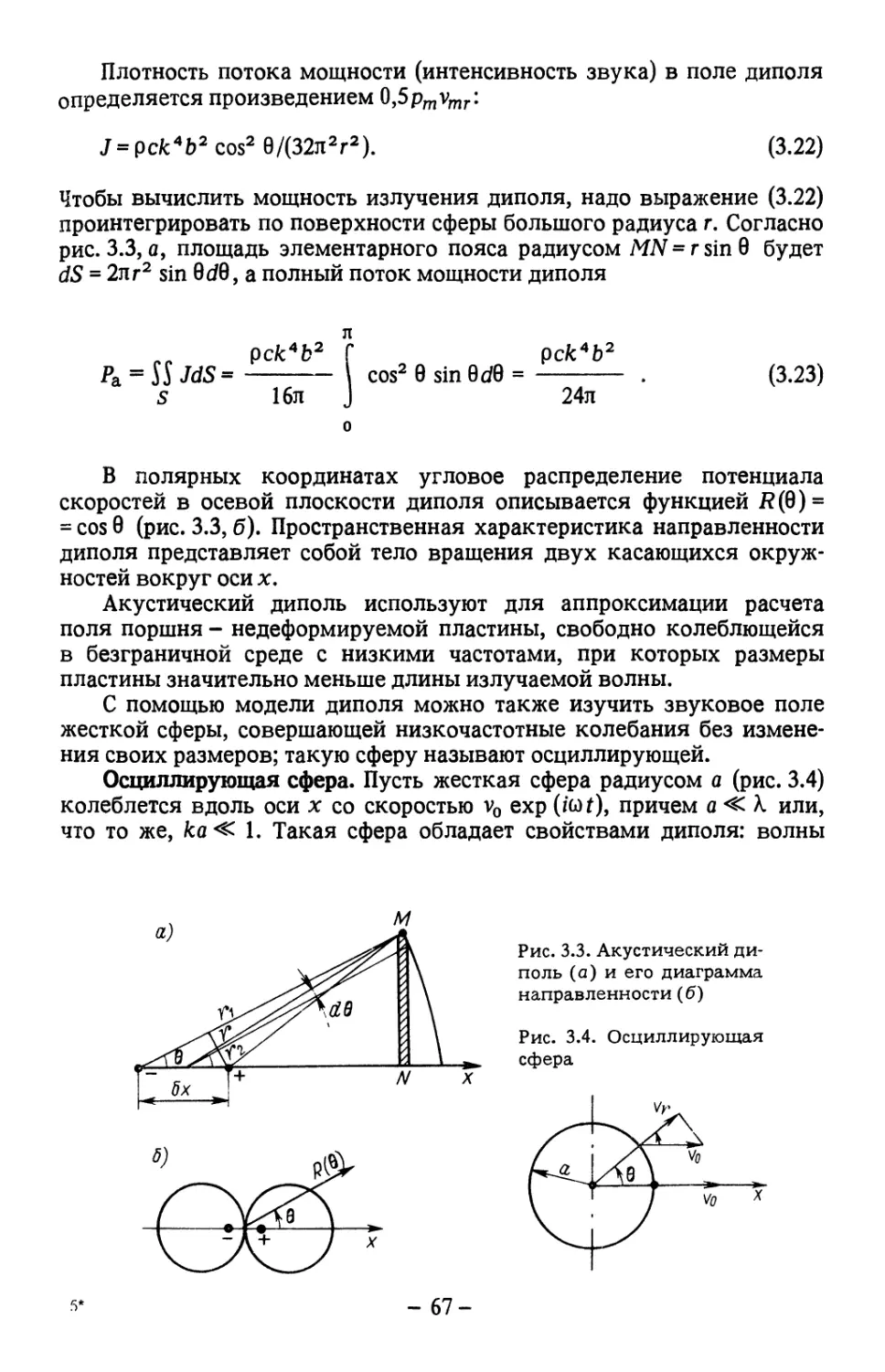
/





Author: Свердлин Г.М.
Tags: техническая акустика электроакустика судовые установки акустика гидроакустика
ISBN: 5-7355-0179-8
Year: 1990




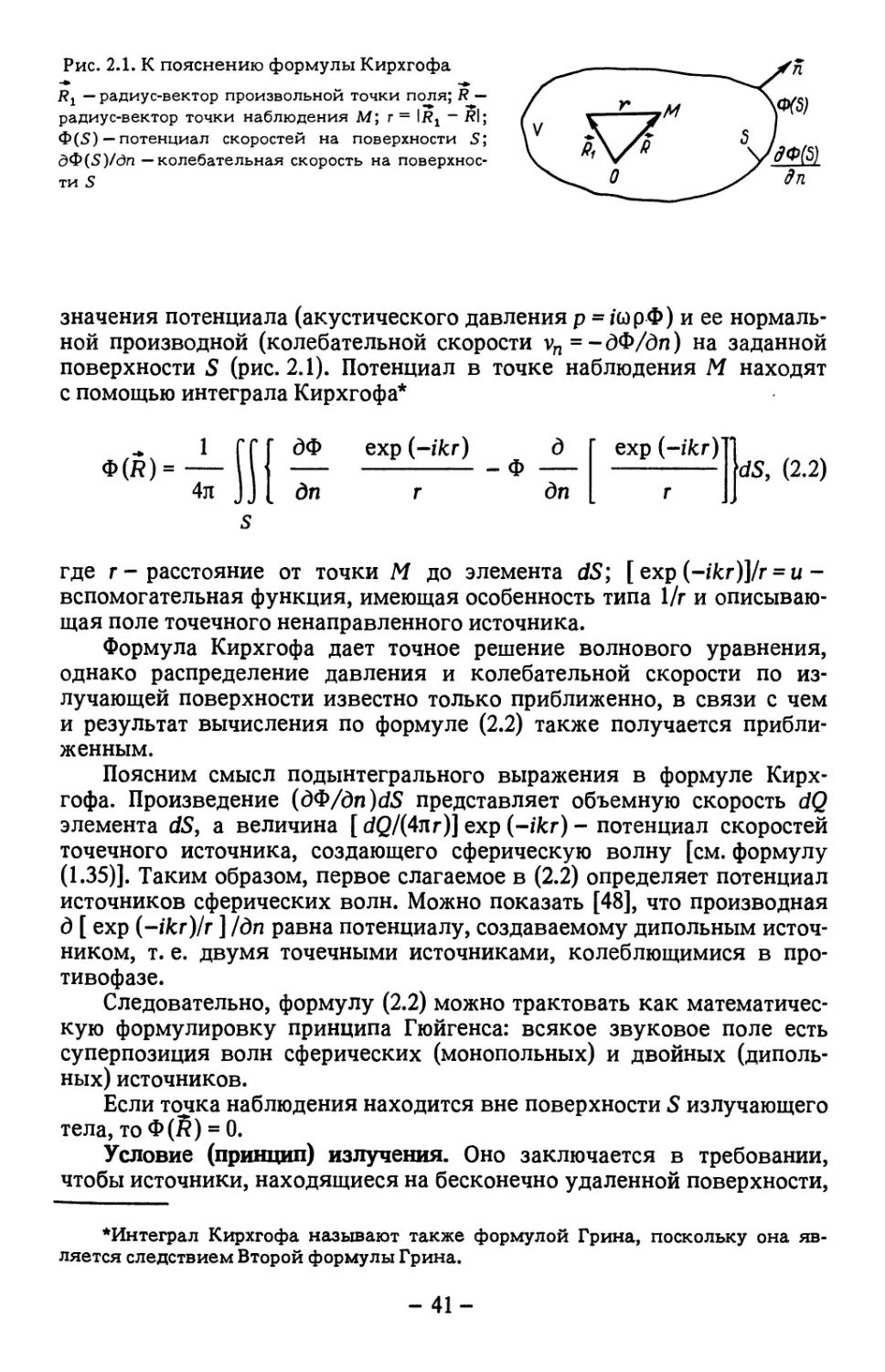
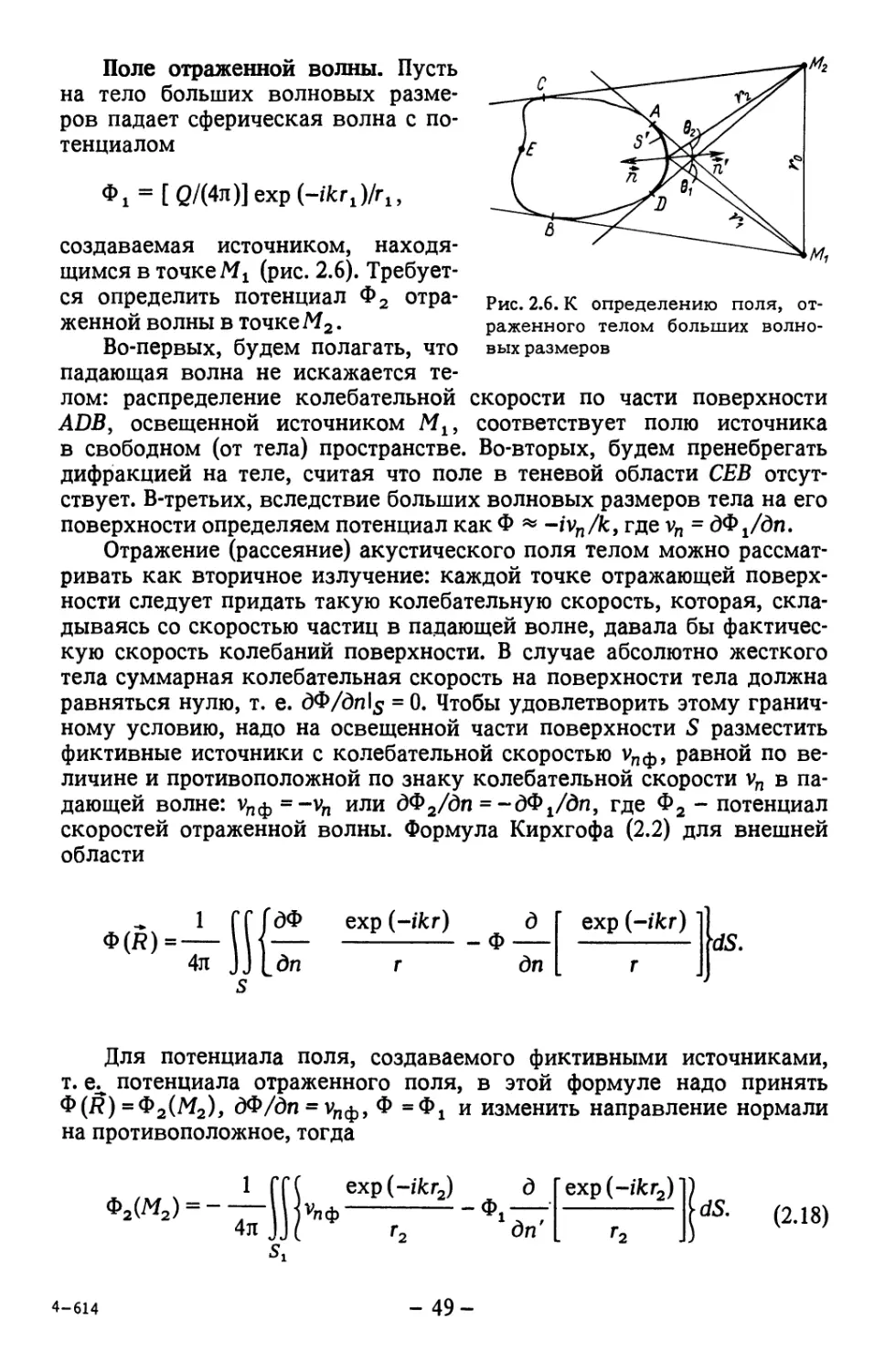
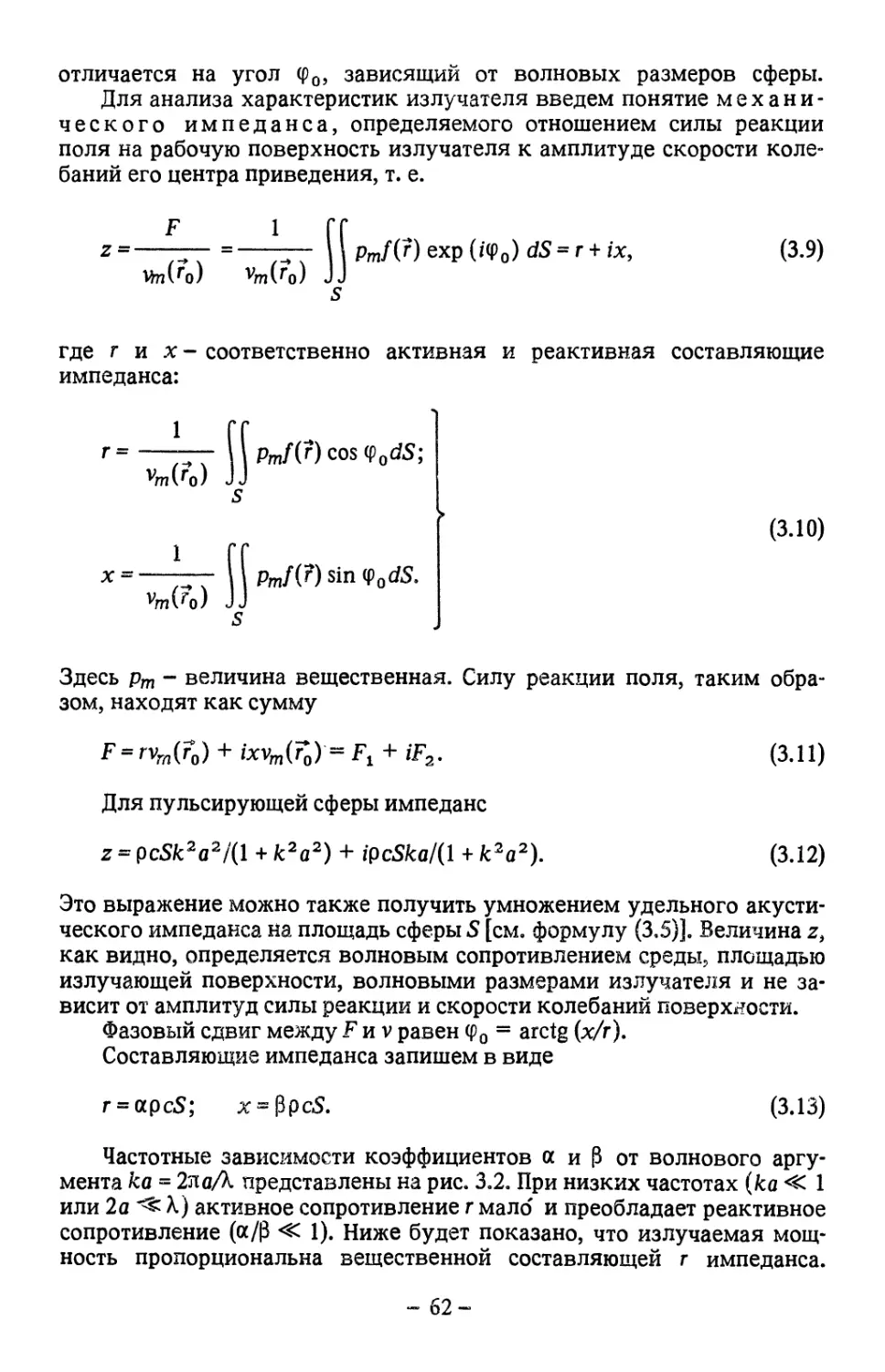
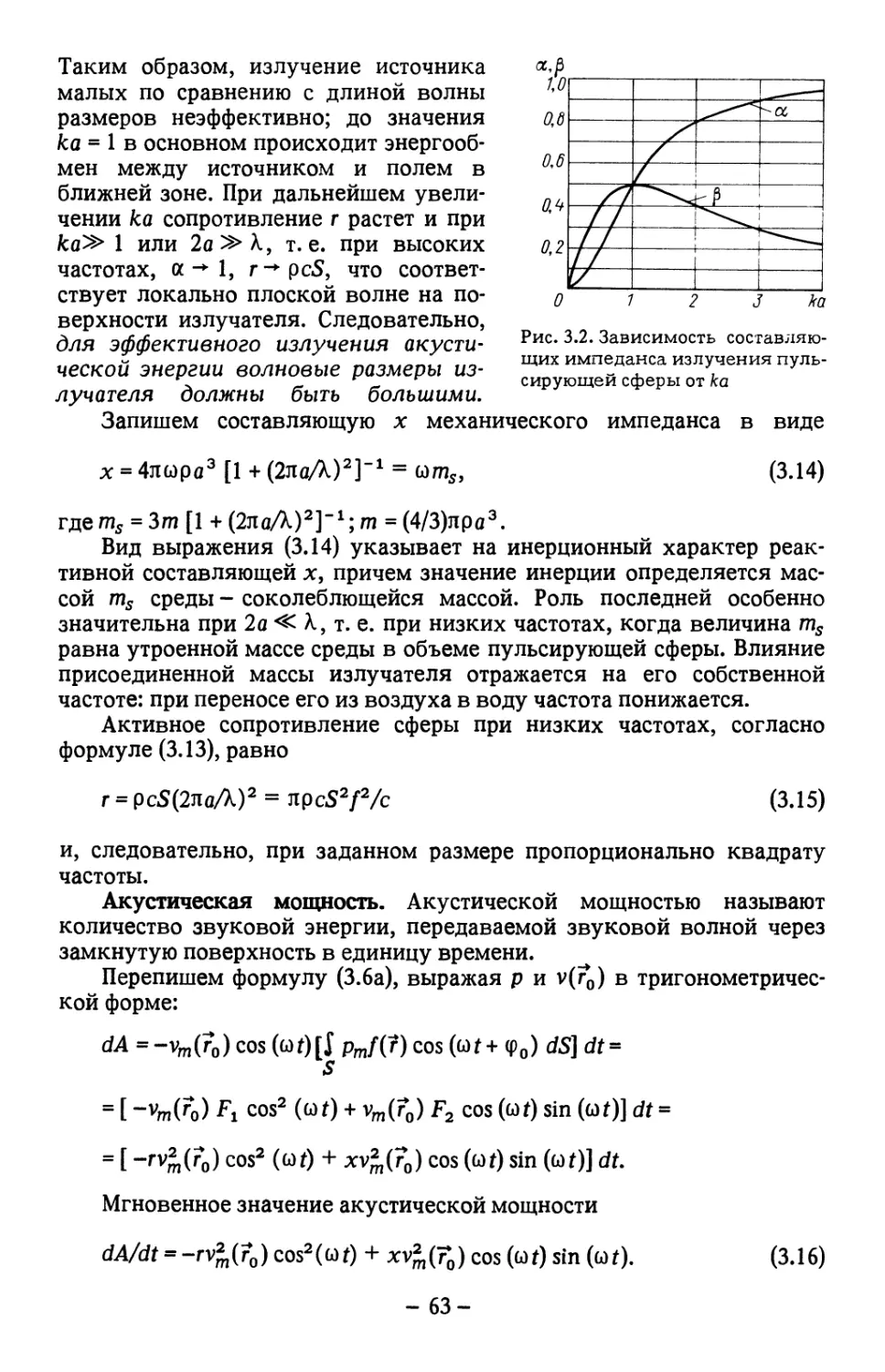
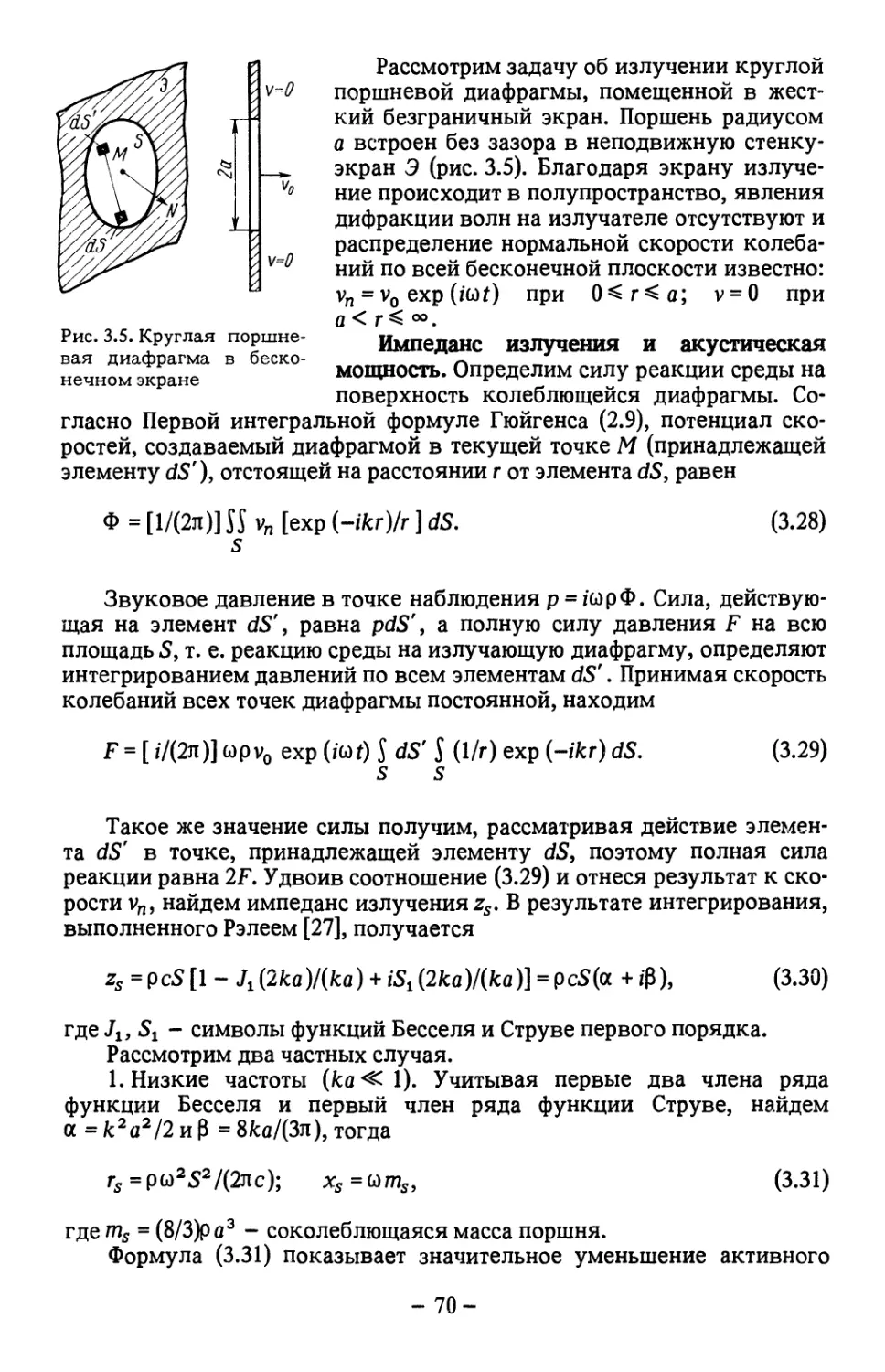
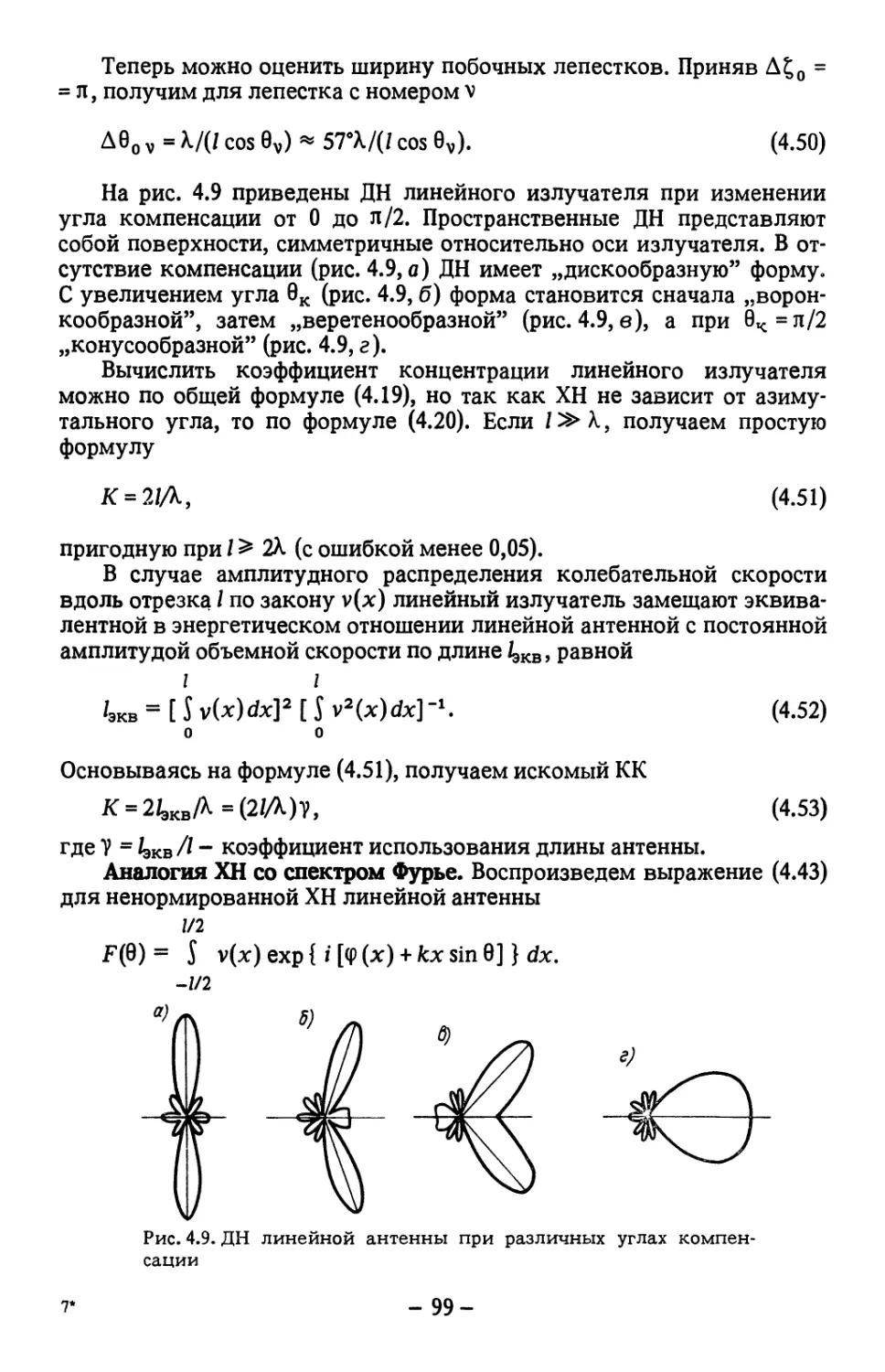
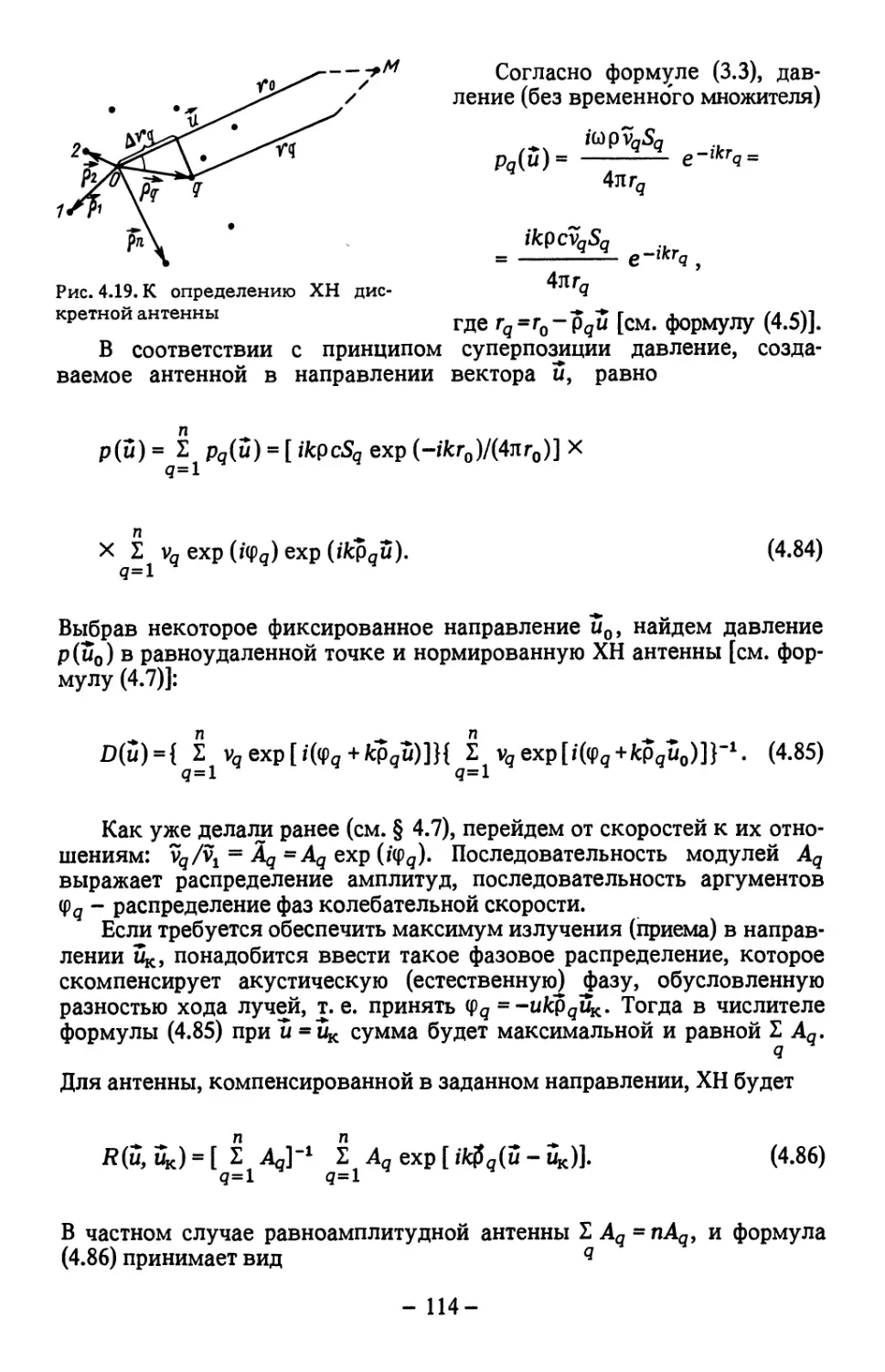
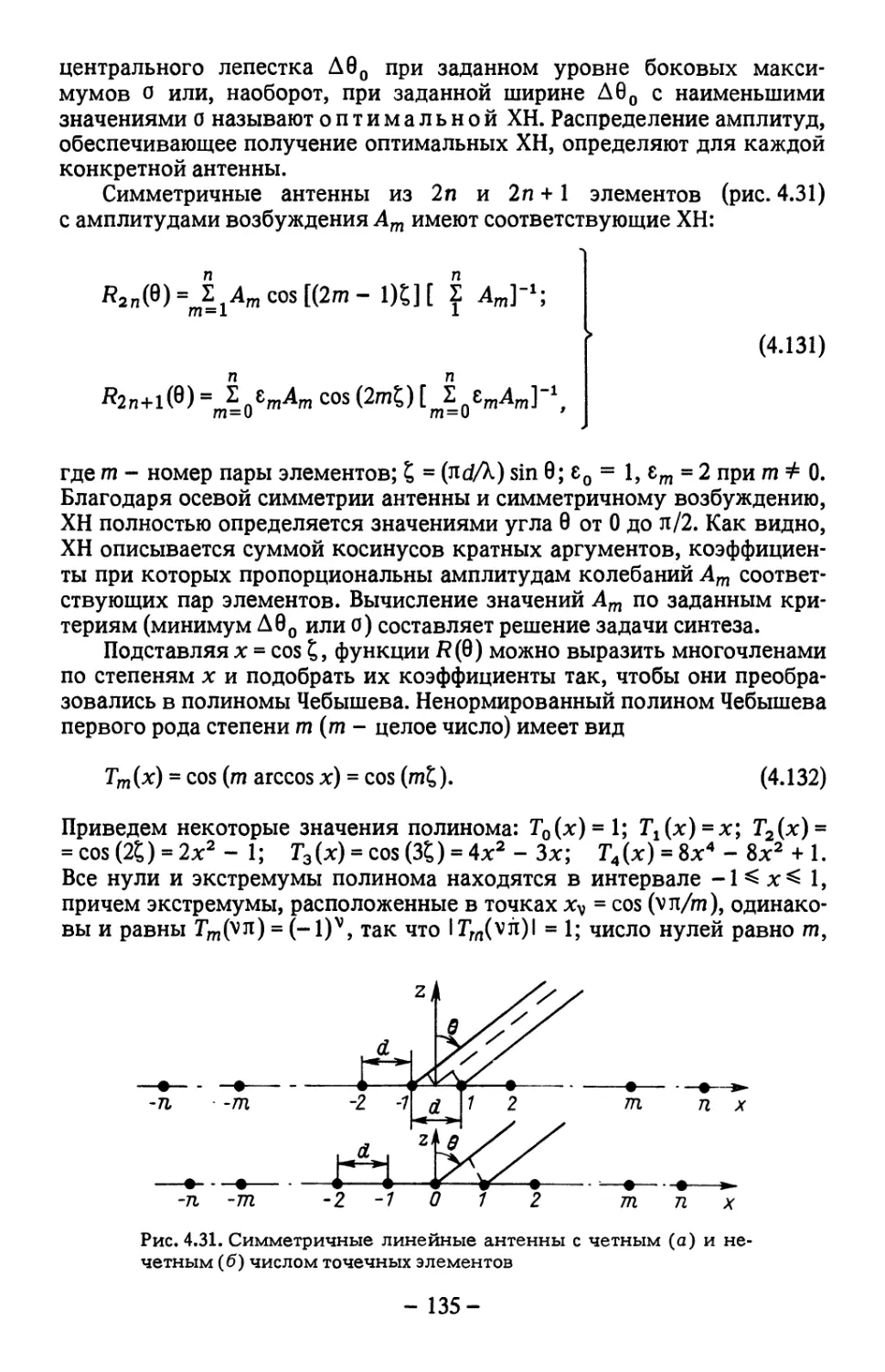
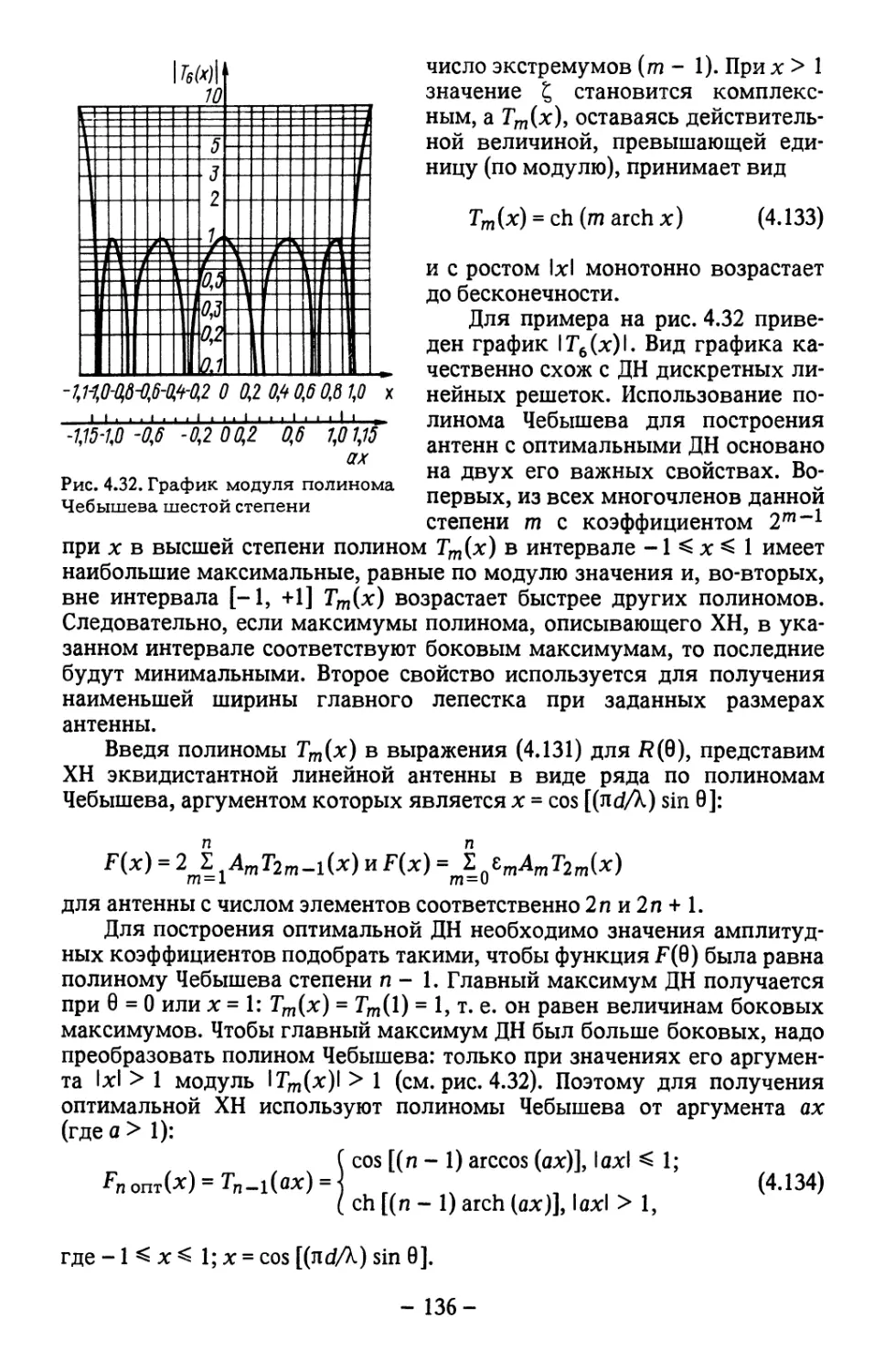
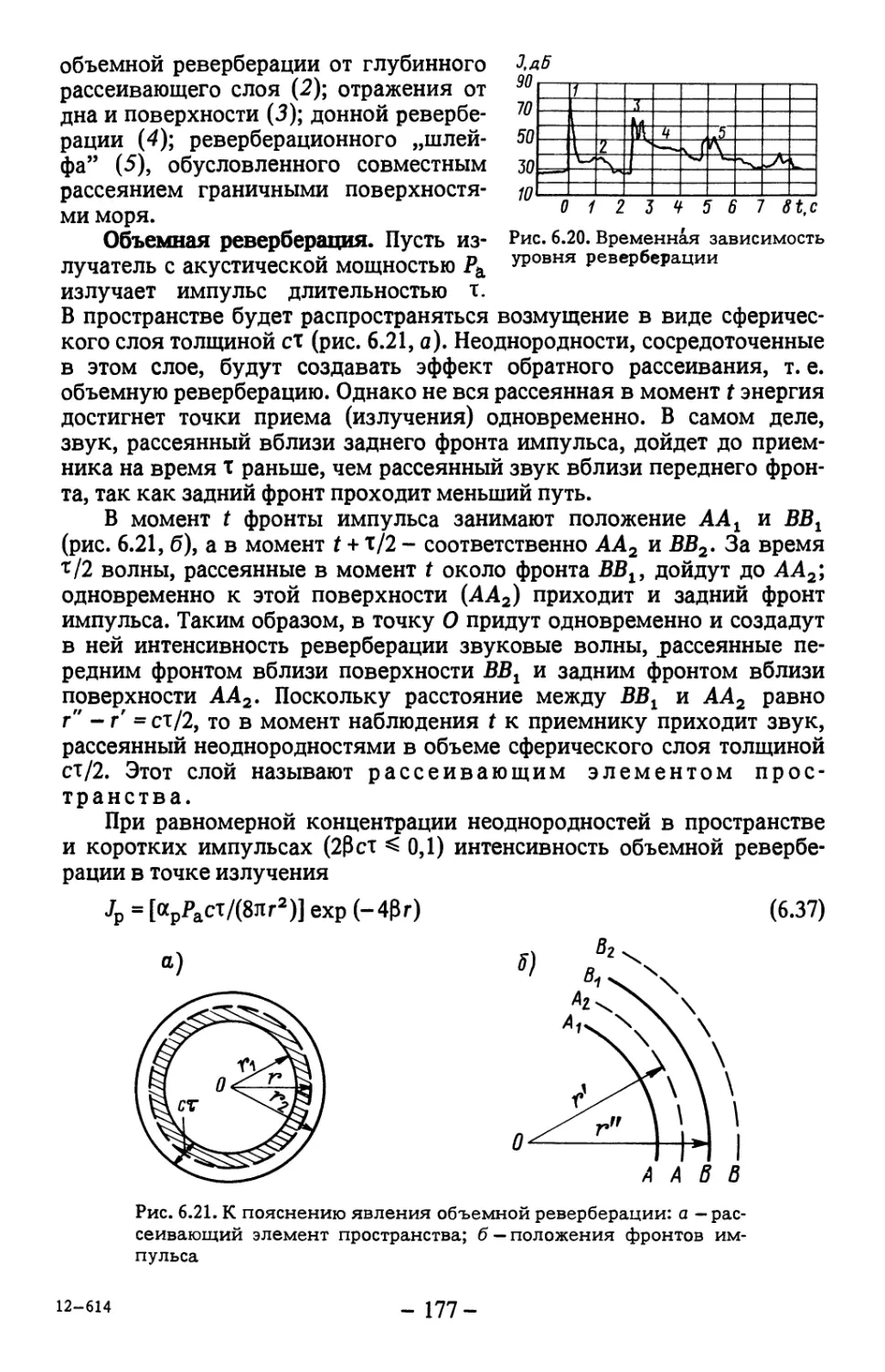
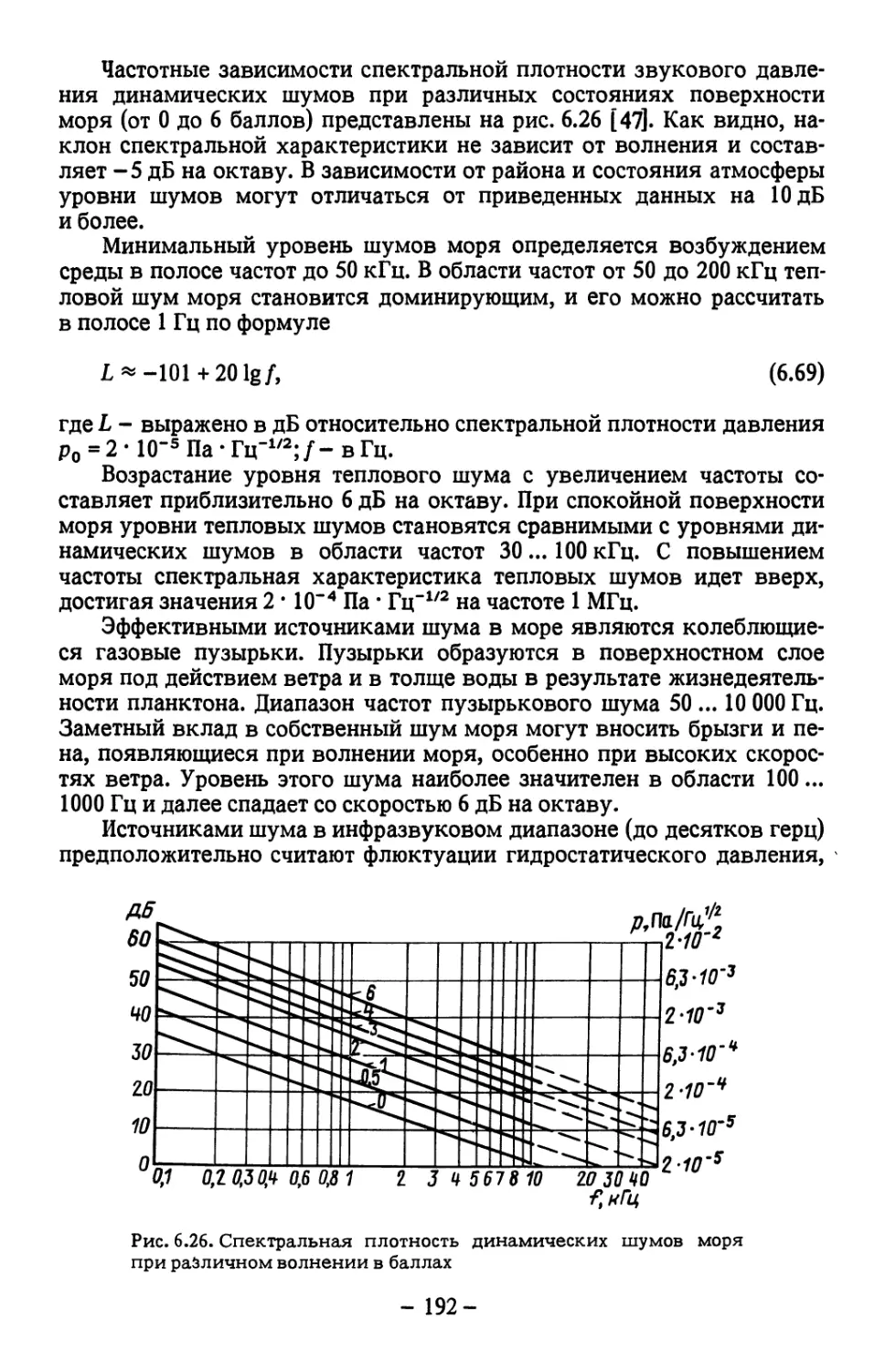
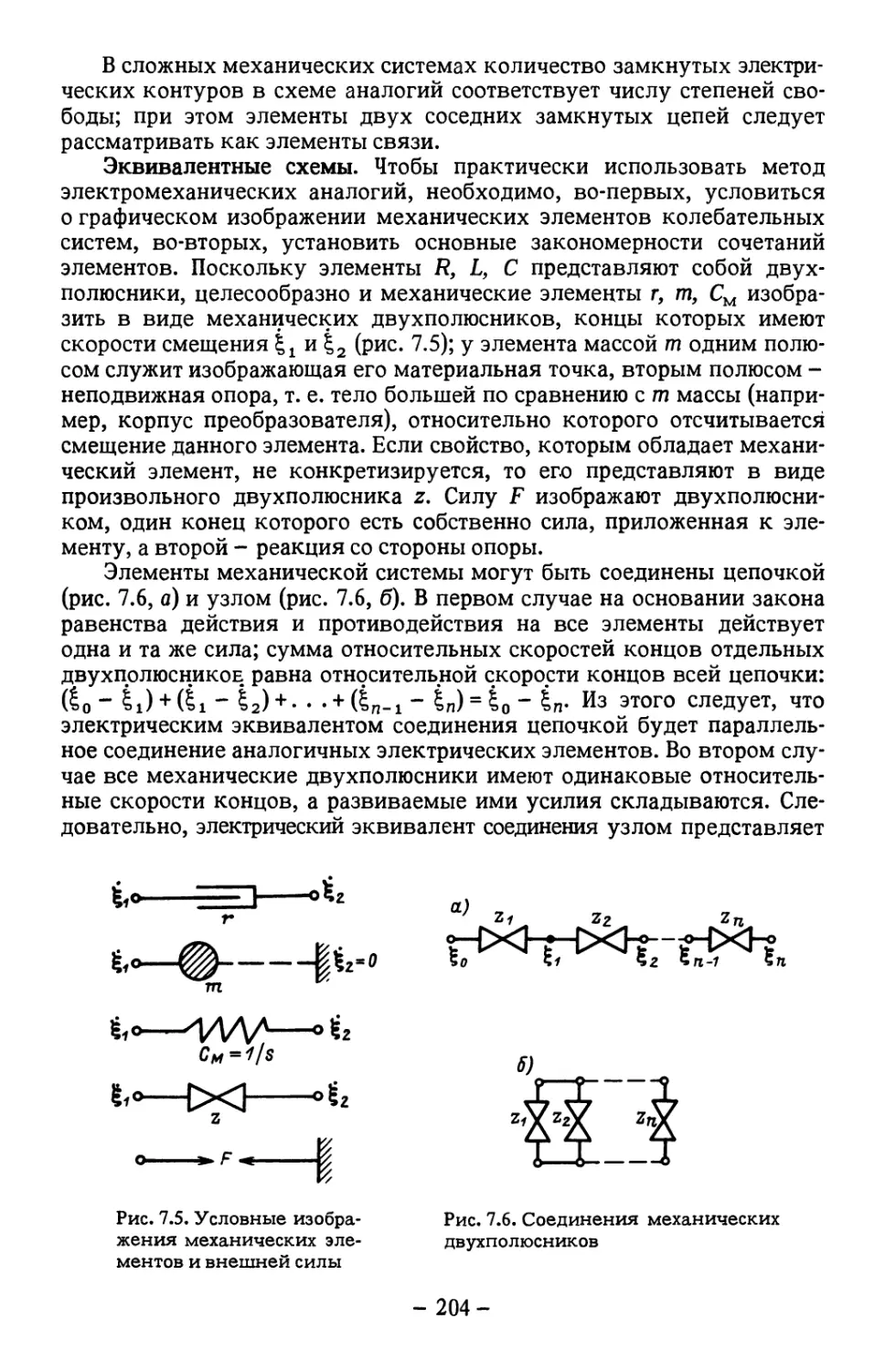
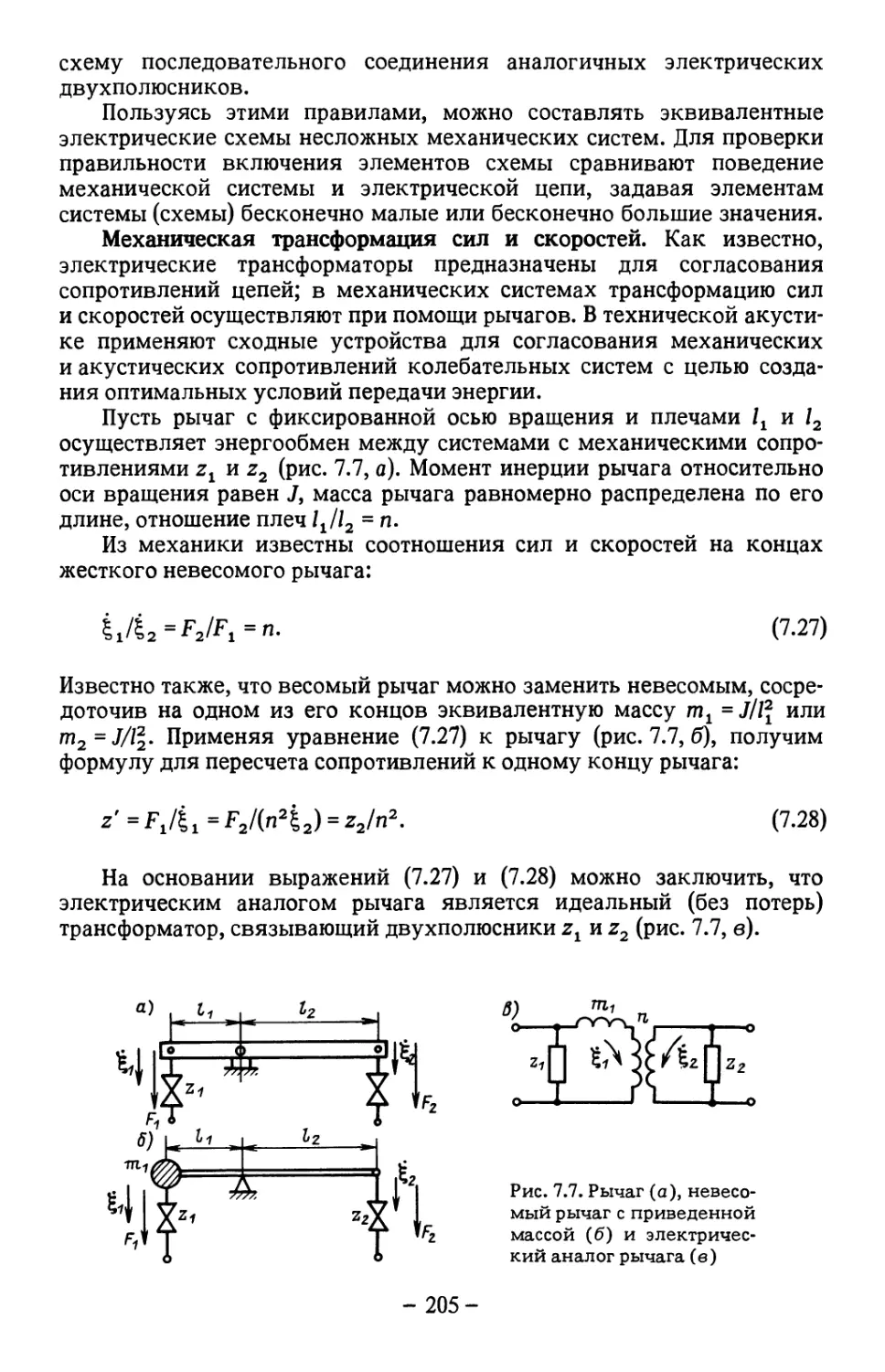
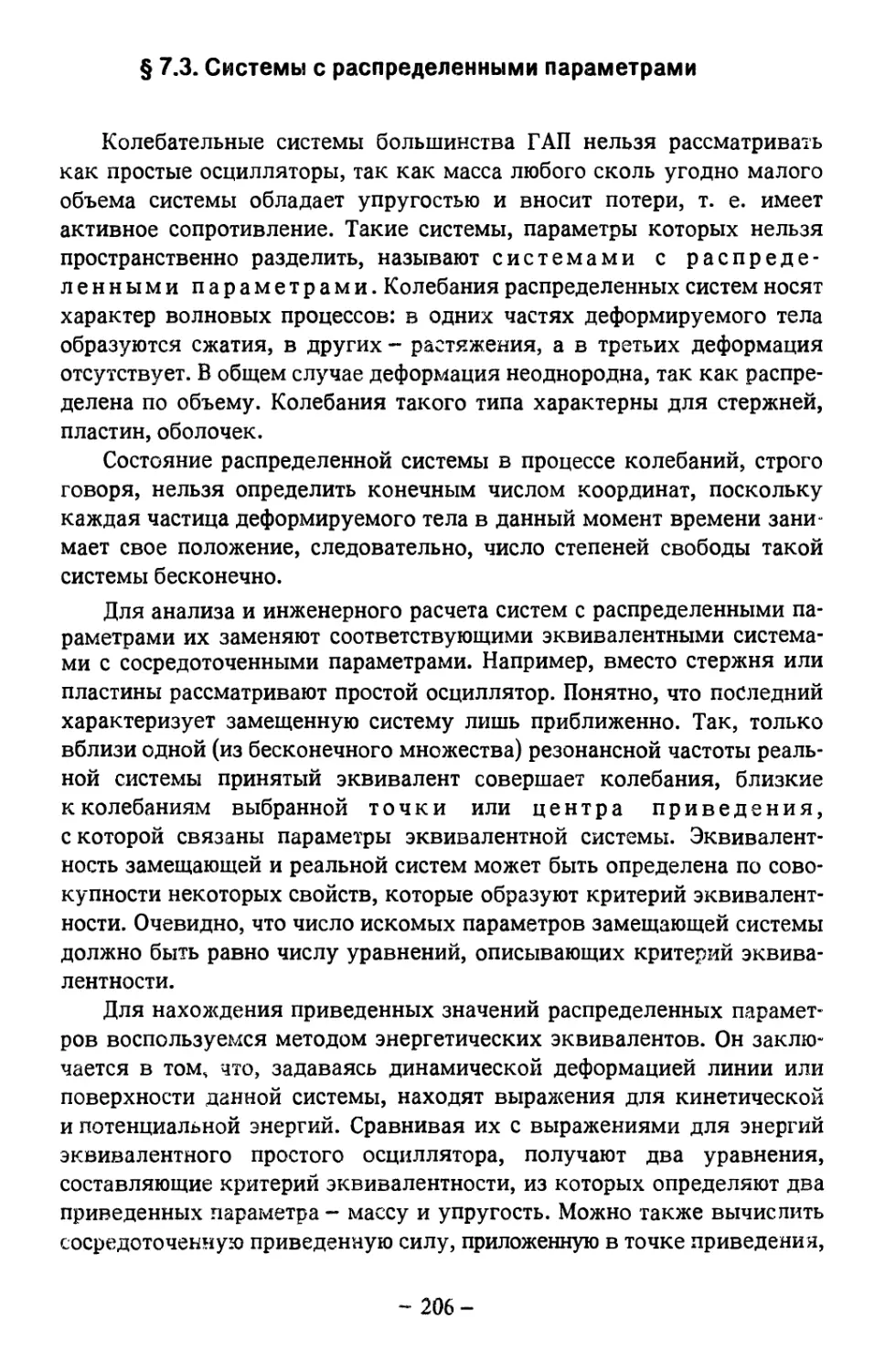
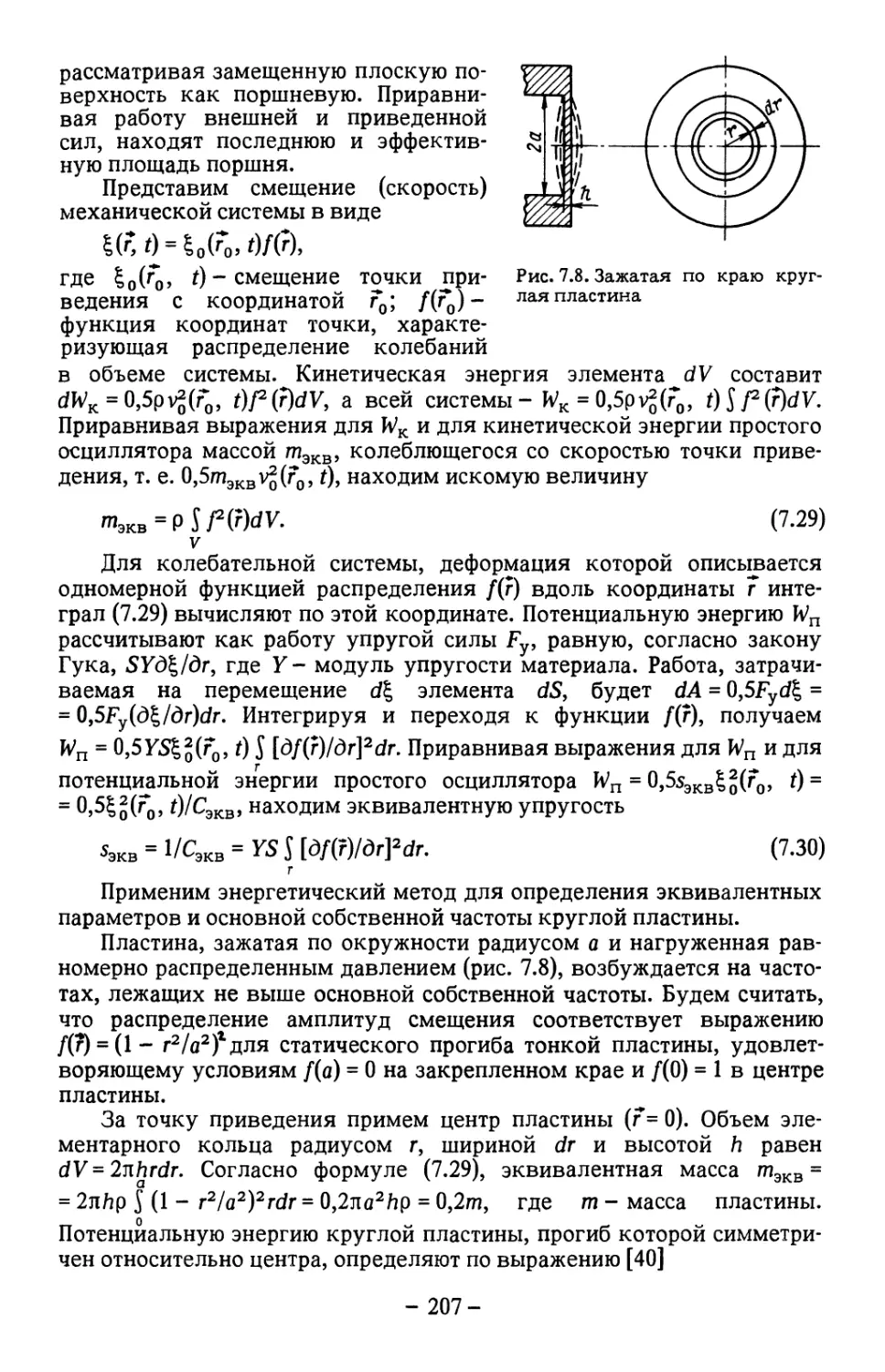
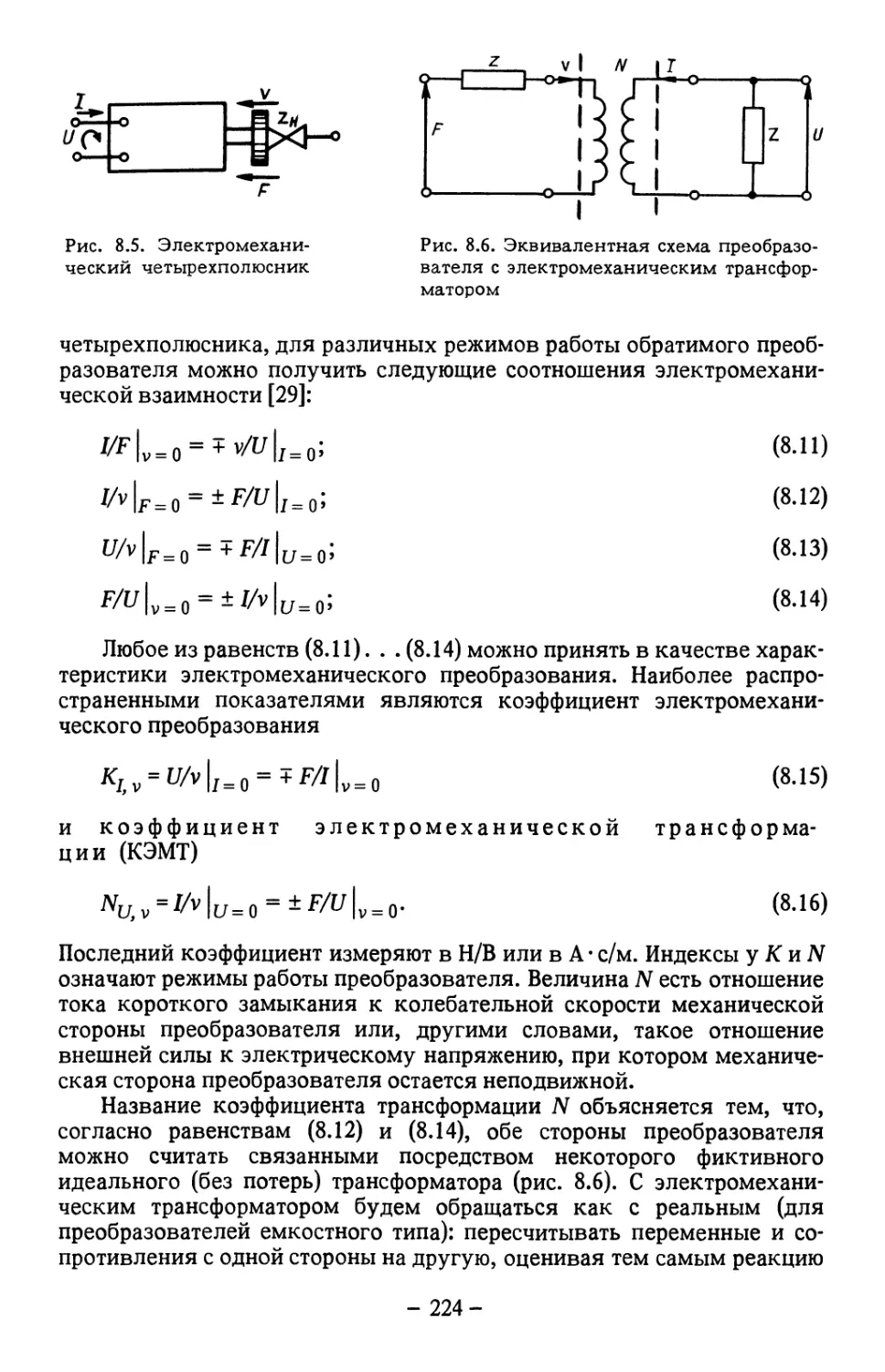
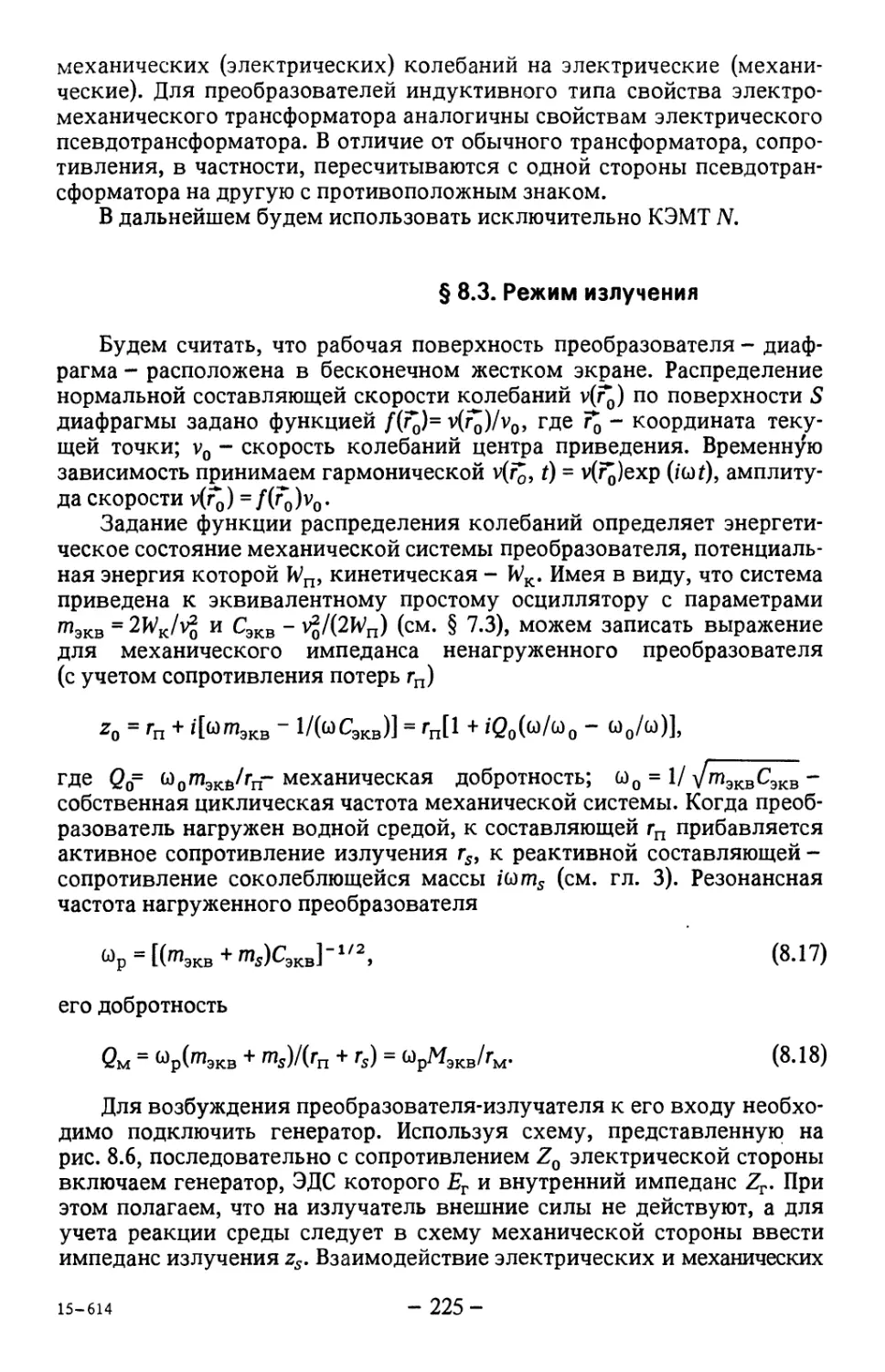
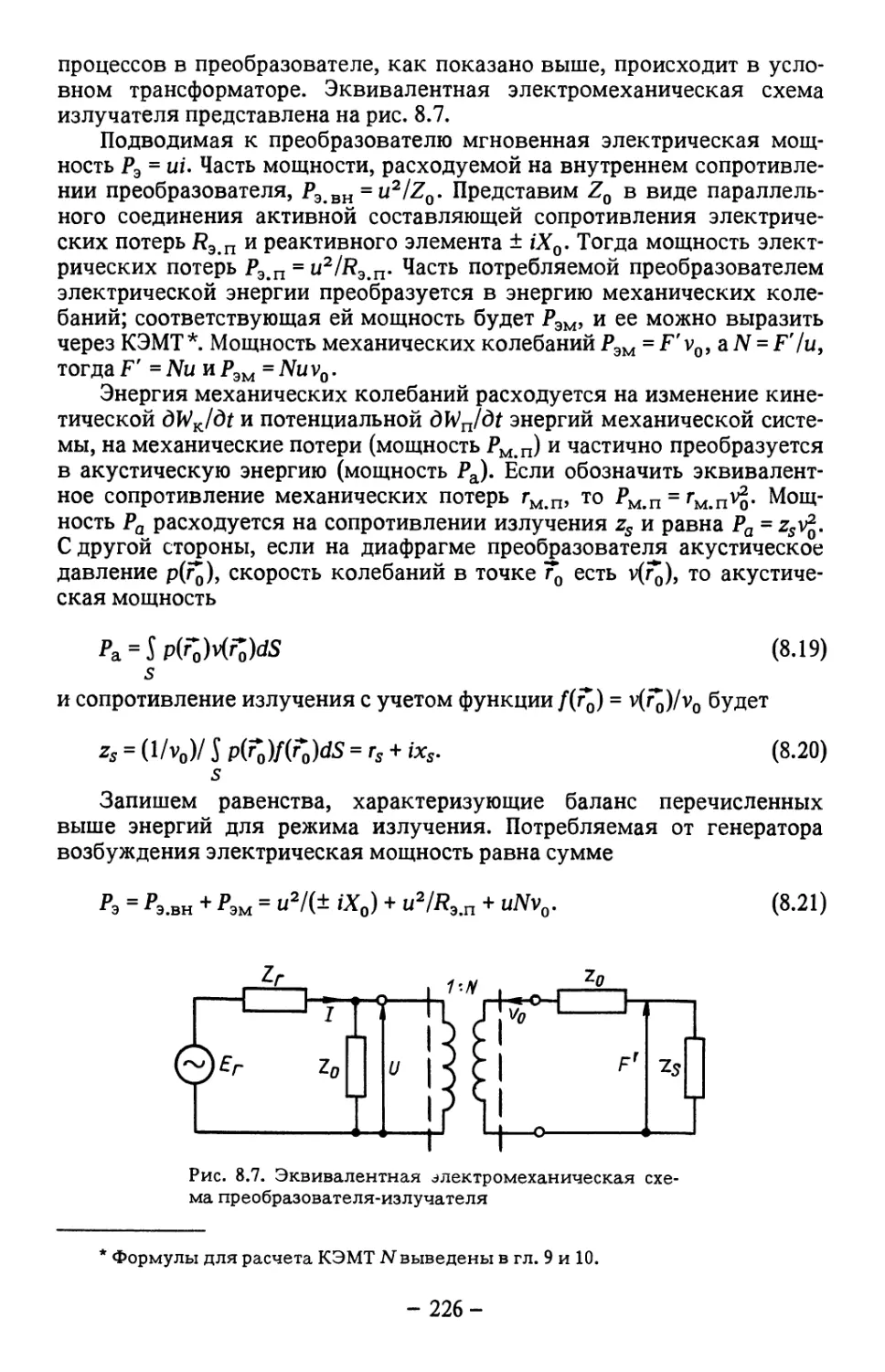
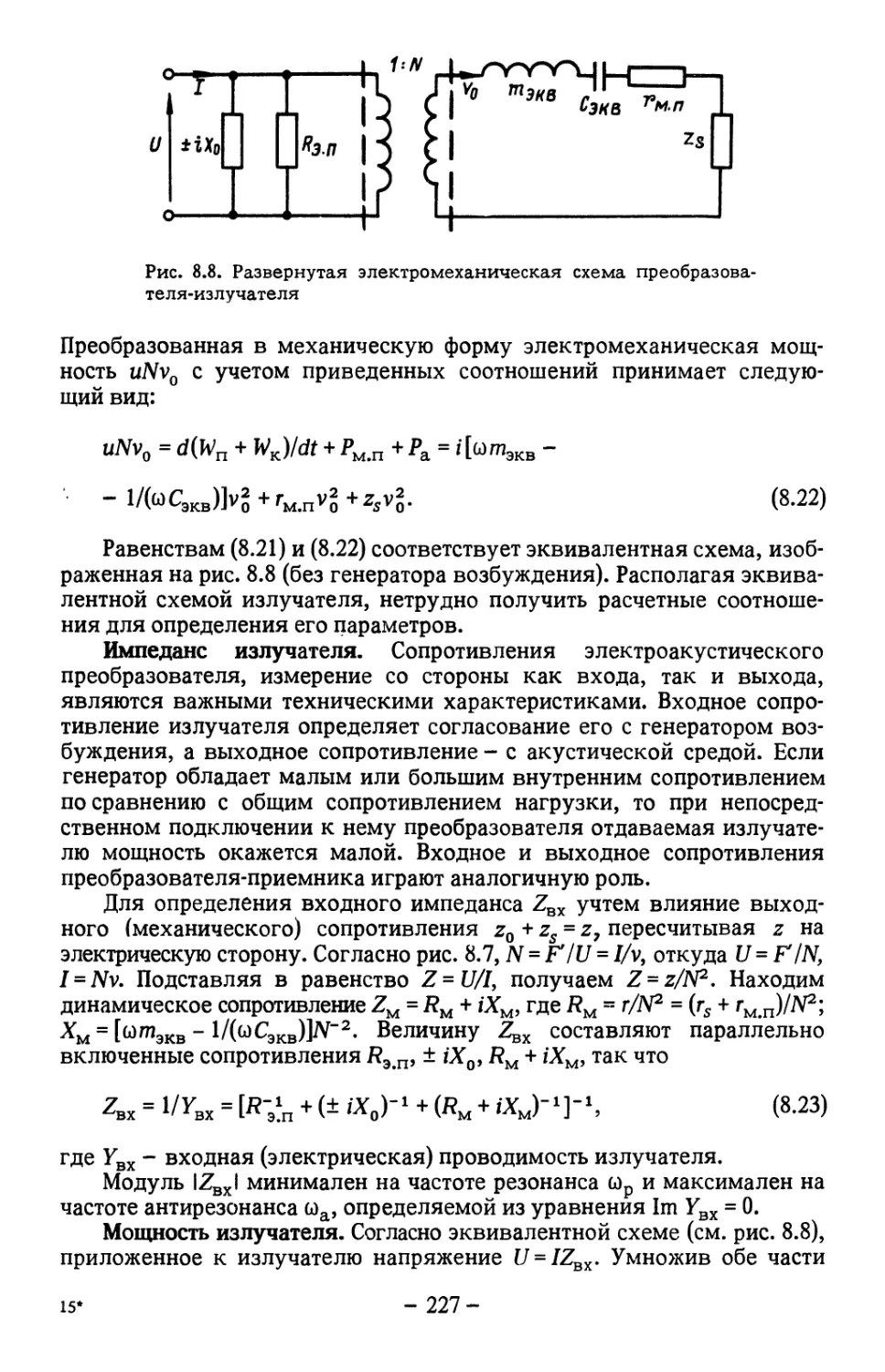
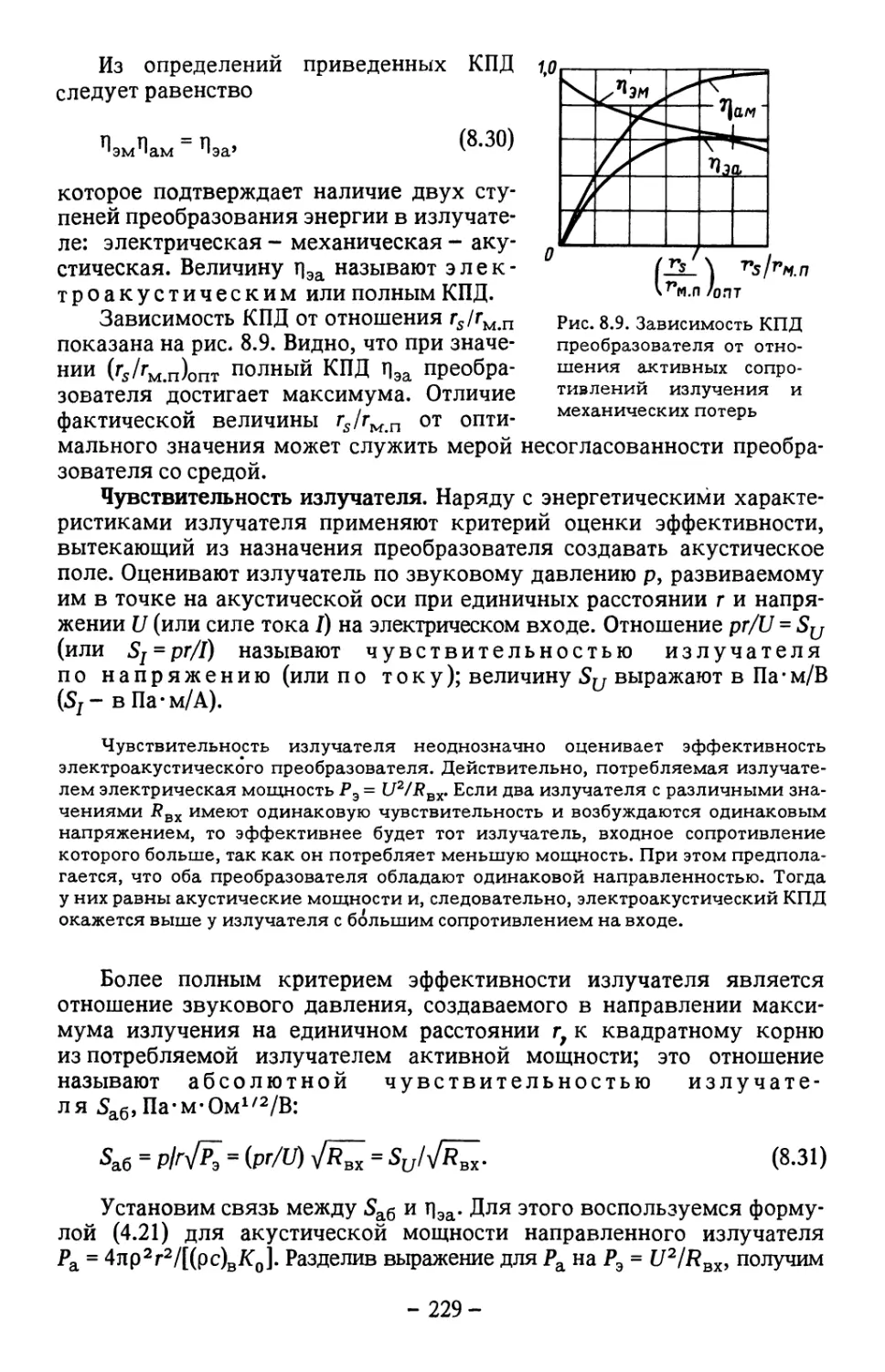
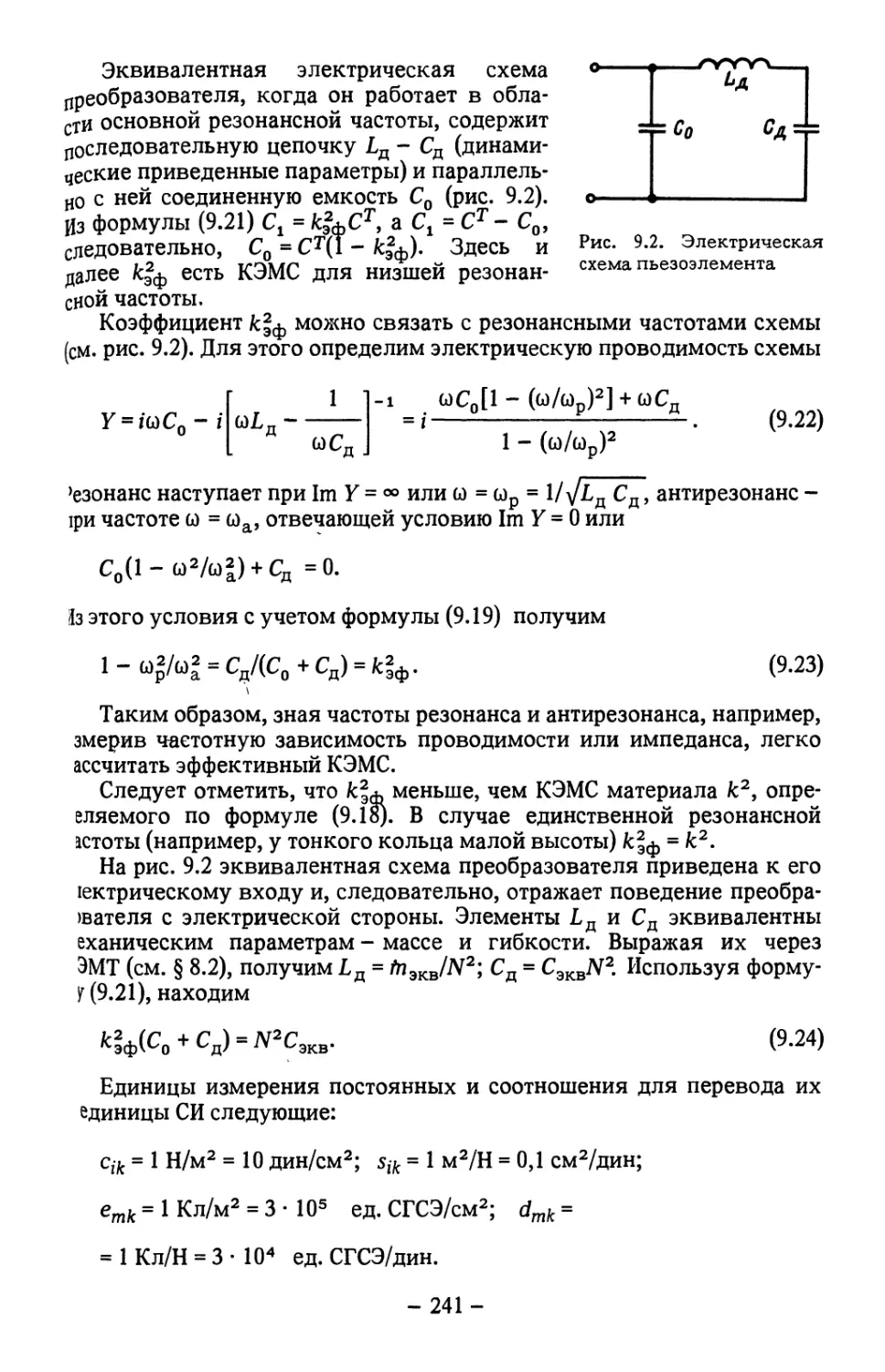
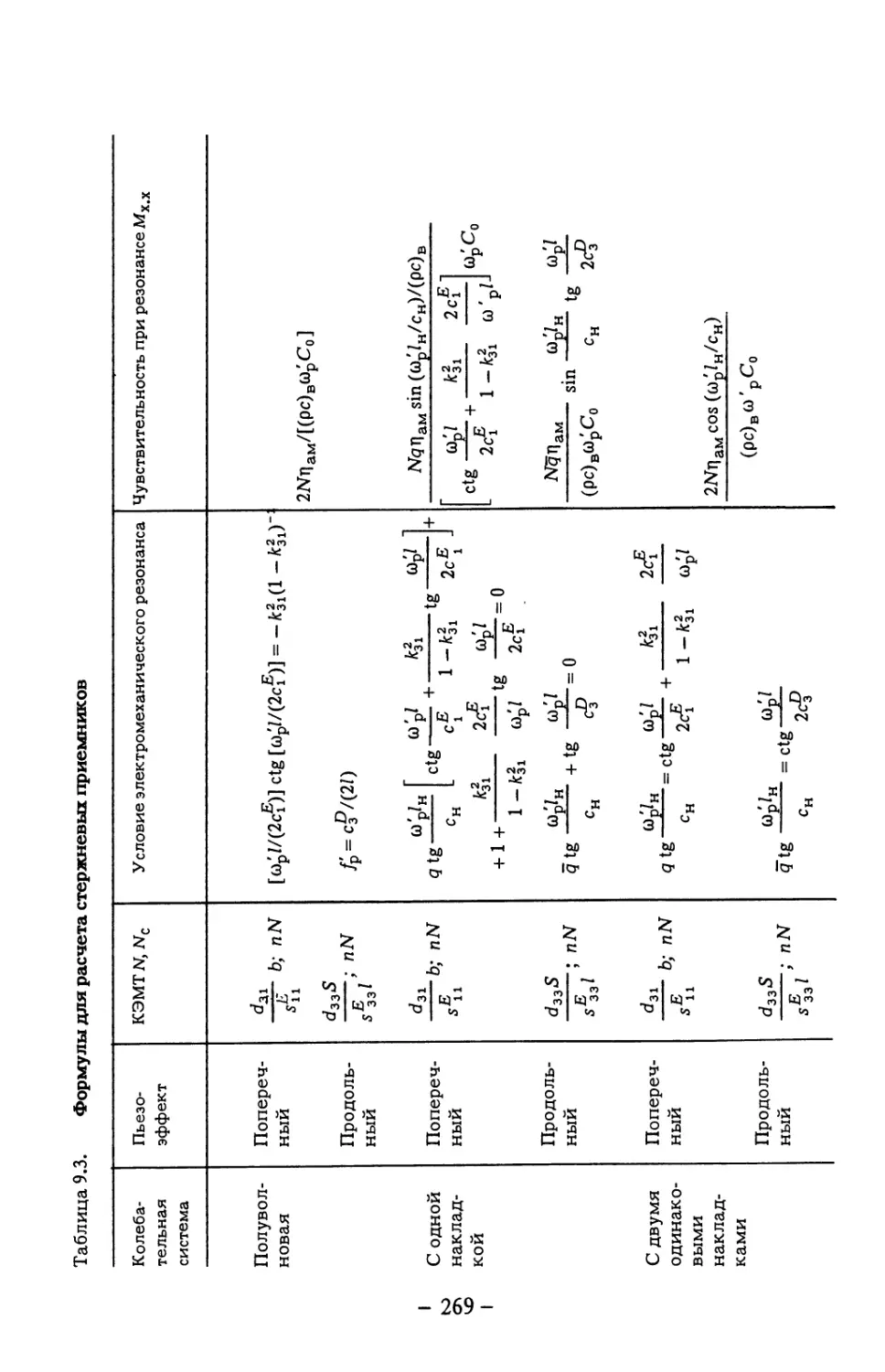
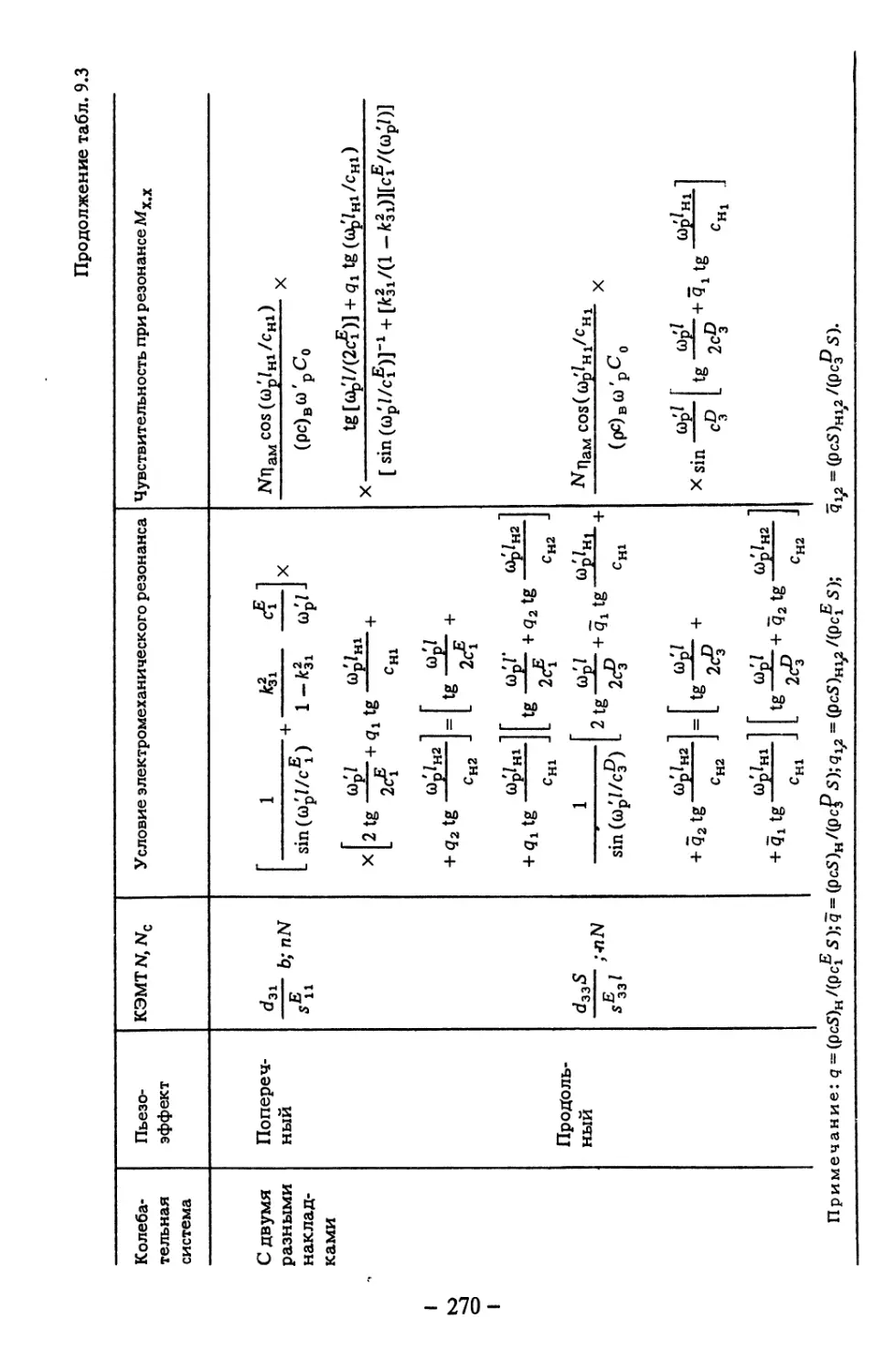
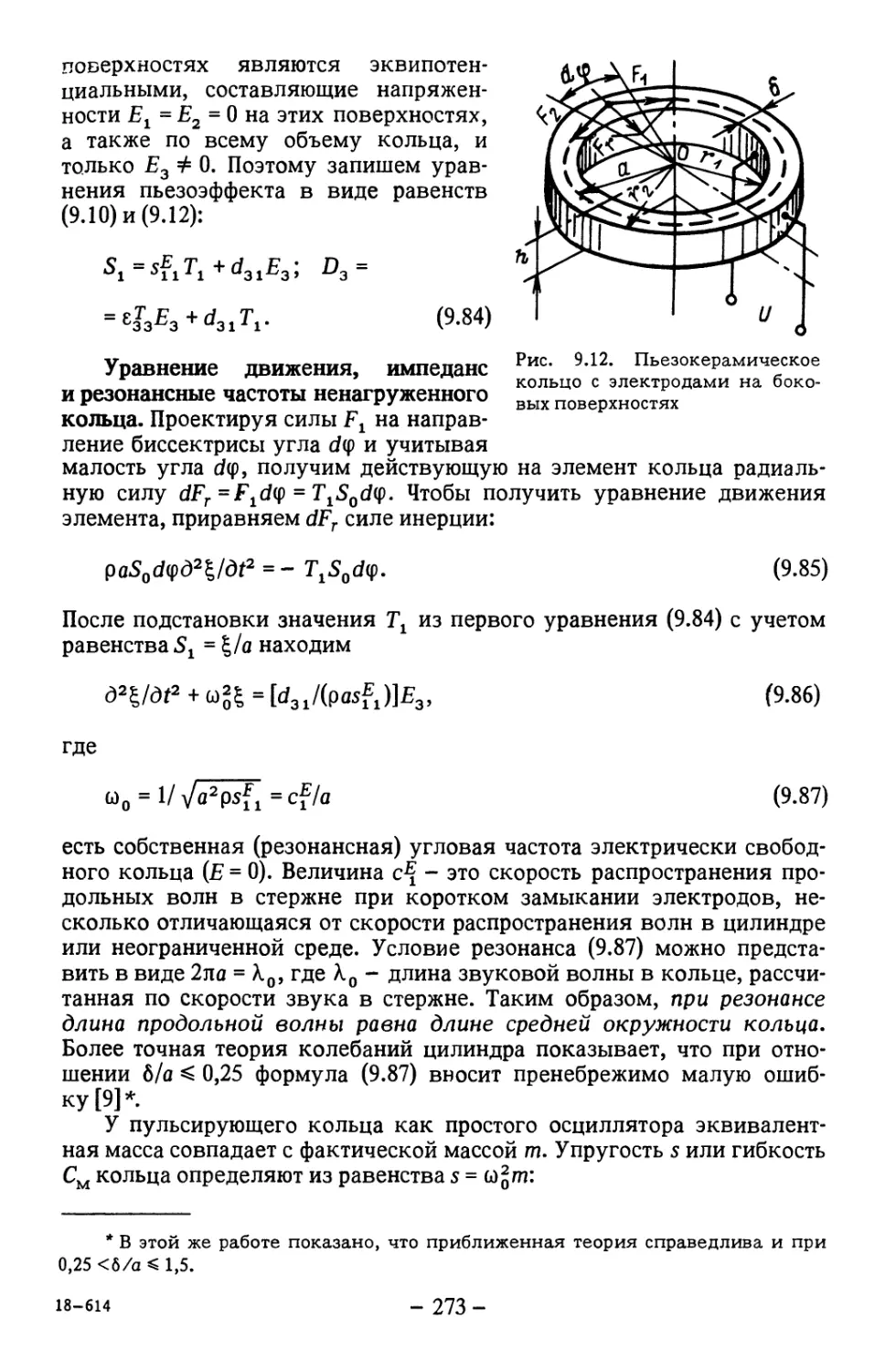
Text
ГМ. Свердлин
2-е издание, переработанное и дополненное
Допущено Государственным комитетом СССР по
народному образованию в качестве учебного пособия
для студентов вузов, обучающихся по специальности
"Физические методы и приборы интроскопии"
Ленинград
„Судостроение"
1990
ББК 32.875
С24
УДК 681.883@78.5)
Рецензенты: кафедра электроакустики и ультразвуковой техники ЛЭТИ
им. В. И. Ульянова (Ленина) (д-р техн. наук М. Д. Смарышев),
д-р техн. наук О. А. КвятковскиЙ
Свердлин Г. М.
С24 Прикладная гидроакустика: Учеб. пособие. - 2-е изд., перераб.
и доп. - Л.: Судостроение, 1990. - 320 с, ил.
ISBN 5-7355-0179-8
В книге изложены теоретические основы гидроакустики и подводных
электроакустических преобразователей (ГАП), используемых в гидроакустических антеннах.
По сравнению с 1-м изданием („Судостроение", 1976 г.) более подробно рассмотрены
методы расчета акустических полей, излучение акустических волн, взаимодействие
по полю элементов антенных решеток, дополнительно включены вопросы отражения
волн от тел в водной среде.
Предназначена для студентов вузов, изучающих прикладную гидроакустику,
будет полезной также специалистам судового и морского приборостроения.
2705140300-028
С — 36-90 ББК 32.875
048@1)-90
ISBN 5-7355-0179-8 © Издательство „Судостроение", 1976
© Свердлин Г. М., 1990, с изменениями
ПРЕДИСЛОВИЕ
В книге изложены общие вопросы акустики, направленность
гидроакустических антенн, особенности распространения звуковых волн
в морской среде, теория и расчет пьезоэлектрических и магнито-
стрикционных преобразователей. Содержание настоящего учебного
пособия в основном соответствует программе курса „Прикладная
гидроакустика", читаемого автором в Ленинградском
кораблестроительном институте в течение ряда лет.
Более подробно, чем в первом издании, рассмотрены методы
расчета акустических полей, излучение акустических волн, теория
направленности антенн. Однако довольно бсльшой круг вопросов,
изложение которых в сравнительно малом объеме представляло
большие трудности, объясняет математическую нестрогость и сокращение
выкладок в некоторых разделах.
Книга разделена на две части. В первой части рассмотрены
теоретические вопросы, составляющие основу лекционного курса. Это теория
акустических волн и методы расчета акустических полей,
направленность гидроакустических антенн, особенности распространения
звуковых волн в океане, отражение волн от тел в водной среде.
Вторая часть посвящена теории и расчету подводных
электроакустических преобразователей, которые называют гидроакустическими
преобразователями (ГАП). Рассмотрены основные виды механических
колебательных систем ГАП: стержневые на продольных колебаниях,
пластинчатые круглые и прямоугольные на колебаниях изгиба,
цилиндрические и сферические на радиальных колебаниях. Получены
расчетные соотношения для оценки эффективности преобразователей
в режимах излучения и приема, которые можно использовать при
выполнении курсовых и дипломных проектов.
Автор надеется, что эта книга, как показал опыт использования
первого издания, будет полезной также специалистам судового и
морского приборостроения.
В процессе подготовки книги автором были учтены советы
Рубанова И. Л., Егорова С. Б., Виноградова В. В., Скребнева Г. К.,
Липатова В. В., Одегова С. А., которым он выражает искреннюю
признательность.
Автор будет благодарен также читателям за предложения и
замечания, которые следует направлять по адресу: 191065, Ленинград,
ул. Гоголя, 8, издательство „Судостроение".
1* -3-
ВВЕДЕНИЕ
К важнейшим научно-техническим проблемам современности
можно отнести развитие ядерной энергетики, освоение космического
пространства и Мирового океана. Последний образован
сообщающимися между собой океанами и морями, занимает более 70 % поверхности
Земли и наряду с космосом оказывает решающее влияние на жизнь
нашей планеты, а использование колоссальных ресурсов его глубин
и донных осадков имеет важнейшее практическое значение. На
каждого жителя планеты приходится в год приблизительно 15 кг
биопродуктов, добываемых из океана. Около 30 % мировой добычи нефти и 12 %
газа, более 10 % олова, 25 % поваренной соли, примерно 70 % мирового
производства брома также приходятся на морские разработки. В
настоящее время появляются первые морские рудники для добычи
других полезных ископаемых. Если еще учесть роль океана в
формировании климата Земли и, следовательно, невозможность
долгосрочного прогноза погоды без знания процессов, протекающих в Мировом
океане, то станет понятным возросший во всём мире интерес к
исследованиям океана, создание средств его освоения.
В последние годы для обнаружения биологически продуктивных
районов используют космическую технику для наблюдения за
поверхностью Мирового океана.
Проникновение человека и доставка технических средств на
большие глубины океана затруднены вследствие большого
гидростатического давления (на глубине 5 км оно в 500 раз превышает атмосферное).
Использование электромагнитных волн и даже мощных лучей лазера
в морской среде также сопряжено с большими трудностями из-за
быстрого затухания этих волн в электропроводной воде. Акустические
(звуковые) волны, благодаря своей природе и свойствам водной
среды, способны возбуждаться при сравнительно малых затратах
энергии и распространяться на большие расстояния, при некоторых
условиях - на тысячи и десятки тысяч километров.
С помощью гидроакустических средств (ГАС)* производят
картографирование дна морей и океанов и обнаруживают небольшие пред-
*Классификация ГАС приведена в ГОСТ 22547-81. Средства
гидроакустические. Термины и определения.
- 4-
меты (эхолоты и гидролокаторы бокового обзора), осуществляют
подводную связь (средства гидроакустической связи), обеспечивают
безопасность плавания судов, измерение скорости хода и глубины под
килем (средства судовождения), производят поиск скоплений рыбы
и контроль за работой орудий лова (средства поиска рыбы и других
объектов промысла), „просвечивают" морское дно для поиска
полезных ископаемых (средства морской геологии), управляют
автономными подводными приборами, доставляющими информацию о
состоянии подводной обстановки (средства телеметрии и
телеуправления), обнаруживают и определяют координаты подводных объектов
(средства подводного наблюдения - шумопеленгаторные и
гидролокационные станции).
Технические параметры гидролокационных станций (ГЛС) -
рабочая частота (от единиц до десятков килогерц), излучаемая
акустическая мощность (от сотен ватт до сотен киловатт), ширина диаграммы
направленности антенны в режимах излучения и приема в главных
плоскостях, форма и длительность излучаемых импульсов, уровень
усиления приемного тракта, ширина полосы частот приемного тракта.
