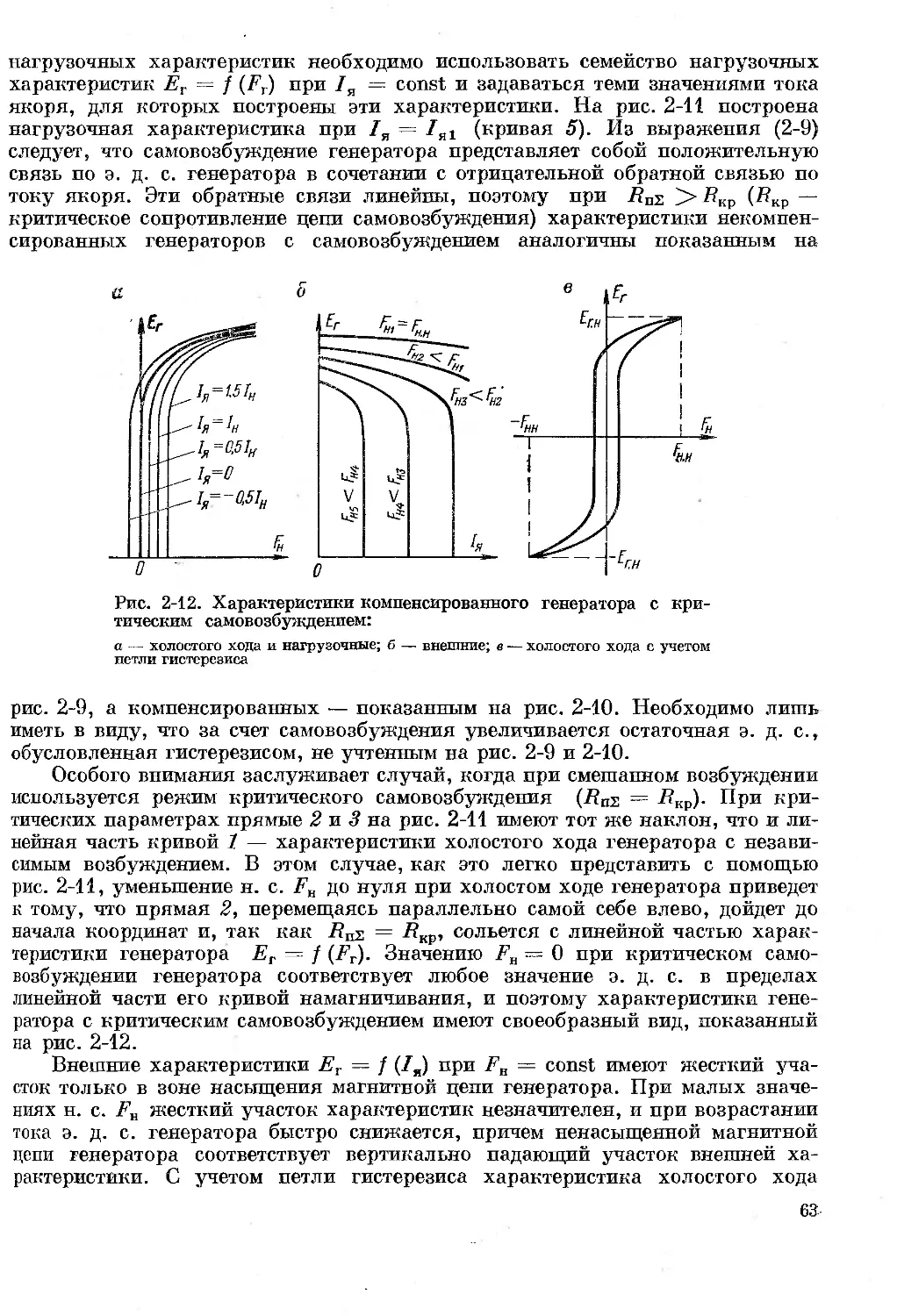
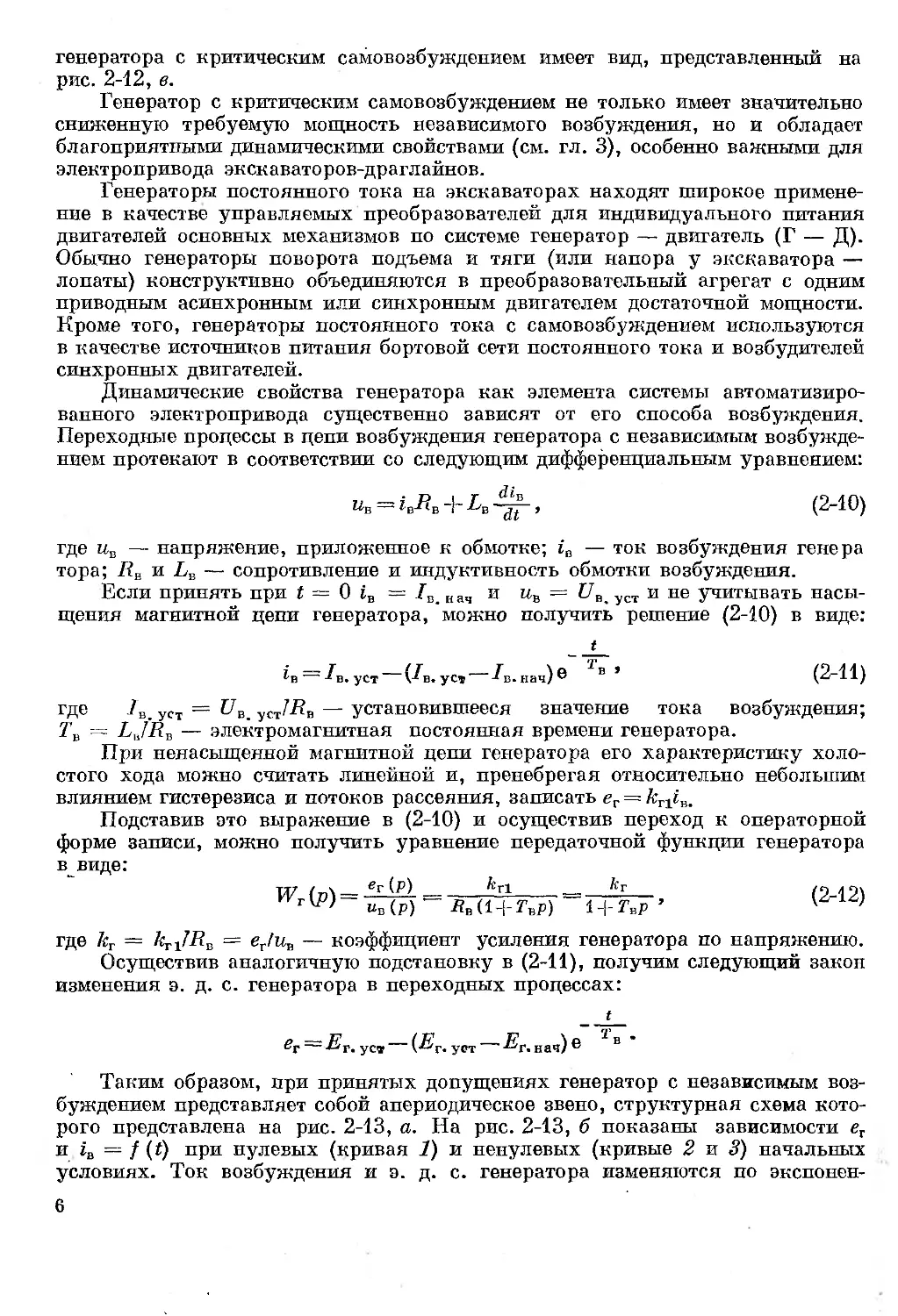
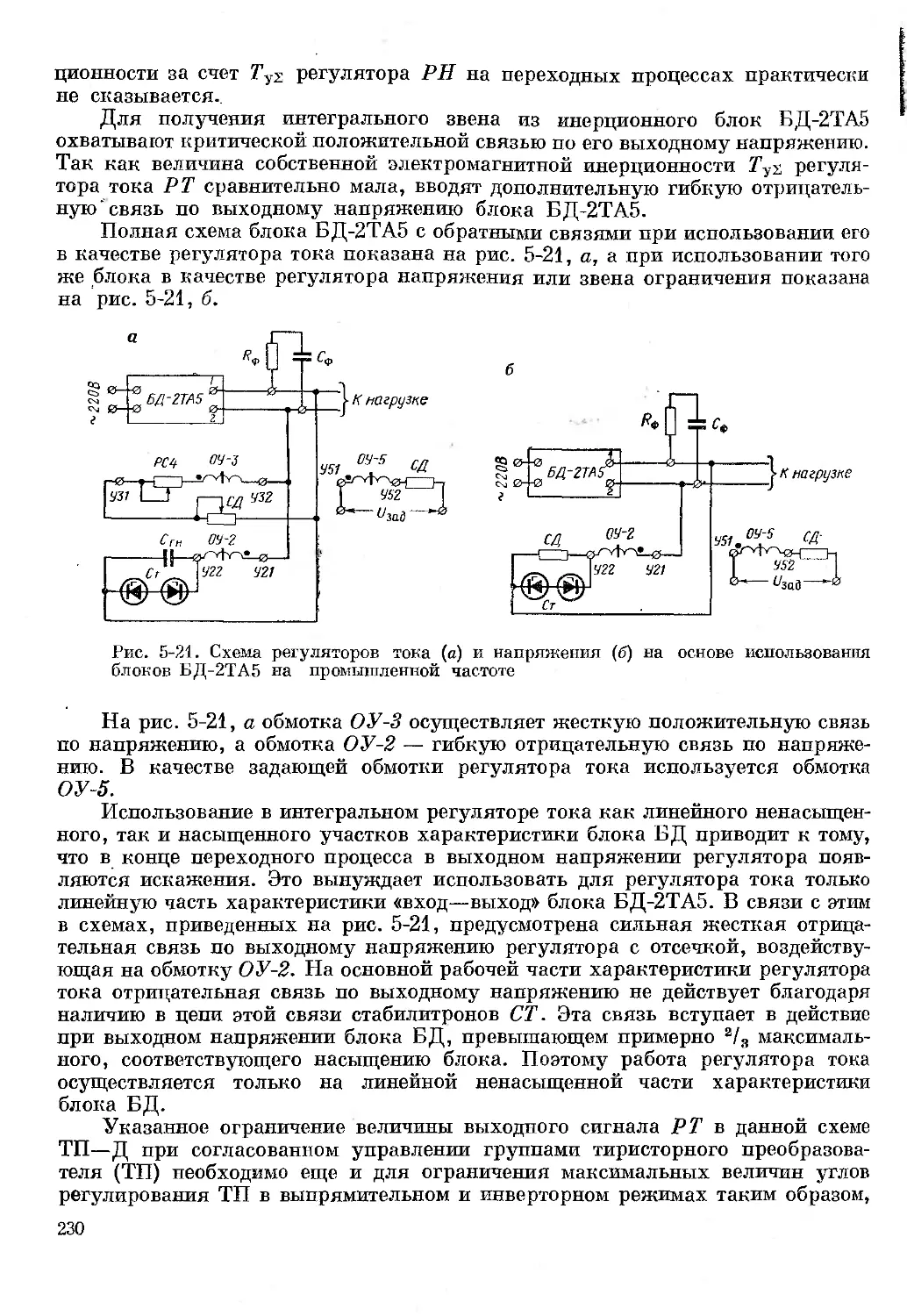
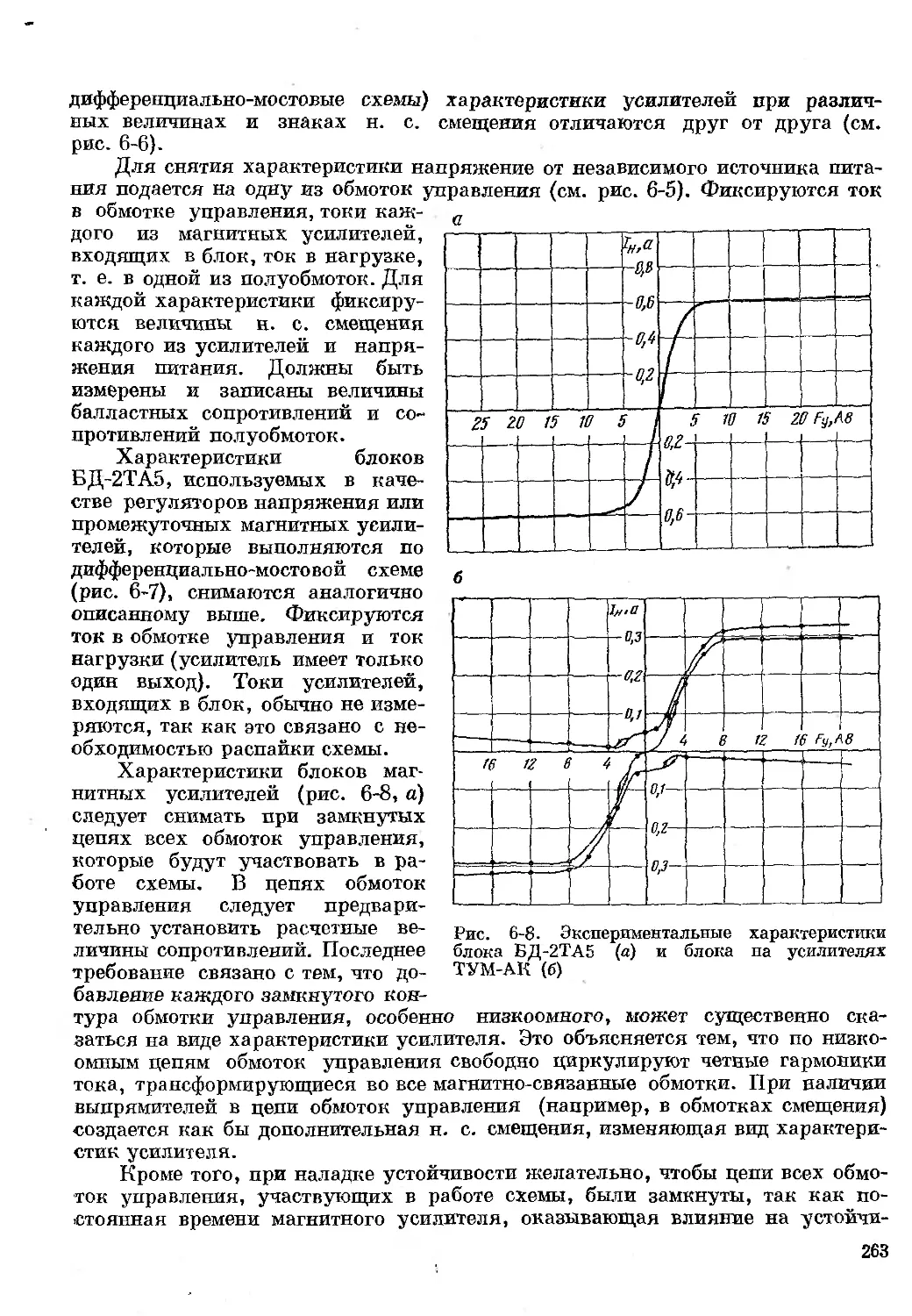
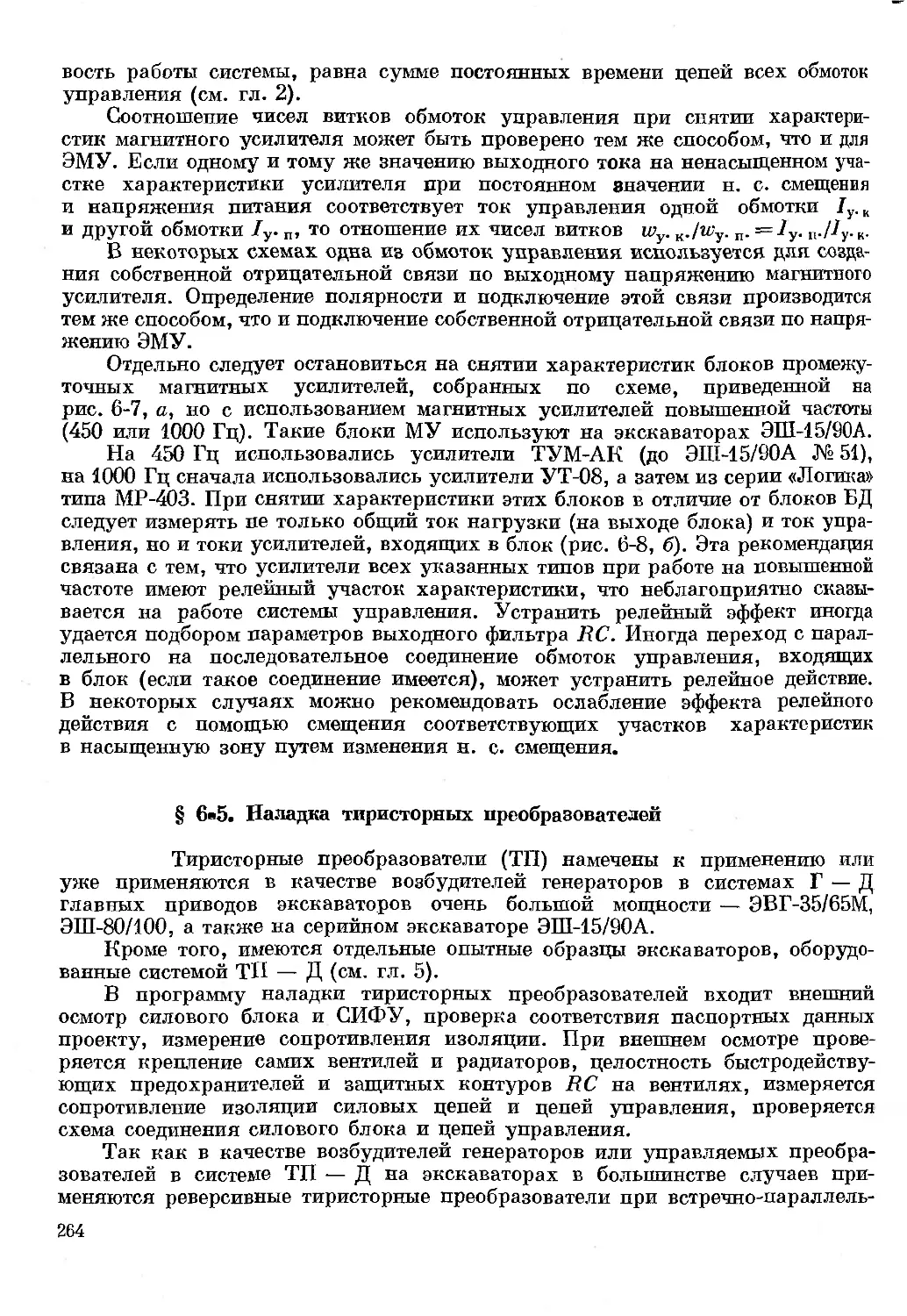
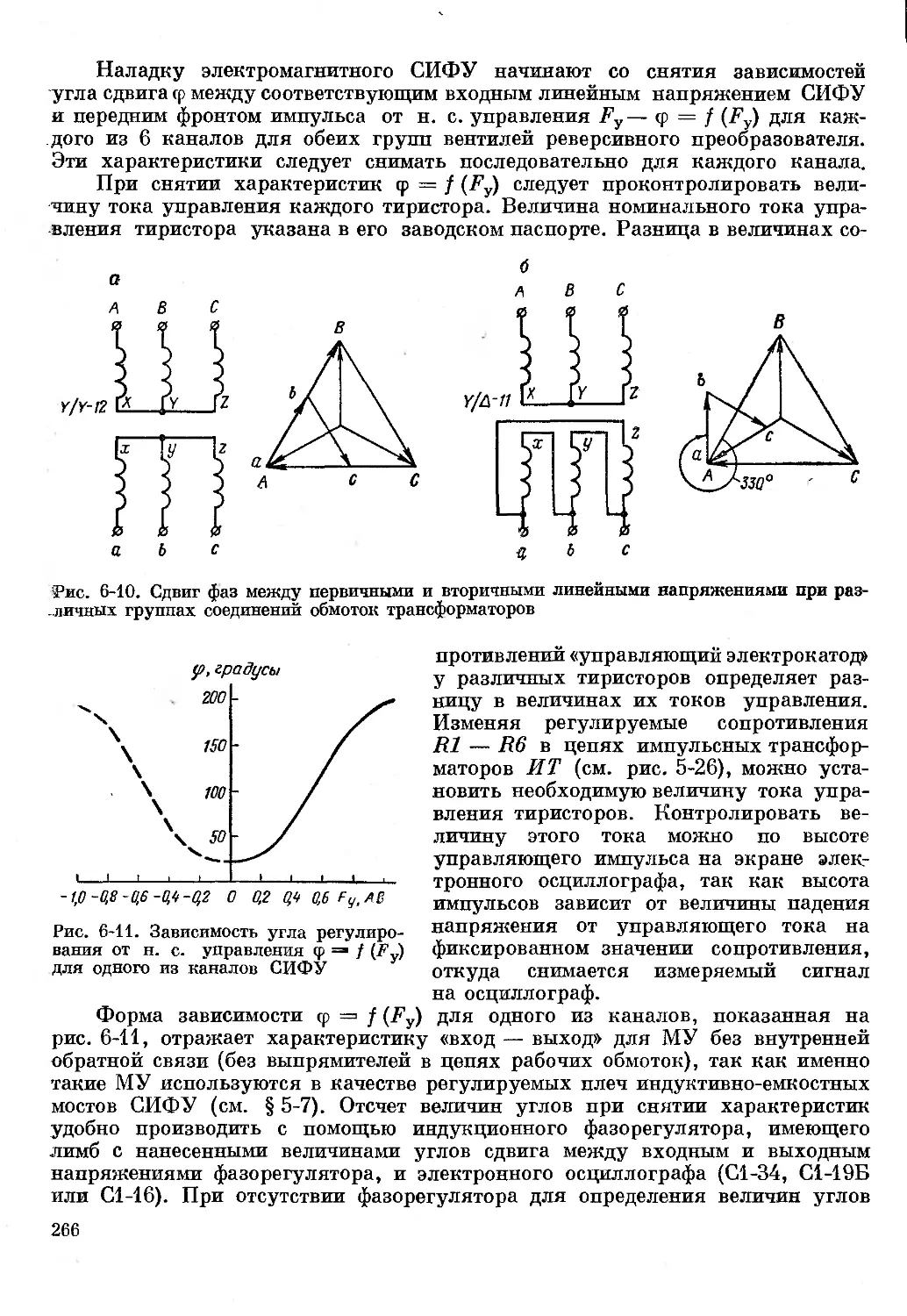
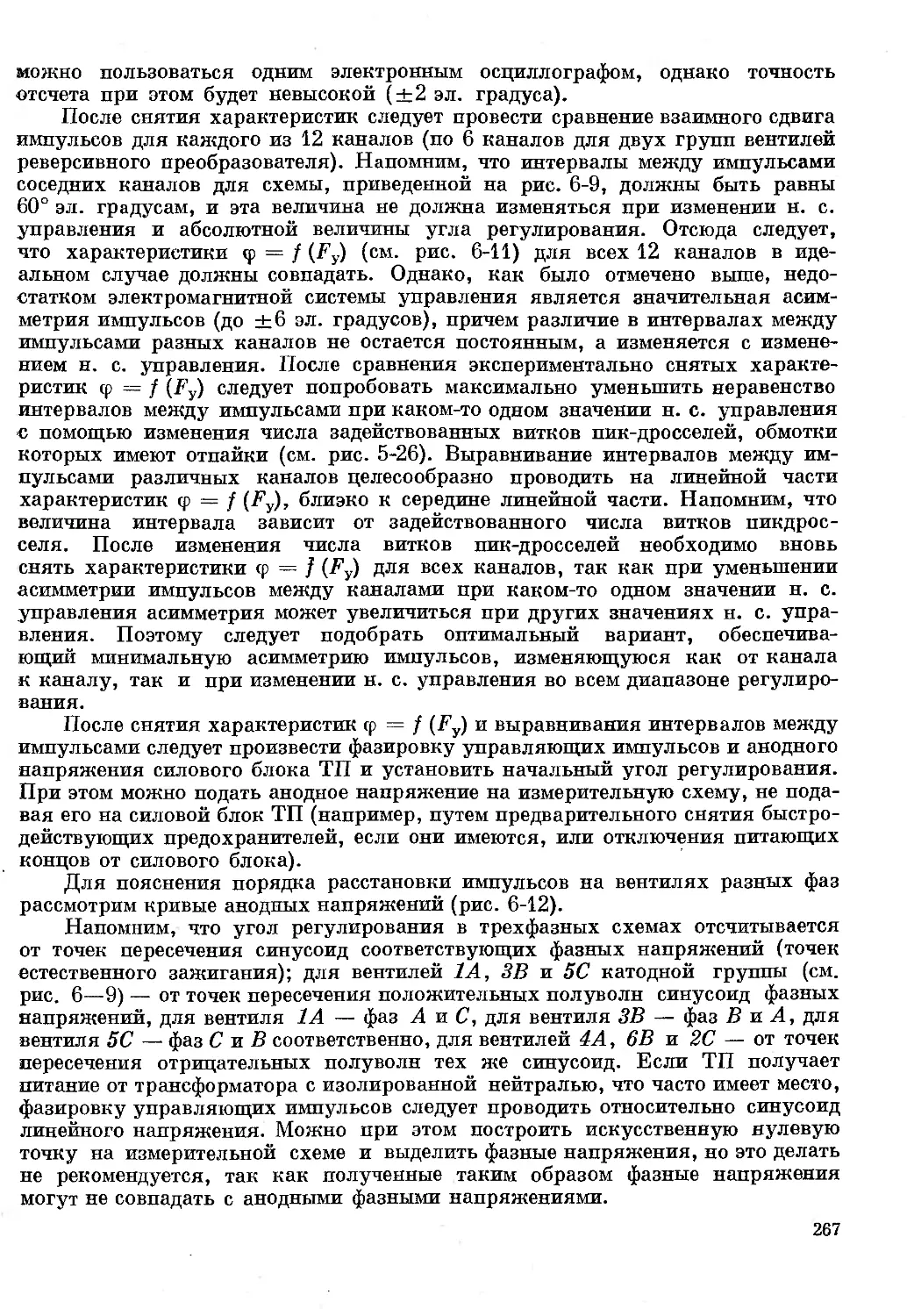
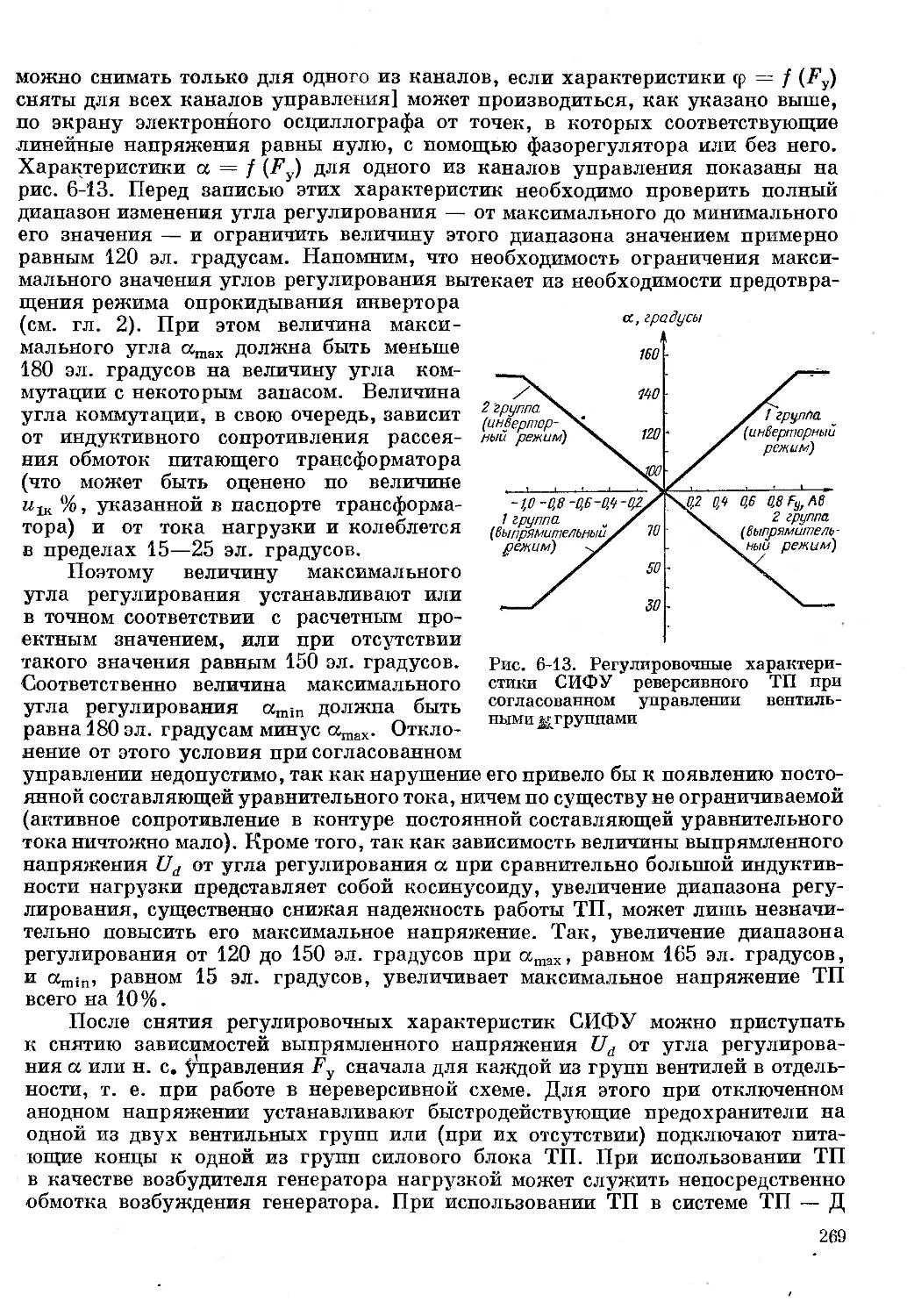
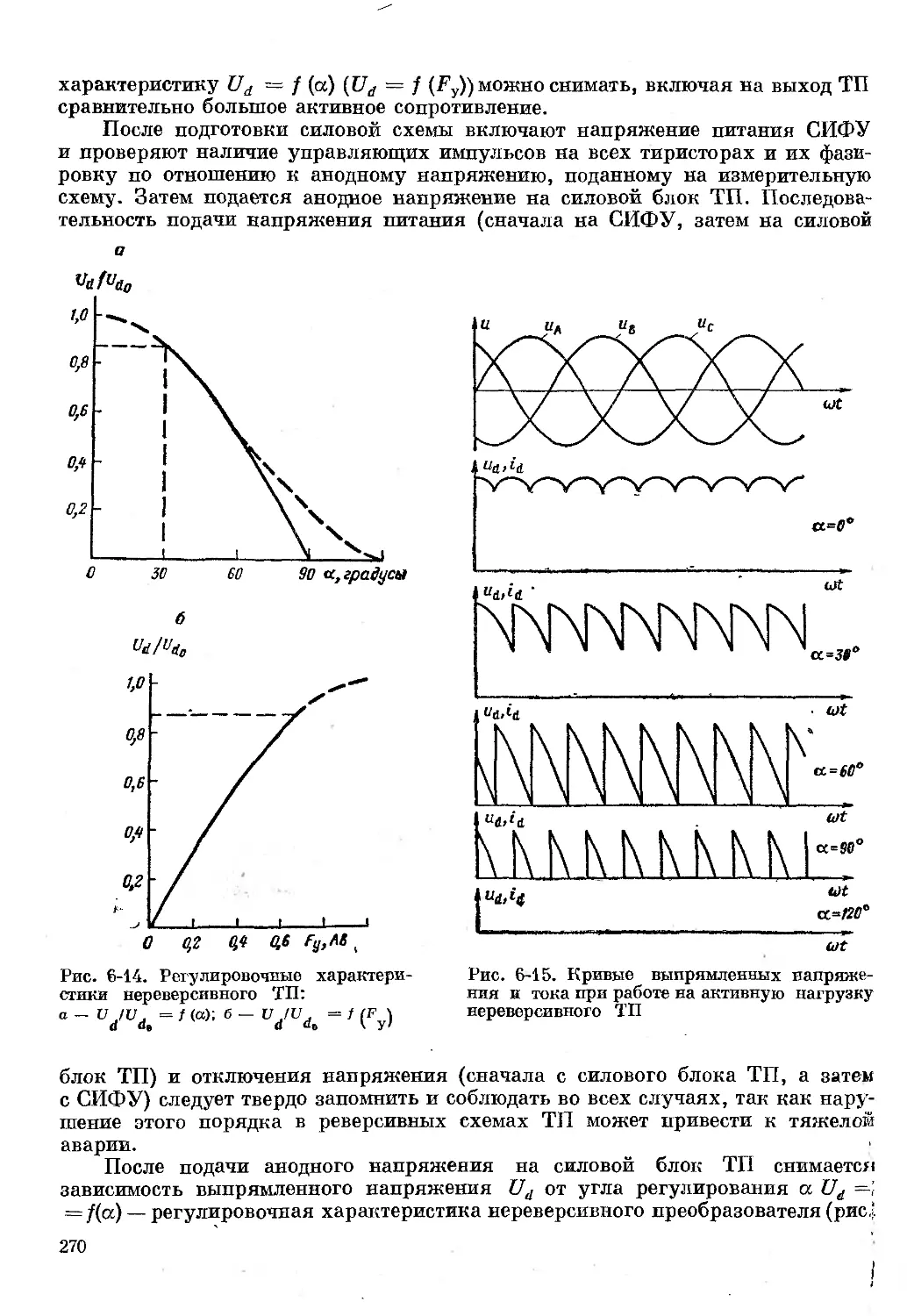
/














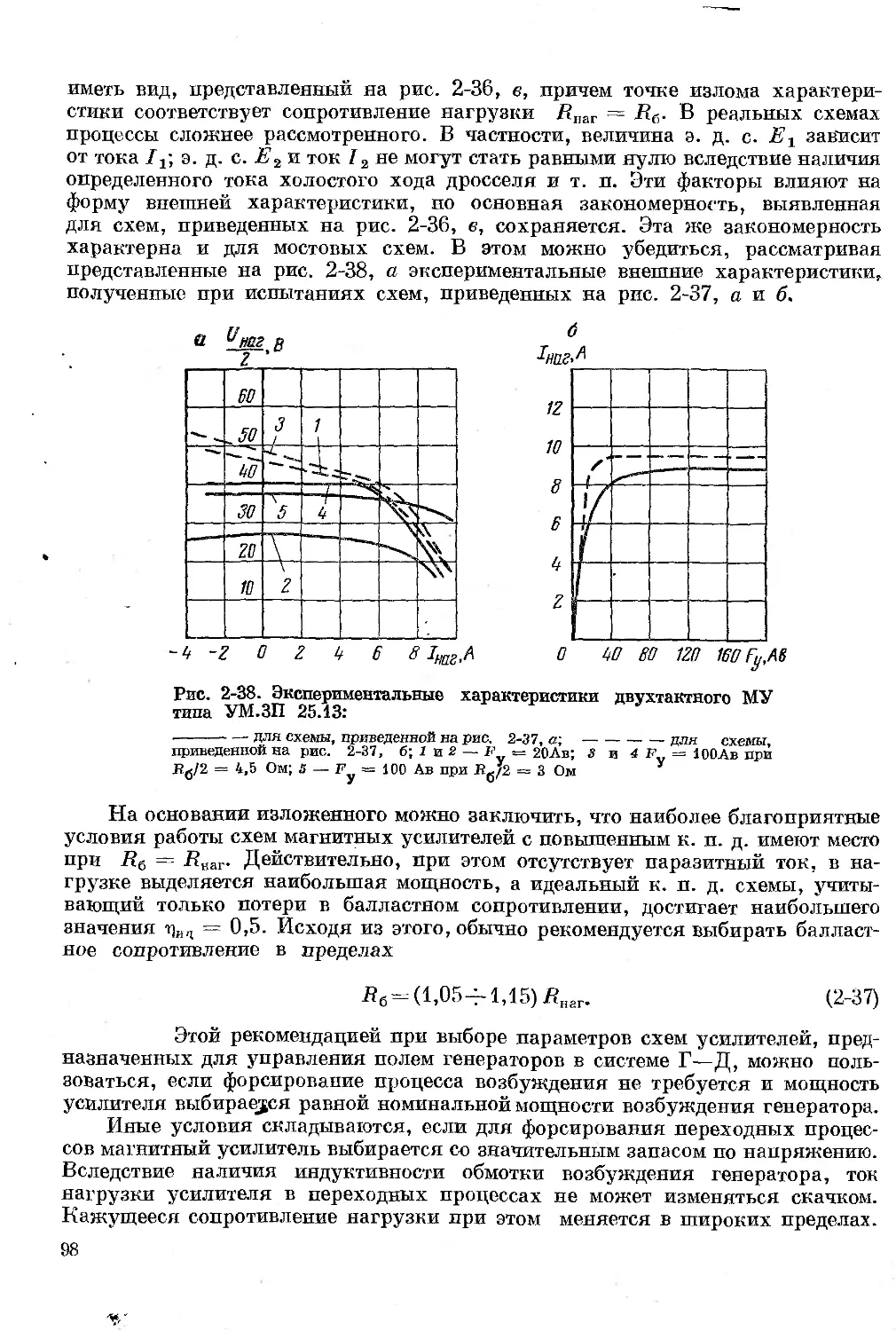
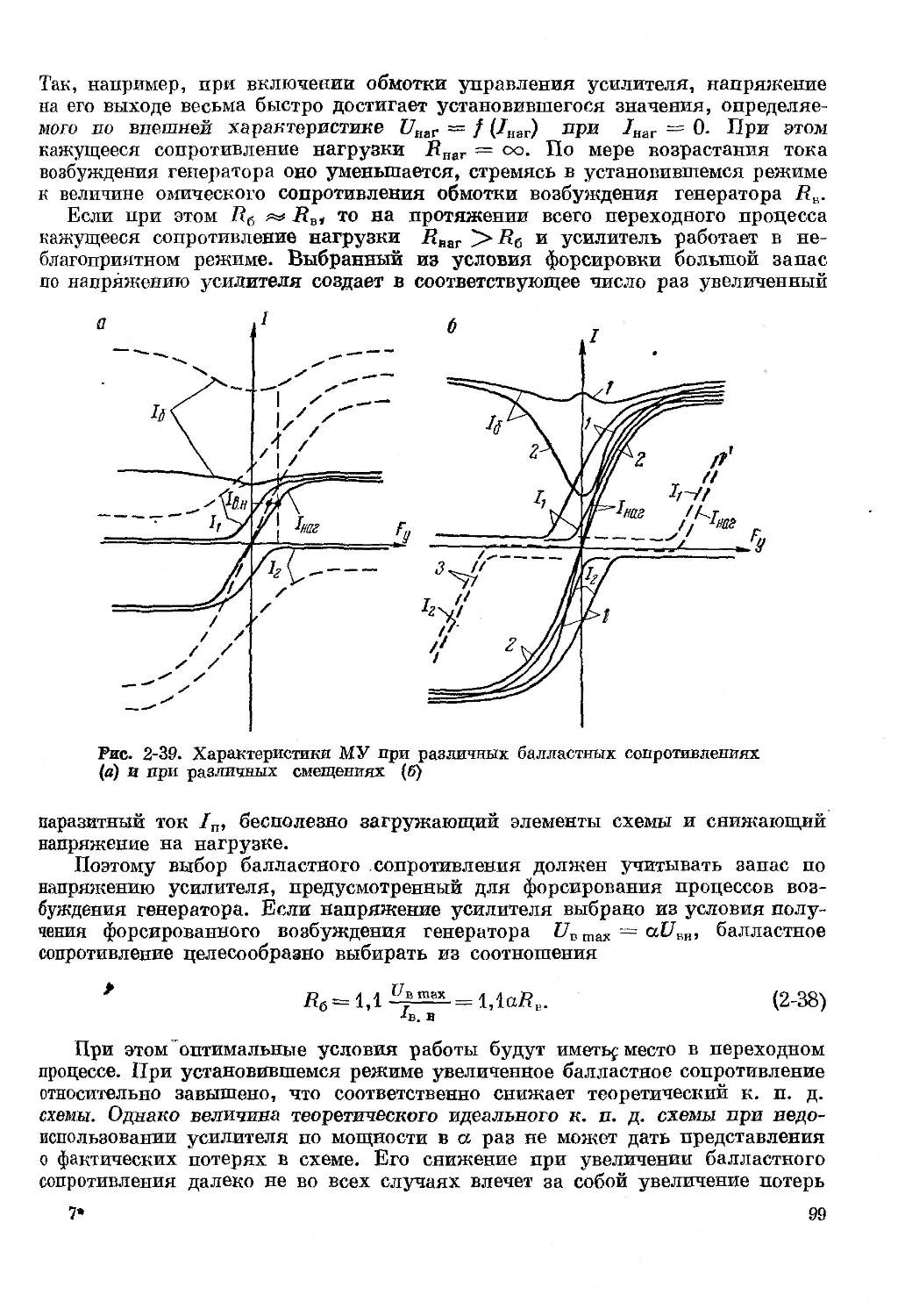


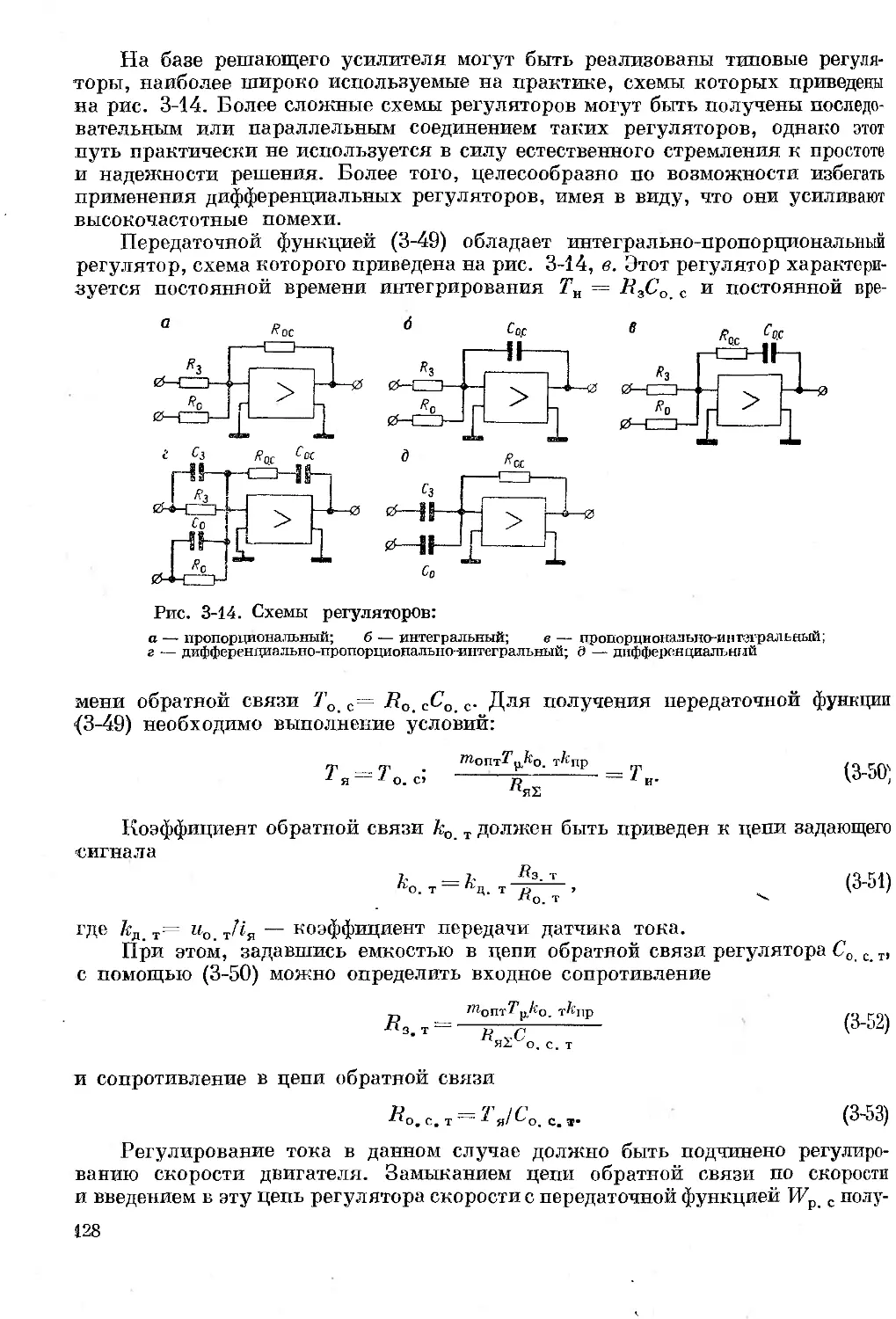
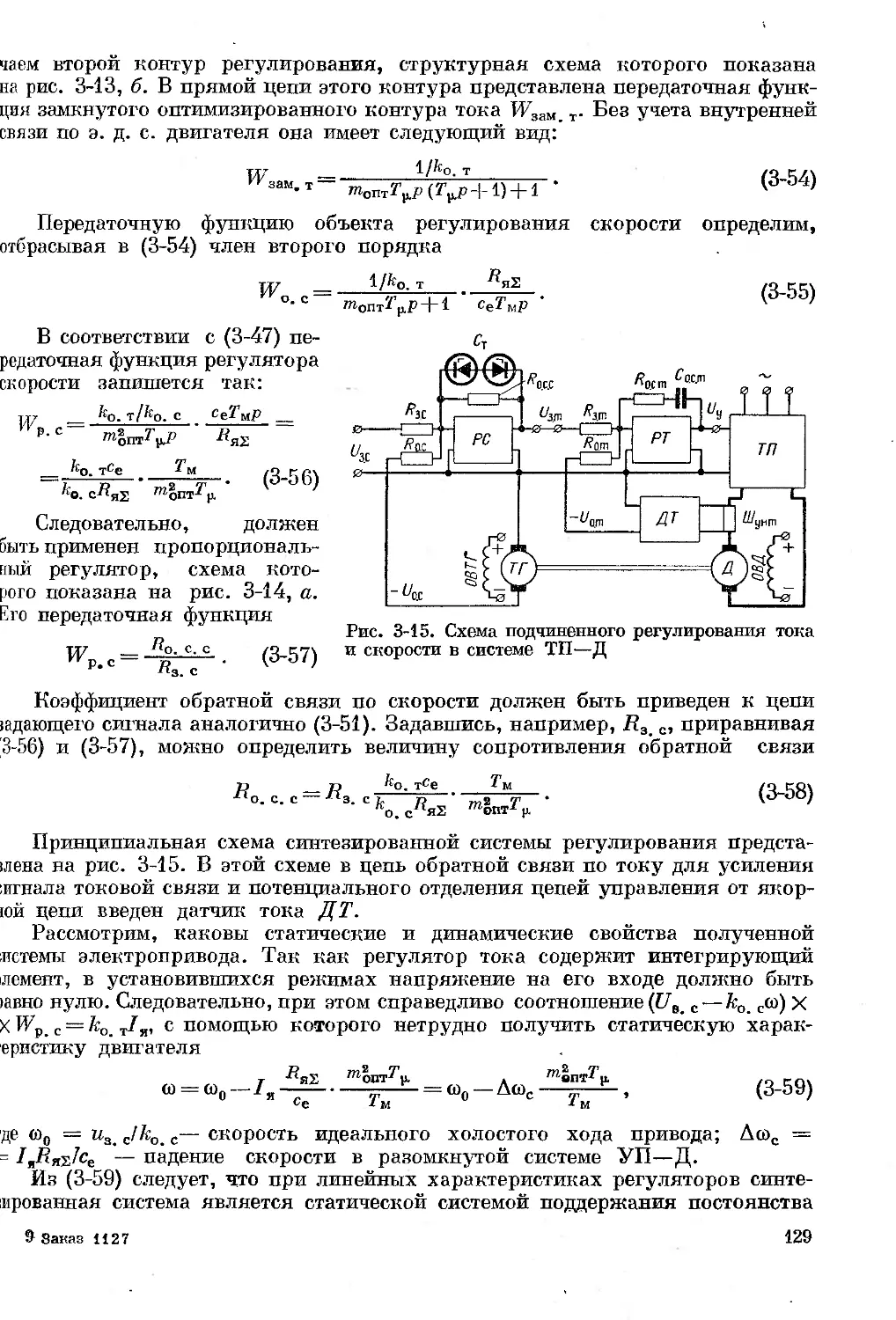

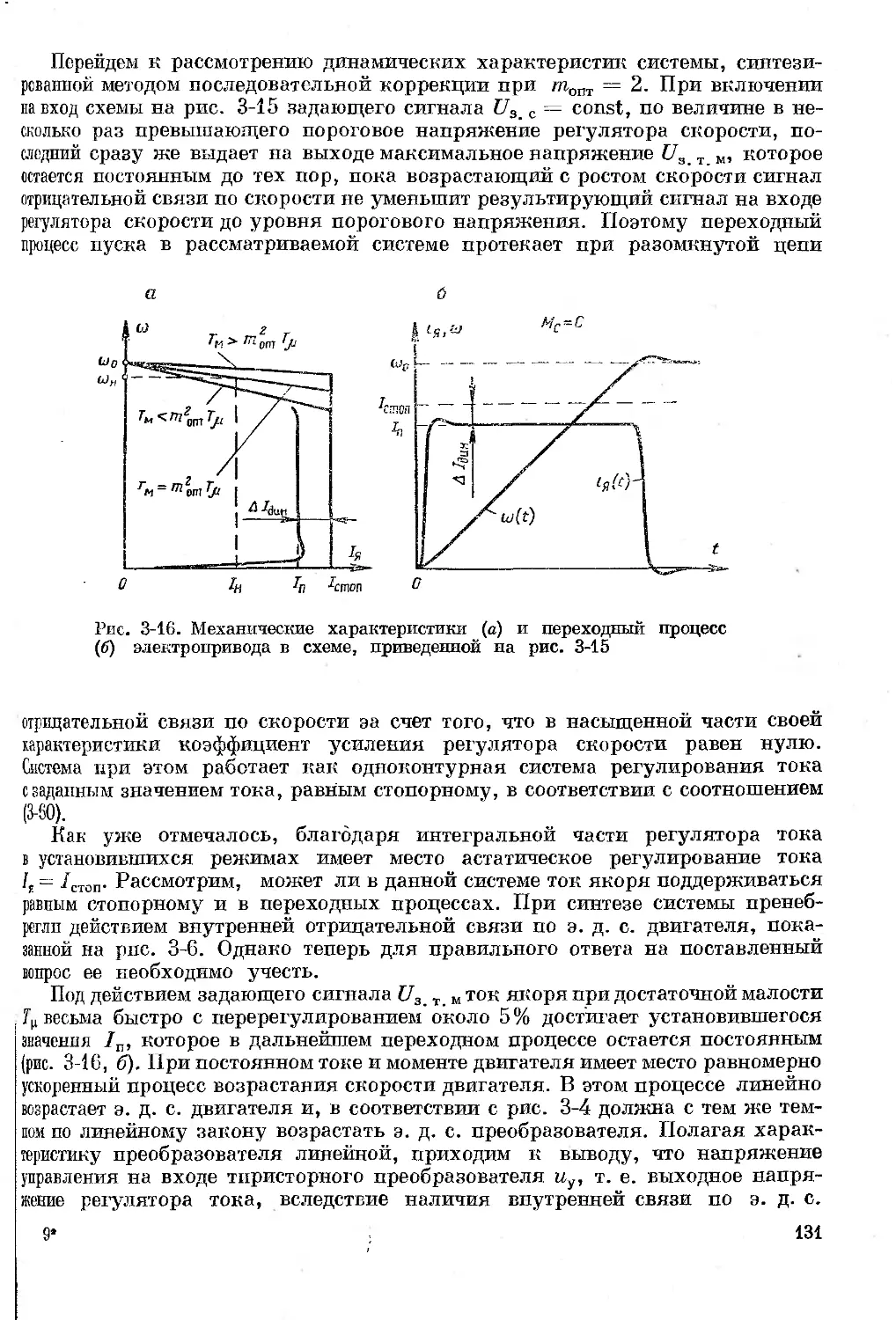




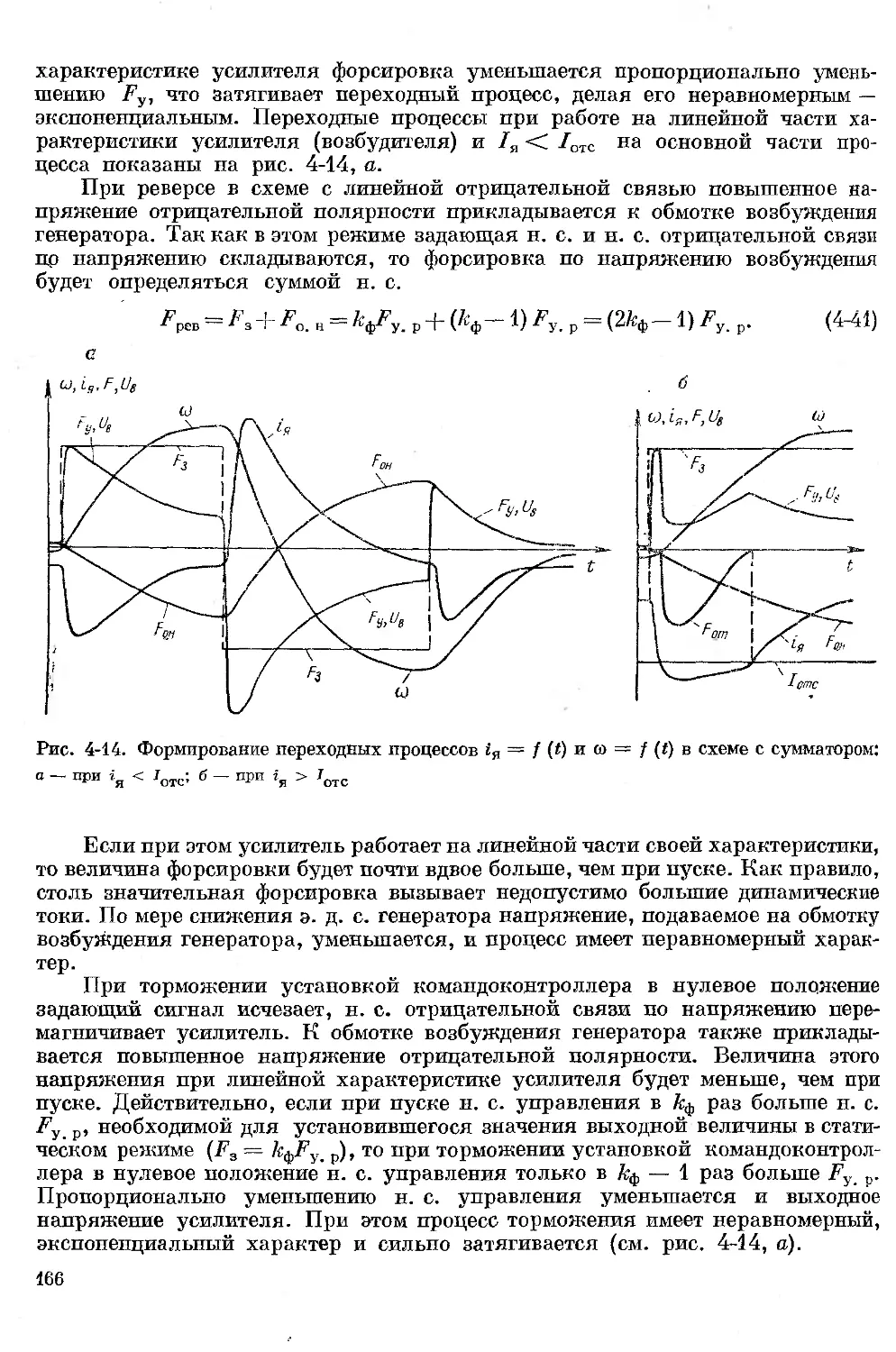
















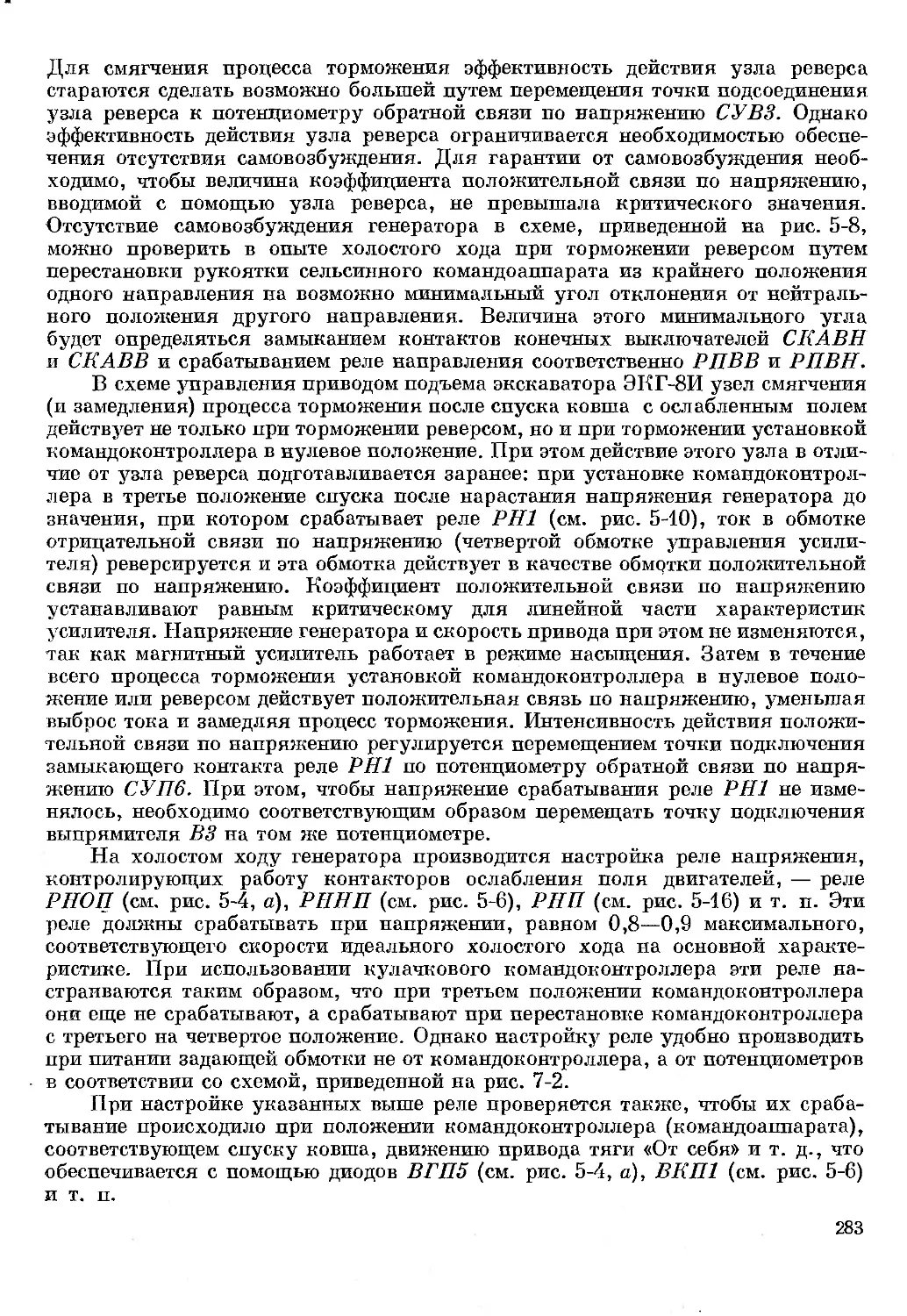







Text
Ю.Я. БУЛЬ. В.И.КЛЮЧЕВ. Л. В. СЕДАКОВ
НАЛАДКА
ЭЛЕКТРОПРИВОДОВ
ЭКСКАВАТОРОВ
ВТОРОЕ ИЗДАНИЕ,
ПЕРЕРАБОТАННОЕ И ДОПОЛНЕННОЕ
Под общей редакцией
проф., докт. техн, наук В. И. КЛЮЧЕВА
МОСКВА • «НЕДР А» • 1975
УДК 621.879.3-83-7: 622.271.3
Буль Ю. Я., Ключей В. И., Седаков Л. В. Наладка
электроприводов экскаваторов. Изд. 2, перераб. и доп. М., «Недра»,
19 75. 312 с.
В книге изложены вопросы наладки электроприводов основных
механизмов одноковшовых экскаваторов средней и большой произво-
дительности, оборудованных системой управляемый преобразова-
тель — двигатель.
Анализируются требования, предъявляемые к электроприводам
основных механизмов одноковшовых экскаваторов, н рассматрива-
ются режимы работы этих электроприводов. Рассматриваются важ-
нейшие особенности и характеристики элементов системы электро-
привода: генераторов постоянного тока, тиристорных преобразова-
телей, двигателей, усилителей. Выявляются принципы построения
современных замкнутых систем автоматического управления экска-
ваторными электроприводами и даются описания наиболее распро-
страненных и перспективных схем. На этой основе даются рекомен-
дации по наладке и эксплуатации основных электроприводов одно-
ковшовых экскаваторов.
Данное издание в отличие от первого дополнено описанием
многоконтурпых систем подчиненного регулирования, тиристорных
преобразователей и современных схем управления приводами основ-
ных механизмов серийных экскаваторов.
Книга предназначается для инженерно-технического персонала,
занятого наладкой и эксплуатацией электрооборудования одноков-
шовых экскаваторов. Основная часть вопросов, рассмотренных в
книге, может представить интерес и для более широкого круга чи-
тателей, связанных с наладкой различных электроприводов по си-
стеме управляемый преобразователь — двигатель.
Табл. 1, ил. 156, список лит. 17 назв.
30704—033
043 (01) — 75
367 — 75
© Издательство «Недра», 1975
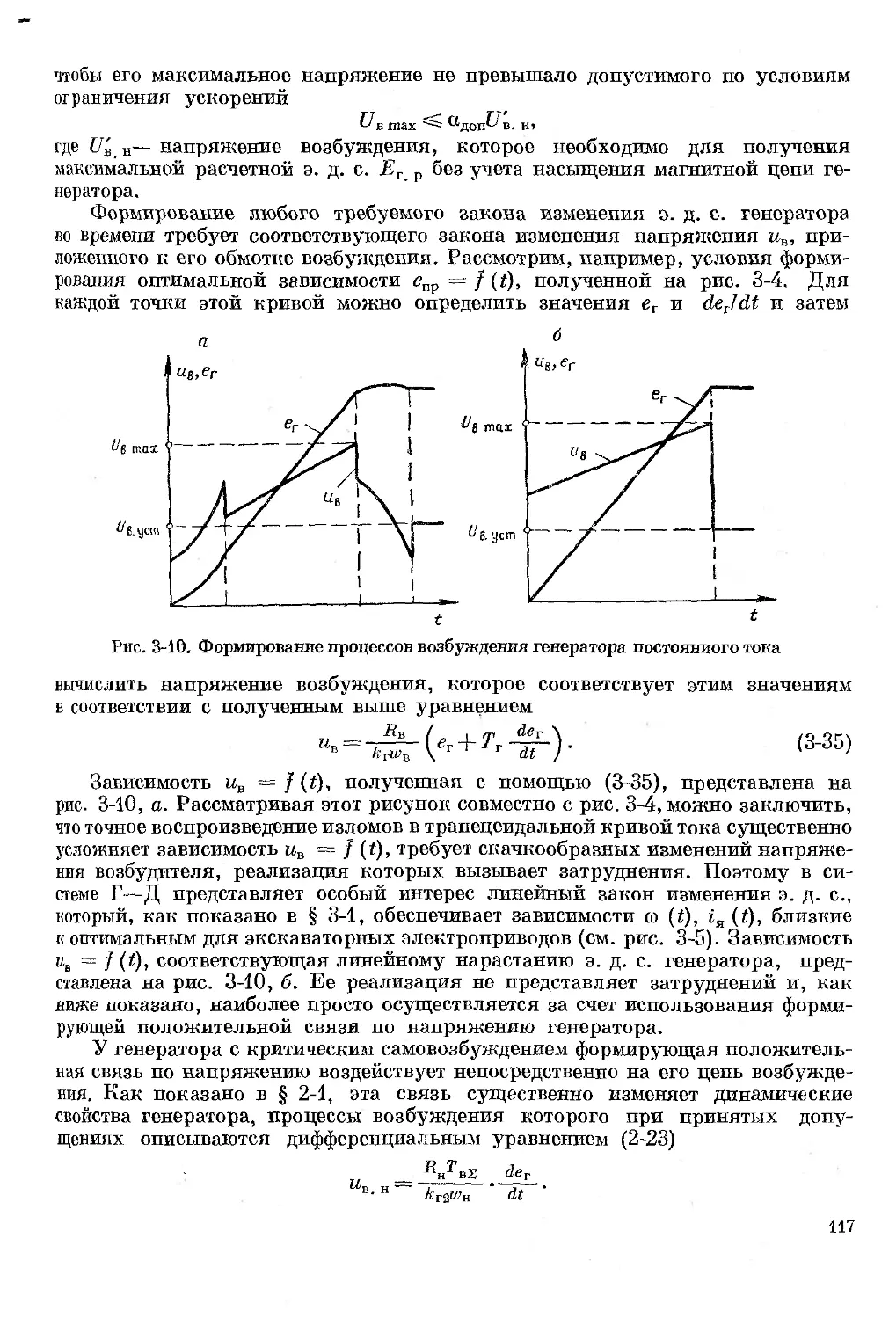
В
ПРЕДИСЛОВИЕ
Добыча полезных ископаемых открытым способом непрерывно раз-
вивается и совершенствуется. Успехи горнодобывающей промышленности
в этой области в значительной степени обусловлены развитием отечественного
машиностроения, обеспечивающего высокий уровень механизации открытых
разработок и оснащающего эти разработки комплексом надежных и высоко-
производительных механизмов. Одно из важных мест среди этих механизмов
занимают одноковшовые экскаваторы средней и большой производительности.
Современный мощный экскаватор является сложной высокопроизводи-
тельной землеройной машиной, которая по насыщенности электрооборудова-
нием, по общей установленной мощности электрических машин сравнима
со средним, а в отдельных случаях и с крупным промышленным предприятием.
Все основные механизмы таких экскаваторов оборудуются индивидуальным
электроприводом по системе управляемый преобразователь — двигатель с той
или иной схемой автоматического управления, как правило, представляющей
собой замкнутую систему автоматического регулирования. Маневренность
основных механизмов экскаватора, надежность их работы и производитель-
ность машины в целом существенно зависят от технических возможностей
системы электропривода, качества ее наладки и условий эксплуатации.
Высокое качество наладки и грамотная эксплуатация требуют хорошей
подготовки наладчиков и технических работников, связанных с эксплуатацией
электрооборудования, которые должны иметь четкие представления, с одной
стороны, о требованиях, предъявляемых к электроприводам основных меха-
низмов экскаваторов, и, с другой стороны, о физических особенностях как
отдельных элементов электропривода, так и всей системы электропривода
в целом. Наладчикам и эксплуатационникам приходится иметь дело со схемами
устаревшими, но в настоящее время еще применяемыми на серийных машинах,
и с новыми, прогрессивными схемами, которые сегодня применяются на отдель-
ных опытных или модернизированных машинах и быстро вытесняют устаревшие
схемы. Так, в эксплуатации находятся экскаваторы ЭКГ-4 и ЭШ-5745, снятые
с производства и оборудованные устаревшей системой трехобмоточный генера-
тор — двигатель; большое количество экскаваторов ЭШ-1О76О, оборудованных
системой Г — Д с ЭМУ. В то же время выпускаются экскаваторы, оборудован-
ные современными системами по структуре подчиненного регулирования
(ЭШ-1О77ОА, ЭШ-5745М), имеются опытные образцы машин, оборудованные
системой тиристорный преобразователь — двигатель (ТП — Д). Поэтому при
наладке и эксплуатации технический персонал должен быть в достаточной
степени осведомлен о принципах построения различных схем экскаваторных
электроприводов.
Авторы данной книги стремились создать техническое пособие для инже-
нерно-технического персонала наладочных организаций, разрезов и рудников.
Поскольку уровень подготовки указанного круга читателей весьма разнообра-
зен, в данной книге, посвященной в своей основной части изложению достаточно
сложных специфических вопросов электропривода экскаваторов и его
наладки, коротко излагаются также известные специалистам-электропривод-
чикам вопросы: отдельные понятия из теории автоматического регулирования,
1*
устройство и характеристики электрических машин, тиристорных преобразова-
телей, раз личных уилителей и т. п.
В книге нашли отражение материалы теоретических и экспериментальных
исследований электроприводов основных механизмов экскаваторов, проведен-
ных кафедрой электропривода МЭИ совместно с НКМЗ, УЗТМ, заводом «Ди-
намо» и трестом Энергоуголь, разработки схем экскаваторных электроприводов,
выполненные ХЭМЗом, ВНИИЭлектроприводом, кафедрой ЭПП МЭИ, трестом
Энергоуголь, а также большой опыт наладочных работ, накопленный коллек-
тивом треста Энергоуголь.
Период, истекший с момента выпуска первого издания данной книги,
характеризуется бурным развитием полупроводниковой техники управления
электроприводами. Промышленность успешно осваивает массовый выпуск
реверсивных тиристорных преобразователей в широком диапазоне мощностей,
осуществляется серийный выпуск элементов унифицированной блочной си-
стемы регуляторов (УБСР). Применение этих технических средств открывает
новые возможности для совершенствования статических характеристик и дина-
мических свойств экскаваторных электроприводов. Кроме того, выполненные
в этот период исследования выявили ряд важных особенностей взаимодействия
электропривода с механическим оборудованием экскаваторов, содержащим
упругие связи, кинематические погрешности и зазоры.
Все эти новые сложные вопросы нашли отражение в настоящем издании
книги. Переработана глава 1 в направлении более полного анализа рабочих
режимов экскаваторных электроприводов с учетом влияния упругих механи-
ческих связей. Глава 2 дополнена описанием тиристорных преобразователей.
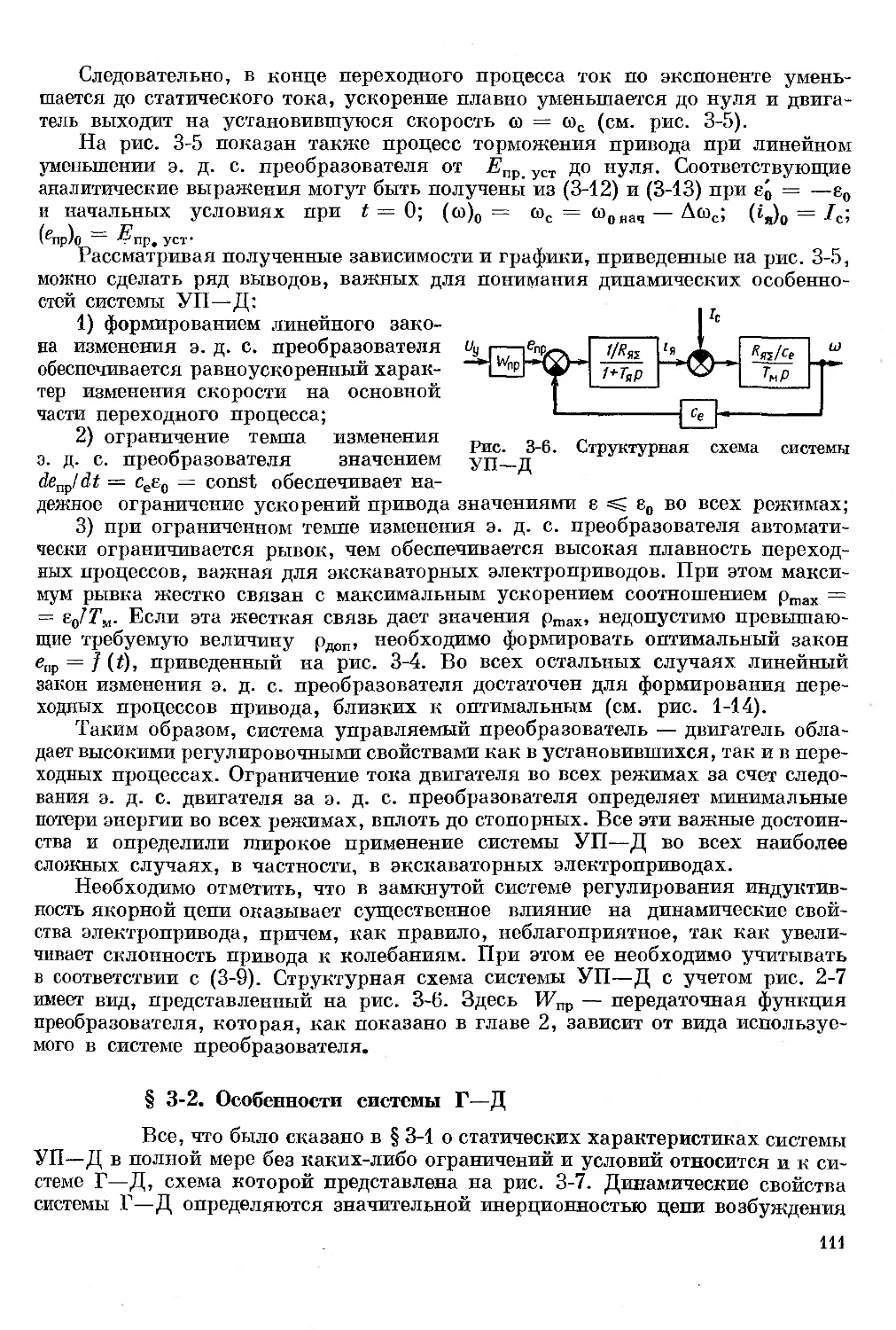
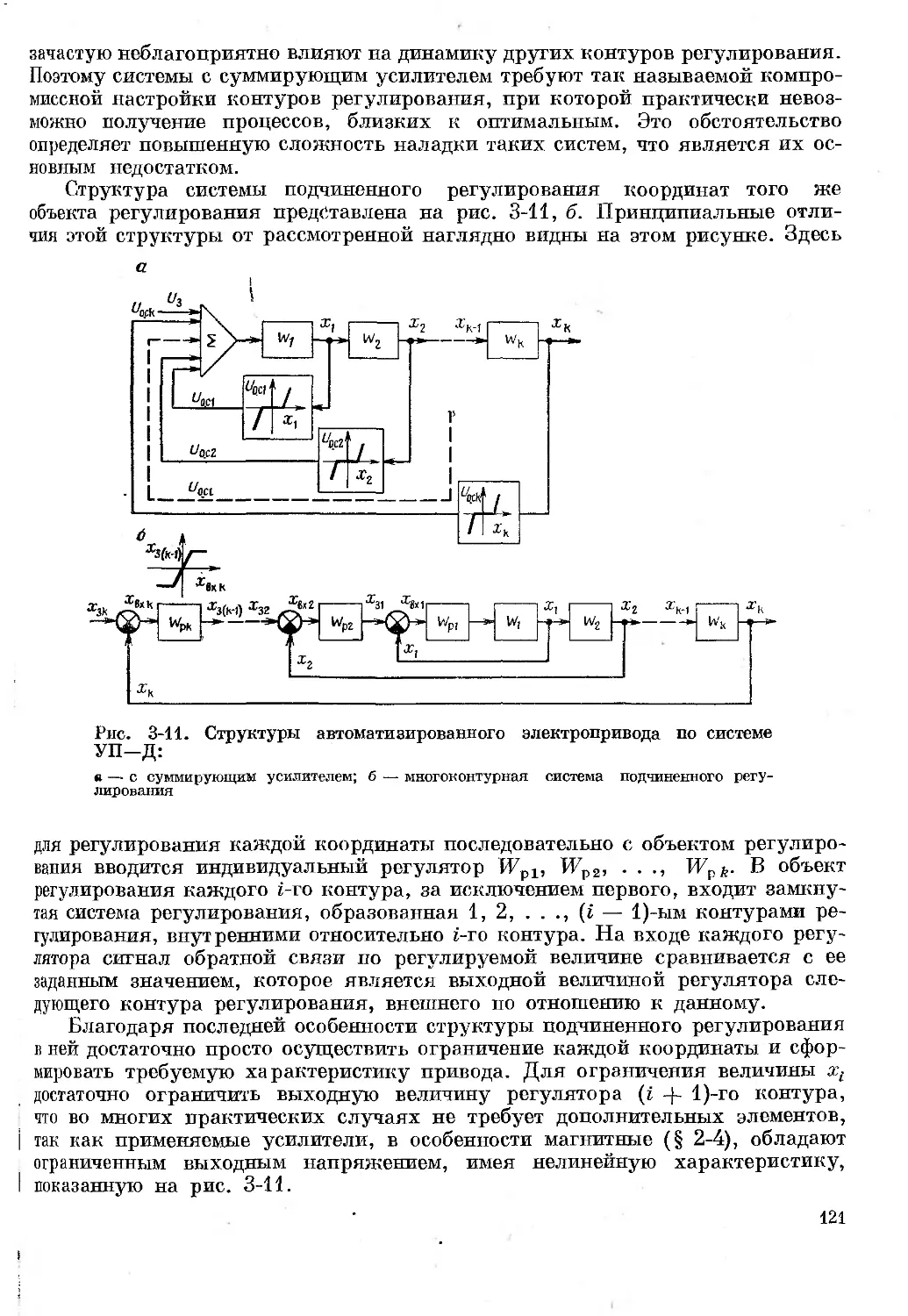
Полностью переработана глава 3, в которой нашли отражение общие свойства
системы управляемый преобразователь — двигатель, особенности систем Г—Д
и ТП — Д, изложены принципы построения многоконтурных систем подчинен-
ного регулирования и рассмотрены особенности последовательной коррекции
контуров регулирования на базе элементов системы УБСР. В соответствии
с этими изменениями переработаны и остальные главы книги. В главе 4 осве-
щены вопросы формирования статических и динамических характеристик
электроприводов в схемах разной структуры. Глава 5 дополнена описанием
современных схем управления приводами основных механизмов, которыми
оборудуются серийные экскаваторы, выпускаемые в настоящее время отече-
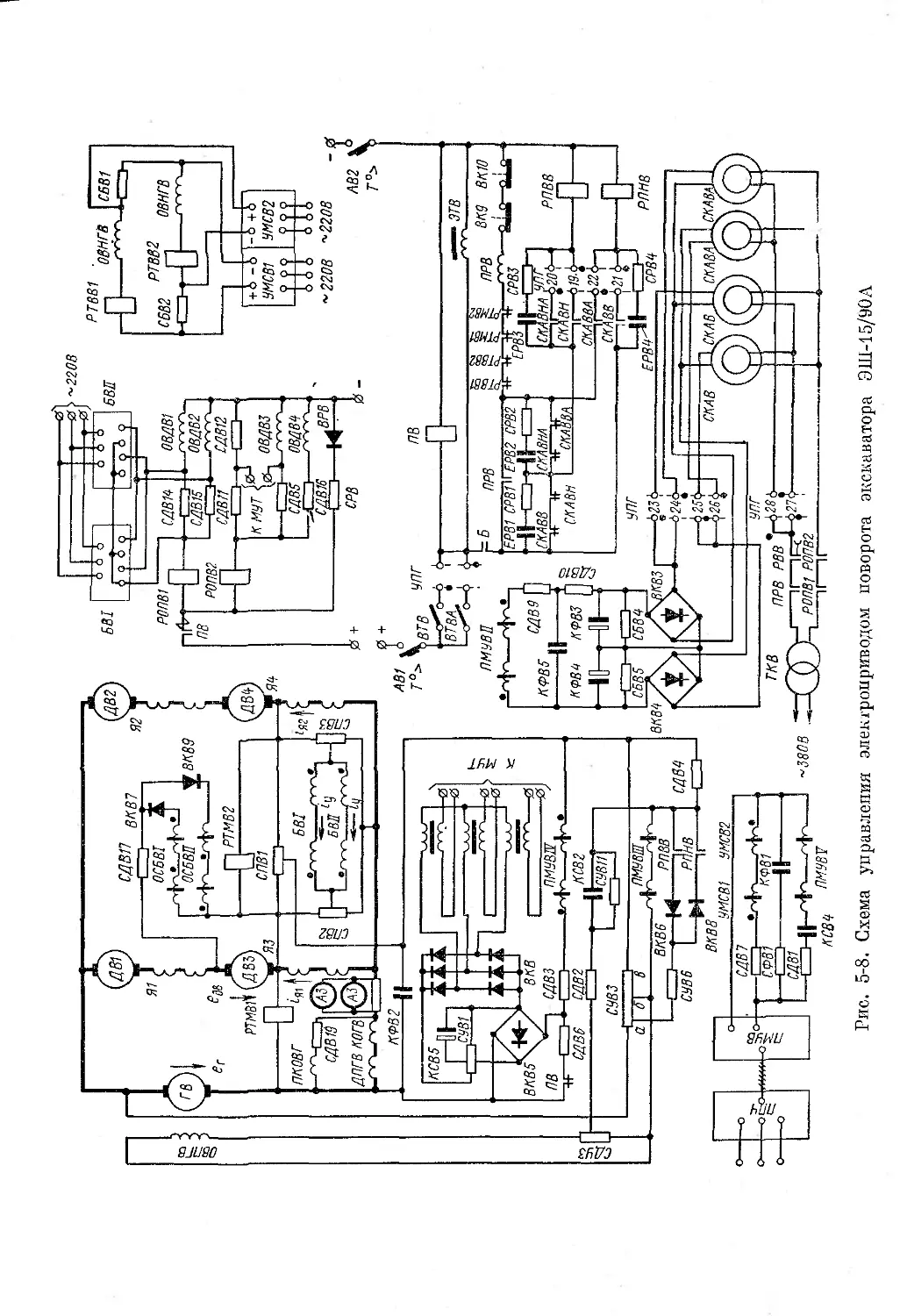
ственной промышленностью — ЭШ-1О77ОА, ЭШ-5745М, ЭКГ-8И, ЭШ-15790А
и т. д. Глава 6 дополнена описанием наладки тиристорных преобразователей.
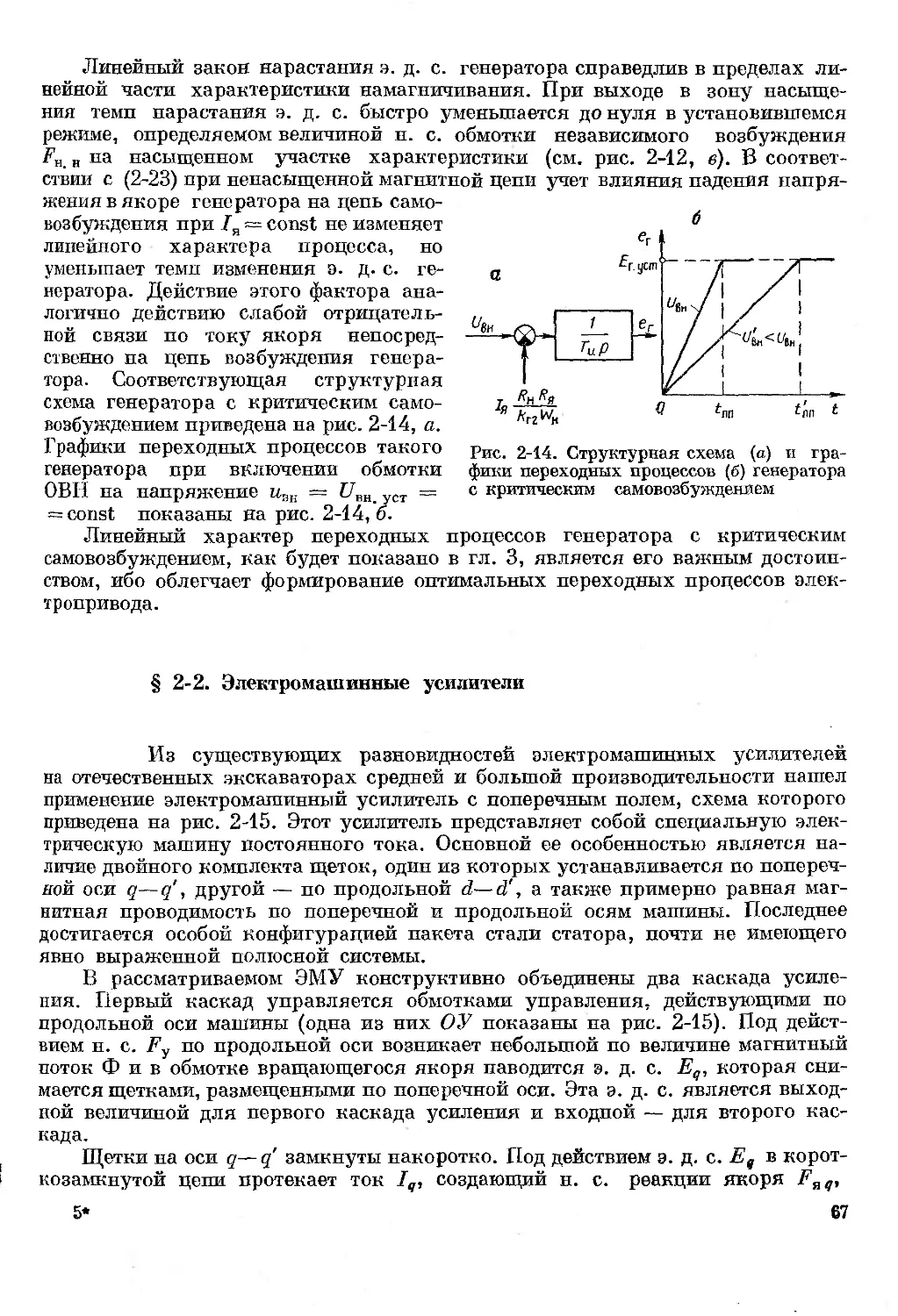
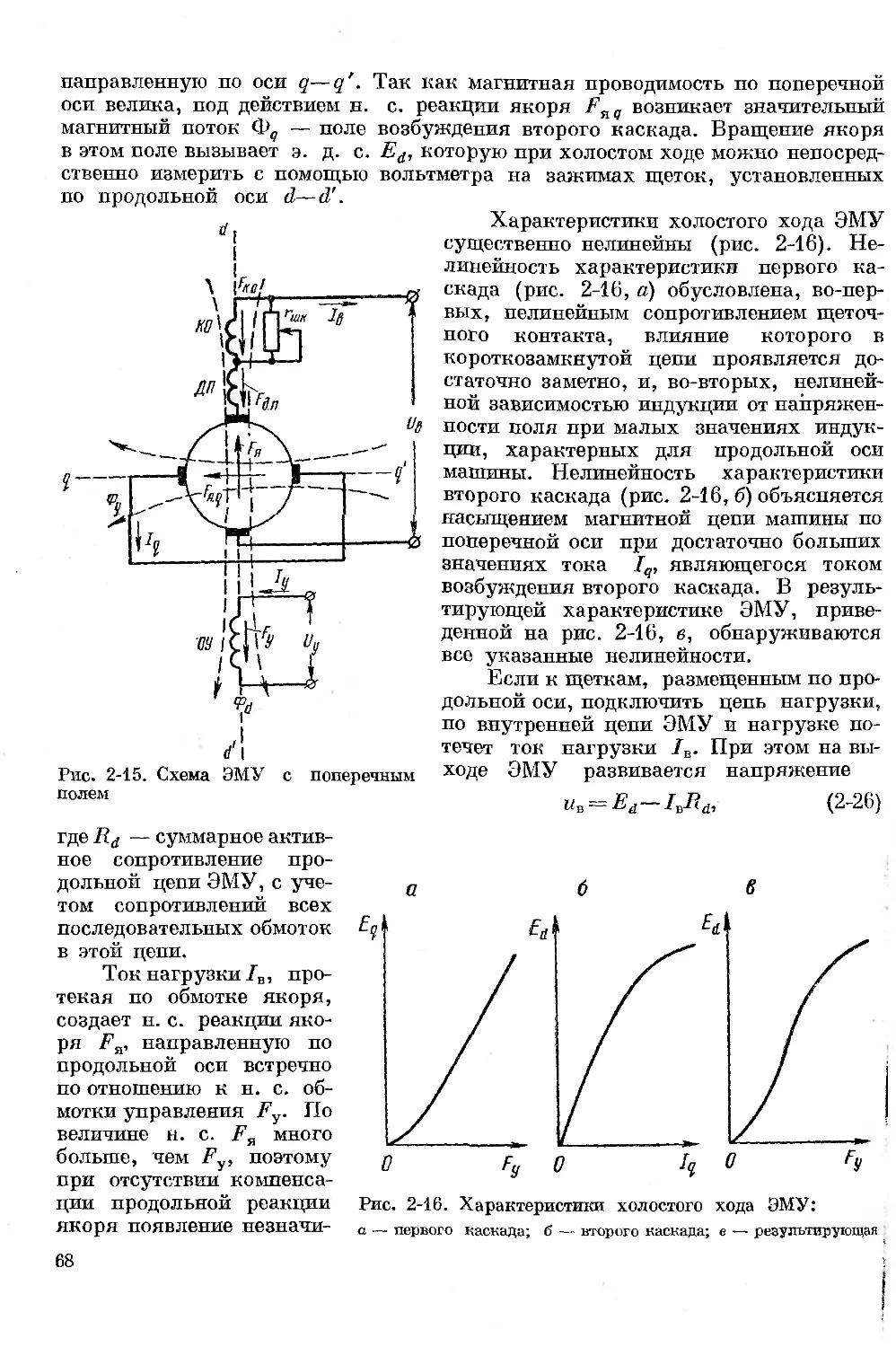
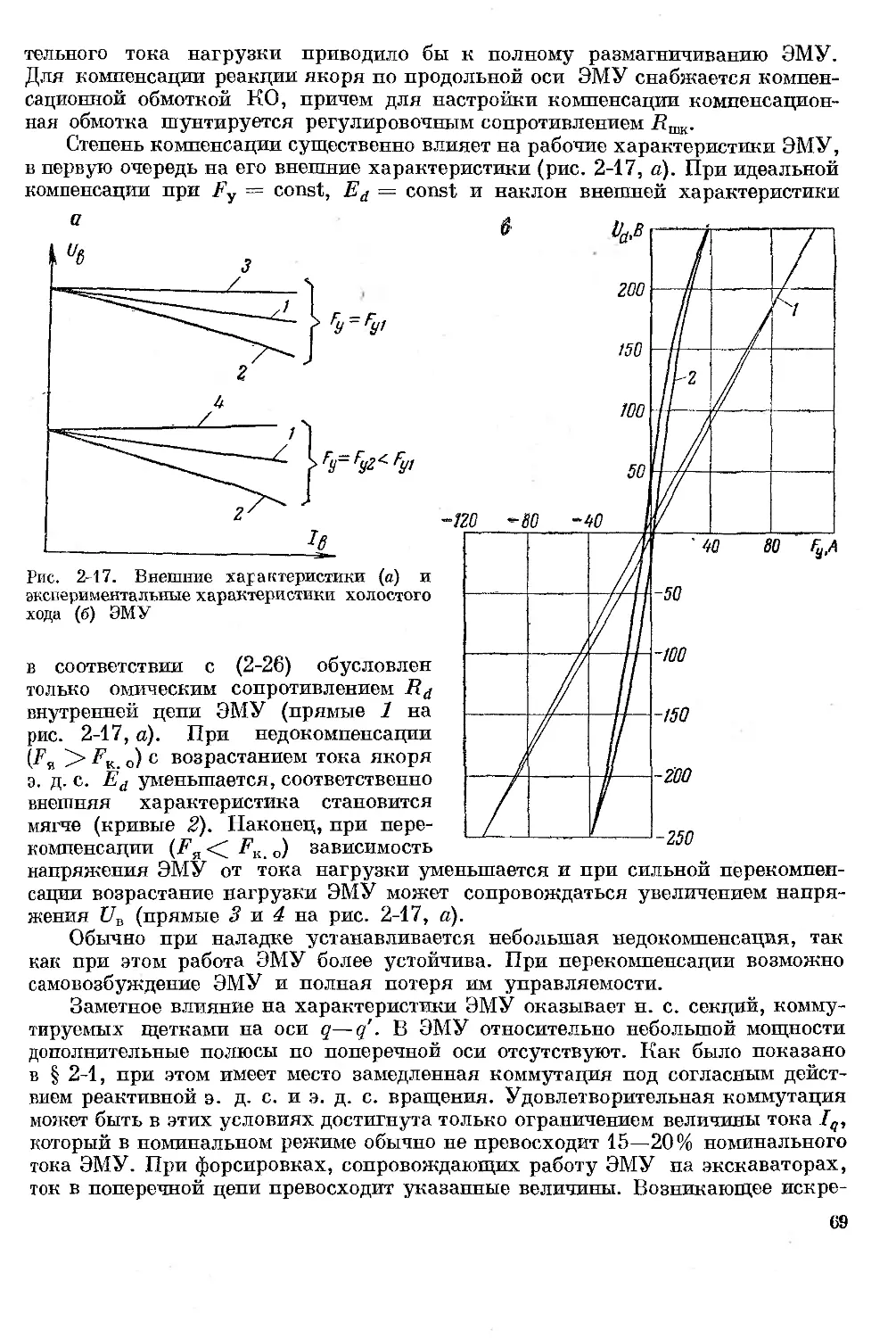
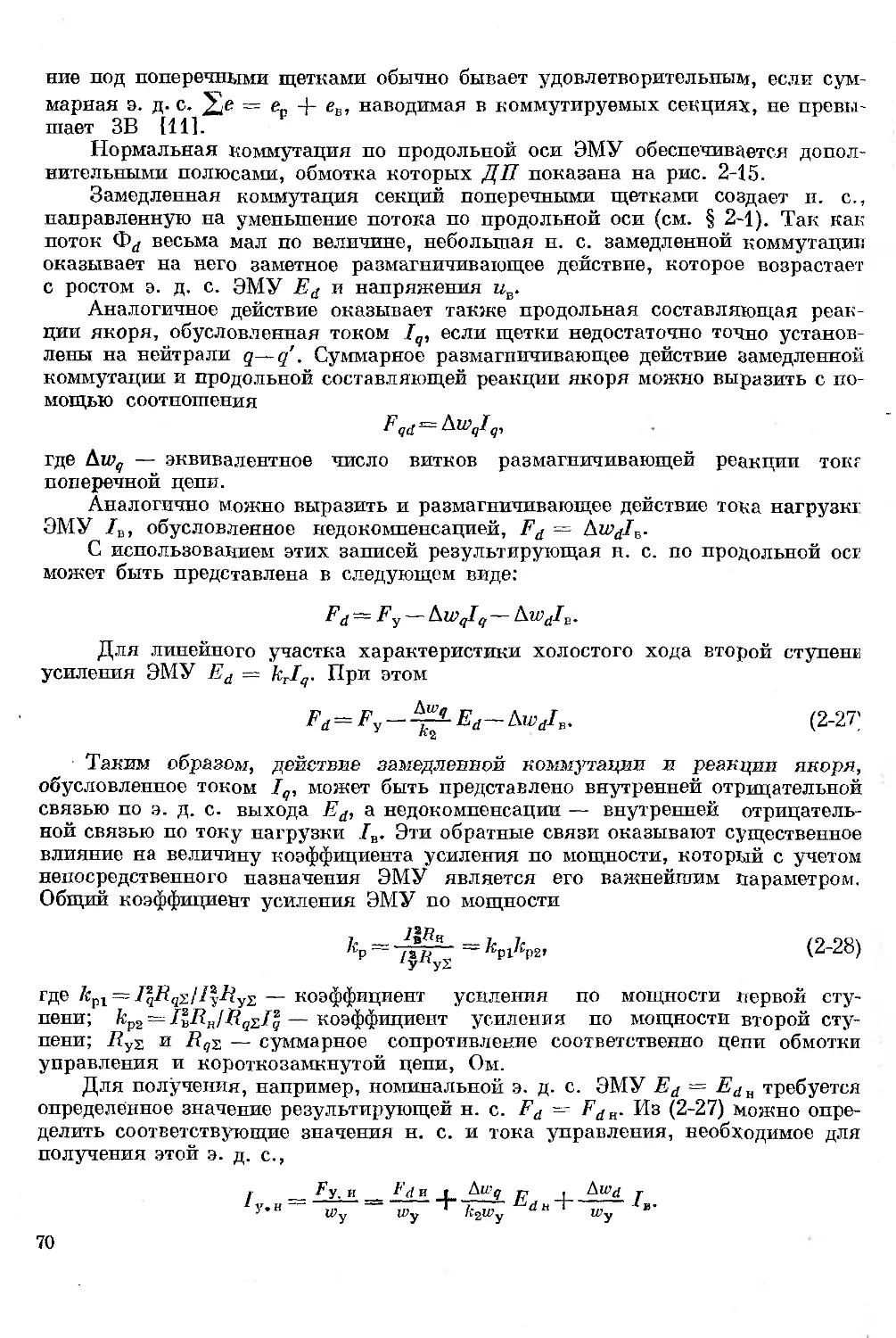
В книге главы 1, 2 и 3, за исключением § 1-1, 2-2 и 2-4, написаны В. И. Клю-
чевым, § 6-5 и главы 4, 5 и 7, за исключением § 5-2 и 5-7, — Ю. Я. Булем,
§ 1-1, 2-2, 2-4 и 5-2 и глава 6, за исключением § 6-5, — Л. В. Седаковым, § 5-7
А. М. Усмановым.
Авторы выражают искреннюю благодарность А. М. Усманову и К. М. Ку-
дрявцеву, оказавшим большую помощь в подготовке рисунков.
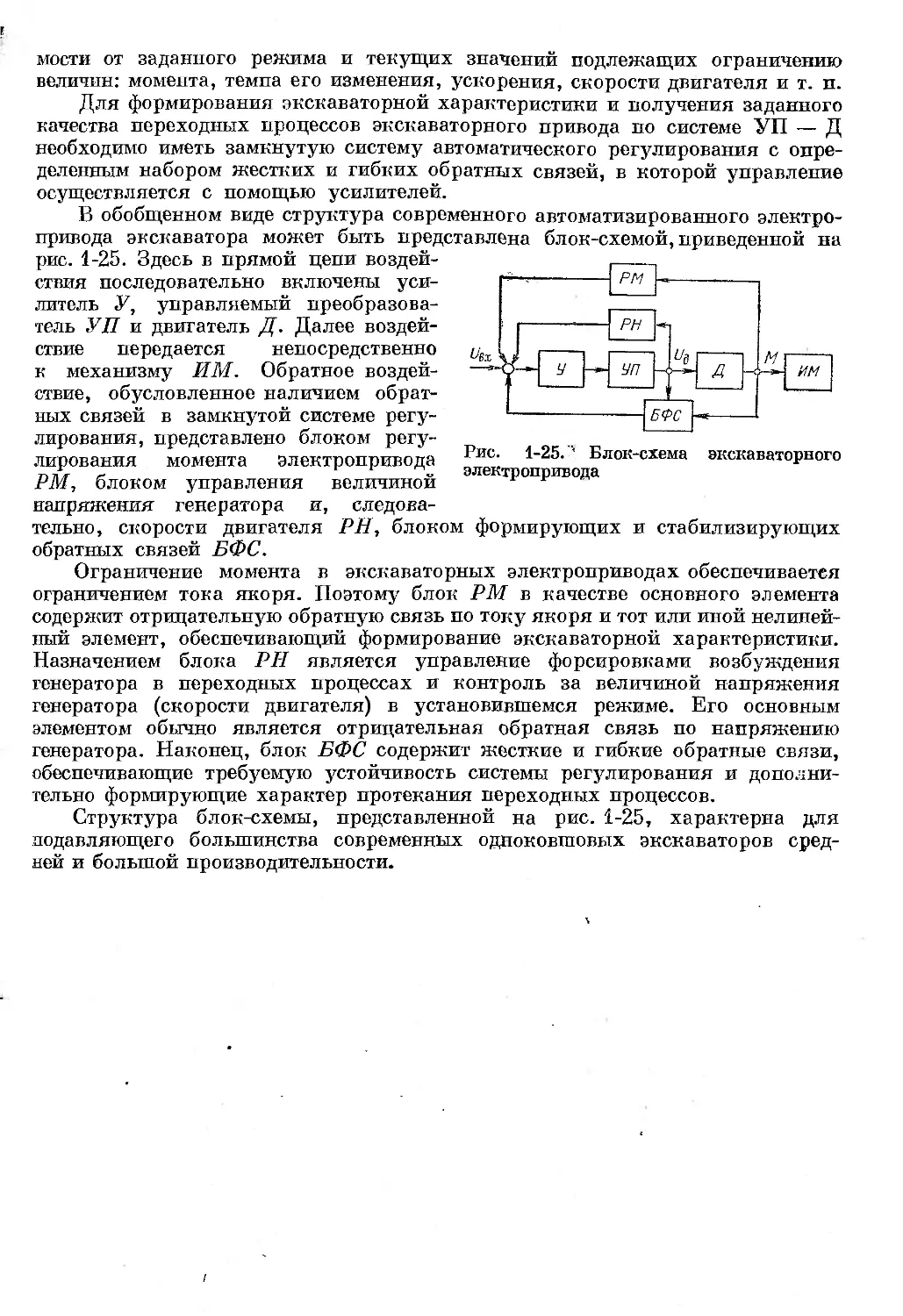
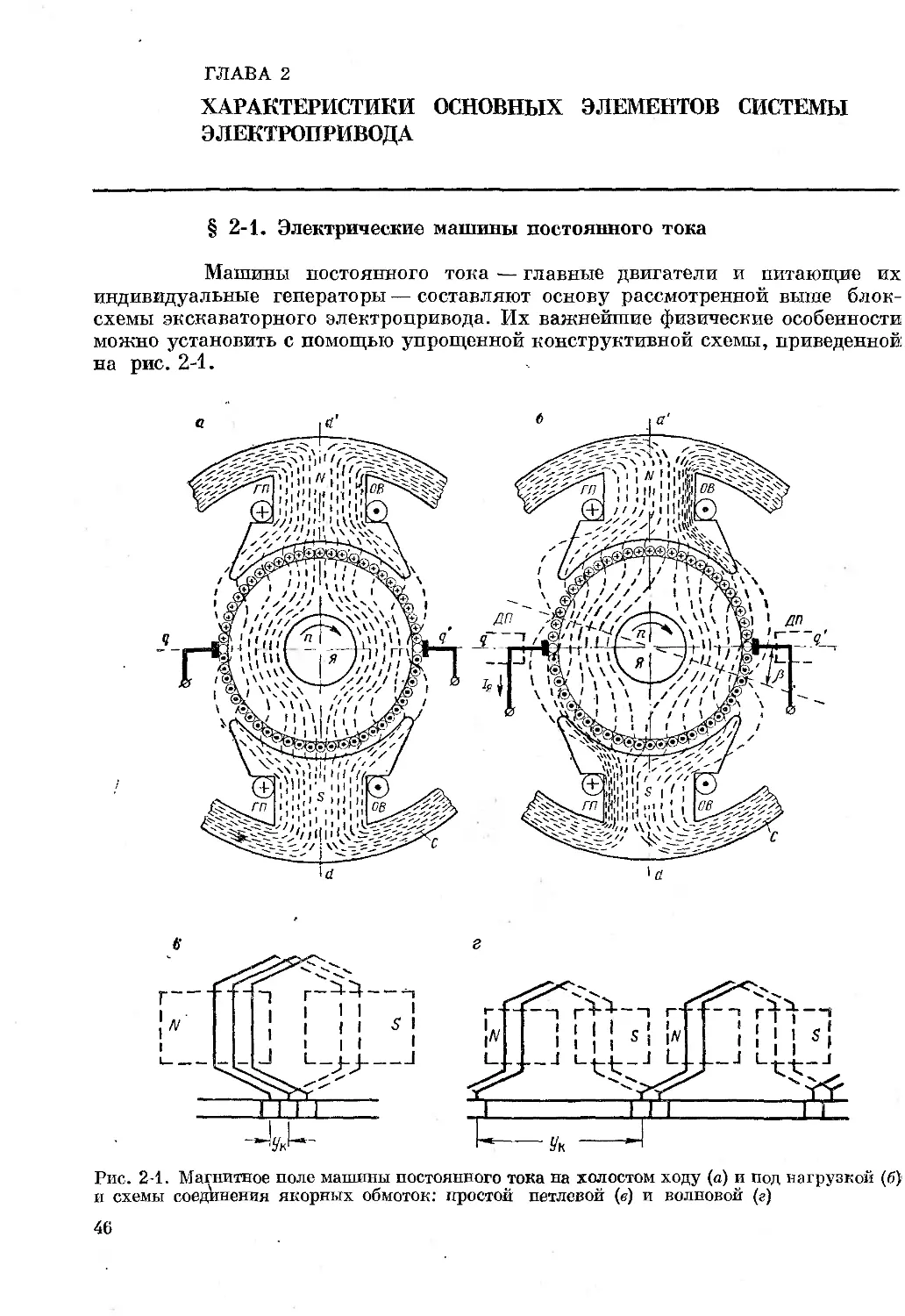
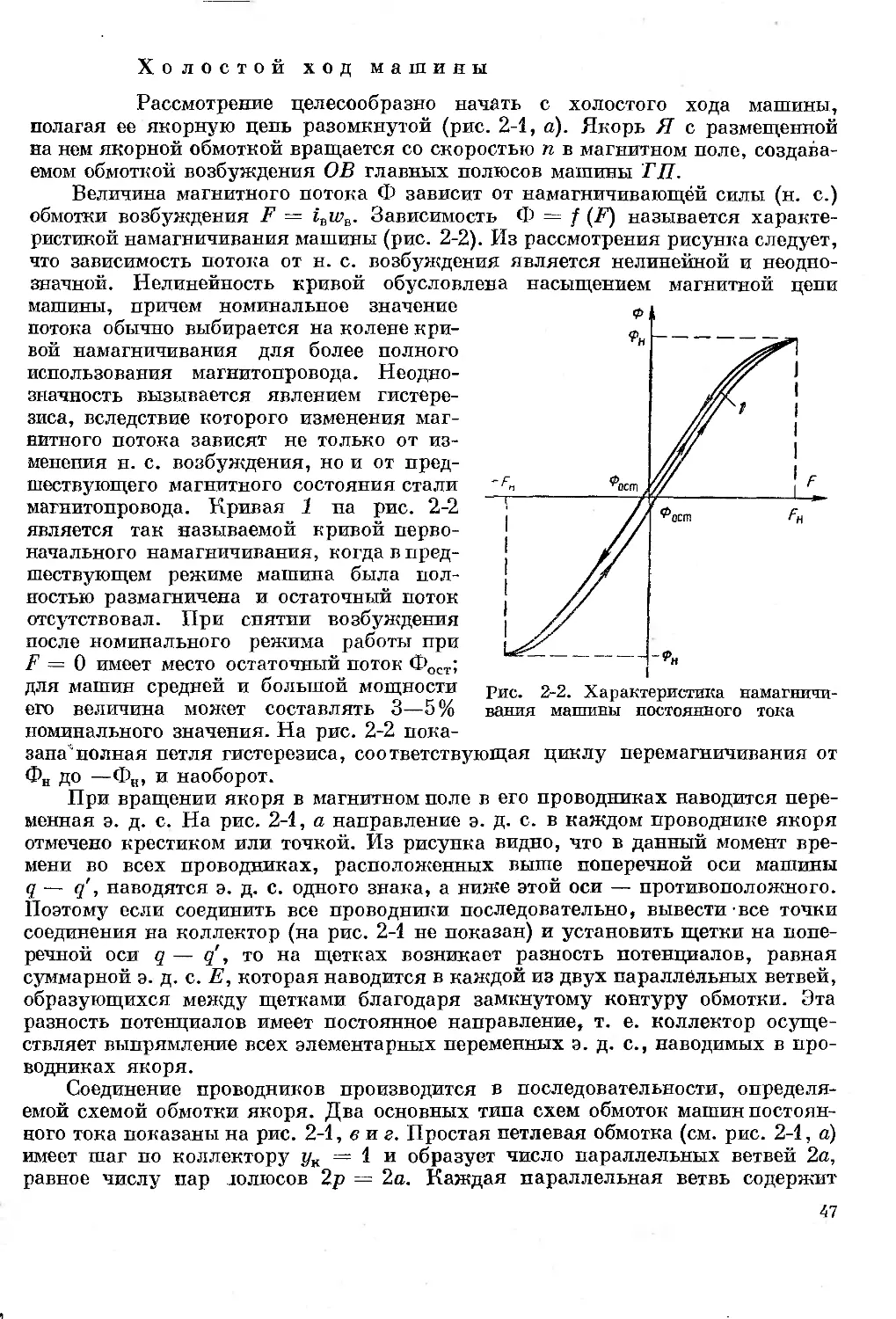
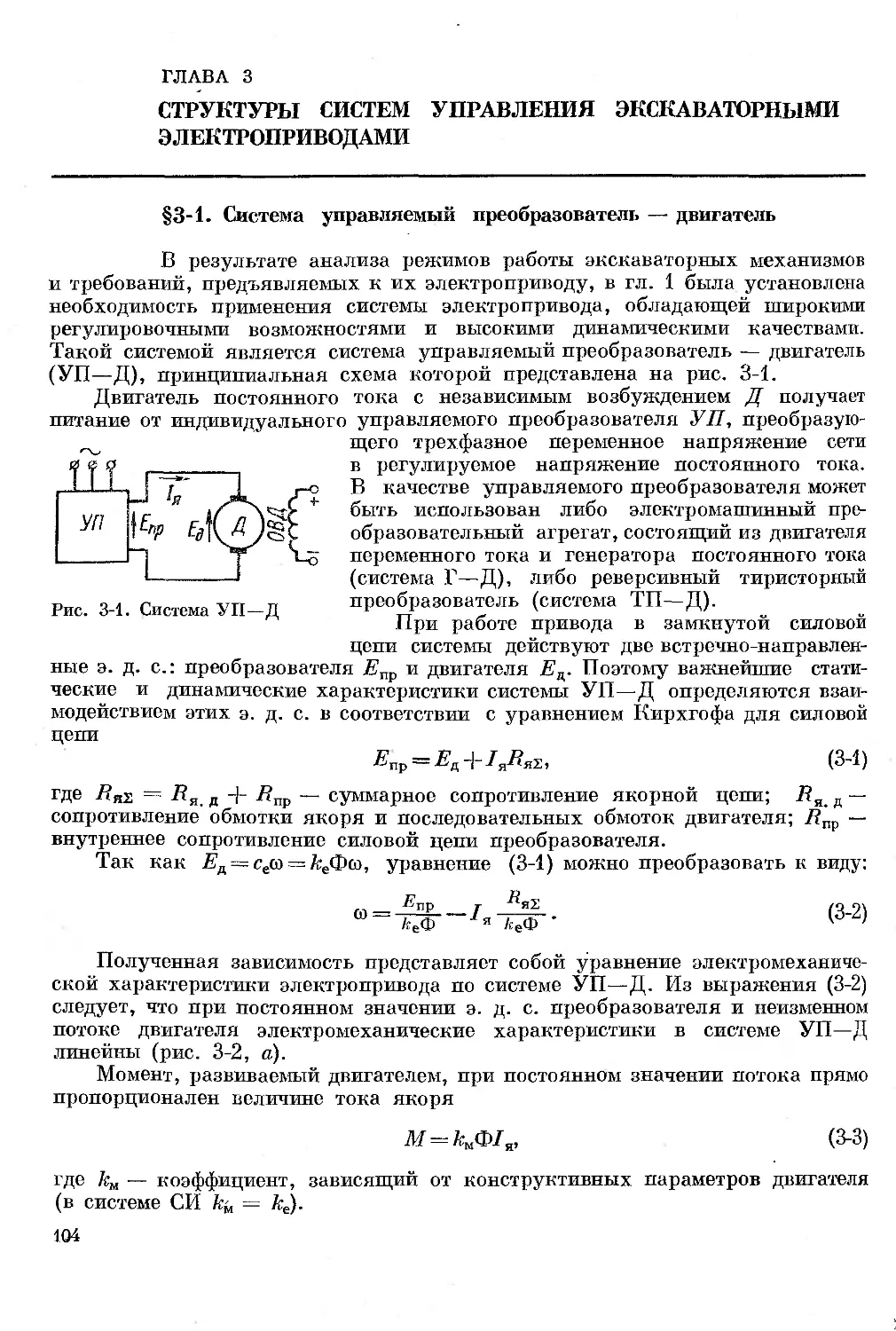
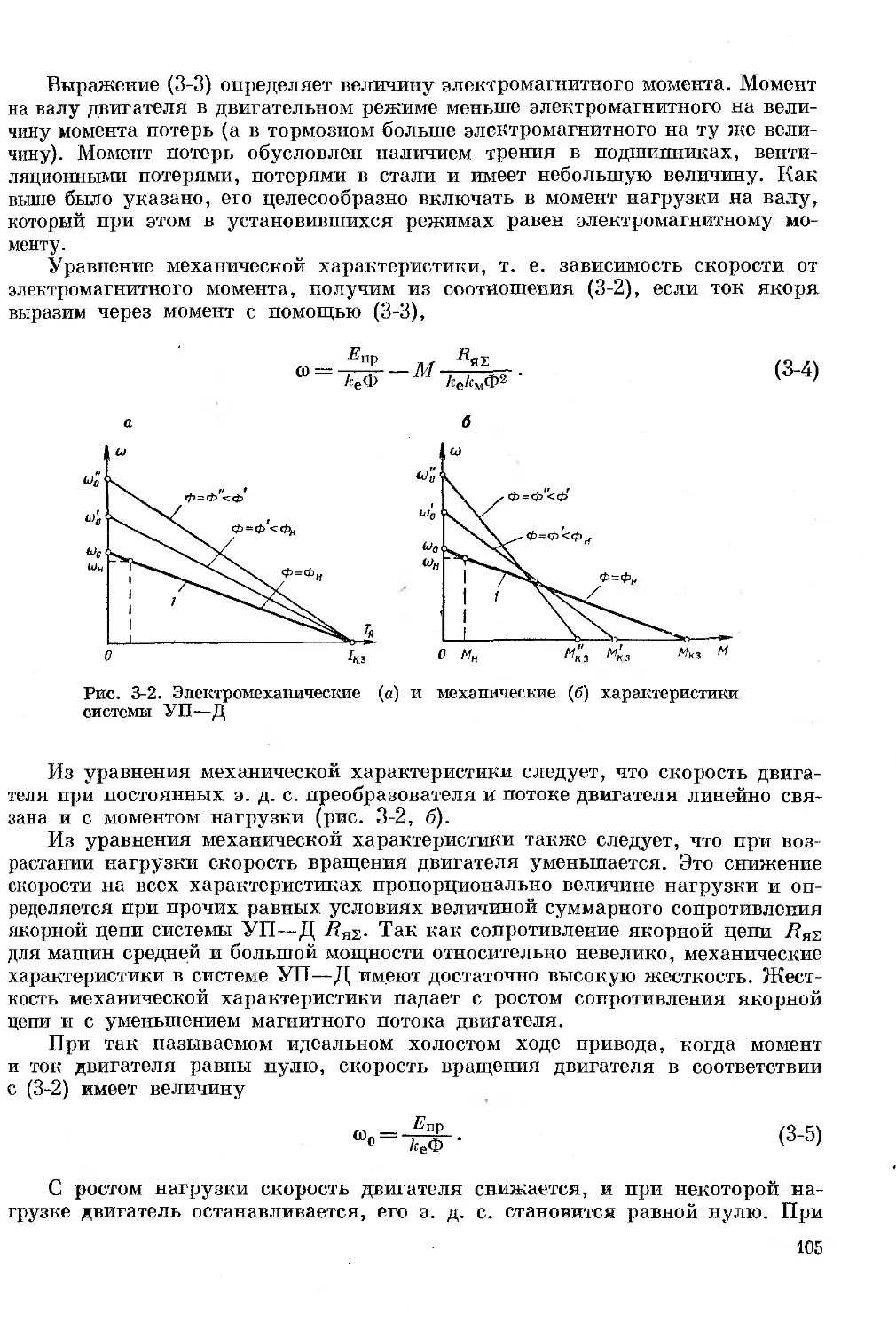
ГЛАВА 1
РЕЖИМЫ РАБОТЫ ЭКСКАВАТОРНЫХ ЭЛЕКТРОПРИВОДОВ
§ 1-1. Общие сведения
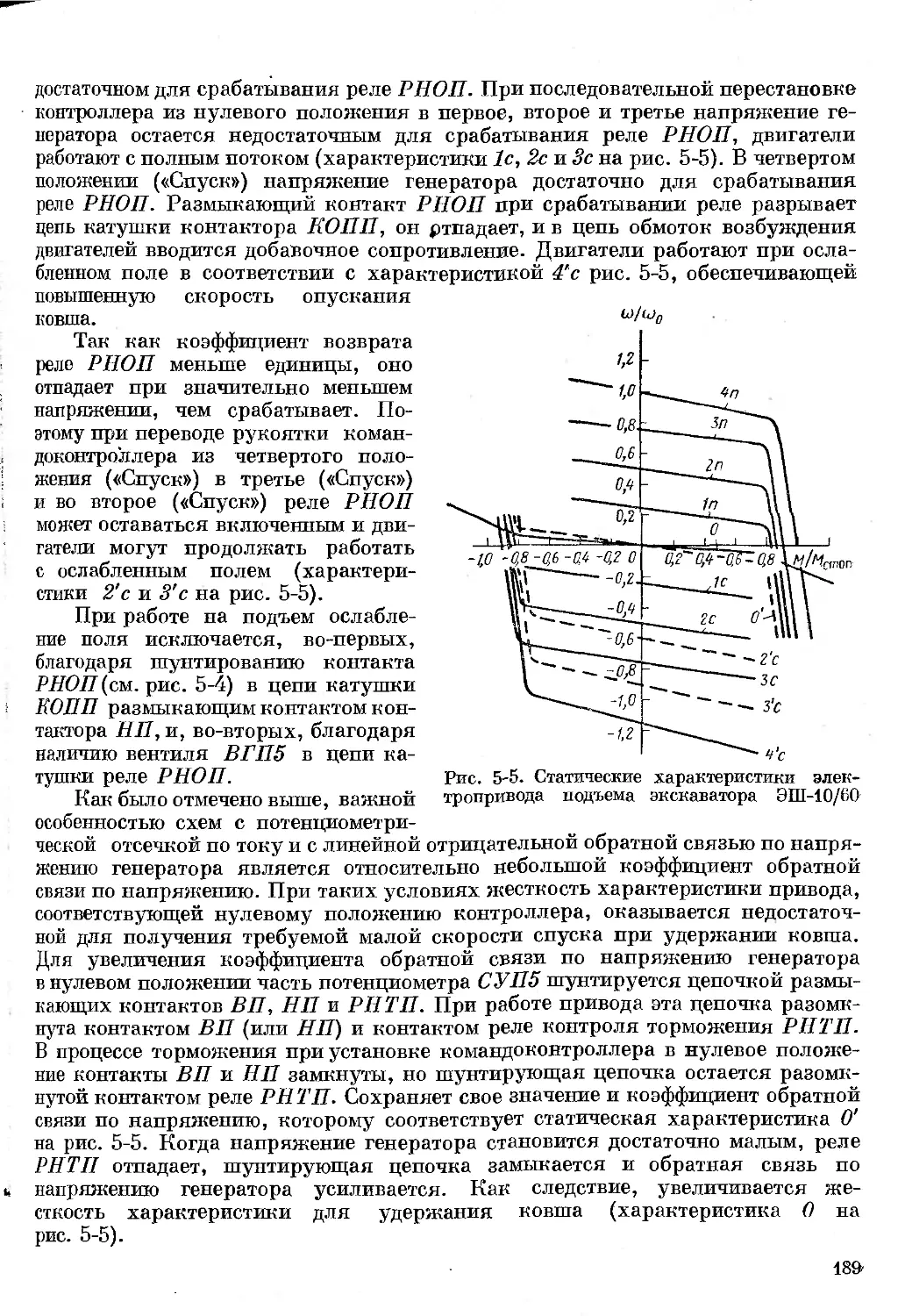
Одноковшовые экскаваторы отечественного производства при ем-
кости ковша свыше 2 м3 выпускаются, как правило, либо с оборудованием
прямой лопаты, либо с оборудованием драглайна. Экскаваторы — лопаты
имеют гусеничный ход и подразделяются на карьерные и вскрышные. Карьер-
ные экскаваторы предназначаются для работы в наиболее тяжелых грунтах
и оборудуются короткой, прочной стрелой и соответствующей рукоятью.
Вскрышные экскаваторы рассчитаны на работу в более легких грунтах и имеют
удлиненное оборудование. Экскаваторы-драглайны предназначаются для ра-
боты в отвал в относительно легких грунтах и имеют легкую длинную стрелу
и ковш, подвешенный на подъемном и тяговом канатах. Экскаваторы-драглайны
снабжаются шагающим механизмом передвижения.
Рабочий цикл экскаватора — лопаты состоит из процесса черпания, пово-
рота на выгрузку и поворота в забой. Процесс черпания осуществляется с по-
мощью механизма подъема, который создает основное режущее усилие, меха-
низма напора, с помощью которого ковш внедряется в грунт и регулируется
толщина снимаемой стружки. Вращение платформы производится механизмом
поворота. В процессе поворота механизм подъема используется для подъема
или опускания ковша, а механизм напора — для выдвижения или втягивания
рукояти в соответствии с необходимыми перемещениями ковша с целью уста-
новки его в требуемое положение при разгрузке или в начале копания.
