/


































































































































































Text
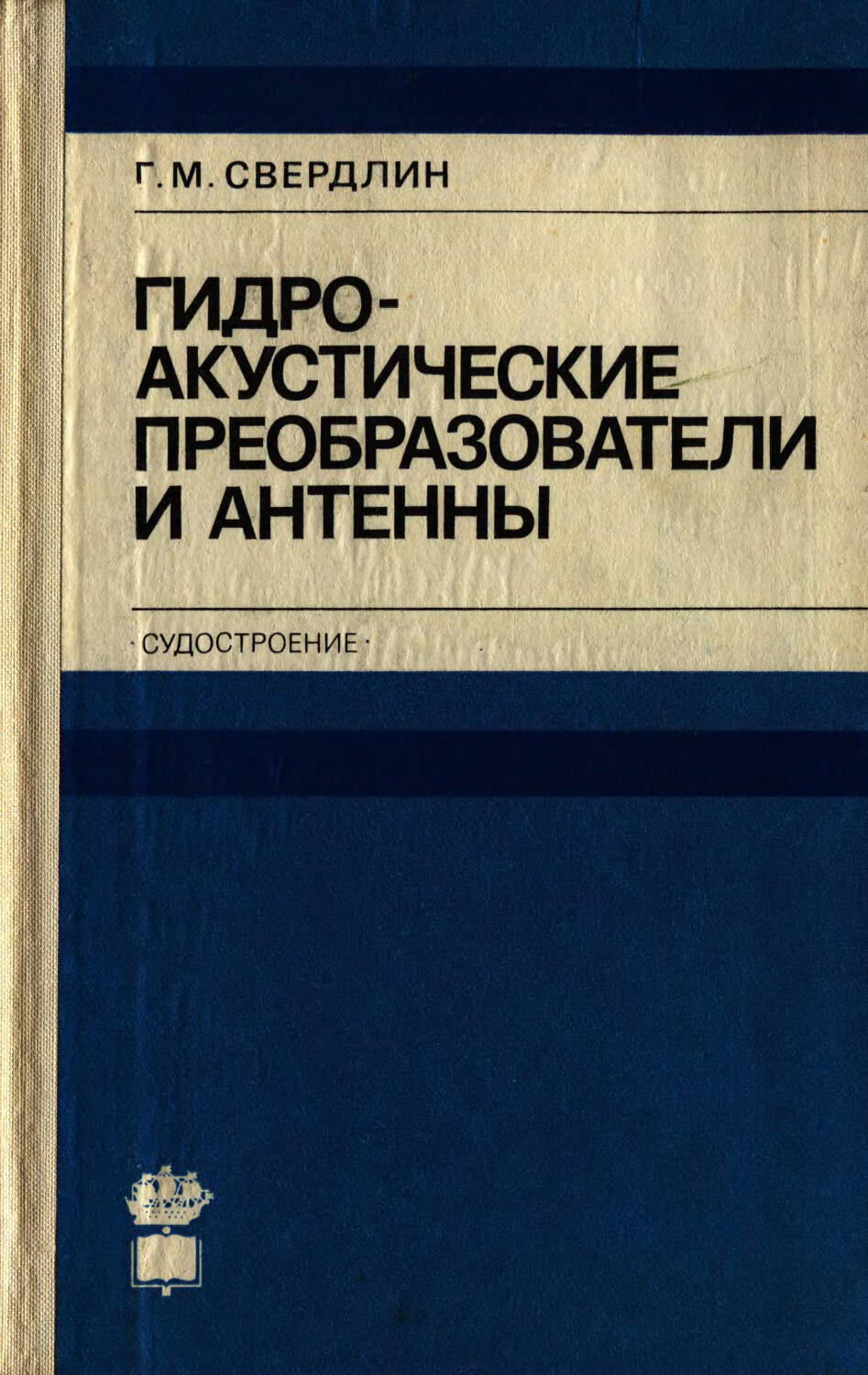
Г.м.СВЕРДЛИН
ГИДРОАКУСТИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ И АНТЕННЫ
СУДОСТРОЕНИЕ-
Г.М. СВЕРДЛИН
ГИДРОАКУСТИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ И АНТЕННЫ
Допущено Министерством судостроительной промышленности в качестве учебника для техникумов
ЛЕНИНГРАД
«СУДОСТРОЕНИЕ»
1980
ББК 32.875 С24
УДК 681.883.67(075.3)
Рецензенты:
д-р техн. наук И. И. КЛЮКИН, инж. И. А. РУМЫНСКАЯ
Научный редактор
канд. техн. наук Д. Б. ДИАНОВ
„ 31805—034
с————— 31—80 3605030000
048(01)—80
© Издательство «Судостроение»,
1980 г.
ПРЕДИСЛОВИЕ
Содержание учебника соответствует программе курса «Гидроакустические преобразователи и антенны», изучаемого в техникумах морского приборостроения. В книге изложены принципы действия и основы расчета гидроакустических преобразователей (ГАП) и антенн. При этом особое внимание уделено электромеханическим колебательным системам, использующим наиболее распространенные в современных антеннах пьезоэлектрические и в меньшей степени маг- нитострикционные эффекты преобразования. Получены (и частично даны без выводов) формулы, позволяющие определить параметры и характеристики стержневых и цилиндрических ГАП в режимах излучения и приема, а также сферического пьезокерамического преобразователя.
Приведены схемы конструкций наиболее употребительных ГАП и антенн и примеры их расчета.
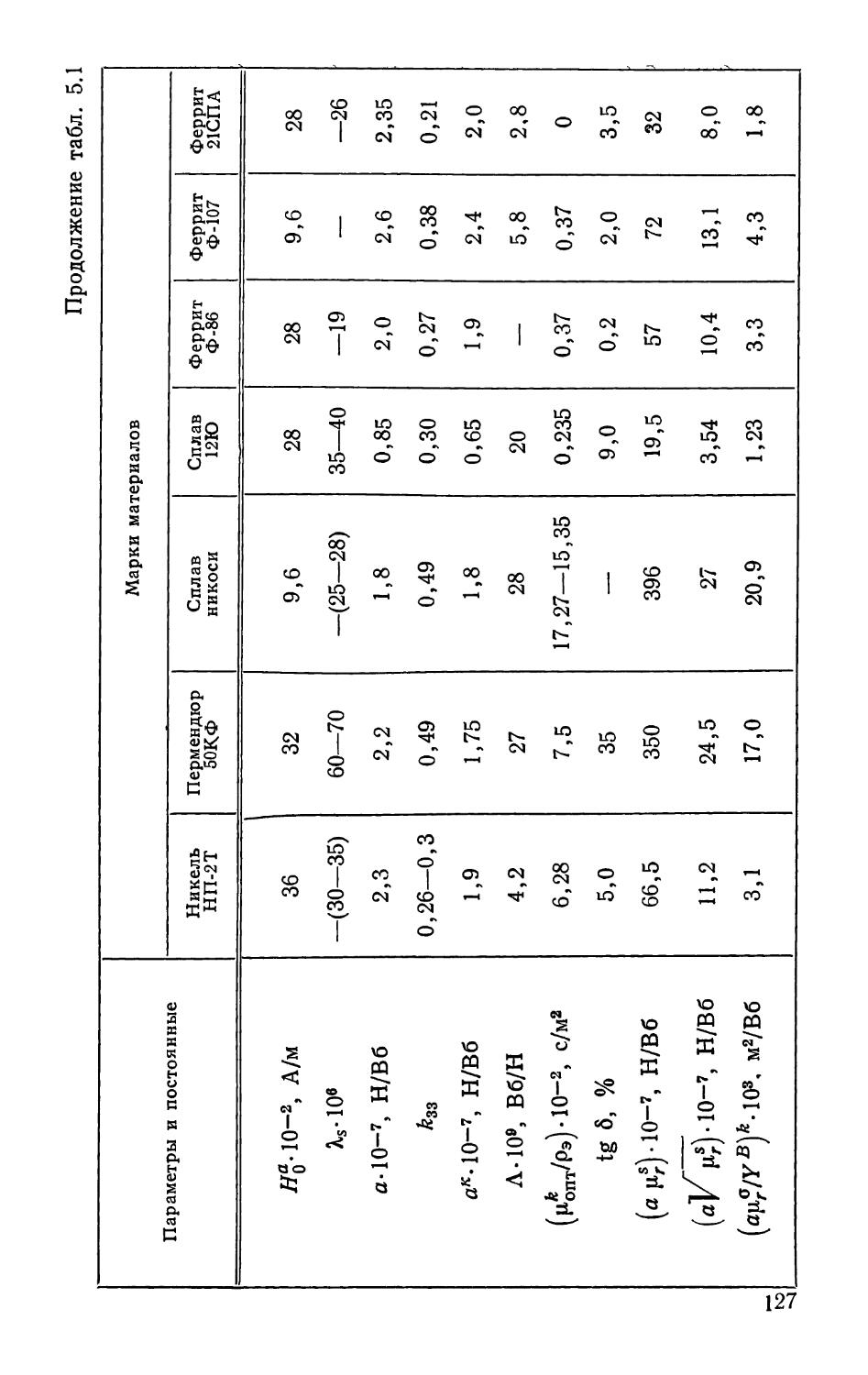
Книга снабжена таблицами значений констант активных материалов и критериев их эффективности для излучателей и приемников, расчетными графиками.
Изложение материала ведется с учетом программ техникумов по математике, физике, электротехнике и гидроакустике (в объеме учебника «Основы гидроакустики и гидроакустические станции» [6]).
Автор считает своим долгом принести благодарность Б. М. Бродскому, Е. А. Зельдину, П. И. Киселеву и Ю. П. Огурцову за советы, способствовавшие улучшению качества книги.
Учебник по курсу подводных электроакустических преобразователей и антенн для техникумов издается впервые и, естественно, не свободен от недостатков. Все замечания и пожелания будут с благодарностью приняты автором. Направлять их следует по адресу: 191065, Ленинград, ул. Гоголя, 8, издательство «Судостроение».
ВВЕДЕНИЕ
Акустические волны — единственный вид излучения, способный распространяться в воде на большие расстояния благодаря сравнительно малому затуханию. С помощью гидроакустических устройств (станций) решаются задачи измерения глубин и обследования рельефа дна, обеспечения безопасности плавания судов, обнаружения и распознавания морских объектов и косяков рыб, подводной связи, передачи информации от автономных приборов в океане и многие другие.
Все современные коммерческие и промысловые суда, а также военные корабли оснащены гидроакустической аппаратурой.
Для излучения и приема звуковых волн в воде используются тела, поверхности которых способны совершать колебания. Свойства тела в режиме излучения и приема звуковых волн находятся в тесной взаимосвязи, чем объясняется общий термин «антенна». В состав всякого гидроакустического устройства входят гидроакустические антенны, которые предназначаются, с одной стороны, для преобразования электрических колебаний, создаваемых генератором, в акустические колебания водной среды (режим излучения) и, с другой — для преобразования акустических колебаний воды в электрические сигналы (режим приема). Процесс преобразования электрической энергии в акустическую и обратно выполняют подводные электроакустические излучатели и приемники антенны, которые называют гидроакустическими преобразователями
(ГАП). Антенна может содержать один или несколько (до десятков и сотен) ГАП. Помимо преобразования
4
энергии антенна обеспечивает также пространственную концентрацию излучаемых и принимаемых сигналов, т. е. направленность устройства. Свойство направленности антенны важно с точки зрения концентрации энергии в нужном направлении при излучении и повышения отношения сигнал/помеха при приеме. Как правило, ГАП, следовательно, и антенны в зависимости от способа включения могут работать излучателями или приемниками. Подобные системы называются обратимыми. Большинство ГАП и антенн обладают свойством обратимости.
Для неискаженного преобразования энергии ГАП антенн работают в линейных режимах. Рабочие частоты современной гидроакустической аппаратуры находятся в диапазоне от единиц герц до сотен килогерц, мощности излучения — от единиц ватт до нескольких мегаватт (в импульсном режиме). Габариты антенн могут достигать десятков метров, а их масса — десятков тонн. Конструкции подводных антенн существенно отличаются от устройств, работающих в воздухе — излучателей (громкоговорителей) и приемников (микрофонов). Это объясняется особенностями водной среды и условиями эксплуатации ГАП.
Во-первых, волновое сопротивление воды — отношение звукового давления к колебательной скорости—примерно в 3500 раз больше волнового сопротивления воздуха, вследствие чего рабочие поверхности (диафрагмы) ГАП колеблются с малыми амплитудами (в 60 раз меньшими, чем в воздухе) и с большими усилиями (в 60 раз большими, чем в воздухе). Поэтому в качестве диафрагм ГАП используются не тонкие гибкие пластинки, а поверхности жестких стержней и оболочки жестких цилиндров и сфер. Во-вторых, из-за большей скорости звука в воде (с= 1500 м/с) для создания определенной концентрации звуковой энергии площадь приемоизлучающей диафрагмы, работающей в воде, должна быть примерно в 20 раз больше площади диафрагмы, работающей в воздухе (с = 330 м/с). В-третьих, чтобы обеспечить излучение больших мощностей, к ГАП подводятся значительные электрические мощности, создающие в активных (в электромеханическом отношении) элементах значительные механические напряжения и тепловые нагрузки. Антенны, установленные на под-
5
водной лодке, при заглублении испытывают гидростатические давления порядка десятков и сотен атмосфер. Все эти факторы предъявляют повышенные требования к обеспечению механической и электрической прочности, тепловому режиму, коррозионной стойкости, КПД ГАП и антенне в целом.
В книге излагаются принципы действия ГАП современных гидроакустических антенн, основы теории направленности, расчет различных электромеханических систем ГАП в режимах излучения и приема, а также описания конструкций и методы проектирования ГАП и антенн. Теоретический материал сопровождается примерами расчетов.
Первый подводный преобразователь, основанный на использовании пьезоэлектрического эффекта кварца, был создан французским физиком Полем Ланжевеном, который вместе с русским инженером К- В. Шиловским изобрел ультразвуковой гидролокатор.
Теория электроакустических преобразователей, и в частности гидроакустических, разработана советскими учеными Н. Н. Андреевым, Л. Я. Гутиным, В. Н. Тюлиным, А. А. Харкевичем и др.
В 1944 г. Б. М. Вул и И. М. Гольдман в СССР открыли новый пьезоэлектрик — титанат бария. С этого времени начинается широкое использование синтетических пьезоматериалов, так называемой пьезокерамики, в качестве активных (чувствительных) элементов ГАП. В современных ГАП широко применяются различные составы пьезокерамики промышленного производства. Благодаря этим материалам оказалось возможным изготовлять преобразователи с криволинейной конфигурацией активной поверхности (сферы, цилиндры) и широкой рабочей полосой частот,
ГЛАВА 1.
ХАРАКТЕРИСТИКИ
ГИДРОАКУСТИЧЕСКИХ
ПРЕОБРАЗОВАТЕЛЕЙ
Излучение и прием акустических волн в воде составляют основную техническую задачу гидроакустики. Акустическое поле представляет собой поле механических возмущений, для их создания или приема используются механические колебательные системы.
Чтобы привести в движение излучающую поверхность (диафрагму), необходимо некоторое механическое устройство; в режиме приема это же устройство преобразует энергию колебаний диафрагмы в другой вид энергии.
Из всех видов энергии в современной технике наибольшее использование находит электрическая энергия, которую довольно легко производить, распределять, усиливать, измерять и преобразовывать. Поэтому в гидроакустике, как и вообще в акустике, широкое распространение получили электромеханические (электроакустические) преобразователи. Колебательная система ГАП, таким образом, является сложной электромеханической системой, в которой одновременно происходят электрические и механические процессы.
В этой главе рассматриваются вопросы теории преобразования линейными обратимыми системами, которые могут использоваться и как излучатели, и как приемники.
§ 1.1. Классификация и основные параметры Г АП
Классификация ГАП. ГАП различаются по многим признакам: назначению, принципу преобразования энергии, структуре механической колебательной системы и формам используемых колебаний, конструкции и др.
7
По назначению ГАП делятся на излучатели, приемники и обратимые универсальные преобразователи. Независимые излучатели и приемники используются в антеннах подводной связи, гидролокаторах, навигационных приборах с раздельными каналами излучения и приема. Универсальные ГАП применяются в аналогичных устройствах при поочередном использовании обоих режимов.
По физическим принципам преобразования энергии ГАП подразделяются на пьезоэлектрические, магнитострикционные, электродинамические, электромагнитные. Все они характеризуются обратимым механизмом преобразования.
Кроме электромеханических преобразователей находят применение и другие подводные источники и приемники звука. Так, мощным источником звука в области низких частот может служить взрыв заряда взрывчатого вещества, менее мощным — электроискровой разряд. Для приема могут также использоваться параметрические приемники, в которых под воздействием звукового поля изменяется какой-либо параметр (например, электрическое сопротивление), регулирующий поток энергии от местного источника питания; к ним относятся угольные, емкостные, полупроводниковые, электрохимические и другие приемники. Свойством обратимости эти преобразователи не обладают.
По структуре колебательной системы ГАП делятся на группы: стержневые, цилиндрические, пластинчатые, сферические.
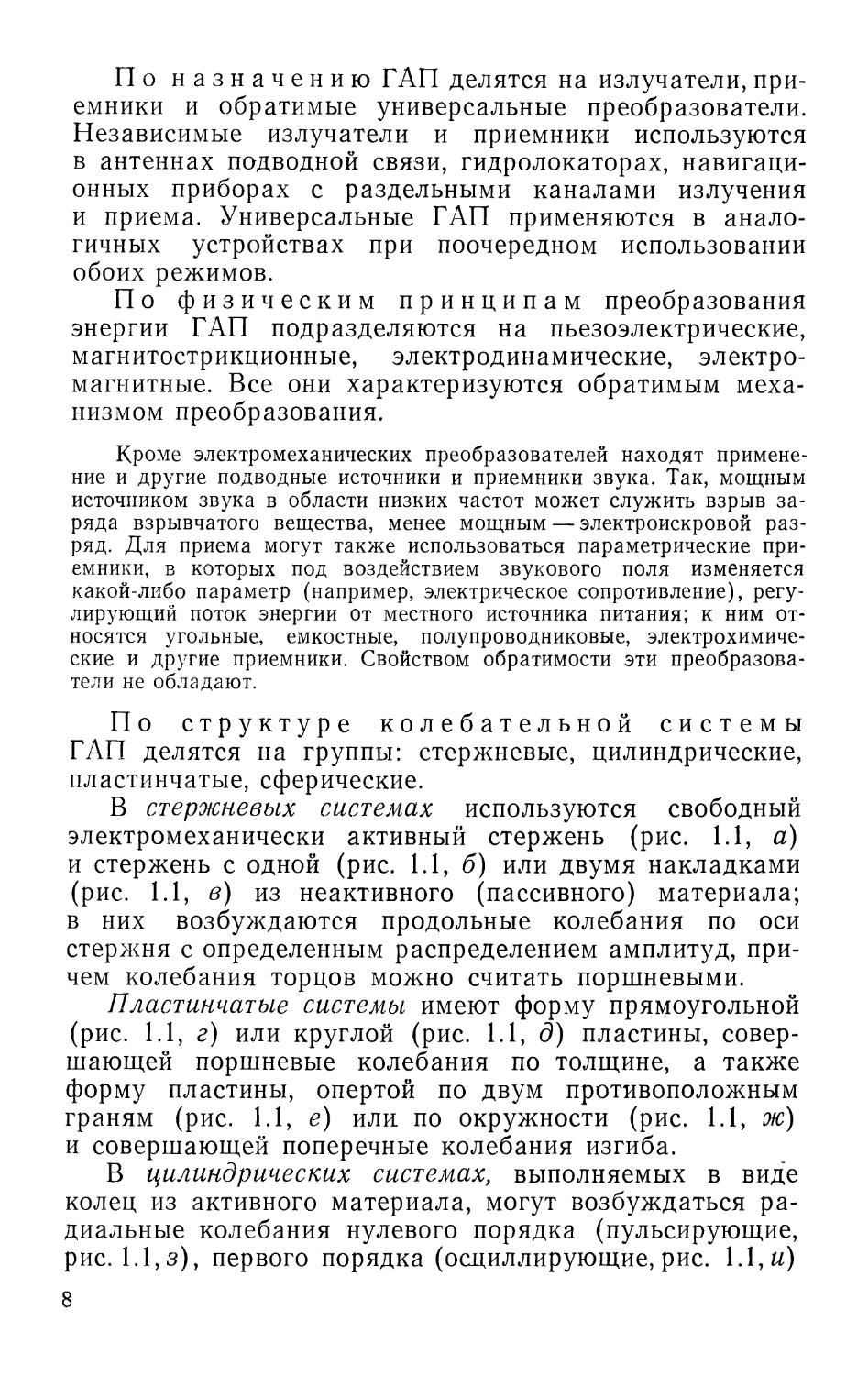
В стержневых системах используются свободный электромеханически активный стержень (рис. 1.1, а) и стержень с одной (рис. 1.1, б) или двумя накладками (рис. 1.1, в) из неактивного (пассивного) материала; в них возбуждаются продольные колебания по оси стержня с определенным распределением амплитуд, причем колебания торцов можно считать поршневыми.
Пластинчатые системы имеют форму прямоугольной (рис. 1.1, г) или круглой (рис. 1.1, д) пластины, совершающей поршневые колебания по толщине, а также форму пластины, опертой по двум противоположным граням (рис. 1.1, е) или по окружности (рис. 1.1, ж) и совершающей поперечные колебания изгиба.
В цилиндрических системах, выполняемых в виде колец из активного материала, могут возбуждаться радиальные колебания нулевого порядка (пульсирующие, рис. 1.1, з), первого порядка (осциллирующие, рис. 1.1, и)
8
Рис. 1.1. Колебательные системы ГАП.
и колебания второго порядка с четырьмя узлами по окружности (изгибные, рис. 1.1, к).
Колебательная система сферического преобразователя представляет собой тонкую однородную сферическую оболочку (рис. 1.1, л), совершающую практически радиальные пульсирующие колебания.
По конструкции ГАП подразделяются на силовые (рис. 1.2, а) и компенсированные (рис. 1.2, б). Конструктивное выполнение ГАП определяется главным об-
Рис. 1.2. Силовая (а) и компенсированная (б) конструкции ГАП.
разом их статической механической прочностью. В силовых конструкциях приемоизлучающая поверхность 1 и активный элемент 2 испытывают одностороннее напряжение (сжатие) от гидростатического давления, поскольку внутренний объем 3 корпуса 4 заполнен воздухом при нормальном атмосферном давлении; под этим напряжением находится и упругая подвеска 5, развязывающая колебательную систему и корпус. Очевидно, активный элемент силового преобразователя должен выдерживать максимальное заглубление антенны без заметного изменения свойств. В компенсированных конструкциях внутренний объем 3 заполнен газом или жидкостью при давлении, равном внешнему гидростатическому; здесь активный элемент подвержен равномерному всестороннему сжатию, так что изменений свойств (параметров) активного материала не происходит. На рис. 1.2,6, кроме того, 6 — отверстие для выравнивания давления; 7 — компенсатор.
10
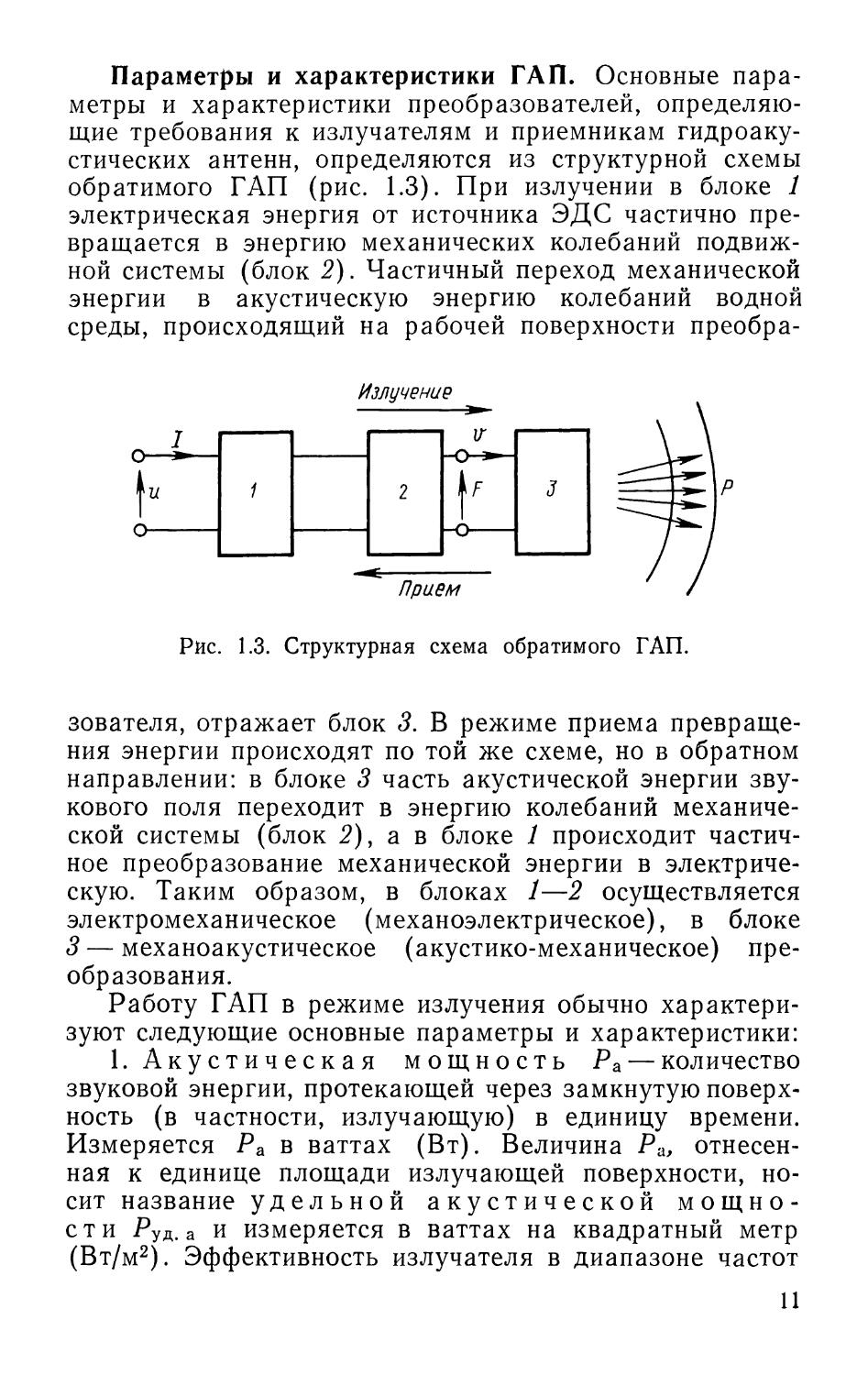
Параметры и характеристики ГАП. Основные параметры и характеристики преобразователей, определяющие требования к излучателям и приемникам гидроакустических антенн, определяются из структурной схемы обратимого ГАП (рис. 1.3). При излучении в блоке 1 электрическая энергия от источника ЭДС частично превращается в энергию механических колебаний подвижной системы (блок 2). Частичный переход механической энергии в акустическую энергию колебаний водной среды, происходящий на рабочей поверхности преобра-
Рйс. 1.3. Структурная схема обратимого ГАП.
зователя, отражает блок 3. В режиме приема превращения энергии происходят по той же схеме, но в обратном направлении: в блоке 3 часть акустической энергии звукового поля переходит в энергию колебаний механической системы (блок 2), а в блоке 1 происходит частичное преобразование механической энергии в электрическую. Таким образом, в блоках 1—2 осуществляется электромеханическое (механоэлектрическое), в блоке 3 — механоакустическое (акустико-механическое) преобразования.
Работу ГАП в режиме излучения обычно характеризуют следующие основные параметры и характеристики:
1. Акустическая мощность Ра — количество звуковой энергии, протекающей через замкнутую поверхность (в частности, излучающую) в единицу времени. Измеряется Ра в ваттах (Вт). Величина Ра, отнесенная к единице площади излучающей поверхности, носит название удельной акустической мощности Руд. а и измеряется в ваттах на квадратный метр (Вт/м2). Эффективность излучателя в диапазоне частот
11
характеризуется частотной зависимостью акустической мощности.
2. Электроакустический КПД к\эа — отношение акустической мощности к электрической мощности Рэ, потребляемой преобразователем от источника возбуждения.
3. Полное входное электрическое сопротивление (импеданс) Z определяет соотношение между приложенным напряжением и и током / в цепи излучателя. Из-за фазового сдвига между и и / величина Z, как правило, является комплексной.
4. Характеристика направленности представляет зависимость создаваемого излучателем поля (звукового давления) от направления на точку наблюдения (приема), т. е. оценивает пространственное или угловое распределение поля.
5. Коэффициент осевой концентрации Ко характеризует способность преобразователя (антенны) концентрировать излучаемую звуковую энергию в пределах малого телесного угла.
Все перечисленные параметры являются функциями рабочей частоты.
Из параметров, характеризующих работу ГАП в режиме приема, наиболее важными являются следующие:
1. Чувствительность холостого хода v определяет величину электрического напряжения и на разомкнутом выходе преобразователя (антенны) при воздействии на его (ее) рабочую поверхность звукового давления р, равного одному паскалю (одному ньютону на квадратный метр). Измеряется v в вольтах на паскаль (В/Па). Частотная зависимость чувствительности характеризует эффективность приемника как акустикоэлектрического преобразователя в диапазоне частот.
2. Электрический импеданс Z* устанавливает соотношение между напряжением, возникающим на электрическом выходе приемника, и током в его цепи; это соотношение обычно является комплексным.
3. Характеристика направленности представляет зависимость ЭДС на выходе (или чувствительности) приемника от направления падающей на его диафрагму плоской волны.
4. Коэффициент осевой концентрации Ко характеризует направленные свойства приемника при
12
падении на его диафрагму волн со всех направлений, например от источников помех. Величина Ко показывает, во сколько раз меньшая энергия помех от равномерно распределенных источников в окружающем пространстве воздействует на направленный приемник, чем на ненаправленный. Иначе, Ко оценивает степень подавления помех, т. е. помехоустойчивость ГАП в режиме приема.
Параметры ГАП в режиме приема, как и в режиме излучения, зависят от рабочей частоты.
§ 1.2. Электромеханическое и электроакустическое преобразование
Основные соотношения при преобразовании. Известны многие примеры механизмов и приборов, в которых механические системы и электрические цепи объединены в разнообразных конструктивных формах. Электрические машины, гидрофоны, измерители вибраций и другие приборы преобразуют механическую энергию в электрическую. В электромоторах, звукоизлучателях, различных электроизмерительных приборах происходит преобразование электрической энергии в механическую. В таких системах механические и электрические процессы взаимосвязаны, и поэтому системы называются электромеханическими.
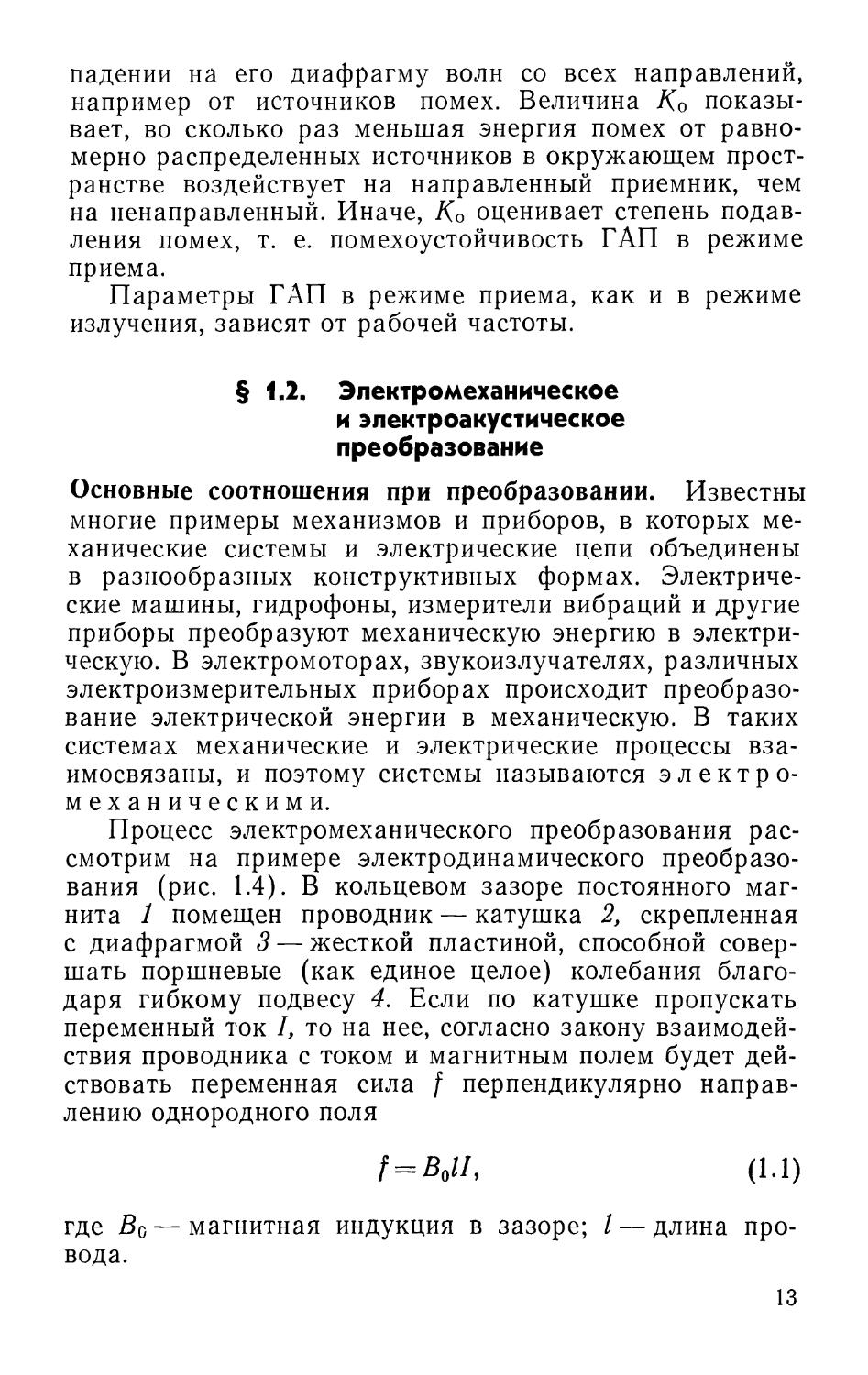
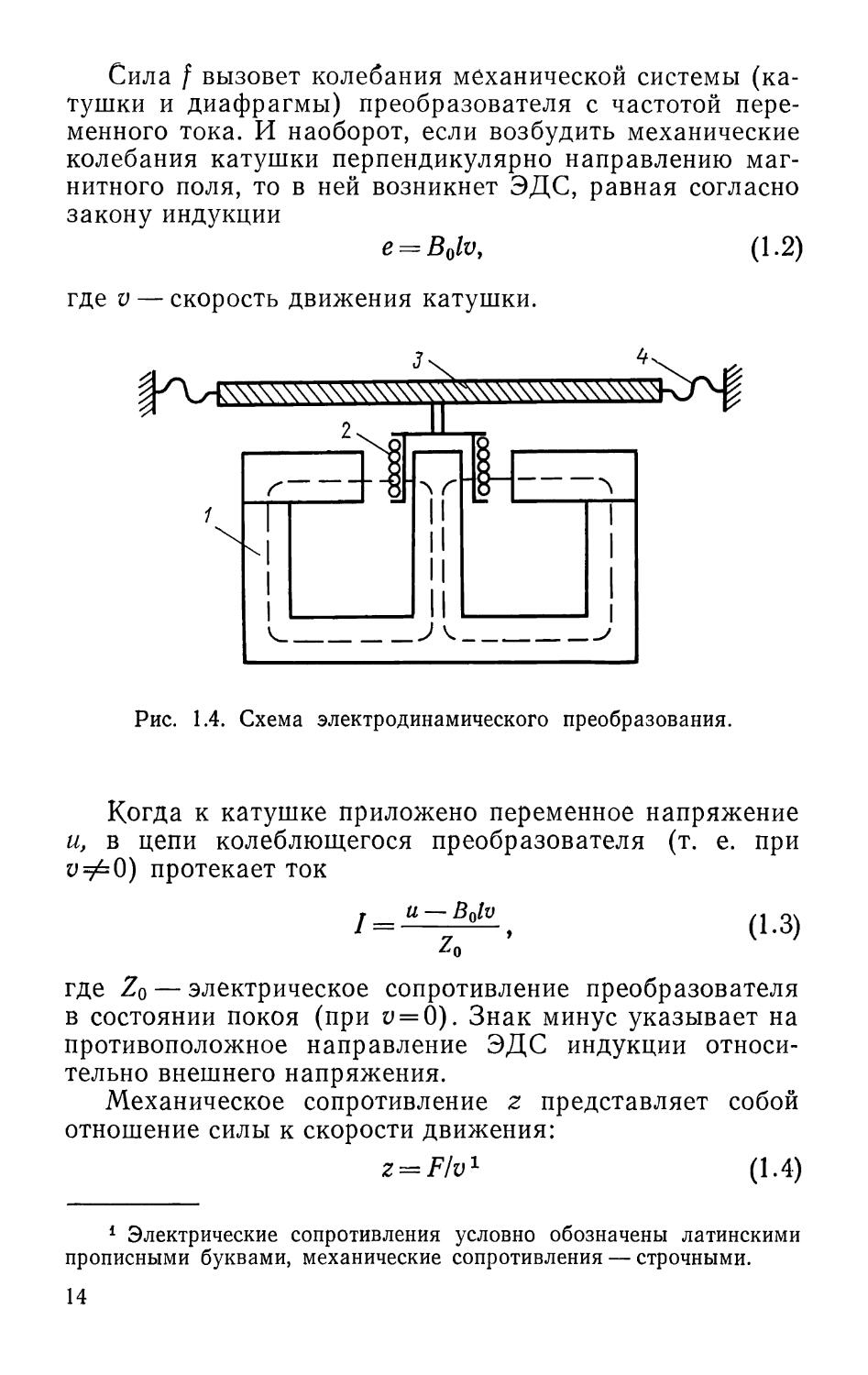
Процесс электромеханического преобразования рассмотрим на примере электродинамического преобразования (рис. 1.4). В кольцевом зазоре постоянного магнита 1 помещен проводник — катушка 2, скрепленная с диафрагмой 3 — жесткой пластиной, способной совершать поршневые (как единое целое) колебания благодаря гибкому подвесу 4, Если по катушке пропускать переменный ток /, то на нее, согласно закону взаимодействия проводника с током и магнитным полем будет действовать переменная сила f перпендикулярно направлению однородного поля
f = B0lIy (1.1)
где BG—магнитная индукция в зазоре; I — длина провода.
13
Сила f вызовет колебания механической системы (катушки и диафрагмы) преобразователя с частотой переменного тока. И наоборот, если возбудить механические колебания катушки перпендикулярно направлению магнитного поля, то в ней возникнет ЭДС, равная согласно закону индукции
e = BQlv, (1.2)
где v — скорость движения катушки.
Рис. 1.4. Схема электродинамического преобразования.
Когда к катушке приложено переменное напряжение и, в цепи колеблющегося преобразователя (т. е. при у=т^=0) протекает ток
/= U-B«lv t (1.3)
^0
где Z0 — электрическое сопротивление преобразователя в состоянии покоя (при у = 0). Знак минус указывает на противоположное направление ЭДС индукции относительно внешнего напряжения.
Механическое сопротивление г представляет собой отношение силы к скорости движения:
z^Flv1 (1.4)
1 Электрические сопротивления условно обозначены латинскими прописными буквами, механические сопротивления — строчными.
14
и измеряется в ньютон-секундах на метр (Н* с/м). Сила, движущая катушку в магнитном поле, приложена в центре диафрагмы и равна f согласно (1.1). Подставляя значение скорости v = BolI/z в уравнение (1.3) и решая его относительно I, находим
/=—- = -±-, (1.5)
Zo “Ь Zm Zbx
где
ZM = (B0l)2lz = K2lz. (1.6)
Как видно из (1.5), при наличии механических колебаний электрическое сопротивление преобразователя складывается из сопротивления Zo при и = 0 и динамического сопротивления ZM. Если механическое сопротивление нагрузки равно бесконечности, то ZM = 0 и входное (электрическое) сопротивление преобразователя ZBX = Z0; при скорости у = 0 в неподвижной катушке противоэлектродвижущая сила не индуцируется и сопротивление Zo не изменяется. Сопротивление ZM отражает взаимодействие электрической цепи и механической системы преобразователя, а именно оценивает реакцию механических колебаний на электрические. Величина К=В01 определяет количественную связь между динамическим и механическим сопротивлениями, равно как и между силой и током (1.1), напряжением и скоростью (1.2). Коэффициент К называют коэффициентом электромеханического преобразования; измеряется К в ньютонах на ампер (Н/А) или, что одно и то же, в вольт-секундах на метр (В* с/м). Коэффициент К показывает, какая сила действует на механическую систему преобразователя, когда по его электрической цепи протекает ток величиной 1А, или какое напряжение развивается на клеммах электрической цепи преобразователя при колебаниях его механической системы со скоростью 1 м/с.
При колебаниях катушки под действием приложенной к диафрагме внешней периодической силы F за счет наведенной ЭДС е в замкнутой цепи катушки возникает ток. Этот ток, взаимодействуя с магнитным полем, создает электромагнитную силу f, противодействующую
15
внешней силе F. Скорость колебаний катушки в зазоре равна
F — f F — В011 г г
(1.7)
Так как I=ejz и e = B0lv, то f = B0le/z = (BqI)2v/Z. Подставив это значение f в (1.7) и решая полученное уравнение относительно скорости v, находим
F F
г + гэ zBx
(1.8)
где
z9 = (B0l)2IZ = K2/Z. (1.9)
Из полученных выражений видно, что входное (механическое) сопротивление преобразователя равно сумме сопротивлений z при 1=0 и za, обусловленного протеканием тока через катушку при ее движении в магнитном поле. Если Z = oo, т. е. электрическая цепь разомкнута, то z9 = 0; при этом не происходит взаимодействия магнитного поля с током и скорость колебаний механической системы определяется только ее собственным (при 1=0) механическим сопротивлением. Если Z—^0, т. е. цепь катушки замкнута накоротко, то I—*оо и электромагнитная сила будет максимальной; максимальной будет и величина сопротивления z3, характеризующего связь механической системы с электрической цепью. Сопротивление z3 оценивает реакцию электрической цепи на механическую систему преобразователя.
Коэффициенты преобразования и трансформации. Равенства (1.3) и (1.7), определяющие зависимость между электрическими (и, I) и механическими (F, у) переменными величинами, были получены для электродинамического преобразователя. Эти равенства справедливы для любого линейного обратимого преобразователя с сосредоточенными силами.
Когда преобразователь работает в режиме излучения, его входная сторона электрическая, а выходная— механическая. Полагая в выражении (1.3) ток /=0 (холостой ход), находим u/v = K. Для преобразователя, работающего в режиме приема, входная сторона механи-
16
ческая, выходная сторона электрическая. При заторможенном входе (у^=0) из (1.7) получаем F/I = K. Таким образом,
(u/v)J=0 = (F/I)v^K. (МО)
Соотношение (1.10) является выражением так называемой теоремы электромеханической взаимности.
Приведем еще одно соотношение взаимности для случая работы излучателя в режиме короткого замыкания (и=0) и приемника при заторможенном входе (п = 0):
(№и = Э)и = «- (1Л1)
В отличие от равенства (1.10) в равенстве (1.11) отношения составлены из взаимно аналогичных величин, поскольку скорость аналогична току, а сила — разности потенциалов. Если представить себе некоторый условный трансформатор, к одной «обмотке» которого приложено «напряжение» F и по ней протекает «ток» v, а к другой «обмотке» приложено электрическое напряжение и и по ней протекает ток / (рис. 1.5), то величина п [см. (1.11)] соответствует коэффициенту трансформации. Этот условный трансформатор преобразует механические величины в их электрические аналоги и наоборот. Величину п называют коэффициентом электромеханической трансформации и измеряют в ампер-секундах на метр (А* с/м) или ньютонах на вольт (Н/В). Если известен коэффициент п, то по напряжению (или току) могут быть определены сила (или скорость), либо по механической силе (или скорости)— напряжение (или ток). Таким образом, обе стороны преобразователя можно считать связанными посредством идеального (т. е. без потерь) электромеханического трансформатора и обращаться с последним как с реально существующим. В частности, можно пересчитывать с одной стороны на другую сопротивления, тем самым оценивая реакцию механических (электрических) колебаний на электрические (механические).
Рис. 1.5. Электромеханический трансформатор.
17
§ 1.3. Характеристики излучателя
Сопротивления излучателя. Для анализа работы и расчета излучателя представим его эквивалентную схему в виде следующих последовательно соединенных цепей (рис. 1.6): генератора возбуждения с ЭДС € и внутренним сопротивлением Zi электрической цепи преобразователя, электромеханического трансформатора и механической цепи с сопротивлением нагрузки zH. Сопротивление Zi генератора, как правило, мало по сравнению с сопротивлением нагрузки, и можно считать Z* — 0. Если же Zi велико, то при непосредственном подключении к генератору преобразователя с малым входным сопротивлением электрическая мощность, отдаваемая излучателю, окажется малой. Чтобы излучатель потреблял от возбуждающего генератора максимальную мощность, их сопротивления должны быть согласованы. Поэтому очень важно знать входное сопротивление ZBX излучателя, измеренное с электрической стороны. Но на величину ZBX оказывает влияние и механическое сопротивление гвых, измеренное со стороны выхода преобразователя.
Когда излучатель нагружен на среду, его выходное сопротивление слагается из сопротивлений z и zH ив общем случае имеет активную и реактивную составляющие, т. е.
2Вых = 2 + 2н =T+iXM. (1.12)
Величина г определяется сопротивлением механических потерь гп в преобразователе и активным сопротивлением излучения rs. Сопротивление гп обусловлено внутренним (в деформируемых элементах) трением, потерями в креплениях, местах склейки и т. п. Величина хш представляет собой сумму собственного реактивного сопротивления преобразователя (инерционного и упругого) и инерционного сопротивления соколеблющейся массы среды.
Чтобы учесть влияние zBbiX на величину ZBX, пересчитаем сопротивление <гвых с механической на электрическую сторону.
Из электротехники известно, что для учета влияния сопротивлений, включенных в цепь одной обмотки трансформатора, на сопротивления в цепи другой обмотки их пересчитывают с одной цепи на другую умножением
18
(или делением) на квадрат коэффициента трансформации. Чтобы учесть влияние zBbix на ZBX, проведем такой пересчет гВЫх с механической на электрическую сторону. Коэффициент n = Flu = I/v, откуда u = F/n, I = nv. Подставляя значения и и / в равенство Z = ull, получаем
Z = z/n2. (1.13)
Таким образом, для приведения механического сопротивления z к электрической стороне надо z разделить на п2, а для приведения электрического сопротивления Z к механической стороне надо Z умножить на п2.
