/













































































































































































































































































































































Text
Аналитическая
геометрия
ГЛАВНОЕ УПРАВЛЕНИЕ ВЫСШИХ И СРЕДНИХ ПЕДАГОГИЧЕСКИХ
УЧЕБНЫХ ЗАВЕДЕНИИ МИНИСТЕРСТВА ПРОСВЕЩЕНИЯ РСФСР
Московский государственный заочный педагогический институт
Л. С. АТАНАСЯН
АНАЛИТИЧЕСКАЯ
ГЕОМЕТРИЯ
Часть вторая
АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ
В ПРОСТРАНСТВЕ
Издательство «Просвещение»
Москва 197 3
Атанасян Л. С.
А-92 Аналитическая геометрия. Ч. 2. Аналитическая гео-
метрия в пространстве. М., «Просвещение», 1969.
ООО с. (Глав. упр. высших и средн, пед. учеб, заведений
М-ва просвещения РСФСР. Моск. гос. заоч. пед. ин-т.)
Книга представляет собой вторую часть курса аналитической геомет-
рии (аналитическая геометрия в пространстве) и содержит как теоретичес-
кий материал, так и набор упражнений, снабженных ответами.
2-2-3
517. 3
ПРЕДИСЛОВИЕ
Предлагаемая вторая (заключительная) часть курса аналитической гео-
метрии посвящена изложению аналитической геометрии в пространстве. Она
состоит из шести глав и приложения. В первой главе рассмотрены коорди-
наты векторов и точек в пространстве. Во второй главе введены скалярное,
векторное и смешанное произведения векторов и изучены их основные свой-
ства. В третьей и четвертой главах изложена теория плоскости и прямой в
трехмерном пространстве. Последние две главы посвящены изучению по-
верхностей в пространстве. В частности, там дана классификация поверхнос-
тей второго порядка и рассмотрены основные типы этих поверхностей,
заданных своими каноническими уравнениями. В приложении рассмот-
рены некоторые вопросы линейной алгебры, которые применяются как в пер-
вой, так и во второй частях настоящего учебника. Такими вопросами являют-
ся определители второго и третьего порядков, исследование и решение сис-
темы двух линейных уравнений с двумя неизвестными и трех лилейных урав-
нений с тремя неизвестными, а также понятие матрицы и ее ранга для соот-
ветствующих случаев.
Так же, как и в первой части книги, автор руководствовался следующи-
ми принципами.
а) Учебник содержит минимальный теоретический материал, необхо-
димый для усвоения всей программы. В частности, исходя из этих сооб-
ражений по существу пришлось отказаться от изложения многих вопросов
общей теории поверхностей второго порядка. Рассмотрена только класси-
фикация и изучены основные типы поверхностей второго порядка по канони-
ческим уравнениям. Опущено изложение теории инвариантов и семиинва-
риантов многочленов второй степени от трех переменных.
Вместе с тем достаточно подробно изучены основы векторной алгебры,
теория прямых и плоскостей в пространстве. В частности, подробно рассмот-
рена теория пучков и связок плоскостей.
б) Все теоретические вопросы, изложенные в учебнике, проиллюстри-
рованы многочисленными примерами и задачами. Многие задачи приведены
с подробными решениями. Кроме того, в конце каждого параграфа дано
большое число примеров и задач для самостоятельного решения. В конце
книги приведены ответы и краткие указания к задачам. Таким образом, при
изучении аналитической геометрии по данному учебнику студенту по сущест-
ву не потребуется привлечение какого-либо задачника.
3
в) В книге обращено большое внимание приложению аналитической гео-
метрии к решению задач элементарной геометрии. В ряде случаев этому
вопросу посвящены отдельные параграфы. Нам кажется, что этот принцип
является существенным для учебника, предназначенного студентам педаго-
гических институтов.
При написании второй части учебника использована литература по ана-
литической геометрии, список которой помещен на стр. 365—366. Широко ис-
пользован задачник-практикум автора по аналитической геометрии [16].
Многие из помещенных там задач вошли в настоящий учебник.
Автор выражает глубокую благодарность проф. Г. Б. Гуревичу, который
внимательно прочитал рукопись и сделал ряд ценных замечаний, способст-
вующих улучшению книги.
Автор выражает также благодарность редактору книги А. 3. Рывкину,
положившему много труда при подготовке рукописи к изданию.
ГЛАВА I
КООРДИНАТЫ ВЕКТОРОВ И ТОЧЕК В ПРОСТРАНСТВЕ
§ 1. КООРДИНАТЫ ВЕКТОРОВ В ПРОСТРАНСТВЕ
В первой части настоящей книги были определены векторы и
основные операции над ними — сложение, вычитание векторов и
умножение вектора на число. Эти операции вводились нами для
векторов трехмерного пространства. Однако, как только мы пере-
шли к аналитическому заданию векторов, т. е. к заданию векторов
с помощью координат, мы ограничились рассмотрением векторов,
лежащих в одной плоскости, или, точнее, векторов, параллель-
ных одной плоскости.
В настоящем параграфе распространим понятие координат век-
тора на случай трехмерного пространства. Предварительно вве-
дем ряд простых понятий.
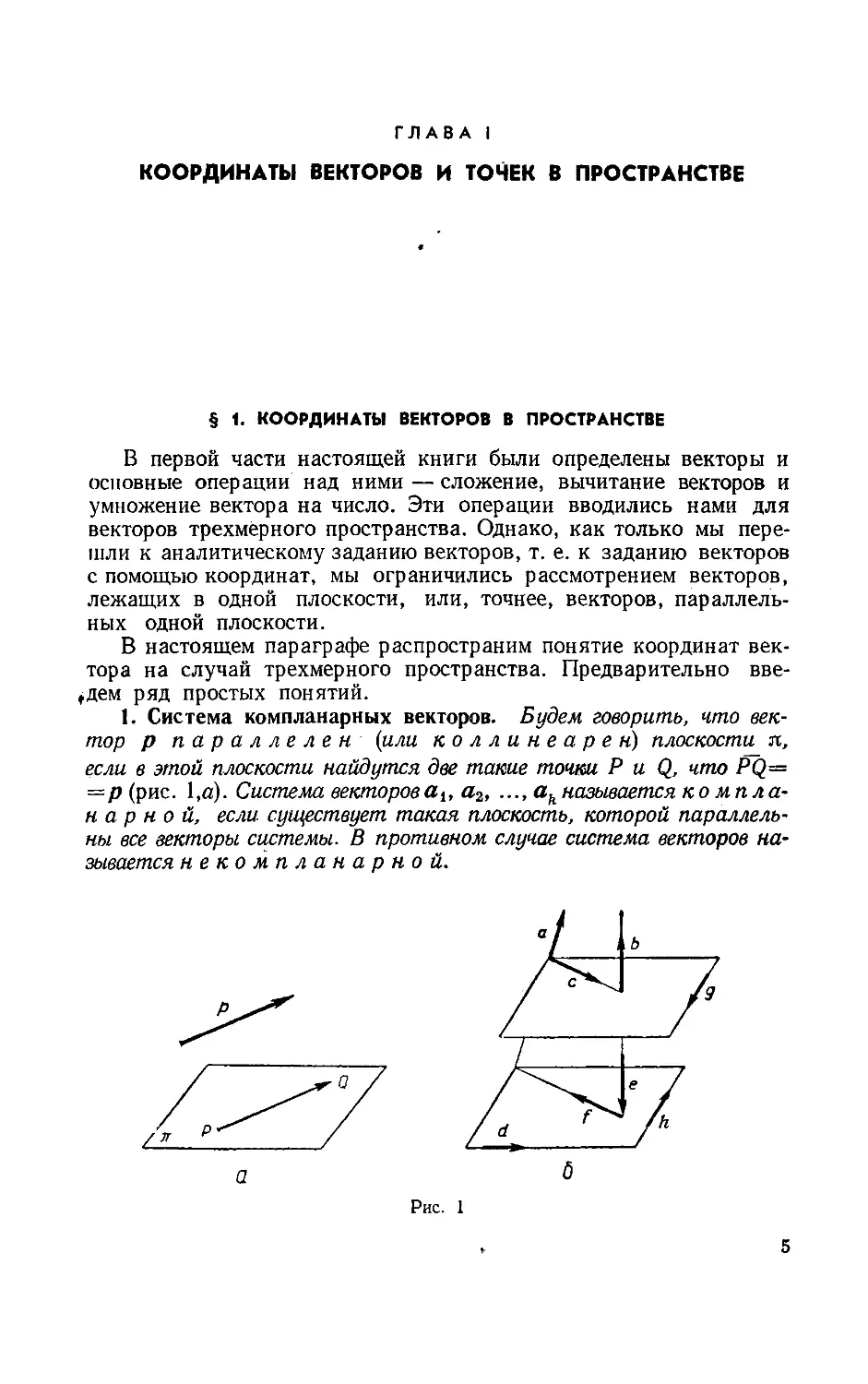
1. Система компланарных векторов. Будем говорить, что век-
тор р параллелен (или коллинеарен) плоскости л,
если в этой плоскости найдутся две такие точки Р и Q, что PQ=
=/?(рис. 1,а). Система векторов a lt а2, ahназывается компла-
н а р н о й, если существует такая плоскость, которой параллель-
ны все векторы системы. В противном случае система векторов на-
зывается некомпланарной.
Рис. 1
5
Например, на рисунке 1,6 системы векторов с, g,f, h, dna,b, с,
f, е компланарны, а система векторов a,g, с, h—не компланарна.
Очевидно, система, состоящая из двух векторов, всегда компла-
нарна.
Докажем предложение, которым мы неоднократно будем поль-
зоваться в дальнейшем.
Теорема [1.1]1. Для того чтобы система, состоящая из
трех векторов а,Ь и с, была компланарной, необходимо и достаточ-
но, чтобы существовали числам, 0 иу, не равные одновременно нулю
и удовлетворяющие условию:
ма + 0& + ус = 0.
Доказательство. Пусть векторы а, b и с компланарны.
Рассмотрим векторы а и Ь. Возможны следующие случаи: а) а =
= 0; б) в #= 0, & и в коллинеарны; в) а и b не коллинеарны. Пока-
жем, что в каждом из этих случаев, существ уют не равные одновре-
менно нулю числа а, 0 и у, удовлетворяющие условиям теоремы.
В самом деле, в случае а) наше утверждение очевидно, так как
1-а4-0-&4-0-с = 0.
В случае б) имеем: b = ма, поэтому
ма 4- (— 1) b 4* 0 • с = 0. >
В случае в) разложим вектор с по нёколлинеарным векторам
а и Ь:
с = ма + 0&,
полученное соотношение запишем так:
ма -J- 0& 4- (— 1) с — 0.
Теперь предположим, что
ма 4- 0й 4- ус = 0
и какой-либо из коэффициентов а, 0 и у не равен нулю. Пусть, на-
пример, м =/= 0. Разделив предыдущее соотношение на м, получим:
а = —— & — — с.
а а
Перенесем векторы а, b и с в точку О и через О проведем плос-
кость п, содержащую векторы & и с. Из предыдущего соотношения
следует, что вектор а также лежит в плоскости л. В самом деле, так
какй и с лежат в плоскости л, то —-& и — —с также лежат в плос-
а а
1 Так же, как и в первой части настоящей книги, в записи [1.1 ] первое
число означает номер параграфа, а второе — номер теоремы. В дальнейшем
теоремы будут нумероваться аналогичным образом.
6
кости л. Отсюда следует, что их сумма, т. е. вектор а, лежит в л.
Таким образом, система векторов а, Ь и с компланарна.
Из доказанного предложения следует теорема.
Теорема [1.21. Если векторы а, Ь и с не компланарны, то
из соотношения
<ха 4~ у£ — О
следует, что
а = Р = у = 0.
А
Рис. 2
2. Базис пространства. Базисом или базой простран-
ства называется система трех некомпланарных векторов elt е2 и е3,
взятых в определенном порядке. Вектор. ег называется при этом
первым вектором базиса, вектор е2 — вторым и век-
тор е3 — третьим.
На векторы eit б2 и е3 накладывается, таким образом, только од-
но ограничение.— требуется, чтобы они были не компланарны, в
остальном векторы базиса произвольны. Важно отметить, что поря-
док следования векторов базиса суще ст вен. Так, например,
системы векторов в1,е2, е3 и е2, eit е3 образуют различные базисы.
Базис eit е2, е3 называется прямоугольным декарто-
вым, если векторы базиса взаимно перпендикулярны и | ej =
= I = | et i = 1. В дальнейшем изло-
жении векторы прямоугольного декарто-
вого базиса будем обозначать буквами
I, J, k. Произвольный базис, в отличие
от прямоугольного декартова, назы-
вается общим декартовым
или аффинным.
3. Координаты вектора в простран-
стве. Пусть в пространстве дан аффин-
ный базис в1, е2, е3. Возьмем произ-
вольный вектор а. Все четыре век-
тора Ci, е2, е3па отложим от некоторой
точки О пространства (рис. 2). Проведем
через конец А вектора а прямую, парал-
лельную вектору 63, и обозначим через
А3 точку пересечения проведенной прямой
Очевидно, ОА = ОА3 4- Л3Л. Вектор ОА3 компланарен с
векторами 61 и е2, поэтому ОА3 =ав1 4- ₽е2 ' (см. I, [4.1 Р).
А
ПЛОСКОСТЬЮ Ов1в2.
С
1 Все ссылки на параграфы или теоремы первой части настоящей книги
обозначаются римской цифрой 1 с указанием номера параграфа или теоремы.
Здесь I, [4.1] означает, что мы ссылаемся на теорему [4.1] первой части на-
стоящей книги.
7
С другой стороны, вектор Д3Д коллинеарен е3, поэтому А3А — уе3.
Подставив эти выражения в предыдущее соотношение, получаем:
а = ос^ + Ре2 +уе3. (1)
Соотношение (1) называется разложением в,.е к т о р а а
по векторам базиса eit е2, е3. Существенно подчеркнуть,
что разложение (1) возможно для любого вектора а. Если, на-
пример, вектор а компланарен с и е2, то в этом случае точки А и
А3 совпадают, поэтому у = 0, и соотношение (1) принимает вид:
а= ctei + ре2, т. е. мы приходим к случаю, рассмотренному в I,
§ 4. Если вектор а коллинеарен е3, то А3 совпадает с О и мы полу-
чаем а =уе3. Таким образом, в этом случае ос = р = 0.
Покажем, что если задан базис elt е2, е3, то для любого вектора
а коэффициенты а, р, у в соотношении (1) определяются одно-
значно. В самом деле, пусть а имеет разложение (1) и, кроме
того, разложение
а = а' е± + р'е2 + у'е3. (2)
Из (1) и (2) следует, что
aei + Рв2 + ув3 = a'et + р'е2 + у'£?3
или
(а — а') е! + (р — р') е2 + (у — у') е3 — 0;
так как векторы ех, е2, е3 не компланарны, то из теоремы [1.2]
следует, что a —a' = р — Р' = у —у' = 0,
т. е.
a = a', р = Р', у = у'.
Мы пришли к следующей теореме.
Теорема [1.3]. Если дан базис elt е2, е3, то любой вектор а
пространства может быть разложен по векторам ег, е2, е3, причем
коэффициенты a, р и у в разложении (1) определяются однозначно и
не зависят от способа разложения.
Только что доказанная теорема показывает, что если в простран-
стве выбран базис е1( е2, е3, то для любого вектора пространства
однозначно определяются три числа ос, р и у — коэффициенты раз-
ложения вектора по базисным векторам. Эти числа называются
координатами вектора в данном базисе.
Итак, координатами вектора в данном базисе
называются коэффициенты разложения вектора по базисным векто-
рам. При этом а называется первой координатой, р—
второй, а у — третьей. Для координат вектора приняты
следующие обозначения: а {“> ₽> yL^,-
Очевидно, если в пространстве выбран базис е1; е2, е3, то любые
три числа, взятые в определенном порядке, в свою очередь опреде-
ляют вектор. В самом деле, если a, р и у — данные числа, то вектор
8
a — a£t + ₽e2 + уе3 имеет эти
числа своими координатами. Числа
{О, 0, 0} являются координатами век-
тора 0. Важно подчеркнуть, что од-
ни и те же числа в разных базисах,
вообще говоря, определяют разные
векторы (см. пример 2).
Если выбранный базис прямо-
угольный декартовый, то координаты
вектора называются прямо-
угольными декартовыми,
в общем случае они называются об-
щими декартовыми или а ф-
ф II иным и.
Векторы, коллинеарные вектору eit имеют координаты {а, 0, 0},
коллинеарные вектору е2—координаты {0, Р, 0} и коллинеарные
е3 — координаты {0, 0, у}.
4. Определение координат данных векторов. Пусть в простран-
стве заданы векторы и некоторый базис elt е2, е3.
"Требуется определить координаты данных векторов.
Для решения задачи, очевидно, необходимо определить коэффи-
циенты разложения данных векторов по векторам базиса. При этом
согласно теореме [1.3] эти коэффициенты не зависят от способа раз-
ложения, поэтому для решения поставленной задачи достаточно
каким-либо способом данные векторы разложить по elt е2, е3. Рас-
смотрим примеры.
Пример 1. Пусть ABCDAiBiCiDi — параллелепипед,
Е, F, G — соответственно середины сторон AAlt AD, CCt. Прини-
мая векторы AAi, AD, АВ за координатные, определить координа.
ты следующих векторов: АС, АЕ, ЕС 1( В1С1( FG, GD,
CBi, aTg-
Решение. Координатами вектора в системе е2, е3 назы-
ваются коэффициенты разложения его по координатным векторам
elt &2, 0з- При этом известно, что коэффициенты разложения не
зависят от способа разложения, поэтому для решения задачи
достаточно каким-либо способом данные векторы разложить по
ei=AAlt e2=AD, е3 = АВ (рис. 3); АС — е2 +е3, отсюда следует,
что ЛС{0, 1, 1}; АЕ = ^АА1= отсюда следует, что
ТЕ (р 0, О}; ECi + Afix + 0г+03, отсюда сле-
дует, что ЕСцр
9
Аналогично можно получить координаты остальных векторов:
ад{0.1.0}, р 1). о, -1).
СВ, {1, -1, 0}, 1. 1).
Координаты вектора существенно зависят от выбора системы
координат. Чтобы ‘в этом убедиться, рассмотрим следующий при-
мер.
Пример 2. Решить предыдущую задачу в предположении,
что за координатные векторы взяты е, = ACit е2 = BiClte3 = CD
Решение. АС = AD A-DC =^BiCiA- (—i)CD = е2+ (—1)е3,
отсюда следует, что А С {0, 1, —1};
АЕ = |aA, = 1 (АС, + ед = ±АС, -1 АС = 2-е,- ± (е- е3),
-лъР 1 Ч-
отсюда следует, что АЕ
£С,= ЕА +ACi = —-ei + — е2 — — е3 + в, = — + — ег — —е3;
1 2 2 2 2 2 2 3
П 1 1 1
отсюда следует, что BCJy, —-I
Аналогично получаем координаты остальных векторов:
ад{0, 1, 0}, о, —Ч, cd {о, о, ij,
CbJi, -2, 1], ATg(— 1,
Ч J I 2 2 2j'
5. Теорема о координатах линейной комбинации векторов. Если
даны векторы а,, а2, .... аЛ,то, как известно, линейной комбинацией
этих векторов называется всякий вектор вида: а,а, 4* oL2a2 + ... +
+ где а,, а2, •••. — произвольные числа (см. I, § 4, п. 5).
Рассмотрим следующую задачу.
Задача 1. Дано несколько векторов своими координатами
в базисе eit е2, е3:
{ai> Pi. У1}> ^2 {а2> Рг> Уг)> • • • > .Рб .У* }•
Дана также некоторая линейная комбинация этих векторов:
р = + ХгЛг + ... + ^feah(T. е. известны коэффициенты
.... %fe). Определить координаты вектора р в базисе elt е2, е3.
Решение. По определению координат векторов имеем:
а, = + у^з,
а2 = а2е, + ₽2е2 + у8е3,
ак + 0* ег + у* е3.
ю
Подставив эти значения в выражение для вектора р, будем иметь:
р X, (aiel + pte2 4- у^з) + Х2 (а^ 4- Р2^2 + у2^3) + • • • +
-|- X/; (а* е1 + Рй ег 4- у* £3) = (X/Xj + Х2а2 4* • • • + X* а* ) е1 4-
-|- (^jPi + ^2Р2 4-Р* ) ^2 + P4Y1 + \Уг 4--F У* ) в3.
Отсюда согласно теореме [1.3] получаем координаты х, у, г
вектора р:
X = XjCCf 4“ Х2СС2 Ч” 4” Xfeaft,
У — МР1 + ^гРг + ••• + ^fePfe>
г = Xty i Ч- Х2у2 + Ч- Xhyft.
Таким образом, мы доказали следующую теорему о коор-
динатах линейной комбинации векторов.
Теорема [1.4]. Каждая координата линейной комбинации
нескольких векторов равна той же линейной комбинации соответст-
вующих координат составляющих векторов1.
Пример 3. Даны векторы a ^l,—2,1}, а2{2, 1, 4}, «3{0,—1, 0}.
Определить координаты вектора р = — а2 Ч- 4«3.
Решение. Согласно предыдущей теореме каждая коорди-
ната вектора р{х, у, г} равна той же линейной комбинации соответ-
ствующих координат составляющих векторов, поэтому
х=1—24-4-0 = —1, у=— 2 — 1 Ч-4 (— 1) = — 7,
z = 1—44-4-0 = — 3.
Итак, р{—1, —7, —3}.
Пример 4. В пространстве даны три некомпланарных век-
тора: «{1,0, 0}, с{1, 1, l},w{0, — 1, 3}. Определить коэффициенты
разложения вектора а {2, —5, 11} по данным векторам и. v и w.
Решение. Пусть а = аи 4- Р® 4- yw. Определим коэф-
фициенты а, р и у. Согласно теореме [1.4] каждая координата
вектора а равна той же линейной комбинации соответствующих
координат векторов «, о и w, поэтому
2 = а • 1 Ч- Р * 1 Ч- У * 0,
-5 = а • 0 4- Р • 1 Ч-у • (- 1),
11 = а • 0 4- Р • 1 4- у • (3).
Из последних двух соотношений определяем р и у:
р = — 1, у = 4.
Из первого соотношения получаем: а = 3. Таким образом,
а = Зя — ® 4- 4w.
* Отметим, что соответствующая теорема на плоскости формулируется
точно так же (см. 1, теорема [4.2]).
11
6. Координаты суммы, разности векторов и произведения векто-
ра на число. Векторы р = а + b, q -= а — Ь, г — Ка являют-
ся, очевидно, линейными комбинациями векторов а и Ь, поэтому
к ним применима теорема [1.4]. Тем самым доказана теорема:
Теорема [1.5]. а) Каждая координата суммы двух векторов
равна сумме соответствующих координат слагаемых векторов.
б) Каждая координата разности двух векторов равна разности
соответствующих координат уменьшаемого и вычитаемого векто-
ров.
в) При умножении вектора на число каждая его координата ум-
ножается на то же число.
Пример 5. Пусть в данной системе известны векторы:
а{1, —2, 1}, &{0, 5, V2).
Определить координаты векторов а + Ь, Ь — а, За, ]/2 Ь.
Решение. Из сформулированной теоремы непосредственно
следует, что (а + Ь) {1, 3, l-j-]/2], (fi — а) {—1, 7, ]/2 —1),
За {3, — 6, 3}, ]/2&{0, 5V2, 2}.
7. Линейно зависимая система векторов. Система векторов аь
а2, .... ah называется линейно зависимой, если существуют числа
а1( а2, •••> ak> не Равные одновременно нулю и удовлетворяющие усло-
вию:
-|- ^2^2 Н" ‘ ’ Н” = 0" (3)
В противном случае система называется линейно неза-
висимой. i
Очевидно, система а1( а2, ..., ak будет линейно независимой
тогда и только тогда, когда равенство (3) имеет место только при
= О, Х2 = О, ..., i~.k = 0. Из определения следует, что два век-
тора линейно зависимы тогда и только тогда, когда они коллинеар-
ны. Из теоремы [ 1.1 ] следует также, что три вектора линейно зави-
симы тогда и только тогда, когда они компланарны.
Легко показать, что система, состоящая более чем из трех век-
торов, всегда линейно зависима.
В самом деле, пусть имеем систему а1г а2, ..., ak, где, k > 3.
Возьмем первые три вектора ai, a2, a3. Возможны два случая:
а) Векторы at, a2, a3 компланарны. Согласно теореме [1.1]
существуют числа %2, Х3, не равные одновременно нулю и удов-
летворяющие условию : Xjai + X2a2 + i3a3 = 0.
Но в этом случае, очевидно, справедливо равенство:
Zjttj + X,2a2 + A,3a3 + 0 • a4 + • • + 0 • a* = 0,
которое означает, что вся система векторов линейно зависима.
12
б) Векторы ар л2, а3 не компланарны. Тогда, принимая векто-
ры а1( а2, а3 за базисные, разложим вектор а4 согласно теореме
11.31 по векторам аг, а2 а3.
at — Х^ + Х2а2 + Х3д3.
Записывая последнее равенство в виде
4- К2а2 + Х3а3 4- (— 1) ai = О
или в виде
Х^ + Х2а2 + Х3а3 4- (— 1) в4 + 0-а5 + • • • + = О,
приходим к выводу, что система векторов а4, а2.ак (где k > 3)
линейно зависима.
Из теоремы [1.4] непосредственно следует
Теорема [1.6]. Если система векторов
<*i {«1, Ро Yi}> а2 {а2, р2, у2}, ... , ak{ak, ₽ft , yd
линейно зависима и имеет место соотношение (3), то та же линей-
ная зависимость имеет место между соответствующими координа-
тами данных векторов, т. е.
+ • • + «* = О,
MPi + ЧРг + •••*+ Ра — О,
+ М2 н------------h Y* = о.
(4)
В самом деле, соотношение (3) говорит о том, что вектор 0 есть
линейная комбинация векторов ait а2, , ak. Из теоремы [1.4]
следует, что каждая координата вектора 0 {0, 0, 0} равна той же ли-
нейной комбинации составляющих векторов, т. е. имеют место соот-
ношения (4).
Пример 6. Найти линейную зависимость между векторами
{21 1
у, 17> 3].
Решение. Система, состоящая из четырех векторов, всегда
линейно зависима, поэтому существуют коэффициенты Х1( Х2, Х3, Х4,
одновременно не равные нулю и удовлетворяющие условию:
Х4л Х2& 4~ ^зс 4” ^"4 & = 0-
Известно, что та же линейная зависимость существует между
координатами этих векторов, поэтому:
Х4 4- 5Х2 4* 4Х3 4" Х4 = 0,
3Xj 4* ЮХ2 — 2Х3 4- 17Х4 = 0,
6Х3 4- ЗХ4 — 0.
Получили систему однородных линейных уравнений относи-
тельно Хь Х2, Х3 и Х4. Очевидно, Х4^ 0. В самом деле, если Х4 = 0,
то из третьего соотношения следует, что Х3 = 0. Тогда из -первого и
13
второго соотношений получаем: Xj = Х2 = 0. Это противоречит
условию линейной зависимости векторов а, Ь, с и d. Таким обра-
зом, Х4 можно положить равным любому числу, отличному от нуля.
Пусть Х4 — 2; тогда Х3 = — 1. Подставив эти значения в первое
и второе соотношения, получаем:
7.4 — 2; 7-2 — 3.
8. Условие коллинеарности двух векторов. Выведем необходи-
мые и достаточные условия коллинеарности двух векторов, задан-
ных своими координатами в пространстве. Пусть в некоторой си-
стеме координат дан ы два вектор а а {а 1( 04, yj и&{а2, р2> Ya}, причем
b 0. Для того чтобы векторы были коллинеарны, необходимо и
достаточно, чтобы существовало число X, удовлетворяющее усло-
вию а — Х&1. Отсюда на основании теоремы [1.4] заключаем,
что
а4 = Ха2, р4 = Х₽2, у4 = Ху2. (5)
Обратно, пусть существует число X, удовлетворяющее усло-
виям (5). Умножив обе части первого соотношения на eit второго
соотношения на е2 и третьего — на е3, получаем:
а4е4 = Ха2е4, 04<?2 = X р2е2, у4е3 = Ху2е3.
Складывая почленно эти равенства, будем иметь:
а4е4 + ₽4е2 + у4е3 = X (а2е4 + р2е2 + у2е3)
или а = ХЬ. Последнее равенство означает, что векторы а и b
коллинеарны. Итак, мы получили следующее предложение.
Теорема [1.7]. Для того чтобы векторы a{at, у 4} и
b {а2, р2, у2} =/= 0, заданные в аффинном базисе своими координатами,
были коллинеарны, необходимо и достаточно, чтобы координаты
вектора а были пропорциональны координатам вектора Ь.
Условие* коллинеарности двух векторов можно сформулировать
несколько иначе.
Теорема [1.8]. Для того чтобы векторы a{ait р4, у 4} и
b{<x2, ₽2, У г} были коллинеарны, необходимо и достаточно, чтобы
одновременно были равны нулю три определителя второго порядка:
ai Pi I = 0, а‘ Yi I = 0, I Yi I = 0. ‘ (6)
«г Р21 а2 |₽2 V2I
Доказательство. Пусть а и Ь коллинеарны. Если хо-
тя бы один из них нулевой, то наше утверждение, очевидно, спра-
ведливо. Предположим, что Ь =#= 0. В этом случае согласно преды-
дущей теореме сс4 = Ха2, р4 = Xj32, у4 = Ху2, поэтому строки
определителей (6) будут пропорциональны, а, значит, каждый из
них обратится в нуль.
1 См. 1, лемму [3.1].
14
Обратно, пусть имеют место соотношения (6). Если at = =
-- yt - 0, то a = 0 и наше утверждение справедливо. Предполо-
жим, что 0^ =# 0, тогда из соотношений (6) получаем: сцРг —
— 0ta2 = 0, с^уг — Yi«2 = 0, откуда р2 = р1( у2 = — у!-
«1 «1
Если ввести обозначение — = X, то a2 = Ха1( р2 = Лр(, у2 = ХуР
“г
Согласно теореме [1.7] векторы коллинеарны.
Если читатель знаком с понятием ранга матрицы1, то ему не-
трудно усмотреть, что доказанной теореме можно дать несколько
иную формулировку.
Теорема [1.9]. Для того чтобы векторы a{a1( рь yj и
&{гх2, Рг, у 2} были коллинеарны, необходимо и достаточно, чтобы
ранг матрицы
/«1 Pi Yi'l
\®2 Рг Уг/ >
образованной из координат векторов, был меньше двух.
Пример 7. Выяснить, какие из следующих пар векторов
коллинеарны:
а) Л1{1, 2, 3}, &4{0, 4, —1}; б) а2{— ]/3, 1,-3}, &2{3, —]ЛЗ, 3/3};
в) a3{0, 1, 3} , &3{0, —2, —6}; г) a4{0, 1, 0}, &4{2, 0, 0}.
Решение. Векторы а1 и не коллинеарны, так как их ко-
ординаты не пропорциональны. Можно в этом убедиться также,
используя теорему [1.8]:
Первое из условий (6) не выполнено, поэтому векторы и &! не
коллинеарны. Важно подчеркнуть, что для коллинеарности век-
торов необходимо равенство нулю всех трех определителей
второго порядка (6).
Векторы а2 и &2 коллинеарны, так как Ь2 = — /3 • а2. Анало-
гично убеждаемся в том, что векторы а3 и Ь3 коллинеарны, а а4 и
&4 не коллинеарны.
Вопросы и упражнения
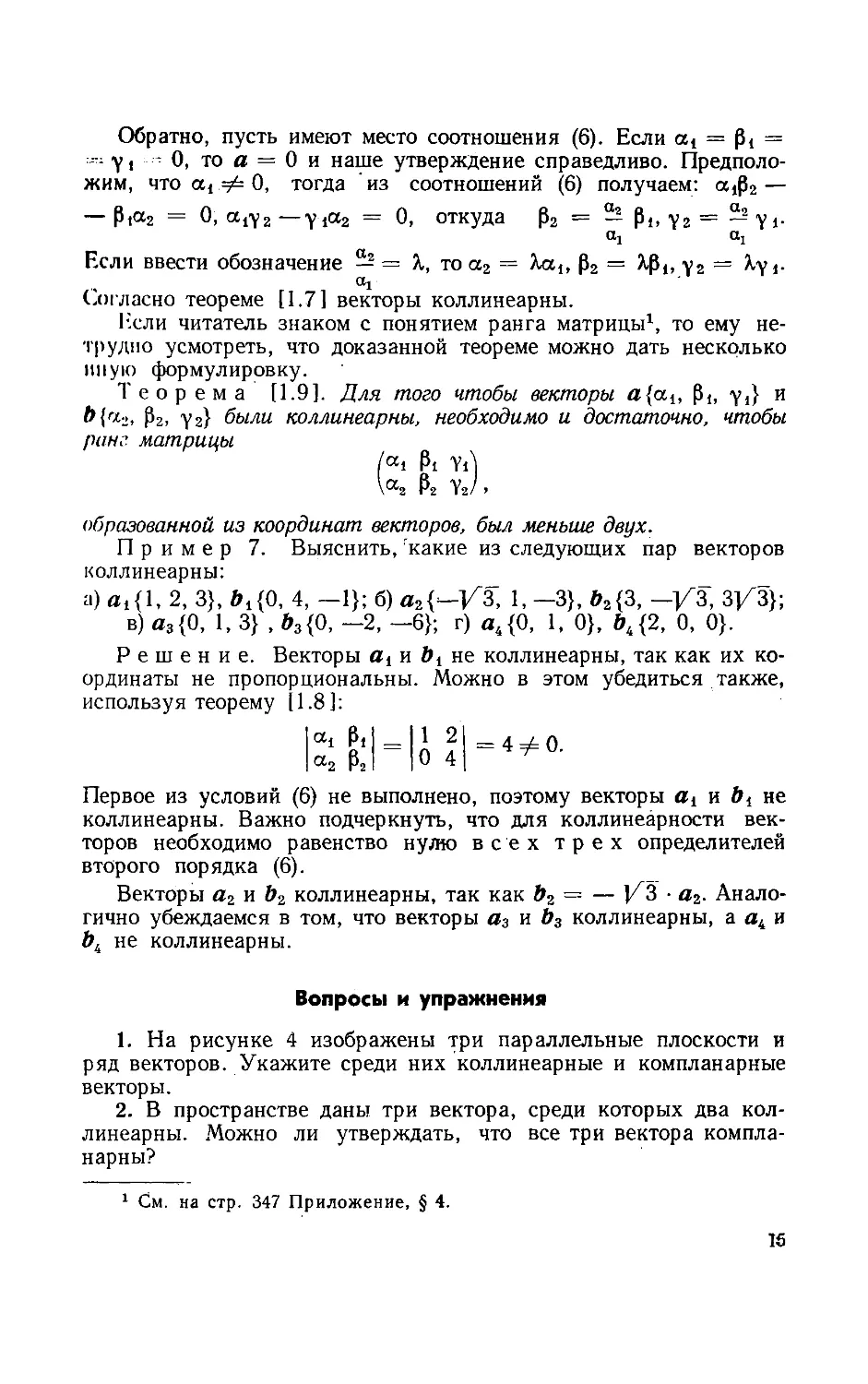
1. На рисунке 4 изображены три параллельные плоскости и
ряд векторов. Укажите среди них коллинеарные и компланарные
векторы.
2. В пространстве даны три вектора, среди которых два кол-
линеарны. Можно ли утверждать, что все три вектора компла-
нарны?
1 См. на стр. 347 Приложение, § 4.
15
3. При определении координат
векторов было подчеркнуто, что век-
торы базиса не компланарны. Где
было использовано это ограничение?
4. В базисе «ь е2, е3 вектор а имеет
координаты {х, у, г}. Каковы коорди-
наты того же вектора в базисах:
a) е2, Ci, s3, б) е3, е2, е1(
в) —е3, е2?
5. Чему равны координаты век-
торов, направленных по диагоналям
параллелограмма, построенного на
векторах г, и е3?
6. Пусть ОАВС — некоторый
тетраэдр в пространстве. Опреде-
лить векторы, имеющие одни и те же координаты
—, —, о) в ба-
2 2 j
зисах: а) ОА, ОВ, ОС; б) ОС, OB, ОА; в) АО, АС, АВ.
7. В пространстве даны два вектора an Ь. Всегда ли можно вы-
брать третий вектор с так, чтобы а, Ь и с были: а) компланарны;
б) не компланарны?
8. В тетраэдре ОАВС векторы et = ОА, е2 = ОВ, е3 = ОС при-
няты за координатные. Определить координаты векторов АВ, ВС,
AC, OK, OL. Здесь К и L — середины соответственно отрезков АВ
и ОА.
9. В тетраэдре ABCS точки Д', В', С —соответственно сере-
дины ребер 5Д, SB и SC; О и О’ —точки пересечения медиан тре-
угольников АВС и А'В'С. Принимая векторы О’С, О'В^ и O'S
за координатные, определить координаты векторов CS, АС, СА',
О’A, AS, АС, BE’, АЕ', где£' — середина отрезка А’С.
10. Решить предыдущую задачу, полагая
= О’А’, е2 — О’Е’, е3 = О'О.
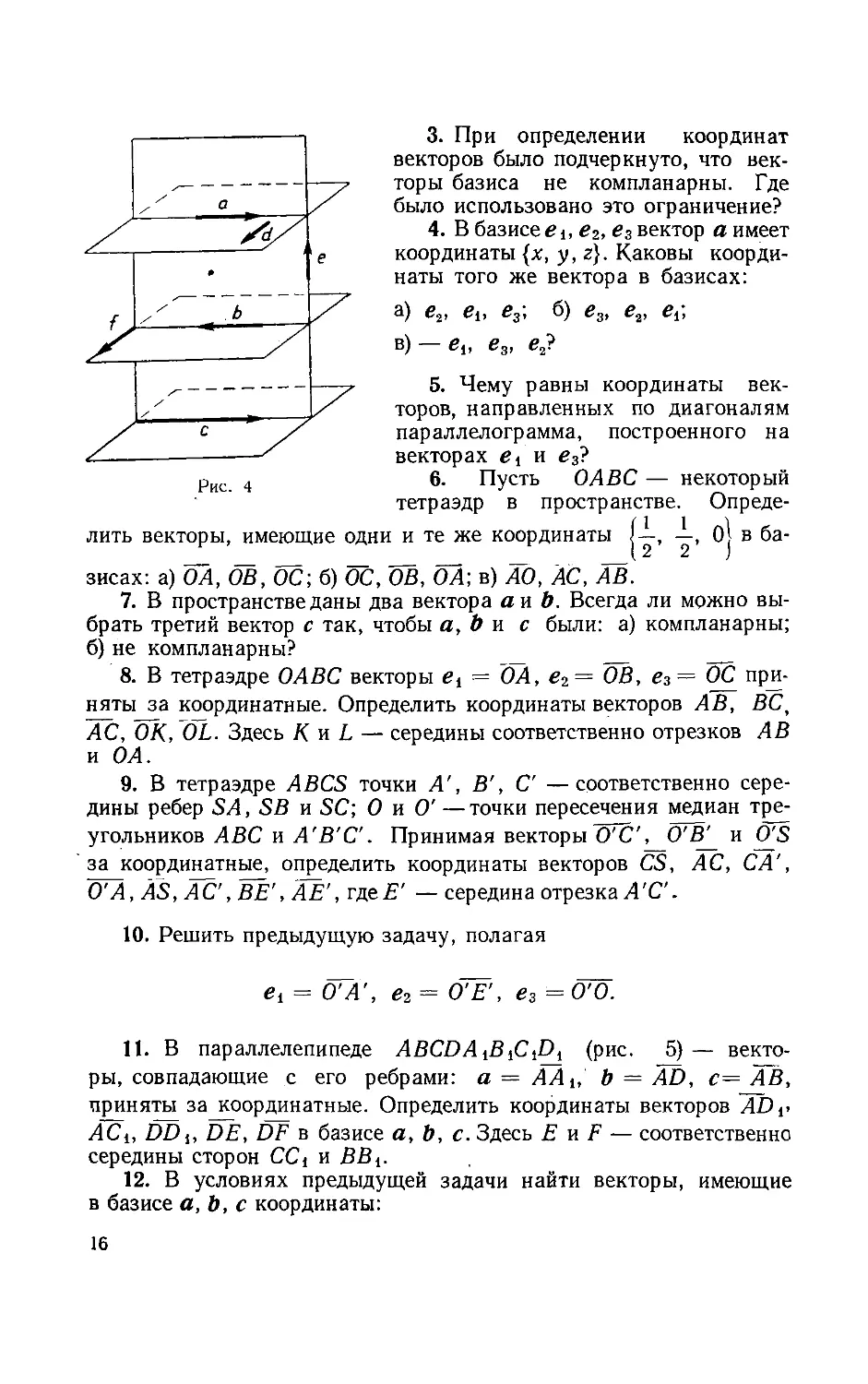
11. В параллелепипеде АВСОА^С^ (рис. 5) — векто-
ры, совпадающие с его ребрами: а = AAlt b = AD, с= АВ,
приняты за_координатные. Определить координаты векторов ДДР
ACi, DD1, DE, DF в базисе а, Ь, с. Здесь Е и F — соответственно
середины сторон CCi и ВВР
12. В условиях предыдущей задачи найти векторы, имеющие
в базисе а, Ь, с координаты:
16
a) (-I 1. -!);
б) {1,-1,-1}; в) {0,-1,-1};
г> {2 ’ °}; д){рь О-
13. Пусть в некотором ба-
зисе et, е2, е3 даны векторы
Л {а,, 01( у 1} и &{а2, 02, у2}.
Каково необходимое и доста-
точное условие компланар-
ности векторов а, Ь и
14. Даны векторы: аД1, —6, 1), аДО, 1, 3}, а3{2, 0, 0},
«ДО, -3, 0}, аД5, 0, —4}, аД2, 2, 0},
аД4, 4, -4}, ав{0, 0, /2}, аД-2, 0, 0}.
Укажите среди них векторы: а) коллинеарные вектору—е^,
б) коллинеарные вектору е2; в) коллинеарные вектору е3; г) колли-
неарные вектору 0! е2; д) коллинеарные вектору et+e2 — е3;
е) компланарные с векторами и е2; ж) компланарные с векторами
elt е3; з) компланарные с векторами е2 и е3.
15. Даны векторы а{2, 3, —1}, &{0, 1, 4}, с{1, 0,—3}. Опреде-
лить координаты следующих векторов:
a) 0J = 2а — b — 2с; г) р^ = а— b — с;
б) р2 = a—b — Зс; д) р5 =
в) р3 = а + 2Ь + Зс; е) р, а~^ + с.
16. При обозначениях задачи 11 (рис. 5) найти линейную зави-
симость между векторами:
a) BjCi, ЕС^ -ABi, СА;
б)_1Ль_Ж_ АВ;
b)FE,CE, CD, FD.
17. Даны пары векторов:
а) «ДЗ, —1, 0} и а ДО, 1, —3};
б) &Д4, 0, — 1} и &Д—8, 0, 2};
> , I'3 4 1)
В) Ci -
(о о 2)
2 1
12 ‘ 3 4
L И.
5 ’ 9 ’ 6/’
1, --
3 5
17
Указать среди них пары колли-
неарных векторов.
18. На рисунке 6 изображен
прямоугольный декартовый базис.
Обозначим через лf ил2 плоскости
01 J и Ojk. Точка At симметрич-
на А относительно плоскости л.ь а
Д2 симметрична А относительно
л2. Вычислить координаты векто-
ров ОА 0А2, A At, А^А2 и
AAt, если О А {2, 3, 3}.
19. Показать, что, вообще гово-
ря, в соотношениях (6) из любых
двух следует третье. В каком слу-
чае это утверждение не справед-
ливо?
§ 2. ПРЯМОУГОЛЬНЫЕ ДЕКАРТОВЫ И АФФИННЫЕ КООРДИНАТЫ ТОЧЕК
В ПРОСТРАНСТВЕ. РЕШЕНИЕ ПРОСТЕЙШИХ ЗАДАЧ В КООРДИНАТАХ
1. Прямоугольные декартовы координаты точек в пространстве.
Координатная система в пространстве вводится по аналогии с си-
стемой координат на плоскости. Возьмем в пространстве три вза-
имно перпендикулярные прямые а, & и с, пересекающиеся в точке
О, и на каждой из прямых — единичный вектор, исходящий из
точки О. Пусть i — вектор на
прямой a, j—на прямой 6 и k—
на прямой с.
Построенный геометрический
образ, состоящий из трех взаим-
но перпендикулярных прямых, пе-
ресекающихся в точке О, и векто-
ров i,j,k назовем прямоуго-
льной декартово й сис-
темой координат в
пространстве (рис. 7). Точ-
ка О называется началом ко-
ординат, а направленные пря-
мые а, Ь, с —о сями коор-
динат1. Направления осей оп-
ределяются соответственно единичными векторами Z, J и k, кото-
рые называются координатными. Ось а называется пер-
вой координатной осью или осью абсцисс,
1 О с ь ю в геометрии называется всякая прямая, на которой зафик-
сировано одно из двух возможных направлений в качестве положительного.
18
b — второй координатной осью или осью
ординат, а с — третьей координатной осью
или осью аппликат. Оси координат обычно обозначаются
так: Ох, Оу, Ог, а система координат: Oijk или Охуг. Плоскости
Оху, Охг и Оуг называются координатными плоско-
стями.
Легко видеть, что задание системы координат в пространстве
позволяет определять положение любой точки в пространстве при
помощи трех чисел. В самом деле, пусть М — произвольная точ-
ка пространства. Проведем через нее три плоскости, соответствен-
но параллельные координатным плоскостям1, и обозначим через Mlt
М2 и /И3 точки пересечения этих плоскостей с осями координат
(рис. 7). По существу Miy М2 и /И3 — проекции точки М на ко-
ординатные оси. Числа
ОМ, ОМ2
х = —- , у —-------
i у- j
ом,
Z = ---2
k
называются координатами точки -М в системе 01 jk,
причем х — первая координата или абсцисса точ-
ки, у — вторая координата или ордината, а г —
третья координата или аппликата этой точки.
Если точка М не лежит на координатных плоскостях, то Mit М2
и М3 не совпадают с точкой М, поэтому координаты точки М от-
личны от нуля. Если точка лежит на одной из координатных плос-
костей, то соответствующая координата равна нулю. Например,
для всех точек плоскости Оху третьи координаты равны нулю.
Если точка М имеет координаты х, у, г, то это обычно записывает-
ся так: М (х, у, z).
Можно дать несколько иное определение координат точки, экви-
валентное предыдущему.. Пусть М — произвольная точка про-
странства. Проведем через нее прямую, параллельную оси Ог;
пусть М' —точка пересечения этой прямой с плоскостью Оху.
Далее проведем через точку М' прямую, параллельную оси Оу.
Точка пересечения этой прямой с осью Ох совпадает с точкой
(рис. 7). Рассмотрим ломаную OMiM'M и назовем ее коорди-
натной ломаной точки М. Очевидно,
ОМ, ЛЦМ' мой
х = —1, у = ——, z =--------.
i У J k
Таким образом, длины звеньев координатной ломаной данной точ-
ки М, взятые с соответствующими знаками, определяют координа-
ты этой точки. Например, точки, изображенные на рисунке 8, име-
1 Здесь термин «параллельности» понимается в широком смысле слова,
т. е. если, например, точка М лежит в плоскости Оху, то «плоскость, прохо-
дящая через М и параллельная Оху», будет та же плоскость Оху.
19
ределенном порядке. Для
юткоординаты: А(3,1,3),В(0,5,4),
С (0, 5, —2), D (2,- —6, 1),
Е (5, 0, 0), F (0, 0, —1).
Итак, если выбрана система
координат, то любая точка про-
странства имеет три координа-
ты. Обратно, при данной системе
координат любые три действи-
тельных числа,взятых в опреде-
ленном порядке, определяют не-
которую точку пространства. Та-
ким образом, задание системы
координат устанавливает взаим-
но однозначное соответствие
между точками пространства и
тройками чисел, взятых в оп-
по координатам
построения точки
достаточно построить ее координатную ломаную.
Например, точку D (2, —6, 1) можно построить так (рис. 8).
Отложим от точки О на оси Ох в положительном направ-
лении отрезок ODit равный 2. Далее, через точку D проведем пря-
мую, параллельную оси Оу, и на ней отложим в отрицательном
направлении отрезок DJD', равный — 6. Через точку D' прове-
дем прямую, параллельную оси Oz, и на ней в положительном на-
правлении отложим отрезок D'D, равный единице. Точка/) — иско-
мая. Отметим, что отдельные звенья координатной ломаной могут
быть равны нулю. Например, координатная ломаная точки В имеет
два звена ОВ2 и В2В, а координатная ломаная точки Е — одно
звено ОЕ.
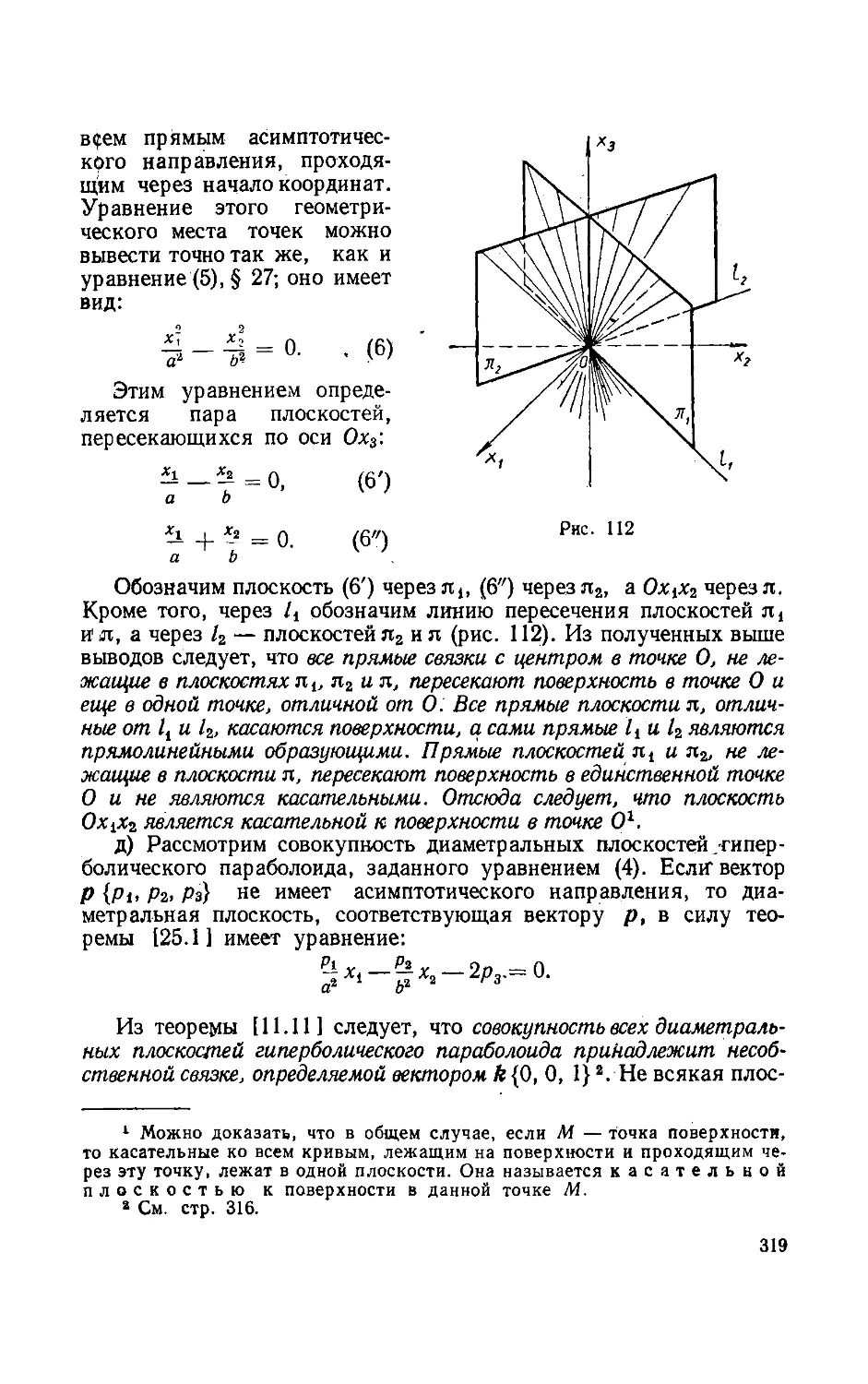
Замечание. Пусть nlt л,2 и л3 — координатные плоскости
Oyz, Oxz и Оху. Возьмем произвольную точку М в плоскости л3.
Очевидно, ее третья координата равна нулю, а первые две коорди-
наты совпадают с соответствующими координатами той же точ-
ки, если мы ее будем рассматривать как точку, лежащую в плос-
кости л3 с координатной системой Oij. Аналогичные замечания
имеют место для координат точек, лежащих в плоскостях Л!
и л2.
Рассмотрим конкретные примеры определения координат точек
по заданным геометрическим условиям.
Пример 1. Дана правильная шестиугольная призма
ABCDEFA iB iCiD
радиус основания которой в выбранной системе единиц равен 1, а
высота 3. Найти координаты ее вершин и центров оснований Ot
и О2, если за начало прямоугольной декартовой системы координат
20
взята вершина А, а оси координат направле-
ны вдоль прямых АВ, АЕ и AAi (рис. 9).
Решение. Как нижнее, так и верхнее
основания пирамиды являются правильными
шестиугольниками, вписанными в окруж-
ность, поэтому длины сторон этих оснований
равны единице. Отсюда следует, что АВ = I.
Координаты всех точек, лежащих в нижнем
основании, могут быть легко определены,
если использовать приведенное выше замеча-
ние.
В системе AIJ точки нижнего основа-
ния имеют координаты Л (0, 0), В(1, 0),
с(|, Ll), D(i, кз),£(о, КЗ),
(см. I, § 7, задача 1), поэтому эти же точки в трехмерном простран-
стве в системе Oijk имеют координаты:
А (0, 0, 0), В (1, 0, 0), с (|, о), 0(1, КЗ, 0),
В(0, КЗ, 0), И-у, о), ojl о).
Так как верхнее основание призмы параллельно нижнему и высота
призмы равна трем, то третьи координаты всех точек верхнего ос-
нования равны трем. У точек А и А± первые две координаты сов-
падают, так как они лежат на оси Oz. Совершенно аналогично, сов-
падают первые две координаты точек В и Bit С и С4 и т. д. Эти сооб-
ражения позволяют сразу определить искомые координаты всех
точек верхнего основания:
ЛИО, 0,3), В1(1, 0, 3), з),
DJ1, КЗ, 3), BJ0, K3,3),Fi(-4, з), о2(4, з).
2. Аффинные координаты точек в пространстве. В прямоуголь-
ной декартовой системе координат оси взаимно перпендикулярны,
а координатные векторы — единичные. Если отказаться от этих
двух требований, а во всем остальном поступить так, как в преды-
дущем пункте, то получим более общий способ аналитического за-
дания точек в пространстве. Возьмем в пространстве три прямые а,
b и с, не лежащие в одной плоскости и пересекающиеся в точке О.
21
На каждой из этих пря-
мых выберем по ненулево-
му вектору: Cj — на пря-
мой а, е2 — на прямой Ь,
а е3 — на прямой с. По-
строенный геометрический
образ, состоящий из пря-
мых а, Ь, с, пересекающих-
ся в точке О и не лежащих
в одной плоскости, и векто-
ров eit е2 и е3, назовем
аффинной или об-
щей декартовой
системой координат. Тер-
минология и обозначения
для аффинной системы
координат те же, что и в случае прямоугольной декартовой.
Покажем, что задание аффинной системы координат позволяет
определить положение любой точки в пространстве при помощи
трех чисел. В самом деле, пусть М — произвольная точка про-
странства. Проведем через нее три плоскости, соответственно па-
раллельные координатным плоскостям, и обозначим через Mlt
М2 и М3 точки пересечения этих плоскостей с осями координат
(рис. 10). Числа
OMt ОМ2 ОМ3 .
z е2 ’ е3
называются координатами точки М в системе Ое^е^
причем х — первая координата или абсцисса точ-
ки, у — вторая координата или ордината, а
z — третья координата или аппликата точкиМ.
Запись: М(х, у, г)Ое1ел означает, что М в системе Ое{е2е3
имеет координаты х, у и г. Так же как и в случае прямоугольной
декартовой системы, задание аффинной системы координат уста-
навливает взаимно однозначное соответствие между точками про-
странства и тройками чисел, взятых в определенном порядке.
Для построения точки по координатам, так же как и в случае
прямоугольной декартовой системы, достаточно построить ее ко-
ординатную ломаную. Например, для построения точки Р (2,-—2, 1)
в системе можно поступить так (рис. 10). Отложим от точки
О на оси Ох в положительном направлении отрезок OPlt равный
двум, принимая за единицу длину вектора е Р Точнее, строим точ-
ку удовлетворяющую условию: ОР \ = 2et. Далее, через
проведем прямую, параллельную оси Оу, и на ней в отрицатель-
ном направлении отложим отрезок PiP’, равный двум, принимая
за единицу измерения длину вектора е2. Точнее, PtP' = —2е2.
Через точку Р' проведем прямую, параллельную е3, и на ней отло-
22
жим отрезок Р’Р, равный единице,
принимая за единицу измерения дли-
ну вектора е3, т. е. Р'Р = е3. Точка
Р — искомая. Подчеркнем еще раз,
что на каждом из звеньев координат-
ной ломаной принята своя единица
измерения. В общем случае эти еди-
ницы измерения не совпадают. Рас-
смотрим следующий пример.
Пример 2. В пространстве
дан параллелепипед
ABCDA iB {С \D f.
Принимая точку А за начало аффинной системы координат и пола-
гая АВ = elt AD = е2, AAt — е3, определить координаты всех
вершин и центра О верхней грани параллелепипеда (рис. 11).
Решение. Так как А — начало координат, а В, D и А! —
концы координатных векторов, то
А (0, 0, 0), В (1, 0, 0,), D (0, 1, 0), At (0, 0, 1).
Из определения координат точек непосредственно следует, что
С (1, 1, 0), Di (0, 1, 1), Cj(l, 1, 1), Bi (1, 0, 1).
Для определения координат точки О проведем через нее плоскости,
параллельные координатным плоскостям (эти плоскости на рисун-
ке 11 не изображены). Очевидно, они пересекают координатные оси
соответственно в точках Ot, О2, Здесь Ot —середина отрезка
АВ, а О2 —середина отрезка AD. Отсюда следует, что О lj.
Заметим, что координаты точки, так же как и координаты век-
тора, существенно зависят от выбора системы координат. Одна
и та же точка в различных системах имеет, вообще говоря, различ-
ные координаты. Например, точка О на рисунке 11 в системе
Aeie&s, как мы показали, имеет координаты^-, -1-, lj* Та же точ-
п
2 } ’
коор-
пред-
спра-
ка в системе Alt AtA, AiBi, AtDi имеет координаты ^0,-^- ,
Легко видеть, что прямоугольная декартова система
динат есть частный случай аффинной, поэтому все теоремы и
ложения, доказанные для аффинной системы координат,
ведливы и для прямоугольной декартовой. Обратное утверждение,
конечно, не справедливо. Поэтому в дальнейшем изложении во
всех случаях, когда это возможно, будем пользоваться аффинной
системой координат. В прямоугольной декартовой системе будем
рассматривать только такие вопросы, изложение которых суще-
ственно упрощается, если пользоваться прямоугольной декарто-
вой системой координат. Итак, во всем дальнейшем изложении, если
23
не будет специальных оговорок,
мы предполагаем, что система
координат аффинная.
3. Координатные октанты.,
Координатные плоскости Оху,
Охг и Oyz аффинной системы
разделяют пространство на
восемь частей, называемых
координатными октан-
тами. Введем нумерацию для
координатных октантов. Пред-
положим, что координатные
векторы приложены к точке О.
Прежде всего рассмотрим коор-
динатную плоскость Оху и в
этой плоскости введем нумера-
цию для координатных углов, определяемых системой Ое^. Пусть
а — первый угол, 0 — второй,у —третий и S —четвертый1 (рис. 12).
Плоскость Оху делит пространство на два полупространства. Ок-
танты, расположенные по ту же сторону от Оху, что и е3, и примы-
кающие к углам а, 0, у и 8, называются соответственно первым,
вторым, т р е т ьим и четвертым. Октанты, располо-
женные по другую сторону от плоскости Оху и примыкающие к
углами, р,у и 8, называются соответственно пятым, шестым,
седьмым и восьмым.
Если точка М (х, у, г) не лежит на координатных плоскостях,
то по знакам чисел х, у и z можно определить, в каком из восьми
координатных октантов она расположена. В самом деле,
если х > 0, у > 0, z >• О, то точка лежит в первом октанте,
если х< 0, у > 0, z > 0, то точка лежит во втором октанте,
если х< 0, у <z 0, z > 0, то точка лежит в третьем октанте,
если х> 0, у < 0, z > 0, то точка лежит в четвертом октанте,
если х > 0, у > 0, z < 0, то точка лежит в пятом октанте,
если х < 0, у > О, z < 0, то точка лежит в шестом октанте,
если х< 0, у <; 0, z < 0, то точка лежит в седьмом октанте,
если х> 0, у <; 0, z < 0, то точка лежит в восьмом октанте.
Очевидно, имеют место и обратные утверждения.
По этим критериям легко определить положение точки в про-
странстве по ее координатам, не прибегая к чертежу. Так, напри-
мер, если А (2,4,1), В (—2,3, 4), С (—5, —]/2, —1),О (—3, 5, — ]/3),
то из предыдущего изложения следует, что А лежит в первом ок-
танте, В — во втором, С — в седьмом, D — в шестом.
4. Радиус-вектор точки. Пусть — данная система коор-
динат, а М — произвольная точка пространства. Вектор ОМ на-
1 См. 1, § 7, п. 3.
24
зывается радиус-вектором точки М (рис. 10). Если М
имеет координаты х, у, г, то по определению
ом, ом2 ом3
X = --L, У = ---Z = -----,
^3
ИЛИ
ОМ1 = хе„ ОМ2 = у е2, OM3=ze3.
Но так как ОМ = ОМ{ + 0М2 + ОМ3, то
ОМ = xet + у е2 + ze3. (1)
Это соотношение имеет место также и в том случае, когда М ле-
жит на одной из координатных плоскостей. Соотношение (1) по-
казывает, что координаты точки М всистеме соответствен-
но равны координатам радиус-вектора точки М в базисе е2> е3.
Это утверждение, по существу являющееся очевидным, играет су-
щественную роль во всем дальнейшем изложении. Следует заме-
тить, что предыдущее утверждение, высказанное по отношению к
аффинной системе координат, очевидно, справедливо и для ее част-
ного случая — прямоугольной декартовой системы, т. е. коорди-
наты точки М в прямоугольной декартовой системе Oijk соответ-
ственно равны координатам радиус-вектора этой точки в базисе
I, J, k.
Используем понятие радиус-вектора для решения следующей
задачи.
ПримерЗ. Дана наклонная шестиугольная призма
ABCDEFA iBfiiD iE^,
в основании которой лежит правильный шестиугольник. Прини-
мая точку А за начало координат и полагая
АВ = et, AF — е2, AAt — е3,
определить координаты всех вершин и центров Ot и О2 Двух осно-
ваний.
Решение. Предположим, что вершины призмы обозначены
по аналогии с обозначениями рисунка 9. Так как начало координат
совпадает с точкой А, а точки В, F и Ai являются концами коор-
динатных векторов, то А (0, 0, 0), В (1,0, 0), F (0, 1, 0), Ai (0, 0, 1).
Для определения координат остальных точек выразим их ради-
ус-векторы через ev е2 и е3:
__ АС = AF + FC = е2 + 2еп поэтому С (2, 1, 0);
AD = ^ + CD = 2Ci + е2 +е2 = 2et +2е2, поэтому D(2, 2, 0);
АЕ = AD + DE = 2Ci +2е2 — et = + 2е2, поэтому £(1, 2, 0);
. AOi = AD = е± + е2, поэтому О± (1, 1, 0);
ЛВ4= АВ + BBi = + е3, поэтому (1, 0, 1);
25
ACt = AC + CCi — ег + 2<?! 4- e3,
dPi = ^2.+ = 2^i + 2e2 + ез>
AEt — AE 4- EEi = 4* 2t?2 4” £3»
AFi = AF + FFj= ег + e3,
Л02 — Л04+ 0£)г = er + e2 + e3,
поэтому Ct(2, 1, 1);
поэтому Dt(2, 2, 1);
поэтому Ei (1, 2, 1).
поэтому Ff(0, 1, 1);
поэтому O2(l, 1, 1).
Очевидно, полученные результаты справедливы также и в том
случае, когда призма правильная. Сравнивая между собой коорди-
наты одних и тех же точек в примерах 1 и 3, мы замечаем, что они
различны и существенно зависят от выбора системы координат.
Перейдем к решению некоторых простейших задач аналитичес-
кой геометрии в координатах1.
5. Разыскание координат вектора по координатам его концов.
Задача 1. Даны две точки А и В своими координатами в
аффинной системе: А (хь уI( zj, В (х2, у2, z2). Определить коорди-
наты вектора АВ.
Решение. Если О — начало аффинной системы координат,
то АВ = ОВ — ОА. Но ОА и ОВ являются радиус-векторами то-
чек А и В, поэтому их координаты нам известны:
О А {хъ уь zj, ОВ {х2, у2, z2}.
Таким образом, АВ как разность векторов ОВ и О А имеет коорди-
наты:
{х2 — хъ у2 — Уь г2 — г,}.
•Итак,
Теорема [2.1]. Каждая координата вектора равна разно-
сти соответствующих координат конца и начала вектора.
Пример 4. Даны точки А (2; —5, 3), В (1, —1, 4) и
С (]/2, 4, 0). Определить координаты векторов АВ, ВС и АС.
Решение. Вычитая из координат точки В соответствующие
координаты точки А, получаем координаты вектора
АВ {— 1, 4, 1}.
Аналогично получаем координаты остальных векторов:
ВС{]А2— 1, 5, —4}, ЛС{|/2 —2, 9, —3}.
Пример 5. Найти координаты начала вектора а {2, —3, 4},
если конец этого вектора имеет координаты (3, —1, 0)'.
Решение. Пусть АВ =* а. Нам известны координаты век-
тора а и точки В. По этим данным легко определить координаты
точки А. В самом деле,
А (х, у, z), В (3, —1,0), а (2, — 3, 4}.
1 Ср. I, § 8.
26
По теореме [2, 1 ] находим:
3 — х = 2, — 1— у = — 3, 0 — г = 4.
Отсюда
х = 1, у = 2, г = — 4; А (1, 2, —4).
Проверка: А (1, 2, —4), В (3, —1, 0), АВ {2, —3, 4}. Мы
видим, что АВ =а , задача решена правильно.
Пример 6. Вершины четырехугольника находятся в точках
А (1, 3, 4), В (4, 0, 6), С (1, 0, —1) и D (—2, 3, —3).
Показать,что ABCD — параллелограмм. Система координат аф-
финная.
Решение. Для решения задачи достаточно показать, что
векторы АВ и ВС не коллинеарны и АВ — DC. Вычислим коорди-
наты векторов АВ, ВС и DC. Имеем: ЛВ{3, —3, 2}, ВС{—3, 0, —7},
DC {3, —3, 2}. _ _
Отсюда видно, что векторы АВ и ВС не коллинеарны, так как
их координаты не пропорциональны. Векторы АВ и DC равны, так
как соответствующие координаты этих векторов равны. Значит,
четырехугольник ABCD — параллелограмм.
6. Определение координат точки, делящей данный отрезок в
данном отношении. Напомним понятие деления отрезка в дан-
ном отношении, которое было введено нами в I, § 81. Говорят, что
точка М, лежащая на прямой АВ, делит направленный отрезок АВ
« *
в отношении л, если л =----.
МВ
Рассмотрим задачу об определении координат точки, делящей
данный отрезок в отношении X.
Задача 2. Пусть в аффинной системе даны две различные
точки своими координатами A (Xi, уь zj и В (х2, у2, 2г)- Определить
координаты точки М, которая делит отрезок АВ в отношении
X =^= — 1.
Решение. Пусть rit г2 и г—соответственно радиус-векто-
ры точек Л, В и М. Так как X =^-, то AM = % -МВ. Но AM =
_____________ МВ
— г — rly МВ = г2 — г. Подставив эти значения в предыдущее
соотношение, получаем: г — r^ = X (г2 — г). Отсюда, учитывая,
что % =/= — 1, получаем:
г = Т1+222 (2)
1 +х
1 Рекомендуем читателю еще раз внимательно прочитать содержание I,
§ 8, п. 2.
27
Пользуясь теоремой о координатах линейной комбинации
торов, получаем:
х __ + X ха
.. _ У1 + \Уг ,_ Zi + Xz2
у i+х ’ i+x •
В частности, если точка М делит отрезок АВ пополам,
= 1, поэтому
то
век-
(3)
X =
У _ Х1 + Х2 _ У1+У2 , _ Z1 + 22
2^2 2
(4)
Таким образом, мы доказали теорему:
Теорема [2.2]. Координаты точки, делящей отрезок АВ,
A (xb у1л zj, В (х2, у2, 2г) в отношении К, определяются из соотно-
шений (3).
Координаты середины отрезка равны полусуммам соответствую-
щих координат концов отрезка.
Пример 7. Определить координаты точек, делящих отре-
зок АВ, А (1, 2, —5), В (0, 1, 4), в отношении Xt = 2, Х2 = —3,
h = к = 1.
4
Решение. Для определения координат точек Mi (xit yt, zj,
M2 (x2, y2, z2), M3 (x3, y3, z3) и M4(x4, y4, z4), делящих отрезок AB
соответственно в отношениях %i, Х2, Х3 и %4, воспользуемся форму-
лами (3):
*1 1+2-0 1 2 + 2-1 4 -5 + 2- 4 . = —— = —, у, = —1 = —, г. = — = 1; 1 +2 ° 1+2 3 1 1+2
Х2 = = 1-3-0 = _j_ = 2-3-1 = J_ = -5 — 3-4 = 17. 1—3 2’ Уа 1—3 2 ’ 1—3 2’
1 +—• 0 v - 4 —4 2 + 7-' „ — 5 + — -4 9 4 16.
|ю — I -г + 1 со Уз 1 |ю 1 + 1 . СО |ю 1
1+0 1 2+1 3 —5+4 1
Xi — 2 2 ’ У4 2 2 ’ Zi ’ 2 ~ 2'
Примере. Найти отношение, в котором каждая из коорди-
натных плоскостей делит отрезок АВ, если даны А (2, —1, 7) и
В (4, 5, —2).
Решение. Пусть %1, Х2 й Х3 — отношения, в которых каж-
дая из координатных плоскостей Оу г, Охг и Оху делит отрезок АВ.
Если обозначить через Pit Р2 и Р3 точки пересечения прямой
АВ с плоскостями Оу z, Oxz и Оху, то
р /2 + A.J • 4
\ l+^i
— 1 + Xj - 5
1 + Xi
7 — Xt - 2\
1 + Xi /
28
р /2 + Л2 - ,4 — 1 4" ^-2 * 5 7 — А.2 • 2\
\ 1 4” ^2 1 4~ ^2 1 4" ^2 /
р /2 4- у 4 -1 4- Х3.5 7-к3. 2\
\ 1 + ^3 1+^3 1 + ^3 /
Так как Р. лежит в плоскости Oyz, то 2 ~ЬЧ14.. = о, отсюда Xt=
1 +*i
= _ I
У'
17
Точно так же получаем: Х2 =у и Х3 =
Пример 9. Дана точка М (2, —4, 4) в прямоугольной де-
картовой системе координат. Определить координаты точки М',
симметричной с точкой М:
а) относительно начала координат;
б) относительно координатных плоскостей
Оху, Oyz, Oxz;
в) относительно координатных осей Ох, Оу, Ог.
Решение, а) Если М(х, у, z) и М'(х’, у', г') симметричны
относительно начала координат, то
=0, ^±21 = 0 и г-±± =0.
2 2 2
Отсюда х' = — х, у — — у, г’ = — г. Для данной точки М по-
лучаем: М' (—2, 4, —4);
б) если М (х, у, г) и М'(х', у', г’) симметричны относительно ко-
ординатной плоскости Оху, то отрезок ММ' перпендикулярен к
плоскости Оху и его середина принадлежит этой плоскости, поэтому
вектор ММ' коллинеарен вектору k, и середина отрезка ММ'
лежит в плоскости Оху. Следовательно, х' — х = 0, у' — у = 0
(условие коллинеарности: ММ' || Л); z_t£ — о (середина отрез-
ка ММ' лежит в плоскости Оху). Таким образом, х' = х, у' — у,
г' — — г.
Для данной точки получаем: М'(2, —4, —4).
Если N и Р — точки, симметричные точке М относительно пло-
скостей Oxz и Oyz, то аналогично предыдущему получаем:
N (2, 4, 4), Р (—2, —4, 4);
в) если М (х, у, г) и М'(х', у', г') симметричны относительно
оси Ох, то вектор ММ' параллелен плоскости Oyz, т. е. комплана-
рен с векторами J, k, и середина отрезка ММ’ лежит на оси Ох.
Следовательно, х — х’= 0 (условие компланарности векторов
ММ', j и k), ~ 0 (середина отрезка ММ' лежит
на оси Ох).
29
Таким образом, х' = х, у’ = — у, г’ — — г. Для данной точ-
ки получаем: М'(2, 4, —4).
Если R и S — точки, симметричные точке М относительно осей
Оу и Ог, то аналогично предыдущему получаем: R (—2, —4, —4),
S (—2, 4, 4).
7. Условие коллинеарности трех точек.
3 а д а ч а 3. Пусть в аффинной системе координат Ое1е2е3 даны
три точки A (Xi, ylt Zi), В (х2, у2, г2) и С (х3, у3, г3). Найти необ-
ходимое и достаточное условие коллинеарности этих точек.
Решение. Точки называются коллинеарными, если
они лежат на одной прямой. Для того чтобы А, В и С были колли-
неарны, необходимо и достаточно, чтобы векторы АВ и АС были
коллинеарны. Отсюда легко получить искомое условие. По теоре-
ме [2.1] имеем:
AB{x2—xit у2 — У1, z2 — zt}, АС{х3—хь y3—yi, z3 — zj.
Согласно теореме [1.8] условие коллинеарности этих векторов за-
пишется так:
х2 — xi У2~ У1
хз — х! Уз — У1
= 0,
Х2 — Х1 Z2— Z1
хз~х1 z3 — Zi
= 0,
У2~ У1
Уз —У<
z2 — Zi
z3 — Zi
= 0.(5)
Согласно теореме [1.9] условие коллинеарности тех же точек
состоит в следующем: ранг матрицы
х2~xi У2 —У< г' — z4\
хз Х1 Уз У1 2з' 21 /
(6)
равен единице. Мы получили теорему.
Теорема [2.3]. Для того чтобы три точки А (хъ yi, Zj),
В (х2, уг. 2г) и С (х3, у3, г3) были коллинеарны, необходимо и доста-
точно, чтобы выполнялись условия (5) или чтобы ранг матрицы (6)
был равен единице.
Пример 10. Даны тройки точек:
a) Ai (2, — 1, 1), Bt (—1,0,0), Ci(2, —4, 15);
б) А2 (1, 0, —1), В2 (3, 2, 1), С2 (0, —1, —2);
в) А3 (3, 4, -1), В3 (3, 4, 1), С3 (3, 4, -18).
Выяснить, какие из этих троек точек коллинеарны.
Решение. Проверяем условие коллинеарности соответст-
вующих векторов для каждой из троек чисел:’
a) A^Bi {—3, 1, —1}, Л??! {0, —3, 14].
I 3 11
Векторы не коллинеарны, так как, например, 3 =
= 9 #= 0. Отсюда следует, что точки Ль Bt и С4 не лежат на одной
прямой;
б) А^В2{2, 2, 2}, Л^2{—1. -1, -!}•
30
Векторы коллинеарны, так как условие (5) выполнено; поэтому точ-
ки Л2, В2 и С2 лежат на одной прямой;
в) ЛД{0, 0, 2}, ЛА {О, 0, —17}.
Условие (5) выполнено, поэтому векторы коллинеарны и точки
А3, В3, С3 лежат на одной прямой.
Вопросы и упражнения
20. Дайте определение системы координат в пространстве. Чем
отличается понятие системы координат от понятия базиса про-
странства?
21. Всякие ли три направленные прямые, проходящие через
точку О, можно принять за оси аффинной системы координат?
22. Как расположены относительно системы координат точки:
Ai (1, 2, 0), А2 (—1, 0, 0),_Л3 (0, 3, 0),
Л4(2, -1, 3), Л6(-1, -5, -/2), Л6(-5, -1,3),
Л7(2, —4, —4), Л8(0, 0, 1)?
23. На рисунке 13 изображен парал-
лелепипед ABCDA lBiClDl. Точка Е —
середина ребра AAlt а К—точка
пересечения диагоналей параллелограм-
ма ВСВ1С1. Вычислить координаты
всех вершин и точек К и Е, если Л —
начало координат и = АВ, e2=AD,
е3 = АЕ.
24. В параллелепипеде
ABCDA iBiCiDi даны координаты
четырех вершин
Л (2, —1, 1), В (1, 3, 4), Ai (4, 2, 0),
D (6, 0, 1).
Найти координаты остальных вершин.
25. Вершины четырехугольника находятся в точках
Л (1, —3, —2), В (8, 0, —4), С (4, 8, —3), D (—3, 5, —1).
Показать, что ABCD — параллелограмм.
26. Даны три вершины параллелограмма
Л (2, 5, 4), В (0, 1, 0) и С (4, 1, 3).
Найти координаты четвертой вершины D.
27. В пространстве дан треугольник АВС. Можно ли выбрать
систему координат так, чтобы вершины треугольника имели коор-
динаты (0, 0, 0), (1, 1, 1), (—3, —3, —3)?
28. Выяснить, в каких октантах расположены точки, симмет-
ричные точкам
31
A (—3, —1, 1), В (—4, 2, —1), С (1, У 2, 3), D (/2, — /3, ^5)
относительно оси Ог.
29. В прямоугольной декартовой системе координат даны точ-
ки А (5, —1, 4), В (7, 0, 5), С (—1, —1, —1). Найти координаты
точек, симметричных данным: а) относительно начала координат;
б) относительно координатных плоскостей Оху, Oyz, Oxz; в) отно-
сительно координатных осей Ох, Оу, Ог.
30. В точке А (хь zt) помещен груз т± кг, а в точке
В (х2, у2, г2) груз т2 кг. Определить координаты центра тяжести
этой системы.
31. Если в вершины тетраэдра поместить одинаковые массы,
то центр тяжести данной системы называется центроидом
тетраэдра. Доказать, что координаты центроида равны сред-
ним арифметическим соответствующих координат вершин.
32. Определить координаты точек Blt В2и В3, если At (0, 0, 0),
Лг_(1, 3, —4), А3 (1, /2, 0) и ЛА {2, 1, -1}, А^В2 {0, 0, -1},
А3В3{0, 0, — 4}.
33. Определить координаты точек, которые делят отрезок АВ
в отношениях Xj =—,
2
Хг — — 3, Хз — 4,
если концы
отрезка
имеют координаты: А (1, —1, 0), В (2, 4, 3).
34. Найти середины отрезков A^Bi, А2В2, А3В3, если
At (1, 3, —1), Bi (0, 0, 1), А2 (1, —1, —1), В2 (У 2, 1, —3),
А3(0, 0, - 5), В3 (4, 4, -4).
35. Доказать, что середины отрезков АВ, CD и EF лежат на
одной прямой. Здесь А (3, 2, 1), В (—4, —2, —1), С (2, 0, 0),
D (4, 0, 0), Е (5, —2, 3), F (1, 2, —3).
36. Даны тройки точек:
а) А (2, 4, —3), В (3, 6, 0), С (1, 2, —6);
б) А (У2, 4, 1), В (0, 0, —3), С (1, 1, 1);
в) А (3, 0, 0), В (4, 5, 0), С (5, 10, 0);
г) А (—1, 1, 2), В (4, 3, 0), С (3, 4, 1).
Выяснить, какие из этих троек точек коллинеарны.
37. Если треугольник АВС задан в пространстве координатами
своих вершин в аффинной системе координат:
А (хъ yi, Zi), В (х2, у2, z2), С (х3, у3, г3),
то координаты центра тяжести определяются по формуле:
х _ *i + *2 + хз v _ У1 + Уг + Уз 2 _ г1 + гг + гз
3 ’ У 3 ’ 3
Доказать.
32
§ 3. ПРИЛОЖЕНИЕ МЕТОДА КООРДИНАТ К ДОКАЗАТЕЛЬСТВУ ТЕОРЕМ
И РЕШЕНИЮ ЗАДАЧ ЭЛЕМЕНТАРНОЙ ГЕОМЕТРИИ
мы приведем
Изложенная в первых двух параграфах теория может быть с
успехом применена для доказательства теорем и решения задач из
курса элементарной геометрии. В этом параграфе
примеры приложения метода координат
к решению-элементарно геометрических
задач. Рассмотрим некоторые свойства тет-
раэдров, параллелепипедов и пространст-
венных многоугольников.
1. Свойства тетраэдров1 2.
Задача 1. Доказать, что отрезки,
соединяющие середины противоположных
ребер тетраэдра, пересекаются в одной
точке и делятся в ней пополам.
Решен и е. Пусть О АВС—данный
тетраэдр, а Ль G1( и ft-
соответственно середины ребер ОА, ОВ,
ОС, СА, СВ, АВ (рис. 14). Принимая вер-
шину О за начало координат и полагая
OAi = a, OBi = b и OCi = с, выразим
радиус-векторы середин отрезков AfFi,
через а, b и с. Если
С1Е
В^С^ и CiEi
A^i, BiGt и
S и Т,
то получим:
середины отрезков
обозначить соответственно через Rt
а их радиус-векторы соответственно через г R, rs и rTt
_ 0At + ОЛ
rR
2
. _ O^ + OGj
s
2
2b + 2с
2
2
2а -f- 2с
2
2
а b 4~ с
2
2
2а + 2Ь
OCj + 0£i _ С +' 2 _ а + 6 + с
2 2 2
Таким образом, rR = гs = гт, а это и означает, что точки R,S,
Т совпадают, что и требовалось доказать.
Рассмотрим задачу, в каком-то смысле обратную предыдущей.
Задача 2. Даны три отрезка, которые не лежат в одной
1 Здесь и в дальнейшем тетраэдром называется произвольная треуголь-
ная пирамида.
2 Л. С. Атанасян
33
Рис. 15
Докажем, что в пространстве
М3, Л14, удовлетворяющие
М есть точка С,... Здесь
плоскости. Известно, что они
пересекаются в одной точке,
являющейся серединой каж-
дого из них. Доказать, что
существует такой тетраэдр,
серединами ребер которого
служат концы данных отрез-
ков.
Решение. Пусть С12С34,
С13С24, С14Сгз—данные от-
резки, а О — их общая се-
редина. Примем точку О за
начало, a ei = OCi3, е2 —
=ОС2з, £з = ОС34 за коорди-
натные векторы аффинной
системы координат (рис. 15).
существуют точки Mlt Л42,
условиям: середина отрезка
i j, t = 1, 2, 3, 4; j =
= 1, 2, 3, 4. Для координат искомых точек введем обозначения:
ЛЛСч, У1, ?i), М2(х2, у2> г2), М3 (х3, уз. ?з), М4 (х4, у4, г4).
Очевидно, в выбранной системе координат точки С(;- имеют коор-
динаты: С13 (1, 0, 0), С24 (— 1, 0, 0), Сгз (0, 1, 0), С14 (0, —1, 0),
С34(0, 0, 1), С12 (0, 0, - 1).
Записывая предыдущие условия в координатах, получим:
xt 4" х3 — 2,
У1 + Уз = 0,
Zi + г3 = 0,
Х\ + х4 = 0,
У! + у4 = — 2,
2i+ г4 = 0,
*2 + *4 = — 2,
Уг + у4 = 0.
^2 + г4 — 0,
х3 4- х4 = О,
Уз + у4 = °.
г3 + г4 = 2,
х2 4~ х3 = 0,
Уг + Уз = 2,
22 “Ь г3 — 0.
Х1 + Х2 = О,
У1 + Уг = 0,
zi + гг = — 2.
Таким образом, с алгебраической точки зрения задача свелась
к определению девяти неизвестных (х1( у1( г1( х2, у2, г2, х3, у3, г3),
удовлетворяющих восемнадцати линейным уравнениям.
Из курса алгебры известно, что система восемнадцати линей-
ных уравнений с девятью неизвестными, как правило, неразреши-
ма, однако в данном частном случае система имеет решение. В са-
мом деле, выпишем все уравнения, содержащие хь х2, х3 и х4:
Xt + х3 = 2, х2 + х4 = — 2, х2 + х3 = 0,
Xi 4- х4 = О, х3 + х4 = 0, Xi + х2 = 0.
Отсюда получаем:
Xi — х2 = 2, Xt + х2 = 0, х3 — х4 = 2, х3 + х4 = 0
34
или
*1 = 1, х2 = — 1, х3 = 1, х4= —1.
Найденные значения неизвестных
удовлетворяют всем шести урав-
нениям.
Совершенно аналогично можно
получить значения остальных не-
известных:
У1 = — 1, Уг = 1, Уз=1, — 1.
= — 1, ?2 =—1, г3= 1, z4 = 1.
Таким образом, мы определили ко-
ординаты вершин тетраэдра, для
которого точки С служат серединами сторон: Mi (1, —1, —I),
М2 (—1, 1, —1), М3 (1, 1, 1), М4(—1, —1, 1). Задача решена.
3 а д а ч а 3. Пусть SABC — тетраэдр, М — точка пересече-
ния медиан треугольника ABC, a At, Bi и —три точки, лежа-
щие соответственно на ребрах SA, SB и SC. Доказать, что точка
Mi пересечения медиан треугольника AiBiCi лежит на прямой
SM тогда и только тогда, когда плоскости АВС и AiBiCi парал-
лельны.
1 \
зт
Ci лежат на координатных осях, то их ко-
Ai (х0, 0, 0), Bi (0, у0, 0),
Точка пересечения медиан треугольника AiBiCi
у. Точка М
1
7’
Решение. Возьмем точку S за начало, a et = SA, е2 = SB
и = SC за координатные векторы аффинной системы координат
в пространстве (рис. 16). В этой системе вершины тетраэдра и точ-
ка М имеют координаты1:
S (0, 0, 0), А (1, 0, 0), В (0, 1, 0), С (0, 0, 1), М (р
Так как точки At, В
ординаты можно обозначить так:
Ci (0, о, г0). -
имеет координаты М4 -у, —-j.. Точка Mi лежит на прямой
SM тогда и только тогда, когда S, М и Mi коллинеарны. Согласно
теореме [2.3] будем иметь:
1 1
3
Уо
3
= 0,
Таким образом,
S4
/IjBjCj параллельны.
1
3
Уо
3
SB1
SB
1
3
Zp
3
sc
= т. e. плоскости ABC и
SC
— 0 или х0 = у0 = гв.
т.
3
х0
3
1 Для определения координат трчки M необходимо воспользоваться за-
дачей 37, стр. 32.
2* 35
Рис. 17
2. Свойства параллелепипедов.
Задача 4, Доказать, что диаго-
нали параллелепипеда пересекаются в
одной точке и делятся в ней пополам.
Решение. Пусть ABCDAiBiCJDi—
параллелепипед. Примем точку А за
начало, а = АВ, е2 = AD, е3 = АА t
за координатные векторы аффинной
системы координат (рис. 17). В этой
системе координат вершины паралле-
лепипеда имеют координаты: А (0, 0, 0),
В (1,0,0), С (1,1,0), О (0,1, 0), А{ (0, 0,1),
Вг (1,0, 1), Ci (1, 1, 1), Di(Q, 1, 1).
Рассмотрим диагонали АСи BDit DBt и CAit Из теоремы [2.2]
следует, что середины этих четырех отрезков имеют одни и те же
координаты , поэтому диагонали проходят через точку
М и в этой точке делятся пополам. Задача решена.
Задача 5. Доказать, что диагональ ACt параллелепипеда
ABCDA iBiCiDi проходит через центры тяжести треугольников
A iBD и BiDiC.
Решение. Пусть аффинная система выбрана так, как в за-
даче 4 (рис. 17). В этой системе, как было отмечено выше, вершины
параллелепипеда имеют координаты:
А (0, 0, 0), В (1,0,0), С (1,1,0), D (0,1,0),
At (0, 0, 1), Bi (1, 0, 1), Ci (1, 1, 1), Di (0, 1, 1).
Центр тяжести треугольника A iBD имеет координаты
(v т) ’ Э центР тяжести ^2 треугольника BiDtC коорди-
(2 2 2 \
у, у, у)1. На рисунке 17 точки Gt и G2 не изображены.
Пользуясь теоремой [2.3 ], легко показать, что точки
Д(0, 0, О,), G.(-, -, G2(-, -,-'l и СД1, 1, 1)
v ’ Чз 3 3 2^3 3 3/
лежат на одной прямой.
3. Свойства пространственных многоугольников. Напомним
ряд простых понятий из курса элементарной геометрии. Система
отрезков АВ, ВС, CD, ..., KL называется ломаной, соеди-
няющей точки А и L. Если точки А и L совпадают, то та-
кая ломаная называется многоугольником и обозначается так:
АВС...К. Отрезки АВ, ВС, ..., КА называются сторонами, а
----------/
' См. задачу 37, стр. 32.
36
точки А, В, С, D, ..., К
— вершинами мно-
гоугольника. Многоуголь-
ники, имеющие 3, 4, ...
...,п вершин, называют-
ся соответственно треу-
гольниками, че-
тырехугольника-
ми, ..., n-у г о л ь н и-
к а м и.
Обычно в курсе элемен-
тарной геометрии рассмат-
ривают простые многоугольники, т. е. многоугольники, удовлет-
воряющие условиям: все вершины различны и лежат в одной плоско-
сти, ни одна из вершин не лежит на его стороне и никакая' пара его
сторон не имеет общей внутренней точки. В настоящем параграфе мы,
вообще говоря, не предполагаем, что рассматриваемые многоуголь-
ники простые. В частности, не предполагаем, что вершины обяза-
тельно лежат в одной плоскости. Такие многоугольники мы назы-
ваем пространственными. Очевидно, для того чтобы
ломаная ABC...KJL была многоугольником, необходимо и достаточ-
но, чтобы АВ + ВС + ... + KL = 0.
Мы будем говорить, что из системы направленных отрезков
AjBi, А2В2, •••, AhBh -
можно составить пространственный многоугольник, если
А~1В1 + A^B2 + ... + А^Вк = 0.
На рисунке 18 изображены направленные отрезки A iBit А2В2,.
А3В3 и Л4В4, из которых можно составить четырехугольник NMK.L.
Мы будем говорить, что многоугольник A iA2--- А2п (п > 1),
имеющий четное число вершин, является составным, если
как из системы направленных отрезков At,A2, Л3Л4, ..., А2п^1Агп,
так и из системы направленных отрезков
Л2Л3, Л4Л5, ..., ^2п-2^2п-Р
можно составить многоугольники. Легко показать, что для того,
чтобы многоугольник А1А2...А2п был составным, необходимо и
достаточно, чтобы
Л1Л2+Л3Л4 + ... 4- 42(1_^2n — 0 (1)
или
А2А3 + Л4Л5+ ... + A2nAf = 0. (2)
В самом деле, пусть, например, выполняется.условие (1). Так
как Л1Л2... Л2„ —многоугольник, то
Л1Л2 + А2А3 + ... + Л2лЛ ( = 0.
37
Вычитая из этого соотношения равенство (1); получаем (2). Из
этих соотношений следует, что из каждой системы направленных
отрезков
Л1Л2, Л3Л4, Л2п_1Л2Л и Л2Л3, Л4Л5, A2nAi
можно составить многоугольник, т. е. многоугольник Л р42... Л2zt
составной.
Легко видеть, что составной четырехугольник, вершины кото-
рого не лежат на одной прямой, является параллелограммом.
В самом деле, если четырехугольник MNPQ составной, то по пре-
дыдущему предложению MN + PQ = 0 или MN = QP; этим ус-
ловием характеризуется параллелограмм.
3 а д а ч а 6. Пусть Л1Л2Л3Л4Л5Л6 — произвольный простран-
ственный шестиугольник. Доказать, что шестиугольник, образо-
ванный из середин сторон данного шестиугольника, является со-
ставным.
Решение. Пусть Mt, Мг, .... Мв—середины сторон
Л|Л2, Л2Л3, ..., AeAi. Требуется доказать, что шестиугольник
MiM2M3M4Al5Al6 составной. Для этого достаточно показать, что
+ М3М4 + М5Мв - 0.
(3)
Возьмем в пространстве произвольную аффинную систему коорди-
нат и обозначим координаты вершин исходного шестиугольника
следующим образом:
At (%1, у 1, гО, Л2 (х2, у2, г2), .... Лв(х8, у6, г6>.
В этой системе середины сторон шестиугольника будут иметь ко-
ординаты:
Д^ ( Х1 Н~ Х2 У1 4~ У2 г1 Ч~ г2 ) ДД [ х2 4~ х3 Уг 4~ Уз г2 + гз]
4 2’ 2 2 Г 2( 2 ’ 2 ’ 2 Г
Д| ( х3 + xi Уз + У 4 гз + г4 ) Д| ( Х1 + ХЪ У 4 -Ь Уз г4 + г5 |
3 I о » О * о Р о * о I*
дд ( хь + xs Уз + Уа ?з + гв ) д^ f хз + xi Уа + Ух га -|- гг j
51 2 ’ 2 ’ 2 J ’ 61 2 ’ 2 ’ 2 Г
а векторы MiM2, М3М4, А43Л4б — координаты:
—
2
м5мвр-^
У1—Уз
2
г1 гз
2
Отсюда непосредственно следует, что выполняется условие (3),
т. е. шестиугольник М составной.
38
Задача 7. Дан неплоский шес-
тиугольник А^гАзА^Ад, противопо-
ложные стороны которого попарно па-
раллельны. Доказать, что у этого шес-
тиугольника диагонали, соединяющие
противоположные вершины, пересека-
ются в одной точке и делятся в ней
пополам.
Решение. Возьмем четыре после-
довательные вершины так, чтобы они
не лежали в одной плоскости, и обоз-
начим их через Ав, Alt А2 и А3. Ос-
тальные две вершины обозначим через
А4 и А5. Точку Ае возьмем за начало,
а векторы = А^А\, е2 = А^А2, е3 =
= Л6Л3 — за координатные векторы
аффинной системы координат (рис. 19).
В выбранной системе координат верши-
ны Ад, Ai, А2, А3 имеют координаты:
Рис. 19
Лв(0, 0, 0), А, (1, 0, 0), А2 (0, 1, 0), Л3 (0, 0, 1).
Обозначим координаты остальных вершин так:
yi> г1)> As(x2, у2, z2).
По условию задачи' А4А2 || Л4Л5, А'2А3 || Л5Лв, Л3Л4 || ЛвЛ4.
Эти условия накладывают ограничения на координаты точек Л4 и
Л5. В самом деле, согласно теореме [2.1 ]
___ Лй2 {-1, 1, 0ЬЛЙз{0, -1, 1},
ЛзЛ4 {Xj, у4, zt — 1), Л4Л5 {х2 Xj, у2 — у1( z2 — zt},
Л5Лв {—х2, —у2, —z2), Л6Л4{1, 0, 0}.
Запишем условия коллинеарности векторов, пользуясь теоремой
[1.8]. Из условия Л3Л4 || Л6Л1 получаем: yt = 0, z4 = 1. Из ус-
ловия А4А2 || Л4Л5 получаем: z2 = z4 и х2 — х4 = у4 — у2. Из
условия А2А3 || А3Ад получаем: х2 = 0, — у2 = z2.
Таким образом, у4 = 0, z4 = 1, х2 = 0, z2 = 1, у2 = — 1,
х4 = — 1 и точки Л, и Ад имеют координаты: Л4(—1, 0, 1),
Лв(0, -1, 1). ,
Теперь легко доказать, что середины диагоналей AiA4, Л2Л5 и
А3Ав совпадают. В самом деле, вычислив координаты середин
Р, Q и R этих отрезков, мы убеждаемся в том, что все три точки
имеют одни и те же координаты:
39
Рис. 20
‘ Р (о, о, IV Q (о, о,
\ 2/ \ 2)
r(o, о, 1).
Задача решена.
Важно отметить, что утверж-
дение, высказанное в задаче,
справедливо только для неп-
лоского шестиугольника. Для
плоского шестиугольника с па-
раллельными противоположны-
ми сторонами середины диаго-
налей, вообще говоря, не совпадают (рис. 20).
Задачи и упражнения
38. Доказать, что четыре отрезка, соединяющие каждую верши-
ну тетраэдра с точкой пересечения медиан противоположной гра-
ни, пересекаются в одной точке, и каждый из отрезков делится
этой точкой в отношении X = 3 (считая от вершины тетраэдра).
39. В тетраэдре ABCD ребра АВ, AC, DB и DC разделены со-
ответственно точками М, N, Р и Q в одном и том же отношении X.
Доказать, что четырехугольник MNPQ — параллелограмм.
40. Дан тетраэдр ABCD и точка S на ребре АВ. Доказать, что
середины отрезков AD, ВС, SD и SC лежат в одной плоскости.
41. Пусть О — точка пересечения диагоналей параллелепипеда,
а I — произвольная прямая, проходящая через О. Доказать, что
отрезок прямой I, заключенный между гранями параллелепипеда,
делится в точке О пополам.
42. Доказать, что две плоскости A\BD и СВ fix, проведенные
через вершины параллелепипеда ABCDAiBfixD ( делят его диаго-
наль ACi на три равные части.
43. Доказать, что во всяком пространственном четырехугольни-
ке середины сторон образуют параллелограмм.
44. Пусть АВС... К — произвольный пространственный много-
угольник с четным числом вершин. Доказать, что многоугольник,
вершинами которого является середины сторон этого многоуголь-
ника, является составным.
45. Пусть в неплоском шестиугольнике противоположные сто-
роны попарно параллельны. Доказать, что точки Р, Q и R, деля-
щие диагонали шестиугольника в одном и том же .отношении, от-
личном от единицы, не лежат на одной прямой.
46. В неплоском четырехугольнике проведены три отрезка,
соединяющие соответственно: а) середины двух противоположных
сторон; б) середины двух других противоположных сторон; в) сере-
дины диагоналей.