Рабочий цикл экскаватора-драглайна состоит из тех же основных этапов —
черпания, поворота на выгрузку и поворота в забой. В процессе черпания режу-
щее усилие создается механизмом тяги, а напор, необходимый для внедрения
режущей кромки или зубьев ковша в грунт, обеспечивается собственным весом
ковша. Регулирование толщины снимаемой стружки грунта в процессе черпа-
ния производится с помощью механизма подъема. Так как драглайн при работе
стоит на верхнем уступе забоя, черпание грунта производится с известной
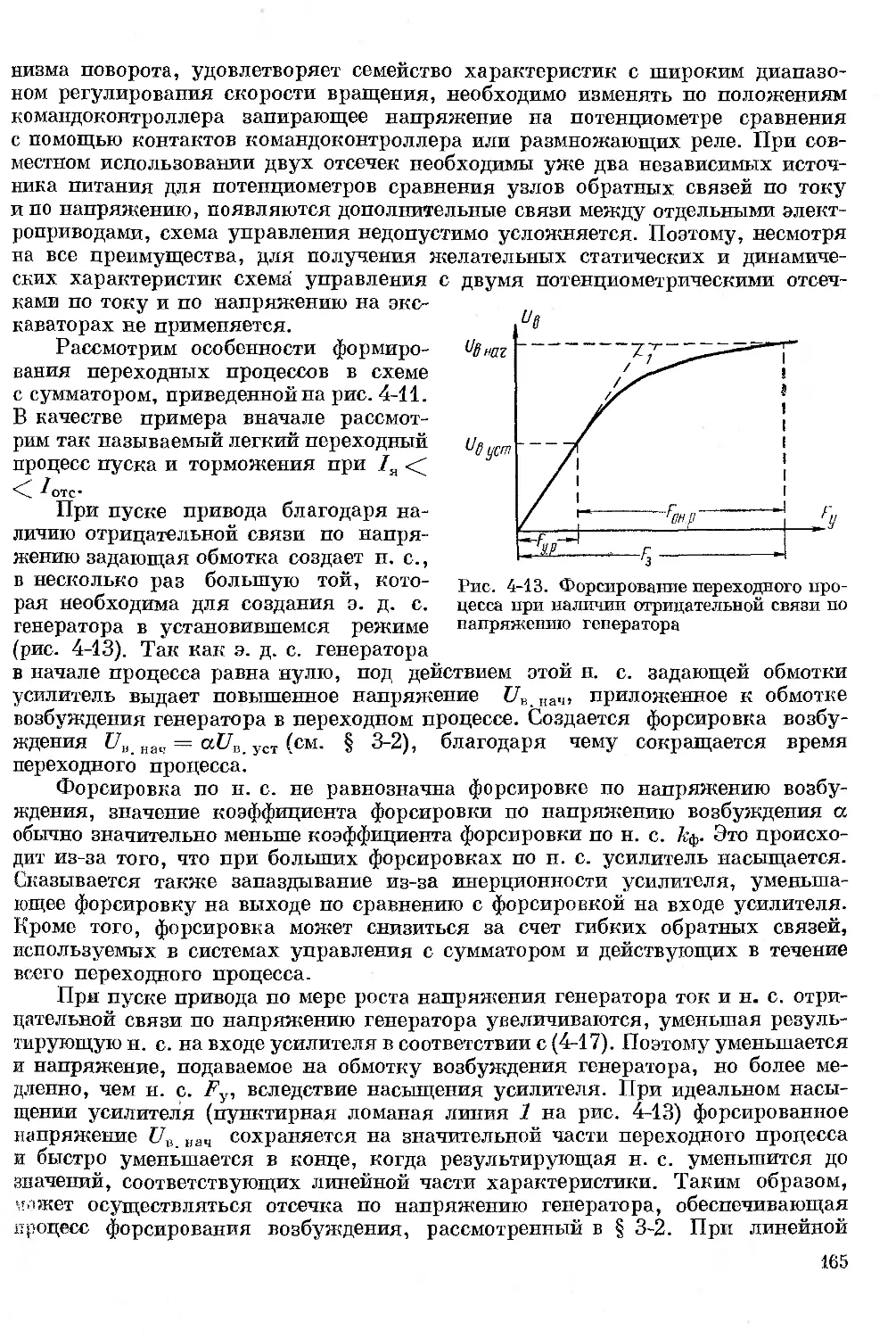
глубины, а выгружается ковш чаще всего на высокий отвал, то в рабочем
цикле драглайна значительное место занимают процессы подъема груженого
и опускания порожнего ковша. В процессе подъема груженого ковша он под-
нимается по относительно пологой траектории и удерживается от опрокидыва-
ния и разгрузки усилием, создаваемым механизмом тяги. Разгрузка ковша
осуществляется под действием собственного веса путем ослабления (быстрого
вытравливания) тягового каната. Процессы подъема груженого и опускания
порожнего ковша обычно совмещаются с поворотом платформы экскаватора
на выгрузку и в забой. Вращение платформы производится механизмом поворота.
В отличие от универсальных экскаваторов малой производительности
(до 2 м3), которые обычно имеют групповой дизельный, дизель-электрический
или электрический привод, все отечественные одноковшовые экскаваторы сред-
ней и большой производительности оборудуются индивидуальным электро-
приводом основных механизмов. В соответствии с рассмотренным выше, основ-
ными электроприводами лопаты являются электроприводы подъема, напора
и поворота, а у драглайна — электропривода подъема, тяги и поворота.
5
Гусеничные экскаваторы — лопаты средней и большой производительности
имеют, как правило, индивидуальный электропривод механизма хода. Меха-
низмы шагания экскаваторов-драглайнов снабжаются либо индивидуальным
электроприводом, либо электрогидроприводом.
Электрооборудование одноковшовых экскаваторов работает в весьма тяже-
лых условиях тряски, ударов, вибраций, большой запыленности. Электро-
приводы основных механизмов экскаватора работают в интенсивном повторно-
кратковременном режиме, с большой частотой включений, при изменяющейся
в широких пределах нагрузке на валу двигателя. Наряду с этим основные
механизмы экскаватора содержат упругие механические связи, обусловленные
ограниченной жесткостью канатов, рабочего оборудования и валов передач,
а также имеют значительные зазоры в передачах и в сочленениях рабочего
оборудования лопаты. Поэтому в отношении сложности требований, предъ-
являемых к электроприводу, основные механизмы экскаватора занимают во
всем многообразии современных производственных механизмов одно из пер-
вых мест.
Важнейшей особенностью рабочего режима механизмов экскаватора,
непосредственно участвующих в процессе копания (подъем и напор лопаты,
тяга драглайна), является систематическое возникновение механических пере-
грузок при копании, которые при благоприятных условиях своевременно устра-
няются машинистом уменьшением толщины стружки, снимаемой ковшом.
Однако при нечетких действиях машиниста, а особенно при неожиданной
встрече ковша с препятствием (крупный валун в относительно мягком грунте,
участок невзорванной скалы при копании в плохо взорванном скальном грунте
и т. п.), создаются условия для возникновения недопустимых нагрузок, способ-
ных, с одной стороны, вызвать поломки рабочего оборудования машины, а с дру-
гой стороны, опасных для электропривода.
При встрече ковша с неодолимым препятствием происходят так называ-
емые резкие стопорения экскаваторных электроприводов, представляющие
собой наиболее тяжелый режим. При этом остановка ковша влечет за собой
быструю остановку всех связанных с ним элементов электропривода и меха-
низма. Запасенная во всех поступательно и вращательно движущихся частях
кинетическая энергия при быстрой остановке ковша переходит в основном
в потенциальную энергию упругих деформаций элементов механизма, резко
увеличивая их нагрузку. На увеличение нагрузки на валу электрический
двигатель реагирует увеличением развиваемого движущего момента. Увеличе-
ние момента привода создает дополнительные нагрузки в элементах механизма
и рабочем оборудовании. Если не принять ограничивающих мер, неизбежны
поломки механизма и выход из строя электрических двигателей.
Таким образом, важнейшим требованием, предъявляемым к электропри-
воду основных механизмов экскаватора, является необходимость ограничения
момента электропривода при механических перегрузках и резких стопорениях
допустимой величиной. Допустимое значение нагрузки определяется либо
условиями работы механического оборудования, либо допустимой перегрузкой
электродвигателей. Максимально допустимое значение момента экскаваторного
электропривода принято называть стопорным моментом Мстоп.
Ограничение момента электропривода стопорным значением во всех режи-
мах может быть достигнуто двумя принципиально различными спосо-
бами:
механическим путем за счет введения в кинематическую цепь механизма
звена с ограниченным предельно передаваемым моментом;
6
ограничением предельного значения момента, развиваемого электропри-
водом при любой нагрузке на валу.
При механическом способе ограничения момента наиболее употребитель-
ными ограничивающими элементами являются муфты предельного момента
и фрикционы с ограниченным значением предельно передаваемого момента.
Этот способ является основным при групповом приводе механизмов, применя-
емым на универсальных экскаваторах — кранах, где муфты сцепления являются
единственным средством индивидуального управления каждым механизмом.
Важнейшим достоинством механического способа ограничения момента
является разобщение привода и механизма при возникновении нагрузок, пре-
вышающих стопорное значение. При стопорениях ковш и жестко связанная
с ним часть рабочего оборудования и передач вплоть до ведомой части муфты
предельного момента резко останавливаются, а привод продолжает работать
с нагрузкой на валу, равной стопорному моменту, передаваемому муфтой.
Однако применительно к экскаваторам средней и большой производитель-
ности механический способ ограничения момента обладает значительными
недостатками. При средней и большой мощности привода габариты фрикционов
велики, частые стопорения и перегрузки вызывают их нагревание и быстрый
износ. Переходные процессы пуска, реверсы и торможения механизма сопро-
вождаются значительными потерями при пробуксовывании муфты, что вызывает
дополнительный нагрев и износ, а также повышает расход энергии на кубометр
вынутого грунта.
Поэтому на экскаваторах средней и большой производительности этот
метод в качестве основного средства ограничения момента применения не нахо-
дит. Его применяют в качестве вспомогательной меры, облегчающей ограниче-
ние нагрузок при стопорениях механизма напора с реечной передачей. На этом
механизме жесткая связь ковша с приводом создает опасные динамические
нагрузки. При наиболее тяжелых ударах во избежание поломок рабочего
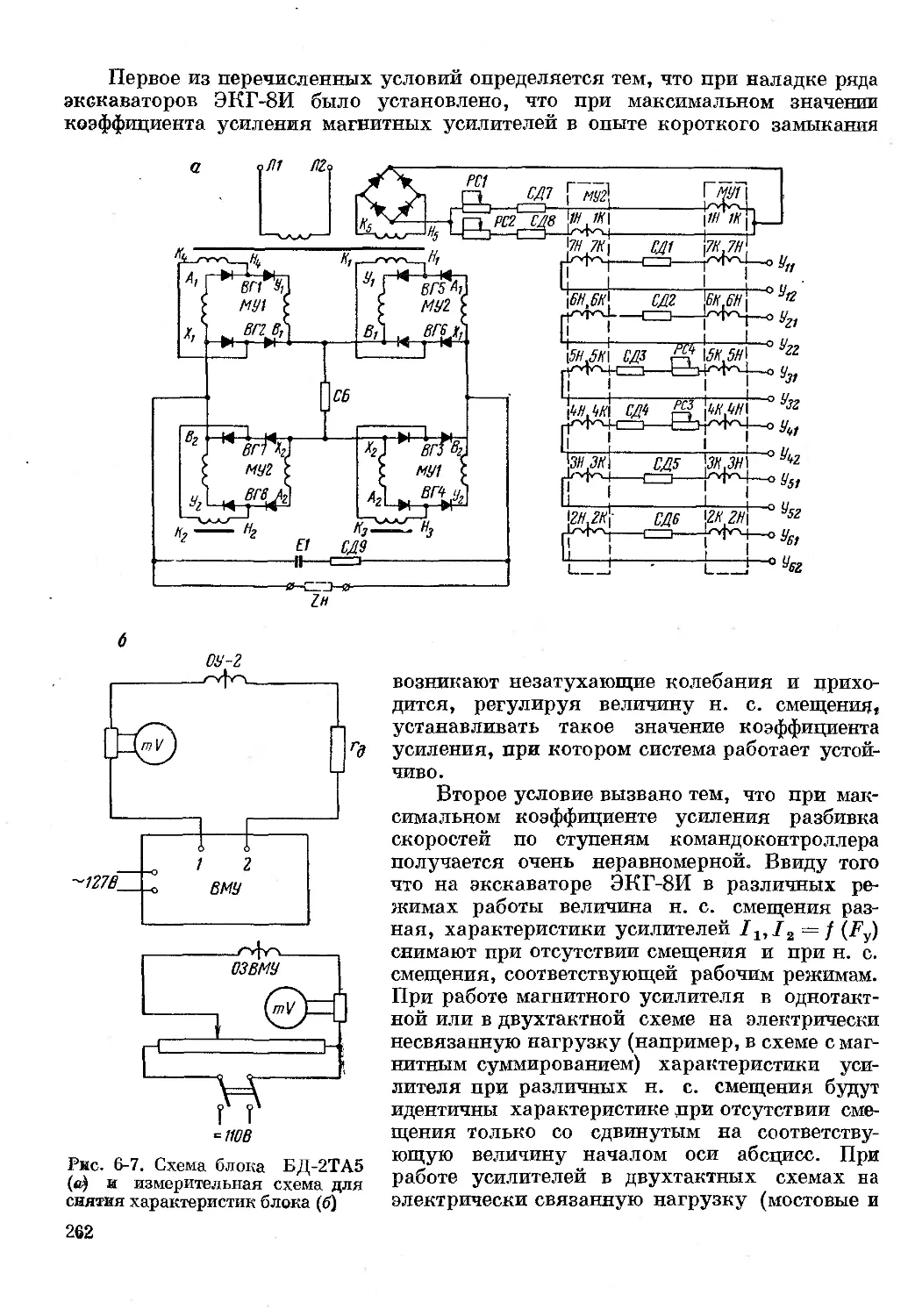
оборудования нужно разобщить механизм и привод с помощью муфты пре-
дельного момента. Чтобы устранить срабатывания муфты при перегрузках
в нормальном режиме копания, которые ограничиваются другим способом,
она настраивается на предельный передаваемый момент, на 20—30% превыша-
ющий допустимое стопорное значение.
Второй способ — Ограничение момента, развиваемого электроприводом,
при индивидуальном приводе механизмов экскаватора является основным
средством защиты механизма и двигателей от ойасных нагрузок. Ограничение
момента электропривода обеспечивается автоматическим воздействием на си-
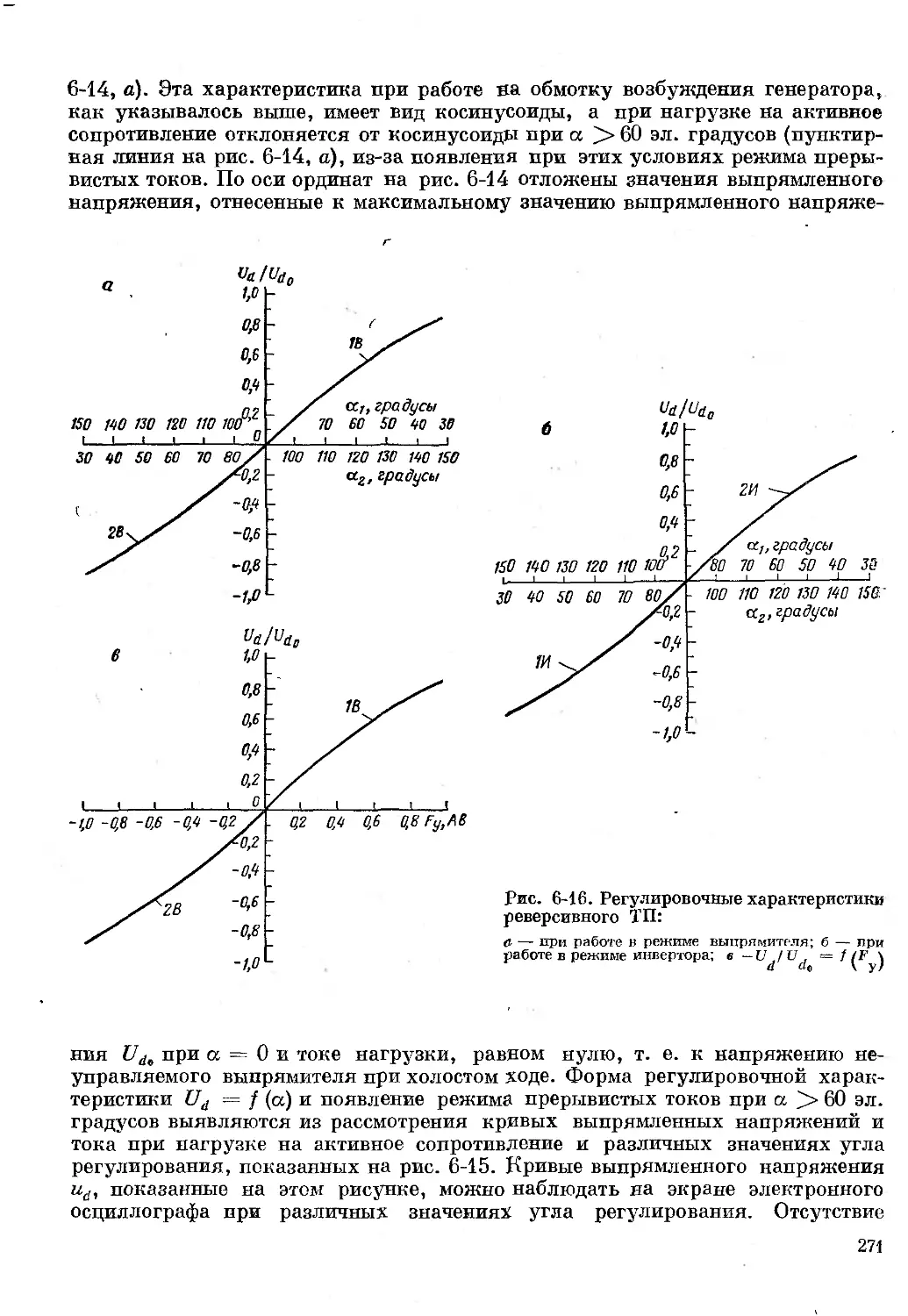
стему управления двигателем. В простейшем случае такое воздействие может
быть получено с помощью реле максимального тока, настроенного на срабаты-
вание при токе двигателя, соответствующем стопорному моменту Мстоп. Ваз-
мыкание контактов реле при увеличении момента двигателя до стопорного
значения может быть использовано либо для отключения приводного двигателя,
либо для введения сопротивления в силовую цепь двигателя, либо для какого-
либо другого изменения параметров привода, направленного на ограничение
его момента.
Попытка использования реле тока РОМ для ограничения момента асин-
хронного электропривода механизмов экскаватора ЭШ-1 (шагающий драглайн
с ковшом емкостью 3,6 м3 и стрелой длиной 40 м) была неудачной. В процессе
эксплуатации напряженная работа реле приводила к быстрому изменению
их уставки. В результате реле срабатывали либо при нагрузке, значительно
меньшей стопорной Мстоп, мешая нормальной работе машины, либо при
7
нагрузке, превышающей стопорную, что вызывало выход из строя механичес-
кого оборудования и двигателей.
Поэтому в качестве основного средства ограничения момента максималь-
ную защиту использовать нельзя. В современных системах экскаваторного
электропривода реле максимального тока предусматриваются только в качестве
дополнительной защиты, отключающей привод в редких, особо тяжелых слу-
чаях. С этой целью уставка максимальной защиты выбирается на 20—30%
больше тока /стоп, соответствующего стопорному моменту Мстоп.
Основным рабочим средством ограничения момента электропривода основ-
ных механизмов экскаватора является формирование так называемой экскава-
торной механической характеристики электропривода. Этот способ лежит
в оснойе всех применяемых систем индивидуального электропривода основных
механизмов экскаваторов, поэтому остановимся на нем более подробно.
Механической характеристикой электропривода называют зависимость
скорости вращения двигателя п от развиваемого им электромагнитного момента
М, т. е. п = f (М). В установившемся режиме, когда скорость вращения по-
стоянна, развиваемый двигателем электромагнитный момент полностью уравно-
вешивается моментом механических потерь и нагрузкой на валу двигателя.
Условимся в дальнейшем считать, что суммарный приведенный к валу двига-
теля момент нагрузки Мс включает в себя все действующие в механизме усилия
и моменты, в том числе и момент механических потерь двигателя. При этом
в установившемся режиме механическая характеристика электропривода выра-
жает и зависимость скорости вращения двигателя от момента статической
нагрузки.
Степень изменения скорости при изменениях нагрузки принято оценивать
жесткостью характеристики
R — ДА/ = Mi—М8
dn Дтг 721—л2 ’
где nt и п2 — значения скорости вращения двигателя соответственно при М =•
= Mt и М = М2.
Жесткость постоянна только при линейной зависимости скорости вращения
от момента, а при нелинейной механической характеристике при разных на-
грузках — различна. Жесткость бесконечна, если при изменениях нагрузки
скорость не изменяется. Такую механическую характеристику имеет синхрон-
ный двигатель. Жесткость отрицательна, если с увеличением нагрузки скорость
уменьшается. Такой жесткостью в пределах нормальных рабочих нагрузок
обладают механические характеристики двигателей постоянного тока и асин-
хронного двигателя. Жесткость положительна, если с возрастанием нагрузки
скорость увеличивается. Примером может служить неустойчивая часть механи-
ческой характеристики асинхронного двигателя.
Для того чтобы электропривод при нормальных статических нагрузках
развивал требуемую рабочую скорость, а при механических перегрузках обес-
печивал ограничение момента, необходима специальная форма механической
характеристики. В пределах изменения нагрузки от нуля до нормальной рабо-
чей нагрузки (например, при подъеме груженого ковша) желательно иметь
стабильную рабочую скорость механизма, т. е. соответствующий участок меха-
нической характеристики должен иметь высокую жесткость. В зоне перегрузок
желательно значительное снижение скорости, вплоть до нуля при нагрузке,
равной стопорному значению. Механические характеристики, соответствующие
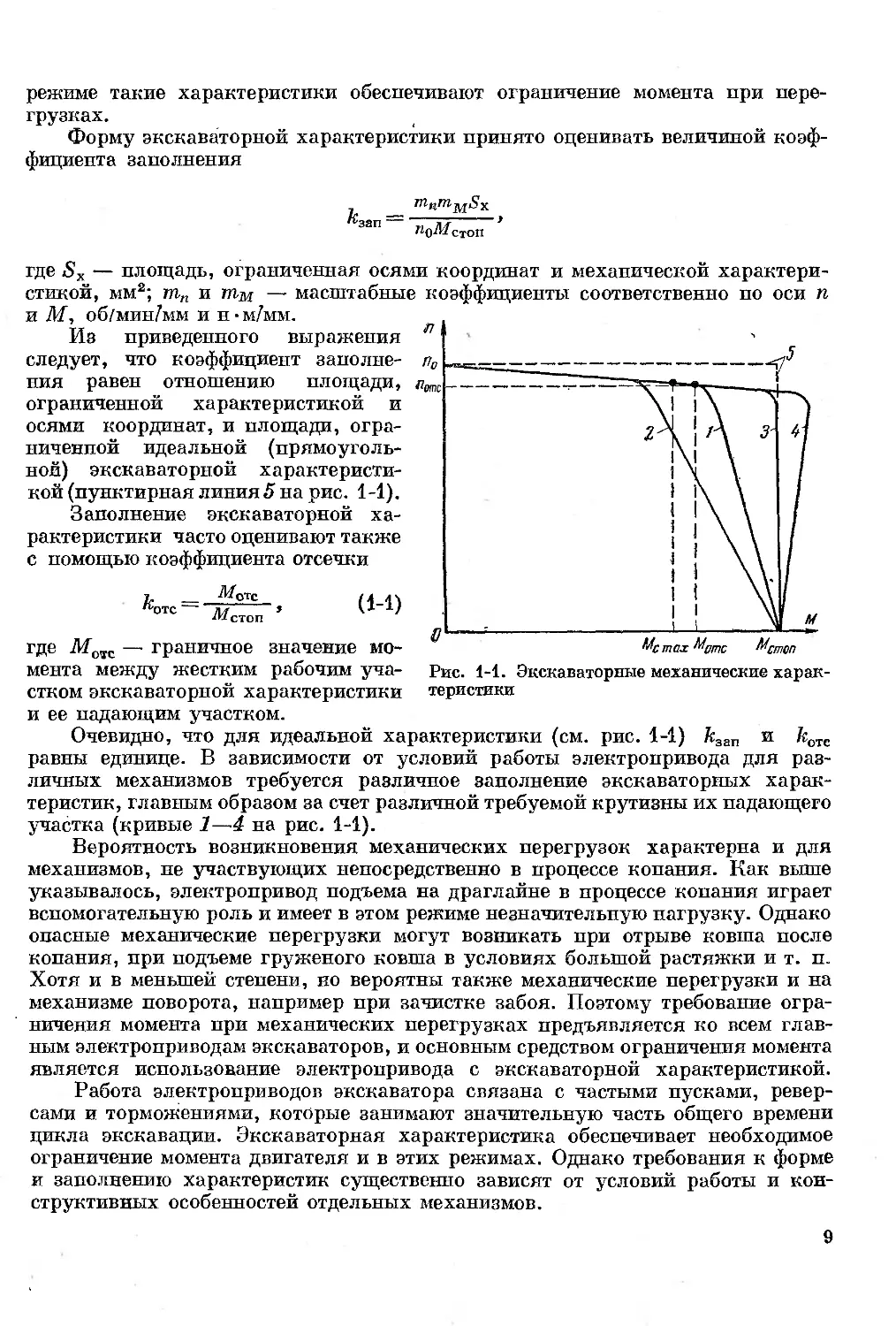
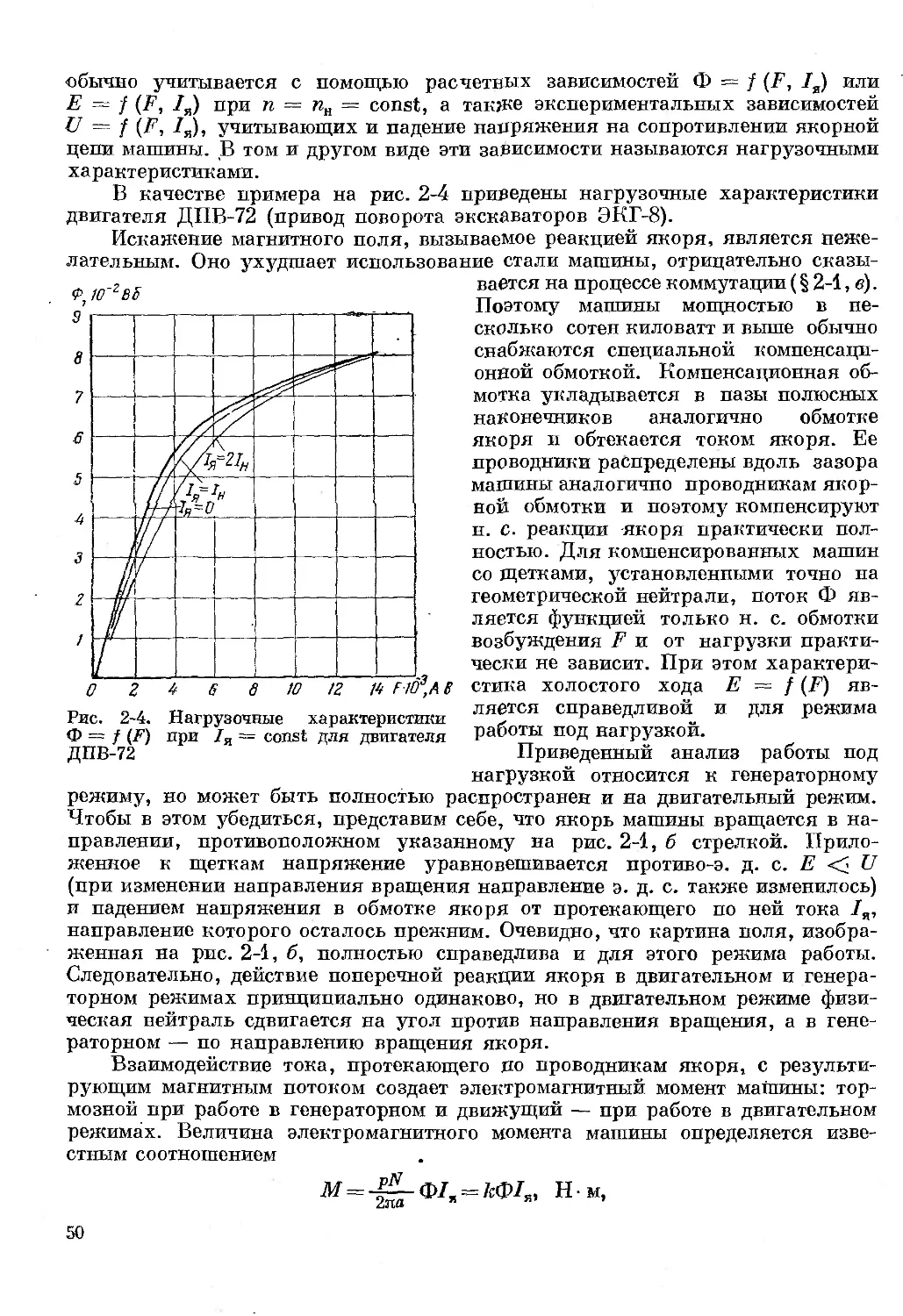
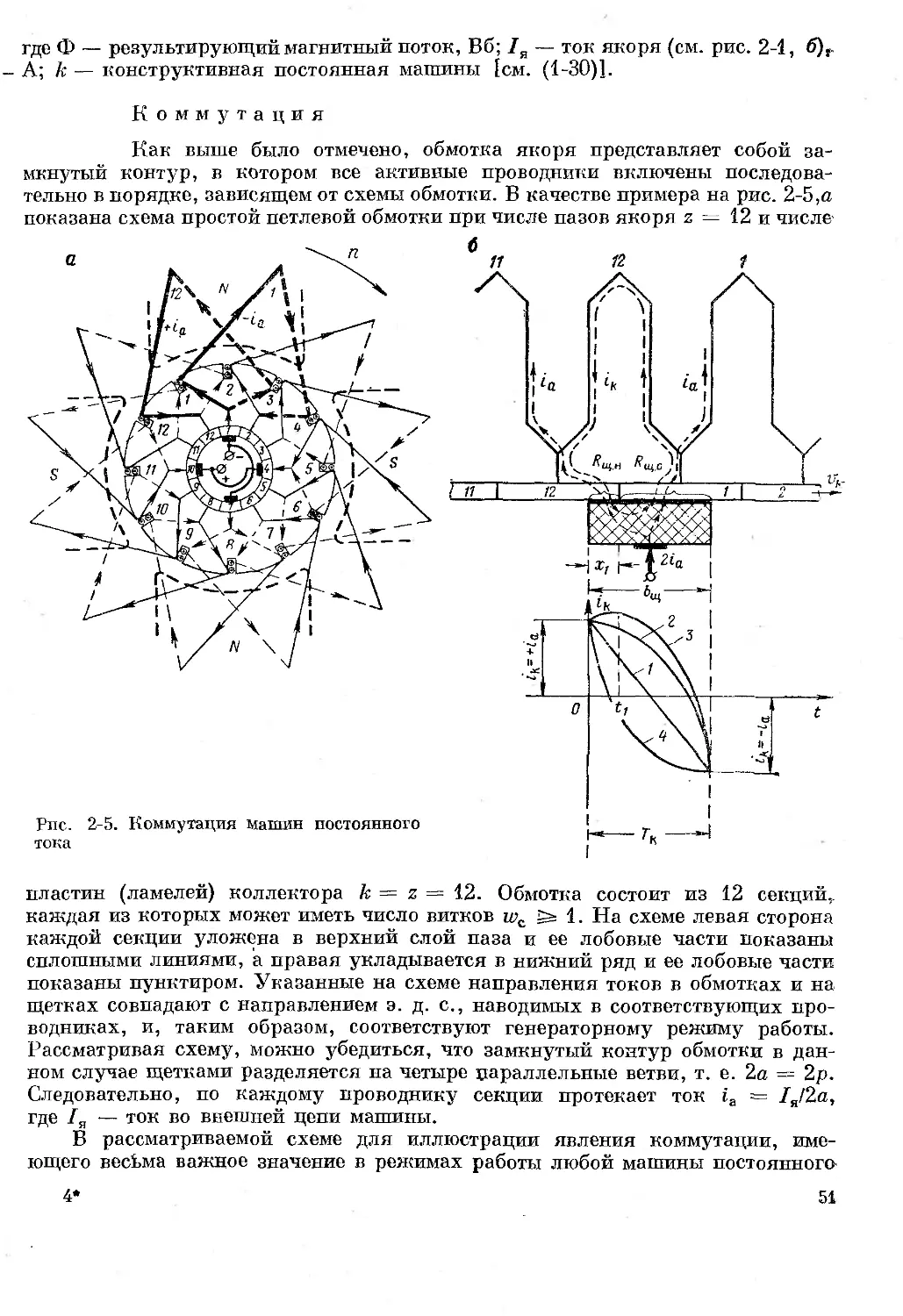
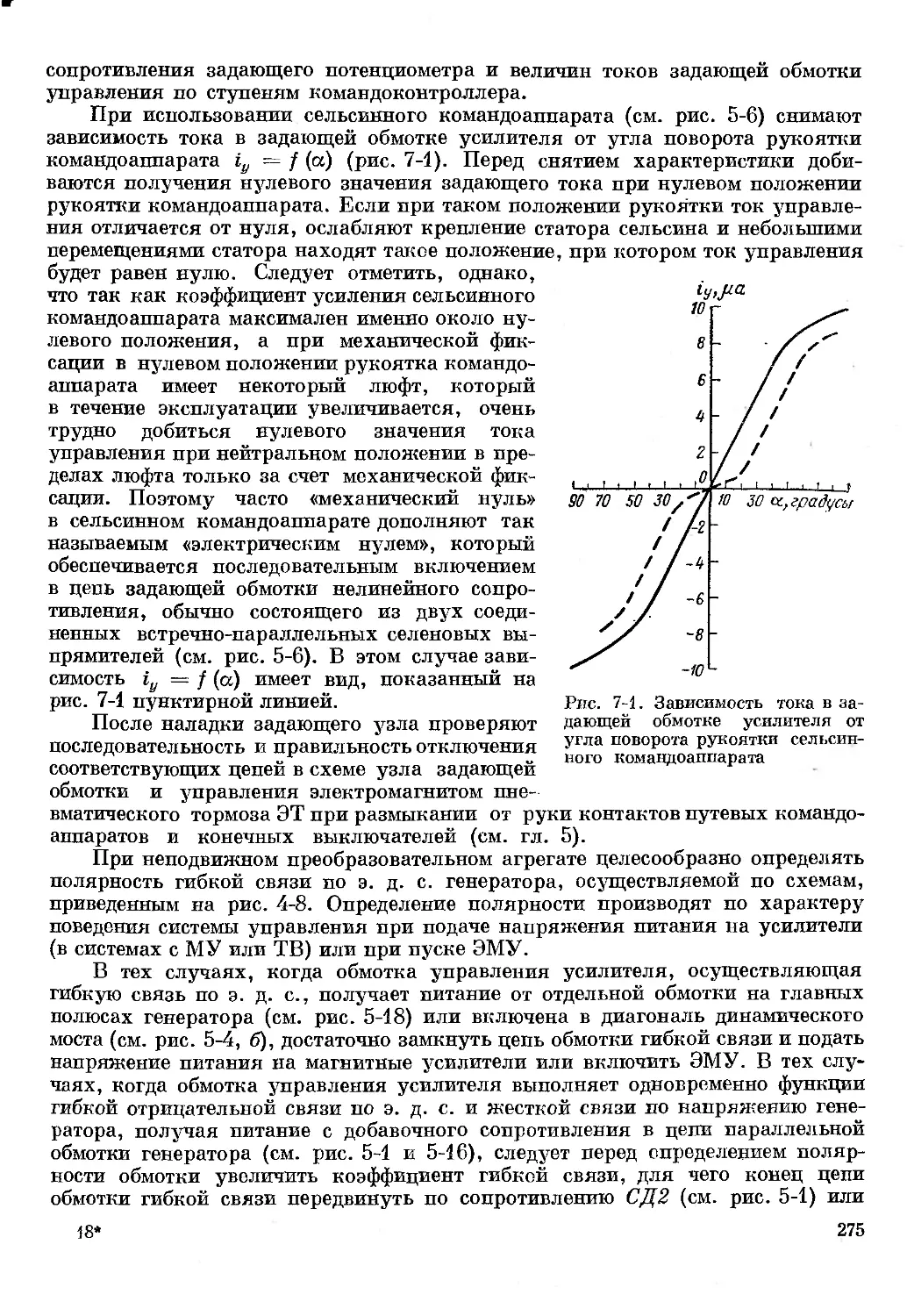
указанным требованиям, называют экскаваторными (рис. 1-1). В статическом
8
режиме такие характеристики обеспечивают ограничение момента при пере-
грузках.
Форму экскаваторной характеристики принято оценивать величиной коэф-
фициента заполнения
^-зап
тчтМ^к
ИоЛ/стОП
где 5Х — площадь, ограниченная осями координат и механической характери-
стикой, мм2; тп и тм — масштабные коэффициенты соответственно по оси п
и М, об/мин7мм и н • м7мм.
Из приведенного выражения
следует, что коэффициент заполне-
ния равен отношению площади,
ограниченной характеристикой и
осями координат, и площади, огра-
ниченной идеальной (прямоуголь-
ной) экскаваторной характеристи-
кой (пунктирная линия 5 на рис. 1-1).
Заполнение экскаваторной ха-
рактеристики часто оценивают также
с помощью коэффициента отсечки
^оТс = -^-, (1-1)
*^стоп
где 7ИОТС — граничное значение мо-
мента между жестким рабочим уча-
стком экскаваторной характеристики
Рис. 1-1. Экскаваторные механические харак-
теристики
и ее падающим участком.
Очевидно, что для идеальной характеристики (см. рис. 1-1) 7сзап и fcOTe
равны единице. В зависимости от условий работы электропривода для раз-
личных механизмов требуется различное заполнение экскаваторных харак-
теристик, главным образом за счет различной требуемой крутизны их падающего
участка (кривые 1—4 на рис. 1-1).
Вероятность возникновения механических перегрузок характерна и для
механизмов, не участвующих непосредственно в процессе копания. Как выше
указывалось, электропривод подъема на драглайне в процессе копания играет
вспомогательную роль и имеет в этом режиме незначительную нагрузку. Однако
опасные механические перегрузки могут возникать при отрыве ковша после
копания, при подъеме груженого ковша в условиях большой растяжки и т. п.
Хотя и в меньшей степени, но вероятны также механические перегрузки и на
механизме поворота, например при зачистке забоя. Поэтому требование огра-
ничения момента при механических перегрузках предъявляется ко всем глав-
ным электроприводам экскаваторов, и основным средством ограничения момента
является использование электропривода с экскаваторной характеристикой.
Работа электроприводов экскаватора связана с частыми пусками, ревер-
сами и торможениями, которые занимают значительную часть общего времени
цикла экскавации. Экскаваторная характеристика обеспечивает необходимое
ограничение момента двигателя и в этих режимах. Однако требования к форме
и заполнению характеристик существенно зависят от условий работы и кон-
структивных особенностей отдельных механизмов.
9
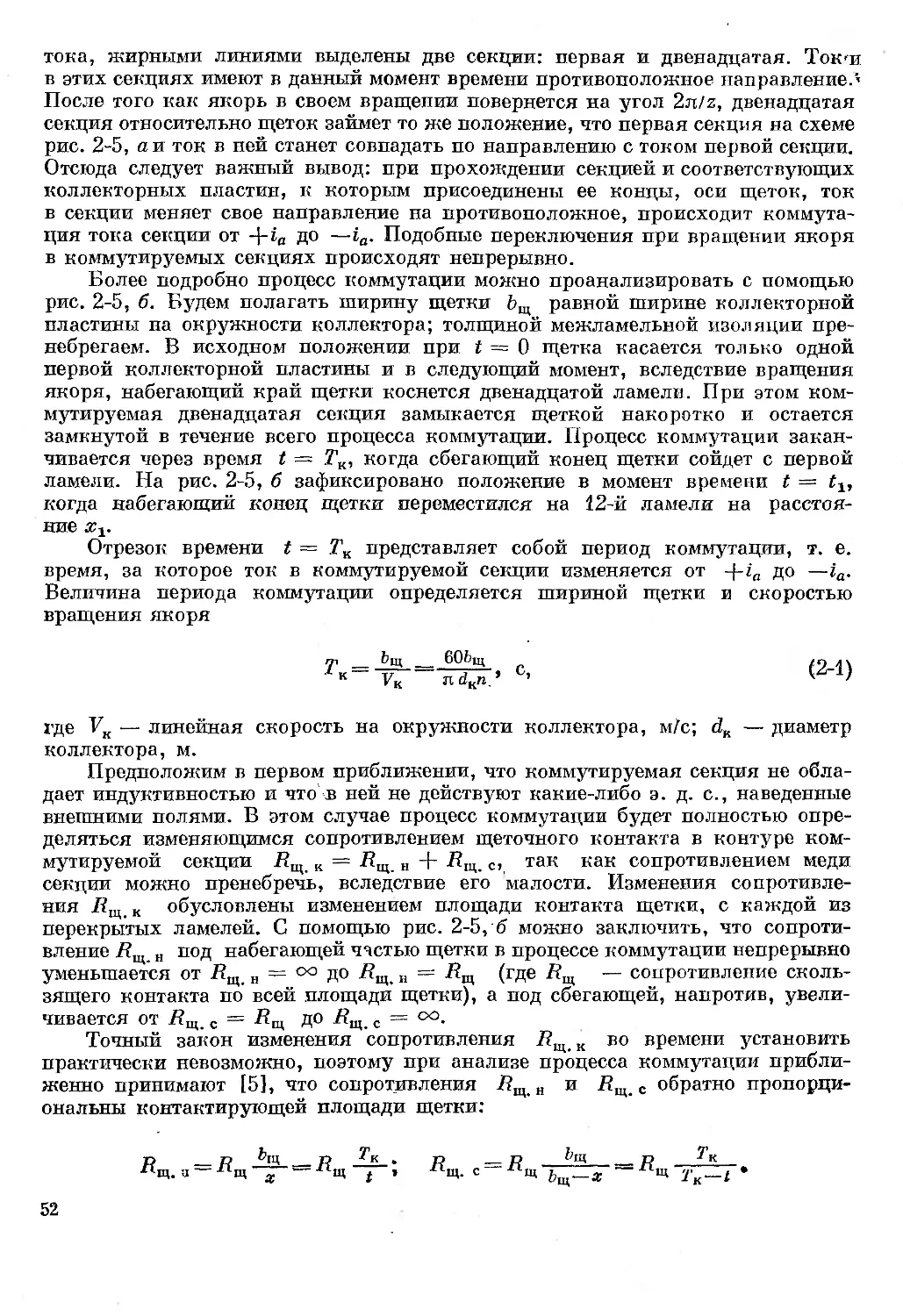
§ 1-2. Рабочие нагрузки основных механизмов экскаваторов
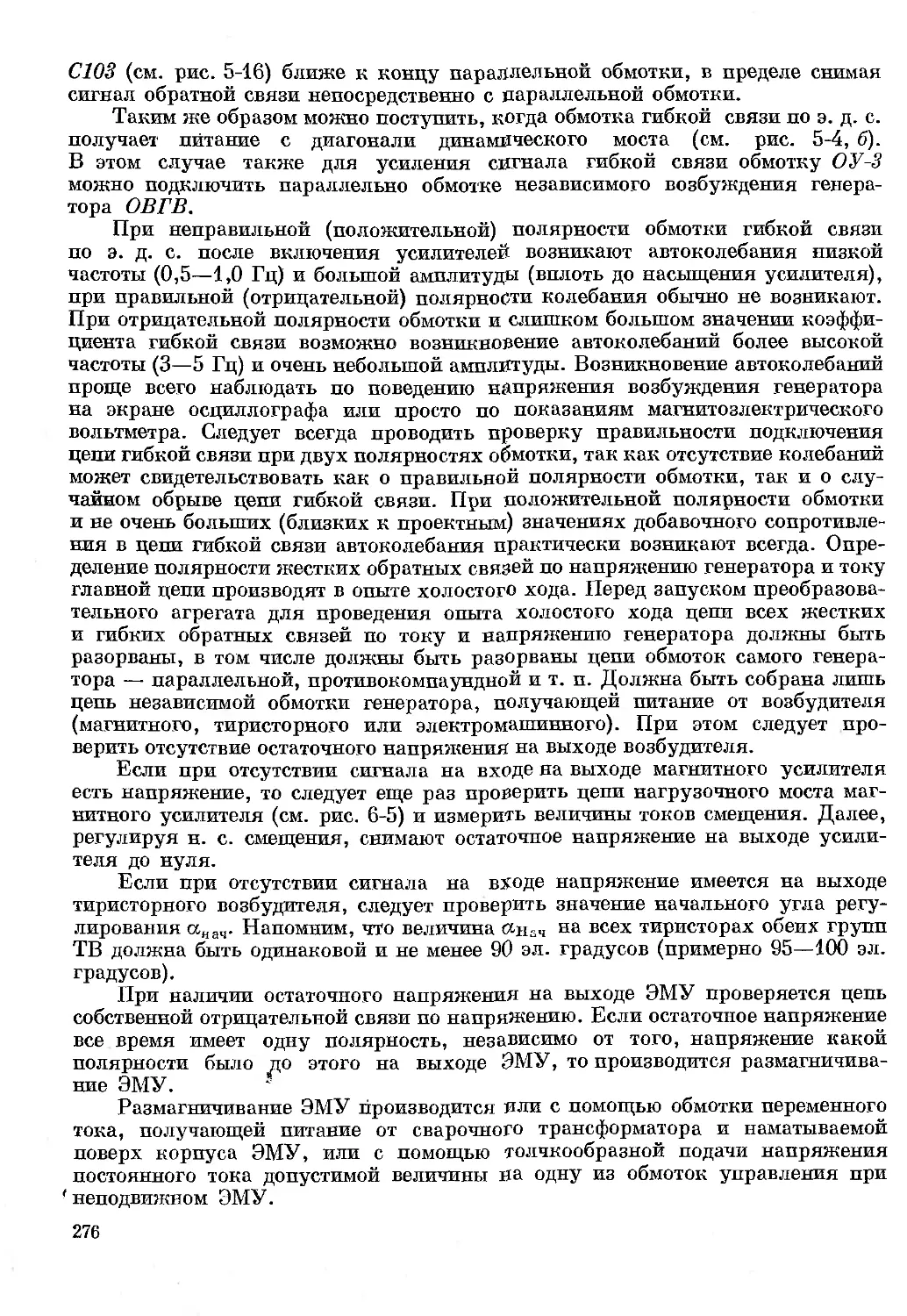
Рис. 1-2.'/ Кинематическая схема
подъемной лебедки:
Д1 и Д2 — двигатели; Р — редуктор;
Б — барабан
„Механизмы подъема и тяги драглайна, а также механизмы подъема
лопаты представляют собой конструктивно аналогичные одноконцевые подъем-
ные лебедки. Наибольшее распространение на экскаваторах средней и большой
производительности имеет лебедка с двухдвигательным приводом, кинемати-
ческая схема которой представлена на рис. 1-2.
В установившихся режимах работы, когда скорость вращения двигате-
лей п является постоянной величиной, двигатели развивают суммарный крутя-
щий момент М, уравновешивающий, с одной стороны, приведенный к их валу
суммарный момент потерь 7Итр, обусло-
вленный всеми действующими в меха-
низме силами трения, а с другой, — при-
веденный к тому же валу момент нагрузки
на барабане Ма, обусловленный натяжением F
подъемного или тягового каната,
М=<=±Мтр + Ма=±Мтр + -^-, (1-2)
где D6 — диаметр барабана; гр — передаточ-
ное число редуктора.
Момент 7Итр является реактивным мо-
ментом, всегда противодействующим движе-
нию, поэтому он при изменении направления
вращения двигателей изменяет свой знак.
Величина этого момента при холостом ходе
(F = 0) минимальна (Мтр = MTp0) и непре-
рывно увеличивается с возрастанием натяже-
ния каната. Момент Ма является активным моментом нагрузки, направление ко-
торого не зависит от направления вращения двигателей. Если двигатели вращают
лебедку в направлении наматывания каната на барабан, момент Ма является
тормозным и имеет знак, совпадающий со знаком момента трения ЛГтр. При
противоположном направлении вращения момент Ма сохраняет прежнее напра-
вление и становится движущим, так как направление его действия в этом случае
совпадает с направлением движения механизма. При этом в формуле (1-2) Ма
и Мтр имеют противоположные знаки, а результирующий момент Мс в зависи-
мости от соотношения их величин может быть либо движущим (Ма < Л7тр0),
либо тормозным (Ма << Мтр0), либо равным нулю (Мтр0 = Ма).
Основным фактором, определяющим рабочие нагрузки электропривода
лебедки, является натяжение каната F, величина которого зависит от веса
ковша, от усилия, обусловленного взаимодействием механизмов, а в процессе
черпания также от условия резания грунта.
В случаях, когда Мтр < Ма, суммарный статический момент нагрузки
на валу двигателей Мс можно определить при вращении лебедки в направлении
наматывания каната с помощью формулы 1
мс
FD6
9
(1-3)
х Все величины в приведенных в данной книге формулах имеют размерности
в системе СИ. Исключение представляет лишь внесистемная единица скорости вращения п,
имеющая размерность об/мин.
10
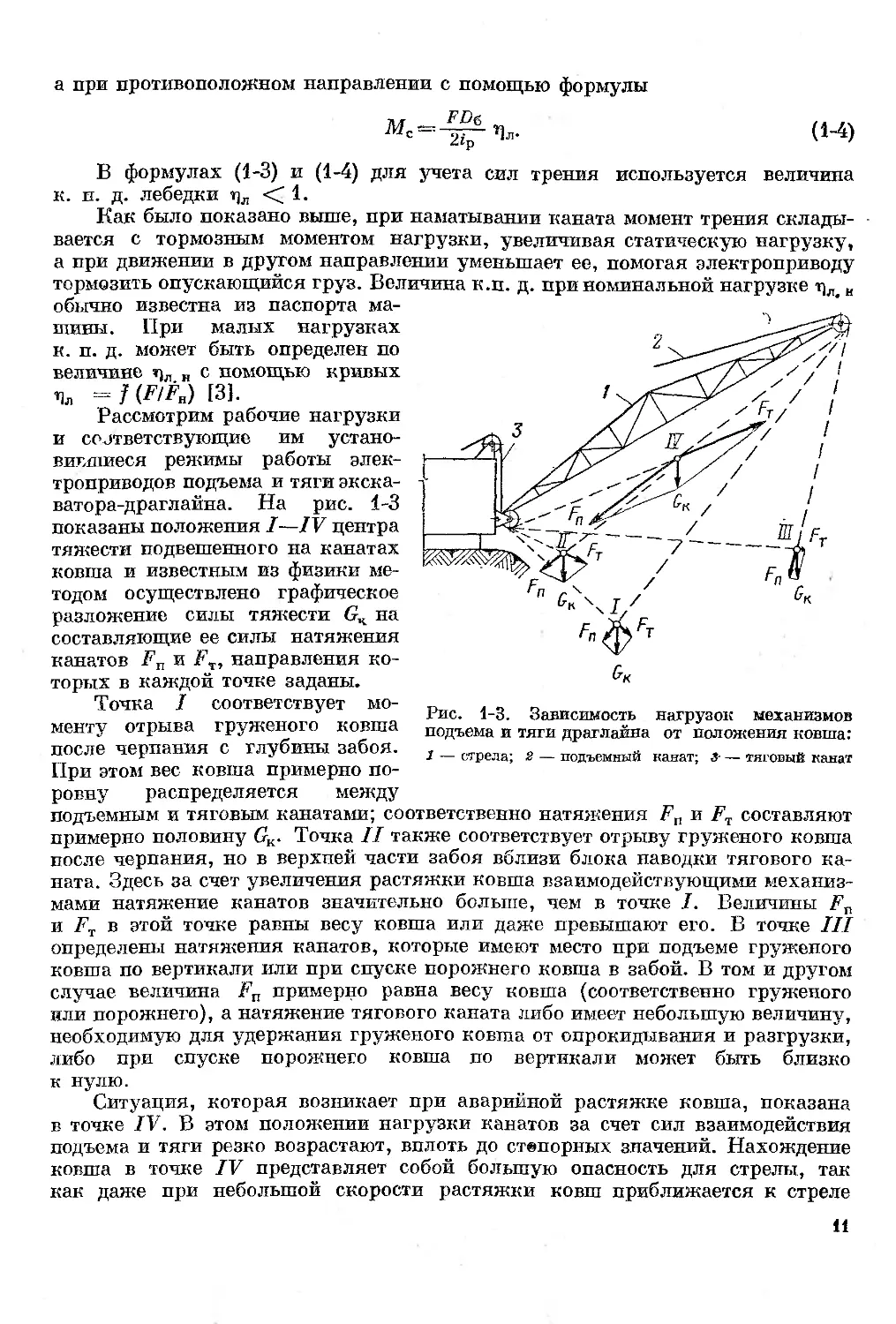
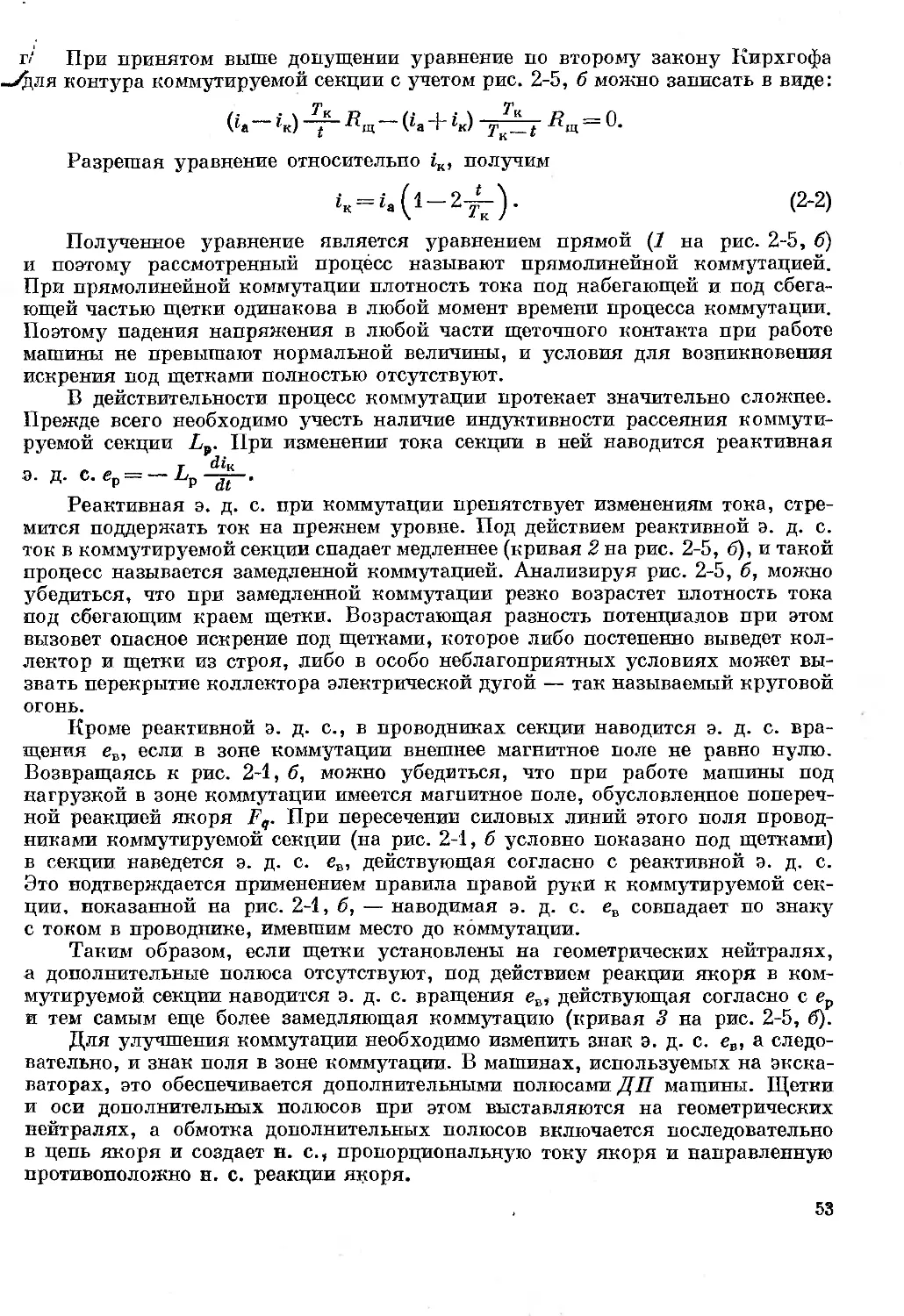
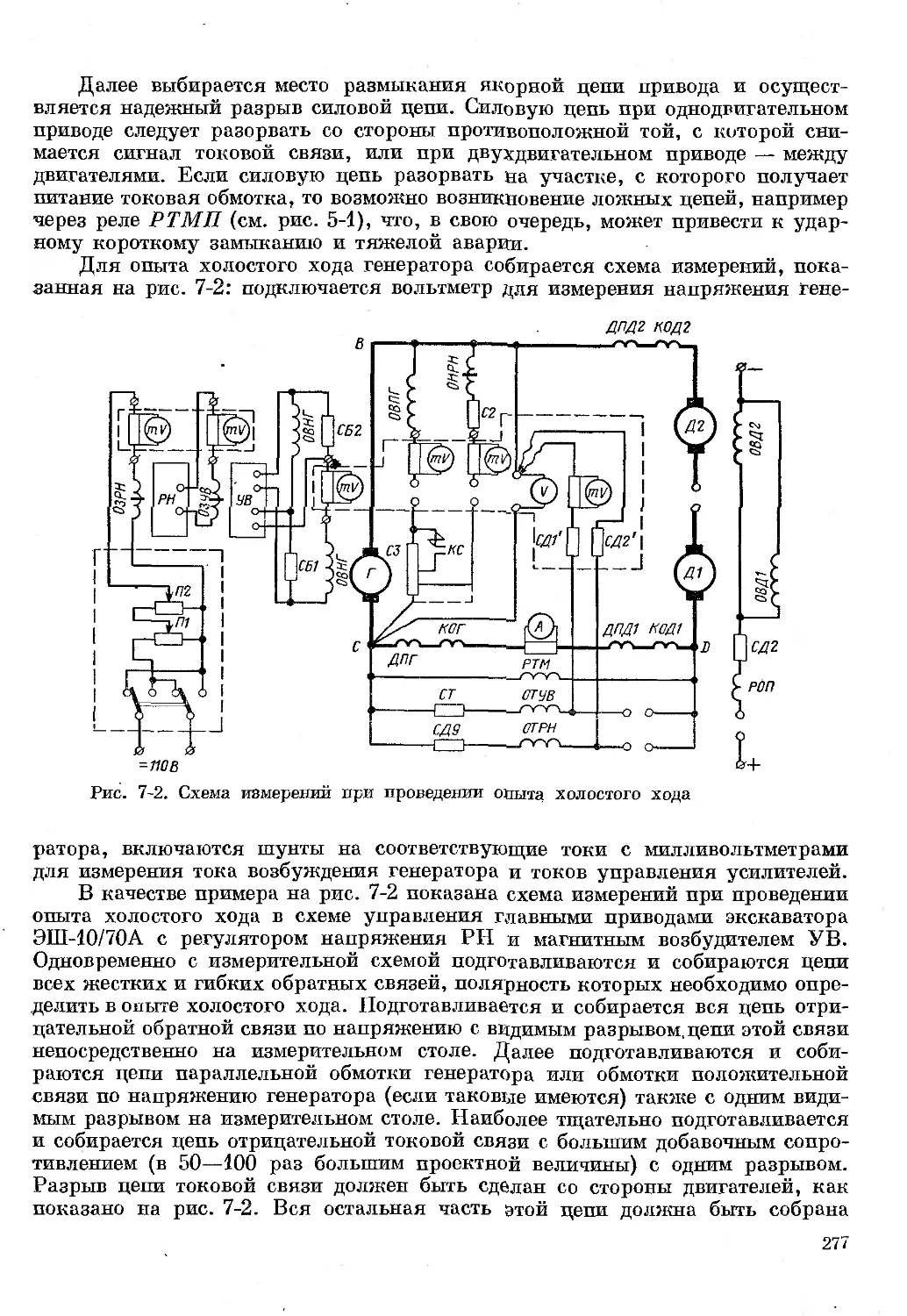
Рис. 1-3. Зависимость нагрузок механизмов
подъема и тяги драглайна от положения ковша:
1 — стрела; 2 — подъемный канат; 3 — тяговый канат
а при противоположном направлении с помощью формулы
(М)
В формулах (1-3) и (1-4) для учета сил трения используется величина
к. п. д. лебедки рл < 1.
Как было показано выше, при наматывании каната момент трения склады-
вается с тормозным моментом нагрузки, увеличивая статическую нагрузку,
а при движении в другом направлении уменьшает ее, помогая электроприводу
тормозить опускающийся груз. Величина к.п. д. при номинальной нагрузке цл> н
обычно известна из паспорта ма-
шины. При малых нагрузках
к. п. д. может быть определен по
величине цл в с помощью кривых
т)л = f (F/FJ [3].
Рассмотрим рабочие нагрузки
и соответствующие им устано-
вившиеся режимы работы элек-
троприводов подъема и тяги экска-
ватора-драглайна. На рис. 1-3
показаны положения I—IV центра
тяжести подвешенного на канатах
ковша и известным из физики ме-
тодом осуществлено графическое
разложение силы тяжести GK на
составляющие ее силы натяжения
канатов F„ и FT, направления ко-
торых в каждой точке заданы.
Точка I соответствует мо-
менту отрыва груженого ковша
после черпания с глубины забоя.
При этом вес ковша примерно по-
ровну распределяется между
подъемным и тяговым канатами; соответственно натяжения Fn и FT составляют
примерно половину GK. Точка II также соответствует отрыву груженого ковша
после черпания, но в верхней части забоя вблизи блока наводки тягового ка-
ната. Здесь за счет увеличения растяжки ковша взаимодействующими механиз-
мами натяжение канатов значительно больше, чем в точке I. Величины Fr
и FT в этой точке равны весу ковша или даже превышают его. В точке III
определены натяжения канатов, которые имеют место при подъеме груженого
ковша по вертикали или при спуске порожнего ковша в забой. В том и другом
случае величина Вп примерно равна весу ковша (соответственно груженого
или порожнего), а натяжение тягового каната либо имеет небольшую величину,
необходимую для удержания груженого ковша от опрокидывания и разгрузки,
либо при спуске порожнего ковша по вертикали может быть близко
к нулю.
Ситуация, которая возникает при аварийной растяжке ковша, показана
в точке IV. В этом положении нагрузки канатов за счет сил взаимодействия
подъема и тяги резко возрастают, вплоть до степорных значений. Нахождение
ковша в точке IV представляет собой большую опасность для стрелы, так
как даже при небольшой скорости растяжки ковш приближается к стреле
11
После разгрузки ковша у головы стрелы осуществляется спуск порожнего
ковша в забой. Натяжение подъемного каната при этом в точке III (см. рис. 1-3)
определяется весом порожнего ковша, а движущий статический момент может
быть вычислен по формуле (1-4). Двигатель при спуске работает в тормозном
режиме (точка III" на характеристике 5).
В процессе черпания ковш внедряется в грунт под действием усилия тяги
и собственного веса, поэтому в начале процесса машинист полностью ослабляет
подъемный канат. При наличии слабины нагрузка электропривода подъема
составляет небольшую величину, обусловленную потерями на трение. Как
показано на рис. 1-4, а, при этом двигатели работают в двигательном режиме,
развивая в зависимости от направления вращения моменты ±ЛГтр0. Если черпа-
ние заканчивается в глубине забоя (точка I на рис. 1-3), двигатели работают
в соответствии с механической характеристикой 1 в точке I со значительно
меньшей нагрузкой, чем в точке II.
Если в процессе работы возникает необходимость остановить ковш и удер-
живать его в определенном положении, машинист устанавливает командо-
контроллер в нулевое положение, которому соответствует характеристика 2
на рис. 1-4, а. Допустим, ковш необходимо удерживать в положении II, пока-
занном на рис. 1-3. При этом под действием веса ковша лебедка начинает вра-
щаться в направлении «Спуск». Двигатели в соответствии с характеристикой 2
переходят в тормозной режим и работают с небольшой скоростью (точка II'
на рис. 1-4, а). Движущий момент нагрузки Мс в этой точке должен вычисляться
по формуле (1-4), причем его величина меньше тормозного момента при подъеме
ковша в этой же точке пространства (режим II, на характеристике 1, показанный
на рис. 1-4, а) на величину удвоенного момента трения Мтр, как это следует
из соотношения (1-2). Точки Г и ИГ на механической характеристике соответ-
ствуют режимам удержания ковша в положениях I и III, показанных на
рис. 1-3.
На рис. 1-4, б показаны аналогичные механические характеристики Г, 2'
и 3' для механизма тяги. При отрыве ковша в точке II (см. рис. 1-3) в процессе
подъема его двигатели тяги работают в тормозном режиме в соответствии с ха-
рактеристикой 3' (в точке II"), а при удержании ковша — в соответствии
с характеристикой 2’ (в точке II’). Момент нагрузки Мс для этого режима опре-
деляется соотношением (1-4). Для разгрузки ковша электропривод тяги уско-
ряется, натяжение каната становится равным нулю, а статический момент
принимает значение Мс = —Мтр0, показанное на рис. 1-4, б. В процессе
последующего выбора слабины тягового каната электропривод реверсируется
и момент трения меняет знак.
В процессе черпания грунта электропривод тяги совершает работу резания
грунта. В начале черпания снимаемая стружка невелика, затем она постепенно
увеличивается, увеличивается заполнение ковша грунтом и образуется так
называемая «призма волочения» грунта перед ковшом. Поэтому в процессе
черпания момент нагрузки механизма тяги непрерывно возрастает вплоть
до стопорного значения. На рис. 1-4, б область нагрузок, соответствующая
процессу черпания, заштрихована.
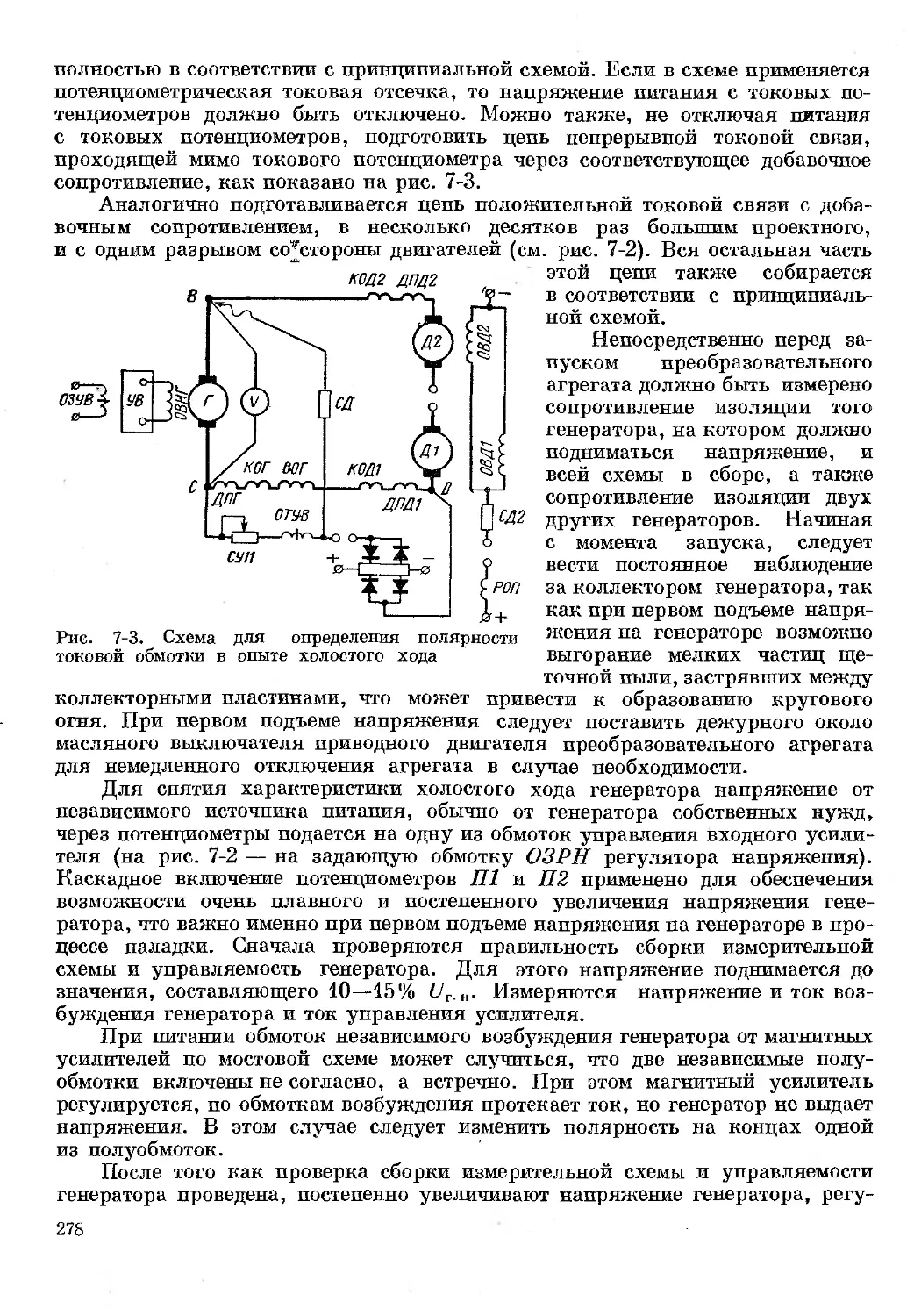
На рис. 1-5 представлена схема рабочего оборудования экскаватора —
лопаты и определены усилие натяжения подъемного каната и усилие напора
при различных положениях ковша. Конструктивно механизм напора может
исполняться либо с реечным зацеплением рукояти с ведущей шестерней на
выходном валу редуктора, либо с канатной передачей усилий на рукоять.
В последнем случае напорная лебедка аналогична приведенной на рис. 1-2,
13
однако она является двухконцевой в связи с необходимостью создания напор-
ного усилия различного знака.
Положение I на рис. 1-5 соответствует подъему груженого ковша непосред-
ственно после черпания с большим вылетом рукояти. Положение II характерно
для перемещений рукояти перед началом черпания либо в процессе зачистки
забоя. Сравнивая эти два положения легко убедиться, что усилие, действующее
на рукоять, при изменениях положения ковша меняется не только по величине,
но и по направлению. Натяжение подъемного каната за счет напорного усилия
при больших вылетах увеличивается,
a
Рис. 1-5. Зависимость нагрузок механиз-
мов подъема и напора экскаватора с обо-
рудованием прямой лопаты от положения
ковша:
1 —- стрела; 2 — рукоять с ковшом; 8 — подъем-
ный канат
копания
рис. 1-6,
в однород-
ен, заштри-
подъема
груженого
при малых — уменьшается, тем в боль-
шей степени, чем ниже центр тяжести
ковша.
Наиболее характерные режимы
работы электропривода подъема экска-
ватора — лопаты можно проанализи-
ровать с помощью рис. 1-6, а. В про-
цессе черпания грунта электропривод
подъема работает в двигательном ре-
жиме, совершая работу подъема ковша
с грунтом и резания грунта. Нагрузка
двигателей подъема . в этом режиме за-
висит от толщины снимаемой стружки,
которая регулируется напорным меха-
низмом. Область нагрузок, соответству-
ющая режимам
ном грунте, на
хована.
В процессе
ковша из положения/ (см. рис. 1-5) дви-
гатели подъема работают в двигательном
режиме с нагрузкой, которая может
быть определена по известному весу ковша с грунтом и поднимаемой части
рукояти (G' на рис. 1-5) с помощью формулы (1-3). Этот режим обозначен на
рис. 1-6, а точкой / на характеристике 1. После подъема ковша на нужную
высоту начинается поворот платформы к месту выгрузки. В процессе поворота
осуществляется спуск груженого ковша до высоты, с которой допустима вы-
грузка в транспортные средства. При этом двигатели подъема работают в тор-
мозном режиме (точка Г на характеристике 3), развивая момент, меньший
на величину удвоенного момента трения, чем момент в точке I на характери-
стике 1. Режиму удержания ковша в этом положении соответствует точка I'
на характеристике 2, в которой двигатели работают в тормозном режиме, обес-
печивая очень малую скорость опускания ковша, при которой за время удер-
жания перемещение ковша практически незаметно.
После выгрузки ковш перемещается в положение II (см. рис. 1-5). Если
в этом положении осуществляется спуск или удержание ковша, двигатели
подъема в установившемся режиме развивают тормозной момент и работают
в соответствии с характеристиками 3 и 2 в точках II” и II' (см. рис. 1-6, а).
При подъеме ковша в этом положении двигатели работают в двигательном
режиме, которому соответствует точка II на характеристике 1.
Сравнивая рис. 1-4, а с рис. 1-6, а, можно убедиться, что режимы работы
подъемных лебедок драглайна и лопаты, если исключить режимы копания,
аналогичны. Более специфичны рабочие нагрузки напорного механизма, кото-
14
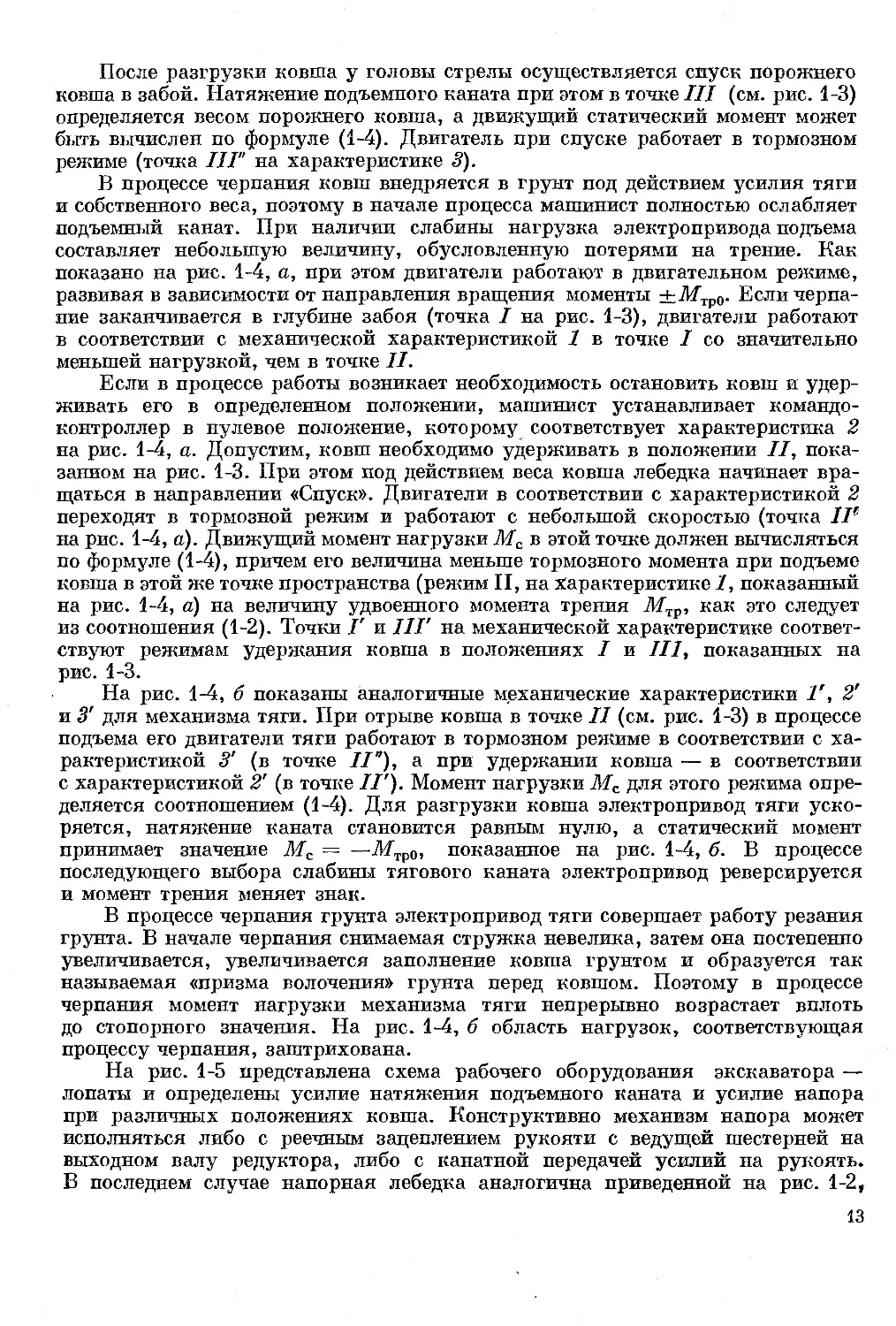
рые показаны на рис. 1-6, б. У всех одноконцевых лебедок (см. рис. 1-4, а, б
и 1-6, а) нагрузки имеют несимметричный характер — при работе в одном
направлении нагрузки только тормозные и электропривод работает только
в двигательном режиме, а при работе в другом направлении нагрузки главным
образом движущие и от электропривода требуются большие тормозные моменты
и небольшой движущий момент при ослабленном канате. У напорного меха-
низма (см. рис. 1-6, б) нагрузки имеют симметричный характер и электропривод
должен работать в двигательном режиме с большими нагрузками при любом
направлении вращения.
Рис. 1-6. Рабочие нагрузки механизмов подъема (а) и напора (б) лопаты
В процессе черпания грунта электропривод напора развивает на рукояти
напорное усилие, обычно близкое к стопорному значению. Область нагрузок
соответствующих режиму копания, на рис. 1-6, б заштрихована. В процессе
подъема или опускания ковша из точки I (см. рис. 1-5) в зависимости от необ-
ходимости рукоять может двигаться вперед, назад либо оставаться неподвиж-
ной. При движении рукояти вперед электропривод должен работать в двига-
тельном режиме, преодолевая силы трения и встречное усилие, создаваемое
подъемным канатом (точка I на характеристике 1'). При обратном движении
электропривод должен развивать тормозной момент, который вместе с моментом
трения должен уравновесить движущий момент, обусловленный усилием подъ-
ема (точка I" на характеристике 3'). При удержании рукояти электропривод
должен развивать такой же момент при малой скорости вращения (точка Г
на характеристике 2').
В положении ковша II (см. рис. 1-5) может осуществляться движение
рукояти вперед, назад либо ее удержание. При движении вперед составля-
ющая FB веса G'K создает на валу электропривода значительный движущий
момент. При этом электропривод работает в тормозном режиме [точка £Г'
на характеристике 1' (см. рис. 1-6, б)], так же как и при удержании ко'йШа
(точка II' на характеристике 2'). При движении назад нагрузка является тор-
мозной и электропривод напора должен работать в двигательном режиме
15
совершая совместно с электроприводом подъема работу по подъему рукояти
с ковшом (точка II на характеристике $')•
Особенностью напорного механизма являются значительные тормозные
моменты нагрузки, которые могут возникать при движении рукояти назад.
Они могут быть обусловлены весом рукояти с ковшом, когда осуществляется
ее подъем в вертикальном положении с помощью механизма напора (точка III
на характеристике 3'). Нагрузки, близкие к стопорным, могут возникать также
при черпании в скальном грунте, если при движении назад зубья ковша упи-
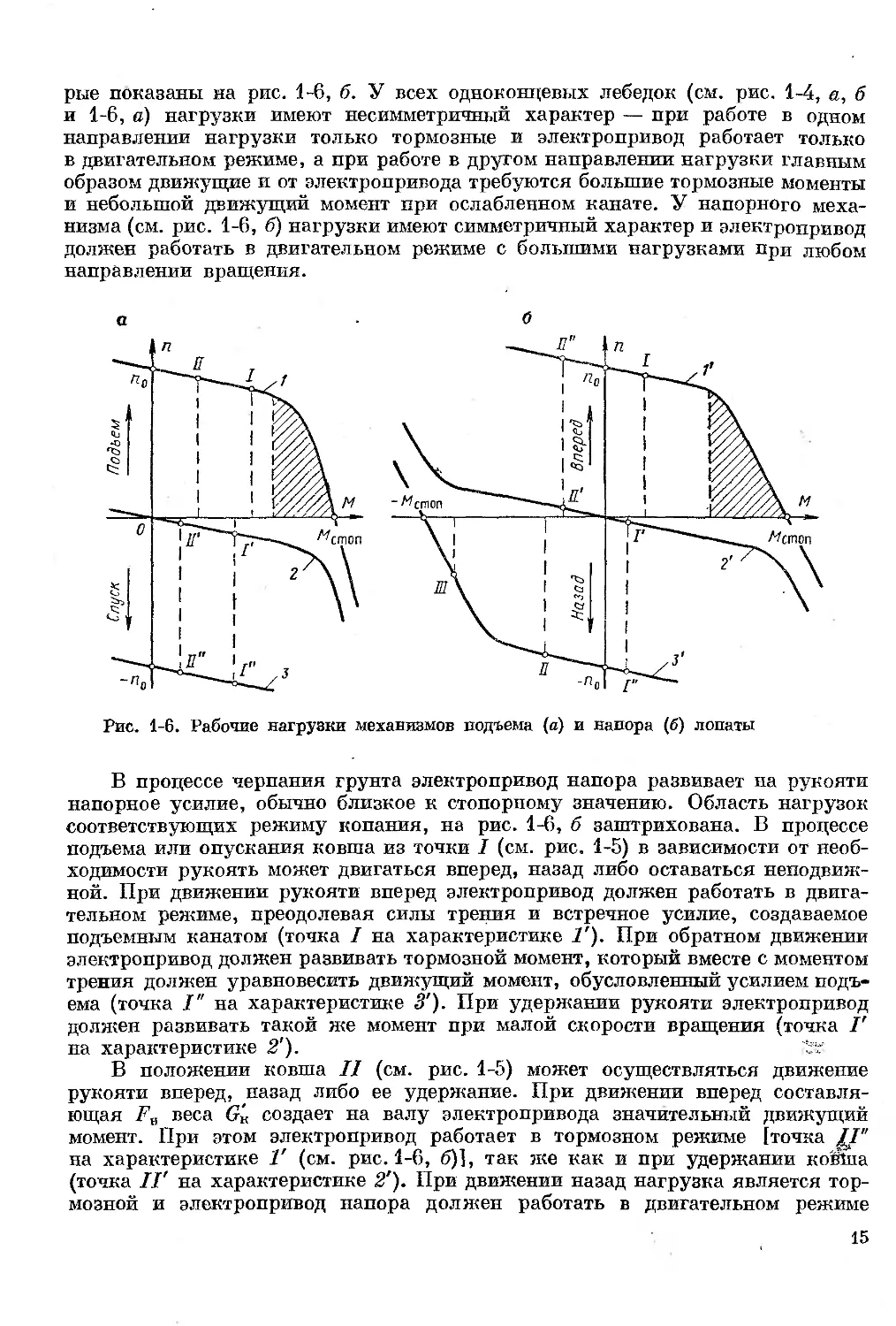
во вращение валы-шестерни В1П1 и ВШ2, которые находятся в зацеплении
с зубчатым венцом ЗВ, неподвижно закрепленным на базе Б (или на гусеничной
тележке экскаватора — лопаты). Валы-шестерни ВШ1 и ВШ2, обегая зубчатый
венец, приводят во вращение поворотную платформу экскаватора П, опира-
ющуюся на роликовый круг РК.
При горизонтальном положении экскаватора и отсутствии ветра суммар-
ный момент нагрузки на валу всех двигателей определяется силами трения
в механизме и может быть вычислен по формуле
Мс =
к • 2/СоРцр
Йр£рТ]р
(1-5)
где к — коэффициент запаса, учитывающий трение роликов о направляющие;
f — 0,05 4- 0,1 — коэффициент трения качения; Go — общий вес механизма;
DKp — диаметр роликового круга; dp — диаметр роликов; ip и т)р — переда-
точное число и к. п. д. редуктора.
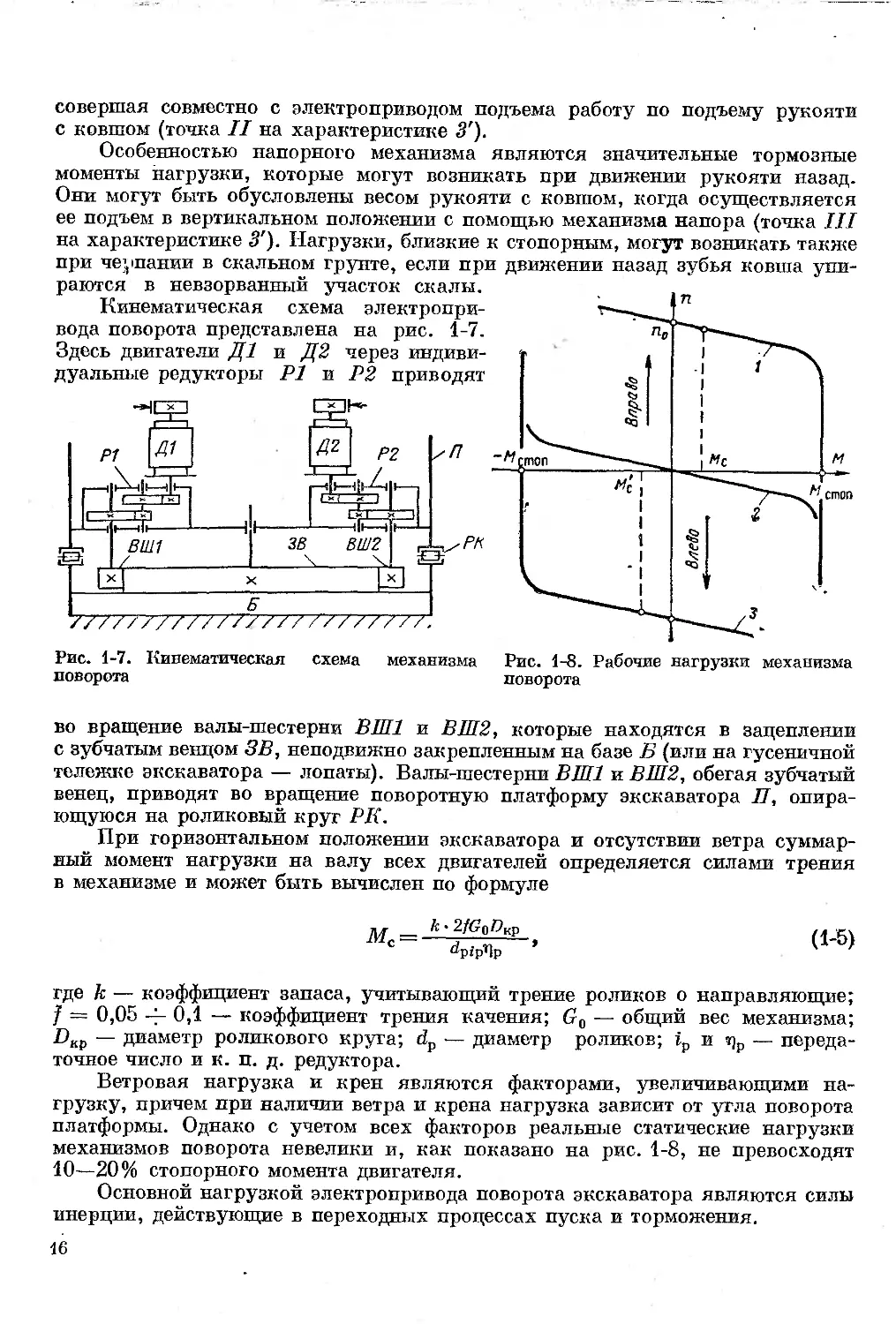
Ветровая нагрузка и крен являются факторами, увеличивающими на-
грузку, причем при наличии ветра и крена нагрузка зависит от угла поворота
платформы. Однако с учетом всех факторов реальные статические нагрузки
механизмов поворота невелики и, как показано на рис. 1-8, не превосходят
10—20% стопорного момента двигателя.
Основной нагрузкой электропривода поворота экскаватора являются силы
инерции, действующие в переходных процессах пуска и торможения.
16
§ 1-3. Переходные процессы пуска и торможения
Основные электроприводы экскаваторов работают в интенсивном
повторно-кратковременном режиме. Пуски, реверсы и торможения повторяются
с большой частотой и их длительность занимает в цикле экскавации значитель-
ное место. Поэтому одним из важных условий получения максимальной произ-
водительности машины является оптимизация переходных процессов экскава-
торных электроприводов, исходя из критерия минимума их длительности.
Уравнение движения электропривода в переходных процессах имеет вид:
где М — момент, развиваемый двигателем; Мс — момент статической нагрузки,
рассмотренный в § 1-2; — приведенный к валу двигателя момент инерции
всех вращательно и поступательно движущихся масс двигателя и механизма;
п — скорость вращения электропривода, об/мин.
Другая форма записи уравнения движения
= (1-6')
где (о = лп/30 — угловая скорость вращения, 17с.
Важной динамической характеристикой электропривода является соотно-
шение приведенного момента инерции механизма и момента инерции самих
двигателей. Это соотношение можно характеризовать величиной
где т — число двигателей привода; /дв — момент инерции якоря одного дви-
гателя.
Для подъемных и тяговых лебедок и напорного механизма у = 1,3 4- 2,0,
т. е. главную роль в суммарном моменте инерции играет момент инерции
двигателей mJ Электропривод поворота характерен большими инерцион-
ными массами механизма — тяжелой поворотной платформы с оборудованием
и длинной стрелой с ковшом на большом вылете. Поэтому для электроприводов
поворота 7 = 5-4- 25, а при безредукторном приводе у имеет и значительно
большие значения.
В паспорте машин и клиентских формулярах двигателей до настоящего
времени вместо момента инерции указывается величина махового момента GD2
в системе МКГС. Зная величину GD2 в кгс-м2, можно определить соответству-
ющую величину момента инерции J в системе СИ с помощью соотношения
J — GD^!^, кг-м2.
Из уравнения движения (1-6) следует, что в переходных процессах момент,
развиваемый двигателем, должен отличаться от момента статической нагрузки
на величину динамического момента
М — т jE
J dt а °’
где е — ускорение вала двигателей, 1/са.
Если движущий момент двигателя М больше тормозного момента нагрузки,
то при ю >0 Л7дИН >0; dto/dt >0 и имеет место переходный процесс
2 Заказ 1127
17
увеличения скорости, например пуск привода. Если ждия 0, то при
« > 0 daddt < 0 и имеет место процесс уменьшения скорости, например
торможение. Все переменные величины, входящие в уравнение движения,
следует рассматривать как алгебраические, полагая при « > 0 движущий
момент двигателя и тормозной момент нагрузки положительными, а при
< 0 — отрицательными. Соответственно тормозной момент двигателя и дви-
жущий момент нагрузки при « > 0 отрицательны, а при « <0 — положительны.
Правильный выбор знаков в уравнении движения облегчается рассмотрением ме-
ханических характеристик двигателя в четырех квадрантах (например, рис. 1-8).
При М = const и Мс = const dtaldt =
ускоренное (или равномерно замедленное)
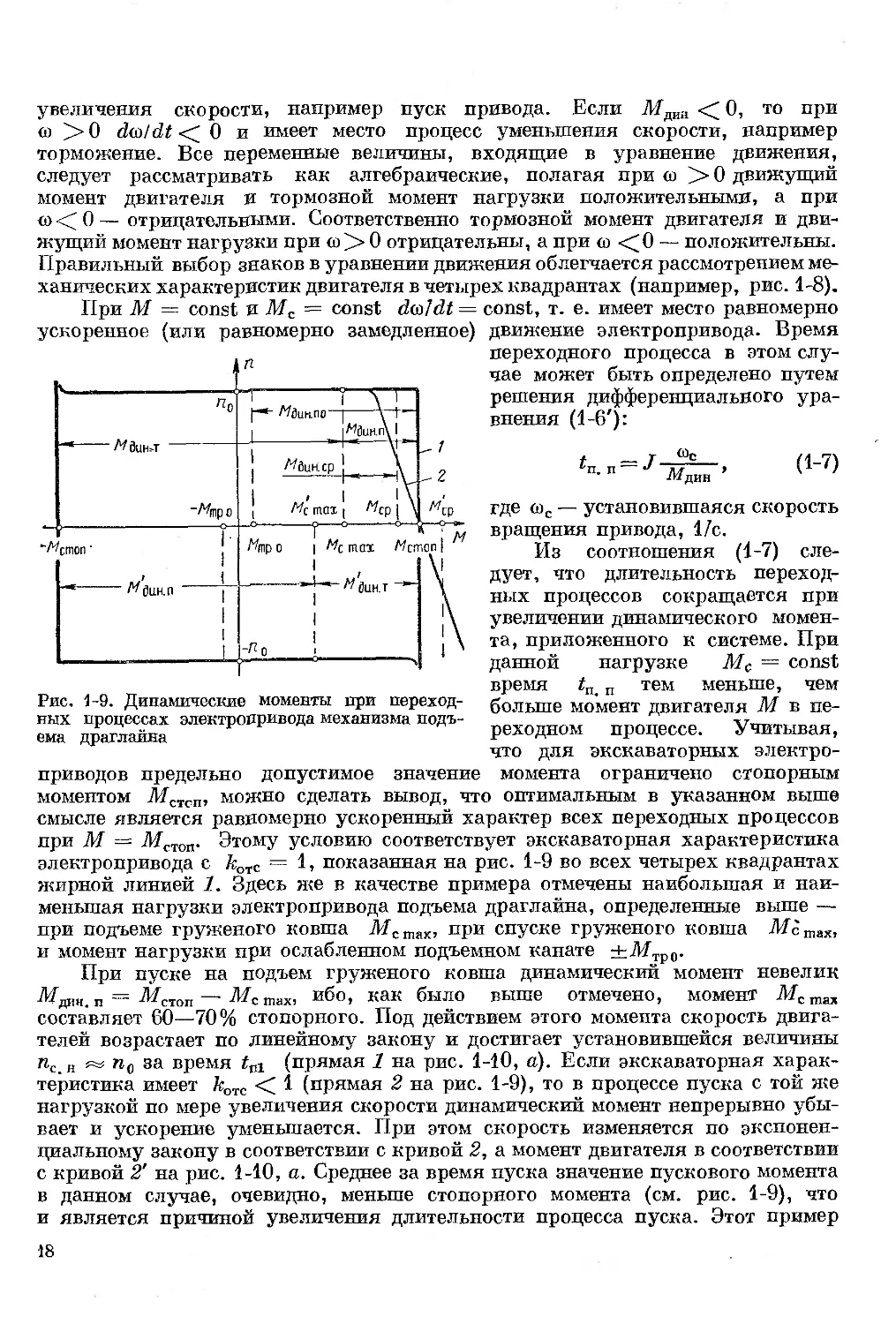
Рис. 1-9. Динамические моменты при переход-
ных процессах электропривода механизма подъ-
ема драглайна
const, т. е. имеет место равномерно
движение электропривода. Время
переходного процесса в этом слу-
чае может быть определено путем
решения дифференциального ура-
внения (1-6'):
= (1-7)
А* дин
где сос — установившаяся скорость
вращения привода, 17с.
Из соотношения (1-7) сле-
дует, что длительность переход-
ных процессов сокращается при
увеличении динамического момен-
та, приложенного к системе. При
данной нагрузке Мс = const
время £п п тем меньше, чем
больше момент двигателя М в пе-
реходном процессе. Учитывая,
что для экскаваторных электро-
приводов предельно допустимое значение момента ограничено стопорным
моментом 7ИСТГП, можно сделать вывод, что оптимальным в указанном выше
смысле является равномерно ускоренный характер всех переходных процессов
при М = Мстоп. Этому условию соответствует экскаваторная характеристика
электропривода с &отС — 1, показанная на рис. 1-9 во всех четырех квадрантах
жирной линией 1. Здесь же в качестве примера отмечены наибольшая и наи-
меньшая нагрузки электропривода подъема драглайна, определенные выше —
при подъеме груженого ковша Mcmax, при спуске груженого ковша 7Истах,
и момент нагрузки при ослабленном подъемном канате ±7Итр0.
При пуске на подъем груженого ковша динамический момент невелик
Мдин. п = 717СТОП — Мс тах, ибо, как было выше отмечено, момент 7Истах
составляет 60—70% стопорного. Под действием этого момента скорость двига-
телей возрастает по линейному закону и достигает установившейся величины
пс н п0 за время tvl (прямая 1 на рис. 1-10, а). Если экскаваторная харак-
теристика имеет fcOTC < 1 (прямая 2 на рис. 1-9), то в процессе пуска с той же
нагрузкой по мере увеличения скорости динамический момент непрерывно убы-
вает и ускорение уменьшается. При этом скорость изменяется по экспонен-
циальному закону в соответствии с кривой 2, а момент двигателя в соответствии
с кривой 2' на рис. 1-10, а. Среднее за время пуска значение пускового момента
в данном случае, очевидно, меньше стопорного момента (см. рис. 1-9), что
и является причиной увеличения длительности процесса пуска. Этот пример
18
наглядно подтверждает, что для получения минимальной длительности пере-
ходных процессов необходима экскаваторная характеристика с /соТС = 1.
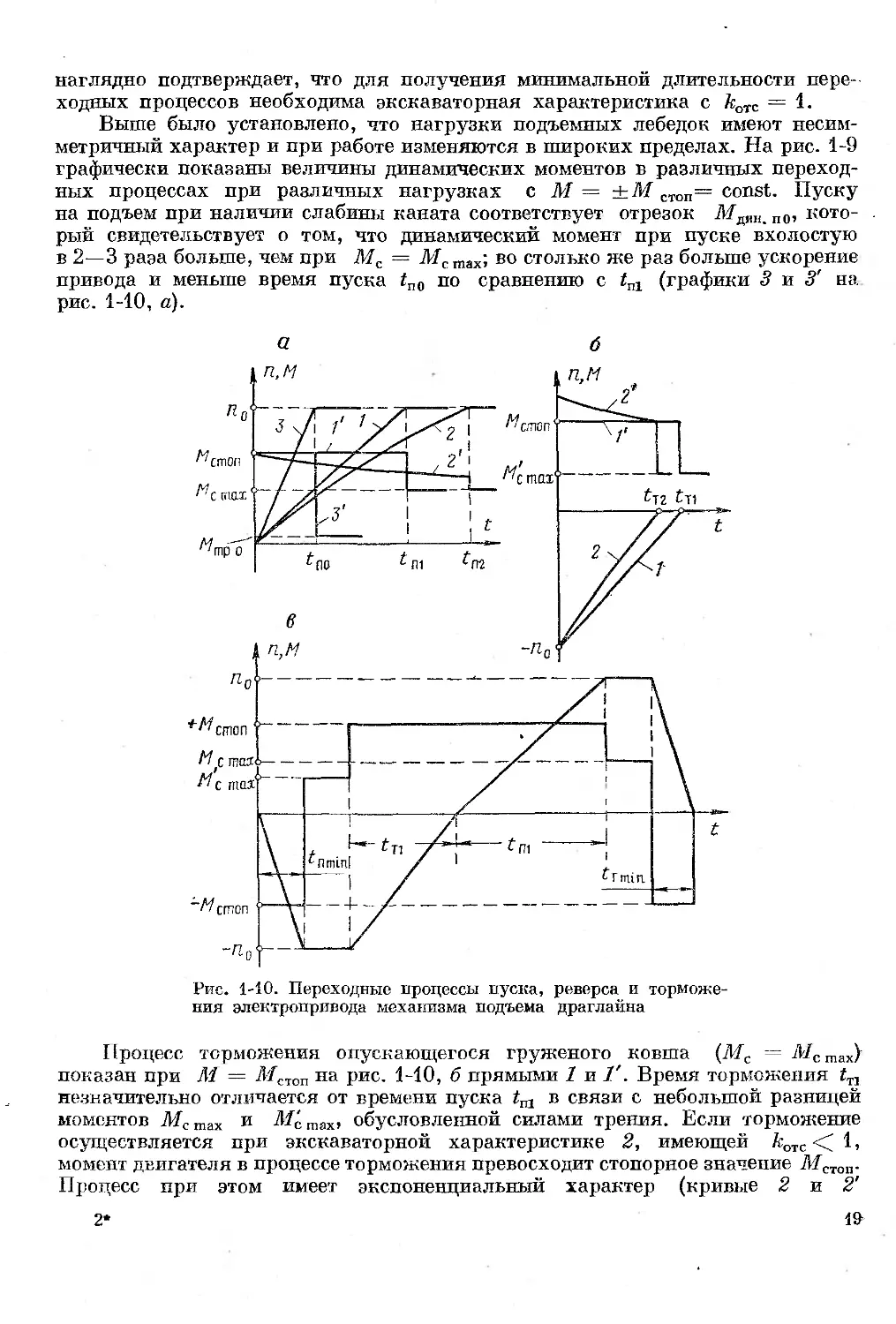
Выше было установлено, что нагрузки подъемных лебедок имеют несим-
метричный характер и при работе изменяются в широких пределах. На рис. 1-9
графически показаны величины динамических моментов в различных переход-
ных процессах при различных нагрузках с М — ±М стоп= const. Пуску
на подъем при наличии слабины каната соответствует отрезок 7Илин п0, кото-
рый свидетельствует о том, что динамический момент при пуске вхолостую
в 2—3 раза больше, чем при Мс = Afcmax; во столько же раз больше ускорение
привода и меньше время пуска tn0 по сравнению с £П1 (графики 3 и 3' на
рис. 1-10, а).
Рис. 1-10. Переходные процессы пуска, реверса и торможе-
ния электропривода механизма подъема драглайна
Процесс торможения опускающегося груженого ковша (7ИС = Мс тах)
показан при М — Л/стоп на рис. 1-10, б прямыми 1 и Г. Время торможения tT1
незначительно отличается от времени пуска £П1 в связи с небольшой разницей
моментов 7Истах и Aff'niax! обусловленной силами трения. Если торможение
осуществляется при экскаваторной характеристике 2, имеющей /сотс < 1,
момент двигателя в процессе торможения превосходит стопорное значение 7ИСТОП.
Процесс при этом имеет экспоненциальный характер (кривые 2 и 2'
2* 1&
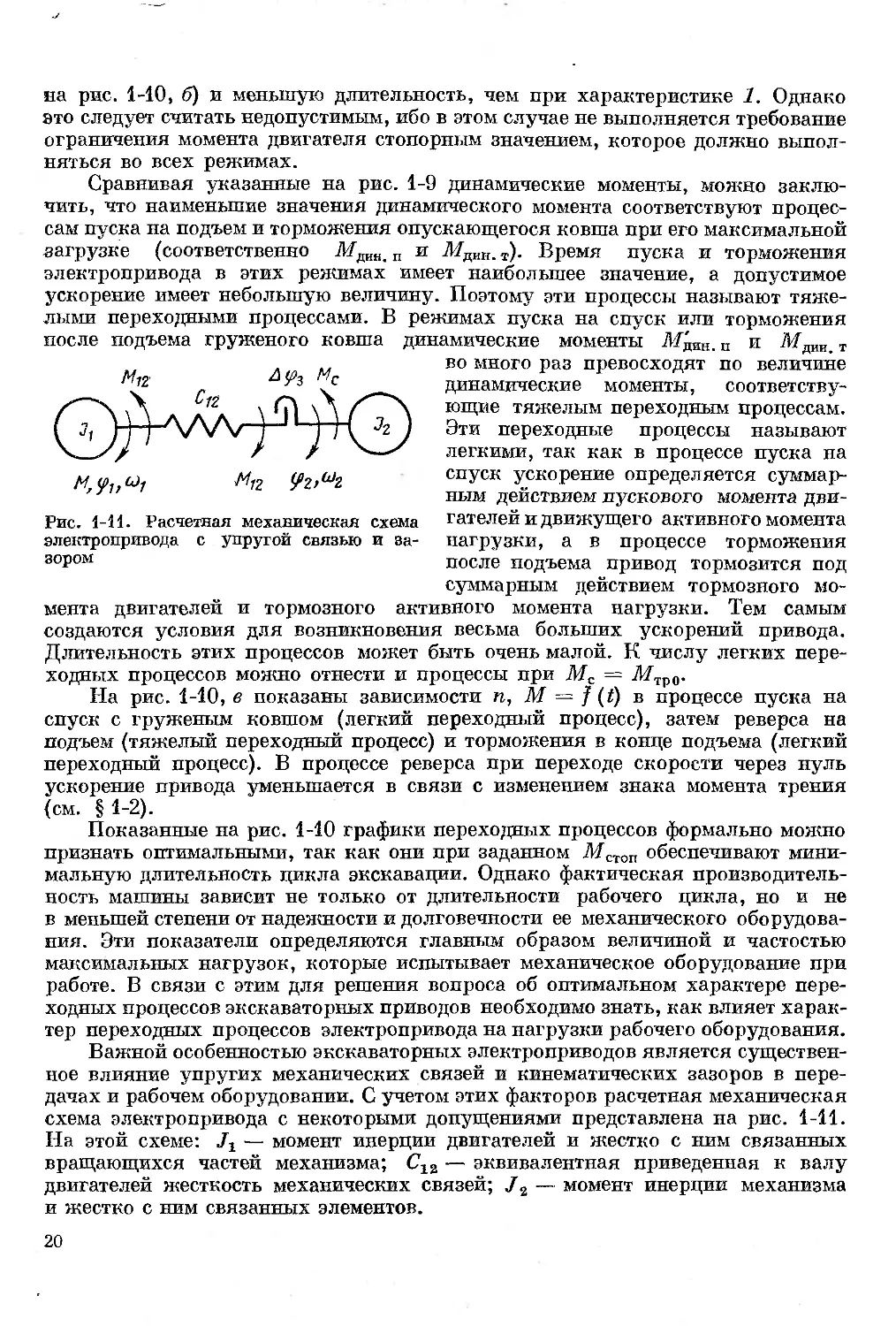
Ml2 Л(/>3 МС
^2
Рис. 1-11. Расчетная механическая схема
электропривода с упругой связью и за-
зором
на рис. 1-10, б) и меньшую длительность, чем при характеристике 1. Однако
это следует считать недопустимым, ибо в этом случае не выполняется требование
ограничения момента двигателя стопорным значением, которое должно выпол-
няться во всех режимах.
Сравнивая указанные на рис. 1-9 динамические моменты, можно заклю-
чить, что наименьшие значения динамического момента соответствуют процес-
сам пуска на подъем и торможения опускающегося ковша при его максимальной
загрузке (соответственно М„„„ п и Л/дин. т). Время пуска и торможения
электропривода в этих режимах имеет наибольшее значение, а допустимое
ускорение имеет небольшую величину. Поэтому эти процессы называют тяже-
лыми переходными процессами. В режимах пуска на спуск или торможения
после подъема груженого ковша динамические моменты 7ИдИИ п и т
во много раз превосходят по величине
динамические моменты, соответству-
ющие тяжелым переходным процессам.
Эти переходные процессы называют
легкими, так как в процессе пуска на
спуск ускорение определяется суммар-
ным действием пускового момента дви-
гателей и движущего активного момента
нагрузки, а в процессе торможения
после подъема привод тормозится под
суммарным действием тормозного мо-
мента двигателей и тормозного активного момента нагрузки. Тем самым
создаются условия для возникновения весьма больших ускорений привода.
Длительность этих процессов может быть очень малой. К числу легких пере-
ходных процессов можно отнести и процессы при 7ИС = Л/тр0.
На рис. 1-10, в показаны зависимости п, М = J (t) в процессе пуска на
спуск с груженым ковшом (легкий переходный процесс), затем реверса на
подъем (тяжелый переходный процесс) и торможения в конце подъема (легкий
переходный процесс). В процессе реверса при переходе скорости через нуль
ускорение привода уменьшается в связи с изменением знака момента трения
(см. §1-2).
Показанные на рис. 1-10 графики переходных процессов формально можно
признать оптимальными, так как они при заданном 7ИСТ0П обеспечивают мини-
мальную длительность цикла экскавации. Однако фактическая производитель-
ность машины зависит не только от длительности рабочего цикла, но и не
в меньшей степени от надежности и долговечности ее механического оборудова-
ния. Эти показатели определяются главным образом величиной и частостью
максимальных нагрузок, которые испытывает механическое оборудование при
работе. В связи с этим для решения вопроса об оптимальном характере пере-
ходных процессов экскаваторных приводов необходимо знать, как влияет харак-
тер переходных процессов электропривода на нагрузки рабочего оборудования.
Важной особенностью экскаваторных электроприводов является существен-
ное влияние упругих механических связей и кинематических зазоров в пере-
дачах и рабочем оборудовании. С учетом этих факторов расчетная механическая
схема электропривода с некоторыми допущениями представлена на рис. 1-11.
На этой схеме: — момент инерции двигателей и жестко с ним связанных
вращающихся частей механизма; С12 — эквивалентная приведенная к валу
двигателей жесткость механических связей; J2 — момент инерции механизма
и жестко с ним связанных элементов.
20
В зависимости от того, какой процесс рассматривается, параметры схемы
на рис. 1-11 могут иметь различное значение и соответствовать различным
элементам электропривода и механизма. Рассмотрим вначале, как влияет
на переходные процессы электропривода подъемной лебедки упругость стрелы
и подъемного каната. Для этого надо принять, что в схеме на рис. 1-11 —
момент инерции двигателей, вращающихся частей редуктора и барабана; С12 —-
приведенная к валу двигателей эквивалентная жесткость стрелы и подъемного
каната; J 2 — приведенный к валу двигателя момент инерции массы ковша
с грунтом. Зазор Аср3 принимаем равным нулю. При этом движение системы
характеризуется следующими дифференциальными уравнениями (потерями
в механизме и демпфирующими факторами пренебрегаем):
М-М12 = Л-^-;
М12-Мс = /2-^Ц
(1-8)
где 7И13 = С12 (<рг — <р2) — приведенный к валу двигателей момент нагрузки
упругого элемента (каната); <рх — угловое перемещение вала двигателя; <р2 —
угловое, приведенное к валу двигателей, перемещение ковша; Мс = FD6l2ip —
приведенный к валу двигателя момент от статического натяжения каната,
Н -м.
Если решить систему уравнений (1-8) относительно упругого момента ТИ12,
можно получить одно уравнение движения второго порядка, которое после
преобразований при М = Мстоп = const может быть представлено в виде:
-^•^2- + АД2 = 72еСр + Мс, (1-9)
12
где еср = (АГстоп — Mc)/(7i + J2) — среднее ускорение привода; Q12 =
.= ]/гС12 (Jx + Jz)?JiJz — частота свободных колебаний двухмассовой упру-
гой системы.
Характеристическое уравнение системы
р2 + й?2 = 0 (1-10)
имеет два чисто мнимых корня ръ 2 = ± ;Q12, что свидетельствует о том, что
при принятых допущениях механическая часть рассматриваемого электро-
привода представляет собой идеальное колебательное звено без затухания.
Решение системы (1-8) для случая пуска под действием приложенного
скачком момента двигателя М — 7ИСТОП = const при начальных условиях
(0) = 0; со 2 (0) = 0; Т1/12 (0) = Мс имеет следующий вид:
со1 = еср« + (т — l)-j2-sin H12t; (1-11)
М12 = J2ecp(1 —cosfi12t) + AZc. (1-12)
Если бы механические связи были абсолютно жесткими (С12 — ©о), то
колебания масс в переходном процессе не возникали бы и скорость двигателя,
как выше было установлено, изменялась по линейному закону coj = ecpt,
а нагрузка каната имела величину М12ср = J2ecp + Мс.
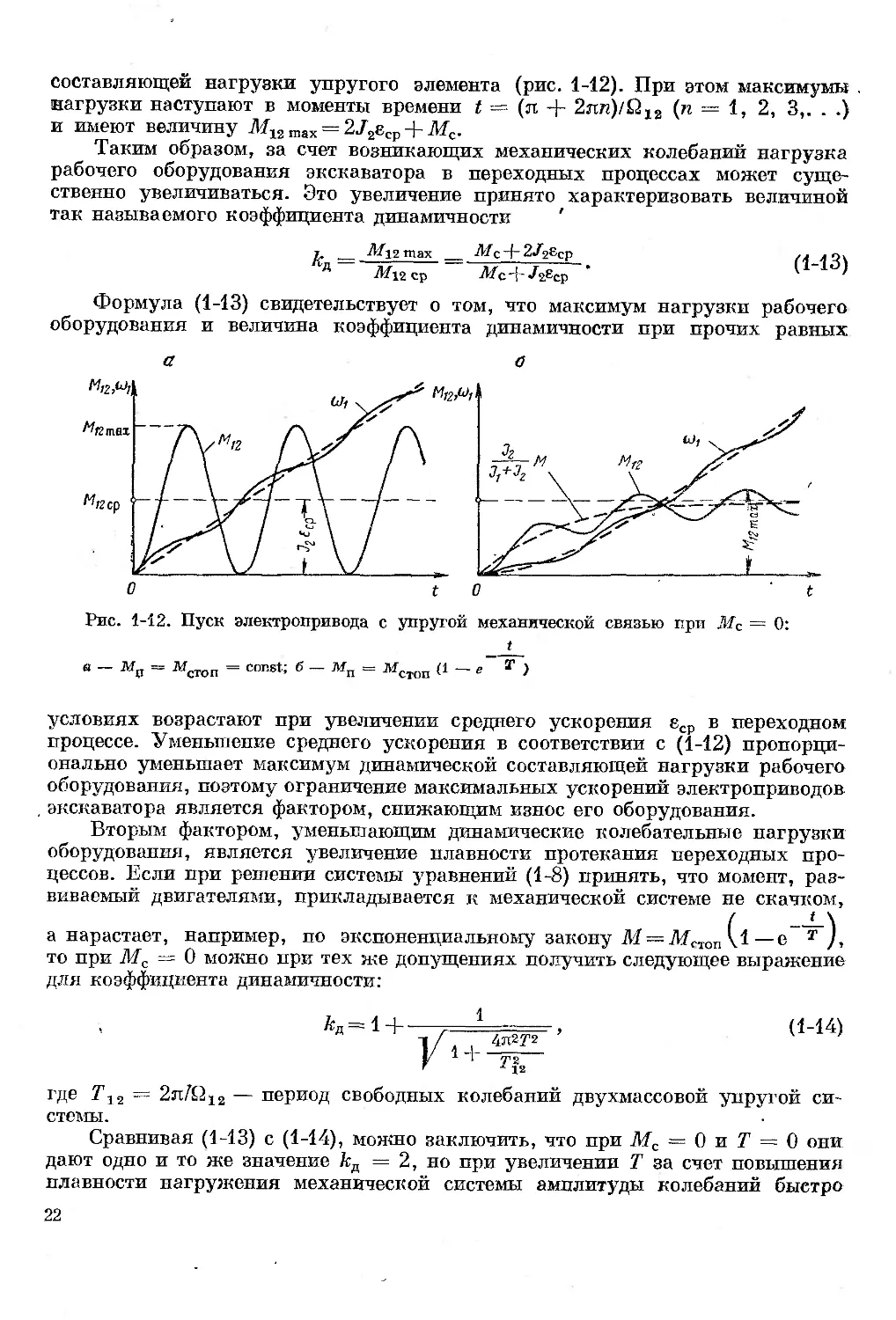
При наличии упругой связи (С12 #= ©°) при внезапном приложении мо-
мента в системе возникают теоретически незатухающие колебания с частотой
П12, которые в соответствии с (1-12) вызывают появление колебательной
21
составляющей нагрузки упругого элемента (рис. 1-12). При этом максимумы .
нагрузки наступают в моменты времени t = (л + 2лл)/Й1а (п — 1, 2, 3,. . .)
и имеют величину М12 тах = 2 ./2еср + Мс.
Таким образом, за счет возникающих механических колебаний нагрузка
рабочего оборудования экскаватора в переходных процессах может суще-
ственно увеличиваться. Это увеличение принято характеризовать величиной
так называемого коэффициента динамичности '
I. ._ max ____ Л/с !-2/2всР ,q.
д Л/12ср Мс+/2еСр •
Формула (1-13) свидетельствует о том, что максимум нагрузки рабочего
оборудования и величина коэффициента динамичности при прочих равных.
Рис. 1-12. Пуск электропривода с упругой механической связью при Мс = 0:
t
е _ Мр = мстоп = const.; б — Мп = Мстоп (1 — е ? )
условиях возрастают при увеличении среднего ускорения еср в переходном:
процессе. Уменьшение среднего ускорения в соответствии с (1-12) пропорци-
онально уменьшает максимум динамической составляющей нагрузки рабочего
оборудования, поэтому ограничение максимальных ускорений электроприводов
экскаватора является фактором, снижающим износ его оборудования.
Вторым фактором, уменьшающим динамические колебательные нагрузки
оборудования, является увеличение плавности протекания переходных про-
цессов. Если при решении системы уравнений (1-8) принять, что момент, раз-
виваемый двигателями, прикладывается к механической системе не скачком,
а нарастает, например, по экспоненциальному закону М — Мпоп (1—е т ),
то при Мс = 0 можно при тех же допущениях получить следующее выражение
для коэффициента динамичности:
7-л —1 -+
4П2Т2
Т2
* 12
(1-14)
где Т12 = 2n7Q12 — период свободных колебаний двухмассовой упругой си-
стемы.
Сравнивая (1-13) с (1-14), можно заключить, что при Мс = 0 и Т = 0 они
дают одно и то же значение /гд — 2, но при увеличении Т за счет повышения
плавности нагружения механической системы амплитуды колебаний быстро
22
снижаются и соответственно уменьшаются значения коэффициента динамич-
ности. Степень снижения зависит от соотношения времени нарастания момента
двигателей от нуля до стопорного значения Т\ и периода свободных колеба-
ний Т12. Для рассматриваемого случая нарастания момента по экспоненте
можно принять Т г ЗТ, при этом формула (1-14) может быть представлена
так:
1 +
____1____
1 / т?
У1+4’5<
(1-15)
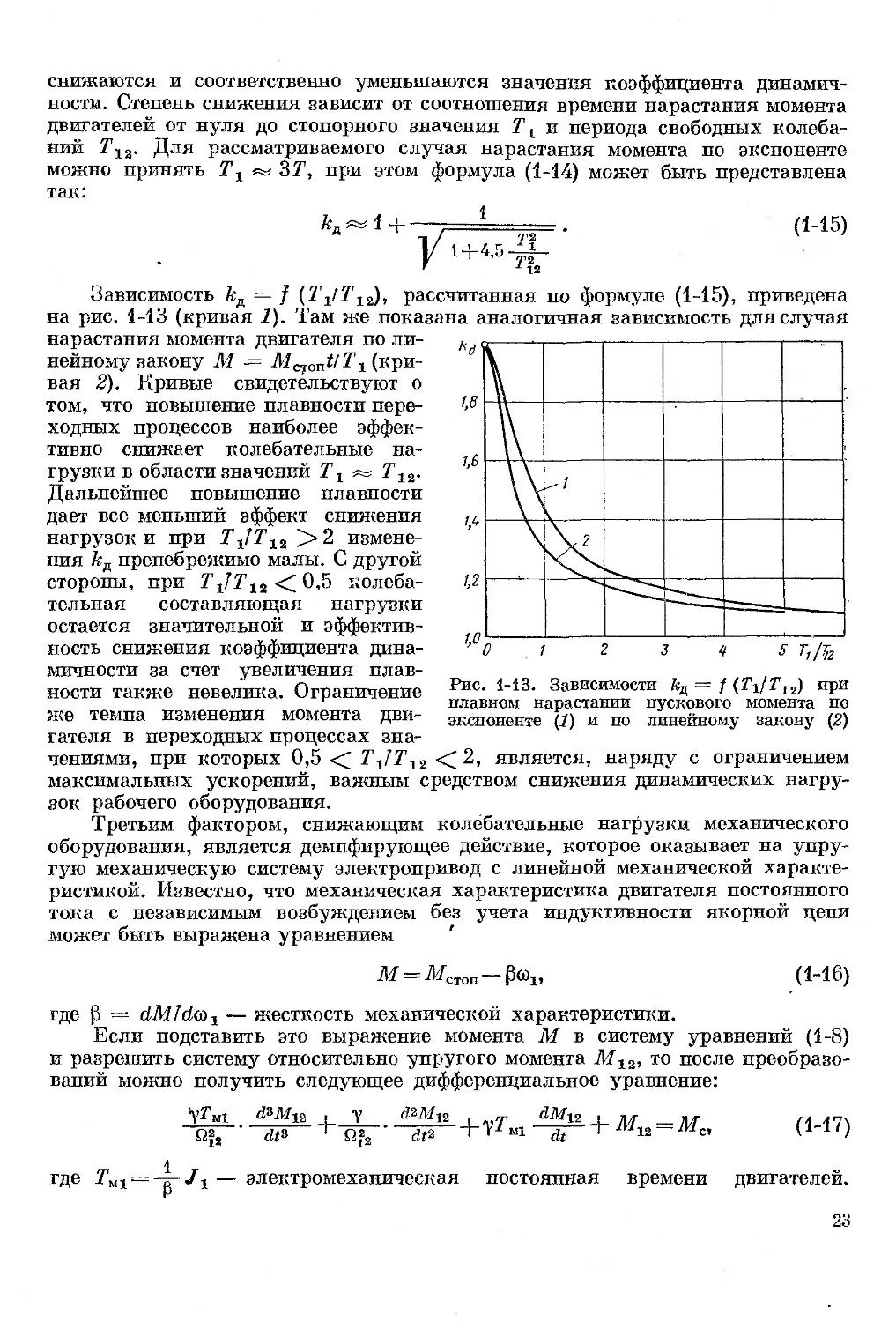
Зависимость kR = J рассчитанная по формуле (1-15), приведена
на рис. 1-13 (кривая 1). Там же показана аналогичная зависимость для случая
Рис. 1-13. Зависимости кя = / (Т\!Т12) при
плавном нарастании пускового момента по
экспоненте (I) и по линейному закону (2)
<Г 2, является, наряду с ограничением
нарастания момента двигателя по ли-
нейному закону М = (кри-
вая 2). Кривые свидетельствуют о
том, что повышение плавности пере-
ходных процессов наиболее эффек-
тивно снижает колебательные на-
грузки в области значений Т\ Т12.
Дальнейшее повышение плавности
дает все меньший эффект снижения
нагрузок и при TJT12 >2 измене-
ния кя пренебрежимо малы. С другой
стороны, при TJT12 < 0,5 колеба-
тельная составляющая нагрузки
остается значительной и эффектив-
ность снижения коэффициента дина-
мичности за счет увеличения плав-
ности также невелика. Ограничение
же темпа изменения момента дви-
гателя в переходных процессах зна-
чениями, при которых 0,5 < 1\1Т12
максимальных ускорений, важным средством снижения динамических нагру-
зок рабочего оборудования.
Третьим фактором, снижающим колебательные нагрузки механического
оборудования, является демпфирующее действие, которое оказывает на упру-
гую механическую систему электропривод с линейной механической характе-
ристикой. Известно, что механическая характеристика двигателя постоянного
тока с независимым возбуждением без учета индуктивности якорной цепи
может быть выражена уравнением '
— 4/СТОп Р®и
(1-16)
где р = dMJdta х — жесткость механической характеристики.
Если подставить это выражение момента М в систему уравнений (1-8)
и разрешить систему относительно упругого момента ТИ12, то после преобразо-
ваний можно получить следующее дифференциальное уравнение:
УТм! </3Л/12 I V С?2Л/12 , dMl2 | ДТ ____ дт
Q2, ‘ *3 ’ 02 • dfi "Г У1 Ml d "Г -^12
1*
где Тм1 = -р- J! — электромеханическая постоянная времени двигателей.
(1-17)
23
о
Следовательно, при этом характеристическое уравнение системы (1-8)
принимает вид:
V Ра + ~^-Р2 + уТы1Р 4-1 = 0. (1-18}
Сравнивая (1-18) с (1-10), можно заключить, что учет зависимости момента
двигателя от скорости увеличивает порядок характеристического уравнения
и делает это уравнение полным. Если воспользоваться критерием Гурвица,
можно получить следующее условие устойчивости:
V-Jg(V-1)>0. (1-19)
Неравенство (1-19) удовлетворяется при любых конечных значениях 7М1 >
>0 и у >1. Это значит, что все корни характеристического уравнения си-
стемы имеют отрицательную действительную часть и все переходные процессы
имеют затухающий характер. Так как исходная система (1-8) не учитывает
сил вязкого трения в механизме, условие (1-19) свидетельствует о том, что
демпфирующий эффект определяется зависимостью (1-16) момента двигателей
от скорости, которая подобна зависимости от скорости момента сил вязкого
трения.
Анализ демпфирующей способности электропривода показывает, что она
зависит от жесткости механической характеристики р и соотношения инер-
ционных масс механизма у. При данном у и данной частоте свободных колебаний
системы й12 зависимость демпфирующего действия от жесткости механической
характеристики имеет явно выраженный максимум, причем оптимальные
значения жесткости Р увеличиваются при возрастании частоты Q12. Демпфи-
рующий эффект возрастает при увеличении инерционных масс механизма, и при
у > 10 подбором жесткости механической характеристики теоретически может
быть получено критическое демпфирование, когда все корни характеристи-
ческого уравнения имеют действительную отрицательную величину, а все
переходные процессы .имеют апериодический характер и свободными колеба-
ниями в механическом оборудовании не сопровождаются.
Однако практически такое демпфирование не реализуется по ряду причин,
из которых важнейшей является наличие индуктивности якорной цепи, которая
при у )> 5 ослабляет демпфирующее действие электропривода тем в большей
степени, чем выше частота свободных колебаний £212.
Второй причиной, затрудняющей использование максимальной демпфиру-
ющей способности, является возможность несовпадения оптимальной жесткости
механической характеристики с жесткостью, требуемой по условиям техноло-
гии. Наконец, в замкнутой системе регулируемого электропривода на демпфи-
рующий эффект оказывают влияние различные обратные связи. Так как демп-
фирующая способность электропривода благоприятно влияет на нагрузки
механического оборудования, при наладке следует стремиться к ее макси-
мально возможному использованию. Соответствующие рекомендации даются
в последующем изложении.