Рис. 1.6. Электромеханическая схема излучателя.
Разделив (1.12) на п2, определим динамическое сопротивление
ZH = Ru + iXH, (1.14)
где RM=г In2, Хы=xjn2.
Приведенные к электрической стороне механические сопротивления измеряются в омах.
Величина сопротивления Z0, измеренная при заторможенной механической стороне, также комплексная. Представим Z0 в виде параллельного соединения сопротивлений активного Rq и реактивного ±iX0 (плюс относится к индуктивному, минус — к емкостному сопротивлению). Теперь приведенная к электрической стороне схема излучателя примет вид, изображенный на рис. 1.7, а входное сопротивление излучателя определится как параллельное соединение сопротивлений /?0, ±iX0t ZM.
Мощность излучателя. Пусть к излучателю приложено переменное напряжение и. Для простоты предположим, что реактивное механическое сопротивление преобразователя равно нулю, т. е. хм = 0. Равенство нулю величины хм означает, что инерционное и упругое сопротивления компенсируют друг друга, так что полное
19
сопротивление преобразователя активно и минимально. Следовательно, скорость колебаний рабочей поверхности при этом достигает максимума, т. е. наступает явление резонанса. Частота, при которой хм = 0, называется частотой механического резонанса.
На частоте резонанса Хм = 0, Zm = Rm и излучатель потребляет от источника возбуждения активную мощность, равную
р»=7Г+1Г~ = Рэ-п+р'*- (1Л5)
К о
Здесь первое слагаемое представляет собой мощность, рассеиваемую во входной цепи в форме тепла на актив-
ъХм
Рис. 1.7. Электрическая схема излучателя.
ном электрическом сопротивлении, т. е. является мощностью электрических потерь
P3.n = u2/Ro- (1.16)
Мощность Рэ. п может быть обусловлена омическим сопротивлением, вихревыми токами, магнитным гистерезисом, токами проводимости в неидеальном диэлектрике.
Чтобы выяснить характер второго слагаемого выражения (1.15), допустим, что г=оо, т. е. механическая сторона преобразователя заторможена и колебания отсутствуют, тогда Rm = 0 и мощность u2/Rm = 0. Таким образом, мощность
Pu = u*/Ru (1.17)
расходуется на движение механической части; эта мощность является частью подводимой электрической мощности, преобразуемой в механическую. Активную мощность Рм, развиваемую излучателем на выходной стороне, называют механической мощностью.
20
Коэффициент полезного действия. Для оценки эффективности излучателя как преобразователя подводимой к его входу активной электрической мощности в активную механическую, развиваемую на его выходе, служит электромеханический КПД г]Эм. Используя выражения (1.15) и (1.17), имеем
^ _ Рм uVRm 1
,эм Рэ ~ uVR0 + uVRu ~~ 1 + Rm/Ro
(1.18)
Как уже сказано, выходное активное сопротивление г = г8 + гп. Тогда для динамического активного сопротивления можно записать
Ям
Г s
п
2
Г П
п2
— Rs-{-R
м- п»
(1.19)
где Rs и Rm. п — приведенные к электрической стороне сопротивления излучения и механических потерь соответственно. Механическую мощность представим в виде
ЯН=-^Я. + -^Я м.п- (1-20)
г>2 р 2
Очевидно, что в (1.20) первое слагаемое, определяемое активным сопротивлением излучения, представляет излучаемую акустическую мощность Ра, а второе слагаемое — мощность механических потерь Рм. п.
Эффективность излучателя как преобразователя энергии механических колебаний в энергию колебаний водной среды оценивают акустико-механическим КПД г]ам, равным согласно (1.20) и (1.14) отношению
^1ам
Р а Rs Г s
Рм Rs^tPm.u Г5-[-Гп
(1.21)
Как видно, чем больше сопротивление излучения по сравнению с сопротивлением механических потерь, тем выше КПД. Отметим, что подводные звукоизлучатели (ГАП) в отличие от работающих в воздухе имеют rs^>rп и, следовательно, более высокий КПД (г]ам = = 0,5-т-0,8).
Эффективность излучателя в целом характеризуется электроакустическим или полным КПД г]эа, определяемым как отношение акустической (полезной) мощности к потребляемой излучателем электрической МОЩНОСТИ, Т. е. Г]эа = Ра/Рэ.
21
Из определений приведенных КПД следует зависимость
Лэа “ ЛэмЛам» 0 *22)
которая указывает на наличие двух ступеней преобразования энергии в излучателе: электрическая — механическая — акустическая.
Чувствительность излучателя. В некоторых случаях эффективность излучателя оценивают по звуковому давлению р, создаваемому им в данной точке поля при единичном напряжении и (или единичном токе I) электрической стороны. Отношение vu = p/u (или vi = p/I) называют чувствительностью излучателя по напряжению (или по току); величина v измеряется в паскалях на вольт, Па/В (или паскалях на ампер, Па/А). Точку измерения давления обычно берут на оси излучателя, т. е. в направлении максимума излучения. По одной величине v нельзя судить об эффективности излучателя.
§ 1.4. Характеристики приемника
Эквивалентная электромеханическая схема. Звуковое поле по отношению к приемнику представляет собой источник энергии с движущей силой F3KBf под действием которой рабочая (приемная) поверхность преобразователя приходит в колебательное движение.
Движущая сила связана с величиной звукового давления р в свободном (от приемника) поле соотношением
Fm = k„pS, (1.23)
где &д—коэффициент дифракции, определяющий отличие фактического давления, действующего на приемную поверхность, от давления в свободном поле1.
Когда приемник совершает колебания под действием силы F3KB, то преобразователь работает как излучатель и испытывает со стороны среды соответствующую реакцию. Из теории излучения известно, что эта реакция характеризуется сопротивлением излучения zs, которое в общем случае является комплексным. Без учета реакции среды механическое сопротивление г преобразо-
1 См. [6, § 4.6].
22
вателя определяется его «собственными» параметрами— массой, упругостью, сопротивлением потерь. При этом, т. е. в отсутствие колебаний, сила звукового поля определяется давлением на поверхности заторможенного преобразователя.
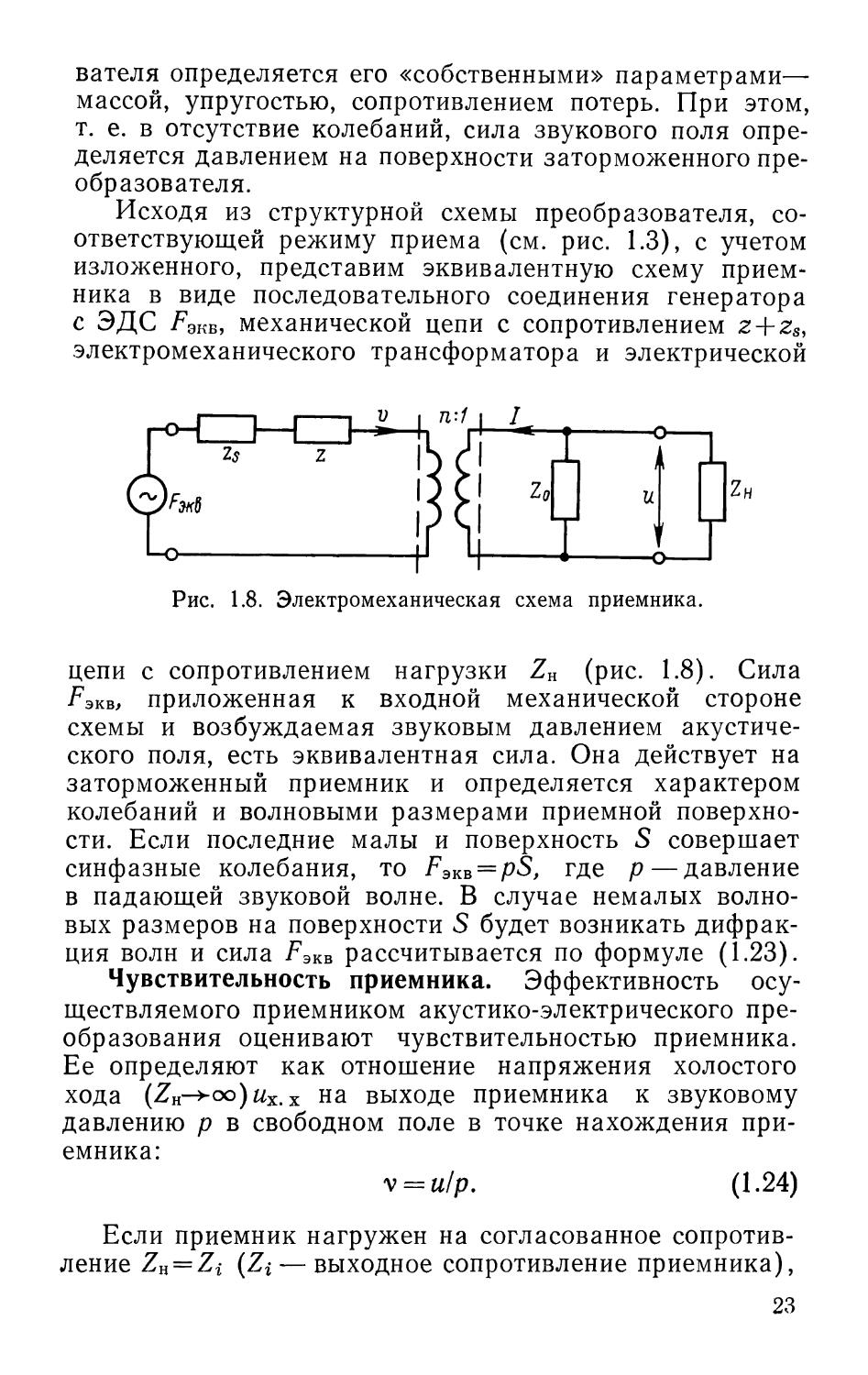
Исходя из структурной схемы преобразователя, соответствующей режиму приема (см. рис. 1.3), с учетом изложенного, представим эквивалентную схему приемника в виде последовательного соединения генератора с ЭДС Fэкв> механической цепи с сопротивлением z-\-zs, электромеханического трансформатора и электрической
Рис. 1.8. Электромеханическая схема приемника.
цепи с сопротивлением нагрузки ZH (рис. 1.8). Сила Fэкв> приложенная к входной механической стороне схемы и возбуждаемая звуковым давлением акустического поля, есть эквивалентная сила. Она действует на заторможенный приемник и определяется характером колебаний и волновыми размерами приемной поверхности. Если последние малы и поверхность S совершает синфазные колебания, то F3KB = pS, где р — давление в падающей звуковой волне. В случае немалых волновых размеров на поверхности 5 будет возникать дифракция волн и сила Fэкв рассчитывается по формуле (1.23).
Чувствительность приемника. Эффективность осуществляемого приемником акустико-электрического преобразования оценивают чувствительностью приемника. Ее определяют как отношение напряжения холостого хода (ZH->oo)wx. х на выходе приемника к звуковому давлению р в свободном поле в точке нахождения приемника:
v = и/р. (1-24)
Если приемник нагружен на согласованное сопротивление Zn = Zi (Zi — выходное сопротивление приемника),
23
развиваемое им напряжение равно и = 0,5их. х. Следовательно, чувствительность приемника при работе на согласованную нагрузку будет вдвое меньше чувствительности при холостом ходе.
Формулой (1.24) определяется стандартная чувствительность по полю.
Иногда чувствительность звукоприемников выражают не в абсолютных единицах, а в децибелах (дБ), принимая за эталонный уровень чувствительности v0 = = 1В/Па. Таким образом, чувствительность в децибе-
Рис. 1.9. Электрическая схема приемника.
лах — уровень чувствительности — определяется равенством vab = 20 lg (v/v0).
Чувствительность приемника является функцией частоты. Когда частотная зависимость чувствительности имеет резонансный характер, чувствительность приемника определяют на резонансной частоте, а ширину полосы — на уровне —3 дБ (0,707 от чувствительности при резонансе).
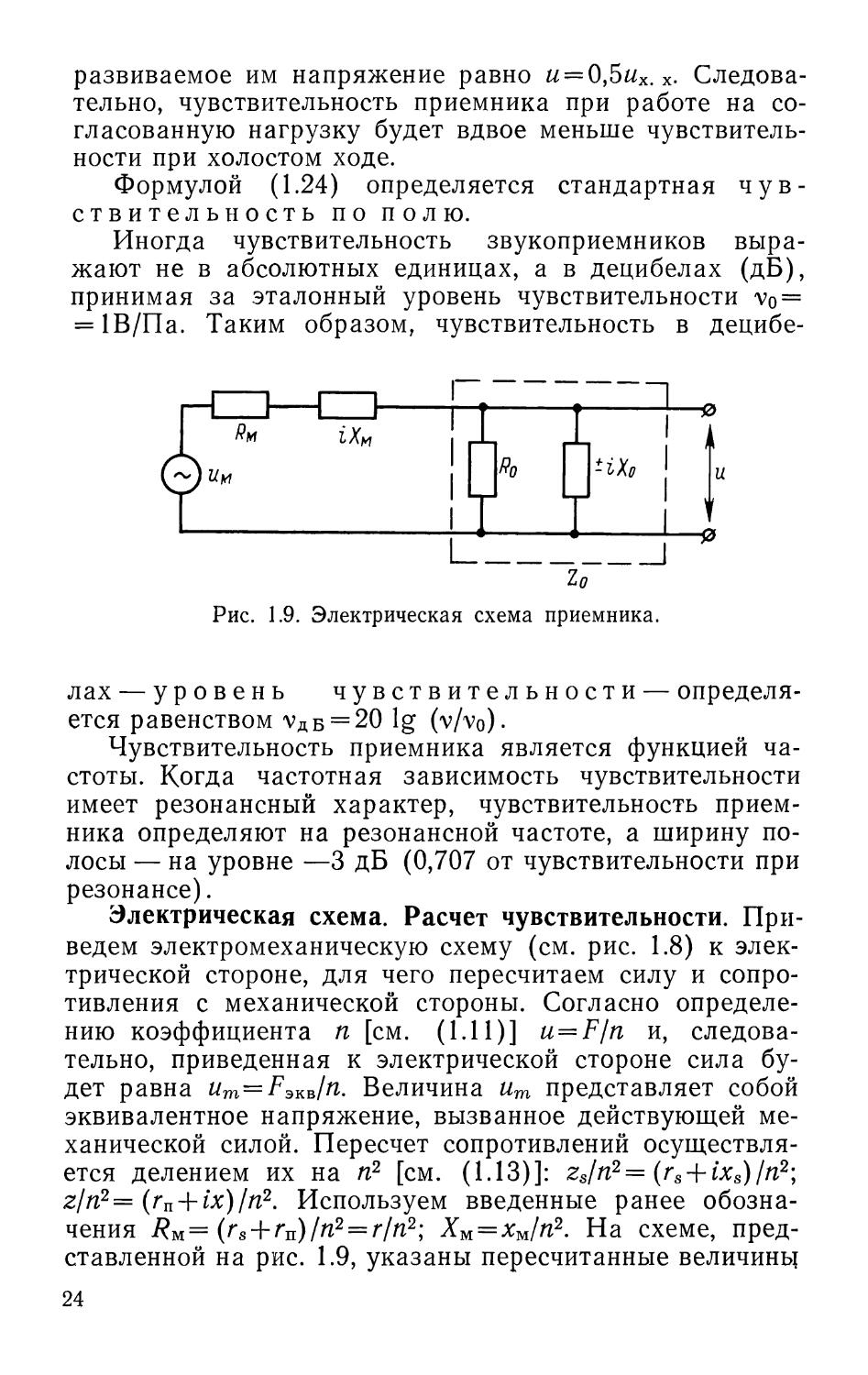
Электрическая схема. Расчет чувствительности. Приведем электромеханическую схему (см. рис. 1.8) к электрической стороне, для чего пересчитаем силу и сопротивления с механической стороны. Согласно определению коэффициента п [см. (1.11)] u = F/n и, следовательно, приведенная к электрической стороне сила будет равна um=F3KB/n. Величина ит представляет собой эквивалентное напряжение, вызванное действующей механической силой. Пересчет сопротивлений осуществляется делением их на п2 [см. (1.13)]: zs/n2= (rs + ixs) /п2; z/n2= (rn + ix)/n2. Используем введенные ранее обозначения RM= (rs-Fru)/n2 = r/n2; Хм = хш/п2. На схеме, представленной на рис. 1.9, указаны пересчитанные величины
24
сопротивлений. Полное выходное (внутреннее) сопротивление приемника, как видно из схемы, образовано тремя сопротивлениями ±iX0, RQj ZM. На разомкнутом выходе схемы (без нагрузки ZM) создается напряжение их. х холостого хода.
Рассчитаем чувствительность приемника по полю. Для простоты допустим, что сопротивление электрических потерь R0 настолько велико, что его влиянием можно пренебречь. Приняв F3KB = pS, из схемы находим
± ipSX0/n
Ux' х г In2 + ixjn2 ± iX0
Соответственно чувствительность
± iStiXn
v = .
г + i (хи ± Х0п2)
Модуль чувствительности равен
S | пХ01
v =■
Vr*+(xM±X0n2)2
(1.25)
(1.26)
Существенно, что в выражении (1.25) механическое сопротивление записано с учетом реакции электрических колебаний.
Для расчета чувствительности приемника согласно выражению (1.25) пересчитываем сопротивление ±iX0 на механическую сторону и определяем скорость колебаний рабочей поверхности (см. рис. 1.8)
v = = _£S_ (1.27)
г + * (*м ± Х0п2) г
Затем пересчитаем v на_ электрическую сторону, т. е. найдем ток I=vn = pSnjz. Умножив ток на сопротивление ±iX0 (влиянием R0 мы пренебрегли), получим напряжение холостого хода их. х= ±iXQI и придем к выражению (1.25).
Если мнимую часть импеданса г приравнять нулю
хм ± Х0п2 — 0, (1.28)
то скорость v (и чувствительность | v |) примет максимальное значение. Уравнение (1.28) выражает условие резонанса преобразователя в режиме приема. Поскольку в (1.28) входит и реактивное механическое сопротивление, и реактивное электрическое (приведенное)
25
сопротивление, то частоту, при которой удовлетворяется уравнение (1.28), называют частотой электромеханического резонанса. Напомним, что условием механического резонанса является уравнение хм = х+х8 = 0. Как видно из (1.28), в зависимости от знака Х0 (индуктивность или емкость) частота электромеханического резонанса может быть как меньше, так и больше частоты механического резонанса.
При электромеханическом резонансе модуль чувствительности составляет
, , SlnXol
или с учетом равенства r = rs/r\ам [см. (1.21)] ■ . 5 | hXq |
rs р
(1.29)
где rsр и г]р — активное сопротивление излучения и акустико-механический КПД на частоте резонанса приемника.
Удельная чувствительность. Чувствительность приемника v является одним из основных его показателей. Из определения v [см. (1.24)] следует, что выходное напряжение ux.x = vp. Даже при сравнительно больших звуковых давлениях выходное напряжение мало (единицы и десятки микровольт). Применяя усилители, можно увеличить напряжение их. х до величины, обеспечивающей нормальную работу аппаратуры, например, телефонов, релейных устройств. Приемник, как правило, подключается к усилителю через трансформатор. При трансформаторном включении нагрузки ZH на приемник, выходное сопротивление которого равно Ziy коэффициент трансформации N выбирается из условия согласования нагрузки и приемника. Это условие заключается в равенстве приведенного сопротивления нагрузки Z'H = = ZH/N2 и сопротивления приемника, т. е. ZH/W2 = Zi. Отсюда N = ^ZHIZi. Напряжение ия на нагрузке будет
Nux
1/>•
(1.30)
Таким образом, напряжение на согласованной нагрузке приемника пропорционально отношению их. x^Zi. По- 26
этому эффективность приемника также оценивают удельной чувствительностью
vn = v/V\ZT\, (1.31)
где \Zi\—модуль внутреннего (выходного) сопротивления приемника. Размерность удельной чувствительности В/(Па • Ом1/з).
Выражение (1.31) показывает, что из двух приемников с одинаковой чувствительностью холостого хода эффективнее будет тот, у которого меньше внутреннее сопротивление. Это легко понять: чем меньше внутреннее сопротивление приемника, тем меньше падение напряжения на нем и соответственно больше напряжение на нагрузке.
§ 1.5. Требования к гидроакустическим преобразователям
Характеристики преобразователей определяются техническими требованиями к гидроакустическим устройствам (станциям), в составе которых они работают: шумопеленгаторам, гидролокаторам, приборам подводной связи, эхолотам. Устройства эти различаются диапазоном рабочих частот, величиной излучаемой мощности, чувствительностью в режиме приема, направленностью, конструкцией и размерами преобразователей и т. д.
Общим требованием к антеннам является обеспечение максимальной эффективности действия аппаратуры: в режиме излучения — создавать максимальное звуковое давление в заданном телесном угле при минимальных затратах энергии, т. е. при высоком КПД, а в режиме приема — обеспечивать высокую чувствительность и высокую помехозащищенность.
Другое общее требование к преобразователям и антеннам — надежность и долговечность. Под надежностью понимают способность преобразователя выполнять основную функцию (излучение, прием) в заданных условиях в течение определенного времени при сохранении заданных характеристик. Время, в течение которого преобразователь надежно работает, называется его долговечностью (порядка 10 лет).
27
Чтобы обеспечить нормальную работу указанных устройств, нужны преобразователи с разнообразными структурами колебательных систем, формами, размерами и массами.
В антеннах шумопеленгаторов, работающих в сравнительно широком диапазоне частот, могут быть использованы цилиндрические пульсирующие (см. рис. 1.1, з) и изгибные (см. рис. 1.1, /с), стержневые с накладками (см. рис. 1.1, в) и пластинчатые (см. рис. 1,1, ж) преобразователи. Основным требованием, предъявляемым к приемникам шумопеленгаторных станций, является достаточно большая величина удельной чувствительности.
Преобразователи гидролокационных антенн, работающих в диапазоне ультразвуковых и высоких звуковых частот (выше 10 кГц) и излучающих большие акустические мощности, выполняются в виде стержневых колебательных систем (см. рис. 1.1, а, б). Эти преобразователи должны допускать излучение удельной мощности порядка нескольких единиц ватт на квадратный сантиметр и иметь высокую надежность. Возникающие при этом режиме механические напряжения в активных элементах преобразователей не должны нарушать их механическую прочность.
Приборы подводной телеграфной и телефонной связи работают в области звуковых частот при мощности излучения порядка 100 Вт. В этих приборах целесообразно использовать цилиндрические преобразователи. Основное требование к ним заключается в обеспечении максимальной чувствительности в режиме приема.
Контрольные вопросы и задачи
1. Поясните назначение отдельных элементов ГАП силовой и компенсированной конструкций.
2. Что называется чувствительностью ГАП в режиме приема и какую размерность она имеет?
3. Какую роль играет в эквивалентной схеме ГАП электромеханический трансформатор?
4. Ток короткого замыкания в цепи излучателя равен 2 А и вызывает колебания его механической части (диафрагмы) с амплитудой скорости 5 м/с. В состоянии покоя (при неподвижной диафрагме) на частоте механического резонанса электрическое сопротивление /?о=120 кОм, А0 = —5i кОм. Рассчитать входное сопротивление в рабочем режиме излучателя, если его механическое сопротивление равно 500 кг/с.
Ответ: 4,24 кОм.
28
5. Преобразователь предыдущей задачи работает в режиме приема. Определить его чувствительность на частоте электромеханического резонанса, если площадь диафрагмы составляет 22 см2.
Ответ: 8,8 мВ/Па.
6. Какие типы колебательных систем ГАП целесообразно использовать в антеннах основных гидроакустических средств?
ГЛАВА 2. НАПРАВЛЕННОСТЬ
ГИДРОАКУСТИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ и антенн
Свойство излучателя создавать в разных направлениях на одинаковом от него расстоянии различные звуковые давления и приемника неодинаково реагировать на волны, приходящие от источника звука с разных направлений, называется направленностью преобразователя (антенны). Направленность, или пространственную избирательность, антенны можно рассматривать как ее способность излучать (принимать) звуковую энергию в определенном телесном угле.
Возможность получения направленного излучения и приема широко используется в гидроакустических устройствах. Применяя остронаправленную излучающую антенну, можно сосредоточить создаваемое ею звуковое поле в одном преимущественном направлении и значительно увеличить давление в заданной точке. Применение направленной приемной антенны позволяет значительно ослабить воздействие на нее помех от источников, расположенных вокруг антенны. Ориентируя направление максимальной чувствительности антенны на источник полезного сигнала, возможно увеличить отношение сигнал/помеха. В шумопеленгаторных станциях с помощью остронаправленной приемной антенны определяется направление на источник шума, например, на движущееся судно.
Поэтому правильный выбор размеров и конфигурации антенн, определяющих их направленность, является одним из основных вопросов проектирования гидроакустической аппаратуры.
29
§ 2.1. Природа и оценка направленности
Природа свойства направленности и ее оценка. Направленность обусловлена конечными размерами антенны и проявляется наиболее отчетливо в тех случаях, когда размеры рабочей поверхности антенны-диафрагмы становятся сравнимы с длиной волны или превышают ее. Рассматривая диафрагму в виде большого количества отдельных площадок малого размера и считая, что каждая из них представляет собой элементарный излучатель, создающий в неограниченной среде сферическую волну, определяем результирующее звуковое давление в точке наблюдения как сумму (суперпозицию) волн от каждого элементарного излучателя. Вследствие различных расстояний от элементов диафрагмы до точки наблюдения приходящие к ней волны оказываются в разных фазах, в результате чего происходит интерференция волн 1. Наложение волн дает увеличение давления при совпадении фаз, либо ослабление, вплоть до полной компенсации, в тех случаях, когда слагаемые элементарные волны оказываются в противофазе. Таким образом, направленность есть результат интерференции волн. Выполняя суммирование для различных направлений относительно диафрагмы, получим зависимость величины звукового давления, создаваемого излучающей диафрагмой, от направления на точку наблюдения; эта зависимость называется характеристикой направленности излучателя.
Антенна может состоять из нескольких преобразователей. Если их возбуждать с различными амплитудами и фазами, подавая на них соответствующие напряжения, то результат суперпозиции волн в точке приема будет отличаться от результата при одинаковых и синфазных преобразователях. Из этого следует, что путем выбора амплитуд и фаз напряжений возбуждения отдельных элементов антенны можно влиять на ее характеристику направленности.
Оценку направленных свойств приемника получают в виде зависимости ЭДС на его выходе (или чувствительности) от направления прихода плоской падающей волны. Так как свойство направленности определяется
1 См. [6, § 4.4].
30
размерами и формой колеблющейся поверхности, то антенна, способная работать и излучателем и приемником, имеет одинаковую направленность в обоих режимах1. Обычно рассматривают направленность для режима излучения.
Характеристика направленности. Представим две точки пространства на одинаковом расстоянии г от излучателя с угловыми координатами (0, ф) и (0О, фо)2
Рис. 2.1. К определению характеристики направленности.
(рис. 2.1). Если излучатель направленный, то создаваемые им давления в обеих точках различны: в первой амплитуда равна р (г, 0, ф), во второй — р (г, 0О, фо). Пусть в направлении (0О, фо) амплитуда давления максимальная р (г, 0о, фо)=/?тах; это направление называют акустической осью излучателя (антенны).
Отношение давлений
-Р(Л е,*) =#(е, ф). (2.1)
Р шах
1 Доказательство этого дано, например, в работе [10].
2 Здесь указаны сферические координаты: г — радиус-вектор; 0 — угол места; ф — азимут (угол между проекцией г на плоскость хОу и осью х); в данном случае плоскость хОу совмещена с поверхностью излучателя, т. е. с его диафрагмой.
31
представляет собой математическое выражение характеристики направленности излучателя. Очевидно, Я(0о, гр0) = 1 есть максимальное значение функции R, оно называется главным максимумом; для других углов R (0, ф) < 1.
Наглядное представление о распределении звукового давления в пространстве, окружающем излучатель, может дать графическое изображение функции R в виде некоторой поверхности, называемой пространственной диаграммой направленности (ДН). Чаще строят плоскостные ДН, проводя сечения пространственной ДН плоскостями, проходящими через акустическую ось.
Некоторые антенны создают звуковые поля, которые симметричны относительно акустической оси. Например, поле круглой поршневой диафрагмы симметрично относительно перпендикуляра к плоскости диафрагмы, проходящего через ее центр. Осевой симметрией обладают также пульсирующий цилиндр (акустическая ось перпендикулярна к оси цилиндра) и линейная база из одинаковых и равноотстоящих элементов (акустическая ось перпендикулярна к базе). У таких антенн акустическая ось является осью вращения пространственной ДН, функция R при изменении азимутального угла не изменяется и зависит только от угла места 0:
Р(Г, 0)/pmax = #(9). (2.10
Если поле антенны не имеет осевой симметрии, то ограничиваются рассмотрением ДН в нескольких плоскостях, проходящих через акустическую ось антенны. Например, для прямоугольной диафрагмы — в двух плоскостях, проведенных через центр диафрагмы перпендикулярно к ней и параллельных ее сторонам.
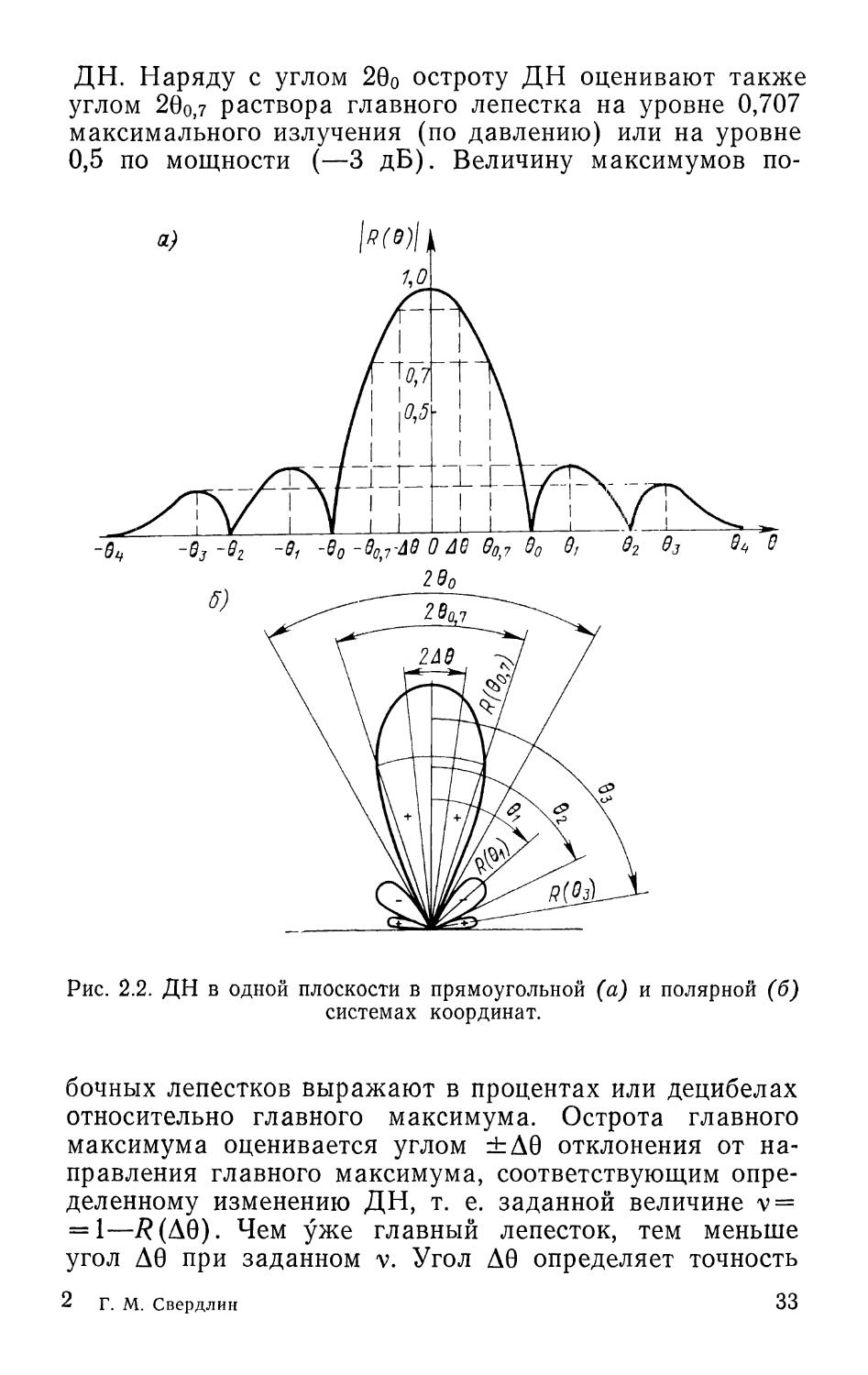
Типичный вид ДН в одной плоскости представлен на рис. 2.2. Как видим, наибольшая часть излучения сосредоточена в пределах угла 20о; эта зона ДН называется главным, или основным, лепестком, а угол 20о — углом раствора, или шириной, главного лепестка на уровне нулевого излучения. Остальные зоны ДН называют боковыми, или побочными, лепестками. Чем меньше угол 20о, тем ярче выражена направленность, тем выше угловая избирательность антенны или острота
32
ДН. Наряду с углом 20о остроту ДН оценивают также углом 20о,7 раствора главного лепестка на уровне 0,707 максимального излучения (по давлению) или на уровне 0,5 по мощности (—3 дБ). Величину максимумов по-
Рис. 2.2. ДН в одной плоскости в прямоугольной (а) и полярной (б) системах координат.
бочных лепестков выражают в процентах или децибелах относительно главного максимума. Острота главного максимума оценивается углом ±Д0 отклонения от направления главного максимума, соответствующим определенному изменению ДН, т. е. заданной величине v = = 1—R(Д0). Чем уже главный лепесток, тем меньше угол Д0 при заданном v. Угол Д0 определяет точность
2 Г. М. Свердлин
33
пеленгования; при отклонении на ±Д0 изменение ДН на величину v еще может быть зарегистрировано индикатором приемного устройства.
При расчете характеристик направленности получаются как положительные, так и отрицательные значения величины R. Изменение знака (см. рис. 2.2, б) указывает на то, что фаза звукового давления меняется на 180°. Чаще всего нас интересует величина давления, поэтому при построении ДН определяют только абсолютные значения величины /?, как это и показано на рис. 2.2, а.
Важно также учитывать, что направленность характеризует дальнее поле, она определяется на расстоянии
r>2L2/X, (2.2)
где L — наибольший линейный размер диафрагмы; %— длина излучаемой волны, рассчитываемая для верхней границы рабочего диапазона частот. Только начиная с расстояния r=2L2/K звуковое поле можно оценивать функцией R. В этой зоне разности фаз волн, приходящих в точку приема от элементарных площадок диафрагмы излучателя, определяются волновым размером L/К диафрагмы и угловыми координатами точки приема и не зависят от расстояния г, если выполняется условие (2.2).
Плоский излучатель в бесконечном экране. Найдем общее выражение для характеристики направленности плоской диафрагмы 5, расположенной в плоскости хОу и совершающей колебания в направлении своей нормали с одинаковой фазой (рис. 2.3). Диафрагма помещена без зазора (допустим такую идеализацию) в безграничную и неподвижную стенку — экран 3, благодаря чему излучение происходит в полупространство.
Разобьем поверхность S излучателя на элементы dS — точечные источники, каждый из которых колеблется по гармоническому закону во времени со своей скоростью vn{x, у) у где х, у — координаты элемента dS. Точку наблюдения М выбираем в дальней зоне, так что расстояние до нее г0>2£2Д (L — наибольший размер диафрагмы). Положение точки М в пространстве задано, кроме г0, углами аир, образуемыми радиусом- вектором го с осями х и у соответственно.
34
Далее составляется выражение для давления, создаваемого каждым элементом диафрагмы, и это выражение интегрируется по всей поверхности S. Имея в виду дальнее поле, можно считать амплитуды давления в точке М от действия элементов dS одинаковыми, направления г и г0 параллельными, и тогда для разно-
Рис. 2.3. Плоская диафрагма в бесконечном жестком экране.
сти хода А г (см. рис. 2.3) лучей от dS и начала координат до точки М получается приближенное значение
а для звукового давления в точке М — выражение [11]
где к = ю/с = 2п/Х — волновое число; р — плотность среды; с — скорость звука в среде.
Так как все элементы диафрагмы колеблются син- фазно, то в точках, находящихся на оси г(а = р = л/2), давление будет максимальным. При этом Дг = 0 и интеграл (2.3) принимает значение
\
Z
А —(xcosa + ^/cosP)
(2.4)
2*
35
Согласно определению (2.1) получаем искомую характеристику направленности:
$ vn(x, у) e~lkArdS
R(a, Р)=-£- (2.5)
J vn (X, У) dS
S
Формула (2.5) пригодна для определения характеристик направленности плоской поверхности любой формы, если известен закон распределения колебаний по этой поверхности.
Рассмотрим частный случай равномерного распределения, когда все точки диафрагмы колеблются с одинаковой амплитудой; такую диафрагму называют поршневой или просто поршнем. Тогда vn(x,y) = = const и функция (2.5) принимает вид
R(a, Р) =— [e~tkArdS. (2.6)
5 s
В технической гидроакустике широко применяются поршневые поверхности, в связи с чем формула (2.6) имеет важное практическое значение.
§ 2.2. Направленность сплошных антенн
Прямоугольная поршневая диафрагма. Как и в общем случае, рассмотренном в § 2.1, диафрагму располагаем в жестком бесконечном экране. Плоскость диафрагмы совпадает с плоскостью хОу, за начало координат принят центр прямоугольника со сторонами а и 6.
Подставляя в формулу (2.6) S = ab, dS = dxdy, А г и интегрируя в пределах от —а/2 до +а/2 и от —6/2 до + 6/2 по переменным х и у соответственно, находим пространственную характеристику направленности
Я (а, Р)
. / па
sin cos а
\ Ь
па
cos а
X
(2.7)
Полученная характеристика не обладает осевой симметрией, и распределение поля в этом случае опреде-
36
ляют в двух плоскостях xOz, параллельной стороне а, и уОг, параллельной стороне Ь.
В плоскости xOz угол |3 = я/2, cos(jt/2)=0 и (2.7) имеет вид
. (па \ sin cos а
R(<*) = ^(2-8)
яа
cos а
X
так как lim (sin ф/ср) = 1.
ф^о
Выражение (2.7) подтверждает зависимость направленности поршня от его волновых размеров; в случае (2.8) это один размер, равный отношению а/Х.
В плоскости уОг угол а = я/2 и в формуле (2.8) вместо а/Х будет Ь/Х.
Для описания характеристик направленности обычно пользуются сферической системой координат (см. рис. 2.1). В данном случае 0 = я/2—а и формула (2.8) запишется так:
R( 6)
па
sin 0
(2.9)
Здесь угол 0 образован направлением на точку наблюдения и акустической осью (нормалью к плоскости поршня).
В плоскости уОг верна формула (2.9) с заменой а/Х на Ь/Х.
Построим ДН прямоугольного поршня в плоскости xOz (или yOz). Для удобства введем обозначение ф = = (jtasin0)A и будем рассматривать характеристику направленности (2.9) как функцию параметра ф.
График функции |/? (ф) | = | (sin ф)/ф | изображен на рис. 2.4, с его помощью рассмотрим некоторые частные случаи.
Пусть аД = 0,25. При изменении 0 от 0 до 90° величина ф= (jtsin0)/4 изменяется от 0 до я/4. При этом функция R плавно уменьшается от 1 до значения 0,707-4/я~0,9 (рис. 2.5). Если бы волновой размер а/Х
37
0,2 71 0,5% 0,bn 0,5% 0,6% 0,7% 0,8% 0,9%
38
Рис. 2.4. ДН прямоугольного поршня в нормальной плоскости, параллельной его стороне.
Для кривой 1 значения <р отложены по верхней горизонтали, значения функции — по правой верти кали.
\я(в)\
39
Рис. 2.5. ДН прямоугольного поршня при различных волновых размерах в прямоугольной (а) и полярной (б) системах координат.
был меньше 0,25, то при 0 = 90° величина R была бы еще ближе к единице. Таким образом, в плоскости малого волнового размера диафрагма практически не обладает направленностью.
Увеличим а/К до 0,5. Тогда с изменением 0 от 0 до 90° величина ф = (я sin 0)/2 изменяется от 0 до я/2. При этом функция R уменьшается от 1 до 0,64 (см. рис. 2.4). ДН для этого случая показана также на рис. 2.5.
Примем a/k= 1. При изменении 0 от 0 до 90° значение ф изменяется от 0 до я, а функция R (см. рис. 2.4) — от 1 до 0. Как видим, пока а/К< 1, функция R не достигает нулевого значения.
Пусть а/Х = 2. Первый нуль функция R будет иметь при ф = 2я sin 0О = я, откуда 0о = ЗО°, второй нуль — при 2nsin 02 = 2я или 02 —90°. При ф = Зя/2 функция R имеет максимум (см. рис. 2.4)—это боковой максимум ДН, равный 0,22 главного максимума. Направление 0i первого бокового максимума находим из уравнения 2я sin 0i = Зя/2, откуда sin 0i = 0,75 и 0i~48°. Таким образом, при а>% направленность диафрагмы выражена четко: имеются нулевые направления и боковые лепестки.
Из выражения (2.9) видно, что при изменении знака 0 функция R(Q) не изменяется, следовательно, ДН симметрична относительно точки 0 = 0: R(—0)=/?(0). Расчет характеристик направленности обычно производят в пределах углов 0 от 0 до 90°. При 0>9О° звуковое поле, создаваемое диафрагмой излучателя, экранируется его корпусом и не поддается простому расчету.
Из приведенных частных случаев ДН можно сделать общие выводы и получить расчетные соотношения, необходимые при проектировании антенн.
При любых волновых размерах поршневой диафрагмы главный максимум ее ДН ориентирован по нормали, проходящей через центр диафрагмы.
Если размеры диафрагмы меньше длины волны в несколько раз, направленность практически отсутствует и выражена слабо при размерах, меньших длины волны. Если размеры диафрагмы больше длины волны, звуковая энергия концентрируется в осевом направлении и появляются боковые лепестки. Для получения остронаправленного пучка размеры диафрагмы должны быть в несколько раз больше длины волны.
40
Угловой раствор главного лепестка на нулевом уровне определяется из условия (тса sin 0о) А== я, откуда
sin0o=Va.
(2.10)
Угловой раствор главного лепестка на уровне 0,707 определяется из уравнения (па sin 60,7) Д=0,44я, и равен
sin0o,7 = 0,44Я/а*
(2.П)
Направление 0П и величина бокового максимума с номером п определяются из приближенных равенств
sin 0„ = (2п +1) , (2.12)
(2.13)
где я=1, 2, ...
Важно отметить, что в формулу (2.13) не входит волновой размер. Это означает, что величина боковых максимумов не зависит от волновых размеров диафрагмы, которые определяют лишь их количество и угловое положение [см. формулу (2.12)],
Задача. Прямоугольная диафрагма колеблется с частотой 25 кГц и в нормальной плоскости, параллельной стороне а, создает под углом 20° к акустической оси на некотором расстоянии звуковое давление р(20°) = 10 Па. Угловые растворы главного лепестка ДН равны 200,7=20° и 200=90°. Какое давление создает поршень на том же расстоянии на оси? В каких направлениях располагаются боковые максимумы ДН в обеих плоскостях и какова их величина? Определите размеры диафрагмы.
Решение. 1. По заданным значениям углов 0о,7= 10° и 0о=45° из формул (2.11) и (2.10) находим волновые размеры:
Ы% = 0,44/sin 10° = 0,44/0,174 = 2,58; all = 1/sin 45° = 1/0,707 = 1,41.
im)h
(2n + 1) я *
2. Определяем значение характеристики направленности при 0 = = 20° по формуле (2.9) и графику, приведенному на рис. 2.4:
R (20°) = sin(1.41nsin20°) ^ 1 l,41n sin 20°
sin (0,48я) 0,48jt
0,66.
41
3. Так как /?(20°) = /7(20°)//7 max, то давление в искомой точке на оси равно
Ртах = Р (20°)/R (20°) = 10/0,66 = 15,1 Па.
4. Для определения направлений боковых максимумов воспользуемся формулой (2.12):
sin 0! = sin 03 =
3
_Х___
3
= 0,58;
0х « 35°;
2
6 ”
2-2,58
5
X
5
= 0,97;
03 « 76°.
2
6
2-2,58
Как видим, в плоскости, параллельной стороне 6, ДН имеет два боковых максимума, равных 22 и 13% (см. рис. 2.5). В плоскости, параллельной стороне а, ДН не имеет бокового максимума, так как
X
а
3
2-1,41
>1.
5. Размеры диафрагмы а=1,41А,; 6 =2,58А,. Длина звуковой
волны X=c/f =1500/25 000=0,06 м. Следовательно, а= 1,41 *0,06= = 0,084 6 м=84,6 мм; 6=2,58-0,06=0,154 8 м= 154,8 мм.
Принимаем а=85 мм, 6 = 155 мм. Такое округление практически не скажется на ДН.
Круглая поршневая диафрагма в бесконечном экране. Используя систему координат, изображенную на рис. 2.1, для пространственной характеристики направленности получим выражение [10]
я (в)
2па
~
sin 0
2 ла ~Х~
sin 0
(2.14)
где а — радиус диафрагмы; d7i(cp)—цилиндрическая функция Бесселя первого порядка от аргумента ф = = (2jtasin0) /X.
Направленность круглого поршня, как это видно из (2.14), зависит только от угла места, т. е. обладает симметрией относительно нормали, проходящей через центр поршня и являющейся его акустической осью. Как
42
23,(9)
О О О О О О '''"Э О
<=T o' ci o' csT c=T o' O' oT о
43
Рис. 2.6. ДН круглой поршневой диафрагмы в зависимости от параметра tp=(jtdA)sin 0 Для кривой 1 значения ф отложены по верхней горизонтали, значения функции — по правой вертикали.
и в случае прямоугольного поршня, направленность определяется величиной ф= (axrfsin 0)/Л, (d — диаметр). И в данном случае для упрощения расчета характеристики i?(0) целесообразно вначале найти функцию i?(cp), которая зависит только от формы диафрагмы и не зависит от ее волновых размеров. График |i? (ф) | = = 11 (ф)/ф|, представленный нарис. 2.6, подобен графику |7?(ф)| для прямоугольного поршня (см. рис. 2.4). Поэтому сделанные ранее выводы о влиянии волновых размеров на ДН прямоугольного поршня остаются верными и для круглой диафрагмы. В отличие от ДН прямоугольного поршня, не обладающего осевой симметрией, пространственная ДН круглого поршня представляет собой поверхность тела вращения диаграммы направленности, которая рассчитана по формуле (2.14), вокруг акустической оси. Другими будут и расчетные соотношения.
Угол раствора главного лепестка на нулевом уровне, определяемый из условий ф = 3,83, равен
sin0o = 1,22 X/d.
(2.15)
Угол раствора главного лепестка на уровне 0,707, определяемый из условия ф = 0,51я, равен
sin0o>7 = 0,5Ш<1
(2.16)
Направления боковых максимумов определяются по значениям ф1 = 5,14; ф3 = 8,42; ... Величины первых трех боковых максимумов |^(ф1) | =0,13; |/?(фз) | =0,065;
1#(ф5) I =0,04.