ГАС, которые не излучают акустическую энергию и предназначены для
обнаружения и определения пеленга (курсового угла) подводного
объекта по производимому им шуму, в частности движущегося судна,
относят к пассивным средствам, например шумопеленгаторные
станции (ШПС). Технические параметры ШПС - полоса рабочих частот,
ширина диаграммы направленности антенны, коэффициент усиления
приемного тракта.
Хотя в теоретическом плане законы и условия распространения
акустических волн в водной и воздушной средах ничем не отличаются,
особенности морской среды и практика использования технических
средств требуют более подробного рассмотрения теории и методов
формирования направленности гидроакустических агнтенн для
обеспечения необходимых тактических показателей ГАС. Большое влияние
на работу ГАС оказывают условия распространения звуковых волн
в море, границы моря - поверхность и дно, шум окружающей среды,
природная структура и очертания различных объектов и препятствий,
отражающих и рассеивающих падающие на них волны. Характерной
особенностью океана как акустической среды является его
неоднородность: физические свойства изменяются в пространстве и во времени.
Неоднородности имеют как регулярный, так и случайный характер
и вызывают пространственные и временные флюктуации уровня и
фазы сигналов, а также изменения спектральных и корреляционных
параметров сигналов.
ЧАСТЬ I
ОСНОВЫ
ГИДРОАКУСТИКИ
ГЛАВА 1. АКУСТИЧЕСКОЕ
ПОЛЕ
Если в некотором объеме упругой среды вызвать механическое
возмущение, то частицы среды этого объема теряют равновесие и
приходят в движение. Благодаря упругим силам, действующим между
частицами, возникшее движение будет последовательно передаваться
соседним частицам и возмущение с конечной скоростью будет
распространяться в среде. Такое движение называют волновым
движением или волной. Когда возмущения настолько малы,
что вызываемые ими деформации линейно связаны с упругими
силами, волна в идеальной безграничной среде распространяется без
изменения формы, и ее называют акустической волной. Область
пространства, в пределах которой распространяется акустическая
волна, получила название акустического поля. Если возмущение
имеет периодический характер в диапазоне слышимых частот, то
создаваемое поле является звуковым.
При распространении акустической волны в какой-либо среде в
одних местах происходит сгущение частиц и начальное давление
(плотность) повышается, в других - разрежение частиц и давление
(плотность) понижается. Приращение начального давления, обусловленное
волной, называют акустическим или звуковым давлением.
В идеальных (невязких) жидкой и газообразной средах при
деформации всестороннего сжатия возникают только нормальные
напряжения (давления), вызывающие распространение волны в направлении
смещения частиц; такую волну называют продольной. В вязкой
среде и твердом теле возникают касательные напряжения и
возбуждаются поперечные (или сдвиговые) волны: колебания частиц
происходят перпендикулярно направлению распространения волны.
Образование того или иного типа волн связано со свойствами среды:
газы и жидкости характеризуются только объемной упругостью,
и в них возможны лишь упругие деформации всестороннего сжатия;
твердые среды (тела) и вязкие жидкости обладают упругостью формы,
т. е. стремятся сохранить форму при воздействии механических
напряжений, благодаря чему они способны передавать также касательные
напряжения.
Как будет показано далее, акустическое поле в каждой точке
и в любой момент времени полностью описывают зависящие от
времени и пространства следующие величины: вектор смещения | частиц
среды из положения равновесия, вектор колебательной скорости
v = d%/dt частиц, звуковое давление р в среде, плотность р среды.
Каждая из этих величин является функцией времени t и координат
данной точки - радиуса-вектора г центра масс рассматриваемой
частицы. В любой момент времени в любой точке функции ?(г, t)9 v(r, t),
Р (*> 0» Р (^ О удовлетворяют так называемому волновому
уравнению.
§ 1.1. Волновое уравнение
В возмущенной среде существует определенная связь между
акустическим давлением, плотностью и колебательной скоростью.
Волновое движение жидкости, развиваемое во времени и в пространстве,
описывают основные уравнения гидродинамики с учетом сжимаемости
среды: уравнения движения, выражающие закон инерции; уравнения
неразрывности, характеризующие закон сохранения массы; уравнения
состояния, определяющие закон Гука. Рассмотрим эти уравнения.
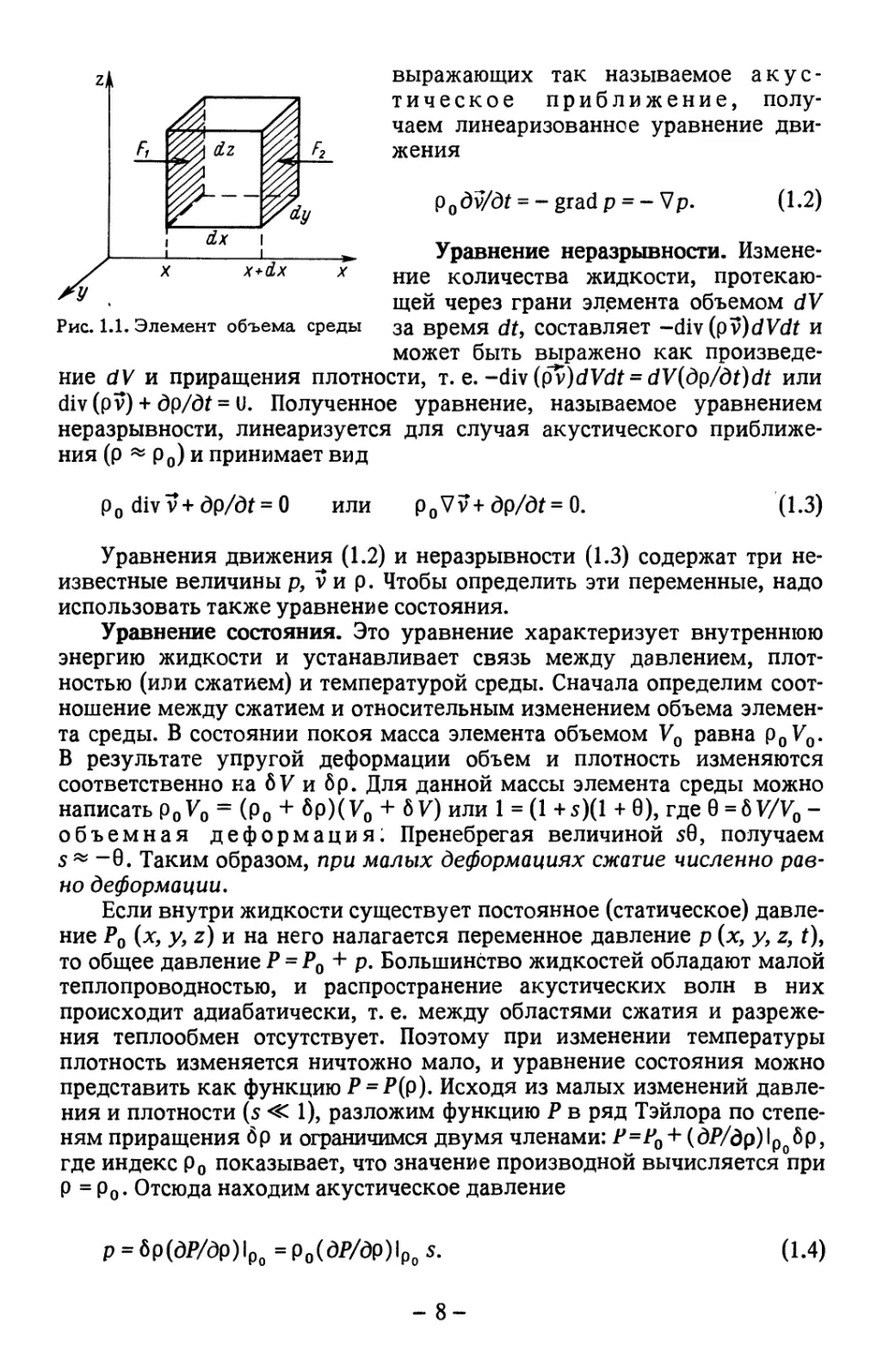
Уравнение движения. Движение элементарного объема жидкости*,
находящегося под действием сил давления жидкости (в частности, сил
акустического поля), направленных нормально к граням
параллелепипеда (рис. 1.1), описывают уравнением
-gradp = pdv/cft, A.1)
где р-р{х9 у, z, t)- переменное давление; dv/dt- полное ускорение
частицы, равное^
dv/dt = dv/dt + vxdv/dx + vydv/dy + vzdv/dz.
Первое слагаемое представляет локальное или местное ускорение,
характеризующее изменение скорости в данной точке; остальные
слагаемые - составляющие переносного ускорения, обусловленного
изменением скорости при перемещении частицы из одного места в другое.
Плотность Р возмущенной среды представим в виде суммы
плотности Ро покоящейся среды и изменения плотности бр, вызванного
возмущением. Обозначим относительное изменение плотности бр/р0 =
= 5; величину 5 называют акустическим сжатием
(уплотнением). В акустике s «с 1, и тогда Р = Ро0 + s) % Ро• Кроме того, очень
мала и колебательная скорость частиц, так что слагаемые переносного
ускорения суть величины второго порядка малости и ими можно
пренебречь по сравнению с локальным ускорением. При этих условиях,
*Жидкость внутри объема рассматриваем как сплошную однородную среду.
Это означает, что всякий малый элемент объема настолько велик, что содержит
большое количество молекул, но он также мал по сравнению с расстоянием,
на котором состояние среды изменяется существенно (в сравнении с длиной
волны).
— 7 —
выражающих так называемое
акустическое приближение,
получаем линеаризованное уравнение
движения
podv/dt = - grad р = - Vp.
A.2)
x+dx
Рис. 1.1. Элемент объема среды
Уравнение неразрывности.
Изменение количества жидкости,
протекающей через грани элемента объемом dV
за время dt, составляет —div (pv)dVdt и
может быть выражено как
произведение dV и приращения плотности, т. е. -div (pv)dVdt = dV(dp/dt)dt или
div (p v) + др/dt = U. Полученное уравнение, называемое уравнением
неразрывности, линеаризуется для случая акустического
приближения (р % р0) и принимает вид
или
= 0.
A.3)
Уравнения движения A.2) и неразрывности A.3) содержат три
неизвестные величины р, v и р. Чтобы определить эти переменные, надо
использовать также уравнение состояния.
Уравнение состояния. Это уравнение характеризует внутреннюю
энергию жидкости и устанавливает связь между давлением,
плотностью (или сжатием) и температурой среды. Сначала определим
соотношение между сжатием и относительным изменением объема
элемента среды. В состоянии покоя масса элемента объемом VQ равна РОУО.
В результате упругой деформации объем и плотность изменяются
соответственно на б V и бр. Для данной массы элемента среды можно
написать РОУО = (р0 + бр)(У0 + б У) или 1 = A +s)(l + 6), где 9 = 6У/УО -
объемная деформация: Пренебрегая величиной s9, получаем
5 ^ -9. Таким образом, при малых деформациях сжатие численно
равно деформации.
Если внутри жидкости существует постоянное (статическое)
давление Ро {х, у, z) и на него налагается переменное давление р {х, у, z, t),
то общее давление Р = Р0 + р. Большинство жидкостей обладают малой
теплопроводностью, и распространение акустических волн в них
происходит адиабатически, т. е. между областями сжатия и
разрежения теплообмен отсутствует. Поэтому при изменении температуры
плотность изменяется ничтожно мало, и уравнение состояния можно
представить как функцию Р = Р(р). Исходя из малых изменений
давления и плотности E «С 1), разложим функцию Р в ряд Тэйлора по
степеням приращения бр и ограничимся двумя членами: Р=Р0 + (dP/dp)lpo6p,
где индекс р0 показывает, что значение производной вычисляется при
р = р0. Отсюда находим акустическое давление
= 6p(dP/dp)lPo=p0(dP/dp)lPos.
A.4)
- 8-
Соотношение A.4) является линеаризованным уравнением
состояния, выражающим линейную зависимость между сжатием
(деформацией) и акустическим давлением; его обычно записывают в виде
Р = Х* = -хв или s = np, A.5)
где X - модуль объемной упругости (всестороннего сжатия)
среды, равный
Х = Ро(аР/ар)|Ро = 1/к. A.6)
Величину к называют сжимаемостью среды. Уравнение A.5)
представляет собой закон Гука для объемной деформации среды.
Теперь мы располагаем всем необходимым для получения
волнового уравнения - полной системой уравнений гидродинамики
идеальной жидкости с учетом ее сжимаемости и в предположении малых
амплитуд колебаний.
Волновое уравнение. Применим операцию div к обеим частям
уравнения A.2):
div(dv/dO + (l/Po)V2p = 0, A.7)
где V2 = д2/дх2 + д2/ду2 + d2/dz2 - оператор Лапласа.
Продифференцируем по времени уравнение A.5): ds/dt = Kdp/dt, учтем равенство
dp/dt = pods/dt и подставим производную dp/dt в A.3). Дифференцируя
A.3) по t, получаем
div (dv/dt) + Kd2p/dt2 = 0. A.8)
Из равенств A.7) и A.8) выводим дифференциальное уравнение
V2p + Kpod2p/dr2 = 0, A.9)
называемое волновым уравнением. Введем обозначение
1/(иоРо) = Х/Ро = с2, A.10)
тогда волновое уравнение A.9) принимает вид
V2p = (l/c2)a2p/dr2. A.11)
Такому же уравнению удовлетворяют функции сжатия, деформации
и колебательной скорости.
Заметим, что, несмотря на ряд допущений, принятых при выводе
волнового уравнения, оно правильно описывает практически любое
волновое движение в жидкости.
Потенциал скоростей. При принятых ранее допущениях (идеальная
среда и малые амплитуды колебаний) движение частиц жидкости
__ 9 —
является безвихревым, что математически выражается условием
rot v= 0. В этом случае поле полностью характеризуется одной
скалярной функцией Ф (х, y,z, t), называемой потенциалом
скоростей. Из теории поля известно соотношение
v = -grad<I>=-V<I>. A.12)
Составляющие вектора колебательной скорости
vx = - дФ/дх; vy = - дФ/ду; vz = - дФ/dz.
Введем функцию Ф в уравнение движения A.2): pQд{VФУдt=:
= роУ(дФ/д0 = Vp. Интегрируя это равенство, находим связь между
акустическим давлением и потенциалом скоростей:
Р = Ро<ЭФ/д*. A.13)
При помощи соотношений A.12) и A.13) по известному
распределению потенциала скоростей можно простыми операциями
дифференцирования определить распределение акустического давления и
скорости колебаний частиц в пространстве и во времени. Таким образом,
акустическое поле в идеальной жидкой среде описывается одной
скалярной функцией - потенциалом скоростей.
В дальнейшем основные характеристики поля будут определяться
через потенциал скоростей.
Выведем дифференциальное уравнение для функции Ф (х, у, z, t).
Продифференцировав по t выражение A.13) и введя функцию Ф в
уравнение A.9), получим д(?2Ф)/дt = Y.Qoд(д2Ф)/дt2. Интегрируя по
переменной t и считая постоянную интегрирования равной нулю ввиду
исчезающего на бесконечности поля, получаем искомое уравнение
У2Ф=A/с2)д2Ф/д*2, A.14)
которое, очевидно, является волновым уравнением. Из соотношений
A.11) и A.14) следует, что волновое уравнение связывает
пространственную и временную зависимости колебательного процесса с
помощью параметров среды - плотности и модуля упругости [см.
уравнение A.10)], характеризующих соответственно инерционные и упругие
свойства среды.
Для гармонического колебательного процесса с угловой
частотой w потенциал скоростей представим в виде Ф sF(х, у, z) exp (io)f)>
где F(x, у, z) - функция координат; в этом комплексном выражении
физический смысл имеет только его вещественная часть. Подставляя
значения Ч2Ф = V2Fexp(/cof) и д2Ф/д^ = -aJFexp (icof) в уравнение
A.14),получаем уравнение Гельмгольца
= 0, A.15)
где /е = (*)/с- волновое число.
- 10-
С помощью волнового уравнения можно определить
распределение в пространстве любой из характеризующих акустическое поле
величин (р, v, s, Ф) в выбранной системе координат. Наиболее часто
применяют прямоугольные (декартовы), сферические и цилиндрические
системы координат. Соответственно волновые процессы в этих
координатах называют плоскими, сферическими и цилиндрическими.
Чтобы получить однозначное решение волнового уравнения A.14)
или уравнения Гельмгольца A.15), необходимо задать граничные
условия и использовать условие излучения. Последнее означает, что
акустическое поле по мере удаления от излучающего источника
приобретает характер убывающей сферической волны.
Граничные условия при решении задачи излучения
формулируются так. На некоторой поверхности 5 задано или давление (потенциал)
Р=/E), или нормальная составляющая колебательной скорости vn -
= -d//dn =/E), или их комбинация дФ/дп + 4Ф = f(S). Необходимо
определить поле в пространстве.
При решении задачи дифракции находят потенциал рассеянного
поля Фд, представляющего разность между полным полем Ф на
поверхности 5 рассеивающего тела и падающим на тело полем Фо. Поле Ф
на поверхности S должно удовлетворять одному из следующих
граничных условий:
1)Ф15 = 0-соответствует дифракции на абсолютно мягкой
поверхности;
2) дФ/дп\$ = 0 - соответствует дифракции на абсолютно жесткой
поверхности;
3)(дФ/дп + оФ) 15 = 0- соответствует дифракции на импедансной
поверхности.
Импеданс поверхности z определяют отношением акустического
давления к нормальной составляющей колебательной скорости (с
обратным знаком): z = -p/vn. Используя соотношения р = корФ и vn =
=~дФ/дп, из третьего условия получаем связь между z и о: z = -/сор/о.
§ 1.2. Плоская волна
Плоской называют такую продольную волну, в которой
характеризующие ее величины зависят от одной декартовой координаты
и времени. Волновое уравнение плоской волны, распространяющейся
вдоль оси х, получим из уравнения A.14), приняв д2Ф/д>^= д2Ф/дг2 = 0:
д2Ф/дх2 = A/с2)д2Ф/д12. A.16)
Решение волнового уравнения. Общее решение уравнения A.16),
называемое интегралом Даламбера, представляет собой сумму двух
произвольных функций вида Ф(* + л/с), имеющих непрерывные
производные первого и второго порядков, т. е.
Ф(х, 0*Ф1(*-л/с) + Ф3(* + л/с). A.17)
- 11-
Физическую сущность решения раскрывает вид аргументов функций
Фх и Ф2: если в некотором слое среды в начальный момент времени
возникает возмущение, описываемое какой-либо функцией, то на
расстоянии х вдоль направления распространения возмущения в момент t
происходит такой же процесс, как и в возмущающем слое, т. е.
функции Фг и Ф2 при распространении не изменяются, но во времени
процесс сдвигается (опаздывает или опережает) на промежуток х/с.
Следовательно, величина с имеет смысл скорости
распространения волны, или скорости звука.
Если зафиксировать значение аргумента х = t - х/с, то ему будет
соответствовать определенное значение функции Ф^т) в момент,
когда координаты t и х удовлетворяют равенству x = c{t- т). Отсюда
следует, что с увеличением времени геометрическая координата
растет. Это означает, что фиксированное значение потенциала
скоростей (или любой величины, характеризующей возмущение)
перемещается в сторону возрастающих значений х с постоянной скоростью с
независимо от конкретного вида функции Фх. Процесс распространения
возмущения в среде с такими пространственно-временными
характеристиками называют бегущей волной. Равенство Ф = Ф(t + х/с)
представляет собой уравнение плоских волн: потенциал скоростей
в данный момент времени имеет постоянное значение в плоскости,
перпендикулярной оси х. Иными словами, волновые поверхности
представляют собой геометрическое место точек, колеблющихся в
одинаковой фазе; при одномерном волновом движении это будут
плоскости, перпендикулярные оси х. Волну, распространяющуюся в
положительном направлении оси х, назовем прямой; волну, описываемую
функцией Ф2(*+ х/с) и бегущую в отрицательном направлении оси х,
будем называть обратной.
В силу линейности волнового уравнения можно, разлагая
функцию Ф в ряд Фурье, воспользоваться принципом суперпозиции: каждая
из гармонических составляющих и любая их сумма (например, сумма
прямой и обратной волн) будут удовлетворять уравнению. По этой
причине в дальнейшем рассматриваются исключительно
гармонические процессы, поскольку практически всякую функцию,
описывающую реальное возмущение, можно представить суммой гармонических
волн.
Гармонические волны. В случае монохроматического возмущения,
как показано выше, волновое уравнение переходит в уравнение
Гельмгольца
= 0. A.18)
Решение уравнения A.18) запишем в комплексной форме
F(x) = А ехр {Чкх) + В exp (ikx), A.19)
где А и В - произвольные постоянные, определяемые из граничных
условий.
- 12-
Потенциал скоростей в точке х в момент t равен
Ф(х, t) = [ А ехр (Чкх) + В ехр (ifcx) ] exp (/cof), A.20)
где Mt + kx- фазы волны: (of - временна'я, кх - пространственная;
fc = 2лА (А. - длина волны, или расстояние, на которое перемещается
любая фаза волны за один период Г = 2л/со). Согласно этому
определению, к = сТ. Заметим, что частота колебаний /=1/Г не зависит от
свойств среды, в то время как длина волны X = c/f зависит от них,
поскольку с = с(х, р). Скорость распространения гармонической волны
называют фазовой скоростью.
Потенциал волны, бегущей в положительном направлении оси х,
равен
Ф±(х, ^=Ае-*кхеш=Ате1(?е>№-кх) ^ ^ 2\)
где Ат - амплитуда, Ф - начальная фаза. Величину Ат еzcp называют
комплексной амплитудой потенциала скоростей.
Пользуясь выражениями A.12) и A.13), находим давление и
скорость колебаний частиц в плоской волне
р = /сор [ А ехр (-ikx) + В ехр (ikx) ] ехр {tot); A.22)
v = ik [ А ехр {-ikx) - В ехр (ikx) ] ехр (Ш). A.23)
Для прямой волны Фх (Б = 0) имеем отношение р/у = рс,для обратной
волны Ф2 (А = 0) p/v = -pc. Таким образом, в пЛоской волне при любой
форме начального возмущения (в том числе и при гармонической)
отношение звукового давления к скорости колебаний частиц
вещественно:
p/v=±pc. A.24)
Этот результат означает, что в зонах сжатия (р > 0) направления
скоростей движения частиц и волны совпадают, а в зонах разрежения
(р < 0) эти направления противоположны.
Величину рс называют удельным акустическим или
волновым сопротивлением среды, и она служит важной
акустической характеристикой среды. Чем больше волновое сопротивление
среды, тем больше акустическое давление при заданной скорости
колебаний частиц. Так, для воды р = 1000кг/м3, с =1500 м/с, рс =
= 1,5 • 106 кг/(с • м^); для воздуха Р = 1,29 кг/м3, с = 330 м/с, р с =
= 425кг/(с *м^). Из сопоставления волновых сопротивлений воды
и воздуха следует, что источник, колеблющийся в обеих средах с
одинаковой амплитудой скорости, будет создавать в воде звуковое
давление приблизительно в 3500 раз больше, чем в воздухе; а при
одинаковом звуковом давлении скорость колебаний частиц в воде в 3500 раз
меньше, чем в воздухе.
- 13-
Запишем действительные части выражений для р и v прямой волны
Re р = -QuAm sin {Ш - кх + ф) = рт sin {ш-кх + <р);
Re v = -кАт sin {Ш - кх + ф) = vm sin (wf - foe + ф).
Как видим, в плоской волне звуковое давление и колебательная
скорость синфазны* и значения их амплитуд не зависят от расстояния.
Постоянство рт и vm объясняется тем, что на пути распространения
плоской волны площадь поверхности фронта не изменяется.
Из равенства A.10) получаем выражение для скорости звука
с = л/х/Р^ = 1/ У>ф7. A.25)
Таким образом, скорость звука в безграничной и идеальной среде
определяется только параметрами среды. Из уравнения A.25) также
следует, что величина с постоянна лишь при определенных условиях.
Так, например, в морской воде колебания температуры,
гидростатического давления, содержания солей приводят к изменению
сжимаемости и плотности среды, а следовательно, и скорости звука.
Адиабатический модуль упругости (или сжимаемость) можно
вычислить из уравнения состояния. На практике значения х (или и)
определяют по измеренным значениям скорости звука и плотности среды.
Для воды X % 2,2 • 109 Па.
Величина с является универсальной характеристикой волн в
безграничной идеальной среде, она сохраняет свое значение как для
плоской, так и для сферической и цилиндрической продольных волн и не
зависит от частоты. При наличии потерь энергии в среде волны не
сохраняют своей формы, и фазовая скорость различна для волн разной
частоты. Зависимость фазовой скорости гармонических звуковых волн
от частоты (длины волны) называют дисперсией звука.
Дисперсия, в частности, вызывается границами пространства (тела), в котором
распространяется волна. Дисперсия приводит к изменениям формы
исходного импульса при его распространении.
Замечание относительно акустического приближения. При
линеаризации уравнений гидродинамики мы исходили из условия
малости уплотнения s^ 1, выражающего акустическое приближение.
Покажем, что 5«v/c, тогда неравенство v/c «С 1 адекватно условию
5^1: акустическое приближение можно также сформулировать как
малое значение скорости колебаний частиц по сравнению со скоростью
звука. Сначала найдем связь между производными дФ/dt и дФ/дх.
Обозначим т «t - х/с, тогда д [Ф(г - х/с) ] /dt = (дФ/дх)дт/дг = дФ/дт;
д [Ф(г - х/с) ] /дх = (дФ/дт)дт/дх=-A/с)дФ/дт. Отсюда дФ/dt = -сдФ/дх.
Применяя это соотношение для уплотнения ds/dt = -сд$/дх и
подставляя его в уравнение неразрывности A.3), в котором dp/dt = pods/dt9
*В обратной волне р и v находятся в противофазе [см. формулу A.24)].
- 14-
z
получаем div v - с div 5 = 0. Интегрируя,
находим искомое равенство v = cs.
Этот результат справедлив и для
трехмерного случая. Действительно,
согласно уравнению состояния р = Xs, но
Х = Р0с2> следовательно, p = P0c2s. Так
как в плоской волне p/v=Poc, то
Р0с25 = Pocv, откуда s = v/c.
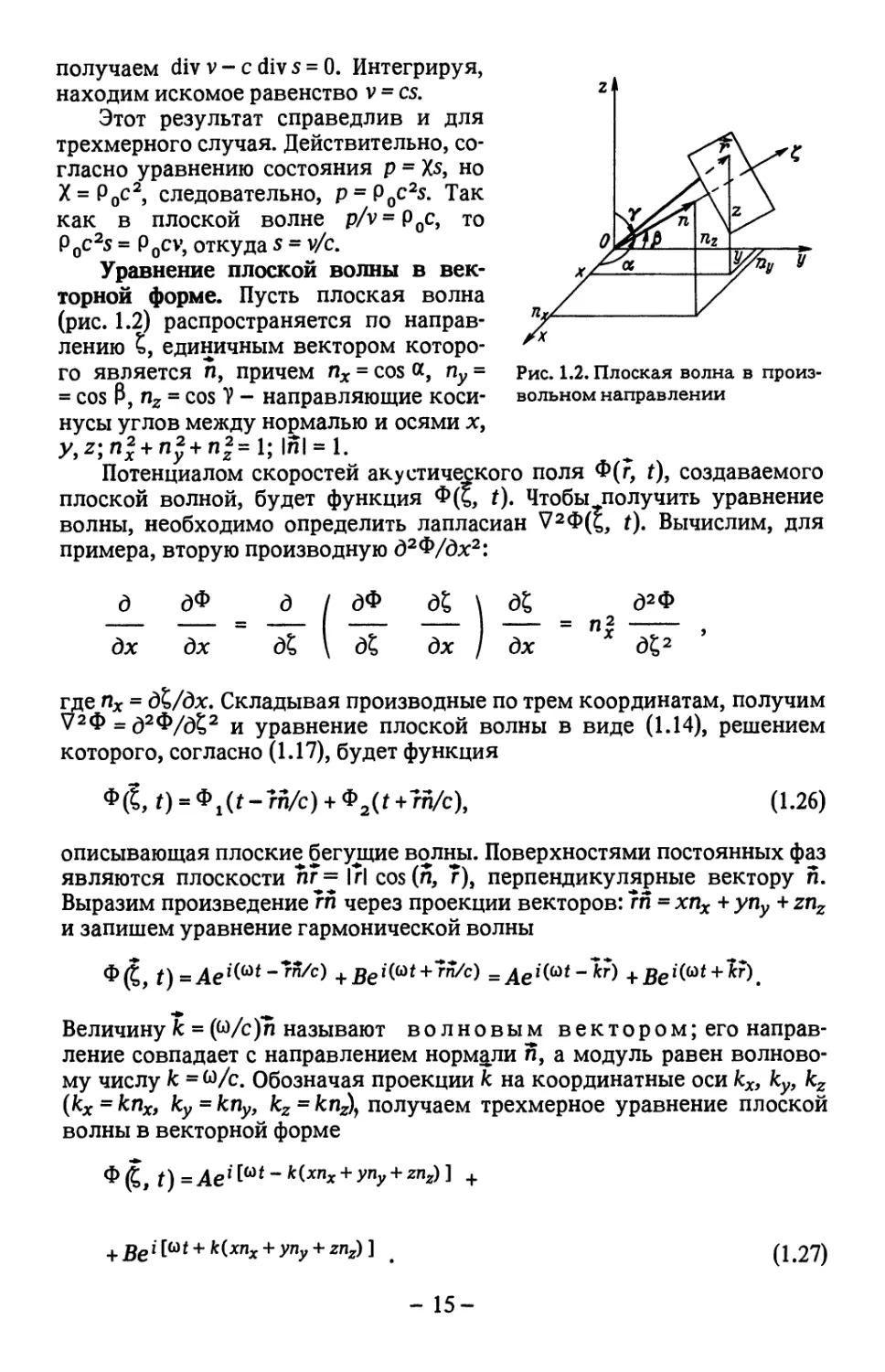
Уравнение плоской волны в
векторной форме. Пусть плоская волна
(рис. 1.2) распространяется по
направлению ?, единичным вектором
которого является п, причем пх = cos «, пу =
= cos P, nz = cos У - направляющие
косинусы углов между нормалью и осями х,
y,z;n|+n2+n2=l;lnl = l.
Потенциалом скоростей акустического поля Ф(г, t), создаваемого
плоской волной, будет функция Ф(?, t). Чтобы получить уравнение
волны, необходимо определить лапласиан Ч2Ф(с>, t). Вычислим, для
примера, вторую производную д2Ф/дх2:
Рис. 1.2. Плоская волна в
произвольном направлении
д
дх
дх
дФ
дх
д2Ф
дх
где пх = dt/дх. Складывая производные по трем координатам, получим
У2Ф=а2Ф/д?2 и уравнение плоской волны в виде A.14), решением
которого, согласно A.17), будет функция
Ф(?, fj-^i^~/с) + Ф2(* +Тп/с), A.26)
описывающая плоские бегутцие волны. Поверхностями постоянных фаз
являются плоскости Ъг= \r\ cos(n, г), перпендикулярные вектору п.
Выразим произведение ^п через проекции векторов: ?п = хпх + упу + znz
и запишем уравнение гармонической волны
Величину к = (м/с)Ъ называют волновым вектором; его
направление совпадает с направлением нормали п, а модуль равен
волновому числу к = fo/c Обозначая проекции И на координатные оси кх, ку, kz
(кх = кпх, ку = кпу, kz = /спД получаем трехмерное уравнение плоской
волны в векторной форме
+ Be*
+ Упу + znz) ]
A.27)
- 15-
§ 1.3. Сферическая волна
Представим себе малую сферу, все точки поверхности которой
совершают синфазные радиальные колебания с одинаковой
амплитудой. Очевидно, в безграничной однородной среде от такого источника
будут распространяться равнс мерно по всем направлениям
акустические волны, имеющие сферический фронт: такие волны называют
сферически-симметричными. Акустическое поле в этом случае
обладает полной симметрией относительно центра возмущения, т. е.
распределение потенциала скоростей (или другой физической
величины) зависит только от одной пространственной координаты -
расстояния от центра до точки наблюдения. В общем случае сферические
волны не обладают центральной симметрией, т. е. амплитуда
колебаний на сферическом фронте во всех точках различная.
Сферически-симметричные волны одномерные и поэтому имеют
много общего с плоскими волнами.
Волновое уравнение и его решение. Волновое уравнение для
сферической волны можно получить из общего трехмерного уравнения
A.14), подставив в него лапласиан в сферической системе координат.
Учитывая независимость Ф от полярного и азимутального углов,
получим
A/г2)д{г2дФ/дг)/дг = A/с2)д2Ф/д*2
или после выполнения преобразований
д2(гФ)/дг2 = A/с2)д2(гФ)/д** . A.28)
Уравнение A.28) тождественно волновому уравнению A.16) плоской
волны с той лишь разницей, что функция Ф заменена произведением
гФ и декартова координата - радиусом-вектором г. Поэтому интеграл
Даламбера уравнения A.28) имеет вид
Ф(г, t) - A/г) Фх(г - т/с) + A/г) Ф2Ц + т/с) A.29)
и выражает совокупность двух бегущих со скоростью с сферических
волн - Ф19 расходящейся от некоторого центра при г = 0, и Ф2,
сходящейся в этом центре. Как видно, амплитуда потенциала Фх убывает
пропорционально изменению расстояния, что вызвано расширением
поверхности фронта волны по мере ее удаления от точечного
источника.
Гармоническая волна. Для случая гармонического возмущения
с частотой со потенциал скоростей расходящейся волны, согласно
уравнению A.29), запишем в комплексной форме
Ф = (А/г) ехр [ 1(Ш-кг) ], A.30)
где А - постоянная, определяемая из граничных условий.
- 16-
Акустическое давление и скорость частиц в сферической волне
р = /сорФ = (/сорД/r) exp[/(cof-fcr)] = (pq/г) ехр [ i(cof - кг) ]; A.31)
V--дФ/дг«A/г + Л)Ф-[ро/(рсг)] [1-//(Ь)] ехр [/((Of-кг)], A.32)
где Ро = /сорЛ = const. Акустическое давление и скорость колебания
частиц среды связаны соотношением
p/v = pc cos ф ехр (/Ф) = [ pdcr/Vl + fcV] exp (i4p), A.33)
где
Ф = arctg [l/(kr)] = arctg [Щ2пг)]. A.34)
Как видно, колебательная скорость частиц в сферической волне
отстает по фазе от давления на угол Ф, зависящий от аргумента кг, т. е.
от волнового расстояния до точки наблюдения. Если кг » 1 (г » \), то
Ф ¦¦ 0 и соотношение между р и v соответствует плоской волне,
амплитуды рт и vm обратно пропорциональны расстоянию г. Область кг» 1
называют волновой зоной, или дальним полем.
Практически р и v можно считать синфазными, начиная с расстояний г>\
(fcr^2n), при которых отношение амплитуд pmhm ^ 0,988рс.
Объясняется это тем, что с увеличением расстояния уменьшается кривизна
фронта сферической волны, и на ограниченной поверхности фронта
волна будет плоской. Следует, однако, подчеркнуть, что при г > \
лишь по фазовым соотношениям между давлением и колебательной
скоростью поле сферической волны можно принимать за поле плоской
волны, поскольку распространение энергии в этой зоне, как и во всем
пространстве, имеет природу сферической волны.
Если рассмотреть воздействие сферической волны на плоскую
поверхность 5, касательную к фронту, то среднее давление на 5 будет
практически равно давлению в плоской волне при условии г> 25Д.
Расстояние г = 2SA определяет границу дальнего поля, и волна будет
локально плоской на заданной поверхности.
Если fcr ^ 1 (г «С к\ то cos Ф -¦ кг, <р -¦ л/2 и амплитуда скорости
частиц убывает по закону 1/г2. Область вблизи центра волны, где
действует этот закон, называют неволновой зоной, так как в ней
гидродинамические эффекты перетекания жидкости преобладают над
волновыми; эту область называют также ближним полем и ее
размеры определяют неравенством кг < 1 или г < Х/Bл) * А./6.
Действительные части выражений A.31) и A.32) имеют вид
Re р = {ро/г) cos ((о t - кг);
Re v = [ ро/(рсг)] cos (Ш - кг) + [ po/(wpr2)] sin (Ш - кг).
Первое слагаемое в формуле для Re v совпадает по фазе с давлением и,
следовательно, определяет излучаемую акустическую энергию; эта
2-614
- 17-
часть существенна при больших значениях г, т. е. в дальнем поле, где
амплитуда скорости частиц, как и звукового давления, уменьшается
пропорционально увеличению расстояния. Второе слагаемое,
убывающее с расстоянием по квадратичному закону, преобладает при малых
значениях г, т. е. в ближнем поле источника. Здесь скорость колебаний
частиц отстает по фазе от давления на л/2, и поэтому ближнее поле не
вносит вклада в излучаемую источником энергию, оно характеризует
поток жидкости вблизи источника. Отношение амплитуд
колебательной скорости в ближнем и дальнем полях [ро/("рг2)] / [ро/(рсг)] =
= 1/(кг) совпадает со значением tg Ф [см. формулу A.34)]. На малых
расстояниях это отношение амплитуд резко уменьшается, на больших
расстояниях - уменьшается значительно медленнее.
Введем понятие потока или объемной скорости. Потоком q через
элемент dS называют произведение нормальной составляющей
колебательной скорости и площади элемента. Считая колебания точечного
источника гармоническими, определим мгновенное значение q через
волновую поверхность радиусом г. Из выражения A.32) находим
: 4лА VI + к2г2 ехр [/(л/2 - ф)] ехр [/(со* - кг)].
Устремив г к нулю (Ф -¦ л/2), вычислим объемную скорость q через
бесконечно малую сферу, окружающую точечный источник
q\r+ о - 4лА ехр (iut) - Qm ехр (tot),
где 4пА = Qm - амплитуда объемной скорости. Таким образом,
выражение A.30) для потенциала скоростей точечного источника
приобретает вид
Ф - [ 0ш/Dпг)] ехр [ i((*t - кг)]. A.35)
Если источник излучает в пределах конуса с телесным углом ft, то
Ф = [ Qm№ г)] ехр [ /И - кг)]. A.35а)
Амплитуду объемной скорости Qm источника через бесконечно
малую сферу (или бесконечно малый сегмент с телесным углом ft),
окружающую .его, называют производительностью источника и
выражают в м3/с. Постоянная А * (?т/Dл) (или А = Qm/Q) есть
производительность точечного источника, отнесенная к телесному углу
ft = 1 ср.
§ 1.4. Цилиндрическая волна
Пусть возмущение в среде создает бесконечно длинный тонкий
цилиндр - бесконечная нить. Для определения акустического поля
такой модели целесообразно использовать цилиндрическую систему
- 18-
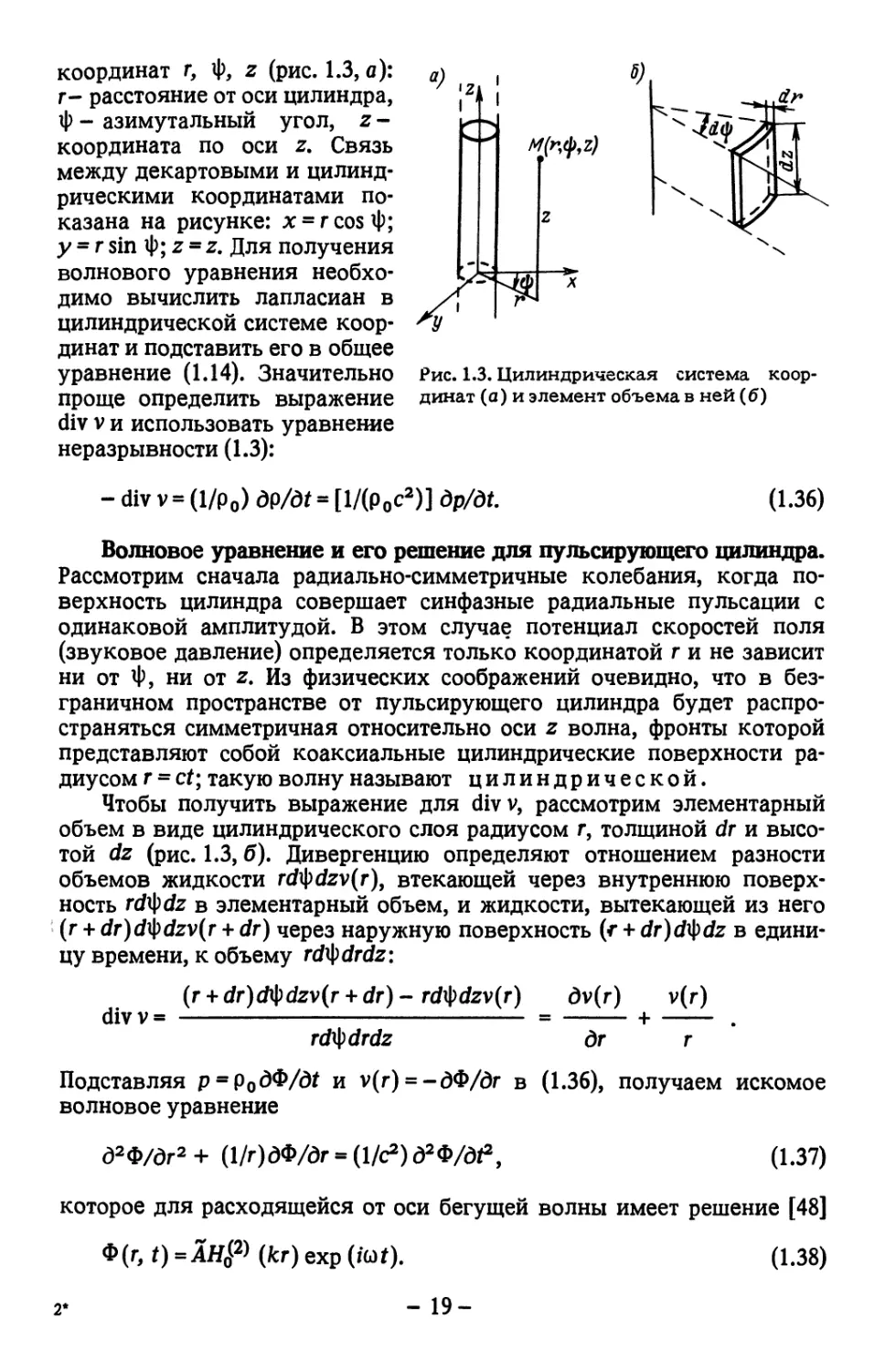
координат г, ф, z (рис. 1.3, а):
г- расстояние от оси цилиндра,
ф - азимутальный угол, z -
координата по оси z. Связь
между декартовыми и
цилиндрическими координатами
показана на рисунке: х = гсо$ф;
у = г sin ф; z = z. Для получения
волнового уравнения
необходимо вычислить лапласиан в
цилиндрической системе
координат и подставить его в общее
уравнение A.14). Значительно
проще определить выражение
div v и использовать уравнение
неразрывности A.3):
'Z
1
A
Z
Л
Рис. 1.3. Цилиндрическая система
координат (а) и элемент объема в ней (б)
- div v = A/Po
[1/(р0с2)] dp/dt.
A.36)
Волновое уравнение и его решение для пульсирующего цилиндра.
Рассмотрим сначала радиально-симметричные колебания, когда
поверхность цилиндра совершает синфазные радиальные пульсации с
одинаковой амплитудой. В этом случае потенциал скоростей поля
(звуковое давление) определяется только координатой г и не зависит
ни от Ф, ни от z. Из физических соображений очевидно, что в
безграничном пространстве от пульсирующего цилиндра будет
распространяться симметричная относительно оси z волна, фронты которой
представляют собой коаксиальные цилиндрические поверхности
радиусом г = ct; такую волну называют цилиндрической.
Чтобы получить выражение для divv, рассмотрим элементарный
объем в виде цилиндрического слоя радиусом г, толщиной dr и
высотой dz (рис. 1.3, б). Дивергенцию определяют отношением разности
объемов жидкости rdtydzv(r), втекающей через внутреннюю
поверхность гс/фс/г в элементарный объем, и жидкости, вытекающей из него
(г + dr)di|)cfzv(r + dr) через наружную поверхность (г + dr)dtydz в
единицу времени, к объему rdtydrdz:
divv =
rdtydrdz
av(r) | v(r)
dr r
Подставляя р = родФ/д* и v(r) = -dO/dr в A.36), получаем искомое
волновое уравнение
д2Ф/дг2 + A/г)дФ/дг
A.37)
которое для расходящейся от оси бегущей волны имеет решение [48]
Ф(г, 0 =1яоB) (кг) exp (to*). A.38)
-19-
Здесь #<Р (?) - функция Ханке ля второго рода нулевого порядка,
представляющая собой линейную комбинацию функций Бесселя и
Неймана; функция Ханкеля гп-го порядка Hffl (?) = Jm(?) - iNm(Q.
При больших значениях кг (практически при кг > 1) можно
воспользоваться асимптотическим выражением
Я<Р (кг) * V2/(nfcr) exp [ -i(kr - л/4)]
и представить потенциал скоростей волны в форме
Ф(г, t) = А )/2/(л/сг) exp [ i(cof - fcr + л/4 + <р)]. A.39)
Из полученного выражения видно, что на больших волновых
расстояниях амплитуда потенциала (и давления) в цилиндрической
волне убывает по закону 1/ уТ7Этого результата следовало ожидать, так
как цилиндрическая волна занимает промежуточное положение
между плоской и сферической волнами. Однако следует заметить, что
вблизи оси структура поля весьма сложная, здесь фаза скорости v
отличается от фазы давления р на 90°, т. е. ближнее поле является
реактивным и не распространяется на большие расстояния от оси
цилиндра.
Определив из уравнения A.38) акустическое давление
кг) ехр (№) A.40)
и колебательную скорость
v = -kAHpy (кг) exp (tot) = кХнР (кг) exp (tot), A.41)
найдем их отношение
p/v = /рсЯеР (кгIН^ (кг). A.42)
Фазовый сдвиг между р и v
0()Jl() 0(I()
(p=arctg . A.43)
2 iVM/^fcON^kOJU)
Если сравнить полученную величину Ф и фазовый сдвиг в
сферической волне, то окажется, что в цилиндрической волне им можно
пренебрегать, начиная с меньших расстояний. Например, если г = Х, то
Ф % 4,5е, а в сферической волне Ф % 9°. Такая разница в значениях
сдвига фаз Ф объясняется меньшей кривизной фронта
цилиндрической волны.
Волновое уравнение и его решение для общего случая. Когда
акустическое поле цилиндра зависит от координат г, ф и z,
дивергенцию колебательной скорости определяют с учетом потоков жидкости
-20-
в трех направлениях - радиальном, тангенциальном и осевом.
Подстановка div v в уравнение A.3) дает волновое уравнение
д2Ф 1 дФ 1 д2Ф д2Ф 1 д2Ф
+ — + — + = — A.44)
дг2 г дг г2 дф2 dz2 с2 dt2
Решение его для волны, расходящейся от оси z, запишем в виде [48]
^, A.45)
где к',у - постоянные, введенные при нахождении Ф методом Фурье
в форме произведения функций, каждая из которых зависит только от
одной из четырех переменных г, ф, z, t; к' = yfc У21 к = м/с.
Очевидно, что при к' = 0 и т = 0 решение A.45) переходит в решение A.38), т. е.
соответствует пульсирующему цилиндру. Аналогичный результат
получится, если в качестве цилиндрического излучателя принять
систему точечных источников, расположенных непрерывно вдоль
оси z и имеющих одинаковую производительность на отрезке
единичной длины [32].
§ 1.5. Энергия звуковых волн.
Акустический импеданс
При распространении звуковых волн в упругой среде ее частицы
получают кинетическую энергию и внутренняя энергия частиц
изменяется. Плотность дополнительной энергии динамически возмущенной
среды относительно ее невозмущенного состояния представляет собой
энергию звуковой волны. Эту энергию определяют отклонения
механических напряжений (давлений) и деформаций (смещений) от их
равновесных значений. Энергия непрерывно распространяется со
скоростью звука.
Энергия звуковых волн. Покажем, что плотность акустической
энергии равна сумме плотностей кинетической энергии
колебательного движения частиц и потенциальной энергии, обусловленной упругой
деформацией частиц среды. Умножим скалярно уравнение движения
A.2) на вектор v и, воспользовавшись формулой div (p v) = p div v +
+ vgradp, получим
р0v(dv/dt) - р div v = - div (pv).
Согласно уравнению A.8) и равенству A.10), divv = -xdp/df =
•(gc2yldp/dt9 и предыдущее соотношение принимает вид
-21-
д Г 1 1 , .
— PoV2 + — P2/(P0c2) = - div(pv). A.46)
dt [ 2 2
Первое слагаемое в скобках есть плотность кинетической энергии
в звуковой волне. Чтобы установить смысл второго слагаемого,
определим работу, совершаемую избыточным давлением dp при
деформации объема Vo на величину dV. Как показано ранее, при малых
деформациях изменение объема dV^-Vodp/pg = -)iVodp. Работа,
произведенная в течение этого бесконечно малого изменения давления,
равна pdV = -KVopdp. Интегрируя, получим полную работу, которую
надо совершить для изменения объема Vo на dV:
р
-иУ0 $pdp = -(l/2)xVop2 = - [ р2/Bр0с2)] Vo.
о
Очевидно, потенциальная энергия, накопленная объемом Vo в
процессе изменения давления от 0 до р, будет равна работе, затрачиваемой на
преодоление акустического (избыточного) давления: [р2/Bр0с2)] Vo.
Следовательно, второе слагаемое в уравнении A.46) - это
потенциальная энергия единичного объема, которая в случае идеальной жидкости
равна его внутренней энергии.
Таким образом, плотность звуковой энергии
W = 0,5ро v2 + 0,5ир2,
и ее выражают в джоулях на кубический метр (Дж/м3). Среднее
значение плотности энергии за один период
W = 0,25р<У + 0,25хр2. A.47)
В плоской бегущей волне, согласно A.27), PqV2 = ир2 и суммарная
плотность энергии
A.48)
W = 0,5pov «0,SkP .
Передача звуковой энергии. Для оценки эффективности
выделения полезного сигнала на фоне помех необходимо рассчитывать
энергию акустического поля, с помощью которого передается
информация. При распространении акустической волны возникающие в
среде переменные звуковые давления передаются окружающим частицам.
Эти силы звукового давления, преодолевая активное сопротивление
9 с в процессе колебаний частиц среды, непрерывно совершают таким
образом работу по передаче звуковой энергии новым зонам.
Определим мощность сил звукового давления. Пусть в месте
нахождения плоской элементарной площадки dS давление равно р, тогда
на нее действует сила pdS, направленная по нормали к площадке.
-22-
Если частицы, принадлежащие этому элементу, имеют скорость v, то
мощность равна pvdS (работа силы pdS на перемещение частиц со
скоростью v в единицу времени) и зависит от ориентации площадки dS.
Величину pv = Q называют векторам плотности потока
акустической мощности. Вектор Qаналогичен понятию
вектора плотности потока импульса среды, используемого в
гидродинамике и определяющего количество вещества р v, протекающего в
единицу времени через единичную площадку. Поток акустической
мощности через площадку dS записывают как pvdSs<&dS', аналогичное
выражение для потока вещества через площадку dS будет р vdS.
Формулы Q = pv и pvdS = QdS - общие формулы гидродинамики,
если р - полное давление; в акустике за р принимают звуковое
(акустическое) давление.
В бегущей плоской волне модуль вектора Q равен
O = pv = p2/(Poc) = Pocv2. A.49)
Плотность акустической энергии W и вектор плотности потока
акустической мощности Q связаны соотношением A.46).
Проинтегрируем уравнение A.46) по некоторой замкнутой
области V, ограниченной поверхностью S. Учитывая связь между потоком
массы среды и дивергенцией векторного поля (теорема
Гаусса-Остроградского), получим
WdV= -Ш div(pv)dV= - И pvndS, A.50)
dt JJJ V S
V
где vn - нормальная к элементу dS составляющая вектора
колебательной скорости. Интеграл в левой части представляет собой полную
звуковую энергию Е в объеме V. Таким образом,
dE/dt=-Ц QndS. A.51)
S
Здесь On - вектор потока мощности через единицу площади замкнутой
поверхности 5 в направлении нормали, т. е. в направлении
распространения акустической волны.
Равенство A.50) выражает закон сохранения акустической энергии
в среде: уменьшение энергии в некотором объеме за единицу времени
равно потоку мощности через поверхность, ограничивающую этот
объем.
Интенсивность звука. Средняя по времени акустическая энергия,
переносимая волной через единицу площади фронта волны, получила
название интенсивности звука. В случае периодического
процесса усреднение производится за больший (по сравнению с
периодом) промежуток времени или за период; оба результата
приближенно одинаковы. Согласно определению, интенсивность равна
-23-
J=— [odt, A.52)
T J
она является векторной величиной, и, как и плотность потока
звуковой мощности, ее выражают в ваттах на квадратный метр (Вт/м2)*.
Для гармонической волны с фазовым сдвигом ф между
акустическим давлением p=pm cos (At и колебательной скоростью v=vmcos(cof-(p)
плотность потока мощности
Q = pv = (l/2)pmvm cos Ф + (l/2)pmvm cos Buf - <p). A.53)
Подставляя A.53) в A.52), принимая за Т период колебаний и
интегрируя, получим
J = 0,5pmvmQos((. A.54)
Интеграл от первого слагаемого уравнения дает плотность потока
звуковой энергии, переносимой волной в направлении ее
распространения, т. е. интенсивность звука, а интеграл от второго слагаемого равен
нулю.
Интенсивность звука в плоской волне (ф = 0, pm/vm = рс)
J = p2/Bpc)=pcv2n/2. A.55)
Эта формула совпадает с выражением A.49), где р, v- эффективные
значения давления и скорости.
В сферической волне, согласно отношению (L33), pm/vm =рссо5ф
и интенсивность звука
J = P2m/Bpc) = C5PCV2, cos2 ф. A.56)
Формулы A.55) и A.56) для волн обоих типов, выраженные через
амплитуду давления, совпадают, а выраженные через амплитуду
колебательной скорости, совпадут при созф^ 1, т.е. для дальнего
поля. Вообще, для создания одинакового давления в среде
необходимо, чтобы колебательные скорости в плоской и сферической волнах
были различны. Для получения равных интенсивностей амплитуда
скорости vm в сферической волне должна быть в 1/cos ф раз больше,
чем в плоской волне.
Установим зависимость J от расстояния для сферической и
цилиндрической волн. Поскольку в сферической волне рт = сорД/г
[см. формулу A.31)], то интенсивность звука обратно пропорциональна
*Используются также единицы Вт/см2 и эрг/(с • см2), причем 1 Вт/см2 =
= 107 эрг/(с • см2) = 104 Вт/м2.
-24-
квадрату расстояния: площадь фронта волны возрастает как 4лг2.
В цилиндрической волне, согласно формуле A.39), при fcr » 1
(практически при г > X) интенсивность убывает с увеличением расстояния по
закону 1/г. Этот результат объясняется тем, что площадь фронта волны
пропорциональна расстоянию г.
Отметим, что на практике определять интенсивность звука по
формуле A.56) целесообразно по первому равенству, так как измерять
звуковое давление намного легче, чем колебательную скорость, и,
кроме того, не требуется измерения фазового угла.
Энергия сферической волны. Поток мощности сферически
симметричной волны, исходящей от источника, будет одинаковым на любой
сферической поверхности, окружающей источник, площадью 4лг2.
Если в каждой точке поверхности давление равно р и колебательная
скорость v [вещественные части выражений A.31) и A.32)], то мощность
Р = (Re р Re vLnr2 = 4nk2QcA2 [ sin2 (ut - fcr) -
- (fcr) cos (to* - fcr) sin (Ш - fcr)] =
= 2npcfc2^2 [1 - cos 2 (CM - fcr) - (fcr) sin 2 И - fcr)].
Интегрируя выражение мгновенной мощности Р в пределах периода Г,
получим среднюю мощность
¦w-t I
+T
2npck2A2.
Отсюда находим удельную (на единицу поверхности) мощность
PcfcaA2/B/a) = coV
Но cop4/r = pm, следовательно, J = p2r2/Bpc), что совпадает с
выражением A.56).
Удельный акустический импеданс. Рассматривая гармонические
волны, мы определяли отношение звукового давления к скорости
колебаний частиц среды в данной точке [см. формулы A.24), A.33)
и A.42)]. Запишем это отношение в комплексном виде
р ftnexp(itof) pm
= — = exp(/<p) = z. A.57)
v i[(of<p)]
Величина z, называемая удельным акустическим
импедансом, не зависит от времени и в общем случае является комплексной.
- 25-
Для плоской волны z = р с 5 т. е. импеданс вещественен и равен
волновому сопротивлению среды.
Из формул A.55) и A.56) видно, что интенсивность звука в
гармонической волне определяется реальной частью удельного импеданса:
J = 0,5 (Rez)v^. Формула A.55) указывает на существенное влияние
величины рс среды на излучение акустической энергии: чем больше рс,
тем большую интенсивность звука (среднюю мощность) развивает
источник с заданной амплитудой скорости колебаний (или смещения
на фиксированной частоте); для создания определенного звукового
давления при большей величине рс от источника потребуется меньшая
энергия (мощность) излучения. Так, при одинаковых амплитудах
колебаний в воде и в воздухе средняя излучаемая мощность в воде
в 3500 раз больше, чем в воздухе. При одинаковой мощности
излучения в обеих средах создаваемое источником звуковое давление в
воде будет в 58 раз больше, чем в воздухе, а скорость колебаний частиц
в воде будет в 58 раз меньше, чем в воздухе.
Для сферической волны с помощью выражения A.33) получим
удельный акустический импеданс
/с2 г2 кг
z=pc + р,2) +*>с аРссо^Ф+A/2)»с81п2ф. A.58)
Комплексный характер z указывает на наличие фазового сдвига между
р иу [см. формулу A.34)]. На расстояниях/-^ К практическиz% рс, что
соответствует плоской волне. На малых волновых расстояниях угол ф
близок к л/2.
Мнимая часть z может быть представлена в виде
Imz-topr [1 + BГСГЛJ], A.59)
т.е. она имеет характер инерционного сопротивления, и при г<С Л.
сопротивление Imz% /topг = fo> ms, гдерг = ms - масса среды на единицу
площади волновой (сферической) поверхности. Реакцию среды,
испытываемую сферой малого волнового радиуса, можно трактовать как
сопротивление несжимаемой жидкости с удельной массой рг. Полная
масса 4лг2рг = D/3)лг3 -Зр, т.е. равна массе среды в тройном о"бъеме
сферы. Массу ms называют присоединенной или соколеблю-
щейся.
Удельный акустический импеданс среды выражают в Н * с/м3 .
§ 1.6. Отражение и прохождение волн
До сих пор рассматривалось поле звуковых волн в неограниченной
среде. Однако в реальной среде имеются препятствия и границы - по
существу это поверхности, на которых заметно изменяется волновое
сопротивление среды. Например, границы вода-воздух, вода-грунт,
-26-
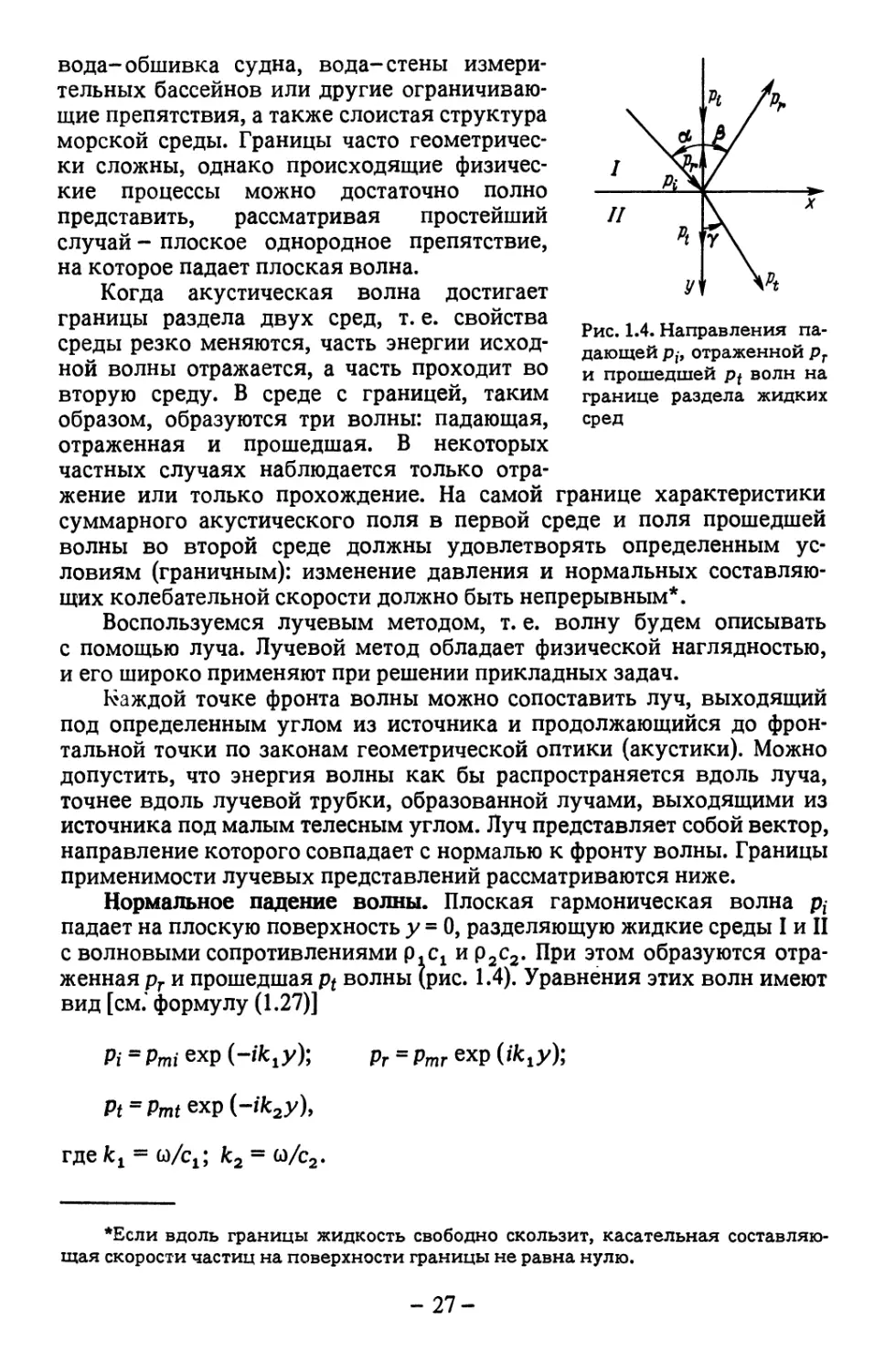
Рис. 1.4. Направления
падающей р,-, отраженной рг
и прошедшей pj волн на
границе раздела жидких
сред
вода-обшивка судна, вода-стены
измерительных бассейнов или другие
ограничивающие препятствия, а также слоистая структура
морской среды. Границы часто
геометрически сложны, однако происходящие
физические процессы можно достаточно полно
представить, рассматривая простейший
случай - плоское однородное препятствие,
на которое падает плоская волна.
Когда акустическая волна достигает
границы раздела двух сред, т. е. свойства
среды резко меняются, часть энергии
исходной волны отражается, а часть проходит во
вторую среду. В среде с границей, таким
образом, образуются три волны: падающая,
отраженная и прошедшая. В некоторых
частных случаях наблюдается только
отражение или только прохождение. На самой границе характеристики
суммарного акустического поля в первой среде и поля прошедшей
волны во второй среде должны удовлетворять определенным
условиям (граничным): изменение давления и нормальных
составляющих колебательной скорости должно быть непрерывным*.
Воспользуемся лучевым методом, т. е. волну будем описывать
с помощью луча. Лучевой метод обладает физической наглядностью,
и его широко применяют при решении прикладных задач.
Каждой точке фронта волны можно сопоставить луч, выходящий
под определенным углом из источника и продолжающийся до
фронтальной точки по законам геометрической оптики (акустики). Можно
допустить, что энергия волны как бы распространяется вдоль луча,
точнее вдоль лучевой трубки, образованной лучами, выходящими из
источника под малым телесным углом. Луч представляет собой вектор,
направление которого совпадает с нормалью к фронту волны. Границы
применимости лучевых представлений рассматриваются ниже.
Нормальное падение волны. Плоская гармоническая волна р,-
падает на плоскую поверхность у = 0, разделяющую жидкие среды I и И
с волновыми сопротивлениями р,^ и р2с2. При этом образуются
отраженная рг и прошедшая pt волны (рис. 1.4). Уравнения этих волн имеют
вид [см.' формулу A.27)]
Pi = Pmi exp (~ikxy)\ рт = pmr exp (ikxy);
^co/q; fc2 = 0)/c2.
*Если вдоль границы жидкость свободно скользит, касательная
составляющая скорости частиц на поверхности границы не равна нулю.
-27-
На плоскости у = О, т. е. по обе стороны границы, должны быть
равны звуковые давления и скорости частиц:
{pi +Pr)\y=0=Pt\y = 0'>(Pi-Pr)/(PiCi)\y = Q:sPt/(p2C2)\y = 0- A-60)
Подставляя выражения для давлений, получаем систему уравнений
1+ nr = W ;(i- v )/(plCl)= W /(р2с2), A.61)
где V =Pmr/Pmi " коэффициент отражения; W =pmt/pmi -
коэффициент прохождения. Система A.61) имеет решение
= (Р2С2 - PxCjAPaCa + PxCj = (q - l)/(q + 1); )
A.62)
= 2p2c2/(p2c2 + plCl) = 2g/fa + 1), )
где q=92c2/(p1c1).
Как видим, отражение и прохождение волны определяется
исключительно отношением волновых сопротивлений граничащих сред. Если
q > 1 (волна падает на среду с ббльшим сопротивлением), коэффициент
^ > 0, т. е. фаза давления при отражении не меняется. Если q < 1
(волна падает из среды с ббльшим сопротивлением), коэффициент
V< 0, т.е. фаза давления на границе меняется на 180°. В обоих
случаях модуль I V I < 1. Коэффициент прохождения V? ^ 2 при
любых значениях q. Среду с большей величиной рс называют
акустически более жесткой, а отражающую среду с меньшей величиной рс -
акустически более мягкой.
При р2с2 = PiCi коэффициент отражения по давлению (и по
колебательной скорости) ТГ = 0, т. е. на границе раздела отражения не
происходит; такую границу называют акустически прозрачной.
В практической гидроакустике для обеспечения наименьшего
отражения (например, экранирование антенн, облицовка поверхностей
измерительных бассейнов) применяют материалы с волновым
сопротивлением, близким к рс воды,- каучук, полистирол, резину некоторых
марок.
Суммарное поле на границе [см. формулу A.61)]
2(р2с2 + р1с1)-1= 11Ги; A.63)
2 + p1c1)-1= W a/(P2c2). A.64)
Отношение амплитуд колебательных скоростей
Vmr/Vmi = -Pmr/Pmi = " ^ ' W^ni =
= [ Pmt/(92c2)][Pmi/(91C1)] = W/q. A.65)
Рассмотрим переход звуковой волны через границы вода-воздух (q =
= 2,85 • 10~4) и воздух-вода (q = 3,5 ф 103). В первом случае отражение
-28-
происходит от почти абсолютно мягкой среды: *W = - 0,99943; W =
= p/pi = 0,00057; v/V| = 1,99943. Таким образом, давление близко к нулю,
а скорость частиц практически удваивается. Во втором случае
отражает почти абсолютно жесткая среда: 1Г = 0,99943; W = р/р{ =
= 1,99943; v/vf = 0,00057. На границе давление удваивается, а скорость
частиц близка к нулю.
Для определения перехода звуковой энергии запишем отношения
плотностей потоков мощности, или интенсивностей:
Jr/Ji - [ РЗЛЛ)] (гр^/р^ V2 = [(q- l)/(q +1)]2; VJ; =
= [ Pmf/BP2c2)] tfp^/p2f) = <W Vfl = 4q(q + I). A.66)
Легко убедиться, что равенство V 2 + W Vq = 1 отвечает закону
сохранения энергии. Формулы A.66) при замене q на 1/q не меняются.
Это означает, что энергетические соотношения при отражении и
прохождении волны не зависят от направления нормально падающей
волны, т. е. безразлично, распространяется ли волна из первой среды
во вторую или наоборот. При переходе волны из воды в воздух (или из
воздуха в воду) коэффициент V 2 = 0,99886, следовательно, почти вся
энергия отражается, а прошедшая энергия составляет 0,00114 падающей.
Наклонное падение волны. Нормали к фронтам волн д, рг и pt
лежат в плоскости ху и образуют с осью у углы а, |3, у (см. рис. 1.4).
Уравнения волн, согласно формуле A.27), имеют вид
Pt = Pmt exp [-ik2(x sin у + у cos у)].
Граничные условия
I i l д i l д i
W+JV|y=o-W|y=o; (Pi+Pr)|y=o= fty=o- O-67)
Pi <ЭУ Р2 dy
После подстановки выражений для давлений в формулы A.67) с учетом
равенства фазовых скоростей распространения всех трех волн по
границе раздела: кг sin a « kx sin P = fc2 sin у, или
Р = a; sin a/sin-у -q/Ca A.68)
получим систему уравнений
Pmi + PW= Pm^ (fri/Pi)(Pmz-Pmr) COS a = (k2h2)pmt COST- A.69)
Равенства A.68), выражающие известные в оптике законы
отражения и преломления, справедливы для любых волновых процессов. По
аналогии с оптикой можно говорить о законах геометрической (лучевой)
-29-
акустики. Точность применения методов лучевой акустики тем выше,
чем меньше длина звуковой волны по сравнению с характерными
размерами, например, отражающего тела.
При заданной амплитуде падающей волны система уравнений A.69)
однозначно определяет соотношение амплитуд отраженной и
прошедшей волн. Решая уравнения, находим коэффициенты отражения <&
и прохождения VJ (подавлению)
q cos a - cos У 2q cos а
°Cf = - ; W = . A.70)
q cos а + cos у q cos а + cos у
Переходя в уравнениях A.69) от давлений к скоростям частиц:
Pmr/Vmi = PiCi/cos a = -pmr/vmr; Pmt/Vmt = P2C2/COS У,
для соответствующих коэффициентов по колебательной скорости
получим
Vmr/Vmi - Pmr/Pmi — V ; Vmt/vmi = [ COS y/{q COS a)] W . A.71)
Анализ выражений коэффициентов отражения и прохождения при
наклонном падении. Обратимся к формулам A.70) и определим, при
каких условиях будет полное проникновение волны из одной среды
в другую, т. е. *$ = 0. Используя закон преломления A.68), нетрудно
получить выражение для искомого угла падения. Из анализа
полученного выражения следует, что такой угол существует, если
выполняются неравенства р2/рх ^ cjc2 > 1 или р2/рх < cjc2 < 1.
Другой частный случай, когда происходит только отражение (т. е.
"ДО = 0), а преломленная волна во вторую среду не переходит,
наблюдается при с1<с2 и sin a > cjc2 - это явление полного
внутреннего отражения. Если sin a >с1/с2, то sin 7 =
= (c2/cj sin a > 1 и cos У = ± / Icos y\. Коэффициент отражения
Vs (q cos a + / Icos y\)/(q cos a ± /Icos y\) = exp (+ 2/ф), A.72)
где I cos VI = [(cjcxJ sin2 a- l]1/2;tgi|) = Icos 7l/(c? cos a).
Из формулы A.72) видно, во-первых, что модуль IV I = 1,т. е.
волна отражается полностью. Во-вторых, между отраженной и
падающей волнами образуется сдвиг по фазе 2ф, который определяют углом
падения и отношениями волновых сопротивлений и скоростей звука
в граничащих средах.
Подставляя cos "У в выражение для давления pt, следует брать
cos У = -/Icos y\9 так как в противном случае величина exp(-ik2ycosv) =
= exp (k2y Icos y\) растет с возрастанием у, что физически лишено
смысла. Получаем ^ = ехр B /ф), коэффициент °М , согласно A.70),
2 о cos a 2 о cos a
W 'Ф. A.73)
Qcosa-flcosVl V(^cosaJ + Icos vl2
-30-
Акустическое давление во второй среде
-/с2 Icos v'y ez(cot-/c2xsin v +
pf =
V(qcosaJ + Icos 7I
Выражение A.74) описывает волну, распространяющуюся в
положительном направлении оси х. Амплитуда ее убывает вдоль волновых
фронтов по мере удаления от границы. Такие волны называют
неоднородными или модулированными по фронту.
Практически волна во второй среде существует только в очень
тонком слое. В случае если волна падает под углом a = 30° из воздуха
в воду (с2/с1 * 4,3), то к2 Icos у I = Bл/Х J [ sin2 a - (сх/с2J]1/2 * ЗХ±.
Так, на длине у = кх волна во второй среде ослабляется в е3 «* 20 раз.
Заметим, что потока энергии во второй среде нет, поскольку вектор Q
неоднородной волны направлен вдоль границы раздела.
Из формул для коэффициентов V и vx видно, что они не
зависят от частоты и, следовательно, верны для негармонических волн,
например акустических импульсов.
Импедансные поверхности. Свойства отражающих поверхностей
можно характеризовать их удельным входным импедансом z,
представляющим собой отношение давления р на границе раздела сред к
нормальной составляющей скорости частиц vn. Из соотношений р =
= /сарФ и v = -grad<l> получаем v = /gradp/(o)p). Для плоской волны,
распространяющейся в направлении, образующем угол а с осью у,
составляющая колебательной скорости vn = fcyp/((op) = ± кр cos <х/(сор) =
= ± [ Р/(Рс)] cos а, откуда импеданс
p/vn = ±pc/cosa. A.75)
При a = 0 выражение A.75) совпадает с соотношением A.24),
определяющим удельный импеданс прямой (знак „+") и обратной (знак
„-") плоских волн. Таким образом, в общем случае наклонного
падения волны удельный импеданс определяется равенством A.75),
причем знак „+" соответствует распространению волны в положительном
направлении нормали к границе, а знак „-"- в отрицательном
направлении.
Коэффициент отражения можно выразить через удельные импедан-
сы граничных сред z± = р^/соз а и z2 = p2c2/cos у, введя их в
соотношения A.70):
V = (z2~z1)/(z2 + z1). A.76)
В частном случае большой разницы импедансов, например при
С2 ^ ci (пористая резина, пенопласт), cosy = [1 - {с2/схJ sin2 a]1/2 * 1,
г2%Ргс2> т.е. импеданс границы не зависит от угла преломления.
Это означает, что при всех углах падения волны на границу раздела
сред во вторую среду волна проникает практически только
- 31-
в направлении нормали к границе. При
этом коэффициент отражения
z2 cos a - pic1
z2cosa + p1c1
A.77)
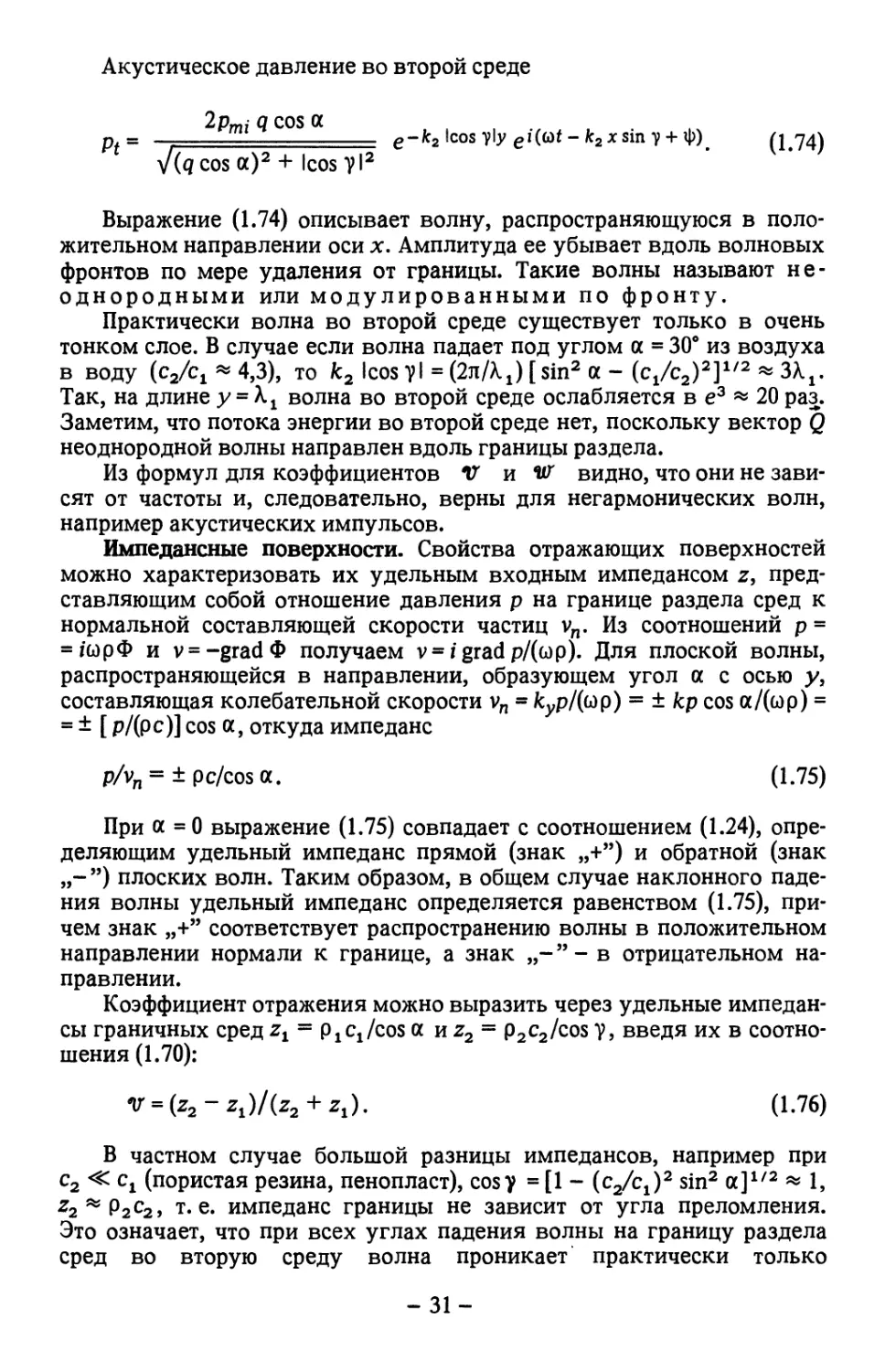
Рис. 1.5. Схема отражения
и прохождения волны
через промежуточный слой
В общем случае импеданс отражающей
среды не равен р2с2, а является
комплексной величиной. Когда смещение в точке
граничной поверхности определяется
звуковым давлением в этой точке,
используют понятие нормального удельного
импеданса. Коэффициент отражения в
общем случае также находят по формуле
A.77). Среды, акустические свойства
которых характеризуются нормальным импедансом, называют им-
педансными.
Прохождение волны через промежуточный слой. Рассмотрим
прохождение плоской волны через слой с плоскопараллельными
границами. Свойства слоя // материала характеризуются волновым
сопротивлением р2с2, среды J- р^ (рис. 1.5). При падении плоской волны под
углом а в верхнем полупространстве (у > 0) давление определяют
суммой
Pi + Pr = Pmi ехр [ Чкг (х sin a - у cos a)] +
+ Pmr e*P [ -*i (* sin a + у cos a)].
В слое // материала устанавливается система волн с давлением
Pi + P'r = Pmi ехР I -ft2(* sin v - У cos у)] +
+ pmr exp [ -ik2(x sin у + у cos у)].
В нижнем полупространстве (y<-h) существует прошедшая волна,
давление в которой
Рхe Pmt exp [ -ife1(x sin a - у cos a)].
A.78)
Имеем четыре неизвестные величины ртг, pmi, pmr, pmt. Записывая
условия непрерывности давления и колебательной скорости на границах
у = 0 и у = -Л и учитывая закон преломления к1 sin a =k2 sin у,
получаем систему четырех уравнений. Решение этой системы
- 32-
относительно модулей коэффициентов отражения °V = pmr/pmi и
прохождения W -pmt/Pmi Дает (для угла падения, не превышающего
угол полного внутреннего отражения)
l(g- l/<j)sin(fc2ftcosv)l
V4cos2(fc2h cosV) + (q + l/qJ sin2 (k2h cos f)
A.79)
I "UT I = 2 [4cos2 (k2h cos Y) + (q + l/qJ sin2 (k2h cos V)]'1'2,
где<? = р2с2 cosa/fc^ cost).
Из соотношений A.79) следует, что полное прохождение волны
через слой ( V = 0) будет при двух условиях: q = 1 (когда a = у = 0,
P2c2 = Pici); k2h cosy =nn или h = nX2/Bcos7) (когда a =7=0,
толщина слоя равна целому числу полуволн в нем). В случае h = 0 или
p2c2 = Pici (отсутствие слоя) коэффициент *1Г =0прир2с2 cos a =
= рхсх cosy - это условие прозрачности границы раздела двух сред при
наклонном падении [см. формулы A.70)]. Условие прозрачности слоя
толщиной h = nk2/2 можно пояснить так. В слое в результате
наложения многократных отражений устанавливается стоячая волна. Если
p2c2<Pici> на границах слоя образуются пучности давления, если
P2c2>Pici " пучности скоростей. В обоих случаях колебания слоя
происходят на резонансной частоте, и слой излучает плоские волны
с амплитудой падающей волны (pmt = pmz- без учета затухания в слое),
распространяющиеся в отрицательном направлении оси у.
Если выполняется равенство k2h = Bп +*1)л/2 или h = Bп + 1)А.2/4,
т. е. толщина слоя равна нечетному числу четвертей длины волны
в нем, коэффициент отражения принимает наибольшее значение
I V 1тах = \q2 - II l{q2 + 1), а коэффициент прохождения -
минимальное I *ur lmin = 2q/(q2 + 1). При р2с2 = pxq V тах = 0 и 1хГ min = 1,
следовательно, слой прозрачен при любых значениях h/k2. Если q -* 0
или q -¦ °°, то V тах -* 1 и W min ¦¦ 0. Это означает, что при большом
различии волновых сопротивлений слоя и окружающей среды слой
толщиной h = Bп + 1)К2/4 полностью отражает падающую волну.
Слой становится прозрачным и при fc2 h <C 1 или h <C А.2, тогда
I W 1-^1, т. е. через тонкий слой звук проходит практически
полностью (если только значения р2с2 ир1с1 не слишком различаются,
иначе слой может существенно отражать). Звукопрозрачность тонкого
слоя объясняется тем, что обе его границы колеблются практически
в одинаковой фазе (h ^ \2), излучая волну в отрицательном
направлении оси у, как пластинка резонансной толщины.
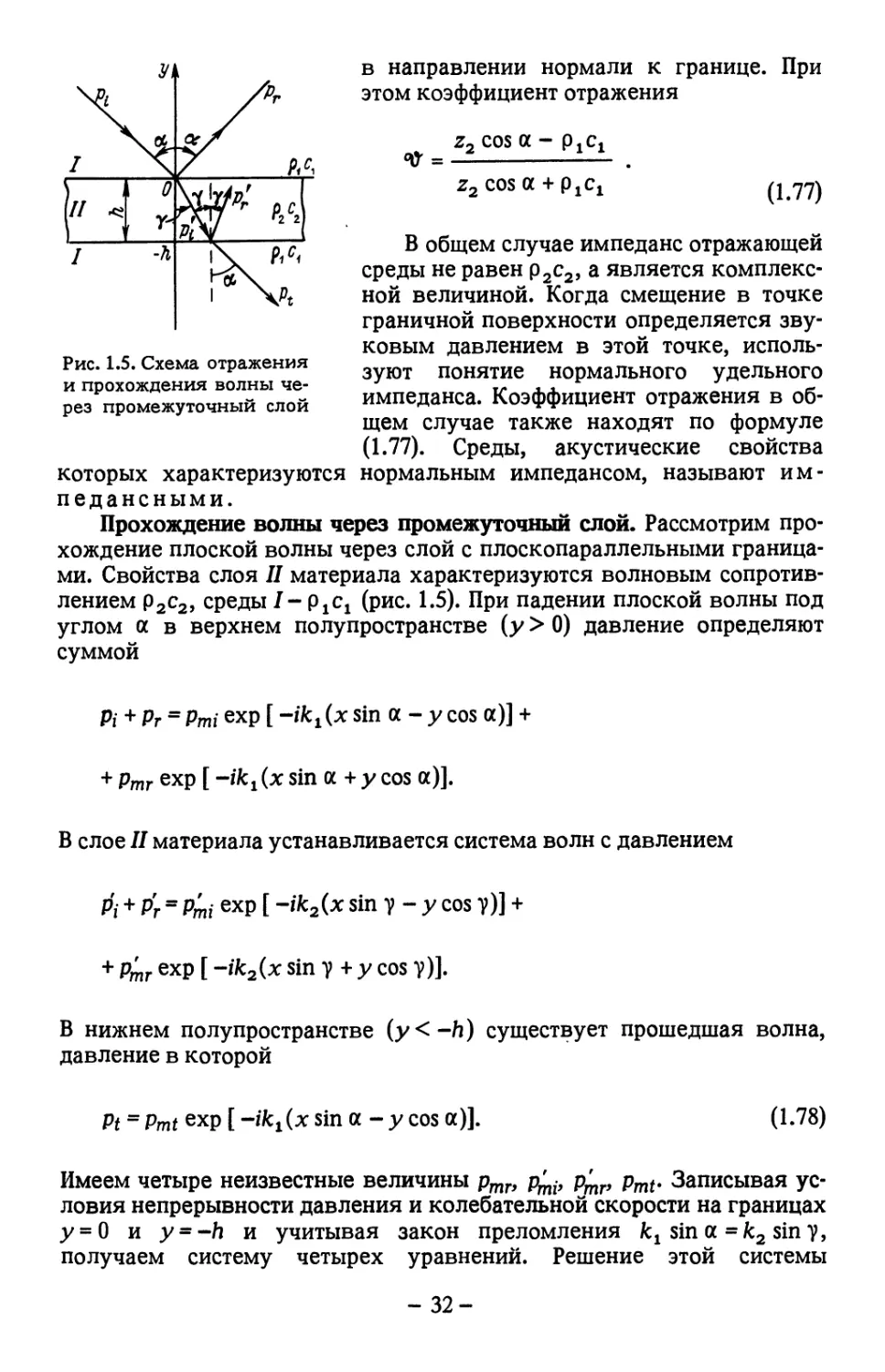
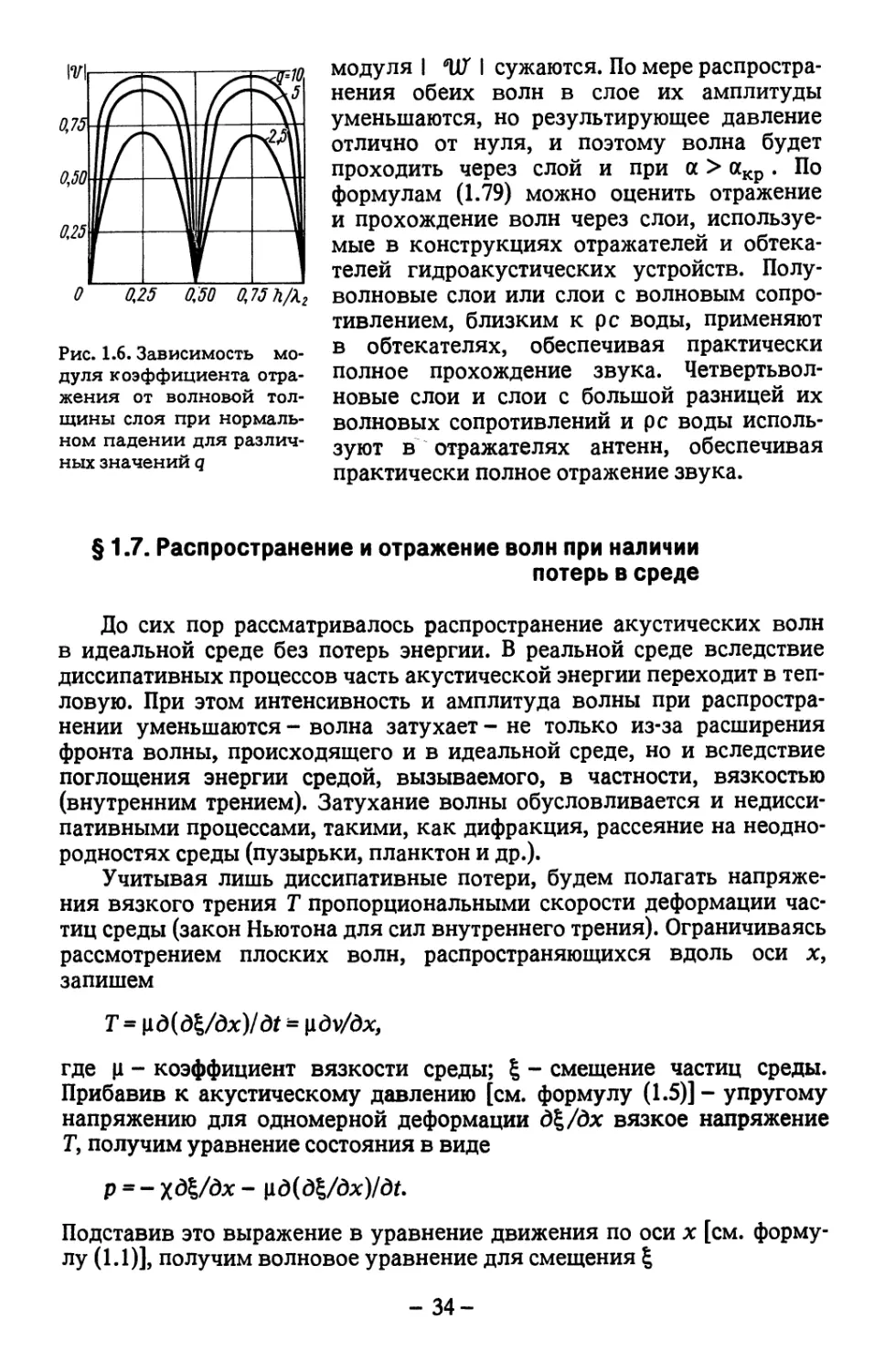
Зависимость коэффициента отражения от волнового размера
толщины слоя при a = 0 для некоторых значений q показана на
рис. 1.6. Когда на толщине слоя укладывается целое число полуволн,
отражение отсутствует и звук полностью проходит через слой-
это полуволновые резонансы. Видно, что с увеличением отношения
волновых сопротивлений слоя и среды модуль I V I в области резо-
нансов изменяется резче и, следовательно, резонансные кривые
3-614 - 33 -
0,25 ОМ 0,75 П/кг
Рис. 1.6. Зависимость
модуля коэффициента
отражения от волновой
толщины слоя при
нормальном падении для
различных значений q
модуля I *W I сужаются. По мере
распространения обеих волн в слое их амплитуды
уменьшаются, но результирующее давление
отлично от нуля, и поэтому волна будет
проходить через слой и при а > акр. По
формулам A.79) можно оценить отражение
и прохождение волн через слои,
используемые в конструкциях отражателей и
обтекателей гидроакустических устройств.
Полуволновые слои или слои с волновым
сопротивлением, близким к рс воды, применяют
в обтекателях, обеспечивая практически
полное прохождение звука.
Четвертьволновые слои и слои с большой разницей их
волновых сопротивлений и рс воды
используют в отражателях антенн, обеспечивая
практически полное отражение звука.
§ 1.7. Распространение и отражение волн при наличии
потерь в среде
До сих пор рассматривалось распространение акустических волн
в идеальной среде без потерь энергии. В реальной среде вследствие
диссипативных процессов часть акустической энергии переходит в
тепловую. При этом интенсивность и амплитуда волны при
распространении уменьшаются - волна затухает - не только из-за расширения
фронта волны, происходящего и в идеальной среде, но и вследствие
поглощения энергии средой, вызываемого, в частности, вязкостью
(внутренним трением). Затухание волны обусловливается и недисси-
пативными процессами, такими, как дифракция, рассеяние на неодно-
родностях среды (пузырьки, планктон и др.).
Учитывая лишь диссипативные потери, будем полагать
напряжения вязкого трения Г пропорциональными скорости деформации
частиц среды (закон Ньютона для сил внутреннего трения). Ограничиваясь
рассмотрением плоских волн, распространяющихся вдоль оси х,
запишем
Г= \id{dt/dx)/dt = \idv/dx,
где |i - коэффициент вязкости среды; ? - смещение частиц среды.
Прибавив к акустическому давлению [см. формулу A.5)] - упругому
напряжению для одномерной деформации д\/дх вязкое напряжение
Г, получим уравнение состояния в виде
Р — Хд\/дх - [id(d?/dx)/df.
Подставив это выражение в уравнение движения по оси х [см.
формулу A.1)], получим волновое уравнение для смещения ?
-34-
(!-80)
X + И Po •
dx2 df\ dx2 / ° dt2
Для синусоидальной волны ?(x, t) = ?(x) exp (/(Of) получим
(X + т^ШМх2 + Poto2?(x) = 0. A.81)
Как видим, эффект поглощения формально можно учесть
введением комплексного модуля объемной упругости х = X + ^Ц»
комплексной^ скорости звука с= vX/Po и комплексного волнового числа к =
* со/с = со VPo/X. Уравнение A.81) принимает вид
по форме оно похоже на уравнение Гельмгольца A.15)^ и,
следовательно, его решением является функция ? =А exp(-ffex)+5exp(/fcx),
описывающая суперпозицию прямой и обратной плоских волн. Для
прямой волны с^нулевой начальной фазой (В = 0) ? = ?max exp (-i?x),
где ?тах в 6 @)в Я. Тогда решение уравнения A.82) имеет вид функции
где fc
В морской среде, являющейся маловязкой, упругие силы
преобладают над вязкими, поэтому можно принять Сд)ц <С х и выражение для
Е упростить:
где Р =fccon/Bx) = w2|i/Bpoc3). Теперь решение уравнения A.82) для
прямой волны принимает вид
^(^O=Uaxexp[/(a)f-kx)]=|maxexp(-px)exp[/(a)f-fcx)]. A.83)
Амплитуда волны уменьшается (при р > 0) с увеличением расстояния
по экспоненциальному закону. Множитель Р является коэффициентом
пространственного затухания* и определяет расстояние х = 1/р, на
котором амплитуда волны уменьшается в е раз. При х = 0 амплитуда
волны ?тах = 1тах0 и ?тах(*)= ?тах0 е*р (*" Р*)- Зависимость амплитуды
волны от времени имеет вид lmaX@ ¦ |тахо ехр (- $cot), где с0 -
скорость распространения волны.
¦Правильнее назвать р коэффициентом поглощения, однако в
гидроакустике принято понятие „коэффициент затухания", включающее в себя все
причины потерь акустической энергии, в том числе за счет рассеяния на неоднород-
ностях среды и дифракции волн.
3* - 35 -
Поскольку амплитуды колебаний параметров поля плоских волн
связаны линейными соотношениями, экспоненциальный закон
затухания с коэффициентом Р справедлив для любого параметра:
колебательной скорости, акустического давления, потенциала скоростей и т. д.
Энергия же волны пропорциональна квадрату ее амплитуды, поэтому
интенсивность звука убывает с увеличением расстояния по закону
/ = 70ехр(-2рх), A.84)
где 2|3 - коэффициент затухания по энергии, Нп/м.
Затухание звука часто измеряют в логарифмических единицах
(децибелах, неперах). Разность уровней ЛГ, дБ, интенсивностей Jo и J
равна N = 10 lg (Jo/J) = 20p x\ge = 8,68рх. Откуда Р = ЛГ/8,68. Разность
уровней ЛГ, Нп, равна N = In {р1/р2)9 следовательно, 1Нп = 8,68дБ.
Равенство A.84) можно записать в виде
j-Vio-0»1**, О-85)
где р выражено в дБ/м.
Отражение плоской волны от поглощающей среды. Примем
скорость звука в отражающей среде комплексной и равной с2 = с2 + щ =
= с2A + /Т]с); мнимая часть учитывает потери во второй среде,
коэффициент цс называют коэффициентом потерь. Обозначая р2/рх =
= т, cjc2 = пи вводя комплексный показатель преломления п в
первое равенство A.70), получаем
V = (т cos а - д/п2 - sin2 а)(/7? cos а + д/п2 - sin2 а).
Обычно Лс^1 и можно принять п = с1/[с2A+1Т]С)] % схA - 1Лс)/с2;
п2 * nj(l - 2/Пс) = л2A + 2/Лп), где п0 = сх/с2\ Лп - коэффициент
потерь по показателю преломления. В справедливости равенства цп =
= - Лс легко убедиться. В самом деле, п = по/A + /Лс) = п - гпх\с =
() /(?)
