



































































































































































































































Author: Ефанов В.В.
Tags: авиация и космонавтика летательные аппараты ракетная техника космическая техника междупланетные соединения (междупланетные полеты) космонавтика (аэронавтика) космонавтика
ISBN: 978-5-905646-13-3
Year: 2020




РОСКОСМОС
* 'Ш
РОССИЙСКИЙ
СЕГМЕНТ
МЕЖДУНАРОДНОЙ
КОСМИЧЕСКОЙ
13 305
2654 1000
увод № 2 РБ увод № 1 РБ
отделение КА
отлетная траектория
КА к Марсу
выведение
на опорную орбиту
(1-е вкл. МД РБ)
промежуточная
орбита
опорная орбита
отделение
ОБ от PH
выведен
выведение ОБ на отлетную траекторию
(4-е вкл. МД РБ)
РОСКОСМОС
переходная орбита
РОССИЙСКИЙ
сброс ДТБ
СЕГМЕНТ
МЕЖДУНАРОДНОЙ
КОСМИЧЕСКОМ
ЭКСПЕДИЦИИ
выведение ОБ
на переходную орбиту
(3-е вкл. МД РБ)
выведение ОБ
на промежуточную орбиту
(2-е вкл. МД РБ)
2022
ПОД РЕДАКЦИЕЙ
ДОКТОРА ТЕХНИЧЕСКИХ НАУК, ПРОФЕССОРА В.В. ЕФАНОВА
КАНДИДАТА ЭКОНОМИЧЕСКИХ НАУК Х.Ж. КА РЧ А ЕВ А
2020
ББК 39.62
УДК 629.785
Р764
Научное издание в 2-х томах
Российский сегмент международной космической экспедиции «ЭкзоМарс-
Р764 2022» / Авт.-сост. В.В. Ефанов. Под ред. д.т.н. В.В. Ефанова, к.э.н. Х.Ж. Карчаева:
В 2-х т. Т. 1. Химки: Издатель АО «НПО Лавочкина», 2020. - 232 с.: ил.
В первом томе книги «Российский сегмент международной космической экспедиции
“ЭкзоМарс-2022”» изложены отдельные методы расчета и проектирования описываемо¬
го космического комплекса.
Описаны общие положения и исходные данные на разработку проекта. Представ¬
лены история зарождения и развития этого проекта и общий облик как аппарата в це¬
лом, так и его составных частей, том числе PH «Протон-М» и РБ «Бриз-М». Освещены
вопросы планетарной защиты, радиационной стерилизации, радиационной обстановки
на трасе полета, дистанционного управления движением межпланетной станции и обе¬
спечения надежности.
Первый том написан учеными и специалистами АО «НПО Лавочкина» с участием
кооперации.
рецензенты:
академик РАН О.М. Алифанов
доктор технических наук, профессор В.В. Хартов
издатель
АО «НПО Лавочкина»
автор-составитель
художник
В.В. Ефанов
В.М. Давыдов
ISBN 978-5-905646-13-3
978-5-905646-14-0 (т. 1)
© АО «НПО Лавочкина», 2020
РОССИЙСКИМ СЕГМЕНТ
международной космической
ЭКСПЕДИЦИИ «ЭКЗОМАРС-2022»
ОГЛАВЛЕНИЕ
ТОМ 1
ВВЕДЕНИЕ
ЧАСТЬ 1 ИССЛЕДОВАНИЯ МАРСА КОСМИЧЕСКИМИ
АППАРАТАМИ 10
Ш Проект «ЭкзоМарс»: краткая предыстория космических
исследований и природа Марса 10
1.1.1 Полеты космических аппаратов 10
1.1.2 Современный Марс 19
ЧАСТЬ 2 БАЗИС, МИССИЯ «ЭКЗОМАРС-2022» 49
rislH Концепция экспедиции 49
ДЖИ Космический аппарат «ЭкзоМарс-2022» 52
ЧЖД Средства выведения 57
2.3.1 Ракета космического назначения 57
2.3.2 Выведение КА «ЭкзоМарс-2022-КА» 63
2.3.3 Подготовка РКН на космодроме Байконур 65
2.3.4 Основные этапы адаптации средств выведения
к запуску КА «ЭкзоМарс-2022-КА» 72
ПРОЕКТ КОСМИЧЕСКОГО АППАРАТА
«ЭКЗОМАРС-2022» 73
Проектный облик десантного модуля «ЭкзоМарс-2022» 73
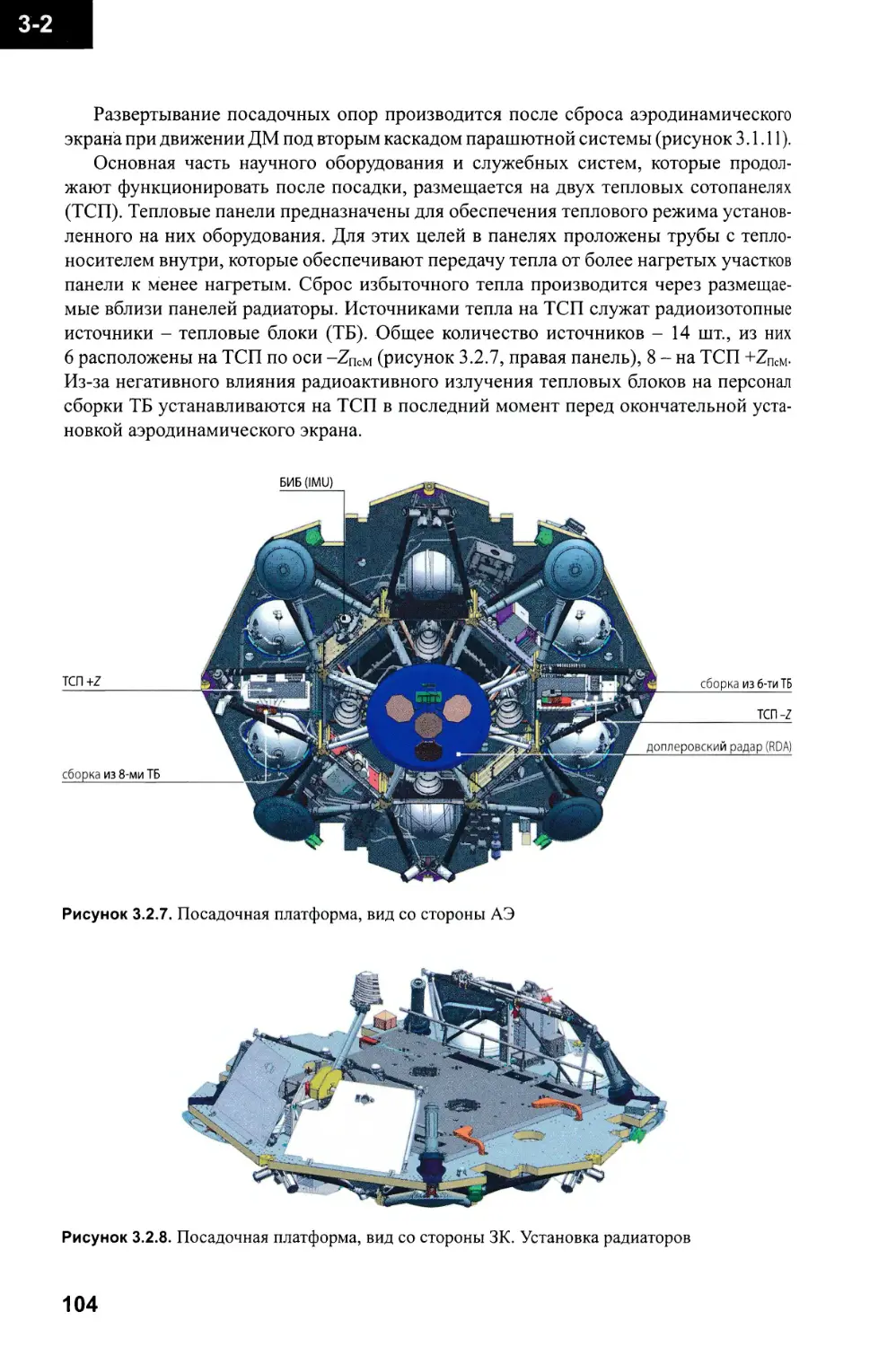
Посадочный модуль «ЭкзоМарс-2022» 100
Российский сегмент баллистико-навигационного
обеспечения полёта и спуска десантного модуля
миссии «ЭкзоМарс-2022» 112
3.3.1
Международный проект «ЭкзоМарс-2022». Состав КА
112
3.3.2 Схема полёта
113
3.3.3 Сезон пылевых бурь на Марсе 114
3.3.4 Характеристики траекторий перелёта к Марсу 115
3.3.5 Баллистико-навигационное обеспечение полёта 120
3.3.6 Условия пребывания посадочной платформы
на поверхности Марса 124
■сЕи Миссия «ЭкзоМарс-2022». Радиация 128
3.4.1 Радиационная обстановка на трассе полета
КА «ЭкзоМарс-2022» 128
5
3.4.2 Локальные поглощенные дозы в местах расположения
аппаратуры десантного модуля КА «ЭкзоМарс-2022»
от ионизирующего излучения космического пространства
и радиоизотопных источников тепла 134
3.4.3 Анализ структурных повреждений в аппаратуре десантного
модуля КА «ЭкзоМарс-2022», вызываемых излучениями
космического пространства и бортовых радиоизотопных
источников тепла 146
3.5
3.5.1
3.5.2
3.5.3
3.6
3.6.1
Планетарная защита миссии «ЭкзоМарс-2022» 157
Основные принципы, требования и методы обеззараживания. . . 157
Основные аспекты радиационной стерилизации 164
Средства дезинфекции чистых сборочных помещений,
контролируемых по микробиологической чистоте 173
Управление движением посадочного аппарата на этапе
его спуска и посадки на поверхность Марса 181
Постановка задачи 181
3.6.2 Анализ условий полета 182
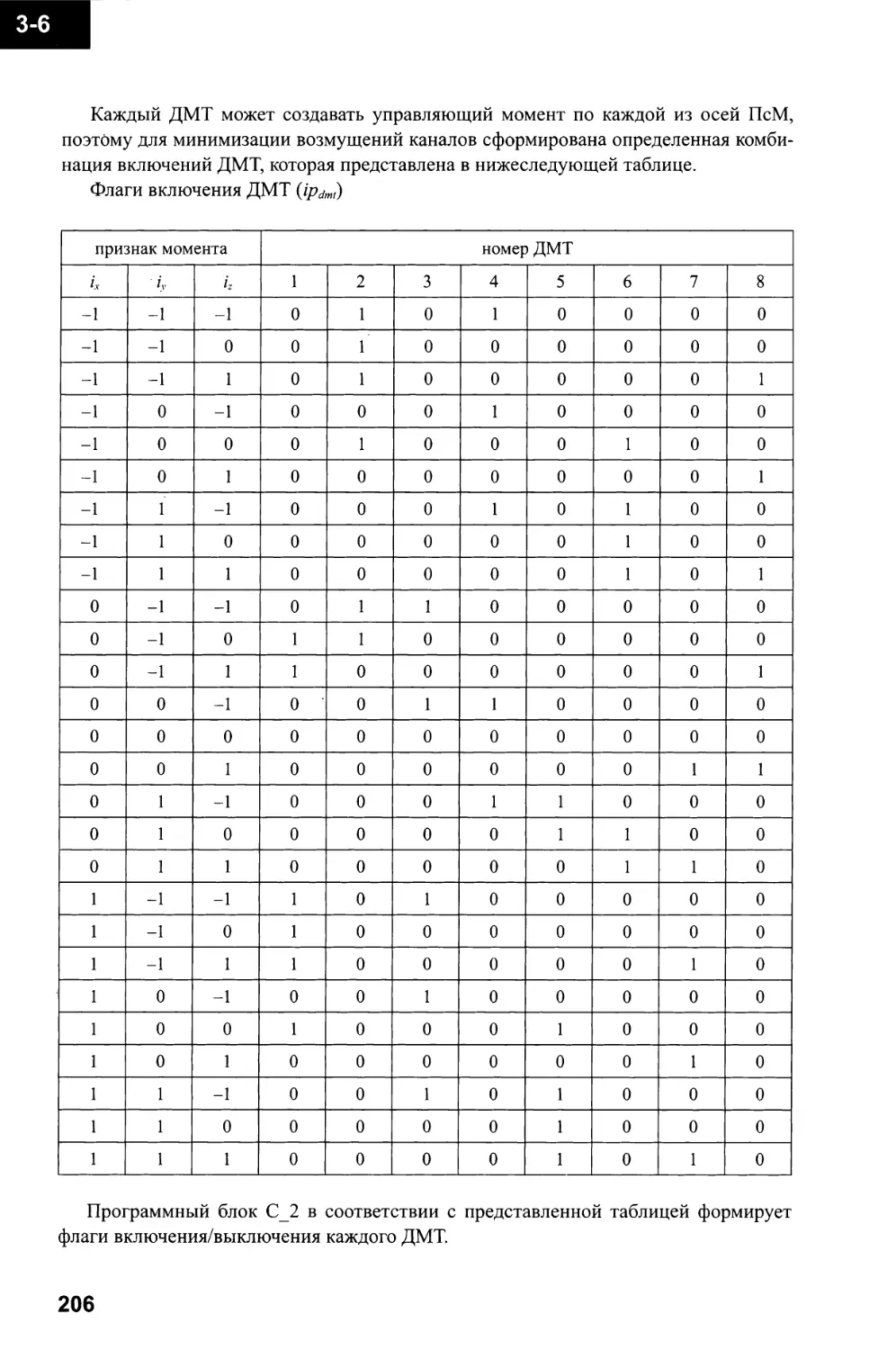
3.6.3 Средства управления движением ПсМ 187
3.6.4 Управление движением ПсМ при работе ТД 194
3.6.5 Структура алгоритмов наведения и управления 201
3.6.6 Моделирование процессов управляемого торможения 207
3.7
Обеспечение надежности космического комплекса 213
3.8
Управление составным космическим аппаратом
«ЭкзоМарс-2022»
219
ТОМ 2
ЧАСТЬ 4 СЛУЖЕБНЫЕ СИСТЕМЫ ДЕСАНТНОГО
И ПОСАДОЧНОГО МОДУЛЕЙ «ЭКЗОМАРС-2022» 8
ЕКН Конструкция десантного модуля 8
ЕВЯ Двигательная установка посадочной платформы
десантного модуля 14
4.2.1 Назначение 14
4.2.2 Обоснование выбранной конструкции ДУ и ее описание 14
4.2.3 Описание работы двигательной установки посадочной
платформы 24
4.3
4.4
Аэродинамика десантного модуля 27
Антенно-фидерная система десантного модуля 47
4.4.1 Общие сведения 47
4.4.2 Порядок работы АФС на этапе входа, спуска
и посадки (EDL) 51
4.4.3 Порядок работы АФС на этапе эксплуатации
на поверхности Марса (SURFACE) 52
4.4.4 Антенна заднего кожуха 55
4.4.5 Антенна посадочной платформы 61
4.4.6 Радиочастотные кабели и переключатели 62
6
fcSsl Система обеспечения теплового режима десантного модуля
космического аппарата «ЭкзоМарс» 66
4.5.1 Этапы эксплуатации КА «ЭкзоМарс» 66
4.5.2 Назначение и функциональные особенности средств СОТР 70
4.5.3 Подсистемы СОТР 71
4.5.4 Алгоритмы управления СОТР 85
4.5.5 Отработка теплового режима десантного модуля
«ЭкзоМарс» 87
ЕКЯ Система энергоснабжения посадочного аппарата 92
КШ1 Тепловое и эрозионное воздействие атмосферы Марса
на аэродинамический экран десантного модуля.
Конструкция и тепловая защита аэродинамического экрана 103
4.7.1 Постановка задачи 104
4.7.2 Исходные данные и результаты расчётов 113
EK3I Посадочная платформа 135
4.8.1 Конструкция посадочного устройства 135
4.8.2 Система схода марсохода с платформы 144
4.8.3 Результаты моделирования динамики раскрытия
трансформируемых конструкций посадочного модуля
в процессе проектирования и доводочных испытаний 162
EEI Прочностные и кинематические испытания посадочного
аппарата проекта «ЭкзоМарс-2022» 184
4.9.1 Состав посадочного аппарата и этапы его эксплуатации 184
4.9.2 Наземная отработка конструкции КА «ЭкзоМарс-2022»
вНПОЛ 187
4.9.3 Испытания конструкций агрегатов и КА в целом
на механические нагрузки 188
4.9.4 Бросковые испытания посадочного устройства (ПУ) ПсМ 209
tewtl Сравнительный анализ и оценка соответствия технического
уровня десантного модуля передовым достижениям
зарубежной науки и техники 215
ПРИЛОЖЕНИЯ 223
1 Научные задачи комплекса научной аппаратуры
посадочной платформы проекта «ЭкзоМарс-2018»
(ныне ЭкзоМарс-2022) 223
2 Проект «ЭкзоМарс»: ЕКА -
следующий этап научных исследований Марса 233
7
ВВЕДЕНИЕ
С самого начала космической эры изучение Марса дистанционными и контактны¬
ми методами как с орбиты его искусственных спутников, так и с посадочных аппа¬
ратов стало одним из важнейших приоритетов мировой космонавтики в области пла¬
нетных исследований. 1 ноября 1962 года с космодрома Байконур ракетой-носителем
«Молния» была запущена советская межпланетная станция « Марс-1» и выведена
на траекторию полета к Красной планете. Первая мягкая посадка на планету была
осуществлена отечественной станцией «Марс-3» в 1971 году. В 2004 году на поверх¬
ность Марса США доставили первый успешный полноценный марсоход, он получил
название «Spirit».
Европейское космическое агентство также имеет определенные успехи в созда¬
нии автоматических космических аппаратов для изучения этой планеты дистанцион¬
ными методами с орбиты искусственного спутника Марса. Станция «Mars Express»
была запущена в 2003 году с космодрома Байконур ракетой космического назначе¬
ния «Союз-ФГ» и выведена на отлетную траекторию межорбитальным буксиром
«Фрегат». Этот аппарат продолжает работать в настоящее время.
Подойти к разгадке Красной планеты ученые пытаются давно. Европа и Рос¬
сия решили делать это в научном и техническом содружестве. Между Российской
государственной корпорацией по космической деятельности (ГК «Роскосмос»)
и Европейским космическим агентством (ЕКА) было подписано Соглашение о со¬
трудничестве, предусматривающее совместную разработку международного проек¬
та «ЭкзоМарс», который включает в себя две миссии. В 2016 году была запущена
межпланетная станция «ЭкзоМарс-2016», состоящая из многофункционального ор¬
битального Trace Gas Orbiter (TGO) и демонстрационного посадочного (EDM) аппа¬
ратов. На последнем были установлены российские научные приборы. Космические
аппараты были созданы ЕКА. Запуск осуществлен российской ракетой космического
назначения «Протон-М». Эта миссия реализована частично успешно. Орбитальный
аппарат надежно выполняет свои функции, он помимо исследований планеты и око-
ломарсианского пространства, будет выполнять роль спутника-ретранслятора для
будущей миссии и передачи на Землю научной и телеметрической информации с по¬
садочного модуля и марсохода. A EDM, который должен был осуществить посадку
на Марс с целью отработки важнейших и новых технологий данного процесса для их
использования в миссии «ЭкзоМарс-2022» разбился при совершении посадки о по¬
верхность планеты. Создание космических комплексов данной серии в настоящее
время завершается наземной отработкой космического аппарата «ЭкзоМарс-2022».
Он состоит из перелетного, посадочного модулей и марсохода, которые созданы
на базе передовых проектно-конструкторских, технологических решений послужат
расширению наших и европейских возможностей в планетных исследованиях.
«ЭкзоМарс» - совместная международная программа Роскосмоса и ЕКА по из¬
учению Марса, основой которой является поиск доказательств существования
в прошлом и настоящем жизни на этой планете. Также предусматриваются широ¬
кий спектр научных исследований атмосферы, пылевой и радиационной обстановки,
поверхностных и подповерхностных слоев (глубиной до 2-х метров), внутреннего
строения, сейсмической активности и многие другие исследования в условиях дол¬
гоживущей (не менее одного года) стационарной посадочной платформы. Интересны
глубинные исследования грунта, который избежал окислительно-востановительных
реакций от воздействия внешней среды.
8
Известно, что необходимым условием существования каких-либо (хотя бы эле¬
ментарных) форм жизни является наличие воды в жидком виде. Предыдущая россий¬
ско-европейская экспедиция подтвердила наличие воды на планете, по крайней мере
в виде льда, особенно на её полюсах.
«ЭкзоМарс» - это масштабный проект по изучению Красной планеты, в ходе
которого ученые планируют сделать то, что ещё никогда не удавалось реализовать
на Марсе, в частности поиски крупных источников воды и газа - метана, одного
из основополагающих углеводов. На Земле этот газ в основном производят живые
организмы: бактерии, растения и животные во время жизнедеятельности и гниения.
В рамках второй экспедиции на планету будет доставлен полноценный марсоход, он
проверит результаты орбитальных исследований, полученных TGO. Помимо обыч¬
ных научных и служебных систем, марсоход оснащен автономной системой навига¬
ции и сможет самостоятельно прокладывать курс к заданным на Земле координатам.
В соответствии с соглашением по программе «ЭкзоМарс» перелетный модуль
и марсоход создает ЕКА, а посадочный модуль - ГК «Роскосмос», при этом головны¬
ми разработчиками являются компании: Thales Alenia Space - с европейской стороны;
НПО имени С.А. Лавочкина - с российской.
Посадочный модуль, доставив на поверхность планеты марсоход, становится
долгоживущей стационарной лабораторией. Научный комплекс создается ИКИ РАН
с кооперацией, в том числе европейской, а комплекс научных приборов подвижной
лаборатории (марсохода) - европейскими институтами с участием ИКИ (нейтрон¬
ный детектор АДРОН-РМ, инфракрасный спектрометр ИСЕМ). В целом, указанный
комплекс состоит: на посадочной платформе - из 11 российских приборов и 2 евро¬
пейских, а на марсоходе - из 7 европейских и 2 российских. Исходя из этого, можно
спрогнозировать, что в случае успеха запланированной экспедиции научные резуль¬
таты исследований будут весьма значительны и возможно превзойдут полученные
предыдущими космическими миссиями.
Запуск межпланетной станции «ЭкзоМарс-2022» планируется осуществить в ав¬
густе-сентябре 2022 года (наиболее благоприятные баллистические условия) ракетой
космического назначения «Протон-М» с разгонным блоком «Бриз-М».
Реализация проекта «ЭкзоМарс-2022» беспрецедентного для российско-европей¬
ской кооперации по созданию совместных автоматических межпланетных комплек¬
сов, позволит отработать принципы взаимовыгодного космического сотрудничества
в области изучения Луны, планет и малых тел Солнечной системы.
Настоящее издание посвящено описанию космической экспедиции «Экзо¬
Марс-2022». Оно состоит из двух томов и четырех частей: часть 1 «Исследования
Марса космическими аппаратами», часть 2 «Базис, миссия “ЭкзоМарс-2022”», часть 3
«Проект космического аппарата “ЭкзоМарс-2022”», часть 4 «Служебные системы де¬
сантного и посадочного модулей “ЭкзоМарс-2022”» и приложения с изложением от¬
дельных частей статей из журнала «Вестник НПО имени С.А. Лавочкина» о научных
задачах проекта «ЭкзоМарс».
В написании книги принимали участие ученые, инженеры, создавшие уникаль¬
ный космический комплекс для углубленного и долговременного изучения Красной
планеты, его служебные и научные системы и приборы, обеспечивающие управление
полетом, наземную отработку, получение и обработку информации, карантин и дру¬
гие необходимые мероприятия для живучести КА и выполнения им научной миссии.
НПО имени С.А. Лавочкина и ГК «Роскосмос» благодарят всех авторов, усилиями
которых создавалась эта книга.
9
ЧАСТЬ 1
ИССЛЕДОВАНИЯ МАРСА
КОСМИЧЕСКИМИ АППАРАТАМИ
ШПРОЕКТ «ЭКЗОМАРС»:
КРАТКАЯ ПРЕДЫСТОРИЯ КОСМИЧЕСКИХ
ИССЛЕДОВАНИЙ И ПРИРОДА МАРСА
За последнее десятилетие изучение Марса выдвинулось в число наиболее пер¬
спективных направлений в программах космических исследований планет Солнеч¬
ной системы. Этому разделу планетных исследований уделяется много внимания
в программах космических агентств США и Европы, к которым в скором времени
предполагают присоединиться новые игроки - Китай, Индия, Япония. В основе
современной стратегии полетов к Марсу и в целом изучения дальнего космоса -
создание высокотехнологичных и вместе с тем отвечающих бюджетным ограничени¬
ям космических аппаратов для решения наиболее актуальных научных задач.
Среди многочисленных проблем природы Марса особый интерес вызывают специ¬
фические особенности его геологии, геохимии, свойств атмосферы, климата, истории
и современного содержания воды, с чем непосредственно связаны общие вопросы те¬
пловой эволюции этой планеты. Они представляют первостепенный интерес в кон¬
тексте сравнительной планетологии и возможности биогенных процессов на Марсе
его биологической активности. Изучение атмосферы дает ключ к пониманию при¬
чин, обусловивших радикальное изменение древнего климата Марса, который, по су¬
ществующим представлениям, около 3,5-3,8 млрд лет назад был близок к условиям,
существующим на Земле. Одновременно это открывает возможности сравнения ме¬
теорологии Земли и Марса и создает необходимые предпосылки для прогноза усло¬
вий на поверхности планеты, в том числе динамического состояния атмосферы, что,
в свою очередь, обеспечивает планирование и безопасность будущих экспедиций.
Из всех планет Солнечной системы Марс с давних времен привлекал к себе осо¬
бое внимание, как планета, на которой могла существовать жизнь. Эти надежды были
похоронены вскоре после начала космической эры, но одновременно открылся чрез¬
вычайно интересный мир природных условий на соседней планете, лишь вдвое мень¬
шей Земли по размерам и вдесятеро меньший по массе, эволюция которой, подобно
Венере, пошла по пути, отличному от эволюции нашей планеты. Современный Марс -
это холодная пустыня с множеством кратеров, систем громадных щитовых вулканов,
плато, нагорий и гигантских разломов, которые сохранили отдельные черты тектоники
и древнего широко развитого вулканизма. Очевидны признаки эрозии поверхностных
пород под воздействием атмосферной динамики (выветривания) и даже интригующие
следы обилия воды и благоприятного климата в ранней истории планеты.
1.1.1. Полеты космических аппаратов
В наши современные знания о природе Марса ключевой вклад внесли полеты ор¬
битальных и посадочных космических аппаратов, хотя далеко не все предпринятые
космические миссии были успешными {Маров М.Я., Хантресс У.Т., 2013)
10
1-1
Рисунок 1.1.1. Общий вид межпланетной станции «Марс-3» и посадочного аппарата
Первым был американский «Маринер-4» (Mariner 4), который в 1965 году проле¬
тел вблизи Марса и измерил параметры его атмосферы с большей точностью, чем это
можно было сделать с Земли. Последующие пролеты у Марса КА «Маринер-6 и -7»
(Mariner 6 and 7) в 1969 году передали первые изображения поверхности планеты.
У них было довольно плохое разрешение, тем не менее детали на снимках оказались
обескураживающими, так как имели сходство с поверхностью Луны. Но уже вскоре
после этого изображения высокого качества, переданные в 1971 году со спутников
Марса «Маринер-9», а также «Марс-2 и -3» (рисунок 1.1.1), позволили увидеть со¬
вершенно другую планету с разнообразными ландшафтами и следами прошлой ге¬
ологической активности и измерить необычные свойства ее разреженной, но очень
динамичной атмосферы.
Перед выходом на орбиту спутника Марса советского КА «Марс-3» от него был
отделен посадочный аппарат, который в 1971 году впервые совершил мягкую посадку
на поверхность Марса в кратере Птолемей, хотя вскоре (через ~20 сек) радиосвязь
с ним прервалась, когда только началась передача с поверхности телевизионного сиг¬
нала (Ефанов В.В., Мартынов М.Б., Карчаев Х.Ж., 2017).
Настоящая «эскадра» космических аппаратов «Марс-4...7» была запущена в Со¬
ветском Союзе в 1973 году. К сожалению, буквально незадолго до запуска обнаружи¬
лось, что при изготовлении их бортовых приборов управления были использованы
«усовершенствованные», но, как оказалось, некачественные электронные элементы
(чипы). Вследствие этого отказы в работе аппаратуры начались уже на траектории
полета и продолжились у Марса, так что у двух орбитальных аппаратов «Марс-4»
и «Марс-5» был ограниченный ресурс работы, а из двух посадочных «Марс-7» не вы¬
шел на околомарсианскую орбиту, а «Марс-6» не выполнил до конца поставленную
задачу. В результате успех «Марса-3» в 1971 году, к сожалению, не удалось повторить
в 1974 году с посадочным аппаратом «Марс-6». Однако при его спуске в атмосфере
были проведены первые прямые измерения атмосферных параметров (температуры,
давления, скорости ветра) с высоты приблизительно 60 км до поверхности, на осно¬
ве которых построена первая модель атмосферы планеты. Интересно, что посадоч¬
ный аппарат «Марс-6» был недавно обнаружен с марсианской орбиты американским
спутником Mars Reconnaissance Orbiter, а бортовой камерой HiRISE (с разрешением
11
1-1
25,3 см на пиксель) получено изображение места посадки, на котором можно разли¬
чить сам посадочный модуль, фрагменты парашюта, теплового экрана и тормозного
двигателя.
Наиболее успешными были полеты в 1975 году американских КА «Викинг-1 и -2»
(Viking 1, 2), состоявших из орбитального и посадочного аппаратов, которые прово¬
дили комплексные научные исследования в течение более одного марсианского года.
Самые интересные результаты были получены по вариациям параметров атмосферы,
а также свойствам пород в месте посадки, анализ которых проводился путем анализа
бортовыми приборами образцов, отобранных механической рукой, снабженной сов¬
ком (scoop). В программе измерений были эксперименты по поиску жизни на Марсе,
проводившиеся путем забора образцов пород и их анализа высокочувствительным
хромато-масс-спектрометром с использованием пиролиза, которые дали, однако, от¬
рицательные результаты. Это привело поначалу к неоправданной потере интереса
к Марсу, что продолжалось почти двадцать лет, до конца 1980-х годов, когда были
запущены советские КА «Фобос-1,-2» (1988), рисунок 1.1.2.
Запуски оказались, однако, только частично успешными: один аппарат был поте¬
рян на трассе перелета из-за ошибки в системе управления, а у другого вышел из строя
бортовой вычислительный комплекс на этапе сближения с одним из двух спутников
Марса - Фобосом, исследования которого с близкого расстояния (-50-100 м) были
основной задачей миссии. Тем не менее, при подлете к Фобосу был проведен ряд
дистанционных измерений, что позволило оценить фотометрические свойства его
слагающих поверхностных пород и сделать определенные выводы об их составе.
Следует упомянуть, что еще в середине 1970-х в СССР планировалась амбици¬
озная программа полетов к Марсу космических аппаратов с целью высадки вначале
Рисунок 1.1.2. Общий вид КА «Фобос-2»
12
1-1
Рисунок 1.1.3. КА «Марс-96»
на поверхность марсохода и затем забора и возврата на Землю образцов пород
(КА «Марс 77-79»). Однако по ряду причин это программа не состоялась, и было
принято решение осуществить вместо нее более простой проект «Фобос-1,-2» (Ефа-
нов В.В., Ширъиаков А.Е., 2018). Это решение вряд ли следует считать оправданным,
поскольку оно, по существу, ликвидировало ряд важных технических заделов по соз¬
данию перспективных марсианских аппаратов и одновременно (что немаловажно!)
«боевой настрой» ученых и инженеров того времени.
В 1990-х были предприняты два новых запуска к Марсу - американский «Марс
Обсервер» (Mars Observer) и российский «Марс-96» (рисунок 1.1.3), но обе миссии
были неудачными. Позже та же судьба постигла американский «Марс Пол ар Л эндер»
(Mars Polar Lander) и российский «Фобос-Грунт».
«Марс-96» создавался как комплексный международный проект, в разработке на¬
учной аппаратуры для которого принимало участие свыше 20 стран.
Он планировался как важный этап в изучении свойств атмосферы, поверхно¬
сти и близкого подповерхностного слоя Марса путем долговременных измерений.
Комплекс состоял из орбитального аппарата, двух малых станций (33°N, 169,4°W
и 37,6°N, 161,9°W) и двух внедряемых зондов - пенетраторов (36°N, 161°W и 26°N,
251°W). Измерения с орбиты включали стандартный состав научной аппаратуры,
предназначенной для телевизионной съемки, радиометрических и спектральных
измерений. Прямые измерения предполагались на пенетраторах и малых станциях,
на которых был установлен комплекс аппаратуры для измерений вариаций метеопа¬
раметров в погранслое, содержания в атмосфере пылевых частиц и др. Локальные
прямые измерения дополнялись дистанционными синхронными измерениями с ор¬
битальных аппаратов при помощи Фурье-спектрометра, многоканального оптиче¬
ского спектрометра и радиометра, которые позволяют получать соответственно рас¬
пределения температуры атмосферы и характеристики ветров по данным измерений
высотных профилей 15-мкм полосы СО2, вертикальное распределение малых атмос¬
ферных составляющих и аэрозолей, а также суточно-сезонные вариации температу¬
ры поверхности и параметра тепловой инерции.
13
1-1
Рисунок 1.1.4. Пенетратор М-96
атмосферу Марса должен
Пенетратор (рисунок 1.1.4) представлял собой
автономный спускаемый аппарат принципиально
нового типа, оборудованный системами и устрой¬
ствами, обеспечивающими его движение после
отделения от орбитального аппарата, внедрение
в грунт, проведение научных исследований и пере¬
дачу научной информации на орбитальный аппарат
для ее ретрансляции на Землю.
Ввод пенетраторов в
был осуществляться с рабочей орбиты. Перед от¬
делением от КА предусматривалась их закрутка
относительно продольной оси, а после отделения
каждый пенетратор должен функционировать са¬
мостоятельно. Перед входом в атмосферу произво¬
дилось заполнение газом надувного тормозящего
устройства, обеспечивающего гашение скорости
спуска до 80 м/сек на момент внедрения. При со¬
ударении с поверхностью планеты должна была
срабатывать система амортизации, ограничиваю¬
щая перегрузку на уровне 500 g, с одновременным
разделением частей пенетратора: внедряемой, про¬
никающей на глубину до 6 метров, и хвостовой,
остающейся в поверхностном слое грунта. Сам
процесс внедрения пенетратора обеспечивал изу¬
чение свойств грунта и одновременно стабильное
положение над поверхностью хвостового отсека с находящимися в нем ТВ-камерами
и научной аппаратурой.
Проект «Марс-96» был доведен до этапа запуска, который состоялся 16 ноября
1996 года. Однако из-за неполадок в работе системы управления разгонного блока
аппарат не вышел на траекторию полета к Марсу. Это ввело планетное научное со¬
общество в состояние прострации, выход из которого произошел благодаря усилиям
группы энтузиастов, сумевших переломить ситуацию. Был предложен и схематично
проработан проект нового базового многоцелевого космического аппарата на осно¬
ве современных технологий, что обеспечивало его запуск носителем среднего, а не
тяжелого класса (типа «Союз-Фрегат» или «Зенит» вместо «Протона») и значитель¬
ное удешевление запусков к планетам и малым телам Солнечной системы. Первым
в ряду таких КА нового поколения был предложен проект полета к Фобосу для забо¬
ра образцов его пород и их возврата на Землю, который был назван «Фобос-Грунт»
(рисунок 1.1.5). Идея встретила поддержку ЦНИИМАШ, НПО им. Лавочкина, ИПМ
им. Келдыша РАН, ИКИ РАН, МАИ, ГЕОХИ РАН, которые активно включились в его
разработку, а вскоре проект получил одобрение Совета по космосу РАН и Роскосмо¬
са. К большому сожалению, из-за хронического недофинансирования этого проекта
сроки его реализации трижды смещались от первоначально намеченного 2003 года
на 2005-й, а затем на 2009-й и, наконец, на 2011-й.
Выбор в качестве актуальной научной задачи планетных исследований полета к Фо¬
босу и доставки на Землю образцов пород с этого небесного тела не случаен. Детальное
изучение в условиях земных лабораторий внеземного вещества, «закапсулировавшего»
14
1-1
в своем составе процессы химических и фазовых превращений на протяжении мил¬
лиардов лет, способно дать ответы на принципиально важные вопросы относительно
природы Марса и происхождения и эволюции небесных тел и Солнечной системы в це¬
лом, и тем самым внести решающий вклад в решение ключевых проблем современно¬
го естествознания - космогонии, космохимии, астробиологии. Следует подчеркнуть,
что проблемы космохимии выходят сейчас на передний край в исследованиях планет
и малых тел, поскольку только детальное изучение внеземного вещества способно дать
ответы о генезисе Солнечной системы, реконструировать основные механизмы ее фор¬
мирования. С этими проблемами непосредственно связаны также интригующие вопро¬
сы относительно эволюции в космосе и на небесных телах первичного органического
вещества и зарождения жизни. Образцы пород с Фобоса представляют особый интерес
еще и в силу остающейся до конца не решенной проблемы происхождения спутников
Марса (Фобоса и Деймоса): являются ли они реликтовыми телами со времени аккреци¬
онной стадии или, скорее, астероидами, позднее захваченными гравитационным полем
планеты. Сценарий захвата в целом отвечает концепции, согласно которой постоянно
происходит миграция комет и астероидов с периферии Солнечной системы (пояса Эд-
жеворта-Койпера) в ее внутренние области - зону расположения планет земной груп¬
пы. Наиболее интенсивно миграция происходила на самых ранних этапах эволюции
Солнечной системы, с чем связывается, в частности, доставка основной массы летучих
на планеты земной группы в процессе гетерогенной аккреции и формирования их ат-
мосфер/гидросфер. Согласно этим оценкам, количество воды, доставленной на Землю
Рисунок 1.1.5. Общий вид КА «Фобос-Грунт»
15
1-1
кометами и астероидами класса углистых хондритов, могло быть сопоставимо с массой
земных океанов. Моделирование миграции малых тел непосредственно связано также
с анализом роли столкновительных процессов и транспорта вещества в Солнечной си¬
стеме и оценками эффективности переходов астероидов на орбиты, пересекающиеся
с орбитами Земли, Венеры, Марса, в частности с проблемой астероидной опасности.
В свою очередь, миграция пылевых частиц могла внести существенный вклад в пере¬
нос органики и даже биогенных форм.
Можно ожидать, что в слое реголита на поверхности Фобоса присутствуют также
частицы вещества с Марса, покидавшие его вследствие импактных процессов, следы
которых очевидны. О такой возможности определенно свидетельствуют найденные
на Земле метеориты класса SNC, происхождение которых с высокой степенью веро¬
ятности связывается с Марсом. Если бы аналогичные фрагменты были найдены среди
пород, доставленных с Фобоса, это значительно повысило бы надежность выводов от¬
носительно хронологии эволюционных процессов на Марсе, а возможно, и о совмест¬
ном происхождении планеты и ее спутников (как это имеет место в системах планет-ги¬
гантов), что имеет неоценимое значение для сравнительной планетологии. В свою
очередь, длительные исследования физико-химических свойств на поверхности Фобо¬
са и в его ближайшем космическом окружении могли бы дать важные сведения о свой¬
ствах поверхности и природе этого астероидоподобного тела, особенностях его вну¬
треннего строения и собственного движения, физических условиях околопланетной
среды в окрестностях Марса и Фобоса (пылевые частицы тора вдоль орбиты Фобоса,
плазма и ее вариации и др.). Получение данных измерений элементного, минерало¬
гического и изотопного состава, в первую очередь изотопных отношений кислорода
и основных породообразующих элементов на Фобосе, представляет первостепенный
интерес для понимания процессов эволюции вещества в пределах Солнечной системы.
Забор грунта с поверхности спутника Марса, как и с самого Марса, - чрезвы¬
чайно сложная научно-техническая задача. Успех проекта зависит как от надежно¬
сти космического аппарата, представляющего собой сложный комплекс современных
Рисунок 1.1.6. КА «Бумеранг»
16
1-1
компьютеризированных систем и автоматических исполнительных органов, работа¬
ющих с высокой степенью автономии, так и от баллистико-навигационного обеспе¬
чения миссии в едином контуре функционирования бортового и наземного комплек¬
сов управления. Требуется высокая точность и надежность их работы на всех этапах
полета, обеспечивающая гибкость маневрирования, формирование промежуточной
орбиты вокруг Марса и орбиты сближения с Фобосом, мягкую посадку на его по¬
верхность, взлет с поверхности и выход на околомарсианскую орбиту, перевод воз¬
вращаемого аппарата на траекторию полета к Земле, вход в ее атмосферу и посад¬
ку капсулы с грунтом в заданном районе. Очень хотелось верить, что нам удастся
все эти задачи решить и тем самым не только компенсировать неудачу с проектом
«Фобос-1,-2», но и продолжить славные отечественные традиции в космических
исследованиях планет. К сожалению, этого не случилось: аппарат «Фобос-Грунт»
не вышел на траекторию полета к Марсу и тем самым не оправдал затраченных
на него многолетних усилий больших коллективов специалистов, оставил неосу¬
ществленными возлагавшиеся на него надежды. Новый подобный запуск, на этот раз
под названием «Бумеранг» (рисунок 1.1.6), предварительно намечен на 2023-2025 гг.
Анализируя произошедшее за последние десятилетия с нашими планетными мис¬
сиями и существующую ситуацию, естественно обращаешься к глубинным причинам,
лежащим в основе этих неудач. Они, несомненно, связаны с социально-экономически¬
ми потрясениями в стране в постперестроечный период, последствиями разрушитель¬
ных 1990-х, утратой многих приоритетов, среди которых оказался научный космос.
Катастрофическими для отечественной программы планетных исследований на протя¬
жении прошедших лет оказались ее хроническое недофинансирование, уход из жизни
настоящих лидеров космической отрасли, образовавшийся разрыв между поколения¬
ми. Громадные негативные последствия для всей нашей планетной программы, вклю¬
чая исследования Луны, имели неудачи с запусками КА «Марс-96» и «Фобос-Грунт».
Не способствовали успехам и произошедшие изменения в системе и методах разработ¬
ки и комплектации космических аппаратов и систем, колоссально возросший уровень
бюрократии, несопоставимый с тем. который был во времена Г.Н. Бабакина, славны¬
ми делами которого мы и сегодня заслуженно гордимся. В результате мы не просто
утратили лидирующую роль, но откатились в области лунно-планетных исследований
на позиции третьестепенных космических держав, пропустив вперед себя не только
американцев, европейцев и китайцев, но также японцев и индийцев.
Оглядываясь сегодня назад, испытываешь смешанное чувство восхищения по¬
истине выдающимися достижениями зарубежных ученых в изучении Вселенной
и, в частности, в исследованиях Солнечной системы, среди которых амбициозные
проекты полетов к Луне, Марсу, Юпитеру, Сатурну, астероидам, кометам, и чувство
глубокой горечи, оттого, что вклад российских ученых в эти достижения минима¬
лен. Осуществленные за последние десятилетия марсианские миссии открыли но¬
вую страницу в изучении этой планеты. Среди них полеты нескольких американских
КА (спутники Марса «Глобальные наблюдения Марса» (Mars Global Surveyor, MGS),
«Марсианский разведывательный спутник» (Mars Reconnaissance Orbiter), «Марс
Одиссей» (Mars Odyssey), «Феникс» (Phoenix), MAVEN для исследований верхней
атмосферы Марса), а также европейского КА «Марс Экспресс» (Mars Express), на ко¬
тором были установлены российские приборы, разработанные ранее в рамках про¬
екта «Марс-96». Российские ученые приняли также участие в американской миссии
КА «Марс Одиссей», на борту которого был установлен инструмент для измерения
17
1-1
методом нейтронного мониторинга содержания в верхнем поверхностном слое водо¬
родсодержащих соединений, наиболее вероятным кандидатом которых может быть
вода. Индийским космическим агентством (ISRO) был выведен на марсианскую ор¬
биту с перицентром 400 и апоцентром 70 000 км спутник Mangalyaan, предназна¬
ченный для изучения геологии, минералогического состава поверхности, свойств
атмосферы и климата, хотя каких-либо значимых результатов получено не было.
Обширную программу исследований Марса намечают китайцы, достигшие больших
успехов в изучении Луны, включая высадку на ее поверхность лунохода.
Значительно пополнили наши знания о Марсе американские марсоходы (рове¬
ры), сначала сравнительно небольших размеров - «Первооткрыватель» (Pathfinder),
«Дух» (Spirit) и «Возможность» (Opportunity), а с 2012 г. начал работу хорошо обору¬
дованный марсоход «Любознательность» (Curiosity). Его целью является получение
ответов на многие интригующие вопросы о природе Марса, в первую очередь о его
геологической истории и климатической эволюции, напрямую связанные с пробле¬
мами палеобиологии. Важной задачей является анализ наличия воды в приповерх¬
ностном слое по трассе движения, также осуществляемый прибором российского
производства. Аппарат позволил получить ряд интересных данных, в том числе о со¬
ставе грунта, распределении и вариациях содержании воды, свойствах атмосферы,
хотя никаких признаков жизни, за исключением дискуссионного вопроса о природе
незначительного переменного содержания в атмосфере метана, обнаружено не было.
Наше возвращение к исследованиям Марса началось с реализации совместного
российско-европейского проекта «ЭкзоМарс», состоящего из двух этапов. На первом
этапе в 2016 г. был запущен комплекс, состоящий из орбитального аппарата и поса¬
дочного блока (демонстрационного модуля) «Скиапарелли» (Schiaparelli) для отра¬
ботки системы посадки на Марс, с очень небольшим составом научной аппаратуры
(DREAMS) и ограниченным временем жизни из-за малой энергоемкости. Спутник
оснащен приборами российского и европейского производства, предназначенными
для высокоточных измерений содержания и вариаций в марсианской атмосфере,
Рисунок 1.1.7. Общий вид КА «ЭкзоМарс-2022»
18
1-1
состоящей почти целиком из углекислоты, примесей других газов (в первую очередь,
метана). Отсюда название спутника TGO - Trace Gases Orbiter. Другой задачей являет¬
ся измерение в атмосфере и в грунте воды. Эти исследования нацелены на получение
данных, которые позволили бы реконструировать историю Марса, в первую очередь,
его прошлого климата. К сожалению, тестовый эксперимент по осуществлению по¬
садки на поверхность посадочного аппарата окончился неудачей - аппарат разбился,
но причины установлены, что позволяет рассчитывать на успешный результат посад¬
ки на втором этапе проекта «ЭкзоМарс» (рисунок 1.1.7). Он более амбициозен, его
главной задачей является высадка на поверхность Марса в 2022 году 345-кг марсохо¬
да. Предусмотрены длительные комплексные исследования на поверхности планеты
на марсоходе и посадочной платформе. В решении этой задачи участвуют совместно
российские и европейские специалисты, о деталях подробно говорится в статьях дан¬
ного сборника, поэтому мы не будем здесь касаться научной и технической сторон
проекта. Вместо этого кратко обсудим то, что нам известно сегодня о Марсе, каковы
главные проблемы исследований.
1.1.2. Современный Марс
Изучение Марса как антипода Венеры по своим природным свойствам, дает воз¬
можность найти подход к решению ключевой проблемы: что предопределило раз¬
личные ветви эволюции соседних с Землей планет. Это не простая задача, которая
требует глубоких исследований. Самые актуальные вопросы включают изучение ге¬
ологических и геохимических процессов, состава пород, сформировавших кору пла¬
неты, вековых и (возможно) периодических изменений климата, содержания воды
на разных горизонтах и цикличности ее появления на поверхности. Накопление экс¬
периментальных данных лежит в основе создания геологических и климатических
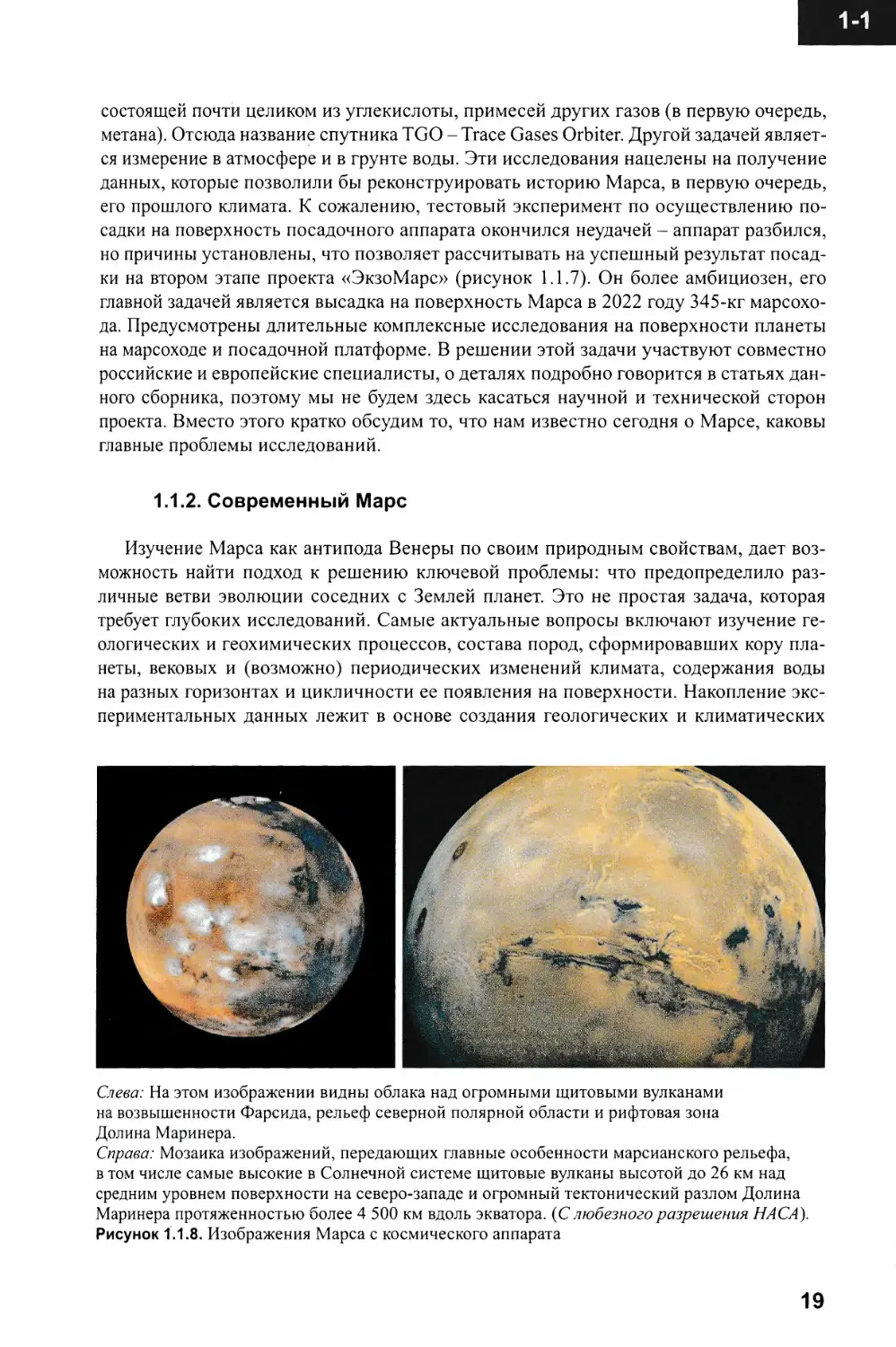
Слева: На этом изображении видны облака над огромными щитовыми вулканами
на возвышенности Фарсида, рельеф северной полярной области и рифтовая зона
Долина Маринера.
Справа: Мозаика изображений, передающих главные особенности марсианского рельефа,
в том числе самые высокие в Солнечной системе щитовые вулканы высотой до 26 км над
средним уровнем поверхности на северо-западе и огромный тектонический разлом Долина
Маринера протяженностью более 4 500 км вдоль экватора. (С любезного разрешения НАСА).
Рисунок 1.1.8. Изображения Марса с космического аппарата
19
1-1
эволюционных моделей, которые так или иначе сфокусированы на истории воды в ге¬
ологическом прошлом и настоящем Марса, а с ней, в свою очередь, непосредственно
связаны перспективы обнаружения следов существующей или исчезнувшей прими¬
тивной жизни, в последнем случае в форме бактериальных окаменелостей (fossils).
Достаточно подробные сведения о свойствах и природе Марса, включая сравнитель¬
но-планетологические проблемы его изучения, можно найти в сборниках и моногра¬
фиях {Mars ; Маров М.Я., 2018; Мороз В.И., 1997; Marov M.Ya., 2015; Ehlmann B.L.,
Anderson F.S., Hanna A., et al, 2016)
Поверхность, рельеф, геология. Поверхность Марса очень неоднородна, различ¬
ные формы рельефа преобладают в Северном и Южном полушариях, причем в Се¬
верном поверхность находится на 1-2 км ниже среднего уровня. Это так называемая
дихотомия фигуры планеты. Южное полушарие представлено сильно кратериро-
ванными ландшафтами, а само оно примерно на 3—4 млрд лет старше, чем гораздо
более молодые равнины и уникальные геологические структуры Северного полуша¬
рия. К наиболее впечатляющим особенностям рельефа относятся большая рифто¬
вая зона - Долина Маринера (Valles Marineris), представляющая собой гигантскую
систему рифтообразных депрессий, и высокогорные районы - плато Фарсида и Эли¬
зиум с расположенными на них гигантскими щитовыми вулканами, наибольшие
из которых горы Олимп, Арсия и Павлина (рисунок 1.1.8).
а в
а - распределение огромных щитовых вулканов в области Фарсида. Слева показана
цветовая шкала высот (от-1 до 27 км), справа вверху показан горизонтальный масштаб
в сопоставлении с размером Большого острова;
на Гавайских островах;
б - самый большой марсианский вулкан гора Олимп —500 км в основании, изображение
получено КА «Викинг»;
в - кальдера на вершине горы Олимп размером 85*60 км, изображение получено КА
«Марс Экспресс». В окрестности горы Олимп и на самом вулкане практически отсутствуют
кратеры ударного происхождения, что свидетельствует о его сравнительно молодом возрасте.
{С любезного разрешения НАСА).
Рисунок 1.1.9. Марсианские вулканы
20
1-1
Рисунок 1.1.10. Рельеф Марса по результатам лазерной альтиметрии (MOLA) с марсианского
орбитального аппарата «Глобал Сервейор» (Mars Global Surveyor, MGS). Масштаб высоты
от темных синих бассейнов до красно-белых возвышеностей/гор показан внизу слева. Марс
обладает очень сложным рельефом, от обширных низких равнин в Северном полушарии
до сильно кратерированных ландшафтов в Южном полушарии с областями перехода между
ними. На верхнем изображении (Северное полушарие) четко выделяются нагорье Фарсида
с несколькими огромными щитовыми вулканами с крутыми склонами и расположенная почти
параллельно экватору к юго-востоку от нагорья Фарсида огромная рифтовая зона Долина
Маринера. На нижнем изображении (Южное полушарие) выделяются огромные бассейны
Эллада приблизительно 2 000 км в поперечнике (темно- синего цвета) и Аргир ~900 км
в поперечнике (светло- синего цвета). (С любезного разрешения НАСА}
Долина Маринера - это гигантский каньон шириной, достигающей 600 км, и глу¬
биной 7-10 км, возможно, тектонического происхождения, который простирается
на ~4 500 км вдоль экватора, с самыми разнообразными геологическими структурами
внутри этого образования. Гора Олимп является самым высоким вулканом на пла¬
нетах (рисунок 1.1.9) и второй по высоте горой в Солнечной системе после пика
Реясильвия на астероиде Веста. Олимп возвышается примерно на 26 км над средним
уровнем поверхности Марса, размер его основания почти 600 км, и кратер на верши¬
не (кальдера) достигает 70 км в поперечнике и 3 км по глубине. Он затмевает Эве¬
рест - самую большую гору на Земле, высота которого составляет только 8,8 км. Еще
одной геологической особенностью Марса является также находящееся в Северном
полушарии гигантское образование Ваститас Бореалис (Vastitas Borealis Formation,
VBF) размером в несколько тысяч километров (в переводе с латинского это название
21
1-1
означает Северная пустошь, а по-русски VBF называют Великой северной равниной).
Оно могло быть дном древнего океана с мощным накоплением осадков, а возмож¬
но, и грязевых отложений. Океаническая гипотеза подкрепляется топографическими
особенностями границ VBF, в то время как предположение о грязевых отложениях
можно связать с деятельностью грязевых вулканов.
Рисунок 1.1.11. Рифтовая зона тектонического происхождения протяженностью свыше
4500 км вдоль марсианского экватора. Максимальная ширина 100 км, глубина 8 км.
(С любезного разрешения НАСА.)
Рисунок 1.1.12. Типичная область резкого перехода от возвышенного рельефа
к равнинами на границе между Северным и Южным полушариями Марса.
{Слюбезного разрешения НАСА)
22
1-1
Рисунок 1.1.13. Северная (слева) и южная (справа) полярные шапки на Марсе. В северной
полярной шапке СО2 накапливается тонким слоем толщиной приблизительно 1 м только
во время северной зимы. Слой имеет диаметр -1000 км в течение северного марсианского
лета над постоянным слоем водяного льда толщиной - 3 км и объемом льда - 1,6 млн км3.
Южная полярная шапка сохраняет постоянное покрытие из сухого льда толщиной
приблизительно 8 м. Ее диаметр -350 км. (С любезного разрешения НАСА)
Подробное изучение марсианского рельефа было проведено с использованием ла¬
зерного альтиметра (MOLA), установленного на спутнике «Марс Глобал Сейвейор»
(Mars Global Surveyor). Это позволило провести детальное картографирование по¬
верхности (рисунок 1.1.10). На картах наглядно представлены обширные низменные
равнины Северного полушария, сменяющиеся сильно кратерированными областя¬
ми Южного полушария. Особо выделяются плоскогорье Фарсида с расположенны¬
ми на нем громадными щитовыми вулканами с крутыми склонами и примыкающая
к нему с юго-востока гигантская Долина Маринера вблизи экватора. Более подроб¬
но они показаны на рисунках 1.1.9 и 1.1.11. соответственно. В Южном полушарии
выделяются огромные котловины - Эллада (Hellas) поперечником приблизительно
2200 км и Аргир (Argir), размер которого примерно 900 км. На границе между Се¬
верным и Южным полушариями хорошо видны переходные зоны, отделяющие друг
от друга геологические провинции с различными чертами рельефа (рисунок 1.1.12).
Большой интерес представляют полярные шапки Марса, которые неразрывно
связаны с характером его атмосферной циркуляции и климатом, причем последний
зависит от наклона орбиты (рисунок 1.1.13). Наиболее обширна по размерам и за¬
пасам льда северная полярная шапка, температура атмосферы на которой не подни¬
мается выше -70°С даже летом. Зимой эта шапка разрастается на 1500 км, дости¬
гая 50° широты, на ней конденсируется из атмосферы углекислый газ, осаждаемый
в виде тонкого слоя сухого льда приблизительно метровой толщины, которые летом
стаивает, обнажая сохраняющийся постоянно водяной лед приблизительно трехки¬
лометровой толщины с объемом льда -1,6 миллионов кубометров. Эта оценка была
получена путем измерений при помощи бортового радара, установленного на евро¬
пейском спутнике «Марс-Экспресс». Для сравнения объем льда в Антарктиде при¬
мерно в 20 раз больше. Южная полярная шапка - меньших размеров, ее поперечник
23
1-1
Вода и климат на Марсе: связь с геологической историей
Нойская эра
Амазонийская эра
3.0 2.5 2.0
миллиарды лет
- Сильная ударная
бомбардировка.
- Образование
систем долин.
- «Теплый/влажный»
ранний Марс ?
