/







































































































Author: Лихошерст В.И.
Tags: характеристика машин по способу привода электротехника электроэнергетика электроника электромеханика
ISBN: 5-230-06500-1
Year: 1998




Text
ББК 31.27
Л65
УДК 62-83:621.314.5:621.382
Рецензенты
кафедра "Автоматизированные системы электроснабжения"
Уральского государственного профессионально-педагогического
университета; профессор кафедры "Электрооборудование
и автоматизация промышленных предприятий" УГППУ,
д-р техн.наук .Т.Шрейнер
Автор: В.ИЛихошерст.
Л65 Системы управления полупроводниковыми преобразователями
электрической энергии: Учебное пособие / В.ИЛихошерст. Екатеринбург:
УГТУ, 1998. 104 с.
ISBN 5-230-06500-1
Излагаются принципы построения и функционирования устройств,
входящих в системы управления полупроводниковыми преобразователями
электрической энергии, которые используются для управления
электродвигателями. Приведены основные соотношения позволяющие
выполнить поверочные расчеты параметров отдельных устройств.
Описание дается в объеме, необходимом для наладки и ремонта систем
управления пребразователями, а также выбора устройств при курсовом
проектировании. Приступающие к изучению этого раздела должны быть
знакомы с принципами работы полупроводниковых преобразователей
электрической энергии и основами промышленной электроники.
Пособие предназначено для студентов всех видов обучения
специальности 18.04 - Электропривод и автоматика промышленных
установок и технологических комплексов при изучении дисциплины
"Преобразовательная техника" и при выполнении курсовой работы, а
также для студентов специальности 18.01 - Электромеханика при изучении
дисциплины "Силовая электроника". Пособие может быть также полезно
наладчикам электроприводов с полупроводниковыми преобразователями.
Библиогр. 22 назв. Табл. 3. Рис. 41.
2302040000-01
Л Без объявл.
7М2(03)-98
ISBN 5-230-06500-1
© Уральский государственный
технический университет 1998
ВВЕДЕНИЕ
В состав полупроводникового преобразователя электрической
энергии могут входить следующие функциональные и конструктивные
узлы:
- один или несколько вентильных комплектов, которые осуществляют
преобразование электрической энергии; комплекты состоят из тиристоров,
транзисторов, диодов, силовых модулей, охладителей; устройств
выравнивания токов параллельно соединенных вентилей и напряжений на
вентилях, включенных последовательно; выполняются комплекты в виде
печатных плат, кассет, блоков, панелей или шкафов;
- силовой трансформатор или токоограничивающие реакторы;
- сглаживающие и уравнительные реакторы;
* система управления вентилями;
- замкнутая САУ выходными параметрами преобразователя;
- САУ электроприводом в целом;
- устройство аварийного (обычно динамического) торможения;
- вводной щиток для подключения напряжения сети, двигателя, реак¬
торов и внешних цепей управления преобразователем;
- коммутационная аппаратура, предназначенная для включения и
выключения входных и выходных силовых цепей, а также цепей питания
системы управления, переключений в цепях управления (автоматические
выключатели, контакторы, реле);
- устройства защиты преобразователя от перегрузки по току, обрыва
фазы, работы при пониженном напряжении и других аварийных режимов
(реле, контакторы, автоматические выключатели типов А3700, ВАТ, ВАБ и
др-);
- устройства, ограничивающие перенапряжения, скорость нарастания
аварийного тока, скорость нарастания прямого анодного напряжения на
вентилях, фильтры, подавляющие радиопомехи, и т.п. (варисторы,
накопители энергии, RC- и LC-цепочки и фильтры);
- измерительные приборы (вольтметры, амперметры и пр.);
- устройства индикации и сигнализации состояния и режима работы
преобразователя (цветные сигнальные лампы, светодиоды, цифровые
индикаторы, зуммеры, сирены);
- вторичый блок питания системы управления и всех остальных
устройств (обычно требуются стабилизированные постоянные напряжения
+5;+12 или +15; +24; -15 В иногда требуются+48; +110 и даже +220 В);
- устройства контроля параметров и обработки информации
(датчики тока и напряжения, датчики состояния вентилей, устройства
потенциальной развязки, датчики температуры корпусов вентилей, р-п
переходов и охлаждающей среды, схемы на логических элементах,
контроллер или микропроцессор, ветровое реле и др.);
з
- система охлаждения вентилей (охладители, на которых
монтируются вентили, вентиляционные каналы и жалюзи, вентиляторы,
устройства подвода и отвода охлаждающей воды, теплообменники,
ионообменные фильтры);
- каркас, на котором крепятся все узлы; каркас часто заключают в
кожух для защиты от внешних воздействий.
Преобразователи комплектных электроприводов обычно содержат
преобразователь для цепи якоря и преобразователь для цепи возбуждения с
их системами управления и системой управления электроприводом.
В зависимости от мощности преобразователя и требований к нему
некоторые из перечисленных устройств могут отсутствовать или
выполнять несколько функций одновременно. Могут быть добавлены и
другие устройства. Например, в очень ответственных преобразователях
устанавливаются автономные системы бесперебойного питания системы
управления, использующие аккумуляторы и преобразователи. Иногда для
повышения надежности и исключения сбоев делают двух- и трехкратное
дублирование отдельных устройств.
В преобразователях различают силовые и информационные цепи и
устройства. В силовых цепях протекают токи, которые подводятся в
конечном итоге к двигателю. Они обеспечивают передачу необходимой
мощности и управляют моментом, скоростью, положением.
Информационные цепи производят обработку маломощных сигналов
управления, которые задают моменты и длительности открывания
силовых вентилей и в конечном итоге через силовые цепи управляют
электроприводом. По мере развития электроники информационные цепи
потребляют все меньшую мощность, величина которой мало зависит от
мощности преобразователя, и выполняют все более сложные функции.
Информационные цепи выполняются как на аналоговых, так и на
цифровых элементах. Ко всем элементам и устройствам предъявляются
требования высокой надежности, стабильности характеристик,
минимальных стоимости, габаритов, массы и энергопотребления и др.
При анализе работы различных схем в пособии приняты следующие
упрощающие допущения:
- открывание и закрывание вентилей происходит мгновенно, токи
обратного восстановления вентилей не учитываются, поскольку они не
оказывают существенного влияния на работу устройств;
- изменение выходного напряжения при переключениях нуль-
органов, компараторов и управляемых вентилей происходит мгновенно;
- обратные токи коллектора и эмиттера не учитываются;
- пренебрегается падением напряжения коллектор - эмиттф откры¬
того транзистора, поскольку обычно оно менее 0,2 В, хотя возможны
падения напряжения на транзисторах усилителей мощности до 3 В и более;
- падение напряжения база - эмиттер насыщенного (открытого)
транзистора иб э н полагается неизменным; обычно ибэ н=0,7...1,0 В, хотя
возможны U&3H=0,3...2,0 В; на временных диаграммах показать это
напряжение, как правило, не удается ввиду малости;
4
- отсчет времени ведется от момента перехода ЭДС фазы а через нуль.
В пособии рассматривается только минимальный набор
информационных устройств, обеспечивающих работу преобразователя в
нормальных условиях без САУ преобразователем. Этот набор в дальнейшем
называется системой управления (СУ).
По принципу обработки информации СУ делятся на аналоговые,
цифровые и цифроаналоговые. Цифровые СУ могут реализовываться
аппаратно и программно. В аналоговых СУ все большее распространение
получают специализированные гибридные и интегральные микросхемы. В
случае программной реализации используются микропроцессорные
наборы и ЭВМ. Конструктивно СУ выполняются на одной или нескольких
печатных платах, каждая из которых представляет законченный
функциональный узел или канал управления тиристором.
Глава I. ФУНКЦИОНАЛЬНЫЕ СХЕМЫ
СИСТЕМ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЯМИ
Системы управления преобразователями состоят из ряда устройств,
выполняющих определенные функции. Каждое устройство имеет несколько
наиболее рациональных технических решений. Некоторые устройства
используются в различных по своему назначению преобразователях,
например, блоки питания системы управления, усилители мощности
управляющих силовыми вентилями импульсов. Однако требования к ним,
их схемы й принципы работы могут различаться в зависимости от типа
преобразователя. Есть устройства, которые используются только в
преобразователях одного типа.
Системы управления беспрерывно совершенствуются, поскольку в
них используются элементы быстро развивающейся электронной техники.
Элементная база СУ обновляется каждые S...7 лет. Разрабатываются новые
специализированные • микросхемы. Изменяются также алгоритмы
управления силовыми вентилями, особенно вентилями преобразователей с
импульсным регулированием выходной величины (широтно-импульсные
преобразователи постоянного напряжения, преобразователи частоты с
широтно-импульсной модуляцией и т.п.), что изменяет и информационные
устройства. К системам управления предъявляются высокие требования с
точки зрения надежности, поскольку они определяют надежность работы
преобразователя в целом.
1. Выпрямительно-инверторные преобразователи
Общая функциональная схема СУ и силовых цепей реверсивного
двухкомплектного выггоямихепьно-инверторного преобразователя (ВИП)
представлена на рисХ На схеме показаны все устройства, которые
используются как при совместном, так и при раздельном управлении.
Реально часть устройств обязательно отсутствует. Количество сигналов,
которые передаются по линии связи, на схеме указывается числом косых
5
черточек на линии или символом, стоящим у черточки. Число фаз
напряжения питания, которые подводятся к вентилям, обозначено буквой
т.
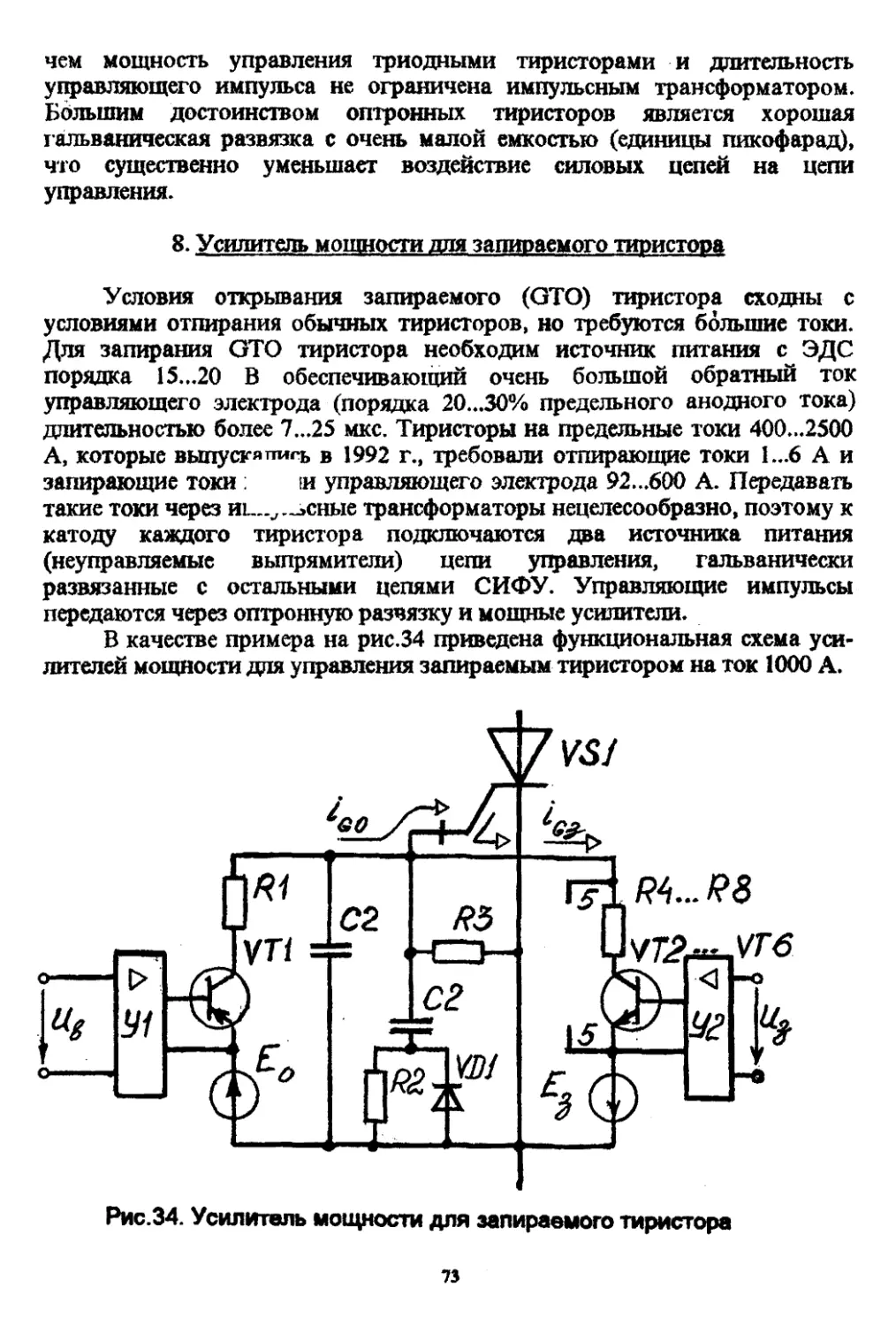
Рис.1. Реверсивный выпрямительно-инверторный преобразователь
Силовые цепи преобразователя подключены к сети через контактор
К2 или автоматический выключатель и виттовой трансформатор ТС. В
зависимости от мощности ВИП используется напряжение сети от 220 В до
35 кВ. Вместо трансформатора могут стоять токоограничивающие
реакторы, которые ограничивают токи короткого замыкания и уменьшают
помехи в сети от преобразователя. Первый вентильный комплект BKI
обеспечивает положительное направление тока в цепи якоря двигателя.
Второй вентильный комплект BKII выдает ток противоположного
направления. Вцепиякоря может бьшГустановлен сглажтающийpgaKlop
LM. При совместном управлении уравнительные реакторы L1X2
ограничивают уравнительный ток. Количество уравнительных реакторов
может быть различным [9]. В случае раздельного управления эти реакторы
отсутствуют, но появляются логическое переключающее устройство ЛПУ и
один или два датчика состояния вентилей ДСВ, которые вьщают
б
логический сигнал наличия или отсутствия тока во всех силовых вентилях
обоих комплектов. Логическое переключающее устройство обеспечивает
безопасность переключения вентильных комплектов путем подачи или
снятия запретов Ьг и Ьп на генерирование управляющих импульсов
каждого вентильного комплекта в отдельности.
Система управления, как правило, питается от сети 380 В через
автомат или контактор К1 и отдельный трансформатор системы
управления ТСУ. Этот трансформатор обеспечивает потенциальную
развязку цепей управления от силовых цепей, подает напряжения на
выпрямители блока питания и на фильтр синхронизирующих напряжений
с требуемым числом фаз, равным р, р/2 или др. Блок питания БП подает
необходимые напряжения на все информационные устройства.
Согласующее входное устройство CRV обеспечивает требуемое
соотношение углов управления первого и второго вентильных комплектов.
Сердцевиной СУ преобразователями с естественной коммутацией вентилей
(ВИП, НПЧ, преобразователей переменного напряжения) является система
импульсно-фазового управления (СИФУ), генерирующая р - фазную
систему управляющих импульсов, которые подаются на переходы
управляющий электрод - катод тиристоров, с фазой (углом управления),
которая задается напряжением управления иу.
В состав СИФУ входят: фильтр синхронизирующих напряжений
ФСНХ подавляющий высоте гармоники в напряжениях, которые
синхронизируют СИФУ с напряжением сети; фазосдвигающее устройство
ФСУ. реализующее заданную фазовую характеристику (зависимость угла
управления от напряжения управления); формирователь длительности
управляющего импульса ФД. который выполняет названную функцию;
усилитель мощности УМ. усиливающий мощность импульса до
необходимой для открывания тиристора, здесь же выполняется
гальваническая развязка между цепями системы управления и силовыми
цепями. Обычно к СИФУ относят и СВУ. В данном пособии УМ
рассмотрены в отдельной главе в связи с использованием их во всех типах
преобразователей и большим разнообразием.
На функциональной схеме показан полный комплект устройств. В
некоторых преобразователях часть устройств может отсутствовать,
функции других смогут быть объединены. Так, нереверсивные
преобразователи не имеют второх о комплекта вентилей, СВУ, ЛПУ, ДСВ и
уравнительных реакторов; иногда для обоих комплектов используется
одна СИФУ, которая подлючается ЛПУ к одному из комплектов ;
функцию СВУ может выполнять ФСУ; ФД и УМ часто объединялись в
одном блокинг-генераторе и т.д. Со временем появляются и новые
функции, соответствующие устройства и принципы их работы.
2. Широтно-импульсные преобразователи постоянного напряжения
Широтно-импульсные преобразователи (ШИП) позволяют
регулировать постоянное напряжение с высоким КПД. В промышленных
7
установках источником постоянного напряжения является выпрямитель, и
поэтому ШИП в конечном итоге вместе с выпрямителем преобразовывает
переменное напряжение сети в регулируемое постоянное. Функциональная
схема силовых цепей и СУ таким ШИП представлена на рис.2. От сети
через многообмоточный трансформатор Т питается силовой
неуправляемый выпрямитель В. После выпрямителя обычно стоит LC-
фильтр Ф для уменьшения пульсаций выпрямленного напряжения. К
выпрямителю может быть подключено несколько ШИП. Сам ШИП, как
правило, выполняется на четырех транзисторах VT1...VT4 и четырех
диодах VD1...VD4. Последовательно с якорем двигателя может стоять
сглаживающий реактор (на схеме не показан). Выходное напряжение ШИП
unnm приложено к цепи якоря двигателя.
Информационные цепи питаются от блока питания БП. Напряжение
управления иу суммируется с пилообразным напряжением ип генератора
ГПН и сумма подается на нуль-орган, выполненный на операционном
усилителе ОУ. Выходное напряжение" нуль-органа ино (рис.2,6) после
усиления управляет транзисторами. Выходное напряжение ШИП
повторяет напряжение нуль-органа, но с друг ой амплитудой и большей
мощностью. На усилители мощности сигналов управления транзисторами
УМ1 и УМ2 подается прямое напряжение НО, а на УМЗ и УМ4 -
инверсное с инвертора И ( на ОУ с коэффициентом усиления К= —1).
Выходные напряжения Ug3l... ибэ4 усилителей мощности подаются на
переходы база - эмиттер силовых транзисторов. Регулировочная
характеристика ШИП приведена на рис.2,в. Усилител;. мощности, как
правило, имеют потенциальную развязку. Выполняются они по схемам,
существенно отличающимся от схем УМ, которые используются для
тиристоров.
В связи с тем, что транзисторы открываются за доли микросекунды, а
их закрывание обычно имеет задержку длительностью несколько
микроскунд, при переключениях в течение некоторого интервала времени
оказываются одновременно открытыми два последовательно соединенных
транзистора одной стойки (например, VT1 и VT4 на рис.2,а) и по их
коллекторным цепям протекают большие токи, перегревающие
транзисторы. Для исключения этого во входных цепях УМ должны стоять
злемены задержки 31 и 32 переднего фронта управляющего импулса на
1...20 мкс. Задержка зависит от свойств силовых транзисторов и УМ.
3. Двухзвенные преобразователи частоты
Функциональная схема двухзвенного преобразователя частоты с
амплитудным регулированием первой гармоники выходного напряжения
или выходного тока приведена на рис.3,а. Силовая часть содержит
выпрямительно-инверторный преобразователь ВИП, который питается от
сети через трансформатор ТС или токоограничивающие реакторы;
фильтр Ф и автономный инвертор АИ. Если используется автономный
8
<5
^ц/кл *
О
t
g
У шип '11
Рис.2. Широтно-импульсный преобразователь: а - функциональная
схема; 6 - временное диаграммы; в - регулировочная
характеристика
•Задание направлений ^
J&.—J[sF
к V6
,л к г с
У Мб I—►
6
а_
У"
^Vi -*
fa-П
^Д-
^L
ВПЕРЕД
T-TLfl
Т
! НАЗАД
П-Агцп п,
ь
м
I
I
I
„ -Ь
/izz3
t
f4
2££
n
т
1
1
I
4.
1
Рис.З. Двухзвенный преобразователь частоты с амплитудным
регулированием: а - функциональная схема; б - временное
диаграммы
инвертор напряжения, то необходим LC-фильтр и для обеспечения
рекуперации энергии в сеть применяется реверсивный ВИП. С инвертором
тока используются нереверсивный ВИП и фильтр, содержащий только
реактор.
Система управления ВИП (СУ ВИП) используется точно такая же,
как и для ВИП приводов постоянного тока, изменяется только ее
назначение. Теперь она должна обеспечивать получение на выходе
инвертора амплитуд напряжений или токов, которые задаются на входе
СУ ВИП. Система управления инвертором (СУИ) обеспечивает получение
требуемой частоты первой гармоники выходного напряжения или тока.
Напряжение управления, пропорциональное заданной частоте fl3,
подается на вход задающего генератора ЗГ, выдающего для трехфазного
АИ шестикратную частоту 6fl3 на распределитель импульсов РИ. В
зависимости от заданного направления вращения магнитного поля
двигателя импульсы подаются на силовые вентили АИ в порядке
1,2,3,4,5,6,1,2 и т.д. для одного направления или в порядке 6,5,4,3,2,1,6,5 и
т.д. для другого направления, если оно предусмотрено. От РИ сигналы
подаются на силовые управляемые вентили АИ через устройства задержки
переднего фронта (на схеме не показаны) и усилители мощности.
4. Преобразователи частоты с широтно-импульсной модуляцией
Функциональная схема силовых цепей и СУ двухзвенным
преобразователем частоты с широтно-импульсной модуляцией (ПЧ с
ШИМ) приведена на рис.4,а. Силовые цепи питаются от сети через
трансформатор ТС. Первым звеном является неуправляемый выпрямитель
В, далее следуют С- или LC-фильтр Ф и второе (выходное) звено - АИН.
Частота и амплитуда первой гармоники выходного напряжения
регулируются изменением относительной продолжительности
положительных импульсов на выходе каждой стойки автономного
инвертора напряжения.
Система управления содержит трехфазный ведущий генератор ВГ
гармонических колебаний и высокочастотный генератор пилообразного
развертывающего напряжения ГПН. Частота и амплитуда ВГ задаются
напряжениями с потенциометров или из СУ ЭП. Каждое гармоническое
напряжение ВГ суммируется с развертывающим напряжением ГПН и
подается на нуль-орган НО. Знакопеременные напряжения, которое
получаются на выходах нуль-органов, управляют силовыми вентилями,
обычно транзисторами, через УМ. Выходное напряжение (например, фазы
А иА0 между выходом А и искусственной нулевой точкой 0) повторяет
двухполярное напряжение нуль-органа (рис.4,6), но имеет намного
большую величину (например, 520 В) и мощность. Так же, как и в ШИП, у
сигналов, которые подаются на УМ, должен задерживаться передний
фронт. Устройства задержки на рис 4,а не показаны.
и
та/
А
зг
В
с
Рис.4. Преобразователь частоты с широтно-импульсной модуля¬
цией: а - функциональная схема; б - временные диаграммы
^S/o
1л
а&1
lr
i 3fft"
t* 'M
“аз* . r—r ! : tf #a&a9
Г7
*Ы"1 „-ь-ь
Цу! , ггт-i
4??t_
^4_
LlZLZL
■U .1 M
| ,j
1 &rT
j—i—f—i—\—
4—1 ..I ., J ■ —I. —1—J.
O-JJL
jLm
*
ft _
"Э*
tf
r ■*
im
1ЛГТ1
Г7
La.
I I
■*— .I..-L
Dt/на/
-*—i—i i—u ...< —t »
/лсрмеж&^ие. -$
■' >■»! i — »f- ♦■■ j—.4 *■»
«■■fc I 1
Ц
X
j~i i u
JmJi
I
J-1+
I
tf
» 1 4
*
# 1 1 ^
& глг г 3?
£&
&
?СГ п0
Рис.5. Преобразователь переменного напряжениям - функционал ь-
ная схема, 6 - временные диаграммы управляющих импульсов
15
Форма линейного выходного напряжения получается близкой к
однополярной и зависит от коэффициента мощности нагрузки (рис.4,6 и
[14, с.21]).
5. Непосредственные преобразователи частоты
Непосредственный преобразователь частоты сос тоит из нескольких
реверсивных выпрямительно-инверторных преобразователей, каждый из
которых питает одну фазу двигателя переменного тока. Каждый ВИП
имеет свою СИФУ. В разомкнутых системах электропривода еще нужен
ведущий (задающий) многофазный генератор прямоугольного или
синусоидального напряжения с регулируемыми амплитудой и частотой. В
замкнутых системах электропривода напряжения управления на СИФУ
ВИП поступают из системы управления электроприводом.