Теперь коэффициент отражения
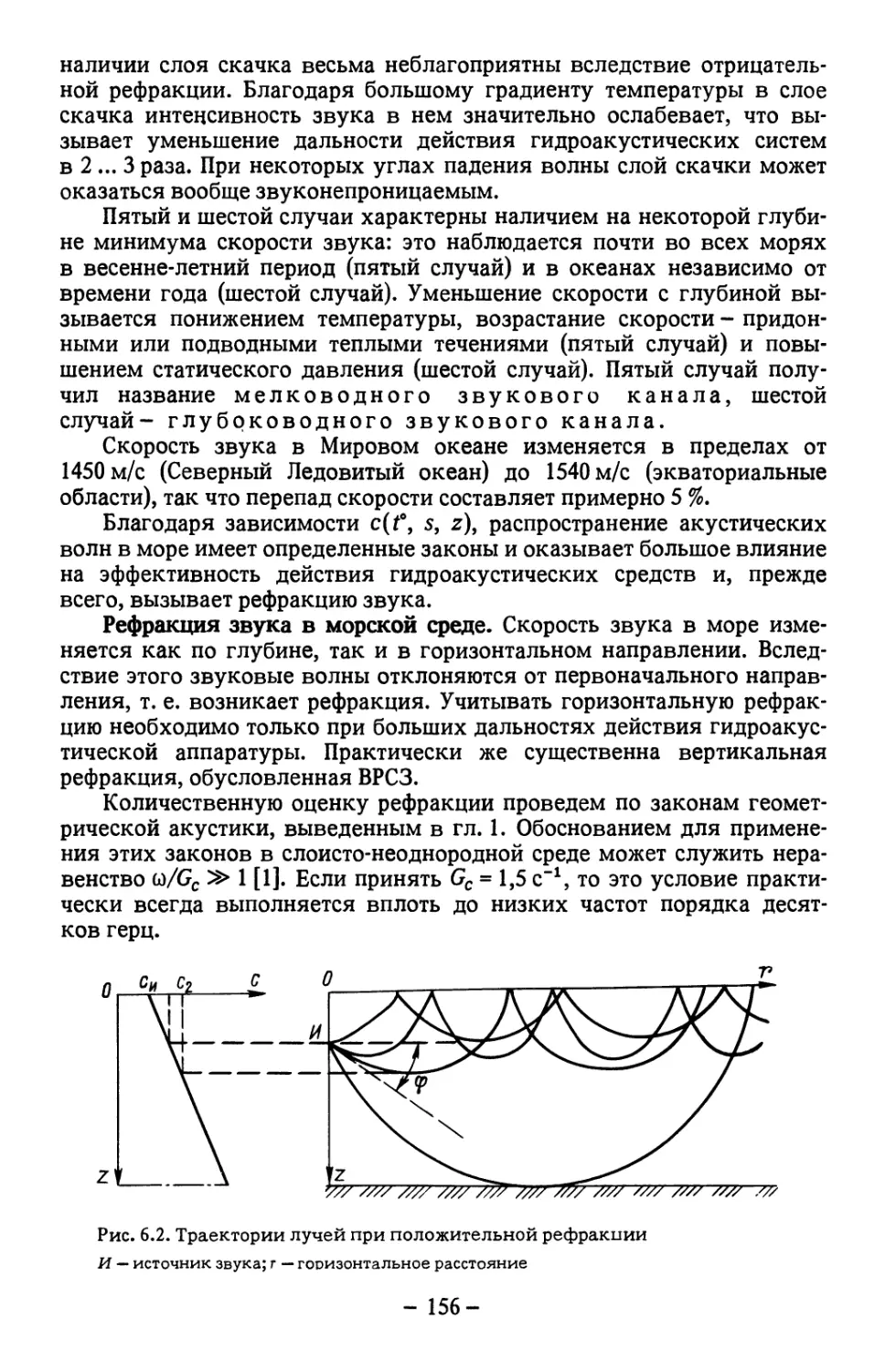
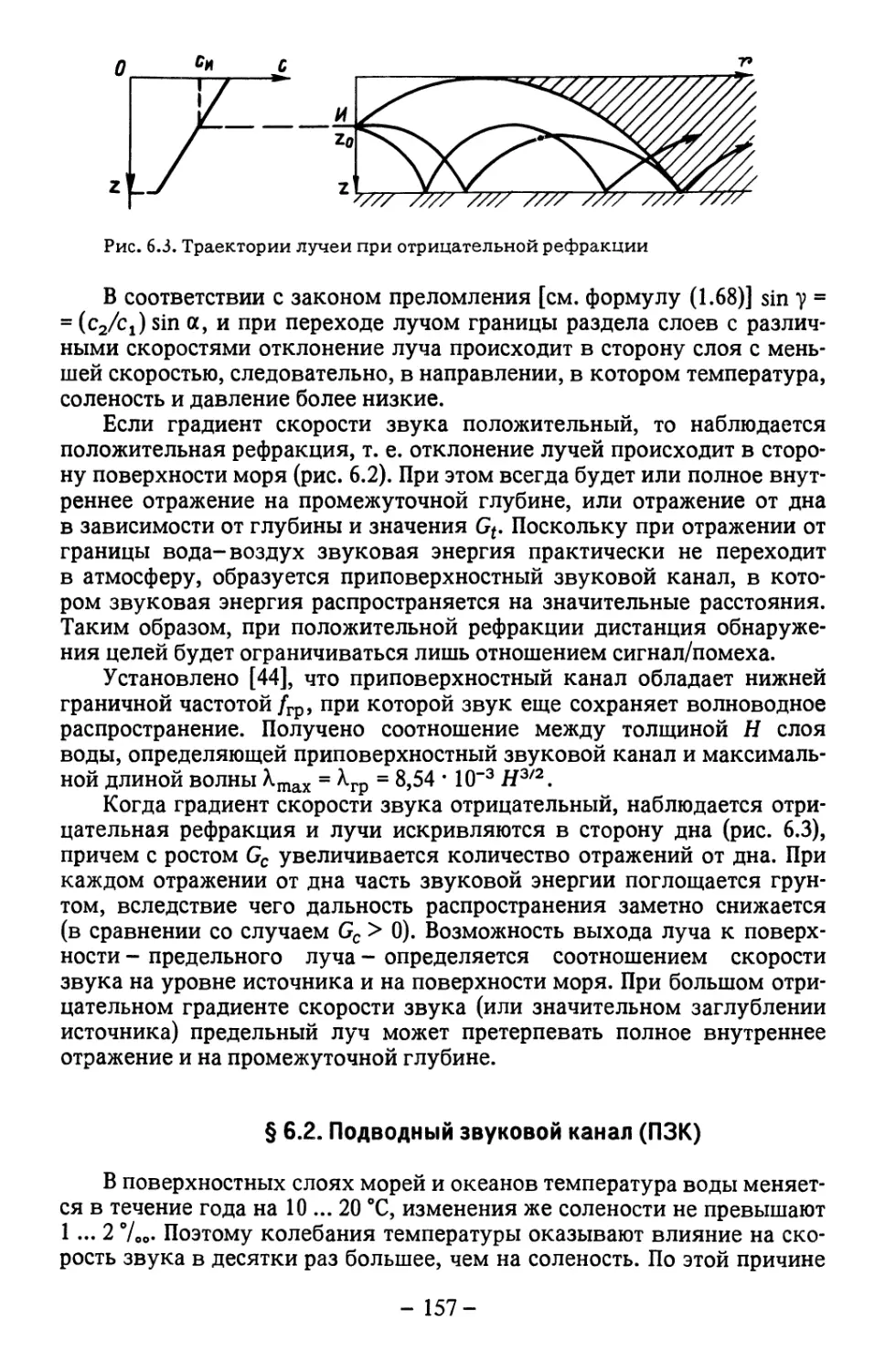
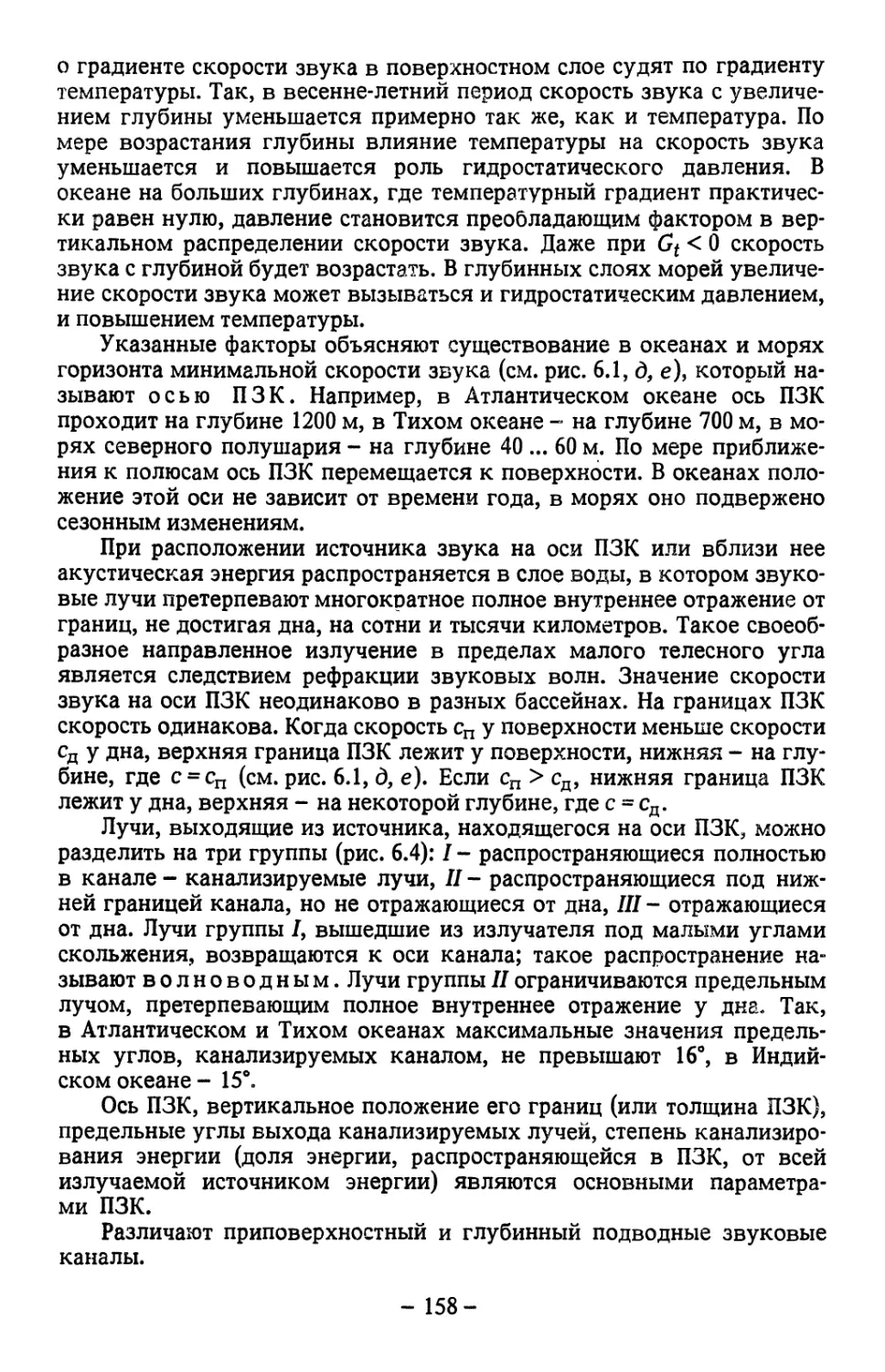
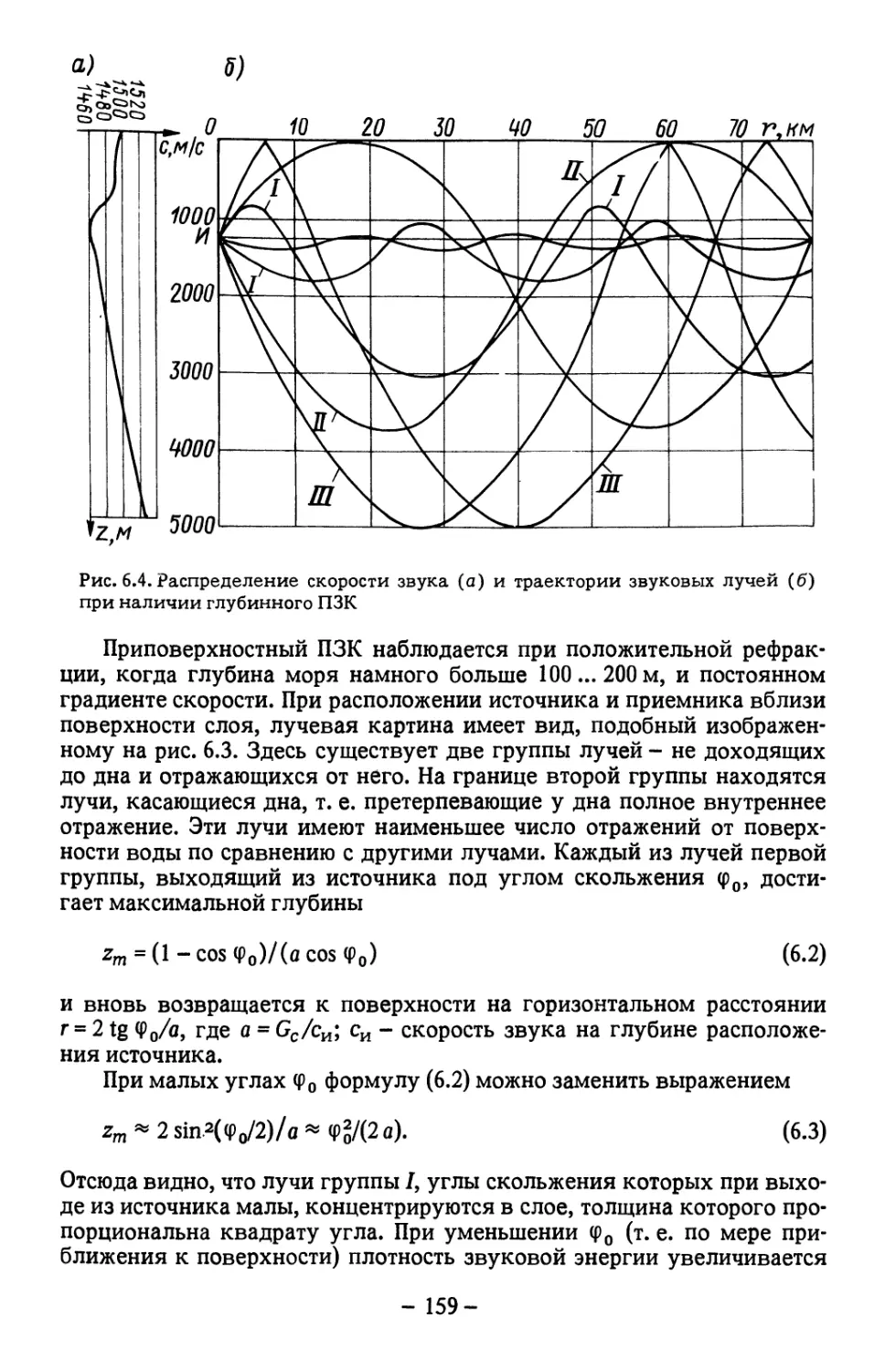
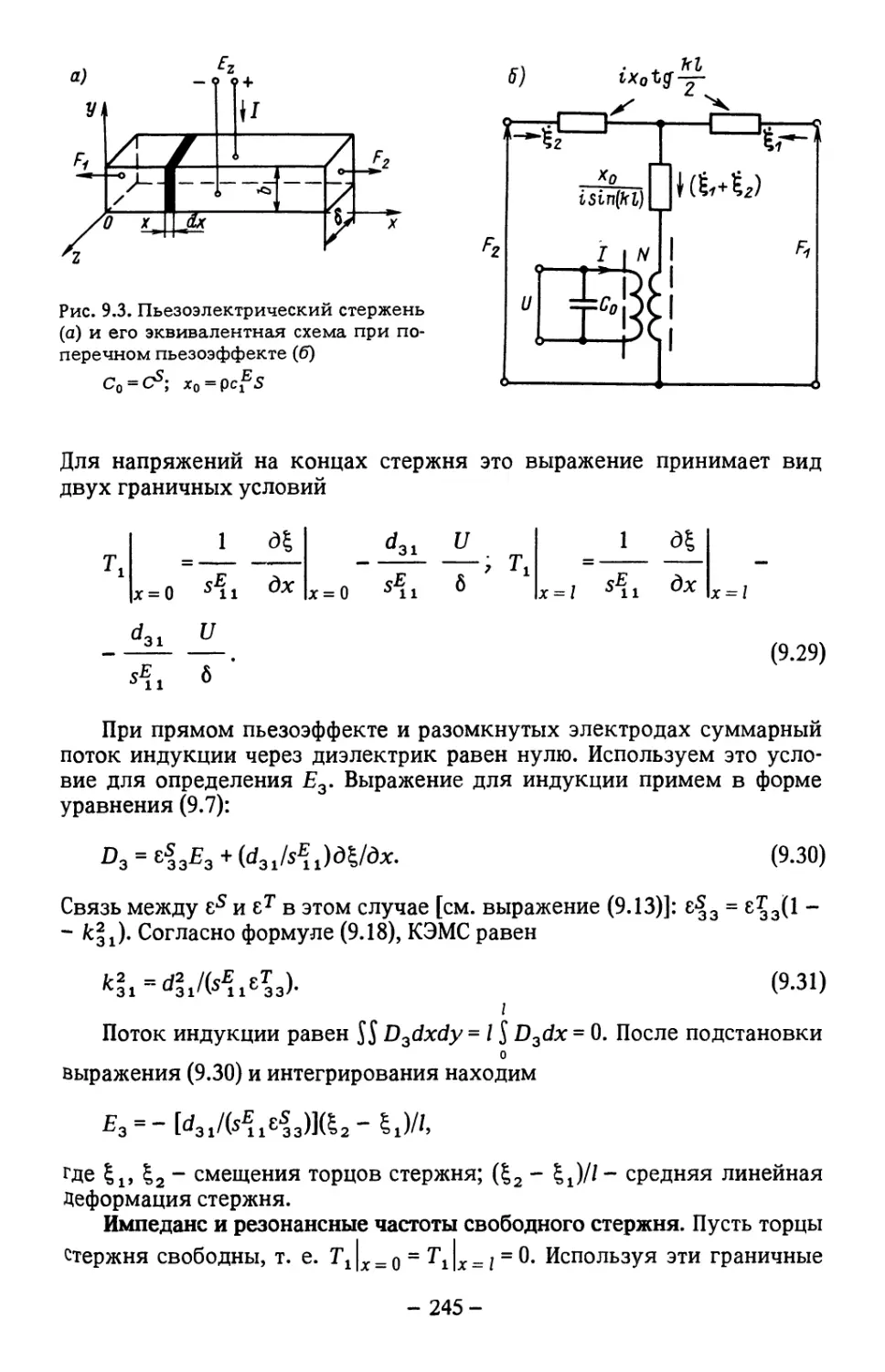
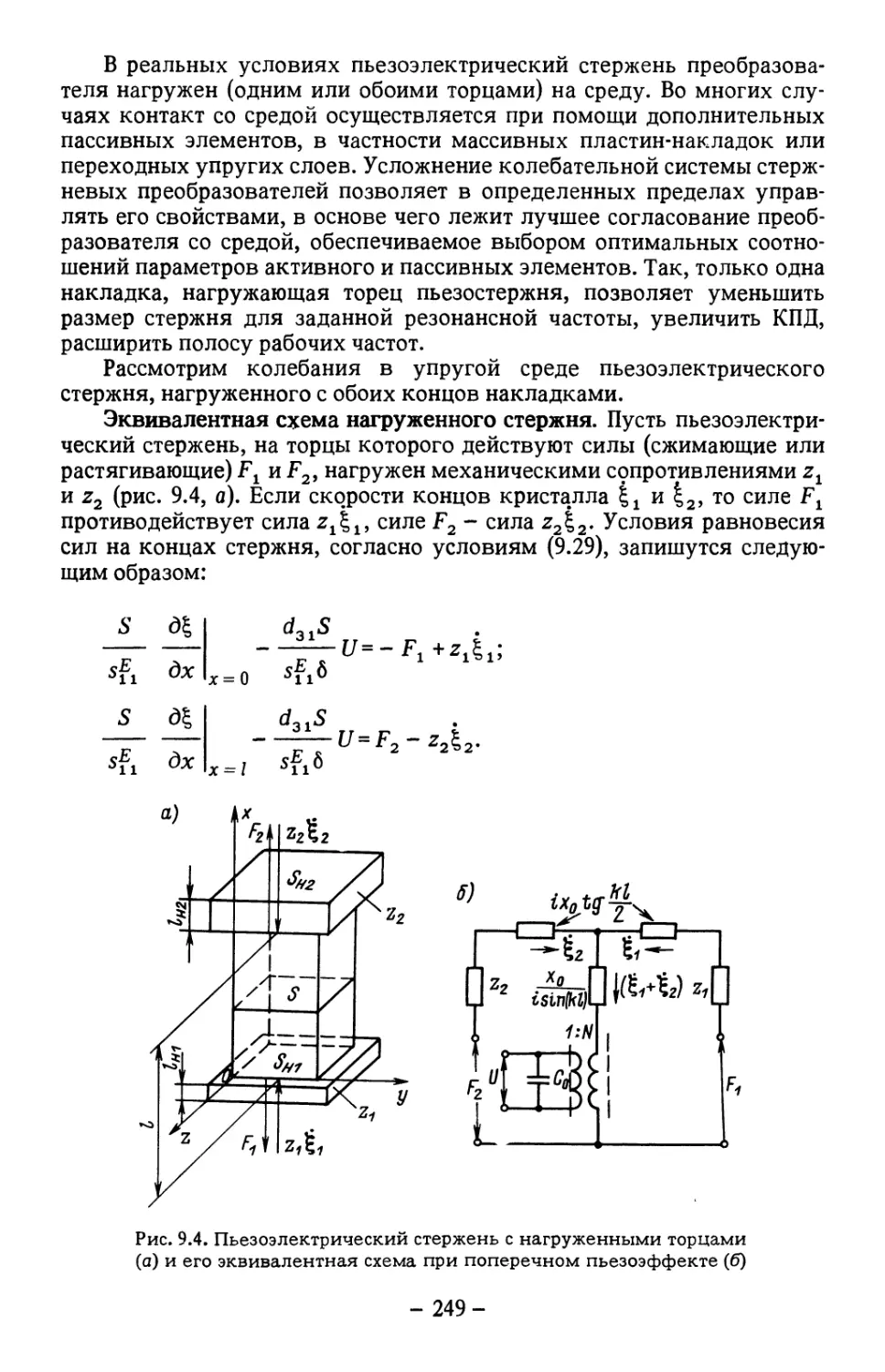
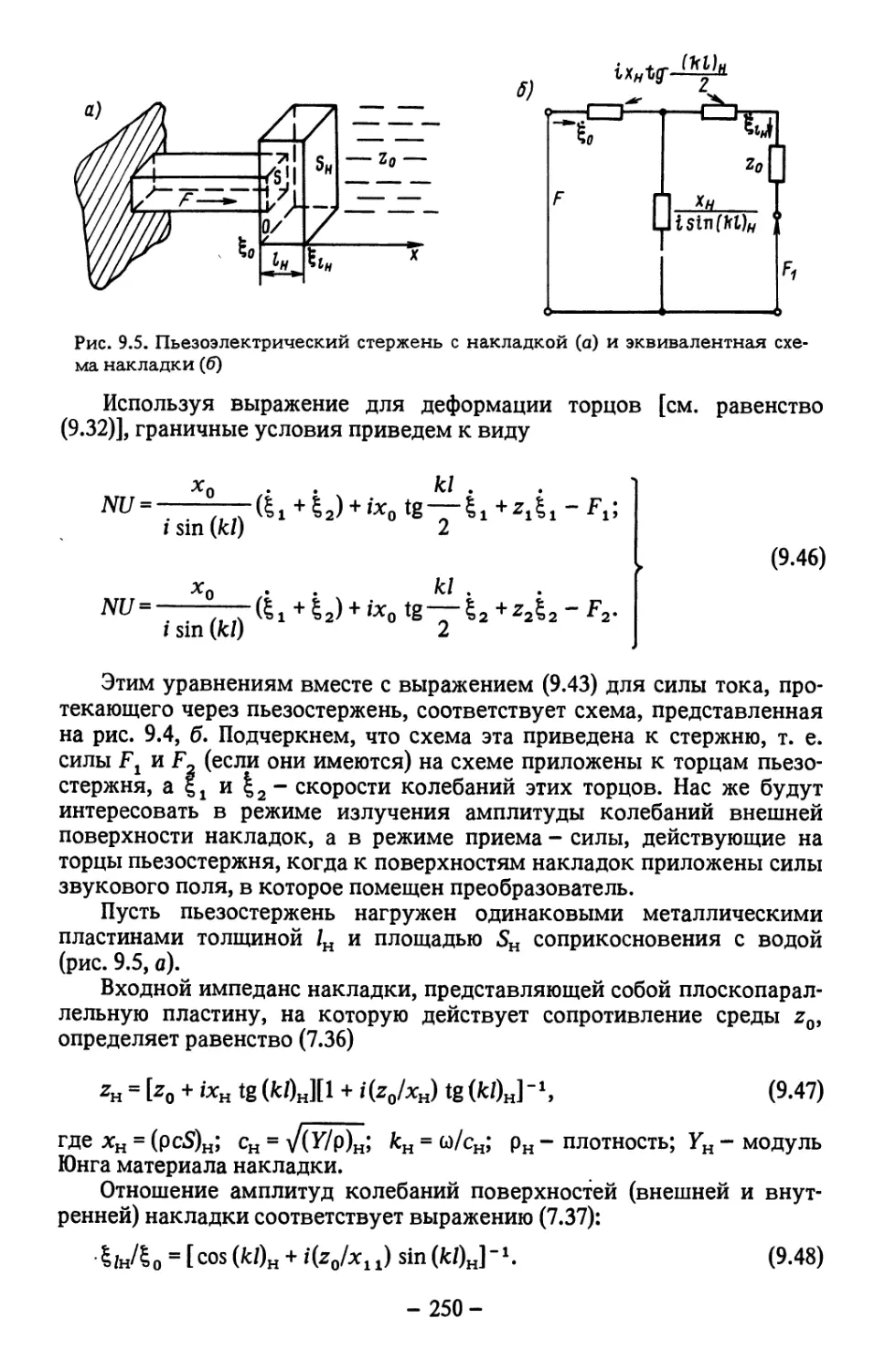
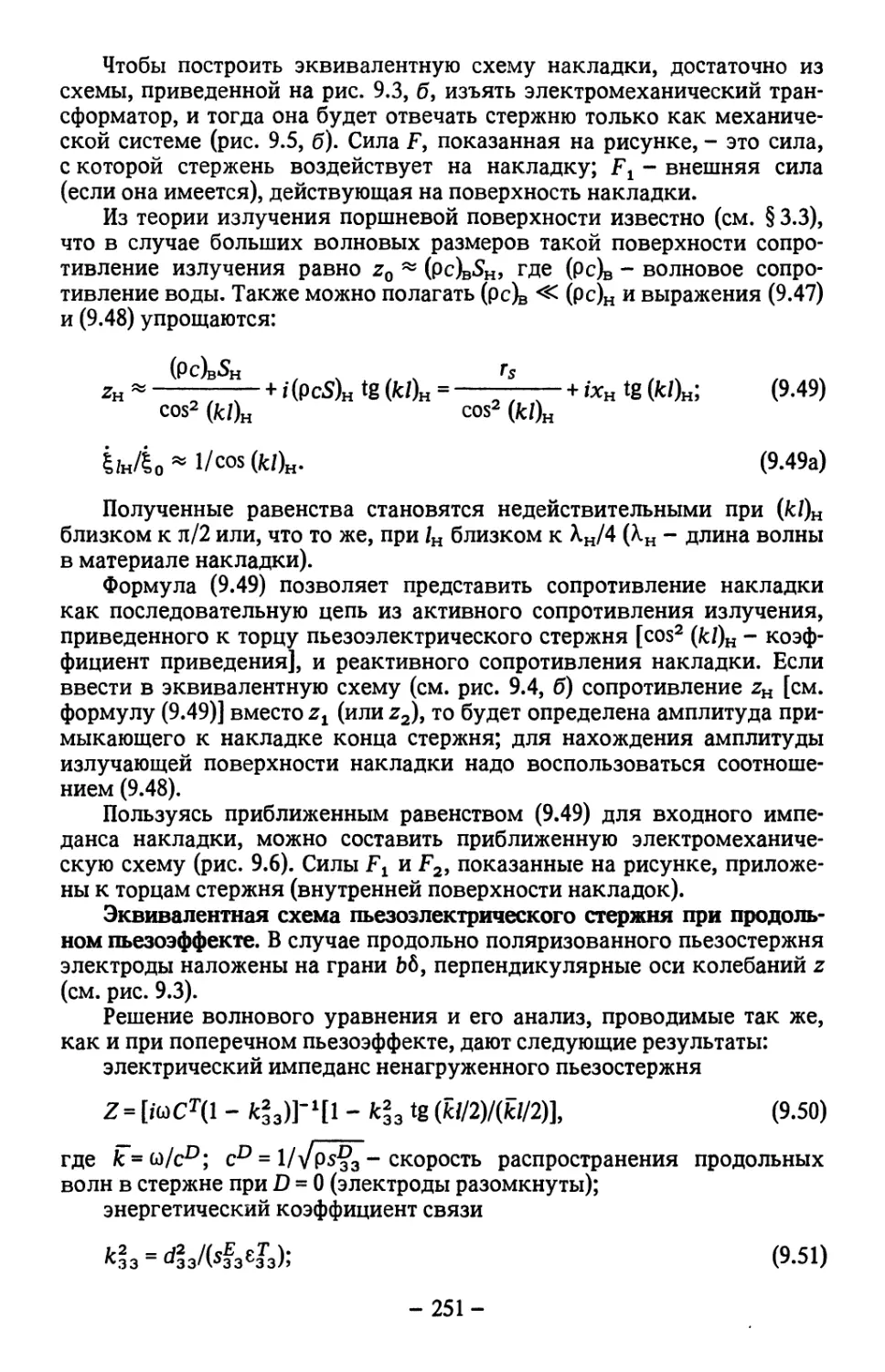
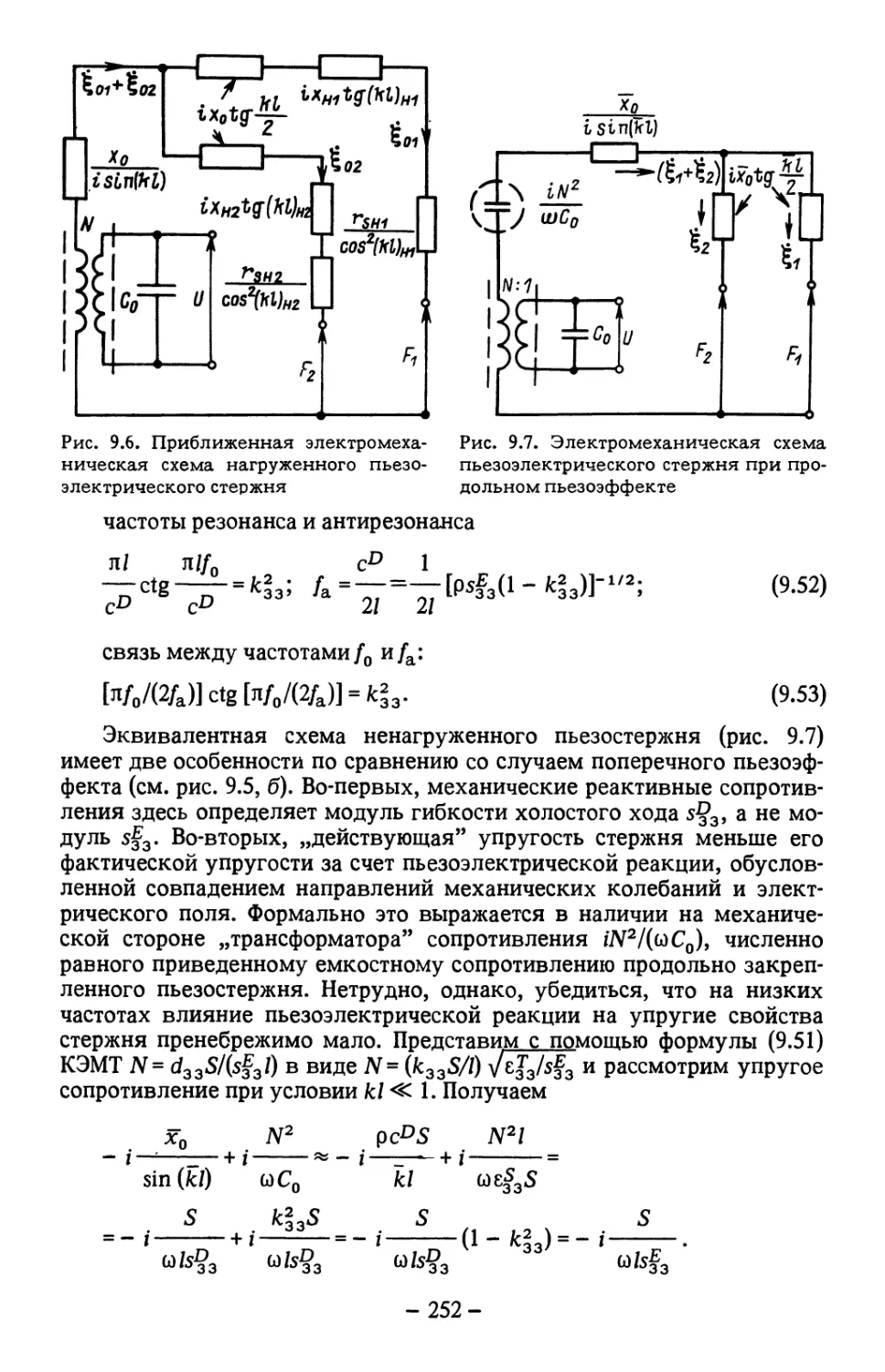
ПТ = (т cos а - Ja + ib)(m cos а + •
где а = Ло - sin2 а; b = 2nl цп. Далее следует воспользоваться
формулой для извлечения квадратного корня из комплексного бинома.
Отражение плоской волны от поглощающего слоя. Для того чтобы
учесть потери в слое, надо в формулах A.79) скорость звука с2 и ?ол-
новое число к2 записать в комплексном виде: Cj = с2A + /лс)> ^2 =
= fc2(l + %)> откуда получаем /^ = со/ [ (^A +Лс)Ь Лс =""Л^. Обычно
Л с <? 1, поэтому можно принять к2 % со/Сг.
На рис. 1.7 приведены кривые зависимостей модуля
коэффициента прохождения по давлению через слой от волновой толщины слоя
при 92c2/(9iC1) = 5 и различных потерях [48]. Из графиков видно,
что с увеличением активных потерь в слое модуль I *ur I уменьшается,
-36-
при значениях т]?<0,1 и
тонких слоях {hA-2 < 0,7)
потери возрастают в
основном в резонансных
областях. При щ> 0,1
коэффициент прохождения
существенно уменьшается даже
при малых hA2J а резонан-
сы отсутствуют.
Формулы для
коэффициентов отражения и
прохождения, полученные для
границ раздела жидких сред
или для жидкого слоя,
пригодны и для некоторых
твердых сред (веществ).
Так, в резине и мягких
пластмассах возбуждаются только продольные волны, и эти материалы
в акустическом отношении подобны жидкости. Кроме того,
упомянутые формулы справедливы и для других сред и пластин при
нормальном падении волн, так как в этом случае сдвиговые волны не
возникают.
Рис. 1.7. Зависимость модуля
коэффициента прохождения от волновой
толщины слоя при различных значениях
коэффициента потерь л/с
§ 1.8. Об условиях применимости законов
геометрической акустики
В предыдущих параграфах предполагалось, что поверхность
раздела сред, от которой происходит отражение, плоская и бесконечно
протяженная. Теперь необходимо установить, как полученные
закономерности отражения можно применять к реальным отражающим
поверхностям, обладающим ограниченными размерами. Из общих
соображений следует, что поверхность ограниченной протяженности по
своим свойствам тем меньше отличается от бесконечной, чем больше
ее размеры и чем ближе к ней находится точка наблюдения. В этом
случае влияние близко расположенных участков поверхности на
отраженное поле значительно больше, чем периферийных элементов,
и картина отраженного поля практически не зависит от
дифракционных явлений на краях поверхности. Экспериментально установлено*
что для выполнения условий образования плоской отраженной волны
размеры поверхности должны быть не менее двух длин волн. При
малых волновых размерах отражающей поверхности волна огибает ее
благодаря свойству дифракции, и плоская отраженная волна не
возникает.
При оценке условий применимости геометрической акустики
вводят в рассмотрение эффективную зону, отраженное поле которой
почти не отличается от поля, которое отражает бесконечная плоскость.
В работе [4] показано, что если размеры отражающей поверхности не
-37-
меньше размеров эллипса с полуосями
1
cosao
Рис. 1.8. Схема
ражения
зеркального от-
то второй член в выражении A.87)
будет меньше 0,03. Расстояния Ro и R1
показаны на рис. 1.8.
Ранее принимали падающую на
поверхность волну плоской. В действительности, как будет показано
ниже, любые источники, начиная с некоторого расстояния, излучают
сферические волны. Для решения задачи об отражении сферической
волны от плоскости раздела сред волну раскладывают на плоские
волны, падающие на границу под различными углами a. Потенциал
отраженной волны получают путем суперпозиции плоских волн,
образующихся при отражении всех составляющих разложения первичного
поля. Для каждой плоской волны коэффициент отражения <\r (a)
определяют, используя формулу A.70):
*V (a) = (m cos a - y/n2 - sin2 a) (m cos a + Jn2 - sin2^), A.86)
где m = p2/p!; n - Ci/c2 >a ~ угол падения волны.
Набег фазы волны произойдет на пути от источника И до границы
и от границы до точки наблюдениям (см. рис. 1.8). Интегрирование по
всем углам падения приводит к следующему выражению для
потенциала отраженной волны на больших волновых расстояниях [5]:
Фг
V(a0) ехр (-
1
(a0)]} , A.87)
где V (а0) - коэффициент отражения для угла падения а = а0;
^(ао)= 0,5 [ V (а0) + V (а0) ctg а0 ]; штрихи означают производные
по углу а.
Если второе слагаемое в фигурных скобках равно нулю, то
сферическая волна будет плоской. Это возможно при со -* °° или при
независимом от угла падения коэффициенте V , в частности если V = ± 1,
что соответствует абсолютно жесткой или абсолютно мягкой
отражающей границе. Выражение для отраженного поля в случае со -»<»
Фг=
A.88)
называют приближением геометрической акустики. В этом
приближении можно представить, что отраженная волна создается
источником Я', являющимся изображением действительного источника И
в зеркале разделяющей плоскости (см. рис. 1.8); источник И' называют
зеркальным или мнимым. Коэффициент отражения не зависит
-38-
от а также при п = 1 (скорости звука в
граничащих средах одинаковы): Ф =
= (т - 1)/(т + 1). В этом случае
применение формул геометрической акустики не
вносит никакой погрешности.
Анализ функции F(a0) показывает,
что, если расстояние от приемника М до Рис. 1.9. к пояснению кри-
границы раздела сред велико в сравнении терия Рэлея
с длиной волны, вторым слагаемым в
уравнении A.87) можно пренебречь и определять поле в лучевом приближении.
Граница раздела сред предполагалась плоской. В действительности
она может иметь неровности. Оценим степень неровности, при которой
еще можно пользоваться приближением геометрической акустики.
Пусть неровности, даже если они большие по сравнению с длиной
звуковой волны, достаточно плавные. Тогда можно считать отражения
от любой точки поверхности зеркальными, т. е. как от бесконечной
плоскости, касательной в рассматриваемой точке к неровной
поверхности. Рассмотрим это явление на примере поверхности с
периодическими неровностями, имеющими синусоидальный профиль (рис. 1.9).
Луч А О, составляющий с идеальной плоскостью угол й, отражается по
правилам геометрической акустики, т. е. по направлению ОВ. При
падении луча CD под тем же углом скольжения на наиболее
выступающую часть неровности (точка D) между лучами АОВ и CDE образуется
разность хода 2Н sin tf.
Согласно Рэлею [27], поверхность отражает зеркально, если
разность хода не больше четверти длины волны:
2Hsind<k/4. A.89)
Таким образом, при скользящем падении (О -¦ 0) волна отражается
зеркально при любом волновом размере Н/к неровности. При малых
углах скольжения и низких частотах зеркальность отражения
сохраняется при сравнительно больших неровностях. В случае 90° > 0 > 0
при падении плоской волны образуются помимо зеркально отраженной
волны рассеянные плоские волны, бегущие в дискретных
направлениях. При крутом падении (tf -> 90°) или большом значении Н/к волна
при отражении разбивается на бегущие в различных направлениях
частичные волны, т. е. рассеивается. За пределами соотношения A.89) по
мере уменьшения Н/к диапазон углов скольжения увеличивается,
и при некотором значении отражение становится полностью
диффузным. Например, для А. =3 м (/=500 Гц) и О = 10° „допустимая" (для
зеркального отражения) амплитуда неровности составляет Я%1 м.
При к = 7,5 см (/= 20 кГц) и д = 5° отражение от поверхности с
неровностями Я > 10 см уже будет отличаться от зеркального.
В случае падения волны на статистически неровную поверхность
рассеивание происходит по всем направлениям.
-39-
Глава 2. МЕТОДЫ РАСЧЕТА
АКУСТИЧЕСКИХ ПОЛЕЙ
Всякое тело, способное колебаться, в упругой среде излучает
акустические волны. Сущность процесса излучения состоит в
следующем. Поверхность колеблющегося тела, будучи в непосредственном
контакте с ближайшими частицами пограничного слоя среды,
вовлекает их в колебательное движение, которое благодаря упругому
взаимодействию между частицами передается более удаленным слоям.
В результате образовавшееся в пограничном слое переменное
(акустическое) давление будет распространяться в окружающей среде в форме
движения чередующихся сжатий и разрежений, т. е. возникают
акустические волны.
Таким образом, колеблющаяся поверхность, соприкасающаяся
с упругой средой, является источником излучения акустических волн.
Задача расчета акустического поля, создаваемого колеблющейся
поверхностью, формулируется так. Определить потенциал (давление)
поля в заданном объеме пространства по известному распределению
потенциала (давления) и его нормальной производной
(колебательной скорости) на излучающей поверхности.
Ниже рассматриваются интегральные методы решения задач
излучения и отражения волн. Некоторые математические выкладки
опущены, их можно найти в работе [48], по материалам которой написана
глава.
§ 2.1. Расчет акустических полей
по формуле Кирхгофа
Из теории поля известна теорема Гаусса-Остроградского: тройной
интеграл от дивергенции векторного поля U пространственной
области V равен потоку поля через поверхность 5, ограничивающую область
У. Положим и=иЧФ (и и = ФУи)9 где Ф и и-любые скалярные
функции, непрерывные вместе со своими производными до второго
порядка включительно во всей области V. Эти функции
удовлетворяют Второй формуле Грина, связывающей значения объемного и
поверхностного интегралов
Ш (иДФ - ФДи)с/7= Н (идФ/дп - Фди/дп)с/5, B.1)
V S
где п - внешняя нормаль к поверхности S* Если принять за Ф
потенциал скоростей поля источника колеблющейся поверхности, за и
вспомогательную функцию, причем Ф и и изменяются во времени по
гармоническому закону, а также потребовать, чтобы каждая из них
удовлетворяла уравнению Гельмгольца, то по формуле B.1) можно
определить значение функции Ф в любой точке М области V, если известны
-40-
Рис. 2.1. К пояснению формулы Кирхгофа
Rx — радиус-вектор произвольной точки поля; R —
радиус-вектор точки наблюдения М; г = \Rt — R\;
ФE)—потенциал скоростей на поверхности 5;
дФE)/сЗп —колебательная скорость на
поверхности 5
значения потенциала (акустического давления р = /озрФ) и ее
нормальной производной (колебательной скорости уп=-дФ/дп) на заданной
поверхности 5 (рис. 2.1). Потенциал в точке наблюдения М находят
с помощью интеграла Кирхгофа*
1 Г Г f дФ ехр(-//сг) д Г expHfcr)!
-Ф—I— 'IMS, B.2)
д
4л JJ I дп г дп
где г-расстояние от точки М до элемента dS; [ ехр (-//ег)]/г = и -
вспомогательная функция, имеющая особенность типа 1/г и
описывающая поле точечного ненаправленного источника.
Формула Кирхгофа дает точное решение волнового уравнения,
однако распределение давления и колебательной скорости по
излучающей поверхности известно только приближенно, в связи с чем
и результат вычисления по формуле B.2) также получается
приближенным.
Поясним смысл подынтегрального выражения в формуле
Кирхгофа. Произведение (дФ/дп)сE представляет объемную скорость dQ
элемента dS, а величина [ dQ/Dnr)] ехр (—zTcr) — потенциал скоростей
точечного источника, создающего сферическую волну [см. формулу
A.35)]. Таким образом, первое слагаемое в B.2) определяет потенциал
источников сферических волн. Можно показать [48], что производная
д [ ехр (-/fcr)/r ] /дп равна потенциалу, создаваемому дипольным
источником, т. е. двумя точечными источниками, колеблющимися в про-
тивофазе.
Следовательно, формулу B.2) можно трактовать как
математическую формулировку принципа Гюйгенса: всякое звуковое поле есть
суперпозиция волн сферических (монопольных) и двойных (диполь-
ных) источников.
Если точка наблюдения находится вне поверхности S излучающего
тела, то Ф (R) = 0.
Условие (принцип) излучения. Оно заключается в требовании,
чтобы источники, находящиеся на бесконечно удаленной поверхности,
¦Интеграл Кирхгофа называют также формулой Грина, поскольку она
является следствием Второй формулы Грина.
-41-
не оказывали влияния на звуковое поле. Такое условие
обеспечивает однозначность решения. Условие излучения записывают в виде
/ дФ \
lim + /?Ф = 0 или lim Ф =D(9, ф) exp (Чкг)/г.
\ дг I г-*00
Вторая запись означает, что поле на больших расстояниях от
произвольного источника определяется множителем exp {-ikr)/r,
выражающим расходящуюся сферическую волну, а функция Ъ@, ф) описывает
зависимость потенциала поля от направления, и ее называют
характеристикой направленности (ХН) источника. Следует отметить, что ХН
любого источника, начиная с достаточно больших значений г, не
зависит от расстояния г.
В случае двух измерений поле точечного (линейного) источника
описывают функцией Яо® (кг), соответствующей цилиндрической
волне. При кг» 1 функция Ханкеля второго рода пропорциональна
exp (-ikr)/ yfr [см. формулу A.39)], и условия излучения
приобретают вид
,-/ дФ \ exp(-iTcr)
lim Vr + /кФ = 0 или lim Ф = D(9) =— B.4)
г-"» \ дг I г-*« /
Формула Кирхгофа B.2) справедлива и для определения
потенциала поля, создаваемого поверхностью 5 источника в точке
наблюдения М вне поверхности 5, по известным значениям Ф и дФ/дп на ней
(внешняя задача). При этом Ф (#) = 0, если точка М находится внутри 5.
Дифференцирование выполняется по нормали, направленной внутрь
поверхности S и являющейся внешней относительно поверхности,
которой окружена 5, создавая замкнутый объем.
Когда потенциал зависит от двух координат, задача становится
двумерной, искомое поле определяют на плоскости, а значения Ф
и дФ/дп задают на некотором контуре /. Формула Кирхгофа в этом
случае
I Г Г дФ
4 J L дп
д 1
я°B) (/сг) - ф — я°B) (fcr) d/' B-5)
дп J
если точка М расположена вне контура /, ограничивающего
рассматриваемую область 5. Если точка М находится внутри контура /, то Ф(#) =
= 0. Дифференцирование в обоих случаях (трех- и двумерном)
производится по нормали, внешней по отношению к области, в которой
рассчитывается поле.
В отсутствие препятствий - тел из веществ, свойства которых
отличны от свойств среды, в однородной среде существует одна
- 42-
Рис. 2.2. К пояснению формулы Кирхгофа при
наличии отражающего (рассеивающего) препятствия
первичная волна, излучаемая колеблющейся поверхностью, на
которой заданы Ф и дФ/дп. Если колебания точечного источника Q
происходят при наличии препятствия - поверхности S (рис. 2.2), возникает
вторичная (рассеянная) волна, так что общее поле представляет собой
суперпозицию прямого (первичного) поля Фо и рассеянного
(отраженного) поля Ф$. В результате решения потенциал полного поля
exp (-ikr)
д Г exp (-ik)
[]|^ B-6)
где Ф0(Я0) = exp {-ikR0)/R0 - потенциал поля точечного источника,
излучающего в свободном (от поверхности S) пространстве сферически
симметричную волну. В частном случае абсолютно жесткой
поверхности 5 скорость дФ/дп и первое слагаемое подынтегральной функции
равны нулю; в случае абсолютно мягкой поверхности давление на
поверхности S, потенциал Ф и второе слагаемое под интегралом равны
нулю.
По приведенной выше формуле B.2) можно вычислить потенциал
скоростей, создаваемый излучающей поверхностью во внешнее
пространство при известных распределениях потенциала и нормальной
составляющей колебательной скорости. Поле, отраженное
поверхностью, можно представить как результат излучения некоторыми
фиктивными щеточниками, расположенными на этой поверхности.
Потенциал Ф$(#) отраженного поля определяется той же формулой B.2) или
вторым слагаемым B.6) с заменой Ф на Ф$.
Для двумерной задачи потенциал рассеянного поля определяют по
формуле B.5), в которой Ф заменяют на Ф$ .
§ 2.2. Поле плоской поверхности
Непосредственное использование формулы Кирхгофа для расчета
поля представляет значительные трудности, поскольку на излучающей
поверхности неизвестны и потенциал, и его нормальная производная,
-43-
и уравнение B.2) является по существу интегральным. Интеграл
Кирхгофа, определяющий поле излучающего тела произвольной
формы, для плоской поверхности можно привести к формулам,
дающим точное решение задачи при задании на поверхности только одной
величины Ф (т. е. р) или дФ/дп (т. е. vn). Такие формулы называют
интегральными формулами Гюйгенса.
Рассмотрим излучение бесконечной плоскости S в верхнее
полупространство (рис. 2.3). Дополняя излучатель до замкнутой
поверхности полусферой 2 и устремляя ее радиус к бесконечности, интеграл по
поверхности 2 будет стремиться к нулю (вследствие условия
излучения), и формула Кирхгофа будет содержать интегрирование только
по плоскости S:
1 ГГ / дФ ди \
Ф(Я)- [и Ф )dS. B.7)
4л JJ \ дп дп I
S
Выберем вспомогательную функцию и в виде такого решения
волнового уравнения, производная по нормали которого на поверхности
интегрирования обращается в нуль. Примем и в форме функции Грина
и = exp H'fcf^ )/гх + ехр Н/сг2)/г2. B.8)
Функция и определяет потенциал, создаваемый двумя точечными
направленными источниками: действительным, помещенным в точке
наблюдениям и мнимым М', являющимся зеркальным изображением
действительного источника в плоскости S.
Вычислим нормальную производную
ди д Г exp (-ikrx) 1 дгх д Г exp (-/fcrv
дп дгл I г, I дп дГо I г, I дп
2
Так как на поверхности S (при сближении точки Q с поверхностью) гх =
s Г2 = г> дгх/дп = -дг2/дп (вместе с движением точки Q по нормали п
величина гх увеличивается, а г2 уменьшается), то ди/дп = 0. Подставляя
\
\
\
Рис. 2.3. К пояснению формулы Гюйгенса для
I д/' поля плоской поверхности
-44-
эти значения в формулу B.7), получаем решение волнового уравнения
для потенциала скоростей, называемое Первой интегральной
формулой Гюйгенса:
1 С С дФ 1 С С дФ exp(-ifcr)
ф(Я)= \\и dS = —- dS. B.9)
4л JJ дп 2л JJ дп г
Как видим , здесь участвует лишь одна величина дФ/дп = vn -
колебательная скорость излучающей поверхности. Переходя от
потенциала к акустическому давлению: чп=дФ/дп, р = /(ор0Ф (за
положительное принято направление vn в сторону точки наблюдения М),
получим
/G)p0 Г Г exp(-ifcr)
p(R) - -^ vn -^ dS. B.10)
2л г
Напомним, что формулы B.9) и B.10) являются точными в
предположении известной функции распределения колебательной
скорости по бесконечной плоской поверхности S. Поскольку реальные
плоские излучатели (и приемники) имеют конечные размеры, при расчете
их полей необходимо дополнить поверхность 5 до бесконечной
плоскости абсолютно жестким, т. е. неподвижным, экраном, на
поверхности которого vn = 0.
Вспомогательная функция и может также иметь вид
и = exp {-ikr1)lr1 - ехр (-//сг2)/г2,
соответствующий полю точечного источника, расположенного над
абсолютно мягкой поверхностью.
На поверхности интегрирования производная по нормали от
функции и, учитывая равенства г2 = гх = г и противоположное
направление векторов drjdn и дг2/дп, равна
ди Ч
e-ikr2
дп г\ дп т\ дп
д I e~ikr
= 2
дп
Таким образом, производная удваивается, поле и = 0 (так как
ri = Г2)и потенциал скоростей в этом случае
- 45-
1 ГГ д Г exp(-zTcr) 1
Ф(Я)- Ф— —— ~ dS. B.11)
2л JJ дп L r J
Такой же будет формула и для давления р. Равенство B.11) называют
Второй интегральной формулой Гюйгенса. Искомый
потенциал (давление) определяется значением потенциала (давления)
на излучающей плоскости.
При выводе формулы B.11) плоскость 5 предполагалась
бесконечной, фактически же поле р задано на части плоскости, поэтому
необходимо ее дополнить до бесконечной плоскости абсолютно мягким
экраном, на котором выполняется граничное условие р = 0.
Воспользуемся известной формулой для производной скалярного
поля F в направлении нормали dF/дп = grad F • л = I grad FI cos (n,r)-
= cos (n,r), тогда дг/дп = cos (л, г). При kr^> 1 (точка наблюдения
находится на большом волновом расстоянии)
д exp (-ikr) ikr +1 дг ik
ikr
дг ik
e-ikr % e-ikr cos
дп г г2 дп г
Если точка наблюдения находится в дальнем поле (г» 2L2/k)*,
т. е. расстояние г значительно превышает наибольший размер
плоского излучателя! (рис. 2.4), то можно принять r = R, cos (л, г) = cos 8 (г и R
параллельными) и вынести амплитудные множители за знак
интеграла. Для давления получим
ik cos в ГГ
p(R)* p{S) exp (-ifcr)dS. B.12)
2nR JJ
s
В случае задания распределения колебательной скорости по
плоскости S [см. формулу B.10)]
ifcpc ГГ
vnE)expHkr)d5. B.13)
S
Множитель cos 6 в формуле B.12) указывает на отличие
характеристики направленности (ХН) поршня в абсолютно мягком экране
от ХН поршня в абсолютно жестком экране при одинаковых
функциях распределения давления p(S) и колебательной скорости vn(S)
*Это условие будет выведено в § 4.2.
- 46-
по излучающей поверхности. При 9 =
= 90° p(R) = 0, что подтверждает факт
равенства нулю избыточного
(акустического) давления на абсолютно
мягкой границе.
Для двумерных волновых полей
формулы Гюйгенса могут быть
получены из выражения B.5), в котором
поле точечного (линейного)
источника в беграничном пространстве,
описываемое функцией Яо® (fcr),
заменяется двумя линейными
источниками: действительным и
мнимым, являющимся зеркальным
изображением в абсолютно жесткой (абсолютно мягкой) поверхности.
В результате получаем Первую формулу Гюйгенса
Рис. 2.4. К определению
дальнего поля плоского поршня
1 Г дФ
Ф(Д) = - — HP(kr)dx
2 I дп
B.14)
и Вторую формулу Гюйгенса
- [ Ф—[нР{кг)]Лс,
2 J дп
B.15)
где г = V(* - ххJ + у\\ х19 ух - координаты точки наблюдения.
Формула Кирхгофа для излучающего тела больших волновых
размеров. Когда размеры колеблющейся
поверхности значительно превосходят
длину волны, формулу Кирхгофа B.2)
можно упростить. На такой
поверхности связь между давлением и
нормальной составляющей колебательной
скорости получается приблизительно
такой же, как в плоской волне, т. е. p/vn%
% рс. Пусть распределение скорости vn
по поверхности задано, причем
дифрагированным полем в области
геометрической тени и проникновением волны в
нее будем пренебрегать (рис. 2.5). Ина- Рис.2.5.к пояснению ф
Че, ЗВуКОВОе ПОЛе В ТОЧКе Наблюдения Кирхгофа для поверхности боль-
М СОЗДаеТСЯ ТОЛЬКО чаСТЬЮ St, Которая ших волновых размеров
-47-
видна из точки М. Для гармонических колебаний р = /сорФ,
следовательно, рсуп=/о)рФ, откуда Ф=-п>пЛ, где vn =дФ/дп = -дФ/дп1.
Таким образом, Ф % ~ {г/к)дФ/дп. Подставим эти соотношения в
формулу B.2):
С exp(-zfcr) i d
Ч——т
Si
Вычислим производные дг/дп = cos (п, ?) = cos 8; д [exp (-/fcr )/г] /дг =
- - [A + ikr)/r2] exp (—iTcr); d [exp (-/fcr)/r ] /dn = - [A + /fcr)/r2] cos 9 X
x exp (-/fcr).
Получаем формулу Кирхгофа в виде
1 Г Г
4л JJ
1 Г Г exp(-Zfcr) / кг- 1 \
Ф(я)-— vn — i + cose Us.
4 JJ \ кг I
Для дальней зоны (fcr » 1) d [exp (-/fcr)/r ] /дп * - (ikr/r2) cos 9 х
х exp (-/fcr).
После подстановки в формулу B.2) окончательно получим
1 Г Г exp(-/fcr)
Ф(Д)= vn (l+cos9)dS. B.16)
4л JJ r
Si
Формула B.16) верна для высоких частот, при которых размеры
излучающей поверхности велики по сравнению с длиной волны. Это
условие, при котором получена формула, носит название
приближения Кирхгофа. Множитель (l+cos9) указывает на зависимость
амплитуды потенциала (давления), создаваемого каждым элементом
поверхности излучателя, от направления на точку наблюдения, т. е.
имеет смысл характеристики направленности элемента.
Отметим, что приближение Кирхгофа можно использовать и для
неплоских поверхностей, если радиусы кривизны их также велики по
сравнению с длиной волны.
Если излучение происходит к пределах малого телесного угла
и отклонения от нормали к поверхности (плоской или слабоизогнутой)
малы, то cos 9 * 1 и формула B.16) принимает вид
exp(-ifcr)
— dS, B.17)
JJ г
Si
адекватный Первой интегральной формуле Гюйгенса B.9),
описывающей поле плоского излучателя.
-48-
1 Г Г
2л JJ
Поле отраженной волны. Пусть
на тело больших волновых
размеров падает сферическая волна с
потенциалом
м1
Рис. 2.6. К определению поля,
отраженного телом больших
волновых размеров
скорости по части поверхности
создаваемая источником,
находящимся в точке Мг (рис. 2.6).
Требуется определить потенциал Ф2
отраженной волны в точкеМ2.
Во-первых, будем полагать, что
падающая волна не искажается
телом: распределение колебательной
ADB, освещенной источником М19 соответствует полю источника
в свободном (от тела) пространстве. Во-вторых, будем пренебрегать
дифракцией на теле, считая что поле в теневой области СЕВ
отсутствует. В-третьих, вследствие больших волновых размеров тела на его
поверхности определяем потенциал как Ф * -/vn/fc, где vn = дФх/дп.
Отражение (рассеяние) акустического поля телом можно
рассматривать как вторичное излучение: каждой точке отражающей
поверхности следует придать такую колебательную скорость, которая,
складываясь со скоростью частиц в падающей волне, давала бы
фактическую скорость колебаний поверхности. В случае абсолютно жесткого
тела суммарная колебательная скорость на поверхности тела должна
равняться нулю, т. е. дФ/дп\$ = 0. Чтобы удовлетворить этому
граничному условию, надо на освещенной части поверхности S разместить
фиктивные источники с колебательной скоростью упф, равной по
величине и противоположной по знаку колебательной скорости vn в
падающей волне: vn$ =-vn или дФ2/дп = -дФ1/дп9 где Ф2 - потенциал
скоростей отраженной волны. Формула Кирхгофа B.2) для внешней
области
exp (-/fcr) д
ф —
г дп
exp (-/fcr)
MS.
т.
Для потенциала поля, создаваемого фиктивными источниками,
потенциала отраженного поля, в этой формуле надо принять
= Ф2(Л/2), дФ/дп = уПф, Ф =ФХ и изменить направление нормали
на противоположное, тогда
ехр(-йсг2)
Упф Фх
д [exp(-/fcr2)"
B.18)
4-614
-49-
Здесь Фх = Ф2, поскольку на абсолютно жесткой поверхности
давления в падающей и отраженной волнах одинаковы: {дФ^дп+дФ^дп)^ = 0.
Определим величину упф. Нормальная составляющая
колебательной скорости в падающей волне
дФ1 дФх дгх Q -ito-i-l
vn = = = e~lkri cos 01#
дп drx дп 4л г2
Для больших расстояний {кг ^ 1) получаем
*пф --ч, * - [ QikKtorJ] exp (-Л14) cos 8le
Вычислим производную по нормали п' от функции exp (-/fcr2)/r2 при
/» 1
д Г exp (-/fcr2) I -ikr2 - 1 дг2
ехР Hfcr2)
г 1ехР Hfcr2)г
дп [ r2 J г! дп
ik
% — exp (-/fcr2) cos 92.
После подстановки значений уПф, Фх и д [exp {-ikr2)/r2]/ дп' в формулу
B.18) получим искомый потенциал
exp[-/k(r1 + г2)]
Л ' Л ч '~ B.19)
16л2
Интегрирование выполняется по площади S' участка AD (см. рис. 2.6),
которая видна из обеих точекМх (излучения) иМ2 (приема).
Для получения полного акустического поля в точке М2 к
потенциалу Ф2Ш2) надо прибавить потенциал прямого поля Фо =
= Q exp (-/fcr0 )/Dгсг0). В случае абсолютно мягкого тела Ф1$ = 0 и Ф215 =
= -Ф115. Проделав выкладки, для потенциала отраженного поля
получим ту же формулу B.19) со знаком минус: на мягкой поверхности
происходит так называемая потеря полуволны, фаза отраженной
волны изменяется на 180°. По модулю отраженные поля от абсолютно
жесткого и абсолютно мягкого тел равны.
При совмещении точек излучения и приема, как, например, в
гидролокации, h = г2 =r, cosBi = cos82 =cos8 и формула B.19) принимает
более простой вид
exp(-2/fcr)
8п2 JJ
s*
- 50-
§ 2.3. Неоднородное волновое уравнение
Однородное волновое уравнение, полученное в предположении
отсутствия внешних сил, описывает распространение волн, обязанное
действию внутренних (упругих) сил. Если в среде имеются источники
(стоки) жидкости или внешние силы, то правая часть волнового
уравнения должна содержать функции, характеризующие действие таких
источников:
J_ д2Ф(г, t)
-/(?,*).
B.20)
В случае гармонической зависимости сил от времени уравнение B.20)
переходит в неоднородное уравнение Гельмгольца
B.21)
Неоднородным уравнением также можно описать волны,
излучаемые источником в виде колеблющейся поверхности произвольного
вида.
Излучение любой поверхностью можно рассматривать как
звуковое поле, созданное распределенными в пространстве источниками
при наличии абсолютно жестких или абсолютно мягких границ. Это
обстоятельство позволяет для решения однородных и неоднородных
уравнений применять одни и те же функции Грина.
На практике встречаются явления или процессы, описываемые
функциями, равными нулю повсюду, кроме промежутка очень малой
длины х, в котором функции принимают очень большие значения А/т.
Аналогичное явление наблюдается при рассмотрении плотности
распределения f(x) точечных источников в пространстве. Если размеры
источника столь малы, что его практически можно принять за
точечный, функция f(x) равна нулю во всем
пространстве, кроме точки, в которой
находится источник. Для описания подобных
распределений используют дельта-
функции.
Дельта-функция. Пусть какое-то
воздействие (силовое или любой другой природы)
характеризуется плотностью распределения
f{t), которое имеет вид прямоугольного о Ьо-% U U+i t
импульса длиной 2т и амплитудой 1/Bт);
тогда площадь прямоугольника равна
единице, Причем f(t) = 0 вне интервала 2Т (рис. 2.7). Рис. 2.7. К пояснению
ЕСЛИ Т -* 0, ТО В Пределе фуНКЦИЯ f{t) - « дельта-функции
фъ)
-51-
и будет представлять собой импульс бесконечной амплитуды,
действующий бесконечно малое время, но площадь прямоугольника
остается все время равной единице. Такую предельную функцию,
отличную от нуля только в точке t = t0, где f(t0) = °°, называют дельта-
функцией (Дирака):
6(*-го)= ton/(О,
где/@ = 1/Bт) при t0 - т < t < to + i и f{t) = 0 при t < t0 - т и t > t0 + т.
Отметим некоторые свойства дельта-функции:
*2
S 4t-to)dt
t*tQ;[Jbit-t0)dt=l;
1приТх <t0 <т2;
0,5 при t0 = тх или tQ = т2; B.22)
О при ^o > T2 или ^o "^ Ti>
б) для любой функции fit)9 не имеющей особенностей в точке
t = t0, справедливо равенство
fitLt-tQ)dt=fit0)9 B.23)
т. е. интеграл равен значению подынтегральной функции, вычисленной
при том значении t, при котором аргумент t-to = 0, если точка f0
расположена внутри промежутка [т19 т2]; если *0 совпадает с одним из
концов промежутка, интеграл равен 0,5/(fo), а если t0 лежит вне
промежутка, интеграл равен нулю;
в) трехмерная (пространственная) дельта-функция имеет вид
Выражения для дельта-функции в сферической и цилиндрической
системах координат
в (г-г0) = (Р sinB) 8(р - р0) 6(В - 60) 6(ф - ф0); B.24)
в(г-го)-A/р)в(р-Ро)в(ф.фо)в(г-2ь). B.25)
Функция Грина. Пусть в фиксированной точке х0 некоторой
линейной системы приложена сосредоточенная сила, а реакция системы в
точке х на это воздействие описывается функцией G (х, х0). Зная эту
функцию, можно, интегрируя, определить поведение системы при
-52-
действии силы, распределенной по закону f(x) в зависимости от
координаты х:
l
F(x) = $G(x,xo)f(xo)dxo, B.26)
о
где dx0 - элемент системы в окрестности х0; f{x0) dx0 - сила,
действующая на промежутке dx0; /- длина системы. Функцию G(x, x0),
характеризующую поведение системы от действия сосредоточенной
силы, называют функцией Грина.
Пусть необходимо определить акустическое поле, излучаемое
системой распределенных в пространстве источников. Если область V
занята источниками /(г0) и известно поле G(rlf г0), которое создает
точечный источник в свободном пространстве в точке Тх, то
аналогично уравнению B.26) искомый потенциал
ФЙ) = Ш С{Г19 го)/(Го) dV0, B.27)
V
где г0 - координата источника; 7Х - координата точки наблюдения;
dV0 означает интегрирование по координате г0.
В соответствии с принципом Гюйгенса применение функции Грина
для расчета акустических полей можно распространить и на
колеблющиеся поверхности. Ранее было показано, что поле, излучаемое
такими поверхностями, создается расположенными на них монопольными
и дипольными источниками. Зная решение для элементарного
источника, т. е. функцию Грина, полное поле определяют как решение для
распределенной силы, получаемое интегрированием.
Применительно к акустическим полям функция Грина
удовлетворяет однородному уравнению Гельмгольца
но в точке ?х = Го она имеет особенность. С помощью дельта-функции
уравнение Гельмгольца для функции Грина
V2G(r19 г0) + k2G(T19 го) = -4лб(г1 - г0) B.28)
остается верным во всех точках пространства; правая часть не равна
нулю только в точке"?! = То расположения источника.
В формуле Кирхгофа B.2) вспомогательная функция и,
определяющая поле точечного источника в свободном пространстве, принята
в виде сферической расходящейся волны ехр (-//сг)/г. При
расположении источника в точке Го функция и имеет вид
и = G(rl3 г0) = exp (-ffc \гг - Т0\)/\гг - го1; г± - г0 = г. B.29)
Равенство B.29) есть функция Грина для безграничной среды. Эта
функция удовлетворяет уравнению B.28) в точках 7Х Ф 70, что подтверждается
-53-
непосредственной подстановкой функции в уравнение, и в точке
7Х = г0, где проверка справедливости равенства B.28) требует
использования интегрального свойства дельта-функции B.23).
Приведем формулу Кирхгофа для функции Грина
1 ГГГ дФ(Г0) ^ ^
G(r19 г0) - Ф(г0)
4л .1.1 I дп0 дп0
Здесь дифференцирование выполняется по нормали в точке г0, а
интегрирование - по поверхности сферы с центром в точке гх.
Сравнивая выражение для потенциала точечного источника Ф =
= [ <2/Dлг)] exp (-ikr) и уравнение B.29), видим, что функция Грина
описывает поле точечного источника с производительностью Q = 4л.
Заметим, что формула B.30) верна для всякой функции,
удовлетворяющей уравнению B.28) и имеющей особенность при ?х = Го типа 1/г,
где г = \?х - го1 - расстояние между точками наблюдения и источника.
Укажем еще одно свойство функции Грина, выражающее принцип
взаимности: при перемене мест источника и точки наблюдения
функция не изменяется, т. е. G(r19 Го) = G{r0, rj.
§ 2.4. Расчет полей с использованием функций Грина
Предположим, что в объеме V пространства находится система
источников акустических полей, потенциал скоростей которых
удовлетворяет неоднородному уравнению Гельмгольца
Ч2Ф(г0) + *2Ф(?о) = -4л/(Г0). B.31)
Пусть также имеются отражающие тела, на поверхности которых или
потенциал (давление) Ф\$ = 0, или колебательная скорость дФ/dnls = 0.
Потенциал акустического поля определяют по выражению B.27), в
котором или функция Грина Gl^ = 0, или dG/dn\s = 0. Если на поверхности
5 задано импедансное граничное условие (дФ/дп + <7ФI? = 0, то должно
выполняться равенство (dG/дп + oG)\$ = 0.
При отсутствии объемных источников /(Го) = 0, а поле
колеблющихся поверхностей находят по формуле B.30). В отличие от формулы
Кирхгофа здесь вспомогательной функцией может быть любая
функция Грина, необязательно ехр (~//сг)/г.
Выбором функции Грина можно привести интеграл (формулу)
Кирхгофа к виду, при котором достаточно знать на излучающей
поверхности только потенциал или его нормальную производную.
Действительно, если точка Го находится на поверхности S, а функция
Грина удовлетворяет условию G{rx, г0) = 0, то по формуле B.30)
находим потенциал поля в любой точке Fx:
-54-
1 ГГ ^ dG(r19r0)
Ф(/Ч) = Ф(г0) ~^- dS0, B.32)
4л JJ дп0
S
где Ф(г*0) - потенциал на поверхности излучателя. Здесь
дифференцирование производится по внешней нормали относительно области,
в которой отыскивается поле (при определении поля вне
поверхности S нормаль п0 будет внутренней относительно S).
При выборе функции Грина из условия dG/dnQ\s = 0 формула
B.30) дает потенциал
1 ГГ дФ{г0)
*(h) = — G(rlf г0) dSOi B.33)
4л JJ дп0
определяемый известной колебательной скоростью на поверхности 5.
Таким образом, если задано давление на излучающей поверхности,
при расчете потенциала поля в любой точке пространства функцию
Грина следует выбирать для абсолютно мягкой границы, а при
известной колебательной скорости на поверхности - для абсолютно жесткой
границы.
При определении поля излучающей плоской поверхности (см. § 2.2)
были получены Первая B.9) и Вторая B.11) интегральные формулы
Гюйгенса. Упрощение формулы Кирхгофа было достигнуто благодаря
выбору вспомогательной функции и, описывающей поле точечного
источника вблизи абсолютно жесткой или абсолютно мягкой
поверхности. Теперь можно сказать, что функция и была функцией Грина,
удовлетворяющей граничным условиям dG/dn\s = 0 или G\$ = 0.
Очевидно, произвести расчет поля по формулам B.32) и B.33)
возможно лишь при известной функции Грина. Для сложных
поверхностей нахождение этой функции представляет достаточно трудную
задачу.
Приведем некоторые функции Грина.
1. Трехмерная функция Грина для свободного пространства [см.
формулу B.29)].
2. Двумерная функция Грина для свободного пространства
где г= I?! - rol; H^ (kr) - функция Ханкеля второго рода нулевого
порядка от аргумента кг, описывающая цилиндрическую волну.
3. Трехмерная функция Грина для полупространства
G{T19 f0) = exp (-ikr)/r ± exp (-ikrl)/r1,
где г= V(*i ~ *0J + (У1 ~УоJ + (zi ~zoJ - расстояние между
- 55-
источником (х0, у0, z0) и точкой наблюдения [хх, у\, zx)\ гх =
= V(*i ~х0J + (У± -Уо) + (zi + zoJ- Ось z расположена
перпендикулярно поверхности. Во втором слагаемом знак „+" для абсолютно
жесткой поверхности, знак „- " для абсолютно мягкой.
4. Двумерная функция Грина для полупространства
где г = yl(xx -х0J + (ух -у0J- Ось у расположена перпендикулярно
поверхности.
§ 2.5. Теорема взаимности акустических полей
Теорема взаимности устанавливает соотношение между
потенциалами двух акустических полей и по существу является следствием
принципа суперпозиции, справедливого для линейных систем.
Согласно этому принципу, суммарное поле в каждой точке пространства
складывается из обоих полей, каждое из которых действует
независимо друг от друга.
Теорема взаимности. Пусть потенциалы скоростей Ф и Ф2 двух
источников удовлетворяют неоднородным уравнениям Гельмгольца
B.21):
АФХ + /с2Фх = - Д; ДФ2 + /с2Ф2 = - /2, B.34)
где Д и /2 - плотности объемных скоростей источников, т. е. объемные
скорости, отнесенные к единице их объема.
Запишем формулу Грина B.1), связывающую объемный и
поверхностный интегралы для функций Фх и Ф2:
Ш (ФхАФ2 - ФзДФх) dV = И (Ф,дФ2/дп - Ф2дФ^drOdS. B.35)
V s
Если умножить первое уравнение B.34) на Ф2, а второе - на Ф1? затем
из второго вычесть первое и полученное уравнение проинтегрировать
по объему У, то интеграл по поверхности некоторой сферы 5, входящей
в объем У, обращается в нуль при любом граничном условии. Формула
B.35) принимает вид
B.36)
Равенство B.36) выражает теорему взаимности.
В случае источников, размеры которых значительно меньше
длины излучаемой волны, соотношение B.36) можно переписать так:
- 56-
ааО1(У1) = Ф1Оа(Уа), B.37)
V V
где Qi(Vi) и Q2(V2) - интегральные объемные скорости источников.
Получение формулы B.37) из B.36) возможно благодаря медленному
изменению потенциалов Ф2 в объеме Ух первого источника и Фх
в объеме У2 второго источника; поэтому потенциалы вынесены за знак
интеграла.
Соотношение B.37) показывает, что если первый источник с
производительностью Q± создает на заданном расстоянии в точке
расположения второго источника потенциал (давление) Ф19 то второй
источник с производительностью Q2 создает потенциал (давление)
<b2 = (Q2/Qi)®i. B.38)
Если Qx~ Q29 потенциалы (давления) равны, т. е. источник с
производительностью Qi вызывает в точке нахождения второго источника
такой же потенциал (давление), как источник с производительностью
Q2 в точке расположения первого источника; предполагается, что сами
источники неподвижны.
Произведение Ф(? представим в виде Фул5^ pvnS = Fvn, откуда
следует, что Ф@ пропорционально мощности. Принцип взаимности,
исходя из соотношения B.37), может быть сформулирован следующим
образом: мощность, расходуемая источником с производительностью
Qx на преодоление поля (давления), создаваемого источником с
производительностью Q2, равна мощности, которую расходует второй
источник на преодоление поля (давления), создаваемого первым
источником.
Когда источники излучения представляют собой колеблющиеся
поверхности (например, поршневые диафрагмы площадью Sx и S2,
заделанные в жесткие экраны и колеблющиеся со скоростями vx =
= дФх/дп и v2 = дФ2/дп), левая часть формулы B.35) равна нулю и
получаем равенство
И Ф1(дФа/дл)сК= И Ф2(аФ1/дп)^5, B.39)
s2 s,
эквивалентное равенству B.37): мощности, расходуемые одним
излучателем на преодоление поля, создаваемого другим излучателем,
одинаковы. Таким образом, полученные соотношения взаимности для
объемных источников справедливы и для колеблющихся
поверхностей.
Параметр взаимности. Используемые в практической
гидроакустике преобразователи, как правило, обратимые, т. е. в зависимости от
условий использования они могут работать как излучатели и как
приемники.
Имеем систему из пульсирующей сферы малых волновых
размеров (монополя), находящейся в первой точке, и обратимого
-57-
преобразователя во второй точке; расстояние между ними равно г.
Монополь с производительностью Qx в свободном поле создает в месте
нахождения преобразователя (вторая точка) давление
р0 = —— е-'*г" e"lfcr = —^- e"*r. B.40)
4лг 4лг 2Кг
Запишем соотношение взаимности B.37), заменив в нем потенциалы
Ф± иФ2 на давления рх ир2:
или с учетом отношения Q±/pQ из формулы B.40)
(Pa/Qa) 2kr ехР (*О/(/рс) = р>0. B.41)
Отношение звукового давления рх на преобразователе к давлению
р0 в свободном поле оценивает свойства преобразователя в режиме
приема. Преобразователь в режиме излучения создает в первой точке
давление р2, следовательно, отношение р2 к производительности Q2
характеризует свойства преобразователя как излучателя.
Коэффициент 2Л/(рс) = 2г/(р/), входящий в соотношение B.41), называют
параметром взаимности. Если отношение рх/р0 не зависит от
частоты, то отношение p2/Q2 ~~ /; в случае равномерной частотной
характеристики в режиме излучения отношение рх/р0 -
характеристика в режиме приема - будет изменяться по закону 1//, т. е. обратно
пропорционально частоте волны.
Заметим, что параметр взаимности зависит от типа волны. В
данном случае использована сферическая волна, что следует из
выражения B.40): амплитуда давления убывает с расстоянием по закону 1/г.
Глава 3. ИЗЛУЧЕНИЕ
АКУСТИЧЕСКИХ ВОЛН
Излучение акустических (звуковых) волн - это процесс создания
акустических (звуковых) полей, вызванный колебаниями различных
тел, непосредственно соприкасающихся с упругой средой. Образование
поля, создаваемого движением протяженного тела, можно пояснить,
используя принцип суперпозиции. Будем рассматривать тело как
совокупность точечных независимых друг от друга источников, тогда
излучаемое телом поле получается в результате наложения полей
каждого точечного источника.
Излучающую поверхность источника в виде колеблющегося тела
называют диафрагмой. В гидроакустических антеннах - устройствах,
- 58-
предназначенных для излучения и приема акустических волн, -
диафрагмами чаще всего являются излучающие поверхности стержней,
пластин, цилиндрических и сферических оболочек.
Для приведения диафрагмы в колебательное движение ее следует
соединить с некоторым механизмом, например электромеханическим
преобразователем, к которому подводится электрическая энергия.
При колебаниях диафрагмы в прилегающем к ней слое среды, в
соответствии с законом смещения диафрагмы, создаются чередующиеся
сжатия и разрежения, которые благодаря упругим связям вызывают
движение частиц в соседнем слое и т. д. В результате от диафрагмы
в окружающую среду распространяются упругие волны, т. е.
происходит излучение акустической энергии.
Энергия, подводимая к излучателю, расходуется на преодоление
реакции среды и внутренние потери в элементах конструкции и
электрической цепи колебательной системы излучателя. Реакция среды
проявляется в том, что на диафрагму (а значит, и на приводящий ее
в движение механизм) со стороны среды действует сила,
обусловленная переменным давлением создаваемого излучателем акустического
поля. Работа, совершаемая диафрагмой против силы реакции, равна
отдаваемой в среду энергии колебаний диафрагмы. Процесс
излучения, таким образом, слагается из преобразования подводимой к
излучателю электрической энергии в механическую и реакции среды на
излучатель»
Для приема акустических волн чаще всего используют те же устройства, что
и для излучения, но преобразование энергии в приемнике происходит в
обратном направлении. На диафрагму приемника, помещенного в акустическое поле,
действует переменное давление этого поля и соответственно сила, приводящая
диафрагму в движение. Преобразование акустической энергии поля в энергию
колебаний диафрагмы сопровождается механическими потерями, а
преобразование механической энергии в электрическую, приводящее к созданию ЭДС на
выходных зажимах приемника, — потерями в электрической цепи.
Излучение и прием акустических волн взаимосвязаны: реакция среды
и процесс электромеханоакустического преобразования у них одинаковы, а
характеристики при излучении и приеме удовлетворяют принципу взаимности,
позволяющему по известным зависимостям в одном режиме устанавливать
соответствующие зависимости в другом режиме.
Данная глава посвящена одному из основных вопросов теории
излучения - реакции среды на излучатель, т. е. взаимодействию
излучателя со средой. Для решения этого вопроса будем рассматривать
упрощенные теоретические модели излучателей. Картина создаваемых
ими полей аналогична полям реальных излучателей, а расчеты их
параметров и характеристик достаточно просты. Основными моделями
служат пульсирующая сфера как источник нулевого порядка и
акустический диполь - источник первого порядка. Суперпозицией полей
этих источников можно описать поля более сложных источников.
«-59-
§ 3.1. Пульсирующая сфера (монополь)
Любую поверхность с фиксированным радиусом а в поле
сферически-симметричной волны можно рассматривать как источник,
совершающий равномерные радиальные колебания и создающий в
однородной безграничной среде расходящиеся сферические волны (рис. 3.1).
Потенциал скоростей (давление). Если скорость колебаний
поверхности сферы задана в виде v(a) = vm exp (/соt), то из граничного условия
- дФ/дг\г=а = vm exp (/cof) находим произвольную постоянную [см.
формулу A.30)]
vma2exp0'fco) vma2
А = —
+ ifca
X exp {i [ fca + arctg A/fco) - л/2]}. C.1)
Пользуясь понятием объемной скорости, определяющей поток
объема среды, вытесняемый в единицу времени источником
колебаний, и выражением для потенциала скоростей точечного источника
[см. формулу A.35)], получаем потенциал скоростей сферического
источника конечных размеров
Ф т {/[of-fc(r-a) + arctg(l/fcaJ-n/2]}, C.2)
Ф ,
4nry/l+k2a2
где Qm = 4na2vm - амплитуда объемной скорости (производительность)
источника.
Для низких частот, при которых линейные размеры источника
значительно меньше длины излучаемой волны (ка <с 1), выражение
C.2) переходит в A.35) и звуковое давление, создаваемое
пульсирующим излучателем на расстоянии г от его центра, равно
р = [ iopQm/Dnr)] exp [ ((ш- кг)]. C.3)
Колебательная скорость частиц
v = - дФ/дг = [1/Dлг2)] A + ikr) Qm x
Хехр[*И-/сг)]. C.4)
Удельный акустический импеданс пульсирующей сферы радиусом а
z = p/vlr=a = рс(каJ/ [1 + {каJ ] +
+ ipcfco/[l + (fcaJ]. C.5)
- 60-
Связь диафрагмы со средой
целесообразно характеризовать величиной, зависящей от
свойств источника и среды и не зависящей от
амплитуды колебаний. При излучении волн
малой амплитуды такой величиной является
полное механическое
сопротивление, или механический импеданс.
Механический импеданс. Бели на элемент
dS поверхности диафрагмы, колеблющейся
ПО НОрмаЛИ СО СКОРОСТЬЮ V, действует СО СТО- Рис. 3.1. Пульсирующая
роны среды (акустического поля) давление р сфера
и сила dF = pdS, то вся диафрагма испытывает
влияние силы F = $ pdS, и за время df она совершает работу против
s
сил акустического поля
dA = ~ И pdSvdt. C.6)
5
Примем некоторую точку на поверхности диафрагмы за центр
приведения, координата которой ?0 и амплитуда нормальной
составляющей скорости колебаний v(F0) максимальна. Распределение
колебаний по поверхности диафрагмы выразим функцией /(г) =
у(г)/у(го), где v(r)- колебательная скорость текущей точки ?. Тогда
уравнение C.6) примет вид
dA = -v(ro)dtttpf(?)dS. C.6a)
s
Для гармонического процесса v(r)=vm(r) exp (itof), р =
= рт exp[/(o)f + ФД и реакцию поля на излучатель определяют по
выражению
F = [ И РтН?) ехр (йр0) dS ] exp (Ш). C.7)
В частности, для пульсирующей сферы /(г) = 1, акустическое
давление на поверхности сферы р(а) = /О)рФ(а), где потенциал
вычисляется по формуле C.2) при г = а, так что Фо = arctg [ l/(ka)]9 и сила реакции
на сферу равна
F = G)pQma [1 + (каJ]'1'2 ехр { / [cof + arctg A/fca)]} =
], C.8)
где S = 4ла2; рт = copQm/Dna ^JT+(kdj2).
Таким образом, сила реакции является комплексной величиной,
ее частота совпадает с частотой колебаний точки приведения, а фаза
-61-
отличается на угол Фо, зависящий от волновых размеров сферы.
Для анализа характеристик излучателя введем понятие
механического импеданса, определяемого отношением силы реакции
поля на рабочую поверхность излучателя к амплитуде скорости
колебаний его центра приведения, т. е.
1
Vm(r0)
ftn/(?)exp(i<P0)dS =
C.9)
где г и х - соответственно активная и реактивная составляющие
импеданса:
pm/(r) cos Ф0с?5;
pmf(r) sin
C.10)
Здесь рт - величина вещественная. Силу реакции поля, таким
образом, находят как сумму
r=Fx + iF2. C.11)
Для пульсирующей сферы импеданс
z « pcSk2a2/(l + к2 а2) + ipcSka/(l + fc2a2).
C.12)
Это выражение можно также получить умножением удельного
акустического импеданса на площадь сферы 5 [см. формулу C,5)]. Величина z>
как видно, определяется волновым сопротивлением среды, площадью
излучающей поверхности, волновыми размерами излучателя и не
зависит от амплитуд силы реакции и скорости колебаний поверхности.
Фазовый сдвиг между F и v равен Фо = arctg (х/г).
Составляющие импеданса запишем в виде
г = арс5; x~PpcS. (ЗЛЗ)
Частотные зависимости коэффициентов ос и Р от волнового
аргумента ка = 2ла/К представлены на рис. 3.2. При низких частотах (ка ^ 1
или 2а ^ X) активное сопротивление г мало' и преобладает реактивное
сопротивление (ос/р ^с 1). Ниже будет показано, что излучаемая
мощность пропорциональна вещественной составляющей г импеданса.
-62-
Таким образом, излучение источника
малых по сравнению с длиной волны
размеров неэффективно; до значения
ка = 1 в основном происходит
энергообмен между источником и полем в
ближней зоне. При дальнейшем
увеличении ка сопротивление г растет и при
ка^ 1 или 2а ^>Х, т.е. при высоких
частотах, а -* 1, r-*pcS, что
соответствует локально плоской волне на
поверхности излучателя. Следовательно,
для эффективного излучения
акустической энергии волновые размеры
излучателя должны быть большими.
Запишем составляющую х механического импеданса
х = 4лб)ра3 [1 + BлаАJ] = озт5,
1,0
0,6
0,6
ол
0,2
О
/7
/ /
11
1 /
V
/
ка
Рис. 3.2. Зависимость
составляющих импеданса излучения
пульсирующей сферы от ка
в виде
C.14)
где ms = Ътп [1 + BЛ0АJ]; m = D/3)лра3.
Вид выражения C.14) указывает на инерционный характер
реактивной составляющей х, причем значение инерции определяется
массой ms среды - соколеблющейся массой. Роль последней особенно
значительна при 2а <? А., т. е. при низких частотах, когда величина ms
равна утроенной массе среды в объеме пульсирующей сферы. Влияние
присоединенной массы излучателя отражается на его собственной
частоте: при переносе его из воздуха в воду частота понижается.
Активное сопротивление сферы при низких частотах, согласно
формуле C.13), равно
= рс5BлаДJ = лрс52/2/с
C.15)
и, следовательно, при заданном размере пропорционально квадрату
частоты.
Акустическая мощность. Акустической мощностью называют
количество звуковой энергии, передаваемой звуковой волной через
замкнутую поверхность в единицу времени.
Перепишем формулу C.6а), выражая р и v(?0) в
тригонометрической форме:
dA = -vm(r0) cos (со О [I Pmf(r) cos
s
<p0) dS] dt =
s
= [ -vm(r0) Fx cos2 @H + vm(r0) F2 cos (uf) sin (Ш)] dt
= [ -"&(г0) cos2 @H + xv2m{?0) cos И) sin (Ш)] dt.
Мгновенное значение акустической мощности
dA/dt = -п^(г0) cos2((o0 + xv2 G0) cos (Ш) sin (ш).
-63-
C.16)
Определим среднее за период значение мощности, развиваемой
излучателем против каждой составляющей реакции поля:
Эта мощность зависит только от вещественных составляющих г и Fx,
импеданса z и силы реакции F, она непрерывно рассеивается в
окружающее излучатель пространство в виде потока энергии. Таким
образом, поток акустических волн
Ра = (l/2)r,v* (?0) = (l/2)Fl4n(?0). (ЗЛ7а)
Множитель, связывающий акустическую мощность и амплитуду
скорости колебаний центра приведения источника, называют активным
сопротивлением излучения и обозначают rs. Мощность Р&\9
определяемую по выражению C.17), также называют активной,
поскольку она характеризует поток энергии, переносимый волной в
окружающее источник пространство.
Активная акустическая мощность, излучаемая пульсирующей
сферой, равна Ра = 4па2J и с учетом равенства A.56) ?а = (l/2)pc5v^ x
х cos2 Фо. Подставляя значение cos(po = ka(\ + к2а2)~1/2 и учитывая
составляющую г импеданса, согласно первому слагаемому уравнения
C.12), получаем Ра = 0,5п?,, что, естественно, совпадает с C.17а) при
vm(K) = vm« В соответствии с формулой C.15) мощность пульсирующей
сферы (с заданной скоростью) при низких частотах пропорциональна
квадрату частоты. При высоких частотах г* рс5 и Ра = 0,5рcSv^, т. е.
акустическая мощность не зависит от частоты (при постоянной
амплитуде колебательной скорости).
Вернемся к выражению C.16) и определим среднее за период
значение мощности, развиваемой излучателем против мнимой
составляющей реакции поля (второе слагаемое):
г г
*а2-— ЫчпЮЛ- —
Этот результат означает, что происходит периодический обмен энергией
между излучателем и полем. Действительно, рассчитаем работу,
производимую излучателем за первую и вторую четверти периода, полагая
х = со ms [см. формулу C.14)]:
-64-
Г/4
1 Г 1
— ип^у* (?0) \ sin B0H dt = —
2 J 2
о
Г/2
Г/4
Таким образом, за первую четверть периода излучатель
производит работу, равную кинетической энергии соколеблющейся массы, а за
следующую четверть периода эта же энергия возвращается обратно
к источнику, приводящему в движение диафрагму излучателя.
С точки зрения излучения мнимая составляющая xs импеданса
характеризует реактивную мощность.
Зная акустическую активную мощность излучателя, можно
рассчитать создаваемое им звуковое давление. Приравнивая выражения
для интенсивности?а/Dлг2) = р^/Bрс) = р2ф/(рс), находим
Рэф = [1/Bг)]7рс?а/л. C.18)
Отметим, что установленные закономерности излучения
пульсирующей сферы можно распространить на пульсационные
(монопольные) излучатели малых волновых размеров, не имеющие сферической
симметрии, например, тело с неравномерным распределением
колебательных скоростей по поверхности, малый поршень в жестком экране
и т. п. В этих случаях дифракционные явления приводят к
равномерному излучению источника произвольной формы. Если функция
распределения скорости колебаний равна /(г), то объемную скорость
источника следует вычислять по формуле Qm = vm(r0) J f(r)dS, излу-
s
чаемую акустическую мощность - по общей формуле C.17а), в которой
на основании выражения C.15) сопротивление rs = роJ52/Dлс), так что
C.19)
Из уравнения C.19) следует, что акустическая мощность любого
(независимо от формы) излучателя малых волновых размеров
определяется при заданной частоте только его объемной скоростью, т. е.
производительностью излучателя.
§ 3.2. Акустический диполь
и осциллирующая сфера
Кроме излучателей пульсационного типа важную роль в теории
излучения играют источники, не создающие объемной скорости,
например осциллирующие тела, т. е. колеблющиеся вдоль какого-либо
направления как единое целое. Поле таких источников не имеет
5-614 - 65 -
сферической симметрии - оно зависит от направления. Характерную
картину излучения осциллирующих тел создают две модели -
акустический диполь и осциллирующая сфера.
Акустический диполь представляет собой систему из двух
точечных источников излучения с одинаковой производительностью Qm,
расположенных один от другого на малом волновом расстоянии бх и
колеблющихся в противофазе (рис. 3.3, а). Суммарный потенциал
скоростей в точке М поля (без временного множителя)
Ф = Qm ехр (-йсг2)/Dлга) - Qm exp (-i
Qm Г exp@,5/fc6xcos8) ехр (-0,5z7e6xcos8)
* ехр (-/fcr)
4л [ г - 0,5бх cos 9 г + 0,5бх cos 8
Ввиду малости^* принято гх = г + (бх/2) cos 8, г2 = г - Fх/2) cos В.
Представляя экспоненциальную функцию в виде ряда Тэйлора ехр (± а) =
= 1 ± а + (± аJ +... и устремляя бх к нулю (произведение Qmbx
остается конечным), получим
Ф = [ Qm6x/Dnr2)] (I + /fcr) exp (-/fcr) cos 8. C.20)
ВеличинуQmбх = bназывают моментом диполя.
Из формулы C.20) видно, что диполь обладает направленным
действием, т. е. на одинаковом расстоянии в разных направлениях
поле различно: по оси - излучение максимальное, по нормали к оси
(в экваториальной плоскости) - минимальное. Поскольку нормаль
к оси является единственной узловой линией в поле диполя, его
называют излучателем первого порядка. У пульсирующей
сферы узловые линии отсутствуют, поэтому ее называют излучателем
нулевого порядка или монополем.
Звуковое давление и радиальную составляющую колебательной
скорости диполя определяют по следующим выражениям:
р = /сорФ = [ //срсЬ/Dлг2)] A + ikr) exp {-ikr) cos 8;
C.21)
у=-аФ/аг=[к2Ь/Dлг)][-1+2//(/сг)+2/(кгJ]ехр (-/fcr) cos 8.
При кг » 1 (дальнее поле) формулы C.21) упрощаются:
pcfc2b k2b
р * cos Qe~lkr; vr ** cos 8e-z/cr. C.21a)
4лг 4лг
Из выражения C.21а) видно, что давление и радиальная
колебательная скорость совпадают по фазе, а их амплитуды убывают
пропорционально увеличению расстояния в данном направлении.
- 66-
Плотность потока мощности (интенсивность звука) в поле диполя
определяется произведением 0,5pmvmr:
cos2 9/C2л2г2).
C.22)
Чтобы вычислить мощность излучения диполя, надо выражение C.22)
проинтегрировать по поверхности сферы большого радиуса г. Согласно
рис. 3.3, а, площадь элементарного пояса радиусом MN = rsinQ будет
dS = 2лг2 sin 9d6, а полный поток мощности диполя
pcfc4fc
16л
cos2 6 sin 9cf9 =
pck4b2
24л
C.23)
В полярных координатах угловое распределение потенциала
скоростей в осевой плоскости диполя описывается функцией ДF) =
= cos 8 (рис. 3.3, б). Пространственная характеристика направленности
диполя представляет собой тело вращения двух касающихся
окружностей вокруг оси х.
Акустический диполь используют для аппроксимации расчета
поля поршня - недеформируемой пластины, свободно колеблющейся
в безграничной среде с низкими частотами, при которых размеры
пластины значительно меньше длины излучаемой волны.
С помощью модели диполя можно также изучить звуковое поле
жесткой сферы, совершающей низкочастотные колебания без
изменения своих размеров; такую сферу называют осциллирующей.
Осциллирующая сфера. Пусть жесткая сфера радиусом а (рис. 3.4)
колеблется вдоль оси х со скоростью v0 exp (/cof), причем а <с К или,
что то же, ка^ 1. Такая сфера обладает свойствами диполя: волны
Рис. 3.3. Акустический
диполь (а) и его диаграмма
направленности (б)
Рис. 3.4. Осциллирующая
сфера
- 67-
сжатия и разрежения, образующиеся с противоположных сторон сферы,
сдвинуты по фазе на 180°. Кроме того, радиальная (нормальная)
составляющая скорости каждой точки поверхности сферы равна vr =
= v0 cos 8, т. е. пропорциональна cos 0. Акустическое поле создается
колебательными скоростями, нормальными к излучающей
поверхности, поскольку производительность источника (вытесняемый в единицу
времени объем среды) определяется только распределением
нормальной составляющей скорости. Таким образом, поле осциллирующей
сферы подобно полю диполя и его можно описывать выражением C.20).
Момент диполя Ъ определяют из граничного условия
- дФ/дг| т=а = v0 cos 0 ехр (/со t). C.24)
Подставляя в первую формулу C.21) значение Ь, получаем
(l+/fcr)cos0
4л г2
exp{/[u>f-fc(r-a)-i|>]}. C.25)
Отсюда видно, что поле осциллирующей сферы определяется
произведением ее объема VC(b на скорость осцилляции. Закон убывания
амплитуды давления в поле при кг^> 1 такой же, как у монополя
(Рт ~~ 1/г)» но вблизи излучателя давление изменяется быстрее, и если
fcr«: 1,торт- 1/г2.
В направлении осцилляции звуковое давление максимально, в
направлении нормали к оси - равно нулю. Нормаль к оси - это
единственная узловая линия в поле осциллирующей сферы, поэтому она
является излучателем первого порядка.
Импеданс излучения zs можно вычислить по общей формуле C.9),
принимая за центр'приведения полюс сферы, тогда/(г) = уг/у0 = cos0,
или из формулы C.23), подставляя значение момента Ь. Величина zs
зависит от тех же аргументов, что и импеданс монополя. Однако
излучатель первого порядка менее эффективен, чем излучатель
нулевого порядка. В этом легко убедиться, учитывая малые размеры
сферы. При ка «с 1 импеданс
1 1 л2р53 т
*s= — pcS(/caL+ — /pc5/ca= + /g> — , C.26)
12 6 12с3 2
где pSa/6 = 0,5р УСф = ms - соколеблющаяся масса.
Средняя излучаемая мощность ?а = 0,5r5vg ~ /4 (при
фиксированных а и v0), в то время как у монополя эта зависимость квадратичная
[см. формулу C.19)]. Этот же вывод следует из сопоставления импедан-
сов: активное сопротивление осциллирующей сферы в 12/(fcaJ раз
меньше, реактивное сопротивление (и соколеблющаяся масса) в 6 раз
меньше, чем у монополя. Преобладание реактивного сопротивления
над активным (при ка4^ 1) проявляется у осциллирующей сферы
-68-
намного сильнее. Это, в частности, видно из сравнения фазовых углов
импедансов обеих моделей: у монополя tg (р0 = 1/(/са), у диполя tg Фо =
= xs/rs=2/(/caK»l/(/ca).
Снижение эффективности излучения осциллирующего источника
по сравнению с пульсирующим, имеющим одинаковые малые
волновые размеры, связано с явлением перетекания жидкости с одной
стороны источника на противоположную, что приводит к
выравниванию звуковых давлений (в случае медленных колебаний),
создаваемых с обеих сторон движением излучателя. При этом значительно
уменьшается активная реакция звукового поля и эффективность
излучения резко падает. С повышением частоты (в случае быстрых
колебаний), когда X ^ 2а (ка » 1), разрежения и сжатия не успевают
взаимно компенсироваться, активная реакция и эффективность
излучения возрастают.
Одним из способов повышения эффективности источника при
излучении низких частот является заделка его рабочей поверхности
в экран, имеющий большие волновые размеры и исключающий
дифракцию вокруг излучателя.
Преобладание активного сопротивления над реактивным у
осциллирующей сферы начинается при ка = 1,69; в то время как у
пульсирующей сферы - при ка = 1. В области высоких частот {ка ^ 1) у
осциллирующей сферы r5-*pcS/3, xs-+0, у пульсирующей сферы r5-*pcS,
*5-0.
Акустическую мощность Ра сферы определяют интегрированием
выражения для интенсивности звука по поверхности фронта волны:
?а = 2лг2 J Jsin9d9 = (Зл3/2) У2сф рс(//сL vg. C.27)
Как видим, излучаемая мощность убывает с уменьшением частоты
значительно быстрее, чем у монополя.
Осциллирующая сфера может служить моделью для расчета полей
различных (не сферической формы) излучателей осциллирующего
типа, например пластин, стержней или других жестких тел,
колеблющихся в свободном (без экрана) пространстве при низких частотах.
§ 3.3. Поршневая диафрагма в бесконечном
жестком экране
Для излучателей больших волновых размеров теоретической
моделью может служить плоская поверхность, все точки которой
колеблются с одинаковыми фазами и амплитудами в направлении
нормали. Такую модель называют поршневой диафрагмой, она
создает плоскую бегущую волну, в которой давление р и
колебательная скорость частиц v синфазны и связаны соотношением p/v = рс.
-69-
v=0
Рассмотрим задачу об излучении круглой
поршневой диафрагмы, помещенной в
жесткий безграничный экран. Поршень радиусом
а встроен без зазора в неподвижную стенку-
экран Э (рис. 3.5). Благодаря экрану
излучение происходит в полупространство, явления
дифракции волн на излучателе отсутствуют и
распределение нормальной скорости
колебаний по всей бесконечной плоскости известно:
vn = v0 exp (iiof) при 0<г^а; v = 0 при
Рис. 3.5. Круглая
поршневая диафрагма в
бесконечном экране
Импеданс излучения и акустическая
мощность. Определим силу реакции среды на
поверхность колеблющейся диафрагмы.
Согласно Первой интегральной формуле Гюйгенса B.9), потенциал
скоростей, создаваемый диафрагмой в текущей точке М (принадлежащей
элементу dS'), отстоящей на расстоянии г от элемента dS, равен
dS. C.28)
Звуковое давление в точке наблюдения р = /сорФ. Сила,
действующая на элемент dS', равна pdS', а полную силу давления F на всю
площадь 5, т. е. реакцию среды на излучающую диафрагму, определяют
интегрированием давлений по всем элементам dSr. Принимая скорость
колебаний всех точек диафрагмы постоянной, находим
-• [ //Bл)] G)pv0 exp (iiof) $ dS' ? A/r) exp (-ikr) dS.
s s
C.29)
Такое же значение силы получим, рассматривая действие
элемента dS' в точке, принадлежащей элементу dS, поэтому полная сила
реакции равна 2F. Удвоив соотношение C.29) и отнеся результат к
скорости vn, найдем импеданс излучения zs. В результате интегрирования,
выполненного Рэлеем [27], получается
zs = pcS [I - JxBka)/(ka) + iSx {2ka)/{ka)] = рс5(а
C.30)
где J^Si - символы функций Бесселя и Струве первого порядка.
Рассмотрим два частных случая.
1. Низкие частоты {ка^ 1). Учитывая первые два члена ряда
функции Бесселя и первый член ряда функции Струве, найдем
а = к2а2/2 и Р = 8/со/(Зл), тогда
рсо252/Bлс);
C.31)
где ms = (8/3)ра3 - соколеблющаяся масса поршня.
Формула C.31) показывает значительное уменьшение активного
-70-
сопротивления излучения с понижением частоты. Отношение xs/rs =
= 16/Cл?а) 2> 1, т. е. реактивное сопротивление излучения
преобладает над активным, и, следовательно, эффективность излучения мала.
Таким образом, подтверждается принципиальная трудность излучения
низкочастотных колебаний, обнаруженная в случае пульсирующей
сферы.
Пульсирующая сфера при ка <^ 1 имеет сопротивление излучения
pco2S2/Dnc) [см. формулу C.19)]. Если эту сферу заделать по
диаметральному сечению в бесконечный экран, то сопротивление полусферы
будет вдвое больше, что совпадает со значением rs поршневой
диафрагмы равной площади [см. формулу C.31)]. Следовательно,
пульсирующая полусфера радиусом R = a/yfl (площадью 2л/?2 = па2) и круглый
поршень радиусом а, колеблющиеся в безграничном экране с
одинаковой скоростью, излучают одинаковую акустическую мощность. Этот
вывод может быть распространен на излучатели любой формы: все
равновеликие (по рабочей площади) излучатели на низких частотах
обладают равным активным сопротивлением излучения и при
заданной скорости колебаний (или объемной скорости) развивают
одинаковую акустическую мощность.
2. Высокие частоты (ка » 1). В этом случае оказываются удобными
асимптотические представления функций Бесселя и Струве:
JxBka)
2ка
0;
StBka)
;
2ка 2ка
1
> 0. C.32)
пка
При этом г5 -* рс5; xs -* 0; ms ¦* 0.