- Вулканизм.
- Речные русла.
- Океаны?
- Ледяные
отложения
в южной
приполярной
области
- Слабая ударная бомбардировка.
- Поздняя стадия формирования
полярных шапок.
- Продолжение вулканизма на плато
Фарсида.
- Продолжение образования речных
стоков русел.
«Холодный/сухой» поздний Марс.
Рисунок 1.1.14. Геологическая история Марса, с которой связана история воды и климата.
Выделены три главных геологических периода: Нойский, Гесперийский и Амазонийский
на временной шкале от 4,56 млрд лет до настоящего времени. Указаны основные процессы
в каждом из периодов, которые формировали марсианский ландшафт и климат.
(С любезного разрешения Джеймса Хэда/Университет Брауна)
обычно не превышает 400 км. На ней также конденсируется из атмосферы углекис¬
лый газ, слой которого зимой толще, а летом он тает быстрее из-за эксцентриситета
марсианской орбиты, так что южная сторона планеты оказывается ближе к Солнцу.
Поверхность и атмосфера Марса, несомненно, претерпели драматические измене¬
ния в течение его геологической истории как результат интенсивной ударной бомбар¬
дировки и вулканических, тектонических и эрозионных процессов, тесно связанных
с историей воды и климатом. Тектоника, вероятно, играла существенную роль в геоло¬
гической истории древнего Марса, хотя она сильно отличалась от глобальной тектоники
земных плит. Значительно большее воздействие на формирование рельефа оказала вул¬
каническая активность, по-видимому, длительное время существовавшая на планете.
Выделяют три главные эпохи в геологической эволюции Марса:
1) Нойская (Noachian) эра, охватывающая 4,6-3,7 млрд лет марсианской истории,
когда сформировалась самая древняя кора и прекратилась интенсивная ударная бом¬
бардировка (в том числе относящаяся к периоду LHB). В эту эпоху ранний Марс, как
предполагают, был теплый и влажный, по поверхности текли реки, возникла сеть ру¬
сел и долин. По времени Нойская эра примерно совпадает с земными Катархейским
и ранним Архейским периодами в геологической истории планеты - эонами, когда
на Земле, вероятно, возникли первые формы жизни.
24
1-1
2) Гесперийская (Hesperian) эра (3,7-2,9 млрд лет назад) - с развитой вулканиче¬
ской деятельностью, излияниями громадных лавовых потоков, формированием рав¬
нин и каналов оттока, а также с предполагаемым существованием достаточно плот¬
ной атмосферы и океана. Можно думать, что это - вершина эволюции Марса.
3) Амазонийская (Amazonian) эра, (от 2,9 млрд лет назад до нашего времени), во
время которой с меньшей интенсивностью образовывались ударные кратеры, возника¬
ли более молодые особенности рельефа, в частности из-за вулканических извержений,
включая продолжающуюся активность горы Олимпа и других соседних вулканов,
формирование каналов оттока и последней стадии полярных шапок (рисунок 1.1.14).
В течение этого последнего периода климат Марса драматическим образом изменился,
что, в конечном счете, привело к современной планете с холодным и сухим климатом.
Проблема геологической эволюции Марса и скорости дифференциации его недр
напрямую связана с изучением химического и минералогического состава вещества,
для чего необходимы прямые измерения по типу проводимых с марсохода «Кьюрио-
сити» при помощи бортового инструмента «Анализ марсианских образцов» (SAM),
включающего газовый хроматограф и масс-спектрометр. Для сбора грунта и пыли ис¬
пользуется совок специальной формы и бурение на глубину несколько десятков сан¬
тиметров. Грунт отличается разнообразием, он гранулирован и по структуре «мельче
сахара, но грубее муки». Измерение состава вулканических пород проводилось путем
пиролизного анализа - дегазации взятых образцов при нагреве до температуры 83 5°C
в среде нейтрального гелия. Кроме значительного содержания двуокиси углерода
СО2, кислорода О2, серосодержащих соединений SO2 и хлора С1, была найдена вода.
Источником СО2, вероятно, служат содержащиеся в породах Fe или Mg карбонаты.
Хлор, по-видимому, имеет марсианское происхождение и вместе с кислородом выде¬
ляется из перхлоратов (солей хлорной кислоты - перхлоратов металлов, неметаллов
и др.), которые ранее были обнаружены на Марсе.
Содержание извлеченной воды оказалось весьма высоким, от полутора до трех
весовых процентов, причем молекулы воды связаны с мелкозернистыми частицами
грунта. Поскольку такое содержание воды было обнаружено в нескольких образцах,
взятых по маршруту марсохода, можно, видимо, говорить о распределении воды
по всей планете, а не о сосредоточении ее только, главным образом, на высоких ши¬
ротах, как свидетельствуют полученные ранее данные нейтронного мониторинга с ор¬
биты. Этим же методом, при помощи установленного на борту марсохода нейтронно¬
го спектрометра ДАН российского производства, независимо изучается содержание
воды и хлора в марсианских породах по трассе движения, причем с гораздо более вы¬
соким разрешением, чем с орбитального аппарата. По принципу функционирования
этот прибор аналогичен спектрометрам LAND, установленному на лунном спутнике
LRO, и HAND, установленному на марсианском спутнике Mars Odyssey. В экспери¬
ментах с использованием прибора «Анализ марсианских образцов» было найдено, что
марсианская вода, извлеченная из грунта, обогащена с тяжелым изотопом водорода,
дейтерием, в пропорции, аналогичной его относительному содержанию в атмосфере.
Аналогичное сходство с атмосферой установлено для изотопов углерода. Это указы¬
вает на то, что поверхность Марса интенсивно взаимодействует с атмосферой и су¬
щественную роль в этом взаимодействии играет пыль, глобально перемещающаяся
по планете в периоды пылевых бурь и реагирующая с атмосферными газами.
Более сложной является проблема обнаружения органических веществ, которые
едва ли могли сохраниться на поверхности, подверженной воздействию жесткой ра¬
25
1-1
диации и окислению. Прибором SAM были обнаружены следы органики, содержащей
углерод и хлор, хотя эти результаты нельзя истолковать однозначно. Для выяснения
происхождения органики важно знать изотопный состав углерода, поскольку на Зем¬
ле преобладает 12С, а в метеоритах 13С. Вместе с тем, нельзя исключить загрязнения
образцов фоновой земной органикой при их нагреве. Нельзя также утверждать, что
данные о наличии углерода относятся к веществу, имеющему марсианское происхож¬
дение, так как его источником могли быть как минералы (например, соли магния), так
и бомбардировка раннего Марса кометами и астероидами. Экзогенная органика могла
взаимодействовать с перхлоратами с выделением атомарного хлора. Эти токсичные
соединения были ранее (в 2008 г.) найдены в полярных областях Марса, а позднее
обнаружены также на низких широтах. Заметим, что распространенность токсичных
веществ на Марсе не только уменьшает предпосылки обнаружить органику и следы
жизни на поверхности планеты, но и создает дополнительные проблемы для экипа¬
жей будущих экспедиций на Марс.
На марсоходе «Кьюриосити» проводились также детальные исследования мине¬
ралогического состава поверхностных пород с использованием стандартного лабора¬
торного метода идентификации минералов на Земле - рентгенографического анализа
(Ehlmann, B.L., and Edwards. C.S., 2014). Это позволило отождествить десять различ¬
ных кристаллических минералов и, кроме того, найти в минеральных структурах не¬
ожиданно большое число аморфных компонентов. Аморфные материалы, подобные
стекловидным веществам, являются компонентом некоторых вулканических отложе¬
ний на Земле. Поэтому полученные результаты и по химическому составу, и по фа¬
зовому состоянию пород дают ключ к реконструкции вулканической истории Марса
и пониманию того, при каких значениях тепловых и химических параметров проис¬
ходила кристаллизация.
Важным геохимическим ключом к ранней геологической истории Марса стало
изучение метеоритов класса SNC, происхождение которых связывают с Марсом.
В частности, в одном из таких метеоритов NWA7533 были обнаружены обломки
пород, идентифицированные как брекчия марсианского реголита. Его уникальный
состав отличен от состава реголита Луны, в нем содержатся кристаллы циркона,
обычно образующиеся во время кристаллизации магмы и не подверженные ударным
процессам плавления, влияющим на состав вмещающих пород. Их измеренный воз¬
раст составил 4428,6 млн лет, что говорит о раннем кристаллическом дифференциро¬
вании пород,. Кроме того, результаты этих исследований позволяют предположить,
что марсианская кора и запасы в ней летучих сформировались в течение первых ста
миллионов лет марсианской истории, и что ее возраст примерно такой же, как возраст
самой ранней коры на Луне и Земле.
Внутреннее строение. Геология поверхностных структур тесно связана с внутрен¬
ним строением планеты, включающим в себя физическое состояние недр, толщину
коры и мантии, радиус и фазовое состояние ядра. Основой этих характеристик слу¬
жат разрабатываемые модели внутреннего строения, ограничениями служат (при их
доступности) сейсмические данные, характеристики гравитационного поля, морфо¬
логия поверхности, величина момента инерции, внутреннего теплового потока. При¬
влекаются оценки свойств минералов и фазовых переходов при высоких давлениях
и температурах, реологии недр, приливных чисел Лява и др. В целом разработанные
модели недр Марса находятся в согласии с хондритовой гипотезой происхождения
26
1-1
а
Газовая оболочка
Жидкий водород
Металлический
водород
Железо-каменное
ядро
Юпитер
Тс = 25000К
Рс = 80 Мбар
I = 0,262
р - скорость S - скорость Плотность
продольных волн поперечных волн или1ниыь
В
б
а - внутренняя структура планет земной группы, Луны и Юпитера. Порядок в расположении
главных областей (ядро, мантия, кора) является следствием дифференциации составляющего
их вещества на оболочки.
Их протяженность зависит от размера (массы) планеты, содержания главных компонентов
и температуры конденсации в зоне формирования. Масса тела предопределяет состояние ядра
и толщину коры (литосферы). Источник: Википедия.
б - Параметры недр (температура Г, давление Р и безразмерный момент инерции У) планет
земной группы и Луны, в сравнении с параметрами Юпитера. Недра Марса занимают
промежуточное положение между Луной и Землей-Венерой.
в - Скорость распространения сейсмических волн и изменения плотности внутри Земли
по данным измерений. Отмечены главные области внутри Земли и границы между ними.
Эта модель была создана в начале 1980-х гг., она называется «Предварительная эталонная
модель Земли» (Preliminary Earth Reference Model, PREM). Источник: Википедия.
Рисунок 1.1.15
27
1-1
а
б
а - Следы палеомагнитного поля в виде узких полос на поверхности Марса в Южном
полушарии (палеомагнетизм). Эти следы хорошо коррелируют с выходами поверхностных
пород, обогащенных гематитом (оксидами железа). Данные измерений на орбитальном
КА «Марс Глобал Сервейор».
б - Гематитовые сферулы в марсианском грунте. Данные получены марсоходом
«Оппортьюнити» (Mars Exploration Rover Opportunity).
С любезного разрешения НАСА.
Рисунок 1.1.16. Свидетельства существования на Марсе древнего магнитного поля
и генерировавшего его жидкого ядра
планет земной группы. Очевидно, Марс испытал раннюю дифференциацию, завер¬
шившуюся выделением жидкого ядра, частично расплавленной мантии и твердой
коры (рисунок 1.1.15), хотя дифференциация не была столь же полной, как на Земле.
Конвекция в ядре привела к возникновению магнитного поля посредством механиз¬
ма динамо, а конвективный тепловой перенос в мантии вызвал широкомасштабный
вулканизм и, вероятно, ранние тектонические процессы. Примесь серы к железу при¬
водит к понижению температуры плавления ядра, и оно, возможно, сохранилось ча¬
стично жидким в современную эпоху.
Наиболее широко распространенный вулканизм с образованием громадных щито¬
вых вулканов относят к Нойско-Гесперийской эре, когда недра были еще горячими.
Марс охладился, однако, достаточно быстро из-за его относительно небольшого раз¬
мера и, соответственно, ограниченных накопленных запасов радиоактивных долго¬
живущих изотопов урана, тория и калия. Согласно разработанным моделям недр, со¬
временная внутренняя структура Марса включает в себя очень толстую (50-130 км)
кору, силикатную мантию толщиной приблизительно 1800 км и частично жидкое ядро
(состоящее в основном из железа с примесью серы), радиус которого около 1480 км,
что составляет 14-17% массы планеты. Внутренняя структура напоминает структуру
Земли с тем, однако, отличием, что фазовые переходы, например переход от оливина
к шпинели, произошли в недрах Марса на гораздо более глубоком уровне из-за мень¬
шего ускорения силы тяжести.
В пользу существования в ранней марсианской истории жидкого ядра свидетель¬
ствуют признаки магнитного поля, оставившего после себя в современную эпоху
остаточную намагниченность поверхностных пород (главным образом, в Южном
28
1-1
полушарии (рисунок 1.1.16)). Эти остаточные магнитные аномалии (палеомагнетизм)
образуют систему полос на поверхности в областях, богатых гематитом (оксидами
железа). Напряженность магнитного поля в районе экватора, создаваемого этими ано¬
малиями, не превышает 60 нанотесла, что почти в 500 раз слабее, чем на Земле.
Атмосфера. Марс обладает очень тонкой, разреженной атмосферой. Среднее дав¬
ление на поверхности (соответствующее тройной точке воды на диаграмме фазовых
переходов) равно 6,1 мбар, что в 160 раз ниже давления на Земле. Давление меня¬
ется в зависимости от рельефа, увеличиваясь до 12,4 мбар на дне котловины Элла¬
да и уменьшаясь до 0,5 мбар на вершине горы Олимп. Атмосфера состоит, главным
образом, из углекислого газа (95% по объему), т.е. почти такая же, как на Венере.
Другими компонентами являются азот (2,7%) и аргон (1,6%). На уровне примесей
содержатся кислород (0,13%), окись углерода (0,02%) и водяной пар (0,01%). Анало¬
гичное содержание воды найдено марсоходом «Кьюриосити» в составе марсианской
пыли и свидетельствует о чрезвычайно низкой влажности на планете, ее очень сухой
атмосфере. Измеренное содержание воды в атмосфере соответствует десяткам или
сотням микрометров осажденной воды. Тем не менее, такое содержание оказывается
близким к насыщению в очень разряженной атмосфере, и вода может конденсиро¬
ваться на холодной поверхности в виде инея. Особый интерес с точки зрения воз¬
можной биологической активности вызывает метан. Сообщалось о его обнаружении
в атмосфере на пределе содержания порядка одной сто миллионной доли, хотя в дру¬
гих измерениях не регистрировались даже следы. Следует иметь в виду, что метан
может быть как органического, так и неорганического (вулканического) происхож¬
дения, подверженного вариациям. Так или иначе, его обнаружение не может быть
решающим аргументом, чтобы судить о наличии потенциальной марсианской биоты
(Jakosky В.М. et al., 2018).
атмосфера перенос
Н2О, со2
АТМОСФЕРА
отложение сублимация
Н2О, С02 Н2О, СО2
Рисунок 1,1.17. Криосферно-атмосферный обмен летучими, приводящий к глобальной
атмосферной циркуляции на Марсе. (С любезного разрешения James Head/Brown University)
29
В отличие от Венеры, на Марсе нет ощутимого парникового эффекта, хотя даже
сильно разреженная атмосфера повышает температуру поверхности на несколько
градусов. Сезонно-суточные температурные колебания превышают 150°С: от +20°С
в некоторых областях вблизи экватора летом до -130°С в районах зимней полярной
шапки, где конденсируется сухой лед (СО2). Температурный градиент в тропосфе¬
ре равен приблизительно -2,57км, а выше тропопаузы (в стратосфере) температура
достигает почти постоянной величины -129°С. В атмосфере Марса, несмотря на ее
низкую плотность, постоянно присутствует взвешенная пыль, вследствие чего цвет
неба на Марсе отличается от земного. В то время как на Земле голубой цвет неба
обусловлен релеевским рассеянием, дневное небо на Марсе из-за рассеяния света
мелкими пылевыми частицами - оранжево-красное, а на горизонте оно становится
темно-фиолетовым.
Динамика марсианской разреженной атмосферы с низкой тепловой инерцией зна¬
чительно отличается от земной прежде всего из-за отсутствия на планете в современ¬
ную эпоху океанов, которые на Земле являются аккумуляторами тепла и сглаживают
суточные и сезонные температурные неоднородности. Для быстро вращающегося
Марса число Росби R0«l, и условие геострофического баланса выполняется. Гло¬
бальная модель циркуляции (GCM) предсказывает топологию движений в тропос¬
фере и стратосфере, в целом подобную топологии движений в земной атмосфере,
с преобладанием ветров, дующих в восточном направлении в высоких широтах зи¬
мой, около субтропиков летом и на запад - на других широтах. В то же время, в от¬
личие от Земли, важную роль в планетарной циркуляции на Марсе играют полярные
шапки. Как говорилось выше, они состоят из водяного льда, покрытого зимой льдом
из углекислого газа с более низкой температурой фазового перехода, вследствие чего
этот лед накапливается зимой и стаивает летом. Сезонный обмен углекислоты меж¬
ду атмосферой и криосферой в полярных шапках служит главным движущим ме¬
ханизмом атмосферного переноса в меридиональном направлении, как это показа¬
но на диаграмме (рисунок 1.1.17). Это приводит к образованию конфигураций типа
конвективных ячеек Хэдли с восходящими и нисходящими потоками, вызывающими
перестройку системы ветров у поверхности и на высоких широтах в летнем и зимнем
полушариях, которая сопровождается сезонными изменениями облачного покрова.
Конвекция компенсирует сильную статическую неустойчивость марсианской ат¬
мосферы, близкой к насыщению даже при очень низком относительном содержании
водяного пара. Тем не менее, даже в условиях низкой влажности и температурного
градиента, близкого к сухоадиабатическому, образуются довольно массивные облака.
Эффективность конвективного обмена в течение дневных часов примерно на порядок
выше, чем в атмосфере Земли, в то время как в течение ночи конвекция полностью
блокируется образующимся инверсионным слоем с положительным температурным
градиентом вблизи поверхности.
Конвекция поддерживает также постоянно высокое содержание пыли в марси¬
анской тропосфере и создает дополнительный динамический эффект, накладыва¬
ющийся на глобальную систему ветров и на процесс формирования дрейфа пере¬
носимых ветром песка и пыли. Этот эффект является результатом положительной
обратной связи между содержанием пыли и степенью нагревания атмосферного газа,
30
1-1
которое проявляется как термически генерируемые суточные и полусуточные прили¬
вы. Эта специфическая особенность марсианской атмосферы проявляется наиболее
сильно во время периодически возникающих глобальных пылевых бурь, когда мелкая
пыль поднимается на высоту более чем ЗСМ10 км благодаря турбулентному переме¬
шиванию. Так как из-за пыли тропосфера очень непрозрачна, возникает антипарни-
ковый эффект, который сильно ослабляет циркуляционный перенос у поверхности.
Открытие этого уникального природного явления во время глобальной пылевой бури
на Марсе в 1971 году послужило основой для проведения аналогии между этим яв¬
лением и возможностью возникновения «ядерной зимы» на Земле как неизбежного
следствия при широкомасштабном использовании атомного оружия и помогло осту¬
дить политические амбиции.
Следует также отметить, что циркуляция марсианской атмосферы сильно воздей¬
ствует на рельеф поверхности - ареографию; та, со своей стороны, влияет на харак¬
тер ветров и генерацию горизонтальных волн различного пространственного масшта¬
ба. В свою очередь, планетарные волны, вызываемые бароклинной неустойчивостью
атмосферы, а также внутренние гравитационные волны проявляются как нерегу¬
лярности в профилях температуры и вертикальных движений в стратосфере. С аре¬
ографией связаны также волны, наблюдаемые в структуре облаков с подветренной
стороны при их перемещении вокруг препятствий, что предполагает существование
в атмосфере Марса сильных потоков с поперечным градиентом скорости. Благодаря
потокам с поперечным градиентом скорости вся приповерхностная атмосфера оказы¬
вается турбулентной, даже при условиях ее относительно устойчивой стратификации
(Marov М. Ya., Kolesnichenko А. V., 2013).
Турбулентность дисперсной среды, сильно ’зависящая от динамического и энерге¬
тического взаимодействия газовой и пылевой фаз, несомненно, играет важную роль
в комплексе процессов, ответственных за формирование, поддержание и затухание
марсианской глобальной пылевой бури, хотя детали этого механизма до конца не
ясны. Тем не менее, можно сделать некоторые оценки, основываясь на оценках турбу¬
лентных потоков импульса и тепла, полученных из измеренных высотных профилей
средней скорости и температуры в поверхностном пограничном слое, хотя эти оценки
изменяются для турбулентных потоков при наличии тяжелой примеси. Тем не менее,
такой подход позволил придти к выводу, что присутствие относительно мелких частиц
пыли в приповерхностном потоке вызывает рост градиента скорости и увеличение эф¬
фекта отрыва частиц с поверхности (saltation), приводящий к переносу возрастающего
количества пыли в атмосферу. Такой механизм может лежать в основе не только воз¬
никновения глобальной пылевой бури, поднимающей миллиарды тонн пыли в атмос¬
феру, но и быть ответственным за образование локальных вихрей - пылевых дьяволов
(dust devils), в тысячи раз превосходящих те, что образуются на Земле.
В отличие от Земли, на Марсе, как и на Венере, нет собственного регулярного маг¬
нитного поля, и атмосфера непосредственно взаимодействует с натекающим солнеч¬
ным ветром. Из-за слабого магнитного поля и его неоднородного распределения воз¬
никают специфические детали при взаимодействии солнечного ветра с марсианской
ионосферой, вызывая формирование нерегулярной квазимагнитосферы планеты.
На дневной стороне возникает магнитный барьер, а силовые линии магнитного поля
выше ионопаузы сносятся на ночную сторону, создавая магнитный шлейф, который
31
1-1
Рисунок 1.1.18. Флювиальные процессы на поверхности Марса - русла древних
высохших рек с многочисленными притоками, простирающимися на сотни километров,
свидетельствующие о потоках жидкой воды на древнем Марсе. Изображение КА «Викинг».
(С любезного разрешения НАСА)
Рисунок 1.1.19. Борозды на поверхности Марса - очевидно, оставленные текущей водой, -
древние сухие русла рек (С любезного разрешения James Green /НАСА)
32
1-1
простирается далеко в космическое пространство. Эта область заполнена заряжен¬
ными частицами, «вытягиваемыми» из атмосферы образующимися электрическими
полями, подобно полярному ветру в верхней атмосфере Земли, создавая устойчивую
конфигурацию обтекания планеты солнечной плазмой. Процессы в верхней атмос¬
фере напрямую связаны с эволюцией Марса, в том числе с потерями воды. Изучение
этих проблем и особенностей аэрономии Марса было главной задачей американского
спутника MAVEN {Mars Atmosphere and Volatile EvolutioN - «Эволюция атмосферы
и летучих веществ на Марсе»). Он провел комплекс исследований состава и динами¬
ки верхней атмосферы, включая ее взаимодействие с солнечным ветром и механизм
убегания (диссипации) частиц в космическое пространство.
в г
а - расщелины, образованные вероятнее всего, потоками воды, стекавшими с крутых склонов;
б - овраги, которые могли образоваться из-за выхода (просачивания) воды на поверхность;
в - каньон Кандор в центральной части Долины Маринера. Видны изолированные, более
или менее упорядоченные структуры, образование которых, очевидно, связано с гигантскими
водными потоками. Они выделяются на фоне хаотической морфологии рельефа, относящейся
к ранним тектоно-вулканическим процессам.
г - следы водной эрозии, образующие специфические локальные упорядоченные структуры
в хаотическом ландшафте, формирование которых может быть связано с гигантскими
потоками воды. {С любезного разрешения НАСА).
Рисунок 1.1.20. Примеры водной эрозии на Марсе
33
1-1
а - обнаженный слоистый покров;
б - овражные альковы и каналы;
в - овражные каналы и конусы выноса (веера). (Согласно J. Dickson; S. Schon and J. Head).
Рисунок 1.1.21. Корреляция обогащенных льдом покровов и особенности сопутствующих им
оврагов в зависимости от широты
34
1-1
Рисунок 1.1.22. Конгломераты пород с признаками потоков воды. Изображение получено
марсоходом «Кьюриосити» (Curiosity). (С любезного разрешения James Green/HACK)
а - ледяное озеро на дне марсианского кратера. Изображение получено
со спутника «Марс-Экспресс» (Mars Express). (С любезного разрешения ЕКА)\
б - свидетельство заполнения кратера Эндевор водой, возможно дважды за геологическую
историю. (С любезного разрешения R. Arvidson, Saint Lewis University).
Рисунок 1.1.23
История воды. Постепенно накапливаются данные в поддержку идеи о том, что
в Нойско-Гесперийскую эпоху природные условия на Марсе сильно отличались
от современных. Очевидно, определяющую роль в этом играла вода. Сейчас, при
крайне низком атмосферном давлении, жидкая вода не может сохраняться на поверх¬
ности, в то время как древняя атмосфера, сопоставимая, как предполагают, по плот¬
ности с земной, могла обеспечивать достаточно высокую температуру поверхности
и не только удерживать воду, но и обеспечивать ее циркуляцию между поверхно¬
стью и атмосферой. Появление гидрологического цикла и вторичной атмосферы
35
1-1
3,9-3,6 млрд лет назад было тесно связано с тектоническими и вулканическими про¬
цессами. В свою очередь, метеорологические, гидрологические и гляциологические
процессы лежали в основе механизма выветривания (weathering), ответственного
за сильную эрозию кратеров и видоизменение марсианского ландшафта. Видимо,
самые древние кратеры были фактически стерты с поверхности, что было возможно
только в условиях плотной, а не современной атмосферы. Предположительно это
произошло более 3,5 млрд лет назад, перед катастрофическим коллапсом древней
атмосферы.
Действительно, многие характерные черты поверхностных ландшафтов указыва¬
ют на то, что потоки воды и, возможно, ледники бороздили поверхность Марса в те¬
чение миллионов лет его истории, причем наиболее активный период приходится,
вероятно, на время приблизительно от 3,8 до 3,6 млрд лет (рисунки 1.1.18 и 1.1.19).
сс
S
X
ф
X
о
£
о
время, млн лет от современной эпохи
б
а - периодические вариации наклонения Марса, вызванные совместным эффектом изменений
наклона марсианской орбиты и прецессии оси его собственного вращения;
б - вариации наклонения в течение последних трех миллионов лет. Текущая величина
соответствует 24°. Согласно J. Laskar.
Рисунок 1.1.24
36
1-1
Рисунок 1.1.25. Предельные вариации наклонения Марса и следствия их влияния на свойства
поверхности и климат Марса. При очень малом наклонении (< 20°) происходит падение
давления углекислой атмосферы, отложение СО2 около полюсов и непрерывное накопление
углекислоты на крутых склонах. При высоком наклонении (35^40°) средняя температура
возрастает из-за более высокой летней инсоляции на полюсах, что приводит к росту
выделения водяного пара/пыли, который перемещается в атмосферу, и к повышению
отложения воды на более низких широтах. Зона стабильности льда на поверхности сужается,
атмосфера становится толще, а ее непрозрачность - выше из-за более высоких содержаний
воды и пыли. (Согласно М. Kreslavsky & J. Head, Vernadsky Institute & Brown University)
В поддержку этой идеи свидетельствуют системы долин, напоминающих русла древ¬
них высохших рек с многочисленными притоками, простирающимися на сотни кило¬
метров. Некоторые из них могут быть связаны с интенсивными водными потоками,
вызванными таянием подповерхностного льда во время денудации ледяных линз,
другие уподоблены движениям Антарктических ледников. Примером структур, где
вода могла подниматься к поверхности через разломы в марсианской коре, служит
область к северу от плато Элизиум.
Некоторые из многочисленных примеров водной эрозии показаны на рисун¬
ке 1.1.20. Это борозды и овраги - следы потоков разрушительной силы на крутых
склонах, которые могли быть вызваны проливными дождями или ливнями, среди них
впечатляющий район Кандор в центральной части Долины Маринера. В некоторых
областях древней тектонической активности встречаются упорядоченные структуры,
образованные на фоне повсеместного хаотического рельефа, очевидно, с участием
воды, особенно, те из них, которые располагаются в устьях рек. Особый интерес пред¬
ставляют овраги, которые могли образоваться из-за появления (просачивания) воды
на поверхность снизу (seepage). Важно заметить в этой связи, что в условиях сильно
разреженной атмосферы даже при достаточно низкой температуре вода (особенно со¬
леная вода, вероятно свойственная Марсу) должна вскипать, оставляя специфические
формы рельефа. Некоторые из морфологических особенностей и сопутствующих им
ниш, каналов и конусов выноса веерной формы связывают с районами предполагае¬
мых обширных отложений льда, а также с извержением в этих областях планеты под¬
ледных вулканов (рисунок 1.1.21). О важной роли жидкой воды в истории планеты
37
1-1
говорит форма конгломератов на поверхности Марса, отснятых с марсохода (рису¬
нок 1.1.22). Еще более удивительным является большое ледяное озеро внутри одного
из ударных кратеров, обнаруженное на снимке со спутника «Марс-Экспресс», слу¬
жащее доказательством спорадического появления обширных объемов жидкой воды
даже на современной планете (рисунок 1.1.23).
Не менее интригующим является вопрос о возможности появления воды на по¬
верхности Марса в связи с вероятными периодическими изменениями его климата
на интервалах от сотен тысяч до миллионов лет. С этой идеей связано, в частности,
обнаружение на внутренних склонах древних ударных кратеров или на стенках глу¬
боких котловин (главным образом, на их южной стороне) довольно молодых оврагов,
образованных потоками воды, возраст которых не превышает нескольких миллио¬
нов лет. Такие климатические вариации могут происходить вследствие периодиче¬
ских изменений наклона оси вращения Марса в пространстве из-за сильного влияния
гравитационного поля Юпитера. К тому же у Марса нет большого спутника, кото¬
рый мог бы, подобно Земле в системе Земля-Луна, стабилизировать положение оси
вращения Марса в пространстве (два небольших его спутника не могут выполнить
эту роль). На вариации наклона оси вращения накладывается ее периодическая пре¬
цессия (рисунок 1.1.24). В совокупности это приводит к отклонениям оси вращения
Марса от перпендикуляра к эклиптике от 15° до 35° на временной шкале в несколь¬
ко миллионов лет. Другими словами, на эти периодические изменения наклонения
наложена модуляция за счет прецессии оси вращения, период которой составляет
примерно сто тысяч лет. Очевидно, чем больше наклон оси вращения, тем больше
10
Современная марсианская гидрологическая система^
Полярная
шапка
- горизонтально стратифицированная
широтно зависимая солнечная инсоляция >
мая засушливая Полярная
пустыня шапка
Криосфера
Мегареголит
Точка
замерзания
воды
-15
чЛ/уДу si/ /г/ \Ду '
П% 0^ 'гТч д^
л!/*
' Основание
■ ->Ч- '>*%.■'№
- 'Vs// zV* /Vs// Z4Z V ' ZX/p/V zVЧ*/ Л/ 4jP zV '
_ . sV /X x'C X Л" X zxxi zkx^zxx zs 4 z 4 A
Слабый средний геотермальный комплекс
-90 -60 -30
30 60 90
Г
I i
I I I
О
I i I
■ I I
т
Широта
Рисунок 1.1.26. Схематичное представление современной гидрологической системы
на Марсе. Система охватывает различные области Северного и Южного полушарий, начиная
от подповерхностной зоны до мегареголитовых и криосферных слоев (ниже и выше точки
замерзания воды) и вплоть до тропосферы/облаков, с учетом полярных шапок.
(Согласно James Head/Brown University)
38
1-1
инсоляции на полюсах и, таким образом, в условиях более теплого полярного лета
возрастает интенсивность испарения/сублимации льдов полярных шапок и перехода
в атмосферу углекислого газа, воды и других летучих, наряду с изменением границ
вечной мерзлоты (рисунок 1.1.25). Это, в свою очередь, приводит к росту температу¬
ры поверхности и атмосферы за счет парникового эффекта.
Рельеф высокоширотных областей в целом совместим с таким сценарием. В част¬
ности, было найдено, что поверхность между полюсами и экватором покрыта осадоч¬
ными породами толщиной 4-6 км на севере и 1-2 км - на юге, в то время как сама по¬
верхность пересечена крупными хребтами и разломами. Осадочное покрытие имеет
слоистую структуру, что подтверждает предположение о периодических изменениях
климата. Теория предсказывает, что на более длительных временных интервалах гра¬
витационные возмущения (пертурбации) могут приобрести хаотический характер,
так что наклонение оси вращения может изменяться от 0° до 60°. Это создает предпо¬
сылки для еще более грандиозных климатических изменений.
Обращаясь к истории воды на Марсе, мы, естественно, задаемся вопросом, где она
находится и каковы ее запасы в современную эпоху. К сожалению, огромные наслоения
песка и пыли на поверхности скрывают не только многие из первоначальных структур
рельефа, но и, возможно, большие залежи подповерхностного водяного льда, сохра¬
нившиеся после предполагаемого катастрофического изменения климата на Марсе.
Присутствие таких залежей на глубине приблизительно 1 м преимущественно на вы¬
соких широтах было подтверждено результатами нейтронной спектрометрии при мо¬
ниторинге с орбиты спутника «Марс-Одиссей», а позже с марсохода. Было найдено,
что содержание льда в породах в отдельных областях может достигать 50% по массе.
Как уже отмечалось, существуют многие характерные особенности рельефа, вероятно,
сформированные с участием воды, и некоторые особенности поверхностных струк¬
тур, которые заманчиво связать с периодическим просачиванием подповерхностной
воды в недавнем прошлом. Это могут быть потенциальные районы, где обнаружена
вода методом нейтронного мониторинга. Как уже говорилось, скорее всего, это соленая
вода, которая легче сохраняется в марсианских условиях. Данное предположение под¬
тверждается обнаружением хлора в том же эксперименте на марсоходе «Кьюриосити».
Спектральные исследования со спутника Mars Reconnaissance Orbiter также показали,
что вода (и, возможно, связанное с ней появление темных полос на поверхности) на¬
сыщена солями хлорной кислоты (перхлоратами НС1О4). Наличие таких гидратирован¬
ных солей, содержащих молекулы кристаллизационной воды, подкрепляет представле¬
ния о возможности периодического появления соленой жидкой воды на Марсе.
В совокупности полученные данные измерений позволяют считать, что в совре¬
менную эпоху среднее содержание водяного льда в приповерхностной зоне Марса
эквивалентно сферическому слою толщиной ~ 30 м. Можно ожидать, однако, что зна¬
чительно большие запасы воды сохранились под поверхностью на глубине нескольких
сотен метров в виде ледяных линз и прослоев. Нельзя исключить, что жидкая вода
может образовываться у нижней поверхности ледяной линзы, подтаивающей из-за на¬
копления тепла вследствие внутреннего теплового потока и сохраняющейся благодаря
очень низкой теплопроводности льда (Lasue J., MangoldN., Hauber E. et al, 2013).
Основные идеи о современной гидрологической системе на Марсе, охватываю¬
щей как Северное, так и Южное полушария, показаны на рисунке 1.1.26. Система
охватывает слой под поверхностью вплоть до мегареголита и слой вечной мерзлоты
(криосферу) с температурой ниже и выше точки замерзания воды, а также полярные
шапки и тропосферу. Климатические вариации вследствие изменений наклонения
39
1-1
Рисунок 1.1.27. Породы на марсианском Плато Меридиани, напоминающие структуры на дне
земных океанов. Высокие концентрации солей хлора и брома, обнаруженные в этих породах,
также связывают их происхождение с древним марсианским океаном. Область, показанная
на изображениях, возможно, представляет собой береговую линию океана, где на мелководье
происходили циклические процессы испарения и/или вымерзания Снимки с марсохода
«Опортьюнити» (Opportunity).(С любезного разрешения НАСА)
оси вращения слабо проявляются на этой диаграмме. Исходя из этого, ряд геологов
считает маловероятным появление воды в реках на поверхности Марса в период
сравнительно краткосрочного климатического потепления. Доказательством служит
возраст кратеров около этих и других форм рельефа, которые датируются поздним
периодом эволюции планеты. В то же время с этими представлениями трудно согла¬
совать слоистую структуру осадочных пород в средних широтах, что никоим образом
не исключает эпизодическую гидрологическую активность на современном Марсе,
особенно при сохранении остаточного вулканизма. С такой активностью могло быть,
в частности, связано образование озера внутри ударного кратера (рисунок 1.1.23).
Разрешению этой проблемы могло бы помочь картирование минералогии пла¬
неты, особенно поиск таких минералов, которые образуются только в присутствии
воды. К сожалению, на сегодняшний день сведения о минералогическом составе
марсианских пород весьма ограничены. Известно, что поверхность Марса состоит,
в основном, из базальтов и обогащена оксидами железа (до 15-18%), что согласуется
с базальтовым составом его коры и объясняется, как говорилось, менее полным диф¬
ференцированием недр Марса по сравнению с Землей. Более детальная информация
доступна лишь для отдельных локальных областей и основана на данных измерений
с посадочных аппаратов. В этих экспериментах были обнаружены некоторые вариа¬
ции в составе минералов, содержащих соединения кремния, магния, алюминия, каль¬
ция, натрия и серы. Характерный красноватый цвет Марса обусловлен отложениями
на его поверхности пыли, напоминающей смесь глины с оксидами железа, подобную
той, которая образуется при выветривании земных лав. Особый интерес представляет
обнаружение на посадочном аппарате «Опортьюнити» образцов пород, состоящих
из глины и обогащенных алюминием, типа монтмориллонита. Такие породы мог¬
ли, однако, сформироваться на древнем Марсе в присутствии пресной, а не соленой
воды. Большой интерес представляет обнаружение пород, обогащенных натрием, что
приближает их минеральный состав к полевым шпатам, уподобляя некоторым извер¬
женным породам на океанических островах Земли. Интересно отметить, что щелоч¬
ность поверхности Марса близка к щелочности Земли и теоретически могла бы быть
подходящей для культивации и выращивания растений.
40
1-1
Конденсация и перемешивание с воздухом
Горячая
кислая смесь
и магматических
флюидов
%
ч
ч
Магматические
летучие
100-градусная
изотерма
Излияние /
Отток
ч
ч
ч
Горячие геотермальные4 %
воды
Подпитка
I
# гидротермальных вод
ч
ч
ч
ч
ч
ч
ч
Ihk \ ч*-
\ 350-градусная
изотерма
Подпитка
Рисунок 1.1.28. Схематичное представление цикла грунтовых вод в вулканическом регионе
на Марсе, как возможный источник абиотического зарождения жизни.
(С любезного разрешения James Head/Brown University)
Рисунок 1.1.29. Метеорит класса ахондритов ALH 84001 (масса 1,931 кг), найденный
27 декабря 1984 г. в горах Алана Хиллса в Антарктиде (слева), происхождение которого
связывают с Марсом. В нем были найдены структуры, вначале отождествленные со следами
бактериальных окаменелостей (микрофоссилов) в форме «червей» (справа). Позднее более
полное изучение показало, что эти структуры имеют скорее неорганическое происхождение.
(Согласно David McKay)
Наиболее интригующей является идея о существовании на Марсе древнего океа¬
на. Действительно, как показали наблюдения со спутника Марса «Глобал Сервейор»,
структуры рельефа в северных областях планеты напоминают береговые линии оке¬
ана, ограничивающего области одинаковой высоты на поверхности. Это можно было
бы объяснить однородными осаждениями осадков, накопленных в больших объемах
воды на марсианских северных равнинах. Кроме того, сообщалось об обнаружении
41
1-1
марсоходом «Опортьюнити» на Плато Меридиан (Meridiani Planum) слоистых струк¬
тур, напоминающих осадочные породы на океаническом ложе Земли, с высокой кон¬
центрацией солей хлора и брома (рисунок 1.1.27). Эти отложения могли быть связаны
с береговой линией древнего океана, где происходили циклические процессы испаре¬
ния и/или замерзания на мелкой воде, оставлявшие после себя слоистые осадочные
породы, богатые солями хлора и брома.
Сегодня нельзя с уверенностью утверждать, был ли в далеком прошлом на Марсе
водный океан. И, тем не менее, помимо приведенных выше данных, существуют дру¬
гие соображения в поддержку этой идеи. Они основаны, прежде всего, на анализе ге¬
ологических структур и появились уже вскоре после того, как были получены изобра¬
жения поверхности с высоким разрешением. По оценкам, средняя глубина древнего
марсианского океана (равномерно разлитого по всей поверхности планеты) могла бы
составить 0,5 км (для сравнения: на Земле средняя глубина Мирового океана 2,9 км).
Эта величина ограничивает максимальные запасы воды на Марсе, за вычетом потерь,
составивших за всю его историю ~ 30%. Источником этих потерь были, главным об¬
разом, процессы аэрономии, обусловленные фотохимическими реакциями в верхней
атмосфере и ее взаимодействием с солнечным ветром. Важную роль в этих процессах
могли играть нетепловые потери атомов водорода и кислорода (Шематович В.И., Ма¬
ров Ш7., 2015; 2018).
Проблема поиска жизни. Марс не только вызывает растущий интерес ученых, но
и привлекает большое внимание общественности, что в немалой степени связано
с еще не утраченными надеждами найти на нем жизнь. С началом космических экс¬
периментов предпринимались попытки найти хоть какие-то признаки существования
бактериальной жизни. В основе лежит стремление понять: возникла ли биота на со¬
седней с Землей планете в период благоприятных климатических условий, перед тем,
как резко сменился путь ее эволюции; могла ли она сохраниться в новой суровой
природной среде и есть ли вероятность обнаружить, по крайней мере, ее окаменелые
остатки (фоссилы) (Vago J.L., Westal Е, 2017).
Подобно существующим концепциям появления первичных живых форм на Зем¬
ле в результате начального абиогенного синтеза, наиболее вероятные очаги возник¬
новения (и, возможно, сохранения) примитивной жизни на Марсе связывают с кру¬
гооборотом подземных вод в вулканических областях, рисунок 1.1.28. В последней
декаде прошлого столетия ажиотаж породили результаты изучения метеоритов клас¬
са SNC, собранных на ледяном щите в Антарктиде, происхождение которых, как уже
отмечалось, связывают с Марсом. Особый интерес вызвал антарктический метеорит
ALH84001 (рисунок 1.1.29), в котором, как объявили исследователи, были найдены
следы бактериальных ископаемых. Однако последующие независимые анализы по¬
ставили эти результаты под сомнение, связав найденные формы и их минеральный
состав со структурами неорганического происхождения.
К сожалению, пока мы не можем дать ответ на поставленный вопрос о жизни
на Марсе. Эксперименты, как ранее проведенные на «Викингах», так и значительно
более поздние, проведенные на марсоходе «Кьюриосити», принесли отрицательные
результаты. Конечно, сейчас мы лучше осознаем, что даже при наличии воды, су¬
ществование которой доказано на Марсе, но в условиях жесткой солнечной ради¬
ации, высокой степени окисленности пород и распространенности токсинов жизнь
на поверхности вряд ли возможна. Это не исключает, однако, возможности отыскать
42
1-1
ее на более глубоких горизонтах и обнаружить на Марсе глубинную бактериальную
биосферу (процессы метаболизма в которой -хемосинтез - принципиально отлича¬
ются от фотосинтеза), подобную той, которая существует на Земле.
Перспективы. Попытаемся обозначить главные цели и направления дальнейшего
изучения Марса, на которых будут в ближайшие годы сосредоточены программы кос¬
мических полетов, включая проект «ЭкзоМарс» К наиболее актуальным можно отне¬
сти следующие проблемы:
- Геологическая история планеты, основные этапы эволюции, включая раннюю
тектонику, широкомасштабный вулканизм, проблему воды и климата и их связь
с геологическими структурами и составом пород.
- Получение более надежных свидетельств существования раннего влажного и те¬
плого климата на планете и причин, вызвавших коллапс атмосферы и глобальное
изменение природных условий.
- Исследования топологии гидрологической системы и ее преобразования в Ной-
ский, Гесперийский и Амазонийский периоды в геологической истории Марса.
- Изучение связи гидрологических и гляциологических процессов с изменениями
структуры коры и мантии, роли эндогенных и экзогенных факторов, в том числе
происхождение долин, русел, озер и других водных бассейнов с характерными
особенностями осадконакопления; поиск точечного вулканизма и гидротермаль¬
ных источников.
- Изучение процессов эволюции марсианской коры во взаимосвязи с морфологией
поверхностных структур, их минералогическим составом, степенью выветрива¬
ния и отложениями рыхлого пылепесчаного материала.
- Поиск свидетельств наличия на Марсе древнего океана, получение оценок на¬
чальных и современных запасов воды и механизмов ее потери, изучение сезон¬
ных изменений гидратации, районов вечной мерзлоты, структуры полярных ша¬
пок и ледников.
Рисунок 1.1.30. Панорама марсианской поверхности в месте посадки КА «Пэсфайндер»
(Pathfinder) в Долине Арес. На переднем плане - серые камни, покрытые красно-коричневой
пылью, на горизонте - холмы. (С любезного разрешения НАСА)
1-1
- Изучение элементного состава поверхностных пород и распространенности водо¬
родсодержащих соединений, сульфатов, хлоридов, металлоносных глин, карбонатов.
- Создание на основе доступных экспериментальных данных более полных моде¬
лей внутреннего строения, реконструкция истории магнитного поля и остаточно¬
го магнетизма.
- Исследования теплового режима и динамики атмосферы Марса, включая вариа¬
ции содержаний СО2, Н2О, SO2, соединений хлора, и роль аэрозолей в тепловом
балансе; получение надежных данных о содержании и вариациях примесей, в пер¬
вую очередь источников метана, благородных газов и их изотопных отношений.
- Изучение аэрономии Марса, его взаимодействия с плазмой солнечного ветра
и топологии индуцированной магнитосферы; получение оценок скорости дисси¬
пации атмосферных компонентов, роли солнечного ветра и нетеплового механиз¬
ма потери атмосферы на разных этапах эволюции.
- Поиск органических веществ и биологических признаков жизни, следов суще¬
ствующей или вымершей биоты в виде окаменевших остатков (fossils), с особым
вниманием на области потенциального нахождения древних водных резервуаров,
а также поиск признаков существования глубинной биосферы.
Этот список можно было бы продолжить, но и перечисленных проблем достаточно
для того, чтобы сформировать комплексные перспективные программы исследований
с использованием различного типа автоматических космических аппаратов-роботов.
Проекты новых полетов к Марсу находятся в повестке дня национальных кос¬
мических агентств ряда стран, среди которых - второй этап проекта «ЭкзоМарс».
Очевидно, главную роль в будущих исследованиях Марса будет играть американское
НАСА. Наряду с НАСА и ЕКА постепенно подключаются другие игроки. Предпола¬
гается осуществление широкомасштабной длительной программы полетов орбиталь¬
ных и посадочных мобильных космических аппаратов с оригинальными задачами
исследований. Обсуждается, например, интересная идея развертывания на Марсе
нескольких когерентно работающих малых посадочных аппаратов, управляемых
находящимся на орбите спутником с оперативной системой обратной связи. Такая
система представляет первостепенный интерес для обнаружения сейсмической ак¬
тивности планеты и детального изучения метеорологических процессов, включая
проблему возникновения и эволюции глобальных пылевых бурь. Роскосмос планиру¬
ет повторение миссии к Фобосу с забором образцов вещества и их возвратом на Зем¬
лю под новым названием «Бумеранг» в сотрудничестве с европейским космическим
агентством ESA. Амбициозную программу исследований Марса, предусматриваю¬
щую создание орбитального и посадочного аппаратов, а вслед за тем забор и возвра¬
щение на Землю марсианского грунта, планируют китайские ученые.
В современную эпоху Марс с его негостеприимными природными условиями -
это холодный мир с разреженной атмосферой и жесткой радиацией, унылая пусты¬
ня, к которой нелегко адаптироваться людям (рисунок 1.1.30). Тем не менее, среди
других планет Солнечной системы это самое подходящее место для посещения,
а в перспективе - возможно, и для обитания. Благодаря исследованиям на космиче¬
ских аппаратах мы получили неоценимую информацию, по существу открыв для себя
новый Марс. Возможности автоматических аппаратов далеко не исчерпаны, и новые
амбициозные миссии растущей сложности и с новыми возможностями призваны зна¬
чительно пополнить наши знания относительно настоящего и прошлого этого увлека¬
тельного мира. Они рассматриваются также как предшественники будущих полетов
человека и как долгосрочная цель освоения Марса.
44
1-1
Предложены и обсуждаются различные сценарии марсианских экспедиций, ко¬
торые можно было бы осуществить до середины этого столетия. Насколько это реа¬
листично? В принципе, такой полет возможен на существующих технических сред¬
ствах, однако более целесообразно использование новых прогрессивных технологий,
в первую очередь бортовых ядерных установок и электрических плазменных/ион-
ных двигателей. Разумеется, должны быть минимизированы риски для астронавтов,
прежде всего обеспечена надежная защита с точки зрения безопасного возвращения
и защиты от проникающей радиации, что представляет собой очень сложную задачу.
Существует большой комплекс медико-биологических проблем, включая проблему
обеспечения психологической совместимости экипажей космонавтов. На подготов¬
ку к их решению нацелены проводимые на земле эксперименты длительностью год
и более с участием отобранных добровольцев в условиях, максимально приближен¬
ных к космическим, включая полную изоляцию. Такие эксперименты проводились
как в России, в Институте медико-биологических проблем, так и в США в специаль¬
ном центре вблизи астрономической обсерватории Мауна Кеа на Гавайях.
Помимо научных, технических и медицинских проблем, надо, конечно, отдавать
себе отчет в том, что полет человека на Марс потребует огромных финансовых ресур¬
сов, которые в настоящее время оцениваются, по меньшей мере, в шестьсот милли¬
ардов долларов. Можем ли мы позволить это себе сегодня, когда человечество стал¬
кивается со многими очень серьезными проблемами на собственной планете? Будут
ли оправданы затраты с точки зрения содействия будущему развитию технологий,
соотношения потенциальных выгод и потерь? Удастся ли объединить усилия наибо¬
лее развитых стран вокруг такого проекта, чтобы предпринять его на международной
основе? И, наконец, какая конечная цель полета человека на Марс? Положит ли это
начало освоению другого мира за пределами Земли, или окажется простой демон¬
страцией возможностей, подобной программе «Аполлон», без дальнейшего продол¬
жения? Не является ли гораздо более оправданной целью на современном этапе, как
было сказано выше, ограничиться освоением Луны?
Это не простые, в первую очередь, политические и социально-экономические во¬
просы, которые неизбежно ставит сам ход развития цивилизации. В любом случае,
в ближайшие десятилетия следует развивать программу робототехнического иссле¬
дований Марса, совмещая ее с требованиями, выдвигаемыми для пилотируемого
полета. Это предполагает, в частности, изучение предпосылок для создания инфра¬
структуры, предшествующей осуществлению высадки на поверхность Марс и даже
сравнительно кратковременного там пребывания. Необходимо на первом этапе не
только детальное изучение выбранных участков и мониторинга их природных усло¬
вий, но организация надежной системы связи и навигации (маяков), предварительное
развертывание материально-технического обеспечения (запасов), получение данных
для прогноза возникновения опасных ситуаций. Развитая робототехническая инфра¬
структура на Марсе рассматривается нами в качестве необходимого этапа осущест¬
вления пилотируемой экспедиции и как элемент в продвижении на практике пробле¬
мы будущего симбиоза «человек-машина».
Нет сомнения в том, что со временем полет человека на Марс состоится - конеч¬
но, при условии, что проблемы, существующие на собственной планете, не окажутся
у опасной черты. Этот полет должен быть осуществлен на международной основе -
как общая цель и следующий шаг на пути прогресса человечества.
45
1-1
Заключение. Исследования Марса связаны не только с изучением его природы и ее
изменением в процессе эволюции, но и с ключевыми проблемами планетной кос¬
могонии и сравнительной планетологии. Образование Марса следует рассматри¬
вать в контексте формирования всей Солнечной системы, а его отличие от соседних
планет Земли и Венеры - исходя из механизмов, оказывающих решающее влияние
на природные свойства. Почему Венера и Марс пошли по другому пути эволюции?
Что сформировало специфический тепловой режим Венеры, и какие события вы¬
звали драматическое изменение предполагаемого первоначально мягкого климата
на Марсе? Были ли его современные природные условия сформированы в результа¬
те продолжительной и сложной эволюции, или эти изменения произошли внезапно
в геологическом масштабе времени?
Выше упоминалось о хондритовой модели образования планет земной группы.
Неясно, однако, согласуется ли эта модель с образованием Марса из наиболее древ¬
него первичного вещества, подобно другим планетам. Первичное вещество входит
в состав хондритовых метеоритов, для которых, в частности, отношение содержаний
железа и кремния составляет 1,7, что соответствует земной величине. В то же время
для Марса ситуация, вероятно, была более сложной. Он сформировался в области
кольцевого сжатия газопылевого диска на сравнительно близком расстоянии от Юпи¬
тера, приливные возмущения которого могли оказать влияние на состав первичной
материи и отклонение от хондритовой модели. Кроме того, при изучении метеоритов
SNC были получены данные, свидетельствующие о том, что спустя примерно мил¬
лиард лет после формирования Марс испытал сильное ударное внешнее воздействие,
что отразилось на его составе. С этим и другими подобными катастрофическими со¬
бытиями заманчиво связать потерю плотной атмосферы, воды и изменение климата,
как это предполагает одна из эволюционных моделей Марса. В пользу такого сцена¬
рия свидетельствуют и изотопные отношения ряда летучих на марсианской поверх¬
ности, в частности высокое отношение D/H.
Важно подчеркнуть, что природу современного Марса нельзя объяснить только
тем фактом, что он находится на 0,5 а.е. дальше от Солнца и его равновесная темпе¬
ратура меньше, чем у Земли. Более вероятно, что причиной потери геологической ак¬
тивности является размер планеты, приблизительно вдвое меньший земного, и почти
на порядок меньшая масса. Следствием является обеднение Марса радиоактивными
изотопами, аккумулируемыми при образовании планеты и служащими в дальнейшем
источником внутренней энергии, с чем связаны тепловая история и геология планеты,
свойства ее атмосферы. Марс исчерпал источники внутреннего тепла в первые мил¬
лиарды лет, после чего начал охлаждаться, что привело к прекращению глобального
вулканизма, уменьшению плотности атмосферы, климатическим изменениям. Таким
образом, можно утверждать, что ограниченные запасы радиогенных источников,
а не расстояние от Солнца оказали наибольшее влияние на эволюцию Марса.
Хотя такая модель кажется довольно правдоподобной, она никак не исключает
возможности упомянутых катастрофических сценариев в истории Марса, например
падения крупного астероида, предположительно вызвавшего образование котловины
Эллада и находящегося диаметрально противоположно нагорью Фарсида, на котором
сосредоточены громадные щитовые вулканы. С этой гипотезой связывают колоссаль¬
ный вынос магматических пород сквозь молодую марсианскую кору и широкое рас¬
пространение вулканизма. Это, в свою очередь, привело к радикальному изменению
рельефа Северного полушария и, вероятно, оказало сильное влияние на атмосферу,
46
1-1
вплоть до потери («срыва») значительной ее части. С потерей атмосферы, по-видимо-
му, был связан переход Марса от эволюционного пути, близкого к земному, в течение
примерно первого миллиарда лет, к совершенно иному сценарию.
Опираясь на сравнительно-планетологический подход, необходимо установить,
какие существуют пределы регулирования для механизмов обратной связи на Земле,
чтобы предотвратить неблагоприятные тренды ее эволюции. С этим тесно связаны
оценки допустимых пределов антропогенных воздействий на окружающую природ¬
ную среду как открытую нелинейную диссипативную систему, накопление измене¬
ний в которой может привести к потере устойчивости и резкой смене (бифуркации)
состояния. Для ответа на этот ключевой вопрос требуется интеграция наук о Зем¬
ле и планетах, нацеленная на лучшее понимание настоящего, прошлого и будущего
Земли. Такой подход будет одновременно способствовать прогрессу в решении кар¬
динальных проблем планетной космогонии и, в частности, возможности наложить
строгие ограничения на диапазон параметров, используемых при разработке моделей
происхождения и эволюции Солнечной системы.
В заключение заметим, что исследованиям Марса посвящена обширная литерату¬
ра, в которой отражены результаты исследований за несколько десятилетий, нашед¬
шие отражение в данном обзоре. Привести ссылки даже на основные работы, и при
этом достаточно объективно, - чрезвычайно сложная задача. Поэтому автор решил
отказаться от такого подхода и предпочел ограничиться ссылками на дополнитель¬
ную литературу в конце статьи, включая собственные монографии, а также наиболее
представительные обзоры. В них можно найти более полные сведения по обсуждае¬
мым проблемам, а также ссылки на первоисточники.
Благодарности
Данная работа выполнена по плану бюджетного финансирования ГЕОХИ РАН
на 2019 г. и поддержана также Грантом РФФИ № 17-02-00507.
Список литературы
Ефанов В.В., Мартынов М.Б., Карчаев Х.Ж. Летательные аппараты НПО име¬
ни С.А. Лавочкина (к 80-летию предприятия) // Вестник НПО им. С.А. Лавочкина.
2017. №2(36). С. 5-17.
Ефанов В.В., Ширшаков А.Е. Исследование Марса и его спутников перспектив¬
ными межпланетными станциями НПО имени С.А. Лавочкина (к 30-летия запуска
КА «Фобос-2») // Вестник НПО им. С.А. Лавочкина. 2018. № 1(39). С.3-9.
Маров М.Я., Хантресс У.Т. Советские роботы в Солнечной системе. Технологии
и открытия. М.: Физматлит, 2013. 609 с.
Маров М.Я. Космос. От Солнечной системы в глубь Вселенной. М.: Изд. 2-е. Физ¬
матлит, 2018. 544 с.
Mars (ed.) Arizona Press, Tucson, AZ.
Мороз В.И. Физика планеты Марс. М.: Наука, 1997.
Шематович В.И., Маров М.Я. О нетепловой диссипации нейтральной верхней ат¬
мосферы Марса // Доклады АН. 2015. Т. 461, № 6. С. 660-663.
Шематович В.И., Маров М.Я. Диссипация планетных атмосфер: физические про¬
цессы и численные модели // Успехи физических наук. 2018. Т. 188, № 3. С. 233-265.
47
1-1
Ehlmann B.L., and Edwards C.S. Mineralogy of Mars. Annu. Rev. Earth Planet Sci.,
2014, 42.
Ehlmann B.L., Anderson F.S., Hanna A. et al. The sustainability of habitability
on terrestrial planets: Insights, questions, and needed measurements from Mars for
understanding the evolution of Earth-like words. J. Geophys. Res.: Planets, 2016, 10.1002,
pp. 1927-1961.
Jakosky B.M., Brain D., Chaffin M. et al. Loss of the Martian atmosphere to space:
Present-day rates determined from MA VEN observations and integrate loss through time.
ICARUS 315, 2018, pp. 146-157.
LasueJ., Mangold N., Hauber E. etal. Quantative assessment of the Martian hydrosphere.
Space Sci Rev. 2013, 174, pp. 155-212.
Marov M. Ya. The Fundamentals of Modem Astrophysics. A Survey of Cosmos from
the Home Planet to Space Frontiers”, SPRINGER, 2015.
Marov M. Ya., Kolesnichenko A.V. Turbulence and Self-Organization: Modelling
Astrophysical Objects //Springer, ASSL, 2013, New York-Helderberg-Dordrecht-London..
Vago J.L., Westal F, Pasteur Instrument Teams, Landing Site Selection WG, and other
contributors. Habitability on early Mars and the search for biosignatures with the ExoMars
rover. Astrobiology 17, Nos 6 and 7, pp. 471-510, 2017.
М.Я. Маров
ГЕОХИ им. В.И. Вернадского РАН
48
ЧАСТЬ 2
БАЗИС, МИССИЯ «ЭКЗОМАРС-2022»
^КОНЦЕПЦИЯ ЭКСПЕДИЦИИ
Миссия «ЭкзоМарс-2022» выполняется на основании соглашения между Феде¬
ральным космическим агентством (Российская Федерация) и Европейским космиче¬
ским агентством (ЕКА) о сотрудничестве в исследовании Марса и других тел Солнеч¬
ной системы робототехническими средствами (дата подписания: 14.03.2013 г.).