Пример. Рассчитать и построить ДН круглой поршневой диафрагмы при волновых размерах а?А=0,15; 0,5; 1,22; 2,44.
Расчет проведем с помощью графика, изображенного на рис. 2.6. Первые две ДН не имеют нулевых направлений, поскольку волновые размеры поршней малы. Чтобы функция R имела один нуль, диаметр поршня должен быть не меньше 1,22 X, как это видно из формулы (2.15). Поэтому ДН при d/X= 1,22 будет содержать полный главный лепесток (0о=9О°). С повышением dfX появятся боковые ле-
44
пестки. Для ^Д = 2,44 определяем нулевые направления 0О и 02 (см. рис. 2.6)
ттН
sin 0О = 1,22Ш= 1,22/2,44 = 0,5; 0о = ЗО°; — sin 02 = 7,02;
X
sin 02 = 7,ШЫ = 2,23/2,44 = 0,91; 02 = 65,5°.
Направление бокового максимума, равного 13%, найдем из соотношения
— sin 0! = 5,14; sin 0t = 5,14%/nd = 1,64/2,44 = 0,67; l
01 = 42°.
Рис. 2.7. ДН круглого поршня при различных волновых размерах в полярной системе координат.
Эти ДН изображены на рис. 2.7. Как видим, при d/X = 0,15 и меньше направленность у диафрагмы практически отсутствует.
Направленность плоских диафрагм с уменьшенными боковыми максимумами. Почему надо уменьшать боковые максимумы? Рассматривая ДН прямоугольной и круглой поршневых диафрагм, имеющих размеры большие, чем длина волны, можно видеть, что каждая ДН содержит сравнительно узкий основной лепесток с главным максимумом, расположенным перпендикулярно к диафрагме, и боковые лепестки, максимумы которых меньше главного максимума и расположены под различными углами к диафрагме. Наличие такого направленного действия у излучателя позволяет большую
45
часть излучаемой им звуковой энергии сосредоточить в направлении местонахождения приемника или локируемого объекта, и тем самым уменьшить непроизводительное рассеяние звуковой энергии в других направлениях. Повышение эффективности работы излучателя благодаря его направленности определяется, во-первых, остротой главного максимума ДН (углами 20о или 20о,7) и, во-вторых, количеством и величиной боковых максимумов. Чем меньше угол 20о (или 20о,7), а также число и уровни боковых максимумов, тем больше величина излучаемой звуковой энергии в требуемом направлении. Для антенны, работающей в режиме приема, относительно большие боковые максимумы у ДН уменьшают отношение сиг- нал/помеха и увеличивают вероятность ложного пеленга, т. е. могут вызвать значительные ошибки в определении пеленга при локации. По этим причинам боковые лепестки у ДН антенн во всех случаях нежелательны, они ухудшают свойства антенны.
Изменяя форму диафрагмы, можно в значительной степени влиять на величину боковых максимумов ДН. Так, например, для прямоугольной диафрагмы первый боковой максимум составляет 22% главного (см. рис. 2.4), а для круглой диафрагмы равных волновых размеров—13% (см. рис. 2.6). Однако при этом раствор главного лепестка больше у круглого поршня, что видно из сопоставления формул (2.15) и (2.10). Таким образом, одновременно с уменьшением боковых максимумов происходит уменьшение остроты ДН и остроты главного максимума.
Приведем (без выкладок) характеристики направленности плоских поршней различной формы.
Направленность поршней в форме трапеции, параллелограмма, треугольника, ромба. Характеристика направленности равнобедренной трапеции в осевой нор-
Рис. 2.8. К определению направленности плоских- поршней.
46
мальной к ней плоскости, проходящей параллельно основаниям h и /2 (рис. 2.8). определяется выражением
где
Я (в)
sin ф! Ф1
sinq>2
Ф2
(2.17)
Ф1 =
Jt (It -f- /2)
2X
sin0;
sine.
2k
В (2.17) первый множитель выражает направленность отрезка длиной {h + k)/2, второй — отрезка длиной (U—/1)/2; на рис. 2.8 эти отрезки равны соответственно АЕ и ЕВ. Выбирая различные соотношения между размерами /1 и /2, можно получать ДН с разными боковыми лепестками. Так, при /2//i = 5,65, первые три боковых максимума равны 2,5; 1,8; 1%. По сравнению с прямоугольной диафрагмой у трапециевидной, как видим, первый боковой максимум в 8,8 раза меньше (22%: 2,5о/0=8,8).
Формула (2.17) пригодна и для расчета ДН поршня в форме параллелограмма (.ACFE, см. рис. 2.8), определяемой произведением диаграмм отрезков АЕ и DF.
Если положить /1 = 0, трапеция преобразуется в равнобедренный треугольник и формула (2.17) принимает вид
где /=/2— длина основания треугольника.
Дополним треугольник АКВ до ромба AKBL. Поршень в форме ромба будет иметь в своей нормальной диагональной плоскости такую же ДН, как и треугольный поршень: от увеличения площади увеличится лишь интенсивность излучения (при сохранении амплитуды колебаний), но распределение поля в пространстве не изменится, так как не изменяется характер колебаний, т. е. распределение амплитуд колебаний по поверхности диафрагмы остается прежним.
47
Чтобы установить особенности ДН ромбического поршня, сравним ее с ДН прямоугольного поршня. В рассматриваемой плоскости прямоугольник PMFN и ромб AKBL имеют одинаковый размер АВ — 1 (см. рис. 2.8). Согласно формуле (2.10) острота ДН прямоугольного поршня оценивается величиной sin0o = V/, а у ромбического поршня — sin0o = 2y/, так как в вы-
11 II 11 V N.uLAIr V Wr P-l^L-Л Чу J
О 71/2 71 J,8J 271 7,02 JK W,17 у
Рис. 2.9. ДН плоских поршней в форме прямоугольника ( ),
круга ( ) и ромба ( ).
ражение (2.18) характеристики направленности входит размер //2. Таким образом, основной лепесток ДН ромба шире и, следовательно, острота его направленности меньше, чем у прямоугольника. Для оценки боковых максимумов ДН ромба обратим внимание на то, что правая часть формулы (2.18) имеет вид (sincp/cp)2. Максимумы же функции |sincp/cp| нам известны (см. рис. 2.4): 0,22; 0,13; 0,09. Возведем в квадрат эти значения и получим: 0,047; 0,017; 0,008. Боковые максимумы ДН ромбического поршня значительно меньше, чем у ДН прямоугольного поршня.
На рис. 2.9 представлены ДН плоских поршней в форме прямоугольника, круга и ромба, по оси абсцисс
48
отложен аргумент ф= (nl/K)sin 0, где / обозначает размер прямоугольника, диаметр круга, диагональ ромба. Сравнение этих диаграмм подтверждает ранее высказанное положение: уменьшение боковых максимумов ведет к уменьшению остроты направленности. Значения синусов углов раствора главного лепестка ДН и первых боковых максимумов в указанном порядке равны sin0o=y/; 1,22К/1; 2X/l; i?(0i)=0,22; 0,13; 0,047.
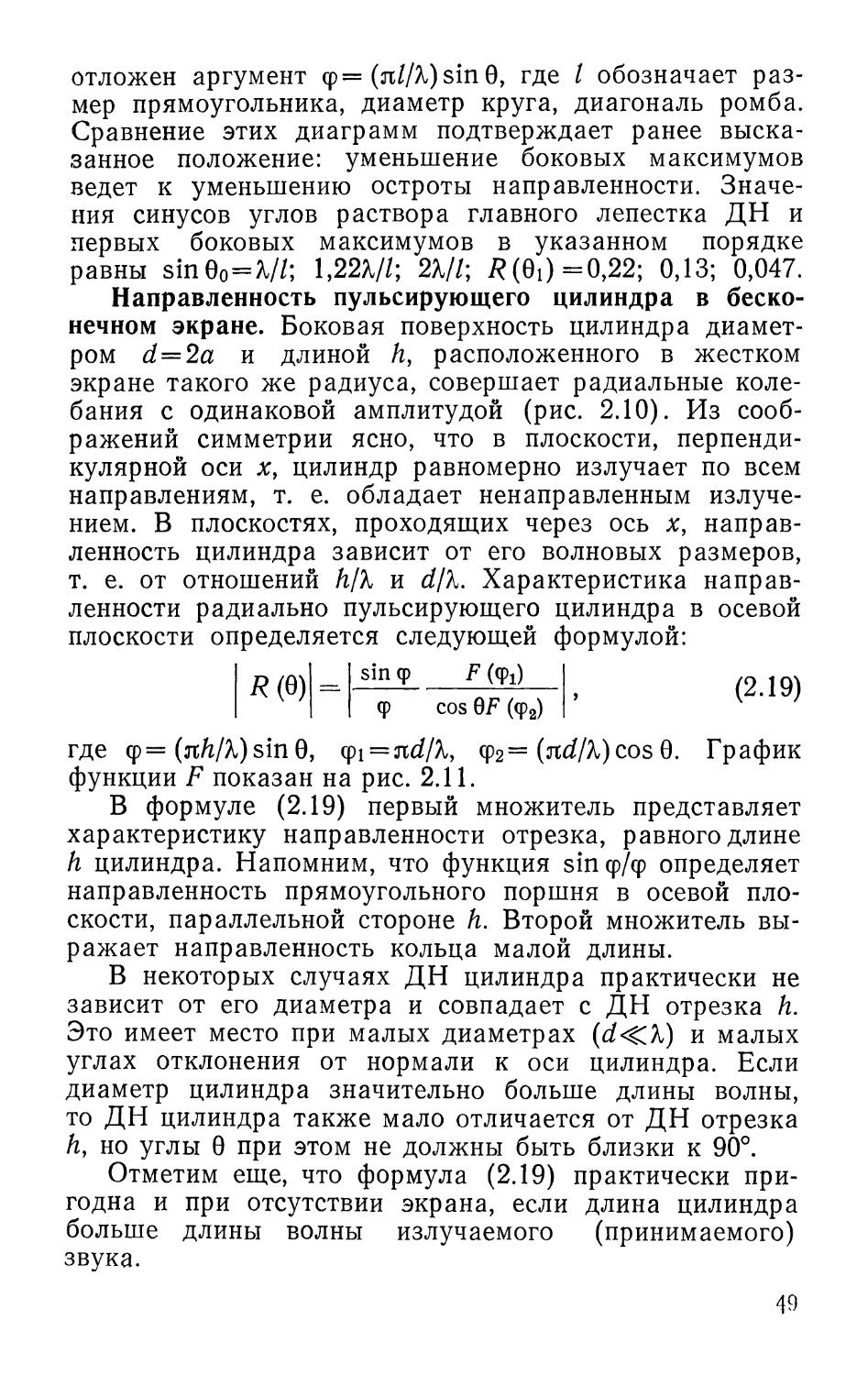
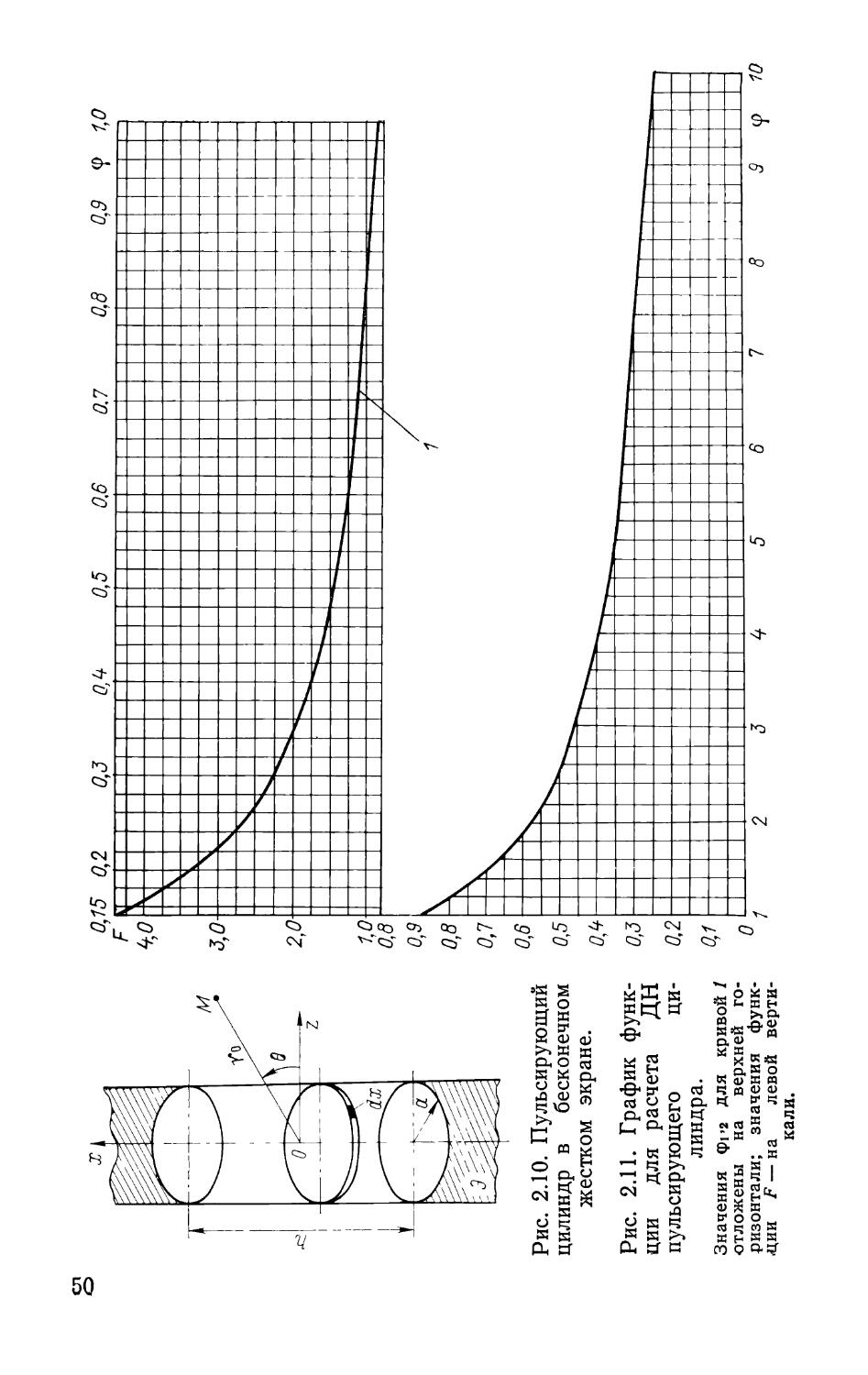
Направленность пульсирующего цилиндра в бесконечном экране. Боковая поверхность цилиндра диаметром d = 2a и длиной Л, расположенного в жестком экране такого же радиуса, совершает радиальные колебания с одинаковой амплитудой (рис. 2.10). Из соображений симметрии ясно, что в плоскости, перпендикулярной оси х, цилиндр равномерно излучает по всем направлениям, т. е. обладает ненаправленным излучением. В плоскостях, проходящих через ось х, направленность цилиндра зависит от его волновых размеров, т. е. от отношений h/K и d/K. Характеристика направленности радиально пульсирующего цилиндра в осевой плоскости определяется следующей формулой:
я (в)
sin ф
Ф
cos 0F (ф2)
где ф= Ort/*A)sin 0, ф! = nd/K) ф2= (nd/X)cos 0. График функции F показан на рис. 2.11.
В формуле (2.19) первый множитель представляет характеристику направленности отрезка, равного длине h цилиндра. Напомним, что функция эшф/ф определяет направленность прямоугольного поршня в осевой плоскости, параллельной стороне h. Второй множитель выражает направленность кольца малой длины.
В некоторых случаях ДН цилиндра практически не зависит от его диаметра и совпадает с ДН отрезка h. Это имеет место при малых диаметрах (d<^X) и малых углах отклонения от нормали к оси цилиндра. Если диаметр цилиндра значительно больше длины волны, то ДН цилиндра также мало отличается от ДН отрезка К но углы 0 при этом не должны быть близки к 90°.
Отметим еще, что формула (2.19) практически пригодна и при отсутствии экрана, если длина цилиндра больше длины волны излучаемого (принимаемого) звука.
49
0,15 0,2
м 2
® <D
cd о g £. a, 5 5 tt
. к 2 Щ П ч ^
t< a
« g
л
у я ч a. sr и
о м «
!*&Б
р, a>
* К g« о, я о Я a> к м
.
ч S 4 «
2 ч
« СО » Я
-И ^ « ©■ 2
ggs I
8 2 8^
<и я к
«* Ч М Я
K(hSS
СО О Q-S?
50
§ 2.3. Направленность линейных дискретных антенн
Для решения ряда технических задач, например поиска или обзора пространства, нужны острые характеристики направленности и антенны должны иметь большие размеры. Изготовить диафрагму антенны в виде сплошной поверхности больших линейных размеров весьма трудно технологически, а в некоторых случаях и невозможно. Поэтому такие антенны реализуют в виде набора отдельных (дискретных) преобразователей, каждый из которых имеет малые волновые размеры и, следовательно, является ненаправленным. С другой стороны, при таком построении антенны можно к отдельным ее элементам подводить напряжения с различными амплитудами и фазами, т. е. создать по поверхности антенны определенное фазоамплитудное распределение. Появляется, таким образом, возможность получать характеристики направленности не только с разной остротой, но и с различной ориентацией акустической оси (ориентировать главный максимум ДН в желаемом направлении).
Наибольшее применение находят плоские (линейные) и цилиндрические (дуговые) дискретные антенны. В первых элементы располагаются вдоль взаимно перпендикулярных отрезков и образуют так называемую антенную решетку, во вторых — по цилиндрической (замкнутой или части) поверхности. Цилиндрическую антенну также монтируют в виде столба, набранного из тонких колец; длину столба принимают такой, чтобы обеспечить требуемую направленность в осевой плоскости. Рассмотрим вначале линейную антенну, состоящую из одинаковых и равноотстоящих точечных элементов, колеблющихся в одной фазе. Такую антенну иногда называют линейной базой.
Дискретная линейная база точечных элементов.
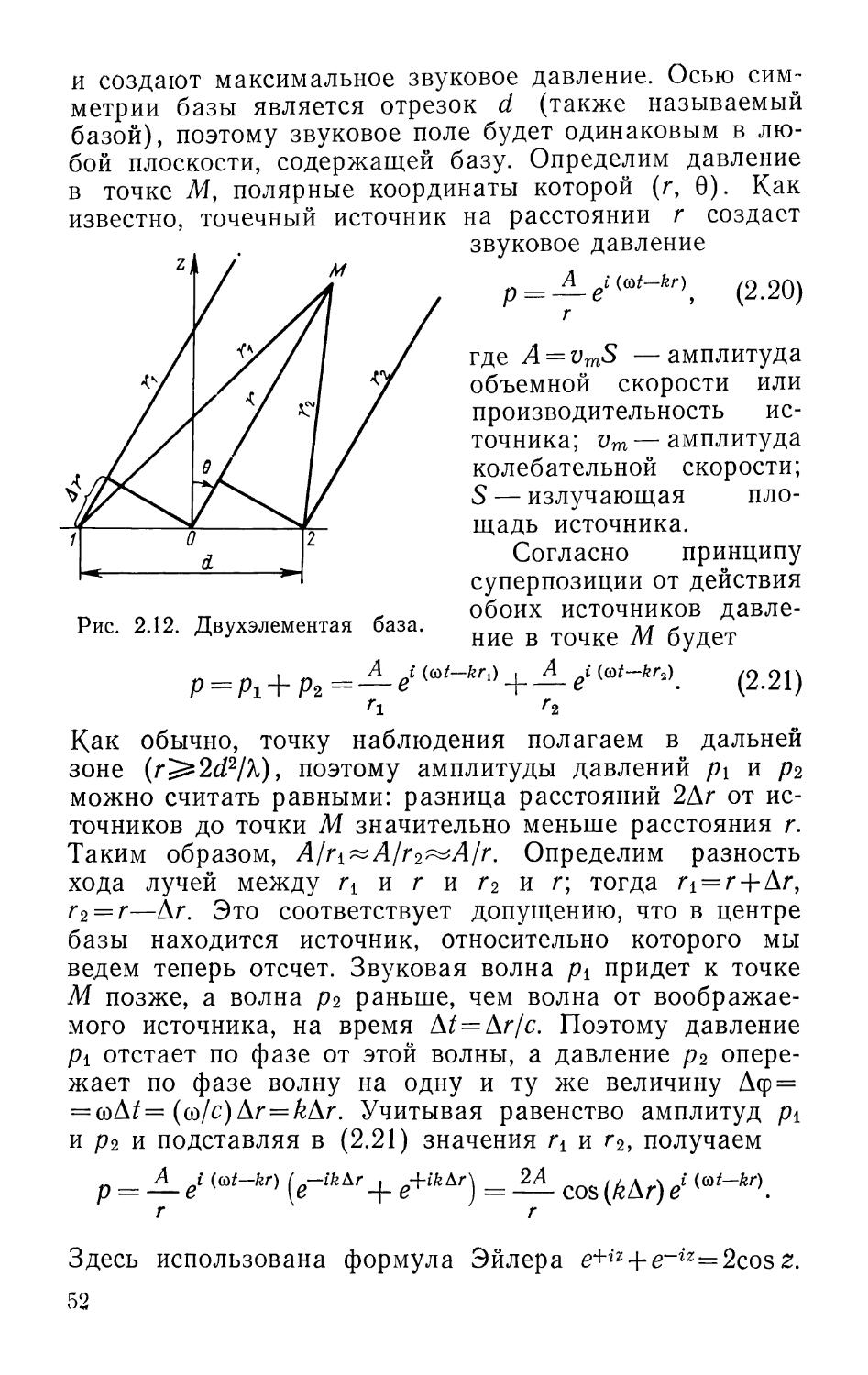
1. Линейная база из двух синфазных элементов. Начнем с простейшей двухэлементной базы (рис. 2.12). Источники 1 и 2, разнесенные на расстояние d, имеют малые волновые размеры, и каждый в отдельности не обладает направленностью. Акустической осью базы, очевидно, является ось г, поскольку в любой ее точке колебания от источников 1 и 2 складываются синфазно
51
и создают максимальное звуковое давление. Осью симметрии базы является отрезок d (также называемый базой), поэтому звуковое поле будет одинаковым в любой плоскости, содержащей базу. Определим давление в точке М, полярные координаты которой (г, 0). Как
известно, точечный источник
Рис. 2.12. Двухэлементая база.
P = Pi + Pz= — eC{at'
ri
на расстоянии г создает звуковое давление
р = Ав< (2.20)
Г
где A = vmS —амплитуда объемной скорости или производительность источника; vm — амплитуда колебательной скорости; S — излучающая площадь источника.
Согласно принципу суперпозиции от действия обоих источников давление в точке М будет
-hrх) _Л_ ei (со/—£г2) (2 21)
Г2
Как обычно, точку наблюдения полагаем в дальней зоне (r^2d2/%), поэтому амплитуды давлений р\ и р2 можно считать равными: разница расстояний 2Дг от источников до точки М значительно меньше расстояния г. Таким образом, Л//ч^Л/г2я^Л/л Определим разность хода лучей между rY и г и г2 и г; тогда ri = r + Ar, г 2 = г—А г. Это соответствует допущению, что в центре базы находится источник, относительно которого мы ведем теперь отсчет. Звуковая волна pi придет к точке М позже, а волна р2 раньше, чем волна от воображаемого источника, на время At = Ar/c. Поэтому давление pi отстает по фазе от этой волны, а давление р2 опережает по фазе волну на одну и ту же величину Дф = = соД^= (со/с)Ar = kAr. Учитывая равенство амплитуд pi и р2 и подставляя в (2.21) значения и г2, получаем
£ (at—kr)
(e-^+e+ik*r
2А г
cos (kAr) i iat~kr\
Здесь использована формула Эйлера e+iz + e~iz=2cosz.
Из рис. 2.12 находим Аг= (d/2)sin 0, так что амплитуда суммарного давления
cos 1^-sin ej • (2.22)
Как и следовало ожидать, при 0 = 0 (направление акустической оси) амплитуда давления максимальна и равна ртmax=2А/г — удвоенной амплитуде давления, создаваемого каждым источником.
Рис. 2.13. График для расчета ДН двухточечной синфазной базы.
Составляя отношение pmlpm max, можно найти выражение для характеристики направленности базы
R (0) = cos
kd
~2~
sin 0) = cos
(2.23)
Из (2.23) видно, что направленность двухэлементной базы зависит исключительно от d/K — волнового размера базы. При функция Я (0)^1, направлен¬
ность отсутствует. Это означает, что оба источника как бы сливаются в один точечный источник. При d = X/2 в направлениях 0=±9О° разность фаз между р\ и р2 составляет 180° и ^(0)=О. При значениях d/K^l по-
53
являются лепестки с максимумами, равными единице, давления р\ и р2 складываются в фазе.
Расчет и анализ ДН целесообразно вести с помощью графика i?(<p)=cos<p, где ф= (jtd/A,)sin0, как это делалось в § 2.2 и 2.3. График функции | cos ф | представлен на рис. 2.13, а ДН двухэлементной базы при различных значениях d/Я в полярной системе координат— на рис. 2.14. В силу осевой симметрии простран-
Рис. 2.14. ДН двухточечной синфазной базы при различных волновых размерах: d/jt=0,15 (кривая /); dj\=0,5 (кривая 2); d/%= 1,0 (кривая 3).
ственную ДН получим, вращая кривую i?(0) вокруг базы — отрезка, соединяющего оба источника.
2. Линейная база из произвольного числа синфазных элементов. База содержит п одинаковых точечных элементов, отстоящих друг от друга на расстоянии d.
Характеристика направленности (по модулю) описывается выражением [И]
Направления нулевых значений R{Q) определим из уравнения (nnd/X) sin 0 = тл;, откуда
(2.24)
nd
(2.25)
54
При m= 1 находим ширину 20о главного лепестка
sine,“‘Sr=T+T’ <2'25')
где£=(п—1 )d — размер базы. При большом числе элементов можно считать L^nd.
Когда т/п=г есть целое число, Д(0) = 1; получаем направления боковых максимумов равных единице
sin0=r —, г= 1,2,... (2.26)
d
Боковые максимумы, равные главному, называют добавочными максимумами. Из (2.26) видно, что если d<%, то добавочные максимумы не образуются. При d>X число добавочных максимумов в одном квадранте равно целой части отношения d/%.
Чтобы ДН не содержала добавочных максимумов, должно выполняться условие
— (2.27)
X ft
Добавочные максимумы присущи дискретным антеннам в отличие от сплошных поверхностей, ДН которых имеют боковые максимумы меньшие, чем единица.
Между нулевыми значениями #(0), определяемыми равенством (2.25), располагаются боковые лепестки, максимумы которых меньше единиц. Число таких максимумов, находящихся между центральным и первым добавочным лепестками или между соседними добавочными лепестками, равно (п—2) и не зависит от отношения d/X. Направление и величину боковых максимумов можно рассчитать из приближенных равенств:
Sin0v-(2v+1)\
v= 1, 2, . . .
v 2nd
l«(0v)l = -T7
1
п\ sin [(2v + 1) я/2п) |
(2.28)
(2.29)
Приведенные выражения позволяют проанализировать ДН базы. Из (2.25) следует, что чем больше волновой размер базы, тем острее ДН. Другими словами,
55
для заданной длины волны (частоты) и определенного числа элементов остроту ДН можно повысить только увеличением промежутка d (и, очевидно, базы L). Когда задано отношение d/X, острота ДН возрастает с увеличением /г, что также приводит к увеличению размера L. Если же зафиксировать базу L, то для повышения остроты направленности надо уменьшить число /г; при этом, как следует из (2.29), увеличиваются боковые максимумы. С увеличением п (при L = const) острота ДН понижается и боковые максимумы становятся меньше. Если принять п настолько большим, что синус в (2.29) можно заменить его аргументом, то п сократится и для первого бокового максимума (v=l) получится значение (0i) = 2/зя~ 0,22. Это значение соответствует ДН непрерывной линейной антенны размером L.
3. Дискретная линейная база точечных элементов с амплитудным распределением. Один из способов уменьшения излучения (приема) в направлении боковых максимумов основан на уменьшении амплитуды возбуждения крайних элементов базы сравнительно со средними элементами. Иными словами, это способ создания такого амплитудного распределения по длине базы, при котором амплитуды уменьшаются от середины к краю базы. В гидроакустических антеннах находят применение линейные базы с симметричным распределением амплитуд относительно центра О (рис. 2.15).
В данном случае для определения характеристики направленности базы уже нельзя пользоваться формулой (2.24), которая получена для базы элементов, имеющих одинаковые амплитуды.
Направленность базы с распределением найдем для некоторых частных случаев.
Пусть база имеет три элемента, возбуждаемых в одинаковой фазе с амплитудами Л0 = 2, Ai=Ai' = l. Просуммируем давления, создаваемые источниками в точке дальнего поля. Крайняя пара источников представляет собой двухэлементную базу 2d и, согласно (2.22), создает давление с амплитудой (2/r) Xcos[(2nc?A)sin0] = = (2/г) cos2q). Прибавим давление от центрального источника с учетом того, что его фаза (и А г) равна нулю, Получаем
р~ = — cos2cp + — = — (1 +cos2cp),
m r Г Г
56
Разделив рт на максимальную амплитуду /?ттах = 4//' в направлении нормали (0 = 0), получим нормированную характеристику направленности
R (0) = ~y (1 -f cos 2ф) = cos2 ф. (2.30)
Далее рассмотрим базу из четырех элементов с отношением амплитуд At: Л2: А3: Л4= 1 : 2 : 2 : 1. Здесь име-
Рис. 2.15. Линейная база равноотстоящих точечных элементов с амплитудным распределением.
ются две двухэлементные базы d (источники с номерами 2 и 3, причем в точке О источника нет) и 3d (источники с номерами 1 и 4). Первая база создает давление 4соэф, вторая — 2cos Зф (расстояние г опущено). По нормали амплитуда равна pmmax = 6 и характеристика направленности
R (0) = — (4 cos ф + 2 cos Зф) = —(2 cos ф + cos Зф)
6 3
или после преобразований
fl(8) = -sln3q> cosy. (2.31)
3 sin ф
Аналогично находят направленность базы при любом заданном амплитудном распределении. Изменяя распределение, можно в значительной степени изменять ДН базы.
57
Расчеты ДН линейных баз с симметричным распределением показывают, что с увеличением амплитуд центральных элементов острота главного максимума и амплитуды побочных максимумов ДН уменьшаются.
Дискретная линейная база направленных элементов. До сих пор рассматривались базы из точечных элементов. ДН таких баз, равно как и ДН сплошных антенн (с прямоугольной или круглой диафрагмой), имеют один существенный недостаток: при любом способе уменьшения боковых максимумов расширяется центральный лепесток, т. е. понижается острота ДН. На практике часто требуется антенна с большой остротой главного максимума и малыми боковыми максимумами. В таких случаях применяют антенны, состоящие из направленных преобразователей. Размеры последних соизмеримы с длиной волны. Общая направленность антенны создается не только расположением отдельных преобразователей (как в базе точечных элементов), но и тем, что каждый преобразователь обладает направленными свойствами.
База из п линейных элементов, расположенных вдоль отрезка прямой и имеющих одинаковые размеры, обладает следующей характеристикой направленности
F (G) = R* (0) F0 (0), (2.32)
где
F0 (0) = 1 Aj (фт+^т si" 6). (2.33)
m=\
В этих формулах /?*(0) —характеристика направленности каждого элемента; Am, фш, dm—амплитуда возбуждения, фаза и абсцисса (начало координат в центре базы) элемента с номером т соответственно; Fo(Q) — характеристика направленности базы точечных элементов, расположенных в центрах элементов рассматриваемой базы.
Равенство (2.32) выражает так называемую теорему умножения, которая позволяет вычислить характеристику направленности линейной базы из одинаково направленных элементов как произведение характеристик направленности каждого элемента и такой же базы точечных элементов.
58
При перемножении характеристик острота ДН будет изменяться мало, так как при небольших значениях 0 функция /?*(0) близка к единице. Величина же боковых максимумов уменьшится значительно, так как при больших значениях 0, в направлении которых ориентированы максимумы, величина |/?*(0)| может быть много меньше единицы.
Таким образом, увеличением размеров элементов, составляющих базу, можно уменьшить излучение (прием)
Рис. 2.16. Линейная база прямоугольных поршней (а) и ДНбазы^.
в направлении боковых максимумов и повысить тем самым остроту направленности базы.
Пример. Определить ДН в плоскости xOz линейной базы из четырех прямоугольных поршней с амплитудами 1 : 3 : 3 : 1 и знакопеременными фазами (рис. 2.16, а) на частоте 30 кГц, если сторона а—2 см, а промежутки d=5 см.
Согласно теореме умножения (2.32) искомая ДН равна произведению ДН одного прямоугольника в плоскости xOz, параллельной стороне а, на ДН линейной базы из четырех равноотстоящих точечных элементов с заданными амплитудами и фазами. Координаты центров и фазы элементов: d{ = —3d/2, ф1 = 0; d2 = —d/2, фг=я; d3 = = d/2, фз = 0; dt=3d/2, ф4 = я. В соответствии с формулами (2.9) и (2.33) запишем:
R* (0) = sin [(па/'к) sin 8] .
(па/Х) sin 0
pQ (0) = j [0—(ЗДе^/2) sin 0] _|_ [я—(kd/2) sin 0]
-f 3el sin -j- el ln+Wd/2) sin 0]^
59
Выразим размеры а и d через Я. Длина волны Я= 1500/30 000 = = 0,05 м = 5 см. Размеры а=2 см = 0,4Я; d=5 см = Я. Подставляя k*= = 2я/Я и используя формулу Эйлера e±iz~cos z±i sin г, для модуля функции F0(Q) получим
| F0 (0) | = | — 2i sin (Зя sin 0) + 6i sin (я sin 0) | =
= | — 2 sin (Зя sin 0) + 6 sin (я sin 0) |.
Можно упростить это выражение, если воспользоваться формулой sin 3cp = 3 sin ср — 4 sin3(p, тогда |FO(0)| = |8 sin3 (я sin 0)|. Функция .Fq(0) при 0 = 30° имеет максимум, равный |/7о(0)|тах =
= 8 зт3(я/2) =8. Таким образом, нормированная характеристика направленности линейной базы из точечных элементов равна \R0 (0)1= = I sin3 (я sin 0) I, всей базы из прямоугольных поршней равна sin (0,4ср)
д (0) 1 =
0,4ф
где ср = я sin 0.
Значения /?*(0) взяты из графика, приведенного на рис. 2.4. ДН представлена на рис. 2.16, б.
Дискретная линейная антенна с компенсированными характеристиками направленности. Подобно тому как радиолокатор определяет местонахождение какого-либо удаленного объекта в воздухе, гидролокатор находит положение подводного объекта. Чтобы определить угловые координаты лоцируемого (пеленгуемого) объекта (источника шума), антенна судового гидролокатора должна быть установлена на специальном поворотном устройстве, выступающем за обводы судна, в частности, под его днищем. Поворотное устройство позволяет поворачивать антенну до тех пор, пока объект не попадет в плоскость симметрии антенны. Тогда акустическая ось ДН совпадет с направлением на объект, а напряжение на выходе антенны (в приемном режиме) будет максимальным. Угловое положение антенны (оно видно на лимбе поворотного устройства) в момент максимума определяет угловое положение (пеленг) объекта.
Механическое вращение антенны затруднено как из-за больших габаритов и массы антенн, так и по причине ухудшения маневренности судна при перемещении антенны. Кроме того, если, например, шумопеленгатор установлен непосредственно в море (у входа в порт), то весьма усложняется управление поворотным устройством. Поэтому в современных гидроакустических станциях для поиска объекта используют неподвижную антенну с вращающейся диаграммой направленности.
60
Одним из способов искусственного (электрического) вращения ДН является использование дискретных антенн из точечных элементов с изменяющимся фазовым распределением. Такие антенны называют антеннами с искусственными, или компенсированными, характеристиками направленности.
Электрическое вращение ДН. Способ искусственного поворота ДН путем изменения фаз отдельных элементов антенны рассмотрим на примере линейной антенны.
Направленность линейной базы приемников обусловлена тем, что при падении звуковых волн на поверхность базы под углом 0 к ее нормали фазы звуковых давлений, действующих на различные приемники, а следовательно и фазы напряжений, возникающих на выходе приемников, различны. Сдвиг фаз напряжений приводит к тому, что при сложении они частично компенсируются. Результирующее выходное напряжение будет максимальным в том случае, когда поверхность базы перпендикулярна (0 = 0) направлению падения звуковых волн и фазы напряжений всех приемников совпадают. При повороте базы на произвольный угол (0=^0) фазы напряжений на выходе приемников становятся различными и суммарное выходное напряжение приемного устройства уменьшается, что и позволяет определять направление на источник воздействующих волн.
Таким образом, поворот базы приемников при определении направления на источник фактически необходим для того, чтобы изменить фазы напряжений, возникающих в приемниках, и, сделав их одинаковыми, получить максимальное напряжение на выходе приемного устройства. Аналогичное изменение фаз отдельных приемников базы можно вызвать с помощью набора задерживающих цепей L — С или R — С. При этом в электрическую цепь каждого приемника вводится фаза, которая компенсирует фазу колебаний, обусловленную падающей акустической волной в заданном направлении 0К. В результате ЭДС приемников складываются в фазе и их сумма максимальна, т. е. выходное напряжение приемного устройства оказывается максимальным не при 0 = 0, а при падении звуковой волны под углом 0 = 0К. Таким образом, акустическая ось антенны (и вся ДН) как бы повернулась на угол 0К без механического сме-
61
щения самих приемников. Эту повернутую характеристику называют компенсированной, а угол 0К — углом компенсации. Изменяя сдвиги фаз, вводимые в цепи приемников, можно обеспечить поворот ДН на любой угол в заданном секторе пространства и определить направление на источник звуковых волн по величине задержки, при которой суммарное напряжение на выходе антенны максимально.
Дискретное изменение фазы каждого приемника во времени вызывает шаговый поворот ДН. Чтобы создать плавный поворот (сканирование) ДН, надо непрерывно изменять во времени сдвиг фаз каждого элемента, что можно сделать при помощи фазовращателей.
Выражение компенсированной характеристики направленности можно получить из выражения некомпенсированной характеристики направленности, принимая за аргумент как фазу акустическую (за счет разности хода волн) фа= (ftd/X) sin 0, так и фазу электрическую (вводимую задерживающей цепью) фэ=—(то/Д) sin 0К.
Для линейной базы, состоящей из п равноотстоящих точечных элементов, получим
Из формулы (2.34) следует, что компенсированные ДН тем меньше отличаются от некомпенсированных, чем меньше угол компенсации 0К. С увеличением 0К основной лепесток расширяется, уменьшаются острота ДН и точность пеленгования. Для устранения этого недостатка применяют криволинейные (круговые, эллиптические) базы, которые рассмотрены в работе [6].
Мощность излучения антенны. В случае ненаправленного излучателя интенсивность звука во всех точках сферической поверхности радиусом г, окружающей этот излучатель, одинакова и акустическая мощность Р0 излучателя равна произведению 5^ на площадь поверхности сферы, т. е.
£ (0) = sin [п (фа фэ)] п sin (фа + фэ)
. (2.34)
§ 2.4. Мощность излучения направленной антенны
62
или
Ро = $о- 4яг*
Р . РтО-4^2
° ' 2рс
(2.35)
(2.36)
где рто — амплитуда звукового давления, создаваемого излучателем на расстоянии г.
В случае направленного излучателя для определения потока звуковой энергии, проходящей через замкнутую сферическую поверхность в единицу времени (т. е. акустической мощности Ра), необходимо разбить эту поверхность на большое число участков малой площади AS. Определив для каждого участка поток проходящей через него акустической энергии АРа, равный произведению & AS, следует просуммировать полученные значения по всей поверхности сферы.
Интенсивность звука на каждой из площадок AS можно выразить через амплитуду давления рт шах, создаваемого излучателем на расстоянии г по акустической оси, и характеристику направленности R. Действительно, по определению, функция R = pm/p т шах* Так как интенсивность звука пропорциональна квадрат" "тения, то
Pm шах 2р С
R2.
(2.37)
Акустическую мощность излучателя можно представить в виде
2
Ра = 2 &AS = Рт тах 2 R2bS. (2.38)
S 2р с S
Если теперь устремить число участков AS к бесконечности, а величину AS — к элементарной площади dS, то полная мощность излучения определится интегрированием выражения элементарной акустической мощности dP^&dS излучателя по всей поверхности сферы:
2
Ра = J 3fdS = -а-- J R2 (0, г|>) dS, (2.39)
5 2р с S
где 0, ф — угловые координаты радиуса-вектора г.
63
Коэффициент концентрации звуковой энергии. Сравним выражения для акустической мощности направленного излучателя (2.39) и ненаправленного излучателя (2.36) в предположении, что первый в точке на оси создает такое же звуковое давление (интенсивность звука), как и ненаправленный излучатель в равноудаленных точках во всех направлениях. Полагая рттах — РтО, 00- ставим отношение
_Р2 4кг2
Ра ~ {Я2 (0, ф) dS '
5
(2.40)
Теперь сравним создаваемые на одинаковом расстоянии обоими источниками звука интенсивности ах (на оси) и &0 в предположении, что акустические мощности источников одинаковы. Приравнивая Р0 = Ра, найдем
4кг2
J R2 (0, г|)) ds s
(2.41)
Как видим, мощности излучения направленного и ненаправленного источников, создающих в точке на оси одну и ту же интенсивность звука, различаются во столько же раз, во сколько различаются интенсивности звука в этой точке при равенстве мощностей у обоих источников.
Обозначим правую часть выражений (2.40) и (2.41) через Ко и запишем эти выражения в виде
А.
°f
су су и шах
0 «-'max
II
о*
Р а
^0
Ра=Ро
Величину Ко называют коэффициентом осевой концентрации (КОК) излучателя. Из (2.42) следует: чтобы направленный излучатель создавал в точке на акустической оси такую же интенсивность (давление), как и ненаправленный излучатель, акустическая мощность первого должна быть в Ко раз меньше, чем у ненаправленного излучателя. Если же оба источника излучают одинаковую акустическую мощность, то направленный источник создает в точке на оси интенсивность звука в Ко (давление в ]/Ко) раз большую, чем
64
ненаправленный источник. Таким образом, величина Ко указывает, что энергетический выигрыш получается при использовании направленного излучателя. Если, например, /Со = 100, то это значит, что для создания определенной величины интенсивности (давления) в направлении максимального излучения от данного источника нужна мощность в 100 раз меньшая, чем от ненаправленного источника. Или: направленный источник создаст на акустической оси интенсивность в 100, а давление в 100= 10 раз большее, чем ненаправленный источник той же мощности.
КОК удобен тем, что оценивает направленность антенны одним числом. Когда он известен, то легко определить акустическую мощность излучателя. Для этого достаточно измерить звуковое давление pmmax = pmo в точке на акустической оси на некотором (не малом) расстоянии г, и тогда согласно (2.42) получим
Рр ^ 2яг2р2т0 Ко рсК0
(2.43)
Как и направленность, КОК зависит от волновых размеров диафрагмы. Правильный выбор этих размеров, обеспечивающих получение необходимой концентрации звуковой энергии (т. е. величин Ко и 20о) позволяет во много раз увеличить эффективность использования акустической мощности антенны и значительно уменьшить расход электрической энергии на возбуждение антенны.
Расчет КОК. Определение КОК, как правило, представляет собой сложную вычислительную задачу, чаще всего она решается с помощью электронной вычислительной машины. Однако для антенн, имеющих большие волновые размеры, можно получить весьма простую формулу для расчета КОК.
Пусть плоская поршневая диафрагма площади 5 колеблется со скоростью vm, будучи встроена в бесконечный жесткий экран. В дальней зоне диафрагма создает в осевом направлении давление с максимальной амплитудой
Pm max
PCVmS
%Г
(2.44)
3 Г. М. Свердлин
65
Выражение (2.44) получается из (2.4) если в нем положить vn(x, y)=vm и волновое число заменить по формуле k = 2л/Х.
Интенсивность звука в точке на оси равна
„ _ Рт max Р^2 (2.45)
m3X 2рс ~ 2XV2 '
Так как волновые размеры диафрагмы велики, ее сопротивление излучения равно rs=pcS. Из общей формулы для акустической мощности Pa=0,5rsvm2 = = 0,5рcSv2m находим величину vm2 = 2PaJpcS и подставляем ее в выражение (2.45), получаем
3'».. = -^-- (2-46)
Следуя второму определению (2.42), для нахождения КОК надо Утах разделить на интенсивность 3''0 = 73о/4я/'2, но Ро = Р& и З'о=Ра/4пг2. Следовательно,
(2.47)
Для определения КОК круглого и прямоугольного поршней произвольных (в том числе и малых) волновых размеров можно воспользоваться графиками рис. 2.17 и 2.18. На рис. 2.18 параметром семейства кривых является величина Ко, а по осям отложены произведения волнового размера на число я. По вертикальной оси на рис. 2.17 отложены в логарифмическом масштабе величины Ко-
Из рассмотрения графиков зависимости КОК от волновых размеров следует, что по формуле (2.47) можно рассчитывать КОК круглого поршня при d/X^ 1, а прямоугольного— при аД^и Ь/Х^ 1.
Для круглого поршня диаметром d формулу (2.47) целесообразно представить в виде
*°=^^да10(тГ (2,48)
Если один из размеров прямоугольника значительно меньше длины волны, например а^0,2Х, то КОК такой полоски, называемой линейной антенной, определяется как Ло~2&Д (без экрана) и Ко — ^Ь/Х (в экране). К линейной антенне можно отнести и пульсирующий ци-
66
линдр, диаметр которого d<^X. КОК такого тонкого цилиндра длиной I равен Ко — 2/Д.
КОК приемной антенны. Помимо полезного сигнала на приемную антенну обычно воздействует большое число случайных акустических помех. Это всегда имеет место в реальных условиях благодаря отражению волн от границ моря и подводных объектов, а также из-за
Рис. 2.17. КОК круглого поршня в экране (7) и без экрана (2).
волн, рассеянных неоднородностями моря К На ненаправленную антенну воздействуют все помехи, а на направленную — главным образом только помехи из пространства в пределах основного лепестка ДН. Такое избирательное действие приводит к полезному увеличению отношения сигнал/помеха на входе направленной антенны.
Допустим, что на антенну по ее осевому направлению воздействует полезный сигнал, а по всем другим — помехи. Будем считать, что источники помех равномерно
1 См. [6, § 9.4].
3*
67
распределены по поверхности сферы большого радиуса, не взаимодействуют между собой и создают в разных направлениях равные потоки звуковой энергии; поле таких независимых источников называется изотроп- н ы м. Отношение акустической мощности Рс, восприни-
Рис. 2.18. Зависимость КОК прямоугольного поршня в бесконечном экране от волновых размеров.
маемой антенной от источника полезного сигнала, к мощности Рп, воздействующей на антенну от всех источников помех, будет пропорционально величине Ко. Этот результат характеризует помехоустойчивость антенны в режиме приема: направленная антенна воспринимает энергию изотропных помех в дальнем поле в Ко раз меньше, чем ненаправленная антенна. Иначе: КОК характеризует эффективность подавления помех направленной антенной.