6. Преобразователи переменного напряжения
Система управления преобразователем переменного напряжения для
регулирования скорости асинхронного двигателя должна быть замкнутой
по скорости и желательно - по току [1]. В пособии рассматривается только
построение СУ, формирующей управляющие импульсы тиристорами.
Функциональная схема полупроводникового преобразователя
переменного напряжения (ППН), управляющего асинхронным двигателем,
представлена на рис.5,а. Силовая часть содержит пять пар встречно-
параллельно соединенных тиристоров. Последние две пары позволяют
осуществить реверс магнитного поля двигателя и динамическое
торможение. Магнитное поле вращается в прямом направлении ("вперед")
при открывании тиристоров VS1...VS6 . Порядок открывания тиристоров
1,6,3,2,5,4,1,6 и т.д. при нумерации, принятой на рис.5,а. В установившемся
режиме углы управления всеми тиристорами одинаковы. Для получения
поля, вращающегося в обратном направлении ("назад"), открывают
тиристоры VS5...VS10 в следующем порядке: 5,10,7,6,9,8,5,10 и т.д. В случае
динамического торможения в обмотки двигателя подается постоянный ток.
Что бы ток протекал от вывода двигателя С1 к вывод},7 С2 в
положительные полупериоды линейного напряжения Цдз, следует
открывать тиристоры VS1 и VS4. В отрицательные полупериодо следует
открывать тиристоры VS9 и VS8. Угол управления должен быть
достаточно большим, поскольку ток ограничен, главным образом,
активным сопротивлением первичной обмотки. При этом на один из
тиристоров в каждом полупериоде (например на VS4 и VS8) можно
подавать управляющий импульс с нулевым углом управления.
Система управления электроприводом СУ ЭП получает сигнал
заданной скорости с указанием ее направления и сигнал обратной связи с
тахогенератора ТГ. Эти сигналы сравниваются, и информация о
рассогласовании подается на логическое устройство для реализации
требуемого режима. Логическое устройство называют часто логическим
14
переключающим устройством (ЛПУ), как и в СУ ВИП, но функции его
несколько сложнее, поскольку в зависимости от режима работы
управляющие импульсы должны подаваться на разные тиристоры. Из СУ
ЭП подается также напряжение управления на ФСУ (задается угол
управления). Как правило, СУ ЭП имеет датчик тока ДТ, что позволяет
формировать заданные максимальные токи или моменты двигателя в
переходных режимах. Желательна и установка ДСВ, поскольку
переключения режимов должны выполняться в бестоковую паузу. В
промышленных ППН (их называют тиристорными станциями управления
ТСУ) ДСВ не ставили, а при изменениях режима ЛУ вводилась пауза
порядка 10 мс. Выходные сигналы ЛУ подаются через усилители мощности
УМ на управляющие электроды тиристоров.
Особенностями СУ ППН является то, что угол управления
отсчитывается от момента перехода фазного напряжения через коль к
положительному значению и импульс управления имеет либо
фиксированную длительность, либо фиксированный момент его окончания
(например, импульс может заканчиваться в момент следующего перехода
фазного напряжения через ноль к отрицательному значению или на 30°
раньше). Таким образом, импульс может иметь переменную длительность.
Достаточный диапазон изменения углов управления 0...1500. Большие
углы управления не используются, так как при отсутствии нулевого
провода выходное напряжение равно нулю, а при его наличии
электромагнитный момент двигателя меньше момента холостого хода.
Временные диаграммы управляющих импульсов для режимов
"вперед", "назад” и "динамическое торможение" приведены на рис.5,6.
Глава И. СИСТЕМЫ ИМПУЛЬСНО-ФАЗОВОГО УПРАВЛЕНИЯ
1. Показатели СИФУ
Основными показателями, которыми характеризуются СИФУ,
являются: диапазон регулирования угла управления, его погрешность,
помехозащищенность по каналам управления и синхронизации,
допустимые провалы в сетевом напряжении, вид согласования
характеристик управления вентильными комплектами (совместное или
раздельное, линейное или нелинейное), асимметрия управляющих
импульсов, вид фазовой характеристики ФСУ и получающиеся при этом
регулировочные характеристики преобразователя, быстродействие]
величина запаздывания, длительность бестоковой паузы при раздельном
управлении, мощность входного сигнала управления (напряжение и ток).
Рад показателей характеризует выходной управляющий импульс: крутизна
фронта тока или напряжения, амплитуда, форма, длительность, внешняя
характеристика импульса (ЭДС, ток короткого замыкания).
Максимальный заданный угол управления в режиме непрерывного
тока ограничен опрокидыванием инвертирования и равен
15
азтах = «"(Ушах+Sq+Да).
где уда* - максимальный угол коммутации, который получается при мак¬
симальных токе якоря и а в инверторном режиме, обычно Ушах = 8.-15°;
Sq - угол выключения тиристора, у обычных (не частотных и т.п.)
тиристоров Sq = 2...9° (100...450 мкс); Да - погрешность ФСУ, которая
принимается 2...3®. В конечном итоге используются максимальные углы
управления не 180°, а 150...170° (и даже 123° [6, с.76]). В режиме
прерывистого тока могут потребоваться утлы управления до 180(1 + 1/р)°-
Углы управления менее 15° практически не используются, поскольку при
этом напряжение на якоре превышает номинальное и имеются трудно
управляемые подрежимы прерывистого тока. При линейном согласовании
минимальный заданный угол управления '
a3min = * —^шах = У шах
Минимальные углы управления обычно находятся в пределах 0...300
(возможны до 57° [6, с. 76]). Угол у ^ проще вычислять при a=Sq + Да.
Асимметрией управляющих импульсов называют величину
отклонения интервалов между ними от интервала повторяемости
= 2* / р в установившемся режиме. Основной причиной асимметрии
являются разброс параметров итеымггпа в разных каналах ФСУ и ФСН.
Асимметрию может вызвать и сдвиг фаз напряжения сети. Обеспечение
симметрии является одним из основных требований, предъявляемых к
СИФУ, поскольку асимметрия приводит к возникновению сложных
биений выходного напряжения [21] и существенно ухудшает технико¬
экономические показатели системы ТП-Д. Асимметрия не должна
превышать 0,5—3° в зависимости от назначения привода.
При работе преобразователей возникают провалы в напряжении
сети. Величина провала характеризуется площадью между первой
гармоникой напряжения сети, амплитуда которой принимается за 100%, и
фактическим напряжением во время провала. Время при этом измеряется |в
градусах. Большинство преобразователей сохраняет работоспособности
при провалах до 400 процентов, умноженных на градус.
В настоящее время принято, что у всех ВИП напряжение управлений
(входной сигнал) должно находиться в пределах ±10 В при токе до±5 мА.
2. Фильтры синхронизирующих напряжений
Работа синхронных ФСУ обязательно синхронизируется с сетью. Для
этого используют напряжения вторичных обмоток ТСУ. Обычно точкой
отсчета является переход синхронизирующего напряжения через нуль, но
при наличии высших гармоник эта точка смещается и даже може|г
многократно повторяться, что приводит к непредвиденным изменения)!
выходного напряжения ВИП. Наличие высших гармоник обусловлена
работой преобразователей электрической энергии [9,11], сварочных
аппаратов, высокочастотных генераторов и другими причинами. Обычно
и
наиболее сильно выражены коммутационные гармоники с порядками
v = 1,5.7.11,13 и т.д., которые создают ВИП.
Для подавлениядщтапихгармоник после ТСУ устанавливается ФСН,
в каждой ячейке (ЯФСН) которго имеется фильр нижних частот. Фильтры
могут быть выполнены на R-, С-, L-элементах (пассивные фильтры) либо
на операционных усилителях (ОУ) с резисторами и конденсаторами
(активные фильтры). К ФСН предъявляются следующие требования [11]:
- подавление высших гармоник до приемлемого уровня;
- создание требуемого фазового сдвига напряжения синхронизации
по отношению к напряжению, которое подводится к тиристорам;
- минимальные изменения фазового сдвига первой гармоники и ее
амплитуды при отклонениях параметров R,L,C во время работы,а также
при быстром изменении гармонического состава напряжения сети;
- идентичность характеристик ячеек ФСН каждой фазы;
- синхронизирующее напряжение на ФСУ, по возможности, должно
подаваться с той же фазы сети, которая подводится к тиристору;
- для некоторых ФСУ необходимо гальваническое разделение
синхронизирующих напряжений различных фаз между собой.
В общем случае ФСН должен иметь р, или р/2 выходных напряжений
в зависимости от используемого ФСУГОт ТСУ может потребоваться в два
раза большее количество напряжений [7грис.31]. Трехфазный (по сетевым
обмоткам) трансформатор позволяет получить симметричную систему
напряжений с любым количеством фаз и любой начальной фазой. В
некоторых случаях для этого может потребоваться соединение вторичных
обмоток в зигзаг. На рис.6 представлены ТСУ и ФСН для трехфазного
мостового преёразователя. Шестифазное напряжение получается
благодаря тому, что у одной половины обмоток выходы берутся от их
начал, а у второй половины - от концов. Векторная диаграмма первых
гармоник сетевого напряжения показана на рис.6,6, выходных напряжений
ТСУ на рис.6,в, синхронизирующих - на рис.6,г. Масштабы диаграмм
различны. В зависимости от используемого ФСУ фазные обмотки могут
быть изолированными или иметь общую нулевую точку.
Основные свойства фильтра можно оценить по его логарифмическим
амплитудной и фазовой частотным характеристикам (JIA4X и ЛФЧХ). По
ЛАЧХ виден коэффициент передачи первой гармоники напряжения
А(оос) и степень подавления высших гармоник по сравнению с первой. По
ЛФЧХ виден сдвиг по фазе первой гармоники синхронизующего
напряжения по сравнению с входным (от ТСУ). Асимптотические ЛАЧХ
большинства фильтров, которые используются в ФСН, состоят их двух
прямолинейных участков. Начальный участок идет горизонтально,
параллельно оси частот, а далее после сопрягающей угловой частоты
юсопр ВДет участок наклоненный вниз. Эффективность фильтра
определяется его порядком п равным порядку описывающего его
дифференциального уравнения и порядку знаменателя передаточной
функции. Обычно порядок фильтра равен числу используемых в нем
реактивных элементов.
17
а
тсу
& $сиц&. Цг/нб
еонЗ
Рис.6. Шестифазный фильтр синхронизирующих напряжений:
а - функциональная схема; б- векторные диаграммы
Наклон второго участка ЛАЧХ, как правило, равен —20п дБ/дек.
Гармонические составляющие помех с угловыми частотами со подав*
ляются фильтром приблизительно в (0,5...1,0)1(<в - ©«^р) / Ос^р]” раз.
Простейший Г-образный RC-фильтр первого порядка представлен н*
рис.7 ,а. Резистор Rg в этой и всех последующих схемах являете*
нагрузкой фильтра и одновременно входным резистором ФСУ. Егр
величина зависит от чувсгвтельноси элемента, стоящего на входе ФСУ.
Если на входе стоит транзистор, то RH= 4...25 кОм, если стоит ОУ, тр
сопротивление RH на порядок больше. Этот резистор оказывает
существенное влияние на характеристики пассивного фильтра. Так
(oconp=(R1+RH)/RiRHCi. Для фильтров первого порядка ЛАЧХ
рассчитывается по формуле
L(ro) = 201gA(a>) = 201gl/ ^ 1 + (a> / <»сопр)2]-
В пробразователях используются фильтры с параметрами Rh=4,7 кОм,
R1=(2,7...3,7) кОм, Сх=1 мкФ и др. (рис.7,а)).
18
а /?, 15 к R„ 15 k i й< fo
a
и
СИН
6
О-/YTi
L АГн
U
I
10 м кГ*t70
г
a
сиН
о
L 5Гн
C2 Zmk
a
син
Rj
HZ>4
u
15 k
1
Рис.7. Фильтры синхронизирующих напряжений: а...г -пассивные
1, 2, 3-го порядков и ССУП-5; д, е - активные -1 и 2-го порядков
iO
so i50 500 1500 5000
оЭ роЭ/с *■-
Рис.8. Логарифмические
амлитудно-частотные
характеристики фильтров.
Буквенные обозначения схем
те же, что и на рис.7
19
На (рис.7,6) представлен Г-образный LC-фильтр второго порядка.
Его сопрягающую угловую частоту 0»^™ = 1 / VLC часто принимают
близкой к половине угловой частоты сети и RH равным 0,5...0.75
волнового сопротивления контура, что обеспечивает интенсивное
затухание колебаний.
Еще более эффективным является фильтр третьего порядка,
образованный последовательным соединений трех фильтров первого
порядка. Его недостатками являются слабо выраженный излом ЛАЧХ и
малый коэффициент передачи первой гармоники. Для меньшего
ослабления первой гармоники следует увеличивать сопротивления и
уменьшать емкости в каждом последующем звене.
Особое место занимает сложный полосовой фильтр (рис.7,г) типа
ССУП-5. Он хорошо подавляет гармоники начиная со второй, не
ослабляет и не сдвигает по фазе первую гармонику, но из-за сложной
настройки и больших габаритов использовался только для наиболее
ответственных электроприводов.
Активный фильтр первого порядка (рис.7 д) позволяет получить
большую амплитуду первой гармоники, чем пассивный фильтр первого
порядка (ЛАЧХ активного фильтра можно поднять) и может иметь
меньшие габариты. В остальном характеристики у них одинаковы.
В качестве активных фильтров второго и третьего порядков
предпочтительно использовать фильтры Баттерворта, как имеющие
монотонно спадающую ЛАЧХ. Для фильтра Баттерворта, второго порядка
(рис.7,е) ЛАЧХ рассчитывается по формуле
На рис.8 приведены ЛАЧХ всех, рассмотренных фильтров кроме
ССУП-5. Для фильтра третьего порядка приняты Ri+1 = 3R; и
Cj+i = С; / 3. В табл.1 приведены значения Юсощ,, степень подавления
пятой гармоники по сравнению к первой через обратное отношение их
коэффициентов передачи, а также фазовый сдвиг первой гармоники српч.
Таблица 1
Схема на рис.7
а
б
в
Г
Д
е
«сопр. рад/с
606
158
314
—
181
212
А(юс) / А(5юс)
2,46
24,8
32,4
44,6
4,36
^22,8
Ф(1), градус
-27
-138
-124
0
-240
-240
В СИФУ электроприводов КТЭ используются ЯФСН с двумя
интеграторами на операционных усилителях, образующих колебательное
звено с резонансной частотой 50 Гц [6, с.75]. При провале входного
напряжения на 400%*град фазовая погрешность этого фильтра не
превышает 1,5°. На одном ОУ можно набрать и фильтр третьего порядка.
Пассивные фильтры удобны тем, что позволяют легко осуществить
го
потенциальную развязку синхронизирующих напряжений между собой и
не требуют источников питания. Их недостатками являются заметное
подавление первой гармоники, большие габариты, масса, стоимость и
энергопотребление. Индуктивности в настоящее время являются крайне
нежелательными элементами, поскольку не имеют интегрального
исполнения, а ручное изготовление их довольно трудоемко. Активные
фильтры удобны тем, что нагрузка не влияет на свойства фильтра и тем,
что они позволяют регулировать переменными резисторами сопрягающую
частоту, коэффициент передачи первой гармоники и ее угол сдвига. В
некоторых случаях ОУ могут оказаться неприемлимыми из-за
невозможности гальванического разделения синхронизирующих напря¬
жений, поскольку отдельные Я ФСУ используют общие источники питания.
Схемы и свойства многих фильтров подробно рассмотрены в [11]. В
настоящее время имеются богатые возможности построения
малогабаритных и высококачественных аналоговых фильтров на ОУ и
цифровых фильтров на базе микропроцессоров.
Синхронизирующее на-
\
(Uo r—J Uмь I m 1 Up I I пряжение можно получить
МУ |—Г не только путем фильтра¬
ции напряжения сети,
которое берется со вто¬
ричной обмотки транс-
Рис.9. Функциональная схема генератора форматора блока пита-
синхронизирующего напряжения ния, но и от генератора Г
гармонического напряже¬
ния синхронизации iUb в схеме, представленной на рис.9. При отсутствии
управляющего сигнала Цу Г генератор работает с частотой сети шс.
Небольшое отклонение его частоты от а>с можно выразить через
изменяющуюся по отношению к напряжению сети начальную фазу <р:
^син = ^син.т COS(oct ~ ф). (5)
Напряжение вторичной обмопси с учетом искажений можно
представить в виде суммы первой и высших гармоник
00
u2 = U2(i)m sin COct + 2 U2(v)m sfrf усос* + <P(V) ]• (6)
v=2
На выходе множительного устройства МУ после перемножения
входных сигналов получится напряжение, содержащее множество
гармоник (7)
оо
иму = Km S*»#» - Кт sm(2wct -<р) + U2(1)m cos(uct - <р) £U2(v)m sm[»o>0t + <9(v)],
v=»2
где Km = U20)mUCHH ]ttl.
Полученное напряжение содержит медленно изменяющееся
напряжение рассогласования по фазе
u<p = Km sin ф (8)
21
и бесконечный спектр напряжений с частотами <ос и выше. Эти
напряжения подавляются фильтром нижних частот Ф, после чего остается
и?, управляющее частотой генератора. При положительном иф
увеличиваются частота генератора и уменьшается рассогласование по
фазе. Система является интегрирующей по фазе, и поэтому в
установившемся режиме отклонение по фазе равно нулю.
Качество синхронизации настолько велико, что на вход фильтра
может подаваться напряжение, которое подводится к вентилям (после
силового трансформатора) и имеет большие провалы во время их
коммутации. Небольшие отклонения частоты сети также не приводят к
заметной погрешности. Сдвиг по фазе на я/2 (между косинусом и синусом
(5) и (6)) легко устраняется введением RC-цепей.
Такие генераторы с системой их регулирования выпускаются за
рубежом в виде интегральных схем, которые дополняются навесными
резисторами и конденсаторами [22, с. 175].
3. Формирователи длительности
Для формирования длительности аналоговыми устройствами
используется либо приращение заряда конденсатора (интегрирование
тока), либо приращение магнитного потока в индуктивности, которые
пропорциональны длительности процесса. В первом случае
контролируется напряжение, во втором случае - ток. При этом ток заряда
конденсатора или напряжение на индуктивности должны бьггь либо
постоянными, либо изменяться по заранее известному неизменному закону.
Наиболее распространенными устройствами для формирования
временных интервалов с невысокой точностью являются одновибраторы,
хоторые после поступления на вход импульса произвольной длительности
формируют на выходе прямоугольный импульс (или провал) напряжения
заданной длительности. У входного импульса важен только передний
фронт, запускающий формирователь длительности (ФД). Под фронтом
понимают скачок напряжения или тока от одного уровня к другому вверх
(положительный фронт) или вниз (отрицательный фронт).
Наиболее распространены в различных областях техники
транзисторные одновибраторы с эмиттерной связью. Однако их
существенным недостатком является наличие в паузах напряжения порядка
15...30% от напряжения питания, поэтому в СИФУ используются
одновибраторы с коллекторно-базовыми связями, у которых напряжение в
паузах практически равно нулю [7,11]. Одновибратор имеет много других
названий: заторможенный мультивибратор, ждущий мультивибратор,
заторможенный релаксатор, спусковое устройство, кип-реле и др.
Длительность выходного импульса может быть постоянной и
регулируемой.
Базовая схема ФД на основе одновибратора с коллекторно-базовыми
связями приведена на рис.10,а. Напряжение питания Unl подведено от БП.
22
В исходном состоянии входное напряжение Чфсу= 0, транзистор VT1
закрыт, конденсатор Сх заряжен током резистора R2, транзистор VT2
открыт током резистора R3, и выходное напряжение ФД ифд = 0. Ток
резистора R5 также равен нулю.
Рис. 10 Формирователь длительности на основе одновибратора:
а - принципиальная схема; б - временные диаграммы
Передний фронт положительного импульса в момент а + &е
открывает транзистор VT1, напряжение ик1 на его коллекторе становится
равным нулю (рис.10,6), левая обкладка конденсатора подключается к
общей шине, напряжение на базе VT2 становится отрицательным по
отношению к его эмиттеру, VT2 закрывается и на выходе ФД появляется
напряжение Это напряжение через R5 поддерживает транзистор VT1 в
а
S
23
открытом состоянии VT1. Далее идет перезаряд конденсатора Cl током
резистора R3. Когда напряжение на конденсаторе превысит напряжение
насыщения перехода база-эмиттер второго транзистора, он
откроется, так как ток резистора R3 переключится в его базу, выходной
импульс прекратится, VT1 закроется. В паузу конденсатор зарядится током
резистора R2 до напряжения питания. Напряжение на коллекторе VT1
растет так же по экспоненте, как и напряжение на конденсаторе, превышая
его на величину падения напряжения на переходе база - эмиттер VT2.
Во время формирования длительности управляющего импульса
напряжение конденсатора изменяется по экспоненте с постоянной времени
R3C1:
uc - Uni[2exp(-t/R3C1)-1]. (9)
При подстановке в (9) значения ис - 0 находим длительность
импульса
tG =R3C1ln2«0,7R3C1. (Ю)
Если подставлять R3 в килоомах и Cj в микрофарадах, то время полу¬
чается в миллисекундах. Например, задаваясь tG « 0,5 мс и R3=15 кОм,
найдем Cj=0,047 мкФ.
Для определения величины выходного напряжения необходимо знать
вольт-ампериую характеристику нагрузки. Обычно нагрузкой является
резистор R6 в цепи базы транзистора усилителя мощности, как показано
штриховой линией на рисЛ0,а. В нагрузку входит также сопротивление
резистора положительной обратной связи R5. Результирующее
сопротивление параллельно включенных резисторов R=R5R6/(R5+R^) и
выходное напряжение ФД
ифд = (Uni “U6.3.H)R/ (®-4 +®*) + Ufi3eH. (11)
Схему ФД можно упростить, используя вместо VT1 выходной
транзистор или выход микросхемы ФСУ, но при этом исключается
резистор R5, и поэтому длительность импульса ФД не может превышать
длительность входного сигнала, поступающего с ФСУ. Вместо Rj можно
поставить конденсатор, но в этом случае должно исключаться закрывание
VT1 задним фронтом входного импульса. Если в качестве VT2
используется транзистор, эмиттерный переход которого не выдерживает
обратного напряжения конденсатора, то в схему добавляются диод и
резистор с источником отрицательного напряжения. Таким свойством
обладает большинство современных транзисторов.
24
Глава III ФАЗОСМЕЩАЮЩИЕ УСТРОЙСТВА
Фазосмещающее устройство (ФСУ) является наиболее важным
функциональным узлом, определяющим основные свойства СИФУ. ФСУ
формирует углы управления, величина которых задается напряжением
управления. Реализуемая при этом зависимость a(U„) называется фазовой
характеристикой, иногда ее называют регулировочной характеристикой
СИФУ (или ФСУ). В каждом периоде напряжения сети формируется р
импульсов для преобразователей с симметричными схемами и р/2 - для
преобразователей с несимметричными схемами силовых цепей. ФСУ,
которые используются в НПЧ, иногда называют модуляторами.
В мощных преобразователях часто применяется параллельное и
последовательное включение тиристоров. Управляющий импульс должен
подаваться на все эти тиристоры одновременно, и в дальнейшем они
рассматриваются как один.
В зависимости от способа формирования заданных углов управления
каждым тиристором в многофазном преобразователе различают
многоканальные и одноканальные ФСУ, а с точки зрения определения
моментов подачи управляющих импульсов различают синхронные и
асинхронные ФСУ. В многоканальных угол управления каждым
тиристором формируется в отдельной ячейке ФСУ. В одноканальных a
формируется в одном устройстве, общем дня всех тиристоров данного ВК.
Некоторые преобразователи имеют синхронные ФСУ, которые здесь
названы комбинированными. В этом случае для каждой пары тиристоров
мостовой схемы, подключенных к одной фазе питающего напряжения
(тиристоров одной стойки), используется одна ячейка ФСУ, которая
управляет одним тиристором катодной группы (например VS1 или VS3) и
одним тиристором анодной группы (VS4 или VS6). Управляющие
импульсы подаются в противофазе, т.е. со сдвигом на полпериода. Для
трехфазной мостовой схемы требуется три ячейки ФСУ с ФД и шесть УМ.
В синхронном ФСУ угол управления в соответствии с фазовой
характеристикой отсчитывается для каждого тиристора от момента
естественного включения, или фаза включения отсчитывается от момента
перехода напряжения (ЭДС) питания анодной цепи через нуль. Таким
образом, фаза подачи i-ro управляющего импульса
= a(Uy) + fte + (i -1)&„, (12)
где $„ = 2% ( р - интервал повторяемости выходных напряжения и тока.
В асинхронной ФСУ момент подачи управляющего импульса на
следующий тиристор отсчитывается от момента подачи предыдущего
импульса. В установившемся режиме управляющие импульсы следуют с
интервалом повторяемости. В общем случае
S’; = Sj_j + &П + Лоц, (13)
где Даj - приращение угла управления, необходимое для получения
требуемых выпрямленных напряжения или тока в переходном режиме.