40
Доказать, что эти три отрезка пересекаются в одной точке и
каждый из них делится в этой точке пополам.
47. На сторонах неплоского четырехугольника ABCD выбраны
точки Вр Ср D, так, что
АА, DC, . AD, ВВ,
А,В С,С D,D В,С r
Доказать, что четырехугольник AiBlClDi плоский.
48., Доказать, что если у шестиугольника Л1Л2Л3Л4Л5Лв про-
тивоположные стороны попарно параллельны, а вершины не ле-
жат в одной плоскости, то
Л1Л2 = Л4Л5, Л2Л3 = Л5Лв, Л3Л4 = Л6Л4.
Будет ли справедливо это свойство для плоского шестиугольника?
ГЛАВА II
ПРОИЗВЕДЕНИЯ ВЕКТОРОВ
§ 4. СКАЛЯРНОЕ ПРОИЗВЕДЕНИЕ ВЕКТОРОВ
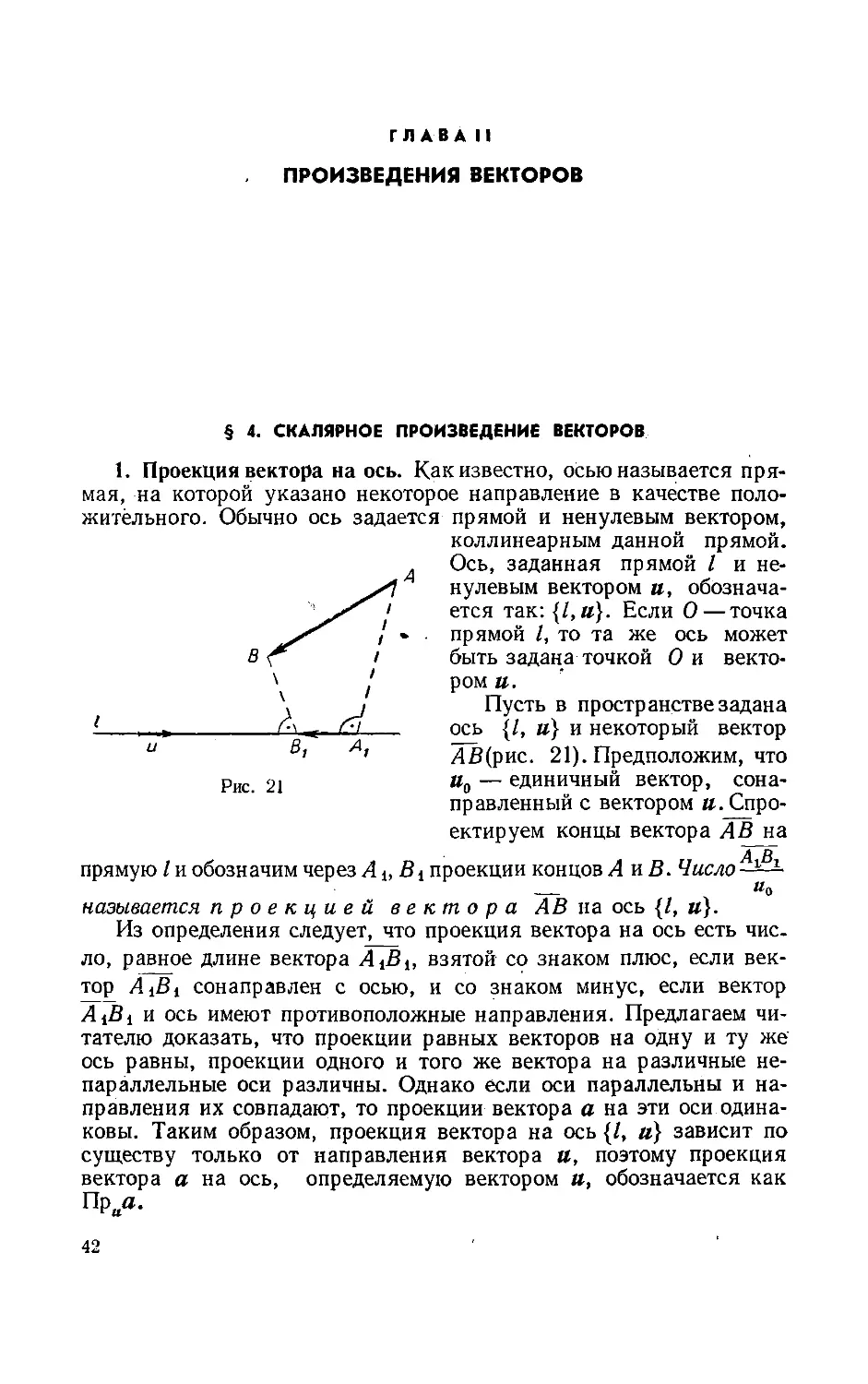
1. Проекция вектора на ось. Как известно, осью называется пря-
мая, на которой указано некоторое направление в качестве поло-
жительного. Обычно ось задается прямой и ненулевым вектором,
Рис. 21
прямую I и обозначим через А ъ В
называется проекцией, ее
Из определения следует, что
коллинеарным данной прямой.
Ось, заданная прямой I и не-
нулевым вектором «, обознача-
ется так: {/,«}. Если О — точка
прямой /, то та же ось может
быть задана точкой О и векто-
ром и.
Пусть в пространстве задана
ось {/, «} и некоторый вектор
Л В (рис. 21). Предположим, что
и0 — единичный вектор, сона-
правленный с вектором «.Спро-
ектируем концы вектора Л В на
проекции концов Л и В. Число^1-
___________ «о
кт о р а АВ на ось {/, и}.
проекция вектора на ось есть чис-
ло, равное длине вектора Л^, взятой со знаком плюс, если век-
тор AiBt сонаправлен с осью, и со знаком минус, если вектор
AiBi и ось имеют противоположные направления. Предлагаем чи-
тателю доказать, что проекции равных векторов на одну и ту же
ось равны, проекции одного и того же вектора на различные не-
параллельные оси различны. Однако если оси параллельны и на-
правления их совпадают, то проекции вектора а на эти оси одина-
ковы. Таким образом, проекция вектора на ось {/, и} зависит по
существу только от направления вектора и, поэтому проекция
вектора а на ось, определяемую вектором и, обозначается как
Пр„а.
42
Из определения проекции
следует, что ' проекция нуле-
вого вектора на любую ось
равна нулю, а проекция не-
нулевого вектора АВ равна
нулю тогда и только тогда,
когда точки At и Bt совпада-
ют, т. е. когда вектор АВ пер-
пендикулярен к оси {/, и}.
На рисунке 22 изображены векторы АВ, CD и EF и ось {/, «}, где
и — единичный вектор. Из рисунка видно, что
ПриЛВ = 4, ПРцСО = 0, npu£F = — 3.
Пример 1. Дан прямоугольный параллелепипед
ABCDA' B'C’D' (рис. 23), при этом АВ = 2, AD = 1 и АА' = 4.
Вычислить проекции векторов АС, В'А', В'А, СА, В'С на ось
{АВ, и}, где и — вектор, направленный вдоль прямой АВ от точ-
ки А к точке В.
Решение. Пр АС = — = 2, так как В есть проек-
“ «о
ция точки С на ось {АВ, и}. Здесь и0 — единичный вектор, сона-
правленный с вектором и.
Пр,/В7Д7=^- =— 2, '
Ио
Рис. 23
Рис. 24
43
так как В и А являются соответственно проекциями точек В' и А'.
Точно так же определяем проекции остальных векторов:
Пр^В7! = — = —2, Пр„СЛ = — = — 2,
Пр^ = J”L = о.
«0
Пример 2. Определить геометрическое место концов векто-
ров а, приложенных к точке О оси {/, «} и удовлетворяющих усло-
вию: Прц а — т, где т — действительное число.
Решение. Пусть «0 — единичный вектор, сонаправленный
с вектором и. Рассмотрим вектор ОС = ти0 (рис. 24). Очевидно,
точка С принадлежит рассматриваемому геометрическому месту
точек, так как _i
Пр„ОС = — = т.
“ «о
Кроме того, она лежит на оси {/, и}. Через точку С проведем плос-
кость л, перпендикулярную к оси {/, и }. Докажем, что искомое
геометрическое место точек совпадает с множеством всех точек
плоскости. Возьмем произвольную точку А плоскости л и рас-
смотрим проекцию вектора ОА на ось {/, а }. Так как проек-
ция точки О совпадает с точкой О, а проекция точки А — с точкой
С, то Пр ОА = — = т.
а Но
Обратно, пусть В — точка геометрического места, a — ее
проекция на ось {/, и}. По условию При ОВ = т. С другой сто-
роны, Пр ОВ поэтому = т и OBi = ти0.
«о «о
Отсюда следует, что совпадает с точкой С, поэтому В — точ-
ка плоскости л. Мы показали, что искомое геометрическое место
точек есть множество всех точек плоскости л.
Выведем формулу для вычисления проекции векторр на ось.
Предварительно уточним понятие угла между двумя векторами.
Пусть в пространстве даны два ненулевых вектора аи&. Перенесем
их в точку О и рассмотрим угол кратчайшего поворота от вектора а
к вектору b Этот угол называется углом между векто-
рами а и Ь. Его мера, очевидно, лежит в пределах от нуля дол.
Угол между коллинеарными векторами равен нулю, если они со-
направлены, и равен л, если они имеют противоположные направ-
ления. Отметим, наконец, что если один из векторов а и Ь нуле-
вой, то по определению мы считаем, что угол (а, &) произволен.
Углом между вектором а и осью {/,»} называет-
ся угол между векторами а и и .
Теперь докажем следующую теорему.
44
Теорема [4.1 ]. Если дана ось {I, и} и вектор а , то
Прц а = | а | cos («7и).
Доказательство. Если а — 0, то | а | = 0, поэтому
При а = 0 • cos (а, и) = 0.
Доказательство проведем для случая а =/= 0. Пусть <р = (а, и ).
Возможны три случая:
а) <р<с-у (рис. 25, а); б) <р>у(рис. 25, б); в) ф=“ (рис. 25, в).
Рассмотрим случаи а) и б). Не нарушая общности, можно счи-
тать, что вектор а единичный и начало вектора а = АВ лежит на
оси {/, «} и совпадает с началом вектора и. Пусть Bt — проекция
точки В на ось {/,«}.
а) Из прямоугольного треугольника ABBi имеем (рис. 25,а):
cos <р = —1, АВ. — АВ • cos <р.
f АВ 1 т
С другой сторрны, При АВ = 451. В данном случае векторы ABt
и __
, Я АВ! . г,
и « сонаправлены, так как <р < —. поэтому — = ABi.
2 а
Таким образом,
ПриДВ — ABi = АВ • cos <р = |а| cos <р;
б) Из прямоугольного треугольника АВВЛ имеем (рис. 25,6):'
cos (180° —<р) = — ( ABi =—АВ • cos ф. С другой стороны,
АВ
— АВ
Пр АВ = —1 = — ABlt таким образом,
“ и
ПриДВ = АВ • cos ср = j а [ cos <р.
45
Предоставляем читателю убедиться в том, что и в случае в)
теорема справедлива.
2. Координаты вектора как проекции. Понятие проекции векто-
рй на ось тесно связано с понятием координат вектора. Имеет ме-
сто следующая теорема.;
Теорема [4.2 ] Если вектор а задан в прямоугольной де-
картовой системе координат 01 jk своими координатами х, у, z,
то каждая координата есть проекция вектора на соответствую-
щую ось, т. е. х — Пр^ а, у = Пруй, z = ПрА а.
Доказательство. Пусть а — ОМ—данный вектор,
a Oijk — прямоугольная декартова система координат (см. рис. 7
на стр. 18). По условию теоремы вектор а имеет координаты х, у, z,
поэтому й = xi + yj + zk. В п. 4, §2 было показано, что коорди-
наты радиус-вектора данной точки совпадают с координатами са-
мой точки. Поэтому числа х, у, z совпадают с координатами конца
вектора а, т. е. точки М. Но по определению координат точки
имеем:
0М1 v = ом2 ОМ3
i ’ У J ’ k ’
где Л41( Л42, М2 являются проекциями точки М на координатные
„ ОМ. ОМ, ОМ.,
оси. С другой стороны, отношения —являются
проекциями вектора ОМ = а на оси координат. Итак,
х = Преа, у = Пруа, z = ПрАа.
Теорема доказана.
В заключение докажем два важных свойства проекций, необхо-
димых для дальнейшего изложения.
Теорема [4.3]. Пусть {/, и} — ось, « — единичный вектор
этой оси. Каковы бы ни были векторы а, Ъ и каково бы ни было число
К имеют место соотношения:
а) Пра(а + Ь) = ПРи а + Прц&,
б) При(Ха) = %Приа .
Доказательство. Докажем сначала соотношение а).
Выберем в пространстве прямоугольную декартову систему коор-
динат так, чтобы начало О лежало на прямой I, а вектор и был пер-
вым координатным вектором. Два других вектора обозначим через
<о и w . Итак, Oavw — прямоугольная декартова система коорди-
нат. Пусть в этой системе векторы а и Ь заданы своими координа-
тами: a {xlt yit z1},'&{x2, у2, z2}. По теореме [1.5] имеем:
(а + b) {Xi + х2, yt + у2, zt + z2}.
Согласно теореме [4.2]
Xi = Приа, х2 = При&, xt + х2 =Пр„(а + b ).
Отсюда следует, что
Пр„й + При& = При(й + b ).
46
Для доказательства соотношения б) заметим, что вектор Ха
согласно теореме [1.5] имеет координаты Xa{Xxi, Xyi, XzJ, поэтому
При(Ха ) = Xxt = Л Прва.
Теорема доказана.
Замечание. Свойство а) может быть распространено на лю-
бое конечное число слагаемых. В самом деле, При (а + b + с) —
= При [(а + Ь) + с] = Прв (« + &) + Прис = При а + Пра& + Првс.
Аналогично,
Пр„ (at + a2 + ... + ah) = Пр^ + Прца2 + ПриаА.
3. Скалярное произведение векторов. Скалярным произ-
ведением вектора а на вектор Ъ называется
число а = | а 11 b | cos (а, Ь), если векторы а и Ь ненулевые, и
число нуль, если хотя бы один из них равен нулю. Скалярное про-
изведение вектора а на вектор b обозначается так: аЬ.
Пользуясь соглашением, введенным на стр. 44, мы будем счи-
тать, что нулевой вектор перпендикулярен к любому вектору
пространства. Итак, (а, Ь) , если хотя бы один из этих
векторов нулевой. Таким образом, каковы бы ни были векторы а и
аЬ = |а| |&| cos (а, Ь ), (1)
Если а — ненулевой вектор, то согласно теореме [4. 1] имеем:
Пра& = |& |cos(&, а), поэтому
аЬ = | а | Прй&. (2)
Аналогично, если b — ненулевой вектор, то согласно теореме
[4.1] Пр6а = | а | cos (а, &), поэтому
аЬ = |&| • Прьа. (3)
Из определения непосредственно следует, что скалярное произ-
ведение двух векторов есть скалярная величина, т. е. число. Отсю-
да и происходит термин «скалярное» .произведение.
Ниже мы перейдем к рассмотрению свойств скалярного произ-
ведения. Предварительно выясним геометрический смысл знака
скалярного произведения.
Пусть аЬ > 0. Из определения скалярного произведения сле-
дует, что | а | | & | cos (a, b ) > 0, откуда
la I ¥=0, |&| #= 0, Z (a, &)<|. (4)
Обратно, если выполнены условия (4), то ab> 0.
47
Пусть ab < О, тогда | а 11 b | cos {а, b ) <. О, откуда
|а| =#0,\Ь | =# О, Z (а, &)>|. (5)
и, обратно, если выполнены условия (5), то а & < 0.
Рассмотрим, наконец, случай, когда
а Ъ = 0 или |а| |&| cos (а, Ь) = 0.
Это равенство может иметь место, если выполнено одно из условий:
а) а =0; б) b = 0; в) а #= 0, b ф 0, но а I Ь- (6)
Обратно, если выполняется одно из условий (6), то а b =0, Мы
пришли к следующей теореме.
Теорема [4.4]. а) Скалярное произведение векторов а и b
положительно тогда и только тогда, когда а 0, & 0,
Z (a, b <
б) Скалярное произведение векторов а и b отрицательно тогда
и только тогда, когда а =#= 0, b 0, Z (а, &) >—.
2
в) Скалярное произведение векторов а и b равно нулю тогда и
только ггтгда, когда они взаимно перпендикулярны1.
Пр имер 3. Определить знаки скалярных произведений
следующих пар векторов;
а) АвА 1 • Л6Л5, б) АдАв А$А^;
в) А 4Л2 ЛгЛ3; г) А ^А№ Л4Л2,
где каждый из сомножителей есть вектор, образованный соответ-
ствующей стороной плоского шестиугольника А 4Л2ЛзА4ЛдАв, изо-
браженного на рисунке 20 (см. стр. 40).
Решение, a) A6Ai • АеА5 < 0, так как Z AiA^A^
б) А5Ав Л6Л4= 0, так как Z 4e^5^4 = у;
в) Л 4Л2 Л2Л3 > 0, так как <р = Z (AiA2, АгА3) <
В самом деле, угол <р острый, так как смежный с ним ZЛ1Л2Л3
тупой;
г) Л 4ЛК • Л1Л2>0, так как Z Л6Л1Л2
4. Основные свойства скалярного произведения. В следующей
теореме сформулированы основные свойства скалярного произве-
дения векторов.
1 Здесь термин «перпендикулярность» распространяется и на тот случай,
когда один из‘векторов нулевой.
48
Теорема [4.5]. Для произвольных векторов а, Ь, с и про-
извольного числа а имеют место следующие свойства скалярного
произведения:
a) ab = Ьа\
б) (аа) b = а (а&); а (а&) = а (а&);
в) а (Ь + с) = ab + ас, (а + Ь) с = ас + Ьс.
Доказательство свойства а) непосредственно следует
из определения скалярного произведения. В самом деле,
ab = | а 11 b I cos (a, by, ba = | b 11 а | cos (&, а).
Но правые части этих равенств равны, так как произведение чи-
сел не зависит от порядка сомножителей, a cos (a, b ) = cos (&, а ).
Отсюда следует, что равны и левые части, т. е. ab = Ьа.
б) Приведем доказательство свойства б): (аа) b = a (ab).
Если b = 0, то соотношение, очевидно, справедливо, так как
по определению (аа) b = 0 и ab = 0, поэтому (аа) b = а (ab).
Если b #= 0, то из соотношения (3) и теоремы |4. 3], получаем:
(аа) b = | Ь | Пр& (аа) = а | b | Прйа = а (ab).
На основании доказанного свойства и свойства а) легко пока-
зать, что а(а&) = а(а&). В самом деле, а(а&) = (а&) а —
= а (Ьа ) = а (ab).
Совершенно аналогично можно доказать свойство в):
а (Ь + с) = ab + de.
В самом деле, если а = 0, то а (Ь + с) = 0, ab =0, ас = 0, поэ-
тому а (Ь 4* с) = ab + ас. Если а =у= 0, то из соотношения (2) и
теоремы |4.3] получаем:
а(» + с) = |а|Пра(& + с) — |а|(Прв& + Првс) =
= |а| Пра& + \а\Прас = ab-у ас.
Предлагаем читателю самостоятельно доказать второе из соот-
ношений в).
Следствия. 1°. Для произвольных векторов а, b и произ-
вольных чисел а, Р имеет место соотношение:
(аа) (Р&) = ар (ab ).
2° Каковы бы ни были векторы a, bit ..., bk, имеет место
соотношение
a(bt± b2+ ... + bk) = abt + аЬг+ ... + abh.
49
В самом деле, 1° непосредственно следует из свойства б) теоре-
мы [4.51, а 2° является обобщением пункта в) той же теоремы.
Предлагаем читателю самостоятельно доказать это следствие ме-
тодом индукции.
Пример 4. Пусть I, J, k — единичные взаимно перпен-
дикулярные векторы. Вычислить скалярное произведение
(27 + ./-ЗЛ) (Z +ЗЙ).
Решение. Пусть а = (2i + J — 3k) (i + 3k). Пользуясь свой-
ством в) теоремы [4.51, получаем:
сс. = 2i (Z -|- 3k) + j (i 4- 3k) 4* (— 3k) (i 4- 3k) =
= (2Z) i + (2Z) (3k) + Ji + J (3k) + (— 3k) i + (— 3k) (3k).
Теперь используем следствие 1°:
a = 2 (ii) + 6 (ik) + ji 4- 3 (Jk) — 3 (ki) — 9 (kk).
Векторы i, j, k единичные и взаимно перпендикулярные, поэ-
тому И =1, kk = 1, ik = ji = jk = ki = 0.
Подставив эти значения в выражение для а, получаем: а =
= 2- 9 = — 7.
Пример 5. Какой угол составляют между собой ненулевые
векторы а и Ь, если известно, что вектор a -j- 3b перпендикуля-
рен к вектору 7а — 5Ь, а вектор а — 4Ь перпендикулярен к век-
тору 7а — 2Ь?
Решение. Так как пары векторов
а + ЗЬ, 7а —ЪЬ иа — 4Ь, 7а —2Ь
взаимно перпендикулярны, то
(а + ЗЬ) (7 а — 5Ь) = 0 и (а — 4&) (7а — 2Ь) = 0.
Отсюда, пользуясь свойствами скалярного произведения, по-
лучаем: 7аа + 16а& — 15&& = 0, 7аа — ЗОаЬ + 8ЬЬ = 0, или
7a2 + 1 бай cos ф—15й2 = 0, 7а2—ЗОаЬ cos <p -> 8Ь2 = 0,
где а = |а|, Ъ = |й |.
Разделив эти соотношения на а2 и введя обозначение % = —,
а
получим:'
7 4- 16% cos <р — 15 V = 0, 7 — 30% cos ф + 8%2 = 0.
Исключив из этих двух соотношений %, получим одно уравне-
ние для определения cos ф. Вычитая из первого соотношения вто-
рое, получаем: <
46% cos ф — 23%2 = 0.
50
Так как а и & — ненулевые векторы, то X =— += 0, поэтому,
а
сократив на 23Х, получаем: 2 eos <р = /.. Подставив это значение в
одно из предыдущих уравнений, получим: 7 + 32 cos2<p — 60 cos2 <р=0,
или cos2 ср = -i; cosq> = ± у, <pt = 60°, <р2 = 120°.
5. Выражение скалярного произведения через координаты сом-
ножителей. Рассмотрим следующую задачу, имеющую важные
практические приложения.
Задача 1. Даны векторы а и b своими координатами в
прямоугольном декартовом базисе:
« {*1, У1, *1} и b {х2, y2,'z2}.
Вычислить их скалярное произведение.
Решение. Пусть Z, J, k— векторы данного прямоугольного
декартового базиса. Из определения скалярного произведения не-
посредственно следует, что
а = 1, /у = о, /а = о,
Л = 0, jj=\, Jk = O, (7)
ki = 0, kj =• 0, kk = 1.
Теперь легко вычислить скалярное произведение векторов а и Ь:
а = XjZ + yj + Zik, b = x2z + y2j + z2k,
ab=(xli+ylf+Zik)(x2i + yJ+z2k).
Пользуясь следствиями 1° и 2° теоремы [4. 5], преобразуем это
выражение так:
ab = (xj) (x2i) + (х^) (y2j) + (xlt‘) (z2k) + (yj) (x2i) + (yj) (yj) +
+ (yj) &*) + (ztk) (x2i) + (ztk) (yj) + (z^) (z2k) =
= xtx2 (ii) + x(y2 (zj) + xtz2 (ik) + ytx2 (Ji) + y,y2 (JJ) + У1г2 (Jk)
+ ztx2 (ki) + Zjy2 (kJ) + z^2 (kk).
Учитывая соотношения (7), окончательно получаем:
ab = XiX2 + yly2 + г&г- (8)
Мы пришли к следующей теореме.
Теорема [4.6]. Если два вектора заданы в прямоугольном
декартовом базисе своими координатами, то их скалярное произве-
дение равно сумме парных произведений одноименных координат.
Из этой теоремы и теоремы [4.4] в) получаем:
Следствие. Для 'того чтобы два вектора, заданные своими
координатами в прямоугольном декартовом базисе, были взаимно
перпендикулярны, необходимо и достаточно, чтобы сумма парных
произведений одноименных координат равнялась нулю.
Пример 6. В прямоугольном декартовом базисе даны век-
торы а {1, 3, 0} и & {2, —3, 1}.
51
Вычислить
a) ab; б) (а + b)(a — b); в) У аа; г) bb.
Решение, а) По формуле (8) получаем:
ab = 1 • 2 + 3 (—3) + 0 1 = —7.
б) Сначала вычислим координаты векторов а + Ь и а — Ь,
а потом воспользуемся формулой (8):
(а + &){3, 0, 1}, (а — &){—!, 6, —1};
(а + Ь) (а — Ь) = 3 - (— 1) + 0 • 6 + 1 • (— 1) = — 4.
в) аа=1-1+3-3 + 0- 0 = 10, У аа = У10.
г) bb = 2 • 2 + (— 3) • (^-3) + 1 1 = 4 + 9 + 1 = 14.
Произведем косвенную проверку полученного в п. б) резуль-.
тэта. Мы получили (а + Ь) (а — b ) = — 4.
Преобразуем левую часть, пользуясь распределительным зако-
ном скалярного произведения векторов:
аа — ab + ba — bb = — 4, 10 — 14 = — 4.
Мы получили правильное числовое равенство.
Пример 7. Выяснить, какие из пар следующих векторов,
заданных своими координатами в прямоугольном декартовом ба-
зисе, взаимно перпендикулярны:
а{3, —1, 2}, &{1, 1, 0), с{0, 0, 3}, й{1, 0, — |}.
Решение. Вычислим попарно скалярные произведения дан-
ных векторов:
ab = 3 • 1 + (— 1) • 1 + 2 • 0 = 2, = 1 • 0 + 1 • 0 + 0 • 3 = 0,
ас = з . о + (— 1) - 0 + 2 • 3 = 6, bd= 1 • 1 + 1 • 0+0 •(—|) = 1,
ad = 3. 1 + (-1).О + 2-(-^=о,
cd = 0 - 1 + 0-0 + 3- I —=—
\ 2^ 2
Отсюда видно, что a I d и b I с .
Другие пары векторов не перпендикулярны. Например, векто-
ры а и & согласно теореме [4.4] образуют острый угол, а векторы
end — тупой угол.
52
Задачи и упражнения1
49. На рисунке 23 изображен прямоугольный параллелепипед
ABCDA' B'C'D'. Определить проекции векторов AD', С'А', СВ,
DC, СА' на ось {АВ, и}, если и — единичный вектор, а АВ = 2.
50. Даны две оси {/, а} и {/, — и}. Как связаны проекции од-
ного и того же вектора на эти оси? Существуют ли векторы, для
которых проекции на данные две оси равны?
51. Дана сферическая поверхность радиуса г. Доказать, что
если концы вектора а лежат на этой поверхности, то проекция
вектора а на любую ось по модулю не больше, чем 2г.
52. Определить проекцию вектора р = 51 + J на ось, имею-
щую направление q = 51 — Y2J.
53. Найти проекцию вектора Z — 2j + 2k на ось, образую-
щую равные острые углы с тремя координатными осями.
54. Дан параллелограмм ОАВС; ОА = СВ = а, ОС — АВ =
= Ь. Дать геометрическое истолкование формул:
а) (а +&)2 + (а — &)2 = 2 (а2 + &2);
б) (а + &)2 —(а —»)2 = 4а&;
в) (а + &) (а — Ь) = а2 — Ь2.
55. Даны векторы: а{1, 5, 2}, b {2, 0, — 1}, с |2, 3,
d {0, 0, — 2}, е {1, 0, 0}. Вычислить их попарные скалярные про-
изведения и по этим произведениям узнать, образуют ли они ост-
рый, прямой или тупой угол.
56. Даны векторы: а {2, —1, 0), & {1, К 2, —5}, с{1, 2, 5},
d {1, 0, 2}. Вычислить скалярные произведения: аЬ, ас, ad,
be, bd, cd.
57. Даны векторы а{4, —2, —4}, b{2, 4, 3}, с{0, 1, —1}.
Вычислить: a) ab\ б) ас\ в) У а2-, г) (а — &) (а + с); д) (а — &)2.
58. В прямоугольной декартовой системе координат даны век-
торы а {2, —1, 3}, &{1, —3, 2}, с{3, 2, —4}. Определить ко-
ординаты вектора х, удовлетворяющего условиям:
ха = 10, xb = 22, хс =' — 40.
59. Доказать, что в аффинном базисе скалярное произведение
векторов a{alt а2, а3} и b {Рь (32, Р3} вычисляется по формуле
аЬ =2 gi/xfii, где g„ = е^,.
и = 1
60. Если векторы а1( а2, а3 не компланарны и aip = 0,
а2р — 0, а3р = 0, то р — 0. Доказать.
1 Во всех задачах этого параграфа предполагается, что базис прямо-
угольный декартовый.
53
61. Доказать, что если векторы alt аг, а3 не компланарны, то
«1«2 а^з
А = «2«1 aiai «2Й3 =#0.
«3°1 «3«2 азаз
62. Пусть еь ег, es — аффинный базис. Числа
ае^ = аь аег = а2, ае3 - а3
называются ковариантными координатами век-
тора а. Доказать, что: а) ковариантные координаты вектора
однозначно определяют вектор; б) любые три числа, взятые в опре-
деленном порядке, могут быть ковариантными координатами неко-
торого вектора.
63« Установить связь между ковариантными и обычными коор-
динатами вектора а в аффинном базисе. Существует ли такой ба-
зис, в котором каждая ковариантная координата совпадает с соот-
ветствующей обычной координатой?
§ 5. НЕКОТОРЫЕ ПРИЛОЖЕНИЯ СКАЛЯРНОГО ПРОИЗВЕДЕНИЯ;
ЕГО СВОЙСТВА, ОТЛИЧНЫЕ ОТ СВОЙСТВ ПРОИЗВЕДЕНИЙ ЧИСЕЛ
1. Вычисление модуля вектора.
Задача 1. Дан вектор а своими координатами х, у, г в
прямоугольном декартовом базисе Z, j, k. Вычислить модуль это-
го вектора.
Решение. Рассмотрим скалярное произведение аа. По
определению аа = |а|| а| cos (а,а) = | а|2. Отсюда следует, что
\а |= У аа ~ У а?
Эта формула позволяет решить поставленную задачу. Так как
а {х, у, г}, то из соотношения (8), § 4 получаем
| а\ = /х2 + у2 + г2. (1)
Мы доказали следующую теорему.
Теорема [5.11. Модуль вектора в прямоугольном декарто-
вом базисе равен корню квадратному из суммы квадратов коорди-
нат вектора.
Если вектор а компланарен с векторами i и J, то z = 0 и
формула (1) принимает вид: а — Ух2 + у2. Мы пришли к теореме
I, [5.2].
Пример!. В прямоугольном декартовом базисе даны век-
торы: а{0, 4, —3}, &{1, 0, 5}, с {4, 1, 2]Z2}. Определить их мо-
дули.
1 Здесь по определению а2 = аа.
54
Решение. По теореме [5. 1 ] | а | = /42 + (— З)2 = 5, | b | =
= V1 + 25 = /26, |с| = У16+ 1+8 = 5.
П р и м е р 2. Дан вектор а {3, 5, —1} в прямоугольном декар-
товом базисе. Определить координаты единичного вектора, сона-
правленного с данным вектором.
Решение. Пусть а0{х0, у0, г0} искомый вектор. Очевидно,
а = %а0, где А, > 0. Отсюда следует, что 3 = %х0, 5 = Ху0, — 1 =
= А гв, или
35 1 .q,
хо = Т’ Уо = zo = — V (2)
А А А
Вектор а0 единичный, поэтому
1«о! = /+2+У<?+^ = 1. = 1, X = /35.
Из сротношений (2) получаем координаты вектора а0:
( 3 5_______1_|
а° 1/35 ’ /35 ’ /35 J
2. Вычисление косинуса угла между векторами.
Задача 2. Даны ненулевые векторы своими координатами в
прямоугольном декартовом базисе: {xlt уъ zj и а2 {х2, у2, z2}.
Вычислить cos (аь а2). '
Решение. Вычислим скалярное произведение данных век-
торов: = | «11 • | л21 cos (alt а2). Так как векторы а, и а2 нену-
левые, то cos (ait а.) —-Д1Дг ‘ .
|Д11 • I а2|
Подставив сюда значения а±а2, [а^, \а2\, выраженные через
координаты1, получаем:
cos^j, а2) =
XiXj+y^j + z^______.
/ Х1 + У 1 + 21/ «2 + У1 + Z2
(ЗУ
Мы пришли к следующей теореме.
Теорема [5.2]. Косинус угла между двумя ненулевыми век-
торами в прямоугольном декартовом базисе равен отношению сум-
мы произведений соответствующих координат данных векторов к
произведению модулей этих векторов.
Пример 3. Определить косинус угла между векторами
а {2, —2, 1} и &{3, 0, —4}.
Решение. Согласно формуле (3)
1 См. формулу (8) , § 4 и формулу (1) настоящего параграфа.
55
cos(a?d) = ^3-2.о+1.(-4^ =
V 4 + 4 + 1/ 9+0+16
2
— 15’
3. Вычисление расстояния между
двумя точками. Доказанная выше тео-
рема [5.1] позволяет получить формулу
для вычисления расстояния между дву-
мя точками, заданными своими коорди-
натами в прямоугольной декартовой системе. В самом деле, пусть в
прямоугольной декартовой системе координат даны две точки
Л (%!, у1( zj и В (х2, у2‘, 22)- По определению модуля вектора
{см. I, § 1, п. 4) АВ = |ЛВ|. Из теоремы [2.1] следует, что
АВ {х2— xit у2— у t, г2 — Zi}, поэтому согласно теореме [5.1]
ЛВ = У (х2 — Xi)2 + (у2 — yj2 + (z2 — zj2.
Мы доказали следующую теорему.
Теорема [5.3]. Расстояние между двумя точками, задан-
ными своими координатами в прямоугольной декартовой системе,
равно корню квадратному из суммы квадратов разностей соответ-
ствующих координат данных точек.
4. Геометрические приложения. Скалярное произведение с ус-
пехом может быть применено для решения задач и доказательства
.теорем элементарной геометрии.
Задача 3. Дан произвольный треугольник АВС. Выразить
cos Z ВАС через стороны АВ, ВС и СА.
Решение. Пусть АВС — данный треугольник, ф == ВАС.
Введем обозначения: АВ = с, АС = Ь, ВС = а. Очевидно
b — с = а, Отсюда (& — с) (Ь — с) = аа, bb — 2Ьс + сс = аа,
__ bb -(-ее —аа
~ 2
Рассмотрим каждое из скалярных произведений в отдельности:
Ьс = АС • АВ cos ср; bb = АС2; сс = АВ2; аа = ВС2.
Подставив эти выражения в предыдущее соотношение, получаем:
ЛС2 + ЛВ2 — ВС2
cos ш — ---!----------.
Y ЧАС-АВ
Эта формула хорошо известна из курса средней школы. Если
Ф = т. е. если треугольник прямоугольный, то отсюда полу-
чаем теорему Пифагора:
АС2 + АВ2 — BQ2 = 0.
56
Задача 4. Треугольник АВС задан векторами АВ — Ь
и АС = с. Выразить через векторы b и с вектор h — АН, где
Н — основание перпендикуляра, опущенного из вершины А
на сторону ВС.
Решение. Вектор ВН коллинеарен с вектором ВС (рис. 26),
поэтому
ВН_ = ХВС = % (с — Ь),
h = АВ + ВН = b + X (с — Ь). (4)
Так как векторы й и ВС взаимно перпендикулярны, то h-BC =
= 0 или [b + X (с — &)] (с — й) = 0, откуда X = ^-~с) ь.
(с — й)2
Подставляя найденное значение X в выражение (4), получим:
h = b + {b~c]b (с — Ь). . (5)
(с — й)2
Пример 4. Показать, что четырехугольник Л (4, 0, 8),
В (5, 2,. 6), С (3, 1, 4), D (2, —1, 6), заданный в прямоугольной
декартовой системе координат, есть квадрат.
Решение. Из курса элементарной геометрии известно,
что квадрат есть параллелограмм, у которого две смежные стороны
равны и взаимно перпендикулярны. Поэтому для того, чтобы ре-
шить задачу, достаточно показать, что АВ= DC, АВ = AD и
TB-LAD. _ ' _
Определим координаты векторов АВ, AD, DC:
АВ{1, 2, —2}, TD{—-2, —1, —2}, DC{\, 2, —2}.
Отсюда непосредственно следует, что АВ = DC, АВ J_ AD. Да-
лее, АВ = /1 + 4 + 4 = 3, AD = /4+1 + 4 = 3.
5. Выражения координат вектора через скалярное произведение;
направляющие косинусы. Если вектор а в прямоугольном декарто-
вом базисе Z, j, k имеет координаты х, у и г, то согласно п. 2, §4
имеем: х = Пр^а, у = Пр/г, г = ПрАа.
Из формулы (3), § 4 следует, что ai = 111 Пр,я = Пр,я, aj =
= Пруа, ak = Пр^а, поэтому х = ai, у = aj, г = ak. Таким об-
разом, разложение вектора а по базисным векторам может быть
записано в следующем виде:
а = (ai) i + (aj) j + (ak) k. (6)
Если a — ненулевой вектор и (a, i) = a, (a, j) = 0, (a,k) =у,
то числа cos a, cos р, cos у называются направляющими
косинусами вектора а в базисе i , j, k . Легко до-
казать, что для любого ненулевого вектора
57
cos2» + cos2p + cos3y = 1. (7)
В самом деле, из (6) получаем:
а = | а | (Z cos а + J cos [3 + k cosy).
Из формулы (1) следует, что
| а | = | а |]/cos2a 4- cos2p + cos2y.
Так как |а| ф 0, то отсюда следует соотношение (7).
Если а0 — единичный вектор, сонаправленный с вектором а,
то, очевидно, а0 и а имеют одни и те же направляющие косинусы,
поэтому соотношение (6), записанное для а0, принимает вид:
«о = («оО i + («о/) J + (aofe) k •=1 cos a + J COSP + k cos Y-
Мы пришли к выводу.
Теорема [5.4]. Направляющие косинусы ненулевого вектора
а являются координатами единичного вектора, сонаправленного с
данным вектором а .
П р и м е р 5. Диагональ АС' прямоугольного параллелепи-
педа образует с каждым из ребер АВ и AD угол 60° (см. рис. 23).
Определить угол, который образует диагональ с третьим ребром
АА'. _ _ ____
г» r-r г АВ . AD . АА' ~
Решение. Пусть I = -т^, J = -.-7-., к = : Если cos а,
Ad AL/ АА ’
cosp, cosy — направляющие косинусы вектора
= cos 60° = —, cos р = cos 60° = —, и по
2 2
АС', то cos а =
формуле (7) получа-
ем: cos2y = 1 — cos2» — cos2B = 1---------- = —: cos у = -+- 2
1 r 2 2 1 ~ 2
y( = y2 = y. Ho Z A’AC' <y> так как АА’ перпендику-
лярен к плоскости BAD, а концы векторов А А' и -AC' лежат по
одну и ту же сторону от нижней грани, поэтому Z А'АС'= у —.
4
6. Свойства скалярного произведения, отличные от свойств про-
изведения чисел. Из предыдущего изложения видно, что формаль-
ные свойства скалярного произведения векторов в основном сов-
падают с соответствующими свойствами произведения чисел. Од-
нако ошибочно думать, что любое свойство произведений чисел
можно автоматически распространить на скалярное произведение
векторов. Скалярное произведение имеет некоторые специфические
свойства, не присущие операции умножения чисел. Рассмотрим ос-
новные из этих свойств.
58
а) Одной из существенных особенностей скалярного произве-
дения является то обстоятельство, что произведение двух векторов
дает число, т. е. объект другой природы, в то время как произве-
дение двух чисел есть число, т. е. объект той же природы. Отсюда,
например, вытекает, что, пользуясь скалярным произведением,
нельзя ввести вектор-единицу и вектор, обратный данному векто-
ру. В самом деле, во множестве чисел всегда существует число 1,
обладающее тем свойством, что а • 1 = а для любого числа а. Но
произведение вектора на вектор есть число, поэтому соотношение
ab = а принципиально невовможно.
б) Если а =/= О, то числовое уравнение а х = 0 всегда имеет
единственное решение. Аналогичные уравнения для скалярного
произведения векторов ах = Ь , как было указало выше, не име-
ют смысла. В связи с этим операция, обратная скалярному произ-
ведению, не вводится. Однако можно ставить вопрос о решении
уравнения вида ах = а, где а и х — векторы, а а — число.
В отличие от предыдущего это уравнение имеет бесчисленное мно-
жество решений. Рассмотрим более подробно этот вопрос. Пусть
ах = а ’ (8)
— данное уравнение и а =/= 0. Возьмем в пространстве прямо-
угольную декартову систему координат Oijk так, чтобы вектор I
был сонаправлен с вектором а . Приложим искомый вектор х к
точке О и обозначим через х, у, г прямоугольные декартовы коор-
динаты конца М этого вектора. В этом случае а = | а | /, х —
— xi + у/ + zk, поэтому согласно теореме [4.6] уравнение (8)
равносильно соотношению
| а | х = а. (9)
Если ОМ — решение уравнения (8), то первая координата
точки М (х, у, г) удовлетворяет уравнению (9). Обратно, если пер-
вая координата некоторой точки М удовлетворяет уравнению (9),
то вектор ОМ, очевидно, является решением уравнения (8). Таким
образом, уравнение (9) является уравнением геометрического мес-
та концов всех решений векторного уравнения (8), если начала
их приложены к точке О.
Так как | а ] #= 0, то уравнение (9) равносильно соотношению
х = — , откуда видно, что точки М лежат в плоскости л, перпен-
|а|
дикулярной к вектору а. При а = 0 плоскость л проходит через
точку О и, следовательно, уравнению (8) удовлетворяют те и толь-
ко те векторы, которые перпендикулярны к а.
в) Если аир — числа, то из равенства ар = 0 следует, что хотя
бы одно из чисел а и р равно нулю. Аналогичного свойства для ска-
лярного произведения нет. В самом деле, если, например, а =^= 0,
Ь У= 0 и a J_ Ь , то ab = 0.
59-
Однако, если соотношение ах = 0 имеет место для любого
вектора х, то отсюда следует, что а — 0.
В самом деле, положив х=а, получаем: aa=Q или | а 11 а | = 0,
отсюда | а |=0 и а=0.
г) Выше было отмечено, что скалярное произведение вектора на
вектор есть число, поэтому квадрат вектора а, т. е. аа, есть скалярная
величина. Если рассмотреть произведение (аа) а, то естественно его
назвать кубом вектора. Мы видим, что куб вектора есть век-
торная величина. Таким образом, операция возведения в степень
сопряжена с принципиальными трудностями, ввиду чего в вектор-
ной алгебре эта операция не вводится. Точнее, рассматривается только
квадрат вектора а2 = аа.
Представляет определенный интерес исследование «квадратных»
векторных уравнений, т. е. уравнений типа
х2 + 2ах + а = 0. (10)
Здесь х — искомый вектор, а — данный вектор, а а — данное
число.
Возьмем в пространстве прямоугольную декартову систему
координат Oljk и все рассматриваемые векторы приложим к
точке О. Обозначим через х, у, г координаты искомого вектора, а
через а1; а2, а3 координаты данного вектора. Тогда по теореме
[4.6] получаем:
х2 = х2 + у2 + г2, ах = atx + а2у + a3z;
поэтому уравнение (10) в координатах запишется так
№ + у2 + г2 + 2 (щх + а2у + a3z) + а = 0 (11)
или
(х 4“ (?1)а 4~ (у 4~ й2)2 4~ (z + tz3)2 — ai 4- а2 4- а3 — а = а2—<х.
(И')
Исследуем это уравнение.
а) а2—а > 0. Предоставляем читателю на основе теоремы
[5.3 ] самостоятельно убедиться в том, что геометрическое мес-
то концов векторов х, приложенных в начале координат, удов-
летворяющих уравнению (11), есть сфера с центром в точке
(—аъ —а2, —а3) и радиуса R = Уа2—а.
б) а2 — а = 0. В этом случае соотношение (11') принимает вид:
(х + at)2 4- (у + а2)2 4- (? 4- «з)2 = 0. Так как в левой части все
слагаемые неотрицательны, то х = — alt у = — а2, г = — а3 и
х = — а.
Итак, в этом случае уравнение (10) имеет единственное реше-
ние.
в) а2—а < 0. Уравнение (11') не имеет ни одного действи-
тельного решения, поэтому нет действительных векторов, удов-
летворяющих уравнению (10).
€0
Пример 6. Решить уравнение
х2 + 2ах + 30 = О,
где а в некотором прямоугольном базисе имеет координаты:
а{1, 2, —5}.
Решение. В данном случае а2 — а = 1 + 4 + 25 — 30 =
= 0. Уравнение имеет единственное решение: х {—1, —2, 5}.
Задачи и упражнения
64. Доказать, что диагонали четырехугольника, заданного
координатами своих вершин
А (—4, —4, 4), В (—3, 2, 2), С (2, 5, 1), D (3, —2, 2),
взаимно перпендикулярны.
65« Определить косинус угла между векторами:
a) at{2, —1, 3} и &J1, —4, 3};
б) а2{0, — 1, 5} и &2{7, 5, 1}.
66« Даны вершины треугольника: А -(2, 1, ]/2), В (1, 0, 0),
С (1 + |/3, ]/3, —]Лб). Найти углы треугольника.
67. : Найти косинус угла при вершине равнобедренного тре-
угольника, если медианы, проведенные из концов его основания,
взаимно перпендикулярны.
68. Даны координаты вершин треугольника: А (1, 1, 1),
В (5, 3, 0), С (2, 0, 1). Определить координаты и длину вектора ВН,
где Н — основание перпендикуляра, опущенного из вершины
В на противоположную сторону.
'69. Даны три некомпланарных вектора: ОЛ{1,—1, —2};
ОВ{1, 0, —1} и ОС {2, 2, —1}. Найти координаты вектора ОН, где
Н — основание перпендикуляра, опущенного из точки О на плос-
кость АВС.
70. Доказать теорему: для того чтобы сумма двух неколлинеар-
ных векторов а и b была направлена вдоль биссектрисы угла,
образованного этими векторами, необходимо и достаточно, чтобы
I а | =| Ь |.
71. Определить вектор, коллинеарный биссектрисе угла А
треугольника ЛВС с вершинами в точках Л (1, 3, 5), В (3, 5, 6) и
С (4, 7, 5).
72. Найти углы между любыми двумя биссектрисами плос-
ких углов прямого трехгранного угла.
73. Решить и исследовать уравнения:
а) х2 + 2ах + 1 = 0;
б) х2 — Ьх + 15 = 0,
61
где ли Ь — векторы, заданные в прямоугольном декартовом ба-
зисе: а {0, 2, 0}, b {1, 1, —2).
74. Пусть ас = Ьс при с =£ 0. Можно ли сократить это со-
отношение на с. Объяснить результат.
75в Справедливо ли соотношение (ab) с = а (Ьс ) для произ-
вольных векторов а, Ь и с? Объясните результат. Для каких
векторов имеет место это соотношение?
76. Пусть х3 = (хх)х. Решить уравнения: а) х3а -р Ь3 = 0;
б) х3 = а. Здесь а и Ь — данные ненулевое векторы.
§ 6. ВЕКТОРНОЕ ПРОИЗВЕДЕНИЕ ВЕКТОРОВ
1. Упорядоченная тройка векторов. Пусть а, Ь, с — система
трех некомпланарных векторов. Эту систему будем называть^
упорядоченной тройкой векторов или репе-
ром, если векторы системы заданы в определенном порядке, т. е.
указано, какой из них
считается первым, ка-
кой вторым и какой
третьим. Если а, Ь, с—
упорядоченная тройка
векторов, то будем счи-
тать, что порядок их
задания совпадает с
порядком записи, т. е.
первым вектором явля-
ется вектор а, вторым —
вектор Ь и третьим —
вектор с. Таким обра-
зом, abc, Ьас и cab — разные упорядоченные тройки векторов.
Легко видеть, что три некомпланарных вектора могут образовы-
вать шесть различных упорядоченных троек: abc, Ьса, cab,
Ьас, асЬ, сЬа.
Пусть abc — упорядоченная тройка векторов. Перенесем эти
векторы в точку М пространства и концы их обозначим через
А, В и С. В сиду некомпланарности векторов а, Ь и с точки
М, А, В, С не лежат в одной плоскости (рис. 27).
Введем следующее определение ориентации репера: репер abc
называется правым или имеющим правую ориен-
тацию, если наблюдателю, глаз которого расположен в точке М,
направление движения по контуру треугольника АВС от точки А
к точке В, от точки В к точке С и от точки С к точке А кажется
совпадающим с направлением движения часовой стрелки. Репер
abc называется левым или имеющим левую ориен-
тацию, если это движение кажется совершающимся против
движения часовой стрелка. На рисунке 27 репер abc правый, а
репер а'Ь'с' левый.
62
Можно указать другое правило для
определения ориентации репера. Репер
abc будет правым (левым), если крат-
чайший поворот вектора а к вектору Ь в
плоскости векторов а и & виден из конца
вектора с совершающимся против движе-
ния (по движению) часовой стрелки.
Рассмотрим, для примера, репер, сос-
тавленный тремя векторами, направленны-
ми вдоль первых трех пальцев правой ру-
ки; точнее, первый вектор а направлен
вдоль большого пальца, второй вектор b
— вдоль указательного пальца, а третий
вектор с — вдоль среднего пальца правой
руки (рис. 28,а). Согласно нашему опре-
делению этот репер имеет правую ориен-
тацию. Легко также усмотреть, что репер,
составленный тремя векторами, направлен-
ными вдоль соответствующих пальцев
левой руки, имеет левую ориентацию
(рис. 28,6). Это обстоятельство может быть
использовано на практике для оп-
ределения ориентации репера. В самом
Рис. 28
деле, если дан ре:
пер abc, то для определения его ориентации достаточно
постараться направить первые три пальца какой-либо руки вдоль
соответствующих векторов репера. Если это удается сделать с по-
мощью пальцев правой (левой) руки, то репер abc — правый
(левый).
Пример 1. На рисунке 13 (см. стр. 31) изображен парал-
лелепипед ABCDAtBiCiDi, в котором репер et е2е3 имеет правую
ориентацию. Определите ориентации реперов:
а) e2ete3; б) Afit AtA DC; в) QB QB( QQ; г) CB CD CQ.
Решение, а) Репер e2 e3 — левый, так как наблюдателю,
глаз которого помещен в точке А, движение по контуру треуголь-
ника DBE кажется совершающимся против часовой стрелки.
б) В репере AiDi AtA DC заменим вектор DC равным ему
вектором AtBv Очевидно, при этом ориентация репера не ме-
няется. В репере АЛО, AtA А1В1 векторы приложены к точке А{,
а концы образуют треугольник DtAB1. Если глаз наблюдателе
помещен в точке Л1( то, очевидно, движение по контуру треуголь-
ника DlABl кажется совершающимся против часовой стрелки, по-
этому данный репер левый. Предлагаем учащемуся самостоятель-
но убедиться в том, что репер в) правый, а г) левый.
63
2. Свойства ориентации репера; ориентация системы координат.
Имеют место следующие свойства ориентации упорядоченных троек
векторов:
а) При циклической перестановке векторов ориентация упоря-
доченной тройки не меняется, т. е. тройки abc-, bca\ cab имеют
одну и ту же ориентацию.
б) При перестановке
двух векторов ориента-
ция упорядоченной трой-
ки меняется на обратную,
т. е. abc и Ьас или
abc и acb или abc и cba
имеют разные ориента-
ции.
в) Пусть Л10, Л!,,
М2— три точки плоско-.
сти а, не лежащие на од-
ной прямой, а А и В—две точки, не лежащие в этой плоскости.
Если точки А и В лежат по одну сторону от плоскости а, то реперы
М0М1У М0М2, М0А и М0Л4р Л40М2, МаВ
имеют одну и ту же ориентацию (рис. 29, а); если же Л и В
лежат по разные стороны от а, то реперы имеют разные ориента-
ции (рис. 29, б).
Эти свойства непосредственно следуют из определения ориен-
таций упорядоченной тройки векторов1.
Примером упорядоченной тройки векторов является тройка
координатных векторов i, j, k. В соответствии с предыдущим оп-
ределением система координат называется правой (левой),
если упорядоченная тройка i, J, k является правой (левой). На
рисунке 30 система Oijk правая, а система O'i'j'k' левая. В
дальнейшем, если не будет специальных оговорок, все рассматри-
ваемые прямоугольные декартовы системы координат будем счи-
тать правыми.
3. Площадь параллелограмма, построенного на двух векторах.
Пусть ей & — два произвольных вектора. Возьмем в пространстве
любую точку С и перенесем в эту точку данные векторы. Концы
этих векторов обозначим через А и В (рис. 31). Возможны два слу-
чая:
1 Понятие ориентации. упорядоченной тройки векторов нами введено
исходя из наглядных соображений, поэтому оно с логической точки зрения
не совсем корректно. Однако оно просто и наглядно и для наших целей впол-
не достаточно. Более строгое изложение этих вопросов требует сложных рас-
суждений. См.', например, учебник П. С. Моденова [7], § 134.
64
b
а) Точки С, А, В не лежат на одной прямой. Этот случай воз-
можен тогда и только тогда, когда а и & не коллинеарны. Про-
ведем через Л и В прямые, параллельные соответственно СВ иСА,
и их точку пересечения обозначим через D. Мы получим четырех-
угольник CADB, который называется параллелограммом,
построенным на векторах а и Ь. Так как BD =
= а и AD = & , то для построения точки D можно было поступить
несколько иначе: перенести вектор b в точку А (или вектор а
в точку В) и обозначить через D конец полученного вектора. Оче-
видно, площадь S этого параллелограмма не зависит от выбора
точки С. Из тригонометрии известно, что эта площадь вычисляется
по формуле:
S = | а | • | Ь | sin (a, b). (1)
б) Точки С, Л, В лежат на одной прямой. Этот случай возможен
тогда и только тогда, когда векторы а и & коллинеарны. Мы не
исключаем из рассмотрения и тот случай, когда один из векторов
а 'И b нулевой или оба нулевые. Перенесем вектор b в точку Л
и обозначим конец полученного вектора через D. По аналогии с
предыдущим четырехугольник CADB называется параллелограм-
мом, построенным на векторах а и & (см. § 3, п. 3). Все вершины
этого параллелограмма лежат на одной прямой, поэтому естествен-
но считать, что площадь 5 этого параллелограмма равна нулю.
При этом соглашении формула (1) остается справедливой. В самом
деле, если а.#= 0 и & =Н= О, то sin (а, &) = 0, поэтому 5 = 0.
Если, например,'а = 0, то- и 5 = 0. , /-
Мы приходим к следующему выводу^
[6 .11. Каковы бы ни были векторы а и Ъ, площадь параллело-
грамма, построенного на этих векторах, вычисляется по формуле (1).
Пример 2. Определить площадь параллелограмма, по-
строенного на векторах а и Ь, в каждом из следующих случаев:
а) | а| = 3, |&| = 4, (а?&) = -;
3 Л. С. Атанасян
65
б) а = АА', Ъ == С'С (см. рис. 23 на стр. 43);
в) а = АВ, Ь — ВС, где ABCD — квадрат, сторона которого
равна трем.
Решение. Для вычисления- площади параллелограмма,
построенного на данных векторах, воспользуемся формулой (1):
a) S = | а 11 b | sin (а, Ь) = 3 • 4 • sin — = 6 К2;
4 '•
б) S = |а| |&|sin(a?&) = |ДА| • ICY71 sin (==
= | АА' 11 С'С | sin л = 0;
в) S = | а \ | Ь | sin (а, &) = | АВ | • | ВС\ sin(4B, ВС) =
= | АВ || ВС | sin у = 3-3 = 9.
4. Векторное произведение векторов. Пусть в пространстве дан
базис z, J, k и два произвольных вектора а и Ъ.
Векторным произведением вектора а на век-
тор b называется вектор р, определяемый следующими условия-
ми-.
а) Модуль вектора р равен площади параллелограмма, пост-
рденного на векторах а и Ь.
. б) Вектор р перпендикулярен как к вектору а, так и к векто-
ру Ь-
в) Если векторы а и b не коллинеарны, то вектор р направ-
лен так, что ориентации троек упорядоченных векторов аЬр
и i j k совпадают.
Векторное произведение вектора а на вектор Ь обозначается
так: l.ab] или а х ft. Из условия а) приведенного выше опре-
деления непосредственно следует:
[6.21 Для того чтобы векторы были коллинеарны, необходимо
и достаточно, чтобы их векторное произведение равнялось нулю.
Если а =/= 0 и & =# О, то, очевидно, условие а) может быть
записано так: | р | = | а | • | b | sin (а, Ь).
Важно подчеркнуть, что векторное произведение двух векторов
в отличие от скалярного произведения есть вектор. Сформулиро-
ванные выше условия однозначно определяют этот вектор. В самом
деле, если векторы а и b коллинеарны, то их произведение со-
гласно условии» а) есть нуль-вектор, если же они не коллинеарны,
то условие а) определяет модуль векторного произведения, условия
б) и в).— направление этого вектора. Кроме того, отметим, что
векторное произведение существенно зависит от порядка сомно-
жителей, т. е., вообще говоря, lab] ф [Ьа ].
66
Выше было отмечено, что если нет специальных оговорок, то
мы будем предполагать, что все координатные базисы правые.
Так как согласно условию в) ориентации трбек abp и i j k совпа-
дают, то в дальнейшем мы будем предполагать, что репер abp
имеет правую ориентацию.
Пример 3. Пусть ABCDA'B’C'D'—прямоугольный па-
раллелепипед, стороны которого имеют длины АВ = 3, AD = 4,
АА' = 5; векторы АВ, AD и АА' образуют правую тройку (рис. 23).
Найти векторы: a) [AD, ВС]; б) [АО, АА' ]; в) [В'А', ВС].
Решение, а) Пусть р = [ДО, ВС]. Так как векторы ДО
и ВС коллинеарны, то площадь параллелограмма, построенного
на этих векторах, равна нулю,, поэтому i р |= 0 и р = 0 .
б) Пусть д ±= [ДО, ДД' ]. Параллелограмм, построенный на
векторах ДО и ДД’, является прямоугольником, поэтому |#Г =
= ДО АА' = 20. Репер ДВДОДД' по 'условию имеет правую
ориентацию, поэтому согласно первому свойству ориентации трех
векторов репер ДО А А'АВ также имеет правую ориентацию. Но
репер ДО АА'д по определению векторного произведения имеет
правую ориентацию. Следовательно, АВ и д сонаправлены;
]ДВ| =3, \q | = 20, поэтому д =
в) По аналогии с предыдущим самостоятельно покажите, что
|В'Д', ВС] = — - ВВ'.
5
5. Объем ориентированного параллелепипеда, построенного на
трех векторах. Пусть а, Ь и с—три произвольных вектора. Возьмем
в пространстве любую точку М и перенесем в эту точку данные
векторы. Концы этих векторов обозначим через А, В и С. Возмож-
ны два случая:
а) Точки М, А, В, С не лежат в одной плоскости. Этот случай
возможен тогда и только тогда, когда векторы а, b и с не ком-
планарны. Проведем через точки А, В и С плоскости, соответствен-
но параллельные плоскостям МВС, МАС и МАВ. Эти плоскости
совместно с плоскостями МВС, МАС и МАВ образуют параллеле-
пипед MADBCA iDiBi, который называется ориентирован-
ным параллелепипедом, построенным на
векторах а, Ь, с (рис. 32). Пусть V — объем этого парал-
лелепипеда. Число ±У называется объемом ориенти-
рованного параллелепипеда, построенно-
го на векторах а, Ь, с, причем знак плюс берется в том
случае, когда репер abc правый, а минус — когда репер abc
левый.
б) Точки М, А, В, С лежат в одной плоскости. Этот случай воз-
можен тогда и только тогда, когда векторы а, b и с компланар-
3* 67
ны. Мы не исключаем из рассмотрения и тот случай, когда отдель-
ные из векторов abac или даже все три вектора равны нулю.
Из геометрических соображений ясно, что параллелепипеда, по-
строенного на компланарных векторах а; Ь и v не существует.
Однако в целях общности по аналогии с предыдущим мы будем счи-
тать. что на этих векторах также построен параллелепипед, объем
которого равен нулю. Таким образом, каковы бы ни были три
вектора, можно говорить об объеме ориентированного параллеле-
пипеда, построенного на этих векторах.
Имеет место следующая теорема.
Теорема [6:3]. Если а — объем ориентированного парал-
лелепипеда, построенного на векторах а, Ь и с, то а = [аЬ] с .
Доказательство. Возможйы два случая: а) векторы а,
Ь и с компланарны; б) векторы а, Ь и с не компланарны. Рас-
смотрим'каждый из этих случаев в отдельности:
а) Векторы а, Ь и с компланарны. Не нарушая общности,
можно считать, что векторы а, Ь и с лежат в одной плоскости л.
Но тогда, согласно определению векторного произведения, вектор
\ab\ перпендикулярен л, поэтому \ab} перпендикулярен с и
\ab] с = 0. С другой стороны, объем параллелепипеда, построен-
ного на компланарных векторах, по определению равен нулю. Сле-
довательно, теорема в данном случае справедлива.
б) Векторы а, Ь и с не компланарны. Приложим их к точке М
и построим параллелепипед на этих векторах так, как изображено
на рисунке 33. Пусть 0= [able = рс, где р = MP =[ab}.
Так как в данном случае р =# 0, то р = рс = | р | Пррс. По
определению | р | есть площадь S параллелограмма, построен-
ного на векторах а и Ь, а |Пррс| = МН, поэтому |Р| =
= 1АН S = |а|.
Теперь выясним, каков знак числа р. Очевидно, знак числа р
определяется углом между векторами р и с, так как р = рс.
Согласно теореме [4.4 ] число р положительно тогда и только тогда,
68
когда (р, с) < и отрицательно тогда и только тогда, когда
(р, с) > Так как р ± о, где о — плоскость векторов а, Ь,
то р > 0 тогда и только тогда, когда р и с расположены по одну
сторону от плоскости о, и Р < 0 в противном случае. Но репер
abp имеет правую ориентацию, поэтому из третьего свойства
ориентаций следует, что Р > 0 тогда и только тогда, когда репер
abc правый, а р < 0 тогда и только тогда, когда репер abc ле-
вый. Мы пришли к выводу, что знаки чисел а и р, а следовательно,
и сами числа совпадают. Теорема доказана полностью.
Следствие. Каковы бы ни были векторы а, b и с, имеет
место соотношение *
lab] с = lea ]b . (2)
Доказательство. Пусть а и Р — объемы ориентиро-
ванных параллелепипедов, построенных на векторах а, Ь, с и
с, а, Ь. Из доказанной теоремы следует, что а = [able, Р =
= lea ] Ь. Если векторы а, Ь, с компланарны, то по определению
а = 0 и р = 0, поэтому а = р. Пусть а, Ь, с не компланарны.
Так как параллелепипеды, построенные на векторах а, Ь, с и
с, а, Ь, совпадают, то |а| = |Р|. По свойствам ориентаций реперы
abc и cab ориентированы одинаково, поэтому знаки чисел а и Р
также совпадают. Таким образом, а = р, т. е. имеет место соотно-
шение (2).
6. Свойства векторного произведения. В следующей теореме
сформулированы основные свойства векторного произведения век-
торов.
Теорема [6.4 ]. Для произвольных векторов а, Ь и с и про-
извольное^ числа а имеют место следующие свойства векторного
произведения:
a) \ab] = — lba]\ ' 4
б) [a, ab] = a [o&l, [aab] = а [а&];
в) [а, b + с] = ]ab] + (ас], (а + Ь,с] = (ас] + [&с].
Доказательство. Свойство а) непосредственно следует
из определения векторного произведения. В самом деле, пусть р =
= lab], q = Ibal.
Очевидно, \р |= \q\, так как каждый из этих модулей.есть
площадь параллелограмма, построенного на одних и тех же векто-
рах а и Ь. Если'а и Ь коллинеарны, то = |^| = 0, поэтому
Р - Я =0.
Рассмотрим случай, когда а и b не коллинеарны. Векторы р
и q перпендикулярны к векторам а и Ь, поэтому р и q колли-
неарны. Так как реперы abp и baq имеют одну и ту же ори-
ентацию, a baq и abq имеют разные ориентации, то abp и
69
abq имеют ,разные ориентации. Из свойств 3) ориентаций следу-
ет, что векторы р и q противоположно направлены. Мы пришли
к выводу, что \р\ = | q |, р nq коллинеарны, имеют противополож-
ные направления, поэтому р = — q.
б) Сначала докажем, что [а, а&] = а [аЬ].
Возьмем произвольный вектор х пространства и, пользуясь
следствием теоремы [6.3],ч преобразуем выражение: [а, х.
Имеем:
[a, ab] х = [ха] (ab) = а ([Aral b) = a ([ab] х) = (а [а&]) х.
Отсюда следует, что ([а, а&]—а|а&])л: = 0. Так как соотноше-
ние справедливо для любого вектора х, то [a, ab] — а [ab] = О
и [a, а&] = а [аЬ].
Доказательство второй части свойства б) непосредственно сле-
дует из доказанного и из свойства а). В самом деле,
[aab] = — [&, аа] = — а [Ьа] = а [аЬ].
в) Сначала докажем, что [а, b + с] — [ab] 4- [ас].
Доказательство проводится по аналогии с предыдущим. Возь-
мем произвольный вектор х пространства и, пользуясь следствием
теоремы [6.3], преобразуем выражение [а, Ь + с] х. Получим:
[а, b + с] х = [ха] (Ь + с) = [ха] b + [ха] с .=
= [qb] х+ [ас] х — ([ab] + [ас]) х.
Отсюда* следует, что (]а, b Ч-с] — [ab] — [ас])х=0. Так как это
соотношение справедливо для любого вектора х, то
[а,Ь + с] — [ab] — [ас] = 0.
Доказательство второй части свойства в) предлагаем провести
самостоятельно.
Из доказанной теоремы непосредственно следуют:
Следствия 1°. Для произвольных векторов а и b и произ-
вольных чисел а и |3 имеет мерто соотношение'.
! [ая, = aftla, Ь].
2°. 'Каковы бы ни были векторы alt а2, ... ah, имеет место
соотношение'у
[at + a2 +-----F ak, b] = [afi] + [a2b + - • + [ak &1-
Пример 4. Пользуясь доказанными свойствами, преобра-
зовать выражение [(т + Ь)(а — &)].
Решение. Имеем:
[(а + ь) (я - »)] = [(а + Ь) а] + [(а + Ь) ( - »)] =
== [аа] + [ba] — [ab] — [ЬЬ].
Но [аа] = 0, [&&] = 0, [ba] = — [ab], поэтому
[(a + b)(a-b)] =-2(а&].
70
7. Выражение векторного произведения через координаты сом-
ножителей.
Задача 1. В прямоугольном декартовом базисе даны век-
торы а {х±, yi, zj и b {х2, у2, z2}. Определить координаты век-
тора р = [аЬ].
Решение. Прежде всего заметим, что векторные произве-
дения базисных векторов I, j и k имеют следующие значения:
[м] = 0, [if] = k, [ik] — j,
[jt\ = — k, \jj} = 0. [j*] = i,
[ЛЛ =J\ [kJ] = — i, [kk] = 0.
(3)
Соотношения [ ii ] = [Jj] — [kk] =0 следуют из [6.2],
а остальные легко.получить непосредственно из определения век-
торного произведения.
Пусть х, у, z — координаты вектора р.
Запишем разложение векторов а кЬ по базисным векторам:
а = xf + yj + zft, b = xj + у J + z2k.
Таким образом,
p .= [ab\ = [(x/ + у J + z^k] (xf + у2/ + z2£)].
Воспользовавшись следствиями 1° и 2° теоремы [6.4] и прини-
мая во внимание соотношения (3), получаем:
Р = (УЛ — *1Уг) i + (x2Z! — xtz2)y + (xty2 — ytx2) k. (4)
Это соотношение может быть записано несколько иначе:
р = |у* 21|t + |21 + У1! к, (4х)
1Уг гг( 1*2 *4 |х2 у2|
г. е.«
х = |У1 *i|, у = |21 xi|, г= xi У1|. (5)
|у2 г2| |г2 х2| х2 у2|
Мы пришли к следующей теореме.
Теорема [6.5]. Если векторы а и Ь заданы в прямоуголь~
ном декартовом базисе своими координатами'.
а {хр ур zj, b {х2, у2, г2},
то координаты х, у, z векторного произведения [аЬ ] определяются
по формулам (5).
Выведенную нами формулу (4') условно можно записать в сле-
дующем, удобном для запоминания виде:
« У k
[abl = xt yt Zi •
X2 г»
(6)
71
«Определитель» в правой части этого равенства не является,
конечно, определителем в обычном смысле слова. Эта условная
запись удобна тем, что если «определитель» правой части разло-
жить по элементам (векторным!) первой строки,' пользуясь обыч-
ными правилами разложения определителя, то получим формулу
(4'), которая уже имеет вполне определенный смысл.
Пример 5. Даны векторы а {2, 4, 0} и & {—1, 2, 5} в пря-
моугольном декартовом базисе. Вычислить координаты вектора
[«&].
Решение. Для определения координат вектора lab ] вос-
пользуемся правилом (6):
k
0
5
[ab] =
— 1 2
= 20/ — 10/ + (4 + 4) k = 20/ — 10/ + 8й.
Таким образом, вектор lab] имеет координаты {20, —10, 8}.
Важно отметить, что в «определителе» (6) элементами второй стро-
ки являются координаты первого вектора-сомножителя а, а эле-
ментами третьей строки — координаты второго векТора-сомножи-
теля Ь.
Пример 6. Определите координаты вектора [ lab 1 с ],
если в прямоугольном декартовом базисе а {1, 1, 0}, Ь {0, —3, 4},
с {3, —5, 1}.
Решение. Сначала определим координаты вектора lab]:
k
0
4
1
— 3
lab] =
= 4/ — 4/— ЗЛ, |а&Г{4, —4, —3}.
Далее
I
Р= 4
3
/
определим координаты искомого вектора р = [[а&] с]:
j k
— 4 —3
— 5 1
= — 19Z— 13/ —8*, р{— 19, —13, —8}.
В заключение рассмотрим некоторые тождества, полезные при
решении задач.
Теорема [6.6]. Каковы бы ни были векторы а, Ь, с и d,
имеют место следующие соотношения:
а) ЦаЬ]с] = b (ас)—а(Ьс), (7)
б) lab] led] = (яс) (bd) — (ad) (be), (8)
в) fa [&cj] + [& \ca\\ + [c fab]] = 0, (9)
r) fab I2 = a2b2 — (ab)2. (10)
Доказательство, а) Пусть
[[a&] c] = p, b (ac) — a (be) = q.
Если a = 0, то соотношение очевидно, так как в этом случае
lab] = 0, (ас) = 0, а (Ьс) = 0.
72
Следовательнб, р = 0, q = 0.
Теперь рассмотрим случай, когда а #= 0. Введем в рассмотре-
ние прямоугольный декартовый базис z, J, k так, чтобы а = i,
b = at i + Pt>/. Очевидно, при а =/= 0 это всегда возможно. Пусть
в этом базисе с = а2 i + ₽г/ +уз£- Вычислим координаты век-
торов р й q.
Имеем: а {1, 0, 0}, b {аь ро 0}, поэтому lab ] {0, 0, PJ. Век-
тор р есть векторное произведение lab] на с, следовательно,
р {— Р1Р2, Р1аг. 0}.
Далее, ас = а2, be = aia2 + Р1Р2, поэтому
q = а2Ь — (ata2 + ptp2) а.
Отсюда следует, что q имеет координаты:
Q {—Р1Рг> агР1, 0}.
Мы пришли к выводу, что соответствующие координаты векторов
р и q совпадают поэтому р = q.
б) Запишем соотношение (7) для lc d ] Ь. Имеем:
Bed] &] = d (cb) — с (db),
или, поменяв местами сомножители в левой части, получаем:
\b [с</]] = с (db) — d (cb).
Умножив скалярно на а, будем иметь:
\b\cd\\а = (db) (са) — (cb) (da).
Воспользовавшись следствием теоремы [6.3] (см. формулу (2),
окончательно получаем:
|й&] [cd] = (ac)(bd) -т (ad) (be).
в) Воспользовавшись соотношениями (7), выразим тройные
векторные произведения через векторы-сомножители:
[а [&с|] = — []Ьс| а] = — с (ab) + b (са),
- |& [са|] = — [|са] b\ = — a (be) + с (ab),
|г |й&|| = — [|а&| с] = — b (са) + а (be).
Сложив все эти соотношения, получаем (9).
г) Соотношение (10) есть частный случай соотношения (8).
В самом деле, положив в (8) с = a, d = Ь, получаем:
\ab\ \ab\ = (аа) (bb) — (ab) (ba),
г. е. соотношение (10). .
8. Вычисление площади треугольника по координатам вершин.
Задача 2. Вычислить площадь треугольника АВС, если
вершины его заданы координатами в прямоугольной декартовой
системе А (хь уь zt), В (х2, у2, г2), С (х3, у3, z3).
73
с Решение. Из определения
у векторного произведения следует,
/ что если вектоРы о и Ь приложе-
/ ны к некоторой точке А, то площадь
параллелограмма, построенного-на
° ° этих векторах а и b (рис. 34), рав-
Рис. 34 на | lab ]|. Отсюда следует, что пло-
- щадь треугольника АВС, изображен-
0. '\ab]\
ного на рисунке 34, равна—
Пользуясь этим замечанием, легко решить поставленную зада-
чу. В самом деле, пусть даны координаты вершин треугольника в
прямоугольной декартовой системе:
А (%!, ул, zj, В (х2, Уг> z2), С (х3, у3, z3).
Т огда
АВ {х2 — х1; у2 — У1» z2 — г1}> АС {хз — х1> Уз — У1Г?з — zj?
Поэтому векторное произведение [ЛВ ЛС] согласно теореме 16.5]
имеет координаты:
IА Й A Cl 11^2 У1 ^2 |^2 У2
1 Ч|у3 —У1 ?я — *11’ 1гз —г1 хз — Х1Г Из— Х1 Уз-^У1|Г
Площадь треугольника^ Л ВС равна:
s = |[АВ-АС]| =
2
= 1-1/|у2 — У1 гг — 21Г+.|г2 — Z1 х2 — xj2+ |х2— xt у? —у/ (11)
•2 У |у3 yj z3 zj |z3 z4 x3 xj |x3 xi y3 - у J
Пример 7. Вычислить площадь треугольника, вершины ко-
торого в прямоугольной декартовой системе имеют координаты:
Л.(5, 3, 4), В (6,.8, 1), С (3, 9, 0).
Решение. По формуле (11) находим:
5 “ ? |/ ' Ц - 4,‘ 1“ 4 - 2Г+ I- 2 f “ |К4- 150 + 256 -
= 2 |/360 = 3/10.
9. Свойства векторного произведения, отличные от свойств
произведения чисел." Из предыдущего изложения видно, что фор-
мальные свойства векторного произведения векторов в основном
совпадают с соответствующими свойствами произведений чиселЛ
Однако так же, как и в случае скалярного произведения, нельзя
любое свойство произведения чисел автоматически переносить на
векторное произведение. Векторное произведение векторов имеет
74
некоторые специфические свойства, не присущие операции произ-
ведения чисел. Рассмотрим основные из этих свойств.
а) Прежде всего отметим, что векторное произведение есть опе-
рация, которая двум векторам ставит в соответствие третий век-
тор, т. е. в отличие от скалярного произведения векторное про-
изведение векторов аналогично операции умножения чисел. Одна-
ко в отличие от произведения чисел векторное произведение суще-
ственно зависит от порядка сомножителей, так' как [ab ] =
= — [Ьа]. Следует подчеркнуть, что здесь мы впервые встречаем-
ся с пройзведением, зависящим от порядка сомножителей.
б) Если а 0, то числовое уравнение ах = £ всегда1 имеет един-
ственное решение. Аналогичное уравнение для векторного произ-
ведения [ах ] = Ь далеко не всегда разрешимо. Исследуем этот
вопрос более подробно. Пусть дано уравнение
[ах ] = Ь, (12)
где а и & — данные векторы, причем а =И= 0.
1) & У= 0. В этом случае, очевидно, х существует тогда и толь-
ко тогда, когда а _1_ Ь. В самом деле, если вектор а не перпенди-
кулярен &, то при любом х вектор [ах ] не может быть равен Ь,
поскольку [ах] по определению векторного произведения пер-
пендикулярен а. Отсюда вытекает, что если а не перпендикулярен
&, то уравнение (12) не имеет ни одного решения.
Если вектор а перпендикулярен Ь, то уравнение (J2) имеет
бесчисленное множество решений. Все эти решения параллельны
плоскости, перпендикулярной Ь. Пусть'л — плоскость, перпенди-
кулярная вектору Ь, а О — некоторая точка в этой плоскости. Пе-
ренесем векторы а и b и все решения х уравнения (12) в эту точ-
ку. Тогда нетрудно видеть, что геометрическое место концов всех
векторов х образует прямую в плоскости л, параллельную вектору
а и отстоящую от точки О на расстоянии . -
I а |
В самом деле, из соотношения (12) следует, что площадь парал-
лелограмма, построенного на векторах а и х, для всех век-
тор о в х имеет одно и то же значение | Ь |, поэтому высота h этого
параллелограмма также постоянна и равна отношению площади к
длине основания, т. е. L^-L Концы векторов х лежат по одну и ту
I а |
же сторону от прямой, проходящей через О и параллельной а, так
как репер axb имеет правую ориентацию.
2) & = 0. Уравнение (12) принимает вид [а г] = 0. Отсюда, учи-
тывая теорему [6.2 ], мы приходим к выводу, что х = Ка, где X —
произвольное действительное число. _Важно подчеркнуть^ что при
любом X соотношение х = )м есть решение данного уравнения.
Приведенное нами исследование показывает, что уравнение
(12) либо не имеет решения,-либо имеет бесчисленное множество
75
решений. В частности, уравнение {ах ] = а не имеет решения,
поэтому нельзя ввести понятие вектора-единицы, т. е. вектора,
удовлетворяющего предыдущему соотношению для любого а.
Нельзя ввести также понятие вектора, обратного данному вектору.
в) Так же как и в случае скалярного произведения, векторное
произведение обладает делителями нуля, т. е. существуют ненуле-
вые векторы а, Ь, произведение которых равно нулю: [а Ь ] =
= 0. Такими векторами по теореме [6.Д] будут коллинеарные век-
торы.
г) Так как произведение коллинеарных векторов есть нуль-
вектор, то [аа ] = 0, поэтому [[аа] а] = 0 и т. д. Отсюда сле-
дует, что для векторного произведения нецелесообразно вводить
понятие степени.
д) Как известно, для чисел справедлив ассоциативный закон,
т. е. для любых трех чисел а, 0, у имеем: (ар)у = а (ру). Операция
векторного произведения не обладает аналогичным свойством.
В самом деле, пусть а, Ь и с — произвольные векторы. Согласно
теореме [6.6 ]
[[ab] с]=Ь (ас) — а (Ьс), [а = — [[&<?] а] = b (са) — с (ab).
Отсюда следует, что [[а&] с] — [а(&с[] =с(аЬ) — а(Ьс). Итак,
[[ab] с] — [a [be]] = (ab) с —а (Ьс).
Если, например, а и с не коллинеарны, то правая часть не рав-
на нулю, поэтому и левая часть отлична от нуля, т. е. в этом случае
[[аЫс)=£ [albc ]].
Задачи и упражнения
77. Репер abc имеет правую ориентацию. Какую ориентацию
имеют следующие реперы
a) bac, acb, bca, cba, cab;
б) —- Ь,а,с; —а,У2Ь, — Зс; —2Ь, —а, — с;
Ч 2
в) а+Ь, —с, а — Ь; с + а, — с, Ь — с; а + Ь, Ь + с, с + а?
78. Тетраэдр ABCD имеет правую.ориентацию1. Определить
ориентации следующих тетраэдров:
a) BCAD; б) ACDB; в) DACB; г) CADB; д) BACD.
79. В параллелепипеде ABCDAtBiCiDi репер AAi АВ AD
имеет левую ориентацию. Определить ориентации реперов:
а) РЛ DC DD б) CtO j С]В г,_в) D^A 4 D^D D^B^
r) BA BB! ВС; j\)FBFDFAir
где F — середина ребра AD.
Ориентацией тетраэдра ABCD называется ориентация репера АВ AC AD-
76
80. Пусть объем ориентированного
параллелепипеда, построенного на век-
торах а, Ь, с, равен —3. Вычислить
объем ориентированных параллелепипе-
дов, построенных на векторах:
а) а, Ь, — с; б) а + Ь, Ь, с;
2 1 '
в) Ь, с, а; г) — Зс, а, —Ь;
д) с — a, b, b + а;
е) —2а+& — Зс, 2b + а , —с + а.
81. SABCDEF— правильная шести-
угольная пирамида, сторона основания
которой равна 2, а высота SO = 3 (рис.
произведения следующих векторов:
1) [AB-AF]; 2)[AD-AB]; 3) [DF DE]; 4) [AD FO]; 5) [ЛЕ-ЛС|-
82. Определить координаты векторов:
a) [ab]; б) [&с|; в) [bd]\ г) [cb]; д) [da]; е) \са\.
если векторы а, Ь, с и d в прямоугольной декартовой системе
имеют координаты:
а{ - 1, 0, 4}, b{2, 1, 3}, с{— 3, 1, — 1| и d {2, 1, —5}.
83. Пользуясь векторным произведением, вычислить площадь
параллелограмма, построенного на векторах а и & в каждом из
следующих случаев:
а) а{— 3, 0, 4}, &{3, —1, 5}; б) а{1, 0, 6}, &{3, -2, 1};
в) а {7, 1, —3}, 6{0, 1, 0}.
84. Пользуясь векторным произведением, вычислить площадь
треугольника АВС в каждом из следующих случаев:
а) Л(— 1, 0, 2), В (2, 3, —3), С(1, 2, —1);
б) А (3, 4, 0), , В (—4, 3, 1), С (2, 7, —8);
в) А(—3, 2, 1) В (3, 0, 3), С (—2, 4, 1).
85. При каком условии [ab]c = [ей] а?
86. Пользуясь следствием из теоремы |6.3], показать, что
[ab] с == a, [ab] с = — а.
87. При каком условии: а) [а + &, с ] = [ас]; б) [ab] = [Ьа]?
88. Определить координаты вектора [ lab ] с ], если в прямо-
угольном декартовом базисе векторы а, Ь и с имеют координаты:
а) а{1, 1, —3}, Ь{— 2, 1, 3}, с {7, 1, 0};
б) а{0, 3, 2}, b{— 1, 0, 2}, с{2, 1, 2};
в) а{1, 2, — 1}, Ь{3, 5, 0}, с{— 1, 4, —2}.
77
89. Пользуясь соотношением (10), Доказать тождество Лагран-
жа:
*1 У12л_ У1 2.J2 . г, ^+У1 + 21 *1*г + У1Уг + %1
^2 Уг Уг ^г| 2г •*'г| -Ч^г “Ь У1Уг 212г -Ч У2 “Ь 22 I
90. Пусть [ас] = [ &с] при с =£ 0. Можно ли сократить это
соотношение на с, т. е. следует ли из предыдущего соотношения,
что а = 6?
91. Пусть [ар] = [Ьр] для любого вектора р. Следует ли отсю-
да, что а = &?
92. Доказать, что из соотношения [[а&] с] = [а [&с[] следует:
(аЬ) с = а (Ьс) и, обратно, из соотношения (ab) с = а (Ьс) следует
[]аЬ]с] = |а[М-
93. Моментом приложенной к точке А силы f относительно точ-
ки В называется вектор р = [ВА f ]. Определить момент силы
f в каждом из следующих случаев:
а) /{2, —4, 3}, А(1, 5, 0), В(0, 0, 0);
б) /{2, —4, 3}, Л (1, 5, 0), В (5, —3, 6);
в) /{3, 0, 1}, А (5, 2, 6), В (4, 5, 2).
94. Показать, что:
а) момент силы относительно точки не меняется, если точку при-
ложения силы переместить по прямой, вдоль которой сила дейст-
вует;
б) момент равнодействующей нескольких сил, приложенных
к одной и той же точке, равен сумме моментов составляющих сил
относительно той же точки.
95. Найти вектор х из системы уравнений:
ха = а, [ха] — Ь при Ь 0.
Написать условия разрешимости этой системы.
96. Дан треугольник координатами своих вершин: '
А (—1, 1, 2), В (1, 1, 0), С (2, 6, —2);
Найти: а) площадь треугольника; б) косинусы внутренних углов;
в) длину высоты ВН и координаты вектора ВН; г) вектор а, кол-
линеарный биссектрисе угла А; д) координаты центра тяжести тре-
угольника. Система координат прямоугольная декартова.
97. Четырехугольник ABCD задан координатами своих вершин:
А (2, —3, 1), В (—1, 1, 1), С (—4, 5, 6Д, D (2, —3, 6).
Доказать, что ABCD — плоский выпуклый четырехугольник. Най-
ти: а) площадь четырехугольника; б) косинусы его углов; в) вектор
а, коллинеарный биссектрисе угла А; г) вектор ВН, где Н — ос-
нование перпендикуляра, опущенного из точки В на прямую АС;
д) координаты центра тяжести четырехугольника. Система коорди-
нат прямоугольная декартова.
78
98. Даны векторы АВ {3, —1, 2}, АС {1,1, 0}. Определить пло-
щадь треугольника АВС. Определить координаты какого-либо
вектора Л, компланарного с векторами АВ и АС и перпендикуляр-
ного к вектору т — АВ — АС.
§ 7. СМЕШАННОЕ ПРОИЗВЕДЕНИЕ ВЕКТОРОВ
1. Смешанное произведение векторов. В предыдущем параграфе
мы вводили понятие объема ориентированного параллелепипеда.
На основе этого понятия вводится новая операция — смешанное
произведение векторов. С ме-
шан н ы м, или трой-
ным, произведением
в'екторов а, Ь и с называ-
ется объем ориентированного
параллелепипеда, построенного
на векторах a; b и с. Сме-
шанное произведение векторов
a, b и с обозначается так:
abc или (abc). .
Из определения следует, что
смешанное произведение трех
векторов есть скалярная вели-
чина, которая равна нулю в том и только в том случае, когда век-
торы а, & и с компланарны. Если векторы а, b и с не компла-
нарны, то abc > 0 тогда и только тогда, когда репер abc правый,
и abc <_ 0 тогда и только тогда, когда репер abc левый.
Пример 1. Пусть ABCDA’B'CD'— параллелепипед,
объем которого V = 4, а репер АВ, AD, АА' правый (рис. Зб)-
Вычислить:
а) (АВ AD АА'); б) (АА’ СС A'D); в) (АЕ AD АВ);
г) (AC AD АА'); д) (AK AD АС).
Здесь Е — середина ребра АА', а К — середина ребра ВС.
Решение.- а) Так как параллелепипед, построенный на век-
торах АВ, АО, ДА', совпадаете параллелепипедом ABCDA'B'C'D'
и репер АВ4О4А' по условию правый, то (АВ ADA А') = 4.
_б) Векторы АА', СС, A'D компланарны, поэтому имеем
(АА,'СС'АГЬ) = 0. _
в) Параллелепипед, построенный на векторах АЕ, AD, АВ,
имеет объем -^V, так как Е — середина ’ ребра АА'. Реперы
АЕ AD АВ и АА' ADAB имеют одну и ту же ориентацию, а реперы
АА' AD АВ и АВ AD АА' — разные ориентации (см. § 6, п. 2).
79
Отсюда следует, что репер АЕ, AD, АВ имеет левую ориентацию.
Таким образом, (АЕ AD АВ) = —2. По аналогии с этим предлагаем
читателю самостоятельно убедиться в том, что (AC AD АА')= 4, а
(AK AD АС) = 0.
2. Свойства смешанного произведения. Из теоремы [6.3] немед-
ленно следует, что abc = \ab\c, С другой стороны, согласно
следствию этой теоремы [bc]a = (ab]c или a [Ьс ] =
= (able. Таким образом, мы приходим к теореме:
Теорема [7.1 ]. Каковы бы ни были векторы а, b и с,
имеют место соотношения:
abc = [ab}c = a\bc}. (1)
Термин «смешанное произведение» исходит из этого соотноше-
ния.
Основные свойства смешанного произведения сформулированы
в следующей теореме.
Теорема [7.2]. Для произвольных векторов а, Ь, с и d
и произвольного числа а имеют место следующие свойства смешан-
ного произведения:
a) abc — bca = cab-,
б) abc = —bac, abc = —cba, abc = —acb;
в) (aa) be = a(abc), a(ab)c = a(abc), ab(ac) = a (abc);
r) (a + b)cd = acd + bed, a(b + c)d = abd + acd,
ab (c + d) =abc + abd.
Доказательства свойств а) и б) непосредственно сле-
дуют из определения смешанного произведения и первых двух
свойств ориентаций репера, сформулированных в § 6, п. 2. Дока-
жем свойства в) и г), причем ограничимся доказательством пер-
вых соотношений. Остальные можно доказать аналогично.
в) По теореме [7. 1] имеем: (аа) Ьс = [(ая) .6| с. Но по теореме
[6. 4] б) имеем |(аа) b\ — a [ab], поэтому
(аа) Ьс = (а [ab]) с = a ([ab| с) = a (abc).
г) По теореме [7. Г] (а + b) cd = (а 4- b) \cd\. В силу распре-
делительного свойства скалярного произведения получаем:
(а 4- b) [cd] = a [cd] 4- b (cd) = acd + bed.
Из указанной теоремы вытекают следующие следствия:
Г. Для произвольных векторов а, Ь, с и произвольных чисел
а, 0, у имеет место соотношение: (а а) (0 Ь) (у с) = офу (abc).
2°. Каковы бы ни были векторы ар а2, ..., ak, b, с, имеет мес-
то соотношение:
(аЛ 4- а2 -р... 4- ak) be = afic 4- агЬс 4-... 4- uhbc.
80
3°. Если a, b, с — произвольные векторы, а р, Ь, с компланар-
ны, то
(a + p)bc = abc\
Пример 2. Вычислить произведения
а = а (Ь + с) (а + b + с), Р = Ъ (с + а) (Ь + 2с),
если abc = 5.
Решение. Пользуясь свойствами смешанного произведения,
получаем:
а = а(Ь + с)[а + (Ь + с)] = а(Ь + с)а + а(Ь ± с) (Ь + с) = О,
так как в каждом из слагаемых векторы компланарны;
Р = b (с + а) (Ь + 2с) = b (с + а) b 4- b {с + а) (2с) =Ь (с+а) (2с) =
= Ьс (2с) + Ьа (2с) = 2 (Ьас) = — 2 (abc) = — 10.
3, Выражение смешанного произведения через координаты век-
торов сомножителей;
Задача 1. Пусть в аффинном базисе eit е2, е3 даны векторы
координатами: а {а1( plt yj, Ь {а2, р2, у2}, с {&3, р3> у3}. Выразить
abc через еъ е2, е3.
Решение. По условию задачи имеем:
л = И- Ра YiC3, b = a2*i “Ь Рг*2 Уг*з> с=а3е1 ~РР3с2-|-у3в3.
„Тогда
’ abc = (а1е1 + ^е2,+ Y1e3) (а2е, + р2с2 + у2с3) (a3et + Р3е2 + у3е3).
Пользуясь следствиями теоремы [7. 2], это соотношение можно
записать так:
&Ьс (cCjCj) (d2Cj + Рг*2 У2*з) («3*1 4* Рз*2 к- Уз*з) “Г
+ (Р А) («2*1 + Рг*2 + Уг*з) («3*1 + Рз*2 + Уз*з) +
(У1*з) («2*1 ~Ь Рг*2 ~к Уг*з) («з*1 к" Рз^г “Ь Рз^з) =
= (tXjCj) (Р2С2 + У2^з) (Рз^2 'Узез) "Ь
+ (Р1^г) (a2^t + Уг^з) («3*1 + Уз*з) +
» + (У1«з) («2*1 + Р2*2) («з*1 + Рз*2) =
— (аА) (Р2*г) (Уз*з) («1*1) (Уг*з) (Рз*г) Н /
+ (Р1*2) («2*1) (Уз*з) + (₽1*2) (Уг*з) («3*1) +
-к. (У1*з) («2*1) (Рз*2) + (У1*з) (Р2*г) («3*1)-
Пользуясь теоремой [7.2] а), б) и следствием 1° этой теоремы,
поЛучаем:
abc = («Ду,, + аДу, + а2РзУ1 — «1РзУ2 — «2P1Y3 — «3P2Y1) (*А*з)-
Таким образом, окончательно получаем:
«1 «2 «з
aftc= Pj р2 рз (сАСд).
У1 Уг Уз
(2)
1 Следствия 2®и 3? могут быть записаны также относительно остальных
сомножителей.
81
В частности, если исходный базис прямоугольный декартовый
и правый, то Ct е2 е3 = 1, и формула (2) принимает вид:
abc = “1 «2 Pi Р2 “OD Р СО со (3)
Y1 ?2 Тз
Мы пришли к. теореме
Теорема [7.3 ]. Если векторы а, b и с заданы в аффинном
базисе , е2, е3 координатами а {а^ ръ yj, b {а2, Рг,. Уг}>
с {а3, р3, уз}, то а, Ь, с и eit е2, е3 связаны соотношением (2).
Если же базис еь е2, е3 прямоугольный декартовый правый,
то abc вычисляется по формуле (3).
Формула (2) позволяет установить условие компланарности
трех векторов, заданных своими координатами в аффинном ба-
зисе. В самом деле, векторы а,Ь и с компланарны тогда и только
тогда, когда abc = 0. Но в силу некомпланарности векторов
^2 , ез имеем: е^2е3 =?= 0.
Таким образом, из соотношения (2) получаем:
Теорема [7.4]. Для того чтобы векторы a{aj, Pi, yj,
& {а2, р2, у2}, с {а3, р3, уз}, заданные в аффинном базисе, были ком-
планарны, необходимо и достаточно, чтобы
Pi
Yi
а„ а3
Р2 Рз =0.
Y2 Уз
(4У
Пример 3. Пусть векторы-а, & и с в базисе ev е2, еэ
имеют координаты: а{3, 4, 5}, &{2, 1, 2}, с{—4, —2, —3}. Вы-
числить abc, если е1е2е3 = —3.
Решение. Воспользуемся соотношением (2):
3
2
1
2
— 4
— 2
— 3
abc —
= (—5)(—3) = 15.
4
5
Пример 4. Выяснить, какие из следующих троек векто-
ров, заданных в аффинном базисе, компланарны:
а) а {4, 5, 3}, &{1, 3/2, 1}, с{— 1, —2, — 1};
б) а{3, 8, 2}, b {4, 7, — 1}, с {72- 1, —4};
в) а{1, 2, 3}, &{4, 5, 6}, с{1, 8, 9};
г) а{0, 1, 1}, &{1, 0, 1}, с{1, 1, 0}.
Решение. Из теоремы [7. 4] следует, что задача по су-
ществу сводится к проверке выполнения условия (4).
4
5
3
а)
1 —1
- —2
2
1 —1
векторы а, b и с не
1 0 0
= 5 - — 2
2 -
3 1 —1
компланарны.
— - + 2 = - ф 0;
2 2
/ 1
82
3 4 —
2
8 7 1
2 —1 —4
3 4 —
2
О 11 17
2 —1 —4
о 11 12
2 2
011 17
2 —1 —4
= О,
так как первые две строки пропорциональны. Таким образом,
данные векторы компланарны.
Предлагаем читателю аналогично убедиться в том, что в случае
в) векторы компланарны, а в случае г) — не компланарны.
4. Вычисление объема тетраэдра по координатам его вершин
Пример 5. Вычислить объем тетраэдра, вершины которого
даны в прямоугольной декартовой системе координатами: А (1, 1, 1),
В (4, 2, —1), С (—3, 1, 4), D (2, 6, 0).
Решение. Из,определения смешанного произведения сле-
дует, что объем W параллелепипеда, построенного на векторах
АВ, АС и AD, равен:', W = |(ЛВ АС Отсюда 'вытекает, что
объем V тетраэдра ABCD определяется соотношением:
V = - | АВ ЛС AD |. (5)
6
Вычислим координаты векторов АВ., AC, AD по данным коор-
динатам концов' этих векторов:
АВ {3, 1, —2}, АС {—4, 0, 3}, AD {1, 5, —1}.
Из соотношения (5), воспользовавшись формулой (3), получаём:
V =— mod
6
3 —4 1
1 0 5
—2 3 -i
= -1- mod (—6) = 1.
5. Условие компланарности четырех точек. Точки называются
компланарными, если они лежат в одной плоскости.
Точки A (xj, ylr Zi), В (х2, у2, z2), С\х3, у3, z3), D (x4,j>4, убудут
компланарны тогда-и только тогда, когда векторы АВ, AC, AD
компланарны. Вычислим координаты этих векторов, воспользо-
вавшись теоремой [2.1]:
АВ {х2 — х1у у2 — yi, z2 — г^,
AC {х3 — х^ у3 — yt, z3 — гл},
AD {x4 — xb y4 — yt, z4 — z^.
Из теоремы [7.4] следует, что точки Л, В, С> D будут компла-
нарны тогда и только тогда, когда
хг — х( х3 — xt
Уг — У1 Уз — У1
z2 Zj z3 Zj
Х4 —х4
У4-У!
z4 —Zi.
= 0.
(6)
83
Теорема [7.5]. Для того чтобы точки Л (jq; yir г^,
В (*2. у2, гг), С (х3, уз, z3), D (х4, у4, г4), заданные в аффинной си-
стеме координат, лежали в одной плоскости, необходимо и дос-
таточно, чтобы их координаты удовлетворяли соотношению (6).
Пример 6. Показать, что точки А (2, —1, 4), В (1, 5, —2),
С (3, 4, 2) лежат в плоскости, проходящей через начало коорди-
нат. Система координат аффинная.
Реш е н и е. Задача сводится к проверке условия компланар-
ности точек А, В, С. О. Воспользуемся'соотношением (6), при этом
за первую точку примем начало координат О (0, 0,0):
2 1 3
1 3
5 4 = 0.
— 1 5 4
4—2 2
3 1 3
4 5 4
2—2 2
Замечание. При выводе соотношения (6) точку (х4, у1; z4)
приняли за исходную, поэтому оно не симметрично относительно
координат всех четырех точек. Однако по существу за исходную
можно было бы принять любую из четырех данных точек.
Задачи и упражнения
99. Что можно сказать о векторах а, Ь, с, если abc = Ьас?
100. Доказать тождество
ах Ьх сх
(abc)(xyz) = ay by су
az bz
101. Доказать/что если i, J и k — взаимно перпендикуляр-
ные единичные векторы, то для любый векторов а и b справедли-
во соотношение:
[а&] = (abi) i + (abj) j + (abk) k.
102. Найти вектор х, удовлетворяющий условию abx = а,
где а и Ь —данные векторы, а а — данное число. Всегда ли
уравнение имеет решение? Выяснить геометрический смысл. .
jpaont-nnv rixvix^vi игллслпю i vvmv, i jjn vividiwi.
103. Доказать, что точки A (3, —1, 2), B(—1, 0, 2), С (0, 3, 1)
з
лежат 8 плоскости, проходящей через точку D (2,--------, 2).