68
Контрольные вопросы и задачи
1. Поясните природу свойства направленности излучателя.
2. По какой причине звуковое поле антенны можно оценивать характеристикой направленности только на большом расстоянии?
3. ДН прямоугольной поршневой диафрагмы в осевой плоскости,
параллельной одной стороне, имеет ширину главного лепестка 200= = 90°, а в перпендикулярной плоскости — 200,7=30°. Определить размеры поршня при частоте 20 кГц. Ответ: 106X127 мм.
4. По каким причинам боковые лепестки у ДН нежелательны? Приведите примеры поршней, ДН которых имеют уменьшенные боковые максимумы.
5. Линейная база из 10 равноотстоящих точечных элементов имеет размер 0,45 м и колеблется на частоте 15 кГц. Рассчитайте ширину главного лепестка и определите количество и величину боковых максимумов.
6. Объясните принцип электрического вращения ДН.
7. Направленный излучатель создает в точке на акустической оси звуковое давление 20 Па. Ненаправленный излучатель с такой же акустической мощностью создает на том же расстоянии давление 4 Па. Чему равен КОК направленного излучателя?
8. Два излучателя с плоскими поршневыми диафрагмами нема¬
лых волновых размеров обеспечивают одинаковую концентрацию звука в воде и воздухе. Какое соотношение площадей диафрагм у обоих излучателей? Ответ: 5Вд/5в3«20.
ГЛАВА 3. ЭЛЕКТРОДИНАМИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
Действие электродинамических преобразователей основано на взаимодействии тока, протекающего в катушке, с постоянным магнитным полем. Устройство электродинамического преобразователя показано на рис. 3.1. В зазоре кольцевой магнитной системы 2, образованного фланцами 3 и цилиндрическим сердечником 10, расположена катушка 12 с одним или несколькими рядами изолированного провода, намотанного на каркас 4. Каркас с помощью стержня 5 жестко закреплен в центре приемоизлучающей диафрагмы 6, являющейся одновременно верхней крышкой корпуса 1. Нижняя часть преобразователя закрыта фланцем 11 с сальником для прохода кабеля и уплотняющей прокладкой (на рисунке не показаны), обеспечивающей герметичность корпуса. Диск 7 из мягкой резины прижат к диафрагме
69
жесткой шайбой 9, ввинчиваемой в нарезку корпуса, шайба 8 является прокладкой.
При колебаниях диафрагмы в деформируемом резиновом диске возникают силы трения, вызывающие дополнительное механическое сопротивление и тормозящие колебания. Мягкая резина, следовательно, выполняет
Рис. 3.1. Устройство электродинамического преобразователя.
роль демпфера. Такое введение искусственного демпфирования увеличивает ширину резонансной кривой, т. е. полосу пропускания преобразователя.
Основные соотношения, описывающие работу преобразователя в режимах излучения и приема, были получены в § 1.2.
§ 3.1. Электродинамический излучатель
Механическое и электрическое сопротивления. В режиме излучения к катушке подводится переменное напряжение и и по ней протекает ток L Магнитное поле, создаваемое этим током, взаимодействует с постоянным магнитным полем в зазоре магнита, От взаимодействия по-
70
лей возникает периодическая сила, пропорциональная току и приводящая подвижную систему (катушку с диафрагмой) в колебательное движение. В воде, окружающей излучатель, создаются звуковые колебания с частотой возбуждающего напряжения.
Амплитуда и скорость колебаний диафрагмы излучателя, а следовательно, и величина создаваемого им звукового давления зависят, во-первых, от силы, воздействующей на диафрагму, и, во-вторых, от величины механического сопротивления -г, преодолеваемого этой силой. Сопротивление г обусловлено инерцией диафрагмы, катушки и соколеблющейся массы воды, упругостью подвеса диафрагмы, потерями на трение (главным образом, в демпфирующем устройстве) и излучение.
Зная величины этих сопротивлений и тока, а следовательно в силу, возбуждающую колебания, можно определить скорость колебаний диафрагмы и излучаемую мощность, а по ней и звуковое поле излучателя. Однако обычно задана не величина тока, а величина напряжения, приложенного к излучателю. Чтобы найти соотношение между и и /, необходимо учесть, что при колебаниях катушки в магнитном поле магнитный поток, проходящий через витки катушки, будет изменяться и в катушке возникнет обратная ЭДС индукции. Как показано выше, наличие ЭДС приводит к тому, что электрическое (входное) сопротивление Z0 излучателя возрастет на величину динамического сопротивления ZM — = K2/z, где К=В01 — коэффициент электромеханического преобразования. Полное электрическое сопротивление излучателя складывается из активного R и индуктивного шЬ сопротивлений катушки и сопротивления ZM:
Z = Z0 + Zu = R + i«>L + K2lz. (3.1)
Поскольку сила, действующая на диафрагму, равна f = KI9 то скорость колебаний диафрагмы
v = KIIz
или
_ Ки Ки
V~ z(Z0 + ZM) ~~ zZ0+K2
Механическая колебательная система излучателя состоит из массы тд и упругости 5Д диафрагмы, массы ка-
71
тушки mK, сопротивления потерь гп в демпфере. Рабочай поверхность диафрагмы нагружена сопротивлением излучения zs, состоящим из активной составляющей rs и инерционного сопротивления соколеблющейся массы ms. Таким образом, механическое сопротивление
г = rs + гп + ш (отд + тк + ms) — isja> =
= rs + rn + i [со (т + ms)—s/со], (3.3)
где т = тя + тк; s = sfl.
Эквивалентная электрическая схема. Для построения эквивалентной схемы излучателя удобнее исходить из выражения динамической проводимости
_1 rs + гп + «<о (т + ms) — is/а
2м _ (BJ)*
= Л—|_J—(-{©(Cj + Ca) — t'/coLi, (3.4)
AS Ап
где Rs = (Я0/)2/гв; Я п = (S0/)2/rn; Cx = m/(B0l)2;
C2 = m/(B01)2\ L± = (B0l)2/s. (3.5)
Из (3.4) видно, что сопротивление ZM можно представить в виде параллельного соединения элементов Rs, /?п, С2, Li. Присоединяя к ZM сопротивление Z0 не¬
подвижной катушки, получим эквивалентную схему, изображенную на рис. 3.2, а. Как видно на схеме, ток в цепи излучателя разветвляется на ряд составляющих, которые протекают по сопротивлениям ZM, обусловленным как собственно механическим сопротивлением диафрагмы, так и реакцией прилегающей к ней воды. Часть тока /s, протекающая по активному сопротивлению Rs, создает излучение звуковых волн в воде. Все остальные составляющие обусловлены преодолением сопротивлений самой диафрагмы и соколеблющейся массы и не создают полезного излучения. Поэтому для увеличения эффективности излучателя следует обеспечить превышение составляющей Is над остальными составляющими. При этом сила, приложенная к диафрагме, будет затрачиваться главным образом на преодоление активной составляющей реакции среды, действующей на поверхности диафрагмы. Чтобы получить такое распределение токов, можно воспользоваться тем, что фаза тока IL (соответствующего силе, преодолевающей упругое со-
72
противление диафрагмы) противоположна фазе токов 1С (соответствующих силам, преодолевающим инерционные сопротивления). При резонансе колебаний в механической системе излучателя, когда упругое и инерционные сопротивления одинаковы, токи IL и 1с компенсируются и их сумма равна нулю. Ток Is при резонансе значи-
Рис. 3.2. Эквивалентная схема электродинамического излучателя при произвольной частоте (а) и механическом резонансе (б).
тельно увеличится (если только Rs^Rn), соответственно возрастет и звуковое поле излучателя.
Приравнивая механические реактивные сопротивления (op(m + ms) =s/cop, находим частоту механического резонанса
~s i <°о
т 1 + mslm У 1 + msltn ^ ^
Величина соо в (3.6) есть резонансная частота излучателя при ms = 0. Условие малости т8 соблюдается, например, в случае работы излучателя в воздухе. Уменьшение резонансной частоты излучателя, работающего в воде, по сравнению с частотой резонанса излучателя, колеблющегося в воздухе, следует учитывать при изме-
73
рениях и регулировке излучателей. В том случае, когда регулировка произведена в воздухе, в воде такой излучатель будет работать не на резонансной частоте и создаваемое им звуковое поле не будет максимальным.
Сопротивление, вносимое в электрическую цепь при резонансе колебаний в механической системе излучателя, чисто активно [ZM. р= (B0l)2/(rs + rn) = RM. р] и состоит из параллельного соединения сопротивлений Rs и Rn (см. рис. 3.2,6). Из схемы видно, что чем больше Ru по сравнению с RSi тем больше ток 7S. Следовательно, для обеспечения большой эффективности излучателя необходимо, чтобы сопротивление потерь гП было значительно меньше сопротивления излучения rs [см. (3.5)]. При выполнении этого условия сопротивление механической системы на резонансной частоте будет определяться в основном сопротивлением излучения и эффективность работы излучателя будет максимальной.
Соотношение между величинами rs и гП, оцениваемое акустико-механическим КПД г]ам [см. (1.21)], можно определить опытным путем, измеряя частотные зависимости потребляемой излучателем мощности в воде и воздухе. При работе в воздухе величины rs и ms пренебрежимо малы и механическое сопротивление zB3 излучателя определяется практически активным сопротивлением потерь и реактивным сопротивлением диафрагмы. Поэтому полоса пропускания 2Аf/f0 излучателя будет определяться добротностью <2вз колебательного контура, составленного из инерционного и упругого сопротивлений
При работе излучателя в воде добротность механической колебательной системы определяется всеми составляющими z (см, 3.2). Причем, так как сопротивление излучения обычно превышает сопротивление потерь, полоса пропускания (2Д/)Вд получается шире, чем в воздухе:
По измеренным значениям резонансных частот fp в воде и f0 в воздухе находим отношение ms/m [см. (3.6)],
(3.7)
2А/\ 1 rs + rn
(3.8)
74
а по измеренным полосам в обеих средах определяем отношение rR/rn, т. е. КПД г]ам [см. 1.21]. Зная величину г]ам, рассчитываем излучаемую акустическую мощность Ра = РмЦ&м (Рш — механическая мощность — известна по частотной характеристике, измеренной в воде) и звуковое давление р на расстоянии г в точке на оси
Коэффициент электромеханического преобразования.
Напряжение, приложенное к излучателю, уравновешивается падением напряжений на сопротивлениях Z0 и ZM, причем мощность, рассеиваемая в активном сопротивлении R катушки, преобразуется в теплоту, т. е. представляет мощность электрических потерь Рэ. п. Чтобы эти потери в электрической цепи излучателя не приводили к значительному снижению КПД, стремятся к тому, чтобы активное сопротивление 7?м, вносимое из механической системы, намного превышало величину R. Такое соотношение между сопротивлениями RM и R можно обеспечить путем увеличения коэффициента электромеханического преобразователя К. Как известно, [см. (1.6)], К=В01, где Во — магнитная индукция в зазоре постоянного магнита, / — длина провода катушки. Индукцию можно выразить через напряженность Я0 магнитного поля в зазоре:
В0 — ii0H0 = 4 тс • Ю-7Я0,
а длину I — через радиус а катушки и число витков N: l = 2naN. Таким образом, коэффициент преобразования
Как видно, необходимую величину К можно получить увеличением напряженности постоянного магнитного поля. Увеличение же К приведет к значительному возрастанию полезного сопротивления Rs = K2/rs в цепи излучателя без увеличения сопротивления его катушки. Достигать увеличения К путем увеличения числа витков и диаметра катушки нецелесообразно, так как с возрастанием полезного сопротивления растет влияние сопротивления провода катушки.
(3.9)
К = 8я2 • 10~7aNHo.
(3.10)
75
§ 3.2. Электродинамическим приемник
В режиме приема на диафрагму электродинамического преобразователя действует звуковое давление акустического поля. Под действием этого давления колеблются диафрагма и скрепленная с ней катушка. В витках катушки наводится ЭДС, создающая на сопротивлении нагрузки ток. Возникающий ток взаимодействует с постоянным магнитным полем, в результате чего на катушку и диафрагму действует сила, тормозящая колебания, вызванные звуковым давлением. Таким образом, колебания механической системы преобразователь—приемник связаны с колебаниями тока в электрической цепи так же, как в случае системы преобразователь— излучатель. Выше было показано, что вследствие реакции электрической цепи собственное механическое сопротивление преобразователя возрастает на величину сопротивления z3= (BQl)2/Z, где Z — полное электрическое сопротивление преобразователя.
Определим чувствительность приемника (гидрофона) в звуковом поле плоской волны, т. е. практически на большом волновом расстоянии от источника. Согласно (1.2), развиваемая гидрофоном ЭДС e = B0lv. Скорость колебаний v подвижной системы определяется действующей на диафрагму силой F и сопротивлением системы. Последнее, как показано выше, слагается из сопротивлений диафрагмы, излучения (активного и реактивного) и реакции электрической цепи. Принимая F = pS (р — звуковое давление в падающей на диафрагму волне, S — площадь диафрагмы), запишем, пользуясь (1.8),
2 + 2Э г + i (сотэкв — Si со) + (B0l)2/Z
где r = rs + rn; тэкв = тд + тк + т8; Z = R + iaL Чувствительность v холостого хода гидрофона
v = _l_^ М?
р г + i (со/Пэкв — s/ю) + гэ
Чувствительность максимальна, когда частота действующей силы совпадает с резонансной частотой механической системы.
При отличных от резонансной частотах сила, действующая на диафрагму, будет затрачиваться не только
(3.11)
(3.12)
76
на преодоление активных сопротивлений (излучения, трения и электрической реакции), но и на преодоление инерционных (диафрагмы и соколеблющейся массы) и упругих (диафрагмы и электрической реакции) сопротивлений. Поэтому скорость колебаний подвижной системы в этом случае будет меньше, чем при резонансе, уменьшится и ЭДС на выходных клеммах приемника.
Когда гидрофон должен воспринимать колебания в широком диапазоне частот, например при использовании гидрофона в приборах для телефонной подводной связи, чувствительность гидрофона не должна сильно изменяться с изменением частоты. В таких случаях искусственно уменьшают остроту резонанса колебательной системы, увеличивая ее активное сопротивление с помощью демпфирующего устройства. Применение демпфера приводит к тому, что полное механическое сопротивление гидрофона в основном определяется трением, не зависящим от частоты. В результате амплитуда скорости колебаний диафрагмы мало зависит от частоты действующего на нее звукового давления и рабочая полоса значительно увеличивается. Однако одновременно значительно уменьшается чувствительность на резонансной частоте, так как большая часть усилий, возбуждающих диафрагму, тратится на преодоление силы трения в демпфирующем устройстве. Электродинамические преобразователи находят применение в звуковом диапазоне частот в основном в режиме излучения: как гидрофоны они имеют ограниченное применение:
Пример. Рассчитать электродинамический излучатель на резонансную частоту fр = 3 кГц, если диафрагма из латуни имеет диаметр d=25 см и толщину h=25 мм. Поле постоянного магнита в зазоре В0= 1 Вб/м2. Катушка из медного провода, длина его /=150 м, сечение 5пр=4 мм2, индуктивность L=15 мГ. Максимальный безопасный для катушки ток /=15 А. Определить максимальную излучаемую акустическую мощность, ширину полосы пропускания, КПД, электрический импеданс и упругость подвеса подвижной системы, обеспечивающую заданную частоту и поршневые колебания диафрагмы.
1. Площадь диафрагмы
s=rf=±(W=o м,.
4 4
2. Масса диафрагмы
тд = рSh — 8500-0,049*0,025 = 10,4 кг, р=8500 кг/м3 — плотность латуни.
77
3. Волновой размер диафрагмы при резойансе
Kva = klpd- =
2 с
jt’3-103-0,25 1,5-103
= 1,57.
4. Безразмерные коэффициенты сопротивления излучения. По графику, представленному на рис. 3.3, определяем
а = 0,6; р = 0,8.
О 1 2 3 ка *+
Рис. 3.3. Коэффициенты а-активного и p-реактивного сопротивления излучения круглой поршневой диафрагмы, излучающей одной
стороной.
5. Сопротивления излучения при резонансе:
— активное
rs = a (pc)BS = 0,6-1,5-Юб.0,049 = 4,41 • 104 кг/с;
— реактивное
xs=$ (рc)BS = 0,8-1,5-106-0,049 = 5,88-104 кг/с.
6. Сопротивление механических потерь
Гп = (1 — 'ПамУ'Пам-
Принимая акустико-механический КПД rjaM = 0,7, получаем гп = 4,41-104-0,3/0,7 = 1,89-104 кг/с.
7. Активное механическое сопротивление
г ==rs + rn = (4,41 + 1,89) -104 = 6,3-104 кг/с.
78
8. Соколеблющаяся масса
ms — =
coD
5,88-104 2я*3-103
= 3,1 КГ.
9. Масса провода катушки
тпр = p/Snp = 8960-150 * 4 • 10“6 = 5,38 кг,
р=8960 кг/м3 — плотность меди.
10. Масса катушки
тк = 6,0 кг.
Здесь учтены масса каркаса и изоляции провода.
11. Добротность механической колебательной системы
2я.3-103*(10,4 + 3,1 + 6,0)
Q =
(Ор/Яэкв
г 6,3.104
12. Ширина полосы пропускания
5,8.
2 А/ =
/р
3000
Q 5,8
13. Омическое сопротивление катушки
= 517 Гц.
# = Рэ-
/
= 0,017-10-®.
150
5 пр
4.10-е
= 0,64 Ом,
рэ = 0,017 мкОм-м — удельное электрическое сопротивление меди.
14. Индуктивное сопротивление катушки
X = 0)pL = 2я*3-103-0,015 = 283 Ом.
15. Сопротивление неподвижной катушки
Z0 = R + iX = 0,64 + 283/.
16. Коэффициент электромеханического преобразования
К=В01= 1-150= 150 Н/А.
17. Динамическое сопротивление
#м = K}jr = 1502/6,3-104 = 0,36 Ом.
18. Электрический импеданс излучателя
z = Z0 + Ям = 0,64 + 283/ + 0,36 = 1,0 + 283/.
19. Мощность электрических потерь
Рэ. п = /2Я = 152• 0,64 = 144 Вт.
20. Механическая мощность
ри = /2 цм = 152.0 3б = 81 Вт
21. Акустическая мощность излучения
Ра, — Рм*Пам = 0,7*81 = 57 Вт.
79
22. Электроакустический КПД
Лаэ :
57
Рм + Рэ.п 81 + 144
23. Упругость подвеса подвижной системы
= 0,175.
s= (2Я.3.103)2-19,5 = 6,9-109 Н/м.
Контрольные вопросы и задачи
1. Поясните устройство и принцип действия электродинамического преобразователя в режимах излучения и приема.
2. Какая составляющая тока в эквивалентной схеме, изображенной на рис. 3.2, обусловливает излучение звуковых волн? Как достигается превышение этой составляющей над остальными, т. е. большая эффективность излучателя?
3. Определить чувствительность электродинамического гидрофона на частоте резонанса по данным примера, приведенного в конце главы.
Ответ: 117 мкВ/Па.
ГЛАВА 4. ПЬЕЗОЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
Пьезоэлектрический эффект, открытый братьями Кюри, заключается в том, что при деформации некоторых кристаллов в определенных направлениях на их поверхностях появляются электрические заряды, т. е. они поляризуются К Это явление, названное прямым пьезоэффектом, было обнаружено у кристаллов кварца, турмалина, сегнетовой соли и других веществ. Деформация, т. е. изменение размеров кристалла под действием приложенного к нему электрического поля, называется обратным пьезоэффектом. Благодаря этим эффектам пьезоэлектрические кристаллы можно использовать в качестве преобразователей механических колебаний приемника звука в электрические колебания напряжения на его выходе и преобразователей
1 Пьезо—(от греч. piezo)—давлю; пьезоэлектричество—электричество, вызванное давлением.
80
электрического напряжения на входе излучателя в механические колебания.
После открытия советскими учеными Б. М. Вулом и И. М. Гольдманом нового пьезоэлектрического вещества — титаната бария широкое применение находят поликристаллические пьезоматериалы (пьезокерамика). В современных ГАП в качестве активных элементов широко применяется пьезокерамика различных составов промышленного производства.
Достоинствами пьезокерамических преобразователей, обусловившими широкое их использование в гидроакустических антеннах, являются: большая эффективность, возможность изготовления активных элементов любой формы и возбуждения различных видов колебаний, широкий частотный диапазон. Благодаря этим достоинствам пьезокерамические ГАП наиболее полно удовлетворяют требованиям, предъявляемым гидроакустическим станциям.
§ 4.1. Пьезоэлектрический эффект и его использование для ГАП
Характеристики пьезокристалла. При действии внешних сил на твердое тело оно не только движется как целое, но и деформируется, т. е. отдельные части его смещаются относительно друг друга, изменяются форма и размеры тела. При этом внутри тела возникают силы, противодействующие деформации. Деформированное тело находится в особом — напряженном состоянии, которое характеризуют силами, отнесенными к единичной площади и называемыми напряжениями1. Нормальные напряжения, действующие по направлениям осей х, у, -г, обозначают Охх=ои оуу = о2, Охх = въ\ тангенциальные или напряжения сдвига — ozy = 04, <Ухх = 05, Оху = Об. Осям х, у, z приданы номера соответственно 1, 2, 3.
Ограничимся рассмотрением упругой деформации, при которой связь между напряжением и степенью деформации линейная, т. е. справедлив закон Гука. Величи-
1 Силы аналогичного происхождения, действующие в жидкой (водной) среде, называются давлениями.
81
ной, характеризующей растяжение и сжатие, является линейная деформация, которую обозначают Su S2, S3 соответственно направлению действия деформации. Другим видом деформации упругого тела является сдвиг, его величину называют угловой деформацией и обозначают 54 = 2SZ2/, S5 = 2SZX, S6 = 2Sxy в зависимости от координатной плоскости, в которой происходит сдвиг.
Заметим, что деформация — величина безразмерная.
Пьезоэлектрический кристалл представляет собой твердое однородное тело, физические свойства которого неодинаковы во всех его точках и зависят от направления; такие тела называются анизотропными. Если, например, подвергнуть пьезокристалл растяжению вдоль некоторой оси, то он сократится по другим осям и изменятся углы между его гранями, т. е. произойдет сдвиг. Поэтому в пьезокристалле под действием электрического напряжения, приложенного вдоль одной оси, возникают упругие напряжения, как нормальные, так и тангенциальные. Нормальные напряжения вызовут сжатия и растяжения вдоль этой оси и ей перпендикулярной, т. е. линейные деформации, а тангенциальные напряжения вызовут сдвиг, т. е. угловые деформации.
Размеры и ориентацию среза пьезокристалла можно выбрать такими, что при обратном пьезоэффекте элемент будет преимущественно сжиматься и растягиваться, т. е. деформироваться вдоль одной оси, а при прямом пьезоэффекте на электродах, наложенных на определенные грани пьезоэлемента, будут возникать напряжения под действием звукового давления в окружающей среде.
Прямой и обратный пьезоэффекты неразрывно связаны друг с другом. Если при действии внешней силы, деформирующей кристалл, на электродах образуется ЭДС, то при приложении внешней ЭДС к этим электродам кристалл будет деформироваться. Это означает, что все пьезоэлектрические преобразователи обладают свойством обратимости, т. е. могут работать и как излучатели и как приемники.
Основные соотношения, характеризующие свойства пьезокристалла. Состояние кристалла как упругого тела может быть оценено механическим напряжением а и деформацией S в каждой точке кристалла. В таком слу-
82
чае говорят, что силы (напряжения) и деформации распределены по объему кристалла.
Связь между напряжениями и деформациями устанавливается законом Гука, справедливым для малых деформаций и выражающим пропорциональность между
о и S:
G = cS
(4.1)
или
S = so,
(4.2)
где с, 5 — коэффициенты пропорциональности; с — модуль упругости; s — постоянная гибкости (податливости). В равенствах (4.1) и (4.2) у всех величин должны быть индексы, указывающие направления действия напряжений и деформаций.
Всякий пьезокристалл является диэлектриком. Когда диэлектрик находится под действием внешнего электрического поля, он поляризуется, изменяется расположение электрически заряженных частиц — связанных зарядов. Состояние поляризованного диэлектрика может быть описано двумя векторными величинами: напряженностью £*, характеризующей силовое действие поля на заряженные частицы, и поляризацией Р, равной поверхностной плотности связанных зарядов в диэлектрике или вектором электрической индукции D, равным произведению е £*, где е — диэлектрическая проницаемость материала диэлектрика1.
Опытами Кюри установлена линейная зависимость между деформацией и полем как при прямом, так и при обратном пьезоэффекте. В соответствии с этим уравнения прямого пьезоэффекта могут быть записаны в виде
D = eS = do, (4.3)
уравнения обратного пьезоэффекта — в виде
о = —еЕ, S = dE. (4.4)
В уравнениях (4.3) и (4.4) е, d — коэффициенты пропорциональности; е— пьезоэлектрическая постоянная; d — пьезоэлектрический модуль. Коэффициенты е и d, связывающие разнородные вели-
1 Величина е = 8о8г, где е—электрическая постоянная, ег — относительная диэлектрическая проницаемость.
83
чйны, имеют размерность: [е] = Кл/м2 (кулон на квадратный метр); [а!] = м/В = Кл/Н (метр на вольт или кулон на ньютон).
Как и соотношения (4.1) — (4.2), уравнения (4.3) и
(4.4) содержат величины, которые должны быть снабжены индексами — указателями направлений.
Электрическое поле, возникающее при деформациях кристалла, может быть направлено либо в том же на-
Рис. 4.1. Пьезоэлектрический стержень с использованием пьезоэффектов: а — поперечного, б — продольного.
правлении, в котором действует сила (механическое напряжение), либо в перпендикулярном направлении. Если, например, сила действует вдоль оси z (з) и образующееся при этом электрическое поле направлено также по оси ,г, то получается продольный пьезоэффект (рис. 4.1, б) и характеризующий его пьезомодуль имеет индексы 33. Второе уравнение (4.3) при этом записывается следующим образом:
£>3 = ^зз^з* (4- 5)
Уравнение обратного продольного пьезоэффекта для этого случая имеет вид
S3 = d3SE^. (4.6)
84
Если сила действует по оси х (1), а электрическое Поле создается вдоль оси -г(з), то получается поперечный пьезоэффект (рис. 4.1, а) и его уравнения должны быть записаны следующим образом:
Ds = dslo1] S1 = d31E3. (4.7)
Пьезомодули d33 и определяют зависимость величины образующегося заряда на единицу площади от приложенной на единицу площади силы или зависимость величины деформации от величины напряженности электрического поля.
Когда пьезокристалл находится одновременно под действием электрического поля Е и деформации 5, то система уравнений, описывающая состояние кристалла, имеет вид
D = e£ + eS; o = cS — eE. (4.8)
При одновременном действии на пьезокристалл электрического поля Е и механических напряжений а система уравнений записывается в виде
D = sE-{-dG] S = so + dE. (4.9)
Энергетический коэффициент электромеханической связи. Пьезоэлемент с электродами, наложенными на две противоположные грани, представляет собой плоский конденсатор. Емкость С такого конденсатора, как известно, определяется площадью А электродов, расстоянием I между ними и диэлектрической проницаемостью е материала диэлектрика:
С = гАП. (4.10)
Следует заметить, что величина е пьезоэлемента зависит от его механического состояния: у закрепленного элемента (5 = 0) диэлектрическая проницаемость es меньше, чем проницаемость еа свободного (а=0) пьезоэлемента.
С помощью соотношений (4.8) и (4.9) можно полу-
чить
es = e°(l-£2),
(4.11)
где
£2_ * .
sV
(4.12)
85
Из полученных выражений, во-первых, видно, что емкость С° свободного пьезоэлемента больше емкости Cs заторможенного пьезоэлемента. Во-вторых, соотношение между диэлектрическими проницаемостями еа и 8s определяется исключительно постоянными материала пьезоэлемента.
Связь между модулями упругости сЕ, измеренном при Е = О (электроды закорочены) и cD, измеренном при D = О (электроды разомкнуты), описывается аналогично (4.11), поэтому
eska = cE/cD = l—k2.
(4.13)
Соотношение (4.13), как и отношение емкостей заторможенного и свободного пьезоэлементов, может служить показателем эффективности пьезоэлектрического преобразования энергии. Если к свободному (а = 0) пьезоэлементу приложено электрическое поле £*, в каждой единице объема элемента запасается определенное количество энергии — плотность энергии, пропорциональная величине е°Е2. У заторможенного (5 = 0) пьезоэлемента при этой же напряженности поля плотность энергии пропорциональна величине ssE2 меньшей, чем еа£2. Разность этих плотностей энергии, пропорциональная величине (еа— es)E2, очевидно, равна плотности механической энергии, обусловленной деформацией. Действительно, благодаря пьезоэффекту часть электрической энергии, подводимой к пьезоэлементу, расходуется на его деформацию и переходит, следовательно, в механическую форму — энергию упругой деформации. Мерой эффективности пьезоэлемента как электромеханического преобразователя служит отношение накопленной им механической энергии к полной запасенной в нем электрической энергии; это отношение назовем энергетическим коэффициентом электромеханической связи. Из отношения (еа—8 s)E2le°E2
получим 1 — es/ea или, согласно (4.11), величину k2. Коэффициент k2 можно также определить и как отношение электрической энергии, образующейся в пьезоэлементе при его деформации, к запасаемой в нем механической энергии.
86
У многих пьезоматериалов (кварц, турмалин, некоторые составы пьезокерамики) &=10-f-20% (&2 — 0,01-Ь- —0,04), для них можно пренебречь различием между е5 и еа, cE(sE) и cD(sD). У пьезоэлементов из этих материалов только несколько процентов электрической (или механической) энергии, подводимой в статическом режиме (практически — при низких частотах), переходит в механическую (или электрическую) энергию упругих деформаций. У других же пьезоматериалов (сегне- това соль, дигидрофосфат аммония, некоторые составы пьезокерамики) коэффициент k = 30-4-70%, и для них уже нельзя не считаться с различием между соответствующими постоянными.
Пьезоэлектрический эффект поликристаллических материалов. Пьезокерамика. Пьезоэлектрические элементы ГАП могут изготавливаться из естественных кристаллов (кварца, турмалина), синтетических кристаллов (сегнетовой соли, дигидрофосфата аммония) и поликристаллических материалов (пьезокерамики различных составов).
Одиночные кристаллы (монокристаллы) титаната бария в природе не встречаются, их можно выращивать искусственно, но размеры получаются настолько малыми, что для ГАП они непригодны.
Керамический материал состава ВаТЮ3 получается в процессе обжига смеси порошков двуокиси титана (29%) и углекислого бария (71%) при температуре 1300° С. После обжига, механической обработки и нанесения электродов (серебрения соответствующих поверхностей) керамику поляризуют, т. е. подвергают воздействию сильного постоянного электрического поля (напряженностью порядка 15—20 кВ/см). При этом оси монокристаллов ориентируются определенным образом по отношению к направлению внешнего поля и образец в целом поляризуется в направлении этого поля. Длительность и температура поляризации, а также величина напряженности поля выбираются такими, чтобы обеспечить получение в керамике предельного значения пьезомодуля. При нагреве до 120° С электрическая поляризация титана бария исчезает. Эта температура отвечает точке Кюри для данной керамики.
Получаемые указанным способом и поляризованные титанат бария и другие подобные ему поликристалличе-
87
Значения постоянных пьезо
Марки
материалов
Класс
и
W
d
с
1
СЗ
с
т
о
W со
с
т
о
Q со
о
s'
ы-
о
S3
со
cf, м/с
См/с
ТБ-1
I
5300
1,05
1,12
4360
4410
4500
ТБК-3
II
5400
1,15
1,05
1,36
4700
4400
4750
5010
ЦТСНВ-1
I
7200
0,62
0,49
0,98
2900
2600
3080
3680
ЦТС-19
I
7330
0,72
0,60
1,32
3120
3000
3210
4080
ЦТС-23
II
7400
0,74
0,67
1,02
3200
3000
3260
3700
ЦТСС-1
II
7300
0,89
0,79
1,13
3500
3300
3620
3940
ЦТБС-3
II
7200
0,82
0,75
1,22
3400
3220
3560
4120
НБС-1
II
5600
1,12
—
1,36
4460
—
4520
4900
ские сегнетоэлектрики принято называть пьезокерамикой или сегнетокерамикой.
Электроды на керамику наносят вжиганием серебра, для чего поверхности ее покрывают пастой, содержащей коллоидальное серебро; при нагреве до температуры 750° С образующийся тонкий слой серебра прочно скрепляется с керамикой, и к нему можно припаивать выводы.
Электрическая прочность пьезокерамики, т. е. ее способность противостоять электрическому пробою, характеризуется величиной напряжения апр или напряженности Еир, при которой происходит короткое замыкание между электродами. Чем больше толщина б пьезоэлемента, тем выше его пробивное напряжение. Для случая равномерного электрического поля в диэлектрике £Пр= = ^пр/6. У керамики из титаната бария £пр~3 кВ/мм.
Пьезоэлектрические свойства пьезокерамики определяются свойствами составляющих ее монокристаллов. Так, монокристалл титаната бария имеет три независимых пьезомодуля: dzi — поперечный, d33— продольный,
С?15 — СДВИГОВЫЙ.
В табл. 4.1 приведены значения упругих, электрических и пьезоэлектрических постоянных некоторых составов пьезокерамики, соответствующие интервалу темпе-
86
керамических материалов
Таблица 4.1
iTcO О СО
СО
к
0
1
о
а
с
т
о
'а
ь
д
ч"
*
о
чз
д
X
о
43
лР
лР
< 50 кВ/см
tg G, °/,
Р
*
о
о
200 кВ/м
о
о
Jld
1100
0,1
0,2
0,45
1,00
0,15
0,30
2,0
120
1175
1,0
0,2
0,53
1,17
0,14
0,37
1,3
2,5
4,0
105
2100
10
0,17
1,77
4,35
0,34
0,72
1,9
9,5
17
250
1540
—
—
1,57
3,63
0,26
0,60
3,5
8,0
—
280
1000
—
0,19
0,7
1,83
0,20
0,57
0,75
2,0
3,5
250
1000
0,5
0,19
0,8
1,8
0,26
0,55
0,7
1,0
1,5
550
2180
10
0,19
1,6
3,33
0,3
0,65
1,2
2,0
3,0
250
2000
—
0,2
0,87
1,83
0,17
0,34
1,0
—
—
220
ратур 16—20° С и слабым возбуждениям. В таблице приняты следующие обозначения: р — плотность; Y* — модуль упругости; Ci — скорость звука; е/ео — относительная диэлектрическая проницаемость; рэ — удельное электрическое сопротивление; ар— предел прочности при статическом растяжении; t-& — температура (точка) Кюри; d — пьезоэлектрический модуль; k — коэффициент электромеханической связи. Нижние индексы при величинах относятся: 31 — к поперечному пьезоэффекту, 33 — к продольному пьезоэффекту; верхние индексы: Е — к режиму постоянства электрического поля (короткому замыканию электродов), D — к режиму постоянства электрической индукции (разомкнутым электродам), о — к свободному (от упругих напряжений) состоянию.
Для получения значений величин Уг*, d, рэ, ар приведенные в таблице числа необходимо разделить на множитель при символе величины, а для вычисления величины е — умножить на электрическую постоянную ео = = 8,85 • 10~12 Ф/м. Например, для пьезокерамики ТБК-3: Yye= 1,15• 1011 Па; ар = 0,2* 108 Па; е33а = 1175x8,85Х X 10“12= 10,4 • 10~9 Ф/м; рэ=107 Ом-м; rf31 = 0,5X Х10-10 Кл/н.
89
§ 4.2. Стержневые пьезоэлёктрИческие преобразователи
Уравнение движения. Колебательная система преобразователя представляет собой стержень из пьезоактивного материала, торцы которого или свободны (см. рис. 1.1 а), или нагружены пластинами-накладками. Причем нагрузка эта может быть либо с одной стороны (см. рис. 1.1,6), либо с обеих сторон (см. рис. 1.1. в).
Рассмотрим колебания пьезоэлектрического стержня, поперечные размеры б и Ь которого значительно меньше его длины / (см. рис. 4.1, а). Возбудить колебания такого стержня можно или непосредственно действием растягивающих (и сжимающих) сил вдоль оси х, например сил звукового поля, или использованием пьезоэффекта. Если электроды наложить на грани, перпендикулярные к оси ,г, и приложить переменное напряжение щ вдоль этой оси, то электрическое поле £3 = w3/6 вызовет колебания стержня по оси х. При действии внешних сил по оси х между электродами возникает поле и разность потенциалов иъ. В обоих случаях направления поля и колебаний взаимно перпендикулярны, это — поперечный пьезоэффект. Когда электроды наложены на грани, перпендикулярные продольной оси стержня (см. рис. 4.1, б), направления электрического поля и механических колебаний совпадают, т. е. используется продольный пьезоэффект.
Для поперечного пьезоэффекта электрическое поле в данный момент времени одинаково и равно £3 = ^3/6, оно не меняется и по длине стержня, т. е. с изменением координаты ху поскольку поперечными деформациями можно пренебречь. Механические напряжения действуют только вдоль оси х и равны о\. Как о\ так и деформация Si распределены по оси х неравномерно. Уравнения, описывающие колебания стержня при действии напряжений cFi и поля £3, имеют вид (4.9)
Si = s^cTj + d3lE3; D3 = &33E3 -f- d3{ (4.14)
Составим уравнение движения элемента длиной dx и площадью поперечного сечения А. Под действием на-
90
пряжения cti левая грань элемента сместится на рассто-
яние h = l, а правая — на расстояние g2 = £4—-dx1.
дх
Таким образом, деформация элемента составит величину S 1 = д%/дх. Аналогично, если на левую грань элемента действует нормальное напряжение ai = a, то на правую грань — напряжение <72 = сг+ (до/дх)dx. Результирующая упругая сила, действующая на элемент стержня, будет F=a\A — 02^4 = —A(da/dx)dx. Согласно второму закону механики эта сила равна силе инерции Fnн = —рAdxX Xd2l/dt2 (рAdx — масса, d2%/dt2 — ускорение элемента):
дЧ да у дР дх
(4.15)
где р — плотность материала стержня; | — смещение элемента стержня по оси х.
Выражение (4.15) и есть уравнение движения стержня по оси х.
Определим ai из первого уравнения (4.14)
<*i
1 дЪ
дх
(4.16)
и подставим в (4.15). Помня, что £з не зависит от координаты х, имеем дЕ3/дх = 0
даг = 1 дЧ
дх дх2
sli
Величина l/sfi = yf есть модуль Юнга. Теперь уравнение (4.15) принимает вид
где
др
С\
. (СЕ\2
(4.17)
Vyfip
(4.18)
1 Из математики известно, что при изменении аргумента на величину dx функция (смещение) изменяется на величину, равную пройзведению частной производной от функции на дифференциал независимой переменной.
91
Уравнение (4.17) является волновым уравнением1, описывающим распространение акустических волн вдоль стержня. Величина С\ представляет собой скорость распространения продольных волн в стержне и, как это следует из (4.18), зависит от модуля упругости при Е = = const (в режиме короткого замыкания электродов) и плотности материала стержня.
Рис. 4.2. Эквивалентная схема пьезоэлектрического стержня с нагрузкой на торцах при поперечном пьезоэффекте (а); пьезоэлектрический стержень с накладками (б).
Эквивалентная электромеханическая схема. Пусть к электродам пьезоэлектрического стержня приложено гармоническое напряжение и с частотой со. Торцы стержня, колеблющиеся со скоростями v\ и v2 (рис. 4.2, а) нагружены механическими сопротивлениями z\ и г2 (накладками) и силами F\ и F2 (например, силами звукового давления).
Решая уравнение (4.17) относительно смещения g, определяя деформации дЦдх торцов, используя граничные условия (на торцах стержня) и находя протекающий через пьезоэлектрический стержень (электроды) ток У, можно получить выражения [11], описывающие колебания пьезоэлектрического стержня с накладками
92
1 См. [6, § 4.2].
как в режиме излучения, когда задано электрическое напряжение и, так и в режиме приема, когда заданы силы давления Fx и F2. На основе этих выражений по методу электромеханических аналогий на рис. 4.2, а построена эквивалентная схема стержневого преобразователя при поперечном пьезоэффекте. Схема состоит из двух частей: электрической и механической, которые связаны между собой через условный трансформатор с коэффициентом трансформации
d^YfA р
n=-3'kl--- = d3iYfb. (4.19)
Электрическая сторона схемы содержит источник напряжения и и емкость С0, равную
Со
4гы
6
833 ( * 4 ) М
(4.20)
где Ы— площадь электрода; б — расстояние между электродами (см. рис. 4.1, а); k3^— энергетический коэффициент связи для рассматриваемого вида колебаний. Согласно (4.12)
kh=d23lYfkG33.
(4.21)
Механическая сторона схемы имеет общую ветвь с сопротивлением —ixo/sinkl, по которой протекает «ток» (скорость) vi + v2, и две параллельные ветви, в каждой из которых действует источник F\ и F2 и протекает «ток» (скорость) V\ и v2 по двум последовательно включенным сопротивлениям Xotg(kl/2) и Z\{z2). Приняты обозначения: Хо = рс\ЕА, k = (d/ciE = (dyp/Y\E — волное число,
рассчитанное по скорости звука в стержне.
Для металлических накладок с размерами рабочей поверхности большими, чем длина звуковой волны в воде, сопротивление zH накладки приближенно равно
г
н
Мв£н_,
COS2 (kl)H
i(pcS)Htg(kl)n,
(4.22)
где индекс «в» относится к воде, индекс «н» — к накладке. Соотношение между силами и скоростями на
93
торце стержня и наружной поверхности накладки дается выражением
FJF = v/vB = cos (fe/)H, (4.23)
справедливым при значениях (kl)u, не близких к я/2. Так как £ = 2лДн, то (&/)н = 2я/нДн> и это условие означает, что размер /н не должен быть равен Ян/4, где Ян — длина волны в материале накладки.
В случае продольно поляризованного пьезоэлектрического стержня (см. рис. 4.1, б) коэффициент электромеханической трансформации
n = dssYiA/l,
(4.24)
а энергетический коэффициент связи
(4.25)
Эквивалентная схема имеет две особенности по сравнению со случаем поперечного пьезоэффекта. Во-первых, механические реактивные сопротивления определяются модулем упругости Уf . Во-вторых, в неразветвленную ветвь механической стороны вносится с электрической стороны сопротивление т2/соС0.
Учет потерь в преобразователе. Колебания пьезоэлектрического преобразователя сопровождаются неизбежными потерями части энергии. Вследствие неидеально- сти диэлектрика пьезоэлектрического стержня через него проходит ток проводимости, вызывая рассеивание части подводимой к нему электрической энергии и нагрев стержня. Потери мощности в стержне называют диэлектрическими потерями, они характеризуются тангенсом угла потерь tg6 (или электрической добротностью Q=l/tg6). При параллельном соединении эквивалентного активного сопротивления потерь Ru, на котором расходуется мощность электрических потерь Pz.n=u2/Ru, и емкости С0 величина
Rn= 1/соС0 tgS. (4.26)
k 33 = ^ззУ^/бзз.
Потери механической энергии в преобразователе обусловлены главным образом превращением части энергии колебаний в теплоту в местах склейки стержня с накладками или отдельных пьезопластин, пз которых
94
набирается стержень, в местах крепления, в экранах и др. Механические потери учитывают введением в схему (параллельные ветви механической стороны) эквивалентных активных сопротивлений гп; величина гп оценивается с помощью определяемого опытным акустико-механического КПД [см. (1.21)].
Расчет в режиме излучения. На рис. 4.3. приведена эквивалентная схема преобразователя с двумя одина-
^ ix* X
Рис. 4.3. Эквивалентная схема симметричного одностороннего излучателя при поперечном пьезоэффекте.
новыми накладками, одна из которых соприкасается с водой, а другая экранирована так, что практически свободна, т. е. совершенно не нагружена; такой преобразователь называют односторонним. Обозначим: Xi = pcEA/s'mkl; х2 = рсЕА tg(&//2); хн = (pcS)Htg(kl)H;
^н= (р£) bSh/C0S2 (kl)n.
Определению подлежит акустическая мощность Ра при заданной разности потенциалов и. Сначала находим «напряжение» Р, действующее на механической стороне. Согласно определению коэффициента электромеханической трансформации F = nu. Таким образом, из схемы, представленной на рис. 4.3, исключается трансформатор, вместо которого между точками а—b включен эквивалентный источник механической силы F. Далее находим «ток» в ветви с полезной нагрузкой гн;
95
фактически V\ есть скорость колебаний торца стержни, примыкающего к рабочей накладке. Так как Ра определяется скоростью колебаний £ЦН внешней поверхности накладки, то, используя равенство (4.23), получим V\H = = vJcos (kl)u.
Выражение для Vml имеет максимум при выполнении условия Х2 + хи—2*1 = 0, которое после подстановок и преобразований приводится к виду
(4.27)
где сн=уун/рн; Ун — модуль Юнга материала накладки. Поскольку при частоте сор скорость колебаний рабочей поверхности накладки максимальна, то равенство (4.27) выражает условие резонанса колебательной системы преобразователя.
На частоте резонанса механическое сопротивление
г «Р (РС)в5н , г„ р 4 cos2 (сйр/н/Сн) 2
(4.28)
Здесь первое слагаемое определяет полезную мощность, поэтому акустико-механический КПД, определяемый отношением акустической мощности к механической мощности, равен
_ “р (Pc)bsh/4 cos2 (сор/н/сн) _
1111 ар(рс)в SH/4 cos2 (сор/н/сн) + гп/2
«р (Pc)bSh 4гр cos2 (о)р/н/Сн)
(4.29)
Акустическая мощность излучения при резонансе
где n=d3iYiEb.
(4.30)
1 Здесь и в дальнейшем выкладки не производятся из-за их громоздкости.
96
При низких частотах, когда преобладающим сопротивлением является Х\у т. е. при Х\'^>Х2+хп и Х2+хи'^>гу акустическая мощность
Р,
«н (pg)B Snn2u2(a\l2 4(р сеА)2
(4.31)
где ан — коэффициент активного сопротивления излу- чения.
Рис. 4.4. Секционированный пьезостержень с накладками с использованием пьезоэффектов: а — поперечного, б — продольного.
Формулы (4.30) — (4.31) можно считать справедливыми и при использовании продольного пьезоэффекта, принимая п=с1мУгЕ А/1, сЕ=съЕ.
Когда пьезоэлектрический стержень должен иметь большой размер, его выполняют наборным из пластинок малой толщины, склеенных между собой; такой преобразователь называют секционированным (рис. 4.4). При большой длине сплошного стержня потребовалось бы чрезмерно высокое напряжение для поляризации и, кроме того, емкостное сопротивление пьезоэлектрического стержня было бы также весьма большим вследствие малой емкости (C=eS//).
4 Г. М. Свердлин
97
Для секционированного преобразователя коэффициент электромеханической трансформации п0 в N раз больше (N — число пластин). Так как расстояние h между электродами отдельной пластины секционированного стержня в N раз меньше, чем у сплошного стержня, а площади электродов у них одинаковы, то емкость пластины в N раз больше емкости сплошного стержня. При параллельном соединении электродов секционированного пьезоэлектрического стержня его емкость возрастает в N2 раз, а емкостное сопротивление уменьшается в то же число раз по сравнению со сплошным стержнем. Соответственно сопротивление Ra диэлектрических потерь уменьшается в N2 раз, поскольку = l/(oC0tg6.