Задачами миссии «ЭкзоМарс-2022» является доставка марсохода (ЕКА) и посадоч¬
ной платформы с комплексом научной аппаратуры (ИКИ РАН) на поверхность Марса.
Миссия предусматривает разработку десантного модуля с посадочной платфор¬
мой, создаваемых Госкопорацией (ГК) «Роскосмос», и перелетного модуля и марсо¬
хода, создаваемых ЕКА.
Научными целями проекта «ЭкзоМарс» являются:
- поиск признаков жизни на Марсе в прошлом и в настоящее время;
- исследование водной/геохимической среды на поверхности и в подповерхност¬
ном слое с распределением по глубине;
- исследование газовых примесей и их источников в атмосфере Марса;
- решения научных задач в условиях долгоживущей стационарной платформы.
Для реализации целей миссии были отработаны сложнейшие передовые техноло¬
гии, а именно:
- вход в атмосферу, спуск и посадка полезной нагрузки на поверхность Марса;
- движение марсохода по поверхности;
- доступ к приповерхностному слою для забора образцов грунта;
- забор образцов, подготовка к анализу и анализ проб грунта;
- отработка наземных средств связи для обеспечения управления и приема научной
информации с КА «ЭкзоМарс-2022», десантного модуля (ДМ) и марсохода.
Одной из ключевых задач проекта является разработка и лётные испытания си¬
стемы входа в атмосферу, спуска и посадки на поверхность Марса с использованием
десантного и посадочного модулей российской разработки.
В состав посадочного модуля входят посадочная платформа (Роскосмос) и марсо¬
ход (ЕКА).
На посадочной платформе устанавливается комплекс научной аппаратуры (КНА),
разрабатываемый ИКИ РАН, для изучения внешней среды и внутреннего строения
Марса в течение одного марсианского года. Исследования с помощью научной аппа¬
ратуры, размещенной на посадочной платформе, начинаются после схода марсохо¬
да на поверхность. Посадочная платформа также включает систему схода марсохода
на поверхность.
Целевая задача марсохода заключается в исследовании поверхности и подповерх¬
ностного слоя в непосредственной близости от места посадки, проведении геологи¬
ческих исследований и поиске следов прошлой и существующей жизни.
Номинальный срок эксплуатации марсохода составляет 218 суток. Марсоход ос¬
нащается российскими научными приборами и устройством для бурения на глубину
два метра, комплексом научной аппаратуры «Пастер», предоставляемым ЕКА.
49
2-1
Для обеспечения запуска КА «ЭкзоМарс» с космодрома Байконур используется
ракета-носитель «Протон», разгонный блок «Бриз-М».
Центр полетных операций ЕКА по согласованию с ГК «Роскосмос»-осуществляет
функции управления составным космическим аппаратом до отделения и входа де¬
сантного модуля в атмосферу с использованием сети Европейской системы дальней
космической связи при поддержке российских наземных станций (РНС).
После посадки и схода марсохода Центр полетных операций ЕКА передает ко¬
мандно-программную информацию на марсоход и посадочную платформу через ор¬
битальный модуль с использованием сети Европейской системы дальней космиче¬
ской связи при поддержке РНС.
ЕКА и ГК «Роскосмос» выполняют свои работы в рамках проекта, основываясь
на принципах использования своих технических стандартов с учётом наработанного
опыта обеих сторон.
Космический аппарат создается в тесной кооперации с Европейским космическим
агентством. Головным предприятием с российской стороны является АО «НПО Ла¬
вочкина», с европейской стороны фирма Талес Аления Аэроспейс (Турин) (Алексаш-
кин С.Н., Лукъянчиков А.В., Мартынов М.Б., Хартов В.В., 2014).
Совместно решаемые задачи ГК «Роскосмос» и ЕКА:
- реализация совместных научных операций марсохода и посадочной платформы;
- принятие решения о месте посадки марсохода;
- управление научными операциями посадочной платформы и размещенной на ней
научной аппаратурой;
- управление операциями по проведению научных исследований с помощью науч¬
ной аппаратуры, размещенной на марсоходе;
- осуществление функций управления составным космическим аппаратом, в том
числе во время межпланетного перелета, разделения и схода марсохода на по¬
верхность Марса.
Задачи, решаемые с преимущественным участием ГК «Роскосмос»:
- разработка, изготовление, испытание и эксплуатация десантного модуля, вклю¬
чая посадочную платформу с размещенной на ней российской научной аппарату¬
рой и систему схода марсохода на поверхность;
- предоставление российской научной аппаратуры - нейтронных и инфракрасных
спектрометров «АДРОН-РМ» и «ИСЕМ» - для размещения на марсоходе;
- проведение работ, связанных с планетарной защитой, в отношении всех элементов
составного космического аппарата миссии «ЭкзоМарс-2022», предоставляемых
ГК «Роскосмос», в соответствии с положениями Договора по космосу и принци¬
пами, разработанными Комитетом по космическим исследованиям (КОСПАР);
- осуществление сборки и испытаний летного образца составного космического
аппарата, включая десантный модуль, перелетный модуль и марсоход;
- предоставление радиоизотопных тепловых блоков для обеспечения теплового ре¬
жима марсохода;
- проведение работ по запуску посредством предоставления ракеты-носителя клас¬
са «Протон-М» с разгонным блоком «Бриз-М» и обеспечение интерфейсов с ра¬
кетой-носителем до отделения составного космического аппарата от разгонного
блока «Бриз-М» в согласованном с ЕКА объеме; разработка документации, не¬
обходимой для получения разрешения на запуск, а также предоставление услуг,
связанных с кампанией по запуску на космодроме Байконур;
50
2-1
- предоставление ЕКА необходимой поддержки для реализации схода марсохода
на поверхность Марса;
- обеспечение радиосвязи Земля-космос посредством РНС в координации с евро¬
пейской сетью Европейской системы дальней космической связи, в соответствии
с международными протоколами связи Европейской кооперации по стандартиза¬
ции в области космической техники и Консультационного комитета по космиче¬
ским системам передачи данных.
Задачи, решаемые с преимущественным участием ЕКА:
- проектирование, изготовление, проведение испытаний и эксплуатация перелет¬
ного модуля и марсохода;
- обеспечение вклада в создание при ведущей роли ГК «Роскосмос» десантного
модуля и достижение максимально возможной преемственности между демон¬
страционным десантным модулем миссии «ЭкзоМарс-2016» и десантным моду¬
лем миссии «ЭкзоМарс-2022»;
- предоставление научных приборов для их размещения на посадочной платформе;
- проведение работ, связанных с планетарной защитой, в отношении всех элемен¬
тов составного космического аппарата миссии «ЭкзоМарс-2022», предоставля¬
емых ЕКА, в соответствии с положениями Договора по космосу и принципами,
разработанными Комитетом по космическим исследованиям (КОСПАР);
- осуществление управления составным космическим аппаратом, в том числе
во время межпланетного перелета, разделения и схода марсохода на поверхность
Марса;
- управление марсоходом на поверхности Марса из центра управления марсоходом
посредством Центра полетных операций ЕКА;
- реализация совместных научных операций марсохода и посадочной платформы;
- обеспечение функции ретрансляции данных с помощью орбитального модуля
для десантного модуля, марсохода и посадочной платформы;
- обеспечение радиосвязи Земля-космос посредством сети Европейской системы
дальней космической связи при поддержке РНС;
- проектирование, проведение испытаний и подтверждение оперативной совме¬
стимости с действующими марсианскими орбитальными аппаратами систем
приемопередатчика диапазона ультракоротких волн проекта «ЭкзоМарс», обе¬
спечивающего функцию ретрансляции данных для десантного модуля/посадоч¬
ной платформы и марсохода;
- обеспечение для ГК «Роскосмос» постоянного и неограниченного доступа
к полному архиву данных миссии «ЭкзоМарс-2022», (необработанные, научные
и вспомогательные данные).
Список литературы
Алексашкин С.Н., Лукъянчиков А.В., Мартынов М.Б., Хартов В.В. Проектная кон¬
цепция десантного модуля «ЭкзоМарс-2018», создаваемого НПО им. С.А. Лавочки¬
на//Вестник ФГУП НПО им. С.А. Лавочкина. 2014. № 2. С. 5-12.
В.А. Колмыков,
А.Е. Ширшаков,
Х.Ж. Карчаев
51
2-2
^КОСМИЧЕСКИЙ АППАРАТ «ЭКЗОМАРС-2022»
При выполнении договоренностей между ЕКА и ГК «Роскосмос» была реализо¬
вана следующая схема деления космической системы «ЭкзоМарс» и распределение
ответственности между отдельными ее частями (рисунок 2.2.1).
перелетный
модуль
СОТРДМ
с адаптером
десантный
модуль
адаптер с системой
отделения ДМ от ПМ
~ ~
задний
кожух
посадочный
модуль
конструкция
ЗК
конструкция
АЭ
антенна
ЗК
устройство
отделения
ЗК от ПсМ
устройство
отделения АЭ
от ДМ
антенна
- посадочной
платформы
Н переключатель |
Ч кабели |
парашютный
контейнер
ТЗП
крышки ПС
парашютная
система
БКС
БКС
ДМ1
ДМ2
1
го
£
LQ
кабели
Рисунок 2.2.1. Схема деления КС «ЭкзоМарс» и распределение ответственности
между отдельными ее частями
I
52
2-2
Состав и основные этапы функционирования КА «ЭкзоМарс-2022»
В состав космического аппарата «ЭкзоМарс-2022» входят (Хартов В.В., Марты¬
нов М.Б., Лукъянчиков А.В., Алексашкин С.Н., 2014) следующие основные элементы
(рисунок 2.2.2):
- перелетный модуль (ПМ);
- десантный модуль (ДМ);
- адаптер с системой отделения десантного модуля от перелетного модуля.
перелетный модуль
десантный модуль
Рисунок 2.2.2. Состав космического аппарата «ЭкзоМарс-2022»
Экспедиция «ЭкзоМарс-2022» состоит из следующих основных этапов:
а) этап наземной подготовки составного КА;
б) этап выведения и перелета к Марсу составного КА (ПМ и ДМ);
в) этап автономного перелета ДМ до входа в атмосферу, входа в атмосферу, спу¬
ска и посадки на поверхность Марса;
г) этап работы на поверхности Марса, включающий в себя 3 фазы:
- фаза подготовки к сходу и сход марсохода с посадочной платформы (ПП);
- фаза автономного функционирования марсохода,
- фаза автономного функционирования посадочной платформы на поверхно¬
сти Марса.
Запуск КА планируется осуществить в августе 2022 года при помощи ракеты-но¬
сителя «Протон-М». Выведение на отлетную траекторию будет осуществляться раз¬
гонным блоком «Бриз-М». Расчетная дата прибытия к Марсу - 19 марта 2021 года.
На этапе перелета «Земля-Марс» КА осуществляет несколько коррекций траек¬
тории для обеспечения требуемого вектора состояния на момент отделения ДМ. Кор¬
рекция на этапе перелета осуществляется при помощи собственной двигательной
установки ПМ. Перелет производится в закрутке. Большую часть времени (около
6 месяцев) КА ориентирован на Землю, остальное время - на Солнце.
53
2-2
Перелетный модуль участвует в обеспечении теплового режима десантного мо¬
дуля на этапе перелета, обеспечивая электроснабжение систем ДМ при помощи сол¬
нечных панелей, а также обеспечивает трансляцию КПП (командно-программной
информации) и ТМИ через радиокомплекс Х-диапазона.
На ПМ расположена часть средств для проведения измерений на этапе перелета
(звездные и солнечные датчики). Бесплатформенные инерциальные блоки (а также
доплеровский радар, работающий при спуске ДМ в атмосфере Марса) расположены
внутри десантного модуля. Там же размещен бортовой компьютер, блоки управления
и автоматики. Перелетный модуль собственным БКУ не располагает.
Управление КА на участке перелёта и вывода КА в точку отделения десантно¬
го модуля осуществляются наземными станциями ЕКА при поддержке российских
станций.
Общий вид космического аппарата «ЭкзоМарс-2022» на этапе выведения пред¬
ставлен на рисунке 2.2.3.
Рисунок 2.2.3. Общий вид космического аппарата «ЭкзоМарс-2022» на этапе выведения
Рисунок 2.2.4. Общий вид космического аппарата «ЭкзоМарс-2022» после отделения
от разгонного блока и раскрытия панелей СБ
54
2-2
После выведения на отлетную траекторию и отделения от разгонного блока
на перелетном модуле производится раскрытие панелей солнечных батарей (СБ),
рисунок 2.2.4.
Более подробно этапы событий приведены в сводной таблице 2.2.1.
Таблица 2.2.1
этап
начальное событие
конечное событие
основные
промежуточные события
подготовка
к запуску
PH на стартовой
площадке
удаление разрывного
кабеля со стартовой
площадки PH
запуск
удаление
разрывного кабеля
со стартовой
площадки PH
отделение составного
космического аппарата
от разгонного
блока PH
отрыв PH от Земли
и выход на траекторию
перелета к Марсу
начальный этап
работы
отделение
составного
космического
аппарата
от разгонного блока
PH
завершение
корректирующего
маневра PH
проверка
составного
космического
аппарата
завершение
корректирующего
маневра PH
завершение
проверки составного
космического аппарата
захват диска Солнца
и начало выработки
энергии;
получение теле¬
метрических данных
наземным центром
управления и задание
устойчивой ориентации
в пространстве
межпланетный
перелет
завершение
проверки
составного
космического
аппарата
запуск активных
операций по расчету
орбит для планирования
развертывания ДМ
коррекция навигации
подлет
к Марсу
запуск активных
операций
по расчету орбит
для планирования
развертывания ДМ
последняя коррекция
для ориентации
в картинной
плоскости
несколько коррекций
траектории
подготовка
и осуществление
отделения ДМ
последняя
коррекция
для ориентации
в картинной
плоскости
отделение ДМ
последние
операции
перелетного
модуля
отделение ДМ
вход перелетного
модуля
в атмосферу Марса
и его разрушение
пассивный вход
перелетного модуля
в атмосферу Марса
и его разрушение
55
2-2
этап
начальное событие
конечное событие
основные
промежуточные события
пассивный
полет ДМ
отделение ДМ
прибытие ДМ в точку
соприкосновения
с атмосферой
вход в атмосферу,
спуск и посадка
ДМ
прибытие
ДМ в точку
соприкосновения
с атмосферой
посадка
(получение важных
телеметрических
данных о входе
в атмосферу,
спуске и посадке
модулем TGO)
подробная
последовательность
входа в атмосферу,
спуска и посадки
сход марсохода
посадка
марсоход сошел
с посадочной
платформы
ввод в действие
элементов марсохода,
необходимых для схода
ввод в действие
посадочной
платформы
посадка
завершение ввода
в действие посадочной
платформы
этап выполнения
посадочной
платформой
научной миссии
завершение
ввода в действие
посадочной
платформы
завершение периода
эксплуатации ПП
на поверхности Марса
ввод в работу
научной
аппаратуры
марсохода
сход марсохода
выполнен
завершение ввода
в работу научной
аппаратуры марсохода
этап научных
исследований
с помощью
марсохода
завершение
ввода в действие
марсохода
завершение периода
эксплуатации марсохода
на поверхности Марса
| - операции с участием КА
| - операции с участием ДМ, посадочной платформы и марсохода
Список литературы
Хартов В.В., Мартынов М.Б., Лукъянчиков А.В., Алексаъикин С.Н. Проектная кон¬
цепция десантного модуля «ЭкзоМарс-2018», создаваемого НПО им. С.А. Лавочки¬
на // Вестник НПО им. С.А. Лавочкина. 2014. № 2. С. 5-12.
И.В. Москатиньев,
А. С. Иванов,
С.Н. Алексашкин,
Б.А. Острешко
56
2-3
Е0СРЕДСТВА ВЫВЕДЕНИЯ
Для осуществления миссии «ЭкзоМарс» предусмотрено два запуска космических
аппаратов к Марсу: в 2016 г. и в 2022 г. В качестве средств выведения полезных на¬
грузок выбрана ракета-носитель (PH) «Протон-М» и разгонный блок (РБ) «Бриз-М».
При выполнении межпланетных перелетов одной из важнейших задач для средств
выведения является минимизация энергетических затрат и обеспечение требуемых бал¬
листических параметров в момент отделения полезной нагрузки от последней ступени
ракеты-носителя - разгонного блока «Бриз-М». Эти требования, необходимые и до¬
статочные для успешного выполнения заключительной фазы перелета к Марсу, были
сформированы и согласованы в результате совместной работы научных и расчетных
подразделений всех участников международной кооперации по проекту. КБ «Салют»
(входит в структуру АО «ГКНПЦ им. М.В. Хруничева») является головным разработ¬
чиком документации, необходимой для обеспечения полета РКН и работает в тесном
взаимодействии с создателями систем управления для PH «Протон-М» и РБ «Бриз-М» -
ФГУП НПЦ АП им. академика Пилюгина и - МОКБ «Марс» соответственно.
С целью выполнения технических требований Заказчика при имевшихся финан¬
совых и временных ограничениях были разработаны новые методические подходы
к формированию полетных заданий (ПЗ) для PH и РБ с учетом оптимальных «окон
пуска» (Боровин Г.К., Голубев Ю.Ф., Грушевский А.В. и др., 2018). Их практическое
применение позволило в разы сократить количество реализаций при отработке ПЗ
на моделирующих стендах, уложиться в заданные ограничения по времени и по объ¬
емам финансирования. При этом было обеспечено высокое качество математических
моделей объекта управления и алгоритмов систем управления как ракетой-носителем
«Протон-М», так и разгонным блоком «Бриз-М». Достигнутая при запуске в 2016 году
точность выведения орбитального блока (рйсунок 2.3.1) с большим запасом гаранти¬
ровала дальнейшее выполнение миссии космическим аппаратом, и 19 октября 2016 г.
«Трейс Гас Орбитер» вышел на орбиту спутника планеты Марс.
Рисунок 2.3.1. Точность выведения орбитального блока, достигнутая при запуске
«ЭкзоМарс-2016»
Методические подходы, разработанные и успешно подтвержденные первым за¬
пуском КА к Марсу в 2016 г., легли в основу подготовки миссии 2022 г. Рассмотрены
шесть вариантов дат запуска - с августа по сентябрь 2022 г. Этот интервал времени
оптимален для решения задач пуска.
2.3.1. Ракета космического назначения
В состав РКН входят модернизированная PH «Протон-М» и космическая головная
часть (КГЧ), состоящая из РБ «Бриз-М» с улучшенными энергомассовыми характе¬
ристиками, облегченного головного обтекателя (длина ГО 13305 мм, наружный ди¬
57
2-3
аметр ГО 4350 мм), переходной системы PH со средствами разделения типа 1666V
и космического аппарата «ЭкзоМарс-2022-КА» (История развития отечественного
ракетостроения, 2014).
Общие виды РКН и КГЧ показаны на рисунках 2.3.2 и 2.3.3 соответственно.
Энергетические характеристики РКН в данной конфигурации обеспечивают воз¬
можность выведения на стандартную геопереходную орбиту (ГПО) с ДГкА=1500 м/с
полезной нагрузки (КА+ПС) массой 6150 кг.
Ракета-носитель «Протон-М»
Для запуска КА «ЭкзоМарс-2022-КА» используется PH «Протон-М» с улучшен¬
ными энергомассовыми характеристиками, соответствующими 3-му этапу модерни¬
зации (Кобелев В.Н., Милованов А.Г., 2009). Данная конфигурация PH ранее неодно¬
кратно использовалась при запусках федеральных и коммерческих КА.
PH «Протон-М» состоит из трех ускорителей, соединенных по тандемной схеме.
На всех ступенях PH установлены высокоэкономичные двухкомпонентные ЖРД, ра¬
ботающие по замкнутой схеме.
Космическая головная часть соединена с верхним отсеком ускорителя III ступени
посредством нижней проставки разгонного блока (технологический стык).
На ракете-носителе применена автономная система управления с БЦВМ, реали¬
зующая терминальный (гибкий) метод управления на всех участках полета. Управле¬
ние полетом I и II ступеней ракеты производится отклонением основных двигателей,
а III ступени - отклонением камер рулевого двигателя. Система управления выдает ко¬
манды на срабатывание пиросредств сброса створок головного обтекателя. Средства
разделения получают команды от СУ PH и предназначены для разрыва механических
связей и отделения I, II, III ступеней и орбитального блока (РБ «Бриз-М» + переходная
система + КА).
Ускоритель I ступени отделяется «горячим» способом под воздействием тяги ДУ
II ступени, запускаемой до выключения ДУ I ступени. Ускоритель II ступени отделя¬
ется путем торможения его шестью РДТТ и разгона III ступени ракеты четырехкамер¬
ным рулевым двигателем. Ускоритель III ступени отделяется от орбитального блока
посредством торможения его четырьмя РДТТ.
Специальных доработок PH «Протон-М» для запуска КА «ЭкзоМарс-2022-КА»
не требуется. Основные характеристики PH «Протон-М» представлены в таблице 2.3.1.
Таблица 2.3.1. Основные характеристики PH
параметр
значение
стартовая масса PH с КГЧ, кг
-700 000
приведенная масса ПН, кг:
на круговой околоземной орбите
(Я=200 км,/=51,6°)
22 500
габариты PH, м:
- длина
- диаметр по стыку с КГЧ
42,34
4,1
количество ступеней (ускорителей)
3
компоненты ракетного топлива
(на всех ступенях):
азотный тетроксид (окислитель)
несимметричный диметилгидразин
(горючее)
58
2-3
параметр
значение
тип и количество двигателей:
- ускоритель I ступени
ЖРД РД-276 (маршевый), 6 шт.
- ускоритель II ступени
ЖРД РД-0210 (маршевый), 3 шт.
ЖРДРД-0211 (маршевый), 1 шт.
- ускоритель III ступени
ЖРД РД-0213 (маршевый), 1 шт.
ЖРД-0214 (рулевой), 1 шт.
Рисунок 2.3.2. Общий вид РКН для запуска КА «ЭкзоМарс-2022-КА»
2-3
Рисунок 2.3.3. Общий вид КГЧ с РБ «Бриз-М» и КА «ЭкзоМарс-2022-КА»
Разгонный блок «Бриз-М»
Для запуска КА «ЭкзоМарс-2022-КА» используется РБ «Бриз-М» с улучшенными
энергомассовыми характеристиками (ЭМХ), соответствующими 3-му этапу модер¬
низации. Данная конфигурация РБ ранее неоднократно использовалась при запусках
федеральных и коммерческих КА. Основными составными частями РБ являются:
- центральный блок (ЦБ), включающий центральный топливный бак с двигатель¬
ной установкой и приборный отсек, в котором установлена аппаратура бортовых
систем;
- дополнительный топливный бак (ДТБ) тороидальной формы, сбрасываемый
в полете после его опорожнения;
- нижняя проставка (НП), обеспечивающая сопряжение и разделение РБ с PH и ГО
и отделяемая в полете вместе с III ступенью PH.
Общий вид разгонного блока «Бриз-М» показан на рисунке 2.3.4.
Основные характеристики РБ «Бриз-М» представлены в таблице 2.3.2.
60
2-3
Таблица 2.3.2. Основные характеристики РБ «Бриз-М»
параметр
значение
длина РБ от стыка с PH до стыка с ПС PH, м
2,654
диаметр РБ по стыку с PH, м
4,1
диаметр РБ по стыку с ГО, м
4,35
диаметр по стыку с ПС PH, м
2,49
максимальный заправляемый запас топлива, т
-19,8
тип и количество двигателей:
- маршевый двигатель
ЖРД, 1 шт.
- двигатели коррекции импульса
ЖРД, 4 шт.
- двигатели стабилизации
ЖРД, 12 шт.
Головной обтекатель
Используется головной обтекатель (ГО) длиной 13305 мм и наружным диаметром
4350 мм, с улучшенными энергомассовыми характеристиками, соответствующими
3-му этапу модернизации. Головной обтекатель предназначен для защиты КА и РБ
«Бриз-М» от воздействий внешней среды при выведении, стоянке на стартовом ком¬
плексе, транспортировке на СК и подготовке КА и РБ в составе КГЧ и РКН. Головной
обтекатель имеет типовое оснащение: теплоизоляция, БКС, отрывные электросоеди¬
нители РБ/ГО, средства отделения ГО, датчики СНИ и СТИ и т.п. Данная конфигура¬
ция ГО является типовой и ранее неоднократно использовалась при запусках феде¬
ральных и коммерческих КА.
61
2-3
Переходная система ракеты-носителя
Переходная система ракеты-носителя (ПС PH) обеспечивает механическое и элек¬
трическое сопряжение РБ «Бриз-М» и КА «ЭкзоМарс-2022-КА» на всех этапах со¬
вместной эксплуатации.
Общий вид переходной системы PH показан на рисунке 2.3.5.
Корпус переходной системы PH имеет коническую форму и выполнен из двух
частей. Верхняя часть представляет собой коническую оболочку из алюминиевого
сплава производства фирмы RUAG Space АВ (Швеция), торец с меньшим диаме¬
тром является шпангоутом для стыковки ПС PH с КА. В верхней части корпуса ПС
PH расположены средства разделения 1666V разработки фирмы RUAG Space АВ
(Швеция): замковая лента, шесть пружинных толкателей, две пирогильотины, экс¬
тракторы, улавливающие устройства. Эти средства разделения предназначены для
механического соединения КА с ПС PH, а также обеспечивают их разделение на це¬
левой орбите выведения. На стыковочном шпангоуте ПС PH установлены два дат¬
чика контроля разделения, датчики систем телеметрических и наземных измерений.
На верхней части корпуса ПС PH устанавливаются два кронштейна с отрывными
электрическими соединителями. Они предназначены для соединения электрических
цепей КА и ПС PH и их разделения в полете. Нижняя часть представляет собой кони¬
ческую оболочку, изготовленную из алюминиевого сплава (производства ГКНПЦ),
торец большого диаметра которой является стыковочным шпангоутом с РБ. Обе ча¬
сти ПС PH по фланцам между собой стыкуются болтами. На нижней части также
установлены датчик СТИ и СНИ. На обеих частях проложена бортовая кабельная
сеть. Для обеспечения заданного теплового режима КА и средств разделения внеш¬
няя поверхность ПС PH закрыта экранно-вакуумной теплоизоляцией. Металлизация
между КА и ПС PH достигается путем прямого контакта поверхностей шпангоута
КА и шпангоута ПС PH.
Рисунок 2.3.5. Общий вид переходной системы PH
62
2-3
2.3.2. Выведение КА «ЭкзоМарс-2022-КА»
Схема выведения была спроектирована для шести расчетных дат: с августа по сен¬
тябрь 2022 г. В связи с отличием параметров отлетных траекторий и программ полета
для каждой даты разрабатывается индивидуальное полетное задание РБ. Траектория
полета PH - одинаковая для всех дат запуска. Выведение КА «ЭкзоМарс-2022-КА»
на отлетную траекторию к Марсу осуществляется разгонным блоком «Бриз-М»
по схеме перелета с четырьмя включениями маршевого двигателя РБ. Используется
выведение с доразгоном, при котором ракета-носитель «Протон-М» выводит орби¬
тальный блок (ОБ) на суборбитальную траекторию;
Для полета PH используется трасса, обеспечивающая наклонение опорной орби¬
ты 64,89°. Сброс ГО осуществляется на участке полета III ступени PH.
Дальнейшее выведение орбитального блока на целевую орбиту осуществляется
при помощи РБ «Бриз-М». Схема выведения КА на отлетную траекторию к Марсу
представлена на рисунке 2.3.6, траектория полета PH и РБ - на рисунке 2.3.7.
Первое включение МД РБ переводит орбитальный блок, состоящий из РБ, ПС
и КА, на опорную орбиту.
Второе включение маршевого двигателя РБ переводит ОБ на промежуточную
орбиту.
После окончания третьего включения маршевого двигателя РБ и завершения опе¬
рации сброса дополнительного топливного бака ОБ переходит на переходную орбиту.
В результате четвертого включения МД формируется отлетная траектория к Марсу.
После выхода на отлетную траекторию к Марсу производится разворот ОБ в ори¬
ентацию, заданную для отделения КА, закрутка ОБ и отделение КА.
После отделения КА и проведения сеансов измерения параметров отлетной тра¬
ектории разгонный блок уводится с отлетной траектории с помощью двух импульсов
увода, выполняемых двигателями коррекции импульса (ДКИ), и переводится в без¬
опасное состояние (сбрасывается давление из всех емкостей). Орбита увода должна
исключать попадание РБ на Марс.
Общая продолжительность выведения КА от момента старта PH (момент КП -
«Контакт подъема») до момента отделения КА составляет ~ 4,5 часа.
Программа выведения КА «ЭкзоМарс-2022-КА» на отлетную траекторию к Мар¬
су разработана с учетом выполнения следующих требований:
- по обеспечению заданных номинальных параметров отлетной траектории КА
к Марсу и точности их формирования;
- по предельной продолжительности нахождения КА в тени Земли;
- по требуемым углам ориентации КА на Солнце на пассивных участках полета
и типу динамических операций для изменения этой ориентации;
- по ориентации КА на момент его отделения от РБ;
- по угловой скорости закрутки КА при его отделении от РБ и по линейной скоро¬
сти расхождения КА и РБ;
- по выполнению маневра увода РБ после отделения КА для предотвращения за¬
грязнения КА и столкновения КА с РБ, а также для непрерывного возрастания
расстояния между ними.
63
2-3
максимальный \
скоростной
НаПОр CJmax
7'
отделение
III ступени
отделение сброс ГО
II ступени
отделение
I ступени
1-евключ. 2-евключ. 3-евключ.
МД РБ МД РБ МД РБ
двигатели I поле падения
ступени PH ускорителя I ст.
двигатели II ступени PH
двигатели III ступени PH
поле падения
ускорителя II ст. и ГО
маршевый
■■■ "ч двигатель РБ
1 (МД РБ)
I
выкл. МД выкл. МД выкл. МД I
\ /
44 сброс ДТБ-1
\
\
\
J
поле падения
ускорителя III ст.
4-е включ.
МДРБ
о
выкл. МД Г
отделениеJ
КА
тормозной
импульс
тормозной f включение двигателей
импульс малой тяги РБ для
поджатия топлива
Б МДРБ
t _ J7~\
I время
сброс ДТБ
Рисунок 2.3.7. Траектория полета PH и РБ
64
2-3
2.3.3. Подготовка РКН на космодроме Байконур
При запуске КА «ЭкзоМарс-2022-КА» используется типовая схема подготовки
РКН «Протон-М» / РБ «Бриз-М» на техническом и стартовом комплексах (ТК и СК)
космодрома Байконур.
Составные части РКН (PH, РБ, ПС PH, ГО) транспортируются с завода-изгото¬
вителя на ТК космодрома железнодорожным транспортом (возможно также транс¬
портирование РБ и ПС PH авиатранспортом на аэродром Юбилейный с последую¬
щей доставкой их в coop. 92А-50 автотранспортом). Автономная подготовка (сборка,
автономные и комплексные проверки) PH «Протон-М», РБ «Бриз-М», ПС PH и ГО
проводится в монтажно-испытательном корпусе (МИК) (сооружение 92А-50). Сбор¬
ка КГЧ проводится в зале 101, а стыковка КГЧ с PH и комплексные проверки КГЧ
и РКН проводятся в зале 111 coop. 92А-50. После завершения сборки и необходимых
проверок РКН транспортируется на технологическую заправочную площадку (ТЗП),
где производится заправка РБ «Бриз-М» компонентами топлива. После этого РКН
транспортируется на СК. Заправка PH компонентами топлива производится на СК.
Иллюстрации автономных подготовок PH, РБ, ГО, сборка КГЧ и РКН на ТК, транс¬
портирование РКН на СК и пуск РКН представлены на рисунках (фото) 2.3.8-2.3.25.
Рисунок 2.3.8. Технический комплекс подготовки составных частей РКН «Протон-М»
(сооружение 92А-50) на космодроме Байконур
Рисунок 2.3.9. Сборка PH «Протон-М» на ТК
65
2-3
Рисунок 2.3.10. Автономные и комплексные проверки PH «Протон-М»
Рисунок 2.3.11. Сборка РБ, автономные
и комплексные проверки систем и агрегатов
на ТК РБ
Рисунок 2.3.12. Сборка КГЧ на ТК.
Установка РБ на рабочее место
66
2-3
Рисунок 2.3.13. Сборка КГЧ на ТК. Установка КА «ЭкзоМарс-2016» на ПС PH
Рисунок 2.3.14. Установка сборки «КА/ПС PH»
на РБ
Рисунок 2.3.15. Монтаж обтекателя
67
2-3
Рисунок 2.3.16. Монтаж ГО
Рисунок 2.3.17. Общая сборка РКН «Протон-М». Стыковка КГЧ с PH. Сборка РКН
Рисунок 2.3.18. Общая сборка РКН «Протон-М». Сборка РКН
68
2-3
Рисунок 2.3.19. Подготовка РКН к вывозу из МИКа
Рисунок 2.3.20. Транспортировка РКН «Протон-М» на ТЗП
Рисунок 2.3.21. Транспортировка РКН «Протон-М» на стартовый комплекс
2-3
Рисунок 2.3.22. Установка РКН «Протон-М» на СК
Рисунок 2.3.23. Подвод фермы обслуживания к РКН «Протон-М»
70
2-3
Рисунок 2.3.24. Старт к РКН «Протон-М» с КА «ЭкзоМарс-2016»
Рисунок 2.3.25. Старт РКН «Протон-М»
71
2-3
2.3.4. Основные этапы адаптации средств выведения к запуску
КА «ЭкзоМарс-2022-КА»
Основные этапы адаптации средств выведения к запуску КА «Экзо-Марс-2022-
КА» приведены в таблице 2.3.3.
Таблица 2.3.3. Основные этапы адаптации средств выведения к запуску КА
«ЭкзоМарс-2022-КА»
№
этапа
наименование этапа
1
Разработка предварительных проектных материалов для ЕКА
в объеме научно-технического отчета
2
Разработка проектных материалов для ЕКА в объеме эскизного проекта по адаптации
КРК «Протон-М» и КРБ «Бриз-М» для запуска КА в части средств выведения,
НИК РБ и КСИСО PH. Разработка ПОН на РКН, ПОБ на РКН.
Согласование и анализ ИД по КА этапа ЭП. Рассмотрение и согласование ДКИ,
разработанной на этапе ЭП. Подготовка ответов на ПД и вопросы Заказчика этапа ЭП
3
Разработка проектных материалов для ЕКА в объеме технического проекта
по адаптации КРК «Протон-М» и КРБ «Бриз-М» для запуска КА
в части средств выведения, НИК РБ и КСИСО PH
4
Разработка (корректировка) технической документации и КД на РКН, КГЧ, РБ, ГО,
ПС PH по адаптации КРК «Протон-М» и КРБ «Бриз-М» для запуска КА
в части средств выведения, НИК РБ и КСИСО PH
5
Подготовка, обеспечение и участие в испытаниях на территории ЕКА при проведении
примерочных испытаний летной ПС PH с КА и автономных испытаниях КА
6
Разработка (корректировка) ЭД на РКН, КГЧ, РБ, ГО, ПС PH по адаптации КРК
«Протон-М» и КРБ «Бриз-М» для запуска КА в части средств выведения, НИК РБ
и КСИСО PH. Корректировка КД и ЭД по результатам изготовления материальной
части (при необходимости). Присвоение документации литеры «О»
7
Адаптация ПМО СУ РБ и ПМО СУ PH, выпуск окончательных расчетов.
Адаптация НИК РБ, КСИСО PH и формирование форматов полетной информации
при пуске КА. Разработка и выпуск Итогового отчета о готовности РКН
и заключений о готовности PH, РБ, ГО, ПС PH, КГЧ, РКН, КСИСО PH,
НИК РБ и ЛИ КК «ЭкзоМарс-2022»
8
Согласование и анализ уточненных ИД по КА. Рассмотрение и согласование
итоговой версии ДКИ. Представление ответов на поручения Заказчика.
Инженерно-конструкторское сопровождение изготовления СР, ПС PH, КГЧ и РКН
9
Разработка и выпуск послепускового отчета о выполнении требований
по подготовке к запуску КА и пуску РКН
Список литературы
Кобелев В.Н., Милованов А.Г. Средства выведения космических аппаратов. М.: Ре¬
старт, 2009. 528 с.
История развития отечественного ракетостроения. М.: Столичная энциклопе¬
дия, 2014. 752 с.
Боровин Г.К., Голубев Ю.Ф., Грушевский А.В. и др. Баллистико-навигационное
обеспечение полетов автоматических космических аппаратов к телам Солнечной си¬
стемы / Под ред. А.Г. Тучина. Химки: АО «НПО Лавочкина», 2018. 336 с.
А.В, Владимиров,
А.В. Исаков
72
ЧАСТЬ 3
ПРОЕКТ КОСМИЧЕСКОГО АППАРАТА
«ЭКЗОМАРС-2022»
ЙППРОЕКТНЫЙ ОБЛИК ДЕСАНТНОГО МОДУЛЯ
«ЭКЗОМАРС-2022»
В соответствии с распределением ответственности по проекту «ЭкзоМарс» меж¬
ду ГК «Роскосмос» и ЕКА ответственным за разработку, изготовление и наземную
отработку десантного модуля и адаптера с системой отделения является АО «НПО
Лавочкина»
За основу проектирования ДМ принимались следующие исходные данные:
- Соглашение по распределению ответственности между ГК «Роскосмос» и ЕКА
- Основные технические требования, определяющие проектный облик, изложенные
в ТЗ и совместном российско-европейском документе требований к системе мис¬
сии MSRD (Mission and System Requirements Document) EXM-M2-RSD-ESA-00003
- Условия функционирования ДМ на всех этапах.
Основные технические требования
Основные технические требования, определяющие проектный облик, изложен¬
ные в ТЗ и совместном российско-европейском документе MSRD, представлены в та¬
блице 3.1.1.
Таблица 3.1.1. Основные требования, определяющие проектный облик ДМ
№ п/п
содержание требования
значение
основные проектные требования
1
доставка на поверхность
Марса марсохода
и научной аппаратуры,
установленной
на посадочной платформе
масса марсохода,
не более
345 кг
масса научной аппаратуры,
не более
45 кг
2
место посадки:
широта, град
*
долгота, град
*
3
эллипс рассеивания
точки посадки
большая полуось, км
±50
малая полуось, км
±7,5
4
высота места посадки от поверхности ареоида, км
-2
5
параметры посадки
осевая перегрузка
< 18
боковая перегрузка
<8
73
3-1
№ п/п
содержание требования
значение
параметры, определяющие облик ДМ
6
параметры входа ДМ
в атмосферу Марса
тип траектории
баллистическая
способ посадки
без выбора места
скорость входа в атмосферу:
Beagle-2
Elysium Planitia
Mawrth Vallis
И=5791,9 м/с
И=5786,3 м/с
Е=5816,9 м/с
угол входа:
Beagle-2
Elysium Planitia
Mawrth Vallis
0= -(12,00±0,21)°
0= -(12,00±0,21)°
0= -(12,00±0,21)°
7 '
носитель
«Протон-М»
диаметр АЭ
от 3,8 до 4,0 м
8
требование
к массово-инерционным
характеристикам
ДМ и ПсМ
масса ДМ на входе в атмосферу
< 2000 кг
положение ЦМ** ПсМ -
отклонение от продольной оси
< 10 мм
положение ЦМ ДМ - отклонение
от продольной оси ДМ
< 10 мм
центробежные моменты
инерции ДМ
Jxy <20 кг м2
Jxz <20 кг-м2
соотношение осевых моментов
инерции ДМ
л >1>2
max (Jyy, Jzz)
9
срок активного
существования
на поверхности Марса
марсохода
0,5 года
посадочной платформы
1 год
10
число направлений для схода марсохода
2
* Для первоначального проектирования использовались координаты места посадки район Meridiani
Planum с координатами и высотой места посадки минус 1 км, в дальнейшем при переходе на высоту
места посадки минус 2 км рассматривались следующие три района посадки: Elysium Planitia - 4,323°
с.ш., 135,663° в.д.; Beagle-2 - 10,6° с.ш., 90° в.д.; Mawrth Vallis - 24,5° с.ш., 20° з.д. В настоящее время
в качестве места посадки выбрана равнина Oxia Planum (18,275° с.ш., 335,368° в.д.) с высотой места
посадки минус 2 км .
** ЦМ - центр масс
Кроме параметров, приведенных в таблице, облик десантного модуля определяет¬
ся принятыми решениями по глубокой интеграции задач, решаемых ПМ и ДМ, жест¬
кими требованиями к массе ДМ, необходимостью использования в ДМ задела проек¬
та «ЭкзоМарс-2016» в части значительного объема аппаратуры: бесплатформенный
инерциальный блок (IMU), доплеровский радар (RDA), трансивер.
74
3-1
Согласование основных проектных требований
к десантному модулю
Для учета всех требований, предъявляемых к элементам конструкции ДМ на всех
этапах от сборки до функционирования на поверхности, все системы удобно разбить
наследующие функциональные элементы (Алексаъикин С.Н., Лукъянчиков А.В., Мар¬
тынов М.Б., Хартов В.В., 2014):
- перелетный модуль (разрабатывается компанией ОНВ);
- система отделения (включает адаптер с системой отделения десантного модуля
от перелетного модуля);
- конструкция ДМ (аэродинамическая форма, конструкция и теплозащитная обо¬
лочка аэродинамического экрана и заднего кожуха со средствами разделения);
- система спуска ДМ в атмосфере Марса (RDA, IMU, парашютная система);
- посадочная платформа (элементы конструкции с интерфейсами для установки
других подсистем);
- система электроснабжения (система управления электропитанием, аккумулятор¬
ные батареи, солнечные панели);
- марсоход;
- служебная и научная аппаратура (БКУ, БРК, научный комплекс);
- система схода (трапы, система развертывания, система зачековки трапов, плат¬
форма марсохода);
- система посадки (посадочные опоры, система зачековки и развертывания);
- двигательная установка (четырехкамерный двигатель, двигатели малой тяги -
ДМТ, система хранения и подачи топлива).
Все перечисленные системы накладывают требования на конструкцию десантно¬
го модуля. Эти требования можно разделить на следующие группы:
1. Конструктивные:
- механические требования (массово-инерционные характеристики элементов,
размещение, прочность конструкции, функционирование механизмов и средств
разделения);
- тепловые требования (обеспечение теплового режима элементов и систем аппа¬
рата и взаимное влияние этих элементов);
- требования к электроснабжению.
2. Эксплуатационные:
- требования по сборке (сборка КА на территории ЕКА, досборка на технической
позиции);
- требования к проведению испытаний (обеспечение проведения всех видов испы¬
таний с учетом ограничений со стороны элементов КА);
- требования к проведению операций на технической позиции (ТП) (обеспечение
требований планетарной защиты, проведение ряда технологических операций
на ТП);
- требования к заправке аппарата на космодроме (заправка перелетного и посадоч¬
ного модулей);
- требования по обеспечению функционирования (проведение научных экспери¬
ментов, обеспечение связи и т.д.);
- требования по обеспечению работ с аппаратом, а также его автономного функци¬
онирования, с учетом установленных на борту радиоизотопных тепловых блоков.
75
3-1
Большинство требований, предъявляемых к каждому отдельному функциональ¬
ному элементу системы, оказывают влияние на другие элементы. В качестве примера
можно привести требование по обеспечению связи на этапе перелета, которое вы¬
нуждает проектировать перелетный модуль для перелета в постоянной ориентации
на Землю, что существенно влияет на логику обеспечения теплового режима мар¬
сохода. Это связано с тем, что при подобной ориентации задний кожух десантного
модуля будет нагреваться под воздействием Солнца, а для обеспечения теплового
режима марсохода необходимо создать минимальную температуру заднего кожуха.
Кроме этого, требование по обеспечению радиосвязи ужесточает требования к мас¬
сово-инерционным параметрам ДМ со стороны КА.
Описанная ситуация вынуждает искать компромиссные решения на каждом шаге
проектирования десантного модуля.
Перечисленные выше функциональные элементы ДМ с кратким описанием ос¬
новных требований, которые накладываются на конструкцию ДМ, представлены
на рисунке 3.1.1.
• количество
направлений
схода
• требования
по сходу
• тепловой режим
• устойчивость
• размеры
при посадке
и расположение
и при сходе
ДУ
• размещение
посадочных опор
• силовая схема
• размещение
элементов
• достаточность
• тепловой режим
• размещение
• тепловой режим
• операции
на платформе:
развертывание,
подъем
• размещение ПС
• обеспечение
точности взаимного
расположения
• требования
к параметрам
движения
• тепловой режим
элементов
;пм+дм
марсоход
посадочная платформа
Q система отделения |
система
схода
система
спуска
система
«посадки
• силовая схема
• аэродинамика
• теплозащитное
покрытие
• операции
при спуске:
ввод ПС,
отделение АЭ,
заднего кожуха
• декомпрессия
• МИХ
• тепловой режим
• размещение
• функционирование
• влияние ТБ
• тепловой режим
• сборка
• определение МИХ
v
• сборка
• операции наТП:
• тепловой режим
заправка, испытания,
• электропитание
установка изотопных источников
• требование
• планетарная защита
• наддув марсохода
к МИХ ДМ
Рисунок 3.1.1. Конструктивные и эксплуатационные требования к ДМ
76
3-1
Состав и основные этапы функционирования ДМ
Этап наземной подготовки
Этап включает в себя все работы по изготовлению, сборке, испытаниям, подготов¬
ке к пуску космического аппарата. В процессе изготовления проводится определение
взаимного расположения приборов, задействованных в управлении движением КА,
а также элементов двигательных установок перелетного и посадочного модулей.
После доставки составных частей КА на технический комплекс полигона Байко¬
нур, по окончании работ с марсоходом и его установки на посадочном модуле (ПсМ),
окончании работ с парашютной системой, стыковки ПсМ и заднего кожуха (ЗК) на ЗК
устанавливается технологическая крышка (аналог аэродинамического экрана - АЭ
для обеспечения планетарного карантина с сохранением возможности доступа во
внутреннее пространство ДМ). ДМ с адаптером и устройством отделения при помо¬
щи технологического кольца устанавливается на ПМ (рисунок 3.1.2).
технологический
аэродинамический экран
Рисунок 3.1.2. КА «ЭкзоМарс-2022» с технологическими элементами
В такой конфигурации с КА проводятся следующие основные работы: установка
КА на адаптере к разгонному блоку, заправка ПМ и ПсМ, установка КА на разгон¬
ном блоке, демонтаж технологической крышки и кольца, установка радиоизотопных
источников на посадочной платформе, установка летного аэродинамического экрана.
Этап выведения и перелета к Марсу КА «ЭкзоМарс-2022»
Основной задачей этапа является доставка КА в окрестность Марса с последую¬
щим отделением ДМ с заданными параметрами движения.
ДМ стыкуется к перелетному модулю при помощи адаптера с устройством отде¬
ления ДМ от ПМ (рисунок 3.1.3). В целях обеспечения теплового режима адаптер
покрывается экранно-вакуумной теплоизоляцией (ЭВТИ). ЭВТИ на рисунке 3.1.3
не показана.
77
3-1
Рисунок 3.1.3. Адаптер с устройством отделения ДМ от ПМ
Отделение ДМ от ПМ происходит при подлете к Марсу. Вектор состояния фор¬
мируется перелетным модулем. Отделение ДМ от ПМ осуществляется при помощи
устройства отделения, установленного на адаптере. Толкатели, входящие в состав
устройства отделения, обеспечивают расхождение составных частей КА.
После отделения ДМ на перелетном модуле остается адаптер с частью устройства
отделения (рисунок 3.1.4). На рисунке условно показана ЭВТИ адаптера с устрой¬
ством отделения.
Рисунок 3.1.4. ПМ с адаптером и частью устройства отделения после отделения ДМ
После разделения ДМ и ПМ перелетный модуль входит в атмосферу Марса и раз¬
рушается от теплового воздействия атмосферы.
Параметры траектории и время отделения ДМ выбирается с учетом места посад¬
ки. Основное место посадки «ЭкзоМарс-2022» - Oxia Planum (рисунок 3.1.5). Коор¬
динаты центра эллипса рассеивания: 18,275° с.ш., 335,368° в.д.
78
3-1
Рисунок 3.1.5. Расчетное место посадки «ЭкзоМарс-2022»
Этап автономного перелета ДМ до входа в атмосферу,
вход в атмосферу, спуск и посадка на поверхность Марса
Основная задача этапа - безопасный спуск и мягкая посадка посадочного модуля
на поверхность Марса при помощи двухкаскадной парашютной системы и тормоз¬
ной двигательной установки.
После отделения от перелетного модуля ДМ совершает перелет до входа в атмос¬
феру Марса (длительность приблизительно 30 мин), спуск в атмосфере и мягкую по¬
садку на поверхность Марса. Отделение ДМ производится в закрутке.
Спуск ДМ в атмосфере Марса происходит по баллистической траектории без аэ¬
родинамического качества, схема движения представлена на рисунке 3.1.6. ДМ стаби¬
лизирован закруткой с номинальной угловой скоростью сох= 16,5 %.
Теоретическая форма десантного модуля без ЭВТИ на аэродинамическом экра¬
не (АЭ) показана на рисунке 3.1.7. ДМ представляет собой осесимметричное тело
с диаметром миделя 3800 мм. Головная часть (аэродинамический экран) выполнена
в виде 140-градусного конуса со сферическим затуплением. Задняя часть (задний ко¬
жух - ЗК) - обратный 74-градусный конус. На заднем конусе расположены 8 малых
конических поверхностей, которые ограничивают кронштейны для стыковки с адап¬
тером. Передняя и задняя конические поверхности сопряжены боковой тороидальной
поверхностью. В задней, плоской части ДМ выступает крышка парашютной системы.
Конфигурация ДМ при входе в атмосферу Марса с установленным на аэроди¬
намическом экране ЭВТИ и после его уноса представлена на рисунке 3.1.8. ЭВТИ
устанавливается на АЭ для обеспечения теплового режима на этапе перелета и ав¬
тономного движения ДМ перед входом в атмосферу. ЭВТИ имеет относительно низ¬
кую температуру разрушения и укладывается секторами для обеспечения ее уноса
без создания возмущений на угловое движение ДМ.
79
3-1
участок
max тепловых
потоков
' с1
раскрытие
1-го каскада
парашютной
системы
раскрытие 2-го каскада
парашютной системы
аэродинамического
экрана
включение
двигательной
установки (ДУ)
Рисунок 3.1.6. Схема спуска ДМ в атмосфере Марса
Рисунок 3.1.7. Форма десантного модуля (без ЭВТИ на аэродинамическом экране).
Направление движения - вдоль +ЛдМ
ДМ с установленным на АЭ ЭВТИ
Рисунок 3.1.8. ДМ после отделения от ПМ и после уноса ЭВТИ
ДМ после уноса ЭВТИ
80
После прохождения участка максимальных тепловых потоков и уноса части те¬
плозащитного покрытия с корпуса ДМ на скорости менее 2,1 М производится ввод
первого каскада парашютной системы. Ввод второго каскада производится на скоро¬
сти менее 0,8 М (рисунок 3.1.9).
1 2
Рисунок 3.1.9. Последовательность функционирования парашютной системы
1
Парашютная система размещена в задней части ДМ на заднем кожухе. Последова¬
тельность ввода парашютной системы:
1) Т=0, М<2,1. Срабатывание мортиры вытяжного парашюта 1-го каскада, выби¬
вание крышки мортиры, вытягивание сумки с вытяжным парашютом 1-го каскада;
2) Т=1 с. Наполнение вытяжного парашюта 1-го каскада;
3) Т=2 с. Сброс крышки контейнера парашютной системы, вытягивание сумки
парашюта 1 -го каскада;
4) Т=4 с. Наполнение первого каскада парашютной системы;
5) При М=0,8. Сброс 1-го каскада парашютной системы, срабатывание мортиры
вытяжного парашюта 2-го каскада;
6) Наполнение вытяжного парашюта 2-го каскада, вытягивание сумки парашюта
2-го каскада;
7) Наполнение 2-го каскада парашютной системы;
8) Сброс аэродинамического экрана ДМ и раскрытие посадочных опор.
Сброс аэродинамического экрана производится после успокоения колебаний ДМ,
возникающих при вводе каскадов парашютной системы, менее чем через 10 с после
ввода второго каскада. Сразу после отделения АЭ производится раскрытие посадоч¬
ных опор, а также парирование остаточной угловой скорости закрутки ДМ. Гашение
угловой скорости вращения вокруг продольной оси X производится при помощи дви¬
гателей малой тяги, размещенной на периферии посадочного модуля. Конфигурация
ДМ после сброса аэродинамического экрана представлена на рисунках 3.1.10, 3.1.11
(второй каскад парашютной системы не показан).
81
3-1
опоры сложены опоры развернуты
Рисунок 3.1.10. ДМ после сброса аэродинамического экрана (ПС не показана)
Рисунок 3.1.11. ДМ после сброса АЭ (второй каскад ПС не показан)
Монотопливная двигательная установка (рисунок 3.1.12) имеет в своем соста¬
ве дросселируемый четырехкамерный тормозной двигатель с суммарной тягой
300... 1300 кгс, а также 8 пятикилограммовых двигателей малой тяги (ДМТ). ДМТ
предназначены для управления ориентацией и стабилизации аппарата на участке ак¬
тивного торможения. Вытеснительная система подачи топлива состоит из четырех
баков (заправка - до 150 кг гидразина) и двух шар-баллонов с газом (гелием).
Включение доплеровского радара RD А производится через ~10 с после отде¬
ления АЭ.
Момент отделения ПсМ от заднего кожуха определяется на борту ПсМ на основа¬
нии результатов измерений RD А и IMU.
Отделение ПсМ от заднего кожуха с парашютной системой производится после
прогрева каталитического пакета тормозного двигателя путем его включения на ма¬
лой тяге.
После отделения заднего кожуха с парашютной системой посадочный модуль
приобретает конфигурацию, показанную на 3.1.15. В этой конфигурации аппарат со¬
вершает посадку на поверхность Марса. Расчетные дата и время посадки аппарата:
19 марта 2021 года 14.03-14.08 LMST.
82
3-1
Рисунок 3.1.12. Двигательная установка
От момента отделения от перелетного модуля на всех последующих участках дви¬
жения (кроме участка максимальных тепловых потоков) ДМ и ПсМ передают теле¬
метрическую информацию (ТМИ). Ретрансляцию информации на Землю должен обе¬
спечить орбитальный модуль TGO, который выведен на околомарсианскую орбиту
в ходе миссии «ЭкзоМарс-2016». Схема радиосвязи - рисунок 3.1.13
83
3-1
Рисунок 3.1.14. Установка излучателей антенны ЗК на кожухе.
Теплозащитное покрытие не показано
Рисунок 3.1.15. Посадочный модуль на этапе активного торможения
От момента отделения от ПМ и до сброса ЗК передача информации ведется через
антенну заднего кожуха (рисунок 3.1.14).
После отделения ЗК радиокомплекс переключается на передачу ТМИ через антен¬
ну ПсМ (рисунок 3.1.15).
При посадке амортизаторы, размещенные в стойках посадочных опор, поглощают
остаточную кинетическую энергию ПсМ. Допустимые скорости посадки: вертикаль¬
ная до 2 м/с, горизонтальная до 2 м/с. Отклонение продольной оси аппарата от мест¬
ной вертикали < 7°.
Зазор между поверхностью и силовой конструкцией восьмигранника при необ-
жатых посадочных опорах составляет 550 мм. Указанная величина выбрана с учетом
максимально допустимой высоты камня в районе посадки - 350 мм.
Длительность фазы от отделения от ПМ и до посадки ~37 минут.
В процессе спуска планируется проведение ряда научных измерений при помощи
элементов метеокомплекса и телевизионной системы, установленных на посадочной
платформе.
84
3-1
Этап работы на поверхности Марса
В процессе первой фазы функционирования аппарата на поверхности Марса про¬
изводится развертывание ПсМ и подготовка к съезду марсохода.
Развертывание солнечных панелей, трапов для схода марсохода, штанги антенны
посадочной платформы начинается через 10 минут после посадки, в течение которых
происходит осаждение пыли. Конфигурация посадочного модуля после раскрытия
представлена на рисунке 3.1.16).
Рисунок 3.1.16. Посадочный модуль после посадки и раскрытия
Полное раскрытие посадочного модуля (без учета раскрытия марсохода) занимает
~15 минут. В течение 10 марсианских суток марсоход производит раскрытие, выбор
направления схода на поверхность и сход на поверхность. После схода марсохода
и марсоход и платформа начинают выполнять свою собственную научную програм¬
мы. Передача на Землю полученной научной информации и телеметрии осуществля¬
ется через аппарат-ретранслятор на орбите Марса. Согласно базовой линии ретранс¬
лятором будет служить аппарат TGO экспедиции «ЭкзоМарс-2016».
Парашютная система десантного модуля
Парашютная система (ПС) разрабатывается предприятиями Европейского косми¬
ческого агентства.
Контейнер с парашютной системой представляет собой цилиндрическую оболоч¬
ку со шпангоутом и конической крышкой. Контейнер имеет следующие габариты: ди¬
аметр цилиндрической части 815 мм, диаметр шпангоута 1060 мм, высота с крышкой
630 мм. Максимальная масса ПС 194 кг.
Устройство парашютной системы показано на рисунке 3.1.17.
85
3-1
1st pilot parachute
PDD1
GG1
PDD2
GG2
envelope canister
base canister
Рисунок 3.1.17. Устройство парашютной системы
Lid release
mechanisms-HRM
1st main parachute
release mechanisms
Lid release
mechanisms - pyro
1st main parachute
2st main parachute
2s’ pilot parachute
1st main parachute
release mechanisms
Lid release
mechanisms - pyro
В состав парашютной системы входят (рисунок 3.1.17):
- Крышка мортиры 1-го каскада (В0Р1);
- Крышка ПС (LID);
- 1 -й вытяжной парашют (1st pilot parachute);
- Мортира 1-го каскада (PDD1);
- Разъемы мортиры 1 -го каскада (GG1)
- Механизм отделения крышки ПС (Lid release mechanisms - HRM);
- Механизм отделения 1-го основного парашюта (1st main parachute release mecha¬
nisms);
- Пирозамки отделения крышки ПС (Lid release mechanisms - pyro);
- Основной парашют 1-го каскада (1st main parachute);
- Основной парашют 2-го каскада (2st main parachute);
- 2-й вытяжной парашют (2st pilot parachute);
- Мортира 2-го каскада (PDD2);
- Разъемы мортиры 2-го каскада(0С2);
- Оболочка контейнера (envelope canister);
- Основание контейнера (base canister).
86
3-1
ПС размещается в задней части десантного модуля под задним кожухом. Контейнер
с парашютной системой стыкуется с ЗК при помощи шпангоута (рисунок 3.1.18) и че¬
тырех пар подкосов (рисунок 3.1.19), которые связывают шпангоут ПС и усиленные
части ЗК. Такая конструктивно-силовая схема способствует равномерному распреде¬
лению нагрузки, которая возникает при вводе первого каскада парашютной системы.
подкосы
парашютной системы
парашютная система
Рисунок 3.1.18. Установка ПС на ЗК
ТЗП ПС
задний кожух
Основные геометрические характеристики и тип парашютов представлены в та¬
блице 3.1.2.
Таблица 3.1.2
№
наименование
диаметр купола, м
тип парашюта
1
1 -й вытяжной парашют
2,4
Disk-Gap-Band
2
1-й основной парашют
15
Disk-Gap-Band
3
2-й вытяжной парашют
4,8
Disk-Gap-Band
4
2-й основной парашют
35
Ringslot
Последовательность функционирования парашютной системы в атмосфере Мар¬
са показана на рисунке 3.1.9.
По контейнеру проложена кабельная сеть антенно-фидерной системы заднего ко¬
жуха, БКС пиротехники ПС, установлены нагреватели и термодатчики. На подкосах
установки парашютной системы установлен делитель мощности антенны заднего ко¬
жуха, рисунок 3.1.19.
87
3-1
Оценка массово-инерционных свойств десантного модуля
на этапе проектирования
Массовая сводка десантного модуля
Массовая сводка основных составных частей десантного модуля и проектные
оценки массовых свойств элементов ДМ представлены в таблице 3.1.3.