Графики функций аир поршневой диафрагмы, начиная с ка = 1,35,
приближаются к предельным значениям, совершая осцилляции с
уменьшающейся амплитудой. Преобладание активного
сопротивления над реактивным, соответствующее значению аргумента 1,35,
показывает, что нижняя частотная граница эффективного излучения
диафрагмы на 35 % выше нижней частоты, которую эффективно
излучает пульсирующая сфера равного радиуса. Практически можно
принимать импеданс круглой диафрагмы в экране чисто активным и
соответствующим импедансу излучения плоской волны rs = pcS при ка > 3
Акустическую мощность, излучаемую поршневой диафрагмой,
можно вычислить по формуле C.17а) с учетом C.30):
Ра = (l/2)9cSav2m = [рс/B5)] [1 - З^каЖка)} Q2m, C.33)
где Qm = vmS = л a2 vm - производительность излучателя.
Для определения импеданса излучения поршневых излучателей,
форма которых близка к круглой, можно исходить из условия равно-
великости данного и круглого излучателей, тогда эквивалентный
- 71-
радиус а = y/S/n. Практически при ка>2
активная составляющая импеданса у
поршневых излучателей достигает максимального
значения rs «* pcS.
Звуковое поле на оси диафрагмы.
Звуковое поле в ближней зоне, определяемое
выражением B.9), имеет сложную структуру.
Некоторое представление о ближнем поле
дает его распределение на оси. Определим
поле вдоль оси круглой поршневой
диафрагмы в бесконечном жестком экране.
Звуковое давление в точке М,
находящейся на оси х и расстоянии г0 от центра
поршня (рис. 3.6), согласно формуле Гюйгенса C.28), равно
р = [ i/Bn)]G>pifo exp (iuf) И A/г) exp (-/fcr) dS.
s
Выберем элемент поверхности в виде кольца радиусом р и шириной
dp, тогда dS = 2npdp; г2 = г2 + p2; rdr = pdp. Подставив в интеграл эти
значения и учитывая изменение г от г0 до гх = V^2, + а2, получим
Рис. 3.6. К определению
ближнего поля на оси
круглого поршня
р = topvm exp (Ш) I exp(-ifcr) dr =-pcvmexp{i[cof- 0,5^^ + г0)]} х
x - ro)]=2fpcvm sin[0,5k(rx - r0)] X
X{expf-O^/Tc^- r0)]-
X exp {!"И-0,5*^ + 0]}.
Амплитуда давления на оси поршня
pm(r0) = 2pcvm
sin
, - г0)] |.
C.34)
Амплитуда звукового давления в центре поршня (г0 = 0; г1 = а)
2pcvm|sin(naA)| . C.35)
Если а = пк=2пк/2, то рт@) = 0; при а = Bп + 1)^/2 амплитуда
pm@) = 2pcvm. Такие нули и максимумы давления, обусловленные
интерференцией волн, распространяющихся от разных участков
диафрагмы, будут чередоваться вдоль оси х. При выполнении условия
Л(Г1 ~ го)/^ =пп или ri ~ го = п^ получаются нули. Так как с
увеличением г0 разность гх - г0 уменьшается, то наиболее удаленный узел
давления отвечает наименьшему значению п = 1, т.е. гх-г0 = Х.
- 72-
Отсюда можно найти расстояние r0 min от центра диафрагмы до
последнего минимума
Готт=а21{2Х)-\12. C.36)
Из условия образования максимумов давления гг- го = Bп +
можно определить (при п = 0) самый удаленный максимум гх - г0 тах =
= А./2, который находится от центра на расстоянии
rOmax=fl2A-V4. C.37)
Равенство C.37), таким образом, определяет минимальное удаление от
центра, начиная с которого интерференционные минимумы и
максимумы отсутствуют. При высоких частотах можно пренебречь слагаемым
Х/4 и дальнюю зону оценить условием
го>а2/Х. C.37а)
Для далеких точек на оси, расстояния до которых удовлетворяют
неравенству л(гх -r0) ^ А., в формуле C.34) значение синуса можно
заменить его аргументом. Тогда
h-ro = Jr2 + a2- г0 | Го» а * г0 [1 + а2/Bг0) - 1] = a2/Bt0),
и амплитуда давления на оси в дальней зоне будет равна
рт =2рсушла2/Bг0^) = лрса2уш/(г0Х), C.38)
т. е. убывание давления происходит по закону сферической волны
(пропорционально увеличению расстояния). Интенсивность звука
в дальней зоне
J = P2JBqc) = [л2а4/Bг^2)]рсу^ . C.39)
Границу дальней зоны, т. е. границу сферического поля, оценивают
расстоянием г0 =2L2/X, где L- наибольший размер поршневого
излучателя.
Рассмотренные закономерности поля на оси поршневого
излучателя следует учитывать при проведении гидроакустических измерений.
Для исключения ошибок, связанных с интерференционными
явлениями, расстояние между излучателем и приемником должно
превышать протяженность зоны дифракции Френеля [17].
§ 3.4. Пульсирующий цилиндр
Бесконечно длинный цилиндр радиусом о, поверхность которого
совершает синфазные радиальные колебания со скоростью v =
= vm exp (-/со0, излучает осесимметричное звуковое поле. Потенциал
-73-
скоростей расходящейся цилиндрической волны в таком поле на
расстоянии г от оси цилиндра определяют по выражению A.38)
Ф(г, t)=AHP{kr)exp(iut).
Используя условие непрерывности радиальной составляющей
скорости на поверхности цилиндра (равенство колебательных
скоростей звукового поля -дФ/дг при г = ак v0 пульсаций излучающей
поверхности), находим постоянную А = vm/[kHp) {ka)] и звуковое
давление в поле
ЯоB) {кг)
p(r, t) = /сорФ = /pcvm ... ехр (/со0, C.40)
Щ к)
—dH0»tt)/dS.
Импеданс излучения пульсирующего цилиндра получим как
отношение силы реакции среды на поверхность цилиндра единичной
длины р(а) * 2л а к колебательной скорости v:
zsl = ipc • 2паНр (ka)/[HP (ka)] = rsl + ixsl. C.41)
Подставляя выражения функций Ханкеля (см. § 1.4) и учитывая
соотношения J^Nott) - Л>(?)ВД) - 2/(л?), получаем
1 пка\нрЦка)\2
J0(ka)Jl(ka)+N1(ka)N0(ka)
C.42)
Формулу C.42) можно применять для расчета импеданса излучения
длинных цилиндров практически уже при длине h> К. При излучении
низких частот {ка ^ 1) справедливы приближенные равенства J0(ka) %
* 1; N0(ka) * 21n(fca)/n; Jx(ka) * 0,5/ca; JV^fea) % ~2/(л/са), и
коэффициенты сопротивления равны
a * 0,5л/са; 0 * fca In [l/(fcc)]. C.43)
Сопоставим активное и реактивное сопротивления излучения
пульсирующего цилиндра. Из равенств C.43) находим xs Jrs x =
= B/n)ln[l/(fcc)]. Например, при fca = 0,01; 0,1; 0,2 получаем р/а =
= 2,9; 1,46; 1,16. Следовательно, при низких частотах реактивное
сопротивление превышает активное, хотя рост отношения р/a
сравнительно медленный. Так, у пульсирующей сферы P/a = l/(fca),
т. е. xs при малых ка увеличивается значительно быстрее.
Определим соколеблющуюся массу на единицу длины цилиндра.
- 74-
Реактивное сопротивление с помощью соотношений C.43)
представим в виде
Величина ла2р представляет собой массу среды т01, вытесненную
цилиндром единичной длины, а соколеблющаяся масса ms х = т01 х
X21n[l/(fca)]. Отношение rnsi/mol = 2 In [l/(/ca)]. В отличие от
пульсирующей (ms = 3 т0) и осциллирующей (ms = 0,5 т0) сфер масса щ х
с уменьшением волнового аргумента ка неограниченно возрастает.
Для оценки импеданса излучения при высоких частотах (ка ^> 1)
следует воспользоваться асимптотическими выражениями функций
Ханкеля при больших значениях аргумента:
zs 1 % *'Рс- 2ло ехр (-/л/2) = 2ларе = г51.
Как и у всех предыдущих моделей излучателей, импеданс излучения
пульсирующего цилиндра (рассчитанный на единицу длины) при
высоких частотах соответствует излучению плоского поршня больших
волновых размеров.
Чтобы рассчитать интенсивность звука и акустическую мощность,
используем выражение C.40) для звукового давления при /сг»1
(дальнее поле), представив его в виде
9m 2
р s Т^ТгТТГТГ / ~Г ехР f/(со' ~ кг + 37Т/4 + 7)]' C'44)
lH/2)(fca)| v и
Интенсивность звука на больших расстояниях
/= Ipl2/Bpc) = pev2, [nkr \HJfi (ка)\2 ]'\ C.45)
т. е. она обратно пропорциональна расстоянию. При излучении низких
частот (ка « 1) I#F (^)l2 * 4/(nfcc)f и тогда
J=^pcfca2/Dr)]v2n. C.46)
Мощность излучения цилиндра единичной длины
Q,5rslv2m, C.47)
где rs х = о р Bл аJ /4 = со р 52 /4. Величина 5Х vm = Qm x представляет
амплитуду объемной скорости цилиндра, рассчитанную на единицу
длины его образующей. Введем Qm i в формулу C.47), получим
Ра1 = орд^ /8. C.48)
Этот результат подтверждает ранее сделанный вывод о том, что
акустическая мощность источника малых волновых размеров
-75-
0,1
0,2 0,3 0,4 0,5 0,6 0,д 1
0,2 0,J Ofr 0,5 0,6 0,в 1
5 6 7 в 910
Рис. 3.7. Зависимость составляющих а и Р импеданса излучения конечного пульсирующего цилиндра
в бесконечном жестком экране при различных значениях a/h
и произвольной формы излучающей поверхности зависит только от его
объемной скорости.
Импеданс излучения конешюго цилиндра. Сопротивление
излучения в общем случае можно определить интегрированием по
поверхности антенны (диафрагмы) произведения акустического давления р
и величины v* - комплексно сопряженной нормальной составляющей
колебательной скорости. В соответствии с известной формулой
сопротивление
где v0 - колебательная скорость точки приведения; р и v измерены на
излучающей поверхности.
Трудоемкую вычислительную задачу интегрирования по
активной поверхности антенны можно заменить более простым
интегрированием плотности потока энергии в дальней зоне по сфере
большого радиуса г, окружающей антенну. Этим методом находят только
активную составляющую сопротивления излучения, связанную с
акустической мощностью:
Принципиально возможно определить полное сопротивление
излучения антенны по известной ее характеристике направленности,
т. е. методом дальнего поля. Такой подход применили авторы работы
[14], в которой получена формула для величины zs пульсирующего
цилиндра длиной h, встроенного в бесконечный экран радиусом
а:
f sh [{nhA) V* - 1] J0(kat) dt
J (JiftA) л/t2 - 1 HP{kat)
где sh-символ гиперболического синуса; J0(S)-функция Бесселя
первого рода нулевого порядка; Я/2)(?)- функция Ханкеля второго
рода первого порядка.
Результаты численного интегрирования представлены на
рис. 3.7 в виде графиков зависимостей коэффициентов
сопротивления а и 3 от волнового аргумента ка; параметром кривых является
отношение радиуса с цилиндра к его длине h.
-78-
ГЛАВА 4. НАПРАВЛЕННОСТЬ
ГИДРОАКУСТИЧЕСКИХ АНТЕНН
Гидроакустическая антенна представляет собой приемно-излучаю-
щее устройство, которое преобразует подводимую электрическую
энергию в акустическую (режим излучения) и, наоборот, энергию
акустического поля в электрическую (режим приема), а также
обеспечивает пространственную избирательность или направленность в обоих
режимах. Антенна состоит из нескольких (до сотен и тысяч)
электроакустических преобразователей, несущей конструкции, элементов
акустического экранирования и других пассивных узлов.
Гидроакустические антенны классифицируют по различным
признакам: назначению (для средств подводной связи, шумопеленгаторов,
гидролокаторов, рыбопоисковых систем и др.), месту установки
(судовые, плавучие, буксируемые, стационарные и др.), конфигурации
активной поверхности (линейные, поверхностные, объемные), способу
создания направленности (интерференционные - дискретные или
непрерывные, фокусирующие, параметрические).
Конструкции антенных устройств современных ГАС различного
назначения в значительной степени определяют эффективность всего
ГАС в целом. Основные требования, характеризующие качественные
показатели работы антенны, предъявляются главным образом к ее
направленным свойствам. Последние обусловлены способностью
антенны излучать акустические волны в разных направлениях с
различной интенсивностью. Направленные антенны позволяют
увеличивать акустическое поле во много раз в нужном направлении (без
увеличения излучаемой акустической мощности) путем концентрации
энергии в узкие пучки. В режиме приема благодаря направленности
антенны повышается ее помехоустойчивость, т. е. увеличивается
отношение сигнал/помеха и уменьшаются ошибки при передаче
информации.
Теорию направленности используют для решения задач
нахождения пространственного распределения потенциалов (давлений) или
интенсивностей, создаваемых излучателем в неограниченной среде,
и зависимости ЭДС на выходе приемника от направления плоской
падающей волны. В результате получают характеристику
направленности акустической антенны. На практике в
большинстве случаев направленность антенны в режимах излучения
и приема одинакова.
Акустическое давление в некоторой точке, удаленной от
излучающего источника конечных размеров, можно рассматривать как
результат суперпозиции волн, приходящих от элементарных площадок
рабочей поверхности источника. В равноудаленных точках в разных
направлениях мгновенные значения давлений элементарных волн будут
складываться в разных фазовых соотношениях и суммарный эффект
будет различным. Следствием этого явления суперпозиции и
получается направленность при излучении. При приеме аналогичный эффект
образуется в результате интерференции напряжений на сумматоре антенны.
-79-
Как было показано в § 2.1, акустическое поле вблизи источника
имеет сложную структуру, и только начиная с больших расстояний
амплитуда давления убывает по закону сферической волны, а
потенциал скоростей поля описывает выражение B.3)
ton Ф(г, 9, ф) =D(9, ф) exp (-ikr)/r,
D.1)
где D(9, ф)-функция, зависящая от угловых координат, т.е. она
характеризует пространственное распределение поля.
Возникает вопрос оценки расстояния г, при котором соотношение
D.1) выполняется с достаточной точностью. Ответ на него будет дан
позднее.
§ 4.1. Акустическое поле антенны в дальней,
промежуточной и ближней зонах
При расчете акустических полей излучающих систем - антенн
с известным распределением колебательной скорости - обычно
используют ряд упрощающих допущений. Во-первых, антенна
располагается в неограниченном однородном пространстве. Обратимся
к какой-либо конкретной модели антенны. Пусть плоская
колеблющаяся поверхность S (рис. 4.1), дополненная бесконечно
протяженным экраном Э, излучает акустическое поле, потенциал которого
в произвольной точке наблюдения М(г0) определяют по выражению
B.9) - Первой интегральной формуле Гюйгенса
Ф(?о) = [1/Bп)] И vn [exp (-ikr)/r ]dS,
Рис. 4.1. К
определению акустического
поля антенны
где r=[(x1-xJ + (y1y) J]
расстояние между точками
наблюдения М и интегрирования Q; vn -
нормальная составляющая
колебательной скорости текущей точки
(х, у) излучающей поверхности.
Во-вторых, в окружающем
антенну пространстве рассматривают
три зоны излучения: дальнюю,
промежуточную и ближнюю. Начало
координат - внутри излучателя,
угол между направлениями OQ
и ОМ - б, расстояние
г = Vr2 + p2-2ropcos6. D.2)
Пусть г0 > р, т. е. точка
наблюдения находится на
достаточном удалении от
антенны, тогда расстояние г можно
-80-
разложить в ряд по возрастающим степеням отношения р/г0:
г = г0 [1 - (р/г0) cos б + A/2)(р/г0J sin2 б +
+ A/2)(р/г0K cos б sin2 б + ...]. D.3)
Если г0 » р, что соответствует дальней зоне, то величину г в
знаменателе подынтегрального выражения можно принять г = г0 и вынести
из-под знака интеграла. Далее, обрывая ряд на втором слагаемом,
получим
г ^ г0 — р cos б, D.4)
следовательно, ехр (-/кг) = exp (-ikr0) exp (/kp cos б), и множитель
exp (-ikr0) также можно вынести из-под знака интеграла.
Приближенное равенство D.4) означает, что лучи ОМ и QM считаются
параллельными (см. рис. 4.1); разность Дг = г0 - г = р cos б = ON называют
разностью хода лучей, обусловливающей сдвиг фаз между
сферическими волнами, приходящими в точку наблюдения (бесконечно
удаленную) от двух элементарных источников, расположенных в
начале координат и в текущей точке излучающей поверхности.
Введем в рассмотрение единичный радиус-вектор и в направлении
на точку наблюдения. Разность хода Дг представляет собой проекцию
вектора р на направление вектора II (или г^). Представим величину Дг
так: Дг = р cos б = Ipl \й\ cos б, где модуль _1ы1 = 1. Как ввдим^разнрсть
хора равна скалярному произведению *ри. Вектор и=Тих +juy +1tuz =
= i cos a +/cos P + к cos у, где cos а = хх/г0, j:os J = yx/rQ, cos у = zjr^ -
направляющие косинусы. Вектор р =/x+Jy +7cz. Скалярно умножая
векторы р и и, находим выражение для разности хода в декартовой
системе координат
Дг = ри = х cos а + у cos Р + z cos у = ххх/г0 + уух/г0 + zzx/r0. D.5)
В сферической системе ^координат вектор р =/р sin 0 cos ф +
+jp sin0 sinф + kp cos0, вектор u = ro/ro = fsin0X cosфх +/sin0Х sinфх +
+ /с cos 0X. Вычисляя скалярное произведение векторов р и и, получим
Дг = р [ sin 0 sin 0X cos (ф - фх) + cos 0 cos 0X ]. D.5а)
Равенства D.5) и D.5а) получены для общего случая,
соответствующего криволинейной поверхности 5, на которой положение точки Q
определяется тремя координатами. ^
Часто разность Дг выражают через проекции векторов р и и на
координатные оси:
= х sin 0 cos ф + у sin 0 sin ф +z cos 0. D.56)
6-614 - 81 -
Сделанные допущения для дальней зоны позволяют записать
формулу для потенциала скоростей
Ф(г0,0, ф) = ехр Н7сго)/Bлго) И vn exp (ifcpS)d5. D.6)
S
Значение интеграла в формуле D.6) зависит только от угловых
координат точки наблюдения 0, ф, что видно из уравнения D.5).
Как следует из выражения D.6), зависимость потенциала поля от
расстояния г0 имеет вид сферической волны. Однако в общем случае
поверхности равных фаз поля не являются сферами с центром в начале
координат, так как потенциал поля (давление) - комплексная
величина, зависящая от координат 0, ф.
Угловое распределение поля в дальней зоне не зависит от
расстояния г0, и его определяют по нормированной характеристике
направленности по полю:
Д(е,Ф) = р(го,0,Ф)/р(го,0о>Фо), D.7)
где р(г0,0,ф)-давление, создаваемое антенной в произвольном
направлении; р(г0, 0о,фо)- давление в равноудаленной точке в
некотором фиксированном направлении. В общем случае функция
D@, ф) является комплексной:
Я@,ф) = Ш@,фIехр[/агёБ@,ф)], D.8)
где ID @, ф) I - амплитудная характеристика; arg D @, ф) - фазовая
характеристика направленности.
Для расчетов часто используют амплитудную ХН в виде
Ш@,фI^/?@,ф) = 1р@,ф)/р@о,фоI. D.9)
За направление нормирования обычно принимают направление
максимального излучения.
Функция #@, ф) геометрически представляет собой некоторую
поверхность, называемую пространственной диаграммой
направленности (ДН). Графическое изображение ДН - это некоторое
сечение пространственной ДН любой плоскостью, проходящей через
ось, в направлении которой поле максимально.
При определении акустической мощности излучающей антенны
пользуются понятием ХН по мощности (интенсивности) -
зависимостью плотности потока излучаемой мощности от направления на
точку наблюдения. Поскольку интенсивность пропорциональна
квадрату давления, нормированная ХН по мощности
D.10)
-82-
Вернемся к вопросу об оценке расстояния от антенны, на котором
можно использовать формулу D.6) при расчете потенциала поля, т. е.
определим границу дальней зоны. Для этого найдем разность фаз
между кг, принимая за г три члена ряда D.3), и приближенным
значением кг * к (г0 - р cos б):
к [ л/rg + р2 - 2рг0 cos 6 - (г0 - р cos 6)] * kp*sin2 6/Bг0). D.11)
Показатель экспоненты exp(-ifcr) в выражении для Ф(г0) определяет
фазу поля, при приближенном вычислении которой величины
отбрасываемых членов ряда должны быть малы не по сравнению с
остающимися, а по сравнению с периодом мнимой экспоненты 2л.
Максимальное значение р приблизительно равно половине наибольшего размера
антенны! (см. рис. 4.1), следовательно, наибольшая фазовая ошибка
может составить величину /cL2/(8r0), которая не должна превышать
значения 2n/N (обычно принимают N- 16). Из требования fcL2/(8r0) ^
< 2л/16 находим искомое расстояние
г0 > 212Д, D.12)
определяющее границу дальней зоны излучающей антенны, часто
называемой зоной дифракции Фраунгофера.
Неравенство D.12) соответствует условию образования локально-
плоской волны на расстоянии г0. По уравнению D.12) оценивают
применимость ХН как качественного показателя работы излучателя
любой формы, принимая за L наибольший размер.
При г0 < 2L2/X дальняя зона плавно переходит в промежуточную
зону, называемую зоной Френеля. В этом случае величину г0
рассчитывают с учетом трех слагаемых ряда D.3). Акустическое поле
антенны в промежуточной зоне имеет более сложную структуру, чем
в дальней зоне. В частности, на монотонное убывание поля по закону
1/г0 налагается осциллирующее затухающее колебание и ХН
искажается. з
На расстояниях г0 < L/4 + (L/2) V ' L/K находится ближняя зона
излучающей антенны, где поле имеет сложную структуру, зависимость
поля от расстояния носит нерегулярный характер, вектор потока
энергии является комплексным. Здесь создается реактивный поток
энергии, происходит энергообмен между излучателем и полем в
ближайшей его окрестности.
§ 4.2, Амплитудная характеристика направленности
излучающей антенны
Направленность антенны - это свойство поля антенны в дальней
зоне [см. формулу D.12)], где разности фаз приходящих элементарных
волн определяются волновым размером антенны и угловыми
координатами точки наблюдения и не зависят от расстояния г0. Если
6* -83-
элементарные площадки рабочей поверхности антенны возбуждать с
различными амплитудами и фазами, результат суперпозиции будет
отличаться от случая равномерного амплитудно-фазового
распределения колебаний. Из этого следует, что выбором распределения можно
влиять на ХН антенны. В этом смысле волновые размеры и форма
активной поверхности антенны эквивалентны амплитудно-фазовому
распределению. Направленные свойства антенны проявляются
только при ее размерах, сравнимых с длиной волны или превышающих
эту длину.
Комплексная нормированная ХН ?F,ф) полностью определяет
пространственное распределение и фазовые свойства излучаемого
антенной акустического поля в дальней зоне. При расчете функции
D(8, ф) антенны необходимо выбрать положение начала координатной
системы (г0, 8, ф), относительно которого отсчитывается разность фаз.
Вещественная положительная функция Я(8,ф), представляющая
амплитудную ХН по полю, нормирована так, что max R (8, ф) = 1.
Когда поле антенны имеет осевую симметрию, функция не зависит
от азимутального угла, и выражение D.7) запишется так:
ЯF) = р(г,8)/р(г,80). D.13)
Осесимметричной ДН обладают, например, осциллирующая сфера,
акустический диполь, круглая поршневая диафрагма, пульсирующий
цилиндр.
Если ДН антенны не имеет осевой симметрии, то, как правило,
рассматривают ДН в двух взаимно перпендикулярных плоскостях.
Например, для прямоугольного поршня - в двух главных плоскостях,
проходящих нормально через центр поршня и параллельно ее сторонам;
одну плоскость (ф=0) называют азимутальной, другую (ф=90°)-
угломестной.
Для наглядного изображения ДН антенны применяют разные
способы. На рис. 4.2 показана двумерная ДН в полярных и декартовых
координатах, а также в логарифмическом масштабе (шкала в
децибелах). Наибольшей наглядностью обладают полярные ДН, но по ним
трудно точно определить направления нулевых и максимальных
излучений. Для введения логарифмического масштаба используют
соотношение
Я(8, ф) = 20 lg Я(8, ф) = 10 lg R2 (8, ф). D.14)
При построении ДН в логарифмическом масштабе хорошо видны ее
особенности в широком динамическом диапазоне.
Часть ДН в пределах угла 280 называют главным или
основным лепестком, угол 28 0 - углом раствора или угловой
шириной основного лепестка на уровне нулевого излучения,
остальные части диаграммы - боковыми или побочными
лепестками. Наряду с углом 26 0 угловую избирательность антенны, или
остроту ДН, оценивают углом 2807 раствора или шириной основного лепестка
- 84-
Рис. 4.2. Вид двумерной
ДН в полярных (а),
декартовых (б) координатах и в
логарифмическом
масштабе (в)
-160 -90
90 1дО
на уровне -3 дБ @,707 максимального давления или 0,5 максимальной
мощности). Величины боковых максимумов выражают в процентах
или децибелах относительно главного максимума, равного 1 дБ
(или 0).
§ 4.3. Фазовая характеристика направленности
антенны
Показатель экспоненты argD(8, ф) = F@, ф) в формуле D.8)
характеризует изменение фазы поля при перемещении точки наблюдения по
поверхности сферы с большим радиусом г0 и центром в начале
выбранной системы координат. Форма фазовой ХН существенно зависит от
положения начала координат.
Наряду с фазовой ХН F(9, ф) также рассматривают в дальней зоне
поверхности, где фаза поля не меняется для всех углов наблюдения.
Если такой (эквифазной) поверхностью является сфера (за вычетом
скачков на ± л при переходе через нули амплитудной ХН), то центр
сферы называют фазовым центром антенны. Если существует
точка, относительно которой фазовая ХН является постоянной
функцией, то координаты фазового центра антенны совпадают
с координатами указанной точки. С физической точки зрения
фазовый центр есть точка на поверхности антенны; из этой точки
распространяются сферические волны, которые принимает наблюдатель,
находящийся в дальней зоне антенны.
Антенна, ДН которой представлена на рис. 4.2, имеет наиболее
простую фазовую характеристику в виде постоянной функции FF, ф) =
= const ± л. Знаки лепестков амплитудной ДН показывают смену фазы
на ± л при переходе через направления, в которых поле равно нулю.
-85-
Если фазовая характеристика не постоянна, то либо фазовый центр
антенны не совпадает с началом координат, либо антенна вообще не
имеет фазового центра*.
§ 4А Коэффициент концентрации звуковой
энергии
Для оценки энергетической эффективности антенны
направленного излучения введена универсальная характеристика - коэффициент
концентрации (КК). Величина КК показывает степень концентрации
излучаемой мощности в данном направлении. Этот параметр
определяют сравнением акустических мощностей излучения направленной
антенны Ра и ненаправленной (точечного излучателя) Ро. Если Ра и Ро
обеих антенн одинаковы и направленная антенна в точке дальнего
поля создает интенсивность звука J(r, 6,ф), а ненаправленная -
интенсивность /0(г), то коэффициентом концентрации антенны в
направлении 8, ф называют отношение
К(9,ф) = Дг,6,ф)//0(г) при Ра=Рв. ' D.15)
Когда за J принимают интенсивность в направлении максимального
излучения, т.е. J = JmdJ<r)i то величину К называют коэффициентом
осевой концентрации (КОК) и обозначают Ко:
*о = WWr) при Ра -*.. D.16)
Равнозначным будет и другое определение КК: отношение
мощности, излучаемой ненаправленной антенной, к мощности излучения
направленной антенны при условии, что в равноудаленных точках
дальнего поля обе антенны создают одинаковые интенсивности, т. е.
= Р/Ра при Дг,9,ф) = 70(г). D.17)
Условием для КОК будет равенство интенсивностей звука в точке
на оси дальнего поля: Jmax(r) = J0(r).
Связь между коэффициентами K(Q, ф) и Ко установим исходя из их
еделений:
определений:
Дг,е,ф)
/яих(»-)Я2(в,ф)
),Ф), D.18)
где Я2(9, ф) - ХН антенны по мощности.
*Бслее подробные сведения о фазовом центре антенны приведены в работе [33].
- 86-
Заметим, что величина Ко > 1,
а /С(9, Ф) может принимать значения от
О до °° (теоретически). Согласно
определению D.17), КОК показывает, во
сколько раз меньшую мощность должна
излучать направленная антенна по
сравнению с ненаправленной, чтобы
создавать в точке приема на акустической
оси заданную интенсивность. Иными
словами, КОК оценивает
энергетический ВЫИГРЫШ При ИСПОЛЬЗОВаНИИ На-
Правленной антенны: увеличение КОК,
а следовательно, и КК при K(Q ,ф) > 1
эквивалентно как бы увеличению мощности генератора возбуждения антенны.
Получим формулу для расчета КК. Известно, что излучаемая
ненаправленной антенной мощность Po = 4nr2J0. Пусть интенсивность
звука, создаваемая направленной антенной в точке дальнего поля,
равна J{r, 9, ф), тогда элементарная акустическая мощность с/Ра -
поток энергии через элемент сферической поверхности радиусом г
(рис. 4.3) в единицу времени- равна J{r,0,ф)c/S. Согласно формуле
D.9), Дг,9,ф) = /(г,90,ф0)#2(9,ф). Полную активную излучаемую
мощность направленной антенны определяют интегралом от <2Ра по
всей поверхности сферы:
Рис. 4.3. К выводу формулы для
коэффициента концентрации
или
И
где cfQ =dS/r2 - элемент телесного угла для элемента площади dS;
интегрирование ведется в пределах полного телесного угла Q = 4л.
В сферических координатах (см. рис. 4.3) площадь элементарного
сферического пояса dS = r sin QdtyrdQ = г2 sin 9с/9</ф. Используя выражение
D.17), получаем
2л 2л
К(во,Фо) = 4л[$ J Яа(9,ф)йпесЙ*|>]-1, D.19)
о о
где #(9,ф)- ХН, нормированная в направлении 90, ф0, в котором
определяют КК. Если 90, ф0 - координаты точки на акустической оси
антенны, то по формуле D.19) находят КОК.
Если ХН антенны обладает осевой симметрией, причем эта ось
совпадает с направлением 9=0, то Д(9,ф) = Я(9) и формула D.19)
принимает вид
D.20)
Для антенны, ось симметрии которой перпендикулярна направлению
- 87-
главного максимума ХН, элементарная площадь dS = 2лг2 cos 6c?6
и КК определяют по формуле
л/2
к(во) = 2[ $ ^(ejcosede]-1. D.21)
-л/2
Согласно выражению D.17), акустическая мощность направленного
излучателя
Ра = 4лг2/0ДГ0 = 4лг2р2/(рс1С0), D.22)
где р0 - эффективное акустическое давление в точке на оси, на
расстоянии г.
Таким образом, если известен (рассчитан или определен
экспериментально) КОК излучателя, то для определения его акустической
мощности достаточно измерить р0 на расстоянии, удовлетворяющем
условию D.12) дальнего поля. Вычисление КК по формуле D.19)
представляет достаточно сложную задачу.
КОК можно рассчитать непосредственно как отношение
мощностей, для чего надо знать активное сопротивление излучения антенны.
В частности, для антенн больших волновых размеров, как показано
в § 3.3, сопротивление rs = pc5. Для антенн конечных размеров их
сопротивление излучения известно только в некоторых частных
случаях, и процедура вычисления КОК таких антенн значительно
упрощается. Покажем это на примере плоского поршня больших волновых
размеров.
КОК плоского поршня. Пусть размеры плоского поршня,
расположенного в бесконечном жестком экране, значительно превышают
длину волны. В дальней зоне плоская диафрагма создает в осевом
направлении максимальное давление, соответствующее точечному источнику
с той же производительностью. Согласно равенству C.3), и с учетом
излучения в полупространство, благодаря экрану, амплитуда давления
Интенсивность звука
Поскольку волновые размеры поршня велики, его сопротивление rs =
= рс5, а излучаемая мощность Ра = 0,5р cSv2^. Подставив значение v^ =
= 2Ра/(рс5) в выражение для Jmax(r), получим
Следуя определению D.16), находим КОК
К0=4л5А2, D.23)
который пропорционален произведению волновых размеров поршня.
- 88-
КОК плоского поршня с амплитудным распределением. Пусть
амплитуда скорости колебаний изменяется вдоль координат х и у
плоской диафрагмы S по закону v{x, у). Кроме того, представим, что
гипотетический плоский поршень площадью 5ЭКВ имеет постоянную
скорость колебаний v0, причем волновые размеры его позволяют
использовать формулу D.23). При каких условиях у обоих поршней
будут одинаковые коэффициенты осевой концентрации? Во-первых,
должны быть равны мощности излучения. Мощность поршня Рэкв =
= 0,5pc53KBv^,мощность излучения диафрагмы Ра = 0,5рс$ v2(x, y)dS =
S
= 0,5рс ? v{x)dx ? v(y)dy. Отсюда находим v2 = A/5экв) $ v2(x, y)dS.
x у S
Во-вторых, приравниваем их объемные скорости, т. е. vo53KB =
= I v{x, y)dS. Возведем обе части в квадрат, подставим значение v2
S
и получим формулу для площади эквивалентного поршня
Обращаясь к формуле D.23), можно заменить S на 5ЭКВ и получить
расчетную формулу для КОК плоской антенны с амплитудным
распределением. Формулу эту записывают в виде
Ко = 4nS3KBA2 = DЛ5Д2) у, D.24)
где У =S3KB /5- коэффициент использования поверхности (КИП).
Величина У ^ 1, но она тем меньше, чем резче меняется амплитуда
колебаний при спадающем распределении. Например, при косинусоидаль-
ном распределении У = 0,81, при треугольном (линейно-симметричном)
7=0,75.
Помехоустойчивость антенны. Направленность приемной антенны
определяют зависимостью ЭДС, возбуждаемой акустическим полем, от
направления падающей волны. Эту зависимость, нормированную по
эффекту на оси, называют характеристикой направленности антенны
в режиме приеца.
Выясним значение коэффициента концентрации для приемной
антенны. Пусть на антенну в осевом направлении 80, ф0 действует
полезный сигнал, а во всех других направлениях - помеха.
Ограничимся рассмотрением случая простой модели помех изотропного
дальнего поля. Некоррелированные источники помех, равномерно
распределенные по сфере с большим радиусом, в центре которой
расположена антенна, создают изотропное поле, т. е. по различным
направлениям средние значения потока акустической энергии одинаковы.
Отношение мощности Рс сигнала к мощности Рп помехи на выходе
антенны называют помехоустойчивостью антенны к. В общем
случае и зависит как от параметров антенны, так и от свойств помехи
и сигнала. Если интенсивность сигнала в точке приема Jc и ХН
-89-
Я(80, Фо) = *> то мощность Рс пропорциональна Jc, т. е. Рс = acJc.
Благодаря направленности антенны суммарный поток энергии источников
помех по всем направлениям в пределах телесного угла 4л будет
равен Рп = <хп/п ? Д2(8, ф)<Ш. Интенсивности Jc и Jn в точке приема из-
мерены в свободном поле. Отношение мощностей составляет
Q
Для ненаправленной антенны Pc/Pn =JC/Jn> Л(8, ф) = 1 и,
следовательно, а/Dл) = 1. Величина 4л [ $ #2F, ф)<Ш ]-1 есть КОК излучателя,
Q
тогда получаем
т. е. помехоустойчивость антенны пропорциональна коэффициенту
осевой концентрации. Если интенсивности сигнала и помехи в
свободном поле одинаковы, то отношение сигнал/помеха на выходе антенны
равно КОК. Из формулы D.25) следует, что КОК приемной антенны
характеризует долю воздействующей на нее энергии изотропных
помех в дальнем поле по сравнению с ненаправленным приемником,
г. е. оценивает эффективность подавления помех направленной
антенной.
§ 4.5. Плоский излучатель в бесконечном жестком
экране
Определим выражение ХН плоской поверхности 5, расположенной
в плоскости хОу и встроенной в бесконечный жесткий экран Э (см.
рис. 4.1). На поверхности 5 распределение нормальной составляющей
скорости колебаний задано функцией vn(x, у). Акустическое давление
в точке полупространства, определяемой радиусом-вектором г^, для
дальней зоны (г0 > 2L2Д) в соответствии с формулой D.6), равно
Р(го) = [ topoexp Hfcro)/Bnro)] И vnU У) ехр («#2)сВ, D.26)
5
где скалярное произведение векторов ри есть разность хода лучей
Дг. В рассматриваемом случае расположения излучателя в плоскости
хОу величина А г в декартовых координатах равна xcosa+ycosP,
а в сферических координатах Д г = х sin 6 cos ф + у sin 8 sin ф.
Выбрав за направление нормирования единичный вектор и0 с
угловыми координатами 8о»Фо(ао>Ро>"Ро)> определим давление в
равноудаленной точке г0:
-90-
р{и0) = [ /«Ро ехр (-йсго)/BЛго)] И vn(x, у) ехр (ifcp20)
Нормированная ХН антенны
4^Т
Р(ыо)
1. D.27)
Если все точки излучающей поверхности S колеблются синфазно, то в
направлении нормали к плоскости S (80 = 0, иох = иоу = 0, pz = 0)
давление будет максимальным
|0)р0 exp(ifcr0) iO)p0 exp (-ifcr0)
Ртах - И vn(x, у) <К = — Qm, D.28)
2Н 5 2пг0
где Qm - производительность излучателя. Величина ртах
соответствует давлению, создаваемому точечным источником с объемной
скоростью Qm*.
Для синфазной антенны из выражения D.27) получаем
Я(«) - A/йп)И щ{х, у) ехр (//сри) с/5. D.29)
В случае равномерного распределения скорости vn(x, у) = const XH
поршневой диафрагмы определяют по выражению
ЯB) = A/5)И ехр(/*Ры)с*5. D.30)
5
Формула D.30) пригодна для расчета пространственной ХН
плоского поршня любой формы, колеблющегося в жестком экране.
Рассмотрим некоторые частные случаи.
Прямоугольный поршень. Как и в общем случае, поршень
находится в бесконечном жестком экране. Начало координат совмещаем
с точкой пересечения диагоналей прямоугольника, стороны которого а
и Ъ параллельны осям х и у. Подставляя в формулу D.30) S = ab, dS ~
~ dxdy и интегрируя в пределах от -а/2 до а/2 по х и от -Ь/2 до Ь/2 по у.
*В формуле C.3) надо 4я заменить на 2л, так как излучение происходит
в полупространство,
- 91-
получаем пространственную ХН, которую запишем в декартовых и
сферических координатах:
sin [(ка/2) cos ос] sin [(kb/2) cos P]
Я(<х,Р)= ; D.31)
(W2)cosa (fcb/2)cosP
sin [(fca/2) sin 9 cos ф ] sin [(kb/2) sin 6 sin ф ]
Д(8,ф)= . D.32)
(ka/2) sin 8 cos ф (kb/2) sin 6 sin ф
Эти выражения подтверждают зависимость направленности
поршня (антенны) от волновых размеров (напомним, к = 2лА). Если принять
один из размеров значительно меньше к, то ХН Я (9, ф) будет
определяться другим размером антенны, которую в данном случае называют
линейной. Таким образом, формула D.31) есть произведение
характеристик направленности двух линейных антенн размерами а и Ь,
расположенных соответственно вдоль осей х и у.
В азимутальной плоскости хОу угол ф = 0, иу = 0, их = sin 9 и
Д (9) = sin [{па/к) sin 9] [(па/к) sin 9] -1. D.33)
В угломестной плоскости yOz угол ф = л/2, их = 0, иу = sin 9 и в формуле
D.33) вместо лаД будет лЬД.
График амплитудной ХН Д(9) (в одном квадранте) представлен
на рис. 4.4.
Угловой раствор центрального лепестка на нулевом уровне
определяют из уравнения (ла/к) sin 90 = л:
290 = 2arcsin(Va), D.34)
а на уровне 0,707 (-3 дБ) - из уравнения sin ?/? = 0,707, откуда
29 о,7 = 2 arcsin @,44 к/а). D.35)
Число т нулевых значений в одном квадранте находят из
уравнения (лаД) sin6«mn, оно равно целой части отношения а/к, число
боковых максимумов будет т - 1. Принимая, что экстремальные
значения функции sin ?/5 расположены примерно посередине между
-92-
соседними нулями, направления
8П боковых максимумов находят
из равенства {па/К) sin 6n =
(п + 0,5)л, где п = 1% 2, ...*.
Соответственно определим величины
боковых максимумов
1Я(9пI*2/[Bп + 1)л]. D.36)
Важно отметить, что
величины и побочных, и главного
максимумов не зависят от волновых
размеров поршня, которые
характеризуют лишь число и угловое
положение боковых максимумов.
Уровень наибольшего первого
побочного максимума Я{^г)%
* 2/(Зл) * 0,22 или -13,2 дБ.
\
\
\
\
\
© |\
\
,
Q1
I
I
/
%
©I
%
X
s
0,9
0,6
0,7
0,6
0,5
4«
0,3
О
-0,09
-0,2
-0,22
Рис. 4.4. ДН прямоугольного поршня в
осевой плоскости, параллельной его
стороне
В качестве примера рассмотрим квадратный поршень (а = Ь). В осевой
(нормальной) плоскости, параллельной одной из сторон, ХН определяют по формуле
D.33), которая уже проанализирована. Для ХН в диагональной плоскости
Я(8) = sin2 {[
sin 0 } {[
sin 6 }.
D.37)
Отсюда находим угловую ширину 2(^'= 2 arcsin (л/2Х/а). Величины побочных
максимумов определим по формуле D.36), возведя ее правую часть в квадрат: i?@1) =
= 4/(9л2) % 0,048; #@3) % 0,0017 и т. д. Сравнивая эти значения с параметрами ХН
в плоскости, параллельной стороне квадрата, приходим к выводу, что в
диагональной плоскости острота направленности 28J и величины подобных
максимумов меньше, чем соответственно 29Q [см. формулу D.34)] и значения 2/Cл) %
« 0,22; 2/Eл) % 0,13 и т. д. (см. рис. 4.4). Эти отличия связаны с амплитудным
распределением колебаний вдоль диагонали: от середины диагонали к ее краю
амплитуда уменьшается линейно. Поэтому, несмотря на то что длина / в -/2 раз
больше стороны а, центральный лепесток ДН расширяется. Угловая ширина ДН
на уровне 0,707 практически одинакова в обоих сравниваемых случаях.
Коэффициент концентрации прямоугольного поршня с известным
амплитудным распределением может быть вычислен по формулам
D.23) и D.24). КОК поршня с равномерным распределением,
излучающего в полупространство (т. е. находящегося в экране), представлен на
рис. 4.5 в виде графиков зависимости Ко от волнового размера одной
стороны аА., параметром семейства кривых является величина b/k.
Круглый поршень (рис. 4.6). Из геометрических построений
находим х = р cos (р, у = р sin ф, dS = pc/pdcp. Переходя в формуле D.30) к
сферической системе координат, получим
*Более точно положения боковых максимумов находят как корни уравнения
-93-
0,1 0Л 0,J 0,5 7 2 3 45 а/к
Рис. 4.5, Зависимость КОК
прямоугольного поршня в бесконечном
жестком экране от волновых
размеров
Рис. 4.6. К выводу ХН круглого
поршня в бесконечном жестком
экоане
J pcfp I exp [ftp sin 8 cos (<р-ф j]dq>.
D.38)
Показатель степени подынтегральной экспоненциальной функции
определяет фазу давления в точке наблюдения М9 а первый интеграл,
равный 2nJ0(fcp sin 8), выражает суперпозицию колебаний от точечных
источников, находящихся на элементарном кольце радиусом р, Таким
образом, функция J0(/casin8) описывает ХН совокупности точек
окружности радиусом а, т. е. антенны в виде окружности.
Используя формулу интегрирования функций Бесселя $ \
= ? J^t,), получим
i?(9) = 2J1(kasine)/(kasin9).
Как и следовало ожидать, ХН круглого поршня не зависит
от угла ф, т. е. обладает симметрией относительно нормали,
проходящей через центр
поршня.
График функции R(l) = 2j\ (?)/?
представлен на ркс. 4.7. Макашум при
5=0 есть главный максимум в
направлении 8=0. Значения ?О=3,83; ?2 =
= 7,02; ?4 = 10jl7 соответствуют углу
—| 29 0 и последующим направлениям
нулевых значений ХН:
Рис. 4.7. ДН круглого поршня
зависимости от аргумента ?
0 = 2arcsin[l,22\/Ba)];
= arcsin[2.,22/\/Ba)];
= arcsin[3,24A/Bfl)].
D.39)
-94-
Значения первых экстремумов i?(^1) = -0,13; /?(^3)= 0,065 и т.д.
есть величины побочных максимумов. Направления побочных
максимумов определяют значениями аргументов ^2 =5,14; ?3 = 8,42 и т.д.
Угловая ширина ХН на уровне -3 дБ:
260O = 2arcsin [0,5R/Ba). D.40)
Пространственная ДН круглого поршня представляет собой
поверхность тела вращения ДН вокруг направления максимума, ее
рассчитывают по формуле D.38).
КОК круглого поршня можно найти по формуле D.20), а при
радиусе а>\/2- по формуле D.23) с погрешностью меньше 6 %. При
наличии амплитудного распределения скорости v(p) КОК определяют
по формуле D.24), в которой КИП равен
У = [1/(яа2)] [И v(p) dS]2 [И v2(p) dS)'K
s s
§ 4.6. Линейный излучатель
Линейный излучатель представляет собой антенну, один из
волновых размеров которой значительно превышает другие, и
направленность антенны определяется именно этим размером. Линейную
антенну можно рассматривать как совокупность дискретных
(отдельных) или непрерывных источников, расположенных вдоль линии,
например отрезка прямой, дуги, окружности, эллипса. К линейным
излучателям относят прямоугольный поршень с большим отношением
сторон, узкую щель в плоском экране, некоторые плоскости сечения
сложных колеблющихся поверхностей, цилиндр малого диаметра
d <С / и большой длины /.
Представим линейный
излучатель в виде плотно заполненного
точечными источниками отрезка
прямой длиной /, расположенного по
оси х (рис. 4.8). Распределение
колебательной скорости вдоль отрезка
задано комплексной функцией
v(x) = v{x) exp [ !<р(х)], где v(x) -
действительная амплитуда, ф(х) -
фаза СКОРОСТИ Колебаний^ТОЧКИ х. Рис. 4.8. Линейный излу-
В ТОЧКе Наблюдения Дальней ЗОНЫ, СО- чатель в трехмерном про-
гласно выражению D.26), в котором странстве
-95-
следует принять vn(x, у) = v(x); pu = х cos a = х sin 8 (а - угол между
радиусом-вектором г0 и плоскостью хОу, т. е. дополнительный к углу
9); dS = cfx, излучатель создает давление
v(x)x
X ехр {/[ф(х) + fcx sin 9]} cfx. D.41)
Таким образом,, направленность излучателя характеризуется
интегралом, представляющим собой ненормированную ХН (иногда
интеграл называют множителем направленности):
1/2
F(Q)= S v(x)exp{i[<p(x) + fatsine]}dbt. D.42)
-//2
Множитель направленности не зависит от азимутального угла ф, и
поэтому ДН линейного излучателя обладает симметрией вращения
вокруг оси х.
Дальнейший расчет требует конкретизации функции амплитудно-
фазового распределения.
Для частного случая наличия симметричного амплитудного
распределения, которое чаще всего используется в гидроакустических
антеннах, и отсутствия фазового распределения выражение D.42)
упрощается. Полагая v(-x) = v(x), получаем
1/2
F(9) = 2 I v(x)cos(fcxsin9)dx. D.43)
При v(x) = const = v0 (однородный отрезок) ненормированная ХН равна
F(9) = 2v0/ sin [(fcZ/2) sin 9] (kl sin 9)-1.
Нормируя ее в направлении 9=0, получаем F@) = v0/, тогда
I kl \ II kl \
Я(9) - sin I — sine j/ I sin 9 j =
- sin ( — sin 9 J / f — sin 9 j. D.43a)
Этот результат совпадает с формулой D.33), т. е. ХН однородного
отрезка длиной I и ХН прямоугольного поршня в осевой плоскости,
параллельной его стороне 1{а = /), аналогичны.
-96-
Антенна с компенсированными ХН. При поиске подводного
объекта, т. е. при определении угловых координат лоцируемого
(пеленгуемого) объекта возникает задача управления положением главного
максимума ХН. Изменение положения главного лепестка ХН в
пространстве называют сканированием. Сканирование в большинстве
практических случаев должно происходить без механического
поворота антенны. Один из способов немеханического поворота ХН
заключается в выборе фазового распределения отдельных элементов
дискретной антенны или изменения фазы вдоль определенных координат
поверхности непрерывной антенны. Для реализации электрического
поворота ХН необходимо компенсировать акустическую разность фаз
Фа> обусловленную разностью хода лучей в заданном направлении 15^,
изменением электрических фазовых сдвигов фэ схемным путем
(„линии задержки"). Если значения фаз Фэ и Фа равны и
противоположны по знаку, то результирующая фаза равна нулю и колебания или
в точке наблюдения при излучении, или на электрических выходах
преобразователей при приеме складываются синфазно, что
обусловливает максимальный эффект в направлении i^.
Антенны с изменяющимся фазовым распределением,
обеспечивающим максимальное излучение в заданном направлении или
максимальное электрическое напряжение на сумматоре приемной антенны
при падении волны с этого направления, получили название антенн
с компенсированными ХН.
Условие компенсации антенны в некотором набавлении щ^
записывают в виде равенства фаз Фэ = -фа или Цэ="~крйк, при котором
Я() 1
Линейная антенна, компенсированная в заданном направлении.
Пусть требуется обеспечить компенсацию антенны в направлении 6К.
В формуле D.42) для ХН Фэ = Ф(х), фа = kx sin 9; условие компенсации
Ф(х) = -kx sin 0K. Принимая амплитудное распределение равномерным,
получаем
1/2
f (fl) = v0 J ехр [ ikx (sin 9 - sin 9K)] dx.
-1/2
Если 9 = 9К, то F(9K) = v0/ и нормированную ХН можно записать в виде
sin [(fcZ/2) (sin9 - sin 9K)] sin?
Я(9,9К)= — = —- , D.44)
(/c//2)(sin9-sin9K) ?
где ? - обобщенный угловой аргумент, равный
S=(/e//2)(sin9-sin9K). D.45)
График функции D.44) аналогичен изображенной на рис. 4.4
функции R (9), только по оси 9 надо откладывать значения аргумента ?.
7-614
-97-
Проанализируем амплитудную ХН Я(9,9К). Положение главного
максимума определяют из очевидного условия ?0 =(/c//2)(sin 60 - sin 9К) =
= 0, откуда 80 = 0К. При 6К = 0, т. е. синфазном возбуждении, 60 = О
и главный максимум перпендикулярен оси антенны. Направления
нулей ХН найдем из уравнения ?т = ± гпл или (kl/2){sin 9m - sin 9K) = ± тп,
откуда
sin Bm = ± т к/1 + sin 8Kj m = l,2,... . D.46)
Угловая ширина центрального лепестка (или главного максимума)
на нулевом уровне (т = 1) Д 9~ = arcsin (k/l + sin 9K) - arcsin (-А.// + sin 9К),
а в отсутствие компенсации (9К = 0) А90 = 290 = 2 arcsin (V/).
Угловую ширину главного максимума на уровне 0,707 определяют
из уравнения sin ?о,7/5о,7 = 0,707, корень которого ?о,7 = ± 1,39.
Получаем sin 90O = ± 1,Ш/{п1) + sin 9К и А 90>7 = arcsin [1,39?/(л/) + sin 9K] -
- arcsin [- 1,39А./(л/) + sin 9К]; при 9К = 0 A'90j7 = 2 arcsin [1,39А./(л/)]. Так
как угол 9 направления на точку наблюдения связан с обобщенным
аргументом ? нелинейной зависимостью [см. формулу D.45)], то
угловая ширина А90 и Д9о,7 оказывается непостоянной в процессе
сканирования и может существенно изменяться при переходе к излучению
вдоль оси (9К = 90°).
Ширина главного лепестка функции sin?/? на нулевом уровне
равна Л^о = 2л. Для перехода к переменной 9 учтем крутизну
функции z (9):
А90 = 2л/1д?/д9||9=0к = 2л/[(л/Д) cos 9K] = ад cos 9K). D.47)
Аналогично можно оценить ширину главного лепестка ХН на
уровне 0,707, принимая Д?о,7 = 2 * 1>39 = 2,78:
А90,7 = 2,78/ld?/d9l|e=eK = 2,78/[(л/Д) cos вк] =
= 0,885X/(/cos6K). D.48)
Из приведенных соотношений видно, что ширина главного
максимума тем меньше, чем больше волновой размер антенны и чем меньше
угол компенсации (относительно перпендикуляра к антенне). При
наименьшей ширине (A907)min = 0,885Х/7% 51°к/1 сканирование
отсутствует, а при сканировании на угол ± 60° от нормали ширина лепестка
увеличивается вдвое.
Направления побочных максимумов можно определить
приближенно (с достаточной точностью) из условия максимума sin ?:
9V = arcsin [ sin 9K ± Bv + l)k/Bl)]9 v = 1, 2,... . D.49)
Значения побочных максимумов равны -2/(Зл), +2/Eп), -2/Gл),...
или -0,22, +0,13,-0,09,... .
-98-
Теперь можно оценить ширину побочных лепестков. Приняв Д?о =
= л, получим для лепестка с номером v
Л60 v = W cos 9V) * 5TX/(l cos 9V).
D.50)
На рис. 4.9 приведены ДН линейного излучателя при изменении
угла компенсации от 0 до л/2. Пространственные ДН представляют
собой поверхности, симметричные относительно оси излучателя. В
отсутствие компенсации (рис. 4.9, а) ДН имеет „дискообразную'3 форму.
С увеличением угла 9К (рис. 4.9, б) форма становится сначала
„воронкообразной", затем „веретенообразной" (рис. 4.9, в), а при 8к=л/2
„конусообразной" (рис. 4.9, г).
Вычислить коэффициент концентрации линейного излучателя
можно по общей формуле D.19), но так как ХН не зависит от
азимутального угла, то по формуле D.20). Если /^>Х, получаем простую
формулу
К = 21/к, D.51)
пригодную при / > 2А. (с ошибкой менее 0,05).
В случае амплитудного распределения колебательной скорости
вдоль отрезка / по закону v(x) линейный излучатель замещают
эквивалентной в энергетическом отношении линейной антенной с постоянной
амплитудой объемной скорости по длине ?>кв, равной
D.52)
D.53)
где У = ^кв/' - коэффициент использования длины антенны.
Аналогия ХН со спектром Фурье. Воспроизведем выражение D.43)
для ненормированной ХН линейной антенны
о о
Основываясь на формуле D.51), получаем искомый КК
Рис. 4.9. ДН линейной антенны при различных углах
компенсации
-99-
Введем переменную р = к sin 9 и запишем это уравнение в виде
1/2
J v(*)exp[i<p(*)]exp(ipx)dx. D.54)
Так как вне промежутка интегрирования функция v(x) = 0, то,
расширяя пределы интегрирования до + °°, получаем интеграл Фурье от
функции v{x) ехр [ /Ф (*)]. Следовательно, ХН линейной антенны есть
преобразование Фурье от амплитудно-фазового распределения
колебательной скорости. Отсюда можно по известной функции F{p),
выполняя обратное преобразование Фурье, определить функцию
распределения колебаний по длине антенны:
v(x) ехр [ /ф (*)] = [1/Bл)] Г F(p) ехр (-ipx)dp. D.55)
— CD
Уместно отметить, что выражение D.54) совпадает со спектром
Фурье функции распределения колебательной скорости вдоль длины /.
Действительно, сравнивая уравнение прямого преобразования Фурье
для спектральной плотности S{u) импульсного сигнала F(t)
длительностью Г
г
о
и уравнение обратного преобразования Фурье
с выражениями D.54) и D.55), устанавливаем аналогию между ХН
и спектральной плотностью, а также между амплитудно-фазовым
распределением вдоль антенны и импульсным сигналом; в
сравниваемых выражениях параметр к sin 8 является аналогом частоты.
Исходя из указанных аналогий, характеристику направленности
называют пространственным спектром амплитудно-фазового
распределения, главный максимум - нулевым спектром, побочные
максимумы - пространственными спектрами.
Расчет ХН при различных амплитудных распределение
показывает, что переход от равномерного распределения к спадающему
от середины линейной антенны к ее краю вызывает увеличение
угловой ширины А90 (ив меньшей степени Д9о,7) и уменьшение
величин боковых максимумов, а также снижение КК (и КИП).
- 100-
§ 4.7. Дискретные линейные антенны
Для получения большой мощности излучения, обеспечения
направленности и возможности управления направленностью (например,
сканирования) без изменения конструкции или механического
поворота используют антенны, имеющие много преобразователей (элементов)
и большие волновые размеры. Такие многоэлементные антенны,
состоящие из ненаправленных преобразователей (монополей), размеры
которых малы по сравнению с длиной волны, получили название
антенных решеток. Антенны из отдельных направленных
преобразователей чаще называют дискретными. Наибольшее применение
находят плоские (линейные) и цилиндрические (дуговые) антенны;
в первых элементы располагают по взаимно перпендикулярным
направлениям, во вторых - по цилиндрической замкнутой поверхности
или ее части.
Рассмотрим сначала простейшую линейную антенну, элементы
которой расположены вдоль отрезка прямой.
Эквидистантная линейная антенна. Дискретная линейная антенна
содержит п одинаковых точечных источников, расположенных на оси
х через равные промежутки d (рис. 4.10). Разность хода лучей из центра
элемента с номером q и из начала координат Агд = г0 - rq = (q - l)d sin 9.
Потенциал скоростей, создаваемый g-м элементом в точке М дальнего
поля, равен
д = [ <УDлг0)] exp {-ikrq)
[ (УDлг0)] ехр [ -ik(r0 -
D.56)
где Qq = vqSq - комплексная производительность; vq = vq exp (/фд) -
комплексная скорость колебаний; vq - действительная амплитуда
колебательной скорости; yq - фаза колебательной скорости q-ro
элемента.
^ —р
I
I
Рис. 4.10. Эквидистантная линейная антенная решетка
- 101-
Результирующий потенциал в точке наблюдения
Ф(го,в)= 6ХР I QLe^e1'^-1)^9, D.57)
4лг0 <?=1
где Qg = vqSq - действительная амплитуда объемной скорости q-ro
элемента.
Ограничимся случаем Qq = const для всех элементов, а фазу Фд
выберем так, чтобы в некотором направлении 8К значения Фд и
акустической (естественной) фазы Фа были бы равны и противоположны по
знаку. Фаза Фа обусловлена разностью хода лучей Д/g, т. е. принимаем
Фэ = -kd(q - 1) sin 9К. Теперь потенциал Ф(г0, 9) имеет вид
Ф (г0, в) = А 2 ехр [ /fcd(q - l)(sin 9 - sin вк)]. D.58)
l
Полученное выражение представляет собой ненормированную ХН
антенны, компенсированной в направлении 9К. Действительно, при
9 = 9К колебания всех элементов в точке (г0, 9К) складываются синфаз-
но, потенциалФ(го,9к) оказывается максимальным и равным An.
Запишем выражение нормированной ХН, приняв за направление
нормирования угол компенсации 9К:
ЛЧ Р(го,в) Ф(го,9)
Р(го,9к) Ф(го,9к)
= _ J [ е ikd (sin 8 - sin 9K) jg -1 ^ D.59)
п g=l
Воспользовавшись формулой суммы для п членов геометрической
прогрессии, получим
D.60)
0 1 = р i( kd/2)( n - l)(sin 9 - sin 8 J x
sin[(nfcd/2)(sin9 -sinBJ]
nsin[(fcd/2)(sin6-sin9K)]
Экспоненциальный множитель определяет фазовую ХН
рассматриваемой линейной решетки. Если начало координат перенести в
середину отрезка! (см. рис. 4.10), то фазовая ХН может быть преобразована
в постоянную функцию, чем доказывается наличие фазового центра,
совпадающего с принятым началом координат.
- 102-
Амплитудную ХН компенсированной эквидистантной линейной
решетки определяют по выражению
= | sin
sin ?)|, D.61)
где ? = 0,5fcof (sin 8 - sin 8K) = (nd/k) (sin 0 - sin 8K). Аргумент t>
адекватен обобщенному угловому аргументу уравнения D.45) для
непрерывной линейной антенны. Сопоставим характеристики направленности
дискретной и непрерывной антенн.
Пусть размер антенны L = {n- l)d зафиксирован, а число
элементов п-*°°9 тогда d-* 0. Найдем предел функции Я(8,8К), подставляя
в формулу D.61) выражения для? и п? = (л/k)(L + d)(sin 8 - sin 9K):
sin [(л Д )(L + d)(sin 8 - sin 8K)]
lim =
d- 0 n sin [(л d/k )(sin 8 - sin 8K)]
sin [(л LA )(sin 8 - sin 8K)] sin ?
= lim
(nA)(L+d)(sin8-sineK) V
где ? =(nLA)(sin8-sin8K). Как видим, формула D.61) переходит
в формулу D.44) для ХН линейного излучателя. Итак, при большом
числе элементов п и при малых промежутках d между элементами, т. е.
малых 5 (например, при ? < л/8 погрешность при замене синуса его
аргументом составляет 2,5 %), функции D.61) и D.44) практически
совпадают. Следовательно, основные параметры ХН - направления нулей
[формула D.46)] и боковых максимумов [формула D.49)], угловая
ширина главного лепестка на нулевом уровне [формула D.47)] и Д807 на
уровне - 3 дБ [формула D.48)] у линейного излучателя и
эквидистантной решетки равных размеров одинаковы. Однако между
характеристиками направленности сравниваемых антенн есть принципиальная
разница, обусловленная тем, что функция D.61) является периодической
с периодом пл и при значениях ? = ± гл, г = 1, 2,... числитель и
знаменатель ее обращаются в нуль; при этом (после раскрытия
неопределенности) ЯF,8К) = 1. Это означает, что ХН решетки кроме главного
максимума в направлении 6 = 8К имеет еще побочные максимумы, равные
главному (их называют единичными ,или добавочными),
направления которых определяют из уравнения
(cfA)(sin 8r - sin 8К) = ± г. D.62)
В соответствии с направлением 8V бокового максимума с номером v
[см. формулу D.49)], находим его величину
J?(BV) = л | sin [Bv + 1)л/Bп)]|, v = 1, 2,... . D.63)
Для 6-элементной линейной решетки ДН, рассчитанная по формуле
D.61), изображена на рис. 4.11. Здесь главный максимум ориентирован
- 103-
по направлению ? = О (или 0 = 9К), два
единичных максимума расположены по
направлениям ± л.
Наличие в ХН добавочных
максимумов, очевидно, нежелательно:
акустическая мощность излучения по
дополнительным лепесткам с
единичными максимумами уменьшает КК и
помехозащищенность антенны,
появляется неоднозначность пеленгования
цели.
Способы подавления добавочных
максимумов. Возможны три способа ограничения единичных
максимумов: выбор волнового промежутка d/k между элементами;
использование направленных элементов; использование неэквидистантных
решеток.
Рассмотрим первый способ. Из условия образования добавочных
максимумов D.62) видно, что первый появляется при ? = ± л, а
предшествующее ему нулевое направление ДН определяют из равенства
п?> = ±(п- 1)л. Таким образом, в интервале значений углового
аргумента i
Рис. 4.11. ДН шестиэлементной
эквидистантной решетки
-(л-
(л- 1)л/л
добавочные максимумы отсутствуют и уровни боковых максимумов
не превышают первого (ближнего к основному лепестку) бокового
максимума.
Поскольку реальные углы 9 охватывают промежуток от -л/2 до
л/2, то предельные значения ? будут
-l - sin 9K);
(nd/k)(l - sin 6K).
Если ?min>~(n-1)л/п, a ?max< (и- 1)л/л, то в интервале углов
- л/2 < 9 < л/2 или 0 < 9 ^ л добавочные максимумы исключены.
Можно записать условие отсутствия добавочных максимумов в виде
одного неравенства
(п - 1)/ [ n(i + |sin ек|>].
D.64)
При 9К = 0 (нет компенсации) максимальный допустимый промежуток
между элементами cfmax = (п - 1) Vn, т. е. он меньше длины волны. При
наличии компенсации вдоль оси антенны (9К = ± л/2) dmax =
= (п - 1) VBn), т. е. он меньше полуволны.
Если выполняется неравенство D.64), то ХН дискретной линейной
антенны при 0 < 9 ^ 180° отличается от ХН непрерывной линейной
антенны длиной / = nd только в области дальних боковых лепестков,
в остальном обе антенны эквивалентны. Заметим, что эквивалентность
сохраняется при любых законах амплитудно-фазового распределения.
- 104-
Диаграммы направленности эквидистантной линейной решетки
при различных углах компенсации 8К весьма схожи с ДН непрерывной
линейной антенны, представленными на рис. 4.9. С ростом угла
поворота 9К главного максимума ХН деформируется, пространственная
форма главного лепестка изменяется от дискообразной до
конусообразной.
Сделаем замечание относительно применения формул D.47) и D.48)
для определения угловой ширины А80 и Д907. При больших
значениях угла 9К эти формулы дают значительные ошибки, а при 6К,
близких к 90°, непригодны к использованию.
Главный лепесток ХН [см. формулу D.61)] ограничен значениями
? х = ± п/п, откуда sin 0+1 = \l(nd) + sin 0К и sin 9_х = -\l(nd) + sin 9К,
угловая ширина (при 9К > 0) Д90 = 0+1 - 9_1. Из условия sin 9+1 ^ 1
получаем ограничение для угла 9К: sin 9K < l-\/(nd); только при
таком значении 9К можно определять угол 9+, = arcsin [X/{nd) + sin 9K]
и ширину А90 = 9+1 - arcsin [~\/(nd) + sin 9KJ. В области значений
углов компенсации, удовлетворяющих соотношению
arcsin [1 - X/(nd)] < 9К < л/2,
угловая ширина на нулевом уровне равна Д90 = 2(л/2 - 9_J или
Д90 = 2 { л/2 - arcsin [~k/{nd) + sin 9K]}. D.65)
В отсутствие компенсации (9К = 0) Д90 = 2 arcsin [K/(nd)],при 9К =
= л/2 (компенсация вдоль оси антенны) Д90 = 2{ л/2-arcsin [~\/{nd) +1].
Если ХН не содержит единичных максимумов, т. е. выполняется
условие D.64), согласно которому d/K = (п - 1)/п при 9К = 0 и d/X =
= (/? - 1)/Bп) при 9К =90°, то соответственно Д90 = 2 arcsin [1/(л - 1)]
и Д90 = 2 { л/2 - arcsin [1 - 2/(п - 1)]}. В случае большого числа
элементов (п » 1) Д90 % 2/п при 9К = 0 и Д90 = 2 [л/2 - arcsin A - 2/п)]
при 9К = 90°. Нетрудно убедиться, что ширина главного лепестка
компенсированной антенны больше, чем некомпенсированной, причем это
различие увеличивается с возрастанием числа элементов.
tyro касается угловой ширины Д90>7 на уровне -3 дБ, то
полученная выше формула D.48) позволяет сделать следующие выводы.
Величина Д90>7 обратно пропорциональна волновому размеру антенны
и увеличивается с возрастанием угла компенсации.
Можно показать [10], что наибольший угол компенсации 9Kmax, при
котором справедлива формула D.48), приближенно равен
бктах % Л/2 - 0,665 y/X/{nd). D.66)
Коэффициент концентрации дискретной линейной антенны. Пусть
линейная решетка состоит из п ненаправленных элементов,
расположенных на осих. В общем случае принимаем положение элементов
неэквидистантным, амплитуды и фазы их колебаний различными.
- 105-
В силу осевой симметрии поля (и пространственной ХН) антенны ее
КК в заданном направлении 0Х определяют равенством D.21)
л/2
*(fli)e2[ S tf^ejcosede]-1, D.67)
-л/2
в котором ХН #(Э) нормирована в направлении в1# Основываясь на
выражении D.56) и учитывая принцип суперпозиции, потенциал поля
антенны можно представить в виде
5exp(-/fcr0) n
ф(го,е) 2 - vq exp Aфд) ехр (ЛДгд), D.68)
4лг0 ^ = 1
где Агд = Рдй - разность хода лучей г0 и /g (см. рис. 4.10); pq - радиус-
вектор точки q, равный координате Xq; и- единичный вектор в
направлении на точку наблюдения, равный их = sin 6 - проекции на ось
антенны; Д/q = Xq\xx =xq sin 0.
Разделив уравнение D.68) на потенциал Ф(го,81), получим
и подставим в формулу D.67):
vq exp (itfq) exp 9i
. D.69)
л/2 п
5 | S Vg exp (/фд) ехр (//сДгд)|2 cos 9c?0
-л/2 я= 1
Известно, что квадрат модуля комплексного числа А равен
произведению -2 и комплексно сопряженного числа Л*, т. е. 1Л12 = АА*.
Вычислим квадрат модуля суммы:
п ~ I- ~ ~ ~ Л П
Z vgeI'»«e*Ar<i|J,ei = Z Z
VqVg cos
Обозначим Arq - Д^ =(дд -^)sin8 =?^g sin9, где Xq, Xg- координаты
- 106-
элементов qng; dqg - расстояние между этими элементами.
Аналогичное преобразование знаменателя выражения D.69) позволяет получить
выражение для искомого КК
/C(91) = { Z Z AqAg cos[(<fq - (fg)~ kdqg sin QJ}*
X [ Z Z AqAg cos (ffq - <fg) sin (kdqgVikdqg)]-1, D.70)
где Am = vm/v1 - отношение скоростей колебаний элементов с
номерами гп и 1. Если направление Qx совпадает с направлением главного
максимума ХН, то формула D.70) дает КОК. Если антенна
компенсирована в направлении 9К, то (fq = kxq sin 9К, ф^ = kxg sin 9K и тогда
/C(9J = { Z Z AqAg cos [kdqg (sin 9K - sin 9 J]} X
x[ Z Z AqAgcos(kdqgsinQK)sin(kdqgyikdqg)]'1. D.71)
При определении КК в направлении компенсации 9А = 8К двойная
сумма в числителе переходит в сумму квадратов амплитуд:
•к) = I Z Aq I [ Z Z AqAg cos (kdqg sin 9K) X
J]-1. D.72)
Для равноамплитудной антенны (Aq = Ag) формула D.72)
упрощается
п п
^(вк) ~ п2 [ Z Z cos (kdqg sin 9K) sin (kdqg)/(kdqg)]. D.73)
В случае некомпенсированной равноамплитудной антенны
lC0=n2[Z Z sin (kdqg) (kdqg)-1]'1. D.74)
КК эквидистантной антенны. Установленная адекватность
линейкой решетки, состоящей из точечных элементов с малым шагом (по
сравнению с длиной волны), и непрерывной линейной антенны
- 107-
позволяет оценивать КК линейных решеток по соответствующим
формулам для непрерывных антенн с заменой длины / эквивалентной
длиной nd, где п - число элементов, d - шаг решетки.
Чтобы использовать формулы D.71)... D.74) для расчета КК
эквидистантной антенны, надо принять расстояние между элементами с
номерами q и g равным dqg = \xq-xg\ = \d(q =g)\. Тогда формулы D.73)
и D.74) можно привести к более простому виду
p=l
(п -р) cos (kdp sin 9K) sin (kdp)/(kdp)]'x; D.75)
п-1
2 2
P-l
(п-р) sin (kdp)/(kdp)]
'1
D.76)
Ранее полученная формула D.51) для КК линейного излучателя
при замене /- nd дает
D.77)
Из неравенства D.64) следует, что при п^> I условием
применимости формулы D.77) будет волновой размер шага решетки в пределах
0<dA< 1/A+1 sin 9к|).
При dA=0,5m {т = 1,2,...), т.е. при шаге решетки,равном целому
числу полуволн, аргумент kdp = 2л • 0,5глр, sin {kdp) = 0 и К"(8К) = п
независимо от значения угла компенсации.
Влияние волнового шага и угла компенсации на КК иллюстрируют
кривые (рис. 4.12), рассчитанные при п = 10. Видно, что при малых
значениях dfk КК увеличивается
линейно и его значение почти
соответствует КК непрерывной линейной
антенны, рассчитываемому по формуле
D.51). При значениях dfk,
превышающих допустимые [см. формулу D.64)],
из-за появления добавочного
максимума КК резко падает, а затем растет до
к/п
1,50
1,25
1,0
0,75
пчп
U,JU
0,25
i
/
V
V
/I
Ул/
/к
л
/
/
ъ-air
О 025 0,500,75 1,0 1,25 1J501,75'а/Л.
Рис. 4.12. Зависимость отношения
коэффициента концентрации эквидистантной
линейной решетки к числу ее элементов от
волнового периода решетки
- 108-
образования добавочных максимумов более высокого порядка, так
как уменьшается ширина основного и бокового лепестков. С ростом
угла компенсации КК сначала уменьшается, а затем увеличивается и
при 9К = 90е имеет наибольшее значение.
§ 4.8. Линейная дискретная антенна, состоящая
из направленных элементов. Теорема умножения
В § 4.7. была рассмотрена линейная антенна, состоящая из
точечных элементов. В более общем случае размеры элементов соизмеримы
с длиной волны, а линия, на которой они расположены, может быть
кривой.
Рассмотрим систему из п линейных элементов, расположенных
вдоль отрезка прямой L (рис. 4.13) и ориентированных одинаково (их
акустические оси параллельны друг другу). Элемент с номером q
имеет комплексную амплитуду возбуждения aq =А„ ехр(/ф ) и ХН
#<j(8). Фазу будем отсчитывать относительно середины отрезка-
начала координат О. В соответствии с принципом суперпозиции,
суммируя в точке наблюдения дальней зоны потенциалы скоростей всех
элементов, получим
Ф(г0, 9) =
exp (-ikrn) n
\ 1
4лгп
1 Aq exp (й
X exp {ikxq sin 8),
D.78)
где xq - координата центра элемента с номером q. Из выражения D.78)
находим ненормированную ХН антенны
F(9) = I Aq exp (Htq)Rq(Q) exp [ikxq sin 6).
g=l
D.79)
Эта формула описывает направленность антенны в общем случае и для
непосредственного использования достаточно сложна. На практике
такие антенны составляют из идентичных (по крайней мере по волновым
размерам) элементов. Тогда
формулу D.79) можно преобразовать
к виду
AqX
X exp {ikxq sin 9), D.80)
где R* (9) - амплитудная ХН
элемента антенны.
q n\
Рис. 4.13. Линейная антенна,
состоящая из произвольных элементов
- 109-
Равенство D.80) выражает так называемую теорему
умножения. Иными словами, ХН линейной антенны из идентичных и
одинаково ориентированных элементов определяют как произведение
характеристик направленности каждого элемента и антенны,
состоящей из ненаправленных элементов, находящихся в центрах элементов
рассматриваемой антенны. Это легко показать, приняв #*(9) = 1
и обозначив
л
2 Aq exp [ /(<pg + kxq sin 6)] =F0(9), D.81)
тогда D,81) принимает вид
F(9)=JR*(e)F0F). D.82)
Теорема D.82) справедлива не только для линейных антенн. В
самом деле, потенциал скоростей, создаваемый элементом с номером q
в некотором направлении!! в пространстве, равен Ф^^^АФ^й^ф),
где А - номирующий коэффициент; Фдо - потенциал, который
создавал бы этот элемент в той же точке, если бы он был ненаправленным.
Результирующий потенциал скоростей в точке наблюдения
) Z ФпЛи).
Выбрав за направление нормирования вектор и0 (углы 90, ф0 в
сферических координатах), получим ХН данной антенны
Я(Й)«ад)Я0E), D.83)
где ЯоB)- ХН гипотетической решетки изотропных элементов,
расположенных в центрах реальных элементов и имеющих такие же
амплитуды и фазы, как реальные элементы.
Функцию R0{u) называют также „множителем решетки". Это
понятие чисто математическое, абстрактное, удобное лишь для анализа
характеристик антенн; физически решетка с ХН R0(u) не реализуема.
Заметим, что в действительности „элементом q", ХН которого
входит в формулу D.83), могут быть группы антенн дискретных или
непрерывных, но их ХН обязательно должны быть идентичны и
одинаково ориентированы в пространстве.
Пример. Пусть линейная неэквидистантная антенна состоит из шести
линейных излучателей (рис. 4.14), размер каждого излучателя равен а, амплитуды
и фазы колебаний одинаковы.
Антенну можно рассматривать состоящей из двух одинаковых групп, каждая
из которых образована тремя непрерывными линейными антеннами.
Ориентация в пространстве каждой группы одинакова. Согласно уравнению D.82), ХН
- по-
Рис. 4.14. Линейная
неэквидистантная антенна
группы как элемента всай антенны, определяют произведением ХН отрезка а
[см. формулу D.43а)] и ХН 3-точечной антенны [см. формулу D.61)]:
Д*(9)* (sin ijQ sin C?a)/C sin E2),
где Si = (ла/А.) sin 8; ?2 = (nd/A.) sin 0. Число элементов равно двум, поэтому ХН
2-точечной антенны, согласно формуле D.61), R0{Q):cos [(nd/X) sin 0]. ХН всей
антенны в плоскости xOz Д@) = #*@) До@).
§ 4.9. Теоремы смещения и сложения
Рассмотрим еще две теоремы теории направленности антенн,
наряду с изложенной теоремой умножения облегчающие расчет ХН
антенн.
Теорема смещения. Сущность теоремы заключается в том, что
элементы дискретной антенны или малые по сравнению с длиной
волны площадки поверхности сплошной антенны можно перемещать в
направлении, перпендикулярном плоскости, в которой определяют
ХН; при таком перемещении ХН не изменяется. Действительно, пусть
антенна расположена в плоскости хОу (рис. 4.15), а ее ХН определяют
в плоскости xOz. Лучи от элементов 1, 2, 3, 4, направленные в точку
дальнего поля, параллельны плоскости xOz; при их перемещении
параллельно оси у разности хода лучей не изменяются. Следовательно,
ХН антенны, состоящей из расположенных по оси х элементов 1, 2',
3', 4', будет такой же, что и исходной системы элементов 1, 2, 3, 4.
Аналогичные рассуждения относительно элементарных площадок
Рис. 4.15. К доказательству
теоремы смещения
Рис. 4.16. К определению ХН
плоской восьмиэлементной
антенны
- ш-
поверхности S сплошной антенны докажут, что ХН антенны в
плоскости xOz равна ХН проекции антенны на ось х, конечно, с учетом
амплитудно-фазового распределения.
Пример 1. Пусть плоская дискретная антенна состоит из двух групп, в
каждой из которых четыре эквидистантных антенны (рис. 4.16).
Для получения ХН в плоскости xOz смещаем элементы вдоль оси у до оси х,
образуется антенна из двух „элементов", ХН каждого из которых i?*(8) =
= sin Dgi)/Dsin ?х), где ^ ~ Ыа/Х) sin 8. В соответствии с теоремой умножения
следует Д*(9) умножить на функцию #0(9) = cos [(nb/K) sin 8], описывающую ХН
гипотетической антенны, состоящей из двух ненаправленных элементов с
одинаковыми (учетверенными) амплитудами.
ХН антенны в плоскости yOz совпадает с ХН i?*(8), так как перемещение
элементов вдоль оси х приводит к эквидистантной 4-элементной антенне с
равными (удвоенными) амплитудами, расположенной вдоль оси у.
В плоскости x'Oz, используя теорему смещения, элементы смещаем по
нормали к оси х и получаем 8-элементную антенну, состоящую из двух одинаковых
групп. ХН каждой группы Д*(8) = sin D?)/Dsin ?), где ? = (ndJX) sin 8. Расстояние
между центрами групп равно d и ХН До(8) = cos [(nd/X) sin 8]. Согласно теореме
умножения, получаем
Д(9) = sin [DndJ\) sin 8] { 4 sin [(ndjk) sin 8] У1 х cos [(nd/X) sin 8].
Теорема сложения. Эта теорема позволяет рассчитывать ХН,
используя принцип суперпозиции, и формулируется следующим
образом. Если амплитудно-фазовое распределение антенны А (х, у) =
= Ах(х, у) + А2(х, у), то ее направленность описывает функция #F, ф) =
= а1Д1(8,ф) + а2Я2F,ф), где /^(8^), Я2(8, ф)- характеристики
направленности антенны при распределениях Ах(х, у), А2(х, у); а± и а2 -
коэффициенты, не зависящие от углов 9, ф.
Пример 2. Определить ХН в плоскости xOz поршневой ступенчатой фигуры,
расположенной в плоскости хОу (рис. 4.17). Представим антенну состоящей из
трех прямоугольных поршней —одного площадью Wi и двух одинаковой
площади b2h' Такой выбор частей продиктован их общим фазовым центром,
совпадающим с началом координат О.
Акустическое поле, создаваемое такой антенной, р =р\ + р2, где (с точностью
до постоянного множителя)
Pi = bi/ii?i(8) = bi/i sin [(л/iA) sin 9] [(л/iA) sin G];
p2 = 2b2h sin [(л/2А) sin 9] [(л/2А) sin в].
В соответствии с теоремой сложения ХН антенны, нормированная относительно
р @), равна
bi/i sin[(n/iA) sin 9]
Wi +2b2h (n/i
2b2l2 sin [(лl2A) sin 9]
bih+2b2l2 (n/2A)sin8
- 112-
n
11
Рис. 4.17. К определению
XH ступенчатого поршня
Рис. 4.18. Плоский кольцевой
поршень в бесконечном жестком
экране
Пример 3. Задан плоский кольцевой поршень (рис. 4.18). Сместим все
элементы кольца до отрезка 25, распределение амплитуд вдоль которого
соответствует удвоенной разности ординат обеих окружностей при 0<х^аи удвоенным
ординатам наружной окружности при а^х^Ь.
Известно, что поле антенны в дальней зоне ^пропорционально
производительности Qm и характеристике направленности Я (и) [см. формулы D.28) и D.29)];
в рассматриваемом случае поршневой антенны — площади S и #@).
Следовательно, с точностью до постоянного множителя pi =5ii?i(8), р2 = 521?2(в), а полное
поле, очевидно, равно разности полей р = Pi - р2 = SxRi(Q) -S2i?2@).
Пронормируем выражение в направлении 0 = 0; для этого воспользуемся функциями
направленности D.38) и получим ХН кольцевого поршня
ь2
Ь2-а2
2 МкЬ sin 6)
kb sin 0
Ь2- а2
ка sin 0
При дешении этой задачи были использованы амплитудные распределения
Ai(x) = 2 Vb2 ~ х2 и А2(х) = 2 Vа2 - х2, по которым следовало определять
характеристики i?i@) и #2@), а затем, согласно теореме сложения, находить ХН антенны.
Все эти расчеты опущены, так как использованы уже известные функции i?@).
§ 4.10. Дискретная антенна с произвольным
расположением точечных элементов
Рассмотрим антенну, состоящую из п ненаправленных элементов,
произвольно расположенных в пространстве.
Характеристика направленности. Пусть элемент с номером q
(рис. 4.19) создает в точке М дальнего поля акустическое давление
pq{u)9 где 2 - единичный вектор в направлении на точку М. Обозначим
pq - радиус:вектор центра д-го элемента, rq - расстояние до точки М,
г0 - расстояние от начала координат О до точки М.
8-614
- 113-
Jr\f
f\
•
Рис. 4.19. К определению
кретной антенны
/
ХН дис-
Согласно формуле C.3),
давление (без временно'™ множителя)
РвB)
4Л Гд
где ^.^J [ш. ф^^ D.5)].
В соответствии с принципом суперпозиции давление,
создаваемое антенной в направлении вектора и, равно
р(и) = 2 pq(u) = [ ikpcSq exp (-/fero)/Dnro)] X
0=1
л ^
X 2 vq exp (/фд) exp O'fcPgu). D.84)
g=l
Выбрав некоторое фиксированное направление и0, найдем давление
р(й0) в равноудаленной точке и нормированную ХН антенны [см.
формулу D.7)]:
¦ п -** ^ п * ¦
D(u) = { 2 Vg ехр[/(фд +kpqu)]}{ 2 Удехр[/(фд+крGи0)]}. D.85)
g=l g=l
Как уже делали ранее (см. § 4.7), перейдем от скоростей к их
отношениям: Vg/vi = Aq =Aq exp (ftpq). Последовательность модулей ^
выражает распределение амплитуд, последовательность аргументов
Фд - распределение фаз колебательной скорости.
Если требуется обеспечить максимум излучения (приема) в
направлении Цс, понадобится ввести такое фазовое распределение, которое
скомпенсирует акустическую (естественную) фазу, обусловленную
разностью хода лучей, т. е. принять Фд =-и\фяи^. Тогда в числителе
формулы D.85) при и = Цс сумма будет максимальной и равной 2 Ая.
я
Для антенны, компенсированной в заданном направлении, ХН будет
#(и,Цс) = [ ^ Aq]'1 2 Aq ехр[/к?а(П-Цс)]. D.86)
В частном случае равноамплитудной антенны 2 Лд ^пАд, и формула
D.86) принимает вид q
- 114-
R(u, uK) = {Vn) 2 exp(/fcPgu)exp(-/fcPguK). D.87)
g=l
Коэффициент концентрации. В общем случае поле (и ХН) антенны
не обладает осевой симметрией, поэтому для получения расчетных
формул следует исходить из общего выражения для КК D.19).
Перепишем последнее в виде
*> 4л [ 5 R2(u)dQV\ D.88)
й
где Q = 4л - полный телесный угол; R(u) = lD(u)l.
Подставим функцию D.85) в формулу D.88), получим
На основании преобразований квадратов сумм комплексных
выражений (см. § 4.7) и формулы [26]
л)] $ exp [ ik{pq - 9g)Z ] = sin (kdqg)/{kdqg)
Q
получаем формулу для КК в направлении и0
К{и0) - | 2 t, exp («7cP0u0)|2f 1 2 IqA*. Sm{kd<^ I. D.89)
9=1 L«=1 в=1 S fcrfgg J
В случае компенсации антенны в направлении ик
D.90)
Каждый элемент антенны при излучении преодолевает реакцию
как собственного поля, так и поля соседних элементов, возникает
акустическое взаимодействие источников антенны, которое изменяет
сопротивление излучения преобразователей. Одним из параметров,
характеризующих взаимодействие элементов по полю, может быть так
называемое взаимное сопротивление zqg излучения элементов (с
номерами q и g). Вещественная часть zqg (активное взаимное сопротивление rqg)
8* -115-
пропорциональна функции sin (kdqg)/(kdqg),
входящей в выражения для /С(П0) и К^).
При расчете КК каждое слагаемое в
знаменателе этих выражений необходимо
удваивать, так как взаимодействия
элементов q, g и g, q равносильны; при
q=g функция sin(kdqg)/{kdqg) = 1, и
слагаемые в знаменателе определяют
собственное сопротивление излучения
элементов zqq (тогда эти слагаемые удваивать не
надо).
Рассмотрим частный случай, когда
элементы расположены на абсолютно
жестком экране в плоскости хОу. Поскольку излучение происходит в
полупространство (Q = 2л), интегрирование по углу 9 имеет пределы от 0 до
л/2, по углу ф - от 0 до 2л. В результате КК удваивается по сравнению
со случаем свободного пространства. Формула D.89) для КК в
направлении 80, ф0 принимает вид
1
\
t 4
/h
2
d >
0
•
3
X
Рис. 4.20. Четырехэлемент-
ная антенна
п п
•2 1 I jV^cosI
q=l g=l
- fg) - k(xq sin90 cosi|)o
n n
+ yQ sin 0O sin фо)][ I 2 cos ((pg - <ря) sin I
D.91)
Для антенны, компенсированной в направлении 9К, фк, КК
определяют по формуле D.90), в которой первьинюмножитель равен TLlAqAg,
скалярное произведение (р^ - Qg)uK = {xq -Xg) sin 6K cos фк +
(рф
Пример. Антенна, показанная на рис. 4.20, состоит из четырех точечных
элементов 1, 2, 3, 4 и компенсирована вдоль оси х. Амплитуды возбуждения
элементов одинаковы, расстояние между элементами d = 0,5А.. Требуется
определить ХН в плоскостях xOz, yOz, хОу и КОК в направлении компенсации.
ХН компенсированной антенны определяют по формуле D.86). Рассчитаем
скалярные произведения ^i(S - iTK) = Pix(ux - икх) = —0,5d(ux - икх); ^2(" - "к) =
= 0,5d(ux - икх) + d{uy - ику); рэ(и - и^ = 0,5d(ux. - икх); р = (и - "к) =
= —0,5d(i/ - икх) — d(uy - иКу), где их = sin 8 cos ф; иу = sin 9 sin ф; икх = sin 8K cos фк;
ику = sin 8K sin фк. Сумма амплитуд !Aq = 4. По формуле D.86) находим
пространственную ХН (с использованием формулы Эйлера)
R(u, и*) = 0,5 { cos [(kd/2)(ux - икх)] + cos [{kd/2){ux - uKX - 2u + 2uKy ]} ,
где uKX = 1; uKy = 0 (так как фк =- 0); kd/2 = л/2.
В плоскости xOz (ф = 0, иу = 0, их = sin 8)
Я(8, 8k) = cos [(n/2)(sin 8 - 1)].
- 116-
В плоскости yOz (ф = л/2, их = 0уиу = sin 8)
Д@, GjJ = cos [(л/2)A + 2sin в)].
В плоскости хОу (8 = л/2, их = cos ф, иу = sin ф)
{ -cosij) + 2sini|))
Коэффициент концентрации в направлении компенсации рассчитываем по
формуле D.90), в которой 12Ад12 = 16. Производить двойное суммирование
практически удобнее не по индексам q и g, а по парам слагаемых (элементов),
расстояния между которыми одинаковы. Расстояния d^-между элементами 1 и 3,
1 и 4, 2 и 3; d V2 — между элементами 1 и 2, 4 и 3; d V5 — между элементами 2 и 4;
d - 0, когда q = g. Далее вычисляем аргументы k(xq - xg)uKx для указанных пар
элементов: к(хх ~ х3) = kd; k(Xi - хА) = 0; к(х2 - х3) - 0; fc(*i - х2) = kd; k(x4 - х3) =
= kd;k (Х2 ~ хА) = kd. Подставив эти значения в формулу D.90), получим
КФкЛк)= 1б{ 4 + [ 2cos (kd) + 4] sin (kd)/(kd) + 4cos (kd) X
X sin (kdy2)/(kdy2) + 2cos (kd) sin (kdy5)/(kd^5) }-1 .
Поскольку 9К = л /2, фк = 0, kd = л, sin л = 0, cos л = —1, то окончательно
К(п /2, 0) = 16 [4 - 4sin (л д/2) /(л ^2) - 2 sin (л >/5)/(л V5)] ~х % 3,4.
§ 4.11. Акустическая мощность дискретной
антенны
Для получения больших мощностей излучения, обеспечения
направленности и возможности управления этой направленностью,
например сканированием, используют антенны, состоящие из большого
количества преобразователей.
Рассмотрим антенну, содержащую п точечных элементов. Пусть
элемент с номером g развивает в некоторой точке пространства
звуковое давление pg, тогда давление, создаваемое всей антенной, равно
Р- |ХРГ D.92)
Если р, v - давление и колебательная скорость на активной
поверхности антенны 5, то мощность излучения антенны
Р= A/2) $pv*dS, D.93)
s
где v* - комплексно-сопряженная величина.
Определим мощность, излучаемую одним элементом антенны,
имеющим номер q. В соответствии с формулой D.93)
D.94)
sq
- 117-
Давление на поверхности g-го элемента определяют по формуле D.92)
как сумму давлений, создаваемых всеми элементами антенны.
Подставляя равенство D.92) в уравнение D.94), получаем
Pq= V*H l^dSq- Z^mSpgdSq- l^Pqg,
где
1
2 Sq
Величина Pqg представляет собой мощность, расходуемую
преобразователем с номером q на преодоление давления, развиваемого на его
поверхности от действия преобразователя с номером g.
Полная мощность излучения многоэлементной антенны равна
сумме мощностей излучения каждого преобразователя:
Р- 2 Pq- Z Zv*J pgdSq. D.96)
q-l 2 4-1 f-1 Ч 5g *
Импеданс излучения. Выше (см. § 3.1) реакцию поля на источник
оценивали импедансом излучения zs, определяя его отношением силы
реакции поля на рабочую поверхность излучателя к скорости
колебаний его центра приведения vx. Для учета акустического
взаимодействия между преобразователями многоэлементной антенны
целесообразно импеданс zs определять исходя из акустической мощности
Ра = 0,5z5 I vxI2, откуда
zs ~2Pj\vx I2 = rs + ixs. D.97)
Импеданс излучения антенны с учетом уравнения D.96)
zs = Z I (v$/v*)(v^/vi)^= 2 Z AgAqzqg, D.98)
A / \) ^лпНЧ • fv /v ^ * ss A * • л) /\j s= A
Величину zqg = rqg + ixqg называют взаимным импедансом
излучения преобразователей с номерами q и g; он равен части
импеданса излучения <j-ro преобразователя и вызван действзгюырш на
него давлением от преобразователя с номером g. Множитель %gAq
учитывает амплитудно-фазовое распределение на поверхности S антенны.
Из вывода выражения D.98) видно, 4iozqg =zgq.
- 118-
Представляя комплексные амплитуды в виде Ag=Ag exp (/(pg),
A*=Aq ехр(Чфд) и учитывая симметричность слагаемых (с
индексами qg и gq) в выражении D.98), его можно легко привести к виду zs =
qg g) р (),
= Z ? Re (AgAqfaqg + ixqg), откуда получаем
?rqg>
g=l g=l
D.99)
Формулы D.99) позволяют вычислить активное и реактивное
сопротивления излучения дискретной антенны через известные взаимные
активные и реактивные сопротивления излучения отдельных
элементов.
Для определения акустической мощности элемента Ря,
работающего в составе антенны, надо знать его полное сопротивление излучения
zsq, тогда Pq = zsq IvJ2. Мощность пропорциональна именно vl9 а не vq,
так как импеданс zsq определяют отношением мощности к IvJ2, а не
П /v г*
К I Vq 12. ПОСКОЛЬКУ Zsq = 2 A*AgZqg, TO
Pq=(l/2)|v1|2 ^ Z^qfrgZqg. D.100)
Когда все элементы, исключая q, заторможены, то Pq = Q,5\Vq\2zqq,
где zqq - собственное сопротивление излучения g-го элемента.
Получим выражение для взаимного импеданса излучения zqg двух
элементов q и g, имеющих малые волновые размеры, одинаковые
производительности Qm и расположенных на абсолютно жестком
плоском экране. Пусть элемент g создает на поверхности элемента q
давление
Рё = [ ikpcQm/Bndqg)] exp {-ikdqg),
где dqg - расстояние между элементами q ng; Qm = vmS0 (So = Sq= Sg).
Сила, действующая на элемент q, из-за малости его размеров равна
Fq = pgS0. Отношение этой силы к скорости колебаний элементов
позволяет получить взаимное сопротивление излучения
Zqg =Fq/vm = /fcpcSo exp (-ikdqg)/{2ndqg) =
= [Pcfc25g/Bn )][sin (kdqg)/(kdqg) + i cos (kdqg)/(kdqg)]. D.101)
Как видно, взаимный импеданс излучения определяется только
геометрией элементов антенны и их взаимным расположением, но
- 119-
не зависит от амплитуд и фаз колебательных скоростей элементов.
Теперь первая формула D.99) для антенны из п точечных элементов,
расположенных на абсолютно жесткой плоскости, принимает вид
rs =
lx AqAg cos^g - <Pj) sin (kdqg)/(kdqg). D.102)
Заметим, что из формулы D.101) можно получить выражение для
активной составляющей собственного сопротивления излучения
источника малых размеров (в жестком экране), приняв q=g. Тогда
rqq=pck2S2/Bn).
Коэффициент концентрации. В предыдущих расчетах КК
предполагалось, что ХН антенны известна. Существует еще один метод
расчета К(п0) в заданном направлении, основанный на использовании
составляющей г5 антенны и давления р(и0) в дальней зоне.
По определению КК D.17)
/C(u) = (Pe/Pa)|Jo(r) = ]{гЛ) =J0 ' 4лг2/@,5г5 |vx|2 ),
где J0(r) = J(r,u) = \р(ио)\2/Bрс); р(йо)~ звуковое давление,
создаваемое антенной на расстоянии г в направлении й0. Получаем общую
формулу
iC(uo) = [4nr2/(pc)][p(uo)/v1]2/rs, D.103)
определяющую КК в заданном направлении по известной величине rs.
Формула D.103) пригодна для дискретных и непрерывных антенн.
В частности, для дискретной антенны, подставляя выражения для rs
D.102) и р(и0) D.84), получим формулу D.90)
§ 4.12. Направленность пульсирующего цилиндра
конечной длины
Расчет ХН антенны с неплоской активной поверхностью можно
выполнить, как правило, лишь приближенными методами, среди
которых наиболее широко используют приближение Кирхгофа. Как
показано в §2.2, формулу Кирхгофа B.2), определяющую потенциал
поля, создаваемого в пространстве излучающим телом, можно
существенно упростить для тела больших волновых размеров. В этом случае
для дальней зоны потенциал скоростей находят по формуле B.16),
в которой расстояние г можно вынести из-под знака интеграла, приняв
г % го " расстояние до точки наблюдения от начала координат, а
показатель экспоненциальной функции представить в виде kr = k{r0 + Дг),
где Аг-разность хода лучей. Интегрирование уравнения B.16) не
вызывает принципиальных трудностей, и для определения ХН
полученный потенциал надо разделить на его значение при выбранном
- 120-
направлении нормирования.
В § 1.4 было приведено выражение
для звукового поля бесконечного
цилиндра с равномерным распределением
колебательной скорости по его длине.
Рассмотрим звуковое поле цилиндра
радиусом а, совершающего осесиммет-
ричные колебания с произвольным
распределением скорости v(z) по длине.
Как частный случай определим поле
пульсирующего цилиндра конечной
длины, расположенного в жестком
экране с таким же радиусом (рис. 4.21).
Согласно равенству A.45), решение
уравнения Гельмгольца для
расходящейся волны имеет вид #<Р (/с' г) X
х ехр {iyz). Комбинируя все
возможные значения волнового числа У, представим звуковое поле,
излучаемое цилиндром, в виде
Рис. 4.21. К определению
пульсирующего цилиндра
Хн
D.104)
где к' = у/к2 - У2. Неизвестную функцию А (у) определим из
граничного условия
-дФ/дг|г = а = v(z). D.105)
Представим функцию v(z) интегралом Фурье
v(z)
S В(у) ехр {iyz)dy;
D.106)
В(у) = A/ Tin) $ v(z) ехр (-iyz)dz.
D.106а)
Подставляя уравнения D.104) и D.106) в формулу D.105), находим
А (V) и потенциал поля
B(y)HP(k'r)exp(iyz)
D.107)
- 121-
В результате интегрирования получится выражение [48]
2i В{к sin в) ехр(-//сД)
4>(r,z)=-=— , D.108)
ftaH^HkacosQ) kcosQ R
справедливое для дальнего поля (/сг^> 1). Как и следовало ожидать,
потенциал здесь убывает по закону сферической волны.
Обращаясь к цилиндру конечной длины h с равномерным
амплитудно-фазовым распределением скорости v(z) = vm, определяем
функцию В{к sin 0) по формуле D.106а) и находим звуковое давление
(пределы интегрирования от -h/2 до h/2)
pchvm exp(-ikR)
р(г>8) = —TZufk—Тл ~^— ад)' DЛ09)
BHPHkQ) R
где Rh(®) - ХН отрезка длиной h.
Полагая /i«^ и, следовательно, Я/,F)* 1, получим
направленность кольца малой длины в диаметральной плоскости
Fa@) = [ cos 9 Я/2) {ка cos 0)]'1. D.110)
Таким образом, направленность пульсирующего цилиндра в
диаметральной (осевой) плоскости зависит как от его длины, так и от
диаметра. Если представить цилиндр состоящим из большого числа
коротких колец, то можно убедиться в справедливости теоремы
умножения: ХН цилиндра есть произведение ХН элементарного кольца
и ХН отрезка, равного длине цилиндра: F(9) =Fa@)flh@).
Нормированная ХН имеет вид
РЦа) sin[(fch/2)sin0]
д(в) i-T—[ " -• D.111)
вяЖкзв) (fch/2)sin0
Если цилиндр имеет малый диаметр (ка <а 1), то 1Я/2) g)l
и его ХН в вертикальной плоскости практически не зависит от
диаметра и совпадает с ХН отрезка длиной h. Такой же результат получается
при малых углах отклонения от нормали к оси цилиндра. По мере
увеличения угла 0 начинает сказываться направленность кольца.
Когда волновой размер диаметра цилиндра большой и ка cos В » 1,
справедливо асимптотическое приближение 1Я/2) (?I * у2Дл?), и для
ХН получаем
D.112)
Из этого выражения следует, что направленность цилиндра большого
диаметра и длиной h мало отличается от направленности отрезка h,
- 122-
если только рассматриаемые направления не приближаются к оси
цилиндра.