Приведенный краткий анализ влияния динамических свойств электро-
привода на нагрузки механического оборудования позволяет уточнить пред-
ставления об оптимальном характере переходных процессов экскаваторных
электроприводов. Для получения максимальной производительности экскава-
тора необходима, как выше было отмечено, не только минимальная длитель-
ность переходных процессов его основных электроприводов, но и ограничение
24
показанный на рис. 1-14, а. Поскольку в ряде практических случаев формиро-
вание трапецеидальной диаграммы момента (тока якоря) вызывает затруднения,
представляет особый интерес график переходного процесса с изменениями
момента по экспоненте, приведенный на рис. 1-14, б. Экспоненциальный харак-
тер нарастания тока во многих случаях обеспечивается естественными динами-
ческими свойствами системы (см. гл. 3), поэтому его реализация проста, а в отно-
шении динамических нагрузок графики на рис. 1-14, а и б эквивалентных
На рис. 1-14, в показаны оптимальные переходные процессы при различных
нагрузках на валу, изменяющихся в пределах от 7Истах до Mcmin. Примени-
тельно к рассматриваемому электроприводу подъема экскаватора-драглайна,
как было установлено в § 1-2, 7Исгаах соответствует пуску на подъем с груже-
ным ковшом, a Afcmin = 7Истах> т- е- соответствует пуску в направлении
«Спуск» при тех же условиях. На рис. 1-14, в с целью большей наглядности
кривые, соответствующие пуску на спуск, построены условно для положитель-
ного направления скорости.
При уменьшении нагрузки от 7Wcmax до 7Итр0 (см. рис. 1-9) ускорение
привода на участке равномерно ускоренного движения непрерывно возрастает
от едоп Д° ем, так как максимальный момент при этом поддерживается постоян-
ным 7Итах = 7ИСТ0П. Дальнейшее уменьшение нагрузки (пуск на спуск с на-
грузкой от 7Итро до Afcmlri = М’с тах) привело бы к дальнейшему возрастанию
ускорений и к недопустимому увеличению нагрузок. Поэтому при пуске на
спуск максимальное ускорение ограничивается величиной етах. Для этого
по мере уменьшения нагрузки соответственно снижается максимальное значе-
ние пускового момента до М = М„ min при Мс — Мс mln. В этих пределах
изменения нагрузки кривая скорости должна формироваться неизменной, как
это показано на рис. 1-14, в. Необходимо заметить, что указанное ограничение
ускорений для экскаваторных электроприводов является фактором, повыша-
ющим удобство управления. Полное время реакции оператора около 1 с, по-
этому время пуска до основной скорости не должно быть меньше этой вели-
чины.
Приведенный анализ и сформулированные требования к переходным про-
цессам являются общими для всех экскаваторных электроприводов. Однако
необходимо учитывать, что условия работы и параметры различных электро-
приводов могут существенно отличаться, в том числе и принимать такие значе-
ния, при которых приходится отступать от тех или иных показателей опти-
мального переходного процесса, показанного на рис. 1-14, а или 1-14, б. Так,
например, для подъемных и тяговых лебедок период свободных колебаний
ковша 7’12 = 14-Зс, а требуемое время пуска лежит в пределах t„ и =
= 1,5 4- 4 с. Очевидно, при этих условиях выбрать темп нарастания момента
(тока) из условия Т А Т12 практически невозможно, ибо такой темп измене-
ния момента привел бы к недопустимому снижению маневренности приводов.
В качестве компромисса в этом случае время нарастания и спадания тока может
быть принято в пределах 0,4—0,6 с, что в сочетании с демпфирующим действием
электропривода и ограничением максимальных ускорений обеспечивает удо-
влетворительную плавность и ограничение колебательных нагрузок.
Большим своеобразием отличаются переходные процессы механизмов
поворота экскаваторов, приведенные инерционные массы которых во много раз
превышают момент инерции двигателей и зависят от положения ковша.
Допустим, момент статического сопротивления этого механизма соста-
вляет 20% от 7ИСТ0П. Этот момент имеет реактивный характер и при М = Л/Стоп=
= const в процессе пуска уменьшает ускорение механизма, а в процессе тормо-
26
жения — увеличивает. За счет этого ускорение при торможении ет больше,
чем при пуске еп,
Ет___Мстоп -[- Д/с 1 ~|~ 0,2 « е
Sn Л/стоп—"А/с 1 — 0,2 ’
Если принятое ускорение еп обеспечивает в наиболее тяжелом случае
ограничение динамической нагрузки стрелы допустимым значением, то при
торможении в тех же условиях динамические нагрузки на стрелу, обусловлен-
ные ускорениями масс стрелы и ковша, возрастут в 1,5 раза, что неже-
лательно.
С другой стороны, сравнивая торможения того же механизма при загружен-
ном ковше, поднятом к голове стрелы, с торможением при нахождении ковша
у пяты экскаватора на минимальном вылете можно видеть, что в последнем
случае за счет уменьшения суммарного момента инерции привода примерно
вдвое можно осуществить торможение примерно в два раза быстрее и тем самым
существенно повысить производительность механизма, переходные процессы
которого существенно влияют на длительность цикла экскавации. В этом слу-
чае динамические нагрузки стрелы возрастут незначительно, так как основную
долю их составляют нагрузки, обусловленные инерцией ковша при максималь-
ном вылете, когда он находится у головы стрелы. Аналогично влияние ветровой
нагрузки, крена и т. п.
Таким образом, для механизмов поворота оптимальным является посто-
янство пускового момента при уменьшении приведенного момента инерции
и внешних нагрузок и поддержание постоянства ускорения при изменениях
сил трения в механизме.
На характер переходных процессов электропривода поворота драглайна
оказывает значительное влияние гибкая подвеска ковша, вследствие которой
ковш в переходных процессах раскачивается относительно головы стрелы
подобно маятнику. Для рассмотрения влияния раскачивания ковша можно
использовать полученные выше результаты, так как расчетная схема, при-
веденная на рис. 1-11, справедлива при определенных допущениях и в этом
случае. Для этой цели в схеме на рис. 1-11 необходимо принять: Jг — при-
веденный момент инерции двигателей, редукторов, поворотной платформы
и стрелы, связи между которыми принимаются абсолютно жесткими; С12 —
приведенная к валу двигателей жесткость связи между головой стрелы и ков-
шом, которая приближенно принимается линейной; J2 — момент инерции
ковша относительно оси вращения поворотной платформы, приведенный к валу
двигателей; А<р3 — зазор, принимаемый равным нулю.
При этих условиях движение электропривода поворота описывается систе-
мой уравнений (1-8) и справедливы приведенные выше результаты решения
этой системы (1-11), (1-12), (1-13) и (1-15). При пуске электропривода поворота
с ковшом у головы стрелы при М = 7ИСТОП = const зависимости ТИ12 и 04 =
= } (t) имеют вид, показанный на рис. 1-12, а. Момент ТИ12 характеризует
при этом усилие, воздействующее на голову стрелы, которое изменяется с пе-
риодом колебаний ковша, составляющего в этом случае величину Т’12 = 3 ~
4- 4 с. Вследствие этого, ускорение двигателей также колеблется с той же
частотой, вызывая неравномерность разгона поворотной платформы, хорошо
видную в кривой со, = ] (t) на рис. 1-12, а. Из-за раскачивания ковша макси-
мальное^'ускорение двигателей в 1,5—2 раза превосходит среднее ускорение,
указываемое в паспорте механизма.
27
Следует заметить, что для рассмотренного выше пуска электропривода
подъема драглайна колебания кривой 04 = f (t) проявляются в значительно
меньшей степени, чем при пуске электропривода поворота с ковшом у головы
стрелы. Это объясняется различным соотношением моментов инерции и J2:
для механизма подъема у = 1,1 4- 1,3, а для рассматриваемого процесса меха-
низма поворота у = 1,7 4- 2,5. Формула (1-11) свидетельствует о том, что
колебания скорости со, при малых у, близких к 1, невелики.
При увеличении длины нити подвеса ковша период колебаний увеличи-
вается. Если при этом уменьшается и вылет ковша относительно оси вращения
платформы, то влияние раскачивания ковша постепенно ослабляется. При
нахождении ковша у пяты стрелы это влияние практически неощутимо. Как
выше было отмечено, этому случаю соответствуют наименьшие величины J2
и соответственно суммарного момента инерции электропривода поворота.
Приведенный выше анализ не учитывал наличия кинематических зазоров
в передачах, люфтов в рабочем оборудовании и слабины канатов. Известно,
что все зубчатые передачи для нормальной работы должны иметь определенные
зазоры в зацеплениях. Результирующая приведенная к валу двигателя вели-
чина зазора возрастает с увеличением передаточного отношения редуктора
и модуля зацепления и с уменьшением его точности изготовления. Наиболее
значительные зазоры характерны для валопроводов механизма поворота; здесь
главную роль играют зазоры в зацеплении ведущей шестерни с зубчатым вен-
цом, которые в процессе эксплуатации существенно возрастают вследствие
износа.
В процессе работы электроприводов подъемных лебедок может нарушаться
связь между ковшом и барабаном вследствие образования слабины канатов.
Слабина подъемного каната образуется либо вследствие недосмотра машиниста,
либо в процессе черпания грунта механизмом тяги по крутой траектории.
Переходные процессы выбора зазоров в передачах и выбора слабины кана-
тов в принципе вполне аналогичны, поэтому достаточно ограничиться рассмо-
трением процессов выбора зазоров в редукторе однодвигательного механизма
поворота. Для этого воспользуемся расчетной схемой, приведенной
на рис. 1-11, приняв, что J х — момент инерции двигателя, соединительной
муфты и редуктора; С12 — приведенная к валу двигателя эквивалентная же-
сткость передач; А<р3 — зазор в зацеплении с венцом, приведенный к валу
двигателя; J2 — приведенный к валу двигателя момент инерции поворотной
платформы.
Для упрощения пренебрежем потерями на трение и будем полагать, что
в исходном положении обе массы неподвижны, к массе J\ скачком приклады-
вается движущий момент М = Мстоп = const, а к массе J2 — тормозной реак-
тивный момент нагрузки Мс. В период выбора зазора А<р3 механическая связь
между массами и J 2 отсутствует и под действием момента М двигателя инер-
ционные массы движутся равномерно ускоренно
Метопу (1_20)
•'1
За время выбора зазора /0 двигатель успевает разогнаться до некоторой
скорости со1нач, величина которой при равномерноускоренном движении опре-
деляется соотношением:
®1 нач — 1^2е0 Д<ра.
(1-21)
28
Так как инерционные массы механизма J2 при этом неподвижны, процесс
выбора зазора оканчивается упругим ударом, при котором запасенная во вра-
щающихся со скоростью <в1нач массах J\ кинетическая энергия частично рас-
сеивается в виде тепла, а в основной части переходит в энергию упругих де-
формаций, вызывая дополнительные динамические нагрузки передач. Если
начало отсчета времени t совместить с моментом окончания выбора зазоров
и не учитывать факторов, вызывающих затухание колебаний, движение элек-
тропривода после выбора зазора может быть представлено, как и во всех пре-
дыдущих случаях, системой уравнений (1-8).
Решение уравнения (1-9) при начальных условиях t = 0; Af12 (0) = 0;
-^^-(0) = С12©1пач имеет вид:
ЛД2 = ТИ12 ср + с^&ч- sin -М12 ср cos fi12f, (1-22)
где -Л1\2ср — Jа^ср Мс-
За счет возникающих в результате удара механических колебаний макси-
мальная нагрузка передач возрастает по сравнению с нагрузкой передач 7И13ср,
которая имела бы место при жесткой связи масс и отсутствии зазоров. В соот-
ветствии с (1-22) коэффициент динамичности, характеризующий увеличение
нагрузки за счет удара при выборе зазоров Л112тах по отношению к средней
нагрузке передач, определяется соотношением
f1-23)
Соотношение (1-23) свидетельствует о том, что возникающие при ударе
упругие механические колебания увеличивают нагрузки передач в значитель-
ной степени. При слабом демпфировании величина коэффициента динамич-
ности kR при со1нач 0 превышает 2. Коэффициент динамичности увеличи-
вается при возрастании начальной скорости <о1нач тем в большей степени, чем
выше жесткость передач С12.
Ограничение ударов при выборе зазоров в передачах электроприводов
поворота представляет собой одну из наиболее сложных задач, решаемых
в процессе наладки электроприводов экскаваторов. Из формулы (1-23) следует,
что при данных параметрах электропривода главным средством повышения
плавности выбора зазоров является ограничение начальной скорости двигате-
лей <м1нач, которую они имеют в конце выбора зазоров. Дополнительный ана-
лиз показывает, что к числу факторов, снижающих величину коэффициента
динамичности при выборе зазоров, относится демпфирующее действие, которое
оказывает электропривод с линейной механической характеристикой. Однако
его влияние значительно меньше, чем влияние начальной скорости двигателей.
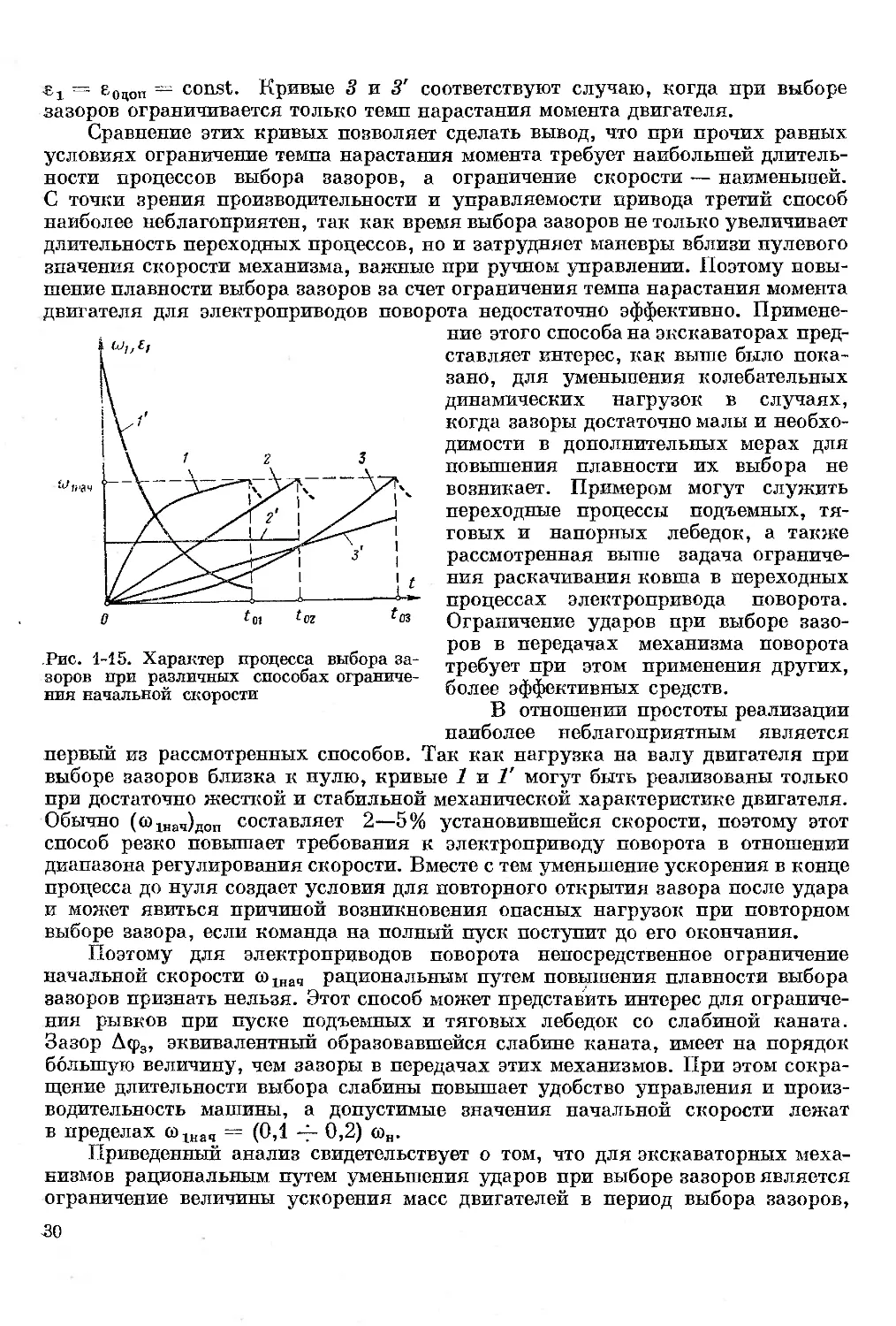
Ограничение начальной скорости <о1нач может быть при прочих равных
условиях достигнуто при различных законах движения в период выбора зазо-
ров, которые иллюстрируются зависимостями, показанными на рис. 1-15.
Кривые 1 и Г соответствуют случаю, когда ограничивается непосред-
ственно скорость вала двигателя с помощью пуска на предварительную ступень
регулирования скорости, обеспечивающей при разомкнутой кинематической
цепи установившуюся скорость двигателя со х уст= со 1нач. Кривые 2 и 2Г соот-
ветствуют случаю, когда ограничение начальной скорости обеспечивается
ограничением начального ускорения вала двигателя допустимой величиной
29
= еоцоп = const. Кривые 3 и 3 соответствуют случаю, когда при выборе
зазоров ограничивается только темп нарастания момента двигателя.
Сравнение этих кривых позволяет сделать вывод, что при прочих равных
условиях ограничение темпа нарастания момента требует наибольшей длитель-
ности процессов выбора зазоров, а ограничение скорости — наименьшей.
С точки зрения производительности и управляемости привода третий способ
наиболее неблагоприятен, так как время выбора зазоров не только увеличивает
длительность переходных процессов, но и затрудняет маневры вблизи нулевого
значения скорости механизма, важные при ручном управлении. Поэтому повы-
шение плавности выбора зазоров за счет ограничения темпа нарастания момента
двигателя для электроприводов поворота недостаточно эффективно. Примене-
Рис. 1-15. Характер процесса выбора за-
зоров при различных способах ограниче-
ния начальной скорости
ние этого способа на экскаваторах пред-
ставляет интерес, как выше было пока-
зано, для уменьшения колебательных
динамических нагрузок в случаях,
когда зазоры достаточно малы и необхо-
димости в дополнительных мерах для
повышения плавности их выбора не
возникает. Примером могут служить
переходные процессы подъемных, тя-
говых и напорных лебедок, а также
рассмотренная выше задача ограниче-
ния раскачивания ковша в переходных
процессах электропривода поворота.
Ограничение ударов при выборе зазо-
ров в передачах механизма поворота
требует при этом применения других,
более эффективных средств.
В отношении простоты реализации
наиболее неблагоприятным является
первый из рассмотренных способов. Так как нагрузка на валу двигателя при
выборе зазоров близка к нулю, кривые 1 и Т могут быть реализованы только
при достаточно жесткой и стабильной механической характеристике двигателя.
Обычно (®1нач)доп составляет 2—5% установившейся скорости, поэтому этот
способ резко повышает требования к электроприводу поворота в отношении
диапазона регулирования скорости. Вместе с тем уменьшение ускорения в конце
процесса до нуля создает условия для повторного открытия зазора после удара
и может явиться причиной возникновения опасных нагрузок при повторном
выборе зазора, если команда на полный пуск поступит до его окончания.
Поэтому для электроприводов поворота непосредственное ограничение
начальной скорости со1нач рациональным путем повышения плавности выбора
зазоров признать нельзя. Этот способ может представить интерес для ограниче-
ния рывков при пуске подъемных и тяговых лебедок со слабиной каната.
Зазор Дфз, эквивалентный образовавшейся слабине каната, имеет на порядок
большую величину, чем зазоры в передачах этих механизмов. При этом сокра-
щение длительности выбора слабины повышает удобство управления и произ-
водительность машины, а допустимые значения начальной скорости лежат
в пределах со1нач = (0,1 4- 0,2) сон.
Приведенный анализ свидетельствует о том, что для экскаваторных меха-
низмов рациональным путем уменьшения ударов при выборе зазоров является
ограничение величины ускорения масс двигателей в период выбора зазоров,
-30
т. е. яри разомкнутой кинематической цепи (кривые 2 и рис. 1-15). Допу-
стимое начальное ускорение при известной желательной величине начальной
скорости в момент удара со1нач может быть определено из формулы (1-21)
„ __ Ю1 нач
Ьодоп— 2Д<р3 •
Рис. 1-16. Осциллограмма переходных
процессов пуска и торможения электро-
привода подъема экскаватора ЭШ-15/90
Выше было установлено, что для всех экскаваторных электроприводов
необходимо ограничение максимальных ускорений е в^. Если допустимое
по условиям выбора зазоров ускорение е0доп егаах, то достаточная плавность
выбора зазоров обеспечивается без применения дополнительных средств за счет
выполнения сформулированных выше общих требований к динамике экскава-
торных электроприводов. Такие условия
имеют место, как выше указывалось,
для электроприводов различных лебе-
док, а также для электроприводов по-
ворота карьерных экскаваторов — ло-
пат (ЭКГ-3,2, ЭКГ-4,6, ЭКГ-8). Для
электроприводов поворота вскрышных
экскаваторов — лопат (ЭВГ-6, ЭВГ-15,
ЭВГ-35/65) и экскаваторов-драглайнов
(ЭШ-10/60, ЭШ-10/70, ЭШ-1579ОАи т. п.)
в большинстве случаев е0доп < етах;
при этих условиях задача получения
требуемой плавности выбора зазоров
требует самостоятельного решения и может потребовать введения в схему спе-
циального узла выбора зазоров (см. гл. 5).
Необходимо иметь в виду, что при е0дов =С етах допустимый момент (ток
якоря) двигателя поворота при выборе зазоров очень мал. Его величину, если
пренебречь небольшими механическими потерями холостого хода двигателя
и редуктора, можно определить по формуле
I
доп J1&0 доп = ~ Jyfio ДОП-
(1-24)
Для электроприводов поворота у = 10 4- 25, поэтому при е0дОП = етах
момент 7И0доп составляет 10—4% стопорного, а при е0доп< етах — имеет
соответственно меньшую величину.
В заключение необходимо подчеркнуть, что приведенные на рис. 1-14
графики оптимальных переходных процессов следует считать идеальными
образцовыми графиками, к которым реальные переходные процессы должны
лишь приближаться в достаточной степени.
На рис. 1-16 представлена осциллограмма переходных процессов электро-
привода подъема при перемещении груженого ковша по вертикали, полученная
при наладке экскаватора ЭШ-15/90.
На начальном участке осциллограммы скорость двигателей подъема близка
к нулю, ток якоря равен току статической нагрузки, что соответствует режиму
электрического удержания ковша. Затем осуществлен пуск на подъем ковша,
который имеет равноускоренный характер и протекает плавно благодаря
ограниченному темпу изменения тока, особенно в конце процесса при выходе
на установившуюся скорость. В процессе пуска система ограничивает ток,
поддерживая его постоянным и равным 0,95ZCTOn. Выше было показано, что
момент и ток при подъеме груженого ковша больше, чем при его удержании
за счет момента потерь в механизме; это хорошо видно на осциллограмме.
31
.Далее следует процесс реверса с подъема на спуск, который относится к числу
легких переходных процессов. В этом режиме система ограничивает макси-
мальное ускорение привода, которое примерно вдвое превышает ускорение
в тяжелом процессе пуска, а ток составляет только 20% от ZCTOn. В конце
осциллограммы записан тяжелый процесс торможения установкой командо-
контроллера в нулевое положение. Уставка системы токоограничения в этом
положении командоконтроллера снижена, система поддерживает постоянным
меньшее, чем при пуске, значение тока, и соответственно время торможения
увеличивается. Наблюдающиеся на осциллограмме небольшие нерегулярные
изменения тока на участках, где он должен быть постоянным, обусловлены
воздействием машиниста на механизм тяги, с помощью которого в процессе
подъема груженый ковш удерживается от опрокидывания и разгрузки. Сравни-
вая рис. 1-16 с рис. 1-14, можно убедиться, что в данном случае получено хоро-
шее приближение к оптимальному характеру переходных процессов.
§ 1-4. Стопорение экскаваторных приводов
стоп/ "'пт
резкого стопоре-
Рис. 1-17. Схемы процесса
-ния
Механизмы экскаваторов, непосредственно участвующие в процессе
черпания грунта, при работе испытывают систематические перегрузки, что
выше уже было отмечено при анализе статических нагрузок (см. рис. 1-4 и 1-6).
Нагрузка электропривода тяги в процессе черпания непрерывно возрастает
и при чрезмерном заглублении ковша в грунт может превысить стопорное
значение. Так как момент двигателя ограничен экскаваторной характеристикой,
превышение момента нагрузки над
моментом двигателя приводит к сни-
жению скорости двигателя. Если
при этом машинист, воздействуя на
механизм подъема, своевременно
уменьшает толщину стружки, на-
грузка на механизм тяги уменьшается
и снижение скорости тяги прекра-
тится. В противном случае электро-
привод, заторможенный нагрузкой,
превышающей стопорную, полностью
останавливается. Такой режим назы-
вают режимом копания до полного
стопорения.
Аналогичные режимы харак-
терны и для копающих механизмов
Механизм подъема этого экскаватора при черпании
экскаватора — лопаты.
испытывает систематические перегрузки, которые обычно устраняются маши-
нистом воздействием на напорный механизм, однако во многих случаях при-
водят к стопорению подъемного механизма.
Наиболее тяжелыми режимами работы копающих механизмов являются
режимы, которые будем называть резкими стопорениями. Такие режимы воз-
никают при внезапной встрече ковша с неодолимым препятствием — крупным
валуном или участком невзорванной скалы, не замеченным машинистом. Упро-
щенная схема такого процесса представлена на рис. 1-17, а. Ковш почти мгно-
венно останавливается, и кинетическая энергия, запасенная во вращающихся
массах двигателя Д, редуктора Р и барабана Б, в процессе стопорения пере-
ходит в потенциальную энергию упругих деформаций всех элементов схемы.
32
Наибольшей податливостью обладает подъемный канат ПК, который с учетом
податливости стрелы показан на рис. 1-17, а в виде пружины. Если принять,
что электропривод обладает идеальной экскаваторной характеристикой, в про-
цессе стопорения к системе прикладывается движущий момент М — М„оп =
= const. Для этого случая после приведения всех величин к валу двигателя,
схему, показанную на рис. 1-17, а можно представить в расчетном виде, показан-
ном на рис. 1-17, б. Движение такой системы описывается дифференциальным
уравнением движения второго порядка
1 d2<o
Q%~di2
со = О,
(1-25)
/ (t) при резком сто-
электропривода
Рис.
и М-
порении
1-18. Зависимости о — / (1)
12 = J
и
где Qo = — частота свободных колебаний одномассовой упругой
системы.
Решение уравнения (1-25) при ненулевых
начальных условиях со (0) = <оиач и (0) =
= 0 имеет следующий вид:
со = <оиач cos Qot. (1-26)
Зависимость упругого момента М12 от вре~
мени можно получить с помощью (1-26) по фор-
муле
t
М12 = С12 j со dt.
о
После преобразований решение относи-
тельно уцругого момента принимает вид:
М12 = <ТОГ! + sin ®ot- (1-27)
Зависимости, построенные с помощью
на рис. 1-18. Рассматривая их, можно видеть, что пропорциональный усилию
в канате момент М12 возрастает по мере снижения скорости, так как запасенная
в останавливающихся инерционных массах кинетическая энергия, освобожда-
ясь, переходит в потенциальную энергию упругого растяжения канатов, вант
и деформаций рабочего оборудования. Наличие избыточного запаса потен-
циальной энергии при <о = 0 является причиной, вызывающей разгон барабана *
и связанных с ним масс в противоположную сторону. Поэтому процесс сто-
порения имеет колебательный характер, причем при идеальной экскаваторной
характеристике теоретически колебания являются незатухающими. Практи-
чески, вследствие неучтенных потерь на трение, энергия упругих колебаний
и в этом случае постепенно рассеивается в виде тепла в трущихся элементах.
Полученные зависимости свидетельствуют о том, что при ограниченном
экскаваторной характеристикой моменте двигателя М Мстоп максимальные
нагрузки элементов привода в процессе стопорения увеличиваются за счет
динамической нагрузки и при неблагоприятных условиях могут достигать
опасных значений. Без учета затухания максимальное значение момента Л712
определяется из (1-27)
ТИ12 max ®нач у J]Cj2 .
(1-28)
33
3 заказ 1127
^Коэффициент динамичности при стопорении определяется соотношением
Т. __ Л/12 max _ л <Онач V JlCyi _ л ОначА^О (1-29^
® Л/стОП -/Истон -/Истон
Коэффициент динамичности характеризует перегрузки механической части
электропривода при резких стопорениях в сравнении с установившимся ре-
жимом стопорения. Из (1-29) следует, что перегрузки тем больше, чем больше
начальная скорость ®иач, момент инерции J\ и жесткость рабочего оборудова-
ния С12. При данной жесткости рабочего оборудования, заданных рабочей
скорости механизма и стопорном моменте электропривода единственным путем
уменьшения коэффициента динамичности является снижение момента инер-
ции J Так как для подъемных, тяговых и напорных механизмов главную
долю в суммарном моменте инерции составляет момент инерции двигателя
(? <С 2), то для получения благоприятных динамических свойств привода в ре-
жимах стопорения весьма важен правильный выбор числа приводных двига-
телей и их скорости вращения, т. е. выбор оптимального по условиям стопоре-
ния передаточного числа.
Очевидным критерием оптимальности в данном случае является допустимое
значение коэффициента динамичности кп_ доп [см. (1-29)]. При выборе его
величины необходимо учитывать важное отличие процессов механических
стопорений от рассмотренных выше режимов выбора зазоров в передачах, хотя
физика этих процессов практически одинакова. Колебательные составляющие
нагрузки передач при выборе зазоров увеличивают средние динамические
нагрузки бесполезно. Поэтому удары в передачах — полностью вредное явле-
ние, ускоряющее износ механизма и нарушающее плавность его работы. Целе-
сообразность уменьшения коэффициента динамичности в этих режимах до
значений, меньших'единицы, не вызывает сомнений.
Динамические нагрузки, обусловленные освобождающейся кинетической
энергией масс электропривода в процессе стопорения, увеличивают рабочее
усилие резания на зубьях ковша. За счет этих усилий даже при работе в тяже-
лых грунтах большинство начинающихся стопорений не вызывают полной
остановки привода, так как увеличенное за счет динамической составляющей
усилие резания оказывается достаточным для разрушения грунта. И только
в тех случаях, когда этого максимального рабочего усилия недостаточно для
преодоления препятствия, стопорение заканчивается полной остановкой
привода.
Следовательно, для механизмов, испытывающих при работе частые на-
грузки, превышающие стопорное значение, допустимое значение коэффициента
динамичности определяется максимальным рабочим усилием на зубьях ковша,
на которое рассчитана машина, и требуемым статическим стопорным усилием,
которое в принципе определяет минимальную необходимую перегрузочную
способность двигателей. Выбором оптимального передаточного отношения
и должно обеспечиваться получение такого коэффициента динамичности.
Эта задача решается на стадии проектирования электропривода, и при
наладке приходится иметь дело уже с определенными его параметрами, а сле-
довательно, и с конкретным максимальным коэффициентом динамичности.
Значения кд для наиболее тяжелых стопорений, определяемые с помощью
(1-29), для приводов подъема экскаваторов — лопат лежат в пределах 1,6—2,5,
причем большие значения соответствуют карьерным экскаваторам с укорочен-
ной массивной стрелой. Для электроприводов тяги драглайна кд = 2,0 4- 4.
34
В диапазоне kR = 2 -4 2,5 заключены значения коэффициентов динамичности
для канатных механизмов напора.
Особое место занимает электропривод реечного напора, для которого расчет
по формуле (1-28) дает значения максимальной нагрузки механизма, значи-
тельно превышающие нагрузку, разрушающую механизм. В соответствии
с (1-28) максимум нагрузки передач при заданной начальной скорости зависит
от жесткости связи ковша с двигателем: чем выше С12, тем больше динамическая
нагрузка. Жесткость реечного напора весьма высока, поэтому его стопорение,
если не принять специальных мер, даже при ограниченном моменте двигателя
М = Л/Стоп должно приводить к поломке. Этим объясняется тот факт, что
в кинематическую цепь механизма напора вводят муфту предельного момента
МПМ (см. рис. 1-17, а). При наличии муфты предельного момента, которая
настраивается на предельный момент, составляющий (1,1 4- 1,2) Л7Стоп , при
резких стопорениях муфта проскальзывает, нарушая жесткую связь между
двигателем и ковшом. При этом рукоять с ковшом останавливается почти мгно-
венно, а массы двигателя и редуктора останавливаются постепенно под дей-
ствием ограниченного муфтой тормозного момента. Расчет коэффициента дина-
мичности и в этом случае может быть произведен с помощью (1-29), однако
вместо момента инерции J г следует подставить во много раз меньшую величину
инерционных масс ведомой полумуфты и жестко связанных с ней элементов
рабочего оборудования.
Рассматривая указанные выше для различных механизмов значения /сц,
можно заметить, что коэффициенты динамичности особенно велики при резких
стопорениях механизма тяги драглайна, да и для других механизмов макси-
мальные нагрузки при стопорениях много выше стопорного момента. Такие /сц
оказываются приемлемыми на практике потому, что нагрузки, соответству-
ющие режимам копания, имеют случайный характер и вероятность резких
стопорений с полной рабочей скорости электропривода весьма мала. Резкие
стопорения возникают в процессе черпания, при этом привод предварительно
нагружен, работает на падающем участке характеристики, скорость его сни-
жена и является случайной величиной, лежащей в пределах <ор > <онач >0.
Сопротивление грунта также является случайной величиной в связи с его
неоднородностью, изменением толщины стружки машинистом при копании
и возможностью разрушения препятствия, вызвавшего стопорение, за счет
динамического повышения усилия на зубьях ковша.
На рис. 1-19, а приведена гистограмма максимальных нагрузок электро-
привода тяги экскаватора ЭШ-13/50, представляющая собой диаграмму часто-
стей различных уровней максимальной за цикл нагрузки тягового каната,
построенную по данным 100 цикловых осциллограмм. Для этого электропри-
вода коэффициент динамичности, рассчитанный по формуле (1-29) для случая
стопорения с полной рабочей скорости, имеет величину /сд = 2,9. Рассматривая
гистограмму на рис. 1-19, а, можно установить, что вероятность появления
в цикле экскавации значений кк >1,5 близка к нулю. Наиболее частыми
являются нагрузки в пределах /сд = 0,9 4- 1,3, которые и определяют износ
механического оборудования. В этих пределах динамические нагрузки при
данной перегрузочной способности двигателей повышают максимальное рабочее
усилие на зубьях ковша, играя, таким образом, положительную роль.
На рис. 1-19, б приведена аналогичная гистограмма максимальных нагру-
зок при работе механизма подъема экскаватора — лопаты ЭВГ-35765. Для
этого механизма расчетный коэффициент динамичности /сц = 2,2. Сравнивая
рис. 1-19, а и б, можно заключить, что, несмотря на совершенно различные
3*
35
условия работы и конструкцию машин, области наиболее вероятных значений
кл в том и другом случае практически совпадают.
Следовательно, расчетные значения /сд, определяемые по формуле (1-29),
износа рабочего оборудования машины не определяют. Для экскаватора —
лопаты эти нагрузки в процессе работы могут возникать, но вероятность их
возникновения невелика. Для механизма тяги драглайна, рассчитанного на
работу в более легких грунтах, реализовать резкое стопорение с полной ско-
= / (t) при стопорении механизма
подъема экскаватора ЭКГ-8
рости можно лишь преднамеренно. Поэтому
достаточно, чтобы предельные нагрузки не
достигали значений, превышающих допусти-
мые по прочности.
Как выше было отмечено, форма экска-
ваторной характеристики определяет наиболее
вероятные значения начальной скорости при
резких стопорениях, поэтому правильный выбор
коэффициента отсечки имеет важное практиче-
ское значение. Чем тяжелее режимы стопо-
рения, тем меньшие коэффициенты отсечки
необходимо устанавливать. Так, для электро-
приводов подъема и канатного напора лопаты
и тяги драглайна можно принимать котс =
= 0,6 4- 0,7 (кривая 1 на рис. 1-1), для рееч-
ного напора fcOTC = 0,5 4- 0,6 (там же, кривая 2).
Таким образом, требования, предъявляемые
к форме экскаваторной характеристики, исходя
из условий формирования оптимальных пере-
ходных процессов и ограничения нагрузок
при стопорениях, противоречивы. Для копа-
ющих механизмов /с0ТС следует выбирать
исходя из условий стопорения. Для механизма подъема драглайна целесооб-
разна характеристика с Лготс = 1, обеспечивающая минимум длительности
переходных процессов пуска и торможения (кривая 3 на рис. 1-1). Для элек-
троприводов поворота экскаваторов, учитывая реактивный характер их на-
грузки и необходимость ограничения ускорений, рациональной является
характеристика, имеющая котв > 1 (кривая 4 на рис. 1-1).
36
Приведенный выше анализ режимов стопорения основан на предположе-
нии, что момент двигателя в процессе снижения скорости изменяется в строгом
соотношении с его статической механической характеристикой, поэтому, в ча-
стности, принималось, что при идеальной экскаваторной характеристике в этом
режиме М = Л7СТОП = const. Это условие на практике чаще всего не выпол-
няется. В процессе стопорения на резкое увеличение нагрузки на валу двига-
тель реагирует соответствующим увеличением тока (момента). Ограничение-
тока стопорным значением обеспечивается действием системы автоматического
регулирования тока, которая практически всегда обладает электромагнитной
инерцией. Так как процессы стопорения протекают весьма быстро, действие
инерционной системы управления запаздывает, что может привести к значи-
тельным выбросам тока за стопорное значение. В качестве примера на рис. 1-20
приведены кривые пи = J (t), построенные по осциллограммам стопорений
электропривода подъема экскаватора ЭКГ-8 с большой (кривые 1) и умень-
шенной (кривые 2) инерционностью системы управления, которые подтвер-
ждают сказанное.
Всплески тока и соответственно момента электропривода, превышающие
стопорное значение, вызывают дополнительное увеличение нагрузки рабочего
оборудования при перегрузках и стопорениях. Поэтому ограничение пиков
тока в этих режимах значениями (1,1 4- 1,2) 1СТ0П является одной из наиболее
важных и сложных задач, решаемых в процессе наладки копающих механизмов
экскаваторов (см. § 4-5 и 7-4).
§ 1-5. Резонансные явления в электроприводах поворота
экскаваторов
Характерными особенностями электроприводов поворота экскава-
торов являются, во-первых, весьма большие приведенные к валу двигателя
инерционные массы поворотной платформы с оборудованием, стрелой и ковшом
на значительном вылете, во-вторых, боль-
шое передаточное число привода и, в-третьих,
наличие в кинематической цепи открытого
зубчатого зацепления ведущей шестерни
с неподвижным венцом, отличающегося невы-
сокой точностью изготовления, работающего
с консистентной смазкой, и поэтому подвер-
женного быстрому износу. Последние обстоя-
тельства определяют повышенный кинема-
тический зазор в валопроводах механизмов
поворота и повышенную кинематическую
погрешность их передач.
Реальная зубчатая передача всегда об-
ладает рядом погрешностей, обусловлен-
ных неточностями изготовления. В соот-
ветствии с ГОСТ 1643—56 «Передачи зуб-
чатые цилиндрические» можно указать следующие основные погрешности,
нарушающие плавность хода зубчатой цилиндрической передачи. При
однопрофильном зацеплении с точным колесом имеет место погрешность угла
поворота изготовленного зубчатого колеса, показанная в пределах одного
оборота на рис. 1-21. Максимальная суммарная погрешность называется кине-
матической погрешностью колеса; она обозначена на рис. 1-21 AFE и опреде-
Рис. 1-21. Кинематическая погреш-
ность зубчатого зацепления
37
ляется всеми неточностями изготовления данного колеса. Составляющая
кинематической погрешности, период которой определяется углом поворота
колеса на один оборот, возникает вследствие биения венца (эксцентриситета)
й накопленной ошибки окружного шага. Накладывающаяся на нее циклическая
погрешность AF обусловлена разностью соседних окружных шагов и, главное,
отклонениями профиля зубьев от идеального. В последнем случае частота
циклической погрешности AF совпадает с частотой перехода зацепления с зуба
на зуб. Вследствие указанных погрешностей передаточное число зацепления не
остается постоянным, а испытывает при работе малые периодические изменения
относительно среднего значения, вызывающие соответствующие пульсации
скоростей и ускорений, связанных зацеплением валов. Изменения скоростей
связанных передачей масс электропривода свидетельствуют о действии в си-
стеме внутренних возмущающих сил, которые по природе являются динами-
ческими, ибо проявляются только при ее движении.
Кинематическая погрешность, вызванная отклонением профиля зубьев
от идеального (погрешность обката), быстро увеличивается при возрастании
модуля зацепления и уменьшении точности его изготовления. По мере износа
поверхности зубьев погрешность обката может увеличиваться в несколько раз.
Именно эти условия характерны, как выше было отмечено, для зацепления
ведущей шестерни с неподвижным зубчатым венцом, которое и является основ-
ным источником периодических внутренних возмущений в электроприводах
поворота. Передачи других механизмов работают в масле, имеют меньшие
модули и более высокую точность изготовления, поэтому их кинематические
погрешности обычно не оказывают существенного влияния на нагрузки элек-
тропривода.
Передачи механизма поворота обладают конечной жесткостью, поэтому
для анализа влияния внутренних возмущений он может быть упрощенно пред-
ставлен двухмассовой расчетной механической схемой, приведенной на рис. 1-11.
При этом нужно принять, что — момент инерции двигателя и жестко с ним
связанных вращающихся масс редуктора, С12 — приведенная эквивалентная
жесткость валопровода, J г — приведенный момент инерции поворотной плат-
формы, Аср3 = 0. Выше было получено следующее выражение для частоты сво-
бодных колебаний такой системы
где Qo = ]/" С12/ J1 — частота свободных колебаний системы при Js = со
(жесткая заделка вала механизма).
Так как для механизмов поворота характерны большие значения у, й12
£20 и определяется главным образом моментом инерции двигателя.
При работе механизма поворота на систему воздействует внутреннее воз-
мущение, обусловленное погрешностью передач, частота которого определяется
частотой перехода венцового зацепления с зуба на зуб. Эта частота пропорци-
ональна скорости вращения платформы
О гч ГГ ___ п
“г —®ПЛ2В— 3() ZB — -уд—ZB,
где ®пл> ппл — скорость вращения платформы; п — скорость вращения двига-
теля; zB — число зубьев венцовой шестерни.
При определенной скорости двигателя п = п^3 частота возмущений ста-
новится равной частоте свободных колебаний системы Q12. Наступает резо-
38
нанс, при котором амплитуды колебаний теоретически возрастают непрерывно,
стремясь к бесконечности, а практически в связи с наличием демпфирующих
факторов ограничиваются конечными, но при слабом демпфировании большими
значениями, при которых нагрузки передач возрастают до опасных величин.
Для большинства отечественных экскаваторов резонансная частота возмущений
соответствует вращению электропривода со скоростью, составляющей 40—
60% номинальной, для экскаватора ЭШ-15790А она выше на 10—15%, чем
частота возмущений при установившейся рабочей скорости вращения двигате-
лей поворота.
Если резонансная частота меньше, чем частота установившихся возмуще-
ний, электропривод поворота проходит зону резонанса в каждом переходном
процессе пуска и торможения. Так как допустимые ускорения поворотной
платформы невелики, переходные процессы механизма поворота протекают
относительно медленно и за время прохождения резонансной зоны колебания
успевают возрасти до больших значений, существенно увеличивая максималь-
ные нагрузки передач, ускоряя их износ и вызывая вибрации и тряску поворот-
ной платформы и стрелы. Особенно неблагоприятные условия работы электро-
привода поворота складываются в тех случаях, когда демпфирование мало,
а возмущения велики. При этом амплитуда колебаний момента нагрузки пере-
дач М12 может превысить среднее значение, что приводит к размыканию зазора
в передачах. Колебания с зазорообразованиями расширяют зону резонанса
и вызывают особенно сильную тряску платформы.
При данной погрешности передач основным фактором, ограничивающим
резонансное усиление колебаний, является демпфирующая способность элек-
тропривода, рассмотренная в § 1-3. В однодвигательных электроприводах
поворота демпфирующий эффект, обусловленный линейной зависимостью мо-
мента двигателя постоянного тока от его скорости, при реальных параметрах
системы обычно достаточно высок, поэтому резонансное усиление возмущений
невелико и опасных проявлений резонанса не наблюдается.
Однако однодвигательный привод в настоящее время применяется лишь
на небольших машинах. Основной тенденцией экскаваторостроения является
использование многодвигательных электроприводов. Использование для при-
вода поворота многодвигательного электропривода позволяет при данном
допустимом ускорении уменьшить нагрузку валопроводов и за счет этого облег-
чить передачи, особенно зацепление ведущей шестерни с венцом. При увели-
чении числа валопроводов достигается более благоприятное распределение
усилий в опорно-поворотном устройстве. Чем большим моментом инерции
обладает механизм и чем выше его скорость вращения, тем больше рациональ-
ное число двигателей поворота. Эта тенденция хорошо видна в конструкциях
машин, выпускаемых в настоящее время: экскаваторы ЭКГ-8И, ЭП1-1О77ОА
имеют двухдвигательный, экскаваторы ЭП1-15/90А, ЭШ-25/100, ЭВГ-35/65 —
четырехдвигательный, экскаватор Э1П-80/100 — восьмидвигательный элек-
тропривод поворота.
Электромеханическая схема двухдвигательного электропривода поворота
представлена на рис. 1-22. Здесь Ji и J'i соответственно моменты инерции дви-
гателей и жестко с ними связанных элементов редукторов; С[2 и C'i2 — при-
веденные к валу двигателей эквивалентные жесткости валопроводов; Д<р31
и А<р32 — кинематические зазоры в каждом валопроводе; /2 — момент инерции
поворотной платформы со стрелой; С23 — приведенная эквивалентная жесткость
связи ковша со стрелой; J3 — момент инерции ковша относительно оси вра-
щения платформы, приведенный к валу двигателя. Якорные цепи двигателей
39
постоянного тока соединены последовательно и включены на регулируемое
напряжение U.
Необходимость последовательного соединения двигателей в многодвига-
тельных экскаваторных электроприводах диктуется условием равномерного
распределения нагрузки между валопроводами механизма. Известно, что при
параллельном соединении распределение нагрузки между жестко связанными
механизмом двигателями определяется их механическими характеристиками.
В силу неодинаковости параметров, различий в величине магнитных потоков
двигателей и других факторов механические характеристики двигателей всегда
отличаются друг от друга. Как следствие, нагрузки двигателей при параллель-
ном соединении обычно неодинаковы, причем различия возрастают с увели-
чением жесткости механических характеристик. При высокой жесткости меха-
Рис. 1-22. Электромеханическая схема
двухдвигательного электропривода пово-
рота
где Ф — результирующий магнитный
конструктивный коэффициент.
нических характеристик небольшие
различия в потоках двигателей могут
создавать условия, при которых один
из двигателей не только принимает на
себя всю нагрузку механизма, но и до-
полнительно подгружается вторым дви-
гателем, который при этом переходит
в генераторный режим работы.
Последовательное соединение обе-
спечивает работу многодвигательного
электропривода с примерно одинако-
выми моментами двигателей. Момент
двигателя постоянного тока опреде-
ляется соотношением
7И = ЛФ7Я, (1-30)
поток машины; 1Я — ток якоря; к —
При последовательном соединении якори двигателей принудительно обте-
каются одним током 1Я, следовательно различия в развиваемых моментах могут
быть вызваны лишь различиями потоков, которые в реальных условиях не
превосходят 5%. Однако, как показали исследования, в многодвигательных
электроприводах поворота наиболее опасные проявления резонанса, обусло-
вленного кинематической погрешностью, имеют место при последовательном
соединении двигателей.
Демпфирующее действие электропривода постоянного тока обусловлено
зависимостью тока от противо-э. д. с. двигателя ER.
троприводе
В однодвигательном элек-
г Дд ^7-~А:ФЮ1
Я Л'ях
поэтому колебания скорости двигателя вызывают колебания тока якоря
и энергия колебаний гасится в виде тепловых потерь в сопротивлениях якор-
ной цепи.
Для двухдвигательного электропривода с последовательным соединением,
если принять потоки двигателей одинаковыми,
/ __ _ и—кФы{—кФы” (1-31)
где ©1 и ©J — скорости вращения двигателей соответственно ДВ1 и ДВ2.
40
Анализируя (1-31), можно заключить, что в двухдвигательном электро-
приводе с последовательным соединением колебания тока зависят не только
от амплитуды колебаний скоростей двигателей, но и от их относительной фазы.
Если колебания скоростей оц и синфазны, то э. д. с. Ед и Ед в формуле (1-31)
в каждый момент времени складываются, вызывая совместным действием коле-
бания тока, аналогичные однодвигательному электроприводу. В этом случае
демпфирующий эффект в многодвигательном электроприводе реализуется
так же, как в однодвигательном. Если колебания скоростей оц и совершаются
в противофазе друг другу, то сумма э. д. с. в формуле (1-31) остается неизменной
и колебания скорости не вызывают колебаний тока. При этом демпфирующее
действие многодвигательного электропривода отсутствует полностью и склады-
ваются условия для наиболее опасных проявлений резонанса. При взаимной
фазе колебаний, лежащей в пределах 0—180°, колебания можно разложить
на синфазную и противофазную составляющие и убедиться, что с увеличением
угла сдвига демпфирующее действие электропривода непрерывно ослабляется.
Амплитуды колебаний валопроводов зависят от амплитуд внутренних
возмущений, обусловленных погрешностью зубчатых зацеплений. Из кон-
структивных соображений их можно принимать одинаковыми. Относительная
фаза колебаний определяется фазой возмущений, которая, в свою очередь,
зависит от относительной фазы зацепления зубьев ведущих шестерен с зубьями
венцовой шестерни. Очевидно, размещением редукторов на поворотной плат-
форме экскаватора в принципе можно обеспечить любую относительную фазу
зацеплений. На практике наиболее часто встречается расстановка редукторов,
при которой возмущения валопроводов являются примерно противофазными.
Именно в этих случаях наблюдаются наиболее неблагоприятные проявления
резонанса.
Необходимо заметить, что при противофазных колебаниях двигателей Д1
и Д2 (см. рис. 1-22) колебательные составляющие нагрузки валопроводов
уравновешиваются на зубчатом венце и на платформу не передаются. При
этом частота свободных колебаний валопроводов точно равна указанной выше
частоте колебаний одномассовой системы Q(l.
На рис. 1-23 представлена осциллограмма переходных процессов пуска
и торможения четырехдвигательного электропривода поворота экскаватора
ЭШ-15/90А, на которой записаны величины тока якоря гя, скорости второго
двигателя п2 и крутящих моментов во всех четырех валопроводах
Запись крутящих моментов производилась с помощью полупроводниковых
тензодатчиков, наклеенных на валах-шестернях механизма.
Резонансная скорость для электропривода поворота экскаватора
ЭШ-15/90А составляет Ир = 510 об/мин. К этой скорости близка установив-
шаяся скорость вращения двигателей в опыте нуст = 480 -4- 500 об/мин. Однако
резонанс начинается при пуске и заканчивается при торможении при скорости
около 300 об/мин, т. е. далеко от зоны резонанса. Это объясняется тем, что
значительные колебания нагрузки валопроводов приводят к систематическому
образованию зазоров, система становится нелинейной и ее резонансная область-
существенно расширяется в сторону скоростей, меньших резонансной, и зависит
от величины тока якоря.
Рассматривая осциллограмму, можно установить, что пары диагонально
размещенных на платформе двигателей (ЛЕ[2 — МДД', МЦ — A/j2) совершают
синфазные колебания, в то время как соседние (7И1й — МЦ; — А/(2)
колеблются в противофазе. Несмотря на значительные колебания скорости
двигателей, суммарная э. д. с. при колебаниях остается примерно постоянной,
41
Без бустеров
4 Я, A
’l2t0^MU>
70 c
Illi 4-Ш-
I I I I I I I I I I I I I I I 1 I I I I I fl I I I I I I I I I I I I I I I I I I I I I I I I I I I I I t |. JK-UI ...I I I I 1 J-J—L I
Pnc. 1-23. Осциллограммы переходных процессов электропривода поворота экскаватора ЭШ-15/90А
редукторов, при котором возмущения
Рис. 1-24. Схемы соединения силовых цепей
многодвигательного электропривода поворота
поэтому колебания тока с основной частотой отсутствуют. Наблюдающиеся
небольшие колебания с частотой, в два раза большей частоты колебаний вало-
проводов, обусловлены несинусоидальностью колебаний с зазорообразова-
ниями и демпфирующего действия на основные колебания оказать не могут.
Как следствие, резонансные колебания интенсивно развиваются и увели-
чивают максимальную нагрузку передач в три раза по сравнению со стопорной,
которая составляет 17 тс-м. Колебания с зазорообразованиями вызывают виб-
рацию платформы, тряску и подобные резонансные явления в металлокон-
струкциях, которые затрудняют нормальную эксплуатацию машины.
Главным средством борьбы с резонансными явлениями является обеспе-
чение условий для реализации демпфирующего действия электропривода либо
за счет соответствующего размещения
в валопроводах механизма синфазны,
либо за счет использования схем со-
единения силовых цепей электропри-
вода, позволяющих реализовать дем-
пфирующий эффект при противофаз-
ных колебаниях. Схемы силовых
цепей, отвечающие этим условиям,
представлены на рис. 1-24 для че-
тырехдвигательного электропривода.
На рис. 1-24, а приведена схема
параллельно-последовательного со-
единения двигателей. При этом ре-
дукторы должны быть расставлены
так, чтобы двигатели, якоря которых
соединены последовательно, испыты-
вали синфазные возмущения, а параллельно включенные якоря двигателей
должны колебаться в противофазе. Параллельно включенные цепи двигателей
образуют замкнутый контур, в котором могут циркулировать демп фирующие
токи, обусловленные противофазными колебаниями суммарных э. д. с. в каж-
дой параллельной ветви.
В схеме, приведенной на рис. 1-24, б, используется число неависимых
источников питания, равное числу пар соединенных последовательно двига-
телей, т. е. при четырех двигателях, показанных на рисунке, необходимо два
источника питания Uх и U2. Как и в схеме на рис. 1-24, а, здесь необходимо
обеспечивать синфазность возмущений для последовательно соединенных дви-
гателей. Относительная фазировка по группам может быть в принципе любой.
Схема индивидуального питания каждого двигателя от отдельного источ-
ника показана на рис. 1-24, в. Эта схема обеспечивает демпфирование колеба-
ний при любых возмущениях, в том числе и при выборе неодинаковых зазоров
в любом сочетании. Схема наиболее эффективна, но требует увеличенного
числа источников питания, поэтому ее рационально применять при исполь-
зовании в качестве источников тиристорных преобразователей.
На ряде экскаваторов типа ЭШ-15/90А для борьбы с резонансом исполь-
зована схема с бустерным двухмашинным агрегатом (рис. 1-24, г). Для реали-
зации этой схемы на экскаваторе устанавливается дополнительный агрегат
из двух механически жестко связанных машин постоянного тока Б1 и Б2,
якоря которых включены параллельно парам диагональных двигателей. Для
получения достаточного демпфирующего действия мощность машин Б1 и Б2
должна быть близка мощности двигателей привода. На рис. 1-24, г пунктиром
43
показаны контуры, в которых циркулируют демпфирующие токи при противо-
газных колебаниях пар двигателей. На всех вновь выпускаемых машинах
схема с бустерным агрегатом не применяется и постепенно заменяется на ста-
рых машинах схемой параллельно-последовательного соединения.
§ 1-6. Блок-схема экскаваторного электропривода
Приведенный в данной главе краткий анализ рабочих режимов
позволяет сформулировать основные требования, предъявляемые к главным
электроприводам экскаваторов. Основным требованием, предъявляемым к таким
электроприводам, является обеспечение максимальной производительности
машины при минимальных нагрузках ее электрического и механического обору-
дования. Для выполнения этого общего требования необходимо, чтобы система
электропривода обладала следующими свойствами:
1) электропривод должен обеспечивать надежное ограничение момента
допустимым стопорным значением во всех режимах работы. Для этого он дол-
жен обладать механической характеристикой зкскаваторной формы, заполнение
которой при проектировании и наладке можно было бы изменять в широких
пределах, в соответствии с условиями работы каждого механизма экскаватора;
2) формирование переходных процессов, имеющих минимальную длитель-
ность при ограничениях, наложенных на предельные значения момента, темпа
его изменения и ускорения, обеспечивающих высокую плавность пуска, реверса
и торможения и за счет этого — минимальные динамические нагрузки механи-
ческого оборудования экскаватора, должно осуществляться достаточно про-
стыми и надежными средствами;
3) схема соединения силовых цепей и динамические свойства системы упра-
вления электроприводом должны благоприятствовать реализации возможного
демпфирующего действия, которое оказывает электропривод с линейной механи-
ческой характеристикой на механические колебания в электромехани-
ческой системе;
4) электропривод должен обеспечивать экономичное регулирование ско-
рости в диапазоне (4 4- 6) : 1 и рекуперацию энергии, освобождающейся при
торможениях механизма поворота или при опускании ковша. Жесткость рабо-
чего участка механической характеристики должна обеспечивать получение
достаточно малой скорости спуска ковша при удержании его путем электри-
ческого торможения при установке командоконтроллера в нулевое положение.
Удовлетворить всем перечисленным требованиям может лишь система
электропривода, обладающая широкими регулировочными возможностями.
Поэтому для индивидуального электропривода основных механизмов одно-
ковшовых экскаваторов с емкостью ковша выше 2 м3 в настоящее время при-
меняются двигатели постоянного тока с независимым возбуждением, управля-
емые изменением напряжения U в цепи якоря (см. рис. 1-22). С этой целью
якорь двигателя подключается к индивидуальному источнику питания —
управляемому преобразователю (система УП—Д). В качестве управляемого
преобразователя может быть использован генератор постоянного тока (си-
стема Г — Д) или тиристорный преобразователь (система ТП — Д).
Для получения экскаваторной механической характеристики с требуемым
заполнением, регулирования скорости и удержания ковша, формирования
оптимальных переходных процессов необходимо регулировать подведенное
к двигателю напряжение U в широких пределах и изменять его знак в зависи-
44
мости от заданного режима и текущих значений подлежащих ограничению
величин: момента, темпа его изменения, ускорения, скорости двигателя и т. п.
Для формирования экскаваторной характеристики и получения заданного
качества переходных процессов экскаваторного привода по системе УП — Д
необходимо иметь замкнутую систему автоматического регулирования с опре-
деленным набором жестких и гибких обратных связей, в которой управление
осуществляется с помощью усилителей.
В обобщенном виде структура современного автоматизированного электро-
привода экскаватора может быть представлена блок-схемой, приведенной на
рис. 1-25. Здесь в прямой цепи воздей-
ствия последовательно включены уси-
литель У, управляемый преобразова-
тель УП и двигатель Д. Далее воздей-
ствие передается непосредственно
к механизму ИМ. Обратное воздей-
ствие, обусловленное наличием обрат-
ных связей в замкнутой системе регу-
лирования, представлено блоком регу-
лирования момента электропривода
РМ, блоком управления величиной
напряжения генератора и, следова-
тельно, скорости двигателя PH, блоком формирующих и стабилизирующих
обратных связей БФС.
Ограничение момента в экскаваторных электроприводах обеспечивается
ограничением тока якоря. Поэтому блок РМ в качестве основного элемента
содержит отрицательную обратную связь по току якоря и тот или иной нелиней-
ный элемент, обеспечивающий формирование экскаваторной характеристики.
Назначением блока PH является управление форсировками возбуждения
генератора в переходных процессах и контроль за величиной напряжения
генератора (скорости двигателя) в установившемся режиме. Его основным
элементом обычно является отрицательная обратная связь по напряжению
генератора. Наконец, блок БФС содержит жесткие и гибкие обратные связи,
обеспечивающие требуемую устойчивость системы регулирования и дополни-
тельно формирующие характер протекания переходных процессов.
Структура блок-схемы, представленной на рис. 1-25, характерна для
подавляющего большинства современных одноковшовых экскаваторов сред-
ней и большой производительности.
РМ
Рис. 1-25. "' Блок-схема экскаваторного
электропривода
ГЛАВА 2
ХАРАКТЕРИСТИКИ ОСНОВНЫХ ЭЛЕМЕНТОВ СИСТЕМЫ
ЭЛЕКТРОПРИВОДА
§ 2-1. Электрические машины постоянного тока
Машины постоянного тока — главные двигатели и питающие их
индивидуальные генераторы — составляют основу рассмотренной выше блок-
схемы экскаваторного электропривода. Их важнейшие физические особенности
можно установить с помощью упрощенной конструктивной схемы, приведенной
на рис. 2-1.
Рис. 2-1. Магнитное поле машины постоянного тока на холостом ходу (а) и под нагрузкой (6)
и схемы соединения якорных обмоток: простой петлевой (е) и волновой (г)
46
Холостой ход машины
Рассмотрение целесообразно начать с холостого хода машины,
полагая ее якорную цепь разомкнутой (рис. 2-1, а). Якорь Я с размещенной
на нем якорной обмоткой вращается со скоростью п в магнитном поле, создава-
емом обмоткой возбуждения ОБ главных полюсов машины ГП.
Величина магнитного потока Ф зависит от намагничивающей силы (н. с.)
обмотки возбуждения F = £вшв. Зависимость Ф = f (F) называется характе-
ристикой намагничивания машины (рис. 2-2). Из рассмотрения рисунка следует,
что зависимость потока от н. с. возбуждения является нелинейной и неодно-
значной. Нелинейность кривой обусловлена насыщением магнитной цепи
машины, причем номинальное значение
потока обычно выбирается на колене кри-
вой намагничивания для более полного
использования магнитопровода. Неодно-
значность вызывается явлением гистере-
зиса, вследствие которого изменения маг-
нитного потока зависят не только от из-
менения н. с. возбуждения, но и от пред-
шествующего магнитного состояния стали
магнитопровода. Кривая 1 па рис. 2-2
является так называемой кривой перво-
начального намагничивания, когда в пред-
шествующем режиме машина была пол-
ностью размагничена и остаточный поток
отсутствовал. При снятии возбуждения
после номинального режима работы при
F — 0 имеет место остаточный поток Фост;
для машин средней и большой мощности
его величина может составлять 3—5%
Рис. 2-2. Характеристика намагничи-
вания машины постоянного тока
номинального значения. На рис. 2-2 пока-
зана’полная петля гистерезиса, соответствующая циклу перемагничивания от
Фн до —Фн, и наоборот.
При вращении якоря в магнитном поле в его проводниках наводится пере-
менная э. д. с. На рис. 2-1, а направление э. д. с. в каждом проводнике якоря
отмечено крестиком или точкой. Из рисунка видно, что в данный момент вре-
мени во всех проводниках, расположенных выше поперечной оси машины
q — q', наводятся э. д. с. одного знака, а ниже этой оси — противоположного.
Поэтому если соединить все проводники последовательно, вывести все точки
соединения на коллектор (на рис. 2-1 не показан) и установить щетки на попе-
речной оси q — q , то на щетках возникает разность потенциалов, равная
суммарной э. д. с. Е, которая наводится в каждой из двух параллельных ветвей,
образующихся между щетками благодаря замкнутому контуру обмотки. Эта
разность потенциалов имеет постоянное направление, т. е. коллектор осуще-
ствляет выпрямление всех элементарных переменных э. д. с., наводимых в про-
водниках якоря.
Соединение проводников производится в последовательности, определя-
емой схемой обмотки якоря. Два основных типа схем обмоток машин постоян-
ного тока показаны на рис. 2-1, ей г. Простая петлевая обмотка (см. рис. 2-1, а)
имеет шаг по коллектору ук — 1 и образует число параллельных ветвей 2а,
равное числу пар толюсов 2р = 2а. Каждая параллельная ветвь содержит
47
проводники, лежащие под одной парой полюсов. Вследствие магнитной не-
симметрии машины потоки отдельных пар полюсов могут быть неодинаковыми.
При этом наводимые в параллельных ветвях э. д. с. имеют различную величину
и под действием их разности возникают уравнительные токи. Чтобы избежать
протекания этих токов через щеточный контакт, в схеме петлевой обмотки пред-
усматриваются уравнительные соединения между ламелями коллектора, кото-
рые должны иметь при работе одинаковый потенциал.
Простая волновая обмотка (рис. 2-1, г) имеет шаг по коллектору ук —
~ (к — где к — число коллекторных пластин, и образует две параллельные
ветви, в каждой из которых последовательно соединены проводники, лежащие
под всеми полюсами машины. Эта обмотка применяется при большом номиналь-
ном напряжении якоря, причем уравнительных соединений не требует.
На практике для крупных машин используется так называемая лягушечья
обмотка, представляющая собой сочетание двух рассмотренных типов обмоток.
В тех проводниках, которые в данный момент времени находятся на попе-
речной оси машины, э. д. с. не наводится, так как на оси q — q' проводники
не пересекают силовых линий магнитного поля (см. рис. 2-1, а). Поперечная
ось машины называется ее геометрической нейтралью. Сдвиг щеток с геометри-
ческой нейтрали при холостом ходе приведет к уменьшению напряжения на
щетках. Очевидно, что при размещении щеток на продольной оси машины
напряжение на щетках равно нулю, так как при этом в каждой параллельной
ветви в любой момент времени наводимые в проводниках э. д. с. взаимно урав-
новешиваются.
Электродвижущая сила машины Е зависит от магнитного потока Ф (Вб)
и скорости вращения со (рад/с) и связана с ними соотношением (щетки на гео-
метрической нейтрали)
£, = /ссоФ, В,
где к — конструктивная постоянная машины [см. (1-30)], — р --
число пар полюсов; а — число пар параллельных ветвей; N — число активных
проводников на якоре.
При со = сон = const э. д. с. пропорциональна магнитному потоку. Учи-
тывая это, с помощью характеристики намагничивания Ф = J (F) можно полу-
чить характеристику холостого хода машины Е = f (F). Вид характеристики
холостого хода полностью повторяет вид кривой намагничивания Ф = f (F),
представленной на рис. 2-2.
Работа под нагрузкой. Реакция якоря
Рассмотрим условия работы электрической машины под нагрузкой,
полагая, что вращающийся с номинальной скоростью пн якорь машины замы-
кается на нагрузочное сопротивление. При этом машина работает в качестве
генератора, преобразуя поступающую на якорь от приводного двигателя меха-
ническую энергию в электрическую, потребляемую нагрузкой (см. рис. 2-1, б).
По проводникам якоря в этом случае протекает ток, направление которого
в каждом проводнике указано на рис. 2-1, б крестиками и стрелками и совпа-
дает с направлением э. д. с.
Рассматривая рис. 2-1, б, можно заключить, что обтекаемая током обмотка
якоря представляет собой катушку, направление н. с. которой совпадает с осью
щеток, т. е. в данном случае с геометрической нейтралью машины. Таким обра-
48
обычно учитывается с помощью расчетных зависимостей Ф = / (F, /я) или
Е = / (F, 1Я) при п = п„ = const, а также экспериментальных зависимостей
U = f (F, 1Я), учитывающих и падение напряжения на сопротивлении якорной
цепи машины. В том и другом виде эти зависимости называются нагрузочными
характеристиками.
В качестве примера на рис. 2-4 приведены нагрузочные характеристики
двигателя ДПВ-72 (привод поворота экскаваторов ЭКГ-8).
Искажение магнитного поля, вызываемое реакцией якоря, является неже-
лательным. Оно ухудшает использование стали машины, отрицательно сказы-
Рис. 2-4. Нагрузочные характеристики
Ф = / (F) при 1Я = const для двигателя
ДПВ-72
вается на процессе коммутации (§ 2-1, в).
Поэтому машины мощностью в не-
сколько сотен киловатт и выше обычно
снабжаются специальной компенсаци-
онной обмоткой. Компенсационная об-
мотка укладывается в пазы полюсных
наконечников аналогично обмотке
якоря и обтекается током якоря. Ее
проводники распределены вдоль зазора
машины аналогично проводникам якор-
ной обмотки и поэтому компенсируют
н. с. реакции якоря практически пол-
ностью. Для компенсированных машин
со щетками, установленными точно на
геометрической нейтрали, поток Ф яв-
ляется функцией только н. с. обмотки
возбуждения F и от нагрузки практи-
чески не зависит. При этом характери-
стика холостого хода Е = / (F) яв-
ляется справедливой и для режима
работы под нагрузкой.
Приведенный анализ работы под
нагрузкой относится к генераторному
режиму, но может быть полностью распространен и на двигательный режим.
Чтобы в этом убедиться, представим себе, что якорь машины вращается в на-
правлении, противоположном указанному на рис. 2-1, б стрелкой. Прило-
женное к щеткам напряжение уравновешивается противо-э. д. с. Е <$ U
(при изменении направления вращения направление э. д. с. также изменилось)
и падением напряжения в обмотке якоря от протекающего по ней тока /я,
направление которого осталось прежним. Очевидно, что картина поля, изобра-
женная на рис. 2-1, б, полностью справедлива и для этого режима работы.
Следовательно, действие поперечной реакции якоря в двигательном и генера-
торном режимах принципиально одинаково, но в двигательном режиме физи-
ческая нейтраль сдвигается на угол против направления вращения, а в гене-
раторном — по направлению вращения якоря.
Взаимодействие тока, протекающего по проводникам якоря, с результи-
рующим магнитным потоком создает электромагнитный момент машины: тор-
мозной при работе в генераторном и движущий — при работе в двигательном
режимах. Величина электромагнитного момента машины определяется изве-
стным соотношением
М = -^-Ф1я = кф1я1 Нм,
2па я ’
50
где Ф — результирующий магнитный поток, Бб; 1Я — ток якоря (см. рис. 2-1, б),
А; к — конструктивная постоянная машины [см. (1-30)1.
Коммутация
Как выше было отмечено, обмотка якоря представляет собой за-
мкнутый контур, в котором все активные проводники включены последова-
тельно в порядке, зависящем от схемы обмотки. Б качестве примера на рис. 2-5,а
показана схема простой петлевой обмотки при числе пазов якоря z = 12 и числе
пластин (ламелей) коллектора к = z = 12. Обмотка состоит из 12 секций,
каждая из которых может иметь число витков шс 1. На схеме левая сторона
каждой секции уложена в верхний слой паза и ее лобовые части показаны
сплошными линиями, а правая укладывается в нижний ряд и ее лобовые части
показаны пунктиром. Указанные на схеме направления токов в обмотках и на
щетках совпадают с направлением э. д. с., наводимых в соответствующих про-
водниках, и, таким образом, соответствуют генераторному режиму работы.
Рассматривая схему, можно убедиться, что замкнутый контур обмотки в дан-
ном случае щетками разделяется на четыре параллельные ветви, т. е. 2а = 2р.
Следовательно, по каждому проводнику секции протекает ток ia = 1я/2а,
где /я — ток во внешней цепи машины.
Б рассматриваемой схеме для иллюстрации явления коммутации, име-
ющего весЬма важное значение в режимах работы любой машины постоянного
4*
51
тока, жирными линиями выделены две секции: первая и двенадцатая. Ток'и
в этих секциях имеют в данный момент времени противоположное направление.’
После того как якорь в своем вращении повернется на угол 2л/г, двенадцатая
секция относительно щеток займет то же положение, что первая секция на схеме
рис. 2-5, а и ток в ней станет совпадать по направлению с током первой секции.
Отсюда следует важный вывод: при прохождении секцией и соответствующих
коллекторных пластин, к которым присоединены ее концы, оси щеток, ток
в секции меняет свое направление на противоположное, происходит коммута-
ция тока секции от -}-ia до —ia. Подобные переключения при вращении якоря
в коммутируемых секциях происходят непрерывно.
Более подробно процесс коммутации можно проанализировать с помощью
рис. 2-5, б. Будем полагать ширину щетки равной ширине коллекторной
пластины на окружности коллектора; толщиной межламельной изоляции пре-
небрегаем. В исходном положении при t = 0 щетка касается только одной
первой коллекторной пластины и в следующий момент, вследствие вращения
якоря, набегающий край щетки коснется двенадцатой ламели. При этом ком-
мутируемая двенадцатая секция замыкается щеткой накоротко и остается
замкнутой в течение всего процесса коммутации. Процесс коммутации закан-
чивается через время t = Тк, когда сбегающий конец щетки сойдет с первой
ламели. На рис. 2-5, б зафиксировано положение в момент времени t = tlt
когда набегающий конец щетки переместился на 12-й ламели на расстоя-
ние жх.
Отрезок времени t = Тк представляет собой период коммутации, т. е.
время, за которое ток в коммутируемой секции изменяется от -|-га до —га.
Величина периода коммутации определяется шириной щетки и скоростью
вращения якоря
yK = 4s-=-^S-, с, (2-1)
к Ук л aKn, ’ v 7
где Бк — линейная скорость на окружности коллектора, м/с; dK — диаметр
коллектора, м.
Предположим в первом приближении, что коммутируемая секция не обла-
дает индуктивностью и что в ней не действуют какие-либо э. д. с., наведенные
внешними полями. В этом случае процесс коммутации будет полностью опре-
деляться изменяющимся сопротивлением щеточного контакта в контуре ком-
мутируемой секции к = Дщ н + с, так как сопротивлением меди
секции можно пренебречь, вследствие его малости. Изменения сопротивле-
ния к обусловлены изменением площади контакта щетки, с каждой из
перекрытых ламелей. С помощью рис. 2-5, б можно заключить, что сопроти-
вление н под набегающей частью щетки в процессе коммутации непрерывно
уменьшается от н = 00 до н = (где — сопротивление сколь-
зящего контакта по всей площади щетки), а под сбегающей, напротив, увели-
чивается от с = Дщ до с =
Точный закон изменения сопротивления 7?щ к во времени установить
практически невозможно, поэтому при анализе процесса коммутации прибли-
женно принимают [5], что сопротивления н и с обратно пропорци-
ональны контактирующей площади щетки:
р ____ г> __ т> Тк e jj ____ р ____Т> Тк
«щ. а — х — с ~ Тк — 1 *
52
г/ При принятом выше допущении уравнение по второму закону Кирхгофа
—/для контура коммутируемой секции с учетом рис. 2-5, б можно записать в виде:
(«а ~ г'к) "7^ Rtn. — а + U =
Разрешая уравнение относительно iK, получим
iK = ja(l-2-^). (2-2)
Полученное уравнение является уравнением прямой (7 на рис. 2-5, б)
и поэтому рассмотренный процесс называют прямолинейной коммутацией.
При прямолинейной коммутации плотность тока под набегающей и под сбега-
ющей частью щетки одинакова в любой момент времени процесса коммутации.
Поэтому падения напряжения в любой части щеточного контакта при работе
машины не превышают нормальной величины, и условия для возникновения
искрения под щетками полностью отсутствуют.
В действительности процесс коммутации протекает значительно сложнее.
Прежде всего необходимо учесть наличие индуктивности рассеяния коммути-
руемой секции Lp. При изменении тока секции в ней наводится реактивная
э. д. с. ер= Ьр—^—.
Реактивная э. д. с. при коммутации препятствует изменениям тока, стре-
мится поддержать ток на прежнем уровне. Под действием реактивной э. д. с.
ток в коммутируемой секции спадает медленнее (кривая 2 на рис. 2-5, б), и такой
процесс называется замедленной коммутацией. Анализируя рис. 2-5, б, можно
убедиться, что при замедленной коммутации резко возрастет плотность тока
под сбегающим краем щетки. Возрастающая разность потенциалов при этом
вызовет опасное искрение под щетками, которое либо постепенно выведет кол-
лектор и щетки из строя, либо в особо неблагоприятных условиях может вы-
звать перекрытие коллектора электрической дугой — так называемый круговой
огонь.
Кроме реактивной э. д. с., в проводниках секции наводится э. д. с. вра-
щения ев, если в зоне коммутации внешнее магнитное поле не равно нулю.
Возвращаясь к рис. 2-1, б, можно убедиться, что при работе машины под
нагрузкой в зоне коммутации имеется магнитное поле, обусловленное попереч-
ной реакцией якоря Fq. При пересечении силовых линий этого поля провод-
никами коммутируемой секции (на рис. 2-1, б условно показано под щетками)
в секции наведется э. д. с. ев, действующая согласно с реактивной э. д. с.
Это подтверждается применением правила правой руки к коммутируемой сек-
ции, показанной на рис. 2-1, б, — наводимая э. д. с. ев совпадает по знаку
с током в проводнике, имевшим место до коммутации.
Таким образом, если щетки установлены на геометрических нейтралях,
а дополнительные полюса отсутствуют, под действием реакции якоря в ком-
мутируемой секции наводится э. д. с. вращения ев, действующая согласно с ер
и тем самым еще более замедляющая коммутацию (кривая 3 на рис. 2-5, б).
Для улучшения коммутации необходимо изменить знак э. д. с. ев, а следо-
вательно, и знак поля в зоне коммутации. В машинах, используемых на экска-
ваторах, это обеспечивается дополнительными полюсами ДП машины. Щетки
и оси дополнительных полюсов при этом выставляются на геометрических
нейтралях, а обмотка дополнительных полюсов включается последовательно
в цепь якоря и создает н. с., пропорциональную току якоря и направленную
противоположно и. с. реакции якоря.
53
Если величину и. с. дополнительных полюсов Выбрать такой, чтобы в ком-
мутируемой секции наводилась постоянная по величине э. д. с. еъ, равная
и противоположно направленная реактивной э. д. с. е0, процесс коммутации
теоретически должен иметь прямолинейный характер, так как при этом Де =
= еъ + ер =0 (при прямолинейной коммутации dijdt = const, следова-
тельно, ер = const). Это наиболее благоприятный случай коммутации. Если
е,, имеет место рассмотренный выше случай замедленной коммутации.
Наконец, если ев >ер, то получается ускоренная коммутация, при которой
плотность тока увеличивается под набегающим краем щетки (кривая 4 на
рис. 2-5, б), что также может вызвать искрение.
Если сумма э. д. с., наводимых в коммутируемой секции, не равна нулю,
т. е. в случае замедленной или ускоренной коммутации, полный ток секции
можно представить в виде суммы токов
— ^к. п+ 4. д»
гДе К. п — ток прямолинейной коммутации; iK д — дополнительный ток,
обусловленный суммой э. д. с., действующих в контуре секции.
Дополнительный ток 1К д и является причиной ухудшения коммутации.
Его величина во всех режимах работы машины должна быть ограничена значе-
нием, при котором на коллекторе не возникает недопустимое искрение. Это
ограничение достигается, с одной стороны, сведением к минимуму результи-
рующей э. д. с. Де, а с другой стороны, увеличением сопротивления щеточного
контакта к. Увеличение сопротивления к влечет за собой увеличение
потерь энергии в щеточном контакте и нагрев коллектора, поэтому возможности
улучшения коммутации этим путем ограничены. Основным средством улучше-
ния коммутации является уменьшение результирующей э. д. с. Де в контуре
коммутируемой секции. В машинах нормального исполнения искрение возни-
кает при среднем значении Де = 1 4- 1,5 В.
Реактивная э. д. с. пропорциональна diK/dt, т. е. зависит от величины тока
якоря 7Я = 2«га и от периода коммутации Тк, обратно пропорционального
скорости вращения (2-1). При возрастании тока нагрузки пропорционально
ему возрастает реактивная э. д. с., и для нормальной коммутации необходимо
соответствующее возрастание э. д. с. вращения ев. Для этого необходимо,
чтобы магнитное'поле в зоне коммутации, создаваемое дополнительными полю-
сами, возрастало также пропорционально току якоря. С этой целью магнитная
цепь дополнительных полюсов выполняется ненасыщенной во всем диапазоне
возможных изменений тока якоря путем увеличения воздушного зазора под.
дополнительными полюсами и выбора при проектировании небольшой индукции
в их сердечниках.
При возрастании скорости пропорционально ей увеличиваются э. д. с. ер.
и ев; их разность Де с возрастанием скорости увеличивается и условия ком-
мутации ухудшаются.
В общем случае в зависимости от схемы обмотки ширина щетки может
в два-три раза превосходить коллекторное деление. При этом соответственно
увеличивается период коммутации (2-1), и коммутация происходит одновре-
менно в двух или трех рядом лежащих секциях. Реактивная э. д. с. в данной
секции зависит от изменения тока в магнитно-связанных коммутируемых сек-
циях
£р = е/, + ем,
где eL — э. д. с. самоиндукции; ем — э. д. с. взаимоиндукции.
54
Кроме того, на условия коммутации может оказывать влияние так называ-
емая трансформаторная э. д. с. ет. Так как контур секции сцеплен с резуль-
тирующим потоком машины Ф (см. рис. 2-1), <?т = —® машинах рас-
сматриваемого класса в реальных условиях эта величина достаточно мала,
поэтому влиянием ее на условия коммутации обычно можно пренебречь.
Кроме перечисленных основных факторов, на условия коммутации в кон-
кретных случаях могут влиять и другие факторы. В частности, весьма важен
правильный выбор марки щеток, хорошая приработка щеток к коллектору.
Плохая коммутация может иметь место вследствие неудовлетворительного
состояния поверхности коллектора или по механическим причинам (вибрация
коллектора, недостаточная жесткость щеточного аппарата, неравномерный
нажим щеток и т. п.).
• Заканчивая краткий анализ физических особенностей процесса коммутации,
необходимо отметить, что при замедленной или ускоренной коммутации ток
коммутируемой секции создает н. с., влияющую на основное поле машины.
Действительно, при прямолинейной коммутации (прямая 1 на рис. 2-5, б)
среднее значение тока iK за период коммутации равно нулю и соответственно
равна нулю н. с. коммутируемой секции. При замедленной коммутации (кри-
вые 2 и 3) среднее значение тока за период коммутации не равно нулю, при этом
возникает н. с. коммутируемой секции Пк- с = weiK. ср, которая оказывает
на главное поле размагничивающее действие. При ускоренной коммутации
среднее значение тока 1К отрицательно (кривая 4) и н. с. FK с действует со-
гласно с н. с. главных полюсов машины, увеличивая поток Ф.
Для машин нормального исполнения влияние н. с. коммутируемых секций
незначительно и его обычно не учитывают. Это явление имеет существенное
значение в электромашинных усилителях, где с ним нельзя не считаться (см.
§ 2-2).
Допустимые нагрузки
Допустимая нагрузка электрической машины ограничивается двумя
факторами: ее нагревом и условиями коммутации. В паспортных данных завод-
изготовитель указывает значения номинальной полезной мощности Ри и номи-
нального тока якоря 7Я Н, которые определяются, исходя из условий нагрева.
При номинальной нагрузке электрическая машина, работая в паспортном
(длительном, повторно-кратковременном или кратковременном) режиме при
температуре окружающей среды до -j-40° С, не перегревается выше темпера-
туры, допустимой для класса изоляции ее обмоток и коллектора.
Для режимов работы экскаваторных электроприводов характерны значи-
тельные кратковременные перегрузки при переходных процессах пуска и тор-
можения или механического характера. Вследствие кратковременности дей-
ствия эти нагрузки не могут сказаться на нагреве машины, но они должны
быть ограничены, исходя из допустимой перегрузочной способности машины.
Перегрузочная способность машины постоянного тока определяется условиями
коммутации.
При больших токах нагрузки, превышающих номинальный в два-три раза,
условия коммутации ухудшаются как за счет того, что возрастают абсолютные
величины э. д. с., наводимых в контуре коммутируемой секции, так и за счет
возможного насыщения дополнительных полюсов. Кратность допустимого
по условиям коммутации тока по отношению к номинальному для машин
55
с независимым возбуждением лежит в пределах 2—2,5. При регулировании ско-
рости вверх от номинальной перегрузочная способность снижается в связи
с рассмотренным выше ухудшением коммутации.
Из приведенного выше рассмотрения режимов работы электрической ма-
шины под нагрузкой непосредственно вытекает, что одна и та же электрическая
машина может работать как двигателем, так и генератором. Это свойство элек-
трической машины называют обратимостью. Однако, несмотря на обратимость,
серийно выпускаемые машины имеют конкретное назначение либо для работы
двигателем, либо для работы генератором. Машина, предназначенная для
работы двигателем, имеет номинальные данные, соответствующие этому режиму
работы и чаще всего рассчитана на реверсирование, регулирование скорости
и т. п. Генераторы выполняются для одного направления вращения, рассчиты-
ваются для работы с постоянной скоростью, величина которой согласуется
со скоростью вращения приводного асинхронного или синхронного двигателя.
Естественно, что основные характеристики двигателей и генераторов различны
и в дальнейшем изложении они рассматриваются отдельно.
Характеристики двигателей
Электродвигатель служит для преобразования электрической энер-
гии, поступающей из сети, в механическую, необходимую для приведения
в движение производственного механизма. Поэтому важнейшим показателем
его электромеханических свойств является зависимость скорости вращения п
от момента М или тока I , т. е. механическая п = / (М) и электромеханическая
Рис. 2-6. Естественные характеристики дви-
гателя ДП-62
п = f (1Я) характеристики. Выраже-
ние естественной характеристики
двигателя, которая соответствует
номинальным значениям приложен-
ного напряжения Ua и тока возбуж-
дения Д н, если питающая сеть
имеет бесконечно большую мощность
и отсутствуют внешние сопротивле-
ния в якорной цепи, имеет вид:
<2'3>
В общем случае результирующий
магнитный поток машины Ф не ос-
тается постоянным, а изменяется при изменении нагрузки на валу и, следова-
тельно, при изменении тока якоря за счет реакции якоря. При номинальной
нагрузке /я = 1Я н, и соответственно поток принимает свое номинальное значение
Ф = Фн. Так как продольная составляющая поперечной реакции якоря Fqd
нелинейно зависит от тока, уравнение (2-3) для некомпенсированных двига-
телей представляет собой весьма сложную нелинейную зависимость. В качестве
примера на рис. 2-6 представлены характеристики п — f (7Я) и п = f (М) для
двигателя ДП-62: Ри = 46 кВт; пи = 625 об/мин; ZH = 233 A; U„ = 220 В.
Для того чтобы выделить влияние реакции якоря, на рис. 2-6 показана
пунктирной прямой 1 механическая характеристика, рассчитанная с помощью
(2-3) для того же двигателя при Ф = Фи, т. е. без учета реакции якоря. При
увеличении момента нагрузки под действием возрастающей реакции якоря
магнитный поток Ф уменьшается, что вызывает возрастание скорости по срав-
56
нению с "характеристикой, не учитывающей влияние реакции якоря. Поэтому
в зоне номинальной нагрузки жесткость характеристики начинает увеличи-
ваться, а в зоне перегрузок, где реакция якоря особенно быстро возрастает,
возможны участки с положительной жесткостью. Здесь скорость при увеличе-
нии нагрузки не уменьшается, а растет, и создаются условия для неустойчивой
работы двигателя.
При номинальном токе возбуждения поток компенсированного двигателя
можно считать постоянным, равным номинальному Ф = Фв = const. В этом
случае механическая и электромеханическая характеристики двигателя пред-
ставляют собой прямые линии, причем снижение скорости при увеличении
нагрузки обусловлено возрастающим падением напряжения в якорной цепи.
Кроме механической и электромеханической характеристик, представляет
также интерес характеристика холостого хода, а для некомпенсированных
двигателей — нагрузочные характеристики (см. рис. 2-4). Эти зависимости
могут быть использованы для определения требуемого тока возбуждения при
регулировании скорости двигателя ослаблением поля.
Динамические свойства двигателя определяются электромагнитной инер-
цией его обмоток якорной цепи и механической инерцией якоря и жестко с ним
связанных элементов механизма. Получим передаточную функцию двигателя,
полагая Ф — const, и индуктивность якорной цепи £ях = const. Переходные
процессы двигателя при этом описываются следующей системой дифферен-
циальных уравнений:
«я = М*я +
, (2-4)
• П/Т т dm
где се = см = кФ; се, см — постоянные двигателя.
Первое уравнение этой системы можно представить в виде:
ия — сс<о = Ня (1 + Т^р) /я (р),
где Тя = Ьп^]Ня — электромагнитная постоянная времени якорной цепи.
Следовательно, ему соответствует передаточная функция апериодического
звена
UBX(p) 1+Гяр ’
где Utx = ия — сею.
Второе уравнение системы (2-4) удобно представить в следующем виде:
4х (Р)Л -^-р<о (р) = >- (р),
где ZBX (р) = IR (р) — Мс/см; Тм = J-zRjJc&k — электромеханическая по-
стоянная времени.
Это уравнение интегрирующего звена с передаточной функцией
^2(Р) = -ТО—
• ^вх \Р) се 1 мР
Поэтому двигатель постоянного тока с независимым возбуждением как
элемент системы регулирования может быть представлен структурной схемой,
57
показанной на рис. 2-7, а. Если положить /с = 0, и воспользоваться известной
формулой
w = ^раз
3аМ l + Wpa^o.c’
где 1УВам •— передаточная функция контура, замкнутого обратной связью;
ТУраз — то же, для разомкнутого контура; Wo. с — передаточная функция
обратной связи, то можно определить результирующую передаточную функ-
цию двигателя по управляющему воздействию
W — Ю (р)__________j/ce____ (2-гЛ
ДБ ия(р) ТяТмР2 + ТпР + 1 •
Рис. 2-7. Структурная схема (а) и графики переходных процессов (б)
двигателя постоянного тока
Если положить Uя = 0, можно путем аналогичных преобразований полу-
чить передаточную функцию двигателя по возмущающему воздействию
тхл* О (Р) 7?я/сесм (1 + Тяр) и
дв~ Мс(р) —
Характер переходных процессов двигателя определяется корнями характе-
ристического уравнения ТяТнр* + Ткр + 1=0, которые могут быть вы-
числены по формуле
При Тк < 47’я корни являются комплексными
Pi.2= — а±/Й,
где
а 2ГЯ ’ Q 2ТЯ V Тк 4*
Чтобы выяснить характер переходных процессов при таком соотношении
параметров, рассмотрим переходный процесс, вызванный возмущающим воз-
действием — приложением нагрузки Мс к валу двигателя, работавшего в пред-
58
шествующем режиме вхолостую (Мс | /=о=О), скачком. Решение системы уравне-
ний (2-4) для этого случая относительно тока двигателя ъя имеет следующий вид:
*я=/с _nvb"MsiD (Р + arctg * (2'8)
График гя = f (t), соответствующий (2-8), а также соответствующая ему
зависимость а = f (t) представлены на рис. 2-7, б сплошными линиями. Рас-
сматривая рисунок, можно убедиться, что при Тм < 47’я двигатель предста-
вляет собой колебательное звено с затуханием, возрастающим при уменьше-
нии Тя. При 7М 47'я оба корня характеристического уравнения становятся
действительными отрицательными числами, и переходные процессы двигателя
приобретают апериодический характер, показанный на рис. 2-7, б пунктирными
кривыми. .
Сравнивая передаточные функции (2-5) и (2-6), можно заключить, что
переходные процессы по управляющему воздействию аналогичны рассмотрен-
ным. Их характер определяется теми же корнями характеристического урав-
нения (2-7), поэтому время затухания и период колебаний при изменениях 17я
имеют ту же величину.
Характеристики генераторов
Основное назначение генератора — преобразование механической
энергии в электрическую, необходимую для питания двигателя, приводящего
в движение механизм. Поэтому для генератора важны характеристики, вы-
являющие регулировочные возможности и зависимость параметров выдаваемой
электроэнергии от различных факторов: 1) зависимость э. д. с. генератора
от н. с. его возбуждения Er = j (Fr) — характеристика холостого хода; 2) за-
висимость потока, э. д. с. или напряжения генератора от н. с. возбуждения
при заданных значениях тока якоря Ег, Ur = f (Fr) и 1Я = const — нагрузоч-
ные характеристики; 3) зависимость э. д. с. или чаще напряжения генератора
от тока нагрузки при данных параметрах цепи возбуждения Ег, Ur = f (7Я) —
внешняя характеристика.
Вид этих характеристик существенно зависит от способа возбуждения
генератора. На экскаваторах находят применение три способа возбуждения
генераторов: независимое, смешанное и параллельное. Из них независимое
возбуждение (рис. 2-8, а) до недавнего времени в экскаваторных схемах Г — Д
имело преимущественное применение. В последние годы все шире используются
генераторы со смешанным возбуждением в различных вариантах — независимое
возбуждение с последовательной противокомпаундной обмоткой (рис. 2-8, б),
независимое возбуждение с параллельным самовозбуждением для двухобмо-
точного генератора (рис. 2-8, в). Параллельное возбуждение (рис. 2-8, а) на
экскаваторах используется для возбуждения вспомогательных генераторов —
возбудителей.
Характеристики некомпенсированного генератора ПЭ-2000 с независимым
возбуждением представлены на рис. 2-9. Щетки установлены на геометрических
нейтралях с практической точностью, поэтому продольная н. с. Fd реакции
якоря невелика. Из рассмотрения этих характеристик можно заключить, что
размагничивающее действие продольной составляющей поперечной реакции
якоря Fqd наиболее сильно проявляется на колене кривой намагничивания
(рис. 2-9, а). Вследствие сложной нелинейной зависимости Fqd от тока якоря
и от потока Ф внешние характеристики генератора нелинейны. С возрастанием
нагрузки напряжение генератора падает как за счет уменьшения э. д. с. под
59
действием реакции якоря, так и за счет падения напряжения в обмотке якоря:
иг = Ег-1пВЯ'С.
Независимое возбуждение с противокомпаундной последовательной обмот-
кой (см. рис. 2-8, б) применяется только для компенсированных генераторов.
В компенсированных генераторах размагничивающее действие поперечной
реакции якоря Fqd отсутствует, а продольная составляющая реакции якоря Fd
может возникать при случайном сдвиге щеток с геометрической нейтрали.
Так как для повышения надежности якорные цепи электроприводов экскава-
торов по системе Г — Д соединяются наглухо, без аварийных отключающих
Рис. 2-8. Схемы возбуждения генераторов постоянного тока
на экскаваторах
аппаратов, возможный сдвиг щеток с геометрической нейтрали против напра-
вления вращения может вызвать тяжелую аварию. Возникающее при этом
подмагничивающее действие реакции якоря может вызвать самовозбуждение
генератора с резким увеличением тока якоря до опасных значений, если цепи
управления полем генератора при этом по каким-либо причинам не действуют.
Второй причиной самовозбуждения может явиться ускоренная коммутация,
при которой, как выше было отмечено, возникает и. с. коммутируемых секций,
действующая согласно с основным полем машины.
Противокомпаундная обмотка (ПКО) уменьшает возможность самовоз-
буждения по току якоря, так как обеспечивает отрицательную обратную связь
по току, компенсирующую подмагничивающую реакцию якоря Fd. Намагни-
чивающая сила этой обмотки в номинальном режиме должна быть небольшой
(2,5—5% от номинальной н. с. возбуждения), поэтому в мощных машинах
число витков последовательной ПКО должно быть меньше единицы. Это дости-
гается параллельным соединением обмоток полюсов либо использованием
ПКО с относительно большим числом витков (н?пко = 20 4- 30), включаемой
параллельно обмоткам компенсационной и дополнительных полюсов.
Характеристики компенсированного генератора МПЭ 12-34/6 с противо-
компаундной обмоткой представлены на рис. 2-10. Сравнивая их с соответству-
ющими зависимостями для некомпенсированной машины, можно видеть, что
60
Рис. 2-9. Характеристики некомпенсированного генератора ПЭ-2000:
а — характеристика холостого хода (1я «= 0) и нагрузочные характеристики; б — внешние
характеристики;
Рис. 2-10. Характеристики компенсированного генератора МПЭ 12-34/6:
а — характеристика холостого хода (1я = 0) и нагрузочные характеристики; б — внешние характери-
стики
размагничивающее действие ПКО линейно зависит от тока и при ненасыщенном
генераторе характеристики линейны. Вместе с тем размагничивающее действие
ПКО более сильно проявляется в ненасыщенной части характеристики холо-
стого хода генератора, а в зоне насыщения жесткость внешних характеристик
увеличивается.
Смешанное возбуждение экскаваторных генераторов (см.рис. 2-8, в) исполь-
зуется прежде всего с целью уменьшить мощность независимого возбуждения
генератора за счет его самовозбуждения. В таком виде оно, в частности, при-
меняется на экскаваторе ЭКГ-4,6 при использовании магнитных усилителей
в качестве возбудителей генерато-
, ров. На рис. 2-11 представлены
зависимости, характеризующие
работу двухобмоточного генера-
тора с самовозбуждением.
Ю ’ Кривая 1 представляет собой
зависимость э. д. с. генератора от
результирующей н. с. генератора
Рг = + Fn> где Fu — и. с. об-
мотки независимого возбуждения,
a РГ: — н. с. параллельной обмотки
в озбуждения.
Величина Ft, зависит от на-
пряжения генератора Ur и от па-
раметров цепи самовозбуждения
!£п
вг
-5.1-77
/? 1
7гпХ
Мп
RtiS
г где ы„ — число витков парал-
лельной обмотки; Т?п2 = /?,, 4-
Рис. 2-11. Характеристики генератора со сме- + ^д. и суммарное сопротив-
шенным возбуждением ление цепи параллельной обмотки
(см. рис. 2-8, в). Ом.
Результирующая н. с. возбуждения генератора
р ~р "n / n
2 г 1 иТ Р, 2 я21 я. г.
(2-9)
Форму характеристики холостого хода генератора с самовозбуждением
можно выявить с помощью (2-9), положив /я = 0, и построений, показанных
на рис. 2-11. Прямая 2 соответствует (2-9) при F* = 5П1, прямая 3 — при
FB = Fh2. Точки пересечения прямых 2 и 3 с кривой 1 значения э. д. с.
холостого хода Eri и Кг2, соответствующие FH1 и Fh2. Это точки искомой харак-
теристики холостого хода генератора Ег = f (FB), построенной на том же
рисунке (кривая 4).
Нагрузочные характеристики Ег — f (F„) при 1Я = const могут быть
получены аналогичными построениями, если в (2-9) принять #= 0 и полагать
его для данной характеристики неизменным. Кроме того, предполагается, что
генератор компенсирован. Для некомпенсированных машин для определения
52
нагрузочных характеристик необходимо использовать семейство нагрузочных
характеристик Ет = / (/'’,) при 7Я = const и задаваться теми значениями тока
якоря, для которых построены эти характеристики. На рис. 2-11 построена
нагрузочная характеристика при 1Я = 1я1 (кривая 5). Из выражения (2-9)
следует, что самовозбуждение генератора представляет собой положительную
связь по э. д. с. генератора в сочетании с отрицательной обратной связью по
току якоря. Эти обратные связи линейны, поэтому при Т?п2 >Якр (Лкр —
критическое сопротивление цепи самовозбуждения) характеристики некомпен-
сированных генераторов с самовозбуждением аналогичны показанным на
Рис. 2-12. Характеристики компенсированного генератора с кри-
тическим самовозбуждением:
а — холостого хода и нагрузочные; б — внешние; в — холостого хода с учетом
петли гистерезиса
рис. 2-9, а компенсированных — показанным на рис. 2-10. Необходимо лишь
иметь в виду, что за счет самовозбуждения увеличивается остаточная э. д. с.,
обусловленная гистерезисом, не учтенным на рис. 2-9 и 2-10.
Особого внимания заслуживает случай, когда при смешанном возбуждении
используется режим критического самовозбуждения (Т?п2 = Лкр). При кри-
тических параметрах прямые 2 и 3 на рис. 2-11 имеют тот же наклон, что и ли-
нейная часть кривой 1 — характеристики холостого хода генератора с незави-
симым возбуждением. В этом случае, как это легко представить с помощью
рис. 2-11, уменьшение н. с. FK до нуля при холостом ходе генератора приведет
к тому, что прямая 2, перемещаясь параллельно самой себе влево, дойдет до
начала координат и, так как Rv^ = RKP, сольется с линейной частью харак-
теристики генератора Ег = / (jFr). Значению FH = 0 при критическом само-
возбуждении генератора соответствует любое значение э. д. с. в пределах
линейной части его кривой намагничивания, и поэтому характеристики гене-
ратора с критическим самовозбуждением имеют своеобразный вид, показанный
на рис. 2-12.
Внешние характеристики Ет = / (Z„) при Ffi — const имеют жесткий уча-
сток только в зоне насыщения магнитной цепи генератора. При малых значе-
ниях н. с. жесткий участок характеристик незначителен, и при возрастании
тока э. д. с. генератора быстро снижается, причем ненасыщенной магнитной
цепи генератора соответствует вертикально падающий участок внешней ха-
рактеристики. С учетом петли гистерезиса характеристика холостого хода
63
генератора с критическим самовозбуждением имеет вид, представленный на
рис. 2-12, в.
Генератор с критическим самовозбуждением не только имеет значительно
сниженную требуемую мощность независимого возбуждения, но и обладает
благоприятными динамическими свойствами (см. гл. 3), особенно важными для
электропривода экскаваторов-драглайнов.
Генераторы постоянного тока на экскаваторах находят широкое примене-
ние в качестве управляемых преобразователей для индивидуального питания
двигателей основных механизмов по системе генератор — двигатель (Г — Д).
Обычно генераторы поворота подъема и тяги (или напора у экскаватора —
лопаты) конструктивно объединяются в преобразовательный агрегат с одним
приводным асинхронным или синхронным двигателем достаточной мощности.
Кроме того, генераторы ностоянного тока с самовозбуждением используются
в качестве источников питания бортовой сети постоянного тока и возбудителей
синхронных двигателей.
Динамические свойства генератора как элемента системы автоматизиро-
ванного электропривода существенно зависят от его способа возбуждения.
Переходные процессы в цепи возбуждения генератора с независимым возбужде-
нием протекают в соответствии со следующим дифференциальным уравнением:
uB = iBRB + LB^, (2-10)
где ив — напряжение, приложенное к обмотке; iB — ток возбуждения генера
тора; йв и£в — сопротивление и индуктивность обмотки возбуждения.
Если принять при t = 0 iB = 1В нач и ив = UB уст и не учитывать насы-
щения магнитной цепи генератора, можно получить решение (2-10) в виде:
_ t
Д “ 7В, уст (7В. уст -Д. нач) ® в 9 (2“Н)
где 1В уСт = UB уст7Лв — установившееся значение тока возбуждения;
Тв = LJRB — электромагнитная постоянная времени генератора.
При ненасыщенной магнитной цепи генератора его характеристику холо-
стого хода можно считать линейной и, пренебрегая относительно небольшим
влиянием гистерезиса и потоков рассеяния, записать ег = Лг1гЕ.
Подставив это выражение в (2-10) и осуществив переход к операторной
форме записи, можно получить уравнение передаточной функции генератора
в виде:
= = д П+У (2-12)
трр kr = krllRB = eTluB — коэффициент усиления генератора по напряжению.
Осуществив аналогичную подстановку в (2-11), получим следующий закон
изменения э. д. с. генератора в переходных процессах:
t
= Ет. ус« (Ег. уОТ Ег, нач) е в
Таким образом, при принятых допущениях генератор с независимым воз-
буждением представляет собой апериодическое звено, структурная схема кото-
рого представлена на рис. 2-13, а. На рис. 2-13, б показаны зависимости ег
и 4 = / (t) при нулевых (кривая 7) и ненулевых (кривые 2 и 3) начальных
условиях. Ток возбуждения и э. д. с. генератора изменяются по экспонен-
6
машин. Значительная электро-
Рис. 2-13. Структурная схема (а) и гра-
фики переходных процессов (б) генератора
с независимым возбуждением
циальному закону. Длительность переходного процесса теоретически равна
бесконечности, а практически процесс считают законченным при достижении
переменной величиной 95—98% установившегося значения, чему соответствуют
£в = (3 4- 4) Тв.
Применяемые на экскаваторах с емкостью ковша свыше 3 м3 генераторы
имеют мощность выше 100 кВт. При этом Тв = (1,5 4- 4) с, причем большие
значения соответствуют большей мощности
магнитная инерция является основной
особенностью генератора как управля-
емого преобразователя.
Динамические свойства генератора
со смешанным возбуждением по схеме,
приведенной на рис. 2-8, в, при слабом
самовозбуждении в принципе анало-
гичны свойствам генератора с незави-
симым возбуждением. Однако при па-
раметрах цепи обмотки самовозбужде-
ния, близких к критическим, наступают
существенные качественные изменения,
представляющие особый практический
интерес при использовании генератора
в системе Г-Д-
При принятых выше допущениях,
пренебрегая потоками рассеяния, пере-
ходные процессы в цепях возбуждения
ваются следующими ифференциальными
описы-
двухобмоточного генератора
уравнениями:
ив и = 1Н/?Н + %Pwh
Ur = ^я^я- г ~ ^п-^п “F »
0 = /в.Лв.т + 2ргрв.т^,
(2-13)
(2-14)
(2-15)
где iH, /?н и №„ — соответственно ток, омическое сопротивление и число витков
(на один полюс) независимой обмотки возбуждения; гп, 7?п и wn — то же, для
параллельной обмотки возбуждения; Фг — магнитный поток одного полюса
генератора; йга = eT!FT — передаточный коэффициент генератора; гя и 7?я г —
ток якоря и омическое сопротивление обмотки якоря генератора.
Уравнение (2-15) с некоторым приближением учитывает влияние контура
вихревых токов с эквивалентными параметрами RB т и т.
Умножив правую и левую части уравнения (2-13) на kr2wKlRH и выразив
поток через э. д. с. генератора, получим
Ата^’н ___т. и ! 2р7сГ2к’н der in
/?„ ив.н— кеЛи dt ’
где ке — , FH 1И wH .
Множитель при производной по э. д. с. генератора в правой части уравне-
ния (2-16) представляет собой постоянную времени независимой обмотки
возбуждения генератора Тн. Действительно, для любой обмотки возбужде-
ния, расположенной на полюсах генератора,
m LB 2pwB ЙФГ ™
Гв= тг-rT’^- (2-17)
5 Заказ 1127
65
Умножим числитель и знаменатель выражения (2-17) на число витков wB,
получим
Тв = 2р^--—^. (2-18)
Л.в at г
На линейном участке характеристики намагничивания производную dCt>r!dF
можно заменить отношением приращений АФГ7АЕГ. Тогда из (2-18) получим
t*=2p^-^=2p^-^-
Учитывая (2-19), уравнение (2-16) запишем в виде:
ив. н = kriFu + Ткр~. (2-20)
Др OL
Аналогично описанному для цепи параллельной обмотки и контура вихре-
вых токов из (2-14) и (2-15) получим:
(er-iaRB. г) = Wn+ Тв (2-21)
0 = krzFB. т + Те. тр. (2-22)
(2-23)
(2-24)
Складывая левые и правые части уравнений (2-20), (2-21) и (2-22), можно
записать
Рр н + рр (er—iBRs, r) = кп (FB + Fn + FB. т) + (Гн + Tn + Тв. т) р-.
Обозначая сумму Тн + Тп + Тв. т как суммарную постоянную времени
возбуждения генератора Тв^ и учитывая, что ег — кт2 (FB -| ~ 7’Г| -| - т) и
что при критическом самовозбуждении kr2wnlRn = 1, получим
/сгй^н . i I? /р deB
RB Wb.h—‘я^я.г —вЕ df •
Если пренебречь влиянием падения напряжения в якоре генератора на
цепь самовозбуждения и положить в (2-23) RB г 0, то можно получить пере-
даточную функцию генератора с критическим самовозбуждением, отражаю-
щую его основные динамические особенности,
W (n\ — ег (F) __ _ 1
«в.н(Р) Ян?в2Р ТКр •
Таким образом, генератор с критическим самовозбуждением в системе
регулирования приближенно может быть представлен интегрирующим звеном
с постоянной интегрирования Т„ = RHTJ}Y,lkT2wH. В отличие от генератора
с независимым возбуждением э. д. с. генератора с критическим самовозбужде-
нием при включении его обмотки независимого возбуждения на напряжение
мвн = ^вн. уст = const изменяется во времени не по экспоненциальному,
а по линейному закону. Это следует из (2-23), так как при 7?я г == 0 и нвн =
= UBB = const
.der = Л'га;л’н rj _ fnn4<
dt RBT^ ^e.b-const.
Интегрируя последнее соотношение, получим
t
__Г -г, j,___ ЛГ21гн£7в и
ЯнГв-2 днГв2 г-
о
(2-25)
66
Линейный закон нарастания э. д. с. генератора справедлив в пределах ли-
нейной части характеристики намагничивания. При выходе в зону насыще-
ния темп нарастания э. д. с. быстро уменьшается до нуля в установившемся
режиме, определяемом величиной н. с. обмотки независимого возбуждения
FK „ на насыщенном участке характеристики (см. рис. 2-12, в). В соответ-
ствии с (2-23) при ненасыщенной магнитной цепи учет влияния падения напря-
жения в якоре генератора на цепь само-
возбуждения при 1Я ~ const не изменяет
линейного характера процесса, но
уменьшает темп изменения э. д. с. ге-
нератора. Действие этого фактора ана-
логично действию слабой отрицатель-
ной связи по току якоря непосред-
ственно на цепь возбуждения генера-
тора. Соответствующая структурная
схема генератора с критическим само-
возбуждением приведена на рис. 2-14, а.
Графики переходных процессов такого
генератора при включении обмотки
ОВН на напряжение пвн = ?7,1Н_ уст =
= const показаны на рис. 2-14,6.
Рис. 2-14. Структурная схема (а) и гра-
фики переходных процессов (б) генератора
с критическим самовозбуждением
Линейный характер переходных процессов генератора с критическим
самовозбуждением, как будет показано в гл. 3, является его важным достоин-
ством, ибо облегчает формирование оптимальных переходных процессов элек-
тропривода.
§ 2-2. Электромашинные усилители
Из существующих разновидностей электромашинных усилителей
на отечественных экскаваторах средней и большой производительности нашел
применение электромашинный усилитель с поперечным полем, схема которого
приведена на рис. 2-15. Этот усилитель представляет собой специальную элек-
трическую машину постоянного тока. Основной ее особенностью является на-
личие двойного комплекта щеток, один из которых устанавливается по попереч-
ной оси q—q', другой — по продольной d—d', а также примерно равная маг-
нитная проводимость по поперечной и продольной осям машины. Последнее
достигается особой конфигурацией пакета стали статора, почти не имеющего
явно выраженной полюсной системы.
В рассматриваемом ЭМУ конструктивно объединены два каскада усиле-
ния. Первый каскад управляется обмотками управления, действующими по
продольной оси машины (одна из них ОУ показаны на рис. 2-15). Под дейст-
вием н. с. Fy по продольной оси возникает небольшой по величине магнитный
поток Фив обмотке вращающегося якоря наводится э. д. с. Eq, которая сни-
мается щетками, размещенными по поперечной оси. Эта э. д. с. является выход-
ной величиной для первого каскада усиления и входной — для второго кас-
када.
Щетки на оси q—q' замкнуты накоротко. Под действием э. д. с. Eq в корот-
козамкнутой цепи протекает ток Iq, создающий н. с. реакции якоря FBq,
5* 67
направленную по оси q—q'. Так как магнитная проводимость по поперечной
оси велика, под действием н. с. реакции якоря Ея<г возникает значительный
магнитный поток Ф? — поле возбуждения второго каскада. Вращение якоря
в этом поле вызывает э. д. с. Ed, которую при холостом ходе можно непосред-
ственно измерить с помощью вольтметра на зажимах щеток, установленных
по продольной оси d—d'.
Рис. 2-15. Схема ЭМУ с поперечным
Характеристики холостого хода ЭМУ
существенно нелинейны (рис. 2-16). Не-
линейность характеристикп первого ка-
скада (рис. 2-16, а) обусловлена, во-пер-
вых, нелинейным сопротивлением щеточ-
ного контакта, влияние которого в
короткозамкнутой цепи проявляется до-
статочно заметно, и, во-вторых, нелиней-
ной зависимостью индукции от напряжен-
ности поля при малых значениях индук-
ции, характерных для продольной оси
машины. Нелинейность характеристики
второго каскада (рис. 2-16, б) объясняется
насыщением магнитной цепи машины по
поперечной оси при достаточно больших
значениях тока Iq, являющегося током
возбуждения второго каскада. В резуль-
тирующей характеристике ЭМУ, приве-
денной на рис. 2-16, в, обнаруживаются
все указанные нелинейности.
Если к щеткам, размещенным по про-
дольной оси, подключить цепь нагрузки,
по внутренней цепи ЭМУ и нагрузке по-
течет ток нагрузки 1В. При этом на вы-
ходе ЭМУ развивается напряжение
полем
где Rd — суммарное актив-
ное сопротивление про-
дольной цепи ЭМУ, с уче-
том сопротивлений всех
последовательных обмоток
в этой цепи.
Ток нагрузки 1В, про-
текая по обмотке якоря,
создает н. с. реакции яко-
ря Fs, направленную по
продольной оси встречно
по отношению к н. с. об-
мотки управления Fy. По
величине н. с. Fs много
больше, чем Fy, поэтому
при отсутствии компенса-
ции продольной реакции
Рис. 2-16. Характеристики холостого хода ЭМУ:
а — первого каскада; б — второго каскада; в — результирующая
якоря появление незначи-
68
тельного тока нагрузки приводило бы к полному размагничиванию ЭМУ.
Для компенсации реакции якоря по продольной оси ЭМУ снабжается компен-
сационной обмоткой КО, причем для настройки компенсации компенсацион-
ная обмотка шунтируется регулировочным сопротивлением Лшк.
Степень компенсации существенно влияет на рабочие характеристики ЭМУ,
в первую очередь на его внешние характеристики (рис. 2-17, а). При идеальной
компенсации при Fy = const, Ed = const и наклон внешней характеристики
а
Рис. 2-17. Внешние характеристики (а) и
экспериментальные характеристики холостого
хода (б) ЭМУ
в соответствии с (2-26) обусловлен
только омическим сопротивлением Rd
внутренней цепи ЭМУ (прямые 1 на
рис. 2-17, а). При нед ©компенсации
(Гя > о) с возрастанием тока якоря
э. д. с. Ed уменьшается, соответственно
внешняя характеристика становится
мягче (кривые 2). Наконец, при пере-
компенсации (Ея < FK о) зависимость
напряжения ЭМУ от тока нагрузки уменьшается и при сильной перекомпен-
сации возрастание нагрузки ЭМУ может сопровождаться увеличением напря-
жения иъ (прямые 3 и 4 на рис. 2-17, а).
Обычно при наладке устанавливается небольшая не декомпенсация, так
как при этом работа ЭМУ более устойчива. При перекомпенсации возможно
самовозбуждение ЭМУ и полная потеря им управляемости.
Заметное влияние на характеристики ЭМУ оказывает н. с. секций, комму-
тируемых щетками на оси q—q'. В ЭМУ относительно небольшой мощности
дополнительные полюсы по поперечной оси отсутствуют. Как было показано
в § 2-1, при этом имеет место замедленная коммутация под согласным дейст-
вием реактивной э. д. с. и э. д. с. вращения. Удовлетворительная коммутация
может быть в этих условиях достигнута только ограничением величины тока IQ,
который в номинальном режиме обычно не превосходит 15—20% номинального
тока ЭМУ. При форсировках, сопровождающих работу ЭМУ на экскаваторах,
ток в поперечной цепи превосходит указанные величины. Возникающее искре-
69
ние под поперечными щетками обычно бывает удовлетворительным, если сум-
марная э. д. с. 2е = + еп, наводимая в коммутируемых секциях, не превы-
шает ЗВ [11].
Нормальная коммутация по продольной оси ЭМУ обеспечивается допол-
нительными полюсами, обмотка которых ДП показана на рис. 2-15.
Замедленная коммутация секций поперечными щетками создает н. с.,
направленную на уменьшение потока по продольной оси (см. § 2-1). Так как
поток весьма мал по величине, небольшая п. с. замедленной коммутации
оказывает на него заметное размагничивающее действие, которое возрастает
с ростом э. д. с. ЭМУ Ed и напряжения ив.
Аналогичное действие оказывает также продольная составляющая реак-
ции якоря, обусловленная током Iq, если щетки недостаточно точно установ-
лены на нейтрали q—q. Суммарное размагничивающее действие замедленной
коммутации и продольной составляющей реакции якоря можно выразить с по-
мощью соотношения
ЕEWqlq,
где Ди?9 — эквивалентное число витков размагничивающей реакции токе
поперечной цепи.
Аналогично можно выразить и размагничивающее действие тока нагрузкг
ЭМУ 7В, обусловленное недокомпенсацией, Fd — !\wdIB-
С использованием этих записей результирующая н. с. по продольной осе
может быть представлена в следующем виде:
Fd~Fy — \WqIq — EwdTB.
Для линейного участка характеристики холостого хода второй ступени
усиления ЭМУ Ed = к,Еч. При этом
Fd = Fy-^Ed-EwdIB. (2-27
Таким образом, действие замедленной коммутации и реакции якоря,
обусловленное током Iq, может быть представлено внутренней отрицательной
связью по э. д. с. выхода Ed, а недокомпепсации — внутренней отрицатель-
ной связью по току нагрузки 7В. Эти обратные связи оказывают существенное
влияние на величину коэффициента усиления по мощности, который с учетом
непосредственного назначения ЭМУ является его важнейшим параметром.
Общий коэффициент усиления ЭМУ по мощности
(2-28)
где Лр1 = IqRqx!lyRys, — коэффициент усиления по мощности первой сту-
пени; = — коэффициент усиления по мощности второй сту-
пени; Ry-% и — суммарное сопротивление соответственно цепи обмотки
управления и короткозамкнутой цепи, Ом.
Для получения, например, номинальной э. д. с. ЭМУ Ed = EdH требуется
определенное значение результирующей н. с. Fd = FdK. Из (2-27) можно опре-
делить соответствующие значения н. с. и тока управления, необходимое для
получения этой э. д. с.,
г ___Fy. и Fd н । г, । Atrj _
*у,и— ,,, —‘ 1 д, Jjdni ...
J Ivy 1Уу Aglvy Ivy
70
Полученное соотношение позволяет заключить, что при прочих равных
условиях внутренние обратные связи ЭМУ увеличивают требуемый ток управ-
ления и в соответствии с (2-28) уменьшают его коэффициент усиления. При
полной компенсации коэффициент усиления ЭМУ по мощности достаточно велик
(до 10 000).
Каждый каскад усиления ЭМУ обладает электромагнитной инерцией.
Постоянная времени входной ступени определяется суммой постоянных времени
отдельных контуров, сцепленных с потоком Фд (если пренебречь рассеянием
этих контуров),
п
Л = 2 « -д-та- + т- °’ <2-29>
Hq i; —Я Д t
£-1
где То z — собственная постоянная времени i-той обмотки управления; Тк о —
постоянная времени компенсационной обмотки; Rot — собственное сопротивле-
ние i-той обмотки; Rr { — добавочное сопротивление в контуре i-той обмотки.
Из (2-29) следует, что электромагнитную инерцию первой ступени усиле-
ния можно уменьшить введением добавочных сопротивлений в цепи обмоток
управления. Так как при этом постоянная времени Тк_ о остается неизменной,
возможности такого снижения ограничены. Необходимо также иметь в виду,
что в соответствии с (2-28) введение добавочных сопротивлений уменьшает
коэффициент усиления ЭМУ.
Электромагнитная инерция второго каскада усиления обусловлена в основ-
ном индуктивностью рассеяния якорной обмотки Lq
= (2-30)
Ее значения для ЭМУ-110 лежат в пределах Т2 = 0,05 ~ 0,2 с.
С учетом изложенного выше, ЭМУ в динамике ведет себя как два последо-
вательных инерционных звена с отрицательными обратными связями по э. д. с.
выходной ступени и ее току нагрузки. При неблагоприятных сочетаниях пара-
метров на ЭМУ возможно возникновение колебаний, что во многих случаях
затрудняет наладку электропривода.
Наличие внутренних связей ЭМУ, особенно связи, обусловленной недо-
компенсацией, определяет некоторые особенности работы ЭМУ в качестве
возбудителя генератора с независимым возбуждением. Вследствие индуктивно-
сти обмотки возбуждения в переходном процессе изменения тока нагрузки
отстают от изменений э. д. с. ЭМУ. Так, например, в начале процесса возбужде-
ния генератора ток нагрузки равен нулю, а э. д. с. ЭМУ достигает вследствие
форсирования и. с. управления значений в зоне насыщения характеристики
холостого хода. Если учесть, что при значительной недокомпенсации коэффи-
циент усиления ЭМУ при /ь = 0 больше, чем в установившемся режиме, можно
заключить, что за счет этого возможность возникновения колебаний на ЭМУ
и всей системы регулирования может существенно увеличиваться.
Изменение коэффициента усиления ЭМУ в динамике при наличии значи-
тельной недокомпенсации используется во многих схемах для создания гибкой
обратной связи по току возбуждения генератора с помощью сопротивления,
шунтирующего обмотку возбуждения.
Уменьшение коэффициента усиления ЭМУ в динамике получается благо-
даря быстрому появлению потока недокомпенсации при появлении тока в шун-
71
тирующем сопротивлении. Величина этого добавочного потока недокомпенса-
ции ЭМУ пропорциональна скорости изменения тока возбуждения генератора.
Важнейшее неблагоприятное влияние на характеристики ЭМУ оказывает
неоднозначность, обусловленная явлением гистерезиса. Для форсирования
переходных процессов возбуждения генератора ЭМУ выбирается со значитель-
ным запасом по напряжению по отношению к номинальному напряжению
возбуждения генератора. Так, например, номинальное напряжение ЭМУ-110,
установленного в схеме управления экскаватора ЭШ-15/90, составляет 230 В,
а номинальное напряжение возбуждения генератора подъема и тяги — 110 В.
Если учесть, что остаточная э. д. с. этого усилителя составляет 20—30 В, ста-
новится ясным, что неоднозначность характеристик ЭМУ недопустимо велика
и в конечном счете определяет значительную неоднозначность статических и
динамических характеристик системы электропривода в целом.
В настоящее время на экскаваторах электромашинные усилители приме-
няются только в сочетании с дополнительными средствами, уменьшающими
неоднозначность их характеристик. Из всех возможных способов размагничи-
вания находит применение внешняя обратная связь по напряжению ЭМУ, воз-
действующая непосредственно на одну из его обмоток управления.
Экспериментальные характеристики холостого хода ЭМУ-110 Ed = / (Fy)
при наличии отрицательной обратной связи по напряжению (кривая 1) и без
нее (кривая 2) представлены на рис. 2-17, б. Сравнивая эти кривые, можно
заключить, что применением отрицательной обратной связи по напряжению
ЭМУ удается в значительной степени уменьшить неоднозначность характери-
стики ЭМУ, причем одновременно повышается ее линейность. В то же время
коэффициент усиления ЭМУ сильно уменьшается, так как требуемая мощность
управления при данной мощности в нагрузке увеличивается.
Приведенный краткий обзор свойств и характеристик позволяет заклю-
чить, что электромашинный усилитель представляет собой сложную специаль-
ную машину, основным достоинством которой является большой коэффициент
усиления и достаточно высокое быстродействие. Однако в электроприводах
экскаваторов в связи с необходимостью уменьшения неоднозначности характе-
ристик этот высокий коэффициент усиления практически не используется,
а склонность ЭМУ к колебаниям затрудняет наладку схем электропривода
и их эксплуатацию.
Щеточный аппарат и коллектор ЭМУ в эксплуатации требуют тщательного
ухода и зачастую их неудовлетворительное состояние или случайное наруше-
ние степени компенсации нарушает нормальную работу ЭМУ, вызывает простои
оборудования. Поэтому в настоящее время на выпускаемых в стране экскава-
торах ЭМУ из схем управления полностью вытеснены более совершенными
магнитными и тиристорными усилителями. Однако в эксплуатации еще нахо-
дится большое число машин, оборудованных системой Г—Д с ЭМУ.
§ 2-3. Тиристорные преобразователи
Развитие полупроводниковой техники привело к созданию мощных
управляемых кремниевых вентилей — тиристоров, с помощью которых можно
конструировать силовые управляемые преобразователи, по ряду показателей
выгодно отличающиеся от электромашинных преобразовательных агрегатов.
