина 1/k — Flf называется степенью раз-
грузки) можно иметь контактное давление колец значительно ниже
давления рабочей среды.
Надежность работы этих уплотняющих устройств в первую .
очередь зависит от правильного соотношения величин контактной
поверхности колец F и поверхности f, на которую действует да-
вление жидкости, нагружающее подвижный элемент (кольцо) 2
уплотнения (рис. 257, <), а также частично от усилия пружины /,
создающей первоначальное нагружение этого элемента.
569
Допуская^ что непосредственный контакт поверхностей сколь*
зящей пары отсутствует и течение жидкости в зазоре подчиняется
гидродинамическому закону, условие равновесия осевых сил,
приложенных к подвижному в осевом направлении элементу 2,
можно выразить уравнением
p^F^bpf + Рпр± Т = О,
где рСр — среднее давление жидкости в зазоре
между прилегающими поверхностями ко-
лец;
Др = Pi—Рг—перепад между давлением уплотняемой
среды и давлением в полости низкого
давления; при условии, что указанная
полость соединена с атмосферой, Др = р1;
f = у (d? — d*») — площадь, на которую действует давле-
ние жидкости, прижимающее подвижный
элемент (кольца) пары к неподвижному;
F =s Д (d| — dg) — площадь контакта прилегающих поверх-
ностей колец;
Т — сила трения подвижного элемента;
Рпр— усилие затяжки пружины 1.
Ввиду того, что в правильно сконструированном уплотнении
сумма сил (Т + Рпр) обычно не превышает 5—8% осевого усилия
давления жидкости, действующего на подвижный элемент, в рас-
чете этой суммой сил пренебрегаем. Последнее уравнение примет
вид
Рср = Р1^ =
или
Рср __ “ “2
j2 *
Pl ^3
Допуская далее, что распределение давления жидкости в за-
зоре в радиальном направлении по ширине b = 1 ~^3 уплот-
няющей поверхности (пояска) будет линейным (что справедливо
при условии параллельности поверхностей, образующих зазор),
можно написать
р
Рср 2 *
В соответствии с этим равновесие сил давления жидкости на
уплотнительное кольцо с учетом указанного расклинивающего
570
действия жидкости наступит при линейном распределении давле-
ния в зазоре при условии
где k —. коэффициент уравновешивания (разгрузки).
При этом значении коэффициента k плотность контакта, тре-
буемая для обеспечения герметичности, достигается лишь дей-
ствием усилия натяжения пружины 1 (рис. 257, а).
Поскольку распределение давления в зазоре по радиусу мо-
жет быть нелинейным, коэффициент k обычно выбирают больше
0,5, так как в противном случае усилие давления жидкости в за-
зоре может превысить усилие прижатия колец и уплотнение «рас-
кроется». На основании практических данных для уплотнений
с широкой контактной поверхностью b = 3-н5 мм можно реко-
мендовать коэффициент уравновешивания: k — 0,55-нО,6.
Точность изготовления и чистота обработки деталей уплотни-
тельного узла. Надежность и герметичность торцовых уплотнений
зависит от точности изготовления и качества скользящих поверх-
ностей колец. Наиболее важное значение имеет соблюдение пер-
пендикулярности герметизирующей плоскости вращающегося
кольца к оси вращения вала. Величина допустимого торцового
биения кольца зависит от его скорости. Последнее обусловлено
тем, что если при малой скорости подвижное в осевом направле-
нии кольцо может частично компенсировать неизбежные наруше-
ния перпендикулярности поверхностей контакта к оси вращения,
то при большой скорости эта компенсация станет в силу действия
сил инерции невозможной. В результате кольца потеряют плот-
ность контакта вследствие образовавшегося клиновидного зазора,
т. е. при некотором значении торцового биения ориентирующееся
кольцо будет как бы «подпрыгивать», сохраняя контакт с опорным
кольцом не по всей поверхности, а лишь в одной точке.
Опыты показывают, что наиболее рациональной является обра-
ботка рабочих поверхностей уплотнительных колец, которая
соответствует чистоте поверхности V10.
Качество уплотнений зависит в значительной мере от правиль-
ного выбора материала контактирующих колец. В общем случае
для деталей торцового уплотнения можно использовать материалы,
применяемые в подшипниках скольжения. Широко применяется
пара из бронзового или чугунного уплотнительного кольца со
стальным цементованным опорным кольцом (буксой).
ГЛАВА XV
ПНЕВМАТИЧЕСКИЕ ОБЪЕМНЫЕ МАШИНЫ
§ 142. Общие положения
В современной технике и, в частности, в системах автоматиза-’
ции производственных процессов применяют наряду с гидравли-
ческими, пневматические приводы и механизмы, основанные на
использовании в качестве рабочей среды сжатого или разрежен-'
кого воздуха. Применение пневмоприводов имеет особые преиму- •
щества в тех случаях, когда требуется осуществить быстрые пе-
ремещения нагрузки (выхода), а также когда применение гидра-
влических приводов с минеральной рабочей средой недопустимо
по требованиям пожарной безопасности.
Современная техника располагает совершенными пневмати-
ческими устройствами, с помощью которых решаются сложные
задачи по автоматизации управления машинами и производ-
ственными процессами; В последнее время пневматика исполь-
зуется также для решения логических задач.
Пневматические приводы (системы) повсеместно применяют
в полиграфическом машиностроении, в литейных и кузнечно-
прессовых, машинах, металлорежущих станках и сварочных агре-
гатах, в оборудовании для термической обработки, подъемно-
транспортных устройствах и в других отраслях техники. Осо-
бенно широко они применяются в устройствах и аппаратах упра-
вления транспортными машинами, в тормозных системах поездов, ;
в управлении рулями ракет и в металлообрабатывающих станках.
В последних машинах они используются для выполнения опера-
ций автоматической загрузки и закрепления заготовок, включе-
ния и выключения рабочих движений режущего инструмента,
освобождения и удаления заготовок со станка и выполнения
других функций по автоматизации станочных операций и кон-
тролю.
К основным преимуществам пневматических систем относится
надежность и долговечность, быстрота действия (срабатывания),
простота конструкции и экономичность, обусловленные одно-
канальным питанием исполнительных пневмоагрегатов (отрабо-
тавший воздух выпускается непосредственно в атмосферу без
отводящих трубопроводов) и дешевизной самой рабочей среды.
-572
Пневматические устройства являются безопасными в пожарном
отношении, что способствует широкому их применению в горно-
добывающей и химической промышленности.
Наряду с этими положительными качествами пневматические
системы обладают рядом недостатков, вытекающих в основном
из природы рабочей среды — воздуха. Воздух обладает высокой
сжимаемостью, ввиду чего он при сжатии накапливает энергию,
которая при известных условиях (при больших инерционных
нагрузках пневмодвигателя) может быть преобразована в кине-
тическую энергию движущихся масс нагрузки и вызвать рывки
и удары. Сжимаемость воздуха в пневматических системах за-
трудняет возможность фиксации без применения специальных
позиционеров и следящих устройств выходного звена пневмо-
двигателей в заданных промежуточных положениях.
Вследствие сжимаемости рабочей среды пневматические сило-
вые системы не обеспечивают без специальных дополнительных
средств необходимой плавности и точности хода, а также не обес-
печивают получение при переменной нагрузке равномерной и ста-
бильной скорости. Помимо этого пневматические приводы имеют,
как правило, более низкий к. п. д. в сравнении с гидравличе-
скими приводами, а также требуют применения смазочных
устройств.
Сжатый воздух для питания пневматических систем обычно
вырабатывается компрессорами, обслуживающими пневматиче-
ские машины всего предприятия, либо определенную их группу.
Применяются преимущественно компрессоры объемных типов,
главным образом пластинчатые и поршневые.
В подобных централизованных и групповых системах
питания обычно применяют давления 0,5—0,6 МПа (5—6 кгс/см2),
при более высоких давлениях питание осуществляется от соб-
ственного компрессора. Распространены компрессоры на давле-
ние 5 МПа (50 кгс/см2). В самолетных гидропневмосистемах
давление воздуха доведено* в целях уменьшения веса пневмо-
агрегатов, до 10—15 МПа (100—150 кгс/см2). В этом случае
питание пневмоприводов осуществляется от предварительно за-
ряженных сжатым воздухом (газом) баллонов.
Расчет процессов в пневматическом приводе основывается на
законах и уравнениях газовой динамики и термодинамики. Поло-
женные в основу газодинамических расчетов пневмосистем и их
элементов вопросы рассмотрены в курсах «Гидрогазовая динамика»
и «Термодинамика», здесь же рассматриваются в основном схемы,
действия и конструктивное выполнение типовых объемных пнев-
момашин, а также методы их расчетов, вопросы же газодинамики
приведены в виде справочных данных и в объеме, необходимом
для изложения материала настоящего курса. Ниже приведены
необходимые для этого основные формулы параметров газа и тер-
модинамики [1J.
573
A
§ 143. Основные параметры газа
Состояние всякого газа определяется тремя основными пара-
метрами: удельным объемом (о), давлением (р) и температу-
рой (Т).
Удельный объем связан с объемом V зависимостью
V
v = ^.
где G — вес газа, заключенного в данном объеме.
Часто для сравнения характеристик используется величина,
называемая удельным весом газа
Из приведенных выражений следует, что удельный вес является
величиной, обратной удельному объему:
V
Под давлением газа здесь понимают абсолютное давление
(с учетом атмосферного давления).
Значение температуры Т для газа определяют по абсолютной
шкале Кельвина, которая связана с температурой t по шкале
Цельсия зависимостью
Под нормальными условиями состояния газа понимают его
состояние при Т = 263 К или при t = 0° С.
Уравнение
Основные уравнения термодинамики
Уравнение состояния газа (уравнение Клапейрона)
pv = RT. (142)
изотермного процесса
pv = const. 7
адиабатного процесса
рр* = const.
Уравнение
Уравнение
политропного процесса
р у" = const.