Сравним звуковые давления, создаваемые цилиндром в осевом
(8 = л/2) и перпендикулярном (8 = 0) направлениях при условии
ка ^> 1. Полагая й^@) = 1, из уравнения D.109) находим
Чтобы определить p{R, л/2), надо воспользоваться значением функции
Ханкеля Н^ (?) при ? -> 0, поскольку ка cos 8 -+ 0 при 8 -* л/2. В
результате подстановки в D.109) получим
|р(Я, л/2)| * 0,S9chkavmRh(n/2)/R.
Отношение
р(Я, 0)/р(Я, л/2) * л
D.113)
показывает, что при Я/, (л/2) * 1 (это
будет в случае h 4С к, практически
h ^ к/3) звуковое давление в осевом
направлении намного превосходит
давление по нормали. Иначе говоря,
короткий и толстый пульсирующий
цилиндр излучает преимущественно
вдоль образующей. При h > к (и 2 а >
> к) излучения цилиндра в двух
взаимно перпендикулярных
направлениях различаются незначительно.
Диаграммы направленности
пульсирующего цилиндра
представлены на рис. 4.22. Как видно, при
малом диаметре кольца {d/k = 1/л) ДН
несущественно отличается от ДН об-
?>азующей Я^(8). С ростом диаметра
d/к = 5/л) направленность кольца
приводит к увеличению излучения
(приема) в радиальных
направлениях: \Rh(B)\ в 2,8 раза больше, чем
для цилиндра той же длины и в 5 раз
меньшего диаметра.
Соотношения, относящиеся к
цилиндру в бесконечном экране,
можно использовать и при отсутствии
экрана, если только длина h > к.
- 123-
\
\
\
\
\
>
\2
\
\
i
\
-Л-
А
\
V
/
\
\
/
/
J
/
у
3,8
3,6
ЗА
3,1
3,0
2,8
2,6
2Л
2,2
2,0
18
16
1,0
0,8
0,6
ол
0,2
О 10 20 JO 40 50 60 70 60
Рис. 4.22. ДН пульсирующего
цилиндра
1 — Fa$) ПРИ ка = 5»' 2 —Я(8) при ка = 5;
2 — Fa(8) при ка = 1; 3 — #(8) при fca = 1;
¦»;5-яй(в)
§ 4.13. Антенны с уменьшенными боковыми
максимумами
Выше были получены ХН плоских, линейных непрерывных и
дискретных антенн, а также пульсирующего цилиндра. Типичная ДН
каждой антенны содержит кроме главного лепестка боковые лепестки
с максимумами, которые меньше или равны главному.
Направленность позволяет более эффективно передавать сигналы в заданном
направлении при излучении, а в режиме приема повысить отношение
сигнал/помеха. Наличие боковых лепестков у излучающей антенны
вызывает непроизводительное рассеяние акустической энергии в
других направлениях, а у приемной антенны - понижение отношения
сигнал/помеха и увеличение вероятности ложной тревоги (в
частности, ошибки в определении пеленга). По этим причинам боковые
лепестки ДН, ухудшающие свойства антенны, желательно совсем устранить
или, по крайней мере, значительно уменьшить.
Плоские поршни. На величины боковых максимумов ДН в
значительной степени влияет форма диафрагмы. Так, например, для
прямоугольного поршня первый боковой максимум составляет 22 % (см.
рис. 4.4), а для круглого одинаковых волновых размеров - 13 % (см.
рис. 4.8). При этом раствор главного лепестка ДН у круглого поршня
больше (острота главного максимума меньше). ХН плоских поршней
(в бесконечном жестком экране) можно определить по общей формуле
D.29). Однако для определения ХН в какой-либо одной плоскости,
перпендикулярной поршню, проще использовать теорему смещения
и привести поршень к линейному излучателю.
Рассмотрим несколько примеров.
1. Поршень в виде равнобедренной трапеции. В нормальной
плоскости, проходящей через большее основание (рис. 4.23), ХН поршня
совпадает с ХН отрезка длиной 2/2 и распределением амплитуд
v(x) = v0; O^x^l,; v(x) = [ vo/(/2 - lx)](l2 -x); lx<x<l2.
После подстановки в D.46), интегрирования и нормирования получим
Я(9) -(sin^/fcj (sin IJ12\ D.114)
где t>1 = [л (/, + 12)/к] sin 9; g2 = [л A2 - lx)/\] sin 9.
Формула DЛ14) пригодна и для расчета ХН поршня в виде
параллелограмма с основанием /2 + 1Х. Действительно, представим
параллелограмм состоящим из большого числа п узких полосок длиной АЕ
и расстоянием между центрами CF/n. Согласно теореме умножения,
направленность такой группы полосок определяют произведением
Rae(q)ru(q)> где Яя(8) = sin [{nnCF sin Q)/{kn)]/{n sin [(nCFsin 9)/(Xn)]}.
Переходя к пределу, имеем limRn(B) = RCF(B), следовательно, ХН
параллелограмма I?AE;(e)#CF(GM ч,то соответствует формуле D.114).
Совместим первый побочный максимум функции RaE с первым
нулевым значением функции Reb, для чего примем [n{lx + /2)/X]sin9 =4,49;
- 124-
Рис. 4.23. К определению ХН
поршня в виде трапеции и
параллелограмма
[л(/2 - L)A]sin 9 = л. Отсюда
находим 12АХ = 5,65. При таком
соотношении оснований трапеции ее ХН
Я(?) = (sin ?/?) sin @,7?)/@,7?) имеет
побочные максимумы 1,5; 1,8; 1 %.
В частном случае 1Х = 0 трапеция
преобразуется в треугольник и
формула D.114) принимает вид D.37),
где 2/2 = а у2- основание
треугольника.
Формула D.37) определяет и ХН
ромба в его нормальной
диагональной плоскости, поскольку
дополнение треугольника до ромба не
изменяет амплитудного распределения вдоль отрезка а
Уменьшенные боковые максимумы (меньше 22 %) имеют ДН
прямоугольного поршня в осевых плоскостях, не параллельных сторонам
прямоугольника.
2. Прямоугольный поршень с распределением. Пусть вдоль отрезка
длиной а, параллельного оси х, амплитуда колебаний изменяется по
закону/(х) = cos (пх/а), а вдоль отрезка длиной Ь - по закону/(у) = 1.
Подставляя f(x) в формулу D.43), после интегрирования и
нормирования получим ХН в виде
#(9) = cos?/(l- 4?2/л2), D.115)
где ? = (noA)sin8. Угловая ширина Д?о =3 (А80 «* 172° к/а), Д?0?7 =
= 1,19(А9О7= 68° к/а). Величина первого бокового максимума
составляет^ %.'
3. Составные поршни. Представленный на рис. 4.24 поршень можно
образовать из п одинаковых поршневых фигур, сдвинутых
относительно друг друга по прямой на одинаковые расстояния dx и d2 в двух
взаимно перпендикулярных плоскостях. Согласно теоремам смещения
и умножения, ХН такого составного поршня в нормальной плоскости,
проходящей через линию сдвига, определяют функцией R(Q)-R1R2,
где Rx - направленность сдвигаемой фигуры; R2 - направленность
линейной группы из п равноотстоящих точечных элементов. В
плоскостях xOz и yOz Rx = sin tly2ll 1?2; #2 = sin (nd1>2? 1?2 /lly2^[ nsin (d1>2? lj2):
•'1,2)]» ГДе ?l,2 = (n'l,2/^) S*n 8-
' Например, для двухступенчатого поршня сдвиг dx найдем при 11 =
= 4,49 (максимум Rx) и d^Jh = л/2 (минимум R2), откуда dx ••= 0,35?2.
В этом случае первый боковой лепесток с максимумом 22 %
разбивается на два лепестка, максимумы которых не превышают 4 %.
Дискретные линейные антенны. Уменьшения побочных максиму-
мов можно достичь также выбором функции распределения и сдвигом
отдельных групп. Группа из пх одинаковых элементов с расстоянием
dx между ними при сдвиге на величину d2 Ф dx эквивалентна
неравномерной антенне (рис. 4.25). При d2 = dx = d получается линейная
- 125-
Рис. 4.24. Ступенчатый поршень
антенна с амплитудой, спадающей от середины к концам антенны.
Пусть имеем группу из пх = 4 элементов (рис. 4.26, а). Сдвигая ее
дважды (л2 = 3), получаем антенну из шести элементов с распределением
амплитуд 1-2-3-3-2-1 и характеристикой й(9) = sin D?) sin C?):
: A2 sin2 ?), где ? = (nd/k) sin 8. ДН показана на рис. 4.26, б; побочные
максимумы составляют менее 2 %. Аналогичная равномерная антенна
имеет побочные максимумы 24 %. Острота ДН остается той же, что у
исходной группы из четырех элементов (?0 = л/4), в то время как у
равномерной 6-элементной антенны острота больше (?0 - л/6).
Анализ ДН дискретных линейных антенн показывает, что с
увеличением амплитуд центральных элементов острота и побочные
максимумы ДН уменьшаются. Этот вывод характерен для антенн как
дискретных, так и непрерывных при спадающем к краям антенны
амплитудном распределении. Если же амплитуда колебаний от середины
антенны к концам возрастает, то главный лепесток ДН сужается, а
боковые максимумы увеличиваются. Например, отрезок длиной / при
а)
Рис. 4.25. Система
эквидистантных линейных антенн (а) и
эквивалентная неравномерная
линейная антенна(б)
Рис. 4.26. Система смещенных
дискретных линейных антенн
(а)иееДН(б)
jz n n 2% Jrc tit
Ч J 2 3 ~Т~
- 126-
линейно возрастающей от середины амплитуды колебаний имеет ХН
i?(9) = 2 sin 5/S - sin2 (S/2)/(g/2J, где ?= (л/Л) sin 8. Угловая ширина
Д?о % 4,66 (Л60 * 1,48V/), Д?о,7 * 2,24 (Д0о;7 * 0,71 V/), величина
первого бокового максимума составляет 58 %. 'Сравнение с равномерным
отрезком показывает, что угловая ширина на нулевом уровне
уменьшилась на 26 %, на уровне 0,707 - на 20 %, первый боковой максимум
увеличился в 2,6 раза.
§ 4.14. Влияние акустического взаимодействия
элементов антенной решетки на ее параметры
До сих пор мы считали, что известна (задана) колебательная
скорость элементов антенны, и все параметры антенн определяли в этом
предположении. В действительности обычно известны не скорости
колебаний vq, а подводимые к элементам напряжения Uq. При расчете
vq по заданным Uq следует учитывать взаимное влияние элементов
антенны.
Используемые в гидроакустических антеннах преобразователи
можно рассматривать как простые осцилляторы с эквивалентными
параметрами. Воспроизведем эквивалентную электроакустическую
схему преобразователя (рис. 4.27), не конкретизируя его конструкцию
[28]. Такая схема состоит из генератора возбуждения с ЭДС Ет и
внутренним сопротивлением Z?\ электромеханической цепи с входным
электрическим импедансом Zo; трансформатора с коэффициентом
трансформации l:N и механическим импедансом г = г + /[о)шэкв-
- 1/(ь)Сэкв)]; акустической цепи с импедансом излучения zs и
эквивалентным генератором силой F3KB (в режиме приема). При излучении
F3KB = 0, а при приеме Ет = 0 и Z? определяет входной импеданс
приемного тракта.
Рассматривая приведенную схему для элемента антенны с
номером q, по правилам расчета электрических цепей находим
колебательную скорость элемента
NUQ Zo NEQ
v== — , g = l,2,...,n, D.116)
^Z
z + zsq ^+Z0 z^+zsq
где Uq - напряжение, подводимое к преобразователю с номером q; n -
число элементов антенны; ZgX - входной механический импеданс,
равный
bt-z + NtZrZjlZr+ZJ. D.117)
Согласно формуле D.98), импеданс излучения элемента можно
представить в виде
D.118)
где zqq - собственный импеданс излучения элемента; zBH -
вносимый импеданс, определяемый взаимным импедансом излучения
- 127-
Рис. 4.27. Эквивалентная
электроакустическая схема преобразователя
преобразователей с номерами
q и g.
Из системы уравнений D.116)
и равенства D.118) видно, что
скорость колебаний элемента q в
антенне зависит от скоростей
остальных элементов. В этом и
проявляется акустическое
взаимодействие элементов.
Для расчета колебательных
скоростей элементов с учетом их взаимодействия необходимо
совместно решить систему уравнений D.116) для всех элементов. Эту систему
приводят к следующему виду:
1,2,..., п.
D.119)
Во многих случаях удается избежать решения системы D.119), т. е.
акустическим взаимодействием пренебрегают. Это допустимо, если
выполняется неравенство
D.120)
при условии
ИЛИ
*qq'
D.121)
При выполнении неравенства D.120) колебательные скорости
элементов пропорциональны подводимым напряжениям,
взаимодействие элементов отсутствует. Неравенство D.120) является, таким
образом, условием независимости преобразователей по
полю. Если преобразователь работает на частотах, далеких от
частоты его механического резонанса, то справедливо первое неравенство
D.121). Второе неравенство D.121) выполняется тем строже, чем
больше волновые размеры рабочей поверхности элемента. В частности, для
стержневых излучателей, установленных на плоских или
слабовыпуклых поверхностях с малыми зазорами, расстояние d между центрами
соседних элементов должно быть больше 0,5А.. В интервале 0,3^ < d <
< 0,5к можно пренебречь акустическим взаимодействием при
инженерных расчетах только в случае синфазного возбуждения элементов
решетки.
Поясним физическую сущность условий независимости преобразователей.
Плоский излучатель с размерами, большими длины волны, формирует вблизи
своей поверхности плоский волновой фронт, и его импеданс близок к величине
рс5. Излучатель малых волновых размеров создает вблизи своей поверхности
расходящийся фронт волны, при этом кроме движений частиц среды вдоль
нормали к рабочей поверхности существует еще тангенциальное движение,
- 128-
связанное с расширением фронта волны и не передающееся в дальнюю зону.
Нормальные составляющие скорости колебаний частиц среды создают активное
сопротивление излучения, обусловливающее акустическую мощность в дальнем
поле. Тангенциальные составляющие скорости создают реактивное
сопротивление излучения, которое физически интерпретируется как наличие соколеблю-
щейся массы среды вблизи излучателя.
При размещении в антенне плоских излучателей, имеющих большие
волновые размеры и, следовательно, большое собственное сопротивление излучения
Zqq (хорошо нагружаются на среду), соседние преобразователи мало влияют на эту
величину. Когда размеры преобразователей меньше длины волны, одиночный
преобразователь плохо нагружается на среду, т. е. имеет малое активное и
большое реактивное сопротивления излучения. При синфазных колебаниях всех
преобразователей антенна в целом формирует близкий к плоскому фронт волны,
а импеданс излучения рассматриваемого преобразователя существенно
меняется. *В этом случае не выполняется первое условие независимости D.121),
взаимодействие между преобразователями велико.
Полученное выше выражение D.101) позволяет рассчитать
активную rqg и реактивную xqg составляющие взаимного импеданса
излучения ненаправленных элементов.
Активное и реактивное сопротивления излучения одного элемента
антенны зависят от активных и реактивных составляющих взаимных,
импедансов излучения элементов, амплитуд и фаз их колебательных
скоростей:
rsq = Re^(vg/Vq)^; xsq = Im Д (vg/vq)zqg. D.122)
Результаты расчета. Учет акустического взаимодействия
элементов антенных решеток приводит к следующим выводам.
1. Параметры, характеризующие режим работы преобразователя
в излучающей антенне и степень его согласования с возбуждающим
электрическим генератором, - колебательная скорость, импеданс
излучения, входной электрический импеданс - зависят от положения
преобразователя в антенне, частоты возбуждения, угла сканирования,
рабочего состояния других преобразователей в антенне. При этом чем
выше акустико-механический КПД преобразователя, тем шире область
изменения указанных параметров.
В качестве примера на рис. 4.28 приведены частотные зависимости
границ изменения параметров пульсирующих цилиндрических
преобразователей высотой й = 0,09А.р, радиусом а = 0,4Хр, установленных в
синфазной 20-элементной решетке с периодом d = 0,125А.р, где А.р -
длина звуковой волны в жидкости на частоте резонанса преобразователя
F=f/fp = 1; акустико-механический КПД преобразователя Лам = 0,85,
добротность Q = 0,9. Значения v0 и Ro относятся к бесконечной
решетке при F= 1.
Зависимость границ изменения параметров преобразователей
в той же решетке на частоте резонанса (F=l) при введении по ее
9-614 - 129 -
0,& 0,9 1,0 1,1 F
0,6 0,9 1,0 1,1 F ' 0,8 0,9 1,0 1,1 1,2 F
Рис. 4.28. Частотные зависимости границ изменения параметров
преобразователей в антенной решетке: а — колебательная
скорость; б — входное электрическое сопротивление; в — косинус
угла между током и напряжением
10
Рис. 4.29. Зависимость границ изменения колебательной
скорости (а), входного электрического сопротивления (б) и косинуса
угла между током и напряжением (в) преобразователей
антенной решетки от угла сканирования
60
до е°
Рис. 4.30. ДН антенной решетки с равномерным (а) и неравномерным (б)
амплитудными распределениями при сканировании на угол 8К=22° при
заданных значениях боковых максимумов о
- 130-
элементам фазового распределения, обеспечивающего поворот
главного максимума ХН на угол 0К, показана на рис. 4.29.
2. Амплитудно-фазовое распределение колебательных скоростей
элементов решетки не совпадает с распределением подводимых
электрических напряжений.
3. Возможно появление аномальных эффектов - наличие в антенне
преобразователей с отрицательным сопротивлением излучения, т. е.
поглотителей энергии.
4. Уровни побочных максимумов не совпадают со значениями,
определенными без учета взаимодействия, нули ХН антенны
„заплывают"; возможно также несовпадение истинного положения главного
максимума ХН в пространстве с расчетным направлением
компенсации антенны.
Для примера на рис. 4.30 приведены расчетные уровни ХН
(центральный лепесток не показан) 8-элементной антенны, состоящей из
пульсирующих цилиндрических излучателей радиусом а = 0,25Хр,
высотой h = 0,45Хр, установленных соосно, с периодом d = 0,5А.р при
частоте резонанса (F= 1) и синфазном равномерном распределении
подводимых электрических напряжений, а также при распределении
напряжений по методу Дольфа-Чебышева, обеспечивающих в
отсутствие акустического взаимодействия различные уровни бокового
поля о.
§ 4.15. Направленность антенн при шумовом
сигнале
Задача расчета ХН акустической антенны при шумовом сигнале
возникает в случае приема антенной гидроакустических шумов.
Поэтому рассмотрим направленность в режиме приема.
Поле шумов в зоне антенны раскладывается в спектр по плоским
волнам, т. е. его можно представить в виде суммы случайных полей
гармонических плоских волн различных частот и направлений
распространения. Если поле шумов стационарно в интервале времени
наблюдения и однородно в пределах антенной решетки, то и поля
составляющих его плоских волн также стационарны, однородны и взаимно
некоррелированы. Дисперсия (средняя интенсивность) шумового
поля в этом случае равна сумме дисперсий полей отдельных плоских
волн.
Важной статистической характеристикой стационарно-однородного
поля шумов является частотно-угловой спектр мощности G(/, 8, ф) [7].
Эта функция описывает распределение дисперсии полей
гармонических плоских волн по частоте и направлениям распространения в
телесном угле (в сферической системе координат). Для поля акустического
давления функцию G выражают в Па2/(Гц • ср). Дисперсия шумового
поля о^, определяемая суммой дисперсий плоских волн по всему
диапазону частот в полном телесном угле 4л, может быть выражена
трехкратным интегралом
9* - 131 -
оо 2Л Л
о? = A/л)J I $G(/, 9, ф) sin бс/вйфй/. D.123)
0 0 0
Будем считать, что приемная антенна осуществляет линейное
преобразование акустического поля в электрический сигнал, для
которого справедлив принцип суперпозиции. Следовательно, поле каждой
стационарной плоской гармонической волны преобразуется приемной
антенной в случайный стационарный гармонический сигнал
независимо от преобразования полей других волн. Если заданы амплитудные
частотная характеристика антенны v(/) и ХН на фиксированной частоте
Я (Л 9, ф), то в соответствии с известными для линейных систем
правилами преобразования случайных внешних воздействий соотношение
между спектром мощности входного воздействия - полем шумов
G(/, 9, ф) и реакцией системы - выходным сигналом антенны G(f)
имеет вид
2л л
J J V2(/)K2(/, 9, i|))G(/, 9, ф) sin 9с/6с/ф. D.124)
Функция G(f) представляет собой частотную плотность дисперсии, или
дисперсию суммы случайных гармоник, частоты которых занимают
единичную полосу частот. G(f) выражают в В2/Гц.
Дисперсию выходного сигнала антенны о2 определяют
суммированием дисперсий отдельных взаимно некоррелированных случайных
гармоник во всем диапазоне частот [18]:
00 2л л
°2 = A/л) J S S ^2(/)Я2(/, 9, ф)G(/, 6, ф) sin 9d9(ft|)df/. D.125)
Определим ХН антенны при шумовом сигнале как функцию
о2(9, ф), описывающую зависимость дисперсии выходного
стационарного шумового процесса от направления прихода плоской волны. Поле
плоской шумовой волны есть сумма случайных некоррелированных
гармонических плоских волн различных частот, распространяющихся
в одном направлении. Частотно-угловой спектр такого поля запишем
с помощью дельта-функции
С(/, в, Ф) = [ Gp(f)b(V - 9N(ф' - ф)]/5т 9. D.126)
Здесь функции 6(9'-9)и6(ф'-ф) показывают, что поток мощности
в зону приема проходит только в направлении (9, ф). Подставив
выражение D.126) в формулу D.125) и интегрируя по переменным В' и ф'
с учетом фильтрующего свойства функции 6 [см. уравнение B.23)],
получим искомую ХН
- 132-
02(9, ф) - A/л)Ь2(/)«2(/, 6, Ф)Ср(/)#. D.127)
Когда приемная поверхность антенной решетки плоская или
выпуклая (вогнутая) компенсирована в направлении (9к,фк), функция
R(f, 9К, фк) = 1 на любых частотах (см. § 4.7). Таким образом, если
плоская шумовая волна приходит в направлении (9к,фк), значение
дисперсии шумового сигнала на выходе антенны будет максимальным
и равным
D.128)
Нормированная ХН по средней мощности (интенсивности) при
шумовом сигнале, согласно общему определению D.10), равна
D.129)
Рассмотрим случай идеальной фильтрации шума в антенне.
Частотная характеристика v2(/) отлична от нуля в диапазоне частот А/ =
=/в -/н (/в и/н ~ соответственно верхняя и нижняя частоты):
/ 0при/н>/>/в.
Подставим функцию v2(/) в формулу D.129):
/в /в
я2(е,Ф) = I я2Т/,е,Ф)ср(/)#[ $ срш]-1. Dлзо)
/н /н
Если спектр мощности поля GM) равномерный в полосе прозрачности
идеального фильтра, т. е. Gp(f) = Go, то выражение D.130) упрощается:
/в
к2(е,ф) = [1/(д/)П к2(/(е,Ф)#.
/н
Расчеты ХН при шумовом сигнале со спектром мощности,
равномерным в конечной полосе частот, позволили выявить ряд ее отличий
от ХН при гармоническом сигнале. Прежде всего, ХН при шумовом
сигнале ни на одном направлении не достигает нулевого значения, что
объясняется отсутствием корреляции между отдельными частотными
- 133-
составляющими. Острота главного максимума растет с расширением
полосы частот. Направления минимумов зависят от ширины полосы
и стремятся к положению нулей при гармоническом сигнале
центральной частоты по мере сужения полосы. В целом отличия ХН при
шумовом сигнале от ХН при монохроматическом сигнале тем больше, чем
шире полоса. При малых волновых размерах антенны ее ХН на
центральной частоте мало зависит от ширины полосы, за исключением
области больших отклонений от направления максимума.
§ 4.16.0 синтезе антенн
Создание антенн, обладающих заранее заданными параметрами, -
важная практическая задача гидроакустики, так как эффективность
любого гидроакустического средства (ГАС) во многом зависит от его
антенны. Требования, предъявляемые к работе антенного устройства
в целом, относятся главным образом к параметрам его ХН.
Выше была рассмотрена прямая задача определения ХН по
заданной форме и закону возбуждения рабочей поверхности или
дискретных элементов антенн, основанная на вычислении R(u) по формуле
D.29). Анализ этого выражения показал, что в простейших случаях
остроту ДН в основном определяют волновые размеры антенны, а
закон амплитудно-фазового распределения влияет на угловое
положение главного максимума и относительный уровень боковых
лепестков.
Синтез антенн - это раздел теории антенн, в котором решается
обратная задача: нахождение практически реализуемых амплитудно-
фазовых распределений по активной поверхности (элементам)
антенны, обеспечивающих точно или приближенно заданную форму ДН.
Разнообразные требования, предъявляемые к современным ГАС,
могут быть удовлетворены, если использовать антенные решетки. Во
многих практических ситуациях форма ДН не имеет существенного
значения, так как требуется обеспечить наилучшие (наибольшие или
наименьшие) значения некоторых параметров ХН, Для этого
определяют ХН, оптимальную по тем или иным критериям. Например,
рассчитывают параметры излучающей антенны, обеспечивающей максимум
КК решетки или имеющей минимальную угловую ширину
центрального лепестка при заданном уровне боковых максимумов, или
создающей минимальное поле в заданном направлении и др.
Рассмотрим специальную задачу выбора и оптимизации
амплитудного распределения с целью получения минимальных боковых
максимумов при минимальном расширении центрального лепестка.
Синтез линейной антенны по методу Дольфа-Чебышева. Задача
оптимизации ХН по заданным критериям была решена Дольфом для
дискретной линейной антенны, состоящей из точечных синфазных и
равноотстоящих элементов. Метод решения основан на использовании
полиномов Чебышева.
ХН антенны фиксированного размера с минимальной шириной
- 134-
центрального лепестка Д90 при заданном уровне боковых
максимумов о или, наоборот, при заданной ширине А60 с наименьшими
значениями о называют оптимальной ХН. Распределение амплитуд,
обеспечивающее получение оптимальных ХН, определяют для каждой
конкретной антенны.
Симметричные антенны из 2л и 2п +1 элементов (рис. 4.31)
с амплитудами возбуждения Ат имеют соответствующие ХН:
п
т-1
т=0
2 Am]'1;
1
tmAm cos Bml) [JLemAm]'\
D.131)
где т - номер пары элементов; ? = (ndA) sin 6; е0 = 1, tm = 2 при т Ф 0.
Благодаря осевой симметрии антенны и симметричному возбуждению,
ХН полностью определяется значениями угла 6 от 0 до л/2. Как видно,
ХН описывается суммой косинусов кратных аргументов,
коэффициенты при которых пропорциональны амплитудам колебаний Ат
соответствующих пар элементов. Вычисление значений Ат по заданным
критериям (минимум Д90 или о) составляет решение задачи синтеза.
Подставляя х = cos ?, функции R(в) можно выразить многочленами
по степеням х и подобрать их коэффициенты так, чтобы они
преобразовались в полиномы Чебышева. Ненормированный полином Чебышева
первого рода степени т(т- целое число) имеет вид
Тт(х) = cos (m arccos x) = cos
D.132)
Приведем некоторые значения полинома: Т0(х) = 1; Т1(х) = х; Т2(х)
(?) 2 {) (?) 2 {) 4 2
р 0() ; 1() ; 2()
= cos B?) = 2х2 - 1; Т3{х) = cos C?) = 4х2 - Зх; Т4{х) = 8х4 - 8х2 + 1.
Все нули и экстремумы полинома находятся в интервале -К х^ 1,
причем экстремумы, расположенные в точках xv = cos (vn/m),
одинаковы и равны Тт{У>п) = (~l)v, так что ITm(vn)l = 1; число нулей равно т,
-71
-771
-71 '771
-2 -1
Рис. 4.31. Симметричные линейные антенны с четным (а) и
нечетным (б) числом точечных элементов
- 135-
число экстремумов (т - 1). При х > 1
значение ? становится
комплексным, а Тт(х), оставаясь
действительной величиной, превышающей
единицу (по модулю), принимает вид
Тт{х) = ch (m arch x)
D.133)
-1,15-1,0 -0,6 -0,2 00,2 0,6
ах
Рис. 4.32. График модуля полинома
Чебышева шестой степени
и с ростом \х\ монотонно возрастает
до бесконечности.
Для примера на рис. 4.32
приведен график 1Г6(хI. Вид графика
качественно схож с ДН дискретных
линейных решеток. Использование
полинома Чебышева для построения
антенн с оптимальными ДН основано
на двух его важных свойствах. Во-
первых, из всех многочленов данной
степени т с коэффициентом 2777"
при х в высшей степени полином Тт(х) в интервале -1 < х ^ 1 имеет
наибольшие максимальные, равные по модулю значения и, во-вторых,
вне интервала [-1, +1] Тт(х) возрастает быстрее других полиномов.
Следовательно, если максимумы полинома, описывающего ХН, в
указанном интервале соответствуют боковым максимумам, то последние
будут минимальными. Второе свойство используется для получения
наименьшей ширины главного лепестка при заданных размерах
антенны.
Введя полиномы Тт(х) в выражения D.131) для #@), представим
ХН эквидистантной линейной антенны в виде ряда по полиномам
Чебышева, аргументом которых является х = cos [(ndA) sin 9]:
для антенны с числом элементов соответственно 2 л и 2 л + 1.
Для построения оптимальной ДН необходимо значения
амплитудных коэффициентов подобрать такими, чтобы функция F(9) была равна
полиному Чебышева степени л - 1. Главный максимум ДН получается
при 9 = 0 или х = 1: Тт(х) = Тт{1) = 1, т. е. он равен величинам боковых
максимумов. Чтобы главный максимум ДН был больше боковых, надо
преобразовать полином Чебышева: только при значениях его
аргумента 1x1 > 1 модуль \Тт(х)\ > 1 (см. рис. 4.32). Поэтому для получения
оптимальной ХН используют полиномы Чебышева от аргумента ах
(где а > 1):
( cos [(л - 1) arccos (ах)], \ах\ < 1;
?п оптМ = Tn_i(ax) = ] D.134)
(ch[(n-l)archlax)],laxl>l,
где -1 < х ^ 1; х = cos [{nd/k) sin 9].
- 136-
Главный максимум ДН будет в точке х = 1 (9=0), при этом
Tn^i(ax) = Tn_i(a) = ch [(л - 1) arch a ], а боковые максимумы будут
равны ± 1. Следовательно, нормированная ХН имеет вид функции
или
ЯF) = о cos {(л - 1) arccos [ a cos {nd sin 0 А)]} , D.135)
где о - величины боковых максимумов:
о = l/rn_i(a) = { ch [(л - 1) arch a]}'1. D.136)
Отсюда находим зависимость параметра а от числа элементов антенны
и величин боковых максимумов:
а = ch { [1/(л - 1)] arch (I/O)} . D.137)
Приравнивая выражение D.137) нулю, получим формулу для
ширины ДН
С А. Г 1
26 п = 2 arcsin \ arccos — cos
nd [а 2(л - 1)
D.138)
При заданной ширине 20 0 из уравнения D.134) определяют параметр а
и по формуле D.136) рассчитывают минимальные значения о боковых
максимумов. Если сравнить угол 20 0 оптимальной ДН с раствором 20 00
ДН аналогичной равноамплитудной решетки, то относительное
расширение ДН оценивают величиной
Г 1 и 1
sin 0o/sin 0OO = (л/л) arccos — cos . D.139)
La 2(л - 1) J
Расчеты по формулам D.136)... D.138) показывают, что уменьшение
боковых максимумов достигается за счет расширения центрального
лепестка, а для получения боковых лепестков с малыми уровнями при
незначительном снижении остроты главного максимума требуется
большее число элементов, что увеличивает габариты антенны.
Амплитуды возбуждения источников определяют сравнением
коэффициентов полинома Тп_\{ах) и выражения Я@). Если источники
имеют одинаковую ХН #*@), то следует функцию D.135) умножить
наД*@).
Приведем соображения относительно выбора периода решетки-
волнового промежутка d/k между соседними элементами.
Принципиально синтез оптимальных антенн по методу Дольфа-
- 137-
Чебышева позволяет рассчитать антенну весьма малых размеров,
принимая d < Х/2, и обеспечить заданный узкий главный лепесток ДН.
Однако для этого необходимо, 4to6bi амплитуды возбуждения отдельных
излучателей были большими, а колебания соседних излучателей
происходили в противофазе. Такие „сверхнаправленные" антенны
практически неосуществимы, так как даже малые отклонения
амплитуд или фаз элементов существенно изменяют форму ДН. В связи
с этим широкое применение находят только синфазные оптимальные
решетки с периодом d > к/2.
Аргумент х функции R(ax) принимает минимальное значение при
9 = л/2 и равен хт[п = cos (лс/Д). При значениях ах < 1 ДН переходит
в область боковых лепестков (см. рис. 4.32). Первый добавочный
(единичный) максимум может образоваться в области значений
ах<- 1. Чтобы этого не случилось, необходимо обеспечить условие
ах > -1 при х * xmin, т. е. a cos (лс?Л) > -1, откуда получаем верхний
предел для периода решетки
dfk < (l/л) arccos (-I/a). D.140)
При компенсации антенны в направлении 9К, отсчитываемом от
нормали к оси антенны, аргумент х = cos [(nd/k) (sin 9 - sin 9K)], и
неравенство D.140) принимает вид
dfk < [лA + sin 9J]-1 arccos (-I/a). D.141)
Оценка коэффициента концентрации двумерной решетки может
быть произведена по формуле [33]
К = DЛ5ЭФА2) |mZ^m|2 [nmlXA*Г1, D.142)
где 5Эф - эффективная площадь активной поверхности антенны.
В частности, при компенсации антенны в направлении 9К и
фактической площади приемно-излучающей поверхности S эффективная
площадь 5Эф =Scos9K.
Пример расчета оптимальных по методу Дольфа-Чебышева антенных
решеток с приведением таблиц и графиков, где указаны ширина ДН на нулевом
уровне излучения и на уровне -3 дБ, нормированные амплитуды возбуждения
элементов, полное число нулей и максимумов ДН относительно расширения
центрального лепестка, коэффициенты осевой концентрации при полуволновом
периоде решетки с числом элементов от 3 до 20 и уровни боковых максимумов
от -30,5 дБ C %) до -14 дБ B0 %), а также направления максимальных и
минимальных излучений, рассмотрены в учебном пособии автора [30].
- 138-
ГЛАВА 5. ОТРАЖЕНИЕ АКУСТИЧЕСКИХ ВОЛН
ОТ ТЕЛ В ВОДНОЙ СРЕДЕ
Одна из областей применения современной гидроакустики -
гидроакустическая локация, т. е. обнаружение и определение координат
различных подводных объектов при помощи регистрации отраженных
от них эхосигналов.
Поверхность облучаемого тела не только отражает акустическую
энергию, но часть ее поглощается веществом тела. Будем полагать
поверхность тела абсолютно жесткой, так что нормальная
составляющая колебательной скорости vn на ней равна нулю. В случае упругой
поверхности в дальнейшие формулы следует вводить коэффициент
отражения.
Практический интерес представляет отраженное поле в
направлении прихода волны, поскольку в гидролокаторах, как правило,
используют одну антенну в режимах излучения и приема.
Предполагаем, что размеры отражающей поверхности значительно
больше длины волны. Равенство vn = 0 в любой точке абсолютно
жесткого тела при воздействии на него акустической волны можно
трактовать как сложение двух противоположно направленных (по нормали)
и имеющих одинаковые амплитуды скоростей колебаний элементов
поверхности, вызванных падающей волной, и колебаний, равных
и противоположных первому; волна, обусловленная этим последним
(встречным) движением и есть отраженная волна.
§ 5.1. Отражение от диска
Пусть на жесткий неподвижный круглый диск радиусом R (см.
рис. 3.5) падает плоская волна, фронт которой параллелен плоскости
диска. Поле на оси диска, согласно Первой интегральной формуле
Гюйгенса B.9), определяют по выражению для потенциала скоростей
Ф(г0) = [1/Bл)] П [v0 exp (-ikr)/r]dS,
S
где v0 ~ - дФ/дх - амплитуда скорости колебаний элемента dS диска;
г - расстояние от dS до точки наблюдения на оси х. Выберем элемент
в виде кольца радиусом р и шириной dp, тогда dS = 2лpcfp; г2 = т% + р2;
rdr = pcfp. Получаем
Ф(г0) = v0 S exp (-ft Уг2 + р2) (г2 + p2)~1/2pdp.
о
Для вычисления интеграла используем подстановку т\ + р2 = ?2:
Ф(г0) = (МО [exp (-ft Ы + Я2) - exp (-ftr0)]. E.1)
- 139-
Если г0 » а, то jRl + rl* го[1 + Я2/Bг2)] и
(-ifcr0) { ехр [ -//сЯ2/Bг0)] - 1 }. E.2)
Рассмотрим случаи далекого и близкого расположения точки
наблюдения.
1. Пусть kR2/Br0) = nR2/(r0X)<^\ или г0 » лЯ2Д. При х<?1
ехр (-*) % 1 - х (при х < 0,4 погрешность менее 1 %) и
Ф(г0) = (ivoA) ехр (-ifcr0) [ -!кД2/Bг0)] = [ RVBr0)] v0 ехр (-ikr0).
Видим, что потенциал (и давление) изменяется обратно
пропорционально расстоянию. Амплитуда давления в отраженной волне на
оси диска
\ps\ = G)pfl2v0/Br0) = QcvonR2/{ro\).
Так как pcv0 = р,- - амплитуда давления в падающей волне, то
k)]Pi. E.3)
Если R ^ А, а ширина ХН круглого поршня 290 = 2 arcsin @,61A./R), то
практически вся энергия, излученная диском (а следовательно,
энергия отраженной волны), концентрируется в направлении нормали
(оси х).
2. Пусть kR2/Br0) = nR2/(r0\) »1 или г0 «: nR2/k. В этом случае
на оси диска наблюдается чередование интерференционных
максимумов и минимумов давления, причем величины максимумов
одинаковы и среднее значение амплитуды р0 = pcv0 (см. § 3.3) не зависит от
г0. Следовательно, пока го<?па2/\} фронт волны не расширяется
и плоская волна отражается зеркально, т. е.
IftlHwl- E.4)
«
Протяженность зоны, определяемой условием г0 «с па2/к, для
плоских отражателей больших волновых размеров на высоких частотах
может оказаться довольно значительной. Так, если 2а = 5 м, /= 50 кГц
(X = 0,03 м), то лЯ2Д * 650 м.
Если источник падающей волны находится на расстоянии г от
диска (на оси), а приемник отраженной волны расположен на
расстоянии г0 от диска (на оси), то
ps = [nR2/(rok)]Pi при rrj(r + го)»лД2А;1
I E.5)
Ps = rPi/(r0 + г) при rro/(r + г0) «С л#2Д. Г
Формулы E.5) можно применять также для расчета отражения от
поршней прямоугольной формы, заменяя л Я2 = S = ab, где а - больший,
- 140-
- меньший размеры прямоугольника. Тогда первая формула спра-
едлива при rro/(r + г0) » Ла2/DХ), вторая - при rrof(r + г0) «С
b
ведлива при rro/(r г0) а/D
лЬ2/DХ). В промежуточном случае
гго/(г + г0)
получим [9]
E.6)
При наклонном падении волны на плоский отражатель отражение
будет максимальным в направлении, при котором угол отражения
равен углу падения. Отражение в направлении на источник будет
ничтожно малым благодаря направленности (размеры больше к).
Переходя от давлений к интенсивностям в формуле E.3) и
распространяя ее на плоский отражатель произвольной формы площади 5,
получаем
E.7)
где Pa.K0/{4nrD = J/ - интенсивность звука в падающей волне; Ра
и Ко - соответственно акустическая мощность и КОК излучателя. Для
учета потерь в среде правую часть формулы E.7) надо умножить на
10"~°»2Рг, где Р - амплитудный коэффициент затухания, измеряемый
в децибелах на единицу длины. Чтобы учесть поглощение энергии
отражателем, формулу следует умножить на коэффициент отражения
(по энергии).
§ 5.2. Отражение от сферы
На жесткую сферу радиусом R падает плоская гармоническая
волна, амплитуда скорости которой v0 (рис. 5.1). Источник помещен в
точку М на расстоянии г0 ^> R, направления от разных элементов
поверхности сферы dS до точки наблюдения М можно считать
параллельными. Нормальная составляющая скорости на сфере в падающей волне
vn = v0 cos 6. Фаза колебательной
скорости в точке с координатой 0,
отсчитываемой от направления
падающей волны, сдвинута относительно
фазы скорости в точке х = 0 (центр
сферы) на величину kR cos 9.
Поле, отраженное поверхностью,
можно рассматривать как излучение
Некоторыми ФИКТИВНЫМИ ИСТОЧ-
м
рис. 5.1. Отражение от сферы
- 141-
никами, расположенными на этой поверхности. В нашем случае
комплексная амплитуда колебательной скорости отраженной волны равна
vocos 9 exp (//сЯ cos 9). Потенциал отраженного поля определяют по
формуле Кирхгофа B.2)
1 Г Г ( а Гехр(-ЛгI expHfcr) дФ
ф—
дп L г J г дп )
S
где 5-излучающая (отражающая) поверхность; -дФ/дп = vn -
нормальная составляющая скорости на поверхности.
Примем волновые размеры поверхности достаточно большими,
тогда связь между Ф и дФ/дп соответствует плоской волне, т. е.
дФ/дп = -//сФ. Вычисляем -дФ/дл = vn cos (п, г), где (п, ?) - угол между
внешней нормалью к поверхности и направлением на источник
падающей волны (см. рис. 5.1):
д Гехр(-Лг) I д Гехр(-йсг) 1 дг
дп [ г J дг L r J дп
-/fcr- 1 exp (-/кг) дг
дп fcr»l
% [ 4fc exp (~ikr)/r]dr/dn = [ifc exp (-/fcr)/r] cos 9.
Подставляя это выражение в формулу B.2), получаем
Ф5 - [1/BЛ)] И [vn exp (-/fcr)/r] cos BdS, E.8)
5
где vn = v0 exp (ikR cos 9); г = r0 - Я cos 9; dS = 2л#2 sin 9cf9. В
знаменателе подынтегрального выражения расстояние г можно принять
равным г0 в силу условия fcr ^ 1. Формула E.8) принимает вид
л/2
Ф5 = |>Я2 exp (-/fcro)/ro) J exp (i • 2/сЯ cos 9) sin 8d9. E.9)
о
Выполняя интегрирование (по переменной 9 от 0 до л/2, в пределах
„освещенной" полусферы), найдем
Ф5 - [М)Я2/Bг0)] exp (-ikr0) [exp BikR)/(ikR) +F(kR)],
где функция F представляет сумму членов, содержащих множитель
1/(/сЯ) во второй степени и выше. На высоких частотах kR» 1
поэтому можно пренебречь величиной F. Получаем окончательный результат
exp[-/fc(r0 -2Я)]. E.10)
- 142-
Акустическое давление в отраженной волне р5 = ^рФ5 и
амплитуда давления
ps\ = UP |*,| = UQv0R/Bkr0) = [R/Br0)]Pi. E.11)
Используя выражение E.11), определим интенсивность в
отраженной волне в точке приема М:
Js = Ы2Л2рс) - [*2/Drg)] pf/Bpc) = [R2/Drl)] Jt
или
. E.12)
Полученную формулу используют при расчете интенсивности
эхосигналов от реальных подводных объектов, эквивалентных по
отражательным свойствам абсолютно жесткой сфере с определенным
радиусом.
§ 5.3. Отражение от кругового цилиндра
Как и в случае сферы, точку излучения-приема М полагаем
значительно удаленной от цилиндра (г0 » R, г0 » Я), так что линии,
соединяющие точку М с произвольной точкой на поверхности цилиндра,
можно считать параллельными (рис. 5.2). Направление падающей
волны перпендикулярно оси цилиндра, т. е. фронт волны параллелен оси.
Применяя метод Кирхгофа, для потенциала в точке М получим
выражение E.8), в котором dS = RHdQ, тогда
v0 exp (~ikrQ)RH n{2
Ф5= $ expB!7c/?cos9)cos8flfe, E.13)
2лго -л/2
где v0 - амплитуда колебательной скорости в падающей волне.
Ограничимся случаем высоких частот (kR » 1), тогда фаза
подынтегрального выражения меняется очень быстро в интервале значений 9 от
-л/2 до л/2 и интеграл можно вычислить так называемым методом
стационарной фазы (асимптотическим), дающим тем более точный
результат, чем больше волновые размеры поверхности отражения.
Рассмотрим метод стационарной фазы для интеграла вида
E.14)
где /(х) - медленноменяющаяся функция; ф(х) - быстроменяющаяся
функция в промежутке а, Ъ. Если при изменении ф(х) на 2л функция/(х)
- 143-
почти не меняется, то в
подынтегральном выражении будут чередоваться
слагаемые противоположных знаков и
примерно одинаковых значений, которые при
интегрировании скомпенсируют друг
друга. Остается рассмотреть только
значение подынтегральной функции в
окрестности экстремума функции ф(х), где она
изменяется относительно медленно. Если
экстремум наблюдается при х = х0, то
Рис. 5.2. Отражение от кру- ф'(х0) = 0 и ряд Тэйлора для ф(х) запишет-
гового цилиндра ся в виде
ф(х) = ф(х0) + A/2)ф"(хо)(х - х0J + ... .
Теперь интеграл E.14) принимает форму
ъ
I * $ ехр [/ф(х0)] ехр [0,5/фсо) (х - х0J] f{x0) dx *
а
оо
*/(*о) ехР Ш(х0)] $ ехр [0,5/ф"(хоКх-хоJ] d(x-x0). E.15)
Переход от конечных пределов к бесконечным не вызовет
существенной ошибки, поскольку основное значение интеграла определяется
только участком вблизи точки х = х0. Остальными членами
разложения в ряд можно пренебречь при условии
Ф(п)(х0)
-— <С1,еслип^З. E.16)
оо
Так как | I ехр [-i(nxJ] dx\ = у/п/п, то
— с»
ехр[0,5,чр"(;со)(х-хоJ] d(x-xo)\ = ^i|0,5 ф"( хо)\-у2. E.17)
— с»
оо
В нашем случае х = В; у{х) = 2 kR cos Q; /(x) = cos9; х0 = 90 = 0;
ф"(90) = -2/cjR cos 90 = -2kR; /(90) = 1. При kR » 1 функция
ехр B ikR cos 9) изменяется быстро, в то время как /(x) = cos9
изменяется медленно. Требование kR ^ 1 не такое уж строгое. В
разложении ф(х) в ряд при х0 = 0 все нечетные производные равны нулю,
а члены, начиная с производной в четвертой степени быстро убывают.
Например, если kR = 2 (диаметр 2R = 2\/n * 0,6\), левая часть
неравенства E.16) при п = 4 составляет 1/24** 0,04 <С 1. Таким образом,
ограничение в разложении ф(х) двумя слагаемыми обеспечивает довольно
высокую точность, степень которой возрастает с увеличением
поперечного волнового размера цилиндра.
- 144-
С учетом выражения E.17) интеграл, входящий в формулу E.13),
равен
ехр (-0,5/ • 2kRx2) dx\ = Ул/@,5 • 2kR) = y/k/{2R).
Подставляя это значение в E.13) и переходя от потенциала к давлению,
получим выражение для амплитуды давления в точке
приема-излучения
i?H ПГ kRH ПГ Н ГТ
/^ = — hr* EЛ8)
2Д V 2\
T
2л г0 0 0
Формула показывает, что с увеличением частоты величина ps
возрастает.
Интенсивность звука в отраженной волне
Js - Ji\Ps/Pi\2 = JiH2R/{2Xr20) = Ра/С0Я2^/(8лг^). E.19)
Амплитуда давления в случае „длинного" цилиндра, когда
г0 <? пН2/BХ), равна
E.20)
§ 5.4. Отражение от эллипсоида вращения
Как и в предыдущих случаях, источник находится на большом
расстоянии от отражателя (г0 ^ 2а, г0 ^ 2Ь) и фронт падающей волны
параллелен оси вращения эллипсоида (рис. 5.3). Поверхность
эллипсоида с полуосями а и Ъ разбиваем на бесконечно короткие цилиндры
(точнее, усеченные конусы) и, применяя метод Кирхгофа, для
потенциала скоростей в точке М на расстоянии г0 от оси х найдем
voexpHfcro) a п/2
Ф5 = ^ ^ еХр (-2/fcp cos 9) cos 9 cos (n, p)pd9dx
2лг0 _а _л/2
Вычисление интеграла по переменной 9 методом стационарной фазы
[Ф(х) = -2fcp cos 9; х0 = 90 = 0; ср"(90) = -2kp; f(x) = 1] дает
, . v0 ехр Н7сг0) ПГ в
Ф5| = / — i ехр (—2i7cp) cos (п, pj VP dx.
2лг0 V к _а
Полученный интеграл также вычисляем по методу стационарной фазы.
ю-614 " 145-
X к
I Здесь (р(х) = -2fcp.. Единичный вектор
нормали к поверхности эллипсоида враще-
' ния в точке с координатами (р, 9, х) при
I 90 = 0 имеет вид
:=» 1"
Отсюда получаем cos (n, р) = [1 + Ь4х2 :
: (а4р2)]~1/2. Условие экстремума показа-
Рис. 5.3. Отражение от эл- теля dp/dx = 0. Из уравнения эллипса при
липсоидавращения g = q (р =у) НаХ0ДИМ 0 = Ъ л/1 " Х2/а2 И
dp/dx = -bx/(a у]а2 -х2). Следовательно,
экстремум будет при х = 0; тогда р@) = Ь; cos (п, р)'х=о = ^ Р"@) =
= -b/а2; Ф"@) = 2kb/a2. Используя формулу E.18), находим
= voa/B/cro).
В частном случае Ь = а получим то же выражение, что для сферы.
Амплитуда давления в точке приема
= [a/Bro)]Pl.
E.21)
Интересно отметить, что в точке касания эллипсоида и фронта
волны (x-z = 0, y = b) один из главных радиусов кривизны Rt = b,
а второй R2 = a2/b, следовательно, полуось а = V#i#2 " среднее
геометрическое главных радиусов кривизны в этой точке.
Интенсивность эхосигнала в точке приема
Js = [R2/Dr2)] J{
E.22)
§ 5.5. Отражение от произвольной поверхности
Пусть в однородной безграничной среде находится замкнутая
поверхность произвольной формы. При отражении звука от нее
существенное значение имеет кривизна поверхности в точке, касательная
плоскость в которой параллельна фронту волны. Например, в случае
сферы кривизна характеризуется ее радиусом [см. формулу E.11)].
В общем случае давление в отраженной волне пропорционально
среднему значению радиуса кривизны нормального сечения, проходящего
через точку касания фронта волны.
Интегралы, которые получаются при применении формулы
Кирхгофа к решению конкретных задач, содержат быстроизменяющиеся
подынтегральные выражения. Для их вычисления чаще всего
используют асимптотические методы, одним из которых является метод
стационарной фазы (см. § 5.3). Применительно к задаче определения
- 146-
отраженного поля в гидролокациоином направлении этот метод
показывает, что решающее значение имеет участок отражающей
поверхности в окрестности точки касания ее с фронтом падающей волны, а
именно участок, соизмеримый с зоной Френеля, т. е. примерно половина
длины волны. Результат вычисления амплитуды давления в
отраженной волне:
E.23)
где Rx и R2 - главные радиусы кривизны в точке касания, причем
Го»Я1,го»Я2.
Сравнение формул E.23), E.3) и E.11) позволяет ввести понятия
эквивалентный плоский отражатель площадью 5ЭКВ = \/яхЯ2 К/2
и эквивалентная сфера радиусом Яэкв = y/R^R^.
Если касание отражающей поверхности фронтом волны происходит
вдоль отрезка прямой длиной Я (т. е. один из главных радиусов
кривизны в точках касания равен бесконечности), то амплитуда давления
в отраженной волне [см. формулы E.18) и E.20)]
н
\р8\ = [A/г0) y/l/BK) J yfRdH] Pi при г0 » лЯ2/BХ), E.24)
о
где R - радиус кривизны в точках касания, или
\р8\ = 0,5 y/R/r^Pi при г0 < пН2/{2к), E.25)
где R - радиус кривизны в ближайшей к источнику падающей волны
точке касания, причем R <С г0.
В случаях невыполнения условий rn » R12 иго»йв формулу
E.23) вместо г0 войдет y/(r0 + ^i)(r0 + Я2), а в E.25) - (г0 + R). Если
#i = Я2 = Я, то получим амплитуду отраженного от сферы давления:
[0,5A + ro/R)-1]W. E.26)
Если касание происходит по плоской площадке, то справедливы
формулы, приведенные в § 5.1.
Таким образом для расчета амплитуды отраженной от некоторой
поверхности волны надо найти точку касания фронта волны с
поверхностью и главные радиусы кривизны в этой точке*. При наличии на
поверхности нескольких точек касания с фронтом волны, расстояние
между которыми велико по сравнению с длиной волны, амплитуду
давления в отраженной волне можно принять равной корню
квадратному из суммы квадратов амплитуд давлений в отдельных точках.
*Главные радиусы кривизны можно определить по формулам
дифференциальной геометрии.
ю*
Следует отметить, что при отражении от тел податливых
(обладающих конечной жесткостью) формулы для амплитуд давления \ps\
можно получить, если в указанные выше равенства ввести
коэффициент отражения для нормального падения.
Рассмотрим отражение от трехосного эллипсоида. Уравнение
эллипсоида х2/а2 + y2/b2 + z2/c2 = 1, уравнение поверхности z =
= с VI - х2/а2 ~ у2/Ъ2 = f(x, у). Средний радиус кривизны
}/RxR2 = Ьсх2/а3 + асу2/Ь3 + abz2/c3, E.27)
где х, у, z- координаты точки касания поверхности эллипсоида
с фронтом падающей волны. Чтобы найти эти координаты, надо задать
направление прихода волны. Пусть оно образует с осями х, у, z
соответственно углы а, |3, у9 тогда cos а = df/dx [1 + {df/дхJ + (df/дуJ] ~т
и аналогично для cos P и cos У.
С помощью двух из этих соотношений и уравнения z=f(x, у)
вычисляем координаты точки касания. Подставляя значения х, у, z в
выражение E.27), получаем
V#i#2 = abc [a2 cos2 а + Ъ2 cos2 P + с2 cos2 у]'1.
Дальнейшая подстановка этого результата в формулу E.23) позволяет
определить амплитуду давления в отраженной волне
Ы = i[abc/Br0)] (a2 cos2 a + Ъ2 cos2 P + с2 cos2 у)'1 } р/. E.28)
В частности, при a = b = c = R получаем формулу E.11) для отражения
от сферы, при Ь = с- общую формулу для отраженного давления от
эллипсоида вращения
\ps\ = {[ аЬ2/Bг0)] [ a2 cos2 а + Ь2 (cos2 Р + cos2 у)]'1 } Pi. E.29)
В случае прихода волны под углами а=у=л/2, Р=0 получаем
формулу E.21) для сферы радиусом а.
Пример. На цилиндр диаметром d = 2 м и высотой Н = 5 м падает волна с
частотой /= 15 кГц. Источник излучения имеет мощность Ра = 100 Вт и находится на
расстоянии го = 1,2 км. Коэффициент концентрации источника в направлении на
отражатель К = 25. Необходимо определить давление в отраженной волне.
Величина лЯ2/BА.) = л • 52/B * 0,1) ** 390 м в 3 раза меньше г0 = 1200 м. Поэтому
воспользуемся формулой E.24). Сначала рассчитаем давление в падающей волне
р( = У2РарсК/Dлг^) = V2 * 100 • 1,5 • 106 • 25/Dл • 12002) * 20,3 Па.
Давление в отраженной волне
Ps = [A/го) Vl/BA.) VkH]Pi = A/1200) Vl/B * 0,1) УГ* 5 • 20,3 « 0,19 Па.
- 148-
§ 5.6. Отражение от тел в слое воды
Особенностью распространения звука в водном слое является то,
что на границах слоя звуковая энергия полностью или частично
отражается обратно в толщу среды. Будем предполагать границы слоя
идеально отражающими.
Точечный источник в слое при непрерывном излучении. Примем
одну границу слоя абсолютно мягкой, другую - абсолютно жесткой.
В этом случае можно считать, что поле в слое создается
действительным источником И и бесконечным рядом мнимых источников,
являющихся зеркальными изображениями в обеих граничных плоскостях
(рис. 5.4). При отражении от свободной поверхности фаза
отображаемого источника изменяется на л, а при отражении от дна,
предполагаемого идеально жестким, фаза не меняется.
Практический интерес представляют средние значения величин,
характеризующих звуковое поле (давление, интенсивность), хотя,
вообще говоря, интерференционная картина в слое достаточно сложна.
Разница между распространением звука в неограниченной среде
и в слое среды особенно существенна при импульсном излучении, так
как в первом случае длительность импульса не изменяется, а во
втором - импульс в точке наблюдения длится в принципе неограниченное
время, постепенно уменьшаясь. И действительный, и каждый мнимый
источники вызывают в точке наблюдения возмущение такой же
длительности, какую имеет импульс, излучаемый действительным
источником, но к моменту окончания возмущения, вызванного близкими
источниками, приходят возмущения от более удаленных мнимых
источников. В результате в точке наблюдения импульс оказывается
растянутым во времени, а его интенсивность постепенно уменьшается.
Отвлекаясь от тонкой структуры поля, воспользуемся методом
энергетического суммирования, при котором с фазовыми
соотношениями между волнами, приходящими от отдельных мнимых
источников, можно не считаться. Общая средняя интенсивность звука в точке
наблюдения [9]
cos
-Я
Я ['а/Dяг»)](я/г„),
E.30)
где Ра ~ акустическая мощность
действительного источника; гп - расстояние от п-го
мнимого источника до точки наблюдения
с координатой х.
Учитывая, что расстояние от
действительного источника до точки наблюдения
Рис. 5.4. Точечный
источник в слое и бесконечный
ряд мнимых источников
- 149-
значительно больше глубины Я, перейдем от суммирования к
интегрированию, т. е. заменим дискретный ряд источников линией
равномерно распределенных источников, мощность которых на отрезке длиной
dz равна (Р&/Н) dz, где Я - среднее расстояние между двумя соседними
источниками. Тогда вместо формулы E.30) получим
00
Г Р& dz r0
J = — . . 5.31
J Я 4n(r§+z2) \/r20+z2
— оо
Для вычисления интеграла используем подстановку z/r0 = tg ?, и тогда
J = PjBnr0H). E.32)
Как видим, в слое с непоглощающими границами средняя
интенсивность звука убывает пропорционально увеличению расстояния от
излучателя; здесь энергия, излучаемая источником в единицу времени,
проходит через поверхность цилиндра радиусом г0 и длиной Я.
Заметим, что на малых по сравнению с глубиной расстояниях
формула E.32) непригодна, и поле определяется в основном излучением
действительного источника и нескольких близких мнимых
источников.
Точечный источник в слое при импульсном излучении. Пусть
источник излучает в течение времени т, тогда все мнимые источники
имеют такую же длительность действия т. Группу излучаемых в
течение т синусоидальных волн будем называть импульсом, форму
которого характеризует функция f(t) изменения интенсивности звука
(мощности, квадрата амплитуды и т. п.), причем f{t) Ф О, только когда
0<*<т.
В точке, отстоящей от оси источников на г0 (ее можно считать
находящейся на оси х)9 колебания начнутся в момент f = rjc. В более
поздний момент времени Т > t' импульсы от некоторой части оси
источников пройдут через точку наблюдения, а от более удаленных
участков оси еще не успеют дойти до нее. В момент Т колебания в
точке наблюдения, вызванные излучением двух симметричных
относительно оси х участков оси z (см. рис. 5.4), будут подчиняться условию
Элемент ойщьщдвет колебание, пропорциональное функции /(Г- Qdz,
где t0 = VTo + z2 /с - время прохождения колебания от „источника" dz
до точки наблюдения.
Интенсивность звука в точке наблюдения в момент Г, согласно
формуле E.31), будет
т т
2Р&[ f(T-to)rodz Раг0 '
'--е\ .:,,. .г^-ее! ., аK.. ^> (ад
Я J ЩЯ +z2K'2 2ПН J (ri+z2^3'2
где 7i-vc2r2-r2le Нижний нулевой предел обусловлен неравенством
- 150-
с(Г-т)<г0. Например, для прямоугольного импульса f(t) = l при
О < t < т и f{t) = 0 при t > т или t < О
J = [ PjBnr0H)] [ у/с2Т2-г2/(сТ)]. E.34)
Полагая T = ro/c + t19 где fx отсчитывается от момента начала
возмущения в точке наблюдения, запишем
J = [ PjBnr0H)] [ y/dVct x/r0J - 1 /A + с^Ао)]. E.35)
Представим ctx/r0 в виде (ст/го)(^/т). Практически ст/г0 = т/t' «с 1,
а интересует нас поведение импульса для моментов tx<?f, поэтому
ctx/r0 = t±/t' <c 1 и формула E.35) упрощается:
J = [ PjBnr0H)] ylltjt' = [ РаД2лг0Я)] VBVT)(fx/т). E.36)
Расчет интенсивности по формуле E.36) в зависимости от tjx
показывает, что интенсивность в точке наблюдения возрастает в течение
промежутка т от нуля до наибольшего значения и далее спадает
сначала быстро, а затем медленно. Отношение максимальной
интенсивности звука в импульсе к интенсивности, создаваемой источником с той
же излучаемой мощностью в установившемся режиме, yj2cx/rQ = yj2\/t'
обычно меньше единицы в несколько и более раз.
Отражение от поверхностей в слое. Выше [см. формулу E.23)]
приведено выражение для давления в отраженной от произвольной
поверхности волне. Интенсивность в гидролокационном направлении
(в безграничной среде)
Js = [ RiRJQrl)] Ji - [nRMtorft] Jh E.37)
где Rx hR2- главные радиусы кривизны участка поверхности,
лежащего в окрестности точки касания ее с фронтом волны. Это выражение
применимо и для направлений, образующих некоторый (не очень
большой) угол с направлением на источник звука.
Поскольку нас интересует поведение импульса в точке приема
в течение промежутка времени т (причем ст/г0 <ЗС 1), то формулу E.37)
можно применять не только для действительного отражателя, но и для
тех мнимых отражателей, колебания которых успевают дойти до
точки приема за это время. Суммирование действия отражателей можно
заменить интегрированием, как это было сделано в случае работы
источника в установившемся режиме. В результате вычисления
получаем выражение для амплитуды давления в точке приема (если
первоначальный импульс имеет прямоугольную форму)
р52/BРс) = [ P^R^mrlH2)} ctx, E.38)
где *i отсчитывается от момента начала возмущения в точке приема
@< tx <т). Максимальное значение амплитуды импульса в точке
приема отраженной волны будет при tx = т.
- 151-
Если источник имеет направленность в вертикальной плоскости
(для простоты положим, что в пределах некоторого угла излучение
равномерно, а вне его - равно нулю), то правую часть формулы надо
умножить на коэффициент концентрации К и она будет применима,
если 60 > V2ci/ro. Если же во< у/2ст/г^ то максимум отраженного
импульса в момент tx = х равен
[pf/Bpc)]max~ [РаКД i*2/Dnr *Я2)] V2d/r0 0О, E.39)
где 280 - ширина ДН; если ДН плавно спадает до нуля, то за 280 нужно
принять угол, меньший действительной ширины.
При отражении от цилиндра с вертикальной осью (радиус R,
высота h) или от вертикально расположенной пластины [предполагается
г0 :» л/?2/BЛ) иг0» Ла2/B^), где а - вертикальный размер пластины]
рассматривают три случая:
1) если углы 280 и 2ф0, определяющие раствор ДН в вертикальной
плоскости источника и отражателя [за угол направленности
отражателя принимают „эффективный" угол ф0 = VBh) или ф0 = \/{2а)],
удовлетворяют соответствующим условиям
то максимальным импульс будет в момент t1=zi и определяют его по
формулам:
для цилиндра
[ Р52/BРс)]тах = [ PbKh2Rl{ArlH2\)\ ex; E.40)
для пластины площадью 5
[ Р5/BРс)]тах = [ PbKS2l{2rlH2\2)] ex; E.41)
2) если 80 (или Фо) меньше, чем v2cx/r0, to применяют следующие
формулы:
для цилиндра
Р2/B9с) = [ P&KRh2/Bnr2H2K)] V2cx/r0 ф0 (или 80); E.42)
для пластины
Р?/BРс) = [ PbKS2l{nr2H2)} у/2ст/г0 ф0 (или 80); E.43)
3) если 8о и Фо меньше, чем V2cx/r0, то для цилиндра и пластины
в момент 11 = х
Р?/BРс) = [P&KRh2/Bnr2H2K)] 80ф0. E.44)
- 152-
Пример. Излучатель мощностью Ра = 100 Вт, имеющий коэффициент
концентрации К = 50 и ширину ДН 20О = 20°, находится в слое среды глубиной Н= 100 м
и облучает сферу радиусом R - 2 м. Длительность импульса т = 30 мс, расстояние
между излучателем и отражателем г0 = 500 м. Требуется определить давление в
отраженной волне.
Величина У2ст/г0 = V2 * 1500 • 30 • 10/500 = 0,42 > 60 = 0,17. По формуле E.39)
находим амплитуду отраженного давления
2pcPJCR2 / 2ст / 1,5-106-100-50 *4
/ 9о = / ' 0,42 • 0,17 = 0,37 Па.
V Го V 2л • 25 • 104 • 104
ГЛАВА 6. ОСОБЕННОСТИ РАСПРОСТРАНЕНИЯ
ЗВУКОВЫХ ВОЛН В МОРСКОЙ СРЕДЕ
Реальная морская среда отличается от идеальной,
во-первых,наличием границ - свободной поверхности и дна. Вследствие этого в море
изменяются эффективность излучения, пространственное
формирование поля (т. е. направленность), законы убывания поля с расстоянием
от излучателя. Во-вторых, морская среда неоднородна, в ней имеются
регулярные и нерегулярные неоднородности. Регулярные
неоднородности - изменения температуры, солености и
плотности главным образом по глубине - приводят к отклонению
направления звукового луча, т. е. к рефракции, в частности к образованию
подводного звукового канала. Нерегулярные
неоднородности - планктон, газовые пузырьки, течения, случайные местные
возмущения, флюктуации скорости звука и плотности - способствуют
повышенному рассеянию звуковой энергии при распространении волн
(дополнительно к потерям, обусловленным морской средой как таковой,
например, ее вязкостью).
В результате возникают пространственные и временные
флюктуации амплитуд и фаз акустических волн, изменяются их
спектральные и корреляционные характеристики.
Теоретические и экспериментальные исследования
распространения акустических волн в океане изложены в фундаментальной
монографии [1], созданной коллективом советских ученых под
руководством академика Л. М. Бреховских.
§ 6.1. Скорость звука
Скорость звука с в море наряду с другими параметрами,
характеризующими среду, имеет определяющее значение при решении многих
задач гидроакустики. Во-первых, с определяет время, необходимое
- 153-
для передачи сигнала от одного объекта к другому. Так, в подводной
связи между окончанием сигнала одним корреспондентом и началом
приема его другим проходит несколько секунд. За счет конечной
скорости звука время t = 2r/c (г-дистанция до цели) определяет
длительность поиска цели в гидролокации. Изменение с в реальных
условиях при изменении температуры f, солености s и
гидростатического давления Ро (глубины z) оказывает существенное влияние на
точность определения координат цели, особенно в вертикальной
плоскости. Рефракция звука в море, обусловленная изменением
скорости звука, может привести к отклонению лучей от их
прямолинейных путей распространения и, как следствие, к погрешности
определения угловых координат. Непостоянство с также влияет на характер
убывания интенсивности звука с расстоянием: при переходе слоев
с разными скоростями изменяются направления звуковых лучей.
Скорость распространения звука в линейной среде, как известно,
определяется только ее физическими свойствами и, согласно
формуле A.10), равна
с = л/х7р"= 1/ л/^р7 F.1)
где X ~ объемный модуль упругости; к - сжимаемость.
Поскольку величины и (или х) и р зависят от f, s и z, то и с
является функцией этих факторов. Зависимость c(t°, s, z) установлена
экспериментально и имеется несколько формул [1,35, 44] и таблиц для
определения скорости звука в море. С увеличением t° и s скорость звука
возрастает: в среднем при изменении f на 1 °С приращение скорости
звука Ас % 4 м/с в холодной воде (до 10 °С) и Ас ^ 2,5 м/с в теплой
воде B5... 30 °С), при изменении солености на 1 °/оо A %о = 0,1 %) Ас**
% 1,2 м/с, при изменении глубины на 10 м - Ас % 0,18 м/с.
Таким образом, фактором, определяющим скорость звука,
является температура. Наблюдения показывают, что характер изменения
скорости с глубиной в поверхностном слое глубокого моря и в мелких
водоемах практически совпадает с характером сезонных изменений
температуры. В горизонтальных направлениях свойства океана почти
не меняются, следовательно, океан можно считать средой плоскостра-
тифицированной. Именно вертикальное распределение скорости звука
(ВРСЗ) c(z) и градиента скорости Gc=dc/dz оказывает наибольшее
влияние на распространение звука в океане. Форма (профиль) кривой
c{z) в разных районах Мирового океана различна и изменяется во
времени. Можно отметить следующие типичные случаи ВРСЗ (рис. 6.1,
а... е): 1) скорость постоянная - градиент скорости Gc = 0; 2) Gc > 0;
3) Gc < 0; 4) Gc ^ о (слой скачка); 5) уменьшение скорости с глубиной,
переходящее к возрастанию скорости в поверхностном слое; 6) то же,
но в глубинных слоях.
Первый случай - изотермическое состояние - характерен для
мелководных районов в холодное время года и возникает в
результате конвекции верхних холодных^более плотных и нижних теплых
слоев воды.
- 154-
а)
50...80М
Рис. 6.1, Типичные случаи вертикального распределения скорости звука в
морях и океанах
сп , Сд — скорость звука соответственно у поверхности и у дна
Второй случай характерен для глубоководных районов северных
морей в холодное время года. ВРСЗ возникает вследствие
вертикальной циркуляции и под влиянием гидростатического давления. В
глубинных слоях океана, где температура и соленость постоянны, имеет
место линейное возрастание скорости звука вследствие увеличения
гидростатического давления.
Третий случай типичен для мелких морей и прибрежных районов
океана в теплое время года, когда верхние слои нагреты больше
нижних. Градиент температуры в поверхностном слое может
изменяться по нескольку раз в день, особенно в теплых морях.
Четвертый случай характеризуется резким уменьшением скорости
вблизи поверхности и последующим медленным ее убыванием;
существует в мелководных районах в теплое время года. При этом в слое
толщиной несколько десятков метров -слое скачка- градиент
скорости может достигать значений 10... 15 м/с, обусловленных
градиентом температуры Gt = dt/dz примерно 1... 2 °С на каждый метр
глубины. В слое скачка сосредоточены водоросли, пузырьки воздуха,
планктон, мелкие морские организмы. Слой скачка подвержен
сезонным изменениям, он формируется весной и осенью разрушается. Ниже
слоя скачка убывание скорости вызывается совместным действием
температуры и статического давления, однако давление линейно
растет с глубиной, а температура медленно уменьшается, стремясь к
определенному пределу. Условия распространения звуковых волн при
- 155-
наличии слоя скачка весьма неблагоприятны вследствие
отрицательной рефракции. Благодаря большому градиенту температуры в слое
скачка интенсивность звука в нем значительно ослабевает, что
вызывает уменьшение дальности действия гидроакустических систем
в 2 ... 3 раза. При некоторых углах падения волны слой скачки может
оказаться вообще звуконепроницаемым.
Пятый и шестой случаи характерны наличием на некоторой
глубине минимума скорости звука: это наблюдается почти во всех морях
в весенне-летний период (пятый случай) и в океанах независимо от
времени года (шестой случай). Уменьшение скорости с глубиной
вызывается понижением температуры, возрастание скорости -
придонными или подводными теплыми течениями (пятый случай) и
повышением статического давления (шестой случай). Пятый случай
получил название мелководного звукового канала, шестой
случай- глубоководного звукового канала.
Скорость звука в Мировом океане изменяется в пределах от
1450 м/с (Северный Ледовитый океан) до 1540 м/с (экваториальные
области), так что перепад скорости составляет примерно 5 %.
Благодаря зависимости с(*°, s, z), распространение акустических
волн в море имеет определенные законы и оказывает большое влияние
на эффективность действия гидроакустических средств и, прежде
всего, вызывает рефракцию звука.
Рефракция звука в морской среде. Скорость звука в море
изменяется как по глубине, так и в горизонтальном направлении.
Вследствие этого звуковые волны отклоняются от первоначального
направления, т. е. возникает рефракция. Учитывать горизонтальную
рефракцию необходимо только при больших дальностях действия
гидроакустической аппаратуры. Практически же существенна вертикальная
рефракция, обусловленная ВРСЗ.
Количественную оценку рефракции проведем по законам
геометрической акустики, выведенным в гл. 1. Обоснованием для
применения этих законов в слоисто-неоднородной среде может служить
неравенство co/Gc » 1 [1]. Если принять Gc = 1,5 с, то это условие
практически всегда выполняется вплоть до низких частот порядка
десятков герц.
Рис. 6.2. Траектории лучей при положительной рефракиии
И — источник звука; г — горизонтальное расстояние
- 156-
'/// //// //77 //// //// //// ////
Рис. 6.3. Траектории лучей при отрицательной рефракции
В соответствии с законом преломления [см. формулу A.68)] sin у =
= (ca/cj sin а, и при переходе лучом границы раздела слоев с
различными скоростями отклонение луча происходит в сторону слоя с
меньшей скоростью, следовательно, в направлении, в котором температура,
соленость и давление более низкие.
Если градиент скорости звука положительный, то наблюдается
положительная рефракция, т. е. отклонение лучей происходит в
сторону поверхности моря (рис. 6.2). При этом всегда будет или полное
внутреннее отражение на промежуточной глубине, или отражение от дна
в зависимости от глубины и значения Gt. Поскольку при отражении от
границы вода-воздух звуковая энергия практически не переходит
в атмосферу, образуется приповерхностный звуковой канал, в
котором звуковая энергия распространяется на значительные расстояния.
Таким образом, при положительной рефракции дистанция
обнаружения целей будет ограничиваться лишь отношением сигнал/помеха.
Установлено [44], что приповерхностный канал обладает нижней
граничной частотой/гр, при которой звук еще сохраняет волноводное
распространение. Получено соотношение между толщиной Я слоя
воды, определяющей приповерхностный звуковой канал и
максимальной длиной волны \тах = Хгр = 8,54 • 10~3 Я3/2.
Когда градиент скорости звука отрицательный, наблюдается
отрицательная рефракция и лучи искривляются в сторону дна (рис. 6.3),
причем с ростом Gc увеличивается количество отражений от дна. При
каждом отражении от дна часть звуковой энергии поглощается
грунтом, вследствие чего дальность распространения заметно снижается
(в сравнении со случаем Gc > 0). Возможность выхода луча к
поверхности - предельного луча - определяется соотношением скорости
звука на уровне источника и на поверхности моря. При большом
отрицательном градиенте скорости звука (или значительном заглублении
источника) предельный луч может претерпевать полное внутреннее
отражение и на промежуточной глубине.
§ 6.2. Подводный звуковой канал (ПЗК)
В поверхностных слоях морей и океанов температура воды
меняется в течение года на 10 ... 20 °С, изменения же солености не превышают
1... 2 %о. Поэтому колебания температуры оказывают влияние на
скорость звука в десятки раз большее, чем на соленость. По этой причине
- 157-
о градиенте скорости звука в поверхностном слое судят по градиенту
температуры. Так, в весенне-летний период скорость звука с
увеличением глубины уменьшается примерно так же, как и температура. По
мере возрастания глубины влияние температуры на скорость звука
уменьшается и повышается роль гидростатического давления. В
океане на больших глубинах, где температурный градиент
практически равен нулю, давление становится преобладающим фактором в
вертикальном распределении скорости звука. Даже при Gt < 0 скорость
звука с глубиной будет возрастать. В глубинных слоях морей
увеличение скорости звука может вызываться и гидростатическим давлением,
и повышением температуры.
Указанные факторы объясняют существование в океанах и морях
горизонта минимальной скорости звука (см. рис. 6.1, д, е), который
называют осью ПЗК. Например, в Атлантическом океане ось ПЗК
проходит на глубине 1200 м, в Тихом океане - на глубине 700 м, в
морях северного полушария - на глубине 40 ... 60 м. По мере
приближения к полюсам ось ПЗК перемещается к поверхности. В океанах
положение этой оси не зависит от времени года, в морях оно подвержено
сезонным изменениям.
При расположении источника звука на оси ПЗК или вблизи нее
акустическая энергия распространяется в слое воды, в котором
звуковые лучи претерпевают многократное полное внутреннее отражение от
границ, не достигая дна, на сотни и тысячи километров. Такое
своеобразное направленное излучение в пределах малого телесного угла
является следствием рефракции звуковых волн. Значение скорости
звука на оси ПЗК неодинаково в разных бассейнах. На границах ПЗК
скорость одинакова. Когда скорость сп у поверхности меньше скорости
сц у дна, верхняя граница ПЗК лежит у поверхности, нижняя - на
глубине, где с-сп (см. рис. 6.1, д, е). Если сп > сД, нижняя граница ПЗК
лежит у дна, верхняя - на некоторой глубине, где с = сц.
Лучи, выходящие из источника, находящегося на оси ПЗК, можно
разделить на три группы (рис. 6.4): / - распространяющиеся полностью
в канале - канализируемые лучи, II - распространяющиеся под
нижней границей канала, но не отражающиеся от дна, III - отражающиеся
от дна. Лучи группы /, вышедшие из излучателя под малыми углами
скольжения, возвращаются к оси канала; такое распространение
называют волноводным. Лучи группы//ограничиваются предельным
лучом, претерпевающим полное внутреннее отражение у дна* Так,
в Атлантическом и Тихом океанах максимальные значения
предельных углов, канализируемых каналом, не превышают 16°, в
Индийском океане- 15°,
Ось ПЗК, вертикальное положение его границ (или толщина ПЗК),
предельные углы выхода канализируемых лучей, степень канализиро-
вания энергии (доля энергии, распространяющейся в ПЗК, от всей
излучаемой источником энергии) являются основными
параметрами ПЗК.
Различают приповерхностный и глубинный подводные звуковые
каналы.
- 158-
10 г, км
Рис. 6.4. Распределение скорости звука (а) и траектории звуковых лучей (б)
при наличии глубинного ПЗК
Приповерхностный ПЗК наблюдается при положительной
рефракции, когда глубина моря намного больше 100... 200 м, и постоянном
градиенте скорости. При расположении источника и приемника вблизи
поверхности слоя, лучевая картина имеет вид, подобный
изображенному на рис. 6.3. Здесь существует две группы лучей - не доходящих
до дна и отражающихся от него. На границе второй группы находятся
лучи, касающиеся дна, т. е. претерпевающие у дна полное внутреннее
отражение. Эти лучи имеют наименьшее число отражений от
поверхности воды по сравнению с другими лучами. Каждый из лучей первой
группы, выходящий из источника под углом скольжения <р0,
достигает максимальной глубины
(l-cos<Po)/(acos(po)
F.2)
и вновь возвращается к поверхности на горизонтальном расстоянии
г = 2 tg <po/a, где а = Сс/си; си - скорость звука на глубине
расположения источника.
При малых углах Фо формулу F.2) можно заменить выражением
2sm*((po/2)/a*<P2o/Ba).
F.3)
Отсюда видно, что лучи группы /, углы скольжения которых при
выходе из источника малы, концентрируются в слое, толщина которого
пропорциональна квадрату угла. При уменьшении ф0 (т. е. по мере
приближения к поверхности) плотность звуковой энергии увеличивается
- 159-
в связи с уменьшением толщины слоя по закону ф^. Излучаемая
источником энергия с уменьшением угла (р0 убывает пропорционально
величине угла, т. е. значительно медленнее. Это и подтверждает тот
факт, что лучи группы / обусловливают фокусировку звуковой
энергии вблизи поверхности. Иными словами, у поверхности происходит
как бы волноводное распространение звука.
Как отмечалось, поверхностный канал обладает граничной
частотой, при которой распространение звука в нем имеет волноводный
характер. Кроме того, условия волноводного распространения зависят
и от угла выхода луча из источника - лучи, выходящие под углами
меньше чем критический, затухают значительно медленнее всех
других.
Глубинный ПЗК наблюдается при распределении скорости звука
по глубине, которое показано на рис. 6.4, а. В слое толщиной Я, где
распространяются лучи группы /, убывание интенсивности происходит
настолько медленно, что звук в канале можно зарегистрировать на
расстояниях в тысячи километров при сравнительно небольших
мощностях источника звука. Например, в Атлантическом океане звук
взрыва заряда весом 1,8 кг, произведенного на глубине 1220 м, был
принят на расстоянии 1670 км, а при заряде 2,7 кг-на расстоянии
5745 км.
Сверхдальнее распространение звука используется для
определения местоположения самолетов и судов, терпящих бедствие в
океане.
§ 6.3. Рефракция и затухание звука в море
Простейшую акустическую модель океана можно рассматривать
в виде плоскопараллельных горизонтальных слоев, в каждом из
которых значение градиента скорости звука постоянно, а на границах слоев
лучи только преломляются. Масштабы неоднородностей
распределения скорости звука в океане обычно превышают длину волны \ на
несколько порядков, поэтому при расчете распространения
акустических волн в рефрагирующей морской среде широко используют
приближение лучевой (геометрической) акустики. В частности, расчет
значений интенсивности звука выполняют по звуковым лучам, т. е. по
кривым, касательные к которым в каждой точке совпадают с нормалями
к волновым фронтам. Условием применимости лучевого метода
служит неравенство
uidc/dz)-1 = BncA)(dc/cfz)-m1ax » 1, F.4)
где {dc/dz)m3iX - максимальный градиент скорости звука. Лучевая
акустика неприменима для расчета поля в теневой зоне, в точках
полного внутреннего отражения, на фокусирующих поверхностях (так
называемой каустике).
Траектория луча. Для плоскослоистой среды любой луч, составляющий
- 160-
угол ф с плоскостью г = const, удовлетворяет закону преломления:
cos [ (p( z)]/c( z) = const, F.5)
где c(z) - вертикальное распределение скорости звука. Например,
если ф0 и с0- соответственно угол скольжения и скорость звука на
горизонте с порядковым номером нуль, то, согласно формуле F.5),
получим
c0cos q>(z) = c(z) cos ф0.
Продифференцируем это равенство по z:
- с0 sin (p(z) dy/dz = cos ф odc(z)/dz. F.6)
Искривление луча характеризуется производной dy/dl, где dl =
= dz/sin ф - элемент длины луча. Из выражения F.4) находим dy/dl =
= -(cos (fQ/co)dc(z)/dz. Таким образом, кривизна луча на произвольном
горизонте тем больше, чем больше его градиент скорости; величина
cos Фо/Cq для каждого луча постоянна. При уменьшении скорости
звука с глубиной [ dc(z)/dz < 0] угол скольжения увеличивается, при
dc(z)/dz > 0 угол ф уменьшается.
Радиус кривизны луча
R = l/\dif/dl\ = (co/cos yo)/\dc(z)/dz\. F.7)
Если dc(z)/dz = const, то R = const: при постоянном градиенте скорости
звука траектория луча представляет собой дугу окружности.
Связь угла скольжения луча с горизонтом его поворота. Пусть
источник расположен на горизонте, где скорость звука сИ = с±.
Определим угол выхода луча из источника, при котором на промежуточной
глубине, где скорость звука равна с2, луч испытает полное внутреннее
отражение (см. рис. 6.2). Так как при повороте луча угол ф2 = 0, из
уравнения рефракции с2 cos фх = сх cos ф2 находим с2со5ф1 = с1.
В силу малости фх можно положить cos ф2 = 1 - 0,5ф^, тогда получим
Опустив индекс у ф, обозначив с2 - сх = Ас и учтя, что значение с2
близко к с19 получаем
F.8)
Уравнение луча. Примем, что излучатель находится в точке с
координатами г = 0, z = zQ, а луч, вышедший из источника под углом
скольжения ф0, отклоняется вниз (рис. 6.5). Из рисунка видно, что для
бесконечно малого элемента луча tg ф = dz/dr9 где г, z - координаты
произвольной точки траектории луча; ф - угол между горизонтальной
11-614 - 161 -
линией и касательной в этой точке. Полное расстояние, проходимое
лучом по горизонтали, определяют интегралом
Z
г = | I ctg <tdz\. F.9)
zo
Пользуясь законом преломления F.5), tg Ф выразим следующим
образом: tg Ф = Vl -cos2 Ф(/п2/[A/п)cos Фо] = y/n2-cos2 Фо/cos Фо, где
п = n(z) = Cq/c(z); c0 - скорость звука на горизонте излучателя.
Формула F.9) принимает вид
= со5Ф0| S [п2(*)-со52(Фо)Г1/2<4
F.10)
В частном случае постоянства градиента скорости звука n{z)
= A - azY1 полное расстояние
(a cos Фо) [1 - A - azJ cos2 Ф0]1/2||0 - (Va)tg Фо.
F.П)
Полагая z0 = 0 (источник находится в начале координат), после
простых алгебраических преобразований получим
[г + A/а) tg Ф0]2 + (z- I/aJ = 1/(о2 cos2 Фо).
F.12)
Равенство F.12) представляет собой уравнение окружности
радиусом R = l/(a cos Фо) и координатами центра г = -tg Ф0/а, z = 1/а. Этот
результат совпадает с выражением F.7). Действительно, при линейном
распределении скорости звука по глубине c(z) = co(l - az), где a =
= Gc/cq = dc(z)/(codz) - относительный градиент скорости. Постоянный
градиент скорости звука равен \dc/dz\ = ас0. После подстановки в
формулу F.7) находим R = l/(a cos Фо).
Рис. 6.5. Элемент луча
CltC3C1C2_
V
г»,
L__|_J_
Рис. 6.6. Аппроксимация профиля ВРСЗ (а)
и траектория луча (б)
- 162-
Время пробега волной элемента луча dl равно dt=dl/c= ldz/(csin <p)l,
полное время пробега
Z
Z Z
t = | J[l/(csin V)]dz\ =(l/co)| S n2(z)[n2(z)-cos2((po)]-»2dz\. F.13)
z0 z0
Умножая выражение F.13) на частоту излучаемой источником волны,
получим фазу соt волны в точке (г, z).
Для построения лучей реальную кривую ВРСЗ c(z)
аппроксимируют ломаной линией, состоящей из отрезков прямой. При этом
распределение c(z) по всей глубине разбивают на п слоев с возможно
минимальным отклонением аппроксимирующей ломаной линии от
заданной кривой c(z). Пример кусочно-линейной аппроксимации
профиля ВРСЗ показан на рис. 6.6, а, б. Границы слоев обозначены через
zu ...,z4; скорости звука на нижних границах слоев - через с1?..., с4;
углы скольжения на нижних границах слоев - через ф«,..., (р4.
Толщина слоя с номером q равна hq =zq -z<j_i {q = 1, 2, 3, 4). Величины (f>q
и cq удовлетворяют закону преломления cos <9q/cq = const, где
константа определяется углом выхода луча из источника. Градиент скорости
звука в слое с номером q равен {cq -cg_i)//?. Лучи являются дугами
окружностей, направление луча при переходе через границу слоев
непрерывно изменяется.
Чтобы определить горизонтальное расстояние rq, проходимое
лучом в слое с номером q, примем в формуле F.10) Фо = фд-1 и с
помощью соотношения cos <P/c{z) = cos 4>q-i/cq_i перейдем к
интегрированию по углу ф, получим
qq д-81п(Ф9.1)|, F.14)
где aq = {cq - cq-.i)l(cq-.\hq) - относительный градиент скорости звука
в слое с номером q; Фд-i, фд - углы скольжения на границах слоя с
номером q. Полная длина проходимого лучом горизонтального пути
я q
Интенсивность звука. Рассматривая акустическое поле в лучевом
приближении, можно считать поток энергии в каждой точке поля
направленным вдоль луча, а звуковую энергию текущей по лучевой
трубке, образованной совокупностью лучей, выходящих из источника.
Интенсивность звука по мере удаления от источника будет
уменьшаться пропорционально изменению площади поперечного сечения S
лучевой трубки.
В однородной среде величина 5 увеличивается пропорционально R2
(R - расстояние до источника) и интенсивность звука ^( Я) = Pai^ /Dn i?),
и*
- 163-
где Ра и к о - соответственно акустическая мощность и КОК
излучателя. В неоднородной (рефрагирующей) среде вследствие искривления
лучей интенсивность j(R) с ростом R изменяется не по закону
„обратных квадратов". Отличие интенсивностей J0(R) и J(R) оценивают так
называемым фактором фокусировки f = J(R)/jo(R),
определяемым по выражению [5]
5шФ). ' F.15)
Входящие в формулу F.15) величины графически показаны на рис. 6.7.
Излучатель расположен в точке (О, z0); точка А (г, z) - точка
наблюдения; г = г(ф0)-горизонтальное расстояние, проходимое лучом при
заданномz; Фо - угол выхода луча из источника; ф - угол скольжения
луча в точке А.
Фактор фокусировки может принимать значения/ > 1 и/ < 1. В
случае / <с 1 акустическое поле значительно ослабляется из-за большого
расхождения лучей, и / является фактором дефокусировки. При / » 1
поле усиливается из-за фокусировки лучей. При постоянном градиенте
скорости звука/= cos2 Фо. Фактор фокусировки, выраженный в
децибелах, называют аномалией распространения ^ =10 lg/.
Затухание звука в море. Амплитуда волны и, следовательно,
интенсивность при распространении звука в неограниченной среде по
мере удаления от источника уменьшаются. Ослабление (потери)
интенсивности с расстоянием происходит по следующим причинам:
расширение фронта волны; поглощение звука (переход части звуковой
энергии в тепловую); рассеяние звука средой.
Снижение интенсивности из-за расхождения волнового фронта
происходит по степенному закону, затухание вследствие
поглощения - по экспоненциальному закону. В глубоководных районах
интенсивность прямого сигнала (на расстояниях, соизмеримых с
глубиной) от источника с акустической мощностью Ра и КОК Ко определяют
по формуле
J= [ Ра^оД4лг2)] ехр (-2|3г), FЛ6)
где Р - пространственный коэффициент затухания по амплитуде; 2р -
коэффициент затухания по интенсивности" (р зависит от
физических свойств среды и частоты звука). Принятый в уравнении F.16)
сферический закон распространения подтверждается
результатами наблюдений в реальных условиях.
Для учета влияния рефракции в морской
среде выражение F.16) надо умножить на
фактор фокусировки / (или аномалию распро-
странения Af).
Согласно равенству A.85), формулу F.16)
можно записать в виде
z f J= [ PaVDnr2)] lO-WP', F.17)
Рис. 6.7. к определению гДе коэффициент Р выражен в децибелах на
фактора фокусировки единицу ДЛИНЫ.
- 164-
0,05
0,01
0,01
0,005
0,001
0,001
0,0005
0,0001
/
/
/
/
f
/
f
/
/
J3, дб/км
35
32
28
24
20
18
12
0,01 0,1 0,5 2 5 Ю
0,02 0,1 ЪкГц
Рис. 6.8. Зависимость
пространственного
коэффициента затухания в
морской воде от частоты
у
у
у
f
у
/
J
/
/
/
20 40 60
80 100
f, и Гц
Рис. 6.9. Частотная зависимость
коэффициента затухания [по
формуле F.18)]
Коэффициент затухания. Потери акустической энергии в пресной
воде объясняются поглощением, обусловленным вязкостью воды, т. е.
внутренним трением при прохождении волны в среде. Потери в
морской воде на частотах ниже 100 кГц оказываются в 2,5 ... 3 раза больше,
чем в пресной. Такое различие обусловлено объемной вязкостью
морской воды (кроме сдвиговой в пресной воде), а также наличием неод-
нородностей (пузырьков воздуха, планктона, твердых частиц и др.),
вызывающих рассеяние энергии, что особенно сильно сказывается на
используемых в практической гидроакустике частотах. Установлено,
что под действием акустического давления распадаются и
восстанавливаются ионы солей, содержащихся в
море, и в особенности сернокислого
магния. Этот процесс вызывает в
каждом элементарном объеме среды
переход части звуковой энергии в тепловую.
На рис. 6.8 приведена
экспериментальная зависимость коэффициента
затухания от частоты звука [50].
На основе обработки данных
измерений в диапазоне 1... 60 кГц
различных исследователей предложена
следующая аппроксимация зависимости
пространственного коэффициента
затухания р, дБ/км, от частоты/, кГц:
100
10
1,0
0,1
0,01
0,001
/
/
I
/
дБ/нм
'0,1 03 1 Ъ 10 30 300
Г«Гц
р = 0,036/
3/2
F.18)
Рис. 6.10. Частотная зависимость
пространственного
коэффициента затухания в области низких
частот
- 165-
На рис. 6.9 представлен график р(/), построенный по
эмпирической формуле F.18).
Природа потерь в области низких частот до сих пор точно не
установлена. На рис. 6.10 показана экспериментальная частотная
зависимость пространственного коэффициента затухания на низких
частотах [44].
Оценивая влияние отдельных факторов на потери при
распространении волны в морской воде, следует отметить, что расширение
фронта волны оказывает существенное влияние только на малых
расстояниях, а при увеличении расстояния становятся ощутимыми потери
из-за поглощения, которые и преобладают в дальнейшем. Например,
если на расстоянии г потери из-за поглощения равны 8 дБ, то на
расстоянии 5 г они составят 40 дБ, в то время как потери, вызванные
расширением фронта волны (при том же изменении расстояния)
увеличатся только на 14 дБ.
§ 6.4. Влияние поверхности моря
на акустическое поле
Отражения звуковых волн от границ могут существенно повлиять
на характер убывания поля с расстоянием и на свойства антенны -
направленность, сопротивление излучения и акустическую мощность.
Оценить влияние отражающих поверхностей в общем случае
затруднительно из-за их неровности, частичного поглощения, неполного
отражения, неоднородности и т. п. Упрощая задачу, примем границы
раздела сред плоскими и абсолютно отражающими. При такой
идеализации применим метод зеркальных источников, позволяющий учесть
главные особенности отражения.
Будем полагать, что источник находится вблизи одной из
ограничивающих поверхностей, а расстояние до другой велико.
Источник вблизи поверхности. Пусть точечный излучатель
расположен под абсолютно мягкой границей на глубине h (рис. 6.11).
Граничные условия требуют, чтобы давление на границе раздела обращалось
в нуль. Это выполняется, если наложить
на поле излучателя Я, создаваемое в
свободном пространстве, поле зеркального
излучателя Я, имеющего равную
производительность и противоположную фазу.
Сложение полей действительного и
зеркального источников приведет к
взаимной компенсации звуковых давлений на
границе, т. е. к выполнению требуемого
граничного условия. Таким образом, поле
излучателя, расположенного вблизи абсо-
Рисб.и.к определению лютно мягк°й границы, эквивалентно
поля источника вблизи n°™ двухточечной противофазной антен-
поверхности ны в безграничной среде.
- 166-
Полагая заглубление источника малым Bh ^х), примем
направления от источников на точку наблюдения параллельными, тогда
разность хода лучей Аг= h sin 6. Потенциал скоростей действительного
и зеркального источников
Ф = B/А/г) sin {kh sin 6) ехр [Цш- kr)\
его модуль 1Ф1 = BA/r) Isin {kh sin 8I и максимальное значение
'Ф' = 2А/г. Составляя отношение 1Ф1/1Ф1тах> получаем ХН
= |sin [Bл^А) sin 6]| . F.19)
При малом заглублении источника (kh ^ 1) функция Я(8) =
= Bл /?Д) sin 6, ХН соответствует диполю, образованному
действительным и зеркальным источниками.
Амплитуда звукового давления в точке приема на глубине Я
[с учетом величин А = Qm/Dn) и sin 8 = Н/r] равна
Рт = [upQm/Bnr)] sin [2лйЯ/(А)]. F.20)
Из выражения F.20) следуют некоторые выводы. По мере
погружения излучателя давление в точке приема начинает изменяться от нуля,
принимает максимальное значение на глубине h « rk/DH) и далее
изменяется по синусоидальному закону, если соблюдается условие
г » h. В вертикальном направлении (8 = 0) наибольшее давление
излучатель создает при h = А./4. На больших расстояниях от излучателя (при
г» 2яhH/k) звуковое давление убывает пропорционально
возрастанию г2, т. е. значительно быстрее, чем в безграничной среде. Такая
сильная локализация поля будет наблюдаться на низких частотах.
Положим для простоты, что излучатель и приемник находятся на
одинаковой малой глубине, тогда г^хи амплитуда звукового
давления
рт = BА/х) sin [2nh2/(xk)]. F.21)
Интерференционная картина, описываемая выражением F.21),
представлена на рис. 6.12. Как видим, наложение прямой и отраженной
волн приводит к чередованию максимумов и минимумов, которые
сначала располагаются близко, а затем удаляются друг от друга. При
х = 2/?2Д наблюдается последний минимум, при х = 4h2A -
последний максимум. На расстояниях х»4/?2 Д амплитуда давления
убывает по закону 1/х , интенсивность звука - по закону 1/х4.
Влияние волнения моря. Изложенное выше относится к полю
источника, расположенного под спокойной поверхностью моря. В
действительности поверхность моря всегда неровная, отраженные от нее
лучи имеют случайные направления, давление в точке приема меньше,
чем при отражении от гладкой поверхности. Как показано в § 1.8,
неровности при крутом и косом падениях волны отражают ее диффузно.
- 167-
Доля диффузного отражения в точке приема возрастает по мере
увеличения неровности. Согласно условию A.89), волнистая поверхность
ведет себя как плоская, если угол падения 6 больше, чем предельный
угол 9Пр зеркального отражения, определяемый равенством
9np = arccos[V(8H)], F.22)
где Я- высота (размах) морской волны.
В случае расположения излучателя и приемника на одинаковой
глубине cos 8 * 2h/x Если 6 > 9пр или расстояние х больше
хпр = 16hHA, F.23)
то волнение моря не нарушает зеркальности отражения. Если 0 < 9пр
(или х < хпр), отраженная энергия не имеет преимущественного
направления и рассеивается диффузно. Распространение звука в этом
случае оказывается сферическим. Пользуясь зависимостью высоты
морских волн от скорости ветра и соотношением F.23), определяют
предельные расстояния невозмущенного сферического
распространения.
При диффузном отражении от поверхности моря, когда высота
морской волны значительно больше длины звуковой волны,
интенсивность отраженного звука в направлении, образующем угол 8 с
нормалью к поверхности, уменьшается по закону cos 8. Определяя поле
в слое с одной или двумя диффузно отражающими границами, будем
считать, что границы этого слоя идеально плоские, а ХН
действительного и мнимого источников R (8) = cos 8.
При оценке отражения от случайной неровной поверхности
следует учитывать ее статистические параметры - среднюю квадратичес-
кую высоту волны и среднюю высоту волны относительно
поверхности. Потери при отражении от поверхности в зависимости от
произведения частоты сигнала и средней высоты волны можно рассчитать по
выражению [51]
А = 10 lg [1 - 0,139(/#K/2]. F.24)
Выражение F.24) справедливо для малых углов скольжения и потерях
не более 3 дБ. При А > 3 дБ эта зависимость показана штриховой
линией на рис. 6.13. Если Я = А./2 = с/B/), величина А = 0,4 дБ, т. е. на
частотах, при которых длина звуковой превышает высоту морской
волны, потерями при отражении от поверхности можно пренебречь. На
рис. 6.14 представлена частотная зависимость потерь при отражении от
поверхности моря при различных его состояниях [7].
Акустическая мощность приповерхностного источника. Как
показано выше, при малом заглублении источника h его поле
соответствует полю диполя и амплитуда звукового давления тем
меньше, чем меньше h. Очевидно, что и мощность излучения Ра при
этом также уменьшается. Определим Ра при произвольном h
- 168-
10
10
1Jv
У
Ь
О 0,1 0,2 0,3 0,4 0,5 0,6 OJ Ofi 0,9 1ЬО 1,1 1,2 1,3 1,4-
/tkh*
Рис. 6.12. Зависимость уровня звукового давления, создаваемого
малозаглубленным источником, от относительного расстояния
А,ДБ
15
10
2 0J9 3 9
?НГ
/
/
/
/
30
1Z
10
//
//А
6 543 2 J
//А
////}
////
///\
//
'У >
/ /
f /
/ /
' /
/
f
1 ft
/
/
0,1
10 100 1000
Рис. 6.13. Кривая потерь
при отражении от
поверхности моря для малых
углов скольжения
Рис. 6.14. Частотные
зависимости потерь при
отражении от поверхности
моря при различном
волнении моря в баллах
Рис. 6.15. Зависимости
относительной излучаемой мощности
точечного источника от его
заглубления (кривая 1) и от
возвышения над абсолютно жестким
грунтом (кривая 2)
1J5
1,5
О
1,0
0,75
0,5
0,15
\
\
J
/
/
,2
л~
,1
о-
—^
О 0,1 0,4 0,6 0,8 1,0 h/К
- 169-
в предположении независимости объемной скорости источника от
заглубления.
Для направленной системы акустическая мощность
л/2
Я2@) Sin вс/в.