104. Вычислить объем тетраэдра, вершины которого находятся
в точках: а) А ’(1, 2, 2), В (5, 1, 3), С (3, 0, —3), D (6, 0, —1);
б) А (0, 0, 0), В (3, 4, —1), С (2, 3, 5), D (6, 0, —3). Система коор-
динат прямоугольная декартова.
105. Дан параллелепипед ABCDA'B'C'D', построенный на
векторах АВ {4,. 3, 0}, AD {2, 1, 2} иА.А'{—3,—2, 5} (см. рис. 36).
Найти: а) объем параллелепипеда; б) площади граней; в) длину
84
высоты, проведенной из вершины А' на грань ABCD; г) косинус
угла <pt между ребром АВ и диагональю B’D; д) косинус угла <р2
между гранями ABCD и ADD'А'. Система координат прямоуголь-
ная декартова.
106. В треугольной призме АВСА'В'С векторы АВ {0, 1, —1} и
АС {2, —1, 4} определяют основание, а вектор АА' {—3, 2, 2} на-
правлен по боковому ребру. Найти: а) объем призмы; б) площади
граней; в) высоту; г) угол <р между ребрами В'С и АА'.
Система координат прямоугольная декартова.
107. , Дан тетраэдр, построенный на векторах АВ {2, 0, 0},
АС {3, 4, 0} и AD {3, 4, 2}. Найти: а) объем тетраэдра; б) площади
граней; в) длину высоты h, проведенной из вершины D; г) косинус
угла cpt между ребрами АВ и ВС; д) косинус угла <р2 между гранями
АВС и ADC. Система координат прямоугольная декартова.
§ 8.,ПРИЛОЖЕНИЕ ВЕКТОРНОЙ АЛГЕБРЫ К ЭЛЕМЕНТАРНОЙ ГЕОМЕТРИИ
Ниже на ряде примеров будет показано, как можно использо-
вать скалярное, векторное и смешанное произведения векторов в
элементарной геометрии. Читателю, желающему более подробно
ознакомиться с подобногр рода примерами, рекомендуем обратить-
ся к следующим учебникам и задачникам: [6], [9], [12], [15],
[17] и др.
1. Некоторые теоремы и задачи планиметрии. Скалярное произ-
ведение векторов, как правило, находит применение в задачах мет-
рического характера. Так называются задачи, в условия которых
входят метрические понятия: длина отрезка, величина угла, пер-
пендикулярность и т. д. Рассмотрим теорему, хорошо известную
из курса элементарной геометрии.
Теорема [8.1 ]. Диагонали ромба взаимно перпендикулярны.
Доказательство. Пусть ABCD — данный ромб с ди-
агоналями АС и BD (рис. 37). Полагая АВ = a, AD = Ь, выра-
зим векторы АС и BD через а и Ь.
Имеем:
АС — АВ -f- AD — а b,
DB = AB — AD = a — b.
Отсюда получаем:
AC DB = (a + b) (a — b) = a2 — b\
a2 = |a |2 = AB2, b2 = \ b\2 = AD2.
Рис. 37
85
___Так как для ромба АВ = AD, то
ЛСхВТ)=ЛВ2 —ЛТ)г=0. Скалярное произве-
дение двух ненулевых векторов равно нулю
в том и только в том случае, когда они взаимно
перпендикулярны. Поэтому 'AC j_ DB, т. е.
диагонали ромба взаимно перпендикулярны-
Применим скалярное произведение для
решения следующей задачи.
Задача 1. В квадрат ABCD вписан
прямоугольник MNPQ так, что вершины М,
N, Р и Q лежат соответственно на сторонах АВ, ВС, CD и DA.
Показать, что либо MNPQ есть также квадрат, либо стороны
прямоугольника MNPQ параллельны диагоналям квадрата ABCD.
Решение. Пусть AD = а , АВ == Ь. Так как векторы
AQ и NC коллинеарны а, то AQ=aa vl.CN = (рис. 38). ________
Точно так же в силу коллинеарности векторов АВ и AM, АВ и
СР получаем: AM = Р&, СР = цЬ.
Воспользуемся далее тем, что MNPQ — прямоугольник. Это
означает, что выполнены следующие условия:
MQ = NP и MQMN =0, . (1)
MQ = AQ — AM = аа— рй,
NP = СР — CN_ = цй — ка,_ (2)
MN = BN — ВМ = (ВС + CN) — (В А + AM) =‘[ ' '
= (1 +Х)а+ (!-₽)&.
Подставив эти значения в соотношения (1), получаем:
аа — Рй = рй — Хя; (аа —рй) [(1 + X) а + (1 —Р) й| = 0.
Из первого соотношения в силу нёколлинеарности а и й получаем:
а‘ =—X, р =—р. Из второго соотношения имеем: а(1Ц-Х)я2—
— Р(1 —р) й2 = 0. Отсюда в силу равенства а2 = йа получаем:
а(1 +Х)— Р(1—Р) = 0,
или а (1 — а) — р (1 — Р) = 0, (а — Р) (1 — а — Р) = 0.
Возможны два случая:
а) а — р = 0, а = р. Тогда из соотношений (2) имеем: MQ =
= а (а — Й), MN = ( 1—а) (а + Й). Эти соотношения пока-
зывают, что MQ || (а — Ь) и MN || (а + Ь), т. е. стороны пря-
моугольника MNPQ параллельны диагоналям квадрата.
б) 1 - а - р = 0, MQ2 = а2#2 + р2й2 = (а2 + р2) а2;
Ш2 = (1 - а)2 я2 + (1 — Р)2 й2 = [(1 - а)2 + (I - Р)2] а2 =
= [2 (1 - а - Р)+ а2 + р2] а2 = (а2 + р2) а2.
86
Таким образом, MQ2 =f MN2 или MQ = MN; в этом случае
прямоугольник MNPQ является квадратом. <
Докажем следующее предложение:
Теорема [8.2 ]. Для того чтобы сумма квадратов двух про-
тивоположных сторон некоторого (не обязательно плоского) четы-
рехугольника , была равна сумме квадратов двух других сторон,
необходимо и достаточно, чтобы диагонали четырехугольника были
взаимно перпендикулярны.
Доказательство. Пусть ABCD — данный четырех-
угольник.
Пусть АС = а, АВ = &, AD — с (рис. 39). Так как
AD = с, ВС = а — b, АВ —b, DC'= а — с, то AD2 -Т ВС2 —
— АВ2 —.CD2 = с2 + (а — Ь)2 —Ъ2 — (а — с)2.
Воспользовавшись свойствами скалярного произведения, полу,
чаем: AD2 + ВС2 — АВ2 — CD2 — — 2ab + 2ас 2а (с — Ь)
Но а ~ АС, с — b — BD, поэтому окончательно получ'аем:
AD2 4- ВС2 — АВ2 — CD2 = 2АС BD.
Отсюда и вытекает утверждение ~
данного предложения.
2. Соотношения' между сторона-
ми и углами треугольника. Рас-
смотрим задачи, устанавливающие д ----——с
некоторые соотношения между
сторонами, углами и другими эле- Рис. 39
ментами треугольника. Обозначим ,
через а, b и с стороны, а А, В к С противолежащие вершины
треугольника. Прежде всего, пользуясь векторной алгеброй, до-
кажем следующие основные соотношения:
Теорема [8.3]. Во всяком треугольнике
а) —-—=—-—=.—-— (теорема синусов); (3)
sin A sin В sin С
б) а2 = Ь2 + с2 — 2bccos А (теорема косинусов). (4)
Доказательство. Пусть АВС — данный треугольник,
aS — его площадь. Выще было показано (см. § 6, задачу 2), что
площадь треугольника может быть вычислена при помощи любого
из следующих соотношений:
S = ~ i (АВ AC] J = 11 ]ВА ВС] | = 11 [СД СВ] |.
87 1
Пользуясь определением векторного произведения, эти соот-
ношения можно записать так:
S = — cb sin А = — са sin В = — ba sin С.
2 2 2
Отсюда немедленно получаем соотношения (3). Соотношение (4)
нами уже выведено, см. задачу 3, § 5.
3 а д а ч а 2. Доказать, что в любом треугольнике 1
ctg А + ctg В + ctg С = а + , (5)
где S — площадь, а а, b и с — длины сторон треугольника АВС.
Решение. Пусть АВС — данный треугольник, СА — Ь,
СВ = а. Тогда, очевидно,
п cos С ab ab
sin С I а| • |6| sin С 2S
Аналогично определяем ctgЛ и ctg В:
t . ABAC (a — b)(—b)
Ctg/l=-2s- =------------------------25 —
, D BA ВС — a)
^B = —s~-----------Ts ’
ctg A +ctg B+ctg C= (— ab + b2 — ab + a2 + ab) =
= (a2 + b2 — ab) = A (a2 + b2 + a2 +b2—2ab) =
= 4 l«2 + b2 + (a - W = °2 + &" + c2.
4<S 4o
Задача 3. Доказать, что длина та медианы треугольника,
опущенной из вершины А на сторону ВС, вычисляется по формуле:
та = Ь2 + с2 + 2bc cos А.
Решение: Пусть АВС — данный треугольник (рис. 40) и
М — середина отрезка ВС. Если АВ = с, АС = Ь, то AM == с +
+ ВМ, АМ=Ь + СМ\ 2АМ==с+ВМ + Ь+СМ-
Но ВМ + СМ — 0, поэтому AM = - ~^ с. Отсюда легко полу-
чить искомую формулу. В самом деле, та = V"AM -AM =
у Iх (b+c) (&+О = bb+cc + 2bc s= b2 + c2 + 2bc cos A.
88
3. Некоторые теоремы и задачи сте- А
реометрии. В заключение рассмотрим УТк
ряд стереометрических задач, для ре- с /
шения которых применим умножение
векторов. _____1
Задача 4. Показать, что угол 0 в ' О с
между двумя противоположными ребра- рис 40
ми произвольного тетраэдра вычисля-
ется по формуле:
С2 + с'2 — Ь2 — Ь'2
cos 0 = ——------------, (6)
2аа'
где а и а' — длины рассматриваемых ребер, а b и Ь', с и с’ — дли-
ны противоположных ребер двух других пар,.
Решение. Пусть О АВС — данный тетраэдр, а О А и ВС —
рассматриваемые ребра. Введем обозначения:
ОА = а, ОВ = Ь, ОС = с; ОА *= а, ОВ = Ь, ОС = с,
ВС = а', АС = Ь', АВ = с'.
Искомое соотношение (6) может быть записано следующим об-
разом:
2 aa'cos 0 = с2 + с'2 — ft2 — Ь'2
или
2а • ВС = с2 — ft2 + АВ2 — АС2,
2а (с — Ь) = с2 — Ь2 + (Ь — а)2 — (с — а)2.
Пользуясь распределительным свойством скалярного произве-
дения (теорема [4.5] в), непосредственно убеждаемся в справед-
ливости этого соотношения.
Задача 5. В основании пирамиды SO АС В лежит прямо-
угольник ОАСВ со сторонами ОА = а, ОВ = Ь; ребро OS перпен-
дикулярно плоскости основания и равно.ft. На стороне основания
АС пирамиды взята такая точка К, что АК = с. Найти угол <р меж-
*ду плоскостями SBC и SOK-
Решение. Направленные прямые ОА, ОВ и OS примем за
оси прямоугольной декартовой системы координат (рис. 41).' В
этой системе вершины пирамиды и точка К имеют координаты:
О (0, 0, 0), А (а, 0, 0), В (0, Ь, 0), С (а, Ь, 0), S (0, 0, ft), К.(а, с, 0).
Угол <р между плоскостями SBC и SOK, равен углу между дву-
мя векторами, перпендикулярными" соответственно этим плоско-
стям. Для нахождения таких векторов воспользуемся векторным
произведением. Рассмотрим векторы р = [ВС • SB [и q =
= [OS • ОК\- Вектор р перпендикулярен к векторам ВС и SB,
поэтому он перпендикулярен к плоскости SBC. Точно так же век-
тор q перпендикулярен к векторам OS и ОК, поэтому он перпенди-
кулярен к плоскости SOK- \
89
Дальнейший /план решения
задачи таков. /
а) По координатам точек опре-
деляем. координаты векторов ВС,
SB,OSnOK.
б) По координатам этих векто-
ров определяем координаты век-
торов р и q. '
в) Определяем косинус угла
между векторами р и q. Векторы
ВС, SB, OS и ОК имеют коорди-
Рис. 41 наты: ВС {а, О, 0}, SB{0, b, —h},
OS {О, 0, h}, ОК {а, с, 0}.
Далее определяем координаты векторов р и q:
Р =
Я =
i J
а 0
0 Ь
k
0
—Л
= ahj + fibk.
р{0, ah,~ab},
I
0
а
J
0
= — hcl + ahj.
q{—he, ah.,®}.
Отсюда, пользуясь теоремой [5.2], получаем:
_•______________аг№____________________ ________ah__________
V a?h? + а2Ь2 К /12с2 + а^ V а2+с2 '
С 3 а д а ч а 6. Доказать, что если, в
1 тетраэдре две пары противоположных
\ ребер взаимно перпендикулярны, то
ь А я .третья пара ребер также взаимно пер-
пендикулярна.
0 Реше-ние. Пусть QABC— дан-
а А ный /тетраэдр, у которого О А _1_ СВ и
Рис. 42 ОВ _1_ АС (рис. 42). Требуется доказать,
что ОС _1_ АВ. Для решения задачи вве-
дем в рассмотрение векторы О А = а,
ОВ = Ь и ОС — с и запишем данные условия, используя скаляр-
ное произведение векторов. Так как ОА _1_ СВ, то ОА СВ = 0 или
а (Ь — с) = 0.
Так как ОВ _1_ АС, то ОВ АС = 0 или
Ь(с — а) = 0.
(7)
(8)
90
Сложив эти два соотношения,
получаем: ab — ас + Ьс—
— ab =0, с (Ь — а) = 0 или
ОС АВ = 0. Отсюда следует,
что прямые ОС и АВ взаимно пер-
пендикулярны.
В тех случаях* когда в услови-
ях задачи фигурирует объем мно-
гогранника, полезно воспользо-
ваться смешанным произведением
векторов. Рассмотрим пример.
Задача 7. Вершина парал-
лелепипеда и центры трех проти-
воположных для данной вершины
граней служат вершинами пирамиды. Вычислить, какую часть
объема параллелепипеда составляет объем этой пирамиды.
Решение. Пусть ОА, ОВ, ОС — ребра параллелепипеда,
исходящие из вершины О, а Р, Q и R — центры граней, противо-
положных вершине О (рис. 43).
Если W — объем данного параллелепипеда, а V — объем пира-
миды OPQR, то из содержания § 7 следует, что W — \ОА О В 0С|,
V = 1 |ОР OQ OR\.
6
Для того чтобы установить связь между W и V, выразим век-
торы OP, OQ, OR через а — ОА, Ь — ОВ, с = ОС. Легко видеть,
что ОР =- ОА 4- АР = a 4-i- b с, OQ = ОВ £- BQ = b + Л а+
+ - с, OR = ОС + С& = с — а = — Ь.
2 2 2
Примем а, Ь и с за базисные векторы пространства. Тогда
ОРр, 1, lj, OQ
§ 7 следует, что
О/?/—, у, 11. Из формулы (2),
Но
OP OQ OR=
1
£
2
£
2
£
2
1
£
2
£
2
£
2
1
(abc) = 1 (abc).
W = \ab с|, V = |\ОР OQ OR\ = ^abc\ = ^.
Таким образом, объем пирамиды OPQR составляет часть объе-
ма исходного параллелепипеда.
91
ч Задачи и упражнения
ч
108. Доказать, что сумма квадратов диагоналей параллелограм-
ма равна сумме квадратов его сторон.
109. Доказать, что сумма квадратов диагоналей любого четы-
рехугольника равна сумме .квадратов всех его сторон без учетве-
ренного квадрата отрезка, соединяющего середины диагоналей.
ПО. Вершина А треугольника соединена с точками At и А2,
делящими сторону ВС на три равные части. Показать, что разность
квадратов отрезков AAt и АА2 в три раза меньше разности квад-
ратов сторон, выходящих из вершины А.
111. На сторонах параллелограмма вне его построены квадраты.
Доказать, что центры этих квадратов являются вершинами нового
квадрата.
112. Основания равнобочной трапеции равны 2а и 2Ь, а высота
ее равна h. Найти угол ср между диагоналями параллелограмма,
обращенный к стороне Ь.
113. Показать, что если AM — биссектриса треугольника АВС,
то
AM ==ЬА.В^сАС>
b-\-c
где b = АС, с = AB. ,
Пользуясь этим соотношением:
а) вывести формулу для вычисления длины биссектрисы:
А
2Ьс cos —
AM = ---------
b + с
ВЛ4 b
б) доказать теорему: — = —.
МС с
114. Доказать, что диагонали четырехугольника (не обязатель-
но плоского) перпендикулярны друг другу в том и только в том
случае, когда отрезки, соединяющие середины противоположных
сторон, равны между собой х.
115. Для треугольной пирамиды ОАВС введены обозначения:
ZCAB = a, ZАВС = ₽, ZBCA = у, ОА = а, ОВ = Ь, ОС =
= с. Показать, что если плоские углы при вершине О прямые, то
ctg а : ctg |3 : ctg у = а1 2 : Ь2 : с2.
116. Даны треугольник АВС и прямая I, пересекающая плос-
кость треугольника. Доказать, что прямая составляет со сторонами
треугольника АВС равные углы тогда и только тогда, когда она пер-
пендикулярна к плоскости треугольника АВС.
1 Две скрещивающиеся прямые Zt и /2 называются взаимно перпендику-
лярными, если прямые 1^ и /2', проведенные через произвольную точку про-
странства, соответственно параллельные данным прямым, перпендикулярны.
92
117. Показать, что в правильной треугольной пирамиде проти-
воположные ребра взаимно перпендикулярны.
118 Зная длины всех шести ребер тетраэдра, определить длины
отрезков, соединяющих попарно середины противоположных сто-
рон. ,
119. Из вершины произвольного параллелепипеда проведены
три диагонали прилегающих граней. Пользуясь свойствами сме-
шанного произведения, установить, какую часть объема паралле-
лепипеда составляет объем пирамиды, боковыми ребрами которой
служат эти диагонали.
120. Доказать, что высоты тетраэдра АВС попарно пересекаются
тогда и только тогда, когда сумма квадратов двух противоположных
ребер одна и та же для всех трех пар.
ГЛАВА III
ПЛОСКОСТЬ
§ 9. УРАВНЕНИЕ ПЛОСКОСТИ В АФФИННОЙ СИСТЕМЕ КООРДИНАТ
1. Понятие уравнения поверхности. ,В главе III первой части
настоящей книги мы подробно изучили понятие уравнения геомет-
рического места точек на плоскости. Там были рассмотрены разно-
образные примеры на составление уравнений геометрических мест
точек и на исследование геометрических мест по уравнениям. По-
нятие уравнения геометрического места точек, которое было вве-
дено для точек плоскости, по существу без каких-либо принци-
пиальных трудностей можно распространить на трехмерное про-
странство. Ниже приводятся основные определения для этого слу-
чая. ' •
Пусть нам дано некоторое выражение F (х, у, г), зависящее от
трех переменных х, у иг. Будем говорить, что х0, у0, г0 явля-
ются .допустимыми значениями выражения
F {х, у, г), если F (х0, у0, г0) —действительное число. Рассмотрим
соотношение
F (х, у, г) = 0. (1)
Может случиться, что соотношение (1) вьйюлняется для всех
допустимых значений х, у и г. В этом случае равенство (1) назы-
вается тождеством.
Например, если
F (х, у, г) = sin2 (х + у + г) + cos2 (х,+ у + г) — 1,
то соотношение
sin2 (х + у + г) + cos2 (х + у + г) — 1 =0
выполняется для всех допустимых значений х, у иг, т. е. в данном
случае мы ,имеем тождество. В большинстве случаев соотношение
(1) выполняется далеко не для всех допустимых значений х, у и г.
В этом случае оно называется уравнением. Например, если
F (х, у, г) = 5х — у + г, то, Очевидно, любые числа х, у и г яв-
ляются допустимыми значениями выражения' 5х — у + г.
94
Соотношение (1) в данном случае имеет вид: 5х — у + z = 0.
Это соотношение выполняется не для всех х, у и г, поэтому оно
является уравнением.
Пусть в пространстве дана система координат Ое^г^з- Под
уравнением геометрического места точек
п р о с т р а нс тв а мы будем понимать такие аналитические ус-
ловия, которым удовлетворяют координаты всех точек данного гео-
метрического места и не удовлетворяют-координаты точек, не при-
надлежащих э^ому геометрическому месту. Если аналитическая
характеристика совокупности уочек сводится к одному уравнению
F (х, у, z) = 0, то такое геометрическое место точек называется
поверхностью, а соотношение (1) — уравнением поверх-
ности.
Таким образом, если S — некоторая поверхность в простран-
стве, где дана система координат то соотношение (1)
является уравнением этой поверхности, если.координаты каждой
точки поверхности X удовлетворяют уравнению (1) и координаты
любой точки пространства, не принадлежащей S, не удовлетворяют
этому уравнению. '
В аналитической геометрии ставя!ся две основные задачи:
а) Зная поверхность как геометрическое место точек, написать
ее уравнение.1
б) Зная уравнение геометрического места, исследовать его свой-
ства. '
,В этой главе рассмотрим указанные задачи для случая, когда
поверхность представляет собой плоскость. .
2. Понятие плоскости и ее уравнения. В курсе элементарной
геометрии плоскость не определяется, так как юна является основ-
ным, неопределяемым геометрическим объектом. Основные свойст-
ва плоскости задаются аксиомами, а остальные выводятся, из них
логическим путем. Однако, пользуясь понятием компланарности
векторов, можно задать геометрическое место всех точек простран-
ства, принадлежащих плоскости. В самом деле, если Мо — произ-
вольная точка плоскости л, а р 'л q — некрллинеарные векторы,
параллельные этой плоскости, то точка М принадлежит плоскости л
тогда и только тогда, когда векторы М0М, р и q компланарны?
Другими словами,, если Gn — множество, всех точек, принадлежащих
плоскости л, то Gn есть геометрическое место 'точек М пространства,
удовлетворяющих условию: векторы М0М, р и q компланарны.
Это свойство может быть использовано для составления уравнения
геометрического места точек Gn, т. е. уравнения плоско-
сти1.
1 В аналитической геометрии термин «плоскость» понимается в смысле
совокупности всех точек, принадлежащих некоторой плоскости, а уравнение
плоскости — как уравнение этого геометрического места точек.
95
3^ Различные способы за-
дания плоскости в аффинной
системе координат. В ана-
литической геометрии поль-
зуются следующими способа-
ми задания плоскости.
а) Пусть л —данная плос-
кость, Мо — произвольная
точка на ней, ар и q — не-
коллинеарные векторы, па-
раллельные этой плоскости.
Очевидно, положение плос-
кости л в пространстве одно-
значно определяется, если
даны точка Мй и векторы р и q (рис. 44, а). Точка Мо назы-
вается начальной то ч к о й, а векторы р, q — нап-
равляющими векторами. Заметим, что за начальную
точку можно выбрать любую точку плоскости, а за направляющие
векторы — любые неколлинеарные векторы, параллельные плос-
кости. Если.в пространстве выбрана аффинная система координат,
то А40, р и q будут иметь координаты:
Мв (х0, Уо. 2о)> р |аР yj, q{a2, ₽2, у21-
Итак, девять чисел (х0, у0, г0), {«!, у4}, {а2, р2, у2} однозначно
характеризуют положение плоскости в пространстве.
б) Плоскость л может быть задана тремя ее точками М2 и
М3, не лежащими на одной прямой (рис. 44,6). Если в выбранной
аффинной системе координат точки имеют координаты у1г г^,
М2 (х2, у2, г2), М3 (х3, у3, г3), то девять чисел (Хд, уъ z.i), (х2, у2, г2),
(х3, у3, г3) однозначно характеризуют положение плоскости в про-
странстве.
в) Если плоскость л не проходит через начало аффинной си-
стемы координат и пересекает оси координат, то ее можно опреде-
лить заданием длин направленных отрезков, которые она отсекает
на осях координат (рис. 44, в). Пусть А^А2 и А3 — точки пересе-
чения плоскости соответственно с осями Ох, Оу и Ог. Если a =
ОД, . ОА. ОА3 ,
= 1', о ------- , с = . то числа а, о и с однозначно оп-
<?1
ределяют положение плоскости в пространстве. Этот способ назы-
вается заданием плоскости в отрезках.
ЙТак, если в пространстве выбрана аффинная система коорди-
нат, то плоскость может быть задана одним из следующих трех
способов.
а) Начальной точкой Л10(х0, у0, г0) и направляющими векторами
yj и 0{аг, р2, у2};
96
б) Тремя точками, не лежащими на одной прямой:
All (*ь yi, zO, М2 (х2, у2, г2) и М3 (х3, у3, г3).
в) Длинами направленных отрезков а, Ь и с, отсекаемых на осях
координат.
Очевидно, эти способы несущественно отличаются друг от дру-
га. Основными следует считать первые два способа, так как ими
может быть задана плоскость, имеющая произвольное расположе-
ние относительно системы координат, в то время как последний
способ может быть использован с указанными выше ограничениями.
Пример 1. Пусть плоскость л проходит через точки
Mi (1, 2, 0), М2 (0, —1, 3) и М3 (1, —1, 1).
Перейти к другим способам задания.
Решение, а) За начальную точку плоскости можно выбрать
любую из данных трех точек, например, Mt (1, 2, 0) и за направ-
ляющие векторы можно взять MiM2 и MiM3. Так как Mi, М2и М3
не лежат на одной прямой, то эти векторы не коллинеарны:
М\М2{—1, —3,3}, ЛМ13{0, —3, 1}.
Итак, плоскостью определяется точкой Mi (1, 2, 0) и неколли-
неарными векторами
МТЙ2{—1, —3, 3}, ЛМ43{0, —3, 1}.
б) Определим точки пересечения плоскости л; с осями коор-
динат: Л1 (а, 0, 0), А2 (0, Ь, 0) и А3 (0, 0, с). Так как A i, Mi, М2, М3
компланарны, то из формулы (7), п. 5, § 7 получаем:
а — 1
— 1
0
= 0.
Отсюда, после раскрытия определителя, будем иметь: а = —.
Точно так же из условий компланарности точек А2, Mi, М2, М3 и
А3, Mi, М2, М3 получаем: b = 8, с = —. Таким образом, числа
3
4 8
а = —, b = 8, с — — являются длинами отрезков, которые плос-
кость п отсекает на осях координат; эти числа характеризуют по-
ложение плоскости в пространстве.
4. Уравнение плоскости, заданной начальной точкой и направ-
ляющими векторами.
Задача 1. Написать уравнение плоскости л, заданной в неко-
торой аффинной системе координат, начальной точкой Мо (х0, у0, г0)
и направляющими векторами />(«,, РР yj и #{а2, р2, у2).
4 Л. С. Атанасян Q7
Решение. Выше было отмечено, что произвольная точка М
принадлежит плоскости л; тогда и только тогда, когда вектор М0М
компланарен с векторами р и q. Если х, у, г —координаты точки
М, то МдМ {х — х0, у — у0, г — Zg}. Пр и этом условие компланар-
ности векторов МдМ, р и q запишется так:
Х~Хд У —Уо г — z0
Yi = 0.
а2 ₽2 Уг
(2)
Это и есть уравнение плоскости л, так как координаты любой
точки плоскости л удовлетворяют этому уравнению, а координаты
точек, не принадлежащих плоскости л, не удовлетворяют уравнению.
Пример 2. Написать уравнение плоскости, проходящей
через точку Мо (1, —3, 0) и параллельной векторам р {1, 3, —4},
q {0, 1, 2}.
Решение. Подставив в соотношение (2) значения координат
начальной точки и направляющих векторов, получаем:
Таким образом, данная плоскость имеет уравнение: 10х — 2у +
+ z — 16 = 0. Непосредственной проверкой легко убедиться в том,
что точка Мд (1, —3, 0) лежит в плоскости л.
Пример 3. Написать уравнение плоскости, проходящей
через точки М^ (1, 2, —3), Л42 (0, 1, 0) и параллельной оси Ох.
Решение. Для того чтобы написать уравнение плоскости,
достаточно знать координаты двух неколлинеарных векторов,
параллельных плоскости. За один из таких векторов можно при-
нять первый координатный вектор et, а за второй — вектор 44^2.
Очевидно, {1, 0, 0}, MtM2{—1, —1, 3}. Если М{ принять за на'
чальную точку, то уравнение (2) принимает вид:
х — 1
1
— 1
У-2
0
— 1
z 4- 3
= 0 или 3 (у — 2) + (г + 3) = 0.
Таким образом, данная плоскость имеет уравнение:
Зу 4- г — 3 — 0.
Пример 4. Написать уравнение плоскости, проходящей
через точку Мо(1, 2, —3) и параллельной координатной плоскости
Оху.
Решение. Данная плоскость параллельна координатным
векторам et и е2, поэтому ее уравнение можно записать так:
98
х — 1 у — 2
1 О
О 1
г 3
О
О
= О или г + 3 = 0.
5. Уравнение плоскости, проходящей через три неколлинеарные
точки. -
Задача 2. Написать уравнение плоскости л, проходящей
через три неколлинеарные точки A4t (х1( у4, г4), ТИ2 (х2, у2, г2) и
М3 (х3, у3, г3), заданные своими координатами в некоторой аффин-
ной системе координат.
Решение. Плоскость л дана тремя точками, не лежащими
на одной прямой. Перейдем к первому способу задания плоскости и
воспользуемся уравнением (2). Точку Mt примем за начальную
точку, а векторы MtM2u MiM3— за направляющие векторы.
Так как
MiM2{x2— х^ у2—yt,^—2i}, MtM3{x3 — xt, уз — yb z3 — Zt},
то уравнение (2) в данном случае принимает вид:
X — Х1 У — У1 г —21
Х2 — Х1 У2 — У1 г2 г1 = 0.
хз~~ Уз — У1 23 [Zi
(3)
Соотношение (3) является уравнением плоскости,
проходящей через три неколлинеарные
точки.
Пример 5. Написать уравнение плоскости, проходящей
через точки О (0, 0, 0), Р (1, —3, 4), Q (0, —5, 5).
Решение. Подставив значения координат точек в соотно-
шение (3), получаем:
или х — у — 2 = 0. Непосредственной проверкой легко убедиться
в том, что координаты точек О, Р и Q удовлетворяют этому урав-
нению.
6. Уравнение плоскости в отрезках.
Задача 3. Пусть плоскость л в некоторой аффинной системе
пересекает оси координат в точках А ь А2 и А3, отличных от начала
координат (см. рис. 44, в). Известны длины отрезков, отсекаемых
ею на осях координат:
Написать уравнение плоскости л.
4:
99
Решение. Плоскость л проходит через точки At (а, 0, 0),
Д2 (0> Ь, 0), А3 (0, 0, с), поэтому мы получим ее уравнение с помощью
соотношения (3):
х — а у
0 — а b
О —а О
г
О
с
= 0 или (х — a) be + уас + zab = 0.
Так как а =# О, b =/= 0 и с ф 0, то, разделив полученное урав-
нение на abc, получаем:
- + £ + - = 1. (4)
abc
Это соотношение называется уравнением плоскости.в
отрезках.
Пр и мер 6. Написать уравнение плоскости,' которая
отсекает на осях координат отрезки: а = 3, b = 5, с = 1;
•б) а = — -, 6 = 2, с = — 3; в) а = — /Г, b = + /3, с=1.
4
Решение. Подставив в Соотношение (4) значения а, b и с,
получаем:
а) — + — + — = 1 или 5х + Зу + 15г — 15 = 0;
3 5 1
б) ~~ + 4—— = 1 или — 24х 4- Зу — 2г — 6 = 0;
~~4
в) —~ + — = 1 или
—/2 /з 1
— УЗх 4- Кг'у + /(Г г — Уб = 0.
7. Параметрическое задание плоскости. В заключение рассмот-
рим параметрическое задание плоскости, т. е. выразим координаты
любой точки плоскости через произвольные параметры. Пусть
в аффинной системе координат плоскость л дана начальной точ-
кой Л40(х0, у0, г0) и направляющими векторами /?{«!, у J и
q {<%2, ₽2> У г}- Точка М (х, у, г) принадлежит плоскости тогда и
только тогда, когда векторы М0М, р viq компланарны, т. е. когда
М0М + Х2 р 4~ Х3 q = 0,
где Х2, и Х3 одновременно не равны нулю.
Поскольку векторы р и q по условию не коллинеарны, то
=/= 0. Поэтому, разделив последнее соотношение на Xj и вводя
обозначения Х= — р, = — окончательно получим М.0М =
= X р + р q. Это соотношение в координатах запишется так:
100
х — х0 = 4- ра2,
У — Уо = Ь01 + Нр2.
г —z0 = 1Y1 + РУ2,
X = Хо + XcCj + на2>
ИЛИ У = Уо + ^₽! + Н₽2,
Z = Zo + %Y1 + НУ2-
(5)
Этот способ задания плоскости называется параметриче-
ским, а уравнения (5) — параметрическими урав-
нениями плоскости. Их смысл заключается в следую-
щем: каковы бы ни были действительные числа X и р, точка с коор-
динатами х, у, z, удовлетворяющая условиям (5), лежит в плоско-
сти л. Обратно, если (х, у, z) — точка плоскости л, то всегда най-
дутся такие числа X и р, что х, у и г выражаются через координаты
точки Мо и координаты векторов р и q при помощи соотноше-
ний (5).
Пример 7. Написать параметрические уравнения плоско-
сти, проходящей через точку Л10(2, 3, —1) и параллельной векто-
рам р {1, 1, 3} и q {2, —1, 0}.
Решение. Подставив координаты данной точки и направля-
ющих векторов плоскости в соотношения (5), получаем:
х ~ 2 -4- \ 4~ 2р,
у = 3 4- р,
z = — 1 4- ЗХ.
Задачи и упражнения
121. Определить координаты нескольких точек, принадлежащих
плоскости 2х — 5у 4~ г — 4 = 0. ,
122. Среди точек ЛД—1, 4, 3), Л2(1, —1, 1), Л3 (1, 0, 5),
Л4(2, 2, и Л5 (4, 2, 0) указать точки, принадлежащие плоскости
2х — у 4~ 3z — 6 = 0.
123. Составить уравнения: а) координатных плоскостей; б) пло-
скостей, проходящих через точку Р (1, —3, 2) и соответственно па-
раллельных координатным плоскостям.
124. Найти уравнение плоскости: а) проходящей через точку
А (—1, 3, 6) и параллельной векторам р{—3, 1, 2} и q{2, 0, —1};
б) проходящей через точку А (—2, 0,4) и параллельной векторам
г> {0, 0, 3} и q {—4, 1, 2}; в) проходящей через точки М^ (0, 1, —3),
М2 (—4, 5, 0) и А43 (2, 1, —1); г) проходящей через точки
Mt (—3, 1, 7) и М2 (0, 1, 2) и параллельной вектору р {—1, 1, 3}.
125. Написать уравнение плоскости: а) проходящей через ось Ох
и точку М (—1, 2, 3); б) проходящей через ось Ог и точку
М (3, 0, —1); в) проходящей через ось Оу и точку М (—3, 2, 4).
126. Написать уравнения трех плоскостей, каждая из которых
проходит через точки (0, 1, —4) и (—1, 3, 5) и параллельна одной
из координатных осей Ох, Оу, Ог.
101
127. Даны координаты вершин тетр аэдра А (—1, 0, 4), В (2, 3, 1),
С (—1, 1, 1) иР (3, 2, —1).
а) Составить уравнения граней тетраэдра.
б) Составить уравнения плоскостей, проходящих через ребра
тетраэдра параллельно противоположным ребрам.
в) Составить уравнения плоскостей, проходящих через вершины
тетраэдра параллельно противоположным граням.
128. Записать уравнение плоскости х — Зу + 4г + 5 = 0 «в
отрезках».
129. Плоскость проходит через точку М (6, —2, 1) и отсекает на
оси Ох отрезок а = —3, а на оси Оу отрезок 6 = 2. Составить для
этой плоскости уравнение «в отрезках».
130. Составить уравнение плоскости, проходящей через точку
М (—1, 2, 4) и отсекающей на осях координат отличные от нуля
отрезки равной длины.
131. Найти уравнения плоскостей, проходящих через точки
(0, 4, —3) и (6, —4, 3), не проходящих через начало координат и
отсекающих на осях направленные отрезки, сумма длин которых
равна нулю.
132. Составить параметрические уравнения плоскости, прохо-
дящей через точку М (1, —3, 5) и параллельной вёкторам р {2, 0, 4}
и q {—3, 2, 1}.
133. Указать несколько точек, принадлежащих плоскости, за-
данной уравнениями: х — ЗХ — ц; у = 1 4- X 4- 2р.; г = — 3 +
-4“ 2Х — 4р.
134. Какие из точек М4 (0, —1, 3), Л42 (1, 1, 2), Л43 (1, 0, 5),
Л14 (0, 3, 4) и М5 0, 1, — принадлежат плоскости, заданной урав-
нениями: х — — 1 + X + р, у = 2 — ЗХ + р, г = "4 — X 4- 2р.
§ 10. ПЛОСКОСТЬ КАК ПОВЕРХНОСТЬ ПЕРВОГО ПОРЯДКА;
РАСПОЛОЖЕНИЕ ПЛОСКОСТИ ОТНОСИТЕЛЬНО СИСТЕМЫ КООРДИНАТ
1. Плоскость как поверхность первого порядка. Для полученных
в предыдущем параграфе уравнений, соответствующих различным
способам задания плоскости, можно указать следующую характер-
ную особенность: все они являются алгебраическими уравнениями
первой степени, т. е. уравнениями вида: Ах 4* By + Cz + D = 0.
Естественно возникает вопрос, всякое ли уравнение первой степени
относительно переменных х, у, z определяет в пространстве плоскость?
На этот вопрос отвечает следующая основная теорема.
Теорема [10.1]. Геометрическое место точек простран-
ства, координаты которых в аффинной системе координат удовле-
творяют уравнению
Ах 4* By 4~ Cz 4- D — 0,
(1)
102
где коэффициенты А, В и С одно-
временно не равны нулю, есть плос-
кость, параллельная векторам
р{В, —А, 0}, q{C, 0, —4},
г {О, С,—В}.
Доказательств®. По
условию теоремы коэффициенты
А, В и С одновременно не равны
нулю. Доказательство проведем
в предположении, что А =/= 0.
Пусть G— поверхность, заданная
уравнением (1) (рис. 45). Возьмем произвольную точку Л1о (х0, у0, г0)
на этой поверхности. Такая точка всегда существует, например
(—у, 0, 0)- Согласно теореме [1.8] векторы р {В, —А, 0} и
q{C, 0, —А} не коллинеарны. В самом деле,1
I и —/1
Напишем уравнение плоскости л, проходящей через точку Л40 и
параллельной векторам р и q:
=4а =#=0.
У — У о
—А
0
z —г0
0
— А
х—х0
В
С
= 0
или А2 (х — х0) -|- АВ (у — у0) + АС (г — г0) = 0.
Так как А 0, то это уравнение равносильно уравнению
А (х — х0) + В (у — у0) + С (г — г0) = 0 или Ах + By + Cz —
— (4х0+ Ву0 + Сг0) = 0. Точка Л40 лежит на поверхности (1),
поэтому Ах0 + Ву0 + Сг0= —D. Подставив это значение в преды-
дущее уравнение, мы приходим к выводу, что уравнение плоскости
л совпадает с уравнением поверхности G. Следовательно, поверх-
ность G есть плоскость л. Нетрудно заметить, что вектор г также
параллелен этой плоскости, так как р , q и г компланарны:
В — А 0
С 0 — А = ВАС — С АВ = 0.
0 С —В
Теорема полностью доказана для случая А #= 0. Если Л = 0, а
какой-либо из коэффициентов В или С отличен от нуля, то, как
нетрудно видеть, доказательство несущественно отличается от пре-
дыдущего. В этих случаях при доказательстве теоремы вместо век-
торов р и q следует брать либо р, г, либо q , г.
Уравнение (1) называется общим уравнением плос-
кости.
Пример 1. Найти геометрическое место точек простран-
ства, координаты которых в некоторой аффинной системе ко-
ординат удовлетворяют уравнению Зх — у + г + 1 = 0.
103
Решение. Согласно предыдущей теореме рассматриваемое
геометрическое место точек есть плоскость. За направляющие
векторы плоскости можно выбрать любую пару, составленную
из векторов
р {—1, —3, 0}, q {1, 0, —3}, г {0, 1, 1}.
Для определения положения плоскости в пространстве достаточно
иметь одну из ее точек. В качестве такой точки можно взять любую
точку плоскости, например Л4о(О, 1, 0).
Доказанную теорему можно сформулировать несколько иначе,
если ввести следующее определение: алгебраической по-
верхностью первого порядка называется геометри-
ческое место точек, координаты которых в некоторой аффинной си-
стеме удовлетворяют уравнению (1), где коэффициенты А, В и С
одновременно не равны нулю.
Теорема [10.Г]. Всякая алгебраическая поверхность пер-
вого порядка есть плоскость.
Важцо отметить, что в условиях теоремы [10.1 ] требуется, чтобы
коэффициенты А, В к С одновременно не равнялись нулю. Это тре-
бование существенно. В самом деле, если А = В = С = 0, то урав-
нение (1) принимает вид: 0-x + 0- y + 0- z + £> = 0. Если
D =/= 0, то в пространстве не существует ни одной точки, координа-
ты которой удовлетворяли бы этому уравнению. Если же D = 0,
то уравнение имеет вид: 0-x-|-0-y + 0- z + 0 = 0. Это-
му уравнению удовлетворяют координаты любой точки прост-
ранства.
2. Условие параллельности вектора и плоскости. Пусть в аффин-
ной системе координат дана плоскость уравнением (1) и вектор
р {а, р, у}. При каком условии вектор р параллелен плоскости?
На этот вопрос отвечает следующая теорема.
Теорема [10.2]. Для
того чтобы вектор р, имеющий
м (х ц z ) координаты {а, р, у} в некоторой
_____Р/ 2 г'Чг' г аффинной системе, был паралле-
/ ~7 лен плоскости, заданной в той же
/ / системе уравнением (1), необходи-
/ мо и достаточно, чтобы
Аа + Др + Су = 0. (2)
Доказател ьств о.
Пусть вектор р{а, р, у} парал-
лелен плоскости (1). Согласно
определению (см. п. 1, § 1) в
плоскости найдутся две такие
точки Mi и М2, что М1М2 = Р-
104
Если в данной системе точки Mi и М2 имеют координаты
All (xit yi, Zi) и М2 (х2, у2, то
Axt 4* Byi + CZi 4- D = О,
Ах2 4* Ву2 4- Cz2 4- D = 0.
Отсюда получаем:
А (х2 — х^ 4- В (у2 — У1) + О (z2 — = 0. (3)
Но MtM2 = р, а вектор р согласно теореме [2.1] имеет координаты
{х2 — Xi, у2 —уь z2 — zj, поэтому х2 — Xj = а, у2 —У1 = ₽,
z2 — Zi = у. Подставив эти значения в соотношение (3),
получаем (2).
Обратно, пусть выполняется соотношение (2). Возьмем произ-
вольную точку Mi (xi, yt, Zi) в плоскости (1) и приложим вектор р
к этой точке (рис. 46). Если М2(х2, у2, z2) — конец вектора р, то
а = х2 — Xi, р = у2 — yi, у = г2 — zit поэтому соотношение (2)
принимает вид (3). Так как точка Mt (xlt yit zt) принадлежит пло-
скости (1), то
Axi 4- Byi 4- Cz| 4-0 = 0. (4)
Сложив соотношения (3) и (4), получаем: Ах2 4- Ву2 4- Сг2 4- D =
= 0, т. е. точка М2 принадлежит плоскости (1), поэтому вектор р
параллелен этой плоскости.
Пример 2. В аффинной системе координат дана плоскость
Зх — 4у 4- 5z — 1 = 0. Выяснить, какие из данных векторов
^[0,5,4], а2{1, 1, 1}, а3{5, 0, —3], а4{1, 2, 1), а5{4, J/2", —1 }
параллельны этой плоскости.
Решение. Вектор a,i параллелен плоскости, так как
3-0 — 4-54-5 - 4 = 0. Вектор а2 не параллелен плоскости, так
как 3 - 1 — 4 - 14-5 - 1 =# 0. Точно так же можно убедиться в
том, что векторы а3 и а4 параллельны, ав5 — не параллелен этой
плоскости.
3. Условие совпадения двух плоскостей. Мы показали, что каж-
дое уравнение вида (1) в пространстве определяет плоскость. Вы-
ясним, при каком условии два уравнения
Л ix 4- В <у 4- С iz 4- О i = О, (5)
А2х 4~ В2у 4- C2z 4- D2 = 0 (6)
определяют одну и ту же плоскость. Докажем следующую тео-
рему.
Теорема [10.3]. Для того чтобы плоскости и л2, задан-
ные уравнениями (5) и (6), совпадали, необходимо и достаточно,
чтобы соответствующие коэффициенты уравнений были пропор-
циональны, т. е. чтобы существовало такое число К, что
А2 = ХЛ|, В2 = КВ 1, С2 = XGi, D2 = KD1*
105
Доказательство. Пусть плоскости, определяемые урав-
нениями (5) и (6), совпадают. Согласно теореме [10.1] векторы
—Alt 0}, qi{Ci, 0, — А^, Г1 {0, параллельны
плоскости л4. В силу совпадения плоскостей они параллельны так-
же и плоскости л2. Тогда согласно теореме [10.2], устанавливаю-
щей условие параллельности вектора и плоскости, будем иметь:
Д 1/4'2 — А1Д2 = 0, С4Л2 — АtC2 = 0, С1Д2 — Д1С2 = 0.
Если, например, =# 0, то, положив —2 = Z или Л2 = Мр
Ai
из первых двух соотношений получаем: В2 = KBit С2 = aCj.
Точка (— — , 0, 0) лежит в плоскости л 1( поэтому она лежит также
в плоскости л2:
А2 (— + D2 = 0,
откуда D2 — Итак, мы показали, что Л2 = ХЛ4, В2 — KBit
С2 = КС 1 и В 2 — KD1.
При выводе этих соотношений мы предположили, что At 0.
Однако это ограничение не существенно, так как если, например,
Л4 = 0, a Bi =# 0, то, положив — = К, мы приходим к тому же
si
выводу.
Обратно, пусть в уравнениях (5) и (6) все коэффициенты пропор-
циональны, т. е. пусть существует такое число К=£ 0, что
Л2 = КА 1, В2 — КВi, С2 = КС 1, D2 — KD1.
Докажем, что плоскости (5) и (6) совпадают. Перепишем уравне-
ние (6) следующим образом:
КА iX -j- КВ ly “I- КСiZ -Т KD1 = 0
или
К (AiX + 51у + CiZ + = 0. (7)
Из соотношений (5) и (7) видно, что всякое решение уравнения (5)
является решением уравнения (7). Таким образом, любая точка
плоскости Л1 принадлежит плоскости л2, т. е. плоскости л( и л2 сов-
падают.
Если воспользоваться понятием .ранга матрицы, то теорему
[10.3] можно сформулировать так:
Теорема [10.3' ]. Для того чтобы плоскости Л! и л2, задан-
ные уравнениями (5) и (6), совпадали, необходимо и достаточно,
чтобы ранг матрицы
/ А1 Bi Ci D1 \
\Л2 В2 С2 D2)
был равен единице.
106
ПримерЗ. Выяснить, какие из следующих пар плоскостей
совпадают:
а) х — 2у 4- z — 1 = 0 их — Зу + 2г — 1=0;
б) х + у — 3 = 0 и х 4* у — 4 = 0;
в) ]/^2х + Зу — 3 г 4- у/~ 2 = 0 и 2х 4~ 3 р^ 2 у— Д/~6 2 4~ 2 =0;
г) — х4-у4-5г — 1 = 0 и х — у 4- 5г 4-1 = 0;
д) 2х — 1 у 4- 4г == 0 и 12х — 9у 4~ 24г = 0.
Р е ш е и и е. а) Плоскости не совпадают, так как коэффициенты
1, —2, 1, —1 и 1, —3, 2, —1 не пропорциональны.
б) Плоскости не совпадают, так как коэффициенты 1, 1, 0,
—3 и 1, 1, 0, —4 не пропорциональны.
в) Плоскости совпадают, так как коэффициенты в уравнениях
плоскостей пропорциональны: А = 2.
г) Плоскости не совпадают.
д) Плоскости совпадают и А = 6.
4. Расположение плоскости относительно системы координат.
Пусть, в некоторой определенной системе координат дана плоскость
(1). Выясним, как она расположена относительно системы коорди-
нат.
а) Условие прохождения плоскости через
начало координат. Если плоскость (1) проходит через
начало координат, то координаты начала координат удовлетворяют
уравнению плоскости A 0 + B- 0 + C- 0+ D=0, отсюда
D = 0. Обратно, если в уравнении (1) D = 0, то начало координат
принадлежит плоскости, так как координаты точки О (0, 0, 0) в дан-
ном случае удовлетворяют уравнению (1).
Итак, плоскость (1) проходит через начало координат тогда
и только тогда, когда D = 0. Плоскость, проходящая через начало
координат, имеет уравнение:
Ах 4- By 4" Сг = 0.
б) Условия, при которых плоскость парал-
лельна одной из координатных осей. Усло-
вие параллельности плоскости (1) и оси Ох, очевидно, сводится к
условию параллельности плоскости и вектора {1, 0, 0}. Соглас-
но теореме [10.2] это условие сводится к соотношению: А • 1 4-
4-5-04-0-0 = 0 или А = 0. Если при этом и D = 0, то пло-
скость (1) проходит через начало координат и, следовательно, содер-
жит ось Ох; если же О =/= 0, то плоскость параллельна оси Ох и не
имеет с ней ни одной общей точки.
Итак, плоскость (1) параллельна оси Ох тогда и только тогда,
когда А = 0, D #= 0 и содержит ось Ох тогда и только тогда, когда
А = D = 0.
107
Совершенно аналогично определяются условия параллельности
плоскости осям Оу и Ог.
Плоскость (1) параллельна оси Оу тогда и только тогда, когда
В = О, D #= 0 и содержит ось Оу тогда и только тогда, когда В =
= D = 0.
Плоскость (1) параллельна оси Ог тогда и только тогда, когда
С = 0, D =/= 0 и содержит ось Ог тогда и только тогда, когда С —
= D = 0.
Запишем общий вид уравнений плоскостей, параллельных одной
из координатных осей или содержащих эту ось.
Координат- ная ось Плоскость параллельна оси Плоскость проходит через ось
Ох By + Сг + D = 0, D 0 By-\-Cz—0
Оу Ах -|- D = 0, £) =^= 0 Ax±Cz=0
Ог Ах -|- By -|- £) = 0, D 0 Ax-j-By=O
в) Условия, при которых плоскость па-
раллельна одной из координатных плос-
костей. Используя рассмотренные выше условия параллельнос-
ти плоскости одной из координатных осей, легко вывести условия,
при которых плоскость параллельна одной 'из координатных плос-
костей. В самом деле, плоскость (1) параллельна координатной
плоскости Оху тогда и только тогда, когда она параллельна как оси
Ох, так и оси Оу, т. е. когда А = 0, В = 0, D =?= 0. Если при этом
и D = 0, то плоскость (1) совпадает с координатной плоскостью
Оху. Аналогично плоскость (1) параллельна координатной плос-
кости Oyz (соответственно Oxz) тогда и только тогда, когда В —
----- 0, С = 0, D =#= 0 (А = 0, С = 0, D #= 0). Если при этом и D =
= 0, то плоскость (1) совпадает с соответствующей координатной
плоскостью.
Запишем общий вид уравнений плоскостей, параллельных од-
ной из координатных плоскостей или совпадающих с ней.
Координат- ная плос- кость Плоскость параллельна координат- ной плоскости Плоскость совпадает с координатной плоскостью
Оху Cz -J- D = 0, С ф 0, D =h о z = 0
Оуг Ах “Н D = 0, А 0; D =т^= 0 х = 0
Охг By + D = 0, В =# 0, D #= 0 у = 0
108
Пример 4. Исследовать
расположение следующих
плоскостей:
а) Зх — г + 1 = 0;
б) у +z = 0; в) 2х — 0;
г) Зу _ 4 = 0
относительно системы коор-
динат.
Решение, а) В урав-
нении плоскости отсутствует
переменная у, поэтому плос-
кость параллельна оси Оу, но
не проходит через эту ось
ввиду того, что свободный
член в уравнении плоскости
отличен от нуля.
б) Плоскость проходит
через ось Ох, так как А =
= 0 = 0.
в)"Плоскость совпадает с
плоскостью Oyz, так как
В = С = D = 0.
г) Плоскость параллельна
координатной плоскости Oxz,
так как А — С = 0.
На практике часто возни-
кает необходимость изобра-
зить на рисунке так называ-
емые следы плоскости, т. е.
линии пересечения плоскости
с координатными плоскостя-
ми. Рассмотрим пример решения такой задачи.
Пример 5. На плоскости чертежа дано изображение начала
координат и координатных векторов общей аффинной системы ко-
ординат. Построить изображение следов следующих плоскостей:
а) 2х + у + z — 4 = 0 (nj);
б) 2х + z — 3 = 0 (л2); в) z — 2 = 0 (л3).
Решение, а) Так как в уравнении плоскости л ( коэффициен-
ты А, В, С и D отличны от нуля, то плоскость не проходит через
начало и не параллельна ни одной из координатных осей. Для
определения следа плоскости nj на координатной плоскости
Q*x*y*i достаточно найти две общие точки плоскости Л! и плоскости
1 При решении этого примера звездочками обозначены геометрические
объекты пространства. Их изображения на плоскость чертежа обозначены
соответствующими буквами без звездочек.
10S
О*х*у*. В качестве таких точек удобнее всего выбрать точки пере-
сечения плоскости л с осями 0*х* и О*у*. Положив в уравнении
плоскости у = О и 2 = 0, найдем: х — 2. Следовательно, точка
Mt* (2, 0, 0) и будет точкой пересечения плоскости лt с осью Ох*.
Аналогично определяем координаты точек пересечения плоскости
Л1 с осями О*у* и О*г*. _
Пусть О — изображение начала координат О*, a OEi, ОЕ2,
ОЕ3 — изображения координатных векторов et*, е2*, е*
(рис. 47, а). Построим на этом рисунке изображения точек A4(*, М*,
М3*. Так как точка М* лежит на оси О*х*, то ее изображение М
- О*М* п OMi о
лежит на прямой кроме того, —j-1- = 2, поэтому = 2.
___________________ ___ е, OEi
Таким образом, OMt = 2 • OEi. Аналогично строим точки М2
и М3. Прямые MiM2, М2М2 и МХМ3, попарно соединяющие эти
точки, и будут изображениями следов плоскости.
б) Плоскость л2 параллельна оси О*у*, поэтому ее следы на пло-
скостях О*х*у* и О*у*г* параллельны оси Оу*. Отсюда следует,
что изображения этих следов на плоскости рисунка параллельны
изображению оси О*у*. Определим координаты точек пересечения
М^ и М3* плоскости л2 с осями О*х* и О*г*:
Mi* 0, О), М* (0, 0, 3).
Изображения следов плоскости даны на рисунке 47, б.
в) Плоскость л3 параллельна координатной плоскости О*х*у*,
поэтому у нее нет следа на этой плоскости. Два других следа па-
раллельны соответственно координатным осям О*х* и О*у*, поэто-
му их изображения параллельны прямым OEi и ОЕ2 (см. рис. 47, в).
Задачи и упражнения
135. В аффинной системе координат дана плоскость
2х — у + Зг + 6 = 0.
а) Найти координаты точки этой плоскости, имеющей абсциссу 2
и лежащей одновременно в координатной плоскости Оху.
б) Найти координаты точек пересечения этой плоскости с осями
координат.
136. Выяснить, какие из векторов:
di {—1, 0, 4}, a2 {1, 1, 1), а3 {1, 3, 4},
а, {2, 0, —1}, а, {3, 5, —6}, а6 {4, 0, —2}
параллельны плоскости
х — Зу + 2г — 8 = 0.
Система координат общая аффинная.
но
137., В аффинной системе координат дана плоскость своим урав-
нением: 5х — 4у + 2г — 7 = 0. Указать несколько векторов, па-
раллельных одновременно данной плоскости и одной из координат
ных плоскостей.
138. Найти точки пересечения с осями координат следующих
(плоскостей:
! а) 2х — у + 5г — 8 = 0;. б) х + у — 6г + 4 = 0;
в) Зх + у — 8 = 0; г) х — 2у 4~ г — 5 = 0;
д) х — Зг 4- 4 = 0; е) 2х — Зг = 0;
ж) х — 8у 4~ г = 0; з) Зх — 8 = 0.
139. Указать особенности в расположении следующих плос-
костей относительно системы координат:
а) 2у — Зг + 6 = 0; б) 2г — 9 = 0; в) 2х + Зг = 0;
г) Зх —у + 4 = 0; д) 2х + 5г + 4 = 0; е) 2х — у = 0;
ж) Зх — 8 = 0; з) 4у = 0; и) 2у 4- 1 = 0.
140« Начертить изображения начала координат и координат-
ных векторов общей аффинной системы координат и построить
изображения следов следующих плоскостей:
а) х — 2у 4~ г — 4 = 0; б) Зх 4- у 4” 2г 4- 6 = 0; .
в) 2х 4- у 4 2г — 4 = 0; г) 5х — 2у 4" 10 = 0:
д) х 4- 2г — 4 = 0; е) 2х — 5 = 0;
ж) 8х — 5у = 0; з) 2у 4* Зг = 0;
и) Зг — 8 = 0; к) у 4~ 3 = 0.
141. Выяснить, какие пары плоскостей совпадают:
а) — 2х — у 4- —г — 4 = 0,
з
б) 2х — у 4- Зг — 1 = 0,
в) Зх — 8у = 0,
г) х — 2у 4- Зг — 1 = 0,
6х 4- Зу — г 4- 12 = 0;
4х — 2у 4- 6г 4- 2 = 0
—-х 4- 2у = 0;
4
2х — 4у — 6г — 2 = 0.
§ 11. ВЗАИМНОЕ РАСПОЛОЖЕНИЕ ПЛОСКОСТЕЙ; ПУЧОК И СВЯЗКА
ПЛОСКОСТЕЙ
1. Взаимное расположение двух плоскостей. Пусть в аффинной
системе координат даны две плоскости:
XjX + ^1у 4~ CjZ + Dj = 0, (1)
ЛгХ 4- ВгУ 4" D2 = 0. (2)
Установим критерии, позволяющие по коэффициентам уравнений
111
(1) и (2) определить их взаимное расположение. По теореме [10.31
плоскости (1) и (2) совпадают тогда и только тогда, когда соответ-
ствующие коэффициенты в уравнениях (1) и (2) пропорциональны.
Найдем условия параллельности и пересечения двух плоскостей.
Теорема [11.1]. Для того чтобы две плоскости, заданные
в аффинной системе уравнениями (1) и (2), были параллельны, необ-1
ходимо и достаточно, чтобы существовало такое отличное от нуля
число А, что
Аг = АЛ j, В2 = ^Blt Сг — ACi, Dz ADj. (3)
Доказательство. Пусть плоскости (1) и (2) параллель-
ны. Это означает, что каждый вектор, параллельный плоскости (1),
параллелен плоскости (2). Векторы
p{Bi ,- Л1; 0}, q {Ср 0, - Ai}, г {0, С1( — BJ
согласно теореме [10.1] параллельны плоскости (1), поэтому они
параллельны также плоскости (2). Из теоремы [10.2] следует,
что
AzBi + B2(—Ai) + С2 • 0= 0
AzCt В20 4- С2 (— Л1) — 0
Az • 0 + BzCi 4- Cz (— Вд — 0
А^Вг — В1Аг — 0> ]
Или Л iC2 — CiA2 = 0, 1(4)
В\С2 — С\Вг ~ 0. )
При доказательстве теоремы [1.8] было показано, что в этом слу-
чае существует такое число X, которое удовлетворяет условиям:
А2 = АЛр В2 = АВЪ С2 = АСр Очевидно, В2 =# АОр так как в
противном случае согласно теореме [10.3] плоскости (1) и (2) сов-
падают.
Обратно, пусть выполняются условия (3). Тогда согласно тео-
реме [10.2] каждый вектор, параллельный одной из плоскостей,
параллелен другой. В самом деле, если, например, р{а, 0, у}
параллелен плоскости (1), то Л^х + Bi₽ 4- Cry = 0. Отсюда сле-
дует, что АЛ1И 4- АВ $ 4- ACiY = 0 или Л2а 4- В20 4- С2у = 0.
Это означает, что вектор параллелен также плоскости (2). Отсюда
и из условий (3) следует, что плоскости (1) и (2) параллельны. Тео-
рема доказана.
Теоремы [10.3] и [11.1] позволяют сразу сформулировать ус-
ловия пересечения двух плоскостей. В самом деле, плоскости (1)
и (2) пересекаются тогда и только тогда, когда они не параллельны
и не совпадают. Аналитически это означает, что коэффициенты при
х, у и z не пропорциональны. Таким образом, мы пришли к тео-
реме.
Теорема [11.2]. Для того чтобы две плоскости, заданные в
аффинной системе уравнениями (1) и (2), пересекались, необходимо
и достаточно, чтобы в уравнениях (1) и (2) коэффициенты при х, у
и г не были пропорциональны.
112
Теоремы [10.3], [11.1] и [11.2]
позволяют полностью ответить на
вопрос о взаимном расположении
двух плоскостей, заданных уравнени-
ями в аффинной системе координат.
Теорема [11.3]. Плоскости,
заданные в аффинной системе коорди-
нат уравнениями (1) и (2):
а) пересекаются тогда и только
тогда, когда коэффициенты при теку-
щих координатах в уравнениях (1) и
(2) не пропорциональны (рис. 48, а);
б) параллельны тогда и только
тогда, когда коэффициенты при те-
кущих координатах в уравнениях (1)
и (2) пропорциональны, но все коэф-
фициенты, включйя свободные члены,
не пропорциональны (рис. 48, б);
в) совпадают тогда и только тогда,
когда все коэффициенты (включая и
свободные члены) в уравнениях (1)
и (2) пропорциональны (рис. 48, в).
Если пользоваться понятием ранга
матрицы, то теорему [11.3] можно сформу-
лировать следующим образом.
Теорема [11.3']. Пусть даны
две плоскости, в аффинной системе коорди-
нат уравнениями (1) и (2). Обозначим через
г и R соответственно ранги матриц
Су Dy
С2 D2
Ау
By
В2
й
By
Вг
а) Для того чтобы плоскости (1) и (2) пересекались, необходимо и доста-
точно, чтобы г = 2.
б) Для того чтобы плоскости (1) и (2) были параллельны, необходимо и
достаточно, чтобы г = 1, R — 2.
в) Для того чтобы плоскости (1) и (2) совпадали, необходимо и достаточно,
чтобы R = 1.
Пример
пар плоскостей:
а) х у — За -[-1 = 0,
б) х -} 4у — За -[-6 = 0,
в) /3 х — у + 6а = 0,
г) х — у = 0,
1. Определить взаимное расположение следующих
х — Зу + а = 0;
—х 4- 2у------а -[- 3 = 0;
2 _ .2
х — ^-у + 2/За+ 1 = 0;
3
а = 0.
из
Решение, а) Коэффициенты при текущих координатах не
пропорциональны, поэтому плоскости пересекаются.
б) Плоскости совпадают, так как все коэффициенты, включая
свободные члены, пропорциональны.
в) Плоскости параллельны, так как коэффициенты при текущих
1/3Л
координатах пропорциональны (X I, но все коэффициенты
не пропорциональны.
г) Плоскости пересекаются, так как коэффициенты при текущих
координатах не пропорциональны.
2. Взаимное расположение трех плоскостей1. Пусть в аффинной системе
координат даны три плоскости:
Дгх + Вху + Cxz + Dx = 0, (5)
А2х + В2у + С2г + D2 = 0, (6)
Д3х + В3у + С3г 4-£>3=0. (7)
Установим критерии, позволяющие по коэффициентам уравнений (5),
(6) и (7) определить их взаимное расположение. Для этой цели введем в рас-
смотрение матрицы:
(АХВХСХ\ /'AXBXCXDX\
I Д252С2 I, (/?) I Д2В2С2Р2 j (8)
\Л3В3С3/ \Д3 В3 С3 D3J
, (АХВХСЛ !AXBXCXDX\
Г12^ (д R С Г ^12Цд R С П /
\^*2 '-'2/ \^2 *^2 ^2 ^2/
, (10)
'Д2 В2 С.\ /Д2 В2 С2 DA
А R с и^[д R г п \ (И)
,Л3 В3 С3/ \Л3 в3 с3 и3/
Здесь в скобках обозначены ранги
соответствующих матриц. Совершен-
но очевидно, что ранги матриц (8)—
(11) удовлетворяют неравенствам:
т <. R С 3, r12 RX2 -;С 2, г13 С /?13 с 2, г23 -С R23 -с 2,
г12 г13 г> г23 < Г> ^12 &13 < R’ R%3 R-
Пользуясь соответствующими теоремами алгебры, покажем, как по ран-
гам матриц (8) — (11) определяется взаимное расположение плоскостей (5)—
(7). Рассмотрим ряд случаев в зависимости от значений г и R.
1. г = R = 3 В этом случае, как известно из курса алгебры (см. при-
ложение § 3, теорема 1), система (5) — (7) имеет единственное решение. Гео-
метрический смысл этого заключается в том, что все три плоскости (5), (6)
и (7) имеют единственную общую точку (рис. 49). Очевидно, в данном случае
Г12 г13 — г23 — Rl2 — «13 — R23 2.
1 При изложении этого вопроса мы будем пользоваться понятием ранга
матрицы. Читателю, не знакомому с этим понятием, этот пункт можно опус-
тить.
114
2. г = 2, R — 3. В этом случае система
(5) —(7) несовместна, т. е. соответствующие
плоскости не имеют ни одной общей точки. С
другой стороны, система однородных урав-
нений
4ia + BjP + CjY = О,
Л2а + В2р + С2у = О,
Л3а + S3p С3у = О
в силу условия г = 2 имеет единственное ре-
шение, определяемое с точностью до числово-
го множителя. Геометрически это означает,
что имеется единственное направление, парал-
лельное одновременно плоскостям (5), (6) и (7).
Рассмотрим более подробно различные
подслучаи взаимного расположения плоскос-
тей при г = 2 и R = 3. Для 'Этой цели вос-
пользуемся рангами матриц (9) — (11). Так
как г = 2, то по крайней мере два числа из
чисел г12, г13, г23 равны двум. В самом деле,
если, например, rJ2 = r13 = 1, то в соответ-
ствующих матрицах вторые строки Д2В2С2 и
Д3В3С3 пропорциональны
поэтому А2В2С2 и Д3В3С3
ны. Отсюда следует, что г23 — 1, поэтому г =
= 1. С другой стороны, так как R = 3, то R12=
= Ris — R23 — 2. Это приводит к следующим
двум
строке А1В1С1,
пропорциональ-
различным случаям:
а) г12=г13=г23 = 2. В этом случае, очевидно, R12 — R33=^i3 = 2. Плос-
кости (5), (6) и (7) попарно пересекаются (теорема [11.3] ) и все три прямые,
по которым они пересекаются, параллельны друг другу. В самом деле, выше
было отмечено, что существует ненулевой вектор, параллельный всем трем
плоскостям. Отсюда следует, что этот вектор параллелен линии пересечения
любой пары плоскостей. Очевидно, прямые, по которым пересекаются плос-
кости, не лежат в одной плоскости (рис. 50, а).
б) rl2 = 1, г13 = г23 = 2, R12 — R23 = R13 = 2. Плоскости (5) и (6) па-
раллельны, а плоскость (7) пересекает как плоскость (5), так и плоскость (6)
(теорема [11.3'] (рис. 50, б) Случаи г13 — 1, г12= г23 = 2 и r!3 = 1, г13 =
= г12 = 2 несущественно отличаются от предыдущего.
3. г = 2, R = 2. В этом случае система (5) — (7) имеет бесчисленное мно-
жество решений. Но так как имеется единственное направление, параллель-
ное всем данным плоскостям, то плоскости (5)—(7) пересекаются по прямой.
Легко видеть, что здесь так же, как и в предыдущем случае, возможны
два подслучая:
а) Па = Нз = Из = 2, R12 = Ri3 = R23 = 2. Все три плоскости по-
парно различны и пересекаются по прямой (рис. 51, а);
6) Г12 = 1, г13 = г23 — 2, R12 = 1, R13 = R23 = 2. Плоскости (5) и
(6) совпадают, а (7) пересекает их (рис. 51, б). Очевидно, случай г12 = ],
Нз = Из = 2, R12 — R13 = R23 — 2 здесь невозможен, так как при этом
случае система (5) — (7) несовместна.
4 г = 1, R = 2. В этом случае система (5) — (7) несовместна, поэтому
плоскости не имеют общих точек Здесь, очевидно, r12 = rJ3 — г23 = 1,
поэтому возможны только два подслучая.
a) R]2 = Ri3 = R23 = 2. Все три плоскости попарно параллельны (рис
52, а).
б) Ria = 1. Ris = Кзз = 2- Плоскости (5) и (6) совпадают, а плоскость
(7) им параллельна (рис 52, б).
115
5. г = R = 1. Все три плоскости сов-
падают (рис. 53).
Очевидно, имеют место предложения,
обратные каждому из сформулированных
выше предложений. Эти предложения мо-
гут быть доказаны рассуждением от про-
тивного. В самом деле, в качестве примера
докажем предложение: если три плоскос-
ти пересекаются по трем параллельным
прямым, то
Рис. 52
г 2, R — 3, г12 — /уд — г2з —
= Ria — R13 — Ras = 2.
Доказательство проведем от против-
ного. Пусть, например, г + 2. Тогда либо
г = 1, либо г =- 3. Если г = 1, то имеет
место либо случай 4, либо случай 5. И в
том и в другом случае плоскости, как было'
показано выше, не пересекаются по трем
прямым. Если г = 3, то имеет место случай
1 и плоскости имеют одну и только одну
общую точку.
Проведенное выше исследование может
быть подытожено в виде следующего пред-
ложения.
Т е о р е м а [11.4]. Пусть в аффин-
ной системе координат даны три плос-
кости уравнениями (5), (6) и (7). Если г,
R, rjj, Кц соответственно ранги мат-
риц (8) —(11), то возможны следующие
восемь случаев взаимного расположения дан-
ных плоскостей (см. таблицу на стр. 117).
Сформулированные критерии являются
необходимыми и достаточными для любо-
го случая взаимного расположения трех
плоскостей.
Пример 2. Определить взаимное
расположение следующих троек плоскос-
тей:
Рис. 53
а) х — Зу + г-|-1 =0,
6х—7y+10z—3=0,
4х — у + 2z—5=0;
в) Зх—7у+ z—1=0,
5х+3у—11г+3=0,
*+5у— 6z-|-2=0;
б) х — 4у +г+1 =0,
x+3y+2z+4=0,
— 2х + у —Зг=0;
г) х—2y+z—4=0,
2х—4у+2г+6=0,
х + у+г—8=0
116
№ п/п Г R ГЧ Взаимное расположение плоскостей
1 3 3 2 2 Плоскости ' имеют единственную общую точку
2 2 3 2 2 Плоскости попарно пересекаются по трем параллельным прямым
3 2 3 1,2 2 Две плоскости параллельны, а третья их пересекает
4 2 2 2 2 Три плоскости попарно различны и пересе- каются по одной прямой
5 2 2 1,2 1,2 Две плоскости совпадают, а третья их пересекает
6 1 2 1 2 Плоскости попарно параллельны
7 1 2 1 1,2 Две плоскости совпадают, а третья им параллельна
8 1 1 1 1 Все три плоскости совпадают
Решение. Для определения взаимного расположения троек плос-
костей воспользуемся теоремой [11.4]. Для этой цели подсчитаем ранги г,
R, rip Rij матриц (8) — (11) для каждого случая в отдельности.
а) Легко видеть, что для данных плоскостей г = 3, т. е. имеет место слу-
чай 1 теоремы [11.4]. Следовательно, плоскости пересекаются в одной
точке.
б) г = 2 и R = 3. Легко видеть, что в этом случае г12 = г13 = г23 = 2,
т. е. имеет место случай 2 теоремы [11.4]: плоскости попарно различны и пе-
ресекаются по трем параллельным прямым.
в) В данном случае г = 2, R = 2, г12 = г13 = г23 = 2. Таким образом,
имеет место случай 4 теоремы [11.4], т. е. плоскости попарно различны и пе-
ресекаются по одной прямой.
г) г = 2, R = 3, r12 = 1, г13 = 2, г23=2. Это случай 3 теоремы[11.4].
В данном случае две плоскости параллельны, а третья их пересекает.
3. Уравнение пучка пересекающихся плоскостей. Пучком
пересекающихся плоскостей с осью I называется совокупность всех
плоскостей пространства, содержащих прямую I. Пучок пересекаю-
щихся плоскостей может быть задан двумя различными плоскостя-
ми, принадлежащими этому пучку. В самом деле, две различные
плоскости, проходящие через I, определяют прямую I, а тем самым
и весь пучок. По аналогии с I, § 171 выведем уравнение пучка пере-
секающихся плоскостей.
1 См. подстрочное примечание на стр. 7.
И7
Теорема [11.5]. Если в аффинной системе координат пу-
чок пересекающихся плоскостей Q задан двумя различными плоскос-
тями (1) и (2), то уравнение
(Л tX + В1У + CjZ + Dj) + Р (А2х + В^-^Сг? 4“ Т>2) = 0, (12)
где а и р принимают всевозможные значения, не равные одновременно
нулю, определяет данный пучок.
Смысл теоремы заключается в следующем: каковы бы ни были
числа а, р, не равные одновременно нулю, уравнением (12) опреде-
ляется некоторая плоскость пучка Q. Обратно, для произвольной
плоскости л пучка й всегда найдутся такие коэффициенты а, р,
что (12) является уравнением плоскости л. Поэтому уравнение (12)
называется уравнением пучка Q.
Доказательство. Прежде всего покажем, что при лю-
бых значениях а и р, не равных одновременно нулю, уравнение (12)
будет служить уравнением некоторой плоскости. Для доказатель-
ства пишем уравнение (12) в следующем виде:
(аЛ 1 + рЛ2) х (a5i + рВ2)у+(аС1+рС'2) z+(aD14-Р-О2)=0. (12')
Уравнение (12') представляет собой алгебраическое уравнение
первой степени с коэффициентами при х, у и г, одновременно не рав-
ными нулю. В самом деле, если предположить, что
осЛ 1 4~ РЛ2 = 0, аВ 1 4- РВ2 = 0> аС^ 4" РСг ~ О,
то в силу того, что а и р не равны одновременно нулю, числа и
Л2, Bi и В2, Ci и С2 будут пропорциональны, что невозможно,
так как данные плоскости (1) и (2) пересекаются (см. теорему
[11.3]).
Покажем, что плоскость (12) при любых а и р принадлежит пуч-
ку Q, т. е. проходит через линию пересечения плоскостей (1) и (2).
В самом деле, если М0(х0, у0, г0) — произвольная точка прямой I,
то AiXg + Biy0 + CjZ0 4- Di =0 и Л2х0 4~ В2у04~ C2z0 4* D2 = 0,
поэтому координаты точки Мо удовлетворяют уравнению (12) при
любых значениях аир.
Таким образом, при любых а и р, одновременно не равных нулю,
уравнение (12) определяет плоскость пучка. Чтобы доказать, что
уравнением (12) задается весь пучок плоскостей, остается показать,
что для любой плоскости л пучка можно подобрать числа аир так,
чтобы уравнение (12) было уравнением плоскости л. Положение
плоскости л в пространстве вполне определяется осью I пучка и точ-
кой Mi (%!, yit z{), принадлежащей плоскости и не принадлежащей
I. Плоскость (12), как было показано выше, всегда проходит через
ось I пучка. Подберем аир так, чтобы плоскость (12) проходила
через точку Mi(xj, yi, zt). Подставим координаты точки Mt в урав-
нение (12):
118
a (AiXt 4“ Biyi + CjZj + Dt) 4- P (A2Xt + B2yi 4- C22i + O2) — 0.
Числа AiXi + Btyt + + Dt и A2xt 4- B2yt 4- C2Zj 4- D2 од-
новременно не равны нулю, так как точка Mi (х/, yt, zt) не лежит
на прямой I. Если, например,
A%Xi 4" B2yt 4” C2Zi 4- D2 =H= 0,
то a можно выбрать произвольно, а р определить равенством:
р _ ^ixi 4- ^1У1 4~ CjZj 4- Dt a
^2xi 4" В2У1 4- C2Zj 4- &2
При выбранных значениях аир плоскость (12) проходит через
I и точку M^Xj, ур г,), т. е. совпадает с л. Теорема доказана пол-
ностью.
Пример 3. Написать уравнение пучка, определяемого пе-
ресекающимися плоскостями:
х — Зу 4- z = 0, 2х — у 4- 2г 4- 2 = 0.
Решение. Подставив в соотношение (12) значения коэффи-
циентов уравнений плоскостей, получаем:
а (х — Зу 4* z) 4" Р (2х — у 4~ 2г 4~ 2) = 0
или
(а 4* 2р) х — (За 4~ Р) у 4~ (а 4~ 2Р) г 4" 2р = 0.
Пример 4. В пучке а (х — Зу 4~ 4г 4- 1) 4- Р (у 4- г) = 0
найти плоскость, проходящую через точку (1, 1, 4).
Решение. Точка (1, 1, 4) принадлежит искомой плоскости,
поэтому a (1 — 3 1 4- 4 • 4 4- 1) 4- Р (1 4- 4) = 0, 15a 4- 5р =0.
Этому соотношению удовлетворяют значения: a= 1, р = —3.
Подставив полученные значения в уравнение пучка, получаем:
х — Зу 4- 4г 4- 1 — 3 (у 4- z) = 0 или х — бу 4- z 4- 1 = 0.
4« Уравнение пучка параллельных плоскостей. Пучком па-
раллельных плоскостей называется совокупность
всех плоскостей пространства, параллельных данной плоскости,
включая эту плоскость. По аналогии с предыдущим можно дока-
зать следующую теорему.
Теорема [11.6]. Если в аффинной системе координат даны
две параллельные плоскости (1) и (2), принадлежащие пучку й,
то уравнение (12), где а и р принимают всевозможные значения, не
обращающие одновременно в нуль выражения
а (а, Р)=аЛ ^рДг, 6(а, P)=aBi4-PB2, с (а, Р)=аС14-рС2, (13)
определяет данный пучок.
Доказательство. Плоскости (1) и (2) параллельны,
поэтому А2 = Mi, В2 = %Bi, С2 =
119
Подставив эти значения в соотношение (12'), получаем:
A j (ос Хр) х 4~ Bi (ос -Т А,р) у4-С1 (ос 4”^Р) z4_O1cc4_^2p== 0- (14)
Легко видеть, что в этом уравнении не все коэффициенты при
х, у и г равны нулю. В самом деле, в данном случае выражения (13)
имеют вид:
а (а, Р) = ^4t (ос 4- Хр), b (а, Р) = (а 4* ХР),
с (а, Р) = Ci (ос 4* ^Р),
откуда и следует утверждение, сформулированное выше. Мы при-
шли к выводу, что уравнением (14) определяется плоскость, которая
в силу теоремы [11.11 параллельна плоскости (1) и поэтому принад-
лежит пучку Q.
Обратно, пусть л — некоторая плоскость пучка Q. Покажем,
что а и р всегда можно подобрать так, чтобы соотношение (12)
было уравнением плоскости л. Пусть плоскость л проходит через
точку (х0, у0, г0). Числа осо и Ро подберем так, чтобы хотя бы одно
из них было отлично от нуля и
аоИ1хо+ + Ро Иг х0 4- B2y0+C2z0+ D2)—0. (15)
Это всегда можно сделать, так как выражения в скобках в силу
параллельности плоскостей (1) и (2) не равны одновременно нулю.
Покажем, что соотношение, полученное из (12) при а=а0
Р = Ро:
аоИ1х Ctz 4- D^) + Р0(Л2х + В2у 4* С2г 4- О2) =0 (16)
является уравнением плоскости л. Прежде всего покажем, что не
все коэффициенты при х, у и г равны нулю. Пусть, напротив,
4- Р0Л2 — 0, a0^i 4- Р0^2 = 0, a0Ci -Ь Р0С2 = 0.
Учитывая эти соотношения, из (15) получаем: v^D i 4- РоП2 = 0. В
силу теоремы [10.3] плоскости (1)и (2) совпадают, что противоре-
чит условиям теоремы. Уравнением (16) согласно теореме [10.1]
задается плоскость. Выше было показано, что эта плоскость при-
надлежит пучку й. Кроме того, она проходит через точку (х0, у0, z0),
поэтому совпадает с л. Теорема доказана.
Пучок параллельных плоскостей, очевидно, однозначно опре-
деляется, если дано уравнение одной из плоскостей этого пучка:
Ах 4- By 4- Cz 4- D = 0. В этом случае уравнение пучка может
быть записано 'так: Ах + By 4- Cz 4* X = 0, где X принимает
всевозможные значения. При % = D получаем уравнение данной
плоскости.
Пример 5. Написать уравнение плоскости, проходящей че-
рез точку Мо (2, —3, 1) и параллельной плоскости Зх — 4у 4- г 4-
4- 15 = 0.
120
Решение. Напишем уравнение пучка плоскостей, опреде-
ляемого данной плоскостью Зх — 4у + z + Л. = 0. Потребуем,
чтобы точка Мо лежала в этой плоскости 3-2 — 4 • (— 3) + 1 +
+ % = 0. Отсюда получаем: X = — 19. Таким образом, искомая
плоскость имеет уравнение: Зх — 4у + z— 19 = 0.
Доказанные две теоремы [11.5] и [11.6] позволяют утверждать,
что если плоскости (1) и (2) не совпадают, то уравнение (12) всегда
определяет пучок плоскостей. Если плоскости (1) и (2) совпадают,
то A2=hAlt В2 = Л.В1, С2 — 'kCi, D2 = поэтому уравнение (12)
при любых а и Р определяет ту же самую плоскость. Таким об-
разом, мы приходим к предложению.
Теорема [11.7]. Уравнение (12) в аффинной системе коорди-
нат определяет'.
а) пучок пересекающихся плоскостей, если плоскости (1) и (2)
пересекаются',
б) пучок параллельных плоскостей, если плоскости (1) и (2) па-
раллельны;
в) одну плоскость, если плоскости (1) и (2) совпадают.
5. Условия принадлежности трех плоскостей одному пучку.
Теорема [11.4] позволяет сформулировать условия, при которых
три плоскости принадлежат одному пучку. Выделим из восьми слу-
чаев взаимного расположения трех плоскостей те случаи, при ко-
торых три плоскости принадлежат одному пучку пересекающихся
плоскостей. Такими будут случаи 4, 5 и 8. Три плоскости принад-
лежат пучку параллельных плоскостей в случаях 6,7 и 8. В осталь-
ных случаях плоскости не принадлежат одному пучку. Таким об-
разом, мы приходим к теореме.
Теорема [11.8]. Три плоскости, заданные в аффинной си-
стеме координат уравнениями (5), (6) и (7), принадлежат одному
пучку тогда и только тогда, когда ранг R второй матрицы (8) мень-
ше трех.
В частности, плоскости принадлежат пучку пересекающихся
плоскостей тогда и только тогда, когда г = R < 2. Плоскости
принадлежат пучку параллельных плоскостей тогда и только тогда,
когда г = 1.
6. Уравнение собственной связки плоскостей. Собствен-
ной связкой плоскостей называется совокупность
всех плоскостей пространства, проходящих через Мо. Точка Л40
называется центром связки. Если в пространстве выбрана аф-
финная система координат, то собственная связка плоскостей мо-
жет быть дана либо координатами центра, либо тремя плоскостями,
пересекающимися в единственной точке — центре связки.
Имеют место следующие две теоремы, доказательства которых
мы не приводим, так как они совершенно аналогичны доказатель-
ству теоремы [11.5]1.
1 См. также 1, теоремы [17.4] и [17.5].
121
Теорема [11.9]. Если в аффинной системе координат дана
связка плоскостей с центром в точке ^х0, у0, г0), то уравнение
а (х — х0) + Р (у — у0) 4- у (г — г0) = О,
где а и р принимают всевозможные значения, не равные одновремен-
но нулю, определяет данную связку.
Теорема [11.10]. Если в аффинной системе координат соб-
ственная связка плоскостей дана тремя плоскостями (5), (6) и (7),
пересекающимися в единственной точке, то уравнение
а (Л jX + Вiy + CjZ + Di) + Р (Х2х 4- В2у 4* C2z + Ог) 4~
4- у + ^зУ Т- С3г 4" Од) = 0,
где а, р, и у принимают всевозможные значения, не равные одновре-
менно нулю, определяет данную связку.
Из теоремы [11.4] непосредственно следует, что три плоскости
принадлежат связке пересекающихся плоскостей тогда и только
тогда, когда г — R.
7. Уравнение несобственной связки плоскостей. Несобст-
венной связкой плоскостей, определяемой нену-
левым вектором р, называется совокупность всех плоскостей про-
странства, параллельных вектору р. Направление вектора р назы-
вается направлением связки.
Если в пространстве выбрана аффинная система координат, то
связка плоскостей, определяемая вектором р, может быть дана
одним из следующих способов:
а) координатами вектора р;
б) двумя пересекающимися плоскостями, принадлежащими связ-
ке;
в) тремя плоскостями, принадлежащими связке, но не принад-
лежащими одному пучку.
Ниже приведем теоремы, которые позволяют записывать урав-
нения связок, задаваемых одним из названных выше способов.
Теорема [11.11]. Если в аффинной системе координат дана
несобственная связка Q, определяемая вектором p{pi, р2, р3}, то
уравнение
« (Рз*~Pi2+Pa) 4- Р (р2х—Piy— р3) 4- у (р зУ—Ргг — Pi)=°. (17)
где а, р и у принимают всевозможные значения, не обращающие од-
новременно в нуль выражения
а23 = а-Рз + РРг Gig = УРз — PPi> ai2 = api 4- ург.
определяет данную связку.
Доказательство. Запишем уравнение (17) в виде
(ар3 4- Рр2)х 4-(уРз— РР1)У~ (“Pi + уРг) г 4- »р2—Рр3 —YPi = O.
Так как выражения а2з, ai3, ai2 одновременно не равны нулю, то
этим уравнением определяется плоскость. Из теоремы [10.2 ] сле-
122
дует, что эта плоскость при произвольных значениях a, [J и у па-
раллельна вектору p{pt, Рг, р3}.
В самом деле,
(«Рз + pp2)pt + (ур3 — рр^Рг — (ар! + ур2) р3 = 0.
Отсюда следует, что плоскость (17) принадлежит связке Q.
Обратно, пусть л — заданная уравнением
Ах + Sy 4“ Cz + D = 0 (18)
произвольная плоскость связки й. Докажем, что а, р и у всегда
можно подобрать так, чтобы плоскости (17) и (18) совпадали. Для
этого достаточно показать, что система
ар3 + Рр2 = А,
УРз — PPi = В,
— ар! — ур2 = С,
аР2 — ₽Рз —yPi = D
относительно а, р, у имеет решения при любых значениях А, В, С
и О и произвольном ненулевом векторе р{ pit р2, р3}. Рассмотрим
матрицу системы и расширенную матрицу:
/ Рз Рг ° \ / ' Рз Рг 0 А \
1 0 —Pt Рз | | 0 —Pi р3 В 1
1 —Pi о — Рг Г 1 — Pi 0 — рг С Г
\ Рг —Рз — Pi / \ . Рг —Рз —Pi D /
Ранг г первой матрицы равен трем, так как хотя бы один из еле-
дующих определителей третьего порядка отличен от нуля:
Рз Рг 0
— Pi 0 — р2
Рг —Рз —Pi
Рз Рг 0
0 —Pi Рз
Рг —Рз —Pi
0 -Pi
— Pi 0
Рг —Рз
------Рг (Pl + Рг + Рз),
— Р- (Р? + Рг + Рз),
= Pi (р? + Р22 + р|).
Ранг R второй матрицы также равен трем, так как г < R и пер-
вые три строки этой матрицы линейно зависимы. В самом деле, не-
посредственным вычислением легко убедиться в том, что все опре-
делители третьего порядка матрицы
Рз
0
— Pi
Рг
0
Рз В
— Рг GJ
123
равны нулю. При этом необходимо учесть, что плоскость (18) па-
раллельна вектору р, поэтому Apt + Вр2 + Ср3 = 0. Теорема
доказана.
Пример 6. Написать уравнение связки плоскостей, опре-
деляемой вектором р {1, —2, 4}.
Решение. Подставив значения координат вектора р в урав-
нение (17), получаем:
а (4х — z — 2) + 0 (—2х — у — 4) + у (4у + 2г — 1) = 0.
После элементарных преобразований получаем:
(4а — 20)х + (4у — 0)у + (2у — а) г — 2а — 40 — у = 0.
Теорема [11.12]. Если в аффинной системе координат не-
собственная связка плоскостей дана двумя пересекающимися плоскос-
тями (1) и (2), принадлежащими связке, то уравнение
а (Л iX 4* Bty + Ci? -f- D j) + 0 А2х 4~ В2у + С2г 4- D2) + у = 0,
где а, 0, у принимают всевозможные значения, причем а и 0 одновре-
менно не равны нулю, определяет данную связку.
Доказательство теоремы предоставляем читателю.
Теорема [11.13]. Если в аффинной системе координат не-
собственная связка плоскостей Q дана тремя плоскостями (5), (6)
и (7), принадлежащими связке, но не принадлежащими одному
пучку, то уравнение
а (Л 4~ В^у СiZ 4~ 0 (Л2х 4- В2у 4~ С2г 4~ О2) 4~
4* у (А3х 4- В3у 4- С3г 4- D3) = 0 (19)
определяет связку S. Здесь а, 0 и у принимают всевозможные зна-
чения, не обращающие одновременно в нуль выражения
а — аЛ 1 4- 0Л2 4- у43, b = aBj 4" 0Дг 4" уВ3,
с = aCi 4- 0С2 4- уС3.
Доказательство. В силу условий теоремы в уравнении
(19) коэффициенты при х, у и г одновременно не равны нулю, сле-
довательно, этим уравнением определяется плоскость. Пусть
P{Pi> Р2> Рз} — вектор, определяющий данную связку. Так как плос-
кости (5), (6) и (7) параллельны этому вектору, то плоскость (19) со-
гласно теореме [10.3] при любых значениях а, 0иу параллельна
вектору р. Отсюда следует, что эта плоскость принадлежит связ-
ке й.
Обратно, пусть плоскость л — заданная уравнением
Ах + By 4- Cz 4- D = 0 (20)
произвольная плоскость связки Й. Докажем, что а, 0 и у всегда
можно подобрать так, чтобы плоскости (19) и (20) совпадали. Для
этого достаточно показать, что система уравнений относительно
а, 0, у
124
Aid 4- Д2р 4* ДзУ — A,
Bid 4- B2|3 + B3y = B,
Cyx + C2p + C3y = C,
Did 4- £>гР 4* D3y = D
(21)
всегда имеет ненулевые решения. Это легко доказать, учитывая,
что четыре плоскости (5), (6), (7) и (20) параллельны ненулево-
му вектору р {ръ р2, р3}, поэтому: ?
Api 4- Вр2 4~ Ср3 — 0,
Л1Р1 + Bip2 4- CiP3 — 0,
4* В2р2 + С2р3 = 0,
"4зР1 + ^зРг + С3р3 = 0.
(22)
Это означает, что одно из первых трех уравнений системы (21)
есть следствие двух других.
В самом деле, если, например, Pi =£ 0, то, разделив все четыре
соотношения (22) на pi, мы приходим к выводу, что все коэффи-
циенты первого уравнения системы (21) линейно выражаются че-
рез соответствующие коэффициенты второго и третьего уравнений
той же системы. Но ранг матрицы
/ А. Д, дЛ
/ В, В2 В3 I
I Ci С2 С3 I
\ Q D2 D3J
согласно теореме [11.8] равен трем, поэтому хотя бы один из опре-
делителей третьего порядка этой матрицы отличен от нуля. Но
первые три строки линейно зависимы, поэтому отличный от нуля
определитель обязательно содержит последнюю строку. Пусть, на-
пример,
Ai
А2
в2
D2
Аз
В3
D3
^0.
Система
Aid 4- ДгР 4~ Д3У — А,
Bid В2р 4- В3у — В,
Did 4- Т)2р 4- D3y = D
имеет единственное решение (а0, р0, у0).
Так как третье уравнение в системе (21) в силу условий (22)
есть следствие первых двух, то числа а0, 0О, у0 удовлетворяют всем
четырем уравнениям системы (21). Теорема доказана.
125
Задачи и упражнения
142. Установить взаимное расположение следующих пар плос-
костей: ,
а) х — 2у + г — 4 = 0, 2х + у — z — 1=0;
б) 2х — у + г — 1=0, 4х — 2у + 2г — 3 = 0;
в) 2х — у +1=0, z — 4 = 0;
г) х + у + г = 0, х + у + г + 1 = 0;
д) у — г = 0, 2х + 3 = 0.
143. Установить взаимное расположение трех плоскостей:
2х + 5у — г + 6 = 0, х + у — 2z — 1 =0, 2х + 5у — г — 1 =0.
144. Показать, что плоскости
х — у + 2г — 5 = 0, х + 2у — г + 1 = 0,
Зх + у + 7г — 12 = 0
пересекаются в одной точке, и найти ее координаты.
145. Показать, что плоскости
Зх — 2у + 5г — 1 = 0, х — 2у + 2 = 0, х + 2у + 5г — 5 = 0
пересекаются по одной прямой.
146. Показать, что плоскости
х — у — г + 4 = 0, Зх — г + 5 = 0, 5х + у — г + 1 — 0
пересекаются по трем параллельным между собой прямым.
147. Установить взаимное расположение плоскостей в каждом
из следующих случаев:
а)3х — у+4г — 6 = 0, х + у + г — 3 = 0, 2х — у — 1 =0;
б) х — Зу + 2г — 8 = 0; х — у+ 2г — 4 = 0, х + у +2г = 0;
в) х — у + г + 5 = 0, 2х + у = 0, х + 2у — г — 5 = 0;
г) Зх — у + 2г — 5 = 0, 6х — 2у + 4г — 5 = 0,
х + у + г = 0.
148. Показать, что четыре плоскости
х — Зу + 4г — 5 = 0, 5х — у + 7г — 12=0,
х + у + г — 2 = 0, 7х — Зу + 12г — 19 = 0
пересекаются в одной точке. Найти координаты точки пересечения.
149. В аффинной системе координат даны три плоскости:
Д1Х + Biy + Ctz + D1 = 0,
А2х В2у + С2г + D2 = 0,
А3х + В3у + C3z + D3 = 0.
При каких условиях, накладываемых нй коэффициенты, эти
плоскости пересекаются в одной и только одной точке, лежащей в
плоскости Оху?
150. В аффинной системе координат даны две пересекающиеся
плоскости:
126
Д^х + .В^у + C{z + — 0,
A2x + B2y + C2z + D2 = 0.
При каком условии линия пересечения Зтих плоскостей: а) пе-
ресекает ось Ог; б) лежит в плоскости Оху?
151. Составить уравнение плоскости, проходящей через начало
координат и параллельной: *
а) плоскости 7х — 5у + г — 6 = 0;
б) - плоскости 2х + у + Зг — 4 = 0;
в) плоскости Зг — 5 = 0;
г) плоскости Зх + 4г — 6 = 0.
152. Составить уравнение плоскости, проходящей через точку
М. (3, 1, —2) и параллельной:
а) плоскости х + у + г — 6 = 0;
б) плоскости Зх — у + Зг + 1 = 0;
в) плоскости 2х — г + 4 = 0;
г) плоскости 2у — 5 = 0.
153. Через линию пересечения плоскостей
х — у + 2г — 4 = 0, 2х + у + г + 2 = 0
провести плоскость:
а) проходящую через начало координат;
б) проходящую через точку М (1, 1, 1);
в) параллельную, оси Ог;
г) параллельную оси Ох.
154. Через линию пересечения плоскостей
2х — у + 2г — 3 = 0 и Зх + у — Зг — 1 = 0
провести плоскость так, чтобы она отсекала на оси Ох отрезок, рав-
ный — 2.
155. Написать уравнение собственной связки плоскостей с
центром в точке /Ио(—1, 5, 2).
156. Написать уравнение связки плоскостей, задаваемой плос-
костями:
2х — у + Зг — 2 = 0, х — у + 2 = 0, Зх + у — г + 1 = 0.
157. В общей аффинной системе координат тетраэдр задан урав-
нениями своих граней:
5х — 2у + г — 4 = 0 (АВС), х — Зу + 4г — 2 = 0 (ABD),
х + г — 2 = 0 (ЛСО), 2х + у+ г + 5 = 0 (BCD).
Через вершину А тетраэдра провести плоскость, параллельную
грани BCD.
158. Даны уравнения боковых граней треугольной призмы
2х + у + г — 4 = 0, х + 2г — 3 = 0,
4х + у + 5г + 1 = 0.
127
Написать уравнение плоскости, проходящей через точки Л (—3, 0, 1)
и В (1, —2, 1) параллельно ребрам призмы.
159. Написать уравнение несобственной связки плоскостей, оп-
ределяемой вектором р {—5, I, 8}.
§ 12. МЕТРИЧЕСКИЕ ЗАДАЧИ ТЕОРИИ ПЛОСКОСТИ
Теория плоскости, изложенная в предыдущих двух параграфах,
справедлива как в аффинной, так и в прямоугольной декартовой
системе координат. В настоящем параграфе мы рассмотрим некото-
рые метрические вопросы этой теории, т. е. вопросы, в постановку
которых входят понятия длины отрезка
и величины угла. Эти вопросы особенно
\ X просто решаются в прямоугольных де-
Xх картовых системах координат, поэтому
\ п s \ в данном параграфе всюду будем пред-
iz 5 полагать, что система координат пря-
I___ \ моугольная декартова.
у/о 1. Способы задания плоскости в пря-
моугольной декартовой системе. В пре-
дыдущем параграфе были рассмотрены
Рис- 54 основные случаи задания плоскости в
пространстве. Очевидно, эти способы мо-
гут быть применены так же и в том случае, когда данная система
координат является прямоугольной декартовой. Однако в этом
случае возможны еще два способа задания плоскости.
а) Пусть л — данная плоскость, Мо— произвольная точка на
ней, а п —некоторый ненулевой вектор, перпендикулярный к
этой цлоскости. Очевидно, положение плоскости л в пространстве
вполне определяется, если даны точка Мо и вектор п (рис. 54). Точ-
ка Л40 называется начальной точкой, а вектор п — нор-
мальным вектором плоскости. Если в пространстве
выбрана прямоугольная декартова система координат, то Мо и п
будут иметь координаты: М0(х0, у0, г0) и п {а, 0,у}. Числа (х0, у0, г0)
и {а, 0, у} однозначно характеризуют положение плоскости в про-
странстве.