Таким образом, получаем коэффициенты nc = db\Y\EX XbN=duYiEA/h и nc = dzzYzE AN/l=dszYzE A/h для секционированного преобразователя с поперечным и продольным пьезоэффектом соответственно.
При использовании продольного пьезоэффекта (см. рис. 4.4, б) и большом числе элементов (пластин) секционированного стержня его эквивалентная схема будет такой же, как при поперечном пьезоэффекте (см. рис. 4.2). В этом случае Л<С/, h<^h (А, — длина волны в пьезокерамике) напряженность поля Е при параллельном соединении элементов по всей длине стержня одинакова и параметры схемы для этих условий соответствуют режиму Е = const. Это выполняется при Л^4 и /г^ОДА,.
Пьезоэлектрический стержень с одной накладкой. Четвертьволновый преобразователь. Колебательная система такого преобразователя применяется в двух вариантах— с ненагруженной и нагруженной накладками. В первом случае с водой соприкасается торец стержня, а накладка свободна, т. е. экранирована; во втором случае накладка рабочая, а торец стержня свободен. Чаще всего размеры I стержня и /н накладки в направлении колебаний составляют четверть длины звуковой волны на резонансной частоте в материале пьезоэлектрического стержня и накладки соответственно. Таким образом, условием механического резонанса преобразователя являются равенства
А, _ сЕ
4 4/р ’
, сн с СЕ Сн
/н = —- или /р =
4/р ,Р 41
4/н
(4.32)
98
4/
Используя общую эквивалентную схему (см. рис. 4.3), получим результаты (табл. 4.2).
Таблица 4.2
Формулы для акустической мощности четвертьволнового излучателя
Частота
Акустическая мощность
Примечание
с ненагруженной накладкой
с нагруженной накладкой
/р
(nripU)2
(<7ПГ]ры)2
(р£^)н
сср (рс)вЛ
ар (Рс)в^н
рсЕА
/«/Р
анл2(рс)вп2и? ч/
аия2 (pc)Bn2u2
Величина ан определяется по кривым, приведенным
на рис. 6.7.
4 (рсе)2А
*(£)'
16 (pc)|S„ *(£)
Пьезоэлектрический стержень без накладок. Полуволновый преобразователь. Одна торцевая поверхность— рабочая, она контактирует с водой, другая — свободная. Эквивалентная схема получается из схемы, приведенной на рис. 4.3, для случая хн = 0, гн = рсЕА при резонансе и гн=апрсЕА при низкой частоте.
Условие механического резонанса при поперечном пьезоэффекте
fp = cBl2l,
(4.33)
при продольном пьезоэффекте
k
2
33>
(4.34)
где I — размер стержня в направлении колебаний.
Активное механическое сопротивление при резонансе
гр = аРг(Рс)в^/4т1р. (4.35)
4*
99
Формулы для расчета стержневых
Приемник
Пьезоэффект
Условие электромеханического резонанса
Симметричный с накладками
Продоль¬
ный
2 я/'/„ п nf'l (pcS)„ tg 2— = peg A ctg p ;
Ся, eg
2uf l nf l
(P cS)H tg p « peg A ctg —
Ch eg
Попереч¬
ный
2nf’l
(pcS)„ tg - /p H =
CH
= + ** ;
ci ®pC0
(pcS).4 tg 2я/р/н « peg A ctg Я/р/
Полуволно¬
вый
Продоль¬
ный
/p = eg! 21
Попереч¬
ный
(2cf/<Dp/) tg ((Bp// 2cf) = 1 — l/fefj
Четвертьволновый с нена- груженной накладкой
Продоль¬
ный
fP = cJK = cd!ai
Попереч¬
ный
tg2<'« + ^x
4/ cH (pcS)H
я (l — *|i) 1
X 2+ 1 31' _ 0
2*3*1 J
Четвертьволновый с нагруженной накладкой
Продоль¬
ный
f _ Cn C3
P 4/„ “ 4/
Попереч¬
ный
f - ■ tg 2Я/р/н l PC'A - c il ■ 8 c, + <рй).Х
xr2+
L 2ftii J
100
преобразователей в режиме приема
Таблица 4.3
Чувствительность при резонансе
Чувствительность при низких частотах
2я/'/
2nr]p cos —
СН
«р (РС)вЮрС0
nSH/a
2К3£8«Л2
о Н'н
2nrjp cos —
сн
«р (рс)вЮрС0
nSH62 2 Yfsa33A2
2пг)р
til2/2Y3&33A
«р (Pc)bwpC0
nS2/2Tf 833Л
п11р/юрС0 (Рс)в
«/2/г3ве°Л
«Лр 1
яб*
1 + 2*1/я (1 — А|,) (рс)вЮрС0
ЯТ]р (Р^)н 1
nSul2
pcf Л ар (рс)вЮрС0
2Ffe3V2 [1 + <p/S)H/pM]
«»1р (pcS)H/pcf Л
2Ff83V2 [l + (pfS)„/pM]
1 +4*з,/я (1 ^з1) (Рс)рЮрС0
101
Акустическая мощность излучения при резонансе
4п2и21}2
«р (рс)вл ’
при низких частотах
«„я2 (рс), я»а» / /н у анч 4 (рс£)а Л U/
(4.36)
(4.37)
Расчет в режиме приема. Расчет симметричного (с двумя одинаковыми накладками) одностороннего
рис. 4.5. Эквивалентная схема одностороннего симметричного стержневого приемника.
приемника производится по эквивалентной схеме, представленной на рис. 4.5. Применяя изложенную в § 1.4 методику расчета чувствительности приемника к стержневому преобразователю, получим формулы (табл. 4.3).
Электрический импеданс. Пьезоэлектрический преобразователь, работающий в режиме излучения, нагружает Возбуждающий его генератор. Известно, что максимальная мощность на нагрузке выделяется при равенстве внутреннего сопротивления генератора и сопротивления нагрузки. Чтобы обеспечить это условие согласования генератора и преобразователя-излучателя, надо прежде всего знать входное (электрическое) сопротивление преобразователя.
Согласно эквивалентным схемам излучателя (см. рис. 1.7 и 4.3) импеданс Z определяется как параллель-
102
мое соединение емкости С0, сопротивления Rn диэлектрических потерь в статическом (заторможенном) состоянии преобразователя и динамического сопротивления ZM = z!ti2 [см. (1.13)].
Частотная зависимость модуля импеданса \Z\ пьезоэлектрического преобразователя представлена на рис. 4.6. На низких частотах (cd<Cg)i) динамическое сопротивление |ZM| настолько велико, что не влияет на величину \Z\; здесь преобразователь ведет себя практически как конденсатор (с потерями): с ростом частоты емкостное сопротивление уменьшается. На частоте со = оси импеданс достигает минимального значения. Благодаря наличию активных сопротивлений частота coi оказывается несколько меньше, чем частота сор механического резонанса, при которой Zm = 0. При механическом резонансе динамическое сопротивление становится активным и минимальным, а импеданс Zp представляет собой параллельное соединение элементов С0,
Ru, RM. При поддержании постоянным напряжения на входе преобразователя протекающий через него ток на частоте со = coi будет максимальным.
С ростом частоты величина |Z| увеличивается и при со = о)2 достигает максимума; частота о)2 называется частотой антирезонанса в связи с тем, что ток, протекающий через преобразователь при |Z| = |Z|max, имеет минимум. Если бы преобразователь не содержал активных сопротивлений, то частота о)2 совпадала бы с частотой сор7 электромеханического резонанса; частота
С0>С0р'.
Зная сопротивления RM и Rn, можно рассчитать механическую мощность Pm = u2/Rm и мощность электрических потерь Рэ.п = гг2//?п, а также электромеханический КПД [см. (1.18)].
Приведем формулы для динамического сопротивления, емкости и электромеханического КПД на частоте механического резонанса (табл. 4.4).
Рис. 4.6. Зависимость модуля электрического импеданса пьезоэлектрического преобразователя от частоты.
103
Формулы для расчета параметров стержневых преобразователей
Параметры
сз
гг
a
vo
<3
к
Ю
Ы>
о
О
о,
3
а
сГ
с
<ф
2
СкГ
со
а
8
о.
3
С
'Ф
а
Р“
<я
S2
•Ф
VO
к
Он
bl'J
со
СО
Си
Е
95 к
S3
Он СО
sg
S 5 S к
S „
и °
^со g
to со Ф
со w
»Я
я
Я
О
Я
ч
о
Я
>»
ч
о
С
«О
а
ф
s
Рн
»к
«
К #К
Hi я
1-1
л о
СО
о
я
° > ё
2 &!
S и ч
а, Я Я
аГ я я и ф я н я ф
т* о
СО
tuD
-UJ
О
о
Рч
3
X
со
а
8
Ы
я ^ О Q.
00
X
со
Р*
<м
О
(М
S2
Ф
со
ю
*С5
bvj
со
СО
Ф
Я
о<
Я
о
«8
2*5
Л о
2*-s
5®о
Ч ^ у
ggj
&,г- *
а; Я Я
ш я я
ф о
ГГ
104
Обычно tg6<Cl (см. табл. 4.1), а так как = l/o)C0tg6, то ^д»1/о)С0. Следовательно, в параллельной эквивалентной схеме (см. рис. 4.3) величиной Rn можно пренебречь. Сопоставление сопротивлений RM и 1/сорСа показывает, что они соизмеримы. Если, однако, преобразователь имеет массивные накладки, то его импеданс на резонансной частоте практически определяется статической емкостью, т. е. величиной 1/сорСо.
§ 4.3. Цилиндрический пьезокерамический преобразователь
Принцип действия и эквивалентные параметры. Цилиндрические преобразователи гидроакустических антенн представляют собой или одиночный пьезокерамический цилиндр малой толщины или состоят из некоторого (иногда большого) числа тонких колец (рис. 4.7). Наружная и внутренняя боковые поверхности кольца посеребрены, т. е. являются электродами. Кольцо поляризуется, таким образом, по толщине в радиальных направлениях.
Если к электродам пьезокерамического цилиндра приложить переменную разность потенциалов, то благодаря обратному пьезоэффекту в цилиндре могут возбудиться колебания сжатия и растяжения длины окружности, колебания по толщине стенок при неподвижной средней поверхности, как в коротком стержне или пластине, а также осевые колебания по длине цилиндра, как в стержне.
В случае тонкого (6<Са) и короткого (h<^a) однородного кольца все его элементы будут совершать синфазное колебание с одинаковой амплитудой вдоль любого радиуса. Кольцо при этом можно рассматривать как простейший осциллятор, его движение является основным типом колебания и носит название нулевой моды. При равномерных пульсирующих колебаниях средний радиус а увеличивается (и уменьшается) на некоторую величину вызывая изменение длины А/с средней окружности. Если до деформации длина /с = 2яа, после деформации — 2я(а + £), то относительная деформация S средней окружности будет
g _ А/с __ 2п (а + I) — 2па __ g /с 2я а а
105
Соответственно деформации S в сечении кольца (см. рис. 4.7) возникнут нормальные напряжения (и силы F\) и результирующая нормальных сил радиальная сила Frj возвращающая кольцо в исходное состояние покоя.
Напряжения о\ связаны с деформацией 5 законом Гука
где Y{E — модуль упругости материала кольца.
Рис. 4.7. Пульсирующее пьезокерамическое кольцо.
Согласно второму закону Ньютона восстанавливающая упругая сила Fr, равная —cxi6M(p, уравновешивается силой инерции, равной произведению массы элемента рб/шс/ср на ускорение d2^/dt2. Из этого равенства получаем уравнение движения
S
(4.38)
106
(4.39)
Уравнение (4.38) определяет гармоническое движение простого осциллятора с собственной (резонансной) угловой частотой соо- Учитывая, что ^Y\Elp = C\E есть скорость распространения продольных колебаний в стержне, выражение (4.39) можно представить в виде
2я/0 = cf /а (4.40)
или 2яа = Яо, где Яо— длина звуковой волны в материале кольца при частоте /0. Таким образом, при резонансе длина продольной волны равна длине средней окружности кольца.
Так как упругость простого осциллятора 5 = со02т, а масса кольца
т = 2яра6А, (4.41)
то, согласно (4.39), упругость кольца
Ye
s = —— • 2яра6А
ра2
2 KYfdh а
(4.42)
При толщине кольца 6=^0,25а ошибка в определении параметров кольца по формулам (4.41) и (4.42) не превышает 5%.
Полученные значения т, со0 не учитывают влияния среды, в которой кольцо совершает колебания, т. е. относятся к ненагруженному преобразователю. В действительности кольцо испытывает со стороны окружающей его наружную поверхность воды реакцию, проявляющуюся в увеличении сопротивления кольца: к массе m добавляется соколеблющаяся масса ms среды, к сопротивлению потерь гп — активное сопротивление излучения rs. Полное механическое сопротивление нагруженного кольцевого преобразователя равно
z = ~Ь rs -f" * со (пг + ms)—t'/coCf, (4.43)
где CuE=\jsE — механическая гибкость кольца. Из теории излучения известны выражения
rs = a (рc)BS; xs = coms - Р (рс)в S,
(4.44)
где 5 — площадь излучающей поверхности; а, |3 — безразмерные коэффициенты активного и реактивного сопротивлений излучения соответственно.
Для проведения расчета преобразователя в режимах излучения и приема необходимо знать его эквивалентную схему.
Электромеханическая схема. С общей структурой эквивалентной схемы мы знакомы (см., например, рис. 1.5). Определим коэффициент п электромеханической трансформации.
Поскольку электроды нанесены на боковые поверхности кольца, а деформируется его средняя поверхность, то электрическое поле направлено по радиусу и напряженность поля равна E$ = u/8, а упругие напряжения действуют по касательным к средней окружности и равны 01 = ез\Ез [см. формулу (4.4)]. Следовательно, здесь используется поперечный пьезоэффект. Выражая постоянную е31 через dsi и Y\E, получим о\ =йъ\У\Е и/6. В осевом сечении кольца по площади So = 8h напряжения одинаковы и потому нормальная сила Fi = oi8h. Очевидно, что радиальная сила в 2я раз больше нормальной, т. е. Fr= = 2nFh Составим отношение силы Fr к приложенному электрическому напряжению:
Полученное выражение и есть искомый коэффициент трансформации.
Теперь можем построить эквивалентную электромеханическую схему пьезокерамического кольца, совершающего радиальные колебания на нулевой моде, как при действии переменного электрического напряжения и в режиме излучения, так и при действии силы F поля акустического давления в режиме приема (рис. 4.8). На схеме С0 = 2яе£3(1—kli)ahl6 — статическая емкость кольца.
Режим излучения. Используя эквивалентную схему, в которой «клеммы» F накоротко замкнуты, определим колебательную скорость поверхности кольца
(4.45)
пи
r+t((om3KB — 1/fflCf)
2 nd3lY fhu
(4.46)
r[l +*Q (co/Wp—(Op/to)]
108
где Q — механическая добротность, равная
Q ~ ®р^экв^ == {щ “Ь ms)I{rs ^*ц)» (4 «47)
о)р — резонансная частота кольца с учетом влияния соко- леблющейся массы среды, равная
(ор=1 IV(m + ms)C%. (4.48)
Поскольку кольцо имеет малую толщину, площадью излучения считаем среднюю поверхность, т. е. величину S = 2nah. Активная составляющая сопротивления излуче-
Рис. 4.8. Эквивалентная электромеханическая схема цилиндрического пьезокерамического преобразователя.
ния при резонансе равна rsp = ap{pc)BS. Будем считать, что вблизи резонанса сопротивление механических потерь гп не зависит от частоты. Величину ги оценивают по акустико-механическому КПД г]р на резонансной частоте:
<*p(Pg)BS
Чр aP(pc)BS + rn *
Полное активное сопротивление излучателя r = a (рc)BS + ap (pc)BS (1 — т|р)/т|р = [ap (рс)в S/t]p1 X X [1—rip + aTip/ap]
или
r=[l —(1—а/ар)11р]Гр = а(йГр, (4.49)
где коэффициент а© показывает, какую долю активного сопротивления гр при резонансе составляет величина г на данной частоте.
109
Используя равенства (4.41), (4.42) и (4.49), выражение для механической добротности можно привести к виду
(3= —\f 1 + ib
а©ар (рс)в а V т
(4.50)
Из (4.50) видно, что изменением толщины б кольца можно в некоторых пределах влиять на добротность и, следовательно, управлять шириной резонансной кривой: чем меньше б, тем шире полоса пропускания преобразователя.
На высоких частотах, когда коэффициент а близок к единице, ар = а0) =1, ms->0, добротность определяется выражением
п рс1% б 4 (рс)в а *
(4.51)
а относительная ширина полосы пропускания 2Дсо 2Дсо (Р~)в а
0)п
со0
pcfilp б
(4.52)
т. е. обратно пропорциональна толщине кольца.
Акустическая мощность излучателя равна PSL = rs\v\2. Подставляя значения v из (4.46) и rs = a(pc)BS, получим
2па (d31yf)2T]fo Ч2Л2
(4.53)
Полагая о) = сор, a = ap, находим аю=1 и мощность при резонансе
<4а1 <Рс)ва 1 + Q2 (Л. _ iV\
\ гл
(4.54)
Частотная зависимость излучаемой мощности определяется как отношение мощностей на данной частоте и на резонансной частоте при неизменном напряжении:
Ра a 1
Рр = «р«2 1 -h Q2 (tO/Шр — Шр/С0)2 '
(4.55)
110
На частотах сон значительно ниже резонансной упругое сопротивление намного больше инерционного и активного сопротивлений; пренебрегая ими, находим скорость колебаний кольца и акустическую мощность
(4.56)
Из (4.56) видно, что напряжение, необходимое для обеспечения на низких частотах заданной удельной акустической мощности тем меньше, чем меньше толщина кольца. Таким образом, с уменьшением толщины кольца понижается необходимое напряжение на низких частотах, а также уменьшается добротность и, следовательно, расширяется полоса пропускания.
Режим приема. Следуя изложенному в § 1.4 порядку расчета чувствительности, из схемы рис. 4.8 определяем колебательную скорость приемной поверхности
v = pS/ [г + i (сотэкв — 1 /coCf—я2/соС0)]. (4.57)
Можно показать, что общее упругое сопротивление преобразователя равно 1/(дСмв, где Сшв — механическая гибкость кольца, измеренная при разомкнутых электродах.
Максимальная скорость колебаний будет при частоте со'р, определяемой из условия сор тэкв— 1/О)рСм1)=0, откуда
сор ~ 1//яэквСм (1-А&) = Юр V 1/(1 -&)• (4.58)
где сор — частота механического резонанса.
Как видно из (4.58), разница между частотами со'р и сор тем значительнее, чем больше коэффициент связи материала кольца. Выражение (4.57) для скорости колебаний кольца приобретает вил v=рц^/а^а^ (рс)ъ[\-\-iQD X X (со/сОр—(Ор /со)] , где QD — электромеханическая добротность приемника, равная
QD = =QVr 1/(1•
r r
(4.59)
111
Vv.v =
Чувствительность холостого хода приемника
«р«<й(РС)веЗз(1 — A3l)°® V1 + [Q° (®Ц« ®р/со)]2
(4.60)
Чувствительность приемника на частоте электромеханического резонанса найдем при а = ар и = 1:
d3iyi4 6 ар (Рс)в833®р °
(4.61)
Частотная зависимость относительной чувствительности
— = — 1 (4.62)
VP % Vl + [Q° (шЦ-со»]2 “ ‘
На частотах значительно ниже резонансной в (4.60) со<Ссо'р и, следовательно, (QDо/рД0)2^!» чувствительность будет
«р«й (Рс)везз (1 - kh) QD(0p
6
а
или с учетом формул (4.58), (4.59), (4.49) и (4.42)
и31
ap«(o(Pc)Be33Qa®p е;
а.
зз
(4.63)
Сегментированный цилиндрический преобразователь.
Для повышения эффективности преобразователя, а также в случае изготовления колец больших диаметров (например, для низких частот) они делаются наборными из тонких сегментов (призм) одинакового размера, склеенных между собой. Активный элемент такого преобразователя и призма показаны на рис. 4.9. Электроды нанесены на боковые поверхности призм, так что электрическое поле, приложенное по оси 3, в кольце направлено по длине средней окружности. При этом происходит деформация средней линии и в кольце возникают радиальные колебания. Таким образом, здесь используется продольный пьезоэффект. Призмы электрически соединяются параллельно.
Упругие свойства сегментированного кольца подобны свойствам сплошного и, если пренебречь влиянием гиб-
112
кости клея, кольца обоих типов имеют одинаковые реактивные механические сопротивления; активное сопротивление сегментированного кольца больше, чем сплошного, из-за потерь в местах склейки призм.
Принимая сечение призмы прямоугольным (из-за малого скоса), напряженность поля определим как Es = ujt, где t — расстояние между электродами, измеряемое по средней линии призмы. Согласно уравнению (4.4) об¬
ратного продольного пьезоэффекта поле Е3 вызовет механическое напряжение вз= — (d33ls33E)E3 и соответственно силу F3=e38h. Возбуждающая радиальная сила Fr, как и в случае сплошного кольца, в 2я раз больше нормальной, т. е.
Коэффициент электромеханической трансформации сегментированного кольца равен
Рис. 4.9. Сегментированное пьезокерамическое кольцо (а) и отдельная призма (б).
(4.64)
113
114
(4.65)
Сопоставляя (4.64) с (4.45), получим
По
A YЕ а33г 3
4si^f
При равенстве модулей Y3E и YtE коэффициент пс (при продольном пьезоэффекте) в d336/d3it раз больше коэффициента п сплошного кольца (при поперечном пьезоэффекте). Поскольку у всех пьезокерамических материалов ^33^2^3! и можно варьировать отношением б/t, то пс практически в несколько раз больше п.
Из сказанного следует, что формулы для расчета сплошного кольцевого преобразователя справедливы и для сегментированного кольца, если заменить п на пс.
Формулы для расчета сегментированного преобразователя сведены в табл. 4.5 (N — число призм в кольце).
Сопоставление колец обоих типов показывает, что для получения равной удельной акустической мощности к сегментированному кольцу надо приложить напряжение в пс/п раз меньше, чем к сплошному.
У сегментированного преобразователя есть еще одно преимущество: облегчается технология изготовления керамических деталей больших габаритов. Однако механическая прочность такой конструкции меньше, чем прочность сплошного кольца. Поэтому их приходится упрочнять путем создания предварительного постоянного сжатия.
§ 4.4 Сферический пьезокерамический преобразователь
Устройство и эквивалентные параметры. Пьезокерамический сферический преобразователь (рис. 4.10) представляет собой оболочку 7, поляризованную по толщине с электродами на внутренней и внешней поверхностях. Вывод от внутреннего электрода 2 проходит через отверстие и сальник 3.
Когда на тонкую однородную оболочку толщиной б и средним радиусом а (6<Са) воздействует переменное электрическое поле напряженностью Е3=и/6 (и — приложенное напряжение), в оболочке возникнут радиальные колебания с амплитудой |г. Деформации всех точек сферы будут одинаковы и равны gr/a, а относительное
115
Изменение площади поверхности сферы приблизительно равно 2gr/a.
Задача о колебаниях тонкой сферической оболочки может быть решена так же, как и для пьезокерамического кольца (см. § 4.3). В результате собственная частота соо ненагруженной сферы определяется формулой
Рис. 4.10. Сферический пьезокерамический преобразователь.
О>о = —Krf/p, (4.66)
а
где У^= l/sc^=2/<sn-f-sn>) — модуль упругости сферы.
Приведем значения эквивалентных механических параметров, коэффициента электромеханической трансформации я, электрической емкости С0 и энергетического коэффициента связи &р2 сферической оболочки:
т = 4яа26р; Cf = l/4nFf6; n—Andz^Y^a\
С0 = 4я8зз (l —kp) а218-, %=4iYM.
(4.67)
Электромеханическая схема нагруженной сферы.
Учесть нагрузку сферической оболочки водной средой можно точно так же, как это сделано в § 4.3 для цилиндрического преобразователя, включив последовательно с элементами механической стороны схемы соколеблю- щуюся массу и активное сопротивление излучения (см. рис. 4.8).
Вследствие явления дифракции (рассеяния) на поверхности сферы сила F будет неодинаковой на разных частотах. Напряжение на выходе приемника и, следовательно, его чувствительность будут определяться дифрагированной волной, которая зависит от соотношений амплитуд и фаз между падающей и рассеянной волнами в месте приема. Коэффициент дифракции сферы &д
F = 1
pS Vi+ky ’
(4.68)
116
где р — звуковое давление в падающей волне; kBa волновой аргумент для окружающей сферу воды.
Расчет пьезокерамического сферического преобразователя подобен расчету цилиндрического преобразователя, изложенному в § 4.3.
Наибольшее применение пьезокерамические сферы находят в качестве чувствительных элементов измерительных приемников звука.
Ограничимся формулой для чувствительности сферического преобразователя в режиме приема
«р«(й (рс2)в8зз (! - kl) V V1 + кУ
Х-у
Yх + [q° (®/ир—®р/®)]2
X
(4.69)
где QD—(dр^экв/^; сор/—^^эквОм0—-cop/yi—&р2; г=awaP (р с) в • 4яа2/г|р.
Безразмерные коэффициенты а и (3 сопротивления излучения и соколеблющуюся массу среды можно рассчитывать по формулам для пульсирующей сферы
k\a2 k-a 3mB
a= p = —(4-70)
1 +Ka-
2Л
1
2_2
,2 „2
1+^tf
где тв = 4яра3/3— масса среды в объемы сферы.
Строго говоря, колебания реальной оболочки не будут пульсирующими из-за отверстия в оболочке (для вывода проводника и технологической обработки) и неоднородности материала и толщины. Поэтому приведенные формулы являются приближенными, но вполне пригодны для практических расчетов.
Контрольные вопросы и задачи
1. Благодаря каким свойствам пьезоэлектрических кристаллов их можно использовать в качестве излучателей и приемников звука?
2. Поясните линейную и сдвиговую деформации упругого тела. В каких единицах измеряются оба вида деформации?
3. Напишите уравнения прямого и обратного пьезоэлектрического эффекта, выраженные через пьезоэлектрический модуль, и определите его размерность.
117
4. Покажите, что емкость свободного (от упругих напряжений) пьезоэлемента больше емкости заторможенного пьезоэлемента.
5. На эквивалентной электромеханической схеме стержневого преобразователя (см. рис. 4.3) поясните соответствие отдельных ее элементов деталям реальной колебательной системы.
6. Пользуясь данными табл. 4.1, определите коэффициент электромеханической трансформации стержня (см. рис. 4.4) из пьезокерамического состава ЦТС-19, составленного из 10 склеенных пластин и колеблющегося в продольном электрическом поле. Размеры стержня /=40 мм; 6 = 6=10 мм.
Ответ: 0,3 Кл/Н.
7. Рассчитайте резонансную чувствительность стержневого приемника (из задачи 6), пластины которого электрически соединены параллельно.
8. Для чего надо знать электрический импеданс излучателя?
Ответ: 400 мкВ/Па.
Объясните частотную зависимость модуля импеданса.
9. Определите модуль электрического импеданса преобразователя из задачи 6 на частоте резонанса, пренебрегая потерями в диэлектрике.
Ответ: 550 Ом.
10. Как влияет толщина стенки пьезокерамического кольца на добротность и полосу пропускания?
ГЛАВА 5. МАГНИТОСТРИКЦИОННЫЕ ПРЕОБРАЗОВАТЕЛИ
Действие магнитострикционных преобразователей основано на взаимосвязи механического и магнитного состояний ферромагнитных материалов. Если изменять магнитное поле в закрепленном (неподвижном) магни- топроводе, то в нем возникает механическое усилие, направленное вдоль силовых линий поля. Это явление, установленное Джоулем в 1847 г., получило название прямого магнитострикционного эффекта. В 1868 г. Э. Виллари обнаружил обратный маг- нитострикционный эффект — изменение начального магнитного поля ферромагнитного тела при его деформации.
В гидроакустических излучателях используется прямой магнитострикционный эффект. В этом случае переменное магнитное поле внутри сердечника (стержня или кольца), изготовленного из магнитострикционного материала, создается током, протекающим по обмотке, на-
118
ложенной на сердечник. Обратный магнитострикцион- ный эффект используется в гидроакустических приемниках. Воздействие сил давления звукового поля вызывает сжатия и растяжения сердечника, приводящие к изменению начального магнитного поля в сердечнике и созданию ЭДС на концах обмотки. Вследствие обратимости магнитострикционного эффекта магнитострикционные преобразователи могут работать и как излучатели и как приемники.
Магнитострикционные преобразователи, используемые в гидроакустических антеннах, имеют некоторые преимущества перед другими, например пьезоэлектрическими, преобразователями: большая механическая прочность, антикоррозийность, простота изготовления, низкие напряжения возбуждения, надежность и долговечность. Недостатками магнитострикционных преобразователей являются следующие: ограниченный сверху частотный диапазон (до 100 кГц), зависимость собственной (резонансной) частоты упругих колебаний от температуры.
§ 5.1. Магнитострикция
и ее использование для Г АП
Краткие сведения о магнитострикции. Опыты по наблюдению магнитострикции показали, что величина и знак деформации зависят от материала образца, способа его изготовления, величины предварительного намагничивания. Существенно, что направление деформации — растяжение или сжатие не зависит от направления поля. У никеля, например, при всех значениях напряженности магнитного поля магнитострикция отрицательна (образец сжимается, укорачивается), а у железа в слабом поле образец удлиняется, в более сильном — укорачивается. Изменение деформации с изменением внешнего поля у всех материалов происходит нелинейно; при этом наблюдается механическое насыщение, т. е. прекращение роста деформации, начиная с некоторого значения поля. Так, у никеля такое насыщение наступает приблизительно при #=5-104 А/м.
Магнитострикционный эффект зависит также от температуры: с увеличением температуры магнитострикция убывает и вовсе исчезает при температуре, называемой точкой Кюри.
Наиболее распространенный материал для сердечников магнитострикционных преобразователей — никель, применяются также железокобальтовые сплавы (пер- мендюр), сплавы никоей (никель-кобальт-кремний), альфер (алюминий-железо) и ферриты.
Прямой магнитострикционный эффект. Опытным путем установлено, что относительная деформация 5 стержня, вызываемая действием магнитного поля, пропорциональна квадрату индукции В:
S = а#2, (5.1)
где а — эмпирический коэффициент, зависящий от материала стержня.
Изменения длины стержня, вызванные магнитострик- ционным эффектом, весьма малы. Например, у никелевого стержня в очень сильном поле, близком к магнитному насыщению (#=0,5 Вб/м2), деформация приблизительно равна 5 = —3,5-10~5. Такие ничтожные изменения размера можно обнаружить только с помощью высокочувствительных приборов1. Однако если к торцам стержня приложить внешние усилия, препятствующие деформаций стержня под действием магнитного поля, т. е. закрепить стержень, то понадобятся весьма значительные усилия. Эти усилия сг, возникающие внутри стержня, можно определить по закону Гука
a = YS, (5.2)
где У —модуль упругости (модуль Юнга) материала стержня. Для никеля У=2,06 -1011 Па и сг=2,06 - 1011Х X3,5 • 10—5= 7,2 • 106 Па; это значение примерно в 70 раз больше атмосферного давления.
Подставляя (5.1) в (5.2), получим
c = aYB2 = yB2. (5.3)
Таким образом, величина растягивающих напряжений, возникающих в закрепленном магнитострикционном стержне при заданной индукции, пропорциональна квадрату магнитной индукции внешнего поля. Упругие на-
1 Максимальная величина деформации, соответствующая насыщению, называется эдагнитострикцией насыщения и обозначается
120
пряжения, определяемые равенством (5.3), называют магнитострикционными напряжениями.
Сила F, действующая на торцы стержня (магнито- стрикционная сила), равна
р = оА = уАВ\ (5.4)
где А —площадь поперечного сечения стержня.
Обратный магнитострикционный эффект. Как указывалось, обратный эффект заключается в изменении магнитного поля сердечника при его деформации. Пусть магнитострикционный стержень помещен в постоянное магнитное поле, которое создает внутри стержня начальную индукцию Во (или напряженность Н0). Намагничивающее постоянное поле называют полем поляризации, а намагниченный стержень — поляризованным. Поляризация осуществляется или постоянными магнитами или пропусканием постоянного тока через обмотку на стержне.
Если на поляризованный стержень действовать переменной силой, то его длина будет изменяться и, следовательно, напряженность поля внутри сердечника также будет меняться. Согласно опытным данным изменения напряженности Н магнитного поля в сердечнике пропорциональны относительным изменениям длины стержня, вызванным внешней силой:
Я = ф (В0) S, (5.5)
где ф (В0)—коэффициент, характеризующий обратный магнитострикционный эффект и зависящий от материала сердечника и начальной индукции Во (или Но) поля поляризации. При фиксированном значении В0 величина ф(В0) называется магнитострикционной постоянной и обозначается а.
Магнитострикционная постоянная, входящая в уравнение (5.5), имеет размерность напряженности магнитного поля и измеряется в амперах на метр (А/м). В результате изменения напряженности магнитного поля будет изменяться магнитный поток, проходящий через витки обмотки, и в ней возбудится ЭДС индукции, При изменении силы, действующей на магнитострикционный сердечник, на выводах обмотки появится напряжение, пропорциональное скорости изменения силы.
121
Интенсивность намагничивания сердечника и Величина ЭДС индукции в значительной степени зависят от магнитного сопротивления магнитопровода (сердечника с обмоткой). Поэтому стержень в магнитострикционных преобразователях обычно делают в виде замкнутого сердечника, как показано на рис. 5.1.
Поверхностью, излучающей звуковые колебания в воду или воспринимающей звуковое давление акустического поля, является наружная поверхность ярма, соединяющего стержни; ярмо называют накладкой.
Неполяризованная магнито- стрикционная система. Неполя- ризованной называется система, у которой начальное намагничивание отсутствует (В0 = 0). Как следует из (5.3), в этом случае магнитострикционные напряжения в стержне и магнитная индукция в нем связаны квадратичной зависимостью. Поэтому как направление напряжений, действующих на торцы стержня, так и направление деформаций стержня не будут зависеть от направления поля индукции (тока в обмотке). При изменении знака поля относительная деформация не изменится: за каждый полупе- риод переменного поля стержень будет испытывать полный цикл сжатия (растяжения) и возвращения к исходной длине, т. е. произойдет удвоение частоты механических колебаний.
Пусть к обмотке, содержащей N витков, приложено гармоническое напряжение u = umcos at, под действием которого по обмотке протекает ток /. Если пренебречь активным сопротивлением обмотки, которая обычно выполняется из провода большого сечения и имеет мало витков, то приложенное напряжение уравновешивается ЭДС индукции. Тогда
ит cos со/ = N . (5.6)
dt
Рис. 5.1. Магнитопровод стержневого преобразователя.
122
Интегрируя (5.6), находим магнитный поток
ф _ Jbn_ sjn sjn
(5.7)
и магнитную индукцию
В = —sin tot = Вт sin tot, сoNA т
Подставляя (5.8) в (5.4), получаем
(5.8)
F = yA (Вт sin tot)2 = — уАВт — уАВ2т cos2cot. (5.9)
2 2
Как видим, переменная составляющая магнитострик- ционной силы (и, следовательно, деформации) неполя- ризованной системы изменяется с двойной частотой приложенного электрического напряжения. Выразим амплитуду этой составляющей через Фт и ит
Из выражения (5.10) следует, что для обеспечения постоянства движущей силы на различных частотах (например, при измерении частотных характеристик преобразователя) необходимо поддерживать постоянным отношение напряжения к частоте.
Поляризованная магнитострикционная система. В этой системе кроме переменной индукции Вш имеется постоянная индукция Во.
Величина и направление магнитострикционных усилий в поляризованном стержне будут зависеть от того, совпадает ли направление создаваемого переменным током магнитного поля индукции Вш с направлением поля индукции В0. В случае совпадения этих направлений деформация, а следовательно, и усилия внутри стержня будут увеличиваться. При встречном направлении полей увеличение тока в обмотке будет приводить к уменьшению индукции Вт в сердечнике и суммарное магнитное поле уменьшится; величина деформации при этом также уменьшится.
(5.10)
123
Определим величину деформации S. Подставим в (5.1) значение B = B0 + Bmsin со/:
S = а -у- В2т j + 2aB0Bwsin со/ i-aBmCOs2co/.
Полученное выражение показывает, что при поляризации (подмагничивании) происходит деформация с частотой изменения тока. Амплитуда этой деформации 2аВоВт пропорциональна не только величине переменной индукции Вш, вызывающей деформацию, но и величине постоянной индукции В0. Увеличивая постоянное намагничивание, можно значительно повысить амплитуду колебаний преобразователя с основной частотой со и тем самым увеличить эффективность преобразователя . При В0^>Вт магнитострикционную постоянную ф(В0 + Вт) можно считать равной <р(В0)=а, зависимость между амплитудами магнитострикционного напряжения и индукции — линейной, т. е.
<*т = Ч>(В0)Вт = аВт. (5.11)
Тогда магнитострикционная сила с учетом выражения (5.8) равна
F = gA = -^—ит sin со/. (5.12)
со N т V ’
Таким, образом, поляризация делает магнитострикционную систему линейной, обеспечивая совпадение частот механических колебаний и приложенного переменного напряжения, а также дает возможность получить сравнительно большие амплитуды колебаний и, следовательно, большие механические мощности.
Вместе с тем следует отметить и достоинства непо- ляризованной системы: возможность использования более низких частот для возбуждения и отсутствие источника поляризации.
Энергетический коэффициент магнитомеханической связи. Подобно энергетическому коэффициенту электромеханической связи (см. § 4.1), характеризующему эффективность пьезоэлектрического преобразования энергии, в магнитострикционном случае показателем эффективности преобразования магнитной энергии в упругую и обратно для статического (низкочастотного) поля является энергетический коэффициент маг-
124
(5.13)
нитомеханической
связи
&33*
eV ( VS )2 Vй U° Г
где p— магнитная проницаемость (абсолютная); верхние индексы указывают постоянство: 5 — деформации (образец заторможен); а — механического напряжения (образец свободен); Н — напряженности магнитного поля (концы обмотки разомкнуты); В — магнитной индукции (обмотка накоротко замкнута).
Для каждого материала существует оптимальное магнитное поле (Н0 или В0), при котором k2 имеет наибольшее значение.
Упругие модули и магнитные проницаемости связаны соотношениями
Y»/YB = ]xs/ц° =\-k\ (5.14)
Напомним, что (ы = (ЫгМ'О, где рг— относительная магнитная проницаемость (безразмерная); ро=4я*10-7 Г/м (генри на метр) — магнитная проницаемость вакуума, называемая магнитной постоянной.
Свойства магнитострикционных материалов. К маг- нитострикционным материалам ГАП предъявляют ряд требований, относящихся к их механическим, магнитным, магнитострикционным и электрическим свойствам. Сердечники преобразователей изготовляют из магнитомягких материалов, магнитные свойства которых характеризуются начальной проницаемостью рНач и коэрцитивной силой Нс. Чем больше величина Яс, тем больше потери на гистерезис.
Плотность р и модуль упругости Y материала сердечника заданной формы определяют резонансную частоту преобразователя. Чем меньше скорость звука с = у У/p в материале, тем меньше размер сердечника для заданной частоты резонанса.
Удельное электрическое сопротивление рэ определяет потери на токи Фуко. Эти потери также зависят от магнитной проницаемости р, так как при данной толщине пластины чем меньше отношение р/рэ, тем меньше потери.
Основными динамическими параметрами магнитост- рикционного материала являются: магнитострикционная
125
Значения постоянных и параметров эффективности некоторых магнитострикционных материалов
со
о
05
о
О
см
сиЕ
о
СО
О
о
СО
со
т
СЮ
СМ
ь-
00
см
см
1
«и —<
ю
ю
о
см
н
о
о
о
о
ю
ю
о
а2
о
о
о
1
со
оо
со
а •
<м
г--
СО
о
1
00
ю
ю
о
Е-
ерри
Ф-86
5200
5700
СО
о
о
о
I
о
о
см
S
о
00
•9*
со
я
о
«2
о
о
оо
о
о
о
о
о
со
ю
о
о
о
LO
1
ч
<4
я
*-> С'З С —
О
D'-
СО
ю
оо
ю
со
05
о
со
1
см
си
<и
со
н
Л
г
я
оо
я
й я
-Ч4
си
|о
О
05
о
о
см
см
о
я
О
о
о
1
1
со
о
см
см
о
£
Ja
00
00
со
5
1
со
1
со
о
-Ч4
■Ч4*
и я
CU
2
со
рменд
50КФ
8200
20,5
5200
о
о
о
LO
со
со
со
■Ч4
см
о
о
о
о
см
т
см
<и
Е
со
йн
со
S041
о
ю
о
о
м Ё
о
05
о
05
о
со
о
со
со
о
о
ю
со
7
Е*
оо
см
со
о
см
а
си
и
сз
С
I
о
CQ
О
~ S
О
1
2 &
а
Г St!
QQ
.а
1 н I
2 с I
«Л* о О
=3- А. —
лу о
sc;
126
Продолжение табл. 5.1
127
постоянная а, магнитострикционная постоянная чувствительности Л и энергетический коэффициент связи /г2. Постоянная а определяет акустическую мощность и чувствительность излучателя по напряжению, постоянная Л — чувствительность излучателя по току и чувствительность приемника на низких частотах.
Величины (ы, а, Л, k2 зависят от напряженности #о (индукции В0) поляризующего поля.
В следующих параграфах будет показано, что чувствительность приемника на резонансной частоте пропорциональна величине a\is, удельная чувствительность при резонансе — величине a]/p,s, чувствительность при низких частотах — величине аца/УБ. Эти величины могут быть названы параметрами эффективности преобразователей.
Максимальная удельная мощность излучателя ограничивается его механической прочностью, магнитострик- цией насыщения Х8, интенсивностью намагничивания насыщения &s, кавитацией воды4.
В табл. 5.1 приведены значения физических постоянных наиболее употребительных магнитострикционных материалов, а также параметры эффективности преобразователей из этих материалов. Кроме упомянутых, в таблице приняты обозначения: ор— предел прочности при растяжении; рг — относительная магнитная проницаемость; св — скорость звука, измеренная при коротко- замкнутой обмотке (В = 0). Значения величин с верхними индексами k и а указывают режим поляризации, при котором максимальны коэффициент магнитомеханической связи и магнитострикционная постоянная соответственно.
§ 5.2. Стержневые магнитострикционные преобразователи
Устройство преобразователя. Преобразователь стержневого типа представляет собой пакет, набранный из тонких электрически изолированных пластин, изготовленных из магнитострикционного металла и предварительно отожженных после штамповки, с наложенной на
1 О влиянии кавитации на излучаемую мощность см. § 6.1.
128
стержни Обмоткой (рис. 5.2). Такая конструкция позволяет значительно уменьшить потери электрической энергии на токи Фуко, так как образовавшийся при отжиге слой окиси на поверхности пластин является хорошим изолятором и препятствует появлению вихревых токов в сердечнике пакета. Пластины в пакете скрепляются шпильками 4.
Рис. 5.2. Стержневой магнитострикционный преобразователь.
Пакет 1 при помощи верхней и нижней накладок образует замкнутый магнитопровод, обладающий малым магнитным сопротивлением. Торцевые поверхности накладок являются излучающими (принимающими) акустические колебания. Чаще всего с водой контактирует поверхность одной накладки, а на вторую накладку наклеивается экран 2 из пористой резины с малым волновым сопротивлением*
Обмотка 5 укладывается на стержни так, чтобы направление витков на соседних стержнях одной магнитной цепи было противоположным. В этом случае магнитные потоки, создаваемые в обоих стержнях, суммируются. На соседних стержнях разных магнитных цепей
5 Г. М. Свердлин
129
направление витков одинаковое. На рис. 5.2 показан случай, когда обмотка охватывает два стержня и, следовательно, в одну магнитную цепь входят четыре стержня.
Для развязки колебательной системы от корпуса (деталь 6) зазоры между пакетом и корпусом заполня-
Рис. 5.3. Элемент колебательной системы преобразователя.
ются резиновыми манжетами 5, охватывающими боковые поверхности накладок со стяжками. Амортизирующие манжеты не служат целям герметизации пакета в корпусе, пакет с обмоткой работает в воде. Обмотка 5 наматывается проводом с водостойкой изоляцией. Выводы проводов обмотки уплотняются сальниками в крышке, герметически закрывающей корпус антенны.
Эквивалентные схемы. В многостержневом преобразователе (см. рис. 5.2) стержни расположены на равных расстояниях и их торцы равномерно нагружены накладками. Можно считать, что колебательная система
130
преобразователя представляет собой монолитный (единый) пакет и поверхности накладок и стержни колеблются как поршни, т. е. с одинаковой амплитудой и фазой. Поэтому достаточно рассмотреть одиночный стержень, нагруженный на торцах соответствующей частью накладок (рис. 5.3). Под действием сил Fi и F2 стержень совершает продольные колебания по оси х (например, сил звукового поля при приеме) или магнито- стрикционных сил, вызванных магнитным потоком Ф (например, при излучении). Упругие напряжения а и индукция В направлены вдоль оси х.
Элемент колебательной системы на рис. 5.3 подобен элементу пьезоэлектрического стержневого преобразователя (см. рис. 4.2, б) и отличается лишь тем, что стержень и накладки магнитострикционного преобразователя, как правило, изготовлены из одного материала. Следовательно, механическая сторона эквивалентной схемы обоих типов преобразователей одинакова (см. рис. 4.3). Магнитострикционный преобразователь представляет собой ферромагнитный сердечник с намоткой. Электрическая сторона схемы должна содержать индуктивность L0 неподвижной обмотки и эквивалентное активное сопротивление потерь RUy обусловленных магнитным гистерезисом и токами Фуко. Обмотка выполняется обычно из толстого провода, имеет мало витков, и ее омическим сопротивлением можно пренебречь.
Определим коэффициент электромеханической трансформации стержневого преобразователя. Если к обмотке приложено напряжение u = umcos со/, магнитный поток,
согласно (5.7), равен sinco^. Магнитострикцион-
ная сила F, развиваемая при этом в поляризованном излучателе, будет [см. (5.12])
Е=ф(В0)Ф:
a>N
• ит sin о)^.
Составив отношение амплитуд силы и напряжения, получим искомый коэффициент
п— Fm -
а
“т
coyv ’
(5.15)
где N — число витков обмотки на одном стержне. 5*
131
Эквивалентная схема поляризованного преобразователя представлена на рис. 5.4. Обозначения на схеме: vu v2 — скорости колебаний торцев стержня; ziH, Z2н — механические сопротивления накладок; х^ = п свА\ kl = (i)l/cB.
Если пакет преобразователя набран из т стержней, то схема, представленная на рис. 5.4, верна и для этого случая, причем за А надо принимать суммарное сече-
I
я.
_^(у/ + у2) —
Н—L—И
н_7_н_
ix0t 01/2)
—1 f
1 I j-XQ , . 5inJd
Z1H 1
1
4zb-c
ar
CM
1
1 7
|
-+*~v2
Fг
ч
i v
Рис. 5.4. Эквивалентная электромеханическая схема стержневого преобразователя.