25
Синхронные ФСУ выполняются многоканальными, одноканальными и
комбинированными. Асинхронные ФСУ имеет смысл выполнять только
одноканальными. По принципу работы ФСУ часто называют и все СИФУ
синхронным многоканальным, асинхронным и т.д.
1. Многоканальные синхронные ФСУ
Функциональная схема однокомплектного трехфазного мостового
преобразователя с многоканальным синхронным ФСУ приведена на
рис.11. На этой и последующих схемах ФСУ иногда будут показываться
ФСН
VMI \fS3\ VS3
-
ТСлУМб
Рис.11. Функциональная схема СИФУ с синхронным
многоканальным ФСУ
устройства, не входящие в ФСУ: ВК, ТСУ, ФСН и др. Для многоканальных
ФСУ требуемое количество синхронизирующих напряжений равно
пульсности преобразователя, в данном случае р=6. Эти напряжения и
общее напряжение управления подаются на р ячеек фазосдвигающего
устройства (ЯФСУ). Выходные сигналы ЯФСУ подаются на ФД, где
формируются по длительности, затем усиливаются по мощности УМ и
через устройство потенциальной развязки подаются на управляющие
электроды (и катоды) тиристоров. Штриховыми линиями показаны линии
передачи дублирующих управляющих импульсов, которые нужны для
мостовых схем, когда импульсы формируются с длительностью, меньшей
интервала повторяемости.
Достоинством многоканальных ФСУ является высокое
быстродействие и сравнительная простота. Их недостаток в большой
асимметрии углов управления (порядка 3...60), поскольку элементы ЯФСУ
изготовляются с разбросом параметров 5...10%. Элементы, имеющие малую
2«
погрешность (0.5... 1%), существенно дороже, поэтому обычно для
уменьшения асимметрии до 2„.3° вводят переменные резисторы и каждую
ячейку настраивают отдельно. Существенно уменьшить асимметрию
можно используя одноканальные ФСУ.
2. Одноканальные синхронные ФСУ
Функциональная схема одноканального синхронного ФСУ
предствлена на рис. 12,а, а временные диаграммы выходных сигналов
каждой ячейки показаны на рис. 12,6. Генератор синхронизирующих
импульсов ГСИ преобразует синхронизирующие напряжения в
последовательность импульсов ис и с длительностью порядка 50 мке,
передний фронт которых совпадает с моментами естественной коммутации
силовых вентилей. Эти импульсы затем задерживаются последовательно в
нескольких ячейках (блоках) задержки Я31...ЯЗЗ. В установившемся
режиме углы задержки а3 во всех ячейках одинаковы, меньше интервала
повторяемости и определяются напряжением управления Uy. Если число
ячеек задержки равно п3, то результирующая задержка а = п3а3.
Выходные импульсы последней ячейки задержки из 3 распределяются по
тиристорам ячейками распределителя ЯР1...ЯРр. От импульса последней
ЯЗ срабатывает (вьщает выходной импульс) только та ячейка, которая
перед этим получила подготовительный импульс (на рис.12,а поступает
сверху). На первую ячейку ЯР1 подготовительный импульс ип и поступает
с ячейки задержки подготовительного импульса ЯЗП. В этой ячейке
задерживается сразу на угол а опережающий импульс иои, который
формируется в генераторе опережающег о импульса ГОИ. Передний фронт
опережающего импульса ио и формируется раньше момента естественного
включения первого тиристора на S...200.
,При срабатывании каждой ЯР запускается ФД, УМ, открывается
тиристор и подается подготовительный импульс на следующую ячейку,
которая в свою очередь сработает от очередного импульса последней ЯЗ.
Последняя ячейка ЯРр не выдает подготовительный импульс на первую
ячейку. На ЯР1 подготовительный импульс подается с ЯЗП. Это сокращает
длительность сбоев в ФСУ. Например, если одна из ячеек сработает
досрочно, то так же досрочно будут срабатывать все последующие ячейки,
но ЯР1 сработает вовремя, в соответствии с сигналом управления. Для
уменьшения числа сбоев в некоторых одноканальных ФСУ
подготовительные импульсы формируются в двух ГОИ и ЯЗП отдельно
для катодной группы тиристоров (VS1, VS3, VS5) и отдельно для анодной
(VS4, VS6, VS2). Тем самым уменьшается максимальное количество сбоев.
Количество ячеек задержки определяется диапазоном регулирования
угла управления, интервалом повторяемости и временем восстановления
ЯЗ. Наиболее просты ячейки, которые задерживают один импульс. Отсчет
ведется либо по заряд}’ конденсатора, либо по величине перемагничивания
27
о-1*» 8> — ^ ^ ^
Т^Г
oc**3atg^ ж
Wl
GW
li
£
/ ^ & £> d.
I— ГТ П П П- П n r^
5
ГТ П -Л П—П n
^tnHof.
jq a
l г 5 f & e
H D □ IT- П П
t?
Рис.12. Одноканальное синхронное ФСУ: а - функциональная схема;
б - временное диаграммы
сердечника. Перед следующей задержкой эти переменные должны быть
возвращены к исходной величине, для чего требуется определенное время
восстановления &в = (0,10...0,02)ЭП. В переходных режимах интервал
между управляющими импульсами может отличаться от &п на ±Аап. Для
повышения выпрямленного напряжения надо задать отрицательное
приращение интервала. Таким образом, минимальное количество блоков
задержки при наличии дополнительного фазового сдвига
синхронизирующего напряжения по отношению к моменту естественного
включения на amin
n3 = (amax " amin) / — 0 4)
Обычно синхронизирующее напряжение переходит через нуль в
момент естественной коммутации, и в (14) следует подставлять amin=0. Для
диапазона 160 эл.град в случае трехфазного мостового преобразователя
достаточно трех ячеек задержки. Для однофазных схем используют одну
ЯЗ. Применение ячеек задержки принципиально позволяет получить сколь
угодно большой угол задержки, но необходимости в этом нет.
Достоинствами одноканальных схем являются малая асимметрия
управляющих импульсов (порядка 0,5°), независимость сформированного
угла управления от формы напряжения сети и простота настройки. Как
правило, при нулевом напряжении управления устанавливают
a = a0 = 7t/2 + ap, для чего вводят напряжение смещения иш. Фазовая
характеристика обычно линейная.
Недостатками рассмотренного одноканального ФСУ являются
большая сложность изготовления и пониженное быстродействие . Скачок
управляющего сигнала не может сократить задержку, которая уже
реализована в первых ЯЗ. Известно несколько способов борьбы с этим
явлением [7]. Достоинствами одноканальных ФСУ является малая
асимметрия управляющих импульсов, обусловленная, главным образом,
погрешностями ЯФСН, нетребовательность к точности параметров
элементов ЯЗ и простота наладки. Используются они при повышенных
требованиях к точности ФСУ.
3. Комбинированные синхронные ФСУ
Комбинированные синхронные ФСУ используются для мостовых и
двухфазных преобразователей. Функциональная схема комбинированного
ФСУ приведена на рис. 13. Генераторы синхронизирующих импульсов
ГСИ1...ГСИЗ выдают импульсы при каждом переходе синхронизирующих
напряжений через ноль, т.е по два импульса в течение периода. Каждая
ячейка ФСУ так же выдает по два импульса за период с интервалом,
равным полупериоду (в установившемся режиме). Здесь и в дальнейшем
под периодом понимается период напряжения питающей сети. Логические
схемы J1C1...JIC3 при одной полярности синхронизирующего напряжения
(например отрицательной) направляют выходной импульс ФСУ на ФД
тиристора катодной группы, а при другой полярности - на тиристор
анодной группы. Одна ЯФСУ управляет двумя противофазными
тиристорами (двумя плечами одной стойки).
Комбинированные ФСУ позволяют существенно уменьшить
асимметрию противофазных управляющих импульсов. Эту асимметрию
29
Г- I P/S __7'CU^
J1C1
~ГСИ£ЯсРСУ2 ( * |ttfCci
hzsrcm
Рис. 13. Функциональная схема комбинированного ФСУ
иногда называют разбежкой импульсов. Разбежка приводит к появлению
первой гармоники в выпрямленном напряжении, что крайне нежелательно,
поскольку подавить ее трудаее, чем высшие гармоники. Название
"комбинированные ФСУ" используется только в данном пособии.
Устоявшегося наименования нет. Некоторые называют их
трехканальными, другие "модификацией одноканального ФСУ" и пр. [13].
4. Асинхронные одноканальные ФСУ
В асинхронных ФСУ (рис.14,а) интервал между управляющими
импульсами задается генератором Г, а затем распределителем импульсов
РИ, имеющим р ячеек ЯР, через ФД и УМ управляющие импульсы
подаются на тиристоры выпрямительно-инверторного преобразователя
ВИП. Распределитель импульсов выполняется в виде кольцевого счетчика
с р ячейками. Один из возможных вариантов приведен на рис.38. Среднее
выпрямленное напряжение преобразователя сравнивается с заданным, и их
разность AUd = Ud3 - Ud управляет (рис.14,6) интервалом (частотой)
следования выходных импульсов генератора &г = Эп - krAUd = 9П - Дап,
где кг - коэффициент передачи генератора. Таким образом, если
выпрямленное напряжение равно заданному, то управляющие импульсы
подаются с интервалом, равным 8П, и угол управления остается
неизменным. Если выпрямленное напряжение меньше заданного, то
интервал между импульсами и угол управления уменьшаются, а ЭДС
преобразователя растет до тех пор, пока выпрямленное напряжение не
станет равным заданному. Такая САР является интегрирующей и
30
г
о
Ж/
Рис. 14. Система ТП-Д с асинхронным одноканальным ФСУ: а- функ¬
циональная схема; б - регулировочная характеристика генератора
астатической. Она точно поддерживает заданное напряжение (без
статической ошибки). В асинхронном ФСУ можно вместо обратной связи
по напряжению использовать также обратную связь по току и,
следовательно, поддерживать ток равным заданному.
Преобразователь с асинхронным ФСУ работает при любой реально
возможной форме напряжения сети, и ФСН принципиально не нужен.
Важно только, чтобы частота сети была достаточно стабильной.
Полностью избавиться от синхронизации с сетью не удается. При пуске
первый управляющий импульс должен быть подан в нужный момент.
Необходимо также ограничение максимального угла управления в
инверторном режиме. Фильтр Ф ставится для получения среднего Uj.
Известны асинхронные ФСУ без генератора и фильтра, в которых
интегрируется разность мгновенных значений заданного и
действительного выпрямленного напряжений [3]. Когда интеграл станет
равным нулю, генерируется управляющий импульс. Таким образом,
среднее напряжение получается равным заданному при любой частоте
сети. Однако в этих ФСУ трудно добиться устойчивости, особенно в
инверторном режиме.
В заключение отметим, что в настоящее время основными являются
многоканальные синхронные ФСУ. Все большее распространение
получают комбинированные ФСУ. Одноканальные и асинхронные ФСУ в
серийных выпрямительно-инверторных преобразователях пока не
используются.
5. Принцип развертывающего уравновешивания
Для формирования углов управления с 70-х годов используется, в
основном, принцип развертывающего уравновешивания, который часто
называют принципом вертикального управления. До этого применялось
31
много других принципов и схем: на основе пик-дросселей и пик-
трансформаторов, диодно-емкостные, транзисторно-емкостные, с
интегрированием напряжения управления, на магнитных усилителях и др.
Принцип развертывающего уравновешивания основан на сравнении
синхронизированного с сетью развертывающего напряжения с
напряжением управления. В момент равенства суммы этих напряжений
нулю или равенства одного другому формируется передний фронт
управляющего импульса. Функциональная схема такого ФСУ приведена
на рис.15,а. Синхронизирующее напряжение подается на вход генератора
а
и
ттА
Рис. 15. Фазосдвигающее устройство с развертывающим уравнове¬
шиванием: а - функциональная схема; б - временное диаграммы
развертывающего напряжения ГРН, имеющего в данном случае
пилообразную форму (рис.15,6). Развертывающее напряжение Up
суммируется с напряжением управления и, когда их сумма переходит через
нуль
uy+up=0, (15)
нуль-орган НО формирует передний фронт выходного напряжения
фазосдвигающего устройства и в конечном итоге управляющий
импульс. Развертывающее напряжение изменяется по требуемому закону (в
данном случае по линейному), начиная с момента естественной
коммутации управляемого тиристора Sc. С этого момента отсчитывается и
угол управления. Для того чтобы легко находить момент равенства суммы
напряжений нулю, следует на временной диаграмме развертывающего
напряжения нанести и напряжение управления, но его положительную
величину откладывать вниз от оси времени. Точка пересечения этих
кривых соответствует равенству нулю их суммы, например при ир = -6 В и
иу = +6 В. Длительность импульса ФСУ принципиальной роли не играет*
Развертывающее напряжение часто называют опорным или по его форме:
линейным, пилообразным, косинусоидальным, синусоидальным и т.д.
32
Иногда вместо нуль-органа ставят компаратор, и угол управления
формируется в момент равенства напряжений управления и развертки.
6. Ячейка ФСУ с пилообразным развертывающим напряжением
Принципиальная схема ЯФСУ с пилоообразным развертывающим
напряжением приведена на рис Л 6,а, принцип работы поясняется
временными диаграммами на рис Л 6,6. На верхней диаграмме показана
ЭДС фазы а, которая подводится к рассматриваемому тиристору. Ниже
приведено синхронизирующее напряжение (для трехфазной мостовой
схемы оно отстает от ЭДС, подводимой к тиристорам, на 210° с учетом
групп соединения трансформаторов и фазового сдвига в ФСН). На рис.6
это напряжение обозначено исин3. Синхронизирующее напряжение
переходит через нуль в момент естественной коммутации. При
положительном напряжении синхронизации транзистор VT1 открыт, он
шунтирует операционный усилитель DA1 и его выходное пилообразное
напряжение uD = 0. Резистор Rt, по которому протекает ток базы, может
являться резистором фильтра, например Rh на рис.7,а, или нагрузкой
фильтра, которую иногда необходимо учитывать при его расчете*
При отрицательном напряжении синхронизации транзистор закрыт и
операционный усилитель интегрирует отрицательное стабилизированное
напряжение UCT. Его выходное напряжение нарастает по прямой линии от
нуля до максимума. Скорость нарастания напряжения ип
пропорциональна UCT / R2Q. Для получения желаемой регулировочной
характеристики из пилообразного напряжения на входе второго
операционного усилителя DA2 вычитается напряжение смещения и
получается развертывающее напряжение, у которого в случае линейного
согласования максимум и минимум равны по абсолютной величине. Такое
развертьюающее напряжение можно получить и без напряжения смещения
[5, с 197]. Операционный усилитель DA2 выполняет роль нуль-органа. Он
не охвачен обратной связью. Сумма напряжений подается на прямой вход.
Если сопротивления входных резисторов равны R4 = Rs = R6, то при
сумме напряжений, превышающей несколько милливольт, на выходе нуль-
органа получается максимальное напряжение * того же знака.
Положительный фронт задает момент открывания тиристора. Строго
говоря, на входе операционного усилителя суммируются не напряжения , а
токи, и в общем случае скачок выходного напряжения происходит в
момент, когда
un / R4 - UCT / R5 + uy / R6 = 0. (16)
В данной схеме суммирование производится на прямом входе
операционного усилителя. Инверсный вход соединен с общей точкой
схемы. Если сделать наоборот, то в момент положительного перехода
суммы напряжений (токов) через нуль будет формироваться не
33
Рис.16. Ячейка ФСУ с пилообразным развертывающим
напряжением: а - принципиальная схема; б - временные диаграммы;
в - фазовая характеристика; г - регулировочная характеристика
преобразователя
положительный, а отрицательный фронт, что принципиального
значения не имеет.
При любом согласовании углов управления при Uy=0 угол
управления должен быть равен а0 [9, 11]. Следовательно, при
8 - Эс = а0 развертывающее напряжение должно быть равно нулю.
Для этого его неоходимо сместить вниз вычитанием напряжения
смещения UCM. Как, следует из временной диаграммы (рис. 16,6), углу
а=я соответствует un = Unm, а углу а0 соответствует UCM. Откуда
UCM =ипт(а0/я). (17)
Если равенство всех входных резисторов DA1 не соблюдается, то
следует перейти к токам и вместо требуемого напряжения смещения
можно использовать произвольное отрицательное стабилизированное
напряжение UCT. Выражая углы в градусах, получим
R5=180R4(UCT/Unin)/a0. (18)
Найдем параметры интегратора. Максимум пилообразного
напряжения принимают на 2...S В меньше напряжения питания
операционного усилителя. Во время заряда напряжение на
конденсаторе (пилообразное напряжение) изменяется по уравнению
(19)
М о
Ток заряда ic = Uw / R2. Конденсатор заряжается до
напряжения Unm за время, равное полупериоду напряжения сети. Если
проинтегрировать (19), учитывая, что длительность полупериода
равна I/2fc, где 4 - частота сети, Гц, то мы получим
Unm = UCT / 2f0R2Cj. Обычно задаются емкостью в микрофарадах.
Тогда при частоте сети 50 Гц сопротивление в килоомах
Rj-lOU^/OJ^C,). (20)
Например, при Cj =0,5 мкФ и равенстве напряжений получаем
R2=20 кОм.
Сопротивление Rj находится исходя из длительности разряда tp
цка 0,2 мс) конденсатора С[ с учетом падения напряжения база -
эмиттер и продолжающегося заряда Cj током резистора R2.
Транзистор должен быть выбран по напряжению и току. Часто
используются транзисторы типа КТ315.
Фазовая характеристика, если пренебречь ограничениями,
проходит через точки (рис.16,6) a=0, Uy = Uymax и а = оц), Uy = 0.
Ha рис.16 и далее используются напряжения управления и ЭДС,
выраженные в относительных единицах Uy, = Uy / Uymax и
Ed» = Ed / EdQ. Тогда аналитическое выражение фазовой
характеристики, справедливое в пределах ограничений, имеет вид
а = а0(1 -Uy / Uyinax) = сц)(1 - Uy,), (21)
35
которое справедливо в пределах ограничений, регулировочная
характеристика в режиме непрерывного тока
Ed = Ed0 cos а = Ed0 cos[a0(l - Uy*)] (22)
получается нелинейной (рис. J 7 ,г).
В несимметричных преобразователях в режиме непрерывного тока
Ed = Ed0(l + cosa) / 2 и Ed=0 при а=к. Для того, чтобы при Uy=0
получить Ed=0, необходимо принять =Unm. При этом изменяются
фазовая и регулировочная характеристики.
Достоинством рассмотренного ФСУ является то, что
развертывающее напряжение не зависит от формы и амплитуды
напряжения сети и имеет неизменную производную. Это обеспечивает
достаточно точное формирование углов управления. Однако отклонения
параметров элементов и частоты напряжения сети приводят к
погрешностям. Схема настраивается на определеную частоту и при другой
(например 60 Гц) изменятся коэффициент передачи, а0, и пр.
7. Ячейка ФСУ с косинусоидальным развертывающим напряжением
Принципиальная схема ячейки многоканальной синхронной ФСУ с
косинусоидальным развертьюающим напряжением приведена на рисЛ7,а.
В случае линейного согласования в качестве развертывающего напряжения
используется одно из синхронизирующих напряжений. Развертывающее
напряжение должно иметь минимум в момент естественной коммутации
Up - -Upm cos(S - »е), (23)
как показано на рис Л 7,6. Управляющий импульс формируется в момент
равенства возрастающего развертывающего напряжения и напряжения
управления. В этот момент & - &е = а. Откуда выражение фазовой
характеристики (рис Л7,в), справедливое в Гфеделах ограничений
a = arccos(uy / Upm). (24)
Регулировочная характеристика в режиме непрерывного тока после
подстановки (24) в (22) получает вид (рис Л7,г)
= ®dOuy / Upm. (25)
Таким образом, при арккосинусоидальной фазовой характеристике
получается линейная регулировочная характеристика преобразователя в
режиме непрерывного тока.
Эта ЯФСУ позволяет при линейном согласованном управлении
формировать углы управления и вторым вентильным комплектом,
используя моменты равенства суммы напряжений на спадающей части
развертывающего напряжения. Как видно из рис Л 7,6, при этом получаем
Рп = щ = % - ап. В случае нелинейного согласования развертывающее
напряжение получается из синхронизирующего после вычитания
напряжения смещения
Up = -Upo, cos(S - ае) - . (26)
36
6
об i
т
^min
os о
г i
0,5-
-0,5 0
-%5
Рис.17. Ячейка СУ с косинусоидальным развертывающим
напряжением: а - принципиальная схема; б - временные диаграммы;
в - фазовая характеристика; г - регулировочная характеристика
преобразователя
В момент, когда Uy + up = 0 в первом полупериоде &-&е = а,
откуда cosa = (Uy - UCM) /и
a = arccos[(uy -UCM)/Upm]. (27)
37
При напряжении управления, равном нулю,
ос = ао = arccos(-UCM / Upm). Для обеспечения одинаковости
характеристик преобразователя при положительном и отрицательном
токах нулевому напряжению управления должен соответствовать угол
управления в обоих вентильных комплектах, равный а0. Подставляя его в
формулу (52), получаем Ed0cosa0I +Ed0cosa0n = -2Бр, откуда
а0 ■= arccos(-Ep / Ed0) • (28)
Сравнивая это выражение с полученным выше, находим, что при R3 = R*
UCM = UpmEp / Ed0. (29)
Если сопротивления входных резисторов не равны, то управляющий
импульс формируется в момент когда uy / R2 + исин / Rj - UCM / R3 =0.
Задаваясь величиной R2 = 10...50 кОм, находим
Ri * R2(Upm + исм) / uymax. (зо)
Если смещение получается от стабилизированного источника с иным
напряжением, чем вычислено по (29), то
R3 = R1UCT/UCM. (31)
Для несимметричных схем развертывающее напряжение надо
сместить вниз на величину его амплитуды. Регулировочная
характеристика в этом случае в режиме непрерывного тока получается так¬
же линейной.
Косинусоидальное развертывающее напряжение можно получить и в
схеме 16,а, если интегрировать в течение полупериода синусоидальное
синхронизирующее напряжение [3].
Достоинством ЯФСУ с косинусоидальным развертывающим
напряжением являются простота ячейки и то, что точность формирования
угла и линейность регулировочной характеристики преобразователя
определяются соотношением сопротивлений только двух резисторов Rj и
R2. Недостаток - возрастание da / dUy при малых и больших а, а также
зависимость амплитуды развертывающего напряжения регулировочной
характеристики от амплитуды напряжения сети. При снижении
напряжения сети Upm может оказаться по абсолютному значению меньше
напряжения управления, и формирование углов прекратится, что особенно
опасно в инверторном режиме. Для исключения этого в моменты
экстремумов иногда добавляют короткие импульсы. Такие импульсы
показаны штриховыми линиями на рис.17,6.
8. Ячейка комбинированного ФСУ
В комбинированном ФСУ используется р/2 ячеек и синхронизирующих
напряжений. Упрощенная схема ячейки комбинированного ФСУ
представлена на рис. 18. Первые четыре транзистора, два логических
элемента и резистор R6 образуют генератор синхронизирующих
38
tv 1
к
<
о]
<*У
А
9
•о
4 г-У
> Q
Рис. 18. Упрощенная принципиальная схема ячейки
комбинированного ФСУ
логических сигналов W (рисЛ9). На транзисторе VT5 и операционном
усилителе DAI выполнен генератор пилообразною напряжения* Операци¬
онный усилитель DA2 является
нуль-органом. На транзисторе VT6
выполнен формирователь
длительности. Элементы ИЛИ-НЕ
на DD3 и DD4 образуют
логическую схему, выбирающую,
на какой тиристор должен быть
подан управляющий импульс. На
базу транзистора VT7 с ЛПУ
подается сигнал запрета Ь.
Рассмотрим подробнее работу
схемы. Синхронизирующее напря¬
жение через резистор R^ подается
на базы транзисторов VT1 и VT2.
В начальный момент времени
синхронизирующее напряжение
равно нулю, транзисторы VT1 и
VT2 закрыты, a VT3 и VT4
открыты. Логические сигналы на
коллекторах транзисторов P=N=0
(низкий уровень). Когда
положительное синхронизирующее
напряжение превысит некоторое
пороговое значение U^n, равное
сумме напряжения насыщения
база-эмиттер и падения
напряжения на R* от тока базы,
транзистор VT1 откроется,
зашунтирует переход база
эмиттер транзистора VT3 и он
закроется. При этом пошляется
логический сигнал Р=1 (рис.19),
имеющий длительность менее
полупериода* После снижения
синхронизирующего напряжения
ниже уровня U6n сигнал Р=0. В
следующем полупериоде, когда
отрицательное синхронизирующее
напряжение превысит по абсолют¬
ной величине пороговое напряжение U6n, откроется транзистор VT2,
зашунтирует переход база - эмиттер VT4 и он закроется. При этом
появляется логический сигнал N=1 (см.рисЛ9).