Показатель адиабаты
Со
574
Теплоемкость при постоянном объеме
_ AR
j, ~ k-Г
/
Отношение абсолютных температур
Z_? — £2~т~
_ J /V а
Т1 Р1
(143)
(144)
В приведенных формулах:
р, Pi и р2 — абсолютные давления газа;
и Т2 — абсолютные температуры газа;
А — механический эквивалент тепла (Д —
= 427 кгс-м/ккал);
R — удельная газовая постоянная (для воздуха
R = 29,27 кгс-м/кг-°C);
ср — удельная теплоемкость газа при постоянном
давлении (для воздуха ср = 0,238 ккал/кг-град);
cv — удельная теплоемкость газа при постоянном
объеме (для воздуха ср = 0,17 ккал/кг-град);
и и k — показатели политропы и адиабаты (для воз-
духа k — 1,405, причем 1 О <».
Следует указать, что для давлений до 10 МПа (100 кгс/см2)
сжимаемость воздуха можно принимать подчиняющейся уравне-
нию Клапейрона (pv = RT) [11; при давлении выше этого сле-
дует применять уравнение
pv = tJRT,
где £ > 1 — опытный коэффициент.
В соответствии с этим удельный объем v реального газа (воз-
духа) при давлениях >10 МПа (100 кгс/см2) будет больше объема
идеального газа.
§ 144. Процесс сжатия газа
в поршневом компрессоре
Рабочий цикл поршневого компрессора состоит из хода всасы-
вания и хода сжатия и последующего вытеснения (выталкивания)
газа из цилиндра в нагнетательную трубу. Этот цикл (процесс)
изобразится в теоретической диаграмме pv, как это показано
на рис. 258, а. Точка а соответствует началу хода всасывания
газа с давлением всасывания рь который будет прбтекать по кри-
вой ab. Точка fr соответствует моменту изменения направления
движения поршня и началу хода сжатия газа, который будет
протекать по кривой Ьс. В точке с давление повысится до выход-
ного (нагнетания) р 2, после чего будет происходить процесс вы-
теснения газа в нагнетательную трубу (емкость) с давлением р2
575
по кривой cd. Точка d соответствует концу вытеснения газа и rtei
реключению нагнетательного и всасывающего каналов, в резулц:
Тате чего давление в цилиндре мгновенно падает по кривой
с р2 до pt. После этого цикл повторяется. •;
Площадь фигуры abed рассматриваемой диаграммы характер
ризует расчетную работу L, совершенную компрессором при ход^
сжатия: 1
L - abed.
ч.»
ь
Эту площадь можно представить в виде суммы площадей: ,
L = cbfg + dege —abfe ~ Sj + s2 -f- s3, |
где s’j, s2 и s3 — площади указанных частей.
Рис. 258. Индикаторная диаграмма идеального компрессора
Из диаграммы также следует
s2 = р2о2 и s8 = PiVi.
V
в
Площадь же Sj = cbfg определится как сумма бесконечно
малых площадок pdv, т. е.
Значение этого интеграла определяется зависимостями между р
и v [11, на основании которых имеем:
при изотермном сжатии (pv = const)
при адиабатном сжатии (pv* = const)
51ад — д' (7*2 ? 1У,
576
при политропном сжатии (pvn ~ const)
51пол в (7*2 — Т1),
Z1
где ?2 < Тг.
Соответственно принятому процессу работа всего цикла ком-
прессора (всасывания, сжатия и нагнетания):
а) при изотермном сжатии (Т2 = Тг и p2v2 ~ PiVr)
Ьиз = Р Ain + p2v2 — р& = PjUjI n ~; (145)
Pl Pl
б) при адиабатном сжатии (p2v2 =f= P1V1, p2v2 = RT2 и р^ =
= RT)
^ад = "J (^3 Г1) H” PuPi P1V1 ~ "%(T2 — ?\) +
+ (RT2 — RTJ — (J + я) (T2 - 7\).
С учетом формул (142)—(144) можем написать
в) при политропном процессе сжатия можно получить анало-
гичным путем
= 1]. (147)
•• * L \ г1 /
Описанные процессы отличаются один от другого лишь кру-
тизной кривой сжатия на диаграмме ри (рис. 258, б). Изотермному
процессу сжатия соответствует наиболее пологая кривая 3 и,
соответственно, наименьшая площадь и работа сжатия; поли-
тропному процессу сжатия соответствует кривая 2; адиабатному
сжатию соответствует наиболее крутая кривая 1 и, соответственно,
максимальная площадь и работа сжатия. При переходе от адиабат-
ного сжатия к изотермному снижается затрачиваемая энергия
(работа), величина экономии которой выражается площадью abc
(отмечена точечной штриховкой).
Практически, при отсутствии специальных средств для сня-
тия тепла процесс сжатия протекает по адиабате. При снятии
тепла с помощью какого-либо охладителя (водяной рубашки)
процесс сжатия практически протекает по политропе с показа-
телем политропы п = 1,20-ь 1,35.
Пример. Рассчитать работу сжатия в компрессоре 1 кг воздуха от абсолют-
ного давления р = 1 ат до абсолютного давления р2 = 10 ат в трех рассмотрен-
ных процессах: изотермном, политропном (п = 1,25) и адиабатном, а также опре-
делить конечные температуры воздуха, если начальная температура его =
= 20° С.
37 T. М. Башта 577
Решение. Учитывая, что удельный вес воздуха при /= 20° С равен у ==
= 1,186 кгс/см3, определим объем, соответствующий весу в 1 кгс при этой тем
пературе (удельный объем):
v
= 0,843 м3/кгс.
Работа при изотермном сжатии [см. выражение (145)]
£иа = Pifiln = 10000-0,8431П у = 19450 кгс-м.
Конечная температура в этом процессе равна начальной температуре:
/а = L == 20° С.
Работа при адиабатном сжатии [см. выражение (146)]
г & Г/ PiX^-r^ 1
£аД = feZTf * -1 =
1 405
= % И 0000-0,843
1,405 — 1
1,405 — 1 1
1,405 — 1 = 27 7 00 кгс-м.
Конечная температура
k
Т.
1,405-1
1,405
= 570 К или /а = 297° С.
Работа при политропном сжатии [см. выражение (147)]
Г/РгХ^—.1
( — I п -- 1 =
Lxpxz J
п
ПОЛ — _ ______ I P1W1
f lr " 1
• 10000 • 0,843
10\±1^=
-г ) 1,25
— 1 =24900 кгс-м.
Конечная температура [см. выражение (144)]
п
1,25 = 465 К или = 192° С.
§ 145. Мощность и к.п.д. компрессора
Из приведенного следует, что при изотермном сжатии мощность
на валу компрессора будет наименьшей.
Отношение работы Лиз при изотермном процессе к работе на
валу компрессора называется изотермным к. п. д. компрессора.
Для Ln3 кгс-м/с имеем
и ^из
75Упр ’
где ynp — мощность на валу компрессора в л. с.
578
Этот коэффициент учитывает степень совершенства процесса
и механические потери энергии.
С учетом т]из формула для мощности (в л. с.) на валу при изо-
термном процессе примет вид
L
ьиз __ __________
пр 75т]Из 75т)ив ’
где Vi — секундный объем газа, поступающего в компрессор.
В практике расчет мощности на валу компрессора обычно
производят, исходя из политропного сжатия, принимая п = 1,35.
Так как работа на валу компрессора отличается от работы, под-
считанной для политропного сжатия, на величину механических
потерь, то формула для расхода мощности (в л. с.) при политроп-
ном процессе примет вид
где т]мех — механический к. п. д. компрессора.
106. Влияние вредного пространства
Реальный компрессор отличается от идеального наличием
мертвого пространства (мертвого объема), под которым для
поршневого компрессора понимается пространство между клапа-
ном и поршнем в крайнем утопленном его положении. Влия-
ние на подачу компрессора этого пространства обусловлено
тем, что газ, оставшийся в конце хода нагнетания поршня в этом
пространстве, расширяется при ходе всасывания, заполняя при
этом часть рабочего объема цилиндра. Вследствие этого при из-
вестных степени сжатия газа и объеме вредного пространства
подача компрессора может значительно понизиться, вплоть до
нулевой. Последнее может иметь место, когда газ, сжатый при
ходе нагнетания во вредном пространстве, заполняет при ходе
всасывания (при расширении от давления нагнетания р2 до да-
вления всасывания рJ весь объем цилиндра, освобождаемый
поршнем.
Условно ход поршня, соответствующий вредному простран-
ству, составит
где Vo — объем вредного пространства;
F — площадь поршня.
Поскольку на работу компрессора влияет сравнительная вели-
чина вредного пространства и полезного объема, описываемого
37* 579
поршнем компрессора, вредное пространство выражается обычнс
в долях хода поршня:
где h — рабочий ход поршня.
В общем случае всасывание воздуха компрессором начнется
лишь тогда, когда давление во вредном пространстве понизится
в процессе хода всасывания до давления всасывания. Вслед-
ствие этого объем Vi воздуха, всасываемого в цилиндр за каждый
ход поршня, будет меньше, чем объем Уъ описываемый поршнем.
Отношение этих объемов у- — цэб называется объемным
коэффициентом подачи или объемным к. п. д.
Поскольку = Fhy a Vi = Fhlt где h — ход поршня, на
протяжении которого происходит всасывание, то
йг
^6 = ^-
Величина цоб определяется из следующих соображений.
Объем сжатого в конце хода нагнетания во вредном пространстве
газа составит
Vo = h0F.
Объем этого же газа, отнесенный к давлению всасывания ри
Vo = (Ло + h — hj F.