ние стержней тА, а за zH— сопротивление mzn всей накладки.
Анализ работы магнитострикционного преобразователя и вывод расчетных формул на основе эквивалентной схемы производится так же, как и для пьезоэлектрического преобразователя (гл. 4). Поэтому приведем только окончательные результаты с необходимыми пояснениями. Формулы относятся к одностороннему преобразователю с двумя одинаковыми накладками, одна из которых нагружена на воду, а другая экранирована.
Симметричный преобразователь. В эквивалентной схеме Zhi = zh2 = zh. Условие механического резонанса определяется равенством (4.27)
ctrfi^L ctg
(^)н
свтА Ц'
(5.16)
где сн = УУн/р — скорость звука в материале накладки; Ун — модуль упругости материала накладки; св — скорость звука в стержне, измеренная при короткозамкнутой обмотке.
132
В дальнейшем принимаем скорости сн и св одинаковыми: св = си = с, что практически верно для большинства магнитострикционных материалов.
Акустическая мощность излучения на резонансной частоте определяется формулой (4.30), в которой п = = а/(оЛ^, u—aNmAB:
Р
а. р —
Ас?В2 (тА)2r]p cos2 (юр/д/с)1
МЛ
(5.17)
Активное механическое сопротивление при резонансе
(PC>BSH
4'Пр cos2 (<Вр/н/с)
(5.18)
В режиме приема преобразователь имеет максимальную чувствительность на частоте электромеханического резонанса, определяемой соотношением
ctg^ctg
С
(Ор/ _ (cS)н 2 сн тАсн
(5.19)
где сн — скорость звука, измеренная при напряженности Н=0 (холостой ход); сн=св = у\—&2~с|/ 1—k2. Чувствительность приемника на резонансной частоте
(5.20)
где L0 — статическая индуктивность магнитопровода преобразователя.
Чувствительность приемника на низких частотах ((Он<(Ор0
или
АЧОн^о/^н 2NmAYH
a(0HL<I/SH
2NmAYB
(5.21)
(5.2Г)
1 Волновые размеры поверхности накладкй полагаем большими, т. е. ар = 1
133
Величина La есть индуктивность свободного (от механических напряжений) магнитопровода, ее измеряют на частотах значительно меньших, чем резонансная.
Электрический импеданс Z преобразователя представляет сопротивление схемы с ее электрической стороны. Импеданс слагается из параллельного соединения индуктивности L0> сопротивления электромагнитных потерь Ru в статическом состоянии колебательной системы
Рис. 5.5. Эквивалентная электри- Рис. 5.6. Зависимость элек- ческая схема преобразователя. трического импеданса и проводимости преобразователя от частоты.
и динамического сопротивления, равного ZM = RM-{-iXM (рис. 5.5). Складывая проводимости, получаем
Z =
1
-1
i®L0 Rn Rm -j" iXy
(5.22)
Анализ выражений для Z и 1/Z показывает, что активная составляющая импеданса имеет максимум на частоте электромеханического резонанса, а на частоте механического резонанса максимума достигает активная составляющая проводимости.
Частотные зависимости модулей |Z| и 11 /Z| преобразователя изображены на рис. 5.6. На низких частотах преобразователь представляет собой индуктивность (с потерями), поскольку величина |ZM| настолько велика, что не влияет на общее сопротивление; здесь с ростом частоты импеданс практически возрастает линейно (Z^coL). На частоте оси импеданс достигает максимума за счет параллельного резонанса в ветвях L0 и ZM; происходит компенсация реактивных проводимостей электрической и механической: индуктивности с приведен-
134
ной массой и приведенной упругости. При дальнейшем увеличении частоты \Z\ уменьшается и на частоте 0)2 достигает минимума, который соответствует последовательному резонансу в ветви ZM: упругое и инерционное сопротивления преобразователя взаимно компенсируются (Хм = 0), сопротивление ветви становится минимальным и активным (RM). На частоте 0)2 импеданс Z обусловлен параллельно включенными L0, Ru, Яш- Частоты o)i и 0)2 не совпадают с частотами электромеханического и механического резонансов, поскольку в схеме имеются активные сопротивления Rn и RM.
§ 5.3. Цилиндрический
магнитострикционный
преобразователь
Устройство, принцип действия, эквивалентные параметры и схема. Цилиндрический преобразователь представляет собой кольцо, набранное из тонких пластин магни- тострикционного материала, с тороидальной намоткой (рис. 5.7). В режиме излучения при приложении к обмотке переменного напряжения и прохождения по ней тока образуется переменное магнитное поле, силовые линии индукции которого располагаются по окружностям с центрами на оси кольца. Благодаря прямому магнитострикционному эффекту в кольце возникнут усилия, направленные по касательным к силовым линиям и вызывающие радиальные колебания кольца. В режиме приема при воздействии на наружную боковую поверхность равномерно распределенной силы давления звукового поля кольцо будет совершать пульсирующие колебания. В соответствии с обратным магнитострикцион- ным эффектом начальное магнитное поле кольца (оно должно быть предварительно поляризовано) будет изменяться, а на концах обмотки развиваться переменная разность потенциалов.
Если толщина б и высота h кольца малы сравнительно с его средним радиусом а, можно считать амплитуды колебаний вдоль любого радиуса одинаковыми и рассматривать кольцо как простейший осциллятор.
Тонкое кольцо из магнитострикционного материала как упругий элемент не отличается от ненагруженного пьезокерамического кольца, для которого были получены
135
(см. § 4.3) следующие эквивалентные параметры (масса т и упругость s):
т = 2nap8hf s = 2nYB8h/a (5.23)
и условие резонанса
2па = c/f0, со0 = da. (5.24)
Выше было показано [см. (5.11)], что напряжение магнитострикции а у поляризованной колебательной си-
Рис. 5.7. Цилиндрический магнито- стрикционный преобразователь.
стемы равно а=<р(50)£, где ф(Бо) — магнито- стрикционная постоянная \ В — переменная
индукция. Соответственно магнитострикционная сила F равна произведению а на площадь сечения магнитопровода
(площадь бh осевого сечения кольца). Полная движущая радиальная сила Fr будет в 2я раз больше F, т. е.
Fr = 2шр (В0) бhB. (5.25)
Так как индукция B = u/ti)N8h, то, подставляя в (5.25) значение индукции, получаем
£, 2яср (Bq)
F'=—^r
(5.26)
Отсюда непосредственно находим коэффициент электромеханической трансформации поляризованного цилиндрического преобразователя
2гсф (До) со N
Электромеханическая схема преобразователя представлена на рис. 5.8. Полное механическое сопротивле-
1 Здесь и в дальнейшем, когда рассматривается кольцевая система, магнитострйкционную постоянную обозначим ф(£о), так как а — это средний радиус кольца.
136
ние нагруженного кольцевого преобразователя определяется выражением (4.43), собственная (резонансная) частота — формулой (4.48).
Используя метод определения расчетных соотношений для режимов излучения и приема пьезокерамического цилиндрического преобразователя, изложенный в § 4.3, получим следующие результаты.
Режим излучения. Предполагаем кольцо тонким (б^0,25а) и принимаем внешнюю рабочую поверхность равной средней поверхности с площадью S = 2nah.
Рис. 5.8. Эквивалентная электромеханическая схема цилиндрического преобразователя.
Акустическая мощность при резонансе равна
где и, В — эффективные значения напряжения и магнитной индукции; N — число витков обмотки.
Акустическая мощность излучения на низких частотах
Частотная зависимость акустической мощности при постоянном отношении напряжения к частоте опреде-
(5.28)
(5.29)
137
ляется выражением (4.55), в котором коэффициент а0) = 1—(1—а)rip, механическая добротность рассчитывается по формуле (4.50), соколеблющаяся масса ms = p(pc)BS/o), р — безразмерный коэффициент реактивного сопротивления излучения.
В области резонанса при немалых волновых размерах, когда высота кольца не меньше длины звуковой волны в воде, формула (4.55) упрощается;
J’aTp = ~1 + Q2 (///р — /р//)2 ’ (5'30)
где Q определяется выражением (4.51). При этом относительная ширина полосы частот преобразователя рассчитывается по формуле (4.52).
Рис. 5.9. Зависимость электрической мощности, потребляемой магнитострикционным преобразователем, от частоты.
Механическая мощность излучателя равна
Рм=— Ра- (5.31)
Чтобы определить полную электрическую мощность, потребляемую излучателем от возбуждающего генератора, надо к Рм добавить мощность электромагнитных потерь Рэ.п=и2/кп.
Частотная зависимость полной потребляемой электрической мощности Рэ излучателя при постоянной движущей силе (постоянном отношении напряжения к частоте) представлена на рис. 5.9. Штриховая линия, близкая к прямой, определяет мощность электромагнитных
138
потерь, а разность значений Рэ—Рп дает на данной частоте механическую мощность Рм, расходуемую преобразователем на колебания его механической системы. Ширина резонансной кривой 2А/ = /2—fi определяется на уровне 0,5 (—3 дБ) от максимума механической мощности.
Режим приема. Частота а/р электромеханического резонанса, на которой скорость колебаний (и чувствительность) максимальна, связана с частотой (ор механического резонанса соотношением (4.58).
Чувствительность приемника при электромеханическом резонансе
Ф (В0) \is N6hr\p (рс)в а
(5.32)
Чувствительность приемника на низких частотах
(fH<fP)
2яф (Bp) L0сона2 ф (Б0) [iaNSfHt
V =
v и. и
YB N6
(5.33)
Как видим, чувствительность приемника на частотах значительно ниже резонансных не зависит от толщины кольца. Из (5.32) следует, что чувствительность приемника при резонансе пропорциональна толщине кольца. Следовательно, тонкостенный цилиндрический приемник, имеющий сравнительно меньшую резонансную чувствительность, обладает более широкой полосой пропускания в связи с понижением добротности; при этом чувствительность на низких частотах не уменьшается.
Частотная зависимость относительной чувствительности приемника имеет вид
— = 1 , (5.34)
где QH — добротность механической системы в режиме приема, определяемая равенством
qh = qK l—k2. (5.35)
Изменение добротности в режиме приема по сравнению с добротностью при излучении связано с реакцией электрической стороны преобразователя на механическую
139
сторону, приводящей к уменьшению модуля упругости материала и соответственно упругости преобразователя. В результате понижаются по сравнению с режимом излучения как резонансная частота, так и добротность. Добротность преобразователя в режиме приема называется электромеханической добротностью.
В области резонанса, где волновые размеры преобразователя велики (2а>Х, h^X), частотную зависимость чувствительности можно рассчитать по формуле (5.34), приняв аа =1 и QH = pc6r)p/(pc)Ba.
Контрольные вопросы и задачи
1. В чем сущность явления магнитострикции и как оно используется в ГАП? Чем принципиально различаются магнитострикцион- ный и пьезоэлектрический эффекты?
2. Стержень длиной /= 10 см из сплава никоей под действием статического магнитного поля #=960 А/м деформируется на величину *S = 0,7* 10-5. Определить абсолютное изменение длины стержня и магнитострикционные напряжения в нем. Магнитная проницаемость сплава р,г=220.
Ответ: 0,7 мкм; 1,33*10® Па.
3. С какой целью поляризуют магнитострикционную систему? Какие достоинства имеет неполяризованная система?
4. Что характеризует и от каких свойств материала зависит коэффициент магнитомеханической связи?
5. Поясните устройство стержневого магнитострикционного преобразователя. Как укладывается обмотка на стержни?
6. Определить удельную акустическую мощность, излучаемую на частоте резонанса никелевым преобразователем с размерами (см. рис. 5.3) 2/н = /=30 мм, d/b=2,36, если амплитуда индукции Вт = = 0,05 Т, а магнитострикционная постоянная а= 1,9*107 Н/Вб, КПД 'Пр=0,7.
Ответ: 7,4 • 104 Вт/м2.
7. Поясните частотную зависимость модуля электрического импеданса преобразователя.
ГЛАВА 6. РАСЧЕТ И ПРОЕКТИРОВАНИЕ ГИДРОАКУСТИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ и антенн
В гидроакустических устройствах в зависимости от назначения и условий эксплуатации используются антенны и преобразователи, которые различаются параметрами и
140
характеристиками в режимах излучения и приема, диапазоном частот, способом преобразования энергии, структурой колебательных систем, конструкцией, массой, габаритами и др. Чтобы наиболее полно удовлетворить требованиям технического задания на разработку антенны, необходимо решить комплекс вопросов, и, в частности, вопросы выбора активного и конструкционных материалов, колебательной системы, обеспечения механической и электрической прочности, влаго- защиты, долговечности и создания технологической и экономически рациональной конструкции.
Современные гидроакустические антенны содержат преимущественно пьезокерамические и магнитострик- ционные преобразователи. Теория этих типов ГАП описана в гл. 4 и 5. Теперь изложим методику расчета и некоторые вопросы проектирования пьезокерамических и магнитострикционных антенн.
§ 6.1. Исходные данные
для проектирования
Задание на проектирование. Исходные данные содержат показатели, которые характеризуют требования к проектируемой системе и ее антенне. При разработке ГАП антенны исходными данными являются:
— назначение антенны;
— режим работы (излучение, прием, излучение и прием, непрерывный, импульсный);
— резонансная частота или диапазон частот;
— направленность антенны или отдельных элементов;
— звуковое давление, создаваемое антенной (отдельным преобразователем) в направлении акустической оси, или акустическая мощность;
— потребляемая электрическая мощность и допустимые напряжения возбуждения или ток;
— чувствительность в режиме приема;
— ширина резонансной кривой (полоса пропускания) и допустимая неравномерность частотной зависимости мощности излучения, звукового давления, чувствительности в рабочем диапазоне;
— максимальное заглубление антенны;
— ограничения по трудозатратам и стоимости.
141
Гидроакустическая антенна, являющаяся одним из основных узлов любой гидроакустической системы, представляет собой весьма сложное устройство. При проектировании антенны нельзя однозначно решить весь комплекс задач, содержащихся в техническом задании. Среди требований, предъявляемых к антенне, имеются и противоречивые, их надо решать на основе компромиссов. Чаще всего рассматривается несколько вариантов решений и выбирается тот, который удовлетворяет заданным требованиям с учетом себестоимости и трудоемкости в условиях производственной базы. В нашу задачу не входит комплексное решение всех условий, вытекающих из особенностей объекта, на котором будет установлена антенна. Ограничимся показателями антенны, обеспечивающими реализацию исходных данных и конструктивными вариантами исполнения.
Общие соображения по проектированию. При проектировании антенны (и ГАП) могут быть поставлены задачи обеспечения преимущественных параметров и характеристик в зависимости от общих требований к системе. Приведем некоторые частные задачи.
Антенна предназначена для работы в режимах излучения и приема. Наибольшая эффективность должна быть при излучении. Чтобы получить максимально возможную удельную мощность, следует выбрать активный материал для ГАП с максимальной эффективностью в режиме излучения и достаточной прочностью (по допустимому напряжению на разрыв). С целью повышения прочности активные элементы ГАП выполняют монолитными. В секционированных преобразователях принимают меры по упрочнению конструкции !. Удельная мощность также ограничивается кавитацией, возникающей на излучающей поверхности при большой амплитуде колебаний и зависящей от длительности импульса и заглубления антенны2. Резонансные ГАП, используемые в антенне, имеют узкую полосу частот; это вызывает повышенные требования к стабильности частоты генератора возбуждения.
1 О методах упрочнения (армирования) пьезокерамических преобразователей см. [9, § 34].
2 О влиянии кавитации см. ниже.
142
Если заглубление антенны не превышает 500 м, то можно использовать силовую конструкцию. При больших гидростатических давлениях необходимо корпус делать толстостенным либо использовать компенсированную конструкцию с жидкостным заполнением корпуса, в которой активный материал испытывает равномерное всестороннее сжатие забортного давления.
Если от антенны требуется максимальная чувствительность в режиме приема, то не возникает проблемы обеспечения динамической прочности, поскольку механические напряжения в активном материале намного меньше допустимых. При необходимости приема в широкой полосе частот надо принимать специальные меры, например уменьшать толщину стенок (в некоторых пределах, ограниченных прочностью) цилиндрического преобразователя, увеличивать отношение площадей накладки и поперечного сечения стержня (не вызывая при этом изгибных колебаний) у стержневых преобразователей, использовать переходные слои.
Для антенны, работающей в обоих режимах, нужен компромиссный подход. Активный материал должен быть выбран с параметрами эффективности, удовлетворяющими в большей степени и излучению, и приему (табл. 6.1). Нужно также иметь в виду, что при гидролокации из-за эффекта Доплера 1 частота эхо-сигнала смещается; это требует увеличения ширины полосы в режиме приема. Прием в широкой полосе требует использования преобразователей, имеющих малую добротность механической колебательной системы. Кроме того, как было показано в гл. 4 и 5, частоты /р максимума излучаемой акустической мощности и f максимума чувствительности в режиме приема не совпадают. Чтобы величины fp и /'р совпадали, коэффициент связи активного материала не должен превышать значения порядка 0,4. Если же по соображениям эффективности используется материал с большим коэффициентом электромеханической связи, то понадобится вводить в электрическую схему приемно-усилительного тракта частотную коррекцию.
При решении вопроса о типе активного материала — пьезокерамического или магнитострикционного — еле-
1 См. [6, § 4.7].
143
дует учитывать высокую механическую прочность металлических магнитострикционных материалов; предел прочности при растяжении составляет сотни мегапаскаль (МПа), а допустимая удельная акустическая мощность достигает 20 Вт/см2. В остальном эти материалы уступают пьезокерамическим. Магнитострикционные преобразователи могут работать в диапазоне частот лишь до 100 кГц, технология их изготовления относительно сложная, материал — дефицитный и дорогой, при
высоких частотах (100 кГц) размеры получаются малыми, затруднена намотка и мала эффективность.
Использование магнитострикционных ферритов в качестве активных материалов ГАП, свободных от потерь на вихревые токи, принципиально возможно, но требует армирования конструкции.
Не обсуждая пока вопросы выбора пьезоматериалов, отметим, что если ставится требование экономии активного материала (и объема), следует использовать материалы с малой скоростью звука. Можно также заменить часть активного материала ГАП пассивным материалом (гибкими вставками) без ущерба для электроакустических параметров. Этим же путем достигают понижения резонансной частоты колебательной системы при заданных размерах.
Выбирая конструкцию и структуру активного элемента ГАП, надо учитывать не только требования по достижению электроакустических параметров, но и особенности колебательной системы. Так, например, в стержневой системе продольный размер в направлении колебаний пьезостержня должен быть по возможности больше, чем два других размера. При невыполнении этого возникнут поперечные колебания, которые ослабят основные колебания. Если длина активного элемента велика, то при использовании продольного пьезоэффекта понадобятся непомерно высокие напряжения
Таблица 6.1
Допустимая удельная мощность излучения в зависимости от длительности импульса
V мс
<&ДОП* Вт/СМ2
>100
0,3
20
5
10
7-8
5
10—12
2
15—16
144
поляризации. В таком случае стержень секционируют, т. е. набирают его из некоторого числа склеенных тонких элементов, поляризованных при умеренных напряжениях. Как было показано, при секционировании активного пьезоэлектрического стержня и параллельном соединении элементов увеличивается коэффициент электромеханической трансформации и емкость, понижаются необходимое напряжение возбуждения, электрическое сопротивление и чувствительность преобразователя-приемника.
Конструкции ГАП содержат детали и узлы (накладки, армирующие и крепежные детали, герметизирующие, развязывающие, экранирующие и электроизолирующие элементы) из пассивных материалов — металлов, пластмасс, резины, полимеров, которые выполняют вспомогательные функции. Если пассивный конструкционный материал соединяется (чаще всего путем склейки) с пьезокерамикой, то коэффициенты линейного расширения сопрягаемых материалов должны быть по возможности близкими.
Основные ограничения излучаемой мощности преобразователя связаны с явлением кавитации на его рабочей поверхности и возникновением механических напряжений в его активном элементе в динамическом режиме.
Влияние кавитации на ГАП и антенны. Явление кавитации заключается в том, что в жидкости при больших растягивающих усилиях происходят местные разрывы с образованием пустот (каверн), наполненных растворенными в воде воздухом и паром.
При работе мощных ГАП и антенн на излучающей поверхности могут возникать разряжения такой величины, которые вызовут разрывы в воде, т. е. кавитационные пузыри. Смесь воды с пузырьками, обладая значительно меньшим волновым сопротивлением, чем сопротивление воды, вызовет резкое увеличение амплитуды колебаний преобразователя и нарушение режима его работы. Насыщенный кавитационными полостями слой воды, прилегающий к поверхности излучателя, препятствует передаче звуковой энергии в среду и звуковое давление в поле уменьшится. В отсутствие кавитации с увеличением напряжения на входе излучателя звуковое давление возрастает пропорционально
145
напряжению, а с появлением кавитации рост звукового давления замедляется. Дальнейшее увеличение электрической мощности, расходуемой на возбуждение излучателя, не вызывает увеличения акустической мощности. При развитой (значительной) кавитации излучаемая акустическая мощность может даже уменьшиться за счет потерь на поглощение и рассеяние кавитационными пузырьками, а возрастание механических напряжений в активных элементах преобразователя может привести к его разрушению. Кроме того, при сильной кавитации имеет место эрозия (механическое разрушение) излучающей поверхности ГАП, особенно при длительной эксплуатации, а также искажение ДН. По указанным причинам при работе ГАП (антенн) следует предотвращать возможность появления кавитации, ограничивая мощность излучения величиной, соответствующей порогу возникновения кавитации.
Порог кавитации характеризуется величиной удельной акустической мощности — интенсивности ^ДОп» при которой кавитация еще не наступает. Порог кавитации тем выше, чем меньше длительность tm излучаемого импульса, больше гидростатическое давление (заглубление 2 преобразователя) и выше частота излучения. Зависимость #доп от tm приведена в табл. 6.1. Зависимость ,^доп от заглубления (при непрерывном сиг* нале) определяется эмпирической формулой
где z измеряется в метрах.
Таким образом, мощность не должна превосходить значения
По опытным данным, в диапазоне 4—15 кГц порог кавитации не зависит от частоты, в диапазоне 15— 50 кГц — увеличивается приблизительно на 30%.
Механическая прочность ГАП. В процессе эксплуатации ГАП подвергаются как статическим, так и динамическим (знакопеременным) нагрузкам. Статическая прочность активных материалов — пьезокерамики, металлических и керамических магнитострикционных материалов характеризуется способностью сопротивляться
ДОп — 0,3 (1 + 0,lz)2,
(6.1)
т
разрыву при действии постоянных растягивающих усилий. Количественной мерой статической прочности является предел прочности — максимальное напряжение растяжения сгр, которое данный материал выдерживает, Величина сгР у магнитострикционных металлов на порядок больше, чем у ферритов и пьезокерамики. Особенность пьезокерамических составов заключается в том, что прочность их на сжатие на порядок выше прочности на растяжение. Следовательно, величина динамических напряжений, возникающих в пьезокерамической или пьезомагнитной керамике, не должна превосходить соответствующего предела ор. Например, для пьезокерамики ТБК-3 величина стр^20 МПа. Очевидно, чем больше удельная акустическая мощность, тем большие механические напряжения создаются в активных элементах ГАП.
Определим связь между напряжением и удельной мощностью излучения для продольно колеблющегося элемента механической системы преобразователя.
Амплитуда колебательной скорости vm излучающей поверхности S согласно общей формуле для акустической мощности Pa = 0,5a(pc)BSy2m равна
Соотношение между амплитудами напряжения (давления) От и скорости vm в плоской волне, распространяющейся вдоль направления колебаний активного элемента, хорошо известно:
где рс — волновое сопротивление активного материала. Приравнивая оба выражения для vm, получаем
При наличии накладок (одной или двух) максимальная величина напряжений, возникающих в нейтральном поперечном сечении стержня, определяется выражением
147
где q= (pcS)H/pcA; индекс «н» относится к накладке; А — площадь поперечного сечения стержня.
Подставив в (6.2) численные значения рс$Е различных составов пьезокерамики, получим таблицу значений механических напряжений в активном элементе при Ра. уд=1 Вт/М2.
ТБ-1
НБС.-1
ЦТСНВ-1
ЦТС-19
28-10®
28,7-103
21,5-10®
25,2-103
ТБК-3
ЦТБС 3
ЦТС-23
ЦТСС-1
27,3-103
26,7-103
25,5-103
27,7-103
Для повышения динамической прочности преобразователя в его активном элементе предварительно создают постоянное сжимающее напряжение сга путем армирования. Если, например, до упрочнения максимальная амплитуда динамических напряжений crw=10 МПа, напряжение армирования ста=15 МПа, то после упрочнения допустимы механические напряжения с амплитудой От = 25 МПа.
Способы и технология армирования пьезокерамических преобразователей изложены в учебнике [9]. Отметим лишь, что стержневые преобразователи армируются при помощи осевой шпильки, проходящей через центральное отверстие пьезоэлемента и стягивающей с определенным усилием излучающую и тыльную накладки. Армирование цилиндрических преобразователей осуществляют или путем насадки нагретого металлического бандажа, который при остывании создает напряжение сжатия в пьезокерамическом кольце, или при помощи силовой намотки на кольце стеклонити с последующим обволакиванием связующим.
Стяжки и бандажи изготовляют из нержавеющей стали и титана.
Принципиально введение в колебательную систему деталей упрочнения (шпилек, бандажа, стеклонити со связующим) и изменение напряженного состояния пьезоактивного элемента вызывают изменение механических, электрических и электроакустических параметров преобразователя. Если, однако, армирующие напряжения не превышают 10—15 МПа, то можно практически
148
ограничиться влиянием гибкости шпильки на частоту резонанса /р. Резонансная частота /р. а армированного пьезостержня больше /р и приближенно равна
/р.а = /р/Г + (тш1т)(сш/с), (6.3)
где тш, сш — масса шпильки и скорость распространения продольных волн в материале шпильки; т, с — те же величины для пьезоэлектрического стержня.
§ 6.2. Выбор типа
преобразователя антенны
Структура колебательной системы ГАП. Вид механической колебательной системы преобразователя определяется главным образом рабочей частотой гидроакустического устройства, составной частью которого является проектируемая антенна. Так, для весьма низких частот (примерно до 2—3 кГц) оказываются пригодными пластинчатые и цилиндрические преобразователи, в которых используются изгибные колебания (см. рис. 1.1, е,ж, к). Стержневые и цилиндрические преобразователи, в которых возбуждаются продольные колебания по оси стержня (см. рис. 1.1, а, б, в) и радиальные колебания нулевого порядка (см. рис. 1.1, з), в диапазоне низких частот имели бы неприемлемо большие габариты и массы. Для звуковых и ультразвуковых частот до 25— 30 кГц целесообразно использовать пульсирующие цилиндрические преобразователи. При более высоких частотах возрастают технологические трудности выполнения таких преобразователей, особенно секционированных; эти трудности связаны с необходимостью обеспечения идентичности преобразователей, из которых набирается антенна: очень сложно изготовить их с одинаковыми параметрами. Для частот выше 25—30 кГц успешно используются простые по конструкции и технологичные стержневые преобразователи, которые также пригодны и для систем, работающих на более низких частотах. Однако при частотах меньших, чем 5—7 кГц, нерационально применять стержневые колебательные системы. Ширина резонансной кривой — полоса пропускания у цилиндрических преобразователей составляет 20—25%, у стержневых — 5—10%.
149
Наглядное представление об относительных размерах стержневых и цилиндрических элементов, изготовленных из различных составов пьезокерамики и магни- тострикционных металлических материалов дает рис. 6.1, на котором размер элемента из ТБК-3 принят за единицу.
Рис. 6.1. Относительные резонансные размеры активных элементов из пьезокерамических и магнитострикционных материалов.
Сферические пьезокерамические и цилиндрические пьезокерамические и магнитострикционные преобразователи могут быть использованы в измерительных установках как излучатели и звукоприемники.
Группирование ГАП в антенну. При выборе колебательной системы преобразователя необходимо учитывать конструктивные условия, обеспечивающие удобство формирования групповой антенны и заданную плотность заполнения рабочей поверхности. В зависимости от за-
150
дачи, решаемой гидроакустическим устройством, т. е. от его назначения, отдельные ГАП группируются на поверхности цилиндра, сферы, части плоскости, на линии той или иной формы (например, отрезке, окружности, дуге).
Преобразователи могут располагаться вплотную и образовывать сплошную поверхность, размеры и форма которой должны обеспечивать требуемую направленность. В этом случае компоновка антенны из отдельных элементов диктуется исключительно технологическими соображениями, невозможностью изготовить активную поверхность больших размеров.
Антенна может содержать дискретную группу цилиндрических или стержневых преобразователей, отстоящих друг от друга на некотором расстоянии. У такой антенны путем создания фазового распределения (с помощью фазозадерживающих цепей) формируется компенсированная ДН с главным максимумом, ориентированным в желаемом направлении при неподвижной антенне К Промежуток между элементами должен быть не менее Х/2 (Я — длина волны в воде), чтобы исключить взаимодействие (по полю) между элементами, которое приводит к изменению их импедансов и рассогласованию с узлами электрической цепи (усилителями, генераторами), к искажению ДН преобразователей. Вместе с тем делать промежуток более 0,7Я не рекомендуется, так как при этом получается большой фазовый «шаг» (Д<р = (nd/X) sin 0к>О,7я sin 0К), искажается ДН или уменьшается угол компенсации 0К, т. е. уменьшается сектор обзора.
В этом можно убедиться, рассматривая выражение (2.37) компенсированной характеристики направленности линейной антенны, состоящей из п равноотстоящих точечных элементов. Чтобы ДН антенны не содержала добавочных максимумов, волновое расстояние между элементами должно удовлетворять условию [15]: d ^ п — 1
% л (1 -j— sin 0к)
где 0К — угол компенсации. Определяя из этого условия sin е„, получаем (п_1)Х
sin 0К<-^ -г 1-
' nd
1 См. § 2.3.
J51
Отсюда видно, что с увеличением d/Я, при фиксированном значении п, величина sin 0К (и угла 0К) уменьшается.
Таким образом, волновой промежуток между элементами антенны ограничен пределами
_1_ <- _d_ < п — 1
2 % Л(1-{-51П0к)
(6.4)
Необходимо также учитывать взаимное влияние элементов антенны непосредственно через детали конструкции, через жидкость, заполняющую корпус компенсированной конструкции антенны, и боковые поверхности одиночных элементов. С целью уменьшения этого влияния рекомендуется по возможности снизить излучение (прием) боковыми поверхностями. Этого можно достигнуть уменьшением поперечных размеров стержневых и длины цилиндрических преобразователей,
Форма и размеры одиночного преобразователя. Чтобы резонансная частота колебательной системы преобразователя определялась размером I в направлении колебаний, остальные размеры должны быть меньше /, по крайней мере, в 1,5—2 раза. В противном случае резонансные частоты, соответствующие всем трем размерам, будут близки и колебания по различным направлениям окажутся «завязанными». Это приведет к снижению эффективности на частоте основного резонанса. Поскольку пьезокерамика обладает анизотропией, т. е. неодинаковостью свойств по разным направлениям, то нежелательные резонансные колебания могут проявиться еще сильнее.
Для уменьшения резонансного размера активного элемента стержневого преобразователя, увеличения излучающей поверхности и расширения полосы пропускания стержень нагружают одной или двумя металлическими накладками (см. рис. 1.1, б, в, 5.1). В некоторых конструкциях пьезоэлектрические стержни устанавливаются на общей наладке (рис. 6.2), в других—преобразователи антенны механически не связаны между собой. Ширина полосы стержневого преобразователя тем больше, чем легче излучающая накладка, чем она тоньше и больше отношение площадей сечений накладки и пьезоактивного элемента. Однако использование тонких накладок ограничено: в тонкой накладке (при толщине 6<Лн/40) и при отношении сечений больше двух воз-
152
буждаются колебания изгиба, собственная частота которых может быть близкой к рабочей частоте преобразователя. Материалами для излучающих накладок могут быть сплав АМг, титан, сталь марки Ст. 35. При использовании АМг или дюраля, плохо сопрягаемых с пьезокерамикой из-за большого различия коэффициентов температурного линейного расширения между накладкой и пьезоэлектрическим стержнем, надо проложить пластинку из титана, стали марок Ст. 35 или Ст. 10.
Рис. 6.2. Дискретная антенна с общей накладкой.
В некоторых случаях делают колебательную систему несимметричной: тыльную накладку утяжеляют, чем достигается более эффективное излучение (прием) в одном направлении. Чтобы при этом не увеличивать длину преобразователя, тыльную накладку выполняют в форме «стакана», обращенного в сторону излучающей накладки (рис. 6.3). Исследование этой системы показало, что при отношении 6//н^0,4 тыльная накладка мало влияет на основные параметры преобразователя, в частности, на резонансную частоту.
При выборе типа пьезоэффекта (продольного или поперечного) следует иметь в виду, что значения пьезомодуля йзз и коэффициента электромеханической связи &33 превышают значения d31 и й31. В этом смысле использование продольного пьезоэффекта имеет преимущество.
153
Однако выполнение ГАП, работающих при продольном эффекте, значительно сложнее в конструкционном отношении. Известно, что цилиндрические преобразователи для этого приходится собирать (склеивать) из призм (см. рис. 4.9). И стержневые преобразователи, имеющие большой размер в направлении колебаний, также надо секционировать — составлять из тонких пластин (см. рис. 4.4), чтобы можно было осуществить поляризацию
и уменьшить необходимое напряжение возбуждения. Изготовление секционированных преобразователей — процесс трудоемкий, стоимость их высокая К
Выбор активного материала. Как уже отмечалось, в качестве активных материалов ГАП современных антенн применяют пьезокерамику различных составов и маг- нитострикционные металлы и сплавы. Свойства активных материалов во многом определяют параметры и характеристики ГАП, их конструкцию, условия эксплуатации, стабильность работы.
Приведем некоторые соображения для выбора пьезоактивных материалов 2.
В зависимости от назначения пьезокерамические материалы делят на четыре класса3. Материалы I класса пригодны для производства пьезоэлементов приемников и излучателей малой и средней мощности, сюда входят ЦТСНВ-1, ЦТС-19, ЦТБС-1. Из материалов II класса изготовляют элементы, работающие в сильных электрических полях и при больших механических напряже-
Рис. 6.3. Колебательная система стержневого преобразователя.
1 — «обращенная» тыльная накладка;
2 — приемоизлучающая накладка;
пьезоэлектрический стержень.
3 —
1 Технология склеивания пьезокерамических блоков и колец описана в работе [9, § 33].
2 Оценка магнитострикционных материалов приведена в § 6.5.
3 См. ГОСТ 13927—74. Материалы пьезокерамические.
154
ниях и пригодные для излучателей большой (ЦТСС-Ц ЦТС-23) и средней мощности (ЦТБС-3, ТБК-3, НБС-1).. Материалы III класса используются для производства! пьезоэлементов с повышенной стабильностью параметров во времени и при изменении температуры (ЦТС-22, НБС-3). Материалы IV класса используются для производства высокотемпературных пьезоэлементов, обладающих повышенной стабильностью параметров в заданном интервале температур и механических напряжений. Для мощных излучателей, работающих в непрерывном режиме или при больших длительностях импульса, следует использовать материалы с малыми внутренними потерями, чтобы не перегревать активные элементы ГАП.
Эффективность ГАП в режимах излучения и приема характеризуется следующими параметрами материалов.
Удельная акустическая мощность на резонансной частоте пропорциональна величине (dzzYEz)2E2 при продольном пьезоэффекте и {dz\YE{)E2 при поперечном пьезоэффекте, а на частотах значительно ниже резонансной—величинам (d3zCE3)E2 и (d3\CE\)E2. Чем больше этот параметр, тем больше удельная излучаемая акустическая мощность (при одинаковой напряженности электрического поля возбуждения) или: для получения одинаковой удельной мощности необходима наименьшая напряженность (и напряжение) поля возбуждения. Электромеханический (и электроакустический) КПД пропорционален величинам p&332C3D/tg б и p&3i2CiD/tg б. Чувствительность приемника на частоте электромеханического резонанса пропорциональна величинам d33Y3/z33s и d31Yf/E33s. Удельная чувствительность приемника при электромеханическом резонансе пропорциональна величинам d33Y3ElYz33sc3D и d3iYiE/}Yz33sCiD> на низких частотах — величинам dS3YСз°1&зз° и d31Y c-Y 1г33°.
Относительные значения указанных параметров эффективности приведены в табл. 6.2; за единицу приняты значения для пьезокерамики ТБК-3.
При выборе пьезоматериала надо руководствоваться значениями тех параметров эффективности, которые наиболее важны для проектируемого ГАП. Так, например, ЦТБС-3, ЦТС-19 и ЦТСНВ-1 обеспечивают получение наибольшей мощности на резонансе и низких частотах.
155
Относительные значения параметров эффективности некоторых пьезокерамически х материалов
N
<о
53
»•
3
t-ч 00
D со
^СО
Q со 43
t-ч
о со
СО
сГ-
Ci
43
0,84
0,84
1,0
1,0
1.19 1,22 2,37 2,0 2,44 2,13 1,46
1.20 1,48 1,43
1.9
1.9
СО СЛ СО
со
Q со о
ЬЪэ
43
со
</э СО
со
Q-
Ci
43
0,83
1,0
1,0
1,26
2,03
1,75
1,77
2,0
1,43
1,12
1,57
1,48
2,0
1,88
О СО
Q со
t-ч ^
О СО СО
сГ-
43
0,8}
1,0
1,0
0,95
1,74
0,98
1,82
1,38
1,5
1,0
1,68
1,43
1,64
1,23
ю
ъд
^со см со ле
Q со о
о.
ю
ъо
СМ СО
ле
Q-
со
О.
0,38
0,68
1,0
1,0
1,10
1,88
2.54 3,46 1,08 1,15 4,18 3,30 4,36
6.54 3,66 4,92
чз
«о
43
0,62
1,0
1,0
2,43
4,81
4.25 4,48 3,87 1,14 0,81
1.33
1.26
4.34 4,77
^ СО >ч
43
0,60
1,0
1,0
2,56
3.0 3,24 3,14 3,44
1.0 0,72 1,34 1,36 4,13 4,63
со
к га
со
1—1
цтснв-
о
со
i—1
Марк
матери
лов
ТБ-1
*
РЭ
н
НБС-
£
я
СМ
ё
а
и
О
н
Я"
и
РЭ
н
я
156
Если существенным требованием является получение наибольшего КПД, то для этого лучшими будут составы ЦТБС-3, ЦТС-23, ЦТСС-1.
Экранирование. Чтобы обеспечить одностороннее излучение (прием), надо тыльную сторону преобразователя (антенны) сделать или свободной, т. е. разгруженной, или нагрузить ее сопротивлением, намного большим сопротивления воды. В случае силовой конструкции, когда преобразователь помещен в корпус, внутренний объем которого заполнен воздухом, условия для разгрузки нерабочей поверхности можно считать идеальными: волновое сопротивление воздуха в 3500 раз меньше, чем волновое сопротивление воды. Если же герметизирующий корпус заполнен электроизоляционной жидкостью, как это делают в компенсированных конструкциях, или преобразователь омывается водой и с тыльной стороны, что имеет место в магнитострикци- онных антеннах, то преобразователи требуется акустически экранировать. Для этого к тыльной накладке стержневых и внутренней поверхности цилиндрического магнитострикционного преобразователей, а в случае пьезокерамического цилиндра — на определенный участок его наружной боковой поверхности приклеивают акустически мягкий экран. Последний обладает малым волновым сопротивлением. Экраны изготовляют из пористой резины марок 10087 и ИРП 1207; первую можно использовать при заглублениях до 100 м, вторую — до 400 м. Толщину бр экранирующей резины выбирают в зависимости от частоты [7]: бР^20 мм в диапазоне 3—10 кГц, бр^10 мм — в диапазоне 10—100 кГц и бр^5 мм — при частотах выше 100 кГц.
Стержневые преобразователи можно экранировать и с помощью металлических пластин, у которых волновое сопротивление больше, чем волновое сопротивление воды. В этом случае экран Э (рис. 6.4) располагают от тыльной поверхности преобразователя на расстоянии четверти длины волны Хж (или нечетного числа
Рис. 6.4. Экранирование стержневого преобразователя.
157
четвертей Яш) в заполняющей корпус жидкости. Толщину 6Э металлического экрана принимают в пределах 0,25—0,05 Хэ (Яэ — длина волны в материале экрана). Коэффициент отражения звуковой волны от плоского слоя имеет наибольшее значение при толщине слоя, равной 0,25К (А, — длина волны в материале слоя). Следовательно, экран должен лучше всего отражать при бэ = 0,25Хэ. Однако опытные данные показывают, что и при меньших значениях бэ экран эффективно отражает, поэтому толщину экрана можно брать в пределах 0,2— 0,05ЯЭ.
§ 6.3. Расчет пьезокерамических преобразователей
Стержневые преобразователи
Приведем методику расчета размеров, параметров и характеристик односторонних преобразователей, работающих с использованием продольного и поперечного пьезоэффекта в режимах излучения и приема. Рассмотрим сплошные и секционированные активные элементы, электрически параллельно соединенные, без накладок, с одной и двумя накладками.
Напомним, что величины, относящиеся к активному элементу, не имеют индекса, а относящиеся к накладке имеют индекс «н».
Пьезоэлектрический стержень без накладок (полуволновой). Обозначения размеров даны на рис. 4.1.
Условие механического резонанса:
а) при поперечном пьезоэффекте — формула (4.33);
б) при продольном пьезоэффекте
— для сплошного стержня — формула (4.34);
— для секционированного стержня с числом секций 4 (см. рис. 4.4,6) —формула (4.33).
Соотношение (4.34) между волновым размером /Д, где 'k = c3D/fv, и коэффициентом связи &33 представлено графиком, приведенным на рис. 6.5 (кривая /).
Коэффициент электромеханической трансформации:
а) при поперечном пьезоэффекте
— для сплошного стержня (рис. 4.1, а)—формула (4.19);
— для секционированного стержня (рис. 4.4, а) — пс = nN\
158
б) при продольном пьезоэффекте
— для сплошного стержня (рис. 4.1,6)—формула
(4.24);
— для секционированного стержня (рис. 4.4, б) — nc = nN.
Рис. 6.5. Зависимость резонансного волнового размера пьезостержня от коэффициента электромеханической связи при продольном (кривая 1) и поперечном (кривая 2) пьезоэффектах.
Эквивалентные сосредоточенные параметры (вблизи резонанса):
а) при поперечном пьезоэффекте
— эквивалентная масса
^ЭКВ == 2
— эквивалентная механическая гибкость
г _ 21
^ЭКВ о р _ >
n2YfA
159
б) при продольном пьезоэффекте
1 Л 1 у"» 2/
тЭкв- 2 рА1, С»«в -п*уВА-
Механическая добротность (вблизи резонанса):
oxpcf rj
а) при поперечном пьезоэффекте Q = у -;
Рис. 6.6. Коэффициенты a-активного и (3-реактивного сопротивления излучения круглого поршня в бесконечном жестком экране.
npchv
б) при продольном пьезоэффекте Q =
2а (рс)в
где а — безразмерный коэффициент активного сопротивления излучения (см. jmc. 3.3, 6.6, 6.7). Величина г)р для силовых конструкций (без тыльного излучения) принимается в пределах 0,7—0,8, для компенсированных (с жидкостным заполнением) — 0,5—0,6.
Электрическое напряжение, необходимое для получения заданной акустической мощности при резонансе — формула (4.36).
Частотная зависимость акустической мощности вблизи резонанса — формула (4.55) [cc^ctp, »1].
160
Электрический импеданс:
а) емкость заторможенного пьезоэлектрического стержня определяется по формулам, приведенным в табл. 4.4;
б) емкостное сопротивление
Xc=IHodC0\ (6.5)
в) сопротивление электрических потерь — формула
(4.26);
Рис. 6.7. Коэффициенты активного сопротивления излучения прямоугольного поршня в бесконечном жестком экране. l — b/a= 1; 2—Ь}а=2; 3 — Ь[а=4
г) активное приведенное механическое сопротивление— формулы (1.14), (4.35);
д) электрический импеданс при резонансе
Rn ~Ь Rm RuRm
■ ШрСо
- -f- шрС0
п—1
(6.6)
Если преобразователи входят в антенну, линейные размеры которой не меньше 2А,, то можно считать каждый преобразователь полностью нагруженным и принимать а~ 1.
Потребляемая электрическая мощность и КПД — формулы (1.15), (1.18), (1.22).
5 Г. М. Свердлин
161
Частотная зависимость звукового давления
Р 1 /
Рр V1 + Q2 (///Р — /Р/Л2 /р ’
(6.7)
где рр— звуковое давление, создаваемое на резонансной частоте на расстоянии г в точке на акустической оси и равное
2гшг)р
(6.8)
где А,р = св//р — длина волны в воде.
Условие электромеханического резонанса:
а) при поперечном пьезоэффекте — табл. 4.3;
б) при продольном пьезоэффекте
— для сплошного стержня — табл- 4.3;
— для секционированного стержня (Л^4) — табл. 4.3 (с заменой сЕ\ на сЕг и кЪ\ на &3з).
Соотношение между резонансными волновыми размерами пьезоэлектрического стержня без накладок представлено графически на рис. 6.5.
Чувствительность в режиме приема:
а) на частоте резонанса — табл. 4.3;
б) на частоте вблизи резонанса
_L = 1 Л_ (6.9)
v» у i+ [«D(///;-/r//)F ' ’
где QD = QI~\ll—k233-
Пьезоэлектрический стержень с одной нагруженной накладкой (четвертьволновый) при продольном пьезоэффекте.
Условие механического резонанса:
а) tg-^ + </tgV-H = 0, (6.10)
с! с«
где q=(pcS)jJpcEsA\ /, /н— размер стержня, накладки в направлении колебаний;
б) для четвертьволновой системы
с н
4/
н
162
Коэффициент электромеханической трансформации определяется по формуле (4.24) и nc = nN.
Эквивалентные масса и гибкость:
а) тжъ = -L (рIS)„ + -у р 1А [cos2 (kl)H + q2 sin2 («)„];
^экв ~ ^^1тэкв\
б) для четвертьволновой системы
т = — (p/S)„ + — q2plA; С = 1/со Ьп .
ЭКВ 2 /н 2 ^ г экв Р экв
Механическая добротность вблизи резонанса
q _ 2я/рг)ртЭкв (611)
а (рс)в SH
Электрическое напряжение, необходимое для получения заданной акустической мощности при резонансе, определяется из формулы, приведенной в табл. 4.2.
Частотная зависимость акустической мощности вблизи резонанса определяется по формуле (4.55).
Электрический импеданс вычисляется по формулам
(6.5), (4.26), (4.35) и табл. 4.4.
Потребляемая электрическая мощность и КПД вычисляются по формулам (1.15), (1.18), (1.22), частотная зависимость звукового давления — по формулам (6.7), (6.8).
Частота электромеханического резонанса рассчитывается по формуле, приведенной в табл. 4.3.
Чувствительность в режиме приема:
а) на частоте резонанса — табл. 4.3;
б) вблизи резонанса определяется по формуле (6.9).
Симметричный преобразователь (с двумя одинаковыми накладками, см. рис. 4.4,6).
Условие механического резонанса определяется по формуле (4.27) или по графикам, приведенным на рис. 6.8, где ^==(pcS)a/pcEi4, X^cE/fv, Ян = сн//Р.