Тиристор представляет собой полупроводниковый вентиль, снабженный допол-
нительным управляющим электродом, с помощью которого можно изменять
его запирающие свойства.
72
Если собрать схему, представленную на рис. 2-18, а, и изменять напряже-
ние источника питания таким образом, чтобы напряжение на вентиле Ua изме-
нялось от 0 до порогового значения U„op, то тиристор будет работать в соответ-
ствии с ветвью 1 вольтамперной характеристики (рис. 2-18, б). При этом его
работа вполне аналогична работе обычного диода при приложении обратного
напряжения: сопротивление вентиля весьма велико, ток Ia пренебрежимо
мал, поэтому практически все напряжение источника Uc уравновешивается
напряжением Ua, а на нагрузке напряжение равно нулю. Если при этом напря-
жение Ua превысит по абсолютной величине показанное на рис. 2-18, б поро-
говое напряжение Unop, произойдет резкое увеличение обратного тока при
почти постоянном падении напряжения на вентиле. Соответствующее резкое
Рис. 2-18. Схема включения (а) и вольтамперные характеристики (б) тиристора
увеличение потерь в запирающем слое приводит к его разрушению и выходу
вентиля из строя.
При положительной полярности приложенного напряжения, если управ-
ляющий электрод отключен (/у_ э = 0), тиристор сохраняет запирающие свой-
ства в пределах 0 < Ua U,,ep, при этом соответствующая ветвь 2 вольтам-
перной характеристики вполне аналогична ее обратной ветви 1. Если положи-
тельное напряжение Ua превысит величину напряжения переключения С’пер,
падение напряжения на вентиле уменьшится до пренебрежимо малой величины.
Вентиль, переходя на ветвь 3 характеристики, приведенной на рис. 2-18, б,
открывается и практически все напряжение источника прикладывается к на-
грузке. Если сопротивление нагрузки достаточно для ограничения тока допу-
стимым значением Ia Ia н, этот режим не опасен для вентиля, так как потери
в вентиле невелики вследствие малости падения напряжения AZ7a &.Uа и.
Однако самопроизвольный переход вентиля в открытое состояние при отсутст-
вии напряжения на управляющем электроде равносилен потере управляемости,
поэтому номинальное напряжение, на которое рассчитан вентиль, обычно ука-
зывается с большим запасом по отношению к предельно допустимым значениям
Епор и Unep. При Uc Ua н вентиль при отсутствии тока управления сохра-
няет свои запирающие свойства как при обратном, так и при прямом приложе-
нии напряжения.
Подключение управляющего электрода к источнику управляющего напря-
жения Uyt э приводит к уменьшению напряжения переключения по мере
73
возрастания тока управления 1у э. При 7у э = 1у э с, как показано на
рис. 2-18, б, происходит спрямление ветви вольтампериой характеристики,
соответствующей положительным напряжениям. Поэтому, подключая управ-
ляющий электрод на напряжение С7у э, обеспечивающее ток управления
1у э > 1у. э. с» можно в требуемый момент открыть вентиль, подключив на-
грузку к напряжению сети.
Тиристор не является полностью управляемым прибором: включением
управляющего электрода на напряжение его можно открыть (если Is Д>7уд),
однако восстановить запирающие свойства отключением управляющего элек-
трода нельзя. Для восстановления запирающих свойств необходимо, чтобы
ток в анодной цепи вентиля снизился до величины, меньшей тока удержания
вентиля в открытом состоянии 7УД (см. рис. 2-18, б) за счет каких-либо внешних
причин (увеличения сопротивления нагрузки Бн или отключения источника
питания £7С). При выпрямлении переменного тока запирающие свойства тири-
стора восстанавливаются при естественных уменьшениях анодного тока до
нуля, обусловленных изменениями переменного напряжения с'эти.
Режимы работы нереверсивного
преобразователя
Анализ режимов работы управляемого тиристорного преобразова-
теля целесообразно провести на примере представленной на рис. 2-19 трех-
фазной нулевой схемы, питающей обмотку возбуждения ОБ электрической
машины. Примем, что в результате предшествующей работы схемы в обмотке
возбуждения установился ток 7d, который благодаря весьма большой индук-
Рис. 2-19. Нереверсив-
ный : тиристорный воз-
будитель
тивности обмотки можно полагать практически неиз-
менным.
На рис. 2-20, а показаны изменения во времени
напряжений еа, еь, ес фаз вторичной обмотки транс-
форматора. При t = 0, током обтекается вентиль фазы С.
Для того чтобы открылся следующий вентиль, необ-
ходимо выполнение двух условий: во-первых, потен-
циал его анода должен быть выше потенциала катода
и, во-вторых, его управляющий электрод должен
обтекаться током Ту Э>7У э с (см. рис. 2 18, б).
Первое условие для вентиля фазы а начинает вы-
полняться в момент времени te к, в который потен -
циал анода, определяемый напряжением своей фазы
еа, начинает превышать общий для всех вентилей
потенциал катода, примерно равный напряжению
фазы работающего в данный момент вентиля, т. е.
фазы с. Поэтому точка te к, равно как и аналогичные точки к
и т. д., называется точкой естественной коммутации вентиля. Если в момент
времени /е. к на управляющий электрод вентиля фазы а подать импульс напря-
жения с крутым фронтом, то ток 7у э быстро достигнет величины 7У 9 с,
характеристика вентиля «спрямится» (см. рис. 2-18, б), вентиль фазы а откроется
и ток нагрузки перейдет с вентиля фазы с (ic) в вентиль фазы a (ia), как пока-
зано на рис. 2-20.
В действительности рассмотренный процесс коммутации тока имеет более
сложный характер, чем показанный на рис. 2-20. Вторичная обмотка каждой
фазы трансформатора всегда обладает индуктивностью рассеяния, поэтому ток
74
вентиля скачком изменяться не мо-
жет. За счет индуктивности трансфор-
матора процесс коммутации тока ра-
стягивается во времени: ток ic посте-
пенно уменьшается, а ток ia посте-
пенно возрастает, причем их сумма
остается постоянной и равной току
нагрузки. Время коммутации харак-
теризуется так называемым углом
коммутации у, величина которого тем
больше, чем больше ток нагрузки.
При пиках нагрузки у достигает 13—
18°. В целях упрощения на рис. 2-20
индуктивность рассеяния трансфор-
матора не учтена.
Таким образом, если на упра-
вляющие электроды вентилей упра-
вляющие импульсы подаются в точ-
ках естественной коммутации te к,
t'e. к, t'i к и т. д., тиристорный пре-
образователь работает так же, как
выпрямитель с неуправляемыми вен-
тилями. После того как ток вклю-
чившегося в работу вентиля ia, ib
или ic возрастает до величины, на-
дежно превышающей ток удержа-
ния 7уд (см. рис. 2-18, б), управля-
ющее напряжение может быть снято.
Это обстоятельство позволяет упра-
влять тиристорами с помощью узких
импульсов шириной от 10—12 до
60—70° с крутым фронтом, необхо-
димым для их четкого включения.
На рис. 2-20, а жирной кривой
выделена зависимость мгновенных
значений напряжения на нагрузке
от времени. Она имеет пульсиру-
ющий характер, причем частота
пульсаций в три раза выше частоты
сети. Ток возбуждения определяется
средним значением выпрямленной
э. д. с. Edo
Пульсации выпрямленного на-
пряжения относительно среднего
значения уравновешиваются э. д. с.
самоиндукции, которая наводится
в индуктивной нагрузке при изме-
нениях тока. При большой
Рис. 2-20. Режимы работы тириеторног®
возбудителя при различных углах регулиро-
вания
75
индуктивности нагрузки L ее индуктивное сопротивление на частоте пульсаций
выпрямленного напряжения = 3®с£ весьма велико, поэтому переменная
составляющая напряжения не может вызвать заметных пульсаций тока.
Регулирование средней выпрямленной э. д. с. Ed осуществляется изме-
нением момента подачи управляющих импульсов относительно точек естест-
венной коммутации в сторону запаздывания включения вентилей, которое
характеризуется углом регулирования а. На рис. 2-20, б представлен режим
работы рассматриваемой схемы в случае увеличения скачком угла регулиро-
вания от а = 0 (см. рис. 2-20, а) до а = 45°. Вследствие большой индуктивно-
сти обмотки возбуждения ток нагрузки в начале процесса сохраняет свое зна-
чение, а среднее выпрямленное напряжение Ed вследствие запаздывания вклю-
чения тиристоров уменьшается. С помощью уравнения для цепи нагрузки
Ed = IdRB + LB*£, (2-31)
учитывая, что при этом E'd < IdRB, можно установить, что ток возбуждения
постепенно снижается по экспоненциальному закону (2-11), стремясь к новому
установившемуся значению
J'.= E'd I
d RB <' ld'
Вследствие большой индуктивности нагрузки процесс уменьшения тока
длится несколько секунд (как показано в § 2-1, tnn ЗТВ}, поэтому его изме-
нение в течение двух-трех периодов переменного тока пренебрежимо мало
и на рис. 2-20 не учитывалось.
Рассматривая рис. 2-20, б, можно установить ряд важных особенностей
импульсно-фазового способа регулирования выпрямленного напряжения. Во-
первых, наглядно видно, что с увеличением угла регулирования снижение
среднего выпрямленного напряжения сопровождается ухудшением формы
кривой напряжения и возрастанием пульсаций относительно среднего зна-
чения. Во-вторых, сравнивая рис. 2-20, а и 2-20, б, можно наглядно видеть,
что при возрастании угла регулирования а увеличивается сдвиг по фазе между
напряжением и первой гармоникой тока каждой фазы трансформатора. Это
обстоятельство приводит к ухудшению коэффициента мощности установки
тем в большей степени, чем шире пределы регулирования напряжения.
На рис. 2-20, в представлен режим работы преобразователя при изменении
угла регулирования скачком от а = 0 до а = 90°. Ток нагрузки преобразо-
вателя, как и в предыдущем случае, вначале сохраняет свое значение, но сред-
нее значение выпрямленного напряжения уменьшается до нуля. При этом,
как показано на рисунке, к цепи нагрузки приложено несинусоидальное пере-
менное напряжение. Ток в каждой фазе в течение первой половины интервала
проводимости вентиля совпадает по направлению с напряжением данной фазы,
и энергия потребляется индуктивностью нагрузки, а в течение другой поло-
вины ток протекает против напряжения, и такое же количество энергии индук-
тивностью отдается в сеть. Очевидно в этом режиме эффект выпрямления на-
пряжения отсутствует, а коэффициент мощности преобразователя практически
равен нулю.
Уравнение (2-31) при этом принимает вид 0 = IdRB -J- LB , и ток воз-
буждения уменьшается по экспоненте до нуля за время tnn ЗТВ. Заметим,
что в установившемся режиме постоянная составляющая тока равна нулю,
а переменная составляющая весьма мала, так как изменяющееся с трехкратной
76
частотой переменное напряжение преобразователя уравновешивается падением
на большом индуктивном сопротивлении нагрузки Xl.
Важной особенностью управляемого вентильного преобразователя является
возможность рекуперации энергии из цепи нагрузки в сеть переменного тока.
В рассматриваемом случае переход в режим рекуперации энергии возникает
при быстром изменении угла регулирования от а — 0 до а 90°. На рис. 2-20, г
построены графики, соответствующие такому режиму при а = 135°. В этом
случае ток нагрузки, сохраняющий в начале процесса свое прежнее значение,
в течение большей части интервала проводимости вентиля протекает против
напряжения соответствующей фазы трансформатора и в течение меньшей ча-
сти — согласно с ним. Поэтому среднее значение э. д. с. преобразователя меняет
знак, преобразователь ведет себя как источник противо-э. д. с., препятствую-
щей протеканию тока нагрузки, чему соответствует следующее уравнение для
цепи нагрузки:
-El = IdRB + LB^L.
Это уравнение свидетельствует о том, что ток нагрузки в данном режиме
протекает под действием э. д. с. самоиндукции нагрузки. Запасенная в магнит-
ной цепи машины энергия преобразуется в электрическую и частично рассеи-
вается в виде тепла в сопротивлении нагрузки, а частично отдается в сеть пере-
менного тока. При этом преобразователь преобразует постоянный ток нагрузки
в трехфазный переменный ток сети. Такое преобразование называется в проти-
воположность выпрямлению инвертированием тока, а рассматриваемый режим
работы преобразователя — инверторным.
Коммутация тока в инверторном режиме обладает важной особенностью,
для пояснения которой на рис. 2-20, д представлен режим работы преобразо-
вателя при изменении угла регулирования от а = 0 до а = 160° скачком.
Нетрудно видеть, что увеличение а в инверторном режиме сопровождается
увеличением средней противо-э. д. с. инвертора, которая при а = 160° дости-
гает величины E'd'.Однако дальнейшее повышение угла регулирования может
привести к нарушению нормальной коммутации токов вентилей, которое в ин-
верторном режиме влечет за собой особо тяжелые последствия.
Рассматривая рис. 2-20, д, примем, что в данный момент ток протекает
через вентиль фазы а против отрицательной полуволны напряжения еа. Через
интервал проводимости, равный 120°, подается управляющий импульс на вен-
тиль фазы b и ток нагрузки должен перейти от вентиля фазы а к вентилю фа-
зы Ъ. Специфика коммутации при этом заключается в том, что в этом режиме
источником э. д. с., вызывающим протекание тока, является нагрузка, ток
протекает против э. д. с. своей фазы, после коммутации вентиль должен рабо-
тать при положительном напряжении еа, в отличие от выпрямительного режима,
когда к нему после коммутации прикладывается обратное напряжение. Если
по каким-либо причинам к моменту появления положительного напряжения
вентиль полностью не восстановит своих запирающих свойств, ток в дальнейшем
будет протекать при положительной полуволне э. д. с. и преобразователь
перейдет из инверторного в выпрямительный режим.
В соответствии с указанным выше первым условием коммутации для пере-
хода тока от фазы а к фазе b необходимо, чтобы потенциал анода вентиля фазы b
был относительно выше (по абсолютной величине меньше) потенциала его ка-
тода, который практически равен напряжению работающей фазы еа. Из
рис. 2-20, д видно, что условие выполняется только до точки 7, где еа = еь.
77
Следовательно, если к этому моменту ток не перейдет полностью к вентилю
фазы b и вентиль фазы а не восстановит полностью своих запирающих свойств,
коммутация под действием э. д. с. нагрузки может сорваться и осуществится
указанный выше неуправляемый переход в выпрямительный режим.
Выше было отмечено, что максимальная длительность коммутации харак-
теризуется углом коммутации у = 13 -4- 18°. Кроме того, для полного восста-
новления запирающих свойств также необходимо время, которое для тиристо-
ров можно характеризовать углом 6 = 1,5 4- 2°. Очевидно, для нормальной
коммутации необходимо, чтобы управляющий импульс был подан с опережением
по отношению к точке 1 на угол pmin = 15-4- 20°. Соответственно максимально
Рис. 2-21. Регулировочная
характеристика Ед = j (а)
при LH = °о
Рис. 2-22. Мостовая схема нереверсивного
тиристорного преобразователя (а) и внеш-
ние характеристики преобразователя (б)
допустимый угол регулирования в инверторном режиме для тиристоров состав-
ляет атах = 180° — у — 6 = 160 4- 165°.
При бесконечно большой индуктивности в цепи выпрямленного тока сред-
няя э. д. с. преобразователя определяется соотношением
Ed = Edll cos а, (2-32)
где Ed„ — среднее выпрямленное напряжение при а = 0.
Соответствующая (2-32) регулировочная характеристика преобразова-
теля представлена на рис. 2-21.
Рассмотренная трехфазная нулевая схема преобразователя имеет сравни-
тельно небольшую частоту пульсаций и большую их амплитуду при регулиро-
вании напряжения. Более благоприятные условия для сглаживания выпрям-
ленного тока складываются в многофазных схемах и, в частности, в трехфаз-
ной мостовой схеме, представленной на рис. 2-22, а. В этой схеме выпрямленное
напряжение пульсирует с частотой в два раза большей, чем в нулевой схеме,
фазы трансформатора не загружаются постоянной составляющей тока и воз-
можно непосредственное питание преобразователя от сети по бестрансформа-
торной схеме. Эти преимущества определили широкое применение схемы в мощ-
ных установках, а в экскаваторных электроприводах она практически является
.единственной применяемой схемой. Свойства схемы особенно благоприятны
при использовании тиристорного преобразователя для питания двигателя,
как показано на рис. 2-22, а.
78
Работа преобразователя на двигатель постоянного тока специфична, ибо
в выпрямительном режиме напряжение преобразователя уравновешивается
главным образом противо-э. д. с. двигателя. В инверторном режиме э. д. с.
двигателя в отличие от работы на обмотку возбуждения может оставаться по-
стоянной при любой величине тока и независимо от его изменений.
Ток двигателя в установившихся режимах работы определяется нагрузкой
на его валу. Поэтому режим работы преобразователя, питающего двигатель,
зависит не только от угла регулирования а, но и от скорости вращения двига-
теля и от нагрузки на его валу. Допустим, что а = 0 и двигатель, имея номи-
нальную нагрузку на валу, вращается с номинальной скоростью. Номинальный
ток якоря благодаря наличию индуктивности якорной цепи £ях при этом
является непрерывным, поэтому скорость двигателя определяется средним
значением выпрямленного напряжения U d — UdH, которое меньше средней
э. д. с. преобразователя Edo на величину падения напряжения на сопротивле-
ниях внутри преобразователя
_ Ud н т Ля
®и _ * я.в . •
се се
При уменьшении нагрузки на валу двигателя его скорость возрастает,
увеличение противо-э. д. с. двигателя вызывает уменьшение тока нагрузки
преобразователя. Уменьшение тока нагрузки приводит к уменьшению падения
напряжения на внутренних сопротивлениях схемы, а также к уменьшению
потери среднего напряжения, обусловленной наличием угла коммутации тока у.
В связи с этим с уменьшением тока нагрузки Id напряжение преобразователя
несколько возрастает. При непрерывном токе внешняя характеристика преоб-
разователя почти линейна и обладает высокой жесткостью (сплошная часть
кривых на рис. 2-22, б). При малых нагрузках противо-э. д. с. двигателя при-
ближается по величине к максимуму пульсирующей э. д. с. выпрямителя.
Интервалы, где эта э. д. с. (жирная кривая на рис. 2-20, а) больше, чем противо-
э. д. с. двигателя (пунктирная горизонталь Ел = Ed„ на том же рисунке),
постепенно уменьшаются. Запасаемой за эти периоды энергии в индуктивностях
нагрузки становится недостаточно для поддержания тока непрерывным —
он становится прерывистым. Если в зоне непрерывного тока противо-э. д. с.
двигателя примерно уравновешивала среднее напряжение выпрямителя, то
в зоне прерывистого тока она взаимодействует с мгновенными значениями на-
пряжения преобразователя. При идеальном холостом ходе (7Я = 0) э. д. с.
двигателя должна быть равна максимуму мгновенных значений выпрямленного
напряжения Е^ Z>Edt, поэтому в зоне прерывистого тока жесткость внешней
характеристики уменьшается (пунктирная часть кривых на рис. 2-22, б).
При увеличении угла регулирования а пульсации выпрямленного напря-
жения увеличиваются и область прерывистых токов расширяется (кривая 1
на рис. 2-22, б). Для уменьшения области прерывистых токов и ограничения
пульсаций тока якоря в области непрерывных токов обычно приходится уве-
личивать индуктивность якорной цепи двигателя за счет введения сглаживаю-
щего дросселя СД.
При работе на двигатель установившийся инверторный режим преобразо-
вателя возможен при наличии активной нагрузки на валу двигателя (напри-
мер, нагрузка на валу двигателя подъемной лебедки экскаватора, см. гл. 1).
Если а = 160°, двигатель под действием протягивающего груза разгоняется
в сторону спуска, его э. д. с. имеет отрицательное значение, увеличиваясь
по абсолютной величине с ростом скорости. На рис. 2-22, а это направление
79
э. д. с. показано пунктирной стрелкой, оно совпадает с направлением тока
а инвертор при а = 160° развивает встречно-направленную противо-э. д. с. -
Ed. При | Ец| | Ed | в якорной цепи протекает ток, который становится
непрерывным. С ростом тока возрастает падение напряжения в преобразова
теле, увеличивается Ud и в установившемся режиме э. д. с. двигателя уравно
вешивается главным образом встречным средним напряжением инвертор;
Ел = /нЯя + Ud.
В этом режиме к четкости коммутации токов вентилей предъявляются
особо высокие требования, ибо рассмотренный выше переход инвертора в вы
прямительный режим представляет собой короткое замыкание под суммарны»
действием э. д. с. двигателя и напряжения выпрямителя.
Режимы работы реверсивных
преобразователей
Анализ рабочих режимов экскаваторных электроприводов, приве
денный в гл. 1, свидетельствует о том, что они охватывают все четыре квадрант;
системы координат ®, М. Внешние характеристики нереверсивного тиристор
ного преобразователя, приведейные на рис. 2-22, б, отражают тот факт, чт<
такой преобразователь имеет одностороннюю про
водимость и способен обеспечить работу электро
привода только при одном знаке момента, т. е
в I и IV квадрантах. В тех случаях, когд;
нереверсивный преобразователь используется
в качестве возбудителя в системе Г—Д, он такж;
не может обеспечить всех режимов электропри
вода, так как без дополнительных средств не по
зволяет реверсировать скорость двигателя.
Поэтому в экскаваторных электропривода»
находят применение главным образом полноупра
вляемые реверсивные схемы тиристорных пре
образователей. Исключение представляет липп
электропривод механизмов подъема, имеющш
несимметричный характер нагрузок, охватыва
ющих I и IV квадранты. Если считать, что протя-
гивающий момент, обусловленный весом пустогс
ковша, достаточен для получения требуемого вре
мени пуска на спуск, а также допустить, что про
кручивание барабана при слабине канатов в об;
стороны не требуется, то применение нереверсив
ного преобразователя возможно.
Реверсивный тиристорный преобразователя
состоит из двух нереверсивных преобразователей
включенных по той или иной схеме, обеспечивающей двустороннюю прово-
димость преобразователя. Для экскаваторов наибольший интерес представляв';
приведенная на рис. 2-23 встречно-параллельная мостовая трехфазная схема
не требующая применения специальных трансформаторов и обеспечивающая
небольшие пульсации выпрямленного напряжения.
Выходы преобразователей ТПВ и ТПН соединены встречно-параллельно,
в результате чего образуются показанные на рис. 2-23 пунктиром замкнутые
контуры, по которым в принципе возможно протекание так называемых урав-
80
Рис. 2-24. Характеристики реверсивного
преобразователя при совместном согласо-
ванном управлении:
а — зависимости U^, а = f (U ); б — внешние
характеристики
нительных токов. Необходимость ограничения уравнительных токов допусти-
мой величиной накладывает дополнительные условия на управление преобра-
зователем. В настоящее время используются следующие способы управления
реверсивными вентильными преобразователями: 1) совместное согласованное;
2) совместное несогласованное; 3) раздельное управление.
При совместном согласованном управлении управляющие импульсы по-
даются одновременно как на электроды тиристоров ТПВ, так и на электроды
тиристоров ТПН, однако относительная фаза их строго согласована. В то время
как один из преобразователей работает выпрямителем, второй подготовлен
к работе инвертором и развивает среднее значение противо-э. д. с., равное
напряжению на выходе выпрямитель-
ной группы. Для выполнения этого
условия углы регулирования ах преоб-
разователя ТПВ и а 2 преобразователя
ТПН должны быть связаны соотно-
шением 04 + а2 = 180°.
Благодаря этому при согласованном
управлении протекание по уравнитель-
ным контурам постоянной составляющей
уравнительного тока исключается.
Однако неравенство мгновенных напря-
жений приводит к тому, что в контурах
уравнительного тока действуют пере-
менные напряжения, вызывающие про-
текание переменной составляющей ура-
внительного тока. Для ограничения
уравнительного тока в каждый контур
вводят так называемые уравнительные
реакторы УР1—УР4. Индуктивное со-
противление уравнительных реакторов выбирается таким, чтобы уравнитель-
ный ток не превышал 10% номинального тока преобразователя.
Уравнительные реакторы могут быть выполнены либо насыщающимися,
либо ненасыщающимися. В первом случае реактор имеет малый воздушный
зазор и обладает необходимой для ограничения уравнительного тока индук-
тивностью при относительно малых габаритах. Однако протекающий по его
катушке рабочий ток нагрузки преобразователя, превышающий величину
уравнительного тока, вызывает насыщение его магнитной цепи и соответствую-
щее уменьшение его индуктивного сопротивления. В схеме на рис. 2-23 вклю-
чены 4 таких реактора, при этом два из них обтекаются рабочим током и имеют
малое индуктивное сопротивление, а два других ненасыщены и ограничивают
уравнительные токи в требуемой степени.
Ненасыщающиеся реакторы имеют большой воздушный зазор и при той
же индуктивности большие габариты. При протекании тока нагрузки их индук-
тивное сопротивление не уменьшается, поэтому в схеме, приведенной на
рис. 2-23, можно ограничиться установкой двух реакторов, которые одновре-
менно выполняют и функции сглаживающих дросселей. При насыщающихся
реакторах может потребоваться введение в якорную цепь дросселя СД, обеспе-
чивающего требуемое сглаживание выпрямленного тока.
Характеристики реверсивного тиристорного преобразователя при согла-
сованном управлении представлены на рис. 2-24. Зависимости alr а2 = f (Uy)
пересекаются при Uy = 0 в точке — а2 = 90°, при этом среднее выпрям-
6 Заказ 1127
81
ленное напряжение каждого преобразователя равно нулю. При Uy '>0 угол аг
уменьшается и возрастает напряжение преобразователя ТПВ, работающего
выпрямителем. Одновременно увеличивается угол а2, что влечет за собой уве-
личение противо-э. д. с. преобразователя ТПН, подготовленного к работе ин-
вертором. При изменении знака управляющего сигнала картина режимов
противоположная и напряжение Ud меняет знак.
Достоинством согласованного управления, особенно важным для экска-
ваторных электроприводов, является при заданном уровне напряжения воз-
можность плавного перехода двигателя из двигательного в генераторный
режим при условии соответствующего изменения нагрузки. Допустим, что при
Uy = Uyl преобразователь работает в номинальном режиме с током Id = Idl,
и напряжением Ud = Udn (рис. 2-24, б). При уменьшении нагрузки скорость
двигателя возрастает, увеличивается его противо-э. д. с. и уменьшается ток.
Уменьшение тока сопровождается увеличением среднего напряжения на вы-
ходе преобразователя Ud за счет уменьшения падения напряжения в его вну-
тренних цепях. Соответственно внешняя характеристика обладает определен-
ным статизмом, зависящим от индуктивного сопротивления рассеяния транс-
форматора, активного сопротивления цепей и падения напряжения на венти-
лях. Статизм уменьшается с возрастанием номинальной мощности преобразо-
вателя и увеличением числа пульсаций выпрямленного напряжения за период
переменного напряжения сети ш (для трехфазной мостовой схемы m = 6).
При уменьшении нагрузки до нуля э. д. с. двигателя становится равной
э. д. с. выпрямителя и противо-э. д. с. инвертора. При этом ток нагрузки преоб-
разователя равен нулю, но благодаря наличию уравнительных токов режим
работы схемы определяется средними значениями напряжений и э. д. с., как
и в области непрерывного тока нагрузки. Если к валу двигателя приложить
движущий момент нагрузки, то э. д. с. двигателя, возрастая, станет больше
противо-э. д. с. инвертора ТПН, двигатель перейдет в генераторный режим,
отдавая энергию в сеть переменного тока. При этом преобразователь ТПВ
током нагрузки не обтекается, так как его э. д. с. меньше э. д. с. двигателя.
Нетрудно видеть, что приведенные на рис. 2-24, б внешние характеристики
преобразователя с согласованным управлением вполне аналогичны внешним
характеристикам генератора с независимым возбуждением.
Совместное несогласованное управление отличается от согласованного
тем, что при регулировании угла угол а2 остается неизменным и равным
максимальному значению, обеспечивающему максимум противо-э. д. с. инвер-
тора (рис. 2-25, а). При противоположном знаке управляющего сигнала оста-
ется неизменным угол — а1тах. Такой способ управления позволяет умень-
шить габариты и вес уравнительных реакторов, которые при согласованном
управлении в значительной степени увеличивают габариты и вес реверсивного
преобразователя. Однако отказ от согласованного управления приводит к ухуд-
шению характеристики Ud = f (£7у), в которой появляется люфт. Внешние
характеристики, соответствующие максимальному напряжению Ud = UdK
(Uy = Uyl и Uy = Uyi), не отличаются от приведенных на рис. 2-24. При
меньших сигналах управления в характеристиках при переходе из выпрями-
тельного режима в инверторный появляется порог. В частности, при £7у = С7у2
и Uys регулирование напряжения преобразователя имеет место только в обла-
сти выпрямительного режима, а противо-э. д. с. инвертора остается неизменной.
При раздельном управлении управляющие сигналы в каждый момент
времени подаются на управляющие электроды только одного из преобразова-
телей ТПВ или ТПН, поэтому протекание уравнительных токов исключается.
82
Переключение преобразователей при изменениях входных сигналов и направ-
ления тока нагрузки осуществляется логическим переключающим устройством, '
которое фиксирует момент уменьшения тока нагрузки до нуля, блокирует
импульсы ранее работавшей группы вентилей и через некоторое время разре-
шает включение другой группы. Переходы тока через нуль при изменениях
режимов работы преобразователя в отличие от согласованного управления
сопровождаются так называемыми бостоновыми паузами небольшой длитель-
ности.
Рис. 2-25. Характеристики реверсивного преобразователя
при совместном несогласованном управлении:
а — зависимости U^, cl — f (t^y)> б — внешние характеристики
Для экскаваторных электроприводов наиболее благоприятными статиче-
скими характеристиками и регулировочными свойствами обладают преобразо-
ватели с согласованным управлением.
Системы импульсно-фазового управления
В соответствии с изложенным выше для управления тиристорным
преобразователем предусматривается система импульсно-фазового управле-
ния (СИФУ), которая должна выполнять две основные функции: 1) создавать
синхронизированную с напряжением сети m-фазную систему импульсов управ-
ления; 2) осуществлять сдвиг фазы управляющих импульсов относительно-
переменного напряжения питающей сети в зависимости от сигнала управления
иа входе СИФУ и обеспечивать вследствие этого требуемое регулирование
выходных параметров (напряжения и тока) преобразователя.
Остановимся кратко на требованиях, которые предъявляются к системам
импульсно-фазового управления. Первая группа требований вытекает из
физики работы управляемых вентилей и относится главным образом к форме
управляющих импульсов.
Для правильного проектирования и наладки СИФУ необходимо знать
характеристики цепи управления тиристоров, которые в каталогах на тири-
сторы обычно представляют в виде диаграмм управления (рис. 2-26). Вольт-
6*
83-
амперные характеристики цепи управления тиристоров в силу технологии
изготовления и ряда внешних факторов (температуры, напряжения анод-
катод и др.) имеют значительный разброс. На рис. 2-26 кривыми А п Б обозна-
чены предельные (граничные) вольтамперные характеристики. Все остальные
характеристики лежат в области между кривыми А и Б.
Для всех тиристоров данного типа существуют минимально необходимые
значения тока Zymln и напряжения Супнп управления, при которых еще
происходит надежное включение любого из них (прямые В и Г на рис. 2-26).
Диаграмма управления ограничена характеристиками предельно допу-
стимых значений напряжения Uy_ доп, тока /у цоп и мощности потерь Ру доп,
которая выделяется в тиристоре при про-
текании тока управления (линии Д, Е и Ж
на рис. 2-26).
Совокупность названных линий на диа-
грамме управления позволяет определить
внешнюю характеристику СИФУ. Для обе-
спечения надежного включения тиристоров
внешняя характеристика СИФУ (прямая 3
на рис. 2-26) должна располагаться выше
заштрихованной области и не должна при
этом пересекать кривую допустимой мощ-
ности.
Большой разброс параметров цепи упра-
вления тиристоров, а также малая предельно
допустимая мощность Ру доп затрудняют
Рис. 2-26. Вольтамперные характе- надежное включение тиристора с помощью
ристики при управлении тиристора постоянного или другого непрерывного сиг-
нала. Поэтому наиболее приемлемым спо-
собом управления является управление с помощью импульсов, которые для
уменьшения разброса моментов срабатывания тиристора должны иметь высокую
крутизну переднего фронта. При крутизне переднего фронта около 10—20 В/мкс
разброс моментов включения тиристоров пренебрежимо мал.
Длительность (ширина) импульса определяется выбранной схемой сило-
вой части преобразователя и режимом его работы. В частности, для работы
трехфазной мостовой схемы преобразователя необходимо подавать на каждый
тиристор либо два узких импульса с интервалом в 60°, либо один широкий
импульс длительностью не менее 60°. Причина такого требования вытекает
из рассмотрения приведенной на рис. 6-15 диаграммы работы этой схемы.
При управлении одиночными узкими (шириной менее 60°) импульсами в обла-
сти прерывистых токов не обеспечивается запуск преобразователя, так как
не могут открыться одновременно тиристоры в анодной и катодной группах.
Частота следования управляющих импульсов задается переменным напря-
жением питающей сети и определяется схемой силовой части преобразователя.
Для m-фазного преобразователя интервалы между импульсами, подаваемыми
на очередные вентили, равны Т1т. Отклонение интервалов между импульсами
от указанной величины называется асимметрией управляющих импульсов
(или углов регулирования). Асимметрия углов регулирования приводит, как
известно, к различной длительности протекания тока через тиристоры и фазы
обмоток питающего трансформатора, к появлению в выпрямленном токе пере-
менных составляющих, частота которых ниже частоты основной гармоники
пульсаций выпрямленного напряжения, сужает возможный диапазон регулп-
84
L
рования, ухудшает к. п. д. преобразователя. Поэтому при наладке преобра-
зователя необходимо стремиться к возможно меньшим значениям ассиметрии
углов. При этом для большинства встречающихся на практике случаев ассим-
метрия импульсов в 2—3° считается вполне приемлемой.
Вторую группу образуют требования, обусловливаемые спецификой кон-
кретного применения преобразователя, его силовой схемой и относящиеся
главным образом к фазосдвигающему устройству СИФУ. Важнейшими из них
являются: диапазон изменения угла регулирования; быстродействие; возмож-
ность суммирования нескольких входных сигналов; мощность управляющего
сигнала на входе СИФУ; вид регулировочной характеристики и способ согла-
сования групп вентилей, образующих
реверсивную схему преобразователя;
помехозащищенность. Последнее требо-
вание обусловлено высоким уровнем
помех, возникающих при коммутации
вентилей, которые могут явиться при-
чиной ложных включений тиристоров,
а также вызвать сбои в системе управ-
Рис. 2-27. Блок-схема СИФУ
ления.
Общая структура системы импульс-
но-фазового управления может быть
представлена схемой, приведенной на рис. 2-27. Здесь устройство, генерирую-
щее импульсы (генератор импульсов ГЛ), управляется с помощью напряже-
ния запуска и3 от фазосдвигающего устройства ФСУ. В свою очередь, ФСУ
осуществляет сдвиг фазы напряжения и3 по отношению к переменному напряже-
нию 77 _ питающей сети в функции сигнала управления иу на входе СИФУ.
Импульсы ни1, появляющиеся на выходе Г И поступают на первичные обмотки
импульсных трансформаторов ИТ и далее на управляющие электроды тири-
сторов.
Современные тиристорные преобразователи комплектуются системами
импульсно-фазового управления, которые могут выполняться по так называе-
мым горизонтальному или вертикальному принципам. В первом случае роль
ФСУ выполняет статический фазовращатель СФВ, простейшими представите-
лями которого являются мостовые схемы фазовращения (рис. 2-28, а). Если
мост не нагружен, то напряжение UE№ (рис. 2-28, б и в) при изменении одного
из параметров (И или X), оставаясь неизменным по величине, меняет фазу <р
в соответствии с формулой
<p = 2arctg-y ,
где X = <в£ или X — 1]&С.
В пределе, как это следует из приведенной формулы, диапазон изменения
фазы выходного напряжения равен 180°. При нагружении моста его выходное
напряжение UEb№ с изменением R или X уже не остается постоянным. Диапазон
изменения фазы при этом уменьшается. В подобных схемах в качестве регули-
руемого сопротивления R находят применение полупроводниковые триоды,
а в качестве регулируемой индуктивности — дроссели насыщения (см. § 2-4).
Фазосмещающее устройство, построенное по вертикальному принципу,
можно представить в виде блок-схемы, приведенной на рис. 2-29, а. Напряже-
ние ип пилообразной формы, вырабатываемое формирователем пилообразного
напряжения ФИН, сравнивается в узле сравнения УС с напряжением управ-
85
ления иу. В момент равенства указанных напряжений (рис. 2-29, б) на выходе
УС появляется сигнал ц3, запускающий генератор импульсов. Следовательно,
при изменении величины напряжения управления изменяется соответственно
и фаза управляющих импульсов.
Рассмотрим две наиболее употребительные схемы формирователей пило-
образного напряжения. В схеме, приведенной на рис. 2-30, а, пилообразное
Рис. 2-28. Мостовая схема фазовращения (я) и векторные диаграммы
напряжений мостовой схемы (б, в)
Рис. 2-29. Блок-схема СИФУ, построенного по вертикальному прин-
ципу (а) и диаграмма напряжений (б)
напряжение ип является суммой синусоидального напряжения — иЕ (вторич-
ная обмотка трансформатора Тр2) и полуволн синусоид напряжения на сопро-
тивлениях 7?7 и 7?2 (рис. 2-30, б). Такая форма пилообразного напряжения
позволяет иметь диапазон изменения фазы управляющих импульсов до 240°.
Недостатком рассмотренной схемы является чувствительность к искажениям
напряжения питающей сети.
Этот недостаток устранен в схеме ФПН с диодным коммутатором
(рис. 2-30, в). Собственно формирователем пилообразного напряжения является
здесь конденсатор С, периодически заряжающийся от источника стабилизи-
рованного напряжения Ес через большое сопротивление R1, так что постоянная
времени заряда конденсатора 7’с — RC много больше периода питающего
напряжения сети. В интервале времени £0—(рис. 2-30, а) диод ДЗ закрыт
и напряжение на конденсаторе нарастает практически по линейному закону.
В момент времени диод ДЗ открывается и начинается разряд конденсатора
по цепи: диод ДЗ, сопротивление R2, вторичная обмотка трансформатора Тр2.
После разряда конденсатора С диод Д2 открывается напряжением — ес
и шунтирует конденсатор С. В момент ts, когда напряжение еа снова проходит
через нуль, диоды Д2 и ДЗ закрываются и начинается новый процесс заряда
конденсатора. Таким образом, начало формирования пилообразного напряже-
86
ния точно совпадает с моментом перехода напряжения питающей сети через
нуль. Возможный диапазон изменения фазы управляющих импульсов состав-
ляет в этой схеме 200-220°.
Элементом сравнения фазосдвигающего устройства может явиться вход-
ная (базовая) цепь транзистора (рис. 2-31, а). Пилообразное напряжение ип
Рис. 2-30. Варианты схем формирования пилообразного напряжения (а, в)
и диаграммы напряжений (б, г) в этих схемах
включается последовательно и встречно
с напряжением управления иу. Тран-
зистор Т работает в ключевом режиме.
Пока напряжение ип остается меньше
напряжения Uy (рис. 2-31, б) диоды
Д1 и Д2 закрыты, на базу транзистора
через сопротивление R1 подается отри-
цательное напряжение, благодаря чему
транзистор находится, в открытом со-
стоянии, а напряжение на выходе схемы
и3 = 0. В момент времени, когда ип
становится равным и больше напряже-
ния иу диоды Д7 и Д2 открываются,
а к базе транзистора прикладывается
положительное напряжение Днд2, рав-
ное прямому падению напряжения на
Рис. '2-31. Устройство сравнения (а) и
диаграмма напряжений (б)
диоде Д2.
Транзистор переходит в режим отсечки (закрывается), а на выходе
схемы появляется напряжение и3, запускающее генератор импульсов.
«7
Генераторы импульсов имеют большое разнообразие схемных решений,
во многом определяемое различием исполнений фазосмещающих устройств.
Две схемы генераторов импульсов (применительно к статическому фазовраща-
телю мостового типа и к фазосмещающему устройству, построенному по верти-
кальному принципу) рассмотрены в § 5-7 при описании полных схем СИФУ
серийных преобразователей.
Тиристорный преобразователь как
элемент экскаваторного электропривода
В настоящее время идет процесс внедрения тиристорных преобра-
зователей в качестве возбудителей генераторов на мощных экскаваторах и
в системе тиристорный преобразователь — двигатель на относительно неболь-
ших машинах. Как выше отмечалось, в основном используется трехфазная
мостовая встречно-параллельная схема реверсивного преобразователя. Преоб-
разователи, предназначенные для возбуждения генераторов, в настоящее время
снабжаются СИФУ с фазовращающими мостами, в которых в качестве управ-
ляемой индуктивности используются дроссели насыщения. Более мощные
преобразователи, предназначенные для питания якорных цепей двигателей,
имеют полупроводниковые СИФУ, построенные по вертикальному принципу.
Статические характеристики преобразователей практически не зависят
от вида СИФУ. Они определяются главным образом способом управления ре-
версивным преобразователем и, как было показано выше, при согласованном
управлении имеют практически тот же вид, что и у генератора с независимым
возбуждением. Характеристика Епр = J (иу) при этом может быть приближенно
заменена прямой линией
Кпр /сПрПу,
где кпр — коэффициент усиления преобразователя по напряжению.
Динамические свойства преобразователя отличаются своеобразием, свя-
занным с дискретностью импульсно-фазового способа регулирования напря-
жения и с неполной управляемостью тиристоров.
Сравнивая рис. 2-20, а с рис. 2-20, д, можно убедиться, что мгновенный
переход от Ed0 к —Edmax в принципе невозможен. Если изменение скачком
фазы управляющих импульсов произойдет в самом конце интервала проводи-
мости работающего вентиля фазы а непосредственно перед очередной комму- j
тацией, то режим работы преобразователя, соответствующий а ~ 160°, как
видно на рис. 2-20, д, начнется не мгновенно, а примерно через интервал 40°, ,
в течение которого должен был бы работать вентиль фазы с, а продолжает рабо- ;
тать вентиль фазы а. Если скачок от а = Ока = 160° был бы совершен сразу <
после окончания коммутации тока с вентиля фазы с к вентилю фазы а, то ука- '
занный интервал запаздывания увеличился бы почти до 160°. Поэтому собст- ’
венно тиристорный преобразователь представляет собой звено с чистым запаз-
дыванием, передаточная функция которого имеет вид:
W (р) = /гпре-г,т«,
где т0 — чистое запаздывание. Его величина близка к полупериоду перемен-
ного тока, что при /с = 50 Гц составляет т0 0,01 с.
Вторым фактором, определяющим динамические свойства вентильного
преобразователя, является быстродействие его СИФУ. Полупроводниковые
СИФУ, построенные по вертикальному принципу, обладают высоким быстро-
действием и практически считаются безынерционными. Однако и в этом случае
88
изменение управляющего сигнала скачком не вызывает скачка угла регулиро-
вания, так как обычно на входе таких СИФУ устанавливаются фильтры, имею-
щие передаточную функцию апериодического звена с малой постоянной вре-
мени, соизмеримой с т0. Фазовращающие мосты с дросселями насыщения также
могут быть представлены передаточной функцией апериодического звена,
но со значительно большей постоянной времени. Поэтому в большинстве прак-
тических случаев тиристорный преобразователь представляют следующей пере-
даточной функцией: Wm (р) = — -1?—, принимая 7'пс «0,01 с для полу-
р 1 + -* прР
проводниковых СИФУ и Тпр = 0,05 4- 0,1 с для СИФУ с магнитными усили-
телями и дросселями насыщения. При этом необходимо учитывать зависимость
напряжения преобразователя от тока нагрузки, добавляя эквивалентное
внутреннее сопротивление преобразователя 7?эчв, определяемое по внешней
характеристике, к суммарному сопротивлению якорной цепи двигателя или
к сопротивлению цепи обмотки возбуждения, если преобразователь исполь-
зуется как возбудитель.
Сравнивая реверсивный тиристорный преобразователь с генератором
постоянного тока, можно установить существенные различия:
1) генератор постоянного тока обладает большой электромагнитной инер-
цией, и обычно в системе Г—Д требуется ускорение (форсирование) процессов
его возбуждения. Тиристорный преобразователь является быстродействующим,
и в электроприводе чаще всего требуется замедление протекания его переход-
ных процессов;
2) электромашинные преобразовательные агрегаты экскаваторов являются
громоздкими вращающимися установками. Тиристорные преобразователи яв-
ляются статическими устройствами, не требующими тяжелых фундаментов;
3) тиристорный преобразователь обладает более высоким к. п. д., чем
электромашинный преобразовательный агрегат. В то же время его коэффициент
мощности при глубоком регулировании напряжения уменьшается, в то время
как синхронный двигатель преобразовательного агрегата обычно работает
с опережающим cos <р, осуществляя компенсацию потребляемой другими на-
грузками реактивной мощности;
4) генератор постоянного тока органически обладает двусторонней прово-
димостью. В тиристорном преобразователе это свойство обеспечивается вклю-
чением двух нереверсивных преобразователей в реверсивную схему с согласо-
ванным управлением;
5) способ управления напряжением генератора в принципе более прост,
чем способ управления напряжением тиристорного преобразователя.
Сопоставляя перечисленные особенности, можно убедиться в том, что по
одним показателям тиристорный преобразователь существенно превосходит
генератор постоянного тока, а по другим показателям выигрывает последний.
Первые две отмеченные выше особенности и высокий к. п. д. тиристорного
преобразователя определяют тенденцию к замене электромашинных агрегатов
статическими преобразователями. Однако отмеченные различия нужно посто-
янно иметь в виду как при проектировании, так и при наладке экскаваторных
электроприводов по системе ТП—Д.
§ 2-4. Магнитные усилители
В основу работы магнитных усилителей положен принцип регули-
рования тока с помощью дросселя насыщения. Простейшая схема такого регу-
лирования представлена на рис. 2-32, а.
89
Дроссель насыщения представлен на этом рисунке упрощенно, в вид!
стального сердечника с размещенными на нем рабочей (силовой) обмоткой и\
и обмоткой управления wy. Силовая обмотка включается в сеть переметки»
тока последовательно с нагрузкой Нпаг. Если цепь обмотки управления разом
кнута, дроссель насыщения представляет собой обычную катушку с железом
обладающую большой индуктивностью и, следовательно, большим индуктив
ным сопротивлением XR. При этом в нагрузочной цепи протекает небольшой ш
величине ток /о — ток холостого хода. Так как в этом режиме индуктивно»
+ "Г
Рис. 2-32. Регулирование переменного тока с помощью дросселя
насыщения:
а — схема; б — характеристики
сопротивление дросселя во много раз превышает сопротивление нагрузки
приложенное напряжение в основной своей части уравновешивается э. д. с
самоиндукции дросселя Екр URp, ток холостого хода невелик и напряжени
на нагрузке близко к нулю (рис. 2-32, б).
Большая величина индуктивного сопротивления дросселя при холосто!
ходе обусловлена отсутствием насыщения стали его сердечника. Если обмотк
управления подключить к источнику постоянного тока и постепенно увеличв
вать ток управления 1у, создаваемая обмоткой управления н. с. вызовет насы
щение сердечника, тем более значительное, чем больше ток подмагничивания
В пределе при достаточно большом подмагничивающем поле сердечник насы
щается полностью и его магнитная проводимость не отличается от магнитно:
проводимости воздуха. При этом падение напряжения на дросселе определяете,
небольшим индуктивным сопротивлением рассеяния рабочей обмотки и е
активным сопротивлением. Предельное значение тока нагрузки при коротко!
замыкании дросселя
Таким образом, как показано на рис. 2-32, б, с увеличением тока управле
ния падение напряжения Z74p уменьшается, а ток нагрузки непрерывно возра
стает от тока холостого хода /0, стремясь к величине 7К- 3. Зависимость 7наг =
= f (Ту) на значительном участке линейна. Более подробный анализ работ!
90
дросселя насыщения показывает, что в этой зоне средние значения н. с. нагру-
зочной и управляющей обмоток примерно равны
Aiar^c
(2-34)
Линейный участок характеристики дросселя является его рабочим участ-
ком и номинальное значение тока нагрузки ZHar н обычно соответствует верх-
ней границе этого участка. Отношение номинального напряжения на нагрузке
к номинальному напряжению сети принято называть коэффициентом исполь-
зования по напряжению
р. _______ t/иаг. н _ /наг. н
, «-И гт г
с 1 к. з
Этот коэффициент характеризует
потерю напряжения в дросселе при
номинальной нагрузке. Обычно его
значения лежат в пределах /;:н =
= 0,6 0,8. Отношение номиналь-
ного тока (или иногда тока ZK 3)
к току холостого хода называется
коэффициентом (кратностью) регу-
Рис. 2-33. Размещение обмоток дросселя на-
сыщения и схема их соединения:
а — однофазный дроссель с тороидальными сердеч-
никами; б — схема соединения обмоток; в — ших-
товка сердечников из П-образных пластин
лирования по току
Ъ ______________ /наг, н
Р-т Д •
Коэффициент кр т характеризует
регулировочные свойства, дросселя и
его желательно иметь возможно большим. Для серийных усилителей кр т =
= 10-4-20. Увеличение /ср. т достигается возможным снижением тока холо-
стого хода за счет уменьшения воздушного зазора и снижения максимальной
индукции в сердечнике при холостом ходе. Поэтому повышение напряжения
сети в сравнении с номинальным ухудшает регулировочные свойства дросселя:
ток холостого хода за счет насыщения сердечника возрастает в большей сте-
пени, чем ток ZK з, и кратность регулирования уменьшается (кривая 1 на
рис. 2-32, б). Аналогично влияет и увеличение сопротивления нагрузки, так
как при Z7C = const Zo const, а ток ZK 3 в соответствии с (2-33) уменьшается
обратно пропорционально сопротивлению нагрузки (кривая 2 на рис. 2-32, б).
Обмотка управления в схеме, приведенной на рис. 2-32, а сцеплена с пере-
менным магнитным Потоком, создаваемым рабочей обмоткой, и в ней наводится
значительная переменная э. д. с., а при замыкании цепи на источник постоянного
тока может протекать переменный ток. Для его ограничения в цепь обмотки
управления включена внешняя индуктивность Аогр. В реальных дросселях
насыщения ограничение переменных наводок в цепях управления достигается
иным путем, за счет некоторого усложнения конструкции. В качестве примера
на рис. 2-33, а показана конструкция дросселя с тороидальными сердечниками.
Точками и крестиками показано направление мгновенных значений переменных
потоков, создаваемых рабочими обмотками wc, что обеспечивается соединением
их по схеме, приведенной на рис. 2-33, б. Очевидно, относительно обмотки
управления wy переменные потоки в сердечниках направлены встречно, поэтому
при полной идентичности каждого сердечника и обмоток wc наведение основной
и всех нечетных гармоник переменного тока в цепях управления исклю-
чено.
' 91
Аналогично размещаются обмотки на прямоугольных сердечниках более
мощных дросселей, шихтовка сердечников которых показана на рис. 2-33, в.
Тороидальные сердечники и показанная шихтовка пластин обеспечивают мини-
мальный воздушный зазор и соответственно минимальный ток холостого хода.
Коэффициент усиления дросселя насыщения по мощности, если принять
Zn 0, с учетом (2-34), можно выразить так:
7 Д:аг. нДнаг___И’уйнаг
Р“ 7®. НЛу ^7”’
где 7?у — собственное сопротивление обмотки управления.
В соответствии с (2-34) обмотки дросселя wc и шу должны быть по нагреву
рассчитаны на одинаковую номинальную н. с. Если принять, что средние длины
витков обеих обмоток равны, то Ву = Rc wy]u%. В этом случае можно полу-
чить приближенное выражение для оценки кр
Днаг Днаг. н
(2-35)
L_________________
₽ Rc 7наг. нДс ’
где Bc — сопротивление нагрузочной обмотки.
Полученное выражение показывает, что коэффициент усиления дросселя
насыщения не превышает одного-двух десятков. Поэтому в магнитных усили-
телях для получения более высоких коэффициентов усиления используется
положительная обратная связь по току нагрузки.
Простейшая схема однофазного магнитного усилителя с положительной
связью по току показана на рис. 2-34, а. Здесь и в дальнейшем рассматриваются
магнитные усилители на постоянном токе, ибо только этот вид усилителей
находит применение на экскаваторах. Для выпрямления переменного тока
нагрузки в схему введен выпрямитель В. Обмотка обратной связи по току w0 с
включена в цепь нагрузки последовательно и создает н. с. Fo с. Рассматривая
характеристики, приведенные на рис. 2-34, г, можно заключить, что положи-
тельная обратная связь по току позволяет существенно увеличить коэффи-
циент усиления, так как создает основную долю н. с., необходимой для насы-
щения сердечников. Форма характеристики существенно меняется: возрастает
ток холостого хода до значения Zg, коэффициент усиления возрастает только
при положительном направлении результирующей н. с. Fy = F — k-J^,
а при противоположном направлении — резко уменьшается, так как ток на-
грузки не меняет своего направления: Fy = —F — kj!^.
Поэтому характеристика усилителя с положительной обратной связью
несимметрична относительно оси ординат.
Недостатком схемы с внешней обратной связью является необходимость
размещения на дросселе обмотки обратной связи wo с, рассчитанной на ту же
н. с., что и рабочие обмотки. Более совершенны схемы с самоподмагничиванием,
т. е. с внутренней связью по току, в которых требуемая н. с. обратной связи
создается рабочими обмотками. На рис. 2-34, б представлена схема, в которой
рабочие обмотки дросселя включены непосредственно в плечи выпрямитель-
ного моста В. При таком включении по рабочим обмоткам протекает пульси-
рующий ток, содержащий постоянную составляющую, равную среднему зна-
чению тока. За счет этого создается постоянная н. с. Fo с, действующая ана-
логично обмотке внешней обратной связи по току.
Другой вариант внутренней обратной связи показан на рис. 2-34, в. Здесь
для получения постоянной составляющей, пропорциональной току нагрузки,
используются дополнительные вентили В1 и В2, а получающийся во внешней
92
цепи) переменный ток выпрямляется основным выпрямителем В. Такую обрат-
ную' связь мы будем в дальнейшем называть внутренней вынесенной обратной
связью по току.
Схема с вынесенной обратной связью по току обеспечивает более благо-
приятные характеристики усилителя при работе на индуктивную нагрузку.
Напряжение на выходе выпрямителя, пульсирующее с двойной частотой сети,
вызывает в индуктивности переменную э. д. с., под действием которой в отдель-
ные моменты времени протекают токи, замыкающиеся через цепь выпрями-
Рис. 2-34. Схемы однофазных магнитных усилителей с положительной обратной
связью по току:
а — с внешней связью; б — с внутренней связью; в — с вынесенной внутренней связью; г —
характеристики усилителей
теля В. В схеме с обычной внутренней связью (см. рис. 2-34, б) эти токи про-
текают по рабочим обмоткам и неблагоприятно влияют на характеристики
и быстродействие магнитного усилителя. Устранить это влияние частично
можно, зашунтировав индуктивную нагрузку емкостью, ориентировочную
величину которой можно определить из соотношения
|-2 1Q3, мкф
тЛнаг
где т — кратность частоты пульсаций по отношению к частоте сети.
Однако более благоприятный результат дает использование вынесенной
обратной связи.
93
Положительная обратная связь по току увеличивает ток холостого хода /0
.до значения 1'0 (см. рис. 2-34, г). Уменьшить его в требуемых пределах можно
с помощью постоянного смещения, осуществляемого, как указано на
рис. 2-34, в, обмоткой шсм. Эта обмотка создает постоянную н. с. FCM, причем
если она направлена согласно с Fo с, то ток /0 увеличивается (положительное
смещение), а если встречно — уменьшается (отрицательное смещение). На
рис. 2-34, г пунктиром показана характеристика при отрицательном смещении.
Ток холостого хода уменьшается до /о, а вся кривая /наг — f (Ру) переме-
щается на постоянную величину FCM вправо.
Магнитные усилители с внутренней связью по току в настоящее время
находят широкое применение. Они обладают достаточно высоким коэффи-
циентом усиления, достигающим нескольких тысяч, и благодаря незначитель-
ности объема меди обмоток управления, удовлетворительным быстродействием.
Собственные постоянные времени обмоток управления для серийных усили-
телей указываются в каталогах. В частности, для трехфазных усилителей
серии УМ.ЗП величина постоянной времени одной обмотки управления лежит
в пределах 0,1—0,5 с.
Зависимость постоянной времени обмотки управления магнитного усили-
теля от основных параметров усилителя и частоты сети выражается соот-
ношением:
Т,. =
у 4/ т \ ыс ) /?у
где кр — коэффициент усиления по н. с.; /— частота питающей сети; wy —
число витков обмотки управления; ыс — число витков рабочей обмотки; 7?вых —
выходное сопротивление; 7?у — сопротивление цепи обмотки управления.
Рассмотренные схемы магнитных усилителей не обеспечивают изменения
направления тока в нагрузке при изменении полярности сигнала на входе.
Такие схемы называют нереверсивными или однотактными. Все главные при-
воды экскаваторов являются реверсивными, поэтому для управления этими
приводами могут быть использованы только реверсивные (двухтактные) уси-
лители, обладающие знакопеременным выходом. Реверсивные схемы магнит-
ных усилителей составляются из двух однотактных схем, одна из которых
работает при положительном сигнале на входе, а другая — при отрицательном.
Простейшая схема двухтактного усилителя может быть получена, если
нагрузкой является вход второго усилителя, у которого для получения знако-
переменного сигнала можно использовать две встречно включенные обмотки
управления (рис. 2-35, а).
Характеристики двухтактного усилителя приведены на рис. 2-35, б. Харак-
теристика 1 представляет собой зависимость тока нагрузки первого усили-
теля МУ1 Iх = / (Fy) при 1СЫ = 0. Подбором величины тока смещения можно
установить любое в пределах рабочего участка характеристики значение тока
холостого хода Zo. В рассматриваемом случае F0M выбрано таким, чтобы точка
холостого хода находилась примерно на середине рабочего участка (кривые 2
и 3). Этим обеспечивается максимальный коэффициент усиления двухтактного
магнитного усилителя, в чем можно убедиться построив результирующие харак-
теристики при различных Fc„,.
Так как обмотки ЭМУ ОУ1 и ОУ2 предполагаются одинаковыми, можно
оперировать расчетным током нагрузки ZHar = Zx — /2, пропорциональным
результирующей н. с. ЭМУ FHar = Fx — F2. Результирующая характеристика
1цат = / (Fy) построена на рис. 2-35, б. Она свидетельствует о том, что сигнал
94
на выходе усилителя меняет свой знак при изменении знака сигнала на входе.
Зависимость /наг = f(Fv) линейна в широких пределах (рабочий участок
характеристики), а при определенном значении Fy наступает практически
идеальное насыщение усилителя, при котором изменение сигнала на входе
не вызывает изменения сигнала на выходе. Эта нелинейность обеспечивает
надежное ограничение выходного сигнала.
Схема усилителя с магнитным суммированием сигналов на выходе исполь-
зуется лишь при небольшой мощности усилителей, работающих на первой
ступени усиления в каскадных схемах возбуждения генераторов. Для непо-
средственного управления полем генераторов используются специальные
Рпс. 2-35. Двухтактный магнитный усилитель с магнитным суммированием сигналов
на выходе:
о — схема; б — характеристики
схемы магнитных усилителей — так называемые двухтактные магнитные уси-
лители с повышенным к. п. д.
В настоящее время известно большое число различных схем двухтактных
магнитных усилителей с повышенным к. п. д. Однако по принципу действия
они делятся только на две разновидности — дифференциально-мостовые и
мостовые. Принцип действия дифференциально-мостовых схем можно наглядно
пояснить упрощенной схемой, представленной на рис. 2-36, а.
В этой схеме нагрузка 7?наг (обмотка возбуждения генератора) включается
в диагональ выпрямительного моста, в два плеча которого введены регулируе-
мые источники тока с э. д. с. Ег, а в два другие — с э. д. с. Е2. Ко второй диа-
гонали моста подключается балластное сопротивление Rc>. Как видно из ри-
сунка, ток нагрузки /наг представляет собой разность токов и Z2 в плечах
схемы и в зависимости от их величины может иметь различное направление.
Ток в балластном сопротивлении 1б равен сумме токов /х и /2. Электродви-
жущие силы Ег и Е2 предполагаются регулируемыми с помощью дросселей
насыщения магнитного усилителя таким образом, что при увеличении э. д. с.
£х э. д. с. Е2 уменьшается. Ток в нагрузке ZHar имеет максимальное значение
при Ег = Elmsx и Е2 = 0, или наоборот.
95-
При этом напряжение на нагрузке £7наг = /нагйнаг достигает наиболь-
шего значения. Это напряжение приложено к контуру, показанному на
рис. 2-36, а пунктиром, и при определенных условиях по этому контуру может
протекать паразитный (уравнительный) ток 7П, уменьшающий ток и напряже-
ние на выходе усилителя. Величина тока /п зависит от соотношения между
сопротивлениями йиаг и 7?б
г 11 (Днаг—Дб)
П Днаг + Дб
(2-36)
Таким образом, паразитный ток протекает по неработающим плечам схемы
только при 7?наг > R6. При йнаг = R6 паразитный ток равен нулю, так же
Рис. 2-36. Схемы замещения двух-
тактных МУ (а, б) и теоретическая
внешняя характеристика (в)
как и при 7?наг <Z R6. В последнем случае его протеканию препятствуют вен-
тили в плечах моста. Этот вывод легко понять, если заметить, что в паразитном
контуре напряжение на нагрузке уравновешивается только падением напря-
жения на балластном сопротивлении. Поэтому напряжение на балластном
сопротивлении не может быть меньше, чем напряжение на нагрузке. Если
£7наг <_ U6, имеют место нормальные условия работы схемы, так как при этом
к соответствующим плечам моста прикладывается напряжение, противополож-
ное направлению тока 12.
В аналогичных условиях работают и мостовые схемы, принцип действия
которых поясняется рис. 2-36, б. Эти схемы предполагают деление обмотки
возбуждения генератора на две ветви Внаг/2, из которых с помощью двух бал-
ластных сопротивлений 7?б/2 образуется мост. Электродвижущие силы Ег
и Е2 осуществляют питание моста по двум его диагоналям. При этом ток в на-
грузке /наг, аналогично рассмотренному выше, равен разности токов / г/2
и /2/2, а ток в балластных сопротивлениях — сумме этих токов.
Здесь также имеется контур для протекания паразитного тока пока-
занный на рис. 2-36, б пунктиром. Если мост уравновешен (2?наг/2 = Яб/2),
ток 1п = 0. При Янаг > R6 к цепи вентиля R2 за счет действия э. д. с. Ег
96
прикладывается напряжение, вызывающее протекание паразитного тока.
Если Бнаг < й6 к этой цепи прикладывается обратное по знаку напряжение
и благодаря наличию вентиля В2 ток 1П = 0.
На рис. 2-37 представлен в качестве примера ряд схем трехфазных ревер-
сивных магнитных усилителей с повышенным к. п. д. На экскаваторах пре-
имущественное распространение имеют мостовые схемы с обычной (рис. 2-37, а)
и с вынесенной (рис. 2-37, б) обратной связью по току. Трехфазная дроссельно-
мостовая схема, приведенная на рис. 2-37, в, успешно применяется в тех слу-
чаях, когда нагрузка имеет два зажима и разделить ее на две равные незави-
симые параллельные ветви, необходимые для использования мостовых схем,
невозможно. Принцип действия этой схемы соответствует принципу действия
Рис. 2-37. Схемы трехфазных реверсивных магнитных усилителей
схемы, приведенной на рис. 2-36, а, причем токи IА и 12 регулируются с по-
мощью силовых обмоток дросселей насыщения, включенных последовательно
с каждым плечом рабочего выпрямителя.
Возможность появления паразитного тока в схемах двухтактных магнит-
ных усилителей с повышенным к. п. д. оказывает на работу усилителя при
индуктивной нагрузке существенное влияние. Это влияние обнаруживается
во внешней характеристике усилителя, форму которой можно выявить, рас-
сматривая при £2 = 0 и /2 = 0 работу схемы, приведенной на рис. 2-36, а.
В соответствии с (2-36) при 7?наг < R6 паразитный ток отсутствует и при
изменениях сопротивления Виаг напряжение на нагрузке изменяется в линей-
ной зависимости от тока нагрузки: Е7наг = 2Ег — 7Нагйб-
При 7?на1 7?б напряжение на нагрузке остается постоянным £7наг = Et,
так как увеличение сопротивления нагрузки сопровождается увеличением
паразитного тока, которое обеспечивает выполнение условия {7ваг = U6 =
= (/i Н- /„) Re- Следовательно, теоретически внешняя характеристика должна
7 заказ 1127
97
иметь вид, представленный на рис. 2-36, в, причем точке излома характери-
стики соответствует сопротивление нагрузки 7?наг = Rf,- В реальных схемах
процессы сложнее рассмотренного. Б частности, величина э. д. с. Ел зависит
от тока 1^, э. д. с. Е2 и ток 12 не могут стать равными нулю вследствие наличия
определенного тока холостого хода дросселя и т. и. Эти факторы влияют на
форму внешней характеристики, но основная закономерность, выявленная
для схем, приведенных на рис. 2-36, в, сохраняется. Эта же закономерность
характерна и для мостовых схем. В этом можно убедиться, рассматривая
представленные на рис. 2-38, а экспериментальные внешние характеристики,
полученные при испытаниях схем, приведенных на рис. 2-37, а и б.
Рис. 2-38. Экспериментальные характеристики двухтактного МУ
типа УМ.ЗП 25.13:
---------для схемы, приведенной на рис. 2-37, а; для схемы,
приведенной на рис. 2-37, б; 1 и 2 — F = 20Ав; 3 и 4 F = 100Ав при
Вб/2 = 4,5 Ом; Л — Fy = 100 Ав при Bg/2 ~ 3 Ом У
На основании изложенного можно заключить, что наиболее благоприятные
условия работы схем магнитных усилителей с повышенным к. п. д. имеют место
при R6 = Внаг. Действительно, при этом отсутствует паразитный ток, в на-
грузке выделяется наибольшая мощность, а идеальный к. и. д. схемы, учиты-
вающий только потери в балластном сопротивлении, достигает наибольшего
значения циц = 0,5. Исходя из этого, обычно рекомендуется выбирать балласт-
ное сопротивление в пределах
Бб = (1,054-1,15) 7?наг. (2-37)
Этой рекомендацией при выборе параметров схем усилителей, пред-
назначенных для управления полем генераторов в системе Г—Д, можно поль-
зоваться, если форсирование процесса возбуждения не требуется и мощность
усилителя выбираемся равной номинальной мощности возбуждения генератора.
Иные условия складываются, если для форсирования переходных процес-
сов магнитный усилитель выбирается со значительным запасом по напряжению.
Вследствие наличия индуктивности обмотки возбуждения генератора, ток
нагрузки усилителя в переходных процессах не может изменяться скачком.
Кажущееся сопротивление нагрузки при этом меняется в широких пределах.
98
Так, например, при включении обмотки управления усилителя, напряжение
на его выходе весьма быстро достигает установившегося значения, определяе-
мого по внешней характеристике Ul!sr — } (2наг) при JHar = 0. При этом
кажущееся сопротивление нагрузки Янаг — оо. По мере возрастания тока
возбуждения генератора оно уменьшается, стремясь в установившемся режиме
к величине омического сопротивления обмотки возбуждения генератора 7?в.
Если при этом R6 <=& RB1 то на протяжении всего переходного процесса
кажущееся сопротивление нагрузки Нмт и усилитель работает в не-
благоприятном режиме. Выбранный из условия форсировки большой запас
по напряжению усилителя создает в соответствующее число раз увеличенный
Рис. 2-39. Характеристики МУ при различных балластных сопротивлениях
(а) и при различных смещениях (б)
паразитный ток Zn, бесполезно загружающий элементы схемы и снижающий
напряжение на нагрузке.
Поэтому выбор балластного сопротивления должен учитывать запас по
напряжению усилителя, предусмотренный для форсирования процессов воз-
буждения генератора. Если напряжение усилителя выбрано из условия полу-
чения форсированного возбуждения генератора UBtnax — aUBB, балластное
сопротивление целесообразно выбирать из соотношения
> Яб = 1,1^2^=1,1айв. (2-38)
•*Е. В
При этом оптимальные условия работы будут иметь^ место в переходном
процессе. При установившемся режиме увеличенное балластное сопротивление
относительно завышено, что соответственно снижает теоретический к. п. д.
схемы. Однако величина теоретического идеального к. п. д. схемы при недо-
использовании усилителя по мощности в а раз не может дать представления
о фактических потерях в схеме. Его снижение при увеличении балластного
сопротивления далеко не во всех случаях влечет за собой увеличение потерь
7»
99
энергии в установившемся режиме, но всегда благоприятно сказывается на
статических характеристиках усилителя.
На «рис. 2-39, а для сравнения приведены характеристики магнитного
усилителя 11г /2, /наг, /б = / (Fy) для а = 4 при R61 — 4,4RV (сплошные
кривые) и Т?б2 = 1,1(пунктирные кривые). Точки холостого хода отдельных
дросселей магнитного усилителя лежат примерно в средней части линейного
участка соответствующей характеристики. Такой выбор обеспечивает, как
выше было указано, максимум коэффициента усиления усилителя.
Рассматривая эти кривые, нетрудно убедиться, что увеличение балласт-
ного сопротивления не только не увеличивает потерь мощности в балластном
сопротивлении в установившемся режиме /наг = но при определенных
условиях может их в значительной степени снизить. В рассматриваемом случае
увеличение сопротивления R6 в четыре раза сопровождается уменьшением
тока в этом сопротивлении в 2,5 раза. Потери энергии в балластном сопротив-
лении при этом снижаются примерно в полтора раза.
Одновременно улучшается форма статических характеристик, что, в свою
очередь, уменьшает потери и улучшает регулировочные свойства усилителя.
Из рисунка видно, что при сопротивлении Вб2 излом характеристики -
= / (Fv) при уменьшении тока выражен слабо, а ток холостого хода значите
лен. При увеличенном балластном сопротивлении 7?б1 ток холостого хода
сильно снижается и появляется четкий излом характеристики в зоне малых
токов нагрузки.
Подобное влияние на характеристику усилителя оказывает уменьшение
напряжения питания, т. е. уменьшение максимальной индукции Вы перемен-
ного поля в сердечниках. Действительно, в данном случае при увеличении
балластного сопротивления и неизменном напряжении питания индукция Вы
уменьшается в значительной степени. Это объясняется отмеченным выше
эффектом возникновения запирающей разности потенциалов на нерабочем
плече схемы при 7?б > RHar. При этом к выходу размагниченного усилителя
прикладывается встречное напряжение, создаваемое подмагниченным усили-
телем. Это напряжение тем больше, чем больше подмагничивание рабочего
плеча и чем больше балластное сопротивление в сравнении с сопротивлением
нагрузки
U3an = I6R6-IliWRliaT ъ UHar 1) •
Правильный выбор балластного сопротивления обеспечивает в динамике
лучшее использование форсировок по напряжению, заложенных при выборе
магнитного усилителя. Чтобы пояснить это, обратимся к схемам, приведенным
на рис. 2-36. В первый момент переходного процесса возбуждения генератора
кажущееся сопротивление индуктивной нагрузки равно бесконечности. При
этом ток на выходе подмагниченного усилителя, равный току в балластном
сопротивлении, составит 7С х х = EjR^
Ток в балластном сопротивлении при холостом ходе схемы обратно про-
порционален величине балластного сопротивления. При выборе Вй из условия
(2-38) ток 7б. х. х в а раз меньше, чем при R6 /?наг. Между тем известно,
что однотактный магнитный усилитель обладает относительно большим вну-
тренним сопротивлением. Поэтому уменьшение тока 1б х х вызывает увели-
чение напряжения на выходе подмагниченного усилителя, а следовательно,
и увеличение форсировки возбуждения генератора с независимым возбуждением
(ср. кривые 4 и-5 на рис. 2-38, а).
100
При работе на индуктивную нагрузку паразитные токи в схемах диффе-
ренциальных магнитных усилителей возникают во всех переходных процессах,
когда кажущееся сопротивление нагрузки превышает установленное балласт-
ное сопротивление. В схемах с обычной внутренней связью (см. рис. 2-37, а
и в) эти токи замыкаются непосредственно по силовым обмоткам размагничи-
ваемого дросселя насыщения. Дополнительная н. с. силовых обмоток, обу-
словленная паразитным током, препятствует размагничиванию сердечников
дросселя обмоткой управления. Тем самым напряжение на выходе усилителя
снижается в тем большей степени, чем меньше н. с., создаваемая обмоткой
управления и чем больше ток /п.
Рассматриваемое явление оказывает существенное влияние на форму
внешних характеристик усилителя, как это видно из сравнения эксперимен-
тальных внешних характеристик в схемах с обычной и с вынесенной обратной
связью по току, представленных на рис. 2-38, а. На основании такого срав-
нения можно сделать вывод, что схема с вынесенной обратной связью по току
при прочих равных условиях реализует более значительное форсирование
возбуждения генератора, особенно при малых сигналах управления. Наиболее
значительное повышение напряжения возбуждения имеет место в зоне отрица-
тельных токов нагрузки, соответствующей режимам гашения поля генератора.
Поэтому использование схемы с вынесенной обратной связью по току особенно
целесообразно для приводов с тяжелыми условиями стопорения. На рис. 2-38, б
приведены регулировочные характеристики в тех же схемах, которые свиде-
тельствуют о том, что характеристика /)|аг = f (Fy) в схеме с вынесенной обрат-
ной связью по току более благоприятна. Характеристика /наг = f (Fy) в схеме
с обычной внутренней связью имеет нелинейный рабочий участок и при про-
чих равных условиях меньшее предельное значение тока нагрузки. Это раз-
личие получается на много более значительным при выборе балластного сопро-
тивления из условия (2-37), т. е. при /?,,аг R6.
Влияние смещения на характеристики двухтактного магнитного усили-
теля поясняется кривыми, приведенными на рис. 2-39, б. Сплошные кривые 1
соответствуют выбору смещения из условия получения максимума коэффи-
циента усиления на рабочем участке, при этом точка холостого хода распо-
лагается примерно на середине рабочего участка характеристики каждого
однотактного магнитного усилителя. В этом случае ток в балластном сопротив-
лении при изменениях н. с. управления Fy почти не изменяется. Введением
более значительного отрицательного смещения ток в балластном сопротивле-
нии при Fy = 0 может быть в значительной степени снижен, однако коэффи-
циент усиления усилителя уменьшается (сплошные кривые 2). Такой выбор
смещения целесообразен в тех случаях, когда желательно уменьшить потери
энергии и нагрев элементов схемы при Fy 0, т. е. во время пауз в рабочем
цикле электропривода.
На рис. 2-39, б пунктирными линиями показаны характеристики усили-
теля при сильном отрицательном смещении. При этом характеристика уси-
лителя /наг = f (Fy) имеет зону нечувствительности тем более широкую,
чем больше отрицательное смещение. Таким образом, смещение может быть
использовано для выключения действия усилителя в определенном диапазоне
сигналов на входе.
Как следует из изложенного выше, форма внешней характеристики имеет
важнейшее -значение для оценки возможных форсировок возбуждения гене-
ратора с независимым возбуждением, ток возбуждения которого вследствие
индуктивности скачком изменяться не может. В зоне характеристик, соответ-
101
Назначение и тип генератора Статика Динамика
И о Б? И и и д ад II СП кя ад о д И д и И| и ь h II СП К S ад о
Генератор подъема МПЭ-12-34/6 . . 980 22 14 1,6 2 58 11,5 5,05
Генератор поворота МПЭ-14-12/4 . . 780 56 5,6 10 4 55 3,4 16,2
ствующей отрицательным значениям тока нагрузки (см. рис. 2-38, а), усили-
тель работает в режимах гашения поля генератора при реверсах и резких сто-
порениях электропривода. Приведенные выше рассуждения относительно
улучшения форсировки при увеличении балластного сопротивления относятся
к случаям использования усилителей в качестве возбудителей генераторов
с независимым возбуждением.
Важнейшей особенностью режима работы магнитного усилителя в схеме
Г—Д с самовозбуждением генератора является возможность изменения тока
нагрузки усилителя скачком. В схеме, приведенной на рис. 2-8, в, это объяс-
няется наличием взаимоиндуктивности между обмотками ОНВ и ОСВ генера-
тора Г.
Поэтому зона отрицательных значений тока на внешних характеристиках
магнитного усилителя в этом случае не является рабочей ни в одном из его
режимов работы. Однако кажущееся сопротивление нагрузки и в этом случае
изменяется при изменениях э. д. с. генератора, вследствие наведения э. д. с.
самоиндукции или взаимоиндукции в его обмотках возбуждения.
В качестве примера в таблице приведены расчетные значения напряжения
и тока возбуждения для генераторов подъема и поворота экскаватора ЭШ-6/60,
определенные при критическом самовозбуждении генераторов из условий ста-
тики (Ет о) и динамики (расчетное время возбуждения генератора tB)
для схемы, приведенной на рис. 2-8, а.
Кажущееся сопротивление нагрузки в динамике RHar значительно выше
сопротивления обмотки независимого возбуждения Въ. Очевидно, для генера-
тора подъема усилитель должен быть выбран с номинальным напряжением
на выходе иъ = 58 В (по условию динамики) и на номинальный ток в нагрузке
/в = 14 А (по условию статики), т. е. с полезной выходной мощностью Рв =
= 0,81 кВт. Выбор балластного сопротивления должен учитывать заложен-
ную при выборе усилителя форсировку по напряжению и обеспечивать получе-
ние при этой форсировке требуемого тока нагрузки в динамике и требуемого
статического тока возбуждения.
При выбранном типе магнитного усилителя практически балластное сопро-
тивление следует определять из соотношения
где UdH — номинальное выпрямленное напряжение выбранного усилителя, В;
Лшах— наибольшее требуемое значение тока возбуждения генератора, А;
ксх — коэффициент схемы, равный 1,1 для мостовых схем (см. рис 2-37, а и б)
и 0,55 для дифференциально-мостовых схем (см. рис. 2-37, в).
102
Рассмотренные двухтактные магнитные усилители с выходом на постоян-
ном токе обладают реальным к. п. д. около 30-35% и комплектуются из двух
однотактных магнитных усилителей. Эти факторы определяют их относительно
высокие габариты, в особенности при использовании наиболее надежных
в настоящее время селеновых выпрямителей. При полезной выходной мощности
усилителя около 2—3 кВт установленная мощность его дросселей и выпрями-
телей составляет 12—15 кВт. Целесообразность использования еще более
мощных усилителей в экскаваторных, да и в других электроприводах вызывает
сомнения. При этом преимущества явно на стороне тиристорных преобразова-
телей.
Поэтому при независимом возбуждении генератора область рационального
использования силовых магнитных усилителей ограничивается мощностью
приводов около 300—400 кВт. Однако и в этой области возможность снижения
требуемой мощности усилителя представляет большой интерес. Инерционность
усилителя тем меньше, чем меньше его габариты. Следовательно, уменьшение
мощности усилителя повышает устойчивость и быстродействие системы регули-
рования, упрощает ее наладку. Использование критического самовозбуждения
генератора расширяет область рационального применения силовых магнитных
усилителей вплоть до мощностей порядка 1000—1500 кВт.
Опыт эксплуатации магнитных усилителей на экскаваторах показал их
высокую надежность. Отечественная промышленность в настоящее время
выпускает качественные серийные усилители УМ.ЗП в широком диапазоне
мощностей и реверсивные (двухтактные) блоки небольшой мощности на уси-
лителях ТУМ с тороидальными сердечниками. Все это создает наиболее благо-
приятные возможности для использования магнитных усилителей на экскава-
торах как в качестве возбудителей генераторов, так и в качестве промежуточных
элементов схемы (входных каскадов усиления, дополнительных нелинейных
элементов, позволяющих получить требуемые характеристики системы регули-
рования, трансформаторов постоянного тока и т. п.).
При принимаемых обычно допущениях в пределах линейной части своей
характеристики магнитный усилитель имеет передаточную функцию апериоди-
ческого звена
где кк у — коэффициент усиления по напряжению; у — суммарная по-
стоянная времени всех обмоток управления.
Полагая коэффициент связи между обмотками управления усилителя
равным 1, суммарную постоянную Ты. у можно определить так:
п
7" Ду I
Лу,. + /,>дойг- »
где Ту t — каталожное значение постоянной времени данной обмотки управле-
ния усилителя; Ддоб, — добавочное сопротивление в цепи этой обмотки;
п — число обмоток управления, используемых в схеме.
ГЛАВА 3
СТРУКТУРЫ СИСТЕМ УПРАВЛЕНИЯ ЭКСКАВАТОРНЫМИ
ЭЛЕКТРОПРИВОДАМИ
§3-1. Система управляемый преобразователь — двигатель
В результате анализа режимов работы экскаваторных механизмов
и требований, предъявляемых к их электроприводу, в гл. 1 была установлена
необходимость применения системы электропривода, обладающей широкими
Рис. 3-1. Система УП—Д
регулировочными возможностями и высокими динамическими качествами.
Такой системой является система управляемый преобразователь — двигатель
(УП—Д), принципиальная схема которой представлена на рис. 3-1.
Двигатель постоянного тока с независимым возбуждением Д получает
питание от индивидуального управляемого преобразователя УП, преобразую-
щего трехфазное переменное напряжение сети
в регулируемое напряжение постоянного тока.
В качестве управляемого преобразователя может
быть использован либо электромашинный пре-
образовательный агрегат, состоящий из двигателя
переменного тока и генератора постоянного тока
(система Г—Д), либо реверсивный тиристорный
преобразователь (система ТП—Д).
При работе привода в замкнутой силовой
цепи системы действуют две встречно-направлен-
ные э. д. с.: преобразователя Епр и двигателя Ед. Поэтому важнейшие стати-
ческие и динамические характеристики системы УП—Д определяются взаи-
модействием этих э. д. с. в соответствии с уравнением Кирхгофа для силовой
цепи
^пр = ^д+^я^я2, (3-1)
где 7?ях = 7?я д 7?пр — суммарное сопротивление якорной цепи; Вя д —
сопротивление обмотки якоря и последовательных обмоток двигателя; 7?пр —
внутреннее сопротивление силовой цепи преобразователя.
Так как Ел ~ сесо = АгеФсо, уравнение (3-1) можно преобразовать к виду:
со
__ Ецр __j
~ кеф я кеФ ’
(3-2)
Полученная зависимость представляет собой уравнение электромеханиче-
ской характеристики электропривода по системе УП—Д. Из выражения (3-2)
следует, что при постоянном значении э. д. с. преобразователя и неизменном
потоке двигателя электромеханические характеристики в системе УП—Д
линейны (рис. 3-2, а).
Момент, развиваемый двигателем, при постоянном значении потока прямо
пропорционален величине тока якоря
М = кКФ1я,
(3-3)
где /гм — коэффициент, зависящий от конструктивных параметров двигателя
(в системе СИ = ке).
104
Выражение (3-3) определяет величину электромагнитного момента. Момент
на валу двигателя в двигательном режиме меньше электромагнитного на вели-
чину момента потерь (а в тормозном больше электромагнитного на ту же вели-
чину). Момент потерь обусловлен наличием трения в подшипниках, венти-
ляционными потерями, потерями в стали и имеет небольшую величину. Как
выше было указано, его целесообразно включать в момент нагрузки на валу,
который при этом в установившихся режимах равен электромагнитному мо-
менту.
Уравнение механической характеристики, т. е. зависимость скорости от
электромагнитного момента, получим из соотношения (3-2), если ток якоря
выразим через момент с помощью (3-3),
Рис. 3-2. Электромеханические (а) и механические (б) характеристики
системы УП—Д
Из уравнения механической характеристики следует, что скорость двига-
теля при постоянных э. д. с. преобразователя и потоке двигателя линейно свя-
зана и с моментом нагрузки (рис. 3-2, б).
Из уравнения механической характеристики также следует, что при воз-
растании нагрузки скорость вращения двигателя уменьшается. Это снижение
скорости на всех характеристиках пропорционально величине нагрузки и оп-
ределяется при прочих равных условиях величиной суммарного сопротивления
якорной цепи системы УП—Д /?ях- Так как сопротивление якорной цепи 7?яХ
для машин средней и большой мощности относительно невелико, механические
характеристики в системе УП—Д имеют достаточно высокую жесткость. Жест-
кость механической характеристики падает с ростом сопротивления якорной
цепи и с уменьшением магнитного потока двигателя.
При так называемом идеальном холостом ходе привода, когда момент
и ток двигателя равны нулю, скорость вращения двигателя в соответствии
с (3-2) имеет величину
С ростом нагрузки скорость двигателя снижается, и при некоторой на-
грузке двигатель останавливается, его э. д. с. становится равной нулю. При
105
этом в якорной цепи протекает ток короткого замыкании, обусловленный только
э. д. с. преобразователя и сопротивлением якорной цепи,
4.3 = 4^. (^6)
Так как сопротивление якорной цепи сравнительно невелико, то ток корот-
кого замыкания при номинальной э. д. с. преобразователя достигает очень
больших величин, в 10-20 раз превосходящих номинальное значение тока дви-
гателя. Эти значения тока во много раз больше, чем допустимые для двигателя
и преобразователя, что приведет к выходу преобразователя и двигателя из
строя. Кроме того, моменты двигателя, обусловленные токами короткого
замыкания, опасны в отношении механической прочности механизма.
Из изложенного следует важный вывод — без применения специальных
средств механические характеристики в системе УП—Д не обеспечивают огра-
ничения момента, необходимого для всех экскаваторных электроприводов.
Электромеханическая и механическая характеристики электропривода
в системе УП—Д, соответствующие номинальному потоку двигателя Фи и но-
минальной э. д. с. преобразователя Епр. н (при которой при номинальном токе
напряжение на зажимах двигателя равно номинальному), называют естествен-
ными характеристиками (прямые 1 на рис. 3-2). Номинальная скорость враще-
ния, соответствующая на естественной характеристике номинальной нагрузке,
обычно равна или близка по величине требуемой рабочей основной скорости
механизма. Поэтому естественная характеристика является основной характе-
ристикой привода.
Из уравнений (3-2) и (3-4) следует, что в системе УП—Д регулирование
скорости может осуществляться либо изменением э. д. с. преобразователя £пр,
либо изменением потока двигателя. Так как э. д. с. преобразователя всегда
ограничена, изменять ее возможно только в сторону уменьшения. При этом
обеспечивается регулирование скорости электропривода вниз от основной
скорости. Механические характеристики, соответствующие изменяющимся зна-
чениям э. д. с. преобразователя, будут параллельны друг другу, так как снижение
скорости двигателя, обусловленное падением напряжения в якорной цепи,
одинаково для всех характеристик благодаря тому, что поток двигателя и со-
противление якорной цепи неизменны. Изменением полярности э. д. с. преоб-
разователя получаются характеристики, соответствующие противоположному
направлению вращения двигателя.
Электродвигатель в номинальном режиме также имеет насыщенную маг-
нитную цепь, поэтому изменение его потока возможно только в сторону умень-
шения. В связи с этим регулирование скорости изменением потока двигателя
постоянного тока называют ослаблением поля двигателя. С помощью уравне-
ний (3-2) и (3-4) легко убедиться, что при ослаблении поля в зоне нормальных
рабочих нагрузок скорость увеличивается, т. е. регулирование скорости
осуществляется вверх от основной.
Ослаблением поля для двигателей нормального исполнения, не рассчи-
танных специально на глубокое ослабление поля, можно получить увеличение
скорости в полтора-два раза. Однако при этом нужно учитывать, что допустимая
нагрузка по мере ослабления поля уменьшается. Из формулы (3-3) следует,
что если при уменьшении потока нагрузку на валу двигателя оставлять неиз-
менной и равной номинальной, ток якоря должен будет возрастать сверх номи-
нального значения обратно пропорционально потоку. Поэтому регулирование
скорости ослаблением поля при значительных нагрузках нерационально, так
106
Рис. 3-3. Формирование экскаваторной
характеристики в системе УП—Д
как при этом увеличивается нагрев электрических машин и ухудшаются усло-
вия их коммутации. В электроприводе экскаваторов ослабление поля исполь-
зуется только в легких режимах, когда нагрузки значительно ниже максималь-
ных рабочих нагрузок: работа электропривода подъема при опускании ковша,
вытравливание тягового каната и т. п. В тяжелых режимах (подъем ковша,
копание, пуск и торможение электропривода поворота) соответствующие двига-
тели работают с полным полем.
В уравнении (3-1) величина падения напряжения ГяВ.яъ при токах, огра-
ниченных допустимыми по перегрузочной способности значениями, невелика
вследствие малости сопротивления якорной цепи. Поэтому во всех нормальных
установившихся и переходных режимах электропривода э. д. с. двигателя
близка по величине к э. д. с. преобразователя. Если пренебречь малой величи-
ной можно получить приближен-
ное соотношение
E^ER = ct«>. (3-7)
Соотношение (3-7) свидетельствует
о том, что при постоянном потоке двига-
теля ф = Фи для управления величиной
скорости как в установившихся, так и
в переходных процессах необходимо соот-
ветствующим образом изменять э. д. с.
преобразователя.
При требуемой статической зависимо-
сти скорости от момента или тока, за-
данной на рис. 3-3 в виде электроме-
ханической характеристики со = J (1Я),
в первом приближении можно в соответствии с (3-7) утверждать, что необ-
ходимо формировать внешнюю характеристику Епр = J (7Я) примерно того
же вида. Для построения этой внешней характеристики следует восполь-
зоваться уравнением (3-1), подставляя в него для каждого значения тока
соответствующее ему по характеристике со = / (/я) значение скорости со и вы-
числяя искомые значения э. д. с. ЕЩ]. Весьма просто внешняя характеристика
может быть найдена графическим путем, как показано на рис. 3-3. Здесь харак-
теристика со = / (/я) в другом масштабе выражает зависимость ER = / (7Я).
Прямая = j (7Я) представляет собой зависимость падения напряжения
в якорной цепи от тока. Сложив в соответствии с (3-1) при каждом токе орди-
наты характеристик Ел = f (7Я) и — f (1Я), получим внешнюю харак-
теристику £пр = J (7Я), которую нужно формировать для получения заданной
механической характеристики привода.
Рассматривая эту внешнюю характеристику, можно увидеть, что для полу-
чения заданной жесткости рабочего участка механической характеристики
при данном 7?ях требуется увеличивать э. д. с. преобразователя по мере воз-
растания нагрузки на валу двигателя. При меньшей требуемой жесткости
рабочего участка или меньшем сопротивлении Т?я2 наклон внешней харак-
теристики меньше, и для получения мягкой характеристики может потре-
боваться даже уменьшение э. д. с. преобразователя при увеличении на-
грузки.
Падающему участку экскаваторной характеристики соответствует при-
мерно такой же падающий участок зависимости Егр = / (7Я). При уменьшении
скорости двигателя от значения <оотс, соответствующего току отсечки /втс,
107
до нуля, э. д. с. преобразователя должна снижаться от величины Евр. отс =
= cecoOTC + 70тс7?ях Д° величины падения напряжения в якорной цепи при
стопорном токе АС7стоп = /СТОП/?Я2-
При необходимости формирования оптимального закона изменения ско-
рости в переходном процессе пуска, характер которого был выявлен в § 1-3
и представлен на рис. 3-4 зависимостями со = / (t) и /'я = / (t), в соответствии
с (3-7) можно заключить, что задача сводится к формированию кривой епр =
= / (t) примерно того же вида, что и со = f (t). Эту кривую, пренебрегая влия-
нием индуктивности якорной цепи, можно рассчитать с помощью (3-1) или
построить графически, как показано на рис. 3-4. Для этого по заданной кривой
гя = / (7) строится зависимость г,
ваются с ординатами кривой eR
я7?ях = f (t), ординаты которой затем склады-
= / (t). В результате получается искомая зави-
симость
сунке жирной штриховой линией. Рассмат-
ривая
воды:
1) в системе УП—Д характер переход-
ных процессов и их длительность полностью
определяются законом изменения э. д. с.
преобразователя и длительностью нараста-
ния или спадания ее до установившегося
значения;
2) на участках переходного процесса,
где ток якоря поддерживается постоянным
(dijdt = 0), темп изменения э. д. с. преоб-
разователя равен темпу изменения э. д. с.
двигателя. Поэтому максимальное ускорение
привода по системе УП—Д всегда пропор-
ционально максимальной производной э. д. с.
преобразователя етах = ----;
3) оптимальный закон изменения э. д. с. преобразователя епр = / (?)
в целом весьма незначительно отличается от линейного.
В современных экскаваторных электроприводах, как ниже будет показано,
формирование линейного закона изменения э. д. с. преобразователя осущест-
вляется достаточно просто. Поэтому представляет интерес рассмотреть, какой
характер имеют переходные процессы в системе УП—Д при изменении э. д. с.
преобразователя по закону
3-4. Формирование оптималь-
закона изменения скорости
Рис.
ного
двигателя в процессе пуска при
Мс = О
епр = / (t), представленная на ри-
ее, можно сделать следующие вы-
епр ^пр. нач 4~
(3-8)
с. преобразователя при t = 0.
где <?пр. нач — значение э. д. с. преобразователя при t = 1).
Переходные процессы в системе УП—Д описываются следующей системой
дифференциальных уравнений:
епр = ;
71 /г Т
Путем преобразований (3-9) с учетом (3-8) можно получить следующее
дифференциальное уравнение:
(3-9)
fry ГТ1 > fry (fCD | . , A
Т’яЛ, ^^2 ЬF® = нач Н* М А(ОС,
(3-10)
108
где
гр __ ^яЕ . ГГ т в _ епр. нач . д. ____ ^с^яХ
я — о э м — » ^онач — ~ “
се(-м
сесм ’
сесм
При реальных соотношениях параметров в разомкнутой системе УП—Д
влиянием индуктивности якорной цепи можно пренебречь. При этом уравнение
(3-10) упрощается
-{-(О-—С00нач + е0^ Лсос.
Решение уравнения при начальном условии со |<=0 = соиач имеет вид:
t \
(3-11)
<0 — С0нач -|~ (С00 нач ^нач Д0)с Cq/P) \1 6
(3-12)
Продифференцировав (3-12) и подставив производную скорости во второе
I уравнение системы (3-9), получим зависимость тока якоря от времени в виде:
Г t я
<6*0 нач'— Онад — Асо<
Мс
(3-13)
ео
Т^л
Полученные зависимости (3-12) и (3-13) дают общее описание переходных
процессов в системе УП—Д при любых начальных условиях. Воспользуемся
ими для выявления характера переходного процесса пуска двигателя подъемной
лебедки в направлении подъема ковша, полагая, что в предшествующем режиме
осуществлялось удержание ковша при соонач = 0 и сонач =—Асос (см. рис. 1-4).
В этом случае
см
см
(3-14)
со — е0£ — Лсос — 80Т\Д1 — е м
г-я = _^/2(1_еЧ-)+2!К
см см
Рассматривая полученный результат, можно заключить, что на начальном
участке переходного процесса ток якоря нарастает по экспоненциальному
закону от значения гя = 1С = Мс/сы, стремясь к постоянной величине
e0Jz + Мс
(3-15)
я max
см
(3-16)
Соответственно динамический
^Идин “ -^1дин шах “ ТЭКЖС ПО
дифференцировав (3-15), получим
тока
момент изменяется от нуля до значения
экспоненте с постоянной времени Ты. Про-
закон изменения во времени производной
-^- = А^2-е'тм
dt т е
и производной момента двигателя
(3-16)
(3-17)
Продифференцировав зависимость (3-14), получим закон изменения го
времени ускорения привода
/ ___t_
8 = е0\1 —с 7м
(3-18)
109
1
гя— •'х е0
t
t
Производная от (3-18) дает зависимость от времени так называемого рывка
Р = '5’=‘Й'е Т“ =Ртахе 3“- (3-19)
С помощью полученных соотношений на рис. 3-5 построены графики епр =
= /(<)> ед(ю) — f (О и (^0 = 7(0 Для начальной и средней части переход-
ного процесса. Рост э. д. с. преобразователя при достижении ею заданного
установившегося значения прекращается, поэтому в момент t = наступает
Рис. 3-5. Переходные процессы электропривода в системе УП—Д
при линейном законе изменения э. д. с. преобразователя и чисто
активном моменте нагрузки
вторая фаза переходного процесса, которой соответствует епр = Ещ,_ уст. При
этом уравнение (3-11) следует записать в виде:
Ты -^+<о = сооуст- Дсос = сос, (3-20)
где со0 уст = Епр_ уст/ее — установившаяся скорость идеального холостого
хода; сос — установившаяся скорость двигателя, определяемая по механичес-
кой характеристике величиной статического момента.
Начальные условия для этой фазы переходного процесса легко установить с
помощью рис. 3-5 при t = со = со1? 1Я = 7ятах. Совмещая начало отс-
чета времени с моментом t—tr, получим решение (3-20) в виде:
____t_
со = сос —(сос— сох)е т“ ; (3-21)
= + (3-22)
Дифференцируя (3-21), получим зависимости ускорения и рывка от
времени на заключительной части процесса пуска:
t t
Р = —-у-е т«=— ртахе т“ . (3-24)
* м
10
Следовательно, в конце переходного процесса ток по экспоненте умень-
шается до статического тока, ускорение плавно уменьшается до нуля и двига-
тель выходит на установившуюся скорость со = сос (см. рис. 3-5).
На рис. 3-5 показан также процесс торможения привода при линейном
уменьшении э. д. с. преобразователя от Елр_ уст до нуля. Соответствующие
аналитические выражения могут быть получены из (3-12) и (3-13) при е^ = —е0
и начальных условиях при t = 0; (со)0 = сос = сооиач — Асос; (Ёя)0 = 1с;
(®пр)о ^пр. уст-
Рассматривая полученные зависимости и графики, приведенные на рис. 3-5,
можно сделать ряд выводов, важных для понимания динамических особенно-
стей системы УП—Д:
1) формированием линейного зако-
на изменения э. д. с. преобразователя
обеспечивается равноускоренный харак-
тер изменения скорости на основной
части переходного процесса;
2) ограничение темпа изменения
э. д. с. преобразователя значением
denp'dt = сее0 = const обеспечивает на-
дежное ограничение ускорений привода
Рис. 3-6. Структурная схема системы
УП-Д
значениями е =5 е0 во всех режимах;
3) при ограниченном темпе изменения э. д. с. преобразователя автомати-
чески ограничивается рывок, чем обеспечивается высокая плавность переход-
ных процессов, важная для экскаваторных электроприводов. При этом макси-
мум рывка жестко связан с максимальным ускорением соотношением ртах =
= Если эта жесткая связь дает значения ртах, недопустимо превышаю-
щие требуемую величину рдоп, необходимо формировать оптимальный закон
епр — f (t), приведенный на рис. 3-4. Во всех остальных случаях линейный
закон изменения э. д. с. преобразователя достаточен для формирования пере-
ходных процессов привода, близких к оптимальным (см. рис. 1-14).
Таким образом, система управляемый преобразователь — двигатель обла-
дает высокими регулировочными свойствами как в установившихся, так и в пере-
ходных процессах. Ограничение тока двигателя во всех режимах за счет следо-
вания э. д. с. двигателя за э. д. с. преобразователя определяет минимальные
потери энергии во всех режимах, вплоть до стопорных. Все эти важные достоин-
ства и определили широкое применение системы УП—Д во всех наиболее
сложных случаях, в частности, в экскаваторных электроприводах.
Необходимо отметить, что в замкнутой системе регулирования индуктив-
ность якорной цепи оказывает существенное влияние на динамические свой-
ства электропривода, причем, как правило, неблагоприятное, так как увели-
чивает склонность привода к колебаниям. При этом ее необходимо учитывать
в соответствии с (3-9). Структурная схема системы УП—Д с учетом рис. 2-7
имеет вид, представленный на рис. 3-6. Здесь Wnp — передаточная функция
преобразователя, которая, как показано в главе 2, зависит от вида используе-
мого в системе преобразователя.
§ 3-2. Особенности системы Г—Д
Все, что было сказано в § 3-1 о статических характеристиках системы
УП—Д в полной мере без каких-либо ограничений и условий относится и к си-
стеме Г—Д, схема которой представлена на рис. 3-7. Динамические свойства
системы Г—Д определяются значительной инерционностью цепи возбуждения
111
генератора и отличаются своеобразием, которому следует уделить особое вни-
мание.
Управление величиной э. д. с. генератора производится воздействием
на его цепь возбуждения. В простейшем случае, например, пуск электропривода
может быть произведен включением обмотки независимого возбуждения гене-
ратора на постоянное напряжение С7В уст, реверс — изменением полярности
этого напряжения. Так как цепь возбуждения генератора обладает значительной
индуктивностью, при скачкообразных изменениях приложенного напряжения
ток возбуждения не может измениться скачком. Возникающий в цепи возбуж-
дения электромагнитный переходный процесс определяет характер изменения
э. д. с. генератора Ег и в конечном счете изменение скорости двигателя. Этим
и обусловлены важнейшие динамические свойства системы Г—Д.
Рис. 3-7. Схема системы Г—Д
Рис. 3-8. Кривые е, а>, гя при нуске
электропривода по системе Г—Д
В § 2-1 было установлено, что, если не учитывать гистерезиса и насыщения
магнитной цепи генератора, при включении его обмотки возбуждения на по-
стоянное напряжение ив = С7В уст и нулевых начальных условиях его э. д. с.
изменяется во времени по закону
/ _£
ег = Ег_ уст\1 — е Г|
(3-25)
Соответствующий график нарастания э. д. с. генератора представлен на
рис. 3-8. Из рассмотрения графика можно заключить, что э. д. с. генератора
изменяется по экспоненциальному закону, который отличается значительной
неравномерностью. В начале процесса темп изменения э. д. с. генератора deT]dt
максимален, а по мере возрастания э. д. с. рост ее непрерывно замедляется.
Величина der/dt стремится к нулю при асимптотическом приближении ег к уста-
новившемуся значению. Если бы первоначальный темп нарастания сохранялся
неизменным, э .д. с. генератора возрастала бы линейно и достигала устано-
вившегося значения за время tB, равное постоянной времени генератора Тт.
Время переходного процесса в соответствии с (3-25) равно бесконечности,
а практически процесс можно считать законченным при tB = (3-^-4) Тг, что
соответствует ег = (0,95 — 0,98) Ет уст.
Полагая в (3-9) епр = ег после преобразований можно получить
7’яЛ,^- + ^м^-+« = ег4--Люс.
tit- lit, Cg
(3-26)
112
Как выше было отмечено, при рассмотрении переходных процессов в разом-
кнутой системе влиянием индуктивности можно пренебречь. Математическое вы-
ражение для любого переходного процесса в системе Г—Д можно получить реше-
нием дифференциального уравнения (3-26), учитывая, что э. д. с. генератора
с независимым возбуждением ег в переходных процессах является функцией
времени. В частности, таким путем для пуска вхолостую (Мс = 0), полагая
Тя = 0, с учетом (3-25) можно получить следующий закон изменения скорости
двигателя:
СО — СОус>у
(3-27)
Аналогичное выражение для тока якоря может быть получено дифферен-
цированием (3-27) и подстановкой результата во второе уравнение системы
(3-9)
. lb Г. уст
о
(3-28)
Из анализа полученных выражений следует, что закон изменения скоро-
сти и тока двигателя во времени представляет собой сумму двух экспонен-
циальных зависимостей, из которых одна определяется электромагнитной
постоянной времени генератора Тг, а другая — электромеханической постоян-
ной привода Ты. В электроприводах основных механизмов экскаваторов вели-
чина Ты всегда значительно меньше, чем Тг. Так, для механизмов подъема,
напора и тяги Тт]Ты = 70-4- 100, а для электроприводов поворота, облада-
ющих значительно большей механической инерцией, ТГ1ТК = 5 10. Учиты-
вая это, можно заключить, что в уравнении (3-27) вторая экспоненциальная
составляющая по абсолютной величине в десятки раз меньше первой, и кроме
того, затухает во столько же раз быстрее первой.
С учетом такого соотношения на рис. 3-8 в соответствии с (3-27) построена
зависимость со = / (£), а по уравнению (3-28) — кривая гя = J (f). Так как
при постоянном потоке двигателя его э. д. с. ед пропорциональна скорости со,
кривая со (t) в другом масштабе изображает и зависимость ед (t).
Эти кривые свидетельствуют о том, что отмеченный выше неравномерный
характер изменения э. д. с. генератора в основном повторяется в кривой э. д. с.
двигателя, а следовательно, и в кривой скорости двигателя. Время переходного
процесса пуска практически равно времени возбуждения генератора t„
я (3 4) Тг. Из рассмотрения кривой тока выявляется еще одна важная
особенность: ток якоря в системе Г—Д не может измениться скачком, поэтому
начальное ускорение всегда равно нулю. Этим определяется повышенная плав-
ность переходных процессов в системе Г—Д в сравнении с другими системами
привода, в частности с асинхронным электроприводом в его простейшем
виде.
При рассмотрении рис. 3-8 следует иметь в виду, что построенная по урав-
нению (3-28) кривая тока якоря может быть получена с помощью соотноше-
ния (3-1), справедливого для любого момента времени переходного процесса
и показанных на том же рисунке зависимостей ег (t) и ел (t). Разность между
мгновенными значениями е, и еп в данный момент времени равна падению
напряжения в цепи якоря, т. е. пропорциональна току якоря.
8 Заказ 1127
113
Как выше было отмечено, для электроприводов подъема, напора и тяги
7Г » Ты, и влияние механической инерции на переходный процесс относительно
невелико. Если принять Тк 0, зависимость (3-27) получает вид:
t \
1-е
CD — CDy^rp
(3-29)
Сравнивая (3-29) с (3-25), можно прийти к выводу, что в этом случае законы
изменения скорости двигателя и э. д. с. генератора полностью совпадают.
С учетом всего изложенного выше, в дальнейшем время пуска или другого
переходного процесса в системе Г—Д будем приближенно полагать равным
времени процесса возбуждения генератора.
Для получения требуемой маневренности механизмов экскаватора необхо-
димо иметь вполне определенную длительность переходных процессов каждого
привода. Так, например, для экскаватора ЭШ-15/90 необходимо время пуска
приводов подъема и тяги tu = 2,0 4- 3,5 с, а для электропривода поворота
в соответствии с допустимым ускорением tn = 12 4- 14 с. Между тем, как было
выше показано, при подаче на обмотку возбуждения генератора напряжения
^в. уст = А. уст^в. г фактическое время переходного процесса в системе Г—Д
при Тг = 2,5 с составит ;п = (3 4 4)-7г = 7,5 4- 10 с.
Нетрудно видеть, что для электроприводов подъема и тяги это время слиш-
ком велико, и для нормальной работы этих приводов требуется более быстрое
протекание переходных процессов в цепи возбуждения генератора. Для электро-
привода поворота время возбуждения генератора незначительно отличается
от требуемого, но вследствие неравномерности экспоненциального процесса
на его начальном участке скорость будет нарастать с ускорением, значительно
большим допустимого, а на заключительном этапе — с ускорением, меньшим .
допустимого. Очевидно, в этом случае необходимо замедлить нарастание э. д. с.
генератора в первой половине процесса для получения допустимых ускорений.
Получение требуемой длительности переходных процессов в системе Г—Д
обеспечивается соответствующими изменениями напряжения С7В, подводимого
к обмотке возбуждения генератора. Для сокращения длительности переходных
процессов это напряжение повышают в сравнении с С7В уст, при этом возбуди-
тель генератора (усилитель питающий его обмотку возбуждения) выбирается
с соответствующим запасом по напряжению. Такие процессы в цепи возбужде-
ния генератора называют форсированными. Для замедления нарастания э. д. с.
генератора, наоборот, в переходном процессе подводят к обмотке возбуждения
генератора пониженное в требуемой степени напряжение.
Рассмотрим процесс возбуждения генератора, при котором к обмотке
возбуждения генератора в переходном процессе подводится повышенное напря-
жение, а по достижении э. д. с. генератора установившегося значения это на-
пряжение автоматически уменьшается до ив = UB уст (рис. 3-9, а).
Закон изменения э. д. с. генератора в рассматриваемом переходном процессе
=: ^Е^* уст -6
(3-30)
Определим время, за которое э. д. с. генератора достигает установившегося
значения Ег уст при наличии форсирования возбуждения. Подставим в (3-30)
значение ег = Ег уст в искомый момент времени tB
Ч \
1 —е 1г /.
Ар, уст - уст
114
Отсюда
т
Логарифмируя, определим время переходного процесса tB
t„ — Тт In---j-.
® г а —1
(3-31>
При наличии форсирования возбуждения время переходного процесса
сокращается и зависит от величины коэффициента форсирования а. На рис. 3-9,в
построена зависимость t,JTr = J (а) по соотношению (3-31). Из рисунка видно,
что при увеличении коэффициента форсирования от а = 1 до а = 3-Д4 время
Рис. 3-9. Форсирование переходных процессов в системе Г—Д:
а —процесс- возбуждения генератора; б— пуск двигателя вхолостую; в—-зависимость (/В/Тг) = / (а)'
переходного процесса быстро уменьшается, однако дальнейшее увеличение
коэффициента форсирования не приводит к существенному снижению времени
переходного процесса. Поэтому на практике значения а. > 4 используются
редко, главным образом при особо тяжелых условиях стопорения приводов,
когда требуется весьма малое время гашения поля генератора.
На рис. 3-9, б представлены зависимости ег, ед, со и гя = / (t) для случая
пуска вхолостую с форсированием, показанным на рис. 3-9, а. Здесь переход-
ный процесс пуска протекает более быстро, чем на рис. 3-8, и имеет более
равномерный характер. Максимум тока якоря при форсировании увеличива-
ется и возрастает заполнение кривой тока в переходном процессе. Процесс
в целом приближается по характеру к оптимальному равноускоренному про-
цессу пуска.
В момент t = tB (см. рис. 3-9, а) напряжение возбуждения ив уменьша-
ется до UB. уст. Этот момент или участок процесса обычно называют отсечкой
форсирования. Дальше э. д. с. генератора сохраняет постоянное значение ет =
— Ег уст и происходит разгон привода до установившейся скорости по стати-
ческой механической характеристике, соответствующей этой э. д. с. генератора.
Этот процесс определяется электромеханической постоянной времени Тм
и, вследствие отмеченной выше малости Ты, занимает в общем времени переход-
ного процесса незначительное место. Соответственно длительность и характер
процессов и при наличии форсирования определяются (для приводов средней
и большой мощности) процессами в цепи возбуждения генератора.
8’
115
Величина максимума тока якоря в переходном процессе пуска может быть
оценена с помощью соотношения [1]
Гг
Л тах=Л+«4.3 (4^) Тг^м . (3-32)
где 1К 3 = Ег.
уст/^2-
Учитывая, что для электроприводов основных механизмов экскаваторов
Тг Л,, выражение (3-32) можно упростить
^ятах^-^с + ^к. s ‘ (3-33)
Из приведенного соотношения следует, что динамическая составляющая
тока в системе Г—Д при изменении нагрузки в рабочих пределах практически
остается неизменной. Следовательно, системе Г—Д свойственно поддерживать
ускорение привода при разных нагрузках практически постоянным. Максимум
тока увеличивается при возрастании нагрузки, увеличении форсирования и
увеличении отношения ТЫ1ТГ. Для механизмов подъема, напора и тяги в соот-
ветствии с приведенными выше соотношениями ТЫ:ТГ = (0,005-^0,015), дина-
мическая составляющая тока относительно невелика, и для получения требуе-
мой длительности переходных процессов необходимо форсировать процессы
возбуждения генератора. Для механизмов поворота, обладающих большими
маховыми массами, TtJTv = (0,14-0,15), при этом динамическая составля-
ющая во много раз больше, и необходимо ограничение темпа нарастания э. д. с.
генератора, т. е. уменьшение напряжения в переходных процессах (а 1).
При работе в диапазоне выше основной скорости с ослаблением магнитного
потока двигателя основное влияние на длительность переходного процесса
оказывает постоянная времени обмотки возбуждения двигателя, если считать,
что э. д. с. генератора при этом остается постоянной. Электродвижущую силу
генератора можно считать постоянной только для случая увеличения скорости
сверх основной, так как во всех схемах управления имеются блокировки, раз-
решающие ослабление поля только при достижении двигателем 0,8—0,9 основ-
ной скорости. При торможении привода после ослабления поля (например,
при торможении после спуска ковша с ослабленным полем) следует учитывать
переходные процессы, происходящие как в обмотке возбуждения генератора, '
так и в обмотке возбуждения двигателя, так как величины постоянных времени
обмоток возбуждения двигателей и генераторов имеют один и тот же порядок.
В практике экскаваторных электроприводов с переходными процессами j
в разомкнутой системе, аналогичными рассмотренным на рис. 3-9, приходится
иметь дело в режимах, которые требуют ограничения максимальных ускорений
привода. Величину максимального ускорения в системе Г—Д можно оценить
с помощью (3-33) и основного уравнения движения (1-6') i
/ do \ __ ЛЛпах Мс Ми 3 ZQ 'W
®тах — I л г —г ' т ‘
\ /щах «^2 1 г
Уравнение (3-34) свидетельствует о том, что для ограничения максималь-
ного ускорения в системе Г—Д необходимо ограничивать запас по напряжению
возбуждения. Если задано допустимое максимальное ускорение едоп, то фор-
мула (3-34) дает соответствующее ему допустимое значение коэффициента фор-
сировки ссцоп. Возбудитель генератора должен выбираться таким образом,
116
чтобы его максимальное напряжение не превышало допустимого по условиям
ограничения ускорений
UB щах ^доп^в. к>
где UBi н— напряжение возбуждения, которое необходимо для получения
максимальной расчетной э. д. с. Ег р без учета насыщения магнитной цепи ге-
нератора.
Формирование любого требуемого закона изменения э. д. с. генератора
во времени требует соответствующего закона изменения напряжения ив, при-
ложенного к его обмотке возбуждения. Рассмотрим, например, условия форми-
рования оптимальной зависимости спр = /(£), полученной на рис. 3-4. Для
каждой точки этой кривой можно определить значения ет и de,ldt и затем
Рис. 3-10. Формирование процессов возбуждения генератора постоянного тока
вычислить напряжение возбуждения, которое соответствует этим значениям
в соответствии с полученным выше уравнением
I3-35»
Зависимость ив = ] (t), полученная с помощью (3-35), представлена на
рис. 3-10, а. Рассматривая этот рисунок совместно с рис. 3-4, можно заключить,
что точное воспроизведение изломов в трапецеидальной кривой тока существенно
усложняет зависимость ив = ] (t), требует скачкообразных изменений напряже-
ния возбудителя, реализация которых вызывает затруднения. Поэтому в си-
стеме Г—Д представляет особый интерес линейный закон изменения э. д. с.,
который, как показано в § 3-1, обеспечивает зависимости со (t), близкие
к оптимальным для экскаваторных электроприводов (см. рис. 3-5). Зависимость
мв = / (I), соответствующая линейному нарастанию э. д. с. генератора, пред-
ставлена на рис. 3-10, б. Ее реализация не представляет затруднений и, как
ниже показано, наиболее просто осуществляется за счет использования форми-
рующей положительной связи по напряжению генератора.
У генератора с критическим самовозбуждением формирующая положитель-
ная связь по напряжению воздействует непосредственно на его цепь возбужде-
ния. Как показано в § 2-1, эта связь существенно изменяет динамические
свойства генератора, процессы возбуждения которого при принятых допу-
щениях описываются дифференциальным уравнением (2-23)
— ДнГвХ _ der
®-н ЛггК’н dt
117
В соответствии с этим уравнением для линейного изменения э. д. с. гене-
ратора достаточно приложить к его обмотке независимого возбуждения напря-
жение UB_ н= const, величина которого определяется допустимым или тре-
буемым темпом изменения э. д. с. (der/dt)f,w. Эти свойства генератора с крити-
ческим самовозбуждением позволяют формировать равноускоренные пере-
ходные процессы в системе Г—Д наиболее простым путем.
§ 3-3. Особенности системы ТП—Д
Как было отмечено в § 2-3, наиболее благоприятными для экска-
ваторных электроприводов характеристиками обладает реверсивный тиристор-
ный преобразователь с согласованным управлением. Его внешние характери-
стики аналогичны внешним характеристикам генераторов, поэтому статиче-
ские регулировочные свойства системы ТП~Д аналогичны регулировочным
свойствам системы Г—Д. В отличие от генератора постоянного тока тиристор-
ный преобразователь обладает значительно более высоким коэффициентом уси-
ления по мощности, несравненно более высоким быстродействием и повышен-
ной за счет введения сглаживающих дросселей и уравнительных реакторов
индуктивностью силовых цепей.
Тиристорный преобразователь как динамическое звено системы автомати-
зированного электропривода может быть с некоторым приближением предста-
влен передаточной функцией апериодического звена (§ 2-3)
W (п\<— />1|р
УУпр(Р) i + TnpP •
т. е. формально так же, как и генератор. Однако величина несоизмерима
с постоянной времени Тг. При полупроводниковой СИФУ величину 7пр при-
нимают равной 0,01 с, что позволяет во многих практических случаях при-
ближенно считать тиристорный преобразователь безынерционным. Это — до-
стоинство, ибо при быстродействующем преобразователе проще формировать
любые требуемые законы движения электропривода. Это же качество является
и недостатком, так как оно определяет принципиальную возможность измене-
ния э. д. с. тиристорного преобразователя скачком при нарушениях в работе
системы управления электроприводом или при аварийных режимах самого
тиристорного преобразователя. Изменение же э. д. с. преобразователя скачком,
как показано выше, в системе УП—Д может вызывать аварийные токи в сило-
вой цепи и ударные динамические нагрузки, опасные для приводимого в дви-
жение механизма. Особенно опасные последствия вызывает исчезновение про-
тиво-э. д. с. инвертора в тормозных режимах работы электропривода.
Поэтому в системе ТП—Д должны особенно тщательно рассматриваться
вопросы защиты электропривода при сбоях в работе СИФУ или при пробое
отдельных вентилей преобразователя, причем возникает необходимость уста-
новки отключающих аппаратов как на стороне переменного тока, так и в цепи
якоря двигателя. В системе Г—Д на экскаваторах якорные цепи генератора
и двигателя соединяются наглухо, если не возникает необходимости коммута-
ции в этих цепях в связи с использованием какого-либо генератора для пи-
тания различных приводов. В последнем случае для коммутации предусматри-
вают контакторы, на которые функции отключения аварийных токов не воз-
лагаются.
Благодаря высокому коэффициенту усиления по мощности общий коэффи-
циент усиления системы ТП—Д достаточен для введения обратных связей
118
непосредственно на вход СИФУ, если она допускает суммирование нескольких
сигналов. В системе Г—Д обязательным элементом является возбудитель,
в связи с тем, что мощность, требуемая для возбуждения генератора, значи-
тельна, особенно если учесть необходимость форсирования процессов возбу-
ждения. В системе ТП—Д дополнительный усилитель вводят главным образом
в связи с необходимостью суммирования сигналов или для последовательной
коррекции.
Вследствие малой инерционности тиристорного преобразователя формиро-
вание оптимальной зависимости е,1р = / (£) (см. рис. 3-4) в системе УП—Д
требует формирования зависимости иу = / (£), отличающейся только масштабом,
так как при этом можно принять епр == иу. Поэтому в разомкнутой системе
УП—Д пуск двигателя включением на вход преобразователя скачком полного
напряжения управления иу — Uy а в принципе недопустим, так как вызовет
аварийные токи, недопустимые ускорения и опасные динамические нагрузки
механизма. Для нормального протекания процесса пуска необходимо плавное
увеличение управляющего сигнала, которое должно формироваться системой
автоматического управления.
Следовательно, в системе УП—Д ограничение максимальных ускорений
должно обеспечиваться работой системы управления, в то время как ограниче-
ние ускорений в системе Г—Д обеспечивается электромагнитной инерционно-
стью генератора и является ее органическим свойством.
§ 3-4. Типовые структуры систем управления
Главным требованием, предъявляемым к экскаваторным электро-
приводам, является требование ограничения момента двигателя допустимым
стопорным значением. Поэтому основной обратной связью в системе управления
таким электроприводом является отрицательная обратная связь по току якоря.
Для получения требуемой жесткости рабочего участка экскаваторных характе-
ристик и в особенности требуемой жесткости механической характеристики
для удержания ковша в соответствии с рис. 3-3 требуется возрастание э. д. с.
преобразователя с ростом нагрузки на валу двигателя. Такой эффект достига-
ется введением жесткой отрицательной связи по напряжению преобразователя,
которая поддерживает напряжение на его зажимах постоянным (с некоторым
статизмом). Кроме того, введением этой обратной связи увеличивается стабиль-
ность характеристики, уменьшаются ее изменения, обусловленные гистере-
зисом в магнитной цепи и температурными изменениями сопротивления обмотки
возбуждения генератора в системе Г—Д или колебаниями напряжения в сети
переменного тока для системы ТП—Д. Наконец, жесткая отрицательная связь
по напряжению требует увеличения задающего сигнала на входе системы, что
создает форсировки в переходных процессах, ускоряющие протекание процес-
сов возбуждения генератора в системе Г—Д.
Более точное поддержание постоянства скорости на рабочих участках
механических характеристик при выполнении всех остальных перечисленных
функций обратной связи по напряжению можно обеспечить применением от-
рицательной обратной связи по скорости двигателя. Однако в экскаваторных
электроприводах предпочтительна обратная связь по напряжению, которая
позволяет удовлетворить требованиям в отношении регулирования скорости
привода и в то же время не требует установки тахогенераторов.
Таким образом, для того, чтобы управлять экскаваторным электроприводом,
нужно регулировать ток якоря и напряжение преобразователя. Поэтому
119
в общем случае в системе управления таким электроприводом должны предусмат-
риваться отрицательные обратные связи по току якоря и напряжению преобра-
зователя. Так как внешняя характеристика, необходимая для формирования
требуемой экскаваторной механической характеристики, обладает существен-
ной нелинейностью, ее реализация в линейной системе с помощью линейных
обратных связей невозможна. В зависимости от структуры системы управления
для получения экскаваторной характеристики используются либо нелинейные
обратные связи, либо нелинейность характеристик элементов прямой цепи воз-
действия на двигатель.
Все схемы управления экскаваторными электроприводами по системе
УП—Д, применяемые на отечественных экскаваторах, разделяются по струк-
туре на две принципиально различные разновидности. Большинство схем на
ранее выпущенных экскаваторах и на части выпускаемых в настоящее время
имеет структуру, которую будем называть структурой с суммирующим уси-
лителем. В последние годы идет процесс повсеместного вытеснения таких схем
новыми схемами, имеющими структуру многоконтурных систем подчиненного
регулирования координат электропривода. Для того чтобы установить их прин-
ципиальные особенности, рассмотрим каждую из этих структур в общем виде.
Для большей наглядности примем, что структурная схема объекта регу-
лирования — системы УП—Д — может быть представлена цепочкой из к
последовательно соединенных звеньев с передаточными функциями Wr, W3, . . .,
Wk, причем необходимо регулировать выходные величины х2, . . хк
каждого звена. Для этого случая структура с суммирующим усилителем пред-
ставлена на рис. 3-11, а. Как следует из рассмотрения рисунка, все обратные
связи в этой структуре заводятся на вход суммирующего усилителя. Для по-
лучения требуемых статических и динамических характеристик в цепи обрат-
ных связей должны быть введены нелинейности. Такие нелинейные обратные
связи называют задержанными или обратными связями с отсечкой по регули-
руемой величине.