Рис. 19. Временное диаграммы
сигналов в ячейке комбиниро¬
ванного ФСУ
40
Сигналы Р и N подаются на инверторы с открытыми коллекторами.
Можно представить, что это транзисторы, базы которых являются
входами, коллекторы подсоединены к R6, а эмиттеры к общей шине. Эти
элементы реализуют логическую функцию W = P+N. Таким образом, W=1
только в том случае, когда P=N=0. Во всех остальных случаях W=0.
Сигналы W представляют короткие импульсы, средины которых
совпадают с моментами естественной коммутации вентилей. Они
открывают транзистор VT5, который разряжает Cj. Поскольку на резистор
R9 подано отрицательное напряжение ист, то по окончании импульса W
конденсатор заряжается и формирует положительное пилообразное
напряжение ип в каждом полупериоде. В нуль-органе на DA2 это
напряжение суммируется с отрицательными напряжениями управления и
смещения UCT. В момент, когда сумма напряжений (точнее, токов)
переходит через нуль, формируется отрицательный фронт выходного
напряжения нуль-органа. Этот фронт через R13 и С2 запирает транзистор
VT6 на время &G, равное требуемой длительности управляющего
импульса. Выходной сигнал Т с коллектора транзистора подается на
логические элементы И DD3 и DD4, на вторые входы которых подаются
логические сигналы положительного Р и отрицательного N
синхронизирующих напряжений. Если оба сигнала, поданные на
логический элемент, равны единице, то на его выходе появляется
единичный сигнал (G1 или G4), который после усиления по мощности и
потенциальной развязки подается на управляющий электрод
соответствующего тиристора. Положительный сигнал запрета Ъ с ЛПУ
открывает VT7, и сигналы Т, G1 и G4 становятся равными нулю, т.е.
накладывается запрет. В двух других каналах формируются начало и
длительность управляющих импульсов, которые подаются на тиристоры
VS3.VS6 и VS5.VS2.
Применение комбинированных ФСУ позволяет в два раза уменьшить
количество ячеек ФСУ и ФД по сравнению с многоканальным ФСУ и
существенно уменьшить асимметрию противофазных импульсов. Они
широко применяются в СУ преобразователей особенно небольшой
мощности.
9. Ячейка ФСУ на основе одновибратора
Рассмотренная в п.2.4 схема одновибратора формирует неизменные
интервалы времени. Ячейки многоканальных и комбинированных ФСУ, а
также блоки задержки одноканальных ФСУ должны формировать
интервалы времени (углы), длительность которых задается напряжением
управления. Небольшое изменение схемы одновибратора позволяет
получить требуемое устройство. Его упрощенная принципиальная схема
приведена на рис.20,а. Управление осуществляется двумя отрицательными
по отношению к общей шине напряжениями управления. Первое
41
а
+158 g Un£ Um
+58
Hfr/Sr M Щ
Г 3,5*
Рис.20. Ячейка ФСУ на основе одновибратора: а - принципиальная
схема; б - временные диаграммы
42
напряжение управления Uyl подводится к аноду диода VD3. Сразу после
открывания транзистора VT1 источник Uyl оказьшается подключенным
через VD3 параллельно конденсатору Cj, и он быстро разряжается до
напряжения, равного
ис(0) « -иу1 + дид « -иу1, (32)
где AUn=0,5...0,7 - падение напряжения на кремниейом диоде при малом
токе, В. Заметим, что Uyl и Uy2 - величины отрицательные. Для упроще¬
ния анализа будем пренебрег ать падениями напряжений в р-n переходах. В
данном случае это приводит к существенным количественным
погрешностям, так как напряжение питания схемы всего 5 В, а падение
напряжения в р-n переходах доходит до 1,5...2,0 В. К счастью, вид
характеристик, в основном, сохраняется. Принципиально напряжение
питания не ограничено, оно может быть и 12... 15 В. В описаниях ячейки [10]
учтена часть падений напряжения на р-n переходах.
Второе напряжение управления Uy2 подается на эмиттер VT2,
который отключен от обшей шины. Напряжение базы VT2, при котором он
открывается током резистора R3, равно
и&о = иб.э.н + иу2 * иу2. (33)
С другой стороны, это напряжение, до которого разряжается
конденсатор током резистора R3 во время формирования интервала
времени (угла управления). Установившееся напряжение на базе VT2
больше этого быть не может. Таким образом, в данной схеме регулируются
начальное и конечное напряжения на времязадающем конденсаторе.
Рассмотрим подробнее работу схемы. Напряжение синхронизации
проходит через нуль в моменты естественной коммутации. Специальная
схема формирует в эти моменты синхронизирующие импульсы, которые
открывают Т1 два раза в течение периода. Вариант такой схемы
рассмотрен в предыдущем параграфе. В микросборке ДК-2 для этого
используются нуль-орган, дифференцирующее звено и преобразователь
импульсов обоих знаков в положительные [10].
В исходном состоянии VT1 закрыт падением напряжения на диоде
VD2 от тока резистора R], подключенного к источнику отрицательною
напряжения. Выходное напряжение ЯФСУ снимается с коллектора VT1.
При закрытом транзисторе VT1 и заряженном Cj падение напряжения на
резисторе R2 отсутствует и выходное напряжение ЯФСУ практически
равно напряжению питания, поскольку ФД подключен через конденсатор и
в интервалы между фронтами не потребляет ток от ЯФСУ . Транзистор
VT2 открыт током резистора R3. Если пренебречь падением напряжения в
переходе база-эмиттер, то напряжение конденсатора uc = Unl - Uy2.
Напряжение на коллекторе VT2 и ток диода VD1 равны нулю.
Положительный импульс открывает VT1 в момент естественной
коммутации. При этом летая обкладка конденсатора Сг присоединяется к
43
общей шине, отрицательное напряжение правой обкладки прикладывается
к базе VT2 и запирает его; ток резистора R 4 переключается через VD1 в
резистор Rt и в базу VT1, удерживая его в открытом состоянии;
конденсатор разряжается через цепь источника первого напряжения
управления и VD3 до Uyl. Быстрый разряд конденсатора виден на
временных диаграммах рис.20,6 как направленный вниз пик напряжения.
Строго говоря, время быстрого разряда входит в длительность интервала,
но мы будем этим пренебрегать.
Далее формируется длительность интервала. Конденсатор
разряжается током резистора R3 от UyI до Uy2. Для того чтобы
напряжение конденсатора (развертывающее напряжение) изменялось по
практически линейному закону, резистор R3 питается от источника
повышенного напряжения Un2 = 15 В. Решая дифференциальное уравнение
заряда конденсатора, получим формулу для его напряжения:
uc = Up - Un2 - (Un2 - Uyl)exp(-S /1), (34)
где т = (OcRjC! - постоянная времени, рад. В момент, когда uc = Uy2
(точнее uc = u6o), VT2 открывается, VT1 закрьшается и отсчет угла
управления заканчивается. Из (34) получаем
a = x!n[(L)n2-Uyl)/(Un2-Uy2)]. (35)
Абсолютные значения напряжений управления в (35) суммируются с
напряжением питания.
Сразу после закрывания VT1 напряжение на его коллекторе
(выходное напряжение ЯФСУ и^) равно нулю, поскольку напряжение
конденсатора равно Uy2 и такое же напряжение на базе VTI.Hcjih бы не
было транзистора VT3, то дальше и*^ нарастало бы по экспоненте с
постоянной времени R2C1. Для повышения крутизны выходного
напряжения резистор R2 кратковременно шунтируется транзистором VT3,
который открывается специальной схемой (на рисунке не показана).
Поскольку ток заряда сравнительно большой, то он вызывает пик падения
напряжения на внутреннем сопротивлении источника второго напряжения
управления. Этот пик хорошо виден на временных диаграммах рис.20,бэд'.
Влияние напряжений управления и резистора R3 на угол управления
поясняют временное диаграммы на рис .20. В первых двух полупериодах
все остается неизменным, а в третьем один из параметров изменяется. На
рис.20,6 показаны синхронизирующие импульсы, которые открывают VT1.
Напряжение конденсатора в первый момент равно напряжению питания,
но вскоре становится равным Uyl; далее по начальному участку
экспоненты нарастает до Uy2, в этот интервал VT1 закрьшается и на
выходе ЯФСУ формируется импульс и^, запускающий ФД.
Длительность этого интервала представляет угол управления. В третьем
44
интервале Uyl уменьшается (возрастает по абсолютной величине) и а
увеличивается (а2 >04).
На рис.20 ,в в третьем полупериоде уменьшаются Uy2 и а. На рис.20 j
в третьем полупериоде увеличено сопротивление R3. уменьшился наклон
линии развфтывающе! о напряжения и возрос угол управления.
Найдем математическое выражение идеализированных фазовых
характеристик ЯФСУ. Для этого будем полагать, что напряжение на
времязадающем конденсаторе (напряжение развертки) изменяется по
близкому к линейному закону, а также будем пренебрегать падениями
напряжения на р-n переходах и временем первого разряда конденсатора до
Uyj. Действительная схема ЯФСУ, которая используется в микросборе
ДК-2, намного сложнее. Она содержит пять транзисторов и пять диодов.
Поэтому учет всех падений по схеме рис.20,а не приведет к точным
результатам. Более полная схема приведена в [7, стр.56] с несколько иными
обозначениями. В частности второе напряжение обозначено U0.
Угол управления пропорционален разности напряжений управления.
Обозначая коэффициент пропорциональности буквой получаем
выражение фазовых характеристик в виде
при условии, что оба напряжения управления отрицательны и
Uy2 - Uyl > 0. Таким образом, все фазовые характеристики представляют
прямые линии. Для построения семейства фазовых характеристик ЯФСУ
на плоскости следует задаться рядом значений сопротивления R3 и одного
из напряжений управления, после чего построить фазовые характеристики
для другого напряжения управления. Затем поменять их ролями. При а==0
оба напряжения управления равны. Это дает начальную точку
характеристики на оси абсцисс. Возможные харахстеристгаси приведены на
рис.2 U где все напряжения выражены в вольтах. Там же штриховой линией
нанесены экспериментальные характеристики. Желаемые фазовые
характеристики СИФУ можно получить, используя в СВУ линейные или
нелинейные звенья. Введением напряжения смещения можно получить
характеристики, представленные на рис.16,в. Обычно основное управление
ведется вторым напряжением управления. Первое используется для
установки начальной фазировки, а иногда и в качестве дополнительного
управления из САУ электроприводом. Резистором R3 устанавливают
равные максимальные углы управления во всех ЯФСУ одной СИФУ.
Рассмотренная схема используется в качестве ЯФСУ
комбинированных ФСУ и в качестве блоков задержки одноканальных
ФСУ. Она принята за основу в микросборке СИФУ типа ДК-2.
Времязадающая цепь является навесной (т.е не входит в состав
мшфосборки). В частности используются R3=75...!20 кОм и С^О.47 мкФ.
В ДК-2 входят два формирователя длительности, две логические схемы и
45
Рис.21. Идеализированные фазовые характеристики ФСУ на основе
одновибратора: а - для первого напряжения управления; б - для
второго напряжения управления
четыре усилителя мощности для огггронных тиристоров с выходным током
до 0,15 А. Схема должна быть дополнена ТСУ, БП, ФСН, ВСУ, а также
ЛПУ и ДСВ при раздельном управлении.
10. Устройства цифрового управления
Начиная с 80-х годов быстро расширяется область применения
цифровых систем управления (ЦСУ) [12,18], поскольку они обеспечивают
более высокую точность, не требуют нападки, имеют высокую надежность,
быстро совершенствуются и хорошо сочетаются с ЦСУ электропривода.
Цифровое управление электроприводом, которое сочетается с цифровой
СИФУ, называют прямым цифровым управлением.
Цифровое управление может выполняться на аппаратурной основе
или программным путем. В первом случае каждая функция реализуется на
одной или нескольких микросхемах широкого применения или
специализированны::. Вся ЦСУ монтируется на печатной плате. Изменение
принципа работы или его усовершенствование требуют переработки
печатной платы. В случае программной реализации используются
микропроцессорные наборы, контроллеры и микроЭВМ. Алгоритм
записывается в память, и для его изменения достаточно перезаписать
содержимое в ячейках памяти.
В ЦСУ часть устройств часто выполняется по выгае рассмотренным
аналоговым схемам: УМ, ФСН. ДСВ, БП. Так же как и аналоговые ФСУ
цифровые ФСУ могут выполняться многоканальными, одноканальными и
комбинированными, синхронными и асинхронными.
46
11. Функциональные схемы цифровых ФСУ и ФД
В цифровых ФСУ используются, главным образом, уже
рассмотренные принципы развертывающего уравновешивания и
горизонтального управления. Вместо развертывающего напряжения
используется линейно изменяющийся код К_. В случае развертывающего
уравновешивания (вертикального принципа) код линейно нарастает и,
когда он станет равным коду заданного угла управления Кр = Ка,
формируется выходной сигнал ФСУ F . Цифровые ФСУ выполняются, как
правило, комбинированными или одноканальными.
Функциональная схема комбинированного ФСУ, построенного по
принципу развертывающего уравновешивания, приведена на рис.22,а.
Синхронизирующее напряжение исин подается на нуль-орган НО, на
выходе которого формируется логический сигнал S знака
синхронизирующего напряжения (рис.22,6). Импульсный элемент ИЭ в
моменты изменения логического сигнала S, которые соответствуют точкам
естественной коммутации вентилей, формирует короткие импульсные
сигналы SK длительностью несколько микросекунд. Этот сигнал подается
на вход R счетчика и сбрасывает его содержимое на нуль. Сразу после
прекращения импульса счетчик начинает заполняться импульсами,
которые подаются на вход +1 с частотой 4* Код счетчика и код заданного
угла управления подаются на схему сравнения кодов Э2. Как только
окажется Кр > Ка, на выходе схемы сравнения А>В появляется выходной
сигнал F =1, который подается через логические элементы И1 и И2 на ФД
и УМ тиристора катодной или анодной группы в зависимости от знака
синхронизирующего напряжения.
Функциональная схема ФСУ, использующего горизонтальный
принцип управления с линейно уменьшающимся кодом К„, приведена на
рис.22,в. Синхронизирующее напряжение преобразуется в логические
сигналы S и импульсы S„, которые подаются на вход SE счетчика на
элементе СТ. При этом в счетчик записывается код угла управления Ка и
сразу передается на его выходы Q (эти сигналы не используются). Код в
счетчике начинает уменьшаться, так как на его вход -1 поступают
импульсы с частотой f^. Когда код в счетчике станет равным нулю, на его
выходе 0< появляется F =1, который в зависимости от значения S
подается на ФД и УМ тиристора катодной или анодной группы и
прекращает счет благодаря элементу И с инверсным входом. В цифровых
СИФУ это иногда называют управлением с предварительным
накоплением сигнала. Можно формировать углы и заполнением счетчика
от введенного кода до предела. Угол управления в этом случае
пропорционален разности кодов заполненного счетчика и введенного.
Схема ФСУ с горизонтальным принципом проще, но менее
быстродействующая. Угол управления в ней формируется в момент (точке)
47
а
Ui
A
И.
32
А
к
В
Й>В
в
^ин\Н0Ц^иэ^
К
ОС
S£
ст
V
40
-/
ш
Qi
иг
GA
Рис.22. Цифровые ФСУ: а - с вертикальным принципом управления;
б - временные диаграммы ее сигналов; в - с горизонтальным
принципом управления; г - временные диаграммы
48
естественной коммутации и в дальнейшем измениться не может. В случае
развертывающего уравновешивания угол формируется позже в момент
равенства кодов, т.е. учитываются изменения заданного угла во время его
отсчета. В цифровых СИФУ это называют управлением без
предварительного накопления (записи) сигнала.
Формирователи длительности управляющего импульса могут
строится на тех же принципах. Но поскольку длительность управляющего
импульса до после изготовления преобразователя не изменяется, то
обычно используется более простой горизонтальный принцип. Код
длительности импульса Кс записывается в счетчик сигналом ФСУ F и
выходной триггер ФД перебрасывается в состояние, при котором подается
сигнал формирования импульса на УМ. Когда код длительности
управляющего импульса станет в счетчике равным нулю, триггер ФД
перебрасывается в исходное состояние и ток в цепи управляющего
электрода прекращается. Дискрета угла ФД принимается существенно
большей, чем дискрета угла ФСУ.
Рассмотрим основные соотношения, необходимые для расчета
цифровых формирователей длительности, для сети с частотой 50 Гц. Углы
S (интервалы времени) будем выражать в элтрадусах. Поскольку одному
периоду сети длительностью 0,02 с соответствует угол 360°, то одной
сеясунде соответствует 360/0,02=1,8 • 1 (г электрических градусов, интервалу
длительностью Т соответствует угол
»«1,8-10*Т. (37)
Если на счетчик поступает последовательность импульсов с
частотой fft, то интервал, соответствующий одной дискрете угла 69, равен
59 =1,8-104 /fa электрических градусов. (38)
Необходимая емкость счетчика определяется максимальным углом
9 м, который должен формировать счетчик
Nc = »max/5». (39)
Емкость двоичного счетчика, имеющего п разрядов
Nc = 2». (40)
Отсюда необходимое количествро разрядов счетчика
n = lnNc/ln2. (41)
12. Цифровые ФСУ и ФД на аппаратной основе
В качестве примера на рис.23 приведен вариант цифрового
комбинированного ФСУ и ФД на базе микросхем КМОП серии К561 [20].
Для получения временных интервалов используется генератор миниЭВМ с
тактовой частотой f,- 5 МГц. МиниЭВМ используется для управления
электроприводом и выдает код Ка заданного угла управления. Для
упрощения схемы не показаны выводы микросхем, которые не
используются. Сигнал высокого уровня (уровень плюса источника
4»
<0
If
к
II
II
-мс\**г) 1*0^59
Рис.23. Упрощенная принципиальная схема цифрового синхронного
комбинированного ФСУ с ФД
питания) обозначен "1" и называется единичным, сигнал низкого уровня
(уровня общей шины) обозначен "О" и называется нулевым.
Синусоидальное синхронизирующее напряжение подается на
компаратор DA1, второй вход которого соединен с общей шиной. Это
превращает его в нуль-орган. Его логический выходной сигнал знака S
синхронизирующего напряжения подается на импульсный элемент,
который выполнен на двух D-триггерах микросхемы DD1 и схеме
"неэквивалентность" DD2. На вход Р триггеров тала К561ТМЗ подан
нулевой сигнал (на схеме не показан). Эти триггеры при положительном
фронте тактового имцульса на входе С запоминают информацию, которая
подана на вход D, а отрицательный фронт передает эту информацию на
выход триггера. Если Q1=Q2, то импульсы, поступающие на тактовый
вход С, не меняют состояние триггеров. После изменения сигнала S
триггеры переключаются. Например, если в исходном состоянии
S=Q1=Q2=0, а затем становится 8=1, то во время положительного фронта
тактового импульса (о чем говорит косая черта на изображении входа С)
единичный сигнал запомнится в триггере DD1.1, а отрицательный фронт
передаст его на выход и станет Ql=l. Следующий положительный фронт
запомнит единицу в DD1.2, а отрицательный передаст его на выход Q2.
Таким образом, после каждого изменения знака синхронизирующего
напряжения в течение Т„ = 1 / f„ сигналы Q1*Q2. Эти сигналы поступают
на входы элемента "неэквивалентность" (исключающее ИЛИ) на
микросхеме DD2 типа К561ЛП2 (четыре микросхемы в одном корпусе). Ее
выходной сигнал S„=Q1®Q2, т.е. при каждом изменении S в течение Тн
сигнал Q1*Q2 и формируется синхронизирующий импульс S„=l. Все
остальное время S„=0. Для получения S„=l длительностью Т„=3,2 мкс
тактовая частота 5МГц делится на 16 счетчиком DD7.1 на микросхеме
типа К56 ШЕЮ.
Синхронизирующий импульс подается на вход R сброса на О
счетчика DD3 типа К561ИЕ16. Принимая 8а=0,1° и ашах=170,° находим
емкость счетчика развертывающего кода Np=amax/8a= 170/0,1 = 1700 и
необходимое число его разрядов по (41) np = In 1700/ In 2 = 10,7;
принимаем пр= 11. Этот счетчик имеет 14 разрядов, но три младших
разряда (Q0, Ql, Q2) на выход не подаются, и выходной код счетчика
К =Q3+2-Q4+4-Q5+...+1024-Qll. Таким образом, выход счетчика
нарастает с частотой fp/8. Для получения желаемой 8а =0,1 частота
тактовых импульсов на входе счетчика определится из выражения (38)
fp/8=l,8-104/0,l. Откуда fp= 1,44-106 Гй. Близкую частоту можно получить
делением £,. на 4 в счетчике DD7.1. В этом случае fp= 1,25 МГц и дискрета
угла управления по (38) 8а=1,8104/(1,25106/8)= 0,1152°. Максимальный
угол, который можно записать в счетчик, Spmax = аш = 2Пр 8а =
51
~2п • 0,1152 = 235,9°, что вполне достаточно при максимально возможном
атах—•
Далее необходимо сравнивать развертывающий код с кодом угла
управления. В принятой серии имеются компараторы типа К561ИП2,
позволяющие сравнивать только четырехразрядные двоичные числа,
поэтому для сравнения 11 разрядов надо использовать три компаратора
DD4, DD5 и DD6. Компараторы имеют 4x2 входов А и В для
сравниваемых чисел и три выхода А>В, А=В, А<В, а также три таких же
входа для наращивания количества разрядов. Когда указанное
соотношение кодов удовлетворяется, на выходе появляется единица. При
последовательном включении одноименные входы соединяются. На входы
А>В и А<В первой ячейки подаются нули, а на вход А=В - единица. Время
задержки в трех ячейках при сравнении кодов не превышает 0,7 мкс.
Выходной сигнал ФСУ F снимается с выхода А=В последнего
компаратора и подается на входы SE счетчиков D9 и DD10 К561ИЕ11 ,
что является командой записи в них кода, который подан на входы
D0...D3 с помощью перемычек. После записи кода длительности
управляющего импульса на выходах Р счетчиков появляется единичный
сигнал, который через схему совпадения DD8 разрешает прохождение
импульсов с частотой fG на счетные входы С и снимает через инвертор
DD12 сигнал R установки триггера DD13 типа Л561ТМ1 в нулевое
состояние. Кроме того, задержанный на несколько микросекунд в элементе
задержки DD12 сигнал F поступает на вход С триггера и переводит его в
единичное состояние. При этом в зависимости от знака
синхронизирующего напряжения открывается либо тиристор катодной
группы, сигнал на усилитель мощности которого поступает со схемы
совпадения на DD14 при S=1 (например VSI), либо тиристор анодной
группы (VS4) через DD15 при S=0. Поскольку на входы ±1 счетчика подан
"0", они работают в режиме вычитания импульсов, поступающих на вход
С. Эти импульсы получаются после деления частоты f„ на 16 во втором
счетчике-делителе DD7.2. Таким образом, /16=£,/256. Дискрета
задания длительности управляющего импульса
8» -1,8 • 104 / <fT / 256)=1,8 • 104 / (5 • 106 / 256)= 0.9216°. Емкость двух
счетчиков Ng=2*= 256. Максимальная длительность управляющего
импульса &о = 8Sq • NG= 0,9126-256 = 236°, что вполне достаточно.
Величина устанавливается при изготовлении преобразователя
перемычками, соединяющими входы D с общей шиной или плюсом
питания. На рис.23 перемычками установлен код 01001100 (76), которому
соответствует Sq = 768S0= 76-0,9216 = 70°. Код счетчика линейно
уменьшается во времени. Когда он станет равным нулю, на выходе Р
счетчика DD10 появляется нулевой сигнал, который через инвертор DD12
возвращает триггер DDI3 в нулевое состояние, и управляющий импульс
прекращается. Одновременно с опрокидыванием триггера нулевой сигнал с
52
выхода Р поступает на схему совпадения DD8, прекращает поступление
счетных импульсов на входы счетчиков, и они остаются в неизменном
состоянии с нулями на всех выходах до поступления очередного импульса
F с ФСУ.
Показанные на рис.23 элементы DD8, DDI1, DD14 и DD15
отсутствуют в серии К561 (часть имеется в серии 1564), но их можно
набрать на схемах И-НЕ.
♦
13. Программная реализация цифровых ФСУ
В {Цифровых ФСУ, реализованных программным путем, используют
либо микропроцессоры, либо микроЭВМ, которая управляет
электроприводом в цепом. Как правило, программным путем реализуются
функции большинства устройств СИФУ. Усилители мощности (УМ)
управляющих тиристорами импульсов с гальванической развязкой
выполняются отдельно по схемам, рассмотренным в четвертой главе.
Система синхронизации наряду с генерацией в моменты естественной
коммутации синхронизирующих импульсов вырабатывает номер текущего
интервала преобразования и его длительность [18, п.6.5].