б) Пусть Oijk — прямоугольная декартова система коорди-
нат в пространстве, а л —данная плоскость. Опустим из точки О
перпендикуляр на плоскость л; обозначим через Н основание пер-
пендикуляра, опущенного из О на л. Обозначим, далее, через па
единичный вектор, перпендикулярный к плоскости л, а через р —
длину отрезка ОН. Если ОН = р ф 0, то вектор ОН ненулевой.
В этом случае и0 возьмем так, чтобы ОН и и0 были сонаправлены
(рис. 55,а). Если ОН = р = 0, то направление и0 возьмем произ-
вольно (рис. 55,6). Очевидно, вектор л0 и число р однозначно оп-
ределяют положение плоскости в пространстве. В системе Oijk
координаты вектора п0 являются направляющими косинусами это-
128
го вектора (теорема [5.4 ]) cos a), cos а2,
cos а3, поэтому положение плоскости
однозначно характеризуется числами
cos at, cos а2, cos а3, р.
2. Уравнение плоскости, заданной
точкой и нормальным вектором.
Задача 1. Написать уравнение
плоскости, заданной в некоторой пря-
моугольной декартовой системе коор-
динат нормальным вектором п {а, р, у}
и начальной точкой М0(х0, у0, г0).
Решение. Произвольная точка
М (х, у, г) пространства принадлежит
плоскости тогда и только тогда, когда
вектор Л4ОЛ4 перпендикулярен к вектору
п (см. рис. 54). Так как Л40Л1 имеет
координаты {х — х0, у — у0, z — z0},
то условие перпендикулярности векто-
ров п и Л4ОЛ4 запишется так:
а (х — х0) + ₽ ( у — Уо) +
+Y (г — г0) = 0. (1)
Рис. 55
Это и есть уравнение плоскости, проходящей через точку
Л40(х0, Уо» г0) и перпендикулярной к вектору п {а, 0,у}. Если плос-
кость проходит через начало координат, то за начальную точку
можно выбрать начало координат О (0, 0, 0). Поэтому в данном
случае уравнение (1) принимает вид:
ах + Ру 4- у z = 0. (2)
Пример 1. Написать уравнение плоскости, проходящей че-
рез точку Л40( 10, —5,4) и перпендикулярной к вектору п {—2, 1, 4}.
Решение. Подставив в уравнение (1) значения координат?
начальной точки и нормального вектора, получаем:
— 2 (х — 10) + 1(у + 5) + 4 (г — 4) = 0 или
—2х 4- у "4“ 4г 9 = 0.
Проверка. Плоскость — 2х + у + 4г 4- 9 = 0 проходит
через точку Мо (10, —5, 4), так как координаты этой точки удов-
летворяют уравнению плоскости: — 2 • 10 4- (— 5) 4- 4 • 4:4- 9 =
= 0. Плоскость имеет согласно теореме [10.1 ] направляющие век-
торы р {1, 2, 0}, q {4, 0, 2}, которые не коллинеарны друг другу.
Вектор п перпендикулярен этим векторам, так как— 2 • 14-1 -2 +
4- 4 . 0 = 0 и — 2-44-1-04-4-2 = 0. Отсюда следует,
что вектор п перпендикулярен плоскости. Задача решена пра-
вильно.
5 Л. С. Атанасян
129
3. Нормальное уравнение плоскости.
Задача 2. Написать уравнение плоскости, заданной в пря-
моугольной декартовой системе координат единичным нормальным
вектором »0{cosa!, cosa2, cosa3} и расстоянием р от начала
координат до плоскости.
Решение. Пусть Н — основание перпендикуляра, опущен-
ного из начала координат на плоскость (см. рис. 55,а), а ОН —
радиус-вектор этой точки. Так как ОН = р»0, то
ОН {pcosaj, pcosa2, pcosa3}.
Таким образом, задача сводится к предыдущей: написать урав-
нение плоскости, проходящей через точку Н(с> cos р cos a2, Р cosa3)
и перпендикулярной к вектору »0{cosa!, cos a2, cos a3}. Подста-
вив координаты вектора п и точки Н в (1), получаем:
cos (х — р cos at) + cos a2 (у—p cosa2) + cosa3 (z — p cos a3)=0.
Так как cos2aj + cos2a2 + cos2a3 = 1 (см. формулу (7), § 5), то
это соотношение сводится к следующему:
х cos cq + у cos a2 + z cos a3 — p = 0. (3)
Это уравнение называется нормальным уравнени-
ем плоскости. Оно существенно отличается от других уравнений
тем, что все коэффициенты имеют геометрический смысл: коэффи-
циенты при х, у и г есть направляющие косинусы любого вектора,
перпендикулярного к плоскости, а свободный член — расстояние
от начала координат до плоскости, взятое со знаком минус.
Задача 3. Дано уравнение плоскости в прямоугольной де-
картовой системе
Ах + By + Cz + D = 0. (4)
Написать нормальное уравнение этой плоскости.
Решение. Пусть (3) — нормальное уравнение плоскости (4).
Согласно теореме [10.3]
А = Xcoscq, В = Xcosa2, С = Xcosa3, D = Хр. (5)
Отсюда получаем:
Д2 + В2 + С2 = X2, X = ± ]<Д2 + S2 = С2 + - VA2 + В2 + С2,
е
где е = ± 1. Если D > 0, то из D = — Хо и р > 0 следует, что
X < 0. Следовательно, е = — 1. Если D < 0, то X > 0, поэтому
е — + 1. Если же D = 0, то е можно выбрать произвольно. Под-
ставив значения X в соотношения (5), получаем:
у еЛ еВ
1 /Л2 + В2 ч- С2 VA2+B2+C2
। еС — е£)
cos а, = г р = — — .
VЛ2 4-В2 + С2, /Л24-В2 + С2
130
Из уравнения (3), учитывая эти соотношения, получаем:
еЛ , еВ , гС , еО
— -X Ч-=г У + ...- Z-\- -----------
/ Л2 + В2 + С2 VЛ2 +В2 +С2' Кл2+В2+С2 /Л2 + В2+С2
= 0. (6)
Мы пришли к следующей теореме.
Теорема [12.1]. Если плоскость в прямоугольной декарто-
вой системе координат дана уравнением (4), то нормальное уравне-
ние этой плоскости имеет вид (6), где 8 = — 1, если D > 0;
8 = + 1, если D <0 и 8 = ± 1, если D — 0.
Пример 2. Написать нормальное уравнение плоскости, за-
данной в прямоугольной декартовой системе координат уравнением:
Зх + 4у — ]/Т1 z — 5 = 0.
Решение. Так как D — — 5, то 8 = + 1, поэтому из (6)
получаем:
4. Нормальный вектор плоскости, заданной общим уравнением.
Имеет место следующая теорема, которая часто используется при
решении разнообразных задач, связанных с плоскостью.
Теорема [12.2]. Если плоскость задана в прямоугольной
декартовой системе уравнением Ах + By + Cz + D = 0, то век-
тор п {А, В, С} перпендикулярен к плоскости.
Доказательство. Возьмем произвольный ненулевой
вектор р {а, 0, у}, параллельный данной плоскости, и докажем, что
п и р взаимно перпендикулярны. В самом деле, так как р парал-
лелен плоскости, то согласно теореме [10.2] Аа + В0 + Су = 0.
Но система координат прямоугольная декартова, поэтому соглас-
но теореме [4.6] это соотношение в векторном виде можно запит
сать так: < р п = 0, т. е. р и п взаимно перпендикулярны.
Итак, мы доказали, что вектор п перпендикулярен к произвольно-
му вектору, параллельному плоскости. Отсюда следует, что
вектор п {А, В, С} перпендикулярен к плоскости.
. 5. Вычисление расстояния от точки до плоскости.
Задача 4. В прямоугольной декартовой системе координат
дана плоскость своим общим уравнением (4). Вычислить расстоя-
ние d от точки Л40 (х0, у0, г0) до этой плоскости.
Решение. Пусть И — основание перпендикуляра, опущен-
ного из данной точки на плоскость (рис. 56). Согласно предыдущей
теореме вектор п {А, В, С} перпендикулярен плоскости, следова-
тельно, коллинеарен вектору НМ0. >По определению скалярного
произведения имеем:
НМап = |77МО| • \п | cos ) = d |« 1 • (±1).
5*
131
Рис. 56
Таким образом,
. d = 1ЯЛ4од I (7)
|л|
Вычислим скалярное произведение
НМйп . Пусть Xt, yt, zt — ко-
ординаты точки Н; тогда
ЯМ0 {х0 — Xj, у0—yi, г0—zj,
НМйп=(х0 — х^ А + (у0—У i) В+
+ (г0 — Zi)C = Ах0 + Ву0 + Сг0—
— (Axi + Byi -|- CZi). Так как
точка Н лежит в данной плоскости,
то Axi И- By i 4“ CZi 4~ Z) = 0.
Таким образом, HMQn = Ax0 4- By0 4- Cz0 4- D. Учитывая, что
|«[ =V A2-j-B2С2, окончательно, получаем:
d__ I Axq 4- #Уо4 Cz0 4~P I
“ /Д2 4-B24-C2
(8)
Мы пришли к следующей теореме.
Теорема [12.3]. Если плоскость в прямоугольной декарто-
вой системе координат дана уравнением (4), то расстояние от точ-
ки Мо (х0, у0, г0) до этой плоскости вычисляется по формуле (8).
Формула (8) принимает простой вид, если плоскость дана нор-
мальным уравнением (3). В этом случае
А = cos ai, В = cos а2, С = cos а3, D = —р,
V А2 4- В2 4- С2 = cos2 а. 4- cos2 а. 4- cos2 а3 =1.
Поэтому формула (8) принимает вид:
d = |х0 cos ai 4- Уо cos а2 + 2о cos а3 — р|. (9)
Теорема [12.4]. Если плоскость в прямоугольной декарто-
вой системе координат дана нормальным уравнением (3), то рас-
стояние от точки Л40(х0, у0, г0) до прямой (3) равно модулю левой
части уравнения плоскости, куда вместо переменных х, у и г под-
ставлены координаты точки Мо.
Пример 3. В прямоугольной декартовой системе координат
дана точка Л40(3, 4, —9) и плоскость х 4- 2у — 2г 4- 13 = 0. Вы-
числить расстояние от точки Мо до данной плоскости.
Решение. По формуле (8) находим:
d = 11 ‘ 4-2 • 4 — 2 • (—9) 4-13 | _ 42 .
F 1 4- 4 4-4 3
132
Пример 4. Написать уравнение плоскости, проходящей
через точки ЛД (—1, 0, 1) и М2 (1, 1, 2) и отстоящей от начала ко-
2
ординат на расстоянии ^=г.
Решение. Пусть А'х + В'у + Сz 4- D' = 0 — искомое
уравнение. Так как плоскость не проходит через начало коорди-
нат, то D' =А= 0; поэтому, разделив уравнение на D' и вводя обозна-
чения
получаем:
Ах 4- By 4- Сг 4-1 = 0.
Искомые коэффициенты А, В и С должны удовлетворять сле-
дующим условиям:
Л • (— 1) 4- С • 1 4- 1 = 0
(точка Mi принадлежит искомой плоскости).
Л-14-В-14-С-24-1=0
(точка Л42 принадлежит искомой плоскости),
12,
—----------= (искомая плоскость отстоит от начала коор-
УА^ + В^+С2 /3 F
2 \
динат на расстоянии
Из первых двух уравнений получаем:
С = А — 1, В = — А— 2С — 1 = — А— 2 • (Л — 1) — 1 =
= — ЗЛ 4- 1.
Подставив эти значения в последнее уравнение, получим:
Е2? = У 'Л2 4- (1 — ЗЛ)2 + (Л — I)2 = ПЛ2 —8Л 4-2,
или 44Л2 — 32Л 4-5 = 0. Это уравнение имеет два решения:
Л = 1*±-6; Л1=А; Д = 1.
44 1 22 ' 2 2
Из первых двух соотношений
С4 = — С2 = — —;
1 22 2 2
Таким образом, существуют две
ловиям задачи:
Ъу —Лг4- 1 = 0, или 5х 4- 7у — 17г 4- 22 = 0, (10)
22 227 22
И
получаем:
В В2 = —1.
1 22 2 2
плоскости, удовлетворяющие ус-
-1-х—-1-у—г 4- 1=0, или х — у — г 4-2 = 0. (11)
133
Проверка. Плоскости (10) и (11) проходят через точки' М t
и Л42, в чем легко убедиться непосредственной подстановкой. Для
проверки второго условия вычислим расстояния от плоскостей
(10), (11) до начала координат:
, 22 2 , 2 2
“1 = —г --- ~ “> = г. = -7=.
1 /25 + 49+289 V 3 2 /1 + 1+1 / 3
Выведем формулу для вычисления расстояния между двумя
параллельными плоскостями.
Задача 5. Даны две параллельные плоскости в прямоуголь-
ной декартовой системе координат:
Ах By Ч- Cz + Di = 0, Ах 4- By 4~ Cz + £)% — 0,
где О1У=О2. Вычислить расстояние между ними.
Решение. Прежде всего отметим, что данные плоскости
действительно параллельны. В самом деле, согласно теореме [12.2]
обе плоскости перпендикулярны к одному и тому же вектору
•п{ А, В, С} и не совпадают. Идея решения задачи заключается
в следующем: возьмем некоторую точку на одной из плоскостей
и вычислим расстояние от этой точки до другой плоскости.
Очевидно, в уравнениях плоскостей хотя бы один из коэффи-
циентов А, В и С отличен от нуля. Если, например, А 0, то
точка (——, 0, 0) лежит в первой плоскости. Вычисляя расстояние
А
от этой точки до второй плоскости, получаем:
d = । — Д1 Н~ Р21 __ 1^2 Д11 (12)
/Д2 + В2 +С2 /Д2 + В2 +С2’ 1 ’
Если Д = 0, а В =+ 0 или С =# 0 то, поступая аналогично, по-
лучаем тот же результат.
Пример 5. Вычислить расстояние между параллельными
плоскостями:
2х — Зу + /3 z — 4 = 0 и 2/Зх — 3]/3у + Зг — 11 = 0.
Решение. Запишем данные уравнения следующим образом:
Г- г- И
2х — Зу + /3 г — 4 = 0, 2х — Зу + ]^3 z —~= 0.
Согласно формуле (12) получаем:
I ——I
. I 4 — /~3 I 11 — 4/~3
d -------------- --------
J/4 + 9+3 4/ 3
134
6. Вычисление угла между
двумя плоскостями.
Задача 6. В прямо-
угольной декартовой системе
координат даны две плоскос-
ти своими уравнениями:
AiX + Bty+CtZ+D^O, (13)
А2х + B2y+C2z —Z?2T=0- (14)
Вычислить угол между ними.
Решение. Если плос-
кости пересекаются, то они
образуют четыре двугранных
угла; меры этих углов обоз-
начим через aj а2> «з и '
а4 (рис. 57). Как известно,
= а2, а3 = а4 и + а3 = 180°,
поэтому достаточно вычислить один из этих углов; этот угол опре-
деляет все остальные углы. Согласно теореме [12.2] векторы
»1 {Лъ CJ и я2 {Л2, В2, С2} соответственно перпендикулярны
к данным плоскостям, поэтому угол между ними равен одному из
углов между плоскостями. На рисунке 57 угол между векторами
пи п2 равен аР Если ф = (»(, га2), то, как известно,
cos <р = ЛД+ВД + ад--------- (15)
К 4i+Bi+Ci.
Мы пришли к теореме.
Теорема [12.5]. Если две плоскости в прямоугольной де-
картовой системе координат даны уравнениями (13) и (14), то
cos <р, где ф — один из углов между плоскостями, определяется
формулой (15).
Частным случаем теоремы [12.5] является
Теорема [12.6]. Для thozo чтобы две плоскости, заданные
в прямоугольной декартовой системе координат, были взаимно
перпендикулярны, необходимо и достаточно, чтобы
Л1Л2 + BiB2 + СА = 0. (16)
Пример 6. Определить углы между плоскостями, заданны-
ми в прямоугольной декартовой системе координат уравнениями:
]/Зх + у — 3 = 0,
2 х + 2/Зу — 2]/2г + 15 = 0.
Решение. По формуле (15) находим:
COS Ф = 2/^ + 2/^
/3 + 1/4 + 12 + 8 V 2
135
Отсюда следует, что <р = 45°, поэтому плоскости, пересекаясь,
составляют углы: = a2 = 45°, a3 = a4 = 135°.
Пример 7. Даны пары плоскостей в прямоугольной декар-
товой системе:
а) х — Зу + г = 0, х + у 4- 1 = 0;
б) х + 4у — 5г = 0, х + у + г — 3 = 0;
в) х — 4у — г + 1 = 0, 2х + 2г — 15 = 0.
Выяснить, какие из этих пар плоскостей взаимно перпендику-
лярны.
Решение, а) Плоскости не перпендикулярны друг другу,
так как условие (16) не выполняется:
1 • 1 + (— 3) • 1 + 1 • 0 = — 2 =/= 0.
б) Плоскости взаимно перпендикулярны, так как
1 • 1 + 4 • 1 — 5 • 1 = 0.
Точно также можно убедиться в том, что и в случае в) плоско-
сти взаимно перпендикулярны.
Задачи и упражнения1
160. Через начало координат провести плоскость, перпенди-
кулярную к векторам:
а){— 1, 0, 4}; б) {3, 1, —2}; в) {2, 1, 0}; г) {3, 5, 1}.
161. Через точку Мо(—3, 1, 5) провести плоскость, перпенди-
кулярную к векторам
' а) (1, 3, —4}; б) (2, 1, 7}; в) [2, —3, 1}; ,г) {3, 0, —1}.
162. Через середину отрезка АВ, где А (3, 1, —2) и В (5, —3, 4),
провести плоскость, перпендикулярную к отрезку АВ.
163. Найти нормальные векторы плоскостей:
а) Зх — у + z — 6 = 0;
б) х + у — z + 1 = 0;
в) х — Зг = 0.
164, Среди пар плоскостей:
а) 2х — у + Зг — 6 = 0, х + 2у Ц- 5 = 0;
б) х — у — г — 3 = 0, х + у + г — 2 = 0;
в) 2х — у + г — 6 = 0, х + у — z — 1 =й= 0;
г) Зх + 5у — 6г — 1 = 0, х + у + z — 2 = 0
указать взаимно перпендикулярные плоскости.
’ Во всех задачах этого параграфа предполагается, что система коорди-
нат прямоугольная декартова.
136
165. В пучке, определяемом плоскостями
7х — Зу 4- 3z — 15 = 0 и х + 12у — 6z 4- 6 = О,
найти две взаимно перпендикулярные плоскости, одна из которых
проходит через точку М (—1, 0, 3).
166. В прямоугольной декартовой системе координат даны
уравнения граней трехгранного угла:
2х — Зу + z — 16 = 0, х + у — z + 1 = 0, х — 2у 4* 2 = 0.
Написать уравнения трех плоскостей, каждая из которых про-
ходит через некоторое ребро и перпендикулярна к противрлежащей
грани.
167. Через точки М (—3, 1, 0) и N (2, 1, —1) провести плос-
кость, перпендикулярную к плоскости 2х — 5у + 2z — 6 = 0.
168. Через начало координат провести плоскость, перпенди-
кулярную к плоскостям
х — у + Зг — 5 = 0 и х + у — 5z + 6 = 0.
169. Через точку М (—6, 0, 3) провести плоскость, перпенди-
кулярную к плоскостям Зх 4- г + 6 = 0 и х 4~ 5у — г — 1 = 0.
170. Найти уравнения трех плоскостей, проходящих через точ-
ки (1, —2, 4) и (3, —4, 5), перпендикулярных соответственно к
координатным плоскостям.
171. Привести к нормальному виду уравнения плоскостей:
а) х + 2у — 2z + 9 = 0;
б) -х — -у + -z4-6 = 0;
’ 7 7 У 7
в) 2х + 3 = 0;
г) х — Зу + z = 0;
д) 6х — 5у — 7 = 0;
е) х 4- 3z — 1 = 0.
172. Вычислить расстояние от начала координат до плоскости
в каждом из следующих случаев: '
а) х — Зу + 5z — 8 = 0; б) 15х 4- 10у — 6z + 18 = 0.
173. Найти расстояние от точки до плоскости в каждом из сле-
дующих случаев:
а) М (1, 0, 5), 2х + 7у + За + 6 = 0;
б) М (—1, 2, 6), х + у + z + 1 = 0;
в) М (3, 1, 8), х + 2у — 3 = 0.
174. Вычислить расстояние между следующими парами парал
лельных плоскостей:
• а) 2х — 2у + z + 10 = 0,
б) 6х — 2у + 3z — 49 = 0,
в) х + у — 5z + 54 = 0,
г) х — у + а — 3 = 0,
2х — 2у + z — 20 = 0;
6х — 2у -j- За 4~ 28 = 0;
х 4- у — 5z 4- 27 = 0;
х — у + z — 18 = 0.
137
175., На оси Ох найти точку, равноудаленную отточки М (4, 1, 1)
и от плоскости х — 2у + 2z — 12 = 0.
17 6., На оси Оу найти точку, равноудаленную от плоскостей:
Зх — 6 = 0, 2х 4~ у — 2z 4- 6 = 0.
177. Составить уравнение геометрического места точек, отстоя-
щих от плоскости Зх—2у+6г—35 = 0 на расстоянии, равном пяти.
178. Составить уравнение геометрического места точек, отстоя-
щих от плоскости Зх + 16 = 0 на расстоянии, равном трем.
179. Составить уравнение геометрического места точек, равно-
удаленных от двух параллельных плоскостей в каждом из следую-
щих случаев:
а) 2х — у + 3z — 14 = 0,
б) х — 4у -j- 5z 3 = 0,
в) х + у — z + 8 = 0,
2х — у “I- Зг 28 = 0
х — 4у + 5г — 15 = 0;
х + у — z + 16 = 0.
180. Написать уравнение плоскости, проходящей через точки
Mi (—1, 0, 1) и М2 (1, 1, 2) и отстоящей от начала координат на
2
расстоянии
181. Написать уравнения плоскостей, делящих пополам дву-
гранные углы между плоскостями:
а) 7х 4~ Зу — z — 4 — 0, 5х — 5у 4" Зг 4~ 2 = 0;
б) х 4- 7г — 8 = 0, Зх — 5г 4- 4у — 10 = 0.
182. Найти уравнения плоскостей, параллельных плоскости
6х 4- Зу 4- 2г = 0 и отстоящих отточки (0, —1, 2) на расстоянии 3.
183. Определить двугранные углы между следующими парами
плоскостей: 1
а) 16х 4" 8у 4" 2z 4-1 — 0, 2х — 2у 4* z 4~ 5 = 0;
б) 2х 4- 5у 4~ 4г 4- 15 = 0, 6х — Зг + 2 = 0.
§ 13. ГЕОМЕТРИЧЕСКИЙ СМЫСЛ ЛИНЕЙНЫХ НЕРАВЕНСТВ
С ТРЕМЯ ПЕРЕМЕННЫМИ
1. Определение отношения, в котором плоскость делит данный
отрезок. Пусть л — плоскость, a Mt и Мг — две различные точки,
расположенные в пространстве так, что прямая MtM2 не парал-
лельна плоскости л. Будем говорить, что плоскость л делит отрезок
р
М iM2 в отношении %, если X = —, где Р — точка пересечения
РМ2
прямой MiM2 и плоскости л. Поставим следующую задачу.
Задача 1. В аффинной системе координат дана плоскость л
уравнением
, Ах 4" By 4- Cz 4- £) = 0 (1)
138
и даны две точки М1(х1, у1( zt) и М2 (х2, у2, z2) своими координа-
тами. Определить отношение X, в котором плоскость л делит отре-
зок AtfiAh-
Решение. Пусть Р — точка пересечения прямой MiM2
и плоскости л. Очевидно, % есть отношение, в котором точка Р де-
лит отрезок MiM2. 'Если Р имеет координаты х0, у0, г0, то
„ ___ *1 + _ У1 + Ху2 _____+ Хг2
0 1 4- X ’ Уо 1+%’ 0 1 + X ’
Точка Р принадлежит плоскости (1), поэтому
Ах0 + Ву0 + Cz0 + D = 0 или
' Д *1 + ^Х2 | ft У1 + Ху2 I £ ?1 + ^2 I £) _ Q
. 1 + х 14-Х 14-Х
После элементарных преобразований получаем:
(Ах^ + Byi + Czl + D) + X (Ах2 + Ву2 + Cz2 + D) = О'. (2)
Исследуем полученное соотношение. Возможны следующие случаи:
a) Axi + Byi -Г CZj + D Ax2~t~ By2 4- Cz2 + D и
Ax2 4- By2 4- Cz2 4" D =£ 0.
В этом случае, разделив соотношение (2) на Ах2 4- Ву2 4- Сг2 +
4- D, определяем К:
X = — AX1 + Byi + Czi + D у= _ 1. (3)
Дхд 4~ By 2 4- С%2 4~ В
б) Axt 4- Ву^ 4- 6?Zj 4~ D = Ах2 -Т Ву2 4- Cz2 4- D =4= 0.
В этом случае, очевидно, точки Mi и М2 не лежат в плоскости
л, но вектор MiM2 параллелен этой плоскости, так как Axi -Т
4- Byi 4- CZi = Ах2 + By2 4- Cz2 или
А (х2 — Xj) 4- В (у2 — Уi) + С (z2 — zt) = 0.
Поэтому точка Р не существует. Заметим, что в данном случае со-
отношение (2) принимает вид: 1 4- Х == 0 или Л = — 1. Известно,
что на йрямой 7Wi/W2 не существует точки, которая делит отрезок
M>iM2 в отношении X = — 1. Таким образом, мы пришли к тому
же результату: в случае б) точки Р не существует.
в) ЛХ1 4~ By 1 4~ CZi 4" D = Ах2 4~ Ву2 4~ Cz2 4~ Z? = 0.
В данном случае точки Mi и М2 лежат в плоскости л, поэтому
поставленная задача теряет смысл.
г) Axi 4- Byi + CZi 4- D #= 0, Ах2 4~ Ву2 Сг2 4- 0 = 0.
Для данного случая точкой пересечения прямой Л11Л42 с плос-
костью л служит Л42, для которой не существует числа X.
Соотношение (2) в данном случае принимает вид: Дх1 4- Byi+
4“ Czi 4- О 4- А, • 0 = 0.
139
В результате этого исследования мы пришли к следующей тео-
реме.
Теорема [13.1]. Если в аффинной системе координат даны
плоскость (1) и две точки (х4, у1( и М2 (х2, у 2, z2), располо-
женные так, что М2 не лежит в данной плоскости и прямая МфЛ2
не параллельна ей, то отношение к, в котором данная плоскость
делит отрезок МХМ2, определяется по формуле (3).
Пример 1. Найти отношение, в котором плоскость Зх —
— 4у + г 4- 1 = 0 делит отрезок, соединяющий точки Л14 (1, 0,—2)
и М2 (2, —3, 1).
Решение. Подставив значения координат точек в левую
часть •уравнения плоскости, получаем:
й4 = 3 • 1—4-04-1- (—2) 4-1 = 2, «
д2 = 3 • 2 — 4 • (—3) 4- 1 • 1 4- 1 = 20.
Имеет место случай а), поэтому по формуле (3) получаем:
\ = — 6-i- = —1.
1 s2 ю
Проверка. Точка Р, делящая отрезок М i-M2 в отношении
X = — —, имеет координаты
р/_8 _21\
\9* 9’ 9/
Непосредственной проверкой убеждаемся в том, что точка Р ле-
жит в данной плоскости.
2. Условие расположения двух точек по разные стороны от плос-
кости. Из приведенного выше исследования вытекает одно важное
следствие. Пусть точки Mi (хь yit zj и М2(х2, у2, z2) не лежат в
плоскости л. Тогда 6t = Axt + Вух 4- Сгх 4- D Ф 0 и б2 =
= Ах2 4* Ву2 4- Сз2 4- D =4= 0.
Имеет место следующая теорема.
Теорема [13.2]. Для того чтобы точки Mi (xt, ylt z4) и
M2 (хг, у г, z2) лежали по разные стороны от плоскости п, заданной
уравнением (1), необходимо и достаточно, чтобы 64 = АхЛ 4* 4-
4- Czi 4- D и б2 = Ах2 -Т Ву2 4- Сг2 4- D имели разные знаки.
Доказательство. Пусть М 4 и М2 лежат по разные сто-
роны от л. Тогда отрезок MiM2 пересекает плоскость л в точке Р,
лежащей между М± и М2, поэтому X > 0. Из (3) вытекает, что К =
= ——, поэтому й4 и й2 имеют разные знаки.
б2
Обратно, пусть й4 и й2 имеют разные знаки. Из предыдущего
исследования вытекает, что имеет место случай а) и % = — — > 0,
т. е. точка пересечения плоскости л и отрезка МрИг лежит между
Mi и Л42, поэтому точки Mi,M2 лежат по разные стороны от плос-
кости л.
140
Из доказанной теоремы немед-
ленно следует
Теорема [13.3]. Для то-
го чтобы точки Mt (xlt ур zt) и
М2 (хг> У г, 2г) лежали по одну сто-
рону от плоскости (1), необходимо
и достаточно, чтобы = АхЛ+
Byi + Czi + D и S2 = Ах2 ~Ь
+ Ву2 + Cz2 + D имели один и
тот же знак.
Рис. 58
Пример 2. Даны Точки
Mi (5, 0, 0), М2 (—1, 2, —3), М3 (2, 1, 1), М4 (0, 0, —1) и
плоскость х — 2у + 4г — 1 = 0. Среди указанных точек выбрать
те точки, которые лежат по ту же сторону от плоскости, что и на-
чало координат.
. Решение. Для начала координат б0= 1-0 — 2-04-4-0 —
— 1 = — 1 < 0. Вычислим числа б для всех данных точек: St=4,
б2 = — 18, 63 = 3, д4 = — 5. Таким образом, искомыми точками
являются Л42 и Л44.
3. Линейные неравенства, характеризующие области, ограни-
ченные плоскостями. Для дальнейшего изложения необходимо
доказать следующую теорему.
Теорема [13.4]. Если в аффинной системе координат дана
плоскость л уравнением (1), то вектор р {А, В, С} не параллелен
плоскости и если его приложить к некоторой точке плоскости, то
координаты Xi, yt, его конца удовлетворяют условию: Axt +
+ Byi + Czi + D > 0.
Доказательство. Из теоремы [10.2] непосредственно
следует, что вектор р не параллелен плоскости л, так как АА +
+ ВВ + СС =#= 0. Для доказательства второй части теоремы при-
ложим вектор р к точке А40(х0, у0, z0) плоскости (рис. 58) и обозна-
чим через Л41 (xj, yi, zt) координаты его конца. В этом случае р =
= A4OA4j; А = Xi — х0, В = у! — у0, С = г4 —- г0 и х0 = Xi — А,
y0=yt — В, z0=Zi — С. Так как точка Л40 лежит в плоскости л, то
A (xi - А) + В (У1 — В) + С (Zi - С) + D = 0
или
AXi + Byi + CZi + D = А2 + В2 + С2 > 0.
Теорема доказана.
Проверим утверждение теоремы для плоскости
4х — Зу + г — 25 = 0.
Возьмем вектор р {4, —3, 1} и приложим к точке (1, 1, 24).
Конец вектора, очевидно, имеет координаты Mi (5, —2, 25). Для
этой точки Sj = 4 • 5 — 3 • (—2) + 1 • 25 — 25 > 0.
141
Поставим следующую задачу.
Задача 2. В аффинной системе координат дана плоскость
Ах + By 4- Сг + D = 0. Определить геометрическое место точек,
координаты которых удовлетворяют условию
Ах + By + Сг + D > 0. (4)
Решение. Возьмем точку Mt (xlt у1( г А так, чтобы Axt 4-
+ Byi + CZi + D > 0. Из теоремы [13.4] следует, что такая точ-
ка всегда существует.
Из теоремы [13.3J следует, что всякая точка М (х, у, г), для ко-
торой d = Ах + By + Cz + D > 0, лежит по ту же сторону от
данной плоскости, что и точка Mt. Обратно, если для точки
М (х, у, г) имеем неравенство (4), то она лежит по ту же сторону от
данной плоскости, что и точка Л4р Таким образом, мы приходим
к выводу:
Геометрическое место точек пространства, координаты кото-
рых удовлетворяют неравенству (4), есть то из полупространств,
определяемых плоскостью (1), в котором лежит конец вектора
р {А, В, С}, если начало приложено к некоторой точке плоскости
(1). Отсюда следует, что геометрическое место точек, координаты
которых удовлетворяют условию
Ах + By + Сг -р D <Z 0,
есть другое полупространство.
Если D =#= 0, то плоскость (1) не проходит через начало коорди-
нат, поэтому для всех точек полупространства, в котором лежит
начало координат, знак выражения д = Ах 4- By 4* Сг 4* D сов-
падает со знаком числа D.
Доказанные выше теоремы могут быть использованы для ана-
литической характеристики некоторых областей пространства,
ограниченных плоскостями. Решим, например, следующую задачу.
Задача 3. Даны две пересекающиеся плоскости
Л1Х 4" Д1У 4~ CjZ 4" = 0, (лi)
А^х 4- Вгу 4- С^г 4- Z)2 = 0 (л2)
и точка Mi (xt, yt; zt), не лежащая на них. Пусть S — внутренняя
область того двугранного угла, образованного данными плоскостя-
ми, которой принадлежит точка ТИр Записать линейные неравен-
ства, характеризующие область S.
Решение. Пусть М (х, у, г) — произвольная точка обла-
сти Q. Это означает, что: а) М и Mi лежат по одну и ту же сторону
от плоскости лр б) М и М j лежат по одну и ту же сторону от плос-
кости л2.
Обратно, если для какой-то точки М пространства выполнены
условия а) и б), то эта точка принадлежит области Q. Пусть
142
6i — Ai%i 4- Вiy 1 + CfZi 4~ Di и 62 — A2Xi +• B2yi 4~ C2Zi 4* D2.
Мы приходим к выводу, что М (х, у, г) принадлежит области й
тогда и только тогда, когда одновременно выполняются два условия:
a) AiX + Biy + CtZ + Di и имеют один и тот же знак.
б) А2х + В2у + C2z + D2 и д2 имеют один и тот же знак.
Эти условия, очевидно, эквивалентны следующим:
(A iX + Biy + CiZ + D J (A iXi + Вiy i + CiZi 4- D J > 0
и
(42x 4~ B2y + C2z 4- D2) (A2Xi + B2yt 4* C2Zi 4" D2) > 0.
Пример 3. Пусть й — внутренняя область того двугран-
ного угла, образованного плоскостями Зх — у 4* 4г 4- 1 = 0 и
х 4- у 4- z — 2 = 0, которой принадлежит начало координат. За-
писать линейные неравенства, характеризующие область й.
Решение. В данном случае = 1, 62 = — 2, поэтому
область й характеризуется неравенствами:
Зх — у 4- 4г 4* 1 0, х 4~ у 4“ z — 2 <С 0.
Задача 4. Даны две параллельные плоскости
Ах 4~ By 4~ Cz 4" D1 — 0,
Ах 4- By 4“ Cz 4* D2 — 0,
где Di D2.
Записать линейные неравенства, характеризующие область й,
расположенную между ними, и две другие внешние области: Й! и
й2.
Решение. Пусть л i ил2 — данные параллельные плоскости,
й — область, расположенная между ними, Й! — внешняя область,
примыкающая к плоскости л1; а Й2 — внешняя область, примы-
кающая к плоскости л2 (рис. #9). Возьмем на данных плоскостях
соответственно точки и М2 и приложим к этим точкам вектор
р {А, В, С}. Пусть = р и М2М2 — р. Возможны два слу-
чая: а) точка Mi принадлежит области Й! и, следовательно, М2
не принадлежит Й2 (рис. 59,а); б) точка М\ не принадлежит й,
и, следовательно, М2 принадлежит й2 (рис. 59,6). Согласно теоре-
ме [13.4] в случае а) области й, й4 и й2 характеризуются нера-
венствами:
(й) : Ах 4~ By 4- Cz 4~ Di <Z 0,
(Й1) : Ах 4- By 4" Cz 4- Di >• 0,
(й2) : Ax 4" By 4" Cz 4- Di <z. 0,
Ax 4- By 4-
Ax 4- By 4~
Ax 4- By 4-
Cz 4* D2 0;
Cz 4- D2 0;
Cz 4* D2 <Z. 0.
В случае б) те же области характеризуются неравенствами:
143
(й) : Ax 4- By 4* Cz 4- D \ > 0, Ax 4~ By 4* Cz 4~ D2 < 0;
(Qi) : Ax + By + Cz + Di< 0, Ax + By + Cz + D2< 0;
(Q2) • Ax 4" By '4* Cz 4~ Di 0, Ax 4~ By 4* Cz 4" D2 > 0*
Мы приходим к выводу, что в любом из этих случаев для точек
области й числа Ах + By + Cz + и Ах + By 4- Сг 4- D2
имеют разные знаки, поэтому
(Ах 4- By 4“ Cz 4” (Ах 4- By 4* Cz 4* D2) <Z 0.
Для точек каждой из областей йц и й2 числа
Ах + By + Cz + Di и Ах 4- By 4- Сг 4- D2 имеют один и тот
же знак.
Рис. 59
Пример 4. Даны две параллельные плоскости
х — 4у + г — 1 = 0 и х — 4у 4~ 2 — 3 = 0.
Записать линейные неравенства, характеризующие области,
определяемые этими плоскостями.
Решение. Внутренняя область й характеризуется нера-
венством
(х — 4у 4- г — 1) (х — 4у 4- z — 3) < 0.
Две внешние области характеризуются неравенствами:
(й') : х — 4у 4- г — 1>0 и — 4у 4- г — 3 > 0;
(Й") :х — 4у 4- г — 1 < 0 и х — 4у 4- г — 3 < 0.
Для более точного определения внешних областей заметим, что
например, для точки (1, 0, 0), лежащей на первой плоскости
левая часть уравнения второй плоскости отрицательна, поэтому
Q" примыкает к первой плоскости, а й' — ко второй.
Используя рассмотренные выше теоремы и задачи, можно за-
писывать «уравнения» различных областей, ограниченных много-
гранными поверхностями.
144
Пример 5. Записать при помощи
линейных неравенств аналитическое за-
дание внутренней области Q треугольной
призмы AOBAiOiBi, изображенной на ри-
сунке 60, если
А (3, 0, 0); О (0, 0, 0), В (0, 2, 0),
АДЗ, 0, 5), Oi (0, 0, 5),
Bi (0, 2, 5).
Решение. Призма ограничена пятью
плоскостями:
AiOiBi, АОВ, ААiOjO, BBjOiO и ABBiA^.
Запишем уравнения всех этих плоскостей:
(ЛАВО : z = 5, (BStOjO) : х =0,
(АОВ) : г = 0, (ЛВВИ,) + |=1.
CAAiOtO) : у = О,
Область Q расположена между параллельными плоскостями
AiOiBi и АОВ, поэтому согласно выводам задачи 4 имеем: г (г—5)<0.
Точка Q лежит по ту же сторону от плоскости AAiBiB, что и на-
чало координат, поэтому у + — 1 < 0. Аналогично получаем
еще два неравенства: у >0 и х>0. Итак, область Q характери-
зуется неравенствами:
z(z — 5)<0, у > 0, х>0, - + КО.
3 2
В заключение докажем следующее предложение.
Теорема [13.5]. Пусть плоскости и л2, заданные в пря-
моугольной декартовой системе координат уравнениями
AiX + Biy + CiZ + Di — 0 и А2х + В2у + C2z + D2 = 0,
пересекаются, но не взаимно перпендикулярны; тогда внутренние
области двух вертикальных двугранных острых углов, образованных
этими плоскостями, характеризуются неравенством:
(AiX + Biy 4- CiZ + Di) (А2х + В2у + C2z -Т £>2) X
X (AiA2 + BiB2 + С А) < 0,
а внутренние области двух вертикальных двугранных тупых уг-
лов — неравенством:
145
(Л iX 4- В^у 4* Ctz + Dj) (A2x + B2y 4~
4~ C2z + D2) (Л1Л2 + + CiC2) > 0.
Доказательство. Плоскости
лt и л2, пересекаясь по прямой /, обра-
зуют четыре двугранных угла, внутренние
области которых обозначим через йь
й[, й2 и й2. Пусть й4 и Qi—внутрен-
ние области острых углов, а й2 и й' —
внутренние области тупых углов. Прило-
жим векторы n^Ai, Bi, CJ и п2{Л2, В2,С2}
к какой-либо точке Р прямой /. Оче-
видно, векторы «j и га2 расположены
в плоскости, перпендикулярной к прямой
I, а угол, определяемый ими, равен линей-
ному углу одного из двугранных углов,
образованных данными плоскостями. Так
как -L«i, a л2_1_л2. то концы этих
векторов будут лежать либо в й2, либо в
й2. Возможны два случая.
1) Концы векторов и п2 лежат в
одной и той же области, скажем й2 (рис.
61,а). В этом случае угол, определяемый
векторами П\ и л2, будет острым, по-
рИСф gi этому т(\П2 = А^Аг + В\В2 С1С2>0. С
другой стороны, область й2 характеризу-
ется неравенствами Atx + В{у 4- CiZ 4~ Hi > 0 и А2х 4- В2у +
4- С2г 4- D2 >0, область й' — неравенствами Atx + Bty 4-
-f- Cj2 4- Di < 0 и A2x 4- B2y 4- C2z 4- D2 <Z 0. Таким образом,
для всех внутренних точек областей й2 и й' имеем:
(A iX 4- Bty 4- CiZ + D^ (A2X 4" B2y 4~ C2z 4~ D2) X
X (Лр42 4- BtB2 4- ВД > 0.
Область Й! характеризуется неравенствами
Л1Х + 51у4_С1г4_Т)1<;0 и А2х 4~ В2у 4~ C2z 4~ D2 > 0,
а область Й1 — неравенствами
Aix 4* Biy 4- CiZ 4- Di > 0 и А2х 4- В2у 4- С2г 4- D2 < 0.
Таким образом, для всех внутренних точек областей и й' име-
ем: 1
(A iX 4- Biy 4" CiZ 4* D J (A2x 4* B2y 4~ C2z 4- Пг) X
X (Л p42 4- B\B2 4- CiC2) < 0.
146
2) Конец вектора лежит в области Й2, а конец вектора л2 —
в Q2 (рис. 61,6). В этом случае угол между векторами и я2
будет тупым, поэтому
/?1И2 = A 4Л2 + BiB2 + с A < о.
Рассуждая аналогично предыдущему, получаем тот же результат.
Пример 6. Даны две пересекающиеся плоскости своими
уравнениями в прямоугольной декартовой системе координат:
2х — 1 Оу 4" 8г 4* 3 — 0, 2х — у 4" г -I- 9 = 0.
Выяснить, какие из точек, указанных ниже, принадлежат внут-
ренним областям острых двугранных углов, образованных данны-
ми плоскостями:
А (2, 0, — 10), В (2, 0, 1), С (4, 1, 0), D (3, 0, —2), Е (3, 1, 1).
Решение. Воспользуемся доказанной выше теоремой.
Внутренние области двух вертикальных двугранных острых уг-
лов, образованных данными плоскостями, характеризуются нера-
венством:
(2х — 10у + 8г + 3) (2х — у — z 4- 9) 22 < 0.
Это неравенство, как нетрудно видеть, выполняется, для точек
А и D.
• Задачи и упражнения
184. Даны точки Pt (1, —1, 4), Р2 (3, 1, 5), Р3 (—6, 0, 1),
Р4(3, —4, 2), Р5(—6, 5, 8), Рв(0, 0, 8) и плоскости
а) 2х — у + z 4- 1 = 0;
б) Зх — г 4- 5 = 0;
в) х 4- у — Зг — 2 = 0;
г) 4х — 8у — 6 = 0.
Для каждой из этих плоскостей среди данных точек указать те,
которые лежат по ту же сторону от плоскости, что и начало коорди-
нат.
185. Даны плоскость х — Зу 4* 2г — 7 = 0 и пары точек:
a) Ai (1, 1, 1)_и Л2(3, —1, 3); б) Bi (0, 0, 0) и В2 (—1, 2, 3);
в) Ci (1, —/2, —1) и С2 (4, —1,5); r)Di (6, 0, 4) uD2 (1, —3, 1).
Найти отношения, в которых данная плоскость делит указанные
выше пары. Указать, какие пары точек лежат по одну сторону от
плоскости и какие по разные.
186. Даны вершины треугольника:
Ai (—1, —3, 4), В (2, —1, 5) и С (1, 3, —9).
147
Выяснить, какие из сторон треугольника пересекаются каждой
из координатных плоскостей.
187. Даны вершины тетраэдра:
А (1, 0, 4), В (3, —1, 1), С (7, —1, 0), D (1, 1, 1).
Записать систему линейных неравенств, характеризующих внут-
реннюю область тетраэдра.
188. Две пересекающиеся плоскости
5х — у 4- 2z — 3 = 0 и х 4- 2у — 5г 4- 1 = 0
делят множество всех точек пространства на четыре области. Соста-
вить систему неравенств, характеризующих внутреннюю область
того двугранного угла, которому принадлежит точка М( 1, 1, 3).
189. Найти уравнение плоскости, делящей пополам тот угол
ме>йду плоскостями
Зх — бу 4- 2г + 5 = 0, 4х — 12у 4- Зг — 3 = 0,
в котором лежит начало координат.
190. Даны две параллельные плоскости itj и л2:
2х — у 4- 5г — 1 = 0, 2х — у 4- 5г 4~ 6 = 0,
и точки
Mt (1, 6, 0), М2 (1, 1, 1), Ms (1, 2, —4),
М4(0, 0, 0), Мб(7, 1, 3), Л46(2, 0, 1).
В какой из трех областей, определяемых параллельными плоско-
стями Л! и л2, расположены данные точки?
191. Охарактеризовать системой неравенств каждую из трех
областей, определяемых двумя параллельными плоскостями:
5х — Зу 4- 2 —: 2 = 0 и 5х — Зу 4- г 4~ 8 = 0.
192, Даны две пересекающиеся плоскости
2х — 5у 4- 2г 4~ 1 = 0 и х — у 4- г — 6 = 0.
Выяснить, какие из точек
Mi (1, 1, 2), М2 (1, —5, 1), М3 (0, 0, 0),
М4(1, 1, 0), М5(2, —1, 2)
принадлежат внутренней области острых двугранных углов, обра-
зованных данными плоскостями.
193. Определить область, заданную системами неравенств в
каждом из следующих случаев:
а) х > 0, у < 0, z <_ 0; х — у — 2г — 4 <С 0;
б) у > 0, у — 3 < 0;
в) Зх 4- У — 6 < 0, х — г — 4 < 0; х 4~ 2у 4~ 3 > 0.
ГЛАВА IV
ПРЯМАЯ И ПЛОСКОСТЬ
§ 14. ПРЯМАЯ В ПРОСТРАНСТВЕ
1. Понятие уравнения линии. В §9 было дано понятие уравнения
или аналитической характеристики геометрического места точек
пространства. Под уравнением геометрического места точек про-
странства мы понимаем такие аналитические условия, кото-
рым удовлетворяют координаты всех точек данного геометричес-
кого места и не удовлетворяют координаты точек, не принадлежа-
щих этому .геометрическому месту. Там же было указано, что если
аналитическая характеристика геометрического места сводится к
одному уравнению F (х, у, z) = 0, то такое геометрическое место
точек называется поверхностью, а данное соотношение — уравне-
нием поверхности.
Введем следующее определение: геометрическое место точек
пространства, координаты которых в некоторой аффинной системе
координат удовлетворяют уравнениям'.
F^x, у, г) = 0, |
F2 (х, у, z) = 0, f
называется линией или кривой. Здесь предполагается, что
FJx, у, г) и F2(x, у, г) — некоторые аналитические выражения и
уравнения (1) независимы, т. е. не каждое решение одного
из этих уравнений является решением другого. Таким образом,
если L — некоторая линия пространства, то соотношения (1) на-
зываются уравнениями этой линии, если координаты
всех точек линии удовлетворяют обоим уравнениям (1), а коорди-
наты любой точки пространства, не принадлежащей линии L, не
удовлетворяют хотя бы одному из уравнений (1).
В настоящем параграфе методами аналитической геометрии
изучим простейшую линию в пространстве — прямую линию.
2. Прямая и ее уравнения. В курсе элементарной геометрии пря-
мая не определяется, так как она является основным геометричес-
ким объектом. Основные свойства прямой задаются аксиоматичес-
ки, а остальные — выводятся из них логическим путем. Однако,
149
пользуясь понятием коллинеарности векторов, можно задать гео-
метрическое место всех точек, принадлежащих прямой. В самом де-
ле, если Мо — произвольная точка прямой I, а р — ненулевой
вектор, параллельный прямой, то М принадлежит прямой I тогда
и только тогда, когда векторы М0М и р коллинеарны. Другими
словами, если Gz — множество всех точек прямой /, то Gz есть
геометрическое место точек пространства, удовлетворяющих усло-
вию: векторы М0М и р коллинеарны. Это свойство может быть ис-
пользовано для составления уравнений прямой1.
3. Различные способы задания прямой в аффинной системе коор-
динат. В аналитической геометрии пользуются следующими спосо-
бами задания прямой.
а) Пусть I — данная прямая, Л40 — ее произвольная точка, а
р — ненулевой вектор, параллельный прямой. Положение пря-
мой I в пространстве однозначно определяется, если даны
точка Мо и вектор р (рис. 62, а). Точка Мо называется началь-
ной точкой, а вектор р — направляющим вектором пря-
мой. Заметим, что за начальную точку можно выбрать любую точ-
ку прямойт а за направляющий вектор — любой ненулевой вектор,
параллельный прямой. Если в пространстве выбрана аффинная си-
стема координат, то точка Л40 и вектор р будут иметь координаты:
М0(х0> Уо> 2о)> Р {“. ₽. Y}- Итак> числа Ло,. Уо> 2о). ₽. У) одно-
значно определяют положение прямой в пространстве.
б) Прямая I может быть задана двумя различными точками
и Л42, принадлежащими этой прямой (рис. 62, б). Если в аффинной
системе координат выбранные точки имеют координаты: Mt (xlt y^zj,
Л42 (х2, уг, z2), то шесть чисел (хь у1э z4), (х2, у2, z2) полностью
определяют положение прямой в пространстве.
в) Положение прямой I в пространстве может быть определено
также заданием двух различных плоскостей и л2, проходящих
через эту прямую. В самом деле, так как плоскости и л2 различ-
ны, то, пересекаясь, они определяют единственную прямую I
(рис. 62,в).
Итак, если в пространстве задана аффинная система координат,
то прямая может быть задана одним из следующих трех способов:
а) начальной точкой Мо и направляющим вектором р;
б) двумя различными точками Mt и Мг;
в) двумя различными плоскостями и Л2, пересекающимися по
прямой I.
Эти способы задания несущественно отличаются друг от друга.
Как мы увидим ниже, от одного способа задания прямой легко пе-
рейти к любому другому способу.
1 В аналитической геометрии термин «прямая» понимается как совокуп
ность всех точек прямой, а уравнения прямой как уравнения этой совокуп-
ности точек.
150
4. Уравнения прямой, заданной началь-
ной точкой и направляющим вектором.
Задача 1. Написать уравнения
прямой, задайной в некоторой аффинной
системе координат точкой Мо (х0, у0, г0) и
направляющим вектором р {а, р, у}.
Решение. Выше было отмечено, что
точка М пространства принадлежит пря-
мой I тогда и только тогда, когда, векторы
М.0М и р коллинеарны. Если (х, у, г) —
координаты точки М, то вектор М0М име-
ет координаты {х— х0, у—у0, г— г0},
поэтому условия коллинеарности векторов
М0М и р {aj.Pi.yJ согласно теореме [1.8]
запишутся следующим образом:
Эти соотношения ‘являются уравнениями прямой I. В самом
деле, координаты любой точки прямой I удовлетворяют этим со-
отношениям, а координаты точек, не принадлежащих прямой I,
не удовлетворяют им. Очевидно, в соотношениях (2) два урав-
нения являются независимыми, а третье зависит от них. В каждом
конкретном случае одно из соотношений (2) можно отбросить.
Выясним геометрический смысл каждого из соотношений (2).
Пусть, например, в первом из этих соотношений а и 0 одновремен-
но не равны нулю. Тогда это соотношение принимает вид:
р (х — х0) — а (у — у0) = 0.
Так как здесь отсутствует переменная г, то этим соотношением
определяется плоскость, параллельная оси Ог. Координаты любой
точки прямой удовлетворяют полученному уравнению, поэтому
эта плоскость будет проходить через нашу прямую. Итак, первое
соотношение (если, конечно, аир одновременно не равны нулю),
определяет плоскость, проходящую через прямую / и параллель-
ную оси Ог. Эта плоскость проектирует данную прямую на коор-
динатную плоскость Оху по направлению оси Ог. Точно так же
можно показать, что если р и у одновременно не равны нулю, то
вторым соотношением определяется плоскость, проходящая через
данную прямую и параллельная оси Ох (если р и у одновременно
151
не равны нулю), а третьим — плоскость, проходящая через данную
прямую и параллельная оси Оу (если а и у одновременно не равны
нулю). Если система координат прямоугольная декартова, то эти
плоскости будут плоскостями, проектирующими (в обычном смысле
этого слова) данную прямую на координатные плоскости.
Если ни одна из координат вектора р не равна нулю, то усло-
вие коллинеарности векторов М0М и р можно записать также сле-
дующим образом:
х—'Хо __ у —Уо _ г — г0
а р у
В случае а #= 0, 0 #= О и у 0 уравнения (2) и (3) эквива-
лентны.
Соотношения (3) называются каноническими урав-
нениями прямой в пространстве* 1.
Пример 1. Написать уравнения прямой, проходящей через
точку Л40(—1, 3, 7) и параллельной вектору р {3, —2, 4}.
Решение. Подставив в соотношения (3) значения коорди-
нат вектора р и начальной точки Мо, получаем:
х + 1 у — 3 г — 7
3 — — 2 — 4
Пример 2. Написать уравнения прямой, проходящей через
точку Л40(1, —1, 2) и параллельной вектору р {0, 4, —3}.
Решение. В данном случае первая координата вектора р
равна нулю, поэтому вместо соотношений (3).мы воспользуемся со-
отношениями (2):
X— 1 у + 1
О 4
у+ 1 г— 2 q г— 2 х— 1
4 —3 ~ —3 О
или, раскрыв определители, будем иметь:
х — 1 = 0, Зу + 4г — 5=0, х — 1 = 0.
Мы видим, что первое и третье уравнения совпадают, поэтому,
отбросив одно из них, получаем уравнения прямой в следующем
виде:
Зу “I- 4z — 5 = 0,)
х — 1 = 0. J
1 В некоторых руководствах канонические уравнения (3) записываются
и в том случае, когда отдельные координаты равны нулю. Например:
х —1 _ у—2 г + 3
0 — 2 “ —5 ’
С алгебраической точки зрения такая запись не имеет смысла. В данном слу-
чае эта запись просто Означает, что числители пропорциональны знаменате-
лям, т. е.
152
Пример 3. Написать уравнения прямой, проходящей через
точку М0(2, —3, 4) и параллельной оси Ох.
Решение. Так как ось Ох параллельна вектору е 41, 0, 0},
то этот вектор является направляющим вектором прямой, поэтому
искомые уравнения прямой запишутся так:
х — 2 у + 3 ________Q у + 3 z — 4
1 0 ~ ’ 0 0
г — 4 х — 2
0 1
= 0,
или
у + 3 = О, 1
z — 4 = 0. J
5. Уравнения прямой, проходящей через две точки.,
Задача 2. Написать уравнения прямой /, проходящей че-
рез две точки Mt (Xi, у1; zt) и М2 (х2, у2, г2), заданные своими ко-
ординатами в некоторой аффинной системе координат.
Решение. Прямую I можно задать начальной точкой
Alt (хъ yit Zi) и направляющим вектором
MiMz{x2 — Xi, у2 — уъ z2 — Zi},
поэтому мы можем сразу написать уравнения прямой,в виде соот-
ношений (2):
х — xi У — У1 =0> У — У1 2 — г1
*2—У2 — У1 ’ У2 — У1 Ч — Ч
2 -2j X —Xt
^2 г1 Х2 Х1
Если х2 — Xi += 0, у2 — У1 =# 0, z2 — 2i^= 0, то соотношения
(4) эквивалентны следующим:
X — Xj _ У — yt = Z — Zj (5)
Х2 Xi у2 ?2 г1
Соотношения (4) или (5) называются уравнениями пря-
мой, проходящей через две точки.
Пример 4. Написать уравнения прямой, проходящей через
две точки: a) Mt (3, —4, 5) и М2 (—1, 2, 0); б) Mt (2, —1, —3) и
М2 (3, -1,5).
Решение, а) Подставив координаты данных точек в соот-
ношения (5), получаем:
х — 3 у + 4 г — 5 х — 3 у+4 Z---5
= —— = , или = —1 =-.
— 1 —3----------------------------------------------2 + 4 0—5-—4-6 —5
б) В данном случае вторая координата вектора MpWafI, 0, 8}
равна нулю; поэтому для составления уравнений прямой восполь-
зуемся соотношениями (4):
153
z + 3 х — 2
8 1
х — 2 У + 1 =0 у + 1 Z + 3 I = с
1 0’08
или
8х — z — 19 = 0,
у+1 =0.
6. Прямая как линия пересечения двух плоскостей*
Задача 3. Прямая I является линией пересечения плоско-
стей л4 ил.2, которые в некоторой аффинной системе координат за-
даны уравнениями:
: *4jX-|_Biy-bCiZ-|-Z)j = (X (6)
л2 : Агх + В2у + C2z + Dz = 0. (7)
Написать уравнения прямой I.
Решение. Координаты любой точки прямой I, очевидно,
удовлетворяют .одновременно уравнениям (6) и (7). В самом деле,
прямая I лежит в плоскости ль поэтому координаты всех ее точек
удовлетворяют уравнению (6). Прямая I лежит также в плоскости
л2, поэтому координаты всех ее точек удовлетворяют уравнению (7).
Обратно, если координаты некоторой точки пространства удов-
летворяют уравнениям (6) и (7), то данная точка лежит на прямой
Z, так как эта точка лежит одновременно на плоскостях л4 и л2.
Мы приходим к выводу, что уравнения (6) и (7) являются урав-
нениями прямой /. Заметим, что согласно теореме [11.2] в этих
уравнениях коэффициенты при х, у и z не пропорциональны.
Таким образом, для того чтобы составить уравнения прямой I,
заданной двумя плоскостями, проходящими через эту прямую, до-
статочно написать систему из двух уравнений, определяющих дан-
ные плоскости.
Имеет место обратное предложение.
Теорема [14.1 ]. Геометрическое место точек простран-
ства, координаты которых в некоторой аффинной системе коорди-
нат удовлетворяют уравнениям (6) и (7), где коэффициенты при
х, у, z не пропорциональны, есть прямая, параллельная вектору.
I в. с
1^2 ^2»
С, А,
С2 А2
Ai Bi ).
Л2 В2 J
(8)
Доказательство. Пусть L — данное геометрическое
место точек. Если л^ — плоскость, заданная уравнением (6), а
л2 — плоскость, заданная уравнением (7), то, поскольку коорди-
наты любой точки L удовлетворяют уравнениям (6) и (7), L цели-
ком лежит в плоскостях Jtj и л2.- Значит, каждая точка геометри-
ческого места L принадлежит прямой /, по которой пересекаются
плоскости л! и л2. С другой стороны, кобрдинаты любой точки пря-
мой I удовлетворяют уравнениям (6) и (7), значит, любая точка
154
прямой I принадлежит L. Отсюда следует, что L и прямая I совпа-
дают.
Остается доказать, что вектор р (см. соотношение (8)) является
направляющим вектором прямой I. Покажем, что р параллелен
плоскости Пр Как известно из теоремы [10.2], условие параллель-
ности вектора р {а, р, у} и плоскости Л! записывается так: Л4а +
4- В4р + Счу = 0. Для вектора р имеем:
А А,
С2 А2
В, А
В2 С2
— А1В1С2 — A {BzC 1 4- В iC 1X2 — В iA 1С2 4- С р4 — б? iB [А % = 0.
Аналогично, можно доказать, что- вектор р параллелен плоскости
л2. Вектор р, параллельный плоскостям л j ил2, параллелен линии
их пересечения, т. е. прямой I. Теорема доказана.
Система уравнений (6) и (7) называется общими урав-
нениями прямой в пространстве.
Доказанная теорема позволяет написать канонические уравне-
ния прямой, если она задана своими общими уравнениями. (6) и (7).
Для того чтобы написать канонические уравнения прямой, доста-
точно найти координаты какой-либо точки Л40 и направляющего
вектора р прямой. За начальную точку Мо можно, очевидно, взять
любую точку пространства, координаты которой удовлетворяют
уравнениям (6) и (7). Задача по существу сводится к решению си-
стемы двух уравнений с тремя неизвестными. Координаты направ-
ляющего вектора р непосредственно определяются из теоремы
[14.1].
Пример 5. Дана прямая общими уравнениями:
х — у4~2г — 3 = 0,1
2х4-у — г 4-6 = 0.)
Написать канонические уравнения этой прямой.
Решение. Определим
Заметим, что в данном случае
4 А =
А В2
A
А
А &2
(9)
координаты начальной точки Л40.
1
2
— 1
1
= 3=^0,
поэтому, придав г произвольное значение (например, г = 0), опре-
делим х0, у0 из соотношений (9): х0 — — 1, у0 = — 4. Итак, точка
Мо имеет координаты (—1, —4, 0).
Координаты направляющего вектора
шений (8):
Р
определяются из соотно-
— 1 2
1 —1 ,
2 1
— 1 2 ,
1 — 1
2 1
или р {—1, 5, 3}. Таким образом, канонические уравнения прямой,
заданной уравнениями (9), имеют вид:
+ 4__г
— 1
155
7. Параметрическое задание прямой. В заключение рассмотрим
параметрическое задание прямой в пространстве, т. е. выразим
координаты любой точки прямой через произвольный параметр.
Задача 4. Написать параметрические уравнения прямой,
заданной в аффинной системе координат точкой Л40(х0, у0, z0) и
направляющим вектором р {а, 0, у}.
Решение. Очевидно, точка М принадлежит прямой I тогда
и только тогда, когда векторы Л4ОЛ4 и р коллинеарны, т. е. суще-
ствует такое число t, что Л40М = tp. Это соотношение в координа-
тах запишется так:.
х — х0 = /а, х = х0 4- at, 1
У — Уо = t ₽> и™ у = Уо + 0/, (Ю)
Z — Zg = ty Z = Zg + yt. J
Эти соотношения называются параметрическими
уравнениями прям. ой. Их смысл заключается в следую-
щем: каково бы ни было число /, точка с координатами, определяе-
мыми соотношениями (10), лежит на прямой I. Обратно, если
(х, у, г) — точка прямой I, то всегда найдется такое число t, что х, у, z
выражаются через х0, у0, z0 и а, 0, у при помощи соотношений
(Ю). .
Пример 6. Написать параметрические уравнения прямой:
а) проходящей через точку Л40(2, 3, —1) и параллельной векто-
ру р {2, 5, —7};
б) проходящей через две точки М{ (1, 2, —5), М2 (1, 4, 2).
Решение, а) Подставив координаты точки Мо и вектора р
в соотношения (10), получим искомые уравнения:
х = 2 4- 2/, у = 3 + 5/, z = — 1 — It.
б) В данном случае за направляющий вектор прямой можно
взять вектор A4iA42{0, 2, 7}. Подставив координаты точки Mi и
координаты вектора MtM2 в соотношения (10), получим:
х = 1, у= 2 4-2/, z = — 5 4-7/.
Пример 7. Написать параметрические уравнения следую-
щих прямых:
( х — Зу + г — 0, (х4-2у4-г — 1=0,
1 у = 0; I х —z4-3 = 0.
Решение: а) Сначала найдем координаты начальной точки
прямой. Поскольку для всех точек данной прямой у = 0, то, пола-
гая в уравнениях г0 = 1, получим х0 = — 1. Таким образом,
точка Л40(—1, 0, 1) принадлежит данной прямой. Для отыскания
направляющего вектора прямой воспользуемся соотношениями (8):
или р {— 1, 0, 1}.
1 —3
0 1
1 1
0 0 ,
—3 1
1 0 ,
156
Теперь легко найти параметрические уравнения прямой:
х = —1 — t, у = 0, z = 1 + t.
б) Для отыскания координат начальной точки Мо прямой поло-
жим г0 = 0, тогда из данных уравнений получим х0= —3, у0 = 2.
Таким образом, точка М (—3, 2, 0) принадлежат данной прямой.
Направляющий вектор р имеет координаты:
12 1 11 1 2 1
(0 —1 , —11, 1 0 J
или р {—2, 2, —2}. Очевидно, в качестве направляющего вектора
прямой I можно также взять вектор р'{1, —Ь 1}> коллинеарный
вектору р. Итак, параметрические уравнения данной прямой
имеют вид:
х = — 3+Л у = 2 — t, z - t.
Задачи и упражнения
194. Определить координаты нескольких точек, лежащих на
прямых:
. х —3 у г + 4
а) ---- = — = —!;
— 1 2 3
б) х = 2 — 3/, у = — 1 + 7/, г = 2Z; х
в) (х + у — z + 6 = 0,
(2х — у + Зг—8 = 0.
.195. Определить координаты точек, лежащих на прямой
х + 2 у-4-4 г — 6 х п
—!—=2—!—=-------- и имеющих: а) абсциссу, равную — 3;
— 1 — 3 5
б) ординату, равную 2.
196. Какие из точек М4 (—1, 3, 5), М2 (—1,4, —2), Л43 (—3, 0, 4),
Л44(2, 10, —11), Л15(3, —1,6) лежат на прямой:
х = —3 + t, у = 2/, г = 4 — 3/.
197. Составить канонические и параметрические уравнения
прямой:
а) проходящей через точку Л40(—3, 8, 1) и параллельной векто-
ру р{—1, 2, 3);
б) проходящей через точку Л40(—1, 3, 5) и параллельной векто-
ру р{—2, 0, 1};
в) проходящей через точку Л4О(8, 3, 7) и параллельной оси Ог;
г) проходящей через точки Mi (—2, 1, 5) и М2 (1, 1, 3);
д) проходящей через начало координат и точку (—3, 1, 5).
- 157
198. Составить уравнения прямой, образованной:
а) пересечением плоскостей Зх — у + г — 6=0 и х + у — 3=0;
б) пересечением плоскости 2х + у — Зг — 5 = 0 и координат-
ной плоскости Оху;
в) пересечением плоскости х — у + 2г = 0 с плоскостью, про-
ходящей через три точки: Mt (1, 1, 1), М2 (—3, 1, 0), Л43(1, —6, 5).
199. Тетраэдр ABCD задан координатами своих вершин
Л (—3, 4, 1), В (0, 4, 2), С (—5, 1, 3), D (3, 5, 1). Составить урав-
нения его ребер.
200. Найти направляющие векторы следующих прямых:
[ х — 2у + 5г — 8 = 0, f х = 0,
а). { б) /
| 2х + 2у — г + 6 = 0; | у + г = 0;
В) ( х + У + г = °, г) / Х = 0,
I х — г = 0; }у = 0.
201. Через точку Л40(—3, 1, 2) провести прямую, параллельную
прямой
( х + 2у — г + 4 = 0,
( Зх — у + г — 6 = 0.
202. Составить параметрические уравнения прямых:
. ( х -J- у — Зг — 1 — 0,
3 ( 2х —у + 9г —2 = 0;
ч f Зх — у + 2г — 6 = 0,
в)
1 х = 0;
х г — 8 — 0,
2у + Зг — 7 = 0;
х = 2,
у — г = 5.
§ 15. ВЗАИМНОЕ РАСПОЛОЖЕНИЕ ПРЯМЫХ И ПЛОСКОСТЕЙ
В настоящем параграфе мы рассмотрим взаимное расположение
двух прямых, а также прямой и плоскости в пространстве.
1. Условие, при котором две прямее лежат в одной плоскости.
Пусть в некоторой аффинной системе координат даны две прямые
своими уравнениями. Выясним, при каком условии эти прямые
лежат в одной плоскости. Для решения этой задачи из уравнений
прямых определим координаты начальной точки и направляющих
векторов. Пусть — прямая, проходящая-через точку М. i (хь у i, zj
и параллельная вектору pfai, pi, у i}, а /2 — вторая прямая, про-
ходящая через точку М2 (х2, у2, г2) и параллельная вектору
р2 {а2, ₽2, у2}. Рассмотрим три вектора:
М^М2{х2 — xit у2 — yi, г2 — г,}, Pifa, Pi,yd, Рг{сс2, Рг,у2}.
Очевидно, прямые Ц и /2 лежат в одной плоскости тогда и только
уогда, когда векторы М\М2, р± и р2 компланарны (рис. 63,а). Усло-
158
вие компланарности этих векторов в координатах согласно теоре-
ме [7.4] запишется так:
х2 Xi Уг У1
“i Pi
Рг
Таким образом, мы приходим к
следующей теореме.
Теорема [15.1]. Для того
чтобы прямая lit проходящая через
точку Mi (xt, уц zj и параллельная
вектору Pi{<Xi> Pi, yj, и прямая 12,
проходящая через точку М2 (х2, у2, г2)
и параллельная вектору р2{а2, р2, Уг},
лежали в одной плоскости, необхо-
димо и достаточно, чтобы координа-
ты точек Mlt М2 и векторов Pi и р2
удовлетворяли условию (1). Система
координат аффинная.
Если прямые li и 12 в пространст-
ве заданы своими уравнениями, то
для того, чтобы воспользоваться
сформулированной выше теоремой,
необходимо предварительно найти
координаты начальных точек МЛ и
Л42 ^и направляющих векторов рЛ и
р2 данных прямых. Координаты то-
чек Mi и М2 и векторов Pi и р2 не-
посредственно определяются, если
г2 zi
Yi
Тг
прямые заданы параметрическими или
каноническими уравнениями. В случае если одна из прямых /( и 12 или
обе прямые заданы общими уравнениями, то предварительно следу-
ет определить координаты начальной точки и, пользуясь теоремой
[14.1], координаты направляющего вектора.
Пример 1. Показать, что прямые
х — I ___ у _______ г + 4
3 ~ — 1 ~~ 5' ’
(2)
Зх — у + 2г — 15 = О,
(о)
х + у + z — 4 = 0,
заданные в аффинной системе координат, лежат в одной плоскости.
Решение. Пусть li — прямая, заданная каноническими
уравнениями (2), а 12 — прямая, заданная общими уравнениями
(3). Определим координаты начальных точек и направляющих век-
торов этих прямых. Из содержания § 14 следует, что прямая про-
159
ходит через точку М^Г, 0, —4) и параллельна вектору pt{3, —1,5}.
Для определения координат начальной точки прямой /2 достаточно
подобрать три числа х, у, г, удовлетворяющие системе уравнений
(3). Для этого можно положить г = 1 и решить полученную си-
стему двух уравнений с двумя неизвестными х и у. В результате
получим х = 4, у = — 1. Координаты направляющего вектора
прямой /2 непосредственно определяются по теореме [14.1]:
р2{—3, —1, 4}. Подставив координаты точек Mlt Л42 и векторов
Pi и р2 в соотношение (1), получим:
4 — 1 — 1 1 +4 3 — 1 5
3 — 1 5 = 3 — 1 5 = 0.
—3 — 1 4 — 3 — 1 4
Таким образом, прямые li и 12 лежат в одной плоскости.
Рассмотрим более подробно взаимное расположение двух пря-
мых, лежащих в одной плоскости.
Если прямые лежат в одной плоскости, то возможны следующие
три случая их взаимного расположения:
а) прямые и /2 пересекаются. Это возможно тогда и только
тогда, когда векторы и р2 не коллинеарны;
б) прямые Ц и /2 параллельны. Это возможно тогда и только
тогда, когда векторы pi и р2 коллинеарны, но вектор MtM2 не
коллинеарен векторам pi и р2,
в) прямые li и 12 совпадают. Это возможно тогда, когда векторы
МХМ2, Pi, р2 коллинеарны.
Для того чтобы дать аналитическую характеристику каждого
из этих случаев, введем в рассмотрение следующие матрицы:
\«2
Pt
Р2
(4)
Уг — У1
Pi
(5)
Предыдущие условия аналитически могут быть сформулирова-
ны в виде следующей теоремы.
Теорема [15.2 ]. Пусть прямая lit проходящая через точку
Л41 (xi, уъ и параллельная вектору pi{a1; pt, yj, и прямая 12,
проходящая через точку М2 (х2, у2, г2) и параллельная вектору
р2{а2, Рг> Ya}, лежат в одной плоскости.
а) Для того чтобы прямые Ц и 12 пересекались, необходимо и до-
статочно, чтобы ранг матрицы (4) был равен двум.
б) Для того чтобы прямые Ц и 12 были параллельны, необходимо
и достаточно, чтобы ранг матрицы (4) был равен единице, а ранг
матрицы (5) был равен двум.
160
в) Для того чтобы прямые It и 12 совпадали, необходимо и доста-
точно, чтобы ранги матриц (4) и (5) были равны единице. Систе-
ма координат аффинная.
Пример 2. Выяснить взаимное расположение двух прямых:
х _____ у + 1 _____ г — 3‘
10 — — 4 ~ —6 ’
Зх + бу Ч- z — 8 — 0,
2х + 5у = 0,
заданных в аффинной системе координат.
Решение. Обозначим первую прямую через /ъ а вторую —
через 12. Нетрудно видеть, что прямая Zt проходит через точку
(0, —1, 3) и параллельна вектору р1{10, —4, —6}, а пря-
мая 12 проходит через точку М2 (0, 0, 8) и параллельна вектору
р2{—5, 2, 3}. Для данных прямых вектор MiM2 имеет координаты
{0, 1, 5}. Координаты векторов pt и р2 пропорциональны, поэ-
тому векторы Pi и р2 коллинеарны. Координаты вектора MjAla
не пропорциональны координатам векторов Pi и р2, следователь-
до, вектор М±М2 не коллинеарен векторам pt и р2. Таким об-
разом, прямые /j и 12 параллельны.
Пример 3. Выяснить взаимное расположение прямых:
х—1 _ у+2 _ г — 3
3 ~ —1 ~ 1
( у+2_1_0,
2 1 х + у — 2г + 7 = 0,
заданных своими уравнениями в аффинной системе координат.
Решение. Прямая Zj проходит через начальную точку
Mi (1, —2, 3) и параллельна направляющему вектору р^З, —1, 1}.
Для прямой 12 начальную точку М2 и направляющий вектор
р2 определим так же, как и в примере 5 § 14: М2 (—8,1,0), р2{—3,
1, —1}. Вектор MtM2 для данных прямых имеет координаты
{—9, 3,—3}. Как видим, координату векторов MiM2, pt и р2
пропорциональны, следовательно, векторы МХМ2, pi и р2 коллине-
арны. Это означает, что прямые Zj и /2 совпадают. .
Если прямые Zj и 12 пересекаются, то легко найти координаты
их точки пересечения. Для этого достаточно рассмотреть систему
уравнений, состоящую из всех уравнений, определяющих прямые
li и 12. В случае пересечения прямых эта система уравнений будет
иметь одно решение.
Пример 4. Убедившись в том, что прямые li и 12, заданные
уравнениями
X —3 у — 7 г—1 х —2 у—3 г + 2
2 1 —1 3—2—5
пересекаются, ндйти координаты точки их пересечения.
6 Л. С. Атанасян
161
Решение. Для данных прямых выполнено условие (1), по-
этому прямые /j и 12 лежат в одной плоскости. Так как при этом
направляющие векторы этих прямых р1{2, 1,—1} и />2{3,—2,—5}
не параллельны, то прямые пересекаются.
Для определения координат точки пересечения можно пользо-
ваться двумя способами.
Первый способ. Канонические уравнения двух прямых
представляют собой шесть линейных уравнений с тремя неизвест-
ными. Вообще говоря, эта система не имеет решений. Однако в
данном случае, когда прямые Zj и 12 пересекаются в одной точке,
система будет иметь единственное решение. Для определения этого
решения из шести уравнений, определяющих прямые /j и Z2, соста-
вим систему из трех независимых линейных уравнений и найдем ее
решение. В данном случае можно составить следующую‘систему
уравнений:
х — 2у + 11 = О,
у 4- z — 8 = 0,
2х + Зу — 13 = 0.
Решая эту систему, получим: х=—1, у = 5, z = 3. Это
решение, очевидно,' определяет координаты общей точки прямых
li и 12.
Второй способ. Запишем параметрические уравнения
прямой Zp
х = 2Z 4-3, у — t 4- 1> 2 — — t 4" I-
Подберем такое значение параметра Z, при котором координаты
х, у, г, определяемые предыдущими соотношениями, удовлетво-
ряют уравнениям прямой 12. Заметим, что в общем случае эта
задача не имеет решения, однако в данном конкретном случае,
когда известно, что прямые Ц и 12 пересекаются в единственной
точ’ке, существует одно и только одно t, удовлетворяющее урав-
нениям прямой 12. л
Подставив предыдущие соотношения в уравнения прямой /2,
получаем:
(2/4-3)-2 = (Z 4- 7) - 3 = (-Z4-1) +2
3 —2 — 5
ИЛИ
Точка пересечения имеет координаты (—1, 5, 3).
2. Условия, при которых две прямые скрещиваются. Пусть в
некоторой аффинной системе координат две прямые даны своими
уравнениями. Выясним, при каком условии они скрещиваются.
162
Для решения этой задачи поступим так же, как в предыдущем
случае, когда выясняли вопрос о принадлежности двух прямых
одной плоскости. Пусть 1± — прямая, проходящая через точку
Mi (%1, yi, и коллинеарная вектору /^{сц, 04, yi}, а /2 — пря-
мая, проходящая через точку М2 (х2, у2, z2) и коллинеарная век-
тору Рг{^2, 02, у г}- Рассмотрим три вектора:
MtM2 {х2 — х1( у2 — уь z2 — Zi}, Pifan 0i, yj, p2 {a2, 02, у 2}.
Прямые Ц и l2 скрещиваются тогда и только тогда, когда векторы
MiM2, pi, р2 не компланарны (рис. 63,6). В самом деле,
пусть /4 и /2 скрещиваются. Перенесем векторы Pi и р2 в точ.
ку М4 прямой и рассмотрим три вектора pi, р2 и MtM2
(рис. 64). Векторы Pi и
MiM2 не коллинеарны,
так как точка М2 не ле-
жит на прямой li. Про-
ведем через точку Mi
плоскость л, параллель-
ную векторам Pi и
MiM2. Очевидно, конец
Р вектора р2 не лежит в
плоскости л. В самом
деле, если Р лежит
в плоскости л, то пря-
мая 12, проходящая через точку М2 плоскости л, также ле-
жит в плоскости л, что невозможно, так как прямые и /2 скрещи-
ваются. Таким образом, вектор р2 не параллелен плоскости л.
Значит, вектрры pi, рг и MiM2 не компланарны. Обратно, если
векторы pi, р2, MiM2 не компланарны, то прямые /, и 12 скрещи-
ваются. В самом деле, если допустить, что прямые li и 12 не скре-
щиваются, то они будут лежать в одной плоскости, но тогда, оче.
видно, векторы pi, р2, MiM2 будут компланарны, что противоре-
чит нашему условию.
Теорема [15.3]. Для того чтобы прямая lit проходящая
через точку Mi (х1( yi, zj и коллинеарная вектору р i {щ, 0i, yj,
и прямая 12, проходящая через точку М2 (х2, у2, z2) и коллинеарная
вектору р2{а2, 02, у2}, были скрещивающимися, необходимо и до-
статочно, чтобы координаты точек Mi и М2 и векторов Pi и р2
удовлетворяли следующему условию'.
х2 Xi у 2 у4
“1 01
а2 02
г2 г,
Yi
Y2
(6)
Система координат аффинная.
6*
163
Пример 5. Показать, что прямые
(Q: ^ = ^- = А
17 5 — 2 1
(Z2) : х = 1 + £1, у = —3 — t, г = 2 + 6Z
скрещиваются.
Решение. Из уравнений йрямых непосредственно следует,
что прямая li проходит через точку Л44 (2, —3, 0) и коллинеарна
вектору Pi{5, —2, 1} а прямая /2 — через точку М2 (1, —3, 2) и
коллинеарна вектору р2{2, —1, 6}. Вектор MiM2, очевидно, име-
ет координаты: {—1, 0, 2}. Подставив координаты векторов AfjAI?.,
plt р2 в соотношение (6), получаем:
— 1
— 1
5 —2 1. =9^=0.
2—1 6
Таким образом, прямые Zj и 12 скрещиваются.
Мы установили критерий для определения взаимного располо-
жения двух прямых, заданных начальными точками и направляю-
щими векторами. Пользуясь понятием ранга матрицы, можно
теоремы 115.1], [15.2] и [15.3] объединить в одно предложение.
Введем в рассмотрение матрицы:
х2 — Х1
а.
У 2 — У1
Pi
Рг
z2 —z:
Yi
Y2
“i Pi Yi
а2 Рг Y2
(7)
и обозначим через R и г соответственно ранги этих матриц. Оче-
видно, R^r. Из теорем [15.1], [15.2] и [15ч.З] непосредственно
следует.
Теорема [15.4]. Пусть в пространстве дана прямая
с начальной точкой (xt, yv г J и направляющим вектором
Pifai, Рь у J и прямая 12 с начальной точкой М2(х2, у2, г2) и направ-
ляющим вектором р2{а2/ р2, у2}. Рассмотрим матрицы (7) и обо-
значим через R и г ранги этих матриц. То^да
а) прямые Ц и /2 скрещиваются тогда и только тогда, когда
R = 3;
б) прямые li и 12 пересекаются тогда и только тогда, когда
R = г = 2;
в) прямые Ц и 12 параллельны тогда и только тогда, когда
R = 2, г = 1;
г) прямые li и 12 совпадают тогда и только тогда, когда
R = г = 1.
Система координат аффинная.
3. Взаимное расположение плоскости и прямой, заданной началь-
ной точкой и направляющим вектором. Пусть в некоторой аффин-
ной системе координат даны прямая I и плоскость л своими урав-
нениями. Выясним их взаимное расположение.
Для решения этой задачи найдем координаты начальной
точки и координаты направляющего вектора прямой I. Пусть
/И0(х0, Уо' го) — начальная точка, а р {а, р, у} — направляющий
вектор прямой I. Допустим, далее, что плоскостью задана своим
общим уравнением
Ах 4~ By 4~ Cz D = 0. (8)
Сначала рассмотрим взаимное расположение вектора р и плос-
кости л. Возможны два случая:
а) Вектор р не параллелен плоскости л. В этом случае, очевид-
но, прямая I пересекает плоскостью. Обратно, если прямая I пере-
секает плоскость л, то вектор р не параллелен плоскости л. Учи-
тывая теорему [10.2], мы приходим к выводу, что, прямая I пере-
секает плоскость л тогда и только тогда, когда
Аа + Вр + Су 0.
б) Вектор р параллелен плоскости л. В этом случае, очевидно,
прямая I либо параллельна плоскости л, либо лежит в ней. Дл?
того чтобы установить, какой из этих случаев имеет место, рассмот-
рим точку Мо. Очевидно, если точка 44 0 лежит в плоскости л, то
прямая I целиком лежит в плоскости л, если же точка 7И0 не лежит
в плоскости л, то прямая параллельна плоскости л. Принимая во
внимание теорему [10.2], мы приходим к следующему выводу:
прямая I лежит в плоскости л тогда и только тогда, когда
Аа 4- ДР + Су = 0 и Ахд 4- Ву0 4* Cz0 4~ D — 0;
прямая I параллельна плоскости л тогда и только тогда, когда
Аа 4- Вр 4- Су — 0 и Ах0 4~ Ву0 4~ Cz0 4~ D 0.
Таким образом, мы приходим к следующей теореме, характе-
ризующей взаимное расположение прямой и плоскости.
Теорема [15.5]. Пусть I проходит через точку М0(х0, у0, z0)
и параллельна вектору р {а, р, у}, а плоскость л задана общим урав-
нением (8). Рассмотрим числа:
£ = Аа 4- Вр 4- Су и т] = Ах0 4- Ву0 4- Cz0 4- D.
а) Для того чтобы прямая I пересекала плоскость л, необходимо
и достаточно, чтобы £ =Д 0.
б) Для того чтобы прямая I была параллельна плоскости л, не-
обходимо и достаточно, чтобы g = 0 и т] Ф 0.
в) Для того чтобы прямая I лежала в плоскости п, необходимо
и достаточно, чтобы £ = т] = 0.
Пример 6. В аффинной системе координат дана плоскость
л и прямые llt 12, 1з своими уравнениями:
165
(л) : Зх — 5у + г — 7 = 0;
(/J : х = 3/, у — — 1 + t, г = 4 4- 5/;
(/2) : = У±1 =
2 1 1 2
(/) : = ZnL = ±=±
J — 2 — 2 — 4
Выясним взаимное расположение плоскости л с каждой из пря-
мых Ц, 12 и /3.
Решение, а) Прямая /j характеризуется начальной точкой
Mi (0, —1, 4) и направляющим вектором р4{3, 1, 5}. Поэтому для
плоскости л и прямой I число введенное в рассмотрение в теореме
[15.5], имеет вид:
= 3-3 — 5. 1 + 1 . 5 = 9 0.
Из теоремы [15.5] следует, что прямая Ц пересекает плоскость л.
б) Прямая 12 характеризуется начальной точкой Л42(1, —2, 7)
и направляющим вектором р2{\, 1, 2}. В данном случае
= 3 • 1-5 - 1+2 - 1 = 0,
т]2 = 3 • 1—5 (—2) + 1 • 7 — 7 = 13 Ф 0.
Из теоремы [15.5] следует, что прямая 12 параллельна плоскости л.
Предлагаем читателю самостоятельно убедиться в том, что пря-
мая Z3 лежит в плоскости л.
4. Взаимное расположение плоскости и прямой, заданной общи-
ми уравнениями. Рассмотрим предыдущую задачу для случая,
когда прямая I задана своими общими уравнениями:
Н- В $ -р ClZ 4~ D j = 0, ]
А2х 4~ В2у 4- C2z 4- D2 = 0, j (9)
а плоскость л — уравнением (8). Для того чтобы выяснить взаим-
ное расположение прямой и плоскости, воспользуемся результа-
тами п. 2, § 11. Введем в рассмотрение три плоскости:
(nJ: AiX 4- Bty 4- CiZ 4~ Dt = 0;
(л2): A2x 4* B2y 4- C2z 4~ D2 = 0;
(л): Ax 4- By + Cz + D =0.
Очевидно, прямая^,/ пересекает плоскость Л в одной точке тогда
и только тогда, когда плоскости л(, л2 ил имеют единственную об-
щую точку; прямая I параллельна плоскости л тогда и только тогда,
когда плоскости л1; л2 и л не имеют ни одной общей точки и, на-
конец, прямая I лежит в плоскости л тогда и только тогда, когда
три плоскости принадлежат одному пучку. Пользуясь теоремой
[11.4], получаем аналитические характеристики каждого из этих
случаев.
166
Теорема 115.6]. Пусть прямая I задана общими уравнения-
ми (9), а плоскость л — уравнением (8). Обозначим через R и г соот-
ветственно ранги матриц'.
(Ах В1 С1 Dt\ /А1 С Л
I Л, В2 С2 D2 I, j А~ В2 С2 I
\А В С D) \А В С J
а) Для того чтобы прямая I и плоскость л пересекались, необхо-
димо и достаточно, чтобы г = R = 3.
б) Для того чтобы прямая I была параллельна плоскости л,
необходимо и достаточно, чтобы г = 2, R = 3.
в) Для того чтобы прямая I лежала в плоскости л, необходимо и
достаточно, чтобы г = R = 2.
Пример 7. Выяснить взаимное расположение прямой и
плоскости в каждом из следующих случаев:
а) прямая I задана уравнениями:
( х — у 4- 5г — 6 = 0,
(2х 4- у — г + 1 = 0;
плоскость л — уравнением: 2х 4- 5у — г + 7 — 0;
б) прямая I задана уравнениями:
J 2х — Зу -Т z — 8 = 0,
[ х + у 4~ z = 0;
плоскость л — уравнением: Зх — 7у + г = 0.
Решение, а) Для данного случая г = 3, следовательно,
согласно теореме [15.6] прямая I пересекает плоскость л. ♦
б) В данном случае г = 2, a R = 3, поэтому в силу той же тео-
ремы прямая I параллельна плоскости л.
В заключение отметим, что если прямая и плоскость пересекают-
ся, то задача вычисления координат их точки пересечения по су-
ществу сводится к совместному решению уравнений прямой и пло-
скости. Задача решается особенно просто, если прямая задана па-
раметрически.
Пример 8. Убедившись в том, что прямая
х = — 1 4" 3/, у = 1 4- 4/, z = — 1 4" t (10)
пересекает плоскость 2х — у 4- г 4- 1 = 0, найти координаты точ-
ки пересечения.
Решение. Направляющий вектор прямой имеет координа-
ты: р {3, 4, 1}, поэтому | = 2-3—1-4 4- 1-1=0; прямая пере-
секает плоскость. Для вычисления координат точки пересечения
сначала определим Параметр этой точки. Для этой цели подставим
в уравнение плоскости выражения х, у и г из соотношений (10):
2 (-1 + 3/) - (1 4- 4/) 4- (- 1 4- t) + 1 = 0.
167
Отсюда получаем: — 3 4* 3t = 0, или t = I. Подставив это зна-
чение в соотношения (10), получаем: х = 2, у = 5, z = 0. Итак,
точка пересечения имеет координаты (2, 5, 0).
Задачи и упражнения
203. Из приведённых ниже пар прямых выделить те, которые
лежат ' в одной плоскости:
а) х4-4 _ у 4-6 _ z— 1 3 5 — 2 И (Зх — 2у 4- z4-5 = 0, |2х 4-Зу 4-4г — 4 = 0;
х—1_У_г4-3 х _ У _ г.
V) 2 1—31 —3 5’
в) х = 2/, у = — 1 4- /, г = з _ t и ! 2у 4- 2г 4- 5 = 0, (х4-у+ 3г —6 = 0;
г) /х 4- 2у — 5г— 15 = 0, и /2х + 3у — г— 3 = 0,
(Зх — у4-2г4- 6 = 0 (4х — 5у 4- г 4- 3 = 0;
д) (2х — у 4-z = 0, 1 у=о и (2х 4- Зу — 5г 4~ 6 = 0, 1. г = 0.
204. Установить взаимное расположение прямых в каждом
из следующих случаев:
„ (2х-Зу-Зг-9 = 0,
Ь- I *-2у+ 2 + 3 = 0;
(2х -р Зу = 0, и f х 4* и — 8 = 0,
j | z —4 -0 |2у + 3г —7 = 0;
" b^y + 2; = 0;
rU X + у — 3z— 1 = 0, (2х + у + 2г — 2 = 0,
*’|2х —у — 9г —2 = 0 (2х — 2у — г — 2 = 0;
(х = 2 + 4t, (х = 7 — 6t,
д)]у = _6/, и ^ = 24-9/,
[г = — 1—8/ (г = 12/.
205. Показать, что прямые
х — 1 у + 1 г4- 10 х — 4__у4~3 _г4- 1
— = ----- -— —:- и -----------------
2—38 1—47
пересекаются. Найти координаты точки их пересечения.
206. Показать, что прямые
(х — Зу 4- 2г 4- 4 =± 0, (Зх 4- 2у 4- 5z — 1 =0,
\2х 4- у 4- 4г 4- 1 = 0 ( 2у 4- г = 0
пересекаются. Найти координаты точки их пересечения.
168
207. Показать, что прямые
x — Xj _ у—у,, = г — гг и х — х2 = у —у2 = г — г2
х2 у2 г2 х} уг гх
пересекаются, если числа xit уь zt и х2, у2, г2 не пропорциональ-
ны. Найти координаты точки их пересечения.
Установить взаимное расположение этих прямых в случае про-
порциональности чисел х1( yit г( и хг, у2, г2.
208. Установить взаимное расположение плоскости
х — 2у + 5г — 6 = 0
и каждой из следующих прямых:
, х у — 1 z+ 2
а) - = ---— —I—;
’ 1 3 1
б) х — 3t, у = — 1 + 2/, г = 3 + /;
ч (2х — у + z —3 = 0,
} ( х —г = 0.
209. Показать, что прямая х = 1 + 2/, у = 3/, z = — 2 + t
пересекает плоскость 2х — у + г+1 = 0. Найти координаты
точки пересечения.
210. а) Доказать, что прямая
( 2х — у + г — 2 = 0,
\— Зх + у — 2г + 3 = 0
пересекает ось Ох. Найти координаты точки пересечения.
б) Доказать, что прямая
(X — -у + г+ 1 = 0,
( к — 2у + 4г = 0
пересекает все координатные плоскости. Определить координаты
точек пересечения.
211. Найти точку пересечения прямой
(Зх— у. + 2г — 1=0
|6х + у — г + 7 = 0
с плоскостью х + Зу + г — 8=0.
212. Составить уравнения прямой, проходящей через точки пе-
ресечения двух прямых
| х + у — г + 6 = 0 х+ 1 _у —2 = г+9
\2х — у + Зг— 25 = 0 2 -1 5
с плоскостью х + 4у + 2г + 3 = 0.
213., Через точку пересечения плоскости х — 2у + Зг + 5 = 0
с осью Ох провести прямую так, чтобы она лежала в данной пло-
скости и была параллельна плоскости Oyz.
169
§ 16. НЕКОТОРЫЕ МЕТРИЧЕСКИЕ ЗАДАЧИ НА ПРЯМУЮ И ПЛОСКОСТЬ
Теория прямой, изложенная в двух предыдущих параграфах,
справедлива как в аффинной, так и в прямоугольной декартовой
системе координат. В настоящем параграфе мы рассмотрим неко-
торые метрические вопросы теории прямой и плоскости, т. е. воп-
росы, в которые входят понятия длины отрезка и величины угла.
Задачи такого типа осо-
бенно просто решаются в
Рис. 65
прямоугольных декарто-
' вых системах координат;
поэтому в данном параг-
рафе всюду будем пред-
1'г полагать, что система ко-
ординат прямоугольная
декартова.
1. Вычисление угла меж-
ду двумя прямыми. Пусть
в пространстве даны две
прямые 1Х и /2. Возьмем
произвольную точку Р и
проведем через эту точ-
ку прямые 1\ и 1'2, соответственно параллельные lt и /2
(рис. 65). Прямые 1'1 и 1'2 образуют четыре углас^о^, <х3 и а4 . Эти
углы называются углами между прямыми 1± и 12. Из
курса стереометрии известно, что понятие угла между прямыми
не зависит от выбора точки Р. Легко видеть, что если дан один из
четырех углов аь а2, а3 и а4, то остальные углы определяются од-
нозначно. В самом деле, = а2, а3 = а4, как вертикальные углы,
и ttj + а3 = а2 + а4 = 180°, как смежные углы. Поставим перед
собой следующую задачу.
Задача 1. В прямоугольной декартовой системе координат
даны координаты {ар Pi.yJ и {а2, (32, у2} направляющих векторов
Pt и рг двух прямых /j и /2- Вычислить косинус угла между пря-
мыми /j и /2.
Решение. Легко видеть, что угол между векторами и
р2 равен одному из указанных выше четырех углов, образованных
данными прямыми (рис. 65). На рисунке 65 угол между векторами
Pi и р2 равен углу Если а = (рь р2), то согласно формуле
(3), § 5 мы приходим к теореме.
Теорема [16.1]. Пусть в прямоугольной декартовой си-
стеме координат направляющие векторы двух прямых Н и 12 имеют
соответственно координаты:
Pi{ai> ₽i, У1} и р2{а2, 02, у2}.
Тогда косинус угла а. между прямыми и 12 определяется формулой
170
ala2 + Р102 + 71Ъ /1Ч
cos а = ------~..zlz_-=______1 . (1)
/а? + р?+-(?/а2+Р;‘ + -Г2
Следствием данной теоремы является следующая
Теорема [16.2]. Если в прямоугольной декартовой системе
координат направляющие векторы прямых. Ей 12 имеют соответст-
венно координаты pfai, Pi, у 1} и р2{а2, Рг, уг}> то для того что-
бы прямые Е и h были взаимно перпендикулярны, необходимо и до-
статочно, чтобы
aia2 + Р 1Рг + у 1Y2 = 0- (2)
Как видим из доказанных выше теорем, для вычисления угла
между двумя прямыми необходимо предварительно найти направ-
ляющие векторы этих прямых. Если прямые заданы своими кано-
ническими или параметрическими уравнениями, то координаты
направляющих векторов определяются непосредственно из -уравне-
ний; если же обе прямые или одна из них заданы общими уравнения-
ми, то координаты направляющих векторов определяются по тео-
реме [14.1 ].
Пример 1. В прямоугольной декартовой системе коорди-
нат даны прямые
(Е): — = -^- = — и (/2) : (* + y+z = 0,
v 17 2 —1—1 27 (. х — z = 0.
Вычислить угол между ними.
Решение. Предварительно вычислим координаты направ-
ляющих векторов этих прямых. Как видно из уравнений прямой
Е, направляющий вектор Pi этой прямой имеет координаты
р1{2, —1, —1}. По теореме [14.1] направляющий вектор р2 пря-
мой Е имеет координаты рг{— 1, 2, —1}. Подставив координаты
этих векторов в соотношение (1), получаем:
— 2 — 24-1 3 1
COS а = - •----22=^27- =-----=-----
/44-14-1/14-44-1 6 2-
Таким образом, один из углов между прямыми равен 120°. Осталь-
ные углы равны 60°, 60°, 120°.
Пример 2. Доказать, что прямые
(х = 2 4- 4t,
Ь = — 1 + 3i, и
|z = —t
2х — у 4- z — 3 = 0,
х 4- 2у — г — 2 = 0
взаимно перпендикулярны.
Решение. Найдем направляющие векторы этих прямых и
воспользуемся теоремой [16.2]. Направляющий вектор прямой Е
имеет координаты р^ {4, 3, —1}. В силу теоремы [14.1 ] направляю-
щий вектор прямой /2 имеет координаты р2{—1, 3, 5}. Мы видим,
171
что для векторов и р2 выполне-
но условие (2), поэтому прямые Ц и /2
взаимно перпендикулярны.
Замечание. При решении
задачи об определении угла между
двумя прямыми мы оставили откры-
тым вопрос о том, пересекаются пря-
мые или скрещиваются. В каждом
конкретном случае может быть . тот
или иной случай. Например, в при-
мере 1 прямые пересекаются, а в •
примере 2 — скрещиваются.
2. Вычисление угла между прямой
и плоскостью. Если прямая I не пер-
пендикулярна к плоскости л, то уг-
лом между прямой / и
плоскостью л называется
угол между прямой I и ее проекцией
на плоскость л. При этом из двух
углов, которые образует прямая
меньший угол. Если прямая перпен-
прямой й плоскостью
с плоскостью, выбирается
дикулярна к плоскости, то угол между
считается равным у.
Задача 2. В прямоугольной декартовой системе координат
дана плоскость л своим уравнением .
Лх -}- jBy “Е Cz D = О
(3)
и даны координаты {а, р, у} направляющего вектора р прямой I.
Вычислить угол между прямой I и плоскостью л.
Решение. Согласно теореме [12.2] вектор п{А, В, С) пер-
пендикулярен к плоскости л. Пусть — угол между прямой I
и плоскостью л, а гр = Z (р, п) (рис. 66). Если гр<-^, т°. очевид-
но, <р = 90° — гр и sin ф — cos гр (рис. 66,а). Если же гр > то
<р = гр — и sin <р= — cos гр (рис. 66,6). Так как sin <р > О,
то для любого <р имеем sin <р = |cos гр|.