Коэффициент электромеханической трансформации определяется по формулам (4.19), (4.24) и nc = nN.
Эквивалентные масса и гибкость
Щкъ = (p/S)H + -у plA [cos2 (kl)n + q2 sin2 (&/)„];
6*
163
(6.12)
1/CD ЬП P экв
Механическая добротность рассчитывается по формуле (6.11), эквивалентная масса — по формуле (6.12).
Электрическое напряжение, необходимое для получения заданной акустической мощности при резонансе — формула (4.30).
Рис. 6.8. Зависимость между резонансными размерами симметричного стержневого преобразователя при различных значениях q.
Частотная зависимость акустической мощности вблизи резонанса находится по формуле (4.55).
Электрический импеданс определяется по формулам
(6.5), (4.26) и табл. 4.4.
Потребляемая электрическая мощность и КПД вычисляются по формулам (1.15), (1.18), (1.22) и табл. 4.4.
Частотная зависимость звукового давления находится по формулам (6.7) и (6.8).
164
Условие электромеханического резонанса:
а) для сплошного стержня — табл. 4.3;
б) для секционированного стержня — по формуле
(4.27), в которой надо принять сЕ=сЕз.
Чувствительность приемника:
а) на частоте резонанса— табл. 4.3;
б) вблизи резонанса определяется по формуле (6.9).
Цилиндрические пьезокерамические преобразователи
Заданными величинами считаем: резонансную частоту fp, ширину полосы пропускания А/, допустимую удельную акустическую мощность Ра. уд или длительность импульса, угол раствора 20о или 20о,7 центрального лепестка ДН в осевой плоскости.
Режим излучения. Размеры преобразователя. Из условия (4.40) механического резонанса ненагруженного кольца определяем его средний радиус, принимая (предварительно) /p = fo-
По формулам (2.10) или (2.11) рассчитываем высоту Я цилиндра.
Высота h отдельного кольца не должна превышать 1,5г2 (г2 — наружный радиус). Исходя из этого выбирают необходимое число колец, из которых будет составлен (склеен) цилиндр.
Толщину 6 принимают в пределах 8^0,2—0,25а. Наружный и внутренний радиусы соответственно равны
г2 = а(1 + б/2а); гх = а(1 — б/2а).
Площадь излучающей поверхности 5 можно принять равной S = 2naH, так как кольцо тонкостенное-
Частота /р резонанса нагруженного кольца (с учетом влияния соколеблющейся массы ms) может быть определена из (4.48):
где р — безразмерный коэффициент реактивного сопротивления излучения (рис. 6.9,6).
Если полученное значение fp мало отличается от fo, например на несколько процентов, то найденные раз-
155
166
К}
167
Рис. 6.9. Коэффициенты a-активного и p-реактивного сопротивления излучения пульсирующего цилиндра в бесконечном жестком экране при различных отношениях радиуса к длине цилиндра.
меры кольца оставляем. Если же разница между /р и f0 нас не удовлетворяет, то изменяем средний радиус. Для этого находим коэффициент |3, соответствующий значению kva (а — ранее определенное значение), подставляем величины р и fp (/р — заданная резонансная частота) и определяем новое значение а *. Возможно, что эту операцию придется повторить, с тем чтобы величина р соответствовала аргументу &ра**.
Когда окончательно определено значение среднего радиуса, уточняем толщину б. По заданной ширине полосы Af находим механическую добротность Q = /P/Af, а по известному отношению масс ms/m или, что то же, отношению /о//Р из (4.50) находим толщину кольца
g __ <%соОЕр (рг)в /р ар
tjppcf fo
Проверка динамической прочности. Определяем величину механических напряжений crm, возникающих в пьезокерамике при заданной удельной мощности, по формуле (6.2). Полученное значение от должно быть меньше предельно допустимого напряжения растяжения сгр для данного типа пьезокерамики в 2—4 раза. Если коэффициент запаса меньше двух, надо снизить акустическую мощность.
Напряжение и напряженность возбуждения. Из формулы (4.54) определяем напряжение, необходимое для обеспечения заданной удельной мощности при резонансе.
Величина напряженности электрического поля Е = = ]/2ц/6 не должна превышать Едоп — допустимого для данной пьезокерамики значения, обеспечивая тем самым электрическую прочность преобразователя. При невыполнении этого условия потребуется уменьшить удельную мощность излучения.
Частотная зависимость акустической мощности рассчитывается по формуле (4.55), добротность Q — по (4.50), коэффициенты а, ар — по графикам, приведенным на рис. 6.9, коэффициент aw—по формуле (4.49).
Мощность преобразователя. Механическая мощность Ля = £а/г]ам, ПРИ резонансе Рм.р = ^р/'Пр- Мощность электрических потерь с учетом (4.26), равна
P3.n = «2(oC0tg6,
168
где электрическая емкость
С0 = е£3 (1 —2nah/8.
Суммарная мощность, потребляемая преобразователем от генератора возбуждения, равна
РЭ = Рм + рэ. п = РЛш + W2toC0 tg б.
Полный КПД
Лаэ ~ Р э == ЛэмЛам*
Электромеханический КПД при резонансе
ч„=[1
2яар (рс)в ahtopCp tg б
-1
п?1)р
где п определяется формулой (4.45).
Электрический импеданс и ток. Активное механическое сопротивление RM при частоте со, приведенное к электрической стороне, рассчитывается по формулам (4.49) и (1.14).
Реактивное механическое сопротивление, приведенное к электрической стороне, равно
Сопротивление Ru рассчитывается по формуле (4.26).
Полное электрическое сопротивление (импеданс) преобразователя Z определяется как параллельное соединение сопротивлений (-/?м + ^м), Ru и 1/шС0.
Входное активное сопротивление преобразователя при резонансе равно
g RuRu ц2
Ru Рэ
Токи при резонансе равны: активная составляющая тока Ir = u/R; реактивная составляющая тока /х = ^сорС0, суммарный ток
i=Vii+cx.
Режим приема. Частота электромеханического резонанса рассчитывается по (4.58), коэффициент связи — ло (4.21).
169
Чувствительность преобразователя определяется: на частоте резонанса — по формуле (4.61), вблизи резонанса— по формуле (4.62) [а0^1], на низких часто- тах — по формуле (4.63).
Сегментированный цилиндр (см. рис. 4.9)
Количество сегментов (призм) делают четным. Как правило, размер t<6. Пусть ^ = 0,66, причем толщина стенки 6 определена выше. Тогда число призм в кольце будет N * = 2яа/0,66. Принимаем ближайшее четное число N и уточняем размер t=2na/N.
Частоты /р и f'р определяются по формулам (4.48) и (4.58), коэффициент электромеханической трансформации по формуле (4.64).
Акустическая мощность излучения при резонансе и чувствительность в режиме приема рассчитываются по формулам, приведенным в табл. 4.5.
Электрическая емкость
со - (1 - ■«?, (:I ■-'Ч,) Ю1Г12Ж.
Электрический импеданс и токи определяются, как для сплошного цилиндра.
§ 6.4. Конструкции преобразователей и антенн
Конструкции преобразователей и антенн определяются главным образом их назначением, диапазоном рабочих частот и условиями эксплуатации. Разнообразие типов конструкций определяется разнообразием типов колебательных систем.
При выборе конструкции следует учитывать не только технические параметры и характеристики ГАП и антенн, но и специфические конструктивные и производственно-экономические требования. К ним относятся герметичность, прочность, жесткость, долговечность и надежность, возможность применения наиболее экономичной технологии при изготовлении.
Как обеспечиваются некоторые из этих требований, покажем на примерах конструктивного оформления ГАП и антенн.
170
Пьезокерамические преобразователи и антенны
Стержневой ГАП (рис. 6.10). Колебательная система преобразователя состоит из пьезокерамического пакета, склеенного из отдельных пластин 11, излучающей (приемной) накладки 1 и тыльной накладки 9. Обе накладки приклеиваются к торцам пакета через электроизоляционный слой. Для герметизации колебательная система помещена в корпус 5. Чтобы акустически развязать накладки и корпус, между ними установлены резиновые прокладки 3 и 10. Герметизация внутренней полости преобразователя (силовой конструкции), которая заполняется каким-либо инертным газом, например элегазом, обеспечивается крышкой 6, установленной на уплотнительном кольце 8. В крышке имеется герметичный кабельный ввод 7, к которому присоединяются монтажные провода 4 и 12; электроды пьезокерамических пластин соединены параллельно.
Для крепления преобразователя к объекту на его корпусе имеются фланцы с отверстиями под крепежные болты. Акустический экран 2 из пористой резины предотвращает тыльное излучение (прием) выступающими частями рабочей накладки. Газ, заполняющий внутреннюю полость преобразователя, обеспечивает хорошую акустическую экранировку остальных элементов колебательной системы.
Стержневой армированный преобразователь. Для увеличения прочности на растяжение секционированных активных элементов при использовании продольного пьезоэффекта в них предварительно создаются статические сжимающие напряжения. Чтобы поддержать эти напряжения в течение срока эксплуатации преобразователя, его армируют. На рис. 6.11 показан стержневой преобразователь, в котором армирование осуществляется с помощью центральной шпильки 2 и гайки 5, сжимающих расположенный между стягиваемыми накладками 1 и 4 пьезокерамический блок. Остальные детали преобразователя те же, что и на рис. 6.10.
Армированный преобразователь (рис- 6.12) имеет некоторые отличия от рассмотренного. К нижнему торцу секционированного активного элемента 2 через электроизоляционный слой приклеен стакан 4, в нижнюю часть
171
QC
172
Рис. 6.10. Стержневой пьезоке- Рис. 6.11. Стержневой армиро- Рис. 6.12. Стержневой армиро-
рамический преобразователь. ванный преобразователь в кор- ванный преобразователь в гер-
пусе. метизирующем чехле.
которого запрессована втулка 5. Армирующая шпилька 10 вворачивается в переднюю накладку 1 и стягивается гайкой 9, расположенной у торца стакана. Стакан и скрепленная с ним тыльная накладка 6 делаются массивными, чтобы уменьшить колебательную скорость тыльной накладки и, следовательно, обеспечить преимущественное излучение передней накладкой.
От лепестков шайб активного элемента, соединенных параллельно, отходит два провода 3 и 11, которые через отверстия в стакане и в накладке 6 соединяются с жилами кабеля 7. Последний привулканизован к втулке 8, приваренной к тыльной накладке, причем во втулке изготовлены канавки, увеличивающие поверхность для вулканизации.
Между передней накладкой 1 и стаканом 4 помещена гибкая (резиновая) прокладка 13 для акустической развязки.
Воздух в объеме между активным элементом 2 и стаканом 4 экранирует боковую поверхность пьезоэлементов.
Герметизация преобразователя обеспечивается резиновым чехлом 12 толщиной 2—3 мм, который приклеен к деталям 1, 4, 6.
Цилиндрический армированный преобразователь (рис. 6.13). Преобразователь содержит активный элемент 1 в виде сплошного пьезокерамического кольца, боковые поверхности которого посеребрены и являются электродами. Припаянные к электродам выводы 6 и 11 присоединяются к проводам 5. На наружную поверхность и торцы кольца надет с натяжением резиновый чехол 8, к которому герметично приклеены стальные фланцы 2. Каждый фланец имеет провод 5, герметично присоединенный с помощью вулканизованной резины 4.
Через центральное отверстие кольца проходит стяжка 3 с гайками 9 и уплотнительными кольцами 10.
Армирование и герметизация осуществляются стягивающим бандажом 7, насаженным в горячем состоянии на детали 1 и 8.
Цилиндрический сегментированный преобразователь
(рис. 6.14). Этот преобразователь отличается от рассмотренного на рис. 6.13 тем, что пьезоактивный элемент состоит из трапецеидальных призм 3, склеенных между собой. Поверхности склейки посеребрены и содержат
173
174
Рис. 6.14. Сегментированный цилиндрический армированный преобразователь.
175
Сварка
Vv.
SO
176
Рис. 6.15. Многоэлементная компенсированная антенна из стержневых преобразователей.
тонкие лепестки 10 из латуни для электрического соединения элементов, лепестки припаяны к проводу 11. Остальные детали те же, что на рис. 6.13.
Многоэлементная компенсированная антенна из стержневых преобразователей (рис. 6.15). Преобразователи 1 выполнены в виде полуволновых секционированных стержней и не связаны между собой механически. Склеенные пьезоэлементы электрически соединены параллельно проводами 6. Преобразователи крепятся к крышке 14 через электроизоляционную плату 13 из текстолита с помощью металлических скоб 2 винтами 1'8. Скобы приклеены по нейтрали к преобразователям. Крышка 14 герметично соединена с корпусом 15 с помощью резиновых уплотнений 3, 5, установленных в канавку крышки и выточку корпуса. К верхнему торцу корпуса приварена сплошным швом по периметру металлическая звукопрозрачная (толщиной 0,5—1 мм) мембрана 17. Мембрана имеет гофр, предназначенный для уменьшения температурных напряжений при сварке.
К нижней части крышки 14 с помощью вулканизации втулкой 11 укреплены кабель 10 и стакан 9. Кабель в стакане соединен с проводами 6 через изоляционную втулку 12, изготовленную из пресс-материала.
Внутренний объем корпуса 15 с мембраной 17 залит электроизоляционной жидкостью 16. Для компенсации объемных изменений, вызываемых гидростатическим давлением и температурой, применяют компенсатор в виде резиновой мембраны 8, привулканизованной к резиновой втулке 11 кабельного ввода и к торцевой выточке крышки 14. Объемы антенны и компенсатора сообщаются каналами 7. Заливка жидкостью производится через отверстия в корпусе 15, которые заглушаются герметичными пробками (на эскизе не показаны). Крышка к корпусу крепится болтами 4.
Многоэлементная компенсированная антенна из стержневых преобразователей с общей накладкой (рис. 6.16). Преобразователи 1, секционированные по направлению колебаний и электрически соединенные параллельно проводами 12, закреплены на рабочей накладке 2. Между пьезоэлектрическими стержнями и накладкой находятся электроизолирующие прокладки 3. Размеры и толщина прокладки выбираются из условия предотвращения электрического пробоя промежутка
Г. М. Свердлин
177
между деталями 1 и 2. Колебательная система, образованная пьезоэлектрическими стержнями с накладкой (и прокладками), механически развязана от корпуса 5 резиновой манжетой 4, выполненной методом вулканизации. Одновременно манжета выполняет функции герметизации.
_ L. ^ ^ J
==#
13
т
12 11 10
8 7 в
Рис. 6.16. Многоэлементная компенсированная антенна из стержневых преобразователей с общей накладкой.
К корпусу 5 болтами 6 присоединена крышка 7 на резиновых уплотнителях 8 и 14, установленных в выточках крышки и корпуса. В крышке 7 на резиновых уплотнителях 9 установлены герметичные выводы 13 проводов. К нижнему торцу крышки 7 привулканизован резиновый компенсатор 11. Внутренний объем антенны, заполненный электроизоляционной жидкостью 15, сообщается с объемом компенсатора каналом 10.
Цилиндрическая компенсированная антенна (рис. 6.17). Антенна содержит пять соосно расположенных сплошных пьезокерамических колец 1, поляризованных в радиальном направлении и посеребренных по боковым поверхностям. Между кольцами размещены резинометаллические шайбы 13 Т-образного сечения. Элементы шайб, соприкасающиеся с поверхностями колец /, выполнены из электроизоляционной резины. Кольца и
178
шайбы механически соединены с помощью металлической шпильки 10 через резинометаллические стаканы 2. Последние содержат элементы из электроизоляционной резины, соприкасающиеся с торцовой и цилиндрической поверхностями колец 1. Электрическое соединение пьезокерамических колец осуществляется проводом 12 (внутренние электроды) и проводом 9 (наружныеэлектроды).
На наружную поверхность всех колец натянут герметизирующий чехол 11 из резины толщиной 3—4 мм с отбортовкой на торцах. Этим обеспечивается герметич-
Рис. 6.17. Цилиндрическая компенсированная антенна.
ное соединение чехла с торцевыми деталями. Отбортовки чехла приклеивают к металлическому фланцу 8 и крышке 3. Фланец изготовлен из стали, к нему приварен штуцер 5, в котором закреплен кабель 7 и герметично вулканизован резиной 6•
Крышка 3 имеет мембрану 4 из резины, выполняющую роль компенсатора изменений объема электроизоляционной жидкости 14, вызываемых действием гидростатического давления и температуры.
Магнитострикционные преобразователи
Магнитострикционный стержневой ГАП (рис. 6.18). Пакет, набранный из электрически изолированных тонких пластин, скрепленных с помощью призматических стяжек 18, образует колебательную систему. Пакет бакели- зируется под вакуумом, чем достигается монолитность системы. Рабочая поверхность накладки 3, контактирующая с водой, шлифуется и обезжиривается для обеспе-
Va7* 179
шш
j/5
Рис. 6.18. Конструкция стержневого магнитострикционного преобразователя.
180
7 Г. М. Свердлин
181
чения надежного акустического контакта со средой. С помощью резиновых манжет 4 пакет укреплен в корпусе 5.
Обмотка 1 накладывается на стержни пакета и предохраняется от возможных повреждений прокладкой 2 из изоляционного материала. Концы обмотки выводятся через отверстия уплотнительного фланца 13 и соединяются с жилами кабеля 8. Припайка к кабелю производится после установки пакета в корпус. Кабельный ввод герметизирован с помощью резиновой шайбы 11, металлической шайбы 10 и зажимной гайки 9. Вкладыши 6 и 17 служат для закрепления пакета в корпусе. При необходимости герметизации объема, где осуществляется присоединение концов обмотки к жилам кабеля, в фланце 13 отверстия под провод делаются с надлежащим уплотнением.
Звукоизоляция нерабочей поверхности тыльной накладки осуществляется экраном 14, выполненным из материала с малым удельным акустическим сопротивлением. Экран прижимается к накладке фланцем 13.
После установки пакета в корпус и подпайки проводов устанавливается крышка 12 через развязывающие и герметизирующие прокладки 15 к 16 к затягивается болтами 7.
Магнитострикционный цилиндрический ГАП (рис. 6.19). Преобразователь состоит из набора никелевых кольцевых пластин 3 толщиной 0,1 мм, закрепленных на нижнем фланце 14 корпуса болтом 1.
Обмотка 2 проходит через концентричные отверстия в пластинах (разрез по А—А). Провод обмотки через отверстия во фланце 14 и сальник корпуса 13 выводится в герметичный объем корпуса, где подпаивается к жилам кабеля 6. Сальник в дне корпуса 13 имеет резиновую шайбу уплотнения и нажимную планку 12, которая с помощью болтов обеспечивает необходимое сжатие резины. Верхний фланец корпуса 10 соединяется с корпусом 13 болтами через уплотнительную резиновую прокладку 11. Металлические и резиновые шайбы S, 9 затягиваются фасонной гайкой 7 и обеспечивают герметичность ввода кабеля в горловину корпуса. Крышка 4 защищает преобразователь от механических повреждений снизу. Отверстие 5 служит для фиксации колец при сборке пакета.
182
§ 6.5. Расчет магнитострикционных преобразователей
Стержневой преобразователь
Выбор магнитострикционного материала. Свойства магнитострикционных материалов приведены в табл. 5.1, где также даны параметры, характеризующие эффективность преобразователей в режимах излучения и приема.
Наибольшее применение находят металлические материалы, ограниченное — ферриты или пьезомагнитная керамика. Самый употребительный материал для ГАП — никель обладает хорошими механическими, маг- нитострикционными и антикоррозийными свойствами. Никель пластичен, и из него можно изготавливать ленту (и пластины) малой толщины (до 0,05 мм), что существенно снижает потери на вихревые токи. Однако по сравнению с другими материалами величина удельного электрического сопротивления у никеля меньше. Уступает никель другим материалам и по величине магнитной проницаемости.
Для сплава пермендюр 50КФ характерны большие значения магнитострикции насыщения, индукции насыщения, магнитной проницаемости. Параметры эффективности в режиме приема у пермендюра значительно выше, чем у никеля и сплава 12Ю. Широкое использование пермендюра в ГАП затруднено из-за коррозионной нестойкости и низкой пластичности, осложняющей механическую обработку.
Никель-кобальто-кремниевый сплав никоей по сравнению с никелем обладает следующими преимуществами: большими значениями проницаемости, коэффициента связи, параметров эффективности в режиме приема и меньшей величиной электромагнитных потерь.
Железоалюминиевый сплав 12Ю имеет высокое электрическое сопротивление и малую коэрцитивную силу, т. е. малые значения электромагнитных потерь, но подвержен коррозии и хрупок. Для ГАП этот материал непригоден.
Магнитострикционные ферриты применяются в ультразвуковой технике, они экономичны, дешевы, относительно просты в изготовлении, не требуют дефицитных
7*
183
исходных материалов. Главное достоинство ферритов — отсутствие потерь на вихревые токи, благодаря весьма большому электрическому сопротивлению и высокой добротности.
КПД ферритовых преобразователей достигает 70— 80% и мало зависит от частоты. Малая механическая прочность затрудняет использование преобразователей в гидроакустических антеннах, но при упрочнении их путем предварительного сжатия возможно применение ферритовых ГАП.
Из всего сказанного о материалах для магнитострик- ционных ГАП и антенн следует вывод: ни один материал не удовлетворяет всей совокупности требований. В каждом конкретном случае можно выбрать материал, наилучшим образом отвечающий поставленной задаче.
Размеры пластины. Как уже отмечалось, при проектировании преобразователей и антенн заданы резонансная частота /р, характеристика направленности в двух осевых плоскостях — раствор 20о или 20о,7 главного лепестка ДН, излучаемая акустическая мощность Ра и чувствительность v в режиме приема-
Пакет стержневого преобразователя показан на рис. 5.2. Элемент симметричной колебательной системы в виде одного стержня с двумя накладками — на рис. 5.3.
Длина пластины Н и толщина набора h пакета определяются требуемой направленностью в осевых плоскостях, параллельных сторонам Н и h. Связь между этими размерами и угловой шириной главного лепестка выражается соотношениями (2.10) и (2.11):
Размеры элемента колебательной системы, выполненной из одного материала, удовлетворяют условию
(5.16) механического резонанса, которое перепишем в виде
ctg (2nlJK) ctg (пЩ = q. (6.13)
Задаваясь коэффициентом q и размером I (или /н)> находим размер /н (или I). При этом целесообразно использовать графики, представленные на рис. 6.8. Рекомендуемые соотношения:
184
q= 1,25-3; Мн = 1,7-т-2.
При l = 2lH общая длина /+2/н = 2/ получается наименьшей и условие резонанса упрощается
ctg (я/р//сн) = yif. (6.14)
Зависимость произведения длины стержня на резонансную частоту колебательной системы от q для некоторых материалов представлена на рис. 6.20-
Рис. 6.20. Зависимость резонансного волнового размера стержня магнитострикционного преобразователя от q.
1 — пермендюр 50КФ; 2 — никель НП-2Т; 3 — сплав никоей.
При выборе ширины t окна можно руководствоваться соотношениями
fpt = fp (d—b) = 0,04-r-0,07cH; fpd = 0,06-0,2сн, (6.15)
которые обеспечивают наибольший КПД. Чем меньше ширина окна, тем КПД выше, но уменьшение t ограни-
185
чено необходимостью размещения обмотки, числу витков которой пропорциональна чувствительность приемника при резонансе.
С увеличением q резонансная частота понижается. С увеличением /н КПД растет, с уменьшением /н — падает. При тонкой накладке и широком окне возникают изгибные колебания накладки, приводящие (вместе с со- колеблющейся массой воды) к снижению величины fp. Практика показывает, что расчет надо вести на частоту несколько больше заданной, а именно: в диапазоне до 25 кГц — на 5%, в диапазоне 25—50 кГц — на 10% и выше 50 кГц — на 15%.
В процессе определения размеров пластины приходится ими варьировать. При фиксированных значениях fP и q увеличение /н вызывает уменьшение /, и наоборот, если зафиксировать /р и /, то уменьшение q приводит к увеличению /н, а увеличение q — к уменьшению /н; при неизменных /р и /н увеличение q вызывает уменьшение длины I стержня, и наоборот. Общая длина (/ + 2/н) не должна превышать 0,4Ян = 0,4сн//р.
Зная размеры элемента колебательной системы и полную длину Н пластины, можно определить ее штамп. При этом число окон (стержней) т ориентировочно оценивается из условия
Потребуется, однако, некоторая корректировка размеров, чтобы обеспечить равномерную нагрузку стержней.
Мощность излучателя. Акустическая мощность Ра преобразователя, значение которой определяется требуемой энергетической дальностью действия гидроакустической станции (гидролокатора, станции связи) или навигационного прибора (маяка, эхолота), отношением сигнал/помеха, направленностью антенны, затуханием звука в море и др., задана исходными условиями. Величина Ра, излучаемая данной поверхностью, как известно (см. § 6.1), ограничена предельным значением, связанным главным образом с явлением кавитации. Зная допустимую удельную мощность (см. табл. 6.1), находим
т > Н
20 U\q
3
(6.16)
186
максимальную акустическую мощность. Механическая мощность преобразователя
Рм = РЛ
ам*
Мощность, потребляемая излучателем от возбуждающего генератора, включает еще мощность Рэ. п электромагнитных потерь, обусловленных вихревыми токами и магнитным гистерезисом.
Мощность потерь Рф на вихревые токи в ферромагнитном сердечнике объемом V, набранном из пластинок толщиной б, рассчитывается по формуле
Рф = °Ф (aBmf)2 V,
где сгф — коэффициент, зависящий от материала, переменной индукции и напряженности постоянного поля (для поляризованного сердечника). Мощность потерь Рг на гистерезис определяется выражением
pr = ocfB2mv,
где аг — коэффициент, зависящий от переменной индукции.
Общая мощность электромагнитных потерь Рэ. п составит
Рэ п — (°ф^2/2 + °г/) BmV.
Как видим, потери энергии пропорциональны Вт2 и, следовательно, Urn [см. формулу (5.8)]. Если ввести некоторое эквивалентное активное сопротивление Рп, на котором расходуется мощность Рэ. ш то потери можно учесть включением параллельно индуктивности L0 об- мбтки сопротивления Rn. При этом на Rn выделяется
МОЩНОСТЬ Рэ. n=^m2/2i?n. С Другой СТОрОНЫ, МОЩНОСТЬ Рэ.п = сгпРт2К, где ап — коэффициент общих потерь. Приравнивая оба выражения для мощности Рэ. п и учитывая (5.8), получаем
R
п
со27УМ2 2arV ’
(6.17)
где N— число витков; А — поперечное сечение магнито- провода (стержня).
Магнитопровод стержневого преобразователя состоит из двух участков с различными размерами (см. рис, 5.3) :2 (t + b) сечением Ыи и 2(/ + /н) сечением А =
187
= bh{. Индукция на этих участках различная, но поток вдоль магнитопровода постоянен. Определим магнитное сопротивление цепи, рассматривая ее как однородный магнитопровод длиной /экв и сечением А. Складывая сопротивления участков, получаем
2 (/ /н) | 2 {t -f- b) 1Экв
\ibh \ihln \ibh
откуда находим «приведенную» длину /экв магнитной цепи
*экв = 2(/ + У + 2(* + &)-р. (6.18)
/н
Как известно, для тороидальной обмотки сечением Л, длиной I и содержащей N витков индуктивность равна
L = \iN2A/l.
Для рассматриваемого магнитопровода стержневого преобразователя выражение следует записать так:
L0 = m\is (2N)2 Л/2/экв, (6.19)
где т — число стержней; т/2 — число независимых магнитных цепей; N — число витков на одном стержне.
Принимая за V «приведенный» объем пакета, равный У=0,5тЛ/Экв, и используя формулу (6.19), выражение
(6.17) для сопротивления Rn приведем к виду
Ru=-^. (6.20)
2u ffn
Коэффициент On определяется экспериментально. Зависимость Оп от частоты для никелевого преобразователя, набранного из пластин толщиной 0,1 мм, при оптимальной поляризации представлена на рис. 6.21; параметром семейства которых является магнитная индукция.
Для излучателя из магнитострикционного феррита коэффициент потерь определяется по формуле
о„^аг = (nf tg 8)/^,
где tg6 — тангенс угла потерь в феррите.
1 Здесь мы предполагаем линии индукции прямоугольными, что вносит весьма малую погрешность.
188
Магнитная индукция, напряжение, импеданс и ток излучателя. Магнитную индукцию В (эффективное значение) в стержне определяют из выражения (5.17) для акустической мощности при резонансе.
Амплитуда напряжения возбуждения излучателя рассчитывается по формуле (5.8).
Оп, Мдт/м3Т2
Рис. 6.21. Зависимость коэффициента суммарных электромагнитных потерь в никеле от частоты при различных амплитудах магнитной индукции.
Число витков выбирается из условия размещения обмотки в окне и с учетом того, что изоляция провода должна быть влагонепроницаемой, обычно из резины.
В гл. 5 отмечалось наличие механического насыщения у магнитострикционных материалов. Вследствие нелинейной зависимости деформации от индукции после некоторого предельного значения индукции акустическая мощность увеличивается незначительно, а электромагнитные потери возрастают существенно. Чтобы пре-
189
образователь работал в линейном режиме, максимальное значение переменной индукции не должно превышать предельной величины ВтАОи. По опытным данным, для никеля, например, Вт Доп~ 0,08—0,1 Т.
Составляющие электрического импеданса излучателя показаны на рис. 5.5.
Излучатель, состоящий из т стержней с N витками на каждом стержне, имеет т/2 независимых магнитных цепей, так как каждая пара стержней образует замкнутый магнитопровод. Индуктивность излучателя определяется по формуле, а индуктивное сопротивление обмотки равно
Хь = шЬ0. (6.21)
Эквивалентное сопротивление электромагнитных потерь рассчитывается по формуле (6.20), а электрический импеданс преобразователя — по формуле (5.22).
На частоте сор механического резонанса Хм = 0, ZM = = RM и электрический импеданс
Г 1
, Rn + Ям
/(OpLo
RjiRm
где RM = Гр/п2, а гр вычисляется по (5.18).
При резонансе импеданс преобразователя является комплексной величиной; для генератора возбуждения преобразователь, таким образом, представляет активнореактивную нагрузку. Для компенсации реактивной составляющей параллельно обмотке подключают емкость С0, которая с индуктивностью L0 преобразователя образует контур, настроенный на частоту сор механического резонанса. Величина C0=l/coP2Lo-
КПД преобразователя рассчитываются по формулам
(1.18), (1.22), т]ам = 0,5^0,8.
Токи (см. рис. 5.5) намагничивания /н (создающий переменный магнитный поток), рабочий /р (обусловливающий механические колебания стержня) и потерь /п (обязанный расходу энергии на вихревые токи и гистерезис), протекающие через излучатель на резонансной частоте, рассчитываются по формулам
/
н
и
copL0
Л>
и
Ru
и
Rn
(6.23)
190
Эффективное значение переменного тока при резонансе
< = Vn. + (K + >,r-
(6.24)
Полный ток, протекающий через обмотку излучателя, включает еще ток поляризации
где В0, Н0 — индукция, напряженность поля поляризации; р(0)— абсолютная магнитная проницаемость материала стержня при В = Во, Я = Я0.
Полный потребляемый ток, нагревающий обмотку (и сердечник)
Сечение провода обмотки определяется по допустимой плотности тока. Учитывая хорошие условия охлаждения обмотки (при омывании ее водой), можно принимать плотность тока равной 5—10 А/мм2.
Режим приема. Заданы величины: резонансной частоты /р, раствора главного лепестка ДН 20о или 20о,т в двух взаимно перпендикулярных плоскостях, чувствительности vP при резонансе.
Величина vp, как это следует из формулы (5.20), зависит от напряженности Я0 поля в сердечнике приемника, поскольку от Но зависит величина магнитострик- ционной постоянной а. В приемниках поле Я0 получают не путем пропускания постоянного тока по обмотке, а за счет остаточного намагничивания сердечника. Для этого по обмотке пропускают кратковременный импульс тока большой силы, сердечник намагничивается и полученное таким образом остаточное намагничивание обеспечивает необходимую чувствительность приемника. Такой способ поляризации значительно упрощает работу приемной антенны. При этом, однако, величина а оказывается меньше оптимальной. По опытным данным для приемника из никеля можно принять а =(0,5—0,6) (см. табл. 5.1).
По заданному значению чувствительности vp [формула (5.20)] определяют число витков N на одном стержне. Если полученное число витков не размещается
(6.25)
2ji(o)W 2N
(6.26)
191
в окне, надо переходить к другому штампу пластины или использовать провод с более тонкой изоляцией.
Частота сор' электромеханического резонанса определяется из уравнения (5.19).
Сердечник преобразователя состоит из тонких кольцевых пластин с отверстиями, через которые пропускаются витки обмотки. Отверстия располагают ближе к наружному или внутреннему контуру, чтобы заметно не увеличить сопротивление магнитопровода и не уменьшить объем активного материала.
Высота цилиндра определяется заданной направленностью в осевой плоскости [формулы (2.10) и (2.11)].
Средний радиус кольца находят из условия резонанса ненагруженного кольца — формула (5.24).
Частота fp механического резонанса нагруженного кольца определяется так же, как в случае пьезокерамического кольца (§ 6.3).
Режим излучения. Акустическая мощность на резонансной частоте РР = РУД. р S, где Руд. Р^РУД. Доп— допустимая удельная излучаемая мощность приведена в табл. 6.1.
Максимальное значение переменной магнитной индукции, необходимое для обеспечения заданной мощности и определяемое из выражения (5.28), не должно превышать величины В™ Доп. Если Вт>ВтАош то надо уменьшить удельную мощность излучения.
Мощность электромагнитных потерь
где V=2nah8 — объем магнитопровода; ап — коэффициент суммарных потерь.
Мощность механических потерь
Механическая мощность Рм. Р и полная электрическая мощность Рэ. р, потребляемая излучателем на частоте /Р;
Цилиндрический преобразователь
р,
а*
192
Частотная зависимость акустической мощности (прй постоянной движущей силе, т. е. при u/f = const) определяется выражением
Яя=-
аср2 (В1
о; -Пр
<N2(pc)BS [1 -Ь- Q2 (///р — /р//)2] \ /
где а0) = 1—(1 — а/ар)г)р, а — коэффициент активного сопротивления излучения (см. рис. 69, a); Q — механическая добротность, рассчитываемая в области резонанса по формуле (4.51).
Полоса пропускания в области резонанса рассчитывается по формуле (4.52), а вне этой области — по формуле
доз (pg)B g/p <WP
2 Л/ =
pc6i]p Y1 + mjm Q Y1 + tnjm
Механическое сопротивление преобразователя, приведенное к электрической стороне, равно
ZM = zf2N2/(p2 (В0),
где z~r [l + iQ(f/fp—f/fp)]; г —по формуле (4.49).
На резонансной частоте приведенное активное механическое сопротивление RM. р = ар (рс)в s/n2r\v = а2/Рм. р. Статическая индуктивность излучателя равна
L0 = \is Ы2Ш2тса.
Электрический импеданс излучателя определяется выражением (5.22); при резонансе импеданс равен
R2 + alLl
+ i-
*4Lo
p о
ГДС R —Rn. pRm. р/ (Rn. р + Ru. р) •
Электромеханический КПД при резонансе вычисляется по формуле (1.18) и равен
1 4
Rm. р
—1
1 1
Rn. р _
=.
2 (рс)в опа?
— 1
бйрфЧбо) J
193
Эффективные значения токов при резонансе
у ^э. п. р аопи '
и зхЛ^2/рб/г
^м. р __ ф2 (В0) Нр и
“ (р^)в^ЛГ2 ‘
Полный ток, нагревающий обмотку, равен
i=Vn+'i+('■+',)*,
где I0 = 2naH0/N=2naB0/ii{0)N — ток поляризации.
Режим приема. По заданной чувствительности vP [формула (5.32)] на частоте резонанса определяют необходимое число витков.
Обмотка должна размещаться на внутренней стенке преобразователя в один слой. При необходимости можно несколько уменьшить толщину стенки.
Частотная зависимость чувствительности рассчитывается по формуле (5.34), чувствительность на низких частотах — по формуле (5.33).
* Н. р ■
(OpLo
^р. р — ■
Контрольные вопросы и задачи
1. По каким причинам удельная акустическая мощность излучателя не должна превышать допустимую?
2. В каких случаях необходимо секционировать стержневой пьезоэлектрический преобразователь?
3. Что такое армирование преобразователя, когда оно применяется?
4. Как выбирают промежуток между центрами элементов в дискретной антенне?
5. С какой целью производят акустическое экранирование антенны? Как оно выполняется в стержневых и цилиндрических антеннах?
6. В пьезокерамическом стержне размерами 40X10X10 мм, набранном из 10 пластин ЦТС-19, используется продольный пьезоэффект. Какое напряжение надо приложить к электродам, чтобы излучаемая акустическая мощность при резонансе была 2 Вт? Акустико-механический КПД принять равным 0,7.
Ответ: 40 В.
7. Цилиндрический преобразователь из пьезокерамики ТБК-3 излучает на резонансной частоте 44 кГц. Какую акустическую мощность он создает при подведении напряжения 100 В, если длина цилиндра втрое больше его среднего радиуса. Акустико-механический КПД принять равным 0,75.
194
Указание: коэффициент активного сопротивления ар определите по графику, приведенному на рис. 6.9, а, предварительно рассчитав аргумент /гра для воды.
Ответ: 6,5 Вт.
8. Рассчитайте чувствительность цилиндрического приемника с размерами а =1,6 см, 6 = 0,25 см, h = 4,8 см, изготовленного из пьезокерамики состава НБС-1. Приемник работает на частоте электромеханического резонанса и его акустико-механический КПД т]р = = 0,7. Влиянием соколеблющейся массы пренебречь.
Ответ: 140 мкВ/Па.
9. Сопоставьте чувствительности цилиндрического приемника из никеля НП-2Т на частоте резонанса и частоте втрое меньшей, если толщина стенки 6 = 0,25 а (а — средний радиус) и КПД т]р = 0,7.
Ответ: vp/vH.4~15,
ГЛАВА 7. ПРИМЕРЫ РАСЧЕТА
ГИДРОАКУСТИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ и антенн
В предыдущих главах изложены теория и методы расчета ГАП и антенн. В настоящей главе даны примеры применения полученных соотношений при проектировании ГАП и антенн, удовлетворяющих заданным техническим условиям. Помимо расчета основных параметров и характеристик антенн приведены также эскизы конструктивного решения.
§ 7.1. Плоская многоэлементная пьезокерамическая антенна
Задание. Спроектировать плоскую дискретную многоэлементную антенну с электрическим вращением ДН по следующим исходным данным.
1. Резонансная частота fp = 25 кГц.
2. Раствор главного лепестка ДН в азимутальной плоскости составляет 20о,7=1О°, в угломестной плоскости— 200,7 = 25°. Сектор обзора в азимутальной плоскости ±30°. Уровень боковых максимумов не должен превышать—12 дБ (25%).
3. Эффективное звуковое давление, создаваемое антенной на расстоянии 10 м в направлении главного максимума, р= 104 Па.
195
4. Режим работы импульсный с длительностью посылок ^и = 20 мс.
5. Потребляемая антенной от генератора возбуждения электрическая мощность 1,5 кВт, напряжение возбуждения ^^200 В.
6. Полоса пропускания Д/^0,05/р.
7. Чувствительность антенны в режиме приема vP^ ^ 1500 мкВ/Па.
8. Заглубление антенны — до 500 м.
Порядок расчета. 1. Приемоизлучающую поверхность системы выбираем в форме прямоугольника, поскольку требуется различная направленность в горизонтальной и вертикальной плоскостях. Для обеспечения обзора пространства в заданном секторе и ускорения процесса поиска цели антенна должна обладать многолепестковой ДН. Чтобы поворачивать акустическую ось при неподвижной антенне, т. е. сформировать компенсированную ДН в азимутальной плоскости, используем дискретную линейную группу преобразователей (см. § 2.3). Расстояние d между центрами преобразователей следует принять равным не менее половины длины волны Х0 в воде на рабочей частоте, чтобы ослабить взаимодействие между преобразователями.
Длина волны Xo = c/fp = 1500/25000 = 0,06 м.
2. Размеры Huh рабочей поверхности в обеих плоскостях определяем по заданным углам 00,7 = 5° и 0О,7 = = 12,5° раствора центрального лепестка. Используя формулу (2.11) или рис. 2.4, находим
(Н/Хо) sin 5° = 0,44; (h/X0) sin 12°30' - 0,44,
откуда # = 5Аю = 0,3 м — размер в азимутальной плоскости; h = 2Я0 = 0,12 м — размер в угломестной плоскости.
3. Выбираем преобразователь стержневого типа, обеспечивающий заданную относительную ширину полосы частот 5%. Расстояние между центрами преобразователей примем равным d=OfiXo = 0,036 м. Тогда число преобразователей в горизонтальном ряду составит
Nr = H/d = 0,3/0,036^8.
Промежуток между элементами устанавливается из технологических требований (размещения элементов крепления и электрического монтажа), примем его рав-
196
ным 3 мм. Размер, занимаемый преобразователями, будет 0,3—7-0,003^0,28 м; размер одного преобразователя
а = 0,28/8 = 0,035 м.
Для вертикальной плоскости примем расстояние d = 0,5A0 = 0,03 м, тогда число преобразователей в ряду составит
NB = h/d = 0,12/0,03 = 4,
размер, занимаемый активной поверхностью, будет (при таком же зазоре 3 мм) 0,12—3 • 0,003~0,11 м. Таким образом, размер одного преобразователя вдоль вертикальной плоскости равен
Ь = 0,11/4 = 0,027 м.
Определим резонансный размер преобразователя, имея в виду полуволновую колебательную систему.
Активный материал выберем по данным табл. 4.1 и 6.2. Исходя из требования эффективного излучения (п. 3) и приема (п. 7), а также меньшего расхода активного материала останавливаемся на пьезокерамике марки ЦТБС-3. Значения ее основных констант для продольного пьезоэффекта следующие:
р = 7200 кг/м3; Y$ = 0,75 • 10й Па; с3° = 4,12-103 м/с; 830 = 19,3 • 1(П9 Ф/м; d33 = 3,33-10-10 Кл/Н; k33 = 0,65; tg 8 = 0,012;
0Р = О,19-1О8 Па.
Из условия (4.34) механического резонанса при продольном пьезоэффекте (с помощью графика, приведенного на рис. 6.5) получаем / = 0,395ЯК = 0,395-0,165 = = 0,065 м (A,K = CsI7fp = 4,12- Ю3/25 • 103 = 0,165 м —длина волны в пьезокерамике).
Полученные размеры одиночного преобразователя ab = 35X27 мм отличаются от резонансного настолько, что связи колебаний по различным направлениям не будет, т. е. собственная частота колебаний пьезоэлемента в основном определяется размером I.
4. Расчет ДН выполняется по формуле R(ср) = = sin ф)/ф или по графику, представленному на рис. 2.4, при этом аргументами функции будут ф! = 5тг sin 0 ф2 = = 2ttsin0. Эти ДН показаны на рис. 7.1.
197
Для расчета ДН дискретной базы элементов надо использовать формулу (2.32), в которой функцию Fo(0) следует рассчитывать по формуле (2.34). Компенсированная ДН изображена на рис. 7.2. Из сравнения диаграмм при 0к = 30° и 0К = О° видно, что при электриче-
0 10 20 30 40 50 60 70 80 0°
Рис. 7.1. ДН многоэлементной плоской антенны.
/ — в горизонтальной плоскости; 2 — в вертикальной плоскости.
ском повороте ДН ее острота несколько понижается, а вследствие влияния направленности одиночного элемента незначительно уменьшается главный максимум.
5. Рассчитаем акустическую мощность антенны и отдельного преобразователя.
Согласно равенству (2.43) акустическая мощность излучения Р& = 4лг2р2/(qc)bK0; здесь р= 104 Па, г =10 м, (рс)в= 1,5 • 106 Н'С/м3. КОК можно определить по фор-
198
о
О,
199
'ис. 7.2. Компенсированная ДН антенны в горизонтальной плоскости.
муле (2.47), пригодной в случае немалых волновых размеров рабочей поверхности антенны (Я = 5Я, h = 2X). За излучающую (приемную) площадь следует принять не фактическую площадь S = Hh, а действующую площадь 5Эфф, которая меньше S за счет поворота ДН. Горизонтальный размер при 0 = 0К становится равным #cos0K, так что 5Эфф = ЯЬ cos 0К. Приняв наибольшее значение 0К = ЗО°, получим
^эфф = 0,3-0,12 cos 30° = 0,031 м2;
Ко = 4jt'0,031 =34,4я « 108;
0 0,Об2
Апг2р\\ _ Ю2.(10у.(0,06)2 = 774 Вт (рс)в-4л5эфф 1,5-106 - 0,031
Так как число преобразователей в антенне NTNB = = 8-4 = 32, то на один преобразователь приходится акустическая мощность
Р а
NrNB
774
32
24 Вт.
Удельная акустическая мощность
, р' О л
Ра уд = —= = 2,5 • 104 Вт/м2 = 2,5 Вт/см2.
*УА ab 0,035*0,027
6. С точки зрения кавитационной прочности воды удельная мощность 2,5 Вт/см2 вполне допустима; при заданной длительности импульса 20 мс порог кавитации больше 5 Вт/см2 (см. табл. 6.1).
Проверим допустимость удельной мощности по механической прочности преобразователя. Согласно выражению (6.2) и таблицы § 6.1 динамические напряжения, возникающие в пьезокерамике, равны
а - 26,7 * 103 * 1/2,5 * 104 - 4,2 • 106 Па.
Эта величина в 4,5 раза меньше максимального напряжения растяжения, которое выдерживает состав ЦТБС-3 (см. табл. 4.1).
7. Напряжение возбуждения, необходимое для излучения на резонансной частоте удельной акустической мощности 2,5 • 104 Вт/м2, определяем из формулы (4.36)
ц V{&)ВЛР' Л СНв^а-уд
2пг\р 2пг)р
200
Стержень без накладок с торцевыми электродами при продольном пьезоэффекте имеет коэффициент трансформации (4.24). Подставим численные значения постоянных и размеров:
п = 3,33 • 10"10 • 0,75 • 1011 • 9,45 ■ 10~4/0,0б5 = 0,36 Кл/м.
КПД примем т]р = 0,6. Коэффициент ар=1. Такие условия можно считать выполненными, поскольку волновые размеры поверхности антенны немалые и каждый преобразователь полностью нагружен.
Для искомого напряжения получаем
9,45-10~4]^ 1,5* 106-2,5‘104
2п-0,6
152
п
152
0,36
423 В.
Эта величина превышает допустимую заданием (200 В). Поэтому увеличим коэффициент п путем секционирования. Пьезокерамический стержень склеим из двух брусков вдвое меньшей длины //2 = 0,065/2~0,032 м. Тогда, как показано в § 4.2, значение п увеличится вдвое, т. е. nc = 2n = 0J2 Кл/м. Соответственно напряжение возбуждения также уменьшится в два раза и будет 210 В.