Формирование угла управления и длительности управляющего
импульса возможно как на щкираммом уровне с использованием
оперативного запоминающего устройства, так и с помощью внешних
таймеров. Программное формирование углов связано с большими
затратами времени, и поэтому требуется очень высокое быстродействие
микропроцессора для выполнения других функций СИФУ. На микроЭВМ,
кроме того, возлагаются функции управления электроприводом, его
защиты и диагностики. Поэтому ниже рассмотрен второй способ отсчета
временных интервалов. С целью снижения аппаратных затрат чаще
используются одноканальные синхронные ФСУ, требующие только один
программируемый таймер. В зависимости от наличия или отсутствия у
микроЭВМ системы прерываний возможны два способа построения ее
связи с УМ [18].
При первом способе по сигналу, выработанному микроЭВМ, в
таймер записывается число, соответствующее рассчитанной величине угла
а. После отсчета интервала времени, соответствующего заданному углу,
таймер вырабатывает сигнал управления прерыванием. МикроЭВМ
прерывает процесс вычислений и выдает в буферный усилитель мощности,
сигнал, соответствующий заданному номеру тиристора (который подлежит
включению). В буферном усилителе сигнал расшифровывается и выдается
импульс на ФД, УМ и далее на управляющий электрод тиристора.
При втором способе микроЭВМ одновременно выдает сигналы в
таймер и в буферный усилитель, соответствующий номеру включаемого
тиристора. При переполнении таймера поданный сигнал через схему
управления, ФД и УМ поступает на тиристор.
53
В зависимости от схемы программируемого таймера возможны два
способа фазового управления: с предварительным и без предварительною
накопления сигнала. При предварительном накоплении сигнала в счетчике
[18, с.176) в момент начала отсчета записывается код числа, определяющий
угол управления. При переполнении счетчика вырабатывается сигнал
выдачи импульса на тиристор (через ФД и УМ). Во втором случае код
записывается в буферный регистр, выход регистра соединен с дискретным
компаратором, на вход которого поступает код с выхода счетчика. В
момент равенства кодов на тиристор подается отпирающий импульс.
В зависимости от принятого способа организации начала отсчета
времени таймером ФСУ может быть синхронной и асинхронной. В обоих
случаях функция распределителя импульсов возлагается на микроЭВМ.
Более подробно алгоритмы цифровых СИФУ изложены в [12,18].
14. Динамические свойства преобразователей
Динамические свойства ФСУ оказывают существенное влияние на
свойства замкнутых систем ТП-Д. Изложение анализа некоторых свойств
требует очень большого объема [17,21], поэтому здесь будут приведены
только конечные выводы и наиболее простые доказательства.
Основные особенности и свойства ВИП с ФСУ, использующем
развертывающее уравновешивание, следующие.
1. Тиристорный преобразователь управляется дискретно в моменты
подачи управляющих импульсов, а не непрерывно.
2. Интервал времени между воздействиями зависит от пульсности
преобразователя, величины и знака производной напряжения управления.
Это хорошо видно на рис.24,а, где на одной диаграмме показаны шесть
развертывающих напряжений трехфазного мостового преобразователя и
сигнал управления, а на второй диаграмме - дискретные значения углов
управления. Вначале напряжение управления растет (положительные
значения отложены вниз) и интервал между управляющими импульсами
меньше интервала повторяемости. Затем, когда напряжение управления
уменьшается, интервал между управляющими импульсами возрастает.
Обратим внимание на то, что графики напряжения управления и значений
а совпадают при соответствующем выборе масштабов.
3. Производная напряжения управления должна быть ограничена
снизу
<«>
dt dt
т.е. на временных диаграммах отрицательная скорость нарастания
напряжения управления (вверх на рис.24) должна быть меньше скорости
нарастания развертывающего напряжения. На участке между точками 1 и
3 рис.24,6 условие (42) не выполняется. В связи с этим, если в первой точке
откроется первый тиристор, то управляющий импульс в точке 2 только
подтвердит его открытое состояние. Импульсы в точках 3 и 4 будут
54
Рис.24. Иллюстрация динамических свойств ФСУ: а - влияние
duy / dt; б - отработка сигнала с недопустимо большой / duy / dt/; в
реакция на гармонический сигнал управления; г - реакция на
гармонические сигналы с частотами выше граничной
55
поданы на предыдущий, ранее открытый, тиристор и напряжение не
изменится. При увеличении напряжения управления в точке 5 снова
подтвердится открытое состояние первого тиристора и только в точках 6 и
7 произойдет открывание последующих тиристоров. На участке между
точками 7 и 8 производные duy / dt и du„ / dt равны абсолютной
величине и противоположны по знаку. Это предельный случай,
соответствующий равенству в (42). При этом не происходит открываний
тиристоров и подтверждения их открытых состояний. Открывание
происходит в точках 8 и 9 после увеличения производной напряжения
управления (когда ее кривая идет вниз на временной диаграмме).
4. Динамические свойства звена можно оценить по его реакции на
гармонический сигнал. В данном случае входным сигналом является
напряжение управления, а выходным можно считать угол управления.
Доказано, что при круговой частоте управляющего сигнала, меньшей
определенного граничного значения
<°улр =РЮС / 2. (43)
преобразователь ведет себя как безинерпионное звено. На рис.24,в показан
входной сигнал, имеющий постоянную и гармоническую составляющие.
Сопоставляя управляющий сигнал с получающимися углами управления,
легко заметить, что огибающая дискретных значений углов управления не
имеет фазового сдвига по отношению к входному сигналу. Таким образом
при выполнении условий (42) и (43) ФСУ и преобразователь в целом
являются безинерционными звеньями. Полезно учесть, что долгое время
преобразователь рассматривали как звено чистого запаздывания или как
апериодическое звено, что не верно. Такой подход иногда встречается и в
современных публкациях.
5. При частотах управляющего сигнала, превышающих граничное
значение, этот сигнал не проходит на выход, т.е. а(Э) не соответствует
Uy(ft). В связи с этим возникают биения и различным управляющим
сигналам могут соответствовать одинаковые а(Э) . На рис. 24jb в верхней
части показаны управляющие сигналы с частотами Зшс и 6шс .В обоих
случаях получается неизменное значение а. В нижней части этого рисунка
показано возникновение биений при частоте управляющего сигнала
5,2сос. Угол управления меняется по сложному периодическому закону,
его огибающая показана штриховой линией на рис.24,г. Более подробно
эти вопросы рассмотрены в [21, п. 1-6].
6. В замкнутых системах, охватывющих преобразователь, могут
возникать субгармонические колебания, обусловленные дискретностью
работы преобразователя [21, рис. 1-21].
56
Глава TV УСИЛИТЕЛИ МОЩНОСТИ УПРАВЛЯЮЩИХ
ИМПУЛЬСОВ ДЛЯ ТИРИСТОРОВ
1. Требования к управляющему импульсу
В начале рассмотрим требования, которые предъявляются к форме
управляющего импульса (на временной диаграмме). Оптимальная с точки
зрения уменьшения времени включения, уменьшения потерь в тиристорах и
повышения надежности работы преобразователя форма импульса
показана на рис. 25,а. Импульс должен иметь крутой передний фронт.
Рис.25. Формы тока управляющих импульсов: а - оптимальная; 6 -
прямоугольная; в - близкая к оптимальной; г - треугольная
Повышение крутизны ускоряет распространение зоны проводимости,
позволяет допускать ббльшую скорость нарастания анодного тока в
тиристоре и уменьшает потери в нем при включении. Рекомендуется, чтобы
ток управляющего электрода -достигал максимального значения
^G.max ж ... 3, 5)1<эт за время tj< 3...4 мхе. Очень нужна высокая
крутизна фронта (более 1 А/мкс) при параллельном и последовательном
соединении тиристоров для одновременности их включения. После
достижения максимума ток может спадать в течение времени t2=10...30 мке
до отпирающего тока IGt=0,2...0,6 А, который указывается в справочных
данных для каждого типа тиристоров. Полная длительность импульса
должна быть не менее 50...10Q мкс. Однако с учетом свойств нагрузки
длительность управляющего импульса должна быть такой, чтобы за время
его действия ток тиристора (ток нагрузки) превысил величину тока
включения IL= 0,1...0,3 А, зависящего от типа тиристора. Если при
анодном токе, меньшем тока включения, снять управляющий импульс, то
тиристор скачком закроется. При этом и на индуктивности нагрузки и на
аноде тиристора может появиться выброс напряжения. Таким образом,
при недостаточной продолжительности управляющего импульса
преобразователь не может работать. В преобразователях, питающих цепь
а
5 g &
/
57
якоря, могут использоваться короткие импульсы управления
длительностью 8...120 (450...670 мкс). В преобразователях, питающих цепи
возбуждения, ток нарастает медленнее и необходимо использовать более
длинные импульсы.
В мостовых преобразователях в режиме прерывистого тока и при
запуске необходимо открывать одновременно два тиристора: один в
катодной и один в анодной группе вентилей. Для этого приходится либо
подавать каждый раз два коротких импульса - на вновь открываемый и на
предыдущий тиристоры (второй импульс называют дублирующим или
сопровождающим), либо подавать одиночные импульсы такой длины, что¬
бы в момент подачи очередного импульса еще существовал предыдущий.
То есть длительность импульса должна превышать длительность
интервала повторяемости. Используются &о=70...120° (3,9...6,7 мс). В
некоторых случаях целесообразны импульсы переменной длительности,
например, в преобразователях переменного напряжения. Наиболее широко
используемые на практике формы импульсов показаны на рис.25.
Управляющие импульсы на триодные тиристоры подаются через
импульсные трансформаторы (рис.26,а), которые обеспечивают требуемую
ЭДС в цепи управляющего электрода и осуществляют потенциальную
развязку цепей управления и силовых цепей.
Рис.26. К расчету установившегося тока управляющего электрода:
а - принципиальная схема цепи управления; б - расчетная схема;
в - вольт-амперная характеристика цепи управляющего электрода
Рассмотрим упрощенно работу этого узла при подаче на первичную
обмотку прямоугольного импульса напряжения (рис.25,6) после окончания
переходного процесса нарастания тока в обмотке. В этом случае можно
пренебречь индуктивностями рассеяния и для упрощения не учитывать
намагничивающий ток. Тогда расчетная схема примет вид,
58
представленный на рис.26,6. В цепи управляющего электрода действует
вторичная ЭДС Е2 = UnJw2 / Wi. Величина тока управляющего электрода
определяется этой ЭДС, активными сопротивлениями обмоток
трансформатора, приведенными ко вторичной цепи, сопротивлением R1(
падением напряжения на диоде AUa и падением напряжения на р-п
переходе управляющего электрода, который на рис.26,6 представлен
нелинейным элементом НЭ.
Вольтамперные характеристики (ВАХ) управляющего электрода,
которые называют также входными характеристиками тиристора,
существенно нелинейны и имеют большой разброс. Они могут находиться
во всей зоне между двумя предельными характеристиками (рис.26,6 для
тиристора на ток 80 А). Поскольку трудно указать ток или напряжение
управляющего электрода, при которых тиристор гарантированно
откроется, в справочных данных приводятся отпирающее напряжение UGT
и отпирающий ток IqT для определенных температур р-n перехода.
Превышение одного из них гарантирует открывание тиристора при
наличии положительного анодного напряжения. Для этого внешняя
характеристика управляющего сигнала должна проходить правее и выше
точки с указанными координатами. На рис.26э область гарантированного
включения (площадь, ограниченная UOT и IqT) при температуре +25°С
заштрихована, а при температуре +125°С покрыта двойной штриховкой.
Уравнение внешней характеристики представляет прямую линию
U<3 = Е2 - AUfl - (RT + R] >10. (44)
На рис.26 ,в нанесены три внешних характеристики - 1,2 и 3. Первая
гарантирует открывание всех тиристоров, вторая - некоторых, третья - ни
одного. В действительности , как правило, тиристор откроется и в третьем
случае, поскольку действительные отпирающие ток и напряжение в 2...3
раза меньше, указанных в каталоге.
Ток управления нагревает р-n переход управляющего электрода.
Допустимая мощность рассеяния для тиристоров каждого типа зависит от
относительной длительности импульсов и может быть от нескольких
единиц до сотен ватт. Для оценки допустимости использования принятых
параметров управляющих импульсов на ВАХ наносятся гиперболы
максимально допускаемой мощности при различных длительностях tQ в
эл.градусах. Внешняя характеристика не должна пересекать эти гиперболы.
Так для первой внешней характеристики на рис.26з импульсы
длительностью 180° не допустимы. Для уменьшения нагревания р-п
перехода предпочтительны короткие управляющие импульсы.
Рассмотрим требования к цепи управления, выполнение которых
обеспечивает надежную работу преобразователя. При открывании
тиристоров в силовых цепях возникают перементле электромагнитные
поля, которые, в частности, пронизывают контур, образованный
проводами, идущими от УМ к тиристору. В этом контуре наводятся
напряжения помех с широким спектром высших гармоник, имеющих
частоты до нескольких сот килогерц. Эти помехи воздействуют на цепь
59
управления тиристором и через импульсный трансформатор передаются в
систему управления. Высокочастотные помехи передаются в систему
управления также и через емкости между обмотками, а также между
обмотками и корпусом импульсного трансформатора. Исходя из этого
необходимо выполнять импульсные трансформаторы малых размеров, с
малым числом витков и с изоляцией, имеющей малую диэлектрическую
проницаемость. Обычно эти емкости измеряются десятками пикофарад.
Для уменьшения наводок импульсные трансформаторы располагают
рядом с тиристорами в силовых блоках (не в блоках СИФУ) и подводки
выполняют витыми и даже экранированными проводами. Допустимый
уровень помех, при которых тиристор не открывается (неотпирающее
напряжение), не превышает 0,3...0,5 В. Для уменьшения уровня помех цепь
управляющего электрода иногда шунтируется резистором с
сопротивлением 50...200 Ом (R2 на рис 27,а). Это также увеличивает
критическое значение duD / dt (допустимую скорость нарастания прямого
анодного напряжения в закрытом состоянии).
о
VD2 KHiQ2
Рис.27. Схемы защиты цепи управляющего электрода: а - простая;
б - сложная
Увеличению критического значения dup / dt и помехоустойчивости
способствует подача отрицательного напряжения на управляющий
электрод закрытого тиристора. Более эффективно подавляет помехи
подключенный там же коцденсатор емкостью 0,01...0,5 мкФ. Еще лучше,
если конденсатор зашунтирован резистором. Открывание тиристора
импульсом помехи может привести к «го пробою ввиду малости тока
управления и большой скорости нарастания анодного тока.
Сбои в СИФУ могут быть вызваны также помехами и
перенапряжениями, которые передаются через емкости между обмотками
«о
импульсного трансформатора при коммутациях в силовых, цепях. При
подаче напряжения питания силовых цепей 10...35 кВ через эту емкость в
СИФУ может передаваться напряжение до 1000 В. Эти помехи уменьшает
конденсатор, подключенный к обмоткам трансформатора (рис.27,б).
Иногда для этой же цели между обмотками импульсного трансформатора
размещают экраны из полосы меди, латуни или однослойной обмотки (на
рис.27,6 показаны штриховыми линиями).
Полная схема цепи управления тиристором мощного
преобразователя показана на рис.27,6. На первичную обмотку подаются
импульсы повышенного напряжения 110...220 В для уменьшения тока
транзистора и обмотки. Цепочка RjCj частично компенсирует
намагничивающий ток. Импульс вторичного тока заряжает конденсатор
С2. Когда напряжение на нем достигнет напряжения пробоя динистора
VD2 порядка 25...35 В, динистор переходит в открытое состояние за
время, не превышающее 0,1 мкс. Это обеспечивает получение очень крутого
фронта тока управляющего импульса и достаточно большой амплитуды в
начальный момент. Установившийся ток определяется сопротивлениями
резистора R2 и обмоток трансформатора. Для индикации исправности
усилителя мощности во вторичной или первичной цепи включают
светодиоды или лампочки накаливания.
2. Усилитель мощности на транзисторе с импульсным
трансформатором
Принципиальная схема усилителя мощности на транзисторе с
импульсным трансформатором приведена на рис.28,а. Это основная схема
УМ. Транзистор, включенный по схеме с общим эмиттером, является
усилителем мощности. Коэффициент усиления транзистора по току
обычно равен 20...50, по напряжению 4...6 и по мощности - 100...300. В
СИФУ мощных преобразователей коэффициенты усиления во много раз
больше, поскольку используются многокаскадные усилители и составные
транзисторы. Трансформатор обеспечивает согласование напряжения
питания усилителя с требуемым напряжением вторичной цепи и
потенциальную развязку низковольтных цепей управления от силовых
цепей, напряжения в которых измеряются сотнями и даже тысячами вольт.
В исходном состоянии поданное на вход УМ напряжение
формирователя длительности Цфд равно нулю, транзистор VT1 закрыт,
напряжение на обмотках трансформатора и токи в них отсутствуют.
Импульс напряжения ФД открывает транзистор, и к первичной обмотке
прикладывается напряжение питания , в обмотке начинает расти
намагничивающий ток, а в сердечнике - магнитный поток, что
обусловливает появление ЭДС и ток управляющего электрода во
вторичной обмотке. Для упрощения анализа пренебрежем активными
«1
а
+U»{
т
о
и
4
O'
■Si
Рис.28. Усилитель мощности на транзисторе с импульсным транс¬
форматором: а - принципиальная схема; б - перемагничивание
сердечника; в - временное диаграммы; г - схема с шунтированием
первичной обмотки стабилитроном и переносом резистора
в первичную цепь
«2
сопротивлениями и индуктивными сопротивлениями рассеяния обмоток
трансформатора. Вначале допустим, что вторичная обмотка разомкнута.
Тогда напряжение, приложенное к первичной обмотке, уравновешивается
ЭДС
ei = "Unl * -wxS (45)
где Wj - число витков первичной обмотки; S - сечение сердечника; В -
маг нитная индукция.
Поскольку к первичной обмотке трансформатора прикладываются
только однополярные импульсы, а отрицательный ток в обмотках
невозможен, то сердечник размагничивается только до остаточной
индукции Вг (рис.28,6). Как следует из (45), производная магнитного
потока постоянна, и он нарастает по прямой линии (рис.28з). За время
импульса длительностью tG магнитная индукция достигает своего
максимума Вт. Намагничивающий ток нарастает нелинейно. Вначале
быстро, а затем производная уменьшается. Во вторичной обмотке в это
время индуктируется вторичная ЭДС
dB
е2 = - w2S — = -Unlw2 / wx, (46)
где w2 - число витков вторичной обмотки.
После прекращения сигнала ФД транзистор закрывается и
намагничивающий ток переключается в цепь VD1-R2. Напряжение на
первичной обмотке % * -R2io тем больше по абсолютной величине, чем
больше R2. Поскольку приращения магнитной индукции при ее
нарастании и уменьшении одинаковы по абсолютной величине, то
площади S} и S2 под Uj будут одинаковы. Отсюда, чем больше R2, тем
больше пик напряжения и тем быстрее размагничивается сердечник. К
сожалению, при этом увеличивается максимальное напряжение на
коллекторе, равное
ик.тах = Uni + R г^Отах* (47)
Если удалить цепь VD1-R2, то транзистор может быть пробит.
Вместо резистора R2 можно поставить стабилитрон (VD3 на
рис. 28,г). Это позволяет существенно уменьшить пик напряжения на
транзисторе и ускорить размагничивание сердечника, которое происходит
теперь по прямой линии, поскольку напряжения на стабилитроне и на
первичной обмотке постоянны. Такой же эффект можно получить, если
подключить катод диода VD1 ко второму источнику питания с
напряжением, превышающим Unl (рис. 30,а). При этом энергия
электромагнитного поля, накопленная во время нарастания магнитного
потока в трансформаторе, будет передана в цепь второго источника. К
сожалению, использовать эту энергию не всегда удается, поскольку для
питания УМ обычно используется самое высокое напряжение блока
питания.
63
Теперь учтем наличие вторичного контура. Под действием
прямоугольного вторичного напряжения возникает прямоугольный
управляющий импульс тока, который через диод VD2 проходит по цепи
управляющий электрод-катод тиристора. Резистор R3 вместе с активными
сопротивлениями обмоток 1рансформатора формирует желаемую
внешнюю характеристику источника управляющего сигнала, т.е.
необходимые ток или напряжение на управляющем электроде,
обеспечивающие открывание тиристора.
Приведенный к первичной обмотке вторичный ток показан на
временных диаграммах. Ток первичной обмотки равен сумме
приведённого вторичного и намагничивающего токов ij = i2 + i<j- Когда
транзистор открыт, то первичный ток протекает через коллектор iK — ii*
После закрывания VT1 вторичный ток прекращается и первичный ток,
равный ifl, замыкается через диод и R2. С учетом активного
сопротивления первичной обмотки Rwl ее ЭДС будет меньше напряжения
питания ej * -(U„i - R^ij), как показано на рис. 28,в штриховой линией,
и Sj > S2. Сопротивления обмоток импульсных трансформаторов
сравнительно велики, поскольку в них используются большие плотности
тока в обмотках (в 2...6 раз большие, чем в обычных) в связи с малой
относительной длительностью импульса. Кроме того, нет необходимости
повышать КПД трансформатора, так как для получения круто падающей
внешней характеристики все равно приходится вводить активные
сопротивления, которые потребляют энергию. Благодаря VD3 на
управляющем электроде не может быть большого отрицательного
напряжения.
Для формирования внешней характеристики можно резистор ставить
не во вторичной цепи (R3), а в первичной (резистор R4 на рис. 28,г). Это
уменьшает напряжение на первичной обмотке и габариты
трансформатора. Шунтирование этого резистора емкостью увеличивает
начальный ток и приближает форму импульса к оптимальной.
Если коэффициент усиления одного транзистора оказывается
недостаточным, то используют составной транзистор по схеме
Дарлингтона, показанный на рис. 28 jr. Коэффициент усиления по току
составного транзистора практически равен произведению коэффициентов
усиления обоих транзисторов в схеме с общим эмиттером (порядка
500...1000).
Габариты трансформатора зависят от количества управляемых
тиристоров и длительности импульса управления. За время управляющего
импульса длительностью tG магнитная индукция увеличивается на
величину АВ, которая ограничена магнитными свойствами сердечника.
Подставляя эти приращения в (45), получим, что объем трансформатора,
пропорциональный произведению числа витков первичной обмотки (это
половина окна) на сечение сердечника, определяется длительностью
импульса
«4
WjS = UnltG / ДВ. (48)
Для уменьшения размеров и массы трансформатора желательно
использовать короткие управляющие импульсы. Г абариты
трансформатора зависят также от величины приращения магнитной
индукции. Приращение индукции в частном цикле намного меньше, чем у
трансформаторов, на первичную обмотку которых подается переменное
напряжение и используется полный цикл перемагничивания с ДВ = 28,,^.
В импульсных трансформаторах можно также использовать полный цикл
перемагничивания. Для этого добавляется размагничивающая обмотка,
ток в которой при отсутствии тока в первичной обмотке обеспечивает
магнитную индукцию, равную -В^. Во время импульса сердечник
неремагничивается до +Втах, что позволяет существенно уменьшить
габариты трансформаторов.
Удобно размагничивающие обмотки всех импульсных
трансформаторов соединить последовательно и запитать от одного
источника тот. Источник тока должен быть таким, чтобы во время
генерации управляющего импульса, когда в одной из обмоток появляется
значительная ЭДС, размагничивающий ток не изменялся, иначе будет
наводиться ЭДС во всех импульсных трансформаторах. Из-за этого
размагничивание используется редко.
При рассмотрении усилителя не учитывались индуктивности
рассеяния обмоток трансформатора и емкости между обмотками, емкость
обмоток по отношению к сердечнику и межвитковая. С учетом этих
индуктивностей и емкостей трансформатор приближенно описывается
дифференциальным уравнением второго порядка и фронты имеют апери¬
одический или колебательный характер [11, стр.205], поэтому реальная
форма импульса вторичного напряжения отличается от прямоугольной.
3. Усилитель-Фоомирователь на блокинг-геневаторе
Блокинг-генератором называется генератор прямоугольных
импульсов на однокаскадном усилителе с положительной
трансформаторной обратной связью. Разработано очень много различных
схем блокинг-генераторов, которые используются в импульсных
устройствах, в частности в радиолокационной технике. Схема, нашедшая
применение для управления тиристорами, приведена на рис.29,а.
Эта схема отличается от предыдущей наличием третьей обмотки
положительной обратной связи w3. Положительный фронт импульса
напряжения ФСУ через Rj и С5 открывает транзистор VT1 и во всех
обмотках возникает ЭДС. ЭДС третьей обмотки через резистор R3 создает
практически неизменный ток базы
Ч a (Unlw3 / wx - Uaa.H - Шд) / R3. (49)
Во время импульса нарастает ток коллектора в связи с ростом
намагничивающего тока. Однако, когда ток коллектора достигает
65
Рис.29. Усилитель-формирователь длительности на блокинг-гене¬
раторе: а - принципиальная схема; б - леремагничивание сердеч¬
ника; в - временная диаграмма намагничивающего тока
5:'
величины iKmax = Bi6, дальнейший его рост прекращается, так как
транзистор входит в активную зону. В связи с этим прекращается рост
магнитной индукдаи. ЭДС в обмотках и ток базы лавинообразно падают
до нуля, транзистор закрывается, прекращаются блокинг-процесс и
выходной импульс. Поскольку величина приращения магнитной индукции
ограничена насыщением сердечника, то длительность импульса, исходя из
(45) определяется параметрами трансформатора, коэффициентом усиления
транзистора и сопротивлением нагрузки:
tG = WjSAB / Unl, (50)
поскольку АВ определяется максимальным намагничивающим током
iomax = Big - h- Здесь В - коэффициент усиления транзистора по току. При
смене транзистора и тиристора длительность импульса может измениться.