Интегрирование по углу 9 проводится в пределах от 0 до л/2,
поскольку нас интересует поле в нижнем полупространстве. Подставив в
интеграл выражение F.19), определив интенсивность с помощью F.20)
«Jmax = Pm/BPC) и проведя интегрирование, найдем
Ра = [Pcfc2Q2 Д8л] [1 - sin DnftA)/DnftA)]. F.25)
Сопоставляя формулы F.25) и C.19) для мощности, излучаемой
точечным источником в безграничном пространстве, получаем
Ра/Ро = 1 - sin DЛЛД)/DЛЛД). F.26)
Как видно, влияние отражающей границы на эффективность
источника зависит от волнового заглубления источника. Зависимость
отношения Ра./Ро от hA представлена на рис. 6.15 (кривая 1). Вблизи
абсолютно мягкой границы (hA -+ 0) Ра./Р0 ~* 0: действительный и мнимый
источники „акустически накоротко замкнуты". С увеличением h
мощность Ра возрастает и, начиная с h > Х/4, осциллирует около значения
Ро. При hА ¦* °° значение Ра./Ро "* 1: здесь условия излучения такие же,
как в безграничном пространстве, отражающая граница не влияет на
поле системы. При hA = 0,375 мощность излучения максимальна:
/> % 1 2Р
•*а *5*'*о»
Активное сопротивление излучения заглубленного источника
найдем из равенства Ра = 0,5г5у^, где vm = Qm/S. Тогда
rs = [Рс^с252/Dл)] [1 - sin Dл/7А)/DлйА)]. F.27)
Таким образом, график зависимости rs от hA аналогичен кривой 1
на рис. 6.15.
§ 6.5. Влияние дна моря на акустическое поле
Неровности дна в большинстве случаев невелики, и, согласно
условию A.89), дно можно считать практически гладким, особенно при
косом падении звуковой волны. Вместе с тем процесс отражения звука
от дна более сложен, чем отражение от поверхности моря. Волновое
сопротивление дна зависит от характера донных осадков и может быть
меньше волнового сопротивления воды, приблизительно равно ему
и даже в несколько раз превышать его. При падении акустической
- 170-
волны на дно часть энергии отражается, а некоторая часть переходит
в грунт, распространяется в нем, претерпевая отражения на границах
слоистой структуры, возвращается обратно в водную среду и
взаимодействует с отраженной от границы раздела вода-грунт энергией.
Результирующий комплексный коэффициент отражения зависит от
частоты и угла падения.
В случае однородного грунта, например ровного песчаного дна,
характерного для мелководных районов (континентального шельфа,
Северного моря), коэффициент отражения v рассчитывают по
формуле A.71). Графики зависимости модуля I U I от угла падения волны
на песчаное дно приведены на рис. 6.16. Видно, что при а > акр =
= arcsin (ct/c2) модуль I V I = 1 - это область полного внутреннего
отражения. При ос < акр значения I V I уменьшаются сначала резко,
а затем медленно. При нормальном падении и P2c,/(p1cJ = q = 2,53
потери при отражении равны V = — 20 lg [{q - \)/{q + 1)] = 7,26 дБ.
Критический угол падения акр * 60°.
На рис. 6.17 представлены графики зависимостей модуля и фазы
коэффициента отражения от угла а на границе вода-плотный морской
песок (P2/Pi = 2,7; с2/сх = 1,2) при разных значениях потерь для песка
Лп. Видно, что с увеличением поглощающей способности грунта I V I
растет медленнее и достигает максимума только при скользящем
падении (ос = 90°), в то же время если х\п = 0 (поглощение грунтом
отсутствует), то I "V 1 = 1 при а > акр * 56°. Таким образом, при
отражении от поглощающей среды для всех углов ос < 90° модуль I V I < 1,
т. е. ни при каких углах падения не наблюдается полного внутреннего
отражения.
Реальные зависимости I V I от а совпадают с теоретическими
только при низких частотах и малых углах падения. Искажения
0,1
0,6
0,5
ОМ
/L.
у
J
/
J
10 20 30 ЦО 50 60 10 SO 90
ос0
20 30 40 50 60 70 80 90
Рис. 6.16. Зависимости модуля
коэффициента отражения по
амплитуде от угла падения
волны на границу раздела вода-
грунт при различных значениях
Рг/Pi ис2/с!
1 - р2/рх - 2,2; cjcx = 1,15; 2~ р2/р1 =
= 2,0;са/с1 = 1,05
Рис. 6.17. Зависимости модуля
коэффициента отражения по амплитуде
(сплошные кривые) и его фазы
(штриховые кривые) от угла
падения волны при различной степени
поглощения грунтом
- 171-
теоретических данных связаны с потерями от поглощения грунтом
и неровностями дна.
Измерения потерь при отражении от илистого грунта показали, что
при всех углах падения эти потери значительно больше, чем при
отражении от песчаного грунта [7].
Пусть источник расположен в полупространстве над абсолютно
жесткой плоской границей. В этом случае граничное условие
отсутствия колебательной скорости на границе удовлетворяется
зеркальным источником, колеблющимся синфазно с действительным. Для
двухточечной синфазной антенны выражения для ХН и КОК, согласно
соответствующим формулам D.64) и D.20), имеют вид
2nh \ Г smDnh/X) l-i
sin9 /C 2 1
где h - расстояние от источника до дна.
Амплитуда давления в точке (г, 9) будет рт = 0)pQm#(8)/Bnr), в точке
на оси (9=0) Рштах = 0)Р0т/Bлг). Интенсивность звука J{r, 9) =
-Лтах#2(е)> где /тах вРттах/BРС)- Акустическую мощность источника
определяют интегрированием выражения cfPa = J(9)dS в верхнем
полупространстве, т. е. в пределах изменения 9 от 0 до л/2:
л/2
]. F.28)
Активное сопротивление излучения источника находят,
сопоставляя формулу F.28) с величиной r5vj},/2:
9ck2S2 Г sinDnhA) I pcfc252 2
1 + = . F.29)
4 hA J 4 К
4 л [ 4л hA J 4 л Ко
Приближение излучателя к границе раздела ведет к увеличению
значения 2/К0 и при h -+ 0 коэффициент Ко -+ 1; 2/К0 -* 2 и rs -* 2г50, т. е.
сопротивление излучения источника непосредственно у жесткой
границы удваивается (по сравнению с излучением изолированного
источника), поскольку он излучает в полупространство. С удалением
источника от границы Ко возрастает и при ft~* °° значение 2/К0 -* 1,
сопротивление г5 -* г50, т. е. источник излучает в полное пространство.
Зависимость величины 2/К0 или, что то же, отношения Р^/Ро,
характеризующего влияние отражающей границы на сопротивление и мощность
излучения источника, от hA представлена кривой 2 на рис. 6.15. Из
графика видно, что при h ^ А./4 влияние жесткой (как и мягкой) границы
наиболее значительно.
§ 6.6. Точечный источник в слое
Распространение звука в мелководных районах морей и океанов
сопровождается отражениями от поверхности и дна, число которых
- 172-
тем больше, чем больше расстояние
до точки наблюдения по сравнению с
глубиной. Как показано выше (см.
§ 5.6), звуковое поле в однородном
слое с абсолютно отражающими
границами - свободной верхней (z=0)
и абсолютно жесткой нижней (z =
- Я) - создается действительным
источником и бесконечным рядом
фиктивных (зеркальных)
источников (рис. 6.18).
В математической постановке
задачу определения поля р(х, z)
сводят к решению уравнения Гельм-
голыда
+ ПДП
Ар + к2р = О
F.30)
при выполнении граничных условий
как для действительного, так и для
фиктивных источников.
Давление в прямой волне (от
действительного источника)
Рис. 6.18. Источник в слое и система
фиктивных источников
Poi = (l/rOi) ехр (-//сг01); г01 = [ х2 + (h - zJ
F.31)
где h - вертикальная координата источника. На границе z = 0 должно
быть р = 0, на границе z = Н должно быть v = 0 (или поскольку v =
= -grad Ф = -grad [ p/(icop)] = [- 1/(/сор)] др/dz, то др/dz = 0).
Функция Poi является решением уравнения F.30), но не
удовлетворяет граничным условиям. Учтем еще действие фиктивного
источника Д, т. е. отраженную волну от дна, получим
Р = Poi + Ро2 =
ехр (~ikr01) + A/г02) ехр (-/fcr02);
F.32)
Функция Poi + Рог удовлетворяет граничному условию при z = H:
источники И и Д расположены симметрично относительно границы
г = Ни dp/dz\z=H = 0; но при z = 0 функция F.32) не равна нулю. Введем
дополнительно еще два фиктивных источника Я и Д/7, учитывающие
отражение от поверхности и двукратное отражение от дна и
поверхности, получим давление (с учетом изменения фазы на л при
отражении от свободной поверхности)
Р = (l/roi)e-*r" + (l/rO2)e-*r°2 - A/гоз)е-*г°з - A/гО4)е-*г°4, F.33)
где г03 = [ х2 + (z + hJ}1'2; г04 = [ х2 + BЯ + z - hJ]1/2.
- 173-
Выражение F.33) при z=0 дает р = 0 (так как гО1=гоз и гО2 = гО4),
однако граничному условию при z = Н не удовлетворяет, так как
отсутствует симметрия относительно границы z = H. Эту симметрию
можно обеспечить, если ввести еще два фиктивных источника ПД и ДПД -
зеркальные отображения источников ПиДПв нижней границе; теперь
не выполняются граничные условия на границе z = 0. Прибавлять
фиктивные источники можно до бесконечности, тогда будут выполняться
граничные условия на обеих границах. Суммарное поле источника
в слое представляют в виде
р(х, z) -J (-1)*[— в"*^1 + — е'***' -
q~° irqi rq2
- — e~ikrq3 - — e~ikrq* , F.34)
J
где rqg = (x2+zqgI/2; zql = 2Hq + h-z; zq2 = 2Я(</ + 1)- h -z;
h+z;zqA = 2H(q + 1) - h + z; q = 0,1, 2,...; g = 1, 2,3, 4.
При импульсном излучении поле в слое в момент t равно
р(х, z, О = Д (-l)«[/(f- rgl/c)/rgl + /(f- rq2/c)/rq2 -
- /(^ - Гзз/с)/гдз "" /(t- rq4/c)/rq4], F.35)
причем 0 ^ ^ - Гд^/с ^ т, где х - длительность импульса.
Нормальные волны в слое. Звуковое поле в слое с непоглощающи-
ми границами на большом волновом расстоянии можно представить
в виде [5]
2д/2л . /л со
p{x,z)= е~'л/4 I sin
Я ^=°
Я ^=° Н
я 4q 0,5) expHV) , ч
X sin j=— , F.36)
Я i&
где \q = ^ук2)" (n/HJ(q + 0,$J - горизонтальная составляющая
волнового вектора к; kQ - волновое число для безграничного
пространства. Выражение F.36) удовлетворяет уравнению
F.30) и граничным условиям р1г=го = О и dp/dzS^H = O. Отдельное
слагаемое pq представляет собой так называемую нормальную
волну, которая является бегущей по координате х и стоячей по
оси z. Амплитуды нормальных волн убывают по цилиндрическому
- 174-
Рис. 6.19. Изменение амплитуд нормальных
волн внутри слоя с акустически мягкой
поверхностью и жесткой нижней границей
закону 1/ д/хГесли [n/(kH)](q + 0,5) > 1, то %q = ± i \lq\ и в зависимости
от знака при i волна будет соответственно незатухающей или
затухающей вдоль координаты х. В последнем случае нормальная волна
является неоднородной, ее амплитуда уменьшается с ростом х
экспоненциально. Частоту нормальной незатухающей волны при q = 0 [k0H =
= л/2 или /о = с/D#)] называют критической частотой этой
волны. При частотах / < /0 все нормальные волны затухают. Именно по
этой причине затухают инфразвуковые волны, поглощение которых
в морской среде ничтожно мало.
Когда источник находится на верхней границе - поверхности
моря - амплитуды нормальных волн равны нулю. При малом
заглублении источника (h<?H) амплитуды будут также малыми, что
обусловливается взаимной компенсацией противофазных источников.
Зависимости амплитуд первых четырех нормальных волн от координаты z
иллюстрирует рис. 6.19.
Представление поля точечного излучателя в слое в виде
нормальных волн целесообразно при малых толщинах слоя, тогда можно
ограничиваться небольшим числом нормальных волн. Лучевое
представление предпочтительно в случае больших толщин и сравнительно
небольших расстояний до точки приема, когда поле будут определять
кроме прямой волны несколько первых отражений от границ слоя
(см. § 5.5).
Зависимость интенсивности звука в слое от расстояния. При
излучении точечного гармонического источника в слое с абсолютно
отражающими границами по высоте слоя возникает сложная
интерференционная картина: фаза колебаний существенно изменяется при
перемещении источника по высоте на малую долю длины волны,
амплитуды колеблются около среднего значения. Практический
интерес, однако, представляет не эта тонкая структура поля, а средние
значения давления, плотности энергии, интенсивности, т. е.
приближенная оценка поля. Эти значения можно получить, используя
энергетический метод суммирования действий источников, рассмотренный
в § 5.5. Для средней интенсивности звука 3 была выведена формула
E.32), согласно которой 3 в слое убывает пропорционально
увеличению расстояния, которое значительно больше толщины слоя.
Если одна из границ слоя частично поглощает энергию, то на
больших расстояниях г средняя интенсивность в слое убывает
пропорционально возрастанию г3/2 [5], что соответствует среднему значению
между г2 для безграничной среды и г для слоя с непоглощающими
границами.
-175-
§ 6.7. Реверберация звука в море
Границы и неоднородности слоев моря обусловливают также
появление полей рассеяния (переизлучения) звуковой энергии, которые
в точке излучения создают эффект, называемый реверберацией.
Если рассеянную волну отделить от прямой, например, при
импульсном излучении, то в точке приема наблюдается явление
реверберации - медленно затухающий звуковой процесс.
Интенсивность реверберации Jp маскирует эхосигнал от цели,
являясь, таким образом, помехой при работе гидролокатора и
ограничивая его дальность действия. Чем ближе лоцируемый объект, тем
больше интенсивность эхосигнала /э, но при этом велика и
интенсивность Jp. Для обнаружения цели по эхосигналу необходимо
превышение J3 над Jp. Трудность регистрации полезного эхосигнала на фоне
реверберационной помехи объясняется тем, что их спектры подобны,
если лоцируемый объект неподвижен.
Знание законов спадания интенсивности реверберации со
временем (расстоянием) и сопоставление их с соответствующими законами
убывания эхосигнала дает возможность рассчитать дальность
гидролокатора и наметить меры уменьшения реверберационных помех.
В зависимости от характера распределения неоднородностей в
море различают три вида реверберации: объемную, поверхностную
(слоевую) и донную (граничную).
Объемная реверберация - рассеяние звука мелкими включениями
в виде газовых пузырьков, твердых взвешенных частиц, термических
неоднородностей (непрерывно перемешивающихся дискретных
объемов воды с различными температурами) и другими рассеивателя-
ми, распределенными по всему водному пространству.
Поверхностная реверберация - рассеяние звука мелкими неодно-
родностями и пузырьками, концентрирующимися в приповерхностном
слое, волнующейся поверхностью моря, а также звукорассеивающими
слоями, расположенными в толще воды.
Донная реверберация - рассеяние звука неровностями дна. В
реальных условиях указанные виды реверберации существуют
одновременно, накладываясь друг на друга. Однако в зависимости от
условий использования гидролокатора и состояния моря может
преобладать тот или иной вид реверберации. Если в районе больших глубин
импульс излучается в горизонтальном направлении, наблюдаются
поверхностная и объемная реверберации. В случае волнения моря на
малых расстояниях (до 500 м) поверхностная реверберация превышает
объемную; при малых скоростях ветра преобладает объемная
реверберация. Донная реверберация проявляется, как правило, в
мелководных районах морей при близком расположении антенны ко дну моря
и при излучении в направлении дна.
На рис. 6.20 представлена временная зависимость уровня
реверберации (в децибелах относительно 0,1 Па), вызванной взрывом заряда
массой 0,9 кг на глубине 240 м в море глубиной 1000 м [44]. На рисунке
отмечены характерные области: поверхностной реверберации B);
- 176-
Э,дб
90
10
50
30
10
1
"S
,1
ill
vt
.А
12
8t,c
Рис. 6.20. Временная зависимость
уровня реверберации
объемной реверберации от глубинного
рассеивающего слоя B); отражения от
дна и поверхности C); донной
реверберации {4); реверберационного
„шлейфа" E), обусловленного совместным
рассеянием граничными
поверхностями моря.
Объемная реверберация. Пусть
излучатель с акустической мощностью Ра
излучает импульс длительностью т.
В пространстве будет распространяться возмущение в виде
сферического слоя толщиной ст (рис. 6.21, а). Неоднородности, сосредоточенные
в этом слое, будут создавать эффект обратного рассеивания, т.е.
объемную реверберацию. Однако не вся рассеянная в момент t энергия
достигнет точки приема (излучения) одновременно. В самом деле,
звук, рассеянный вблизи заднего фронта импульса, дойдет до
приемника на время т раньше, чем рассеянный звук вблизи переднего
фронта, так как задний фронт проходит меньший путь.
В момент t фронты импульса занимают положение ААХ и ВВ±
(рис. 6.21, б), а в момент t + т/2 - соответственно АА2 и ВВ2. За время
?/2 волны, рассеянные в момент t около фронта ВВ19 дойдут до АА2;
одновременно к этой поверхности (АА2) приходит и задний фронт
импульса. Таким образом, в точку О придут одновременно и создадут
в ней интенсивность реверберации звуковые волны, рассеянные
передним фронтом вблизи поверхности ВВХ и задним фронтом вблизи
поверхности АА2. Поскольку расстояние между ВВ± и АА2 равно
г" - г' = сх/2, то в момент наблюдения t к приемнику приходит звук,
рассеянный неоднородностями в объеме сферического слоя толщиной
ст/2. Этот слой называют рассеивающим элементом
пространства.
При равномерной концентрации неоднородностей в пространстве
и коротких импульсах BРст ^ 0,1) интенсивность объемной
реверберации в точке излучения
4рг) F.37)
А А В В
Рис. 6.21. К пояснению явления объемной реверберации: а
—рассеивающий элемент пространства; б — положения фронтов
импульса
12-614
- 177-
или в момент t = 2r/c от начала излучения
*2)]ехрК
F.37а)
где ар - коэффициент объемной реверберации, характеризующий
рассеивающую способность моря; по опытным данным ар = 10...
Из формулы F.37) следует, что Jv пропорциональна излучаемой
мощности и длительности посылки и убывает пропорционально
увеличению квадрата времени (или расстояния).
Поверхностная реверберация. В этом случае неоднородности
сосредоточены в слое толщиной h (рис. 6.22), причем плотность их
распределения в среднем постоянна во всем слое. При импульсном
излучении в слое будет распространяться возмущение в форме кольцевой
области с внутренним радиусом г и шириной ст. Как и в случае
объемной реверберации, рассеянные волны одновременно приходят в точку
приема из зоны, лежащей в пределах от г до г + ст/2.
Для коротких импульсов интенсивность реверберации в точке
излучения
r3)] ехр (-4Рг)
или в момент времени t от начала излучения
[^hP&T/Bnc2t3)] exp (-2Pcf).
F.38)
F.38а)
10" м-1.
Значения ар лежат в пределах 1(Г6
Интенсивность поверхностной реверберации в отличие от
объемной убывает пропорционально времени (или расстоянию) в третьей
степени, т. е. быстрее, чем объемная; это можно объяснить разницей в
геометрии рассеивающих элементов.
Донная реверберация. Пусть источник расположен на расстоянии Я
от дна (рис. 6.23). Реверберация порождается рассеиванием на
неровностях и неоднородностях дна, так что по нему распространяется
кольцевая возбужденная поверхность, ширина которой равна ct/cos8.
Наложение рассеянных волн, образующее суммарный эффект донной
реверберации, создается кольцевой поверхностью шириной ст/B cos 8).
ст
Рис. 6.22. К пояснению
поверхностной реверберации
Рис. 6.23. К пояснению донной
реверберации
- 178-
Интенсивность донной реверберации для коротких импульсов
Jp = [<хрЯРаст/A6лг4)] ехр (-4Рг) F.39)
или, принимая г = ct/2:
Jp = [арЯРат/(лс3*4)] ехр (-2М). F.39а)
Значения ар = 10~3 ... 10 м.
Как видно, интенсивность донной реверберации спадает
пропорционально расстоянию (или времени) в четвертой степени, т. е.
наиболее быстро в сравнении с другими видами реверберации.
Для гидролокации существенна только рассеянная энергия в
обратном направлении. Так как поле рассеянной мощности является
направленным, то во все формулы для Jp войдет КОК этого поля в
направлении приема.
Направленность антенны гидролокатора значительно снижает
уровень реверберации: при одинаковой направленности в режимах
излучения и приема интенсивность объемной реверберации
уменьшается примерно на 30 % [32].
При большой скорости ветра (более 8 м/с) интенсивность
поверхностной реверберации падает быстрее, чем по закону 1/г3, на малых же
расстояниях (меньших 400 м) при любой скорости ветра ослабление Jp
происходит медленнее, чем по теории. На расстояниях, превышающих
1500 м, поверхностная реверберация маскируется объемной и не
зависит ни от состояния поверхности моря, ни от сезона.
Донная реверберация зависит от рефракции звука в гораздо
большей степени, чем другие виды реверберации, поскольку в этом
случае Jp зависит от угла падения, на величину которого рефракция
оказывает влияние.
Приведенные теоретические законы убывания интенсивности
реверберации в общем согласуются с опытными данными. В
некоторых случаях наблюдаются выбросы Jp, что связано с наличием в морях
и океанах звукорассеивающих слоев. Залегают эти слои на глубинах
100 ... 1000 м и включают планктон, рыб и другие морские организмы.
Следует отметить, что флюктуации реверберации маскируют эхо-
сигнал сильнее, чем монотонно убывающая реверберация. Рассеяние
звука на хаотически распределенных в море и меняющихся во
времени рассеивателях представляет собой нестационарный случайный
процесс. Статистические свойства морской реверберации исследованы
В. В. Ольшевским и изложены в его монографии [20].
§ 6.8. Сила цели подводных объектов
Отражающую способность цели - подводного объекта,
облучаемого звуковой волной, оценивают так называемой силой цели Т
(в децибелах), равной отношению интенсивности Jr отраженной волны
12*
- 179-
в точке, расположенной на единичном расстоянии от „акустического
центра" цели, к интенсивности Jz падающей на цель волны:
Г= 101g(Jr//z). F.40)
Под акустическим центром понимают точку на поверхности цели или
вне ее, из которой исходят эхосигналы.
Если волна отражается от жесткой сферы радиусом R(R^> К), то,
согласно формуле E.11), интенсивность Jr в отраженной волне на
расстоянии г от точки излучения-приема равна
Jr = Ji[R/Br)]2.
При г = 1 м отношение Jr Д- = R2/4 и сила цели сферы
Т= 10 lg (/Д)|г=1 = 10 lg (Я/2J = 20 lg (R/2). F.41)
При определении уровня эхосигнала от реальных лоцируемых
объектов ввиду сложности картины рассеянного поля их
аппроксимируют эквивалентными по отражающей способности телами простой
аналитической формы. Если радиус кривизны отражающей
поверхности и расстояние от нее до точки приема значительно превышают
длину волны, то в качестве эквивалентного отражающего тела можно
принять сферу радиусом R3KB. Эквивалентным радиусом
цели называют радиус такой зеркально отражающей неподвижной
сферы, которая на расстоянии, равном расстоянию до отражающей
цели, создает в точке приема эхосигнал, интенсивность которого
совпадает с интенсивностью эхосигнала от цели. Из этого определения
следует, что сила цели представляет собой уровень эхосигнала,
выраженный в децибелах, относительно сигнала, полученного от сферы
с эквивалентным радиусом R3KQ = 2 м:
Г = 201ё(Яэкв/2). F.42)
Сила цели для тел простой формы может быть получена
аналитическим путем. Формулы для расчета эквивалентного радиуса
некоторых жестких зеркально отражающих тел приведены в табл. 6.1 [44].
Пользуясь этими формулами, в принципе возможно произвести расчет
силы цели объектов сложной формы. Например, корпус подводной
лодки аппроксимировать эллипсоидом вращения, а боевую рубку-
цилиндром. Радиусы кривизны поверхностей корпуса и рубки в
различных точках можно определить по чертежам лодки.
На практике широко распространен метод определения Т, при
котором интенсивность /э измеряют на большом волновом расстоянии
г (по сравнению с размерами объекта и его радиусом кривизны) от
отражающего объекта, а затем приводят к интенсивности на
единичном расстоянии. Для этого надо знать потери при распространении
и уровень излучения источника.
- 180-
Таблица 6.1. Формулы для расчета эквивалентных радиусов некоторых
объектов простой формы
Форма
отражателя
Сфера:
большая
малая
Бесконечный
цилиндр:
большого
диаметра
малого
диаметра
Цилиндр
конечной
длины
Конечная
плоская
пластина:
произвольной формы
прямоугольная
круглая
Эллипсоид
^ЭКВ
R
65,81? 3А2
V2#r
6л2!?2 VrA
L ^2R/\ X
X (sin ?/Q cos 0
2S/X
Bab/\) x
X (sin VI) cos 0
2л1?2 JxB?) x
XCos0
[8/(Зл)]?2#3
bc/a
abc
[ a2cos2a +
+ b2 cos2 p +
+ c2cos2 y]'1
Обозначения
1? - радиус
сферы; к —
длина волны
1? - радиус
цилиндра
L — длина
цилиндра;
1? - радиус
цилиндра;
? = kL sin 0
S — площадь
пластины;
L —
наибольший размер
пластины;
/ —
наименьший размер
пластины
a, b — стороны
прямоугольника; Х> = ка sin 0
R — радиус
пластины;
1-kR sin 0
к= 2лА
а, Ь, с —
главные полуоси
эллипсоида
Направление
падающей волны
Любое
Перпендикулярно оси
цилиндра
Перпендикулярно оси
цилиндра
Под углом 0
к нормали
Перпендикулярно
поверхности
пластины
Под углом 0
к нормали в
плоскости,
содержащей
сторону а
Под углом 0
к нормали
Перпендикулярно
поверхности
пластины
Параллельно
оси a
Под углами
а, р, у
соответственно к осям х,
Условия
применимости формулы
kR » 1; г > 1?
kR < 1; кг » 1
kR » 1; г > 1?
/с#< 1
г > L2I\
г > L2/\; kl» 1
r>a2/\;kb^> 1;
r>R2/\;kR >1
fc!?< 1
fca » 1; kb » 1;
fcc» 1; r» a;
г^ Ь; г^> с
- 181-
Продолжение табл. 6.1
Формула
отражателя
Любая
выпуклая
поверхность
Любое
вытянутое в длину
тело вращения
^ЭКВ
RXR2/A
SnV/K2
Обозначения
Rlf R2 -
главные радиусы
кривизны
V — объем
тела
Направление
падающей волны
По нормали
к
поверхности тела
Вдоль оси
вращения
Условия
применимости формулы
fcl?! » 1; kR2 > 1;
г > Rv r> R2
Все размеры
малы по сравнению
сХ
Если J,- - интенсивность в падающей (на отражатель) волне, то /э =
= mJi/r29 где т - коэффициент, определяемый формой, размерами
и положением отражателя. Интенсивность JJ можно выразить через
мощность источника Ра1, излучаемую в единичный телесный угол:
JP/2
2* Следовательно, интенсивность эхосигнала
F.43)
Уровень зхосигнала получим логарифмированием равенства F.43):
1Э = 10 lg J3 = 10 lg m + 10 lgPai- 40 lg г.
F.44)
Слагаемое 40 lg г показывает уменьшение уровня интенсивности при
распространении сигнала от излучателя до отражателя и обратно,
вызванное расширением фронта волны. Действительные потери при
распространении происходят также вследствие затухания в среде
и из-за ее неоднородности; обозначим эти потери (в децибелах)
через 2Н.
Полагая в выражении F.43) г= 1, получаем /э|г=1 -mJr По
определению, отношение J3 |r== j. /Jf = m есть сила цели [см. формулу F.40)],
следовательно, lOlgm^T. Величина 101gPai=W представляет собой
уровень излучения. Теперь равенство F.44) запишется так:
L3 = W-2#+T. F.45)
Из этого уравнения находят силу цели Т по данным измерений других
величин, причем погрешности измерения Я наибольшие.
Определим силу цели подводного объекта, от которого на
известном расстоянии г измерен уровень эхосигнала L3. Заданы акустическая
мощность ?а, КОК Ко и рабочая частота источника.
За расчетную модель примем жесткую сферу радиусом Яэкв,
интенсивность эхосигнала от которой на расстоянии г равна J3 от реальной
цели.
- 182-
При совмещении точек излучения и приема интенсивность эхо-
сигнала от сферы определяют по формуле E.12), которая с учетом
затухания в среде принимает вид
F.46)
Уровень эхосигнала
L* = Ю lg [Р&К0/{4п)] + 20 lg №экв/2) - 2[Рг - 5 lg А/ + 20 lg г]. F.47)
Отсюда находим силу цели эквивалентной сферы [см. формулу F.42)]
r = L3-W + 2H, F.48)
где TV = 10 lg [Ра/С0/Dл)] - уровень излучения.
Экспериментально установлено, что сила цели подводных лодок
и надводных кораблей зависит от скорости хода, курсового угла и
угла места, длительности посылки, частоты, глубины и расстояния.
Ориентировочные значения Т (в децибелах) некоторых объектов в
зависимости от частоты посылки и курсового угла приведены ниже [13].
Тип цели
Подводная лодка
„Трешер"
Подводная лодка
„Стерджен"
Транспорт,Джордж
Вашингтон"
кГц
2
12
9,5
5...
12
13.
17.
30
.14
.18
Курсовой угол, град
45..
13.
15.
18.
.70
.16
.16
.20
90
32
32
37
135
10.
10.
17.
... 175
.9
.9
..14
Примечания: 1.Для транспорта ,/1иберти" Т = 20...30 дБ при курсовом угле от 60 до
155°. 2. Для пловцов Т = —15 дБ независимо от курсового угла.
§ 6.9. Дальность действия гидроакустических
систем
В самом общем смысле эффективность использования ГАС
оценивают вероятностью выполнения определенных функций системы на
заданном расстоянии от условленной точки. Например, обнаружение
эхосигналов гидролокационной станции (ГЛС) или сигналов пассивной
локации шумопеленгаторными станциями (ШПС) на фоне помех
- 183-
в данный интервал времени. Помехами могут быть шумы
судна-носителя ГАС, возникающие при его движении, а также реверберационные
помехи. Для судовых ШПС шумовые помехи, очевидно, преобладают,
а для ГЛС существенны как шумовые, так и реверберационные
помехи.
Каким должно быть отношение сигнал/помеха (ОСП) на входе
системы приемник-индикатор-оператор для правильного (с заданной
вероятностью) обнаружения сигнала? Наименьшую величину ОСП
называют порогом обнаружения (ПО) и определяют выраженным
в децибелах отношением мощности Рс (или среднего квадрата
напряжения U%) сигнала в полосе частот А/ приемника к мощности Рп (или
среднему квадрату напряжения U^) шумовой помехи в полосе частот
1 Гц. Это отношение измеряют на входе приемника, его необходимо
знать для обнаружения сигнала с заданными вероятностями
правильного обнаружения Рп.о и ложной тревоги (ошибки) Рл#т:
ПО = 10 lg (Рс/Рп) = 10 lg (U2M). F.49)
Важным качественным показателем работы ГАС является
дальность действия (ДД), определяемая минимальным значением ОСП
на входе приемного тракта, при котором вероятность правильного
обнаружения сигнала Рп.о» регистрируемого индикатором на выходе
тракта, равна заданному значению ДД при обеспечении требования
к вероятности ложных тревог Рл.т.
На практике потенциальные возможности ГАС оценивают
энергетической дальностью действия (ЭДД), под которой
понимают ДД в неограниченной и однородной среде. ЭДД определяют
параметры приемно-излучающей части системы, сила цели,
пространственное затухание и уровень помех в точке приема. ДД пассивных систем
локации зависит также от уровня шума пеленгуемой цели, но ШПС
(в отличие от ГЛС) не подвержены действию реверберационных помех.
В морях и океанах убывание интенсивности сигнала с расстоянием
происходит по закону г~т, где т = 1... 2, в зависимости от условий
распространения в данном районе. Примем этот закон
соответствующим сферической волне {т = 2).
Уравнение дальности действия ГАС запишем в виде
Jcmin = b2Jn, F.50)
где /cmin - минимальная интенсивность сигнала, обеспечивающая
регистрацию сигнала с заданными значениями Рп.о и Рл#т; /п -
интенсивность помехи в точке приема; б - ОСП по давлению; б2 - ОСП
по энергии.
Интенсивность эхосигнала от жесткой сферы радиусом R3KB,
принимаемой за эквивалент цели, определяют по формуле F.46), в
которой /э = JCmin> ^o = ^i ~ КОК излучателя.
Пусть спектральная плотность интенсивности помех в полосе А/
описывается функцией G(f)=af~n, где п = const, т.е. помеха изотропная.
- 184-
При А/ <ЗС/0 величина Jn, очевидно, пропорциональна А/ и тем меньше,
чем больше КОК приемной системы К2, т. е.
/п = G(f) &f/K2 = (a/fn№/K2). F.51)
Уравнение F.50) принимает вид
Ра K^R^jOAf/iienakfb2) = г4 • 10°>2Рг. F.52)
Частотные зависимости коэффициента затухания р и
коэффициентов концентрации Кх и К2 представим функциями
тогда
r7~v ' 100>2Ь/тг? F.53)
где v =п + г?! + п2.
Отметим, что ЯЭкв характеризует отражающую способность цели
(СЦ), которую принимаем не зависящей от частоты. В более общем
случае в выражении F.53) следует вместо R%KB использовать
эффективную площадь поперечного сечения отражателя 5Эф = л#|кв, зависящую
от его формы, расположения в пространстве и частоты. Если 5Эф=/с3/,
tov =п + Г?! + п2 + п3.
Оптимальные частоты. Расчеты дальности действия ГАС
определенной конструкции при фиксированных условиях распространения и
характеристиках цели показывают, что максимальная дальность
достигается на одной частоте, называемой оптимальной частотой.
Существование такой частоты связано, с одной стороны, с более
быстрым затуханием в среде при повышении частоты, вызывающим
уменьшение дальности, с другой стороны, с увеличением концентрации
звуковой энергии и снижением уровня шумов в море, приводящих к
росту дальности. При работе системы на оптимальной частоте заданная
дальность обеспечивается минимальным значением излучаемой
мощности, а в случае заданной мощности достигается наибольшая
дальность. Таким образом, оптимальная частота зависит от дальности
обнаружения при определенных параметрах среды, системы и объекта
обнаружения.
Определим ЭДД пассивной системы локации. Используя формулу
F.17) для минимальной интенсивности, можно написать
Jmin
F.54)
где Af - фактор аномалии; г выражено в м; Р - в дБ/м.
Пусть источник шума в точке на оси, на сравнительно малом
расстоянии г0 (таком, чтобы можно было не учитывать затухания)
- 185-
создает в узкой полосе частот интенсивность Jq. Введя Jo в формулу
F.54), получим
^ F.55)
В соответствии с уравнением дальности F.50)
откуда
JoAfl{b2Jn) = (г/гоJ10°'1Рг. F.56)
Если частотную зависимость КОК приемника задать функцией К = kfV,
то F.56) запишется так:
JoAf/F2Jno) = [г2Г»/(кг>)] Ю0'1^, F#57)
где Jno - интенсивность помехи носителя системы при
ненаправленном приеме на частоте 1 кГц в полосе 1 Гц.
В уравнении F.57) величинами, зависящими от частоты, являются
коэффициент затухания Р и множитель У""1. Примем Р = 0,036 • 10~3/3/2 =
Ь/ [ ()]
ф у У р , /
Ь/ [см. формулу F.18)] и определим оптимальную частоту /опт из
условия максимизации дальности обнаружения. При этом левую часть
уравнения следует считать постоянной. Перепишем уравнение F.57)
в виде
JoAfkr2o/(b2JnQr2) =ГЦ • 10 W8'.
и для нахождения /0Пт вычислим производную
(/ ) V • w°>lbf3/2r
+ /"ц • 0,1 br • — /1/2 (In 10) Ю0'15^ .
2
Из уравнения d/df= 0 получаем
И=0,1ЬгC/2J,3/Опт/2,
откуда при Ъ = 0,036 • 10~3 находим искомую частоту в килогерцах
/опт = Ю0(80,5И/гJ/3. F.58)
Для плоской антенны больших волновых размеров ц= 2, для линейных
антенн (/ >2k)\i = 1. При п = 2
/опт* Ю0-30/г2/3. F.59)
- 186-
При п = 1
/опт%Ю0-19/г2/3.
F.60)
Если задана дальность г, частота /0Пт соответствует
максимальному значению Jo/(b2Jno)-
Уравнение дальности F.55) или F.57) можно решить графическим
путем. Значение Jmin определяется при заданном уровне помех
порогом обнаружения.
Ниже даны средние значения уровней шумов в полосе 1 Гц
различных судов [44]. Уровни излучения приведены к расстоянию 1 ярд =
= 0,91 м и выражены в децибелах относительно 1 мкПа.
Тип судна,
скорость
(в узлах)
Торговое, 10
Пассажирское, 15
Линкор, 20
Крейсер, 20
Эсминец, 20
Корвет, 15
Частота, кГц
0,1
152
162
176
169
163
157
0,3
142
152
166
159
153
147
1,0
131
141
155
148
142
136
3,0
121
131
145
138
132
126
5,0
117
127
141
134
128
122
10,0
111
121
135
128
122
116
25,0
103
ИЗ
127
120
114
108
Рассмотрим ЭДД активной системы локации. Эти системы
используют для обнаружения, распознавания, телеуправления, измерения
параметров объектов и среды и др. Исходя из уравнения дальности
F.55), определим оптимальную частоту при условии минимизации
левой части уравнения, т.е. принимаем заданными все величины,
кроме акустической мощности Ра- Следовательно, при фиксированном
значении дальности системы г на частоте /опт необходимая излучаемая
мощность будет наименьшей. Очевидно, наименьшими будут и
размеры активной поверхности антенны для заданной удельной
акустической мощности.
Продифференцируем правую часть уравнения и приравняем
производную нулю:
откуда находим
/onT = [v/@,46bmr)]1/'n. F.61)
Принимая значения коэффициентов Ь = 0,036 • 10~3, т - 3/2, п - 2, nt =
~ "г = 2, Пз = 0, получим v = 6, и тогда частота в килогерцах
/опт - 3878/г2/3 * 3900/г2'3. F.62)
- 187-
Для линейных антенн пг = п2 = 1 имеем
з. F.63)
Когда заданы размеры антенны ГАС, максимальную дальность гтах
определяют из уравнения F.53) с учетом формулы F.61).
Вернемся к уравнению дальности F.50) и представим его в
следующем виде:
Jinin
*2'4)] 10~°'2РГ = 62Jn- <6'64)
Введя интенсивность /0 = P^Kji^n), создаваемую ГАС на оси ДН на
малом расстоянии г0 = 1 м, получим
[ JQS^Af/Dnr4)] Ю-0'2^ = 62Jn, F.65)
где Jn - интенсивность помех в рабочей полосе частот. Запишем
выражение F.65) в логарифмических единицах (децибелах):
Юlg/0 + 101Е^эф + ЮlgА/- 10lgDл)-40lgг- 2рг = 20lg б + Юlg Jn
или
Расстояние г, определенное из этого трансцендентного уравнения,
при Af = 1 будет энергетической дальностью действия ГАС.
Из формулы F.48), учитывая принятые выше обозначения,
находим
где La = 10 lg «/min ~ минимальный уровень эхосигнала.
Уровень воспринимаемой шумовой помехи уменьшается
благодаря направленности приемника, и, следовательно, на выходе
приемника уровень мощности шума равен 10 lg Jn ~ 10 lgK2. В момент
обнаружения цели ОСП равно пороговому значению, соответствующему
установленному вероятностному критерию. Таким образом, уравнение
активной гидроакустической локации записывается так:
Когда помехой является реверберация, а не шум моря, нельзя
использовать коэффициент концентрации, определенный для
изотропного поля помех: реверберация имеет неизотропный характер. В этом
случае 10 (lg Jn - lg ^) = 10 lg Jp (Jp - интенсивность реверберации,
измеренная на выходе приемника) и уравнение локации имеет вид
W-2#+r-101gJp = 201g6.
- 188-
Помехи в работе ГАС. Прием полезного сигнала всегда
сопровождается наличием помех, воздействующих на приемную антенну.
Помехи могут быть внутренними (шумы преобразователей, элементов
электрической цепи ГАС) и внешними (шумы моря, судна-носителя
ГАС, реверберации). Уровень воспринимаемых антенной шумов
оценивают спектральными характеристиками - спектральной плотностью
интенсивности (мощности) G{f) или давления. Функция С(/), Вт/(м2Тц),
определяет интенсивность (мощность), приходящуюся на единичную
полосу частот: G(f) = dJ/df. Интенсивность в полосе от Д до /2 равна
J(A/) ^G(/)d/
/) ^G(/)d/.
Функцию G(f) обычно задают в форме G{f) = а/~п, где п - степень
уменьшения спектрального уровня интенсивности в полосе частот. Из
системы уравнений G(fx) = af^n и G(f2) = a/2"n находим
п = [10 lg G(A) - 10 lg G(/2)] / [10 lg (/a/A)];
lg a = [10 lg G(A) lg/2 - 10 lg G(/2) lg/J / [10 lg (/a/A)].
Если ввести в рассмотрение эквивалентную частоту /э, определяемую
из условия равенства интенсивностей ДА/) спектра G(/) и
равномерного спектра G(/3), т. е. Ц\ с/"п df=affnAf, то для/э получим
/э = [(/а -АH " п)/Ш-п "А1"")]17" F.66)
При /2 = 2Д, т. е. интервал частот равен октаве*, 10 lg (f2/f1) - 3 и п =
= AG(/)/3. В частном случае п = 2 спад спектра AG(/) = 6 дБ на октаву,
а частота/э = v2A-
На основании формулы F.51) интенсивность помех на приведенной
частоте /э в полосе Д/ на выходе приемной антенны может быть
выражена формулой
Jn(/3,A/) = JnoA//(/?^), F.67)
где Jno ~ стандартная удельная интенсивность помех на частоте 1 кГц
в полосе 1 Гц, измеренная ненаправленным приемником (К2 = 1).
Аналогичная формула для давления помехи
, ДЛ = Рпо ШИРАКУ2). F.68)
В обеих формулах/э выражено в кГц, А/- в Гц.
Установлено, что скорость объектов-носителей ГАС влияет на поле
(давление) помех: можно считать его пропорциональным скорости
в третьей степени. Если значения стандартных Лт0 и Рпо измерены при
*Октава — логарифмическая единица измерения относительного изменения
частоты - есть интервал частот с отношением граничных частот 2:1. Интервал
между частотамиД и/2, выраженный в октавах, равен \og2{f2/f1) = 3,32 lg (/2/Д).
- 189 -
Дб
10
о
-10
6
N.
к
:-—
5=
— —
¦
¦¦¦««,
**
>¦«
*•¦.
*«.
¦а
*¦*
- *
0,6 0,81,0
1 J Ц 5678910
10
О
-10
%
—»—,
' ,
^
' .
i
QJS 0,8 1,0
5 618310
Рис. 6.24. Спектральные уровни шумов некоторых источников
1...4— легкий крейсер, v — 24; 24,4; 17; 15 уз; 5 — эсминец, v ¦* 30 уз; 6 — торговое судно;
7—линкор, v « 20 уз; 8—пассажирское судно; 9 — корвет, v «15 уз; 10... 13 — подводная
лодка, v «10; 8; б; 4 уз
скорости v0, то для учета скорости v надо правые части формул F.67) и
F.68) умножить соответственно на (v/v0N и (v/v0K.
Пример. Давление помех задано функцией рп-а [Д//(/эХК2)]1/2 v3.
Стандартное удельное давление помехи при скорости судна v0 = 10 уз рц0 -
= 0,02 Па • Гц/2. На судне работает ГЛС в полосе частот от Д = 19,8 кГц до % =
= 20,8 кГц. Антенна в виде квадрата имеет площадь 0,64 м2. Спад спектра помехи
составляет 6дБ на октаву (п = 2). Определить уровень помех при скорости
v = 20 уз.
Из формулы Рпо = а [Д/оЛ/? #о)]1/2 v? находим а и подставляем в заданную
функцию:
Рп(/э> АО-PnoKAf/A/b) Ko/K2]l/2(/o//3)(v/VoK.
По формуле F.66) вычисляем эквивалентную частоту
/э s^hhss л/19,8 • 20,8 = 20,3 кГц.
Так как волновые размеры антенны @,8 м) больше А. = 1,5/20,3 = 0,074 м, то КОК
определяем по формуле D.23)
К2 = 4л • 0,64 • 10э/5,46 * 1470.
Полагая /0 = 1 кГц, А/о = 1 Гц, Ко = 1, находим искомое давление рп(/э, А/) =
= [рп0 УД//(/э VS5] (v/Vo K -0,02 л/тО • 203/B0,3 лД470 • 103) = 6,5 • 10~3 Па.
Уровень давления помех 20 lg рп(/э, А/) = —43,7 дБ.
as
-го
-чо
-60
iff
20 30
v.ys
Рис. 6.25. Типовая зависимость уровня помех от
скорости судна
- 190-
Запишем уравнение дальности F.57), подставив выражение для
КОК в режиме приема К2
и выразим его в децибелах при г0 = 1 м:
-20lgг-рг+ 10lgAf = 20lg6 + 10lg/no- ЮlgК2-\йlg Jo.
Уровни шума цели 10 lg/0 и интенсивности помех 10 lgJno находят по
спектрограммам. На рис. 6.24 [44, 47] представлены уровни
спектральной плотности интенсивности шума некоторых источников, на
рис. 6.25 - зависимость уровня помех (гидродинамических, шумов
машин, механизмов и гребных винтов, шумов моря при волнении 3
балла) от скорости сторожевого корабля [13]. На обоих рисунках
уровни шума выражены в децибелах относительно р0 = 1 Па.
Средства гидроакустической связи (телеметрические системы).
Запишем уравнение дальности относительно давления, исходя из
зависимости ] = р2/(рс):
где ^(б), Я2(9)"" ХН соответственно излучающей и приемной антенн
в горизонтальной плоскости; г0 = 1 м.
Считая излучатель ненаправленным, получим
-201gr-Pr+101gA/=201g6+201gpb(/3,A/)-201gi?2(e)-201gpo.
Следует заметить, что качество передачи информации при
использовании ГАС зависит не только от ОСП, но и от полосы частот. Так, для
средств служебной связи достаточной оказывается полоса 300...
1400 Гц. Для обеспечения удовлетворительной связи ОСП по энергии
б2 > 4, хорошей связи б2 > 18.
Реальные дальности действия гидроакустических систем могут
значительно отличаться от энергетических дальностей, рассчитанных
по приведенным формулам, поскольку морская среда ограничена
поверхностью и дном, неоднородна и свойства ее флюктуируют.
§6.10. Шумы моря
Шумы моря классифицируют по источникам их возникновения:
1) динамические шумы вызываются движением масс воды, течениями,
прибоем, ветром, дождем, сейсмическими возмущениями, тепловым
возбуждением воды и др.; 2) биологические шумы создаются рыбами и
различными видами морских организмов; 3) технические шумы
возникают при работе механизмов на судах, береговых производственных
установок и других источников, находящихся в гаванях и портах.
- 191-
Частотные зависимости спектральной плотности звукового
давления динамических шумов при различных состояниях поверхности
моря (от 0 до 6 баллов) представлены на рис. 6.26 [47]. Как видно,
наклон спектральной характеристики не зависит от волнения и
составляет -5 дБ на октаву. В зависимости от района и состояния атмосферы
уровни шумов могут отличаться от приведенных данных на 10 дБ
и более.
Минимальный уровень шумов моря определяется возбуждением
среды в полосе частот до 50 кГц. В области частот от 50 до 200 кГц
тепловой шум моря становится доминирующим, и его можно рассчитать
в полосе 1 Гц по формуле
L*-101+201g/, F.69)
где L - выражено в дБ относительно спектральной плотности давления
р0 = 2 • 10 Па • Гц/2;/- в Гц.
Возрастание уровня теплового шума с увеличением частоты
составляет приблизительно 6 дБ на октаву. При спокойной поверхности
моря уровни тепловых шумов становятся сравнимыми с уровнями
динамических шумов в области частот 30... 100 кГц. С повышением
частоты спектральная характеристика тепловых шумов идет вверх,
достигая значения 2 • 10 Па • Гц/2 на частоте 1 МГц.
Эффективными источниками шума в море являются
колеблющиеся газовые пузырьки. Пузырьки образуются в поверхностном слое
моря под действием ветра и в толще воды в результате
жизнедеятельности планктона. Диапазон частот пузырькового шума 50... 10 000 Гц.
Заметный вклад в собственный шум моря могут вносить брызги и
пена, появляющиеся при волнении моря, особенно при высоких
скоростях ветра. Уровень этого шума наиболее значителен в области 100 ...
1000 Гц и далее спадает со скоростью 6 дБ на октаву.
Источниками шума в инфразвуковом диапазоне (до десятков герц)
предположительно считают флюктуации гидростатического давления,
ДБ
60
50
40
Z0
10
10
о
-10'3
2-10'3
0,1 ОХ 0,30,4 0,6 0,8 1 2 3 Ч 567 8 10 10 30 НО
Ш-ю'
Рис. 6.26. Спектральная плотность динамических шумов моря
при различном волнении в баллах
- 192-
вызываемые ветровым волнением на поверхности океана, и
турбулентное движение воды за счет течения, порождающее изменения
статического давления в точке нахождения звукоприемника.
По опытным данным спектры давления ветрового волнения имеют
максимальные значения 1... 2 Па в диапазоне 0,08... 0,4 Гц в
зависимости от глубины и гидрометеорологических условий, а с дальнейшим
ростом частоты уровень давления уменьшается линейно с наклоном
12... 15 дБ на октаву.
Для низкочастотного шума обнаружены значительные сезонные
отклонения среднего уровня, достигающие 7 дБ, при максимуме зимой
и минимуме летом.
В области средних звуковых частот (от 100 Гц до нескольких
килогерц) источниками шумов являются волны, гребни волн и ветер.
Шумообразование в диапазоне частот выше 1... 2 кГц связано с
кавитацией в приповерхностном слое и ударами брызг, срываемых ветром
с гребней волн, о поверхность.
Шум биологического происхождения охватывает диапазон от
десятков герц до 10 кГц. Скопления движущихся рыб создают
значительный гидродинамический и биологический шум. В тропических
прибрежных районах биологические шумы могут преобладать над
динамическими шумами в особенности при малой балльности и быть
предельными помехами при работе ГАС.
Технические и корабельные шумы рассмотрены в работах [44, 47].
13-614
ЧАСТЬ II
ГИДРОАКУСТИЧЕСКИЕ
ПРЕОБРАЗОВАТЕЛИ
ГЛАВА 7. МЕХАНИЧЕСКИЕ
КОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
Основные технические задачи гидроакустики - излучение и прием
акустической энергии в морской среде. Акустическое поле
представляет собой поле механических возмущений, для создания или приема
которых используют механические колебательные системы. Чтобы
привести в движение излучающую поверхность, которую будем называть
рабочей, необходимо некоторое устройство, преобразующее энергию
любого вида в энергию механических колебаний; в режиме приема
это же устройство должно преобразовать энергию колебаний рабочей
поверхности в другой вид энергии.
В современной технике из всех видов энергии наиболее часто
используют электрическую энергию, которую сравнительно легко
получать, распределять, усиливать, измерять и преобразовывать.
Поэтому в гидроакустике, как и вообще в акустике, широко
распространены электромеханические (электроакустические)
преобразователи. Колебательная система подводного электроакустического
преобразователя (ГАП) - это совокупность сложных механических систем
и электрических цепей, в которой одновременно происходят и
взаимодействуют электрические и механические процессы.
В настоящей главе рассматриваются механические системы.
Реальные колебательные системы в общем случае обладают
распределенными параметрами, т. е. бесконечным числом степеней свободы. Однако
изучение систем целесообразно начать с простого осциллятора -
системы, имеющей одну степень свободы и сосредоточенные параметры.
На его примере можно рассмотреть механизм колебаний, основные
понятия и характеристики, а также установить качественные
закономерности колебательного процесса. В дальнейшем будут рассмотрены
колебания более сложных систем, в частности стержневых.
§ 7.1. Простой механический осциллятор
Модель простого осциллятора представляют в виде невесомой
пружины 5, закрепленной одним концом и нагруженной на другом
конце сосредоточенной массой т (рис. 7.1). В колебательных системах
всегда имеется трение (или другое сопротивление движению),
которое вызывает рассеяние, т. е. диссипацию энергии колебаний. На
модели элемент г, называемый демпфером, отражает наличие вязкого
трения.
- 194-
Свободные колебания. Если масса т выведена из состояния
равновесия, на нее действует сила, возвращающая ее в исходное положение.
Учитывая эту восстанавливающую силу F^-si,,
пропорциональную малому смещению ? от положения равновесия,.силу
сопротивления FTp =- г?, пропорциональную малой скорости | смещения,
и силу инерции, получим дифференциальное уравнение движения
осциллятора
или
GЛ)
где 5 - упругость пружины, Н/м; г - активное механическое
сопротивление, Я* с/м; r/Bm) = б-множитель затухания; s/m = GJ. Решение
уравнения G.1) запишем в виде
I {t) = А ехр (- 60 cos ((о0' t - ф),
где
G.2)
G.3)
Функция G.2) описывает непериодический процесс, однако при
слабом демпфировании (б ^ со0) можно говорить о почти
периодическом процессе колебаний и применять к нему термины „частота",
„период", „фаза" в общепринятом смысле. Из-за активного
сопротивления амплитуда колебаний со временем убывает по
экспоненциальному закону ехр (- б?), а собственная частота системы незначительно
уменьшается (ц| < 0H). Мерой быстроты затухания колебаний является
постоянная времени т- промежуток
времени, за который амплитуда колебаний
уменьшается в е раз; легко видеть, что т = 1/6.
Убывание амплитуды за один период
составляет ехр (бГ'), а натуральный логарифм
отношения двух соседних амплитуд, называемый
логарифмическим декрементом за-
тухания i3,равен
О = 8Г = 2лб/ц; = 2л6/
= л/ /Q2 - 1/4.
G.4)
Величину Q = 0H/Bб) = G)om/r = л/FГ)
называют добротностью системы, она
Рис. 7.1. Модель простого осциллятора
13* -195-
показывает число периодов, по истечении которых амплитуда
колебаний уменьшается в ел % 23 раза. Действительно, через Q периодов
амплитуда будет меньше начальной в еб@г' = е^@ * ел раз, что
справедливо при Q » 1. При малых значениях декремента
в * л/0 = Г/т = 1/(/"от) = лг/ V^5 G.5)
его влияние на частоту колебаний осциллятора пренебрежимо мало,
в то время как амплитуда колебаний существенно зависит от tf.
В частном случае осциллятора без потерь F = 0) решение G.2)
описывает периодический процесс: система совершает свободные или
собственные гармонические колебания с собственной круговой
частотой
аH = ys/in. G.6)
Термин „собственная" подчеркивает факт независимости частоты о0
от характера начального возбуждения, вызвавшего колебательный
процесс.
Вынужденные колебания. Пусть на массу осциллятора непрерывно
действует внешняя периодическая сила F = Fm exp (itit), тогда
уравнение движения примет вид
I +2б| + coJS = (Fjm) exp (Ш). G.7)
Его общее решение складывается из двух функций: одна описывает
свободные колебания, другая - установившиеся:
№ = A exp (- bt) exp [i(o# - ф)] + [Fm/(ico)] [г +
+ i(u)/n - s/o))] exp (/«О» G.8)
где mm, - /s/o) иг- соответственно инерционное, упругое и активное
сопротивления. Комплексную величину г + /(com - s/co) = z, назьюаемую
полным механическим сопротивлением или механическим
импедансом осциллятора, можно представить так:
z= г[1 + (/со0т/г)(соДо0 - соо/(о)] =
= r(l + /Qv) = г Vl + Q2v2 exp (/ф), G.9)
где
v = (о/соо - соо/(о; ф = arctg (Qv); G.10)
угол ф определяет сдвиг по фазе между внешней силой и скоростью
колебаний осциллятора.
Выражение G.8) характеризует полное движение осциллятора
- 196-
с момента приложения силы. Процесс такого сложного движения
называют переходным.
Переходный процесс. Выясним характер движения, которое
возникало бы в системе только от приложения внешней силы в момент
t = 0 при нулевых начальных условиях.
Вещественная часть решения G.8) имеет вид функции
- ф).
G.11)
Постоянные А
и ф0 определяются начальными смещением ?0
и скоростью ?0. Но и при нулевых начальных условиях одна из
постоянных не равна нулю, т. е. движение с собственной частотой G)q
существует. Оно, однако, быстро затухает и по истечении некоторого
времени практически исчезает, движение приобретает стационарность
и становится гармоническим колебанием с частотой вынуждающей
силы.
Используя условие ?о=|о=0 и принимая w = tyj % оз0, находим
A cos ф0 = О, A sin ф0 = - Fm/{(x)or) и после подстановки в формулу G.11)
получаем
= [Fm/(M1 П - ехР (- Шsin (М-
G.12)
Выражение G.12) описывает процесс нарастания (раскачивания)
колебаний осциллятора с момента воздействия гармонической силы на
резонансной частоте (рис. 7.2). Амплитуда колебаний увеличивается
по закону 1 - ехр (- &t). В момент t = 1/6 амплитуда достигает
1 - ехр (- 1)« 0,63 полного (установившегося) значения. С ростом
амплитуды возрастают потери энергии на преодоление сил
сопротивления, но в определенный момент работа вынуждающей силы будет
компенсировать потери энергии, и в системе установятся
вынужденные колебания с максимальной амплитудой. Время tv по истечении
которого колебания достигнут определенного уровня, например
составляющего 95% максимума, найдем из уравнения 1 - ехр (- bti) =
= 0,95, откуда
t± = 3/6 = Зт = ЗГ/tf = 3Q/(n/0).
Число колебаний за этот промежуток
равно n = t1/T = 3Q/n. После
прекращения действия внешней силы
колебания затухают по закону ехр (- 60,
осциллятор возвращается в состояние
покоя и тем быстрее, чем больше 6.
Гидроакустические устройства
часто работают в импульсном
режиме. При возбуждении излучателя
короткими импульсами можно
получить большие акустические мощности
G.13)
Рис. 7.2. График переходного
процесса в осцилляторе
- 197-
без возникновения кавитации на излучающей поверхности, уровень
реверберационных помех уменьшается, точность определения
дистанции увеличивается. Длительность импульса tK должна быть
согласована с постоянной времени т (или декрементом) колебательной системы,
чтобы за время ?и колебания установились. Из формулы G.13) следует,
что чем меньше т (больше 0), тем скорее установятся колебания.
Наименьшая величина декремента затухания й = 3/(fotx) = 1/(/*от)«
Необходимо, чтобы за время паузы между импульсами колебания
прекратились к началу следующего импульса. Так, амплитуда колебаний
составит 0,01 установившегося значения при времени спадания tcn =
= 4,6т*1,15*и.
Установившиеся колебания. Известно, что акустическую
мощность, излучаемую колеблющейся поверхностью, определяет скорость
колебаний, поэтому более существенной величиной, чем смещение,
является скорость вынужденного колебательного движения.
Продифференцируем второе слагаемое выражения G.8) по времени и с учетом
G.9) получим
| = (Fjz) exp (ftof) = (Fm/\z\) exp [Цш - ф)]. G.14)
Видно, что между вынуждающей силой и колебательной скоростью
существует фазовый сдвиг, зависящий от параметров системы и
частоты.
Действительная часть выражения G.14) с учетом G.9)
I = (Fj\z\) cos (Ш - ф) = [Fm cos (Ш - ф)]/[г Vl+ Q2v2] G.15)
представляет фактически наблюдаемый процесс установившихся
колебаний осциллятора; его амплитуда, частота и фаза зависят от
параметров системы, а также от амплитуды и частоты вынуждающей силы.
Амплитуда колебательной скорости достигает максимального
значения Fm/r при v =0 или со =со0, т. е. при совпадении частоты внешней
силы и собственной частоты системы без учета потерь. Условие
ь)отп- 5/со0 = 0, при котором амплитуда скорости колебаний резко
возрастает, называют условием резонанса. График зависимости
амплитуды скорости колебаний от частоты представляет собой хорошо
известную резонансную кривую; чем меньше затухание или чем
больше добротность, тем острее резонанс, т. е. тем сильнее изменения
амплитуды скорости вблизи резонансной частоты.
Энергия колебаний простого осциллятора. Энергия, необходимая
для обеспечения установившихся колебаний осциллятора, численно
равна работе внешней силы, вызывающей перемещение d% за время Л.
Умножим уравнение движения G.7) на d?:
и проинтегрируем обе части равенства по переменной t
t t
(l/2)m|2 + J ri2dt + (l/2M^2 = S Fldt.
о о
- 198-
Здесь первое слагаемое - кинетическая энергия h/K, третье -
потенциальная энергия Wn, второе слагаемое описывает рассеяние энергии
активным сопротивлением. Интеграл в правой части равен работе,
производимой силой F. Энергия, запасенная в консервативной
системе (г = 0) при F = 0, постоянна:
W = WK + h/n = (l/2)mco2A2 sin2 (coo0 +
+ (U2)sA2 cos2 (cv) = (l/2)mu2A2 = (l/2)sA2 = const.
В процессе колебаний осциллятора энергия периодически переходит
из потенциальной в кинетическую и обратно, следовательно,
свободные колебания не затухают.
Энергия, рассеянная в течение одного периода Г, составляет
W = $ rk2dt = r\2m I sin2 (gV- <p)df =
о а
= A/2)г|2,Г = лш0^. G.16)
Работа внешней силы F = Fm cos (d)?) за период Г, вызывающей скорость
колебаний | = |m cos (tit - ф), равна
W = i Fd^ = №dt = (l/2)Fm|m I [ cos Bcof - ф) +
0 0 0
+ cos ф]* = (l/2)Fm|mr cos ф. G.17)
Подставляя значения Fm = im'zl и Q = 1/(гыС), получим
Как видно, работа, совершаемая за одно колебание, обратно
пропорциональна добротности. Отношение энергии, рассеиваемой за один
период, к полной запасенной энергии (кинетической или
потенциальной) равно
Таким образом, добротность или логарифмический декремент
характеризуют затухание энергии осциллятора: чем больше Q (меньше й),
тем больше запасенная энергия по сравнению с теряемой за период
и, следовательно, осциллятор совершит больше полных колебаний
до их прекращения.
Сопротивление потерь. При колебаниях механических систем
неизбежно возникают силы сопротивления, работа которых вызывает
безвозвратное рассеяние энергии колебаний. Таковы силы трения
в опорах и местах крепления деталей системы, силы сопротивления
- 199-
среды, в которой происходят колебания, силы внутреннего трения
в материалах деформируемых элементов. Сила сопротивления любой
природы зависит от скорости колебаний системы.
Принятая выше прямая пропорциональность силы FTp скорости |
характерна для вязкого жидкостного трения, при этом сопротивление
потерь постоянно. Наибольшие потери энергии происходят в элементах
упругости (податливости), сопротивление потерь в которых
определяют свойства самих элементов и частота их колебаний. Выразим
добротность через упругое сопротивление Q' =s/{m) = 1/(а)гС), где С = 1/5 -
гибкость (податливость) элемента. Экспериментально доказано, что
добротность большинства твердых тел в звуковом диапазоне частот
практически постоянна. Тогда г= 1/(Q'g)C), т. е. сопротивление потерь
обратно пропорционально частоте. Для случая постоянства Q
выражение механического импеданса можно представить в виде
z = r + [//(а)С)](аJшС - 1) = г{1 + [//(corC)] x
х (coVcog - 1)} = гA + iQ'v'), G.18)
где(Г = 1/(о)гС)'= G)o/(co9corC) = (gH/g))Q; v' = GJAo2 - 1 = (со/со0)(co/gH -
- co0/a)) = (a)/wo)v; r = l/ftoCQ')= rowo/w; r0 = (cOqCQ')" = const.
Легко видеть, что QV =Qv на всех частотах. При использовании
параметров Q', v' или Q, v сопротивление г в выражениях G.9) и G.18)
для импедансов является действительным сопротивлением потерь
на данной частоте. Поскольку в механических колебательных
системах преобладает сопротивление потерь твердого тела, обратно
пропорциональное частоте, следует пользоваться параметрами Q' и v'.
Однако, вследствие равенства Q'\' = Q\, можно не делать различия между
жидкостным и „твердым" трением.
В случае „твердого" трения собственная частота затухающих
колебаний больше, чем резонансная частота при жидкостном трении. Решая
уравнение движения
находим частоту Qq = оз0[1 + 1/(8Q2)] и множитель затухания 6 = 0H/BQ).
Потери, вызываемые внутренним трением в деформируемых
элементах упругости, зависят от свойств элементов. Для учета этих
потерь преобразуем уравнение движения:
ml + /о>г& + s? = ml + 5A + i/Q)\ = m\ + 5^ = F,
где 5 = 5A + i/Q) - комплексная упругость системы. Действительная
часть Re5 = 5 есть упругость идеальной системы без потерь, мнимая
часть Im 5 = s/Q обратно пропорциональна добротности системы.
Составляющие комплексной упругости определяют измерением резонансной
частоты E = со2т) и ширины полосы пропускания BАса = wo/Q).
Таким образом, введение комплексной упругости позволяет
- 200-
формально вести расчеты системы, считая ее идеальной и имеющей
импеданс z = /com - is/(А = /сотA - со2/со2); здесь со2 = со2A + i/Q), а
отношение s/(Qm) = co2m/(coQ) отражает наличие в системе активного
сопротивления.
Частотная зависимость мощности. Из выражения G.17) для работы
внешней силы за период Т находим мощность колебаний осциллятора
в установившемся режиме Р = 0,5Fmvm cos ф. Подставляя значения
vm = Fm/\z\; cos ф = r\z\, получаем
Р = (l/2)rv2 = [F2/B\z\] cos ф = rF2/BЫ2).
На резонансной частоте z = г, ф = 0 и мощность
G.19)
G.20)
Исследуем, как изменяется колебательная мощность осциллятора
с частотой при неизменной амплитуде внешней силы. Для удобства
сравнения разных осцилляторов или характеристик одного
осциллятора при изменении его параметров представим частотную зависимость
мощности безразмерной функцией
= r2l\z\2 = r2[r2
Y^ii + Q^2)-1.
G.21)
Полученное выражение равно отношению квадратов амплитуд
скорости на текущей частоте и на резонансной.
Из формулы G.21) следует, что форма характеристики (острота
резонансной кривой вблизи максимума) зависит от добротности: чем она
больше, тем кривая уже. По резонансной кривой, измеренной в
стационарном режиме, можно рассчитать декремент и добротность,
характеризующие систему в неустановившемся режиме. График функции
G.21) изображен на рис. 7.3.
Вблизи резонансной частоты примем со = со0 + А со, причем А со ^ со0,
тогда со + со0 ^ 2о) и
P/Pp = [l+BQAa)/aHJ]-1.
Выражение G.22) устанавливает взаимосвязь
отношения мощностей и относительной
полосы частот 2Д(|)/оH. При 2QA со/со 0 = 1
отношение Р/Р = 0,5 или - 3 дБ. На этом уровне
принято определять полосу пропускания
системы, или ширину резонансной
кривой, которая с учетом формулы G.5) равна
G.23)
Ширина резонансной кривой есть мера
избирательности колебательной системы, и так
как она функционально связана с добротностью
G.22)
ш/щ
Рис. 7.3. Частотная
зависимость мощности
колебаний
- 201-
(или декрементом), то Q (или й) характеризует избирательность
системы. При больших значениях добротности резонансная кривая
почти симметрична относительно G)/o)o = 1 для значений Р/Р^ от 1 до 0,5.
Однако, как показано выше, у осциллятора с относительно высокой
добротностью возрастает время установления колебаний. Кроме того,
при больших значениях Q ширина полосы частот осциллятора
ограничена. Однако,уменьшая величину Q, следует помнить, что для
обеспечения мощности и избирательности необходима высокая добротность.
Определим полосу пропускания в зависимости от длительности ?и
импульса силы, для чего введем в формулу G.13) 0 (или Q) из
выражения G.23):
2Д/= 3/(л^) * \/tx. G.24)
Если время устанавливания колебаний составляет 1/п длительности *и,
т. е. tx -tK/n9 то полоса должна быть 2Д/=п/*и. Отсюда следует: чем
короче воздействующий на осциллятор импульс, тем шире должна
быть полоса пропускания, чтобы снизить частотные искажения,
вносимые резонансной колебательной системой. При ?и = tx полоса
пропускания наименьшая и равна l/fH.
Фазовая частотная зависимость. Сдвиг фаз между колебательной
скоростью ? и вынуждающей силой F определяют по выражению G.10).
Зависимость угла ф от частоты называют фазовой характеристикой
осциллятора. Зависимость ф(а)/(оо) для нескольких значений Q
показана на рис. 7.4. Для всех значений Q при а) = 0, а для больших значений
Q и при низких частотах угол отставания ? от F равен -90°, т. е.
скорость опережает силу на 90°, что указывает на упругий характер
импеданса системы. На резонансной частоте ф = 0, и импеданс является
чисто активным. Вблизи резонанса tg ф « 2Ag)Q/gH. По мере
увеличения частоты угол ф растет, стремится к + 90° и тем быстрее, чем больше
добротность. Следовательно, на частотах, значительно выше
резонансной, скорость отстает от силы на угол,
близкий к 90°, т. е. импеданс системы
приобретает инерционный характер.
Скорость изменения ф, т. е. наклон
фазовой характеристики определяется
величиной производной с/ф/da). На
частотах вблизи резонанса d?/c/G)%
*2Q/gH = t.
Когда на колебательную систему
действует произвольная внешняя сила
F(t), решение уравнения движения
может быть найдено с помощью
преобразования Фурье. В случае если F(t)
периодическая функция времени, ее
Рис. 7.4. Фазовая частотная зави- Разлагают в ряд Фурье и, согласно прин-
симость при различных значе- Дипу суперпозиции, искомую функцию
ниях добротности смещения (скорости) определяют как
-202-
сумму частных решений, соответствующих частотам а), 2м,. . ., гш.
Если функция F{t) непериодическая, ее следует представить в виде
интеграла Фурье.
§ 7.2. Метод электромеханических аналогий
Метод электромеханических аналогий заключается в том, что
элементы заданной механической системы рассматривают как
аналоги элементов некоторой определенной электрической схемы; такую
электрическую схему называют эквивалентной данной механической
системе. Анализ эквивалентной схемы производят по законам
электрических цепей, причем колебательные процессы в них описываются
аналогичными уравнениями.
Сравнивая дифференциальное уравнение напряжений в контуре
Ldl/dt + RI + A/С) Jldt = e G.25)
и уравнение движения простого осциллятора
mdv/dt + rv + A/Cj / vdt = F, G.26)
убеждаемся в том, что они подобны; аналогичны и их решения для
тока и скорости. Можно составить следующую систему взаимных
аналогов - механических и электрических:
переменные: сипа F, Н, -* ЭДС (напряжение) U, В; скорость v,
м/с, -* ток /, А; смещение ?, м, -> заряд q, Кл;
параметры и сопротивления: масса т, кг, -* индуктивность L, Гн;
гибкость См, м/Н, -*- емкость С, Ф; коэффициент трения г, кг/с, -»
активное сопротивление R, Ом; инерционное сопротивление com, кг/с, ->
индуктивное сопротивление coL, Ом; упругое сопротивление 1/(о)См),
кг/с, -* емкостное сопротивление 1/(соС), Ом; механический импеданс
z, кг/с, -* электрический импеданс Z, Ом.
Этот метод широко используют при анализе различных
механических систем, так как электромеханические аналогии, вытекающие из
формального подобия уравнений G.25) и G.20), отражают физическое
соответствие процессов в механической системе и эквивалентной ей
электрической цепи. Например, инерция массы препятствует
мгновенному изменению скорости при воздействии (или прекращении
действия) силы, равно как индуктивность препятствует мгновенному
изменению тока при включении (выключении) источника ЭДС.
Аналогично тому, как часть колебательной электрической энергии
безвозвратно расходуется (превращается в тепловую энергию) на активном
сопротивлении цепи, в механической системе благодаря трению
превращается в тепло часть энергии механических колебаний.
Подобно емкости - накопителю электрической энергии - в элементе
гибкости запасается механическая (упругая) энергия.
-203-
В сложных механических системах количество замкнутых
электрических контуров в схеме аналогий соответствует числу степеней
свободы; при этом элементы двух соседних замкнутых цепей следует
рассматривать как элементы связи.
Эквивалентные схемы. Чтобы практически использовать метод
электромеханических аналогий, необходимо, во-первых, условиться
о графическом изображении механических элементов колебательных
систем, во-вторых, установить основные закономерности сочетаний
элементов. Поскольку элементы R, L, С представляют собой
двухполюсники, целесообразно и механические элементы г, т, Сы
изобразить в виде механических двухполюсников, концы которых имеют
скорости смещения ?х и |2 (рис. 7.5); у элемента массой т одним
полюсом служит изображающая его материальная точка, вторым полюсом -
неподвижная опора, т. е. тело большей по сравнению с т массы
(например, корпус преобразователя), относительно которого отсчитывается
смещение данного элемента. Если свойство, которым обладает
механический элемент, не конкретизируется, то его представляют в виде
произвольного двухполюсника z. Силу F изображают
двухполюсником, один конец которого есть собственно сила, приложенная к
элементу, а второй - реакция со стороны опоры.
Элементы механической системы могут быть соединены цепочкой
(рис. 7.6, а) и узлом (рис. 7.6, б). В первом случае на основании закона
равенства действия и противодействия на все элементы действует
одна и та же сила; сумма относительных скоростей концов отдельных
двухполюсникоЕ равна относительной скорости концов всей цепочки:
(io" U + (ti - I2) + - • - + dn-i ~ 4л) = !о~ ?п- Из этого слеДУет> что
электрическим эквивалентом соединения цепочкой будет
параллельное соединение аналогичных электрических элементов. Во втором
случае все механические двухполюсники имеют одинаковые
относительные скорости концов, а развиваемые ими усилия складываются.
Следовательно, электрический эквивалент соединения узлом представляет
¦—I
Рис. 7.5. Условные
изображения механических
элементов и внешней силы
in
><
Рис. 7.6. Соединения механических
двухполюсников
- 204-
схему последовательного соединения аналогичных электрических
двухполюсников.
Пользуясь этими правилами, можно составлять эквивалентные
электрические схемы несложных механических систем. Для проверки
правильности включения элементов схемы сравнивают поведение
механической системы и электрической цепи, задавая элементам
системы (схемы) бесконечно малые или бесконечно большие значения.
Механическая трансформация сил и скоростей. Как известно,
электрические трансформаторы предназначены для согласования
сопротивлений цепей; в механических системах трансформацию сил
и скоростей осуществляют при помощи рычагов. В технической
акустике применяют сходные устройства для согласования механических
и акустических сопротивлений колебательных систем с целью
создания оптимальных условий передачи энергии.
Пусть рычаг с фиксированной осью вращения и плечами /х и /2
осуществляет энергообмен между системами с механическими
сопротивлениями zx и z2 (рис. 7.7, о). Момент инерции рычага относительно
оси вращения равен J, масса рычага равномерно распределена по его
длине, отношение плеч ljl2 = л.
Из механики известны соотношения сил и скоростей на концах
жесткого невесомого рычага:
ijU-FjF^n. G.27)
Известно также, что весомый рычаг можно заменить невесомым,
сосредоточив на одном из его концов эквивалентную массу т1 = Jll\ или
r^2=:J^2- Применяя уравнение G.27) к рычагу (рис. 7.7, б), получим
формулу для пересчета сопротивлений к одному концу рычага:
На основании выражений G.27) и G.28) можно заключить, что
электрическим аналогом рычага является идеальный (без потерь)
трансформатор, связывающий двухполюсники z1 и z2 (рис. 7.7, в).
а) , ьл
Рис. 7.7. Рычаг (а),
невесомый рычаг с приведенной
массой (б) и
электрический аналог рычага (е)
- 205-
§ 7.3. Системы с распределенными параметрами
Колебательные системы большинства ГАП нельзя рассматривать
как простые осцилляторы, так как масса любого сколь угодно малого
объема системы обладает упругостью и вносит потери, т. е. имеет
активное сопротивление. Такие системы, параметры которых нельзя
пространственно разделить, называют системами с
распределенными параметрами. Колебания распределенных систем носят
характер волновых процессов: в одних частях деформируемого тела
образуются сжатия, в других - растяжения, а в третьих деформация
отсутствует. В общем случае деформация неоднородна, так как
распределена по объему. Колебания такого типа характерны для стержней,
пластин, оболочек.
Состояние распределенной системы в процессе колебаний, строго
говоря, нельзя определить конечным числом координат, поскольку
каждая частица деформируемого тела в данный момент времени зани-
мает свое положение, следовательно, число степеней свободы такой
системы бесконечно.
Для анализа и инженерного расчета систем с распределенными
параметрами их заменяют соответствующими эквивалентными
системами с сосредоточенными параметрами. Например, вместо стержня или
пластины рассматривают простой осциллятор. Понятно, что последний
характеризует замещенную систему лишь приближенно. Так, только
вблизи одной (из бесконечного множества) резонансной частоты
реальной системы принятый эквивалент совершает колебания, близкие
к колебаниям выбранной точки или центра приведения,
с которой связаны параметры эквивалентной системы.
Эквивалентность замещающей и реальной систем может быть определена по
совокупности некоторых свойств, которые образуют критерий
эквивалентности. Очевидно, что число искомых параметров замещающей системы
должно быть равно числу уравнений, описывающих критерий
эквивалентности.
Для нахождения приведенных значений распределенных
параметров воспользуемся методом энергетических эквивалентов. Он
заключается в том, что, задаваясь динамической деформацией линии или
поверхности данной системы, находят выражения для кинетической
и потенциальной энергий. Сравнивая их с выражениями для энергий
эквивалентного простого осциллятора, получают два уравнения,
составляющие критерий эквивалентности, из которых определяют два
приведенных параметра - массу и упругость. Можно также вычислить
сосредоточенную приведенную силу, приложенную в точке приведения,
-206-
рассматривая замещенную плоскую
поверхность как поршневую.
Приравнивая работу внешней и приведенной
сил, находят последнюю и
эффективную площадь поршня.
Представим смещение (скорость)
механической системы в виде
где ?0(r
ведения
, 0 ""смещение
с координатой
точки
приРис. 7.8. Зажатая по краю
круглая пластина
функция координат точки,
характеризующая распределение колебаний
в объеме системы. Кинетическая энергия элемента dV составит
dWK = 0,5pvg(r^, tjpfydV, а всей системы- WK = 0,5ру^(Го, filpfydV.
Приравнивая выражения для \\1К и для кинетической энергии простого
осциллятора массой шэкв, колеблющегося со скоростью точки
приведения, т. е. 0,5m3KBvJ(ro, t), находим искомую величину
тэкв = р $p{r)dV. G.29)
v
Для колебательной системы, деформация которой описывается
одномерной функцией распределения /(г) вдоль координаты 7
интеграл G.29) вычисляют по этой координате. Потенциальную энергию h/n
рассчитывают как работу упругой силы Fy, равную, согласно закону
Гука, SYd^/dr, где У- модуль упругости материала. Работа,
затрачиваемая на перемещение d? элемента dS, будет dA = 0,5Fyd? =
= 0,5Fy(c)?/c)r)cfr. Интегрируя и переходя к функции /(г), получаем
Wn = 0,5У5?2(Го, t) $ [df(r)/dr]2dr. Приравнивая выражения для Wn и для
потенциальной энергии простого осциллятора h/n = 0,5s3KB|2(ro, 0 =
= 0,5?2(Го, О/Сэкв» находим эквивалентную упругость
г
Применим энергетический метод для определения эквивалентных
параметров и основной собственной частоты круглой пластины.
Пластина, зажатая по окружности радиусом а и нагруженная
равномерно распределенным давлением (рис. 7.8), возбуждается на
частотах, лежащих не выше основной собственной частоты. Будем считать,
что распределение амплитуд смещения соответствует выражению
/(г) = A- г2la2f для статического прогиба тонкой пластины,
удовлетворяющему условиям f(a) = 0 на закрепленном крае и /@) = 1 в центре
пластины.
За точку приведения примем центр пластины (Г= 0). Объем
элементарного кольца радиусом г, шириной dr и высотой h равен
dV=2nhrdr. Согласно формуле G.29), эквивалентная масса шэкв =
= 2nhp J(l - r2la2Jrdr = 0,2ла2/?р = 0,2гл, где m - масса пластины.
Потенциальную энергию круглой пластины, прогиб которой
симметричен относительно центра, определяют по выражению [40]
-207-
Wn = лО I {(Р-Цйт1 + (l/r)d|/dr]2rdr, G.31)
0
где D = Yh3/[12A - v2)]- жесткость пластины на изгиб; v -
коэффициент поперечного сжатия (Пуассона) материала пластины.
Подставляя в подынтегральную функцию закон динамической деформации
?(?)= ?0/(г), после дифференцирования и интегрирования получим
откуда эквивалентная упругость
*экв = 64nD/Ca2) = 16лУЬ3/[9а2A - v2)]. G.32)
По формуле G.6) находим основную собственную частоту пластины
13). G.33)
Следует заметить, что, во-первых, принятый закон распределения
амплитуд колебаний поверхности пластины справедлив при условии
малого смещения центра пластины (?0 <? h). Если условие не
выполняется (например, при значительном заглублении), собственная
частота пластины будет зависеть от натяжения средней по толщине
поверхности пластины. Практика показывает, что с увеличением
гидростатического давления частота /0 увеличивается. Во-вторых, частота /0
пластины уменьшается под влиянием соколеблющейся массы среды;
влияние это тем больше, чем меньше толщина пластины и плотность
ее материала.
§ 7.4. Стержневые колебательные системы
В ГАП широко используют колебательные системы в виде как
отдельных, так и сочлененных (составных) стержней.
Уравнение движения и его решение. Рассмотрим однородный
стержень с малыми поперечными размерами (рис. 7.9). Колебания стержня
происходят под действием упругих сил, сечение движется как единое
целое, без искривлений, т. е. остается плоским. При малых размерах
вдоль осей у и z можно пренебречь составляющими сил инерции по
этим осям, тогда не равны нулю напряжения Т(х) и задача становится
одномерной. Обозначая площадь нормального сечения стержня через 5,
запишем выражение для результи-
Ё(х) Л(*+йх) рующей силы, действующей на
^i «-"I I" "" элемент в положительном направ-
]J(x+ux)
лении оси х:
х+dx Ь [- т(х) + Т(х + dx)]S = - T(x)S
Рис. 7.9. Деформация длинного +№)
стержня = S[dT{x)/dx]dx.
-208-
Силы и смещения считаем положительными, если их направления
совпадают с положительным направлением оси х. Для малых упругих
деформаций справедлив закон Гука: Т(х) = Уд? {х)/дх, где У - модуль
Юнга материала стержня; ? (х) - смещение сечения стержня х из
положения равновесия; д\1дх = [ - ? (х) + ? (х + dx)]/dx - деформация
элемента стержня dx. Приравнивая силу инерции $Sdxd2\(x, t)/dt2 силе
упругости элемента, получаем уравнение движения стержня
= d(ST)/dx =
где р - плотность материала стержня.
Для однородного стержня постоянного сечения
д2Ш2, G.34)
где с2 = У/р. Выражение G.34) представляет собой одномерное
волновое уравнение, а величина с2 равна квадрату скорости
распространения продольных волн в стержне.
Функция смещения ?, входящая в уравнение G.34), зависит от
координаты х и времени t Решение этого уравнения \(х, t) отыскивают
в виде произведения двух функций X(x)T(t), каждая из которых
зависит от одной переменной, что приводит к системе двух линейных
однородных уравнений второго порядка. Искомая функция равна
6 (х, t) = [A1 cos (kx) + А2 sin (kx)][Bx cos (Ш) + В2 sin (tof)L G.35)
где к = м/с; 0) - частота свободных колебаний. Значения произвольных
постоянных А12, Б12 определяются граничными и начальными
условиями.
Для учета внутренних потерь в стержне будем полагать упругие
напряжения пропорциональными скорости деформации, тогда полное
напряжение составит
Т{х) = УдЦдх + тд{дЦдхIди
где г - постоянная материала стержня. Уравнение движения, согласно
формуле G.34), будет
9d2lldt2 = Yd2\ldx2 + тд{д2Цдх2Iди
и для установившихся гармонических колебаний с угловой частотой со
оно принимает вид
Как видим, диссипативные свойства материала колеблющегося
стержня могут быть учтены заменой модуля упругости У комплексным
модулем У=У+шг. Соответственно коплексная скорость с= у/?/р =
14-614 - 209 -
= cVl + ittrlY. Как правило,
(ог/У«1, и поэтому с^с[1 +
+ /сог/BУ)]. Если воспользоваться
выражением для добротности
Q = 1/(со гСм), то получим с % с[1 +
+ //BQYCJ, где См - гибкость
Рис. 7.10. К определению входного ме- стерЖНЯ.
ханического импеданса стержня ВХОДНОЙ механический ИМПв-
данс стержня
(плоскопараллельного слоя). Пусть на один торец стержня действует сила F, а другой
торец испытывает со стороны среды (воды) сопротивление z0 (рис. 7.10).
Принимая распределение амплитуд продольных колебаний по закону
l(x)=A1 cos (kx)+A2 sin (foe), определим постоянные Ах и А2 из
граничных условий
YSdl/dx \х = о = - F; YSdl/дх \Xss г = - zo| (/),
где | (/) - амплитуда скорости колебаний рабочей поверхности
стержня. Подставляя значения деформаций в граничные условия, находим
постоянные Ах и А2, а также входной (со стороны действия силы F)
импеданс стержня
F F zo + ipcStg{kl) гл
G.36)
l + /[zo/(pc5)]tg(k/)
где |@)- скорость колебаний входного торца стержня. Величину рс5
называют характеристическим импедансом. Когда рабочая
поверхность стержня S нагружена средой полностью, сопротивление
z0 = (рс)в5, где (рс)в = 1,5 • 106 Н-с/м - волновое сопротивление воды.
Отношение амплитуд колебаний (и скоростей) рабочей и входной
поверхностей равно
@) = 4@/4@) = [1/ cos (kl)]{\ + i[zo/(QcS)] tg (kl)}-K G.37)
Если z0 < pcS и аргумент kl Ф л/2, т. е. / Ф А./4, то ^(/)/^@) % 1/cos (/с/).
Если стержень не нагружен, z0 = 0 и его входной импеданс zBX =
= ipcS tg (к/). При резонансе tg (kl) = 0, / = Xo/2 и zBX = 0.
Рассмотрим продольные колебания стержней при различных
граничных условиях.
Свободный стержень. Так называют стержень, на торцах которого
(х = 0, х = /) упругие напряжения равны нулю. Следовательно, стержень
не нагружен, на его торцы не действуют внешние силы и
сопротивление со стороны среды отсутствует. Подставляя граничные условия
db,/dx = 0 при х = 0 и х = /, получим А2 = 0, sin (kl) = 0, откуда kl = пп
или / = пкп/29 где ^п = clfn, п = 1, 2,.... Смещение l(x) = A cos (knx) =
= А cos (ппх/1). Если заданы начальные смещение ?0 и скорость |0, то
?(х, 0 = cos (ппх/Шо cos (М + D0/"п)sin ("п01-
-210-
Рис. 7.11. Распределение амплитуд смещения ?(х)
и механических напряжений Т(х) вдоль
закрепленного стержня
о
770;
Т(х)
Равенство кп1 = пп выражает условие резонанса стержня, из которого
следует соотношение частот 0)п = пьI = ппс/1. Для первой формы
колебаний (п = 1) смещение
, t) = cos {пх/Ш0 cos
sin
В этом случае по длине стержня укладывается половина длины
волны, причем ?(//2) = 0, т. е. среднее сечение стержня в процессе
колебаний остается неподвижным. Распределение амплитуд смещения
и напряжения по длине стержня соответственно описывают функции
1(х) = 6@) cos (лх/7); Т(х) = - (л Y/l)W) sin {nx/l) = - Г(//2) sin (лх//),
где ?@) - амплитуда смещения при х = 0; Г(//2) - амплитуда
напряжения в нейтральном сечении стержня (х = //2). Свободный стержень,
резонирующий на частоте, соответствующей половине длины волны,
получил название полуволнового стержня.
Определяя эквивалентные параметры стержня изложенным ранее
методом, получим тэкв = 0,5pS/. Так как 0)^ = 1/(тэквСэкв), то
Qkb = 1/(<0ошэкв)- Подставляя аH = Ь)х = лс//, находим Сэкв = 2//(л2У5).
Стержень с закрепленным торцом. Один торец стержня (рис. 7.11)
закреплен, другой - свободный (от напряжений). Под влиянием
толчка (удара) в стержне распространяется волна смещения,
описываемая функцией G.35). Граничные условия: ? = 0 при х = 0 и Т = 0 при
х = /. Первое условие приводит к выражению. I = A sin (/с/), из второго
условия следует cos(fc/) = 0, следовательно, кп1 = Bп + 1)л/B/) или
/ = Bп + 1)Хп/4, где п = 0,1, 2. ... Таким образом, в стержне создаются
только нечетные гармонические колебания,
при резонансе по длине стержня
укладывается нечетное число четвертой длин волн.
Полагая п = 0 (практический случай),
получаем ?(*) = ?(/) sin [лх/B/)], где |(/)-
смещение свободного торца. При этом / = А.о/4, т. е.
по длине / укладывается четверть длины
волны. Такой стержень называют
четвертьволновым.
Входной импеданс стержня,
определяемый выражением G.36), При ZQ -* « (стержень Рис- 7Л2- Зависимость от-
закреплен) равен zBX = - /pcSctg kl, т. е. «осительного входного
* 7 ^ вх т^ ? импеданса закрепленно-
является чисто реактивным. График относи- го стрежня от его волново.
тельного значения импеданса zBX=zBX/(pcS) го размера
14*
-211-
как функции волновой длины стержня 1/К, представлен на рис. 7.12.
Видно, что при К К/4 (kl< л/2) знак реактивности отрицательный,
сопротивление имеет упругий характер. В интервале К/2 > I > К/4
сопротивление положительно и имеет инерционный характер. Точки
l/K=j/4 (/=1,2,...), в которых zBX = 0, соответствуют резонансам.
Самая низкая резонансная частота (/ = 1) /0 = с/D1) = /у/р/D/). При kl = пи
или 1/Х = п/2 (п = 1, 2,. . .) ZjjX = °° - это условие антирезонанса, и
определяемые из него частоты называют антирезонансными.
Рассмотрим диапазон частот, для которого аргумент fc/ <С 1, тогда
zBX = - /pcS ctg kl * - ipcS/{kl) = - /pc25/(co/). Здесь величина рс25// =
= YS/l определяет упругость стержня и zBX =- /5/@ =- i/(wCM), где
См - гибкость стержня. Следовательно, в низкочастотном диапазоне
импеданс стержня представляет упругое сопротивление. Вблизи
резонансных частот импеданс изменяется почти линейно (см. рис. 7.12),
и в этой области частот zBX можно аппроксимировать
последовательным соединением инерционого и упругого сопротивлений. Аналогично
предыдущему находим эквивалентные массу тэкв = 0,5р/5 и гибкость
Сэкв =8//(л2У5), следовательно, zBX =i[(i)m3KB - 1/(соСэкв)]. Что
касается потерь в материале стержня или элементах конструкции,
поддерживающей стержень, то в общем случае эти потери достаточно малы
и в области низких частот ими можно пренебречь. Однако в области
резонансной частоты сопротивление потерь может оказаться
соизмеримым с малым значением реактивного сопротивления. Входной
импеданс принимает вид
*вх = г + /[соглэкв - 1/(иСэкв)]. G.38)
Таким образом, рассматриваемый стержень, обладающий
распределенными параметрами, вблизи частоты /0 можно аппроксимировать
простым осциллятором с сосредоточенными эквивалентными
параметрами.
Составной двухсекционный стержень. Стержни 1 и 2 с
характеристическими импедансами (qcSI и (рс5J жестко скреплены в точке
х = 1г (рис. 7.13). Требуется определить эквивалентные параметры
и основную резонансную частоту системы.
В соответствии с общим выражением G.35) запишем смещения
стержней ?х(х) = А1 cos (kxx) + А2 sin (kxx) и ?2(х) = Вх cos (k2x) +
+ В2 sin [k2x). Граничные условия: на
свободных торцах (х = 0, х = 11+12)
отсутствуют напряжения, следовательно,
деформации dbI/dx = 0 и d?J/dx = O; в
плоскости сопряжения секций 1 и 2 (х = 11)
должны быть одинаковыми смещения
H'hhVи упругие силы Y^^/dx=
~ ^2^2С*^>2'С1Х-
Подставим в граничные условия соот-
Рис. 7.13. Составной двух- ветствующие выражения для смещений
секционный стержень и деформаций:
- 212-
i/dx|x=o=fciA2 = O; A2 = 0; dljdx \x=ix + /2 =
k2 {- вх sin[fca(/1 + /2)] + B2 cos[fca(/1 + /2)]} = 0;
tg[fc2(/1 + /2)]; ?(Ii)^i c°s(fc1/1) = ^2(/1) = 5
2[-B1 sin(ka/1)
Установив соотношения между произвольными постоянными, запишем
выражения для смещений:
Si(*) = Bi{ C0S(^2/2)/[ C0S(Mi) cos(fc2/1 + /c2/2)]} cos(klX);
/x + /2)] sin(fc2x)} =
Координату поверхности 52, являющейся в реальной конструкции
ГАП приемно-излучающей, х = 1Х + /2 примем за точку приведения
и определим энергии WK1 и WK2 обоих стержней по формуле G.29),
в которой следует положить vo(ro) = ^2A± + /2), /(г) = ? 1>2(х), dr=dx,
пределы интегрирования от 0 до /х и от /х до (/х + /2). Выполнив
интегрирование и приравняв WK1 + JVK2 = 0,5rn3KBw2^2(^i + 'г)> получим
1 sinBfc1Z1)/Bfc1/1)+
(l/2)m2 sinBfc2/2)/Bfc2/2) + m2/2, G.39)
где т1 = P1/1S1, m2 = P2/252 - массы стержней.
Эквивалентная гибкость (упругость)
Сэкв = 1/*экв =
Для получения резонансного уравнения составим выражение для
входного импеданса рассматриваемой системы (см. рис. 7.13). Стержень
1 нагружен стержнем 2, сопротивление которого как свободного равно
Zq = /(рс5J *& (^г'г)- Подставим это значение z0 в равенство G.36):
i(pcSJtg(k2/a) + i(PcSItg(fc1/1)
. G.40)
tg^ytg^/)
Как известно, колебательная система попадает в резонанс, когда
мнимая часть ее импеданса равна нулю, следовательно,
(PCS)! tg (Mi) + (Рс5J tg (/c2/2) = 0. G.41)
-213-
Выражение G.41) есть искомое частотное уравнение.
Преобразуем два последних слагаемых формулы G.39) с учетом
соотношения G.41):
1 cos2(fr2/2) 2sin(/c1/1)cos(k1/1) I
— 9iS±L + — P2S2/2X
2 * X1 cosM^/J 2k±lt 2
2sin(/c2/2)cos(/c2/2)
2k2l2
= - [1/B0))][cos2 (fea/2)(pcS)atg
- sin (fc2/2) cos (k2/2)] = 0
Таким образом, величина тэкв определяется равенством
тэкв = т1 cos2 (k2/2)/[2cos
0,5m
2.
Расчеты нормированной (относительно реальной) эквивалентной
массы трехсекционного стержня показывают, что она наибольшая
у симметричной колебательной системы (р = 0,5) в интервале значений
волнового размера средней секции /До = 0,15.. .0,25. Для некоторых
составных стержней из разнородных материалов при больших
значениях р = 0,8. . . 0,9 эквивалентная масса имеет минимум в области
значений /Д = 0,2... 0,25 [35].
Коэффициент асимметрии р составного стержня
определяют как отношение р = Г/1, где / - длина среднего стержня, Г -
расстояние до нейтрального сечения (рис. 7.14).
Узловое (нейтральное) сечение. В процессе продольных колебаний
стержневой системы одно из ее сечений остается неподвижным, его
называют узловым или нейтральным.
Например, у свободного однородного
стержня оно расположено посередине.
У двухсекционного стержня
координата узлового сечения х0 = Л/4, что
следует из условия 1г(х) = A cos {кхх0) = 0;
этот результат совпадает с полученным
для стержня, закрепленного одним
концом: сечение х0 неподвижно, т. е.
как бы закреплено.
Поскольку скорость смещения в
узловой плоскости i(x0) = 0, входные
импедансы обеих частей системы -
слева и справа от х = х0 - равны
бесконечности, а их длины х0 и х0 + /2
составляют ко/4 на резонансной частоте всей
Рис. 7.14. Составной трехсек- системы. Для левой части импеданс
ционный стержень (а) и распре- z = i(pcSI tg (fcjXo) = °° ИЛИ ctg (/c1X0)= 0,
деление смещений по длине для Правой чаСТИ
стержня (б)
-214-
i(pcSJ tg(/c2/2)+ i(pc5I tg[fc1(f1 - x0)]
1 - [(Pc5J/(pc5)j tg(fca/a) tgik.d, - x0)] " °°'
откуда
tglM'i - *0)l ^^2/2) = (QcS)J(9cSJ. G.42)
Равенства G.42) и ctg(fc1xo) = 0 по существу являются уравнениями
резонанса составного стержня, записанными через волновые размеры
четвертьволновых частей. В этом легко убедиться: подставив в
выражение G.42) ctg^xj = 0, получим соотношение G.41).
Примеры некоторых колебательных систем с формулами для
расчета их эквивалентной массы и резонансных частот приведены
в табл. 7.1.
Механические напряжения. В процессе продольных колебаний
составного стержня во всех его поперечных сечениях возникают
механические напряжения. Механическая колебательная система
большинства стержневых преобразователей представляет собой трехсекцион-
ный стержень. Средний стержень обычно изготовляют из активного
в электромеханическом отношении материала, например из пьезокера-
мики (см. рис. 7.14). Механические напряжения, возникающие в
активном материале преобразователя-излучателя, определяют и
ограничивают акустическую мощность. Чтобы не превысить предела прочности
(на разрыв), необходимо знать распределение напряжений
(деформаций) по длине секций, в особенности средней секции.
Следуя изложенной выше методике, определяем функции
смещения и деформации отдельных секций при следующих граничных
условиях: равенство смещений и упругих сил в плоскостях сопряжения
секций; отсутствие напряжений на внешней поверхности стержня 2;
нагрузка рабочей поверхности стержня / активным сопротивлением
излучения. Последнее условие имеет вид Y1S1d?iJdx = - (pc)B51|1@)
при х = 0, где |1@) = cOqIj^CO) = ^сД^О). Приведем выражения для
смещения рабочей накладки ?х(х) и напряжений Т(х) в средней секции:
- cos (fc^J] sin (foe)- P1c1S1/(pcS)[sin(/c1/1) +
icJ cos (fc,/,)] cos (fcx)}, x ^ [0, /].
Максимальное напряжение возникает в сечении с координатой х0,
которую найдем из уравнения ?(х0) = 0 или дТ/дх = 0:
pcS lKpcUPiCjlg^l,)
tg (kx0) = ctg (fc^J. G.43)
9iC1S1 1 + [(рс)в/(р1с1)] ctg(fcj/J
-215-
Таблица 7.1. Формулы для расчета эквивалентной массы и частотные уравнения колебательных систем
Тип системы
Точка
приведения
Эквивалентная масса т_
Частотное уравнение
о г/2
I 0 I
1 1
— plS = — т
2 2
—- p/S =— т
2 2
9lS
1
—-М + -
2 2cos2 @H
1 plS
— M +
M
2 2sin2 (coo//c)
—pxs
2 X1
1
2
cos2(co0/2/c2)
/=— /-= —
° 21 V p 2/
4/ v p 4/
0
cooM+ pcStg =0
с
coo/
WOM - pcS ctg = 0
с
91c1S1 ctg = p2c252 tg
C2
I
to
-lf 0
1
li
f W
2
Примечание:
средоточенные массы;
— m1 + — гп 2 cos
2 2
— m2 + —
2 2
Mi m\ KMi
+— 1+
2 2 L \ qcS I
2 2 sin2(fc/')
m2 sin2 (A:/")
2 sin2(/c/') cos2(it2/2) '
/c/' = arctg [ pc5 ctg (fc x/ j)/( p lC iSJ];
co2-pc5-
tg-
coo/
= <Jltg-
C2
=0
tg -1 =
характеристическое сопротивление j-го стержня (накладки); m,- — масса 1-го стержня (накладки); М, Мх, М2 — со-
ю
9
8
7
6
5
J
2
1
|\\
\
\
\
\
v
Y
\
\
4
16'
ч
6
8s'
10-
11—
тшт
mm
Расчеты показывают, что для наиболее
широко применяемых материалов
составных стержней ГАП относительная
разница в положениях углового
сечения с учетом нагрузки рабочей
накладки и без ее учета в диапазоне волновых
размеров 11/к1 * 0,08. . . 0,15
составляет 10. .. 15%.