Таблица 3.1.3. Значения масс основных элементов ДМ
№
наименование элемента
масса, кг
1
КОНСТРУКЦИЯ КОРПУСА дм
447,4
1.1
аэродинамический экран
196,0
1.2
задний кожух
225,3
1.3
устройства отделения АЭ и ПсМ
26,1
2
ПАРАШЮТНАЯ СИСТЕМА
194,0
3
ПОСАДОЧНАЯ ПЛАТФОРМА
808,7
3.1
научная аппаратура посадочной платформы
45,0
3.2
тормозная двигательная установка
167,6
3.3
конструкция ПП
289,7
3.4
элементы системы управления
59,3
3.5
радиосистема
16,0
3.6
система электроснабжения
102,5
3.7
бортовая кабельная сеть
74,2
3.8
элементы СОТР научного и служебного оборудования
54,5
4
МАРСОХОД С СИСТЕМОЙ ЗАЧЕКОВКИ НА ПАЛЛЕТЕ
345,00
5
ЗАПРАВКА
130,2
гидразин (максимальная заправка 150 кг)
128,00
гелий
2,2
СУММАРНАЯ МАССА ДМ
1925,3
элементы устройства отделения ДМ от ПМ
1,4
СУММАРНАЯ МАССА ДМ с учетом элементов системы
отделения ДМ от ПМ (без учета балансировки)
1926,7
максимальная масса для статической балансировки ПсМ
22,1*
максимальная масса для статической балансировки ДМ
1,6*
максимальная масса для динамической балансировки ДМ**
34,4*
Максимальная масса для статической и динамической**
балансировок ПсМ и ДМ
37,7*
МАКСИМАЛЬНАЯ МАССА ДМ
при входе в атмосферу Марса с учетом балансировки
и элементов устройства отделения ДМ от ПМ
1964,4*
* массы балансировочных грузов получены по результатам оценок с использованием метода Монте-
Карло (10000 реализаций). Значения масс балансировочных грузов зависят от масс, положения цен¬
тров масс, а также центробежных моментов инерции ДМ и ПсМ в сборе. Суммарная масса ДМ с уче¬
том масс грузов является оценочной;
масса балансировочных грузов для динамической балансировки ДМ получена исходя из требования
попадания в прямоугольную область ЛгЛ=<20 кг м2;
88
3-1
Масса адаптера с устройством отделения ДМ от ПМ не превышает 48 кг.
Соотношение систем координат (СК) основных составных частей КА представле¬
но на рисунке 3.1.20.
f+Хпм, +Хдм,
+Хд, +Хпсм
2790
| +Умх
Рисунок 3.1.20. Соотношения СК КА
89
3-1
Определение разбросов массово-инерционных параметров ДМ
и составных частей
В разделе представлены результаты определения массово-инерционных параме¬
тров ДМ, ПсМ, их конфигураций, а также отдельных составных частей (СЧ) аппа¬
рата. При расчете учтены возможные разбросы массово-инерционных параметров
СЧ. Расчет характеристик проводился при помощи метода Монте-Карло. Цель рас¬
чета: получение исходных данных для анализа движения ДМ в атмосфере Марса
с учетом возможных разбросов массово-инерционных параметров аппарата, а также
оценка масс балансировочных грузов для выполнения требований.
Расчетная программа реализована в системе компьютерной математики Math Works
MATLAB (Дьяконов В.П., 2005; Кривилев А.В., 2005).
Последовательность определения суммарных массово-инерционных параметров:
1) Общая сборка разбивается на крупные подсборки, для которых определяют¬
ся номинальные массово-инерционные параметры. Номинальные параметры опре¬
делены на основании проектной трехмерной твердотельной модели. Разбиение
на подсборки осуществляется по конструктивным соображениям и с учетом разделе¬
ния составных частей в процессе функционирования;
2) На основании номинальных параметров на МИХ СЧ назначаются допуски. До¬
пуски назначаются исходя из конструктивных соображений;
3) Расчет характеристик СЧ с учетом отклонений. Отклонения назначаются слу¬
чайным образом с учетом назначенных в пункте 2 допусков на основании равномер¬
ного закона распределения (Горяйнов В.Б., Павлов И.В. и др., 2001; Печинкин А.В.,
Тескин О.И. и др., 2004). Рассчитывается 10000 вариантов наборов МИХ СЧ;
4) Определение суммарных характеристик несбалансированного ДМ и ПсМ
на основании рассчитанных в пункте 3 наборов МИХ СЧ;
5) Оценка выполнения требований к положению центра масс ПсМ и ДМ, а также
центробежным моментам инерции ДМ;
6) При невыполнении требований к МИХ - определение массы балансировоч¬
ных грузов, необходимых для коррекции. Учет определенных балансировочных масс
в параметрах ПсМ, ДМ, аэродинамического экрана, заднего кожуха. Методика балан¬
сировки разработана на основании (Дронг В.И., Дубинин В.В. и др., 2002; Канатни¬
ков А.Н., Крищенко А.П., 2001; Поляхов Н.Н.,2000; Сивухин Д.В., 2002; Фролов К.В.,
Попов С.А. и др., 2002);
7) Определение МИХ ДМ, ПсМ и отделяемых частей для различных этапов поле¬
та с учетом выработки топлива и раскрытия посадочных опор.
В настоящем расчете десантный модуль был разбит на 41 относительно крупную
часть, для которой определены массово-инерционные параметры с учетом разбро¬
сов - всего 10 независимых параметров (масса, положение центра масс, моменты
инерции) для каждой из частей.
Разбросы параметров назначались исходя из проработки конструкции отдельных
СЧ, а также по результатам моделирования возможных отклонений в программе для
твердотельного моделирования. Значения осевых моментов пропорциональны мас¬
сам составных частей.
90
3-1
Массы отдельных составных частей взяты из конструкторской документации.
Массово-инерционные параметры парашютной системы (с учетом отделяемых ча¬
стей) и марсохода получены из европейской документации.
В результате расчетов получены суммарные МИХ ДМ, ПсМ, а также отделяемых
частей аппарата. В качестве примера на рисунках 3.1.21-3.1.23 представлены разбро¬
сы положения центра масс ДМ и ПсМ, а также значения центробежных моментов
инерции ДМ для 10000 рассчитанных вариантов.
После определения суммарных характеристик аппарата проводится проверка каж¬
дого варианта на соответствие требованиям к массово-инерционным параметрам ДМ
и ПсМ. Требования, учитываемые при расчете, в части положения центра масс и цен¬
тробежных моментов инерции ДМ следующие:
- отклонение положения центра масс ДМ и ПсМ относительно продольной оси ме¬
нее 10 мм;
- центробежные моменты инерции ДМ Jxy, Jx: по абсолютному значению должны
быть меньше 20 кг м2.
При несоответствии параметров рассчитанного варианта приведенным требо¬
ваниям производится балансировка аппарата. С помощью грузов, размещаемых
на специально отведенных местах.
Из-за дефицита массы балансировка осуществлялась до границы зоны допуска.
Операция балансировки выполняется в такой последовательности:
1. статическая балансировка - коррекция поперечного положения центра масс
ПсМ (д/у2+и2 < 10 мм). Проводится с учетом ухудшения центровки ПсМ в процессе
выработки топлива. При необходимости добавляются балансировочные грузы на вы¬
деленные места на конструкции ПсМ;
2. проверка требования по (д/у2+^2 < Ю мм) положению центра масс относитель¬
но продольной оси на уровне ДМ. В случае несоответствия требованиям - коррекция;
3. проверка требований по величинам центробежных моментов инерции ДМ
(|ЛтЛ|<20 кг-м2). Коррекция - при необходимости.
После определения масс балансировочных грузов обновляются МИХ ДМ, ПсМ
(рисунки 3.1.24, 3.1.28), а также отделяемых частей.
После определения итоговых МИХ ДМ контролируются соотношения осевых мо¬
ментов инерции и положение центра масс вдоль продольной оси.
Гистограммы, показывающие распределения масс балансировочных грузов, ко¬
торые требуется разместить на ПсМ и ДМ, представлены на рисунках 3.1.29-3.1.32.
Гистограммы демонстрируют частоту попадания грузов определенных масс в ин¬
тервалы. Максимальная масса грузов для коррекции положения центра масс ПсМ -
22,1 кг. Максимальная масса груза для коррекции поперечного смещения центра
масс ДМ - 1,6 кг. Максимальная масса грузов для коррекции центробежных мо¬
ментов инерции - 34,3 кг. Максимальная суммарная масса грузов для удовлетво¬
рения всем требованиям - 37,7 кг. Максимальная суммарная масса грузов учитыва¬
ет массу грузов для статической балансировки ПсМ, статической и динамической
балансировок ДМ.
91
3-1
-0,02
Y, м
Рисунок 3.1.21. Отклонение центра масс ПсМ от продольной оси без балансировки
-Jxz, кг-м2
Рисунок 3.1.23. Центробежные моменты инерции ДМ без балансировки
92
3-1
0,001 ;
-0,01
Y, м
Рисунок 3.1.24. Отклонение центра масс ПсМ от продольной оси после отделения от ЗК
с учетом балансировки
0,015
=Q,015J
Y, м
Рисунок 3.1.25. Отклонение центра масс ПсМ от продольной оси с минимальным остатком
топлива с учетом балансировки
93
3-1
-Jxx, кг-м2
Рисунок 3.1.27. Осевые моменты инерции ДМ после балансировки
-Jxz, КГ-М2
Рисунок 3.1.28. Центробежные моменты инерции ДМ после балансировки
Рисунок 3.1.29. Распределение масс балансировочных грузов для статической
балансировки ПсМ
94
3-1
Рисунок 3.1.30. Распределение масс грузов для статической балансировки ДМ
Рисунок 3.1.31. Распределение масс грузов для динамической балансировки ДМ
95
3-1
Таблица 3.1.4. МИХ ДМ и отделяемых частей в процессе движения в атмосфере
№
наименование
элемента
масса, кг
положение ц.м.
X, мм
У, мм
Z, мм
1
ДМ при входе
в атмосферу Марса*
1866,5...1932,4...
2000,0
759...771...
783
-10...-2...10
-10...2...10
2
ДМ после уноса
эвти*
1861,5...1926,6...
1994,9
758...769
...782
-10...-2...10
-10...2...10
3
ДМ после отделения
крышки мортиры
и ввода вытяжного
парашюта
1-го каскада*
1860,0... 1924,9...
1993,2
759...771...
783
-10...-2...10
-10...2...10
4
ДМ после увода
крышки ПС
с ТЗП и мортирой
1-го каскада *
1842,7...1907,8...
1975,6
771...783...
795
-10...-2...10
-10...2...10
5
ДМ после ввода
парашюта
1-го каскада*
1799...1865...
1933
797...810...
823
-11...-3...10
-10...2...10
6
ДМ после ввода
вытяжного
парашюта
2-го каскада*
1797...1863...
1931
798...811...
824
-11...-3...10
-10...2...10
7
ДМ после ввода
парашюта
2-го каскада*
1730...1798...
1868
833...845...
858
-11...-3...10
-10...2...11
8
ДМ после
отделения АЭ,
ПО сложены*
1528...1593...
1660
774...790...
801
-11...-3...7
-19...2...8
9
аэродинамический
экран**
191...205...
223
277...293...
305
-43...0...58
^13...3...81
10
ДМ после отделения
АЭ,
ПО развернуты *
1528...1593...
1660
785...803...
815
- 11...-3...7
-19...2...8
11
ПсМ с разложенными
ПО, заправлен**
1245...1308...
1374
-77...-63...
-49
-8...-4...7
-8...4...8
12
задний кожух после
отделения ПсМ*
277...285...
307
234...250...
264
-35...3...10
-73...-4...6
13
ПсМ с минимальным
остатком
топлива - 10,66 кг**
1111...1173...
1234
-87...74...
-58
-10...-5...8
-9...4...9
Примечание-. Моменты инерции - центральные
‘ координаты центра масс даны в СК ДМ
** координаты центра масс даны в СК ПсМ
*** требование к суммарным отклонениям по осям У и Z: V y2+Z2 < 10 мм
**** требования к центробежным моментам инерции |Л, , |<20 кг м2
96
3-1
1хх, кг-м2
Iyy, КГМ2
Л,, кг-м2
(-IXy), КГ-М2
(-/«), КГМ2
(-Iyz), кг-м2
2398±7%
1922±7%
1536±5%
-20...5...20****
-20...12...
20****
-22...6...33
2380±7%
1911±7%
1524±5%
-21...5...22
-14...12...22
-22...6...33
2380±7%
1908±7%
1522±5%
-21...6...22
-14...12...23
-22...6...33
2378±5%
1875±7%
1489±5%
-21...5...22
-14...12...23
-22...6...33
2374±5%
1812±7%
1425±5%
-22...4...22
-14...12...23
-22...6...33
2374±5%
1811±7%
1424±5%
-22...4...22
-14...12...23
-22...6...33
2369±5%
1746±7%
1359±5%
-22...4...22
-13...12...23
-22...6...33
1885±5%
1451 ±5%
1064±5%
-14...4...23
-6...12...29
-15...6...27
451...484...
542
235...252...
288
236...252...
281
-10...0...11
-10...0...13
-14...0...11
1908±5%
1490±5%
1103±5%
-14...4...23
-5...12...29
-15...6...27
1465±6%
1086±6%
698±7%
-12...4...21
-2... 14...29
-11...6...26
432...443...
472
290...298...
325
291...299...
312
-6...-1...5
-6...0...5
-8...0 ...5
1261±7%
913±7%
662±7%
-12...4...21
-2...14...29
-11...6...26
97
3-1
Рисунок 3.1.32. Распределение суммарных масс для балансировки ДМ
МИХ ДМ получены для следующих этапов движения аппарата в атмосфере
Марса:
- ДМ перед входом в атмосферу (см. рисунки выше);
- ДМ после уноса ЭВТИ с аэродинамического экрана;
- ДМ с учетом последовательного отделения элементов парашютной системы;
- ДМ после отделения аэродинамического экрана (без учета обгара ТЗП) с остатка¬
ми системы отделения (СО) АЭ, часть СО АЭ остается на ЗК;
- раскрытие посадочных опор;
- отделение заправленного ПсМ;
- посадка ПсМ с минимальным остатком топлива.
Итоговые характеристики ДМ по этапам полета представлены в таблице 3.1.4.
Представленные параметры получены после обработки результатов расчета для
10 000 вариантов с учетом балансировки.
Для следующих конфигураций параметры приведены для ДМ под парашютом без
учета самого парашюта:
- ДМ после отделения крышки мортиры и ввода вытяжного парашюта 1 -го каскада;
- ДМ после ввода парашюта 1-го каскада;
- ДМ после ввода вытяжного парашюта 2-го каскада;
- ДМ после ввода парашюта 2-го каскада.
98
3-1
Список литературы
Алексашкин С.Н., Лукьянчиков А.В., Мартынов М.Б., Хартов В.В. Проектная кон¬
цепция десантного модуля «ЭкзоМарс-2018», создаваемого НПО им. С.А. Лавочки¬
на// Вестник ФГУП НПО им. С.А. Лавочкина. 2014. № 2. С. 5-12
Горяйнов В.Б., Павлов И.В. и др. Математическая статистика. М.: Изд-во МГТУ
им. Н.Э. Баумана, 2001.
Дронг В.И., Дубинин В.В. и др. Курс теоретической механики. М.: Изд-во МГТУ
им. Н.Э. Баумана, 2002.
Дьяконов В.П. MATLAB 6.5 SP1/7 + Simulink 5/6. Основы применения. М.: СОЛОН-
Пресс, 2005.
Канатников А.Н., Крищенко А.П. Линейная алгебра. М.: Изд-во МГТУ им. Н.Э. Ба¬
умана, 2001.
Кривилев А.В. Основы компьютерной математики с использованием системы
MATLAB.M.: Лекс-Книга, 2005.
Печинкин А.В., Тескин О.И. и др. Теория вероятностей. М.: Изд-во МГТУ
им. Н.Э. Баумана, 2004.
Поляхов Н.Н. Теоретическая механика. М.: Высшая школа, 2000.
Сивухин Д.В. Общий курс физики. М.: ФИЗМАТЛИТ, 2002.
Фролов К.В., Попов С.А. и др. Теория механизмов и механика машин. М.: Изд-во
МГТУ им. Н.Э. Баумана, 2002.
© Раздел «Парашютная система десантного модуля». ESA/TASinl/ADS-UK, 2019
И.В. Москатиньев,
А. С. Иванов,
С.Н. Алексашкин,
Б.А. Острешко,
Д.В. Новиков
99
3-2
ВЙПОСАДОЧНЫЙ МОДУЛЬ «ЭКЗОМАРС-2022»
ПсМ выполняет активное торможение на конечном участке траектории спуска
и совершает посадку на поверхность Марса (рисунки 3.1.15 и 3.1.16). На этом этапе
в задачу ПсМ входит обеспечение допустимой посадочной скорости и, следователь¬
но, перегрузки при посадке. В состав ПсМ входят:
- посадочная платформа (ПП);
- марсоход;
- система разделения марсохода и посадочной платформы.
Основным элементом ПсМ является посадочная платформа. ПП обеспечивает
размещение и функционирование узлов и агрегатов, необходимых для доставки и по¬
следующего функционирования на поверхности Марса полезной нагрузки аппарата -
марсохода и комплекса научной аппаратуры (КНА) посадочной платформы. ПП соз¬
дает условия для развертывания и схода марсохода на поверхность.
Состав посадочной платформы:
- конструкция ПП;
- переходная платформа марсохода - паллета;
- двигательная установка;
- посадочное устройство;
- устройство схода марсохода;
- комплекс научной аппаратуры;
- система электроснабжения (СЭС);
- элементы системы управления;
- элементы системы обеспечения теплового режима (СОТР);
- элементы радиокомплекса;
- элементы бортовой кабельной сети.
Основным силовым элементом платформы, на котором производится установка
всех остальных частей ПсМ, является силовая плита с восьмигранником (рисун¬
ки 3.2.1, 3.2.2).
Рисунок 3.2.1. Силовая платформа ПП. Вид со стороны -X
100
3-2
Плоская восьмигранная силовая плита выполняется из трехслойного композици¬
онного материала. Со стороны АЭ на панель устанавливается восьмигранная кон¬
струкция, которая увеличивает строительную высоту платформы. Область размеще¬
ния кронштейнов для стыковки с задним кожухом связана с восьмигранником при
помощи подкосов. Для придания дополнительной жесткости конструкции в нижней
части восьмигранника установлена рама в.форме паука. На верхней поверхности пли¬
ты (со стороны марсохода) устанавливаются рамы для поддержки тепловых сотопа-
нелей, зачековки трапов и размещения части оборудования.
На силовой платформе размещается монотопливная двигательная установка ПсМ
(рисунок 3.2.3), которая монтируется непосредственно на платформе.
Рисунок 3.2.3. Монтаж ДУ на платформе
101
3-2
Основные элементы ДУ:
- тормозной четырехкамерный дросселируемый двигатель;
- 8 двигателей (4 сборки по 2 двигателя) малой тяги;
- 4 топливных бака с гидразином;
- 2 шар-бал л она с газом наддува - гелием;
- клапаны и трубопроводы для заправки, проверок и подачи топлива и газа наддува;
- агрегаты автоматики.
Схема двигательной установки с расположением двигателей в системе координат
ПсМ представлена на рисунке 3.2.4.
2240
I +/псм; +Хду
+ZncM
102
3-2
Для поглощения остаточной кинетической энергии при посадке на посадочной
платформе устанавливается посадочное устройство, которое состоит из четырех
посадочных опор (ПО). Посадочные опоры в транспортном и рабочем положениях
представлены на рисунках 3.2.5, 3.2.6. В состав каждой опоры входит амортизатор,
который и обеспечивает поглощение остаточной энергии. Допустимые скорости по¬
садки: вертикальная скорость - менее 2 м/с, горизонтальная скорость - менее 2 м/с.
На каждой посадочной опоре устанавливается устройство для определения факта ка¬
сания поверхности планеты. По команде указанного устройства производится отсеч¬
ка тяги тормозного двигателя.
Рисунок 3.2.5. Фрагмент посадочной платформы. Посадочные опоры и штанга антенны ПП
в транспортном положении
ТСП+Z
посадочные опоры
в рабочем положении
ТСП -Z паллета
штанга антенны ПП
в транспортном положении
платформа
Рисунок 3.2.6. Фрагмент посадочной платформы. Посадочные опоры и штанга антенны ПП
развернуты
103
3-2
Развертывание посадочных опор производится после сброса аэродинамического
экрана при движении ДМ под вторым каскадом парашютной системы (рисунок 3.1.11).
Основная часть научного оборудования и служебных систем, которые продол¬
жают функционировать после посадки, размещается на двух тепловых сотопанелях
(ТСП). Тепловые панели предназначены для обеспечения теплового режима установ¬
ленного на них оборудования. Для этих целей в панелях проложены трубы с тепло¬
носителем внутри, которые обеспечивают передачу тепла от более нагретых участков
панели к менее нагретым. Сброс избыточного тепла производится через размещае¬
мые вблизи панелей радиаторы. Источниками тепла на ТСП служат радиоизотопные
источники - тепловые блоки (ТБ). Общее количество источников - 14 шт., из них
6 расположены на ТСП по оси -ZncM (рисунок 3.2.7, правая панель), 8 - на ТСП +ZncM.
Из-за негативного влияния радиоактивного излучения тепловых блоков на персонал
сборки ТБ устанавливаются на ТСП в последний момент перед окончательной уста¬
новкой аэродинамического экрана.
Рисунок 3.2.7. Посадочная платформа, вид со стороны АЭ
Рисунок 3.2.8. Посадочная платформа, вид со стороны ЗК. Установка радиаторов
104
3-2
Установка радиаторов для обеспечения теплового режима оборудования на ТСП
показана на рисунке 3.2.8.
Антенна посадочной платформы, через которую производится передача телеме¬
трической и научной информации на этапах от отделения ПсМ от ЗК, размещена
на раскрывающейся штанге. Размещение антенны позволяет работать через нее как
в транспортном положении (рисунок 3.2.5), так и в раскрытом (рисунок 3.2.6).
Для обеспечения теплового режима оборудования на ТСП устанавливается одно¬
родная теплоизоляция и ЭВТИ.
Часть служебных систем, тепловой режим которых обеспечивается только до
момента посадки, а также научные приборы с собственной СОТР, размещаются вне
ТСП - на сторонах восьмигранника, на раме доплеровского радара (RDА), непосред¬
ственно на платформе или на элементах конструкции (рисунки 3.2.5-3.2.8).
Комплекс научной аппаратуры массой до 45 кг размещается на посадочной плат¬
форме ДМ и предназначен для решения научных задач в условиях долгоживущей
стационарной платформы. Полный перечень научного оборудования ПП с указанием
состава, решаемых научных задач и места размещения представлен в таблице 3.2.1.
Таблица 3.2.1
тип прибора
блоки, входящие
в прибор
решаемые научные задачи
примечание/
расположение
ТСПП-ЭМ
телевизионная
система
КАМ-О/МЭ
панорамная камера
предназначена
для передачи
изображения
4 блока / ПП
БСД/ЭМ
блок сбора и обработки
данных
ТСП-Z
блок интерфейсов
и памяти
БИП
управление комплексом
научной аппаратуры
ТСП-Z
Фурье-спектрометр
ФАСТ
мониторинг малых
атмосферных составляющих
(метан и др.), мониторинг
температуры и аэрозоля
от приповерхностного слоя
до ~20 км
ТСП-Z
метеокомплекс
БУ МТК
мониторинг температуры,
давления, скорости ветра,
влажности, оптической
плотности. Мониторинг
аэрозоля. Измерение
характеристик атмосферы
во время спуска
ТСП-Z
БДШП МТК
СБ +Y
БДВА МТК
ТСП-Z
БДА МТК
ТСП +Z
ДБ МТК
ТСП-Z
метеоштанга
рама ПП -Z
микрофон
ТСП +Z
ODS
ТСП +Z
гамма-нейтронный
спектрометр
и дозиметр
АДРОН-ЭМ
АДРОН-ЭМ-ДЭ
мониторинг связанной
воды в грунте, анализ
элементарного состава
поверхности, мониторинг
радиационной дозы
восьмигранник
Люлин МЛ
ТСП +Z
ИНГ-ЮМ
ТСП +Z
105
3-2
тип прибора
блоки, входящие
в прибор
решаемые научные задачи
примечание/
расположение
лазерный
спектрометр
м-длс
М-ДЛС
исследование химического
изотопного состава атмосферы
вблизи поверхности
ТСП-Z
микроволновый
радиометр
РАТ-М
РАТ-М
мониторинг температуры
грунта и атмосферы
ПП
сейсмометр СЭМ
СЭМ
исследование внутренней
структуры Марса
восьмигранник
газоаналитический
комплекс
МГАК
ГХМ
анализ состава атмосферы,
включая инертные газы
ТСП-Z
нгмс
ТСП-Z
УФ-М
СБ+У
пылевой комплекс
ударный сенсор
определение характеристик
и динамики атмосферной
пыли
ПП
MicroMED
ТСП +Z
штанга ПК
СБ-У
датчик электро¬
магнитного поля
ПП
магнитометр
МЭГРЭ
ЛЭМИ-СЕМ
определение параметров
магнитного поля
СБ+У
БЭ МЭГРЭ
ТСП-Z
LARA когерентный
транспондер
антенна ТХ
исследование внутренней
структуры и собственного
движения Марса.
Измерение расстояния
между Землей и Марсом
2 блока/
Рама ПП +Z
антенна RX
1 блок/Рама ПП
+Z
БЭ LARA
ТСП +Z
HABIT определение
условий
обитаемости
БД HABIT
мониторинг температуры,
влажности и УФ-излучения
ПП
БЭ HABIT
ПП
лазерный уголковый
отражатель*
INRRI (FOV)
ПП
* в состав КН А не входит
Марсоход имеет достаточно сложный механический, тепловой и электрический
интерфейсы, из-за чего монтаж марсохода непосредственно на силовую плиту не
представляется возможным. К интерфейсу марсохода предъявляются следующие
требования: доступ к узлам крепления снизу, неоднократная сборка и разборка стыка,
тепловая развязка марсохода и посадочной платформы, монтаж отрывных разъемов
на поверхности установки и т.д. В связи с этим, несмотря на дефицит массы была
предусмотрена отдельная переходная платформа для установки марсохода (паллета),
которая имеет более простой интерфейс с платформой (рисунки 3.2.9-3.2.11) (Алек-
сагикин С.Н., Лукьянчиков А.В., Мартынов М.Б., Хартов В.В., 2014). Между паллетой
и платформой реализован болтовой стык с тепловой развязкой.
106
3-2
Рисунок 3.2.9. Установка марсохода на посадочной платформе с использованием паллеты
Рисунок 3.2.10. Паллета марсохода, вид со стороны марсохода
Рисунок 3.2.11. Паллета марсохода, вид со стороны платформы
107
3-2
В состав системы электроснабжения входят аккумуляторные батареи (АБ), ком¬
плекс автоматики и стабилизации (КАС), панели солнечных батарей (СБ). АБ и КАС
размещены на ТСП +ZncM, СБ расположены по периметру платформы: 4 пакета по две
створки боковых панелей, две больших и две малых панели между трапами. В транс¬
портном положении панели представлены на рисунке 3.2.15. После посадки пане¬
ли производится раскрытие панелей (рисунок 3.2.12). Суммарная площадь панелей
солнечных батарей ~10 м2. Панели зачековываются и раскрываются независимо друг
от друга.
марсоход
боковые панели СБ
панели СБ между трапами
трапы для схода
марсохода
Рисунок 3.2.12. ПсМ вид сверху. Все элементы раскрыты
радиаторы ТСП-Z
Платформа имеет два направления для схода марсохода (рисунок 3.2.12). Каждое
направление имеет по два трехсекционных трапа с ограждениями, которые ограни¬
чивают боковое движение марсохода при съезде. Каждый из трапов зачековывается
и раскрывается независимо от других. Длина трапа подобрана таким образом, чтобы
при наиболее вероятных элементах рельефа в месте посадки (ямы, уклоны, камни),
обеспечить допустимый угол схода для марсохода (<20°). Трапы выполнены раскры¬
вающимися. В транспортном положении показаны на рисунке 3.2.15, после посадки
производится раскрытие трапов (рисунок 3.2.12).
108
3-2
Марсоход
Марсоход разрабатывается предприятиями ЕКА. Общий вид марсохода в транс¬
портном положении представлен на рисунке 3.2.13, в развернутом положении - на ри¬
сунке 3.2.14, на этом же рисунке показаны основные элементы марсохода. Внутри
корпуса марсохода для обеспечения его теплового режима устанавливаются три те¬
пловых блока, аналогичных устанавливаемым на посадочной платформе.
марсоход в транспортной
конфигурации
Рисунок 3.2.13. Марсоход, транспортное положение на паллете
поворотный механизм
концевая панель
корневая панель
UNF антенна
навигационная камера
штанга марсохода
камера движения
неподвижная панель СБ
элементы механического
интерфейса марсохода
корпус марсохода
система движения
марсохода
Рисунок 3.2.14. Марсоход, развернутая конфигурация на паллете
радиатор
109
3-2
1 - подъем штанги марсохода, колеса зачекованы
2 - предварительное раскрытие передних и задних колес марсохода
3 - подъем марсохода на колеса, средняя пара зачекована
4 - марсоход после полного подъема на колеса
Рисунок 3.2.15. Подъем марсохода на колеса
3 4
1 - предварительное раскрытие корневых панелей марсохода
2 - предварительное раскрытие концевых панелей СБ
3 - раскрытие концевых створок СБ
4 - полное раскрытие марсохода
Рисунок 3.2.16. Раскрытие панелей солнечных батарей марсохода
110
3-2
Последовательность раскрытия марсохода представлена на рисунках 3.2.15
и 3.2.16. На рисунке 3.2.15 показано раскрытие колес и штанги марсохода, его подъем
на колеса. После подъема на колеса производится расчековка и раскрытие панелей
солнечных батарей (рисунок 3.2.16). После развертывания штанги марсохода до и по¬
сле подъема производится съемка возможных направлений для схода. На основании
этих съемок на Земле принимается решение о направлении схода марсохода.
После схода на поверхность марсоход приступает к выполнению своей научной
программы. В состав КН А марсохода входят научные инструменты для изучения ге¬
ологии планеты (в том числе два российских прибора), а также для поиска признаков
жизни путем отбора и анализа проб грунта, как с поверхности планеты, так и с глуби¬
ны до 2 метров. В состав комплекса входят,
Список литературы
Алексаъикин С.Н., Лукъянчиков А.В., Мартынов М.Б., Хартов В.В. Проектная кон¬
цепция десантного модуля «ЭкзоМарс-2018», создаваемого НПО им. С.А. Лавочки¬
на// Вестник ФГУП НПО им. С.А. Лавочкина. 2014. № 2. С. 5-12
©Раздел «Марсоход». ESA/TASinl/ADS-UK, 2019
И.В. Москатиньев,
А. С. Иванов,
С.Н, Алексашкин,
Б.А, Острешко
111
3-3
ВИРОССИЙСКИЙ СЕГМЕНТ БАЛЛИСТИКО¬
НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ
ПОЛЁТА И СПУСКА ДЕСАНТНОГО МОДУЛЯ
МИССИИ «ЭКЗОМАРС-2022»
3.3.1. Международный проект «ЭкзоМарс-2022». Состав КА
Международный проект «ЭкзоМарс-2022» предусматривает разработку россий¬
ской стороной - АО «НПО Лавочкина» десантного модуля с посадочной платформой,
а европейской стороной - перелетного модуля и марсохода (Хартов В.В. и др., 2014).
В состав космического аппарата «ЭкзоМарс-2022» входят следующие основные
элементы: перелетный модуль (ПМ), десантный модуль (ДМ), адаптер с системой
отделения десантного модуля от перелетного модуля. В состав ДМ, в свою очередь,
входят посадочная платформа (ПП) и марсоход.
Экспедиция «ЭкзоМарс-2022» состоит из трех основных этапов:
- этап выведения и перелета составного КА (ПМ и ДМ);
- этап спуска и посадки ДМ на поверхность Марса;
- этап работы на поверхности Марса, состоящий из двух фаз: фазы съезда марсохо¬
да с посадочной платформы и фазы функционирования посадочной платформы
на поверхности Марса после съезда марсохода.
Перелетный модуль управляет КА на межпланетном этапе, осуществляет коррек¬
цию траектории на этапе перелета «Земля - Марс», обеспечивает требуемый вектор
состояния на момент отделения ДМ для обеспечения требуемых параметров входа
ДМ в атмосферу Марса. Все .вышеуказанные маневры на этапе перелета осуществля¬
ются при помощи собственной двигательной установки ПМ. ПМ участвует в обеспе¬
чении теплового режима десантного модуля на этапе перелета, обеспечивая электро¬
снабжение систем ДМ при помощи солнечных панелей, а также транслирует КПИ
и ТМИ. После разделения ДМ и ПМ перелетный модуль входит в атмосферу Марса
и разрушается от теплового воздействия атмосферы.
Десантный модуль предназначен для размещения марсохода (разработка ЕКА)
и посадочной платформы с КН А (разработка ИКИ РАН). Отделение ДМ от ПМ про¬
исходит при подлете к Марсу при помощи системы отделения, разрабатываемой рос¬
сийской стороной. После разделения ДМ совершает перелет до входа в атмосферу
Марса (длительность приблизительно 30 мин), спуск в атмосфере и мягкую посадку
на поверхность.
Задачами марсохода являются геологические исследования и поиск следов жизни
в подповерхностном слое Марса.
Запуск КА планируется осуществить в конце сентября - начале октября 2022 года
ракетой-носителем «Протон-М». Выведение на отлетную траекторию будет осущест¬
вляться разгонным блоком «Бриз-М». Расчетное время прибытия к Марсу - июнь
2023 года.
В процессе спуска планируется проведение части научных измерений при помо¬
щи аппаратуры, установленной на посадочной платформе, входящей в состав ДМ.
После посадки происходит развёртывание элементов ПП, развертывание и сход
марсохода, установленного на платформе. После схода начинается выполнение ос¬
новной части научных задач приборами, установленными на посадочной платформе.
112
3-3
Ретрансляцию телеметрической и научной информации на всех этапах автоном¬
ного функционирования ДМ должен обеспечивать орбитальный модуль TGO, выве¬
денный на околомарсианскую орбиту в ходе миссии «ЭкзоМарс-2016».
Уникальность проекта для НПО Лавочкина заключается в необходимости созда¬
ния десантного модуля, удовлетворяющего условиям размещения и функционирова¬
ния одновременно марсохода и научной аппаратуры, установленной на посадочной
платформе, и обладающего способностью устойчивого движения в атмосфере Марса
и уменьшения скорости движения с гиперзвуковой до посадочной.
3.3.2. Схема полёта
В соответствии с составом КА и распределением ответственности сторон экспе¬
дицию «ЭкзоМарс-2022» можно разделить на следующие основные этапы {Khan М.,
Varga G., RocchiA., 2017):
- выведение составного КА ракетой-носителем «Протон-М» и разгонным блоком
«Бриз-М» на отлётную траекторию (ориентировочно четырьмя включениями
с фазами пассивного полета по промежуточным орбитам ИСЗ, суммарной дли¬
тельностью примерно 9 часов), отделение КА от РБ;
- межпланетный перелёт в течение около 9 месяцев с проведением коррекций тра¬
ектории средствами перелётного модуля для наведения КА в прицельную точку
входа в атмосферу Марса с углом входа примерно 12 градусов;
- выставка и закрутка КА для обеспечения ориентированного входа десантного мо¬
дуля в атмосферу Марса, отделение десантного модуля;
- автономный полёт десантного модуля с последующим торможением в атмосфере
и посадкой на поверхность Марса в-заданном районе;
- функционирование посадочной платформы на поверхности Марса.
Из предложенных в октябре 2014 года четырёх потенциальных мест посадки спу¬
скаемого аппарата «ЭкзоМарс-2022»: Aram Dorsum, Hypanis Vallis, Mawrth Vallis,
Oxia Planum (Ваго Хорхе и др., 2014) 28 марта 2018 года рабочая группа отобрала
два места для дальнейшего изучения: Oxia Planum и Mawrth Vallis (Долина Мавра)
(В erg a М., 2017). Оба места расположены несколько севернее экватора. В обоих ме¬
стах ранее присутствовала вода, что важно для поиска следов жизни. Oxia Planum
было определено как основное место посадки, Mawrth Vallis - как резервное. Их ко¬
ординаты на марсианском эллипсоиде MOLA представленны в таблице 3.3.1.
Таблица 3.3.1. Координаты предполагаемых точек посадки
обозначение
широта, градус
долгота, градус
Oxia planum
18,159° с.ш.
24,334° з.д.
Mawrth vallis (lpo)
22,4270° с.ш.
18,5204° з.д.
Mawrth vallis (lpc)
22,1694° с.ш.
18,0101° з.д.
Главное техническое ограничение - место посадки должно быть достаточно низко,
чтобы дать возможность парашютам успеть затормозить спускаемый модуль. Также
зона посадки эллипсом 120 на 19 км не должна иметь опасных мест, таких как крутые
склоны, рыхлый грунт, крупные скалы. Предстоит детально изучить места потенци¬
альных посадок: картографировать распределение и размеры скал и кратеров, опреде¬
лить крутизну склонов, области рыхлого «песка», определить возможные маршруты
марсохода (на удалении до 5 км от точки посадки) и мест бурения для забора грунта.
113
3-3
3.3.3. Сезон пылевых бурь на Марсе
На момент прилёта КА к Марсу и последующей посадки накладывается суще¬
ственное ограничение - он не должен происходить в сезон пылевых бурь или за не¬
продолжительное время до его начала.
Сезон пылевых бурь на Марсе приходится на период прохождения им района
перигелия своей орбиты. Времена, соответствующие сезону пылевых бурь, удобно
представлять в виде функции долготы Солнца Ls в весенней ареоэкваториальной си¬
стеме координат (СК). Основная плоскость этой системы координат перпендикулярна
оси вращения Марса и проходит через линию пересечения плоскости экватора пла¬
неты с плоскостью орбиты Марса. В этом случае Ls=0 соответствует моменту весен¬
него равноденствия на Марсе. Можно условно считать, что точка Ls=0 обозначает
начало весны в Северном полушарии, Ls=90° - начало лета, Ls=180° - начало осени
и Ls=270° - начало зимы. Перигелий находится вблизи точки с Ls=255°, недалеко
от точки зимнего солнцестояния. Вследствие эллиптичности гелиоцентрической ор¬
биты Марса осень и зима в Северном полушарии значительно короче весны и лета.
В Южном полушарии - обратная картина. Времена года на Марсе с привязкой к дол¬
готе Солнца представлены на рисунке 3.3.1.
полушарии
ноябрь
январь
февраль
сентябрь
Ц=270
август
МЕ
апрегь
декабрь
■'ЮНЬ
август
ноябрь
сентябрь
октябрь
у иибегпАиои
ЛМЕ
орбита
Земли
Рисунок 3.3.1. Времена года на Марсе и определение долготы Солнца
орбита
Марса
30'
апрель
114
3-3
Для целей планирования экспедиции «ЭкзоМарс» считается, что сезон пылевых
бурь начинается при Ls=l 80° и заканчивается при Ls=324°. Диапазон дат, соответству¬
ющий этим величинам долгот Солнца, является запретным для прилёта КА к Марсу
и последующей посадки. Для удобства планирования далее для каждого из рассма¬
триваемых вариантов перелёта используется только одна дата прилёта к Марсу.
В предполагаемые сроки осуществления миссии пылевые бури на Марсе прогно¬
зируются на периоды (по земной временной шкале):
- с конца февраля по начало декабря 2022 года;
- с начала января по середину сентября 2024 года.
3.3.4. Характеристики траекторий перелёта к Марсу
На рисунках 3.3.2 и 3.3.3 представлены изолинии окон старта полётов на Марс
на 2022 г. Расчёт произведен с использованием программного комплекса Balcalc (Бо-
ровин Г.К. и др., 2018). По оси абсцисс приведены времена старта с Земли с 1 ян¬
варя 2022 года; по оси ординат - длительность перелетов в сутках в интервале
с 150 по 500 суток. Цветовыми уровнями показаны суммарные затраты характеристи¬
ческой скорости в км/с.
2022/09/20 11:29:25
Рисунок 3.3.2. Перелёт на Марс в течение ~ 233 сут.
Рассматриваемое окно старта предполагает запуск с Земли в период с 25 сентября
по 15 октября 2022 года. (Первая дата пускового периода в англоязычной литературе
обозначается как «Launch Period Open» или сокращённо «LPO». Аналогично имену¬
ют последнюю дату периода запуска - «Launch Period Close» или «LPC»). Для сокра¬
щения затрат на разработку полётных заданий для разгонного блока «Бриз-М» было
отобрано три пары дат старта (основная и резервная), располагающиеся в начале,
середине и конце периода запуска. В связи с тем, что наклонение опорной орбиты
115
3-3
2022/09/01 06:51:22
Рисунок 3.3.3. Перелёт на Марс в течение ~ 355 сут.
при выведении КА было изменено с 51,4 на 65 градусов, первая и последняя дата
отстояли от LPO и LPC на один и два дня соответственно для уменьшения изменений
в траекториях средств выведения (Varga G., 2018).
Дата прилёта составного КА к Марсу и последующего входа ДМ в атмосферу
Марса назначена на 19.03.2021 и является одинаковой для всех дат старта. В это вре¬
мя долгота Солнца в весенней ареоэкваториальной системе координат равна 19°. Ве¬
личина инерциального траекторного угла входа выбрана равной минус 12,4 градуса.
Точкой входа в атмосферу Марса («Entry Interface Point», EIP) считается пересече¬
ние радиуса 3516 км, соответствующего высоте около 120 км (Khan М., Varga G.,
Rocchi А., 2017).
Основные характеристики межпланетной траектории перелёта Земля - Марс для
выбранных дат пускового периода приведены в таблице 3.3.2.
В таблице используются следующие обозначения:
Т1 - дата старта с Земли;
Koi - асимптотическая скорость отлёта от Земли, км/с;
5001 - склонение вектора асимптотической скорости отлёта от Земли в системе ко¬
ординат J2000, км/с;
Т2 - дата прилёта к Марсу;
Ко2 - асимптотическая скорость подлёта к Марсу, км/с;
5002 - склонение вектора асимптотической скорости подлёта к Марсу в системе ко¬
ординат J2000, км/с;
VA - модуль абсолютной скорости входа в атмосферу Марса при посадке в Oxia
Planum, км/с;
VR - модуль относительной скорости входа в атмосферу Марса при посадке в Oxia
Planum, км/с.
116
3-3
Таблица 3.3.2. Характеристики траекторий перелёта Земля - Марс
вариант
LPO
LPM
LPC
г,
25.09.22
05.10.22
15.10.22
5,128
5,556
6,371
Зоо,
49,32
36,75
30,74
Т2
11.06.21
Их2
2,493
2,324
2,406
6x2
-7,90
5,23
12,39
Гл
5,530
5,456
5,491
rR
5,394
5,265
5,275
Модуль вектора асимптотической скорости отлета (Охоцимский Д.Е., Сихарули¬
дзе Ю.Г., 1990) для всех дат старта пускового периода не превышает 6,4 км/с. Эта
скорость возрастает от первой даты к последней. Модуль вектора асимптотической
скорости прилета к Марсу изменяется в зависимости от даты старта в интервале
от 2,5 до 2,3 км/с. Скорость подлёта и входа в атмосферу максимальна на краях пе¬
риода запуска и минимальна в его середине. Склонение векторов гиперболической
скорости отлёта относительно плоскости среднего экватора Земли положительное.
Величина угла склонения постепенно уменьшается от 49 градусов при запуске в пер¬
вую дату до 31 градуса - в последнюю. Асимптотическая скорость подлёта лежит
немного ниже плоскости экватора Марса.
Посадка в точку с заданной долготой будет обеспечиваться путём подбора момен¬
та подлёта к Марсу внутри заданной даты. Вход в атмосферу и дальнейший полёт ДМ
будет происходить в том же направлении, что и движение атмосферы и поверхности
Марса. Это обусловлено требованием выполнения посадки ПП до марсианского по¬
лудня для заряда аккумуляторных батарей, а также приводит к снижению относитель¬
ной скорости входа в атмосферу до величин порядка 5,5 км/с.
Траектория гелиоцентрического участка перелёта при старте 05.10.2022 в проек¬
ции на плоскость эклиптики показана на рисунке 3.3.4. На рисунке 3.3.5 приведены
графики изменения расстояний от КА до Земли и Солнца во время перелётов для ва¬
риантов LPO и LPC. На рисунке 3.3.6 представлены графики изменения углов Солн¬
це - КА - Земля и Солнце - Земля - КА для этих же вариантов перелётов.
Из представленных данных видно, что расстояние от Земли до Марса в момент
прибытия равно около 320 млн км. Угол СОЗ в первые сутки после старта с Земли
равен 60° и далее уменьшается до 20° на 50-е сутки полёта, затем немного увеличива¬
ется до 40° на 150-е сутки полёта и далее практически не изменяется. Величина угла
СЗО в первые два с половиной месяца полёта увеличивается со 120-140 градусов
в начале перелёта до 150-170 градусов и далее уменьшается до 60 градусов к момен¬
ту прилёта к Марсу.
Для траектории перелёта были рассчитаны условия радиовидимости со следую¬
щих российских и иностранных станций слежения:
- Россия: Калязин и Медвежьи Озёра;
- ESTRACK (ESA): Malargue (Маларгуэ), New Norcia (Нью Норсия) и Cebreros
(Цебрерос);
- DSN (NASA): Goldstone (Голдстоун), Canberra (Канберра) и Madrid (Мадрид).
117
3-3
Y3Kn> км
Рисунок 3.3.4. Траектория перелёта Земля - Марс
—
расстояние
до Солнца (LPO) до Земли (LPO)
— до солнца (LPC) ----- до Земли (LPC)
- ■■■■ --- -----
дата
расстояние, млн. км
25/09/22 24/11/22 23/01/23 24/03/23 23/05/23 22/07/23
Рисунок 3.3.5. Расстояния от КА до Солнца и Земли для вариантов «ЬРО» и «ЬРС»
118
3-3
углы
— СОЗ (LPO) СЗО (LPO)
СОЗ (LPC) СЗО (LPC)
дата
25/09/22 24/11/22 23/01/23 24/03/23 23/05/23 22/07/23
Рисунок 3.3.6. Углы СОЗ и СЗО для вариантов «LPO» и «LPC»
Рисунок 3.3.7. Длительность зон радиовидимости КА с наземной станции «Калязин»
для вариантов «ЬРО» и «LPC»
119
3-3
Анализ данных показывает, что на начальном этапе полёта у станций, находящих¬
ся в Южном полушарии, условия наблюдения КА будут хуже, чем у станций Северно¬
го полушария. Это связано с тем, что величины угла склонения траектории перелёта
относительно плоскости среднего экватора Земли будут положительными. К момен¬
ту подлёта к Марсу характеристики радиовидимости будут примерно одинаковыми
для обоих полушарий. Условия связи с космическим аппаратом с обеих российских
станций - «Калязин» и «Медвежьи Озёра» - будут практически одинаковыми в связи
с тем, что они располагаются близко друг к другу. Длительность зоны радиовидимо¬
сти для станции слежения «Калязин» для вариантов «LPO» и «LPC» показана на ри¬
сунке 3.3.7. Величина максимального угла места наблюдения КА будет варьироваться
в диапазоне от 40 до 80 градусов. График его изменения схож с графиком длительно¬
сти зон радиовидимости.
3.3.5. Баллистико-навигационное обеспечение полёта
3.3.5.1. Коррекции траектории
Межпланетный перелёт планируется баллистическим: номинальная траектория
не предполагает выполнения во время перелёта детерминированных манёвров DSM
(Deep Space Maneuvers) (Иванов Н.М., Лысенко Л.Н., 2004). Запланированы только
корректирующие манёвры для компенсации возникающих отклонений фактической
траектории от номинальной (стохастические навигационные манёвры). По текущей
схеме (Khan М., Varga G., Rocchi А., 2017) полёт к Марсу включает следующие дина¬
мические операции БНО:
- Коррекция ТСМ 1 (Trajectory Correction Maneuver 1) для парирования ошибок
исполнения маневра выведения КА на траекторию перелёта, обозначаемая так¬
же как LIC (Launch Insertion Correction). Эта коррекция должна быть проведена
как можно раньше с целью сокращения необходимых затрат характеристической
скорости. Однако существует ряд операций на борту КА, которые должны быть
реализованы в течение начальной стадии LEOP (Launch end Early Orbit Phase) для
калибровки бортовых приборов, а также расчётов, выполняемых на Земле - опре¬
деление параметров движения КА и расчет параметров оптимальной коррекции.
Эти операции на борту, накопление траекторных измерений на Земле и расчёт
коррекции занимают обычно 4-5 дней. Коррекция LIC проводится на 7-й день.
Величина LIC зависит от точности выведения.
- Коррекция, которая должна парировать ошибки исполнения LIC (Clean-up
manoeuvre), обозначается ТСМ 2 (Trajectory Correction Maneuver 2) и проводится
на 30-е сутки полёта. После этого на 50-е сутки полёта КА переходит в режим
ориентации на Землю. Затем начинается пауза до момента подготовки к третьей
коррекции, которая производится перед подлётом к Марсу.
- Третья, четвёртая и пятая коррекции (ТСМЗ, ТСМ4, ТСМ5) проводятся стандарт¬
ным образом, за 30, 8 и 2 суток до прибытия к Марсу.
- Отделение ДМ от ПМ совершается за 30 минут до момента входа в атмосферу.
Корректирующие импульсы производятся с целью повышения точности приведе¬
ния КА к Марсу. Коррекции рассчитываются исходя из требования обеспечения вы¬
полнения краевых условий, заданных в картинной плоскости (В-plane) при нулевых
ошибках исполнения самой коррекции.
120
3-3
3.3.5.2. Программа измерений на участке перелёта
Программа измерений формировалась на основе навигационного анализа миссии.
Траектория КА была разбита на несколько дуг. Для каждой из них доплеровские из¬
мерения условно считаются основными, на участках планируемых измерений ADOR
они выполняютсяпри наличии видимости с двух станций каждые 4 часа. Для различ¬
ных дуг имеется своя частота проведения доплеровских измерений. За 43 дня до под¬
лёта к планете измерения осуществляются ежедневно.
Определение орбиты ведется по запросным доплеровским измерениям с исполь¬
зованием телеметрической информации в течение всего перелёта. Во время LEOP
и до проведения LIC наземными станциями ESA будут выполняться запросные изме¬
рения наклонной дальности. Уточнение орбиты с использованием ADOR проводит¬
ся в течение одной недели перед определяющими коррекциями. Ежедневные ADOR
проводятся и обрабатываются в последние 43 дня до прибытия к Марсу. Характери¬
стики ошибок при проведении траекторных измерений наземными станциями приве¬
дены в таблице 3.3.3.
Таблица 3.3.3. Ошибки траекторных измерений наземных станций
случайная ошибка запросных измерений
наклонной дальности (1а)
4 м
систематическая ошибка
запросных измерений (1а)
20 м
случайная ошибка запросных измерений
радиальной скорости
0,075 мм/с
систематическая ошибка запросных измерений
радиальной скорости
нет
случайная составляющая ошибки
измерений ADOR (la)
5 см
ошибка знания координат
станций ESA (1а)
0,5 м
ошибка знания координат
станций DSN NASA (1а)
5 см
В баллистическом центре ИПМ им. М.В. Келдыша РАН (БЦ ИПМ) планируется
обработка траекторных измерений КА «ЭкзоМарс», определение и прогнозирование
параметров движения.
Привлеченные отечественные наземные станции слежения БЦ ИПМ будут обе¬
спечивать для них расчёт целеуказаний и обработку траекторных измерений.
Задействование отечественных наземных станций слежения целесообразно про¬
водить по следующей схеме. Сигнал излучается со станции ESA, принимается на КА
и переизлучается на Землю. Этот сигнал одновременно принимается станцией ESA
и одной из российских станций. Если при обработке измерений отечественной стан¬
ции учесть характеристики излучаемого сигнала и особенности бортового радио¬
комплекса, то могут быть получены доплеровские измерения по схеме «3-путевого
доплера». Такие измерения, несомненно, повысят точность определения параметров
движения КА и надежность реализации задач миссии.
121
3-3
3.3.5.3. Предварительная оценка точности приведения КА к Марсу
Оценка точности приведения КА к Марсу в момент перед отделением спускаемо¬
го модуля производилась в соответствии с расписанием коррекций - таблица 3.3.4.
Таблица 3.3.4. Расписание коррекций
коррекция
время
назначение
ТСМ1
Отделение от рб +7 дней
коррекция ошибок выведения
ТСМ2
Отделение от рб +30 дней
коррекция ошибок исполнения tcml
ТСМЗ
Вход в атмосферу -30 дней
коррекции для уточнения
наведения на точку спуска
ТСМ4
Вход в атмосферу -8 дней
ТСМ5
Вход в атмосферу -2 дня
Использованная модель погрешностей исполнения коррекции (Khan М.,
Yamaguchi Т, 2014) учитывала разбросы по величине и направлению импульса кор¬
рекции. Результаты оценки точности в виде эллипсов рассеивания в картинной пло¬
скости подлётной ветви гиперболы приведены на рисунке 3.3.8.
В.Т, км В.Т, км
а
б
а - Oxia Planum (начало окна старта);
б - Mawrth Vallis (конец окна старта).
Рисунок 3.3.8. Эллипсы рассеяния (З-s) в картинной плоскости, соответствующие ошибкам
приведения КА после 4-й (ТСМ4) и 5-й (ТСМ5) коррекций для первого окна старта
По предварительным оценкам, ошибки в начале и в конце окна старта для одних
и тех же мест посадки различаются несущественно. Полученные величины ошибок
приведения являются приемлемыми, однако до двух раз меньше полученных ранее
122
3-3
для аналогичных перелётов {Khan М., Yamaguchi Т, 2014). Проведение более деталь¬
ной оценки возможно после уточнения исходных данных по модели ошибок приве¬
дения, используемой ЕКА.
3.3.5.4. Требования к информационному обеспечению для участия
антенны в Калязине в навигации КА «ЭкзоМарс-2022»
Согласно приложенному интерфейсному документу (Firre D., Budnik F, 2017)
участие российской антенны ТНА-1500 в Калязине в навигационном обеспечении
полета КА «ЭкзоМарс-2022» ограничивается получением траекторной данных следу¬
ющих типов: запросные измерения дальности, запросные и беззапросные частотные
измерения.
Все полученные измерения предлагается передавать в формате TDM (Tracking
data message), рекомендованном CCSDS. Помимо измерений частоты и запаздыва¬
ния сигнала, траекторные данные должны включать характеристики метеоусловий
на станции, а также параметры частоты излученного сигнала для случая проведения
запросных частотных измерений. Рекомендуемый формат TDM позволяет записать
измеренные значения, а также сервисные данные, полученные за сеанс наблюдений,
в один или несколько ASCII файлов.
Наведение антенны и настройка частот в запросном и приемном каналах про¬
изводятся по параметрам прогнозной траектории, предоставляемой Европейским
центром управления (ESOC). Эти данные являются достаточными для управления
антенным комплексом при условии, что будут обозначены значения номинальной
частоты приема бортового радиокомплекса в Х-диапазоне, а также номинальной ча¬
стоты передаваемого сигнала в беззапросном режиме (если они не находятся в соот¬
ношения 880/749).
3.3.5.5. Основные требования к поступающей от ESOC
информации для независимого решения задач
баллистики и навигации КА «ЭкзоМарс-2022»
1. Получение первичных траекторных измерений - наклонной дальности, допле¬
ра и DDOR - в формате TDM не позднее чем через 1 сутки после проведения сеан¬
са для некритичных участков перелета и не позднее 2 часов после сеанса во время
прохождения важных фаз миссии: выведения на перелетную траекторию, проведения
коррекций, отделения и посадки спускаемого модуля.
2. Получение актуальных данных по текущей и прогнозируемой ориентации КА
в форматах АРМ (Attitude parameter message) или АЕМ (Attitude ephemeris message)
на всем участке перелета вплоть до отделения спускаемого аппарата.
3. Получение данных о работе двигателей системы ориентации в составе посы¬
лок АРМ.
4. Наличие табличных значений силы и момента давления солнечной радиации,
действующей на поверхность КА, в зависимости от направления на Солнце в связан¬
ной СК.
5. Получение номинальных значений прогнозируемых параметров коррекций
(ТСМ-1...ТСМ-5) в составе посылок формата ОРМ (Orbit parameter message).
6. Предоставление информации из интерфейсных документов взаимодействия
с другими наземными станциями, участвующими в навигации КА, в части ITRF ко¬
ординат станций, типов используемых монтировок и геометрии их главных осей.
123
3-3
3.3.6. Условия пребывания посадочной платформы
на поверхности Марса
Основные баллистические условия пребывания КА вблизи Марса представлены
на рисунках 3.3.9 и 3.3.10.
На рисунке 3.3.9 приведены графики изменения углов Солнце - Земля - Марс
и Солнце - Марс - Земля на интервале один марсианский год (примерно соответству¬
ющий двум земным годам). Видно, что в середине ноября 2023 года оба угла будут
около нуля градусов. Будет происходить так называемый «заход Марса за Солнце»,
в котором Марс при наблюдениях с Земли будет наблюдаться на фоне Солнца, что
значительно ухудшит условия радиосвязи с TGO. В течение примерно 10 дней угол
СМ3 будет менее одного градуса, а угол СЗМ - меньше двух градусов.
На рисунке 3.3.10 для этого же времени показаны графики изменения расстоя¬
ний от Марса до Земли и Солнца. Максимальное расстояние между Землёй и Марсом
около 400 млн км приходится на моменты противостояний, при которых планеты рас¬
полагаются на одной прямой с Солнцем, но с разных сторон от него. Такая конфи¬
гурация будет складываться в ноябре 2023 года - примерно за два месяца до начала
сезона глобальных пылевых бурь. При расположении Земли и Марса с одной стороны
от Солнца минимальное расстояние будет равно примерно 100 млн км. Эта конфигу¬
рация будет складываться в конце января - начале февраля 2025 года.
Для этих точек посадки были рассчитаны времена восхода и заката Солнца и Зем¬
ли на Марсе (в марсианских часах, равных ~1,03 земного часа), а также продолжи¬
тельности светового дня и видимости Земли в земных и марсианских часах. Результа¬
ты представлены на рисунках 3.3.11 и 3.3.12. Эта информация позволяет определить
условия работы систем электроснабжения и радиосвязи посадочной платформы
и марсохода. Колебания продолжительности светового дня в течение марсианского
года зависят от широты точки посадки - чем дальше от экватора, тем они больше.
Для точки посадки Mawrth Vallis, максимально удалённой от экватора, отклонения
Рисунок 3.3.9. Углы Солнце - Земля - Марс и Солнце - Марс - Земля
124
3-3
03.23 07.23 11.23 03.24 07.24 11.24 03.25 07.25
дата, месяц.год
06.23 10.23 02.24 06.24 10.24 02.25 06.25
дата, месяц.год
Рисунок 3.3.11. Длительность светового дня для рассматриваемых точек посадки
Рисунок 3.3.12. Длительность видимости Земли для рассматриваемых точек посадки
125
3-3
03.23 07.23 11.23 03.24 07.24 11.24 03.25 07.25
дата, месяц.год
Рисунок 3.3.13. Длительность видимости Марса со станции слежения «Калязин»
достигают почти двух марсианских часов. Продолжительность зон видимости Земли
из точек посадки также колеблется вокруг величины в 12 марсианских часов, и при¬
мерно в тех же диапазонах.
Также были определены условия радиовидимости Марса с российских назем¬
ных станций слежения. Анализ результатов расчётов условий радиовидимости
с наземных станций показывает, что длительность зон наблюдения Марса составля¬
ет от 3 до 16 часов, максимальный угол места в основном изменяется в диапазоне
от 10 до 60 градусов (рисунок 3.3.13). Длительность зон радиовидимости для рос¬
сийских станций слежения достигает максимальных значений (до 16 часов) в июне
2023 года и с октября 2024 по май 2025 года. Минимальная продолжительность ради¬
овидимости приходится на декабрь 2023 - январь 2024 года.
Таким образом:
1. Сценарий миссии «ЭкзоМарс-2022» предполагает старт с Земли в интервале
с 25 сентября по 15 октября 2022 года. Дата прилёта к Марсу выбрана из условия вхо¬
да в атмосферу с минимальной скоростью и назначена на 11 июня 2023 года.
2. В качестве основного места посадки выбран район Oxia Planum.
3. Для рассмотренных вариантов перелёта Земля - Марс приведены основные
баллистические условия функционирования КА.
4. Рассмотрены условия пребывания посадочной платформы на поверхности
Марса, а также характеристики радиовидимости для российских и иностранных на¬
земных станций.