Диод VD2 повышает помехозащищенность схемы. Импульсы помех,
уровень которых меньше U6<9 H + AUS, не могут запустить блокинг-
генератор.
Поскольку в блокинг-генер аторе ограничивается ток коллектора, то
можно допустить большую степень насыщения сердечника. При этом
несколько изменятся вид частного цикла перемагничивания и график
изменения намагничивающего тока во времени (рис.29,6 и в). В конце
импульса производная тока возрастает в связи с насыщением сердечника.
66
Возможность срабатывания от случайных импульсов помех и
неудобство изменения длительности импульсов после изготовления
трансформатора ограничивают применение блокинг-генераторов. В
начальном этапе применения тиристорных преобразователей они были
очень распространены.
4. Усилитель мощности управляющих импульсов оптимальной Формы
В усилителях мощности управляющих импульсов, близких к
оптимальным по форме, обычно используется предварительно заряженный
конденсатор , колебательный разряд которого на обмотку импульсного
трансформатора (рис.30,а) обеспечивает требуемую форму начального
участка импульса, а затем на первичную обмотку подается напряжение от
основного источника питания с напряжением Unl.
&
I
5
VDl -Ly
1 T
<P^ ,.пл ;
VD8
Ц<рЭ2
Ъ VTi
Рис.30. Усилитель мощности импульсов с формой, близкой к опти¬
мальной: а - принципиальная схема; б - временная диаграмма
первичного напряжения
Конденсатор заряжается от второго источника питания
Un2 «(1,5...3,5)ии1. Сопротивление резистора R2 должно быть таким,
чтобы его ток был существенно меньше вторичного тока, приведенного к
первичной обмотке, так как питание импульсного трансформатора через
резистор нецелесообразно из-за увеличения потерь энергии. После
открывания транзистора конденсатор в течение 20...30 мкс разряжается
почти по экспоненте (рис.30,6). Когда напряжение на нем снизится до Unl,
откроется диод VD3, и в дальнейшем к первичной обмотке будет
приложено неизменное напряжение основного источника питания,
обеспечивающее требуемую внешнюю характеристику управляющего
67
сигнала. Известны схемы с использованием двух конденсаторов, которые
предварительно заряжаются до разных уровней.
На рис.30,а опущены вторичные цепи, но попутно показан удачный
вариант возвращения энергии электромагнитного поля импульсного
трансформатора в цепь источника питания Un2. Конденсатор С2, общий
для всех УМ, воспринимает эту энергию, а затем частично передает ее
конденсаторам С|. Кроме того, добавлены два диода VD1 и VD2,
позволяющие управлять УМ от двух ФД для получения сдвоенных
управляющих импульсов, которые необходимы в трехфазных мостовых
схемах. Такие диоды можно поставить во всех рассмотренных схемах УМ и
ФД.
5. Усилители мощности с высокочастотным заполнением
Рассмотренные в предыдущих параграфах выходные импульсные
трансформаторы имеют довольно большие габариты, массу н емкость
между обмотками. Например, трансформатор коротких управляющих
импульсов для тиристора Т-160 преобразователя типа ПТЦ имеет массу
220 г и размеры 55x45x50 мм. Большие габариты обусловлены
сравнительно большой длительностью импульса и тем, что
пфемагничивание сердечника происходит по частной петле гистерезиса,
при которой приращение магнитной индукции в 5-8 раз меньше, чем при
перемагничивании по полной петле гистерезиса. Эти недостатки
устраняются при использовании высокочастотного заполнения
управляющего импульса. В этом случае в течение управляющего импульса
на первичную обмотку выходного трансформатора подается
высокочастотное (5...100 кГц) прямоугольное напряжение. Напряжение
вторичной обмотки выпрямляется и через резистор подается на
управляющий электрод и катод силового тиристора. Для этих
трансформаторов обычно используются кольцевые ферритовые сердечники
с наружным диаметром 12...20 мм, высотой 3...6 мм и массой 5...15 г.
Усилители с высокочастотным заполнением называют также
формирователями импульсов на несущей частоте. Они требуют наличия в
СИФУ от одного до р генераторов прямоугольного напряжения.
Питание усилителей мощности выполняется по-разному. Обычно один
генератор прямоугольного напряжения питает все р или 2р усилителей
мощности реверсивного преобразователя. Усилитель мощности каждого
тиристора имеет свой выходной трансформатор, вторичное напряжение
которого выпрямляется однофазной мостовой (рис.31,а) или нулевой
(рис.31,в) схемами. Поскольку ключом, подающим прямоугольное
напряжение на первичную обмотку выходного трансформатора, обычно
является биполярный транзистор с односторонней проводимостью, то для
коммутации переменного тока нужен выпрямитель. Этот выпрямитель
также может быть выполнен по мостовой схеме на четырех диодах
(VD...VD4 на рис.31,а) или по нулевой схеме на двух диодах (VD1...VD2 на
рис.31,в). При использовании нулевой схемы уменьшается число диодов,
68
а
6
U:
и.
в
i
L
г?
mi г
Щ-л\03
SfTb
U
I&L
Рис.31.Усилитель мощности с высокочастотным заполнением:
а - схема с использованием мостовых выпрямителей; б - временные
диаграммы; в - схема с использованием лучевых выпрямителей
<9
но увеличивается сложность трансформатора и его габаритная мощность.
На временных диаграммах (рис.31,6) показаны напряжение генератора ur,
напряжение формирователя длительности и^д, которое открывает
транзистор, и выпрямленное вторичное напряжение на конденсаторе ц..
После закрывания транзистора ток в первичной обмотке прекращается
немедленно и энергия магнитного поля выходного трансформатора
передается в цепь управляющего электрода, что несколько увеличивает
длительность импульса. Однако это заметной роли не играет.
Вторым решением является использование отдельных генераторов на
выходном трансформаторе для каждого тиристора. Усилитель мощности в
этом случае подает прямоугольное напряжение на базы или напряжение
питания на генератор только на время импульса. Генератор запускается, и
вторичное напряжение после выпрямления подается на управляющий
электрод тиристора. На первый взгляд кажется, что в первом случае
требуется больш&я мощность генератора. Это не так, поскольку
одновременно импульсы управления подаются не более чем на 2...4
тиристора даже в реверсивной схеме и во втором случае суммарная
мощность генераторов оказывается больше. Генераторы могут быть без
самовозбуждения и управляться от отдельного автогенератора (т.е. это
будут инверторы). Напряжение питания подается все время, а
управляющие сигналы только на время управляющего импульса.
Используется также однополярное высокочастотное заполнение с
относительной продолжительностью импульсов 0,25...0,50. Это упрощает
схему хенератора и выпрямителя, но требует увеличения габаритов
трансформатора из-за перемагничивания по частной петле гистерезиса.
Должна быть увеличена и амплитуда тока управляющего электрода
тиристора.
6. Автогенератор Роеоа
Ь качестве генератора прямоугольного напряжения мощностью до
нескольких сот ватт наиболее широко используется автогенератор Роера,
который представляет собой самовозбуждающийся двухтактный блокинг-
генератор с одним сердечником, но двумя транзисторами, что позволяет
генерировать импульсы обеих полярностей (рис.32,а).
Допустим, в начальный момент магнитная индукция в сердечнике
трансформатора равна -Вт (точка 1 на рис.32,6). С этого момента
магнитная индукция начнет возрастать, и во всех обмотках возникает
ЭДС, направленная от точки (начала обмотки). ЭДС базовой обмотки Wgj
создает ток базы % первого транзистора. Транзистор VT1 откроется, и
первая коллекторная обмотка wKl окажется под напряжением питания Un,
обусловливающим рост магнитной индукции и поддерживающим
практически неизменную ЭДС во всех обмотках. Г1 оложигельная обратная
связь, также как и в обычном блокинг-генераторе, будет поддерживать VT1
в открытом состоянии. Ток коллектора во время перемагничивания
70
сердечника равен сумме приведенных к первичном обмотке токов нагрузки,
базы (показаны штриховой линией) и намагничивающего тока i(>. В конце
полупериода автогенератора сердечник насыщается и все быстрее
нарастают намагничивающий ток и ток коллектора. Когда ток коллектора
достигнет величины iKlmax = Bjigi, транзистор войдет в насыщение,
нарастание тока и магнитной индукции существенно замедлится,
уменьшится ток базы и начнется лавинообразный процесс закрывания
VT1. Магнитная индукция в этот момент максимальна (точка 2 на
рис.32,6).
Рис.32. Автогенератор Роера: а - принципиальная схема;
6 - перемагничивание сердечника; в - временные диаграммы
Далее магнитная индукция начнет спадать и возникнет ЭДС про¬
тивоположного направления (к точке на рис.32,а). При этом ЭДС второй
базовой обмотки i62 откроет VT2, и коллекторная обмотка окажется
под напряжением источника питания. Магнитная индукция будет спадать
с постоянной скоростью, пока сердечник не перемагнитится и ток
коллектора не достигнет величины, ограниченной током базы
itc2max ~ ®2*б2 • После лавинообразного закрывания VT2 ЭДС в обмотках
снова скачком изменит направление. Таким образом, ЭДС во всех
обмотках и выходное напряжение и2 имеют прямоугольную форму.
71
В соответствии с (50) частота автогенератора определяется сечением
сердечника, его материалом (АВ), числом витков коллекторных обмоток,
сопротивлениями резисторов Rj = R2 и отчасти коэффициентами усиления
транзисторов, которые должны быть близки друг другу. Коллекторные
обмотки имеют равные числа витков и мотаются обычно одновременно
двумя проводниками для улучшения магнитной связи между ними и
уменьшения индуктивности рассеяния. Для пуска автогенератора при
подаче напряжения питания между источником питания и базой одного из
транзисторов ставят резистор для внесения асимметрии.
Автогенераторы обычно генерируют частоту 5...50 кГц. Сердечник
выполняется из колцевого феррита, наматывается из тонкого ленточного
пермалоя или холоднокатаной электротехнической стали с прямоугольной
петлей гистерезиса. Рассмотренная схема не является единственной.
Используется много ее разновидностей.
Рассмотренный автогенератор имеет в литературе много
наименований: двухтактный блокинг-генератор, магнитно-транзисторный
мультивибратор, двухтактный преобразователь с самовозбуждением,
автогенератор с насыщающимся трансформатором, генератор
прямоугольного напряжения на транзисторах с индуктивной обратной
связью, однофазный транзисторный инвертор с самовозбуждением. На
наш взгляд, наиболее правильно называть его автогенератором Роера - по
фамилии автора (Royer О.Н.), предложившем его в 1955 г.
Поскольку частота автогенератора Роера пропорциональна
напряжению питания, то при р=2 в асинхронной одноканальной СИФУ он
может заменить все элементы СИФУ [11, с.105]. Нужен только регулятор,
сравнивающий заданное и действительное выпрямленные напряжения и
вырабатывающий приращение напряжения питания (напряжение
управления) автогенератора (рис. 14,а).
7. Усилитель мощности для оптронного
тиристора
Самым простым является усилитель
мощности управляющего импульса для
оптронного тиристора (рис.33). При
открывании транзистора VT1 формиро¬
вателем длительности появляется ток в
светодиоде, и он дает обычно
инфракрасное излучение. Лучи, попада¬
ющие на светоприемную площадку
тиристора, открывают его. Ток
фотодиода должен быть 0,08...0,40 А,
падение напряжения на нем 2..3 В. Таким
Рис.33. Усилитель мощности образом, мощность управления оптрон-
для оптронного тиристора ным тиристором существенно меньше,
72
чем мощность управления триодными тиристорами и длительность
управляющего импульса не ограничена импульсным трансформатором.
Большим достоинством оптронных тиристоров является хорошая
гальваническая развязка с очень малой емкостью (единицы пикофарад),
что существенно уменьшает воздействие силовых цепей на цепи
управления.
Условия открывания запираемого (GTO) тиристора сходны с
условиями отпирания обычных тиристоров, но требуются большие токи.
Для запирания GTO тиристора необходим источник питании с ЭДС
порядка 15...20 В обеспечивающий очень большой обратный ток
управляющего электрода (порядка 20...30% предельного анодного тока)
длительностью более 7...2S мкс. Тиристоры на предельные токи 400...2500
А, которые выпуск" пигь в 1992 г., требовали отпирающие токи 1...6 А и
запирающие токи : м управляющего электрода 92...600 А. Передавать
такие токи через ии.^.^сные трансформаторы нецелесообразно, поэтому к
катоду каждого тиристора подключаются два источника питания
(неуправляемые выпрямители) цепи управления, гальванически
развязанные с остальными цепями СИФУ. Управляющие импульсы
передаются через оптронную развязку и мощные усилители.
В качестве примера на рис.34 приведена функциональная схема уси¬
лителей мощности для управления запираемым тиристором на ток 1000 А.
8. Усилитель мощности для запираемого тиристора
с
с
Рис.34. Усилитель мощности для запираемого тиристора
73
Отирающий импульс с ФД подается на светодиод оптронной пары, что
обеспечивает гальваническую развязку. При этом фотодиод оптронной
пары открывает все транзисторы усилителя мощности У1 и мощный
транзистор VTI. Под действием ЭДС Е0 отпирающего источника через Rj
в цепь управляющего электрода подается ток, который открывает
тиристор. Усилитель выполнен трехкаскадным, с очень большим
коэффициентом усиления по току. Транзистор VT1 является четвертым
каскадом. Начальное значение тока 25 А, затем оно снижается до 5 А.
Закрывающий сигнал аналогично поступает на светодиод оптронной
пары усилителя У2, который открывает пять параллельно включенных
транзисторов VT2...VT6 типа ТК235-50, запирающий ток 200 А протекает
по цепи управляющего электрода в обратном направлении и прерывает
ток в анодной цепи тиристора. Второй усилитель четырехкаскадный.
Последние три каскада выполнены по схеме Дарлингтона. Эмиттер
последнего транзистора подключен к базам VT2...VT6. Остальные
элементы схемы служат для защиты от помех.
Глава V. УСТРОЙСТВА УПРАВЛЕНИЯ РЕВЕРСИВНЫМИ
ПРЕОБРАЗОВАТЕЛЯМИ
1. Согласующие входные устройства
Согласующее входное устройство (СВУ) используется только в
двухкомплектных реверсивных преобразователях. Оно осуществляет
согласование углов управления вентильных комплектов по уравнению
а1 + ап = я + 2ар (5!)
в случае линейной фазовой характеристики, или
Б(Ц + Е<ш = ~2Ер (52)
в случае арккосинусоидальной фазовой характеристики.
В этих уравнениях о.] - угол управления первым вентильным комплектом;
®п * угол управления вторым вентильным комплектом; ар - угол
рассогласования; BdI - ЭДС первого вентильного комплекта в режиме
непрерывного тока, В; Edn - ЭДС второго вентильного комплекта, В; Б„-
ЭДС рассогласования, В.
При совместном управлении нелинейное согласование позволяет
уменьшить уравнительную ЭДС. Чем больше угол рассогласования, тем
меньше уравнительная ЭДС (13, n.3.8.J и, следовательно, индуктивность,
габариты и масса уравнительных реакторов, но при этом искривляются
регулировочная и внешние характеристики. При угле рассогласования 60°
в трехфазной мостовой схеме уравнительная ЭДС равна нулю, при ар=30°
максимум уравнительной ЭДС уменьшается в 10 раз.
При раздельном управлении линейное согласование позволяет иметь
в момент переключения равные по абсолютной величине ЭДС в режиме
74
непрерьшного тока в обоих вентильных комплектах, что упрощает работу
системы управления электроприводом при изменении направления тока.
Не лишено смысла и введение некоторого рассогласования [13].
Зависимость (51) легко реализуется на суммирующих операционных
усилителях. Обычно принимают U„i = Uy + AUp. Зависимость (52) должна
учитывать фазовую характеристику ФСУ. В щюстейшем случае, когда
угол, рассогласования (и напряжение рассогласования) равен нулю,
условия (51) и (52) равноценны и соотношение (51) реализуется на
инвертирующем операционном усилителе (ОУ), при этом Uyn = -UyI.
Введением в СВУ нелинейных функций можно получить любую желаемую
фазовую характеристику ФСУ при любом развертывающем напряжении.
Иногда СВУ в явном виде отсутствует, поскольку реализуется в
фазосдвигающем устройстве, общем для обоих вентильных комплектов.
2. Датчики состояния вентилей
Снятие управляющих импульсов с вентильного комплекта
допускается только при отсутствии тока во всех тиристорах или, когда ток
в любом из них меньше тока удержания 1н = 0,20...0,35 А. Второе условие
расширяет область допустимых переключений, но измерить столь малые
токи по сравнению с номинальным током преобразователя чрезвычайно
трудно. Поэтому определяют отсутствие тока по наличию напряжения на
тиристорах. Прямое падение напряжения на аноде тиристора при наличии
анодного тока составляет 1...3 В. Таким образом, если напряжение на всех
тиристорах превышает 10...30 В, то можно с полной уверенностью
утверждать, что анодный ток по ним не протекает. Основанные на этом
принципе датчики наличия тока (ДНТ) называются датчиками состояния
вентилей (ДСВ).
Поскольку напряжение сети сто раз в секунду переходит через нуль,
то в тиристорном преобразователе выдаются ложные сигналы наличия
тока с частотой ЮОхт Гц . Опасности это не представляет, так как
выдаются сигналы, запрещающие переключение ВК. Длительность ложных
сигналов невелика, и их можно отфильтровать.
Для гальванической развязки выходных сигналов ДСВ от силовых
цепей используется либо оптронная, либо трансформаторная развязка.
Схема ДСВ с оптронной развязкой приведена на рис. 35,а. Под действием
напряжения на силовых тиристорах катодной (или анодной) группы YS1,
VS3 и VS5 протекает ток по резисторам Rj-.-Rg через выпрямительные
мостики и светодиоды оптронных тиристоров VS7...VS9, Выпрямительные
мостики обеспечивают требуемое направление тока в светодиодах при
любой полярности напряжения на тиристорах. Когда напряжение на всех
силовых тиристорах превысит 10...30 В, все светодиоды будут светиться и
75
VS3
г)
1 1
-0
0
Рис.35. Датчики состояния вентилей: а - с оптронной потенциальной
развязкой; б - с трансформаторной потенциальной развязкой
7*
открытые оптронные тиристоры VS7...VS9 соединят базу транзистора VT1
с общев шиной системы управления. Это закрывает оба транзистора, и на
выходе ДСВ появляется логический сигнал отсутствия тока в ВК, равный
единице. В данном пособии он обозначен буквой V. Если хотя бы на одном
силовом тиристоре данной группы напряжение окажется настолько малым,
что излучение светодиода будет недостаточным для удержания
оптронного тиристора в открытом состоянии, то соответсвующий
оптронный тиристор ДСВ закроется, ток резистора R7 переключится в
базу VTI, оба транзистора откроются и сигнал V станет равным нулю, что
соответсвует наличию тока в ВК.
Если вентильный комплект выполнен по мостовой схеме, то
достаточно контролировать ток только в одной группе силовых
тиристоров - катодной или анодной, поскольку ток может протекать
только одновременно в двух группах и нв может протекать только в одной.
Если вентильные комплекты включены встречно параллельно, то для
обоих вентильных комплектов можно использовать один ДСВ. Для того
чтобы один и тот же датчик можно было применять в преобразователях,
имеющих различные номинальные выходные напряжения 460,230 и 115 В,
в цепи выпрямительных мостиков последовательно устанавливают три
резистора (на рис.35,а показаны только два) и для напряжений, меньших
460 В, некоторые резисторы закорачивают.
Используются также ДСВ с оптронными диодными парами, которые
работают в фотогальваиическом режиме. Как и в предыдущем случае,
напряжение с силового тиристора через резисторы и выпрямительный
мостик подается на светодиод. При засвечивании фотодиода в нем
возникает фогоЭДС. Положительный потенциал с его анода подается на
инверсный вход ОУ, катод фотодиода соединен с прямым входом ОУ. На
выходе ОУ появляется отрицательное напряжение, свидетельствующее об
отсутствии тока. Это напряжение подается на анод диода, связанного через
резистор с базой выходного п-р-п транзистора. Для отрицательного
напряжения диод закрыт. Аналогичные схемы остальных тиристоров через
свои диоды также подключены к базе выходного транзистора и образуют
логическую схему ИЛИ. Эмиттер транзистора связан с общей шиной
системы управления, а в цепь коллектора включен резистор так же, как на
схеме рис.35,а. Если один из силовых тиристоров проводит ток, то
связанный с ним ОУ выдает положительное напряжение благодаря
дополнительному отрицательному напряжению смещения, которое
подается через резисторы на инверсный вход ОУ и на базу транзистора.
При этом ток ОУ через диод и резистор открывает транзистор и
логический сигнал на его коллекторе V = 0. При отсутствии тока во всех
силовых тиристорах выходной транзистор закрыт напряжением смещения
и V = 1 [6, рис 2.24].
Идею трансформаторной развязки поясняет схема ДСВ, приведенная
на рис.35,6. На первичную обмотку Wj трансформатора Т через
токоограничивающий резистор R5 подается прямоугольное напряжение с
77
частотой 10...100 кГц. Вторичная обмотка w2 через выпрямительный
мостик нагружена на два транзистора VT1, VT2 и стабилитрон VD5. Если
силовой тиристор открыт, то транзисторы закрыты. Амплитуда
напряжения на вторичной обмотке устанавливается равной падению
напряжения на стабилитроне и двух диодах выпрямительного мостика
VD2. Ток первичной обмотки ограничен резистором R5. ЭДС, которая
индуктируется в третьей обмотке w3 через выпрямительный мостик,
выдает напряжение, которое является логическим сигналом наличия тока в
данной фазе. Если напряжение на силовом тиристоре превышает 10...30 В,
то транзисторы открываются, и вторичная обмотка оказывается замкнутой
накоротко. Напряжение на всех обмотках и на выходе схемы оказывается
близким к нулю. Почти все прямоугольное напряжение питания падает на
резисторе Rs, ограничивающем ток первичной обмотки. Выходое
• ,
напряжение ячейки близко к нулю.
Выходные сигналы со всех фаз (ячеек) подаются на логическую схему
шИЛИ - НЕ (ш - число фаз). Единичный сигнал любой ячейки приводит к
появлению на выходе логической схемы сигнала V=0, который является
выходным сигналом ДСВ наличия тока. Когда на всех тиристорах имеется
напряжение, то на все входы логической схемы поступают нули и ее
выходной сигнал V= 1.
Большим достоинством рассмотренных датчиков наличия тока
является то, что каждый датчик может быть использован в
преобразователях с несколькими номинальными выходными
напряжениями и любыми номинальными токами преобразователя.
Датчики же, основанные на измерении тока, должны быть рассчитаны на
номинальные токи, количество стандартных значений которых превышает
30. Логический сигнал наличия тока может быть принят равным как нулю,
так и единице, что принципиальной роли не играет.
3. Логические переключающие устройства
При раздельном управлении вентильными комплектами
рсивного преобразователя в СУ входит логическое переключающее
, ройство (ЛПУ), которое при необходимости переключения определяет
момент снятия управляющих импульсов с одного ВК и момент подачи их
на другой ВК. Часто эти устройства называют просто переключающими
устройствами. К ЛПУ предъявляются очень высокие требования с точки
зрения надежности. Сбои в ЛПУ, как правило, приводят' к аварии.
Раздельное управление вошло в практику только после разработки
надежных ЛПУ.
Логические переключающие устройства строятся на интегральных
логических элементах. Обычно в основе лежат два триггера: триггер
заданного направления тока ТЗН (D3 на рис.36,а) и триггер истинного
направления ТИН D6. Направление тока определяется тем, какой из
вентильных комплектов включен - BKI или BKII (рис.1). Если триггеры
78
находятся в одинаковом состоянии (Ql = Q2), то запрет подается только на
СИФУ одного ВК. Если триггеры находятся в разных состояниях, то
запреты (bj = Ьд - 1) подаются на СИФУ обоих ВК.
ТОШ
У
ч
Z
о
о
/
t
О
0
1
1
i
1
о
а
6
<?