В схеме, приведенной на рис. 3-11, а, задержанными показаны все обрат-
ные связи. В этом случае отмеченный на схеме входной задающий сигнал упра-
вления электроприводом к3 не определяет полностью заданного значения ни
одной из регулируемых величин. Основным фактором, задающим уровень каж-
дой регулируемой величины, в этом случае является напряжение отсечки в цепи
соответствующей обратной связи. При необходимости изменения задания уровня
данной величины возникает необходимость регулирования напряжения отсечки
этой величины. Поэтому в самом простом случае, когда требуется изменять
уставку только одной из регулируемых величин, управление электроприводом
требует переключений в цепи задающего сигнала и3 и в цепи обратной связи
по этой координате. При необходимости изменения уровня нескольких величин
задача дополнительно усложняется.
Стремление упростить командоаппарат, с помощью которого осуществля-
ется управление режимами работы электропривода, приводит к необходимости
отказа от применения более чем одной задержанной обратной связи. При этом
другие связи остаются непрерывными (линейными) и постоянно действуют на
вход суммирующего усилителя. Очевидно, при этих условиях независимая
настройка контуров регулирования полностью исключается. Взаимное влия-
ние основных обратных связей обычно неблагоприятно, что осложняет полу-
чение требуемых статических хар актеристик и динамических показателей
привода. Для настройки требуемого качества данной регулируемой величины
обычно приходится вводить дополнительные корректирующие связи, которые
120
зачастую неблагоприятно влияют на динамику других контуров регулирования.
Поэтому системы с суммирующим усилителем требуют так называемой компро-
миссной настройки контуров регулирования, при которой практически невоз-
можно получение процессов, близких к оптимальным. Это обстоятельство
определяет повышенную сложность наладки таких систем, что является их ос-
новным недостатком.
Структура системы подчиненного регулирования координат того же
объекта регулирования представлена на рис. 3-11, б. Принципиальные отли-
чия этой структуры от рассмотренной наглядно видны на этом рисунке. Здесь
Рис. 3-11. Структуры автоматизированного электропривода по системе
УП—Д:
в —' с суммирующим усилителем; б — многоконтурная система подчиненного регу-
лирования
для регулирования каждой координаты последовательно с объектом регулиро-
вания вводится индивидуальный регулятор И7р1, Wp2, . . ., Wpk. В объект
регулирования каждого i-ro контура, за исключением первого, входит замкну-
тая система регулирования, образованная 1,2,.. ., (i — 1)-ым контурами ре-
гулирования, внутренними относительно i-ro контура. На входе каждого регу-
лятора сигнал обратной связи по регулируемой величине сравнивается с ее
заданным значением, которое является выходной величиной регулятора сле-
дующего контура регулирования, внешнего по отношению к данному.
Благодаря последней особенности структуры подчиненного регулирования
в ней достаточно просто осуществить ограничение каждой координаты и сфор-
мировать требуемую характеристику привода. Для ограничения величины
достаточно ограничить выходную величину регулятора (i -f- 1)-го контура,
что во многих практических случаях не требует дополнительных элементов,
так как применяемые усилители, в особенности магнитные (§ 2-4), обладают
ограниченным выходным напряжением, имея нелинейную характеристику,
показанную на рис. 3-11.
121
До тех пор, пока результирующий сигнал на входе (I + 1)-го регулятора
превышает пороговое напряжение, напряжение на его выходе остается постоян-
ным. Цепь регулирования для (ь + 1)-го и всех внешних по отношению к нему
контуров благодаря этому размыкается, регулируется только величина xlt
заданное значение которой хз1 при этом остается постоянным. Когда разность
между х3 и xi+1 станет меньше порогового напряжения, (i Д- 1)-й регуля-
тор вступает в действие, работая на линейном участке своей характеристики.
Если ни один из регуляторов не работает в зоне насыщения, осуществляется
регулирование величины xk во внешнем контуре системы. При этом все внут-
ренние контуры работают, но их работа подчинена задаче регулирования вы-
ходной величины системы.
Таким образом, структура подчиненного регулирования в принципе
обеспечивает возможность настройки каждого внутреннего контура незави-
симо от настройки его внешних контуров. Благодаря этому в такой структуре
возможно введение в контур регулирования xt дополнительных формирующих
или корректирующих обратных связей, необходимых для получения требуемого
качества регулирования г-той величины, причем эти связи не оказывают влия-
ния на качество работы всех контуров регулирования, внутренних по отноше-
нию к данному. Как ниже будет показано, дополнительными мерами можно
уменьшить в требуемой степени влияние работы внутренних контуров на внешние.
Возможности формирования экскаваторных характеристик с высоким
заполнением и настройки высокого качества переходных процессов в струк-
туре подчиненного регулирования значительно выше, чем в системе с сумми-
рующим усилителем. Эти возможности облегчают наладку и эксплуатацию по-
добных систем, что и определило их широкое применение в экскаваторных элект-
роприводах. Особый интерес представляет применение этой структуры в соче-
тании с методом последовательной коррекции контуров регулирования. Для
правильного понимания особенностей экскаваторных электроприводов, име-
ющих структуру подчиненного регулирования, необходимо хорошо изучить
основные динамические свойства систем с последовательной коррекцией.
§ 3-5. Система подчиненного регулирования с последовательной
коррекцией
Из теории автоматического регулирования известно, что для полу-
чения требуемых динамических качеств системы регулирования необходимо
либо введение регулятора с определенной передаточной функцией в прямую
цепь регулирования (последовательная коррекция), либо получение тем или
иным путем определенной передаточной функции цепи обратной связи (парал-
лельная коррекция). До сравнительно недавнего времени в автоматизирован-
ном электроприводе использовалась главным образом параллельная коррек-
ция, как наиболее просто реализуемая на практике в системах с электромашин-
ными, магнитными и другими подобными им усилителями. Развитие аналоговой
вычислительной техники создало предпосылки для использования в системах
автоматического управления электроприводами высококачественных решающих
усилителей, с помощью которых относительно просто реализуются достаточно
сложные передаточные функции регуляторов, необходимых для последователь-
ной коррекции контуров регулирования.
Именно на этой основе метод последовательной коррекции получил интен-
сивное развитие, в результате которого была разработана эффективная инже-
нерная методика синтеза многоконтурных систем подчиненного регулирования
122
(см. рис. 3-11, б), позволяющая расчетным путем определять параметры регу-
ляторов, обеспечивающие конкретные динамические показатели контура ре-
гулирования [8, 15, 16]. Рассмотрим идею этого метода вначале в общем виде,
решая задачу синтеза внутреннего контура регулирования величины в схеме
на рис. 3-11, б.
Примем, что объект регулирования в свою очередь, состоит из цепочки
п звеньев, имеющих передаточную функцию апериодического звена,
(3-36)
1=1
Если такой объект регулирования охватить отрицательной обратной связью
по выходной величине то при высокой требуемой точности регулирования
динамические качества контура, как показывает практика, неудовлетвори-
тельны в связи с наличием недопустимых перерегулирований и плохо затуха-
ющих колебаний или в связи с неустойчивостью его, приводящей в реальной
системе к незатухающим автоколебаниям. За счет введения в цепь регулирова-
ния регулятора с передаточной функцией И7р1 (см. рис. 3-11, б) можно в прин-
ципе полностью изменить передаточную функцию разомкнутого контура регу-
лирования, которая при этом определяется очевидным соотношением
1^раЛ[(р)=И7р1Кр)И\(р). (3-37)
Соотношение (3-37) отражает теоретическую возможность полной компен-
сации динамических звеньев системы регулирования. Для этого достаточно
положить П7раз1 (р) = где /сУ2 — коэффициент усиления системы, обе-
спечивающий требуемую точность регулирования величины хг, и определить
требуемую передаточную функцию регулятора Игр1(р) = /су2/И71(р).
Если полученная передаточная функция регулятора может быть практи-
чески реализована, то введением такого регулятора последовательно с объек-
том регулирования возможно получить безынерционную систему регулирования,
в которой выходная величина следует за изменениями входной без запаздыва-
ния. Однако по ряду причин задача синтеза подобной идеально быстродейству-
ющей системы практического интереса не представляет. Во-первых, если бы
такое быстродействие удалось реализовать,электропривод оказался бы беззащит-
ным в отношении помех, обусловленных коллекторными пульсациями напря-
жения электрических машин, зубцовыми колебаниями их магнитного потока,
пульсациями тока и напряжения при использовании в системе тиристорных
преобразователей и т. п. Эти высокочастотные возмущения в реальном электро-
приводе отфильтровываются инерционностью звеньев системы, а при идеаль-
ной компенсации привели бы к его полной неработоспособности. Поэтому по-
требовалось бы введение дополнительных фильтров, появились бы новые
инерционные элементы, которые свели бы эффект идеальной компенсации к
нулю.
Во-вторых, в действительности практическая реализация идеальной ком-
пенсации невозможна. Прежде всего для реализации бесконечно большого
быстродействия, очевидно, потребовались бы бесконечно большие форсировки
и, следовательно, бесконечно большая мощность на выходе регулятора. При
наличии в цепи регулирования больших постоянных времени во многих случаях
даже реально требуемое быстродействие системы регулирования требует боль-
ших форсировок по напряжению на входе инерционных звеньев и для
123
электроприводов с быстропротекающими переходными процессами может оказа- !
ться нереализуемым. Компенсация динамических звеньев с малой постоянной |
времени также может быть практически невозможной в связи с ограниченным '
быстродействием применяемых в электроприводе решающих усилителей.
Вместе с тем влияние этих постоянных времени на динамику системы может
быть настолько слабым, что попытки их компенсации приведут лишь к неоправ-
данному усложнению системы регулирования.
На основании изложенного можно заключить, что идеальная компенсация
нерациональна и нереализуема на практике, поэтому важным исходным во-
просом при последовательной коррекции является определение желаемого
вида передаточной функции разомкнутого контура, которая должна быть
получена в результате введения в контур регулятора. Если эта передаточная
функция КрВ31 известна, то необходимая передаточная функция регулятора
легко определяется по известной передаточной функции объекта регулирова-
ния:
(3-38)
В рассматриваемом методе при определении желаемой передаточной функ-
ции РИраз! исходят из того, что компенсации подлежат лишь большие и средние
постоянные системы Tt и из желательности введения в контур регулирования
интегрирующего элемента, имеющего бесконечно большой статический коэф-
фициент усиления, позволяющий осуществить регулирование без статической
ошибки (астатическое регулирование). Этим исходным позициям соответствует
получение передаточной функции разомкнутой системы вида
И^раз 1 (Р) =-------------> (3-39)
Гор П (Пр+1)
1=1+1
где I — число скомпенсированных регулятором средних и больших постоян-
ных времени; ко с1 — коэффициент обратной связи (на схеме, приведенной
на рис. 3-11, б, С1 = 1).
Оставшиеся нескомпенсированными п — I постоянных являются малыми
величинами. При этом без заметной погрешности можно приближенно принять
П (^p + D^Zp + l, (3-40)
i=n
где Т — 2 — сумма нескомпенсированных малых постоянных времени
р' i=/+l
объекта регулирования.
Погрешность пренебрежимо мала, если Тъ 2 Гц [8]. При этом переда-
точная функция (3-39) принимает следующий вид:
Передаточная функция регулятора определяется с помощью (3-38)
/=/
П (1 + Пр)
124
Передаточная функция замкнутой системы запишется так:
ТТЛ /п\_______Ира3 ।_________l/fco. cl_ /9 ZQ1
3SMlW с Top^p+D+i ’
где И’о. с = ко. ci — передаточная функция цепи обратной связи.
Нетрудно видеть, что в результате выбора желаемой передаточной функ-
ции разомкнутого контура вида (3-41), получена система регулирования, ди-
намика которой не зависит от общего ко-
эффициента усиления, а определяется
только постоянными времени То и Т[Х.
Корни характеристического уравнения
(3-43) определяются соотношением
1 , 11/ «г2 /о ,,,
Pi, г — 2Т~~ ~ т0 V ~~i m ’ (3-44)
где m = TJT^.
В соответствии с (3-44) полное время
затухания переходных процессов в син-
тезированной системе не зависит от инте-
грирующей составляющей,а зависит только
от величины некомпенсируемой постоян-
ной времени Т^. С другой стороны, каче-
ство процессов, определяемое величиной
дискриминанта (3-44), зависит только от
соотношения постоянных времени m и не
зависит от их величины. При То < 4 Гц
процесс имеет затухающий колебательный
характер. При этом переходная функция
для полученной системы регулирования
Рис. 3-12. Переходные функции кон-
тура регулирования, синтезированного
методом последовательной коррекции
—— / Vim — m? m
ж1(0 = 1 — е 2TV- <C0S 27Ъ t+ Vim-m^
sin
V 4m — m2
2T~o
(3-45)
t
На рис. 3-12 приведены зависймости (t), построенные с помощью (3-45)
для различных значений ш при заданной величине Гц. Рассматривая эти кри-
вые, можно прийти к выводу, что время t^r, эа которое выходная величина
первый раз достигает заданного значения, зависит от соотношения постоянных
То и Гц. При m = 4 процесс имеет монотонный апериодический характер и
время £рег теоретически равно бесконечности, а практически составляет (6-4-8)
7Р. При тп = 2 процесс имеет характер затухающих колебаний с тем же вре-
менем затухания, ио время £рег = 4,7 Гц, т. е. существенно меньше, чем при
m = 4. При дальнейшем уменьшении ш время t^r дополнительно сокращается,
но возрастает перерегулирование. Задаваясь допустимым перерегулированием,
можно однозначно определить величину топт, обеспечивающую минимальную
длительность процесса регулирования при требуемом его качестве. При т=топт
контур называют оптимизированным по быстродействию методом последова-
тельной коррекции. Для экскаваторных электроприводов, как было отмечено
в гл. 1, колебательность привода желательно иметь минимальной, поэтому
^ОПТ 2—4.
Передаточная функция (3-43) замкнутого первого контура в системе,
приведенной на рис. 3-11, б, является составной частью передаточной функции
125
•объекта регулирования следующего контура, которая состоит из передаточшш
•функции внутреннего замкнутого контура pr3aM1 и из собственной переда-
точной функции второго объекта регулирования
w« (р) - W,m, (р) W. (р) _ —
G незначительной погрешностью в передаточной функции замкнутого
внутреннего контура пренебрегают членом второго порядка
тотТ^р {Т^р +1) +1 п^Т^р + 1.
В общем случае, принимая для всех контуров mom одинаковым и считая,
что некомпенсируемую инерционность содержит только первый контур, получи®
Wo .= 1/fc°-c(i-U-W, (3-46'
Ч^Р+1
т. е. объект регулирования i-той переменной величины включает в себя в ка-
честве некомпенсируемой части линейное приближение передаточной фушщш
замкнутого (i — 1)-го контура.
Передаточная функция регулятора i-той переменной
PJ7 _ И-раз I (р) ________1/fcp, с i_____ ftp, с ti-рДо. с t /g
pZ 7 Woi(p) TnU^pCTnU^p + Diyoz mi^pWi
Передаточная функция замкнутого i-того контура имеет следующий вид
Ж,ам i = —-----. (3-48)
т^2^<т°™г>+1)+1
Следовательно, с увеличением номера контура регулирования постоянная
времени интегрирования и постоянная времени, некомпенсируемая регулято-
ром, быстро возрастают. Вместе с тем увеличивается число членов характери-
стического уравнения высшего порядка, отбрасываемых при оптимизации.
Однако проведенные исследования [8] позволяют заключить, что погрешность,
обусловленная отбрасыванием членов характеристических полиномов замкну-
тых контуров, имеющих порядок выше второго, в целом невелика.
Для выяснения основных свойств систем подчиненного регулирования,
оптимизированных методом последовательной коррекции, синтезируем систему
подчиненного регулирования тока якоря и скорости двигателя и проанализируем
ее основные свойства. Примем, что двигатель постоянного тока с независимым
возбуждением управляется напряжением на якоре с помощью тиристорного
преобразователя с быстродействующей системой импульсно-фазового управле-
ния. Такой преобразователь можно представить в виде инерционного звена
с коэффициентом усиления /спр и небольшой постоянной времени учиты-
вающей инерционность системы управления и в первом приближении чистое
запаздывание собственно тиристорного преобразователя. Структурная схема
.двигателя в системе УП—Д представлена на рис. 3-6. Ее характерной особен-
ностью является наличие внутренней обратной связи по э. д. с. двигателя.
Исследованиями установлено, что в системе подчиненного регулирования, опти-
мизированной методом последовательной коррекции, влияние внутренней
связи по э. д. с. двигателя пренебрежимо мало, поэтому ее при определении
параметров регуляторов можно не учитывать.
В соответствии с изложенными выше принципами введем последовательно
-с объектом регулирования регулятор тока с передаточной функцией Wp т. Зам-
126
кнув систему обратной связью, образуем внутренний контур для регулирования
тока двигателя и осуществим его оптимизацию. Структурная схема контура
регулирования тока представлена на рис. 3-13, а. Передаточная функция
данного объекта регулирования имеет вид:
_ ко. +пр1/Яя2
°-т-(7’прР+1)(2’яр + 1Г
Выше было указано, что величина приближенно учитывает чистое за-
паздывание преобразователя и малые инерционности системы управления,.
поэтому ее можно принять в ка-
честве меры для оценки сум-
марной постоянной некомпен-
сированных инерционных эле-
ментов системы, положив =
= 7+. В соответствии с (3-42)
и (3-47) передаточная функция
регулятора тока определится
так:
Р* т &о. +пр *
. УяР + 1 Гя ,____1_
ТиР Ти "Г Ткр ’
Где 7^ /ьо. т^пр ’ 1 яХ^опт^1р_*
Полученная передаточная
функция регулятора тока сви-
детельствует о том, что он дол-
6
Рис. 3-13. Синтез системы подчиненного регулиро-
вания тока и скорости в системе ТП—Д
(3-49)
жен иметь составляющую выходного сигнала, пропорциональную входному
воздействию, и составляющую, интегрирующую входной сигнал. Рассмотрим,
как реализуется такой регулятор на практике.
Специально для компоновки подобных структур ВНИИЭлектроприводом
разработана унифицированная блочная система регуляторов (УБСР), состоя-
щая из транзисторных усилителей, датчиков, задающих устройств, блоков
связи, функциональных преобразователей и источников питания [8].
Элементы блочных устройств допускают эксплуатацию в нормальной
среде при температуре окружающего воздуха от +1 до +50 °C, 80%-ной влаж-
ности, вибрациях 5—50Гц с ускорением до 4g и ударной нагрузке до 15g.
Основным элементом всех регулирующих устройств данной системы явля-
ются полупроводниковые операционные усилители постоянного тока, выпол-
ненные с высоким коэффициентом усиления (более 1000). Имеются также моди-
фикации усилителей, позволяющие осуществить потенциальное разделение
входа и выхода, что расширяет возможности использования системы в различ-
ных схемах.
В системе УБСР принят унифицированный сигнал 0 ± 24 В; 0 + 10 мА.
Технические данные наиболее употребительного в данной системе усилителя
УПТ-3
Выходное напряжение, В.............±24
Сопротивление нагрузки, кОм ... 2,4
Входное сопротивление, кОм ... 10
Полоса пропускания при ky = 1
для режима иБЫх тах = 24 в, Гц 30
Дрейф нуля, приведенный ко входу
при t°o.c = l + 50° С, %........0,4
127"
На базе решающего усилителя могут быть реализованы типовые регуля-
торы, наиболее широко используемые на практике, схемы которых приведены
на рис. 3-14. Более сложные схемы регуляторов могут быть получены последо-
вательным или параллельным соединением таких регуляторов, однако этот
путь практически не используется в силу естественного стремления к простоте
и надежности решения. Более того, целесообразно по возможности избегать
применения дифференциальных регуляторов, имея в виду, что они усиливают
высокочастотные помехи.
Передаточной функцией (3-49) обладает интегрально-пропорциональный
регулятор, схема которого приведена на рис. 3-14, в. Этот регулятор характери-
зуется постоянной времени интегрирования Ти = R3CO с и постоянной вре-
Рис. 3-14. Схемы регуляторов:
а — пропорциональный; б — интегральный; в — пропорционально-интегральный;
г — дифференциально-пропорционально-интегральный; д — дифференциальный
мени обратной связи То с= Ro сСо с. Для получения передаточной функции
(3-49) необходимо выполнение условий:
. ^ОПТ^’р.^О. т^пр
Я О. с> Р - и*
71 я X
(3-50)
Коэффициент обратной связи ко т должен быть приведен к цепи задающего
сигнала
*о.т = Лц.т^, (3-51)
где кд т= ио Т7Д — коэффициент передачи датчика тока.
При этом, задавшись емкостью в цепи обратной связи регулятора Со с т,
с помощью (3-50) можно определить входное сопротивление
г, monrTpko т/спр
и сопротивление в цепи обратной связи
/?о.с.т = ^я/Со.с.в. (3-53)
Регулирование тока в данном случае должно быть подчинено регулиро-
ванию скорости двигателя. Замыканием цепи обратной связи по скорости
и введением в эту цепь регулятора скорости с передаточной функцией Wp с полу-
128
чаем второй контур регулирования, структурная схема которого показана
на рис. 3-13, б. В прямой цепи этого контура представлена передаточная функ-
ция замкнутого оптимизированного контура тока W3aM_ т. Без учета внутренней
звязи по э. д. с. двигателя она имеет следующий вид:
w —__________________Vfc°- т_________
заМ" т тотТ^р (ГцР-}- 1) -|-1
Передаточную функцию объекта регулирования
отбрасывая в (3-54) член второго порядка
(3-54)
скорости определим,
W
г о. с
В соответствии с (3-47) пе-
редаточная функция регулятора
жорости запишется так:
.г? _ ftp, т/^о. с _ СеТмР __
” С ~ топт7'р.7'
<3-56)
ПО. "‘'ОПТ-4
Следовательно, должен
зыть применен пропорциональ-
ный регулятор, схема кото-
рого показана на рис. 3-14, а.
Sro передаточная функция
И7р.с = -4^. (3-57)
Л3. С
(3-55)
1/fcp, т_____ДяХ
топт7р.Р +1 сеТыр
Рис. 3-15. Схема подчиненного регулирования тока
и скорости в системе ТП—Д
Коэффициент обратной связи по скорости должен быть приведен к цепи
сдающего сигнала аналогично (3-51). Задавшись, например, R3 с, приравнивая
3-56) и (3-57), можно определить величину сопротивления обратной связи
р р ^о. тсе
**о. С. С -**3. С и Р т
о. с топт7 р.
(3-58)
Принципиальная схема синтезированной системы регулирования предста-
лена на рис. 3-15. В этой схеме в цепь обратной связи по току для усиления
игнала токовой связи и потенциального отделения цепей управления от якор-
юй цепи введен датчик тока ДТ.
Рассмотрим, каковы статические и динамические свойства полученной
истемы электропривода. Так как регулятор тока содержит интегрирующий
лемент, в установившихся режимах напряжение на его входе должно быть
>авно нулю. Следовательно, при этом справедливо соотношение (778 с — ко Ссо) X
X ^р. с — *о. т^я< с помощью которого нетрудно получить статическую харак-
еристику двигателя
^ОПТ^р, * ™ОПТ7р.
co — <оо 1К —- — • —-— — со Д(ос — , (3-59)
се * м 7 м
де ®0 = и3. С/Ао. с—скорость идеального холостого хода привода; А<вс =
= — падение скорости в разомкнутой системе УП—Д.
Из (3-59) следует, что при линейных характеристиках регуляторов синте-
ированная система является статической системой поддержания постоянства
9 Заказ 1127
129
скорости с линейной механической характеристикой. Скорость идеального
холостого хода зависит только от задающего сигнала Us с и коэффициента обрат-
ной связи по скорости. Статизм зависит от соотношения постоянных Tfl и Ти.
Если Ты тпоит 7^, жесткость меньше или равна жесткости характеристики
в разомкнутой системе УП—Д; при Ты Д> /ПсптТ’р статизм уменьшается в
Ты1тп0ПтТ ц раз.
Полученный результат поясняет смысл термина «подчиненное регулиро-
вание тока»: при работающем регуляторе скорости действие системы регули-
рования тока компенсируется действием обратной связи по скорости.
Работающий контур тока стремится поддерживать заданное значение тока
постоянным, обеспечивая при неизменном задающем сигнале астатическое регу-
лирование тока, т. е. абсолютно мягкую механическую характеристику. Для
получения жесткой механической характеристики необходимо увеличивать
заданное значение тока по мере возрастания нагрузки на валу двигателя, чтс
и обеспечивается работой контура регулирования скорости. При возрастания
нагрузки на валу двигателя его скорость уменьшается, результирующий сиг-
нал на входе регулятора скорости возрастает и пропорционально увеличивается
задающий сигнал на входе контура тока, компенсируя увеличивающийся
с возрастанием нагрузки сигнал отрицательной связи по току. Посколыц
коэффициент усиления регулятора скорости определен исходя из условиг
динамики, его величина жестко связана соотношением постоянных времени Д,
и Тц, что является существенным недостатком полученной системы.
Действительно, в соответствии с (3-59) жесткой механической характеры
стикой будет обладать электропривод с большой Тк, например электроприво;
поворота экскаватора, а мягкой — с малой Тк, например электропривод подъ-
ема. В гл. 1 было показано, что для электроприводов поворота желателык
смягчать характеристику для улучшения затухания колебаний ковша, а цль
электропривода подъема желательно иметь жесткий рабочий участок экскава
торной характеристики, необходимый для удержания ковша в нулевом поло
жении командоконтроллера. Нетрудно видеть, что соотношение жесткости
при последовательной коррекции прямо противоположно тому, что диктуете}
требованиями к экскаваторным электроприводам.
В реальной системе на ток накладывается ограничение /я 7СТОП. ДЛ}
реализации этого ограничения в системе подчиненного регулирования токг
достаточно ограничить задающий сигнал на входе регулятора тока, т. е. огра
ничить напряжение на выходе регулятора скорости. Поэтому в структурно!
схеме на рис. 3-13, б характеристика регулятора скорости показана нелиней
ной, а соответствующее ограничение выходной координаты в схеме на рис. 3-1!
Обеспечивается шунтированием цепи обратной связи стабилитронами Ст. Мак
симальное напряжение регулятора скорости определяется соотношением
^р. с. и ^3. Т. М ^О. Т^СТОП === ^Д. Т^З. тЛт0П-/^О. т (3-60
Если рассогласование па входе регулятора скорости больше, чем половит
ширины линейной зоны его характеристики, напряжение на его выходе по
стоянно, и система работает как система поддержания постоянства тока с нуле
вой статической ошибкой. Следовательно, при со < соотс уравнение статпче
ской механической характеристики имеет вид:
1Я = 7СТОП = const. (3-61
Соотношения (3-59) и (3-61) определяют форму электромеханических ха
рактеристик в рассматриваемой системе, приведенных на рис. 3-16, а.
130
Перейдем к рассмотрению динамических характеристик системы, синтези-
рованной методом последовательной коррекции при топт = 2. При включении
на вход схемы на рис. 3-15 задающего сигнала Z73. с = const, по величине в не-
сколько раз превышающего пороговое напряжение регулятора скорости, по-
следний сразу же выдает на выходе максимальное напряжение Ua т м, которое
остается постоянным до тех пор, пока возрастающий с ростом скорости сигнал
отрицательной связи по скорости не уменьшит результирующий сигнал на входе
регулятора скорости до уровня порогового напряжения. Поэтому переходный
процесс пуска в рассматриваемой системе протекает при разомкнутой цепи
Рис. 3-16. Механические характеристики (а) и переходный процесс
(б) электропривода в схеме, приведенной на рис. 3-15
отрицательной связи по скорости эа счет того, что в насыщенной части своей
характеристики коэффициент усиления регулятора скорости равен нулю.
Система при этом работает как одноконтурная система регулирования тока
с заданным значением тока, равным стопорному, в соответствии с соотношением
(3-60).
Как уже отмечалось, благодаря интегральной части регулятора тока
в установившихся режимах имеет место астатическое регулирование тока
1, = Лтоп- Рассмотрим, может ли в данной системе ток якоря поддерживаться
равным стопорному и в переходных процессах. При синтезе системы пренеб-
регли действием внутренней отрицательной связи по э. д. с. двигателя, пока-
занной на рпс. 3-6. Однако теперь для правильного ответа на поставленный
вопрос ее необходимо учесть.
Под действием задающего сигнала U3 т м ток якоря при достаточной малости
весьма быстро с перерегулированием около 5 % достигает установившегося
значения 7П, которое в дальнейшем переходном процессе остается постоянным
(рис. 3-16, б). При постоянном токе и моменте двигателя имеет место равномерно
ускоренный процесс возрастания скорости двигателя. В этом процессе линейно
возрастает э. д. с. двигателя и, в соответствии с рис. 3-4 должна с тем же тем-
пом по линейному закону возрастать э. д. с. преобразователя. Полагая харак-
теристику преобразователя линейной, приходим к выводу, что напряжение
управления на входе тиристорного преобразователя ку, т. е. выходное напря-
жение регулятора тока, вследствие наличия внутренней связи по э. д. с.
9’
131
двигателя на основной части переходного процесса должно возрастать по линей-
ному закону
(3-62)
где е = day/dt — ускорение двигателя, соответствующее установившемуся пу-
сковому току 7П.
Процесс нарастания напряжения иу определяется интегральной составля-
ющей регулятора тока, для которой справедливо следующее уравнение:
«вх. т — и dt ~ 7 и fcnp
(3-63)
С другой стороны,
^"ВХ. Т- ^3. Т м “'О п "'О, Т^^ЦИН?
(3-64)
где Д/дИН — абсолютное расхождение между статической и динамической
характеристиками двигателя (см. рис. 3-16, а).
Приравнивая (3-63) и (3-64) с учетом выражения постоянной времени Д
(3-50), можно получить следующее соотношение:
АТдИН
топт7’„Се
(3-65)
Полученное соотношение свидетельствует о том, что в переходном про-
цессе, когда е = d«7dt =£ 0, в данной системе ток должен отличаться от сто-
порного тока на величину А7ДИН. Расхождение между статической и динами-
ческой характеристиками А7ДИН, показанное на рис. 3-16, а, тем больше, чем
выше ускорение цривода, чем больше некомпенсируемая постоянная времени
Tji и там больете требуемое по условиям необходимого качества процесса свет-
ношение постоянных времени топт.
Для того чтобы получить выражение, удобное для количественных оценок,
необходимо преобразовать (3-65), учитывая, что с = ю0//п.'п (где Д. п~ длитель-
ность переходного процесса, сеюо = Епр_о UB), и затем представить его
в относительных единицах, поделив левую и правую часть на 7СТОП. В резуль-
тате преобразований получим
= ----(3-66)
•*СТОП АС/СТОП Ип. п
Где А77СТОП 7" стоцТ?яХ-
В системе ТЦ—Д суммарную некомпенсируемую постоянную прини-
мают равной 0,01 с. Для экскаваторных электроприводов А77сго11 ш 0,1 (7В
и топт = 2-4-4. Соответственно расхождение между статической и динамиче-
ской характеристиками при этих условиях при времени пуска tB п = 2 с со-
ставляет (0,1-4-0,2) 7С1ОП, а при времени стопорения tn в = 1 с (0,24-0,4)
70ТвП. Такие расхождения между статической и динамической характеристи-
ками свойственны системе Г—Д при больших постоянных времени Тг и недо-
132
статочном запасе по напряжению возбуждения. Увеличивая форсировки по
напряжению возбуждения, получаем при стопорениях в системе Г—Д выбросы
тока за стопорное значение, не превышающие 10%. В системе же с быстродей-
ствующим тиристорным преобразователем, постоянная времени которого на
два порядка меньше, чем у генератора, с контуром тока, оптимизированным
по быстродействию методом последовательной коррекции, выбросы тока за
стопорное значение при стопорениях могут превышать 40% 1стоп, причем
уменьшить их можно только уменьшая шопт, т. е. ухудшая качество процессов,
увеличивая перерегулирования и ухудшая затухание колебаний.
Это кажущееся противоречие объясняется главным образом обманчиво-
стью термина «оптимизация по быстродействию». В действительности, вводя
в контур тока интегрально-пропорциональный регулятор, за счет его пропор-
циональной составляющей компенсируем инерционность якорной цепи, а за
счет интегральной составляющей в цепь управления вводится значительная
инерционность, характеризуемая постоянной Тк, величина которой выбирается
настолько большой, что определяет динамику и требуемое качество регулиро-
вания. Поэтому рассматриваемая система электропривода является в принципе
инерционной системой, аналогичной по ряду показателей быстродействия
системе Г—Д.
Для оценки расхождения между статической и динамической
характеристикой при пуске формулу (3-65) можно представить в весьма
наглядном виде, учитывая, что в соответствии с уравнением движения
т r 1 da т е
Следовательно,
<?_ См/дИн
~ ч
Подставляя полученное значение е в формулу (3-65), после преобразований
получим
1___/с -
, (3-67)
-«СТОП Л [___* м
^ОПТ^'р.
где 7С — ток статической нагрузки.
Из формулы (3-67) следует, что расхождение между статической и дина-
мической характеристиками А1ПИН77СТОП в переходных процессах тем меньше,
чем больше электромеханическая постоянная времени Ты и чем меньше вели-
чина топтТц. Кроме того, величина естественно уменьшается
с ростом статической нагрузки.
Формулой (3-67) можно пользоваться для оценки величины А7днн/7Стоп
в тяжелых переходных процессах электроприводов копающих механизмов
с большими статическими нагрузками (пуск на подъем, реверс после спуска
ковша и т. п.). Для легких переходных процессов тех же электроприводов
(пуск на спуск, торможение после подъема) применять формулу (3-67) не сле-
дует, так как в этих процессах требуется ограничение ускорений, и расхожде-
ния, выявляемые формулой (3-67), не представляют практического интереса.
Для этих режимов формула (3-67) неприменима, и следует пользоваться форму-
лой (3-65), подставляя в нее значение допустимого ускорения едвп, или форму-
лой (3-66), подставляя в нее значение времени переходного процесса.
133
Для режимов резких стопорений следует пользоваться формулой (3-66),
подставляя в нее значение времени стопорения.
Для электроприводов поворота удобно пользоваться формулой (3-67).
Например, при игопт = 4; 7\г = 0,01 с и Тк = 0,4 с А/,,ин составляет 9%
стопорного значения. Если принять топт = 2, то при тех же условиях формула
(3-67) даст значение А7№JICTQU = 0,05, что можно признать приемлемым
и соответствует лучшим результатам, получаемым в системе Г—Д.
На основании проведенного анализа можно отметить следующие достоин-
ства системы подчиненного регулирования с последовательной коррекцией,
важные для экскаваторных электроприводов:
1) система обеспечивает возможность формирования экскаваторных ха-
рактеристик с высоким заполнением простыми средствами;
2) подбор параметров системы регулирования, обеспечивающих опреде-
ленные динамические качества электропривода, осуществляется предельно
простым инженерным методом, имеющим приемлемую для практики точность.
Простота оценок параметров весьма удобна при наладке приводов;
3) благодаря инерционности регулятора тока система отфильтровывает
высокие частоты, что обеспечивает сохранение демпфирующей способности
привода на высоком уровне при абсолютно мягкой статической характери-
стике (см. § 1-3);
4) как и все системы, имеющие структуру подчиненного регулирования
рассматриваемая система проста в наладке и эксплуатации.
Вместе с тем на основании того же анализа выявлен ряд недостатков рас-
смотренного метода синтеза, затрудняющих непосредственное использование
полученной системы в экскаваторных электроприводах:
1) жесткая связь между коэффициентом обратной связи и динамическими
свойствами контура регулирования предопределяет жесткость рабочего участка
механической характеристики, которая находится в противоречии с требова-
ниями к экскаваторным электроприводам. За счет этого даже прп использо-
вании нежелательной отрицательной связи по скорости во многих случаях
невозможно получить удовлетворительную жесткость рабочей части характе-
ристики;
2) вследствие инерционности регулятора тока системе свойственны зна-
чительные расхождения между статикой и динамикой, которые во многих
режимах не обеспечивают удовлетворительного ограничения тока или мини-
мальной длительности переходных процессов;
3) система не обеспечивает ограничения ускорений в легких переходных
процессах (пуск на спуск, торможение в конце подъема), когда точность под-
держания тока в динамике достаточно высока, а также при выборе зазоров
в передачах и слабины канатов;
4) некомпенсируемая инерционность для внешнего контура возрастает
при увеличении числа контуров регулирования тем быстрее, чем больше топт.
Для экскаваторных электроприводов, вследствие нежелательности перерегу-
лирований по скорости, топт Д>2, поэтому введение дополнительных внутренних
контуров регулирования, например контура регулирования ускорения, не-
допустимо снижает быстродействие внешнего контура — контура регулиро-
вания скорости.
Поэтому при выборе унифицированной структуры экскаваторных электро-
приводов целесообразно, учитывая отмеченные достоинства систем с последо-
вательной коррекцией, положить рассмотренный подход в основу ее синтеза,
но за счет дополнительных мероприятий устранить отмеченные недостатки.
434
§ 3-6. Оптимальная структура экскаваторных электроприводов
Структура экскаваторного электропривода, отвечающая всем уста-
новленным в гл. 1 техническим требованиям, представлена на рис. 3-17. Рас-
сматривая эту схему, легко установить, что она является двухконтурной си-
стемой подчиненного регулирования тока якоря двигателя и напряжения пре-
образователя и, таким образом, сохраняет все перечисленные выше особенно-
сти систем этого типа. В качестве регулятора тока используется интегральный
регулятор. Следовательно, постоянная якоря Тя предполагается некомпенси-
Рис. 3-17. Оптимальная структура экскаваторного электропривода
руемой. Задающий сигнал к3. т и сигнал обратной связи по току якоря суммиру-
ются на входе дополнительного усилителя 30, имеющего характеристику
«вход — выход» с ограничением выходной величины. Во всех режимах, в ко-
торых ток якоря незначительно отличается от стопорного, пропорциональный
усилитель 30 работает на линейной части своей характеристики, и работа
схемы контура тока не имеет отличий от рассмотренной в § 3-5. Однако в лег-
ких переходных процессах пусковой ток уменьшается, разность т— и0 т
возрастает и достигает порогового значения. При этом усилитель 30 работает
как звено ограничения, подавая на вход регулятора тока постоянный сигнал
т.«
duy
dt
сеТи
Лпр Ьдоп’
(3-68)
= т
- * и
где едоп — допустимое ускорение двигателя.
Электродвижущая сила преобразователя нарастает в этом режиме по
линейному закону с предельно допустимым по условию ограничения ускорений
темпом независимо от величины тока якоря. Если за счет увеличения нагрузки
ток возрастет, то разность к3. т— ио т= иъя 3 о станет меньше порогового на-
пряжения звена ограничения — система начнет регулировать ток, как это
и должно быть в тяжелых режимах, ограничивая его стопорным значением.
Таким образом, за счет введения звена ограничения 30 в экскаваторном
электроприводе обеспечивается ограничение максимальных ускорений, чем
устраняется отмеченный выше третий недостаток систем с последовательной
коррекцией.
Взамен отрицательной связи по скорости в схеме используется отрицатель-
ная обратная связь по напряжению преобразователя. Сигнал, задающий уро-
вень напряжения (скорости двигателя), ия в и сигнал обратной связи по напря-
жению мо. н суммируются на входе пропорционального регулятора напряжения.
Для устранения отмеченного выше первого недостатка систем с последователь-
ной коррекцией, который при переходе к регулированию напряжения стано-
вится еще более острым, на вход регулятора напряжения подается сигнал
135.
положительной обратной связи по току кп т, регулируя который можно полу-
чить любую требуемую жесткость рабочего участка механических характери-
стик.
В данной системе положительная связь по току вводится главным обра-
зом для того, чтобы компенсировать действие внутреннего контура тока,
направленное на смягчение механической характеристики. Если положительная
связь по току подается на вход PH с коэффициентом /сн. т= 17/Су н, где н—
коэффициент усиления регулятора напряжения, то при работе PH в пределах
линейной части своей характеристики его выходное напряжение п3 т содержит
составляющую, в каждый момент численно равную сигналу отрицательной
связи по току, воздействующему на вход 30. Следовательно, при такой настройке
положительной связи по току положительная и отрицательная связи по току
в системе взаимно компенсируются, и систему можно рассматривать как разом-
кнутую по току якоря.
При работе токоограничения регулятор PH, как и регулятор скорости
в схеме на рис. 3-15, насыщен и выдает на выходе постоянное напряжение
из. т = &з. т. м= const. Тем самым прекращается действие отрицательной связи
по напряжению и положительной связи по току — система работает как одно-
контурная система регулирования тока, так же как и в схеме на рис. 3-15.
Из данного описания следует, что благодаря компенсации действия отри-
цательной связи по току жесткость рабочего участка в данной схеме при под-
держании постоянства напряжения на двигателе получается достаточно высо-
кой для любого экскаваторного электропривода. Одновременно устраняется
отмеченная выше связь между жесткостью статической характеристики и дина-
микой системы, свойственная системе с последовательной коррекцией. Под-
бором коэффициента положительной обратной связи по току якоря можно
установить любую требуемую жесткость рабочего участка экскаваторных
характеристик.
Интегральный регулятор тока не компенсирует постоянную времени
якорной цепи Тк. За счет этого суммарная некомпенсируемая инерционность
Тц = Тпр + Тя возрастает, и быстродействие системы при последовательной
коррекции может быть, как выше было показано, совершенно неудовлетвори-
тельным. В рассматриваемой структуре этот недостаткок устраняется за счет
введения в сигнал отрицательной связи составляющей, пропорциональной
производной регулируемой величины. Говоря строго, это эквивалентно приме-
нению смешанной последовательно-паралллельной коррекции, однако струк-
тура позволяет для выбора параметров и оптимизации применить основной
подход, свойственный рассмотренному методу последовательной коррекции,
дополнив его некоторыми изменениями в соответствии с использованием сме-
шанной коррекции.
Опыт наладки экскаваторных электроприводов показывает, что для полу-
чения требуемых динамических качеств привода достаточно осуществить
настройку контура регулирования тока в режиме короткого замыкания (при
снятом возбуждении двигателей) и контура регулирования напряжения в ре-
жиме холостого хода (при разомкнутой якорной цепи). При оптимальной на-
стройке контуров в этих искусственных режимах обеспечивается близкая
к оптимальной динамика привода в рабочем состоянии (см. гл. 7).
Заметим, что режим к. з. в точности соответствует условиям работы схемы
при отсутствии внутренней связи по э. д. с. двигателя. Выше было показано,
что пренебрежение внутренней связью по э. д. с. является одним из главных
допущений рассмотренного метода синтеза многоконтурных систем подчинен-
136
кого регулирования. Поэтому оптимизация контура тока по режиму к. з.
лишь поясняет смысл этого допущения, а формальных отличий от рассмотрен-
ного метода синтеза не имеет. Настройка контура напряжения по режиму
холостого хода в принципе применима лишь к схеме, приведенной на рпс. 3-17,
и ей подобным. Основанием для этого является использование обратной связи
по напряжению вместо обратной связи по скорости и применение компенсиру-
ющей положительной связи по току якоря, благодаря которой при работе
контура напряжения токовые цепи управления можно считать разомкнутыми.
Режим к. з.
Структурная схема контура тока, в режиме к. з. представлена на
рис. 3-18, а. В соответствии с рассмотренным выше методом последовательной
коррекции примем, что передаточная функция регулятора тока должна быть
Рис. 3-18. Оптимизация динамики экскаваторного элек-
тропривода по режиму к. з. (а) и режиму х. х. (б)
выбрана с таким расчетом, чтобы получить передаточную функцию разомкну-
того контура тока вида:
•^pas.TW r0.Tp(r^+l) -
где То т— оптимальная постоянная интегрирования контура тока; = Тп р+
+ Тя — суммарная некомпенсируемая постоянная токового контура.
В соответствии с (3-38) определяется передаточная функция регулятора
тока
W„. * = т /Л р ~ TV ’ (З-69)
К3. О^ГТрЛб. т* о. Ч:Р * иР
ГДС Тк = о^пр^О. Т^о.
Передаточная функция замкнутого контура тока согласно (3-43) будет
иметь вид:
(3~70)
Рассматривая (3-70), можно убедиться, что введение в контур регулиро-
вания сигнала, пропорционального производной тока, расширяет возможности
137
настройки, нарушая жесткую связь между соотношением постоянных времени
и характером процессов. Корни характеристического уравнения
где
Pi, 2 — "у
* о. т
; То Т4-ГТ , Т
2 р. 11
(3-71)
Таким образом, представляется возможность при любом соотношении
постоянных шт получить требуемое качество процесса, подобрав значение
гибкой составляющей Тт таким образом, чтобы получить соответствующий
дискриминант уравнения (3-70). Так, для получения критического демпфирования
(граничного случая апериодического процесса при равенстве дискриминанта
нулю) можно получить следующие условия: гп/опт—4тт = 0; 0ПТ = 2)'Лт1*
Следовательно,
T-i = (2 Vm-t — г'гт)-
(3-72)
Если выбрать игт = 4, то в соответствии с (3-72) 7\. =0 что соответствует
случаю чисто последовательной коррекции. При тт 4 Тт ¥= 0, т. е. для
получения требуемого качества процесса необходимо вводить гибкую связь
по регулируемой величине. Так как То т= ттТ^, то величина тт непосредст-
венно определяет постоянную интегрирования регулятора тока Tv и, как
следствие, расхождение между статикой и динамикой в соответствии с (3-63)
и (3-64), полагая /сэ о=1.
Использование гибкой связи по току позволяет выбирать величину тт опт
из условия получения минимума допустимого значения Д7дин в соответствии
с (3-65). Подставляя найденное таким образом значение игт опт в формулу (3-72),
можно определить постоянную гибкой связи по току Тт опт, обеспечивающую
апериодический характер процессов.
Величина максимального выходного напряжения звена ограничения 30
вычисляется по формуле
ГТ
3. О. М ~~ Л.
к пр
(3-73)
Режим х. х.
Структурная схема контура регулирования напряжения в режиме
холостого хода с учетом полученной передаточной функции регулятора тока
представлена на рис. 3-18, б. Как и ранее, желаемая передаточная функция
разомкнутого контура имеет вид:
Wzpa3.H(p) =
1/fep. и
Т” — Т
и — z пр*
где
138
С помощью (3-38) определяется передаточная функция регулятора напря-
жения
Wp, н (р) = — - Ги ------= Лу. н. (3-74)
к3. О^Пр^О, н-* о. н
Передаточная функция замкнутого контура регулирования напряжения
W3aM. н (р) = . (3-75)
1 О. В1 рР* Т U о. Н + 1 н) Р 1
Полученная передаточная функция вполне аналогична (3-70) и обеспечи-
вает те же возможности настройки путем подбора т'а. опт, тн опт и Тк, какие
были установлены для контура тока. Следует, однако, иметь в виду, что для
контура напряжения нет очевидного критерия для выбора пгн. опт. Поэтому для
этого контура целесообразно проверить качество регулирования при Тк = 0
н вводить гибкую связь лишь в том случае, если какой-либо показатель неудо-
влетворителен.
Полученные несложные соотношения являются приближенными, но они
могут служить хорошим ориентиром при наладке сложных систем, имеющих
рассматриваемую структуру.
Все изложенное относится к случаю, когда для реализации оптимальной
структуры (см. рис. 3-17) используются элементы УБСР. Однако важным до-
стоинством этой структуры является ее универсальность, позволяющая реали-
зовать ее на достаточно простых и надежных магнитных усилителях, сохранив
основные особенности рассмотренной схемы за счет использования формирующей
положительной связи по напряжению. Такие реализации наиболее рациональны,
для экскаваторных электроприводов по системе Г—Д и рассматриваются в сле-
дующей главе.
ГЛАВА 4
ФОРМИРОВАНИЕ СТАТИЧЕСКИХ И ДИНАМИЧЕСКИХ
ХАРАКТЕРИСТИК ЭКСКАВАТОРНЫХ ЭЛЕКТРОПРИВОДОВ
§ 4-1. Узел жесткой отрицательной связи по току главной цепи
Применение токовой связи во всех системах экскаваторного электро-
привода вызвано необходимостью ограничения момента и тока предельно
допустимыми значениями. Нелинейный характер статической характеристики
Рис. 4-1. Узел непрерывной отрицательной связи
по току
основных механизмов экска-
ватора определяет нелиней-
ный характер токовой связи.
В замкнутых системах
Г—Д, где для создания об-
ратной связи по току якоря
служит одна из обмоток упра-
вления усилителя, нелиней-
ный характер токовой связи
получают за счет использо-
вания нелинейных элементов
(например, полупроводнико-
вых выпрямителей) в цепи
самого токового узла или за
счет нелинейности харак-
теристик усилителей.
Наиболее распростра-
нены две разновидности то-
ковой связи, применяемые
в схемах управления с уси-
лителями:
1) непрерывная токовая связь; в этом случае для получения нелинейности
используется естественная нелинейность характеристик усилителя;
2) токовая связь с потенциометрической отсечкой; в этом случае для исклю-
чения действия токовой связи в диапазоне рабочих нагрузок до момента отсечки
используют потенциометр сравнения в сочетании с полупроводниковыми вы-
прямителями (селеновыми, германиевыми, кремниевыми).
Схема узла непрерывной отрицательной связи по току якоря показана
на рис. 4-1. Здесь токовая обмотка О Т является одной из обмоток управления
силового магнитного усилителя МУ, питающего обмотку независимого воз-
буждения генератора ОВНГ. Принцип действия узла токовой связи не изменится,
если в качестве токовой обмотки будет служить одна из обмоток управления
не силового, а промежуточного усилителя, однако для конкретности рассмот-
рим случай, когда токовая обмотка принадлежит силовому магнитному уси-
лителю.
Токовая обмотка получает питание с участка главной цепи, образованного
компенсационными обмотками и обмотками дополнительных полюсов генера-
торов и двигателей. Такая схема питания цепи токовой обмотки имеет место
во всех узлах токовой связи — и непрерывном, и с потенциометрической от-
сечкой. Величина сигнала обратной связи прямо пропорциональна величине
140
тока якоря, так как напряжение EU^, подаваемое на узел токовой связи в уста-
новившемся режиме, линейно связано с величиной тока якоря
Л17Т=/;,Л>Д, (4-1)
где 7?д — сопротивление участка КЕ главной цепи (см. рис. 4-1).
Н. с. задающей обмотки в схемах с непрерывной токовой связью выбира
ется таким образом, чтобы установившийся режим работы (на основной ско-
рости) соответствовал насыщенному участку характеристики магнитного уси-
лителя (рис. 4-2, а), где’ток на выходе МУ практически не зависит от величины
задающих ампер-витков.
Рис. 4-2. Характеристика магнит-
ного усилителя (а), внешние харак-
теристики генератора (б) и электро-
механические характеристики при-
вода (в) для схемы, приведенной на
рис. 4-1
Так как обратная связь, осуществляемая с помощью токовой обмотки,
является отрицательной, н. с. токовой обмотки во всех режимах действует
на уменьшение тока якоря. При росте нагрузки на валу двигателя ток якоря
увеличивается. Под действием напряжения А£7Т по цепи токовой обмотки
начинает протекать ток
где гт ц= го т+ Гд т — сопротивление цепи токовой обмотки; г0 т— сопро-
тивление токовой обмотки; гд> т— добавочное сопротивление и сопротивление
соединительных проводов.
Ток 10 т, протекающий по токовой обмотке, создает н. с.
Яд
fт= 4. т^о. т = ^я ”7 ^о. т> (4-3)
' т. ц
где гг0. т— число витков токовой обмотки усилителя.
141
Если обмотка ОТ является обмоткой управления двухтактного магвит-
ного усилителя, нужно учитывать, что она состоит из двух обмоток управления,
каждая из которых принадлежит одному из входящих в схему однотактных
магнитных усилителей и имеет число витков wy и сопротивление гу. При после-
довательном соединении этих обмоток управления в соотношениях (4-2) и (4-3)
го. т= 2гу и ш0< т = wy, а при параллельном
Рис. 4-3. Нагрузочные характеристики генератора
(о) и зависимости Ег = f (Fy) при 7Я = const (б)
го т= 0,5гу и wo т = 0,5шу. Это
обстоятельство должно учиты-
ваться и во всех аналогичных
соотношениях, приведенных в
дальнейшем изложении.
Согласно определению, ко-
эффициент обратной связи по
току якоря равен отношению
выходной величины обратной
связи к входной величине, т. е.
в данном случае отношению
н. с., создаваемой токовой об-
моткой усилителя, к току якоря
, Ет Ед
^о. т ~f ~ ~Z и’о. т (^~1)
«я гт. ц
Намагничивающая сила FT
вычитается из н. с. задающей
обмотки F3, уменьшая резуль-
тирующую н. с. управления.
Однако так как работа проис-
ходит на насыщенном участке
характеристики МУ (участок
В А на рис. 4-2, а), ток выхода
МУ не уменьшается.
Соответственно неизменна
величина тока возбуждения
генератора, а э. д. с. генера-
тора и скорость двигателя
уменьшаются незначительно:
э. д. с. генератора за счет раз-
магничивающей реакции якоря,
а скорость двигателя из-за уменьшения э. д. с. генератора и падения напря-
жения в главной цепи.
Когда ток якоря достигнет значения тока отсечки, а пропорциональная
ему н. с. токовой обмотки достигнет величины Ет. отс, магнитный усилитель
выходит на линейный участок своей характеристики. При дальнейшем росте
нагрузки ток выхода магнитного усилителя линейно уменьшается с ростом
тока якоря. Соответственно уменьшаются ток обмотки независимого возбу-
ждения генератора, получающей питание от магнитного усилителя, э. д. с.
генератора и скорость двигателя. Уменьшение э. д. с. генератора при умень-
шении тока независимой обмотки с ростом нагрузки происходит по нагрузочным
характеристикам генератора, представленным на рис. 4-3, а.
Насыщенному участку характеристики МУ соответствуют жесткие участки
внешней характеристики генератора и статической характеристики привода ВА
(см. рис. 4-2, б и в). При этом С7В = const система регулирования разомкнута
142
и механическая характеристика вполне аналогична характеристикам разомкну-
той системы Г—Д. Линейному участку характеристики МУ (участок АО на
рис. 4-2, а) соответствуют падающие участки внешней характеристики гене-
ратора и статической характеристики привода АС на рис. 4-2, б и в. Уменьше-
ние скорости двигателя на этом участке происходит в основном за счет умень-
шения э. д. с. генератора под действием токовой обмотки, а также за счет
всех тех факторов (падения напряжения, реакции якоря и т. д.), которые дей-
ствуют постоянно.
Из сказанного выше следует, что заполнение статической характеристики
в схемах с непрерывной связью по току зависит от отношения п. с. управления
Д оте, соответствующей насыщенному участку характеристики «вход — вы-
ход» МУ, к полной задающей н. с. F3. Чем ближе это отношение к единице,
тем круче будет падающий участок статической характеристики АС, тем больше
будет ее заполнение. Напомним, что отношение момента отсечки к стопорному
моменту (или тока отсечки к стопорному току) называют коэффициентом от-
сечки котс.
Коэффициент отсечки в рассматриваемых схемах с непрерывной связью
по току при отсутствии обратной связи по напряжению генератора определя-
ется только указанным выше отношением
т. __ Дп’С __ Ft. отс Fj. ОТС_л _ FЛИН /г Г\
'‘'ОТС " Г Т? __ 77 Т? Г ' V* *3)
2 СТОП '3Гу. стоп Гз 2 3
При моменте нагрузки, равном стопорному, двигатель останавливается,
генератор работает в режиме короткого замыкания. При этом генератор соз-
дает э. д. с. Ег стоп, равную суммарному падению напряжения в главной цепи.
Величина тока возбуждения 1В стоп, необходимого для создания э. д. с.
генератора Ег стоп, определяется по нагрузочной характеристике генератора
для данной величины стопорного тока (см. рис. 4-3, а). Величина результиру-
ющей н. с. Fy стоп магнитного усилителя, необходимой для получения тока
независимой обмотки 1В стоп в стопорном режиме, определяется по характери-
стике «вход — выход» ЙУ или непосредственно по зависимости Ег — j (Fy),
представленной на рис. 4-3, б при 7Я = 1Я стоп.
Так как э. д. с. Ег_ СтОП и соответствующий ток обмотки возбуждения
в стопорном режиме невелики, н. с. токовой обмотки в этом режиме Г, стоп
незначительно отличается от н. с. задающей обмотки (не более чем на 10%).
Таким образом, приближенно можем записать
Ру. стон = Рз — Л. стоп = °- (4-6)
Следовательно, Гт стоп F3 и стопорный ток в соответствии с (4-4) можно
шределить из приближенного соотношения
Передаточный коэффициент токовой связи
Аъ. тх — ко гк,
,,, ь
гт. ц
(4-8)
где кг и= ErIFy — передаточный коэффициент разомкнутой системы, опре-
деляемый по нагрузочной характеристике генератора, перестроенной в зависи-
мости от н. с. управления на входе магнитного усилителя для данного значе-
ния тока якоря (см. рис. 4-3, б).
143
Из (4-5) и (4-7) можно получить соотношение, связывающее коэффициент
токовой связи ко_ т и коэффициент отсечки кптс
т. __________FmiK_____
°'Т (1-----^отс) /стоп
(4-8)
Рассматривая особенности узла непрерывной отрицательной обратной
связи по току, не учитываем действия других обратных связей, обычно присут-
ствующих в схеме. Это позволяет не только наглядно представить принцип
получения экскаваторной
формы характеристики,
но и проанализировать
регулировочные возмож-
ности простейшей схемы,
представленной на рис. 4-1.
Регулирование скоро-
сти может быть осуще-
ствлено уменьшением за-
дающей н. с. F3. При этом
получается семейство про-
межуточных характери-
стик, показанных на рис.
4-2, в прямыми II, I иО.
Нетрудно видеть, что та-
кое регулирование дает
линейные промежуточные
характеристики. Эти ха-
рактеристики параллельны
падающему участку АС
основной характеристики,
так как коэффициент уси-
ления системы и коэффи-
циент обратной связи по
Рис. 4-4. Узел отрицательной связи по току с потенцио- току не изменяются. Же-
метрической отсечкой сткость этих характери-
стик тем меньше, чем
больше заполнение основной характеристики. Это особенно неблагоприятно
для режима удержания ковша, который на характеристике 0 практически
осуществить невозможно.
Более жесткие промежуточные характеристики могут быть получены из-
менением коэффициента обратной связи по току, например его уменьшением,
что может быть осуществлено введением в цепь токовой обмотки ОТ дополни-
тельных сопротивлений. Однако введение управляющих контактов в цепь
токовой обмотки крайне нежелательно, так как недопустимо снижает надеж-
ность токоограничения. Кроме того, получить удовлетворительную жесткость
промежуточных характеристик указанным способом все равно не представля-
ется возможным. Поэтому на практике требуемую жесткость и даже форму
промежуточных характеристик получают регулированием в других узлах
схемы, например, изменением коэффициента обратной связи по напряжению
и другими средствами, упомянутыми в § 4-4.
Схема узла жесткой отрицательной связи по току якоря с потенциометри-
ческой отсечкой изображена на рис. 4-4. Здесь, так же как и в случае непрерыв-
144
ной токовой связи, токовая обмотка может принадлежать или силовому, или
промежуточному усилителю.
В отличие от непрерывной токовой связи, нелинейность которой может
быть получена только за счет нелинейности характеристик усилителя, потен-
циометрическая отсечка может применяться в сочетании с любым типом уси-
лителя с практически линейной характеристикой. Цепь токовой обмотки, так
же как и в схеме с непрерывной токовой связью, получает питание с участка
главной цепи. Отличие состоит в том, что здесь последовательно в цепь токовой
обмотки включены участок потенциометра сравнения и полупроводниковые
вентили. Потенциометр сравнения обычно получает питание от возбудителя
(ГСП) или от специального трансформатора через выпрямительный мост (см.
главу 5).
В схеме, изображенной на рис. 4-4, ток 1п по потенциометру сравнения
протекает в направлении от А к В и образует на участках потенциометра СМ
и МР равные падения напряжения UCm = UMp- Напряжения Ucm и Ump
называют напряжением сравнения Z7cp, или запирающим потенциалом.
Рассмотрим работу узла токовой связи. При росте нагрузки на валу двига-
теля ток якоря и напряжение на участке главной цепи AZ7T, приложенное
к цепи токовой обмотки, увеличиваются. Однако пока напряжение At/T меньше
величины напряжения сравнения Z7CC, ток по цепи токовой обмотки не проте-
кает.
Действительно, при протекании тока 1п по потенциометру сравнения в на-
правлении от А к В потенциал точки М становится ниже потенциала точки С,
а потенциал точки Р ниже потенциала точки М на величину напряжения
сравнения. Из схемы, приведенной на рис. 4-4, ясно, что к цепи токовой обмотки
приложена разность напряжений At/T — Z7cp. Пока UC9 больше AZ7T ток по цепи
РМКЕДР в направлении от Д к Р или по цепи МСДЕКМ в направлении
от С к Д протекать не может из-за запирающего действия вентилей В1 и В2.
По мере увеличения тока якоря At/T становится больше Z7cp и по цепи токовой
обмотки в направлении от К к М или от М к К (в зависимости от полярности
тока главной цепи, рис. 4-4) начинает протекать ток
7о т= (4-10)
гт. ц
гДе гт. ц = го. т+ гд. т+ гп + гв — сопротивление цепи токовой обмотки; гп —
rMP (rAM + грв)
внутреннее сопротивление потенциометра, гв=-----Д-----•--гв—сопротив-
гмр~ргам+грв
ление полупроводниковых вентилей в прямом направлении.
Величину тока якоря, при которой начинает действовать токовая обмотка
(ток отсечки 1отс) можно определить исходя из равенства
АПт = 1/тср = /отс/?д.
Отсюда
= (4-11)
Зависимость тока, протекающего по цепи токовой обмотки 10 т, от тока
якоря получим из выражения (4-10) и (4-11)
Г — /яДЛ~/отсДД __ Дд /т J Ч
7°.я' — ~ г» .. О я 7отсП
10 Заказ 1127
145
Намагничивающая сила токовой обмотки
^о. т 4. т (Л -^Отс) „ «’о. т* (4М2)
гт. ц
Коэффициент обратной связи по току якоря будет равен отношению и. с.
токовой обмотки к сигналу, подаваемому на вход токового узла, т. е. к разности
величин (1Я — 1тс)
k — - — _2а_
"'О. т Т __ Г „ t^OT-
1 я 1ОТС ‘ т. ц
Передаточный коэффициент токовой связи
^о. tS т^т. н Т ~^о. т^т в»
1 т. U
(4-13)
где кг_ л — передаточный коэффициент разомкнутой системы.
Здесь следует обратить внимание на полную идентичность выражений
(4-4) с (4-13) и (4-8) с (4-14) для коэффициентов обратных связей по току ко т
Рис. 4-5. Электромеханические характеристики
для схемы, приведенной £на рис. 4-4
и к0. т s в схемах с потенциомет-
рической отсечкой и непрерывной
связью по току.
При токе якоря большем, чем
ток отсечки, н. с. токовой обмотки
линейно увеличивается с ростом
тока якоря, а результирующая
н. с. управления линейно умень-
шается. Соответственно уменьша-
ются н. с. обмотки независимого
возбуждения, которая получает
питание от усилителя, э. д. с.
генератора и скорость двигателя.
Таким образом, в схеме с'по-
тенциометрической отсечкой жест-
кий участок В А статической ха-
рактеристики (рис. 4-5) получается
за счет исключения действия токо-
вой обмотки в диапазоне рабочих нагрузок при М <_ ЛГОТС(1Я<; 7ОТС). Падение
скорости на этом участке происходит за счет падения напряжения в главной
цепи и размагничивающего действия реакции якоря и противокомпаундных
обмоток генераторов.
Мягкий участок АС статической характеристики с линейным уменьшением
скорости двигателя в зависимости от момента нагрузки получаем при М Мтс
(7Я 2>/Отс), когда токовая обмотка вступает в действие в основном за счет сни-
жения э. д. с. генератора под действием токовой обмотки.
При моменте нагрузки, равном стопорному, двигатель останавливается,
генератор работает в режиме короткого замыкания с небольшой по величине
э. д. с. Ег_ сгоп. Если при этом, так же как и в схеме с непрерывной токовой
связью, пренебречь величиной Fv стоп 0, можно воспользоваться соотноше-
нием (4-7). Из соотношения (4-7) и (4-13) определяем величину стопорного тока
7 3
я. СТОП— *0. т (1 —/сотс)
(4-15)
146
Из выражения(4-15)можно по заданному к0. т определить котс, или наоборот.
В отличие от схемы с непрерывной токовой связью в схеме с потенциомет-
рической отсечкой легко получить промежуточные характеристики, в том числе
характеристику 0, соответствующую пулевому положению командоконтрол-
лера, экскаваторной формы (см. рис. 4-5), что особенно важно для режима
удержания ковша. Действительно, в схемах с потенциометрической отсечкой
условия для получения экскаваторной характеристики ничем не отличаются
друг от друга на всех положениях командоконтроллера, так как при всех по-
ложениях командоконтроллера усилитель работает на линейной части своей
характеристики, а экскаваторная форма статической характеристики полу-
чается за счет исключения действия токовой обмотки в определенном диапа-
зоне нагрузок с помощью запирающего напряжения.
§ 4-2. Узел жесткой отрицательной связи по напряжению генератора
В большинстве схем управления экскаваторными электроприводами
применяют жесткую отрицательную обратную связь по напряжению генера-
тора. Использование этого типа обратной связи объясняется целым рядом при-
чин. Одна из основных причин уже указывалась выше: это необходимость
получения жесткого участка статической характеристики. Другой важной
причиной применения этого вида связи является необходимость создания в пере-
Рпс. 4-6. Схемы узла обратной связи по напряжению генератора
ходных процессах форсировок по напряжению возбуждения. Кроме того, при-
менение отрицательной связи по напряжению уменьшает влияние температур-
ных изменений параметров схемы управления на характеристики электро-
привода.
Схема узла отрицательной связи по напряжению генератора изображена
на рис. 4-6, а. Так как потенциометрическая отсечка по напряжению практи-
чески в экскаваторных приводах не применяется, схема этого узла для линей-
ной и нелинейной связей будет одной и той же. Различие проявляется только
в характеристиках усилителей, используемых для получения обратной связи.
Величина сигнала, поступающего на вход усилителя, как следует из схемы,
приведенной на рис. 4-6, а, линейно связана с напряжением генератора. Под
действием напряжения генератора UT по обмотке обратной связи протекает
ток /о н, создающий н. с. Уо. н>
F = I w г °-н
J о. н л о. н^о. н г
(4-16)
147
где гн. и = го. в + гд — сопротивление цепи обмотки обратной связи; н —
число витков обмотки управления; гь н — сопротивление обмотки управления.
Намагничивающая сила задающей обмотки в схеме с отрицательной об-
ратной связью по напряжению всегда выбирается в несколько раз большей,
чем результирующая н. с. усилителя, необходимая для создания расчетной
э. д. с. генератора в установившемся режиме. Отношение задающей н. с. уси-
лителя Fs и результирующей н. с. Fy> р называют коэффициентом форсировки
по н. с.
Для выявления физических особенностей действия узла отрицательной
обратной связи по напряжению генератора рассмотрим его работу, предпола-
гая, что какие-либо другие обратные связи в схеме отсутствуют. При этом спра-
ведливо следующее уравнение н. с.:
Fy.p = Fa-^H. (4-17)
По определению коэффициент обратной связи по напряжению генератора
к0_ н равен отношению выходного сигнала обратной связи к входному сигналу
= 1/Ом. (4-18)
о Г ГН. цСг Гц ц
Коэффициент усиления обратной связи по напряжению
ко. в2 = fc0. А. н = Лг. н . (4-19)
гн. ц
Часто обмотку обратной связи по напряжению подключают не на полное
напряжение генератора, а на часть потенциометра, подключенного на полное
напряжение генератора (рис. 4-6, б). В этом случае ток в цепи обратной связи
можно определить по методу эквивалентного генератора.
Напряжение при разомкнутой цепи обратной связи
Ток в цепи обратной связи
и9. »
гв. ц
(4-20)
где Гн. ц— входное сопротивление обратной связи; гэ = rir2^(ri + га)-
Намагничивающая сила обмотки обратной связи из (4-20)
17 __ й>о. н
-*О. Н / \ •
а+гн. ц (1+-М
\ /
Коэффициент обратной связи по напряжению
ко.-в
Fp, в _______U>O, н____
Ч+'-и.ц (1 + ~)
(4-21)
(4-22)
148
т. е. коэффициент обратной связи увеличивается с увеличением части потенцио-
метра г2, к которой подключена цепь обратной связи.
После подачи задающего сигнала F3 процесс увеличения напряжения гене-
ратора и скорости двигателя будет продолжаться до тех пор, пока напряжение
генератора не достигнет установившегося значения, при котором разность
н. с. задающей обмотки и обмотки отрицательной связи по напряжению гене-
ратора равна Fy р. Другому значению задающей н. с. будет соответствовать
другое установившееся значение напряжения генератора.
Уравнение (4-17) для узла отрицательной связи по напряжению можно
записать в виде:
Fy. F3 —ko.BUt, (4-23)
где Ur — напряжение генератора между точками FE (см. рис. 4-6), к которым
подключен узел обратной связи по напряжению генератора Ur~Er—1яг'я;
г'я = гя г-|-7?Л; тя#г— сопротивление обмотки якоря генератора; — сопротив-
ление участка НЕ главной цепи.
При линейных характеристиках генератора и усилителя Ег = /гг_ bF
Следовательно, Ег — kr. ,,F3 — кг К (ко. ЯЕГ — ко. яг'я1я).
Из полученного выражения видно, что н. с. отрицательной связи по напря-
жению генератора состоит из двух составляющих: и. с. отрицательной связи
по э. д. с. генератора (ко ЯЕГ) и и. с. положительной связи по току якоря
(к0 иг'„1я). Преобразуя это соотношение, получим
где
Ег = -- кг- ”----F3 + 4 ---ко „гя1я =
1-Ь^Г. Н ^о. Н 1 + ^г. 1Л0. н
— К hF3 + кг, цко ягя1 я — кг. aF3+кг. ико. Т7Я,
(4-24)
к* — кг- н к’
г-““ 1 + /сг. Hfco.H ’ К°
(4-25)
Коэффициент кг. н называют передаточным коэффициентом замкнутой
системы (в статическом режиме) в отличие от коэффициента кг,,,, который назы-
вают передаточным коэффициентом разомкнутой системы. Физический смысл
коэффициента к). н как передаточного коэффициента замкнутой системы можно
понять, если учесть, что коэффициент /ц. п представляет собой отношение э. д. с.
генератора к задающему сигналу на входе системы, замкнутой с помощью отри-
цательной связи по напряжению генератора.
В выражении (4-24) второй член определяет действие положительной связи
по току якоря. Намагничивающая сила положительной связи по току якоря
Е(,.т = к'.т1я, (4-26)
где ко. т — коэффициент положительной связи по току, получаемой благодаря
наличию отрицательной связи по напряжению [см. (4-25)1.
Пользуясь выражением (4-26), выражение (4-24) можно записать в виде:
Яг = Кн(Я9 + Кт). (4-27)
Из (4-27) следует, что благодаря действию отрицательной связи по напря-
жению э. д. с. генератора возрастает с увеличением тока якоря.
Соотношения (4-24) и (4-27) для некомпенсированных генераторов являются
приближенными, так как коэффициент кг. н» который можно рассматривать
как передаточный коэффициент замкнутой системы в режиме нагрузки, в этом
149
связи по напряжению генератора увеличивает
Рис. 4-7. Графическое определение точек внешней
характеристики генератора в схеме с линейной отри-
цательной связью но напряжению при /я /!тс
случае зависит от нагрузки. Кроме того, эти соотношения, как выше было от-
мечено, справедливы только при линейных характеристиках усилителя и гене-
ратора. Насыщение усилителя и генератора уменьшает коэффициент Д'. и, и
при идеальном насыщении соотношения (4-24) и (4-27) лишены смысла, так как
система регулирования становится разомкнутой.
Рассмотрим работу системы при увеличении нагрузки на валу двигателя.
С возрастанием нагрузки увеличивается падение напряжения в главной цепи,
а также усиливается размагничивающее действие реакции якоря и вспомога-
тельных противокомпаундных обмоток (см. § 2-1). Наличие отрицательной
жесткость рабочего участка
статической характеристики.
Действительно, при
уменьшении напряжения ге-
нератора н. с. отрицательной
связи по напряжению умень-
шается, а так как задающие
ампер-витки остаются посто-
янными, результирующая
н. с. управления на входе
усилителя возрастает, увели-
чивая ток возбуждения и
частично компенсируя таким
образом падение напряже-
ния генератора. Чем больше
уменьшается н. с. отрица-
тельной связи на каждый
вольт изменения напряжения
генератора, т. е. чем больше
коэффициент обратной связи,
тем в большей степени компенсируется падение напряжения генератора.
Конечно, с помощью одной отрицательной связи по напряжению генера-
тора нельзя в принципе добиться такого положения, чтобы напряжение гене-
ратора совсем не уменьшалось с ростом нагрузки. При любом значении коэф-
фициента отрицательной связи пр напряжению генератора небольшое падение
напряжения все же будет иметь место.
Сказанное можно пояснить графически. На рис. 4-7 изображена серия
нагрузочных характеристик генератора для разных значений тока якоря,
построенных в зависимости от н. с. управления на входе усилителя, и зависи-
мости н. с. Fo. н от напряжения генератора при различных значениях коэффи-
циента обратной связи ко. н. Так как Fo. н и Ur связаны линейной зависимостью,
графики будут изображаться прямыми линиями. Из точки О' на оси абсцисс,
соответствующей значению задающей н. с. F^ проведем прямую, изображающую
зависимость Fo н = / (С7Г) при данном значении ко в (параллельно прямой ОК',
изображающей аналогичную зависимость во втором квадранте). Точки пере-
сечения прямой Fo. н = / (Ur) с характеристикой холостого хода и нагрузоч-
ными характеристиками определяют установившиеся значения напряжения
генератора на холостом ходу и при различных значениях нагрузки. Из рис. 4-7
видно, что если без обратной связи при возрастании нагрузки от нуля до номи-
нальной напряжение уменьшалось на величину АС, то при наличии обратной
связи и при возрастании нагрузки на ту же величину напряжение генератора
уменьшается в значительно меньшей степени (на величину АС). При увеличе-
150
нии коэффициента обратной связи (луч ОК") падение напряжения генератора
с ростом нагрузки происходит в еще меньшей степени (на величину АС”),
но всегда напряжение при нагрузке все же меньше, чем напряжение при хо-
лостом ходе генератора.
Нами были рассмотрены назначение и принцип действия двух важнейших
узлов: узла отрицательной связи по току и отрицательной связи по напря-
жению. В схемах экскаваторных электроприводов чаще всего оба эти узла
работают совместно и обеспечивают формирование статических и динамических
характеристик привода. Другие обратные связи и специальные узлы схемы
управления применяются в различных схемах по-разному.
§ 4-3. Узлы гибких обратных связей
Для получения желательного качества переходных процессов при-
водов в большинстве систем управления, кроме жестких, используются также
и гибкие обратные связи. Напомним, что важнейшими показателями качества
переходных процессов являются устойчивость, быстродействие, величина пере-
регулирования и время затухания колебаний.
Следует подчеркнуть, что качество динамических и статических характери-
стик систем управления находится во взаимосвязи. Это проявляется как в том,
что от формы полученной статической характеристики зависит протекание
переходных процессов приводов, так и в том, что как статические, так и динами-
ческие характеристики системы управления зависят от общего коэффициента
усиления системы управления, только зависимость эта проявляется неодно-
значно. Если для статических характеристик чем больше коэффициент усиле-
ния системы (т. е. чем больше коэффициенты усиления обратных связей), тем
меньше статизм системы регулирования и тем выше качество статических ха-
рактеристик, то для динамических характеристик только один показатель
качества — быстродействие — повышается до известной степени прямо про-
порционально коэффициенту усиления системы. Все остальные показатели
качества или ухудшаются с увеличением коэффициента усиления (и могут
сделать систему неработоспособной, например при возникновении незатуха-
ющих колебаний), или, в лучшем случае, не изменяются с увеличением коэф-
фициента усиления. Известно, что для каждой замкнутой системы регулиро-
вания с числом звеньев более двух (т. е. практически для всех систем управле-
ния экскаваторными электроприводами с использованием усилителей) суще-
ствует критическое значение общего коэффициента усиления, при превышении
которого система становится неустойчивой. А величина общего коэффициента
усиления определяет, как было показано выше, коэффициенты усиления всех
обратных связей. Иначе можно сказать, что для каждой системы управления
существует определенная область значений коэффициентов усиления жестких
обратных связей (которые определяют качество статических характеристик
системы), при которых система остается устойчивой.
Во многих случаях при использовании лишь жестких обратных связей
параметры системы управления таковы, что критическое значение коэффици-
ента усиления во много раз меньше значения коэффициента усиления, необхо-
димого для получения заданного качества статических характеристик. Вве-
дение в систему регулирования гибких обратных связей (воздей-
ствий, пропорциональных производным от выходных величин) увеличивает
значение критического коэффициента усиления, т. е. позволяет добиться устой-
чивой работы системы управления при заданном качестве статических харак-
теристик.
151
Введением в закон регулирования воздействий, пропорциональных произ-
водным от выходных величин, добиваются не только устойчивой работы системы.
Часто даже при значениях критического коэффициента усиления, достаточных
для получения заданных статических характеристик или когда система упра-
вления устойчива при всех практически достижимых значениях коэффициента
усиления, гибкие обратные связи вводят для устранения (или уменьшения)
перерегулирования или колебательности и для получения монотонного харак-
тера переходного процесса.
Корректирующие или формирующие гибкие обратные связи расширяют
возможный диапазон других параметров системы (коэффициентов усиления
обратных связей по току и по напряжению), и появляется возможность улуч-
шить статические и динамические характеристики системы.
Однако следует отметить, что если система управления построена таким
образом, что на гибкие обратные связи возлагается задача формирования
переходных процессов приводов, то это, с одной стороны, значительно повышает
требования, предъявляемые к коэффициенту усиления гибких обратных связей,
а с другой — ведет к недоиспользованию возможностей системы управления
по получению хорошего быстродействия и наилучшего качества переходных
процессов. Система с корректирующими гибкими обратными связями предпоч-
тительнее системы с формирующими гибкими обратными связями. Иными сло-
вами, система управления должна быть построена таким образом и характер
основных жестких обратных связей и их коэффициенты усиления должны быть
такими, чтобы они с известным приближением обеспечивали требуемый закон
изменения напряжения на обмотке возбуждения генератора в переходных про-
цессах в системе Г—Д или требуемый закон изменения напряжения управления
на входе тиристорного преобразователя в системе ТП—Д (см. § 3-1). А на гиб-
кие обратные связи должна быть возложена задача устранения перерегулиро-
вания, достижения устойчивой работы системы и при необходимости получения
монотонного характера переходных процессов.
В схемах управления экскаваторными электроприводами применяются
различные виды гибких обратных связей, но, так же как и среди жестких обрат-
ных связей, среди гибких обратных связей можно выделить два основных вида,
применяемых во многих схемах управления, — это гибкая отрицательная
обратная связь по э. д. с. (иногда по напряжению) генератора или пре-
образователя и гибкая отрицательная обратная связь по току главной
цепи.
Различные варианты схем узла гибкой отрицательной обратной связи
по напряжению представлены на рис. 4-8. Так как гибкая обратная связь —
это обратная связь по производной от входной величины, то для ее осуществле-
ния могут быть использованы известные дифференцирующие схемы — с диффе-
ренцирующим трансформатором (рис. 4-8, а) и с дифференцирующим контуром
RC (рис. 4-8, б). Дифференцирование, осуществляемое с помощью дифферен-
цирующего трансформатора и контура ВС, происходит с искажениями.
Принцип действия дифференцирующего трансформатора предельно прост:
изменения входной величины (напряжения преобразователя) вызывают соот-
ветствующие изменения магнитного потока в сердечнике трансформатора Фт.н,
а выходная величина — э. д. с. вторичной обмотки трансформатора ет.н2 —
пропорциональна производной потока
^.н2=—(4-28)
152
Если бы поток Фт н изменялся в точности по тому же закону, что и напря-
жение преобразователя Un, т. е. в любой момент времени Фт н= k-JJ^, то
выходная величина трансформатора была бы пропорциональна производной
от напряжения преобразователя
— ь dUn
ет. Н2 в2 •
При этих условиях дифференцирование, осуществляемое трансформатором
являлось бы идеальным. Однако в действительности вследствие наличия электро-
Рис. 4-8. Схемы узлов гибкой отрица-
тельной связи по напряжению преоб-
разователя:
а — с дифференцирующим трансформатором;
б — с дифференцирующим контуром; в —
с операционным усилителем; г — с дифферен-
цирующей обмоткой генератора; — с дина-
мическим мостом для генератора с независи-
мым возбуждением; е — то же, для генера-
тора с самовозбуждением
магнитной инерции самого трансформатора изменения его потока всегда в той
или иной степени отстают от изменений входной величины — в закон дифферен-
цирования этим вносятся более или менее значительные искажения. Инерцион-
ность дифференцирующего трансформатора можно характеризовать постоянной
времени 7’ст= н1/гт. нХ, где LT Н1 и гт Н1 соответственно индуктивность и сум-
марное сопротивление цепи первичной обмотки трансформатора.
Аналогичные искажения имеют место и при использовании контура R С
(см. рис. 4-8, б). Если предположить, что сопротивление R в схеме, приведен-
ной на рис. 4-8, б, достаточно мало, то Uc U^. При этом ток заряда ем-
кости
1 = (4-29)
di dt
153
Соответственно выходной сигнал
= (4-30}
где Тр_ к= RC — постоянная времени дифференцирующего контура.
Для получения достаточной величины сигнала на выходе необходимо иметь
достаточно большие значения сопротивления R. Но чем больше величина
сопротивления R, тем больше закон изменения напряжения на емкости откло-
няется от закона изменения входной величины, что и вносит в дифференциро-
вание искажения.
В двух вариантах узла гибкой обратной связи по напряжению дифферен-
цированию подвергается не непосредственно входная величина, а дополнитель-
ная переменная в инерционном элементе дифференцирующего контура, при-
ближенно повторяющая закон изменения входной величины. Это обстоятельство
не только вносит в дифференцирование искажения, но и определяет значитель-
ные габариты дополнительных инерционных элементов для получения мощности
выходного сигнала, соизмеримой с мощностью других управляющих воздей-
ствий. Так, например, для получения большей вторичной э. д. с. трансформа-
тора в схеме на рис. 4-8, а и тока его нагрузки необходимо при прочих равных
условиях увеличивать магнитный поток, следовательно, увеличивать габариты
трансформатора.
Коэффициент обратной связи б схеме, приведенной на рис. 4-8, а, можно
изменять ступенями с помощью отпаек на обмотках и изменением магнитного
потока. Для регулирования потока на стабилизирующих трансформаторах
предусматривается возможность изменения воздушного зазора в сердечниках.
Дополнительное регулирование коэффициента обратной связи б схеме,
приведенной на рис. 4-8, а, может быть достигнуто изменением добавочных
сопротивлений гд1 и гда.
В схеме на рис. 4-8, б увеличение сигнала гибкой обратной связи требует
увеличения тока i емкости, т. е. в соответствии с (4-29) увеличения при прочих
равных условиях емкости батареи конденсаторов. Дополнительное регулиро-
вание может быть осуществлено подбором сопротивлений схемы, учитывая,
что коэффициент гибкой обратной связи увеличивается при возрастании по-
стоянной времени Трк = RC. Однако при этом увеличиваются и искажения
б дифференцировании.
Рассмотренные схемы могут быть использованы и для получения других
гибких обратных связей, например по напряжению усилителя, по тому или
иному управляющему воздействию и т. д.
Для существенного уменьшения искажений при дифференцировании в со-
четании с пассивными элементами (контурами /?С) применяют активные эле-
менты — операционные усилители, в качестве которых могут быть использо-
ваны элементы системы УБСР. Один из простейших вариантов схемы дифферен-
цирования с использованием операционного усилителя показан на рис. 4-8, в.
Как известно [4], коэффициент передачи к (р) или отношение изображений
выходного напряжения £7ЕЫХ (р) к входному UBX (р) в операционном усилителе
имеет вид:
V ВХ (Р) (Р)
где Zj (р) и Z2(p) — изображения входного сопротивления и сопротивления
обратной связи.
Для схемы, приведенной на рис. 4-8, в, Zt (р) = и Zz(p) = R.
154
Подставляя значения ZT (р) и Z2 (р) в (4-31) получаем зависимость изобра-
жения выходного напряжения от входного
£/ВЫх (р) = RCpUBX (р) = Тя. киъх (р), (4-32)
где 7Д. к= RC — постоянная времени дифференцирования.
Переходя от изображений к оригиналам, получим
(4-33)
г. о. выражение полностью идентичное (4-30). Однако в этом случае искажения
при дифференцировании существенно меньше, так как благодаря очень большому
значению коэффициента усиления операционного усилителя потенциал точки а
(см. рис. 4 8, в) близок к нулю и напряжение на емкости С практически точно
повторяет все изменения входного напряжения, т. е. здесь можно принять
п = и
С — U Р.Х •
Следует отметить, что в практических схемах дифференцирования для
предотвращения самовозбуждения последовательно с емкостью С включают
небольшое добавочное сопротивление или параллельно сопротивлению обрат-
ной связи подключают небольшую емкость. Могут применяться и более слож-
ные специальные схемы дифференцирования.
Для получения сигнала гибкой отрицательной связи по э. д. с. генератора
нет необходимости в использовании сложных схем дифференцирования. Здесь
применяются достаточно простые схемы, однако их использование возможно
только в системе Г—Д.
Схемы узлов гибкой отрицательной связи по э. д. с. генератора, приведен-
ные на рис. 4L8, г, д и е, не требуют использования дополнительных громозд-
ких инерционных элементов и позволяют получить высокую точность диффе-
ренцирования и значительную мощность сигнала на выходе очень простыми
средствами. В этих схемах осуществляется непосредственное дифференциро-
вание магнитного потока генератора Ф, а так как еГ — кеФг, то сигнал на вы-
ходе пропорционален с высокой точностью производной э. д. с., генератора-
dcrldt. Таким образом, схемы, приведенные на рис. 4-8, г, д, и е обеспечи-
вают получение сигнала гибкой обратной связи по э. д. с. генератора.
Для дифференцирования потока генератора может быть использована
специальная обмотка ОУГ, расположенная на главных полюсах генератора
аналогично его обмотке возбуждения (рис. 4-8, г). В этой обмотке при изме-
нениях потока генератора наводится э. д. с.
е<ууг = —п?оуг —• (4-34)
Так как поток генератора велик, то достаточная для управления, усили-
телем мощность сигнала получается при использовании небольшой по объему
обмотки ОУГ, размещение которой на главных полюсах генераторов средней
и большой мощности обычно не вызывает затруднений.
Аналогичный эффект может быть получен при использовании так называе-
мой схемы динамического моста (см. рис. 4-8, д). Здесь обмотка возбуждения
генератора ОБ включается в одно из плеч уравновешенного моста:
го В _ Г1
Г д ь ~ Г8 ’
155
Рис. 4-9. Схемы узлов гибкой отрицательной
связи по току якоря:
а — с дифференцирующим трансформатором; б —
с обмоткой на дополнительных полюсах
В установившемся режиме на диагонали моста об благодаря его уравно-
вешенности напряжение отсутствует. Однако в переходных процессах баланс
ЙФГ
моста нарушается за счет э. д. с. самоиндукции eL — wB и на выходе разви-
вается напряжение
TJ — _ _№в Г2 der
вых Г1+г2 dt ке ' Г! + г2 ' dt ’
¥
Соотношение (4-35) соответствует разомкнутой цепи обмотки обратной
связи, но справедливо и для конечных значений сопротивления этой цепи, если
оно в десятки раз больше любого из остальных сопротивлений схемы.
Схема динамического моста для
генератора с самовозбуждением пред-
ставлена на рис. 4-8, е. Для нее
при указанных выше условиях спра-
ведливо соотношение (4-35), в кото-
рое нужно подставить вместо щ. число
витков параллельной обмотки юп.
Недостатком динамического мо-
ста (см. рис. 4-8, д и е) является
влияние температурных изменений
сопротивления меди обмотки возбу-
ждения генератора на баланс моста.
При нарушении уравновешенности
моста в выходном сигнале кроме
составляющей, пропорциональной deTldt, содержится и составляющая жесткой
отрицательной обратной связи по напряжению усилителя (для рис. 4-8, й)
или по напряжению генератора (для рис. 4-8, е).
Действие гибкой отрицательной обратной связи по напряжению генератора
или преобразователя во всех режимах направлено на уменьшение темпа изме-
нения напряжения. Уменьшение форсировок по н. с. на входе усилителя, обу-
словленное действием гибкой связи, оказывает стабилизирующее действие,
уменьшая перерегулирование по напряжению и препятствуя возникновению
колебаний напряжения. Нежелательно действие гибкой отрицательной связи
по напряжению только при резких стопорениях механизма. В этом случае она
стремится замедлить спадание напряжения, противодействуя отрицательной
связи по току. За счет этого выбросы тока за стопорное значение при резких
стопорениях увеличиваются.
На рис. 4-9 представлены варианты схем узла гибкой отрицательной обрат-
ной связи по току якоря. В схеме, приведенной на рис. 4-9, а, для получения
производной тока используется стабилизирующий трансформатор (аналогично
рис. 4-8, а), но в качестве первичной обмотки используются один-два витка,
получаемые одно- или двукратным пропусканием кабеля с током якоря через
окно магнитопровода трансформатора. В схеме на рис. 4-9, б используется
специальная обмотка ОТ Г, намотанная на дополнительных полюсах генера-
тора или двигателя. Известно, что для нормальной коммутации необходимо,
чтобы поток дополнительных полюсов изменялся пропорционально току якоря.
При этом
сот г = —гготг
<?ФЛ. п
dt
dt-я
dt
(4-36)
156
Гибкая отрицательная обратная связь по току во всех режимах действует
на замедление темпа изменения тока якоря. В частности, при подаче задающего
сигнала в режиме короткого замыкания эта обратная связь замедляет темп
нарастания тока и тем самым облегчает работу системы токоограничения,
устраняя перерегулирования и колебания тока якоря. Однако следует иметь
в виду, что эта обратная связь, увеличивая устойчивость токоограничения,
в некоторых режимах снижает устойчивость по напряжению. Так, сильная
гибкая отрицательная связь по току при уменьшении тока в конце переходного
процесса пуска создает н. с., действующую согласно с задающей н. с. усили-
теля, препятствуя быстрому спаданию тока. Тем самым создаются условия для
запаздывания отсечки по напряжению. Более позднее снятие форсировки вызы-
вает перерегулирование по напряжению и скорости. Если при этом сильную
гибкую связь по току желательно сохранить, можно уменьшить ее указанное
неблагоприятное действие использованием сильной гибкой отрицательной
обратной связи по напряжению.
Необходимо заметить, что сигнал жесткой отрицательной связи по току
во всех рассмотренных выше схемах содержит соизмеримую с ним составляющую
гибкой отрицательной связи по току. Это объясняется наличием индуктивности
дополнительных полюсов и компенсационных обмоток, с которых снимается
сигнал жесткой связи по току. Наличие этой составляющей во многих случаях
позволяет обойтись без использования специального угла гибкой связи по току.
Перейдем к рассмотрению специальных узлов гибких обратных связей,
обеспечивающих плавный выбор зазоров в передачах механизмов поворота.
До 1965 г. единственным средством, ограничивающим удары в процессе
выбора зазоров, было использование контура RC в задающем узле (рис. 4-10, а).
В некоторых схемах экскаваторного электропривода этот узел применяется
до сих пор (см. гл. 5). При использовании контура RC изменение скорости при
выборе зазоров происходит в соответствии с кривой 3 (см. рис. 1-15), т. е. как
было показано в § 1-3, обеспечивается самый неблагоприятный закон измене-
ния скорости из всех возможных.
Кроме отмеченных в § 1-3 недостатков процесса выбора зазоров при исполь-
зовании контура R С, следует сказать, что благодаря наличию случайных воз-
мущений, например гистерезиса, темп изменения э. д. с. генератора не остается
равным установленному в процессе наладки. Величина зазоров в процессе
эксплуатации также изменяется, причем значительно, что еще более снижает
эффективность работы контура RC, так как при этом или увеличиваются удары
в передачах, или при специальном усилении действия контура RC, например
увеличением емкости, существенно ухудшается управляемость привода: машина
не реагирует на короткие команды и перемещение на малые углы становится
затруднительным.
При анализе процесса выбора зазоров, проведенном в § 1-3, было показано,
что средством ограничения динамических нагрузок в процессе выбора зазоров
может быть ограничение скорости двигателей к моменту окончания выбора
зазоров с помощью ограничения величины ускорения ех в этом процессе и обе-
спечения равноускоренного движения в соответствии с кривой 2 рис. 1-15
при Ej = const.
Можно считать, что при выборе зазоров практически равноускоренный
закон движения реализуется даже при неравномерном экспоненциальном за-
коне изменения э. д. с. преобразователя и скорости двигателя на основной ча-
сти переходного процесса. Дело в том, что угол, на который поворачиваются
двигатели в процессе выбора зазоров, составляет столь незначительную часть
157
полного пути, проходимого с момента пуска до установившейся скорости
(или от вращения с установившейся скоростью до остановки), что эту пасть про-
цесса можно практически всегда рассматривать как равноускоренную.
Ограничение величины ускорения е, в процессе выбора зазоров может
быть осуществлено ограничением скорости изменения э. д. с. преобразователя
der^!dt в этом процессе допустимой величиной. Конечно, после окончания про-
6
Рис. 4-10. Схемы узлов выбора зазоров:
— с контуром RC в задающем узле; б — с использо-
ванием гибкой связи ио о. д. с. генератора и с отсеч-
кой по току главной цепи; в — то же, с узлом запи-
рания на транзисторе по первому варианту; г — то
же. с узлом запирания на транзисторе по второму
варианту
цесса выбора зазоров это ограничение должно автоматически сниматься, так
как для привода поворота на основной части переходного процесса требуется
поддерживать ток якоря близким к стопорному, т. е. необходимо высокое бы-
стродействие контура токовой связи (см. гл. 1).
Из изложенного, естественно, вытекает необходимость обеспечения для
привода поворота двух темпов изменения э. д. с. преобразователя: одного —
в период выбора зазоров, другого — после окончания выбора зазоров на основ-
ной части переходного процесса, в период разгона и торможения привода.
Автоматическое снятие ограничения величины denv!dt следует производить
в функции сигнала, реагирующего непосредственно на наличие или отсутствие
зазоров в передачах. Таким сигналом для привода поворота экскаватора может
158
быть величина тока якорной цепи. Действительно, так как маховые массы по-
воротной платформы в 10—20 раз больше маховых масс двигателей, а ускоре-
ние двигателей в процессе выбора зазоров ограничено, величина тока якорной
цепи при выборе зазоров весьма мала, а после окончания выбора зазоров при
том же ускорении увеличивается во столько раз, во сколько суммарный момент
инерции больше момента инерции двигателей Jp,.
Построенная на описанных выше принципах схема узла выбора зазоров
показана на рис. 4-10, б. Здесь скорость изменения э. д. с. генератора deridt
в период выбора зазоров ограничивается с помощью сигнала гибкой отрица-
тельной связи по э. д. с: генератора. Источником сигнала, пропорционального
производной э. д. с. генератора, служит специальная обмотка ОДГ, размещен-
ная на главных полюсах генератора. Величина э. д. с., наводимая в этой об-
мотке при изменениях магнитного потока полюса Фг, определяется из (4-34)
еодг = — wодг+р —j-j— = > (4-3 /)
2р»ОдГ рсо уу
где -------^-=—; се = ~^'~ — постоянная генератора; со—скорость вра-
щения генератора, 1/с; N — число активных проводников обмотки якоря;
а — число пар параллельных ветвей обмотки якоря; р — число пар полюсов;
и>одг — число витков обмотки ОДГ на один полюс.
Сигнал гибкой отрицательной связи по э. д. с. генератора подается на одну
из обмоток управления ОУБВЗ вспомогательного магнитного усилителя БВЗ
(блока выбора зазоров), с помощью которого сравнительно слабый сигнал гиб-
кой связи по э. д. с. генератора усиливается. Расчеты показывают, что для по-
лучения достаточно мощного сигнала, пропорционального depdt, без допол-
нительного усиления потребовалась бы обмотка ОДГ со сравнительно большим
объемом меди, размещение которой на главных полюсах генератора было бы
затруднительно, а то и вовсе невозможно.
С выхода блока БВЗ получает питание одна из обмоток управления сило-
вого усилителя У, управляющего полем возбуждения генератора.
Сигнал, пропорциональный depdt, подается на обмотку ОУБВЗ не непо-
средственно, а через потенциометр ПО, получающий питание с участка главной
цепи через выпрямительный мост В1. Необходимость использования в схеме
выпрямительного моста В1 объясняется тем, что схема выбора зазоров должна
работать одинаково вне зависимости от знака ускорения двигателей или знака
тока якорной цепи. Сопротивление потенциометра ПО выбирается обычно
сравнительно малым, существенно меньше регулируемого сопротивления СД1,
включенного в цепь обмотки ОУБВЗ. В цепь этой обмотки включен также своей
реверсивной диагональю выпрямительный мост В2.
Использование в схеме выпрямительного моста В2 вытекает из необходи-
мости запрещения подачи паразитного сигнала, пропорционального току якор-
ной цепи, на обмотку ОУБВЗ.
В процессе выбора зазоров, пока якорный ток имеет небольшую величину,
напряжение Un, создаваемое на потенциометре ПО, составляет обычно не более
20% э. д. с., наводимой на обмотке ОДГ. Под действием разности напряжений
(еОдг — Un) по обмотке ОУБВЗ протекает ток, создающий н. с. управления,
достаточную с учетом коэффициентов усиления БВЗ и У для ограничения темпа
изменения э. д. с. генератора dejdt заданной величиной. Коэффициент гибкой
связи по э. д. с. и тем самым величина desldt в схеме рис. 4-10, б может регу-
лироваться изменением добавочного сопротивления СД1.
159
После окончания выбора зазоров ток якоря в связи с многократным уве-
личением маховых масс начинает возрастать, соответственно увеличивается
запирающий потенциал на потенциометре ПО, величины (еОдГ — Un) и сигнал
гибкой связи уменьшаются, что служит причиной дальнейшего увеличения
тока якоря, запирающего потенциала UE и т. д., до тех пор, пока величины Un
и еодг не сравняются при токе якоря, составляющем обычно около 50%
стопорного значения. После этого цепь гибкой отрицательной связи по э. д. с.
генератора будет заперта, дополнительное ограничение на величину dejdt,
введенное на период выбора зазоров, будет снято, последует дальнейшее уве-
личение тока якоря, и на основной части переходного процесса ток якоря будет
поддерживаться близким к стопорному значению, с помощью системы токоогра-
пичепия.
Проведенный анализ процесса нарастания тока якоря после окончания
выбора зазоров показывает, что схема, приведенная на рис. 4-10, б, обеспечи-
вает не только ограничение ускорения в процессе выбора зазоров, но и ограни-
чение темпа нарастания тока якоря после окончания выбора зазоров. Таким
образом, частично может быть решена задача ограничения величины dMJdt
для уменьшения раскачивания ковша (или рукояти) при вращении. Ограниче-
ние величины dMJdt, обеспечиваемое схемой, приведенной на рис. 4-10, б,
может оказаться недостаточным, например, для существенного ограничения
раскачивания рукояти на мощных экскаваторах — лопатах. В этом случае
дополнительное ограничение величины dMJdt может быть получено исполь-
зованием гибкой отрицательной связи по току, осуществляемой с помощью
одной из обмоток управления блока БВЗ. В качестве источника сигнала гиб-
кой связи по току может служить специальная обмотка, размещенная на до-
полнительных полюсах генератора в соответствии со схемой, приведенной
на рис. 4-9, б.
Недостаток схемы выбора зазоров, приведенной на рис. 4-10, б, заключа-
ется в том, что в этой схеме максимально возможная величина сигнала еодг
жестко ограничена максимальной величиной падения напряжения AtZ на
участке якорной цепи КЕ, с которого получает питание потенциометр ПО.
Действительно, как было указано выше, узел выбора зазоров должен запираться
при токе якоря, составляющем примерно 50% стопорного значения. Если на-
строить запирание узла выбора зазора при больших значениях тока, допустим,
при 75—85% стопорного значения, то в некоторых режимах, например при
торможении установкой командоконтроллера в нулевое положение, узел вы-
бора зазоров перестает запираться, существенно затягивая процесс торможения.
Величина падения напряжения JMJ, соответствующая половине стопор-
ного тока, на большинстве выпускаемых в настоящее время серийно экскава-
торах (ЭШ-10/70А, ЭШ-15/90А, ЭКГ-8И) составляет 8—12 В, а в отдельных
случаях даже меньше. Таким образом, и величина еОдГ не должна превышать
8—12 В, что заставляет для получения достаточной величины сигнала гибкой
обратной связи по э. д. с. существенно снижать сопротивление цепи ОУБВЗ
в,то время, как для уменьшения постоянной времени БВЗ желательно, чтобы
добавочное сопротивление в цепи ОУБВЗ не менее чем в 4—5 раз превышало
собственное сопротивление обмотки управления. В противном случае на работе
блока БВЗ существенно сказывается запаздывание из-за значительной собствен-
ной постоянной времени. Так, при использовании в качестве блока выбора
зазоров серийного блока магнитных усилителей БД 2тА5 с пятикратным доба-
вочным сопротивлением в цепи ОУБВЗ собственная постоянная времени БВЗ
составляет около 0,3 с.
160
Следует отметить, что небольшое запаздывание вступления в работу блока
БВЗ полезно, так как при этом характер изменения скорости при выборе
зазоров приближается к кривой 1 (см. рис. 1-15). Однако слишком большое
запаздывание может привести к тому, что блок вообще не будет успевать всту-
пать в работу в период выбора зазоров.
Для устранения указанного недостатка — развязки величин еодг и АС/ —
возможно применение одного из вариантов схем, приведенных на рис. 4-10, в
иге использованием полупроводникового триода в специальном узле запирания
блока выбора зазоров.
В схеме, приведенной на рис. 4-10, в, сигнал гибкой отрицательной связи
по а. д. с. генератора подается на обмотку ОУБВЗ так же, как в схеме, приве-
денной на рис. 4-10, б, через потенциометр ПО. Но в отличие от схемы, приве-
денной на рис. 4-10, б, здесь потенциометр ПО получает питание не от участка
главной цепи, а от отдельного источника питания Ux через триод Т1, работа-
ющий в ключевом режиме.
Таким образом, устраняется указанная выше косвенная зависимость
величин э. д. с. еОдг и падения напряжения АС/. Величина э. д. с. еОдг
может быть увеличена в необходимой степени для включения добавочного
сопротивления достаточной величины в цепь обмотки ОУБВЗ.
В процессе выбора зазоров при малом значении тока якоря триод заперт
с помощью положительного смещения, подаваемого на базу триода через со-
противление гх, напряжение на потенциометр ПО от источника С7Х не поступает,
и величина тока, протекающего через обмотку ОУБВЗ, целиком определяется
величиной э. д. с. еодг и полным сопротивлением цепи ОУБВЗ. После оконча-
ния выбора зазоров ток якоря нарастает и, когда напряжение, снимаемое с уча-
стка главной цепи, АСУ становится больше напряжения смещения, на базу
триода Т1 подается отрицательный потенциал, триод открывается и переходит
в режим насыщения, а на потенциометре ПО появляется запирающее напряже-
ние. Величину уставки тока, с которой начинается запирание цепи гибкой
обратной связи по э. д. с. генератора, здесь можно регулировать, изменяя
величину напряжения смещения, подаваемого на базу триода Т1.
В схеме, приведенной на рис. 4-10, г, цепь гибкой отрицательной связи
по э. д. с. генератора замыкается непосредственно через коллекторную цепь
триода Т1, находящегося в режиме насыщения с помощью отрицательного
смещения, подаваемого на его базу. При увеличении якорного тока после окон-
чания процесса выбора зазоров, когда величина напряжения АСУ, снимаемого
с участка главной цепи, станет больше напряжения смещения, на базу триода
Т1 подается положительный потенциал, триод переходит в режим отсечки,
разрывая цепь гибкой отрицательной связи по э. д. с. генератора. Величину
уставки тока, при котором происходит разрыв цепи гибкой обратной связи,
можно регулировать так же, как в схеме, приведенной на рис. 4-10, в, изменяя
величину напряжения смещения.
§ 4-4. Формирование статических и динамических характеристик
в схемах с сумматором
При рассмотрении узлов отрицательной связи по току в § 4-1 было
показано, что получение экскаваторной формы как основной, так и промежуточ-
ных статических характеристик в схемах с сумматором достаточно просто обе-
спечивается применением отрицательной связи по току с потенциометрической
отсечкой.
11 Заказ 1127
161
При использовании в схемах с сумматором непрерывной связи по току
возникают трудности с получением экскаваторной формы промежуточных ха-
рактеристик (что, по сути дела, не столь важно для работы основных механиз-
мов экскаваторов) и характеристики в нулевом положении командоконтрол-
лера, что важно для приводов всех основных механизмов, особенно для копа-
ющих (характеристика удержания ковша), но также и для привода поворота
(отсутствие ползучей скорости при наклоне экскаватора, ветровой нагрузке,
при копании и т. п.).
В схемах с непрерывной связью по току эта проблема также решается, но
с применением специальных средств, например с помощью сильного отрицатель-
ного смещения характеристик МУ (см. § 2-4) в нулевом положении командо-
контроллера. При 'этом в пределах возникающей зоны нечувствительности уси-
лителя действие токовой связи исклю-
1--------г-------———I чается и обеспечивается естествен-
Рис. 4-11. Схема управления приводами
основных механизмов экскаватора с сумма-
тором
ная жесткость механической харак-
теристики привода. Экскаваторная
форма промежуточных характеристик
обеспечивается изменением коэффи-
циента токовой связи на промежу-
точных положениях командокон-
троллера с помощью дополнительных
нелинейностей при несимметричном
управлении двумя однотактными
усилителями, входящими в двухтакт-
ный блок (см. описание схемы экска-
ватора ЭКГ-8И в § 5-3).
В большинстве практических
схем управления главными приво-
дами экскаваторов с сумматором (ЭКГ-4,6; ЭШ-15/90А, ЭШ-10/60 ит. д.). отрица-
тельная связь по току с потенциометрической отсечкой применяется б сочетании
с линейной отрицательной связью по напряжению генератора (рис. 4-11).
Совместное использование этих двух основных видов жестких обратных связей
б схемах с сумматором определяется, как уже было отмечено выше, необходи-
мостью получения достаточной жесткости рабочего участка статических харак-
теристик и необходимостью создания форсировок по н. с. и напряжению воз-
буждения.
Схема, приведенная на рис. 4-11, изображена с одним силовым усилите-
лем У. В целом ряде схем с сумматором (на экскаваторах ЭШ-15/90А, ЭШ-15/90,
ЭШ-14/75) с целью повышения общего коэффициента усиления системы б схему
вводится дополнительный промежуточный усилитель. Не внося ничего прин-
ципиально нового ни в статические, ни в динамические характеристики системы,
введение дополнительного усилителя лишь усложняет наладку устойчивости
(см. гл. 7). Поэтому усилитель У в схеме, приведенной на рис. 4-11, при рас-
смотрении статических и динамических характеристик схемы можно считать
состоящим или из одного, или из нескольких последовательно включенных
усилителей.
Статические характеристики схемы, приведенной на рис. 4-11, показаны
на рис. 4-12. Рабочий участок БА статических характеристик формируется
за счет исключения действия отрицательной связи по току до значения, равного
току отсечки 70тс и работе отрицательной связи по напряжению. Участок АС
статических характеристик соответствует работе обеих обратных связей.
162
В § 4-2 было показано, что при 7Я <j ZOTC жесткая отрицательная связь
по напряжению генератора увеличивает жесткость рабочего участка стати-
ческой характеристики. Из (4-24) следует, что участок ВА внешней характери-
стики должен иметь положительную жесткость, так как с возрастанием тока
якоря согласно (4-24) э. д. с. генератора увеличивается.
При токе якоря большем, чем ток отсечки, вступает в действие токовая
связь, которая интенсивно размагничивает генератор, уменьшая э. д. с. гене-
ратора и скорость двигателя.. Линейная отрицательная связь по напряжению
генератора при 1Я 2>/отс и здесь увеличивает жесткость падающего участка
статической характеристики. Покажем это, получив зависимость э. д. с., гене-
ратора от тока якоря для участка токоограничения.
В рассматриваемой схеме при /я > ZOTC уравнение н. с. на входе усилителя
в статическом режиме будет иметь вид:
Fy = F3 — Fo H—Fa,T = Fs —ko B Ur — *o. T (4—/0TC).
(4-38)
При линейных характеристиках генератора и усилителя Вг ~ кг. н • Fy_ Р.
Используя (4-24) и (4-25), преобразуем (4-38)
В г = кГ' BF з кг. цко* uFp * 1Н К т &о. н'-я) К Н^О. Т^ОТС-
Отсюда
Ег (1 н^о. н)==s ^rj н (Fз -f- ^отс) ““ кг. н (/со> т к0. н^я)-^"я> (4-39)
где ZCTC — /со.ткотс — н- с- эквивалентная, по своему действию запирающему
напряжению в цепи отсечки по току.
11'
163
Из (4-39) получим
Ег = к’т. н (F3 + FOTC) - к'т, „к". Т7Я = %. „ (F3 + Fmc) - к;. т27я. (4-40)
где кг, н = л , К ; ко т~к0 т ко, т, к0. = кг. Кко, т.
1 -j- аг. нЛО. и
Из соотношения (4-40) видно, что действие отрицательной связи по напря-
жению генератора ослабляет отрицательную связь по току, т. е. увеличивает
жесткость участка токоограничения и ухудшает заполнение статической ха-
рактеристики.
Таким образом, из-за линейности отрицательной связи по напряжению
одновременно с увеличением жесткости рабочего участка характеристики уве-
личивается и жесткость участка ограничения момента. Например, при увели-
чении ко. н для сохранения прежнего значения установившегося напряжения
генератора согласно соотношению (4-24) необходимо увеличить задающую н. с.
F3. В соответствии с (4-15) в стопорном режиме при этом должна увеличиться
и и. с. токовой обмотки FT. стоп. А для сохранения прежнего значения стопор-
ного тока (при неизменном коэффициенте обратной связи по току к0 т) прихо-
дится уменьшать запирающее напряжение Umc, т. е. уменьшать- крутизну
участка токоограничения статической характеристики.
При уменьшении ко н в этой схеме наблюдается обратная картина: благо-
даря линейности обратной связи уменьшается жесткость как рабочего участка,
так и участка токоограничения характеристики и, как видно из рис. 4-12, за-
полнение характеристики увеличивается.
Следует отметить, что при больших мощностях естественная жесткость
в системе Г—Д достаточно высока и в специальном повышении &о „обычно нет
необходимости. Поэтому, когда требуется увеличить коэффициент отсечки за
счет небольшого уменьшения жесткости рабочего участка статической харак-
теристики, прибегают к уменьшению кг, н.
Непосредственным способом уменьшения жесткости (увеличения крутизны)
участка токоограничения статической характеристики является увеличение
коэффициента отрицательной связи по току (рис. 4-12, в).
Из изложенного следует, что возможности получения высокого заполнения
статической характеристики в схеме с сумматором довольно ограничены,
а получение нулевой или положительной жесткости участка ограничения мо-
мента в схеме с сумматором невозможно.
Так как именно линейность, непрерывность отрицательной связи по на-
пряжению генератора оказывает нежелательное действие, увеличивая жест-
кость участка токоограничения, то исключение действия отрицательной связи
по напряжению при больших нагрузках, т. е. применение отрицательной связи
по напряжению с отсечкой, может существенно расширить возможности форми-
рования желаемых статических характеристик.
В схемах с сумматором возможно применение потенциометрической от-
сечки по напряжению генератора, однако эти схемы в экскаваторном электро-
приводе распространения не получили. Это объясняется тем, что при введении
потенциометрической отсечки по напряжению схема управления значительно
усложняется. Возникает необходимость в отдельном независимом источнике
питания сравнительно большой мощности для потенциометра сравнения узла
обратной связи по напряжению. Так как технологическим требованиям, предъ-
являемым к электроприводу основных механизмов экскаватора, кроме меха-
164
низма поворота, удовлетворяет семейство характеристик с широким диапазо-
ном регулирования скорости вращения, необходимо изменять по положениям
командоконтроллера запирающее напряжение на потенциометре сравнения
с помощью контактов командоконтроллера или размножающих реле. При сов-
местном использовании двух отсечек необходимы уже два независимых источ-
ника питания для потенциометров сравнения узлов обратных связей по току
и по напряжению, появляются дополнительные связи между отдельными элект-
роприводами, схема управления недопустимо усложняется. Поэтому, несмотря
на все преимущества, для получения желательных статических и динамиче-
ских характеристик схема управления с двумя потенциометрическими отсеч-
ками по току и по напряжению на экс-
каваторах не применяется.
Рассмотрим особенности формиро-
вания переходных процессов в схеме
с сумматором, приведенной на рис. 4-11.
В качестве примера вначале рассмот-
рим так называемый легкий переходный
процесс пуска и торможения при 7Я
Рис. 4-13. Форсирование переходного про-
цесса при наличии отрицательной связи по
напряжению генератора
отс-
При пуске привода благодаря на-
личию отрицательной связи по напря-
жению задающая обмотка создает и. с.,
в несколько раз большую той, кото-
рая необходима для создания э. д. с.
генератора в установившемся режиме
(рис. 4-13). Так как э. д. с. генератора
в начале процесса равна нулю, под действием этой н. с. задающей обмотки
усилитель выдает повышенное напряжение С7В нач, приложенное к обмотке
возбуждения генератора в переходном процессе. Создается форсировка возбу-
ждения UK нач = aUD уст (см. § 3-2), благодаря чему сокращается время
переходного процесса.
Форсировка по н. с. не равнозначна форсировке по напряжению возбу-
ждения, значение коэффициента форсировки по напряжению возбуждения а
обычно значительно меньше коэффициента форсировки по н. с. к$. Это происхо-
дит из-за того, что при больших форсировках по и. с. усилитель насыщается.
Сказывается также запаздывание из-за инерционности усилителя, уменьша-
ющее форсировку на выходе по сравнению с форсировкой на входе усилителя.
Кроме того, форсировка может снизиться за счет гибких обратных связей,
используемых в системах управления с сумматором и действующих в течение
всего переходного процесса.
При пуске привода по мере роста напряжения генератора ток и и. с. отри-
цательной связи по напряжению генератора увеличиваются, уменьшая резуль-
тирующую н. с. на входе усилителя в соответствии с (4-17). Поэтому уменьшается
и напряжение, подаваемое на обмотку возбуждения генератора, но более ме-
дленно, чем н. с. Fy, вследствие насыщения усилителя. При идеальном насы-
щении усилителя (пунктирная ломаная линия 1 на рис. 4-13) форсированное
напряжение С7В нач сохраняется на значительной части переходного процесса
и быстро уменьшается в конце, когда результирующая и. с. уменьшится до
значений, соответствующих линейной части характеристики. Таким образом,
илжет осуществляться отсечка по напряжению генератора, обеспечивающая
процесс форсирования возбуждения, рассмотренный в § 3-2. При линейной
165
характеристике усилителя форсировка уменьшается пропорционально умень-
шению Fy, что затягивает переходный процесс, делая его неравномерным —
экспоненциальным. Переходные процессы при работе на линейной части ха-
рактеристики усилителя (возбудителя) и /я < ZOTC на основной части про-
цесса показаны на рис. 4-14, а.
При реверсе в схеме с линейной отрицательной связью повышенное на-
пряжение отрицательной полярности прикладывается к обмотке возбуждения
генератора. Так как в этом режиме задающая и. с. и н. с. отрицательной связи
пр напряжению складываются, то форсировка по напряжению возбуждения
будет определяться суммой и. с.
Рис. 4-14. Формирование переходных процессов гя = / (t) и со = f (t) в схеме с сумматором:
а — при гя < Готс; б — при г'я > Готс
Если при этом усилитель работает на линейной части своей характеристики,
то величина форсировки будет почти вдвое больше, чем при пуске. Как правило,
столь значительная форсировка вызывает недопустимо большие динамические
токи. По мере снижения э. д. с. генератора напряжение, подаваемое на обмотку
возбуждения генератора, уменьшается, и процесс имеет неравномерный харак-
тер.
При торможении установкой командоконтроллера в нулевое положение
задающий сигнал исчезает, и. с. отрицательной связи по напряжению пере-
магничивает усилитель. К обмотке возбуждения генератора также приклады-
вается повышенное напряжение отрицательной полярности. Величина этого
напряжения при линейной характеристике усилителя будет меньше, чем при
пуске. Действительно, если при пуске н. с. управления в кф раз больше и. с.
Fy р, необходимой для установившегося значения выходной величины в стати-
ческом режиме (F3 — /СфЕу- р), то при торможении установкой командоконтрол-
лера в нулевое положение и. с. управления только в кф — 1 раз больше Еу р.
Пропорционально уменьшению и. с. управления уменьшается и выходное
напряжение усилителя. При этом процесс торможения имеет неравномерный,
экспоненциальный характер и сильно затягивается (см. рис. 4-14, а).
166
При наличии насыщения усилителя (см. рис. 4-13) и отсутствии линейной
зависимости между величинами коэффициентов форсировки по напряжению
возбуждения а и по н. с. управления кф переходные процессы в схеме, приве-
денной .на рис. 4-11., с 7Я < /отс будут соответственно несколько отличаться
от показанных на рис. 4-14, а, однако основной характер процессов останется
неизменным.
Из рис. 4-14, а видно, что в схеме с линейной отрицательной связью по
напряжению зависимость UB — J (t) при пуске, реверсе и торможении прямо
противоположна оптимальной (см. § 3-2). Соответственно и переходные про-
цессы пуска, реверса и торможения при 7Я < ZOTC в схеме с линейной отрица-
тельной связью по напряжению имеют ярко выраженный неравномерный
характер с постоянно изменяющимся значением ускорения — максимальным
в начале и минимальным в конце процесса — и плохим заполнением время-
токовой диаграммы.
Однако даже при неравноускоренном изменении э. д. с. генератора в ре-
жиме холостого хода можно получить достаточно равномерное изменение э. д. с.
генератора и скорости двигателя в режиме нагрузки при высоких значениях
коэффициентов усиления отрицательной связи по току.
В качестве примера рассмотрим переходный процесс пуска привода при
токах якоря больших, чем ток отсечки, при одновременном действии двух
обратных связей — по току и по напряжению (см. рис. 4-14, б).
В схеме, приведенной на рис. 4-11, максимальный темп нарастания тока
якоря двигателя при пуске определяется только суммарной постоянной вре-
мени генератора Тв-£ и запасом по напряжению усилителя. Действительно,
так как при t = О 1Я = 0 и М = 0, то (dco/df)z=o = 0. Поэтому из (3-9) мак-
симальный темп нарастания тока якоря
7 ^‘я N ___ 1 7 der \ кг . Vм (4-42)
Соотношение о” получаем из (3-35).
Начальный темп изменения тока якоря, таким образом, удовлетворительно
ограничивается, так как величина Тв% сравнительно велика, а {7В м — огра-
ничено. После того как ток якоря превысит ток отсечки, и. с. управления на
входе усилителя Fy резко уменьшится в соответствии с соотношением (4-38)
и соответственно уменьшится напряжение UB (см. рис. 4-14, б). Ток якоря при
этом уменьшится настолько, чтобы снижение размагничивающего действия
токовой обмотки обеспечило возрастание UB, увеличение э. д. с. генератора
и скорости двигателя.
Система токоограничения стремится поддержать ток постоянным, однако
ток якоря и ускорение привода по мере разгона все же непрерывно уменьша-
ются, а скорость изменения э. д. с. генератора при нагрузке меньше, чем при
холостом ходе, благодаря статизму системы регулирования.
Одновременное с увеличением напряжения генератора непрерывное воз-
растание и. с. обмотки отрицательной связи по напряжению Fo „ усложняет
работу узла токоограничения. Здесь, так же как и при формировании статиче-
ской характеристики, линейность, непрерывность действия отрицательной
связи по напряжению неблагоприятно сказывается на формировании динами-
ческой характеристики, снижает заполнение время-токовой диаграммы.
167
Поэтому повышаются требования в отношении коэффициента усиления узла
токоограничения: на начальных участках переходного процесса токовая связь
должна снимать значительные избыточные форсировки (см. рис. 4-14, б).
Выявим факторы, влияющие на заполнение время-токовой диаграммы в
переходных процессах пуска и торможения в схеме с сумматором (см. рис. 4-11).
Динамическая зависимость со = / (/я) (кривая 2 на рис. 4-12) в системе Г-Д
из-за наличия большой постоянной времени генератора Тв% всегда в той или
иной степени отличается от статической характеристики (кривая 1 на рис. 4-12).
Однако характер динамической зависимости со = J (7Я) в известной степени
определяется формой статической характеристики. Из сопоставления кривых 2
и 2 на рис. 4-12 можно заключить, что использование электропривода по пре-
дельно допустимому току не достигается вследствие двух причин: уменьшения
тока по мере роста скорости, обусловленного формой статической характери-
стики 1, и расхождения между статической и динамической зависимостями.
Эти факторы при заданном значении ZCTOn увеличивают фактическое время пере-
ходного процесса по сравнению с теоретически минимальным значением времени
этого процесса при /я = ZCTon = const.
Из соотношений (4-38), (4-40) и (3-9), пренебрегая относительно небольшим
падением напряжения в якорной цепи и полагая характеристики усилителя
и генератора линейными, получим для схемы, приведенной на рис. 4-11, соот-
ношение для приближенной оценки относительной величины разности между
значениями тока якоря в динамике 1дин и стопорного тока ZCTon
Д/дин
/стоп
<0 .. , -.1 1 | <00 (1 Лотс) 1 Т„ Л.тЕ ( \ 1 стоп /
1+Ь^. . 1 Тм ^О. тХ 9
(4-43)
где со — текущее значение скорости привода; соо — скорость идеального холо-
стого хода; Тв? — суммарная постоянная времени возбуждения генератора
[см. (2-23)]; Ты — электромеханическая постоянная времени привода; Zc —
ток статической нагрузки; ко_ т2— коэффициент усиления отрицательной связи
по току; ктс — коэффициент отсечки.
Из рассмотрения (4-43) видно, что величина А/дин//стоп зависит от скорости
привода и что эта зависимость тем сильнее, чем меньше Arorc, т. е. чем жестче
участок токоограничения. Устранение зависимости AZWIH/ZCTon от скоро-
сти возможно лишь при ктс = 1* что в схеме с сумматором (см. рис. 4-11)
недостижимо. Из (4-43) также следует, что расхождение между статической и ди-
намической характеристиками обусловлено в основном большой постоянной
времени возбуждения генератора Тву. Чем больше Твх, тем при прочих равных
условиях больше величина расхождения AZBHH/ZCTOn. При Тв? = 0 динамиче-
ская и статическая зависимости на участке токоограничения совпали бы. Кроме
постоянной времени генератора Тв^, на величину расхождения AZflHH/Zcron
оказывает влияние соотношение постоянных времени TB?JTa.
Для механизмов с относительно малыми инерционными массами, а именно
для приводов копающих механизмов, величина расхождения AZflHH/ZCTOn при
прочих равных условиях относительно больше; для приводов поворота экскава-
торов с большим суммарным моментом инерции величина AZBHH/ZCTOn относительно
меньше. При увеличении статической нагрузки величина AZBIIH/ZCTOn и ускоре-
ние привода уменьшаются. Во всех случаях уменьшение расхождения AZ4Ha/ZCTon
может быть достигнуто увеличением коэффициента отрицательной связи по току.
168
Таким образом, рассматривая соотношение (4-43), можно заключить, что
использование схемы с сумматором, приведенной на рис. 4-11 для формиро-
вания оптимальных переходных процессов пуска и торможения неэффективно.