Отношение этих объемов
Vi _ h() + h — h1
Vo ~ hQ
Умножая обе части уравнения на т ~ и произведя пре-
образования, получим
(148)
Для случая изотермного режима расширения газа вредного
пространства
(149)
В общем же случае, считая расширение газа политропным,
имеем
Й80
Из приведенного следует, что коэффициент т]об понижается
как с увеличением относительного вредного пространства (/и),
так и с увеличением степени сжатия газа —
Коэффициент т]об учитывает влияние
вредного (мертвого) объема, а также потери
напора всасывания вследствие гидравличе-
ского сопротивления каналов, утечки воз-
духа и изменения плотности газа, обуслов-
ленные теплообменом между ним и стен-
ками компрессора и пр. Для практических
расчетов коэффициент т]об (ось ординат) для
одноступенчатого компрессора можно опреде-
лять по графику, приведенному на рис. 259,
где зона, ограниченная кривыми а—b (отме-
чена точечной штриховкой) представляет
собой поле фактических значений т)об при
° Рн
различном степени сжатия воздуха — ,
Рв
(Рн и Рв — давления нагнетания и всасы-
вания).
Следует заметить, что с энергетической
Рис. 259.
коэффициента
График
подачи:
одноступенчатого ком-
прессора (кривые а и
б); с — нижняя гра-
ница для многоступен-
чатых компрессоров
точки зрения, рас-
сматриваемое вредное пространство не оказывает на работу ком-
прессора существенного отрицательного действия, так как пре-
обладающая часть энергии, затраченной на сжатие газа "вредного
пространства в ходе нагнетания поршня, возвращается при его
расширении в ходе всасывания.
107. Степень наполнения компрессора
Важным параметром является степень наполнения компрес-
сора Л газом, под которым понимается отношение объема газа,
поданного компрессором и приведенного к начальным условиям
(при давлении pj, к объему, описанному поршнем. Очевидно,
что если бы отсутствовали утечки газа через неплотности, а также
нагревание его при течении через всасывающие клапаны, то сте-
пень наполнения равнялась бы объемному к. п. д. (% = т}об).
Однако, вследствие наличия утечек и нагрева, будем иметь X <
<Яоб- Для типовых компрессоров можно принять
ь = Поб - 0,04.
(150)
Степень наполнения определяется по индикаторной диаграмме.
Согласно изложенному выше, объем поданного газа Vs =
Л Р
~ h2F и вес G = — , где — удельный объем газа при
V2
давлении нагнетания р2. Объем же этого газа при давле-
нии всасывания составляет > , где — удельный объем газа
V2
при давлении всасывания pv
581
Учитывая, что объем, описываемый поршнем, равен Fh, можем
написать по смыслу определения степени наполнения
Д, . pfa ^2 . °1 ^2 Рг ^1
»2 ’ Л »2 h Pl ’ Тг'
Значения ft2, h, р2 и р, берутся из индикаторной диаграммы,
а температура входящего Тг и выходящего Та газа измеряется
при индицировании.
§ 146. Подача поршневого компрессора
Идеальный компрессор. Подача идеального поршневого ком-
прессора одинарного действия, отнесенная к условиям всасыва-
ния (при давлении всасывания), определяется как
Vnn = Fhn = ^-^-hn.
п 4
С учетом степени наполнения X фактическая подача
Сэф = Q-Л = hnk,
где D и h — 2г — диаметр и ход поршня;
г — радиус кривошипа;
V = h и п — объем, описываемый поршнем за один ход
и частота вращения.
Массовая подача идеального компрессора
m = QTp,
где р — плотность воздуха во всасывающем патрубке компрес-
сора.
Массовая производительность реального компрессора меньше,
чем идеального, имеющего тот же объем, описанный поршнем,
и равна
m' — XQTp = 'k^-hnp.
Подача поршневого компрессора двойного действия
Q9* = (2F - f) hnK, (151)
где f — площадь штока.
Отношение хода поршня h к его диаметру D обычно состав-
ft о
ляет = 2.
Пример. Определить величину подачи поршневого компрессора двой-
ного (двустороннего) действия, если диаметр его поршня D= 500 мм, ход поршня
h — 800 мм, диаметр штока d = 125 мм, частота вращения п — 90 об/мин, аб-
солютное давление на входе рх ~ 0,8 ат, абсолютное давление на выходе р2 ~
= 1,8 ат; относительный объем вредного пространства т = 0,05.
582
Объемный к. п. д. компрессора [см. выражение (149)]
T)o6=l-0,05(J|-l)
= 0,95.
Степень наполнения [см. выражение (150)]
Х= 0,95 — 0,04 = 0,91.
Площадь поршня
F = = 1LLLPJ5 = 0,196 м2.
4 4
Площадь сечения штока
_ад12
4 4
Подача компрессора [см. выражение (151)]
п (2 0,196 — 0,012).0,8.90 п П1 Л.._ 3/
<2эф = --!---~——--------0,91 = 0,415 м3/с.
Многоступенчатый компрессор. Из формулы (149), следует, что
при увеличении степени сжатия газа (p2/pi) объемный к. п. д.
понижается. Ввиду этого степень сжатия в одной ступени компрес-
сора обычно ограничивается р21рг — 6-5-7, а следовательно, одно-
ступенчатые поршневые компрессоры с распространенным отно-
сительным вредным пространством т = 0,05 могут надежно ра-
ботать при давлениях нагнетания до со0,5—0,6 МПа (5—6 кгс/см2).
При более высоких степенях сжатия объемный к. п. д. недопу-
стимо снижается. Так, например, если принять, что расширение
газа вредного пространства происходит по изотерме и т — 0,05,
то степень сжатия, при которой объемный к. п. д. снизится до
нулевого значения, определится из условия [см. выражение (149]
0= 1—0,05 (^—1).
’ \Pi /
Отсюда находим степень сжатия газа, при которой подача
снизится до нулевого значения:
x = Pi = 21.
Pi
Если снизить объемнный к. п. д. до значения т]об = 0,7, то
при подстановке в формулу (148) получим, что подача компрес-
сора снизится (величину вредного пространства принимаем т =
= 0,05) до нуля при степени сжатия = 7.
Так как работа компрессора при т]об меньше 0,7 неэкономична,
то степень сжатия в одном цилиндре практически ограничена
величиной 7. Для получения же более высоких давлений газа
583
применяют многоступенчатые компрессоры последовательного
сжатия (до шести ступеней сжатия), позволяющие получить тре-
буемые высокие давления при сохранении приемлемого значения
объемного к. п. д. При шести ступенях представляется возможным
повысить степень сжатия газа до — ^120.
Pi
Распределение сжатия между ступенями. Минимальная затрата
работы на сжатие воздуха в идеальном компрессоре будет иметь
место при одинаковой степени сжатия во всех ступенях. При обес-
печении этого условия работа сжатия и температура нагнетаемого
воздуха в отдельных ступенях будут практически одинаковы.
Степень сжатия в одной ступени (цилиндре) идеального ком-
прессора при этом условии определится как
2 Г~
Pl
где z — число ступеней;
Р2+1 ~ конечное давление.
Например, если z — 3, рг ~ 1 ат (абсолютное), рг+1 = 125 ат
(абсолютное), то степень сжатия в одной ступени
Следовательно, при этом условии будем иметь абсолютные
давления
рх = 1 ат; р2 = хр± = 5 ат; р3 = хр2 ~ 25 ат;
р4 = хРз ~ 125 ат.
Поскольку объем сжатого газа в каждой последующей ступени
меньше, чем в предыдущей, то объемы последующих цилиндров
меньше предыдущих, причем обеспечивается условие
W2 ’
где и>2, w3 и ш4 — объемы цилиндров по порядку ступеней.
В соответствии с заданным сжатием на каждой ступени выби-
раются диаметры цилиндров dr > d2 > d3, . .
Если величины ходов поршней всех цилиндров одинаковы,
то диаметры последующих цилиндров определятся из условия
т. е. при расчете параметров очередной ступени сжатия, преды-
дущая ступень служит исходной и т. д. Или, иначе, в первом при-
ближении можно принять, что объемы цилиндров первых двух
ступеней уменьшаются по мере возрастания давления соответ-
ственно уменьшению удельного объема засасываемого воздуха.
584
В соответствии с этим при одинаковых ходах и прочих равных
условиях площади поршней определятся из соотношения
здесь i и (I + 1) — порядковые номера ступеней сжатия.
§147. Типы поршневых компрессоров
Поршневые компрессоры изготовляются преимущественно с не-
подвижными цилиндрами и, реже, — с вращающимися цилин-
драми, выполненными в виде многоцилиндрового звездообразного
блока. Последние компрессоры называют роторными.
Кроме того, различают одноступенчатые и многоступенчатые
компрессоры с рядным (рис. 260) и соосным (см. рис. 262) распо-
ложением цилиндров, а также иные типы компрессоров с осями
цилиндров, расположенными под углом. Поршневые компрессоры
применяют для работы до 100 МПа (1000 кгс/см2) и выше.
В передвижных компрессорных станциях распространены
рядные вертикальные компрессоры. При числе z цилиндров больше
двух компрессоры этого типа, при смещении фаз на угол 2л/г
динамически уравновешиваются и допускают относительно высо-
кие частоты вращения, что позволяет выполнять непосредствен-
ное соединение компрессора с приводным электродвигателем.
Принцип действия одноступенчатого поршневого компрессора
аналогичен действию поршневой гидромашины с клапанным или
золотниковым распределением (см. рис. 49), от которой компрес-
сор отличается лишь тем, что всасывающий и нагнетательный
клапаны обычно приводятся принудительно, хотя иногда приме-
няются и самодействующие пластинчатые клапаны; поршни при-
водятся с помощью коленчатого вала или кулачкового эксцен-
трика.
На рис. 260 приведены принципиальные схемы компрессоров
одноступенчатого сжатия с одним (рис. 260, а) и двумя цилин-
драми, расположенными в ряд, с приводом поршней от общего
коленчатого вала (рис. 260, 6). Число цилиндров при рядном
расположении доводится до 4 и более; коленчатый вал выпол-
няется со смещением фаз рабочего процесса на 2л/г, где z — число
цилиндров.
Принципиальная схема трехступенчатого компрессора с ряд-
ным расположением цилиндров приведена на рис. 261, а. Выход-
ное давление предыдущего цилиндра является входным давле-
нием (всасыванием) для последующего цилиндра.
С целью предохранения компрессора от перегрева на входе
в каждую последующую ступень сжатый воздух подаваемый
предыдущей ступенью, подвергается охлаждению с помощью тех
или иных охладительных устройств а.