Г
О
i
i
О
1
0
0
i
u\i ran
Рис.36. Логическое переключающее устройство: а - принципиальная
схема; б - логический элемент И-НЕ и его диаграмма истинности;
в - RS - триггер с инверсными входами и его диаграмма истинности
В рассматриваемом ЛПУ (рис.36) используются, в основном,
двухвходовые логические элементы 2И-НЕ и RS-тригтеры на их основе. На
рис.36,6, в показаны условные обозначения этих элементов и диаграммы
истинности. Если на один из входов логического элемента 2И-НЕ подан
логический сигнал 0, то на выходе всегда будет 1. Выходные сигналы
триггера зависят от сигналов на входах и от его предыдущего состояния.
При нормальной работе триггера его^ выходные сигналы имеют
противоположные значения, если Q=l, toQ = 0, и наоборот. Триггеры на
элементах 2И-НЕ управляются нулевыми сигналами. Не допускается
одновременная подача нулевых сигналов на оба входа. При переходе
79
входных сигналов от х=0, у=1 или от х=1, у=0 к х=у=1 состояние
триггера не изменяется и сохраняется сколь угодно долго.
Переключение ВК можно производить только при отсутствии тока во
всех силовых тиристорах преобразователя. Сигнал отсутствия тока в ЛПУ
поступает с ДСВ, если он один, либо с логической схемы 2И, на входы
которой подаются сигналы с ДСВ обоих ВК. Какой ВК следует включить,
определяется либо логическим сигналом I заданного направления тока из
системы управления электроприводом, либо самим ЛПУ, работающем по
принципу сканирующей логики.
Таблица 2
Таблица состояний элементов ЛПУ в различных режимах
Логические
сигналы
Исходное
состояние.
Работает
BKI
Вовремя
задержки
времени
По
окончании
задержки
времени
Установив¬
шийся режим>
после появ¬
ления тока
I
1
0
0
V
0
Ф
I
<8>
А = I • V
1
1
1
1
В = А-V
1
0
0
1
Ql=f(A,B)
1
0
0
0
S=VT
0
0
I
0
С = Q1 • S
1
1
1
1
D = Q1 • S
1
1
0
1
Q2=ltC,D)
I
I
0
0
bi=Ql-Q2
0
1
1
1
bn=Q102
1
1
1
0
P = bi • bn
0
1
1
0
T<=P
0
0
ф
0
Примечания.
1. Переход Т от 0 к 1 происходит с задержкой времени.
2. Логические сигналы имеют следующие значения:
1=I требует включения BKI; 1=0 требует включения ВКИ;
V=0 свидетельствует о наличии тока в ВК;
b|=t - запрет работы ВК1; Ъц=1 - запрет работы BKII.
3. Кружком выделены сигналы, вызвавшие переключения.
Рассмотрим первый вариант. Допустим, что включен BKI и протекает
ток в соответствии с логическим сигналом заданного направления тока
1=1. Тогда логические сигналы в ЛПУ будут иметь значения, указанные во
втором столбце табл.2.
so
Сигнал V=0, поскольку имеется анодный ток в тиристорах. По
логическим функциям, которые приведены в табл.2, вычисляются А, В, С и
D, равные единице и S=0. Поскольку работает ВЮ, то на его тиристоры
подаются управляющие импульсы и, следовательно, нет сигнала запрета
на этот ВК (bj= 0). Это может быть только в том случае, когда Ql= Q2 = 1
(см. логику работы элемента D7 на рис.36,6). На входы элемента D8
поступают сигналы Щ = Q2 = 0 и на его выходе формируется запрет
работы BKII bjj=l. Триггеры сохраняют неизменное состояние, так как на
их входах имеются единичные сигналы. Обратим внимание на то, что
сигнал S=0 запрещает передачу состояния триггера заданного
направления (D3) триггеру истинного направления (D6).
Рассмотрим работу ЛПУ при изменении направления тока. Для этого
вначале должен измениться сигнал заданного направления тока,
например, с 1=1 на 1=0, что не вызовет никаких изменений логических
сигналов в ЛПУ, кроме указанного. Изменения начнутся после того, как
по условиям работы электропривода прекратится ток в цепи якоря и с ДСВ
поступит V=i. Это приведет к изменению сигнала на втором входе
триггера заданного направления D3 на В=0 (см. третий столбец табл.2), и
он пфеюточится. Второй триггер останется в прежнем состоянии, так как
S=VT переходит от состояния 0 к состоянию 1 в течение времени задержки
порядка 1 мс. Величина задержки определяется длительностью заряда
конденсатора С* (временем перехода сигнала Т от 0 к 1).
Логические сигналы во время задержки приведены в третьем столбце
табл.2. Элемент D9 выдает логический сигнал Р запрета работы обоих
ВК. Этот сигнал повторился бы на выходе D10, если бы к его выходу не
был подключен Cj. Элемент D1 имеет пассивный выход, т.е. между плюсом
источника питания микросхемы и ее выходом нет транзисторного
усилителя тока. Может стоять только резистор со сравнительно большим
сопротивлением (см. микросхемы К155ЛА7, К511ЛАЗ и др.). Выходной
транзистор микросхемы включен между ее выходом и общей шиной.
Поэтому при изменении сигнала Р от 1 к 0 практически немедленно
изменяется и выходной сигнал Т элемента D10, так как выходной
транзистор микросхемы закорачивает и практически мгновенно разряжает
конденсатор. При переходе Р от 0 к 1 выходной транзистор микросхемы
D10 закрьшается и во время задержки конденсатор С< заряжается током,
протекающим через резистор Rt и диод VD2 (это резистор Rg и диод VD4
на схеме рис 35,а). Сигнал Т остается равным нулю до тех пор, пока
напряжение на конденсаторе не достигнет уровня логической единицы,
после чего становится Т=1. Для элементов серии К511 уровень логической
единицы равен 10 В. На этом период задержки оканчивается. Таким
образом во время задержки S=0, Т=0 и состояние ТЗН не передается ТИН,
они находятся в разных состояниях, сигналы запрета подаются на оба ВЮ
Если во время задержки система управления электроприводом вновь
изменит заданное направление тока, то переключится ТЗН (D3), оба
81
триггера окажутся в одинаковом состоянии (Q1=Q2) и сразу будет снят
запрет на работу BKI. Таким образом, ЛПУ как бы дает время на
"размышления", во время которого можно изменить ранее принятое
решение.
Рассмотрим изменения сигналов в ЛПУ по истечении задержки.
Полагаем, что сигнал из системы управления не изменился (1=0), тока нет
(V=l), и после заряда конденсатора появился сигнал Т=1. Тогда и S=VT=1
(см. четвертый столбец табл.2) и состояние ТЗН передается ТИН.
Поскольку Ql = Q2=l, то Ьц=0, a bj=l. Тем самым снимается запрет на
подачу управляющих импульсов на тиристоры ВКИ. При этом В= 0, Ql—1,
C=l, D= 0, S=l, <53=1. работает ВКИ.
Когда появится ток обратного направления, ДСВ выдаст V= 0 и
станет S=0, поскольку положительное напряжение Cj не передаемся через
VD2. После чего A=B=C=D=1 (см .пятый столбец табл.2), прекращается
воздействие на входы триггеров, и они остаются в неизменном состоянии.
Поскольку на один из входов D9 поступает нулевой сигнал, то Р=0 и Т=0.
Так будет продолжаться до следующего изменения заданного направления
тока, после чего логические сигналы будут изменяться аналогично выше
рассмотренному случаю.
Рассмотрим второй принцип управления ЛПУ, который именуется
сканирующей логикой. В этом случае сигналы на ЛПУ из системы
управления электроприводом не подаются. На вход заданного
направления тока I поступают чередующиеся логические сигналы 0 и 1 с
мультивибратора. При наличии тока (V=0) мультивибратор заторможен и
заданное направление тока не изменяется. Как только ток прекращается,
мультивибратор запускается сигналом с ДСВ и не более, чем Чфез пол
своего периода меняет логический сигнал заданного направления тока.
Сигнал I остается неизменным в течение полупериода колебаний
мультивибратора (2...10 мс). В это время происходят все выше
рассмотренные изменения логических сигналов в ЛПУ. Если в этот
полупериод мультивибратора появился ток в другом комплекте, то
мультивибратор останавливается до очередного прекращения тока.
Если в течение полупериода мультивибратора ток в другом
комплекте не появился, то мультивибратор переключится в исходное
состояние и разрешит подачу управляющих импульсов на ранее
работавший комплект. Появление тока в прежнем направлении остановит
мультивибратор. Если ток не появился, то колебания мультивибратора
продолжаются до появления и сохранения тока в одном из комплектов.
Использовалось много различных алгоритмов работы
мультивибратора. Например, непрерывная работа с подключением при
прекращении тока и отключением после его прекращения, запуск
мультивибратора сигналом появления тока сразу в нужном направлении,
использование в качестве мультивибратора напряжения сети.
82
Глава VI. УСТРОЙСТВА СИСТЕМ УПРАВЛЕНИЯ
ПРЕОБРАЗОВАТЕЛЯМИ ЧАСТОТЫ И ШИРОТНО-ИМПУЛЬСНЫМИ
ПРЕОБРАЗОВАТЕЛЯМИ
1. Шашьашшш
Все преобразователи, СУ которыми рассматриваются ниже, являются
по существу вторыми, выходными звеньями двухзвенных
преобразователей. Отличительной особенностью этих СУ является
наличие генераторов линейно изменяющихся или гармонических сигналов
и переменная длительность импульсов, управляющих силовыми
транзисторами.
Для АИ с амплитудным регулированием выходных напряжения или
тока необходимы управляемые задающие генераторы импульсов с
частотами от единиц до нескольких сот или тысяч герц. Обычно это
шестикратная выходная частота преобразователя. Управляющие
импульсы, которые подаются на силовые транзисторы, имеют
длительность от нескольких миллисекунд до долей секунды. Генераторы
развертывающего напряжения в СУ ШИП и АИН с ШИМ работают с
неизменной частотой 1...S0 кГц. Исключением являются АИН с ШИМ, у
которых частота развертывающего напряжения поддерживается кратной
частоте первой гармоники выходного напряжения для подавления
некоторых высших гармоник. Длительность управляющих импульсов в
ШИП и АИН с ШИМ и с формированием тока изменяется от единиц до
сотен микросекунд. Непрерывные импульсы с переменными
длительностями и паузами передавать через трансформаторы не удается.
Часто используется высокочастотное заполнение, но для импульсов
микросекундной длительности это также затруднительно.Наилучшим
решением является применение оптронной развязки с использованием
индивидуальных источников питания усилителей мощности дня каждого
силового вентиля, как это было показано на рис.34 для запираемого
тиристора. Для уменьшения габаритов трансформаторов индивидуальных
источников питания применяется высокочастотное прямоугольное
напряжение.
2. Задающие генераторы
Задающие генераторы (ЗГ) определяют частоту первой гармоники
выходных напряжения или тока АИ с амплитудным регулированием.
Частота ЗГ должна быть пропорциональной его напряжению управления и
регулироваться в диапазоне от 20:1...100:1. Главными требованиями,
которые предъявляются к ЗГ, является соответствие его частоты заданной
и ее стабильность, от чего зависит точность поддержания скорости в
разомкнутой системе. Обычно отклонения частоты не превышают
1,0...0,1%.
83
1=^
+ Ct *
О
to
Рис.37. Задающий генератор: а - функциональная схема; б - временные
диафаммы; в - принципиальная схема триггера Шмитта
С другой стороны, можно считать, что ЗГ формируют требуемые
интервалы времени между импульсами, и поэтому для их построения
используются все выше рассмотренные методы формирования интервалов.
Широко применяется развертывающее преобразование с регулируемой
производной развертывающего напряжения при постоянном (реже
переменном) уровне сравнения [15,п.2-1]. Для получения линейной
регулировочной характеристики используется линейно н&растающее и
линейно спадающее пилообразные развертывающие напряжения.
Минимальные габариты таких устройств получаются при использовании
конденсаторов и ОУ. Функциональная схема одного из применяемых ЗГ
приведена на рис.37,а.
Напряжение управления ЗГ uf3, задающее выходную частоту,
подается с потенциометра RPj или вводится из системы управления
электроприводом. Это напряжение подается на входные резисторы
Rj = R2 = R3 = R4 = R интегратора на ОУ либо со своим знаком, либо с
обратным. Знак входного напряжения определяется транзисторами VT1 и
VT2, которые управляются триггером Шмитта ТШ. Когда открыт
транзистор VT1, резистор R2 соединен с общей шиной и положительное
напряжение управления не попадает на вход ОУ. На входные резисторы
R3, R4 подается отрицательное напряжение управления с инвертирующего
усилителя ИУ, имеющего коэффициент передачи, равный минус единица.
Это напряжение интегрируется ОУ. Если напряжение управления
неизменно, то на выходе ОУ и на конденсаторе напряжение нарастает по
линейному закону. Если открыт VT2, то напряжение на выходе ОУ
линейно уменьшается.
Рассмотрим подробнее работу ЗГ при неизменном напряжении
управления. Допустим, что в начальный момент времени напряжение на
выходе ОУ равно отрицательному опорному напряжению —Uon и
напряжение на выходе ТШ максимальное положительное. Координаты
этой точки обозначены на рис.37 цифрой 1. Ток резистора R6 открывает
транзистор VTI и удерживает в закрытом состоянии VT2. При этом
входной резистор ОУ R2 соединяется через VT1 с общей шиной и
практически не оказывает влияния на выходное напряжение ОУ. На
входные резисторы R3, R4 поступает отрицательное напряжение с
инвертора И, равное -иь . Ток этих резисторов i,. = / 2R протекает с
выхода ОУ через конденсатор С. При этом
«о = "Uon + »ct / С, (53)
где t - текущее время, с.
Поскольку напряжение левой (по рис.37) обкладки конденсатора по
отношению к общей шине практически равно нулю, то напряжение
конденсатора одновременно является треугольным и, выходным
напряжением ОУ. Когда и* достигнет +Uon (точка 2), то напряжение на
выходе триггера Шмитта скачком станет отрицательным (точка 3).
Транзистор VT1 закроется, a VT2 откроется. Ток конденсатора изменит
направление, но останется прежним по абсолютны! величине. Время, в
85
течение которого uT изменяется на 21^ от -Uon до +1}^,, является
полупернодом выходных, напряжений ОУ и ЗГ. Этот полупериод исходя из
(53) равен Тэт / 2 = 2UonC / ic, откуда следует, что частота ЗГ
*зг - (54)
Т*. 8UonRC 6
линейно зависит от напряжения управления. Выходное напряжение ТШ
является выходным напряжением ЗГ изг. Стабильность частоты зависит, в
основном, от постоянства величин входящих в (54). Наиболее
существенное влияние оказывает температура, до которой нагреваются
элементы ЗГ и блока питания.
На временных диаграммах показано, как при увеличении
напряжения управления в два раза в момент Ij удваивается частота ЗГ,
поскольку в два раза возрастают по абсолютной величине производные
напряжения конденсатора.
Рассмотрим один из вариантов триггера Шмитта, схема которого
приведена на рис.37Операционные усилители выполняют роль
компараторов, сравнивающих треугольное напряжение с положительным и
отрицательным опорными напряжениями. Треугольное напряжение
практически все время меньше положительного и больше отрицательного
опорного напряжений. Исключения составляют только моменты
переключения (точки экстремумов 1 ...4). Прямой вход DA1 почти все время
положителен по отношению к инверсному входу, поэтому на выходе DA1
имеется положительное напряжение и диод VD5 заперт. Прямой вход DA2
почти все время отрицателен по отношению к инверсному входу, поэтому
на выходе DA2 напряжение отрицательное и диод VD6 также заперт.
Таким образом, в интервалы между переключениями ОУ сигналы с них на
DA3 не проходят. Схема на DA3 представляет элемент памяти благодаря
положительной обратной связи на прямой вход через R7.
Как было принято выше, треугольное напряжение линейно нарастает
от точки 1, напряжение на выходе ЗГ положительно, открыт VT1. В точке 2
напряжение ит на несколько милливольт превышает +Uon, и на выходе
DA1 появляется отрицательный импульс (рис.37,6), который проходит
через VD5 и запоминается на выходе DA3. Когда треугольное напряжение
станет меньше —UOT в точке 4, на выходе DA1 появится положительный
импульс и на выходе ТШ и ЗГ напряжение скачком станет положительным
(точка 1). На временных диаграммах рис.37,6 длительности импульсов на
выходе компараторов преувеличены для наглядности в сотни раз. Диоды
VD1...VD4 ограничивают напряжения между прямыми и инверсными
входами ОУ, что является обязательным для некоторых типов ОУ.
Выпускаются ОУ, для которых эти диоды не нужны. Аналогичные
триггеры Шмитта (пороговые элементы) описаны в [19,с.297]. Триггер
Шмитта может быть выполен и на одном ОУ [5,с.187; 15,с.401.
86
3. Распределители управляющих импульсов
В однофазных автономных инверторах с амплитудным
регулированием величины первой гармоники напряжения или тока в
течение периода формируются два выходных импульса: один
положительный и один отрицательный. Трехфазный АИ выдает за период
шесть импульсов с интервалом 60°. Следовательно, для получения частоты
первой гармоники fj выходные импульсы ЗГ должны следовать с частотой
lM = 6fj. Для подачи импульсов на вентили нужен распределитель
импульсов (РИ).
В качестве РИ можно использовать счетчики со счетом до шести и
кольцевые регистры. При транзисторной реализации простейшим является
счетчик на трех триггерах. Три триггера имеют восемь различных
состояний. Для получения шести состояний в одном из них счетный
импульс добавляет не одну единицу, а три. Эта операция называется
исключением избыточных состояний. Тогда получается шесть состояний, и
каждое длится 60°. Если управляющие импульсы должны иметь
длительность 180° или 120°, то далее ставятся дешифраторы на диодах. На
базе интегральных схем РИ можно выполнить на счетчике, который
представляет одну микросхему. Для получения управляющих импульсов с
длительностью более 60° требуется еще не менеее 6 логических элементов.
а
К VI
к vs
Di
а.
\Зг
- +
тт
■к
KVS
S3
1
тт
г
к
0HL
I L
05
1 L
1
t
1
X
t
Рис.38. Распределитель импульсов на базе регистра Джонсона:
а - упрощенная принципиальная схема; б - временные диаграммы
87
Более простым получается РИ на регистрах с перекрестными связями на
тактируемых триггерах (регистрах Джонсона). Несколько таких схем
описано в [15].
Рассмотрим одну из применяемых схем, которая приведена на
рис.38,а. В ней использованы три тактируемых Ж-триггера DD1...DD3.
Положительный фронт импульса изг, который поступает на тактовый вход
С от ЗГ, записывает в триггер информацию, которая подана на вход J,
если К * J. Отрицательный фронт импульса ЗГ передает записанную
информацию на выходы триггер&ЛЗ данной схеме на вход J каждого триг¬
гера подается инверсный сигнал Q с предыдущего триггера, а на вход К
подается сигнал с прямого выхода. Таким образом, при поступлении
импульса ЗГ каждый i-й триггер переводит следующий 0+1)-й в состояние,
противоположное своему Qi+1 - Qj. Чередование состояний показано в
табл.3.
Номера
импульсов
ЗГ
Таблица 3
Выходы
триггеров
Исходное состояние в двоичном
коде принято 110. После
положительного фронта первого
импульса ЗГ первый триггер
переводит второй триггер г в
нулевое состояние (точнее, в этот
момент запоминается.,. требуемое
состояние), второй подтверждает
нулевое состояние третьего
триггера, а третий в свою очередь
подтверждает единичное состояние
первого. После отрицательного
фронта импульса ЗГ эти сигналы
появляются на выходах триггеров.
В следующем такте первый триггер
подтверждает нулевое состояние
второго триггера, второй триггер
переводит третий триггер в еди¬
ничное состояние, а третий триггер подтверждает единичное состояние
первого триггера и тд. Как видно из таблицы, первый триггер находится
три интерала в единичном состоянии, затем три интервала (l80°) в
нулевом. Через 120^ такие же состояния проходит третий триггер, затем -
второй. Временное диаграммы состояния тригтеров показаны на рис.38,6.
Очевидно, что если силовыми вентилями первой стойки (фаза А)
управлять сигналами первого триггера, то второй стойкой (фаза В) следует
управлять сигналами третьего триггера, а транзисторами третьей стойки
(фаза С) - сигналами DD2. Поскольку три триггера имеют восемь
различных состояний, то рассмотренный регистр имеет оде два
избыточных состояния 111 и ООО, при которых нагрузка АИ замкнута
накоротко. К счастью, в эти состояния регистр попадает очень редко. Для
исключения избыточных состояний все прямые (или инверсные) выходы
88
Q»
Q2
Q3
1
1
0
1
0
0
1
0
1
0
0
1
0
1
1
0
1
0
1
1
0
1
0
0
1
0
1
подаются на схему совпадения, которая переводит один из триггеров в
нулевое состояние подачей сигнала на установочный вход R (или S). После
чего два триггера остаются в единичном (нулевом) состоянии, а один
переводится в нулевое (или единичное). На рис. 38,а эта часть схемы не
показана.
Для реверсирования двигателя необходимо изменить порядок
переключения силовых управляемых вентилей. В случае использования в
качестве РИ реверсивного счетчика для этого достаточно переключить его
логическим сигналом с суммирования на вычитание. Регистры с
перекрестными связями не меняют направление переключения. Для реверса
необходимо использовать логическую схему, которая может содержать
порядка 20 элементов.
Тиристорные АИН дополняются устройствами управления
коммутирующими тиристорами. Для этого используется тот же РИ,
дополненный задержками и формирователями длительности управляющих
импульсов.
В заключение обратим внимание на то, что РИ всегда выполняются
на цифровых (логических) элементах.
4. Устройства задержки переднего фронта импульса
Для исключения сквозного тока в двух последовательно соединенных
транзисторах, образующих стойку АИН или ШИП (рис.2,а), необходимо
после снятия отпирающего импульса с одного силового транзистора
подавать отпирающий импульс на другой силовой транзистор после
некоторой задержки t3. Длительность задержки определяется свойствами
транзистора, а также усилителем мощности управляющего сигнала (УМС)
и составляет 1 ...20 мкс.
Один из вариантов схемы, обеспечивающей задержку только
переднего фронта импульса приведен на рис.39,а. Логический сигнал О
входного импульса инвертируется элементом D1 и подается на вход
второго элемента D2 2И-НЕ через RC-цепочку. Напряжение на выходе D1
имеет прямоугольную форму (см. логический сигнал F на рис.39,6).
Напряжение ис на конденсаторе С изменяется по экспонентам. Ввиду
большой крутизны характеристики вход-выход сигнал на выходе D2 будет
изменяться почти скачком при определенном уровне напряжения на
конденсаторе (на рис.39,6 этот уровень показан штриховой линией) и
единичном сигнале на втором входе. Можно представить, что напряжению
на конденсаторе соответствует ступенчатый логический сигнал X. Этот
сигнал запаздывает по отношению к входному сигналу G. Выходной
сигнал второго элемента Y = GX имеет нулевой уровень во время
запаздывания сигнала X. Выход Z элемента D3 равен нулю, когдаУ=С>=1.
После инвертирования Z элементом D4 получаем сигнал D, передний
фронт которого запаздывает по отношению к входному сигналу G на
время задержки t3, а срезы (задние фронты) совпадают. Элементы D3 и D4
89
5
в
в\
ну
ш
ik
X
1
1
Рис.39. Устройства задержки: а - типовая схема; б - ее временные
диаграммы; в - упрощенная схема; г - ее временные диаграммы
90
повышают крутизну выходного сигнала. Обычно все четыре элемента
представляют одну микросхему.
Более простой вариант устройства задфжки переднего фронта
представлен на рис.39 ,в* На временных диаграммах (рис.39,г) напряжение
на конденсаторе сразу заменено логическим сигналом Н, который
запаздывает по сравнению с входным сигналом О на требуемое время
задержки. После инвертирования выходного сигнала первого элемента
F = GH на выходе D2 получается требуемый сигнал D с задержанным
передним фронтом.В принципе, последние элементы в обоих схемах могут
отсутствовать, если управление УМ производится нулевым сигналом и
достаточна крутизна логического сигнала.
Поскольку напряжение на конденсаторе изменяется плавно и
сравнительно медленно, то фронты сигналов F и Y имеют заметную
длительность (пологие). В первом варианте схемы D3 и D4 существенно
повышают крутизну фронтов. С этой точки зрения первая схема имеет
большое преимущество перед второй. Если во вторую схему добавить два
инвертирующих логических элемента, то крутизна выходного сигнала
будет еще лучше, чем в первой, но потеряется преимущество в простоте.
5. Усилители мощности управляющих сигналов для транзисторов
Силовые транзисторы преобразователей работают в ключевом
режиме, при котором транзистор находится либо в закрытом состоянии (в
области отсечки по статическим выходным характеристикам), либо в
открытом состоянии (область насыщения). В усилителях мощности
управляющих сигналов (УМС) в большинстве случаев транзисторы
используются в ключевом режиме. В УМС и в качестве силовых
транзисторов используются обычные биполярные, биполярные с
изолированным затвором и полевые транзисторы. Рассмотрим построение
этих схем на биполярных транзисторах. В открытом состоянии ток
коллектора 1М определяется нагрузкой. Для силовых транзисторов это
ток двигателя. У транзисторов УМС ток коллектора ограничен
резистором, который специально включается в эту цепь.