Из определения скалярного произведения следует, что cos гр =
= ——, поэтому получаем следующую формулу для вычисления
sin <р:
sin <р =
______~Е ДР ~Ь Cll___
/Да+В2 + С2 Каа + Р2 +12‘
(4)
172
Задача решена. >Мы пришли к следующей теореме.
Теорема [16.3]. Если в прямоугольной декартовой системе
координат дана плоскость л уравнением (3) и даны координаты
{а, р, у} направляющего вектора прямой I, то синус угла между
прямой I и плоскостью л определяется по формуле (4).
Если прямая I задана своими общими уравнениями, то, для
того чтобы воспользоваться этой теоремой, предварительно необхо-
димо определить координаты направляющего вектора р этой пря-
мой.
Пример 3. Пусть в прямоугольной декартовой системе
координат дана плоскость
х — у + 2z — 5 = 0
и прямая х = 3 + Уб t, у = — 1+ У5 t, г = Уб t. Вы-
числить угол между прямой и плоскостью.
Решение. Для определения угла между прямой и плос-
костью найдем синус этого угла, воспользовавшись формулой (4):
l/s— /5+2/61 1 опо
sin ср = —-5——- = —, откуда <р = 30.
1Лб- /16 2
Заметим, что из формулы (4) можно получить условия пересе-
чения прямой и плоскости. В самом деле, очевидно, прямая I пере-
секает плоскость тогда и только тогда, когда угол ср между ними не
равен нулю. Поэтому из формулы (4) мы снова получаем условие
пересечения прямой и плоскости: Аа + Вр +Су #= 0. Это ус-
ловие получено нами ранее в теореме [15.5] для более общего слу-
чая, когда прямая и плоскость заданы в аффинной системе коор-
динат.
Получим далее условие перпендикулярности прямой с на-
правляющим вектором р{а, Р, у} и плоскости л, заданной уравне-
нием (3). Для того чтобы прямая I была перпендикулярна к плос-
кости л, необходимо и достаточно, чтобы векторы р и п были
взаимно перпендикулярны, где п{А, В, С} — вектор, перпендику-
лярный к плоскости (см. теорему [12.2]).
Теорема [16.4]. Пусть в прямоугольной декартовой си-
стеме координат дана плоскость л уравнением (3) и прямая I на-
правляющим вектором р {а, Р, у}- Для того чтобы прямая I была
перпендикулярна к плоскости л, необходимо и достаточно, чтобы
числа А, В, С были пропорциональны числам а, р, у, т. е. чтобы
(Д О Г*\
р был равен единице.
Пример 4. Доказать, что прямая I, заданная в прямоуголь-
ной декартовой системе координат уравнениями
12х И- 2у — 6z -f- 1 — 0,
(2х— у+ г—2 = 0,
перпендикулярна плоскости 2х 7у + Зг — 12 =? 0.
173
о
Рис. 67
Решение. Согласно
теореме [14.1 ] направляю-
щий вектор прямой I имеет
координаты {—4,—14,—6}.
Мы видим, что этот
вектор коллинеарен век-
тору п {2, 7, 3}, перпен-
дикулярному к плоскости.
Таким образом, прямая I перпендикулярна к данной плоскости.
3. Вычисление расстояния от точки до прямой.
Задача 3. Пусть в прямоугольной декартовой системе ко-
ординат дана точка Л40(х0, у0, г0) и прямая I своими каноническими
уравнениями
х —-Ч _ у —У1 _ г —
(5)
а 0
Вычислить расстояние от точки Мо до данной прямой I.
Решение. Опустим из точки Л10(х0, у0, z0) перпендикуляр
на прямую I и обозначим через И основа'ние этого перпендикуляра.
Нас интересует длина d отрезка М0Н. Очевидно, М0Н есть высота
параллелограмма MJMqNNi, построенного на векторах Л41Л40 и р,
где Mi (xlt уt, Zi), р {а, 0, у} (рис. 67). Для нахождения высоты
этого параллелограмма мы можём воспользоваться следующей
S
формулой: d =------, где S — площадь данного параллелограмма,
MiNi •
a MiN 1 — модуль вектора р. Из определения векторного произве-
дения (см. § 6, п. 4) вытекает, что
S = |[MpWop]|, a MiNi = \p\.
Поэтому предыдущее соотношение принимает вид:
d = Дор]1 (6)
|р| •
Чтобы получить окончательную формулу для вычисления d,
заметим, что векторы MiM0 и р имеют соответственно координаты:
{х0— xlt у0 — yi, г0 — zt} и р {а, 0, у},
поэтому векторное произведение [М iMQ р ] согласно теореме
[6.5] будет иметь координаты:
/ Уо У1 2о 2i| |г0 х0 xJ |х0 х4 у о у J]
10 Y Г I Y а Г | а 0 1Г
Подставив в соотношение (6) выражения для|[Л41Л40 р ]| и
|р| через координаты, получаем следующую теорему.
174
/ Уо — У1 2о~ 21
' Р У
Теорема [16.5]. Если в прямоугольнойдекартовойсистеме
координат прямая I определяется начальной точкой 4/0+ у о г1)
и направляющим вектором р {а, (3, у}, то расстояние. от точки
Мо (х0' Уо> 2о) д° данной прямой определяется по формуле'.
Хо Xi Хо Хх у0 yj
У а______________« Р (7)
]/а2 4-Р2 + 72
Пример 5. Вычислить расстояние от точки Л10(4, —5, 3)
до прямой I, заданной уравнениями:
х — 5__у + 2__ г — 6
3 —4 5
Решение. Из уравнений прямой мы определяем координа-
ты начальной точки и направляющего вектора:
Mi (5, —2, 6), р {3, —4, 5}.
Подставив значения координат точек Мо, Mt и координаты вектора
р в формулу (7), получим:
/457
/9+16 + 25 5
Если прямая задана не каноническими и не параметрическими,
а общими уравнениями, то для решения поставленной выше зада-
чи необходимо предварительно найти координаты начальной точки
и направляющего вектора прямой.
4. Вычисление расстояния между двумя прямыми. Пусть lY и
и /2 — две прямые в пространстве. Возьмем произвольные точки
Mi и М2, соответственно лежащие на прямых /j и /2, и обозначим
через р расстояние между ними. Очевидно, р существенно зависит
от выбора точек Mt и М2. Расстоянием d между прямыми и 12
называется кратчайшее из всевозможных расстояний р между лю-
быми двумя точками прямых li и 12.
Покажем, что, каковы бы ни были две различные прямые
li и /2, всегда существует расстояние d между ними. В самом деле,
рассмотрим три случая в зависимости от взаимного расположения
прямых li и 12.
а) Прямые li и 12 пересекаются в точке Р. В этом случае d = О,
так как на данных прямых существуют точки Mi = Р и М2 = Р,
расстояние между которыми равно нулю.
б) Прямые li и. 12 параллельны. В этом случае расстояние между
прямыми li и /2, очевидно, равно расстоянию от любой точки одной
прямой до другой прямой.
в) Прямые li и 12 — скрещиваются. Пусть h — прямая, которая
пересекает прямые li и 12 и перпендикулярна к каждой из этих пря-
175
мых. Из курса элементарной геометрии
известно, что для двух скрещиваю-
щихся прямых существует одна и
только одна прямая h, обладающая
этими свойствами.
Обозначим через Hi и Н2 точки
пересечения прямой h соответственно
с прямыми /j й /2. Легко показать, что
длина отрезка HiH2 есть расстояние
между прямыми li и 12. В самом деле,
пусть М t — произвольная точка на
прямой а М2 — произвольная точка
на прямой 12. Допустим, что не совпадаете или М2 несовпада-
ет с Н2, и докажем, что М iM2 > HiH2. Проведем плоскость л j через
прямую параллельно 12 и плоскость л2 через прямую 12 параллель-
но li (так называемые опорные плоскости двух скрещи-
вающихся прямых, рис. 68). Плоскости лj и л2 параллельны друг
другу, а прямая h перпендикулярна к этим плоскостям, в то время
как прямая MiM2 не перпендикулярна к плоскостям л t и л2. Отсю-
да вытекает, что HiH2 < MiM2.
Теперь выведем формулу для вычисления расстояния между
двумя прямыми. Сначала рассмотрим общий случай, когда прямые
скрещиваются.
Задача 4. Пусть в прямоугольной декартовой системе ко-
ординат даны две скрещивающиеся прямые и 12 своими канони-
ческими уравнениями:
Gi)
к —Ху = У — У1 = г — гг
“1 01 71
(8)
(О:
(9)
Вычислить расстояние между ними.
Решение. Из уравнений (8) и (9) определим координаты
начальных точек и направляющих векторов прямых lt и /2:
У1, ^1)» ^2(^2» Уг» ^г)> Pi {®1> 01» Tl}» Рг {®2’ 0г> Уг)"
Перенесем векторы Pi и р2, в точку Mi и построим паралле-
лепипед на векторах pi, р2 и MiM2 (рис. 69). Очевидно, если
MiN iP iQiM2N2P 2Q2 —
построенный нами параллелепипед и обозначения выбраны так,
что вектор pi направлен вдоль ребра MiNi, а вектор р2 — вдоль
ребра A44Qi, то прямая /j совпадает с прямой MiNi, а прямая /2 —
с прямой M2Q2 (см. рис. 69). Пусть Jtj — плоскость грани MiNiPiQi,
а л2 — плоскость параллельной грани M2N2P2Q2. Из предыдущих
176
рассуждений следует, что искомое расстояние d между прямыми
It и 12 равно расстоянию между плоскостями iq ил2, а это расстоя-
ние есть не что иное, как высота построенного нами параллелепи-
педа. Итак, d = — , где V — объем параллелепипеда, а 5 — пло-
щадь грани MiNiPiQi. Из свойств смешанного и векторного про-
изведений следует, что V = \MtM2 pip2\, aS = |[Р1/?г]|, поэтому
__
HP1P2II
Остается выразить модули тройного и векторного произведений
через координаты рассматриваемых векторов. Очевидно, вектор
MjM2 имеет координаты {х2 — xlt у2 — ylt г2 — zj, поэтому, вос-
пользовавшись формулами для вычисления тройного и векторного
произведений, окончательно получаем формулу:
*2 —*1 У2 —У1 z2 — гг
«1 ₽i 7i
а2 Рг 7г
I2
d
• (10)
тг+К:Г+Ш
Заметим, что полученная нами
формула определяет расстояние
между двумя прямыми и в случае,
когда они пересекаются. В самом
деле, в этом случае векторы MiM2,
pi?ip2 будут компланарными и
числитель рассматриваемого выше
выражения обратится в нуль,
г. е. d = 0.
Формула (10) не пригодна в случае, когда прямые Zt и 12, парал-
лельны, поскольку в этом случае как числитель, так и знаменатель
обращаются в нуль. В этом случае расстояние между данными пря-
мыми равно раЬстоянию от произвольной точки прямой Zt до пря-
мой 12 (см. теорему [16.5]). Мы доказали следующую теорему.
Теорема [16.6]. Если в прямоугольной декартовой системе
координат даны две непараллельные прямые уравнениями (8) и (9),
то расстояние d между ними вычисляется по формуле (10).
Пример 6. Пусть в прямоугольной^ декартовой системе
координат даны две прямые своими уравнениями:
х —3 _ у + 15 = г —9 х-Ь 1 = у — 1 = г —9
2 — — 7 — 5 2 1 —3-
Вычислить расстояние между ними.
Решение. Из уравнений прямых найдем координаты на-
чальных точек и направляющих векторов прямых:
177
Mi (3, —15, 9), M2 (—1, 1, 9),Pi{2, —7, 5} и p2 {2, Г,—3}.
Векторы pi и p2 не коллинеарны (их координаты не пропорциональ-
ны), поэтому для вычисления расстояния между непараллельными
прямыми li и /2 можно воспользоваться предыдущей теоремой. Под-
ставив координаты начальных точек и направляющих векторов в
формулу (10), получаем d = 4|Лз“.
Задачи и упражнения
214.' Найти косинус угла между прямыми:
а\ х — 1 _ У _z + 3 * + 3_у — 5__
? 2 — —1 — 2 1 “ 1 ~ 2 ’
61 * + 5 у + 2 г~4 и /2х - у + г - 3 = 0,
’ -1 “ 3 - 0 |х — Зу + 5 = 0;
в) /3* + у 4-2 —6= 0, (х + 2у + Зг — 6 = 0,
7U + y + 4 = 0 и )х — Зуг + 1 = 0.
215. Доказать, что следующие прямые взаимно перпендикуляр-
ны1:
а) * + 7 _ У 2 ~3 и х У + 5 г + 1.
; 4 ~ 1 - — 1 и 1 - —1 - з ’
61 * ~ 2 У + 3 2 — 1 х У + 1 г — 2
' — 7 — 1 ~ 5 И 1 = — 3 = 2 •
216. Доказать, что прямые АС и BD, проходящие соответствен-
но через точки А (2, —3, 1), В (1, 4, 0), С (—4, 1, 1),D (-5, -5, 3),
взаимно перпендикулярны.
217. Найти косинусы углов между осями координат и каждой
из следующих прямых:
а\ х 3 _ у 2____ g. х 1 ____ у __ г ,
7 5 1 ~ 3’ ' — 2 ~ 3 ~ — 1’
В) - = У+ 1 = L- г) — = У + 1 = г~3
' 1 1 Г —2 0 5 •
218. Определить синус угла между прямой — = у_Т_ _ -----
и плоскостью х + 2у — z + 1 = 0.
219, Найти синус угла между прямой
и каждой из координатных плоскостей.
220* Среди прямых:
2х + у — z + 3 = 0,'
х + у + z — 4 = 0
а) (2Х_Г?+*7?~п б) х = 2/— 1, у = 3/, z = 5;
' (х -Ь Зу — 2 + 1 = 0; z
1 Мы, вообще говоря, не предполагаем, что прямые пересекаются.
178
в) х ~ 1 = у +3 = —• г) х~~3 _ У 1 = г — 5
7 3 2 0’ 7 —4 6 14
указать прямые, перпендикулярные к плоскости 2х — Зу — 7г +
+ 6 = 0.
221. Найти расстояние от точки Л1о(—2, 1, 3) до прямой
[ х + у — 2г = 0,
(Зх — у + г— 3 = 0.
222. Найти расстояния между прямыми в каждом из следую-
щих случаев:
,х = 2t — 3,
ч у = t + 1, (* + 2у + 2г + 6 = 0,
а) L-2/-A ' х + у —1=0;
2
х + 1 у + 2 г — 4 х у — 1 г + 1
' —1 3 _J_ 2 6 1
2
• .х —3 у —4 г+2 х —1 у+7 г+2
'—12 1 1 3 2
и / 5х —у —г = 0, + —2у + г + 3 = 0,
7 \1х — 4у — 2г = 0 I х-^-у + г —3 = 0;
. х — 1 у — 2 г—3 х — 2 у—3 г — 4
д) —--= <--- = --- и --- = --- = ---
' 2 3 4 3 4 5 '
223. Треугольник АВС задан координатами сврих вершин:
А (2, —8, 6), В (0, 8, 3) и С (3, 1, 6). Найти длину высоты этого
треугольника, проведенной из вершины С.
§ 17. ЗАДАЧИ НА СОЧЕТАНИЯ ПРЯМЫХ И ПЛОСКОСТЕЙ
В приложениях аналитической геометрии часто приходится
предварительно рассматривать различного рода задачи на сочета-
ния прямых и плоскостей в пространстве. Этому вопросу посвящен
данный параграф. Здесь решения задач даются в общем виде и от-
дельные задачи иллюстрируются конкретными числовыми приме-
рами. От читателя не требуется запоминание всех выводов и формул
этого параграфа. Требуется только четкое понимание принципов
решения задач. Необходимо также в каждом конкретном случае
уметь решать тот или иной'числовой пример.
Для удобства дальнейшего изложения введем следующую нуме-
рацию для уравнений прямых и плоскостей, встречающихся в
формулировках задач этого параграфа:
х ~ = У —У1 = г — гх-
«1 Pi 71
179
X — Ха _ У — Уъ __ 2?2.
а2 $2 7а
Mtx + Bty + C\z -f- Dt = 0, 734
(Л2х + В2у + C2z + D2 = О;
[Л3х + В3у 4- C3z + D3 = О, /4'
bV + B4y + C4z + D4 = 0;
Ах + By + Cz + D — 0. (5)
1. Задачи на составление урав-
нения плоскости, определяемой
различными данными.
Задача 1. В некоторой аффинной системе координат дана
точка Л10(х0, у0, г0) и не проходящая через нее прямая I каноничес-
кими уравнениями (1). Составить уравнение плоскости, проходя-
щей через точку Мо и,содержащей прямую I.
Решение. Пусть л — плоскость, проходящая через Л40 и
содержащая прямую I. Для того чтобы написать уравнение пло-
скости.л, очевидно, необходимо иметь координаты некоторой точки
этой плоскости и двух неколлинеарных векторов, параллельных
ей (рис. 70). Если в качестве начальной точки выбрать точку Л40,
а за направляющие векторы взять неколлинеарные векторы
{Xi —х0, yi — Уо, 2i —2о?иР {аъ у J, где Alj — началь-
ная точка, ар — направляющий вектор прямой, то уравнение плос-
кости л будет иметь следующий вид:
X х0
Xi-rXo
«1
У— Уо
У1 —Уо
г—2о
21 2о
Vi
(6)
Пример 1. Написать уравнение плоскости, проходящей
через точку 7И0(—1, 0, 5) и содержащей прямую /, заданную урав-
нениями
х ___ у ____ г_
2 ~ — 3 — 4 ‘
Решение. В данном случае начальная точка прямой
совпадает с началом координат, а вектор р имеет координаты
{2, —3, 4}. Поэтому уравнение (6) имеет вид:
х 4- 1
1
2
у г — 5
0
— 3 4
— 5 =0
или 15х + 14у + Зг = 0. Непосредственной проверкой легко убе-
диться в том, что полученное уравнение плоскости удовлетворяет
всем условиям задачи.
Решим предыдущую, задачу в предположении, что прямая I
задана своими общими уравнениями.
180
Задача 2. В некоторой аффинной системе координат дана
точка Мо (х0, у0, г0) и не проходящая через нее прямая I общими
уравнениями (3). Составить уравнение плоскости, проходящей
через точку Мо й содержащей прямую I.
Решение. Первый способ. Пользуясь способом,
изложенным в § 14, легко определить координаты начальной точки
и направляющего вектора прямой I, и тем самым задачу можно
свести к предыдущей задаче. Предлагаем читателю самостоятельно
написать уравнение искомой плоскости в данном случае.
Второй способ. Искомая плоскость л, проходящая через
точку Мо и прямую I, принадлежит пучку плоскостей, определяе-
мых плоскостями (3). Поэтому намечается .следующий план реше-
ния задачи.
1) Напишем уравнение пучка плоскостей, определяемого плос-
костями (3). Пусть А и р — параметры пучка.
2) Потребуем, чтобы плоскость, принадлежащая данному пуч-
ку, проходила через точку Мо, и из полученного соотношения оп-
ределим значения параметров А и р.
3) Подставив значения А и р в общее уравнение пучка, получим
уравнение искомой плоскости.
Осуществим намеченный план.
Как известно, уравнение пучка, определяемого прямой (3), запи-
сывается следующим образом:
A (AiX 4- Biy + + 4~ p (A2x + 52у_4_ C2z 4- D2) =0. (7)
Подставив сюда координаты точки Л10(х0> у0,' z0), получаем:
-®1Уо+ ^12о 4" £>1) 4" р (Л2х0 + ^гУо + ^2го + ^г) = 0.
Так как точка Мо не лежит на прямой Z, то по крайней мере один
из коэффициентов при А и р не равен нулю. Поэтому за А и-p можно
принять следующие числа:
А = Л2х04~ В2у0 + Сгго + Яг, р = — (Л^ 4- Biy0 + САгй + DJ.
Подставив эти значения А и р в соотношение (7), окончательно по-
лучаем:
(Л2х04- В2у0+ C2z0 4- D2) (AiX 4- В4у+ Ci?-]- Dt) —
—51у04- С12о 4~ D^ (А2х + В2у 4- С2г 4~ D2) — 0. (8)
Пример 2. Написать уравнение плоскости, проходящей
через точку Мо (2, 5, —3) и содержащей прямую I;
I % — у 4- 2 — 0,
|х 4- 2у — 4г 4- 1 = 0.
Система координат аффинная.
Решение. Подставив значение координат точки Мо и ко-
эффициентов уравнений прямой I в соотношение (8), получаем:
25 (х — у 4- г) 4- 6 (х 4- 2у — 4z 4~ 1) — 0
или 31х — 13у 4- г 4- 6 = 0.
181
3 а д а ч a. 3. Написать уравнение плоскости л, определяемой
двумя различными пересекающимися или параллельными прямыми
li и 12, которые в аффинной системе координат заданы канонически-
ми уравнениями (1) и (2).
Решение. Из канонических уравнений прямых и /2 оп-
ределяем координаты начальных точек* и направляющих векторов
этих прямых:
у4, г^, pt{alt ₽1; yj, М2(х2, у2, г2), р2{а2, ₽2, у2}.
Возможны два случая:
а) Прямые и /2 не параллельны. В этом случае векторы pi и р2
не коллинеарны, поэтому плоскость л может быть определена точ-
кой Mi и векторами Pi и р2. Уравнение плоскости имеет вид:
X — Xj у — yt 2 — Zi
ai Pi Yi
«2 ₽2 Y2
(9)
б) Прямые li и l2 параллельны. В этом случае векторы pi и р2
коллинеарны, но Pi и MVM2 не коллинеарны, поэтому в уравнении
(9) координаты вектора р2 можно заменить координатами вектора
М iM2.
X — Xi У —Vi 2 Zi
х2 — Xi ai у2 — У1 Pi Yi = 0.
(Ю)
Интересно отметить, что если прямые li и 12 не лежат в одной плос-
кости, то уравнением (9) определяется плоскость, содержащая пря-
мую Ц и параллельная прямой /2, а уравнением (10) — плоскость,
проходящая через и пересекающая прямую /2 в точке 7И2. Пред-
лагаем читателю самостоятельно доказать эти предложения.
Задача 4. Пусть в аффинной системе координат дана плос-
кость (5) и точка Мо (х0, у0, г0), не лежащая в этой плоскости.
Написать уравнение плоскости л, проходящей через данную точку
Мо и параллельной данной плоскости.’
Решение. В§ 11, п. 4 было отмечено, что уравнение пучка
плоскостей, параллельных, данной, имеет вид: Ах + By + Cz +
4- X = 0. Подберем коэффициент X так, чтобы плоскость пучка
проходила через точку Л40 (х0, у0, г0). Для этого в уравнение пучка
подставим координаты точки Л40:
Ах0 4~ Ву0 + Сг0 4* X = 0,
откуда X = — (Лх0 4- Ву0 4- Сг0).
Таким образом, уравнение искомой плоскости имеет вид:
Ах 4- By 4- Сг — (Лх0 4- Вуа 4- Сг0) = 0, (11)
182
Пример 3. В аффинной системе координат дана точка
Л40(—3, 5, 1) и плоскость уравнением х — 2у + г + 1 = 0. На-
писать уравнение плоскости, проходящей через точку Мо и парал-
лельной данной плоскости.
Решение. Подставив координаты точки Мо и коэффициенты
данной плоскости в уравнение (11), получаем:
х — 2у + z — (—3— 2 • 5 + 1) = 0 или х — 2у + г + 12 =0.
Задача 5. В аффинной системе координат даны две скрещи-
вающиеся прямые /j и 12 своими уравнениями (1) и (3). Написать
уравнение плоскости л, проходящей через прямую /2 и параллель-
ной прямой //.
Решение. Первый способ. Определим координаты
начальной точки М2 и направляющего вектора- р2 прямой 12. Сог-
ласно теореме 114.1 ] имеем:
Р2
В, с,
в2 с2
Q At
4
Л2 В2
Если Л12(х2, у2, г2)— начальная точка прямой /2, то уравнение
плоскости л имеет вид:
Х — Х2 У —У2
С, Ci Ai
B2 C2 C2 A2
Второй способ. Запишем уравнение пучка, определяе-
мого плоскостями, заданными уравнениями (3), и из этого пучка
выберем плоскость, параллельную прямой Уравнение пучка
имеет вид:
X (Л iX + В ±у + CiZ -|- + р (А2х + В2у + C2z 4~ О2) = 0.
Для того чтобы плоскость пучка была параллельна прямой llt
необходимо и достаточно, чтобы
X (Л^Ч- BiP4 + С4у J + р(Л2а! + B2Pi + С2у i) = 0.
Так как данные прямые скрещиваются, то хотя бы один из коэф-
фициентов при X и р в этом соотношении отличен от нуля. Поэтому
за Хир можно принять следующие числа: Xj = A2ai + B2Pi + С2у1г
р = — (Л^! + В^ + CiYi). Подставив их в уравнение пучка,
получим уравнение искомой плоскости:
(Л2«1 4~ B2Pi + С2у A (Atx + Bry + CiZ + DJ —
—(Л jOC] 4- В iPi + C|-y J (A2x + B2y + C2z + O2) = 0. (12)
1 Плоскость л называем опорной. Через каждую из двух скрещиваю-
щихся прямых проходит одна и только одна опорная плоскость (см. теорему
118.31).
183
Пример 4. В аффинной системе координат даны две скрещи-
вающиеся прямые и Z2 своими уравнениями:
(Z,): =^Z_2 = £+1 и (Q; (х + у-2г+1=0,
Написать уравнение плоскости, проходящей через прямую Z2 и па-
раллельной прямой li.
Решение. Подставив в (12) значения коэффициентов урав-
нений прямой Z2 и координат вектора pi, получаем:
(2— 4) (х + у — 2г 4- 1) — (2 + 3— 8) (х — г) = 0 или окон-
чательно: х — 2у + г — 2 — 0.
Предлагаем учащемуся по аналогии с предыдущими задачами
решить следующую задачу.
Задача 6. В аффинной системе координат даны две точки
М1 (*b Уь zO и М2 (х2, у2, г2) и прямая lt каноническими уравнениями
(1). Написать уравнение плоскости, проходящей через точки Mi и
М2 и параллельной прямой Zt. Выяснить, всегда ли существует та-
кая плоскость.
2. Задачи на составление уравнений прямой, определяемой раз-
личными данными.
Задача 7. В аффинной системе координат дана прямая Zt
своими каноническими уравнениями (1) и точка Л40(х0, у0, г0),
не лежащая на этой прямой. Написать уравнения прямой Z, прохо-
дящей через точку Л40 и параллельной прямой Zr
Решение. Прямая Z проходит через точку Л40 и параллель-
на прямой 1Ъ поэтому точку Мо можно принять за начальную точ-
ку, а вектор р1{а1, Pi, у 1}—за направляющий вектор этой прямой.
Таким образом, мы сразу получаем канонические уравнения пря-
мой Z;
x—xQ = у — у0 = г—
«1 Pi Yi
Задача 8. В аффинной системе координат дана точка
Л40(х0, уо, г0) и прямая Z, не проходящая через эту точку, своими1 об-
щими уравнениями (3). Написать уравнения прямой, проходящей
через точку Мо и параллельной прямой Z.
Решение. Задача решается аналогично предыдущей. Поль-
зуясь теоремой (14.1 ], найдем координаты направляющего вектора
прямой Z, а следовательно, и искомой прямой:
Р
Bi
Bt С2
Ci Ai
ct A
Ai Bi
A2 b2
Таким образом, искомая прямая
имеет следующие уравнения:
х — х0 = у —у0 = г—г0
l^i I 1 Cj Лд I Xj I
I C2 j | C2 A2 IA2 B2 j
184
Пр и мер 5. Через точку ' Мо (1, —6, 3) провести прямую,
параллельную прямой ' ( Зх — у + 4 = О,
(х + у — 4z — 1 = 0.
Система координат аффинная.
Решение. В силу теоремы [14.1] направляющий вектор
данной, а следовательно, и искомой прямой имеет координаты:
р {4, 12, 4}. Поэтому уравнение искомой прямой имеет вид:
х — 1 _ у + 6_г — 3
12 4~ ‘
Задача 9. В аффинной системе координат даны две скрещи-
вающиеся прямые Zt и Z2 своими каноническими уравнениями (1)
и (2) и точка Мо (х0, у0, г0), не лежащая на этих прямых. Напи-
сать уравнения прямой Z, проходящей через точку Мо и пересекаю-
щей данные две прямые.
Решение. Первый способ. Воспользуемся следую-
щим очевидным геометрическим фактом: прямая Z является линией
пересечения двух плоскостей nj и где л4 — плоскость, прохо-
дящая через прямую Zt и точку Мо, а л2 — плоскость, проходящая
через прямую Z2 и точку Мо.
Плоскости Ki и л2 согласно задаче 1 имеют следующие уравне-
ния:
ь: * и х <=> о У — Уо У1 —Уо г — Zg Z1 2о = 0, (13)
«1 Pi Yi
X — х0 У —Уо г — z0
Х2 хд у2 —Уо гг г0 = 0. (14)
“2 Рг Т2
Система, состоящая из уравнений (13) и (14), есть общие урав-
нений прямой Z.
Второй способ. Пусть р
{а, Р, у} — направляющий
вектор прямой Z. Как прямые Zt и Z, так и прямые 12и I пересекают-
ся, поэтому согласно теореме [15.1] будем иметь:
xi — хо У1 — Уо zi — го «1 Pi Yi = 0 и х2— хо у2 — Уо ?2—20 Рг Уг = 0
ару а р y
Из этих двух соотношений определяем а : р : у.
Искомые уравнения прямой Z имеют вид:
Х — ХЛ >== у —у0 _ г — г0.
а Р V
185
' Пример 6. В аффинной системе координат дана точка
Л40(1, —2, 1) и две скрещивающиеся прямые 1^ и 1г:
х—3 _у + 2^_г + 3 х _ у + 1 г — 1
1—11—23 5
Написать уравнения прямой, проходящей через точку Ма и пере-
секающей две данные прямые.
Решение. Пользуясь соотношениями (13) и (14), напишем
уравнения плоскостей л j и л2, проходящих через точку Мо и соот-
ветственно через прямые lt и 12:
х— 3 у + 2
— 2 О
г + 3 х у + 1
4 =0 и j _j
= 0.
2 — 1
о
5
1 — 1
— 2 3
После элементарных преобразований получаем общие уравнения
искомой прямой I:
(2х Зу + г + 3 = 0,
(5х + 5у — г + 6 =- 0.
Задача 10. В аффинной системе координат даны две скре-
щивающиеся прямые Ц и /2 общими уравнениями (3) и (4) и точка
M0(x0, у0, г0), не лежащая на этих прямых. Написать уравнения
прямой, проходящей через точку Л40 и пересекающей прямые
и /2.
Решение. Напишем уравнения плоскостей Л1 и л2, проходя-
щих через точку Л40 и соответственно через прямые и /2, поль-
зуясь решением задачи 2:
(Л2х0+ В2у0 + С2г0+ О2) (Atx + Biy + CjZ + DJ —
— (Л4х0 + ^1Уо + Cizo + ^i) (Л2* + ^гУ + ^2Z + ^г) ~ 0>
(Л4х0 + В4у0 + С4г0 + Р4) (Л3х + В3у 4- C3z + D3) —
— 03xo + ^зУо + C3z0 + D3) (Л4х + В4у + С4г 4~ О4) = 0.
Эти два уравнения являются общими уравнениями прямой I.
Задача 11. В афинной системе координат даны две прямые
li, 12 соответственно своими каноническими уравнениями (1), (2)
и прямая /3 уравнениями
х — х3 _ у —у3 _ г—г3
«з Рз Уз
Написать уравнения прямой I, пересекающей прямые lit 12 и парал-
лельной прямой Z31.
Решение. Очевидно, задача имеет единственное решение
в том и только в том случае, когда направляющие векторы данных
1 В этой задаче термин «параллельность» понимается в широком смысле
слова: искомая прямая должна быть либо параллельна прямой /3, либо сов-
падать с ней.
186
прямых не компланарны. Будем предполагать, что это условие вы-
полнено. Прямую I можно рассматривать, как линию пересечения
двух плоскостей: ль проходящей через Ц и параллельной /3, и л2,
проходящей через 12 и параллельной 13. Записав уравнения этих
плоскостей, мы получим соотношения, определяющие в своей со-
вокупности уравнения искомой прямой. Для отыскания уравнений
плоскостей Л1 и л2 воспользуемся решением задачи 5:
X — xt У — У1 г — 2( X — х2 У—Уг 2 — Z2
«1 Pi Yi = о, а2 ₽2 У2 = 0
“з ₽з Уз “з ₽з Уз
Эти соотношения являются общими уравнениями искомой прямой I.
3. Некоторые метрические задачи на сочетания прямых и
плоскостей. Во всех задачах этого пункта предполагается, что сис-
тема координат прямоугольная декартова.
Задача 12. Пусть в прямоугольной декартовой системе коор-
динат дана точка Л40 и прямая уравнением (1). Написать урав-
нение плоскости л, проходящей через данную точку и перпендику-
лярной к данной прямой.
Решение. Так как л перпендикулярна к прямой то она
перпендикулярна к направляющему вектору р этой прямой. Та-
ким образом, задача сводится к составлению уравнения плоскости,
проходящей через точку Мо (х0, у0, г0) и перпендикулярной к век-
тору Pi{ai, Pi, yj. Пользуясь задачей 1, § 12, получаем уравне-
ние искомой плоскости:
«1 (х — х0) + Pi(y — у0)+У1 (2 — 2о) = 0.
Полученное уравнение справедливо как в том случае, когда точка
Мо не лежит на прямой /1; так и в том случае, когда она принад-
лежит Ц.
Задача 13. В прямоугольной декартовой системе координат
дана плоскость л общим уравнением (5) и не перпендикулярная к
ней прямая Ц каноническими уравнениями (1). Написать уравнение
плоскости л', проходящей через прямую / и перпендикулярной к
плоскости л.
Решение. Искомая плоскость проходит через прямую Z1T
поэтому она содержит начальную точку z{) прямой
и параллельна направляющему вектору p{ai, Pi, yi}. Так как,
кроме того, плоскость л' перпендикулярна к плоскости л, то век-
тор п{А, В, С} согласно теореме [12.2] параллелен л'. Итак, зада-
ча сводится к составлению уравнения плоскости, проходящей че-
рез точку Mi и параллельной векторам и п:
х — х0 У — Уо г — 2о
“1 Pi Yi
А В С
= 0.
187
Пользуясь этой задачей, можно написать уравнения плоскостей,
проектирующих данную прямую I на координатные плоскости. В
самом деле, рассмотрим следующий пример.
Пример 7. В пространстве дана прямая своими каноничес-
кими уравнениями:
х — 3 у z + 1
4 —2 '
Составить уравнения плоскостей, проектирующих данную прямую
на координатные плоскости.
Решение. В силу предыдущей задачи проектирующие плос-
кости будут иметь следующие уравнения:
х — 3 у г+1 х — 3 У
4 — 1 — 2 = о, 4 — 1
1 0 0 0 1
X С У г + 1
4 — 1 — 2 = 0,
0 0 1
г+ 1
— 2 =0,
0
или
Мы видим, что полученные уравнения в точности совпадают с
каноническими уравнениями прямой. Это не случайно (сравни § 14,
стр. 151, 152).
Задача 14. Пусть в аффинной системе координат дана пря-
мая It своими каноническими уравнениями (1) и плоскость я урав-
нением (5), причем прямая не лежит в плоскости л. Написать урав-
нение проекции прямой Ц на плоскость л.
Решение. Пусть I — проекция прямой It на плоскость л.
Очевидно, I есть линия пересечения двух плоскостей: плоскости л
и плоскости л', проектирующей прямую It на плоскость л. Вейлу
предыдущей задачи уравнение плоскости л' имеет вид: '
х — Xt у — yi г — Zj
“1 Pi 71
АВС
Таким образом, соотношения:
х — Xt у — У1 г — Zt
®i 0i Vi
АВС
Ах By -ф- Cz + D — 0
являются общими уравнениями прямой I.
188
Пример 8." Написать уравнения проекции прямой
х — 1 _у 4- 5 _ г — 2
3 ~ —1 ~ 2
на координатные плоскости.
Решение. Так как есть уравнение
плоскости, проектирующей данную прямую на плоскость Оху, то
соотношения
Г х — 1 _у 4-5
~3 ^7’
[ г = О
являются уравнениями проекции данной прямой на координатную
плоскость Оху. Аналогично получаем проекции этой прямой на
другие координатные плоскости:
у 4- 5 z — 2 ( х — 1 z — 2
~=7 2~’ —3 ~2~’
х = 0; | у = 0.
Задача 15. Составить уравнения прямой I, проходящей
через точку М0(х0, у0, z0) и перпендикулярной к плоскости л, за-
данной уравнением Ах 4~ By 4- Cz 4- D = 0.
Предлагаем учащемуся самостоятельно убедиться в том, что
, х — ха у — уп г — г„
прямая I имеет уравнение: -------5 = 'L в = —
Задача 16. Через точку Л40(х0, у0, z0) провести прямую I,
перпендикулярную одновременно к двум непараллельным прямым
lt и заданным каноническими уравнениями (1) и (2).
Решение. За направляющий вектор прямой I можно взять
векторное произведение направляющих векторов pt и р2 прямых
li и /2. В данном случае p^ctf, Pi, у J, р2{“г, Рг, у2}, поэтому
Р = 1РЛ) Р Т' . т‘ Ь I-
1 S, Т. V, «, О, Р, I
Искомое уравнение прямой I имеет вид:
х хо __ У У о _ z го
I Pi Vi I I Ti «г ! I «1 ₽1 I
I Ра Та I I Уг «г I I «2 ₽2 I
Пример 9. Написать уравнения прямой, проходящей через
точку Л10(1, 2, 4) и перпендикулярной к оси Oz и к биссектрисе уг-
ла, образованного координатными векторами i и j.
Решение. Заметим, что координатный вектор k является
направляющим вектором оси Oz, а вектор I 4- j направлен по
биссектрисе угла, образованного векторами i и j. Поэтому на-
189
правляющие векторы данных прямых имеют координаты: {0, 0, 1}
и р2 {1, 1, 0}.
В силу предыдущей задачи уравнения искомой прямой имеют
вид:
х — 1 у—2 z—4 х— 1 у—2 z—4
---- = — = - ИЛИ -: = - = .
1011 |101-I ° ° I-—1-1-0
I 1 0 I I 0 1 I I 1 1 I
Рис. 71
Z,
и плоскость
Л2,
проходящую
эти плоскости не совпадают, так как
они пересекаются по прямой Z. Таким обр
Задача 17. В простран-
стве даны две скрещивающиеся
прямые /j и Z2 своими канони-
ческими уравнениями (1) и (2).
Написать уравнения прямой,
перпендикулярной к данным
прямым и пересекающей каж-
дую из них.
Решение. Пусть I —
прямая, пересекающая прямые
Z, и 12 соответственно в точках
Pi и Р2 и перпендикулярная к
этим прямым (рис. 71). Рас-
смотрим две плоскости: плос-
кость 'л л, проходящую через Zt и
через Z2 и Z. Очевидно,
прямые li и Z2 скрещиваются;
азом, задача сводится к
составлению уравнений плоскости л4 и л2.
Легко понять, что плоскость л, проходит через начальную точ-
ку Mt (xit yi, Zi) прямой It и коллинеарна направляющему вектору
Pi {«л, Pi, Yi} прямой li и направляющему вектору р прямой Z.
В силу предыдущей задачи 'направляющий вектор р прямой I
имеет координаты:
f Pi Yi Yi ai
1 Р2 Ya Уг
«1 Р1
®2 Ра
Таким образом,уравнение
плоскости л л имеет вид:
X — Xj
«л
Pi Yi
Рг Ya
у — Ул г — г,
Pi Yi
Yi «1 «1 Pi
Уг аг аг Рг •
190
По аналогии уравнение плоскости л2 имеет вид:
х — х2 У— У2 z —
а2 р2 Y2
Pi Yi Yi ai ai 0
Рг 7 г Y2 «2 a2 0
Система, состоящая из полученных уравнений плоскостей
и л2, определяет искомую прямую I.
Замечание. При решении этой задачи можно было рассуж-
дать несколько иначе. По существуя! и л2 есть плоскости, проходя-
щие соответственно через прямые /f и/2и перпендикулярные к опор-
ным плоскостям. Уравнения этих плоскостей легко записать, если
воспользоваться задачей 13.
Задача 18. Дана прямая каноническими уравнениями (1)
и не лежащая на ней точка Мо. Написать уравнения прямой Z,
проходящей через точку Мо и пересекающей прямую под прямым
углом.
Решение. Первый способ. Очевидно, прямая I
является линией пересечения плоскости л1( проходящей через дан-
ную точку Мо и прямую /1; и плоскости л2, проходящей через дан-
ную точку Мо и перпендикулярной к 11. Поэтому, записав уравне-
ния плоскостей Л! и л2, мы получим общие уравнения прямой:
х —х4
х0 —*1
“1
у —У1 z — Zi
Уо — 71 го — г»
Pi Vi
а1 (х — х0) + 0! (у — у0) + Yi (г — z0) = 0.
Второй способ. Пусть р{а, 0, у} — направляющий век-
тор прямой I. Если Ру {alt 0Ь yj — направляющий вектор, а
Mi(xlt у 1( z^ — начальная точка прямой /1; то из условий задачи сле-
дует, что векторы р npi взаимно перпендикулярны, а векторы р, pt
и M0Mt компланарны. В координатах эти условия пишутся так:
aai + 00! + YTi = °>
a 0 у
«1 0i Yi
*i— х0 У1—Уо Zi — z0
Из этих двух соотношений определяем a : 0 : у • Далее записываем
канонические уравнения прямой I.
Пример 10. Написать уравнения прямой, проходящей через
точку /Ио(—1, 3, 5) и пересекающей ось Ох под прямым углом.
Решение. Пользуясь предыдущей задачей, напишем урав-
нения плоскостей Л! и л2. Ось Ох определяется начальной точкой
191
О (О, О, 0) и направляющим вектором /{1, 0, 0}, поэтому уравне-
ния плоскостей ил2 имеют вид:
2
5
О
(я1):
х у
— 1 3
1- О
= 0 или 5у — 3z = О,
(л2) : 1-(х + 1) + 0-(у — 3) 4; 0 • (г — 5) = О или х + 1 = 0.
Таким образом, искомая прямая задается следующими общими урав-
нениями:
( 5у — 3z = О,
I х + 1 = 0.
J и точку (3,
2х у — z -|- 5 = 0
227., Показать, что прямые
4 х 4- 3 у + 5- г —7
---------. = <_!— — ------ к
Задачи и упражнения
224. Написать уравнения плоскостей, проходящих через начало
координат и каждую из прямых:
* —1 _ 4 _ г + 5. ~ J 2х — у + z— 3 =0,
’ 3 7 -1 ’ Ч х + у — 5г + 3 = 0;
в) х = t, у — —1 + 5/, г = 3 — 2t.
225., Написать уравнения плоскостей, проходящих через точку
М (—1, 5, 3) и каждую из координатных осей.
226. Составить уравнение плоскости, проходящей через прямую
- 1, 5).
х + 1 = у + 1 = г +1
4 5 —1
лежат в одной плоскости. Составить уравнение плоскости, проходя-
щей через эти прямые.
228., Показать, что прямые
*4-5 = у +4 _ г — 7 и j Зх + 2у + г — 2 =0,
3 1 ~2 I х — Зу +2г—13 = 0
лежат в одной плоскости. Составить уравнение этой плоскости.
229., Доказать, что следующие пары прямых параллельны:
а) х = 2 + 4/, у = — 6/, г = — 1 — 8t и
х = 7 — 6/, , у = 2+ 9/, г = 12/;
б) £±2 = у+_1 = ± и I х+у —г = 0,
. 3 —2 1 IX — у — bz — 8 = 0.
Составить уравнения плоскостей, проходящих через каждую из
этих пар прямых.
192
230. Составить уравнение плоскости, проходящей через прямую
х + 1 у — Зг— 1
—j— = • и параллельной прямой
| 2х — у +'г — 3 = 0,
1 х + 2у — Зг + 5 = 0.
231. Составить уравнение плоскости, проходящей через точку
М (1, 1, —3) и параллельной прямым
( 2х — 2у + Зг — 4 = 0, I Зх — у — г = 0,
I х 4* 2у — 4г 4~ 1 = 0 I х у — Зг 4~ 1 = 0.
232. Написать уравнение плоскости, проходящей через'начало
координат, точку Мо(—3, 1, 7) и параллельной прямой х = 5/,
у = — 1 + t, г = — 2/.
233, Составить уравнения прямой, проходящей через точку
(0, 0, 1) и пересекающей каждую из прямых:
( х — 2у 4- г —1=0, х —1 _ у _ г 4-1
I 2х — у 4-2г — 3 = 0: 3 2
234. Составить уравнения прямой, проходящей через точку
(2, —1, 1) и пересекающей каждую из прямых:
( 2х — у 4- 4 = 0, I х 4~ Зг — 4 = 0,
12у4-3г—10=0 И I 2х4-5г —8 = 0.
235. Составить уравнения прямой, пересекающей прямые
х — 1 _____ у __ г — 5 х 4- 2 _ у — 1 _ г 4-1
~1 ~2 3 — 2" — б"
и параллельной прямой
х = 1 — 2t, у = 3t, г = 5 — t.
236. Найти уравнения прямой, параллельной прямой
х _ у _ г
1 2 — з"
и пересекающей прямые:
I 2х + у — 1 =0, (Зх— у + г 4- 2 = 0,
( х — 2у 4- Зг = 0 И ( 4х 4- 5у — 2г —3 = 0.
237. Составить уравнения прямой, проходящей через точку пе-
ресечения прямой — X. — с плоскостью Оуг и парал-
лельной прямой
( х — у + 5г — 1 =0,
1 2х 4- у — г4-6 = 0.
7 Л. С. Атанасян
193
238. Из начала координат опустить перпендикуляр на плоскость
х — Зу + 5г — 6 = 0.
. 239. Из точки (1, —2, 5) опустить перпендикуляры на координат-
ные плоскости.
240. Найти координаты проекции точки (5, —6, 7) на плоскость
х — 4у + За + 4 = 0.
241. Написать уравнение плоскости, проходящей через точку
М (1, —5, 3) и перпендикулярной к прямой в каждом из следую-
щих случаев:
а) х 1 = У ~6 = г + 2 ' ( х + Зу + 5г — 7 = 0,
5> -1 3 : ’ |х + у- г+1—0.
242. Написать уравнения перпендикуляра, опущенного из точки
(2, 3, — 1) на прямую —j— =
243. Найти координаты проекции точки (—3, 10, 2) на прямую
х — 1 __ у + 2 _ г
~3 —5 Г
244. Через прямую —у провести плоскость,
перпендикулярную к плоскости х + 5у + 7г — 3 = 0.
245. Составить уравнения проекции прямой
х — 1 _ у —3__г — 2
3 ~ — 1 5
на плоскость Зх — у + г — 1 =0.
246. Составить уравнения проекции прямой »
(х + Зу + г — 6 = 0 О1
1 л на плоскость 2х + у — г — 6 = 0.
I х + 2у — г — 1=0
247. Составить уравнения проекций прямой х — — 1 + t,
у — — 4t, г = 2 + 6/ на координатные плоскости.
248. Составить уравнения прямой, проходящей через начало
координат и перпендикулярной к прямым:
х + 1 _ у __ г х + 5 ___у —7 ___ г + 1
~2 ~ 1 — 5 ~ —2 '
249. Составить уравнения общего перпендикуляра двух прямых:
х + 3 _ у —6 _ z х + 2 __ у ____ г — 7
— 4 ~ ~з +’ —4 Г — 1
250. Составить уравнения общего перпендикуляра двух прямых:
х — 3 у + 15 г — 9 х 4- 1 у — 1 _ г — 9
~2 ~1 5~~’ ~2 1 ~ — 3 ’
194
251. Составить уравнения общего перпендикуляра двух прямых:
( 5х — у — г = 0, ( х — 2у + г + 3 = 0,
[• 7х —4у — 2г = 0; |х — у + г — 3 = 0.
§ 18. ПРИЛОЖЕНИЕ ТЕОРИИ ПЛОСКОСТИ И ПРЯМОЙ К ДОКАЗАТЕЛЬСТВУ
ТЕОРЕМ И РЕШЕНИЮ ЗАДАЧ СТЕРЕОМЕТРИИ
Изложенная в главах III и IV теория плоскости и прямой может
быть применена к доказательству теорем и решению задач элемен-
тарной геометрии. В этом параграфе будут рассмотрены некоторые
примеры приложения теории прямой и плоскости к доказатель-
ству теорем и решению задач стереометрии.
1. Теоремы о взаимном расположении прямых и плоскостей.
Теорема [18.1 ]. Если прямая It и плоскость л перпендику-
лярны к одной и той же прямой 12, то они параллельны между собой1.
Доказательство. Пусть в произвольно выбранной пря-
моугольной декартовой системе координат данные прямые llt 12 и
плоскость л имеют уравнения:
(I )• х~х<> = У ~Уо = ? — г»
«1 Pi Yi ’
(/ )• x~xi = У —У1 = z — zi,
aa ' Pa Ya
(л): Ax -|- By 4- Cz 4- D = 0.
Так как прямые и Z2 взаимно перпёндикулярны, то
«1«2 + Pi₽2 + Y1Y2 = 0- (1)
С другой стороны’, в силу того что плоскость л перпендикулярна
к прямой 12, имеем: а2 = К А, р2 = АВ, у2 = ХС, где X 0. Под-
ставив эти выражения в (1) и сократив на X, получаем: Да^Вр^
4- Cyi = 0, т. е. направляющий вектор прямой параллелен плос-
кости л. Таким образом, прямая либо параллельна плоскости
л, либо принадлежит этой плоскости. Теорема доказана.
Теорема [18.2]. Если прямая I параллельна двум пересе-
кающимся плоскостям л и п', то она параллельна их линии пере-
сечения.
Доказательство. Пусть в некоторой аффинной сиетеме
координат данные плоскости л и л' и прямая I имеют уравнения:
(л) : Ах 4- By 4- Сг 4- D = 0, (2)
(л') : А'х 4- В'у 4- С'г 4- D' = 0, (3)
(Л • - У ~Уо = г~го
а Р Y
1 В этом параграфе термин «параллельность» понимается в широком
смысле слова. Например, предложение «прямая Z параллельна плоскости а»
следует понимать так: либо I || а в обычном смысле, либо I принадлежит а
7*
195
Так как I || п и I || л', то
Ла + Вр + Су= 0, А'а + В'Р + С'у = 0. (5)
В силу того что плоскости лил' пересекаются, коэффициенты
в уравнениях (2) и (3) не пропорциональны, ^поэтому хотя бы
один из определителей
Л В не равен нулю..
Д' В'
Пусть, например, А
А'
Решив систему (5)
R' ^°-
D
относительно
I С в
I С' В'
А
А'
Если ввести обозначение
ния запишутся так:
В С
В' С' ’
Jy Р = —
В |
В' I
|az в'|
а и Р, получаем:
А С
А’ С
А В
А' В'
С А
С' А'
Y-
то предыдущие соотноше-
А В
А' В' ’
a =
a = Л
Р = Х
, у = %
Таким образом, векторы
{а. ₽. Y) и
~В' С'
С А
С' А'
А В
А' В'
В С
коллинеарны. Согласно теореме [14.1 ] второй вектор является нап-
равляющим вектором линии пересечения плоскостей лил'. Теоре-
ма доказана.
Теорема [18.3]. Если даны две скрещивающиеся прямые,
то через каждую из них можно провести одну и только одну плоскость,
параллельную второй прямой.
Доказательство. Пусть Ц и 12 — данные скрещиваю-
щиеся прямые, определяемые соответственно начальными точками
Л41 (xi, уь г^, М2 (х2, у2, г2) и направляющими векторами
Pi {ai> Pi. Y1} и Pz {a2> Рг, Уг}- Докажем, что существует одна и
только одна плоскость л, проходящая через прямую /j и парал-
лельная прямой 12. Доказательство существования нами уже про-
ведено при решении задачи 5, § 17. В самом деле, плоскость л, про-
ходящая через точку Mi и параллельная неколлинеарным векто-
рам pi и р2, является искомой. Ее уравнение имеет вид:
196
0i V1
02 Y2
а101
а2 02
(6)
(7)
Если раскрыть определитель левой части этого уравнения по эле-
ментам первой строки и ввести обозначения
= Yi а1
Y2 “2
то предыдущее уравнение примет вид:
ДруХ 4" ДуаУ + Дар 2— (Дру-Ч + ДуаУ1 4* Дар21) = 0.
Теперь докажем, что плоскость п, проходящая через Ц и парал-
лельная /2, единственная. В самом деле, пусть
Ах 4* By -f- Cz 4- D = 0 (8)
— уравнение какой-либо плоскости л/, проходящей через lt и па-
раллельной /2. Так как li лежит в плоскости я', а /2 параллельна
ей, то согласно теореме [15.51 имеем:
Ла, 4-В0! 4-CY1 = 0, (9)
Axi 4" By j 4" Czt 4- D = 0, (10)
Ла2 4~ В02 4" Су 2 — 0. (11)
Из соотношений (9) и (11), учитывая обозначения (6), получаем:
А = ХДру, В — ХД?а, С = 1Дар
(см. доказательство теоремы [18.2 ]). Подставив эти значения в соот-
ношения (10), определяем коэффициент D:
D = — X (Дру Xi 4- ДуаУ 1 4- ДарИ^.
. Мы видим, что все коэффициенты уравнения (8) плоскости я'
пропорциональны соответствующим коэффициентам уравнения (7)
плоскости я. Из теоремы [10.3] следует, что плоскости я и я' сов-
падают.
Точно так же можно доказать, что существует одна и только
одна плоскость, проходящая через /2 и параллельная Ц.
Т е орема [18.4]. Даны две прямые и /2. Для того чтобы
существовала плоскость, проходящая через li и перпендикулярная к
12, необходимо и достаточно, чтоб&1 прямые и /2 были взаимно пер-
пендикулярны.
Доказательство. Пусть прямые li и /2 Даны своими урав-
нениями в прямоугольной декартовой системе.
x — Xj _ у — ух _ г — гх х—х2 _ у — у2 _ г —z2
ai Pi Т1 а2 Ра Та
Сначала предположим, что через прямую li можно провести
плоскость Ах + By + Cz + D = 0, перпендикулярную к прямой
/2. Так как эта плоскость проходит через прямую /1( то Дах 4-В014-
4- Сух = 0. Кроме того, плоскость перпендикулярна к /2, поэтому
векторы {а2, 02,у2} и {Л, В, С}' коллинеарны, т. е. А = 1.а2,
197
В = кр2, С = Ху2. Подставив эти значения в предыдущее соотно-
шение, получаем: X + ^р2 4- -у iy2) — О- В силу условия X =/= О
будем иметь:
ai«2 + ₽i₽2 + Yi¥2 = 0. (12)
Таким образом, мы пришли к выводу, что если через Ц проходит
плоскость, перпендикулярная к /2, то прямые /j и /2 перпендикуляр-
ны друг к другу.
Теперь докажем обратное утверждение. Пусть и /2 взаимно
перпендикулярны. Докажем, что существует плоскость, проходя-
щая через li и перпендикулярная к /2. В самом деле, рассмотрим
плоскость
а2 (х —xD + ₽2 (У — уО+уг (г —Zi) = 0. (13)
Согласно теореме [15.5] и условию (12) прямая Ц лежит в этой плос-
кости. Кроме того, направляющий вектор плоскости (13) совпадает
с направляющим вектором прямой /2, поэтому плоскость (13) пер-
пендикулярна к прямой /2. Теорема доказана.
2. Теоремы о свойствах тетраэдра.
Теорема [18.5]. В произвольном тетраэдре шесть плоско-
стей, каждая из которых проходит через ребро и середину непере-
секающегося с ним ребра, пересекаются в одной точке.
Доказательство. Пусть О АВС— данный тетраэдр. При-
мем за начало координат точку О, а за координатные векторы в1 =
= ОА, е2 = ОВ, е3 - ОС.
Обозначив середины ребер ОА, ОВ, ОС, АВ, ВС, СА соответ-
ственно через Л4Р М2, М3, Л44, М5 и Мв, будем иметь:
Запишем уравнения плоскостей:
(0АМ5): у —г = 0, (АВМ3):
(0ВМ6): х —z = 0, (ВСMJ:
(OCMJ: х — у = 0, (СДМ2):
х 4" у -J- 2г = 1,
2х + у 4" 2 = 1,
х 4- 2у -]-2=1.
Легко убедиться в том, что все эти плоскости проходят через точ-
ку "4 ’ 'j)’ ДРУГИХ общих точек плоскости не имеют.
В самом деле, координаты точки Q, как нетрудно убедиться не-
посредственной подстановкой, удовлетворяют уравнениям всех
шести плоскостей. С другой стороны, плоскости
у — г = 0, х — г = 0, х4-у4-2г=1
198
имеют единственную общую точку, так как
О 1
1 О
1 1
= — 4 0.
Отсюда вытекает, что все шесть плоскостей не могут иметь более
чем одну общую точку.
Т е о р ем а [18.6]. Если в тетраэдре ОАВС ребра ОА, ОВ
и ОС взаимно перпендикулярны, то имеет место соотношение
ОА2 ОВ2 ОС2 ОН2
где ОН — высота, опущенная из вершины О на грань АВС, а Н —
основание перпендикуляра, опущенного из точки О на плоскость АВС.
Доказательство. Точку О примем за начало, а направ-
ленные прямые ОА, ОВ, ОС — за оси прямоугольной декартовой
системы координат. Пусть ОА = а, ОВ = Ь, ОС = с, ОН = h.
Тогда в выбранной системе координат плоскость АВС будет иметь
следующее уравнение «в отрезках» (см. § 9, п. 6):
— + — + — =1 или Ьсх + асу 4- abz — abc - 0.
а b с
Вычислим расстояние h от начала координат до этой плоскости, вос-
пользовавшись теоремой [12.3]:
_ _____| —abc |___ _ abc
~ у Ь-Р + а'с1 + а-Ю ~ V ЬЧ2 + а2с2 + а2Ь2
Отсюда получаем:
_1_ _ b2c2 + а2с2 + a2b2 _ 1 , 1 J_
h2 ~ а2Ь2с2 ~ а2 Ь2 + с2'
Теорема [18.7] Во всяком тетраэдре четыре прямые,
соединяющие каждую вершину с центром тяжести противополож-
ной грани, пересекаются в одной точке.
Доказательство. Примем вершину О данного тетраэд-
ра ОАВС за начало аффинной системы координат, а векторы ei =
= ОА, е2 = ОВ, е3 = ОС за координатные векторы. В этой сис-
теме вершины тетраэдра имеют координаты:
О (0, 0, 0), Л (1, 0, 0), В (0, 1, 0), С (0, 0, 1),
поэтому, согласно задаче 37, стр. 32 центры тяжести граней ОАВ,
ОАС, ОВС, АВС имеют соответственно координаты:
g 1, о\ (1, о, Д (о, 1 g 1 -Д
\з’з )’ \з 3/’ \ 3’ 3/’ ^3’ 3’ 3/
199
Если обозначить через /(, 12, 12 и /4 прямые, соединяющие соот-
ветственно вершины О, А, В и С с центрами тяжести противополож-
ных граней, то легко записать уравнения этих прямых:
п \ . х у г
= = —, илих = у=г,
7 У 7
(/2): —у =, или—-(х—1) = у = г,
7 7
(U • -р- = = или х = — — U = г,
з з
(U : — = -у- = —, или х = у = —-(г—1).
7 7
Непосредственной подстановкой убеждаемся в том, что все эти
прямые проходят через точку /у у
так, как указано на
3. Примеры решения задач стереометрии.
Задача 1. В правильной четырех-
угольной пирамиде SABCD боковая грань
наклонена к основанию под углом а.
Найти угол ф между плоскостями ARC и
SAB, если К — середина .. ребра SB.
Решение. Для решения задачи сна-
чала необходимо выбрать систему коорди-
нат. За начало прямоугольной декартовой
системы координат возьмем основание Н
высоты SH, опущенной из вершины S на
плоскость ABCD (рис. 72), а за координат-
ные оси — диагонали AC, BD и высоту SH.
Положительные направления осей выберем
рисунке 72. Если АС = BD = 2а, SH — h,
то вершины пирамиды и точка К будут иметь координаты:
А (а, 0, 0), В (0, а, 0), С (— а, 0, 0),
D (0, — а, 0), S (0, 0, /I), К (0, |, А).
Запишем уравнения плоскостей SAB, АВС и АКС. Плоскость
АВС совпадает с координатной плоскостью Оху, поэтому она имеет
уравнение
г = 0. (14)
200
Плоскость ЗЛВ отсекает на координат-
ных осях отрезки a, a, h, поэтому она
имеет уравнение «в отрезках»:
- + ^ + y = 1- <15)
а а п
Уравнение третьей плоскости А КС лег-
ко записать как уравнение плоскости,
проходящей через ось Ох и через точку К:
— hy + az = 0. (16)
По уравнениям (14), (15) определяем:
1 1
h
cos а = — —
а
у 2Л24-а2 ’
По уравнениям (15) и (16) определяем:
a2 —ft2
V 2Л2 + а2 / а2 4-й2'
h
Если ввести обозначение k= —, то предыдущие соотношения
'а
примут вид:
1
cos а = -----
/2й24-1
(17)
coscp =
1 — й2
1 —ft2
_____ _______ r .. . cos а,
V 2й2 + 1 • У 1 + й2 /14-й2
(18),
Из соотношения (17) получаем:
_ 1 — cos2 а
2 cos2 а
Подставив это выражение в соотношение (18), после элементарных
преобразований получаем:
cos ф =
3 cos2 а — 1
/2 (1 4- cos2 а)'
Задача 2. , Пусть SABCD — правильная четырехугольная
пирамида. Доказать, что сумма расстояний от любой точки М, ле-
жащей внутри основания ABCD, до боковых граней есть величина
постоянная, не зависящая от выбора точки М.
201
Решение. Пирамида SABCD правильная, поэтому основа-
ние ABCD является квадратом. Точку О пересечения диагоналей
примем за начало, а векторы ОА = i, ОВ — J, ОК — k за коор-
динатные векторы прямоугольной декартовой системы координат
(рис. 73). Здесь К — точка, лежащая на луче OS и удовлетворяющая
условию: ОК •= ОА = ОВ.
OS
Если h = —, то в выбранной системе координат боковые гра-
ни пирамиды будут иметь следующие уравнения «в отрезках»:
(ABS): ^ + ^ + - 11ft = 1, или hx + hy 4- z — h = 0;
(BCS): —- + + - 11ft = 1, или — hx + hy + z — h = 0;
(CDS): _ х_ _ У. 1 г_ 1 1 ft = 1, или — hx — hy 4- z — h = 0;
(DAS): 1 1 ft = 1, или hx — hy 4- 2 — h = 0.
Пусть М (а, Ь, 0) — произвольная точка, лежащая внутри квад-
рата ABCD. Так как точки О и М лежат по одну и ту же сторону от
.любой боковой грани, то согласно теореме [13.3] имеем:
ha + hb — h < 0,
— ha + hb — h<zO,
— ha — hb — h<0, (19)
ha — hb — h < 0.
Вычислим расстояния от точки М до боковых граней пирамиды,
пользуясь теоремой [12.3]. При этом будем учитывать также нера-
венства (19).
d _____ | ha + hb — ft | _h — ha — hb
ABS ~ У h2 + ft2 +1 / 2ft2 4- 1 ’
d _____ | —ha-]-hb — h\ ft -|- ha — hb
BCS — / Й2 + ft2 + 1 v 2h.2 + 1 ’
d _____ | — ha — hb — ft | ha + hb 4* ft
CDC /ft2 4-ft2 + i У 2ft2 + 1 ’
d _ | fta — ftft — ft | __ft — ha -y hb
DAS V h2 + h2 4-T ~ / 2ft2 + 1
Отсюда следует, что
^ABS + ^BCS "Ь ^CDS + ^DAS = у f'
Мы видим, что полученная сумма не зависит от координат а, b точ-
ки М. Задача решена.
202
Задачи и упражнения
252. Доказать, что если плоскость а и прямая I перпендикуляр-
ны к одной и той же плоскости р, то они параллельны между собой.
253. Доказать, что две параллельные плоскости пересекают
третью плоскость по параллельным прямым.
254. Доказать, что если взаимно перпендикулярные плоскости
аир пересекаются по прямой I и если другая прямая Г проведена
в плоскости а и перпендикулярна к I, то Г перпендикулярна к р.
255. Доказать, что внутренние равноделящие плоскости дву-
гранных углов трехгранного угла пересекаются по одной прямой.
256. Найти геометрическое место точек пространства, равноуда-
ленных от трех вершин данного треугольника.
257. Найти геометрическое место точек, разность квадратов рас-
стояний от которых до двух данных точек постоянна.
258. Доказать, что плоскости, перпендикулярные к ребрам тре-
угольной пирамиды и делящие их пополам, пересекаются в одной
точке.
259. Доказать, что перпендикуляры, опущенные из концов диа'
гонаЛи параллелограмма на плоскость, проходящую через другую
диагональ, равны по длине.
260. В правильной треугольной пирамиде SABC высота SH рав-
на h, сторона основания равна а. Найти угол ср между плоскостями
ARC и НВС, где /С — середина ребра SB.
261. Доказать, что во всяком тетраэдре три прямые, соединяю-
щие серединынепересекающихся ребер, пересекаются в одной точ-
ке. .
262. В усеченной (параллельно основанию) треугольной пирами-
де AjAzA3А'Л'Л' середина каждого из боковых ребер AiA'lt Л2Ла,
Л3Л' соединена с точкой пересечения диагоналей противополож-
ной боковой грани. Доказать, что полученные три прямые пересе-
каются в одной точке.
263. Дан куб, ребро которого равно а. Вычислить расстояние
между вершиной А куба и его диагональю, не проходящей через
точку А и лежащей в том диагональном сечении куба, которое со-
держит эту точку.
264. В произвольной точке М плоскости основания правильной
четырехугольной пирамиды восставлен перпендикуляр к основанию,
который пересекает плоскости боковых граней соответственно в точ-
ках Nlt N2, N3 и Nt. Доказать, что MN t + MN2 + MN 3 + MN^
есть величина постоянная, не зависящая от точки М.
265. Обобщить и доказать предыдущую задачу на случай пра-
вильной пирамиды с произвольным числом вершин.
266. Пусть 5ЛИ2...Лп — правильная пирамида. Доказать,
что сумма расстояний от любой точки М, лежащей внутри основа-
ния AiA2...An до боковых граней есть величина постоянная, не за-
висящая от выбора Точки М.
ГЛАВА V
ПОВЕРХНОСТЬ И ЕЕ УРАВНЕНИЕ. УРАВНЕНИЯ ОТДЕЛЬНЫХ
ВИДОВ ПОВЕРХНОСТЕЙ второго порядка
§ 19. ПРЕОБРАЗОВАНИЕ СИСТЕМЫ КООРДИНАТ
В первой главе настоящей книги при определении координат
векторов и точек было отмечено, что они существенно зависят от
выбора систем координат. В настоящем параграфе мы установим
связь между аффинными и прямоугольными декартовыми коорди-
натами одного и того же вектора, а также одной и той же точки в
двух различных системах координат.
1. Зависимость между координатами вектора в двух различных
аффинных базисах.
Пусть eit ег, е3 и е/, е2', е3 — два различных аффинных базиса
пространства, ар — произвольный вектор, имеющий координаты1
Pi, Рг> р? в базисе et,e2, е3 и р/, р2, р3 в базисе е/, е2, е3'.
Для удобства дальнейшего изложения базис elt е2, е3 назовем
старым или исходным, а ,е2, е3 новым. Предпо-
ложим, что векторы нового базиса .заданы своими координатами в
старом базисе:*
е1 {СИ> С21> с31}> е2 {с12> С22’ С3г)» ез {С13> С23> С3з)• (D
Из определения координат вектора следует2, что
Р = + Р2^2 + Р3е3 = -2 Piei (2)
и
Р = Р\ е\ + р2е2 + р3 е3 = 2 p'i <•
1 В этом и последующем параграфах вместо обычных обозначений х,
у, г для координат вектора или точки мы будем применять также индексные
обозначения хг, хг, х3. Это позволит в ряде случаев широко пользоваться
знаком суммирования 2 .
2 Здесь и в дальнейшем знаком S мы будем пользоваться только для обоз-
начения сумм, состоящих из трех слагаемых, поэтому для сокращения за-
писи мы не будем указывать значений, которые принимают индексы
суммирования. Например, для обозначения суммы ргег + р2еа + р3е3
1=3
вместо hei мы будем записывать так: ^р^ или ^р,^.
• i
204
Согласно (1) векторы е', е'2, е'3 выражаются через векторы eit
е2, е3 следующим образом:
е1~ У Cjiej> е2 = У С/2 ез = У Cj3 е)
или
е\ где i = 1, 2, 3.
!
Подставив эти значения в выражение для р, получаем1:
р=2 twr
(3)
(4)
(4')
Из соотношений (2) и (3) в силу теоремы о единственности раз-
ложения вектора по базисным векторам получаем: .
Р1 = 2^СН’ /’2 = 2Р<С26 /’3 = 2Р‘СЗ/
или в развернутом виде:
Pi = Си Р\ + с12р; + ci3p'3,
р2 = с21р; + с22р2 + с23р'у
Рз ~ С31Р1 + С32Р2 СззРз'
Эти соотношения называются формулами преобра'
зования координат векторов. В сокращенной за-
писи они имеют вид:
Р/ = 2С'“Р“’ 1‘=1’2>3-
а
Как видим, координаты вектора р в базисе ^i,e2, е3 выражаются
через координаты того же вектора в базисе е/, е2, е3 при помощи
системы линейных функций. Коэффициентами при р/ служат числа
Си. c2i, с31, которые суть координаты вектора е/в исходном базисе
е1(е2, вз> в свою очередь коэффициентами при р2'служат координаты
вектора е2 и прир3' —координаты вектора е3'.
Так как векторы , е2 , е3'
сн
Iе!; I = С21
С31
компланарны, то
С13
С23
сзз
не
С12
С22
С32
(5)
¥=0.
Мы доказали следующую теорему.
1 Здесь мы пользуемся следующим сокращенным обозначением!
/=з <=з
У PtCjiei = 2 У
i, j i=i z=i
В этой сумме — 9 слагаемых.
205
Т е о р е м а [19.1]. Пусть е1( е2, ези в/, е2 , е3—два произволь-
ных аффинных базиса, причем векторы е/,е2' ,е3 заданы в базисе
е2, е3 координатами (1). Если pltp2,pЗи р^, р2,р3 суть соответст-
венно координаты вектора р в базисах elt е2, е3 и е3 , е2, е3,
то pi,p2, рз выражаются через р^, р2 , р3 при помощи соотноше-
ний (4).
В силу (5) система (4) всегда разрешима относительно р^, р2 , р3:
Pi — ^iiPl С12Р2 “Ь С1зРз>
Pt'~ C2iPi + С22р2 + С23р3,
Рз’—c3ipi-^-с32р2с33р3
(6)
или в сокращенной записи
Матрицы
(7)
являются взаимно обратными. Это означает, что их эле-
менты удовлетворяют соотношениям:
2 cz<x са/ — &IJ » Ь /. = L 2, 3.
Здесь в,./ = 1, если i — j, и = 0, если i =£ j.
том виде эти соотношения имеют вид:
С11СИ + C12c2i + С13С31 = 1,
Си с12 4- с12с22 4* с13с32 — О,
сЦс1з+ с12сгз + с1зСзз = О,
^21cll 4"С22С21 4" С23С31 = О,
с21с12 + С22С22 + С23С32 = 1»
^21^13 “I" с2гС23 4* с23с33 — О,
С31 с11 + сз2с21 + С33С31 — 0.
С31С12 4" С32С23 + с33с32 — 0. I
С31С13 4- с32 с23 4- с33с33 =1. )
В разверну-
(8)
206
Пример 1. Написать формулы преобразования координат
векторов, если новые базисные векторы в старом базисе имеют коор-
динаты:- «е'{2, —1, 3}, 0, 2), е'3{3, —2, 2}.
Решение. Подставим координаты новых базисных векторов^
в формулы (4). Получаем:
Pi = 2/>; + Р2 + Зр'3,
Рг = — Р\ — 2Р3>
Рз = 3Р; + 2^2 + 1 2Рз-
Здесь выражены старые координаты векторов через новые. Раз-
решив эти соотношения относительно pt', р2 , рз , получим выра-
жения новых координат через старые:
Pi = —2pi — 2p2 + Рз,
п . 5 1
Р2 = 2Р1 + -Р2—уРз-
Рз = Р1+ |pS-|p3-
Если, например, вектор р в старом базисе имеет координаты
{3, —4,*2}, то, подставив значения в последние соотношения, по-
лучим координаты вектора р в новом базисе: {4, —5, 0}.
2. Зависимость между координатами векторов в двух различных
прямоугольных декартовых базисах. Формулы преобразования (4)
применяются также и в том случае, когда старый и новый бази-
сы являются прямоугольными декартовыми. В этом случае коэф-
фициенты’ с{;., кроме условия (5), удовлетворяют ряду допол-
нительных соотношений. Получим эти соотношения. Пусть
gi, ёз> ёз И ffp ё'г ё'з— Два прямоугольных декартовых базиса,,
причем
ё\ C21> с31}> ё2{.С12< С22< Сзг}> ёз {С13> С23> ^ЗзЬ
Отсюда следует, что
g'l = С11ё1 + + С31ёй>
g'2 = Ci2gi + c22g2 + c32g-3,
ёз ~ С1зё1 С2зёз “Ь С3зёз‘
(9)
1 В этом параграфе вместо обычных обозначений прямоугольного декар-
това базиса будем применять индексные обозначения: gt, g2, g3.
207
Если обозначить координаты векторов git g2, g3 в системе g{,
g2, g3 через gi {Си, c21, c31}, 5Г2{с12, c22, c32}, g3{cl3, c23, c33}, to
gi = Ciig; 4^21^ + C3ig'y
gi = ciigt 4* C22g2 “1“ C3ig3<
g3 ~ C13gt 4" C23g2 C33g3-
(10)
gig3 = C31,
g2g3 = C32>
g3g3 = C33'
(10), получим:
g'igi = Си.
g'2gi = C12-
g3gi~ C13>
Умножая каждое из соотношений (9) поочередно на git g2, g3
и учитывая, что базис git g2,g3 прямоугольный' декартовый, полу-
чим:
g\gi = CS1,
g2g2 ~ С22>
g3g2 = С23-
Поступая аналогично с соотношениями
gig'i^K gig'2 = ^i, gig3 = ^3i’
g3gl = Cj2> g3g2 ~ C22, gig3 ~ C31'
g3g\ = Ci3, g3g2 ~ C23’ g3g3 ~ C33' » '
Сравнивая полученные соотношения и учитывая, что скалярное
произведение не зависит от порядка сомножителей, получаем:
С31 с13>
С32 ~ С23>
сзз — сзз'
Таким образом, соотношения (10) принимают вид:
gi — ^ngi + cl2g2 4- cl3g3 ,
g2 — c2igl 4* + c23g3’>
gs == c3igi 4- C32g2' 4- c33g3 .
Учитывая, что векторы glt g2, g3 и g'v g'2, g'3 являются единичны-
ми и взаимно перпендикулярными, мы из соотношений (9) и (10'),
на основании теорем [5.1 ] и [5.2 ] получаем:
спс12 4* с21с22 + с31с32 — 0,
снс13 + с21с2з с31с33 — 0,
^12^13 4- с22с23 4~ с32с33 = 0;
Ch = Сц, c21 = c12,
C12 = C21, C22 = C22,
- c13 = C31> c23 = c32,
(10')
C?l+^+^ = l,
^ + ^2+c|2 = 1,
^з + ^з + ^з =1>
(11)
'208
С11 + С12 + С13 = \
С21 1 С22 1 С23 ~ 1’
С31 + С32 + С33 = 1 ’
С11С21 С12С22 + С13С23 = 0>
С11С31 С12СЗг 1 С13С33 = 0>
С21С31 ~Ь С22С32 ~Ь С23С33 =®- )
Итак, если старый и новый базисы
являются прямоугольными декарто-
выми, то в формулах преобразования
(4) коэффициенты удовлетворяют соот-
ношениям (11) и (12). Эти соотношения
(12)
Рис. 74
легко запомнить, если ввести в рассмотрение матрицу, составленную
из коэффициентов соотношений (4):
сн ci2 с1з^
С21 С22 С23
.С31 С32 С33/
(13)
Соотношения (11) и (12) означают, что сумма квадратов эле-
ментов любой строки или столбца равна единице, а сумма произве-
дений соответствующих элементов различных строк или столбцов
равна нулю. Матрица, элементы которой удовлетворяют этим соот-
ношениям, называется ортогональной матрицей.
Например, матрица
является ортогональной. В самом деле, сумма квадратов элементов
любой строки или столбца этой матрицы равна единице, а сумма
произведений соответствующих элементов различных строк или
столбцов равна нулю.
Например, для первой и третьей строк имеем:
o.-U- * ,1+ ’ 1 = о.
V2 V2 2 /2 2
Таким образом, мы пришли к следующей теореме.
Теорема [19.2]. Пусть glt g2, g3 « gi , g2' > g3 — два пря-
моугольных декартовых базиса, причем векторы gi ,g2 , g3 заданы
в базисе glt g2, g3 своими координатами:
С21> С31}> g2{.Ci2' С22> С32}’ 5"з(С13> С23> С3з)"
8 Л. С. Атанасян
209
м Если Pi, Рг, PiU Pl , р2, рз суть
/X , координаты вектора р соответствен-
r / <ег но в базисах glt g2, g3 и gu g2, g3,
/ mo pi, p2, pз выражаются через plt
X* ' P?’ nPu помощи соотношений (4),
где матрица (13) ортогональная.
1 Пример 2. Пусть ABCD А'В'CD'—
Рис. 75 некоторый куб, сторона которо-
го равна единице. Написать форму-
лы преобразования координат векторов, если АВ, AD, АА' —
старый базис, а СС, СВ', CD' —новый (рис. 74).
Решение. Из рисунка 74 видно, что новые координатные
векторы gi'—CC, g2'=C'B', g3=C'D' имеют в исходном базисе
следующие координаты:
^{о, 0, -1}, g’{Q, - I, 0(, g;{_I, о, 0}.
Таким образом, формулы (4) в.данном случае будут иметь вид:
Pi — — Рз'> Рз — — Рз , Рз = — Pi •
3. Связь между координатами точек в различных аффинных
системах координат. Пусть Oeie2e3 и O'ei'e2'e3—две аффинные сис-
темы координат в пространстве, а М — произвольная точка, имею-
щая координаты (xi, х2, х3) в системе Oeie2e3 и (х/, х2 , х3) в сис-
теме O'ei'e2'e3 . Установим зависимость между х1г х2, х3 и х/,
х2, х3 .
Предположим, что новое начало ц новые координатные векторы
в исходной системе Овувгвз имеют координаты:
е1{С11> C21> с31}> e2{Ci2< С22’ сзг}> ез{С13> С23> С33}’ @ ct2, а3).
___ (14)
Если г = ОМ —радиус-вектор точки М в старой системе, а г' —
= О'М — радиус-вектор той же точки в новой системе (рис. 75),
то, рассматривая треугольник 00' М и применяя к нему правило
треугольника для сложения векторов (см. 1, § 2, п.2), получаем: ОМ =
= 00' + О'М, или
г = г’ + ОС. (15)
Так как координаты точки согласно § 2, п. 4 совпадают с коор-
динатами ее радиус-вектора, то в системе Oeie2e3 векторы г и 00'
имеют координаты: г {х1( х2, х3}, 00' {04, а2, а3}. Если вектор г' в
системе Ое^гвз имеет координаты {у1( у2, Уз}, то из соотно-
шений (15) получаем:
*1 = У1 + сц, :
х2 = у2 + а2,
(16)
*з = Уз + аз-
210
Координаты вектора г' в новой системе совпадают с координатами
точки М в системе O'e/e/tf/, т. е. r'{xi', х2' , х3'}. Но выше было по-
казано, что координаты вектора в старом и новом базисах связаны
соотношениями (4), поэтому
у, = У с.„ х', У? = У х , уч=Ус,„х'
Подставив найденные значения уь у2, у3 в формулы (16), получим:
Xj = CHxj + С12*2 + С13Х3 + й1> ^2 = й21^| "Ь ^22^2 "1” С23Х3 °2» хз ~ ^З1х\ + £32^2 + ^33^3 + &з (17)
или в сокращенной записи
о* + О и II ч* (17')
Формулы (17) называются формулами преобразо-
вания координат точек в пр остр ан ств е. В этих фор-
мулах, так же как и в формулах (4), коэффициентами при х/, х2', х3'
являются соответственно координаты векторов е/, е2 , е3'. Свобод-
ными членами являются координаты новогр начала в исходной сис-
теме. Так как векторы е/, е2',е3' не компланарны, то |сгу|#=0, поэ-
тому уравнения (17) разрешимы относительно х/, х2', х3':
Xj = ciix1 с12х2 4- £1з^з “Ь
Х2= £21-^1 4" С22%2 “Ь ^з-'-з “Ь й2,
Х3= CgjXj ^32-^2 “Ь С33Х3 й3
(18)
или в сокращенной записи:
Матрицы
(18')
являются взаимно обратными. Это означает, что их элементы удов-
летворяют соотношениям (8). Мы доказали следующую теорему.
Теорема [19.3]. Пусть Ое1е2е3 и O'ei'e2e3—аффинные сис-
темы координат, причем точка О' и векторы ,е2,е3 заданы в систе-
ме Оеуе2е^своимикоординатами (14). Еслиxi,x2,x3 и х/, х2 , х3' явля-
8*
211
ются координатами точки М пространства относительно систем
Oeie2e3uO'ei'e2e3 ,тох±, х2, х3 выражаются через xt', х2 , х3' при
помощи соотношений (17), а х/, х2 , х3 —через хи х2, х3 при помо-
щи соотношений (18).
Пример 3. Написать формулы преобразования координат
точек в пространстве, если даны координаты новых координатных
векторов и нового начала в старой системе О' (—1, 0, 2):
ej{3, —1, 4}, е'{0, —2, 1}, е’{3, —5, 5}.
Решение. Подставив координаты нового начала и новых
координатных векторов в формулы (17), получаем:
х^ = ЗХ] 4“ Зх3 — 1,
х2 = — X' — 2х'2 — 5х'3,
х3 = 4*1 + х’ + 5х3 + 2.
Отсюда, разрешив эти соотношения относительно х/, х2 , х3 , полу-
чаем выражения новых координат через старые:
' , 5,1, 17
х. =-----х,4— х2 4- х3--,
1 6 2 2 6
, 5 ,1 , „ 13
х„-----х, 4— Хп 4" 2х,---
2 2 2 2 3 2
7 1 „ , 19
х3 — — х,--х2 х3 4-
3 6 2 2 6
4. Пусть ОАВС — произвольный
преобразования координат точек
тетраэдр. Напи-
при переходе от
е3 = ОС,
Пример
сать формулы
координатной системы Oeie2e3, где е± .= О А, е2 = ОВ, е3 = ОС,
к системе О'е^ е2 е3, где О' = А, е\ = АВ, е'2 = АО, е'3 = АС.
Решение. Определим координаты нового начала и новых
координатных векторов в старой системе. Так как 61= ОА, то
точка А имеет координаты А (1, 0, 0). С другой стороны,
е/ = АВ = ОВ — ОА = е2 — et, е2 = АО = — ОА = — ev
е3 = АС = ОС — ОА = е3 —
Отсюда следует, что
<{—1, 1, 0}, е'{—1, 0, 0}, е'3{— 1’, 0, 1}.
Подставив координаты точки А и векторов е/, е2 , е3 в соот-
ношения (17), мы получаем формулы преобразования координат
точек:
Xi = — х' — х2 — х3 4* 1, х2 = xj, х3 - х3.
212
Пример 5. Найти точку М, которая имеет одинаковые коор-
динаты в двух различных системах: Oete2e3 и О'е'^е'д, где
О' (—4, 1, —8), ej{3, —1, 1}, е,{— 1, 5, 1}, е'3{1, 2, —3}.
Решение. Формулы (17) для данного случая имеют вид:
xt = Зх\ — х2 + х3 — 4,
х2 = — xt + 5х2 4- 2х3 4-1,
х3 = х' + х2 — Зх3 — 8.
Для искомой точки Xi = х/, х2 = х2', х3 = х3'; поэтому коор-
динаты точки М. удовлетворяют системе уравнений
2>Ci — х2 4- х3 — 4 = О,
— *1 + 4х2 + 2х3 4-1 = 0,
Xi 4- х2 — 4х3 — 8 = 0.
Отсюда определяем координаты точки М:
Xi = 3, х2 — 1, Хз = — 1.
- 4. Частные случаи* преобразований аффинных систем координат
точек. Если при переходе от системы Ое1е2е3 к системе O'ei'e2e3'
векторы eit е2, е3 не меняются, т. е. = е1г е2? = е2) е3 = е3>
то такое преобразование называется переносом начала
координат. В данном случае векторы Ci , е2'. е3 имеют коор-
динаты е( {1,0, 0}. е2' {0,1,0}, е3 {0,0,1}; поэтому форму-
лы (17) принимают вид:
xi — х\ + аи
х2 х2 4- ^2*
х3 = х3 4“ й3.
(19)
Эти выражения называются формулами преобра-
зования координат при переносе начала
координат. Заметим-, что при переносе начала координат, все
точки меняют свои координаты.
Пример 6. Написать формулы преобразования координат
точек при переносе начала в точку О (2, —3, 4).
Решение. Подставив координаты точки О' в формулы (19),
получаем: xt = х/ 4-2, х2 = х2' — 3, х3 = х3' 4- 4.
Если при переходе от системы Ое^вд к другой системе О'ех'е2е3
начало координат не меняется, т. е. О = О', то такое преобразова-
ние называется аффинным поворотом системы
213
координат. Существенно отметить, что при аффинном пово-
роте углы между координатными векторами и длины векторов, вооб-
ще говоря, меняются. Координаты точки О' при аффинном пово-
роте равны (0, 0, 0); поэтому соотношения (17) принимают вид:
Х| = С11Х] 4“ £12^2 “Ь С13Х3>
Х2 = С31Х1 -f- C22Xg 4" ^23^3>
х3 = С31Х, “1“ С32Х2 ^ЗЗ^З'
(20)
Эти соотношения называются формулами преобра-
зования при аффинном повороте.
Пример 7. Написать формулы преобразования координат
точек при аффинном повороте, если:
4“ ^2* == ^2’ е3 “ ^3’
Решение. Подставив значения координат векторов
в формулы (20), получаем:
Xj = Xj 4~ х3»
х2 = х^ 4~ Х2 >
х3 = х3.
5. Связь между координатами точек в различных прямоуголь-
ных декартовых системах координат. Частные случаи преобразо-
вания прямоугольной декартовой системы координат. Формулы
преобразования координат точек (17) и (18) применяются также
и в том случае, когда старая.и новая системы координат прямо-
угольные декартовы. Как было показано в п. 2 настоящего параг-
рафа, в данном случае матрицы преобразований (7) должны быть
ортогональными, т. е. удовлетворять условиям (11) и (12).
Формулы преобразования координат точек для частных случаев
(переноса начала и поворота системы) по существу ничем не отли-
чаются от соответствующих частных случаев преобразования общей
аффинной системы координат. Таким образом, при параллельном
переносе прямоугольной декартовой системы координат формулы
преобразования имеют вид (19), а при повороте прямоугольной де-
картовой системы координат формулы преобразования совпадают с
формулами (20) с той лишь разницей, что матрица преобразования
в данном случае будет ортогональной.
6. Обратная задача. Поставим обратную задачу: пусть дана аф-
финная система координат Oeie2e3 и система уравнений (17) с оп-
ределителем, отличным от нуля. Существует ли такая новая аффин-
ная система координат О'е/е2'е3, при переходе к которой фор-
мулы преобразования координат точек имеют вид (17)? Легко убе-
диться в том, что такая система (Уе(е^е3 существует. Для этого
214
достаточно в качестве начальной точки этой системы взять
О' (alt а2, а3) и за базисные векторы е/ {си, с21, с31), е2'{с12, сгз> сзг},
е3'{С1з, с23, с33}, где числа а2, а3, с11( с21,..., с33 взяты из урав-
нений (17). В силу условия |сар| 0 векторы е/, е2 , е3 не ком-
планарны, поэтому они определяют новый базис. Нетрудно видеть,
что формулы перехода от системы координат Oeie2e3 к системе
О'е1'е2е3 совпадают с формулами (17). Таким образом, доказана
следующая теорема.
Т е о р е м а [19.4]. Если дана аффинная система координат
Ое^2е3 и система линейных уравнений (17) с определителем, отлич-
ным от нуля, то существует система координат O'eie2e3, при пе-
реходе к которой уравнения (17) являются формулами преобразова-
ния координат точек. Новая система координат определяется соот-
ношениями (14).
Аналогичная теорема имеет место для прямоугольной декарто-
вой системы координат.
Теорема [19.5]. Если дана прямоугольная декартова сис-
тема координат Ogig2g3 и система линейных уравнений (17),
коэффициенты которой при х/, х2 ,х3 образуют ортогональную
матрицу, то существует прямоугольная декартова система коор-
динат О' g /g2 g 3 , при переходе к которой соотношения (17) явля-
ются формулами преобразования координат точек. Новая система
координат определяется так’.
О (^1, а2, а3), gg2{ct2> с22> сзг}> 5з{с1з> сгз> сзз)-
Пример 8. Являются ли соотношения
х = 2у' + 2г' — 6,
у = 2х' —у' -j- 2z' + 1,
z == Зх -j" у Т- 4z — 3
формулами преобразования координат точек? В случае положи-
тельного ответа найти координаты нового начала и координаты но-
вых базисных векторов е/, е'2, е3 .
Решение. Данные формулы являются формулами преоб-
разования координат точек, так как
О 2 2
2—12
3 1 4
= 6 0.
Новая система координат в данном случае определяется так:
О' (— 6, 1, —3), < {0, 2, 3}, е'{2, —1, 1), е3{2, 2, 4).
215
П р и м е р ,9. Даны формулы преобразования координат:
2 , । з , ,
х =—X+ —у+
7 7
6 ,
— г
7
6 , , 2 , 3 ,
Л 7 7 Л 7
3 , 6 , , 2
г == —х--------у 4-----
7 7 л 7'
Найти новую координатную систему. Будет ли новая система
координат прямоугольной и декартовой, если исходная система
прямоугольная декартова?
Решение. Так как определитель, составленный из коэффи-
циентов, равен — Г, то согласно теореме [19.4] существует система
O'^i'e2'e3', при переходе к которой данные соотношения являются
формулами преобразования координат точек. Если исходная система
прямоугольная декартова, то новая система также является пря-
моугольной декартовой в силу того, что матрица, образованная из
коэффициентов при х', у', г' является ортогональной.
7. Невещественные точки, линии и поверхности в пространстве.
В I, § 26 было введено понятие невещественных точек и линий
на плоскости. Введем в рассмотрение аналогичные понятия для
случая трехмерного пространства.
Если в пространстве выбрана система координат, то каждой точ-
ке сопоставляются три действительных числа х, у, z — координа-
ты точки, взятые в определенном порядке; в свою очередь любой
упорядоченной тройке действительных чисел соответствует точка.
Таким образом, выбор системы координат позволяет установить
взаимно однозначное соответствие между точками пространства и
упорядоченными тройками действительных чисел. По аналогии
с I, § 26 расширим понятие точки пространства. При фиксирован-
ной системе координат точкой назовем любую упорядоченную трой-
ку комплексных чисел. Точки (х1( уъ Zj) и (х2, у2, 2г) совпадают тог-
да и только тогда, когда xt = х2, yi = у2, = г2. Если три коор-
динаты точки вещественные, то она называется веществен-
ной или действительной; если же хотя бы одна коорг
дината невещественна — невещественной или ком-
плексной. Если точка в системе Ое{е2е3 имеет координаты
(xt,x2,x3), то мы будем считать, что та же точка в системе О'е^е^е^
имеет координаты х/, х2 , х3, определяемые из соотношений (17),
где О' (а(, а2, а3), в1{сц, c2i, c3i,}, e2{ci2, с22, с32,}^ е3'{с13, с2з, с33}.
Важно отметить, что числа аъ а2, а3, с11( с12, ..., с33 всегда счи-
таются действительными, поэтому понятие действительных и ком-
плексных точек не зависит от выбора системы координат.
Две точки, соответственные координаты которых являются соп-
ряженными комплексными числами, называются комплекс-
216
но сопряженными точками. Можно показать, что
это понятие также не зависит от выбора системы координат.
Поверхностью, определяемой уравнением F (х, у’ г) — О,
будем называть совокупность всех точек (х, у, г), как действитель-
ных, так и комплексных, координаты которых удовлетворяют это-
му уравнению.
В частности, плоскостью называется геометрическое ме-
сто точек, координаты которых удовлетворяют уравнению Ах +
+ By + Cz + D =0, где по крайней мере один из коэффициентов
Л,В или С отличен от нуля. Если все коэффициенты А, В, С
и D — действительные числа или пропорциональны действитель-
ным числам (коэффициент пропорциональности может быть и ком-
плексным), то плоскость называется вещественной или
действительной, в противном случае она называется
невещественной. Нетрудно видеть, что вещественная плоскость со-
держит как вещественные, так и невещественные точки. Например,
вещественной плоскости х + у — 2>z — 2 = 0 принадлежит ком-
плексная точка (5, Зг, 1 + г).
Каждая поверхность, определяемая уравнением F (х, у, г) =
= 0, содержит, вообще говоря, бесчисленное множество как дей-
ствительных, так и комплексных точек. Однако существуют поверх-
ности, которые содержат конечное число действительных точек или
вовсе их не содержат. Например, поверхность 2х2 + 4у2 + Зг2 =
= 0 содержит только одну действительную точку (0, 0, 0), все ос-
тальные точки комплексные, а поверхность
х2 + Зу2 + 4г2 + 1 = 0
не содержит ни одной вещественной точки.
Линией, определяемой системой уравнений
(Fi(x, у, г)=0,
(Е2(х, у, г)=0,
назовем совокупность всех точек (х, у, г) действительных и ком'
плексных, координаты которых удовлетворяют данной системе
уравнений. Линией, определяемой системой параметрических урав-
нений
Xi = fi (0, х2 = f2 (/), х3 = fs(t),
называется совокупность всех точек с координатами (хъ х2, х3),
которые можно получить из данных уравнений-, придавая t дей-
ствительные или комплексные значения.
Задачи и упражнения
267. Даны координаты новых базисных векторов в старом бази-
се: е/{—3, 1, 1}, е2'{1, 0, 4}, е3 {1, 1,5}. Найти координаты век-
тора р в старом базисе, если в новом этот вектор имеет коорди-
наты {—1, 5, 2}.
217
268. Написать формулы преобразования аффинной системы ко-
ординат в пространстве, если даны координаты нового начала и
новых координатных векторов в старой системе:
а) <{— 3, 0, 0}, е'2{1, 5, —2}, е3{1, 7, —1}, О'(3, —4, 5);
б) ej{—1, 1, 0}, ej {2, 3, 5), е'3{0, 2, 5}, О'(5, —3, 0);
в) <{1, 0, 0}, е'2 {0, 1, 0}, е'{0, 0, 1}, О'(—3, 1, 2).
269. Определить координаты новых координатных векторов и
нового начала в старой системе, если формулы преобразования
имеют вид:
a) Xi = xj — 3xj + xj, б) Xi = х\ — 2х'2 + 5,
х9 = х' + xj, х„ = — 4х j + х' — 2х' — 1,
£1*4' X 1 4 О *
х3 = Xi 1; хз = 3Xj 4х2 -|- х3;
в) xt = xj — xj -J- 3xj — 1, г) Xj = xj;
x2 = 3xj — x3 + 2, x2 = xj,
хз — хз — хз = xi + X2 + хз + !•
270. Являются ли соотношения
xi = xi + 2x2' + x3' — 1,
x2 = 2x/ — x2' + x3',
x3 = Xi — 3x2' + 1
формулами преобразования координат?
271. Какие из приведенных ниже матриц ортогональны:
/1 0 0\
а) I 0 cos ф sin ф I;
\0 — sin ф cos ф/
1
/2 2
1
У/2 2
218
272. Даны формулы преобразо-
вания координат точек:
0,2,, 3 , , 6 ,
х — 2 4“ — х 4“ — У 4~ — z ,
7 7 У 7
. . 6 , , 2 , 3 ,
у = 1 4— х 4—у z ,
* 7 7 Л 7
г = 3 4- — х' — — у' 4- — г'.
7 7 Л 7
Является' ли новая система коор-
динат прямоугольной декартовой,
если исходная система прямо-
угольная и декартова?
273. Найти формулы преобра-
зования координат при переходе
от прямоугольной декартовой сис-
темы Охуг к прямоугольной декар-
товой системе Ox’y'z’, если начало новой системы совпадает с на-
чалом О старой системы, ось Oz' совпадает с осью Oz, а лучи Ох' и
Оу' являются соответственно биссектрисами углов, образованных
векторами (I, J) и (/, — j).
274. Пусть Jij и л2 — две различные плоскости в пространстве,
а е3 — вектор, не параллельный этим плоскостям. Две аффинные
системы Ое^2е3 и О'е^е^ез расположены в пространстве так,
что точка О и векторы eit е2 лежат в плоскости ль а точка О' и век-
торые/, е2—в плоскости л2. Причем О', е/, е2 являются проекция-
ми О, еъ е2 по направлению вектора е3 (рис. 76).
а) Написать формулы преобразования координат при переходе
от системы Oeie2e3 к системе О'е^е2'е3.
б) Показать, что если точка М лежит в плоскости и имеет в
системе Ое±е2 координаты (х, у), то проекция/И' этой точки на плос-
кость л2 по направлению е3 имеет те же координаты в системе
O'eie2.
§ 20. ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА. ПЕРЕСЕЧЕНИЕ ПОВЕРХНОСТИ
С ПРЯМОЙ и плоскостью
1. Понятие уравнения поверхности. В § 9 было дано понятие по-
верхности и ее уравнения. Пусть дано уравнение
F (х, у, г) = 0. (1)
Геометрическое место всех точек пространства, координаты которых
в некоторой аффинной системе координат удовлетворяют соотно-
шению (1), называется поверхностью, определяемой урав-
нением (1). Таким образом, соотношение (1) называется у р а в-
н'е н и е м данной поверхности S, если соблюдены следую-
щие два условия: а) координаты любой точки поверхностиS удовлет-
219
воряют уравнению (1), б) координаты любой точки, не принадле-
жащей поверхности S, не удовлетворяют этому уравнению.
В двух предыдущих главах нами рассмотрен один частный,
но весьма важный вид поверхности — плоскость. Из теоремы [10.1 j
следует, что плоскость есть поверхность, определяемая уравнением
Ах + By + Cz + D = 0, где А, В и С одновременно не равны
нулю.
Рассмотрим другие примеры поверхностей.
Пример 1. Найти поверхность S, которая в прямоугольной
декартовой системе координат определяется уравнением
х2 + у2 + z2 — 9 = 0.