585
На рис. 261, б изображена схема двухступенчатого компрес-
сора с дифференциальными (ступенчатыми) поршнями. Первыми
ступенями сжатия здесь служат цилиндры с эффективной пло-
Рис. 260. Схемы одно-
ступенчатого (а) и двух-
ступенчатого (6) ком-
прессоров с рядным
расположением ци-
линдров
л (D% _ 6?®)
щадью г j = ——j—- и второй — цилиндры с площадью F2=
= -г-, где и и d — диаметры цилиндров. Подача такого компрес-
тг
сора определится суммарным рабочим объемом цилиндров диа-
метром d.
Последняя схема имеет преимущества в компрессорах малой
подачи, когда размеры поршня второй ступени недостаточны для
а) б)
Рис. 261. Принципиальная схема поршневого трех ступенчато го компрессора
с рядным расположением цилиндров
размещения поршневого пальца. Недостатком двухступенчатых
компрессоров является некоторая сложность изготовления сту-
пенчатых цилиндра и поршня, для обеспечения герметичности
которых требуется высокая соосность ступеней.
На рис. 262 представлена схема трехступенчатого тандем-
компрессора с поршнями, расположенными на общем штоке.
При движении поршня 1 вправо воздух засасывается из атмосферы
в левую полость цилиндра а и вытесняется из правой полости
этого цилиндра в левую полость цилиндра Ь.. Поскольку площадь
586
сечения цилиндра а в п раз больше сечения цилиндра Ь, в такой же
степени происходит сжатие воздуха в левой полости цилиндра
(при изотермном сжатии).
При движении поршня 2 влево этот сжатый воздух вытесняется
из левой полости цилиндра b в правую полость цилиндра с,
площадь которого в п раз
меньше площади цилиндра Ь;
в результате происходит по-
вышение в п раз давления,
вытесняемого в эту полость
воздуха. При последующем
движении поршня 3 в пра-
вую сторону предварительно
сжатый воздух вытесняется
в магистраль d.
Аналогичным способом
соединены между собой левая
полость цилиндра а с пра-
вой полостью цилиндра b и
левая полость цилиндра b
с правой полостью цилиндра
Рис. 262. Схема трехступенчатого порш-
невого тандем-компрессора
с. При таком соединении цилинд-
ров получим трехступенчатое сжатие и соответственно — повы-
шение давления на выходе последнего цилиндра.
При отношении рабочих площадей поршней /, 2 и 3
степень сжатия компрессора при изотермном процессе будет
равна Зп.
Число ступеней доводится до г = 5 4-6 и степень сжатия
до х = 120 и более.
§ 148. Органы распределения и регулирования
компрессора
Распределение газа в компрессорах осуществляется, в основ-
ном, с помощью клапанов и, реже, — золотников, причем, кла-
паны выполняются самодействующими и несамодействующими.
Самодействующие клапаны могут быть пластинчатыми, а золот-
ники — с плоским распределительным элементом. Принципиально
эти распределители не отличаются от соответствующих распреде-
лителей гидравлических систем.
Ввиду того, что подача газа поршневым компрессором проис-
ходит отдельными порциями (по закону косинуса; см. стр. 116),
причем в ходе всасывания подача вообще отсутствует, на выходе
(вблизи) компрессора устанавливается газосборник, представ-
ляющий собой закрытый цилиндрический сосуд, снабженный
587
манометром и предохранительным клапаном. Благодаря тому, что
объем газосборника значительно (в 50 раз и более) превышает
объем цилиндра, при поступлении в газосборник порции сжатого
газа, соответствующей подаче за один ход поршня, давление в га-
зосборнике возрастает незначительно (можно считать давление
в нем постоянным), а следовательно, газ в расходную трубу из
газосборника поступает практически равномерно.
Объем газосборника определяется по формуле
Т7 kF h »
У = м ’
где F и h — площадь и ход поршня компрессора;
k — коэффициент; для компрессора одинарного дей-
ствия k = 0,55 и двойного действия k = 0,21;
6 — коэффициент; обычно принимают 6 = 1/50.
Подачу компрессора регулируют различными способами, из
которых наиболее распространенными являются периодическое
ручное или автоматическое изменение частоты его вращения или
остановка компрессора по сигналам давления в газосборнике
(ступенчатое регулирование). Применяется также с этой целью
принудительное отжатие (открытие) всасывающих клапанов на
части хода нагнетания поршня, в результате чего воздух, посту-
пивший в цилиндр при ходе всасывания, не сжимается на этой
части хода нагнетателя, а вытесняется обратно без давления во
всасывающий трубопровод.
§ 149. Роторные пластинчатые компрессоры
Второе место по распространенности после поршневых зани-
мают пластинчатые компрессоры. Принцип действия и конструк-
тивные элементы пластинчатых компрессоров те же, что и пластин-
чатых насосов гидросистем (см. стр. 273).
Компрессор состоит из неподвижного корпуса 1 (рис. 263),
в расточке которого помещен эксцентрично пластинчатый ротор 5,
несущий в радиальных пазах свободно посаженные пластины 2,
которые прижимаются при вращении ротора центробежной силой
к внутренней поверхности статора. Образованное в результате
указанной эксцентричности серповидное пространство в зоне
нагнетания (отмечено точечной штриховкой) делится пластинами
на ряд изолированных камер, образованных двумя смежными
пластинами и поверхностями ротора и статора с боковыми крыш-
ками. Объемы камер при вращении ротора в направлении стрелки
уменьшаются, в результате чего давление в них повышается.
При соответствующем числе пластин и конструкции компрессора
представляется возможным повысить давление в камере, подходя-
щей к полости нагнетания 5, до величины, близкой к давлению
в этой полости, и тем самым устранить скачок давления в данной
камере при соединении ее с полостью нагнетания,
585
ь
Число пластин выбирается в зависимости от назначения и
подачи компрессора от 4 до 20 и более. Одноступенчатые компрес-
соры рассчитывают для работы на давление 0,4—0,5 МПа (4—
5 кгс/см2), двухступенчатые — на давление 0,8 МПа (8 кгс/см2).
Привод компрессора осуществляется обычно от электродвигателя
с частотой вращения 750—1500 об/мин.
В этих компрессорах предусматривается водяное охлаждение
корпуса, достигаемое циркуляцией воды в каналах водной ру-
башки 4. В компрессорах двухступенчатого сжатия предусматри-
вается также межступенчатое охлаждение сжимаемого газа (см.
рис. 261). Расход охлаждающей воды на 1 м3 воздуха при нагреве
воды на 15° С составляет: для одноступенчатых машин 1,5—2 кг
и двухступенчатых — 3 кг.
Преимуществом этих компрессоров является отсутствие кла-
панов, а также малые габариты и масса машины.
Подача компрессора. Рабочая камера пластинчатого компрес-
сора образуется внутренней поверхностью корпуса, наружной
поверхностью ротора, двумя пластинами и торцовыми крышками.
Изменение объема этой камеры при повороте ротора обусловливает
всасывание и вытеснение рабочей среды.
Для приближенных расчетов объем камеры, ограничиваемый
двумя соседними (бесконечно тонкими) пластинами (рис. 263)
(отмечено точечной штриховкой на правом рисунке), может быть
принят при большом числе пластин (z > 20)
Vo = fb = Rbe,
где f — площадь камеры;
z — число пластин;
е = — г — эксцентриситет;
R и г— радиус статорного кольца и ротора;
Ъ — ширина ротора.
589
В соответствии с этим рабочий объем компрессора (теорети-
ческая подача за один оборот) [см. выражение (93) ]
q — Voz = 4nRbe.
С учетом толщины s пластины рабочий объем будет меньше
на величину объема, занимаемого пластинами:
q = 2be (2л 7? — sz).
Теоретическая подача компрессора
= qn = 2enb (2л7? — sz),
где п — частота вращения.
Действительная (эффективная) подача фэф пластинчатого ком-
прессора меньше теоретической QT на величину объемных потерь
(утечек газа и сжатия его в мертвом пространстве,-а также потерь,
обусловленных температурным воздействием). Отношение дей-
ствительной подачи к теоретической определяется коэффициентом
подачи
Саф
Величина этого коэффициента обычно колеблется от 0,6 до 0,85.
Регулирование подачи производится теми же способами, что
и у поршневых компрессоров (см. стр. 588). Наиболее распро-
страненным способом регулирования является периодический
перевод компрессора на холостой ход путем прекращения всасы-
вания и одновременного соединения нагнетательного штуцера
со всасывающим или с атмосферой.
Для уменьшения сил, защемляющих пластины в пазах ротора,
их обычно выполняют под некоторым углом ср, образованным
радиусом ротора и касательной к окружности, описанной из
центра О ротора радиусом е (рис. 263). В этом случае направле-
ние действующего на пластину усилия реакции статорного кольца
совпадает с направлением перемещения пластин.
§ 150. Пневматические двигатели
Пневматические объемные двигатели, как и гидравлические,
обладают рядом существенных достоинств — высокой приеми-
стостью, высоким пусковым моментом, малой массой, приходя-
щейся на единицу мощности, взрывобезопасностью и пр. Они
делятся на двигатели: 1) возвратно-поступательного прямолиней-
ного движения, 2) поворотного движения (на угол <360°) и 3) вра-
щательного движения. Два первых типа двигателей (пневмоци-
линдры) практически не отличаются от соответствующих гидра-
влических двигателей.
590
Пневмоцилиндры конструктивно подобны гидроцилиндрам, за
исключением того, что в них предусмотрена смазка скользящих
пар, обычно путем установки по обе стороны уплотнительных
колец b (рис. 264) и сальниковых войлочных колец а, пропиты-
ваемых специальными сма-
зочными составами. Штоко-
вая уплотнительная пара,
помимо этих колец, снабжает-
ся дополнительной набив-
кой с, периодически подпиты-
ваемой смазкой через канал ск
108. Регулирование
скорости пневмодвигателя
Ввиду высокой сжимаемо-
сти рабочей среды (воздуха)
а Ь b а
Рис. 264. Пневмоцилиндр
Рис. 265. Схема пневмоцилиндра с
дроссельным регулятором для за-
тормаживания поршня в конце
хода
важными являются вопросы регулирования скорости и торможения
в конце хода поршня пневмоцилиндра. Простейшими регуляторами
являются, как и в гидравлических схемах (см. стр. 499), дроссели,
а для торможения в конце хода — пневматические демпферы.