Максимально возможный ток коллектора 1КВ определяется
параметрами транзистора (статическими выходными характеристиками) и
током базы 1б. Ток коллектора не может превышать 1к в , который равен
1к.в = В1б + W1 + В) + июэ (1 + В) / гк * В1б! (55)
где В - статический коэффициент усиления транзистора по току в схеме с
общим эмиттером; 1кб0 - обратный ток коллектора, А; гк
сопротивление коллектора, Ом. Второе слагаемое в (55) на 3...4 порядка
меньше максимально допустимого тока коллектора. Третье слагаемое в
режиме насыщения очень мало ввиду большой величины гк и малого
напряжения насыщения и^эн . Обычно и^эн<3 В, хотя возможны
91
5
S
Цс.Э)&
О
ш -
4
3
2
i
О
в
IS
•
’h'c
L<i
О
i 2 5 кн
Рис.40. Ключ на биполярном транзисторе: а - упрощенная схема
усилителя мощности; б - временные диаграммы токов при
переключениях; в - зависимость напряжения коллектор-эмиттер
от коэффициента насыщения
92
напряжения на открытом высоковольтном транзисторе до 7 В. Исходя из
изложенного, вторым и третьим слагаемыми в (55) можно пренебречь и
пользоваться приближенным выражением. Обычно в открытом состоянии
ток базы подается с некоторым избытком
^б.н = ^н^к.н / ®> (56)
где кн - коэффициент насыщения, обычно при максимальном токе
коллектора кн=1,5...3,5.
Закрытое состояние транзистора обеспечивается подачей на базу
отрицательного по отношению к эмиттеру напряжения (U&3<0).
Схема простого УМС, обеспечивающего открывание и закрывание
силового транзистора, приведена на рис.40,а. Источник питания ИП
подает на усилитель положительное и отрицательное по отношению к
эмиттеру силового транзистора напряжения питания постоянного тока.
Управляется УМС током, который подается на светодиод оптронного
транзистора VT2. Потенциал эмиттера VTI по отношению к общей шине
не превышает по абсолютной величине 2 В, поскольку он соединен с ней
через р-n переходы VT3...VT5 и VD1. При протекании по светодиоду тока,
достаточного для открывания VT2, база транзистора VT1 оказывается
соединенной через резистор R3 с минусом источника питания и VT1
заперт. Транзистор VT4 открыт током резистора R2 и подает на базу
силового транзистора VT5 отрицательное напряжение, величина которого
равна прямому падению напряжения на диоде VD1. Силовой транзистор
при этом закрыт. Резистор R2 ограничивает ток базы VT4, а резистор R7 -
ток коллектора VT4 и диода VD1.
После прекращения тока в фотодиоде транзистор VT2 закрывается и
током резисторов Rs, R3 открывается VT1. Ток его эмиттера поступает в
базу VT3 и открывает его. Усиленный транзистором VT3 ток открывает
силовой транзистор. Величина тока базы VT5 ограничена резистором R6.
Оба состояния могут сохраняться сколь угодно долго.
Для более глубокого понимания работы УМС и силового
транзистора рассмотрим динамические свойства биполярных транзисторов
в схеме с общим эмиттером при переключениях. Для этого используем
широко распространенный метод заряда [4, 5 §3.2]. Согласно этому методу
максимально возможный мгновенный ток коллектора iK в пропорционален
заряду в базе. При скачке тока базы от нуля до неизменной величины 1$
максимально возможный ток коллектора нарастает пропорционально
заряду базы по экспоненте с постоянной времени т„, приблизительно
равной времени жизни неосновных носителей (например, дырок в п - базе)
с учетом рекомбинации и заряда емкости коллекторного перехода
1ьв = ®1бф -exp(-t / tp)j, (57)
где t - текущее время, с. В реальных схемах ток коллектора всегда
ограничен также величиной тока 1ЬН , который определяется нагрузкой.
Для силовых транзисторов это ток двигателя.
93
Временное диаграммы токов при открывании и закрывании
транзистора приведены на рис.40,6. Длительность переднего фронта тока
коллектора (до достижения 1КН) находится из (57)
1ф1 = Tpln j61 . . (58)
к,н / “
В течение этого времени транзистор находится в активной области и
избыточных зарядов нет. После превышения максимально возможным
(расчетным, реально не протекающим) током коллектора тока нагрузки
(тока насыщения, ^„>1^) в базе накапливается избыточный зарвд,
величину которого можно охарактеризовать коэффициентом насыщения
для мгновенных значений
К = i„ / iK. (59)
где iK - действительный ток коллектора. В активной области коэффициент
насыщения считается равным единице. В области насыщения ток iK B
продолжает нарастать по выражению (57), но с меньшей раза в два по
сравнению хр постоянной времени tpH, которая соответствует режиму
насыщения. Ток коллектора при этом остается практически неизменным
Для закрывания транзистора можно подать на базу нулевое
напряжение (соединить ее с эмиттером), но для ускорения процесса
закрывания лучше подать отрицательный ток 162. Тогда максимально
возможный ток коллектора будет спадать по экспоненте, стремящейся к
-В162 по уравнению
iK.B = В[1б2 - (1б2 - 1и)ехр(-Ч / tp.H)]. (60)
До тех пор пока iK B > 1^н, изменения тока коллектора не происходит.
Длительность этого времени рассасывания, при котором itB уменьшается
от максимального (равного Big;) до IfcH, из (60) равна
tp * *р.н 1® - „ 61 • (61)
к.н / U~l62
Численное значение 162 следует подставлять в формулы со знаком минус.
Очевидно, что чем больше по абсолютной величине запирающий ток базы
и чем меньше начальный коэффициент насыщения, тем быстрее
закрывается транзистор. В частности, если коэффициент насыщения равен
единице (1$ = 1к н / В), то времена нарастания тока коллектора сверх 1К Н
и рассасывания равны нулю.
При iK < 1кн изменение тока коллектора происходит по (60), но с
постоянной времени хр. Длительность заднего фронта (времени спада iK
до нуля)
94
Таким образом, если в стойке один транзистор закрывается, а другой
в это время открывается, то сквозной ток в стойке будет равен
максимально возможному току того транзистора, у которого он меньше.
Большая часть напряжения питания инвертора U„, подведенного к стойке,
будет приложена к этому транзистору. Мощность потерь в коллекторном
р-n переходе транзистора равна произведению приложенного напряжения
на Она сопоставима с номинальной мощностью двигателя. Для
исключения этих чрезвычайно больших потерь необходимо вводить
задержку на открывание силовых транзисторов инверторов и
преобразователей постоянного напряжения.
После спадания тока коллектора до нуля избыточный
отрицательный заряд в базе быстро рассасывается, ток базы и ток перехода
эмиттер-база прекращаются.
Заметим, что в импульсной технике принято длительность фронтов
измерять на интервале изменения переменной величины от 0,1 до 0,9
установившегося значения и наоборот. В рассматриваемых случаях нет
необходимости в этом уточнении .
Для устранения времени рассасывания иногда применяют
автоматическое регулирование тока базы, при котором транзистор все
время находится на границе активной области и области насыщения. Это
позволяет сократить время переходных процессов в биполярных
транзисторах с 10...40 мкс до единиц и долей микросекунды.
Трудность поддержания транзистора на грани между областью
насыщения и активной областью (будем обозначать этот режим кн = 1)
обусловлена тем, что ток коллектора силового транзистора в интервалы
его проводимости равен току двигателя в данный момент времени и может
иметь любую величину от нуля до максимума тока статора. Эта САР
должна быть чрезвычайно быстродействующей, поскольку регулируется не
среднее значение тока, как в САР электропривода, а мгновенное значение
и объектом управления является не двигатель, а транзистор, постоянные
времени которого исчисляются микросекундами и ее долями.
Для контроля кн обычно используют напряжение коллектор-эмиттер
и^э силового транзистора. На рис. 40,в показана зависимость этого
напряжения от коэффициента насыщения при двух неизменных токах
коллектора. В области насыщения напряжение на коллекторе обычно не
превышает двух вольт и мало зависит от к„. По мере уменьшения кн и
приближения его к единице Ut3 растет все быстрее и может достигнуть
нескольких сот вольт. Поскольку непосредственно измерить кн не
возможного для поддержания кн « 1 поддерживают иьэ = 3...4 В (точка S
на рис.40 ,в).
Идею построения УМС с САР, обеспечивающей поддержание
силового биполярного транзистора не границе активной области и
области насыщения иллюстрирует рис.40,а при подключенном диоде VD2.
Усилитель мощности питается прямоугольным напряжением, которое
преобразуется в два постоянных напряжения, одно из них +U„
95
положительно по отношению к эмиттеру, а второе —Un - отрицательно.
Для открывания силового транзистора необходимо прервать ток
светодиода. Тогда VT2 закроется!, и током резисторов R3 и R5, который
далее протекает через переходы база-эмиттер транзисторов VT1, VT3 и
VT5, будут открыты все эти транзисторы. Каждый из этих транзисторов
усиливает ток в В+1 раз. Напряжение на базе VT1 UT (в точке Т) равно
сумме падений напряжения на трех открытых переходах база-эмиттер
транзисторов VTS, VT3, VT1, и его можно считать постоянным.
Напряжение на аноде открытого диода VD2 (точка D) равно сумме
падений напряжения на диоде и на коллекторе VT5 uD = AUfl2 + иКЛ5.
Если uD>Uj, то ток резистора R3 и ток базы VT1 равны
%1 = iR3 = 1ик.»5 ~ (Uj —Дид2 )] / R3. (63)
При увеличении напряжения на коллекторе силового транзистора
(например из-за возрастания тока двигателя) базовые токи трех
транзисторов и коэффициент насыщения VT5 увеличиваются. Согласно
рис.40,в это приводит к уменьшению иКЭ5 и возврату к точке, близкой к
исходной точке S . В случае уменьшения ub3S базовые токи и коэффициент
насыщения уменьшаются и и^э5 приближается к точке S снизу.
Таким образом, диод VD2 обеспечивает отрицательную обратную
связь, стабилизирующую напряжение ик э5 и поддерживающую кн *1.
При использовании САР тока базы силового транзистора напряжение на
нем в открытом состоянии увеличивается по сравнению с управлением
неизменным избыточным током базы и возрастает его нагрев. Этим
приходится платить за устранение времени рассасывания и существенное
уменьшение мощности, потребляемой схемами управления силовыми
транзисторами. При отсутствии САР тока базы его надо подавать
максимальным, исходя из принятой перегрузочной способности. В
действительности токи двигателя обычно намного меньше тока
перегрузки. В каждом полупериоде токи коллекторов силовых
транзисторов изменяются от нуля до амплитудного значения, зависящего
от нагрузки, и наоборот. Поэтому при использовании САР ток базы в
среднем будет существенно меньше. При этом на порядок уменьшается и
потребление мощности от источника прямоугольного напряжения,
питающего выпрямители УМС.
Аналогично выше рассмотренным УМС без стабилизации
коэффициента насыщения выполняются и УМС современных силовых
IGBT-транзисторов (биполярных транзисторов с изолированным
затвором). Типовая схема УМС представлена на рис.41. Управляющий
сигнал подается на вход интегральной микросхемы МС, которая управляет
двухкаскадным усилителем на дополняющих МДП-транзисторах
VT1...VT4. К положительному полюсу источника питания УМС +U„
подключены транзисторы VT1, VT3 с индуцированным каналом n-типа, а
к общей шине подключены транзисторы VT2,VT4 с индуцированным
каналом p-типа. Положительный входной сигнал проходит на выход МС
96
и открывает транзисторы VTI, VT3 и силовой IOBT-транзистор VT5. При
нулевом уровне входного сигнала открываются VT2, VT4 и закрывается
VTS. В отличие от УМС, управляющих обычными биполярными
транзисторами, которые должны обеспечить достаточно большой
установившийся ток базы УМС для ЮВТ-транзисторов, должны
обеспечивать подачу достаточно больших зарядов в моменты
переключения. Для этого требуются токи, часто составляющие несколько
ампер. Установившийся же ток сравнительно небольшой.
Схема, представленная на рис.41, предназначена для управления
силовым транзистором, который подключен к минусовой (общей) шине
источника питания инвертора. Источники питания всех УМС могут быть
общими. Для силовых транзисторов, подключенных к плюсовой шине,
требуюся индивидуальные источники питания УМС каждого силового
транзистора и оптронная развязка управляющих сигналов.
Переходные процессы при переключениях полевых транзисторов
протекают намного быстрее, чем в ключевых схемах на биполярных
транзисторах. Длительность фронтов в УМС равна 10...20 не, длительность
переключения КЗВТ-транзистора измеряется также десятками, реже
сотнями наносекунд. Поскольку токи силовых транзисторов могут
составлять сотни ампер, то ввиду больших di/dt на проводниках
возникают заметные импульсы напряжения. Так провод ник длиной 100 мм
может иметь индуктивность порядка 50 нГн, и при di / dt=l А/нс на нем
возникает падение напряжения около 50 В. Поэтому при монтаже УМС
+vn ,—,
VTi
Рис.41. Схема усилителя мощности управляющего сигнала
для силового ЮВТ-транзистора
97
для IGBT-транзисторов площади, охватываемые проводниками с током,
должны быть минимальными (дня уменьшения индуктивности). При
необходимости используют витые провода , как условно показаны
провода, идущие к VT5, на рис.41. Кроме того, на всех участках проводов
питания подключаются конденсаторы: например, <1^=50...200 мкФ и
Cj=5...20 мкФ танталовые или электролитические и С2=0,05...0,20 мкФ
керамический. Каждую силовую стойку также шунтируют конденсатором
емкостью 10...1000 мкФ.
Усилители мощности для силовых полевых транзисторов (MOFSET-
транзисторов) строятся аналогично выше рассмотренным, но питание
УМС обычно однополярное 12...1S В. Соответственно упрощается и схема
УМС.
Для управления силовыми транзисторами выпускаются микросхемы
(драйверы) для одного транзистора, для обоих транзисторов одной и
шести транзисторов всех трех стоек АИН. Зарубежные фирмы выпускают
также УМС в одном корпусе (модуле) с одним или несколькими (до 6)
силовыми транзисторами, которые шунтируются встречными
быстродействующими силовыми диодами. Модули могут содержать
датчики тока, датчики температуры р-л переходов и др. устройства.
6. Генераторы ведущего сигнала
В системах управления двухзвенными АИН с ШИМ и НПЧ для
формирования частоты, требуемого <тсла фаз, амплитуды и формы
среднего выходного напряжения преобразователя частоты используется
mj-фазный (mj • число фаз выходного напряжения ПЧ) генератор
ведущего сигнала (ГВС). Напряжения ГВС по существу усиливаются ПЧ
по величине и мощности и подаются на двигатель. Генераторы ведущего
сигнала называют также задающими.
Генераторы ведущих сигналов должны обеспечивать выполнение
следующих функций:
1. Регулирование амплитуды в диапазоне 1:10...1:200.
2. Регулирование частоты в диапазоне от 0,1...2 Гц до максимальной
частоты, подаваемой на двигатель (70...250 Гц)
3. Возможность регулирования фазы..
4. Поддержание требуемого сдвига фаз.
5. Возможность изменения порядка чередования фаз для реверсивных
электроприводов
6. Формирование напряжения требуемой формы (прямоугольной,
трапецеидальной, синусоидальной и др.).
7. Высокое быстродействие. Полоса пропускания по амплитуде и
частоте должна составлять 5... 100 Гц в зависимости от требований к
электроприводу.
8. В некоторых случаях требуется возможность синхронизации с
другими генераторами (многодвигательные приводы, синхронные валы).
98
Для этой цепи не подходят наиболее распространенные генераторы
гармонических колебаний, основанные иа резистивно-емкостных частотно¬
зависимых элементах [5], ввиду большой инерционности, трудности
перестройки амплитуды и частоты электрическим сигналом и трудности
поддержания требуемого сдвига фаз. Находят применение следующие
принципы построения ГВС гармонического напряжения.
1. Использование суммирования одного гармонического сигнала с
mi-фазным, в результате чего возникают биения с разностной частотой.
После фильтрации сигналы имеют практически синусоидальную форму.
2. Выпрямление гармонического напряжения повышенной частоты
(400...2000 Гц) фазочувствительным выпрямителем с частотой
демодуляции, большей или меньшей на величину требуемой выходной
частоты по сравнению с исходным гармоническим напряжением [14], и
имеющим требуемое число фаз. После фильтра нижних частот получаются
практически синусоидальные напряжения. Легко достигается и требуемый
фазовый сдвиг при использовании mt фазного генератора прямоугольных
напряжений для демодуляции. Изменение соотношения частот меняет
порядок чередования фаз.
3. Генераторы на основе цифрового формирования требуемого
сигнала (например, близкого к синусоидальному).
4. Цифроаналоговые ГБС и генераторы кодов, изменяющихся по
закону ступенчатой аппроксимации ведущего сигнала [15, §2-3].
Используются две разновидности аппроксимации синусоиды полиномами
нулевого порядка: ступенчатая аппроксимация при равномерном
квантовании по времени и ступечатая аппроксимация при равномерном
квантовании по уровню и переменном по длительности интервалов.
5. Ведущие генераторы прямоугольного напряжения можно
построить на базе ЗГ и РИ, которые управляют автономными
инверторами.
Амплитуда выходного напряжения может регулироваться
изменением напряжения питания и усилителями напряжения с
регулируемым коэффициентом усиления.
При квантовании по уровню для получения п ступеней
аппроксимации требуется п/2 различных напряжений (п/4 отличающихся
по абсолютной величине). Так дня п = 12 требуется три положительных
уровня: 0,5; 3/2; 1 и три отрицательных. Выходное напряжение содержит
только гармоники с номерами v = кп ± 1, где к = 1,2,3... целое число.
Отсутствуют четные гармоники и гармоники кратные трем. Правильный
выбор величины ступеней или интервалов позволяет исключить гармоники
с v = кп ± 1 и ниже, а при квантовании по уровню также и кратные с ними.
Для задания равномерных интервалов могут использоваться
рассмотренные выше задающие генераторы. Помимо рассмотренных
принципов построения ВГ используется и много других идей.
99
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Браславский И.Я. Асинхронный полупроводниковый
электропривод с параметрическим управлением. М.: Энергоатомиздат,
1958. 224 с.
2. Быстродействующие электроприводы постоянного тока с широтно¬
импульсными преобразователями / М.Е.Гольц, А.Б.Гудзенко, М.В.Остеров
и др. М.: Энергоатомиздат, 1986.184 с.
3. Горбачев Г.Н., Чаплыгин Е.Е. Промышленная электроника:
Учебник для вузов / Под ред. В.А.Лабунцова. М.: Энергоатомиздат, 1988.
320 с.
4. Евсеев Ю.А., Дерменджи П.Г. Силовые полупроводниковые
приборы: Учебник для техникумов. М.: Энергоиздат, 1981.472 с.
5. Забродин Ю.С. Промышленная электроника: Учебник для вузов.
М.: Высш. школа, 1982.496 с.
6. Комплектные тиристорные электроприводы: Справочник /
И.Х.Евзеров, А.С.Горобец, Б.И.Мошкович и др.; под ред.
В.М.Перельмутера. М.: Энергоатомиздат, 1988.319 с.
7. Крылов С.С., Мельников Е.В., Конышев Л.И. Информационные
цепи преобразователей тирийорных электроприводов. М.: Энерго¬
атомиздат, 1984.160 с.
8. Лихошерст В.И. Полупроводниковые преобразователи электри¬
ческой энергии для электроприводов с двигателями переменного тока:
Учебное пособие. Свердловск: УПИ им.С.М.Кирова, 1986.72 с.
9. Лихошерст В.И. Полупроводниковые преобразователи электри¬
ческой энергии для электроприводов с двигателями постоянного тока:
Учебное пособие. Свердловск: УПИ им.С.М.Кирова, 1987.80 с.
10. Лихошерст В.И., Шилин С.И. Преобразователи электроэнергии:
Методические указания к лабораторным работам по курсу "Электронные,
микропроцессорные и преобразовательные устройства". Екатеринбург:
УГТУ - УПИ, 1994. 35 с.
11. Писарев А.Л., Деткин Л.П. Управление тиристорными
преобразователями: (Системы импульсно-фазового управления). М.:
Энергия, 1975. 264 с.
12. Перельмутер В.М., Соловьев А.К. Цифровые системы управления
тиристорным электроприводом. К.: Техшка, 1983.104 с.
13. Полупроводниковые выпрямители / Е.И.Беркович, В.Н.Ковалев,
Ф.И.Ковалев и др.; Под ред. Ф.И.Ковалева и Г.П.Мостковой.-2-е изд.,
перераб. М.: Энергия, 1978.448 с.
14. Сандлер А.С., Гусяцкий Ю.М. Тиристорные инверторы с
широтно-импульсной модуляцией для управления асинхронными
двигателями. М.: Энергия, 1968.96 с.
15. Системы управления тиристорными преобразователями частоты /
В.А.Бизиков, В.Н.Миронов, С.Г.Обухов, Р.Н.Шамгунов. М.: Энергоиздат,
1981.144 с.
100
16. Тиристорные преобразователи частоты в электроприводах /
А.Я.Бернштейн, Ю.М.Гусяцкий, А.В.Кудрявцев, Р.С.Сарбатов; под ред.
Р.С.Сарбатова. М.: Энергия, 1980.328 с.
17. Управляемый выпрямитель в системах автоматического
управления/ Н.В.Донской, А.Г.Иванов, В.М. Никитин, А.Д.; под ред.
А.Д.Поздеева. М.: Энергоатомиздат, 1984.352 с.
18. Файнштейн В.Г.,Файнштейн Э.Г. Микропроцессорные системы
управления тиристорными электроприводами/ Под ред.
О.В.Слежановского. М.: Энергоатомиздат, 1986. 240 с.
19. Фролкин В.Т., Попов JI.H. Импульсные и цифровые устройства:
Учеб. пособие для вузов. М.: Радио и связь, 1992. 336 с.
20.Шило B.JI. Популярные микросхемы КМОП: Справочник. М.:
Издательство Ягуар, 1993.64 с.
21 Шипилло В.П. Автоматизированный вентильный электропривод.
М.: Энергия, 1969.400 с.
22. Энергетическая электроника: Справочное пособие/ Пер. с нем.
Под ред. В.А.Лабунцова. М.: Энергоатомиздат, 1987.464 с.
101
ОГЛАВЛЕНИЕ
Введение 3
Глава I. Функциональные схемы систем управления
преобразователями 5
1. Выпрямительно-инверторные преобразователи 5
2. Широтно-импульсные преобразователи постоянного
напряжения 7
3. Двухзвенные преобразователи частоты 8
4. Преобразователи частоты с широтно-импульсной
модуляцией 11
5. Непосредственные преобразователи частоты 14
6. Преобразователи переменного напряжения 14
Глава П. Системы импульсно-фазового управления 15
1. Показатели СИФУ 15
2. Фильтры синхронизирующих напряжений 16
3. Формирователи длительности 22
Глава III Фазосмещающие устройства 25
1. Многоканальные синхронные ФСУ 26
2. Одноканальные синхронные ФСУ 27
3. Комбинированные синхронные ФСУ 29
4. Асинхронные одноканальные ФСУ 30
5. Принцип развертывающего уравновешивания 31
6. Ячейка ФСУ с пилообразным развертывающим
напряжением 33
7. Ячейка ФСУ с косинусоидальным развертывающим
напряжением 36
8. Ячейка комбинированного ФСУ 38
9. Ячейка ФСУ на основе одновибратора 41
10. Устройства цифрового управления 46
11. Функциональные схемы цифровых ФСУ и ФД 47
12. Цифровое ФСУ и ФД на аппаратной основе 49
13. Программная реализация цифровых ФСУ 53
14. Динамические свойства ФСУ и преобразователя 54
Глава IV. Усилители мощности управляющих импульсов
для тиристоров 57
1. Требования к управляющим импульсам 57
2. Усилитель мощности на транзисторе с импульсным
трансформатором 61
3. Усилитель-формирователь на блокинг-генераторе 65
4. Усилитель мощности управляющих импульсов
оптимальной формы 67
5. Усилители мощности с высокочастотным заполнением 68
6. Автогенератор Роера 70
7. Усилитель мощности для оптронного тиристора 72
102
8. Усилитель мощности для запираемого тиристора 73
Глава V. Устройства управления реверсивными преобразователями 74
1. Согласующие входные устройства 74
2. Датчики состояния вентилей 75
3. Логические переключающие устройства 78
Глава VI. Устройства систем управления преобразователями частоты
и широтно-импульсными преобразователями 83
1. Общие сведения 83
2. Задающие генераторы 83
3. Распределители управляющих импульсов 87
4.Устройства задержки переднего фронта импульса 89
5. Усилители мощности управляющих сигналов для транзисторов 91
6. Генераторы ведущего сигнала 98
Библиографический список 100