8. Каждый элемент антенны должен крепиться по нейтральному (центральному) сечению стержня. Для этого между двух брусков, образующих пьезокерамический стержень, вклеивают тонкую металлическую пластинку, как показано на рис. 6.15. Пластинка в составе колебательной системы изменяет ее резонансную частоту на величину А/р, равную согласно [7]
Д£ Гпл^пЛ
2 (/пл — $пл) /пл
где сПл — скорость звука в стержне, изготовленном из материала пластинки; 6ПЛ — толщина пластинки; /пл — резонансный размер стержня из материала пластинки на частоте /р резонанса пьезокерамического стержня.
Выбираем пластинку толщиной 1 мм из титанового сплава ВТ-1, для которого скорость сПл = 5250 м/с. Определяем /пл, рассматривая титановый стержень как полуволновую систему, тогда
/„л = cJ2fp = 5250/2 • 25 • 103 = 0,105 м.
8 Г. М. Свердлин
201
Подставим численные значений в выражение Д/р и получим
А/р =
5,25- Ю3-1 - 10~8 2(0,105 —0,001).0,105
= 240 Гц.
Для
Учитывая это изменение (уменьшение) частоты, находим длину волны в керамике
К = '
/р — Д/р
4,12-Ю3 25000 — 240
0,166 М
и соответствующий размер пьезокерамического стержня / = 0,395А,К = 0,395-0,166 = 0,065 6 м.
Как видим, изменение частоты на 240 Гц практически не сказывается на резонансном размере пьезоэлемента.
При проверке параметров пьезоэлементов необходимо регулировать их резонансные частоты, так как измеренные частоты не всегда совпадают с расчетными значениями. Для этой цели к торцам стержней приклеивают накладки толщиной несколько (2—3) миллиметров, предварительно укоротив пьезокерамические стержни на 1—2 мм. Шлифованием накладок достигают требуемой резонансной частоты. Материал накладок и пьезокерамика должны иметь близкие значения коэффициента линейного расширения. В противном случае будет нарушена монолитность колебательной системы и, как результат, изменится резонансная частота и снизится эффективность, а при быстрых изменениях температуры возможно разрушение преобразователя.
9. Изменения резонансного размера I пьезокерамического стержня при укорочении на А/ и замене изъятой части керамики металлическими накладками толщиной /ш очевидно, не должны изменять основного резонанса, т. е. размеры (/ — Д/) и /н должны удовлетворять условию механического резонанса:
(рс)к
рс
Е
/2я/рП , 2я/р (/ — А/) \ с /н 2 сЕ
Уменьшим общий размер стержня на Д/ = 2,6 мм, тогда V — I — 6ПЛ = 0,065 6 — 0,001 = 0,064 6 и Г —Д/ = 0,064 6 —
202
—0,002 6 = 0,062 м. Подставив численные значения известных величин, получим уравнение
4,5-5,25 ■ /360-25-10-3 7,2-3,22 t§\ 5,25
О
= ctg
Н
180-25 62-10—3 \° 3,22 )
ИЛИ
tg (1,714/)н - 0,98 ctg 86,6° - 0,058 6.
По таблице тангенсов находим 1,714 /н = 3,35 откуда толщина накладки /н=1,96^2 мм.
Используя накладки толщиной 2 мм, получаем окончательный размер I одного пьезостержня, составленного из двух секций-брусков каждый длиной
= бпл—/н = 0,032 8—0,000 5—
—0,002 ^ 0,03 м.
Уточним значения коэффициента электромеханической трансформации и напряжения возбуждения
Пс = d33 Y3 -'у-- = 3,33-10-10 -0,75-1011 х
X
9,45-10~4-2 0,06
= 0,78
Кл/м;
и
152
«с
152
0,78
195 В.
10. Механическая добротность преобразователя [формула (6.11)].
Масса накладки тн= (р/Л)н = 4,5-103-2- 10_3 • 9,45Х XIО-4 = 8,5-10-3 кг.
Масса одной секции стержня и половины крепящей пластинки
т = 0,5рГ Л + (0,5р8Л )пл = (0,5 • 7,2 • 103 • 0,06 + 0,5 • 4,5 X X 10s-1-10-3)-9,45-10-4 = 0,204 + 0,002 = 0,206 кг.
Отношение волновых сопротивлений накладки и стержня
q = (рс)н/рс = 4,5 • 5,25/7,2 ■ 3,22 = 1,02.
8* 203
Волновой аргумент (kl) „ = 2я • 25 • 103 • 2 • 10~3/5,25 X XI О3=0,06.
Подставим значения величин в (6.11) с учетом (6.12)
Q
2я-25-108-0,6 1,5-10«-9,45-10-*
[8,5 • 10-3 + 0,206 (1 +1,04 • 0,003 6)] =
= 66,5 • (0,008 5 + 0,207) = 14,2.
11. Относительная ширина полосы преобразователя (и антенны)
-^=-L=-L_ = 0,07 /р Q 14,2
и ширина полосы (резонансной кривой)
2А/ = 0,07 • 25.103 = 1750 Гц.
12. Электрический импеданс (см. § 4.2) рассчитаем по отдельным составляющим на частоте резонанса. Активное сопротивление излучения
г, = — (рс)в Л = 0,25 • 1,5 • 10е • 9,45• 10-4 = 0,35 • 103 кг/с.
4
Активное механическое сопротивление
г=-^— = 0,35-103/0,6 = 0,59• 103 кг/с.
4Р
Активное механическое сопротивление, приведенное к электрической стороне (динамическое сопротивление),
D г 0,59-103 ~
RM = = — =970 Ом.
п\ 0,782
Емкость пьезоэлектрического стержня, составленного из двух брусков длиной Г/2 (расстояние между электродами) каждый,
г^аЬ-2
142
Величина диэлектрической проницаемости заторможенного пьезоэлектрического стержня [формула (4.11)]
833= 19,3-10_9 (1—0,652) = 11,15-10-9 Ф/м. Статическая емкость
11,15-10—®-9,45-10—«-2
Сп =
0,03
:700*10-12 Ф = 700 пФ.
204
Эквивалентное сопротивление диэлектрических потерь [формула (4.26)]
Rn = (2я- 25 • 103.7 • 10-10 • 0,012)-1 = 0,76 • 10е Ом.
Полное активное сопротивление
R
0,76-106.970 0,76-106 970
« 970 Ом.
Поскольку сопротивления RM и Rn включены параллельно и Rn^Ru, то мощность диэлектрических потерь по сравнению с механической мощностью пренебрежимо мала. Следовательно, электромеханический КПД г]эм~1.
Емкостное сопротивление
° шрС0 1-2я-103 • 25 * 7 -10—10
Полное электрическое сопротивление (импеданс)
z _ RMXC __ -970-9,1-№ р tf„-f _ 970 — 9,1-104 0,97 + 9,17 (80,2 —8,5г)-Ю3
Х 0,972 + 9,12 _ 83,6
Модуль электрического импеданса
— 8,82-Ш X (0,96—0,10-Ю3.
Zp | = 103]/ 0,962 + (0,1)2 = 965 Ом.
13. Коэффициент полезного действия Лаэ = ЛэмЛам = ^ = 0,6.
14. Электрическая мощность, потребляемая антенной от генератора,
Рэ = -^- = —= 1290 Вт
Лаэ 0,6
не превосходит 1,5 кВт, как это оговорено заданием.
Каждые четыре преобразователя вертикального ряда антенны образуют одну секцию, общее число которых равно восьми. При параллельном соединении преобразователей секции параметры одной секции следующие:
— напряжение возбуждения ц=195 В;
— акустическая мощность 4Ра =4*24 = 96 Вт;
— электрическая мощность 4Ра7'Паэ = 9610,6 = 160 Вт;
205
S06
Рис. 7.3. Эскиз конструкции плоской пьезокерамической антенны.
— активное (параллельное) сопротивление R/4 = = 970/4 = 242 Ом;
— электрическая емкость 4С0 = 4 • 700 = 2800 пФ.
15. Для расчета чувствительности преобразователя
(и антенны) в режиме приема необходимо предварительно определить частоту электромеханического резонанса fP\ Подставим численные значения величин в условие резонанса (см. табл. 4.3)
4,5-5,25
7,2-4,12
tg
, 2"V
= ctg
Р С \ С !
Н
( 2-180/р.2-10—3
_У_,
5,25-103 /
я/р/
180/р-0,0б
4,12-103
ИЛИ
0,796 tg (0,137/р)° = ctg (2,62/р)°,
где /р измеряется в килогерцах.
Решая это уравнение графически, получим /р = = 33 кГц.
Чувствительность рассчитываем по формуле [с учетом cos(&/)H~ 1]
2псцр- 10е = 2-0,78-0,6-10° = 4300 мкВ/Па.
Р (рс)в »;С0 1,5-10в.2я-33-103-7.10-10
Электромеханическая добротность
Q° = _8 =■ = 19 5.
/1 — 0,652 0,76
Полоса пропускания в режиме приема
2Аf = fp/QD = 33/19,5 = 1,7 кГц
практически совпадает с шириной полосы в режиме излучения (см. п. 11).
16. Эскиз конструкции антенны представлен на рис. 7.3.
§ 7.2. Цилиндрическая
пьезокерамическая антенна
Задание. Спроектировать приемоизлучающую антенну станции гидроакустической связи по следующим данным.
1. Резонансная частота /р=15 кГц.
207
2. Направленность в горизонтальной плоскости отсутствует. В вертикальной плоскости ДН с раствором главного лепестка 20о,7=1О° должна ориентироваться под углом 45° к поверхности антенны.
3. Эффективное звуковое давление, создаваемое антенной на расстоянии 1 м в направлении главного максимума, р^Ю4 Па.
4. Режим работы импульсный с длительностью посылок ^и = 20 мс.
5. Напряжение возбуждения w^200 В.
6. Полоса пропускания Д/^0,1 /р.
7. Чувствительность антенны в режиме приема vp^500 мкВ/Па.
8. Заглубление антенны — до 10 м.
Порядок расчета. 1. Рабочую поверхность антенны выбираем в форме цилиндра в связи с требованием ненаправленности в горизонтальной плоскости. Кроме того, цилиндрический преобразователь имеет сравнительно (со стержневым) широкую полосу пропускания.
Для обеспечения поворота главного максимума в вертикальной плоскости на 45° относительно нормали к оси антенну выполним в виде дискретной линейной группы из отдельных цилиндрических преобразователей с использованием фазового компенсатора (см. § 2.3).
2. Высоту (длину) Я антенны определим по заданному углу раствора ДН в вертикальной плоскости. Согласно формуле (2.11)
(tfA0)sin5° = 0,44.
Длина волны Яо в воде на резонансной частоте равна Я0 = c/fv = 1500/15 000 = 0,1 м.
Высота
Я = 0,44Vsin 5° = 0,044/0,087 « 0,5 м.
3. Расстояние d между центрами преобразователей примем равным 0,5Яо, т. е. d = 0,5 «0,1 = 0,05 м. Тогда число преобразователей
208
N = Hid = 0,5/0,05 = 10.
Чтобы компенсированная ДН не имела добавочных максимумов, должно выполняться условие (6.4) : d/%^ =^9/10(1+sin 45°) =0,53; это условие обеспечивается.
4. ДН в вертикальной плоскости. В соответствии с теоремой умножения [формула (2.32)] имеем
Р __ sin [ (jtftAp) sin 9] sin [ (Nitd/hp) sin 9]
(nh/K0) sin 0 ’ N sin[ (jtdA0) sin 0]
где h — размер одного элемента.
Между элементами располагаются шайбы-прокладки (см. рис. 6.17) толщиной 2—5 мм, поэтому вертикальный размер отдельного преобразователя составит h—А. Приняв Д = 4 мм, получим й = 46 мм.
Положения минимумов (нулей) ДН определяются из условия (Arjw/Ao)sin0 = mjt или 5sin0 = m, где т=1, 2, ..., 5; 0О= 11,5°; 02 = 23,5°; 04 = 37°; 06 = 53°; 08 = 90°. Положения побочных максимумов находятся из условия 5 sin 0= (2т +1) /2, где т= 1, 2, 3, 4; 0i = = 17,5°; 0з = ЗО°; 05 = 44,5°; 07 = 64°.
Компенсированная ДН рассчитывается по формуле (2.34), где 0К=45°, Nnd/Ik0 = 5n. Положения нулей: —63° 15', —43°527, —23°087, —17°027, —5°207, + 6°087, 17° 53', 30° 287, 65° Об7. За счет направленности (хотя и слабой) одиночного элемента главный максимум будет меньше единицы, а именно 0,69.
5. Коэффициент осевой концентрации антенны, имеющей большие волновые размеры (в нашем случае Я=5Яо), можно определить по формуле (§ 2.4)
Ко = 2#/Яо = 10.
6. Для определения поперечных размеров преобразователя необходимо выбрать активный материал. Стремясь к наименьшему расходу активного материала и к меньшим габаритам, выберем пьезокерамику марки ЦТСНВ-1 (см. табл. 4.1 и 6.3). Значения ее основных констант:
р = 7200 кг/м3; cf = 2900 м/с; rfai= 1,77.10-ю Кл/Н;
(Тр
Y\ =0,62- 10м Па; взз= 18,6-10-9 Ф/М; kzi = 0,34; tg б = 0,019;
= 17 МПа.
209
Средний радиус а цилиндра определяем из равенства (4.40)
2,9-103 2я-15* 103
0,03 м.
Принимая толщину 6 = 0,23а = 0,007 м, находим радиусы
гг = 0,03 — 0,003 5 ж 0,027 м; г2 - 0,03 + 0,003 5 - 0,033 м.
7. Акустическая мощность. Подставим численное значение величин в формулу (2.43), получим
Ра = 4я(104)2/1,5-106-10 = 84 Вт.
С учетом уменьшения действующей поверхности антенны из-за электрического поворота ДН (5Эфф = = S cos 0К = 0,707 S) потребная мощность излучения
будет
Ра = 84/0,707 -118 Вт.
Акустическая мощность Р'а одного преобразователя
л; = 118/10= 11,8 Вт.
Излучающая площадь (по среднему радиусу) одного преобразователя
S = 2n- 0,03 • 0,046 - 0,008 67 м2.
Удельная акустическая мощность
Р'а уд= 11,8 =1360 Вт/м2= 0,136 Вт/см2.
'У 0,008 67
Эта величина допустима — кавитация не наступит (см. табл. 6.1). Надо еще проверить механическую прочность. Динамические напряжения, возникающие в пьезокерамике, равны (§6.1)
а = 21,5-103]/0,136* 104 = 0,8-106 Па-0,8 МПа.
Как видим, и по механической прочности удельная мощность 0,136 Вт/см2 вполне допустима, так как предел прочности на растяжение у состава ЦТСНВ-1 в 20 раз больше.
210
8. Напряжение возбуждения, необходимое для обеспечения излучения удельной мощности 1,36 • 104 Вт/м2 [формула (4.54)],
Vау (рс)вР
Р- УД
а.
Безразмерные коэффициенты а и |3 активного и реактивного сопротивления излучения пульсирующего цилиндра находим по графикам, приведенным на рис. 6.9, при а/Н = 0,06 и &а = 2яа/Ло= 1,9 : ар« 1, |3Р = 0,3. Акустико-механический КПД принимаем т]р = 0,7. Тогда
1/^ 1,5-106*0,136* 104*0,03 D
и = ——- -— =176 В.
1,77-10“10-0,62-1011 -0,7
Полученное значение и удовлетворяет заданию.
9. Уточним резонансный размер, найденный для нена- груженного кольца.
Отношение соколеблющейся массы ms к массе т кольца равно
mjm = р (рс)в/2я/рр6.
Сначала подставляем значение р = 0,3 и получаем mjm = 0,3-1,5-106/2я/р • 7200 = 0,007 = 0,14-104//р.
Отношение частот /0*//Р = У1 +0,14- 104//р. Принимая /р= 15 кГц, находим /о* = 15,7 кГц. Для получения такой резонансной частоты средний радиус должен быть равен а* = 2,9- 103/2я-15,7-103 = 0,029 м. Очевидно, можно оставить значения а = 30 мм, 6 = 7 мм.
Добротность колебательной системы рассчитаем по формуле (4.50), приняв ар=1
7,2-2,9-0,7-7 в Д517__24 4 1,5-30 *15
Следовательно, ширина полосы будет А/ = /P/Q = 15/2,4 = 6,25 кГц.
10. Электрический импеданс. Рассчитаем составляющие импеданса на частоте резонанса.
Коэффициент электромеханической трансформации
п = 2nd31Yfh = 2я • 1,77 • 10-10 • 0,62 • 1011 • 0,046 = 3,17 Н/В.
211
Активное сопротивление излучения
г8 = (рс)ъ S = 1,5.106.0,008 67 = 1,3 • 104 кг/с. Активное механическое сопротивление
г = rs/riP = 1,3-104/0,7 = 1,86-104 кг/с.
Динамическое сопротивление
= —= 1’86'104 = 1850 Ом. м п2 3,172
Электрическая емкость пьезокерамического кольца
_ «&(1— klx)2nah
18,6-10-9 (1 — 0,342) -2я-0,03-0,046
0,007
= 20,4-10-9 Ф.
Эквивалентное сопротивление диэлектрических потерь
Rn = (2я/рС0 tg 6)"1 = (2я • 15-103 - 20,4 • 10-9- 0,019)-1 =
= 27,4-103 Ом.
Полное активное сопротивление
R
27,4-1,85
29,25
= 1,73 кОм.
Так как Ru^$>Rm> то практически мощность диэлектрических потерь пренебрежимо мала по сравнению с мощностью механических колебаний и КПД г]Эм~1. Емкостное сопротивление
= — i (2п -15 -103 - 20,4 -10-9)-1 = — 520/ Ом.
11. Коэффициент полезного действия
Лаэ ЛэмЛам 1 ‘ ^>7 0,7.
12. Электрическая мощность, потребляемая от генератора:
— одним преобразователем
Р; = _1Ы= 16,85 Вт;
0,7
212
— всей антенной при параллельном соединении преобразователей
Рэ= 118/0,7 =168,5 Вт.
13. Токи преобразователя при резонансе:
— активная составляющая
IR -- u!R = 156/1730 = 0,09 А;
— реактивная составляющая
/* = и • 2я/рС0 = 156/520 « 0,3 А;
— суммарный ток
/ = ]/ 0,09а + 0,32 = 0,31 А.
14. Чувствительность в режиме приема имеет максимальное значение на частоте /'р, определяемой соотношением (4.58):
/р - 15/]/1 —0,342 = 15,95 кГц.
Чувствительность определяется выражением (4.61):
vp =
- = 930 мкВ/Па.
1,5- 10е-18,6-10—9 0,88-0,03-2я-15,95-103
Чувствительность на низких частотах [формула (4.63)]:
1,77-10-10-0,03-10«
18,6-Ю-9
364 мкВ/Па.
15. Электромеханическая добротность [формула (4.59)]
Qd = 2,7/V1 — 0,342 = 2,7/0,94 = 2,87.
Ширина полосы в режиме приема
Д/ = fp/QD = 15,95/2,87 = 5,55 кГц.
16. Антенна (см. рис. 6.17) состоит из десяти соосно расположенных сплошных пьезокерамических колец. Описание ее дано в § 6.2. По заданию антенна используется при заглублении до 10 м, поэтому отпадает надобность в компенсаторе гидростатического давления.
213
§ 7.3. Плоская магнитострикционная антенна
Задание. Спроектировать приемоизлучающую антенну для эхолота по следующим исходным данным.
1. Резонансная частота /р = 80 кГц.
2. Направленность в горизонтальной (азимутальной) плоскости оценивается раствором главного лепестка на уровне 0,7 (по звуковому давлению) 20о,7=1О°, в вертикальной (угломестной) плоскости — 20о,7 = 20°. Допустимый уровень боковых максимумов—13 дБ (22%).
3. Режим работы импульсный, длительность импульса посылок ^и=5 мс, период следования импульсов Г = 0,1 с.
4. Амплитуда звукового давления, создаваемого антенной на расстоянии 10 м, должна быть не менее Рт= 104 Па.
5. Чувствительность в режиме приема при резонансе не менее vP=150 мкВ/Па.
6. Потребляемая электрическая мощность РЭ.Р^ <1,0 кВт.
7. Напряжение возбуждения ат<300 В.
8. Заглубление антенны — до 10 м.
Пор ядок расчета. 1. Приемоизлучающая поверхность антенны должна обеспечивать разную направленность в двух взаимно перпендикулярных плоскостях, поэтому выбираем эту поверхность в форме прямоугольника с размерами Я и Л.
Волновые размеры Н/к и h/k поверхности определяем из формулы (2.11) или по графику, представленному на рис. 2.4:
Н/к = 0,44/sin 5° = 0,44/0,087 = 5,06; hlk = 0,44/sin 10° = 0,44/0,174 = 2,53.
Рассчитав длину волны в воде на частоте резонанса Я = 1500/80 • 103 = 0,018 7 м, находим размеры рабочей поверхности антенны в азимутальной плоскости Я = 5,06Я = = 0,095 м, в угломестной плоскости Я = 2,53Я~ 0,048 м.
2. По значениям волновых размеров рассчитываем характеристики направленности в обеих плоскостях. Расчет можно провести по формуле (2.9) или используя график функции (sin ф/ф (см. рис. 2.4); аргумент
214
функции ф = 5,06я sin 0; 2,53nsin0. Задавая различные значения угла 0 в пределах от 0 до 90°, определяем произведения 5,06 sin 0 и 2,3 sin 0, а по ним с помощью графика получаем искомые значения /?(0).
Диаграммы направленности антенны представлены на рис. 7.4. Из графиков видно, что величина побочных
Рис. 7.4. ДН антенны эхолота в горизонтальной (кривая 1) и вертикальной (кривая 2) плоскостях.
максимумов не превосходит 22%, как это и требуется заданием.
3. Магнитострикционный преобразователь с прямоугольными накладками представляет собой колебательную систему стержневого типа. В качестве активного материала выбираем никель как наиболее употребительный и достаточно полно удовлетворяющий комплексу основных требований. Постоянные никеля марки НП-2Т (см. табл. 5.1):
Кв = 21,5- Ю10 Па;
р = 8900 кг/м3;
ропт/р0 = 35; #о = 1200 —1600 А/м;
ак = 1,9-107 Н/Вб.
св = 4900 м/с; &зз — 0>26;
215
4. Определим штамп пластины. В соответствии с рекомендациями (см. § 6.5) расчет стержневой колебательной системы надо вести на частоту большую, чем /у, в нашем случае расчетная величина частоты составит fp + 0,15fp = 92 кГц.
Принимаем отношения площадей сечения и стержня, а также размеров стержня и накладки в направлении колебаний равным 2, т. е. q = SJmA = 2y ///н=2. Из условия (6.14) механического резонанса (или по графику, представленному на рис. 6.20, кривая 2) рассчитаем размер стержня
ctg (я. 9,2.104//4,9 • 108) = ctg (92я//4,9) = 1,41.
По таблицам котангенса найдем (92я//4,9)°=35°; 92 • 180//4,9 = 35, откуда /=0,01 м.1 Следовательно, высота накладки равна /н=0,5/=0,005 м.
Общая длина /+2/н=4/н не должна превышать 0,4ЯН. Длина волны в материале равна
Размер 4/н=4 *0,005 = 0,02 м меньше, чем 0,4*0,053 = = 0,021 м.
В соответствии с условием (6.16) находим минимальное число стержней (окон)
Подставляя в равенства (6.15) значения fp и скорости с, определяем допустимые пределы для размеров b — ширины стержня, t — ширины окна и d — длины одной секции:
Поскольку общая длина преобразователя в горизонтальной плоскости равна 95 мм, при числе окон т — 8 продольный размер одной секции составит d=95/8^ ~12 мм. Но ширину окна t нельзя взять меньше 4 мм, тогда ширина стержня будет b = d—/ = 8 мм, что вдвое больше t и выходит за рекомендуемые пределы. Обычно 6^/, следовательно, надо увеличить число т. Примем
1 По графику на рис. 6.20 при q=2 находим lfv—960, откуда I=960/92 000 = 0,0104 м«0,01 м.
216
Ян = с//р = 4900/92 * 103 = 0,053 м.
6 = 1-*-7 мм, f = 2-*-4 мм; d = З-ь-11 мм.
т= 12, тогда ^ = 95/12~8 мм; 6 = 8—4 = 4 мм. Изменение размера Я на 1 мм (12-8 = 96) практически не скажется на характеристике направленности.
Штамп пластины: d= 8 мм, b = t=A мм, Я=96 мм, /= 10 мм, /н=5 мм.
5. Акустическая мощность излучателя рассчитывается по формуле (2.43).
В нашем случае Я> h> 2% и применение формулы (2.47) для расчета КОК вполне закономерно. Подставляя значения Я=5,06Я и h = 2,53^, получаем /Со ~ 160.
Излучаемая акустическая мощность при г = 10 м и ршо=Ю4 Па
р - 2^-lo2-(t°4)2 — 256 Вт. а 1,5-106-160
Удельная акустическая мощность
Ра уд = - 25^ - ■ = 5,56 • 104 Вт/м2 = 5,56 Вт/см2 уд 0,004 6
не превышает величину допустимой мощности, ограниченной кавитационной прочностью воды: при длительности импульса /и = 5 МС Руд. доп=10 Вт/см2 (табл. 6.1).
6. Магнитную индукцию в стержне находим из формулы (5.17). Имея в виду оптимальную поляризацию, принимаем а= 1,9*107 Н/Вб. КПД при резонансе принимаем г|р = 0,6. Подставляем известные значения величин
jj, 2/l,5.1Q..5.5liOLc003 т 2-1,9-10т0,60,816
Полученное значение вдвое меньше индукции насыщения. Максимальная величина индукции Вт = 0,042 Т значительно меньше предельно допустимой и обеспечивает работу преобразователя в линейном режиме.
Напряжение и возбуждения излучателя связано с магнитной индукцией равенством (5.8). Полагая wm=300 В, находим число витков на одном стержне
Д1 — ит 300 _ = 5 9^6
2nfvmABm 2я-8-104-12-0,048-0,004/2-0,03
где тА= 12 • 0,048- 0,004 = 2,3 • 10-3 м2 — суммарное се- чецие стержней.
217
7. Определим электрическую мощность, потребляемую излучателем от генератора возбуждения.
Механическая мощность излучателя
^ = ^4 = 266/0,6 = 427 Вт.
Для расчета мощности электромагнитных потерь воспользуемся опытными данными, представленными на рис. 6.21 и относящимися к никелевой ленте толщиной 0,1 мм. Из графика (для кривой 5 = 0,03 Т и f = 80 кГц) получаем коэффициент ап= 1,56 • 109 Вт/(м3*Т2).
Приведенный объем магнитопровода V=0,5 тА1экв, где эквивалентная длина /экв определяется по (6.18): /экв = 2 (10 + 5) + 2 (4 + 4) • 0,8 = 42,8 мм;
V = 0,5 • 2,3.10"3 • 42,8 • 10"3 = 0,49 • 10"4 м3.
Мощность электромагнитных потерь
P3.n = onB2mV= 1,56-109-(0,042)2-0,49-10-4 = 135 Вт.
Суммарная мощность, потребляемая излучателем,
Рэ = Рм + Рэ.п = 427+135 = 562 Вт меньше обусловленной заданием Рэ= 1 кВт.
8. КПД преобразователя
*)эм = = 0,76; г)аэ = 0,76 • 0,6 = 0,46.
obZ
9. Коэффициент электромеханической трансформации [формула 5.15)]
1,9.Ю7 2я-8-104-6
6,3 н/в.
10. Сопротивления преобразователя на резонансной частоте. Предварительно по формуле (6.19) рассчитаем статическую индуктивность
Lo
2-2,3-10-3-Зя-4я.10-7-62
0,0428
170-10-Т.
Индуктивное сопротивление
Х^ = 2я-8-104-170-10_6 = 850 Ом. Эквивалентное сопротивление электромагнитных потерь [формула (6.20)]
R
П
(2я-8-104)2-170-10~~6 2- 140я-IQ-7-1,56-109
^ 315 Ом.
Механическое сопротивление, приведенное к элек- рической стороне,
218
75 16
219
RM = rv/n2, а гр — по формуле (5.18): 1,5 * 106 * 0,0046
Rы
4(6,3)2-0,6(0,816)2
0,1 МО3 Ом.
Полное электрическое сопротивление (импеданс) преобразователя на резонансной частоте [формула (6.22)]
0,315 + 0,11
85/
315-0,11
29,3/
0,345 + 0,036/
: 8,8 + 84/.
Таким образом, эквивалентная последовательная схема преобразователя имеет составляющие импеданса
R, = 8,8 Ом; X = 84/ Ом.
Для компенсации реактивной составляющей необходимо к обмотке подключить (параллельно или последовательно) конденсатор емкостью
С0:
10е
0)pL0 4я2 (8* 104)2-170
= 2,33-10-8 Ф.
11. Токи преобразователя рассчитываем по формулам (6.23) — (6.26).
Ток намагничивания
212
2Я-8-104-170-10-6
= 2,48 А.
Рабочий ток
Ток потерь
/р = 212/0,11 -103 = 1,9 А.
/п = 212/315 = 0,68 А.
Ток поляризации при оптимальной напряженности поля Hq = 1500 А/м
Нр1ж
2N
1500-42,8-10-3
2-6
= 5,35 А.
220
Полный ток
12 — ^0 + + (^П + ^р)2 —
- К(5,35)2 + (2,48)2 + (0,68 + 1,9)® = 6,4 А.
Принимая допустимую плотность тока /= 10 А/мм2, получаем сечение провода (без изоляции) обмотки 5Пр = 0,65 мм2 и его 0 0,9 мм.
12. Чувствительность в режиме приема рассчитаем без учета изменения резонансной частоты, которое практически не отразится на значениях параметров преобразователя в связи с малой величиной коэффициента связи /г = 0,26. Принимая магнитострикционную постоянную a = 0,5aft = 0,5- 1,9-107 = 0,95 • 107 Н/Вб, согласно формуле (5.20) получаем
vp = 176-10-6 В/Па-176 мкВ/Па.
Это значение отвечает заданию. Если бы по заданной величине чувствительности vp=150 мкВ/Па мы находили требуемое число витков, то оно оказалось бы равным N^6. В противном случае понадобилось бы или увеличить число N и соответственно использовать провод с более тонкой изоляцией, или изменить штамп пластины. Тогда расчет следует провести заново.
13. Эскиз конструкции антенны представлен на рис. 7.5.
§ 7.4. Измерительный гидрофон
Задание. Спроектировать гидрофон для гидроакустических измерений, удовлетворяющий следующим требованиям.
1. Рабочий диапазон частот 100—70 000 Гц.
2. Неравномерность частотной зависимости чувствительности не более ±2 дБ.
3. Нижний предел измеряемых давлений /?min=l Па. Превышение полезного сигнала над шумами должно быть не менее 14 дБ.
4. Изменение чувствительности за счет направленности не должно превышать ±3 дБ.
5. Наибольшая глубина погружения гидрофона равна 5 м. Длина кабеля — не более 10 м.
221
Порядок расчета. 1. Наиболее пригодным для измерительных целей является пьезокерамический гидрофон с активным элементом в форме сферы. Такой гидрофон практически не обладает направленностью и в диапазоне частот ниже основного резонанса имеет малую неравномерность. Очевидно, чем больше чувствительность гидрофона, тем меньшую величину звукового давления можно измерить. Поэтому частоту резонанса /р следует выбрать не слишком далеко от верхней границы /в рабочего диапазона. С точки зрения получения меньшей неравномерности чувствительности интервал /р— /в не должен быть слишком малым.
2. Примем частоту резонанса равной /0=Ю0 кГц.
Далее следует выбрать активный материал. Исходя
из условия обеспечения максимальной удельной чувствительности на низких частотах (см. табл. 6.2), лучшим материалом является пьезокерамика ЦТС-19, также удовлетворяющая требованиям стабильности и линейности. Постоянные пьезокерамики ЦТС-19 приведены в табл. 4.1.
3. Размеры пьезоэлемента. Средний радиус а сферической оболочки, согласно (4.66), равен
где Уьс = 2,44 • 1011 Па; q = 7,3 • 103 кг/м3. Подставив численные значения, получим а = 9,2 мм. Толщину оболочки выбирают в пределах 0,1—0,2 а. Примем 6 = 1,6 мм, тогда наружный радиус /*2=10 мм, внутренний радиус /*1 = 8,4 мм.
Излучающая площадь
S = Anri = 4я (10~2)2 = Ап • 10-4 м2.
Масса оболочки
т = 4яра26 = 4я • 7,3 ■ 103(9,2.10~3)2 -1,6-10-3 =
= 39,5я*10-4 кг.
Механическая гибкость оболочки С„ = 114nY*6 =. 1 /4я • 2,44 • 10й • 1,6 • 10-3 = 0,64 • 10“9/я м/Н.
222
4. Чтобы учесть влияние соколеблющейся массы, вычислим аргумент
k0r2 = 2 nfQr2/c = 2п • 105 • 10"2/1,5-103 = 4,2.
По формулам (4.70) находим коэффициенты сопротивления излучения |30 = 0,23 и ао = 0,95.
Соколеблющаяся масса
ms = ро (pc)BS/2nf0 = 0,23 • 1,5 • 106 • 4.10~4/2 • 105 -- = 6,78* 10—4 кг.
Эквивалентная масса
ttl3KB = m + ms = 131-10-4 кг.
Частота механического резонанса при этой нагрузке
/р = /о Vт/тэкв = 105 Y124/131 = 0,974 • 105 = 97,4 кГц.
Вычислим для частоты /р волновой аргумент kvr2 = = 4,09 и коэффициент |3Р = 0,23. Как видим, практически нет разницы между значениями эквивалентных масс. Следовательно, можно остановиться на значении частоты /р = 97,4 кГц. ^
Частота /' электромеханического резонанса связана с частотой /р соотношением (4.69), в котором энергетический коэффициент электромеханической связи й2р =
= 4iYc /езз = (1,57• 10-10)2■ 2,44 • 10и/13,7• 10-9 = 0,44;
fp = fp/V 1 — k\ = 97,4/yT— 0,44 = 130 кГц.
Определим значения коэффициентов ар и |3р при частоте /р. Аргумент k'vг2 =2л• 130-103-10—2/1,5• 103 = 5,44; ар = 0,97: р' =0,178^0,18.
5. Статическая емкость пьезоэлемента [формула (4.67)]
Са = 4я • 13,7 • 10-® • (1 — 0,44) • (10-2)2/1,6 • 10-3 =
= 6,04-10-9 Ф.
6. Коэффициент электромеханической трансформации [формула (4.67)]
п = 4зх • 1,57• 10-10 • 2,44 1011 • 10~2 = 4,8 Н/В.
7. Вычислим значения величин, входящих в формулу (4.69) для чувствительности гидрофона, приняв акустико-механический КПД при резонансе г)Р = 0,7:
223
Расчет чувствительности
f, кГц
0,042-(1)
V 1+<2)2
a
Р
а(й
пуЮ*
1
2
3
4
5
6
7
0,1
0,004 2
1
0
0,004 2
0,3
1,26
1
0,042
1
0
0,042
0,3
1,26
5
0,21
1,02
0,042
0,20
0,33
1,2
10
0,42
1,08
0,15
0,36
0,41
1,07
20
0,84
1,31
0,41
0,49
0,6
0,735
30
1,26
1,61
0,61
0,49
0,74
0,44
40
1,68
1,96
0,74
0,44
0,83
0,33
50
2,1
2,33
0,82
0,39
0,89
0,23
60
2,52
2,71
0,86
0,34
0,92
0,17
70
2,94
3,10
0,90
0,30
0,95
0,13
аа = 1 — (1 — а/ар) т]р = 1 — 0,7 + 0,7а/0,97 = 0,3 + 0,72а; Юр = 2л-130-103 = 8,17-105; ms = p (pc)BS/2nf = р • 1,5 • 10е • 4 • 10~4/2f = ЗООр//; г = ашар (pc)BS/r]p = (0,97-1,5-10®-4я-10_4/0,7) аш = 2610аи; kr% = 2n- 10_2f/l,5-103 = 0,42-10-4/; (kr2f =0,175-Ю"8/2; ^экв=== 0,012 4 + /tzs, Q = <*>ptn3KB/r —
= 8,17- Ю5тэкв/2,61 • 103am = 313/пэкв/ат;
«р
= 1,57 • 10~10-2,44-1011-1,6- 10~3-0,7 = Q 256 • Ю~2 0,97-2,25-109-13,7-10_9-0,56
8. Расчетная формула частотной зависимости чувствительности приобретает вид г__ 0,061
/ашУ 1 + 17,5-10-4/2>< х 10*
V i+[«° (///;-/;//)]’ ’
где / измеряется в кГц; v — в мкВ/Па,
224
сферического гидрофона
Таблица 7.1
тЭКВ* ^°2
qd
130
f
-//130
О)-(Ю)
V i+(ii)2
(12)*(6)•(3)*(1)
V, мкВ/Па
8
9
10
11
12
13
14
2,5
26,1
1300
33 930
33 930
1018
60
2,5
26,1
130
3 393
3 393
1018
60
2,44
23,1
26
600
600
1012
60,3
2,31
17,7
12,9
228
228
1014
60,1
1,98
10,3
6,35
65,4
65,4
1005
60,7
1,68
7,10
4,10
29,1
29,1
1040
58,6
1,57
5,94
2,94
17,5
17,5
1134
53,8
1,48
5,20
2,22
11,5
11,6
1197
51,0
1,42
4,79
1,70
8,17
8,23
1240
49,2
1,38
4,54
1.32
5,98
6,07
1250
48,8
Результаты расчета сведены в табл. 7.1. График частотной зависимости чувствительности представлен на рис. 7.6. Как видно, наибольшая неравномерность в рабочем диапазоне частот составляет 20 lg (60,7/48,8) = = 1,9 дБ, что удовлетворяет п. 2 этого задания.
0,1 0,2 0,3 0,0 0,6 0,8 1,0 2 3 0 5 6 78910 20 30 00 60
0, кГц
Рис. 7.6. Частотная зависимость чувствительности сферического
гидрофона.
9. При наименьших значениях чувствительности Vmin = 48,8 мкВ/Па и звукового давления /?min=l Па напряжение холостого хода Ux.x = 48,8 мкВ. Так как уровень полезного сигнала превышает уровень шума на
225
14 дБ (в 5 раз), то напряжение шума (на входе усилителя) не должно быть больше ггш = 48,8/5— 9,8 мкВ.
10. Для оценки влияния кабеля, которым гидрофон соединяется с входом усилителя, рассчитаем выходной импеданс Z* гидрофона. На низких частотах величина Zi определяется главным образом емкостью С° свободного преобразователя. Чтобы экранированный кабель не уменьшал выходное напряжение гидрофона, емкость С° должна быть больше (например, в 5 раз) емкости кабеля Скаб. В нашем случае Са=езз 4я • а2/б = = 13,7• 10~9-4я(9,2• 10—3)2/1,6• 10-3 = 9,1 • 10-9 Ф. Следовательно, погонная (на единицу длины) емкость кабеля не должна быть больше Скаб// = 9100/5 • 10 = = 182 пФ/м.
Рассчитаем величину Z* на верхней частоте диапазона. Используя данные табл. 7.1, получим:
г = 2610-0,95-2480 кг/с; /?м = 2480/(4,8)2 = 108 Ом;
* = 2я-70-103-0,0138—1/2-70-103-0,64-КГ9 (1—0,44) = = 0,607-104—2-104= —1,39-104;
Хм= —1,39 104/(4,8)2 = -605 Ом; ZlM = 108-605/;
Хс = 1 Ц2п • 70 • 103 • 6,04 • 10“ 9 = — 376/.
Выходной импеданс гидрофона
z XcZiM _ — 376/ (108 — 605/)
iB~ Xc + Ziм ~ —376t + 108 — 605/ _
— 40,6/ -227 _ ( — 227 — 40,6/) (0,108 + 0,98/) _
_ 0,108 — 0,98/ ~ (0,108)2 + (0,98)2 _
15,3 — 227/ 0,97
15,7—233/.
Емкостное сопротивление кабеля на верхней частоте диапазона составляет — i/2n • 70 • 103 • 1,82 • 10~9 = =—1250; Ом. При таком соотношении импедансов гидрофона и кабеля напряжение на входе усилителя будет равно 0,84 их. х.
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
1. Ананьева А. А. Керамические приемники звука. М., Изд-во АН СССР. 1963.
2. Белоус Е. С., Горбенко В. С., Пугач В. П. Проектирование гидроакустических антенн и преобразователей. Киев, Изд. Киевского политехи, ин-та им. 50-летия Великой Октябрьской соц. революции, 1975.
3. Г у тин Л, Я. Избранные труды. Л., Судостроение, 1977.
4. И о ф е В. К., Я н п о л ь с к и й А. А. Расчетные графики и таблицы по электроакустике. М. — Л., Госэнергетическое изд-во, 1954.
5. К а м п Л. Подводная акустика. М., Мир, 1972.
6. Колесникова И. К-, Румынская И. А. Основы гидроакустики и гидроакустические станции. Л., Судостроение, 1970.
7. О р л о в Л. В., Ш а б р о в А. А. Расчет и проектирование антенн гидроакустических рыбопоисковых станций. М., Пищевая промышленность, 1974.
8. Простаков А. Л. Гидроакустика и корабль. Л., Судостроение, 1967.
9. Рабинович А. Г., Рубанов Л. А. Технология производства гидроакустической аппаратуры. Л., Судостроение, 1973.
10. Свердлин Г. М. Гидроакустика и подводные электроакустические преобразователи. Ч. 1. Л., Изд. Ленингр. кораблестроит. ин-та, 1969.
11. Свердлин Г. М. Прикладная гидроакустика. Л., Судостроение, 1976.
12. Свердлин Г. М, Огурцов Ю. П. Расчет преобразователей. Л., Изд. Ленингр. кораблестроительного ин-та, 1976.
13. Свердлин Г. М., Огурцов Ю. П. Расчет магнитострик- ционных преобразователей. Л., Изд. Ленингр. кораблестроительного ин-та, 1977.
14. Смажевская Е. Г., Фельдман Н. Б. Пьезоэлектрическая керамика. М., Советское радио, 1971.
15. Смарышев М. Д. Направленность гидроакустических антенн. Л., Судостроение, 1973.
227
ОГЛАВЛЕНИЕ
Предисловие 3
Введение 4
Глава 1. ХАРАКТЕРИСТИКИ ГИДРОАКУСТИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ 7
§ 1.1. Классификация и основные параметры ГАП . —
§ 1.2. Электромеханическое и электроакустическое
преобразование 13
§ 1.3. Характеристики излучателя 18
§ 1.4. Характеристики приемника 22
§ 1.5. Требования к гидроакустическим преобразователям 27
Глава 2. НАПРАВЛЕННОСТЬ ГИДРОАКУСТИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ И АНТЕНН 29
§ 2.1. Природа и оценка направленности .... 30
§ 2.2. Направленность сплошных антенн 36
§ 2.3. Направленность линейных дискретных антенн 51 § 2.4. Мощность излучения направленной антенны 62
Глава 3. ЭЛЕКТРОДИНАМИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ 69
§ 3.1. Электродинамический излучатель 70
§ 3.2. Электродинамический приемник 76
Глава 4. ПЬЕЗОЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ 80
§ 4.1. Пьезоэлектрический эффект и его использование для ГАП 81
§ 4.2. Стержневые пьезоэлектрические преобразователи 90
§ 4.3. Цилиндрический пьезокерамический преобразователь 105
§ 4.4. Сферический пьезокерамический преобразователь „115
228
Глава 5. МАГНИТОСТРИКЦИОННЫЕ ПРЕОБРАЗОВАТЕЛИ 118
§ 5.1. Магнитострикция и ее использование для ГАП 119 § 5.2. Стержневые магнитострикционные преобразователи 128
§ 5.3. Цилиндрический магнитострикционный преобразователь 135
Глава 6. РАСЧЕТ И ПРОЕКТИРОВАНИЕ ГИДРОАКУСТИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ И АНТЕНН 140
§ 6.1. Исходные данные для проектирования . . .141
§ 6.2. Выбор типа преобразователя антенны . . . 149
§ 6.3. Расчет пьезокерамических преобразователей 158
Стержневые преобразователи —
Цилиндрические пьезокерамические преобразователи 165
Сегментированный цилиндр 170
§ 6.4. Конструкции преобразователей и антенн . . —
Пьезокерамические преобразователи и антенны 171 Магнитострикционные преобразователи . .179
§ 6.5. Расчет магнитострикционных преобразователей 183
Стержневой преобразователь —
Цилиндровый преобразователь 192
Глава 7. ПРИМЕРЫ РАСЧЕТА ГИДРОАКУСТИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ И АНТЕНН 195
§ 7.1. Плоская многоэлементная пьезокерамическая
антенна —
§ 7.2. Цилиндрическая пьезокерамическая антенна 207 § 7.3. Плоская магнитострикционная антенна . . 214
§ 7.4. Измерительный гидрофон 221
Указатель литературы 227
Свердлин Г. М.
С24 Гидроакустические преобразователи и антенны.— Л.: Судостроение, 1980.—232 с., ил.
Книга является учебником для средних специальных учебных заведений по специальности № 0649. В ней изложены принципы действия гидроакустических преобразователей (ГАП), наиболее употребительных в гидроакустических антеннах типов, теория направленности и теория расчета и проектирования ГАП.
Приведена методика расчета и конструкции ГАП и антенн.
Книга содержит примеры расчета типичных ГАП и антенн и данные в виде справочных таблиц и графиков.
Книга предназначена для учащихся техникумов, она может быть полезной студентам вузов, изучающим прикладную гидроакустику, а также техникам, работающим в этой области.
31805—034
С 31—80 3605030000 32.875
048(01)—80
Григорий
Михайлович
СВЕРДЛИН
ГИДРОАКУСТИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ И АНТЕННЫ
Редактор Э. В. Зубкова Художественные редакторы О. П. Андреев и В. А. Пурицкий Технические редакторы А. И. Казаков и
A. П. Ширяева
Оформление переплета художника
B. И. Коломейцева Корректоры С. X. Кумачева,
И. П. Острогорова и Е. М. Реутская ИБ № 327
Сдано в набор 28.12.79. Подписано в печать 24.04.80. М-26989. Формат 84ХЮ8/32. Бумага типографская № 2. Гарнитура литературная. Печать высокая. Уел. печ. л. 12,18. Уч. изд. л. 11,5. Изд. № 3431—78. Заказ № 2747. Цена 50 коп.Тир 3890 кз< Издательство «Судостроение», 191065, Ленинград, ул. Гоголя, 8.
Ленинградская типография № 4 ордена Трудового Красного Знамени Ленинградского объединения «Техническая книга» им. Евгении Соколовой Со- юзполиграфпрома при Государственном комитете СССР по делам издательств, полиграфии и книжной торговли. 191126, Ленинград, Социалистическая ул., 14.
В 1980 году
издательство «Судостроение» выпустит книгу:
НИГУЛ У. К. Нелинейная акустодиагностика. Одномерные задачи. 1980, 20 л., ил., В пер. 3 р. 40 к.
Впервые дано теоретическое обоснование ис- пользования нелинейного искажения акустических эхо-сигналов для получения дополнительной информации о параметрах зондируемых объектов. Изложены методы описания одномерных волновых процессов в слоистых средах с учетом нелинейных эффектов диссипации и слабых неоднородностей слоев. Выведены асимптотические представления эхо-сигналов от слоистой среды.
Книга предназначена для инженеров, аспирантов, научных работников, занимающихся вопросами акустодиагностики слоистых сред и составных стержней в подводной акустике.