При резких механических стопорениях для ограничения тока якоря допустимым
значением необходимо, чтобы э. д. с. генератора снижалась достаточно быстро—
со скоростью, соответствующей резкому уменьшению в этом режиме скорости
и э. д. с. двигателя. Для этого требуются значительные форсировки, направлен-
ные на ускоренное гашение поля генератора, которые создаются токовой связью
при выбросах тока за стопорное значение. Величина выброса тока якоря за
стопорное значение при резком стопорении зависит от темпа спадания э. д. с.
генератора при данном темпе стопорения привода.
Заметим, что отсутствие выбросов тока за стопорное значение может быть
только при очень плавных стопорениях, при которых длительность снижения
скорости двигателя не меньше времени спадания э. д. с. генератора под дей-
ствием отрицательной связи по напряжению. При более резких стопорениях
выбросы тока якоря за стопорное значение неизбежны.
Величина этих выбросов будет тем меньше, чем больше коэффициент усиле-
ния токового узла. Действительно, если при резком стопорении ток якоря пре-
высит стопорное значение, токовая обмотка создает и. с. Fo т большую, чем
максимальная н. с. задающей обмотки F3. При этом токовая обмотка перемаг-
нитит усилитель и он будет выдавать напряжение противоположной поляр-
ности.
Под действием напряжения отрицательной полярности, приложенного
к обмотке независимого возбуждения, генератор будет интенсивно размагни-
чиваться, тем самым способствуя эффективному ограничению тока якоря. Чем
больше будет напряжение, приложенное к обмотке независимого возбуждения,
тем быстрее будет спадать э. д. с. генератора, тем меньше будет выброс тока
якоря. В свою очередь, величина напряжения, прикладываемого к обмотке не-
зависимого возбуждения в процессе стопорения, зависит от запаса напряжения
усилителя, а также от величины коэффициента усиления токового узла. При
достаточном запасе по напряжению возбудителя чем больше значение переда-
точного коэффициента токовой связи, тем при меньших значениях выбросов
тока якоря за стопорное значение будет реализована форсировка по напряже-
нию возбуждения и будет достигнут необходимый темп спадания э. д. с. гене-
ратора,
§ 4-5. Формирование статических и динамических характеристик
в схемах подчиненного регулирования
Оптимальная структура схем управления электроприводами основ-
ных механизмов экскаваторов, рассмотренная в § 3-6, а именно двухконтурная
система подчиненного регулирования тока и напряжения двигателя со звеном
ограничения в контуре регулятора тока, в настоящее время реализуется на экс-
каваторах в двух вариантах. В первой, наиболее распространенной реализации
(рис. 4-15, а), применяемой на серийных экскаваторах НКМЗ (ЭШ-10/70А,
ЭШ-5745М) и большом числе модернизируемых экскаваторов УЗТМ и НКМЗ
(ЭШ-15790, ЭШ-14/75, ЭШ-10/60 и др.), в системе Г — Д используется генератор
с критическим самовозбуждением. При этом благодаря наличию обмотки само-
возбуждения снижается необходимая мощность независимого возбуждения [17],
и в качестве возбудителя применяется двухтактный силовой магнитный усили-
тель промышленной частоты.
169
Во втором варианте реализации оптимальной структуры (рис. 4-15, б),
примененном на экскаваторах Э1П-15/90А и ЭВГ-35/65М в системе Г — Д
используется генератор с независимым возбуждением, управляемый тиристор-
ным преобразователем ТВ.
6
Рис. 4-15. Схемы управления приводами основных механизмов экскаваторов
по структуре подчиненного регулирования:
а — с критическим самовозбуждением генератора и магнитным усилителем-возбудителем;
б — с формирующей положительной связью по напряжению и тиристорным возбудителем
Покажем, что обе указанные схемы имеют передаточные функции замкну-
тых контуров регулирования тока и напряжения, полностью совпадающие
с соответствующими передаточными функциями двухконтурной системы подчи-
ненного регулирования тока и напряжения, рассмотренной в гл. 3 (§ 3-6).
Для этого рассмотрим структурные схемы (рис. 4-16) в опытах короткого
замыкания и холостого хода для обоих вариантов реализации оптимальной
структуры, показанных на рис. 4-15.
170
На рис. 4-16, а приведена структурная схема разомкнутой системы Г—Д
с критическим самовозбуждением генератора, на рис. 4-16, б — участок струк-
турной схемы Г—Д с тиристорным возбудителем, охваченный формирующей
положительной связью по напряжению.
В обоих вариантах реализации оптимальной структуры функции звена
ограничения выполняет возбудитель генератора. В схеме, приведенной на
рис. 4-15, а, — это силовой магнитный усилитель, в схеме, приведенной на
рис. 4-15, б, — это тиристорный возбудитель. В некоторых практических
схемах с тиристорным возбудителем, оборудованным электромагнитной СИФУ,
не обеспечивающей необходимое ограничение диапазона угла регулирования а
(см. § 5-7), в схему вводится дополнительный усилитель с характеристикой типа
насыщения, который одновременно выполняет функции звена ограничения
оптимальной структуры и служит для ограничения диапазона угла регулиро-
вания (см. § 5-4). Указанное отличие не вносит ничего принципиально нового
в работу схемы, поэтому рассмотрим вариант схемы, показанный на рис. 4-15, б,
где функции звена ограничения выполняет тиристорный возбудитель.
В обоих вариантах схемы (см. рис. 4-15, о и б) регулятор напряжения выпол-
нен на двухтактном магнитном усилителе промышленной частоты, имеющем
характеристику звена ограничения. Одна из четырех обмоток управления ре-
гулятора напряжения является задающей ОЗРН, две другие выполняют функ-
ции отрицательной связи по напряжению двигателя ОНРН и положительной
связи по току главной цепи ОТ PH.
Отдельная обмотка управления ОДРН, получающая питание от специаль-
ной обмотки ОДГ, размещенной на главных полюсах генератора, осуществляет
функции гибкой отрицательной связи по э. д. с. генератора и служит для сня-
тия перерегулирования по э. д. с. генератора и скорости двигателя. В схеме,
приведенной на рис. 4-15, а, обмотка ОДРН часто не используется, а ее функции
выполняет обмотка ОНРН, цепь которой в этом случае подключается не на пол-
ное напряжение генератора, а параллельно обмотке самовозбуждения ОВПГ
и части добавочного сопротивления в цепи этой обмотки, благодаря чему в сиг-
нале, подаваемом на обмотку ОНРН, появляется составляющая, пропорцио-
нальная производной по э. д. с. генератора. Величину этой составляющей
можно регулировать, перемещая точку подключения цепи ОНРН по добавоч-
ному сопротивлению в обмотке самовозбуждения.
В схеме, приведенной на рис. 4-15, а, генератор с критическим самовоз-
буждением имеет передаточную функцию интегрирующего звена (см. § 2-1).
Поэтому можно считать, что в этой схеме генератор выполняет функцию ин-
тегрального регулятора тока оптимальной структуры (см. рис. 3-17).
Передаточная функция объекта регулирования тока для структурной схемы
приведенной на рис. 4-16, а, имеет вид:
1/7? „у
w°-р-т = rBSp(i+7’yP) (1+ад '
В схеме, приведенной на рис. 4—15, б, генератор имеет передаточную
функцию обычного инерционного звена. Поэтому для обеспечения действия
контура регулирования тока, эквивалентного действию контура с интегральным
регулятором тока, применяется положительная связь по напряжению генера-
тора с критическими параметрами, осуществляемая с помощью обмотки упра-
вления ОНТВ.
171
Рис. 4-16. Структурные схемы для систем подчиненного регулирования Г—Д,
приведенных на рис. 4-15:
а — для разомкнутой системы Г—Д\ б — для участка цепи схемы, приведенной на
рис. 4-15, б, охваченного формирующей положительной связью по напряжению; в — для
контура регулирования тока в опыте короткого замыкания; г — для контура регулиро-
вания напряжения в опыте холостого хода
Передаточная функция для участка структурной схемы, приведенной
на рис. 4—16, б, охваченного положительной связью по напряжению,
ЛуАу
W1 kl + TyP) (1 + Тв^р)-кукгконтв •
При критическом коэффициенте обратной связи по напряжению коптв =
= контвкр — 1/fcyfcr и полагая отношение ТУ?ТВ-^ 0, получим
TTZ _ ____кукг1___
1 Т^р(1 + Тур)
(4-45)
Анализируя соотношение (4-45), можно заключить, что и в этом случае
можно рассматривать генератор совместно с возбудителем, охваченные крити-
ческой положительной связью по напряжению, в качестве интегрального регу-
лятора тока оптимальной структуры (см. рис. 3-17).
Тогда передаточная функция объекта регулирования тока IVO р т для струк-
турной схемы, приведенной .{на рис. 4-16, б, будет совершенно идентична вы-
ражению (4-44), и дальнейший анализ оптимизации контуров регулирования
в схемах, приведенных на рис. 4-15, о и б, можно проводить совместно.
Произведем оценку величин постоянных времени в выражении для Wo р т.
Постоянная времени магнитного усилителя Ту благодаря возможности в зна-
чительной степени снижать инерционность усилителя увеличением мощности
сигналов управления в схемах, приведенных на рис. 4-15, составляет в среднем
0,1 с. При использовании тиристорного возбудителя его постоянная времени
Ту практически пренебрежимо мала при наличии более высокой инерционности
якорной цепи и неучтенной инерционности рассеяния магнитного потока гене-
ратора. Поэтому в данном случае за достаточно достоверную меру относительно
малых некомпенсируемых постоянных времени можно принять величину Т\> =
= Ту + 0,1 с.
Следует заметить, что методы оптимизации контуров регулирования, рас-
смотренные в § 3-5, применимы при любом уровне малости некомпенсируемых
постоянных времени. Требуемое качество процессов определяется только вы-
бором постоянной времени интегрирующего звена Т 0 в определенном отношении
к любому принятому уровню нескомпенсированной постоянной времени ГД
а требуемое быстродействие при больших Т’^ может быть обеспечено путем рас-
смотренной выше последовательно-параллельной коррекции. Ошибка в сторону
завышения Т^ в сравнении с реальным объектом приведет к некоторому завы-
шению длительности процессов при сохранении качества: напротив, занижение
оценки Гц может привести к увеличению перерегулирования и к общему ухуд-
шению качества процессов. В связи с наличием потоков рассеяния генератора,
которыми обычно пренебрегают, принимать величину Гц в системе Г—Д при
любых значениях Гу и Гя меньше 0,1 с нет оснований.
Итак, отнеся к малым нескомпенсированным постоянным времени постоян-
ные времени возбудителя Гу и якорной цепи Гя, т. е. приняв Гц = Гу + Гя,
передаточную функцию объекта регулирования тока в режиме короткого замы-
кания можно записать в виде:
ту ________________кукг_________________1//ср, т___
°-₽-т W (1+Т'^р) то, тр (1+т^р) ’
где
у, _
°- т — ко, tkykr •
(4-46)
173
Из рассмотрения (4-46) видно, что передаточная функция объекта имеет
оптимизированную форму и следует лишь определить величину оптимального
коэффициента обратной связи по току &о т. Структурная схема контура тока для
указанных условий представлена на рис. 4-16, в. Здесь в качестве звена огра-
ничения 30 принят пропорциональный регулятор, а его инерционность отнесена
к некомпенсируемой части объекта регулирования.
Передаточная функция, представленного на рис. 4-16, в замкнутого кон-
тура регулирования тока в режиме короткого замыкания,
зам1 то ^р2+(Го т+Гт)р+1
где Тт — постоянная времени участка главной цепи, с которой снимается сиг-
нал отрицательной связи по току, или при наличии отдельной обмотки гибкой
связи по току (см. 4-36) постоянная гибкой связи по току.
Структурная схема контура регулирования напряжения в опыте холостого
хода показана на рис. 4-16, г. Предположив, что в качестве регулятора напря-
жения используется магнитный усилитель с пренебрежимо малой постоянной
времени Тр_ н, которую можно не компенсировать, принимаем Т"ц = Ту +
+ TD н. Если в структурной схеме на рис. 4-16, г напряжение обратной связи
но з. д. с. преобразователя приведено к параметрам задающей обмотки, вели-
чина постоянной времени обратной связи Ти при ег = /сг2Фг может быть вычи-
слена по формуле
у, __ 2рг^ОдГ . wO%PHRo- вко. д (4-48}
н WO3PHR°- Д ’
где и?одг— число витков обмотки ОДГ\ ко R — коэффициент гибкой связи по
э. д. е.; гь'одрн и Wosph — числа витков соответственно задающей обмотки
и обмотки гибкой связи по э. д. с. регулятора напряжения; Но 3 и Ro д суммарные
сопротивления контуров тех же обмоток; рг — число пар полюсов генератора.
Изменением сопротивления Во д здесь можно менять постоянную гибкой
связи по э. д. с. Поэтому, задавшись удобным значением коэффициента обрат-
ной связи по напряжению ко. н, можно вычислить постоянную времени инте-
грирования для контура напряжения по формуле
Кф. Н’су^ГгеО. н
Особенностью схемы, приведенной,4 на рис. 4-15, б, является изменение
передаточной функции контура, охваченного положительной связью по напря-
жению, в режимах работы с ограниченным ускорением, т. е. при насыщении
звена ограничения. При этом генератор является инерционным звеном, а так как
напряжение возбуждения UB = J7D-M = const, его переходные процессы при-
обретают экспоненциальный характер.
Неравномерность изменения э. д. с. генератора в режиме ограничения
ускорения при высоком коэффициенте форсирования незначительна, поэтому
схема, приведенная на рис. 4-15, б, обладает динамическими качествами и воз-
можностями, весьма близкими к аналогичным показателям оптимальной струк-
туры, рассмотренной в § 3-6.
Передаточная функция, представленного на рис. 4-16, а замкнутого кон-
тура регулирования напряжения в режиме холостого хода,
П7 _______________ifk°- н_______ (4-501
Пзам2- Го нГ^2+(Го н + Гн)р + 1 • >
174
Из рассмотрения передаточных функций (4-47) и (4-50) для замкнутых кон-
туров регулирования тока и напряжения схем, приведенных на рис. 4-15,
следует, что эти передаточные функции имеют оптимизированную форму и пол-
ностью совпадают с аналогичными уравнениями (3-70) и (3-75), полученными
в гл. 3 для систем подчиненного регулирования с использованием последова-
тельно-параллельной коррекции. При этом следует отметить, что оптимизация
контуров регулирования (см. § 3-5) произведена в рассмотренном случае
не с помощью компенсации, а с помощью использования большой инерционно-
сти генератора, уже имеющейся в контуре регулирования.
Отсюда можно заключить, что статические и динамические свойства схем,
приведенных на рис. 4—15, аналогичны статическим и динамическим свойствам
Рис. 4-17. Статические характеристики для схем подчиненного регулирования,
приведенных на рис. 4-15:
а — внешние характеристики генератора; б — электромеханические характеристики привода
схем подчиненного регулирования с использованием последовательно-парал-
лельной коррекции, рассмотренным в гл. 3.
Статические характеристики схем, приведенных на рис. 4-15, при одина-
ковых, в частности критических, параметрах цепи положительной связи по
напряжению генератора совершенно идентичны и показаны на рис. 4-17. Из-
менение заполнения статической характеристики с помощью изменения коэф-
фициента обратной связи по напряжению генератора контв, осуществляемой
с помощью обмотки управления возбудителя, показано на рис. 4-18.
Рабочему участку ВА статических характеристик (см. рис. 4-17, б) соот-
ветствует работа регулятора напряжения и возбудителя на линейных ненасы-
щенных участках своих характеристик. При этом коэффициент положитель-
ной связи по току подбирается таким образом, чтобы действие отрицательной
связи по току контура регулирования тока компенсировалось действием поло-
жительной связи по току контура регулирования напряжения. При такой
настройке контур регулирования тока при работе регулятора напряжения
будет фактически разомкнут, а величина напряжения двигателя не будет зави-
сеть от величины тока главной цепи UR = const. В этом случае можно считать,
что при работе регулятора напряжения замкнут только контур регулирования
напряжения двигателя и осуществляется астатическое регулирование этого
напряжения, что обеспечивает естественную жесткость рабочего участка ВА
механической характеристики (см. рис. 4-17, б). При этом участок ВА внешней
характеристики генератора будет иметь положительную жесткость.
175
Покажем это, получив зависимость э. д. с. генератора и скорости двига-
теля от тока якоря. Уравнение н. с. на входе возбудителя для обеих схем, при-
веденных на рис. 4-15, a it б (для схемы, приведенной на рис. 4-15, б с учетом
действия критической положительной связи по напряжению), будет
Н^З ко. н^р, (кО' т ^От. цкр, н) кя = 0. (4-51)
где &р н — коэффициент усиления регулятора напряжения на линейном участке
характеристики; н — коэффициент отрицательной связи по напряжению;
Рис. 4-18. Зависимости э. д. с. ге-
нератора от и. с. управления (а) и
задающей и. с. (б) и электромехани-
ческие характеристики привода (в)
для схемы, приведенной на рис.
4-15, б, при изменении коэффициента
формирующей обратной связи по
напряжению контв
ко т—коэффициент отрицательной связи по току; ко. т п — коэффициент поло-
жительной связи по току; — задающая н. с. на входе регулятора напряже-
ния; UR — напряжение на якоре двигателя.
При указанных выше условиях, когда действие отрицательной связи по
току при работе регулятора напряжения полностью компенсируется, коэффи-
циент положительной связи по току имеет критическое значение: кО1. п =
=ЛОТ. п. кр=&о. т/*р. Н- Тогда уравнение (4-51) упрощается: кр HF3 — „ко
Отсюда С/д = F^k^ н — const.
Уравнения для рабочих участков механической характеристики двигателя
и внешней характеристики генератора будут:
я. д ,• .
z> I*'
' ЕГ. О
(4-52)
(4.53)
176
гДе гя. д— сопротивление якоря двигателя; се — постоянная двигателя; г'я —
сопротивление главной цепи до зажимов якоря двигателя; Er_ о = Е3/ко н;
= Fslcjto. н.
Подбирая коэффициент положительной связи по току кт п можно, как это
следует из (4-51), получить любую требуемую жесткость рабочего участка
статической характеристики (см. рис. 4-17). Однако в большинстве случаев
ограничиваются астатическим регулированием напряжения, а не скорости дви-
гателей, так как, во-первых, на рабочих участках статических характеристик,
особенно на характеристике удержания ковша, желательно иметь некоторое
падение скорости с ростом нагрузки и, во-вторых, при астатическом регулиро-
вании скорости демпфирующая способность электропривода резко ослабляется
(см. гл. 1).
С ростом тока нагрузки благодаря увеличению н. с. положительной связи
по току выходной сигнал регулятора напряжения увеличивается вплоть до его
насыщения. С насыщением регулятора напряжения контур регулирования
напряжения размыкается, после чего на вход звена ограничения 30 посту-
пает постоянный задающий сигнал, и контур регулирования тока, вступая
в работу, поддерживает значение якорного тока, равное заданному стопорному
значению, обеспечивая благодаря наличию интегрирующего звена в контуре
регулирования тока полную независимость тока от скорости. Уравнение
статической характеристики па участке токоограничения: 1Я — 1СТОП. Напом-
ним, что не для всех основных механизмов экскаватора желательно аста-
тическое регулирование тока на участке токоограничения. Так, для приводов
копающих механизмов желательно иметь отрицательную жесткость участка
ограничения момента, для привода поворота — положительную (см. гл. 1).
Указанная форма характеристики может быть получена, если изменять
величину выходного сигнала на насыщенном участке характеристики регуля-
тора напряжения и тем самым изменять величину задания на входе контура
регулирования тока. В практических схемах изменение жесткости участка
токоограничения обеспечивается другим путем — изменением коэффициента
обратной связи по напряжению, осуществляемой с помощью обмотки управле-
ния возбудителя. В схеме рис. 4-15, а с этой целью используется отдельная
обмотка управления силового МУ, в схеме рис. 4-15, б — основная обмотка
формирующей связи по напряжению ОН ТВ. Зависимость жесткости участка
токоограничения от изменения знака и величины коэффициента обратной связи
по напряжению, осуществляемой с помощью обмотки ОН ТВ, в схеме, приведен-
ной на рис. 4-15, б, ясна из рассмотрения рис. 4-18. В схеме, приведенной на
рис. 4-15, а, имеет место аналогичная зависимость с тем отличием, что здесь
для изменения жесткости участка токоограничения, учитывая наличие инте-
грирующего звена (генератора с критическим самовозбуждением) в контуре
регулирования тока, требуется очень слабая дополнительная связь по напря-
жению, воздействующая на вход возбудителя.
Из анализа рис. 4-18 следует, что при критическом значении коэффициента
обратной связи по напряжению контв = кКр получим астатическое регули-
рование тока якоря, при кОнтг> ккр — положительную жесткость участка
токоограничения, при контв < к^р — отрицательную жесткость участка
токоограничения. Для механизмов, где требуется весьма невысокая жесткость
участка ограничения момента, например для механизмов напора скальных
лопат, может оказаться необходимым даже изменение знака обратной связи.
Таким образом, из анализа рис. 4-18 следует, что в схеме, приведенной
на рис. 4-15, можно в широких пределах регулировать жесткость участка
12 Заказ 11.27
177
токоограничения путем выбора знака и интенсивности действия формирующей
обратной связи по напряжению генератора, осуществляемой с помощью обмотки
управления возбудителя.
Сопоставляя возможности изменения заполнения статических характери-
стик в схемах с сумматором (см. рис. 4-11) и в схемах подчиненного регулиро-
вания (см. рис. 4-15), можно заключить, что если в схемах с сумматором эти
возможности весьма ограничены, то в схемах подчиненного регулирования
возможно обеспечить практически любое необходимое заполнение статических
характеристик.
Напомним, что, как показал опыт наладки и исследования экскаваторных
электроприводов, для получения требуемых динамических свойств электро-
привода в схемах подчиненного регулирования достаточно осуществить на-
стройку контура регулирования тока в опыте короткого замыкания и контура
регулирования напряжения в опыте холостого хода. При оптимальной настрой-
ке контуров регулирования в этих опытах обеспечиваются оптимальные пере-
ходные процессы в рабочих режимах.
Выше было показано, что передаточные функции для замкнутых контуров
регулирования тока и напряжения схем, приведенных на рис. 4-15, в опытах
короткого замыкания и холостого хода имеют оптимизированную форму и пол-
ностью совпадают с аналогичными выражениями для систем подчиненного
регулирования с последовательно-параллельной коррекцией. Отсюда следует,
что в схемах, приведенных на рис. 4-15, можно получить оптимальные переход-
ные процессы электроприводов основных механизмов экскаваторов, вполне
аналогичные тем, которыеТмогут быть получены при использовании элементов
УБСР.
Важнейшим показателем качества переходных процессов является исполь-
зование электропривода по предельно допустимому току —заполнение время-то-
ковой диаграммы в переходных процессах.
В схемах подчиненного регулирования (см. рис. 4-15) заполнение время-то-
ковой диаграммы в переходных процессах пуска и торможения будем оценивать
так же, как и для схем с сумматором [см. (4-43)], — по величине расхождения
между динамической и статической характеристиками. Для этого можно исполь-
зовать соотношение (3-67), полученное в гл. 3. Напомним при этом, что та!ПТц =
= То т, а для схем, приведенных на рис. 4-15, постоянная времени интегриро-
вания контура регулирования тока То т определяется величинами суммарной
постоянной времени генератора и коэффициентом усиления контура отри-
цательной связи по току к0. и, т. е. То т = Т^/ко. Tz, где йо. т2 = /со тйу/сг//?я2
[см. (4-46)].
Соотношение (3-67) нельзя применять для оценки величины А7ДИН/1СТОП
лишь в легких переходных процессах, когда регулятор тока выполняет функции
звена ограничения и работает на насыщенном участке характеристики.
Из сопоставления соотношений (3-67) и (4-43) видно, что в схемах подчи-
ненного регулирования исчезает зависимость Д7дан/7Стоп от скорости привода,
что естественно благодаря наличию интегрирующего звена в контуре регулиро-
вания тока. В остальном соотношения (3-67) и (4-43) полностью аналогичны и
анализ, проведенный при рассмотрении соотношения (4-43) , в равной мере от-
носится и к соотношению (3-67). Разница заключается в том, что в схемах с сум-
матором увеличение коэффициента усиления в контуре отрицательной связи
по току при прочих равных условиях получить значительно сложнее, во-пер-
вых, из-за ослабления действия отрицательной связи по току на участке токо-
ограничения линейной отрицательной связью по напряжению, действующей
178
непрерывно, а во-вторых, из-за значительно меньшего ^.запаса устойчивости
в схемах с сумматором [18].
На рис. 4-19, а л б приведены идеализированные графики переходных
процессов пуска привода для схем, изображенных на рис. 4-15, а л б. На
рис. 4-19, в приведены графики переходных процессов пуска привода подъема,
построенные на основании экспериментальных данных, полученных при на-
ладке схемы с сумматором (см. рис. 4-11) и схемы подчиненного регулирования
Рис. 4-19. Графики переходных процессов пуска привода в различных схемах:
а — идеализированный график пуска для схемы, приведенной на рис. 4-15, а; б — то же для схемы, приве-
денной на рис. 4-1 5,6. в — экспериментальные кривые переходных процессов пуска привода подъема;
--------для схемы подчиненного регулирования, приведенной на рис. 4-15;-----------для схемы
сумматором, приведенной на рис. 4-11
(см. рис. 4-15, б). Из сопоставления этих графиков преимущества системы
подчиненного регулирования в отношении заполнения время-токовой диаграммы
выявляются особенно наглядно.
Анализ процессов ограничения тока якоря при резких механических сто-
порениях, проведенный в предыдущем параграфе, в значительной степени
относится и к схемам подчиненного регулирования. Здесь для оценки ве-
личины выбросов тока якоря за стопорное значение при резких стопорениях
можно использовать соотношение (3-66), полученное в гл. 3.
Из анализа соотношения (3-66), а также учитывая, что пгог.тТр, = То т
И ?о. т= следует, что ограничение выбросов тока якоря за стопорное
значение может быть достигнуто увеличением коэффициента отрицательной
связи по току.
2*
ГЛАВА 5
ОПИСАНИЕ СХЕМ УПРАВЛЕНИЯ
§ 5-1. Обзор применяемых схем
Основные механизмы всех выпускаемых в настоящее время отечест-
венных серийных одноковшовых экскаваторов с ковшом емкостью более 2 м3
оборудуются системой Г — Д. Одновременно ведутся работы по разработке
и испытаниям системы тиристорный преобразователь — двигатель (ТП — Д)
для основных механизмов экскаваторов. Однако пока эти работы не вышли
из стадии создания отдельных опытных образцов экскаваторов, оборудованных
системой ТП — Д.
Схемы управления основных механизмов экскаваторов по системе Г — Д
отличаются очень большим разнообразием: в эксплуатации находится около
двух десятков различных схем экскаваторных электроприводов. Различия
между некоторыми из них несущественны. Поэтому целесообразно выделить
основные типы схем, исходя из их принципиальных особенностей, а затем про-
вести описание наиболее распространенных и характерных схем для каждого
из выделенных типов.
В качестве принципа классификации используем структуру применяемых
схем. По этому признаку все схемы управления электроприводами основных
механизмов одноковшовых экскаваторов можно разбить на следующие основные
группы:
1) схемы с суммирующим усилителем, где сигналы всех обратных связей
и сигнал задания подаются на вход одного усилителя, используемого в качестве
сумматора.
Эти схемы можно, в свою очередь, подразделить на:
а) схемы с одним каскадом усиления. В качестве примера можно привести
схемы управления главными приводами серийных экскаваторов ЭКГ-4,6Б
с силовыми магнитными усилителями, выпускаемыми УЗТМ, и ЭШ-10/60
с электромашинными усилителями поперечного поля, который был серийным
экскаватором НКМЗ до 1972 г. Схема управления экскаватора ЭКГ-4,6Б раз-
работана ВНИИЭлектроприводом, а ЭШ-10760 — ХЭМЗом;
б) схемы с двумя каскадами усиления, в которых для увеличения общего
коэффициента усиления системы введен дополнительный промежуточный уси-
литель. В качестве примера можно привести схемы управления главными при-
водами серийного экскаватора УЗТМ ЭШ-15/90А с силовыми и промежуточ-
ными магнитными усилителями (схема с СМУ и ПМУ) и схемы управления
главными приводами экскаваторов УЗТМ ЭШ-15/90 и ЭШ-14775 с электрома-
шинными и промежуточными магнитными усилителями (схема с ЭМУ и ПМУ).
Схемы с ЭМУ и ПМУ и СМУ и ПМУ были разработаны ВНИИЭлектроприводом;
2) схемы с одним силовым усилителем, где используются принципиальные
особенности характеристик применяемого усилителя — возбудителя. К схемам
этого типа можно отнести схемы управления экскаватора ЭКГ-8И, выпускае-
мого серийно Ижорским заводом.
3) схемы подчиненного регулирования, где каждый из регулируемых пара-
метров имеет отдельный контур регулирования, причем заданием для каждого
последующего подчиненного контура является выходная величина предыдущего
180
контура. Таким образом, число контуров равно числу регулируемых пара-
метров.
Эти схемы в настоящее время получают все более широкое распростране-
ние. К их числу относятся схемы управления главными приводами серийных
экскаваторов НКМЗ (ЭШ-10/70А и ЭШ-5/45М) и схемы, применяемые в настоя-
щее время для модернизации целого ряда экскаваторов УЗТМ и НКМЗ
(ЭШ-14/75, ЭШ-15/90, ЭШ-15790А, ЭШ-10/60, ЭВГ-35/65).
На серийных экскаваторах НКМЗ ЭШ-10/70А и ЭШ-5/45М применяется
схема подчиненного регулирования с генераторами с критическим самовозбу-
ждением и использованием в качестве возбудителей генераторов силовых маг-
нитных усилителей.
На серийных экскаваторах УЗТЦ ЭШ-1579ОА и мощных экскаваторах —
лопатах НКМЗ ЭВГ-35/65М намечена к применению схема подчиненного ре-
гулирования с генераторами с независимым возбуждением и использованием
в качестве возбудителей генераторов тиристорных возбудителей.
Во всех этих схемах система управления двухконтурная и содержит контур
регулирования тока двигателя, подчиненный контуру регулирования напря-
жения двигателя.
В качестве регуляторов напряжения в упомянутых схемах применяются
магнитные усилители промышленной частоты. В схемах с магнитными усили-
телями функции звена ограничения выполняет магнитный усилитель — возбу-
дитель генератора, в схемах с тиристорными возбудителями функции звена
ограничения выполняет вспомогательный магнитный усилитель, включенный
на вход тиристорного возбудителя. Функции интегрального регулятора тока
выполняет или генератор с критическим самовозбуждением, или генератор
с независимым возбуждением, охваченный совместно с возбудителем критиче-
ской положительной связью по напряжению (см. гл. 4).
В разработках системы ТП — Д для основных механизмов одноковшовых
экскаваторов и на тех опытных экскаваторах, где эта система уже используется,
в большинстве случаев применяется двухконтурная система подчиненного
регулирования тока и напряжения двигателя постоянного тока с независимым
возбуждением.
§ 5-2. Схемы с суммирующим усилителем
А, Схемы с одним каскадом усиления
^Экскаватор ЭКГ» 4,6 Б
Двигатели подъема, напора и поворота (хода) экскаватора ЭКГ-4,6Б
получают питание от двухобмоточных генераторов ГП (ГН и ГВХ). Параллель-
ные обмотки ОВПГ генераторов через сопротивление 2СД включаются на якор-
ные зажимы генераторов. При номинальной э. д. с. генераторов эти обмотки
создают для генератора поворота 30—35%, для генератора подъема — 25%,
для генератора напора — 20% суммарной н. с. возбуждения, остальная н. с.
возбуждения каждого генератора создается обмоткой независимого возбужде-
ния. Обмотки независимого возбуждения ОВНГ получают питание от силовых
магнитных усилителей УМС. Использование самовозбуждения генераторов
позволило снизить требуемую мощность этих усилителей на 20—30%.
Силовые магнитные усилители имеют мостовую схему включения нагрузки
для получения на [.обмотке возбуждения знакопеременного напряжения
181
постоянного тока. Для этого обмотка независимого возбуждения ОВНГ каждого
генератора разделена на две разные полуобмотки, включаемые в соответству-
ющие плечи моста, два другие плеча которого образуют балластные сопроти-
вления СБ1 и СБ2 (см. § 2-4).
Схема управления электроприводом подъема приведена на рис. 5-1, а.
Магнитный усилитель УМСП имеет шесть обмоток управления, из которых
в схеме используются четыре, а также обмотки смещения (не показанные на схе-
ме), которые необходимы для выставления нуля напряжения на выходе усили-
теля при отсутствии управляющего сигнала. Кроме того, с помощью обмоток
смещения устанавливаются требуемые значения токов холостого хода каждого
из однотактных магнитных усилителей, составляющих двухтактную схему
(см. § 2-4).
Обмотка управления УМСП-1 осуществляет жесткую отрицательную об-
ратную связь по току якоря с отсечкой. Схема узла токовой отсечки аналогична
рассмотренной в § 4-1. При неработающем приводе, когда накладывается меха-
нический тормоз при выключении выключателя тормоза ВТП, второй контакт
ВТП подключает обмотку УМСПЛ через добавочное сопротивление СДП4
непосредственно на вход узла токовой связи без узла отсечки. При этом обрат-
ная связь по току становится непрерывной и эффективно ограничивает ток
в якорной цепи, обусловленный остаточной э. д. с. генератора.
182
Обмотка УМСП-Ъ используется для получения жесткой отрицательной
обратной связи по напряжению. Так как в качестве потенциометра используется
цепь параллельной обмотки, за счет э. д. с. взаимоиндукции, наводимой в па-
раллельной обмотке при изменении потока и э. д. с. генератора, на обмотку
УМСП-6 воздействует также и сигнал гибкой отрицательной обратной связи
по э. д. с. генератора (см. § 4-3). Величина гибкой обратной связи по э. д. с.
генератора максимальна при подключении цепи обмотки УМСП-6 параллельно
параллельной обмотке; она отсутствует, если эту цепь подключить непосред-
ственно на напряжение генератора. Выбором положения точки подключения
обмотки УМСП-6 на сопротивлении СДП2 можно получить сигнал гибкой об-
ратной связи по напряжению генератора, оказывающий достаточное стабили-
зирующее действие и в то же время незначительно замедляющий протекание
переходных процессов. Следует напомнить, что сигнал гибкой отрицательной
связи по э. д. с. генератора неблагоприятно влияет на условия огра-
ничения тока при резких стопорениях, препятствуя интенсивному гашению
поля генератора. Поэтому коэффициент гибкой обратной связи по э. д. с.
генератора выбирается минимальным, но достаточным fдля стабилизации
системы.
Для ограничения перерегулирований и колебаний тока якоря при работе
системы токоограничения в схеме предусмотрена гибкая отрицательная обрат-
ная’связь по току якоря, осуществляемая обмоткой УМСП-4. Эта обмотка по-
лучает питание от специальной обмотки СТП, намотанной на дополнительных
полюсах генератора, э. д. с. которой пропорциональна производной тока якоря
(см. § 4-3).
Задающая обмотка усилителя УМСП-2 через добавочное сопротивление
СУП4 и контакт командоконтроллера «Подъем» или «Спуск» подключается
параллельно одному из участков задающего потенциометра СУПЗ. Направление
и величина тока, протекающего по задающей обмотке, зависят от положения
рукоятки командоконтроллера КПП. При перестановке рукоятки командоконт-
роллера в положение «На себя» замыкается контакт «Подъем» и задающая об-
мотка через сопротивление СУП4 подключается к левому плечу потенциометра
СУПЗ. При этом полярность задающего сигнала соответствует подъему ковша.
При перестановке рукоятки командоконтроллера в положение «От себя» за-
мыкается контакт «Спуск», цепь задающей обмотки подключается к правому
плечу потенциометра СУПЗ. Соответственно меняется полярность задающего
сигнала, привод работает в направлении спуска. Переключениями контактов
командоконтроллера КПП обеспечиваются четыре ступени скорости в каждом
направлении. Контакты КПП, обозначенные 5, 4 и 5, замыкаются последова-
тельно при ходе рукоятки командоконтроллера от нуля в любую сторону. Тем
самым последовательно выводятся участки добавочного сопротивления СУП4,
задающая н. с. увеличивается от минимального значения, соответствующего
первой скорости, до максимального значения, соответствующего основной,
четвертой скорости привода. Статические характеристики электропривода
подъема экскаватора ЭКГ-4,6Б показаны на рис. 5-2.
При работе на спуск в четвертом положении командоконтроллера размы-
кается контакт 6 (см. рис. 5-1). При этом отключается контактор ПП, в цепь
обмотки возбуждения двигателя ОВДП вводится добавочное сопротивление,
поле двигателя ^подъема ослабляется и скорость спуска увеличивается (харак-
теристика 4с на рис. 5-2). При переводе рукоятки контроллера в третье положе-
ние «Спуск» контакт 6 замыкается и поток двигателя вновь принимает номиналь-
ное значение (характеристика Зс на рис. 5-2).
183
Характеристика 0 на рис. 5-2 соответствует нулевому положению командо-
контроллера. На этой характеристике привод работает в режиме удержания
ковша.
Относительно малая скорость спуска в режиме удержания ковша обеспе-
чивается в рассматриваемой схеме за счет исключения действия токовой связи
до нагрузок, соответствующих току отсечки (что обычно больше веса груженого
ковша), и выбора необходимой величины коэффициента отрицательной связи
по напряжению.
Однако следует отметить, что возможности увеличения жесткости характе-
ристики удержания в рассматриваемой
Рис. 5-2. Статические характеристики элек-
тропривода подъема экскаватора ЭКГ-4,6Б
схеме довольно ограничены из-за не-
высокого общего коэффициента уси-
ления системы.
Схема электропривода напора
полностью аналогична рассмотрен-
ной, в ней лишь не предусмотрено
ослабление поля двигателя. Схема
поворота (хода), имеющая некоторые
отличия от схемы подъема, приве-
дена на рис. 5-1, б.
Обмотки управления магнитного
усилителя УМСВ осуществляют те
же функции, что и в рассмотренной
схеме подъема. Отличия схемы свя-
заны с использованием генератора
ГВХ для питания либо двигателей
поворота ДВ1 и ДВ2, либо двига-
теля гусеничного механизма пере-
движения ДХ. Выбор того или иного
варианта включения производится
переключателем ПРР.
Для работы механизма поворота
переключатель ПРР устанавливается
в положение, при котором замы-
кается его контакт ПРР-1 в цепи контактора КВ. Если при этом контакт
выключателя тормоза ВТВ замкнут, контактор КВ срабатывает и своими
силовыми контактами подключает двигатели ДВ1 и ДВ2 к генератору ГВХ.
Одновременно блок-контакты КВ замыкают цепь электромагнита тормоза» ЭТВ
и привод растормаживается, размыкают цепь катушек контакторов КХ и ШХ
и сопротивления СДВ4 в цепи токовой отсечки, а также подготавливают цепь
самопитания КВ через замыкающий контакт реле PH.
Одновременно с контактом ПРР-1 замыкается контакт ПРР-3 и шунти-
руется часть потенциометра СУВ4, что обеспечивает получение напряжения
генератора ГВХ, соответствующего режиму поворота. Размыкание контактом
КВ цепи сопротивления СДВ4 вызывает увеличение напряжения отсечки по
току до значения, обеспечивающего требуемый для электропривода поворота
стопорный ток.
Переход к работе механизма хода достигается перестановкой переключа-
теля ПРР в положение, при котором замыкается его контакт ПРР-2, а контакт
ПРР-1 размыкается. Процесс перехода контролируется реле напряжения PH,
которое срабатывает при небольшом напряжении генератора и имеет высокий
коэффициент возврата, который обеспечивается введением в цепь его катушки
184
сопротивления СД при размыкании контакта PH после срабатывания. Реле
PH при работе механизма поворота было включено и катушка контактора КВ
получала питание через замыкающие контакты PH и КВ.
Поэтому при наличии напряжения на генераторе переключение контактов
ПРР-1 и НРР-2 не вызывает отключения контактора КВ и включения контакто-
ров КХ и HIX до тех пор, пока напряжение на генераторе не станет достаточно
малым. При этом реле PH отключается и отключает катушку контактора КВ.
Контактор КВ отключается, силовыми контактами отключает двигатели ДВ1
и ДВ2 от генератора ГВХ, а размыкающим блок-контактом замыкает цепь
катушек ШХ и КХ. Контактор 1ПХ подключает к сети обмотку возбуждения
двигателя хода ОВДХ, а контактор КХ подключает к генератору его якорь.
Рис. 5-3. Вспомогательные узлы схемы
экскаватора ЭКГ-4,6Б:
а — узел блокировочного контактора и управле-
ния двигателя открывания . днища; б — узе л
температурной компенсации
Так как двигатель хода расположен на нижней раме, токоподвод к его якорю
и обмотке возбуждения с поворотной платформы производится через кольца
кольцевого токосъемника КТ.
Управление механизмом передвижения осуществляется с помощью коман-
доконтроллера поворота ККВ и переключателя ВТ Г. Требуемые для двигателя
хода значения э. д. с. генератора и стопорного тока обеспечиваются введением
в цепь задающей обмотки добавочного сопротивления (при размыкании контакта
ПРР-3) и шунтированием потенциометра отсечки сопротивлением 4СДВ (при
замыкании нормально закрытого контакта КВ). Переключатель ВТ Г служит
для управления механическими тормозами правой и левой гусениц. В положе-
нии! оба контакта ВТГ разомкнуты, катушки электромагнитов ЭТПТ и ЭТЛГ
питания не получают, поэтому правая и левая гусеницы заторможены. В поло-
жении 2 оба контакта замкнуты, следовательно оба тормоза подняты — при
подаче на двигатель ДХ напряжения осуществляется прямолинейное движение.
Положения 3 и 4 служат для поворота экскаватора —• при этом либо левая,
либо правая гусеница застопорена и благодаря наличию механического диффе-
ренциала осуществляется поворот соответственно влево или вправо.
Для уменьшения размеров панелей на экскаваторе ЭКГ-4,6Б блокировоч-
ные контакторы или реле на каждом приводе отсутствуют. Предусмотренная
каждой схемой максимальная защита (реле РТМП, РТМН, воздейст-
вует на цепь катушки общего блокировочного контактора!!(рис. 5-3). В этой же
цепи осуществлена блокировка нулевого положения контроллеров напора
185
и поворота (на подъеме соответствующий контакт контроллера использован
для управления ослаблением поля двигателя, поэтому нулевая блокировка
отсутствует), а также блокировка с масляным выключателем асинхронного
двигателя преобразовательного агрегата ВМ и автоматом А2, подающим пита-
ние на двигатели вентиляторов подъема, поворота и напора. Кроме того, в цепь
нулевой катушки масляного выключателя заведена блокировка, запрещающая
включение асинхронного приводного двигателя преобразовательного агрегата
при отключенных магнитных усилителях.
На рис. 5-3, а показана силовая цепь и цепь управления двигателем ДК
открывания днища ковша. Двигатель ДК, имеющий смешанное возбуждение,
подключается к сети 110 В автоматом А16 через добавочное сопротивление СДК.
Сопротивление СДК имеет значительную величину, что обеспечивает неболь-
шой пусковой момент, достаточный для систематического выбора слабины
троса, связанного с защелкой днища ковша, при любых рабочих перемещениях
рукояти.. Для открывания днища машинист нажимает кнопку КОД, после чего
срабатывает контактор КД и выводит большую часть сопротивления СДК.
При этом ток в якоре двигателя и его момент во много раз возрастают, трос
выдергивает защелку, и днище ковша отпадает.
При эксплуатации экскаваторных приводов температура машин изменяется
в весьма широких пределах как за счет изменений температуры окружающей
среды, так и за счет нагрева при работе и охлаждения во время пауз.Изменения
температуры обмоток вызывают изменения их сопротивления, поэтому вели-
чина сигнала на входе узла отрицательной связи по току при прочих равных
условиях зависит от температуры обмоток, с которых он снимается. Это вызы-
вает изменения установленного стопорного тока привода тем более значитель-
ные, чем в более широких пределах изменяется температура.
Температурные изменения сопротивления шунтовой обмотки генератора
собственных нужд вызывают изменения напряжения бортовой сети 110 В.
Если не изменять сопротивления шунтового реостата, при холодных машинах
зимой напряжение сети будет на 5—10% выше, а при нагретых машинах летом
на 5—10%, ниже номинала. Это дополнительный фактор, вызывающий изме-
нения стопорных токов.
Если не принимать специальных мер, стопорный ток при холодных машинах
зимой может оказаться на 50—70% выше, чем при нагретых машинах летом.
Величина стопорного момента привода при этом будет изменяться в еще более
широких пределах, так как, вследствие температурных изменений сопротивле-
ния обмоток возбуждения двигателей, их ток возбуждения и поток при холод-
ных машинах будет больше, чем при нагретых.
В тех схемах, где специальные средства температурной компенсации отсут-
ствуют, при эксплуатации напряжение генератора собственных нужд система-
тически контролируется и поддерживается постоянным вручную экипажем
машины, а некоторое уменьшение пределов изменения стопорного момента
достигается сезонной переналадкой приводов. Однако температурные изменения
стопорных токов и моментов в этих условиях остаются значительными и для их
уменьшения в новых схемах экскаваторного привода предусматриваются спе-
циальные устройства температурной компенсации.
В рассматриваемой схеме частичная компенсация изменений стопорных
токов достигается регулированием напряжения генератора собственных нужд
возбудителя В в зависимости от температуры его обмотки возбуждения. Схема
узла возбуждения возбудителя В представлена на рис. 5-3, б. Для питания
обмотки возбуждения ОВВ используется трехфазный магнитный усилитель
186
МУТК, задающая обмотка которого ОУ-1 подключена на падение напряжения
в обмотке возбуждения ОВВ, а обмотка ОУ-3 осуществляет жесткую положи-
тельную обратную связь по напряжению возбудителя.
При изменениях температуры обмотки ОВВ изменяется ее сопротивление
и, следовательно, задающий сигнал. Поэтому по мере нагрева возбудителя его
напряжение возрастает, частично компенсируя возникающее по мере нагрева
главных машин уменьшение стопорного момента, и наоборот.
Обмотки усилителя ОУ-2 и ОУ-4 замкнуты накоротко с целью демпфирова-
ния резких возмущений, возникающих при изменении нагрузки возбудителя,
особенно при включении двигателя открывания днища ковша. Для уменьшения
влияния колебаний напряжения сети переменного тока, в усилителе МУТК
не предусмотрена внутренняя обратная связь по току. При этом усилитель
работает как регулятор тока и при неизменном сигнале на входе и изменениях
напряжения сети переменного тока стремится поддерживать ток возбуждения
постоянным (см. § 2-4).
Экскаватор ЭШ-10/60
Схемы управления приводами подъема и поворота экскаватора
ЭШ-1О76О приведены на рис. 5-4. Электропривод основных механизмов экска-
ватора ЭШ-1О76О осуществляется по системе Г—Д с ЭМУ, потенциометрической
отсечкой по току и непрерывной отрицательной обратной связью по напряжению
генератора (см. § 4-4). Для уменьшения влияния гистерезиса в магнитной
б
Рис. 5-4. Схемы управления электроприводами подъема (а) и поворота (б) экскаватора
ЭШ-10/60
187
цепи ЭМУ, вызывающего неоднозначность статических и динамических харак-
теристик привода, в схемах используется жесткая отрицательная обратная
связь по напряжению ЭМУ, воздействующая на его обмотку управления, как
это было рассмотрено в § 2-2. Схемы отдельных приводов принципиально ана-
логичны, поэтому достаточно подробно рассмотреть лишь схему управления
приводом подъема, а при рассмотрении двух других схем можно ограничиться
выявлением их специфических особенностей.
Привод подъема осуществляется от двух двигателей ДП1 и ДП2, якорные
цепи которых соединены последовательно и получают питание от генератора
подъема ГП (рис. 5-4, а). Обмотки возбуждения двигателей ОВДП1 и ОВДП2
соединены параллельно и через добавочное сопротивление СДП1 включаются
непосредственно на зажимы генератора собственных нужд. При работе с пол-
ным потоком часть сопротивления СДШ шунтируется контактами контактора
КОПП.
Обмотка возбуждения генератора подъема ОВГП получает питание от
электромашинного усилителя УП. Для повышения устойчивости схемы парал-
лельно обмотке возбуждения генератора включено балластное нагрузочное
сопротивление СУП6 (см. § 2-2).
. Усилитель имеет четыре обмотки управления. Обмотка ОУ-1 осуществляет
жесткую отрицательную обратную связь по току якоря с отсечкой и включена
в узел, аналогичный рассмотренному в § 4-1 на рис. 4-4. Потенциометр токового
узла СУП2 получает питание от сети 110 В через зажимы, которые включаются
на напряжение генератора собственных нужд с помощью автомата. От тех же
зажимов получают питание цепи управления всех приводов.
Обмотка ОУ-4 осуществляет жесткую отрицательную обратную связь
по напряжению генератора и включена в соответствии со схемой, приведенной
на рис. 4-6 (см. § 4-2). Обмотка ОУ-3 через сопротивление СУП10 включена
на напряжение ЭМУ и обеспечивает упоминавшуюся выше жесткую отрицатель-
ную обратную связь по напряжению ЭМУ. Одновременно эта же обмотка выпол-
няет функции гибкой отрицательной связи. Благодаря шунтированию сопро-
тивления СУП10 емкостью С„ на обмотку ОУ-3 воздействует сигнал гибкой от-
рицательной обратной связи по напряжению ЭМУ, препятствующей резким
изменениям напряжения ЭМУ и тем самым способствующий затуханию колеба-
ний этого напряжения.
Управление приводом осуществляется воздействием на цепь задающей
обмотки усилителя ОУ-2 с помощью командоконтроллера подъема. При работе
на подъем в первом положении командоконтроллера ККП замкнут контакт В,
включается контактор ВП и своими замыкающими контактами подключает
обмотку ОУ-2 к сети 110 В через добавочное сопротивление СУП1. При этом
обмотка создает задающую н. с., необходимую для получения первой скорости
подъема, и двигатели подъема работают в соответствии с механической харак-
теристикой In на рис. 5-5. При последовательном переводе контроллера во вто-
рое, третье и четвертое положения замыкаются соответственно контакты 1,
2 и 3 командоконтроллера ККП (см. рис. 5—4) и задающая н. с. возрастает
вплоть до значения, соответствующего основной скорости (характеристики 2п,
Зп и 4п на рис. 5-5).
При спуске получает питание контактор НП (см. рис. 5—4) и обмотка ОУ-2
подключается к сети его контактами, причем направление тока в обмотке
и ее н. с. меняются на противоположные. Одновременно размыкается контакт
НП в цепи катушки контактора ослабления поля КОПП и тем самым создаются
условия для автоматического ослабления поля при напряжении генератора,
188
достаточном для срабатывания реле РНОП. При последовательной перестановке
контроллера из нулевого положения в первое, второе и третье напряжение ге-
нератора остается недостаточным для срабатывания реле РНОП, двигатели
работают с полным потоком (характеристики 1с, 2с и Зс на рис. 5-5). В четвертом
положении («Спуск») напряжение генератора достаточно для срабатывания
реле РНОП. Размыкающий контакт РНОП при срабатывании реле разрывает
цепь катушки контактора КОПП, он ртпадает, и в цепь обмоток возбуждения
двигателей вводится добавочное сопротивление. Двигатели работают при осла-
бленном поле в соответствии с характеристикой 4'с рис. 5-5, обеспечивающей
повышенную скорость опускания
ковша.
Так как коэффициент возврата
реле РНОП меньше единицы, оно
отпадает при значительно меньшем
напряжении, чем срабатывает. По-
этому при переводе рукоятки коман-
доконтроллера из четвертого поло-
жения («Спуск») в третье («Спуск»)
и во второе («Спуск») реле РНОП
может оставаться включенным и дви-
гатели могут продолжать работать
с ослабленным полем (характери-
стики 2'с и З'с на рис. 5-5).
При работе на подъем ослабле-
ние поля исключается, во-первых,
благодаря шунтированию контакта
РНОП (см. рис. 5-4) в цепи катушки
КОПП размыкающим контактом кон-
тактора НП, и, во-вторых, благодаря
наличию вентиля ВГП5 в цепи ка-
тушки реле РНОП. Рис. 5-5. Статические характеристики элек-
Как было отмечено выше, важной тропривода подъема экскаватора ЭШ-10/60
особенностью схем с потенциометри-
ческой отсечкой по току и с линейной отрицательной обратной связью по напря-
жению генератора является относительно небольшой коэффициент обратной
связи по напряжению. При таких условиях жесткость характеристики привода,
соответствующей нулевому положению контроллера, оказывается недостаточ-
ной для получения требуемой малой скорости спуска при удержании ковша.
Для увеличения коэффициента обратной связи по напряжению генератора
в нулевом положении часть потенциометра СУП5 шунтируется цепочкой размы-
кающих контактов ВП, НП и РНТП. При работе привода эта цепочка разомк-
нута контактом ВП (или НП) и контактом реле контроля торможения РНТП.
В процессе торможения при установке командоконтроллера в нулевое положе-
ние контакты ВП и НП замкнуты, но шунтирующая цепочка остается разомк-
нутой контактом реле РНТП. Сохраняет свое значение и коэффициент обратной
связи по напряжению, которому соответствует статическая характеристика О'
на рис. 5-5. Когда напряжение генератора становится достаточно малым, реле
РНТП отпадает, шунтирующая цепочка замыкается и обратная связь по
напряжению генератора усиливается. Как следствие, увеличивается же-
сткость характеристики для удержания ковша (характеристика 0 на
рис. 5-5).
189
Для правильной работы рассмотренного узла необходимо, чтобы реле
РНТП (см. рис. 5-4) срабатывало при небольшом значении напряжения гене-
ратора и имело высокий коэффициент возврата. Повышение коэффициента
возврата реле обеспечивается введением в цепь катушки РНТП добавочного
сопротивления, зашунтированного его же размыкающим контактом.
В схеме предусмотрен ряд защит. Максимальная защита (реле РТМП)
срабатывает при превышении током якоря стопорного значения на 20—30%.
Защита от повышения напряжения генератора при обрыве отрицательной связи
по напряжению осуществляется с помощью реле РТВП. Это реле срабатывает,
если ток возбуждения генератора превысит на 20—30% наибольшее рабочее
значение. Для защиты от обрыва поля в цепь возбуждения двигателей вклю-
чено реле РОПП. Все перечисленные защиты воздействуют на цепь катушки
промежуточного контактора КПП. Повторное включение этой цепи возможно
только после установки командоконтроллера в нулевое положение, так как
во всех рабочих положениях нулевой контакт командоконтроллера ККП
разомкнут.
Защита головных блоков от опасного приближения ковша (защита от
«переподъема») осуществляется с помощью контакта конечного выключателя
КВП1, отключающего IV и III скорости подъема вверх, и контакта конечного
выключателя КВП2, который отключает контактор ВП, запрещая подъем
ковша, и накладывает механический тормоз. Выведение ковша из опасной зоны
после срабатывания защиты производится с помощью контакторов НП и РВП.
При переводе командоконтроллера в положение «От себя» эти контакторы
срабатывают и своими замыкающими контактами шунтируют контакты
конечного выключателя КВП1 и КВП2, что позволяет производить спуск
ковша.
Схема управления электроприводом поворота представлена на рис. 5-4, б.
Так как требования, предъявляемые к электроприводу поворота, существенно
отличаются от требований, предъявляемых к подъему и тяге, схема поворота
имеет существенные отличия от схем указанных приводов. К числу этих осо-
бенностей относятся: использование гибкой отрицательной обратной связи
по э. д. с. генератора, отсутствие жесткой обратной связи по напряжению
генератора на всех рабочих положениях контроллера, отсутствие ослабления
поля двигателей.
Гибкие отрицательные обратные связи по напряжению генератора и ЭМУ
осуществляются обмоткой ОУ-3. Гибкая отрицательная связь по э. д. с. гене-
ратора осуществляется благодаря включению обмотки ОУ-3 в диагональ ди-
намического моста (см. § 4-3). Гибкая отрицательная связь по напряжению
ЭМУ осуществляется с помощью емкости Св. Вследствие неточной балансировки
моста, а также разбаланса моста при нагреве обмотки возбуждения генератора
появляется составляющая жесткой отрицательной связи по напряжению ЭМУ.
Действие этой жесткой связи значительно слабее, чем на приводах подъема
и тяги. Дополнительное стабилизирующее действие оказывает включение со-
противления СУВ10 параллельно якорю ЭМУ, минуя его компенсационную
обмотку.
Рассматривая узел отрицательной обратной связи по напряжению генера-
тора (обмотка ОУ-4}, можно убедиться, что во всех рабочих положениях цепь
обмотки ОУ-4 разомкнута контактом ВВ или НВ, а в нулевом положении после
торможения привода, когда реле РНТВ отпадает, обратная связь по напряже-
нию начинает действовать, обеспечивая гашение остаточного поля генератора
и уменьшая тем самым возможные «ползучие» скорости.
190
Особенностью токового узла является наличие контакта КПВ в цепи по-
тенциометра сравнения СУВ2. При отпадании КПВ, например вследствие сра-
батывания защиты, запирающий потенциал отсечки по току размыканием
контакта КПВ снимается, и токовая связь действует как непрерывная, ограничи-
вая ток. Во время пауз, когда цепи управления приводом отключаются контак-
том ВТВ и накладывается механический тормоз, указанная блокировка допол-
нительно ограничивает ток якоря, обусловленный остаточной э. д. с. генератора
Необходимо заметить, что в схеме поворота в отличие от схем подъема
и тяги при срабатывании защиты и отпадании контактора КПВ автоматического
наложения тормоза не происходит. Внезапное наложение тормоза на полной
скорости вызвало бы недопустимые динамические нагрузки, опасные для стрелы.
Ь. Схемы с двумя каскадами усилэния
Экскаватор ЭШ-15/90А
Для питания двигателей основных механизмов на экскаваторе
ЭШ-15/90А используются генераторы с тремя обмотками возбуждения на глав-
ных полюсах: обмоткой независимого возбуждения ОВНГП, параллельной
обмоткой ОВПГП, осуществляющей самовозбуждение генератора (около 40%
суммарной н. с. генератора в номинальном режиме), и небольшой по объему
противокомпаундной обмоткой ПКОГП, которая включается параллельно
компенсационной обмотке и обмотке дополнительных полюсов генератора и осу-
ществляет непрерывную отрицательную связь по току якоря.
Схема управления электроприводом подъема приведена на рис. 5—6.
Отмотка независимого возбуждения ОВНГП генератора разделена на две рав-
ные полуобмотки. Питание ее осуществляется по мостовой схеме от магнит-
ного усилителя УМСП. Все обратные связи воздействуют не на вход силового
магнитного усилителя, а на вход промежуточного магнитного усилителя ПМУП.
Для уменьшения постоянной времени первого каскада в качестве промежуточ-
ного усилителя в схеме используется магнитный усилитель с повышенной часто-
той питающего напряжения. Для питания промежуточных усилителей исполь-
зуется статический преобразователь частоты. На экскаваторах ЭШ-15/90А
с № 26 по № 50 применяется магнитный преобразователь частоты ПЧМ с выход-
ной частотой 450 Гц, на экскаваторах ЭШ-15/90А, начиная с № 51, — полупро-
водниковый преобразователь частоты ППЧ с выходной частотой 1000 гц.
Основными узлами схемы управления являются узел отрицательной связи
по току якоря с потенциометрической отсечкой, узел отрицательной обратной
связи по напряжению и узел задающей обмотки.
Недостатком рассмотренных выше схем с потенциометрической отсечкой
по току является питание потенциометров отсечки разных приводов от одного
источника питания — сети 110 В. При таком питании силовые цепи всех трех
приводов оказываются электрически связанными через генератор собственных
нужд и возможные в процессе эксплуатации замыкания на землю при небла-
гоприятных условиях могут нарушать работу узлов токоограничения, вызывая
тяжелые аварии. В рассматриваемой схеме этот недостаток устраняется пита-
нием потенциометров сравнения СУП1, СУТ1 и СУВ1 от индивидуальных
источников питания — выпрямителей ВКП (ВКТ и ВКВ) и трансформаторов
ТОП (ТОТ и ТОВ).Дяя уменьшения пульсаций напряжения отсечки на выход
каждого выпрямителя включен емкостный фильтр (КСП5 на рис. 5-6).
191
Рис. 5-6. Схема управления электроприводом подъема экскаватора ЭШ-15/90А
Отрицательная связь по току якоря с потенциометрической отсечкой
осуществляется с помощью одной из обмоток управления промежуточного
усилителя (ПМУШУ на рис. 5—6). Для уменьшения остаточных токов при
наложенных тормозах и для увеличения надежности токоограничения при
срабатывании защиты обмотка токовой связи с помощью замыкающих контактов
контактора ПП2 при наложении тормозов или срабатывании любой из защит
через сопротивление СДП6 подключается непосредственно к участку якорной
цепи, минуя токовый потенциометр СУШ, что обеспечивает осуществление не-
прерывной связи по току. Коэффициент этой связи можно регулировать, изме-
няя величину сопротивления СДП6. С помощью КС-цепочки, состоящей из со-
противления СДП14 и емкости КФП5, в сигнале, поступающем на обмотку
жесткой отрицательной связи по току ПМУШУ, содержится также составля-
ющая, пропорциональная производной тока якоря (см. § 4-3). Жесткая отри-
цательная связь по напряжению в схеме привода подъема осуществляется с по-
мощью обмотки ПМУПШ. В сигнале, поступающем на обмотку ПМУПШ,
также содержится составляющая, пропорциональная скорости изменения на-
пряжения генератора благодаря емкости КСП2, шунтирующей часть добавоч-
ного сопротивления СДП4 в цепи обмотки жесткой отрицательной связи по на-
пряжению.
Узел задающей обмотки получает питание от сельсинного командоаппарата
СК АП. На экскаваторах ЭШ-15/90А, начиная с № 51, предусмотрена возмож-
ность управления экскаватором из двух кабин (правой и левой). На схеме,
приведенной на рис. 5-6, показаны два сельсинных командоаппарата: СКАЛ,
установленный в правой кабине, и СК АП А, установленный в левой кабине.
Переключение цепей управления для работы машиниста в правой или левой
кабине производится с помощью универсального переключателя УПГ.
Трехфазная вторичная обмотка сельсина нагружена на потенциометр,
состоящий из сопротивлений СБП4 и СБП5. С помощью выпрямителей ВКПЗ
и ВКП4 осуществляется однополупериодное выпрямление. Емкости КФПЗ
и КФП4 служат для сглаживания пульсаций выпрямленного напряжения.
На первичную однофазную обмотку сельсина напряжение питания 127 В подается
от трансформатора 380/127 В при включении блок-контакта контактора ПП2
одновременно с подачей напряжения на обмотки возбуждения двигателей от ге-
нератора собственных нужд. При спуске ковша осуществляется ослабление
поля двигателя с помощью контактора ПП1, при отпадании которого в цепь
обмотки возбуждения двигателей вводится часть добавочного сопротивления
СДП5. Скорость спуска, при котором осуществляется ослабление поля, конт-
ролируется с помощью реле РННП, подключаемого на напряжение генератора
через диод ВКП1 и добавочное сопротивление СДП19. При работе на подъем
ослабление поля исключается благодаря наличию диода в цепи обмотки реле
РННП.
Механические характеристики электропривода подъема показаны на рис.5-7.
Так как основная структура данной схемы полностью аналогична рассмот-
ренной выше схеме управления приводом подъема экскаватора ЭШ-10/60,
то и статические характеристики, соответствующие крайним и нулевому поло-
жениям сельсинного командоаппарата, здесь имеют тот же вид, что и характе-
ристики 4п, 4с и 0, соответствующие четвертому и нулевому положениям ко-
мандоконтроллера на рис. 5-5. Различие лишь в том, что благодаря большему
общему коэффициенту усиления системы жесткость рабочего участка стати-
ческой характеристики и характеристики удержания ковша здесь выше. По-
этому специальное усиление коэффициента жесткой отрицательной связи по
13 Заказ 1127
193
напряжению генератора при нулевом положении сельсинного командоаппарата
в данной схеме отсутствует. Отсутствует и соответствующая характеристика,
обозначенная на рис. 5-5 индексом 0. Что касается характеристик, соответст-
ствующих промежуточным положениям сельсинного командоаппарата, то их
может быть бесчисленное множество, и они заполняют всю площадь, ограни-
ченную характеристиками соответствующими крайним положениям командо-
аппарата на рис. 5-7.
Здесь так же как и в схеме, приведенной на рис. 5 4, спуск ковша на про-
Рис. 5-7. Статические характеристики элек-
тропривода подъема экскаватора ЭШ-15/90А
межуточных положениях командоаппарата возможен как с полным, так и с ос-
лабленным полем в зависимости от пре-
дыдущего положения командоаппарата
и срабатывания реле РННП.
Кроме указанных выше основных
жестких и гибких обратных связей,
в схеме используются дополнительная
гибкая отрицательная связь по выход-
ному напряжению ПМУ, осуществля-
емая с помощью одной из обмоток
управления ПМУ (на рис. 5-6 —
ПМУПУ) п цепочки, состоящей из
сопротивления СДП1 и емкости КСГ14.
Иногда с помощью одной обмотки упра-
вления ПМУ осуществляют одновре-
менно две отрицательные обратные
связи по выходному напряжению ПМУ:
жесткую и гибкую. Обе связи служат
одной цели — уменьшению релейных
участков в характеристике «вход —
выход» ПМУ. При этом жесткая связь,
уменьшая коэффициент усиления ПМУ,
одновременно уменьшает и постоянную
времени, а гибкая связь — увеличивает
постоянную времени первого каскада.
Действие ряда защит в схеме, приведенной на рис. 5-6: максимальной то-
ковой, осуществляемой с помощью реле РТМП, защиты от повышения напря-
жения генератора, осуществляемой с помощью реле РТВП1 и РТВП2,
аналогично действию таких же защит в схеме, приведенной на рис. 5-4. При
срабатывании этих защит отключается питание цепей управления и накла-
дываются тормоза.
Реле РТВП1 и РТВП2, кроме основной функции защиты от повышения
напряжения генератора, защищают также магнитные усилители УМСШ
и УМСП2 от недопустимой перегрузки по току.
Реле защиты РТМП и РТВП действуют не непосредственно, а с помощью
промежуточного реле ПРП. Блок-контакты реле РТМП и РТВП включены
последовательно в цепь катушки реле ПРП, через блок-контакты которого,
в свою очередь, получают питание катушки контакторов ПП2 и ПП1 и электро-
магнита тормоза ЭТП.
Контакты реле защиты от обрыва поля возбуждения двигателей РОПП
включены непосредственно в цепь катушки тормоза ЭТП и в цепь питания пер-
вичной обмотки сельсина СКАП. При использовании сельсинного командо-
аппарата сложнее, чем в кулачковом командоконтроллере, осуществляется
194
контроль нулевого (нейтрального) положения командоаппарата. Здесь этот
контроль осуществляется с помощью размыкающих контактов специальных
микровыключателей СКАПВ, СК АПН (в правой кабине) и СКАПВ А, СК АПНА
(в левой кабине). Для защиты маломощных контактов микровыключателей от
подгарания служат цепочки R С — ЕРП1, СРП/, ЕРП2, СРП2.
Защита от переподъема ковша осуществляется с помощью командоаппарата
КАП- при приближении ковша к голове стрелы последовательно размыкаются
контакты командоаппарата КАП1, КАП2, КАП5 и КАП6, вначале снижая
скорость подъема ковша (при размыкании КАП1 и КАП2), а затем отключая
питание первичной обмотки сельсина (при размыкании КАП5) и накладывая
механический тормоз (при размыкании КАП6). Выведение ковша из опасной
зоны после срабатывания защиты производится с помощью реле РПНП,
которое, шунтируя контакты КАП, разрешает только спуск ковша, так
как реле РПНП остается притянутым, когда контакт СКАПН командо-
апиарата (СКАПНА — в левой кабине) замкнут, что имеет место лишь
в положении рукоятки командоаппарата «От себя», обеспечивающем спуск
ковша.
Схемой, приведенной на рис. 5-6, предусматривается также так называемая
координатная защита стрелы от опасного приближения ковша, осуществляемая
с помощью контактов микровыключателей УК1 и У КЗ (в схеме привода подъема)
и УК2 (в схеме привода тяги), принадлежащих к устройству защиты стрелы.
Это устройство часто называют также устройством защиты стрелы от растяжки,
так как опасное приближение ковша к стреле наступает именно в режиме
растяжки. Устройство координатной защиты стрелы реагирует на положение,
ковша относительно стрелы, измеряя (косвенным методом с помощью механи-
ческих передач) сумму длин подъемного и тягового канатов, не находящихся
на барабанах. При опасном приближении ковша к стреле последовательно
размыкаются контакты УК1, УК2 и У КЗ, что вызывает отпадание вспомога-
тельных контакторов КП1, КП2 и КПЗ. При отпадании контактора КП1 вво-
дятся добавочные сопротивления в цепи питания сельсинов подъема и тяги
и таким образом снижаются скорости перемещения подъемного каната «Вверх»
и тягового «На себя» и ограничивается скорость растяжки. Здесь следует
иметь в виду, что скорость растяжки, под которой будем подразумевать скорость
приближения ковша к стреле, зависит не только от скорости движения подъем-
ного и тягового канатов, но и от положения ковша относительно стрелы, причем
последняя зависимость нелинейна. Чем ближе ковш к стреле, тем больше ско-
рость его приближения к стреле, если полагать скорость движения подъемного
и тягового канатов постоянной.
При отпадании контактора КП2 в цепь задающей обмотки ПМУПП
вводится добавочное сопротивление и скорость перемещения подъема «Вверх»
снижается в еще большей степени. Одновременно с помощью размыкающего
контакта КП2, изменяющего направление тока в задающей обмотке ПМУ тяги,
производится автоматическое реверсирование привода тяги. Если движение
ковша по направлению к стреле продолжается, размыкается контакт УКЗ
и отпадает контактор КПЗ. При этом отключается питание сельсинов подъе-
ма и тяги и накладываются механические тормоза на привода подъема
и тяги
Выведение ковша из опасной зоны после срабатывания защиты произво-
дится с помощью реле РПНП (в схеме привода подъема) и РПВТ (в схеме при-
вода тяги), которые, шунтируя замыкающие контакты КПЗ в схемах соответ-
ствующих приводов, разрешают включение катушек электромагнитов тормозов
13*
195
ЭТП и ЭТТ и подают питание на первичные обмотки сельсинов подъема и тяги.
При этом возможен только спуск ковша и вытравливание тягового каната,
так как реле РПНП и РПВТ срабатывают только при установке рукояток
командоаппаратов подъема и тяги в положение «От себя».
Схема управления приводом тяги аналогична схеме привода подъема
и поэтому здесь не приводится. Небольшое отличие имеется в узле ослабления
поля: на приводе тяги ослабление поля двигателей производится не автомати-
чески, а машинистом с помощью кнопки на командоаппарате тяги, при этом
ослабление разрешается, как и на приводе подъема, только при достижении
определенной скорости движения привода в направлении «От себя». Напомним,
что двигатели тяги при установившемся движении на вытравливание тягового
каната работают в генераторном режиме.
Защита блоков наводки от опасного приближения ковша (защита от «пере-
тяги») производится в схеме привода тяги с помощью командоаппарата КАТ.
Действие этой защиты аналогично действию защиты от переподъема: контакты
командоаппарата КАТ, последовательно размыкаясь при приближении ковша
к блокам наводки, сначала снижают скорость движения тяги «на себя », а затем
отключают питание первичной обмотки сельсина. Выведение ковша из опасной
зоны производится с помощью реле РПВТ, упомянутого выше.
Схема управления четырехдвигательным электроприводом поворота экска-
ватора ЭШ-15/90А, приведенная на рис. 5-8, имеет ряд отличий от схем приводов
копающих механизмов.
Главное из этих отличий заключается в параллельно-последовательном
соединении якорных цепей двигателей. Как видно из рис. 5-8, якори двигате-
лей соединены попарно-последовательно и образуют две параллельные ветви,
получающие питание от одного генератора.
Четыре двигателя устанавливаются на поворотной платформе таким об-
разом, что два двигателя располагаются по правому борту и два — по левому.
В каждой из параллельной ветвей последовательно соединяются якори двига-
телей, расположенных по диагонали, т. е., например, якорь левого переднего
двигателя соединен последовательно с якорем правого заднего двигателя.
Такое соединение выполняется для создания наилучших условий демпфирова-
ния параметрически возбуждаемых резонансных колебаний, возникающих
в механизме поворота при вращении (см. § 1—5). Для выполнения этого послед-
него условия необходимо последовательно соединять якорп двигателей, коле-
блющихся синфазно. На экскаваторе ЭШ-15/90А расстановка двигателей у по-
воротных редукторов на поворотной платформе относительно венцовой шестерни
осуществляется таким образом, что двигатели, расположенные по диагонали,
колеблются синфазно и в противофазе с парой двигателей, расположенных по
другой диагонали.При указанном выше способе соединения в каждой параллель-
ной ветви оказываются двигатели, колеблющиеся синфазно, а в разных парал-
лельных ветвях — двигатели, колеблющиеся в противофазе.
При параллельном соединении двигателей одного механизма, работающих
на общий вал, т. е. принудительно имеющих одинаковую скорость вращения
и в общем случае несколько различные механические характеристики, необ-
ходимо введение в схему специального узла, выравнивающего токовые нагрузки
между параллельными ветвями.
В схеме, приведенной на рис. 5-8 для узла выравнивания используются
четыре однотактных магнитных усилителя. Для удобства комплектования
на экскаваторах ЭШ-15/90А в узле выравнивания применяются два серийных
реверсивных блока ПДД-1,5В, каждый-из которых состоит из двух однотактных
196
сдчз овпгв
Рис. 5-8. Схема управления электроприводом поворота экскаватора ЭШ-15/90А
усилителей УМ.ЗП 25,25. В узле выравнивания все усилители, составля-
ющие блоки ПДД-1,5В, собраны в нереверсивную схему. По одному усилителю
нз каждого блока выравнивания (БВ1 и БВП) подключены к зажимам добавоч-
ного сопротивления СДВ14 в цепи обмотки возбуждения двигателя ДВ1.
Второй из усилителей каждого из блоков выравнивания подключается к за-
жимам добавочного сопротивления СДВ15 в цепи обмотки возбуждения двига-
теля ДВ2. Отметим, что?'якори двигателей ДВ1 и ДВ2 находятся в разных
параллельных ветвях силовой цепи.
Сигнал задания обмотки управления блоков выравнивания получают при
наличии разности потенциалов между точками ЯЗ и Я4 в параллельных ветвях
силовой цепи. Эта разность потенциалов будет иметь место при неравенстве
токов в параллельных ветвях. На величину этой разности влияет также неоди-
наковость сопротивлений компенсационных обмоток и добавочных полюсов
двигателей ДВЗ и ДВ4. При наличии указанной разности потенциалов по об-
моткам управления обоих блоков выравнивания протекает ток. Для увеличения
коэффициента усиления блоков выравнивания по три обмотки управления
каждого блока соединены параллельно. Несмотря на то, что ток протекает
по обмоткам управления обоих блоков, в каждый момент времени работает
только один из блоков выравнивания, что обеспечивается с помощью обмоток
смещения ОСБВ1 и ОСБВП, подключенных на напряжение двигателя ДВЗ.
Благодаря наличию выпрямителей ВКВ7 и ВКВ9 в цепи обмоток смещения при
одном направлении вращения и соответственно полярности напряжения Г7яз
на зажимах якоря двигателя ДВЗ ток протекает по одной из обмоток смещения,
при другом направлении вращения и другой полярности напряжения БЯз ток
протекает по другой обмотке смещения. При протекании тока по обмоткам
ОСБВ1 или ОСБВП обеспечивается сильное отрицательное смещение, при
котором выходное напряжение соответствующего блока БВ1 или БВН близко
к нулю.
На обмотки управления блоков выравнивания подается не непосредственно
разность потенциалов между точками ЯЗ и Я4 силовой цепи, а напряжение,
снимаемое с потенциометров СПВ2 и СПВЗ, подключенных параллельно участ-
кам параллельных ветвей силовой "цепи, состоящим из компенсационных обмо-
ток и обмоток дополнительных полюсов двигателей ДВЗ и ДВ4. Такая схема
включения применена для того, чтобы обеспечить возможность получения нуле-
вого сигнала управления при скорости вращения, равной нулю. Соответству-
ющую настройку можно произвести в опыте короткого замыкания при отклю-
ченном возбуждении двигателей.
Встречное включение обмоток управления двух усилителей, входящих
в один блок выравнивания БВ1 или БВП, обеспечивает при протекании тока
управления увеличение напряжения одного из усилителей работающего блока
и уменьшение напряжения другого усилителя того же блока (рис. 5-9).
Рассмотрим работу узла выравнивания при неравенстве токов в параллель-
ных ветвях силовой цепи. Допустим, что при пуске привода поворота влево
ток в левой параллельной ветви больше чем в правой, и протекает снизу вверх
в направлении от ЯЗ к Я1 (направления э. д. с. генератора и э. д. с. двигателей
указаны стрелками). При этом потенциал точки ЯЗ ниже, чем Я4, и ток упра-
вления протекает справа налево в направлении, указанном стрелкой. Обмотки
управления работающего блока выравнивания (блока БВП, так как при ука-
занном направлении э. д. с. ецв ток смещения протекает по обмотке ОСБВ1)
включены таким образом, что обеспечивают уменьшение напряжения на сопро-
тивлении СДЫ4 и увеличение напряжения на сопротивлении СДВ15, что, в свою
198
очередь, приводит к увеличению тока и потока возбуждения двигателя ДВ1
и уменьшению тока и потока возбуждения двигателя ДВ2.
Соответственно указанным изменениям потоков возбуждения двигателей
э. д. с. двигателя ДВ1 увеличивается, а э. д. с. двигателя ДВ2 уменьшается,
в результате чего якорный ток в левой ветви силовой цепи уменьшается, а в пра-
вой ветви увеличивается, что в конечном счете приводит к уменьшению разности
токов в параллельных ветвях. Так как коэффициент усиления блока выравни-
вания сравнительно невелик, раз-
ность токов в параллельных ветвях
силовой цепи не может быть сде-
лана менее 10—15% /стоп.
При торможении (допустим,
после разгона влево) направление
тока главной цепи меняется на
противоположное, а направление
э. д. с. двигателей сохраняется
прежним. При этом в работе ос-
тается блок ВВП, так как поляр-
ность напряжения Uxs до полной
остановки двигателя не меняется.
Если предположить, что ток ле-
вой ветви силовой цепи при тор-
можении будет больше, чем пра-
вой, то направление тока управле-
ния изменится, так как потенциал
точки ЯЗ станет выше, чем потен-
циал точки Я4. Соответственно
поток возбуждения двигателя ДВ1
будет уменьшаться, а двигателя
ДВ2 — увеличиваться. Так как
при торможении величина тока
главной цепи определяется раз-
ностью э. д. с. двигателей и э. д. с.
генератора (при пуске — наобо-
рот), то уменьшение потока возбу-
ждения ДВ1 и увеличение потока
ДВ2 приведет к уменьшению тока
-120400-80 -so -40 20 0 20 40 SO 80 100 Fy,Л8
Рис. 5-9. Характеристика магнитных усилите-
лей блока выравнивания
в левой ветви силовой цепи и увеличению — в правой, т. е. опять, к вы-
равниванию токов.
Если предположить, что ток левой ветви силовой цепи при торможении
будет меньше, чем правой, то направление тока управления останется неиз-
менным (направление тока показано на рис. 5-8 сплошной стрелкой), что
приведет к увеличению потока возбуждения ДВ1, уменьшению потока воз-
буждения ДВ2 и опять к выравниванию токов силовой цепи.
Для выяснения причин использования двух блоков выравнивания (по од-
ному для каждого направления вращения) рассмотрим пуск привода поворота
вправо. При этом направления э. д. с. генератора и двигателей и тока в силовой
цепи меняются на противоположные, а величина тока в левой ветви силовой цепи
остается большей, чем в правой. Потенциал точки ЯЗ в этом случае выше по-
тенциала точки Я4, и поэтому ток в обмотках управления блока выравнивания
гакже меняет свой знак. Однако действие узла выравнивания необходимо
199
оставить таким же, как при пуске влево, так как для уменьшения разности токов
в параллельных ветвях следует увеличивать поток возбуждения двигателя ДВ1
и уменьшать поток возбуждения двигателя ДВ2. При изменении направления
тока управления это достигается благодаря запиранию блока БВП и введению
в действие блока БВ1 с помощью обмоток смещения, как было показано выше.
Действительно, при изменении полярности напряжения на зажимах двигателя
ДВЗ ток смещения протекает по обмотке ОСБВП, цепь обмотки ОСБВ1 заперта
благодаря наличию в ней выпрямителя ВКВ7.
Так как на всех приводах экскаватора ЭШ-15/90А для унификации исполь-
зуются генераторы одинаковой мощности и одинакового напряжения, на при-
воде поворота генератор недоиспользуется по напряжению. Для получения
напряжения генератора, необходимого для обеспечения номинальной скорости
вращения механизма поворота, вполне достаточно н. с., создаваемой независи-
мой обмоткой возбуждения генератора, при отключенной параллельной обмотке
и той же мощности силовых магнитных усилителей, от которых получает пита-
ние независимая обмотка в схемах приводов подъема и тяги.
В схеме, приведенной на рис. 5-8, параллельная обмотка генератора ис-
пользуется как источник сигнала, пропорционального скорости изменения
э. д. с. генератора devldt (см. § 4-3). Из-за недостаточного количества обмоток
управления ПМУ в схеме, приведенной на рис. 5-6, б, сигнал, пропорциональ-
ный deTjdt и снимаемый с потенциометра СДУЗ, подключенного на зажимы
параллельной обмотки генератора, подается на обмотку жесткой отрицательной
связи по напряжению генератора ПМУВП1 через сопротивления СДВ2 и
СУВ11. На ту же обмотку подается сигнал, пропорциональный второй произ-
водной э. д. с. генератора d-eJdB, получаемой вторичным дифференцированием
сигнала, пропорционального первой производной по э. д. с. с помощью цепочки
RC {СДВ2, КСВ2).
Та же обмотка управления ПМУ — ПМУBill используется в узле смяг-
чения реверса.
В § 4-4 была показана необходимость снятия излишних форсировок в про-
цессе торможения реверсом в схемах с линейной отрицательной связью по на-
пряжению. Действительно, непрерывная отрицательная связь по напряжению
обусловливает форсирование переходных процессов, причем форсировка
по н. с. усилителя наиболее значительна в процессе торможения ревер-
сом. В начале этого процесса суммарная н. с. на входе ПМУ почти в два
раза больше, чем в начале пуска. Это затрудняет ограничение тока
и ускорения (замедления) привода, вызывая опасные динамические нагрузки.
Поэтому в процессе торможения желательно уменьшать форсировки, ослабляя
действие отрицательной связи по напряжению генератора или даже изменяя
ее знак на противоположный, т. е. используя положительную связь по на-
пряжению.
Для управления работой узла реверса используются два реле РПВВ и
РПНВ, одно из которых срабатывает при повороте экскаватора вправо, другое—
влево. Срабатывание реле осуществляется с помощью замыкающих контактов
микровыключателей СКАВВ, СКАВН, установленных в сельсинном командо-
аппарате поворота (в левой кабине — СКАВВА, СКАВНА).
В режимах пуска и вращения с установившейся скоростью цепь сопро-
тивления СУВ6 разомкнута, так как в цепь замкнутого реверсивного контакта
РПВВ {РПНВ) включен вентиль ВКВ6 {ВКВ8), исключающий протекание тока
при данной полярности генератора. При торможении реверсом полярность
напряжения генератора сохраняется прежней, а реверсивные контакты пере-
200
ключаются и сопротивление СУВ6 подключается к точке а потенциометра
СУВЗ.
Рассматривая схему узла обратной связи по напряжению для режима
торможения реверсом, можно заключить, что при этом обмотка ПМУВЗ ока-
зывается включенной в диагональ моста, образуемого сопротивлениями габ,
г6в, СУВ6 и СДВ4. Подбором сопротивления СУВ6 можно в широких пределах
изменять обратную связь по напряжению. Так, если выбрать его из условия
га6
ГСУВ6=ГСДВ4~>
г бе
то мост уравновешен, напряжение на его диагонали равно нулю, т. е. обратная
связь по напряжению отключается. Если гсуве ^>т'сувб,т:о имеет место
только уменьшение коэффициента отрицательной связи по напряжению. При
гсуве <. г'сувб изменяется знак обратной связи — осуществляется поло-
жительная обратная связь по напряжению генератора, уменьшающая форси-
ровки по н. с. управления при торможении реверсом.
Рассмотренные отличия схемы привода поворота наиболее существенны.
Другие особенности этой схемы связаны с работой защитных цепей. Максималь-
ная токовая защита в связи с наличием двух параллельных ветвей силовой цепи
выполнена с помощью двух максимальных реле РТМВ1 и РТМВ2. Реле
РТМВ1 подключено на участок главной цепи, по которому протекает суммар-
ный якорный ток (ток якоря генератора). При превышении током якоря гене-
ратора стопорного значения на 20—30%, например в результате нарушений
в цепи отрицательной токовой связи, реле РТМВ1 срабатывает и с помощью
промежуточного реле ПРВ отключает питание первичной обмотки сельси-
нов. По причинам, рассмотренным выше при описании схемы ЭШ-10/60,
тормоза при срабатывании любой из защит на приводе поворота не накла-
дываются.
Значительное превышение стопорного значения якорного тока двигателей
может иметь место и в том случае, когда ток якоря генератора не превышает
стопорного значения. Это может быть при маловероятном, но принципиально
возможном обрыве цепи возбуждения у одного или у двух двигателей в одной
из двух параллельных ветвей силовой цепи (например, при обрыве цепи воз-
буждения у ДВ2 и ДВР). При этом, если обрыв произойдет при полной скоростп
вращения привода поворота, будет иметь место ударное короткое замыкание,
так как двигатели ДВ1 и ДВЗ, развивающие номинальную э. д. с. (в сумме
около 450 В), будут нагружены на участок цепи, состоящий из якорных и ком-
пенсационных обмоток и обмоток дополнительных полюсов четырех двигателей
(величина сопротивления этой цепи составляет не более 0,05 Ом). Отрицатель-
ная связь по току, реагирующая лишь на суммарный ток главной цепи и упра-
вляющая величиной потока возбуждения генератора, не будет ограничивать
величину тока якоря, замыкающегося по внутреннему контуру якорных об-
моток двигателей ДВ1, ДВЗ, ДВ4 и ДВ2. Если не принять специальных за-
щитных мер, то в худшем случае под действием многократно возросшего якор-
ного тока двигателей ДВ1 и ДВЗ произойдет резкое торможение поворотной
платформы с ускорением, значительно превышающим допустимое, возможна
поломка стрелы и валопровода механизма поворота и выход из строя всех че-
тырех двигателей.
Для защиты от указанных аварийных режимов служит реле РТМВ2.
При нормальной работе привода или даже при существенном (но одинаковом)
201
превышении стопорного значения якорными токами параллельных ветвей
и якорным током генератора — от чего должно защищать реле РТМВ1 — раз-
ность потенциалов между точками ЯЗ и Я4, к которым подключено реле РТМВ2,
близка к нулю. При указанном выше повреждении — обрыве поля возбуждения
у одного или у двух двигателей одной из параллельных ветвей — направление
якорного тока двигателей другой параллельной ветви изменяется на противопо-
ложное, и реле РТМВ2, оказываясь под значительной разностью потенциалов,
срабатывает и, отключая питание цепей возбуждения всех двигателей с
помощью контактора ПВ, предотвращает аварию.
Действие других видов защит в схеме привода поворота аналогично дей-
» ствию таких же защит в схемах приводов подъема и тяги: аналогично действует
защита от обрыва отрицательной связи по напряжению и от перегрузки магнит-
ных усилителей с помощью реле РТВВ1 и РТВВ2; контроль нейтрального
положения командоаппарата также осуществляется с помощью размыкающих
контактов микровыключателей СКАВВ и СКАВН' питание на первичные об-
мотки сельсина подается только при наличии тока возбуждения двигателей,
что контролируется с помощью замыкающих контактов реле РОПВ1 и
РОПВ2.
Дополнительной защитой в схеме привода поворота является (как и в схе-
мах управления поворотом на других экскаваторах) контроль положения лыж:
с помощью размыкающих контактов конечных выключателей ВК9 и ВК10
в цепи промежуточного реле ПРВ вращение не разрешается до подъема лыж
в верхнее положение.
§ 5-3. Схемы с одним силовым усилителем
Экскаватор Э К Г- 8 И
Генераторы подъема ГН, напора ГН и поворота ГВХ экскаватора
ЭКГ-8И имеют независимое возбуждение и получают питание от силовых
трехфазных магнитных усилителей МУП, МУН и МУВ, имеющих мостовую
схему включения нагрузки. Генераторы поворота и напора используются для
питания двигателей хода при передвижении.
Схема управления электроприводом подъема приведена на рис. 5-10.
Одной из важных особенностей схемы является раздельное несимметричное
управление каждым из двух однотактных магнитных усилителей, образующих
двухтактную схему.
Напомним, что во всех рассмотренных выше схемахупра вление уси-
лителями было симметричным — каждая обмотка управления двухтактного
магнитного усилителя составляется параллельным или, чаще, последова-
тельным соединением обмотки управления Одного однотактного усилителя
с такой же обмоткой управления другого усилителя (см. § 2-4). При этом н. с.
каждой из составляющих обмоток равны между собой, но относительно внутрен-
ней обратной связи по току направлены противоположно. Это дает основание
в схемах управления изображать обмотку управления двухтактного магнит-
ного усилителя аналогично обмотке управления ЭМУ, не показывая составля-
ющих ее обмоток отдельных дросселей.
В схеме экскаватора ЭКГ-8И в отдельных режимах осуществляется раздель-
ное управление каждым однотактным усилителем для получения специальных
результирующих характеристик двухтактного усилителя. Поэтому здесь
202
Рис. 5-10. Схема управления электроприводом подъема экскава-
тора ЭКГ-8И
в отличие от ранее рассмотренных схем указывается схема соединения обмоток
управления каждого однотактного усилителя.
Экскаваторная характеристика привода как в основном, так и в промежуточ-
ных положениях командоконтроллера обеспечивается совместным действием
трех главных узлов схемы: узла задающих обмоток МУП1-1 иМУП2 1, узла
отрицательной обратной связи по току якоря с обмотками МУП1-3 и МУП2-3,
узла обратной связи по напряжению генератора с обмотками МУП1-4 и МУП2-4.
Наиболее простой вид схема имеет при работе на основной характеристи-
ке — в третьем положении командоконтроллера и на характеристике удержа-
ния ковша — в нулевом положении
командоконтроллера.
При включении реле РП с помощью
автомата ВП напряжение питания за-
мыкающим контактом РП подается на
электромагнит тормоза ЭПВП и через
контакт К-2 командоконтроллера или
размыкающий контакт реле РН1 — на
контактор П2. Срабатывая, контактор
П2 закорачивает сопротивления СДПЗ
и СДП4 в цепях обмоток возбуждения
двигателей и увеличивает тем самым
токи возбуждения до их номинального
значения. Кроме того, реле РП, сраба-
тывая, своим замыкающим контактом
подготавливает цепь питания задающих
обмоток МУП1-1 и МУП2-1 и одновре-
менно другими замыкающими контак-
тами закорачивает сопротивление СДП7
в цепи обмоток смещения МУП2-2 и
МУП1-2, чем создается сильное отрица-
тельное смещение в нулевом положении
командоконтроллера, обеспечивающее
соответствующую зону нечувствитель-
ности в характеристике усилителя (см. рис. 2-39, б). Ширину зоны нечувствитель-
ности можно регулировать с помощью изменения н. с. отрицательного смещения,
изменяя величины добавочных сопротивлений СУП10 и СУ ПИ. В пределах зоны
нечувствительности напряжение усилителя при возрастании тока якоря и сиг-
нала отрицательной связи по току остается равным нулю. При этом (если пре-
небречь остаточной э. д. с. генератора) двигатели подъема работают в режиме
динамического торможения на сопротивление якорной цепи, и характеристика
имеет высокую жесткость, соответствующую жесткости естественной характе-
ристики в системе Г — Д (см. § 3-2). При перегрузках по току сигнал обратной
связи по току выводит усилитель из зоны нечувствительности и токоограниче-
ние начинает действовать, как и в схеме с потенциометрической отсечкой по
току (кривая 0 на рис. 5-11).
Если в нулевом положении командоконтроллера при разомкнутых контак-
тах К-4 и К-3 (см. рис. 5-10) цепь обмотки смещения получает питание через
параллельно соединяемые сопротивления СУШО и СУП11 и часть потенцио-
метров СУП8 и СУП9, то в рабочих положениях командоконтроллера при за-
мыкании контактов К-4 или К-3 цепь обмоток смещения оказывается включен-
ной в диагональ моста, образованного сопротивлениями СУШО и СУП11,
204
частью сопротивлений СУП9 или СУП8 и цепочкой из сопротивлений парал-
лельно включенных задающих обмоток и добавочных сопротивлений С УII4
и СУП5. При этом мост может быть уравновешен, а ток и н. с. смещения сде-
ланы равными нулю. На практике в рабочих положениях командоконтроллера
используют небольшие значения н. с. отрицательного смещения. Замыкание
на промежуточных положениях командоконтроллера контактов К-6 и К-5 не из-
меняют существенно величины н. с. смещения.
Задающая обмотка и обмотка смещения получают питание с диагонали
моста, два плеча которого образуют обмотки возбуждения двигателей, а два
других — добавочные сопротивления СДП5 и СДП6. При неизменном напря-
жении возбудителя, питающего сеть 110 В, напряжение на диагонали моста
возрастает при увеличении температуры машин и уменьшается при ее умень-
шении, частично компенсируя температурные изменения параметров схемы.
В третьем положении командоконтроллера при работе на подъем замкнуты
его контакты К-2 и К-4, а контакты К-5 и К-6 разомкнуты. Поэтому задающие об-
мотки МУШ-1 и МУП2-1 оказываются включенными параллельно через оди-
наковые сопротивления СУП4 и СУП5 и образуют обычную обмотку управле-
ния двухтактного магнитного усилителя, аналогично любой из рассмотренных
выше схем с МУ. При этом задающая обмотка создает н. с., направление кото-
рой соответствует работе привода на подъем.
Так как в узле обратной связи по току разомкнут контакт К-1, обмотки
МУШ-З и МУП2-3 включены симметрично, образуя обычную обмотку упра-
вления двухтактного магнитного усилителя. Эта обмотка осуществляет непре-
рывную отрицательную обратную связь по току якоря.
Наконец, так как вентиль ВЗ в цепи реле РН1 при работе на подъем запи-
рает эту цепь, то контакт РН1 в узле обратной связи по напряжению разомкнут
и обмотка, образуемая последовательным включением обмоток МУП1-4 и
МУП2-4, осуществляет жесткую отрицательную обратную связь по напряже-
нию генератора.
На основании сказанного можно заключить, что в крайних положениях
помандоконтроллера требуемое заполнение экскаваторной характеристики обес-
печивается нелинейностью характеристики усилителя, который в режиме хо-
иостого хода работает в режиме глубокого насыщения. Требуемая скорость
идеального холостого хода привода обеспечивается соответствующей величиной
тока возбуждения генератора в зоне насыщения магнитного усилителя, требуе-
мое значение стопорного тока — выбором коэффициента обратной связи по
току и соответствующей величиной задающей н. с. Отрицательная обратная
связь по напряжению несколько уменьшает крутизну падающего участка
характеристики, т. е. уменьшает ее заполнение. Необходимость ее использо-
вания в данном случае продиктована условиями ограничения тока при резких
стопорениях. Отрицательная обратная связь по напряжению в начале этого
процесса создает форсировки, ускоряющие изменение полярности напряжения
усилителя. Этим практически исключаются выбросы тока за стопорное значе-
ние в начале стопорения,обусловленные инерционностью контура токовой связи.
При работе на спуск в третьем положении командоконтроллера замкнут
контакт К-3, направление н. с. задающей обмотки изменяется на противополож-
ное. Контакт К-2 разомкнут и, когда напряжение генератора станет достаточным
для срабатывания реле РН1, контактор II2 отпадает, вводит добавочные со-
противления СДПЗ и СДП4 в цепи обмоток возбуждения двигателей и проис-
ходит ослабление поля двигателей. При этом напряжение, снимаемое с диаго-
нали моста, образованного обмотками возбуждения и добавочными сопроти-
205
влениями, возрастает. Размыкающий контакт реле РН1 Вводит добавочное
сопротивление СДП10 в цепь задающей обмотки. Величина этого добавочного
сопротивления подбирается таким образом, чтобы можно было не только ком-
пенсировать увеличение напряжения питания, но и дополнительно снизить
задающий ток и н. с. Одновременно несколько изменяется и величина н. с.
смещения, что, однако, не оказывает влияния на работу схемы, так как в ука-
занном режиме МУ работает в режиме насыщения. Одновременно замыкается
контакт РН1 в цепи сопротивления СУШ. Обмотка обратной связи по напря-
жению включается в диагональ моста, соотношение плеч которого СДП9 и
СУШ выбирается таким, чтобы получить положительную связь по напряжению
генератора.
Таким образом, основная характеристика на «Спуск» имеет меньший сто-
порный ток (за счет уменьшения задающей н. с.), более высокое заполнение
(вследствие действия положительной обратной связи по напряжению) и более
высокую скорость идеального холостого хода (из-за ослабления поля). Соот-
ветствующие характеристикиШп (подъем) и П1с (спуск) показаны на рис. 5-11.
Было бы неправильным полагать,что положительная связь по напряжению
при спуске вводится с целью увеличения заполнения экскаваторной характе-
ристики, в котором нет необходимости. Она введена для ограничения бросков
тока якоря в начале процессов торможения, которые вызываются усилением
поля двигателей после спуска с ослабленным полем и усиливались бы форсиров-
кой, создаваемой отрицательной связью по напряжению, если бы ее оставили
неизменной.
Статические характеристики, соответствующие генераторному режиму
работы при торможении после спуска для различных положений командоконт-
роллера при включенном реле РН1, показаны на рис. 5-11 штриховыми ли-
ниями (Гп, II'п и ПГп).
В промежуточных положениях командоконтроллера для получения экска-
ваторной формы механических характеристик используется несимметричное
управление двухтактным магнитным усилителем. Так, в первом положении
командоконтроллера при работе на подъем замкнут контакт 6 (см. рис. 5-10)
и токи, протекающие по задающим обмоткам МУП1-1 и МУП2-1, сильно
разнятся. Причиной несимметрии являются выпрямители ВВП1 и ВВП2,
которые включены таким образом, что задающая обмотка усилителя МУШ,
работающего на подъем, шунтируется контактом К-6 через вентиль ВВП1
и ток в ней во много раз уменьшается, в то время как вентиль ВВП2 заперт,
и по задающей обмотке размагничиваемого усилителя МУП2 протекает та-
кой же большой ток, что и при работе на основной характеристике
(рис. 5-12).
При холостом ходе, когда ток в якоре равен нулю, в схеме действуют только
задающие обмотки и обмотки отрицательной связи по напряжению МУП1-4
и МУП2-4. Результирующая н. с. каждого однотактного усилителя опреде-
ляется соотношениями: Fr = F3r— Fo в и F2 =-Fsi-]~ F0H.
Так как задающая н.с. F3% велика, Fo н не оказывает на усилитель МУП2
заметного влияния, и он остается полностью размагниченным. Результиру-
ющая н. с. Fx получается небольшой, и усилитель МУШ дает на выходе ток
возбуждения, необходимый для получения первой скорости холостого хода.
При нагрузке и возрастании тока якоря действие узла отрицательной об-
ратной связи по току в первом положении командоконтроллера также является
несимметричным, так как контакт К-1 замкнут и создает цепь для выпрямителей
ВПТ. Выпрямитель ВПТ1 шунтирует обмотку МУП1-3 усилителя, работа-
206
ющего на подъем, а обмотка МУП2-3 обтекается током, как и при работе на
основной характеристике.
Действие токовой связи на усилителе МУШ ослаблено настолько, что при
возрастании тока якоря результирующая н. с. и, следовательно, напряжение
на обмотке возбуждения генератора уменьшаются незначительно. Действие
токовой связи на другом усилителе проявляется полностью, но вследствие
большой величины н. с. F32 он остается размагниченным до тех пор, пока ре-
зультирующая н. с. не уменьшится до значений, соответствующих линейной
рабочей ветви его характеристики. Пока усилитель МУП2 размагничен, на-
Рис. 5-12. Характеристики магнитных усилителей при несимметричном управлении в схеме
экскаватора ЭКГ-8И:
а — в зависимости от задающей н. с» в опыте холостого хода генератора; б — в зависимости от н. с. упра-
вления в рабочих 8 к и н
пряжение на обмотке возбуждения, как выше было сказано, уменьшается не-
значительно, чем обеспечивается жесткий участок характеристики. При даль-
нейшем увеличении тока якоря усилитель МУП2 подмагничивается, его напря-
жение резко возрастает, а результирующее напряжение на обмотке возбуждения
быстро уменьшается. Этим обеспечивается падающий участок характери-
стики при токах, близких к стопорному (кривая In на рис. 5-11).
Во втором положении командоконтроллера при работе на подъем размы-
кается контакт К-6 (см. рис. 5-10) в узле задающих обмоток, а контакт К-5
остается замкнутым. При этом шунтирующее действие вентиля ВВП1 осла-
бляется сопротивлением СДП8, и и. с. F3l увеличивается. Это приведет к уве-
личению скорости идеального холостого хода, а стопорный ток изменится не-
значительно (кривая Пп на рис. 5-11). Аналогично работает схема и в проме-
жуточных положениях спуска (кривые 1с и Нс на рис. 5-11). Промежуточные
характеристики вблизи точки холостого хода имеют нелинейный участок,
имеющий более низкую жесткость, чем в области средних нагрузок. Эта
207
нелинейность обусловлена нелинейностью сопротивления вентилей ВПТ. При
малых токах сопротивление вентиля велико и токовая связь ослабляется в
меньшей степени, чем при более значительных нагрузках.
Требуемая жесткость характеристики привода, соответствующая нулевому
положению командоконтроллера, в данной схеме, как было отмечено выше, до-
стигается введением зоны нечувствительности усилителя за счет сильного от-
рицательного смещения. В тех случаях, когда на генераторе подъема исполь-
зуется противокомпаундная обмотка, жесткость характеристики в нулевом
положении командоконтроллера существенно снижается.
Максимальная токовая защита, осуществляемая в схеме привода подъема
с помощью реле МР1, воздействует при срабатывании на отключите блоки-
ровочного контактора РБ в схеме пуска синхронного двигателя (см. § 5-6). При
отключении РБ теряют питание задающая обмотка, обмотка смещения и вспо-
могательное реле РП (см. рис. 5-10). При отключении РП накладывается меха-
нический тормоз. При приближении ковша к голове стрелы путевой командо-
аппарат своим контактом КВП1 отключает цепь задающей обмотки на подъем
ковша. Одновременно с разрывом цепи задающей обмотки создается, как было
показано выше, сильное отрицательное смещение, что обеспечивает быстрое
гашение поля генератора.
В условиях эксплуатации экскаваторных приводов температура машин
изменяется в весьма широких пределах за счет изменений температуры окру-
жающей среды, а также нагрева при работе и охлаждения во время пауз.
Изменения температуры обмоток вызывают изменения их сопрбтивления, по-
этому величина сигнала на входе узла отрицательной связи по току при прочих
равных условиях зависит от температуры обмоток, с которых он снимается.
Это вызывает изменения установленного стопорного тока привода тем более
значительные, чем в более широких пределах изменяется температура.
Температурные изменения сопротивления шунтовой обмотки генератора
собственных нужд вызывают изменения напряжения бортовой сети 110 В.
Если не изменять сопротивления шунтового реостата, при холодных машинах
зимой напряжение сети будет на 5—10% больше, а при нагретых машинах ле-
том — на 5—10% меньше номинала. Это дополнительный фактор, вызывающий
изменения стопорных токов.
Если не принимать специальных мер, стопорный ток при холодных машинах
зимой может оказаться на 50—70% выше , чем при нагретых машинах летом.
Величина стопорного момента привода при этом будет изменяться в еще более
широких пределах, так как вследствие температурных изменений сопротивле-
ния обмоток возбуждения двигателей, их ток возбуждения и поток при холод-
ных машинах больше, чем при нагретых.
При эксплуатации напряжение генератора собственных нужд системати-
чески контролируется и поддерживается постоянным вручную экипажем ма-
шины, а некоторое уменьшение пределов изменения стопорного момента
достигается сезонной переналадкой приводов. Однако температурные измене-
ния стопорных токов и моментов в этих условиях остаются значительными,
и для их дальнейшего уменьшения в новых разработках схем экскаваторного
привода предусматриваются специальные устройства температурной компенса-
ции.
В схеме ЭКГ-8И предусмотрена компенсация температурных изменений
стопорных токов. Одно из средств компенсации было рассмотрено выше. Бла-
годаря тому, что цепь задающей обмотки получает питание с диагонали моста,
двумя плечами которого являются обмотки возбуждения двигателей с измеия-
208
ющимися при нагреве сопротивлениями, и. с. задающей обмотки при нагреве
поддерживается примерно постоянной. Дополнительным средством температур-
ной компенсации являются добавочные сопротивления СТ КП в цепи токовых
обмоток. Эти сопротивления выполнены из никелевой проволоки, обладающей
высоким температурным коэффициентом сопротивления ccK — 0,006 1/°С (ад =
= 0,004 1/°С для меди), и помещены в поток нагретого воздуха, выходящего
из генератора подъема. При изменении температуры машины соответственно
изменяется и температура сопротивлений СТ КП. Благодаря этому при повы-
шении температуры увеличение падения напряжения на входе токового узла
сопровождается соответствующим увеличением сопротивления контура токо-
вых обмоток, что уменьшает температурные изменения коэффициента обратной
связи по току в тем большей степени, чем больше доля сопротивлений СТКП
в суммарном сопротивлении своей цепи.
Общее действие рассмотренных устройств температурной компенсации
может быть подобрано таким, чтобы при уменьшении температуры имело место
уменьшение и стопорного тока. Так как уменьшение температуры сопрово-
ждается увеличением тока возбуждения двигателей и их потока, такой закон
изменения стопорного тока обеспечит в условиях эксплуатации примерное
постоянство стопорного момента привода
-^стоп ^Фхол-^стоп ХОЛ ^^ГОр^СТОП. гор,
где ФхолД>Фгор? ® -Дтоп, ХОЛ стоп, гор*
Схема электропривода напора — хода (рис. 5-13, а) принципиально ана-
логична схеме подъема. Отличия в схеме связаны только с тем обстоятельством,
что от генератора напора получает питание один из двигателей хода. Привод
напора — однодвигательный, поэтому цепь задающей обмотки получает пита-
ние не от мостовой схемы, а подключается параллельно обмотке возбуждения
двигателя напора. Кроме того, отсутствие ослабления поля позволяет исключить
из схемы контактор ослабления поля и реле напряжения РН1. В последнем
нет необходимости, так как при постоянном потоке двигателей ограничение
тока при торможениях обеспечивается схемой без применения положительной
связи по напряжению генератора. С помощью обмотки управления МУН1-4,
МУН2-4 осуществляется только жесткая отрицательная связь по напряжению
генератора. Ограничение максимального хода рукояти на приводе напора
осуществляется с помощью размыкающих контактов КВН1 и КВН2 конечных
выключателей, разрывающих цепь задающей обмотки соответственно при уборке
или выдвижении рукояти на опасное расстояние.
Задание режимов работы (напором или ходом) осуществляется с помощью
универсального переключателя УП1. При установке УП1 в левое положение
срабатывает контактор 2Л2, замыкая якорную цепь двигателя напора. Напря-
жение питания на командоконтроллер напора подается размыкающим контак-
том силового контактора 1Л2 хода, чем контролируется разомкнутое состояние
силовой цепи хода при работе напором. Стопорный ток на приводе напора
больше, чем на приводе хода, что обеспечивается увеличением задающей п. с.
при работе напором с помощью шунтирования сопротивления СДН11 в цепи
задающей обмотки замыкающим контактом силового контактора 2Л2. Для того
чтобы исключить возможность замыкания силовой цепи при наличии напряже-
ния на генераторе, что может привести к недопустимым броскам тока главной
цепи, переключение с напора на ход и обратно контролируется с помощью
реле минимального напряжения РНЗ. Для увеличения коэффициента возврата
реле РНЗ добавочное сопротивление СДНЗ, включенное последовательно
14 Заказ 1127
209
Рис. 5-13. Схема управления электроприводами напора
Из схемы
запуска СД
)да (а) и поворота — хода (б) экскаватора ЭКГ-8 И
14*
с обмоткой реле, шунтируется его же размыкающим контактом. Реле РНЗ сраба-
тывает при напряжении генератора, не превышающем 5—10% его номинального
напряжения, не разрешая при этом переключения силовой цепи. Действительно,
если при втянутом реле РНЗ произвести переключение УП1, то соответству-
ющий силовой контактор отпадает, однако другой не включится, пока не отпа-
дет реле РНЗ и его размыкающий контакт не создаст цепи для питания катушки
соответствующего силового контактора. Такой же принцип контроля переклю-
чения в силовой цепи используется и на других экскаваторах, в частности
в схеме привода поворота — хода экскаватора ЭКГ-4,6 (см. § 5-2).
При замыкании якорной цепи двигателя хода с помощью контактора 1Л2
теряет питание командоконтроллер напора и получает питание командоконтрол-
лер хода. Все контакты двух командоконтроллеров подключены параллельно
ДРУГ ДРУГУ- Поэтому статические характеристики и работа схемы для напора
и хода полностью аналогичны. Изменяются лишь параметры статических
характеристик. В режиме хода меньше стопорный ток благодаря уменьшению
задающей н. с. и больше напряжение холостого хода благодаря увеличению
максимального значения тока возбуждения генератора. Последнее достигается
уменьшением балластных сопротивлений в цепи нагрузки магнитного усили-
теля с помощью контактора ШХ2, подключающего параллельно балластным
сопротивлениям СБН сопротивления СБХ. Контакторы ШХ2 и 1Л2 включаются
одновременно после срабатывания контактора ШХ1, подающего напряжение
на обмотку возбуждения двигателя хода.
Максимальная токовая защита в схеме привода напора — хода осуще-
ствляется с помощью последовательных токовых теле МР2 и МР5.
Особенности схемы управления электроприводом поворота — хода (см.
рис. 5-13, б) обусловлены специфическими требованиями, предъявляемыми
к механизму поворота, а также питанием от генератора поворота одного из
двигателей хода. Все блокировки, связанные с переключением с двигателей
поворота на двигатель хода, выполнены так же, как и в схеме напора — хода.
Задание режимов работы поворотом или ходом производится универсальным
переключателем УП1.
Контроль переключений в силовой цепи осуществляется с помощью реле
минимального напряжения РН2. Питание контроллеров поворота или хода
осуществляется через блокировочные контакты силового контактора 1Л1
якорной цепи двигателя хода. Изменение параметров статических характеристик
при переходе с поворота на ход (стопорный ток и напряжение холостого хода
в режиме хода меньше, чем в режиме вращения) осуществляется введением
добавочного сопротивления в цепь задающей обмотки и увеличением балластных
сопротивлений в цепи нагрузки магнитных усилителей. Увеличение балластных
сопротивлений происходит при отпадании контактора ШХ, разрывающего цепи
сопротивлений СБВ, подключенных параллельно балластным сопротивлениям
СБВХ, в режиме поворота.
Существенное отличие схемы управления приводом поворота связано
с использованием в этой схеме не отрицательной, а положительной связи по
напряжению генератора с критическими параметрами. Связь по напряжению
осуществляется с помощью обмоток управления МУВ1-4, МУВ2-4-, никаких
изменений коэффициента этой связи или ее знака по положениям командокон-
троллера не производится. Использование положительной связи с критическими
параметрами связано с желательностью получения равноускоренного протека-
ния переходных процессов привода поворота при нулевой жесткости участка
токоограничения статической характеристики (см. § 4-5).
электропривода поворота экскаватора
ЭКГ-8И
Другой особенностью схемы привода поворота — хода экскаватора ЭКГ-8И
является симметричное управление однотактными магнитными усилителями,
образующими двухтактную схему на всех положениях командоконтроллера.
В этой схеме никаких переключений или шунтирования в узле токовой
связи не производится. Поэтому на всех положениях командоконтроллера
коэффициент токовой связи остается неизменным. По положениям командокон-
троллера изменяется лишь задающая н. с. В I и II положениях командокон-
троллера, когда замкнуты контакты
К-6 и К-5, цепь задающей обмотки
МУВ2-1, МУВ1-1 шунтируется частью
или всем сопротивлением СДВ8.
В III положении командоконтроллера,
когда контакты К-6 и К-5 разомкнуты,
цепь задающей обмотки ничем не шун-
тируется, и задающая н. с. возрастает.
Величина задающей н. с. на всех
положениях командоконтроллера обе-
спечивает при отсутствии тока главной
цепи работу магнитных усилителей на
насыщенных участках своих характери-
стик. Соответственно скорость идеаль-
ного холостого хода в зависимости от
положения командоконтроллера не из-
меняется, а величина стопорного тока
изменяется пропорционально измене-
нию задающей и. с.
Статические характеристики при-
вода поворота показаны на рис. 5-14.
Требуемая жесткость статической характеристики в нулевом положении коман-
доконтроллера здесь, так же как на других приводах, обеспечивается с помощью
сильного отрицательного смещения. При этом и. с. отрицательного смещения
определяет величину максимального тока в нулевом положении командокон-
троллера независимо от величины стопорного тока в других положениях коман-
доконтроллера. Чтобы бесполезно не загружать электропривод поворота зна-
чительным током в процессе копания, вызывающим дополнительный нагрев
электрических машин, величина максимального тока в режиме поворота умень-
шается благодаря уменьшению н. с. отрицательного смещения, что достигается
введением в режиме поворота добавочного сопротивления СДВ14 в цепь обмотки
смещения МУВ2-2, МУВ1-2 размыкающим контактом силового контактора 2Л1.
Максимальная токовая защита в схеме привода поворота — хода осуще-
ствляется с помощью последовательных токовых реле MP3 и MP4.
§ 5-4. Схемы подчиненного регулирования
А. Схемы Г— Де МУ
Экскаватор ЭШ-10/70А
Наиболее простой и в то же время эффективной реализацией опти-
мальной структуры экскаваторных электроприводов (см. § 3-6) является,
в частности, схема управления электроприводами основных механизмов экска-
ваторов НКМЗ (ЭШ-10/70А и ЭШ-5/45М).
213
На главных приводах этих экскаваторов при использовании системы Г-Д
применена двухконтурная система подчиненного регулирования тока и напря-
жения двигателя в сочетании с критическим самовозбуждением генератора.
В этой схеме в соответствии с оптимальной структурой, рассмотренной в § 3-6,
контур регулирования тока (момента) двигателя подчинен контуру регулиро-
вания напряжения двигателя.
Такие же схемы, как уже было отмечено выше, применяются трестом Энерго-
уголь для модернизации целого ряда экскаваторов УЗТМ и НКМЗ (ЭШ-14/75,
ЭШ-15/90, ЭШ-10/60, ЭШ-6/60). В качестве регуляторов напряжения во всех
этих схемах применяются магнитные усилители промышленной частоты. Регу-
Рис. 5-15. Структурная схема управления главными приводами по системе
Г—Д с критическим самовозбуждением генератора и подчиненным регулиро-
ванием параметров электропривода
лирование напряжения двигателя осуществляется с помощью нелинейного
блока PH, выполненного на двухтактных МУ типа БД2ТА5. Блок PH включен
на вход звена ограничения 30, выполненного на двух силовых однотактных
МУ типа УМЗП. В данной реализации оптимальной структуры, показанной
на рис. 5-15, функции звена ограничения 30 осуществляет возбудитель генера-
тора — силовой магнитный усилитель. Функции интегрального регулятора
тока в данной реализации выполняет генератор, обладающий характеристикой
интегрирующего звена благодаря использованию критического самовозбу-
ждения.
В динамике при постоянной величине напряжения, приложенного к обмотке
независимого возбуждения генератора с критическим самовозбуждением, обла-
дающего характеристикой интегрирующего звена, обеспечивается принципиаль-
ная равномерность всех переходных процессов. Кроме того, так как в данной
реализации возбудитель, имеет характеристику звена ограничения, при больших
нагрузках, когда возбудитель работает на линейном ненасыщенном участке
характеристики, ограничивается момент двигателя, а при малых нагрузках,
когда возбудитель работает на насыщенном участке характеристики, благодаря
ограниченному запасу по напряжению силовых МУ, ограничивается ускорение.
Схемы управления главными приводами экскаватора ЭШ-10/70А выполнены
в соответствии со структурной схемой, приведенной иа рис. 5-15.
214
Схема управления электроприводом подъема ЭШ-10/70А приведена на
рис. 5-16. Здесь силовые магнитные усилители МУП, выполняющие в соответ-
ствии с рис. 5—15 роль звена ограничения, осуществляют управление полем
генератора с критическим самовозбуждением, питая обмотку независимого
возбуждения генератора ОВНГП, собранную по мостовой схеме. Сопротивление
цепи параллельной обмотки возбуждения генератора ОВПГП устанавливается
равным критическому. Обмотка управления силового магнитного усилителя
ОТМУП осуществляет жесткую непрерывную отрицательную связь по току,
действующую в переходных процессах с отсечкой. Действительно, в легких
переходных процессах при малых нагрузках, например при пуске на спуск
ковша, токовая связь фактически не .действует, так как магнитный усилитель
работает на насыщенном участке, выполняя роль звена ограничения.
В тяжелых переходных процессах при больших нагрузках, например
при пуске на подъем ковша, когда токовая связь выводит магнитный усилитель
на линейный ненасыщенный участок характеристики, осуществляется ограни-
чение тока.
Задающая обмотка силового магнитного усилителя ОЗМУП получает
питание от блока двухтактных магнитных усилителей БНП, выполняющего
в соответствии со схемой рис. 5-15 роль регулятора напряжения.
Блок БНП имеет три обмотки управления: обмотку жесткой отрицательной
обратной связи по напряжению генератора ОНБНП, обмотку жесткой положи-
тельной обратной связи по току якоря ОТБНП и задающую обмотку ОЗБНП,
величина и направление тока в которой изменяются с помощью контактов
командоконтроллера.
В четвертом положении командоконтроллера при работе на подъем замкнуты
контакты К-1, К-5, К-4 и К-3. При этом задающая обмотка ОЗБНП создает
наибольшую н. с., достаточную для глубокого насыщения БНП.
В процессе пуска привода, пока напряжение генератора и скорость двига-
теля не достигнут значений, близких к установившимся, регулятор напряжения
БНП насыщен и выдает постоянный задающий сигнал на вход МУП. Контур
регулирования тока стремится поддержать значение тока, близкое к стопор-
ному. Расхождение между значениями динамического и стопорного токов опре-
деляется, как было показано в гл. 4, инерционностью контура регулирования
тока — в данном случае в основном постоянной времени возбуждения генера-
тора и коэффициентом усиления токового узла. Когда скорость двигателей при-
ближается к установившемуся значению, отрицательная связь по напряжению
выводит блок БНП на ненасыщенный линейный участок характеристики.
Вступая в работу, контур регулирования напряжения стремится поддер-
жать значение напряжения на двигателях, равное заданному, компенсируя
с помощью положительной связи по току и отрицательной связи по напряжению
действие отрицательной связи по току, что, в свою очередь, эквивалентно фак-
тическому размыканию контура регулирования тока при работе регулятора
напряжения.
Подбирая коэффициент положительной связи по току, можно компенсиро-
вать действие не только отрицательной связи по току, но и других факторов,
снижающих напряжение на двигателях по мере роста нагрузки: реакции якоря
генератора, падения напряжения в главной цепи и т. п. Таким образом, на-
стройкой контура регулирования напряжения можно получить как полную
независимость напряжения на двигателях (или даже скорости двигателей) от
якорного тока при работе регулятора напряжения, так и сохранить слабую
зависимость между указанными величинами (якорным током и напряжением
215
Рис. 5-16. Схема управления электроприводом подъема экскаватора
ЭШ-10/70А
двигателя), т. е. можно обеспечить любую требуемую жесткость рабочего
участка статической характеристики. Практически в схемах управления всех
приводов, в том числе и привода подъема, получают астатическое регулирование
напряжения, а не скорости двигателей, так как на рабочих участках всех ста-
тических характеристик, соответствующих любому положению командокон-
троллера, а особенно — нулевому, т. е. на характеристике удержания ковша,
желательно иметь некоторое падение скорости с ростом нагрузки.
Соответствующие механические характеристики привода подъема экскава-
тора ЭШ-10/70А показаны на рис. 5-17, а.
Рис. 5-17. Статические характеристики электроприводов экскаватора ЭШ-10/70А:
а — подъем; б — поворот
Напомним, что при использовании критического самовозбуждения при
ненасыщенном генераторе напряжение и ток независимой обмотки в установив-
шемся режиме близки к нулю (см. рис. 2-12, а). Отличие тока независимой
обмотки от нуля определяется при этом наличием петли гистерезиса
(см. рис. 2-12, в) и реакцией якоря. Соответственно выходной (ток независимой
обмотки возбуждения ОВНГП) и входной (результирующая н. с. управления)
сигналы на силовых МУ близки к нулю. Только при насыщенном генераторе
(рис. 2-12, а), что соответствует IV положению командоконтроллера, ток неза-
висимой обмотки может иметь значительную величину. При этом следует отме-
тить, что на насыщенном участке своей характеристики генератор будет уже
не интегрирующим, а обычным инерционным звеном, причем насыщенному
участку характеристики соответствует существенно меньшая инерционность
генератора.
Уравнение н. с. на входе силовых МУ при ненасыщенном генераторе
^У(МУ) = ^ОЗ(МУ) — ^ОТ(МУ) 0, (5-1)
где /оз (МУ)" — н. с. обмотки ОЗМУП, сигнал на выходе БНП-, Fqt (МУ) —
н. с. отрицательной связи по току.
217
С ростом нагрузки увеличивается значение якорного тока и и. с. Fo^ (КУ).
Соответственно растет и н. с. Fos (му> до тех пор, пока БНП не насыщен.
Когда БНП насыщается, размыкая тем самым контур регулирования напряже-
ния, н. с. Л’оз (Му) достигает своего максимального значения Fv3 (mas), а ток
якоря — стопорного значения 7СТОП. После насыщения БНП на вход МУП
поступает постоянный задающий сигнал Fo3 (1Т1аХ), и контур регулирования
тока, вступая в работу, поддерживает значение якорного тока, равное задан-
ному стопорному значению, обеспечивая благодаря наличию интегрирующего
звена (генератора с критическим самовозбуждением) в контуре регулирования
тока полную независимость тока от скорости, т. е. нулевую жесткость участка
токоограничения (см. рис. 5-17, а).
Так как в схеме рис. 5-16 максимальный выходной сигнал БНП F(l-,> (max)
на всех положениях командоконтроллера имеет одинаковую величину, а коэффи-
циент отрицательной связи по току неизменен, то и величина стопорного тока
по положениям командоконтроллера также не меняется (см. рис. 5-17, а).
В режиме идеального холостого хода, когда ток якоря равен нулю, выход-
ной, а следовательно, и входной сигналы регулятора напряжения БНП при
ненасыщенном генераторе должны быть равны нулю. Действительно, в этом
случае н. с. независимой обмотки и н. с. управления силовых МУ Fy (МУ),
как было показано выше, близки к нулю (см. рис. 2-12, а). А так как н. с. отри-
цательной связи по току F0T (МУ) в этом режиме равна нулю, то должен быть
равен нулю и выходной сигнал БНП Аоз(МУ) (см (5-1)]. Поэтому уравнение
н. с. на входе БНП в режиме идеального холостого хода будет иметь вид:
f’y(BHn) = FОЗ(БНП) &ОН(БНП) == ^ОЗГБНП) — ^ОН^г 0. (5-2)
На IV положении командоконтроллера в режиме холостого хода генератор
работает на насыщенном участке характеристики, т. е. Fy(My) >0, соответ-
ственно Fy (БНП) > о И Боз (БНП) > Fan (БНП)-
Из (5-2) следует, что, изменяя н. с. задающей обмотки регулятора напряже-
ния БНП, можно получать любые необходимые значения напряжения генера-
тора и скорости идеального хода.