Механическая добротность. Для
установившихся колебаний
механической системы добротность Q
характеризует ширину полосы рабочих частот.
Величина Q зависит от внутренних
потерь в деформируемых элементах (они
вызывают их нагрев) и от излучения
акустической энергии в окружающую
среду.
У преобразователей, работающих в
водной среде, значение Q мало
благодаря большому сопротивлению
излучения, пропорциональному волновому
сопротивлению воды, равному
1,5 • 106 Н • с/м3. Из формулы 2Дб) = aH/Q
видно, что ширина полосы тем больше,
чем меньше Q.
Рассматривая колебательную
систему ГАП в виде простого осциллятора с эквивалентными параметрами
и принимая рабочую поверхность преобразователя 5Н полностью
нагруженной, можно записать
Используя приведенные в табл. 7.1 соотношения для составного
трехсекционного стержня, по формуле G.44) рассчитаны значения
механической добротности в зависимости от волнового размера
средней секции 1/К (рис.7.15). Из графиков видно, что с увеличением
отношения площадей Sx/S величина Q уменьшается, следовательно,
ширина полосы частот возрастает.
0 0,050,1 0,15 0,2 0,25 1/Х
Рис. 7.15. Зависимость
механической добротности трехсек-
ционного стрежня от волнового
размера средней секции при
различных значениях S^S
(коэффициент асимметрии
р = 0,7; S2/S= 4)
ГЛАВА 8. ЭЛЕКТРОМЕХАНОАКУСТИЧЕСКОЕ
ПРЕОБРАЗОВАНИЕ ЭНЕРГИИ
В предыдущей главе было рассмотрено поведение механических
систем и определены параметры и характеристики безотносительно
к связи этих систем с электрической частью преобразователя. Для
-218-
излучения и приема акустических волн в морской среде используют
подводные преобразователи (ГАП), которые представляют собой
электромеханоакустические системы; в них подводимая
электрическая энергия преобразуется в механическую, механическая - в
акустическую в режиме излучения и в обратном порядке в режиме
приема. Преобразование механических колебаний в акустические, по
существу являющиеся тоже механическими, представляет процесс
передачи энергии колебаний некоторого тела окружающей среде. Понятия
механических и акустических колебаний относятся не столько к
различию в их природе, сколько к свойствам сред (тел), в которых они
совершаются. В колебательной системе ГАП взаимодействуют
механические и электрические процессы, вследствие чего возникают
дополнительные особенности, которые изменяют параметры чисто
механических систем, равно как и параметры чисто электрических
систем.
Физические процессы, сопровождающие динамические режимы в
электромеханической системе, можно представить в форме
механических смещений или деформаций отдельных частей системы и в виде
электромагнитных процессов, протекающих в различных средах и
сопровождаемых излучением электромагнитной энергии. В дальнейшем
рассматриваются системы, механические части которых соответствуют
или простому осциллятору (например, однородное тонкое кольцо
малой высоты, совершающее радиальные колебания, пульсирующая
сфера), или обладают распределенными параметрами (например,
стержневые, пластинчатые колебательные системы). Что касается
элементов, составляющих электрическую часть системы, то ее во всех
случаях можно рассматривать как систему с сосредоточенными
параметрами: линейные размеры элементов значительно меньше длины
электромагнитных волн в рабочем диапазоне частот ГАП.
В теории электроакустического преобразования решаются две за-'
дачи: определение акустического поля р(Т, t) при заданном
электрическом напряжении u{t), подводимом к излучателю; определение
напряжения холостого хода на электрическом выходе приемника
wx.x@ П0 известному акустическому давлению в падающей волне,
т. е. в свободном поле ро{Т, t). Аналитические зависимости между
указанными переменными образуют уравнения преобразователя. В
режиме излучения необходимо определить входное сопротивление
преобразователя ZBX для согласования его с генератором возбуждения,
а в режиме приема - внутреннее сопротивление ZBH для обеспечения
правильной работы последующих узлов электрической цепи
(трансформаторов, усилителей и т. п.).
Изучение систем для преобразования энергии базируется на двух
различных исходных представлениях. Один подход опирается на
решение уравнений преобразователя при заданных граничных условиях
на механической и электрической сторонах. Второй метод использует
представление о кинетической и потенциальной энергиях, а
соотношение между силами получают при помощи уравнений Лагранжа; в этом
случае на основе уравнений для сил строят эквивалентную
-219-
электрическую схему, используя метод электромеханических
аналогий.
Применяемые в гидроакустических устройствах ГАП, как правило,
обратимы, т. е. в зависимости от условий использования могут
работать в качестве излучателя и приемника.
Несмотря на то что физические принципы преобразования энергий
в ГАП могут быть различными (например, электродинамический,
электромагнитный, пьезоэлектрический, магнитострикционный),
основные соотношения, описывающие электромеханические связи,
имеют единообразную форму. Эти соотношения получим на примере
рассмотрения электромеханического преобразования в
электродинамическом излучателе (приемнике) - системе с сосредоточенными
постоянными и одной степенью свободы.
§ 8.1. Электромеханоакустическал система
Представим обратимый электроакустический преобразователь
структурной схемой (рис. 8.1), в узле 1 которой подводимая
электрическая энергия частично превращается в энергию механических
колебаний подвижной системы (узел 2), а в узле 3 механическая энергия
также частично переходит в энергию звукового поля. В режиме
приема преобразования энергии происходят по тем же этапам в обратном
направлении.
Рассмотрим электродинамический преобразователь, принцип
действия которого основан на явлении взаимодействия тока с
постоянным магнитным полем (рис. 8.2). В зазоре цилиндрического магнита 1
(или электромагнита) помещена подвижная катушка 2, жестко
скрепленная с диафрагмой 3, способной совершать поршневые колебания
благодаря гибкому подвесу 4; по катушке проходит переменный ток.
Согласно закону взаимодействия магнитного поля постоянного
магнита и тока, на катушку будет действовать переменная
электродинамическая сила*
f=B0U, (8.1)
где / - длина провода катушки; Во - постоянная магнитная индукция
в зазоре; / - ток в катушке. При переменном токе в катушке сила /
вызовет колебания катушки (и диафрагмы) с частотой тока, и в
окружающую среду будет излучаться звуковая энергия.
При движении катушки со скоростью 7 в ней, согласно закону
электромагнитной индукции, возникает ЭДС**
e = -B0Zv. (8.2)
* Силовые линии поля в зазоре перпендикулярны виткам катушки.
** Векторы?и Во взаимно перпендикулярны.
-220-
Излучение^
/
2^
J
Прием
Рис. 8.1. Структурная схема
обратимого электроакустического
преобразователя
Рис. 8.2. Схема
электродинамического преобразователя
Общее электрическое напряжение в установившемся режиме
преобразователя
jj -7f D/ 7 1 1/" (Я. 1\
где Zo - электрическое сопротивление преобразователя при
заторможенной механической системе (v = 0); К = I U/v\ при разомкнутой
электрической цепи (/ = 0). Модуль отношения напряжения на разомкнутой
электрической стороне к скорости колебаний механической системы
(диафрагмы с катушкой) называют коэффициентом
электромеханического преобразования. Коэффициент К = В01
выражают в В • с/м.
Составим уравнение движения механической системы
преобразователя. Внешняя сила F, действующая на колеблющуюся со скоростью
v катушку в отсутствие магнитного поля и равная zv {z - механическое
сопротивление подвижной части системы), уравновешивается
реакцией механической нагрузки. Полная реакция катушки учитывает
также силу / магнитного взаимодействия [см. формулу (8.1)]:
F = zv + 50// = zv + /C/. (8.4)
Здесь коэффициент электромеханического преобразования равен
отношению силы на заторможенной механической стороне к току на
электрической стороне, т. е. К = IF//I при v = 0.
Уравнения (8.3) и (8.4) связывают механические и электрические
величины преобразователя и позволяют определить две из величин II
I, F, v, если известны две другие и параметры z, Zo, К.
Если к преобразователю не приложены механические силы (F = 0),
то, подставляя значение v из (8.4) в (8.3), найдем
U = (Zo + K2/z)I = (Zo + ZM)L (8.5)
Выражению (8.5) соответствует схема, изображенная на рис. 8.3 и
являющаяся эквивалентной электрической схемой преобразователя-
излучателя.
Как видно, в рабочем режиме полное (входное) электрическое
сопротивление преобразователя-излучателя складывается из
- 221-
Рис. 8.3. Эквивалентная
электрическая схема
излучателя
Рис. 8.4. Эквивалентная
механическая система
приемника
электрического сопротивления при v=0 и динамического
сопротивления, обусловленного колебаниями механической
нагрузки. Действительно, когда z -*• °° и v -* 0, механическая сторона
заторможена, ZM -> 0 и ZBX = Zo, т. е. механическая сторона не оказывает
реакции на электрическую сторону преобразователя. При конечной
величине z динамическое сопротивление ZM Ф О и ZBX =ZQ+ZM.
Поскольку механическое сопротивление преобразователя z, как
правило, является комплексным, то ZM также имеет активную и
реактивную составляющие. Если z чисто реактивное, то и ZM также будет
реактивным, причем в случае г = шт (инерционный характер) ZM =
= К2/(/сот)=:- iK2/(ttm) = - //(o)C'M), т. е. динамическое сопротивление
оказывается емкостным; при z- 1/(коСм) (упругий характер)
последовательно с Zo включается индуктивное сопротивление механической
упругой реакции. На резонансной частоте колебаний механической
системы, когда z = г (активный характер), динамическое
сопротивление максимально и, следовательно, потребляемый преобразователем
ток минимален.
Аналогичное рассмотрение преобразователя-приемника, выход
которого замкнут накоротко, дает следующее выражение:
F = (z + JPlZb = (z + z3)v. (8.6)
Выражению (8.6) отвечает эквивалентная механическая система
преобразователя-приемника, состоящая из соединенных узлом
сопротивлений z и гэ (рис. 8.4). Сопротивление реакции электрической
стороны на механическую увеличивает механический импеданс
преобразователя и поэтому представляет собой сопротивление
электродинамического торможения.
Уравнения (8.3) и (8.4) являются уравнениями
электромеханического преобразования электродинамического излучателя и приемника
соответственно. Коэффициент электромеханического преобразования
определяют соотношения j U/v\I= 0 = \F/l\ v = 0.
Уравнения (8.5) и (8.6) показывают, что электродинамическую
колебательную систему можно рассматривать как осциллятор (контур)
соответственно механический или электрический со сложным
импедансом, учитывающим взаимные связи. Каждый контур имеет одну
степень свободы и одну обобщенную силу.
Аналогичные рассуждения можно произвести и для других
принципов электромеханического преобразования энергии.
-222-
§ 8.2. Уравнения электромеханического
преобразования
Приведем основные сведения из общей теории линейного
обратимого преобразования.
Уравнения двустороннего электромеханического преобразования
можно представить следующими комплексными зависимостями между
переменными величинами на входе и на выходе:
U = ZI + Kv; F = zv + tf/. (8.7)
В формуле для U знак „- " относится к так называемым
индуктивным преобразователям, знак „+" - к емкостным: в первых движение
вызывают электродинамические силы взаимодействия токов и их
магнитных полей, а токи создаются ЭДС в результате движения
магнитных полей или проводников; у вторых - движение обусловлено
электростатическими силами взаимодействия между заряженными
телами, а разности потенциалов вызываются изменением
относительного расположения заряженных тел.
Входное сопротивление преобразователя-излучателя
ZBX = Zo ± K2/(z + zH) = Zo + ZBH; (8.8)
входное сопротивление преобразователя-приемника
zBX = z ± K2/(Z0 +ZH) = z + zBH, (8.9)
где zH - сопротивление механической нагрузки (например,
сопротивление излучателя); ZH - сопротивление электрической нагрузки
(например, входное сопротивление усилителя); ZBH и zBH -
соответствующие внесенные сопротивления.
Теорему электромеханической взаимности внешних воздействий
записывают в виде
0 = +F//|v=0 (8.10)
и формулируют следующим образом: отношение напряжения
холостого хода на электрической стороне к заданной колебательной скорости
на механической стороне численно равно отношению внешней силы,
способной затормозить механическую сторону преобразователя, к
заданной силе тока на электрической стороне. ¦
Уравнения (8.7) электромеханического преобразования можно
рассматривать как уравнения некоторого обобщенного
четырехполюсника с разнородными сторонами - механической и электрической.
На электрической стороне действуют напряжение и ток, на
механической стороне - сила и колебательная скорость (рис. 8.5). Из линейных
уравнений, связывающих комплексные амплитуды электрических (U, I)
и механических (F, v) переменных величин на обеих сторонах пассивного
-223-
Рис. 8.5.
Электромеханический четырехполюсник
Рис. 8.6. Эквивалентная схема
преобразователя с электромеханическим
трансформатором
четырехполюсника, для различных режимов работы обратимого
преобразователя можно получить следующие соотношения
электромеханической взаимности [29]:
(8.11)
(8.12)
(8.13)
(8.14)
\v = 0 = ±I/v\u=0;
Любое из равенств (8.11). . . (8.14) можно принять в качестве
характеристики электромеханического преобразования. Наиболее
распространенными показателями являются коэффициент
электромеханического преобразования
и коэффициент
ции (КЭМТ)
; = 0
электромеханической
(8.15)
трансфор ма-
(8.16)
Последний коэффициент измеряют в Н/В или в А • с/м. Индексы у К и N
означают режимы работы преобразователя. Величина N есть отношение
тока короткого замыкания к колебательной скорости механической
стороны преобразователя или, другими словами, такое отношение
внешней силы к электрическому напряжению, при котором
механическая сторона преобразователя остается неподвижной.
Название коэффициента трансформации N объясняется тем, что,
согласно равенствам (8.12) и (8.14), обе стороны преобразователя
можно считать связанными посредством некоторого фиктивного
идеального (без потерь) трансформатора (рис. 8.6). С
электромеханическим трансформатором будем обращаться как с реальным (для
преобразователей емкостного типа): пересчитывать переменные и
сопротивления с одной стороны на другую, оценивая тем самым реакцию
- 224-
механических (электрических) колебаний на электрические
(механические). Для преобразователей индуктивного типа свойства
электромеханического трансформатора аналогичны свойствам электрического
псевдотрансформатора. В отличие от обычного трансформатора,
сопротивления, в частности, пересчитываются с одной стороны
псевдотрансформатора на другую с противоположным знаком.
В дальнейшем будем использовать исключительно КЭМТ N.
§ 8.3. Режим излучения
Будем считать, что рабочая поверхность преобразователя -
диафрагма - расположена в бесконечном жестком экране. Распределение
нормальной составляющей скорости колебаний v(T0) по поверхности S
диафрагмы задано функцией /(г^)= v(rJJ)/v0, где Го - координата
текущей точки; v0 - скорость колебаний центра приведения. Временную
зависимость принимаем гармонической v(r?, t) = v(ro)exp (i'G)f)>
амплитуда скорости v(f^) =/(?0)v0.
Задание функции распределения колебаний определяет
энергетическое состояние механической системы преобразователя,
потенциальная энергия которой Wn, кинетическая - JVK. Имея в виду, что система
приведена к эквивалентному простому осциллятору с параметрами
шэкв = 2WK/v^ и Сэкв - v%/{2h/n) (см. § 7.3), можем записать выражение
для механического импеданса ненагруженного преобразователя
(с учетом сопротивления потерь гп)
- 1/(о)Сэкв)] = гп[1 + i
где Qo= иотэкв/гп- механическая добротность; соо = 1/ у/тэквСэкв -
собственная циклическая частота механической системы. Когда
преобразователь нагружен водной средой, к составляющей гп прибавляется
активное сопротивление излучения г5, к реактивной составляющей -
сопротивление соколеблющейся массы icom5 (см. гл. 3). Резонансная
частота нагруженного преобразователя
его добротность
Qm = "Р(™Экв + ms)HTn + h) = и?Мэкв/гы. (8.18)
Для возбуждения преобразователя-излучателя к его входу
необходимо подключить генератор. Используя схему, представленную на
рис. 8.6, последовательно с сопротивлением Zo электрической стороны
включаем генератор, ЭДС которого Ег и внутренний импеданс Zr. При
этом полагаем, что на излучатель внешние силы не действуют, а для
учета реакции среды следует в схему механической стороны ввести
импеданс излучения zs. Взаимодействие электрических и механических
15-614 - 225 -
процессов в преобразователе, как показано выше, происходит в
условном трансформаторе. Эквивалентная электромеханическая схема
излучателя представлена на рис. 8.7.
Подводимая к преобразователю мгновенная электрическая
мощность Рэ = ш. Часть мощности, расходуемой на внутреннем
сопротивлении преобразователя, P3.BH = u2IZ0. Представим Zo в виде
параллельного соединения активной составляющей сопротивления
электрических потерь #э п и реактивного элемента ± iX0. Тогда мощность
электрических потерь Рэ#п = 1/2/Яэ.п- Часть потребляемой преобразователем
электрической энергии преобразуется в энергию механических
колебаний; соответствующая ей мощность будет Рэм, и ее можно выразить
через КЭМТ*. Мощность механических колебаний Рэм = F'v0, aN = F'/u,
тогда F' =Nuu Рэм =Nuv0.
Энергия механических колебаний расходуется на изменение
кинетической dWjdt и потенциальной dh/Jdt энергий механической
системы, на механические потери (мощность Рм.п) и частично преобразуется
в акустическую энергию (мощность Ра). Если обозначить
эквивалентное сопротивление механических потерь гМЛ1, то Рмп = rM#nvj*.
Мощность Ра расходуется на сопротивлении излучения zs и равна Ра =z5vg.
С другой стороны, если на диафрагме преобразователя акустическое
давление pir^), скорость колебаний в точке То есть v(r^), то
акустическая мощность
Hro)dS (8.19)
и сопротивление излучения с учетом функции /(Го) = v(f^)/v0 будет
= (l/v0
= rs
ixs.
(8.20)
Запишем равенства, характеризующие баланс перечисленных
выше энергий для режима излучения. Потребляемая от генератора
возбуждения электрическая мощность равна сумме
и2Шэ.п + uNv0.
(8.21)
Рис. 8.7. Эквивалентная электромеханическая
схема преобразователя-излучателя
* Формулы для расчета КЭМТ N выведены в гл. 9 и 10.
-226-
Рис. 8.8. Развернутая электромеханическая схема
преобразователя-излучателя
Преобразованная в механическую форму электромеханическая
мощность uNv0 с учетом приведенных соотношений принимает
следующий вид:
- l/(coC3KB)]vg + гм nv2 + zsv2. (8.22)
Равенствам (8.21) и (8.22) соответствует эквивалентная схема,
изображенная на рис. 8.8 (без генератора возбуждения). Располагая
эквивалентной схемой излучателя, нетрудно получить расчетные
соотношения для определения его параметров.
Импеданс излучателя. Сопротивления электроакустического
преобразователя, измерение со стороны как входа, так и выхода,
являются важными техническими характеристиками. Входное
сопротивление излучателя определяет согласование его с генератором
возбуждения, а выходное сопротивление - с акустической средой. Если
генератор обладает малым или большим внутренним сопротивлением
по сравнению с общим сопротивлением нагрузки, то при
непосредственном подключении к нему преобразователя отдаваемая
излучателю мощность окажется малой. Входное и выходное сопротивления
преобразователя-приемника играют аналогичную роль.
Для определения входного импеданса ZBX учтем влияние
выходного (механического) сопротивления z0 + zs = z? пересчитывая z на
электрическую сторону. Согласно рис. 8.7, N = F/U = //v, откуда U = F/N,
I = Nv. Подставляя в равенство Z=U/I, получаем Z-z/N2. Находим
динамическое сопротивлениеZM = RM + iXM, где RM = r/N2 = (r5 + гмп)/ЛР;
^м = [сошэкв - 1/((|)Сэкв)]ЛГ~2. Величину ZBX составляют параллельно
включенные сопротивления Яэ п, ± iX0, RM + /Хм, так что
где Увх - входная (электрическая) проводимость излучателя.
Модуль IZBXI минимален на частоте резонанса сор и максимален на
частоте антирезонанса соа, определяемой из уравнения Im Увх = 0.
Мощность излучателя. Согласно эквивалентной схеме (см. рис. 8.8),
приложенное к излучателю напряжение
/ZBX. Умножив обе части
15*
-227-
этого равенства на величину, комплексно сопряженную с силой тока,
протекающего через преобразователь, получим полную потребляемую
преобразователем электрическую мощность. Действительная часть
произведения UI*, учитывающая выделение энергии на активных
элементах, будет выражать потребляемую от источника возбуждения
активную мощность Рэ. Если реактивное механическое сопротивление
механического резонанса z = г,
Хм = 0, т. е.
то мощность
п Г J2 I'D
JTg — U 1Л i
выполняется
условие
).П *Э М*
(8.24)
где Рэп - мощность электрических потерь, обусловленная омическим
сопротивлением, вихревыми токами, магнитным и электрическим
гистерезисом, несовершенством диэлектрика.
Чтобы выяснить сущность Рэм, допустим, что механическая
сторона преобразователя заторможена, тогда \z\ = °°, RM = °° и Рэм = 0.
Таким, образом, мощность Рэм = U2/RM представляет собой часть
электрической мощности генератора, расходуемой на движение
механической части, или электромеханическую мощность.
КПД излучателя. Для оценки эффективности излучателя как
преобразователя потребляемой активной электрической мощности в
механическую служит электромеханический КПД т]эм. Из выражения
(8.24) получаем
Динамическое активное сопротивление RM = rjN2 + rMSI/N2 = Rs + Ru.n,
где Rs и RMn - приведенные к электрической стороне сопротивления
излучения и механических потерь. Из схемы (см. рис. 8.8) следует
^ (8.26)
Ра = (U2/Rl)Rs = (N2rs/r2)U2. (8.27)
Эффективность излучателя как преобразователя энергии
механических колебаний в энергию колебаний упругой среды оценивают
акустико-механическим КПД
П ам = PJPsm = Ws + Ям.п) = rs/(rs + гм.п). (8.28)
Как видно, чем больше г5 по сравнению с гм#п, тем выше КПД. Уместно
отметить, что ГАП в отличие от воздушных преобразователей имеют
г5 » гм п и, как следствие, более высокий КПД (т]ам = 0,5... 0,8).
Используя равенства (8.26) и (8.27), получаем выражения для КПД
,n + гм.пA + г,/гм.п)]-ь
)- (8.29)
-228-
Из определений
следует равенство
приведенных КПД
(8.30)
Рис. 8.9. Зависимость КПД
преобразователя от
отношения активных
сопротивлений излучения и
механических потерь
которое подтверждает наличие двух
ступеней преобразования энергии в
излучателе: электрическая - механическая -
акустическая. Величину Т]эа называют
электроакустическим или полным КПД.
Зависимость КПД от отношения rs/rMSl
показана на рис* 8.9. Видно, что при
значении (г5/гМвПHПТ полный КПД лэа
преобразователя достигает максимума. Отличие
фактической величины rs/rMSl от
оптимального значения может служить мерой несогласованности
преобразователя со средой.
Чувствительность излучателя. Наряду с энергетическими
характеристиками излучателя применяют критерий оценки эффективности,
вытекающий из назначения преобразователя создавать акустическое
поле. Оценивают излучатель по звуковому давлению р, развиваемому
им в точке на акустической оси при единичных расстоянии г и
напряжении U (или силе тока /) на электрическом входе. Отношение pr/U = Sy
(или Sj = pr/I) называют чувствительностью излучателя
по напряжению (или по току); величину 5^ выражают в Па-м/В
E7- вПа-м/А).
Чувствительность излучателя неоднозначно оценивает эффективность
электроакустического преобразователя. Действительно, потребляемая
излучателем электрическая мощность Рэ = t/2/J?BX. Если два излучателя с различными
значениями RBX имеют одинаковую чувствительность и возбуждаются одинаковым
напряжением, то эффективнее будет тот излучатель, входное сопротивление
которого больше, так как он потребляет меньшую мощность. При этом
предполагается, что оба преобразователя обладают одинаковой направленностью. Тогда
у них равны акустические мощности и, следовательно, электроакустический КПД
окажется выше у излучателя с большим сопротивлением на входе.
Более полным критерием эффективности излучателя является
отношение звукового давления, создаваемого в направлении
максимума излучения на единичном расстоянии rf к квадратному корню
из потребляемой излучателем активной мощности; это отношение
называют абсолютной чувствительностью
излучателя 5аб, Па-м-0м1/2/В:
5аб = Р1ЫК = (pr/U) V^ = Sy/y/R^. (8.31)
Установим связь между 5а^ и Лэа- Для этого воспользуемся
формулой D.21) для акустической мощности направленного излучателя
Ра = 4np2r2/[(pc)BiC0]. Разделив выражение для Ра на Рэ = U2/RBX, получим
-229-
. (8.32)
Сравнивая формулы (8.31) и (8.32), находим искомое соотношение
(8.33)
Выражение (8.32) подтверждает вывод о том, что эффективность
излучателя пропорциональна его входному активному сопротивлению.
Следует отметить, что рассмотренные качественные показатели
работы излучателя зависят от частоты. Поэтому для полной оценки
преобразователя надо определить (аналитически или
экспериментально) его частотную зависимость, т. е. зависимость какого-либо
параметра (чувствительности, мощности, КПД, импеданса и др.) от частоты.
В случае резонансной характеристики излучателя его полосу частот
определяют на уровне - 3 дБ @,707 чувствительности на резонансе
и 0,5 максимального значения энергетического параметра).
§ 8.4. Режим приема
На приемную поверхность S - диафрагму преобразователя,
находящегося в акустическом поле, действует давление р(^), вызывая
колебания диафрагмы со скоростью v(f^), где г*0 - радиус-вектор
текущей точки поверхности 5. Обозначим давление, которое создает
колеблющаяся диафрагма на своей поверхности, через рх{г^). Тогда
результирующее давление на диафрагме преобразователя можно представить
в виде [2]
p(r;) = P3Q-p1(r0), (8.34)
где рз(г[,) - давление на диафрагме заторможенного преобразователя.
Умножим обе части выражения (8.34) на v(r?) и проинтегрируем его
по площади 5:
p3(r0/f(r0)dS-
s s
- v0 5 P^fi^dS. (8.35)
s
Левая часть равенства определяет долю энергии (мощности)
акустического поля, которая переходит в энергию колебаний диафрагмы, т. е.
представляет собой механическую мощность преобразователя Рм. Если
механический импеданс преобразователя zM, то Рм = VqZm, т.е.
Рм = v0 5 р(Го№о№ = vfcM. (8.36)
S
Второе слагаемое в выражении (8.35) характеризует колеблющуюся
диафрагму как источник акустической мощности Ра. Полагая Ра = vj*z5,
где zs - импеданс излучения преобразователя, получаем
= v20zs. (8.37)
-230-
Рис. 8.10. Эквивалентная
механическая схема
приемника
Рис. 8.11. Электромеханическая схема
преобразователя-приемника
Из равенства (8.35) с учетом формул (8.36) и (8.37) определяем
скорость колебаний центра приведения
v ={z +Z) $ р (r)f(r)dS. (8.38)
5
Полученное выражение позволяет представить преобразователь-
приемник, возбуждаемый акустическим полем, в виде
эквивалентного генератора с ЭДС, равной
*экв=1 РзЮ/Ю<^ (8-39)
5
и внутренним сопротивлением zs (рис. 8.10).
Часть энергии механических колебаний преобразуется в
электрическую энергию (мощность Рэм), которую можно выразить через КЭМТ
N: Рэм = UXXI= UxxNv0, где Uxx - напряжение на разомкнутом
электрическом выходе приемника.
Запишем соотношения мощностей (энергий) для режима приема:
(8.40)
Рмэ;
(iVvoJt7x.x/(iVvo) = UVvoJZo,
где Zo - электрический импеданс заторможенного преобразователя.
С точки зрения баланса энергий равенствам (8.40) соответствует
электромеханическая схема, показанная на рис. 8.11.
Сила F3KB определяется формой колебаний и волновыми
размерами диафрагмы преобразователя. Если размеры малы, давления в
отраженной (рассеянной) волне ps ** 0 и на поверхности приемника
практически совпадают с давлением р0 в падающей волне (в свободном поле),
тогда F3KB = pQS. В случае больших волновых размеров диафрагмы на
ее поверхности возникает дифракция и сила F3KB = kap0S, где кп -
коэффициент дифракции. Коэффициент кд - величина комплексная.
На рис. 8.12 показаны зависимости модуля \кп\ от волнового
диаметра D/X.
- 231-
1,6
0,8
Рис. 8.12. Зависимость коэффициента
дифракции от волнового диаметра для
круглого поршневого диска A),
пульсирующего цилиндра B) и цилиндра,
экранированного на 180° жестким
экраном C)
О 0,2 ОМ Ofi 0,8 1,0 U
В/А
Рис. 8.13. Эквивалентная
электрическая схема приемника
Если форма колебаний диафрагмы задана функцией /(г^)
координат поверхности, F3KB = kRp0Scpi где 5ср =^/(Гд)с?5-средняя
поверхность диафрагмы. 5
Эффективность приемника как акустико-электрического
преобразователя оценивают чувствительностью приемника.
Ее определяют как отношение напряжения холостого хода на выходе
приемника к звуковому давлению в свободном поле в точке
нахождения приемника:
M = UxJp0. (8.41)
Если к приемнику подключено большое сопротивление нагрузки ZH
(практически холостой ход), напряжение на его клеммах равно ЭДС Е.
Когда приемник нагружен на согласованное сопротивление ZH = ZBH
(где ZgH - внутреннее (выходное) сопротивление), развиваемое им
напряжение на выходе U = 0,5Е и чувствительность будет вдвое
меньше, чем при холостом ходе.
Отношение (8.41) определяет стандартную
чувствительность по полю, отношение Uxy на его выходе к звуковому
давлению на диафрагме называют чувствительностью приемника
по давлению.
Иногда чувствительность приемников выражают не в вольтах на
паскаль (В/Па), а в децибелах, принимая за эталонный уровень
Мо = 1 В/Па. Таким образом, уровень чувствительности определяют
равенством М' = 20 lg (М/Мо). Так как М < Мо, то М' < 0. Если принять
М0 = 1 мкВ/Па (такой уровень встречается), тоМ' > 0.
Чувствительность М является функцией частоты; при резонансном
характере функции ширину полосы частот определяют на уровне
- 3 дБ @,707 чувствительности при резонансе).
Приемник можно представить (на основании теоремы Тевенина)
как генератор, ЭДС которого равна напряжению на его разомкнутых
клеммах, а внутреннее сопротивление равно электрическому
сопротивлению преобразователя. Напряжение Ux х определяют из равенства
- 232-
(8.41): иХлХ=Мро, внутреннее сопротивление- из эквивалентной
схемы (см. рис. 8.11).
Примем F3KB = po5cp, z = zs + гм#п + \х = гм + ixM и приведем схему
к электрической стороне (рис. 8.13). Для этого пересчитаем силу
и сопротивления: pQScp/N = U3M; rM/N2=RM; xM/N2=XM. Полученная
эквивалентная схема позволяет определить чувствительность по полю
и электрический импеданс приемника. Полагая Zo = ± iX0, находим
POSCV/N ( ±ip0X0Scp/N
• Ям + iXM ± iX0 rjN2 + ixjN2 ± iX0
Соответственно чувствительность холостого хода
М = UxJp0 = ± iX0ScpN[rM + Цхы ± X0N2)]-K (8.42)
Величина ±iXjN2 представляет собой приведенное к механической
стороне статическое реактивное электрическое сопротивление, т. е.
она отражает реакцию электрических колебаний. Механический
импеданс приемника равен z = rM + /(xM ±X0N2), электрический импеданс
Z = ± iX0(RM + iXj/[RM + i(XM ± Хо)] = ± iX0(rM + ixj/z. (8.43)
Порядок расчета чувствительности следующий: пересчитав
сопротивление ± iX0 на механическую сторону, определяем скорость
колебаний v0 = F3KB/z = p0Scp/F, далее трансформируем v0 на электрическую
сторону, находим силу тока / = Nv0 = p0ScpN/zn напряжение Uxx = /Zo =
= ± iXopoScpN/z'; после деления Uxx на давление в падающей волне
получаем выражение (8.42). Откуда следует условие резонанса
преобразователя-приемника хм ± X0N2 = 0 или
и р(гпэкв + ms) - 1/@) рСэкв) ± X0iV2 = 0. (8.44)
В полученную формулу входят и механические и электрические
(приведенные) реактивные сопротивления, поэтому частоту оз'
называют частотой электромеханического резонанса.
Напомним, что частоту механического резонанса сор определяют из
уравнения хм = х + xs = 0. В зависимости от знака Хо (индуктивность или
емкость) частота 0)р может быть как меньше, так и больше частоты 0)р.
При трансформаторном включении нагрузки ZH на приемник с
выходным сопротивлением ZBH коэффициент трансформации п выбирают
из условия согласования приемника с нагрузкой (ZBH = Z'H) и
п = y/ZH/ZnH. В этом случае напряжение на нагрузке будет UH = 0,5nUxx =
= 0,5L/x#x yZH/ZBH. Таким образом, напряжение на согласованной
нагрузке приемника пропорционально отношению UXtX/y/ZBH. Поэтому
эффективность приемника также оценивают удельной
чувствительностью, под которой понимают отношение чувствительности
холостого хода к корню квадратному из модуля внутреннего
сопротивления приемника:
(8.45)
-233-
измеряемое в В/(Па*0м1/2). Как видно, при одинаковой
чувствительности Мхх приемников, работающих на согласованные нагрузки,
эффективнее будет приемник с меньшим внутренним электрическим
сопротивлением: чем ниже ZBH, тем меньше падение напряжения и тем
больше напряжение на нагрузке.
ГЛАВА 9. ПЬЕЗОЭЛЕКТРИЧЕСКИЕ
ПРЕОБРАЗОВАТЕЛИ
Пьезоэлектрический эффект заключается в том, что при
деформации некоторых кристаллов в определенных направлениях они
поляризуются, причем величина поляризации пропорциональна деформации.
Это явление было названо прямым пьезоэффектом. Изменение
размеров кристалла под действием приложенного к нему
электрического поля, т. е. обратный пьезоэффект, также является
линейным: величина деформации пропорциональна полю. Таким образом,
пьезоэлектрические кристаллы могут быть использованы в'качестве
линейных и обратимых электромеханических преобразователей.
Наличие пьезоэффекта у ряда кристаллов обусловлено тем, что
электрические заряды атомов, составляющих кристаллическую решетку пьезокристалла,
неуравновешены. Под действием внешнего электрического поля изменяется
взаимное расположение атомов решетки, а следовательно, и размеры кристалла.
При воздействии внешней силы, деформирующей кристалл, также изменяется
расположение атомов решетки, в результате чего внутри кристалла меняется
электрическое поле и появляется поляризация у всего кристалла, а между
электродами — разность потенциалов.
В 1944 г. Б. М. Вул и И. М. Гольдман в СССР открыли новый сегнетоэлектрик —
титанат бария (тибар). Сегнетоэлектрическим веществам благодаря
особенностям внутренней структуры присуща в некотором интервале температур
спонтанная поляризация. Для них характерно наличие температуры Кюри,
ниже которой кристалл разбит на спонтанно поляризованные области (домены),
причем поляризация в различных доменах ориентирована по разным
направлениям. При действии внешнего электрического поля происходит переориентация
доменов и появляется поляризация у кристалла в целом. Выше температуры
Кюри спонтанная поляризация разрушается тепловым движением. При
температурах ниже точки Кюри все сегнетоэлектрики обладают пьезоэлектрическими
свойствами.
Сегнетоэлектрики обычно используют в поликристаллическом виде,
получаемом по обычной керамической технологии. Сегнетоэлектрическая керамика,
заполяризованная электрическим полем и превращенная таким образом в
пьезоэлектрический материал, получила название пьезоэлектрической керамики или
пьезокерамики.
Для улучшения свойств и повышения их стабильности в пьезокерамику
тибара вводят модифицирующие добавки. В 1952 г. был открыт пьезоэлектрик
ниобат свинца, а затем ряд твердых растворов на его основе. Особенно высокими
пьезоэлектрическими свойствами и стабильностью обладают твердые растворы
на основе титаната-цирконата свинца с различными добавками.
- 234-
Большая эффективность действия, возможность изготовления
чувствительных (активных) элементов любой формы и возбуждения
различных видов колебаний, широкий частотный диапазон
пьезоэлектрических преобразователей обусловили успешное использование
их в гидроакустических антеннах.
§ 9.1. Свойства кристаллов и основные соотношения
пьезоэлектрического эффекта
Пьезоэлектрический кристалл является и конденсатором, и
электромеханическим преобразователем, поэтому для полной
характеристики его работы надо рассмотреть его упругие, диэлектрические и
пьезоэлектрические свойства.
Некоторые сведения о кристаллах. Всякий кристалл представляет
собой твердое однородное анизотропное тело, его физические свойства
описываются тензорами. Различаются кристаллы по своей симметрии,
которая выражается как во внешней форме, так и в особенностях
протекания физических процессов.
Выделим в деформированном теле элемент в виде бесконечно
малого куба с ребрами, параллельными осям х, у, z, и рассмотрим
упругие напряжения, действующие на грани элемента (рис. 9.1). Эти
напряжения могут быть представлены как результат приложения
равнодействующей силы в центре каждой грани. Разложив
напряжения Т на составляющие (компоненты) по координатным осям, получим
девять возможных компонент, образующих тензор второго ранга Tik.
Первый индекс в Т^ указывает направление силы, вызывающей эту
компоненту напряжения, второй индекс - грань куба, на которую
действует сила (напряжение); при этом осям х, у, z придают
соответственно номера 1, 2, 3. Таким образом, три компоненты Т1Х, Т22, Т33
изображают нормальные напряжения, остальные шесть - напряжения
касательные. Из условия статического равновесия куба относительно
оси вращения следует равенство Т& = Тьь и напряжение в каждой
точке деформированного тела оценивают девятью компонентами,
шесть из которых попарной равны.
Для сокращения числа индексов
компонент тензора напряжения
двойные индексы заменяют одиночными,
полагая ТХХ = Т19 Т22 = Т29 Т33 = Г3,
Г23 = Т4, Г13ЯГ5, Т12 = Т6. Это
означает переход от тензорных обозначений
к матричным.
При упругой деформации каждая
частица тела претерпевает смещение.
Если обозначить составляющие
смещения по осям через ?х, ?2, ?3, то
величины д? х /дх = Sx, д| 2/ду = 52, д? Jdz =
= S3 представляют относительные
Рис. 9.1. Напряжения в упруго-
деформированном элементе
- 235-
удлинения в направлении осей и называются линейными
деформациями. Сдвиговые или угловые деформации
определяются как dljdz + d^Jdy = S4, dljdz + dljdx =S5, dljdy + dljdx =
= 56. Деформации Sjk = S^ оценивают изменение угла между двумя
отрезками, параллельными осям / и к до деформации. Например,
54 - это угол сдвига в плоскости zOy. Угловые деформации Sj (j = 4, 5,
6) выражают суммой двух равных углов, на которые сдвигаются ребра
параллелепипеда по отношению к соответствующим осям.
Все компоненты линейной и угловой деформации образуют тензор
второго ранга [S].
Линейную зависимость между напряжениями Т и деформациями S
устанавливает закон Гука, справедливый для малых деформаций.
Закон Гука для компонент напряжений и деформаций сокращенно
записывают в виде
Ti-i^ijSj-CijSj, i, j = 1,2,..., б (9.1)
или в матричной форме [Т] = [с][5], где [с]-матрица модулей
упругости, имеющая шесть строк и шесть столбцов. Вследствие
равенства Cij-Cji число модулей упругости уменьшается с 36 до 21;
например, в кристаллах кубической системы всего три модуля
упругости.
Обобщенный закон Гука записывают также в виде
Sj-sjiTu j,i = 1,2,...,6 (9.2)
или [5] = |У|[Г], где [5] = [с] - матрица модулей гибкости
(податливости).
Соотношения пьезоэлектрического эффекта. Электрическое
состояние пьезокристалла характеризуют векторы напряженности Е
электрического поля и поляризации Р^ связанные соотношением
Рт = Ьтп ~ ео)?п> т, п = 1, 2, 3, (9.3)
где tmn - абсолютная диэлектрическая проницаемость материала;
е0 - электрическая постоянная; Рт, Еп - компоненты векторов.
Матрица [е] содержит три строки и три столбца и представляет
тензор второго ранга. Благодаря соотношению ешп = епт число
независимых проницаемостей в общем случае равно шести.
Компоненты вектора электрической индукции определяют по
выражению Dm = zmnEn и, согласно соотношению (9.3):
Dm = z0En+Pm. (9.4)
В пьезокристалле электрическая поляризация обусловлена не
только полем, но и деформацией, причем в случае малых деформаций
поляризация пропорциональна деформации, т. е. уравнение
прямого пьезоэффекта имеет вид
Pm = emkSk9 m = 1,2,3; fc = l,2,...,6 (9.5)
- 236-
или [P] = [e][S], где [е] - матрица пьезоэлектрических
постоянных кристалла, содержащая три строки и шесть столбцов.
При наличии электрического поля и деформации поляризация
Pm=(lmn-Z0)En+emiSi, (9.6)
электрическая индукция
Dm=emnEn+emiSi. (9.7)
Из формулы (9.7) видно, что tmn есть диэлектрическая
проницаемость заторможенного кристалла Ez=0), обозначим ее е^п. Из
выражения (9.6) следует, что emi устанавливает зависимость между Рт и S,-
в отсутствие электрического поля в кристалле (Еп = 0). Такое условие
будет выполнено при коротком замыкании электродов, наложенных
на грани кристалла. Если электроды отсутствуют или разомкнуты,
то индукция при деформации кристалла равна нулю, т. е. Dm = ^пЕп +
+ emiS( = 0, откуда видно, что Еп Ф 0. Таким образом, если к кристаллу
не приложено внешнее поле, это не означает, что поле в кристалле
отсутствует, так как оно может быть вызвано деформацией.
Обратный пьезоэффект заключается в деформации
кристалла, вызываемой электрическим полем в нем. Если приложить к
кристаллу внешние силы, чтобы устранить эти деформации, то в кристалле
возникнут упругие напряжения, пропорциональные компонентам
поля:
Тк = -епкЕп, (9.8)
где епк - пьезоэлектрические постоянные кристалла, входящие в
уравнение (9.5) прямого пьезоэффекта. В соотношении [Г] = - [е][Е] матрица
[е] определяет напряжения, возникающие в заторможенном кристалле
под действием заданного электрического поля.
При наличии в кристалле электрического поля и деформации
напряжения Тк будут равны
Tk = ckiSl-enkEn. (9.9)
Модули упругости cki связывают компоненты напряжения и
деформации при Еп = 0, т. е. в отсутствие поля; их обозначают С\z-.
Решая уравнения (9.9) относительно компонент деформации,
получим
Si = sikTk + dniEn, (9.10)
где
dni = enksEik. (9.11)
-237-
В соотношении [S] = [d][E] матрица [d] определяет деформации,
возникающие в свободном (от напряжений) кристалле при заданном
приложенном поле, ее называют матрицей пьезоэлектрических
модулей.
Используя равенства (9.10) и (9.11), введем пьезомодули в
выражение (9.7) для индукции:
Dm = (е* n + emjdnj)En + emjskjTk = tlnEn + dmkTk, (9.12)
где
Из соотношения (9.12), следует, что tTmn есть диэлектрические
проницаемости кристалла при отсутствии в нем упругих напряжений.
На основании формул (9.12), (9.10) и (9.4) можно за основные
уравнения прямого и обратного пьезоэффекта соответственно принять
Pi = dimTm; Si = dmiEm9 (9.14)
где Pi - поляризация, вызванная механическими напряжениями при
отсутствии внутри кристалла электрического поля; S,- - деформация,
вызванная электрическим полем в отсутствие напряжений (внешних
усилий).
Зависимость упругих констант кристаллов от их электрического состояния
объясняется пьезоэлектрической реакцией на упругость: при упругих процессах
вследствие прямого пьезоэффекта возникает поляризация, вызывающая, в свою
очередь, изменение механического состояния, которое обусловлено обратным
пьезоэффектом (если Е Ф 0). Таким образом, в пьезокристалле кроме процесса
Т-* S (или S-*T) возможен вторичный эффект Т-* Р ¦+Е -+ S (или S -* Р -* Е ¦+ Т),
приводящий к изменению деформации или напряжения и, следовательно,
упругих постоянных.
Связь между постоянными сЕ, sD, е5, ег устанавливает
соотношение [9]
es/tT = sD/sEt (9Л5)
В зависимости от того, какие переменные (Г, Е, S, D) приняты за
аргументы и какие за функции, получим систему уравнений (9.7) и
(9.9) или (9.10) и (9.12). Каждая из постоянных, входящих в указанные
уравнения, отражает различные стороны пьезоэлектрического эффекта
и отвечает разным состояниям кристалла. Так, пьезоэлектрическая
постоянная в уравнении (9.7) определяет электрическую индукцию
(поляризацию), вызываемую заданной деформацией в отсутствие
электрического поля в кристалле, а в уравнении (9.9) - механическое
напряжение, возникающее в закрепленном кристалле под действием
заданной напряженности электрического поля. Пьезоэлектрический
-238-
модуль, согласно уравнению (9.10), определяет деформацию,
возникающую в свободном кристалле при данном электрическом поле, а
согласно уравнению (9.12) - электрическую индукцию (поляризацию),
обусловленную заданным механическим напряжением в кристалле
при отсутствии электрического поля.
§ 9.2. Энергетический коэффициент
электромеханической связи
Отношение ts/tT или, что то же, отношение емкостей
заторможенного и свободного кристаллов, равно как и отношение упругих
постоянных при разомкнутых и замкнутых электродах, может быть
показателем эффективности пьезоэлектрического преобразования
энергии.
Если подвести к кристаллу разность потенциалов, в нем
накапливается определенное количество электрической энергии, часть
которой благодаря пьезоэлектрическому эффекту расходуется на
деформацию кристалла и переходит, следовательно, в механическую энергию
упругих деформаций. Мерой эффективности кристалла как
электромеханического преобразователя является отношение генерируемой
в кристалле механической энергии к полной запасаемой в нем
электрической энергии; это отношение назовем энергетическим
коэффициентом электромеханической связи (КЭМС)
и обозначим к2. Коэффициент к2 можно также определить как
отношение электрической энергии, генерируемой в кристалле при его
деформации, к полной накапливаемой в нем механической энергии.
Плотность полной энергии кристалла, которой он обладает в
свободном состоянии при заданной напряженности электрического поля,
пропорциональна проницаемости ег. У заторможенного кристалла при
этом же поле плотность энергии пропорциональна проницаемости es.
Очевидно, разность этих плотностей энергии равна плотности
механической энергии, обусловленной деформацией. Согласно определению,
получаем к2 = (ег - ts)/eT = 1 - es/tT или с учетом соотношения (9.15)
\-k2. (9.16)
Из равенства (9.13) с учетом (9.11) находим
e5/er=l-d2/(^er). (9.17)
Сопоставляя (9.17) и (9.16), получаем
(9.18)
Коэффициент к2 определен для статического режима (практически
для низких частот). Выражение (9.18) показывает, что величину к2
определяют исключительно постоянные материала пьезоэлемента,
поэтому к2 называют КЭМС материала.
-239-
Величина к2 зависит от направления электрического поля и
характера рабочих деформаций или, иначе, для каждой системы упругих
граничных условий и каждой ориентации электрического поля
существует свой КЭМС. Для пьезокерамики за главные КЭМС принимают
к33, к31 или /ср- для поля, параллельного оси z, и к15 - для поля,
перпендикулярного оси z. Например, выражение для fe^ в
соответствии с формулой (9.16) следующее:
Так как ет> е5, то емкость Ст свободного пьезоэлемента больше
емкости Cs заторможенного. Имея в виду пьезоэлемент с плоскими
электродами площадью 5ЭЛ и расстоянием между электродами б,
запишем
Как видим, электрическая схема пьезоэлемента содержит две
параллельно включенные емкости Cs и к2Ст = Сд, причем емкость Сд
обязана пьезоэффекту или деформации пьезоэлемента. КЭМС к2 можно
определить как отношение дополнительной емкости, обусловленной
пьезоэлектрическим эффектом, к емкости свободного пьезоэлемента:
^2 — п iqT _ q 1(с8 + С ) (9 19)
В динамическом режиме, когда на пьезоэлемент действуют
переменные нагрузки (знакопеременные электрические и механические
напряжения), распределение плотности электрической и механической
энергий по объему меняется, т. е. зависит от координат. В таком случае
КЭМС колебательной системы преобразователя зависит от характера
колебаний, распределения деформаций и напряжений по объему.
КЭМС преобразователя называют эффективным и обозначают /с|ф.
Общая эквивалентная схема преобразователя в динамическом
режиме имеет вид параллельно соединенных статической емкости Cs
и бесконечного числа цепочек-контуров ЦСи резонансная частота
каждого из которых wpI- = l/yL/Q. Аналогично выражению (9.19)
эффективный КЭМС для /-й резонансной частоты
= I Q[CS+ ? С,-]-1 =[ 2 Q]/Cr. (9.20)
/=i /=1 /=1
Сумма емкостей Q определяет накапливаемую в преобразователе
энергию, обусловленную механическими колебаниями, а емкость Cs -
электрическую энергию, запасаемую в заторможенном
преобразователе. Емкость Ст измеряют на частоте значительно ниже основной
резонансной частоты.
Для частоты первого резонанса эффективный КЭМС
х = CX[CS + | CiY1 = С1[С1 + Cs + I Q]-1 = CJCT, (9.21)
где и - ьх т с t^ ц-цт и0.
-240-
Эквивалентная электрическая схема
преобразователя, когда он работает в
области основной резонансной частоты, содержит -L. q
последовательную цепочку Ьд - Сд
(динамические приведенные параметры) и параллель-
но с ней соединенную емкость Со (рис. 9.2).
Из формулы (9.21) Сх = к2фСт, а Сх = Ст - Со,
следовательно, Со = СЩ - /с2ф). Здесь И Рис- 9-2- Электрическая
далее /с2ф есть КЭМС ДЛЯ низшей реЗОНан- схема пьезоэлемента
сной частоты.
Коэффициент /с|ф можно связать с резонансными частотами схемы
(см. рис. 9.2). Для этого определим электрическую проводимость схемы
У-Л>С0-/ю1д Г=» °L ' ' v' ' -^. (9.22)
>езонанс наступает при Im Y = °° или со = озр = 1/у/ЬдСд, антирезонанс -
фи частоте со = G)a, отвечающей условию Im Y = 0 или
СоA - оJАо2) + Сд =0.
h этого условия с учетом формулы (9.19) получим
1 - со2/а)I = СД/(СО + Сд) = fcfф. (9.23)
Таким образом, зная частоты резонанса и антирезонанса, например,
змерив частотную зависимость проводимости или импеданса, легко
ассчитать эффективный КЭМС.
Следует отметить, что к\<ь меньше, чем КЭМС материала fc2, опре-
еляемого по формуле (9.18). В случае единственной резонансной
астоты (например, у тонкого кольца малой высоты) к%^ = к2.
На рис. 9.2 эквивалентная схема преобразователя приведена к его
1ектрическому входу и, следовательно, отражает поведение преобра-
)вателя с электрической стороны. Элементы 1Д и Сд эквивалентны
еханическим параметрам - массе и гибкости. Выражая их через
ЭМТ (см. § 8.2), получим Ьд = fn3KB/N2; Сд = C3KBN2. Используя форму-
К9.21), находим
Ь1ф{С0 + Сд) = N2C3KB. (9.24)
Единицы измерения постоянных и соотношения для перевода их
единицы СИ следующие:
cik = 1 Н/м2 = 10 дин/см2; sik = 1 м2/Н = 0,1 см2/дин;
еш^=1Кл/м2 = 3-105 ед.СГСЭ/см2; dmk =
= 1 Кл/Н = 3 • 104 ед. СГСЭ/дин.
-241-
§ 9.3. Пьезоэлектрический эффект поликристаллических
сегнетоэлектриков
Пьезоэлектрические активные элементы ГАП можно изготавливать
из естественных кристаллов (кварц, турмалин), синтетических
кристаллов (сегнетова соль, дигидрофосфат аммония) и поликристаллических
материалов (пьезокерамика различных составов).
В соответствии с равенствами (9.14) уравнения прямого и
обратного пьезоэффекта монокристалла ВаТЮ3 принимают вид
Pi =d15T5; P2 = d15T4; Р3 = d31T± + d31T2 + d33T3;
$i ~ d31E3 = 52; S3 = d33E3; S4 = d15E2; S5 = dlsEx.
Физические свойства пьезокерамики зависят от ее состава, чистоты
исходных материалов, технологии изготовления и условий
поляризации. К технологии производства пьезокерамических элементов
предъявляют высокие требования для обеспечения одинаковых
свойств элементов.
Если из поликристаллического сегнетоэлектрика изготовлен
параллелепипед и поляризован в одном направлении (например,
по оси z), то в нем можно вызвать нормальные и касательные напря
жения. Пьезоэлектрические свойства пьезокерамики определяют,
естественно, составляющие ее монокристаллы.
Твердые растворы на основе цирконата-титаната свинца получили
наименование составов ЦТС, они обладают существенными пьезо
электрическими свойствами, малыми диэлектрическими потерями,
температурной и временной стабильностью. К достоинствам пьезокера
мики относят также высокие значения КЭМС и диэлектрическое
проницаемости, малые механические потери. К недостаткам - малук
механическую прочность, старение, зависимость параметров от темпе
ратуры и одноосного статического сжатия.
В табл. 9.1 приведены значения упругих, электрических и пьезо
электрических постоянных некоторых пьезокерамических материа
лов: ТБ-1 (титанат бария); ТБК-3 (титанат бария-кальция); ЦТСНВ-
(цирконат-титанат свинца-натрия-висмута), ЦТС-19, ЦТС-23 (цирконат
титанат свинца); ЦТСС-1 (цирконат-титанат свинца-стронция); ЦТБС
(цирконат-титанат бария-свинца); НБС-1 (ниобат бария-свинца).
Пьезокерамический (активный) элемент как основная дета#
всякого пьезоэлектрического преобразователя в зависимости с
геометрической формы, расположения на нем электродов и способа tf
включения может совершать различные колебания. Форма колебан!'
активного элемента ГАП в большой степени определяет его
эффектность как преобразователя энергии. Наиболее часто в ГАП используй
продольные колебания стержней, поперечные поршневые колебан»
(по толщине) пластин, изгибные колебания опирающихся и закрепле
ных по краю пластин, пульсирующие колебания тонких сферически
оболочек.
-242-
постоянных пьезокерамических материалов некоторых марок
Постоянная
р, кг/м3
Yf -Ю-1, Па
Yf -10"ll,na
5^1-1012,м2/Н
5^2-1012,м2/Н
5^3-1012,м2/Н
с% м/с
с^, м/с
езз/ео
рэ-10-7,Ом-м
Гр * Ю'8, Па
с/31-101О,Кл/Н
dg3-10lo,Kn/H
*31
*33
tg б при?, кВ/м:
<5
100
200
Класс I
ТБ-1
5300
1,05
-
8,9
—
10,7
4600
4200
1500
ОД
0,2
-0,45
1,00
0,2
0,5
2,0
3,0
120
400
ЦТСНВ-1
7300
0,62
0,49
16,3
-4,55
20,2
2900
2600
2200
10
0,2
-2,0
4,30
0,34
0,72
1,9
9,0
12
250
60
ЦТС-19
7330
0,72
0,60
15,1
-5,50
16,0
3120
3000
1540
10
-
-1,57
3,63
0,26
0,60
3,5
8,0
290
70
Класс II
ТБК-3
5400
1,15
1,05
8,4
-2,45
9,5
4700
4400
1200
1,0
0,18
-0,51
1,13
0,17
0,37
1,3
2,5
4,0
105
450
ЦТС-23
7400
0,74
0,67
13,2
-
15,0
3200
3000
1100
50
0,18
-0,75
1,50
0,20
0,41
0,75
2,0
3,5
285
300
ЦТСС-1
7300
0,89
0,79
-
-
-
3500
3300
1000
0,5
0,19
-0,8
1,8
0,26
0,55
0,7
1,0
1,5
260
ЦТБС-3
7200
0,82
0,75
11,3
-3,35
13,5
3500
3200
2300
10
0,2
-1,60
3,20
0,32
0,65
1,2
2,0
3,0
180
350
НБС-1
5600
1,12
1,00
11,6
-3,14
12,9
4460
-
2000
100
0,2
-0,87
1,83
0,17
0,34
1,0
245
Примечание: значения всех постоянных измерены при температуре 16
вости; с,- — скорость звука; е-^/е0 — относительная диэлектрическая проницаемость; рэ—
Тр — предел прочности при статическом растяжении; d^ — пьезоэлектрический модуль; к
ханическая добротность в воздухе.
20 °С; р — плотность; У,- иSfc — модули упругости и
податлиудельное объемное электрическое сопротивление;
— КЭМС; tK — температура (точка) Кюри; QM —
ме§ 9.4. Продольные колебания пьезоэлектрического
стержня
Возбудить колебания по длине стержня можно двумя способами:
использованием поперечного и продольного пьезоэффекта. Рассмотрим
продольные колебания пьезокерамического стержня при поперечном
пьезоэффекте. Пусть упругий стержень длиною / с малыми
поперечными размерами (Ь <^ /, б «С /) подвергается растягивающим или
сжимающим усилиям вдоль оси х (рис. 9.3, а). Если размеры Ъ и б малы по
сравнению с длиной упругой волны в стержне на рабочей частоте, то можно
пренебречь составляющими сил инерции по осям у и z. Тогда только
составляющая напряжения 7\(х) не равна нулю, и задача становится
одномерной.
Уравнения движения. Движение стержня по оси х описывает
уравнение G.34):
pd2Ux)/dt2=dT1(x)/dx, (9.25)
где Ь,{х) - смещение элемента стержня по оси х.
Для решения задачи об электромеханических колебаниях стержня
необходимо уравнение (9.25) дополнить уравнениями пьезоэффекта.
Если электроды нанести на грани, перпендикулярные оси z, и
приложить электрическое напряжение U (обратный пьезозффект) вдоль этой
оси, то составляющая напряженности Ez не меняется по длине стержня
и равна Е3 = U/6. Внешние силы Fx и F2 действуют в
перпендикулярном к полю Ez направлении, т. е. используется поперечный пьезоэф-
фект. В соответствии с выражениями (9.10) и (9.12) применим
уравнения пьезоэффекта
dlldx-s^J^d^E^ D3 = eT33E3^d31T1. (9.26)
Подставим в уравнение (9.25) значение 2\ из первого уравнения (9.26)
и учтем эквипотенциальность электродов, т. е. dEjdx = 0, тогда
получим
d2\ldt2 = [1/(р5^)]а^/дх2 = (с* Jд2Цдх2, (9.27)
где cf = (р5^)/2 - скорость распространения продольных волн
в стержне при Е = 0 (электроды замкнуты накоротко).
При гармоническом возбуждении Е3 =Ет exp (/wf) решение
уравнения (9.27) представляет функция
%(х, t) = [A sin (kx) + В cos (kx)] ехр (Ш), (9.28)
где к = со/с^ = со \ф5^ t - волновое число в материале стержня.
Подставим значение Е3 в первое уравнение (9.26) и определим
механическое напряжение в стержне
- 244-
5)
Рис. 9.3. Пьезоэлектрический стержень
(а) и его эквивалентная схема при
поперечном пьезоэффекте (б)
Для напряжений на концах стержня это выражение принимает вид
двух граничных условий
<*3i
* 11
1
5 ll
и
б
дх
d3i U
х-0 Ъ б ' Tl
X = l
1
5 11
дх
(9.29)
При прямом пьезоэффекте и разомкнутых электродах суммарный
поток индукции через диэлектрик равен нулю. Используем это
условие для определения Е3. Выражение для индукции примем в форме
уравнения (9.7):
(9.30)
(9.31)
Связь между ts и ег в этом случае [см. выражение (9.13)]:
- fc§J. Согласно формуле (9.18), КЭМС равен
31 31'^ 1 1°зз/'
Поток индукции равен И D3dxdy = / ^ D3dx = 0. После подстановки
о
выражения (9.30) и интегрирования находим
где ?15 ?2 - смещения торцов стержня; (?2 - IJ/1- средняя линейная
Деформация стержня.
Импеданс и резонансные частоты свободного стержня. Пусть торцы
стержня свободны, т. е. Тх \х = 0 = Тх \х = t = 0. Используя эти граничные
-245-
условия и выражение (9.28), найдем произвольные постоянные А и В,
а затем функцию смещения
6(х, t) = [d3l/(k6)][ sin (/ex) - tg (kill) cos {kx)]Um exp (icor). (9.32)
Установим связь между силой тока и напряжением. Для этого
определим деформацию д^/дх, подставим в выражение (9.30) и,
учитывая (9.31), получим
D3 = (езз + е зз^зЛ cos №*) + * (fc//2)sin (**)!) x
x(t/m/6)exp(iuf). (9.33)
Сила тока /, протекающего по пьезоэлектрическому стержню,
выражена через плотность тока j = dD/dt = toD и равна I-lljdxdy-
= !'соЬ$Шх. Подставив выражение (9.33) после интегрирования,
о
получим
/ = iV)CsU +1(d3ib/sf !J[2/(рс^5)] tg (fc//2)t/. (9.34)
Первое слагаемое представляет собой емкостный ток для
заторможенного стержня, поскольку емкость С5 = ts3 3Ь//б определяется
проницаемостью закрепленного (в направлении оси х) стержня. Во втором
слагаемом электрическая проводимость (множитель при U) выражена
отношением некоторой постоянной величины (d3,b/s^1J =N2 к
механическому сопротивлению z = - 0,5/pc^Sctg(fc//2). Из этого следует,
что N есть КЭМТ и второе слагаемое представляет собой динамический
ток, обусловливающий колебания стержня.
Определим электрическую проводимость колеблющегося стержня
исходя из выражения (9.34):
Y = I/U= [tob//6][ef з + е 13к*г1 tg (/c//2)/(/c/)]. (9.35)
Если воспользоваться соотношением (9.16), то проводимость можно
выразить через емкость свободного стержня:
У = /о)Сг[1 - к231 + k%xl tg (kl/2)/{kl)], (9.36)
зз/
На низких частотах (к/ <^ 1) tg (kl/2) ** kl/2, и тогда У = /0)Сг. Таким
образом, измерением импеданса на низких частотах можно
непосредственно определить диэлектрическую проницаемость свободного
стержня.
Условие kl = Bп + 1)л соответствует резонансу: проводимость
стержня (в предположении идеального диэлектрика) У=°°. Низшая
основная резонансная частота (при п = 0) равна
- 246-
ее определяют длина стержня, плотность и модуль гибкости
материала стержня, измеренные при замкнутых электродах. Антирезонансная
частота /а соответствует бесконечному импедансу, т. е. нулевой
проводимости. Тогда из формулы (9.36) 1 - к\г + к*х tg(fca//2)/(/ca//2) = 0,
откуда получаем условие антирезонанса
(л//а/с*) ctg(n//a/cf) = - k\J(\ - klx) (9.38)
или с учетом выражения (9.37)
[л/а/B/0)] ctg [л/а/B/0)] = - klJU - fcfj. (9.39)
Как указывалось выше [см. формулу (9.23)], КЭМС можно
определить измерением частот резонанса и антирезонанса. Если положить
/а - /0 = Д/, разложить котангенс в ряд и ограничиться одним членом,
то получим приближенное равенство
k231*n*bf/Df0). (9.40)
Заметим, в частности, что при известных значениях модуля s^
[его вычисляют по формуле (9.37), если измерена частота /0] и ej3 (ее
рассчитывают, если измерена емкость на частоте / <С /0) можно из
соотношения (9.31) определить пьезоэлектрический модуль.
§ 9.5. Эквивалентные схемы пьезоэлектрического
стержня
Совместное решение уравнений движения и пьезоэффекта при
определенных граничных условиях (механических и электрических)
позволяет определить параметры стержневых преобразователей,
не прибегая к эквивалентным схемам. Последние, однако, благодаря
наглядности и возможности использования хорошо развитых методов
расчета электрических схем широко применяют в теории
электроакустических преобразователей.
Эквивалентная электромеханическая схема ненагруженного
стержня. Пусть на торцы стержня действуют силы Fx и F2 (см. рис. 9.3, а),
тогда в граничных условиях (9.29) для механических напряжений
следует принять Тх \х = 0 = - FJS; Т1 \х = г = F2/S.
Для известной функции распределения амплитуд смещения по
Длине стержня (9.28) ?(х) = A sin (кх) + В cos (кх) выразим постоянные А
чВ через смещения торцов ?х и ?2:
- 247-
Вычислив деформации д\1дх на концах стержня, переходя от
смещений к скоростям (| =/(*)?), учитывая соотношение cf = l/(psfхс^)
и изменив направление отсчета смещений и сил, с тем чтобы
удлинение стержня было равно ^ + ?2> уравнения (9.29) приведем к виду
d31S 9CiS . kl .
U ft+E) + <Pfotg6F,; (9.41)
. / ftiEa) <Pcfog
/sin flu) 2
pcfS . _ fc/
(SiW 'Pc^Sg
f sin (fc/) 2
(9.42)
Определим силу тока через пьезоэлектрический стержень. Выше
было получено выражение для силы тока / = /cob I Ddx. Используя
о
выражение (9.30) для индукции, находим
5 ?| +|2). (9.43)
Выражения (9.41). .. (9.43) описывают поведение
пьезоэлектрического стержня как в режиме излучения, когда задана разность
потенциалов U, так и в режиме приема, когда заданы силы Fx и F2.
Из этих формул следует, что электрическую и механическую части
рассматриваемой колебательной системы можно представить
связанными через идеальный электромеханический трансформатор с
коэффициентом трансформации
N=d31S/(s^) = d31b/sE11. (9.44)
Эквивалентная электромеханическая схема ненагруженного стержня
при поперечном пьезоэффекте изображена на рис. 9.3, б.
Сущность сопротивлений на механической стороне схемы можно
установить, рассматривая область низких частот. При kl ^ 1 или
/ ^ Х/Bп) справедливы приближенные равенства
- ito/n/6;
/pc* tg (fcZ/2) * !Pc^SfcJ/2 = /com/2, (9.45)
где m = plS- масса стержня; См = s± J/S - механическая гибкость
стержня, измеренная при короткозамкнутых электродах.
Таким образом, на низких частотах пьезостержень представляет
систему с сосредоточенными параметрами.
Зная элементы эквивалентной схемы, можно определить амплиту
ды скорости концов стержня при заданной разности потенциалов V
на электродах („клеммы" Fx и F2 при этом попарно замкнуты,
поскольку торцевые поверхности стержня свободны) или напряжение холостой
хода UXmX при заданных силах, действующих на торцах стержня.
- 248-
В реальных условиях пьезоэлектрический стержень
преобразователя нагружен (одним или обоими торцами) на среду. Во многих
случаях контакт со средой осуществляется при помощи дополнительных
пассивных элементов, в частности массивных пластин-накладок или
переходных упругих слоев. Усложнение колебательной системы
стержневых преобразователей позволяет в определенных пределах
управлять его свойствами, в основе чего лежит лучшее согласование
преобразователя со средой, обеспечиваемое выбором оптимальных
соотношений параметров активного и пассивных элементов. Так, только одна
накладка, нагружающая торец пьезостержня, позволяет уменьшить
размер стержня для заданной резонансной частоты, увеличить КПД,
расширить полосу рабочих частот.
Рассмотрим колебания в упругой среде пьезоэлектрического
стержня, нагруженного с обоих концов накладками.
Эквивалентная схема нагруженного стержня. Пусть
пьезоэлектрический стержень, на торцы которого действуют силы (сжимающие или
растягивающие) F1 и F2, нагружен механическими сопротивлениями zx
и z2 (рис. 9.4, а). Если ско.рости концов кристалла |х и |2, то силе Fx
противодействует сила z1\19 силе F2 - сила z2|2. Условия равновесия
сил на концах стержня, согласно условиям (9.29), запишутся
следующим образом:
S
дх
х=0
s? dx
Рис. 9.4. Пьезоэлектрический стержень с нагруженными торцами
(а) и его эквивалентная схема при поперечном пьезоэффекте (б)
- 249-
— Zo —
В)
lisin(M)H
Рис. 9.5. Пьезоэлектрический стержень с накладкой (а) и эквивалентная
схема накладки (б)
Используя выражение для деформации торцов [см. равенство
(9.32)], граничные условия приведем к виду
г sin (kl)
(li
sin
—li +*ili - F±;
2
kl .
2
(9.46)
Этим уравнениям вместе с выражением (9.43) для силы тока,
протекающего через пьезостержень, соответствует схема, представленная
на рис. 9.4, б. Подчеркнем, что схема эта приведена к стержню, т. е.
силы F± и F« (если они имеются) на схеме приложены к торцам пьезо-
стержня, а |х и |2 - скорости колебаний этих торцов. Нас же будут
интересовать в режиме излучения амплитуды колебаний внешней
поверхности накладок, а в режиме приема - силы, действующие на
торцы пьезостержня, когда к поверхностям накладок приложены силы
звукового поля, в которое помещен преобразователь.
Пусть пьезостержень нагружен одинаковыми металлическими
пластинами толщиной /н и площадью 5Н соприкосновения с водой
(рис. 9.5, а).
Входной импеданс накладки, представляющей собой
плоскопараллельную пластину, на которую действует сопротивление среды z0,
определяет равенство G.36)
*н = [*0 + **н *(*0н1[1 + »(V*J tgtfc/y-1, (9.47)
где хн = (рс5)н; сн = л/A7р)н; кн = ы/сн; рн - плотность; Ун - модуль
Юнга материала накладки.
Отношение амплитуд колебаний поверхностей (внешней и
внутренней) накладки соответствует выражению G.37):
= [cos (/c/)H + f(V*n) sin(fcOJ. (9.48)
-250-
Чтобы построить эквивалентную схему накладки, достаточно из
схемы, приведенной на рис. 9.3, б, изъять электромеханический
трансформатор, и тогда она будет отвечать стержню только как
механической системе (рис. 9.5, б). Сила F, показанная на рисунке, - это сила,
с которой стержень воздействует на накладку; Fx - внешняя сила
(если она имеется), действующая на поверхность накладки.
Из теории излучения поршневой поверхности известно (см. § 3.3),
что в случае больших волновых размеров такой поверхности
сопротивление излучения равно z0 % (рс)в5н, где (рс)в - волновое
сопротивление воды. Также можно полагать (рс)в ^ (рс)н и выражения (9.47)
и (9.48) упрощаются:
(Рс)в5н rs
zH * —— + /(Рс5)н tg (fc/)H = -— + ixH tg (k/)H; (9.49)
cos2 (fc/)H cos2 (fc/)H
1/н/1о*1/СО5(^)н. (9.49a)
Полученные равенства становятся недействительными при (fc/)H
близком к л/2 или, что то же, при /н близком к Кн/4 (Кн - длина волны
в материале накладки).
Формула (9.49) позволяет представить сопротивление накладки
как последовательную цепь из активного сопротивления излучения,
приведенного к торцу пьезоэлектрического стержня [cos2 (fc/)H -
коэффициент приведения], и реактивного сопротивления накладки. Если
ввести в эквивалентную схему (см. рис. 9.4, б) сопротивление zH [см.
формулу (9.49)] вместо zx (или z2), то будет определена амплитуда
примыкающего к накладке конца стержня; для нахождения амплитуды
излучающей поверхности накладки надо воспользоваться
соотношением (9.48).
Пользуясь приближенным равенством (9.49) для входного
импеданса накладки, можно составить приближенную
электромеханическую схему (рис. 9.6). Силы Fx и F2, показанные на рисунке,
приложены к торцам стержня (внутренней поверхности накладок).
Эквивалентная схема пьезоэлектрического стержня при
продольном пьезоэффекте. В случае продольно поляризованного пьезостержня
электроды наложены на грани Ьб, перпендикулярные оси колебаний z
(см. рис. 9.3).
Решение волнового уравнения и его анализ, проводимые так же,
как и при поперечном пьезоэффекте, дают следующие результаты:
электрический импеданс ненагруженного пьезостержня
fcyPH - k233 tg (k//2)/(fc//2)], (9.50)
где k"=o)/cD; cD = l/vp5^- скорость распространения продольных
волн в стержне при D = 0 (электроды разомкнуты);
энергетический коэффициент связи
1з); (9.51)
-251-
i sin(frl)
HZ3
ф
||Л/:7
/ir ^ \Т ~- /г Ь I
7сг та
Рис. 9.6. Приближенная
электромеханическая схема нагруженного
пьезоэлектрического стержня
Рис. 9.7. Электромеханическая схема
пьезоэлектрического стержня при
продольном пьезоэффекте
частоты резонанса и антирезонанса
л/ л//0
— ctg
cD cD
Кзз> /а ~ __ "" -_ I
-1/2.
связь между частотами/0 и/а:
[H/0/B/a)]ctg[n/0/B/a)] = ^3.
(9.52)
(9.53)
Эквивалентная схема ненагруженного пьезостержня (рис. 9.7)
имеет две особенности по сравнению со случаем поперечного пьезоэф-
фекта (см. рис. 9.5, б). Во-первых, механические реактивные
сопротивления здесь определяет модуль гибкости холостого хода s§3> а не мо"
дуль sf3* Во-вторых, „действующая" упругость стержня меньше его
фактической упругости за счет пьезоэлектрической реакции,
обусловленной совпадением направлений механических колебаний и
электрического поля. Формально это выражается в наличии на
механической стороне „трансформатора" сопротивления j7V2/(o)C0), численно
равного приведенному емкостному сопротивлению продольно
закрепленного пьезостержня. Нетрудно, однако, убедиться, что на низких
частотах влияние пьезоэлектрической реакции на упругие свойства
стержня пренебрежимо мало. Представимсломощью формулы (9.51)
КЭМТ JV= d33S/(s§3l) в виде N= {k33S/l) y/t^3/s§3 и рассмотрим упругое
сопротивление при условии kl <^ 1. Получаем
N2
sin (fc/)
5
-+/-
pcDS
kl
S
N2l
uzS3s
¦A-*1з)в-'-
-252-
При наличии механических нагрузок на торцах стержня в виде
пассивных накладок (или слоев), как показано выше, в схему надо будет
ввести сопротивления этих нагрузок, включаемые в ветви
механической стороны.
§ 9.6. Продольные колебания пьезоэлектрической
пластины по толщине
Рассмотрим пьезоэлектрическую пластину, боковые размеры
которой / и Ь велики по сравнению с ее толщиной б (рис. 9.8). Электроды
наложены на большие грани, перпендикулярные оси z. Можно считать,
что по отношению к плоской волне, распространяющейся по толщине,
пластина закреплена по боковым поверхностям, так как вдоль
направлений / и Ъ смещения отсутствуют. Учитывая, что индукция D3 = const,
так как dDjdz = 0, целесообразно принять уравнения пьезоэффекта
с независимыми переменными D и S. В этом случае уравнения имеют
вид
Т =
1
3
зз
dz
Волновое уравнение для случая D = const
/Jfc CD
и ъ <-зз
dt2 p
его решение
\(z, t) = [A sin
дЧ
dz2
(kz)
д2Ъ
dz2 '
cos(fcz)]exp(/coO.
(9.54)
(9.55)
Используя граничные условия на свободных поверхностях (Т3 = О
при z = 0 и z = б), получим
, t) = [cDe33D3/{e§3cQ3(*)][sin (kz) -
- tg (fce/2) cos (kz)].
(9.56)
Разность потенциалов на электродах
пластины определяют интегрированием второго
уравнения (9.54):
U=\ E3dz-
X [sin (кб) + 2tg sin2
Рис. 9.8.
Пьезоэлектрическая пласти при
продольном пь' 1эекте
- 253-
Сила тока через пьезопластину / = шЬЮ3. Электрический импеданс
колебательной системы
z = U/I = [6/(кое*3 W)][l - e§3 tg
или
z = [1/0ЧоСо)][1 - kl3 tg {кЫ2I{кЫ2I (9.57)
где
fc?3=^3/H3C?3)- (9.58)
Из условия Z = О получаем уравнение для определения
резонансной частоты
(fco6/2)ctg(/Eo6/2) = fc|3- <9-59)
Максимум Z будет на частоте антирезонанса, определяемой из
уравнения fca6 = л, откуда/а = cD/B6).
Измерив частоты/0 и/а, можно рассчитать КЭМС
Ц3 = [л/0/B/а)] ctg [п/0/B/а)]. (9.60)
Эквивалентная схема рассматриваемой пьезопластины имеет вид,
представленный на рис. 9.7, но постоянные d33/s§3 и s§3 заменяются
соответственно на е33 и 1/с§3> т^к что скорость звука cD и
коэффициент трансформации N определяют по выражениям
где kt = e33/ у/г^3с^3 - КЭМС для колебаний по толщине,
параллельных направлению электрического поля.
§ 9.7. Пьезоэлектрический стержень
как осциллятор
Как показано в гл. 7, стержень (одиночный или составной) с
малыми поперечными размерами, совершающий продольные колебания,
в окрестности основного (низшего) резонанса можно представить
простым осциллятором с эквивалентными параметрами (см. § 7.3).
Коэффициент электромеханической трансформации. При анализе
колебаний тонкого пьезокерамического стержня как системы с
распределенными параметрами было получено выражение (9.44) для КЭМТ N,
определяемого отношениями F/U или I/v. В последнем случае /-
динамическая (определяемая механическими колебаниями) составляющая
электрического тока на входе активного элемента, v=|1 + |2-
-254-
суммарная скорость торцов пьезостержня (см. рис. 9.2, 9.6). При
поперечном пьезоэффекте, согласно формуле (9.44), N = d31b/sExl.
Переходя к эквивалентной схеме преобразователя, в которой
механическая сторона представляет собой простой контур (см. рис. 8.8),
КЭМТ iV3KB следует определять как отношение динамического тока / на
входной стороне к скорости колебаний vH рабочей поверхности (или
„току" в контуре шэкв - Сэкв - гм.п - zs).
Отношение коэффициентов трансформации эквивалентного
простого осциллятора и пьезокерамического стержня N3KB/iV = (^1+|2)/vH.
Обратимся к трехсекционной колебательной системе (см. рис. 7.16)
и рассмотрим распределение скоростей по ее длине на основной
резонансной частоте. На основании формулы (9.49а) отношение скоростей
i>1 торца стержня и vH внешней поверхности, рабочей накладки равно
t1/vH = cos(fc/)Hl. Связь между скоростями L и |2 можно выразить
через координату узловой (нейтральной) плоскости: \jk2~
= sin (?/')/sin [fc(/ - /')]. Получаем
=iVcos (W)H1 {1 + sin [k{l - Dl/sin (kl% (9.62)
Если ввести коэффициент асимметрии р = /7/, то формула (9.62)
принимает вид
#экв = {1 + sin [W(l - p)]/sin (kip)} cos (fc/)Hl, (9.63)
где cos(/c/)H1 = {l + [(pc5J/(pc5JJctg2(/c/p)}-1/2. В частности, для
стержня без накладок (р = 0,5) N3KB = 2N; в этом случае КЭМТ
определяют как отношение силы тока к скорости только одной стороны
преобразователя - его рабочей поверхности, а не к скорости обоих
торцов активного стержня, как при определении N.
Получим выражение для КЭМТ пьезоэлектрического
преобразователя [2]. Запишем уравнения, связывающие механическое и
электрическое состояния элемента объема пьезоэлектрического стержня,
в виде (9.12) и (9.10):
Dm = ZmnEn + dmkTk; St = sEkTk + dniEn. (9.64)
Подводимая к преобразователю-излучателю электрическая
мощность Рэ = ui, где и - напряжение на входе; / - сила тока в
электрической цепи. С другой стороны, Рэ можно определить в виде интеграла по
объему активного элемента:
Рэ = J En(dDmldt)dV = $ tmnEn(dEn/dt)dV +
v v
+ UniEn{dTkldt)dV. (9.65
v
Часть электрической энергии, потребляемой излучателем и преобра
зуемой в энергию механических колебаний, называют электромеха
нической Рэм. По формуле (8.21) Рэм = uNv0, где v0 - скорость колебаний
-255-
центра приведения. В равенстве (9.65) второе слагаемое определяет
мощность Рэм, следовательно,
uNv0 = 5 dniEn(dTk/dT)dV.
v
Отсюда находим общее выражение для КЭМТ
N = [l/(uv0)] J dniEn(dTk/dt)dV. (9.66)
v
Для примера определим КЭМТ стержневого преобразователя,
в котором используется поперечный пьезоэффект (см. рис. 9.3, а).
Торцы активного элемента предполагаем свободными. Такой ненагру-
женный стержень был рассмотрен в § 7.4 и определены функции
смещения, напряжения, собственные частоты колебаний и эквивалентные
параметры, в частности Г=(лУ?0//) sin(nx//), где модуль Юнга У
следует заменить на l/sfr
Подставив в формулу (9.66) функцию Т и значения Еп = u/б, dT/dt =
= /со Г, dni = d31, dV = Sdx, получаем
/
Nc = - [d3J(uvo)](u/6)i^o(l/s^)(nS/l) $ sin (nx/l)dx =
о
= W31/5f1)E/6)(cos л - cos 0) = Bd31/sf1)b.
Этот результат совпадает с выражением (9.63) при /н1 = 0, р = 0,5 и
N= d31b/s^ [см. формулу (9.44)].
Пьезоэлектрический стержень как система со многими степенями
свободы. Анализ колебаний пьезоэлектрического стержня как системы
с бесконечным числом степеней свободы целесообразно провести с
помощью энергетических соотношений. Энергетический метод,
предложенный Б. С. Ароновым и положенный им в основу общей теории
электроакустических преобразователей [2], позволяет учесть
различные формы энергий, участвующих в процессе работы преобразователя
в режимах излучения и приема. В этой теории исходными являются
уравнения Лагранжа
d dW dW d dW dW
Q~ _Q
dt dsoi dsoi ' dt dq dq
где sQi, q> и soi, q - соответственно обобщенные перемещения, заряды
и скорости, токи; W= WK + W3- WBH- IW/- для режима излучения,
W = WK + WaM - WBH - I Wj - для режима приема. Здесь WK -
кинетическая энергия; h/BH - внутренняя; W3 - электрическая (подводимая
к излучателю); WaM - механическая (воспринимаемая от
акустического поля); ZWj- энергия, распространяющаяся в среду и в элементы
конструкции.
В уравнениях Лагранжа вместо потенциальной используют
внутреннюю энергию. Связано это с тем, что h/BH зависит не только от
-256-
деформации активного элемента, но также от его электрического
(магнитного) состояния.
Распределение смещений s{F, t) и скоростей v(r, t) на рабочей
поверхности механической системы представим в виде разложения
по собственным формам колебаний /;(?):
sir, t) = Z soi№G); vfc t) = l voi(t)fi(r),
1=1 1-1
где soi{t) =soi(ro, t) и voi{t) = voi(ro, t) - смещения и скорости центра
приведения, координата То которого задана на рабочей поверхности;
п - число степеней свободы системы.
Если обозначить сумму обобщенных сил, действующих на систему,
через Е Fj, то уравнения Лагранжа можно записать в виде
j
d(dWjdvoi)/dt - dh/BH/dsoi ± Z Fj = 0.
Решение этих уравнений может быть, сведено к решению бесконечной
системы линейных алгебраических уравнений, коэффициенты
которых имеют смысл масс и гибкостей; будем их называть
эквивалентными параметрами. Таким образом, вместо исходной механической
колебательной системы с распределенными параметрами вводят
некоторую гипотетическую с сосредоточенными в центре приведения
параметрами. Собственные частоты со,- и формы колебаний /,-(г) находят как
решения задачи о движении механической системы при заданных
граничных условиях в предположении изотропности системы и
отсутствия потерь в ней.
За обобщенные координаты, определяющие положение
механической системы при известных формах колебаний, принимаем soz(f)
и vQi(t) = sOi{t), для электрической части (стороны) - u(t).
Далее необходимо получить выражения для энергий и уравнения
движения механической и электрической обобщенных координат.
Приведем полученные в работе [2] результаты для пьезокерамическо-
го преобразователя.
Кинетическая энергия механической системы
WK = A/2) ? pi I voifiCr)\2dV = I A/2)тй1&,
V 1=1 /=1
где та - эквивалентные массы, соответствующие формам колебаний
Внутренняя энергия преобразователя
где Wf = С0Г/^2 - запасаемая в заторможенном преобразователе E = 0)
электрическая энергия; U - подводимое напряжение; Со - статическая
п
емкость; WM = I 5j,-/Bc^) - механическая энергия, обусловленная
i=i F
обратным пьезоэлектрическим эффектом; с% - эквивалентные гибкости
п-614 . 257 -
для форм колебаний /, (г); Д W = I 5gz/BAcIZ) - энергия взаимодействия
/=1
электрических и механических полей; Асц - эквивалентные гибкости
для тех же форм колебаний.
Запишем выражение для части электрической энергии источника
возбуждения, расходуемой на деформацию активного элемента,
т. е. электрическую энергию, используя КЭМТ:
где Ni - КЭМТ для формы колебаний/;(г).
Акустическая энергия излучения
к = ы
S 1=1
где p{r, t) - акустическое давление на рабочей поверхности; s(r, t) -
нормальная составляющая смещения этой поверхности; /aI-(f) - сила
реакции среды на колеблющуюся поверхность, приложенная в центре
п
приведения. Комплексная амплитуда силы Fa,- = 2 ?azmvom> гДе zaim ~
i=i
импеданс излучения для формы колебаний /2(г); при т = / -
собственный импеданс, при тФ i - взаимный импеданс излучения,
соответствующий акустическому взаимодействию колебаний форм//(г) и/ш(г).
В режиме приема акустическое поле сообщает преобразователю
механическую энергию
^ам = 2 5О2- J рэ(г, t)fi{T)dS - Wa = Z 50/экв1- - h/a,
i=l 5 i=l
где/экв1 - эквивалентная сила при форме колебаний /z(f); p3{r, t) -
давление на заторможенной поверхности преобразователя; Wa -
акустическая энергия, излучаемая колеблющейся поверхностью приемника.
Комплексную амплитуду силы/ЭКВ1 представляют в виде
t)fi(r)dS = pCBScpikui,
Рис. 9.9. Эквивалентная электромеханическая схема
пьезоэлектрического стержневого преобразователя
- 258-
где рсв - акустическое давление в свободном поле; 5ср1 = $ fi(r)dS -
5
средняя площадь рабочей поверхности; /сд1- - коэффициент дифракции.
В результате рассмотрения баланса энергий при работе
преобразователя в режимах излучения и приема приходим к следующим
соотношениям:
для режима излучения
o ioi M;
1=1
N(U = {i[ama - l/(uc«> -1/(иДс,,)]
П
J
для режима приема
щ- l/(coc«)- l/(*> Дед)]
где rM ш- и Яэ п - сопротивления соответственно механических потерь,
возникающих при деформациях колебательной системы и элементов
конструкции, и электрических потерь, обусловленных изменением
электрических полей.
Указанные соотношения отвечают эквивалентной
электромеханической схеме (рис. 9.9) преобразователя-излучателя (ключ в
положении „Я" и преобразователя-приемника (ключ в положении „Я").
§ 9.8. Устройство стержневого пьезокерамического
преобразователя
На рис. 9.10 показан стержневой пьезокерамический
преобразователь. В корпусе 5 размещен активный элемент, состоящий из
излучающей (приемной) накладки 1, пьезокерамического пакета, склеенного
из отдельных пластин 11, и тыльной накладки 9. Для акустической
развязки рабочей накладки от корпуса между ними установлена
резиновая прокладка 3, обеспечивающая одновременно герметизацию
этого места соединения. Тыльная накладка акустически развязана от
корпуса с помощью резиновой прокладки 10. Герметизация
внутренней полости преобразователя, которая обычно заполняется каким-либо
инертным газом, например элегазом, обеспечивается крышкой 6,
установленной на уплотнительном кольце 8. В крышке имеется
герметичный кабельный ввод 7, к которому присоединяются монтажные
провода 4 и 12, объединяющие соответствующие электроды пьезокерами-
ческих пластин. Для крепления преобразователя к объекту на его
корпусе выполнены специальные фланцы с отверстиями под крепежные
17* - 259 -
Рис. 9.10. Устройство
стержневого пьезокерами-
ческого преобразователя
болты. Акустический экран 2 из пористой
резины предотвращает тыльное излучение
(прием) выступающих частей рабочей
накладки. Поскольку внутренняя полость
преобразователя заполнена газом, то это
обеспечивает хорошую акустическую экранировку
остальных элементов колебательной системы.
Выведем расчетные соотношения,
определяющие основные параметры и
характеристики стержневых преобразователей в
режимах излучения и приема.
Учет потерь в преобразователях.
Приведенные выше эквивалентные схемы
стержневых пьезопреобразователей не полны, так
как не учитывают потерь механической
мощности из-за демпфирующих свойств
активных и пассивных материалов (т. е.
внутренних потерь) и необратимого расхода
энергии в элементах конструкции, а также
потерь электрической мощности вследствие
электрической энергии в пьезоактивных элементах,
исследования показывают, что внутренние
рассеяния
Экспериментальные
потери энергии колебаний в пьезокристаллах и в материале накладок
значительно меньше, чем потери в местах склейки отдельных пластин
или сегментов и пакета (блока) с нагружающими накладками, в местах
крепления, в экранах и др.
Принимая силы, связанные с наличием механических потерь,
пропорциональными колебательной скорости, можно эти потери учесть
введением в схему (в параллельные ветви механической стороны)
эквивалентных активных сопротивлений гм п, величину которых
оценивают измеренным акустико-механическим КПД.
Вследствие неидеальности диэлектрика пьезоэлемента через него
проходит ток проводимости, вызывающий рассеивание части
подводимой к нему электрической энергии и нагрев активного элемента. Эти
диэлектрические потери характеризует tg б F - угол потерь)
или электрическая добротность Q3 = ctg б, равная отношению
реактивного тока /с к активному /п или отношению реактивной мощности
к активной (мощности Рэп). Для учета потерь в электрическую часть
схемы вводят эквивалентное сопротивление R3 п. При параллельном
соединении R3 п и емкости Со получаем /с = UuC0; In = U/R3 п; tg 6 =
= /п//с = 1/(соЯэ.пС0).
Эквивалентные схемы. Схему стержневого излучателя для
поперечного пьезоэффекта можно получить из общей электромеханической
схемы (см. рис. 9.4, б), если в ней „клеммы" Ft и F2 попарно замкнуть
накоротко и к электрической стороне приложить переменное
напряжение.
Эквивалентную схему излучателя с накладками для продольного
пьезоэффекта получают, используя схему, показанную на рис. 9.7.
- 260-
Для этого на механической стороне в ветви с „токами" |х и |2
включают соответствующие сопротивления накладок ^ и z2, а „клеммы"
Fx и F2 попарно замыкают.
Для построения эквивалентной схемы приемников надо в общей
схеме (см. рис. 9.4) положить U = 0 и выходную (электрическую)
сторону или разомкнуть (приемник не нагружен), или замкнуть на
сопротивление нагрузки, а за F1 и F2 принять эквивалентные силы давления
акустического поля. При одностороннем приеме „клеммы" Fx или F2
следует накоротко замкнуть. Кроме того, как показано выше (см. § 8.4),
необходимо статическое реактивное сопротивление l/(/G)C0) привести
к механической стороне преобразователя; именно сопротивление
N2C/wC0) изменяет резонансную частоту преобразователя в режиме
приема по сравнению с такой же частотой при излучении.
§ 9.9. Расчетные соотношения для режима
излучения
Рассмотрим пьезокерамический излучатель с осью у,
параллельной излучающей поверхности (см. рис. 9.4, а). Напряжение U
приложено к электродам на гранях, перпендикулярных оси z, т. е.
используется поперечный пьезоэффект. Накладка 1 нагружена водой, т. е.
является рабочей, тыльная накладка предполагается идеально
экранированной.
Расчет одностороннего излучателя проведем по приближенной
эквивалентной схеме (см. рис. 9.6), исключив из нее сопротивление
нагрузки тыльной накладки. Введем обозначения:
— iv /sin (kf\ — — 17 • /fv fp fW/9^ ¦+• v tP f W^ = 17 *
(aq/ «эли \Л,(^ IZ<, I [Aq ife \l\,l/ AJ T -^Hl ° V 'HI 2J
/[л*0 tg (/c//2) + xH2 tg (fc/)H2] = /z3; rM#n + (pc)B5H1/cos2 (/c/)H1 = r;
z2 = r + /z2. (9.67)
Скорости |х и|2 на схеме- это скорости торцов пьезостержня. Для
определения колебательной скорости излучающей поверхности |н1
воспользуемся соотношением (9.49а) и запишем
NU/cos (kl)Hl iz3
- izx + iz2z3/(z2 + iz3) z2 + iz3
NU/cos(kl)Hl
iz3)/z3+z2
(9.68)
Приравнивая мнимую часть знаменателя нулю, получаем условие
достижения максимальной скорости, т. е. условие механического
резонанса
z^+z^-z^^. (9.69)
-261-
Таблица 9.2. Формулы для расчета стержневых излучателей
Система
Полуволновая
С одной
накладкой
С двумя
разными
накладками
Пьезоэффект
Поперечный
Продольный
Поперечный
Продольный
Продольный
Условия резонанса/0 и антирезонанса/а
с? . 1
10-21 2/V^T'
л//о п//0
р3 <р3
tg(coo//cf) + q tg(w
Q tg Ml - ctg2
сн (
cH J °g с
*33
сз * с
С„2
wa i w?
.Ч1 С ^ Jctg
- t? Wa/Hl
CH1
(л//а/
= -*.
+
2cP\
coo//'
Hi
1]
g-
' p )
u
2/
= 0
^33
g~
CH2
(
a
•6
2
1
ctg(n//a/c^) =
l-*fc)
1
2/Vps^3(l-fcf7)
ctg[Wo//Bcft]
0H//Bc?)
/ Г o)a/
p Ltg c?
г chi
v"'
D +
CH2
1-2
^33
1 k2
1 — /СЗЗ
- 262-
Эквивалентные параметры тэкв, Сэкв
Механическая
добротность QM
КЭМТ N,NC
— Р/5;
1
1 cos2 (WJH/O
Т р/5 рн н
2 Cos2(«//cf)
+— р/5
н 2
1 COS2(C0p/Hl/CHl)
(р/5)н
где ctg (cOp/Vcf) = q tg (wp/Hi/cHi)
Лам
Ь)ртэкв
Лам
(d33/sb33)S/l;
nN
nN
nN
533 /
sf3/
- 263-
Система
Пьезоэффект
Условия резонанса/0 и антирезонанса/а
С двумя
одинаковыми
накладками
0н
о tg = ctg
Продольный
2с? 1-fcf, и,/
Система
Пьезоэффект
Акустическая мощность Ра
Полуволновая
С одной
накладкой
Поперечный
С двумя
разными
накладками
С двумя
одинаковыми
накладками
Продольный
Поперечный
Продольный
Продольный
J {Nq[/naMtg[0H//Bcf)] X
(Ре) A f ctg[aH(/BC3D)] - 2fc|3Cf /(Шо/)}а
tg(coo(/ cg)+ q; tg(coo/Hl/cHl Ь
-— —
Продольный
X И
4N2Lr2 cos2 @H/H/cH)
Примечание: индекс „н1„ относится к первой накладке (рабочей); индекс „н2„ - ко
-264-
Продолжение табл. 9.2
Эквивалентные параметры тэкв , Сэкв
Механическая
добротность QM
КЭМТ N,NC
1 cos2 (G)D/H/cH)
— р/5 и —
2 sin2[(Op//Bcf)
d33S d33S
Статическая
емкость Со, Со с
Динамическое активное сопротивление
Примечание
efjW/б : СгП2
е|3Ь6//; С0п2
е ззЬ^б > tS33bUh
(wp/Hl/cHl)} х
tg (ыр/н2/сн2)
C0n2
второй накладке (тыльной); индекс „с" — к секционированному активному элементу.
= (pcS)H/(pcf S)
g"=(pc5)H/(pc?5)
-265-
Скорость колебаний при резонансе
M//cos((o0/Hl/cHl) M//cos((o0/Hl/cHl) z3
s _ - - - - 5 (9.70)
где r5o = (Pc)B^Hi/cos2 ("o^hi^hi)- Определим акустико-механический
КПД как отношение
Лам - Ло = [Wcos2 (aH/Hi/cHi)][rM.n +
+ (Pc)bSh1/cos2 (Wo^Hi/^i)]. (9.71)
После простых преобразований и с учетом условия (9.69) получаем
.
(Рс)в5н1 *з
Акустическая мощность при резонансе
[M/cos(Qo/Hl/cHlno)]2 (z2+z3J
(9.72)
Подставляя значение JV из формулы (9.44), находим мощность пьезоке-
рамического излучателя или рассчитываем эффективное значение
напряжения, которое надо приложить к пьезостержню при резонансе,
чтобы получить заданную удельную мощность ^а.р.уд = ^a.p/^Hi-
На частотах значительно ниже основной резонансной частоты
можно принять zx » z2; z% » z3; z2 » г, тогда скорость из формулы
(9.68) и акустическая мощность соответственно будут равны
(9.73)
В частном случае симметричной колебательной системы
(одинаковые накладки) z2 = z3 и резонансное уравнение принимает вид
z2 = 2zx или
(рс5)н tg (ОH/Н/Сн) = pcExS ctg [GH//Bc^)]; ' (9.74)
акустическая мощность
i>a.P = [2W/ cos (со0/н/Сн)Ло]2[(рс)в5н]-1. (9.75)
При использовании продольного пьезоэффекта (см. рис. 9.7)
условие резонанса (9.69) остается справедливым при следующих значениях
входящих в него сопротивлений:
- 266-
zx =xjsin(kol) - ЛГ2/@HС0); z2 =xo tg(fco//2) +
+ xH1 tg(fco/)H1; z3 =x0 tg(fco//2) + xH2 tg(fco/)H2;
г = гм.п + (Pc^h^cos2 (/co/)H1,
где x0 = Pc^S; L = o)o/c?; (fco)H ^2 = coo/cH3>2^V = d33S/(s§3l).
В формулу (9.72) для акустической мощности надо также подставить
соответствующие значенияN, z2,z3.
Для секционированного преобразователя, у которого активный
элемент набран из п склеенных пластинок малой толщины
(см. рис. 9.10), при параллельном соединении электродов КЭМТ iVc
в п раз больше, чем N сплошного стержня. При поперечном и
продольном пьезоэффекте соответственно Nc = d31bn/s^1=d31S/{s^1h) и Nc =
/(i) /(§)
33i3 333
В случае продольного пьезоэффекта и большого числа пластин
секционированного стержня его эквивалентная схема будет, как при
поперечном пьезоэффекте (см. рис. 9.4, б). Действительно, если h < /
и h <С X (к - длина волны в пьезокерамике), напряженность поля Е
при параллелльном соединении пластин по всей длине стержня
одинакова, и параметры схемы для этих условий отвечают режиму Е = const,
в частности Е = 0 (короткое замыкание). Практически условия
однородности поля выполняются при п > 6 и h ^ 0, IX.
По изложенной методике можно произвести расчет излучателей
с различными модификациями колебательной системы и условиями
использования. В табл. 9.2 приведены формулы для расчета
параметров односторонних излучателей при частоте механического
резонанса, колебательные системы которых содержат сплошные и
секционированные активные элементы с использованием поперечного и
продольного пьезоэффекта, две различные или одинаковые накладки,
одну накладку или не имеют накладок (полуволновая система).
§ 9.10. Расчетные соотношения для режима приема
Как и в режиме излучения, расчет одностороннего приемника
проведем по эквивалентной схеме, представленной на рис. 9.4, б,
принимая силу Fx =F3Kb = Po^hi (Po "" давление в падающей волне) и
замыкая накоротко „клеммы" F2. Оставляя принятые обозначения
элементов схемы [см. соотношения (9.67)], сопротивление zx запишем с учетом
реакции электрической стороны; именно zx =zx +ЛГ2/(соСо). Силу F3KB
приведем к стержню, используя формулу (9.49а): FdKB = pSH1/cos(fc/)Hi
и по схеме определяем скорость колебаний
. P0SHl/cos{kl)Hl iz3
z2 + iz3(- ifj/li^g - zj] i(z3 - zj
-267-
poSHl/cos(/c/)H1
Максимум | будет при равенстве нулю мнимой части знаменателя, т. е.
z1z2+zjLz3-z2z3=0. (9.77)
Равенство (9.77) отражает условие резонанса приемника, оно
содержит как реактивные механические, так и приведенное реактивное
электрическое сопротивление. Частоту G)o', определяемую из уравнения
(9.77), называют частотой электромеханического
резонанса. Разница между частотами G)o' и G)o (резонансная частота
излучателя) зависит от КЭМС; чем больше к%ф (и КЭМС материала),тем
она больше.
Напряжение на разомкнутых электродах UXtX = |iV/(coC0). В
частности, при резонансе (с учетом механических потерь)
Np0SHiVcosK'hi/chi) z3
[(pc)BSHi/cos2K
>0nocosKVc)H1
(9.78)
Чувствительность холостого хода при резонансе Л/Х.х =?= U0/p0. На
низких частотах, при которых гхУ> z29zt^> z39z2^ г, чувствительность
Мн.ч = [N5H1/(z1/0)H.4C7)]z3/(z2 + z3), (9.79)
где Сг- электрическая емкость свободного пьезостержня.