5. На данном этапе разработки проекта с точки зрения баллистико-навигацион¬
ного обеспечения функционирования десантного модуля основным проблемным во¬
просом является обеспечение связи ДМ с Землей через орбитальный КА TGO миссии
«ЭкзоМарс-2016». В процессе посадки в выбранный район и в первые минуты пре¬
бывания посадочной платформы на поверхности Марса - на одном из критических
этапов миссии - указанный КА должен проходить над этим районом. Синхронизация
этих событий должна быть выполнена с очень высокой точностью.
126
3-3
Список литературы
Боровин Г.К., Голубев Ю.Ф., Грушевский А.В., Заславский Г.С., Захваткин М.В.,
Корянов В.В., Лавренов С.М., Морской И.М., Симонов А.В., Степаньянц В.А., Боро¬
вин Г К. и др., Тучин Д. А., Ярошевский В.С. Баллистико-навигационное обеспечение
полетов автоматических космических аппаратов к телам Солнечной системы / Под
ред. А.Г. Тучина. Химки: НПО Лавочкина, 2018. 336 с.
Ваго Хорхе, Лорензони Лейла, Калантропио Фабио, Защиринский А.М. Выбор ме¬
ста посадки для миссии «ЭкзоМарс-2018» // Вестник НПО им. С.А. Лавочкина. 2014.
№ 2. С. 42-46.
Иванов Н.М., Лысенко Л.Н. Баллистика и навигация космических аппаратов. М.:
Дрофа, 2004. 544 с.
Охоцимский Д.Е., Сихарулидзе Ю.Г. Основы механики космического полёта. М.:
Наука, 1990. 448 с.
Хартов В.В., Мартынов М.Б., Лукьянчиков А.В., Алексашкин С.Н. Проектная кон¬
цепция десантного модуля «ЭкзоМарс-2018», создаваемого в НПО им. С.А. Лавочки¬
на// Вестник НПО им. С.А. Лавочкина. 2014. № 2. С. 5-12.
Berga М. ExoMars 2018 - Mission Analysis ICD, Issue 4, EXM-M2-ICD-AI-0067,
31.03.3017, 79 p.
Firre D., Budnik F. Russian antenna support to ExoMars RSP - Navigation ICD. EXM
Reference EXM-G2-ICD-ESC-50005. ESA. Issue 1 Rev. 0, 2017-07-25, 27 p.
Khan M., Varga G., Rocchi A. ExoMars RSP Mission Consolidated Report on Mission
Analysis. EXM-G2-REP-ESC-00001. Issue 3, Rev. 0, 2017-06-14, 50 p.
Khan M., Yamaguchi T. ExoMars 2016 Mission Consolidated Report on Mission
Analysis. Reference EXM-MS-RP-ESA-00008. Issue 4 Rev. 0, 2013-03-27, 108 p.
Khan M., Yamaguchi T. ExoMars 2018 Mission and System Requirements Document.
EXM Reference EXM-M2-RSD-ESA-00003. ESA. 2014, 63 p.
Varga G. ExoMars RSP: Escape conditions for increased inclination launch programs.
EXM-G2-TNO-ESC-50015. Issue 2, Revision 0, 07.08.2018, 9 p.
А.Г. Тучин,
A. В, Грушевский,
M.B. Захваткин,
А.В. Симонов,
B. А. Степаньянц,
Д.А. Тучин,
А.С. Гаммам,
А,Е. Евграфов,
Е.С. Гордиенко,
А.Л. Воробьев
127
3-4
ВПМИССИЯ «ЭКЗОМАРС-2022». РАДИАЦИЯ
Предотвращение разрушающего воздействия космической радиации на устрой¬
ства, материалы и аппаратуру космических аппаратов накладывает повышенные тре¬
бования к корректному прогнозированию радиационных условий в период их полета.
В свою очередь, определение параметров радиационного воздействия космического
пространства позволяет сформировать реальные требования к радиационной стойко¬
сти используемых комплектующих (особенно изделий микроэлектроники), обеспечи¬
вающие надежное функционирование КА.
3.4.1. Радиационная обстановка на трассе полета
КА «ЭкзоМарс-2022»
«ЭкзоМарс-2022» является совместным проектом Роскосмоса и Европейско¬
го космического агентства, при этом десантный модуль (ДМ), осуществляющий
посадку на Марс и доставляющий туда европейский марсоход, разрабатывается
в АО «НПО Лавочкина» и аккумулирует накопленный предприятием опыт по созда¬
нию КА для фундаментальных научных исследований (Ефанов В.В., Мартынов М.Б.,
Пичхадзе К. М., 2012).
За время полета бортовая аппаратура, устройства и конструкции десантного мо¬
дуля КА «ЭкзоМарс-2018» подвергаются воздействию следующих ионизирующих
излучений космического пространства (ИИ КП):
- протонов и ионов солнечных космических лучей (СКЛ);
- протонов и тяжелых ядер галактических космических лучей (ГКЛ);
- протонов и электронов радиационных поясов Земли (РПЗ) на кратковременном
этапе выведения КА на межпланетную траекторию.
В работе (Н.М. Хамидуллина, 2014, с. 91-94) были представлены результаты рас¬
чета параметров радиационной обстановки в период полета КА, который произво¬
дился в соответствии с баллистическими данными, определяющими межпланетную
траекторию КА (перелет Земля - Марс) для двух дат пуска КА - 2018 и 2020 гг.
В первом случае (старт в 2018 году) длительность перелета составляла 245 суток,
во втором (старт в 2020 году) - 150 суток. Функционирование ДМ на поверхности
Марса предполагалось в течение 2 земных лет, или 730 земных суток. Было показано,
что различие в значениях суммарных поглощенных доз не превышает 12%, несмотря
на существенную разницу в длительностях этапа перелета от Земли к Марсу, что,
несомненно, определяется решающим вкладом в значения поглощенных доз от про¬
гнозируемого аномально большого события СКЛ (рисунок 3.4.1).
Расчеты характеристик радиационных условий проводились с помощью про¬
граммного комплекса COSRAD (Кузнецов Н.В. и др., 2011), основанного на динами¬
ческой модели ГКЛ (ГОСТ 25645.150-90, 1991; Модель космоса, 2007, с. 208) и веро¬
ятностной модели СКЛ (ГОСТР 25645.165-2001, 2001; Модель космоса, 2007, с. 402),
модифицированных с учетом радиальной зависимости потоков СКЛ по мере удаления
КА от Солнца. Поскольку модель СКЛ носит вероятностный характер, то при расче¬
те потоков частиц СКЛ и их вклада в поглощенную дозу в соответствии с ОСТ 134-
1044-2007 задавалась вероятность 0,01 (это означает, что превышение приведенных
значений потоков и поглощенных доз от СКЛ за время полета возможно лишь в 1%
128
3-4
случаев). Из этого определения следует, что тем самым прогнозируются экстремаль¬
ные («наихудшие») условия полета, соответствующие возникновению в период полета
аномально большой солнечной вспышки, типа события 2000 г. (ОСТ 134-1044-2007,
2007, с. 6).
В настоящее время принят следующий сценарий полета КА «ЭкзоМарс-2022»:
длительность перелета Земля - Марс составляет 237 суток, функционирование ДМ
на поверхности Марса - 2 земных года.
В свете вышесказанного, казалось бы, пересчет доз для увеличенной длительности
перелета КА от Земли до Марса (от 150 до 237 суток) не приведет к значительному
увеличению доз (не более 10-12%). Однако в конце 2016 года ОСТ 134-1044-2007 был
аннулирован и вместо него внедрена новая редакция ОСТ 134-1044-2007-изменение 1,
согласно которой для СКЛ следует задавать вероятность 0,10 (это означает, что пре¬
вышение приведенных значений потоков и поглощенных доз от СКЛ за время полета
возможно лишь в 10% случаев), что, естественно, снижает значения потоков и доз и,
тем самым, требования к стойкости (ОСТ 134-1044-2007- изменение 1, 2017, с. 8).
При анализе радиационных условий на поверхности Марса во всех случаях при¬
нималось, что значения поглощенных доз там уменьшаются на 70% из-за поглощения
ионизирующих излучений космического пространства атмосферой Марса по сравне¬
нию с дозами на околомарсианских орбитах.
Результаты расчетов поглощенных доз (в Si) за сферическими защитными экра¬
нами различной толщины в течение всего заданного срока активного существования
(САС) КА «ЭкзоМарс» для различных сценариев полета и двух редакций ОСТ 134-
1044-2007 представлены на рисунке 3.4.1.1.
--■СКЛ, 2018
- ГКЛ,2018
- суммарная доза, 2018
• СКЛ, 2020
■ ГКЛ,2020
суммарная доза, 2020
СКЛ, 2022_«Новый» ОСТ
ГКЛ, 2022_«Новый» ОСТ
суммарная доза, 2022«Новый» ОСТ
1,00Е+0б
1,00Е+05
1.00Е+04
1,00Е+03
1,00Е+02
1,00Е+01
1,00Е+00
1,О0Е-О2
1,00Е+02
1,00Е—01 1,00Е+00 1,00Е+01
толщина защиты, г/см2
Рисунок 3.4.1.1. Зависимость поглощенных доз от толщины сферической защиты за САС
КА «ЭкзоМарс» (перелет + 2 земных года на поверхности Марса) для различных дат
старта, сценариев полета и двух редакций ОСТ 134-1044-2007 («Новый ОСТ» обозначает
использование ОСТ 134-1044-2007-изменение 1 с задаваемой вероятностью СКЛ 0,10)
129
3-4
Как следует из сравнения данных на рисунке 3.4.1.1, именно изменение требова¬
ний стандарта к вероятности СКЛ приводит к существенному уменьшению значений
поглощенных доз (почти в 2,5 раза), а не изменение баллистических данных, выража¬
ющееся, прежде всего, в увеличении длительности перелета Земля - Марс.
На рисунках 3.4.1.2, 3.4.1.3 приведены энергетические спектры потоков протонов
СКЛ и ГКЛ за САС КА (237 суток перелета Земля - Марс + 730 суток на Марсе), не¬
обходимые для оценки вклада высокоэнергетических протонов в частоту случайных
одиночных эффектов (сбоев и отказов).
энергия, МэВ
Рисунок 3.4.1.2. Дифференциальные энергетические спектры потоков протонов СКЛ за САС
КА для различных значений толщины защиты X в массовых единицах (г/см2)
энергия, МэВ
Рисунок 3.4.1.3. Дифференциальные энергетические спектры потоков протонов ГКЛ за САС
КА для различных значений толщины защиты X в массовых единицах (г/см2)
130
3-4
На рисунках 3.4.1.4, 3.4.1.5 приведены данные, необходимые для оценки вклада
ТЗЧ в частоту одиночных эффектов, а именно: дифференциальные ЛПЭ-спектры по¬
токов тяжелых заряженных частиц (ТЗЧ), к которым относятся ионы СКЛ (с заряда¬
ми 2< z <28) и ядра ГКЛ (с зарядами 2< z <92) за САС КА.
Важной задачей является определение влияния радиационных условий функци¬
онирования КА на формирование требований к радиационной стойкости (PC) ис¬
пользуемых в бортовой аппаратуре электрорадиоизделий (ЭРИ). В 2013 году автором
была проведена классификация (по дозовому и одиночным эффектам) различных
1,00Е+09
1Д0Е+08
1Д0Е+07
1Д0Е+06
1Д0Е+05
1Д0Е+04
1Д0Е+03
1Д0Е+02
1Д0Е+01
1Д0Е+00
1,00Е—01
1,00Е-02
1,00Е-03
1,00Е-04
1,00Е-05
1,00Е+01
1,00Е+02
1Д0Е+03
1Д0Е+04
ЛПЭ, МэВ-см2/г
1Д0Е+00
1,00Е+05
Рисунок 3.4.1.4. Дифференциальные ЛПЭ-спектры потока ТЗЧ СКЛ, г/(см4 МэВ),
за САС КА для различных значений толщины защиты X в массовых единицах (г/см2)
ЛПЭ, МэВ-см2/г
Рисунок 3.4.1.5. Дифференциальные ЛПЭ-спектры потока ТЗЧ ГКЛ за САС КА
для различных значений толщины защиты X в массовых единицах (г/см2)
131
3-4
типов полетов КА (в основном разрабатываемых в НПО им. С.А. Лавочкина) и на
основании анализа их радиационных условий были сформулированы требования
к радиационной стойкости используемых ЭРИ (Хамидуллина Н.М., 2014, 948-961).
Отдельно были выделены межпланетные полеты к Марсу. Результаты послужили ос¬
новой для разработки Руководящего документа по стратегии менеджмента комплек¬
тования электронной компонентной базой космических аппаратов разработки НПО
им. С.А. Лавочкина (стандарт предприятия).
Требования к радиационной стойкости комплектующих бортовой аппаратуры
по дозовому эффекту, естественно, зависят от дозовых нагрузок в период полета,
причем при оценке поглощенных доз в ЭРИ необходимо учитывать как компоновку
КА и расположение на нем рассматриваемой аппаратуры, так и конструкцию самой
аппаратуры, а также учитывать вклад в дозу от бортовых радиоизотопных источни¬
ков (тепловых блоков на основе диоксида плутония), который, в некоторых случаях,
может доминировать над вкладом от излучений космического пространства. Кроме
того, требования к радиационной стойкости ЭРИ различаются в зависимости от спо¬
соба ее подтверждения, а именно: используются ли справочные данные или же ре¬
зультаты испытаний. Согласно {ОСТ 134-1034-2012, 2013) в первом случае требуется
трехкратный запас по дозе. Более подробно эти вопросы рассмотрены в разделе 3.4.2.
В таблице 3.4.1.1 приведены требования к радиационной стойкости используемых
в бортовой аппаратуре ЭРИ по одиночным эффектам (сбоям и отказам) для межпла¬
нетных полетов к Марсу (Хамидуллина Н.М., 2014, с. 948-961), полученные в соответ¬
ствии с рекомендациями РД 134-0139-2005.
Необходимо заметить, что, в отличие от дозового эффекта, консервативная защита
(увеличение толщины стенок корпусов, установка дополнительных кожухов и т.п.)
для уменьшения в БА одиночных эффектов не является эффективной мерой: при уве¬
личении толщины защиты частично ослабляется поток протонов СКЛ, но, с другой
стороны, увеличивается поток вторичных ионов и ядер, рожденных в ядерных реак¬
циях ГКЛ с атомами защитного материала.
Таблица 3.4.1.1. Требования к PC ЭРИ в БА КА по одиночным эффектам
тип орбиты, или
«сценарий» полета
одиночные сбои*
одиночные отказы**
Lo, МэВ/(мг/см2)
о0, см2/бит
Lo, МэВ/(мг/см2)
о0, см2/чип
межпланетные полеты
к Марсу, САС 3 года
>2-3
< 10-8
> 20-25
< 10-2
Примечания:
’ - на определение требований не влияет длительность САС КА, т.к. рассматривается работоспособ¬
ность РЭА во время аномально большой солнечной вспышки.
** - требования сформулированы при условии ВБР > 0,999, где ВБР - вероятность безотказной работы РЭА.
Следует отметить, что, если для точного определения требований к стойкости ЭРИ
в бортовой аппаратуре по дозовому эффекту необходимо тщательно учесть компонов¬
ку КА и расположение на нем прибора, то для уточнения требований к параметрам
отказо- и сбоеустойчивости ЭРИ важны прежде всего другие факторы: внутренняя
компоновка прибора, количество ЭРИ, способ их соединения, а также схемотехни¬
ческие и программные способы парирования одиночных эффектов. При этом, как
было показано на примере расчетов для КА «Спектр-Р» и «Спектр-УФ» (Хамидулли¬
на Н.М., 2009. С. 39-46; Хамидуллина Н.М., 2009. С. 55-60), расположение аппаратуры
на КА практически не влияет на частоту сбоев и отказов.
132
3-4
Список литературы
ГОСТ25645.150-90. Галактические космические лучи. Модель изменения потоков
частиц. М.: Госстандарт, 1991.
ГОСТР 25645.165-2001. Лучи космические солнечные. Вероятностная модель по¬
токов протонов. М.: Госстандарт, 2001.
Ефанов В., Мартынов М., Пичхадзе К. Космические роботы для научных исследо¬
ваний И Наука в России. 2012. № 1. С. 1-14.
Кузнецов Н.В., Малыъикин Ю.М., Н.И. Николаева Н.И., Ныммик Р.А. и др. Про¬
граммный комплекс COSRAD для прогнозирования радиационных условий на борту
космических аппаратов // Вопросы атомной науки и техники (ВАНТ). Сер. Физика
радиационного воздействия на радиоэлектронную аппаратуру, 2011. Вып. 2. С. 72-78.
Модель космоса / Под ред. Л.С. Новикова. 8-е изд. Т. 1: Физические условия в кос¬
мическом пространстве. М.: КДУ, 2007. 871 с.
ОСТ 134-1044-2007. Аппаратура, приборы, устройства и оборудование космиче¬
ских аппаратов. Методы расчета радиационных условий на борту космических аппа¬
ратов и установление требований по стойкости радиоэлектронной аппаратуры кос¬
мических аппаратов к воздействию заряженных частиц космического пространства
естественного происхождения. 2007 г.
ОСТ 134-1044-2007- изменение 1. Аппаратура, приборы, устройства и обору¬
дование космических аппаратов. Методы расчета радиационных условий на борту
космических аппаратов и установление требований по стойкости радиоэлектронной
аппаратуры космических аппаратов к воздействию заряженных частиц космического
пространства естественного происхождения. 2017 г.
ОСТ 134-1034-2012. Аппаратура, приборы, устройства и оборудование космиче¬
ских аппаратов. Методы испытаний и оценки стойкости бортовой радиоэлектронной
аппаратуры космических аппаратов к воздействию электронных и протонных излуче¬
ний космического пространства по дозовым эффектам.
РД134-0139-2005. Аппаратура, приборы, устройства и оборудование космических
аппаратов. Методы оценки стойкости к воздействию заряженных частиц космическо¬
го пространства по одиночным сбоям и отказам.
Хамидуллина Н.М. Расчет одиночных сбоев в РЭА орбитальных обсерваторий
на основе 3d-моделирования // Полет. 2009. № 7. С. 39-46.
Хамидуллина Н.М. Использование 3d-моделирования для расчета вероятности
тиристорного эффекта в РЭА КА «Спектр-Р» и «Спектр-УФ» // Полет. 2009. № 9.
С. 55-60.
Хамидуллина Н.М. Радиационные условия в период полета КА «ЭкзоМарс-2018».
Требования к радиационной стойкости используемых в бортовой аппаратуре элек¬
трорадиоизделий // Вестник ФГУП «НПО им. С.А. Лавочкина». 2014. № 2. С. 91-94.
Хамидуллина Н.М. Влияние радиационных условий полета космических аппара¬
тов на радиационную стойкость электрорадиоизделий бортовой радиоэлектронной
аппаратуры // Проектирование автоматических космических аппаратов для фунда¬
ментальных научных исследований / Под ред. В.В. Хартова, В.В. Ефанова: В 3-х т.
М.: Изд-во МАИ-ПРИНТ, 2014. Т. 2. С. 948-961.
Н.М. Хамидуллина
133
3-4
3.4.2. Локальные поглощенные дозы в местах расположения
аппаратуры десантного модуля КА «ЭкзоМарс-2022»
от ионизирующего излучения космического пространства
и радиоизотопных источников тепла
В период полета космические аппараты (КА) подвергаются разрушающему воз¬
действию ионизирующих излучений космического пространства (ИИ КП): протонов
и электронов радиационных поясов Земли, протонов и тяжелых заряженных частиц
солнечных и галактических космических лучей.
Для обеспечения надежной работы в космосе служебной и научной аппаратуры,
различных устройств и используемых материалов чрезвычайно важно еще на ста¬
дии проектирования космического аппарата предсказать радиационную опасность,
в частности по дозовому эффекту, а именно корректно рассчитать полученную ими
дозовую нагрузку - локальные поглощенные дозы (ЛИД). В свою очередь, эти дан¬
ные необходимы для анализа радиационной стойкости (PC) аппаратуры и комплек¬
тующих электрорадиоизделий (ЭРИ), формирования критериев выбора стойкой
к воздействию ИИ КП элементной базы, определения необходимости проведения
радиационных испытаний и т.п.
Для КА «ЭкзоМарс-2022» задача корректного расчета ЛПД в бортовой аппара¬
туре осложняется необходимостью учета вклада, который, наряду с ИИ КП, вносят
радиоизотопные тепловые блоки (ТБ) на основе диоксида плутония, установленные
на борту для обеспечения теплового режима функционирования десантного модуля,
включая марсоход (ровер).
Специально для выполнения этой задачи было доработано, модернизировано
и использовано лицензионное программно-математическое обеспечение (ПМО)
«LocalDose&SEE» (LocalDose&SingleEventsEffects - Локальная доза и одиночные
эффекты) (Пичхадзе К.М., Хамидуллина Н.М., Зефиров И.В., 2006; Хамидуллина Н.М.,
2008; Хамидуллина Н.М., Зефиров И.В., 2008; Хамидуллина Н.М., Артемов М.Е., Зе¬
фиров И.В., 2014).
Краткое описание ПМО для расчета локальных поглощенных доз
Указанное выше ПМО (программный комплекс) позволяет рассчитывать локаль¬
ные поглощенные дозы в различных местах КА методом секторирования с приме¬
нением пространственного интегрирования по трехмерной модели КА, созданной
в рамках настоящей работы.
Важнейшими составными частями ПМО являются:
- исходные данные по радиационным условиям полета, основанные на современ¬
ных моделях космоса;
- исходные данные по радиационным характеристикам бортовых радиоизотопных
источников;
- собственно комплекс программ для расчета ЛПД по методу секторирования;
- трехмерная модель КА с учетом ее изменений на различных этапах полета.
ПМО представляет собой комплекс взаимодействующих программ, использующий
два хорошо известных программных продукта: «MicrosoftExcel» и «3DStudioMax»,
одно из самых распространенных и универсальных приложений, занимающихся
трехмерным компьютерным моделированием.
134
3-4
По своей логике интерфейс реализованного программного комплекса разделяется
натри принципиально разных шага (Хамидуллина Н.М., 2008; Зефиров И.В., 2009):
1. Процесс вычисления распределения масс, отражающий компоновку КА.
2. Вычисление локальных поглощенных доз, частоты одиночных эффектов для
каждого заданного места комического аппарата и вывод численных результатов
в виде «Ехсе1»-таблиц.
3. Автономный просмотр в среде «3DStudioMax» распределения масс для каждо¬
го выбранного локального места.
Специально для проведения расчетов ЛПД на КА с бортовыми радиоизотопными
источниками авторами статьи была проведена модернизация программного комплек¬
са с целью расширения его функциональных возможностей: разработан дополнитель¬
ный модуль программы «LocalDose&SEE», который путем введения дополнительной
таблицы с характеристиками радиоизотопных источников и уравнений, описываю¬
щих распределение доз при удалении от источников, позволил учесть накопленные
дозы в различных точках КА (локациях) от ТБ.
Важнейшим элементом расчета является создание специально подготовленной
(расчетной) трехмерной модели КА, описание которой представлено ниже.
При современном подходе проведение расчета становится процессом итерацион¬
ным. Отслеживая различные этапы проектирования и конструирования изделия, рас¬
чет изменяется, отражая вносимые изменения исходных данных.
Состав и структура КА
В состав КА «ЭкзоМарс-2022» входят следующие основные элементы: перелет¬
ный модуль (ПМ); десантный модуль (ДМ); адаптер с системой отделения десантного
модуля от перелетного модуля.
Внешний вид космического аппарата «ЭкзоМарс-2022» представлен на рисун¬
ках 3.4.2.1-3.4.2.3.
Рисунок 3.4.2.1. Общий вид космического аппарата «ЭкзоМарс-2022»
135
3-4
Рисунок 3.4.2.2. Структурный состав КА «ЭкзоМарс-2022»
Рисунок 3.4.2.3. Общий вид десантного модуля КА «ЭкзоМарс-2022»
Система координат перелетного модуля, а также основные габаритные и присое¬
динительные размеры показаны на рисунке 3.4.2.4.
136
3-4
Рисунок 3.4.2.4. Система координат ДМ и ПМ КА «ЭкзоМарс-2022»
Траектория и длительность перелета
На рисунке 3.4.2.5 приведена траектория перелета Земля - Марс КА «Экзо¬
Марс-2022». Перелет осуществляется за 237 суток, длительность функционирования
десантного модуля на поверхности Марса составляет 2 земных года. Таким образом,
общее время функционирования ДМ составляет примерно 3 года.
Радиационные условия функционирования КА «ЭкзоМарс-2022», необходимые
для расчета ЛПД, представлены в разделе 3.4.1. Однако следует заметить, что в на¬
стоящем разделе представлены результаты расчета ЛПД, полученные на основании
исходных данных (ИД) по радиационным условиям полета в соответствии с ОСТ
134-1044-2007, т.е. завышенные почти в два раза по сравнению с рекомендациями но¬
вой редакции этого стандарта (ОСТ 134-1044-2007-изменение 7, 2017). Это обуслов¬
лено использованием этих ИД, начиная с 2013-2014 гг., в ТТЗ на КА и в частных ТЗ
на бортовую аппаратуру и, соответственно, определением радиационной стойкости
комплектующих ЭРИ исходя именно из этих дозовых нагрузок.
137
3-4
Рисунок 3.4.2.5. Траектория перелета для старта КА в 2022 году
Размещение и характеристики радиоизотопных источников тепла
Как упоминалось ранее, в данном расчете учитывается вклад в поглощенную
дозу излучений 17 тепловых блоков, размещенных двумя сборками из 6 и 8 шт. ка¬
ждая на посадочной платформе и в количестве 3 шт. на ровере. В качестве источ¬
ников тепловой энергии для ДМ проекта «ЭкзоМарс-2022» предполагается исполь¬
зовать тепловые блоки, аналогичные блокам ТБ-8,5, разрабатываемые для проектов
«Луна-Глоб» и «Луна-Ресурс-1». В каждой сборке (кассете) тепловые блоки распола¬
гаются в непосредственной близости друг от друга и оказывают существенное влия¬
ние на служебные системы и приборы полезной нагрузки, находящиеся около места
установки кассет или отдельных ТБ (в ровере).
На тепловой сотопанели (ТСП) десантного модуля по оси -Z размещена сборка
из 8 ТБ, рисунок 3.4.2.6; со стороны +Z установлена сборка из 6 ТБ, рисунок 3.4.2.7.
На рисунке 3.4.2.8 приведен способ размещения еще трех тепловых блоков в составе
ровера.
В таблице 3.4.2.1 и на рисунке 3.4.2.9 представлены полученные разработчиком
ТБ данные о максимальных (расчетных) значениях мощности поглощенной дозы
от различных излучений тепловых блоков, а также поглощенных доз за 1 год полета
КА в зависимости от расстояния до тепловых блоков.
138
3-4
БУ МТК
трансиверы
БИБ
BE MEGRE
КАС
БУПП
сборка тепловых
блоков
испаритель
Рисунок 3.4.2.6. Размещение на ТСП сборки из 8 шт. ТБ (по оси -Z)
ФАСТ
МикроМед
ГХМ
ЛАРА
БИП
Адрон-ЕМ-ИНГ
сборка тепловых
блоков
испаритель
Рисунок 3.4.2.7. Размещение на ТСП сборки из 6 шт. ТБ (со стороны +Z)
Рисунок 3.4.2.8. Размещение 3 шт. ТБ на ровере
(панели солнечных батарей условно не показаны)
139
3-4
Таблица 3.4.2.1. Мощность поглощенной дозы (Гр/с) и поглощенная доза (рад) в Si
от теплового блока за 1 год САС КА в зависимости от расстояния до ТБ
расстояние
до ТБ, см
мощность
дозы от гамма-
излучения
и рентгеновского
излучения, Гр/с
мощность
дозы от потока
нейтронов, Гр/с
суммарная
мощность дозы
от гамма-излучения,
рентгеновского
излучения
и нейтронов, Гр/с
суммарная
поглощенная
доза за 1 год
полета КА рад
10
1,62Е-07
1Д0Е-08
1,73Е-07
5,46Е+02
50
6, ЗОЕ-09
4,40Е-10
6,74Е-09
2Д1Е+01
100
1,60Е-09
1Д0Е-10
1,71Е-09
5,36Е+00
200
4,00Е-10
2,80Е-11
4,28Е-10
1,36Е+00
Рисунок 3.4.2.9. Значения суммарной (от всех видов излучений) поглощенной дозы,
накопленной за 1 год от одного ТБ, в зависимости от расстояния до него
Расчетная трехмерная модель КА «ЭкзоМарс-2022»
Решение задачи расчета локальных физических величин, которые выражают коли¬
чественную меру радиационных воздействий в конкретном месте КА, и, в частности,
локальных поглощенных доз от различных видов ионизирующих излучений, пред¬
полагает обязательный анализ пространственной структуры космического аппарата.
Здесь могут быть выделены следующие направления:
- общие закономерности представления пространственной структуры космическо¬
го аппарата;
- разделение конструктивных элементов изделия на существенные и несуществен¬
ные с точки зрения их учета в расчетах радиационных характеристик;
- классификация существенных конструктивных элементов космического аппарата
по дополнительным признакам: типам геометрического представления, физиче¬
ским свойствам материалов, особенностям взаимного расположения.
140
3-4
Важной особенностью представления пространственной структуры КА приме¬
нительно к нашей задаче является разделение его конструктивных элементов на су¬
щественные и несущественные. Принадлежность детали изделия к тому или иному
классу определяется, прежде всего, относительными размерами детали и близостью
её расположения к тому локальному месту на КА, где необходимо рассчитать радиа¬
ционные характеристики (более точно, той долей телесного угла, который занимает
данная деталь, и массовой толщиной защиты в этом телесном угле). Действительно,
с точки зрения радиационной защиты, небольшая деталь, находящаяся далеко от ме¬
ста расчета, не создает достаточного экранирующего эффекта в силу крайне малого
телесного угла, намного меньшего, чем шаг разбиения сферы, окружающей объект
расчета, на элементарные телесные углы.
При создании расчетной 3D-модели КА необходимо принимать во внимание то,
что на точность полученных результатов влияет несколько различных факторов:
- точность физических моделей космоса;
- степень детализации (аппроксимации) 3D-модели изделия;
- погрешности численных методов расчетов.
Поскольку физические модели, описывающие исходные данные, в настоящее вре¬
мя имеют точность в пределах ±50% для описания потоков частиц радиационных по¬
ясов Земли, ±20-25% для галактических космических лучей и ±100% для солнечных
космических лучей (Модель космоса, 2007, с. 631), задание высокой степени детали¬
зации (сложности) 3D-модели КА приводит к неоправданному превышению точно¬
сти расчета, что, в свою очередь, приводит к следующему:
- усложнение процесса редактирования элементов 3D-модели, связанное с задей¬
ствованием ресурсов компьютера;
- увеличение пространства на жестком диске компьютера, занимаемого файлом
ЗО-модели;
- увеличение времени проведения вычислений;
- увеличение времени создания используемой для расчета ЗО-модели, вызванное
необходимостью моделировать большее количество конструктивных элементов.
В приведенном перечне только последний пункт имеет существенное значение,
так как создание мелких элементов связано с дополнительными трудностями 3D-мо¬
делирования, уточнением многочисленных исходных данных и т.д. Все эти усилия
не принесут улучшения точности расчетов из-за погрешностей, вызванных другими
указанными факторами.
Создание расчетной ЗО-модели КА происходит путем адаптации конструкторской
ЗО-модели, созданной на основе рабочей конструкторской документации.
На рисунках 3.4.2.10-3.4.2.12 представлены этапы работы с трехмерной моделью
КА «ЭкзоМарс-2022»:
- на рисунках а) представлена адаптированная конструкторская модель, готовая
к импортированию в среду «3DS Мах» и полученная путем снижения сложности
моделей элементов конструкции, узлов и агрегатов трехмерной конструкторской
модели изделия (выполненной в программе трехмерного твердотельного проек¬
тирования на основе данных сборочного чертежа), а также за счет уменьшения
общего количества составных элементов путем исключения некритичных;
- рисунки б) показывают расчетную трехмерную модель КА в формате «3DS Мах»,
пригодную к использованию в программном комплексе (некоторые элементы
конструкции условно не отображены).
141
3-4
Рисунок 3.4.2.10. Этапы подготовки ЗЭ-модели к использованию в среде «3DStudioMax»
(двигательная установка ДМ)
Рисунок 3.4.2.11. Этапы подготовки ЗЭ-модели к использованию в среде «3DStudioMax»
(вид со стороны солнечных батарей ДМ)
Рисунок 3.4.2.12. Этапы подготовки ЗЭ-модели к использованию в среде «3DStudioMax»
(ДМ в транспортном положении)
142
3-4
Результаты расчета локальных поглощенных доз
Для оценки и сравнения вклада ИИ КП и ТБ в поглощенную дозу в аппаратуре КА
«ЭкзоМарс-2022» было выбрано несколько наиболее характерных локаций.
В результате проведения расчета были определены:
- ЛПД от ионизирующих излучений космического пространства внутри различ¬
ных приборов и устройств КА «ЭкзоМарс-2022» на этапе перелета Земля - Марс
(таблица 3.4.2.2);
- ЛПД от ИИ КП внутри различных приборов посадочной платформы КА «Экзо¬
Марс-2022» за период функционирования на поверхности Марса (таблица 3.4.2.3);
- поглощенные дозы в аппаратуре КА «ЭкзоМарс-2022» от излучений радио¬
нуклидных источников тепла ТБ-8,5 на различных этапах миссии (таблицы
3.4.2.2-3.4.2.3.);
- суммарные ЛПД от всех видов излучений (таблица 3.4.2.4).
Таблица 3.4.2.2. Локальные поглощенные дозы в некоторых приборах и устройствах КА
«ЭкзоМарс-2022» при осуществлении перелета Земля - Марс
прибор
ЛПДкп,
рад
ЛПДтб,
рад
ЛПДсум (перелет),
рад
1
прибор EPC + Y
107,3 (89%)
13,8(11%)
121,1
2
прибор DAT CRTU
53,7 (83%)
11,2(17%)
64,9
3
АБ+У
24,5 (21%)
94,1 (79%)
118,6
4
ДУ
175,2 (73%)
65,6 (27%)
240,8
5
БИБ-Y-Z
31,1 (37%)
53,1 (63%)
84,2
6
БЦВМ (OBS)
35,8 (5%)
661,3 (95%)
697,1
7
ударный сенсор
130,1 (87%)
20,0(13%)
150,1
8
КАС
56,9(12%)
435,3 (88%)
492,2
9
Адрон-ЭМ-ДМ
85,4 (58%)
61,1 (42%)
146,5
10
Адрон-ЭМ-ДЭ
60,8 (46%)
71,1 (54%)
131,9
11
MicroMED
106,0 (65%)
56,5 (35%)
162,5
12
микрофон
276,3 (92%)
23,3 (8%)
299,6
Примечания:
1 ЛПДкп - суммарная доза от ИИ КП: СКЛ и ГКЛ,
ЛПДтб - доза от ТБ (тепловых блоков),
ЛПДСум - суммарная доза от ИИ КП и ТБ.
2 Для расчета ЛПД внутри прибора использовалось следующее приближение: прибор рассматривался
как «монолитный» блок со средней плотностью, определяемой с помощью габаритно-массовых харак¬
теристик прибора по формуле р = m/V, где m - масса прибора, V - его объем. В случае необходимости
более детального расчета ЛПД в отдельных комплектующих ЭРИ используется подробная 3D-модель
прибора.
Таблица 3.4.2.3. Локальные поглощенные дозы в некоторых приборах и устройствах
посадочной платформы КА «ЭкзоМарс-2022 за время функционирования на поверхности
Марса
прибор
ЛПДкп,
рад
ЛПДтб,
рад
ЛПДсум (пов-ть),
рад
1
АБ+У
5,1 (2%)
252,1 (98%)
257,2
2
ДУ
68,7 (27%)
142,5(73%)
211,2
3
БИБ -Y-Z
5,4 (4%)
143,3 (96%)
148,7
143
3-4
прибор
ЛПДкп,
рад
ЛПДтв,
рад
ЛПДсум (пов-ть),
рад
4
БЦВМ (OBS)
5,8 (0,3%)
1944,2 (99,7%)
1950,0
5
ударный сенсор
18,3 (26%)
50,9 (74%)
69,2
6
КАС
8,3 (0,6%)
1354,1 (99,4%)
1362,4
7
Адрон-ЭМ-ДМ
17,0(10%)
146,6 (90%)
163,6
8
Адрон-ЭМ-ДЭ
8,7 (4%)
194,0 (96%)
202,7
9
MicroMED
19,1 (11%)
147,8(89%)
166,9
10
микрофон
212,7 (65%)
116,1 (35%)
328,8
Таблица 3.4.2.4. Локальные поглощенные дозы в некоторых приборах и устройствах КА
«ЭкзоМарс-2022 за САС: этап перелета Земля - Марс (237 суток) и время функционирования
посадочной платформы на поверхности Марса (2 земных года)
прибор
ЛПДсум (перелет)
рад
ЛПДсУм (пов-ть)
рад
ЛПДсум
рад
1
прибор ЕРС +У
121,1 (100%)
-
121,1
2
прибор DAT CRTU
64,9(100%)
-
64,9
3
АБ +Y
118,6 (48%)
257,2 (52%)
375,8
4
ДУ
240,8 (53%)
211,2 (47%)
452,0
5
БИБ -Y-Z
84,2 (36%)
148,7 (44%)
232,9
6
БЦВМ (OBS)
697,1 (26%)
1950,0 (74%)
2647,1
7
ударный сенсор
150,1 (68%)
69,2 (32%)
219,3
8
КАС
492,2 (27%)
1362,4 (73%)
1854
9
Адрон-ЭМ-ДМ
146,5 (47%)
163,6 (53%)
310,1
10
Адрон-ЭМ-ДЭ
131,9 (39%)
202,7 (61%)
334,6
11
MicroMED
. 162,5 (49%)
166,9 (51%)
329,4
12
микрофон
299,6 (48%)
328,8 (52%)
628,4
Примечание:
ЛПДсум(перелет) - суммарная доза, накопленная за этап перелета;
ЛПДсуМ(пов-ть) - суммарная доза, накопленная при функционирования на поверхности Марса
Как следует из результатов расчета локальных поглощенных доз, полученных
аппаратурой ДМ КА «ЭкзоМарс-2022» от ионизирующих излучений космического
пространства и 17 радиоизотопных источников тепла (14 тепловых блоков на поса¬
дочном модуле и 3 - на ровере), значения суммарных доз внутри приборов (в геоме¬
трическом центре) за САС лежат в диапазоне от 70 рад до 3 крад, при этом дозы от ИИ
КП лежат в диапазоне от 70 рад до 700 рад. Эти величины показывают минимальную
дозовую нагрузку на ЭРИ от КП (т.е. для наиболее защищенных ЭРИ), значения же
доз в ЭРИ от ИИ КП, расположенных «худшим» образом в приборе (около стенки
с минимальной толщиной и/или обращенной в открытый космос), как правило, в 1,5—
3 раза больше. Таким образом, максимальная дозовая нагрузка на ЭРИ от космиче¬
ских излучений лежит в диапазоне от 200 рад до 2 крад. Значения доз от ТБ опреде¬
ляются только расстоянием от источника до точки, в которой рассчитывается доза.
Как следует из таблицы 3.4.2.2, максимальный вклад в дозу от ТБ наблюдается в ев¬
ропейской БЦВМ (порядка 2 крад), таким образом, максимальная дозовая нагрузка
на ЭРИ в БЦВМ составляет ~ 4 крад. Дозы в ЭРИ остальных приборов будут меньше,
например, в КАС они составят максимум 3 крад, а в других приборах (в частности,
Адрон-ЭМ-ДМ) - максимум 600-700 рад.
144
3-4
Полученные максимальные значения доз в ЭРИ приборов позволяют для каждо¬
го из них выработать требования к радиационной стойкости (PC) используемой эле¬
ментной базы, которая, по определению, является ее предельно допустимой дозой.
В случае подтверждения стойкости радиационными испытаниями достаточно, чтобы
дозовая нагрузка не превышала значения PC, в случае же использования справочных
данных (справочники, базы данных, результаты испытаний аналогов или других пар¬
тий ЭРИ) необходимо, чтобы PC превышала значения дозовой нагрузки с 3-кратным
запасом {ОСТ 134-1034-2012). Учитывая полученные данные о дозовых нагрузках
ЭРИ в отечественной аппаратуре на КА «ЭкзоМарс-2022» (не более 3 крад), получа¬
ем, что максимальный уровень требований к PC составляет 8-9 крад с учетом 3-крат¬
ного дозового запаса.
Список литературы
Зефиров И.В. Специфика программного комплекса для расчета радиационных ха¬
рактеристик аппаратуры космического аппарата с использованием 3D-моделирова¬
ния // Космонавтика и ракетостроение, 2009. № 4. С. 78-87.
Модель космоса / Под ред. Л.С. Новикова. 8-е изд. Т. 1: Физические условия в кос¬
мическом пространстве. - М.: КДУ, 2007. 871 с.
ОСТ 134-1044-2007 - изменение 1. Аппаратура, приборы, устройства и обору¬
дование космических аппаратов. Методы расчета радиационных условий на борту
космических аппаратов и установление требований по стойкости радиоэлектронной
аппаратуры космических аппаратов к воздействию заряженных частиц космического
пространства естественного происхождения. 2017 г.
ОСТ 134-1034-2012. Аппаратура, приборы, устройства и оборудование космиче¬
ских аппаратов. Методы испытаний и оценки стойкости бортовой радиоэлектронной
аппаратуры космических аппаратов к воздействию электронных и протонных излуче¬
ний космического пространства по дозовым эффектам.
Пичхадзе К.М., Хамидуллина Н.М., Зефиров И.В. Расчет локальных поглощенных
доз с учетом реальной конфигурации космического аппарата // Космические исследо¬
вания, 2006. Т. 44, № 2. С. 179-182.
Хамидуллина Н.М. Расчет радиационных характеристик бортовой аппаратуры
с использованием трехмерной модели КА // Полет. 2008. № 10. С. 49-55.
Хамидуллина Н.М., Зефиров И.В. Свидетельство о государственной регистрации
программ для ЭВМ № 2008613789 «LocalDose&SEE», 08.08.2008 г.
Хамидуллина Н.М., Артемов М.Е., Зефиров И.В. Компьютерные методики расчета
параметров радиационных условий в космическом пространстве и на борту косми¬
ческих аппаратов // Научное издание «Проектирование автоматических космических
аппаратов для фундаментальных научных исследований» / Под ред. В.В. Хартова,
В.В. Ефанова: В 3-х т. М.: Изд-во МАИ-ПРИНТ, 2014. Т. 2. С. 864- 947.
77. С Черников,
И.В. Зефиров,
Е.В. Власенков,
Т.Ш. Комбаев,
Н.М. Хамидуллина
145
3-4
3.4.3. Анализ структурных повреждений в аппаратуре
десантного модуля КА «ЭкзоМарс-2022»,
вызываемых излучениями космического пространства
и бортовых радиоизотопных источников тепла
В условиях длительных межпланетных миссий особое значение приобретает обе¬
спечение теплового и электрического режимов функционирования КА с использова¬
нием бортовых источников электрической и тепловой энергии. Речь идёт как о по¬
садочных аппаратах, так и о тех, что могут быть направлены к внешним планетам
Солнечной системы: в обоих случаях нестабильность или недостаточность теплового
и светового потока от Солнца приводит к необходимости повышения энергетической
автономности КА. В целях обеспечения электрического питания и обогрева различ¬
ных бортовых приборов, следовательно, требуется долговременный и стабильный
источник энергии. Наиболее очевидным решением в большинстве подобных случаев
является использование радиоизотопных источников тепловой и электрической энер¬
гии: РИТов и РИТЭГов.
Так, в случае КА «ЭкзоМарс-2022» источником тепловой энергии на борту явля¬
ются радиоизотопные тепловые блоки (ТБ). На десантном модуле (ДМ) КА предпола¬
гается использовать 17 тепловых блоков на основе диоксида плутония-238. Энергия
в ТБ получается из спонтанного ядерного распада изотопов плутония в топливной
смеси, побочным эффектом которого являются потоки нейтронов с характерным
спектром деления. Это нейтронное излучение создает дополнительную радиацион¬
ную нагрузку на радиоэлектронную аппаратуру (РЭА). Вследствие долгого соседства
РЭА со столь мощными источниками нейтронов приобретают значение и такие виды
воздействий, которыми при оценке радиационной стойкости КА обычно пренебрега¬
ют, а именно структурные повреждения, или эффекты смещения.
Как правило, эффектами смещения, вызываемыми энергичными частицами кос¬
мического пространства, по сравнению с другими эффектами можно пренебречь: их
вклад мал по сравнению с воздействием ионизационной компоненты. Однако нали¬
чие на борту КА радиоизотопных источников может привести к необходимости учета
этих эффектов и даже к их доминированию в качестве деструктивного фактора для
бортовой аппаратуры. Эффекты смещения — результат упругого и неупругого неи¬
онизирующего взаимодействия энергичных частиц КП и радиоактивных источников
на борту КА с ядрами атомов. Такое взаимодействие создаёт структурные поврежде¬
ния полупроводников и некоторых оптических материалов (Ионизирующие излучения
космического пространства, 2013, с. 104-106; Space engineering, 2010, рр. 50-68).
При проходе через кристаллические решётки материалов частицы испытывают
столкновения с атомами, расположенными в их узлах. В этих взаимодействиях ато¬
мам передаётся энергия, в результате чего те смещаются из занимаемых позиций.
Смещения и выбивание атомов ведёт к дефектообразованию, созданию вакансий
и т.д. Такие радиационно- индуцированные центры дефектообразования - причина
деградации параметров материалов и оборудования. Образование в кристаллической
решетке твердых тел простых и более сложных радиационных дефектов оказывает
влияние на оптические, электрические и механические свойства вещества. В полу¬
проводниковых материалах от количества дефектов зависят такие важнейшие пара¬
метры, как время жизни неосновных и концентрация основных носителей заряда,
в значительной степени определяющие эксплуатационные характеристики полупро¬
146
3-4
водниковых приборов. В случае же оптических материалов дефекты могут вызывать
помутнение, формирование центров окрашивания и прочие вредные при их техниче¬
ском применении эффекты.
В настоящей главе рассматриваются характеристики неионизационного взаимо¬
действия как потока нейтронов от ТБ, так и заряженных частиц КП с материалами
современных интегральных микросхем (ИМС). Расчет проводился на примере при¬
боров отечественного производства, установленных на ДМ КА «ЭкзоМарс-2022»
наиболее близко к сборкам ТБ, а именно: блок управления (БУ), размещённый рядом
со сборкой из 6 ТБ, а также комплекс автоматики и стабилизации (КАС) и научный
прибор АДРОН-ИНГ-ЮМ — рядом со сборкой из 8 ТБ.
3.4.3.1. Характеристики потока нейтронов ТБ
Общая интенсивность потока нейтронов (основная доля которого приходит¬
ся на интервал энергий от 2 до 3 МэВ) от одного грамма изотопа не превышает
2,5 104 нейтронов/с.
Учитывая, что общая масса изотопа в одном ТБ составляет 16 г, получаем следу¬
ющее максимальное значение интенсивности потока нейтронов от одного ТБ (так на¬
зываемый выход нейтронов):
Fn < 4Т05 нейтронов /с.
Используя зависимость потока от расстояния до точечного источника
(3.4.3.1)
получаем зависимость максимальной плотности протока нейтронов одного ТБ от рас¬
стояния до него, представленную в таблице 3.4.3.1.
выход нейтронов, у.е.
Рисунок 3.4.3.1. Спектр нейтронов от изотопа Ри-238
147
3-4
Таблица 3.4.3.1. Зависимость максимальной плотности протока нейтронов одного ТБ
от расстояния до него
R, см
плотность потока нейтронов, см 2-с 1
5
1,27-103
10
3,18-Ю2
50
12,7
100
3,18
150
1,43
200
0,80
250
0,51
Дифференциальный спектр нейтронов от Ри-238 (в условных единицах) представ¬
лен на рисунке 3.4.3.1.
3.4.3.2. Характеристики эффектов смещения
Эффекты смещения описывают при помощи следующих величин (Space
engineering, 2010, рр. 50-68):
- эквивалентный поток (флюенс) протонов, электронов или нейтронов, нормиро¬
ванный на 50 МэВ, 10 МэВ или 1 МэВ. Данная величина чаще всего используется
при проведении испытаний ЭРИ на стойкость к эффектам смещения. Нормиров¬
ка зависит от энергии моноэнергетического пучка частиц, при помощи которого
проводятся испытания. Значение эквивалентного флюенса позволяет сравнить
(3.4.3.2)
смещения, созданные произвольным спектром частиц, со смещениями, вызван¬
ными частицами заданной энергии.
- неионизационная линейная передача энергии, NIEL(E)\
NIEL(E) = №\ ,
\ /смещения
- суммарная неионизационная доза (total non-ionizing dose, TNID\.
TNID=jF(E) ■ NIEL (E) • dE,
(3.4.3.3)
где F(E) - дифференциальный энергетический спектр потока частиц, см2МэВ-1.
1
протоны
нейтроны
г
LOOE+OO 1,00Е+01 1,00Е+02 1,00Е+03 1,00Е+04
Е, МэВ
LOOE+OO
1,00Е-01
1.00Е-02
L
S
1,00Е-03
1,00Е-04
1,00Е-О5
1/
Рисунок 3.4.3.2. Энергетические зависимости неионизационной линейной передачи энергии
NIEL(E) для нейтронов и протонов
148
3-4
Расчётная формула эквивалентного флюенса нейтронов, нормированного на по¬
ток протонов с энергией в 50 МэВ, имеет вид (NIELp(50 МэВ) = 0,00349 МэВсм2т-1):
F
эквив. для р 50МэВ
1
A/£Zp(50 МэВ)
^F(E)NIEL(E)dE.
(3.43.4)
Подавляющий вклад в неионизационную поглощённую дозу на борту КА «Экзо-
Марс-2022», как будет показано ниже, составляют нейтроны от ТБ, поэтому важно
привести характеристики их энерговыделения при образовании структурных по¬
вреждений. На рисунке 3.4.3.2 представлены энергетические зависимости неиони¬
зационной линейной передачи энергии NIEL(E) для нейтронов и протонов (Space
engineering, 2010, рр. 50-68).
3.4.3.3. Расположение бортовой аппаратуры и приборов
Рассмотрим ИМС, расположенные «худшим образом» в приборах БУ, КАС
и АДРОН-ИНГ-ЮМ, а именно около стенки приборов, которые, в свою очередь,
расположены вблизи соответствующих сборок ТБ, т.е. на минимальном расстоянии
от радиоизотопных источников. На рисунках 3.4.3.3, 3.4.3.4 показано реальное взаим¬
ное расположение БУ, КАС, АДРОН-ИНГ-ЮМ и ТБ на 3 D-модели ДМ.
Рисунок 3.4.3.3. Взаимное расположение сборки из 6 ТБ и БУ (ЗИ-модель ДМ)
Рисунок 3.4.3.4. Взаимное расположение сборки из 8 ТБ и приборов КАС и АДРОН-ИНГ-ЮМ
(3 D-модель ДМ)
149
3-4
Расстояния от ИМС до каждого теплового источника представлены в табли¬
цах 3.4.3.2-3.4.3.3.
Таблица 3.4.3.2. Минимальные расстояния от ИМС БУ до каждого из 6 ТБ ближайшей сборки
№ ТБ
1
2
3
4
5
6
R, мм
76,85
114,59
65
107
76,85
114,59
Таблица 3.4.3.3. Минимальные расстояния от ИМС КАС и АДРОН-ИНГ-ЮМ до каждого
из 8 ТБ ближайшей сборки
№ ТБ
1
2
3
4
5
6
7
8
7?кас, мм
97,18
108,22
77,98
91,37
77,98
91,37
97,18
108,22
^АДРОН-ИНГ-ЮМ, ММ
119,19
156,51
104,13
145,37
104,13
145,37
119,19
156,51
3.4.3.4. Расчёт эквивалентного флюенса и неионизационной дозы
в местах расположения ИМС от нейтронов ТБ и частиц КП
а) Воздействие нейтронов ТБ
Используя спектр из рисунка 3.4.3.1, формулы (3.4.3.3), (3.4.3.4) и рисунок 3.4.3.2,
получаем значение эквивалентного выхода нейтронов от 1 ТБ (на расстоянии R=Q см)
за САС КА «ЭкзоМарс-2022» (967 суток), нормированного на поток протонов с энер¬
гией 50 МэВ:
f-жвив. дляр50МэВ 2,4’ 1 0 .
Используя данные таблицы 3.4.3.2 и формулу (3.4.3.1), получаем следующее
значение эквивалентного флюенса нейтронов за САС КА от сборки из 6 ТБ в месте
расположения ближайшего к сборке электрорадиоизделия (ЭРИ) в приборе БУ (при
нормировке на протоны с энергией 50 МэВ):
Fсумм.жвнв. для р50МэВ 1,6’1011 см-2.
Для суммарной неионизационной дозы, которая определяется по формуле (3.4.3.3),
значение TNID составляет 5,5-108 МэВг-1 = 8,7 рад.
С использованием данных таблицы 3.4.3.3 и формулы (3.4.3.1) получаем следую¬
щие значения эквивалентного флюенса нейтронов за САС КА от сборки из 8 ТБ в ме¬
стах расположения ближайших к сборке ЭРИ в приборах КАС и АДРОН-ИНГ-ЮМ
(при нормировке на протоны с энергией 50 МэВ):
- для прибора КАС:
Fсумм.жвнв. дляр50МэВ = 1,8’ 1 011 СМ_2
TNIDkac = 6,4’108 МэВг1 = 10,2 рад.
- для прибора АДРОН-ИНГ-ЮМ:
F'сумм.жене.для р50МэВ 9,6 10 СМ
TNIDAJ1p0H = 3,4-108 МэВ г1 = 5,4 рад.
б) Воздействие частиц КП на этапе перелёта
Помимо нейтронного излучения от тепловых блоков, структурные повреждения
вызывают также частицы излучений космического пространства (КП): потоки про¬
тонов солнечных (СКЛ) и галактических (ГКЛ) космических лучей, а также вторич¬
ные частицы, порождаемые при взаимодействии первичного космического излучения
150
3-4
с материалами КА и с марсианским грунтом при функционировании ДМ в течение
двух земных лет на поверхности Марса.
С применением программного комплекса COSRAD (Кузнецов Н.В. и др., 2011)
был выполнен расчет спектров потоков протонов и нейтронов СКЛ и ГКЛ в зави¬
симости от толщины сферической защиты за время перелета КА к Марсу в течение
237 суток (рисунки 3.4.3.5, 3.4.3.6).
С использованием этих спектров и значений неионизационной линейной пере¬
дачи энергии NIEL(E) нейтронов и протонов (рисунок 3.4.3.2) по формуле (3.4.3.3)
проведена оценка дозы структурных повреждений за характерной защитой. За время
перелета к Марсу величина неионизационной дозы от частиц космических излучений
за защитой в 1 г/см2 составит 0,20 рад, это более чем на порядок меньше доз от ней¬
тронов ТБ.
£
с
1,00Е+02
1,00Е+03
1,00Е+04
1,00Е+00 1,00Е+01
1,00Е+05
энергия, МэВ
а
энергия, МэВ
б
Рисунок 3.4.3.5. Дифференциальные энергетические спектры потоков протонов СКЛ (а)
и ГКЛ (б) для различных значений толщины защиты Хв массовых единицах (г/см2)
151
3-4
энергия, МэВ
а
энергия, МэВ
б
Рисунок 3.4.3.6. Дифференциальные энергетические спектры потоков нейтронов СКЛ (а)
и ГКЛ (б) для различных значений толщины защиты X в массовых единицах (г/см2)
в) Воздействие частиц КП и вторичного излучения на поверхности Марса
Для анализа вклада в процессы смещения от первичных частиц КП, а также вто¬
ричных частиц, созданных при взаимодействии первичного космического излучения
с марсианским грунтом, были использованы работы (Matthia D. et al., 2016; Matthia D.
et al., 2017), где представлены результаты измерений с помощью аппаратуры MSL/
152
3-4
RAD, расположенной на борту марсианской лаборатории “Curiosity”. Согласно этим
измерениям, в общем излучении на поверхности Марса доминируют протоны и ней¬
троны. С использованием приведённых в статье спектров нейтронов (Matthia D. et al.,
2017, с. 21) и протонов (Matthia D. et al., 2017, с. 23), а также данных по NIEL(E) (рису¬
нок 3.4.3.2) был произведён расчёт эквивалентных флюенсов (нормированных на мо-
ноэнергетические протоны с энергией 50 МэВ) и TNID за два земных года. Суммарный
эквивалентный флюенс первичных и вторичных протонов на поверхности Марса со¬
ставляет 1,02-108 см-2, что соответствует неионизационной дозе от протонов 0,006 рад,
а суммарный эквивалентный флюенс первичных и отраженных от поверхности Мар¬
са нейтронов равен 3,06-108 см-2, что приводит к неионизационной дозе от нейтронов
0,017 рад. Таким образом, общая доза на поверхности Марса от протонов и нейтро¬
нов космического пространства и вторичных частиц, рожденных их взаимодействием
с грунтом, не превышает 0,023 рад. Такое значение более чем на два порядка меньше
доз от нейтронов тепловых блоков, и, следовательно, этим вкладом в возникновение
структурных повреждений в ЭРИ бортовой аппаратуры, в частности приборов БУ,
КАС и АДРОН-ИНГ-ЮМ, можно пренебречь.
Стоит заметить, что приблизительная оценка вклада вторичных частиц, создан¬
ных при взаимодействии первичного космического излучения с марсианским грун¬
том, возможна также путём пересчёта из значения поглощённой дозы ионизирующих
излучений. Для этого можно использовать представленные в (Matthia D. et al., 2017,
с. 26) результаты измерений аппаратурой MSURAD средней мощности поглощен¬
ной дозы (в кремнии) от всех составляющих вторичных излучений от грунта Марса,
которая равна 0,023 рад/сутки. Таким образом, за 2 земных года поглощенная доза
составит 17 рад. Для перехода от поглощенной дозы DUOH к неионизационной Dcmp вос¬
пользуемся выражением, приведенным в (ОСТ 134-1034-2012, с. 26):
ТЗстр Е)ион 6стр /Ъион^
где Ъстр, Ъ11ОН - удельные поглощенные дозы типовых спектров по структурным и ио¬
низационным эффектам, представленные в (ОСТ 134-1034-2012, приложение Д,
с. 32). В нашем случае Ьстр /Ъио = 5,3-10^, т.е. Dcmp= 17-5,3-10^ =0,009 рад~0,01 рад, что
приводит к величине того же порядка, что и при более точном расчете с использова¬
нием спектров.
3.4.3.5. Анализ стойкости приборов ДМ КА «ЭкзоМарс-2022»
к структурным повреждениям
Для оценки работоспособности БА по отношению к структурным повреждениям
необходимо знать стойкость ЭРИ (и, соответственно, аппаратуры в целом) к этому
эффекту. Известно, что наименее стойкими к эффектам смещения являются ИМС, из¬
готовленные по биполярной технологии, а также оптоэлектронные приборы и прибо¬
ры на основе ПЗС-структур (Ионизирующие излучения космического пространства,
2013, с. 154-156); здесь же приведены типичные значения стойкости ЭРИ различно¬
го назначения и различных типов и показано, что минимальная стойкость наиболее
«критичных» аналоговых биполярных ИМС составляет ~30 рад. В таблице 3.4.3.4
приведены результаты расчётов доз (от ТБ и КП) в сравнении с типичными уровнями
стойкости изделий ЭКБ по структурным повреждениям, представленными в сборни¬
ке (Ионизирующие излучения космического пространства, 2013, с. 154-156).