Решение. Если М (х, у, г) — произвольная точка простран-
ства, заданная в прямоугольной декартовой системе своими коор-
динатами, то согласно теореме [5.3] ОМ2 = х2 4- у2 4- г2, где О—
начало кобрдинат. Таким образом', точка М будет принадлежать
поверхности S тогда и только тогда, когда ОМ2 — 9 = 0 или ОМ =
= 3. Мы видим, что все точки поверхности S отстоят от начала коор-
динат на расстоянии г = 3.
Обратно, если некоторая точка М пространства удалена от нача-
ла координат на расстояние г=3, то для этой точки согласно теоре-
•ме[5.3] имеем: ]/х2 + у2 + г2 — 3 или х2 4- у2 + z2 — 9, т. е. эта
точка принадлежит поверхности. Таким образом, данным уравне-
нием определяется сфера с центром в начале координат и радиусом,
равным трем.
Пример 2. Определить поверхность, заданную уравнением
х2 4- у2 = 0. Система координат аффинная.
Решение. Так как сумма квадратов двух чисел равна нулю
только в том случае, когда каждое из чисел равно нулю, то задан-
ному уравнению удовлетворяют координаты тех и только тех то-
чек пространства, для которых х = 0 и у = 0. Геометрическое
место точек, определяемое уравнениями х = 0, у = 0, есть ось Oz.
Итак, уравнение х2 4- у2 = 0 определяет прямую — ось Ог.
Пример 3. Найти поверхность, заданную уравнением
х2 4- 4у2 4- г2 = 0.
Решение. Этому уравнению удовлетворяет только одна трой-
ка чисел 0, 0, 0, так как сумма квадратов трех чисел равна нулю
только в том случае, когда каждое из этих чисел равно нулю. Та-
ким образом, в данном случае вся поверхность, определяемая урав-
нением х2 4* 4у2 4- г2 = 0 состоит из одной точки — начала коор-
динат.
Пример 4. Найти поверхность, определяемую уравнением
х2 — xz 4- ух — уг — х 4- г = 0.
Решение. Легко видеть, что это уравнение можно преоб-
разовать следующим образом: (х 4- у — 1) (х — г) = 0. Если точ-
220
ка М (х, у, г) лежит на данной поверхности, то, очевидно, коор-
динаты этой точки удовлетворяют по крайней мере одному из сле-
дующих уравнении: х + у — 1 = 0, х — 2 = 0, так как произве-
дение двух чисел равно нулю только тогда, когда один из сомножи-
телей равен нулю. Обратно, если координаты некоторой точки про-
странства удовлетворяют одному из этих уравнений, то, очевидно,
такая точка лежит на данной поверхности. Отсюда мы приходим
к выводу, что рассматриваемая поверхность есть совокупность
всех точек пространства, координаты которых удовлетворяют од-
ному из уравнений: х + у — 1 = 0, х — 2 = 0. Каждым из этих
уравнений определяется в пространстве плоскость, поэтому рас-
сматриваемая поверхность есть совокупность двух пересекающихся
плоскостей: х + у — 1 = 0, х — 2 = 0.
Пример 5. Найти поверхность, определяемую уравнением
х2 + Зу2 + г2 + 1 = 0.
Решение. Легко видеть, что не существует в пространстве
ни одной точки, координаты которой удовлетворяли бы данному
уравнению. В самом деле, уравнение поверхности можно записать
так: х2 + Зу2 + г2 = — 1, Но сумма трех неотрицательных чи-
сел не может равняться — 1. Итак, поверхность, определяемая
данным уравнением, не имеет ни одной, действительной точки.
Такие поверхности называются нулевыми.
Из рассмотренных примеров следует, что введенное выше
понятие поверхности в ряде случаев не совпадает с обычным, ин-
туитивным понятием поверхности, известным нам из курса элемен-
тарной геометрии. Однако в большинстве случаев, как мы увидим
ниже, Данное нами определение приводит к обычным поверхнос-
тям.
2. Поверхности второго порядка. Приведенное выше определение
поверхности как геометрического места точек, координаты которых
удовлетворяют уравнению (1), приводит нас к естественной класси-
фикации поверхностей по свбйствам их уравнений. Поверхность
называется алгебраической, если она задается уравне-
нием (1), где F (х, у, г) — целый многочлен от переменных х, у' и
г, т е. алгебраическая сумма конечного числа членов вида Ахтупгр,
где А — постоянный коэффициент, а т, п и р — целые неотрица-
тельные показатели. Сумма т + п + р называется степенью
данного члена, а наибольшая из степеней членов многочлена назы-
вается степей ь ю многочлена. Всякую неалгебраи-
ческую поверхность называют трансцендентной. Ал-
гебраические поверхности различают по порядку их уравнений,
т. е. по степеням многочлена, стоящего в левой части уравнения (1).
Из теоремы [10.1] следует, что в предыдущих двух главах мы по
существу изучали поверхности первого порядка. Объектом нашего
221
изучения в настоящей исследующей главах будут алгебраические
поверхности второго порядка.
Поверхностью второго порядка называет-
ся геометрическое место точек пространства, координаты которых
в некоторой (вообще говоря, аффинной) системе координат удовлет-
воряют уравнению
Ах2 + By2 + Cz2 + Dxy + £xz+Fyz+Gx+/fy+#z+£=O, (2)
где А, В, .... L —действительные числа, причем по крайней мере
один из коэффициентов А, В, С, D, Е, F отличен от нуля. Други-
ми словами, поверхность второго порядка есть геометрическое мес-
то точек пространства, координаты которых удовлетворяют урав-
нению (1), где F (х, у, г) — некоторый многочлен второй степени.
Покажем, что это определение носит геометрический характер,
т. е. не зависит от выбора системы координат в пространстве. Пусть
Ое&вз — исходная, а O'ei'e2e3'— новая системы координат, где
O',et ,е2 и е3 заданы в старой системе при помощи соотношений (14)
из § 19. Найдем уравнение геометрического места (2) в новой систе-
ме координат. Для этой цели перейдем к индексным обозначениям—
как для координат точек пространства, так и для коэффициен-
тов уравнения (2). Так же кай и в предыдущем параграфе, для коор-
динат точек вместо обычных обозначений х, у, z будем применять
индексные обозначения х1( х2, х3. Если, далее, положить
А — аи, В — а22, С = а33, D = 2а12 = 2а21, Е'=2а13 = 2а31,
F = 2а23 2а32, G = 2а14, Н = 2а24, К = 2а34, L = а44,
то в новых обозначениях уравнение (2) примет вид:
«их? + а22х2 + а33 xl + 2а 12 xtx2 + 2a13XiX3 +
"Е 2а23х2х3 -f- 2а44Х1 Т- 2а24х2 -|~ 2а34х3 -Е а44 = 0. (2 )
Или в сокращенной записи:
= 01- (3)
i, j
Теперь легко записать уравнение поверхности в новой системе
координат. В самом деле, подставив в соотношение (3) вместо
Xi, х2, х3 их выражения через координаты точек в новой системе
(см. (17) из § 19), получаем искомое уравнение:
^diixlxj + 2^idiixi + dii^ 0. (4)
Здесь at/, а^', а44' —действительные числа, подробные выра-
жения которых через нет надобности выписывать.
1 См. сноску2 на стр. 204 и сноску 1 на стр. 205.
222
Мы пришли к выводу, что в новой системе координат исходная
поверхность определяется алгебраическим уравнением (4), степень
которого не выше степени уравнения (3), т. е. не выше двух. Пока-
жем, что степень этого уравнения не ниже степени уравнения (3).
В самом деле, если предположить, что степень уравнения (4)
ниже степени уравнения (3), то при обратном переходе от системы
О' ei егв3 ксистеме Ое^г^зстепень уравнения должна повыситься,
что противоречит предыдущему выводу. Таким образом, нами до-
казана следующая теорема.
Т е о р е м а [20.1 ]. Если в некоторой аффинной системе коорди-
нат Ое^е^е^ геометрическое место точек задано алгебраическим
уравнением второй степени (2),то в любой другой системе О'е/ е2'е3'
это геометрическое место также будет задано алгебраическим
уравнением второй степени.
Тем самым доказано, что понятие поверхности второго порядка
не зависит от выбора системы координат.
Нашей ближайшей задачей является изучение геометрических
свойств поверхностей второго порядка и классификация этих по-
верхностей по примеру классификации кривых второго порядка.
Предварительно рассмотрим задачи пересечения поверхности с
прямой и плоскостью которые в дальнейшем неоднократно будут
использованы при изучении формы поверхностей второго порядка.
3. Пересечение поверхности второго порядка с прямой. Пусть
в аффинной системе координат Oete2e3 дана поверхность вто-
рого порядка уравнением (3) и прямая параметрическими уравне-
ниями:
Xi = р^ + gp х2 = p2t + g2, х3 = p3t + g3, (5)
гдеp {pi, p2, p3} — направляющий вектор прямой, a Mo (g1(g2,g3) —
начальная точка этой прямой. Найдем точки пересечения пря-
мой (5) и поверхности второго порядка (3). Для решения этой за-
дачи поступим точно так же, как и при решении аналогичной задачи
в теории кривых второго порядка (см. I, § 29). Сначала опреде-
лим параметры точек пересечения прямой (5) и поверхности (3).
Для этой цели подставим значения х2, х3 из соотношений (5)
в уравнение (3) и найдем корни полученного уравнения относитель-
но t:
+ gj (р/ + gy) + 2£ai4 (pLt.+ gz) + a44 = 0.
t. i
После необходимых преобразований получаем:
Pt2 + 2Qt + R = 0, (6)
где
p = ^aijPiPj> . <7)
‘•i
223
Q — ^Pi (aii?i+ai2B2+aj3^3 + au)> (8)
= "Ь 2 “b aU‘ (9)
‘. i
Корни уравнения ,(6) являются параметрами точек пересечения
прямой (5) с поверхностью, заданной уравнением (3). Подставив
найденные значения параметров в уравнение (5), получаем коор-
динаты точек пересечения.
Заметим, что каждому корню уравнения (6) соответствует точ-
ка пересечения, причем различным корням соответствуют различ-
ные точки. Существенно отметить, что вещественным корням урав-
нения (6) соответствуют вещественные точки, а невещественным
корням — невещественные точки. Таким образом, для выяснения
количества и характера точек пересечения необходимо исследовать
уравнение (6).
Прежде всего заметим, что коэффициент Р в уравнении (6), как
видно из соотношения (7), зависит от направления прямой (5) и
не зависит от выбора начальной точки этой прямой. Отсюда следует,
что если для всех параллельных прямых выбрать один и тот же нап-
равляющий вектор, то коэффициент Р будет иметь одно и то же зна-
чение. Поэтому если для некоторой прямой коэффициент Р отличен
от нуля, то для всех прямых, параллельных этой прямой, коэффи-
циент Р не равен нулю. Это обстоятельство позволяет ввести сле-
дующее определение: прямые, направляющие векторы которых
удовлетворяют условию Р = 0, называются прямыми асим-
птотического направления по отношению
к данной поверхности, а направляющие векторы этих
прямых — векторами асимптотического нап-
равления или асимптотическими векторами.
Мы не будем проводить подробного исследования уравнения (6),
так как оно по существу ничем не отличается от исследования ана-
логичного уравнения (3) из 1, § 29. Используя выводы, к которым
мы пришли в 1, § 29, где подробно рассматривался вопрос о пе-
ресечении кривой второго порядка с прямой линией, мы приходим
к теореме, аналогичной теореме I, [29.1].
Теорема [20.2]. Если прямая (5) не имеет асимптотичес-
кого направления по отношению к поверхности второго порядка (3),
то она пересекает поверхность в двух точках'.
а) вещественных различных, если Q2 — PR > 0;
б) комплексно-сопряженных, если Q2 — PR < 0;
в) совпадающих, если Q2 — PR = 0.
Если прямая имеет асимптотическое направление по отноше-
нию к поверхности второго порядка, то она либо пересекается с ней
в одной точке (Р = 0, Q 0), либо не имеет с ней ни одной общей
точки (Р = 0, Q = 0, R =/= 0), либо принадлежит поверхности
всеми своими точками (Р = 0, Q = 0, R = 0).
224
Из этой теоремы непосредственно следует:
Теорема [20.3]. Если прямая имеет с поверхностью более
двух общих точек, то она целиком лежит на поверхности.
Прямые, принадлежащие поверхности всеми своими точками,
называются прямолинейными образующими
поверхности второго порядка;
Пример 6. Определить точки пересечения поверхности вто-
рого порядка х2 — 2ху 4- 2z2 + xz — х — у = 0 с прямой х =
= 3 + 4/, у = 3 + 4/, г = 3 + 4/.'
Решение. Подставив значения х, у, z в уравнение данной
поверхности, получим уравнение для определения параметров то-
чек пересечения прямой с поверхностью: 8/2 + 10/ + 3 = 0.
3 1
Отсюда /4 =-----и /2 =------. Мы видим, что заданная пря-
4 2
мая неасимптотического направления, так как она пересекает по-
верхность в двух точках. Для того чтобы определить координаты
этих точек, подставим найденные значения параметра в уравнение
прямой. Мы получим:
Mi (0, 0, 0), М2 (1, 1, 1).
Пример 7. Найти те прямолинейные образующие поверх-
ности
х2 + у2 — г2 = 1,
которые проходят через точку (1, 1, 1).
Решение. Если р (а, 0, у} — направляющий вектор иско-
мой прямолинейной образующей, то параметрические уравнения
этой образующей запишутся так:
X = 1 + а/, у = 1 + 0/, 2=1+ у/.
Подставив эти значения в уравнение поверхности, после элемен-
тарных преобразований получаем:
(а2 + 02 —у2)/2 + 2 (а + 0 -у)/ = 0.
Прямая I будет прямолинейной образующей в том и только в
том случае, когда
а2 + 02 —у2 = 0, а + 0 —у = 0.
Заметим, что у =И= 0, так как в противном случае из первого соот-
ношения получаем: а = 0 и 0 = 0.
Разделив последние соотношения на у и вводя новые неизвест-
а 6 В
ные — = §, — = <п, получаем:
У ?
g2 + = 1, g + -п = 1.
Из этих двух уравнений легко получить значения £ и тр
' ii = °» ’’li — 1,+г = Ь ^2 = °-
225
Положив у = 1, полу-
чаем координаты двух
направляющих векторов
прямолинейных образую-
щих:
Pi{0, 1, 1}, р2{1, 0, 1}.
Таким образом, парамет-
рические уравнения пря-
молинейных образующих
имеют вид:
X = 1,, у — Z —
X — 1 +Л У=1, Z=l +1.
Подставив значения х,
у и z в исходное уравне-
ние поверхности, убежда-
емся в том, что оно прев-
ращается в тождество от-
носительно t.
4. Метод сечений для изучения формы поверхности. Для изуче-
ния формы поверхности удобнее всего задавать ее в прямоуголь-
ной декартовой системе координат.
Пусть S — некоторая поверхность, заданная в прямоугольной
декартовой системе координат уравнением (1). Для изучения формы
поверхности будем пользоваться так называемым методом сечений.
Сущность этого метода заключается в следующем: поверхность S
рассекается плоскостями, параллельными координатным плоскос-
тям, и определяются линии пересечения поверхности с плоскостя-
ми. По виду этих линий судят о форме данной поверхности.
Применение метода сечений основывается на следующей тео-
реме:
Теорема [20.4]. Если S — поверхность, заданная в прямо-
угольной декартовой системе координат уравнением (1), a z=h —
плоскость л, параллельная координатной плоскости Оху, то проек-
ция линии пересечения поверхности S с данной плоскостью л на
плоскость Оху в системе 01j имеет уравнение
F(x, у, h) = 0. (10)
Доказательство. Пусть L — линия пересечения по-
верхности S с плоскостью л, a L'— проекция этой линии на коор-
динатную плоскость Оху (рис. 77). Мы должны доказать, что линия
L’ в системе Оху имеет уравнение (10). Для этой цели необходимо
показать, что координаты любой точки линии L' на плоскости Оху
удовлетворяют уравнению (10), а координаты точки плоскости Оху,
не лежащей на линии L', не удовлетворяют этому уравнению. Возь-
226
мем произвольную точку М' на кривой L'. Пусть в плоскости Оху
точка М' имеет координаты (х', у'). Эта же точка в пространстве
будет иметь координаты (х', у', 0). Так как точка ЛГ лежит на
кривой L', то она является проекцией некоторой точки М кривой L.
Точки М и М' лежат на одной прямой, параллельной оси Ог, по-
этому первые две координаты этих точек совпадают. Так как, кро-
ме того, точка М лежит в плоскости л, то она имеет координаты
М (х', у', /г).. Точка М одновременно лежит на поверхности (1),
так что F (х', у' , ti) = 0. Мы видим, что координаты точки
М' (х', у') в плоскости Оху удовлетворяют уравнению (10).
Возьмем, далее, произвольную точку Р'(х*,у*) в плоскости Оху,
не лежащую на кривой L', и покажем, что координаты этой точки
не удовлетворяют уравнению (10). В самом деле, проведем через
точку Р' прямую, параллельную оси Ог, и обозначим через Р точ-
ку пересечения этой прямой с плоскостью л. Так как точка Р' в
пространстве имеет координаты (х*, у*, 0), то точка Р будет иметь
координаты (х*, у*, h). Но точка Р' не лежит на кривой L' , поэ-
тому точка Р не лежит на кривой L, т. е. координаты точки Р не
удовлетворяют уравнению поверхности S:
F (х*, у*, h) у= 0.
Таким образом, мы показали, что если точка плоскости не лежит на
кривой L’г то ее координаты не удовлетворяют уравнению (10).
Теорема доказана.
Следствие. Линия пересечения плоскости Оху с поверхностью
(1) в системе OiJ имеет уравнение
F (х, у, 0) = 0.
Аналогичные теоремы могут быть доказаны для случаев, когда
поверхность S подвергается сечению плоскостями, параллельны-
ми координатным плоскостям Оуг и Охг.
Доказанная теорема позволяет построить так называемую кар-
ту поверхности в горизонталях и с помощью карты
изучить ее форму. Пересечем поверхностьЗ плоскостями л ь л 2, ,..,лА,
заданными уравнениями z — hi, г — h2, ..., г = hk , где числа
hlt h2...hk следуют друг за другом через одинаковые, достаточно
малые числовые промежутки. Если для каждого сечения построить
ее проекцию на плоскость Оху, то получим множество кривых, кото-
рое называется картой поверхности в горизонта-
лях. Эта карта дает некоторое представление как о всей поверх-
ности, так и о некоторых ее участках. Например, сгущение линий на
карте означает возрастание крутизны поверхности в соответст-
вующем участке.
Пример 8. Дана поверхность в прямоугольной декартовой
системе координат Oijk уравнением х2 + у2 = z2. Построить кар-
ту этой поверхности в горизонталях.
227
Решение. Определим проек-
ции сечений этой поверхности с
плоскостями z = h при hi = 0, й2=
= 1, й3 — 2, Л4= 3, hr = 4. Согласно
теореме [20.4] проекции этих сечений
в системе Oij имеют уравнения:
х2 + v2 = 0, х2 + у2 = 1, х2 + у2=
=22, х2 +у2 = З2 и х2 + у2 = 42.
Уравнение х2+у2 — 0 определяет на
плоскости Оху единственную точку—
_ начало координат, а остальные урав-
У нения, как мы знаем, определяют
окружности соответствующего ра-
диуса. Таким образом, карта дан-
ной поверхности в горизонталях
есть совокупность концентрических
окружностей. Позже мы увидим, что
этим уравнением определяется ко-
ническая поверхность, образованная
вращением прямой вокруг оси Ог
(см. рис. 78).
Рис- 78 5. Пересечение поверхности
второго порядка с плоскостью.
В предыдущем пункте был указан способ для определения линии
пересечения поверхности с плоскостью, параллельной одной из
координатных плоскостей. Пользуясь найденными результатами,
изучим характер линии, полученной при пересечении поверхности
второго порядка с произвольной плоскостью. Докажем следующую
теорему.
Теорема [20.5]. Пусть в некоторой системе координат да-
на поверхность второго порядка уравнением (2') и плоскость л своим
общим уравнением
AiXi + А 2X2 + Л3х3 + Л4 — 0.
(Н)
Если существует хотя бы один вектор р, параллельный плоскости
л и не имеющий асимптотического направления, то линия пересе-
чения поверхности (2') с данной плоскостью л является кривой вто-
рого порядка.
Доказательство. Пусть O'gig2g3 — новая прямо-
угольная декартова система координат, которая расположена в про-
странстве так, что точка О’ и векторы gi,g2 лежат в плоскости л.
В этой системе координат поверхность второго порядка имеет урав-
нение (4), а плоскость л — уравнение х3' = 0. Найдем уравнение
линии пересечения данной поверхности с плоскостью л в системе
O'g’ig’a-. Для этой цели (см. следствие теоремы [20.4 ]) необходимо в
уравнение (4) подставить х3' = 0;
228
a'^Xj2 + 2aj 2xjx2 + а22х22 + 2а'14х' + 2а24х2 + a4I = 0. (12)
Согласно условиям теоремы существует вектор р неасимпто-
тического направления относительно данной поверхности и парал-
лельный секущей плоскости О' gig 2. Обозначая координаты этого
вектора относительно новой системы координат через {р/, р2', 0}
и подставляя их в соотношения (7), получаем:
Р = d^p';1 + 2а12р'р2 + а'22р22 0.
'Отсюда следует, что хотя бы один из коэффициентов аи', а12', а22
не равен нулю. Это означает, что кривая (12), по которой поверх-
ность второго порядка пересекается с плоскостью л, является кри-
вой второго порядка. Теорема доказана.
При доказательстве теоремы [20.5] мы предположили, что су-
ществует хотя бы один вектор неасимптотического направления,
параллельный плоскости л. Покажем, что это предположение весь-
ма существенно. В самом деле, имеет место следующая
Теорема [20.6]. Пусть в некоторой аффинной системе
координат дана поверхность второго порядка уравнением (2>) U
плоскость л общим уравнением (11), причем любой вектор, парал-
лельный плоскости л, имеет асимптотическое направление относи-
тельно поверхности второго порядка. Тогда имеют место три слу-
чая взаимного расположения плоскости л с данной поверхностью".
а) плоскость л пересекает поверхность или касается поверхности
по прямой линии;
б) плоскость л целиком принадлежит поверхности второго по-
рядка;
в) плоскость п не имеет ни одной общей точки с поверхностью
второго порядка.
Доказательство. Как и в предыдущем случае, выберем
новую прямоугольную декартову систему координат О'g i g2 g^' так,
чтобы точка О' и векторы g/ и g2 лежали в плоскости л. В этой
системе координат поверхность определяется уравнением (4), а
плоскость л — уравнением х3' = 0. Линия пересечения плоскости
л с поверхностью второго порядка, как было показано выше, имеет
уравнение (12). Легко видеть, что в данном случае коэффициенты
ап', а12' а22 равны нулю. В самом деле, в данном случае векторы
gi {1,0, 0} g2 {0, 1, 0} и (gr/ + S2) {1, 1,0} имеют асимптотичес-
кие направления относительно данной поверхности. Поэтому,
подставив координаты этих векторов в соотношение (7), получаем:
ац'== 0, «22' — °, Щ2 0.
Таким образом, уравнение (12), характеризующее совокупность
общих точек поверхности второго порядка и плоскости л, имеет вид:
2а14' х/ + 2а^' х2' + аи' = 0. (13)
Возможны следующие три случая.
229
1) Хотя бы один из коэффициентов а)4', а24' отличен от нуля1
В этом случае уравнением (13) определяется в плоскости л прямая
линия, и, следовательно, поверхность (4) пересекается с плоскостью
л или касается плоскости л по прямой, имеющей в плоскости О'gi gz
уравнение (13).
2) а14'=0, а24'=0, а44'=И=0. В этом случае на плоскости O'gi’gz
не существует ни одной точки, координаты которой удовлетворяли
бы уравнению (13), т. е. поверхность не имеет с плоскостью л ни
одной общей точки.
3) ai4'= 0, a2i' = 0, а44' = 0. В этом случае координаты любой
точки плоскости л будут удовлетворять уравнению (13), т. е. плос-
кость л целиком принадлежит данной поверхности.
Теорема доказана.
Пр имер 9. Определить характер пересечения поверхности
(S) : х2 — у2 = 2 с плоскостью (л) : х — у = 4.
Решение. Прежде всего выясним, существует ли хотя бы
один вектор, параллельный данной плоскости и не имеющий асим-
птотического направления относительно поверхности S. Для данной
поверхности S уравнение (7), определяющее векторы асимптотичес-
кого направления, имеет вид: р42— р22 = 0. Координаты {р1,р2, Рз}
любого вектора, параллельного плоскости х — у = 4, удовлетво-
ряют условию: Pi — рг = 0- Из этого и предыдущего соотношений
вытекает что все векторы, параллельные плоскости л, будут иметь
асимптотическое направление относительно поверхности. Таким
образом, в данном случае применима теорема [20.6]. Пересечение
поверхности второго порядка S с плоскостью л определяется си-
стемой уравнений
г х2 —у* = 2,
I х — у = 4.
Эта система эквивалентна следующей:
{ 4 (х + у) = 2,
I х— У =4,
так как каждое решение первой системы является решением вто-
рой системы и наоборот. Мы видим, что рассматриваемая поверх-
ность пересекается с плоскостью л по прямой линии, которая опре-
. . 1 .
деляется уравнениями: х + у = х — у = 4.
Задачи и упражнения
275. Найти точки пересечения поверхности х2 —ху 4- zy — 5г=0
« х— 10 у —5 г
с прямой -----= -----=----.
7 3—1
276. Найти точки пересечения поверхности у2 — 2х2 + г2 — 2ху—
— хг Ц- 4уг 4- Зу — 5г = 0 с прямой *-~2 = у
230
277. Найти точки пересечения поверхности
г2 — 3xz + 2yz — ух 4- Зх -j- 2z = О
а) с осью Оу;
б) с прямой — = —— = —.
16—24 —9
278. Какие из следующих прямых:
а) х~4 = у +2_2~3. б) х~3 _X _ 2
1 — 1 — — 1 ’ ' 8 “ 2 “ — 1 ’
в)— Г)-^=Л±1=Л; д)£ = Л=£
— 6 2 —3 —3 6 4 .5 —1 О
имеют асимптотическое направление относительно поверхности вто-
рого порядка 2ху + уг — гх — 2х + 2у — Зг — 2 = 0?
279. Найти линию пересечения поверхности х2 — у2 = 0 с плос-
костью z = 5.
280. Найти линию пересечения поверхности х2 + Зу2 — 4xz —
— 2yz + г — 6 = 0 с плоскостью Оху.
281. Для поверхности х2 — у2 — 2х + z — 3 =0 построить кар-
ту в горизонталях.
282. Методом сечейий изучить поверхность х2 — 2у2 4- г2 — 2x4-
4-6 = 0.
283. Методом сечений изучить поверхность у2 — г2 —2х 4- 5г-\-
+ 3 = 0.
§ 21. СФЕРИЧЕСКАЯ ПОВЕРХНОСТЬ
1. Уравнение сферической поверхности. Сферическая
поверхность или сфера, есть геометрическое место то-
чек, равноудаленных от некоторой точки, называемой центром.
Пусть в прямоугольной декартовой системе координат Oijk точка
С (х0, у0, г0) является центром сферической поверхности радиуса г
(рис. 79). Для того чтобы точка М (х, у, г) принадлежала сферичес-
кой поверхности, необходимо и
достаточно, чтобы МС = г или
согласно теореме [5.3]:
^(х-Хо)2+(у-у0)2+(г-г0)2 =г.
Так как в левой части равен-
ства выбирается арифметическое
значение корня, то предыдущее
Рис. 79
231
равенство эквивалентно следующему:
(х - хй)2 + (у - уй)2 + (г - г0)2 = г2, (1)
или в развернутом виде:
х2 + у2 + г2 — 2х0х — 2у0у — 2z0z + х02 + у02 + z02—г2=0. (2)
В частности, если точка С совпадает с началом координат, то
уравнение сферы имеет вид:
х2 + у2 + z2 = г2. (3)
Мы пришли к следующей теореме.
Теорема [21.1].В прямоугольной декартовой системе коор-
динат сферическая поверхность с центром в точке С (х0, у0, zj радиу-
са г имеет уравнение (1). Если центр сферической поверхности сов-
падает с началом координат, то уравнение этой поверхности имеет
вид (3).
Пример 1. Написать уравнение сферической поверхности:
а) с центром в точке С (1, —2, 3) радиусом г — 5; б) с центром в
начале координат радиусом г = 2.
Решение, а) Пользуясь соотношением (1), получаем урав-
нение искомой сферической поверхности:
(х - I)2 + (у + 2)2 + (г - З)2 = 25,
или в развернутом виде:
х2 + у2 + z2 — 2х + 4у — 6z — 11 = 0.
б) Пользуясь соотношением (3), получаем;
х2 + у2 + z2 = 4.
Важно подчеркнуть, что уравнения (1), (2) и (3) записаны в пря-
моугольной декартовой системе. В аффинной системе координат эти-
ми уравнениями, вообще говоря, определяется не сферическая по-
верхность.
2. Обратная задача. В предыдущем пункте было доказано, что
уравнение любой сферической поверхности имеет вид (2). Посколь-
ку уравнение (2) является алгебраическим уравнением второй сте-
пени, то сферическая поверхность есть поверхность второго поряд-
ка. Отметим некоторые особенности уравнения (2):
а) в уравнении отсутствуют члены с произведениями xy,xz и yz;
б) коэффициенты при х2, у2, г2 равны друг другу.
Таким образом, уравнение любой сферической поверхности име-
ет вид:
, x2 + y2 + z2 +Лх4-Ву+ Cz + D = 0. (4)
Верно ли обратное утверждение, т. е., всегда ли уравнением (4)
определяется сферическая поверхность? Ответ на этот вопрое да-
ет следующая теорема.
232
Теорема [21.2]. Геометрическое место точек простран-.
ства, координаты которых удовлетворяют уравнению (4), есть:
(А В С \
— Т’ — Т’--2/ и
радиусом г — ~А—, если Л2+ В2 + С2 — 4D > 0;
б) точка с координатами (—если Л2 + В2 +
+ С2 — 4D = 0;
в) пустое множество, если А2 + В2 + С2 — 4D < О1.
Доказательство. Данное уравнение (4) можно преоб-
разовать следующим образом:
х2 + 4х + - + у2 + Ву+-+г2 + Сг+- +D — - — - — - = 0,
4 4 4 4 4 4
ИЛИ
Н|Г+(у+^+Н^’°л,+№^~10 <5>
\ ~ J \ ^ / \ ! **
Возможны следующие случаи:
а) Л2 + В2 + С2 — 4D > 0. В этом случае соотношение (5),
которое эквивалентно соотношению (4), может быть переписано
так: *
Iх- (-1)1’+ Гу- (- W+ [г- (-1 ]1‘= ГГлЧ-№ + с--4оТ
I \ / j I \ 2 /1 \ 2 / j | 2 I
Этим уравнением определяется сферическая поверхность с центром
n TOUKA ( А В С\ /Л2 + в2 + С2 — 40
в точке — — I и радиусом г = -------
В самом деле, если, воспользовавшись теоремой [21.1],
записать уравнение сферической поверхности с центром в точке
/ А' в С\
I—- , —— — I и радиусом г, то мы в точности получим при-
веденное выше уравнение.
б) Л2 + В2 + С2 — 4D — 0. Соотношение (5) в этом случае
принимает вид:
Этому уравнений) удовлетворяют координат^ единственной точки
/ А В С \ ™ Л
, , . Таким образом, геометрическое место точек
\2----------------2-2/ г, г
состоит из одной точки. Для общности можно сказать, что в дан-
ном случае уравнением (5) определяется сфера нулевого радиуса.
1 Ср. I, теорема [12.2].
233
в) Д2 + В2 4- С2 — 4D < 0. В этом случае не существует в
пространстве ни одной вещественной точки, координаты которой
удовлетворяют уравнению (5) или (4). Искомое геометрическое мес-
то не имеет ни одной действительной точки. Как видим, в данном
случае поверхность (5) является нулевой. Поскольку в последнем
случае существуют комплексные числа, удовлетворяющие уравне-
нию (5), то поверхность (5) при А2 + В2 4- С2 — 4D <0 называют
также мнимой сферической поверхностью.
Теорема доказана.
Пример 2. Выяснить, какие из приведенных ниже уравне-
ний определяют в прямоугольной декартовой системе координат сфе-
рическую поверхность. В случае когда уравнение определяет сфе-
рическую поверхность, найти ее радиус и координаты центра.
а) х2 + у2 + z2 — 6х + 8у — Юг + 1 = 0;
б) 2х2 + 2у2 + 2г2 —2х + 4у+ 2г + 3 = 0;
в) х2 + V2 + z2 + 2х — 4у — 6г + 5 = 0;
г) х2 + у2 + г2 — 2х + 4у — 2г + 8 = 0.
Решение. Для решения данной задачи воспользуемся ре-
зул ьтатами теор емы [21.2].
а) Для уравнения а) имеем: А2 + В2 4- С2 — 4D = 196 > 0.
Следовательно, данное уравнение определяет в пространстве сфе-
ру, центр которой находится в точке (3, —4, 5) и радиус которой ра-
вен 7..
б) Для уравнения б) имеем: А2 4- В2 4- С2 — 4D = 0. Следо-
вательно, уравнением б) определяется точка С ^4- — К — ~
или сфера нулевого радиуса с центром в точке С.
в) В данном случае А2 4- В2 4- С2 — 4D > 0, поэтому мы име-
ем сферу с центром в точке (—1, 2, 3) радиуса г = 3.
г) В данном случае А2 4~ В2 4- С2 — 4D < 0, значит, поверх-
ность, определяемая уравнением г), нулевая.
3. Сферическая поверхность, проходящая через четыре данные точки.
Уравнение сферической поверхности (4) содержит четыре независимых па-
раметра А, В, С и D, поэтому, вообще говоря, сферическая поверхность од-
нозначно определяется в случае, если заданы какие-либо четыре условия,
накладываемые на коэффициенты А, В, С и D. В частности, сферическая по-
верхность вполне определяется заданием четырех точек, лежащих в этой
поверхности и не лежащих в одной плоскости. В самом деле, поставим сле-
дующую задачу.
Задача 1. Пусть в прямоугольной декартовой системе координат
даны четыре точки своими координатами:
М1(Х1, У1. Zi), Л42 (х2, у2, г2), М3 (х3, у3, г3) и Mt (х4, у4, г4).
Точки Л41( М2, М3, Л44 не лежат в одной плоскости. Написать уравне-
ние сферической поверхности, проходящей через эти точки.
234
Решение. Пусть соотношение (4) является искомым уравнением сфе-
рической поверхности, проходящей через точки М4, М2, М3 и Л44. Так как эти
точки принадлежат поверхности (4), то координаты их удовлетворяют урав-
нению (4):
xi + У1 + z 1 + Axi + By! + Сгх + D = О,
Х1 + У г + + Лх2 + Ву2 4- Сг2 + D = О,
,хз + Уз + гз + ^хз + Ву3 + Cz3 -|- D = О,
*4 + У1 + г4 + Лх4 + Ву4 4- Сг4 + D = 0. .
В этих уравнениях неизвестными являются коэффициенты А, В, С и D.
Таким образом, мы получили четыре линейных уравнения с четырьмя неиз-
вестными А, В, С и D. Из теории линейных уравнений известно, что если
определитель, составленный из коэффициентов при неизвестных, отличен от
нуля, то система линейных уравнений имеет единственное решение. В данном
случае этот определитель имеет вид:
xi У1 Ч 1
хз у3 z2 1
хз Уз г3 1
*4 ' >4 Z4 1
(7)
Так как точки Л44,Л12,Л13,Л44 не лежат в одной плоскости, то этот определитель
не равен нулю. Определив из соотношений (6) неизвестные А, В, С, D и под-
ставив найденные значения в уравнение (4), получим искомое уравнение сфе-
рической поверхности.
Задачу можно решить значительно проще, если поступить несколько ина-
че. Исключим из соотношений (4) и (6) А, В, С, D. Для этого поступим так,
как обычно делают в алгебре: приравняем нулю определитель пятого порядка,
составленный из коэффициентов при А, В, С, D и свободных членов:
х2+У+ z2 X У г 1
*1 +>1 + А Х1 У1 Z1 1
4 + у 2 -г 4 хз Уз 22 1 = 0.
*з+>з+ 4 хз Уз 23 1
,4+л2 + 4 Xi У1 Z4 1
(8)
Легко убедиться в том, что это уравнение действительно является уравнением
сферической поверхности. В самом деле, раскрыв определитель по элементам
первой строки, и разделив его на неравный нулю определитель (7), мы получаем
уравнение вида (4). Полученному уравнению удовлетворяют координаты всех
точек Л^, М3, М3 и Л44. В самом деле, если, например, подставить координаты
точки Мг в соотношение (8), то в определителе образуются две равные строки,
следовательно, получим правильное числовое равенство: 0 = 0.
Итак, уравнение (8) имеет вид уравнения (4) и этому уравнению удовлет-
воряют координаты четырех вещественных точек. Значит, в силу теоремы [21.2],
уравнением (8) определяется вещественная сфера.
Пример 3. Определить уравнение сферической поверхности, проходящей
через четыре точки, заданные в прямоугольной декартовой системе своими
координатами:
Мз(4, —1, 2), Л42(0, —2, 3), Л43(1, —5, —1), М4(2, 0, 1).
235
Решен н е. Запишем уравнение сферической поверхности, проходящей
через данные точки, пользуясь соотношением (8):
х2 +_у2 + г2 42 + (— I)2 + 22 О2 + (— 2)2 + З2 12 + (_5)2+1_1)2 22 + О2 + I2 х у г 4—1 2 0—2 3 1 —5 —1 2 0 1 1 1 1 1 1 = 0.
Раскрыв этот определитель по элементам первой строки, после необходимых
преобразований, получаем:
х2 _|_ га _ 4Х_|_ бу— 2г + 5=0.
4. Сферическая поверхность, проходящая через две диаметрально
противоположные точки.
Задача 2. В прямоугольной декартовой системе координат
даны две различные точки своими координатами: Mi(xir у,, zt) и
М2 (х2, у2, 2г). Написать уравнение сферической поверхности, для
которой отрезок MtM2 является одним из диаметров.
Решение. Из геометрических свойств сферической поверх-
ности известно, что точка М принадлежит этой поверхности тогда
и только тогда, когда /Л11Л4Л42 = 90° или более точно, когда
векторы MiM и М2М перпендикулярны. Используя это свойство,
легко записать искомое уравнение сферической поверхности. В
самом деле, пусть М (х, у, г) — произвольная точка пространства.
Для того чтобы эта точка принадлежала рассматриваемой сфери-
ческой поверхности, необходимо и достаточно, чтобы MtM М2М —
= 0. Векторы MtM и М2М имеют следующие координаты:
MtM{x—xit у—уь г—Zi}, МгМ {х—х2, у — у2, г— г2), поэтому
предыдущее соотношение в координатах запишется следующим об-
разом:
(х — xt) (х — х2) + (у — yi) (у — уг) + (2 — zt) (г — z£ = 0. (9)
Мы получили уравнение сферической поверхности, для которой
отрезок MiM2 является одним из диаметров.
Пример 4. Написать уравнение сферической поверхности,
для которой отрезок ОК является одним из диаметров, где О —
начало координат, а точка К имеет координаты (2, 4, 3).
Решение. Воспользовавшись формулой (9), получаем:
х (х — 2) + у (у — 4) + z (г — 3) = 0
или
х2 + у2 + г2 — 2х — 4у — Зг = 0.
5. Касательная плоскость к сферической поверхности в данной
точке. Из курса элементарной геометрии известно, что плос-
кость, проходящая через точку М сферы и перпендикулярная к
236
радиусу СМ, является каса-
тельной плоскостью к сфере в
точке М. Рассмотрим сле-
дующую задачу.
Задача 3. Пусть в не-
которой прямоугольной де-
картовой системе координат
задана сферическая поверх-
ность уравнением (4). Напи-
сать уравнение касательной
плоскости к этой поверхно-
сти в точке Mt (х1; yit z^,
лежащей на данной поверх-
ности.
Решение. Из теоремы
[21.2] следует, что центр С этой
поверхности имеет* координаты
зом, вектор CMi
имеет координаты
Задача сводится к тому, чтобы написать уравнение плоскости, про-
ходящей через точку Mt (xt, уъ zt) и перпендикулярной к вектору
CMi (рис. 80). Согласно § 12, п. 2 имеем:
(х — Xi) + (у — У1) (yi + + (г — Zi) (zt + £-) = о.
Учитывая, что точка Mi (xlt уь zt) лежит на сфере, после элемен-
тарных преобразований получаем уравнение касательной плоскос-
ти в окончательном виде:
XiX + У1У + ZiZ + (х + Xi) + I (у + У1) + у (z + Zi) + 0=0. (10)
Пример 5. Дана сферическая поверхность: х2 + у2 4- z2—
— х + Зу + 2z — 3 = 0. Написать уравнение касательной плос-
кости в точке (1,1, —1). Система координат прямоугольная декар-
това.
Решение. Подставив координаты точки и значения коэф-
фициентов уравнения поверхности в предыдущее уравнение, полу-
чаем: х + 5у — 6 = 0.
Предыдущее уравнение (10) значительно упрощается, если сфе-
рическая поверхность имеет центр в начале координат. В самом де-
ле, в этом случае уравнение сферической поверхности имеет вид
(3), поэтому уравнение касательной плоскости в точке (хъ уь Zi)
принимает следующий вцд: xxt + yyt + zzt — г2 = 0.
237
Замечани е. При решении разнообразных задач полезно
пользоваться также следующими соображениями: если С — центр
сферы, а г — ее радиус, то всякая касательная плоскость к этой
поверхности отстоит от точки С на расстоянии г (см. рис. 80).
Рассмотрим следующий пример.
Пример 6. В прямоугольной декартовой системе координат
даны сферическая поверхность уравнением х2 + у2 + г2 — 9 = 0 и
прямая / общими уравнениями ^аписать уравне-
ние касательной плоскости к данной сферической поверхности,
проходящей через прямую /.
Решение. Запишем уравнение пучка плоскостей, определя-
емого прямой I:
К (х + у — 6) + р (х — 2г — 3 ) = 0.
Определим X и р так, чтобы эта плоскость отстояла от центра дан-
ной сферической поверхности, т. е. от начала координат, на расстоя-
нии г = 3:
16Х + 3р | = 3
/(Х+р)2+%2+4р2
Приводя к общему знаменателю и освободившись от радикала, бу-
дем иметь:
2р2 — Хр — X2 = 0.
Из этого соотношения видно, что если % = 0, то и р = 0. Так как
X и р одновременно не равны нулю, то Х=#0, поэтому, разделив на
X2, получаем квадратное уравнение 2 —( —) — 1=0, имею-
щее корни 1 и----Откуда Х4 = 1, pt = 1 и Х2 = — 2, р2 = 1.
Таким образом, мы получаем уравнения двух плоскостей, про-
ходящих через данную прямую и касающихся сферической по-
верхности:
2х + у — 2г — 9 = 0,
х -р 2 у -р 2г — 9 = 0.
6. Задачи на геометрические места, приводящие к сферической
поверхности. В заключение рассмотрим несколько задач на опре-
деление геометрических мест точек в пространстве.
Задача 4. Найти геометрическое место точек пространства,
отношение расстояний которых от двух данных точек постоянно1.
Решение. Пусть А и В — данные точки. Возьмем прямо-
угольную декартову систему координат так, чтобы начало коор-
1 См. I, задачу 2, § 12.
238
динат было в точке В, а положительное направление оси абсцисс
совпало с направлением луча ВА. Если АВ = а, то Л (а, 0, 0),
а В (0, 0, 0). Если М (х, у, z) — произвольная точка геометричес-
кого места, то = X, где AM и ВМ — расстояния от
точки М до данных точек А и В, а X — данное постоянное поло-
жительное число. Так как
AM = /’(х—a)2 + y2+z2, ВМ =У х2 + у2 + гя,
то
]А(х — а)2 + уг +z2 = X]/ x2 + y2 + z2.
Это соотношение является уравнением искомого геометрического
места точек. Возведем обе части этого соотношения в квадрат:
' (х — а)2 + у2 + г2 = X2 (х2 + у2 + z2);
при этом полученное уравнение будет эквивалентно прежнему.
Преобразуя последнее соотношение, получаем:
х2 (1 — X2) + у2 (1 — V) + г2 (1 — X2) — 2ах + а2 = 0. (11)
Возможны два случая:
а) X = 1. Уравнение (11) принимает вид: —2ах + а2 — 0
или 2х — а = 0. Как мы видим, в данном случае искомое геомет-
рическое место точек представляет собой плоскость, перпендикуляр-
ную к прямой АВ и проходящую через середину отрезка АВ.
Мы пришли к известной из курса элементарной геометрии тео-
реме о том, что геометрическое место точек пространства, равно-
удаленных от двух данных точек, есть плоскость, пер педикулярная
к отрезку, соединяющему эти точки, и проходящая через его сере-
дину.
б) X 1. Разделив соотношение (11) на 1 — %2, получаем:
х2 + у2 + г2---— х+-^-=0.
7 1—X2 1— X2
Так как для данного уравнения
A2 + B2 + C2 — 4D = ——---------= 4Х2д2 > 0,
(1 — X2)2 1 — X2 (1 — X2)2
то согласно теореме [21.2] искомое геометрическое место представ-
ляет собой сферическую поверхность с центр ом в точке , 0, 0^.
Легко видеть, что эта точка лежит на прямой АВ. Задача решена.
Задача 5. Дан куб, сторона которого равна 2а. Найти гео-
метрическое место точек пространства, сумма квадратов расстояний
которых от шести граней данного куба есть величина постоянная.
239
Рис. 81
Решение. Возь-
мем прямоугольную
декартову систему ко-
ординат в простран-
стве так, чтобы нача-
ло координат совпало
с центром куба, а ко-
ординатные плоскости
были параллельны со-
ответствующим гра-
ням (рис. 81). При
Выбранной системе
координат грани куба
будут иметь следую-
щие уравнения: х = а, х = — а, у = а, у — — a, z = a, z =
=—а. ПустьМ (X, Y,Z) — произвольная точка геометрического
места. Запишем, что сумма квадратов расстояний от этой точки до
всех шести граней есть величина постоянная и равная k2:
(X - а)2 + (X + а)2 + (У —а)2 +'(У + а)2 + (Z - а)2 +
+ (Z + а)2 = k2,
или
2(Х2 + У2 4- Z2 + За2) = k2.
Отсюда получаем окончательное выражение для уравнения
геометрического места точек:
X2 4-У2 + Z2 = — —За2.
2
Геометрическое место точек, определяемое этим уравнением,
нами было исследовано выше. В соответствии с теоремой [21.2]
рассмотрим три случая:
il2
а)----За2 > 0. В этом случае уравнение геометрического мес-
та можно записать в следующем виде:
X2 + у2 Z2 = (|/~ fe2-6a2y.
Отсюда следует, что искомое геометрическое место точёк есть сфе-
ра с центром в начале координат радиуса
г=]/ТЕМ.
б) у — За2 = 0 или k2 = 6а2. В этом случае рассматриваемое
геометрическое место точек согласно теореме [21.2] представляет
собой единственную точку — начало координат, т. е. центр куба.
240
в) у — За2 < 0. В пространстве нет ни одной точки, удовлет-
воряющей условиям задачи.
* Задачи и упражнения
284. Составить уравнение сферической поверхности радиуса 5,
центр которой находится в точке:
a) Ot (—1, 0, 5); б) О2 (—5,,0, 0); в) О3 (3, 0,-4); г) О4(0, 0, 0).
285. Определить центры и радиусы следующих сфер:
а) х2 + у2 + г2 — 6х + 8у — Юг + 1 = 0;
б) х2 + у2 + г2 + 2х — 4у — 6г + 5 = 0;
в) 2х2 + 2у2 + 2г2 — 2х + 4у + 2г + 3 = 0.
286. Определить, какие поверхности заданы следующими урав-
нениями:
а) х2 + у2 + z2 — 4х + бу — Юг + 34 = 0;
б) х2 + у2 + г2 - 6х + 2г + 7 = 0;
в) 4х2 + 4у2 + 4г2 — 8х + 4у — 32г + 60 = 0;
г) 9х2 + 9у2 + 9г2 + 6х — 54у + 73 = 0;
д) х2 + у2 + г2 — 2х + бу — 2г + 18 = 0.
287. Написать уравнение сферической поверхности, проходя-
щей через две диаметрально противоположные точки:
а) А (2, —3, 4), В (—5, 6, —7);
б) Л (1, —3, 5), В (4, 1, 0);
в) Л (3, 1, 0), В (2, 2, —1).
288. Написать уравнение сферы, проходящей через точки:
а) (0, 0, 0), (0, —1, 0), (2, 1, 3), (—2, 1, 1>;
б) (0, 0, 0), (—а, Ь, с), (а, —Ь, с), (а, Ь, —с).
289. Написать уравнение касательной плоскости к сфере (х—2)2 +
+ у2 + г2 = 4 в точках:
а) (0, 0, 0); б) (3, ^2, 1); в) (4, 0, 0); г) (0, ]А2, /2).
290. Написать уравнение сферы, центр которой лежит на пря-
мой 5у + 2г = 0, 2х — Зу = 0 и которая проходит через две'точ-
ки (0, —2, —4) и (2, —1, —1).
291. Найти уравнение сферы, центр которой лежит на плоскости
2х + Зу + 4г — 6 = 0 и которая проходит через точки (3, 0, 2),
(-1, 1, 1), (2, -5, 4).
292. Найти уравнение плоскостей, касающихся сферы х2 + у2 +.
+ г2 — 4х + 2у — 6г + 5 = 0 и параллельных плоскости 2х +
+ 2у — г = 0.
9 Л. С. Атанасян
241
293. Написать уравнения плоскостей, проходящих через прямую
х + у— 6 = 0, х — 2z— 3 — 0 и касающихся сферы х2 + у8 +
г2 — 9 = 0.
,294.'Написать уравнения плоскостей, кЗЬающихся сферы х2 +
+ у2 + г2 + 6х — 2г + 1 =0 и проходящих через прямую
х — 16__ г _ у 4- 15
2 2 ~ 3' ' i
295. Найти уравнение сферы с центром в начале координат, ко-
торая касается прямой * + .== = ‘
296. Найти геометрическое место точек пространства, сумма.квад-
ратов расстояний которых от двух данных точек А и В есть величи-
на постоянная.
297. Найти геометрическое*место точек пространства, из кото-
рых данный отрезок виден под прямым углом.
298. Дана сфера с центром в точке О, радиуса г и на ней точ-
ка А. Найти геометрическое место точек, делящих всевозможные
хорды, проведенные через А в одном и том же отношении X.
299. Найти геометрическое место середин всех хорд сферы, имею-
щих данную длину.
300. Дана связка прямых с центром в точке А и точка В. Найти
геометрическое место проекций точки В на прямые связки.
§ 22. ЦИЛИНДРИЧЕСКИЕ ПОВЕРХНОСТИ
1. Уравнение цилиндрической поверхности. Поверхность, обла-
дающая тем свойством, что вместе с каждой точкой М она содержит
всю прямую, проходящую через М. и параллельную данному фикси-
рованному вектору р, называется ц и ли н'д рической по-
верхностью или цилиндром.
Прямые, параллельные вектору р и принадлежащие цилинд-
рической поверхности, называются образующими этой
поверхности. Таким обра-
Рис. 82
зом, цилиндрическая по-
верхность образована пря-
мыми линиями, парал-
лельными данному векто-
ру р и удовлетворяющими
еще одному условию, нап-
ример проходящими через
все точки кривой L. В этом
случае кривая L называет-
ся направляющей
цилиндрической поверх-
ности (рис. 82).
242
Рассмотрим следующую задачу.
Задача 1. Пусть Ое^гвз— аффинная система координат
в пространстве. Даны кривая L, расположенная в плоскости Ое^
и имеющая в этой плоскости уравнение
F(x, у) = 0, (1),
и вектор р{а, 0, у}, не параллельный плоскости Ое^з. Написать
уравнение цилиндрической поверхности, для которой образующие
параллельны вектору р, а кривая L является направляющей.
Решение. П сть S — рассматриваемая цилиндрическая по-
верхность, а М (х, у, г) —. произвольная точка этой поверхнссти
(рис. 83). Обозначим через У точку пересечения образующей /,
проходящей через точку М, с плоскостью Оху. Очевидно, точка N
лежит на кривой L. По определению цилиндрической поверхности
векторы MN и р коллинеарны. Если (х1; ур 0) — координаты точ-
ки N в пространстве, то согласно теореме [2.1], вектор MN имеет
координаты (xi —х, у4— у, 0 — г). Условие коллинеарности век-
торов MN и р запишется следующим образом:
Xi — х= fxx, yi — у = Х0, ,.0 — z — Ау.
Вектор р це параллелен плоскости Ое^г, поэтому у 4= 0; из пос-
леднего соотношения получаем: X = — Из первых двух соот-
V
ношений следует, что
а В
xt = х — z —, yi = у — г —.
Y Y
Ч*
243
Точка JV принадлежит кривой L, поэтому F (xit у4) = 0. Подста-
вив сюда полученные выше значения xlt у1г будем иметь:
р(х— г —, у — z— 'l = 0. (2)
\ Y у/
Таким образом, координаты точки М цилиндрической поверх-
ности удовлетворяют уравнению (2). Теперь покажем, что если точ-
ка Р (х*, у*, г*) не лежит на поверхности S, то ее координаты не
удовлетворяют уравнению (2). Проведем через точку Р прямую /*,
параллельную вектору р, и обозначим через Q (х2, у2, 0) точку пе-
ресечения прямой I* с плоскостью (рис. 83). Очевидно, точ-
ка Q не лежит на кривой L, и поэтому ее координаты (х2, у2, 0)
не удовлетворяют уравнению кривой L:
F (х2> Уг) 0. ' (3)
С другой стороны, из условия коллинеарности векторов р
и PQ аналогично предыдущему получаем:
х2 = х* — г* —, у2 = у* —г* —.
Y у
Подставляя эти значения в соотношение (3), будем иметь:
р(х* — г*—, у* —
' \ Y Y/
т. е. координаты точки Р не удовлетворяют уравнению (2). Таким
образом, доказана следующая теорема.
Теорема [22.1 ]. Если ваффинной системе координат Ое ie2e3
направляющая L цилиндрической поверхности лежит в плоскости
Ое te2 и в этой плоскости имеет уравнение (1), а образующие парал-
лельны вектору р {а, 0, у}, причем у #= 0, то поверхность S опреде-
ляется уравнением (2).
Пример 1. Пусть в плоскости Оху прямоугольной декарто-
вой системы Охуг дана кривая L уравнением х2 + у2 = г2. Напи-
сать уравнение цилиндрической поверхности S, для которой кривая
L является направляющей, а образующие параллельны вектору
Р {1, 0, 1}.
Решение. Направляющая L рассматриваемой цилиндри-
ческой поверхности S есть окружность, определяемая в плоскости
Оху уравнением х2 + у2 — г2 = 0. Для решения задачи восполь-
зуемся уравнением (2). Соотношение (1) в данном случае имеет
вид: х2 + у2 — г2 = 0. Так как а = 1, 0 — 0 и у = 1,то соотно-
шение (2) принимает следующий вид:
(х — г)2 + у2 — г» = 0.
Поверхность S изображена на рисунке 84.
244
2. Цилиндрическая поверхность,
образующие которой параллельны
оси Oz. Рассмотрим частный слу-
чай, когда” образующие цилиндри-’
ческой поверхности параллельны
оси Ог, т. е. когда вектор р име-
ет координаты {0, 0, у}, где у 0.
Подставив значения координат
вектора р в соотношение (2), полу-
чим уравнение этой поверхности:
F (х, у) = 0.
Мы пришли к весьма интересно-.
му выводу: уравнение цилиндри-
ческой поверхности, образующие - Рис- 84
которой параллельны оси Ог,
по внешнему виду совпадает с уравнением направляющей L в плос-
кости Оху. Этот вывод на первый взгляд кажется противоречивым,
однако по существу здесь никакого противоречия нет. В самом де-
ле, уравнение (1), как уравнение геометрического места точек плос-
кости, определяет кривую L, в то время как то же самое уравнение
(1), как уравнение геометрического места точек всего трехмерного
пространства, определяет цилиндрическую поверхность S.
Имеет место обратное предложение: геометрическое место точек
пространства, координаты которых в некоторой аффинной системе
координат удовлетворяют уравнению (1), есть цилиндрическая
поверхность, образующие которой параллельны оси Ог. В самом
деле, если L—кривая плоскости Оху, определяемая уравнением (1),
то цилиндрическая поверхность, для которой L является направляю-
щей, а образующие параллельны оси Ог, как раз определяется
уравнением (1), поэтому она совпадает с рассматриваемым геомет-
рическим местом точек.
Полученный вывод может быть сформулирован в виде следующей
теоремы.
Теорема [22.2]. Если в аффинной системе координат
Oe^e-j направляющая L цилиндрической поверхности S лежит
в плоскости Ое^ъ и в этой плоскости имеет уравнение (1), а обра-
зующие этой поверхности параллельны вектору е3, то цилиндри-
ческая поверхность S определяется в пространстве тем же уравне-
нием (1).
Обратно, геометрическое место точек пространства, координаты
кФпорых в некоторой аффинной системе Ое^е^ез удовлетворяют
уравнению (1), есть цилиндрическая поверхность, образующие ко-
торой параллельны вектору е3.
П р и м е р 2. Напирать уравнение цилиндрической поверхности,
направляющая которой является окружностью, лежащей в плос-
кости Оху и имеющей в ней уравнение х2 + у2 = г2, а образующие
параллельны оси Ог. Система координат прямоугольная декартова.
245
имеет вид:
Решение. Пользуясь теоремой
[22.2], мы приходим к выводу, что соотно-
шение х2 + у2 — г2 = 0 есть искомое урав-
нение рассматриваемой цилиндрической
поверхности 5. Эта поверхность, очевид-
но, может быть образована вращением вок-
руг оси Ог прямой /, параллельной ей и
отстоящей от нее на расстоянии г (рис. 85).
3. Цилиндрические поверхности вто-
рого порядка. Пользуясь теоремой [22.1],
можно доказать следующую теорему.
Теорема [22.3]. Если направляющая
цилиндрической поверхности является кри-
вой второго порядка, то соответствующая
цилиндрическая поверхность есть поверх-
ность второго порядка.
Доказательство. Пусть S —
цилиндрическая поверхность, направляющая L которой явля-
ется кривой второго порядка. Выберем в пространстве аффин-
ную систему координат так, чтобы кривая L лежала в плоскости
Оху, а ось Ог была параллельна образующим поверхности S. Если
L — кривая второго порядка, то ее уравнение в плоскости Оху
ацх2 + 2а12ху + а22у2 + 2ai3x + 2а23у + а33 = 0.
Согласно теореме [22.2] это же уравнение определяет поверхность
S. Мы видим, что S является поверхностью второго порядка.
Теперь рассмотрим критерий для определения цилиндрических
поверхностей второго порядка.
Теорема [22.4]. Для того чтобы поверхность второго по-
рядка, определяемая ц аффинной системе координат уравнением
'^aijxix/ + 2^tauxl + a4i = 0, (4)
была цилиндрической поверхностью с образующими, параллельными
вектору р {pi, р2, р3}, необходимо и достаточно, чтобы выполнялись
условия'.
atiPt + al2p2 + ai3p3 = 0,
®2tPl "T ^22^2 "T @2зРз ~
a3iPi + а32р2 + а33р3 = 0, (5)
a^Pt 4* а^Рз ^43Р3 = 0*
Доказательство. Пусть S — данная цилиндрическая
поверхность второго порядка, образующие которой параллельны
вектору p{pt, Рз, Рз}- Покажем, что координаты вектора р удов-
летворяют условиям (5).
246
Пусть (уь у2, уз)— произвольная точка пространства, а I —
прямая, проходящая через эту точку и параллельная вектору р.
Тогда прямая I является либо прямолинейной образующей поверх-
ности S, либо не имеете ней ни одной общей точки. Согласно теореме
[20.2] Q == 0, т. е.
У1 (fluPi +' а12р2 + ai3p3) + У2 (а21р1 + а22р2 + ЯгзРз) +
+ Уз(а31Р1 + О32Р2 + О-ЗЗрз) + (а41Р1 + П42Р2 + й4зРз) = О-
Так как это соотношение имеет место для любой точки (у1( у2, у3)
пространства, то справедливы соотношения (5).
Обратно, пусть для поверхности второго порядка S, заданной
уравнением (4), существует вектор р, координаты которого удов-
летворяют соотношениям (5) . Возьмем произвольную точку (у j, у2, у3)
этой поверхности!! покажем, что прямая I, проходящая через эту
точку и параллельная вектору р, является прямолинейной образу-
ющей. В самом деле, прямая I определяется параметрическими
соотношениями:
Xi = Pit + у 1, х2 = p2t + у2, х3 = p3t + у3.
Из соотношений (5) следует, что для этой прямой Р = Q = 0 (см.
формулы (7) и (8) из § 20). Так как точка (уь у2, у3) принадлежит
поверхности S, то и Р — 0. Мы пришли к выводу, что I — прямо-
линейная образующая поверхности.
Пример 3. Доказать, что поверхность, заданная в аффин-
ной системе координат уравнением
4xt2 + 2х22 + Зх32 + 4xtx3 — 4х2х3 + 8xj — 4х2 + 8х3 = 0,
является цилиндрической. Найти направление образующих.
Решение. .Составим систему (5) для данной поверхности и
покажем, что существует ненулевой вектор, удовлетворяющий
этой системе уравнений:
4pj + 0- р2 + 2р3 = 0,
O-pt + 2р2 — 2р3 = 0,
2pt — 2р2 + Зр3 = 0,
4pi — 2рг + 4р3 = 0.
Возьмем первые два из этих уравнений и определим pit р2 и р3, удов-
летворяющие им:
2pi + Рз = О, р2 — Рз = 0.
Отсюда следует, что р3 =# 0. Если положить р3 = 2,. то р2 = 2 и
pi = —1. Мы получили вектор р {—1, 2, 2}, координаты которого
удовлетворяют первым двум уравнениям. Но координаты того же
вектора удовлетворяют и остальным двум уравнениям, в чем легко
убедиться непосредственной подстановкой. Итак, данная поверх-
ность является цилиндрической, образующие которой параллель-
ны вектору р {—1, 2, 2).
247
- Теорема [22.4] позволяет установить критерий для опре-
деления цилиндрических поверхностей второго порядка. В самом
деле, рассмотрим матрицу:
/й11 й12 «1з\
I а21 fl22 fl23 I (6)
г a3i а32 а33 |
\а41 а42 °4з/
и обозначим через 7? ранг этой матрицы. Возможны следующие слу-
чаи:
a) R = 3. В этом случае система (5) имеет только нулевое реше-
ние, поэтому поверхность S не является цилиндрической.
б) R — 2. Имеется одно направление, удовлетворяющее систе-
ме (5). Поверхность является цилиндрической с определенным нап-
равлением образующих.
в) R = 1. Имеется бесчислейное множество направлений, удов-
летворяющих системе (5). Все они параллельны некоторой плоскос-
ти. В этом случае можно доказать, что поверхность распадается,
на пару плоскостей, т.-е. мы имеем цилиндрическую поверхность,
направляющей которой является пара прямых.
Ранг матрицы (6) не может быть равен нулю, так как по опреде-
лению поверхности .второго порядка хотя бы один из коэффициен-
тов* а,у при 1,7 < 3 не равен нулю.
Мы пришли к следующей теореме.
Теорема [22.5]. Пусть поверхность второго порядка за-
дана в аффинной системе уравнением (4) и R — ранг матрицы (6),
Для того чтобы поверхность была цилиндрической, необходимо
и достаточно, чтобы 7? < 2. При этом если R = 2, то цилиндри-
ческая поверхность имеет образующие определенного направления,
а при R = 1 она распадается на пару плоскостей.
4. Принцип классификации цилиндрических поверхностей второ-
го порядка. Имеет место следующая важная теорема, пользуясь
которой можно классифицировать цилиндрические поверхности вто-
рого порядка. *
Теорема [22.6]. Любое сечение цилиндрической поверхнос-
ти второго порядка плоскостью, не параллельной образующим, яв-
ляется кривой второго порядка, причем для одной и той же поверх-
ности все эти сечения принадлежат одному и тому же аффинному
классу кривых второго порядка.
Доказательство. Пусть S — данная цилиндрическая
поверхность второго порядка, образующие .которой параллельны
вектору р. Возьмем’произвольную плоскость, не параллельную
вектору р, и докажем, что она пересекает поверхность^ по кривой
второго порядка. Для этой цели выберем новую аффинную систе-
му кoopдинaт'0'e^'^2,^з, так, чтобы точка О'лежала в плоскости л,
векторы е/, е2 были параллельны этой плоскости, а вектор е3 был
248
равен вектору р. Обозначим через L линию пересечения поверхности
3 с плоскостью л и выведем уравнение этой линии в системе O'ei'e2.
Сначала запишем уравнение поверхностиЗ в системе О'е(е2е2 . Так
как 3 — поверхность второго порядка, то в этой системе она опре-
деляется уравнением второй степени. Однако образующие нашей
поверхности параллельны вектору е2 , поэтому согласно теореме
[22.2] в уравнении поверхности отсутствует переменная г'. Таким
образом, поверхность 3 в новой системе О'е^' е2е2 имеет уравнение ;
Ян'х'2 + 2а12х'у' + Ягг'у'2 + 2а13'х' + 2а23'у' + «зз' = 0.
Согласно определению поверхности второго порядка хотя бы один
из коэффициентов аи', а12', а22 не равен нулю. По теореме [22.2]
этим же уравнением в системе О'е/е/ определяется кривая L. Таким
образом, L есть кривая второго порядка.
Теперь покажем, что для цилиндрической поверхности S все
сечения, не параллельные вектору р, принадлежат одному и тому
же аффинному классу кривых второго порядка.
В самом деле, пусть и л2 — две произвольные плоскости, не
параллельные образующим и пересекающие поверхность 3 по кри-
вым второго порядка и L2. Заметим, что по определению цилин-
дрической поверхности кривая L2 является проекцией кривой Li
на плоскость л2 по направлению вектора р. Возьмем в плоскости л4
произвольную систему координат и спроектируем эту систе-
му на плоскость л2 по направлению вектора р. Пусть О'е/е2'— про-
екция этой системы на плоскость л2. Если произвольнаятдчка М плос-
кости Л( в системе Oete2 имеет координаты х, у, то ее проекция М'
на плоскость л2 по направлению р в системе О'е^'е^ имеет те же коор-
динаты х, у (см. задачу 274, § 19). Отсюда немедленно следует, что
кривая L в системе Ое^е2 имеет то же уравнение, что и кривая L2
в системе О'е^е^. Но это означает, что Lt и L2 принадлежат одному и
тому же аффинному классу кривых. Теорема доказана полностью.
Доказанная теорема позволяет классифицировать цилиндри-
ческие поверхности по виду сечений, не параллельных образующим.
Так как все сечения, не параллельные образующим, принадлежат
одному и тому же аффинному классу, тег цилиндрические поверх-
ности классифицируют в соответствии с принадлежностью этих се-
чений тому или иному классу кривых. Например, если все сечения
являются эллипсами, то поверхность называется эллипти-
ческой цилиндрической поверхностью.
Уравнение этой поверхности при надлежащем выборе прямоуголь-
ной декартовой системы координат может быть записано следую-
щим образом:
В самом деле, пусть л — плоскость, перпендикулярная к обра-
зующим. Она пересекает данную эллиптическую цилиндрическую
поверхность по эллипсу. В плоскости л возьмем прямоугольную
249
Рис. 86
декартову систему координат OIJ так, чтобы этот эллипс имел ка-
ноническое уравнение
Если k — единичный вектор, перпендикулярный'к плоскости п,
то согласно теореме [22.2 ] рассматриваемая цилиндрическая поверх-
ность в выбранной системе координат имеет то же уравнение
у 2 <12
- + у-= 1.
а2 62
Если все сечения, не параллельные образующим, являются ги-
перболами, то такая поверхность называется гиперболичес-
кой цилиндрической поверхн ос- т ь ю. По ана-
логии с предыдущим убеждаемся в том, что уравнение гиперболичес-
кого цилиндра в специально выбранной системе координат имеет
вид:
Х1 — t = 1
а2
Аналогично определяется параболическая цилин-
дрическая поверхность, простейшее уравнение кото-
рой имеет вид:
у2 = 2рх.
На рисунке 86 изображены эти поверхности. Полная классифика-
ция цилиндрических поверхностей второго порядка будет дана в
следующей главе.
250
Задачи и упражнения
301. Составить уравнение цилиндрической поверхности в каж-
дом из следующих случаев:
а) Направляющая лежит в плоскости Оху и является окруж-
ностью с центром в начале координат и с радиусом, равным 3, а
образующие параллельны вектору {—4, 2, 1}.
б) Направляющая лежите плоскости Oyz и имеет в этой плоскос-
ти уравнение 2у2 — г2 + уг — 5 = 0, а образующие параллельны
оси Ох.
в)' Направляющая лежит в плоскости Оху и имеет в этой плос-
у2
кости уравнение-----— = 1, а образующие параллельны вектору
{1, 2, 1}. 5 4
302. Нижеследующие поверхности заданы своими уравнения-
ми в аффинной системе координат. Указать среди них цилиндри-
ческие поверхности и для каждой цилиндрической поверхности
найти координаты направляющего вектора прямолинейных обра-
зующих:
а) х2 + у2 + 2z2 + 2ху + 4z = 0;
б) X2 + 2ху + у2 — z — 1 = 0;
в) 4х2 + бу2 + 4z2 + 4хг _ 8у — 4г 4- 3 = 0;
г) х2 + 5у2 + г2 + 2ху + бхг + 2уг — 2х 4~ бу — Юг = 0;’
д) х2 + у2 + 4г2 + 2ху + 4хг + 4уг — 6z + 1 = 0;
е) 4ху + 2х + 4у — 6г — 3 = 0;
ж) 4х2 — у2 — 4х — 4у + 15 = 0.
303. Доказать, что нижеследующие поверхности являются ци-
линдрическими. Пользуясь теоремой [22.6], определить тип каж-
дой из этих поверхностей. Система координат аффинная.
а) х2 + 2у2 + г2 + 2хг + 4у = 0;
б) х2 + 2у2 + бг2 — 4хг 4~ 4уг + 4х — 4у — 12г = 0;
в) 4х2 + 16z2 4- 16хг 4- 4х 4- 14г4- 2у — 1 = 0;
г) 4х2 — у2 — 8хг — 4уг — 8х — бу — 4г — 4 = 0.
304. Написать уравнение цилиндрической поверхности, образу-
ющие которой параллельны вектору р {а, 0,у} и являются касатель-
ными к сфере х2 4~ у2 4" г2 = а2. Система координат прямоуголь-
ная декартова.
§ 23. КОНИЧЕСКИЕ ПОВЕРХНОСТИ. ПОВЕРХНОСТИ ВРАЩЕНИЯ
1. Уравнение конической поверхности. Поверхность, на которой
имеется точка Л40, обладающая тем свойством, что вместе с каж-
дой точкой М, отличной от Л40, поверхность содержит всю прямую
251
МйМ, называется конической
поверхностью или кон усом1.
Точка Мв называется верши-
н о й, а прямые, проходящие че-
рез эту точку и принадлежащие
поверхности, — обр азующи -
м и. Таким образом, коническая
поверхность образована прямыми
линиями, проходящими через фик-
сированную точку Мо и удовлет-
воряющими еще одному условию,
например каждая из этих пря-
мых имеет одну и только одну общую точку с данной кри-
вой L. В этом случае L называется направляющей кони-
ческой поверхности (рис. 87). Очевидно, для данной
поверхности S, вообще говоря, существует бесчисленное множест-
во направляющих.
Рассмотрим следующую
задачу.
Задача 1. Пусть
Ое^е2е3 —аффинная систе-
ма координат в простран-
стве. Даны кривая L, рас-
положенная в плоскости
Ое^2 и имеющая в этой
плоскости уравнение
, F (х, у) = 0, (1)
и точка Л40 (х0, у0,г0), )1е
лежащая в этой плоскости.
Написать уравнение кони-
ческой поверхности с вер-
шиной в точке Мо, для
которой L является нап-
равляющей кривой.
Решение. Пусть S — рассматриваемая коническая поверх-
ность, а М (х, у, г) — произвольная точка этой поверхности
(рис. 88). Обозначим через TV точку пересечения образующей /, прохо-
дящей через точку М, с плоскостью Оху. Очевидно, точка N (хь у ь 0)
лежит на кривой L. По определению конической поверхности точ-
ки Мо, М п N лежат на одной прямой, поэтому из теоремы [2.3]
следует, что имеют место следующие соотношения:
Xi = х0 + (х — х0) X, yt - уо + (у — у0) X, 0 = ze + (г — z0) X.
Мы, вообще говоря, не предполагаем, что точка Л40 единственная.
252
Из последнего соотношения получаем: X = ——. Подставив
20—Z
значение X в предыдущие два соотношения, получаем: »
v _ v j_ х~х<> z и - м 4- У~У° г
— хе п ин У1 — Уо । *<>•
?о z ♦ г0 з
Точка W принадлежит кривой L, поэтому координаты этой точки
удовлетворяют уравнению (1). Подставив в уравнение (1) значения
для xt и уь получаем:
F (х0 + х-^ г0, у0 + г\ = 0. (2)
\ 20 — Z ZQ — Z /
Итак,* координаты х, у, г любой точки М конической поверх-
ности, отличной от вершины, удовлетворяют уравнению (2)1. Пред-
лагаем читателю самостоятельно убедиться в том, что если точка Р
не лежит на конической поверхности, то ее координаты не удов-
летворяют уравнению (2). Доказательство проводится аналогично
доказательству соответствующего предложения при решении за-
дачи 1 предыдущего параграфа (см. стр. 243). Таким образом, нами
доказана следующая теорема.
Т е о р е м а [23.1 ]. Если в аффинной системе координат Ое^г^з
направляющая L конической поверхностиЗ лежит в плоскости Оху
и имеет в системе уравнение (1), а точка Мо (х0, у0, г0) яв-
ляется вершиной, то коническая поверхность S определяется урав-
нением (2).
Пример 1. Написать уравнение конической поверхности с
вершиной в точке Мо (0, 0, 5) и направляющей L, заданной в плос-
кости Оху уравнением х® + у® — 25 = 0.
Решение. В данном случае уравнение (2) принимает вид:
(хв + х-=^ г0У + (уо + г0У- 25 = 0.
\ г0 — г / ( ' г0 — г )
Подставив сюда значения координат точки Мо, получим:
1 Уравнению (2), очевидно, не удовлетворяют координаты вершины
г _
конуса, так как л =------- при г = г0 не существует. Поэтому, строго
г0 — г
говоря, уравнением (2) определяется вся коническая поверхность, за исклю-
чением вершины. Однако в ряде случаев уравнение (2) можно преобразовать
таким образом, чтобы новое уравнение определяло всю коническую поверх-
ность. Как мы увидим ниже, это всегда можно сделать в случае, если кони-
ческая поверхность является алгебраической.
«
253
Этому уравнению удовлетворяют координаты всех точек
конической поверхности, за исключением точки Мо. Однако, пре-
образуя .полученное уравнение, мы придем к уравнению х2 + у2—
— (5 — z)2 = 0, которому будут удовлетворять координаты всех
точек конуса (см. сноску на стр. 253).
2. Конические поверхности второго порядка. В дальнейшем из-
ложении мы ограничиваемся рассмотрением только таких коничес-
ких поверхностей, которые в аффинной системе координат опреде-
ляются уравнением второй степени, т. е. конических поверхностей
второго порядка.
Прежде всего покажем, что если направляющая конической
поверхности 3 является кривой второго порядка, то 3 есть поверх-
ность второго порядка. Пусть 3 — коническая поверхность, нап-
равляющая L которой является кривой второго порядка.«Выберем
в пространстве аффинную систему координат так, чтобы кривая L
лежала в плоскости Оху, а вершина Мй совпадала с точкой (0,0, 1).
Пусть кривая L в плоскости Оху имеет уравнение:
апх2 + 2а12ху + а22у2 + 2а13х + 2а23у + азз = 0. '
Тогда уравнение (2) для кривой L и точки Мо (0, 0, 1) будет иметь
следующий вид:
.—— -|- 2п12-----Ь <%22 —~i Ч- -------И- 2п23 —-— 4~
1 (1 — г)2 12 (1 — 2)3 1 22 (1_Z)2 1 13 1 — 2 23 1 — 2
+ ^33 = 0.
или
ai4X2+2at2xy + Ог2у24- 2aisx (1—z)+2a23 у (1—z) + а33(1—z)2 = 0.
Заметим, что если первому уравнению не удовлетворяют ко-
ординаты точки А40(0,0, 1), то последнему уравнению удовлетворяют
координаты всех точек конической поверхности 3, в том числе и
точки Мо.
Итак, доказана
Теорема [23.2]. Если направляющая конической поверхно-
сти 3 является кривой второго порядка, то 3 — поверхность второ-
го 'порядка.
Теперь установим критерий для определения конических по-
верхностей второго порядка.
Т е орема [23.3]. Для того чтобы поверхность второго по-
рядка, определяемая в аффинной системе координат уравнением
'ZaijX^j + 2'^iaiixi + аи = 0, v (3)
i,j i
была конической поверхностью С вершиной в точке (уь у2, у3), необ-
ходимо и достаточно, чтобы выполнялись условия'.
254
«11У1 + а12?2 + й1зУз + Я14 -0>
а21У1 "Ь’^ггУг 4" я2зУз “Ь а24 =0>
аз1У1 "Ь О32У2 + й33уз + й34 = О,
^41У1 Н“ й4гУг ~Ь а4зУз + й44 О'
(4)
Доказательство. Пусть S — коническая поверхность
второго порядка с вершиной в точке M0(yi, уг, уз)- Возьмем произ-
вольный вектор p{pi, р2, Рз} неасимптотического направления и
проведем через Ма прямую I, параллельную вектору р. Пусть
согласно § 14, п. 7
Xi = Pit + у1( х2 = p2t + у2,- х3 = p3t + Уз (5)
— параметрическое задание прямой I. Тогда, как следует из п. 3,
§ 20, параметры точек пересечения поверхности (3) и прямой (5)
являются корнями квадратного уравнения Pt2 + 2Qt + R = 0.
Так как начальная точка Мо (у 1, у2, у3) принадлежит поверхности,
то R = 0, поэтому предыдущее уравнение принимает вид: Pt2 +
+ 2Q^=0. По определению конической поверхности прямая I
либо целиком лежит на S, либо, кроме точки Мо, не имеет других
общих точек. Это означает, что предыдущее уравнение-либо имеет
бесчисленное множество решений, либо только одно: t = 0. Оче-
видно,- эти условия выполняются только в том случае, когда Q =
= 0, или в развернутом виде:
(«иУ; + Я12У2 + аиУз + Оц) Pi + («21У1 + Я22У2 + ЯгзУз + ЯцУРг +
+ (<231У 1 + Й32У2 + «ззУз + аз^Рз = °- (6)
Так как равенство (6) должно быть справедливо для любого вектора
Р {Pi> Рг> Рз} неасимптотического направления, то имеют место пер-
вые три из четырех соотношений (4). Точка Л10 (у4, у2, Уз) ле-
жит на поверхности S, поэтому 2аоУ/У/ + Vt + а44 = или
ь /
У1 (аиУ 1 + Я12У2 + Я1зУз + П14) + Уг (Я21У1 + ЯггУг + сгзУз + #24) +
+ Уз (<*31У 1 + Я32У2 + й33уз + а34) + а41у i + а42у2 + я4зУз+а44=0- (7)
Отсюда, учитывая первые три из соотношений (4), получаем:
а41У1 + а4гУг + а4зУз + а44 = 0.
Обратно, пусть выполнены соотношения (4), покажем, что S—
цилиндрическая поверхность с вершиной в точке Л40 (уь у2, у3).
Прежде всего заметим, что координаты точки 7И0 согласно соот-
ношениям (4) удовлетворяют уравнению (7) поверхности S, поэтому
Мо лежит на этой поверхности. Проведем произвольную прямую (5)
через и найдем точки пересечения этой прямой с поверхностью
S. В данном случае в силу соотношений (6) и (7) получаем следующее
уравнение для определения параметров точек пересечений: Pt2 =
= 0. Отсюда следует, что прямая (5) либо целиком принадлежит
поверхности S, либо пересекает ее только в точке Мо. Мы видим,
что S — коническая поверхность.
255
Доказанная теорема позволяет установить критерий для опре-
деления конических поверхностей. Рассмотрим матрицы:
«и «12 «1з\ «12 «13 «14
«21 «22 «23 1 | «21 «22 «23 «24
«31 «32 «33 j 1 «31 «32 «33 «34
«41 «42 «43/ ' «41 «42 «43 «44
(8)
Система (4) совместна тогда и только тогда1, когда ранги этих
матриц равны между собой, поэтому имеет место теорема.
Теорема [23.4]. Для того чтобы поверхность (3) была ко-
нической, необходимо и достаточно, чтобы ранги матриц (8) сов-
падали.
Следствие. Если (3) — коническая поверхность, то
«11 «12 «13 «14 £
«21 «22 «23 «24 = 0.
«31 «32 «33 «34
« «41 «42 «43 «44 •
В самом деле, если (3) — коническая поверхность, то ранги
матриц (8) совпадают, поэтому ранг второй из этих матриц меньше
четырех. Отсюда следует, что определитель этой матрицы равен
нулю.
Пр и м е р 2. В аффинной системе координат дана поверхность
Второго порядка:
2х/ — Зх22 + 2х32 —8xtx3 + 4xt — 6х2 + 8х3 — у = 0.
Показать, что эта поверхность является конической, и найти коор-
динаты вершины.
Решение. В данном случае соотношения (4) имеют вид:
2у4 + 0 • у2 — 4у3 + 2 = 0,
0- У1 —Зу2 + 0- у3 —3 = 0,
— 4у! + 0 • у2 + 2у3 + 4=0,
2у1-Зу2 + 4у3-^ = 0.
Легко цоказать, что эта система имеет единственное решение:
У1= у, у2 = — 1, Уз = у
Из теоремы [23.3] следует, что поверхность коническая с вер-,
шиной в точке Мп — 1, —1
°\3 з/
1 См приложение, § 4, теорему 3.
256
2 3. Коническая поверхность с
,----------------? вершиной в начале координат. При
/ уХ-4—Uj, / выводе уравнения (2) мы предпо-
/ / лагали, что вершина конической
/ ' поверхности не лежит в плоскости
! ЖЖ ®ХУ и> следовательно, не совпада-
ет с началом координат. Теперь рас-
, смотрим тот частный случай, ког-
/dL да вершина совпадает с началом
s' Z:'X координат.
s' Функция F (х, у, г) называет-
л XSn ся однородной, если для
любого t имеет место соотноше-
ние. 89 ние: F (tx, ty, tz)=q (f) F (x, у, г).
Например, функция x4 — у4 +
+ г4 является однородной, так как
(/х)4 — (/у)4 + (/г)4 = /4 (х4 — у4 + г4).
Докажем следующую теорему.
Теорема [23.5]. Если F (х, у, г) — однородная функция,
то поверхность, определяемая в аффинной системе координат урав-
нением
F (х, у, г) — 0, (9)
является конической поверхностью с вершиной в начале координат.
Доказательство. Пусть S — поверхность, определя-
емая уравнением (9), М1(хл, yit zj — некоторая точка поверхности
S, а О (0, 0, 0) — начало координат. Покажем, что вместе с точкой
Mi поверхности S принадлежит любая точка М (х, у, z) прямой
ОМх- Если М лежит на прямой ОМlt то векторы ОМ и OMt колли-
неарны, поэтому координаты точки М могут быть представлены в
виде:
х — txlt у = /у1( z — tZi.
Так как Mt — точка поверхности S, то F (хр уь z4) = 0. Под-
ставим, далее, координаты точки М в уравнение (9), получим:
F (х, у, г) — F (tXi, /уь tz^ = <p(t) F(xit у 1( zj = 0,
т. е. точка М принадлежит поверхности S. Таким образом, поверх-
ность S образована прямыми, проходящими через точку О, значит,
5 — коническая поверхность с вершиной в точке О.
Пример 3. В прямоугольной декартовой системе коорди-
нат дана поверхность S уравнением: х2 + у2 — а2г2 = О» Показать,
что S является конической поверхностью. Найти вершину и одну
из направляющих этой поверхности.
Решение. Функция х2 + у2 — г2 является однородной,
так как
(tx)2 + (ty)2 — (atz)2 = t2 (x2 + у2— a2z2),
257
Рис. 90
поэтому согласно теореме [23.5] поверхность S есть коническая по-
верхность с вершиной в начале координат.
Возьмем сечение данной поверхности с плоскостью г = h, где
h =# 0. Легко показать, что все образующие конической поверх-
ности пересекают плоскость г = h. В самом деле, если вектор
р{а,0,у} параллелен образующей, то он имеет асимптотическое нап-
равление (теорема [20.2]), поэтому а2 + 02 —у2 = 0. Отсюда сле-
дует, что у =/= 0, т. е. р не параллелен плоскости z = h. Таким об-
разом, линия пересечения данной поверхности с плоскостью г —h
есть направляющая поверхности £. Согласно теореме [20.4] проек-
ция линии пересечения плоскости z=h и поверхности S на плоскость
Оху имеет уравнение х2 + у2 = a2h2. Этим уравнением определя-
ется окружность. Итак, S образована прямыми, проходящими че-
рез начало координат и через все точки окружности х2 + у2 = a2h2,
г = h (рис. 89).
Поверхность S называется круговой конической
поверхностью.
Из теоремы [23.3] следует
Теорема [23.6]. Для того чтобы поверхность второго порядка
(3) была конической поверхностью с вершиной в начале координат,
необходимо и достаточно, чтобы аи = а24 = a3i — аи= 0, т. е-
чтобы уравнение (3) имело вид:
ацх^ + а22х/ + а33х32 + 2aiZXiX2 + 2a13XiX3 + 2а23х2х3 = 0.
Так, например, поверхность — + — — = 0 есть коническая
а2 Ь2 сг
поверхность второго порядка с вершиной в начале координат.
4. Конические сечения. При изучении цилиндрических поверх-
ностей второго порядка мы_показали, что в сечении этих поверх-
2Ь8
ностей с плоскостями, не параллельными образующим, получается
кривая второго порядка одного и того же аффинного класса.
Ниже мы покажем, что если коническую поверхность второго по-
рядка рассекать различными плоскостями, то в сечении можно по-
лучить все основные виды кривых второго порядка: эллипс, пара-
болу и гиперболу.
Для простоты изложения рассмотрим сечения круговой кони-
ческой поверхности. Предварительно поставим следующую задачу.
Задача 2. Пусть в прямоугольной декартовой системе коор-
динат дана круговая коническая поверхность S:
х2 + у2 — а2г2 = 0 (10)
и плоскость л, проходящая через ось Ох. Найти сечения данной по-
верхности плоскостями, параллельными плоскости л-.
Решение. Возьмем новую прямоугольную декартову систе-
му координат так, чтобы новое начало О' совпало с точкой О, век-
тор I' совпал с вектором I, а вектор j' был параллелен плоскости
л. Если /(/, /') = а, то, очевидно:
j' — J cos а + k sin а, a k' = — j sin a + k cos a.
Тогда согласно-теореме [19.3] формулы преобразования коор-
динат имеют вид: ,
х = х',
у = у' cos a — z' sin a,
z = у' sin a + z' cos a.
Уравнение конической псв^рхности в новой системе координат
имеет вид:
х’2 + (у' cos a — z' sin a)2 — a2 (y’ sin a + z' cos a)2^= 0
или
x'2 + (cos2a— a2 sin2a) y'2—(2 sinacosa +2a2 sina cosa)y'z' +
+ (sin2 a — a2 cos2 a) z2 = 0.
Рассмотрим сечение этой поверхности плоскостью z' = h.
Согласно теореме [20.4] проекция рассматриваемого сечения
на плоскость О'х'у', т. е. на плоскость л, в системе O'i'j' имеет
уравнение:
х'2 + (cos2 a — a2 sin а) у'2 — (2sin a cos a -T 2a2 sina cos a) hy' +
+ (sin2 a — a2 cos2 a) h2 = 0. (11)
Исследуем полученное уравнение.
При h = 0 уравнение (11) принимает вид: х'2 + (cos2a —
— a2sin2a) у'2 = 0. Этим уравнением определяется линия пересе-
чения л с поверхностью S. Возможны три случая:
а) cos2a — a2sin2a > 0. Кривая представляет собой пару ком-
плексных прямых, пересекающихся в действительной точке (0, 0).
В этом случае плоскость л не содержит образующих конуса и пе-
ресекает конус в одной точке — вершине конуса (рис. 90,а).
259
6) cos2a — a2sin2a < 0. Кривая представляет собой пару пере-
секающихся прямых. В этом случае плоскость л пересекает конус
по двум образующим (рис. 90,6).
e)cos2a — a2sin2a = 0. Кривая представляет собой пару слив-
шихся прямых. В этом случае плоскость л касается конической по-
верхности вдоль образующей (рис. 90,в)..
При h у= 0 уравнением (11) определяется проекция сечения, па-
раллельного плоскости л на эту плоскость. Для определения вида
кривой (11) вычислим ее инварианты Iь /2 и /3 (см. I, § 32):
/t = 1 -J- cos2 a — a2 sin2 a, I2 = cos2a — a2 sin2a,
1 0 0
— sin a cos a (1 a2) h---------a2h2-
Л
0
0
cos2 a — a2 sin2 a
— sin a cos a (1 + a2) h (sin2 a — a2 cos2 a) h2
Прежде всего отметим, что при 7i =/= 0 имеем /3 < 0.
Определим сечения, параллельные плоскости л, в каждом из
рассмотренных выше трех случаев расположения плоскости л.
•а) Плоскость л не содержит образующих поверхности S. В этом
случае, как.было показано выше, cos2a — a2sin2a > 0, поэтому для
кривой (11) /j >0, /2 > 0. Согласно таблице, приведенной в I,
стр. 285, сечение, параллельное плоскости л, представляет собой
эллипс (рис. 90, а).
б) Плоскость л пересекает поверхность S по двум образующим.
В этом случае для кривой (11) /2 = cos2a — a2sin2a < 0, поэтому
сечение, параллельное плоскости л, представляет собой гиперболу
(/2 < 0, /3 =/= 0) (рис. 90,6).
в) Плоскость л касается конической поверхности вдоль образу-
ющей. В этом случае для кривой (11) /2 = 0, значит, сечение, па-
раллельное плоскости л, представляет собой параболу (рис. 90, в).
Приведенное исследование можно резюмировать в виде следую-
щей теоремы.
Теорема [23.7]. Пусть л' — произвольная плоскость, не
проходящая через вершину круговой конической поверхности, ал —
плоскость, параллельная л' и проходящая через вершину. Сечение
данной поверхности с плоскостью л' представляет собой:
а) эллипс, если плоскость л не содержит прямолинейных образу-
ющих;
б) гиперболу, если плоскость л содержит две прямолинейные об-
разующие;
в) параболу, если плоскость л касается поверхности по одной об-
разующей.
Таким образом, из девяти типов кривых второго порядка шесть
типов, в том числе эллипс, гипербола и парабола, являются плос-
кими сечениями круговой конической поверхности. Поэтому они и
называются к о н и ч е с к "и ми сечениями.
260
5. Поверхность вращения.
Поверхность, которая вместе с
каждой своей точкой содержит
всю окружность, полученную
вращением, этой точки вокруг
некоторой фиксированной пря-
мой I, называется поверхно-
стью в р а щ е н и я (рис. 91).
Прямая I, вокруг которой про-
изводится вращение, называется
осью вращения. Враще-
ние точки вокруг оси происхо»
дит в плоскости, перпендику-
лярной к оси. В сечении повер-
хности вращения плоскостями,
перпендикулярными к оси вра-
Риг. 91
щения, получаются окружности,
которые называются параллелями. Полуплоскости, определяе-
мые осью вращения, пересекают поверхность вращения по кри-
вым, называемым меридианами. Если взять произвольный-
меридиан и вращать его вокруг оси вращения Z, то получим рассмат-
риваемую поверхность. Следовательно, все меридианы конгруент-
ны между собой. Очевидно, всякую поверхность вращения можно
получить вращением некоторой линии вокруг заданной прямой —
оси вращения.
Рассмотрим следующую задачу.
Задача 3. Пусть Одуг — прямоугольная декартова система
координат в пространстве. Вывести уравнение поверхности, об-
разованной вращением вокруг оси Ог линии, лежащей в плоскости
Оу г и заданной в ней уравнением
Е(у, г) = 0.
(12)
Решение. Пусть L — кривая, определяемая в плоскости Оуг
уравнением (12). Сначала рассмотрим случай, когда кривая L или
симметрична относительно оси Ог, или ординаты всех точек кривой
не отрицательны. Пусть М (х, у, г) — произвольная точка поверх-
ности 5, образованной вращением кривой L вокруг оси Ог (рис. 91).
Проведем через эту точку параллель и обозначим через N точку,
в которой данная параллель пересекает кривую L. Не нарушая
общности, можно предположить, что ордината ее не отрицательна,
поэтому точка W будет иметь координаты 0, р, г, где р = CN = СМ.
Так как точка N лежит на кривой L, то F (р, г) = 0. С другой
стороны, р = СМ = У^х’-Ьу*. Подставив значение р в предыду-
щее соотношение, получаем:
г) = 0. (131
261
Итак, если точка принадлежит поверхности вращения, то коор-
динаты этой точки удовлетворяют уравнению (13).
Обратно, пусть Р (х*, у*, г*) — произвольная точка простран-
ства,- координаты которой удовлетворяют уравнению (13). Покажем,
что точка Р принадлежит поверхности S. Рассмотрим окружность с
центром в точке К, которую опишет точка Р, вращаясь вокруг оси
Oz. Очевидно, радиус этой окружности равен РК. = Ух*2 + у*2.
Пусть Q — точка пересечения этой окружности с плоскостью
Оуг, имеющая положительную ординату. Эта точка будет иметь коор-
динаты (0, [/х*2 + у*2, г*). Из соотношения (13)следует, что коор-
динаты этой точки удовлетворяют уравнению (12), поэтому точка Q
принадлежит кривой L. Отсюда вытекает, что точка Р принадлежит
поверхности S. ‘
Теперь рассмотрим общим случай,'когда кривая, заданная урав-
нением (12), является произвольной. Рассмотрим кривую Lt, сим-
метричную заданной кривой L относительно оси Ог (рис. 92). Обо-
значим через-L* геометрическое место точек плоскости Оуг, принад-
лежащих как кривой L, так и кривой Li- Легко видеть, что кри-
вая L* определяется уравнением F ( ± у, г) = 0. Эго уравнение
следует понимать следующим образом: точка М (Р, у) принадлежит
кривой L* тогда и только тогда, когда координаты точки М удов-
летворяют уравнению F ф, у) = 0, или F (—р, у) = 0. Так как кри-
вая L* симметрична относительно оси Ог, то, применяя результат,
полученцый выше, мы приходим к уравнению поверхности, обра-
зованной вращением кривой L* во-
круг оси Ог:
F(±/x2 + y2, ?М=0. (14)
Поверхности, образованные враще-
нием кривых L и L* вокруг оси Ог,
совпадают, поэтому уравнение поверхно-
сти S имеет вид (14). Мы пришли к сле-
дующей теореме.
Теорема [23.8 ]. Если в прямо-
угольной декартовой системе координат
Оху г дана кривая L, расположенная в
плоскости Оуг и имеющая в этой плос-
кости уравнение (12), то поверхность,
образованная вращением кривой L вокруг
оси Ог, определяется уравнением (14).
Если кривая симметрична относи-
тельно оси О г или если она не содер-
жит точек, для которых у < 0, то
уравнение поверхности вращения, имеет
вид (13).
262
Рис. 93
Докажем, что всякое уравнение вида (13) или (14) определяет
поверхность вращения.
Теорема [23.9]. Пусть q>(£, г]) — некоторая функция от
двух переменных. Геометрическое место точек пространства, коор-
динаты которых в прямоугольной декартовой системе координат
удовлетворяют уравнению ф (х2 + у2, г) = 0, есть поверхность-
вращения, для которой осью вращения является ось Ог.
Доказательство. Возьмем в плоскости Oyz кривую,,
определяемую уравнением ср (у2, г) = 0, и запишем уравнение по-
верхности, образованной вращением этой кривой вокруг оси Ог.
Пользуясь теоремой [23.8], получаем
ср ([± 'Кх2 + у2]2, г) = 0 или <р (х2 -Ь у2, г) = 0.
Таким образом, полученное нами уравнение совпадает с заданным-
уравнением; значит, уравнением ср (х2 + у2, г) = 0 определяется
поверхность вращения.
6. Поверхности, образованные вращением некоторых кривых
второго порядка. Применим предыдущие результаты для определения
уравнений поверхностей, образованных вращением кривых второ-
го порядка.
Пример 4. Написать уравнения поверхностей, образован-
ных вращением вокруг оси Ог следующих кривых, расположенных
в плоскости Oyz:
v2 г2
1) эллипса -—Н - = 1;
а2 с2
265
v3 Z2
2) гиперболы -----— 1;
а2 с2
y2 22
3) гиперболы — — 4—= 1;
а2 с2
4) параболы у2 — Ipz = 0.
Решение. Так как в данных
уравнениях переменная у входит толь-
ко в^четных степенях, то заданные кри-
вые, расположенные в плоскости Оуг,
симметричны относительно оси Ог, поэ-
тому, воспользовавшись формулой (13),
получаем уравнения соответствующих
поверхностей вращения;
I у2 22
1) —т 4— =1. Эта поверхность
а2 с2
называется эллипсоидом в р а-
щ е н и я (рис. 93);
х ~ у ~ г2
2) -------- = 1. Поверхность называется однополо-
а2 с2
стным гиперболоидом вращения (рис. 94);
X2 4- V2 22
3) — 4— = 1. Поверхность называется двуполо-
fl2 с2
стным гиперболоидом вращения (рис. 95).
4) х2 4- у2 — 2pz = 0. Поверхность называется параболо-
идом вращения (рис. 96).
264
Все поверхности, полученные, выше, являются поверхностями*
второго порядка. Однако далеко не всякая поверхность, получен-
ная вращением кривой второго порядка, является поверхностью’
второго порядка. Приведем пример.
Пример 5. Написать уравнение поверхности, образованной*
вращением параболы г2 — 2ру = 0, №= 0 вокруг оси Oz (рис. 97).
Решение. В данном случае кривая не симметрична отно-
сительно оси вращения Oz, однако ординаты всех точек этой кри-
вой неотрицательны, поэтому уравнение поверхности вращения,
имеет вид (13):
г2 — 2р Ух2 + у2 — О, или г2 = 2р Ух2 + у2- ’
Если возвести обе части в квадрат, то получим уравнение поверх-
ности в следующем виде: г4 = 4р2 (х2 + у%). Легко видеть, что это
уравнение эквивалентно предыдущему, поэтому в данном случае
поверхность вращения является поверхностью четвертого порядка.
Задачи и упражнения
365. Написать уравнение конической поверхности в каждом из*
следующих случаев.