Резонансное уравнение симметричного приемника (z2 = z3)
2z1 = z3 или
(pc$)H1tgp- =PcfSctg-^- + —^i-. (9.80)
Чувствительность симметричного приемника при резонансе
1М„1 = 2ЛГПО cos (UolJcH)/[(Qc)BUoCol (9.81)
Из выражения (9.80) видно, что приведенное значение механической
гибкости стержня меньше значения С^ = sfxl/S, поскольку s^ = 5^A -
- /с31) < sf19 и, следовательно, резонансная частота выше, чем в
режиме излучения. Для пьезоматериалов с малой электромеханической
связью (/с31 <ЗС 1) равенство (9.80) переходит в условие (9.74)
механического резонанса.
-268-
Таблица 9.3. Формулы для расчета стержневых приемников
Колебательная
система
Пьезо-
эффект
Условие электромеханического резонанса
Чувствительность при резонансе Мх#х
Полувол-
С одной
наклад-
С двумя
одинаковыми
накладками
Попереч-
ный
Продольный
Поперечный
ПродольПопереч-
Продольный
Ь; nN
[G)p//Bcf)] ctg [G)p7/Bcf)] = - fcf x(l -
sE33l'
¦Ь; nN
d33S
d31
b; nN
-; nN
tg 4
cop/ 2cf
со'/н 6)'/
q tg + tg -~f = 0
CH C3
2cf
G)p/
COp/H
ctg
2cf
2c?
sin —— tg
(pc)BG)pC0 cH 2c?
2NnaMcos((Op/H/cH)
(pc)B(o'pCo
Продолжение табл. 9.3
Колебательная
система
Пьезо-
эффект
КЭМТ NtNc
Условие электромеханического резонанса
Чувствительность при резонансе Мх
С двумя
разными
накладками
Поперечный
b;nN
о
I
Продольный
in(a)^/C^) 1-fcf, Qp/
[Upf UpJH1
2tg^+qitg"^T+
cH2
wp;hi 1Г wpr
tg -ЛТ
cH1 JL 2cf
(Op?
2c?
^P H2 I . ^P
cH2 J L 2c?
COp/Hl
CH1
(pc)Bo)'pCo
tg[G)p7/Bcf)]
CH2
Примечание:д = (pc5)H /(pcf 5); g =
;q1? =(pc5)H1>J/(pcf S); q1? =(pc5)H]>2/(pc?5).
В табл. 9.3 приведены формулы для расчета стержневых
преобразователей в режиме приема при частоте электромеханического
резонанса.
§ 9.11. Импеданс (проводимость) пьезоэлектрического
преобразователя
Электрический импеданс Z представляет собой параллельное
соединение емкости Со заторможенного стержня, сопротивления
диэлектрических потерь Яэ п и приведенного динамического импеданса ZM:
Z =[шС0 + 1/ЯЭвП + 1/(Ям + iXj]'1 = R + iX.
Электрическая проводимость преобразователя
1/Z = 1/Дэд + RJ\ZJ> + /[о)С0 - XJ\ZJ*] = G + /У.
На частоте аH механического резонанса (Хм = 0) эквивалентная
электрическая схема преобразователя содержит параллельную цепь
из COiRm и Дм.
Определим Z стержневого излучателя с двумя различными
накладками (см. рис. 9.4, б). Для упрощения записи введем обозначения:
xj[i sin (fc/)] = - izx; ix0 tg (kl/2) = iz2; zH, 2 - входные сопротивления
накладок; Zo - электрический импеданс заторможенного
преобразователя.
Импеданс механической стороны
z = - /z, + (iz2 + zHl)(/z2 + zH2)/Biz2 + zHl + zH2). (9.82)
После подстановки значений z19 z2, zHl2 = ixHlotg(kl)Hlo и простых
преобразований получим
tg (kl) + fll tg (fc/)Hl + q2 tg (fc/)H2[l - fll tg (fc/)Hl tg (kl)]
tg (fcOIfli tg (fc/)Hl + a2 tg (k0H2 + 2 tg (kl/2)
(9.83)
где fll = xHl/x0; a2 = xh2/a:0. Приведенный импеданс ZM = z//V2 соединен
параллельно с Zo, так что входной импеданс излучателя Z= Z0ZM/(Z0 +
) /( 2)
M) 0( 0)
Уравнение резонансных частот получим из условия Z= 0, т. е. z = 0
(см. табл. 9.2).
Уравнение антирезонансных частот находим из условия Z= °°, т. е.
z + Z0N2 = 0. Например, для продольного пьезоэффекта, используя
формулы (9.44), (9.18), (9.16), (9.27), получаем
к*
зз
sf3// /а)е3г3A - k233)S ikl
-271-
I2| * (z Г1 соответствующее уравнение для частот а)а
приведено в табл. 9.2.
На рис. 9. И показаны графики
модулей IZI и l/IZI в зависимости от частоты.
Минимум импеданса (максимум
проводимости), т. е. резонанс, наблюдается на
частоте 0I5 максимум импеданса (минимум
проводимости), т. е. антирезонанс, - на
р), р,
и ш1 ш2 ш частоте со2. Если бы преобразователь не
имел активных сопротивлений, то экстре-
Рис. 9.U. Зависимости мо- мальные значения импеданса (проводи-
дулей импеданса и про- мости) находились бы точно на частотах
водимости преобразова- w0 механического и 0)^ электромехани-
теля от частоты ческого резонансов.
§ 9.12. Цилиндрический пьезокерамический
преобразователь
Цилиндрические преобразователи гидроакустических антенн
состоят из некоторого, иногда достаточно большого числа тонких
пьезокерамических колец малой высоты. Эти преобразователи
обладают рядом достоинств: простотой конструкции колебательной
системы, устойчивостью к действию гидростатического давления,
возможностью регулировки ширины резонансной кривой изменением
толщины стенки.
Рассмотрим колебания тонкостенного пьезокерамического кольца
с электродами на внешней и внутренней поверхностях, служащими
как для поляризации в радиальном направлении (?3), так и для
приложения (снятия) переменной разности потенциалов (рис. 9.12). Если
к электродам подвести переменное напряжение, то благодаря
обратному пьезоэлектрическому эффекту по касательным к средней
окружности G\) возникают механические напряжения, которые
преобразуются в радиальную силу, вызывающую радиальные колебания
кольца. В случае тонкого изотропного кольца F < a, h «С а) все его
точки совершают синфазные и одинаковые радиальные смещения,
которые являются основными колебаниями кольца и носят название
нулевой моды. Кольцо в этом случае можно рассматривать как
простой осциллятор.
Выделим элемент кольца между двух осевых сечений с
центральным углом dcp. Масса элемента равна pa50dcp (p - плотность материала;
So - площадь осевого сечения). На ненагруженное кольцо с малыми
поперечными размерами будут действовать лишь тангенциальные
напряжения Тг (и силы FJ, не равные нулю, а напряжения Т2 = Т3 = О
на свободных поверхностях и внутри кольца. Деформация 5Х в
направлении касательной к средней окружности связана с деформацией 53
в радиальном направлении очевидным соотношением Sx = ?/a, где ? -
радиальное смещение. Далее, поскольку электроды на боковых
-272-
поверхностях являются
эквипотенциальными, составляющие
напряженности Ех = Е2 = 0 на этих поверхностях,
а также по всему объему кольца, и
только Е3 Ф 0. Поэтому запишем
уравнения пьезоэффекта в виде равенств
(9.10) и (9.12):
Аз
(9.84)
Рис. 9.12. Пьезокерамическое
кольцо с электродами на
боковых поверхностях
Уравнение движения, импеданс
и резонансные частоты ненагруженного
кольца. Проектируя силы Ft на
направление биссектрисы угла dip и учитывая
малость угла dip, получим действующую на элемент кольца
радиальную силу dFr ^F^ip = T^Qdip. Чтобы получить уравнение движения
элемента, приравняем dFT силе инерции:
QaS0dipd2^/dt2 =- TjSgGfcp. (9.85)
После подстановки значения Гх из первого уравнения (9.84) с учетом
равенства S± = ?/a находим
)]ЕЭ, (9.86)
где
:cf/a
(9.87)
есть собственная (резонансная) угловая частота электрически
свободного кольца {Е = 0). Величина с\ - это скорость распространения
продольных волн в стержне при коротком замыкании электродов,
несколько отличающаяся от скорости распространения волн в цилиндре
или неограниченной среде. Условие резонанса (9.87) можно
представить в виде 2ла = Ло, где Хо - длина звуковой волны в кольце,
рассчитанная по скорости звука в стержне. Таким образом, при резонансе
длина продольной волны равна длине средней окружности кольца.
Более точная теория колебаний цилиндра показывает, что при
отношении б/a ^ 0,25 формула (9.87) вносит пренебрежимо малую
ошибку [9]*.
У пульсирующего кольца как простого осциллятора
эквивалентная масса совпадает с фактической массой т. Упругость 5 или гибкость
См кольца определяют из равенства s = @2ш:
* В этой же работе показано, что приближенная теория справедлива и при
0,25 <Ь/а < 1,5.
18-614
- 273-
5 = [1/(оар5&)]2лра50 = 2nS0/(as^) = 1/С*. (9.88)
В случае гармонического возбуждения Е3 = Ет exp (icof) решение
уравнения (9.86) для установившегося режима
g-[d3ie«S/(MS-«»)lE3. (9.89)
Используя это выражение совместно с уравнениями пьезоэффекта,
можно найти электрическую проводимость преобразователя.
Определим ток, протекающий через преобразователь, к которому
приложено переменное напряжение и = &Е3. Так как кольцо тонкое,
= 2niG)ahD3. С помощью выражений (9.84), (9.31) и (9.16) получим
2nmahz3s3 a§1j3g
/ = и+ и, (9.90)
б б(со2о-оJ)
где ef з ~ диэлектрическая проницаемость заторможенного кольца
(для нулевой моды колебаний).
Первое слагаемое в формуле (9.90) есть емкостный ток 1с = шСои,
поскольку при б <ЗС а величину 2ne^3ah/6 можно считать статической
емкостью цилиндрического конденсатора*. Используя решение (9.89) и
выражение (9.31), нетрудно привести второе слагаемое в (9.90) к виду
/д = Bnd31h/s?1)?), где | = ig)? - радиальная скорость колебаний
кольца. Таким образом, ток /д обусловливает колебания механической
системы преобразователя и является динамическим током. Величина
(9.91)
согласно формуле (8.16), есть коэффициент электромеханической
трансформации рассматриваемого преобразователя.
Из выражения (9.90) определим проводимость кольца (со
свободными боковыми поверхностями) в динамическом режиме:
l/Z = //f/=[2n/a)a/]/6][e3S3 + fc21e^3wg/(aJ- со2)]. (9.92)
При со -> со0 проводимость 1/Z-* °° и наступает резонанс, частоту
которого определяют по формуле (9.87). Антирезонансная частота оз.
отвечает нулевой проводимости, и с помощью соотношений (9.16)
из (9.92) находим
Ua-ug/d-fcfJ. (9.93)
Отсюда следует, что КЭМС можно вычислить по измеренным
значениям частот 0H и 0)а.
* Емкость цилиндрического конденсатора С - 2neh/ln (^/rj = 2nehAn A +
b 2neha/6.
- 274-
Рис. 9.13. Эквивалентные схемы цилиндрического приемника: а -
электромеханическая; б - электрическая
Преобразуем выражение (9.92) для проводимости, используя
значения к219 0)^ jy^H ВВедем в него массу и гибкость кольца, тогда
получим
шС0 + [шЬ - /
I'1. (9.94)
Равенству (9.94) или, что то же, равенству (9.90) соответствует
параллельное соединение Со и цепочки L-C, причем С =
L = m/N2. Согласно уравнению (9.10), при ? = 0 (и | = 0) 7\ = d31l
Заменяя Е3 = и/6 и переходя к радиальной силе Fr = 2nf1S0 =
= [2nd31S0/(bsfl)]u9 находим выражение (9.91): N = Fr/u\^ = 0 = 2nd31h/sf1,
соответствующее определению (8.16).
Электромеханическая схема нагруженного пьезокерамического
кольца. Общая структура эквивалентной схемы известна (например,
см. рис. 8.8), и КЭМТ также определен, поэтому построение схемы для
режима излучения понятно. На электрической стороне напряжение
от внешнего источника приложено к параллельной цепочке Со - #эп,
на механической стороне - последовательная цепочка т - С^- гмп -
- zs, при этом zs = rs + mms.
Для построения эквивалентной схемы в режиме приема надо
в уравнение движения (9.85) ввести силу F = Fm exp (iotf), действующую
а)
S)
Рис. 9.14. Сегментированное пьезокерамическое кольцо (а)
и отдельная призма (б)
- 275-
Таблица 9.4. Формулы для расчета цилиндрических преобразователей
Тип
кольца
K3MTN
Динамическое активное
сопротивление #M.p на
частоте С0р; RM на
частотах, близких к СОр
Механическая
добротность ?)м
Сплошное
2п
2n(pc)Bah/(№r)aM);
(РС)
Сегментированное
2л
(РС)В
Тип
кольца
Статическая
емкость Cq
Электромеханическая
добротность
Рэм
Чувствительность в режиме приема
на частоте СО '
Сплошное
Сегментированное
6hn
Примечание: п — число призм; СОр — угловая частота механического резонанса;
тивления излучения на рассматриваемой частоте (на резонансной частоте принимаем
со стороны звукового поля и равномерно распределенную по внешней
поверхности кольца. Уравнение принимает вид
(9.95)
где р - звуковое давление в падающей волне.
Делая те же подстановки и преобразования, что и при решении
уравнения (9.86), получим
- 276-
Акустическая мощность Рар на частоте top;Pa на частотах, близких к top;
Ран на низких частотах
cf J (о)н/со0J (LT/6J
— Цр]2]
Чувствительность в режиме приема
М на частотах, близких к top
аы(Рс)ве "A - /eft) ао [1 + О|м(ы/Ыр - Ыр/ыJ]1'2
«e(pc)Be?,a-*)-«L ЭМЧ U/J
Мнч на низких
частотах
а
е зз
ь 33 0
top — угловая частота электромеханического резонанса; а — коэффициент активного сопро-
a 1)*a 1Aa)TW
Частное решение этого уравнения для установившихся колебаний
(9.97)
Пусть преобразователь возбуждается только силой F= 2nahp.
Полагая ?3 = 0, определим ток, протекающий через преобразователь. Для
-277-
этого из первого уравнения (9.84) найдем 7\ и подставим во второе
уравнение, далее, используя формулу (9.97), получим выражение для
D3 и затем для силы тока:
F, (9.98)
р
6A - Я2) 6A - Q2)
где П =о)/оH. Если в выражение (9.98) ввести массу и гибкость
кольца, то
2nd31hF NF
1 = - = . (9.99)
fcfj 1/(С$] zE
На рис. 9.13, а представлена эквивалентная схема, отвечающая
равенству (9.99); в схему добавлено сопротивление потерь гм.п. На
электрической стороне сопротивление Zo = 1/(jg)C0).
Для определения напряжения холостого хода Uxx
(чувствительности Мхх) следует из уравнения (9.84), учитывая значение ? по
формуле (9.97), найти Е3. Полагая Dm = 0, получим
ихл = 6\Е3\ = (d31a/tT3)(\ - Q2)[Q2A - к231) - 1]-*р. (9.100)
По эквивалентной схеме ЭДС на выходе приемника
UXmX = /Zo = NFZ0/{zE + iV2Z0) = NFZjzD. (9.101)
Здесь учтена реакция электрической стороны на механическую:
сопротивление Zo приведено к входной стороне приемника.
В соответствии с теоремой об эквивалентном генераторе построим
электрическую схему приемника (рис. 9.13, б), в которую входят
механическое и электрическое сопротивления потерь.
Сегментированный (секционированный) цилиндрический
преобразователь. Для повышения эффективности преобразователя, а также
в случае необходимости изготовления колец больших диаметров (для
низких частот) их набирают из тонких призм, приклеенных друг к
другу (рис. 9.14). Электроды наносят на боковые поверхности призм,
поэтому электрическое поле в кольце направлено по средней
окружности, и деформация кольца происходит в направлении поля. Призмы
электрически соединяют или параллельно, или последовательно.
Принимая сечение призмы прямоугольным (скос малый),
напряженность поля определим как Е3 = U/t, где t - расстояние между
электродами, измеряемое по средней линии призмы. Согласно уравнению
обратного продольного пьезоэффекта, Г3 = - {d33/s§3)E3 и
возбуждающая радиальная сила, как и для сплошного кольца, равна Fr =
= 2nd33E3&h/s$3 =Bnd33/s§3){Wt)U. Зная Fr, находим КЭМТ
сегментированного кольца
- 278-
(9.102)
Сравнивая выражения (9.102) и (9.91), получаем
Nc = [d33sfJ(d31s
(9.103)
где N- КЭМТ сплошного кольца. Таким образом, в предположении
5fi
^^з КЭМТ секционированного кольца в d33b/(d31t) раз больше,
чем КЭМТ сплошного кольца.
Сопоставление обоих типов колец показывает, что для получения
заданной удельной акустической мощности на резонансной частоте
и на низких частотах к секционированному кольцу надо приложить
напряжение в NJN раз меньше, чем к сплошному.
Недостатком секционированных колец является их относительно
малая механическая прочность, поэтому склеенные кольца
необходимо армировать с помощью предварительного постоянного сжатия.
Формулы для расчета параметров и характеристик таких
цилиндрических преобразователей приведены в табл. 9.4.
§ 9.13. Сферический пьезокерамический
преобразователь
Для проведения гидроакустических измерений необходимы
излучатели и приемники звука, удовлетворяющие требованиям неискажен-
ности звукового поля, широкого частотного диапазона, отсутствия
направленности действия. Наиболее полно этим требованиям
отвечают преобразователи с активным элементом сферической формы.
Пьезокерамический сферический преобразователь (рис. 9.15, а)
представляет собой оболочку 1 (однородную или склеенную из двух
полусфер) с электродами на внутренней и внешней поверхностях.
Вывод 2 от внутреннего электрода проходит через отверстие в сальнике 3.
Уравнение движения и эквивалентные параметры. Рассмотрим
ненагруженную тонкую однородную оболочку со средним радиусом а,
поляризованную по толщине б. Радиальные колебания оболочки
вызываются действием
симметричного возбуждения а)
(механического или
электрического).
Элемент оболочки
показан на рис. 9.15, б.
Направление его поляризации
совпадает с осью z, оси х и у
расположены в касательной
плоскости. Вследствие эк-
випотенциальности
сферических поверхностей Е1 =
Из-за
¦¦ D2 = 0.
2C)
Рис. 9.15.
Пьезокерамический сферический
преобразователь (а) и элемент
сферической оболочки (б)
- 279-
отсутствия нагрузки упругие напряжения Т3 = 0, а благодаря
механической однородности равны нулю и все сдвиговые напряжения.
В силу симметрии следует равенство напряжений Т1=Т2 = ТС,
радиальных смещений %1=Ъ>2~%>с и выражение для модуля гибкости s<f =
= 0,5E^ +sf2). Заменив поверхность элемента квадратом (ввиду его
малости) со стороной /, запишем относительное изменение площади
квадрата при деформации его сторон на А/:
[(/ + А/J - /2]//2 ~ 2Д/// = 2SX = 252.
Очевидно, относительной деформации площади поверхности сферы
соответствует радиальная деформация 2?с/а, определяемая по
закону Гука:
Аналогично для индукции
Исходя из условий постоянства Т и Е, запишем уравнения пьезо-
эффекта
ya = 2s?T + d31E3; D3 = tT3E3+2d31T. (9.104)
Решая задачу о колебаниях пьезокерамической тонкой
сферической оболочки так же, как для пьезокерамического кольца, получим
уравнение движения сферического элемента
g 3f )]J53, (
где
G)o = 1/(в л/p^f) (9.106)
есть собственная частота ненагруженной сферы.
Решение уравнения (9.105) при гармоническом возбуждении
описывает функция (9.89), ток и проводимость определяют соответственно
по формулам (9.90) и (9.92). Проводимость
# ^ - со2)], (9.107)
где КЭМС сферы равен
k^2dlJ[tJM% +sfa)] = d§1/(ej3sf). (9.108)
Из выражения (9.107) находим частоты резонанса и антирезонанса
- 280-
а затем приводим его к виду
Отсюда находим эквивалентные механические и приведенные к
электрической схеме параметры, КЭМТ и электрическую емкость
сферической оболочки:
ш = 4ла2р6; С^ =5*7D л б); L = m/N2; ^
N= Dnd31/sf)a; Co = 4ле3ГA - fc2)a2/6. (9.109)
Электромеханическая схема нагруженной сферы не отличается
от схемы нагруженного тонкостенного цилиндра. Следует, однако,
отметить, что в режиме приема под силой F, приложенной к
механической стороне, надо понимать эквивалентную силу звукового поля,
действующую на заторможенную сферическую оболочку, причем
вследствие дифракции сила F будет неодинаковой на разных частотах.
Напряжение на выходе приемника и, следовательно, его
чувствительность будут определяться дифрагированной волной, которая зависит
от амплитудно-фазовых соотношений между падающей и рассеянной
волной в месте расположения приемника. Коэффициент дифракции
сферы 1/сд1 = \F/(pS)\ = л/l + fc2a2, где р - звуковое давление в падающей
волне; ква - волновой аргумент для окружающей сферу среды (воды).
Приведем формулу для чувствительности сферического приемника:
M = d31x\0& \кп\ p
Х[1+03^@3/0)^ G)»2]'2, (9.110)
гДе (?эм = "о^эквАу "о = !/ V™3kbC? = соо/ л/l - /с2; Х = (рс2)в;
г = 4ла2(рс)ваы/п0; ам = 1 - A - а)л0; а = /с2а2/A + /с2а2); шэкв =
= 4ла2рб + р(рс)в5/со; 0 = /сва/A + fc2a2).
Строго говоря, колебания реальной сферической оболочки не
будут пульсирующими из-за наличия отверстия в оболочке (для
вывода проводника и технологической обработки) и неоднородности
материала по толщине, не будет выполняться и сформулированные
граничные условия. Однако приведенная здесь теория вполне пригодна
для инженерных расчетов сферического преобразователя.
-281-
§ 9.14. Пластинчатые преобразователи, работающие
на колебаниях изгиба
Пластинчатыми электроакустическими преобразователями
называют такие преобразователи, у которых механические колебательные
системы выполнены в виде пластин круглой или прямоугольной
формы. При работе пластинчатых преобразователей в режиме как
излучения, так и приема используются колебания плоской поверхности
пластины, соприкасающиейся с водной средой, в направлении своей
нормали. Колебания пластины могут быть либо продольными - по
толщине, либо поперечными - на изгибе. При продольных (одномерных)
колебаниях механической системы резонансная частота ее обратно
пропорциональна линейному размеру. Поэтому с понижением
резонансных частот колебаний недопустимо увеличиваются размеры
системы. Так, например, полуволновый стержень из пьезокерамики ЦТБС-3
при /0 = 500 Гц имел бы длину 3,2 м, а пьезокерамическое кольцо -
диаметр 2 м. Чтобы уменьшить резонансные размеры
преобразователей, используют пьезокерамические пластины, совершающие
колебания изгиба, при которых резонансная частота преобразователя
пропорциональна толщине и обратно пропорциональна квадрату линейного
размера пластины.
В электроакустике широко применяют пластинчатые
колебательные системы, названные биморфными. Простейший биморфный
элемент представляет собой две склеенные пьезоэлектрические
пластины, свободно опирающиеся по периметру. Поскольку знак
деформации (сжатие или растяжение) зависит от полярности электрического
напряжения, то электроды можно соединить так, что под действием
переменного напряжения одна пластина будет растягиваться, а другая
сжиматься, в результате создается изгибающий момент и пластины
изгибаются. При механическом воздействии на поверхности пластин,
например давлением акустического поля, возникают колебания
изгиба, вызывающие электрические заряды на электродах.
Поперечные колебания изгиба позволяют получить
малогабаритную колебательную систему и преобразователь в целом. Рассмотрим
пластинчатые преобразователи, в которых взаимодействуют
механические напряжения, вызванные деформациями изгиба пьезокерамиче-
ских пластин, и электрическое поле поляризации в них.
Принцип действия. Для возбуждения колебаний изгиба
механической системы в режиме излучения надо создать в ее поперечных
сечениях изгибающие моменты. Для обеспечения режима приема
требуется соединить электроды таким образом, чтобы именно
механические напряжения, вызванные деформациями изгиба пластин,
преобразовывались в электрические сигналы.
Этим требованиям отвечают механические колебательные системы
в виде биморфных элементов, состоящих из разнородных пластин,
жестко связанных плоскостями и отличающихся или электрическими,
или механическими свойствами. Если в одной из пластин создать
напряжения сжатия Г, укорачивающие ее длину, а одновременно
-282-
5) 3
Рис. 9.16. Схема конструкции пластинчатых преобразователей,
работающих на колебаниях изгиба
1 — пьезокерамические пластины; 2 — электроды; 3 — несущая опора
в другой - напряжения растяжения, растягивающие ее, то возникнут
изгибающие моменты М относительно срединной плоскости пластин (рис. 9.16, о).
В режиме приема под действием падающей акустической волны
биморфный элемент изгибается на несущих опорах и в пьезокерами-
ческих пластинах возникают механические напряжения Т,
преобразуемые ими в электрические сигналы (рис. 9.16, б).
В случае если для создания механических колебаний (или
преобразования механических напряжений в электрические сигналы)
используют пьезоэлектрические пластины, электроды в биморфном
элементе надо соединить определенным образом. При этом следует
учитывать взаимные направления полей первоначальной поляризации
пластин (вектор Ёо), возникающих механических напряжений (Г) и
напряженности внешнего электрического поля (вектор Ё).
а).
Рис. 9.17. Последовательное (а)
и параллельное (б) соединения
пластин в биморфных элементах
1 —пьезокерамические пластины;
2 -—электроды
Рис. 9.18. Схема соединения
биморфных элементов в
преобразователе
- 283-
Варианты соединения электродов в биморфном элементе,
образованном пьезокерамическими пластинами, показаны на рис. 9.17, а, б.
Полярность электрических зарядов, возникающих на электродах,
условная. Отличия в электрических свойствах соединяемых пьезо-
пластин создаются _выбором взаимных направлений^ полей
поляризации Ео и рабочего ?. Если направления векторов Ео и Е в одной из
пластин совпадают, то в ней возникнут механические напряжения
одного типа (например, сжатие), а в этот момент в другой пластине, где
направления векторов противоположны, возникнут напряжения
другого типа (растяжение). Этим и обусловлено создание изгибающего
момента в поперечных сечениях пластин.
Таковы физические предпосылки создания механических
колебательных систем, в основу которых положен принцип действия
пластинчатых преобразователей.
На практике в пластинчатых преобразователях стремятся создать
условия закрепления биморфных элементов, близкие к свободному
опиранию краев, так как в этом случае можно достичь наибольшей
эффективности преобразователя. С этой целью преобразователи
выполняют симметричными (рис. 9.18, а) из двух объединенных в одной
конструкции биморфных элементов 1, которые располагаются соосно
и параллельно друг другу на несущей их опоре 2 с небольшим
воздушным промежутком 3 между ними, выполняющим роль экрана. Осесим-
метричные колебания биморфных элементов при их движении в
противоположных направлениях происходят относительно плоскости
симметрии; форма колебаний показана штрихами.
Такую конструктивную схему используют, как правило, в
преобразователях-излучателях и преобразователях-приемниках давления.
Акустическое давление действует на наружные поверхности обоих
биморфных элементов и вызванные им механические напряжения
преобразуются в электрический сигнал на выходе, пропорциональный
значению давления на входе.
Резонансные частоты. Резонансные частоты пластинчатых
преобразователей/01- зависят как от геометрических соотношений и упругих
постоянных материалов биморфных элементов, так и от условий
их закрепления:
foi = 2Xfhcll3r/l2i (9.111)
где 2h - толщина биморфного элемента; / - длина элемента; Х{ -
собственное число, определяемое условиями закрепления элемента;
Сизг"" скорость распространения поперечных (изгибных) колебаний
в материале биморфного элемента.
Из выражения (9.111) видно, что резонансные частоты
пластинчатых изгибных преобразователей пропорциональны толщине и обратно
пропорциональны квадрату длины элемента, причем / всегда в
несколько раз больше 2h, что обеспечивает малые габариты низкочастотных
пластинчатых преобразователей.
Использование поперечных колебаний изгиба биморфных элементов
- 284-
в пластинчатых преобразователях приводит к тому, что длины волн,
на которых они работают, всегда значительно больше размеров
преобразователей. Известно, что в этом случае рабочие поверхности слабо
нагружены средой, внутреннее сопротивление преобразователей не
согласовано с акустической нагрузкой, следовательно, они
неэффективны в качестве одиночных излучателей и поэтому чаще
применяются в режиме приема. Наиболее благоприятный режим их работы будет
в диапазоне частот, верхняя граница которого может быть
приближенно определена условием 2/?<0,ld или 2h^0,l/, где d-диаметр,
/ - длина. Если это условие не выполняется, т. е. элементы имеют
не малую толщину и, как следствие, становятся более жесткими,
деформации изгиба уменьшаются и эффективность преобразователей
падает. При этом снижается точность расчета параметров
преобразователей, основанного на теории „чистого" изгиба, справедливой для
тонких пластин.
Нижняя граница диапазона частот ограничивается сложностью
изготовления тонких пьезокерамических пластин, так как не
обеспечивается достаточная механическая прочность. Для пластинчатого
преобразователя, конструктивная схема которого (см. рис. 9.17, а)
является силовой по восприятию гидростатического давления, именно
низкая механическая прочность - основной его недостаток.
Для пластинчатых преобразователей, работающих на колебаниях
изгиба, характерна зависимость резонансных частот, формы
колебаний и электромеханических параметров от условий закрепления
биморфных элементов. При расчетах эту зависимость определяет
значение собственного числа Х{ для различных условий закрепления
краев биморфного элемента. Так, для прямоугольного биморфного
элемента, если два его края свободно опираются, а другие два
свободны, собственное число на низшей частоте Х1 =3,14, если же два края
жестко заделаны, Х1 = 4,73; их резонансные частоты отличаются в
D,73/3,14J = 2,27 раза.
Чтобы рассчитать электроакустические характеристики и
параметры пластинчатого преобразователя с помощью эквивалентной
электромеханической схемы, необходимо знать его эквивалентные
параметры - массу тэкв, гибкость Сэкв и КЭМТ N. В каждом конкретном
случае их определяют через формы колебаний, размеры и упругие
параметры биморфных элементов.
Круглые преобразователи. Основные элементы пластинчатых
преобразователей этого типа - круглые тонкие биморфные пластины,
работающие на поперечных колебаниях изгиба.
Реальные конструкции круглых пластинчатых преобразователей
содержат кроме механических колебательных систем -
пьезокерамических биморфных элементов - также опоры, с которыми эти
элементы соединены, герметизирующие металлические мембраны и
покрытия, электроизоляционные прослойки и электрические вводы.
Конструкция широко распространенного круглого пластинчатого
преобразователя-приемника представлена на рис. 9.19. Для реализации
условий свободного опирания биморфных элементов колебательная
-285-
Рис. 9.19. Поперечное сечение круглого
симметричного преобразователя
система выполнена симметричной. Биморфные элементы собирают из
пьезокерамических пластин 2, которые через электроизоляционную
прослойку 3 склеивают эпоксидным клеем с металлической
подложкой 4. Подложка вместе с круглым корпусом - опорой 7 - изготовлена
в виде одной детали. Затем две такие детали сваривают по периметру,
а внутренний объем 5 между ними образует воздушный экран. К
наружным плоскостям пьезокерамических пластин приклеивают
элементы электроизоляции и мембраны 6. Кабель 1 на входе приваривают
и привулканизовывают к корпусу. Заключительная операция
изготовления преобразователя - приварка торцов мембран к круглому
корпусу по периметру.
Малогабаритные конструкции преобразователей более простые.
Кольцевые опоры изготавливают методом прессования, например, из
пресспорошка АГ-4с. К опорам симметрично приклеивают биморфные
элементы (как на рис. 9.18, а). Герметизируют конструкцию заливкой
компаундом или с помощью резинового чехла, приклеиваемого к
рабочим поверхностям биморфных элементов.
Известны конструкции круглых пластинчатых приемников
градиента давления, т. е. реагирующих на разность давлений.
Принцип действия приемника показан на рис. 9.18, б. Обе наружные
поверхности биморфного элемента 1 соприкасаются с окружающей
средой, т. е. являются рабочими. По торцам элемент нагружен
инерционными (массивными) деталями 2. Колебания биморфного элемента
относительно неподвижных деталей 2 создает падающая акустическая
волна. Возбуждающую силу из-за огибания волны определяет разность
давлений р2 - рх на обеих сторонах приемника. При этом
электрическое напряжение на выходе и чувствительность приемника будут
пропорциональны указанной разности.
Благодаря высокой удельной чувствительности, надежности
и простоте конструкции круглые пластинчатые приемники широко
применяются. В рабочем диапазоне частот от нескольких герц до
нескольких килогерц их используют на глубинах до 1500 м [22].
Для определения эквивалентных параметров необходимо знать
форму колебаний механической системы, т. е. аналитическую
зависимость ее смещения от координат. На низких частотах (вблизи первого
резонанса) форму осесимметричных колебаний круглых биморфных
элементов в зависимости от условий закрепления описывает функция
где г - текущий радиус точки на поверхности биморфного элемента;
- 286-
а - радиус элемента; п - коэффициент, характеризующий условия
закрепления контура. При п = 1 будет свободное опирание, при п = 2 -
жесткая заделка по краю (в дальнейшем индекс п используется без
пояснений).
Эквивалентные массы
гпэкв=кпт, (9.112)
где к± = 0,3; к2 = 0,18; т - масса биморфного элемента.
Эквивалентные гибкости
(9Л13)
где ?=2,45-К)-2; ? = 1,67 • 10~2; D = УBлK/[12A - v2)] - изгибная
жесткость элемента; У, v - соответственно модуль Юнга, коэффициент
Пуассона материала биморфного элемента.
Резонансные частоты
2па2 V Ph 2па2 V ЗрA - v2)
где Хх = 2,23; Х2 = 3,2; р - плотность материала элемента.
Как известно, в режиме приема на рабочую поверхность
преобразователя действует сила акустического поля F3KB. Если размеры
приемника малы по сравнению с длиной волны, то эта сила
^эквл = Ро I fn(r)dS = ро5ср,
5
где р0 - давление в падающей волне; 5ср - средняя площадь
пластины. Для свободно опирающейся пластины Scp = 0,55, где S = па2 (для
жестко заделанной по краю 5ср = 0,355).
Составляющие импеданса излучения rsn = an(pc)B5; xsn = Pn(pc)BS>
где ап и рп - безразмерные коэффициенты, зависящие от волнового
диаметра элемента 2аД. Значения аир для свободного опирающегося
круглого преобразователя в экране приведены ниже:
ка..
а ..
Р ..
. 0,5
. 0,023
. 0,099
1,0
0,087
0,176
1,5
0,172
0,214
2,0
0,257
0,211
2,5
0,323
0,175
3,0
0,359
0,123
3,5
0,368
0,072
4,0
0,356
0,034
4,5
0,337
0,012
5,0
0,320
0,004
Коэффициент электромеханической трансформации при условии,
что электроды полностью покрывают плоские поверхности пластин,
равен
y), (9.115)
где к?= 9; к?= 0; d^ - пьезоэлектрический модуль активного
материала.
-287-
Внутреннее сопротивление приемников, работающих ниже
резонанса, определяется емкостью Со. При поперечном пьезоэффекте
и последовательном включении пластин
(9.116)
при продольном пьезоэффекте
(9.117)
где 5ЭЛ - площадь электродов. При параллельном включении пластин
емкость будет в 4 раза больше.
Сопротивление механических потерь оценивают акустико-меха-
ническим КПД т]ам. Для преобразователей, типа показанного на
рис. 9.18, который выполнен из металла, лам = 0,75. . .0,8, а в случае
герметизации резиной или компаундом Т1ам < 0,6.
Все приведенные формулы обеспечивают достаточную точность
при расчете биморфных элементов толщиной 2h < 0,2а, при большей
толщине необходимо учитывать ее влияние на эквивалентные
параметры [31].
Прямоугольные преобразователи. Биморфный элемент этих
преобразователей имеет форму тонкой прямоугольной пластины.
Конструкции излучателей и приемников давления симметричны (рис. 9.20, а),
состоят из двух биморфных элементов 1, соединенных между собой
через опоры 2 по двум противоположным торцам АВ и CD, торцы AD
и ВС свободны. Для герметизации экранирующей полости 3 применяют
сравнительно жесткие защитные элементы вдоль свободных торцов,
что приводит к возникновению сильной механической связи между
биморфными элементами по этим торцам и снижению эффективности
преобразователя. Для ослабления связи между торцами AD и ВС
колебательную систему в некоторых конструкциях помещают в
герметичный металлический корпус (рис. 9.20, б), заполненный маслом.
Рис. 9.20. Конструктивные схемы пря- Рис. 9.21. Биморфные элементы в ви-
моугольных преобразователей де монолитных призм
- 288-
ОС
0,6
/
/
¦
-->
2 4 6 8 hb
Рис. 9.22. Зависимость активной а и реактивной C составляющих
импеданса излучения прямоугольной пластины длиной / и
шириной Ь, опирающейся двумя ребрами, от волновой ширины kb
В целях повышения механической прочности колебательной
системы биморфные пластины для излучателей часто выполняют в виде
монолитных однородных призм (рис. 9.20). Электроды на поверхностях
пьезокерамических призм представляют собой две изолированные
друг от друга серебряные полоски. Призмы предварительно
поляризованы либо в разных направлениях (рис. 9.21, а), либо в одном
направлении (рис. 9.21, б); в первом случае электроды на каждой поверхности
соединяют параллельно, во втором - последовательно. Второй вариант
более технологичен: к электродам, находящимся на одной грани
призмы, подводят высокое напряжение поляризации одной
полярности.
Формы колебаний прямоугольных биморфных элементов,
опирающихся двумя противоположными торцами и свободных по двум
боковым (см. рис. 9.20), определяют по выражению
fix) = sin (лх//),
где х - текущая координата; / - длина биморфного элемента между
опорами.
Эквивалентная масса т1 = 0,5т, где т = 2рШ - масса биморфного
элемента; Ь-его ширина. Эквивалентная гибкость Сэкв =2/3/(ji4bD).
Основная резонансная частота
D nh
г /
Joi ~ rz.* /
2 /2/
ph 2/2 V 3p(l - v2)
КЭМТ для поперечного пьезоэффекта
- v)],
для продольного
ЛГ1=2яс?ззГЬЛ2/[б/A-v)],
где б - расстояние между электродами.
19-614 - 289 -
(9.118)
(9.119)
(9.120)
Изменения коэффициентов а и Р составляющих импеданса
излучения в зависимости от волновой ширины элемента при различных
отношениях длины к ширине представлены на рис. 9.22.
Средняя площадь прямоугольного элемента при свободно
опирающихся торцах 5ср = 0,645 (где S = Ь/), что приблизительно в 1,4 раза
превышает среднюю площадь круглой пластины такой же площади.
Влияние толщины биморфных элементов на их эквивалентные
параметры можно учесть по формулам, приведенным в работе [31].
§ 9.15. Нелинейные параметрические
преобразователи и антенны
При высоких уровнях излучения акустической энергии возникают
нелинейные явления: кавитация, шумообразование, изменение
профиля и спектрального состава акустических сигналов, акустические
течения и др. Некоторые из таких явлений, как правило, нежелательны,
другие же можно использовать, в частности, для создания
гидроакустических приборов - параметрических преобразователей (антенн).
Действие параметрического излучателя основано на
использовании нелинейных свойств водной среды. Такой излучатель
малых размеров имеет узкую диаграмму направленности практически
без боковых лепестков и постоянные параметры направленности в
широкой полосе частот. При этом эффективность его на 2-3 порядка
меньше обычного электроакустического преобразователя.
Принцип действия излучающей параметрической антенны
поясняет рис. 9.23, а. Ультразвуковой преобразователь Я возбуждается от
генераторов Г1 и Г2 и излучает высокочастотные волны, называемые
волнами накачки. Частоты Д и Д напряжений генераторов
в пределах рабочей полосы мало отличаются друг от друга. Если
уровень излучения первичных волн достаточно велик, в среде
благодаря нелинейному взаимодействию волн, образуется вторичное
излучение с частотами 2Д, 2/2, суммарной Д + Д и разностной Д - Д. Волны
высоких частот при распространении быстро затухают, а волны низких
частот Д - Д, образовавшиеся в зоне взаимодействия протяженностью
L, распространяются на большие расстояния. Участок среды, в котором
взаимодействуют волны, по существу представляет собой антенну,
излучающую низкочастотный сигнал.
Так как L составляет десятки и даже сотни метров и, следовательно,
L » А. (X - длина волны разностной частоты), в зоне L формируется
ДН с малой угловой шириной центрального лепестка (порядка
нескольких градусов). Рабочими частотами параметрических излучателей
являются разностные частоты. Поскольку частоты Д и Д электрических
сигналов можно изменять в широких пределах полосы пропускания
преобразователя накачки и выбирать их близкими, нелинейные
параметрические антенны обеспечивают широкополосное излучение.
Использование указанных свойств позволяет создавать
параметрические антенны для целей гидролокации, измерения глубин
- 290-
.:¦«?¦• й; •••/••.¦¦¦•¦/« ¦:•
Рис. 9.23. Схема параметрических излучающей (а) и приемной (б) антенн
с высокой точностью (прецизионные эхолоты), передачи широполосной
информации, гидроакустических измерений и др. При излучении
акустическое давление, создаваемое такими антеннами, достигает
десятков тысяч Паскалей*
Пример [39]. Ширина ДН обычной антенны современного эхолота составляет
не менее 20°; при этом глубину измеряют с большими погрешностями. Чтобы
повысить точность измерения, необходимо сформировать ДН со значительно
меньшей угловой шириной. При частоте 9 кГц (оптимальной для глубин до 6 км)
такая антенна должна иметь площадь 25 м2. В одном экспериментальном
эхолоте с частотой волн накачки 200 кГц применена параметрическая антенна с
рабочей частотой 12 кГц, ширина ДН которой равна 2° при ничтожно малых
(меньше 1 мм) размерах излучающей поверхности преобразователя накачки. Получены
положительные результаты работы эхолота при глубине до 4 км.
В параметрических приемниках используют нелинейный
эффект - изменение фазы (т. е. скорости распространения) волны
высокой частоты при прохождении зоны действия принимаемого
акустического поля. Нелинейный параметрический приемник содержит
излучатель и приемник, разнесенные на определенное расстояние L один от
другого (рис. 9„23, б). Высокочастотный излучатель создает мощную
акустическую волну накачки с частотой /, при распространении
которой изменяются параметры среды. Волна принимаемого сигнала с
частотой /с распространяется под углом 0 к оси системы излучатель-
приемник. В результате взаимодействия высоко- и низкочастотных
волн на приемник действует волна накачки, промодулированн»я
волной сигнала. При этом изменение фазы высокочастотного сигнала
пропорционально изменению амплитуды давления низкочастотного
сигнала. Информацию о параметрах сигнала получают с помощью схемы
обработки, которая содержит усилитель, фильтр и фазовый
дискриминатор. Волна /с принимается в области среды протяженностью L, и
эта область фактически выполняет роль антенны.
Параметрические приемники обеспечивают широкополосный и
узконаправленный прием и могут быть использованы для определения
параметров гидроакустических излучателей и характеристик
ультразвуковых полей, а также для градуировки гидроакустических
приемников.
19*
- 291-
§ 9.16. Сравнительная оценка пьезокерамических
материалов для ГАП
Естественные пьезоэлектрические и синтетические кристаллы
имеют ограниченное применение в ГАП. В настоящее время в качестве
активных элементов излучателей и приемников звука применяются,
главным образом, различные составы пьезокерамики, обладающие
высокой электрической и механической прочностью, малой
гигроскопичностью, стабильностью свойств в широком диапазоне температур
и во времени и имеющие технологические преимущества, которые
отмечались выше. Пьезокерамика наиболее полно отвечает целому
комплексу требований, предъявляемых к активным элементам
преобразователей современных гидроакустических антенн.
Для рационального проектирования антенн и сравнения
различных составов пьезокерамики используют критерии эффективности
активных материалов, дающие возможность оценить основные
качественные показатели работы гидроакустических антенн в различных
режимах. Для сравнения эффективности использования наиболее
распространенных пьезокерамических материалов в табл. 9.5
приведены значения их параметров.
Излучатели. Удельная акустическая мощность излучателя на
резонансной частоте пропорциональна величине fecS JE2, а на частотах
значительно ниже резонансной - величине (dikcgJE2. Из таблицы
видно, что при одинаковой напряженности электрического поля
наибольшая мощность излучения как при резонансе, так и при низких
частотах будет у преобразователей из материалов ЦТБС-3, ЦТС-19
и ЦТСНВ-1. Иначе говоря, для получения одинаковой удельной
акустической мощности излучения наименьшая напряженность поля (и
напряжение) потребуется для преобразователей, активные элементы
которых изготовлены из материалов указанных марок.
Параметр пьезоматериала Qc^kflkQ3 как критерий получения
наибольшего электромеханического КПД имеет максимальное
значение для ЦТБС-3, ЦТСС-1 и ЦТС-23. Однако из-за меньшей
диэлектрической проницаемости емкостное сопротивление элементов из ЦТСС-1
и ЦТС-23 будет в 2,2 раза больше, и в случае необходимости получения
значительных удельных мощностей излучения требуемые напряжения
могут оказаться близкими к напряжению поверхностного пробоя.
Приемники. Удельная чувствительность, достаточно полно
характеризующая эффективность преобразователя в режиме приема, на
частоте электромеханического резонанса пшпшциональна dik/(sik v%c^),
а на низких частотах- величине dik д/с^/езз- Чувствительность
холостого хода приемника при резонансе пропорциональна cf^/E^e^3).
Из данных табл. 9.5 видно, что при резонансе удельная
чувствительность будет больше у приемников из ЦТСНВ-1 и ЦТБС-3, а при низких
частотах-из ЦТС-19 и ЦТСНВ-1. Чувствительности холостого хода
приемников, изготовленных из пьезокерамических материалов
разных марок отличаются мало, исключая ТБК-3 при использовании
продольного пьезоэффекта.
- 292-
Таблица 9.5. Значения параметров пьезокерамических материалов,
определяющих эффективность преобразователей
Марка материала
ТБ-1
ТБК-3
ЦТСНВ-1
ЦТС-19
ЦТС-23
ЦТСС-1
ЦТБС-3
НБС-1
(^зз^зJ
(<*3i /*? J
87,3
25,6
141,5
36,9
453,1
150,6
514,7
108,1
100
32,3
-
561,9
200,5
201,2
56,2
(d33/cE3 I028
(d31/cf I028
5,7
1,0
6,5
1,2
273,5
47,6
146,4
25,3
25,0
5,5
29,8
5,2
100,0
20,9
-
3,8
/c|3/tg6
/c3Vtg6
8,3
1,3
5,5
1,2
5,8
1,3
4,5
0,8
8,4
0,02
30,2
6,8
21,1
5,1
11,6
2,9
(d33/eT33)l01A
(d31/eJ3)lO1A
6,7
3,0
9,4
4,2
19,5
9,1
23,6
10,2
13,6
6,8
18,0
8,0
13,9
7,0
9,2
4,4
(^ззЛ/ё|зI012
(^з1л/ё1з~I012
1,2
3,3
1,5
9,2
4,3
9,2
4,0
4,5
2,3
5,7
2,5
6,7
3,3
4,1
1,9
Помимо требований, предъявляемых к активным материалам
и связанных с эффективностью ГАП, важными являются требования
к надежности. Свойства пьезокерамических материалов, от которых
зависит надежность преобразователей - это усталость при длительном
воздействии динамических напряжений, старение материала со
временем, влияние рабочего напряжения, температуры и давления [22].
ГЛАВА 10. МАГНИТОСТРИКЦИОННЫЕ
ПРЕОБРАЗОВАТЕЛИ
Магнитострикция - это явление, присущее ферромагнитным
материалам и связывающее их механическое и магнитное состояния. При
изменении магнитного поля в закрепленном магнитопроводе возникает
- 293-
усилие, направленное вдоль силовых линий — прямой магни-
тострикционный эффект, а деформация магнитопровода с
начальной напряженностью поля приводит к изменению магнитного
поля- обратный магнитострикционный эффект.
Магнитострикция есть результат обменного и магнитного
взаимодействий в ферромагнитных телах. В процессе намагничивания
магнитные силы проявляются в смещениях границ между областями
спонтанной намагниченности (доменных границ) и вращения
магнитных моментов доменов. При характеристиках поля, изменяющихся от
нуля до значений, соответствующих техническому насыщению, в
основном возникает магнитострикция, вызванная магнитными
силами решетки. Процессы смещения и вращения приводят к изменению
энергетического состояния решетки, а следовательно, и равновесных
расстояний между атомами решетки: атомы смещаются, и происходит
деформация решетки - магнитострикция. Магнитострикция такого
типа практически не связана с изменением объема кристалла и
вызывает лишь искажение его формы (линейная магнитострикция).
Электроакустические преобразователи, действие которых
основано на использовании магнитострикции, находят применение в
различных гидроакустических антеннах. Магнитострикционные
преобразователи по сравнению с другими, например пьезоэлектрическими, имеют
следующие преимущества: большую механическую прочность, анти-
коррозийность, простоту изготовления, низкие требуемые
электрические напряжения, надежность и долговечность. Вместе с тем магнито-
стрикторам свойственны и недостатки: ограниченный сверху
частотный диапазон и зависимость собственной частоты колебаний от
температуры.
§ 10.1. Основные соотношения магнитострикционного
эффекта
Уже первые опыты по наблюдению магнитострикции показали, что
величину и знак деформации определяют структура образца, способ
изготовления, величина предварительного намагничивания; при этом
знак деформации не зависит от направления поля. У никеля,
например, при всех значениях поля магнитострикция отрицательна (образец
укорачивается) и наблюдается механическое насыщение, т. е.
прекращение роста деформации начиная с некоторого значения поля.
Существенно, что при изменении внешнего поля деформация меняется
нелинейно.
Магнитострикционный эффект зависит от температуры: с
увеличением температуры он убывает и вовсе исчезает в точке Кюри, где
термические колебания энергии компенсируют систематизирующее
действие сил кристаллической решетки.
Обратный магнитострикционный эффект. Рассмотрим магнитопро-
вод в виде стержня (прямого или кольца) с обмоткой. Если включить
внешнее напряжение на обмотку, по ней потечет ток /. При этом связь
-294-
между векторами напряженности Я магнитного поля, электрической
индукции D и плотности j тока проводимости в любой точке стержня
определяют по уравнению Максвелла, которое в дифференциальной
рационализированной форме имеет вид
iotH=J + dD/dt. A0.1)
Чтобы ввести в уравнение A0.1) векторы магнитной индукции В
и интенсивности намагничивания J, воспользуемся теоремой Стокса
5 jdS = nl (л - число витков на стержне) и законом полного тока
п/ = J Hdl (интегрирование вдоль линии индукции, т. е. по длине /
стержня), а интенсивность / положим равной J = Jx + J2, где Jx = f(B), J2
вызывается магнитострикционными свойствами стержня. Тогда можно
получить следующие выражения для силы тока и магнитного
потока [29]:
A0.2)
, A0.3)
где \i - абсолютная магнитная проницаемость стержня при отсутствии
магнитострикции, т. е. J2 = 0; S - площадь поперечного сечения магни-
топровода; интеграл в знаменателе представляет собой магнитное
сопротивление цепи Rm.
Интенсивность /2, обусловленная малыми деформациями д^/61
в направлении линий индукции поляризованного магнитопровода,
пропорциональна деформации и зависит от начальной индукции Во
(напряженности Яо) поля поляризации. Соотношение
J2 = (p(igd?/d/ A0.4)
выражает обратный магнитострикционный эффект. Осуществляют
поляризацию или постоянными магнитами, или пропусканием
постоянного тока через обмотку, наложенную на стержень.
В общем случае магнитная цепь состоит из т участков с разными
значениями величин Sm, lm, \im. При этом индукция Вт на разных
участках тоже неодинакова, но поток вдоль всего пути
интегрирования Ф = Z BmSm = const.
т
Активную в магнитострикционном отношении часть цепи примем
однородной, что соответствует действительности, и будем
рассматривать ее как один участок с проницаемостью |i и площадью сечения S.
Заменяя выражение для Rm суммой интегралов по участкам всей
цепи, определим „приведенную" длину /экв магнитной цепи
/(цш5ш). A0.5)
т
Прямой магнитострикционный эффект. Как указывалось, прямой
-295-
Т(В)
V
магнитострикционный эффект
заключается в деформации ферромагнитного тела
в направлении силовых линий поля, в
которое помещено это тело. При свободной
деформации магнитострикционного
стержня механические напряжения в нем не
возникают. Если внешним воздействием
предотвратить деформацию от
намагничивания, то в стержне возникнут
напряжения. Будем говорить, что стержень,
находящийся в переменном магнитном поле,
совершает колебания под действием
„магнитострикционных" усилий Г(В).
Последние надо понимать в том смысле,
что для устранения деформаций,
вызванных полем, внешние усилия должны быть
равны и направлены противоположно упругим напряжениям Т(В).
Следовательно, величина Т(В) равна упругому напряжению,
возникающему в заторможенном магнитострикционном стержне при заданной
индукции (или намагниченности) магнитного поля.
Зависимость напряжения Т(В) магнитострикции от индукции
имеет вид, представленный на рис. 10.1. Если поляризованный
стержень подвергнуть воздействию переменной индукции с амплитудой
Бш«сБ0, то циклические изменения Т(В) относительно точки Во
можно принять соответствующими кривой Т(В), а зависимость между
амплитудами магнитострикционного напряжения и индукции -
линейной, т. е.
A0.6)
Рис. 10.1. Зависимость
магнитострикционного
напряжения от
магнитной индукции
где
dT(B)/dB\B = в
/ = 0 = ф(Во)- A0-7)
Функция ф(Б) представляет важную характеристику
магнитострикционного материала. Чем больше ф(В), тем сильнее при данном
значении индукции (или потока) магнитострикционное напряжение (или
сила). Выбором поляризующего поля можно обеспечить работу магни-
тострикционной системы на крутом участке кривой Т(В), где у (В)
имеет наибольшее значение и, следовательно, наиболее эффективным
будет магнитомеханическое преобразование.
При фиксированном значении начальной индукции величину ф(?0)
называютмагнитострикционной постоянной.
§ 10.2. Неполяризованная магнитострикционная система
Неполяризованной называют систему, у которой начальное
намагничивание отсутствует (Во = 0). Исходя из нелинейной зависимости
Т(В) при воздействии переменного магнитного поля с медленноменяю-
щейся индукцией, можем записать
Т(В) = $ [dT(B)/dB]dB = $ <$(B)dB, A0.8)
о о
- 296-
где ф(Б) = дТ(Б)/дБ при отсутствии деформации (д?/д/ = 0).
Теоретически и экспериментально установлено, что в широком
диапазоне индукций функция фB?) линейна, т. е. (р(В) = у В, где у -
постоянная величина. Согласно равенству A0.8), получаем соотношение
в
Т{В) = y$BdB = {\/2)yB2, A0.9)
выражающее квадратичную зависимость магнитострикционных
напряжений (и деформаций) от индукции приложенного поля.
Магнитострикционная сила и деформация. Пусть ко входной
стороне (обмотке) системы приложено переменное напряжение и = Um cos (cof),
под действием которого по обмотке, имеющей п витков, протекает
ток/. На индуктивности L происходит падение напряжения,
определяющее магнитный поток Ф, на активном сопротивлении R обмотки -
падение напряжения RL Поскольку обычно число витков мало, а
сечение провода большое, омическими потерями можно пренебречь. Тогда
Um cos ((of) = пёФ/сИ, магнитный поток
n)]sin(GH A0.10)
и магнитная индукция
B = [Um/{anS)]sm(ut). A0.11)
Подставим равенство A0.11) в выражение A0.9):
ЦВ) = (l/4)yB2m[l - cos BШ)] = ТО(В) - TJB) cos BgU). A0.12)
Таким образом, переменная составляющая движущей силы (и
деформации) неполяризованной системы изменяется с двойной частотой
приложенного электрического напряжения.
Магнитострикционная сила
НВ) = ЦВ)Б= (V4)yB2mS- (U4)yB2mScosBo>f), A0.13)
амплитуда ее переменной составляющей
FjB) = A/4O^5= A/4)G/5)Ф^ = [7/Dn25)][f/m/0)]2. A0.14)
Механический импеданс z системы^ по определению, есть
отношение переменной составляющей силы F(B) к скорости смещения системы
(стержня) и в общем случае является величиной комплексной, т. е.
z= \z\ ехр (/ф). Согласно выражению A0.12), смещение ? = ?шехр Bко*)
и, следовательно, ? = 2ко?. Отсюда
Действительная часть смещения
- 297-
Re? =[- yB2mS/{SQ\z\)]sm BШ - ф) = - 5msinBcof- ф). A0.15)
Потребляемый ток. Мощность электромагнитных потерь и
механическая мощность. Составим выражение для энергетического баланса
системы в режиме излучения. Мощность, отдаваемая источником,
равна ы1 = пЫФ/сЛ. Учитывая формулу A0.2) для силы тока и принимая
интенсивность /2, как и в случае поляризованной системы,
пропорциональной деформации [см. соотношение A0.4)], для однородного
участка магнитной цепи длиной /экв [см. равенство A0.5)] получаем
/ = Б/экв/(цп)-GБ/п)^. A0.16)
Подставив в A0.16) выражения A0.11) для индукции, A0.15) для
смещения и индуктивности L тородиальнок обмотки
, A0.17)
получим
/ = [Um sin (Ш)]/Ш + [yUmtJBton2S)] X
x[cos(G)f- ф)- соз(ЗсоГ-ф)]. A0.18)
Здесь первое слагаемое - ток намагничивания, второе -
динамический ток, обусловливающий механические колебания стержня с
частотой приложенного напряжения, третье - ток третьей гармоники.
Таким образом, при синусоидальном напряжении возбуждения ток,
протекающий через неполяризованную магнитострикционную
систему, оказывается несинусоидальным.
Полный ток, потребляемый системой при излучении, должен еще
включать ток потерь, которые обусловлены вихревыми токами и
магнитным гистерезисом.
Мощность потерь Рф на вихревые токи в ферромагнитном пакете
объемом V, набранном из пластинок толщиной б, можно рассчитать
по формуле
Рф = офFЯш/JУ, A0.19)
где оф - коэффициент, зависящий от материала намагничиваемого
тела, переменной индукции и постоянной напряженности.
Мощность потерь Рг на гистерезис определяют по формуле
Pr = 0rfB2mV9 A0.20)
где ог - коэффициент, зависящий от переменной индукции.
Из выражений A0.19) и A0.20) видно, что потери энергии
пропорциональны квадрату амплитуды индукции и, следовательно,
квадрату амплитуды приложенного напряжения. Поэтому если ввести
- 298-
некоторое эквивалентное активное сопротивление Яэ.п> на котором
расходуется мощность потерь Рэп =РФ +РГ, можно учесть потери
включением R3n параллельно индуктивности L обмотки. Тогда с одной
стороны Рэ#п = 1/?,/(ЖЭфП), с другой - РЭиП = onB%V, где оп - коэффициент
суммарных потерь. Приравнивая оба выражения для мощности РЭтП
и учитывая равенства A0.11) и A0.17)э получаем формулу для
определения сопротивления потерь R3S1 в магнитопроводе из однородного
материала
Яэ.п=(о21/Bцоп), A0.21)
где коэффициент
* +ог/. A0.22)
Теперь возможно дополнить выражения A0.16) и A0.18) для силы
тока через излучатель силой тока потерь /п = и/Дэ#п = [Um cos (tot)]/RBSl,
получаем
/ = и/Яэ.п + В1экв/(\1п)-(уВ/п)$. A0.23)
Составим уравнение энергетического баланса системы, для чего
умножим обе части равенства A0.23) на и /
1и = u2/i?3.n + (ВЪ
Как видим, подводимая к системе мгновенная мощность складывается
из мощности электромагнитных потерь, скорости изменения
электромагнитной энергии и механической мощности.
Определим среднюю мощность, потребляемую магнитострикцион-
ной системой, т. е. вычислим интеграл
Р = Ш = {\1Т) \ uldt = ВД2КЭ.П) +
о
+ [yU%UDuS)] cos Ф = Рэ.п + РЭМ5 A0.24)
где Рэм - мощность, расходуемая на механические колебания стержня.
После простых преобразований с использованием равенств A0.11)
и A0.14) получим
где Fm(B) - амплитуда магнитострикционной силы.
В случае резонанса механической системы, когда сдвиг по фазе
между движущей силой и скоростью колебаний отсутствует (cos ф = 1)
и механический импеданс чисто активный (z = г), электромеханическая
мощность также активная и равна P.3MQ ~ F2](B)/Br)o
- 299-
§ 10.3. Поляризованная магнитострикционнал система
В этой системе кроме переменной индукции В существует
постоянная индукцияВо, т. е. на постоянный поток Фо налагается переменный
поток Ф. При условии Вт<?В0 можно считать J2 = ф(?0 В)д?/
?/
@)?
Магнитострикционная сила, согласно формуле A0.6), и с учетом
равенств A0.11) равна
F(B) = Ф(БО)Б5 = [<v(B0)/(un)]Um sin (wf). A0.26)
Определяя деформацию совершенно так же, как для неполяризо-
ванной системы, получим
Re? = - [<v{Bo)Um/(u2n\z\)]cos{(>)t- <р) = - |mcos(uf- ф). A0.27)
Как видим, колебания поляризованной системы происходят с
частотой возбуждающего поля. Очевидно, это будет справедливо на
линейном участке кривой Т(В), где магнитострикционная функция
постоянна.
Полный ток, потребляемый системой, помимо токов потерь,
намагничивания и динамического будет включать еще ток поляризации
где Ц/0) - абсолютная магнитная проводимость материала стержня при
индукции В = Б0.
Подставляя выражения A0.27), A0.11) и A0.17), в которых у В
заменяем на ф(В0), в формулу A0.16) и дополняя последнюю силой тока /0,
для полного тока получим
/= (UjR9uTl) cos (Ш) + [I/m/(uI)] sin И) + Я0/экв/([1@)п) +
U/n]cos(uf-q>). A0.29)
Для определения средней мощности, потребляемой системой,
составим произведение 1и и усредним результат по времени. Получим
ul= U2JBR3J + [v(B0)UmlJBn)] cos <p.
Подставив во второе слагаемое значение ?ш из равенства A0.27),
найдем выражение для электромеханической мощности
^эм = [Ф2BУ WoJn2lzl)] cos ф. A0.30)
Сравнение поляризованной и неполяризованной систем. Принимая
ф(?0) = у(В0) и сопоставляя амплитуды ?ш обеих систем [см. равенства
- 300-
A0.15) и A0.27)], найдем, что отношение этих амплитуд равно 8В0/Вт
при возбуждении их переменным полем с одинаковыми напряжением
и частотой или, что то же, при одинаковой амплитуде переменной
индукции. Сравнение выражений для механической мощности
поляризованной и неполяризованной систем дает величину 16(В0/ВтJ.
Таким образом, неполяризованная магнитострикционная система,
колеблющаяся с двойной частотой, не только является нелинейной
и имеет повышенные электромагнитные потери [см. формулу A0.22)],
но и обладает малой эффективностью магнитомеханического
преобразования по сравнению с поляризованной системой. Поляризация (под-
магничивание) делает магнитомеханическую связь линейной,
обеспечивая совпадение частот механических колебаний и приложенного
переменного напряжения, а также позволяет получить достаточно
большие амплитуды колебаний и соответственно высокие
механические мощности.
Достоинства неполяризованной системы заключаются в
возможности использования более низких частот для возбуждения и отсутствии
источника поляризации.
§ 10.4. Магнитострикционные (пьезомагнитные)
уравнения
Связь между малыми амплитудами колебаний векторов Н, В и
тензоров S, Т может быть описана соотношениями, аналогичными
уравнениям пьезоэффекта. Ограничиваясь одномерным случаем,
соответствующим, например, колебаниям тонких стержней по длине или
пульсирующим радиальным колебаниям тонкостенных колец,
коэффициенты в уравнениях считаем скалярными величинами. Используя
аналоги Я -> Е, В -> D, ц -* е, 1/5 -* У, можно записать системы пьезомаг-
нитных уравнений связи соответственно равенствам (9.7), (9.9) и (9.10),
(9.12):
В=д5Я+е5; T=YHS-eH; 5 = A/Уя)Г+ dH; B=\iTH+dT, A0.31)
где Уя- модуль упругости, измеренный при холостом ходе (Я=0);
\is - магнитная проницаемость закрепленного стержня (деформация
5 = 0); е = a\is; а = фB?0) - магнитострикционная постоянная; d- a\iT/YB;
цг- магнитная проницаемость свободного стержня (напряжения
Г=0); YB- модуль упругости, измеренный при коротком замыкании
обмотки (В = 0).
Соотношение между магнитной и упругой энергией для
статического (низкочастотного) поля в магнитострикционном образце
характеризует материал с точки зрения эффектиности
магнитомеханического преобразования. Количественно степень преобразования
магнитной энергии в упругую и обратно оценивают энергетическим
коэффициентом магнитомеханической связи. На
практике, как правило, используют продольный магнитострикционный
эффект, и поэтому можно ограничиться одним коэффициентом
-301-
Соотношение между упругими модулями YH/YB и магнитными
проницаемостями \is/\iT запишем аналогично выражению (9.16):
а выражение для коэффициента связи - аналогично формуле (9.18):
к2 = уя<Р/|1г = а^Б/уВ. (Ю.ЗЗ)
Для каждого материала существует оптимальное магнитное поле (Но
или Во), при котором значение к2 максимально.
§ 10.5. Стержневой
преобразователь
Устройство. Преобразователь стержневого типа (рис, 10.2)
представляет собой пакет тонких электрически изолированных пластин 1
из магнитострикционного материала, предварительно отожженных
после штамповки, с наложенной на стержни обмоткой.
Штамп пластины пакета может содержать четное или нечетное
число стержней с накладками на торцах, чаще всего выполненными из
того же активного материала. При четном числе, с? ьржней их площади
сечений одинаковы, при нечетном - крайние стержни, вдвое тоньше.
Пластины в пакете скреплены заклепками 4, хомутиками или склеены.
После сборки пакет бакелизируют в вакууме, чем достигается
монолитность колебательной системы.
Рис. 10.2. Стержневой магнитострикционный преобразователь
- 302-
Рабочую поверхность накладки (одной или двух),
соприкасающуюся с водной средой, шлифуют и обезжиривают для обеспечения
надежного акустического контакта со средой. При наличии обтекателя его
полость заполняют или жидкостью, или плотной резиной, или
пластмассой с удельным акустическим сопротивлением, близким к рс воды.
Звукоизоляцию нерабочей поверхности преобразователя
осуществляют экраном 2, выполненным из материала с малым удельным
сопротивлением. Экран либо приклеивают к тыльной стороне, либо
прижимают к ней.
Для акустической развязки преобразователя от корпуса (деталь 6)
зазоры между пакетом и корпусом заполняют амортизирующей
резиной. Пакет в корпусе фиксируют резиновыми манжетами 3,
охватывающими боковые поверхности накладок со стяжками или специальные
выступы на уровне нейтрали колебательной системы. Манжеты
закрепляют металлическими скобами 6. Поскольку амортизирующие
манжеты не обеспечивают герметизации пакета в корпусе, пакет с обмоткой
оказывается в воде.
Провод обмотки 5 (в случаях омывания ее водой) имеет
двухслойную резиновую изоляцию. Число витков обмотки определяется
необходимой чувствительностью и распределением амплитуд по длине
рабочей поверхности, а направление намотки - условиями обеспечения
замкнутости магнитных потоков и несвязанности их в магнитных
цепях. В частности, для достижения равномерного распределения
число витков на всех стержнях (при четном их числе) одинаково,
направление витков на соседних стержнях одной магнитной цепи
противоположное, на соседних стержнях разных магнитных цепей -
одинаковое; при нечетном числе стержней витки наматывают через
стержень в одном направлении. На рис. 10.2 показан случай, когда
обмотка охватывает два стержня, и, следовательно, в одну магнитную цепь
входят четыре стержня. Выводы проводов обмотки уплотняют
сальниками в крышке, герметически закрывающей корпус антенны.
Эквивалентная схема. Для анализа многостержневой системы
достаточно рассмотреть продольные колебания одиночного стержня,
нагруженного на торцах соответствующей частью накладок (рис. 10.3).
Стержень длиною / с малыми поперечными размерами совершает
колебания вдоль оси х или под действием сил Ft и F2 (например, сил
звукового поля) или магнитострикционных усилий, вызванных
магнитным потоком Ф (например, при излучении). Постоянное и переменное
магнитные поля в стержне также направлены по оси х. При этих
условиях задача оказывается одномерной: только механические
напряжения Т(х) = Т и индукция В(х) = В не равны нулю. Элемент
колебательной системы, показанный на рис. 10.3, подобен элементу
пьезоэлектрического стержневого преобразователя (см. рис. 9.4, а) и отличается
лишь тем, что стержень и накладки магнитострикционного
преобразователя, как правило, изготовляют из одного материала. Поэтому не
повторяя вывода уравнения движения и не рассматривая вновь
граничные условия, можно утверждать, что механическая часть (сторона)
эквивалентной схемы преобразователей обоих типов одинакова
-303-
Рис. 10.3. Элемент колебательной
системы стержневого преобразователя
(см. рис. 9.4, б). Сила,
действующая на механической стороне
поляризованного преобразователя,
согласно формулам A0.6) и A0.7),
равна F(B) = q>{B0)BS = aBS.
Магнитострикционную силу
F(B) можно выразить через
приложенное к обмотке излучателя
напряжение и = Um exp (/со 0-
Пренебрегая омическими потерями в
обмотке, приравниваем и = nd<P/dt,
находим магнитный поток Ф и
индукцию В = u/(i(>)nS), где S -
площадь поперечного сечения
магнитопровода. Следовательно,
F(B) = aBS = [a/{ian)]u, A0.34)
где п - число витков на стержне.
Ток, протекающий через излучатель, в соответствии с
выражениями A0.23) и A0.29) равен
t//(icoL0)
A0.35)
где Lo - статическая индуктивность; |х, |2 - скорости колебаний
торцов стержня.
Из равенств A0.34) и A0.35) определяем КЭМТ N.t = а/(/соп) для сил
и напряжений и N2 = ш/(соп) для токов и скоростей.
Эквивалентная электромеханическая система поляризованного
магнитострикционного преобразователя представлена на рис. 10.4;
коэффициент трансформации
N=ia/(un\ A0.36)
Электромеханический трансформатор в этом случае следует
рассматривать как псевдотрансформатор. Выражения для движущей силы
и тока имеют вид
Рис. 10.4. Эквивалентная электромеханическая система
стержневого преобразователя
-304-
Если пакет преобразователя состоит из т стержней,
расположенных на равных расстояниях, то и в этом случае схема на рис. 10.4
верна, причем за 5 надо принимать суммарную площадь сечения
стержней mS, а за z1 и z2 - соответственно mz1 и mz2.
§ 10.6. Цилиндрический магнитострикционный
преобразователь
Устройство. Цилиндрический преобразователь (рис. 10.5) состоит из
тонких круглых пластин, набранных вдоль образующей с
тороидальной намоткой. Пластины изготавливают из магнитострикционных
материалов. При прохождении по обмотке переменного тока силовые
линии индукции магнитопровода располагаются по окружностям
с центрами на оси кольца. Усилия, возникающие благодаря прямому
магнитострикционному эффекту и направленные вдоль силовых
линий (точнее, по касательным к ним), вызывает радиальные колебания
кольца. Если длина кольца h мала по сравнению с длиной звуковой
волны в кольце, наряду с радиальными будут и осевые колебания.
Если толщина 6 кольца мала (б <ЗС а, б <С h), можно считать амплитуды
колебаний всех точек одинаковыми и рассматривать кольцо как
простой осциллятор.
Для тонкого кольца в § 9.12 получены следующие эквивалентные
параметры и резонансная частота:
= 2лYBSja;
A0.37)
где а - средний радиус; h - высота; 50 = &h - площадь осевого сечения
кольца; св - скорость распространения продольных колебаний в
стержне, которую практически можно принимать за скорость в цилиндре
или неограниченной среде.
Электрическая схема. Выше было показано, что при наличии
постоянной индукции Во магнитострикционные напряжения Т(В) =
= ц>(В0)В. Для элемента кольца с центральным углом с/ф (см. рис. 9.11)
радиальная сила равна (p(Bo)BSod(p, следовательно, полная движущая
J1-.N
Рис. 10.5.
Цилиндрический
магнитострикционный преобразователь
Рис. 10.6. Электромеханическая схема
цилиндрического преобразователя
20-614
-305-
Таблица 10.1. Формулы для расчета магнитострикционных преобразователей
Условие механического
резонанса
ctg —EJL ctg —*jr =
сн 2сВ
= (c5)H/(cBm5)
/о = св/Bла)
(ненагруженный)
X 1 //Л_ //«ж, _I_ m \/"* ^
/п— 1/^лЛ \\iil "г ''•л-' М'
(нагруженный)
Эквивалентные параметры
тэкв» сэкв
стержневой
(р/5)н + — p/mSX
2
cos2 (G)p/H/cH)
sin2[cop//BcB)]
цилиндрический
2лар6л; а/BлУвбп)
Механическая
добротность Qm
^ам
осВпам ,
aQ(pc)B ao)p
K3MTN
Динамическое активное
сопротивление RM
Условие электромеханического
резонанса
а
6)Л
2лф(В0)
СОЛ
"^н r
(рс5)н tg -Е— = рсв5 х ctg
сн
2a2L0
ш'рп2
ctg
ctg
2cH
цилиндрический
Примечание: m— число стержней; n — число витков на одном стержне; a — коэффи-
ная постоянная в формулах для стержневого преобразователя; ф (Во) — магнитострикцион-
цилиндра; б и/i — толщина стенки и высота цилиндра; индекс ,,н" относится к накладке
-306-
Акустическая мощность Ра#р
Статическая индуктивно~
2n(Qc)Bah
стержневой
Чаи
2тц5л25//экв; /экв = 2A +
цилиндрический
2ла
Чувствительность Мр на резонансной
частоте («)«
Чувствительность М нч на низких частотах
стержневой
(ОрЬо cos (Цр*н/сн)
(рс)в
aQHLolSH/BnmSYH) =
2пгп5Ув
цилиндрический
Лам
(рс)ва
\iT(p(B0)nuHah/YB
циент активного сопротивления излучения; а(|) = 1-A-а)Лам» a -магнитострикцион-
ная постоянная в формулах для цилиндрического преобразователя; a — средний радиус
стержневого преобразователя.
20*
-307-
сила Fr = 2лф(Б0)Ф. Подставляя значение индукции В = u/(iunS0), где
и - напряжение, приложенное к обмотке, получаем
Fr = 2л ф(Я0 )/(/(*) n)]u =Nxu. A0.38)
Динамический ток, согласно формуле A0.35), равен / = [/ф(Б0)/(сол)]?.
Поскольку в данном случае ? есть смещение кольца по средней линии,
то скорость смещения | = 2л|г, где |г - радиальная колебательная
скорость. Для тока, протекающего через преобразователь (без учета тока
потерь), получаем
/ = [2лф(Б0)/(/0)п)]|г = ^2|г. A0.39)
Таким образом, КЭМТ поляризованного цилиндрического
преобразователя определяют по формуле
\NX\ = \N2\ =]У = 2лф(Я0)/(о)п). A0.40)
Электромеханическая схема преобразователя представлена
на рис. 10.6.
Используя методику получения расчетных соотношений для
режимов излучения и приема пьезокерамических преобразователей,
изложенную в гл. 9, нетрудно получить формулы*, приведенные в
табл. 10.1.
§ 10.7. Импеданс магнитострикционного
преобразователя
В соответствии с эквивалентными схемами (см. рис. 10.4 и 10.6)
импеданс Z представляет собой сопротивление схемы с
электрической стороны в виде параллельного соединения статической
индуктивности Lo, сопротивления электромагнитных потерь Яэ#п и
динамического импеданса ZM = RM + iXM.
Анализ выражений для Z=R+iX и l/Z=G+/7 показывает, что
составляющая R импеданса имеет максимум при частоте 0)q
электромеханического резонанса, составляющая G проводимости - при
частоте 0H механического резонанса. Графики зависимости импеданса и
проводимости от частоты изображены на рис. 10.7. Экстремальные
значения, соответствующие частотам 0)х антирезонанса (минимум тока)
и со2 резонанса (максимум тока), не совпадают с частотами G)q и со0
из-за наличия активных сопротивлений R3n и RM. При частоте и1
импеданс достигает максимума за счет параллельного резонанса в цепи
^о - ^м: происходит компенсация реактивных проводимостей -
электрической и механической. При частоте со2 импеданс достигает минимума,
* Подробный расчет магнитострикционных преобразователей приведен
в учебном пособии автора [29].
- 308-
который обусловлен последовательным
резонансом в ветви ZM; упругое и
инерционное сопротивления взаимно
компенсируются (Хм = 0), сопротивление ветви
минимально и равно RM. При частоте со2
импеданс состоит из параллельно
включенных Lo, ДЭЛ1, Дм.
Согласно теореме об эквивалентном
генераторе, преобразователь-приемник
можно рассматривать как генератор, ЭДС
которого равна напряжению на
разомкнутом выходе: Uxx=Mxxp (Мхх -
чувствительность холостого хода; р - звуковое
давление в свободном поле), а
внутреннее сопротивление равно электрическому
импедансу преобразователя (рис. 10.8).
Для согласования приемника с нагрузкой используют
трансформатор (рис. 10.8, б). Приведенное к первичной цепи трансформатора
сопротивление нагрузки 2H = ZH/n2, где п - коэффициент
трансформации. Если \Z^\ = IZBHI, т. е. приемник и нагрузка согласованы,
напряжение на Z^ равно 0,51Гх х, а напряжение на нагрузке во вторичной
цепи трансформатора при этом будет в п раз больше, т. е. UH =
и ш1 шг ш
Рис. 10.7. Частотная
зависимость модулей
импеданса и проводимости
магнитострикционного
преобразователя
Как видно, в случае согласованной нагрузки напряжение на ней
пропорционально отношению UXJ y/~\Z^H\. Таким образом,
эффективность преобразователя в режиме приема при согласованной нагрузке
определяется его удельной чувствительностью.
Рис. 10.8. Эквивалентная схема приемника без
нагрузки (а) и с нагрузкой (б)
-309-
§ 10.8. Магнитострикционные материалы и их
сравнительная оценка для ГАП
К магнитострикционным материалам ГАП предъявляют ряд
требований, относящихся к их магнитным, магнитострикционным,
электрическим и механическим свойствам.
Сердечники преобразователей изготовляют из магнитомягких
материалов, магнитные свойства которых характеризуются начальной
магнитной проницаемостью цнач и коэрцитивной силой Нс.
Основные динамические параметры магнитострикционных
материалов - магнитострикционная постоянная а = (Т/В)$, магнитострик-
ционная постоянная чувствительности Л = (В/Т)ц и энергетический
коэффициент магнитомеханической связи fc2*. Эти параметры связаны
соотношениями
к2 - a V/1* = УнЛ2/цг; Л = a\xs/YH = a\iT/YB.
Постоянная а определяет акустическую мощность и
чувствительность излучателя по напряжению, постоянная Л - чувствительности
излучателя по току и приемника на низких частотах.
Чувствительность приемника на резонансной частоте
пропорциональна величине ац5, удельная резонансная чувствительность - вели-
вел
л/и?,
чине а д/Ji?, удельная чувствительность на низких частотах - величине
Электромагнитные потери зависят от удельного электрического
сопротивления рэ материала преобразователя, характеризующего
потери на вихревые токи, и коэрцитивной силы Нс, характеризующей
потери на гистерезис.
Механические потери в преобразователе оценивают добротностью
Максимальную удельную мощность излучателя ограничивают его
механическая прочность, магнитострикция насыщения \s,
интенсивность намагничивания насыщения Js.
Плотность р и модуль упругости У материала сердечника заданной
формы определяют резонансную частоту преобразователя. Чем ниже
скорость звука с = уУ/р, тем меньше размер сердечника для заданной
частоты резонанса.
Предельную рабочую температуру t магнитострикционного
материала определяет точка Кюри.
Упругие, магнитные, электрические и магнитострикционные
постоянные широко применяемых магнитострикционных материалов,
а также критерии эффективности использования преобразователей из
этих материалов приведены в табл. 10.2. Значения параметров
соответствуют оптимальному подмагничиванию.
Данные таблицы позволяют произвести сравнительную оценку
магнитострикционных материалов.
* Индексы S и Н обозначают постоянство соответственно деформации и
напряженности магнитного поля.
- 310-
Таблица 10.2. Значения постоянных и параметров некоторых магнитострик-
ционных материалов
Параметры и
постоянные
р, кг/м3
Ув-10-",Па
сВ, м/с
Тр-10-6,Па
рэ-107,Ом-м
Ио А/м
В^Тл
Инач^о
^оп/^о
Нк0 • 10, А/м
Н? • 10, А/м
Vi°6
а • 10, Н/Вб
*33
а*-Ю, Н/Вб
Л-109,Вб/Н
<к,°С
Qm
(ц^пг/Рэ)-1О-2,с/м2
tg6,%
ац?-10-7,Н/Вб
а 7^ Ю, Н/Вб
(ац^У^Ю3, м2/Вб
Никель
НП-2Т
8900
2,15
4900
360
0,7
170
0,61
100
35
10...20
36
-37
2,3
0,26... 0,3
1,9
4,2
360
750
6,28
6,0
66,5
11,2
3,1
Пермендюр
49КФ
8200
2,05
5200
500
3,4
140
2,4
700
200
4...6
32
70
2,2
0,48... 0,54
1,75
27
980
600
7,5
40
350
24,5
17,0
Сплав
никоей
8800
1,9
4650
420
1,8
17...25
0,062
1400
220
4...6
9,6
-25...-27
1,8
0,49
1,8
28
350
-
15,35
-
396
27
20,9
Сплав
12Ю '
6700
1,58
4800
800
16
10
1,6
1000
30
3...6
28
40
0,85
0,30
0,65
20
600
400
2,35
3,0
195
11,2
12,3
Феррит
21СПА
5200
1,79
5900
60...80
107
270
0,32
44
16
10...17
28
-26
2,4
0,21
2,0
2,8
590
2000
0,019
3,0
32
8,0
1,8
Примечание: значения tg б и механической добротности Qu соответствуют
оптимальному полю подмагничивания Но; для к33, а, Л даны максимальные значения; tg б
соответствует амплитуде индукции Вт < 0,001 Тл; QM соответствует амплитуде
механического напряжения 7^ < Ю5 Па; Тр — предел прочности при растяжении; сВ — скорость звука,
измеренная при короткозамкнутой обмотке (В = 0); Цг —относительная магнитная
проницаемость.
-311-
Хотя сердечники магнитострикционных преобразователей
набирают из тонких металлических пластин с целью уменьшения потерь на
вихревые токи, устранить эти потери полностью не удается, что ведет к
снижению КПД преобразователя и ограничению сверху диапазона его
рабочих частот.
В ультразвуковой технике применяют керамические материалы,
обладающие магнитострикционными свойствами, - ферриты или
пьезомагнитную керамику. По сравнению с пьезоэлектрической
керамикой магнитострикционные ферриты экономичны, дешевы,
относительно просты в изготовлении, не требуют дефицитных исходных
материалов. Основное преимущество ферритов по сравнению с
металлическими материалами заключается в отсутствии потерь на вихревые
токи. Магнитные потери в ферритовых сердечниках обусловлены в
основном гистерезисом. Благодаря чрезвычайно малой
электропроводности и высокой механической добротности (см. табл. 10.2), КПД
ферритовых преобразователей достигает 70... 80% и мало зависит
от частоты, а верхний предел рабочей полосы частот практически
определяется конструктивными соображениями. Недостатком ферритовых
преобразователей является их относительно малая механическая
прочность. Если, например, у никелевого излучателя, благодаря его
высокой прочности, в стационарном режиме предельная интенсивность
излучения 20 Вт/см2, то у ферритового излучателя она не превышает
3 Вт/см2. Поэтому использование ферритовых магнитострикторов
в гидроакустических антеннах возможно только при условии
повышения их прочности путем предваритального сжатия.
СПИСОК ЛИТЕРАТУРЫ
1. Акустика океана/Под ред. акад. Л. М. Бреховских. М.: Наука, 1974. 693 с.
2. Аронов Б. С. Об энергетическом методе расчета электроакустических
преобразователей//Вопр. судостроения. Сер. Общетехн. 1978. Вып. 31. С. 48—59.
3. Он же. Об эффективных коэффициентах электромеханической связи
пьезокерамических тел//Прикл. механика. 1980. Т. XVI. № 10. С. 101-107.
4. Бажина И. А. Об уточнении границ применимости геометрических
методов в акустике//Вопр. радиоэлектроники. Сер. 8.1960. Вып. 3. С. 3—11.
5. Бреховских Л. М., Лысанов Ю. Я. Теоретические основы акустики океана.
Л.: Гидрометеоиздат, 1982.264 с.
6. Булычева 3. Я., Ганаева Л. И., Голялина И. Я. Отечественные материалы
для магнитострикционных преобразователей//Вопр. судостроения. Сер.
Акустика. 1974. Вып. 1. С. 34-39.
7. Бурдик В. С. Анализ гидроакустических систем: Пер. с англ. Л.:
Судостроение, 1988. 392 с.
8. Вахитов Я. Ш. Теоретические основы электроакустики и
электроакустическая аппаратура. М.: Искусство, 1982, 415 с.
9. Гутин Л. Я. Избранные труды. Л.: Судостроение, 1977.599 с.
10. Дианов Д. Б. Акустические приемно-излучающие антенны. Л.: ЛЭТИ,
1982. 73 с.
11. Он же. Теория и расчет акустических приемно-излучающих устройств.
Л.: ЛЭТИ, 1981.73 с.
12. Добровольский Ю. Ю., Кудашева О. А., Рубанов И. А. О влиянии
взаимодействия резонансных электроакустических преобразователей на параметры
излучающей линейной антенной решетки//Акуст. журн. 1983. Т. 29. Вып. 3.
С. 341-346.
13. Евтютов А. П., Митько В. Б. Инженерные расчеты в гидроакустике.
2-е изд. Л.: Судостроение, 1988. 288 с.
14. Жуков В. Б., Островский Д. Б., Свердлин Г. М. Сопротивление излучения
конечного цилиндра: Человек и океан. Тез. докл. 2-й Дальневосточ. акуст. конф.
Владивосток, 1978. Ч. 2. С. 7-10.
15. Исакович М. М. Общая акустика. М.: Мир, 1982. 495 с.
16. Капм Л. Подводная акустика: Пер с англ. М.: Мир, 1972. 328 с.
17. Колесников А. Е. Акустические измерения: Учеб. для вузов. Л.:
Судостроение, 1983. 256 с.
18. Левин Б. Р. Теоретические основы статистической радиотехники: В 2 т.
М.: Сов. радио. 1966. Т. 1.728 с.
19. Лепендин Л. Ф. Акустика. М.: Высш. шк., 1978. 488 с.
20. Ольшевский В. В. Статистические методы в гидролокации. Л.:
Судостроение, 1983. 280 с.
21. Орлов Л. В., Шабров А. А. Гидроакустическая аппаратура
рыбопромыслового флота. Л.: Судостроение, 1987. 222 с.
22. Подводные электроакустические преобразователи: Справ./Под ред.
В. В. Богородского. Л.: Судостроение, 1983. 248 с.
-313-
23. Простаков А. Л. Электронный ключ к океану. Л.: Судостроение. 1986.
181с.
24. Пъезокерамические преобразователи: Справ./Под ред. С. И. Пугачева.
Л.: Судостроение, 1984. 256 с.
25. Рубанов И. Л. О влиянии взаимодействия резонансных
электроакустических преобразователей на характеристику направленности антенной решетки
с произвольным амплитудно-фазовым распределением//Акуст. журн. 1982. Т. 28.
Вып. 5. С. 681-684.
26. Рыжик И. М., Градштейн И. С. Таблицы интегралов, сумм, рядов и
произведений. М.: Физматгиз, 1963.1100 с.
27. РэлейДж.У. Теория звука: Пер. с англ.: В 2 т. М.: Гостехиздат, 1955.
Т. 2.475 с.
28. Свердлин Г. М. Гидроакустические преобразователи и антенны. Л.:
Судостроение, 1988. 200 с.
29. Он же. Прикладная гидроакустика. Л.: Судостроение, 1976.279 с.
30. Он же. Проектирование оптимальных антенн: Учеб. пособ. Л.: ЛКИ,
1984.70 с.
31. Скребнев Г. К. Пластинчатые гидроакустические преобразователи,
работающие на колебаниях изгиба. Л.: ЛЭТИ, 1985.48 с.
32. Скучик Е. Основы акустики: Пер. с англ.: В 2 т. М.: Мир, 1976. Т. 2.542 с.
33. Смарышев М, Д. Направленность гидроакустических антенн. Л.:
Судостроение. 1973.278 с.
34. Смарышев М. Д., Добровольский Ю. Ю. Гидроакустические антенны:
Справ, по расчету параметров. Л.: Судостроение, 1984. 300 с.
35. Справочник по гидроакустике: 2-е изд. Л.: Судостроение, 1988.522 с.
36. Статические и динамические свойства магнитострикционного сплава
никоси/М. Д. Авраменко, Н. А. Баранова, В. И. Бородин и др.//Акуст. журн. 1968.
Т. 14. Вып. 1.С. 25-29.
37. Сташкевич А. П. Акустика моря. Л.: Судостроение, 1966.354 с.
38. Сыркин Л. Н. Пьезомагнитная керамика. Л.: Энергия, 1980.208 с.
39. Тимошенко В. И. Расчет и проектирование параметрических
акустических преобразователей: В 2 ч. Таганрог: ТРТИ, 1967. Ч. 1.91 с.
40. Тимошенко С. Я. Колебания в инженерном деле. М.: Наука, 1967. 444 с.
41. Тюлин В. Н. Введение в теорию излучения и рассеяния звука. М.: Наука,
1976. 186 с.
42. Ультразвук/Под ред. И. П. Голяминой. М.: Сов. энцикл., 1979.400 с.
43. Ультразвуковые преобразователи: Пер. с англ. М.: Мир, 1972. 424 с.
44. Урик Р. Дж. Основы гидроакустики: Пер. с англ. Л.: Судостроение,
1978, 445 с.
45. Физическая акустика: Пер. с англ. В 7 т. М.: Мир, 1966-1970. Т. 1. Ч. А.
592 с.
46. Харитонов А. В. Электрические схемы-аналоги электроакустических
преобразователей: Учеб. пособ. Л.: ЛЭТИ, 1979.58 с.
47. Хортон Дж. У. Основы гидролокации: Пер. с англ. Л.: Судостроение,
1961. 472 с.
48. тендеров Е. Л. Волновые задачи гидроакустики. Л.: Судостроение,
1972.348 с.
49. Яковлев А. Н., Каблов Г. Я. Гидролокаторы ближнего действия. Л.:
Судостроение, 1983.199 с.
50. March H. W.t Schulkin M.t Kneale S. G. Scattering of Underwater Sound by the
Sea Surface//J. Acoust. Soc. Am. 1961. Vol. 33. P. 334.
51. Thorp W. H. Deep Ocean Sound Attenuation in the Sub- and Low-Kilocycle-per-
Second Region//J. Acoust. Soc. Am. 1965. Vol. 38. P. 648.
-314-
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Антенна: Магнитострикция 294
гидроакустическая 79 Масса присоединенная 63
дискретная 101 Материалы магнитострикционные 310
с компенсированными ХН 97 — пьезокерамические 292
линейная непрерывная 95 Модуль гибкости (податливости) 236
направленность 83 - пьезоэлектрический 238
параметрическая 290 - упругости 236
плоская 90 Мощность акустическая 226
помехоустойчивость 89 - диэлектрических потерь 260
— излучателя 228
Вектор волновой 15 - колебательная 198
Волны нормальные 174 — приповерхностного
источника^
Давление звуковое (акустическое) 6 - электромагнитных потерь 298
Декремент затухания 195
Деформация в твердом теле 235 Направленность:
Добротность механическая 218 антенны 83
— электрическая 260 диаграмма 82
характеристика 84
Затухание звука в море 164
Полоса пропускания 201
Излучатель: Постоянная магнитострикционная 296
КПД 228 - пьезоэлектрическая 237
нулевого порядка (монополь) 60 Преобразователь гидроакустический:
первого порядка (диполь) 65 — магнитострикционный стерж-
производительность 60 невой 302
Импеданс: цилиндрический 305
входной механический 210 - пьезоэлектрический стержне-
излучателя 227 вой 259
механический 62 цилиндрический 272
акустический удельный 25 Пьезоэффект 236
Интенсивность звука 23 обратный 237
поперечный 244
Колебания вынужденные 196 продольный 251
— распределенных систем 206 прямой 236
— свободные 195 уравнения 236
— установившиеся 198
Коэффициент концентрации: Резонанс механический 195
излучающей антенны 86 - электромеханический 268
приемной антенны 90 Рефракция звука 156
— магнитомеханической связи 301 Решетка антенная 101
— электромеханической связи 239 Дольфа—Чебышева 134
трансформации 224 эквидистантная 103
стержневого
преобразователя 254 Сопротивление потерь диэлектриче-
цилиндрического преобра- ских 260
зователя 274 механических 199
электромагнитных 299
-315-
Стержень полуволновый 210
— составной 212
— четвертьволновый 211
Схема эквивалентная 224
— электромеханическая 227
— электрическая 232
Уравнение волновое 9
— Гельм гольца 10
— гидролокации 138
— движения стержня 208
— луча 161
Характеристика направленности 83
максимумы боковые (побочные) 84
— главный 84
— добавочные (единичные) 103
угловая ширина 84
Частота резонанса механического 262
электромеханического 269
Чувствительность излучателя 229
— приемника 232
удельная 233
Энергия звуковой волны 21
ОГЛАВЛЕНИЕ
Предисловие 3
Введение 4
Часть I ОСНОВЫ ГИДРОАКУСТИКИ 6
Глава 1. Акустическое поле 6
§ 1.1 Волновое уравнение 7
§ 1.2. Плоская волна И
§ 1.3. Сферическая волна 16
§ 1.4. Цилиндрическая волна 18
§ 1.5. Энергия звуковых волн. Акустический импеданс 21
§ 1.6. Отражение и прохождение волн 26
§ 1.7. Распространение и отражение волн при наличии
потерь в среде 34
§ 1.8. Об условиях применимости законов геометрической
акустики 37
Глава 2. Методы расчета акустических полей 40
§ 2.1. Расчет акустических полей по формуле Кирхгофа 40
§ 2.2. Поле плоской поверхности 43
§ 2.3. Неоднородное волновое уравнение ¦ 51
§ 2.4. Расчет полей с использованием функций Грина 54
§ 2.5. Теорема взаимности акустических полей 56
Глава 3. Излучение акустических волн 58
§ 3.1. Пульсирующая сфера (монополь) 60
§ 3.2. Акустический диполь и осциллирующая сфера 65
§ 3.3. Поршневая диафрагма в бесконечном жестком экране.... 69
§ 3.4. Пульсирующий цилиндр 73
Глава 4. Направленность гидроакустических антенн 79
§ 4.1. Акустическое поле антенны в дальней, промежуточной
и ближней зонах 80
§ 4.2. Амплитудная характеристика направленности
излучающей антенны 83
§ 4.3. Фазовая характеристика направленности антенны 85
§ 4.4. Коэффициент концентрации звуковой энергии 86
§ 4.5. Плоский излучатель в бесконечном жестком экране 90
§ 4.6. Линейный излучатель 95
§ 4.7. Дискретные линейные антенны 101
§ 4.8. Линейная дискретная антенна, состоящая из
направленных элементов. Теорема умножения 109
- 317-
§ 4.9. Теоремы смещения и сложения 111
§ 4.10. Дискретная антенна с произвольным расположением
точечных элементов ИЗ
§ 4.11. Акустическая мощность дискретной антенны 117
S 4.12. Направленность пульсирующего цилиндра
конечной длины 120
§ 4.13. Антенны с уменьшенными боковыми максимумами 124
§ 4.14. Влияние акустического взаимодействия элементов
антенной решетки на ее параметры 127
§ 4.15. Направленность антенн при шумовом сигнале 131
§ 4.16. О синтезе антенн 134
Глава 5. Отражение акустических волн от тел различной
формы в водной среде 139
§ 5.1. Отражение от диска 139
§ 5.2. Отражение от сферы 141
§ 5.3. Отражение от кругового цилиндра 143
§ 5.4. Отражение от эллипсоида вращения 145
§ 5.5. Отражение от произвольной поверхности 146
§ 5.6. Отражение от тел в слое воды 149
Глава 6. Особенности распространения звуковых волн
в морской среде 153
§ 6.1. Скорость звука 153
§ 6.2. Подводный звуковой канал (ПЗК) 157
§ 6.3. Рефракция и затухание звука в море 160
§ 6.4. Влияние поверхности моря на акустическое поле 166
§ 6.5. Влияние дна моря на акустическое поле 170
S 6.6. Точечный источник в слое • 172
§ 6.7. Реверберация звука в море 176
§ 6,8. Сила цели подводных объектов 179
§ 6.9. Дальность действия гидроакустических систем 183
§ 6.10. Шумы моря 191
Ч а с т ь 11. ГИДРОАКУСТИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ 194
Глава 7. Механические колебательные системы 194
§ 7.1. Простой механический осциллятор 194
§ 7.2. Метод электромеханических аналогий 203
§ 7.3. Системы с распределенными параметрами 206
§ 7.4. Стержневые колебательные системы 208
Глава 8. Электромеханоакустическое преобразование энергии .... 218
§ 8.1. Электромеханоакустическая система 220
§ 8.2. Уравнения электромеханического преобразования 223
§ 8.3. Режим излучения 225
§ 8.4. Режим приема 230
Глава 9. Пьезоэлектрические преобразователи . 234
§ 9.1. Свойства кристаллов и основные соотношения
пьезоэлектрического эффекта 235
§ 9.2. Энергетический коэффициент электромеханической
связи 239
§ 9.3. Пьезоэлектрический эффект поликристаллических
сегнетоэлектриков 242
§ 9.4. Продольные колебания пьезоэлектрического стержня 244
— 318 —•
§ 9.5. Эквивалентные схемы пьезоэлектрического стержня 247
§ 9.6. Продольные колебания пьезоэлектрической пластины
по толщине 253
§ 9.7. Пьезоэлектрический стержень как осциллятор 254
§ 9.8. Устройство стержневого пьезокерамического
преобразователя 259
§ 9.9. Расчетные соотношения для режима излучения 261
§ 9.10. Расчетные соотношения для режима приема 267
§ 9.11. Импеданс (проводимость) пьезоэлектрического
преобразователя 271
§ 9.12. Цилиндрический пьезокерамический преобразователь... 272
§ 9.13. Сферический пьезокерамический преобразователь 279
§ 9.14. Пластинчатые преобразователи, работающие на
колебаниях изгиба * 282
§ 9.15. Нелинейные параметрические преобразователи
и антенны 290
§ 9.16. Сравнительная оценка пьезокерамических материалов
дляГАП 292
Глава 10. Магнитосгрикционные преобразователи 293
§ 10.1. Основные соотношения магнитострикционного
эффекта 294
§ 10.2. Неполяризованная магнитострикционная система 296
§ 10.3. Поляризованная магнитострикционная система 300
§ 10.4. Магнитострикционные (пьезомагнитные) уравнения 301
§ 10.5. Стержневой магнитострикционный преобразователь 302
§ 10.6. Цилиндрический магнитострикционный преобразователь 305
§ 10.7. Импеданс магнитострикционного преобразователя 308
§ 10.8. Магнитострикционные материалы и их сравнительная
оценка для ГАП 310
Список литературы , 313
Предметный указатель 315
Учебное пособие
СВЕРДЛИН ГРИГОРИЙ МИХАЙЛОВИЧ
ПРИКЛАДНАЯ ГИДРОАКУСТИКА
Зав. редакцией П. К. Зубарев
Редактор А. А. Ивановская
Художественный редактор Е. Я. Радомысльский
Технический редактор Е. А. Полякова
Корректор С. Н. Маковская
Оформление художника Д. Ю. Панфилова
ИБ № 1350
Подписано в печать 02.04.90. М—15561. Формат 60 х 88 1/16. Бумага офсетная № 2. Печать
офсетная. Усл.-печ. л. 19,6. Усл. кр.-отт. 19,6. Уч.-изд. л. 19,94. Тираж 3200 экз. Изд. № 4417-89.
Заказ № 614. Цена 1 руб.
Издательство „Судостроение", 191065, Ленинград, ул. Гоголя, 8.
Набрано в издательстве „Судостроение" на наборно-печатающем автомате операторами
М. А. Маренковой, В. В. Михайловой.
Отпечатано в Ленинградской типографии № 4 ордена Трудового Красного Знамени
Ленинградского объединения „Техническая книга" им. Евгении Соколовой Государственного
комитета СССР по печати.
191126, Ленинград, Социалистическая ул., 14.