Принцип действия последних основан на запирании в конце хода
поршня воздуха в полости сброса;
воздух выдавливается затем на
оставшейся части хода через ре-
гулируемые (дроссельные) кана-
лы [1].
Для регулирования скорости
пневмодвигателя в основном при-
меняют устройства, аналогичные
применяемым в гидродвигателях
[1Ь Регулирование скорости осу-
ществляется преимущественно с
помощью дроссельного регулятора
скорости, устанавливаемого обыч-
но на выходе двигателя. Регуля-
тор состоит из регулируемого дрос-
селя 5 и обратного клапана 4 одно-
стороннего действия (рис. 265).
Для затормаживания поршня в конце хода и предотвращения
его ударного действия применяют такие же, как и у гидроци-
линдров дроссельные (демпфирующие) устройства, размещаемые
обычно в крышках цилиндров. В конце хода поршня 1 (рис. 265)
его выступы 2 входят в соответствующую камеру 5, перекрывая
свободный выпуск (удаление) из цилиндра отработавшего воздуха
в атмосферу, который будет удаляться в этом случае через один
из регулируемых дросселей 5.
591
109. Пневмоцилиндр с гидравлическим замедлителем
Вследствие высокой сжимаемости воздуха регулирование при
пневматическом демпфере скорости исполнительного двигателя
и, в частности, обеспечение заданного закона движения поршня
и его замедление в конце хода, крайне затруднительно. Эффектив-
ность торможения (демпфирования) пневмодвигателя в конце хода
(рис. 265) значительно ниже, чем в аналогичных устройствах
гидравлических цилиндров, ввиду чего в конце хода может воз-
никнуть удар. Поэтому для регулирования скорости на всем пути
5 6 7 8
перемещения поршня применяют гидравлические демпферы и ре-
гуляторы в сочетании с пневматическими исполнительными дви-
гателями. ВХ таких комбинированных пневмо-гидравлических
системах источником энергии служит сжатый воздух, а регулиро-
вание скорости движения поршня обеспечивается с помощью ги-
дравлических устройств.
На рис. 266, а показана схема одного из подобных пневмо-
гидравлических приводов с пневматическим 1 и гидравлическим 2
цилиндрами, поршни которых помещены на общем штоке. Тор-
можение поршня пневмоцилиндра осуществляется с помощью
дроссельного канала в поршне 3 гидроцилиндра 2.
На рис. 266, б показана иная схема одного из демпферов.
Он состоит из конусного штока 6 с двумя поршнями; межпоршне-
вая камера d заполнена тормозной жидкостью. Поршень давле-
нием воздуха в левой полости Ь, соединенной с воздушной маги-
стралью, постоянно удерживается в крайнем правом положении.
Поскольку с этой же магистралью соединен и бачок 5, под таким же
давлением будет находиться до вступления демпфера в действие
и тормозная жидкость в камере d.
После того как поршень 8 силового пневмоцилиндра при
перемещении влево придет в контакт с правым тормозным порш-
нем и приведет его в движение в том же направлении, жидкость
592
из камеры d будет вытесняться через дроссельное кольцевое
проходное сечение, образованное штоком 6 и отверстием в пере-
городке с, в правую полость тормозного цилиндра 4 (в камеру а).
Подбором конусности штока 6 можно обеспечить требуемую эффек-
тивность и закон равномерного замедления поршня 8 пневмо-
цилиндра. Обратное движение поршня 8 осуществляется под
давлением жидкости, находящейся в бачке 7, в который для
этого подводится через распределитель воздух из магистрали.1
В рассматриваемой схеме предотвращается также жесткий удар
поршня 8 при подходе его к правому поршню штока 6. Из схемы
d 5 a) *
6)
Рис. 267. Схема пневмоцилиндра с гидравлическим демпфером, размещенным
в поршневом штоке
следует, что при движении поршня 8 влево он вытесняет через
отверстия f жидкость из промежуточной камеры е в бачок 7.
После того как первое из отверстий f будет перекрыто движущимся
поршнем 8, эффективность демпфирования повысится, а после
перекрытия второго отверстия поршень и шток 6 будут связаны
жидкостью, запертой в камере е. Благодаря этому устройству
обеспечивается плавность включения демпфера.
На рис. 267, а показана схема аналогичного пневмоцилиндра,
у которого гидравлический регулятор помещен в поршневом штоке.
В цилиндрический канал штока / цилиндра 3 плотно входит не-
подвижный полый стержень 5, укрепленный в правой крышке
цилиндра. Полости этого стержня и штока образуют камеры а
и d, соединенные между собой дроссельным каналом е и заполнен-
ные жидкостью, которая при перемещении поршня 2 перетекает
через дроссельный канал из одной камеры в другую. Подбором
сопротивления дросселя е можно осуществить регулирование
скорости перемещения поршня 2.1
При регулируемом рабочем ходе этого поршня воздух подается
в канал b и перемещает поршень 2 в правую сторону; при этом
объем камеры а уменьшается и жидкость выдавливается через
дроссель е в камеру d. Сопротивление дросселя оказывает при
этом демпфирующее действие, ограничивая скорость перемещения
поршня.
При подаче воздуха в канал с (рис. 267, б) поршень 2 пере-
мещается в правую сторону и жидкость вытесняется давлением
38 т. М. Башта 593
подаваемого воздуха, действующего на подвижный герметизиро-
ванный поршенек 4, из камеры d в расширяющуюся камеру а.
Поршенек 4 герметизирует камеры а и b и обеспечивает компен-
сацию разности площадей сечения этих камер. При движении
поршня 2 в правую сторону образуется, вследствие того что пло-
щадь сечения камеры а больше площади сечения камеры d,
излишек жидкости, под действием которого поршенек 4 переме-
щается в правую сторону. При движении поршня 2 в левую сто-
рону создается нехватка жидкости и поршенек 4 под действием
давления воздуха перемещается в левую сторону, обеспечивая
заполнение (зарядку) жидкостью через дроссель е камеры п.
ПО. Пневмодвигатели вращательного движения
В качестве пневматических двигателей вращательного движе-
ния (пневмомоторов) применяют преимущественно пластинчатые
(рис. 268) и поршневые (рис. 269) машины и реже — машины иных
типов (шестеренные, винтовые и пр.) Принцип их действия тот же,
что и соответствующих типов гидромоторов, однако характери-
4 5
Рис. 268. Схема пластинчатого пневмомотора
стики существенно отличаются, что обусловлено в основном сжи-
маемостью рабочей среды (воздуха). Это в первую очередь сказы-
вается на индикаторной диаграмме (см. стр. 596).
Поршневые пневмомоторы распространены в гидросистемах
погрузочных машин, лебедок, локомотивов, молотков в горной
промышленности, шестеренные пневмомоторы — в гидросистемах
врубовых машин, комбайнов и конвейеров, пластинчатые гидро-
моторы — в сверлильных станках, приводах насосов и пр.
Пластинчатые пневмомоторы допускают работу при частоте
вращения до 10 000 об/мин, что позволяет применять их в ручных
дрелях и высокооборотных шлифовальных машинах.
Применяются нереверсивные и реверсивные пневмодвигатели,
причем использование специальных автоматических регуляторов
594
обеспечивает поддержание заданной постоянной мощности на
валу двигателя.
На рис. 268, а приведена конструктивная схема пластинчатого
пневмомотора вращательного движения. Сжатый воздух подво-
дится через канал 4 корпуса и далее, через отверстие 5 в статоре 2
в соответствующую рабочую камеру пневмомотора, образован-
ную двумя смежными пластинами 3 и поверхностями статора 2
и ротора 7.
После того, как эта камера будет отсечена при вращении ро-
тора от каналов 5, заполнение ее сжатым воздухом прекратится
Рис. 269. Схема поршневого пневмомотора
и при дальнейшем вращении объем камеры будет увеличиваться,
воздух в ней расширяться, развивая неуравновешенное действие
на ограничивающие камеру пластины и, следовательно, крутя-
щий момент. При соединении камеры, заполненной расширив-
шимся воздухом, с каналами 6 статора воздух удаляется в атмо-
сферу.
Регулирование скорости этого пневмомотора осуществляется
поворотом его статора 2 относительно оси симметрии корпуса;
при этом изменяется продолжительность соединения рабочих ка-
мер с окном питания, а следовательно, и степень наполнения ка-
мер сжатым воздухом.
На рис. 268, б приведена принципиальная зависимость крутя-
щего момента М и мощности N на валу пластинчатого пневмомо-
тора от частоты вращения его вала. Максимальная скорость имеет
место при нулевом крутящем моменте (при отсутствии нагрузки),
с увеличением которого она снижается. В этом отношении пневмо-
мотор подобен электродвигателю постоянного тока, однако в от-
личие от него допускает возможность неограниченной по времени
перегрузки до полной остановки ротора без применения каких-
либо защитных устройств.
Скорость вращения ротора обычно регулируется изменением
расхода сжатого воздуха с помощью дросселя, включаемого
3S* 595
Адиабата
Изотерма
Ход поршня
Рис. 270. Расчетная индикаторная
диаграмма пневмодвигателя
обычно во входную магистраль, а
величина крутящего момента —
изменением давления, осущест-
вляемым при помощи регулятора
(редуктора) давления.
На рис. 269 приведена схема
гйдромотора поршневого типа
с звездообразным расположением
неподвижных цилиндров и зо-
лотниковым (цапфовым) распреде-
лением рабочей среды. Поршни/
связаны с кривошипным валом 2
с помощью шатунов 3. Чередо-
вание фаз рабочего цикла осуществляется посредством связанного
с коленчатым валом вращающегося распределительного золот-
ника 4, через окна а, b и с
которого производится наполнение
Рис. 271. Пневмомоторы шестеренного типа
цилиндра сжатым воздухом, его расширение и выпуск в атмо-
сферу.