а) Направляющей является окружность плоскости Оху с цент-
ром в начале координат и радиусом г = 5, а вершина находится-в
точке Мо (1, 1, 1).
б) Направляющей является гипербола плоскости Оху, задан-
ная в ней уравнением х2 — 2у2 — 1, а вершина находится в точке-
(-1, 2, 1).
в) Направляющей является кривая плоскости Оуг, заданная
уравнением г2 + у2 — у = 0, а вершина имеет координаты (1, 0, 1).
306. Доказать, что поверхность
х2 — 2у2 + z2 + 4ху — 8xz — 4yz — 14х — 4у + 14z + 16 = 0
является конической. Определить координаты вершины. Система-
координат аффинная.
307. Доказать, что поверхность, заданная в аффинной системе
координат уравнением
х2 — 5z2 + Зху + 2уг — 7х — бу — 2г + 10 = 0,
является конической. Определить координаты вершины.
30 8.1 Написать уравнение конической поверхности с вершиной*
в точке Мо (1, 2, 4), образующие которой составляют с
плоскостью 2х + 2у + г = 0 угол <р = 45°.
309. Написать уравнение цилиндрической поверхности враще-
ния, если ось вращения совпадает с Ог, а радиус г = 5.
1 В задачах 308—316 предполагается, что система координат прямоуголь-
ная декартова.
265-
310. Написать уравнение цилиндрической поверхности враще-
ния, если ось вращения проходит через начало координат и парал-
лельна вектору {0, —1, 1}, а г — 3.
311. Окружность радиуса г расположена на плоскости Оху так,
что она касается оси Ох в начале координат. Написать уравнение
поверхности, образованной вращением окружности вокруг оси Ох.
312. Составить уравнение поверхности, образованной вращением
параболы г2 = Зу, х — 0, вокруг оси Ог.
313. 'Написать уравнения поверхностей, образованных.враще-
нием вокруг оси Оу каждой из следующих кривых, расположенных
в плоскости Оху:
а) + = 6) x--v2 = l;
9 '4 19
в) — — y = — 1; г) х = 4у.
314. Написать уравнение поверхности, образованной вращением
синусоиды г = sin у, х = 0 вокруг оси Ог.
315. Доказать, что поверхности .^заданные каждым из следующих
уравнений, являются поверхностями вращения
а) х4 + 2х2у2 + у4 + 2 (х2 + у2) — г = 0;
б) х2 + у2 + г2 = 3 ±]/х2 + у2;
316. Даны две скрещивающиеся прямые Ц и /2. Определить по-
верхность, образованную вращением прямой /2 вокруг прямой
ГЛАВА VI
КЛАССИФИКАЦИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА,
ИЗУЧЕНИЕ ОСНОВНЫХ ВИДОВ ПОВЕРХНОСТЕЙ
ПО КАНОНИЧЕСКИМ УРАВНЕНИЯМ
§ 24. СОПРЯЖЕННЫЕ И ГЛАВНЫЕ НАПРАВЛЕНИЯ
1. Сопряженные направления. В I, § 31, п. 1 было введено поня-
тие сопряженных направлений относительно кривой второго по-
рядка. Здесь мы рассмотрим аналогичное понятие для поверхностей
второго порядка.
Пусть в аффинной системе координат дана поверхность второго
порядка уравнением
2а£ухгх7 + 2 2а£4х£ + а44 = 0. (1)
t.j
Если координаты двух ненулевых векторов р {рь р2, р3} и
q {pi> Яг, Рз} удовлетворяют соотношению:
анР1Р1 4~ Д22Р2Р2 4" аззРзРз + Qi2PiP2 + G21P2P1 4~
+°1зР1Рз 4* Яз1РзР1 4- ЯгзРгРз 4- ДзгРзРг — 0> (2)
то векторы называются сопряженными относительно по-
верхности второго порядка (1). Условие сопряженности (2) в сокра-
щенной записи имеет вид:
2а£/р£ру = 0. (2')
i-i
Очевидно, понятие сопряженности есть взаимное понятие, так
как если в соотношении (2) pit р2, р3 поменять соответственно ме-
стами с р£, р2, Рз» то это соотношение не изменится.
Понятие сопряженности в некотором смысле является обобще-
нием понятия асимптотичности. В самом деле, если сопряженные
векторы р и q коллинеарны, то
р — \q, или,pt = Хрь р2 =• Хр2, рз = %р3.
Подставив эти соотношения в уравнение (2), получаем условие
асимптотичности:
2 ац 4i я, = о» (3)
i.i
267
Прежде всего покажем, что введенное понятие сопряженности
не зависит от выбора системы координат. В самом деле, пусть
Ое^2е3 и О'е^е2'е3—две системы координат. Предположим, что
для векторов р и q выполнено условие (2) в системе Oete2e3,u пока-
жем, что для тех же векторов выполнено аналогичное условие в
системе О'е^е^ез . Пусть {р4, р2, р3}, {<71, q2, q3} и {р/, р2 , р3'},
{<7,' ,q2 , <73'}— координаты векторов р и q соответственно в си-
стемах Ое1в2е3 и О'е/е2 е3 . Согласно предположению числа pi, р2,
Рз и pi, q2, q3 удовлетворяют условию (2).
Пусть в системе О'е^е2е3. данная поверхность имеет уравнение
S а</ X, X/ + 2 2 а<4 х< + «44 = 0. (4)
Пользуясь формулами (17), § 19, установим связь между коэффици-
ентами atj и а'и- Для этого достаточно подставить в соотноше-
ния (1) значения xt из формул (17Д § 19 и в полученном уравнении
вычислить коэффициенты при произведениях В результате по-
лучаем:
(5)
a,p
-Согласно формулам (4), § 19 имеем:
Pt = %iaPa и qt = ^cfPq'e.
а Р
Подставив эти значения в (2'), получаем:
<./.а,Р
или, учитывая соотношение (5), будем иметь:
2aapPa<7p=0.
Таким образом, понятие сопряженности двух векторов не зависит
от выбора системы координат.
Основные свойства понятия сопряженности относительно по-
верхности второго порядка в точности совпадают с аналогичными
свойствами сопряженности относительно кривой второго порядка.
Рассмотрим эти свойства.
1) Если векторы р и q сопряжены относительно поверхности
(1), то Хр и pq, где 0 и р 0, также сопряжены относительно
той же поверхности.
Это свойство легко проверить, если в соотношение (2) вместо коор-
динат векторов р и q подставить координаты векторов У.р и pq.
Из этого свойства следует, что понятие сопряженности по сущест-
ву относится не к векторам р и q, а к их направлениям.
2) Если вектор р сопряжен с тремя векторами q, г и s, то он
сопряжен с любой линейной комбинацией этих векторов.
368
В самом деле, пусть
= 0. tyPfj = 0, yaljPiSj = 0.
i,j i,j i,j
Если Xj —• a qj + ₽ ry + у sy, to
=^aijPi + pry + ?«,) =
M Л/
= = 0.
‘./ ‘./ i .i
Отсюда, в частности, следует, что если вектор р сопряжен с тремя
некомпланарными векторами q, г и я , то он сопряжен с любым век-
тором пространства, так как любой вектор пространства линейно
выражается через q, г, s.
3) Для того чтобы координатные векторы е1,е2,ие3 были взаим-
но сопряжены относительно данной поверхности второго порядка
(1), необходимо и достаточно, чтобы ai2 = al3 = а23 = 0.
В самом деле, условие сопряженности (2) для векторов {1,0, 0}
и е2 {0, 1, 0}, как легко видеть, сводится к соотношению а12 = 0.
Точно так же, записывая условие сопряженности для векторов eit
е3 и е2, е3, получаем соответственно: а13 = 0 и а23 = 0.
4) Для любой плоскости л пространства существуют два взаим-
но перпендикулярных вектора р и q, которые параллельны плоскости
л и сопряжены относительно поверхности (1).
Пусть O'i'j'k'— нов-ая прямоугольная декартова система коор-
динат, выбранная так, что О' лежит в л, а/' и j' параллельны этой
плоскости. Предположим, что уравнение поверхности в этой систе-
ме имеет вид (4). Если р {д1( р2, 0} и q {g,, q2, 0} — два произ-
вольных вектора, заданные в новой системе координат своими коор-
динатами и параллельные плоскости л, то условие их сопряженнос-
ти относительно поверхности (4) имеет вид:
«ПР1<71 + а'22РгЪ. + а\2Р1Ч2 + a'2lp2qi = 0. (6)
Возможны два случая: а) а\\ = а'22 = а'\2 = 0. В этом случае,
как следует из соотношения (6), любые два вектора, параллельные
плоскости л, сопряжены относительно поверхности второго поряд-
ка, поэтому наше утверждение справедливо; б) хотя бы один из ко-
эффициентов а'п, а22, a’i2 не равен нулю. Тогда согласно теореме
[20.51 плоскость л пересекает поверхность второго порядка по кри-
вой второго порядка, уравнение которой имеет вид:
aHx'2 + Zai2x'y' + а'22у'2 + 2a'l3x’ + 2a23y' + а'3 = 0.
Согласно теореме I, [31.3] для этой кривой существуют два взаимно
перпендикулярных сопряженных направления. Другими словами,
в плоскости л существуют два взаимно перпендикулярных вектора
269
P {Pi> Р2}, и q {qi, q2}, для которых выполнено условие (6). Эти
же векторы в пространстве имеют координаты р {pit р2, 0} и
q {qt> Pz, 0}, поэтому из соотношенйя (6) следует также, что они
сопряжены относительно поверхности (4).
Пример 1. Показать, что векторы р {1,3, —2} и q {1, 1, 7}
сопряжены относительно поверхности второго порядка
5хг2 + Зх22 — 2х32 — 2хрс2 — 4х2х3 + 3%( — 5х2 — 6 = 0.
Решение. В данном случае условие сопряженности двух
векторов записывается так:
Sp^i +~3p2q2 — 2p3q3 — ptq2 — p2qt — 2p2q3 — 2p3q2 = 0.
Непосредственной подстановкой легко убедиться в том, что векторы
р и q сопряжены относительно данной поверхности.
2. Главные направления. Направление ненулевого вектора р
называется главным относительно поверхности второго по-
рядка, если любой вектор, перпендикулярный к р, сопряжен с ним.
Найдем условия, при которых данный вектор имеет главное
направление. Имеет место следующая важная теорема.
Теорема [24.1 ]. Если поверхность второго порядка задана
в прямоугольной декартовой системе координат уравнением (1),
то, для того чтобы ненулевой вектор р {pit р2, р3} имел главное
направление относительно этой поверхности, необходимо и достаточ-
но, чтобы существовало такое число k, при котором координаты век-
тора р удовлетворяют условиям'.
ацР1 + а12Р2+а1зРз =
azlPi + а22Р^а2ЭРз = kp2,
°31Р1 “Ь й32Рг“ЬйззРз = kp3.
(7)
Доказательство. Пусть р {р4, р2, р3} имеет главное нап-
равление относительно поверхности (1). Это означает, что если х —
произвольный вектор, перпендикулярный к вектору р, то х сопря-
жен с р, т. е. для любых трех чисел х1( х2, х3, удовлетворяющих
условию
XiPi + х2р2 + х3р3 = 0, (8)
имеет место условие
(fluPt + ^12p2 + ai3p3) + х2 (a2ipt + а22р2 4- а23р3) +
+ х3 (a3lpi + а32р2 + а33р3) = 0. (9)
Это возможно тогда и только тогда, когда числа р1( рг, р3 пропор-
циональны числам (aupi + al2p2 + al3p3), (a2ipi + а22р2 +'а23р3),
(«31Р1 + аз2р2 + а33р3). Таким образом, существует действительное
число k, удовлетворяющее условиям (7).
Обратно, если существует действительное число k, удовлетворяю-
щее соотношениям (7), то для всякого вектора х, удовлетворяюще-
270
го условию (8), выполняется также условие (9), т. е. вектор р имеет
главное направление. Теорема доказана.
Доказанная теорема дает возможность решить задачу об опре-
делении главных направлений данной поверхности второго поряд-
ка. Очевидно, для отыскания главных направлений необходимо
найти такие числа ри р2, рз и k, которые удовлетворяют системе
(7), причем важно заметить, что действительные числа pt, р2 и р3
одновременно не равны нулю. Мы сейчас укажем способ, позволяю-
щий найти решение системы (7) трех уравнений с четырьмя неизвест-.
ными. Запишем систему (7) в следующем виде:
(«и — k)pi + ai2p2 + а13р3 = О,
«2iPi + («22 — k) Рг + а2зРз = 0.
«31Р1 Н" «32^2 4“ («33 Рз =
(10)
Рассмотрим эту систему как систему однородных линейных урав-
нений относительно pit р2, р3. Система будет иметь ненулевые ре-
шения тогда и только тогда, когда определитель Системы равен
нулю, т. е.
«и — k й12
«21 «22
«31 «32
«13
«23 .
Ощ --- k
(11)
Мы получили кубическое уравнение относительно k. Решив это
уравнение, найдем значение k и, подставив найденное значение в
уравнение (10), определим координаты вектора, имеющего главные
направления. Таким образом, каждому значению k соответствует
по крайней мере один вектор главного направления. Может случить-
ся и так, что данному значению k соответствует несколько попарно
неколлинеарных векторов главного направления, даже бесчислен-
ное множество таких векторов. Уравнение (11) называется х а р а к-
теристическим уравнением поверхности второго
порядка, а корни этого уравнения — х а р а кт еристичес-
к и м и числами поверхности.
Пример 2. Определить векторы главных направлений от-
носительно поверхности второго порядка:
7л/ + 6х22 4- 5х,2 — 4x^2 — 4х2х3 — *i + 2х2 — 30 = 0.
Решение. Составим характеристическое уравнение дан-
ной поверхности:
7 — k — 2
— 2 6 — k
0 —2
Отсюда получаем:
/г3— 18Л2 + 99& - 162 = 0.
271
Определим корни этого уравнения1. Найдя корень k 3, раз-
ложим левую части уравнения по теореме Безу на линейные мно-
жители:
(k — 3) (fe2 -- 15fe + 54) = 0.
Отсюда получаем характеристические числа данной поверхности:
kt = 3, k2 = 9, k3 = 6.
Теперь определим главные’направления, соответствующие каж-
дому из корней характеристического уравнения. Если k — корень
характеристического уравнения, то координаты вектора главного
направления, соответствующего корню k, определяются из соот-
ношений (10). Для данной поверхности при kt — 3 система (10) при-
нимает вид:
4pi — 2р2 = 0, -2.pl + Зр2 — 2р3 = 0, — 2р2 + 2р3 = 0.
Рассмотрим первые два уравнения. Учитывая, что определитель,
составленный из коэффициентов при и р2, в этих уравнениях не
равен нулю, мы приходим к выводу, что третье уравнение есть
следствие первых двух. Из первых,двух уравнений получаем:
Л=4~ о 2iZ = 4Z,/’2= 2 гН = 8/’ Рз = 1 2-зР=8/-
Очевидно, t может принимать любое значение, отличное от нуля.
В частности, при t = 1 получаем вектор р {4, 8, 8}, который яв-
ляется вектором главного направления, соответствующего характе-
ристическому числу 3. Совершенно аналогично получаем векторы
главных направлений, соответствующих другим характеристичес-
ким числам: q {2, —2, 1} и г {2, 1, —2}. Заметим, что векторы р,
q и г взаимно перпендикулярны. Несколько позже мы увидим, что
это обстоятельство не является случайным.
3. Некоторые свойства главных направлений. Прежде всего до-
кажем следующую фундаментальную теорему.
Теорема [24.2 ]. Каждая поверхность второго порядка име-
ет по крайней мере три взаимно перпендикулярных главных направ-
ления.
Доказательство. Сначала покажем, что каждая поверх-
ность второго порядка имеет по крайней мере один вектор главного
направления. В самом деле, характеристическое уравнение (11) от-
носительно k является алгебраическим уравнением третьей степе-
ни. Из курса алгебры известно, что всякое алгебраическое уравне-
ние третьей степени с действительными коэффициентами имеет по
1 Решение кубического уравнения представляет для студента первого
курса определенную трудность. Обычно корни определяют разложением ле-
вой части уравнения на линейные множители. Иногда полезно воспользовать-
ся следующей теоремой: уравнение X3 + аД2 + а2Х + а3=0 с целыми ко-
эффициентами может иметь рациональными корнями только целые числа,
которые являются делителями свободного члена а3.
272
крайней мере один действительный корень. Таким образом, харак-
теристическое уравнение (11) имеет один действительный корень.
Обозначим его через kt. Подставив значения этого корня в соотно-
шения (10), мы получаем систему однородных линейных уравнений,
определитель которой равен нулю. Но тогда эта система имеет по
крайней мере одно ненулевое решение р1( р2, р3- Следовательно,
вектор p{pi, р2, Рз} будет вектором главного направления.
Пусть л — плоскость, перпендикулярная к вектору р главного
направления. Согласно свойству 4) сопряженных направлений
(см. п. 1 настоящего параграфа) существуют два взаимно перпенди-
кулярных вектора г ns, которые параллельны плоскости л и сопря-
жены относительно заданной поверхности. Так как вектор р имеет
главное направление, то любой вектор, параллельный плоскости л,
сопряжен с вектором р, отсюда следует, что векторы р, г и s
попарно сопряжены. Покажем, что вектор г имеет главное направ-
ление. Очевидно, любой вектор q, перпендикулярный к вектору г,
будет компланарен с векторами р и s, поэтому q = Xр + ps.
В силу свойства 2) сопряженных направлений вектор q сопряжен
с вектором г. Этим доказано, что ненулевой вектор г имеет'главное
направление. Точно так же можно доказать, что вектор s имеет глав-
ное направление. Теорема доказана.
В заключение рассмотрим еще одно свойство главных направле-
ний, полезное для практических целей.
Теорема [24.3]. Если дана поверхность второго порядка
в прямоугольной декартовой системе координат уравнением (1), то
для того, чтобы ненулевой вектор р {pit р2, рз} имел как главное,
так и асимптотическое направление относительно данной поверх-
ности, необходимо и достаточно, чтобы координаты вектора р
удовлетворяли следующим условиям:
o-uPi + + а13р3 — 0,
a2ipi + а22р2 + а2зрз = О,
+ а3гр2 + а33рз = 0.
(12)
Доказательство. Пусть вектор р имеет как главное,
так и асимптотическое направления; тогда координаты вектора р
удовлетворяют соотношениям (7). Умножив первое из соотноше-
ний (7) на Pi, второе на р2, третье на р3 и сложив, получаем:
(аиР1 + ai2p2 + а13р3) Pi + (a2iPi + а22р2 + а23р3) р2 +
+ (^31P1 + а32р2 + ЯззРз) Рз = k(p\ 4- р2 + Рз);
так как вектор р {р1( р2, р3} есть вектор асимптотического направ-
ления, толевая часть последнего соотношения равна нулю, поэтому
fe(pi+ р2 + р3)=0- Так как вектор р ненулевой, то k = 0. Подста-
вив найденное значение k в соотношения (7), приходим к соотноше-
ниям (12).
Ю Л. С. Атанасян 973
Обратно, пусть координаты вектора р удовлетворяют соотно-
шениям (12). Покажем, что вектор р имеет как главное, так и асимп-
тотическое направления. Из теоремы [24.1] немедленно следует,
что вектор р имеет главное направление. В самом деле, в силу со-
отношений (12) координаты вектора р удовлетворяют уравнениям
(7) при k = 0.
Покажем, что этот же вектор имеет асимптотическое направле-
ние. Для этой цели умножим первое из соотношений (12) на pit
второе на р2, третье на ps и сложим:
(fliiPi + CI12P2 + а13р3) Pi 4- (Я21Р1 + О22Р2 + а2.зРз) Рг +
+ (flsiPi + йзгРг + а3зрз)р3 = 0,
или Saz7 pz pj = 0.
Пример 3. В прямоугольной декартовой системе координат
дана поверхность второго порядка: х2 -|- 2х| — 4х2— 12х.. + 10 =
= 0. Найти векторы, имеющие как главные, так и асимптотичес-
кие направления относительно данной поверхности.
Решение. Соотношения (12) для данной поверхности имеют
вид:
О-р^О-Рг + 0-р3 = 0,
0-Р1+Р2 + 0-р3 = 0,
O'Pi + О'Рг + Рз = 0-
Отсюда р2 = 0 и р3 = 0. Таким образом, ось Ох имеет как глав-
ное, так и асимптотическое направления. Других векторов, удовлет-
воряющих этим условиям, нет.
Задачи и упражнения
317. Дана поверхность второго порядка х? — 3xtx2 + *1*3 +
+ х2 — 4Xi — 2хг + 5=0. Выяснить, какие из векторов а {1, 0, 0},
Ь {2, 2, 2}, с {-р 1, о|, d {0, 0, —15} имеют асимптотические нап-
равления относительно данной поверхности?
318. Дана поверхность второго порядка: 2xf + 5x1 + 8х3 +
+ 12xfx3 + Ox^X! + 2xjX2 + 8xf + 14х2 + х3 = 0.
В каждом из следующих случаев найти вектор, сопряженный
с данными:
б) (—1, 2, 0}, {1, —5, 1}; в) {6, 0, —1}, {1, 1, —1}.
319. Записать в общем виде1 условие сопряженности вектора
Р {Рр Р2> Рз):
а) с осью Ох4; б) с осью Ох2; в) с осью Ох3; г) с плоскостью OxjX2.
1 Мы будем говорить, что вектор сопряжен плоскости, если он сопряжен
с любым вектором, параллельным этой плоскости.
274
320. Найти главные направления следующих поверхностей вто-
рого порядка:
а) Зх? + 5х| + 3x1 — 2х2х3 4- 2х3Х! — 2х4х2 4- 2xt 4- 15 = 0;
б) 6х? 4- 3x1 4- Зх! — 2х2х3 4- 4х3х( — 4xtx2 4- 15xt — Зх2 4~
4- х3 — 5 = 0;
в) Х\ 4- х| — 3 = 0;
г) 8xf + 7x1 + Зх! — 8х2х3 4- 4х3х( — 12xiX2 4- 2xj — 8х2 4-1=0;
д) Зх? — х? — х3 4- 6х2х3 — 6xf 4- х2 4- 5 = 0.
Система координат прямоугольная декартова.
321. Найти векторы, имеющие как главные, так и асимптотичес-
кие направления относительно следующих поверхностей второго
порядка:
а) 4х? — х? — х3 4~ 2х2х3 — 8х( — 4х2 — 8х3 = 0;
б) х? 4- 2х2х3 — 4xt 4- 6х2 4- 2х3 = 0;
в) 4х? — 4х2х3 4- 4x3Xj — 4xtx2 — 2xt 4- 2х2 — 1=0.
Система координат прямоугольная декартова.
322. Для того чтобы вектор главного направления имел одно-
временно и асимптотическое направление, необходимо и достаточно,
чтобы характеристическое число, соответствующее этому вектору,
равнялось нулю. Доказать.
323. Пусть поверхность задана общим уравнением. Ответьте на
• ледующие вопросы.
а) При каком условии для данной поверхности второго порядка
всякое направление является главным?
б) При каком условии координатная ось Ох имеет главное на-
правление?
в) При каком условии любой вектор, параллельный плоскости
Oxtx2, имеет главное направление?
§ 25. ДИАМЕТРАЛЬНЫЕ ПЛОСКОСТИ И ЦЕНТР
1. Диаметральные плоскости. Пусть в аффинной системе коор-
динат дана поверхность второго порядка уравнением:
l.aijxixj + 2 4- а44 = 0. (1)
Если Р {pi, Р2, Рз} — вектор, не имеющий асимптотического
направления относительно этой поверхности, то из теоремы [20.2 ]
следует, что все прямые, параллельные вектору р, пересека-
275
10*
Рис. 98
ют поверхность в двух точках
— действительных или комп-
лексно сопряженных. Если
Alj и М2 — комплексно со-
пряженные точки, а М — се-
редина отрезка М iM2, то
точка М имеет действитель-
ные координаты. В самом
деле, пусть
а24-ф2. ^з+г’Рз),
M2 (ad—a2—ф2, «з—Фз),
тогда согласно теореме [2.2] имеем M(ab a2, a3).
Таким образом, середина любой хорды неасимптотического на-
правления есть действительная точка.
По аналогии с теорией кривых рассмотрим геометрическое место
середин всех хорд, параллельных вектору р (см. 1,§30). Обозна-
чим через М. (%!, х2, х3) координаты произвольной точки искомого
геометрического места (рис. 98). Напишем параметрические урав-
нения прямой /, проходящей через точку М и параллельной векто-
РУ Р-
= Pit + хь г2 = p2t 4- х2, г3 = p3t + х3.
Пусть (Х1; Х2, Х3) и (Уt, У2, У3)— координаты точек пересече-
ния прямой I с поверхностью (1), а £ и т] — параметры этих то-
чек. Тогда
Xi = р^: + х„ Х2 = р£ + х2, Х3 = р* + х3;
= PPi + xlt У2 = р2т( + х2, У3 = р3т] + х3.
Так как М(хъ х2, х3) — середина отрезка, соединяющего точки
(Xi, Х2, Х3) и (У4, У2, У3), то Xi 4- У4 = 2х1( Х2 + У2 = 2х2,
Х3 4- У3 = 2х3.
Из предыдущих соотношений получаем:
Pt (I + Л) = 0, р2 (I 4- т]) = 0, р3 (I 4- п) = О-
Но pi, р2 и р3 одновременно не равны нулю, поэтому | 4- т) = 0.
С другой стороны, | и т] являются корнями квадратного урав-
нения (6), из §20, где Р #= 0. Сумма корней квадратного уравнения
равна нулю в том и только в том случае, когда коэффициент при не-
известном в первой степени равен нулю. В данном случае в силу фор-
мулы (8), § 20 имеем:
Q — Pi (PaXi + а12х2 4- «43X3 4- Яц) + рг (o-2iXi 4- а22х2 4-
4* й2зХ3 4" а^) 4* рз (#34X4 “г йз2х2 4* а,33х3 4~ = 0. (2)
276
Мы показали, что если xlt х2, х3 — координаты середины произволь-
ной хорды, параллельной вектору р {р1( р2, р3}, то они удовлетво-
ряют уравнению (2). Предлагаем студенту самостоятельно дока-
зать, что имеет место и обратное предложение, т. е. если координа-
ты Xi, х2, х3 точки М удовлетворяют уравнению (2), то М принадле-
жит рассматриваемому геометрическому месту точек1.
Легко показать, что уравнением (2) определяется плоскость.
В самом деле, покажем, что не все коэффициенты при хь х2, х3 рав-
ны нулю. Доказательство проведем, рассуждая от противного. Пусть
О11Р1 + «12^2 + й1з Рз — О,
aziPi ~\-.а22р2 Ч- йгзРз — 0 и a3ipt + а32р2 + а33р3 — 0.
Умножив первое соотношение на второе на р2, третье на р3
и сложив, получаем: '%flijPiPj — 0, т. е. вектор р {рь р2, р3}
I.i
имеет асимптотическое направление, что противоречит условию вы-
бора вектора р. Итак, мы доказали следующую теорему.
Т е орема [25.1 ] . Геометрическое место середин всех хорд поверх-
ности (1), параллельных вектору р {рх, р2, р3} неасимптотическо-
го направления, есть плоскость, заданная уравнением (2).
Эта плоскость называется диаметральной плос-
костью поверхности второго порядка, соответствующей (или
сопряженной) вектору р.
Мы видим, что каждому вектору о неасимптотического напра-
вления соответствует воя диаметральная плоскость.
Доказанная теорема позволяет выяснить геометрический смысл
понятия сопряженности. В самом деле, условие сопряженности (2)
из § 24 может быть записано в следующем виде:
+ Я12?2 + РаЯд + Рг (Й2191 + <222?2 + а2з?з) +
+Рз(^з1?1+ a32q2 + а33<7з) = 0
Сравнивая это соотношение с соотношением (2), мы видим, что
здесь записано необходимое и достаточное условие параллельности
вектора q плоскости /2) Итак, если р не имеет асимптотического
направления, то для того, чтобы вектор q был сопряжен с вектором
р, необходимо и достаточно, чтобы q был параллелен диаметраль-
ной плоскости, соответствующей вектору р.
Пример 1. Найти уравнение диаметральной плоскости по-
верхности
Xi — х2 — 2x1 — 4xtx2 -I- 2x^3 — 6х2х3 — 2xj + 4х2 — 5 = 0,
сопряженной направлению прямой
(2х, — х2 — х3 + 1 = 0,
|Xj + х2 — 2х3 4-3 = 0.
1 Доказательство по существу не отличается от доказательства соответ-
ствующего предложения для теории кривых, см. 1, стр. 259—260.
277
Решение. Пользуясь теоремой Ц4.1 ], определим координа-
ты направляющего вектора прямой р {3, 3, 3}. Подставив значения
коэффициентов уравнения поверхности (1) и координаты вектора р
в соотношение (2), после элементарных преобразований получаем:
Зх2 + 2х3 = 0.
Пример 2. Найти уравнение той диаметральной плоскости
поверхности
6x2 + 9x2 + х2 + 6xtx2 — 4xtx3 — 2х2 — 3 = 0,
которая параллельна плоскости + Зх2 — х3 + 5 = 0.
Решение. Найдем координаты вектора р {pt, р2, р3},
сопряженного искомой диаметральной плоскости. Для этой цели за-
пишем условие параллельности плоскости (2) и данной плоскости:
6Pi 4~ 3pg — 2р3 _3pt -|- 9р2 _ — 2pt -р Рз
1 ~ 3 ~~ — 1
Отсюда, положив = 2, получаем: р {2, — 1, 5}. Уравнение диа-
метральной плоскости, сопряженной найденному вектору, имеет
вид: Xj + Зх2 — х3 — 1 = 0.
2. Главные диаметральные плоскости. Каждая диаметральная
плоскость поверхности второго порядка есть в некотором смысле
плоскость симметрии. В самом деле, если диаметральная плоскость
л соответствует вектору р, то данная поверхность симметрична от-
носительной по направлению вектора р, т. е. если М. при-
надлежит поверхности, то точка М', симметричная точке М от-
носительно л по направлению р, также принадлежит поверхности.
Выясним, существуют ли такие диаметральные плоскости, которые
являются плоскостями симметрии в обычном смысле слова. Легко
показать, что всякая диаметральная плоскость, ортогональная
соответствующим хордам, является плоскостью симметрии. В самом
деле, пусть диаметральная плоскость л ортогональна соответствую-
щим хордам. Направляющий вектор р этих хорд по определению не
имеет асимптотического направления, поэтому все прямые, перпен-
дикулярные к плоскости л, пересекают эту плоскость в двух и толь-
ко в двух точках. Середины этих хорд, очевидно, лежат в плоскости
л, поэтому л — плоскость симметрии.
Диаметральная плоскость, являющаяся плоскостью симметрии
поверхности, называется главно й.
Из предыдущих рассуждений следует, что диаметральная плос-
кость будет главной тогда и только тогда, когда она ортогональна
вектору, которому она соответствует.
Таким образом, для того чтобы диаметральная плоскость была
главной, необходимо и достаточно, чтобы соответствующий ей век-
тор имел главное, но не асимптотическое направление.
Это предложение позволяет практически определять все глав-
ные диаметральные плоскости.
278
3. Центр поверхности второго порядка. Точка С пространства
называется центром поверхности второго порядка (1), если по-
верхность симметрична относительно С. Это означает, что для
всякой точки М, принадлежащей поверхности, точка М', симмет-
ричная М относительно С, также принадлежит поверхности.
Выясним, всякая ли поверхность второго порядка имеет центр,
сколько может существовать центров и как определить координаты
центра поверхности второго порядка. На все поставленные вопросы
по существу отвечает следующая теорема.
Теорема [25.2]. Для того чтобы точка g2, g3)
была центром поверхности второго порядка (1), необходимо и доста-
точно, чтобы координаты этой точки удовлетворяли системе урав-
нений'.
а1Л1 + а12?2 + а13?3 + Я14 — О,
^21^1 ^22^2 "Ь ^23^3 “Ь ^24 =
а31^1 ~Ь ^32^2 + °33^3 ~Ь й34 =
(3)
Доказательство. Пусть С (gv g2, g3) — центр поверх-
ности второго порядка (1). Возьмем три некомпланарных вектора
P{Pi, р2, Рз}, Q{qi, 9г, Рз}, г {^i, г2, г3}, не имеющих асимптотических
направлений относительно данной поверхности. Если через точку
C(£i, £г, £з) провести три прямые, параллельные векторам р,
q и г, то каждая из этих прямых пересекается с поверхностью
соответственно в двух точках Л41( Л12; Niy N2 и Pt, Р2. Точка С как
центр поверхности является серединой отрезков МiM2, Af jAf2 и Pt Р2.
Отсюда следует, что С принадлежит диаметральным плоскостям,
соответствующим векторам р, q иг, но тогда координаты точки
С удовлетворяют их уравнениям:
Pi^i + Рг^г + Р3А3 ~ О»
+ 92^2 + 9з^3 ==
zyXi + г 2А2 + г 3Л3 = О,
где А[ a^h -Е а-2^2 ~Ь ^3^з Ч~
Так как векторы р, q и г не компланарны, то
Pi Рг Рз
91 9г 9з ¥= 0.
П г2 г3
поэтому Ai = А2 — А3 = 0, т. е. имеют место соотношения (3).
Обратно, пусть координаты точки С (£1; £2, £3) удовлетворяют
соотношениям (3). Возьмем произвольную (вещественную или не-
вещественную!) точку Mt (хь х2, х3) поверхности (1) и докажем, что
точка М2(у4, у2, у3), симметричная точке Мj относительно С, так-
же принадлежит поверхности (1). В самом деле, xt + у 4 = 2?j, х2 +
+ у2 = 2g2, х3 + уз = 2£3; отсюда получаем:
У1 = — Xi, у2 = 2§2 — х2, уз = 2£3 — х3.
279
Подставив эти значения в левую часть уравнения поверхности
(1), получим:
(2^ - хг) (2е7 - ху.) + 2]^ (2£г - xj + а44 =
м
= 4 Va. _ ity.aillixj + y,aljxlxj + 4Уа(Ч?г — 2VaMx£ + а44 =
^МВЗ
i.j iJ i>i
= 41 lXj ~Ь
i'i
+ yai4:i —УацХ.^ +^aijxixJ 2Уф4х£ + а44.
<•/
Нетрудно видеть, что полученное выражение равно нулю, так
как:
(an^i + а12Вг + а<з5з + Ям) = О,
2й* Лл+2а«х< =2а^г*;+2а/4Х/=
i,j i,J
==’^ixj(ai^l 4~ dj2^,2 ~i~a /зВз + dji) = О,
^auxixi + 22а‘'4^ + й« = °’
Здесь первые два равенства следуют из соотношений (3), а пос-
леднее — из того обстоятельства, что точка Mt принадлежит по-
верхности (1).
Мы доказали, что точка М2, симметричная любой точке Mt по-
верхности (1) относительно точки С, принадлежит этой поверхности.
Это означает, что С — центр поверхности. Теорема доказана.
Доказанная теорема позволяет исследовать вопрос о существо-
вании центров поверхностей второго порядка. Задача сводится к ис-
следованию системы уравнений (3).
Рассмотрим матрицы:
°и а12 а13\ /аи а12 а13 а14\
а21 а22 <223 I, I й21 а22 а23 а241 (4)
Й31 ^32 азз' 'аз1 а;>2 азз a3i>
и обозначим соответственно через г и Я их ранги. Очевидно, г < R.
Возможны следующие случаи:
1) г = R = 3. В этом случае система (3) имеет единственное ре-
шение и соответственно этому поверхность имеет один и только один
центр. Поверхности, обладающие таким свойством, называются
центральными поверхностями второго порядка.
2) R = г = 2. ,В данном случае система совместна и имеет бес-
численное множество решений. Так как R = 2, то система содер-
280
жит два линейно независимых уравнения, через которые линейно
выражается третье уравнение. Точки, координатами которых яв-
ляются решения системы (3), в данном случае лежат на одной пря-
мой. Итак, при г = R = 2 поверхность имеет прямую центров,
определяемую системой (3).
3) R = г — 1. Система (3) имеет бесчисленное множество реше-
ний. В этом случае два уравнения являются следствиями одного,
поэтому поверхность имеет плоскость центров.
4) г < R. Система (3) не имеет ни одного решения, в соответствии
с этим поверхность не имеет на одного центра.
Поверхности, не имеющие ни одного центра или имеющие бес-
численное множество центров, называются н е цен тр а льны-
м и поверхностями второго порядка.
Из предыдущих рассуждений следует, что поверхность будет
центральной, т. е. будет иметь единственный центр, в том и только
в том случае, когда
^з
I «и
! «21
I «31
«12
«22
«32
«13
«23
«33
=£0.
Пример 3. Найти центр поверхности второго порядка
2%2 + 12х| + 4х| + 8х(х2 — 4xtx3 + 12х2х3 — lOxj 4- 14х3 4-7 = 0.
Решение. Для данной поверхности составим систему урав-
нений (3):
2В, + 4|2 —2|3 —5 = 0,
4В, 4- 12В2 + 6Вз = 0,
- 2В, + 6В2 + 4В3 + 7 = 0.
Так как определитель этой системы не равен нулю, то она имеет
единственное решение: Bi = —, у2 = 0, Вз = — 1-
Задача 1. Поверхность второго порядка задана уравне-
нием (1). При каком условии плоскость Ох,х2 является плоскостью
центров данной поверхности?
Решение. Пусть для данной поверхности плоскость х3 = 0
является плоскостью центров. Это означает, что всякое решение
уравнения х3 =--- 0 является решением системы (3) и наоборот. Возь-
мем точки О (0, 0, 0), А (1,0, 0) и В (0, 1, 0), координаты которых
удовлетворяют уравнению х3 = 0. Подставив координаты этих то-
чек в систему (3), получим: а,, = а2, = а31 = а12 = а22 = а32 = а,4=
= а24= а34 = 0, отсюда следует, что ai3 = = 0. Таким обра-
зом, если плоскость Ох,х2 является плоскостью центров поверхнос-
ти, то уравнение поверхности г>меет вид:
а33х23 + а44 = 0.
Обратное утверждение очевидно.
281
4. Некоторые теоремы о центрах. В заключение рассмотрим не-
сколько теорем, весьма полезных для практических приложений.
Теорема [25.3 ]. Пусть в аффинной системе координат по-
верхность второго порядка задана уравнением (1). Для того чтобы
начало координат совпадало с центром поверхности, необходимо и
достаточно, чтобы в уравнении поверхности коэффициенты а14,
а24, а34 обращались в нуль.
Доказательство. Из соотношений (3) непосредственно
следует, что при = ё2 = 6з = О имеем: а14 = а24 = а34 = 0.
Обратно, пусть в уравнении поверхности а14= а24 = а34 = 0.
Покажем, что начало координат является центром поверхности
второго порядка. В самом деле, в данном случае соотношения (3)
принимают вид: + + = 0>
«2161 + «22^2 + О23?3 = 0>
O3161 Н- о32^2 + q33B3 = 0.
Этой системе удовлетворяют координаты начала, следовательно,
точка 0 (0, 0, 0) является центром симметрии поверхности.
Из теоремы [22.5] и предыдущего исследования вытекает сле-
дующая интересная теорема.
Теорема [25.4]. Всякая поверхность второго порядка, име-
ющая бесчисленное множество центров, является цилиндрической
поверхностью.
Если цилиндрическая поверхность второго порядка имеет хотя
бы один центр, то она имеет бесчисленное множество центров.
Доказательство. В самом1 деле, если поверхность име-
ет бесчисленное множество центров, то согласно выводам п. 3 нас-
тоящего параграфа R < 3, а из теоремы [22.5] следует, что поверх-
ность является цилиндрической.
Для доказательства второй части теоремы заметим, что для вся-
кой цилиндрической поверхности второго порядка R < 2, поэтому
если эта поверхность имеет хотя бы один центр, то из предыдущих
рассуждений следует, что она имеет бесчисленное множество цент-
ров.
Теорема [25.5]. Для того чтобы поверхность второго по-
рядка была конической, необходимо и достаточно, чтобы она имела
по крайней мере один центр, принадлежащий самой поверхности.
Этот центр будет вершиной конической поверхности.
Доказательство. В самом деле, пусть поверхность яв-
ляется конической поверхностью второго порядка. Тогда согласно
теореме [23.3] координаты вершины Мо (уь у2, уз) удовлетворяют
системе уравнений (4) из § 23. Из первых трех соотношений этой
системы и теоремы [25.2 ] следует, что точка Мо является центром
поверхности второго порядка. Таким образом, поверхность имеет
хотя бы один центр Л40, принадлежащий конической поверхности.
Обратно, пусть дана поверхность второго порядка, имеющая
хотя бы один центр Л40 (уь у2, уз) , принадлежащий самой поверх-
282
ности. Докажем, что эта поверхность является конической поверх-
ностью с вершиной в точке Л40. В самом деле, так как точка Л40 яв-
ляется центром поверхности, то выполняются соотношения (3),
т. е. первые три из соотношений (4), § 23. Точка Ма принадлежит
поверхности, поэтому выполняется также соотношение (7), § 23.
Отсюда следует, что <241yi + ai2y2 + й43у3+ а44 = 0. Итак, со-
гласно теореме [23.3 ] данная поверхность является конической
поверхностью с вершиной в точке Л40.
Задачи и упражнения
324. Найти уравнение диаметральной плоскости поверхности
xi — х2 + 2%з — 4xjX2 + 2х4х3 — 6х2х3 — 2xi + 4х2 — 5 = 0,
сопряженной направлению прямой
| xt — 2х2 + х3 — 2 = 0,
[ Зх4 — Зх3 + 4 =0.
325. Найти уравнение той диаметральной плоскости поверхнос-
ти 6х? + 9x2 + х? + 6xiX2 — 4xjX3 — 2х2 — 3 = 0, которая
параллельна плоскости х4 + Зх2 — х3 + 5 = 0.
326. Найти уравнение той диаметральной плоскости поверхнос-
ти xj + х| + х| + 2xtx2 — 2х2х3 — 6xiX3 + 2х4 — 6х2 — 2х3 =
= 0, которая проходит через прямую Xj 3 — t, х2 = 2 + 3/,
х3 = — 1 + t.
327. Найти уравнение той диаметральной плоскости поверхности
2x2 + 10x2 — 2х| + 12xjX2 + 8х2х3 + 12х4 + 4х2 + 8х3 — 1=0,
которая проходит через прямую xt = 1 + t, х2 = — 1— t, х3 =t.
328. Найти уравнение той диаметральной плоскости поверх-
ности Х| — 2x2 + 3x2 4х4х3 — 6х2х3 + 8xi — 2х3 + 3 = 0,
которая проходит через точки Mi (0, —3, 3) и М2 (5, —1, 4).
329. Найти общую диаметральную плоскость следующих трех
поверхностей второго порядка:
х2 — 2x2 + х2 — 4х4х3 + 6х2х3 — 8xi + Юх2 = 0>
3x2 _|_ 2Х2 — 2xiX3 + 4х2х3 — 4х, — 8х3 — 8 = 0,
х2 + х2 + х2 + 2Х1Х2 + 6xtx3 — 2х2Х3 + 2X1 — 6х2 — 2х3 = 0.
330. Найти общую диаметральную плоскость поверхностей:
4x2 2x2 + 3x2 + 4xix3 — 4х2х3 + 8xi — 4х2 + 8х3 = 0,
xf + 9x2 2х2 — 4xix2 — 6xix3 + 2х2х3 + 8xi — 16х2 +1 = 0.
331. Составить уравнение той диаметральной плоскости поверх-
ности х2 — x4x2 + 2х2х3 + Xi — х3 = 0, которая проходит через
точку (1, 1, 1) и сопряжена вектору а, параллельному плоскости
OXiX2,
283
332. При каком условии плоскость Oxtx2 является одной из диаме-
тральных плоскостей поверхности второго порядка.
333. Ответьте на следующие вопросы.
а) Существует ли такая поверхность второго порядка, для кото-
рой все диаметральные плоскости совпадают?
б) Как расположены диаметральные плоскости пары пересекаю-
щихся плоскостей?
334. Найти центры следующих поверхностей второго порядка:
a) xf + х* + х? + 2х4х2 + 6xjx3 — 2х2х3 +2xf—6х2—2х3=0;
б) 3x2 2х| — 2xjx3 + 4х2х3 — 4xt — 8х3 — 8 = 0;
в) 2х| + 12х^ + 4xj + 8xtX2 — 4xtx3 + 12х2х3 — 10х4 +
+ 14х3 + 7 = 0.
335. Найти геометрическое место центров следующих поверх-
ностей второго порядка:
а) 9x2 5Х2 9Х2 — 12x^2 — 6х2х3 + 12х2 — З6х3 = 0;
б) 2x2 + 10x2 — 2х|+ 12xjX2 + 8х2х3 + 12xt + 4х2 — 8х3 —
— 1 = 0;
в) Х| + 4x2 + 4xfx3 — 2х2х3 = 0;
г) 2x2 2%2 4- 2^2 4х4х2 — 4х(х3 — 4х2х3 + 5xt + 5х2 —
— 5х3 + 2 = 0.
336. Поверхность задана общим уравнением. При каком условии
плоскость OxjX2 является плоскостью центров этой поверхности.
337. Найти уравнения главных диаметральных плоскостей сле-
дующих поверхностей второго порядка:
a) xf + х2 + 5x2 _ бх4х2 — 2xiX3 + 2х2х3 — 4xt + 6х2 + 2х3 —
— 8 = 0;
б) 5x2 — х2 х2 4- 4xjX2 + 6xtX3 + 2xj + 8х2 + 6х3 — 10 = 0;
в) 5x2 4- 2х| + 5x2 — 4х1х2 — 2Х(Х3 — 4х2х3 — 6xi + 6х2—7=0;
г) xf + х2 + 3x2 + 2х(х2 — 6xiX3 + 6х2х3 — 4xt + 4х2 — 2х3 —
— 12 = 0;
д) 2x2 + 3x2 + 2x2 4- 2Х1Х2 + 4xtx3 + 2х2х3 + 2xj +6х2+2х3=0.
§ 26. КЛАССИФИКАЦИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА
1. Упрощение уравнения поверхности второго порядка путем
преобразования системы координат. В данном параграфе мы будем
предполагать, что поверхность второго порядка задана уравнением
atjxixj + 2 а1^Х‘ Н- а44 ~ 0 (1)
t.i i
в прямоугольной декартовой системе координат.
284
Из теоремы [24.2] немедленно следует
Теорема [26.1 ]. Какова бы ни была поверхность второго
порядка, всегда существует такая прямоугольная декартова система
координат, в которой уравнение поверхности имеет следующий
вид:
а^х2 + а22х2 + а33х2 + 2aiixi 4- 2а^х2 + 2a3ix3 + а44 = 0. (2)
Доказательство. Пусть поверхность второго порядка
задана уравнением (1). Согласно теореме[24.2 ] эта поверхность име-
ет по крайней мере три взаимно перпендикулярных главных направ-
ления. Возьмем новую систему координат так, чтобы новые коорди-
натные оси имели главные направления. Если i', J’, k’ —новые
координатные векторы, то каждый из них имеет главное направ-
ление, поэтому все три вектора взаимно сопряжены. Из свойства (3)
сопряженности немедленно следует, что в уравнении поверхности
в новой системе координат отсутствуют члены с произведениями пе-
ременных, т. е. поверхность имеет уравнение вида (2). Теорема до-
казана.
Из этой теоремы видно, что путем поворота системы координат
всегда можно упростить уравнение поверхности второго порядка,
приведя его к виду, не содержащему произведений переменных.
Из теоремы [25.3 ] следует, что если поверхность имеет хотя бы
один центр, то, приняв его за начало координат, мы можем добить-
ся того, чтобы уравнение поверхности не содержало членов первой
степени. Таким образом, принимая во внимание теорему [26.1],
мы приходим к следующему выводу.
Теорема [26.2 ]. Если поверхность второго порядка имеет
хотя бы один центр, то всегда существует такая прямоугольная
декартова система координат, в которой уравнение поверхности име-
ет вид:
aiixf + а22х2 + а33х2 + Й44 = 0. (3)
Из теоремы [25.3] следует также, что если поверхность не име-
ет ни одного центра, то в любой системе координат уравнение по-
верхности содержит хотя бы один член первой степени. Имеет мес-
то следующая теорема.
Теорема [26.3 ]. Если поверхность второго порядка не име-
ет ни одного центра, то всегда существует такая прямоугольная
декартова система координат, в которой уравнение поверхности
имеет вид:
anxi + а22Х1 = хз- (4)
Доказательство. Возьмем систему координат, в кото-
рой уравнение поверхности имеет вид (2). Так как поверхность не
имеет ни одного центра, то хотя бы один из коэффициентов аи,
«22> а33 равен нулю. В самом деле, если все указанные коэффициен-
285
ты не равны нулю, то ранг г первой из матриц (4), § 25 равен трем,
а это означает, что поверхность имеет центр. Не нарушая общности,
можно предположить, что a3S = 0 Возможны два случая: а) ац у=
=£ 0, а22 ¥= 0; б) atl =# 0, а22 = 0. Рассмотрим каждый из этих слу-
чаев в отдельности.
а) ап #= 0, а22 =# 0. Для данного случая уравнение (2) прини-
мает вид:
а 11*1 + Й22^2 + 2а14 Х1 + 2а24 х2 + 2а34х3 + <з44 = 0. (5)
Матрицы (4), § 25 для данного уравнения имеют вид:
0 0 \ /аи 0 0 а14\
I 0 ^22 0 j’ I 0 ^22 ® ^24 j
\ 0 0 оу \0 0 0 ам/
Так как первая матрица имеет ранг 2, то вторая матрица должна
иметь ранг 3 в силу того, что поверхность не имеет ни одного центра.
Отсюда следует, что а34 0. Разделив уравнение (5) на — 2а34 и вво-
дя новые обозначения для коэффициентов, получаем:
Ах2 -+- Вхг2 4- 2С%1 4- 2Дх2 4~ В =- х2,
где А 0, В =£ 0.
Выделив в левой части предыдущего уравнения два полных квад-
рата, будем иметь: '
л / , , о С , С2\ . D / , . о D , D2\ , С2 D2
АI х, 4" 2 — х, 4“ — I 4- В (х-> 4-2 — х2 4~ — I 4* В-— — —х3
V А А2/ \ 1 В 2 В2) А В 3
или
Введем в рассмотрение новую прямоугольную декартову систему
координат так, чтобы
, С , D . „ , С2 . D2
х, = х< 4--, х, = х, 4----, х, = х, — £ 4------—.
1 А 2 2 В 3 3 А В
Согласно теореме [19.5] такая система координат существует.
Из формул (19), § 19 видно, что рассматриваемое преобразование
координат является переносом начала координат. Очевидно, в этой
системе координат уравнение поверхности имеет вид (4).
б) ац =# 0, а22 = а33 = 0. В данном случае уравнение (2) при-
нимает вид:
ацх2' 4- 2a14xt 4- 2а24х2 4- 2^X3 4- аи = 0. (6)
Так как эта поверхность не имеет ни одного центра, то, так же
как и в предыдущем случае, можно показать, что хотя бы один из
коэффициентов а24 или не равен нулю.
286
Сначала рассмотрим случай, когда один из этих коэффициентов
равен нулю. Не нарушая общности, положим, что а24 = 0, аам =/= 0.
(Если а.м =/= 0, а34 = 0, то поменяем между собой оси Ох2 и Ох3.)
Разделив уравнение (6) на — 2а34 и вводя новые обозначения для
коэффициентов уравнения, получаем:
Ах2 + 2BXi + С = х3, А 0. (7)
Выделяя в левой части уравнения полный квадрат, будем иметь:
. , о В . В2\ „ . В2
A I X, -j- 2 X. -(- I Хо С “р —
V А 1 А2) 3 А
ИЛИ
А^ + ^ = х3-С + ^
Введем в рассмотрение новую прямоугольную декартову сис-
тему координат так, чтобы
В этой системе координат уравнение поверхности имеет вид (4).
Остается рассмотреть случай, когда а24 =А= 0, а34 0. Выберем
новую прямоугольную декартову систему координат так, чтобы фор-
мулы преобразования имели следующий вид:
v' _ „ __ °34Х2 g24X3 у' ___ °24Х2 Т °34Х3
л । *^2 > Л'З —
Ka2.( + a34 Vah+aL
Согласно теореме [19.5] такая система координат существует.
В новой системе уравнение (6) принимает следующий вид:
апх'2 + 2а14х' + 2|/ a22i + a23i х3 + а44 = 0.
Разделив это соотношение на —2ya2i-\-a2i, мы приводим его к виду
(7). Уравнение (7), как было показано выше, легко приводится к
виду (4). Теорема доказана полностью. Мы пришли к следующему
выводу.
Теорема [26.4]. Если поверхность второго порядка в пря-
моугольной декартовой системе координат дана уравнением (1), то
путем надлежащего выбора новой прямоугольной декартовой системы
координат уравнение этой поверхности можно привести к одному
из следующих видов:
Ах2 + Вх2 + Сх2 + D = 0, где А =/= 0, В 0, С 0; (8)
Ах2 + Вх2 = С, (9)
где хотя бы один из коэффициентов А или В не равен нулю;
Ах2 -|- Вх2 = х3, где А 0, В =/= 0; (10)
/Ixf = х3> где А =f= 0. (И)
287
Очевидно, уравнением (8) определяется центральная поверх-
ность второго порядка. В случаях (9), (10) и (11) поверхность не
является центральной. Из теоремы [22.5] следует, что уравнения (9)
и (11) определяют цилиндрические поверхности, а уравнение (10)—
нецилиндрическую поверхность. При этом цилиндрическая по-
верхность (9) имеет линию центров, а поверхности (10) и (11) не име-
ют ни одного центра.
Доказанная выше теорема позволяет дать полную классифика-
цию поверхностей второго порядка.
2. Классификация центральных поверхностей второго порядка.
Из теоремы [26.2 ] следует, что уравнение любой центральной по-
верхности второго порядка можно привести к виду (8), где А =И= 0,
В 0, С =/= 0, a D — произвольный коэффициент.
Рассмотрим два случая:
I. D =И= 0. Разделив уравнение (8) на (—D), получаем;
А В С , .
-----х,-----х;-----xi = 1
D 1 D 2 D 3
или
А х% В х~ -)- С'х23 = 1, где А' =^= 0, В' =/= 0, С =/= 0. (12)
Возможны следующие случаи.
а) Коэффициенты А', В', С положительны. Если ввести обоз-
начения А' — -- , В' = — , С = — , то уравнение (12) прини-
й2 Ь2 с2
мает следующий вид:
Поверхность, определяемая уравнением (13), называется эллип-
соидом.
б) Два из коэффициентов уравнения (12) положительны, а тре-
тий — отрицателен. Не нарушая общности, можно предположить,
что А' > 0, В' > 0, С < 0. Если ввести обозначения А' = — ,
а2
В' = 1,
Ь»
—, то уравнение (12) приводится к виду:
с2
X? х| х'з
— + —------------= 1.
а2 Ь2 с2
(14)
н о-
Поверхность, определяемая этим уравнением, называется о д
полостным гиперболоидом.
в) Два из коэффициентов А', В', С отрицательны, а один
положителен. Не нарушая общности, можно предположить, что
в уравнении (12) А' < 0, В' < 0, С > 0. Если ввести обозначения
А' - — —, В' = — —, С = —,
а2 Ь2 с2
С
& ’
288
те уравнение (12) приводится к следующему виду:
х2 х2 х2
*1 , z х3 _ __ |
а2 Ь2 с1 ~
(15)
Поверхность, определяемая уравнением (15), называется
двуполостным гиперболоидом.
г) Все коэффициенты А', В', С отрицательны. Если ввести
обозначения
А' =----L, В' = — — , С' =
а2 Ь2
то уравнение (12) принимает вид:
X । Хп Ха
— +~ + — = — 1.
а2 Ь2 с2
(16)
На этой поверхности нет ни одной действительной точки, так
как сумма квадратов трех действительных чисел не может равнять-
ся — 1. Поверхность называется мнимым эллипсоидом.
II. D = 0. В этом случае уравнение (8) принимает вид:
Ах2 + Вх2 + Сх2 = 0. (17)
Из теоремы (23.61 следует, что этим уравнением определяется
коническая поверхность второго порядка. Возможны два случая:
а) все коэффициенты А, В, С имеют один и тот же знак, б) коэф-
фициенты А, В, С имеют разные знаки. Рассмотрим каждый из
этих случаев в отдельности.
а) Не нарушая общности, можно предположить, что А > 0,
В > 0, С > 0. В этом случае поверхность, определяемая уравне-
нием (17), имеет одну действительную точку О (0, 0, 0), так как
если сумма трех неотрицательных чисел равна нулю, то каждое сла-
гаемое равно нулю. Такая коническая поверхность называется мни-
мой конической поверхностью. Ее уравнение мо-
жет быть приведено к виду
2 2 2
Х7 xt Xt
—1- + — + —= 0.
а2 Ь2 с2
(17')
б) Не нарушая общности, можно предположить, что А > 0,
В > 0, С < 0. Если ввести новые обозначения для коэффициен-
тов, то уравнение (17) в данном случае приводится к следующему
виду:
(17")
Поверхность, определяемая этим уравнением, называется вещест-
венной конической поверхностью второго порядка.
289
Уравнения (13) — (16), (17'), (17") называются каноничес-
кими уравнениями соответствующих поверхностей, а система
координат, в которой уравнение поверхности имеет такой вид, —
канонической системой координат.
Резюмируя все сказанное выше, мы приходим к следующей тео-
реме.
Теорема [26.5 ]. Существует, шесть и только шесть типоз
центральных поверхностей второго порядка'. 1) эллипсоид, 2) одно-
полостный гиперболоид, 3) двуполостный гиперболоид, 4) мнимый
эллипсоид, 5) мнимая коническая поверхность второго порядка,
6) вещественная коническая поверхность второго порядка.
3. Классификация поверхностей второго порядка, имеющих
бесчисленное множество центров. Из теоремы [25.4] следует, что
всякая поверхность, имеющая бесчисленное множество центров,
является цилиндрической поверхностью. Уравнение таких поверх-
ностей в силу теоремы [26.4] можно привести к виду (9). Согласно
теореме [22.2] этим уравнением определяется цилиндрическая
поверхность с прямолинейными образующими, параллельными
оси 0х3.
В § 22 было показано, что цилиндрические поверхности можно
классифицировать по виду сечений, не параллельных образующим.
В данном случае направляющая цилиндрической поверхности в
плоскости Охрс2 имеет уравнение Ах2 + Вх2 = С. Возможны два
подслучая:
1)4 и В отличны от нуля; 2) один из коэффициентов А или В
равен нулю. Рассмотрим каждый из этих подслучаев в отдель-
ности.
1) А #= О, В =# 0. В данном случае уравнением (9) на плоскости
OxiX2 определяется центральная кривая второго порядка. Соглас
но теоремам I, [27.4] и [22.6 ] получаем следующие виды цилинд-
рических поверхностей.
а) Эллиптическая цилиндрическая по-
верхность:
б) Гиперболическая цилиндрическая повер-
хность:
2 2
X, X.)
Н—= (19>
а2 о2
в) Мнимая эллиптическая цилиндричес-
кая поверхность:
X?
4- + - 1. (20)
а2 62
290
г) Пара вещественных пер
плоскостей:
X? х|
—!----- = 0.
а2 й2
есекающихся
(21)
Д) Пара
щи хс я по
мнимых плоскостей, пересекаю-
вещественной прямой (оси Ох3):
2 2
Х7 Хп
4-+4-=°- (22)
а2 Ь2
Уравнения (18) — (22) называются каноническими
уравнениями соответствующих поверхностей второго порядка, а сис-
темы координат, в которых поверхности имеют канонические урав-
нения, — каноническими системами координат.
2) А У= 0, В = 0. В соответствии с теоремами I, [27.6] и [22.6]
мы приходим к следующим видам цилиндрических поверхностей
второго порядка.
а) Пара вещественных параллельных
плоскостей:
х42 — а2 = 0. (23)
б) Пара мнимых параллельных плоскос-
тей:
х2 + а2 = 0. (24)
в) Пара слившихся плоскостей:
х2 = 0. (25)
Резюмируя приведенное выше исследование, мы приходим к сле-
дующей теореме.
Теорема [26.6]. Всякая поверхность второго порядка,
имеющая бесчисленное множество центров, является цилиндричес-
кой поверхностью второго порядка. Существует восемь и только
восемь видов поверхностей второго порядка, имеющих бесчисленное
множество центров'. 1) эллиптическая цилиндрическая поверхность,
2) гиперболическая цилиндрическая поверхность, 3) мнимая эллипти-
ческая цилиндрическая поверхность, 4) пара вещественных пересе-
кающихся плоскостей, 5) пара мнимых плоскостей, пересекающихся
по вещественной прямой, 6) пара вещественных параллельных плос-
костей, 7) пара мнимых параллельных плоскостей, 8) пара сливших-
ся плоскостей.
4. Классификация поверхностей второго порядка, не имеющих
центров. Сначала рассмотрим классификацию поверхностей, урав-
нения которых можно привести к виду (10). Так как коэффициенты
А и В не равны нулю, то возможны следующие два случая: а) оба
коэффициента имеют один и тот же знак, б) коэффициенты А и В
имеют разные знаки.
291
а) Л>0, B>0. Если ввести обозначения:
А = — , В = —,
2а2 262
то уравнение (10) приводится к следующему виду:
X2 г2
A_ + J2_ = 2x3. 126)
a2 Ь- ’
Поверхность, определяемая этим уравнением, называется э л-
липтическим параболоидом.
б) А > 0, В < 0. Если ввести обозначения:
то уравнение (10) приводится к следующему виду:
Поверхность, определяемая этим уравнением, называется г и-
перболическим параболоидом.
Уравнения (26) и (27) называются каноническими
уравнениями соответствующих параболоидов, а системы коорди-
нат, в которых параболоиды имеют такие уравнения, — канони-
ческими системами.
Рассмотрим, наконец, поверхность, определяемую уравнением
(11). Если ввести обозначения А = —. то уравнение (11) прини-
2р
мает вид: х? = 2рх3. (28)
Из теоремы [22.2 ] следует, что этим уравнением определяется ци-
линдрическая поверхность, направляющая которой является па-
раболой, поэтому она называется параболической ци-
линдрической поверхностью второго порядка.
Итак, мы приходим к следующему выводу.
Теорема [26.7 ]. Всякая поверхность второго порядка,
не имеющая ни одного центра, принадлежит одному из следующих
трех видов: 1) эллиптический параболоид, 2) гиперболический пара-
болоид, 3) параболическая цилиндрическая поверхность второго по-
рядка.
Резюмируя все приведенные выше выводы, мы можем сформу-
лировать следующую фундаментальную теорему.
Теорема [26.8]. Существуют семнадцать и только сем-
надцать видов поверхностей второго порядка, приведенных в следую-
щей таблице.
В этой таблице символ оо1 означает, что поверхность имеет прямую
центров, а оо2 — плоскость центров.
292
Название поверхности Каноническое уравнение Число цент- ров
1. Эллипсоид 2. Однополостный гиперболоид 3. Двуполостный гиперболоид 4. Мнимый эллипсоид 5. Вещественная коническая поверх- ность 6. Мнимая коническая поверхность 7. Эллиптический параболоид 8. Гиперболический параболоид 9. Эллиптическая цилиндрическая поверхность 10. Гиперболическая цилиндрическая поверхность 11. Мнимая эллиптическая цилиндри- ческая поверхность 12. Параболическая цилиндрическая поверхность 13. Пара вещественных пересекающих- ся плоскостей 14. Пара мнимых плоскостей, пересе- кающихся по вещественной пря- мой 15. Пара вещественных параллельных плоскостей 16. Пара мнимых параллельных пло- скостей 17. Пара слившихся плоскостей 7 7 1 7 ° о II II 11 II >? 7 о о г к” v г чг|г т г II " 7 II . „ ", 1 ° ° . 1 | . сч сч Н счсч счеч cj II II о + + + -Vk V ч? а & * п * -° ъ "в н "4' & к" о.сч я „ чг a ««|« 1 , II 1 + 1 + *^*^*"^* <>1* ~~ ЧГ 1 ,ч-сч- 4-4- 1 1 « * V а V Q * 4 ' _L_ _1_ 1 СЧ- С1 СЧ— М И Q СЧ — о» гм „ 1 -Г -f- ~ + к а х в к в V в 1 СЧ — « СЧ —« 1 -. 1 1 Ч О ч Q СЧ — СЧ СЧ—М «Чт- <я OJ _ w 1 X О X Q * ° Ч Q 1 1 1 1 1 1 1 0 0 оо1 оо1 0 оо1 оо1 оо2 оо2 оо2
293
5. Приведение общего уравнения поверхности второго порядка
к каноническому виду. Выше по существу был дан способ приведе-
ния уравнения поверхности второго порядка к каноническому виду.
Идея состоит в следующем: сначала путем поворота системы коор-
динат приводят уравнение к виду (2), не содержащему произведе-
ний переменных, далее переносом начала координат добиваются
дальнейшего упрощения уравнения поверхности (см. теоремы [26.2]
и [26.3]).
Важно подчеркнуть, что при этом не является обязательным пред-
варительное отыскание координат центра поверхности. Применяя
метод группировки членов, рассмотренный выше, можно непосред-
ственно найти те формулы преобразования переноса начала коор-
динат, после применения которых уравнение поверхности приводит-
ся к одному из видов (8) — (11).
Рассмотрим несколько примеров приведения уравнения поверх-
ности второго порядка к каноническому виду.
Пример 1. В прямоугольной декартовой системе координат
дана поверхность:
Xi — 6х2 4- 2х3 — 2xj -р 12хг 4“ 4х3 4- 9 = 0. (29)
Привести уравнение этой поверхности к каноническому виду.
Решение. Данное уравнение поверхности имеет вид (2),
поэтому, применяя метод группировки членов, приведем уравне-
ние к одному из видов (8) — (11). Сгруппируем члены левой части
уравнения (29) следующим образом:
{х? — 2xf 4- 1) — 6 (х2 — 2х2 4- 1) 4~ 2 (%з 4~ 2хз 4* 1) 4~
4-9—14-6 — 2 = 0,
или
(Xi - I)2 - 6 (х2 - I)2 4- 2 (х3 4- I)2 + 12 = 0.
Если ввести в рассмотрение новую систему координат O'xix2x3
так, что
xj = Xj — 1, xj = х2 — 1, xj = х3 4- 1,
то уравнение поверхности (29) в новой системе координат примет вид:
xj2 — 6xj2 4- 2xj2 4- 12 =0,
или
.2 ,2 ,2
X, Х2 . Х3 __ 1
~12 2 +
Рассмотрим еще одно преобразование системы координат:
Здесь мы поменяли местами вторую и третью координатные оси.
294
В новой системе координат поверхность имеет уравнение:
~ 2 ^2 ~2
= <30>
Мы получили каноническое уравнение двуполостного гиперболоида.
Формулы преобразования координат при переходе от уравнения
(29) к уравнению (30) имеют вид: xt — xt — 1, х2 = х3 + 1/
хз = х2 — 1.
Пример 2. С помощью преобразования поворота системы
координат вокруг начала и параллельного переноса привести к ка-
ноническому виду следующее уравнение поверхности второго по-
рядка:
5 xf И- Зх 2 4“ Зх'з — 2х 1X2 2х 1X3 — 2x2X3 4~
+ 4xj + 8х2 + 12х3— 4 = 0. (31)
Решение. С помощью преобразования поворота системы
координат вокруг начала добиваемся того, чтобы в новой системе
Oxix2x3 в уравнении поверхности отсутствовали члены с произве-
дениями переменных. При этом, очевидно, новые оси координат бу-
дут иметь главные направления. Далее, при помощи преобразо-
вания параллельного переноса приводим уравнение поверхности
к каноническому виду.
Осуществим этот план для данной поверхности (31).
Составим характеристическое уравнение и найдем его корни:
5 — k —1 1
— 1 з — fe —1
1 —1 3 — k
— k3 + Ш2 — 36/г + 36 = 0,
или
(k — 2) (— k2 + 9k — 18) - О1.
Отсюда получаем:
ki = 2, k2 = 6, k3 = 3.
Найдем главные направления, соответствующие полученным
характеристическим числам. Для этой цели воспользуемся форму-
лами (10), § 24. Подставив туда kt = 2, получаем:
Зр! — рг + рз = 0, — pi + р2 — Рз = 0, pt — р2 + рз = 0.
Из первых двух соотношений будем иметь:
Pi = 0, р2 = 21, р3 = 2/.
Подберем t так, чтобы вектор р был единичным.
р\ + Р2 + рз = 8/2, 8/2 = 1, t =
1 См. сноску на стр. 272.
295
Из предыдущих соотношений получаем:
/(о, q. q.
Точно так же определяем единичные векторы, соответствующие
другим характеристическим числам:
rf_2,_______L -41 k'-4 --41
1/6’ / б’ V б/’ (у з’ v з’ у зг
Если мы примем эти векторы за новые координатные векторы,
то формулы преобразования будут иметь вид:
Xi = 0 Xj Н—х., Н Х3,
1 1 1 -\Г с - э/ о
х = 2х'-----4х', 4---Lxj,
л2 2 1 У 6 уз
7*2 I 1 г' ’г'
у* — ___X. Н----X,.------л4.
Х3 2 V 6 V 3
Подставив эти значения в уравнение (31), после преобразований
получаем:
2х) ~Ь 6x2 И- Зхз 4" Ю 2 X) + 2 Д/~6x2 — 4 = 0.
Пользуясь методом группировки членов, легко приводим это
уравнение к следующему виду:
2
4-Зх3 — 30 = 0.
Если ввести в рассмотрение новую систему координат Оху2х3
так, чтобы х. = х‘. + ~ х' -|—-4, х, = х', то в этой сис-
1 1 'у 2 л - у 6
теме координат уравнение поверхности принимает вид:
— 2 ~ 2 '"-'2
4- 4- х 2 | х з = 1
15 5 Т 10
Мы получили каноническое уравнение эллипсоида. Предлагаем
читателю самостоятельно написать формулы преобразования коор-
динат при переходе от системы Ох1х2х3 к системе Ох!х2х3.
Пример 3. В прямоугольной декартовой системе координат
дана поверхность
3xf + 2х2 — 4х3 = 0. (32)
Привести уравнение этой поверхности к каноническому виду.
Решение. Уравнение (32) имеет вид (6), поэтому для его уп-
рощения применим метод, рассмотренный при доказательстве тео-
ремы [26.3]. Выберем новую прямоугольную декартову систему
296
так, чтобы формулы преобразования имели вид, приведенный на
стр. 287. Для поверхности (32) получаем:
2х2—4х, , 4х2 + 2х3
Л. л<. , — « Л-п .-- .
1 - у 20 3 /20
Уравнение (32) в новой системе координат будет иметь вид:
Зх'2 + ]/20 х'2 = °-
Отсюда следует, что данная поверхность является параболи-
ческой цилиндрической поверхностью второго порядка.
Из таблицы, приведенной на стр. 293, видно, что из семнадцати
видов поверхностей второго порядка два являются коническими по-
верхностями, а девять — цилиндрическими. Геометрические свой-
ства этих поверхностей нами подробно изучены в § 22 и 23. Таким
образом, остается исследовать геометрические свойства первых пя-
ти типов поверхностей, приведенных в таблице. Следующие два.
параграфа книги посвящены этому вопросу.
Задачи и упражнения
С помощью преобразования вращения прямоугольной декарто-
вой системы координат привести к каноническому виду следую-
щие уравнения поверхностей второго порядка и написать формулы
преобразования координат,
338. 2%2 + 2x2 — 5x2 2xjX2 — 15 = 0.
339. 3xf + 2х2 — 4х3 = 0.
340. х2 + 5x2 х2 2х(х2 + 6х(х3 + 2х2х3 — 12 = 0.
341. х| + ^2 + 4x2 + 2xtx2 + 4xfx3 + 4х2х3 — 24 — 0.
342. Х| — 2x2 х2 _}_ 4Х1х2 — 10xtx3 + 4х2х3 — 6 = 0.
343. 5x2 + 5Х2 _ Зх2 + 8Х1Хз _ 9 = о.
С помощью переноса начала прямоугольной декартовой систе-
мы координат привести-к каноническому виду следующие уравне-
ния поверхностей второго порядка.
344. х2 — 6x2 2х| — 2xj + 12х2 + 4х3 + 9 = 0.
345. 3x2 — 2x2 12Х1 — 2х2 + 4х3 + 6 = 0.
346. х2 + 2x2 _ 4х2 + 12хз + Ю = 0.
347. 2xf + х2 + 4x2 _ 4Х1 бх2 + 16х3 — 1=0.
348. %2 + 2x2 — 6xj + 4х2 — 8х3 + 13 = 0.
349. х2 14Х1 + 144 = о.
С помощью преобразования вращения системы координат и пе-
реноса начала координат привести к каноническому виду уравне-
ния следующих поверхностей второго порядка.
350. 5xf+3x| + 3x2—2х1х2+2х1х3—2x2x3+4xj+8х2+12х3—4=0.
297
351. 4“ х| Ч- 4х| -Т 2х^х3 4xiX3-]~ 4x2x34- Sx^H- 4x2 — 5— 0.
352. 2xiX3 + 4Xi — 6х2 + 8х3— 2 = 0.
353. 5x2 5%2 8x^2 — 4xix3 + 4х2х3 —Збх! + 36х2 — 18х3—
— 18 = 0.
354. 4x2 + 2x2 зх2 _|_ 4Х1х3 — 4х2х3 + 8xt — 4х2 4- 8х3= 0.
§ 27. ИЗУЧЕНИЕ СВОЙСТВ ЭЛЛИПСОИДА И ГИПЕРБОЛОИДОВ
ПО ИХ КАНОНИЧЕСКИМ УРАВНЕНИЯМ
1. Эллипсоид. Как было отмечено выше, эллипсоидом
называется геометрическое место точек пространства, координаты
которых в некоторой прямоугольной декартовой системе координат
удовлетворяют уравнению-.
а2
(1)
*2 ,
62 с2
Система координат, в которой эллипсоид задан таким уравне-
нием, называется канонической системой, а само
уравнение — каноническим уравнением. Изучим
геометрические свойства эллипсоида.
а) Эллипсоид не проходит через начала канонической системы коор-
динат, так как координаты точки О (0, 0, 0) не удовлетворяют
уравнению (1).
б) Найдем точки пересечения эллипсоида (1) с осями координат.
Для определения координат точек пересечения с осью Oxi следует
совместно решить уравнения эллипсоида и оси Охх:
4 + 3 + 4= *2 = 0. *3 = 0-
а2 Ь£ с2
Решив эту систему, получаем точки пересечения: Ai (а, 0, 0),
А2 (—а> 0, 0). Аналогично получаем точки пересечения с осью Ох2:
Bi (0, b, 0), В2 (0, —Ь, 0) и с осью Ох3 : Cj (0, 0, с), С2 (0, 0, — с).
Таким образом, эллипсоид с каждой осью координат пересе-
кается в двух точках, симметричных относительно начала коорди-
нат. Точки Ai, А2, Bit В2, Ct, С2 называются вершинами,
а отрезки A iA2, BiB2, CjC2 — осями эллипсоида. Числа а, Ь,
и с называются полуосями эллипсоида. Если все эти числа
попарно различны, то эллипсоид называется трехосным. Ес-
ли две полуоси равны друг другу, то мы получаем эллипсоид
вращения (см. § 23, п. 6). Если, наконец, а = Ь = с, то по-
верхность согласно теореме [21.2] представляет собой сферу
с центром в начале координат.
в) Так как переменные xlt х2, х3 содержатся в уравнении эллип-
соида только в четных степенях, то эллипсоид симметричен отно-
сительно всех координатных плоскостей, всех координатных осей
и начала координат.
298
Доказательство этих предложений предлагаем провести чи-
тателю самостоятельно по аналогии с теорией кривых на плоскости
(см. I, § 19, п. 2).
г) Исследуем вопрос о пересечении эллипсоида с прямой линией.
Заметим, что согласно формуле (7), § 20, если вектор p{pi, р2, Рз}
имеет асимптотическое направление относительно эллипсоида, за-
2 2 2
Р\ Р? Р-1
данного уравнением (1), то — -|—- -------= 0, поэтому pi =
а2 Ь2 с2
= р2 = рз = 0. Таким образом, эллипсоид не имеет веществен-
ных асимптотических направлений. Отсюда следует, что любая пря-
мая пересекает эллипсоид в двух и только в двух точках, которые
могут быть вещественными, комплексно сопряженными или слив-
шимися. В частности, легко показать, что любая прямая, прохо-
дящая через начало координат, пересекает эллипсоид в двух и
только двух вещественных точках.
Отсюда можно сделать вывод, что эллипсоид не имеет прямоли-
нейных образующих, поэтому не является ни конической, ни ци-
линдрической поверхностью.
д) Рассмотрим совокупность диаметральных плоскостей эллип-.
соида, заданного уравнением (1). Так как эллипсоид не имеет ни
одного вектора асимптотического направления, то для любого век-
тора р {р^ р2, Рз} существует диаметральная плоскость, соот-
ветствующая этому вектору. Из теоремы [25.1] вытекает, что эта диа-
метральная плоскость определяется уравнением:
Р1Х1 | Р2Х2 । РзХ3 Q
Д2 ’ &2 “Г С2
Мы видим, что все диаметральные плоскости проходят через нача-
ло канонической системы координат и образуют собственную связ-
ку плоскостей с центром в этой точке (см. § 11, п. 6).
е) Определим центры симметрии эллипсоида. Согласно теореме
[25.2 ] центры симметрии для поверхности, заданной уравнением
(1), определяются из соотношений: = 0, х2 = 0, х3 = 0.
Таким образом, эллипсоид имеет единственный центр симмет-
рии — начало канонической системы координат.
ж) Определим область изменения координат точек эллипсоида
(см. I, § 19, п. 2). Из уравнения (1) следует, что
у? < j <- j < 1
а2 ’ 62 ’с2 ’
поэтому
х2 < а2, х2 < Ь2, х2 < с2
и —а < Xi < а, —b < х2<Ь, —с < х3 < с.
Отсюда вытекает, что точки эллипсоида расположены внутри
параллелепипеда М1М.2М.3М.^М.\М.2М3М.^, изображенного на ри-
сунке 99.
29»
Рис. 99
з) В заключение изучим
форму эллипсоида методом
сечений (см. п. 4, § 20). Пос-
троим карту поверхности в го-
ризонталях, пользуясь тео-
ремой [20.4]. Если эллипсо-
ид (1) пересечь плоскостью
х3 = h, параллельной плос-
кости Oxix2, то проекция се-
чения на плоскость Ох 1%2 име-
ет уравнение:
= 1 _ 1
а2 Ь2 с2
Возможны три случая:
а) — с < h. < с. В этом случае в сечениях мы получаем эллипсы,
центры которых лежат на оси Ох3. В самом деле, проекции этих
линий на плоскости Охрс2 имеют уравнения
у 2
—— + —
I h2\
а2 1-- Ь2
\ с2/
= 1.
hz
Так как 1------>0, то этим уравнением определяется эллипс с
с2
полуосями
а* = а
б’ = ь]/1-5.
При уменьшении | h\ полуоси возрастают, и при | h \ = 0 имеем
а* = а, Ь* — Ь. Таким образом, пересечение плоскости Охрс2 с эл-
липсоидом (1) будет эллипсом:
а2 Ь2
б) h = с, h = — с. В данном случае уравнение проекции сече-
Xi X
ния на плоскость Ох4х2 принимает вид: — Н—— = 0. Кривая
а2 Ь2
представляет собой две мнимые прямые, пересекающиеся в вещест-
венной точке (0, 0). Таким образом, плоскости х = с и х — — с
касаются эллипсоида в точках
(0, 0, с) и С2 (0, 0, — с).
1 Здесь проекция сечения рассматривается как кривая плоскости Oxtx2
и определяется в системе О/J одним уравнением. Всюду в дальнейшем
кривые, лежащие в координатных плоскостях Ох1х2, Ох2х3, Ox3xlt будут за-
даны аналогичным образом одним уравнением.
.300
в) h > с или h <
•< — с. В этом слу-
чае в сечениях полу-
чаем мнимые эллипсы,
так как плоскость х3 — h
при | h | > с не имеет
с эллипсоидом общих
вещественных точек.
Легко показать, что
сечения, параллельные
другим координатным
плоскостям, дают ана-
логичную картину.
Все выводы, сделанные выше, дают полное представление о гео-
метрической форме эллипсоида. Поверхность изображена на рисун-
ке 100.
2. Однополостный гиперболоид. Однополости ым ги-
перболоидом называется геометрическое место точек прос-
транства, координаты которых в некоторой прямоугольной декар-
товой системе координат удовлетворяют уравнению
а2 ft2
1.
с2
(2)
Система координат, относительно которой однополостный ги-
перболоид имеет уравнение (2), называется канонической
системой, а само уравнение каноническим урав-
нением.
Изучение геометрических свойств однополостного гиперболои-
да проведем по той же схеме, которая была выработана нами при
изучении свойств эллипсоида. Многие свойства однополостного
гиперболоида аналогичны соответствующим свойствам эллипсои-
да, поэтому доказательства этих свойств мы опустим.
а) Однополостный гиперболоид не проходит через начало кано-
нической системы координат, так как координаты точки О (0, 0, 0)
не удовлетворяют уравнению (2).
б) Точки пересечения однополостного гиперболоида с осями Oxi
и Ох2 определяются точно так же, как и в случае эллипсоида.
С осью Oxi однополостный гиперболоид пересекается в точках
Aj (а, 0, 0) и А2 (—а, 0, 0), а с осью Ох2 — в точках Bi (0, b, 0)
и В2 (0, — Ь, 0). С осью Ох3, однополостный гиперболоид пе-
ресекается в двух комплексно сопряженных точках. Таким об-
разом, ось Ох3 не имеет с однополостным гиперболоидом общих
вещественных точек. Точки A it А2, Blt В2 называются вершина-
м и, а отрезки AiA2, BtB2 — вещественными осями
однополостного гиперболоида. Числа а, Ь, с называются полу-
осями однополостного гиперболоида.
301
в) Так же как и в случае эллипсоида, переменные х2, х3 со-
держатся в уравнении поверхности в четных степенях, поэтому
однополостный гиперболоид симметричен относительно всех коор-
динатных плоскостей, всех координатных осей и начала координат.
г) Исследуем вопрос о пересечении однополостного гиперболо-
ида с прямой, проходящей через начало коорд шат. Пусть / — пря-
мая, определяемая параметрическими уравнениями (см. § 14, п. 7):
Xi = Pit, х2 = p2t, х3 = p3t. (3)
Найдем параметры точек пересечения этой прямой с одно-
полостным гиперболоидом (2). Для этой цели, очевидно, не-
обходимо значения х1( х2, х3 подставить в уравнение (2). После
элементарных выкладок получаем: /£1-|_£2— £2] р—1=0 или
\ а3 Ь2 с2 /
Pt2 — 1 = 0.
Возможны три случая.
1) Р = —2 + —2— ^>0. В этом случае квадратное уравнение
относительно t имеет два вещественных решения
t. = -i, t2 = — —L;
VP У P
поэтому при P > 0 прямая пересекает однополостный гиперболоид
в двух точках, симметричных относительно начала координат.
2) Р = 0. В этом случае согласно теореме [20.2 ] прямая I не
пересекает однополостный гиперболоид и является асимптотой этой
поверхности.
3) Р < 0. Очевидно, в данном случае прямая пересекает поверх-
ность (2) в двух комплексно сопряженных точках. Вещественных
точек пересечения с однополостным гиперболоидом прямая I не
имеет.
Выясним геометрическую картину полученных результатов.
Прежде всего определим геометрическое место точек, принадлежа-
щих всем асимптотам, проходящим через начало координат. Для
того чтобы вектор p{pi, р2, р3} имел асимптотическое направление
относительно поверхности (2), необходимо и достаточно, чтобы его
координаты удовлетворяли уравнению
Pi । Р j Рз _ о
а2 Ь2 с2
Из приведенного исследования вытекает, что точка М (х15 х2, х3)
лежит на асимптоте, проходящей через начало координат, тог-
да и только тогда, когда вектор ОМ {xlt х2, х3} имеет асимптоти-
ческое направление. Таким образом, искомое уравнение рассмат-
риваемого геометрического места точек согласно соотношению (4),
имеет вид:
(4)
302
*»2 v2 v2
51 4. = o. (5)
a2 b2 c2
Этим уравнением согласно теореме
[23.5] определяется коническая поверх-
ность, которая называется асимп-
тотическим конусом с вер-
шиной в начале коорди-
нат.
Если прямая, проходящая через на-
чало координат, проходит внутри этого
конуса, то можно показать, что для этой
прямой Р < 0, поэтому согласно преды-
дущему выводу она не имеет с поверх-
ностью общих точек. Если же прямая
проходит вне конуса, то Р > 0; она
пересекает поверхность в двух и только
в двух точках, симметричных относи-
тельно начала координат (рис. 101).
Мы приходим к интересному выводу:
все прямые, проходящие
через начало канонической системы координат и лежащие внутри
асимптотического конуса, пересекают однополостный гиперболоид
в двух комплексно сопряженных точках-, прямолинейные образую-
щие асимптотического конуса вовсе не пересекают однополостный
гиперболоид, а прямые, расположенные вне асимптотического ко-
нуса пересекают его в двух вещественных точках.
д) Рассмотрим совокупность диаметральных плоскостей одно-
полостного гиперболоида, заданного уравнением (2). Если вектор
Р {Рь р2, Рз} не имеет асимптотического направления, то диамет-
ральная плоскость, соответствующая этому вектору, согласно теб-
реме [25.1)] имеет уравнение:
X, . Х2 Хо л
Р1 — +р2 — — Рз — = 0.
а2 гЬ2 с2
Мы видим, что все диаметральные плоскости проходят через
начало координат, однако в отличие от случая эллипсоида не вся-
кая плоскость, проходящая через начало координат, является диа-
метральной плоскостью. В самом деле, если координаты вектора
р удовлетворяют соотношению (4), то плоскость, заданная преды-
дущим уравнением, не является диаметральной плоскостью.
е) Так же как и в случае эллипсоида, можно показать, что однопо-
лостный гиперболоид является центральной поверхностью, имею-
щей единственный центр, совпадающий с началом канонической си-
стемы координат.
ж) Определим область расположения точек однополостного ги-
перболоида по отношению к канонической системе координат. Вы-
зоз
ше было отмечено, что все точки
однополостного гиперболоида рас-
положены вне асимптотического
конуса. Из уравнения (2) следует,
что если точка М (jq, х2, х3) лежит
на однополостном гиперболоиде,
2 2
Xi Х9 z-x
то-----1---> 1. Отсюда следует,
а2 62
что точки однополостного гипер-
болоида расположены также вне
цилиндрической поверхности, за-
данной в канонической системе ко-
9 9
*i . *2
ординат уравнением — — — 1.
а2 Ь2
На рисунке 102 заштрихована та
область, которой принадлежат
точки однополостного гипербо-
лоида.
Рис. 102 з) в заключение изучим фор-
му однополостного гиперболоида
методом сечений. Прежде всего определим линии пересечения по-
верхности с координатными плоскостями. Из теоремы [20.4] сле-
дует, что плоскость Оххх2 пересекает однополостный гиперболоид
х2 х2
(2) по линии, имеющей в этой плоскости уравнение _______? = р
а2 Ь2
Это — уравнение эллипса, который называется горловым
эллипсом однополостного гиперболоида. Далее, плоскость
Ох^з пересекает гиперболоид по линии, имеющей в этой плоскости
9 2
Х1 Х3
уравнение--------= 1, а плоскость Ох2х3 — по линии, имеющей
а2 с2
х2
в этой плоскости уравнение---------— 1. Эти линии называют-
Ь2 с2
ся главными гиперболами однополостного гипербо-
лоида.
Если поверхность пересечь плоскостью х3 — h, параллельной
плоскости OXiX2, то проекция сечения на плоскость Oxix2 имеет
уравнение
I = 1 I
а2 ’’’ Ь2 с2'
При любом значении h этим уравнением определяется эллипс с по-
луосями
См. сноску на стр. 300.
304
Рис. 103
a' = — jZc3 +fta и
c
b’ =±]/c’ + /ia,
c
в чем легко убедиться, раз-
делив обе части последнего
уравнения на 1 + —.
/ С2
Таким образом, карта по-
верхности в горизонталях
представляет собой систему
эллипсов, имеющих общие главные оси, при этом йаимень-
шим из этих эллипсов . является горловой эллипс (рис. 103).
Чем больше абсолютное значение h, тем больше полуоси эллипса.
Если поверхность пересечь -плоскостью xt — h, параллельной
плоскости Ох2х3, то проекция сечения на плоскость Ох2х3 имеет
уравнение
2 2
4__^3 = j _
Ь2 с2 а2 '
'Возможны три случая:
а) — а < h < а. В
этом случае 1 — > О,
поэтому проекции сече-
ний на плоскость Ох2х3
являются гиперболами
с мнимой осью Ох3. На
рисунке 104 эти гипер-
болы обозначены римс-
кой цифрой (I).
б) h = а и h = — а. В этом случае проекции сечений сов-
у 2 у 2
падают и имеют уравнение —2--------- =0. Этим уравнением опре-
Ь2 с2
деляются две прямые, пересекающиеся в начале координат
(рис. 104, прямые II). Таким образом, плоскости, параллельные
плоскости Ох2х3 и отстоящие от нее на расстоянии а, пересекают
поверхность по двум прямолинейным образующим.
в) h>a или /г< — а. В' этом случае
1 —- <0,
а2
поэтому в
сечении получаем гиперболу, длд которой ось Ох2 является мни-
мой осью. На рисунке 104 эти гиперболы обозначены цифрой III.
Таким образом, карта поверхности на плоскость Ох2х3 имеет
вид, изображенный на рисунке 104. Легко показать, что карта
11 Л. С, Атанасян
305
поверхности на плоскость Oxtx3 имеет
аналогичный вид.
Изученные выше геометрические свой-
ства поверхности, а также построенные
карты дают полное представление об од-
нополостном гиперболоиде. Поверхность
изображена на рисунке 105.
3. Прямолинейные образующие одно-
полостного гиперболоида. При исследова-
нии формы однополостного гиперболоида
методом сечений мы обнаружили, что в от-
личие от эллипсоида на однополостном ги-
перболоиде существуют прямолинейные
образующие. Исследуем более подробно
этот вопрос. Докажем прежде всего следую-
щую теорему.
Теорема [27.1 ]. Через каждую
точку однополостного гиперболоида про-
ходят две и только две прямолинейные
образующие.
Доказательство. Пусть M0(yi, у2, Уз)— произвольная
точка однополостного гиперболоида (2). Рассмотрим прямую /,
проходящую через эту точку (см. § 14, п. 7):
Xi = Pit + у 1, х2 = p2t + у2. х3 = p3t + уз, (6)
и выясним, можно ли направляющий вектор p{pi, р2, р3} подобрать
так, чтобы прямая (6) целиком лежала на поверхности (2). Для этой
цели, очевидно, необходимо и достаточно, чтобы соотношение
(Pit + У1)2 (Pat + Уз)3 _ (Pat + Уз)2 _ j
аа Ь2 с2
было тождеством относительно t.
Переписав это соотношение в виде
/Р1 । Рз__Рз\ р |. 2 !Р1У1 I PaVa_РзУз\ । /У?« । Уз __Уз___|
\ а2 Ь2 с2) \ а2 Ь2 с2 / "Ц а2 Ь2 с2
и заметив, что свободный член в нем обращается в нуль, посколь-
ку точка Мо (уь у2, у3) принадлежит однополостному гиперболоиду
(2), мы приходим к выводу, что последнее соотношение будет тож-
деством тогда и только тогда, когда в нем коэффициенты при /2 и
t обращаются в нуль: к
Р14_р1_р1 = 0, (7)
а2 Ь2 с2 '
У1Р1 j УаРа ’УзРз _ q (g\
а2 Ь2 с2
306
В этой системе уравнений plt р2, Рз — неизвестные величины,
а остальные нам известны. Выясним, имеет ли система ненулевые
решения и сколько их. Из соотношения (7) следует, что р3 =/= 0.
р? р?
В самом деле, если р3 = 0, то из (7) следует, что — + — = 0,
а2 &
поэтому pi — р2 = 0. Итак, pt = р2 — р3 = 0. Мы пришли к про-
тиворечию, так как направляющий вектор прямой I — ненулевой.
Так как нас интересует только направление вектора р, то, не на-
рушая общности, можно положить рз = с. Если ввести в рассмот-
рение новые неизвестные, X = —, ¥ — —, то систему (7), (8)
а b
можно записать так:
X2 + Ya = 1, (7')
У1 X^Y —— = 0. (8')
а Ь с
Теперь применим следующий искусственный способ исследо-
вания этой системы. Пусть X,Y — прямоугольные декартовы коор-
динаты точки на плоскости. Тогда уравнение (7') интерпретирует-
ся как уравнение окружности радиуса единица, а уравнение (8') —
как уравнение прямой. В самом деле, yt и у2 одновременно не рав-
ны нулю, так как у 1; у2,- Уз — координаты точки на поверхности (2),
а эта поверхность не пересекает ось Ох3. Поэтому согласно теоре-
ме I, [15.1] уравнением (8') определяется прямая. Вычислим
расстояние от начала координат д^ прямой (8'). Согласно форму-
ле (8), I, § 16 получаем:
Отсюда вытекает, что прямая (8') пересекает окружность (7')
в’двух и только двух различных точках. Это означает, что суще-
ствует два и только два различных решения системы (7') и (8').
Пусть (X 1( Yi) и (Х2, Y2) — эти решения. Тогда координаты векторов
p {aXit bY 1, с} и q {аХ2, bY2, с} удовлетворяют соотношениям (7)
и (8). Эти векторы не коллинеарны. В самом деле, если, например,
Xi =/=Х2, то I £ I #= 0. Очевидно, все другие
системы (7) и (8) определяют векторы, коллинеарные
Теорема доказана.
решения
Р и q.
Для того чтобы написать уравнения прямолинейных образую-
щих, проходящих через данную точку поверхности, запишем урав-
нение (2) однополостного гиперболоида в следующем виде:
11*
307
Рассмотрим две системы уравнений:
М - + -1 = ^(1 + т - . \ а с ) \ - о ] — = (10) \ а с ) \ b /
/Х1 t *з\ 1 1 Hi - + - = 14 1— т ’ \ а с / \ о / = + (11) \ а с / \ Ь /
В этих уравнениях Aj, Х2, Иг — произвольные параметры,
причём как Л2, так и ц2 одновременно не равны нулю. Для
удобства дальнейшего изложения введем следующее соглашение:
будем говорить, что параметры Аь Х2 (или pi±, ц2) принимают д о-
пустимые значения, если они одновременно не равны нулю.
Покажем, что уравнениями (10) при любых допустимых значе-
ниях Xj и Х2 определяется прямая в пространстве. В самом деле,
матрица коэффициентов при xit х2 и х3 уравнений (10) имеет сле-
дующий вид:
/^1 ^2
la Ь с |
I Аг Ах ____Аг I
\ а • b с '
Легко видеть, что ранг этой матрицы при любых допустимых зна-
чениях А, и А2 равен двум, так как, например, определитель, об-
разованный из элементов первых двух столбцов, равен:
М + М 0.
ab
Из теоремы [14.1 ] следует,-Что система (10) определяет в про-
странстве прямую. Так же можно показать, что при любых допус-
тимых значениях щ и ц2 уравнениями (11) определяется прямая.
Покажем, что прямая (10) при любых допустимых значениях
Xi и А2 является прямолинейной образующей однополостного ги-
перболоида. В самом деле, если точка Л1*(х* , х2 , х3 ) принад-
лежит прямой (10), то
+ Ы = X,fl 4- и -О. = ^(1 — —)• (12)
\ а с /• \ b j \ а с / \ b /
Если \ = 0, Х2 =# 0, то из соотношений (12) получаем:
* *
Х1 _ хз _ о
а с
Отсюда вытекает, что координаты точки М* удовлетворяют урав-
нению однополостного гиперболоида, записанного в виде (9). Точ-
но так же легко показать, что точка прямой (10) принадлежит од-
нополостному гиперболоиду в случае, если A.J #= 0, а Х2 = 0. Если,
наконец, Х( #= 0 и Х2 0, то, перемножив соответственно левые
и правые части соотношений (12) и сократив на MA2, получим:
1 + ^ = 0,
Ь
308
Мы снова приходим к выводу, что точка М * принадлежит одно-
полостному гиперболоиду.
Точно так же можно показать, что при любых допустимых зна-
чениях р! и р2 прямая, определяемая уравнениями (11), принадле-
жит однополостному гиперболоиду.
Таким образом, при всевозможных допустимых значениях Х.1;
Х2 и р1( р2 уравнениями (10) определяется одно семейство прямо-
линейных образующих, а уравнениями (11) другое.
Покажем, что ни одна из прямых первого семейства не совпада-
ет ни с одной из прямых второго семейства. Возьмем произвольную
прямую первого семейства и произвольную прямую /2 второго се-
мейства. Пусть Х2, pi, р2 — параметры этих прямых. Тогда из
теоремы [14.1] следует, что направляющие векторы прямых (10)
и (11) имеют координаты:
—2Ц, Ь? + *11 Г Pi — Иг гщщ —Р-i — Иг
Ьс ’ ас ’ ab ) I Ьс ’ * ас ab
Приравнивая нулю определители второго порядка, составленные
из координат этих векторов, мы убеждаемся в том, что эти векторы
коллинеарны тогда и только тогда, когда X2pi + Xip2 = 0. Та-
ким образом, если X2pi + Xip2 =# 0, то прямые не совпадают. Если
Х2 pi + lip.2 = 0, то, не нарушая общности, можно положить pi=
= Иг — — тогда уравнения прямых (10) и (11) запишутся
так:
\ а с) \ Ь / \а
(13)
М- + -) = —Mi —М- — -'I = М— i — -У (14)
\а с/ \ Ь) _ \а с/ \ Ь /
Этими уравнениями определяются две параллельные прямые,
так как направляющие векторы этих прямых коллинеарны, а
точка , o') принадлежит прямой (13) и не
\ Xi -f- Л 2 /
принадлежит прямой (14). В последнем утверждении легко убе-
диться, если подставить координаты этой точки в уравнения (13)
и (14).
В заключение сформулируем основные свойства семейств (10)
и (И) прямолинейных образующих однополостного гиперболоида.
а) Через произвольную точку поверхности (2) проходит одна
и только одна прямолинейная образующая, принадлежащая каж-
дому из семейств (10) и (11).
б) Две различные прямолинейные образующие, принадлежащие
одному и тому же семейству, не пересекаются.
309
Рис. 106
в) Две прямолинейные образующие раз-
личных семейств всегда лежат в одной
плоскости и параллельны тогда iT только
тогда, когда проходят через диаметраль-
но противоположные точки горлового эл-
липса.
г) Если и 12 — прямолинейные обра-
зующие, проходящие через данную точку
Л40, то плоскость, определяемая прямыми
li и /2> является касательной плоскостью
к однополостному гиперболоиду.
Доказательство всех'этих свойств пре-
доставляем читателю.
Мы видим, что однополостный гипербо-
лоид является дважды линейчатой поверх-
ностью. Однополостный гиперболоид с дву-
мя семействами прямолинейных образую-
щих изображен на рисунке 106.