В схеме, приведенной на рис. 5-16, ток и н. с. задающей обмотки ОЗБНП
изменяются ступенями при введении в цепь задающей обмотки участков доба-
вочного сопротивления СД119. Соответственно получаем семейство механиче-
ских характеристик (1п—4п при работе на подъем и 1с—4с при работе на
спуск), показанных на рис. 5-17, а с регулированием скорости идеального
холостого хода по ступеням командоконтроллера и неизменным значением
стопорного тока. Для увеличения скорости спуска ковша так же, как и во всех
рассмотренных выше схемах, осуществляется ослабление поля двигателей
подъема. Контроль ослабления поля осуществляется аналогично рассмотрен-
ному выше (см. § 5-2) с помощью поляризованного реле РНП, срабатывающего
только при работе на спуск и при напряжении генератора, составляющем 80—
85% от значения, соответствующего IV положению командоконтроллера.
Значение стопорного момента при ослабленном поле двигателей уменьшается
пропорционально уменьшению магнитного потока двигателей (см. рис. 5-17, а).
В нулевом положении командоконтроллера равны нулю н. с. задающей
обмотки БНПБоз (бнп) и в соответствии с (5-2) н. с. £Он (бнп)- При этом контур
регулирования напряжения стремится поддержать напряжение генератора
также равным нулю, что обеспечивает высокую жесткость характеристики
удержания ковша (кривая О на рис. 5-17, а). При необходимости, как уже было
218
отмечено выше, жесткость характеристики удержания может быть повышена
изменением коэффициента положительной связи по току.
Обмотка ОНБНП в схеме, приведенной на рис. 5-16, осуществляет не
только жесткую отрицательную связь по напряжению генератора, но одновре-
менно и гибкую отрицательную связь по э. д. с. генератора (см. § 4-3 и 5-2).
Действительно, в переходных процессах при изменении потока главных полю-
сов в обмотке ОВПГП наводится э. д. с., пропорциональная скорости измене-
ния магнитного потока главных полюсов или пропорциональная производной
э. д. с. генератора dejdt. Соответственно в н. с. обмотки ОНБНП содержится
составляющая, пропорциональная dejdt. Перемещая точку подсоединения цепи
обмотки ОНБНП по добавочному сопротивлению в цепи параллельной обмотки
С103, можно изменять коэффициент гибкой отрицательной связи по э. д. с.
генератора (см. § 5-2). Величина коэффициента гибкой связи подбирается таким
образом, чтобы избежать перерегулирования по скорости, что, как известно,
является необходимым требованием к приводу подъема (§ 1-3), и в то же время
получить устойчивую работу системы управления.
Простота схемы токового узла позволяет использовать весьма простой
и эффективный способ компенсации температурных изменений стопорных токов.
Добавочное сопротивление СТКП в цепи обмотки ОТМУП выполнено из нике-
левой проволоки, обладающей высоким температурным коэффициентом сопро-
тивления. Это сопротивление устанавливается в поток нагретого воздуха,
выходящего из генератора, поэтому при возрастании температуры машин сопро-
тивление контура токовой обмотки увеличивается, компенсируя соответству-
ющее увеличение сопротивления участка якорной цепи, с которого снимается
сигнал отрицательной связи по току.
Для устранения зависимости стопорного тока от напряжения сети перемен-
ного тока блок БНП получает питание от стабилизатора напряжения.
Действие основных видов защит в схеме привода подъема ЭШ-10/70А ана-
логично действию таких же защит в схемах управления приводами экскаваторов
ЭШ-15/90А, ЭШ-10/60 и т. и. (см. § 5-2).
В схеме предусмотрены максимальная защита (реле РМЩ и защита от
обрыва поля (реле РОПП), которые воздействуют на цепь контактора КПП.
При срабатывании защит или при отключении универсального переключателя
У ПН контактор КПП отпадает, отключая электромагнит тормоза ЭВП (накла-
дывается тормоз) и контактор КСП. Последний своими силовыми контактами
вводит в цепь обмотки самовозбуждения генератора добавочное сопротивление
С103, что способствует быстрому гашению поля генератора и ограничению тока
якоря при аварийных режимах. Одновременно замыкающий контакт КПП раз-
рывает цепь, шунтирующую нулевое положение командоконтроллера, и запре-
щает тем самым подачу задающего сигнала при срабатывании защит.
При приближении ковша к голове стрелы последовательно размыкаются
контакты КАП1 и КАП2 командоаппарата защиты от переподъема ковша.
При размыкании контакта КАП1 в цепь задающей обмотки вводится добавоч-
ное сопротивление СД113, и скорость подъема снижается примерно вдвое.
При этом спуск ковша возможен на полной скорости благодаря тому, что при
установке командоконтроллера в положении спуска сопротивление СД113
шунтируется выпрямителем В12. Если после размыкания контакта КАП1
подъем ковша продолжается, размыкается контакт КАП2, отключая контактор
КПП. При этом теряет питание задающая обмотка ОЗБНП и. происходит тор-
можение привода. Одновременно КПП отключает контактор КСП, который
вводит добавочное сопротивление в цепь обмотки самовозбуждения, что
219
существенно сокращает путь, проходимый ковшом при торможении, и наклады-
вает механический тормоз.
Защита стрелы от растяжки на некоторых образцах экскаваторов ЭШ-10/70А
производится с помощью координатного устройства защиты стрелы УЗС,
измеряющего косвенным методом с помощью измерения емкости системы ковш —
вспомогательная антенна, натянутой вдоль стрелы, расстояние ковша до
стрелы.
При опасном приближении ковша к стреле последовательно срабатывают
вспомогательные реле УЗС Р1 и Р2, замыкающие контакты которых, в свою
очередь, разрывают цепи промежуточных реле Р4 и Р5. Реле Р4, отпадая,
снижает скорость движения подъемного («Вверх») и тягового («На себя») каната
примерно вдвое, вводя добавочные сопротивления в цепи задающих обмоток
ОЗБНП и ОЗБНТ. При дальнейшем приближении ковша к стреле отпадает
реле Р5, разрывая цепи задающих обмоток ОЗБНП и ОЗБНТ подъема и тяги
(«На себя»), но сохраняя (при постановке командоконтроллеров подъема и тяги
в положение «От себя») возможность движения «На спуск» привода подъема
и «От себя» привода тяги. При исчезновении задающей н. с. подъема и тяги оба
привода интенсивно тормозятся под действием н. с. обмоток ОНБНП и ОНБНТ.
Интенсивность торможения значительно усиливается, а тормозной путь суще-
ственно уменьшается благодаря тому, что при срабатывании Р5 отпадают кон-
такторы КСП и КСТ, вводя добавочные сопротивления в цепи обмоток самовоз-
буждения генераторов подъема и тяги.
Замыкающий контакт ЗЛ в цепи контактора КПП запрещает работу при-
водом подъема при невключенных вентиляторах двигателей и генераторов.
Блок-контакт реле РН1 отключает схему управления и накладывает тормоз
при исчезновении напряжения питания магнитных усилителей.
Схема управления приводом тяги полностью аналогична схеме управления
приводом подъема и поэтому не приводится. Имеется лишь одно существенное
отличие схемы привода тяги, заключающееся в использовании слабой отрица-
тельной связи по напряжению генератора, осуществляемой с помощью обмотки
управления силового магнитного усилителя. Эта обратная связь используется
для повышения жесткости участка токоограничения, что, как известно, жела-
тельно в приводе тяги для снижения скорости, с которой начинаются возможные
стопорения, и следовательно, для ограничения усилий, возникающих в меха-
низме при стопорениях, а также для удобства управления процессом копания.
С той же целью, т. е. для уменьшения крутизны участка токоограничения, но
в основном для ускорения процесса гашения поля генератора при стопорениях
сопротивление цепи самовозбуждения в схеме привода тяги устанавливают
на 10—15% больше критического. Еще одно, второстепенное, отличие в схеме
привода тяги (так же, как и на других экскаваторах) заключается в том, что
здесь ослабление поля двигателей производится по желанию машиниста, с по-
мощью кнопки на командоконтроллере тяги, а не автоматически, как на приводе
подъема. Однако контроль величины и направления скорости двигателей при
ослаблении поля производится так же, как и на приводе подъема.
Схема управления электроприводом поворота (рис. 5-18) по структуре
и принципу работы аналогична схеме подъема. Отличия в схеме привода пово-
рота связаны с особенностями предъявляемых к этому приводу требований
и с использованием генератора поворота для питания двигателя шагания.
Управление приводами поворота и шагания осуществляется с помощью
отдельных обмоток регулятора напряжения БНВ: приводом поворота — с по-
мощью обмотки БНВО32, приводом шагания — с помощью обмотки БНВО31.
220
Рис. 5-18. Схема управления электроприводом поворота экскаватора
ЭШ-10/70А
Благодаря использованию отдельных обмоток просто осуществляется задание
различных значений напряжения генератора для поворота и шагания: макси-
мальное значение напряжения для привода поворота должно быть примерно
в 1,5 раза больше, чем для привода шагания.
Задание направления и величины скорости в режиме вращения осуще-
ствляется с помощью командоконтроллера ККВ, а в режиме шагания — с по-
мощью универсального переключателя УПЗ.
В режиме вращения, как и на других приводах, предусмотрено четыре зна-
чения скорости идеального холостого хода при двух направлениях вращения
в режиме шагания (два значения скорости в одном направлении и одно — в дру-
гом). В направлении опускания лыж, т. е. непосредственно для осуществления
самого процесса шагания, предусмотрено два значения скорости (I и VI положе-
ния переключателя УПЗ). В противоположном направлении, т. е. для некото-
рой подрегулировки’и установки лыж в нейтральное положение, предусмотрено
одно маневровое значение скорости.
Так как схема привода поворота-шагания по своей структуре полностью
идентична схемам других главных приводов и величина максимального выход-
ного сигнала регулятора напряжения БНВ, являющегося заданием для вели-
чины стопорного тока на всех положениях командоконтроллера ККВ и переклю-
чателя УПЗ неизменна, то величина стопорного тока по положениям ККВ и УПЗ
также не должна меняться. Однако величина стопорного тока при шагании
должна быть примерно вдвое больше, чем при вращении. Отсюда вытекает необхо-
димость изменения коэффициента отрицательной связи по току при переходе от
вращения к шаганию, и наоборот. Увеличение стопорного тока в режиме шагания
обеспечивается благодаря тому, что при размыкании якорной цепи двигателей
поворота и замыкании якорной цепи двигателя шагания сигнал токовой связи
снимается только с дополнительных полюсов и компенсационной обмотки генера-
тора, а в режиме вращения — с дополнительных полюсов и компенсационных
обмоток генератора и одного двигателя ДВ2. Для небольшого изменения соот-
ношения величин стопорных токов в двух режимах перемещают точку подсоеди-
нения цепи токовой обмотки по сопротивлению СТКВ1. Так как статические
нагрузки привода поворота незначительны, высокой жесткости рабочего участка
механической характеристики не требуется. Более того, она даже нежелательна,
так как при слишком жесткой характеристике привода хуже гасятся колебания
ковша при переходе к установившемуся режиму. Это, в свою очередь, может
приводить к увеличению колебаний ковша и связанных с ними дополнительных
динамических нагрузок стрелы в последующем переходном процессе. Поэтому
положительная обратная связь по току якоря в схеме поворота не предусма-
тривается. Механические характеристики приводов поворота и шагания пока-
заны на рис. 5-17, б.
Другой важной особенностью электропривода поворота является наличие
устройства, ограничивающего удары при выборе зазоров и замедляющего темп
нарастания тока якоря в переходных процессах. Анализ процесса выбора зазо-
ров и принцип работы узла выбора зазоров были подробно рассмотрены в § 1-3
и 4-3. В схеме привода поворота ЭШ-10/70А основным элементом устройства
выбора зазоров является блок БВЗ, представляющий собой такой же двух-
тактный магнитный усилитель, что и блок регулятора напряжения БНВ.
Основной управляющей обмоткой блока выбора зазоров БВЗ является обмотка
гибкой отрицательной обратной связи по э. д. с. генератора ОГСБВЗ. Эта
обмотка получает питание от специальной обмотки ОГСГВШ, намотанной на
главных полюсах генератора, э. д. с. которой пропорциональна производной
222
потока генератора и его э. д. с. (см. § 4-3). Сигнал гибкой отрицательной связи
по э. д. с. генератора усиливается блоком БВЗ и подается на обмотку управле-
ния силового усилителя О32МУВ. Выбором соответствующего коэффициента
гибкой обратной связи по э. д. с. генератора, действующей через блок БВЗ,
можно получить любой требуемый малый темп нарастания э. д. с. генератора
•и, следовательно, любую плавность выбора зазоров.
Сигнал, пропорциональный производной по э. д. с. генератора, подается
на обмотку ОГСБВЗ не непосредственно, а через потенциометр СД322, получа-
ющий питание с участка главной цепи через выпрямительный мост ВГ2. В цепь
обмотки управления ОГСБВЗ включен своей реверсивной диагональю выпря-
мительный мост ВГ1, необходимый для исключения подачи сигнала, пропорцио-
нального току якорной цепи, на обмотку ОГСБВЗ.
В процессе выбора зазоров, пока якорный ток имеет небольшую величину,
напряжение, создаваемое на потенциометре СД322, составляет не более 20%
э. д. с., наводимой на обмотке ОГСГВШ. Под действием разности напряжений
(снимаемого с обмотки ОГСГВШ и напряжения на сопротивлении СД322) по
обмотке ОГСБВЗ протекает ток, создающий н. с. управления, достаточную для
ограничения темпа изменения э. д. с. генератора заданной величиной.
После окончания выбора зазоров ток якоря в связи с многократным увели-
чением маховых масс начинает возрастать, соответственно увеличивается
запирающий потенциал на потенциометре СД322 и уменьшается ток обмотки
ОГСБВЗ и сигнал гибкой связи, воздействующий на обмотку О32МУВ. Это,
в свою очередь, вызывает рост тока якоря до тех пор, пока гибкая связь по э. д. с.
генератора не отключится полностью, причем за счет совместного действия гиб-
кой отрицательной связи по э. д. с. и жесткой отрицательной связи по току
нарастание тока якоря до максимального значения сильно замедляется. Огра-
ничение ускорения двигателей в период выбора зазоров и замедленное нараста-
ние тока якоря после выбора зазоров обеспечивает высокую плавность переход-
ных процессов привода поворота.
На основной части переходных процессов пуска и торможения привода
поворота при больших значениях якорного тока цепь обмотки ОГСБВЗ заперта,
и контур регулирования тока стремится поддержать значение тока главной
цепи близким к стопорному.
Действие защит в схеме привода поворота — максимальной (реле РМВ)
и от обрыва поля (реле РОПВ) — аналогично действию таких же защит в схеме
привода подъема с тем отличием, что здесь так же, как в схемах управления
приводом поворота других экскаваторов, механический тормоз накладывается
только вручную.
Кроме указанных, в схеме привода поворота имеется защита от обрыва цепи
отрицательной обратной связи по напряжению или от превышения установлен-
ной скорости вращения, осуществляемая с помощью реле максимального напря-
жения РНВ1, срабатывающего при напряжении генератора, превышающем
напряжение, соответствующее паспортной скорости вращения поворотной
платформы на 15—20%. При срабатывании реле РНВ1 отпадает контактор
КПВ, отключая контактор КСВ и исключая протекание тока по цепи задающей
обмотки. При отключении КСВ, даже в случае обрыва цепи отрицательной связи
по напряжению, обеспечивается достаточно быстрое гашение поля генератора
и торможение привода благодаря введению добавочного сопротивления СЗОЗ
в цепь параллельной обмотки возбуждения генератора.
Задание режимов работы (поворот или шагание) производится с помощью
универсального переключателя УШ. При установке УШ в положение Э
223
(экскавация) срабатывают вспомогательный контактор КП1 и реле РФ1. Кон-
тактор КШ включает цепь питания катушки силового контактора КВ, а реле
РФ1 закорачивает экономическое сопротивление ЭС1 в цепи катушки КВ.
Контактор КВ срабатывает, замыкая силовую цепь двигателя поворота. При сра-
батывании контактора КВ разрывается цепь питания реле РФ1 и оно отпадает,
вводя сопротивление ЭС1 в цепь катушки КВ. Только после включения сило-
вого контактора КВ возможно включение универсальным переключателем УПВ
контактора КПВ и появление сигнала задания вращения в обмотке О32БНВ,
так как в цепь питания катушки контактора КПВ введен замыкающий контакт
КВ. В эту же цепь введены размыкающие контакты двух реле РС2 и РСЗ,
контролирующих наличие смазки поворотных редукторов, и размыкающий
контакт конечного выключателя ВЛ, запрещающий вращение при неподнятом
положении лыж. При установке УП1 в положение Ш (шагание) срабатывают
вспомогательный контактор КП2 и реле РФ2. Контактор КП2 подает напряже-
ние питания на катушку силового контактора КШ и контактора возбуждения
двигателя шагания КВШ, а реле РФ2 закорачивает экономическое сопротивле-
ние ЭС2 в цепи катушки КШ. Контактор КШ срабатывает, замыкая якор-
ную цепь двигателя шагания. При срабатывании КШ разрывается цепь
питания реле РФ2, и оно отпадает, вводя сопротивление ЭС2 в цепь
катушки КШ.
После включения КВШ (одновременно с силовым контактором КШ) и нара-
стания тока возбуждения двигателя шагания срабатывает реле обрыва поля
РОПШ, подготавливая цепь питания для катушки контактора КПШ. Универ-
сальным переключателем УПШ производится включение контактора КПШ,
снимающего тормоз шагания и подготавливающего цепь питания зада-
ющей обмотки 031БНВ. После включения КПШ возможна подача сигнала
задания шагания на обмотку 031БНВ с помощью универсального переклю-
чателя УПЗ.
В цепь контактора КПШ включены блокировки, разрешающие работу
приводом шагания только после включения вентилятора, двигателя шагания
(замыкающий блок-контакт Л9) и наличия смазки редуктора шагания (блок-
контакт РС1).
Для того чтобы исключить возможность замыкания силовой цепи при боль-
шой величине напряжения на генераторе, что может привести к недопустимым
броскам тока главной цепи, переключение в силовой цепи с поворота на шага-
ние и обратно контролируется с помощью реле минимального напряжения
РНВ2. Реле РНВ2 втягивается при напряжении генератора, не превышающем
10% установленного значения напряжения идеального холостого хода, соответ-
ствующего паспортной скорости вращения экскаватора, и отпадает при напря-
жении, равном примерно 2—4% указанного значения. Для увеличения коэффи-
циента возврата реле РНВ2 добавочное сопротивление СД328, включенное
последовательно с обмоткой реле, шунтируется его же размыкающими контак-
тами. При втянутом реле РНВ2 переключение в силовой цепи невозможно.
Действительно, если в этом случае произвести переключение УП1, то соответ-
ствующий силовой контактор отпадает, однако другой не включается, пока
не отпадет реле РНВ2 и его размыкающий контакт не создаст цепи для питания
катушки соответствующего вспомогательного контактора (КП2 или КПТ).
Для исключения возможности одновременного замыкания силовой цепи пово-
рота и шагания (например, при нарушениях в контактах переключателя УШ)
осуществляется двойная блокировка: в цепи катушек вспомогательных кон-
такторов КП1 и КП2 — размыкающими контактами КП2 и КП1, в цепи кату-
224
шек силовых контакторов КВ и КШ — размыкающими контактами КШ
и КВ.
Схемы управления главными приводами серийных экскаваторов НКМЗ
ЭШ-10/70А и ЭШ-5/45М полностью аналогичны, за небольшим исключением,
связанным с тем обстоятельством, что на ЭШ-5/45М нет отдельного двигателя
для привода механизма шагания. Для этой цели на ЭШ-5/45М используются
двигатели механизма тяги. Переключение с механизма тяги на механизм шага-
ния производится с помощью механического устройства.
Б, Схемы Г'— Д с ТВ
Экскаватор ЭШ-15/90А
Другой возможной реализацией оптимальной структуры, рассмотрен-
ной в § 3-6, является схема Г—Д с тиристорным возбудителем (схема Г—Д
с ТВ), примененная в последнее время для приводов основных механизмов
экскаватора ЭШ-15/90А. Схема управления электроприводом подъема Г—Д
с ТВ по структуре подчиненного регулирования экскаватора ЭШ-15/90А пока-
зана на рис. 5-19. Эта схема работает аналогично рассмотренной выше схеме
подчиненного регулирования Г—Д с МУ экскаватора ЭШ-10/70А. Основное
отличие здесь связано с тем обстоятельством, что в схеме Г—Д с ТВ исполь-
зуется генератор только с независимым возбуждением, что, в свою очередь,
определяет применение в этой схеме формирующей положительной связи по
напряжению (см. § 4-5). Другое отличие связано с тем, что используемые
в схемах с ТВ на экскаваторах ЭШ-15/90А тиристорные преобразователи обору-
дованы электромагнитной СИФУ, не обеспечивающей необходимое ограничение
диапазона угла регулирования а при любых изменениях сигнала управления
(см. § 5-7). Поэтому в указанных схемах СИФУ в качестве звена ограничения
не используется, а с этой целью в схему дополнительно вводится усилитель РП
с характеристикой типа насыщения, который осуществляет как функции звена
ограничения оптимальной структуры, так и обеспечивает ограничение диапа-
зона угла регулирования для обеих групп вентилей тиристорного преобразо-
вателя. Другие отличия схем Г—Д с МУ и Г—Д с ТВ по структуре подчинен-
ного регулирования несущественны.
В схеме, приведенной на рис. 5-19, тиристорный преобразователь ТВП
осуществляет управление полем генератора с независимым возбуждением,
питая две обмотки независимого возбуждения ОВНГП1 и ОВНГП2, соединен-
ные параллельно. Использование генератора с двумя обмотками возбуждения
связано с применением в этой схеме генератора, использовавшегося в каскадной
схеме с сумматором того же зкскаватора, приведенной на рис. 5-6.
Задающая обмотка СИФУ тиристорного преобразователя ОЗТВП получает
питание от вспомогательного усилителя РП, выполняющего функции звена
ограничения. Задающая обмотка РП ОЗРП, в свою очередь, получает питание
с выхода регулятора напряжения РНП.
Регуляторы напряжения и вспомогательные усилители в рассматриваемой
схеме выполнены на основе двухтактных блоков магнитных усилителей промыш-
ленной частоты БД-511.04.
Действие контура регулирования тока в схеме, приведенной на рис. 5-19,
эквивалентно действию интегрального регулятора тока, но уже не благодаря
применению критического самовозбуждения генератора, как в схеме, приведен-
ной на рис. 5-16, а при использовании генератора с независимым возбуждением,
15 Заказ 1127
225
Рис. 5-19. Схема управления электроприводом
подъема экскаватора ЭШ-15/90А (по системе
Г—Д с ТВ
благодаря применению формирующей положительной связи по напряжению
генератора, осуществляемой с помощью обмотки управления вспомогательного
регулятора ОНРП (см. § 4-5).
Из-за указанной особенности схемы, приведенной на рис. 5-19, в стати-
ческом режиме работы привода большим значениям напряжения генератора
соответствуют большие значения выходного сигнала регулятора РП в отличие
от схемы, приведенной на рис. 5-16, где при ненасыщенном генераторе и отсут-
ствии тока главной цепи выход звена ограничения — возбудителя генератора
не зависел от величины напряжения генератора.
Другие элементы схем, приведенных на рис. 5-19 и 5-16, выполняют вполне
аналогичные функции. Регулятор напряжения РНП имеет четыре обмотки упра-
вления: задающую \.рЗРНП, жесткой отрицательной связи по напряжению
ОНРНП, жесткой положительной связи по току ОТРНП и гибкой отрицатель-
ной связи по э. д. с. ОГНРНП. Жесткая отрицательная связь по току осуще-
ствляется обмоткой управления вспомогательного регулятора ОТРП. Взаимо-
действие перечисленных обратных связей при формировании статических ха-
рактеристик привода в схемах, приведенных на рис. 5-19 и 5-16, полностью
аналогично, поэтому и статические характеристики схемы, приведенной на
рис. 5-19, вполне аналогичны характеристикам, показанным на рис. 5-17, а.
Действительно, при работе регулятора напряжения контур положительной
связи по току настраивается таким образом, •чтобы полностью компенсировать
действие отрицательной связи по току, осуществляя астатическое регулирование
напряжения двигателя и обеспечивая естественную жесткость рабочего участка
механической характеристики. После насыщения регулятора напряжения
контур регулирования напряжения двигателя размыкается, и поддерживается
заданное значение тока, равное стопорному, независимо от значения скорости
привода. Различие в статических характеристиках схем, приведенных на
рис. 5-16 и 5-19, определяется лишь тем обстоятельством, что в схеме рис. 5-16
используется кулачковый командоконтроллер, а в схеме рис. 5-19 — сельсин-
ный командоаппарат, от которого получает питание задающая обмотка регуля-
тора напряжения !,рЗРНП. Поэтому статических характеристик, соответству-
ющих промежуточным положениям сельсинного командоаппарата, в схеме,
приведенной на рис. 5-19, может быть бесчисленное' множество и они могут
заполнять всю площадь, ограничиваемую характеристиками 4п и 4'с на
рис. 5-17, а.
Другая особенность статических характеристик в схеме, приведенной на
рис. 5-19, связана с тем, что в этой схеме благодаря применению формирующей
положительной связи по напряжению просто регулировать жесткость участка
токоограничения от отрицательной (для механизма тяги) до положительной
(для механизма поворота).
Обмотки возбуждения 0ВМП1 и 0ВМП2 двигателей МП1 и МП2 получают
питание от нереверсивного тиристорного преобразователя ВМП, управляемого
промежуточным усилителем РВМП, выполненным на основе однотактного
магнитного усилителя промышленной частоты. Обмотка управления ОТРВМП
осуществляет отрицательную связь по току возбуждения двигателей. С помощью
обмотки управления ОНРВМП контролируется ослабление поля двигателя.
При полярности напряжения генератора, соответствующей спуску ковша, что
контролируется с помощью диода ДП2 в цепи обмотки ОНРВМП, и при значе-
нии напряжения генератора, составляющем 80—85% значения соответству-
ющего крайнему положению сельсинного командоаппарата, что контролируется
с помощью стабилитрона СтП5, по обмотке ОНРВМП протекает ток управления,
15’
227
обеспечивающий снижение выходного напряжения тиристорного преобра-
зователя ВМП и ослабление поля двигателей. Для ограничения величины
ослабления поля служит стабилитрон СТП6, шунтирующий цепь обмотки
ОНРВМП при протекании по ней тока и падении напряжения на сопротивле-
ниях обмотки и ВП143 больше определенной величины.
Работа схем, приведенных на рис. 5-19 и 5-16, в переходных процессах
аналогична.
Различие может проявляться лишь в легких переходных процессах, на-
пример на приводе подъема при пуске на спуск, при торможении после подъема,
когда якорный ток невелик и регулятор РП работает на насыщенном участке
своей характеристики, выполняя функции звена ограничения, положительная
связь по напряжению не действует и возможно неравномерное протекание
переходных процессов, в то время как в схеме, приведенной на рис. 5-16, все
переходные процессы принципиально равномерны. Однако степень этой нерав-
номерности может быть невелика при использовании значительных форсировок
по напряжению возбуждения.
Еще одно различие связано с применением цепочки стабилитронов СТПЗ
и Ст114, шунтирующих добавочное сопротивление в цепи жесткой отрицатель-
ной связи по току при превышении значения стопорного тока на 15—20%.
Применение указанного узла имеет практическое значение в основном для при-
вода тяги, где возможны выбросы, тока якоря за стопорное значение в процессе
копания. На приводах подъема и поворота в нормальных режимах работы при
правильно налаженной схеме выбросы тока якоря за стопорное значение не
должны иметь места.
В схеме, приведенной на рис. 5-19, в отличие от схемы, приведенной на
рис. 5-16, гибкая противоперерегулировочная связь по э. д. с. осуществляется
отдельной обмоткой управления регулятора напряжения ОГНРНП. Кроме
того, здесь в схему введены дополнительно слабая гибкая отрицательная связь
по э. д. с. генератора, осуществляемая с помощью обмотки управления СИФУ
ОГНТВП, и гибкая отрицательная связь по току, осуществляемая обмоткой
управления вспомогательного регулятора РП ОГТРП.
Указанные отличия связаны в основном с тем обстоятельством, что в схеме,
приведенной на рис. 5-19, последовательно в контур регулирования напряже-
ния включены два однотипных регулятора РНП и РП с близкими значе-
ниями постоянных времени, что существенно снижает уровень устойчивости
контура регулирования напряжения по сравнению со схемой, приведенной на
рис. 5-16.
Для повышения устойчивости в схеме, приведенной на рис. 5-19, вве-
дена дополнительно слабая гибкая связь по э. д. с. на СИФУ и искусственно
повышена величина постоянной времени вспомогательного регулятора РВ
путем закорачивания одной из обмоток управления ОУРП.
Значительное увеличение постоянной времени регулятора РП, входящего
в контур регулирования тока, определяет, в свою очередь, необходимость при-
менения сильной гибкой отрицательной токовой связи, осуществляемой обмот-
кой ОГТРП, для снятия перерегулирования по току.
В схеме Г—Д с ТВ основных механизмов экскаватора ЭШ-15/90А (см.
рис. 5-19) предусмотрены в основном те же виды защит, что и в каскадной схеме
Г—Д с МУ и ПМУ этого же экскаватора (см. рис. 5-6 и 5-8). Действие этих
защит было подробно рассмотрено в § 5-2 при описании схемы Г—Д с МУ
и ПМУ.
228
§ 5-5. Схема тиристорный преобразователь — двигатель
В настоящее время еще не выпускаются серийные одноковшовые
экскаваторы, оборудованные системой ТП—Д. Имеются лишь отдельные опыт-
ные образцы экскаваторов ЭКГ-3,2, ЭКГ-4,6, ЭКГ-8, где привод основных
механизмов осуществляется по системе ТП—Д. Поэтому здесь будет описана
опытная схема ТП—Д привода поворота одноковшового экскаватора А
Выше уже было отмечено, что в разработках системы ТП—Д для основных
механизмов одноковшовых экскаваторов в большинстве случаев применяется
двухконтурная структура подчиненного регулирования тока и напряжения
Рис. 5-20. Структурная схема управления главными приводами по системе
ТП—Д с подчиненным регулированием параметров электропривода
двигателя постоянного тока независимого возбуждения. В рассматриваемом
случае также применена указанная структура. Для приводов основных меха-
низмов экскаваторов представляет интерес реализация оптимальной структуры
в системе ТП—Д на основе использования магнитных усилителей на промышлен-
ной частоте. В данной реализации оптимальной структуры (рис. 5-20) все
звенья системы управления: регуляторы тока РТ и напряжения PH, звено
ограничения 30 выполнены на блоках двухтактных магнитных усилителей
БД-2ТА5. Регулятор напряжения PH должен быть безынерционным и пропор-
циональным. Звено ограничения 30 на линейной части характеристики до огра-
ничения величины выходного сигнала должно также обладать свойствами
пропорционального регулятора. Регулятор тока РТ должен обладать характери-
стикой интегрального звена. В то же время реверсивный блок МУ БД-2ТА5
представляет собой инерционное звено с постоянной времени Ту%, определяемой
суммарной инерционностью его цепей управления. Постоянная времени Ту^
увеличивает некомпенсируемую инерционность контура регулирования напря-
жения, однако благодаря сравнительной малости Ту% при необходимых вели-
чинах сигналов задания и обратных связей повышение некомпенсируемой инер-
1 Такая схема была испытана на приводе поворота экскаватора ЭШ-6/60.
229
ционности за счет 7\-х регулятора PH на переходных процессах практически
не сказывается..
Для получения интегрального звена из инерционного блок БД-2ТА5
охватывают критической положительной связью по его выходному напряжению.
Так как величина собственной электромагнитной инерционности Ту± регуля-
тора тока РТ сравнительно мала, вводят дополнительную гибкую отрицатель-
ную связь по выходному напряжению блока БД-2ТА5.
Полная схема блока БД-2ТА5 с обратными связями при использовании его
в качестве регулятора тока показана на рис. 5-21, а, а при использовании того
же блока в качестве регулятора напряжения или звена ограничения показана
на рис. 5-21, б.
Рис. 5-21. Схема регуляторов тока (а) и напряжения (б) на основе использования
блоков БД-2ТА5 на промышленной частоте
На рис. 5-21, а обмотка ОУ-3 осуществляет жесткую положительную связь
по напряжению, а обмотка ОУ-2 — гибкую отрицательную связь по напряже-
нию. В качестве задающей обмотки регулятора тока используется обмотка
ОУ-5.
Использование в интегральном регуляторе тока как линейного ненасыщен-
ного, так и насыщенного участков характеристики блока БД приводит к тому,
что в конце переходного процесса в выходном напряжении регулятора появ-
ляются искажения. Это вынуждает использовать для регулятора тока только
линейную часть характеристики «вход—выход» блока БД-2ТА5. В связи с этим
в схемах, приведенных на рис. 5-21, предусмотрена сильная жесткая отрица-
тельная связь по выходному напряжению регулятора с отсечкой, воздейству-
ющая на обмотку ОУ-2. На основной рабочей части характеристики регулятора
тока отрицательная связь по выходному напряжению не действует благодаря
наличию в цепи этой связи стабилитронов СТ. Эта связь вступает в действие
при выходном напряжении блока БД, превышающем примерно а/3 максималь-
ного, соответствующего насыщению блока. Поэтому работа регулятора тока
осуществляется только на линейной ненасыщенной части характеристики
блока БД.
Указанное ограничение величины выходного сигнала РТ в данной схеме
ТП—Д при согласованном управлении группами тиристорного преобразова-
теля (ТП) необходимо еще и для ограничения максимальных величин углов
регулирования ТП в выпрямительном и инверторном режимах таким образом,
230
чтобы угол регулирования инверторной группы ТП аи не превышал 150°,
а угол регулирования выпрямительной группы ТП ссв был не менее 30°.
Собственные параметры блока БД-2ТА5 (нелинейность его статической
характеристики «вход—выход», постоянные времени обмоток управления и т. п.)
оказывают на качество переходных процессов тем меньшее влияние, чем больше
абсолютная величина емкости Сг н. С другой стороны, величина Сг н опреде-
ляется, исходя из необходимого быстродействия контура регулирования тока,
что, в свою очередь, определяется, исходя из необходимого заполнения время-
токовой диаграммы (см. гл. 3) и сохранения максимальной демпфирующей спо-
собности при возникновении резонансных колебаний электропривода поворота
(см. § 1-5). Величина емкости Сг „ при неизменном быстродействии контура
СДТ1 0ТРТ1
еды
Рис. 5-22. Схема управления двухдвигательным электроприводом поворота
одноковшового экскаватора по системе ТП—Д
регулирования тока может быть выбрана тем больше, чем больше коэффициент
отрицательной связи по току (см. гл. 3).
Схема двухдвигательного электропривода механизма поворота одноковшо-
вого зкекаватора по системе ТП—Д показана на рис. 5-22. Для наилучшего
использования демпфирующей способности электропривода при резонансных
колебаниях в схеме, приведенной на рис. 5-22, предусматривается индиви-
дуальное питание каждого двигателя от отдельного реверсивного тиристорного
преобразователя. Каждый тиристорный преобразователь, в свою очередь, упра-
вляется собственными интегральными регуляторами тока РТ1 и РТ2. Каждый
регулятор тока управляется своим звеном ограничения 30, имеющим два уровня
выходного сигнала: нижний — для задания малого ускорения при выборе
зазоров и верхний, на который звено ограничения переключается после оконча-
ния выбора зазоров. Переключение с нижнего уровня на верхний происходит
с помощью нелинейного элемента в цепи отрицательной связи по выходному
напряжению 30 в функции тока главной цепи. На своем верхнем уровне звено
30 практически не работает, так как после окончания выбора зазоров ток глав-
ной цепи значительно возрастает и токовая связь выводит звено 30 на линей-
ный насыщенный участок характеристики, задавая величину ускорения,
численно не превышающую величину ускорения в период выбора зазоров.
Таким образом, в период выбора зазоров ограничивается ускорение двигателей,
231
а на основной части переходного процесса, после окончания выбора зазоров,
ограничивается момент двигателей.
Механические характеристики привода поворота п = / (М), получаемые
в схеме ТП—Д, приведенной на рис. 5-22, вполне аналогичны механическим
характеристикам, получаемым в схеме Г—Д, построенной по структуре подчи-
ненного регулирования, например в схеме, приведенной на рис. 5-18.
В схеме, приведенной на рис. 5-22, предусмотрена максимальная токовая
защита с помощью реле РТМ1 и РТМ2, защита от обрыва поля двигателей
и защита от обрыва цепи отрицательной связи по напряжению с помощью реле
максимального напряжения РНМ. При срабатывании любой из указанных
защит отключается питание задающей обмотки регулятора напряжения ОЗРН.
Другие виды защит и блокировок в схеме, приведенной на рис. 5-22, ана-
логичны применяемым в схемах двухдвигательного привода поворота одноков-
шовых экскаваторов, например в схеме, приведенной на рис. 5-18.
§ 5-6. Схемы управления двигателями преобразовательных агрегатов
На всех карьерных экскаваторах, где для привода основных меха-
низмов используется система Г—Д, в качестве приводного двигателя преобра-
зовательного агрегата применяется высоковольтный (6 кВ) синхронный двига-
тель. Исключение составляет экскаватор ЭКГ-4,6, где применен высоковольт-
ный асинхронный двигатель на 6 кВ.
Во всех случаях пуск синхронного двигателя в ход осуществляется прямым
подключением обмотки статора на полное напряжение сети. При этом синхрон-
ный двигатель пускается в ход как асинхронный с помощью специальной пуско-
вой обмотки, стержни которой расположены в пазах полюсных наконечников
и соединены между собой на торцах пластинами, образующими короткозамкну-
тые кольца. После достижения подсинхронной скорости на обмотку ротора по-
дается возбуждение, и двигатель втягивается в синхронизм. Схемы пуска син-
хронных двигателей на различных экскаваторах отличаются лишь способом
подачи возбуждения. На экскаваторах ЭШ-15/90А, ЭШ-15/90, ЭШ-14/75 подача
возбуждения осуществляется с помощью реле частоты Рч, контролирующего
момент достижения двигателем подсинхронной скорости, на экскаваторах
ЭШ-10/70А, ЭКГ-8И и ЭШ-10/60 — с помощью реле времени РВ. Кроме ука-
занного различия следует отметить, что на экскаваторах ЭШ-15/90А, ЭШ-15/90,
ЭШ-14/75, ЭШ-10/60 обмотка ротора синхронного двигателя в течение пуска
замкнута на обмотку якоря возбудителя через значительное разрядное сопро-
тивление; на экскаваторах ЭШ-10/70А и ЭКГ-8И осуществляется глухое под-
ключение обмотки ротора на якорь возбудителя.
Рассмотрим работу схемы пуска синхронного двигателя на экскаваторе
ЭШ-15/90А (рис. 5-23.) Перед запуском синхронного двигателя СД необходимо
включить высоковольтный разъединитель Р2 комплектного высоковольтного
распределительного устройства (КРУЭ) и запустить вспомогательный агрегат,
в который входит возбудитель синхронного двигателя ВС и генератор собствен-
ных нужд ГСН. Затем включением автоматов АС1 и А С.2 на панели управления
пуском синхронного двигателя подается напряжение постоянного тока 110 В
на схему управления пуском двигателя. При этом через размыкающий контакт
В2 масляного выключателя включается реле времени РВ1, а затем реле РВ2.
Включением автомата АВ1 в КРУЭ подается напряжение от измерительного
трансформатора TH на нулевую катушку ОКЗ масляного выключателя В2.
Нулевая катушка получит питание и разрешит включение масляного выключа-
232
Рис. 5-23. Схема управления пуском синхронного двигателя преобразовательного
агрегата экскаватора ЭШ-15/90А
теля, если подано напряжение питания 110 В на схему пуска синхронного дви-
гателя и втянуто реле РВ2, включены силовые магнитные усилители, наличие
напряжения на которых контролируется реле РН1 и РН2 (по одному реле на
каждый из двух силовых трансформаторов 380/220 В, подающих напряжение
питания на силовые магнитные усилители), закрыт люк, открывающий доступ
к высоковольтному разъединителю Р, расположенному в базе (контролируется
конечным выключателем КВЛ), включен разъединитель Р (контролируется
блок-контактом К С А) и закрыта крышка привода разъединителя Р (контроли-
руется конечным выключателем КВКР1).
Включением автомата АВ2, установленного в КРУЭ, подается напряжение
питания 220 В на схему привода включения и отключения масляного выключа-
теля В2. При включении автомата АВ2 коллекторный двигатель Д взвода при-
вода масляного выключателя заводит пружину. Двигатель Д останавливается
при размыкании контакта конечного выключателя БНП. Одновременно замы-
кается контакт БНП в цепи включающего электромагнита ЭВ масляного
выключателя.
Поворотом ключа КУ в КРУЭ или кнопкой «Пуск» в кабине машиниста
подается напряжение на электромагнит включения ЭВ и масляный выключатель
В2 подключает обмотку статора синхронного двигателя к сети 6 кВ, двигатель
начинает разгоняться. При включении масляного выключателя его размыка-
ющий контакт В2 разрывает цепь включающего электромагнита ЭВ, а замыка-
ющий контакт В2 подготавливает цепь отключающего электромагнита ЭО.
Одновременно в схеме пуска двигателя СД/размыкающий контакт В2 разрывает
цепь питания реле РВ1, а замыкающий контакт В2 подготавливает цепь пита-
ния контакторов М, КП и КФ. Сразу же после включения масляного выключа-
теля В2 благодаря напряжению, индуктируемому в обмотке ротора двигателя
СД, в цепи обмотки ротора возникает ток, создающий падение напряжения
на разрядном сопротивлении СР. Реле РЧ, подключенное через выпрямитель
ВГ1 на участок сопротивления СР, притягивается, разрывая свой контакт
в цепи контакторов М, КП и КФ. По истечении выдержки времени (7—8 с)
после включения масляного выключателя В2 реле РВ1 отключается, подгота-
вливая своим размыкающим контактом цепь питания катушек контакторов
КП и М и отключая с выдержкой времени реле РВ2. По мере увеличения ско-
рости двигателя уменьшается величина напряжения, индуктируемого в обмотке
ротора, и соответственно величины тока и падения напряжения на разрядном
сопротивлении СР и напряжения, подаваемого на реле РЧ. Кроме того, благо-
даря наличию выпрямителя в цепи катушки реле РЧ происходит однополупери-
одное выпрямление этого тока, и при достижении подсинхронной скорости
интервалы между полупериодами увеличиваются настолько, что реле РЧ от-
ключается, замыкая своим контактом цепь питания катушек контакторов КП
и М. Контактор 'М, срабатывая, замыкает разрядное сопротивление СР в цепи
обмотки ротора, а контактор КП подает напряжение на обмотку возбуждения
ОВВС возбудителя ВС, обеспечивая плавное вхождение двигателя в синхронизм.
Выдержка реле времени РВ2 должна быть такой, чтобы в сумме с выдерж-
кой реле времени РВ1 обеспечить время, необходимое для достижения двигате-
лем подсинхронной скорости и втягивания в синхронизм. В противном случае,
т. е. если реле РВ2 отпадет раньше, чем ток ротора увеличится до величины,
необходимой для включения реле обрыва поля РОП, которое снова включает
реле РВ1, то реле РВ2, размыкая свои контакты в цепи нулевой катушки,
отключит двигатель от сети. Величина суммарного времени, за которое синхрон-
ный двигатель достигает подсинхронной скорости, зависит от ряда причин:
234
мощности трансформаторной подстанции и высоковольтной линии, питающей
экскаватор, длины линии и т. п., и в разных случаях колеблется от 10—12 до
15—16 с. Реле РОП осуществляет защиту двигателя от работы без возбуждения.
Если после отключения реле РОП при значительном уменьшении или исчезно-
вении тока возбуждения за время, равное сумме выдержек времени реле РВ1
и РВ2, возбуждение не восстановится, реле РВ2 отключит двигатель от сети,
размыкая свои контакты в цепи нулевой катушки. Кроме того, нулевая катушка
должна отключать двигатель от сети при уменьшении напряжения сети ниже
65% номинального значения.
Следует отметить, что нулевая катушка ОКЗ в КРУЭ отключает синхрон-
ный двигатель от сети не мгновенно, а с выдержкой времени (1—6 с), которая
может регулироваться. Выдержка времени при отключении с помощью нулевой
катушки предусмотрена, в частности, для того, чтобы кратковременные сниже-
ния напряжения, вызванные, например, запуском преобразовательных агрега-
тов на соседних экскаваторах, не приводили к отключению от сети преобразова-
тельного агрегата на данном экскаваторе.
Максимальная защита синхронного двигателя осуществляется с помощью
максимальных реле OKI, ОК2, получающих питание от трансформаторов тока
TTal, TTcl. При пуске двигателя катушки реле OKI, ОК2 шунтируются размы-
кающими контактами контактора КП, благодаря чему реле не срабатывают от
пусковых токов. При значительном снижении напряжения сети предусмотрена
форсировка возбуждения двигателя с помощью контактора КФ, замыкающего
часть добавочного сопротивления ШР в цепи обмотки возбуждения возбудителя
ОВВС. Контактор КФ втягивается при отключении реле РФ, контролирующего
напряжение сети и получающего питание через выпрямитель ВС1 от измеритель-
ного трансформатора напряжения TH. Если синхронный двигатель отклю-
чается от сети максимальной защитой или нулевой катушкой, то размыкается
контакт конечного выключателя БК А, установленного в КРУЭ. Повторный
запуск СД возможен только при ручном замыкании с помощью специальной
кнопки в КРУЭ контакта БК А в цепи включающего электромагнита ЭВ.
На зкскаваторе ЭШ-10/70А используется такое же высоковольтное распред-
устройство КРУЭ, что и на экскаваторе ЭШ-15/90А. Поэтому все операции,
связанные с включением и выключением масляного выключателя и работой
защитных реле, установленных в КРУЭ, происходят на зтих экскаваторах
аналогично.
На экскаваторе ЭШ-10/70А применяется более простая схема пуска син-
хронного двигателя (рис. 5-24) при глухом подключении возбудителя к обмотке
ротора синхронного двигателя, что является вполне оправданным для легкого
режима пуска преобразовательного агрегата, и подаче напряжения возбуждения
на обмотку ротора только в функции времени.
После запуска вспомогательного агрегата, состоящего из возбудителя
синхронного двигателя ВС и генератора собственных нужд ГСН, включается
автомат А2, подающий напряжение постоянного тока 110 В на схему управления
пуском двигателя СД. При этом через размыкающий контакт В масляного
выключателя включается реле времени РВ, включающее, в свою очередь, про-
межуточное реле РБ. Реле РВ размыкает, а реле РБ замыкает свои контакты
в цепи катушки контактора М. Включением автоматов АВ1 и АВ2 подготавли-
вается схема включения масляного выключателя В.
Пуск двигателя возможен только при наличии напряжения питания 110 В
на схеме управления пуском, что контролируется с помощью замыкающего
контакта реле РБ в цепи нулевой катушки ОКЗ, и при наличии напряжения
23S
питания на силовых магнитных усилителях, что контролируется с помощью
реле РШ. При подаче напряжения на силовые МУ реле РН1 срабатывает,
замыкая свой контакт в цепи включающего электромагнита ЭВ и размыкая
свой контакт в цепи отключающего электромагнита ЭО.
КВТ
1 К транс-
срормато-
J РУ е/°Л
UB1
РВ
-220В
в
Рис. 5-24. Схема управле-
ния пуском синхронного
двигателя преобразователь-
ного агрегата экскаватора
ЭШ-10/70А
ЛК
Из
тв
КУ1
ШР2 ОВВС
ген
РВ
0К2
0К1
ДПВС
дпгснсогс^
РБ [~
РВ “pSl
'йгм
С2
Г~|Я?
О
[——I
При включении кнопки «Пуск» в кабине машиниста масляный выключатель
В подает напряжение 6 кВ на обмотку статора синхронного двигателя, и двига-
тель начинает разгоняться. При включении масляного выключателя его замы-
кающий контакт В подготавливает цепь питания контактора М, а размыкающий
контакт В разрывает цепь питания реле РВ.
С выдержкой времени 8—16 с, устанавливаемой при наладке и определя-
емой временем достижения двигателем подсинхронной скорости, реле РВ отпа-
дает, включая контактор М, который подает напряжение на обмотку возбужде-
236
пия ОВВС возбудителя ВС. Постепенное нарастание напряжения на возбудителм
ВС, определяемое величиной суммарной
печивает плавное вхождение двигателя
разрывает свой контакт в цепи катушки
мени!,5—2 с отключается, осуществляя
в дальнейшем защиту двигателя от
работы без возбуждения.
Схема управления пуском син-
хронного двигателя на экскаваторе
ЭКГ-8И (рис. 5-25) по принципу своего
действия полностью аналогична схеме,
приведенной на рис. 5-24. Здесь также
применено глухое подключение возбу-
дителя к обмотке ротора синхронного
двигателя и подача возбуждения в
функции времени.
В схеме управления пуском имеется
одно вспомогательное реле — реле вре-
мени РВ и контактор КП, подающий
напряжение на обмотку возбуждения
ОВВ1 возбудителя В1 синхронного дви-
гателя. При подаче напряжения пита-
ния на схему управления пуском дви-
гателя реле РВ включается, так как
катушка реле получает питание через
размыкающий контакт Л масляного
выключателя. После включения масля-
ного выключателя Л, подающего напря-
жение на обмотку статора двигателя и
размыкающего свой контакт Л в цепи
катушки реле РВ, реле РВ отключается
с выдержкой времени, достаточной для
достижения двигателем подсинхронной
скорости. Размыкающий контакт реле
РВ включает контактор КП, цепь пита-
постоянной времени возбудителя, обес-
в синхронизм. При отпадании реле РВ
реле РБ, и реле РБ с выдержкой вре-
~екв
~380В
Рис. 5-25. Схема управления пуском син-
хронного двигателя преобразовательного
агрегата экскаватора ЭКГ-8И
ния которого заранее подготовлена замы-
кающим контактом масляного выключа-
теля. Защита от исчезновения тока воз-
буждения осуществляется с помощью
реле РОП, замыкающий контакт которого запрещает работу главными приводами
при отключении реле РОП. С той^же целью — защиты синхронного двигателя
от работы в асинхронном режиме — в цепь нулевой катушки включен блок-кон-
такт Л7 контактора приводного двигателя генератора собственных нужд.
§ 5-7. Системы импульсно-фазового управления тиристорными
преобразователями
В качестве примеров конкретной реализации принципов построения
систем управления тиристорными преобразователями рассмотрим две системы.
На рис. 5-26 представлена схема одной фазы (фазы А) СИФУ, выполненной
по «горизонтальному» принципу. Данная СИФУ используется в разработанном
237
ВНИИЭлектроприводом серийном преобразователе, применяемом в качестве
возбудителя генераторов на экскаваторах ЭШ-15/90А и ЭВГ-35-65М.
Для выяснения принципа работы СИФУ покажем вначале, как изменяется
напряжение U24 на конденсаторе С1 при изменении входного сигнала системы
и~
Рис. 5-26. Схема электромагнитной системы
импульсно-фазового управления
управления. Рабочая обмотка магнитного усилителя МУ представляет собой
некоторое индуктивное сопротивление Xl, величина которого изменяется
в функции тока управления iy, как это показано на рис. 5-27, а.
При этом напряжение U2i в комплексной форме имеет вид
и«=и„
где U28 — напряжение на вторичной обмотке трансформатора Tpl\ R — сум-
марное активное сопротивление рассматриваемого контура (МУ — Tpl)-, Xl —
реактивное сопротивление МУ; — реактивное сопротивление конденса-
тора С1.
Выражение (5-3) может быть представлено в удобном для дальнейшего
анализа виде:
U^ = U2S^~------, (5-4)
где Zc = /7?2 + X?; 6 = arctg-^—.
Полученное выражение (5-4) представляет собой уравнение окружности
на комплексной плоскости (рис. 5-28), касающейся действительной оси в начале
координат (точка 2), с центром О', расположенным на мнимой отрицательной
полуоси и отстоящим от начала координат на величину радиуса p = -^-cos6.
Zc
Иными словами, при изменении параметра Хь от максимального (при
гу = 0) до минимального (при iy = iymax) значения вектор напряжения t/24
поворачивается вокруг начала координат (точка 2) против часовой стрелки
на угол <р'. Конец вектора U2i (а следовательно, и начало вектора Й43) пере-
Рис. 5-27. Зависимость индуктивности рабочей обмотки МУ от тока управления (а); харак-
теристики намагничивания пик-дросселя (б) и импульсного трансформатора (в) электромаг-
нитной системы импульсно-фазового управления
мещается при этом от точки 4' до
точки 4" по дуге окружности I,
описываемой выражением (5-4).
При некотором промежуточном
значении тока iy указанные век-
торы займут положение, опреде-
ляемое точкой 4"'.
Расширение диапазона изме-
нения фазы выходного напряже-
ния СФВ достигается введением
в схему дополнительного источ-
ника напряжения U (вторичная
обмотка трансформатора Тр2 —
см. рис. 5-26), сдвинутого по отно-
шению к напряжению Й23 на 60е.
Из рис. 5-28 видно, что вектор
Рис. 5-28. Векторная диаграмма напряжений
СИФУ при изменении тока управления
выходного напряжения Й14 СФВ
при изменении гу от нуля до
iy шах изменяется от CZi4 до С714, по-
ворачиваясь вокруг точки 1 на
угол ф >ф'. При этом соотношение
напряжений С721 и U23, а также величина емкости С1 выбираются такими, чтобы
обеспечивались, с одной стороны, необходимый диапазон изменения угла ф
(обычно 180—190°) и, с другой стороны, требуемые границы изменения угла
регулирования а соответствующей фазы (в данном случае фазы А).
239
Следует заметить также, что дроссель насыщения МУ, являясь существенно
нелинейным элементом, обусловливает появление в схеме высших гармоник
напряжения и тока. Поэтому проведенный выше анализ дает лишь качествен-
ную картину явления. В реальном устройстве при изменении тока управле-
ния гу конец вектора С724 (а следовательно, и UХ4) перемещается не по окруж-
ности I, а по некоторой кривой II,
показанной на рис. 5-28 штриховой
линией.
Напряжение USi поступает на
генератор импульсов ГИ (см. рис.
5-26), на входе которого включен
пик-дроссель ПД. Магнитопровод
пик-дросселя изготовлен из мате-
риала с прямоугольной характери-
стикой намагничивания, которая в
идеализированном виде представлена
на рис. 5-27, б. До насыщения маг-
нитопровода пик-дросселя его индук-
тивность Ад велика и практически
все напряжение Uх4 прикладывается
к его обмотке (рис. 5-29, а). Для
этого случая, пренебрегая активным
сопротивлением входной цепи ГИ,
можно написать
tzX4 u&i ** , (5-5)
где iBX — ток на входе ГИ.
Если совместить начало отсчета
с моментом перехода синусоиды на-
пряжения н14 через нуль и принять
в качестве допущения, что индуктив-
ность рассеяния ПД L^ = Q (индук-
тивность в насыщенном состоянии
пик-дросселя), то при принятой ха-
рактеристике намагничивания (рис.
5-27, б) в момент перехода напряже-
ния нХ4 через нуль ток iEX также равен
нулю. Поэтому из решения дифферен-
циального уравнения (5-5) имеем
iBX = -^z-(l —cos©/),
а
Рис. 5-29. Формирование импульсов упра-
вления СИФУ по схеме, приведенной на
рис. 5-26
где Ulia — амплитудное значение напряжения н14.
В момент времени t = /х (см. рис. 5-29, а) ток /ЕХ достигает значения 10,
при котором пик-дроссель насыщается. В этом случае при принятых выше
допущениях напряжение на ПД нБ4 становится равным нулю, вследствие чего
напряжение нХ4 скачком прикладывается к сопротивлениям R1 и R2, т. е.
иХБ *=& ux4 = D’x4m sin (f>t, до момента времени t2, когда напряжение иХ4 меняет поляр-
ность. Далее при отрицательной полуволне напряжения wX4 процесс повторяется.
Наличие индуктивности рассеяния пик-дросселя (/Д 0) сказывается
в основном на задержке нарастания напряжения нх4 в момент насыщения ПД
240
(кривая 1 на рис. 5-29, б). Уменьшение времени нарастания напряжения (кри-
вая 2 на рис. 5-29, б) достигается введением в схему конденсаторов СЗ и С2
(см. рис. 5-26).
Формирование импульсов, поступающих на первичные обмотки импульс-
ных трансформаторов ИТ1 и ИТ4 (см. рис. 5-27, а) осуществляется с помощью
двух работающих в ключевом режиме транзисторов Т1 и Т2. Диоды Д1 и Д2,
установленные в базовых цепях транзисторов, поочередно (через 180е) выде-
ляют одну из полуволн напряжения £71Б, действующую в сторону открытия
соответствующего транзистора. Для того чтобы транзисторы были надежно
закрыты в период ненасыщенного состояния пик-дросселя, на их базы подается
напряжение отрицательного смещения — С7см. При этом диоды ДЗ и Д4 защи-
щают базы транзисторов от отрицательных перенапряжений. Когда напря-
жение и1Ъ больше некоторого значения Uc, определяемого напряжением (7СМТ
один из транзисторов (в зависимости от полярности напряжения (715) открыт.
В течение этого времени первичная обмотка трансформатора wy оказывается
подключенной к источнику постоянного напряжения U=, и таким образом пери-
одически появляются импульсы напряжения ни1 прямоугольной формы (см.
рис. 5-29, виг).
Импульсные трансформаторы, кроме первичной wx и вторичной w2 обмо-
ток, имеют также дополнительную обмотку смещения п?см (см. рис. 5-26),
которая служит для надежного размагничивания сердечника после исчезнове-
ния на первичной обмотке импульса и}!1. С этой целью на обмотку и?сы подается
напряжение £7СН, и поэтому исходное магнитное состояние сердечника импульс-
ного трансформатора определяется н. с. обмотки смещения FCM. Этому состо-
янию соответствует точка а на идеализированной характеристике намагничи-
вания импульсного трансформатора (см. рис. 5-27, в). Под влиянием импульса
напряжения ни1 сердечник импульсного трансформатора перемагничивается
в направлении, указанном стрелкой на рис. 5-27, в. При этом напряжение
на вторичных обмотках w2 при идеальной магнитной связи между обмотками
описывается выражением
t
и.л2 = т ,
где Т — суммарная постоянная времени импульсного трансформатора; к —
коэффициент, зависящий от параметров обмоток.
Поскольку постоянная времени Т много больше ширины импульса и(11,
спадание напряжения пи2 происходит относительно медленно (см. рис. 5-29, в
и г). В момент насыщения сердечника (точка б на рис. 5-27, в) напряжение пи2
становится равным нулю (моменты времени t3 и ti на рис. 5-29, виг). Таким
образом, на вторичных обмотках импульсных трансформаторов образуются
управляющие импульсы шириной 80—90° и с достаточно крутым передним
фронтом. Задний фронт импульса ин1 вызывает появление на вторичных обмот-
ках импульсов отрицательной полярности (пунктирные кривые на рис. 5-29, в
и г), которые срезаются вентилями В1 и В2 (см. рис. 5-26).
В целом система управления для каждой группы преобразователя (при
мостовой трехфазной схеме силовой части) имеет три фазы, работающие
со сдвигом в 120°. Каждая из фаз вырабатывает в течение периода питающего
напряжения два импульса, сдвинутые относительно друг друга на 180°. Таким
образом СИФУ создает шестифазную систему широких управляющих импуль-
сов, положение которых во времени определяется величиной входного сиг-
нала — тока управления iv.
16 Заказ 1127
241
На рис. 5-30 приведена разработанная ВНИИЭлектроприводом схема
одного канала системы импульсно-фазового управления, построенной на полу-
проводниковых элементах по «вертикальному» принципу.
Формирователь пилообразного напряжения ФПН в данной схеме выпол-
нен на конденсаторе С1 с диодным коммутатором. Работа аналогичного устрой-
ства уже рассматривалась в § 2-3 (см. рис. 2-30). Отличием данной схемы от
К тиристорам
Рис. 5-30. Полупроводниковая система импульсно-фазового управления
схемы, приведенной на рис. 2-30, является наличие дополнительной цепочки,
состоящей из диода Д4 и динистора Д5 (их назначение будет пояснено ниже)
и третьего источника э. д. с. еь (трансформатора ТрЗ) в узле формирования
коммутирующего напряжения пк, благодаря чему достигается увеличение
длительности нарастания пилообразного напряжения до 240—270°. Последнее
обстоятельство вносит определенные удобства при наладке СИФУ, поскольку
при требуемом обычно диапазоне изменения угла а, равном 150—165°, поз-
воляет в некоторых пределах плавно изменять граничные значения углов
регулирования.
Управляющее работой коммутатора напряжение tzK формируется наводи-
мой во вторичных обмотках трансформаторов Тр1 — ТрЗ системой трех синусо-
идальных, сдвинутых относительно друг друга на 60°, э. д. с. еа, —ес и еь
(рис. 5-31, а) с помощью диодов Д1 и Д2 и сопротивления R1. Каждый из диодов
открыт в те интервалы времени, когда мгновенные значения э. д. с. соответ-
ствующей фазы более положительны, чем э. д. с. двух других фаз. При этом
242
через открытый диод (Д7 или Д2) под действием разности соответствующей
э. д. с. и э. д. с. фазы С (—ес) протекает ток, величина которого ограничивается
сопротивлением R1. В интервале времени, когда более положительна э. д. с.
фазы С, оба диода закрыты, и ток не протекает ни в одной из фаз (интервал вре-
мени ty — t2 на рис. 5-31). Таким образом, графиком коммутирующего напряже-
ния пк является линия, огибающая сверху систему указанных э. Д- с. еа — ес
и еь (тонкая сплошная линия на рис.
5-31, а). в
Начало заряда конденсатора С1
(и следовательно, начало формирова-
ния пилообразного напряжения пп)
благодаря наличию диодного комму-
татора точно синхронизировано с мо-
ментом перехода коммутирующего на-
пряжения ик (э. д. с. еа) через нуль. В мо-
мент диод ДЗ (см. рис. 5-30), выпол-
няющий функцию коммутатора, под
действием положительного напряже-
ния +Z7K закрывается и к конденса-
тору С1 через сопротивление R10 при-
кладывается стабилизированное напря-
жение -|-Z7(T. Величина сопротивления
R10 сравнительно велика, так что
в течение периода питающего напря-
жения конденсатор заряжается прак-
тически постоянным током, т. е. по
прямолинейному закону. При разом-
кнутых клеммах 2—7 (вход сигнала
управления) и отсутствии управля-
ющего напряжения иу пилообразное
напряжение на конденсаторе С1
возрастает до тех пор, пока оно не
станет равным напряжению ик (момент
времени на рис. 5-31, а). В этот
момент открывается диод ДЗ и конден-
Рис. 5-31. Формирование импульсов упра-
вления СИФУ по схеме, приведенной па
рис. 5-30
сатор С1 разряжается по цепи: сопро-
тивление диод ДЗ, сопротивление
R1, вторичная обмотка трансформа-
тора Тр2. Естественно, что разряд
конденсатора С1 не может происхо-
дить быстрее, чем снижается коммутирующее напряжение ик (в данном слу-
чае э. д. с. еь).
В интервале времени t2 — Z5 напряжение ик отрицательно и действует
в сторону проводимости диодов ДЗ и Д6. Последний также открывается и шун-
тирует конденсатор С1, благодаря чему напряжение на нем остается равным
нулю до момента R, когда коммутирующее напряжение снова переходит через
нуль, и начинается новый цикл заряда конденсатора С1.
В базовой цепи транзистора Т1, работающего в ключевом режиме, дей-
ствует разность пилообразного напряжения и напряжения управления пу.
Когда напряжение пилы меньше напряжения управления диод Д7, являющийся
элементом узла сравнения, закрыт, а транзистор Т1 благодаря наличию цепи
115*
243
состоит из шести аналогичных каналов, условно показанных на структурной
схеме, приведенной на рис. 5-30, б в виде прямоугольников. Каналы работают
последовательно с фазовым сдвигом 60°, и создают, таким образом, шестифазную
систему узких управляющих импульсов, положение которых во времени зави-
сит от величины напряжения управления иу.
Поскольку при использовании для управления преобразователем узких
импульсов на каждый тиристор необходимо подавать 2 импульса со сдвигом
в 60°, каждый канал одновременно с генерацией собственного импульса обес-
печивает через диод Д13 подачу импульса ни1 на первичную обмотку ИТ пред-
шествующего канала и через 60° получает такой же импульс от последующего
канала (см. рис. 5-30, б и 5-31, д).
ГЛАВА 6
НАЛАДКА ОСНОВНЫХ ЭЛЕМЕНТОВ СИСТЕМЫ УПРАВЛЕНИЯ
ЭЛЕКТРОПРИВОДАМИ
§ 6-1. Наладка машин переменного тока
На экскаваторах наладку по полной программе производят для
высоковольтных двигателей переменного тока (асинхронных или синхронных),
используемых в качестве приводных двигателей преобразовательного агрегата
и двигателей насосов гидросистемы шагания на экскаваторах ЭШ-15/90А.
Кроме работ по ревизии электрических машин, производят наладку схемы .
пуска для синхронных двигателей. Низковольтные асинхронные двигатели
вспомогательных приводов обычно не нуждаются в специальной наладке.
Для этих двигателей проводят лишь внешний осмотр, замер сопротивления
изоляции и сопротивления обмоток постоянному току и пробный запуск.
Схемы пуска синхронных двигателей преобразовательных агрегатов на
различных экскаваторах отличаются лишь способом подачи возбуждения
(см. главу 5).
Наладка схем пуска синхронных двигателей преобразовательных агрегатов
производится в следующем порядке. Сначала производится прозвонка схемы
и проверка ее соответствия проекту. Затем проверяется работа схемы при
неподвижном синхронном двигателе без передачи высокого напряжения. Для
этого на схему управления пуском подается напряжение постоянного тока
и проверяется последовательность и четкость срабатывания всех реле и кон-
такторов, входящих в схему, при включении привода масляного выключателя
и срабатывании его блок-контактов. На экскаваторах ЭШ-15/90А, ЭШ-10/70А
и ЭШ-5/45М, где используются комплектные высоковольтные распредустрой-
ства типа КРУЭ, при указанной проверке масляный выключатель должен быть
выкачен из ячейки, а разъединитель включен, так как в КРУЭ имеется блоки-
ровка, не разрешающая включение масляного выключателя при выключенном
разъединителе. Связь между ячейкой и масляным выключателем МВ осуще-
ствляется при этом с помощью специального шнура с двумя разъемами. Вклю-
чение и отключение МВ может производиться дистанционно с помощью кнопки
«Пуск» в кабине машиниста. Одновременно с указанной проверкой производится
предварительная настройка выдержек реле времени.
В схемах пуска с подачей возбуждения в функции частоты тока обмотки
ротора (см. рис. 5-23) производят настройку реле частоты РЧ. Реле РЧ должно
быть настроено на время срабатывания (отпускания) немногим менее 0,5 с.
Как было отмечено в § 5-6, благодаря наличию выпрямителя в цепи ка-
тушки РЧ происходит однополупериодное выпрямление тока в цепи РЧ и по
мере приближения к синхронной скорости интервалы между полупериодами
все более увеличиваются. Когда двигатель достигнет подсинхронной скорости,
величина этого интервала станет больше 0,5 с, и при правильной настройке РЧ
должно отпадать, включая своим размыкающим контактом контакторы Мы.КП.
В схемах пуска с подачей возбуждения в функции времени (ЭШ-10/70А,
ЭКГ-8И) настройка выдержки реле времени производится таким образом,
чтобы двигатель успел разогнаться до подсинхронной скорости к моменту
подачи возбуждения. Так как время разгона двигателя зависит от величины
напряжения питания на зажимах двигателя при пуске, а это напряжение.
246
в свою очередь, зависит от мощности трансформаторной подстанции, от которой
питается экскаватор, протяженности электрических сетей, мощности других
потребителей и т. и., то время разгона двигателя до подсинхронной скорости
изменяется в довольно широких пределах (10—16 с). Поэтому реле времени
приходится настраивать с запасом и величину выдержки времени в пределах
10—16 с подбирать в зависимости от конкретных условий пуска двигателя.
Вхождение двигателя в синхронизм на экскаваторе ЭШ-10/70А происходит
мягче, чем на ЭШ-10/60, так как на ЭШ-10/60 подача напряжения возбуждения
на обмотку ротора после срабатывания реле времени производится скачком,
а на ЭШ-10/70А после достижения подсинхронной скорости замыкается кон-
тактор М, подающий напряжения на обмотку возбуждения возбудителя, и дви-
гатель плавно входит в синхронизм.
Для определения величины тока возбуждения синхронного двигателя,
который следует установить при работе экскаватора, снимают нагрузочную
U-образную характеристику синхронного двигателя — зависимость тока ста-
тора от тока возбуждения при неизменном моменте нагрузки на валу двигателя.
U-образную характеристику снимают обычно при холостом ходе синхрон-
ного двигателя, так как создать постоянную нагрузку на валу синхронного
двигателя в условиях эксплуатации экскаваторных приводов затруднительно.
При необходимости постоянная нагрузка небольшой величины (20—30% Рн)
на валу синхронного двигателя может быть создана во время опыта короткого
замыкания главных приводов. При этом, так как не следует длительно про-
пускать ток короткого замыкания во избежание повреждения коллекторов
двигателей, периодически снижают ток короткого замыкания до нуля, а затем
после небольшого перерыва (1—2 мин) возобновляют опыт.
Снятие U-образной характеристики производят, изменяя ток возбуждения
возбудителя синхронного двигателя ВС (см, рис. 5-24) с помощью реостата
в цепи обмотки возбуждения этого возбудителя. При этом токи статора и ротора
измеряются с помощью щитовых приборов.
Опыт начинают на холостом ходу преобразовательного агрегата, посте-
пенно повышая ток возбуждения сверх его номинального значения таким
образом, чтобы ток статора достиг значения (1,2 А- 1,4) 1п. Затем ток возбу-
ждения уменьшают, записывая значение тока статора при нескольких значе-
ниях тока возбуждения. При плавном уменьшении тока возбуждения находят
такое его значение 10, при котором ток статора минимален. При этом cos ср = 1.
При дальнейшем снижении тока возбуждения ток статора вновь увеличивается.
При токе возбуждения, большем 10, синхронный двигатель работает в режиме
синхронного компенсатора с опережающим cos ср. При токе возбуждения,
меньшем 10, синхронный двигатель работает с отстающим cos ср и потребляет
реактивную мощность из сети. Ток возбуждения обычно снижают до значения,
при котором ток статора достигает (0,7 4- 0,8) 7Н. После снятия U-образной
характеристики устанавливают ток возбуждения синхронного двигателя для
работы экскаватора под нагрузкой на 40—50% больше тока 10. Этот ток будет
соответствовать работе синхронного двигателя под нагрузкой с небольшим
опережающим cos ср = 0,90 4- 0,95. Не следует устанавливать ток возбуждения
как значительно большим, так и значительно меньшим 10. Если установить
ток возбуждения значительно большим 10, то это приведет к излишнему нагреву
статорных и роторных обмоток. Если установить ток возбуждения меньшим 10,
то это приведет к повышенному нагреву статорной обмотки и снижению пере-
грузочной способности синхронного двигателя, что может привести к его выпа-
дению из синхронизма.
247
§ 6-2. Наладка машин постоянного тока
Наладка машин постоянного тока, генераторов ( системе Г — Д)
и приводных двигателей основных механизмов является одним из важнейших
мероприятий, так как от надежной работы этих машин во многом зависит
надежная работа экскаватора в целом.
Методика проведения указанных работ изложена в [11]. В данной книге
будут рассмотрены лишь отдельные виды работ по машинам постоянного тока,
связанные с наладкой коммутации.
Установка щеток на электрическую нейтраль производится заводом-изго-
товителем. Однако проверку правильности установки щеток на нейтраль сле-
дует обязательно производить на месте монтажа, а также после ремонта с раз-
боркой машин, при замене щеток, при их срабатывании, если меняют более
половины щеток, и т. и.
Существует несколько способов проверки положения щеток относительно
нейтрали. Наиболее распространенным является индуктивный метод, применя-
емый при неподвижной машине при условии тщательной предварительной
регулировки щеточного аппарата и пришлифовки щеток. Для нахождения
электрической нейтрали этим методом на обмотку возбуждения генератора
подается напряжение постоянного тока от независимого источника питания
(генератора собственных нужд, аккумуляторной батареи). На зажимы якоря
(например, непосредственно к щеткам двух соседних бракетов) подсоединяется
милливольтметр магнитоэлектрической системы с пределом измерения до 3 В
для грубой регулировки, а затем — милливольтметр с пределом измерения
до 75 мВ — для точной установки щеток в нейтральное положение.
При подаче и отключении напряжения с обмотки возбуждения в обмотке
якоря наводится э. д. с. трансформации. Если щетки находятся в нейтральном
положении, напряжение на щетках будет равно нулю. Практически такого
положения щеток отыскать не удается, поэтому нейтральное положение щеток
находят по минимальному отклонению стрелки милливольтметра при отключе-
нии напряжения с обмотки возбуждения. Рекомендуется для определения
величины сдвига с нейтрали ориентироваться по отклонению стрелки милли-
вольтметра именно при отключении, а не при подаче напряжения на обмотку
возбуждения, так как отклонения при отключении получаются более отчетли-
выми. Отключение напряжения с обмотки возбуждения следует производить
только после того, как ток, протекающий в обмотке возбуждения, достигнет
установившегося значения. Об этом можно судить или непосредственно по
показаниям амперметра, измеряющего величину тока, или по отклонению
стрелки милливольтметра. При достижении током установившегося значения
стрелка милливольтметра должна возвратиться в нулевое положение. Величина
установившегося тока в обмотке возбуждения не должна быть слишком мала
для того, чтобы нейтральное положение щеток было найдено возможно точнее.
С другой стороны, величина тока не должна быть слишком велика, чтобы не
возникло больших перенапряжений на обмотке возбуждения при разрыве
ее цепи. Рекомендуется, чтобы величина установившегося значения тока в об-
мотке возбуждения составляла 5—10% номинального тока возбуждения.
До производства замеров главная цепь, а также цепи всех обмоток, магнитно-
связанных с обмоткой возбуждения, должны быть разорваны.
При указанных выше условиях первый замер производится, когда щетки
установлены по заводской метке, а при отсутствии заводской метки — при
такой установке траверсы, чтобы линия оси щеток находилась примерно против
248
середины главных полюсов. Второй замер производится после смещения тра-
версы в произвольном направлении (по вращению или против вращения).
После двух замеров определяется, в каком направлении следует смещать тра-
версу для установки ее в нейтральное положение.
Каждый замер следует проводить при нескольких (например, четырех)
положениях якоря. Якорь следует проворачивать в одном и том же направле-
нии, чтобы избежать влияния перемещения щеток в щеткодержателях на пока-
зания милливольтметра.
После отыскания нейтрального положения щеток по минимальному откло-
нению стрелки милливольтметра следует окончательно закрепить траверсу
и еще раз проверить правильность ее установки при нескольких положениях
якоря, так как при закреплении траверсы щетки иногда смещаются.
Не во всех случаях траверсу следует устанавливать точно в нейтральное
положение. Для генераторов главных приводов после отыскания электрической
нейтрали щетки следует несколько сдвигать с нейтрального положения по
направлению вращения для создания небольшой размагничивающей реакции
якоря во время работы приводов, гарантирующей генераторы от самовозбужде-
ния. У компенсированных генераторов, не имеющих противокомпаундных
обмоток (ЭШ-10/70А), щетки следует сдвигать на 0,5—1 ламель в направлении
вращения.
У компенсированных генераторов, снабженных легкой противокомпаунд-
ной (или последовательной) обмоткой (ЭШ-15/90А, ЭШ-10/60), щетки нужно
сдвигать не более чем на 0,5 ламели в направлении вращения или оставлять
в нейтральном положении. У генераторов без компенсационной? обмотки
(ЭКГ-4,6) щетки также могут быть оставлены в нейтральном положении или
сдвинуты на 0,5 ламели в направлении вращения.
У вспомогательных генераторов (генератор собственных нужд, возбудитель
синхронного двигателя), снабженных дополнительными полюсами, щетки
устанавливаются в нейтральное положение.
У двигателей главных приводов, работающих в реверсивном режиме,
следует по возможности точно установить щетки в нейтральное положение.
У некоторых электрических машин постоянного тока (например, у четырех-
полюсных двигателей ДПЭ-82, имеющих четыре бракета) каждая пара бракетов
крепится к отдельной траверсе, причем зти две траверсы крепятся независимо
друг от друга. В этом случае нейтральное положение отыскивается для каждой
щеточной траверсы (каждой пары бракетов) в отдельности, при зтом щетки дру-
гой траверсы (другой пары бракетов) изолируются от коллектора (под щетки
подкладывается плотная бумага или электрокартон).
Такой же метод отыскания нейтрального положения для каждой пары
бракетов или для некоторых пар бракетов приходится применять и тогда, когда
все бракеты (у многополюсной машины) крепятся к одной траверсе.
Такой метод определения нейтрали может потребоваться после капиталь-
ного ремонта машины с разборкой магнитной системы и щеточного аппарата.
Так, при отыскании нейтрального положения щеток на одном из генераторов
главных приводов экскаватора ЭШ-10/60 после ремонта оказалось, что в то
время как две пары бракетов из трех находились точно в нейтральном положе-
нии, одна пара бракетов была сдвинута с нейтрального положения на 3 ламели
против вращения. В этом случае с помощью прокладок изменяют положение
всех щеткодержателей смещенной пары бракетов и устанавливают зту пару
бракетов в нейтральное положение при изолированных от коллектора щетках
всех других бракетов. Затем проверяют нейтральное положение щеточной
249
траверсы индуктивным методом, когда щетки всех бракетов установлены на
свои места и имеют контакт с коллектором.
Для генераторов главных приводов при наладке часто используется еще
один метод проверки нейтрального положения щеток. Этот метод основан на
оценке величины сдвига щеток с нейтрали по величине продольной реакции
якоря в опыте короткого замыкания. Как известно, если щетки установлены
в нейтрали, продольная реакция якоря отсутствует (см. гл. 2). Величина про-
дольной реакции якоря прямо пропорциональна величине угла сдвига щеток
с нейтрального положения.
В опыте короткого замыкания, который всегда проводится для замкнутой
системы Г — Д, охваченной токовой связью, чем больше продольная реакция
якоря, тем больше ток независимой обмотки. Если продольная реакция якоря
отсутствует, то величина тока независимой обмотки (для однообмоточного
генератора) в опыте короткого замыкания определяется лишь величиной э. д. с.
генератора при коротком замыкании (по соответствующей данному току якоря
нагрузочной характеристике генератора). Если щетки сдвинуты с нейтрали
по вращению и, следовательно, имеется продольная размагничивающая реакция
якоря, то независимая обмотка создает поток, компенсирующий размагничива-
ющую реакцию якоря, и поток, обеспечивающий необходимую э. д. с. корот-
кого замыкания Ек 3. При сдвиге щеток с нейтрали против направления вра-
щения ток независимой обмотки сначала уменьшается до нуля, пока продольная
реакция якоря не создаст соответствующего намагничивающего потока,
обеспечивающего величину Ек s, а затем вновь увеличивается, создавая
поток, компенсирующий намагничивающую реакцию якоря. Таким спосо-
бом можно с большой степенью точности установить щетки в нейтральное
положение.
Для компенсированных генераторов щетки сдвигают с нейтрали в напра-
влении вращения. По опыту наладки установлено, что величина этого сдвига
должна быть такой, чтобы ток независимой обмотки в опыте короткого замыка-
ния составлял 2—5% величины тока независимой обмотки в опыте холостого
хода (с учетом тока независимой обмотки, необходимого для обеспечения
э. д. с. Ек. 3).
Если указанным способом положение щеток относительно нейтрали про-
веряется для многообмоточного генератора, то все другие обмотки на главных
полюсах, кроме независимой, должны быть разорваны (т. е., например, парал-,
лельная и противокомпаундная на генераторах ПЭ174-7К экскаватора
ЭШ-15/90А). При наличии последовательной обмотки (ЭШ-10/60) она не раз-
рывается, ан. с., создаваемая этой обмоткой в опыте короткого замыкания,
может быть легко учтена. Как уже отмечалось, на компенсированных генера-
торах, снабженных противокомпаундной или сериесной обмотками, щетки
обычно устанавливаются точно в нейтральное положение.
Размагничивающий поток, создаваемый противокомпаундной обмоткой,
также может быть оценен по величине тока независимой обмотки в опыте корот-
кого замыкания.
После установки щеток на электрическую нейтраль может потребоваться
выполнение дополнительных наладочных работ, связанных с необходимостью
настройки коммутации, которая иногда остается неудовлетворительной при
выполнении всех необходимых условий, а именно: правильной установке щетко-
держателей, равномерном и нормальном нажатии на щетки и их тщательной
пришлифовке к поверхности коллектора, установке щеточной траверсы в ней-
тральное положение, хорошем состоянии поверхности коллектора и т. п.
250
Ж
Рис. 6-1. Схема для определения зоны
безыскровой коммутации
Иногда улучшения коммутации добиваются, прибегая к увеличению сопро-
тивления щеточного контакта. Напомним, что ток коммутируемой секции
проходит через щетку в поперечном направлении, а ток нагрузки прохо-
дит через щетку по ее высоте. Поэтому для улучшения коммутации жела-
тельно увеличить сопротивление щетки в поперечном направлении, не изменяя
ее сопротивления в продольном направлении. Для этого применяют или сло-
истые щетки, каждая из которых состоит из двух щеток, склеенных между
собой изолирующим лаком, или двойные разрезные щетки, каждая из которых
состоит из двух отдельных щеток, устанавливаемых в одном щеткодержателе.
Составные части разрезной щетки должны иметь возможность свободно пере-
мещаться относительно друг друга.
В некоторых случаях улучше-
ния коммутации достигают, увели-
чивая ширину коммутационной зоны.
Увеличить ширину коммутационной
зоны можно или смещая щеткодер-
жатели на траверсе за счет прокла-
док, или заменив щеткодержатели и
щетки более широкими [10].
В наиболее сложных случаях,
когда все другие методы не дают ре-
зультата, наладка коммутации про-
изводится с помощью определения
области безыскровой работы по ме-
тоду Касьянова [10]. Сущность этого
метода заключается в том, что опыт-
ным путем при нескольких значе-
ниях якорного тока от холостого
хода до (1,4 4- 1,5) 1„ н находят пре-
дельные (максимальные и минималь-
ные) значения н. с. дополнительных
полюсов, при которых коммутация
сохраняет первоначальное значение.
Изменение н. с. дополнительных по-
люсов при постоянной величине тока
нагрузки можно производить несколькими способами. Например, если имеется
достаточно свободного пространства между главными и дополнительными по-
люсами, то можно намотать на дополнительные полюса поверх основной
обмотки на время проведения опыта добавочную обмотку и подать на эту
обмотку напряжение от независимого источника питания. Возможно также, не
отсоединяя обмотку дополнительных полюсов от главной цепи, подать на
зажимы обмоток дополнительных полюсов и компенсационной напряжение от
независимого источника (рис. 6-1).
В качестве источника питания для получения добавочного тока в обмотке
дополнительных полюсов (см. рис. 6-1) можно использовать генератор Г2
главного привода другого основного механизма с налаженной системой упра-
вления. На рис. 6-1 УВ1 и УВ2 управляемые возбудители генераторов соответ-
ственно Г1 и Г2, ОЗУВ1, ОЗУВ2, ОТУВ1 и ОТУВ2 — задающие и токовые
обмотки возбудителей.
Сравнительно сложную работу по определению зоны безыскровой коммута-
ции следует проводить при необходимости только для генераторов главных при-
25*
водов. Для двигателей главных приводов, а тем более для машин постоянного
тока вспомогательных приводов коммутацию в подавляющем большинстве
случаев можно наладить, не прибегая к методу безыскровой зоны. Определение
области безыскровой работы удобно производить при работе генератора в опыте
короткого замыкания.
Для генераторов главных приводов осуществить работу в режиме корот-
кого замыкания с регулировкой величины якорного тока в широких пределах
достаточно просто: опыт короткого замыкания генераторов входит в программу
обычной наладки и необходим для установления величин стопорных токов
(см. гл. 7).
Опыт по определению зоны безыскровой работы начинают с режима холо-
стого хода испытуемого генератора при разомкнутой главной цепи и отсутствии
тока в обмотке возбуждения генератора. При этих условиях постоянно увели-
чивают ток, протекающий по обмотке дополнительных полюсов от генератора Г2
(см. рис. 6-1), до тех пор, пока не появятся первые искры под сбегающими
краями щеток. Затем плавно уменьшают ток до нуля и, изменяя полярность
напряжения генератора Г2, вновь увеличивают значение тока до появления
искрения на коллекторе испытуемого генератора. Затем останавливают пре-
образовательный агрегат, замыкают главную цепь генератора и в режиме
короткого замыкания для различных значений тока главной цепи (в пределах
от 0,2 до 1,51я н.) определяют величины добавочного тока AI, протекающего
по обмотке дополнительных полюсов генератора Г1, при которых начинается
искрение генератора Г1. Для каждого значения якорного тока 1Я генератора Г1
начало искрения определяют при двух направлениях добавочного тока Д/ —
положительном и отрицательном. Положительным называют направление
добавочного тока, совпадающее с направлением основного тока нагрузки,
отрицательным — противоположное направлению тока нагрузки.
Следует учитывать, что изменение величины и направления добавочного
тока влияет на ток якоря: при положительном направлении добавочного тока
ток якоря уменьшается, при отрицательном — увеличивается. Поэтому для
проведения опытов при одинаковых абсолютных значениях тока якоря и доба-
вочного тока и разных направлениях добавочного тока приходится несколько
изменять величину э. д. с. генератора Г1, регулируя его ток возбуждения. При
проведении опытов не следует допускать сильного искрения, что, в свою оче-
редь, может повлиять на ширину области безыскровой работы. Величину доба-
вочного тока фиксируют при появлении первых искр. Для более точного опре-
деления момента начала искрения коллектор затемняют. Величину
добавочного тока, при котором начинается искрение, следует определять не-
сколько раз, так как искрение, раэ возникнув, исчезает при величине добавоч-
ного тока, значительно меньшей, чем та, при которой оно началось. Опыт
повторяют несколько раз, плавно увеличивая добавочный ток от нуля и отме-
чая каждый раз величину добавочного тока, при котором возникает искре-
ние. При увеличении тока якоря величина добавочного тока, при котором начи-
нается искрение, снижается. Максимальная величина добавочного тока (в опыте
холостого хода) обычно не превышает 10—15% номинального тока якоря.
По результатам опытов строят кривые, ограничивающие область безыскро-
вой работы при положительном и отрицательном направлениях ’добавочного
тока дополнительных полюсов ± =/ f (рис. 6-2). На рис. 6-2
по оси абсцисс отложены относительные значения якорного тока 7Я/1Я и., по оси
ординат — относительные значения добавочного тока дополнительных полюсов.
252
Для каждого значения тока якоря наилучшая коммутация будет, очевидно,
определяться точкой, лежащей примерно посередине между верхней и нижней
границами области. При правильно настроенных дополнительных полюсах
и хорошей коммутации верхняя и нижняя границы симметричны относительно
оси абсцисс, а средняя линия, соединяющая средние точки при различных
значениях тока якоря, практически совпадает с осью абсцисс (рис. 6-2, а).
Величина отклонения средней линии от оси абсцисс, а также кривизна
этой линии и ширина области безыскровой работы характеризуют качество
процесса коммутации, настройку дополнительных полюсов и различные при-
чины нарушений в процессе коммутации. Отклонение средней линии вверх
Рис. 6-2. Области безыскровой ра-
боты:
а —- при правильно настроенных дополни-
тельных полюсах; б — при слишком сла-
бом поле дополнительных. полюсов; в —
при слишком сильном поле дополнитель-
ных полюсов
от оси абсцисс указывает на то, что поток дополнительных полюсов недостато-
чен и их действие должно быть усилено. Отклонение средней линии вниз от оси
абсцисс указывает на то, что поток дополнительных полюсов больше необходи-
мой величины и, следовательно, действие дополнительных полюсов должно быть
ослаблено (рис. 6-2, б и в). Из рисунка видно, что границы области безыскровой
работы во всех случаях сближаются при увеличении тока якоря, а при некото-
ром значении тока якоря — пересекаются. При токе якоря, большем, чем ток,
соответствующий точке пересечения границ областей, безыскровая работа
не может быть обеспечена при любой настройке дополнительных полюсов.
Чем шире область безыскровой работы, тем надежнее и устойчивей про-
текает процесс коммутации машины при различных нагрузках. Слишком
быстрое сближение верхней и нижней границ области безыскровой работы
может указывать на механические неисправности в контакте, например на
вибрацию щеток.
Следует отметить, что ширина области безыскровой работы уменьшается
с увеличением мощности машины и скорости ее вращения.
Ширина области безыскровой работы зависит также от многих других
факторов: правильности подбора марки и ширины щеток, нажима на щетки,
состояния поверхности коллектора, приработке щеток и поверхности коллек-
тора и т. п. Если поток добавочных полюсов значительно меньше (или больше)
253
необходимого, то при некотором значении тока якоря нижняя (или верхняя)
граница безыскровой области пересекает ось абсцисс. При токах якоря, боль-
ших чем ток якоря, соответствующий точке пересечения одной из границ
области с осью абсцисс, безыскровая работа возможна только при наличии
добавочной н. с. дополнительных полюсов одного направления (см. рис. 6-2).
Кривизна средней линии безыскровой области может служить показателем
компенсированности машины. Для машин с правильно рассчитанной компенса-
ционной обмоткой средняя линия близка к прямой.
По результатам опытов определения области безыскровой коммутации
может потребоваться, как указывалось выше, усиление или ослабление ком-
мутирующего поля добавочных полюсов. Поток дополнительных полюсов
обычно регулируют, изменяя величину зазора дополнительных полюсов. Однако
изменение величины зазора можно производить различными способами.
Напомним, что для регулирования величины потока дополнительных полю-
сов зазор дополнительных полюсов делают из двух частей — воздушного зазора
между дополнительным полюсом и якорем и зазора, обеспечиваемого набором
немагнитных прокладок между дополнительным полюсом и ярмом. Между
дополнительным полюсом и ярмом устанавливается также некоторое количе-
ство стальных прокладок. Если требуется ослабить действие дополнительных
полюсов, можно, удалив часть стальных прокладок между полюсом и ярмом,
увеличить воздушный зазор между полюсом и якорем и тем самым ослабить
действие коммутирующего поля. Однако при этом изменится и форма кривой
поля дополнительного полюса, что может привести к ухудшению коммутации.
Поэтому величину воздушного зазора между дополнительными полюсами
и якорем стараются оставлять неизменной, а регулировку величины потока
дополнительных полюсов при необходимости производят за счет изменения
зазора между дополнительными полюсами и ярмом. Если требуется ослабить
действие дополнительных полюсов, то часть магнитных прокладок заменяют
немагнитными той же толщины и, наоборот, если нужно усилить действие
дополнительных полюсов, то часть немагнитных прокладок заменяют стальными
той же толщины.
Правильность каждого изменения зазора следует проверять опытным
путем, пропуская добавочный ток по обмотке дополнительных полюсов по
схеме, приведенной на рис. 6-1, и определяя область безыскровой коммутации
при новом зазоре. Если отклонение средней линии новой области безыскровой
коммутации от оси абсцисс при изменении зазора уменьшилось, то изменение
произведено в правильном направлении. Изменение величины зазора следует
проводить до тех пор, пока средняя линия области безыскровой коммутации
будет практически совпадать с осью абсцисс. При этом получим оптимальную
.настройку дополнительных полюсов.
§ 6-3. Наладка электромашинных усилителей
Наладка электромашинных усилителей поперечного поля начи-
нается с ревизии ЭМУ и приводного двигателя. Так же как и для наладки
любых машин постоянного тока, особое внимание должно быть обращено на
коллектор и щеточный аппарат (см. § 6-2). При этом должны быть проделаны
операции по регулировке и притирке щеток и установке их на электрическую
нейтраль. Для ЭМУ работа щеточного аппарата имеет еще более важное зна-
чение, чем для обычных машин постоянного тока, так как недостаточно тща-
тельная пришлифовка щеток к поверхности коллектора или недостаточно точная
254
Рис. 6-3. Отыскание нейтраль-
ного положения щеток в элек-
тромашинном (усилителе попе-
речного поля
установка их в нейтральное положение может привести или к значительному
снижению коэффициента усиления ЭМУ, или к неустойчивой его работе и само-
возбуждению. Это объясняется тем, что н. с. обмотки управления ЭМУ очень
мала, а н. с. реакции коммутационных токов в поперечной цепи и н. с. от сдвига
щеток обычно в несколько раз превышает величину результирующей н. с.
управления (см. гл. 2). Однако после установки щеток в нейтральное положение
их всегда сдвигают на 1,5—2 мм по направлению вращения для гарантии от
самовозбуждения при разрыве цепи собственной отрицательной обратной связи
по напряжению ЭМУ и для обеспечения стабильности статических характе-
ристик ЭМУ.
Отыскание нейтрального положения щеток
производится, так же как для обычных машин
постоянного тока, индуктивным методом
(рис. 6-3). На усилителях ЭМУ-100 и ЭМУ-110,
устанавливаемых на экскаваторах, щетки по-
перечной и продольной цепей жестко связаны
друг с другом, так как все щеткодержатели
крепятся к одной траверсе. Поэтому нейтраль-
ное положение отыскивается только для щеток
поперечной цепи. Напомним, что при опреде-
лении электрической нейтрали индуктивным
методом щетки должны быть предварительно
тщательно пришлифованы к коллектору. Для
этого после притирки щеток ЭМУ должен вра-
щаться на холостом ходу в течение 10—12 ч до
образования зеркальной поверхности на всей
площади щеток, прилегающей к коллектору.
Установка электрической нейтрали на не при-
тертых щетках может привести к значитель-
ным ошибкам. При отыскании электрической
нейтрали цепи всех обмоток управления, кроме
той, на которую подается питание от незави-
симого источника, должны быть разорваны.
Также должна быть разорвана поперечная и
продольная цепи ЭМУ и цепь компенсацион-
ной обмотки, замкнутой на шунтирующее
сопротивление. Милливольтметр подключается
к поперечным щеткам. Отклонение стрелки
при отключении источника питания. Нейтральное положение щеток прове-
ряется для четырех положений якоря при повороте якоря в одну сторону.
В программу ревизии ЭМУ входит, как и для всех электрических машин,
измерение сопротивления изоляции и измерение сопротивления постоянному
току. Сопротивление изоляции измеряется у всех обмоток управления, обмоток
якоря, компенсационной и дополнительных полюсов относительно корпуса
и между обмотками с помощью мегометра на 1000 В. Сопротивление всех обмо-
ток постоянному току можно замерить с помощью моста ММВ. Измерение
сопротивления обмотки якоря производят при поднятых щетках между кол-
лекторными пластинами, противостоящими друг другу по диаметру (в соответ-
ствии с величиной шага по коллектору). Измеряется также полная величина
сопротивления к , шунтирующего компенсационную обмотку, а также
возможные пределы регулирования этого сопротивления.
милливольтметра
255
Перед первым пуском ЭМУ и для притирки щеток цепи обмоток управления
ЭМУ во избежание возможного самовозбуждения машины должны быть отклю-
чены от схемы, а продольная и поперечная цепи ЭМУ разорваны.
После притирки щеток, отыскания их нейтрального положения и сдвига
щеток с нейтрального положения по вращению поперечная цепь может быть
замкнута, после чего можно собирать схему для снятия характеристики холо-
стого хода ЭМУ (рис. 6-4, а).
Характеристикой холостого хода ЭМУ называют зависимость э. д. с.
на продольных щетках от тока одной из обмоток управления (или от н. с.
управления) при разомкнутой выходной цепи ЭМУ (см. рис. 6-4, а). Во время
холостого хода обмотка якоря нагружена током поперечной цепи. Для снятия
Рис. 6-4. Схемы для снятия характеристик электромашинного усилителя
поперечного поля:
а — характеристики холостого хода; б — нагрузочной характеристики
характеристики холостого хода напряжение от независимого источника питания
подается на одну из обмоток управления. Измеряется ток управления и напря-
жение на выходе ЭМУ. Подъем напряжения производится постепенно, при этом
необходимо внимательно наблюдать за коммутацией щеток, особенно попереч-
ных, нагруженных током. Напряжение поднимается до величины, соответству-
ющей 1,3UK, что составляет 300 В для ЭМУ-110 и ЭМУ-100 с U,, = 230 В, кото-
рые применяются на экскаваторах (ЭМУ-110 — на ЭШ-10/60 и ЭШ-15/90;
ЭМУ-100 — на ЭКГ-8). Для испытания витковой изоляции обмотки якоря,
согласно ПУЭ, напряжение, равное 1,ЗЕ7Н, поддерживается в течение 5 мин.
Для ЭМУ допустимо кратковременное (в течение нескольких секунд) повышение
напряжения до 1,75С7Н (400 В). Но такого повышения напряжения не требуется,
так как во время работы напряжение ЭМУ обычно не превышает 200—
250 В.
После увеличения до максимальной величины напряжение снижается
до нуля и поднимается до такого же значения, но противоположной полярности.
Во время первого подъема напряжения запись показаний приборов не произ-
водится. Характеристику холостого хода ЭМУ рекомендуется снимать, фикси-
руя полную петлю гистерезиса, начиная с максимального значения напряжения
одной полярности до максимального значения напряжения другой полярности
256
и затем вновь до максимального значения напряжения прежней поляр-
ности.
При снятии каждой ветви характеристики ток управления следует изме-
нять только в одну сторону, т. е. в сторону увеличения или в сторону уменьше-
ния. Иногда для подрегулировки напряжения или тока управления перед
записью показаний приборов перемещают движок реостата то в одну, то в дру-
гую сторону. При этом ЭМУ перемагничивается по частным петлям гистерезиса
и результирующая характеристика значительно искажается. При снятии
характеристик ЭМУ-100 и ЭМУ-110 используется вольтметр магнитоэлектри-
ческой системы М45М с пределами измерений 0—75; 0—150 и 0—300 В. Пре-
делы измерения 0—75 и 0—150 В используют для более точного снятия уча-
стков характеристики при малых напряжениях. Для измерения тока управле-
ния используют шунт 0,3—0,75 А с милливольтметром на 75 мВ.
На холостом ходу может быть проверено соотношение числа витков обмоток
управления. Если одному и тому же значению напряжения на холостом ходу
ЭМУ UK соответствует ток управления одной обмотки 7у. п и другой обмотки /у. п,
то отношение их чисел витков шк/шп — Iy Л/1У к. Таким образом может
быть проверено соотношение числа витков всех обмоток управления ЭМУ.
Следует иметь в виду, что при повторных измерениях напряжения воз-
можен разброс показаний 7у< п/7у к из-за наличия гистерезиса.
На холостом ходу производят также определение полярности и подключе-
ние обмотки собственной отрицательной обратной связи по напряжению ЭМУ.
Для этого при неподвижном ЭМУ один из выводов обмотки обратной связи
соединяют непосредственно на клеммнике с одним из выводов ЭМУ, а другой
вывод обмотки обратной связи оставляют свободным. После запуска ЭМУ
при отсутствии сигнала в обмотках управления производят кратковременное
подключение другого конца обмотки обратной связи через заранее подгото-
вленное добавочное сопротивление 1000 Ом (например, остеклованное сопро-
тивление ПЭВ-50) ко второму выводу ЭМУ. При подключении обмотки обратной
связи внимательно следят за изменением напряжения ЭМУ по вольтметру
сначала на большом пределе (до 300 В), затем на малых пределах (до 15 В).
За счет остаточного напряжения при замыкании цепи обмотки обратной связи
в зависимости от ее полярности напряжение ЭМУ или увеличивается, или
уменьшается. Если полярность обмотки обратной связи окажется положитель-
ной, то увеличение напряжения может произойти довольно быстро, поэтому
сначала используют вольтметр с большими пределами измерения. Если поляр-
ность обмотки обратной связи окажется отрицательной, то уменьшение напря-
жения может быть незаметным на вольтметре с большим пределом измерения.
Поэтому после нескольких проб подключают вольтметр с малым пределом
измерения и окончательно убеждаются, что при подключении обмотки обратной
связи напряжение ЭМУ уменьшается, т. е. что обмотка действует как отрица-
тельная обратная связь по напряжению ЭМУ.
После определения полярности выставляют величину коэффициента обрат-
ной связи по напряжению ЭМУ в соответствии с проектом с помощью регу-
лировки величины добавочного сопротивления СД (см. рис. 6-4, а) в цепи
обмотки обратной связи. Напомним, что собственная отрицательная связь
по напряжению вводится для получения однозначных характеристик ЭМУ.
При наладке, если необходимо изменить величину коэффициента усиления
системы, изменяют величину коэффициента обратной связи по напряжению
ЭМУ (см. главу 7). Дело в том, что коэффициент обратной связи по напряжению
ЭМУ выбирается в проекте (особенно для каскадных схем ЭШ-14/75, ЭШ-15/90)
17 Закав 1127
257
с большим запасом (учитывая, что коэффициент усиления ЭМУ очень велик)
и некоторое ослабление обратной связи (в 1,5—2 раза) не сказывается суще-
ственно на однозначности характеристик ЭМУ.
На холостом ходу ЭМУ подключается также гибкая обратная связь по
напряжению ЭМУ. В схемах управления главными приводами экскава-
тора ЭШ-10/60, где функции гибкой и жесткой обратных связей по напряжению
ЭМУ выполняет одна обмотка, а гибкая связь создается шунтировкой сопроти-
вления, последовательно включенного в цепь обмотки, с помощью конденсатора
(см. гл. 5) совершенно излишне определять полярность обмотки для гибкой
отрицательной связи, если уже определена полярность обмотки для жесткой
отрицательной связи, так как в этом случае гибкая связь действует как отри-
цательная. Следует иметь в виду, что условия устойчивой работы ЭМУ значи-
тельно изменяются при его нагрузке. Необходимую величину коэффициента
гибкой обратной связи по напряжению ЭМУ обычно определяют при проведении
опытов холостого хода и короткого замыкания генераторов, т. е. когда ЭМУ
нагружен на обмотку возбуждения генератора и шунтирующее сопротивле-
ние (см. рис. 6-4, б).
При нагрузке ЭМУ производится настройка компенсации и снятие нагру-
зочных характеристик. Электромашинные усилители, работающие в схемах
управления приводами экскаваторов, настраиваются на работу с недокомпенса-
цией продольного потока реакции якоря. Настройка степени компенсации
осуществляется с помощью сопротивления BU!K, шунтирующего компенсацион-
ную обмотку. Это сопротивление на ЭМУ-100 и ЭМУ-110 выполняется из двух
частей: нерегулируемой в виде небольшой катушки, расположенной за клемм-
ным щитком (на ЭМУ-110 величина этого сопротивления составляет приблизи-
тельно 2,7 Ом при t — 15° С), и регулируемой — в виде проволочного реостат»
с движком, перемещающимся с помощью винта.
Напомним, что компенсационная обмотка ЭМУ рассчитывается таким
образом, что полная н. с. компенсационной обмотки больше н. с. продольной
реакции якоря. При любом случайном разрыве цепи шунтирующего сопро-
тивления во время работы ЭМУ возможно самовозбуждение, что может при-
вести к значительному повреждению и выходу из строя ЭМУ. Поэтому перед
запуском ЭМУ для работы под нагрузкой тщательно проверяют всю цепь шун-
тирующего сопротивления 7?шк, качество паек наконечников на проводах,
идущих от сопротивления 11 шк к выводам компенсационной обмотки, надеж-
ность контакта реостата и т. п. Предварительно величину сопротивления
устанавливают минимальной, чтобы исключить самовозбуждение, замыкают
цепь нагрузки ЭМУ, состоящую из обмотки возбуждения генератора и шунти-
рующего сопротивления 7?и.к. После запуска постепенно увеличивают ток
нагрузки, подавая напряжение от независимого источника питания на одну
из обмоток управления ЭМУ. При этом внимательно наблюдают за коммута-
цией продольных щеток. Ток нагрузки поднимают до номинального значения.
При этом замечают величину выходного напряжения и ток управления. Отно-
шение величин выходного напряжения ЭМУ при нагрузке и холостом ходе
определяется степенью недокомпенсации (см. гл. 2).
Так как напряжение при номинальном токе нагрузки соответствует линей-
ному участку характеристики намагничивания, то отношение величин напря-
жений при нагрузке и при холостом ходе равно величине недокомпенсации.
Величину сопротивления, шунтирующего компенсационную обмотку 7?тк,
устанавливают таким образом, чтобы величина выходного напряжения ЭМУ
при номинальном токе нагрузки была на 15—20% меньше, чем при холостом
258
ходе при неизменном значении н. с. управления. ЭМУ настраивается для работы
при недокомпенсации для получения стабильных внешних характеристик.
При нагрузке ЭМУ на обмотку возбуждения неподвижного генератора
снимается нагрузочная характеристика — зависимость выходного напряжения
от тока одной из обмоток управления (или от н. с. управления) при постоянной
величине сопротивления нагрузки. Так же как и при снятии характеристики
холостого хода, при снятии нагрузочной характеристики рекомендуется фикси-
ровать полную петлю гистерезиса. При этом во избежание ошибок при снятии
каждой ветви характеристики ток управления следует изменять только в одну
сторону. Кроме напряжения на выходе и тока управления, измеряемых с по-
мощью тех же приборов, что и при снятии характеристики холостого хода,
при снятии нагрузочных характеристик фиксируют ток нагрузки ЭМУ с по-
мощью шунта 75 А, 75 мВ (для ЭМУ-100 и ЭМУ-110) и милливольтметра М45М
на 75 мВ.
§ 6-4. Наладка магнитных усилителей
К первому этапу наладки относится ревизия, ко второму этапу —
подача напряжения и снятие характеристик «вход — выход» отдельных МУ,
входящих в двухтактную схему, и
Во время внешнего осмотра
тов МУ, затяжка болтов, качество
пайки наконечников на выводных
концах и крепление их на сборке вы-
водов.
С помощью мегомметра на 1000 В
измеряется сопротивление изоляции
всех обмоток управления и рабо-
чих обмоток относительно магнито-
провода и между собой.
Измерение сопротивления по-
стоянному току обмоток управления
производится с помощью моста ММВ.
Если выпрямители нагрузки и
внутренней обратной связи не входят
в блок МУ, изготовляемый заводом
(например, на экскаваторах ЭКГ-8),
следует внимательно проверить схему
соединения между МУ и выпрямите-
лями и схему сборки самих выпря-
мителей (см. рис. 2-37).
Затем собирается цепь нагрузки
блока МУ (рис. 6-5). Для силовых МУ,
используемых в качестве возбудите-
лей генераторов, нагрузкой во всех
случаях служит мост (см. рис. 2-37),
состоящий из двух полуобмоток неза-
висимого возбуждения и балластных
сопротивлений. Измеряются вели-
чины балластных сопротивлений /?б
и сопротивления нагрузки 7?наг,
блока МУ.
проверяется плотность сборки паке-
Рис. 6-5. Схема для снятия характеристик си-
ловых магнитных усилителей
17'
259
представляющих собой сопротивления полуобмоток независимого возбуждения
ОВГ, проверяется соотношение величин сопротивлений R6 и Ннаг, так как во всех
схемах R6 должно быть больше /?нач. Проверяется правильность сборки нагру-
зочного моста: на зажимы каждой полуобмотки должны быть подсоединены одно-
именные зажимы разных усилителей (два плюса или два минуса). В противном
случае сопротивление нагрузки будет выполнять роль балластного сопротивле-
ния и, так как 7?наг < R6, сразу же после подачи напряжения питания по незави-
симой обмотке возбуждения будет протекать большой ток. Перед подачей напря-
жения питания проверяются цепи обмоток смещения и собирается схема изме-
рений для контроля величин токов МУ и нагрузки и снятия характеристик
Рис. 6-6. Экспериментальные характеристики силовых магнитных
усилителей типа УМ.ЗП.32.32:
а — без смещения; б — с положительным смещением
«вход — выход» блока МУ — зависимостей токов каждого из магнитных уси
лителей, входящих в блок, и тока нагрузки от тока в одной из обмоток управле
ния или и. с. управления (рис. 6-6).
Для измерений токов нагрузки и тока управления силовых МУ исполь
зуются шунты на соответствующие токи в комплекте с милливольтметрам!
на 75 мВ. Одновременно измеряется напряжение на одной из независимы:
полуобмоток с помощью вольтметра магнитоэлектрической системы М45М
Использование астатического вольтметра приводит к ошибкам, так как в это:
случае измеряются постоянная и переменная составляющие напряжения.
После подачи напряжения питания по показаниям приборов можно еще ра;
проверить правильность сборки схемы: если схема нагрузочного моста собран;
правильно, то при отсутствии тока в обмотках управления и обмотках смещенш
величины токов в независимых полуобмотках должны быть близки к нулю
а величины токов в балластных сопротивлениях должны равняться полусумм;
токов магнитных усилителей, входящих в блок. Наличие небольшого ток;
в независимой обмотке при отсутствии сигнала в обмотках управления объяс
няется неодинаковостью начальных значений токов МУ, входящих в блок, что
260
в свою очередь, может быть связано с целым рядом причин: неодинаковостью
качеств выпрямителей внутренней обратной связи, не совсем точным равен-
ством напряжения питания двух МУ, неодинаковостью сопротивления
нагрузки, т. е. сопротивлений полуобмоток между собой, и неодинаковостью
балластных сопротивлений и т. п.
Нулевое значение тока в независимой обмотке при отсутствии сигнала
в обмотках управления устанавливается с помощью обмоток смещения. В боль-
шинстве схем с силовыми МУ применяется отрицательное смещение, т. е.
при наличии сигнала в обмотках смещения значения токов МУ, входящих
в блок, уменьшаются.
Величину н. с. обмоток смещения для разных схем выбирают, исходя из
различных предпосылок. Так, для схем экскаватора ЭКГ-4,6 величину
н. с. смещения выбирают таким образом, чтобы магнитный усилитель в рабо-
чем режиме работал на участке характеристики с максимальным коэффици-
ентом усиления — этим определяется качество статических и динамиче-
ских характеристик системы. В соответствии с этим устанавливают начальные
токи МУ при отсутствии сигнала в обмотках управления, равными приблизи-
тельно половине максимальных токов на насыщенном участке характеристики
усилителя.
Для экскаваторов ЭШ-10/70А и ЭШ-5/45М, где магнитные усилители выби-
рают со значительным запасом по напряжению, а величины балластных сопро-
тивлений устанавливаются равными сопротивлению независимых полуобмоток
в динамике, величины максимальных токов МУ, соответствующих насыщенному
участку их характеристик, могут значительно превышать величину номиналь-
ных токов усилителей. В этих случаях н. с. отрицательного смещения уста-
навливают такой величины, чтобы значение эквивалентного по нагреву тока
нагрузки не превышало номинального тока МУ. Таким величинам н. с. отри-
цательного смещения соответствуют обычно значения начальных токов, равные
примерно х/4—113 максимальных величин токов МУ.
На экскаваторах ЭКГ-8И величина н. с. смещения в различных режимах
разная. В основных рабочих режимах обычно устанавливают довольно сильное
отрицательное смещение, которому соответствуют значения начальных токов,
равные примерно Ve максимальных величин токов МУ, т. е. вблизи ниж-
него колена характеристики 1г, /2 = / (Fy) (см. рис. 2-39, б). При установке
командоконтроллера в нулевое положение величина н. с. отрицательного
смещения увеличивается в несколько раз. Этому режиму работы соответствуют
характеристики, показанные пунктирными линиями на рис. 2-39, б, со значи-
тельной зоной нечувствительности. При отключенной схеме управления, но при
вращении преобразовательного агрегата и включенных магнитных усилителях
создается начальная н. с. отрицательного смещения, при которой магнитные
усилители работают на участках характеристик при минимальных значениях
тока холостого хода или вблизи нижнего колена характеристик. Начальная
н. с. смещения вводится для уменьшения нагрева усилителя, поэтому точная
регулировка величины начальной н. с. не требуется. На экскаваторах ЭКГ-8И
изменение н. с. смещения в разных режимах производится с помощью одной
обмотки смещения при перестановках командоконтроллера и включении и от-
ключении схемы управления (см. гл. 5).
Окончательный выбор величины и знака н. с. рабочего смещения произ-
водится в опытах холостого хода и короткого замыкания, исходя из двух усло-
вий: обеспечения устойчивой работы приводов и удобного распределения ско-
ростей по ступеням командоконтроллера.
261
Первое из перечисленных условий определяется тем, что при наладке ряда
экскаваторов ЭКГ-8И было установлено, что при максимальном значении
коэффициента усиления магнитных усилителей в опыте короткого замыкания
Рис. 6-7. Схема блока БД-2ТА5
(е| и измерительная схема для
снятия характеристик блока (б)
возникают незатухающие колебания и прихо-
дится, регулируя величину н. с. смещения,
устанавливать такое значение коэффициента
усиления, при котором система работает устой-
чиво.
Второе условие вызвано тем, что при мак-
симальном коэффициенте усиления разбивка
скоростей по ступеням командоконтроллера
получается очень неравномерной. Ввиду того
что на экскаваторе ЭКГ-8И в различных ре-
жимах работы величина н. с. смещения раз-
ная, характеристики усилителей /х,/2 = / (^у)
снимают при отсутствии смещения и при н. с.
смещения, соответствующей рабочим режимам.
При работе магнитного усилителя в однотакт-
ной или в двухтактной схеме на электрически
несвязанную нагрузку (например, в схеме с маг-
нитным суммированием) характеристики уси-
лителя при различных н. с. смещения будут
идентичны характеристике при отсутствии сме-
щения только со сдвинутым на соответству-
ющую величину началом оси абсцисс. При
работе усилителей в двухтактных схемах на
электрически связанную нагрузку (мостовые и
262
дифференциально-мостовые схемы) характеристики усилителей при различ-
ных величинах и знаках н. с. смещения отличаются друг от друга (см.
рис. 6-6).
Для снятия характеристики напряжение от независимого источника пита-
ния подается на одну из обмоток управления (см. рис. 6-5). Фиксируются ток
в обмотке управления, токи каж-
дого из магнитных усилителей,
входящих в блок, ток в нагрузке,
т. е. в одной из полуобмоток. Для
каждой характеристики фиксиру-
ются величины н. с. смещения
каждого из усилителей и напря-
жения питания. Должны быть
измерены и записаны величины
балластных сопротивлений и со-
противлений полуобмоток.
Характеристики блоков
БД-2ТА5, используемых в каче-
стве регуляторов напряжения или
промежуточных магнитных усили-
телей, которые выполняются по
дифференциально-мостовой схеме
(рис. 6-7), снимаются аналогично
описанному выше. Фиксируются
ток в обмотке управления и ток
нагрузки (усилитель имеет только
один выход). Токи усилителей,
входящих в блок, обычно не изме-
ряются, так как это связано с не-
обходимостью распайки схемы.
Характеристики блоков маг-
нитных усилителей (рис. 6-8, а)
следует снимать при замкнутых
цепях всех обмоток управления,
которые будут участвовать в ра-
боте схемы. В цепях обмоток
управления следует предвари-
Рис. 6-8. Экспериментальные характеристики
блока ВД-2ТА5 (а) и блока на усилителях
ТУМ-АК (б)
тельно установить расчетные ве-
личины сопротивлений. Последнее
требование связано с тем, что до-
бавление каждого замкнутого кон-
тура обмотки управления, особенно низкоомного, может существенно ска-
заться на виде характеристики усилителя. Это объясняется тем, что по низко-
омным цепям обмоток управления свободно циркулируют четные гармоники
тока, трансформирующиеся во все магнитно-связанные обмотки. При наличии
выпрямителей в цепи обмоток управления (например, в обмотках смещения)
создается как бы дополнительная н. с. смещения, изменяющая вид характери-
стик усилителя.
Кроме того, при наладке устойчивости желательно, чтобы цепи всех обмо-
ток управления, участвующих в работе схемы, были замкнуты, так как по-
стоянная времени магнитного усилителя, оказывающая влияние на устойчи-
263
вость работы системы, равна сумме постоянных времени цепей всех обмоток
управления (см. гл. 2).
Соотношение чисел витков обмоток управления при снятии характери-
стик магнитного усилителя может быть проверено тем же способом, что и для
ЭМУ. Если одному и тому же значению выходного тока на ненасыщенном уча-
стке характеристики усилителя при постоянном значении и. с. смещения
и напряжения питания соответствует ток управления одной обмотки /у. к
и другой обмотки /у. п, то отношение их чисел витков wy. к./ггу. п-/1у.к-
В некоторых схемах одна из обмоток управления используется для созда-
ния собственной отрицательной связи по выходному напряжению магнитного
усилителя. Определение полярности и подключение этой связи производится
тем же способом, что и подключение собственной отрицательной связи по напря-
жению ЭМУ.
Отдельно следует остановиться на снятии характеристик блоков промежу-
точных магнитных усилителей, собранных по схеме, приведенной на
рис. 6-7, а, но с использованием магнитных усилителей повышенной частоты
(450 или 1000 Гц). Такие блоки МУ используют на экскаваторах ЭШ-15/90А.
На 450 Гц использовались усилители ТУМ-АК (до ЭШ-15/90А № 51),
на 1000 Гц сначала использовались усилители УТ-08, а затем из серии «Логика»
типа МР-403. При снятии характеристики этих блоков в отличие от блоков БД
следует измерять не только общий ток нагрузки (на выходе блока) и ток упра-
вления, но и токи усилителей, входящих в блок (рис. 6-8, б). Эта рекомендация
связана с тем, что усилители всех указанных типов при работе на повышенной
частоте имеют релейный участок характеристики, что неблагоприятно сказы-
вается на работе системы управления. Устранить релейный эффект иногда
удается подбором параметров выходного фильтра RC. Иногда переход с парал-
лельного на последовательное соединение обмоток управления, входящих
в блок (если такое соединение имеется), может устранить релейное действие.
В некоторых случаях можно рекомендовать ослабление эффекта релейного
действия с помощью смещения соответствующих участков характеристик
в насыщенную зону путем изменения н. с. смещения.
§ 6«5. Наладка тиристорных преобразователей
Тиристорные преобразователи (ТП) намечены к применению или
уже применяются в качестве возбудителей генераторов в системах Г — Д
главных приводов экскаваторов очень большой мощности — ЭВГ-35/65М,
ЭШ-80/100, а также на серийном экскаваторе ЭШ-15/90А.
Кроме того, имеются отдельные опытные образцы экскаваторов, оборудо-
ванные системой ТП — Д (см. гл. 5).
В программу наладки тиристорных преобразователей входит внешний
осмотр силового блока и СИФУ, проверка соответствия паспортных данных
проекту, измерение сопротивления изоляции. При внешнем осмотре прове-
ряется крепление самих вентилей и радиаторов, целостность быстродейству-
ющих предохранителей и защитных контуров RC на вентилях, измеряется
сопротивление изоляции силовых цепей и цепей управления, проверяется
схема соединения силового блока и цепей управления.
Так как в качестве возбудителей генераторов или управляемых преобра-
зователей в системе ТП — Д на экскаваторах в большинстве случаев при-
меняются реверсивные тиристорные преобразователи при встречно-параллель-
264
ном соединении двух групп вентилей с питанием от трансформатора с одной
вторичной обмоткой, причем каждая из групп собирается по трехфазной мосто-
вой схеме (рис. 6-9), то далее будет рассматриваться наладка тиристорного
преобразователя, собранного по указанной схеме.
К первому этапу наладки ТП относится фазировка напряжений питания
силового блока ТП и СИФУ. В том случае, когда силовой блок и СИФУ полу-
чают питание от одного трансформатора, то в такой фазировке, естественно,
нет необходимости. Однако при использовании ТП сравнительно большой
мощности (например, в системе ТП — Д) или вообще, когда мощности ТП
и питающего трансформатора близки, питание силового блока ТП и СИФУ
Рис. 6-9. Схема реверсивного тиристорного преобразователя со встречно-
параллельным включением вентильных групп и трехфазной мостовой схемой
соединения вентилей
может осуществляться от разных трансформаторов для снижения уровня
искажений в напряжении питания СИФУ при нагрузке ТП. В этом случае
необходима проверка совпадения групп соединения трансформаторов, от кото-
рых получают питание силовой блок ТП и СИФУ.
Напомним, что сдвиг фаз между первичными и вторичными линейными
напряжениями в наиболее распространенных (стандартизированных) группах
соединений составляет: в группе Y/Y — 12 сдвиг фаз отсутствует, в группе
Y/A — 11 вторичные линейные напряжения отстают от первичных на 330°
(рис. 6-10).
После проведения указанных выше предварительных операций следует
приступить к наладке СИФУ. В качестве примера рассмотрим наладку электро-
магнитной системы фазоимпульсного управления, построенной по горизонталь-
ному принципу (см. § 5-7). Такая система применяется на ТП, используемых
в качестве возбудителей генераторов на экскаваторах, при согласованном
управлении двумя группами вентилей.
265
Наладку электромагнитного СИФУ начинают со снятия зависимостей
угла сдвига <р между соответствующим входным линейным напряжением СИФУ
и передним фронтом импульса от н. с. управления Fy — ср = / (Fy) для каж-
дого из 6 каналов для обеих групп вентилей реверсивного преобразователя.
Эти характеристики следует снимать последовательно для каждого канала.
При снятии характеристик ср = / (Fy) следует проконтролировать вели-
чину тока управления каждого тиристора. Величина номинального тока упра-
вления тиристора указана в его заводском паспорте. Разница в величинах co-
Рис. 6-10. Сдвиг фаз между первичными и вторичными линейными напряжениями при раз-
. личных группах соединений обмоток трансформаторов
rf
-1,0 -0,8 -0,6 -0/t -0,2 0 0,2 0,6 Fу, АО
Рис. 6-11. Зависимость угла регулиро-
вания от и. с. управления <р = f (Fy)
для одного из каналов СИФУ
противлений «управляющий электрокатод»
у различных тиристоров определяет раз-
ницу в величинах их токов управления.
Изменяя регулируемые сопротивления
R1 — R6 в цепях импульсных трансфор-
маторов ИТ (см. рис. 5-26), можно уста-
новить необходимую величину тока упра-
вления тиристоров. Контролировать ве-
личину этого тока можно по высоте
управляющего импульса на экране элек-
тронного осциллографа, так как высота
импульсов зависит от величины падения
напряжения от управляющего тока на
фиксированном значении сопротивления,
откуда снимается измеряемый сигнал
на осциллограф.
Форма зависимости <р = f (Fy) для одного из каналов, показанная на
рис. 6-11, отражает характеристику «вход — выход» для МУ без внутренней
обратной связи (без выпрямителей в цепях рабочих обмоток), так как именно
такие МУ используются в качестве регулируемых плеч индуктивно-емкостных
мостов СИФУ (см. § 5-7). Отсчет величин углов при снятии характеристик
удобно производить с помощью индукционного фазорегулятора, имеющего
лимб с нанесенными величинами углов сдвига между входным и выходным
напряжениями фазорегулятора, и электронного осциллографа (С1-34, С1-19Б
или С1-16). При отсутствии фазорегулятора для определения величин углов
266
можно пользоваться одним электронным осциллографом, однако точность
отсчета при этом будет невысокой (±2 эл. градуса).