153
3-4
Таблица 3.4.3.4. Рассчитанные эквивалентные флюенсы и TNID от ТБ для БУ, КАС, АДРОН-
ИНГ-ЮМ на борту КА «ЭкзоМарс-2022» в сравнении с типичными значениями стойкости
прибор
Fэкв р 50 MeV>
эквивалентный
флюенс от ТБ,
нормированный
на протоны
с энергией
50 МэВ, см-2
TNID,
суммарная
неионизационная
доза, рад
(дозовый
коэффициент
запаса)
диапазон стойкости
ЭРИ к структурным
повреждениям,
эквивалентный
флюенс
(нормировано
для протонов
с энергией
50 МэВ), см 2
минимальная
стойкость ЭРИ
к структурным
объёмным
повреждениям
по TNID
(суммарной
неионизационной
дозе), рад
БУ
1,6Т0"
8,92 (3,4)
10и-1012
~30
КАС
1,8-Ю"
10,44 (2,9)
АДРОН-ИНГ-
10М
9,6-1010
5,62 (5,3)
Как видно из таблицы 3.4.3.4, при сравнении результатов проведённых расчётов
доз от нейтронов ТБ в рассмотренных приборах с минимальными значениями стой¬
кости комплектующих биполярных ИМС, оказывается, что для прибора КАС коэф¬
фициент запаса Кзап<3; т.е., расположенные в нём ЭРИ и, соответственно, сам при¬
бор могут оказаться нестойкими к нейтронному излучению сборок ТБ по эффектам
смещения.
Представляется важным определить, какие приборы на борту десантного моду¬
ля попадают в так называемую «группу риска», а именно приборы, в которых дозо-
вая нагрузка на их комплектующие ИМС не меньше минимальной стойкости 30 рад,
а также не меньше 10 рад - с учетом 3-кратного запаса по стойкости в соответствии
с (ОСТ 134-1034-2012, с. 6-7). Для этого определим минимальные расстояния от сбо¬
рок, соответствующие дозам 30 рад и 10 рад.
Учитывая линейные размеры ТБ и их сборок, сопоставимые с типичными рас¬
стояниями до ближайших приборов (таблицы 3.4.3.2 и 3.4.3.3), представляется не¬
корректным рассматривать их в качестве точечных источников, соответственно, их
излучение обладает определенной пространственной анизотропией. Необходимо бо¬
лее точно учитывать вклад каждого ТБ из сборки в каждой точке, удаленной на опре¬
деленное расстояние от центра сборки. В результате зоны, в которых значения TNID
превышают значения 30 рад и 10 рад, оказываются ограниченными поверхностью
более сложной формы, чем сфера, а именно, близкой к эллипсоиду.
Определить дозу в точке, расположенной на расстоянии R от центра сборки
изЛ^шт., можно с помощью следующего простого уравнения:
(3'415)
где R, - расстояние от заданной точки до центра z-того ТБ, коэффициент Do опре¬
деляется с помощью эквивалентного флюенса на расстоянии R=0 см и равен
£)0=1,3ТО3 рад-см2.
Задавая значения D(R) вдоль осей координат х, у и z, равными 30 рад и 10 рад,
определяем размеры осей эллипсоидов, ограничивающих области вокруг сборок,
внутри которых дозы превышают значения 30 рад и 10 рад, соответственно.
154
3-4
В соответствии с ОСТ 134-1034-2012, в случае определения стойкости к струк¬
турным повреждениям экспериментальным путем {Ионизирующие излучения косми¬
ческого пространства, 2013, с. 173-176), дозовый коэффициент запаса для бортовой
аппаратуры, определяемый как отношение стойкости к накопленной за САС КА не¬
ионизационной дозе, не должен быть меньше 1, т.е. максимальная дозовая нагрузка
должна быть равна 30 рад. Задавая значение D(R) = 30 рад в уравнении (3.4.3.5), по¬
лучаем следующие размеры полуосей эллипсоидов вокруг сборок:
- для сборки из 6 ТБ: а = 4,7 см, b = 6,3 см, с = 3 см, (3 4 3 6)
- для сборки из 8 ТБ: а = 4,8 см, b = 8,4 см, с = 3,3 см
где а, b и с - полуоси эллипсоида.
Как следует из (3.4.3.6), размеры осей эллипсоидов практически совпадают с раз¬
мерами сборок в направлении соответствующих осей, что указывает на тот факт, что
во всех ЭРИ в бортовой аппаратуре дозовая нагрузка меньше 30 рад. Однако часто
значения стойкости ЭРИ определяют из справочных данных, в связи с чем необходи¬
мо учитывать трехкратный запас по дозе, т.е. максимальная дозовая нагрузка должна
быть равна 10 рад.
Задавая значение D(R) = 10 рад в уравнении (3.4.3.5), получаем следующие разме¬
ры полуосей эллипсоидов вокруг сборок:
- для сборки из 6 ТБ: а=8 см, Ь=9,3 см, с=7 см, (3 4 3 7)
- для сборки из 8 ТБ: 67=8,8 см, 6=11,7 см, с=8 см.
Согласно анализу компоновки ДМ, в указанную область попадает только прибор
КАС, для которого окончательный вывод о работоспособности по отношению к неи¬
онизационным эффектам возможен только после тщательного анализа стойкости его
комплектующих и, при необходимости, проведения их испытаний.
Для определения работоспособности аппаратуры к структурным повреждениям
необходимо прежде всего определить конкретные параметры радиационной стойко¬
сти по эффектам смещения ЭКБ в приборах, учесть конструкцию приборов (точное
взаимное расположение ЭРИ в приборах и сборок тепловых блоков), на основании
чего рассчитать соответствующие локальные эквивалентные флюенсы (неионизаци¬
онные дозы) и затем коэффициенты запаса в соответствии с ОСТ 134-1034-2012.
Показано, что вкладом в создание структурных повреждений от частиц кос¬
мического пространства и созданных ими вторичных излучений от грунта Марса
по сравнению с нейтронным излучением от сборок ТБ можно пренебречь. Ана¬
лиз, проведенный в статье, показывает, что на борту десантного модуля КА «Экзо¬
Марс-2022» только прибор КАС входит в «группу риска» по отношению к струк¬
турным повреждениям в случае подтверждения стойкости «критичных» ЭРИ
справочными данными.
Общий вывод, который можно сделать на основании анализа ситуации на борту
КА «ЭкзоМарс-2022», состоит в том, что при использовании в длительных межпла¬
нетных миссиях радиоизотопных источников энергии эффекты смещения могут пред¬
ставлять угрозу для функционирования бортовой РЭА. В связи с этим необходимо
своевременно устанавливать стойкость входящих в её состав ЭРИ к этим эффектам,
а также проводить расчёт характеристик неионизационного воздействия излучений
искусственных радиоизотопных источников на бортовую аппаратуру.
155
3-4
Список литературы
Ионизирующие излучения космического пространства и их воздействие на бор¬
товую аппаратуру космических аппаратов / Под науч. ред. докт. техн, наук, проф.
Г.Г. Райкунова. - М.: ФИЗМАТЛИТ. 2013.-256 с.
Кузнецов Н.В., Малышкин Ю.М., Николаева Н.И., Ныммик Р.А., Панасюк М.И.,
Ужегов В.М., Яковлев М.В. Программный комплекс COSRAD для прогнозирования
радиационных условий на борту космических аппаратов // Вопросы атомной науки
и техники. Сер. Физика радиационного воздействия на радиоэлектронную аппарату¬
ру. 2011. Вып. 2. С. 72-78.
ОСТ 134-1034-2012. Аппаратура, приборы, устройства и оборудование космиче¬
ских аппаратов. Методы испытаний и оценки стойкости бортовой радиоэлектронной
аппаратуры космических аппаратов к воздействию электронного и протонного излу¬
чений космического пространства по дозовым эффектам. - 34 с.
Matthia D., Ehresmann В., LohfH. et al. The Martian surface radiation environment-
a comparison of models and MSL/RAD measurements. - J. Space Weather Space Clim., 6,
A13,pp. 1-17, 2016.
Matthia D., Hassler D., de Wet W., Ehresmann B. et al. The radiation environment on
the surface of Mars - Summery of model calculations and comparison with RAD data. -
Life Sciences in Space Research, 14, pp. 18-28, 2017.
Space engineering. Calculation of radiation and its effects and margin policy handbook,
ECSS, ECSS-E-HB-10-12A, 17 December 2010, pp. 50-68.
A.A. Тютюнников,
M.E. Артемов)
H.M. Хамидуллинй)
E.B. Власенков
156
3-5
аЗПЛАНЕТАРНАЯ ЗАЩИТА МИССИИ «ЭКЗОМАРС-2022»
В соответствии со статьей IX Договора «О принципах деятельности по исследо¬
ванию и использованию космического пространства, включая Луну и другие небес¬
ные тела» (Лондон/Вашингтон, 27 января 1967 г.) необходимо предохранять плане¬
ты и Землю от «вредного загрязнения, а также неблагоприятных изменений земной
среды вследствие доставки внеземного вещества». В связи с этим, Международной
неправительственной организацией COSPAR (Комитет по космическим исследовани¬
ям) выработана политика планетарной защиты для участников межпланетных проек¬
тов. COSPAR классифицировал межпланетные экспедиции, разработал требования
по планетарной защите и установил некоторые рекомендации по их выполнению
(COSPAR Planetary Protection Policy, 2011). Основной целью является защита пла¬
нет от земного микробиологического загрязнения, а также защита земных условий
от возможного биологического загрязнения, исходящего от внеземных образцов или
от возвращаемых аппаратов или систем.
3.5.1. Основные принципы, требования и методы обеззараживания
Основной целью планетарной защиты в совместной с Европейским космическим
агентством (ЕКА) межпланетной экспедиции «ЭкзоМарс-2022» является защита мар¬
сианской среды от загрязнения земными микроорганизмами.
Посадка на Марс десантного модуля (ДМ) и размещенного на нем марсохода (ро¬
вера), а также проведение беспрецедентных биологических экспериментов по пои¬
ску возможных форм марсианской жизни делает проект «ЭкзоМарс-2022» крайне
сложным с точки зрения выполнения требований планетарного карантина Марса.
Достоверность результатов эксперимента, указывающих на наличие жизни или ее
следов, напрямую зависит от корректного выполнения правил планетарной защиты,
а их несоблюдение может поставить под сомнение целесообразность этой миссии
(Preventing the Forward Contamination of Mars. National Research Council, 2006).
Поскольку аппаратура марсохода, помимо прочего, предназначена для проведения
биологических экспериментов по поиску жизни на Марсе, миссия «ЭкзоМарс-2022»
в целом относится к категории IVb по классификации COSPAR (COSPAR Planetary
Protection Policy, 2011).
К десантному модулю космического комплекса (КК) «ЭкзоМарс-2022» приме¬
няются требования категории IVa по классификации COSPAR (COSPAR Planetary
Protection Policy, 2011) как для экспедиции посещения без поисков жизни.
Доставка ДМ, содержащего марсоход, осуществляется разрабатываемым ЕКА
перелетным модулем (ПМ), к которому предъявлены требования категории III как
к орбитальному или пролетному аппарату. Тем не менее, ПМ после отделения ДМ
попадает в атмосферу Марса, разрушается; его обломки в основном сгорают при па¬
дении и частично падают на поверхность Марса. Таким образом, существует огра¬
ничение на уровень бионагрузки даже для перелетного модуля, определенное ЕКА
и представленное в таблице 3.5.1.1.
Согласно требованиям СО SPAR, для экспедиций категории IVa плотность ми¬
кробиологического загрязнения поверхности посадочных аппаратов не должна пре¬
вышать 300 бактериальных спор на квадратный метр и 3 1O5 бактериальных спор
на всех поверхностях посадочного аппарата перед пуском. Общее количество спор
(поверхностное и объемное), которое может попасть на Марс с учетом загрязненности
157
3-5
ДМ, подсистем его спуска и посадки, а также обломков ПМ, не должно превышать
5*10- бактериальных спор.
Для учета возможных рисков загрязнения на космодроме в период пусковой кам¬
пании вводится дополнительный допуск в 105 спор поверхностной бионагрузки меж¬
ду уровнем загрязнения ДМ после сборки изделия и перед его пуском.
В таблице 3.5.1.1 приведены требования, предъявляемые к ДМ, марсоходу, ПМ
и КА в целом.
Таблица 3.5.1.1. Требования к уровню бионагрузки для составных частей КК в целом
(П - поверхностная бионагрузка, О - объемная, или инкапсулированная)
№
изделие
максимальный уровень
бионагрузки после сборки, споры
максимальный уровень
бионагрузки перед пуском, споры
1
КА в целом
4105 (П+О)
5105 (П+О)
2
ДМ
3,6-105 (П+О)
из них:
1,7105 (П)
1,9 10s (О)
4,6-105 (П+О)
из них:
2,7 105 (П)
1,9-105 (О)
3
ДМ без
марсохода
3,4-105 (П+О)
из них:
1,51О5 (П)
1,9 10s (О)
4,4-105 (П+О)
из них:
2,5105 (П)
1,9105 (О)
4
марсоход
2-104(П)
2104(П)
5
перелетный
модуль*
-
4104 (П+О)
из них:
104 (П)
3104 (О)
Примечание'.
для ПМ указан максимальный уровень допустимой бионагрузки упавших на поверхность Марса
несгоревших обломков.
Ограничение на уровень общей бионагрузки ДМ требует, что бы оборудование,
имеющее большую площадь поверхности и способное занести земные микроорга¬
низмы на Марс - такое как элементы подсистемы спуска и посадки (парашют, аэро¬
динамический экран, задний кожух и т.п.) - было простерилизовано до гарантирован¬
ного уровня стерильности не хуже 10’3.
Для контроля загрязнения Марса органическими соединениями необходимо
представить перечень всех органических материалов, используемых в ДМ (COSPAR
Planetary Protection Policy, 2011). Собранные образцы (весом 50 г каждый) всех орга¬
нических материалов, используемых на ДМ в количестве > 25 кг, должны храниться
в специальных условиях до конца миссии.
Выполнение указанных выше требований по планетарной защите осуществляется
реализацией следующих процедур.
1. Условия сборки ДМ
Сборку космических аппаратов, осуществляющих посадку на Марс, необходимо
проводить в чистых помещениях, контролируемых также по уровню микробиологи¬
ческого загрязнения.
158
3-5
Современные чистые помещения в части промышленной чистоты (пылевые ча¬
стицы, органическая грязь) классифицируются и создаются согласно требованиям
(ГОСТ ИСО 14644-1-2002, 2002).
При реализации экспедиций с посадкой аппаратов на Марс и, более того, с про¬
ведением там биологических экспериментов по поиску форм марсианской жизни
(категория IVb по классификации COSPAR), выставляются не только требования
по ограничению промышленной (корпускулярной и органической) загрязненности,
но и жесткие требования к микробиологической чистоте воздуха и поверхностей чи¬
стого сборочного помещения (требования планетарной защиты).
В проекте «ЭкзоМарс-2022» определены следующие требования к биологической
чистоте сборочных помещений на различных стадиях работ с десантным модулем:
1. Сборка устройств и аппаратуры ДМ производится в чистом помещении не хуже
класса 8 ИСО.
2. Сборка ДМ - в чистом помещении не хуже класса 8 ИСО, контролируемом
по микробиологической чистоте (т.н. класс 8 ИСО НС, (НС Highly Controlled, строго
контролируемый).
В таком помещении:
- средняя поверхностная плотность спорообразующих микроорганизмов не пре¬
вышает 1000 бактериальных спор/м2;
- общая плотность микроорганизмов (колониеобразующих единиц, КОЕ) в возду¬
хе - не более 100 КОЕ/м3, на поверхности - не более 10 000 КОЕ/м2.
3. Сборка летного образца ДМ и интеграция его с марсоходом - в чистом поме¬
щении не хуже класса 7 ИСО НС (контролируемом по микробиологической чистоте).
В таком помещении:
- средняя поверхностная плотность спорообразующих микроорганизмов не пре¬
вышает 50 бактериальных спор/м2;
- общая плотность микроорганизмов (колониеобразующих единиц, КОЕ) в возду¬
хе - не более 10 КОЕ/м3, на поверхности - не более 500 КОЕ/м2.
Максимально допустимый уровень биоконтаминации (уровень «тревоги») подра¬
зумевает следующее: максимальная поверхностная плотность спорообразующих ми¬
кроорганизмов не более 200 бактериальных спор/м2; максимальная общая плотность
микроорганизмов (колониеобразующих единиц, КОЕ) на поверхности - не более
2000 КОЕ/м2.
Первоначальная сборка посадочной платформы ДМ осуществлялась в чистом по¬
мещении АО «НПО Лавочкина» класса 8 ИСО, где с помощью облучения импульсны¬
ми ксеноновыми ультрафиолетовыми установками УИКб-01 -«Альфа» (производство
ООО «НПП «Мелитта», Россия) и регулярной ежедневной уборкой pH нейтральным
дезинфицирующим средством «Экор» (АО НПП «Новодез», Россия) (см. подробнее
раздел 3.5.3) была достигнута степень микробиологической чистоты, характерная
для помещений класса 7 ИСО НС и даже лучше, а именно:
- в воздухе не более 3 КОЕ/м3;
- на поверхностях чистого помещения в среднем не более 35 спор/м2.
В настоящее время дальнейшая сборка ДМ происходит в TASinI (г. Турин, Италия),
куда из России (из АО «НПО Лавочкина» и его смежных организаций) производится
поставка на сборку элементов ДМ, прошедших очистку (70% раствором этилового
спирта), поверхностную стерилизацию импульсным УФ-облучением с помощью уста¬
новок УИКб-01-«Альфа», радиационную стерилизацию гамма-излучением (см. под¬
робнее раздел 3.5.2) или газовую стерилизацию (радиоэлектронная аппаратура).
159
3-5
2. Поверхностная очистка (деконтаминация)
Под очисткой (деконтаминацией) понимается система мероприятий по снижению
микробиологического загрязнения до заданного приемлемого уровня.
Каждый поставляемый на сборку агрегат подвергается поверхностной очистке
от пыли и микроорганизмов. Поверхностная очистка от пыли осуществляется меха¬
ническим удалением пыли (например, смывом влажными салфетками и т.п.) по соот¬
ветствующим методикам и инструкциям. Поверхностная очистка от микроорганиз¬
мов осуществляется специальными средствами: спиртом (европейские специалисты
используют 70% раствор изопропилового спирта, российские - раствор этилового
спирта с концентрациями от 70 до 96%), спороцидами и т.п. дезинфектантами по со¬
ответствующим методикам и инструкциям. Применяемые методы поверхностной
очистки должны быть совместимы с используемыми материалами.
3. Стерилизация
Под стерилизацией понимается система мероприятий, приводящих к полной
очистке объекта от всех жизнеспособных клеток микроорганизмов и их покоящихся
форм (споры, цисты и т.д.).
Предполагаемые к применению методы стерилизации поставляемых на сбор¬
ку компонентов ДМ должны быть совместимы с используемыми комплектующими
и материалами. В настоящее время применяются следующие способы стерилизации:
1. Стерилизация по объему гамма-излучением или потоком электронов с энер¬
гией до 10 МэВ (по соответствующим методикам и инструкциям) для материалов
и агрегатов (за исключением радиоэлектронной аппаратуры) десантного модуля, ра¬
диационная стойкость которых подтверждена либо испытаниями, либо справочными
данными. Поглощенная доза при этом определяется экспериментально путем облу¬
чения радиорезистентных форм микроорганизмов и представителей видов микроор¬
ганизмов, типичных для сборочных помещений. Как правило, значения поглощенной
дозы лежат в диапазоне от 20 до 30 кГр, что может обеспечить гарантированный уро¬
вень стерильности вплоть до 10_6. В каждом конкретном случае уровень стерильно¬
сти определяется исходным уровнем бионагрузки до стерилизации. Ввиду больших
размеров элементов ДМ их обработка излучениями неизбежно приводит к распреде¬
лению поглощенных доз по поверхности (и объему), поэтому до проведения финаль¬
ной стерилизации готовых изделий необходим выбор таких оптимальных режимов
обработки на конкретной радиационной установке, которые обеспечат заданный уро¬
вень стерильности в точке с наименьшей мощностью поглощенной дозы, а наиболь¬
шая величина поглощенной дозы не превышает при этом радиационной стойкости
(предельно допустимой дозы) стерилизуемого элемента (см. подробнее раздел 3.5.2).
Стерилизация по объему и поверхностям гамма-излучением была успешно при¬
менена для стерилизации конструкций и некоторых устройств посадочных аппаратов
в проекте «Марс-96». Стерилизация потоком электронов на ускорителе была отрабо¬
тана на конструкции технологического макета марсианской мини-метеорологической
станции (Парамонов Д.В. и др., 2010).
Перед стерилизацией каждый агрегат помещают в двойную микробиологически
непроницаемую упаковку (в настоящее время нами используется материал «Tyvek»)
и отправляют на облучение.
2. Стерилизация (обеззараживание) поверхностей ультрафиолетовым облучени¬
ем элементов ДМ в процессе сборки и чистового помещения между этапами сборки
для повышения класса чистоты сборочного помещения. В настоящем проекте, как
160
3-5
и в миссии «ЭкзоМарс-2016», применяются импульсные УФ-установки, которые по¬
казала свою эффективность, надежность и удобство в работе.
3. Термическая (тепловая) стерилизация (сухое тепло или автоклавирование).
4. Газовая стерилизация.
Особое внимание следует уделить обеззараживанию электронной аппаратуры, т.к.
многие из приведенных выше методов не применимы к ней, в частности радиацион¬
ная стерилизация и в некоторых случаях - тепловая. По этой причине повышенное
значение приобретает организация рабочего места для чистой сборки аппаратуры
вкупе с методами очистки.
По окончании процедуры стерилизации на каждый агрегат выдается сертификат
уровня бионагрузки.
4. Микробиологический контроль
Для оценки уровня исходной и конечной биоконтаминации осуществляется ми¬
кробиологический контроль поверхностей агрегатов по соответствующим методике
и инструкции.
5. Предотвращение перезагрязнения
Предотвращение повторного загрязения (перезагрязнения) во время сборки, ис¬
пытаний и др. осуществляется протиркой спиртом и/или спороцидами, изоляцией од¬
них элементов от других с помощью микробиологически непроницаемой упаковки,
применением фильтров (например, фильтр НЕРА), локальным УФ-облучением и др.
6. Специальная одежда
Одним из основных источников микро¬
биологического загрязнения среды чистого
помещения является человек. В связи с этим
огромное значение имеет использование
специальной одежды, предотвращающей такое
загрязнение. Основные требования к специ¬
альной одежде можно свести к следующему:
- специальная одежда должна соответ¬
ствовать классу чистового помещения,
в котором производится сборка; в частно¬
сти, при работе в чистом помещении кл.
ИСО 7 НС операторы должны быть изо¬
лированы от оборудования с помощью
специальной стерильной одежды, остав¬
ляющей открытыми только глаза (рису¬
нок 3.5.1.1). Руки защищаются от контак¬
та с оборудованием посредством двойного
комплекта хирургических перчаток по¬
верх одежды, при этом первая пара пер¬
чаток изолирует руки оператора от среды
чистого помещения, а вторая пара - меня¬
ется при каждой новой операции.
Рисунок 3.5.1.1. Специалисты ГНЦ
РФ-ИМБР РАН в спецодежде для
взятия проб воздуха и с поверхностей
чистых помещений (в руках -
воздухозаборные устройства)
161
3-5
- смена и стирка специальной одежды производится в соответствии с инструк¬
циями, принятыми для чистового помещения каждого из классов; специальная
одежда должна изготавливаться полностью из специального синтетического ма¬
териала, обработанного антистатиком и поддающегося очистке при загрязнении
частицами.
7. Процедура доступа и правила поведения в чистом помещении
В чистое помещение допускается только специально подготовленный и обучен¬
ный персонал в специальной одежде.
Основные требования к процедуре доступа в чистовые помещения:
- процедура доступа в чистовое помещение должна соответствовать классу чисто¬
ты этого помещения;
- переодевание в специальную одежду каждого из классов производится в соответ¬
ствии с Инструкцией по процедуре доступа в чистовое помещение;
- переодевание в специальную одежду необходимого класса чистоты должно про¬
исходить в шлюзовой камере, расположенной при входе в чистовое помещение.
В чистом помещении персонал должен соблюдать определенные правила поведе¬
ния, позволяющие снизить биологическое загрязнение и перезагрязнение элементов
ДМ, например:
- ограничить численность работающих в помещении людей до 5-7 человек:
- избегать резких движений;
- не вносить в помещение неочищенные чертежи, документы, мобильные телефо¬
ны, ноутбуки и т.д.
8. Упаковка
Все комплектующие изделия, представляемые на сборку после стерилизации или
поверхностной очистки, должны быть помещены в двойную герметичную и/или ми¬
кробиологически непроницаемую упаковку (биологическая защита).
Упаковка должна соответствовать следующим требованиям:
- упаковка должна изготавливаться из плотной антистатической полиэтиленовой
пленки, либо должна иметь на своей внешней поверхности металлизированный
шлейф (полоску) для съема статического электричества;
- первая (наружняя) упаковка вскрывается в тамбуре (шлюзовой камере) перед вхо¬
дом в чистовое помещение для сборки;
- нарушение герметичности и вскрытие второй (внутренней) упаковки допускает¬
ся только в чистом помещении после проведения ее внешней спиртовой очистки;
- после вскрытия упаковки не допускается ее вторичное использование;
- упакованные комплектующие изделия (штатные и ЗИП) должны размещаться
в специальной транспортировочной таре.
9. Транспортировка
Все комплектующие изделия и ДМ должны транспортироваться на сборку (после
проведения стерилизации) и на полигон (после чистовой сборки) в специальной таре
(транспортировочном контейнере):
162
3-5
- исключающей прорыв упаковки;
- исключающей попадание пыли размером > 0.3 мкм и влаги при проведении
транспортных операций и хранении;
- исключающей образование локальных концентраций статического электричества;
- обеспечивающей необходимую амортизацию в соответствии с перегрузками, до¬
пускаемыми по ТУ на комплектующее изделие;
- содержащей в своей конструкции такелажные приспособления, обеспечивающие
ее перенос и крепление в транспортных средствах.
В заключение следует отметить, что примененные при сборке ДМ методы обе¬
ззараживания его составных частей, обеспечение в АО «НПО Лавочкина» условий
чистой сборки путем применения впервые импульсных УФ-установок и уникальных
дезинфектантов для уборки помещений и, соответственно, поддержания там высо¬
кого уровня микробиологической чистоты, привели к выполнению всех требований
по планетарной защите на настоящей стадии работ по проекту «ЭкзоМарс-2022».
Это подтвердили контрольные замеры бионагрузки в различных местах посадоч¬
ной платформы, взятые независимыми специалистами ЕКА в чистом помещении
в TASinl. Однако, в настоящий момент многие проблемы обеспечения планетарной
защиты миссии еще только поставлены, и не определены конкретные пути их реше¬
ния. Предстоит огромная совместная работа многих подразделений НПО им. С. А. Ла¬
вочкина, РАН, поставщиков пусковых услуг на Байконуре и ЕКА для успешного вы¬
полнения поставленных задач.
Список литературы
ГОСТ ИСО 14644-1-2002. Чистые помещения и связанные с ними контролируе¬
мые среды. Часть 1. Классификация чистоты воздуха. ISO 14644-1-99.
Парамонов Д.В., Трофимов В.И., Хамидуллина Н.М., Новикова Н.Д., Поликар¬
пов Н.А., Дешевая Е.А. Радиационная стерилизация элементов конструкции спускае¬
мого на Марс аппарата - мини-метеорологической станции // Авиакосмическая и эко¬
логическая медицина. 2010. Т. 44. № 2. С. 10-14.
COSPAR Planetary Protection Policy. (20 October 2002; As Amended to 24 March
2011). Approved by the bureau and council, World Space Council, Houston, Texas, USA.
Preventing the Forward Contamination of Mars. National Research Council. 2006.
Washington, DC: The National Academies Press. 152 p.
H.M. Хамидуллина,
Е.А, Дешевая,
C.H. Устинов,
Д.В. Захаренко,
B.H, Сычев
163
3-5
3.5.2. Основные аспекты радиационной стерилизации
Ограничение общей бионагрузки космического комплекса (КК) «ЭкзоМарс-2022»
(не более 5 • 105 спор) характеризует достаточно высокий уровень микробиологиче¬
ской чистоты. Одним из основных условий, позволяющих значительно снизить ми¬
кробную загрязненность десантируемых на Марс космических аппаратов, является
использование стерилизационных процедур, которые способны обеспечить макси¬
мальное снижение уровня их поверхностной и объемной бионагрузки. Выбор ме¬
тода стерилизующей обработки конструкционных элементов основывается на его
совместимости со всеми материалами стерилизуемого объекта. Следовательно,
важно в каждом конкретном случае выбрать надежный метод антимикробной обра¬
ботки, исключающий его негативное влияние на физико-химические, технологиче¬
ские и функциональные свойства материалов и аппаратуры {Preventing the Forward
Contamination of Mars. National Research Council, 2006).
Одним из наиболее эффективных приемлемых методов обеззараживания для
металлических элементов и конструкций является их стерилизация с помощью ио¬
низирующего излучения, аналогично стерилизации медицинской продукции {ГОСТ
ISO11137-1-2011, 2011).
В рамках американских проектов «Викинг» {Roberts Т.А., Hitchins A.D., 1969)
и российского проекта «Марс-96» были проведены исследования, в результате кото¬
рых экспериментально установлены поглощенные дозы радиации, вызывающие де¬
сятикратное снижение (Dj0) колониеобразующих единиц (КОЕ) типичных штаммов
микроорганизмов (таблица 3.5.2.1), характеризующие радиорезистентность (радиа¬
ционную устойчивость) микроорганизмов.
Таблица 3.5.2.1. Радиационная устойчивость микроорганизмов
наименование
Dio, кгР
наименование
Dio, кгР
Basillus polymyxa
3
Aspergillus flavus
<0,15
Basillus subtilis
3
Paecilomyces varioti
<0,09
Basillus cereus
3
Aspergilius niger
<0,09
Basillus anthracoides
2
Cladosporium nerbaruin
<0,05
Basillus pumilus
1
Mucor fiavus
<0,04
Basillus megaterium
1
Myceliophthora thermofila
<0,02
Pennicillium chryzogenum
<0,8
Basillus lentus
<0,02
Pennicillium cyclopiurn
<0,8
Basillus licheniformis
<0,015
Alternaria alternata
<0,8
Trichoderma viride
<0,01
Botrytis cinerea
<0,8
Fusarium oxysporum
< 0,007
Staphylococcus aureus
<0,8
Rhizomucor pussilus
< 0,002
Pennicillium notaturn
<0,6
Absidia ramoza
< 0,002
Staphylococcus epidermiclis
<0,6
Pseudomonas aeruginosa
<0,001
Aspergillus clavatus
<0,3
Rhizomucor tauricus
<0,001
Aspergillus fumigatus
<0,3
Rhizomucor nichei
< 0,0008
164
3-5
Так как одна и та же величина поглощенной доза от фотонов любой энергии, в том
числе и гамма-облучение, имеет одинаковую относительную биологическую эффек¬
тивность (АлександровЮ.А., 2007), то представленные в таблице 3.5.2.1 данные были
использованы нами в качестве основы для настоящей работы.
Облучение образцов с микроорганизмами проводилось на гамма-установке
ГУ-200М при мощности поглощенной дозы 5 кГр/час.
Типичные значения радиорезистентности и, тем самым, эффективности радиаци¬
онного воздействия на микроорганизмы, представленные в таблице 3.5.2.1, показали,
что для большинства исследованных видов характерна довольно низкая стойкость
к облучению. Среди бактерий наиболее радиорезистентными (в споровой форме)
были виды Bacillus subtilis, Bacillus cereus, Bacillus pumiius, Bacillus anthracoides, для
которых величина Dj0 составляла 2-3 кГр. Таким образом, это позволяло предполо¬
жить, что для снижения уровня контаминации на 8-10 порядков необходимо облучать
изделие дозой 20-30 кГр.
В настоящей работе были проведены исследования по выявлению радиоустой-
чивых видов споровых организмов, присутствующих в среде чистых помещений
АО «НПО Лавочкина», в которых проводилась сборка ДМ. Далее были определены
стерилизующие уровни гамма-излучения, а также установлены оптимальные режи¬
мы (дозы) радиационной стерилизации комплектующих изделий и материалов ДМ.
Не все конструкционные материалы элементов ДМ являются стойкими к уров¬
ню стерилизующей дозы радиационного воздействия. Например, многие типы резин,
смазки и некоторые другие полимеры меняют свои физико-химические свойства при
действии повышенных доз радиационного воздействия. В отличие от них, алюми¬
ний и другие металлы, а также такие полимеры, как полиимид, стеклопластик или
углепластик, выдерживают воздействие даже в несколько сотен и тысяч кГр, поэтому
к ним может быть применен метод радиационной стерилизации.
Выделение и идентификация бактериальных
и грибных штаммов
Для создания рабочего банка штаммов (коллекции) микроорганизмов, обнаружи¬
ваемых в чистых помещениях для сборки ДМ «ЭкзоМарс-2022», были проведены
микробиологические исследования. Они включали оценку микробной контаминации
воздуха и поверхностей чистых помещений, выделение доминирующих там штам¬
мов бактерий и плесневых грибов, а также их идентификацию и включение в состав
рабочей коллекции.
Отбор проб воздуха осуществлялся с применением аспирационно-седимента¬
ционного метода с помощью пробоотборника SAS (фирмы PBi, Франция) и чашек
с универсальной питательной средой R2A. После отбора проб чашки снимали с про¬
боотборника и помещали в транспортный контейнер. В лаборатории чашки с про¬
бами инкубировали при температуре 32±1°С в течение 3-5 суток, затем проводили
подсчет выросших колоний микроорганизмов и выделение чистых культур.
Пробы с поверхностей чистых помещений отбирали методом протирания поверх¬
ностей стерильными салфетками (TEXWIPE, ТХ3211), увлажненными стерильной
дистиллированной водой. Пробы доставляли в лабораторию в сумке-холодильнике
при 4-8°С в течение нескольких часов, после чего проводились микробиологические
исследования.
165
3-5
Определение радиационной чувствительности
штаммов микроорганизмов и распределения дозы радиации
по макету СЧ ДМ
Для определения радиационной чувствительности штаммов, выделенных из сре¬
ды чистых помещений предприятия (уточнение данных - в таблице 3.5.2.1), пустые
чашки Петри заражали полученными суспензиями тест-культур микроорганизмов.
Для этого на поверхности чашек автоматической пипеткой равномерно маленькими
каплями наносили по 0,1 мл взвеси исходной концентрацией 109 клеток в 1 мл, так
чтобы уровень микробной обсемененности составлял от 108до 103 клеток на чашку.
Затем чашки подсушивали при комнатной температуре 18-20°С до полного высыха¬
ния капель суспензии.
Контаминированные тест-культурами чашки подвергали облучению на гамма-у¬
становке ГУ-200М, где в качестве источника используется СО60, после чего в ми¬
кробиологической лаборатории их заливали питательной средой R2A и по росту
тест-культур или его отсутствию судили о стерилизующей эффективности различных
доз ионизирующего излучения.
Для контроля полученной поглощенной дозы, в соответствии с ГОСТ ISO11137-
3-2008, использовали государственные образцы дозиметров поглощенной дозы фо¬
тонного и электронного излучения (СО ПД (Ф) Р5/50). Дозиметры этого типа опреде¬
ляют поглощенную дозу в диапазоне от 5 до 50 кГр, который полностью перекрывал
потенциально необходимые значения для стерилизации (ГОСТ ISO11137-2-2011,
2Ш'ГОСТISO11137-3-2008, 2008).
Чтобы произвести контроль значения поглощенной дозы, дозиметры размещали
непосредственно на объекте облучения. Данное размещение дозиметров позволяло
определить наименьшее значение поглощенной дозы в объеме чашки Петри, а также
исключить риск недостаточного облучения образцов микроорганизмов.
Распределение значения поглощенных доз исследовали на макете одной из ти¬
пичных металлических массивных составных частей (СЧ) десантного модуля. Макет
представляет собой шар диаметром ~50 см, выполненный из алюминиевого сплава
АМгЗ и имеющий двойную стенку толщиной по 5 мм каждая.
Во время проведения облучения с периодичностью в 1 час проверяли значение
поглощенных доз на прикрепленных дозиметрах для контроля полученных доз. По¬
сле того, как самый дальний относительно облучателя дозиметр набирал минимально
необходимую поглощенную дозу, проводили анализ распределения значений погло¬
щенных доз в объеме макета.
Эффективность радиационной стерилизации макета оценивали на специально
приготовленных биологических индикаторах. Для их приготовления использовали
устойчивые к радиации штаммы, выделенные из помещений предприятия. Биоинди¬
каторы готовили на полосках фильтровальной бумаги размером 1*3 см. На каждую
полоску автоматической пипеткой равномерно переносили 0,1 мл смешанной суспен¬
зии спор. Используя в приготовлении суспензии споры различных концентраций, по¬
лучали биоиндикаторы с содержанием спор 108, 107, 106, 105, 104 и 103 КОЕ (колони¬
еобразующих единиц) на полоску. Каждый биоиндикатор в асептических условиях
переносили в индивидуальный стерильный пакетик - зиплок.
После радиационного облучения биоиндикаторы транспортировали в микробио¬
логическую лабораторию, где в асептических условиях заливали 20 мл расплавлен¬
166
3-5
ного (48-50аС) агара R2A. Посевы инкубировали при температуре 32±1°С в течение
5 суток, проводя промежуточный осмотр каждые сутки. Отсутствие микробного ро¬
ста (колоний) на чашке по истечении срока инкубирования посевов свидетельствова¬
ло об эффективности радиационной стерилизации макета.
Результаты и обсуждение
На первом этапе исследований определяли радиационную устойчивость 9 штам¬
мов бактерий и 7 штаммов грибов, выделенных из чистых помещений и оборудова¬
ния, следующих видов:
- спорообразующие бактерии: Bacillus pumilus 1, В. pumilus 2, В. vallismortis 3,
В. subtilis 4, В. megaterium 7.1, В. pumilus 8, В. pumilus 9, В. subtilis 10, В. subtilis 12,
- грибы: Penicillium chrysogenum 1, Р cyclopium 2, Р granulatum 7, Р expansum 8,
Cladosporium cladosporioides 3, Cl. sphaerospermum 4, Chaetomium globosum 5.
Среди грибов доминировали представители рода Penicillium, а среди бактерий -
спорообразующие бактерии рода Bacillus, споры которых, как было показано на ос¬
новании ранее проведенных исследований, обладают наибольшей резистентностью
к ионизирующей радиации и представляют основной интересе с точки зрения плане¬
тарного карантина (Nicholson W.L. et al., 2000).
Вышеперечисленные штаммы микроорганизмов были проверены на радиоре¬
зистентность к ионизирующему гамма-излучению при облучении дозами 5, 10, 15
и 20 кГр. Штаммы плесневых грибов характеризовались относительно невысокой
радиорезистентностью и не выживали уже при дозе гамма-облучения 5 кГр (что со¬
относится с данными таблицы 3.5.2.2). В ассоциации же споровых бактерий были
выявлены штаммы с различной чувствительностью к воздействию ионизирующей
радиации.
Таблица 3.5.2.2. Оценка радиационного воздействия гамма-излучения при дозах 5 кГр и 10 кГр
на штаммы микроорганизмов, выделенных из среды чистых помещений для сборки ДМ
штамм
численность микроорганизмов (КОЕ/образец)
исходная
численность
доза радиации
5 кГр
| 10кГр
плесневые грибы
Penicillium chrysogenum 1
(8,1±1,3)'Ю5
0
0
Р. cyclopium 2
(3,1±0,5)-105
0
0
Cladosporium cladosporioides 3
(7,4±0,9)-105
0
0
Cl. sphaerospermum 4
(9,2±0,4)105
0
0
Chaetomium globosum 5
(3,5±0,4)-105
0
0
P. granulatum 7
(6,4±0,2)-105
0
0
P. expansum 8
(4,2±0,5)Ю5
0
0
неспорообразующие бактерии
Micrococcus luteus 5
(1,1±0,1)107
0
0
Staphylococcus sp. 6
(4,2±0,7)-106
0
0
Acinetobacter Iwoffii 11
(7,4±1,5)Ю6
0
0
167
3-5
штамм
численность микроорганизмов (КОЕ/образец)
исходная
численность
доза радиации
5 кГр
10 кГр
спорообразующие бактерии
Bacillus pumilus 1
(7,4±0,3)-106
(3,4±0,5)-103
(5,9±0,1)-101
В. pumilus 2
(2,9±0,6)106
(8,4±0,9)102
(2,4±0,5)-10'
В. vallismortis 3
(5,8±0,8)-106
(4,7±1,4)-101
0
В. subtilis 4
(3,7±0,6)10б
(5,2±0,5)-102
3,1-10'
В. megaterium 7.1
(4,4±0,5)-10б
(3,1±0,9)10'
0
В. pumilus 8
(5,2±1,5) 106
(1,5±О,5)-1О3
0
В. pumilus 9
(4,7±0,4)-106
(7,6±1,8)-102
0
В. subtilis 10
(6,9±0,7) 106
(4,3±0,8)102
(3,9±0,7)-10'
В. subtilis 12
(4,8±0,9)-106
(2,8±0,5)-102
0
Споры штаммов В. pumilus \,В. pumilus 2, В. subtilis 4 и В. subtilis 10 в концентра¬
ции 106 спор выживали в отличие от спор остальных бацилл при радиационном воз¬
действии 10 кГр (таблица 3.5.2.2). Дальнейшая проверка радиационной чувствитель¬
ности этих спор к гамма-облучению при дозе 15 кГр выявила резистентность лишь
у В. subtilis 10 при той же концентрации спор (106 спор/мл). Проведенные на этом эта¬
пе микробиологические исследования по определению эффективности инактивации
споровых бактерий показали, что при дозе излучения 15 кГр снижение микробной
популяции возможно не менее чем в 105раз.
При воздействии гамма-излучения с дозой в 20 кГр не выживал почти ни один
из радиоустойчивых штаммов в исследуемой концентрации (таблица 3.5.2.3).
Таблица 3.5.2.3. Оценка воздействия гама-излучения с дозами 15 и 20 кГр
на радиоустойчивые штаммы микроорганизмов, выделенных из среды чистых помещений
предприятия
штамм
численность микроорганизмов (КОЕ/образец)
исходная
численность
доза радиации
15 кГр
20 кГр
спорообразующие бактерии
Bacillus pumilus 1
(5,1±0,3)-106
0
0
В. pumilus 2
(4,7±0,5)106
0
0
В. subtilis 4
(6,4±0,3)106
0
0
В. subtilis 10
(3,9±0,1)106
1,9-10'
0
Из таблицы 3.5.2.3 следует, что штамм Bacillus subtilis 10 являлся наиболее устой¬
чивым к радиационному воздействию среди выделенных культур и его радиорези¬
стентность соответствовала или даже превышала этот показатель у штамма анало¬
гичной видовой принадлежности, представленный в таблице 3.5.2.1.
Таким образом, среди микроорганизмов, обсеменяющих чистые помещения пред¬
приятия, присутствовали штаммы с повышенной радиорезистентностью. Устойчи¬
вые к гамма-облучению при дозе радиации в 10-20 кГр штаммы использовались
в дальнейшем для приготовления биоиндикаторов контроля радиационной стерили¬
зации макета металлической СЧ ДМ.
168
3-5
Проведенные исследования показали, что для эффективной инактивации споро¬
вых бактерий, численность которых равна 106 на объект, уровень дозы гамма-облуче¬
ния должен быть не ниже 20-25 кГр.
Для проверки эффективности выбранного режима радиационной стерилизации
проведены эксперименты по инактивации микробиологических тестов с образцами,
содержащими биоиндикаторы, созданные из споровых бактерий, наиболее устойчи¬
вых к действию ионизирующего излучения. Для определения дозы гамма-облучения,
позволяющей достигать уровня стерильности не ниже 10-3, были проведены допол¬
нительные исследования при уровне исходной бионагрузки 107 и 108 спор. В резуль¬
тате установлено, что все биоиндикаторы были стерильными при воздействии гам¬
ма-облучения в 25±2 кГр (таблица 3.5.2.4).
Таблица 3.5.2.4. Количество спор тест-культур бактерий на биоиндикаторах до и после
радиационной стерилизации
Биоиндикатор
численность микроорганизмов КОЕ
исходная
численность
доза гамма-излучения
25±2 кГр
Биоиндикатор № 1
(4,9±0,5) 106
0
Биоиндикатор № 2
(4,2±0,6)107
0
Биоиндикатор № 3
(2,9±0,5) Ю8
0
Таким образом, учитывая типичный исходный уровень микробиологического за¬
грязнения стерилизуемого объекта, для получения необходимого уровня стерильно¬
сти 10'3 требуется доза гамма-облучения не меньше чем 20-25 кГр.
Определение распределения поглощенной дозы гамма-излучения
по объему облучаемого объекта и выбор режима облучения
На следующем этапе исследований проводили определение распределения погло¬
щенной дозы гамма-излучения по объему макета СЧ ДМ и, соответственно, выбор
режима облучения.
Различие значений поглощенных доз по объему облучаемого массивного объекта
больших размеров объясняется двумя факторами:
- ослаблением излучения массивными конструкциями и защитными экранами об¬
лучаемого объекта и, соответственно, уменьшение поглощенной дозы, т.е. это чи¬
сто физический фактор, обусловленный взаимодействием излучения с веществом;
- различной удаленностью точек на объекте от облучателя (геометрический
фактор).
Физический фактор, обусловленный ослаблением излучения
при взаимодействии с веществом
Перед проведением модельного эксперимента по стерилизации металлических
элементов СЧ ДМ была определена степень поглощения дозы сплавом алюминия
АМгЗ. Измерения проводились с помощью наборных алюминиевых пластин в коли¬
честве 21 шт., размером 100x100 мм и толщиной 2 мм каждая. После проведения об¬
лучения и проверки показателей дозиметров был построен график, который отражал
уменьшение значения поглощенной дозы при увеличении толщины алюминиевой
защиты (рисунок 3.5.2.1).
169
3-5
Рисунок 3.5.2.1. Изменение поглощенной дозы гамма-излучения в зависимости от толщины
наборной алюминиевой пластины
Используя этот график, можно рассчитать минимальную дозу гамма-облучения,
которую следует подавать на внешнюю поверхность изделия заданной толщины для
обеспечения стерилизующей дозы внутри изделия.
Геометрический фактор
Для расчета поглощенной дозы в точке объекта, расположенной на расстоянии R
от облучателя, используется с хорошей точностью приближение точечного источни¬
ка, и, соответственно, зависимость описывается простым выражением:
D(R)=D0/R2,
где D(R) - доза радиации в точке, расположенной на расстоянии R от облучателя; Do -
константа, характеризующая свойства источника.
Для определения распределения поглощенной дозы по объему элементов ДМ и,
соответственно, для выбора режима радиационной стерилизации с учетом выше¬
приведенных факторов был подвержен облучению металлический макет, при этом
на нем схематически были определены основные точки контроля значения поглощен¬
ной дозы при проведении облучения (рисунок 3.5.2.2).
Снижение значений поглощенной дозы (более чем в 4 раза) при движении от бли¬
жайшей к источнику точки (1) до дальней внешней точки (5) представлено на ри¬
сунке 3.5.2.3 (геометрический фактор), при этом вклад физического фактора (погло¬
щение проникающей радиации всеми стенками), как показали дозиметры, составил
примерно 25%.
170
3-5
Рисунок 3.5.2.2. Точки контроля значений поглощенных доз при облучении макета
металлического элемента ДМ
номер точки на макете
Рисунок 3.5.2.3. Значения поглощенных доз ионизирующего излучения в контрольных точках
исследованного макета элемента ДМ
Таким образом, для получения стерилизующей дозы 25 кГр в каждой точке макета
необходимо обеспечить следующий режим облучения: после облучения с поглощен¬
ной дозой 20 кГр (в ближайшей к источнику точке) повернуть макета на 180° и по¬
вторно облучить его такой дозой.
171
3-5
Из вышеизложенного следует:
1. Проверку эффективности стерилизации металлического макета проводили
с использованием биоиндикаторов с исходной бионагрузкой 107 и 108 спор на обра¬
зец. После радиационной обработки на гамма-установке ГУ-200М макета с подачей
на ближнюю сторону 20±2 кГр и последующим поворотом изделия на 180° все образ¬
цы биоиндикаторов были стерильны.
2. Величина стерилизующей дозы гамма-облучения определяется изначальной
микробной контаминацией подлежащего стерилизации элемента конструкции непо¬
средственно перед его помещением в микробиологически непроницаемую упаковку,
а также требованием к окончательному минимальному уровню стерильности, кото¬
рая, в частности, для посадочного аппарата миссии «ЭкзоМарс-2022» составляет 103.
Было получено, что для достижения данного уровня стерильности при исходной био¬
нагрузке 106 бактериологических спор на объект стерилизующая доза гамма-облуче¬
ния для штаммов споровых бактерий, выделенных из среды сборочных чистых поме¬
щений, должна составлять не менее 25 кГр.
3. Для достижения требуемого значения поглощенной дозы по всему объему ме¬
таллических составных частей ДМ необходимо обеспечить следующий режим об¬
лучения: поглощенная доза первичного облучения ближайшей к источнику точки
на поверхности объекта должна быть не менее 20 кГр, после чего требуется разворот
на 180° объекта стерилизации и аналогичное повторное облучение.
Список литературы
Александров Ю.А. Основы радиационной экологии. Марийский гос. ун-т. 2007.
268 с.
ГОСТ ISO 11137-1-2011. Стерилизация медицинской продукции. Радиационная
стерилизация. Часть 1. Требования к разработке, валидации и текущему контролю
процесса стерилизации медицинских изделий.
ГОСТ ISO 11137-2-2011. Стерилизация медицинской продукции. Радиационная
стерилизация. Часть 2. Установление стерилизующей дозы.
ГОСТ Р ИСО 11137-3-2008. Стерилизация медицинской продукции. Радиацион¬
ная стерилизация. Часть 3. Руководство по вопросам дозиметрии.
COSPAR PLANETARY PROTECTION POLICY (20 October 2002; As Amended to
24 March 2011).
Nicholson W.L., MunakataN., HorneckG., Melosh H.J., SetlowP. Resistance of Bacillus
endospores to extreme terrestrial and extraterrestrial environments // Microbiology and
molecular biology reviews. 2000. V. 63 (3). P. 548-572.
Preventing the Forward Contamination of Mars. National Research Council. 2006.
Washington, DC: The National Academies Press. 152 p.
Roberts T.A., Hitchins A.D. Resistance of spores // In G.W. Gould and A. Hurst (ed.),
The Bacterial Spore. Academic Press, New York, N.Y. 1969. P. 611-670.
E.A. Дешевая,
H.M. Хамидуллина,
A.B. Часовских,
C.A. Харин,
C.H. Устинов,
B.H. Сычев
172
3-5
3.5.3. Средства дезинфекции чистых сборочных помещений,
контролируемых по микробиологической чистоте
Основная цель политики планетарной защиты миссии «ЭкзоМарс-2022» - защи¬
та марсианской среды от загрязнения земными микроорганизмами - накладывает
на всех стадиях работы от начала сборки до старта КА серьезные требования по огра¬
ничению бионагрузки составных частей десантного модуля и всего КА.
Сборку космических аппаратов, осуществляющих посадку на Марс, необходимо
проводить в чистых помещениях (COSPAR Planetary Protection Policy, 2011), в кото¬
рых, благодаря конструктивным особенностям и оснащению специальным оборудо¬
ванием, поддерживается определенная концентрация пыли, микроорганизмов, аэро¬
зольных частиц и химических паров.
Чистое помещение служит защитой создаваемого объекта от окружающей среды,
включая работающий персонал, сборочные единицы (материалы, аппаратуру, устрой¬
ства и т.п.), вспомогательное оборудование, и, естественно, должно соответствовать
определенным требованиям.
Современные чистые помещения в части промышленной чистоты (пылевые ча¬
стицы, органическая грязь) классифицируются и создаются согласно требованиям
стандарта (ГОСТ ИСО 146641-2002, 2002).
При реализации экспедиций с посадкой аппаратов на Марс, предназначенных
для проведения там биологических экспериментов по поиску потенциальных форм
марсианской жизни («ЭкзоМарс-2022») и относящихся к категории IVb по класси¬
фикации COSPAR, как уже было сказано, выставляются не только требования к про¬
мышленной чистоте (контроль корпускулярной и органической загрязненности),
но и жесткие требования к микробиологической чистоте воздуха и поверхностей
чистого сборочного помещения (планетарная защита) на различных стадиях работ
с десантным модулем (ГОСТ ИСО 14698-1-2005, 2005; ECSS-Q-ST-70-58C, 2008) -
см. подробнее раздел 3.5.1.
Среда чистых помещений представляет собой искусственную систему, в которой
для выполнения вышеуказанных нормативов по микробиологической чистоте долж¬
ны быть строго соблюдены правила работы в чистом помещении, процедуры доступа
в него, использования специальной одежды и др. Очевидно, одним из важнейших усло¬
вий для поддержания заданных уровней микробной чистоты является необходимость
проведения регулярных уборок с применением дезинфицирующих средств, способных
подавлять широкий спектр микроорганизмов и, особенно, спорообразующих бактерий.
Для решения этой задачи, в первую очередь, были проведены исследования
по созданию коллекции (банка данных) штаммов микроорганизмов (бактерий и гри¬
бов), встречающихся в чистых помещениях пяти организаций, принимающих уча¬
стие в разработке служебной и научной аппаратуры для ДМ и в сборке ДМ миссии
«ЭкзоМарс-2022»: НПО им. С.А. Лавочкина и его смежные организации. При этом
определялись виды микроорганизмов в чистых и вспомогательных помещениях пред¬
приятий, их количественный уровень на поверхностях и в воздухе, а также потен¬
циальная устойчивость к химическим препаратам. В работе мы руководствовались
такими критериями, как потенциальная способность бактерий и грибов длительное
время выживать в неблагоприятных условиях внешней среды.
Полученные при микробиологических исследованиях чистых помещений данные
позволили отобрать наиболее репрезентативные виды бактерий и грибов для тести¬
рования эффективности дезинфекционных средств.
173
3-5
Общеизвестно, что споры бактерий рода Bacillus наиболее устойчивы к хими¬
ческим средствам дезинфекции, они могут годами сохранять жизнеспособность во
внешней среде. Данные микроорганизмы за счет образования спор высокоустойчивы
ко многим факторам внешней среды, в том числе к высоким температурам, воздей¬
ствию небольших доз «мягкого» ультрафиолета (например, создаваемого ртутными
УФ-лампами и практикуемого в медицинских учреждениях, за исключением опера¬
ционных и т.п.), изменению pH среды и воздействию ряда химических соединений.
Для обеспечения планетарной защиты именно к этим экстремофилам предъявляются
особо жесткие требования по их численности. В чистых помещениях всех исследо¬
ванных организаций спорообразующие бактерии были выявлены в значительных ко¬
личествах, существенно превышающих указанные в разделе 3.5.1 требования к уров¬
ню бионагрузки.
Состав видов плесневых грибов, вошедших в банк штаммов и используемых
для тестирования дезинфекционных средств, формировался также по принципу их
устойчивости к внешним воздействиям. Кроме этого учитывалась встречаемость
плесневых видов микромицетов на исследуемых поверхностях в чистых помещени¬
ях. В среде чистых помещений доминировали грибы рода Penicillium и Aspergillus,
которые в значительной мере представлены в коллекции тестовых культур.
Предварительный анализ дезинфицирующих средств (ДС) проводили на основа¬
нии инструкций по их применению, а также с учетом того, что многие препараты уже
исследовались в 2015 году (Дешевая Е.А. и др., 2017). В результате ранее проведенной
работы было выбрано средство «Экор», эффективность которого была подтвержде¬
на в условиях подготовки технического комплекса (ТК) Байконур к старту КА «Экзо-
Марс-2016» (Дешевая Е.А. и др., 2017). На этапе пусковой кампании, длительность
которой составляла примерно 3 месяца, использовалось только это дезинфекцион¬
ное средство. Однако при длительной работе в чистых помещениях рекомендуется
применять не менее двух препаратов, т.к. использование только одного ДС в течение
длительного времени приводит к адаптации микроорганизмов к нему. Поэтому приме¬
нение препаратов должно быть периодическим с целью недопущения появления рези¬
стентных микроорганизмов. В связи с этим были проведены исследования по оценке
антимикробной эффективности новых дезинфекционных средств, которые должны:
- иметь широкий спектр антимикробной активности при обработке поверхно¬
стей из различных материалов и обладать спороцидностью, подтвержденной
производителем;
- не вызывать коррозирующего и повреждающего воздействия на металлы, резину,
стекло, пластиковые и другие материалы;
- быть безопасными для человека;
- быть простыми в приготовлении и применении.
Хотя основным критерием при выборе ДС для проведения дальнейших исследо¬
ваний было наличие в Инструкции по применению данных о его спороцидной актив¬
ности, немаловажным было и требование о производстве ДС в России.
Методика
За последние 3 года на российском рынке представлены новые ДС, которые в раз¬
ной концентрации способны подавлять, по данным разработчиков, рост спорообразу¬
ющих бактерий и грибов.
174
3-5
Рабочие концентрации средств выбирались по рекомендации производителя:
- минимальная концентрация средства предлагалась для участков с поражением
плесневыми грибами;
- максимальная концентрация средства рекомендовалась для инактивации споро¬
вых форм бактерий.
Кроме комбинированных четвертичных аммониевых ДС были также выбраны
препарат с активным хлором и 6%-ный раствор перекиси водорода в качестве дез¬
средства с выраженной антимикробной активностью в отношении споровых бакте¬
рий и грибов.
Таким образом, для первичного тестирования были выбраны следующие средства
и их рабочие концентрации:
- «Ди-Хлор-Экстра» -2,0% (производитель ООО «Дезснаб - Трейд», Россия);
- Перекись водорода - 6,0% (производитель ООО «НПП «РОСТ»);
- «Экор» - 0,4% (производитель ОАО НПО «Новодез», Россия);
- «Неоклин экстра» - 0.5% и 3,0% ( приозводитель ОАО НПО «Новодез», Россия);
- «МБИ премиум» - 0,5% и 4,0% (производитель ЗАО «Мир без инфекций», Россия);
- «Необак актив» - 0,7% и 3,0% (производитель ОАО НПО «Новодез», Россия);
- «МДС-2» - 0,5% и 2,0% (производитель ООО «Медицинская дезинфекция», Россия);
- «Литосанит» - 0,6% (производитель ООО «Сателлит», Россия);
- «ОДС-15» - 2,0% (производитель ООО «Сателлит», Россия);
Первоначальную оценку антимикробной активности испытуемого средства про¬
водили, используя полуколичественный диско-диффузионный метод (Лабинская А. С,
Волина Е.Г., 2008), основанный на диффузии в плотную питательную среду испытуе¬
мого антимикробного препарата.
Метод заключается в однократной обработке стандартных дисков диаметром 6 мм
растворами испытуемого антимикробного препарата. Диски накладывали на поверх¬
ность плотной питательной среды, предварительно засеянной одним из тест-микро-
организмов. В качестве питательной среды использовали трипказо-соевый агар для
бактерий и картофельно-декстрозный агар для грибов.
Чашки Петри с культурами тест-микроорганизмов и дисками с разными средства¬
ми помещали в термостат на 24 часа при температуре 37°С для выращивания бакте¬
рий и на 3-5 суток при 28°C - для выращивания грибов.
По истечении указанного срока производили учет результатов исследований пу¬
тем измерения диаметра зоны задержки роста тест-микроорганизмов (в мм) вокруг
вышеуказанных дисков.
В структуре банка штаммов, изолированных из чистых помещений предприятий,
наибольшим был удельный вес бактерий вида Bacillus (68%). Второе по резистент¬
ности к ДС место занимали грибы рода Aspergillus (9%). Несмотря на то, что устой¬
чивость пенициллов к дезинфектантам обычно ниже, чем у аспергиллов, их наличие
к коллекции было также актуальным (8%).
Степень достаточной эффективности ДС оценивалась как полная при наличии
зоны задержки роста микроорганизмов вокруг диска не менее 8 мм (это означает, что
культура микроорганизма чувствительна к ДС); недостаточная - при отсутствии зоны
задержки роста.
Далее проводились исследования, способность выбранных дезсредств обеззара¬
живать 99,99% микроорганизмов при обработке поверхности в режиме дезинфекции
объектов по методу, предложенному производителем. Для этого создали ассоциацию
бактерий и грибов в равных соотношениях.
175
3-5
Для приготовления взвеси каждой тест-культуры покоящейся формы спорообразу¬
ющих бактерий использовали суточную культуру, выращенную на плотной питатель¬
ной среде (трипказо-соевый агар) при температуре 37°С. Затем, для стимулирования
спорообразования у бактерий рода Bacillus, готовили суспензию каждой отдельной
культуры в физиологическом растворе и рассевали ее на поверхность картофельного
агара, разлитого в стерильные чашки Петри, в объеме 0,2-0,5 мл на чашку. Инкуби¬
рование посевов производили в течение 48 часов при температуре 37°С в термостате.