На рис. 270 приведена теоретическая (расчетная) индикатор-
ная диаграмма пневмодвигателя. Наполнение цилиндра сжатым
воздухом под давлением р происходит на участке /—2 кривой;
596
в точке 2 происходит отсечка окна питания и на участке 2—3—
расширение воздуха; в точке 3 цилиндр соединяется с атмосферой
и давление мгновенно понижается до атмосферного (до давления
выпуска р0); на участке 4—5 происходит выталкивание отрабо-
тавшего воздуха; в точке 5 происходит отсечка цилиндра от вы-
пускного окна и далее, на участке 5—6 — сжатие оставшегося
в цилиндре воздуха; в точке 6 цилиндр соединяется с нагнетатель-
ной магистралью и давление в нем мгновенно повышается до р
(точка /), после чего процесс повторяется.
Расширение воздуха после отсечки теоретически может про-
исходить как при адиабатном изменении состояния газа (кри-
вая 2—3), так и при изотермном (кривая 2—3'). Фактический
процесс будет протекать по политропе, которая расположится
между кривыми 2—3 и 2—3'.
Фактическая индикаторная диаграмма (см. заштрихованное
поле) будет отличаться от рассмотренной. Поскольку при движе-
нии поршня объем цилиндра увеличивается, давление в нем падает;
в равной мере начало и конец «сброса» давления будут растя-
нуты; выталкивание происходит при давлении выше атмосфер-
ного р0.
На рис. 271, а представлен нереверсивный пневмомотор ше-
стеренного типа, предназначенный для привода маневровой ле-
бедки, работающей в угольных шахтах, где имеется рудничный
газ или взрывчатая угольная пыль, ввиду чего применение элек-
троэнергии недопустимо. Двигатель имеет две косозубые ше-
стерни (угол наклона зубьев 6°), валики шестерен установлены
на подшипниках качения.
На рис. 271, б представлен реверсивный пневмомотор шесте-
ренного типа, предназначенный для привода горных машин и
механизмов. В отличие от двигателя, описанного выше, отрабо-
тавший воздух здесь направляется в глушитель шума, предста-
вляющий собой акустический фильтр низкой частоты.
Реверсирование описанных шестеренных пневмодвигателей
осуществляется трехходовым краном управления золотникового
типа. Смазка косозубых шестерен производится автомасленкой,
подающей масло в поток сжатого воздуха.
СПИСОК ЛИТЕРАТУРЫ
Основная
1. Башта Т. М. Гидроприводы и гидропнемоавтоматика, М., «Машино-
строение», 1972, 320 с.
2. Башта Т. М. Машиностроительная гидравлика. М., «Машиностроение»,
1971, 672 с.
3. Башта Т. М. Гидравлические приводы летательных аппаратов. М., «Ма-
шиностроение», 1967, 495 с.
4. Основы теории и конструирования объемных гидропередач. М.» «Высшая
школа», 1968, 400 с. Авт.: А. В. Кулагин, Ю. С. Демидов, В. Н. Прокофьев,
Л. А. Кондаков.
Дополнительная
5. Аксиально-поршневой регулируемый гидропривод. М. «Машинострое-
ние», 1969, 496 с. Авт.: Прокофьев В. Н., Данилов Ю. А., Кондаков Л. А. и др.
6. Гавриленко Б. А., Минин В. А., Рождественский С. Н. Гидравлический
привод. М., «Машиностроение», 1968» 490 с.
7. Герц Е. В. Пневматические приводы. М.» «Машиностроение», 1969,
359 с.
8. Гамынин Н. С. Гидравлический привод систем управления. М., «Машино-
строение», 1972, 376 с.
9. Некрасов Б. Б. Гидравлика и ее применение на летательных аппаратах.
М., «Машиностроение», 1967, 368 с.
10. Осипов А. Ф. Объемные гидравлические машины. М., «Машинострое-
ние», 1966, 208 с.
И. Объемные гидравлические приводы. М., «Машиностроение», 1969, 628 с.
Авт.: Башта Т. М., Зайченко И. Зм Ермаков В. В. и др.
12. Пономаренко Ю. Ф. Испытание гидропередач. М., «Машиностроение»,
1969, 292 с.
13. Пономаренко Ю. Ф. Высокомоментные радиально-поршневые гидромо-
торы горных машин. М. «Недра», 1972, 376 с.
14. Хаймович Е. М. Гидроприводы и гидроавтоматика станков. М.—Киев,
1953, 550 с.
15. Эрнст В. Гидропривод и промышленное его применение. Пер. с англ.
М., Машгиз, 1963, 492 с.
598
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
А
Аксиально-поршневые гидромашины
179
• — — бескарданной схемы 235
— — с наклонной люлькой (цилин-
дровым блоком) 183, 185
---- с наклонной шайбой (диском)
184, 241
— •— с бесшатунным приводом цилин-
дрового блока 235
— — с неподвижным цилиндровым
блоком 256
— <— с наклонным расположением ци-
линдров 250
Аксиально-поршневые гидромашины
— Дезаксиал 192
— Действующие силы 184
— Карданная связь ведомого и веду-
щего валов 195
— Кинематика и динамика 50, 56, 63,
115, 158, 188, 195, 244, 250
— Кинематика и динамика поршня 188
— Крутящий момент на валу 213
— Распределение жидкости 218
Б
Баки (резервуары) 206 — Наддув 208
Быстродействие гидромашины 10, 494
В
Вредное пространство (мертвый объем)
----газового компрессора 579
— — гидромашины 85, 209, 375
Г
Газ
— Параметры 574
— Процесс сжатия 575, 578, 581, 583,
585, 588
— Растворение в жидкостях 43
Гидравлические опоры (башмаки)
поршней 246
Гидравлические передачи — Диапазон
регулирования 12
Гидродвигатели
— прямолинейного и поворотного дви-
жения (см. Гидроцилиндры)
— роторные (см. Гидромоторы)
Гидродвигатели
— Объемное регулирование 473
— Регулирование скорости 430, 437
Гидромашины
— аксиально-поршневые (см. Акси-
ально-поршневые гидромашины)
— винтовые 353
— радиальные роторно-поршневые 107
— радиально-поршневые с плоскими
направляющими статора 146
— с наклонными цилиндрами 250
— с неподвижным цилиндровым бло-
ком 256
— шестеренные (см. Шестеренные ги-
дромашины)
Гидромашины
— Быстродействие 10, 494
— Вредное пространство (мертвый
объем) 85, 209, 375
— Герметизация (см. Уплотнения)
— Гидродвигатели (см. Гидродвига-
тели)
— Гидромоторы (см. Гидромоторы)
— Действующие силы 123
— Динамика 11, 188, 393
— Испытания 460
— Индикаторная диаграмма 68, 141,
222
— Крутящий момент на валу 91, 123,
213, 301, 334
— Механические потери 93
— Мощность 18, 91, 420
— Надежность 486, 488
— Объемные потери и к. п. д. 77, 80,
88, 89, 95, 97, 98, 99, 320, 322
— Определения и терминология 5, 70,
71, 107, 179, 273, 311, 490, 528, 572
— Оптимальный режим работы 180
— Параметр регулирования 76
— Поршни (см. Поршни гидромашин)
— Потери мощности и к. п. д. 98, 440
599
— Рабочий объем 74
— Распределение жидкости (см. Рас-
пределение жидкости в гидр о ма-
шинах)
— Расчет (см. Расчет)
— Ресурс работы 71, 112, 288, 488
— Удельный вес (весовая отдача) 11,
179, 301
— Условные изображения 23
— Характерный объем 75
— Частота вращения 71, 165, 169, 180,
239
Гидромоторы
— высокомоментные (тихоходные) 169,
209, 301
— роторные 73, 89, 93, 98, 107, 129,
169, 179, 206, 301, 305, 334, 430
Гидромоторы
— Объёмные потери и к. п. д. 89
— Пульсация (колебания) давления и
крутящего момента 122, 129, 223,
303
Гидропередачи вращательного движе-
ния
— гидромеханические и гидродиффе-
ренциальные 451
— с дистанционным управлением 457
— с постоянной скоростью 449
— открытые и закрытые 447
Гидропередачи вращательного движе-
ния 427
— Потери мощности и к. п. д. 77, 80,
89, 440
— Регулирование скорости 430, 437
• — Регулирование (см. Регулирование)
— Характеристика 443
Г ид р оцил инд р ы (силовые ц ил инд р ы)
490
— мембранные и сильфонные 137, 520,
526
— поворотного движения 528, 532
— прямолинейного движения 190
— различных схем 504, 512, 515, 516,
518
— телескопические 516
Гидроцилиндры
— Демпфирование энергии 504
— Испытания 520
— Расчет 509, 510
— Регулирование скорости 499, 502
Д
Давление — Стабилизация 421
Давление в гидропередачах (см. Жид-
кости гидросистем)
Ж
Жидкости гидросистем 35
----высокотемпературные 47
— Вязкость 35, 36, 37, 47
600
— Давление в гидропередачах 11, 17,
18, 47, 156, 158, 163, 165, 180, 243,
254, 256, 287, 312, 353
— Индекс вязкости 38
— Кавитация (см. Кавитация)
— Компрессия (см. Компрессия жид-
кости)
— Насыщенные пары 45
— Очистка силовая 543, 544, 545, 548
— Растворение газов 43
— Сжимаемость и влияние на харак-
теристики гидромашин 40
— Стойкость механическая и химиче-
ская (деструкция) 42
— Требования к жидкости 47
К
Кавитация
— жидкости 45, 82
— Очистители кавитационные 548
Карданный механизм связи 195
Квадрант (см. Гидроцилиндры пово-
ротного движения)
Колпаки воздушные 61
Компрессия жидкости в рабочих ка-
мерах насосов 135, 218, 276, 327
Компрессоры газовые 575
— Мощность и к. п. д. 578
— Подача 582
М
Мультипликаторы (см. Преобразова-
тели давления)
Н
Напор — Инерционные потери 65, 67
Н асосы
— комбинированные и сдвоенные 271,
298, 308
— мембранные 363
— перекачивающие 52
— пластинчатые 273, 284
— роторно-поршневые аксиальные 202,
235
— роторно-поршневые радиальные 107
— с вращающимися поршнями 364
— сверхвысоких давлений 373
— с двойным давлением и с двумя сту-
пенями подачи 418, 419
— с качающимся плоским золотником
и неподвижным блоком 256
— с полыми поршнями 163
— с ручным приводом 52
— шестеренные и винтовые ЗГ1, 348,
353
— эксцентриковые 165
Насосы
— Всасывание 209, 212, 321
— Кавитационная характеристика 206
— Карданная связь ведущего и ведо-
мого валов 195
— Нагрузка на поршень 183
— Нагрузка на подшипники 325
— Напор 68
— Подача (см. Подача насоса)
— Подача и объемные потери (см.