После снятия характеристик следует провести сравнение взаимного сдвига
импульсов для каждого из 12 каналов (по 6 каналов для двух групп вентилей
реверсивного преобразователя). Напомним, что интервалы между импульсами
соседних каналов для схемы, приведенной на рис. 6-9, должны быть равны
60° эл. градусам, и эта величина не должна изменяться при изменении н. с.
управления и абсолютной величины угла регулирования. Отсюда следует,
что характеристики q> = / (Fy) (см. рис. 6-11) для всех 12 каналов в иде-
альном случае должны совпадать. Однако, как было отмечено выше, недо-
статком электромагнитной системы управления является значительная асим-
метрия импульсов (до ±6 эл. градусов), причем различие в интервалах между
импульсами разных каналов не остается постоянным, а изменяется с измене-
нием н. с. управления. После сравнения экспериментально снятых характе-
ристик <р = / (Fy) следует попробовать максимально уменьшить неравенство
интервалов между импульсами при каком-то одном значении н. с. управления
с помощью изменения числа задействованных витков пик-дросселей, обмотки
которых имеют отпайки (см. рис. 5-26). Выравнивание интервалов между им-
пульсами различных каналов целесообразно проводить на линейной части
характеристик <р = / (Fy), близко к середине линейной части. Напомним, что
величина интервала зависит от задействованного числа витков пикдрос-
селя. После изменения числа витков пик-дросселей необходимо вновь
снять характеристики ср = f (Fy) для всех каналов, так как при уменьшении
асимметрии импульсов между каналами при каком-то одном значении н. с.
управления асимметрия может увеличиться при других значениях н. с. упра-
вления. Поэтому следует подобрать оптимальный вариант, обеспечива-
ющий минимальную асимметрию импульсов, изменяющуюся как от канала
к каналу, так и при изменении н. с. управления во всем диапазоне регулиро-
вания.
После снятия характеристик <р = / (Fy) и выравнивания интервалов между
импульсами следует произвести фазировку управляющих импульсов и анодного
напряжения силового блока ТП и установить начальный угол регулирования.
При этом можно подать анодное напряжение на измерительную схему, не пода-
вая его на силовой блок ТП (например, путем предварительного снятия быстро-
действующих предохранителей, если они имеются, или отключения питающих
концов от силового блока).
Для пояснения порядка расстановки импульсов на вентилях разных фаз
рассмотрим кривые анодных напряжений (рис. 6-12).
Напомним, что угол регулирования в трехфазных схемах отсчитывается
от точек пересечения синусоид соответствующих фазных напряжений (точек
естественного зажигания); для вентилей 1А, ЗВ и 5С катодной группы (см.
рис. 6—9) — от точек пересечения положительных полуволн синусоид фазных
напряжений, для вентиля 1А — фаз А и С, для вентиля ЗВ — фаз В и А, для
вентиля 5С — фаз С и В соответственно, для вентилей 4А, 6В и 2С — от точек
пересечения отрицательных полуволн тех же синусоид. Если ТП получает
питание от трансформатора с изолированной нейтралью, что часто имеет место,
фазировку управляющих импульсов следует проводить относительно синусоид
линейного напряжения. Можно при этом построить искусственную нулевую
точку на измерительной схеме и выделить фазные напряжения, но это делать
не рекомендуется, так как полученные таким образом фазные напряжения
могут не совпадать с анодными фазными напряжениями.
267
Из векторной диаграммы, приведенной на рис. 6-12, г, видно, что векторы
линейных напряжений СА, АВ и ВС отстают от векторов соответствующих
фазных напряжений на 30 эл. градусов. То же следует из рассмотрения кривых
фазных и линейных напряжений, приведенных на рис. 6-12, а и б.
Поэтому при использовании кривых линейных напряжений величины
углов регулирования отсчитываются для вентилей катодной группы 1А, ЗВ
и 5С от начала положительных полуволн синусоид линейных напряжений соот-
ветственно СА, АВ и ВС, а для вентилей анодной группы 4А, 6В и 2С — ат
концов тех же полуволн, т. е. от точек, где значения линейных напряжений
равны нулю, что удобно для отсчета.
Рис. 6-12. Кривые анодного на-
пряжения и фазировка управля-
ющих импульсов:
а — кривые фазных напряжений; б —
кривые линейных напряжений; в —
фазировка управляющих импульсов;
г — векторная диаграмма фазных и
линейных напряжений
Перед расстановкой импульсов следует убедиться в отсутствии сдвига
между анодным напряжением и напряжением питания СИФУ, относительно
которого производилось снятие характеристик <р = / (Гу), если эти напряже-
ния в схеме получают от разных трансформаторов. Затем устанавливают началь-
ное значение угла регулирования анач при отсутствии сигнала управления
с помощью обмоток смещения на магнитных усилителях, входящих в СИФУ.
Для поддержания постоянным значения анач при изменении напряжения пита-
ющей сети на МУ предусмотрено две обмотки смещения: одна — с питанием
от стабилизированного источника, другая — получающая питание от напря-
жения собственных нужд. Для реверсивного ТП при индуктивной нагрузке
значение начального угла регулирования устанавливают равным 95—100 эл.
градусов. На рис. 6-12, в показана расстановка импульсов для шести каналов
одной группы при значении авач, равном 90 эл. градусов. На этом рисунке
показаны положения только переднего фронта импульсов, ширина управля-
ющих импульсов в рассматриваемой схеме составляет 95—100 эл. градусов
(см. §5-7).
Следующим этапом наладки СИФУ является снятие регулировочных харак-
теристик — зависимостей угла регулирования а от н. с. управления а = / (Гу).
Отсчет величин углов для любого из каналов [регулировочную характеристику
268
можно снимать только для одного из каналов, если характеристики <р = / (Fy)
сняты для всех каналов управления] может производиться, как указано выше,
по экрану электронного осциллографа от точек, в которых соответствующие
линейные напряжения равны нулю, с помощью фазорегулятора или без него.
Характеристики а = f (Fy) для одного из каналов управления показаны на
рис. 6-13. Перед записью этих характеристик необходимо проверить полный
диапазон изменения угла регулирования — от максимального до минимального
его значения — и ограничить величину этого диапазона значением примерно
равным 120 эл. градусам. Напомним, что необходимость ограничения макси-
мального значения углов регулирования вытекает из необходимости предотвра-
щения режима опрокидывания инвертора
(см. гл. 2). При этом величина макси-
мального угла атах должна быть меньше
180 эл. градусов на величину угла ком-
мутации с некоторым запасом. Величина
угла коммутации, в свою очередь, зависит
от индуктивного сопротивления рассея-
ния обмоток питающего трансформатора
(что может быть оценено по величине
и1к %, указанной в паспорте трансформа-
тора) и от тока нагрузки и колеблется
в пределах 15—25 эл. градусов.
Поэтому величину максимального
угла регулирования устанавливают или
в точном соответствии с расчетным про-
ектным значением, или при отсутствии
такого значения равным 150 эл. градусов.
Соответственно величина максимального
угла регулирования amin должна быть
равна 180 эл. градусам минус атах. Откло-
нение от этого условия при согласованном
управлении недопустимо, так как нарушение его привело бы к появлению посто-
янной составляющей уравнительного тока, ничем по существу не ограничиваемой
(активное сопротивление в контуре постоянной составляющей уравнительного
тока ничтожно мало). Кроме того, так как зависимость величины выпрямленного
напряжения Ud от угла регулирования а при сравнительно большой индуктив-
ности нагрузки представляет собой косинусоиду, увеличение диапазона регу-
лирования, существенно снижая надежность работы ТП, может лишь незначи-
тельно повысить его максимальное напряжение. Так, увеличение диапазона
регулирования от 120 до 150 эл. градусов при атах, равном 165 эл. градусов,
и amin, равном 15 эл. градусов, увеличивает максимальное напряжение ТП
всего на 10%.
После снятия регулировочных характеристик СИФУ можно приступать
к снятию зависимостей выпрямленного напряжения Ud от угла регулирова-
ния а или н. с. Управления Fy сначала для каждой из групп вентилей в отдель-
ности, т. е. при работе в нереверсивной схеме. Для этого при отключенном
анодном напряжении устанавливают быстродействующие предохранители на
одной из двух вентильных групп или (при их отсутствии) подключают пита-
ющие концы к одной из групп силового блока ТП. При использовании ТП
в качестве возбудителя генератора нагрузкой может служить непосредственно
обмотка возбуждения генератора. При использовании ТП в системе ТП — Д
а, градусы
160
ПО
120
50
30
Рис. 6-13. Регулировочные характери-
стики СИФУ реверсивного ТП при
согласованном управлении вентиль-
ными ^группами
10
2 группа
(инвертор-
ный режим)
1 группа,
(инверторный
режим)
-1,0 -0,8 -0,6 -0,0 - 0,2
1 группа
(выпрямительный
режим)
0,2 0/> 0,6 08 Fy, Л6
2 группа
(выпрямитель-
ный режим)
269
характеристику Ud — f (a) (Ud = / (Fy)) можно снимать, включая на выход ТП
сравнительно большое активное сопротивление.
После подготовки силовой схемы включают напряжение питания СИФУ
и проверяют наличие управляющих импульсов на всех тиристорах и их фази-
ровку по отношению к анодному напряжению, поданному на измерительную
схему. Затем подается анодное напряжение на силовой блок ТП. Последова-
тельность подачи напряжения питания (сначала на СИФУ, затем на силовой
о
Рис. 6-14. Регулировочные характери-
стики нереверсивного ТП:
“ - 6 - ии/и<1 = f (Fv)
d a “о \ У'
кшшш
• wt
wt
а=3в°
ut
a=f2B'
wt
Рис. 6-15. Кривые выпрямленных напряже-
ния и тока при работе на активную нагрузку
нереверсивного ТП
блок ТП) и отключения напряжения (сначала с силового блока ТП, а затем
с СИФУ) следует твердо запомнить и соблюдать во всех случаях, так как нару-
шение этого порядка в реверсивных схемах ТП может привести к тяжелой
аварии.
После подачи анодного напряжения на силовой блок ТП снимается
зависимость выпрямленного напряжения Ud от угла регулирования a Ud =•;
= /(a) — регулировочная характеристика нереверсивного преобразователя (рис,'.
270
6-14, а). Эта характеристика при работе па обмотку возбуждения генератора,
как указывалось выше, имеет вид косинусоиды, а при нагрузке на активное
сопротивление отклоняется от косинусоиды при а }> 60 эл. градусов (пунктир-
ная линия на рис. 6-14, а), из-за появления при этих условиях режима преры-
вистых токов. По оси ординат на рис. 6-14 отложены значения выпрямленного
напряжения, отнесенные к максимальному значению выпрямленного напряже-
иа/иц0
i,o -
-/,0L
в 1,0}-
рис. 6-16. Регулировочные характеристики
реверсивного ТП:
— при работе в режиме выпрямителя; б — при
работе в режиме инвертора; в ~V ,/U. ~ f (F \
а а0 V у/
ния Udn при а = 0 и токе нагрузки, равном нулю, т. е. к напряжению не-
управляемого выпрямителя при холостом ходе. Форма регулировочной харак-
теристики Ud = / (а) и появление режима прерывистых токов при а 2> 60 эл.
градусов выявляются из рассмотрения кривых выпрямленных напряжений и
тока при нагрузке на активное сопротивление и различных значениях угла
регулирования, показанных на рис. 6-15. Кривые выпрямленного напряжения
ud, показанные на этом рисунке, можно наблюдать на экране электронного
осциллографа при различных значениях угла регулирования. Отсутствие
271
искажений и срывов в кривой ud в процессе изменения угла а может служить
свидетельством нормальной работы СИФУ и исправности проверяемой вен-
тильной группы ТП.
Зависимость выпрямленного напряжения от н. с. управления при работе
на индуктивную нагрузку и значении
a.
-нач = 90 эл. градусов показана на
рис. 6-14, б.
Полностью аналогично прове-
ряется вторая вентильная группа
и снимается ее регулировочная
характеристика Ud = / (а) при
отключенном анодном напряжении
с первой группы вентилей. После
этого можно приступать к снятию
регулировочных характеристик
реверсивного ТП. Эти характе-
ристики имеют вид, показанный
на рис. 6-16. Регулировочные ха-
рактеристики при работе вентиль-
ных групп в выпрямительном ре-
жиме, показанные на рис. 6-16, а,
можно снимать при нагрузке ТП
в соответствии со схемой управле-
ния, например на обмотку возбу-
ждения генератора или на актив-
ное сопротивление.
Регулировочные характери-
стики при работе вентильных
групп в инверторном режиме
(рис. 6-16, б) можно снять лишь
при наличии отдельного управля-
емого источника э. д. с. Поэтому
эти характеристики в процессе
наладки на экскаваторе обычно не
снимают. При снятии характери-
стик реверсивного ТП (см. рис.
6-16, а) записываются значения
тока нагрузки Id и тока каждой
из двух групп вентилей Idl и
Idi (см. рис. 6-9). Величина раз-
ности Idl — Id2 при работе пер-
вой группы вентилей в выпря-
мительном режиме и величина
разности Id2 — Idl при работе в
выпрямительном режиме второй
группы вентилей определяют ве-
личину статического уравнительного тока. Величину уравнительного тока
можно определить и непосредственно по показаниям амперметра нерабо-
тающей группы вентилей, т. е. в первом случае — по величине тока Id2,
а во втором случае — по величине тока Idl.
Величина статического уравнительного тока изменяется с изменением угла
регулирования. Максимальное значение этого тока имеет место при a = 60 эл.
272
градусов и не должно превышать 10—15% номинального тока преобразователя.
Если указанное условие не выполняется, следует увеличить индуктивность
уравнительных дросселей, уменьшая величину их воздушного зазора. Зависи-
мость выпрямленного напряжения Vd!Udo от н. с. управления Fy для ревер-
сивного ТП при значениях анач = 90 эл. градусов и amin = 30 эл. градусов
показана на рис. 6-16, в.
По характеру изменения кривой выпрямленного напряжения, наблюда-
емого на экране электронного осциллографа в процессе изменения угла а,
так же, как и выше, можно судить о нормальной работе СИФУ и исправности
силового блока реверсивного ТП. Кривые выпрямленного напряжения ud
при различных значениях угла а должны иметь вид, показанный
на рис. 6-17.
18 заказ 1127
ГЛАВА 7
НАЛАДКА СХЕМ УПРАВЛЕНИЯ ГЛАВНЫХ
ЭЛЕКТРОПРИВОДОВ ЭКСКАВАТОРОВ
§ 7-1. Программа работ
После того как выполнена ревизия электрических машин, аппаратов
и усилителей, наладка основных элементов системы управления, а также на-
ладка схемы пуска приводного двигателя преобразовательного агрегата и произ-
веден пробный пуск преобразовательного агрегата, приступают к последнему
этапу наладочных работ — наладке схемы управления в целом.
В программу наладочных работ входят:
а) сборка схемы — определение полярности и подключение жестких и гиб-
ких обратных связей;
б) установление проектных параметров — напряжений холостого хода,
токов короткого замыкания на основных и промежуточных характеристиках
и токов возбуждения двигателей;
в) получение заданных статических характеристик;
г) получение заданных динамических характеристик.
В процессе производства наладочных работ производится осциллографи-
рование переходных процессов электроприводов в опытах холостого хода,
короткого замыкания и в рабочих режимах.
§ 7-2. Подключение жестких и гибких обратных связей
Перед тем как приступить к определению полярности и подключе-
нию жестких и гибких обратных связей, проверяется работа контакторно-
релейной аппаратуры схемы управления главными приводами при неподвижном
преобразовательном агрегате. Для этого на схему подается напряжение питания
от сети постоянного тока и проверяется четкость срабатывания контакторов
и реле при повторных включениях и отключениях, отсутствие задеваний сило-
вых контактов за дугогасительные камеры. Далее определяется величина
минимального напряжения срабатывания контакторов, реле и катушек пневма-
тических тормозов ЭТ. Это напряжение, согласно ПУЭ, не должно превышать
85% номинального напряжения питания.
Проверяется правильность работы схемы при срабатывании промежуточных
реле, а также реле защиты и блокировки (см. гл. 5). Первоначальная проверка
может быть произведена при замыкании и размыкании соответствующих кон-
тактов от руки.
Во время проведения подготовительных работ (до запуска преобразова-
тельного агрегата) устанавливаются токи возбуждения двигателей (полные
и ослабленные) в холодном состоянии электрических машин. Первоначально
величины токов возбуждения устанавливаются на 15—20% больше номиналь-
ных, а затем еще раз проверяются при установившейся температуре электри-
ческих машин во время испытаний экскаватора в забое.
Кроме перечисленных работ, до запуска преобразовательного агрегата
дополнительно проверяются цепи основных обратных связей и устанавливаются
ориентировочные величины сопротивлений в цепях обратных связей в соответ-
ствии с проектом. Производится предварительная установка величины
274
сопротивления задающего потенциометра и величин токов задающей обмотки
управления по ступеням командоконтроллера.
При использовании сельсинного командоаппарата (см. рис. 5-6) снимают
зависимость тока в задающей обмотке усилителя от угла поворота рукоятки
командоаппарата iy = / (а) (рис. 7-1). Перед снятием характеристики доби-
ваются получения нулевого значения задающего тока при нулевом положении
рукоятки командоаппарата. Если при таком положении рукоятки ток управле-
ния отличается от нуля, ослабляют крепление статора сельсина и небольшими
угла поворота рукоятки сельсин-
ного командоаппарата
перемещениями статора находят такое положение, при котором ток управления
будет равен нулю. Следует отметить, однако,
что так как коэффициент усиления сельсинного
командоаппарата максимален именно около ну-
левого положения, а при механической фик-
сации в нулевом положении рукоятка командо-
аппарата имеет некоторый люфт, который
в течение эксплуатации увеличивается, очень
трудно добиться нулевого значения тока
управления при нейтральном положении в пре-
делах люфта только за счет механической фик-
сации. Поэтому часто «механический нуль»
в сельсинном командоаппарате дополняют так
называемым «электрическим нулем», который
обеспечивается последовательным включением
в цепь задающей обмотки нелинейного сопро-
тивления, обычно состоящего из двух соеди-
ненных встречно-параллельных селеновых вы-
прямителей (см. рис. 5-6). В этом случае зави-
симость iy = / (а) имеет вид, показанный на
рис. 7-1 пунктирной линией.
После наладки задающего узла проверяют
последовательность и правильность отключения
соответствующих цепей в схеме узла задающей
обмотки и управления электромагнитом пне-
вматического тормоза ЭТ при размыкании от руки контактов путевых командо-
аппаратов и конечных выключателей (см. гл. 5).
При неподвижном преобразовательном агрегате целесообразно определять
полярность гибкой связи по э. д. с. генератора, осуществляемой по схемам,
приведенным на рис. 4-8. Определение полярности производят по характеру
поведения системы управления при подаче напряжения питания на усилители
(в системах с МУ или ТВ) или при пуске ЭМУ.
В тех случаях, когда обмотка управления усилителя, осуществляющая
гибкую связь по э. д. с., получает питание от отдельной обмотки на главных
полюсах генератора (см. рис. 5-18) или включена в диагональ динамического
моста (см. рис. 5-4, б), достаточно замкнуть цепь обмотки гибкой связи и подать
напряжение питания на магнитные усилители или включить ЭМУ. В тех слу-
чаях, когда обмотка управления усилителя выполняет одновременно функции
гибкой отрицательной связи по э. д. с. и жесткой связи по напряжению гене-
ратора, получая питание с добавочного сопротивления в цепи параллельной
обмотки генератора (см. рис. 5-1 и 5-16), следует перед определением поляр-
ности обмотки увеличить коэффициент гибкой связи, для чего конец цепи
обмотки гибкой связи передвинуть по сопротивлению СД2 (см. рис. 5-1) или
18'
275
С103 (см. рис. 5-16) ближе к концу параллельной обмотки, в пределе снимая
сигнал обратной связи непосредственно с параллельной обмотки.
Таким же образом можно поступить, когда обмотка гибкой связи по э. д. с.
получает питание с диагонали динамического моста (см. рис. 5-4, б).
В этом случае также для усиления сигнала гибкой связи обмотку ОУ-3
можно подключить параллельно обмотке независимого возбуждения генера-
тора овгв.
При неправильной (положительной) полярности обмотки гибкой связи
по э. д. с. после включения усилителей возникают автоколебания низкой
частоты (0,5—1,0 Гц) и большой амплитуды (вплоть до насыщения усилителя),
при правильной (отрицательной) полярности колебания обычно не возникают.
При отрицательной полярности обмотки и слишком большом значении коэффи-
циента гибкой связи возможно возникновение автоколебаний более высокой
частоты (3—5 Гц) и очень небольшой амплитуды. Возникновение автоколебаний
проще всего наблюдать по поведению напряжения возбуждения генератора
на экране осциллографа или просто по показаниям магнитоэлектрического
вольтметра. Следует всегда проводить проверку правильности подключения
цепи гибкой связи при двух полярностях обмотки, так как отсутствие колебаний
может свидетельствовать как о правильной полярности обмотки, так и о слу-
чайном обрыве цепи гибкой связи. При положительной полярности обмотки
и не очень больших (близких к проектным) значениях добавочного сопротивле-
ния в цепи гибкой связи автоколебания практически возникают всегда. Опре-
деление полярности жестких обратных связей по напряжению генератора и току
главной цепи производят в опыте холостого хода. Перед запуском преобразова-
тельного агрегата для проведения опыта холостого хода цепи всех жестких
и гибких обратных связей по току и напряжению генератора должны быть
разорваны, в том числе должны быть разорваны цепи обмоток самого генера-
тора — параллельной, противокомпаундной и т. п. Должна быть собрана лишь
цепь независимой обмотки генератора, получающей питание от возбудителя
(магнитного, тиристорного или электромашинного). При этом следует про-
верить отсутствие остаточного напряжения на выходе возбудителя.
Если при отсутствии сигнала на входе на выходе магнитного усилителя
есть напряжение, то следует еще раз проверить цепи нагрузочного моста маг-
нитного усилителя (см. рис. 6-5) и измерить величины токов смещения. Далее,
регулируя н. с. смещения, снимают остаточное напряжение на выходе усили-
теля до нуля.
Если при отсутствии сигнала на входе напряжение имеется на выходе
тиристорного возбудителя, следует проверить значение начального угла регу-
лирования анач. Напомним, что величина сснЕЧ на всех тиристорах обеих групп
ТВ должна быть одинаковой и не менее 90 эл. градусов (примерно 95—100 эл.
градусов).
При наличии остаточного напряжения на выходе ЭМУ проверяется цепь
собственной отрицательной связи по напряжению. Если остаточное напряжение
все время имеет одну полярность, независимо от того, напряжение какой
полярности было до этого на выходе ЭМУ, то производится размагничива-
ние ЭМУ. Г
Размагничивание ЭМУ производится или с помощью обмотки переменного
тока, получающей питание от сварочного трансформатора и наматываемой
поверх корпуса ЭМУ, или с помощью толчкообразной подачи напряжения
постоянного тока допустимой величины на одну из обмоток управления при
'неподвижном ЭМУ.
276
Далее выбирается место размыкания якорной цепи привода и осущест-
вляется надежный разрыв силовой цепи. Силовую цепь при однодвигательном
приводе следует разорвать со стороны противоположной той, с которой сни-
мается сигнал токовой связи, или при двухдвигательном приводе — между
двигателями. Если силовую цепь разорвать на участке, с которого получает
питание токовая обмотка, то возможно возникновение ложных цепей, например
через реле РТМП (см. рис. 5-1), что, в свою очередь, может привести к удар-
ному короткому замыканию и тяжелой аварии.
Для опыта холостого хода генератора собирается схема измерений, пока-
занная на рис. 7-2: подключается вольтметр для измерения напряжения гене-
Рис. 7-2. Схема измерений
при проведении опыта холостого хода
ратора, включаются шунты на соответствующие токи с милливольтметрами
для измерения тока возбуждения генератора и токов управления усилителей.
В качестве примера на рис. 7-2 показана схема измерений при проведении
опыта холостого хода в схеме управления главными приводами экскаватора
ЭШ-10/70А с регулятором напряжения PH и магнитным возбудителем УВ.
Одновременно с измерительной схемой подготавливаются и собираются цепи
всех жестких и гибких обратных связей, полярность которых необходимо опре-
делить в опыте холостого хода. Подготавливается и собирается вся цепь отри-
цательной обратной связи по напряжению с видимым разрывом,цепи этой связи
непосредственно на измерительном столе. Далее подготавливаются и соби-
раются цепи параллельной обмотки генератора или обмотки положительной
связи по напряжению генератора (если таковые имеются) также с одним види-
мым разрывом на измерительном столе. Наиболее тщательно подготавливается
и собирается цепь отрицательной токовой связи с большим добавочным сопро-
тивлением (в 50—100 раз большим проектной величины) с одним разрывом.
Разрыв цепи токовой связи должен быть сделан со стороны двигателей, как
показано на рис. 7-2. Вся остальная часть этой цепи должна быть собрана
277
полностью в соответствии с принципиальной схемой. Если в схеме применяется
потенциометрическая токовая отсечка, то напряжение питания с токовых по-
тенциометров должно быть отключено. Можно также, не отключая питания
с токовых потенциометров, подготовить цепь непрерывной токовой связи,
проходящей мимо токового потенциометра через соответствующее добавочное
сопротивление, как показано на рис. 7-3.
Аналогично подготавливается цепь положительной токовой связи с доба-
вочным сопротивлением, в несколько десятков раз большим проектного,
и с одним разрывом со^стороны двигателей (см. рис. 7-2). Вся остальная часть
этой цепи также собирается
в соответствии с принципиаль-
ной схемой.
Непосредственно перед за-
пуском преобразовательного
агрегата должно быть измерено
сопротивление изоляции того
генератора, на котором должно
подниматься напряжение, и
всей схемы в сборе, а также
сопротивление изоляции двух
других генераторов. Начиная
с момента запуска, следует
вести постоянное наблюдение
за коллектором генератора, так
как при первом подъеме напря-
Рие. 7-3. Схема для определения полярности жения на генераторе возможно
токовой обмотки в опыте холостого хода выгорание мелких частиц ще-
точной пыли, застрявших между
коллекторными пластинами, что может привести к образованию кругового
огня. При первом подъеме напряжения следует поставить дежурного около
масляного выключателя приводного двигателя преобразовательного агрегата
для немедленного отключения агрегата в случае необходимости.
Для снятия характеристики холостого хода генератора напряжение от
независимого источника питания, обычно от генератора собственных нужд,
через потенциометры подается на одну из обмоток управления входного усили-
теля (на рис. 7-2 — на задающую обмотку ОЗРН регулятора напряжения).
Каскадное включение потенциометров П1 и П2 применено для обеспечения
возможности очень плавного и постепенного увеличения напряжения гене-
ратора, что важно именно при первом подъеме напряжения на генераторе в про-
цессе наладки. Сначала проверяются правильность сборки измерительной
схемы и управляемость генератора. Для этого напряжение поднимается до
значения, составляющего 10—15% UT. н. Измеряются напряжение и ток воз-
буждения генератора и ток управления усилителя.
При питании обмоток независимого возбуждения генератора от магнитных
усилителей по мостовой схеме может случиться, что две независимые полу-
обмотки включены не согласно, а встречно. При этом магнитный усилитель
регулируется, по обмоткам возбуждения протекает ток, но генератор не выдает
напряжения. В этом случае следует изменить полярность на концах одной
из полуобмоток.
После того как проверка сборки измерительной схемы и управляемости
генератора проведена, постепенно увеличивают напряжение генератора, регу-
278
лируя ток задающей обмотки ОЗРН с помощью потенциометров П1 и П2.
Подъем напряжения генератора первоначально рекомендуется производить
только за счет независимой обмотки возбуждения генератора, не подключая
ни параллельную обмотку возбуждения и ни одну из обратных связей, вплоть
до значения напряжения, обеспечиваемого максимальной величиной тока
независимой обмотки, что, в свою очередь, определяется насыщением возбуди-
теля У В. Эта рекомендация связана с тем, что при подключении, например,
обмотки отрицательной связи по напряжению с неправильной полярностью
при нечетких действиях наладчика возможен быстрый подъем напряжения на
генераторе, что по указанным выше причинам (загрязнение коллектора и т. п.)
может привести к образованию кругового огня и выходу якоря из строя.
После проверки работы генератора при напряжении, определяемом макси-
мальным значением тока независимой обмотки, можно приступать к подклю-
чению цепи отрицательной связи по напряжению. Эту связь, как и другие
жесткие связи, рекомендуется подключать на остаточном напряжении гене-
ратора при отсутствии задающего сигнала.
Для определения полярности обмотки отрицательной связи по напряжению
цепь этой обмотки с добавочным сопротивлением, в 5—10 раз превышающим
расчетное, кратковременно замыкают и по вольтметру, сначала на больших,
затем на малых пределах измерения, следят за изменением напряжения гене-
ратора в момент замыкания цепи. В качестве добавочных могут быть использо-
ваны остеклованные сопротивления типа ПЭВ на 1000—5000 Ом.
Если действие обмотки правильно, то при ее подключении напряжение
генератора уменьшается. После определения полярности добавочное сопро-
тивление отключают и устанавливают расчетный коэффициент обратной связи
по напряжению, изменяя сопротивление в цепи обмотки обратной связи (напри-
мер СД7 в схемах, приведенных на рис. 5-1, 5-16 и 5-18) или перемещая точку
подключения цепи обратной связи к потенциометру (например, на потенцио-
метре СУП5, показанном на рис. 5-4, а). Если сигнал отрицательной связи
по напряжению снимается согласно схеме с добавочного сопротивления в цепи
параллельной обмотки (см. рис. 5-1, а и 5-16), то первоначально цепь обмотки
отрицательной связи подключают на полное напряжение генератора (штрихо-
вая линия на рис. 7-2).
Следует отметить, что если полярность обмотки, выполняющей одновре-
менно функцию гибкой связи по э. д. с. и жесткой связи по напряжению, опре-
делена при неподвижном агрегате как для обмотки гибкой связи по э. д. с.,
то действие этой обмотки в качестве жесткой связи по напряжению должно
обеспечиваться автоматически. Однако дополнительную проверку действия
в качестве обмотки жесткой отрицательной связи по напряжению следует
все же проводить по указанной выше методике.
Расчетный коэффициент отрицательной связи по напряжению удобно уста-
навливать при максимальном расчетном значении напряжения генератора,
поэтому, при использовании двухобмоточного генератора коэффициент отри-
цательной связи по напряжению устанавливают после замыкания цепи парал-
лельной обмотки.
Определение полярности параллельной обмотки рекомендуется проводить
не по изменению напряжения генератора в момент замыкания и размыкания
обмотки, а косвенным методом, так как в параллельной обмотке, обладающей
большой индуктивностью, в момент размыкания ее цепи наводится значитель-
ная, э. д. с., что может привести к образованию дуги, опасной для наладочного
персонала. Поэтому замыкание цепи параллельной обмотки следует проводить
27S
при замкнутой цепи отрицательной связи по напряжению генератора и отсут-
ствии задающего сигнала, а непосредственно перед замыканием цепи парал-
лельной обмотки следует измерить величину остаточного напряжения гене-
ратора. О полярности параллельной обмотки можно судить при замкнутой
цепи отрицательной связи по напряжению генератора по величине тока незави-
симой обмотки при одном и том же значении напряжения генератора до и после
замыкания цепи параллельной обмотки. Действительно, в замкнутой системе
для одного и того же значения напряжения генератора потребуется меньшее
значение тока независимой обмотки при наличии тока в обмотке самовозбужде-
ния, чем при его отсутствии. Если же полярность параллельной обмотки ока-
жется отрицательной, то при протекании в ней тока для получения того же
значения напряжения генератора потребуется большее значение тока в незави-
симой обмотке.
Принципиально аналогично может быть определена полярность жестких
положительных и отрицательных связей по напряжению, осуществляемых
с помощью обмоток управления силового усилителя при наличии регулятора
напряжения.
Указанным способом можно определять, например, полярность формиру-
ющей положительной связи по напряжению в схеме подчиненного регулирова-
ния привода подъема Г — Д с ТВ экскаватора ЭШ-15/90А (см. рис. 5-19) и сла-
бой отрицательной связи по напряжению, осуществляемой с помощью обмотки
управления силового усилителя, в схеме подчиненного регулирования привода
тяги экскаватора ЭШ-10/70А. В последнем случае при замкнутой цепи отри-
цательной связи по напряжению регулятора напряжения и при правильной
(отрицательной) полярности обмотки управления силового усилителя для
одного и того же значения напряжения генератора потребуется большее зна-
чение тока задающей обмотки силового усилителя, чем при разорванной цепи
отрицательной связи, и тем более большее, чем при неправильной (в данном
случае — положительной) полярности обмотки управления силового усили-
теля. Указанный косвенный метод определения полярности обмоток обратных
связей наиболее удобен при использовании слабых обратных связей.
При установлении расчетного значения коэффициента отрицательной
связи по напряжению в схемах, приведенных на рис. 5-16, 5-18 и 5-19, при
отсутствии гибкой связи по э. д. с. в большинстве случаев возникают авто-
колебания. Поэтому после определения полярности жестких связей по напря-
жению и подключения параллельной обмотки следует замкнуть и цепь гибкой
отрицательной связи по э. д. с., осуществляемой с помощью отдельной обмотки
(см. рис. 5-18), полярность которой была определена заранее при неподвижном
преобразовательном агрегате. В том случае, когда гибкая связь по э. д. с.
осуществляется с помощью обмотки отрицательной связи по напряжению гене-
ратора (см. рис. 5-1 и 5-16), получающей сигнал с участка добавочного сопро-
тивления в цепи параллельной обмотки, перемещают точку подключения цепи
обмотки отрицательной связи по сопротивлению СЗ на рис. 7-2 (СД2 на рис. 5-1,
С103 на рис. 5-16) до тех пор, пока автоколебания исчезнут.
Следует заметить, что при перемещении точки подключения цепи обмотки
отрицательной связи по сопротивлению СЗ (см. рис. 7-2) изменяются одно-
временно коэффициенты гибкой и жесткой обратных связей. Например, при
перемещении точки подключения ближе к параллельной обмотке гибкая связь
усиливается, а жесткая — ослабляется. Для сохранения величины коэффициента
жесткой связи следует соответственно уменьшить величину добавочного сопроти-
вления в цепи обмотки обратной связи СД7 на рис. 5-1 (СД107 на рис. 5-16 и т. п.).
280
Для тех схем управления главными приводами, где функции гибкой отри-
цательной связи по напряжению генератора осуществляются обмоткой жесткой
отрицательной связи по напряжению с помощью контура RC (см. рис. 5-6)
специального определения полярности гибкой связи не требуется, так как
правильность действия гибкой связи обеспечивается автоматически после
определения полярности жесткой связи.
После подключения обмотки гибкой отрицательной связи по э. д. с. или
напряжению генератора в схемах с суммирующим усилителем (см. рис. 5-1,
5-4, 5-6), где гибкая связь действует в течение всего переходного процесса,
скорость изменения э. д. с. генератора в переходных процессах уменьшается.
Это замедление переходных процессов будет тем больше, чем сильнее действие
гибкой связи, что может служить еще одним признаком правильности опре-
деления полярности обмотки гибкой связи.
Б схемах подчиненного регулирования (см. рис. 5-16, 5-18 и 5-19), где
гибкая отрицательная связь по э. д. с. действует только в конце переходного
процесса, после подключения обмотки гибкой связи по э. д. с. соответственно
замедляется лишь окончание переходных процессов.
После подключения параллельной обмотки и жестких и гибких обратных
связей по напряжению можно приступать к снятию характеристики холостого
хода генератора. Подъем напряжения при снятии характеристики производят
постепенно до максимальной величины, соответствующей 1 ,ЗС7Г н . Это напря-
жение поддерживается в течение 5 мин для испытания витковой изоляции
обмотки якоря согласно ПУЭ. Далее напряжение снижается до нуля и под-
нимается до максимальной величины, но противоположной полярности. Харак-
теристику холостого хода генератора рекомендуется снимать, фиксируя пол-
ную петлю гистерезиса. При снятии характеристики следует только увеличивать
или только уменьшать задающий сигнал, в противном случае трудно избежать
искажений, так как генератор будет перемагничиваться по частным петлям
гистерезиса (см. § 6-3). Напомним, что при первом подъеме напряжения до
максимальной величины следует вести постоянное наблюдение за коллектором
генератора.
При снятии характеристики холостого хода записываются токи независи-
мой и параллельной обмоток, напряжение генератора, токи управления усили-
телей. Характеристика холостого хода генератора строится в функции сум-
марной н. с. возбуждения.
Как выше было отмечено, на холостом ходу генератора следует определять
полярность токовых связей. Наиболее тщательно следует проводить определе-
ние полярности отрицательной токовой связи. Ошибки при определении поляр-
ности этой связи совершенно недопустимы, так как при неправильной (положи-
тельной) полярности отрицательной токовой связи в опыте короткого замыка-
ния, проводимом непосредственно после опыта холостого хода, неизбежно
развитие тяжелой аварии из-за неконтролируемого возрастания тока главной
цепи сразу после запуска преобразовательного агрегата с полным выходом
из строя генератора и двигателя данного привода.
Перед определением полярности токовой связи в опыте холостого хода
генератора следует разомкнуть цепи всех обратных связей — отрицательных
и положительных, жестких и гибких, а также цепи параллельной и противо-
компаундной обмоток генератора.
Как было указано выше, цепь токовой связи должна быть полностью
собрана с одним разрывом со стороны двигателя (см. рис. 7-2 и 7-3). При исполь-
зовании потенциометрической отсечки напряжение питания с токового потен-
281
циометра должно быть отключено или должна быть собрана{цепь'токовой связи,
проходящая помимо токового потенциометра (см. рис. 7-3). Определение поляр-
ности токовой связи в схемах, приведенных на рис. 7-2 и 7-3, происходит пол-
ностью аналогично. Разберем для примера определение полярности токовой
обмотки в схеме, приведенной на- рис. 7-3. Цепь токовой обмотки, получающей
питание с участка главной цепи CD, как было сказано выше, собирается пол-
ностью. Один конец цепи токовой связи подсоединяют к точке С схемы, другой,
который по схеме должен быть подсоединен к точке D, оставляют свободным.
Затем при отсутствии задающего сигнала на остаточном напряжении генера-
тора свободный конец цепи токовой связи через добавочное сопротивление,
в 50—100 раз превышающее расчетное, кратковременно подключают к точке В
схемы, т. е. на противоположный полюс напряжения генератора, и по вольт-
метру следят за изменением напряжения генератора. При этом токовая обмотка
работает как обмотка отрицательной связи по напряжению генератора. Если
при таком подключении токовой обмотки напряжение генератора уменьшается,
то полярность обмотки правильная, если напряжение увеличивается, то поляр-
ность обмотки нужно изменить на обратную.
Здесь следует особо подчеркнуть при определении полярности токовой
связи необходимость сборки именно левого участка цепи токовой связи по
проектной схеме, т. е. участка, примыкающего к точке С (см. рис. 7-2 и 7-3).
Если сделать наоборот, т. е. собрать по проектной схеме правый участок цепи
токовой связи, примыкающий к точке D, то полярность токовой обмотки будет
определена неправильно со всеми вытекающими отсюда последствиями.
Описанный способ определения полярности отрицательной токовой связи
отличается большой надежностью и простотой. Не следует проводить опыт
по определению полярности токовой связи в режиме короткого замыкания,
как рекомендуется в некоторых инструкциях по наладке, так как это может
привести к тяжелым авариям.
Аналогично описанному выше может быть определена полярность положи-
тельной токовой связи. Для этого свободный конец цепи обмотки положитель-
ной связи по току ОТ PH (см. рис. 7-2) при отсутствии задающего сигнала на
остаточном напряжении генератора через большое добавочное сопротивление
кратковременно подключают на противоположный полюс генератора, т. е.
цепь обмотки положительной связи по току подключается на напряжение
генератора.
Так как при этом обмотка ОТ PH должна действовать как обмотка положи-
тельной связи по напряжению, то при ее подключении напряжение генератора
должно увеличиваться.
На холостом ходу генератора определяют полярность обмоток гибкой
обратной связи по току, получающих питание через цепочку ВС (см. рис. 5-6).
Определение полярности этих обмоток производят так же, как обмоток жесткой
обратной связи по току, подключая их через большое добавочное сопротивление,
помимо цепочки ВС, на напряжение генератора при отсутствии задающего
сигнала в соответствии со схемой, приведенной на рис. 7-3. Параметры це-
почки ВС подбираются в опыте короткого замыкания.
При опыте холостого хода проверяется также работа узла реверса. В схеме
привода поворота экскаватора ЭШ-15/90А, где функции обмотки узла смягчения
реверса выполняет обмотка отрицательной связи по напряжению генератора,
действие этой обмотки в качестве положительной связи по напряжению в ре-
жиме реверса обеспечивается автоматически при правильной блокировке с по-
мощью контактов реле РПВВ, РПНВ и диодов ВКВ6, ВКВ8 (см. рис. 5-8).
282
Для смягчения процесса торможения эффективность действия узла реверса
стараются сделать возможно большей путем перемещения точки подсоединения
узла реверса к потенциометру обратной связи по напряжению СУВЗ. Однако
эффективность действия узла реверса ограничивается необходимостью обеспе-
чения отсутствия самовозбуждения. Для гарантии от самовозбуждения необ-
ходимо, чтобы величина коэффициента положительной связи по напряжению,
вводимой с помощью узла реверса, не превышала критического значения.
Отсутствие самовозбуждения генератора в схеме, приведенной на рис. 5-8,
можно проверить в опыте холостого хода при торможении реверсом путем
перестановки рукоятки сельсинного командоаппарата из крайнего положения
одного направления на возможно минимальный угол отклонения от нейтраль-
ного положения другого направления. Величина этого минимального угла
будет определяться замыканием контактов конечных выключателей СКАВН
и СКАВВ и срабатыванием реле направления соответственно РПВВ и РПВН.
В схеме управления приводом подъема экскаватора ЭКГ-8И узел смягчения
(и замедления) процесса торможения после спуска ковша с ослабленным полем
действует не только при торможении реверсом, но и при торможении установкой
командоконтроллера в нулевое положение. При этом действие этого узла в отли-
чие от узла реверса подготавливается заранее: при установке командоконтрол-
лера в третье положение спуска после нарастания напряжения генератора до
значения, при котором срабатывает реле РН1 (см. рис. 5-10), ток в обмотке
отрицательной связи по напряжению (четвертой обмотке управления усили-
теля) реверсируется и эта обмотка действует в качестве обмотки положительной
связи по напряжению. Коэффициент положительной связи по напряжению
устанавливают равным критическому для линейной части характеристик
усилителя. Напряжение генератора и скорость привода при этом не изменяются,
так как магнитный усилитель работает в режиме насыщения. Затем в течение
всего процесса торможения установкой командоконтроллера в нулевое поло-
жение или реверсом действует положительная связь по напряжению, уменьшая
выброс тока и замедляя процесс торможения. Интенсивность действия положи-
тельной связи по напряжению регулируется перемещением точки подключения
замыкающего контакта реле РН1 по потенциометру обратной связи по напря-
жению СУП6. При этом, чтобы напряжение срабатывания реле РН1 не изме-
нялось, необходимо соответствующим образом перемещать точку подключения
выпрямителя ВЗ на том же потенциометре.
На холостом ходу генератора производится настройка реле напряжения,
контролирующих работу контакторов ослабления поля двигателей, — реле
РНОП (см. рис. 5-4, а), РННП (см. рис. 5-6), РНП (см. рис. 5-16) и т. п. Эти
реле должны срабатывать при напряжении, равном 0,8—0,9 максимального,
соответствующего скорости идеального холостого хода на основной характе-
ристике. При использовании кулачкового командоконтроллера эти реле на-
страиваются таким образом, что при третьем положении командоконтроллера
они еще не срабатывают, а срабатывают при перестановке командоконтроллера
с третьего на четвертое положение. Однако настройку реле удобно производить
при питании задающей обмотки не от командоконтроллера, а от потенциометров
в соответствии со схемой, приведенной на рис. 7-2.
При настройке указанных выше реле проверяется также, чтобы их сраба-
тывание происходило при положении командоконтроллера (командоаппарата),
соответствующем спуску ковша, движению привода тяги «От себя» и т. д., что
обеспечивается с помощью диодов ВГП5 (см. рис. 5-4, а), ВКП1 (см. рис. 5-6)
и т. п.
283
Далее настраиваются реле РНТП (см. рис. 5-4, а)\1РНТВ (см. рис. 5-4, б),
осуществляющие гашение поля генератора в нулевом положении командо-
контроллера в схеме главных приводов экскаватора ЭШ-10/60. Эти реле должны
притягиваться при напряжении, меньшем напряжения, ' соответствующего
первому положению командоконтроллера. Если реле РНТ будут втягиваться
при достаточно большом напряжении, может случиться, что при установке
командоконтроллера в нулевое положение после разгона до скорости, при
которой РНТ еще не сработало, сразу вступит в действие сильная обратная
связь по напряжению, что приведет к резкому торможению с большими вы-
бросами тока. Особенно нежелательна нечеткая настройка реле РНТВ на
приводе поворота ЭШ-10/60 (см. рис. 5-4, б), где узел отрицательной связи
по напряжению включается в работу лишь в нулевом положении .командо-
контроллера.
После настройки реле в схемах с кулачковым командоконтроллером
производится разбивка величин напряжений по ступеням командокон-
троллера в соответствии с желаемой разбивкой скоростей (см. гл. 5). В схе-
мах с сельсинным командоаппаратом устанавливают лишь значения мак-
симальных напряжений, соответствующих крайним положениям командоап-
парата.
При разомкнутой главной цепи на холостом ходу генератора снимают
статические характеристики главных приводов при имитации действия тока
главной цепи с помощью независимого источника питания, воздействующего
на токовую обмотку (см. § 7-3).
После снятия статических характеристик записываются все установленные
параметры при разомкнутой главной цепи, а именно: в крайних положениях
сельсинного командоаппарата и во всех положениях командоконтроллера
в обе стороны измеряют величины напряжения генератора, токов независимой
и параллельной обмоток генератора, токов обмоток управления усилителей,
задающей и обратных связей.
В опыте холостого хода производится осциллографическая запись изме-
нения напряжения генератора при перестановках командоконтроллера
О—IV—IV—0 *. Одновременно фиксируется изменение тока задающей обмотки
и напряжение на обмотке независимого возбуждения генератора (см. рис. 7-4, а).
После проведения опыта холостого хода агрегат останавливают для под-
готовки опыта короткого замыкания. В этом опыте устанавливают величину
стопорных токов, подключают противокомпаундную обмотку и регулируют
величину гибкой связи по току.
Для подготовки опыта короткого замыкания главная цепь замыкается
при неподвижном агрегате. Окончательно проверяется и собирается цепь токо-
вой связи и измеряется ее сопротивление. Проверяется соответствие граду-
ировки амперметра тока главной цепи, установленного в кабине машиниста,
и измерительного шунта. Бывает, что, например, к шунту на 3000 А, 75 мВ
подключают прибор, отградуированный на 2000 А, 75 мВ. В этом случае следует
переградуировать шкалу прибора. Непосредственно к шунту на время опыта
подключается милливольтметр на 75 мВ для контроля за величиной тока глав-
ной цепи. Проверяется напряжение срабатывания реле максимальной токовой
защиты РТМ. Реле должно срабатывать при напряжении, соответствующем
1 Здесь и в дальнейшем записью 0—IV—IV—0 будем пользоваться для обозначе-
ния перестановок командоконтроллера или командоаппарата из крайнего положения одного
направления в крайнее положение другого направления, а затем в нулевое положение.
284
току якоря, на 15—20% превышающему стопорное значение. Напряжение
срабатывания реле РТМ подсчитывается по формуле
£7Вт = (1,154-1,20)7стД7?, В,
где ZCT — стопорный ток на основной характеристике, А; А/? — сопротивление
участка главной цепи (при температуре 75° С), с которого снимается сигнал
токовой связи.
Разрывается цепь возбуждения двигателей. Разрыв цепи возбуждения
делают там, где это наиболее удобно, например непосредственно на катушке
реле обрыва поля РОП. Блок-контакт реле РОП, шунтирующей нулевое поло-
Рис. 7-4. Осциллограммы опытов холостого хода и короткого замыкания:
а —- изменение э. д. с. генератора и напряжения возбуждения в опыте холостого хода; б — изменение
тока главной цепи в опыте короткого замыкания
жение командоконтроллера, закорачивают. Перед проведением опыта корот-
кого замыкания необходимо проверить затяжку тормозов на двигателях. Дляа
предотвращения растормаживания двигателей во время опыта к. з. следует
или отключить питание электромагнита тормоза, или спустить воздух из пневмо-
системы.
С момента запуска синхронного двигателя необходимо вести непрерывное
наблюдение за коллекторами двигателей и генератора и показаниями ампер-
метра тока главной цепи.
При первом проведении опыта короткого замыкания для каждого привода
около масляного выключателя приводного двигателя преобразовательного
агрегата следует поставить дежурного для немедленного отключения агрегата
в случае необходимости (например, в случае самовозбуждения генератора
и аварийного возрастания тока главной цепи).
Первоначально увеличение тока в опыте короткого замыкания следует
проводить плавно при питании задающей обмотки усилителя от потенциометра
в соответствии со схемой, приведенной на рис. 7-2, до значения тока якоря,
составляющего 10—20% 1Я н . При этом проверяется управляемость генератора
и правильность показаний амперметра тока главной цепи в кабине машиниста
путем сравнения показаний этого амперметра с показаниями контрольного
милливольтметра, подключенного непосредственно к шунту около генератора.
Затем проверяется работа схемы при другой полярности задающего сиг-
нала. Если схема управления работает нормально, производят увеличение тока
главной цепи — также при питании задающей обмотки от потенциометра —
285
сначала до номинального, а затем до стопорного значения, непрерывно наблю-
дая за коллектором генератора. Наблюдение за коллектором генератора необхо-
димо потому, что при опыте короткого замыкания впервые проверяется работа
дополнительных полюсов и компенсационной обмотки генератора и настройка
коммутации. В некоторых случаях, особенно после капитального ремонта
экскаватора с полной разборкой электрических машин, возможны витковые
замыкания в обмотке дополнительных полюсов или между компенсационной
обмоткой и обмоткой дополнительных полюсов, что приводит к резкому ухуд-
шению коммутации, причем искрение при упомянутых повреждениях прямо
пропорционально росту нагрузки.
При питании задающей обмотки от потенциометра в схемах с сумматором
(см. рис. 5-1, 5-4, 5-6, 5-8) замечают, какому значению задающего тока соответ-
ствует расчетное значение стопорного тока при крайних положениях командо-
аппарата или командоконтроллера. Затем в случае необходимости производят
регулировку величины коэффициента обратной связи по току изменением
сопротивления цепи токовой связи или величины запирающего потенциала
в схемах с потенциометрической отсечкой по току, добиваясь получения расчет-
ного стопорного тока при установленном в опыте холостого хода значении
тока задающей обмотки.
В схемах подчиненного регулирования (см. рис. 5-16, 5-18 и 5-19), где не
предусмотрены дополнительные средства регулирования стопорного тока,
расчетное максимальное значение стопорного тока должно соответствовать
максимальному значению выходного тока регулятора напряжения, что обе-
спечивается изменением коэффициента токовой связи с помощью изменения
сопротивления в ее цепи. Напомним, что регулятор напряжения насыщается
при небольших значениях задающего тока (около 20% максимального), и по-
этому уже второму положению командоконтроллера соответствуют макси-
мальные значения выходного тока регулятора напряжения и стопорного тока.
Далее проводят опыт короткого замыкания при питании задающей обмотки
усилителя по нормальной схеме с помощью командоаппарата или командо-
контроллера. В крайних положениях командоаппарата или командоконтрол-
лера измеряют: ток главной цепи, токи обмоток независимого и параллельного
возбуждения, задающей обмотки входного усилителя или регулятора напря-
жения и выходной ток регулятора напряжения, величину напряжения генера-
тора, падение напряжения на участке главной цепи, с которого снимается
сигнал токовой связи.
По величине тока независимой обмотки в опыте короткого замыкания
«оценивают величину сдвига щеток с нейтрального положения (см. § 6-2). Если
щетки установлены в нейтрали, продольная реакция якоря отсутствует. Вели-
чина продольной реакции якоря прямо пропорциональна величине угла сдвига
щеток с нейтрального положения (см. гл. 2).
Напомним, что щетки у генераторов сдвигают с нейтрали в направлении
вращения таким образом, чтобы обеспечивалась небольшая размагничивающая
реакция якоря. При этом ток независимой обмотки в опыте короткого замыка-
ния должен превышать ток, необходимый для создания э. д. с. Ек л , на 1 —
2% (см. § 6-2).
Далее определяется полярность противокомпаундной обмотки. Для этого
противокомпаундная обмотка (ПКО) подключается параллельно обмотке допол-
нительных полюсов и компенсационной обмотке (см., например, рис. 5-6).
Если цепь ПКО заранее подготовлена, то подключение может производиться
при вращающемся агрегате, но при нулевом положении командоконтроллера.
286
Если ПКО подключена правильно, т. е. действует как отрицательная связь,
по току, то при прежнем значении тока якоря в опыте короткого замыкания
величина тока независимой обмотки значительно увеличивается. Если ПКО
действует неправильно, т. е. подмагничивает генератор, то ток независимой
обмотки значительно уменьшается или даже изменяет знак. Величина размаг-
ничивающегося потока, создаваемого ПКО, может быть оценена по величине
тока независимой обмотки в опыте короткого замыкания.
После подключения ПКО подключается положительная обратная связь
по току. Полярность этой связи определяется заранее в опыте холостого хода.
Величина коэффициента положительной токовой связи предварительно уста-
навливается при снятии статической характеристики в режиме холостого хода,
а окончательно — при наладке рабочих режимов. Затем подключается гибкая
отрицательная связь по току. Напомним, что полярность гибкой связи по току,
осуществляемой с помощью контуров RC, также должна быть определена
в опыте холостого хода.
Не может быть определена полярность обмоток гибкой обратной связи
по току в опыте холостого хода в тех случаях, когда гибкая связь по току соз-
дается с помощью специальных обмоток, намотанных на дополнительных полю-
сах генератора, как, например, в схемах управления приводами экскаватора
ЭКГ-4,6. В этих схемах полярность обмотки гибкой отрицательной связи по
току может быть определена в опыте короткого замыкания по характеру изме-
нения тока главной цепи при замкнутой цепи обмотки гибкой связи при произ-
вольной ее полярности. В том случае, если полярность этой обмотки окажется
неправильной, то изменение тока главной цепи, особенно спадание тока, будет
происходить сравнительно быстро с перерегулированием; возможно возникно-
вение незатухающих колебаний. Если полярность обмотки окажется правиль-
ной, изменение тока главной цепи должно происходить сравнительно медленно.
С увеличением эффективности действия гибкой связи, например уменьшением
добавочного сопротивления в цепи обмотки управления, перерегулирование,
по току должно уменьшаться.
Величина коэффициента гибкой связи по току подбирается предварительно
в опыте короткого замыкания с помощью осциллографических записей измене-
ния тока главной цепи, исходя из условия достижения минимальной величины
перерегулирования при устойчивой работе схемы во всех режимах.
После подключения всех обратных связей записываются значения тока
главной цепи на ««всех положениях командоконтроллера, одновременно фикси-
руются величины задающего тока, напряжения питания цепей управления,
а в схемах с потенциометрической отсечкой — величина запирающего
потенциала.
При осциллографировании в опыте короткого замыкания записывают
изменение тока главной цепи при перестановках командоконтроллера
О—IV—IV—0; на тех же осциллограммах фиксируется изменение тока зада-
ющей обмотки (см. рис. 7-4, б).
§ 7-3. Получение заданных статических характеристик
Для получения заданных статических характеристик при наладке
главных приводов экскаватора необходимо установить проектные значения ско-
ростей и стопорных усилий основных механизмов и получить заданное заполне-
ние статических характеристик. Напомним, что скорости идеального холостого
хода механизмов определяются величинами напряжения холостого хода
287
генераторов и токов возбуждения двигателей, стопорные усилия — величинами
токов короткого замыкания и токов возбуждения двигателей.
Параметры напряжений холостого хода и токов короткого замыкания для
крайних положений сельсинного командоаппарата и кулачкового командо-
контроллера и промежуточных положений командоконтроллера обычно за-
даются в проекте электрооборудования экскаватора и должны быть известны
при наладке. Однако при отсутствии таких данных наладчик должен уметь,
исходя из проектных величин скоростей основных механизмов и стопорных
усилий, которые обычно указываются в паспорте экскаватора, определить
расчетным путем величины напряжения холостого хода и токов короткого
замыкания.
Приведем соотношения, необходимые для проведения такого расчета. Если,
например, в паспорте экскаватора указана скорость подъема ковша при задан-
ной нагрузке или средняя скорость подъема ковша £7ср_ к (м/с), то, исходя
из заданной жесткости характеристики со = / (М) или задавшись приблизи-
тельно величиной жесткости, например такой, чтобы средняя скорость подъема
ковша отличалась от скорости идеального холостого хода не более чем на 10—
15%, определяем скорость идеального холостого хода, приведенную
к ковшу Vo к (м/с).
Далее определяем скорость идеального холостого хода, приведенную к валу
двигателя,
ю0 = юб1, рад/с. (7-1)
где соб — угловая скорость вращения барабана подъемной лебедки, рад/с,
г — передаточное отношение редуктора.
®б = 2д°;к~, рад/с; (7-2)
D6 — диаметр барабана подъемной лебедки, м.
Затем определяем э. д. с. двигателя на холостом ходу
^д. О == ^е®о> В.
Тогда э. д. с. холостого хода генератора
Яг. о — кЕя. о, В, (7-3)
где к — число приводных двигателей. ж
Величину стопорного тока электропривода подъема определяют по вели-
чине максимального усилия Астоп в подъемном канате, указываемого в паспорте
экскаватора. Сначала определяют стопорный момент в расчете на один дви-
гатель
Мстоп = РоТ,°-пДб , Н• м, (7-4)
стоп 2kil\ ’ ’ 4 '
где »; — к. п. д. редуктора.
Затем определяют величину стопорного тока
г _____________________________ Метоп д
СТОП Z. ’
Аналогично указанному можно определять величины напряжений холо-
стого хода и стопорных токов для электроприводов тяги и напора.
Для электропривода поворота в паспорте указывается установившаяся
скорость вращения поворотной платформы ппл (об/мин). Так как статические
288
нагрузки механизма поворота невелики, можно считать, что скорость идеаль-
ного холостого хода ппл*0 = ипл. Тогда скорость двигателя
где i — передаточное отношение механизма поворота, I = гред гв; грец — пере-
даточное отношение редуктора; гр — передаточное отношение венцовой пары.
Напряжение холостого хода генератора определяем по соотношению (7-3).
Используя величины момента инерции и максимально допустимого замед-
ления поворотной платформы с груженым ковшом, определяем величину сто-
порного момента на валу двигателя
1
^СТОП [л *^пр^доп^1 > Н ' M, (7-5)
где к — число двигателей; едоп — максимально допустимое замедление пово-
ротной платформы с груженым ковшом на максимальном вылете, рад/с2;
г, — к. и. д. поворотного механизма; /пр — приведенный к валу двигателей
суммарный момент инерции поворотной платформы и якорей двигателей, кг-м2,
+ «r-м2,
7гр — момент инерции поворотной части экскаватора с груженым ковшом
на максимальном вылете, кг-м2; I — передаточное отношение механизма пово-
рота; /дв — момент инерции якоря двигателя, кг-м2.
Далее по величине стопорного момента на валу двигателя определяем
величину стопорного тока аналогично указанному выше.
Первоначально формирование статических характеристик главных при-
водов производят на холостом ходу генератора. Для этого, как было отмечено
выше, при разомкнутой главной цепи снимают статические характеристики
главных приводов, имитируя действие тока главной цепи с помощью независи-
мого источника питания, воздействующего на токовую обмотку (рис. 7-5).
Конечно, при этом не учитываются многие факторы, действующие, когда
главная цепь замкнута, а именно: размагничивающее действие реакции якоря
и противокомпаундной обмотки, падение напряжения в главной цепи.
Однако снятая при разомкнутой главной цепи характеристика дает воз-
можность оценить, насколько получающаяся статическая характеристика
соответствует заданной, а также оценить величины стопорного тока и тока
отсечки.
При потенциометрической отсечке необходимо использовать источник
питания (рис. 7-5, а), гальванически не связанный с источником, питающим
потенциометры токовой отсечки. В схемах, где потенциометры питаются от
генератора собственных нужд, может быть использован, например, возбудитель
синхронного двигателя. При непрерывной токовой связи в качестве источника
питания при снятии характеристики может быть использован генератор соб-
ственных нужд (рис. 7-5, б). В том и другом случае регулирование величины АС''
производится с помощью потенциометра, допустимый ток которого должен быть
достаточен для питания токового узла наибольшим током, соответствующим
стопорному току якоря. Поэтому в схемах, где токовая связь осуществляется
с помощью обмотки управления силового усилителя, потребляющей в стопор-
ном режиме значительный ток, можно использовать небольшой генератор
19 Заказ 1127 2S;J
ДПД2 КОД?.
К Возбудителю В2
Рис. 7-5. Схемы для снятия статических характеристик:
а — в схемах С сумматором и потенциометрической отсечкой по току; б — в схемах подчи-
ненного регулирования с непрерывной связью по току
постоянного тока, напряжение которого можно регулировать в широких пре-
делах изменением тока возбуждения.
Статические характеристики снимают для нулевого и крайних положений
командоконтроллера (командоаппарата), а для кулачкового командоконтрол-
лера и для всех промежуточных положений одного направления.
При снятии характеристик записываются напряжение генератора, напря-
жение ДС7, подаваемое на цепь токовой обмотки, и ток, протекающий по токовой
обмотке. По результатам опыта могут быть построены внешние характеристики
UT = / (/я). Величина тока главной цепи /я для каждой точки характеристики
подсчитывается по формуле 1я = AU/AB, где Д7? — сопротивление в горячем
состоянии участка главной цепи, с которого получает питание токовая обмотка.
При снятии статических характеристик устанавливаются величины основ-
ных параметров для основных и промежуточных характеристик — напряжения
холостого хода и расчетные значения стопорного тока, которые затем уточ-
няются в опыте короткого замыкания, а также регулируется заполнение стати-
ческих характеристик — жесткости рабочего участка и участка токоограниче-
ния. Способы регулировки основных параметров главных приводов и заполне-
ния статических характеристик несколько различны для схем с сумматором
одно- и двухкаскадных и для схем подчиненного регулирования. В схемах
подчиненного регулирования возможно просто проводить независимую регу-
лировку напряжения холостого хода и стопорного тока, а в схемах с сумматором
независимое изменение этих параметров значительно более сложно. Действи-
тельно, если для изменения напряжения холостого хода в схеме с сумматором
изменить задающую н. с. входного усилителя, то одновременно изменится
и величина стопорного тока, а если изменить коэффициент отрицательной
связи по напряжению, то изменится жесткость обоих участков статической
характеристики. Тот или иной способ регулировки в конкретных схемах при-
меняется в зависимости от простоты и удобства его осуществления. В большин-
стве схем с сумматором для изменения напряжения холостого хода проще изме-
нять коэффициент отрицательной связи по напряжению: в схеме, приведенной
на рис. 5-1, — изменяя добавочное сопротивление СД7 в цепи обмотки отрица-
тельной связи по напряжению, в схемах, приведенных на рис. 5-4 и 5-6, —
перемещая точку подключения цепи отрицательной связи по напряжению по
потенциометрам СУП5 и СУПЗ.
В схемах управления главными приводами экскаваторов ЭКГ-8И (см.
рис. 5-10) величину напряжения холостого хода на основной характеристике
можно регулировать, лишь изменяя величину тока насыщения МУ с помощью
изменения величин балластных сопротивлений СБ1 и СБ2.
В схемах подчиненного регулирования (см. рис. 5-16, 5-18 и 5-19) напряже-
ние холостого хода на основной и промежуточных характеристиках наиболее
просто регулировать изменением величины задающего тока регулятора напря-
жения. При этом никакие другие параметры привода изменяться не будут.
Во всех схемах с сумматором и потенциометрической отсечкой по току
величину стопорного тока регулируют изменением запирающего потенциала.
Кроме того, величину стопорного тока здесь можно регулировать, изменяя
величину сопротивления цепи токовой связи. Однако при этом изменится
и жесткость участка токоограничения, поэтому для регулировки абсолютной
величины стопорного тока рекомендуется пользоваться первым из указанных
выше способов.
В схемах управления главными приводами экскаватора ЭКГ-8И
(см. рис. 5-10) величину стопорного тока на основной характеристике
19* 291.
удобно регулировать, изменяя величину максимальной н. с. задающей об-
мотки.
В схемах подчиненного регулирования величину стопорного тока на основ-
ной характеристике можно регулировать, изменяя величину тока насыщения
регулятора напряжения или изменяя коэффициент токовой связи. Возможность
изменения тока насыщения регулятора напряжения в схеме, приведенной на
рис. 5-16, очень ограничена, так как, стремясь повысить коэффициент токовой
•связи в соответствии с проектом, используют предельно допустимую по нагреву
величину тока насыщения PH. Коэффициент токовой связи в схемах, приведен-
ных на рис. 5-16, 5-18 и 5-19, изменить очень просто с помощью изменения вели-
чины добавочного сопротивления в цепи токовой связи. На заполнении статиче-
ской характеристики это изменение (обычно небольшое) практически не сказы-
вается благодаря использованию критического самовозбуждения генератора
в схеме, приведенной на рис. 5-16, или критической положительной связи по
напряжению в схеме, приведенной на рис. 5-19.
После установления проектных значений основных параметров главных
приводов, напряжения холостого хода и стопорного тока формируют заданное
заполнение статической характеристики: заданную жесткость рабочего участка
и участка токоограничения.
Одна из наиболее распространенных задач, встречающихся при наладке
схем с сумматором и потенциометрической отсечкой по току, — это уменьшение
жесткости (увеличение крутизны участка токоограничения). Для выполнения
этой задачи необходимо увеличить коэффициент токовой связи. В двухкаскадных
схемах с сумматором ЭШ-15/90А (см. рис. 5-6) с большим общим коэффициентом
усиления, где последовательно с токовой обмоткой включены значительные
добавочные сопротивления, для увеличения коэффициента токовой связи доста-
точно уменьшить сопротивление в ее цепи и затем увеличить запирающий потен-
циал таким образом, чтобы значение стопорного тока осталось неизменным.
Соответственно уменьшается жесткость участка токоограничения.
В однокаскадных схемах с сумматором (см. рис. 5-1 и 5-4) добавочные
сопротивления в цепи токовой связи или отсутствуют (ЭКГ-4,6), или эти сопро-
тивления закорачивают еще на предварительном этапе наладки (ЭШ-10/60).
В этом случае уменьшение сопротивления цепи токовой связи возможно за счет
увеличения мощности токового потенциометра (см. § 4-1). Последним способом
пользуются довольно редко, так как при незначительном увеличении kQ т
мощность потенциометра резко возрастает.
В схеме ЭШ-10/60 с электромашинными усилителями можно использовать
еще один способ уменьшения жесткости участка токоограничения статической
характеристики — за счет увеличения общего коэффициента усиления системы
при ослаблении собственной отрицательной связи по напряжению ЭМУ. При
этом неоднозначность характеристик ЭМУ несколько возрастает (см. гл. 2).
Последовательность наладочных операций при этом следующая. После
ослабления обратной связи по напряжению ЭМУ н. с. задающей обмотки умень-
шают таким образом, чтобы напряжение холостого хода, соответствующее
четвертой скорости, сохранило прежнее значение. Затем увеличивают запира-
ющий потенциал настолько, чтобы сохранилось прежнее значение стопорного
тока. Таким образом, крутизна падающего участка статической характеристики
увеличивается.
Еще один способ выполнения поставленной задачи возможен во всех схемах
с сумматором. Увеличение коэффициента заполнения характеристики может
быть достигнуто ослаблением отрицательной связи по напряжению генератора.
292
При этом уменьшается жесткость участка токоограничения и жесткость рабо-
чего участка статической характеристики. Последовательность наладочных
операций при этом способе следующая: ослабление обратной связи по напря-
жению, затем соответствующее уменьшение задающей н. с. и увеличение запи-
рающего потенциала.
По существу последние два способа увеличения заполнения статической
характеристики, так же как и предыдущие, сводятся к увеличению коэффи-
циента усиления токовой связи на участке токоограничения.
В схеме управления приводами ЭКГ-8И (см. рис. 5-10 и 5-13) уменьшение
жесткости падающего участка статической характеристики также получают
увеличением коэффициента отрицательной связи по току, уменьшая сопроти-
вление СТ К в цепи этой связи и затем увеличивая задающую н. с. таким обра-
зом, чтобы величина стопорного тока осталась прежней.
В схемах подчиненного регулирования (см. рис. 5-16, 5-18 и 5-19) можно
получить любую требуемую жесткость участка токоограничения — положи-
тельную, нулевую и отрицательную (см. гл. 4) — благодаря использованию
критического самовозбуждения генератора (см. рис. 5-16, 5-18) или формиру-
ющей положительной связи по напряжению (см. рис. 5-19). При этом жесткость
участка токоограничения может легко регулироваться изменением добавочного
сопротивления в цепи обмотки самовозбуждения, что может изменить жесткость
участка токоограничения лишь в небольших пределах, или (для более суще-
ственного изменения жесткости этого участка) введением дополнительной слабой
формирующей связи по напряжению, воздействующей на возбудитель в схеме
рис. 5-16. Так, в схеме привода тяги экскаватора ЭШ-10/70А с критическим
самовозбуждением генератора для увеличения жесткости участка токоогра-
ничения используется слабая отрицательная связь по напряжению, воз-
действующая на силовой магнитный усилитель. Коэффициент этой связи легко
регулируется изменением добавочного сопротивления в ее цепи. При этом
изменение коэффициента дополнительной связи по напряжению, воздейству-
ющей на возбудитель, влияет лишь на наклон участка токоограничения, прак-
тически не изменяя напряжения холостого хода благодаря действию основ-
ной сильной отрицательной связи по напряжению регулятора напряжения.
Второй важной задачей при формировании статических характеристик
является получение заданной жесткости рабочих участков основной характери-
стики, соответствующей крайним положениям командоконтроллера (командо-
аппарата), и характеристики при нулевом положении командоконтроллера.
Жесткости рабочих участков этих характеристик отличаются незначитель-
но, в то время как для приводов всех основных механизмов драглайна и ло-
паты за исключением привода поворота, требования, предъявляемые к жест-
кости характеристики при нулевом положении командоконтроллера — ха-
рактеристики удержания ковша, существенно более высокие, чем требова-
ния, предъявляемые к жесткости рабочего участка основной характеристики
(см. гл. 1).
В схемах с сумматором возможности изменения жесткости рабочих участков
указанных характеристик ограничены. В зтих схемах необходимая жесткость
на рабочих участках характеристик обеспечивается исключением действия токо-
вой связи до значения тока, равного току отсечки, в сочетании с действием
линейной отрицательной связи по напряжению. Здесь возможно повышение
жесткости рабочих участков характеристик за счет увеличения коэффициента
отрицательной связи по напряжению. Однако при этом одновременно будет уве-
личиваться и жесткость участка токоограничения. Поэтому к указанному спо-
293
собу повышения жесткости прибегают крайне редко. Его можно использовать
только в том случае, когда при увеличении коэффициента обратной связи по
напряжению одновременно имеется возможность увеличить коэффициент обрат-
ной связи по току, сохраняя прежнюю крутизну участка токоограничения.
Последовательность наладочных операций при этом следующая. После увели-
чения коэффициента обратной связи по напряжению увеличивает н. с. задающей
обмотки таким образом, чтобы напряжение холостого хода, соответствующее
крайним положениям командоконтроллера, сохранило прежнее значение. Затем
уменьшают сопротивление в цепи обратной связи по току для сохранения
прежнего значения стопорного тока.
Следует отметить, что в двухкаскадной схеме с сумматором экскаватора
ЭШ-15/90А (см. рис. 5-6) жесткость рабочего участка характеристики при нуле-
вом положении командоаппарата обычно оказывается вполне достаточной благо-
даря большому общему коэффициенту усиления системы, и поэтому в дополни-
тельной регулировке жесткости обычно нет необходимости. В этой схеме к су-
щественному снижению жесткости может привести лишь излишне сильное
действие противокомпаундных обмоток и продольной размагничивающей реак-
ции якоря. Напомним, что степень размагничивания генератора от продольной
реакции якоря и противокомпаундной обмотки может быть оценена по величине
тока независимой обмотки в опыте короткого замыкания, как было показано
в § 6-2. Ослабление действия продольной реакции якоря достигается более
точной установкой траверсы в нейтральное положение. Ослабление действия
противокомпаундной обмотки проще всего получить введением в цепь обмотки
добавочного сопротивления.
Учитывая, кроме того, что в большинстве случаев противокомпаундная
обмотка ухудшает коммутацию генераторов, ее по возможности следует отклю-
чать, обеспечивая отсутствие самовозбуждения генераторов небольшим сдвигом
щеток с нейтрального положения по вращению (см. § 6-2).
Действительно, в переходных процессах при изменении потока главных
полюсов в противокомпаундной обмотке (располагаемой на главных полюсах)
наводится э. д. с. самоиндукции, эквивалентное сопротивление ПКО снижается,
что, в свою очередь, приводит к уменьшению тока дополнительных полюсов
и компенсационной обмотки, параллельно которым подключена ПКО и, следо-
вательно, к ухудшению коммутации.
В однокаскадной схеме с электромашинными усилителями экскаватора
ЭШ-10/60 (см. рис. 5-4) возможно повышение жесткости рабочего участка за
счет увеличения общего коэффициента усиления системы при ослаблении соб-
ственной отрицательной связи по напряжению ЭМУ. Последовательность нала-
дочных операций при этом следующая: после ослабления обратной связи по
напряжению ЭМУ увеличивают коэффициент обратной связи по напряжению
генератора таким образом, чтобы напряжение холостого хода генератора, соот-
ветствующее крайним положениям командоконтроллера, сохранило прежнее
значение.
Кроме того, в схеме, приведенной на рис. 5-4, для увеличения жесткости
механической характеристики при нулевом положении командоконтроллера
предусмотрены специальные узлы усиления отрицательной связи по напряже-
нию (узлы гашения остаточного напряжения). Регулировать жесткость этой
характеристики можно, перемещая точку подключения шунтирующей цепи
размыкающих контактов на потенциометре СУП5 обратной связи по напря-
жению. При этом необходимо проследить, чтобы напряжения срабатывания
и отключения реле РНТП были возможно меньше, в противном случае тормо-
294
жение при установке командоконтроллера в нулевое положение протекает
излишне резко. Кроме того, при этом часто имеет место подгорание контактов
реле РНТП и реверсивных контакторов, узел гашения остаточного напряжения
перестает работать.
В однокаскадной схеме с магнитными усилителями экскаватора ЭКГ-4,6Б
(см. рис. 5-1) никаких дополнительных средств регулирования жесткости
характеристики при нулевом положении командоконтроллера не предусмотрено.
А при небольшом общем коэффициенте усиления прибегать к дополнительному
усилению отрицательной связи по напряжению независимо от положения коман-
доконтроллера нерационально, так как это приведет к увеличению жесткости
участка токоограничения (см. гл. 4).
В схеме экскаватора ЭКГ-8И (см. рис. 5-10 и 5-13) изменение коэффициен-
тов обратных связей не влияет на жесткость рабочего участка характеристик,
соответствующих крайним положениям командоконтроллера, так как при этом
магнитные усилители насыщены, и жесткость рабочего участка статических
характеристик определяется естественной жесткостью внешних характеристик
генераторов. В схеме экскаватора ЭКГ-8И при нулевом положении контрол-
лера и реальных значениях нагрузок система регулирования разомкнута
благодаря введению большой н. с. отрицательного смещения и созданию зоны
нечувствительности в характеристике магнитного усилителя (см. рис. 5-11).
Поэтому единственным способом, которым в схеме, приведенной на рис. 5-10,
можно повысить жесткость рабочих участков основной характеристики
и характеристики нулевого положения, является снижение размагни-
чивающего действия продольной реакции якоря путем тщательной уста-
новки траверсы в нейтральное положение в опыте короткого замыкания
(см. § 6-2).
В схемах приводов подъема и тяги экскаватора ЭШ-10/70/7 изменение
жесткости рабочих участков основной характеристики и характеристики нуле-
вого положения достигается главным образом за счет изменения коэффициента
положительной связи по току, регулированием величины добавочного сопроти-
вления СД109 в цепи обмотки ОТБНП (см. рис. 5-16).
Величину коэффициента положительной связи по току подбирают предва-
рительно при снятии статических характеристик в режиме холостого хода при
разомкнутой главной цепи, исходя из заданной жесткости рабочих участков
статических характеристик с учетом действия размагничивающей реакции
якоря и противокомпаундной обмотки. При этом на рабочем участке внешней
характеристики э. д. с. генератора должна увеличиваться с ростом тока (см.
рис. 4-17). Проверяют правильность выбора коэффициента этой связи при работе
под нагрузкой. В частности, для привода подъема эффективность действия
положительной связи по току проверяется в режиме удержания ковша. При этом
ковш должен медленно опускаться.
В схемах подчиненного регулирования привода поворота (см. рис. 5-18),
где положительная связь по току не используется, необходимая жесткость
рабочих участков характеристик получается за счет действия отрицательной
связи по напряжению. Так как здесь требования к жесткости невысокие, допол-
нительной регулировки обычно не требуется. При необходимости такая регули-
ровка может быть осуществлена изменением коэффициента отрицательной связи
по напряжению. Благодаря тому, что в схемах по структуре подчиненного регу-
лирования на участке токоограничения при работе контура регулятора тока
регулятор напряжения не работает (см. гл. 4), любое изменение коэффициентов
обратных связей по току или напряжению, воздействующих на регулятор
295
напряжения, никак не сказывается на жесткости характеристики участка
токоограничения.
После получения заданного заполнения основной характеристики при край-
них положениях командоаппарата (командоконтроллера) и заданного значения
жесткости характеристики при нулевом положении командоконтроллера форми-
рование статических характеристик можно считать законченным. Необходимое
заполнение промежуточных статических характеристик как в схемах подчинен-
ного регулирования, так и в схемах с сумматором обеспечивается автоматически,
а так как особых требований в отношении заполнения промежуточных характе-
ристик не предъявляется, наладочные работы по регулированию заполнения
промежуточных характеристик обычно не производят.
В схемах с кулачковым командоконтроллером производят лишь разбивку
величин напряжения холостого хода по ступеням командоконтроллера, опреде-
ляющую соотношение скоростей на основной и промежуточных характеристи-
ках. Эту разбивку производят или равномерно между четырьмя положениями
командоконтроллера, или равномерно между II, III и IV положениями, а I сту-
пень оставляют для осуществления маневровых операций (запасовки канатов,
смазки роликового круга и т. п.) с малой скоростью, составляющей 10—15%
основной.
В схемах с сумматором одновременно с разбивкой напряжений осуще-
ствляется и разбивка величин стопорных токов по ступеням командоконтрол-
лера. Только если величины напряжений и соответственно скоростей идеального
холостого хода разбиваются пропорционально соотношению задающей н. с.
по ступеням командоконтроллера (например, во II, III и IV положениях —
соответственно 35, 65 и 100% максимального значения), то у стопорного тока
пропорционально задающей н. с. разбивается лишь разница между максималь-
ным значением стопорного тока, соответствующего крайнему положению коман-
доконтроллера, и током отсечки. Поэтому обычно разница между значениями
стопорного тока по ступеням командоконтроллера, особенно при больших
значениях коэффициента отсечки, очень невелика.
В схемах подчиненного регулирования, если не предусмотрено специальных
средств регулирования стопорного тока, то по ступеням командоконтроллера
величина стопорного тока практически не изменяется. Исключение может
составить 1 ступень, если на этой ступени предусмотрена очень небольшая
величина задающей н. с., при которой регулятор напряжения не насыщается.
Формирование промежуточных характеристик приводов основных механиз-
мов экскаваторов ЭКГ-8И (см. рис. 5-10 и 5-13) производят с помощью специаль-
ных средств.
В схемах приводов подъема и напора ЭКГ-8И (см. рис. 5-10 и 5-13) проме-
жуточные скорости получают благодаря шунтировке селеновыми выпрямите-
лями задающей обмотки одного из двух магнитных усилителей, входящих
в блок. Здесь регулировкой добавочных сопротивлений СУ4, СУ5 часто не
удается добиться удовлетворительной разбивки скоростей холостого хода по
ступеням командоконтроллера и приходится прибегать к увеличению и. с.
отрицательного смещения в рабочих положениях командоконтроллера с целью
уменьшения коэффициента усиления магнитного усилителя. Кроме того, напря-
жение холостого хода на промежуточных положениях командоконтроллера
регулируется в небольших пределах с помощью изменения величины коэффи-
циента обратной связи по напряжению.
Величины стопорных токов на промежуточных характеристиках приводов
подъема и напора экскаватора ЭКГ-8И регулируются изменением шунтируемых
295
частей сопротивлений СУ4, СУ5 и СД8 в задающем узле и шунтируемых частей
сопротивлений СУ1 иСУ2ъ токовом узле. Коэффициент токовой связи на проме-
жуточных положениях командоконтроллера меньше, чем на крайних. Поэтому,
на экскаваторе ЭКГ-8И необходимо проверять, чтобы контакты командокон-
троллера в цепи обратной связи по току размыкались раньше, а замыкались
позже соответствующих контактов в цепи задающей обмотки. В противном слу-
чае неизбежны выбросы тока якоря за стопорное значение основной характери-
стики при перестановках командоконтроллера из крайнего в промежуточное
положение, например при копании на приводе подъема.
В схеме привода поворота экскаватора ЭКГ-8И (см. рис. 5-13, 6) величины
скоростей идеального холостого хода на всех положениях командоконтроллера
одинаковы, так как магнитный усилитель работает на насыщенном участке
характеристики (см. рис. 5-14). Величины же стопорного тока регулируются
по положениям командоконтроллера благодаря изменению задающей н. с.
В этой схеме величины стопорных токов на промежуточных положениях коман-
доконтроллера можно регулировать с площадью изменения шунтируемой части
сопротивления СДВ8 в задающем узле.
§ 7-4. Получение заданных динамических характеристик
Требования к динамике приводов основных механизмов экскаваторов
подробно рассмотрены в главе 1. При формировании динамических характери-
стик этих приводов одним из основных требований является получение задан-
ного быстродействия при устойчивой работе системы управления, отсутствии
перерегулирования по скорости и минимальной величине перерегулирования
по току.
Оценку качества переходных процессов производят обычно по осциллогра-
фическим записям работы приводов основных механизмов. На осциллограммах
работы приводов под нагрузкой записываются изменения скорости привода
(с помощью тахометрического моста), тока главной цепи и тока задающей
обмотки усилителя. Последнее записывается только для фиксации перестановок
командоконтроллера (командоаппарата). В необходимых случаях на тех же
осциллограммах записываются изменения напряжения на обмотке независимого
возбуждения генератора, а в многодвигательном приводе — изменение скорости
каждого из двигателей.
Под нагрузкой осциллографируются специальные режимы работы приводов.
На рис. 7-6 в качестве примера приведены осциллограммы специальных режи-
мов работы приводов экскаватора-драглайна ЭШ-15/90 и экскаватора-лопаты
ЭВГ-35/65, оборудованных схемами по структуре подчиненного регулирования.
Для привода подъема драглайна и лопаты осциллографируются: режим
перемещения пустого и груженого ковша по вертикали, подъем ковша, разгон
до установившейся скорости, торможение в режиме реверса, спуск ковша,
разгон до установившейся скорости, торможение установкой командоконтрол-
лера в нулевое положение. Затем осциллографируется тот же режим перемеще-
ния ковша по вертикали, но начиная со спуска ковша. Для привода подъема
лопаты для выявления качества токоограничения осциллографируются также
режим копания до стопорения и резкое стопорение ковша. При осциллографи-
ровании специальных режимов перестановки командоконтроллера исследу-
емого привода осуществляются резко и четко. Так, например, при осциллогра-
фировании режима перемещения ковша по вертикали командоконтроллер
подъема перемещается из нулевого положения в крайнее положение одного
297
в ле вс? Р Вправо
На себя
направления, после достижения установившейся скорости — в крайнее положе-
ние другого направления, затем в нулевое положение. Такие перестановки
командоконтроллера обозначаются в тексте, как указывалось выше, 0—IV—
IV—0.
При осциллографировании работы приводов подъема драглайна машинист
должен регулировать скорость привода тяги таким образом, чтобы обеспечить
вертикальное перемещение ковша. Аналогично должно производиться регули-
рование скорости привода напора для обеспечения вертикального перемещения
ковша при осциллографировании специальных режимов работы привода подъ-
ема экскаватора-лопаты. Для приводов тяги экскаватора-драглайна и напора
экскаватора-лопаты осциллографируется перемещение ковша по горизонтали
при перестановках командоконтроллера 0—IV—IV—0. Записываются два
режима: начинающийся с.перемещения ковша «На себя» и начинающийся с пере-
мещения ковша «От себя». При этом скорость подъема должна регулироваться
таким образом, чтобы обеспечить указанное горизонтальное перемещение.
Для привода тяги экскаватора-драглайна записывается режим копания до сто-
порения. Для привода напора экскаватора-лопаты записывается режим рез-
кого стопорения при копании. Для приводов подъема, напора и тяги режимы,
перемещения ковша осциллографируются, как при работе узла ослабления
поля двигателей, так и при полном поле двигателей.
Для привода поворота осциллографируется разгон до полной скорости,
затем реверсирование, снова разгон до полной скорости в противоположную
сторону и торможение установкой командоконтроллера в нулевое положение.
Осциллографирование производится при пустом и полностью нагруженном
ковше для трех положений ковша — у головы, у пяты и у середины стрелы.
Указанная полная программа осциллографирования переходных процессов
приводов производится при наладке экскаватора после монтажа. При контроль-
ной наладке машин возможно осциллографирование по сокращенной про-
грамме, например для привода поворота только при одном положении ковша
у головы стрелы. Для других приводов осциллографируются только те режимы,
которые осуществляются при работе экскаваторов, например для привода подъ-
ема драглайна: спуск порожнего ковша, реверсирование и торможение уста-
новкой командоконтроллера в нулевое положение и подъем груженого ковша,
реверсирование и торможение установкой командоконтроллера в нулевое поло-
жение.
После окончания наладки осциллографируется работа основных механизмов
экскаватора в обычном рабочем цикле, снимаются так называемые цикловые
осциллограммы. При этом желательна одновременная запись работы электро-
приводов всех трех основных механизмов экскаватора. На рис. 7-7 в качестве
примера приведены цикловые осциллограммы работы экскаватора ЭВГ-35/65.
Осциллографирование обычно производится с помощью осциллографа
Н-700 с записью процессов на фотобумагу. Для ограничения тока, проходящего
через вибраторы, допустимыми значениями пользуются специальными магази-
нами шунтов и добавочных сопротивлений (например, Р-155 к осциллографу
Н-700). При отсутствии такого магазина возможно использование обычных
Рис. 7-6. Осциллограммы специальных режимов работы главных приводов экскаватора-
драглайна ЭШ-15/90 и экскаватора-лопаты ЭВГ-35/65:
а — перемещение груженого ковша по вертикали без ослабления поля (ЭШ-15/90); б — перемещение порож-
него ковша по вертикали с ослаблением поля (ЭШ-15/90); в — перемещение порожнего ковша по вертикали
с ослаблением поля (ЭВГ-35/65); г — работа привода напора при копании (ЭВГ-35/65); д — поворот с пу-
стым ковшом у середины стрелы (ЭШ-15/90); е — поворот с пустым ковшом на полном вылете (ЭВГ-35/65)
29»
шунтов, а в качестве добавочных сопротивлений могут быть использованы
радиосопротивления ВС-2 или остеклованные сопротивления ПЭВР-25, ПЭВР-50
и т. п.
При отсутствии осциллографа возможна приблизительная оценка качества
переходного процесса с помощью обычных электроизмерительных приборов.
Конечно, эта оценка может быть произведена значительно менее точно, чем по
осциллограммам. Так, с помощью электроизмерительных приборов и механи-
ческого секундомера возможно оценить быстродействие (время пуска, реверса
и торможения привода), а также наладить устойчивую работу системы. Однако
Рис. 7-7. Цикловые осциллограммы работы экскаватора ЭВГ-35/65:
а — подъема и поворота; б — напора; пп, пн и пъ— скорости вращения двигателей соответственно подъема,
напора и поворота; ?я п, гя н и ?я в — якорные токи подъема, напора и поворота; iQ п, iQ н и г3 —
точки задающих обмоток подъема,’ напора и поворота^ — усилия в канатах механизма напора; Мп —
момент на барабане механизма подъема; М* — момент на выходном валу-шестерне механизма поворота
300
точно оценить по электроизмерительному прибору величину перерегулирова-
ния, а при наличии затухающих колебаний — амплитуду и время затухания
колебаний практически невозможно из-за инерционности измерительной системы
прибора.
Первая задача при наладке динамики — достижение устойчивой работы
системы управления, так как устойчивость является необходимым условием
работоспособности системы и достижения других заданных динамических пока-
зателей качества: быстродействия, ограничения величины перерегулирова-
ния и т. д.
Напомним, что изменение быстродействия системы управления означает
одновременно фактическое изменение всех коэффициентов гибких обратных
связей и быстродействия контуров жестких обратных связей, что в свою очередь,
существенно влияет на устойчивость системы. Поэтому имеет смысл говорить
о наладке устойчивости при заданном быстродействии. Способы изменения
быстродействия в различных системах управления будут рассмотрены ниже,
а здесь следует отметить, что подбор величин коэффициентов гибких обратных
связей при наладке для достижения устойчивой работы системы значительно
сложнее, чем корректировка величин коэффициентов жестких обратных связей
для получения заданной проектом статической характеристики. Причина этого
заключается в том, что коэффициенты жестких обратных связей определяются
заданными проектом статическими характеристиками и могут быть просто най-
дены расчетным путем, в то время как коэффициенты гибких обратных связей
плохо поддаются расчету с учетом всех действующих факторов, нелинейностей
характеристик отдельных элементов и т. п. и в большинстве случаев подбираются
при наладке экспериментально для получения заданных динамических харак-
теристик. Кроме того система управления бывает устойчива в довольно узком
диапазоне параметров гибких обратных связей, причем эта область параметров,
в свою очередь, является функцией параметров жестких обратных связей.
При каждом конкретном значении коэффициентов жестких обратных связей
имеется определенная область коэффициентов гибких обратных связей, при
которых система управления устойчива. Вне пределов этой области система
управления неустойчива.
Благодаря принципиальным особенностям структуры (см. гл. 3) наладка
устойчивости в схемах подчиненного регулирования проще, чем в схемах
с сумматором. В схемах подчиненного регулирования на разных участках пере-
ходных процессов двухконтурная схема работает как одноконтурная или даже
как разомкнутая. Действительно, на основной части переходных процессов
пуска и торможения контур регулирования напряжения разомкнут, регулятор
напряжения лишь выдает задание на подчиненный ему контур регулирования
тока. В легких переходных процессах, например при пуске на спуск привода
подъема, контур регулирования тока тоже разомкнут. При этом благодаря
наличию звена ограничения ограничивается ускорение.
В схемах с сумматором на основной части переходных процессов работают
все обратные связи, жесткие и гибкие. Наиболее сложна наладка устойчивости
в каскадных схемах с сумматором ЭШ-15/90А с МУ и ПМУ.
Следует отметить, что, так как электромашинный усилитель поперечного
поля является двухкаскадным усилителем, то с точки зрения наладки устой-
чивости и ограничения величин перерегулирования и колебательности, схему
с ЭМУ (см. рис. 5-4) следует рассматривать как двухкаскадную.
Во всех схемах управления наладка устойчивости в основном осуще-
ствляется в опытах холостого хода и короткого замыкания. В большинстве
301
случаев если в указанных режимах система управления устойчива, то система
устойчива и в рабочих режимах. После наладки устойчивости в опыте холостого
хода добиваются полного отсутствия перерегулирования по напряжению (см.
рис. 7-4, а), в опыте короткого замыкания — минимальной, не более 10% вели-
чины перерегулирования по току (см. рис. 7-4, б). Так как способы ограничения
величины перерегулирования и наладки устойчивости в большинстве случаев
принципиально однотипны, рассмотрение этих вопросов проведем совместно.
Одним из основных способов наладки устойчивости и ограничения величины
перерегулирования по напряжению в опыте холостого хода как в схемах с сум-
матором, так и в схемах подчиненного регулирования является подбор пара-
метров гибкой отрицательной связи по э. д. с. или по напряжению генератора.
Однако, если в схемах подчиненного регулирования гибкая отрицательная
связь по э. д. с. действует лишь как перерегулировочная только в конце пере-
ходного процесса и практически не влияет на его длительность, то в схемах
с сумматором гибкая отрицательная связь по э. д. с. (напряжению) действует
в течение всего переходного процесса и существенно влияет на его длительность
(см. гл. 4 и 5).
Отсечка действия гибкой отрицательной связи по э. д. с. на основной части
переходного процесса в схемах подчиненного регулирования определяет также
упрощение наладки устойчивости в этих схемах по сравнению со схемами
с сумматором.
В схемах экскаваторов ЭКГ-4,6 и ЭШ-10/70А (см. рис. 5-1, 5-16 и 5-18)
для изменения коэффициента гибкой отрицательной связи по э. д. с. переме-
щают точку подключения цепи отрицательной связи по напряжению (УМС-б,
ОНБН) по добавочному сопротивлению в цепи параллельной обмотки генера-
тора. Для сохранения неизменным коэффициента жесткой отрицательной связи
по напряжению изменяют при этом величину добавочного сопротивления СД7
в цепи обмоток УМС-6, ОНБН.
Эффективность действия гибкой отрицательной связи по э. д. с. в схеме
экскаватора ЭШ-10/70А обычно корректируют в рабочих режимах для устране-
ния перерегулирования по скорости.
В схеме управления экскаватором ЭШ-15/90А (см. рис. 5-6 и 5-8) эффектив-
ность действия гибкой связи по напряжению регулируется с помощью измене-
ния параметров фильтра RC в цепи обмотки жесткой отрицательной связи
по напряжению.
В схеме, приведенной на рис. 5-6, для изменения коэффициента гибкой отри-
цательной связи по напряжению изменяют величину емкости КСП2 или пере-
мещают точку подключения этой емкости по сопротивлению СДП4 в цепи об-
мотки ПМУПШ жесткой отрицательной связи по напряжению генератора.
В схемах приводов поворота экскаваторов ЭШ-15/90А и ЭШ-10/70А (см.
рис. 5-8 и 5-18) для изменения коэффициента гибкой отрицательной связи
по э. д. с. регулируют величину добавочных сопротивлений СДВ2 и СД323
в цепи обмоток соответственно ПМУВШ и ОГСБНВ.
В схеме управления приводом поворота экскаватора ЭШ-10/60 (рис. 5-4, б)
изменение эффективности действия гибкой отрицательной связи по э. д. с.
генератора, осуществляемой с помощью обмотки управления ЭМУ ОУ-3, вклю-
ченной в диагональ динамического моста, достигается регулированием величины
сопротивления СУВ12, включенного последовательно с обмоткой управления
ОУ-3.
Наладку устойчивости в каскадных схемах с сумматором производят также
изменением коэффициентов гибких связей, которыми окружены усилители-
302
возбудители (см. рис. 5-4, 5-6 и 5-8) и промежуточные усилители (см. рис. 5-6).
В схеме, приведенной на рис. 5-4, а, для изменения коэффициентов гибкой отри-
цательной связи по напряжению ЭМУ изменяют величину емкости Сп, шунтиру-
ющей добавочное сопротивление СУП10 в цепи жесткой отрицательной связи
по напряжению ЭМУ. В схеме управления главными приводами экскаватора
ЭШ-15/90А (до № 51) использовалась гибкая обратная связь по выходному
напряжению силового магнитного усилителя (так называемая трансформатор-
ная связь), осуществляемая замыканием цепи одной из обмоток управления си-
лового магнитного усилителя на обмотку управления промежуточного магнит-
ного усилителя через добавочное сопротивление. Изменением величины этого
добавочного сопротивления осуществлялась регулировка коэффициента транс-
форматорной связи, оказывающей влияние как на устойчивость системы, так
и па ее быстродействие.
В схемах управления ЭШ-15/90А (после № 51), где используется лишь
гибкая отрицательная связь по выходному напряжению ПМУ, осуществляемая
г, помощью отдельной обмотки управления ПМУУ (см. рис. 5-6 и 5-8), регули-
ровка коэффициента этой связи производится изменением величины емкости
КС4 и сопротивления СД! в цепи обмотки ПМУУ.
Одновременно с гибкими связями, создаваемыми с помощью контуров ПС,
в ЭМУ действуют другие гибкие обратные связи, особенно в режиме нагрузки
(следовательно, и в режиме холостого хода генератора). Важнейшей из этих
связей является гибкая обратная связь по току нагрузки ЭМУ, создаваемая
с помощью сопротивления СУП6 (см. рис. 5-4) благодаря наличию потоков рас-
сеивания компенсационной обмотки и обмотки якоря ЭМУ. Эффективность
действия этой гибкой связи зависит от величины сопротивления СУП6. Сопро-
тивление СУП6 обычно устанавливают в 7—10 раз большим сопротивле-
ния независимой обмотки возбуждения генератора.
В схеме экскаватора ЭКГ-8И (см. рис. 5-10 и 5-13) не предусмотрено спе-
циальных средств для достижения устойчивости и устранения перерегулирова-
ния в опыте холостого хода. Эта схема обладает достаточным запасом устойчи-
вости, и в данном случае ограничиваются установкой расчетных значений
коэффициентов жестких обратных связей.
После достижения устойчивости и устранения перерегулирования в опыте
холостого хода добиваются устойчивости и минимальной величины перерегули-
рования в опыте короткого замыкания. Здесь также благодаря принципиальным
особенностям структуры наладка устойчивости в схемах подчиненного регули-
рования проще, чем в схемах с сумматором.
Действительно, в схемах подчиненного регулирования только при нараста-
нии и спадании тока в опыте к. з. работает регулятор напряжения и соответ-
ственно единственная гибкая отрицательная связь в системе — по э. д. с.
генератора. При установившемся значении тока регулятор напряжения насы-
щен и работает лишь контур регулирования тока. В схемах с сумматором в опыте
к. з. при токе, большем тока отсечки, работают все жесткие и гибкие обратные
связи. Напомним, что во всех схемах управления одновременно с сигналом
жесткой отрицательной связи по току с участка главной цепи снимается и сиг-
нал гибкой связи по току (Ад величина которого прямо пропорциональна
величине индуктивности последовательных обмоток главной цепи Ад, в боль-
шинстве случаев оказывающий стабилизирующее влияние на работу системы
управления.
303
Кроме того^ во всех схемах управления на устойчивость в опытах к. з.
существенное влияние оказывает положение щеточных траверс генератора
относительно нейтрального положения. При небольшом сдвиге щеток с ней-
трали по направлению вращения и наличии размагничивающей реакции якоря
устойчивость в опыте к. з. существенно повышается и, наоборот, при положении
щеток точно в нейтрали или при их сдвиге против направления вращения устой-
чивость в опыте к. з. существенно ухудшается, возможно возникновение авто-
колебаний.
В схеме экскаватора ЭКГ-4,6Б (см. рис. 5-1) перерегулирование по току
в опыте к. з. просто ограничивается изменением сопротивления СД9 в цепи
обмотки гибкой отрицательной связи по току УМ С-4, получающей питание от
специальной обмотки СТ, расположенной на дополнительных полюсах генера-
тора. На устойчивость в опыте короткого замыкания в этой схеме оказывает
влияние и величина коэффициента гибкой отрицательной связи по э. д. с.
генератора, способы регулирования которого были рассмотрены выше.
В схеме экскаватора ЭШ-10/60 (см. рис. 5-4) гибкой связи по току нет,
и величину перерегулирования в опыте к. з. ограничивают изменением коэффи-
циента гибкой связи по напряжению ЭМУ (см. рис. 5-4, а), или коэффициента
гибкой связи по э. д. с. генератора (см. рис. 5-4, б).
Напомним, что кроме указанных гибких обратных связей, действующих
с помощью специальных элементов схем, в ЭМУ, как отмечалось выше, дей-
ствуют внутренние гибкие обратные связи. В схеме управления приводом подъ-
ема экскаватора ЭШ-10/60 (см. рис. 5-4, а) гибкая отрицательная связь по току
нагрузки ЭМУ регулируется изменением сопротивления СУП6 в опыте корот-
кого замыкания. В схеме управления приводом поворота (см. рис. 5-4, 6}
аналогичная связь регулируется в том же опыте изменением сопротивлений
СУВ6 п СУШО.
В каскадной схеме с сумматором (см. рис. 5-6 и 5-8) для достижения устой-
чивости в опыте к. з. приходится использовать весь комплекс гибких обратных
связей: по току главной цепи, по напряжению генератора, по выходным сигна-
лам промежуточного и силового усилителя.
В опыте к. з. в этой схеме подбираются параметры гибкой отрицательной
связи по току главной цепи, осуществляемой с помощью цепочки RC (емкости
КФП5 и сопротивления СДП14). Параметры других гибких связей корректи-
руются для достижения устойчивости в опыте к. з. с учетом результатов наладки
устойчивости в опыте холостого хода. Методика изменения параметров основ-
ных гибких связей была рассмотрена выше.
Устойчивость в опыте короткого замыкания в схемах с токовой отсечкой
следует налаживать при наличии запирающего потенциала в цепи токовой
связи, так как условия устойчивости при действии непрерывной токовой связи
и при действии нелинейной токовой связи (связи с отсечкой) существенно
различны.
Особенно важно достижение устойчивости без сколько-нибудь заметного
перерегулирования по току в опыте короткого замыкания для привода поворота.
Опыт наладки показал, что даже очень небольшие колебания тока в опыте корот-
кого замыкания, затухающие в течение одного-двух периодов, могут неблаго-
приятно сказаться при работе привода поворота. При этом в рабочих режимах
в процессах разгона и торможения возможны длительные, медленно затуха-
ющие колебания тока значительной амплитуды.
Выше уже было отмечено, что в схеме управления главными приводами
экскаватора ЭКГ-8И гибкие обратные связи не используются.
304
Эта схема (см. рис. 5-10 и 5-13) обладает достаточным запасом устойчивости,
однако в опыте короткого замыкания меньшим, чем в опыте холостого хода.
Здесь в опыте к. з. возможно возникновение автоколебаний даже при проект-
ных значениях коэффициента жесткой отрицательной связи по току. Так как
в схеме управления экскаватором ЭКГ-8И гибкие обратные связи отсут-
ствуют, для устранения автоколебаний уменьшают коэффициент усиления маг-
нитного усилителя, увеличивая н. с. отрицательного (рабочего) смещения.
При этом одновременно искажается характеристика «вход — выход» МУ так,
что на ее начальном участке коэффициент усиления становится меньше, чем на
среднем участке в ненасыщенной зоне характеристики, что также способствует
повышению устойчивости работы системы управления.
Возникновение автоколебаний в опыте короткого замыкания в схемах Г—Д
с возбудителем, представляющим собой инерционное звено, где для токовой связи
используется обмотка управления этого возбудителя, кажется трудно объясни-
мым, так как при пренебрежении индуктивностью главной цепи эти схемы
как в опыте холостого хода, так и в опыте к. э. принято описывать уравнениями
второго порядка. Более того, при проведении опыта так называемого искусствен-
ного к. з.1, где индуктивность главной цепи исключается, автоколебания возни-
кают даже при меньших значениях коэффициента жесткой отрицательной связи
по току, чем в опыте обычного короткого замыкания, возможно, благодаря
исключению составляющей гибкой отрицательной связи по току, содержащейся
в сигнале, снимаемом с участка главной цепи. Проведенные исследования
показали, что возникновение автоколебаний в указанных режимах, вероятно,
объясняется повышением порядка системы управления за счет потоков рассея-
ния генератора. Действительно, при учете потоков рассеяния генератора одно-
обмоточный генератор описывается уже уравнением второго порядка, двухобмо-
точный — третьего и т. д., а система управления Г—Д с МУ — соответственно
уравнениями третьего, четвертого и т. д. порядков.
В схемах подчиненного регулирования в опыте короткого замыкания на
разных участках переходного процесса, как уже отмечалось выше, работают
или совместно контуры регуляторов тока и напряжения — при нарастании
и спадании тока главной цепи или только контур регулятора тока — при уста-
новившемся значении тока.
Схема экскаватора ЭШ-10/70А (см. рис. 5-16 и 5-18) обладает значительным
запасом устойчивости после насыщения регулятора напряжения, и специальной
наладки устойчивости в этом режиме обычно не требуется. Если все же в ука-
занном режиме возникают автоколебания, то чаще всего нарушение устойчи-
вости связано со сдвигом щеточных траверс генератора с нейтрального положе-
ния против вращения. При нарастании и спадании тока и совместной работе
двух контуров регулирования возникновение автоколебаний возможно значи-
тельно чаще, поэтому приходится подбирать значение коэффициента гибкой
отрицательной связи по э. д. с. генератора так, чтобы, с одной стороны, до-
биться устойчивости в опыте к. з., а с другой стороны, не допустить перерегули-
рования по скорости в рабочих режимах. Б качестве практического наладочного
приема при этом можно рекомендовать искажение характеристики «вход —
выход» регулятора напряжения в зоне, близкой к нулевому значению входного
сигнала, с помощью увеличения н. с. отрицательного смещения таким образом,
1 Опыт искусственного к. з. — это опыт холостого хода, когда цепь токовой
связи подключена на напряжение генератора, а цепи всех других обратных связей разор-
ваны.
20 Заказ 1127
305
чтобы в указанной зоне коэффициент усиления регулятора напряжения имел
существенно меньшее значение, чем на других участках характеристики.
Важнейшей задачей при наладке динамики является получение заданного
быстродействия приводов основных механизмов, которое, в свою очередь, зави-
сит от заполнения время-токовой диаграммы — чем меньше будут расхождения
между значением тока главной цепи в переходных процессах и предельным,
стопорным значением тока, тем больше быстродействие. Здесь, конечно, следует
напомнить, что в легких переходных процессах накладывается дополнительное
ограничение по величине предельного ускорения и поэтому по этим процессам
нельзя судить о заполнении время-токовой диаграммы. Кроме того, наличие
статической нагрузки в зависимости от ее знака по отношению к направлению
движения (например, активного момента на приводе подъема) соответственно
увеличивает или уменьшает заполнение время-токовой диаграммы (см. § 3-5,
4-4 и 4-5).
Во всех схемах УП—Д получение необходимого заполнения время-токовой
диаграммы и заданного быстродействия приводов основных механизмов зависит
от коэффициента усиления и быстродействия контура регулирования тока.
В схемах Г—Д заполнение время-токовой диаграммы зависит от имеюще-
гося запаса по напряжению возбудителя, а реализация этого запаса — также
от коэффициента усиления токового узла.
Также, как и обеспечение других заданных динамических показателей ка-
чества переходных процессов, достижение заданного быстродействия в схемах
подчиненного регулирования, благодаря особенностям структуры, осуществля-
ется более просто, чем в схемах с сумматором.
Действительно, если в схемах с сумматором на основной части переходных
процессов работают все обратные связи, в том числе все гибкие, замедляющие
переходные процессы и ухудшающие заполнение время-токовой диаграммы, то
в схемах подчиненного регулирования на основной части переходных процессов
никакие гибкие связи не действуют, работает лишь контур регулирования тока,
и заполнение время-токовой диаграммы зависит лишь от коэффициента усиления
и быстродействия токового узла.
Из сказанного вытекает, что основным способом увеличения заполнения
время-токовой диаграммы, применимым для всех схем, независимо от их струк-
туры, является увеличение коэффициента токовой связи. Способы изменения
коэффициента токовой связи в различных схемах были рассмотрены выше.
В схемах с сумматором (см. рис. 5-1, 5-4, 5-6 и 5-8) одним из основных спо-
собов изменения заполнения время-токовой диаграммы благодаря использова-
нию линейной отрицательной связи по напряжению является изменение коэф-
фициента форсирования по н. с. управления, т. е. изменение коэффициента
жесткой отрицательной связи по напряжению генератора. При этом изменяется
быстродействие на холостом ходу генератора. Например, при увеличении коэф-
фициента форсирования по н. с. управления максимальное и среднее значения
напряжения, прикладываемого к обмотке возбуждения генератора в переход-
ном процессе, увеличиваются, а время переходных процессов сокращается.
Указанный способ повышения быстродействия неприменим для привода
поворота экскаватора ЭШ-10/60 (см. рис. 5-4, б), где отрицательная связь по
напряжению включается только в нулевом положении командоконтроллера при
окончании процесса торможения. В схеме управления приводами экскаватора
ЭШ-10/60 с использованием ЭМУ в качестве возбудителя генератора повышение
быстродействия возможно за счет увеличения коэффициента усиления ЭМУ
при ослаблении собственной отрицательной связи по напряжению ЭМУ. В схеме
306
управления приводом поворота экскаватора ЭШ-10/60 возможно изменение
быстродействия за счет регулировки величины сопротивления СУВ10, вклю-
ченного параллельно якорю ЭМУ. При увеличении сопротивления СУВ10 не-
компенсированный поток реакции якоря от тока нагрузки уменьшается и ко-
эффициент усиления ЭМУ увеличивается.
Отметим, что изменение быстродействия на холостом ходу генератора экви-
валентно, по сути дела, изменению коэффициента токовой связи. Действительно,
например, при увеличении коэффициента форсирования по н. с. увеличивается
задающая н. с., и для сохранения прежнего значения стопорного тока и запол-
нения статической характеристики необходимо увеличить коэффициент токовой
связи. Так же оказывается необходимым увеличение коэффициента токовой
связи для сохранения статических параметров и при увеличении коэффициента
усиления возбудителя.
Благодаря указанным выше особенностям в схемах с сумматором (ЭКГ-4,6,
ЭШ-10/60, ЭШ-15/90А) быстродействие и заполнение время-токовой диаграммы
можно регулировать также изменением коэффициентов гибкой отрицательной
связи по э. д. с. или напряжению генератора. Способы изменения эффектив-
ности действия гибких связей в перечисленных схемах были рассмотрены выше.
При наладке в большинстве случаев возникает необходимость увеличения
быстродействия. Уменьшая с этой целью коэффициенты гибких связей по
э. д. с. или напряжению генератора, необходимо следить за тем, чтобы при этом
другие показатели качества переходных процессов не ухудшались, в частности
недопустимо возникновение перерегулирования по скорости в рабочих режимах.
В схеме управления приводом подъема экскаватора ЭШ-10/60 (см. рис. 5-4),
где гибкая обратная связь по напряжению генератора отсутствует, возможно
регулирование быстродействия за счет изменения коэффициента гибкой обрат-
ной связи по напряжению ЭМУ изменением величины емкости, включенной
параллельно сопротивлению СУП10.
На экскаваторах ЭШ-15/90А и ЭКГ-4,6, где используются генераторы со сме-
шанным возбуждением, изменение соотношения величин и. с. параллельной
и независимой обмоток влияет на быстродействие привода. При увеличении
доли н. с. параллельной обмотки процессы торможения несколько затяги-
ваются, а длительность процессов пуска соответственно несколько умень-
шается. Следует отметить, что соотношение и. с. обмоток генератора опреде-
ляется при проектировании генератора и может быть изменено при наладке
только в небольших пределах. Увеличение доли н. с. параллельной обмотки,
повышающее плавность протекания переходных процессов, используется чаще
всего на приводе поворота. Наоборот, на приводах подъема и напора экскава-
тора ЭКГ-4,6 нужно стремиться уменьшить долю н. с. параллельной обмотки,
так как н. с. параллельной обмотки задерживает спадание э. д. с. генератора
и ухудшает качество токоограничения при резких стопорениях.
В схеме подчиненного регулирования Г—Д с МУ экскаватора ЭШ-10/70А
(см. рис. 5-16 и 5-18), а также в схеме экскаватора ЭКГ-8И (см. рис. 5-10 и 5-13),
увеличение заполнения время-токовой диаграммы и повышение быстродействия
возможно за счет изменения форсирования по напряжению возбуждения изме-
нением величины балластных сопротивлений СБ1, СБ2. При уменьшении бал-
ластных сопротивлений до тех пор, пока величина балластного сопротивления
не станет равной величине сопротивления независимой обмотки в динамике,
время изменения э. д. с. генератора на холостом ходу сокращается (см. гл. 2).
При дальнейшем уменьшении балластного сопротивления время изменения
э. д. с. генератора не изменяется. При уменьшении балластных сопротивлений
20* 307
необходимо следить', чтобы величина эквивалентного по нагреву тока нагрузки
магнитного усилителя не превышала номинального тока рабочей цепи усили-
теля. Для уменьшения величины эквивалентного тока нагрузки используют
увеличение н. с. отрицательного смещения, что уменьшает величины началь-
ных токов магнитных усилителей при отсутствии сигнала в обмотках упра-
вления.
Следует отметить, что в схеме экскаватора ЭКГ-8И на указанный способ
регулирования быстродействия накладываются дополнительные ограничения,
связанные с тем обстоятельством, что в этой схеме магнитные усилители на
основных статических характеристиках работают в режиме насыщения. Поэтому
изменение величин балластных сопротивлений здесь ведет к изменению стати-
ческих параметров (напряжений холостого хода и скоростей приводов), а также
к изменению нагрева магнитных усилителей.
Отметим также, что в схемах подчиненного регулирования, как и в рассмо-
тренных выше схемах, изменение быстродействия на холостом ходу генератора
эквивалентно изменению коэффициента токовой связи. Действительно, напри-
мер, при уменьшении балластных сопротивлений увеличивается коэффициент
усиления магнитного усилителя. Соответственно, для сохранения прежнего
значения стопорного тока необходимо увеличить коэффициент токовой связи.
На какие параметры схемы управления следует воздействовать для полу-
чения заданного быстродействия, определяют по осциллограммам переходных
процессов. Если, например, по осциллограммам видно, что время переходных
процессов привода мало отличается от времени изменения э. д. с. генератора
в режиме холостого хода, а ток главной цепи в переходных процессах суще-
ственно отличается от стопорного, то отсюда следует, что необходимо уменьшить
время изменения э. д. с. генератора в режиме холостого хода одним из указан-
ных выше способов.
Для оценки величины расхождения между статическими и динамическими
характеристиками в системах подчиненного регулирования при наличии инте-
гратора в контуре регулирования тока можно использовать соотношения
(3-65)—(3-67).
Специальной задачей, которая должна быть выполнена при наладке дина-
мики, является обеспечение плавного выбора зазора в механизме поворота,
что достигается наладкой специального узла выбора зазоров в схеме привода
поворота ЭШ-10/70А (см. рис. 5-18) или дополнительных узлов в схеме ЭШ-10/60
(см. рис. 5-4, б) и ЭШ-15/90А (см. рис. 5-8).
В схеме привода поворота экскаватора ЭШ-15/60А, где для плавного выбора
зазоров, кроме задающего фильтра (емкость КФВ5, сопротивления СДВ9,
СДВ10), используется сигнал гибкой отрицательной связи, пропорциональный
второй производной от э. д. с. генератора, величина этого сигнала регулируется
изменением величины емкости КСВ2 и изменением соотношения величин сопро-
тивлений СДВ2 и СУВ11. Сигнал, пропорциональный первой производной
по э. д. с. генератора, регулируемый изменением величины суммарного сопро-
тивления СДВ2 и СУВ11 и перемещением точки подключения цепи обмотки
ПМУBill по потенциометру СДУЗ, также благоприятно влияет на процесс
плавного выбора зазоров, однако чрезмерное его усиление может уменьшить
заполнение время-токовой диаграммы и затянуть переходный процесс, так как
этот сигнал действует в течение всего переходного процесса с одинаковой
эффективно стью.
В последнем варианте схемы привода поворота экскаватора ЭШ-10/60
(см. рис. 5-4, б), где для повышения уровня сигнала гибкой отрицательной
3JS
связи по э. д. с. генератора в течение выбора зазоров часть сопротивления
СУВ12 в диагонали динамического моста закорачивается размыкающими кон-
тактами реле РВЗ, срабатывающим после окончания выбора зазоров, эффектив-
ность действия этого узла выбора зазоров регулируется изменением величины
шунтируемой части сопротивления СУВ12 и напряжения срабатывания реле
РВЗ. Реле РВЗ должно срабатывать при токе главной цепи, примерно равном
30—35% стопорного, и отпадать — при токе, равном 15—20% стопорного.
Эффективность действия узла выбора зазоров в схеме привода поворота
экскаватора ЭШ-10/70А (см. рис. 5-18) регулируется изменением величины
сопротивления СД321 в цепи обмотки управления ОГСБВЗ блока выбора зазо-
ров БВЗ. Для надежного запирания цепи обмотки ОГСБВЗ следует использо-
вать полную величину сигнала, снимаемого с участка главной цепи на потен-
циометр СД322. Кроме того, это дает возможность повысить эффективность
действия узла увеличением сигнала, снимаемого с обмотки гибкой связи
ОГСГВШ.
Величину сопротивления потенциометра СД320 следует устанавливать
возможно большей, чтобы не увеличивать постоянную времени блока БВЗ,
а величину сопротивления потенциометра СД322 — возможно меньшей для
удобства регулирования эффективности действия узла изменением величины
одного сопротивления СД321. Емкость в схеме узла выбора зазоров служит
в качестве фильтра высших гармоник, наводимых в обмотке ОГСГВШ, и обычно
не регулируется.
СПИСОК ЛИТЕРАТУРЫ
1 . Основы автоматизированного электропривода. М-, «энергия», 1974. Авт.: М. Г. Чи-
ликин, М- М. Соколов, В. М. Терехов, А. В. Шииянский.
2 . Ключей В. И. Ограничение динамических нагрузок электропривода. М.,
«Энергия», 1971.
3 . В о л к о в Д. П. Динамика и прочность одноковшовых экскаваторов.
4 . Теория автоматического управления. Под. общ. ред. А. В. Нетушила. «Высшая
школа», часть I, 1968 и часть II, 1972.
5 . Петров Г. Н. Электрические машины. Часть III «Коллекторные машины по-
стоянного и перемеииого тока», М., «Энергия», 1968.
6 . С о л о д у х о Я. Ю- и др. Тиристорный электропривод постоянного тока. М.,
«Энергия», 1971. (Библиотека по автоматике, вып. 431).
7 . Ш и п и л л о В. П. Автоматизированный вентильный электропривод. М-, «Энер-
гия», 1969.
8 . Л е б е д е в Н. Д. и др. Управление вентильными электроприводами постоянного
тока. М., «Энергия», 1970.
9 . К л ю ч е в В. И. Автоматизация реверсивных электроприводов (подъемно-транс-
портные машины). М., «Энергия», 1966. (Библиотека по автоматике, вып. 196).
10 . Г е м к е Р. Г. Неисправности электрических машин. Госэнергоиздат, 1960.
11 . Т у н А. Я., И в а н о в О. А. Наладка электрических машин электроприводов.
Госэнергоиздат, 1963.
12 . Тун А. Я. Наладка бесконтактной аппаратуры электроприводов. М., «Энергия»,
1964.
13 . Р и в л и н Л. Б. Монтаж крупных электрических машин. Госэнергоиздат, 1956.
14 . Жерве Г. К. Промышленные испытания электрических машин. Госэнерго-
издат, 1950.
15 . Kessler С. Ein Beitrag zur Theorie mehrshleifigen Regelungen. — «Regelung-
stechnik», 1960, N 8.
16 . Kessler C. Das simmetrische Optimum. — «Regelungstechnik», 1958, N 6.
17 . Буль IO. Я., Симонов IO. В. Выбор параметров обмоток возбуждения
при использовании критического самовозбуждения в замкнутых системах Г—Д. «Электри-
чество», 1972, № 2.
ОГЛАВЛЕНИЕ
Предисловие ......................<.................................................. 3
Глава 1. Режимы работы экскаваторных электроприводов................................. 5
§ 1-1. Общие сведения ..................................................... 5
§ 1-2. Рабочие нагрузки основных механизмов экскаваторов.................. 10
§ 1-3. Переходные процессы пуска и торможения............................. 17
§ 1-4. Стопорение экскаваторных приводов.................................. 32
§ 1-5. Резонансные явления в электроприводах поворота экскаваторов .... 37
§ 1-6. Блок-схема экскаваторного электропривода........................... 44
Глава 2. Характеристики основных элементов системы электропривода................... 46
§ 2-1. Электрические машины постоянного тока.............................. 46
§ 2-2. Электромашипные усилители ......................................... 67
§ 2-3. Тиристорные преобразователи...................................... 72
§ 2-4. Магнитные усилители.............................................. 89
Г л а в а 3. Структуры систем управления экскаваторными электроприводами . . . 104
§ 3-1. Система управляемый преобразователь — двигатель................... 104
§ 3-2. Особенности системы Г—Д........................................... 111
§ 3-3. Особенности системы ТП—Д.......................................... 118
§ 3-4. Типовые структуры систем управления............................... 119
§ 3-5. Система подчиненного регулирования с последовательной коррекцией . 122
§ 3-6. Оптимальная структура экскаваторных электроприводов............... 135
Глава 4. Формирование статических и динамических характеристик экскаваторных
электроприводов .............................................................. 140
§ 4-1. Узел жесткой отрицательной связи по току главной цепи............. 140
§ 4-2. Узел жесткой отрицательной связи по напряжению генератора......... 147
§ 4-3. Узлы гибких обратных связей....................................... 151
§ 4-4. Формирование статических и динамических характеристик в схемах
с сумматором.......................................................... 161
§ 4-5. Формирование статических и динамических характеристик в схемах под-
чиненного регулирования................................................. 169
i
Г л а в а 5. Описание схем управления...............................................180
§ 5-1. Обзор применяемых схем............................................ 180
§ 5-2. Схемы с суммирующим усилителем.................................... 181
§ 5-3. Схемы с одним силовым усилителем.................................. 202
§ 5-4. Схемы подчиненного регулирования.................................. 213
§ 5-5. Схема тиристорный преобразователь — двигатель..................... 229
§ 5-6. Схемы управления двигателями преобразовательных агрегатов .... 232
§ 5-7. Системы импульсно-фазового управления тиристорными преобразова-
телями ................................................................. 237
311
Глава 6. Наладка основных элементов системы управления электроприводами , 246
§ 6-1. Наладка машин переменного тока............................... 246
§ 6-2. Наладка машин постоянного тока . .... . . . . 248
§ 6-3. Наладка электромашинных усилителей . .......... 254
§ 6-4. Наладка магнитных усилителей . . ... ...............- 259
§ 6-5. Наладка тиристорных преобразователей......................... 264
Глава 7. Наладка схем управления главных электроприводов экскаваторов . 274
§ 7-1. Программа работ.............................................. 274
§ 7-2. Подключение жестких и гибких обратных связей ................ 274
§ 7-3. Получение заданных статических характеристик................. 287
§ 7-4. Получение заданных динамических характеристик.......... . 297
Список литературы ............................................................ 310
ЮРИЙ ЯКОВЛЕВИЧ БУЛЬ
ВЛАДИМИР ИВАНОВИЧ КЛЮЧЕЙ
ЛЕОНИД ВАСИЛЬЕВИЧ СЕДАКОВ
Наладка электроприводов экскаваторов
Редактор издательства Е. II. Фролова
Художник М. И. Гозенпут
Художественный редактор О. Н. Зайцева
Технический редактор В. В. Максимова
Корректор Л. В. Сметанина
Сдано в набор 18/VII 1974 г. Подписано в печать 25/XI 1974 г. Т-19165. Формат 70 X 100*/16.
Бумага М» 2. Печ. л. 19,5. Усл. п. л. 25,35. Уч.-изд. л. 25,9. Тираж 12000 экз.
Заказ № 1127/4292-12. Цена 1 р. 65 к.
Издательство «Недра», 103633, Москва, К-12, Третьяковский проезд, 1/19.
Ленинградская типография № 6 Союзполиграфпрома при Государственном комитете
Совета Министров СССР по делам издательств, полиграфии и книжной торговли,
196006, г. Ленинград, Московский пр., 91,