По истечении 48-часовой инкубации чашки Петри с посевами вынимали из термо¬
стата и дополнительно выдерживали при комнатной температуре (20-22°С) в присут¬
ствии естественного источника света в течение 5 суток.
В дальнейшем проводили контрольное исследование тест-культур бактерий, вы¬
ращенных на картофельном агаре. Взвесь (смыв) каждой тест-культуры бактерий го¬
товили в стерильном физиологическом растворе, используя эталонный стеклянный
стандарт мутности на 10 единиц, что соответствует количеству микробных клеток
1 млрд/мл. Затем серией последовательных разведений в стерильном физиологиче¬
ском растворе добивались концентрации взвеси каждого тест-микроорганизма, рав¬
ной 106 клеток в 1 мл.
Для стандартизации тест-культуру микромицетов штаммы выращивали в чашках
Петри со средой Чапека. Подтверждали ее видовую идентичность на основании ана¬
лиза их морфологических свойств, а затем высевали на скошенный агар (среда Чапе¬
ка). Для приготовления взвеси (суспензии) спор грибов для заражения поверхности
чашки Петри использовали тест - культуры грибов, выращенные на среде Чапека при
28 °C и имеющие возраст от 14 до 28 суток, считая с момента пересева.
Суспензию спор грибов готовили в концентрации 105-106 КОЕ/мл. Для этого
в колбу (пробирку), содержащую 10 мл стерильного физиологического раствора, пе¬
реносили споры гриба из пробирки с чистой культурой путем захвата спор бактери¬
ологической петлей.
Определение количества спор в суспензии осуществляли методом подсчета с ис¬
пользованием счетной камеры Горяева. Приготовленные суспензии спор грибов па¬
раллельно подвергали контролю для оценки их жизнеспособности.
Заражение поверхности квадратных чашек Петри осуществляли путем равномер¬
ного нанесения приготовленной взвеси спор бактерий и грибов, смешенных в равных
частях, на их поверхность с помощью пипетки из расчета 105-106 колониеобразую¬
щих единиц (КОЕ) на 1 см2 площади.
Затем чашки, с нанесенными на их поверхность микробными клетками, обраба¬
тывали рабочими растворами ДС. До и после проведения дезинфекционной обра¬
ботки с поверхности зараженных ассоциацией бактерий и грибов чашек отбирались
микробиологические пробы методом смыва. Проводили посев на питательные среды
и определяли окончательную эффективность действия дезинфектанта. В исследова¬
ниях подтверждался рекомендованный производителем режим обработки при 3-крат¬
ной повторности.
Результаты и обсуждение
В таблице 3.5.3.1 представлены отдельные данные оценки антимикробной актив¬
ности дезинфицирующих средств в отношении штаммов микроорганизмов, выделен¬
ных из чистых помещений.
176
3-5
Таблица 3.5.3.1. Оценка антимикробной активности ДС (зона задержки роста культуры, мм)
177
3-5
Выявлена высокая чувствительность всех микроорганизмов к хлорсодержащиму
ДСи к 6% перекиси водорода. У штамма Bacillus cereus ИК отмечалась наименьшая
зона задержки роста при воздействии 2% «Ди-Хлор-Экстра», а культуры Aspergillus
niger Г и Aspergillus niger ИР были заметно чувствительны (не стойки) к действию
перекиси водорода.
Кроме этого, показана чувствительность всех штаммов микроорганизмов к ДС
«Экор» (0,4%) и «Литосанит» (0,6%). Зоны задержки к этим ДС колебались, но были
значимы.
Средство «Неоклин экстра» в концентрации 0.5% и 3% не вызывало задержку
роста большинства исследованных штаммов грибов и отдельных спорообразующих
бактерий.
К низкой концентрации «МБИ» премиум 0,5% были устойчивы многие штаммы
пенициллов. При 4% концентрации этого препарата значительно возрастала чувстви¬
тельность всех микроорганизмов к его действию.
Aspergillus clavatus ИК, Penicillium lanosum ИС и ряд других, не представленных
в таблице штаммов грибов, были устойчивы к действию средства «Необак актив»
в различных концентрациях.
Рост грибов Aspergillus clavatus ИК, Aspegillus niger Г, Aspegillus niger ИК и от¬
дельных пенициллов, выделенных из среды чистых помещений двух предприятий,
не подавлялся действием препарата «МДС- 2» в рекомендуемых концентрациях, ко¬
торые составляли 0,5% и 2%.
Средство ОДС-15 в концентрации 3% не задерживало рост черного аспергилла
(черная плесень) и отдельных грибов рода Penicillium.
Обобщенные данные об устойчивость всех тест-культур по отношению к изучае¬
мым ДС представлены в таблице 3.5.3.2.
Наблюдались различия по чувствительности к ДС у бактерий и грибов. Получены
данные о резистентности грибных культур, выделенных из среды помещений ряда
предприятий, к высоким концентрациям исследуемых дезинфекционных средств.
С большой вероятностью можно утверждать, что очаги развития черных аспергиллов
имеют место около исследуемых помещений (раздевалки, шлюзы, тамбуры и т.п.),
и они могут попадать в чистые помещения из близко расположенных вспомогатель¬
ных помещений. Предотвратить распространение спор плесневых грибов, часто пе¬
реносимых на подошве обуви, может наличие липких ковриков перед входом в чи¬
стое помещение. Переносу спор микромицетов будет препятствовать также наличие
различных воздушных фильтров, например в зонах с направленным потоком воздуха.
В отношении споровых бактерий выявлена почти одинаковая антимикробная актив¬
ность к исследуемым ДС при следующих концентрациях: «Экор» - 0,4%; «МБИ преми¬
ум» - 4%; «Необак актив» - 3%; «МДС-2» - 2%, «Литосанит» - 0,6%; «ОДС-15» - 3%.
Сравнительный анализ антимикробного действия исследованных ДС показал,
что большинство их проявляли слабую активность в отношении штаммов грибов,
хотя в Инструкции по применению ДС рекомендуется увеличивать концентрацию
препаратов для подавления роста споровых бактерий, а не грибных культур. Отсюда
следует, что для выбора эффективного ДС всегда необходимо проверять его антими¬
кробную активность в отношении «диких» природных штаммов, характерных для
данного места, несмотря на его активность в отношении коллекционных штаммов,
указанную в Инструкции. Эту рекомендацию следует применять ко всем исследуе-
178
3-5
Таблица 3.5.3.2. Действие ДС на микроорганизмы. В ячейках указана доля (в %)
микроорганизмов различной степени чувствительности к данному дезинфектанту
от общего числа микроорганизмов из чистых помещений
дезсредство
бактерии
грибы
слабо¬
чувствительные,
%
высоко¬
чувствительные,
%
устойчивые,
%
слабо¬
чувствительные,
%
высоко¬
чувствительные,
%
устойчивые,
%
Экор 0,4%
0
100
0
0
100
0
Неоклин экстра 0,5%
9,1±1,1
63±1,1
27±2,2
2±0,1
70±1
28±1,1
Неоклин экстра 3%
4,5±0,1
95±0,4
0
3±2,2
60±1,1
37±3,3
МБП премиум 0,5%
1±0,5
98±0,5
0
1±1,1
77±1,1
22±2,2
МБП премиум 4%
1±0,5
98±0,5
0
2±1
92±2,1
6±3,1
Необак актив 0,7%
1±1
98±1
0
3±1
69±1
28±2%
Необак актив 3%
3±1
96±1
0
84±2,2
0
16±2,2%
МДС-2 0,5%
6±1
88±1
4±2
1±0,5
68±1,7
29±2,2%
МДС-2 2%
0
100
0
82±2
0
16±2%
Литосанит 0,6%
0
100
0
0
100
0
ОДС-15 2,0%
3±0,5
96±0,5
0
2±1
90±2
5±3%
Ди-Хлор-Экстра 2,0%
0
100
0
0
100
0
Перекись водорода 6,0%
0
100
0
0
100
0
Примечание:
К слабочувствительным относятся штаммы, у которых зона задержки роста до 10 мм; к высокочувстви¬
тельным - зона задержки роста более 10 мм; устойчивые - нет зоны задержки роста.
мым штаммам микроорганизмов. В противном случае, как показали проведенные ис¬
следования, при эффективном подавлении споровых форм бактерий ДС можно спро¬
воцировать развитие плесневых грибов, которые могут быть устойчивы к действию
даже высоких концентраций дезинфектантов.
В результате проведенных исследований были определены ДС, обладающие зна¬
чительными антимикробными свойствами в отношении бактерий и грибов, выделен¬
ных из помещений разных организаций. Это средства «Экор» (концентрация 0,4%)
и «Литосанит» (0,6%).
До и после проведения дезинфекционной обработки с поверхностей чашек, заражен¬
ных ассоциацией бактерий и грибов, отбирались микробиологические пробы методом
смыва. Проводили посев на питательные среды и определяли эффективность действия
дезинфектанта. В таблице 3.5.3.3 представлены данные об эффективности действия
исследованных дезинфекционных средств в отношении выбранных микроорганизмов.
Таблица 3.5.3.3. Эффективность выбранных дезинфекционных средств
средство
исходная численность
микроорганизмов
на чашке
до дезинфекции, споры
численность
микроорганизмов
после двукратной
обработки, споры
эффективность
Литосанинт
2,0-106
0
100%
Экор
3,2-106
0
100%
179
3-5
Все препараты обладали 100%-ной эффективностью антимикробного действия.
Таким образом, для проведения дезинфекционной обработки во всех помещениях
пяти исследованных организаций для выполнения требований по планетарной защи¬
те при сборке составных частей ДМ рекомендованы следующие дезинфекционные
средства и режимы обработки поверхностей пола и стен:
- средство «Экор» (производитель ОАО НПО «Новодез», Россия), концентрация
рабочего раствора 0,4%, время обеззараживания 60 мин, способ обеззаражива¬
ния - двукратное протирание;
- средство «Литосанит» (производитель ООО «Сателлит», Россия), концентрация
рабочего раствора 0,6%, время обеззараживания 30 мин, способ обеззаражива¬
ния - двукратное протирание.
Применение данных средств должно быть периодически сменяемым с целью не¬
допущения появления резистентных микроорганизмов к одному дезинфекционному
средству. Периодичность должна быть равной 14 суткам (сменяемость дезинфекци¬
онного средства следует проводить через каждые 2 недели его применения).
Применение 6% перекиси водорода возможно в качестве запасного средства при
появлении штаммов микроорганизмов, устойчивых к средствам «Экор» и «Литоса¬
нит», при обработке неметаллических поверхностей во вспомогательных помещениях.
При этом следует учитывать, что при проведении работ в одном помещении более
четырех-пяти месяцев необходимо организовывать регулярный аудит эффективности вы¬
бранных ДС к штаммам микроорганизмов, обнаруживаемых в среде чистого помещения,
и дезинфекционных мероприятий. Данные исследования вместе с регулярным микробио¬
логическим мониторингом помогут понять механизмы повышения численности микро¬
организмов в среде помещений и избежать или снизить степень риска его загрязнения.
Список литературы
ГОСТИСО 146641-2002. Чистые помещения и связанные с ними контролируемые
среды.
ГОСТ ИСО 14698-1-2005. Чистые помещения и связанные с ними контролируе¬
мые среды. Часть 1: Контроль бионагрузки.
Дешевая Е.А., Хамидуллина Н.М., Новикова Н.Д., Поликарпов Н.А., Гуридов А.А.,
Орлов О.И. Выбор эффективного дезинфекционного средства, подавляющего весь
спектр микроорганизмов, контаминирующих поверхности помещений космодрома
Байконур // Авиакосмическая и экологическая медицина. 2017. Т. 51, № 2. С. 35-40.
Лабинская А.С, Волина Е.Г. Общая и санитарная микробиология. М.: 2008.
С. 342-352.
COSPAR PLANETARY PROTECTION POLICY. (20 October 2002; As Amended to
24 March 2011). Approved by the Bureau and Council, World Space Council, Houston,
Texas, USA.
ECSS-Q-ST-70-58C. Обеспечение качества космической продукции. Микробиоло¬
гический контроль полетного аппаратного обеспечения и чистоты помещений. 2008.
Е.А. Дешевая,
С. В. Фиалкина,
А.Б. Полянская,
Н.М. Хамидуллина,
Д.В. Захаренко,
А.А. Гуридов
180
3-6
Исправление движением посадочного
АППАРАТА НА ЭТАПЕ ЕГО СПУСКА И ПОСАДКИ
НА ПОВЕРХНОСТЬ МАРСА
Исследование планет, их спутников и других небесных тел Солнечной систе¬
мы ставит задачу доставки на их поверхность научной аппаратуры и передвижных
устройств. Как правило, для космического аппарата (КА), совершающего миссию
доставки, в момент достижения им поверхности исследуемого небесного тела требу¬
ется довольно малая скорость соударения (контакта) с поверхностью и, кроме того,
определенная ориентация продольной оси КА относительно нормали к подстилаю¬
щей поверхности рельефа.
Относительная скорость сближения КА с исследуемым небесным телом, как пра¬
вило, составляет 3-6 км/с, и снижение этой скорости до допустимой скорости кон¬
такта представляет собой сложную техническую задачу. Для каждого небесного тела
способ решения этой задачи индивидуален. Способ доставки зависит от наличия или
отсутствия газовой атмосферы тела, величины гравитационного ускорения на его
поверхности и характеристик относительного орбитального движения, а также до¬
ставляемой массы. При отсутствии атмосферы (Луна, астероиды) снижение относи¬
тельной скорости может быть осуществлено только за счет реактивных двигателей
торможения, что связано со значительным расходом топлива (Лихачев В.Н., Сихару¬
лидзе Ю.Г., Федотов В. П.,2012; Жуков Б.И. и др., 2012). Наличие плотной атмосфе¬
ры (Венера, Земля) позволяет снизить относительную скорость аэродинамическими
средствами торможения за счет преобразования кинетической энергии КА в тепло¬
вую, при этом требуется использование определенной аэродинамической формы кор¬
пуса КА и ее теплозащиты.
Марс обладает довольно разреженной атмосферой, которая позволяет использо¬
вать комбинацию аэродинамических средств торможения - теплозащитный аэроди¬
намический экран, парашютную систему. Однако даже значительная площадь пара¬
шюта не позволяет к моменту контакта КА с поверхностью снизить относительную
скорость до приемлемых значений. Технически реализуемая скорость движения
КА относительно поверхности при снижении КА на парашюте может быть дове¬
дена до 45-65 м/с. Поэтому для снижения скорости до допустимых пределов на за¬
ключительном участке спуска КА необходимо использовать реактивные двигатели
торможения.
3.6.1. Постановка задачи
С целью разработки и реализации российско-европейского проекта доставки
на поверхность Марса передвижного марсохода между Российским и Европейским
космическими агентствами подписано соглашение, согласно которому одной из за¬
дач, выполняемых российскими специалистами, является задача создания посадоч¬
ного модуля (ПсМ). Для выполнения его управляемого торможения и мягкой посадки
требуется определить состав и необходимые характеристики измерительных средств,
выработать требования к исполнительным средствам и разработать логику и алгорит¬
мы управления, обеспечивающие надежное снижение скорости ПсМ после отделения
парашютной системы (ПС) до приемлемых значений, приземление ПсМ и дальней¬
шую его устойчивость на поверхности Марса.
181
3-6
3.6.2. Анализ условий полета
На формирование профиля спуска при работе тормозного двигателя (ТД) суще¬
ственное влияние оказывают условия полета, предшествующие его включению.
Для КА «ЭкзоМарс» был выбран наиболее простой способ баллистического аэро¬
динамического торможения закрытой капсулы, внутри которой располагается ПсМ
с научными приборами и другими устройствами, которые будут работать на поверх¬
ности Марса. Капсула состоит из лобового аэродинамического экрана, с передней по¬
лусферы предохраняющего посадочную платформу от воздействия высоких темпера¬
тур и давления набегающего потока, и защитного кожуха, закрывающего ее с задней
полусферы. Капсула при этом обладает собственной статической аэродинамической
устойчивостью и достаточной теплозащитой для прохождения плазменного участка
траектории спуска. На участке аэродинамического торможения скорость движения
капсулы снижается от скорости входа, достигающей 5600 м/с, до значений, допусти¬
мых для работы парашютной системы.
Для посадки платформы большой массы парашютная система должна начинать
функционировать еще при значительной скорости спуска, достигающей 500 м/с, т.е.
при сверхзвуковой скорости набегающего потока. Для КА «ЭкзоМарс» применена
двухкаскадная схема парашютной системы, когда сверхзвуковой парашют вводится
в действие при числе Маха порядка 2,2, а при М < 0,9 производится его отделение,
и дальнейшее снижение КА выполняется на дозвуковом парашюте.
Установившуюся скорость, до которой парашютная система может обеспечить
спуск при достижении поверхности Марса, можно оценить исходя из соотношения
равенства силы торможения парашюта и силы гравитационного притяжения Марса
рК2
CPS= где Ср - коэффициент сопротивления парашюта на дозвуковом режиме
спуска; S - площадь парашюта; р - плотность атмосферы; V - скорость снижения
платформы; g,.,=3,723 м/с2 - ускорение свободного падения на поверхности Марса;
т =1800 кг - масса посадочной платформы с массой парашютной системы. Отсюда
(3.6.1)
Оценим возможное значение установившейся скорости спуска для ряда техниче¬
ски реализуемых парашютных систем, для этого рассмотрим применение парашюта
с диаметром купола 15, 25 и 35 м. Для различных значений диаметра парашюта и вы¬
соты полета относительно средней поверхности Марса на рисунке 3.6.1 представле¬
ны результаты расчета по формуле (3.6.1).
Из рисунка следует, что при использовании парашюта диаметром 15 м скорость
снижения составляет порядка 100 м/с и более. Для снижения установившейся скорости
спуска, а также исходя из ряда технических требований, предъявляемых к парашют¬
ной системе для КА «ЭкзоМарс», был выбран диаметр дозвукового парашюта 35 м.
Выполнение аэродинамического торможения в разреженной атмосфере Марса
и снижение на парашюте до установившейся скорости спуска сопряжено с дефици¬
том высоты. Это приводит к тому, что к моменту включения двигателей торможения
установившаяся скорость спуска на парашюте во многих случаях полета не достига¬
ется. В связи с этим для доставки полезной нагрузки выбраны районы в области Oxia
Planum с координатами Х=24,3° ср=18,2° и Mawrth Valles с координатами 1=18-18,5°
182
3-6
— h=-1 км — h=0 км — h=+1 км
Рисунок 3.6.1. Скорость снижения КА на парашюте
(р=22,15-22,4°, где поверхность Марса находится ниже среднего уровня на 1,5-2,5 км
и где соответственно плотность атмосферы увеличивается на 20% относительно ее
значений на средней поверхности Марса.
Спуск посадочной платформы на парашюте имеет ряд особенностей. Во-первых,
это влияние ветра на движение посадочной платформы. Парашют тормозится отно¬
сительно воздушного потока, а при наличии горизонтальной составляющей ветра
парашют вместе с набегающим потоком втягивается в горизонтальное движение со
скоростью ветра. При этом связка парашют-посадочный модуль ориентирована в на¬
правлении гравитационной вертикали. Согласно модели атмосферы Марса скорость
ветра в приповерхностных слоях атмосферы может достигать 25-30 м/с. То есть вме¬
сте с установившейся вертикальной скоростью спуска посадочный модуль может
иметь горизонтальную скорость указанной выше величины.
Во-вторых, парашют с посадочной платформой на стропах представляет собой
маятниковую систему, где точкой подвеса является фокус парашюта - точка прило¬
жения силы его торможения, длина строп с фалом является длиной подвеса маятни¬
ка, а масса посадочной платформы - массой маятника. Период маятниковых колеба¬
гг
у s™
ний определяется известным соотношением 7"=2тг
где £ - расстояние от фокуса
парашюта до центра масс ПсМ. Применительно к КА «ЭкзоМарс» £~50 м, откуда
7"~23 с. Амплитуда маятниковых колебаний зависит от возмущений при раскрытии
парашюта. Для КА «ЭкзоМарс» на рисунке 3.6.2 представлена область углов ориен¬
тации посадочного модуля в момент отделения защитного кожуха вместе с парашют¬
ной системой.
Из рисунка следует, что ПсМ под парашютом совершает конические движения
с амплитудой от 7 до 12 градусов. За счет этих колебаний к систематическому движе¬
нию ПсМ добавляются дополнительные гармонические составляющие: угловой ско¬
рости с амплитудой порядка 3,3% и горизонтальной скорости с амплитудой до 2,6
м/с с указанным выше периодом.
183
3-6
Рисунок 3.6.2. Область углов ориентации продольной оси ПсМ в момент отделения
парашютной системы с защитным кожухом
Для экономии массы на этапе перелета и при входе в атмосферу Марса КА стаби¬
лизирован вращением с угловой скоростью 16,5%. За счет действия возмущающих
аэродинамических моментов аэродинамического экрана к моменту ввода парашют¬
ной системы диапазон угловой скорости вращения достигает 10-22 %. Дозвуковой
парашют за счет демпфирования большой площади купола очень быстро прекраща¬
ет вращение. ПсМ соединен с парашютной системой длинным фалом и за счет от¬
сутствия вращающего момента от фала продолжает вращение вокруг собственной
оси. Это вращение затрудняет работу радиолокационного доплеровского альтиметра
(РДА). Поэтому после отделения аэродинамического экрана двигатели малой тяги
получают возможность снизить скорость вращения ПсМ до малых значений, порядка
0,5 %, что позволяет РДА приступить к измерению высоты и проекций скорости
движения КА относительно поверхности Марса.
Известно (Лихачев В.Н., Сихарулидзе Ю.Г., Федотов В.П., 2013), что для по¬
строения управляемого торможения на реактивных двигателях необходимо знание
направления гравитационного ускорения на поверхности планеты. Построение по¬
садочной системы координат планируется до момента отделения десантного моду¬
ля от перелетного модуля. К моменту разделения система управления перелетным
модулем обеспечивает знание направления на центр притяжения Марса. Снижение
КА на внеатмосферном участке длительностью порядка 30 мин и на участке аэро¬
динамического спуска длительностью до 6 минут выполняется при вращении КА.
За указанное время угол собственного вращения составит порядка 40 000°. Счисле¬
ние текущей ориентации КА в посадочной системе координат выполняется на этих
участках с использованием информации бесплатформенных (бескарданных) гиро¬
скопов. Но за счет погрешности масштабного коэффициента гироскопа, даже сни¬
женного за счет калибровок бескарданных инерциальных блоков (БИБ) к моменту
отделения до величины 80 ppt, и погрешности начальной выставки в информации
звездных датчиков ошибка в знании угла собственного вращения в посадочной систе¬
ме координат составит порядка 2,2.. .3,6°. Так как на всем протяжении аэродинамиче¬
184
3-6
ского торможения продольная ось КА находится в почти горизонтальном положении,
то практически на ту же величину накапливается ошибка в знании ориентации пло¬
скости, содержащей гравитационное ускорение Марса. С одной стороны, эта ошибка
полностью переходит в ошибку знания ориентации связанных осей посадочной плат¬
формы относительно истинного направления гравитационной вертикали, а с другой -
дает систематическую составляющую ошибки в оценке величины проекции гравита¬
ционного ускорения порядка 0,16-0,2 м/с2.
Кроме того, на высоте менее 10,2 м РДА теряет работоспособность и уже нель¬
зя использовать его информацию о высоте и проекциях скорости движения. Эта
информация может быть получена только на основе инерциальной системы навига¬
ции. При длительности спуска с этой высоты до контакта с поверхностью порядка
5...7 секунд инерциальная система счисления за счет ошибки знания направления
гравитационного ускорения может накопить ошибку в величине навигационной го¬
ризонтальной скорости от 1 до 1,5 м/с.
Для повышения точности знания направления гравитационной вертикали к на¬
чалу управляемого торможения используется информация одновременно от двух
БИБ и реализована вычислительная процедура уточнения направления гравита¬
ционного ускорения по информации РДА и БИБ, изложенная в (Лихачев В.Н., Фе¬
дотов Я/7,,2016). В соответствии с этой процедурой РДА на момент времени t из¬
меряет вектор и модуль скорости движения КА Vl(z), а через интервал времени А/
фиксируется новый вектор V2(Z+Af). Изменение вектора связано с работой внешних
сил и с влиянием гравитационного ускорения. Работа внешних сил проявляется
в изменении вектора кажущейся скорости, которое можно вычислить на борту КА
с использованием информации углоизмерительных и акселерометрических каналов
А/
гироинерциальных средств AVxar=jAdZ, где А - вектор ускорений от внешних сил,
о
за исключением гравитационных.
В итоге можно составить векторное уравнение, где неизвестный вектор гравита¬
ционного ускорения gm=A^ [VI (Z) + AVxar - V2(/+A/)j. Все составляющие векторного
уравнения вычисляются в единой системе координат, поэтому вектор гравитацион¬
ного ускорения будет определен абсолютно точно в этой системе координат, так как
угловая ошибка ориентации для каждого элемента векторного уравнения одинакова.
Единственной причиной неправильного определения ориентации вектора гравитаци¬
онного ускорения является навигационная ошибка в оценке начальной и текущей со¬
ставляющих скорости. И чем больше интервал времени А/, тем точнее будет оценено
направление вектора гравитационного ускорения.
Особенность посадки автоматических аппаратов на поверхность Марса состоит
также в том, что необходимо избежать накрытия посадочного модуля куполом пара¬
шюта после его мягкой посадки на поверхность. Наибольшая вероятность накрытия
соответствует чисто вертикальному спуску без наличия ветра. Избежать накрытия
можно путем выполнения маневра увода ПсМ в горизонтальной плоскости от точки
разделения ПсМ с парашютной системой. Способ отделения парашюта от ПсМ суще¬
ственно влияет на схему дальнейшего управляемого торможения. Для КА «ЭкзоМарс»
был выбран способ, когда парашютная система остается закрепленной на защитном
кожухе (ЗК), а сам ЗК отделяется от ПсМ практически в момент начала активной фазы
торможения на реактивном двигателе торможения. За счет резкого снижения массы,
185
3-6
закрепленной на ПС, скорость ЗК быстро уменьшается и он приземляется значительно
позже посадочной платформы. После приземления ЗК купол парашюта складывается
вдоль поверхности Марса в направлении поверхностного ветра. При этом расстояние
от точки закрепления парашюта на защитном кожухе до крайней точки купола вы¬
тяжного парашюта может составить порядка 80 м. Таким образом, дистанция между
приземлившимися ПсМ и ЗК должна иметь не меньшее расстояние.
Анализ углов ориентации посадочной платформы при моделировании ее спуска
на парашюте показывает, что ПсМ перед запуском тормозного двигателя осущест¬
вляет спуск практически в вертикальном положении, то есть вблизи установившего¬
ся режима. Наличие горизонтальной скорости говорит о наличии соответствующего
ветра в атмосфере. Очевидно, что наиболее безопасным удалением от точки падения
защитного кожуха является направление, перпендикулярное направлению скорости
ветра, то есть направление, перпендикулярное горизонтальной скорости ПсМ. Однако
точность определения направления горизонтальной скорости по информации нави¬
гационной системы к моменту отделения защитного кожуха с парашютной системой
оказалась недостаточной, оказалось, что ошибка в оценке направления вектора для
горизонтальной скорости менее 15 м/с составила более 30°. Такая ситуация приводит
к тому, что для 10% траекторий невозможно правильно определить направление ма¬
невра увода платформы. Поэтому были предприняты шаги к выбору другого принципа
определения направления увода. Дополнительный анализ ориентации вектора гори¬
зонтальной скорости ПсМ в точке отделения ЗК (рисунок 3.6.3) показывает, что вектор
горизонтальной скорости все еще ориентирован в направлении движения в плоскости
аэродинамического торможения. Движение в обратном направлении маловероятно.
Поэтому направление увода ПсМ из-под купола парашюта принято противоположным
указанному направлению. Дистанция увода должна быть и больше указанной выше
величины, так как при изменении направления ветра ЗК с ПС могут начать переме¬
щаться в направлении увода, сокращая дистанцию. Поэтому участок увода должен
выполняться с максимально возможной горизонтальной скоростью увода.
Рисунок 3.6.3. Ориентация вектора горизонтальной скорости движения ПсМ перед
отделением парашютной системы в геодезической СК
186
3-6
Создать скорость увода можно только при работающих двигателях торможения
путем отклонения вектора тяги от гравитационной вертикали на максимально воз¬
можный угол на отведенном для этой операции интервале времени. С этой целью
алгоритм управления ориентацией построен на принципе максимального быстродей¬
ствия. То есть переориентация ПсМ после отделения парашютной системы должна
проводиться с максимальной угловой скоростью для достижения максимально допу¬
стимого угла отклонения продольной оси (вектора тяги тормозного двигателя) за ми¬
нимальное время.
3.6.3. Средства управления движением ПсМ
Управляемое торможение на реактивном двигателе для выполнения мягкой посад¬
ки на поверхность Марса имеет много общего с выполнением прецизионного тормо¬
жения на поверхность Луны (Лихачев В.Н., Сихарулидзе Ю.Г., Федотов В.П., 2013).
Поэтому состав технических средств, обеспечивающих процесс управления на этом
участке, может быть идентичным.
Для управления движением ПсМ при работе тормозного двигателя используются:
- бортовая вычислительная система (ОВС);
- радиолокационный доплеровский четырехлучевой альтиметр (РДА);
- два бескарданных инерциальных блока (БИБ), каждый из которых содержит
по три волоконно-оптических гироскопа и три акселерометра, идентичные оси
чувствительности которых взаимно перпендикулярны;
- восемь двигателей малой тяги (ДМТ), способных создавать управляющие момен¬
ты по трем осям базовой системы координат ПсМ;
- тормозной двигатель (ТД) с регулируемой тягой;
- блок управления приводами (БУП) регулирования тяги ТД;
- блок управления (БУ) двигателями малой тяги;
- датчики контакта посадочных опор с поверхностью.
Разработка средств управления посадкой выполняется совместно европейской
и российской сторонами. Распределение ответственности сторон по разработке, изго¬
товлению и поставке этих средств представлено на рисунке 3.6.4.
Бортовая вычислительная система разработана европейскими специалистами
и при выполнении задач управления движением:
- формирует циклограмму основных операций, выдавая соответствующие коман¬
ды в систему электроавтоматики КА;
- обеспечивает прием и обработку информации БИБ, РДА;
- выполняет расчет алгоритмов и формирование навигационной информации для
управления движением ПсМ;
- выполняет расчет алгоритмов наведения и управления как угловым движением
ПсМ, так и управления движением центра масс ПсМ;
- формирует признаки инициализации каждого из характерных участков управления;
- выдает флаги (требования) команд на срабатывание пиротехнических устройств
ПсМ;
- формирует флаги управляющих команд на электропироклапаны ДМТ и на приво¬
ды управления тягой и разности тяг камер тормозного двигателя.
187
3-6
БИБ
радар
парашютная
система
Рисунок 3.6.4. Распределение ответственности сторон:
■■ - ЕКА, - Роскосмос
Рисунок 3.6.5. Внешний вид прибора ASTRIX-1090A
В качестве БИБ используются приборы ASTRIX-1090A, модифицированные для
обеспечения их функционирования в условиях ударных воздействий по перегрузке
и угловым ускорениям в момент ввода сверхзвукового парашюта. Внешний вид при¬
бора представлен на рисунке 3.6.5.
188
3-6
По информации этих приборов ОВС реализует вычислительную процедуру опре¬
деления ориентации ПсМ в посадочной системе координат и выполняет оценку нави¬
гационных параметров движения.
Доплеровский альтиметр
Радиолокационный доплеровский альтиметр (РДА) является основным измери¬
телем скорости и высоты полета ПсМ. Счисление траектории по информации БИБ
путем интегрирования математической модели движения начинается на удалениях
от поверхности порядка 100 км и связано с большими перегрузками на участке аэро¬
динамического торможения. Это, даже с практически минимальными погрешностя¬
ми измерений БИБ, приводит к точности знания высоты полета к моменту включения
ТД в несколько километров и скорости 10-20 м/с. Вполне естественно, что активная
локация поверхности средствами РДА позволяет существенно повысить точность
знания параметров траектории.
РДА предназначен для получения измерительной информации о дальности до по¬
верхности вдоль четырех узких лучей его антенной системы и о скорости движения
ПсМ относительно поверхности в проекции на оси этих лучей. Альтиметр для изме¬
рения дальности измеряет временной интервал от момента излучения передатчиком
радиолокационного импульса до момента прихода в приемник отраженного от по¬
верхности импульса. Измерение проекций скорости основано на определении допле¬
ровского сдвига частоты отраженного от поверхности радиосигнала.
Разработчиком РДА является отделение Thales Alenia Space в Риме. РДА был соз¬
дан для миссии Sciaparelli и используется в составе КА «ЭкзоМарс». РДА являет¬
ся импульсным радиолокационным прибором. Излучение радиосигналов, их прием
и выдача полученной информации выполняются по одному лучу на интервале 50 мс,
после чего указанные операции выполняются по следующему лучу.
Профиль посадки Sciaparelli (соотношение высота - вертикальная скорость, высо¬
та - горизонтальная скорость, высота - углы ориентации КА от гравитационной вер¬
тикали) отличается от профиля посадки КА «ЭкзоМарс». Для подтверждения работо¬
способности РДА в новых условиях были проведены его дополнительные испытания
в условиях пустыни Марокко. Кроме того, Thales Alenua Space разработало специаль¬
ную аппаратуру, формирующую отраженный от поверхности сигнала, в функции па¬
раметров движения и характеристик собственно РДА. Многократное математическое
моделирование торможения ПсМ с использованием образца РДА, на вход приемника
которого подавался указанный выше сигнал, подтвердило работоспособность РДА
в условиях профиля посадки КА «ЭкзоМарс».
Двигательная установка
Двигательная установка предназначена:
- для демпфирования угловой скорости вращения десантного модуля, находящего¬
ся под парашютом;
- для создания управляющих моментов по трем осям десантного модуля после от¬
деления парашюта;
- для создания управляемой силы торможения после отделения парашюта.
189
3-6
Выбор двигателей
Для обеспечения условий работы РДА для управления траекторией и угловым
движением на ПсМ могут быть использованы только низкотемпературные гидрази¬
новые двигатели, в условиях разреженной атмосферы Марса не создающие помех
при прохождении радиолокационного сигнала РДА через факелы выхлопных газов
двигателей. Кроме того, на пассивном участке траектории под парашютом необходи¬
мо снизить скорость вращения ПсМ с 10-22% до 0,5-2%. Эту задачу могут выпол¬
нить гидразиновые реактивные двигатели малой тяги (ДМТ). По условиям размеще¬
ния на ПсМ эти двигатели могут быть размещены на расстоянии 1,5 м от продольной
оси симметрии в нижней части ПсМ. Для исключения попадания струй выхлопа этих
двигателей на элементы конструкции ПсМ ДМТ установлены так, что ось сопла каж¬
дого ДМТ отвернута от внешнего контура ПсМ на угол 18° и в этой касательной пло¬
скости отвернута от направления продольной оси ПсМ на угол 58°. Таким образом,
для создания управляющего момента в канале вращения используется только 80% их
тяги. Тогда суммарная тяга ДМТ, создающих управляющий момент одного знака, при
моменте инерции ДМ с еще неотделившимся защитным кожухом порядка 1850 кгм2,
длительности снижения угловой скорости вращения 5 с, должна составлять не менее
150 Н. Из имеющегося ряда двигателей были выбраны ДМТ с тягой 50 Н - по четыре
ДМТ для положительного и отрицательного знака управляющего момента в канале
вращения.
В качестве двигателя торможения был разработан гидразиновый двигатель. Для
обеспечения снижения ПсМ на заключительном участке торможения его тяга должна
быть несколько меньше «марсианского веса» и составила не более 3400 Н. Для ин¬
тенсивного торможения ПсМ после отделения парашютной системы уровень тяги ТД
должен превышать «марсианский вес» ПсМ в 2,5 раза и составлять не менее 12000 Н.
При этом гравитационные потери на торможение составят 67%. Для управления тя¬
гой используется шаговый электропривод с диапазоном изменения угла поворота
±125°, ценой одного шага поворота привода 0,25° и максимальной угловой скоростью
вращения 125%. При этом изменение тяги при повороте привода на один градус со¬
ответствует 60-70 Н/°, а длительность перехода от минимальной тяги к максималь¬
ной и наоборот составит 1,5-2 с.
При таком уровне тяги и допуске на положение центра масс ПсМ в попереч¬
ной плоскости 0,01 м возмущающий момент в каналах тангажа или рыскания мо¬
жет составить 120 Нм. Для создания управляющего момента в каналах тангажа или
рыскания в соответствии со схемой размещения ДМТ на ПсМ используется толь¬
ко 50% тяги ДМТ, то есть даже два установленных в одном месте ДМТ могут ком¬
пенсировать возмущающий момент только 75 Н-м из необходимых 120 Н-м. Таким
образом, тяги установленных ДМТ недостаточно для парирования момента от экс¬
центриситета тяги тормозного двигателя. Кроме того, для управления ориентацией
ПсМ необходим дополнительный управляющий момент в тех же каналах. Поэтому
тормозной двигатель, кроме собственно тяги торможения, должен создавать и управ¬
ляющие моменты. С этой целью он должен иметь по крайней мере четыре камеры
или использовать четыре независимых двигателя, разнесенных от продольной оси
на определенное расстояние. Для создания управляющих моментов в каналах тан¬
гажа или рыскания тяга диаметрально противоположных камер/двигателей должна
регулироваться в определенных пределах.
190
3-6
При использовании 4-камерного двигателя можно использовать схему, когда один
из приводов регулирует общий расход топлива (суммарную тягу четырех камер),
а два других привода дифференциально изменяют расход через диаметрально проти¬
воположные камеры, создавая разность тяг этих камер.
Для управления вертикальной скоростью снижения команды управления посту¬
пают на привод регулирования тяги двигателя (ПРТ), а команды управления угловым
движением в каналах тангажа и рыскания - на два привода регулирования тяги диа¬
метрально противоположных камер (ПРК), изменяя их тягу от уровня, задаваемого
ПРТ. При переводе ПРТ на новый режим тяги двигателя пропорционально ей изменя¬
ется возмущающий момент, создаваемый самим двигателем. Но при сохранении угла
ПРК в том же соотношении изменяются и управляющие моменты. То есть изменения
в канале управления центром масс не изменяют режима работы каналов управления
угловым движением. Отклонения в соотношении возмущающего и управляющего
момента могут возникнуть только за счет технологических погрешностей в изготов¬
лении и регулировке камер. В свою очередь, изменения положения ПРК в каналах
управления угловым движением не изменяют результирующую тягу двигателя, тем
самым не влияют на работу канала управления центром масс ПсМ.
При использовании же четырех независимых двигателей при изменении команды
управления движением центра масс изменяются возмущающие моменты от двигате¬
лей. В этом случае при неизменной команде управления угловым движением изме¬
няется соотношение между возмущающими и управляющими моментами, что, несо¬
мненно, вызовет динамические забросы по углам и изменения в командах управления
угловым движением. В свою очередь, изменения команд в каналах управления угло¬
вым движением практически не сказываются в канале управления движением центра
масс, так как при этом практически не изменяется суммарная тяга всей двигательной
установки. Это влияние может проявиться только при выходе тяги на режим мини¬
мальной или максимальной тяги.
При этом использование одного исполнительного органа для управления двумя
каналами всегда вызывает возможность потери эффективности одного из каналов
за счет ограничений в пределах работоспособности привода. При использовании че¬
тырех независимых тормозных двигателей на привод регулирования тяги каждого
двигателя должна поступать и команда управления движением центра масс, и коман¬
да управления канала тангажа (рыскания). Поэтому для сохранения работоспособно¬
сти канала управления угловым движением необходимо ограничить требуемую ско¬
рость изменения команд управления движением центра масс (например, ограничить
скорость изменения угла поворота регулятора тяги в канале управления движением
центра масс 80-100 град/с, с тем чтобы из располагаемого диапазона максимальной
скорости ПРТ ±125% для управления угловым движением всегда оставалась возмож¬
ность регулировать положение привода с угловой скоростью 20-40%).
После отделения парашютной системы и защитного кожуха начинается собствен¬
но управление вертикальной и горизонтальной скоростью КА. Для торможения вер¬
тикальной скорости производится регулирование тяги тормозного двигателя, а для
управления горизонтальной скоростью - управление углом отклонения продольной
оси от гравитационной вертикали. Требуемая скорость разворотов порядка 10 %, она
должна достигаться на интервале 1-1,5 с. Поэтому на управление угловым движе¬
ние требуется максимальное угловое ускорение от исполнительных органов порядка
5-10 %2. Для поперечных моментов инерции порядка 1000 кгм2 требуемая величи¬
191
3-6
на управляющих моментов по каналам тангажа и рыскания должна составлять 150-
175 Н-м. Так как диаметрально противоположные камеры ТД расположены на рас¬
стоянии 0,55 м от продольной оси, то снижение тяги одной камеры и увеличение
тяги другой относительно их среднего уровня на 100-150 Н достаточно для создания
моментов такого уровня.
Таким образом, для парирования возмущающего момента от эксцентриситета тяги
тормозного двигателя и создания необходимого управляющего момента для управле¬
ния ориентацией ПсМ необходимо, чтобы диапазон регулирования разности тяг двух
диаметрально противоположных камер составлял 10-15% от суммы тяг этих камер.
Если использовать четыре независимых двигателя тягой 750-3500 Н, то они обе¬
спечат и управление вертикальной скоростью, и создание управляющих моментов.
Однако при этом дискретность изменения управляющего момента на один шаг угла
поворота регулятора тяги составит порядка 15-20 Н-м/шаг и для создания макси¬
мального управляющего момента потребуется всего 10-20 шагов поворота привода.
В то же время при использовании 4-камерного двигателя и применения для управ¬
ления разностью тяг камер таких же приводов, как и для управления общей тягой
двигателя, дискретность управляющего момента составит порядка 1,5 Н-м/шаг.
Таким образом, использование 4-камерного двигателя существенно снижает вза¬
имные ограничения и взаимосвязь каналов управления, а также обеспечивает доста¬
точную мягкость управления угловым движением ПсМ.
Основные характеристики тормозного двигателя
В соответствии с вышеизложенным для КА «ЭкзоМарс» был разработан 4-ка¬
мерный тормозной двигатель, работающий на продуктах разложения гидразина. Его
использование потребовало включить в перечень операций управления дополнитель¬
ный участок прогрева катализатора в камерах двигателя. С этой целью включение
двигателя производится за 4 с до начала управления его тягой. На этом интервале
времени при фиксированном значении угла ПРТ тяга двигателя возрастает от нуля
до -1500 Н. Включение двигателя на режим «Прогрев» допускается еще на участке
спуска на парашюте.
Рисунок 3.6.6. Дроссельная характеристика ТД
192
3-6
30
25
20
1 с
IJ
и
5
0
gJ
-100 -80 -60 -40 -20 0 20 40 60 80 100
угол поворота ПРТ, град
Рисунок 3.6.7. Коэффициент пропорциональности Кк
Рисунок 3.6.8. Максимальный угол поворота ПРК
угол поворота ПРТ, град
Рисунок 3.6.9. Достижимая разность тяг камер
193
3-6
В общем случае дроссельная характеристика ТД - нелинейная функция, но в рабо¬
чем диапазоне углов поворота ПРТ может быть аппроксимирована линейной функци¬
ей с насыщением в районе максимальной тяги P^P^S^Del^-Del^P^, где Рг - тяга
в настроечной точке; Sd - производная тяги по углу поворота ПРТ; Del(\) - угол пово¬
рота ПРТ; Del,. - значение угла ПРТ в настроечной точке дроссельной характеристики;
Ртах - максимальная тяга. Зависимость тяги ТД от угла поворота ПРТ представлена
на рисунке 3.6.6.
Рабочий диапазон углов поворота ПРТ - от минус 72,5° до +90°, так что тяга
тормозного двигателя может регулироваться от минимальной тяги 2943 Н до макси¬
мальной тяги 12737 Н. В режиме «Прогрев» угол поворота ПРТ должен быть равен
минус 95°, при этом установившееся значение тяги тормозного двигателя в конце ре¬
жима «Прогрев» составляет 1483 Н.
При нулевом положении привода ПРК тяга каждой камеры в номинале равна од¬
ной четвертой суммарной тяги двигателя Prk(i)=PtlJA. Для управления угловым движе¬
нием разность тяг двух диаметрально противоположных камер регулируется приво¬
дами ПРК. Разность тяг пары камер определяется соотношением \Prk=KkDel(2,3\ где
коэффициент пропорциональности Кк практически линейно зависит от суммарной
тяги двигателя (угла поворота ПРТ), рисунок 3.6.7.
При этом система управления должна ограничивать командное значение угла ПРК
в функции угла ПРТ в соответствии с предельными значениями, представленными
на рисунке 3.6.8.
Таким образом, в зависимости от общей тяги двигателя для управления угло¬
вым движением может использоваться разность тяг пары камер в пределах 10-20%
от суммарной тяги этих камер (рисунок 3.6.9).
3.6.4. Управление движением ПсМ при работе ТД
Задача торможения с использованием реактивных двигателей для посадки на по¬
верхность Марса во многих аспектах подобна задачам прецизионного торможения при
посадке на поверхность Луны (Лихачев В.Н., Сихарулидзе Ю.Г., Федотов В.П.,2013).
Основная задача управляемого торможения состоит в снижении скорости спуска
после отделения парашютной системы и переводе посадочной платформы на поверх¬
ность Марса с конечными параметрами движения, не превышающими возможности
посадочных опор. Спроектированное посадочное устройство КА «ЭкзоМарс» пред¬
ставляет собой четыре посадочные опоры, подкрепленные подкосами. Для поглоще¬
ния энергии удара и обеспечения устойчивости ПсМ на поверхности после касания
посадочных опор с поверхностью необходимо, чтобы:
- вертикальная скорость контакта не превышала 2 м/с;
- горизонтальная скорость была не более 2 м/с;
- отклонение продольной оси от гравитационной вертикали не превышало 7°.
При этом рассматривается возможность приземления и дальнейшего сохранения
устойчивого положения платформы на поверхности с уклоном до 15°.
Профиль посадки ПсМ
Суммируя особенности спуска десантного модуля под парашютом и учитывая задачи
управляемого торможения, еще при снижении на дозвуковом парашюте выполняются
следующие подготовительные операции для последующего управляемого торможения:
194
3-6
- отделение аэродинамического экрана, в результате чего освобождается полусфе¬
ра для работы ДМТ с целью управления угловым движением и для работы до¬
плеровского альтиметра измерения дальности и проекций скорости перемещения
ПсМ относительно поверхности Марса;
- раскрытие посадочных опор для их фиксации перед будущим контактом
с поверхностью;
- включение алгоритмов «демпфирования», т.е. управление работой двигате¬
лей малой тяги для снижения угловой скорости вращения ПсМ до значений,
не превышающих 0,5-2%, что существенно облегчит работу РДА при спуске
на парашюте;
- прием информации от РДА при удалении аэродинамического экрана на достаточ¬
ное расстояние;
- расчет алгоритмов наведения и управления по навигационной информации, уточ¬
ненной измерениями альтиметра;
- прогноз момента включения тормозного двигателя и отделения ЗК с ПС.
Момент включения ТД прогнозируется в функции текущих значений высоты
и вертикальной скорости. Критерием включения является достаточность оставшего¬
ся перепада высот для выполнения:
- снижения в течение 3 с режима «Прогрев» ТД еще на парашюте;
- снижения в течение 1 с режима «Прогрев» после отделения ЗК с ПС (по заверше¬
нии этого интервала времени выполняется замыкание контура управления в ка¬
нале «высота-вертикальная скорость» и в каналах «ориентация-горизонтальная
составляющая скорости»);
- снижения с постоянной скоростью, зафиксированной на момент замыкания кон¬
туров управления (фиксированная длительность участка набора горизонтальной
скорости увода);
Рисунок 3.6.10. Профиль «посадка» ПсМ
195
3-6
- снижения с интенсивным торможением вертикальной и горизонтальной скорости
(переход на интенсивное торможение определяется достижением определенного
соотношения между высотой и вертикальной скоростью);
- снижения на заключительном участке до контакта ПсМ с поверхностью.
Профиль посадки в координатах высота-вертикальная скорость представлен
на рисунке 3.6.10.
Параметры движения в момент включения ТД в режим «Прогрев» определяются:
- разбросом угла входа десантного модуля в атмосферу;
- распределением плотности атмосферы в функции высоты;
- аэродинамическими характеристиками ДМ и их отклонениями от номинала;
- алгоритмами ввода в действие каждого из каскадов парашютной системы;
- характеристиками парашютных систем.
Согласно статистическим расчетам траекторий спуска и посадки на момент отде¬
ления ЗК с ПС максимальная горизонтальная скорость составляет 25 м/с, максималь¬
ная вертикальная скорость - 45 м/с, минимальная - 33 м/с. Соответственно макси¬
мальная высота на этот момент составляет 1000 м, а минимальная - 600 м.
Алгоритмы навигации, наведения и управления
Задача управления движением этапа «Посадка» реализуется в бортовом вычисли¬
тельном комплексе ОВС в трех программных функциональных блоках: навигацион¬
ной задачи; наведения; управления.
Взаимодействие указанных блоков и блоков формирования команд для их выпол¬
нения представлено на рисунке 3.6.11.
Рисунок 3.6.11. Схема взаимодействия блоков навигации, наведения и управления
196
3-6
Блок навигационной задачи
Алгоритмы навигационной задачи разрабатываются специалистами 'Thales Alenia
Space и подробно в данной статье не описываются. Основные операции навигацион¬
ной задачи для целей управления движением состоят в том, что блоки навигационной
задачи:
- на каждом 10 мс такте получают информацию от БИБ об изменении углов враще¬
ния КА вокруг осей чувствительности волоконно-оптических гироскопов, оце¬
нивают достоверность этой информации, обрабатывают эту информацию и реа¬
лизуют вычислительную процедуру определения ориентации базовых осей ПсМ
в посадочной системе координат;
- на тех же 10 мс тактах получают информацию о приращении кажущейся скоро¬
сти по осям чувствительности акселерометров, оценивают достоверность этой
информации, с учетом информации об ориентации производят вычисление те¬
кущих параметров траектории и оценивают положение вектора гравитационного
ускорения;
- на каждом 50 мс такте получают информацию о дальности до поверхности и про¬
екции скорости движения на один из лучей антенной системы РДА;
- с учетом изменения ориентации и кажущейся скорости вычисляют изменение
дальности и скорости по двум предыдущим лучам на интервале паузы в их работе;
- по восстановленной информации в паузе опроса для двух предыдущих лучей
и информации опроса текущего луча вычисляют оценку высоты и проекций ско¬
рости в посадочной системе координат;
- по этой информации производят коррекцию вычисления параметров траектории,
полученных на основе инерциальной информации на интервале между опросами
лучей РДА;
- формируют массив навигационной информации в посадочной системе координат
для задач наведения и управления торможением ПсМ, где hnav - навигационная
оценка высоты ПсМ над поверхностью Марса; Vrnav - навигационная оценка вер¬
тикальной скорости; Vxnav, Vynav - навигационные оценки проекций горизонталь¬
ной скорости в посадочной системе координат; Q,jav - кватернион ориентации
ПсМ, Wnav - оценка проекций угловой скорости ПсМ.
Прекращение использования информации РДА на высотах ниже 10,2 м выполня¬
ется навигационной задачей, которая должна счислять дальнейшее изменение пара¬
метров движения только по информации БИБов. Признак «РДА вне контура» алго¬
ритмы управления движением не используют. Это событие повлияет на изменение
ошибок навигационных измерений, но не на программный профиль торможения.
До момента отделения ЗК с ПС навигационная задача использует систему коорди¬
нат (СК), связанную с центром масс Марса. Ось OZ этой СК направлена от центра масс
Марса к расчетной точке посадки на его поверхности, ось ОХ - в плоскости орбиты
по направлению движения, а ось OY дополняет СК до правой. В этой СК выполняется
расчет траектории ПсМ на основе информации БИБов на участке аэродинамического
торможения и спуска на парашюте. Начальный вектор траектории рассчитывается
на Земле для высоты 125 км над средней поверхностью Марса. После получения досто¬
верной информации от РДА параметры траектории корректируются по его информации.
Спустя 1 с после отделения ЗК с ПС навигационный блок формирует посадоч¬
ную СК, где формируется информация о движении ПсМ относительно поверхности.
197
3-6
Начало СК помещается на поверхность Марса, ось Zf также направлена от центра
масс Марса к его поверхности, плоскость расположения осей ОХ^ и OY{ принимается
перпендикулярной к направлению оси OZ{ а направление этих осей принимается как
ближайшее к направлению <9КЬ и OZb связанных осей системы координат ПсМ в этот
момент. При этом расчет траектории движения выполняется на основе информации
БИБ, корректируемой информацией от РДА так, что расчет траектории продолжается
и в отсутствие информации от РДА.
Блок наведения и управления движением на этапе «Посадка»
Алгоритмы наведения и управления разрабатываются специалистами НПО
им. С.А. Лавочкина. В основу управления заложен принцип вертикальной посадки,
когда отклонение продольной оси ПсМ (вектора тяги) от гравитационной вертика¬
ли в угоду возможности функционирования РДА ограничено углом 30°. Управление
строится на основе навигационной оценки высоты полета, вертикальной и горизон¬
тальной скорости и отклонения продольной оси от гравитационной вертикали, фор¬
мируемых навигационной задачей системы управления.
Учитывая слабую зависимость управления высотой и вертикальной скоростью
от ориентации вектора тяги относительно вертикали, наведение и управление высо¬
той и вертикальной скоростью выполняется независимо от ориентации ПсМ и его
горизонтальной скорости. В соответствии с этим управление формируется в двух
каналах:
- в канале управления высотой и вертикальной скоростью;
- в канале управления ориентацией и горизонтальной скоростью.
Канал управления высотой и вертикальной скоростью
Включение ТД на этапе «Посадка» происходит на высоте не более 1 км, а пере¬
мещение ПсМ вдоль поверхности не превышает 1 км. Поэтому управление можно
строить в предположении плоскопараллельного гравитационного поля тяготения,
считая вектор гравитационного ускорения в посадочной системе координат постоян¬
ным. Кроме того, учитывая, что расход топлива в процессе торможения не превышает
5-7% от начальной массы ПсМ, при принятии решений по управлению и наведению
можно считать массу ПсМ неизменной, оставляя влияние истинного изменения мас¬
сы как возмущающее влияние в контуре управления.
С учетом этих предположений рассмотрим схему движения ПсМ под действием
тяги двигателя торможения, представленную на рисунке 3.6.12.
Уравнения движения ПсМ в посадочной системе координат в плоскости движения
могут быть записаны в виде:
dVrldt=Acasty - gm;
dVn/dt=Asm^;
dh/dt=V,:, (3.6.2)
dmldt=-PIPU(i\
dVha=A,
где A=P/m - ускорение, создаваемое двигателем торможения; Vhar - характери¬
стическая скорость торможения; т - масса КА; Pud - удельный импульс двигателя
торможения.
198
3-6
h - высота KA над поверхностью Марса;
Vn - горизонтальная составляющая скорости движения КА;
К - вертикальная составляющая скорости;
Р - тяга двигателя торможения;
Fj=(^ - угол отклонения вектора тяги от гравитационной вертикали;
gm - ускорение свободного падения на поверхности Марса;
Z( - вертикальная ось посадочной системы координат.
Рисунок 3.6.12. Параметры движения ПсМ
В условиях вышеописанных предположений система уравнений движения (3.6.2)
записывается как дифференциальные уравнения с постоянными коэффициентами,
которые интегрируется в конечном виде
Vr2-V2
h -h=
° 2(J-g,„) ’
где ho и Vm - высота и вертикальная скорость в момент включения двигателя
торможения.
Если в момент завершения торможения выполнить условия идеального контакта
ПсМ с поверхностью, когда высота и вертикальная скорость одновременно примут
нулевое значение, то при постоянном значении ускорения, создаваемого двигателями
К2
торможения, необходимо выполнение соотношения h=^~ Последнее соотно-
шение преобразовано так, что в качестве программного значения выбирается требуе¬
мое значение вертикальной скорости в функции измеренной высоты
Ир,-^ 2й,,ДЛ,(3.6.3)
где hnav - навигационная оценка высоты; Арг -постоянное программное значение ка¬
жущегося ускорения.
Для достижения идеальных условий контакта необходимо, чтобы в каждый мо¬
мент времени навигационная оценка вертикальной скорости была равна программ¬
ному значению в соответствии с соотношением (3.6.3). Однако в процессе торможе¬
ния присутствуют ошибки в оценке навигационных параметров как вертикальной
скорости, так и высоты. Изменение высоты может быть вызвано также за счет гори¬
зонтального перемещения ПсМ вдоль поверхности с переменной высотой рельефа.
199
3-6
Для парирования таких возмущений в процессе торможения в соответствии с от¬
клонением от программного значения вертикальной скорости AVp=Vnav-Vpr необ¬
ходимо регулировать кажущееся ускорение, создаваемое двигателями торможения,
в соответствии с соотношением A=Apr+Svr Л7рг, где Svr - настроечный коэффициент
алгоритма управления вертикальной скоростью. Программное кажущееся ускорение
Арг должно быть выбрано из условий минимизации расхода топлива на торможение
и из условий достаточности диапазона регулирования тяги тормозного двигателя.
Оценка реального ускорения содержит высокую шумовую составляющую, вы¬
званную вибрациями от ТД, поэтому алгоритм управления тягой ТД основан на изме¬
нении угла поворота ПРТ в зависимости от отклонения оценки вертикальной скоро¬
сти от программного значения
Del( 1 )=5\Л Vpr+Sin, Ja Гр,. dt+Del!p, (3.6.4)
где Z?eZ( 1) - требуемый угол поворота ПРТ; Sint - настроечный коэффициент при инте¬
грале от отклонения вертикальной скорости; Delip - угол поворота ПРТ, соответству¬
ющий номинальной тяге ТД на соответствующем участке управления.
Канал управления ориентацией
и горизонтальной скоростью движения
Основная задача контура управления ориентацией и горизонтальной скоростью
после включения ТД заключается в создании горизонтальной скорости для увода
ПсМ из-под парашюта, а на участке интенсивного торможения - в обнулении гори¬
зонтальной скорости к моменту контакта ПсМ с поверхностью. Управление гори¬
зонтальными составляющими скорости возможно только за счет отклонения векто¬
ра тяги ТД от гравитационной вертикали на угол ср. При идеальном отслеживании
программы торможения вертикальная составляющая полного ускорения от двигате¬
ля торможения на первой части маневра A=gm, тогда горизонтальная составляющая
ускорения на этой части маневра составит Ahor=gm\g% а на интенсивном торможении
А=Арг и соответственно Ahor=Ap,tgy.
Оптимальным по быстродействию при выполнении маневра увода является про¬
цесс с быстрым выходом на максимально допустимый угол отклонения от вертикали
одного знака, а на участке интенсивного торможения - с быстрым выходом на огра¬
ничение угла другого знака. Если предположить, что переходы на ограничение вы¬
полняются с максимальной угловой скоростью lFmax, то уравнения движения в гори¬
зонтальной плоскости записываются в виде:
dVn/dt=Ap,tgq,
dq/dt=Wm^-
Интегрирование этой системы при нулевых начальных значениях переменных
в момент <р=сртах дает соотношение К„=ЛрДп(со8фтах)/И'тах. При значениях (ртах=20°
и fPmax=10 % на первой части маневра изменение горизонтальной скорости в момент
достижения ограничения по углу ориентации составляет V=1,33 м/с, а на интенсивном
торможении при Ap=2gm -V=2,65 м/с. Если выбрать длительность первой части манев¬
ра равной tbam=\2 с, то процесс изменения угла ориентации ПсМ относительно гравита¬
ционной вертикали после замыкания контуров управления будет иметь вид, представ¬
ленный на рисунке 3.6.13; там же показано изменение горизонтальной скорости.
200
3-6
25
-25 -* —1 L L- L
Рисунок 3.6.13. Типовое изменение ориентации и горизонтальной скорости в процессе
маневра увода
Интеграл горизонтальной скорости будет соответствовать дальности маневра уво¬
да ПсМ от точки отделения ЗК с ПС. Для представленного процесса дальность увода
составляет /,=127 м, что создает запас более 50 % от требуемого значения. Таким
образом, длительность первой части маневра увода должна быть не менее 4flW=12 с,
максимальная горизонтальная составляющая скорости при этом - порядка 15 м/с.