Подача насоса)
— Подпитка 208, 248
— Разгрузка и ограничители мощно-
сти 403, 406, 410, 420, 423
— Расчет роторно-поршневых насосов
(см. Расчет)
— Регулятор мощности 397
— Скорость в режиме самовсасывания
206
— Скорость поршня 115, 188
— Срок службы (см. Ресурс работы
гидромашины)
— Частота вращения предельная 205
О
Опоры гидравлические (см. Гидравли-
ческие опоры поршней)
Очистители жидкости (см. также Филь-
тры}
— — кавитационные 548
----магнитные 543
----центробежные 545
----электростатические 544
П
Передачи гидравлические (см. Гидро-
передачи вращательного движения)
Подача насосов 58, 113, 116, 153, 167,
185, 202, 262, 277, 314
----пластинчатых 274, 277, 355
----роторно-поршневых 113, 153,
167, 185, 186
----шестеренных и винтовых 314,
320
Подача насоса
— Неравномерность (пульсация) 59,
116, 202, 281, 289, 331
— Подача и регулирование 185, 202,
262, 381
— Подача и объемные потери 58, 113,
116, 153, 167, 185, 202, 262
— Равномерность 116, 146, 314
— Регулирование 381, 388, 394, 398,
415, 417, 418
Пневмодвигатели 590, 591, 592, 594
Пневмомашины объемные 572
Пневмомашины
— Индикаторная диаграмма 596
— Распределение и регулирование 586
Подшипники шестеренных насосов —
Нагрузка 325
Поршни гидромашин 216, 239, 246
— Скорость поршня насоса 115, 188
Преобразователи давления и расхода
368, 369, 370
Процессы переходные 102, 212
Р
Расчет
— аксиально-поршневых гидромашин
267
— радиально-поршневых гидромашин
175
— ротор но-порш невых насосов 175,
267
Распределение жидкости в гидромаши-
нах 134, 159, 165, 218, 224, 254, 258
— клапанное и клапанно-щелевое 156,
163, 165, 260
— плоским золотником 218
• — цилиндрическим золотником”^ 134,
254
Распределительная пара — Разгрузка
контактной поверхности 143, 159
Регулирование
— дроссельное 430, 499
— объемное 437
— пневмомашины 586
— подачи насоса 381, 388, 394, 398,
415, 417
— скорости вала гидропередачи 430
— скорости гидродвигателя 430, 437
Регуляторы
— давления 423
— мощности насоса 397
У
Уплотнения 550
— вращающихся соединений 568, 593
— гидродинамические 565
— кольцами 554, 560
— манжетные 557
— механические 568
— неподвижных стыков 552
Ф
Фильтрация жидкости 537
Фильтры
— металлокерамические 540
— типы 539, 540, 542
Ш
Шестеренные гидромашины
,— Автоматическое регулирование тор-
цовых зазоров 341
— Влияние центробежных сил 322
— Конструкции насосов 347
— Крутящий момент 334
— Нагрузка подшипников 325
— Насосы с косозубыми шестернями
348
— Насосы с шестернями внутреннего
зацепления 350
— Объемные потери 320
— Пульсация подачи 331
— Расчетная подача 314
601
ОГЛАВЛЕНИЕ
Предисловие...................................................................................... 3
Глава I. Общие сведения ...................................................................... 5
§ 1. Основные термины и определения................................................... 5
§ 2. Преимущества гидропривода...................................................... 10
§ 3. Принцип действия объемного гидропривода......................................... 12
§ 4. Механизм гидравлической связи................................................... 19
§ 5. Схемы гидроприводов . .......................................................... 21
§ 6. Условные графические обозначени я объемных гидравлических
и пневматических машин .................................. 23
t
Глава И. Рабочая жидкость гидросистем и ее свойства ............................................ 35
§ 7. Вязкость жидкости ........................ 35
§ 8. Сжимаемость и стойкость жидкости...................... 40
§ 9. Давление (упругость) насыщенных паров и кавитация
жидкости......................................................................... 45
§ 10. Вязкость применяемых жидкостей и рабочие давления . . 47
§ 11. Высокотемпературные жидкости ........................... 47
§ 12. Требования к рабочим жидкостям ............ 48
Глава III. Насосы для перемещения (перекачки) жидкости .... 49
§ 13. Насосы с ручным приводом .. 49
§ 14. Насосы с механическим приводом . 52
§ 15. Скорость и ускорение поршня ....... 56
§ 16. Инерционные потери напора.............. 65
§ 17. Влияние сил инерции жидкости на давление в цилиндре
в период нагнетания.......................................... 67
§ 18. Индикаторная диаграмма поршневого насоса........................ 68
Глава IV. Рабочие параметры и характеристики объемных насосов
и гидромоторов гидравлических приводов (систем) .... 71
§ 19. Определения............................................ 71
§ 20. Рабочий объем гидромашины и расчетная подача жидкости 74
§ 21. Характерный объем ...................................... 75
§ 22. Параметры регулирования................................. 76
§ 23. Объемные потери и объемный к. п. д. насоса.............. 77
§ 24. Объемные потери и объемный к. п. д. гидромотора .... 89
602
§ 25. Мощность и крутящий момент на валу гидромашины ... 91
§ 26. Механические потери мощности и механический к. п. д.
гидромашины .................................................. 93 •
§ 27. Суммарные потери мощности В гидромашине ...... 98
§ 28. Переходные процессы в гидроприводе........................ 102
§ 29. Дифференциальное уравнение движения Гидропривода . . 103
Глава V. Радиально-поршневые гидромашины (насосы и гидромо-
торы) ......................................................... 107
§ 30. Общие сведения и типовые конструкции............ 107
§ 31. Подача насоса..................................... . 113
§ 32. Скорость и ускорения поршня при движении в цилиндре 115
§ 33. Равномерность подачи (потока) жидкости ........ 116
§ 34. Действующие силы и крутящий момент........... 123
§ 35. Колебание угловой скорости гйдромотора ........ 129
§ 36. Контакт поршней со статорным кольцом ..... .... 132
§ 37. Распределение жидкости................................ 134
§ 38. Радиально-поршневые насосы с плоской направляющей . . 146
§ 39. Насос с прямоугольными Поршнями ....................... 154
§ 40. Радиально-поршневые насосы с клапанными распределе-
нием ..................................................... 156
§ 41. Эксцентриковые насосы с клапанно-щелевым распределе-
нием ..................................................... 165
§ 42. Радиально-поршневые высокомоментные гидромоторы . . 169
§ 43. Последовательность расчета основных параметров ради-
альных поршневых гидромашин ................................ 175
Глава VI. Роторные аксиально-поршневые гидромашины ....... 179
§ 44. Общая характеристика и принципиальная схема..... 179
§ 45. Средняя подача насоса . . л..................... 185
‘ § 46. Кинематика и динамика аксиально-поршневых машин . . 188
§ 47. Механизм карданной связи............................ 195
§ 48. Равномерность подачи (потока) жидкости .... .... 202
§ 49. Особенности расчета насоса с наклонным диском ..... 203
§ 50. Предельные частоты вращения насоса.................. 205
§ 51. Процесс всасывания ................................. 209
\§ 52 . Крутящий момент на валу Машины..................... 213
53. Разгрузка поршня от действия боковых сил ... .... 216
§ 54. Распределение жидкости................................... 218
§ 55. Аксиальные роторно-поршневые насосы бескарданной схемы 235
.. § 56. Аксиально-поршневые гидрсмашины с неподвижным на-
клонным диском.................................................... 241
§ 57. Гидромашины с наклонным расположением цилиндров . . 250
§ 58. Насосы с распределением пр»и помощи осевой цапфы и ци-
линдрических золотников ................................. 254
§ 59. Гидромашины с качающимсяг плоским золотником и непод-
вижным цилиндровым блоком.................................. 256
§ 60. Насосы с клапанным и клапанно-щелевым распределением 260
§ 61. Основные вопросы изготовления деталей аксиально-поршне-
вых насосов................................................. 266
§ 62. Последовательность расчета основных параметров акси-
ально-поршневой гидромашилы................................ 267
§ 63. Сдвоенные насосы.......................................... 271
6Q3
А
|'
Глава VII. Пластинчатые гндромашины
273
§ 64. Пластинчатые насосы одинарного действия.............. 273
§ 65. Пластинчатые насосы двойного действия................ 284
§ 66. Конструктивные варианты пластинчатых машин........... 297
§ 67. Пластинчатые гидромоторы ............................ 301
§ 68. Комбинированные насосы .............................. 308
Глава VIII. Шестеренные и винтовые гидромашины.................. 311
§ 69. Шестеренные насосы...................................... 311
§ 70. Нагрузка подшипников . ................................. 325
§ 71. Пульсация подачи........................................ 331
§ 72. Насосы со ступенчатыми шестернями................ 333
§ 73. Крутящий момент на валу шестеренной гидромашины . . . 334
§ 74. Выбор параметров шестеренного насоса.................... 336
§ 75. Насосы с автоматическим регулированием торцовых зазоров 341
§ 76. Обеспечение реверсивности шестеренного насоса...... 344
§ 77. Способы обеспечения равномерного прижима плавающих
дисков ..................................................... 346
§ 78. Вопросы конструирования шестеренных насосов........ 347
§ 79. Многоступенчатые и многошестеренные насосы.............. 348
§ 80. Насосы с косозубыми (спиральными) и шевронными шестер-
нями ....................................................... 348
§ 81. Насосы с шестернями внутреннего зацепления.............. 350
§ 82. Винтовые насосы ........................................ 353
§ 83. Мембранный насос ................................. . 363
§ 84. Насосы с вращающимися поршнями .............. 364
§ 85. Насос с роликовыми вытеснителями........................ 367
Г лава IX. Гидравлические преобразователи и насосы сверхвысоких
давлений................................................. 368
§ 86. Вращательный гидропреобразователь....................... 369
§ 87. Поступательные преобразователи ........................ 370
§ 88. Насосы сверхвысоких давлений............................ 373
Глава X. Регулирование подачи объемных насосов....................... 381
§
§
§
§
§
§
§
§
§
§
89. Регулирующие устройства ............................
90. Автоматическое регулирование подачи по давлению . . . .
91. Влияние на регулирование трения в механизме.........
92. Динамическая характеристика ..........................
93.
94.
95.
Момент (или усилие) на регулирующем органе .
Регулятор мощности с отсечкой давления . . . .
Двухступенчатые (дифференциальные) регуляторы .
96. Введение искусственной утечки........................
97. Регуляторы с обратной связью по положению ...........
98. Регулирование подачи насоса с клапанно-щелевым распре-
делением ...............................................
381
388
393
393
394
397
398
400
403
406
§ 99. Регулятор с чувствительным элементом типа сопло—заслонка 410
604
§ 100. Регулирование подачи путем изменения внутренней цир-
куляции жидкости............................................ 415
§ 101. Регулирование подачи путем дозирования объема питания
насоса .................................................. 417
§ 102. Регуляторы с двойным давлением....................... 418
§ 103. Насос с двумя ступенями подачи....................... 419
§ 104. Ограничители мощности насоса......................... 420
§ 105. Стабилизатор давления................................ 421
§ 106. Ограничители давления ............................... 422
§ 107. Регулятор давления с нагрузкой насоса................ 423
§ 108. Регулятор давления насоса с электр одистанционным управ-
лением ................................................... 424
§ 109. Сравнительная оценка механизмов распределения и регули-
рования поршневых насосов .................................. 425
Глава XI. Объемные гидравлические передачи вращательного дви-
жения ............................................................ 427
§ ПО. Принципиальные схемы .................................427
§ 111. Регулирование частоты вращения вала гидромотора . . . 430
§ 112. Потери мощности и к. п. д. гидропередачи............. 440
§ 113. Характеристики гидропередачи с учетом объемных потерь 443
§ 114. Открытые и закрытые гидропередачи.................. 447
§ 115. Гидропередачи с постоянной выходной скоростью .... 449
§ 116. Гидромеханические (дифференциальные) передачи постоян-
ной выходной скорости ...................................... 451
§ 117. Гидродифференциальные передачи ...................... 452
§ 118. Электрогидравлическое дистанционное управление гидро-
передачей .................................................. 457
Глава XII. Испытания гидромашин и шум при их работе............... 460
§ 119. Снятие объемных характеристик гидромашин............. 460
§ 120. Снятие механических характеристик гидропередачи .... 466
§ 121. Испытание высокомоментного гидромотора............... 469
§ 122. Испытательная установка с регенерацией мощности .... 470
§ 123. Оценка ошибки при измерениях........................ 474
§ 124. Шум при работе объемных гидромашин................... 475
§ 125. Конструктивные меры по снижению шума насоса.......... 483
§ 126. Оценка надежности гидромашин......................... 486
Глава XIII. Гидродвигатели прямолинейного и поворотного движения 490
§ 127. Гидроцилиндры ....................................... 490
§ 128. Регулирование скорости гидроцилиндра................. 499
§ 129. Гидроцилиндр с демпфером............................. 504
§ 130. К- п. д. гидроцилиндров.............................. 508
§ 131. Расчет гидроцилиндров ............................... 509
§ 132. Гидроцилиндр со ступенчатым поршнем.................. 512
§ 133. Тандем-цилиндры...................................... 515
§ 134. Телескопические гидроцилиндры ....................... 516
§ 135. Гидроцилиндр с фиксацией положения поршня........... 518
§ 136. Испытания гидроцилиндров ............................ 520
§ 137. Мембранные и сильфонные гидроцилиндры................ 520
§ 138. Поворотные гидродвигатели ........................... 528
605
Глава XIV. Вспомогательная гидроаппаратура..................... 537
§ 139. Фильтрация рабочей жидкости......................... 537
§ 140. Силовая очистка рабочей жидкости.................... 543
§ 141. Герметизация (уплотнение) соединений............... 550
Глава XV. Пневматические объемные машины ..................... 572
§ 142. Общие положения................................... 572
§ 143. Основные параметры газа ............................ 574
§ 144. Процесс сжатия газа в поршневом компрессоре ...... 575
§ 145. Мощность и к. п. д. компрессора..................... 578
§ 146. Подача поршневого компрессора .................. . 582
§ 147. Типы поршневых компрессоров......................... 585
§ 148. Органы распределения и регулирования компрессора . . . 587
§ 149. Роторные пластинчатые компрессоры................... 588
§ 150. Пневматические двигатели ........................... 590
Список литературы................................................ 598
Предметный указатель............................................ 599
Баш та Т. М.
БЗЗ Объемные насосы и гидравлические двигатели
гидросистем. Учеб, для вузов по специальности
«Гидропневмоавтоматика и гидропривод». М., «Ма-
шиностроение», 1974.
606 с. с ил.
Описаны конструкции, изложены вопросы расчета, конструирова-
ния и испытаний объемных насосов и гидродвигателей, применяю-
щихся в силовых гидравлических системах машин и механического
оборудования. Дан анализ их качеств применительно к случаям ис-
пользования. Приведены конструкции и характеристики гидравли-
ческих передач (трансмиссий) различных типов.
Б
31303-124
038 (01)-74
124-74
6П2.3
Трифон Максимович Б а ш т а
ОБЪЕМНЫЕ НАСОСЫ И ГИДРАВЛИЧЕСКИЕ ДВИГАТЕЛИ ГИДРОСИСТЕМ
Редактор издательства С. И. Булатов
Технический редактор /7. Ф. Демкина
Корректор В. А. Воробьева
Переплет художника А. С. Мунтяна
Сдано в набор 11/111 1974 г. Подписано к печати 2/VII 1974 г. Т-09948
Формат 60 X 9071В Бумага типографская № 3. Усл. печ. л. 38. Уч.-изд. л. 37,8
Тираж 22 000 экз. Заказ 920 Цена 1 р. 48 к.
Издательство Машиностроение», 107885, Москва, Б-78, 1-й Басманный пер., 3
Ленинградская типография № 6 Союзполиграфпрома
при Государственном комитете Совета Министров СССР
по делам издательств, полиграфии и книжной торговли
193144, Ленинград, С-144, ул. Моисеенко, 10
Новые книги 1974 года
издательства «Машиностроение»
по
НАСОСОСТРОЕНИЮ, КОМПРЕССОРАМ,
ВЕНТИЛЯТОРАМ
Выйдут и вышли в 1974 году
БАРЕНБОЙМ А. Б, Малорасходные фреоновые турбокомпрессоры. 224
4000 экз. Цена 80 к.
ГИДОН Л, М. Монтаж поршневых компрессоров. 232 с., 14 000 экз. Це
56 к.
КАЗАКЕВИЧ В. В. Автоколебания (помпаж) в компрессорах. Изд. 2
перераб. и доп. 16 л., 8000 экз. Цена 1 р. 55 к.
Лабораторный курс гидравлики» насосов и гидропередач. Учебное посоС
для вузов. Под ред. С. С. Руднева, Л. Г. Подвидза. 18 л., 20 000 экз. Це
85 к. Авт. О. В. Байбакова, Д. А. Бутаев, 3. А. Калмыков и др.
Планируются к выходу в 1975 году
Высокооборотные лопаточные насосы. Под ред. Б. В. Овсянникова, В. Б. Ч
баевского. 20 л., 7000 экз. Цена 2 р. 15 к. Авт.: Б. В. Овсянников, Б. И. Б
ровский, Н. С. Ершов и др.
ЕЛИСЕЕВ Б. М. Расчеты деталей центробежных насосов. Справочное пос
бие. 12 л., 12 000 экз. Цена 80 к.
КАРЕЛИН В. Я. Кавитационные явления в центробежных и осевых нас
сах. Изд. 2-е, перераб. и доп. 23 л., 5000 экз. Цена 2 р. 30 к.
КИСЛОВ В. Г., БАШИРОВ Р. М., ПОПОВ В. Я. Топливные насосы ра
пределительного типа. 12 л., 5000 экз. Цена 80 к.
Лопастные насосы. Под ред. Л. П. Грянко, А. Н. Папира, 35 л., 12 000 эк
Цена 2 р. Авт.: Д. С. Алесопольский, Г. В. Викторов, Г. И. Кривченко и д
Центробежные вентиляторы. 28 л., 13 000 экз. Цена 2 р. 10 к. Авт.: Т. С. О
ломахова, М. И. Невельсон, Е. Я. Юдин и др.
ЯРЕМЕНКО О. В. Испытания насосов. Справочное пособие. 15 л., 15 ОС
экз. Цена 1 р.
УВАЖАЕМЫЕ ЧИТАТЕЛИ!
На книги 1975 г. книжные магазины, распространяющие техническую лите
ратуру, с сентября 1974 г. будут принимать предварительные заказы.
№
ПОСЕЩАЙТЕ КНИЖНЫЕ МАГАЗИНЫ, ЗАКАЗЫВАЙТЕ
И ПОКУПАЙТЕ КНИГИ ИЗДАТЕЛЬСТВА
«МАШИНОСТРОЕНИЕ»!