Для получения процесса, близкого к изображенному на рисунке, можно использо¬
вать пропорциональный закон управления с формированием на каждом такте управ¬
ления требуемого значения угла ориентации Fiw=kvn(Vnnav-Vn где в качестве требу¬
емого значения программной горизонтальной скорости следует принять Vnpr)=15 м/с,
если t<tham\ иначе РПр=0. Для компенсации возмущающего момента от эксцентрисите¬
та тяги ТД в алгоритм управления следует ввести интеграл от отклонения навигаци¬
онного значения горизонтальной скорости от программного значения.
Реализация маневра увода, с одной стороны, зависит от вертикальной составля¬
ющей ускорения, диктуемого работой канала «высота - вертикальная скорость», но,
в свою очередь, влияет на работу этого канала, снижая вертикальную составляющую
ускорения за счет отклонения вектора тяги ТД от гравитационной вертикали на угол
порядка 20°.
3.6.5. Структура алгоритмов наведения и управления
Алгоритмы наведения и управления этапа «Посадка» формируют флаги (требо¬
вания) на выполнение команд управления приводами ПРТ и ПРК и включения ДМТ.
Диспетчер выдачи команд ОВС транслирует эти команды, а их выполнение осущест¬
вляется блоками электроавтоматики ПсМ и блоком управления приводами (БУП) ре¬
гулирования тяги ТД и его камер.
201
3-6
Алгоритмы наведения и управления этапа «Посадка» реализованы в четырех про¬
граммных блоках: UPR, С_1, С_2, С_3. Подпрограмма TMI формирует массив теле¬
метрической информации работы этих алгоритмов.
Программный блок UPR содержит алгоритмы наведения и алгоритмы управления
канала «высота-вертикальная скорость». Он формирует признаки смены событий
(//2=1,..., 11), реализующих профиль посадки ПсМ, формирует циклограмму этапа
«Посадка» и производит смену числовых параметров как алгоритмов управления вы¬
сотой и вертикальной скоростью, так и параметров алгоритмов управления ориента¬
цией и горизонтальной скоростью.
При ip=\ реализуется участок снижения на ПС до момента формирования при¬
знака выдачи команды «Отделение аэродинамического экрана» (АЭ); при ip=2 реа¬
лизуется участок снижения на ПС от момента выдачи команды «Отделение АЭ» до
момента формирования признака выдачи команды на раскрытие посадочных опор;
при ip=3 реализуется участок спуска на ПС от момента выдачи команды на раскры¬
тие посадочных опор до формирования признака начала демпфирования; на этом
же участке производится перевод привода ПРТ (ПРТ(1)) в заданное положение
(DelPRJ{l)=Del(V)); при ip=4 реализуется участок спуска на ПС от момента формиро¬
вания признака «Демпфирование» до момента формирования признака выдачи ко¬
манды на включение РДА в режим измерений; при ip=5 реализуется участок спуска
на ПС от момента выдачи команды на переключение РДА в режим измерений до при¬
знака перехода навигационной задачи в режим относительной навигации (с исполь¬
зованием достоверной информации РДА).
Представленные выше признаки событий формируются по жесткой временной
циклограмме, начало которой соответствует моменту ввода в действие дозвукового
парашюта. Следующие признаки и смена событий вырабатываются на основе опре¬
деленных функционалов.
При ip=6 реализуется участок спуска на ПС от момента получения от навигаци¬
онной задачи признака достоверной информации от РДА до формирования признака
выдачи команды «Пуск» на включение тормозного двигателя в режиме тяги, обеспе¬
чивающем его «Прогрев». Признак ip=6 формируется в соответствии со следующей
процедурой:
- выполняется расчет прогнозируемой высоты включения ТД
ht^hk^tb^dt^ Vrnav\^S2
- оценивается интервал времени до выдачи команды включения ТД
dtt =(h-htl. )/|K,.J,
где hk - прицельная высота окончания интенсивного торможения; tham - длительность
первой части маневра увода; dttr - длительность выполнения операций от команды
«Пуск» до замыкания контуров управления; S2 - параметр программы интенсивного
торможения.
Если на трех тактах управления выполняется неравенство dttl<§, то формируется
признак ip=6.
При ip=7 реализуется участок неуправляемого заданной длительности снижения
под парашютом от момента выдачи команды «Пуск» до выдачи команды «Отделение
ЗК с ПС».
При //2=8 реализуется участок заданной длительности снижения от момента вы¬
дачи команды «Отделение ЗК с ПС» до формирования признака замыкания контура
управления приводами ПРТ и ПРК1, ПРК2 - DelPR7(l,293).
202
3-6
При ip=9 реализуется участок снижения от момента замыкания контура управле¬
ния приводами ПРТ, ПРК1 и ПРК2 до формирования признака перехода на интенсив¬
ное торможение; на этом же участке выполняется первый этап маневра увода.
При z/2= 10 реализуется участок снижения от момента перехода на интенсивное
торможение до формирования признака перехода на заключительный участок тормо¬
жения. Признак ip=10 формируется в соответствии со следующей процедурой:
- выполняется расчет прогнозируемой высоты интенсивного торможения
hit=hk+S2V2rnav;
- оценивается интервал времени до интенсивного торможения
dllt=(h-hit)/\V,\ ,
- если dti(<0, то z/2= 10.
При //2=11 - реализуется заключительный участок торможения. Признак //2=11
формируется в соответствии со следующей процедурой:
- оценивается программная вертикальная скорость заключительного торможения:
yrprVrcp+Svh-(h„a-hkk), если Vrp>Vrcpc, иначе Vrp=V,.cpc. (3.6.5)
Если Vrp>Vrn, то //2=11. Здесь Vr - программная скорость спуска на высоте менее
Ла-ь SVh ~ настраиваемый параметр; hkk - высота спуска с постоянной скоростью.
Команда «Останов» тормозного двигателя формируется по сигналам срабатыва¬
ния датчиков касания поверхности, установленных на каждой посадочной опоре.
Каждый датчик касания дублирован. Выходная информация датчиков аналоговая, она
минует ОВС и поступает непосредственно в блоки электроавтоматики. Во избежание
ложного срабатывания датчиков касания активацию обработки информации от дат¬
чиков касания начинают после прекращения работы РДА. По началу этой обработки
опрашивается состояние всех датчиков касания, составляется карта этого состояния.
Система электроавтоматики выдает команду «Останов» только по изменению состо¬
яния любого из датчиков.
ip=1-3 ip=4,5
ip=6
ip=7 ip=8
ip=9
ip=10
ip=11
KK
Рисунок 3.6.14. Циклограмма основных операций
203
3-6
Управление тягой ТД обеспечивается поворотом выходного вала ПРТ. Командное
значение угла ПРТ определяется соотношением
Z)el(l)=51„.(K.„(,,+K,,,.)+Z)e7o,
где Svr - настроечный параметр для каждого из участков ip=9, 10 и 11; V,.pi. - про¬
граммное значение вертикальной скорости: для участка ip=9 равное модулю Vrnav
в момент замыкания контуров управления, для участка ip=l0 равное выражению
V,p = V Л*)/^2 и для участка ip=l 1 равное выражению (3.6.5).
Программный блок UPR формирует циклограмму основных операций, представ¬
ленную на рисунке 3.6.14.
Программный блок С_1 инициируется через 5 с после отделения ЛЭ, когда стано¬
вится возможной работа двигатели малой тяги (ДМТ). Он формирует флаги вклю¬
чения ipdmt(j)=^ или ipdmt(j)=® каждого ДМТ под номером/=1,...,8 и требуемую дли¬
тельность включения ДМТ либо rf^(/)=<^/min=0,053 с, либо б/^,и/(/')=^„/тах=0,103 с.
Схема алгоритма демпфирования представлена на рисунке 3.6.15.
Рисунок 3.6.15. Схема алгоритма демпфирования
Работа алгоритма демпфирования на каждом такте управления:
Положить ipdmt(j)= 1 j= 1,... ,8;
если И>2%, то ipdmt(j)=\, dtdmt(j)= dtd„umaJ=l,3,5,7 (зона1); иначе,
если И;<-2%, то ipdm((j)=l9 dtdm((j)= dtdmtmaJ=2Afi^ (зона2); иначе,
если 0,5%<И/г<2%, то z/W/)=l, ^w/(/)=^miny=3,7(3OHa3); иначе,
если -0,57c>FK>-2%, то zpJw/(/>l, dtdmt(j)= dtdlfltmiJ=\,5 (зона 4).
При значении ipdmt(j)=\ блоки электроавтоматики ПсМ должны подать напряжение
на электропневмоклапан соответствующего ДМТ. По завершении указанной длитель¬
ности напряжение должно сниматься этими блоками, если на этом такте управления
не поступила новая команда на включение.
Программный блок С_3 предназначен для выработки флагов управления в канале
«ориентация-горизонтальная скорость». В качестве исполнительных органов канала
управления ориентацией тангажа и рыскания одновременно могут использоваться
как приводы регулирования разности тяг камер ТД, так и ДМТ.
204
3-6
Программный блок С_3 использует следующие навигационные параметры:
- кватернион ориентации;
- навигационную оценку проекций угловой скорости;
- навигационную оценку проекций горизонтальной скорости.
Требуемое значение углов отклонения ПсМ от вертикали Fx, Fy определяется соот-
Svy - коэффициенты преобразования проекций горизонтальной скорости в посадоч¬
ной системе координат в требуемые проекции углов отклонения от вертикали; ех,
еу - направляющие косинусы ориентации продольной оси ПсМ в посадочной систе¬
ме координат; VnXpr, V„ypi. - программные (требуемые при выполнении маневра увода)
проекции горизонтальной скорости. Указанные параметры формируются подпро¬
граммой UPR для участков ip=9, 10, 11. Величины проекций требуемого угла откло¬
нения нормируются, если полный требуемый угол превышает заданное ограничение
Fmax. Значение Fmax =15° принято с учетом ограничения области работоспособности
RD А и ожидаемой динамической ошибки управления. Программное (требуемое) зна¬
чение горизонтальной скорости задается равным нулю, если модуль горизонтальной
скорости превышает значение K„6<WJ=25 м/с. При такой горизонтальной скорости ЗК
с ПС за время спуска удалятся от приземлившегося ПсМ на расстояние, существен¬
но превышающее допустимые 80 м. В остальных случаях принимается программное
значение горизонтальной скорости Vn2= 15 м/с, в большинстве траекторий не достига¬
емое в процессе маневра, но ускоряющее переходные процессы. За 1,5 с до прогнози¬
руемого перехода на интенсивное торможение Vnx =Vny
Формируется программный кватернион (Qpi) в зависимости от требуемых углов
ориентации: gpr(0)=cos(F)/2); Qpr(i)=sm(Fj/2)ex; 2/?,.(2)=sin(F,/2)ey; QP>(.2)=0. Опреде¬
ляется кватернион отклонения ориентации ПсМ от программной Ре как кватернион¬
ное произведение сопряженного кватерниона текущей ориентации (Q„av) на кватерни¬
он требуемой ориентации (Qpt). Учитывая сравнительную малость углов отклонения
ПсМ от требуемой ориентации, их значения оценивают по приближенным соотноше¬
ниям: Е,.=2-Ре(0)-Ре(1); =2-Ре(0)-Ре(2); Е,.=Ре(0)-Ре(3).
Требуемый угол поворота ПРК ТД формируется в соответствии с соотношениями
DelPR7(2)=-K^Sny\Ery-R^
DelPR7(3)^K24\(Sm\ErxRad+Tx(Wx„a-WXpr)^SjErxdt)+DelK^)
где DelPRJ{2) - требуемый угол поворота ПРК, регулирующий разность тяг камер 1
и 3 ТД; DelpRiQ) - требуемый угол поворота ПРК, регулирующий разность тяг ка¬
мер 2 и 4 ТД; Е,г, Ег - отклонение угла ориентации ПсМ от требуемого значения; WXpr,
Wypr - программная (требуемая) угловая скорость ПсМ; Snx, Sny, Тх, Ту, Sx, Sy- настройки
алгоритма, формируемые подпрограммой UPR для участков ip=9, 10, 11.
ДМТ в управлении ориентацией каналов тангажа и рыскания играют вспомо¬
гательную роль и включаются, когда динамическая ошибка управления превыша¬
ет определенный уровень. Поддержание заданной ориентации в канале вращения
на всех участках этапа «Посадка» обеспечивают ДМТ. Алгоритм управления ДМТ
после замыкания контуров управления использует обычный пропорционально-диф¬
ференциальный закон управления. Если в соответствующем канале управления от¬
клонение от заданной ориентации (Е„) превышает зону нечувствительности, то фор¬
мируется признак создания управляющего момента (&,-) соответствующего знака, где
i=x,y,z.
205
3-6
Каждый ДМТ может создавать управляющий момент по каждой из осей ПсМ,
поэтому для минимизации возмущений каналов сформирована определенная комби¬
нация включений ДМТ, которая представлена в нижеследующей таблице.
Флаги включения ДМТ (ipdm^
признак момента
номер ДМТ
ix
iv
iz
1
2
3
4
5
6
7
8
-1
-1
-1
0
1
0
1
0
0
0
0
-1
-1
0
0
1
0
0
0
0
0
0
-1
-1
1
0
1
0
0
0
0
0
1
-1
0
-1
0
0
0
1
0
0
0
0
-1
0
0
0
1
0
0
0
1
0
0
-1
0
1
0
0
0
0
0
0
0
1
-1
1
-1
0
0
0
1
0
1
0
0
-1
1
0
0
0
0
0
0
1
0
0
-1
1
1
0
0
0
0
0
1
0
1
0
-1
-1
0
1
1
0
0
0
0
0
0
-1
0
1
1
0
0
0
0
0
0
0
-1
1
1
0
0
0
0
0
0
1
0
0
-1
0 •
0
1
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
1
1
0
1
-1
0
0
0
1
1
0
0
0
0
1
0
0
0
0
0
1
1
0
0
0
1
1
0
0
0
0
0
1
1
0
1
-1
-1
1
0
1
0
0
0
0
0
1
-1
0
1
0
0
0
0
0
0
0
1
-1
1
1
0
0
0
0
0
1
0
1
0
-1
0
0
1
0
0
0
0
0
1
0
0
1
0
0
0
1
0
0
0
1
0
1
0
0
0
0
0
0
1
0
1
1
-1
0
0
1
0
1
0
0
0
1
1
0
0
0
0
0
1
0
0
0
1
1
1
0
0
0
0
1
0
1
0
Программный блок С_2 в соответствии с представленной таблицей формирует
флаги включения/выключения каждого ДМТ
206
3-6
3.6.6. Моделирование процессов управляемого торможения
В соответствии с разработанными алгоритмами наведения и управления в НПО
им. С.А. Лавочкина разработана математическая программа моделирования процес¬
сов посадки ПсМ от момента отделения ЗК с ПС и до контакта посадочных опор
с поверхностью. При этом реализована пространственная модель движения ПсМ
в плоскопараллельном гравитационном поле Марса, внедрены программные бло¬
ки наведения и управления движением, модель собственно ПсМ, включающая схе¬
му размещения камер ТД, сопел ДМТ, математические модели динамики приводов
и тяги ТД.
По результатам теоретических разработок и математического моделирования про¬
веден выбор настроек алгоритмов на каждом участке торможений.
При анализе работоспособности алгоритмов наведения и управления особый ин¬
терес представляют траектории с максимальной горизонтальной скоростью в момент
отделения ЗК с ПС. При этом торможение ПсМ с минимальной (по модулю) верти¬
кальной скоростью выполняется за наименьшую длительность работы ТД и необхо¬
димо проверить выполнение требования снижения горизонтальной скорости до до¬
пустимых пределов на момент контакта посадочных опор с поверхностью. Для такой
траектории приняты И,ю—33 м/с и И„о=2О м/с. На рисунках 3.6.16-3.6.20 представ¬
лены графики изменения параметров движения, когда ряд возмущающих факторов
препятствует снижению горизонтальной скорости.
На этом и последующих рисунках в качестве начального времени для момента
отделения ЗК с ПС условно принято 100 с.
Из анализа графиков следует, что для данной траектории в условиях неблагопри¬
ятного сочетания угловой скорости в момент отделения ЗК с ПС 7%, отклонения
центра масс на 0,01 м от вектора тяги и навигационной ошибки знания ориентации 2°
30
■40
—Vx —Vy —Vr —Fx —Fy —Wx —Wy
Рисунок 3.6.16. Изменение параметров движения для траектории с V,ю=-33 м/с и И„о=2О м/с
207
3-6
Рисунок 3.6.17. Изменение углов ПРТ и ПРК для траектории с Ко—33 м/с и К„о=2О м/с
разработанные алгоритмы обеспечивают выполнение требования по горизонтальной
скорости (К = 1,65 м/с) и другим параметрам движения на момент контакта посадоч¬
ных опор с поверхностью. При этом процесс снижения горизонтальной скорости
выполняется при углах отклонения от гравитационной вертикали порядка 10°; при
успокоении ПсМ после отделения ЗК с ПС может требоваться разность тяг камер ТД
208
3-6
Рисунок 3.6.19. Разность тяг камер ТД для траектории с Г%=^33 м/с и И,70=20 м/с
Рисунок 3.6.20. Выполнение маневра увода на траектории с Ко—33 м/с и Ко=1 м/с
до 500 Н, а статическое отклонение угла ПРК для парирования эксцентриситета тяги
может составлять порядка 10°.
Для проверки выполнения требования о дальности удаления ПсМ от точки разде¬
ления с ЗК и ПС на рисунке 3.6.20 представлены результаты моделирования в тех же
условиях, но при начальной горизонтальной скорости, равной 1 м/с.
209
3-6
На этой траектории выполняются все требования к параметрам движения для мо¬
мента контакта ПсМ с поверхностью Марса. Дальность увода ПсМ от точки разделе¬
ния с ЗК и ПС в неблагоприятных условиях составит 87 м.
Траектории с большей (по модулю) начальной вертикальной скоростью менее
критичны к динамическим параметрам, но требуют большей высоты в момент отде¬
ления ЗК с ПС (порядка 1 км) и определяют запас топлива на торможение.
Разработанные алгоритмы наведения и управления движением ПсМ были переда¬
ны в Thales Alenia Space для их программирования и внедрения в программное обеспе¬
чение бортовой вычислительной машины КА «ЭкзоМарс». Там они прошли проверку
на совместимость с навигационной задачей и на правильность функционирования
в составе стенда Е2Е математического моделирования всей схемы снижения и по¬
садки, от точки разделения с перелетным модулем и до момента касания посадочных
опор с поверхностью Марса. На этом же стенде проведены статистические расчеты
траекторий спуска и посадки при действии всех возмущающих факторов. Результаты
О 50 100 150 200 250 время, с
Рисунок 3.6.21. Скорость вращения ПсМ до начала демпфирования
Рисунок 3.6.22. Демпфирование скорости вращения
210
3-6
Рисунок 3.6.23. Изменение высоты после отделения ЗК с ПС
время, с
Рисунок 3.6.24. Реализованный профиль посадки
время, с
Рисунок 3.6.25. Изменение горизонтальной скорости
время, с
211
3-6
Статистические расчеты подтвердили ожидаемое функционирование алгоритмов
навигации, наведения и управления движением ПсМ в процессе работы двигателя
торможения и выполнение требований к параметрам движения в момент контакта
посадочных опор с поверхностью Марса.
Таким образом:
1. Разработан профиль посадки, учитывающий специфику условий снижения по¬
садочного модуля до включения тормозного двигателя и обеспечивающий необходи¬
мые условия функционирования радиолокационного доплеровского альтиметра.
2. Разработаны требования и создан тормозной двигатель, обеспечивающий вы¬
полнение задач мягкой посадки на поверхность Марса.
3. Разработаны алгоритмы наведения и управления движением посадочного мо¬
дуля, обеспечивающие управляемое торможение с выполнением требований к пара¬
метрам движения в момент контакта посадочных опор с поверхностью.
4. Алгоритмы и параметры наведения и управления режима «Посадка» прошли
проверку на математическом стенде НПО им. С.А. Лавочкина и переданы в Thales
Alenia Space для их внедрения в программное обеспечение бортовой вычислительной
машины.
5. Совместимость российских алгоритмов наведения и управления с европейски¬
ми алгоритмами навигации и правильность функционирования алгоритмов навига¬
ции, наведения и управления подтверждена статистическими расчетами всей схемы
полета, начиная от момента отделения десантного модуля от перелетного модуля и до
контакта посадочных опор с поверхностью.
Список литературы
Жуков Б.И., Зайко Ю.К., Лихачев В.Н., Сихарулидзе Ю. Г., Тучин А.Г., Федотов В.П.
Адаптивный терминальный алгоритм наведения для посадки на Луну // Вестник
ФГУП НПО им. С.А. Лавочкина. 2012. № 4(15). С. 92-102.
Лихачев В.Н., Сихарулидзе Ю.Г., Федотов В.П. Заключительные этапы тормо¬
жения и методика расчета параметров управления движением КА, совершающего
мягкую посадку на Луну // Вестник ФГУП НПО им. С.А. Лавочкина. 2013. № 1(17).
С. 3-10.
Лихачев В.Н., Сихарулидзе Ю.Г., Федотов В.П. Этап основного торможения для
выполнения мягкой посадки на поверхность Луны как один из видов коррекции тра¬
ектории // Вестник ФГУП НПО им. С.А. Лавочкина. 2012. № 5(16). С. 27-33.
Лихачев В.Н., Федотов В.П. Метод оценки направления гравитационного уско¬
рения на активном участке посадки КА на поверхность Марса // Вестник НПО
им. С.А. Лавочкина. 2016. № 1(31). С. 3-6.
В.Н. Лихачев,
В.П. Федотов,
И. А. Груд ев
212
3-7
ВИОБЕСПЕЧЕНИЕ НАДЕЖНОСТИ
КОСМИЧЕСКОГО КОМПЛЕКСА
Задачами изучения Марса с помощью автоматических космических аппаратов яв¬
лялось исследование характеристик атмосферы, магнитного и гравитационного по¬
лей, физических и химических характеристик грунта, рельефа поверхности и другое.
В исследованиях Марса принимали участие СССР (Российская Федерация) - 21 мис¬
сия, США - 22 миссии, Европейское космическое агентство - 3 миссии, Китай, Япо¬
ния и Индия - по одной миссии.
История исследований Марса насчитывает почти 60 лет и началась в 1960 году
с экспедиции советского автоматического аппарата (Ефанов В.В., Ширъиаков А.Е.,
2018) . За это время были как успехи, так и неудачи. Успешными были 17 миссий,
20 - завершились неудачей, 8 миссий продолжаются.
Если считать успешными экспедиции, в результате которых была получена науч¬
ная информация, то оценить статистическую надежность марсианских миссий можно
по формуле {Колобов А.Ю., Дикун Е.В., 2017)
р_п-т + 1
п + 2
где п - общее количество предпринятых миссий;
т - количество неуспешных миссий.
На настоящее время предпринято 45 миссий, из них 20 миссий неудачных. При та¬
ком соотношении предпринятых и неуспешных миссий оценка вероятности успеш¬
ности миссии по исследованию Марса составляет 0,55. Оценка показывает высочай¬
шую сложность марсианских миссий.
Международный проект «ЭкзоМарс-2022» разрабатывают ГК «Роскосмос» и Ев¬
ропейское космическое агентство (ЕКА).
Задачами миссии является доставка на поверхность Марса марсохода и россий¬
ской посадочной платформы с комплексом научной аппаратуры.
Научными целями проекта «ЭкзоМарс-2022» являются:
- поиск признаков жизни на Марсе в прошлом и в настоящее время;
- исследование водной/геохимической среды на поверхности и в подповерхност¬
ном слое с распределением по глубине;
- исследование газовых примесей и их источников в атмосфере Марса;
- решение научных задач в условиях долгоживущей стационарной платформы.
Кроме того, в рамках проекта планируется осуществить разработку и лётные ис¬
пытания системы входа в атмосферу, спуска и посадки на поверхность Марса.
Запуск составного автоматического космического аппарата будет осуществлен
при помощи ракеты-носителя «Протон-М». Выведение на отлетную траекторию бу¬
дет производиться разгонным блоком «Бриз-М».
Миссия «ЭкзоМарс-2022» состоит из следующих этапов:
этап выведения и перелета составного КА (перелетный модуль (ПМ) и десантный
модуль (ДМ));
- этап спуска - посадки ДМ на поверхность Марса;
213
3-7
- этап работы на поверхности Марса, включающий в себя две фазы:
- сход марсохода с посадочной платформы,
- функционирование посадочной платформы на поверхности Марса после съез¬
да марсохода.
Основными принципами обеспечения успешного выполнения экспедиции по до¬
ставке марсохода на Марс и выполнения научных задач являются:
- реализация экспедиции с высокой вероятностью успеха одним пуском;
- использование отработанной и высоконадежной ракеты-носителя;
- организация системы работ по обеспечению предприятий-разработчиков радио¬
электронных бортовых систем электрорадиоэлементной базой повышенного ка¬
чества и надежности;
- глубокая экспериментальная наземная отработка с подтверждением запасов
работоспособности бортовых систем при действии внешних воздействующих
факторов на уровне автономных и комплексных испытаний, включая ресурсные
и термовакуумные электрические испытания с термоциклированием;
- разработка перечня нештатных ситуаций и порядка выхода из них;
- выявление критичных элементов и технологий, разработка мероприятий по их
особому сопровождению;
- резервирование посадочных средств, построенных на различных физических
принципах.
Миссия «ЭкзоМарс-2022» состоит из следующих этапов (Ширилаков А.Е. и др.,
2014):
- Этап выведения на трассу перелета.
- Этап перелета Земля - Марс.
- Этап входа в атмосферу Марса, спуск и посадка.
- Этап схода марсохода.
- Этап работы на поверхности Марса.
Вероятность успешного выполнения перечисленных этапов определяется веро¬
ятностью безотказной работы (ВБР) составных частей (СЧ) космического комплек¬
са (КК) десантного модуля (ДМ), определяемых с учетом циклограммы работы СЧ
в ходе выполнения этапа.
Из всего многообразия систем и агрегатов космического аппарата можно выде¬
лить две основные группы: устройства механического типа и устройства электрон¬
ного типа.
Надежность устройств механического типа обеспечивается коэффициентами за¬
паса прочности (устойчивости, износостойкости и т.п.); надежность устройств элек¬
тронного типа - выбором электрорадиоизделий, обеспечивающих заданную надеж¬
ность и ресурс, а также резервированием элементов с недостаточной надежностью.
Далее представлены результаты расчетных оценок вероятности успешного выпол¬
нения этапов миссии. Значения ВБР составных частей КК и ДМ получены по резуль¬
татам соответствующих расчетов надежности.
Этап выведения на трассу перелета
Во время этого этапа ДМ находится в выключенном состоянии. Структурная схе¬
ма надежности (ССН) этапа представлена на рисунке 3.7.1.
В соответствии с ССН вероятность успешного выполнения этапа
РВЫв=Ррн’РгоРгоРПхС=0,974180,98690,9970,9998=0,9583.
214
PH - ракета-носитель, РБ - разгонный блок, ГО - головной обтекатель,
ПхС - переходная система (вместе с системой отделения ДМ от РБ).
Рисунок 3.7.1. ССН этапа выведения
Этап перелета Земля - Марс
Этап выполняется десантным модулем. ССН этапа представлена на рисунке 3.7.2.
—
СЭС
СОТР
-
БКС
К
СЭА - система электроавтоматики, СЭС - система электроснабжения,
СОТР - система обеспечения теплового режима, БКС - бортовая кабельная сеть,
К - элементы конструкции, КНА - комплекс научной аппаратуры.
Рисунок 3.7.2. ССН этапа перелета Земля - Марс
Вероятность успешного выполнения этапа
РПерелета=РсэА-Рсэс-РсотР’РБкс-Рк-Ркнд=0,99985-0,99915-0,99985-0,9(6)8-0,9(5)85-0,9994=
=0,9982.
Цифра в скобках соответствует количеству девяток после запятой.
Этап входа в атмосферу Марса, спуск и посадка
ССН этапа представлена на рисунке 3.7.3.
ДУ - двигательная установка, БУПРТ - блок управления приводом регулятора тяги,
АЭ - аэродинамический экран, ЗК - задний кожух, АФС ЗК - антенно-фидерная система ЗК,
ПУ - посадочное устройство, КПП - конструкция посадочной платформы,
УО - устройство отделения, А - адаптер.
Рисунок 3.7.3. ССН этапа входа в атмосферу Марса, спуска и посадки
215
3-7
Вероятность успешного выполнения этапа
Рвх. и посадки=РСЭА’РсЭС’РСОТР’РБКС’Рду'РКНД’РдЭ’РЗК’РАФС ЗК’РБУПРТ’РПУ’РкПП'Руо’Рд'РбКС А=
=0,9(8)-0,9(7)5-0,9(8)-0,9(8)788-0,9983-0,9(6)0,99968-0,9998-0,9(8)-0,9(7)-0,9999х
х0,9(5)846-0,9998-0,9998-0,9(5)=0,9973.
Этап схода марсохода
ССН этапа представлена на рисунке 3.7.4.
П - пружины (40 шт.), Т трапы (4 шт.), ЗД -замок детонационный (4 шт.).
Рисунок 3.7.4. ССН этапа схода марсохода
В соответствии со ССН вероятность успешного выполнения этапа
Рсхода мх=Рсэа-Рсэс-Рсотр-Рбкс-Рдфс-Рп-Рт-РзД=0,9(6)-0,99997-1 -0,9(6)-0,9(7)8-1 х
х0,9(7)4-0,99984=0,99976.
Этап работы на поверхности Марса
Этап заключается в научных исследованиях в течение двух лет на поверхности
Марса с использованием комплекса научной аппаратуры посадочной платформы.
ССН этапа представлена на рисунке 3.7.5.
Рисунок 3.7.5. ССН работы на поверхности Марса
В соответствии со ССН вероятность успешного выполнения этапа
Рсходамх=РсэА’Рсэс’Рсотр’РБкс‘РдФс*РкнА,Ркпп=0,99974-0,9983-0,99973-0,99998-0,9(5)8Х-
х0,95102-0,9(5)846=0,9488.
216
3-7
Оценка вероятности выполнения миссии
В миссии кроме десантного модуля принимают участие: наземный научный ком¬
плекс (ННК), наземный комплекс управления (НКУ) и оборудование, предоставляе¬
мое ЕКА.
К изделиям европейской зоны ответственности относятся: марсоход, парашютная
система, система разделения марсохода и посадочной платформы, бортовая цифровая
вычислительная система № 1, радар, АФС2 и другие устройства. По данным ЕКА, ве¬
роятность безотказной работы изделий ответственности европейской стороны за вре¬
мя миссии составляет 0,9429.
Структурная схема вероятности успешного выполнения миссии представлена
на рисунке 3.7.6.
Рисунок 3.7.6. ССН миссии
Вероятность успешного выполнения миссии «ЭкзоМарс-2022» определяется
по формуле
5
р =р .р .р ,ур
гмиссии ГННК г НКУ г ЕКА /’
/=1
где Р/ - вероятность успешного выполнения z-ro этапа миссии; РЕКА - вероятность без¬
отказной работы оборудования и приборов, предоставляемых ЕКА (по данным ЕКА).
Рмиссии=0,9991-0,99609-0,9429-0,0,9583-0,9982-0,9973-0,99976-0,9488=0,84.
Обеспечение надежности миссии
Для успешного выполнения миссии был выполнен комплекс мероприятий в обла¬
сти надежности:
- Разработка и выполнение Программы обеспечения надежности.
- Проведение анализа видов, последствий и критичности отказов с составлением
перечня критичных элементов и выработкой мероприятий по их сопровождению
по качеству и обязательному контролю со стороны предприятий-разработчиков
на всех этапах жизненного цикла изделия.
- Максимальное использование схемно-технических решений, имеющих положи¬
тельный опыт использования.
- Включение в Комплексную программу наземной экспериментальной отработки
полного цикла испытаний, предусмотренного нормативной документацией, дей¬
ствующей в отрасли.
217
3-7
- Проведение испытаний составных частей космического аппарата в условиях,
максимально приближенных к реальным и основанных на системном подходе.
- Проведение глубокого анализа рисков проекта с разработкой стратегии управле¬
ния ими до того, как они станут событиями с серьёзными последствиями.
- Использование глубоко резервированных бортовой вычислительной сети и сис¬
темы управления.
- Применение предприятиями-разработчиками радиоэлектронных бортовых сис¬
тем элементной компонентной базы повышенного качества и надежности.
- Тщательная и полная отработка программно-алгоритмического обеспечения.
Список литературы
Ефанов В.В., Ширшаков А.Е. Исследование Марса и его спутников перспективны¬
ми межпланетными станциями НПО имени С.А. Лавочкина (к 30-летию запуска КА
«ФОБОС-2») // Вестник НПО им. С.А. Лавочкина. 2018. № 1. С. 3-9.
Колобов А.Ю., Дикун Е.В. Интервальные оценки безотказности единичных косми¬
ческих аппаратов // Надежность. 2017. Т. 17. № 4. С. 23-26.
Ширшаков А.Е., Артюхов М.И., Казакевич Ю.В., Калашников А.И. Организация
управления полетом автоматической межпланетной космической станции «Экзо¬
Марс-2018» // Вестник НПО им. С.А. Лавочкина. 2014. № 2. С. 53-57.
К. В. Катунин,
А.Ю. Колобов
218
3-8
Направление составным космическим
АППАРАТОМ «ЭКЗОМАРС-2022»
Межпланетный КА научного назначения создан международной кооперацией
на новейшей платформе с применением уникальных технологий, которые апробиро¬
ваны на наземных испытаниях и будут проверены в полете.
Особенностью управления миссией является совместная работа по планирова¬
нию операций и задействование международных наземных средств и орбитальной
группировки ретрансляторов на орбите ИСМ для управления ровером и посадочной
платформой.
В данном разделе кратко освещены итоги проектирования КА «ЭкзоМарс-2022»
и подходы к управлению миссией.
Программа полета и летные испытания КА
Программа полета КА «ЭкзоМарс-2022» определяется тактико-техническим зада¬
нием на ОКР создания соответствующего космического комплекса.
В программу полета составного КА входят три независимые программы для пе¬
релетного модуля, десантного модуля и ровера. Организация программы полета и ее
реализация возложены на центр управления полетом миссии, центр управления рове¬
ра и центр управления посадочной платформы. В соответствии с Программой полета
КА ЦУ ПП выполняет Программы летных испытаний КК.
Проведение летных испытаний десантного модуля и посадочной платформы
определяют государственный заказчик и головной разработчик комплекса совмест¬
ным решением.
Общее руководство летными испытаниями десантного модуля осуществляет
Госкомиссия, назначаемая постановлением (решением) Правительства Российской
Федерации.
Летные испытания российского сегмента проводятся в составе соответствующего
космического комплекса (КК) в соответствии с Программой летных испытаний КК,
целью которых являются:
- Всесторонняя проверка и подтверждение характеристик КК (составных ча¬
стей и систем ДМ и ПП) требованиям, заданным в ТТЗ, в реальных условиях
функционирования.
- Проверка достаточности и эффективности наземной отработки изделий комплек¬
са и комплекса в целом.
- Отработка комплекса и его составных частей, которую невозможно осуществить
в наземных условиях.
- Отработка эксплуатационной документации.
- Определение возможности использования КК по целевому назначению.
Выпуск программы летных испытаний КК должен сопровождаться выпуском
программ и методик определения и оценки характеристик комплекса, его составных
частей и систем, в том числе бортовых систем КА по результатам летных испытаний.
Кроме того, должны быть разработаны Программа полета ДМ и перечень возможных
нештатных ситуаций. Для посадочной платформы выпускается также Программа на¬
учных исследований.
219
3-8
По результатам выполнения Программы летных испытаний Госкомиссия прини¬
мает решение об использовании КК для решения целевой задачи - проведения про¬
граммы научных исследований на поверхности Марса.
Летные испытания проводятся по следующим этапам:
- начальный участок полета (до месяца), на котором проводятся проверочные
включения систем составного КА;
- технологический этап летных испытаний на перелете (около 8 месяцев), на кото¬
ром проводится тестирование всех систем КА, работающих на перелете, посадке
и поверхности Марса;
- заключительный этап летных испытаний на поверхности Марса, совмещаемый
с зачетными испытаниями (до 24 месяцев).
Общая программа экспедиции КА «ЭкзоМарс-2022» включает следующие фазы
полета и функционирования на поверхности Марса:
- выведение на трассу перелета Земля-Марс;
- межпланетный перелет и подготовка к разделению перелетного и десантного
модуля;
- пассивный полет ДМ до входа в атмосферу Марса, спуск и посадка;
- функционирование посадочной платформы на поверхности Марса:
1) подготовка ПП к работе на поверхности и обеспечение схода ровера;
2) проведение научных исследований.
Выведение СКА и операции на начальном участке
Основной задачей данной фазы является перевод КА на траекторию перелета
к Марсу.
Выведение составного КА с помощью PH «Протон» и РБ «Бриз-М» производится
двумя включениями с участками пассивного полета по промежуточным орбитам ИСЗ
суммарной длительностью 4,5 ч.
В течение этого времени в составе ДМ функционирует СЭА, часть СОТР и БЦВМ,
которые запитываются от аккумуляторной батареи ПМ.
На выведении осуществляется операция сброса внутреннего давления ДМ по ав¬
тономной программе БУ ПП по сигналам с датчиков ускорения.
Отделение КА осуществляется с заданной ориентацией и угловой скоростью.
По срабатывании контактов отделения автоматически выполняются следующие
основные операции на СКА:
- включение БИБ в ДМ;
- включение радиокомплекса Х-диапазона ПМ;
- подготовка ДУ ПМ к работе, прогрев ДУ ПМ;
- раскрытие солнечных батарей ПМ;
- поиск и построение солнечной ориентации;
- закрутка КА.
Также в первом сеансе связи по команде с Земли выполняются следующие
операции:
- включение звездного датчика ПМ и верификация его показаний;
- перевод СЭА в конфигурацию на перелете.
Выполнение данных операций осуществляется в сеансном режиме общей дли¬
тельностью до 3 ч, включая подзаряд АБ ПМ.
220
3-8
В течение первого месяца проводится оценка работы бортовых систем СКА после
выведения:
- калибровка БИБ и звездного датчика;
- подтверждение работы системы сбора телеметрии ПМ;
- анализ работы системы управления ПМ;
- проверка радиокомплекса ПМ и АФС;
- анализ работы СЭС ПМ;
- анализ работы СОТР ПМ.
В части ЛМ проводятся следующие операции:
- проверка работы системы сбора данных и телеметрии;
- проверка работы системы управления, включая БУ ПРТ;
- проверка работы УВЧ ППУ в дежурном и сеансном режиме;
- анализ работы СЭС;
- анализ теплового режима и проверка СОТР;
- проверка ровера с использованием АБ ровера;
- проверка угла засветки звездного датчика для требуемой ориентации разделения
ПМ-ДМ;
- проверка части КН А.
Одновременно оценивается оперативность анализа полученной информации
между СКА-ЦУПМ и ЦУ ПП, оперативность, в случае необходимости, выработки
управляющих воздействий и передачи их на борт КА; оценивается взаимодействие
наземных групп, обеспечивающих работу КА.
Операции СКА на перелете
Основными задачами данной фазы является доставка ДМ в окрестность Марса
и отделение ДМ с заданными характеристиками скорости, угла входа в атмосферу
Марса и угловой скорости ДМ.
Длительность перелета составного КА к Марсу составляет 8,5 месяцев. На пере¬
лете ДМ запитывается от ПМ.
На этом этапе выполняются:
- проведение сеансов связи с Землей;
- проведение сеансов измерения траектории;
- проведение коррекций траектории перелета на отлете от Земли и подлете к Марсу;
- проведение сеансов тестирования.
На начальном участке отлета сеансы связи (СС) проводятся ежесуточно в первый
месяц полета с длительностью до 4 ч, на промежуточном участке перелета - с ча¬
стотой 1 СС/ 2-3 дня. Перед подлетом к Марсу проводятся учащенные сеансы свя¬
зи с измерением траектории КА для определения требуемых импульсов коррекции,
рисунок 3.8.1.
В течение перелета запланировано три сессии сеансов тестирования:
- тестирование БИБ в течение 1 ч с включением двух комплектов приборов;
- тестирование радара в течение 1 ч с включением дежурного режима без излучения;
- тестирование БУ ПП и БА ПП в течение 30 минут;
- тестирование ППУ УВЧ в течение Г ч с включением дежурного режима;
- тестирование двух полукомплектов БУ ПРТ в течение 1 ч;
- тестирование КНА в течение 2 ч;
- тестирование ровера в течение 4 ч (от АБ ровера).
221
3-8
выведение, 4,5 ч автономный полет ПМ
ПЕРЕЛЕТ составного КА ЗЕМЛЯ - МАРС
ориентация для маневра
ориентация для перед отделением
маневра коррекции _ закрутка
1
|Г
1 Г
1 г
1
1 18,5 7с
[ориентация!
1 на Солнце 1
Щ | ориентация на Землю |
о
1 1
о
InporpaMJ
■риентация
ЗРВ га ЗРВ П
ЗРВ европейских пунктов радиотелескопа р:| TGO |
Рисунок 3.8.1. Общий вид участка перелета Земля - Марс
Тесты проходят на фоне двух или четырехчасовых сеансов связи ПМ с Землей.
Тестирование проводится на фоне сеанса связи с непосредственной передачей теле¬
метрии КА, тест может быть остановлен по результатам оперативного анализа ТМИ.
Через 2 месяца после отделения КА от РБ на перелете последовательно проводят¬
ся следующие операции:
- просушка катализатора тормозного двигателя ДМ (для каждого пакета в отдель¬
ном сеансе);
- закрытие клапана давления ДМ (после сеансов просушки).
В течение перелета аппаратура КАС обеспечивает выравнивание заряда АБ ДМ
малыми токами. Периодически производится подзаряд АБ для парирования самораз¬
ряда АБ.
В случае разряда АБ вследствие ее задействования для парирования нештатной
ситуации ПМ, последующий подзаряд производится от ПМ. При этом во избежание
срабатывания токовой защиты ПМ общее потребление ДМ не должно превышать
350 Вт (400 Вт с учетом запаса) за счет снижения потребления СОТР, производимого
программно по признаку НШС.
Фаза перелета заканчивается построением требуемой траектории подлета и под¬
готовкой к разделению.
Операции по подготовке к разделению ПМ и ДМ
Основными задачами данной фазы является подготовка БС ДМ к работе на посад¬
ке и заряд АБ ровера.
За две недели до разделения ПМ-ДМ ежесуточно проводятся сеансы связи с со¬
ставным КА длительностью до 12 ч.
Длительность фазы подготовки к разделению составляет 5 суток, в течение кото¬
рых проводятся следующие операции:
- вакуумирование ДУ через ДМТ;
- заряд АБ ровера;
222
3-8
- прогрев конструкции ДМ;
- прогрев ДУ ДМ;
- включение второго комплекта БИБ ДМ и работа двух комплектов БИБ;
- включение ППУ УВЧ;
- переход на бортовое питание ДМ;
- включение БУ ПРТ;
- запрет обработки сигнала «Разряд АБ»;
- разделение ПМ-ДМ.
Переход на бортовое питание ДМ осуществляется за 30 минут до разделения
ПМ-ДМ.
Прогрев конструкции ДМ и двигателей ДМ осуществляется непосредственно
до включения двигателей ДМТ и ТДУ соответственно.
Операции ДМ на посадке
Основная задача данной фазы - осуществление ДМ мягкой посадки на поверх¬
ность Марса.
Фаза входа в атмосферу Марса, спуска и посадки длится 37 минут и включает
в себя следующие этапы:
- внеатмосферный участок полета в режиме закрутки со скоростью 16,5-18,5%
продолжительностью 30 минут;
- спуск ДМ с активацией парашютной системы продолжительностью 6 минут;
- посадка ДМ с помощью ДУ продолжительностью до 45 с.
На фазе EDL функционируют все служебные БС ДМ, из состава комплекса науч¬
ной аппаратуры работает ТСПП-ЭМ и МТК, ровер отключен.
Основные операции и события на данной фазе:
- разделение ПМ и ДМ;
- поддержание температуры ДМ, прогрев телекамер ТСПП-ЭМ;
- прогрев радара;
- передача ТМИ ДМ на TGO;
- вход в атмосферу Марса;
- включение метеорологического комплекса (МТК);
- ввод первого и второго каскадов парашютной системы;
- отстрел аэродинамического экрана;
- демпфирование угловой скорости вращения ДМ с использованием ДМТ;
- включение радара на измерения;
- прогрев ТДУ;
- переход на передачу ТМИ через МН А ПП;
- раскрытие посадочных опор;
- резка высокочастотного кабеля МНА ЗК и отделение заднего кожуха с парашют¬
ной системой;
- работа ТДУ и ДМТ ДМ;
- вывод радара из контура управления (на высоте ниже -10,6 м);
- подготовка датчиков касания;
- касание поверхности;
- отключение резервного комплекта БИБ, БУ ПРТ и радара;
- продувка ТДУ.
Циклограмма основных событий на фазе EDL приведена на рисунке 3.8.2.
223
3-8
автономный!
полет ПМ I
программная ориентация ДМ
передача ТМИ ДМ в открытом контуре, 8 кбит/с
разделение ДМ и ГМ
19.03.21 13:30
время касания поверхности Марса
19.03.21 в 14:03-14:08 LMST
вход в атмосферу
Марса
01:00 08:00 15:00 23:00 08:00 15:00 01:00 08:00 15:00 23:00 08:00 15:00 23:00
18.03.21 19.03.21 20.03.21
Рисунок 3.8.2. Схема полета ДМ на посадке
Операции на поверхности до съезда ровера
Основными задачами данной фазы являются раскрытие посадочной платформы
для работы на поверхности Марса и обеспечение съезда ровера, рисунок 3.8.3.
В первые сутки функционирования ПП на поверхности Марса обеспечивается та¬
кая последовательность:
- перевод ОВС1 в номинальный режим работы на поверхности (по касанию
поверхности);
- отключение БУ ПРТ и одного БИБ (по касанию поверхности);
- завершение сеанса связи с TGO в открытом контуре после посадки в течение
3 минут и переход ППУ УВЧ в режим «Приема»;
- определение ориентации ПП;
- проверка БС ПП;
- развертывание трапов и БФ ПП (начало развёртывания через 10 минут после по¬
садки, в течение которых происходит осаждение пыли);
- раскрытие штанги МНА ПП;
- разрешение контроля Uminl и Umin2;
- активация алгоритмов СОТР для работы на поверхности (после раскрытия кон¬
струкции ПП);
- отключение основного комплекта БИБ;
- проведение научных метеоисследований;
- штатное функционирование служебных систем в условиях Марса.
224
3-8
Функционирование БС ПП обеспечивается при следующих условиях работы:
- ОВС1 функционирует в номинальном режиме.
- Переход из номинального режима БЦВМ в пониженный осуществляется без пе¬
резагрузки ОВС1 (при необходимости).
В режиме пониженного электропотребления ОВС1 не поддерживает функцию
выдачи силовых команд, обмена с ППУ, приема и обработки аналоговых ТМ параме¬
тров, работы массовой памяти, тепловой режим ПП обеспечивается при этом только
с помощью РИТ.
В то же время сохраняются все внутренние служебные функции, включая счет
времени, работа алгоритмов управления БС и алгоритмов СОТР, обмен с абонентами
по МКО, анализ ТМИ, поступающей по МКО из БУ ПП, прием и обработка сигналов
из КАС.
Переход в номинальный режим осуществляется через перезагрузку ОВС1.
По сигналу «Разряд АБ» ОВС-1 должна подготовить научную аппаратуру и слу¬
жебные системы к обесточиванию и затем отключить всю некритичную для функцио¬
нирования ДМ бортовую аппаратуру, при этом ПП переводится в режим «выживания».
По сигналу «Предельный разряд АБ» КАС отключает АБ от разряда, при этом все
бортовые системы ДМ переводятся в режим «выживания».
Автоматический выход из режима «выживания» в режим сохранения осуществля¬
ется автоматически при снятии признака «Uminl» или по истечении 1 суток.
Сеансы связи ПП с TGO проводятся в зоне радиовидимости орбитального ап¬
парата продолжительностью до 15 минут, приемник ППУ УВЧ находится в режиме
готовности.
проверка
проверка
разрешение
отстыковки
10-е сутки
автономный
время касания
поверхности Марса
19.03.21
SOL=39
сезон пылевых бурь
СС СС
СС СС
rover- LP-
LP- rover-
TGO TGO
П 1 П Л М М П Л 1
TGO TGO
XX
функционирование ПП на поверхности Марса, проведение научных исследований Марса, 2 года
01.04.21 01.07.21 01.10.21 01.01.22 01.04.22 01.07.22 01.10.22 01.01.23
Рисунок 3.8.3. Функционирование ПП на поверхности Марса
225
3-8
Совместное функционирование ПП и ровера продолжается до 10 суток, в течение
которых выполняется:
- проведение сеансов связи - 15 минут днем (ночью);
- проверка и подготовка ровера к съезду;
- электропитание роверу ночью не предоставляется;
- проведение круглосуточных метеоисследований, передача НИ обеспечивается
после съезда ровера;
- обеспечение теплового режима;
- тепловой режим ровера поддерживается автономно.
Операции ПП на поверхности Марса после съезда ровера
Основной задачей данной фазы является автономная работа посадочной платфор¬
мы для проведения научных исследований. На этойфазе обеспечиваются:
- Проведение сеансов связи с TGO (1 сеанс днем и/или 1 сеанс ночью согласно
расчетным зонам видимости и ресурсам TGO);
- Включение БИП после съезда ровера для проведения регулярных научных
измерений;
- Раскрытие штанг приборов КН А после съезда ровера (должно быть определено);
- Проверка КНА;
- Настройка ОВС1 для автономной работы без ровера;
- Штатное функционирование служебных систем в условиях Марса.
Ежесуточно ПП передает на TGO до 150 Мбит информации.
Фактическая циклограмма функционирования ПП и суммарное электропотребле¬
ние зависят от фактического коэффициента прозрачности атмосферы Марса и можут
ограничиваться, если коэффициент прозрачности атмосферы более 1,2. Профили ра¬
боты ПП представлены на рисунке 3.8.4.
— PLDOFF
— MINDATA
— MONITOR
—ADRON PAS
— ADRON ACT
— MGAK&M-DLS
LARA
^—-fast
Рисунок 3.8.4. Типовые сутки автономной работы ПП
226
3-8
Функциональная схема и логика взаимодействия БС КА
Составной космический аппарат «ЭкзоМарс» содержит в своем составе следую¬
щие модули:
- Перелетный модуль;
- Десантный модуль (посадочная платформа);
- Ровер.
В состав ДМ входит БЦВМ, которая управляет следующими БС ПМ:
- СЭС ПМ;
- БУПМ;
- СД;
- ДУПМ;
- ЗД;
- СОТРПМ;
- Радиокомплекс «Х»-диапазона;
- Антенный переключатель ПМ.
Таблица 3.8.1. Функционирование БС ДМ
№
п/п
БС
фазы функционирования ДМ КА «ЭкзоМарс»
до КП
выведение
перелет
посадка
поверхность
до съезда
ровера
после
съезда
ровера
1
БЦВМ
+
+
+
+
+
+
2
СЭС ДМ
+
+
+
+
+
+
3
БУ ДМ
+
+
+
+
+
+
4
БА ПП
+
+
+
+
+
+
5
Элементы
конструкции
-
+
+
+
+
-
6
ППУ «УВЧ»
-
-
-
-
+
+
7
АФС ППУ
-
-
-
-
+
+
8
БИБ
-
+
+
+
-
-
9
Радар
-
-
-
+
-
-
10
Ровер
-
-
+
-
+
-
11
КНА
-
-
-
МТК,
ТСПП
МТК,
ТСПП
+
12
СОТР
+
+
+
+
+
+
13
ПС
-
-
-
+
-
-
14
БУ ПРТ
-
-
-
+
-
-
227
3-8
БЦВМ ДМ также управляет всеми бортовыми системами ДМ:
- СЭС ДМ;
- СЭА (БУ ПП, БА ПП, СИП);
- БИБ;
- Радар;
- ППУУВЧ;
- Антенный переключатель;
- ДУ;
- СОТР;
- БУ ПРТ;
- Конструкция и пиротехника.
На этапе до разделения КАС ПМ запитывает КАС ДМ. Электропитание ровера
до съезда осуществляется через КАС ДМ.
Коммутацию электропитания в ДМ осуществляет СЭА.
Телеметрический сбор осуществляет БУ ПП по запросу из БЦВМ.
Телеметрия европейской части подключена к системе сбора телеметрии БЦВМ.
Функционирование БС ДМ КА на различных фазах представлена в таблице 3.8.1,
функциональная схема составного КА - на рисунке 3.8.5.
Рисунок 3.8.5. Структурная схема составного КА «ЭкзоМарс»
228
3-8
Организация управления миссией
Особенностью организации работ по управлению миссией «ЭкзоМарс-2022» яв¬
ляется совместная работа четырех ЦУП (ЦУП миссии, ЦУП марсианского ретранс¬
лятора, ЦУП ровера и ЦУП посадочной платформы).
Непосредственное управление Земля - КА «ЭкзоМарс» ЦУП миссии осуществля¬
ет только до этапа разделения ПМ и ДМ. После отделения ДМ управление с Земли
осуществляется с использованием ретрансляторов на орбите ИСМ. До съезда ровера
всю координацию осуществляет ЦУП миссии, который собирает заявки от служб, про¬
водит моделирование целевого функционирования и реализует сеансы управления.
Эксплуатация КА научного назначения показывает, что основным критерием
эффективности научных программ являются следующие показатели: количество
времени, отведенного на научные исследования за определенный период времени;
оперативность и надежность работы КА и персонала ЦУП при срочном изменении
программы исследований или режимов работы комплекса научной аппаратуры. Эти
показатели достигаются выбором оптимальной схемы управления; построением
соответствующей технологии планирования и реализации программы научных из¬
мерений и сеансов связи; разработкой аппаратно-программных средств поддержки
согласованных технологий проведения сеансов связи и научных наблюдений; опти¬
мальным построением НКУ.
После передачи управления от ЦУП миссии в ЦУ ПП, при управлении посадоч¬
ной платформой КА «ЭкзоМарс» решаются следующие основные задачи:
- организация работ по координации взаимодействия всех элементов наземного
сегмента;
- планирование работ по управлению ПП в целях проведения научных наблюдений;
- организация и координация сеансов связи с ПП;
- анализ функционирования бортовых систем ПП, ЦУ ПП и других элементов на¬
земного сегмента;
- обмен заявками с ЦУП ровера на проведение сеансов ретрансляции;
- баллистико-навигационное обеспечение полета;
- прием научной информации наземными станциями и передача ее в заинтересо¬
ванные организации для дальнейшей обработки.
Управление КА осуществляется по замкнутой схеме, условно представленной
на рисунке 3.8.6.
Технология управления посадочной платформы учитывает следующие требова¬
ния, характерные для данной миссии:
- Использование в составе наземного сегмента управления КА сетевых структур,
средств планирования и управления полетом, объединенных общей сетью и свя¬
занных с ЦУП ровера через специальный сервер обмена;
- «Сквозное» планирование - результат работы планирующей программы преды¬
дущего этапа используется для планирования программы очередного этапа (в за¬
ранее утвержденных формах);
- Автоматизация процессов технологического цикла управления КА (формирова¬
ния долгосрочной программы работ с КА, формирования КПП и планирования
сеанса управления, процесса реализации сеанса);
- Обеспечение автоматического приема ТМ-потоков, обработки, допускового кон¬
троля всех ТМ-параметров и автоматизированного анализа ТМ-информации
в ЦУ ПП в реальном времени;
229
3-8
Рисунок 3.8.6. Планирование работа в ЦУ ПП
- Автоматизация анализа состояния бортовых систем и ПП в целом по результатам
вторичной обработки телеметрической информации до уровня НОРМА/НЕНОРМА,
с целью оперативности обнаружения на начальной стадии опасных тенденций в ра¬
боте бортовых систем и формирования рекомендаций для парирования нештатных
ситуаций, возникающих на платформе;
- Применение математического моделирования, средств обработки и наглядно¬
го отображения результатов моделирования в задачах тестирования программ
управления КА и задачах анализа функционирования систем по ТМИ с целью
повышения надежности управления;
- Использование при управлении КА рабочей документации и аппаратно-про¬
граммных средств планирования, подготовки и реализации сеансов связи, про¬
шедших отработку при проведении комплексных испытаний КА на Земле.
Планирование работы миссии имеет трехуровневую структуру (Ширшаков А.Е.,
Артюхов М.И., Казакевич Ю.В., Калашников А.И., 2014).
Долгосрочное планирование номинально охватывает действия по планированию
в течение 6-месячного периода. Первоначально долгосрочный план (ДСП) будет со¬
ставляться на всю миссию. По мере необходимости и по ходу выполнения миссии
в ДСП будут вноситься дополнения. Такие обновления будут производиться по необ¬
ходимости приблизительно каждые шесть месяцев. Необходимость обновлений свя¬
зана с тем, что график работы наземных станций ESTRACK составляется на шести¬
месячный период. Долгосрочное планирование завершается за 6 месяцев до начала
выполнения запланированных операций.
Среднесрочное планирование номинально охватывает действия по планированию
в течение 4-недельного периода. Среднесрочное планирование начинается за 8 не¬
дель до начала периода, покрываемого среднесрочным планом (ССП), и завершается
не позднее чем за 4 недели до него. Среднесрочное планирование включает в себя
следующие действия:
- подтверждение пролетов для управления посадочной платформой (и марсо¬
ходом), включая сроки доставки конечных команд и задержки передачи дан¬
ных телеметрии для каждого пролета. Предполагается, что данный план будет
непротиворечив;
230
3-8
- проверка доступности ретрансляционных орбитальных аппаратов;
- подтверждение расположения наземных станций.
Краткосрочное планирование номинально охватывает действия по планированию
в течение одной недели. Краткосрочное планирование начинается за 1 неделю до на¬
чала периода, покрываемого краткосрочным планом (КСП), и завершается не позд¬
нее, чем за 2 дня до него. Краткосрочное планирование включает в себя следующие
действия:
- финальная доработка всех команд, которые необходимо выполнить;
- согласование пролетов ЕЦУПД между Центром управления операциями марсо¬
хода (ЦУОМ) и ЦУПП в соответствии с совместной политикой выделения проле¬
тов на случай непредвиденных ситуаций.
Список литературы.
Ширшаков А.Е., Артюхов М.И., Казакевич Ю.В., Калашников А.И. Организация
управления полетом автоматической межпланетной космической станции «Экзо-
Марс-2018» // Вестник «НПО им. С.А. Лавочкина». 2014. № 2. С. 53-57.
И.А. Грубев,
АЛ. Калашников
231
научное издание
монография
РОССИЙСКИЙ СЕГМЕНТ
МЕЖДУНАРОДНОЙ КОСМИЧЕСКОЙ ЭКСПЕДИЦИИ
«ЭКЗОМАРС-2022»
Том 1
подписано в печать 12.10.2020
бумага мелованная
формат 70x100 1/16
печать офсетная
усл. печ. л. 14,5
тираж 500 экз.
издатель - АО «НПО Лавочкина»
отпечатано с готового оригинал-макета в книжной типографии
ООО «КОМПАНИЯ Полиграфмастер», 125130, Москва, ул. Клары Цеткин, д. 28.
-3-108 -2-Ю8 -108
О 108
2-108 ЗЮ8
* Уэклг КМ
НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ
имени Семёна Алексеевича ЛАВОЧКИНА
является головным в ракетно-космической отрасли по созданию автоматических
космических комплексов для фундаментальных научных исследований Вселенной,
в том числе Солнечной системы и её планет.
Для реализации этого направления предприятие осуществляет разработку, испытания,
производство, дистанционное управление в полёте космическими аппаратами
научного и прикладного назначения, а также средств выведения
(космических межорбитальных буксиров, головных обтекателей, переходных отсеков).
АО «НПО ЛАВОЧКИНА»
ул. Ленинградская, д. 24, город Химки,
Московская область, Российская Федерация, 141402
+7(495) 251-6744, факс: +7(495) 573-3595
NPOL@LASPACE.RU HTTP://WWW. LASPACE.RU
«ЙШ1