Линейчатый характер однополостного гиперболоида использует-
ся в строительной технике. Знаменитый русский,инженер В. Г. Шу-
хов предложил конструкции башен, сконструированных из прямо-
линейных балок, расположенных так, как расположены прямоли-
нейные образующие однополостного гиперболоида вращения. Эти
конструкции,оказались очень прочными и легкими. Они часто ис-
пользуются при строительстве водонапорных башен, высотных ра-
диомачт, телевизионных башен и т. д.
4. Двуполостный гиперболоид. -Двуполостным гипер-
болоидом называется геометрическое место точек простран-
ства, координаты которых в некоторой прямоугольной декартовой
системе координат удовлетворяют уравнению
4 + 4 — 4 = — 1- (15)
а3 62 с2 v '
Система координат, в которой уравнение поверхности имеет
вид (15), называется канонической, а само уравнение —
каноническим уравнением. Метод исследования
геометрических свойств двуполостного гиперболоида по существу
ничем не отличается от метода исследования свойств однополост-
ного гиперболоида, хотя в отдельных случаях мы приходим к дру-
гим выводам. Проведем обзор этих свойств.
а) Двуполостный гиперболоид не проходит через начало канони-
ческой системы координат.
б) Двуполостный гиперболоид пересекает ось Ох3 в двух точках
Ct (0,-0, с) и С2 (0, 0, —с). Оси Oxt и Ох2 не пересекают поверхность
в вещественных точках. Точки С4 и С2 называются вершинами
поверхности, а отрезок С£2 — действительной осью. Числа а, b и
с называются полуосями двуполостного гиперболоида. Ес-
310
ли а = Ь, то согласно п. 6, § 23 поверхность представляет собой дву-
полостный гиперболоид вращения.
в) Двуполостный гиперболоид симметричен относительно всех
координатных плоскостей, координатных осей и начала коорди-
'нат.
г) Исследование вопроса о пересечении поверхности с прямыми,
проходящими через начало координат, в точности совпадает с ис-
следованием однополостного гиперболоида. Так же как и в пре-
дыдущем случае, геометрическое место точек, лежащих на асимп-
тотах, проходящих через начало координат, является конусом,
определяемым уравнением (5). Этот конус называется асимпто-
тическим конусом с вершиной в начале координат.
Но в отличие от предыдущего случая прямые, проходящие через О
и расположенные внутри конуса, пересекают поверхность в двух точ-
ках, симметричных относительно начала координат, а прямые,
расположенные вне конуса, не имеют действительных точек с по-
верхностью.
д) Выясним вопрос о наличии прямолинейных образующих на
двуполостном гиперболоиде. Докажем, что двуполостный гипер-
болоид, в отличие от однополостного гиперболоида, не имеет прямо-
линейных образующих. Доказательство проведем от противного.
Пусть прямая (6) является прямолинейной образующей, проходя-
щей через точку M0(yi, у2. Уз) поверхности (15). Это означает, что
координаты направляющего вектора р {pit р2, рз} удовлетворяют
системе (7) и (8)1. Очевидно, р3 0, поэтому существует число
t =/= 0 такое, что р3 = ct. Если ввести обозначения: X =
at
У =^, то координаты вектора р можно записать так:
Pi = Xat, р2 = Ybt, рз = ct.
Подставив эти значения в соотношения (7) и (8), получаем (7')
и (8'). Отметим, что хотя бы один из коэффициентов при X и У в
уравнении (8') отличен от нуля. В самом деле, если у! = у2 = О,
то уз =/= 0, так как M0(yi, у2, Уз) — точка поверхности (15). Но в
этом случае соотношение (8') принимает вид: 0 • X +. 0-У —— =
- ’ с 1
— О, что противоречиво.
Теперь покажем, что в отличие от случая однополостного гипер-
болоида система (7') и (8') не может иметь вещественных решений.
В самом деле, интерпретируя (7') как уравнение окружности, а
(8х) как уравнение прямой, мы видим, что они не пересекаются в
вещественных точках, так как расстояние d от прямой (8') до нача-
1 Легко видеть, что хотя уравнения (2) и (15) различны, но соответствую-
щие уравнения (7) и (8) для этих поверхностей тождественны
311
ла координат в данном случае больше радиуса окружности. В са-
мом деле,
е) Если вектор р {ръ р2, р3} не имеет асимптотического направ-
ления, то диаметральная плоскость, соответствующая этому век-
тору, имеет уравнение
+ — — х3 = 0,
а2 Ьг 2 с2 3
поэтому все диаметральные плоскости поверхности принадлежат
собственной связке плоскостей с центром в начале координат. Од-
нако, так же как и в случае однополостного гиперболоида, не вся-
кая плоскость этой связки является диаметральной.
ж) Двуполостный гиперболоид, так же как и эллипсоид и одно-
полостный гиперболоид, является центральной поверхностью с цент-
ром в начале канонической-системы кбординат.
з) Определим область расположения точек двуполостного ги-
перболоида относительно канонической системы координат.
Выше было отмечено, что все точки поверхности расположены внут-
х2
ри асимптотического конуса. Из уравнения (15) следует, что —3 >1,
поэтому х3 > с и х3 < — с. Таким образом, все точки двуполост-
ного гиперболоида лежат вне полосы, заключенной между двумя
параллельными плоскостями х3 = с и х3 = — с (рис. 107).
и) Предлагаем читателю самостоятельно исследовать поверх-
ность методом сечений и убедиться в том, что сечения плоскостями
312
х3 = h, где h> с, представляют собой эллипсы, а сечения плос-
костями, параллельными координатным плоскостям Ох{Х3 и Ох2х3,—
гиперболы. Двуполостный, гиперболоид имеет вид, изображенный
на рисунке 108.
Задачи и упражнения
355. Написать уравнение эллипсоида, оси которого совпадают
с осями координат и который:
а) проходит через точку М (2, 0, 1) и пересекает плоскость Oxtx2
X2 X2
ПО эллипсу у + Y = I1;
б) проходит через точку N (1, ]/3, ]/3) и пересекает плоскость
v2 v2
0XiX2 по эллипсу
4 5
xL Х1
плоскость Ох2х3 пр эллипсу----------1---- I,
25 2
по окружности xf + х| = 25.
каноническое уравнение однополостного гипер-
в) пересекает
а плоскость Oxtx2
356. Написать
болоида, который:
а) проходит через точку (|/5, 3, 2) и пересекает плоскость
Ох,х3 по гиперболе — — — = 1;
5 ' 4
б) пересекает плоскость OxiX2 по окружности xf 4- х2 = 9,
X2 X2 •
а плоскость Oxtx3 по гиперболе — -^ = 1. '
357. Найти сечения эллипсоида + у + = 1 координатны-
проекцию на плоскость Oxtx2 линии пересечения
X2 X— х~
гиперболоида — —---------- = 1 с плоскостью xt —
16 16 4
ми плоскостями.
X—
358. Определить сечение однополостного гиперболоида у + -^ —
— у = 1 плоскостью, проходящей через точку (0, 2, 0) и парал-
лельной ПЛОСКОСТИ OXjXg.
359. Найти
однополостного
— 2х3 = 0.
360. Найти
+ хг — Хз — 1; которые проходят через точку (1, 1, 1).
361,. Написать уравнение той диаметральной плоскости эллип-
те прямолинейные образующие поверхности х? +
1 См. сноску на стр. 300.
313
соида — + у + ^ = 1, которая проходит через прямую xt— х2+
+ х3 + 5 — 0, + 2х2 +1 = 0.
362. Составить уравнение диаметральной плоскости однополост-
у 2 Х~ X2
ного гиперболоида — 4— ------ = 1, делящей пополам хорды, па-
9 16 4
раллельные вектору р {1, 1, 1}.
363. Написать уравнения двух систем прямолинейных образую-
щих однополостного гиперболоида
xf + 9х| — Хз = 9
и определить те прямолинейные образующие, которые проходят
через, точку (3, —, —1).
3
§ 28. ИЗУЧЕНИЕ СВОЙСТВ ПАРАБОЛОИДОВ ПО ИХ КАНОНИЧЕСКИМ
УРАВНЕНИЯМ
В предыдущем параграфе мы рассмотрели геометрические свой-
ства эллипсоида, однополостного и двуполостного гиперболоидов.
В настоящем параграфе изучим геометрические свойства парабо-
лоидов по их каноническим уравнениям.
1. Эллиптический параболоид. Эллиптическим, па-
раболоидом называется геометрическое место точек простран-
ства, координаты которых в некоторой прямоугольной декартовой
системе удовлетворяют уравнению
у 2 у 2
+ -2- = 2х3: (1)
а2 Ь2 3
X *
Система координат, относительно которой эллиптический пара-
болоид имеет уравнение (1), называется канонической, а
само уравнение — каноническим. Изучение геометричес-
ких свойств эллиптического параболоида проведем по той же схеме,
по которой были изучены поверхности в предыдущем параграфе.
а) Эллиптический параболоид проходит через начало канони-
ческой системы координат, так как координаты точки О (0, 0, 0)
удовлетворяют уравнению (1).
б) Найдем точки пересечения поверхности (1) с осями коорди-
нат. Для определения точек пересечения эллиптического парабо-
лоида с осью Oxi следует совместно решить уравнение (1) и уравне-
ние оси Охр.
2 2
= 2х3, х2 = 0, х3 = 0.
Очевидно, эта система имеет единственное решение: xt = 0,
х2 = 0, х3 = 0. Таким образом, эллиптический параболоид имеет
с осью Oxi только одну точку — начало координат. Точно так же
314
можно показать, что начало ко-
ординат является единственной
точкой пересечения поверхности
(1) с осями Ох2 и Ох3. Точка О
называется вершиной эл-
липтического параболоида.
в) Так как переменные Xi и
х2 содержатся в уравнении (1) в
четных степенях, то эллипти-
ческий параболоид симметричен
относительно координатных
плоскостей Oxtx3 и Ох2х3. Важ-
но подчеркнуть, что поверхность
не симметрична относительно
плоскости. OXiX2. Отсюда сле-
дует, что эллиптический пара-
болоид симметричен относитель-
но координатной оси Ох3 и не
симметричен относительно осей
Oxi и Ох2 и начала коорди-
нат.
г) Исследуем вопрос о пере-
сечении эллиптического пара-
болоида с прямыми, проходя-
щими через начало координат.
Пусть
Xi = pit, Х2 = p2t, х3 = p3t (2)
— уравнение произвольной пря-
мой, проходящей через начало
координат. Определим парамет-
ры точек пересечения этой пря-
мой с поверхностью (1). Для
этой цели подставим значения
Xi, х2, х3 в уравнение (1):
/ п5 П’\
Н? +-W/2-W = 0- (3)
Отсюда видно, что коэффициент Рис. Ш •
при /2 равен нулю тогда и толь-
ко тогда, когда рх = р2 = 0. В этом случае прямая (2) совпадает
с осью Ох3. Исключив этот случай из рассмотрения, мы получаем
два корня:
tv = 0,»/8 =
2р3
2 2 •
Pi _1_ Р2
а2 Ьг
315
Таким образом, если прямая не лежит в плоскости Ох{х2 и не сов-
падает с осью 0х3, то она пересекает параболоид в двух различных
точках, одна из которых совпадает с началом координат. Если пря-
мая лежит в плоскости Охрс2, то р3 = 0, и, следовательно, t2 = 0;
в этом случае оба корня и t2 уравнения (3) совпадают, следова-
тельно^ прямая касается поверхности. Наконец, если прямая сов-
падает с осью Ох3, то для этой прямой коэффициент при Z2 обращает-
ся в нуль. Следовательно, ось Ох3 будет иметь асимптотическое нап-
равление и пересечет поверхность в одной точке — начале коор-
динат.
д) Выясним вопрос о наличии прямолинейных образующих на
эллиптическом параболоиде. Докажем, что эллиптический парабо-
лоид не имеет прямолинейных образующих. Пусть М0(у1, у2, у3) —
произвольная точка поверхности, а
*1 = У1 + Pit, х2 = у2 + Pit, *з = Уз + Pst (2')
— произвольная прямая, проходящая через точку УИ0. Прямая
(2') будет прямолинейной образующей поверхности (!) тогда и
только тогда, когда'
р — Pi I — П и Г) _ Р1У1 I. РгУг „ _ о
Но эта система имеет только нулевые решения, так как из первого
уравнения следует, что pt = р2 = 0; подставив эти значения во
второе уравнение, получаем, что р3 = 0.
е) Рассмотрим совокупность диаметральных плоскостей эллип-
тического параболоида, заданного уравнением (1). Если р {pi, р2, р3}
не имеет асимптотического направления, т. е. если и р2 одно-
временно не равны нулю, то диаметральная плоскость, соответст-
вующая вектору р, в силу теоремы [25.1 ] имеет уравнение:
Из теоремы [11.11] следует, что совокупность всех диаметраль-
ных плоскостей эллиптического параболоида представляет собой
несобственную связку, определяемую вектором £{0, 0, 1}. В самом
деле, уравнение (17), § 11 для вектора k {0, 0, 1} имеет вид: aXj +
+ ух2 — [J = О1. Дополнительное условие, сформулированное
в § 11, сводится к тому, что а и у одновременно не равны нулю, в
остальном .они совершенно произвольны. Мы видим, что совокуп-
ность плоскостей, определяемых этим уравнением, совпадает с со-
вокупностью всех диаметральных плоскостей эллиптического пара-
болоида.
ж) Из* теоремы [25.2] следует, что эллиптический параболоид
1 Здесь введены новые обозначения для координат точек: х = xv у — х2.
316
не имеет ни одного центра. В самом деле, запишем систему (3),
§ 25 для .уравнения (1)-:
ii = 0, ^ = 0, 0. gj + O. g2—1 =0.
в2 > bi I »2
Мы видим, что эта система не совместна.
з) Определим область расположения точек эллиптического пара-
болоида относительно системы координат. Из уравнения поверхнос-
ти (1) следует, что для всех точек поверхности х3 >0, причем х3 =
= 0 тогда и только тогда, когда точка совпадает с началом коор-
динат. Отсюда следует, что все точки эллиптического параболоида
эа исключением начала координат расположены по одну и ту же
сторону от плоскости Охрс2.
и) В заключение изучим форму эллиптического параболоида
методом сечений. Построим карту поверхности в горизонталях.
Если эллиптический параболоид пересечь плоскостью х3 = h па-
раллельно плоскости OXiX2, то проекция сечения на плоскость OxiX2
будет иметь уравнение
—« + 4 = 2/i.
ав 1 Ь2
Из предыдущего исследования следует, что имеет смысл рас-
сматривать только те сечения, для которых h > 0. При h > 0
получаем: . „ 2
Xj Х3 _ .
2ha2 "Г 2hb2
Таким образом, все плоскости, параллельные плоскости OxiX2
и отсекающие от оси Ох3 отрезки h > 0, пересекают эллиптический
параболоид по эллипсам. Карта поверхности в горизонталях имеет
вид, изображенный на рисунке 109.
Плоскости, параллельные другим координатным плоскостям,
как легко видеть, пересекают эллиптический параболоид по пара-
болам. В самом деле, если в уравнении эллиптического параболоида
положить х2 = Л, то в сечении получим параболу, проекция кото-
рой на плоскость 0XiX3 имеет уравнение
4 _ 2r ^21
а2 - ^3 — 62 •
На рисунке НО изображена-карта поверхности на плоскость
Oxtx3.
Если в уравнение эллиптического параболоида положить Xi = Л,
то получим аналогичную карту на плоскости Ох2х3.
Все выводы, сделанные выше, дают полное представление о
геометрической форме эллиптического параболоида. Поверхность
изображена на рисунке 111.
2. Гиперболический параболоид. Нам остается изучить еще одну
поверхность — гиперболический параболоид. Так
1 См. сноску на стр. 300,
317
называется геометрическое место точек,, координаты которых в не-
которой прямоугольной декартовой системе координат удовлетво-
ряют уравнению
= 2х3. (4)
Система координат, относительно которой поверхность имеет
уравнение (4), называется канонической, а само уравне-
ние — каноническим. Рассмотрим основные свойства этой
поверхности.
а) Гиперболический параболоид проходит через начало канони-
ческой системы координат.
б) Гиперболический параболоид пересекается с осями каноничес-
кой системы координат в единственной точке — в начале коорди-
нат.
в) Гиперболический параболоид симметричен относительно ко-
ординатных плоскостей Oxtx3 и Охгх3 и не симметричен относитель-
но плоскости OXiX2. Отсюда следует, что поверхность симметрична
относительно координатной оси Ох3 и не симметрична относительно
осей 0%1 и 0х3 и начала координат.
Все эти свойства доказываются точно так же, как и для эллипти-
ческого .параболоида, поэтому доказательства мы опускаем.
г) Исследуем вопрос о пересечении гиперболического параболо-
ида с прямыми (2), проходящими через начало канонической системы
координат. Подставив значения xt, х2, х3 из соотношений (2) в
уравнение (4), получаем:
/ гЛ гЛ\
= * (5)
Возможны четыре случая:
1) — •р ¥= 0, Рз ¥= 0. В этом случае уравнение (5) имеет
два различных корня, один из которых равен нулю, поэтому
прямая пересекает гиперболический параболоид в двух различ-
ных точках, одна из которых совпадает с началом координат.
2 2
2) — -£| =£ 0, р3 = 0. Уравнение (5) имеет два совпадающих
корня, поэтому прямая (2) к а с а е т с я поверхности.
2 2
3) = 0, Pg =# 0. Уравнение (5) имеет единственный
корень /= 0. В этом случае прямая (2) имеет асимптотическое нап-
равление и единственную общую точку с поверхностью. Однако в
отличие от предыдущего случая она не касается поверхности.
4)--^ — ^| = 0, Рз = 0. Как видно из уравнения (5), прямая
является прямолинейной образующей.
Выясним геометрическую картину полученных результатов.
Сначала определим геометрическое место точек, принадлежащих
318
всем прямым асимптотичес-
кого направления, проходя-
щим через начало координат.
Уравнение этого геометри-
ческого места точек можно
вывести точно так же, как и
уравнение (5), § 27; оно имеет
вид:
4 - 4 = °' • (6)
Этим уравнением опреде-
ляется пара плоскостей,
пересекающихся по оси 0х3:
_ f1 2 = о, (6')
а b
хл + ** = о. (6")
а b
Рис. 112
Обозначим плоскость (6') через лt, (6") через л2, a Oxtx2 через л.
Кроме того, через 1^ обозначим линию пересечения плоскостей Л!
и л, а через /2 — плоскостей л2 и л (рис. 112). Из полученных выше
выводов следует, что все прямые связки с центром в точке О, не ле-
жащие в плоскостях лъ л2 и п, пересекают поверхность в точке О и
еще в одной точке, отличной от О. Все прямые плоскости п, отлич-
ные от и 12, касаются поверхности, а сами прямые и /2 являются
прямолинейными образующими. Прямые плоскостей и л2, не ле-
жащие в плоскости п, пересекают поверхность в единственной точке
О и не являются касательными. Отсюда следует, что плоскость
0xiX2 является касательной к поверхности в точке О1.
д) Рассмотрим совокупность диаметральных плоскостей.гипер-
болического параболоида, заданного уравнением (4). Если* вектор
Р {pt> р2> Рз} не имеет асимптотического направления, то диа-
метральная плоскость, соответствующая вектору р, в силу тео-
ремы [25.1] имеет уравнение:
xt — — х2 — 2р3-— 0.
а2 ы
Из теоремы [11.11] следует, что совокупность всех диаметраль-
ных плоскостей гиперболического параболоида принадлежит несоб-
ственной связке, определяемой вектором k{Q, 0, 1}2. Не всякая плос-
1 Можно доказать, что в общем случае, если М — точка поверхности,
то касательные ко всем кривым, лежащим на поверхности и проходящим че-
рез эту точку, лежат в одной плоскости. Она называется касательной
плоскостью к поверхности в данной точке М.
2 См. стр. 316.
319
кость этой связки яв-
ляется диаметральной.
Если вектор р имеет
асимптотическое нап-
равление, то плоскость,
определяемая уравне-
нием, приведенным вы-
ше, не является диаме-
тральной.
. е) Уравнение (4) не
позволяет делать каких-
либо существенных вы-
водов относительно об-
ласти расположения
точек поверхности. Для
изучения формы повер-
хности применим метод
сечений. Гиперболиче-
ский параболоид пересе-
кает координатные плос-
кости соответственно по
линиям1:
Х1 *5 ____ Л.
а2 ~ ~2 ~ и’
Xi = 2агх3,
х1 = — 2Ьгх3.
Первая кривая является па-
рой прямых /j и /2> рассмот-
ренных выше, а две другие —
параболы. Они называются
главными параболами
гиперболического параболоида.
На рисунках 113, 114 и 115 эти
кривые выделены жирными ли-
ниями.
Если поверхность пересечь
плоскостью г3 = h, то проек-
ция сечения на плоскости
OXiXz имеет уравнение
2 2
в2 Ь2 —
Рис. 115
1 См. сноску на стр. 300.
320
При всевозможных h О
этими уравнениями определя-
ются гиперболы, изображен-
ные на рисунке 113. При-
чем значениям h > 0 соответ-
ствуют гиперболы, заклю-
ченные в паре вертикальных
углов между lt и /2, содержа-
щей ось О*!, а значениям
<0 соответствуют гиперболы,
расположенные в другой паре
вертикальных углов. Мы ви-
дим, что карта поверхности
в горизонталях ' имеет вид,
изображенный на рисунке 113.
Предлагаем читателю самостоятельно убедиться в том, что карты
поверхности на другие координатные плоскости имеют вид, изобра-
женный на рисунках 114 и 115. Гиперболический параболоид изоб-
ражен на рисунке 116.
3. Прямолинейные образующие гиперболического параболоида.
Докажем следующую теорему.
Теорема [28.1 ]. Через каждую точку гиперболического па-
раболоида проходят две и только две прямолинейные образующие.
Доказательство. Пусть М0(у у2, у3) — произвольная
точка гиперболического параболоида (4). Рассмотрим прямую I,
проходящую через эту точку и определяемую параметрическими
уравнениями (6), § 27. Выясним, можно ли направляющий вектор
р {Pi> р2> Рз} подобрать так, чтобы эта прямая целиком лежала на
поверхности (4). Для этого необходимо и достаточно, чтобы соотно-
шение
+ У1)2 (Pit + У2)2
—о®
р =2 (р3/ + Уз)
было тождеством относительно t. Так же, как и в п. 3, § 27, полу-
чаем:
2
Pt Pi
а® Ь2
. (7)
Р1У1 РйУ1 __ п
а2 — Ь2 -Рз-
(8)
В этой системе уравнений р2, р3 — неизвестные величины, а
остальные величины нам известны. Выясним, имеет ли эта система
ненулевые решения и сколько их. Из соотношений (7) и (8) следу-
ет, что р1 У= 0. Так как нас интересует только направление вектора
р, то, не нарушая общности, можно положить = а. Если ввести
321
в рассмотрение новые неизвестные X =—, Y = р3, то система (7),
ь
(8) принимает вид:
Х’= 1, — X — = Y.
а Ь
Отсюда следует, что система имеет два и только два решения:
X, = 1, 4^ = — — X = — 1, У2 = — 4- Ц .
a b а Ъ
Таким образом, координаты векторов
р [а, Ь, — — и q (— а, Ъ,
( а о} ( а Ь)
удовлетворяют соотношениям (7), (8). Очевидно, эти векторы не
коллинеарны, и все другие решения системы (7) и (8) определяют
векторы, соответственно коллинеарные им. Теорема доказана.
Для того чтобы написать уравнения прямолинейных образую-
щих, проходящих через данную точку, поступим точно так же, как
и в п. 3, § 27. Напишем уравнение поверхности (4) в виде:
Рассмотрим две системы уравнений:
(9)
(Ю)
(Н)
xi __х2 ___
а b ’
X. I Х2
-i + -2=|1.
а о
Здесь 1 и ji — произвольные параметры.
Рис. 117
согласно теореме [14.1]
Точно так же, как в п. 3,§ 27 можно
показать, что при всевозможных
значениях параметров Аир урав-
нениями (10) определяется одно
семейство прямолинейных образу-
ющих, а уравнениями (11) — дру-
гое. Легко показать, что ни одна
прямая первого семейства не сов-
падает ни с одной прямой второго
семейства. В самом деле, направля-
ющие векторы прямых (10) и (11)
координаты: *
b ’ а ’ ab (Ь ’ а ’ аь)
322
Эти векторы при любых значениях X и ц не коллинеарны, по-
этому прямые (10) и (11) не могут совпасть.
Отметим еще одно интересное свойство прямолинейных обра-
зующих гиперболического параболоида. Легко видеть, что вектор
р при любом X параллелен плоскости (6'), а вектор q при любом р
параллелен плоскости (&'). Таким образом, все прямолинейные
образующие семейства (10) параллельны плоскости (6'), а прямо-
линейные образующие семейства (11) — плоскости (6")-
Гиперболический параболоид с двумя семействами прямолиней-
ных образующих изображен на рисунке 117.
Задачи и упражнения
364. Написать каноническое уравнение эллиптического парабо-
лоида, который:
а) проходит через точку М (2, 3, 1) и пересекает плоскость
OXiXs по параболе х? = 8х3;
б) пересекает плоскость OXiX3 по параболе х{ = 22х3, а плоскость
Ох2хг по параболе х| = 24х3.
З6 5.: Написать каноническое уравнение гиперболического пара-
болоида, если поверхность:
а) проходит через точку М (2, )<3, 0) и пересекает плоскость
Oxtx2 по прямым ]/3Xi —2х2 = 0, 1/3x4 + 2х2 = 0;
б) пересекает плоскость OxiX2 по прямым х, — х| = 0, а плос-
кость Ох4х3 по гиперболе х( = 4х3.
366. Найти сечения следующих поверхностей координатными
плоскостями:
2 2 2 2
а) -т — = 2х3; б) + % = 2х3.
/ 1 '24 &
X2 X2
367. На гиперболическом параболоиде ------— 2х3 найти
прямолинейные образующие, параллельные плоскости 6xi + 4х2 —
— 8х3 + 1 = (У.
ПРИЛОЖЕНИЕ
ЭЛЕМЕНТЫ ТЕОРИИ ОПРЕДЕЛИТЕЛЕЙ
И ЛИНЕЙНЫЕ УРАВНЕНИЯ
§ 1. ОПРЕДЕЛИТЕЛИ ВТОРОГО ПОРЯДКА И СИСТЕМЫ ДВУХ ЛИНЕЙНЫХ
УРАВНЕНИЙ С ДВУМЯ НЕИЗВЕСТНЫМИ
1. Определители второго порядка. Рассмотрим таблицу, состо-
ящую из четырех чисел:
%) (1)
Такие таблицы называются квадратными матрицами
второго порядка. Матрица (1) имеет две строки и два
столбца. Числа ait bit а2, b2 называются элементами этой
матрицы.
Выражение — bta2, составленное из элементов данной мат-
рицы, называется определителем второго порядка
матрицы (1) и обозначается символом | “1 или А. Итак,
А = |®‘ N = — М2-
|U2 t^2l
(2)
Для матриц и их определителей применяются также и другие
обозначения. В тех случаях когда несущественно знать элементы
матрицы, ее обозначают одной заглавной буквой латинского алфа-
вита:
д = (ai в = /С1
\#2 ^2/ W2 ^2/’
а определители этих матриц обозначаются так: | А |, | В |. или
det A, det В. - *
Числа alr blt а2, Ь2 называются также элементами опреде-
лителя (2). Диагональ матрицы (1), содержащая числа ait Ь2, назы-
вается главной диагональю, а вторая диагональ —
побочной. Из определения следует, что определитель второго
порядка равен разности произведений элементов, находящихся на
324
главной и на побочной диагоналях. Например, определитель
мат-
/— 1 4\
\ 3 5/
рицы
равен (—1) -5 — 4 • 3 = — 17, т. е.
4
5
Или другой пример:
Гз1
= — 17.
I1? 4^2-| = /2-4/2 -4-2=0.
Подчеркнем еще раз, что определитель и матрица — это суще-
ственно разные понятия. Матрица — это таблица (1), а определи-
тель — число, вычисляемое по правилу (2).
2. Свойства определителей второго порядка. Рассмотрим основ-
ные свойства определителей второго порядка.
1°. Определитель не меняет своего значения, если его строки
заменить соответствующими столбцами:
|а1 ^11 — |а1
к м к ь2|
В самом деле, пусть
Aj =
Л
если ввести понятие транспонирования матрицы. Матрица
Вычислим эти определители:
Ai = a^bz — Ьщг, А2 = а^Ь2 — Ьщ2,
поэтому Aj = Д2.
Это свойство может быть сформулировано несколько иначе,
а. а,
ь2
называется транспонированной по отношению к мат-
рице (1). Очевидно, она получена из матрицы (1) заменой строк на
столбцы с теми же номерами. Легко показать, что если матрица А*
является транспонированной по отношению к матрице Л, то Л, в
свою очередь, является транспонированной по отношению к Л*.
Таким образом, если матрица А* является транспонированной по
отношению к А, то | Л * | = | Л |.
Свойство 1° утверждает равноправие строк и столбцов определи-
теля, поэтому дальнейшие свойства определителей будем доказы-
вать только для столбцов.
2°. Если в определителе элементы некоторого столбца (строки)
равны нулю, то определитель равен нулю. В самом деле,
|0 bi\Q;bn_Q.b-Q_
|0 &2| 1
3° (свойство антисимметрии). При перестановке
325
столбцов (строк) определитель умножается на—1, Действительно,
bi ail
Ь2 а2\
l“‘ £‘| = аЛ—Мг>
lU2 U2\
отсюда следует, что Р‘
| = bta2 — aib2
'!ai *i ='_ pi «11
. |a2 b2 |fe2 a2|*
Из свойства 3° непосредственно следует.
4°. Определитель с одинаковыми столбцами (строками) равен ну-
лю. Имеет место более общее свойство.
5°. Если элементы двух столбцов (строк) определителя пропор-
циональны, то определитель равен нулю. В самом деле, пусть
Д = bi и = Ааь Ь2 = Аа2.
u2
Тогда
Д = aib2 — a2bi = А (а^ — a2ai) = 0.
6°. Если определитель равен нулю, то столбцы (строки) опре-
делителя пропорциональны. Это свойство является обратным по
отношению к предыдущему. Пусть Д = a2bi — a2bi = 0.
Возможны два случая:
a) at = а2 = 0. В этом случае свойство справедливо, так как
можно считать, что числа а1г а2 пропорциональны числам bit b2.
б) По крайней мере одно из чисел и а2 не равно нулю, скажем,
щ 0. Разделив соотношение aib2 — bia2 = 0 на ait получим:
Ь2 — — а2 = 0. Если положить — = А, то отсюда следует, что
О1 “1
bi = Aflj и b2 = Ха2.
Объединяя последние два свойства, приходим к следующей
теореме.
Теорема 1. Для того чтобы определитель второго порядка
был равен нулю, необходимо и достаточно, чтобы столбцы (строки)
определителя были пропорциональны.
3. Система двух линейных уравнений с двумя неизвестными.
Рассмотрим систему двух линейных уравнений с двумя неизвест-
ными:
арс + 01У — ci,
а2х + b2y = с2.
Решением системы (3) называются такие два числа х0, у0,
которые при подстановке их в уравнения обращают последние в
правильные числовые равенства. Например, для системы х — 2у =
= 5, —2х + 4у = — 10 числа (—1, —3), (7, 1), (1, —2) являются
решениями.. Два решения (xit yj и (х2, у2) совпадают тогда и толь-
ко тогда, когда xt = х2, у4 = у2.
Система (3) называется совместной, если она имеет по
крайней мере одно решение. При этом если она имеет единственное
(3)
326
решение, то называется определенной. Система, не имею-
щая ни одного решения, называется несовместной.
Теория систем линейных уравнений по существу сводится к ре-
шению следующих задач: а) найти условия совместности данной
системы; б) найти условия определенности системы; в) указать спо-
соб отыскания всех решений системы.
Для системы (3) введем в рассмотрение следующие определители
Д _ \Ci b.
, = М, д q
|с2 Ьг \а2 с2
д - ai bi
а2 b2’
с?_ *
Д называется определителем системы. Его эле-
ментами являются коэффициенты при неизвестных. Определители
Дх и Ду получены из Д заменой в нем одного из столбцов столбцом
свободных членов.
Прежде чем перейти к решению и исследованию системы (3),
докажем следующее вспомогательное предложение.'
Лемма. Если х0, у0 — решение системы (3), то х0Д = ДХ и
у0Д = Ду. - ,
Доказательство. Так как х0, у0—решение системы (3),
то ctiX0 + biy0 = Ci и а2х0 4- b2y0 = с2. Умножим, далее, первое
равенство на Ь2, а второе — на bi и вычтем из первого соотноше-
ния второе1
ciib2XQ — u2biXo — Cib2 — c2bi,
или
A = Дж. (4)
Аналогично, умножая первое равенство на а2 и второе на aj
и вычитая из первого равенства второе, получим:
Уо А = (5)
Лемма доказана.
4. Решение и исследование системы (3) при Д =И= 0. Так как
Д =4= 0, то из соотношений (4) и (5), разделив их на Д, получаем:
Ду Av
*0 = / и Уо = . (6)
Таким образом, если А#=0и (х0, у0) — решение системы (3),
то числа х0 и у0 удовлетворяют соотношениям (6). Отсюда следует,
что система (3) при Д =/= 0 может иметь не более одного решения.
Теперь покажем, что при Д =£ 0 система (3) всегда совместна.
В самом деле, числа х0 = у, у0 = Ах. удовлетворяют этой си-
стеме, в чем легко убедиться непосредственной подстановкой:
„ I h ________ а1 (с1^2—с2^1) + ^1 (а1с2— а2с1) „
U4 — ~Г“ U 4 — — —————- ---------- = Cj,
— ^1^2
1 Этот прием обычно применяется для исключения неизвестных.
327
„ A* I L Ay a2 (C1^2 —C2&1) + b2 (0^2 — 0.2cl) r
2 Д 2 Д ajt — biO.2
Мы пришли к следующей теореме.
Теорема 2. Если определитель системы (3) двух линейных
уравнений с двумя неизвестными отличен от нуля, то система сов-
местна и имеет единственное решение, которое определяется по
формулам (6).
Пример 1. Найти решения следующей системы линейных
уравнений:
2х — 5у = 19, х + Зу = — 7,
Решение. Вычислим определитель системы: А = г ^1 =
1 о
= 11. Так как А 0, то система имеет единственное решение, ко-
торое можно найти по формулам (6):
| 19—51 12 191
_ДХ _ |-7 3| _ 22 _ 9 _ Ду _ 11 ~7|
°~Д ” 11 ~11 ’ 11
3.
11
5. Решение и исследование системы (3) при А = 0. Из доказан-
ной в п. 3 леммы непосредственно следует, что если при А = 0
система (3) совместна, то Дх = Ду = 0. В самом деле, пусть х0, у0 —
решение системы (3), тогда х0А = /Хх, у0А = А , поэтому Ах =
= Ду = 0. Таким образом, при А = 0 система (3) совместна тогда
и только тогда, когда А = Ах = Ау = 0. Рассмотрим этот случай
более подробно.
а) Пусть хотя бы один из коэффициентов а1л blt а2, Ь2 отличен
от нуля. Если, например, at 0, то из условий А = Дх = Ду =
= 0 следует, что существует такое число X, что а2 = \ait b2 =
= Х&!, с2 = Хер В этом случае каждое решение первого уравнения
является решением второго. Так как первое уравнение имеет бес-
численное множество решений, то система (3) также имеет бесчис-
ленное множество решений.
б) at = bt = а2 = b2 = 0. Если Cj 0 или с2 =/= 0, то, очевид-
но, система не совместна; если ct = с2 = 0, то любая пара чисел
х, у является решением системы (3). Таким образом, мы пришли к
следующей теореме.
Теорема 3. Пусть определитель А системы (3) равен нулю,
а) Система не совместна, если хотя бы один из определителей Ах
или Ау отличен от нуля, б) Система не совместна, если ДЛ = Ду =
= 0, at =bt = a2=b2=0 и хотя бы один из коэффициентов ct
и с2 дтличен от нуля, в) Система имеет бесчисленное множество
решений, если ДЛ = Ду = 0 и хотя бы один из коэффициентов
at, bt, а2, b2 отличен от нуля, г) Всякая пара чисел является реше-
нием системы, если ах = bt — а2 = b2 = Ct = с2 = 0.
328
Имеет место и обратное предложение. Отсюда, в частности,
получаем.
Теорема 4. Если в системе (3) Д = 0 и хотя бы один из
коэффициентов при х, у не равен нулю, то для того, чтобы одно из
уравнений было следствием второго, необходимо и достаточно,
чтобы Дж = Ду = 0. В этом случае система имеет бесчисленное
множество решений.
Пример 2. Исследовать системы уравнений:
а) 2х — у = 5, 4х — 2у = 10;
б) 2х — у = 5, 4х — 2у = 3;
в) 0-х + 0-у = 3, 0-х + 0-у = — 2.
Решение, а) Данная система совместна и имеет бесчислен-,
ное множество решений, так как Д — Дж — Ду = 0 и коэффициен-
ты при х и у отличны от нуля.
б) Данная система не совместна. Для этой системы Д — 0, a
Дж и Ду отличны от нуля.
в) Система не совместна. Имеет место случай б) теоремы 3.
6, Система линейных однородных уравнений. Система (3)
называется о д н о р о.д н о й, если с( = 0 и с2 = 0, т. е.
а^х + 1цу = 0,1
а2х -j- b2y = 0.J
(7)
Очевидно, однородная система линейных уравнений совместна,
так как числа 0, 0 являются решением этой системы; это решение
называется тривиальным.
Для системы (7) имеем: Дж = 0 и Ду = 0, поэтому возможны
только два случая:
а) Д =/= О, Д.г = 0, Ду = 0. В данном случае согласно теореме 2
система совместна и имеет единственное решение, которое будет
нулевым (тривиальным);
б) Д = Дж = Ду = 0. В этом случае согласно теореме 3 система
также совместна, но имеет бесчисленное множество решений.
Таким образом, получаем теорему.
Теорема 5. Система двух линейных однородных уравнений
с двумя неизвестными всегда совместна и имеет одно решение при
Д =Н= 0 и бесчисленное множество решений при Д = 0. Здесь Д —
определитель, составленный из коэффициентов при неизвестных.
Пример 3. Исследовать системы уравнений:
а) х — у = 0, 2х + Зу = 0;
б) 2х — у = 0, 4х — 2у = 0.
Решение, а) Так как для этой системы Д — % =
= 5 #= 0, то система имеет только одно решение 0, 0.
б) Данная система имеет бесчисленное множество решений, так
как в этом случае Д = 0.
320
§ 2. ОПРЕДЕЛИТЕЛИ ТРЕТЬЕГр ПОРЯДКА. ПОНЯТИЕ ОБ ОПРЕДЕЛИТЕЛЯХ
/l-го ПОРЯДКА
1. Определители третьего порядка. Рассмотрим таблицу, состо-
ящую из девяти чисел:
/ан а12 «1з\
Л = I Й21 «22 «23 I- (О
\«31 Д32 О33'
Такие таблицы называются квадратными матрицами
тр етьего пор я дка. Матрица (1) имеет три строки и три
столбца. Элементы atJ данной матрицы обозначены одной буквой
с двумя индексами, где первый индекс указывает номер строки,
в которой находится данный элемент, а второй — номер столбца.
Выражение
А = йцйг2«33 «12«23«31 + «13«21«32 -
— «1з«22«31 — а 12«21«зз — ДцЯ2з«32 (2)
называется определителем третьего порядка матрицы (I).
По аналогии с теорией определителей второго порядка опреде-
лители третьего порядка матрицы (1) обозначаются так:
А =
«и а12 й13
«21 «22 «2»
«31 «32 «33
или |Л|.
(3)
Числа ац, а12> называются элементами определителя,
а произведения из трех элементов, входящие в выражение (2), —
его членами. Таким образом, определитель третьего порядка имеет
девять элементов и шесть членов.
Чтобы запомнить выражение (2), воспользуемся одной из сле-
дующих схем:
или
330
аН\ а12\ /Я13\ /ЙН
Й21 й22ч ,й23ч ,й21. й22
\ Й31 й32 °33 «31 «32
В первой таблице под матрицей (1) выписаны первая и вторая
строки той же матрицы, а во второй таблице справа от матрицы (1)
приписаны первый и второй столбцы данной матрицы. С помощью
каждой из этих таблиц можно получить все шесть членов определи-
теля (3), если произведения элементов таблиц, соединенных точка-
ми, взять со знаком плюс, а штрихами — со знаком минус.
Пользуясь формулой (2), вычислим следующий определитель:
2 2 3
0 1—1
Д =
2 4 6
= 2-1-6 Ч- 0-4-3 Ч- 2-2-(— 1)-2Ч-3 —
_ 2-4-(—1) — 0-2-6 = 10.
Подсчитаем его значение, пользуясь правилом, описанным вы-
ше. Воспользуемся первой таблицей:
/2Ч 2 х3\
Ч /
°ч X —1
— 2' X '6 + = 2-1-6 + 0-4-3 + 2-2-(— 1)-
'у 'у -2-1-3 —2-4-(- 1) — 0-2-6 = 10.
- 27 ''Д '''3 4-
— W 1 211/ +
2. Миноры и алгебраические дополнения определителя треть-
его порядка. Минором Miy элемента atj определителя Д на-
зывается определитель матрицы, которая получится из матрицы
(1), если в ней вычеркнуть строку и столбец, на пересечении кото-
рых находится элемент а^.
Например, минор Л413 определителя (3) равен: ' 21 Й221 Этот
минор получен из определителя Д вычеркиванием первой стро-
ки и третьего столбца.
Точно так же получаем: Л422 = Д. Л423= l011 а12|и т. д.
|«31 «331 1«31 «321
Алгебраическим дополнением А и элемента aif
называется число
А1}={- 1)‘+/Мг,,
Например, А12 =— М12, А22 = М22, Ч23 = — М23.
Докажем следующую теорему.
33^
Теорема 1. Определитель Д равен сумме произведений всех
элементов любого столбца (строки) на их алгебраические дополне-
ния, т. е.
Д = аиА и + a2iA2i + a3iA3i,
i = 1, 2, 3. (4)
Д = ацАц + al2Al2 + ai3Ai3.
Доказательство этой теоремы'сводится к преобразованию выра-
жения (2). В самом деле, рассмотрим доказательство теоремы для
элементов первого столбца. Вынесем в выражении (2) элементы.пер-
вого столбца за скобки, получим:
& ~ а11 («22«33 — «32«2з) + «21 (—U 12#33 4" «32«1з) +
+ Яз1(«12«23 -- «22«1з)-
Нетрудно видеть, что выражения в скобках суть алгебраические
дополнения элементов первого столбца. В самом деле,
«22«33 «32«23 —
= а„22 = Л4П = Дн,
и32 и33|
«12«33 «32«13 = ]п*2 „13| = Д^21 = ^21'
1“32 ы33|
«12«23
«22«13 = "12 “13| = ^31 = Д31-
“22 “231
Итак, Д = аиДи + ОгИг! + «31 Дзь
Предлагаем читателю самостоятельно убедиться в справедли-
вости теоремы для остальных столбцов и строк.
Формулы (4) применяются для практического вычисления опре-
делителей третьего порядка. Выражения (4) называются разло-
жением (или раскрытием) определителя по элементам
соответствующей строки или столбца.
3. Свойства определителей третьего порядка. Рассмотрим основ-
ные свойства определителей третьего порядка.
Г. Определитель не меняет своего значения, если его строки
заменить соответствующими столбцами. Если ввести понятие
транспонирования матрицы третьего порядка по анало-
гии с теорией матриц второго порядка1, то свойство Г можно сфор-
мулировать несколько иначе: значение определителя третьего по-
рядка при транспонировании матрицы не меняется. Для доказа-
тельства, применив одну из схем стр. 330 и 331, подсчитаем опре-
делители Ди Д*, где:
Д =
«и
«21
«31
«12 Й1з
«22 «23’ А* —
«32 «33
«И «21 «^
«12 «22 «32 >
«13 «23 «33,
См. стр. 325.
332
Д = ЙЦЙ22«33 4“ «12«23«31 4” «13«21«32 —ий13«22«31 —
-- Oj2«21«33 «И«23«32>
Д* — ЙЦ«22«33 + Й12«23«31 + Й13«21«32 — «31«22«13 —
-- Й-21«12«33 ЙЦЙ23Й32-
Отсюда следует, что Д = Д*.
В силу свойства 1° и теоремы 1 свойства определителей третьего
порядка, доказанные для столбцов, будут иметь место и для строк.
Поэтому последующие свойства определителей будем доказывать
только для столбцов.
2°. Если в определителе Д элементы некоторого столбца (строки)
равны нулю, то определитель равен нулю. В самом деле, пусть,
например, в определителе (3) все элементы первого столбца равны
нулю: ац — a2i = а31 = 0. Раскрывая определитель по элементам
этого столбца, получим:
Д == 0 • Ац + 0 • А21 4~ 0 • Л31 = 0.
3° (свойство антисимметрии). При перестановке
двух любых столбцов (строк) в матрице (1) значение определителя
этой матрицы умножается на — 1. Пусть
«и «12 «13 «и «13 «12
д.= «21 «22 «23 и Д' = «21 «23 «22
«31 «32 «33 «31 «33 «32
где Д' получен из Д перестановкой второго и третьего столбцов.
Разложив каждый из определителей по элементам первого столб-
ца, получаем:
Д — вцАц 4- a2lA2i 4- ацА31,
А' — ацАп 4- a2iA2i 4~ йзМзь
В силу свойства 3°, и. 2, § 1 имеем: Лц = — Ац, А21 = — А2ц
A3i = — Лзь откуда Д = — Д'.
4°. Если у определителя соответствующие элементы двух столб-
цов (строк) равны, то определитель равен нулю. В самом деле, пусть,
например, соответствующие элементы двух первых столбцов опре-
делителя (3) равны. По свойству 3° имеем:
«и а12 а13 о12 ait ai3
«21 «22 «23 = «22 «21 «23 •
«31 «32 «33 «32 «31 «33
Учитывая, что ац — al2, a2i = а22 и а31 = а32, получим: Д =
= — Д, откуда А = 0.
333
Пользуясь этим свойством, сформулируем следующее предло-
жение.
5°. Если элементы некоторого столбца (строки) умножить на
алгебраические дополнения соответствующих элементов другого
столбца (строки), то полученная румма будет равна нулю.
Возьмем определитель (3) и докажем, например, что сумма про-
изведений элементов первого столбца на соответствующие алгебраи-
ческие дополнения элементов второго столбца равна нулю. В самом
деле,
S — ацА12 + а2Мг2 + «зМзг==-
= —«и
«21 а23 I „ «И «13
Г «21
«31 «33 «31 азз
— «з1
аН «13
«21 «23
«И «11 «13
«21 «21 «23
«31 «31 «33
Полученный определитель, очевидно, равен нулю, так как у
него элементы первого столбца равны.соответствующим элементам
второго столбца. Другие случаи могут быть рассмотрены совершен-
но аналогично.
Прежде чём перейти к следующему свойству, введем следующие
сокращенные обозначения для столбцов матрицы (1):
/«и\ [ai2\ /а1з\
а*1 = I I’ а*2 = I а22 I «*3 = I «23 I.
\«з1/ \«зв/ \«зз/
В этих обозначениях определитель (3) может быть записан так:
Д = I «*1 «*2 «*3 I’
Введем следующие соглашения.
а) Произведением столбца а^ на число X будем называть столбец
А«1Л
Ха — I Хао? |.
I 21 I
\™«3i/
б) Суммой двух столбцов а*; и будем называть столбец
/ alf + alh\
a*i+a*b= К+«2* '
' a3l + a3kJ
Аналогично определяется сумма нескольких столбцов.
в) Линейной комбинацией столбцов а#1, а*2, «*з, •••, «** назы-
вается столбец
6* — ^ia*i + ^2«*2 + ... + ^«*4-
334
Например, если
/IX / 0\ /2+0\ / 2\
а = I 2 |, а = I 1 ), то 2а + За = 14+3 | =| 7 1.
*1 I Г *2 I г *1 *2 I I I I
\3 J \—5/ ' \6—15/Д—9/
Линейное свойство определителей третьего порядка формулируется
следующим образом.
6°. Если j-й столбец a*j определителя (3) есть линейная комбина-
ция некоторых столбцов
+ ^*2 + ... +
то
Д = XjAi + А.2Д2 И- ... 4* ^ЙД^»
где определители, Д^ Д2, .... txh получены из исходного определителя
заменой j-го столбца соответствующими столбцами линейной ком-
бинации.
Для доказательства этого свойства предположим, например,
что первый столбец определителя (3) есть линейная комбинация
произвольных столбцов:
= Kb*i + ^2^*2 + ••• +
Тогда выражение определителя Д, пользуясь теоремой 1, можно
преобразовать следующим образом:
Д =
аН «12
«21 «22
«31 «32
«13
«23
«33
— «1М11 + «21^21 + «31^31 =
= (^Ьц + Х2&12 + ... + kkblk) Ait +
+ (^1^21 + ^2^22 + • • • + 4^2ft) ^21 +
4~ (^i^3i 4~ ^2^32 4- ... 4- Л31 =
= %! (ЬпАп 4- Ь2М21 4- Ь31Л31) +
4- ^2 (^12^11 4- ^22^21 4- ^32^31) 4~ • • •
• • • 4" Ч 4- b2hA2k 4- b3hA3k) —
= XjAj 4- ^2^2 4- ••• 4- ^АД*.
Точно так же можно ввести понятие линейной комбинации
строк и доказать аналогичное свойство относительно строк опре-
делителя.
Из этого свойства, полагая k — 1, получаем^
7°. Общий множитель всех элементов некоторого столбца (стро-
ки) можно вынести за знак определителя.
Из свойств 4°, 6° и 7° получаем:
8°. Определитель равен нулю, если какой-либо столбец (строка)
есть линейная комбинация других столбцов (строк).
335
9°. Если к элементам некоторого столбца (строки) прибавить
одну и mg же линейную комбинацию соответствующих элементов
других столбцов (строк) определителя, то его значение не изменит-
ся. В частности, определитель не меняет своего значения, если к
элементам некоторого столбца (строки) прибавить элементы другого
столбца (строки), умноженные на одно и то же число.
10°-. Если определитель равен нулю, то один из его столбцов
(строк) является линейной комбинацией остальных столбцов
(строк). В самом деле, пусть А = 0, где А — определитель (3).
Докажем, что элементы некоторой строки являются линейными ком-
бинациями остальных строк. Рассмотрим миноры Л131, ТИ32 и М33
элементов третьей строки. Возможны два случая: а) все эти миноры
равны нулю; б) хотя бы один из указанных миноров отличен от
нуля. Рассмотрим каждый из этих случаев в отдельности.
а) М31 = Л432 = М33 = 0 или
«12 «13 _ аН «13
агг «23 а21 а23
аи а12
«21 «22
Если 012 = «1з — «н = 0, то утверждение справедливо, так как
мы можем считать, что первая строка нашего определителя есть
линейная комбинация остальных строк с нулевыми коэффициента-
ми. Предположим, что а12У=0. Тогда из соотношений а12а2з—
— «22«1з = 0 и аца22 — «12«21 = 0 получаем
п --- Д22 „ „ - «22 п
«23 — «13’ «21------«И-
«12 «12
Если ввести обозначение — = X, то предыдущие соотношения
«12
можно записать так:
#23 — ^«13, «21 = ^«11, «22 == ^-«12-
Мы приходим к выводу, что элементы второй строки пропорцио-
нальны элементам первой строки.
б) Пусть, например, М33 =/= 0. Тогда система уравнений
a3i - апх + а21У, 1 * ф
^32 = ^12# “I"' &22У I
согласно теореме 2 предыдущего параграфа имеет единственное
решение х0, у0. К элементам третьей строки определителя А при-
бавим элементы первой строки, умноженные на число —х0, и эле-
менты второй строки, умноженные на число —у0. При этом, как
следует из свойства 9°, определитель А не меняет своего значения:
«и
«21
«12
«22
«13
«23
«31 апхо «21Уо «32 «12*0 «22У0 «33 «13*0 ’ «2зУо
336
Так как х0, у0 являются решением системы (5), то первые два элемен-
та третьей строки равны нулю, поэтому, раскрывая определитель А
по элементам третьей строки, получаем:
(Дзз — ЯЛ — £гзУо) Л433 = 0.
Так как М33 =# 0, то а33 = а13х0 + «гзУо-
Итак, если М33 =£= 0, то элементы третьей строки определителя
являются линейной комбинацией соответствующих элементов пер-
вых двух строк. Свойство полностью доказано. .
Объединяя свойства 8° и 10°, приходим к важной теореме.
Теорема 2. Для того чтобы определитель третьего порядка
был равен нулю, необходимо и достаточно, чтобы некоторый стол-
бец (строка) этого определителя был линейной комбинацией
остальных столбцов (строк).
4. Практическое вычисление определителей третьего порядка.
Для того чтобы вычислить определитель третьего порядка, можно
пользоваться исходным определением, данным в формуле (2), или
правилом, указанным на стр. 330—331. Однако вычисление опре-
делителей значительно упрощается, если воспользоваться дока-
занной выше теоремой 1 о разложении определителя по элементам
некоторого столбца или строки. При этом вычисление "определителя
третьего порядка сводится к вычислению определителей второго
порядка. Формула (4) показывает, что если все элементы данного
i-го столбца равны нулю, за исключением одного, например а^-,
то
Д = а„ А„ = (- l)w аи М1}.
Таким образом, в данном случае вычисление определителя
третьего порядка сводится к вычислению одного определителя
второго порядка. Поэтому, пользуясь свойствами определителей,
целесообразно сперва преобразовать определитель третьего поряд-
ка так, чтобы все элементы некоторого столбца или строки, за ис-
ключением, быть может, одного, обратились в нуль.
Рассмотрим несколько примеров вычисления определителей
третьего порядка.
Пример 1. Вычислить определитель:
Решение. Первый способ,
литель по элементам первого столбца:
Разложим этот опреде-
= (—!)• 16 + 7(—2) = —30.
12 Л. С. Атанасян
337
Второй способ. В определителе Д элемент а2{ = О/
Преобразуем этот определитель, не меняя его значения, так, чтобы
еще один элемент первого столбца был равен нулю. Для этого ум-
ножим первую строку на 7 и прибавим к последней строке, получим:
— 1
о
о
Д =
1
3 5
4 6
19 36
Разложив этот определитель по элементам первого столбца, полу-
чаем:
4 6
19 36
= —30.
Д = — 1 •
Пример 2. Вычислить определитель
Решение. Преобразуем данный определитель, не меняя
его значения, таким образом, чтобы все элементы третьего столбца,
кроме элемента а33, обратились в нуль. Для этой цели сначала ум-
ножим последнюю строку на 2 и прибавим ко второй строке, а за-
тем умножим эту же строку на —5 и прибавим к первой строке.
В результате получим:
— 2 5
17 — 2
— 4 1
— 7 18 0
10 9 0
2 —4 1
— 7 18
10 9
=—63 —180 = —243.
5. Понятие об определителях я-го порядка. Понятие определи-
телей второго и третьего порядков может быть естественным обра-
зом обобщено на случай определителей n-го порядка, где п —
Произвольное натуральное число. '
Предварительно рассмотрим следующее вспомогательное поня-
тие. Пусть
«1, «2...“п (6)
— некоторая перестановка чисел 1,2......п. Рассмотрим два числа
az и a,j этой последовательности. Говорят, что числа аг и a,j обра-
зуют инверсию или беспорядок, если большее из них
расположено левее меньшего, т. е. если i < j, aat >az. В против-
ном случае говорят, что числа а; и а;- не образуют инверсии. Обо-
значим через / (а1( ..., ап) число всех беспорядков перестановки (6).
Перестановка (6) называется ч е т н о й, если / (сц, ..., ап) четное
число, в противном случае она называется нечетной. Напри-
338
мер, в перестановке 3, 2, 1,4 имеется три инверсии (3, 2); (3, 1) и
(2, 1), поэтому I (3, 2, 1, 4) = 3; перестановка является нечетной
Пусть дана таблица, состоящая из п строк и « столбцов:
/аи а12 ... "Я1л\
I #21 й22 • • агп I
\ЯЛ1 ЙЛ2 • • • апп/
Такая таблица называется квадратной матрицей п-го
порядка. Числа ai} называются элементами этой мат-
рицы; индекс i указывает на номер строки, а индекс / — на номер
столбца, на пересечении которых расположен данный элемент.
Выберем из п2 элементов матрицы (7) какие-либо п элементов
так, чтобы они находились в разных строках и одновременно в раз-
ных столбцах. Это означает, что они берутся по одному из каждой
строки и по одному из каждого столбца. Пусть aaii, aa,2, • Яалл —
выбранные элементы. Составим произведения этих элементов:
^,1 %2 - аапп- (8)
Припишем этому произведению знак плюс, если перестановка
0ц, а2....ап четная, и знак минус, если она нечетная. Другими
словами, берется произведение вида
(-1)'<а1’я..... ап)аа11%2 ••• V (9)
Введем следующее основное определение. Определителем Д матрицы
(7) называется алгебраическая сумма, состоящая из п! всевозможных
произведений вида (9) ,
п!
A = 2(-D""-".................... av.
Произведения вида (9) называются членами определителя, а
числа а/7- — элементами определителя. Определитель матрицы (7)
обозначается следующим образом:
аи а12 ... а1я
а21 а22 • ; • а2п
«л! ^л2 • ^лл
или Д = det а = det (а(/).
Из данного определения, например, следует, что опреде-
литель четвертого порядка содержит 4! = 24 членов вида
(—“* “»•«<> aa i аа2аа3 аа4, а определитель пятого порядка
содержит 5! = 120 членов вида
(а1( аа, а„ а., а5)
' а,1 а,2 а,3 а,4 а55
12*
339
Мы не будем останавливаться на формулировке и доказательстве
свойств определителей п-го порядка, отметим лишь, что эти свойст-
ва в большинстве случаев являются прямым обобщением соответ-'
ствующих свойств определителей второго и третьего порядков. В
частности, имеет место теорема о разложении определителя по эле-
ментам некоторой строки или столбца, т. е. обобщение теоремы 1.
Пользуясь этой теоремой, вычисление определителей n-го порядка
можно свести к вычислению нескольких определителей (п — 1)-го
порядка.
Приведем пример вычисления определителя четвертого порядка.
Пример 3. Вычислить определитель
О 65 114 О
0 0 15
Решение. Разложив этот определитель по элементам пер-
вого столбца, получаем:
Д = (— 1)J+2
65
1
0
114 0
5 6
1 5
= —65
114 0
1 5
5 6
1 5
= — 65 • 19+ 114 • 5 = — 665.
§ 3. СИСТЕМА ТРЕХ ЛИНЕЙНЫХ УРАВНЕНИЙ С ТРЕМЯ НЕИЗВЕСТНЫМИ
I. Система неоднородных линейных уравнений. Пусть даны три
линейных уравнения с тремя неизвестными:
аих + а12у + ai3z = bv
+2У 4" +з^ = ^2>
а31х 4* азгУ 4~ а33г Ь3.
(1)
Решить эту систему — это означает найти такие значения х0, у0
и г0 при которых каждое из уравнений обращается в верное число-
вое равенство. Эти числа х0, у0, z0 называются решением си-
стемы. Система называется совместной, если она имеет
хотя бы одно решение. При этом, если она имеет единственное реше--
ние, то называется определенной. Система, не имеющая
ни одного решения, называется несовместной.
Так же как и в случае двух уравнений с двумя неизвестными,
теория системы линейных уравнений с тремя неизвестными сводится
к решению вопросов о совместности, определенности и к способам
отыскания решений системы.
Введем следующие обозначения:
340
«13
«23
«33
«11 «12
Д = a2t а22
«31 «32
Этот определитель называется определителем си С -
темы.
bj Ut2 Ui2 «И ^1 «13 «И «12 Ьх
Ах = ^2 «22 «23 • Д,= «21 Ь2 О23 . Дг = «21 «22 Ь2 »
63 а32 а33 «31 Ь3 а33 «31 «32 Ь3
Эти определители получены из определителя системы заменой
в нем соответствующего столбца столбцом свободных членов.
Прежде чем перейти к решению и исследованию системы (1),
докажем следующее вспомогательное предложение.
Лемм а. Если х0, у0, г0 — решение системы (1), то
*оА = УоА = Ау. г0Д = Дг. (2)
Доказательство. Подставим х0, у0, г0 в систему (1) и
из полученных соотйошений будем исключать члены, содержащие
Уо и го:
«н*о + «12Уо + «1з20 = blt
«21*0 4" «22У0 4~ «23Z0 = ^2’
«31*0 "4” «згУо “Ь «ззго = &з-
(3)
Умножив первое соотношение на Ац, второе — на Д21 и тре-
тье — на Д31 определителя Д, получим:
«11Дц*о + «12-4 нУо 4~ «1зЛцг0= biAa,
«21-^21*0 4" «22-^21Уо + «23^21г0 ~ ЬъДи,
«3 И31*0 + «32^431Уо + «зз-Л31Z0 = ^3-^31-
Сложим полученные соотношения:
(аиЛц + а21Л21 + «зМз1)*о + + а22-421 + а32-4з1)Уо 4~
+ (й!1зЛц + а2зЛ21 + ОззЛз1)2о ~ ^1Лц + Ь2Л21 + ЬзЛзр
Рассмотрим выражения, стоящие в скобках. Первая скобка по-
лучена умножением элементов первого столбца определителя си-
стемы на алгебраические дополнения этого же столбца. Эта сумма,
как известно из теоремы 1, § 2, равна определителю системы. Вто-
рая скобка есть сумма произведений элементов второго столбца на
алгебраические дополнения соответствующих элементов первого
столбца. Такая сумма в силу свойства 5°, § 2, равна нулю. В силу
тех же причин третья скобка также равна нулю.
Выражение, находящееся в правой части последнего соотно-
шения, равно Дж. В самом деле, раскрыв определитель Дж по эле-
ментам первого столбца, получаем:
Дх = Ь1
«22
«32
«23 h «12
и2
«33 «32
«13 £ «12 «13
«33 «22 «23
— Ь1Ац + ft2X2i 4- Ь3Л31.
341
Таким образом получаем:
х0А = Ах.
Умножая, далее, соотношения (3) на алгебраические дополнения
сперва второго, а затем третьего столбцов, аналогично получаем:
' упА = Л„ и А = Ал.
/U У 2-q Z
Лемма доказана.
Доказанная лемма в дальнейшем будет использована для ис-
следования системы трех линейных уравнений с тремя неизвестны-
ми.
2. Решение и исследование системы (1) при А =/= 0. Так как
А 0, то из (2) получаем:
Ау А„ А, . ..
*•=£• ’’• = Т’ <2)
Таким образом, если А у= 0 и х0, у0, г0 — решение системы (1),
то числа х0, у0, г0 удовлетворяют соотношениям (2'). Отсюда сле-
дует, что система (1) при А 0 может иметь не более одного
решения.
Теперь покажем, что при А =/= 0 система (1) всегда совместна.
В самом деле, числа
удовлетворяют этой системе, в чем легко убедиться непосредственной
подстановкой. Покажем, например, что числа х0, у0, г0 удовлетво-
ряют первому уравнению системы. Подставив эти числа в левую часть
первого уравнения системы (1), получаем:
аИ + а12 -Ь а13 -£ ~ -у аи (&1А1 + ^2^21 + 63Л31) +
+ а12 (^1^12 + Ь2А22 + b3A32) + <2i3 (&iA3 + 62Лз +63Л33) =
= («11^11 + <^12^12 + а1зЛз) + (ан^21 + Я12^22 + а1зАз) +
+ (°1М31 + «12^32 + а1зАз) — &!•
Здесь мы разложили определители Аж, А , и А2 по элементам
тех столбцов, куда входят blt Ь2 и Ь3.
Точно так же можно показать, что числа х0, у0, г0 удовлетворяют
остальным уравнениям.
Мы пришли к следующей теореме.
342
Теорема 1. Если определитель системы (1) отличен от
нуля, то система имеет единственное решение, которое определяет-
ся по формулам (2').
Правило для отыскания решения системы (1), сформулирован-
ное в этой теореме, называется правилом Крамера.
Пример 1. Найти решение следующей системы линейных
уравнений:
' 2х + у — 3z = — 9,
х — 4у — 2г = 3,
х-Ь6у— г =— 14. х
Решение. Вычислим определитель системы. Так как А —
= — 1 #= 0, то система имеет единственное решение, которое на-
ходится по формулам (2'):
Av 1 I Av
Хо = — = — = 1, у0 = -2.
0 Д 1 д
— = -2, z0 = — — = 3.
1 д 1
3. Решение и исследование системы (1) при Д = 0. Из доказан-
ной в п. 1 леммы непосредственно следует.
Теорема 2. Если А = 0, а хотя бы один из определителей
А , Ау, Аг системы (1) отличен от нуля, то система не имеет ни
одного решения.
Доказательство. В самом деле, если Д = 0 и систе:
ма (1) совместна, то, как следует из соотношений (2), Дж=Ду==Дг=0.
Теорема доказана.
Если Аж = А., = Дг = А = 0, то можно доказать, что в этом
случае система (1) либо не имеет ни одного решения, либо имеет
бесчисленное множество решений. Доказательство этого утвержде-
ния будет дано в следующем параграфе.
Рассмотрим примеры.
Пример 2. Исследовать систему:
2х + 4у —Зг = 1,
4х + 8у — 6г = 2,
6х— у — 0.
Решение. Легко видеть, что для данного примера
Д= Дж=-Ау= Д2 = 0.
В данном случае система имеет бесчисленное множество реше-
ний. В самом деле, второе из'уравнений системы, как легко заме-
тить, есть следствие первого, поэтому данная система эквивалентна
следующей системе:
2х 4- 4у — Зг = 1,
6х — у = 0.
343
Положив z = t, где t — произвольный параметр, мы получаем си-
стему двух уравнений с двумя неизвестными:
( 2х 4~ 4у — 1 -р 3/,
| 6х — у = 0.
Полученная система для каждого значения t имеет определенное
решение, так как определитель системы отличен от нуля. Та-
ким образом, исходная система имеет бесчисленное множество ре-
шений.
Пример 3. Исследовать следующую систему уравнений:
I 2х + 4у — Зг = 1,
4х + 8у — 6г = 1,
Зх -|- бу — 9г = 2.
Решение. Непосредственным вычислением легко убедиться
в том, что для данного примера мы имеем тот же случай:
д = Дх = = 0.
Однако в отличие от предыдущего случая система не совместна,
так как первые два уравнения этой системы не имеют ни одного ре-
шения.
Пример 4. Исследовать следующую систему уравнений:
х — Зу + z = 1,
' 2% + у— 12г = 0,
Зх — 2у— 11г = 0.
Решение. В данном случае А = 0, а = — 35, поэтому
согласно теореме 2 система не совместна.
4. Решение и исследование системы трех однородных уравнений.
Система (1) называется однородной, если bi = b2 = Ъ3 — 0,
т. е. система линейных однородных уравнений имеет следующий
вид:
' ацХ +а12у + а13г = 0,
а21х + а22у + а23г = 0, (4)
. a3Jx + а32у + а33г = 0-
Предыдущая теория полностью применима для данного частного
случая, однако в силу того, что bi = b2 = Ь3 = 0, некоторые тео-
ремы будут формулироваться несколько иначе.
Прежде всего заметим, что система линейных однородных урав-
нений всегда совместна. В самом деле, числа 0, 0, 0 являются реше-
нием системы, независимо от значения коэффициентов системы (4).
Это решение называется тривиальным. Таким образом, задача ис-
344
следования системы однородных уравнений заключается в выясне-
нии вопроса о том, когда система, кроме тривиального решения,
имеет еще ненулевые решения.
Возможны два случая: Д ф О, Д = 0. Рассмотрим каждый из
этих случаев в отдельности.
а) Если Д =/= 0, то к системе (4) применима теорема 1, поэтому
имеет место следующая теорема.
Теорема 3. Если определитель системы трех линейных од-
нородных уравнений с тремя неизвестными не равен нулю, то си-
стема имеет только одно тривиальное решение.
б) Д = 0. Докажем следующую теорему.
Теорема 4. Если определитель системы трех линейных
однородных уравнений с тремя неизвестными равен нулю, то систе-
ма имеет бесчисленное множество решений.
Доказательство. Пусть
Д =
«и
а21
«si
«12
а22
а32
«13
«23
«33
= 0.
Согласно теореме 2 предыдущего параграфа элементы некоторой
строки определителя Д являются линейными комбинациями соответ-
ствующих элементов остальных строк. Пусть, например,
а31 = Ха21 + Р-«11> «32 = ^«22 4“ Н«12’ «33 = ^«23 4" н«13-
Отсюда немедленно следует, что третье уравнение системы (4) яв-
ляется следствием первых двух уравнений. Поэтому система (4)
эквивалентна следующей системе двух линейных уравнений с
тремя неизвестными:
| а„х + а12у + al3z = 0,
I #21^ 4“ «22У 4~ «23^ ~ О'
Исследуем полученную систему. Возможны два случая.
1) Числа ап, ai2, а13 пропорциональны числам а21, а22, а23. В
этом случае, очевидно, одно из уравнений этой системы есть след-
ствие другого уравнения, поэтому система (5) эквивалентна одному
уравнению, которое имеет бесчисленное множество решений.
2) Числа ailt ai2, ai3 и а21, а22, а2з не пропорциональны. Напри-
мер, г11 О12 =^= 0. В этом случае предыдущую систему запи-
|«21 «22I
шем в следующем виде:
| аих + а12у = — al3z,
1 «21^ 4“ «22У «23^*
Придавая г произвольные значения, получаем вполне определен-
ные значения для хи у, поэтому система (4) также имеет бесчислен-
ное множество решений.
345
Пример 5. Исследовать следующую систему уравнений:
2х — Зу + 4г = 0, х + у — г — О, 4х + у + z = О.
Решение. Определитель этой системы равен' 7, поэтому си-
стема имеет единственное тривиальное решение 0, 0, 0.
Пример 6. Исследовать систему уравнений:
Зх + 4у — 7г = 0, х + у + 2г = 0, 5х + бу — Зг = 0.
Решение. Определитель этой системы равен нулю. В силу
доказанной выше теоремы эта система имеет бесчисленное множест-
во решений. В самом деле, последнее уравнение есть следствие пер-
вых двух, так как, умножив второе уравнение на 2 и сложив с
первым, получаем третье уравнейие. Таким образом, задача сво-
дится к исследованию системы двух уравнений:
| Зх + 4у — 7г = 0,
I х -|- у -}- 2г — О
или
( Зх + 4у — 7 г,
( . % "Р у ~ — 2г.
Положив г = /, получаем: х = — 15/, у = 13/. Для каждого зна-
чения / получаем решение исходной системы. Таким образом, си-
стема имеет бесчисленное множество решений.
§ 4. РАНГ МАТРИЦЫ; ТЕОРЕМА О СОВМЕСТНОСТИ СИСТЕМЫ
ЛИНЕЙНЫХ УРАВНЕНИЙ
1. Прямоугольные и квадратные матрицы. В предыдущих параг-
рафах было введено понятие матрицы второго и третьего порядков.
Здесь мы обобщаем это понятие.
Пусть дана таблица вещественных чисел, состоящая из т строк
и п столбцов:
(1)
Такие таблицы называются прямоугольными матри-
цами типа т х п. Здесь т — число строк, ап — число столбцов.
Числа atj называются элементами матрицы. Если т = п,
то матрица называется квадратной матрицей п-го
порядка.
2. Ранг матрицы. Для дальнейшего изложения необходимо ввести
понятие ранга матрицы. Пусть дана матрица А типа п X k:
346
Если зафиксировать некоторое число р строк этой матрицы и
столько же столбцов, то элементы, находящиеся на пересечении
этих столбцов и строк, образуют квадратную матрицу р-го поряд-
ка. Определитель этой матрицы называется минором р-го
порядка матрицы А. Очевидно, р < min (n, k)1. Мино-
рами первого порядка будут элементы матрицы. Например, для мат-
рицы
(2 3 4 5\
1 3 0 5 1
5 13 11
4 4 3 1/
минорами второго порядка будут следующие определители:
Первый из этих определителей составлен из элементов, находя-
щихся на пересечении первой и второй строк с первым и третьим
столбцами, второй определитель — вторым и третьим столбцами и
третий определитель получен из элементов, находящихся на пересе-
чении второй и четвертой строк с первым и четвертым столбцами.
Для той же матрицы определитель третьего порядка
2 4 5
1 0 5
4 3 1
является минором третьего порядка. Он образован из элементов,
находящихся на пересечении первой, второй и четвертой строк и
первого, третьего и четвертого столбцов.
Введем следующее, важное определение. Число г называется
рангом матрицы А, если выполнены следующие условия.
1. Матрица А имеет по крайней мере один минор r-го по-
рядка, отличный от нуля.
2. Всякий минор матрицы А, имеющий порядок г + 1 и выше
(если вообще такие существуют), равен нулю.
Если все элементы матрицы равны нулю, то ранг матрицы счи-
тается равным нулю.
1 Т. ё. наименьшее из чисел п и /г.
347
Всякий минор наивысшего порядка, отличный от нуля, назы^
вается базисным минором данной матрицы; столбцы и строки!
из элементов которых составлен базисный минор, называются б at
зисн ыми. Очевидно, у матрицы может быть несколько базисных
миноров.
Если все миноры (г + 1)-го порядка равны нулю, то, очевидно,
будут равны нулю также все миноры более высокого порядка. В са-
мом деле, возьмем произвольный минор (г + 2)-го порядка и раз-
ложим его по элементам некоторого столбца. Очевидно, все коэф-
фициенты при элементах этого столбца будут равны нулю, так как
они являются алгебраическими дополнениями этих элементов, а
алгебраические дополнения элементов минора (г + 2)-го порядка
являются минорами (г + 1)-го порядка или отличаются от них
знаком. Это замечание позволяет вычислить ранг матрицы, не вы-
числяя всех ее миноров. В самом деле, если удастся показать, что
какой-то минор r-го порядка отличен от нуля, а все миноры
(г + 1)-го порядка равны нулю, то ранг матрицы равен г.
Однако такой путь определения ранга матрицы в ряде случаев
также связан с вычислительными трудностями. Существует более
эффективный способ вычисления ранга матрицы, основанный на
элементарных преобразованиях матрицы.
Элементарными преобразованиями матрицы
А называются следующие преобразования:
а) перестановка двух строк или столбцов;
б) умножение строки (или столбца) на произвольное, отличное
от нуля число;
в) прибавление к одной строке (или столбцу) другой строки
(столбца), умноженной на некоторое число;
г) вычеркивание, строки (или столбца), целиком состоящей из
нулей.
Можно показать, что элементарные преобразования не меняют
ранга матрицы. Пользуясь этим замечанием, путем элементарных
преобразований, упрощая матрицу, приводят ее к специальному
виду, который позволяет непосредственно определить ранг матри-
цы без дополнительных вычислений.
При м е р 1. Определить ранг матрицы
(2—1 1\
4 5 9 1
О — 1—11
2 1 3/
Решение. Выполним некоторые элементарные преобразо-
вания этой матрицы, которые приводят матрицу к более простому
виду. Для удобства дальнейшего изложения будем применять со-
кращенные обозначения для элементарных преобразований матриц.
Смысл этих обозначений будет ясен из последующего:
348
Знак волнистой линии означает, что матрица, записанная справа
от этого знака, получена из предыдущей матрицы путем элементар-
ных преобразований, причем над знаком указаны преобразования,
которые выполнены. Например, II — 2-1 означает, что из второй
строки вычли первую строку, умноженную на 2, а 11<->Ш означает
перестановку соответствующих строк.
/о _1 1 \
Итак, мы получили матрицу^ | J1, ранг которой равен
рангу исходной матрицы. Легко видеть, что ранг этой матрицы ра-
вен двум, так как, например, 11 #= 0. Итак, ранг исходной
матрицы равен двум.
3. Теорема о базисном миноре. Для дальнейшего изложения нам
необходимо доказать следующую теорему.
Теорема 1 (теорема о базисном миноре).
Любой столбец матрицы (1) является линейной комбинацией ее
базисных столбцов1.
Доказательство. Для конкретности предположим, что
базисный минор расположен в первых г строках и первых г столб-
цах этой матрицы. Таким образом, мы предполагаем, что
аН а12 • • • а1г
= М =£0.
&rl аг2 • • •
1 В § 2, п. 3 Приложения введено понятие линейной комбинации столб-
цов определителя третьего порядка (см. стр. 334). Понятие линейной комби-
нации столбцов матрицы (1) вводится совершенно аналогично.
349
Введем в рассмотрение следующий определитель (г + 1)-го порядка:
«и «12 • • • «1г «15
«21 «22 ... «аг «25
^5 =
«И «г2 • • • ' «Г5
«к! «Й2 ... акг aks
(2)
Здесь k принимает значения от 1 до т, а $ — значения от 1 до п.
Легко видеть, что для любых значений k и s имеем: Dks = 0. В самом
деле, если k < г, то, очевидно, в определителе Dks две строки сов-
падают, поэтому определитель равен нулю. Если s < г, то в опре-
делителе два столбца совпадают, поэтому определитель также ра-
вен нулю. Если, наконец, k > г и s > г, то определитель Dhs яв-
ляется минором (г + 1)-го порядка матрицы (1), поэтому он равен
нулю. Итак, Dks = 0 при любых значениях Айе.
Разложив этот определитель по элементам последней строки,
получаем:
Dks = «аИ*1 + + • •• + akrAkr + aksM = 0, (3)
где Akj являются алгебраическими дополнениями последней строки
определителя Dks, а М является базисным минором. Важно заме-
тить, что алгебраические дополнения AhJ не зависят от числа k, так
как они образованы из элементов первых г базисных строк опреде-
лителя Dks. Так как М =/= 0, то соотношение (3) можно разделить
на М. Вводя новые обозначения для коэффициентов
(J _ __ Aki £ __ ____ А/г2 Q _ ___ Akr
‘ 1 М ’ 2 М............. г М ’
соотношение (3) приведем к следующему виду:
Ci«*i + C2ak2 + ... + C/ikr = aks. (4)
Полагая k = 1, 2.....п, получаем следующую систему соотноше-
ний:
Ci«n + Сга12 + + Cratr ~
Ci«2i + С2«22 + ... + Cra2r — a2s,
ciani + ^2«Л2 + ... + Cranr = ans.
Эти равенства показывают, что- s-й столбец матрицы (I) является
линейной комбинацией первых г столбцов этой же матрицы с коэф-
фициентами С1( С2....Сг. Поскольку s может быть любым столб-
цом от 1 до т, то теорема доказана полностью.
Точно так же может быть доказана аналогичная теорема для
строк.
Теорема 2. Любая строка матрицы (1) является линейной
комбинацией ее базисных строк.
350
Пример 2.
Рассмотрим матрицу:
(2—1 1\
4 5 9 .
0—1-11
2 1 Зу
Выше (см. пример 1 на стр. 348) было показано, что ранг этой
матрицы равен двум. В качестве базисного минора можно взять ми-
цор, образованный из элементов, стоящих на пересечении первых
двух строк и первых двух столбцов. Согласно нашей теореме третий
столбец является линейной комбинацией первых двух столбцов.
Для того чтобы получить коэффициенты этой комбинации, рассмот-
рим вспомогательную матрицу, образованную из первых двух строк
нашей матрицы
' /2—1 1\
\4 5 9/
содержащих базисный минор исходной матрицы. Выразим элементы
последнего столбца этой матрицы через первые два столбца. Для
этого достаточно решить следующую систему уравнений:
2х — у = 1,
4х ф- 5у = 9.
Это уравнение имеет единственное решение: х = 1, у = 1.
Таким образом, мы приходим к выводу, что последний столбец
матрицы А является суммой первых двух столбцов этой матрицы.
Непосредственной проверкой легко убедиться в том, что вывод со-
ответствует действительности.
Теорема 3. Пусть
(ali ai2 а1п \ /а11 °12 ••• airfot
а21 а22 ••• а2п I и Д' = I а21 а22 ••• а2п^2
&т2 • • • &тпу ^т2 • • •
— две матрицы соответственно ранговruR, причем первые п столб-
цов этих матриц совпадают. Если последний столбец матрицы А'
линейно выражается через остальные столбцы, то г = R.
Д о. к а з а т е л ь с т в о. Пусть Мг — базисный минор , мат-
рицы А. Так как этот же определитель является минором матрицы
А', то г < R. Покажем, что все миноры (г + 1)-го порядка матри-
цы А' равны нулю. В самом деле, пусть Мг+1 — произвольный ми-
нор (г + 1)-го порядка матрицы Д'. Если в этот минор не входят
элементы последнего столбца этой матрицы, то Мг+1 = 0, так как
ранг матрицы Л, равен г. Если в этот минор входят элементы послед-
него столбца матрицы Д', то в силу линейного свойства определи-
телей Мг+1 можно представить как сумму п определителей
351
(г + 1)-го порядка, каждый из которых, как нетрудно видеть,
равен нулю. В самом деле, полученные определители либо име-
ют два пропорциональных столбца, либо отличаются от некото-
рого минора (г + 1)-го порядка матрицы А числовым множителем.
Отсюда следует, что все эти определители равны нулю, поэтому
Мг+1 = 0. Мы приходим к выводу, что k = г. Теорема доказана.
4. Условие совместности общей системы линейных уравнений.
В предыдущих параграфах мы подробно изучили вопрос о решении
системы двух и трех линейных уравнений соответственно с двумя
и тремя неизвестными. Здесь мы рассмотрим критерий совместно-
сти общей системы линейных уравнений с произвольным числом
уравнений и неизвестных.
Пусть дана система, содержащая т линейных уравнений с п
неизвестными:
ацХ1 + аЛ +----------h ainxn = blt
4~ ^22^2 "Т “ 4" &2пХп = ^2>
ат1Х1 + ат2х2 + ’ ‘ ‘ + атпХп =
(6)
Решить систему — это означает найти такие числовые значения
xlt х2.хп, при которых каждое из уравнений системы обращается
в правильное числовое равенство. Система называется совмест-
ной, если она имеет хотя бы одно решение, в противном случае
она называется несовместной.
Для того чтобы сформулировать теорему о совместности системы
уравнений (6), введем в рассмотрение следующие две матрицы:
Й11 а12 ••• ain
a2i а22 ••• а2п
@т2 ••• ^тп
аи а12 • • • а1п bt
й21 а22 " а2п ^2
‘ami ^т2 ’ ’ ’ ^тп
(7)
(8)
Матрица (7) называется основной матрицей или матри-
цей системы, а матрица (8) —расширенной мат-
рицей системы (6). Теорема о совместности системы урав-
нений (6) формулируется следующим образом.
Теорема 4. Система (6) совместна тогда и только тогда,
когда ранг расширенной матрицы этой системы равен рангу основ-
ной матрицы.
Доказательство. Сначала допустим, что система (6)
совместна, т. е. имеется хотя бы одно решение: Xi = clt хг — сг,...
352
..., хп = сп. Подставив эти значения в каждое из уравнений сис-
темы (6), получаем правильные числовые равенства:
+ а12с2 Ч----Ь а1псп =.- blt ]
а21С1 + а22С2 + ’ • ‘ + а2пСп — &2> | (9)
amiCi + ат2С2 + • ’ • + атпСп = Ьт- 1
Согласно теореме 3 матрицы (7) и (8) имеют один и тот же ранг.
Теперь допустим, что матрицы (7) и (8) имеют один и тот же ранг,
докажем, что система (6) совместна. Пусть г — ранг матриц (7) и (8).
Рассмотрим.г базисных столбцов матрицы (7), они будут также ба-
зисными столбцами и матрицы (8). Таким образом, в матрице (8)
существуют базисные столбцы, не содержащие последнего столбца.
По теореме 1 последний столбец матрицы (8) является линейной
комбинацией базисных столбцов, а следовательно, может быть
представлен как линейная комбинация столбцов матрицы (7). Обо-
значив коэффициенты этой линейной комбинации через cit с2,..., сп,
мы приходим к выводу, что выполняются равенства (9). Таким об-
разом, система совместна.
Доказанная теорема называется теоремой Кронекер а—
К а п е л л и.
Применим доказанную теорему к исследованию систем двух и
трех линейных уравнений с тремя неизвестными.
1. Система двух линейных уравнений с
тремя неизвестными. Пусть дана система линейных
уравнений:
аНХ1 + а12Х2 + Й13Х3 = 1 (Ю)
О21^1 Н- &22Х2 4“ а23Х3 ~ ^2> J
причем хотя бы один из коэффициентов при неизвестных отличен
от нуля.
В данном случае матрицы (7) и (8) имеют вид:
Л = iaa а1з\ и А' = (Oii
\а21 0-22 ®23/ \^21 0-22 ^23 ^2/
Обозначим ранги этих матриц соответственно через г и R. Воз-
можны следующие случаи:
। а) г = 2. Так как матрица А включается в матрицу А', то R =
= г, поэтому система (10) совместна. Если, например, I^h ’ ^12|=И= 0,
то, положив xs = /, где t — произвольное вещественное число, мы
получаем систему двух уравнений с двумя неизвестными, которая
согласно теореме 2, § 1 Приложения имеет единственное решение.
Итак, для любого х3 = t система (10) имеет единственное
решение. Это означает, что система (10) как система двух уравне-
нии с тремя неизвестными имеет бесчисленное множество решений;
353
б) г — R = 1. Согласно только что доказанной теореме система
(10) совместна. Так как R = 1, то в матрице А' согласно теореме 2
строки линейно зависимы. Это означает, что существует такое чис-
ло X, что
#11 = Хя21, <212 = ^#22> #13 ” ^<#23> ^1 = А.&2-
Отсюда следует, что в системе (10) одно уравнение независимо, а
второе является следствием первого. В таком случае система имеет
бесчисленное множество решений, причем два неизвестных могут
быть взяты произвольно, а третье определяется однозначно;
в) r<R. Согласно доказанной теореме система не совместна.
2. Система трех линейных уравнений с
тремя неизвестными. Пусть дана система линейных
уравнений (1), § 3 Приложения, причем хотя бы один из коэффици-
ентов при неизвестных отличен от нуля.
В данном случае матрицы (7) и (8) имеют вид:
(аН а12 ®1з\ г /#11 й12 а1з ^1\
#21 ^22 ^23 I И Л = I #21 #^22 ^23 ^2 I •
#31 #32 а33/ \#31 ^32 ^33 ^3/
Обозначим через г ранг матрицы А, а через R ранг матрицы А’.
Возможны следующие случаи:
а) г = 3. Тогда | А | 0, поэтому R — 3, и система совместна.
Согласно теореме 1, § 3 она имеет единственное решение.
б) г = R~— 2. Согласно только что доказанной теореме система
совместна. Так как R = 2, то в матрице Л' две строки линейно не-
зависимы и согласно теореме 2 одна из строк линейно зависит от
двух других. Это означает, что в системе (1), § 3 Приложения два
уравнения независимы, а третье уравнение является следствием
этих двух. Так как система двух совместных уравнений с тремя
неизвестными, как было показано выше, имеет бесчисленное мно-
жество решений, то рассматриваемая система также имеет бес-
численное множество решений.- В этом случае два уравнения из трех
являются линейно независимыми, а третье уравнение является их
следствием.
в) г = R — 1. Не вдаваясь в подробности, отметим, что и в этом
случае система также совместна и имеет бесчисленное множество
решений. Однако в отличие от случая б) одно уравнение является
независимым, а два .других зависят от него;
г) r< R. Согласно доказанной теореме система несовместна.
Пример 3. Исследовать систему:
Xi + 2х2 = 1> — + х2 = 4, Xi + 5х2 = 3. -
Решение. Матрицы (7) и (8) в данном случае имеют вид:
/ ! 2\ / 1 2 Ь
— 1 11 —1 1 4.
\ 15/ \ 153/
Ранг первой матрицы равен двум, а расширенной матрицы — трем,
поэтому система не совместна.
ОТВЕТЫ И УКАЗАНИЯ
2. Да. 4. а) (у, х, г}; б) (г, у, х); в) { — х, г, у). 5. {1, О, 1) ; {—1, О,— 1),
(1, Qt —1); {—1, О, 1}. 6. а) ОМ, где М — середина отрезка АВ>
б) ON, где N— середина отрезка ВС', в) АР, где Р—середина отрезка ОС.
7, а) Всегда; б) вектор с существует тогда, когда а и Ъ не коллинеарны.
8. АВ {—1, 1. 0), ВС {0, -1, 1), АС {-1, 0, 1), ОК "к °1’
Од|10, о|. 9. CS {— 2, 0, 2), АС {4, 2, 0}, СА' {— 3, —1, 1).
— ’ _ _ - 5 1 — 3
О’А{—2, —2, — 1}., AS {2, 2, 2}, АС' {3, 2, 1), В£Ч0, ——, 1 , АЕ' {2,—, 1).
10. CS {2, — 4,2}, АС {—4, Л 0), СА'{3,_—4, —1), (ГА J2, 0, 1),
AS{—2, 0,—2), АС'{—3, 2, —1), ВЕ'{0, 5, —1), А£'{-2,1, —1}. 11. АО1{1, 1,0},
А^ {1, 1, 1},' 55х (1, 0, 0), Р£ {у, 0, lj, 57 {у, - 1, 1}. 12. a) FD',
б) CAf, в) СА; г) BF-, д) АЕ. 13. |^г^2| =0’ 14‘ а) Сз’ Ot’ б) °4’ в) аа' °0’
д) а7; е) а3, at, а3, а3; ж) а3, аь, ае, а3; з) а2, at, а3. 15. Р1 {2, 5, 0},
р2 {- 1, 2, 4), рз (5, 5, -2), Pl {1, 2, -2), ръ ^1, 2, у), р6{1, у, -4).
16. 2) 2£СХ + СА + ABi = 0; б) 2FD + ААХ — 2 AD +2АВ =0; в) Ё£ -
— С£ + CD — £0 = 0. 17. б) и &2j_b) ct и с2. 18.__ОАХ (2, 3, —_3},
ОА2{—2, 3,3), ААХ (О, 0, —6), АА2{—4, 0, 0). АгАг = АХА + АА2;
АХА2 {—4, 0, 6). 19. Каждое ' из соотношений (6) следует из остальных
двух в том и только в том случае, когда хотя бы одна из координат
векторов а и Ь, не входящая в данное соотношение, отлична от нуля.
Например, третье из соотношений (6) следует из первых двух в том и
только в том случае, когда ах и а2 одновременно не равны нулю. 22. Ах ле-
жит в плоскости Оху, А2 принадлежит ’ оси Ох, А3—оси Оу, Ав —оси Oz;
Ad, А5, Ав и А, принадлежат соответственно четвертому, седьмому, третьему и
восьмому октантам. 23. £ (0, 0, 1), К ^1, у, 1^, А (0, 0, 0), В (1, 0, 0),
С (1, 1, 0), D (0, 1, 0), Ах (0, 0, 2), В, (1, 0, 2), Сх (1, 1, 2), Ох (0, 1, 2).
24. Ох (8, 3, 0), Сх (7, 7, 3), Вх (3, 6, 3), С (5, 4, 4). 26. D (6, 5, 7). 27. Нет,
так как точки (0, 0, 0), (1, 1, 1), (—3, —3, —3) коллинеарны, а вершины
треугольника не коллинеарны. 28. Указание. Если точка имеет координа-
ты х, у, г, то симметричная ей точка относительно оси Ог имеет координаты
355
..........................5),
1, -4), В12 (7, 0, -5), С12(—1, -1, 1), Л„(5, 1, 4),
....................- -1);
-5),
х =
— х, —у, г. 29. Введем следующие обозначения: точку, симметричную точке А
относительно начала координат, обозначим через A'f точки, симметричные от-
носительно осей Ох, Оу и Ог, — через Ах, А2, А3 и относительно координат-
ных плоскостей Оху, буг и Охг — через А12, Л23, А13. Аналогичные обозначе-
ния введем для остальных точек. Тогда: А' (— 5, 1, — 4), В' (— 7, 0,
с'(1, 1. 1); л12(5, -1 ". ". •. ", \ -
В13(7, 0, 5), С13 (-1, 1, -1), Агз (-5, - 1, 4), В23 (—7, 0, 5), С23 (1, - 1,
А (5, 1, -4), Вх(7, 0, -5), Ci (- 1, 1, 1), А2 (-5, -1, - 4), В2(- 7, 0,
С2(), — 1, 1), А3(—5, 1, 4), В3(—7, 0, 5), С, (1, 1,-1). 30.
mi*i + т2х2 _ т1у! + m2y2 -j- т2г2
. , У * 2 . оа. Oj (z, I,
«1 + т2 т1 + т2 trii + т2
' /4 2 \ /5 13 9\ /9
В2(1, 3, —5), В3(1, /2, -4). 33. мх -, 1 , М2 , М3 2
\ о о / \ 2 2 Z / \ О
-1).
/ 1 3 \
34. Если Mlt М2, М3—середины данных отрезков, то I —, —, О г
/ 1 I \ / 9 \
М2 I—, 0, —21, М3 12, 2, —— I. 35. Середины трех данных отрезков
лежат на оси Ох. 36. а); в). 40. Систему координат выбрать так, чтобы начало
совпало с точкой А и АВ — elt АС = е», AD=e3. Если в этой системе S(X, 0, 0),
то середины отрезков AD, ВС, SD и SC будут иметь соответственно координаты
Mi (°, °- 4)’ М2(4’ °)’ Мз(р °’ М* (р Р °)' Далее
показать, что векторы М2М2, М2М2 и МгМ2 линейно зависимы. 41. Си-
стему координат выбрать так, как в задаче 4 из § 3, и учесть, что в этой
/ 1 1 1 \
системе точки пересечения диагоналей имеют координаты: I—, —, — I
42. См. решение задачи 5 из § 3. 43. Доказать, что четырехугольник, образо-
ванный из середин сторон пространственного четырехугольника, является
составным. 44. Эта задача является обобщением задачи 43 и задачи 6 на стр.
38. См. решение задачи 6. 45. Если систему координат выбрать так, как в
задаче 7 на стр. 39, то вершины шестиугольника будут иметь координаты:
ЛД1, 0, 0), Л2(0, 1, 0), Л8(0, 0, 1), Л4(—1, 0, 1), ЛБ(0, —1, 1), Л,(0, 0, 0). Далее,
обозначив через X отношение, в котором точки Р, Q и R делят диагонали, вы-
числить координаты этих точек и показать, что векторы PQ и PR не колли-
неарны. 47. Ввести в рассмотрение радиус-векторы или координаты рассмат-
риваемых точек и, пользуясь ими, доказать, что точка М, делящая отрезок
AjCx в отношении р, совпадает с точкой N, делящей отрезок DjBi в отношении
X. 48. См. решение задачи 7 на стр. 39. Для плоского шестиугольника указан-
ное свойство, вообще говоря, не справедливо. См. рис. 20. 49. При AD'= 0,
npjTA' =ь — 2, ПрцС7В = 0, ПриДС'= 2, ПрцСЛ' =— 2. 50. Пр„а=— Пр_ца.
Проекции вектора на данные оси равны тогда и только тогда, когда век-
тор а перпендикулярен к прямой I. 51. Если {/, и} —данная ось, то
Приа = I а | cos (а, и); | Приа ] = / а | [cos (а, и) |< | а |. Но | а | < 2г, поэтому
| При а | < 2г. 52. 1. 53. 55. Воспользоваться теоремой [4. 4]. Углы
(а, Ь) и (d, е) — прямые, (a? d) и (с^4d) —тупые, остальные—острые. 56. ab —
= 2 —/2, ас = 0, ad=2, Ьс=— 24 + 2/Т, bd = — 9, cd=l 1. 57. a)— 12;
б) 2; в) 6; г) —49; д) 89. 58. х{—4, —6, 4}. 61. Докажем от против-
ного. Пусть А — 0. Тогда какая-либо строка есть линейная комбинация осталь-
ных. Пусть, например, а3а3 = У.а2ах + а3а2 = Ха2а2 + а3а3 =
— Ха2а3 + раха3. Если положить р — а3 — Ка2 — рах, то .предыдущие соот-
356
ношения запишутся так: pa1 = Q, ра2 = 0, ра3 = 0. Отсюда следует, что
р = 0, т. е. векторы аг, а2, а3 компланарны (см. задачу 60). 62. Пусть а =
=х1е1 + хгег + хзез- Тогда данные в условиях задачи соотношения запишутся
так: + х3ехе2 +х3е1е3=а1, х2е2е2 + х2е2е2 + х3е2е3=а2, х2е3ех +x2e3e2-j-
+ х3е3е3 = а3. Далее следует использовать результат предыдущей задачи.
63. Если eiej=gij, alt a2, a3—ковариантные координаты, a xlt xit х3 — обыч-
ные, -то aj = Xigu + x2g21 x3g31, a2 = Xjg12 + x2g22 + x3g32, a3 = Xjgi3 +
+ xigi3 + хзёзз- Соответствующие координаты для любого вектора совпадают
тогда и только тогда, когда gn = g22 = g33 = 1; gn — 0, если i =£ j, т. e. ког-
15
да базис прямоугольный декартовый. 65. а) 66. 30°, 60°, 90°.
4 ___ ' _ __fi 111
67. cos ф = —. 68. ВН (—3, —3, 1), V19. 69. ОН — —. 70. До-
5 ( 3 6 6)
казательство. Пусть вектор р = а + Ь направлен вдоль биссектрисы уг-
ла (а, Ь). Тогда Z (a, а+&)=Х («+&, b) или cos [а, (а+&)]—cos [(а+&), &J.
а (а + Ь) (а 4- b)b
откуда 7777+/»1 = I ы । „ , а, ’ \b\a (а+b) = \а\ (а + b)b,
\а I |а + о\ | b 11 а + о|
\b\(a?+ab) = | а | (ab + ft2), | b | |а |2-| а 11 b |2 = ab (| а\ -| Ь\),
I a I I&I (|a|-|ft|) = (aft)(|a|-|ft|). Окончательно получаем: (| а | — | b |)Х
X [(а Ь) — | а 11 b |] = 0. Так как векторы а и b не коллинеарны, то а b —
— | а 11 b | 0, поэтому из предыдущего соотношения получаем: | а | = | b |.
Докажем обратное предложение. Пусть | а | = | b | = a, Z (а, а + Ь) = фх
и Z (Ь, а + Ь) = ф2. Докажем, что = ф2. Из определения скалярного произ-
ведения, имеем: а (а + b) = | а 11 а -|- b | cos фй; b (а -j- ft)=| b 11 а + b | cos ф2.
Таким образом, в силу условия | а | = | b | получаем: а (а + Ь) = а2 -)- ab,
b (а + Ь) = Ьа. + ft2; а (а + Ь) = ft (а + Ь). Из предыдущих соотношений
следует, что cos <pr = cos ф2. Так как фх < л и ф2 < л, то <рх = фа.
(19 22 1
71. ]—, —, —
115’ 15 3
приложенных к началу координат, есть сфера с центром в точке (0, — 2, 0}
и радиуса R = У 3 ; б) нет решений. 76. а) Если а и b не коллинеарны,
то задача не имеет решений. Если а и b коллинеарны, то, положив а = Х&,
. 72. 60°. 73. а) Геометрическое место концов векторов х,
получаем: Хбх2 + (bb) b = 0, b (Хх2 + bb)—Q. Так как b ф 0, то. Хх2 + bb =
о bb
= 0 или х2 + — = 0.
А
Мы получили векторное
квадратное уравнение;
2
б) x = |a| Зл. Решение. Пусть а0 — единичный вектор направления а,
а х0 — единичный вектор искомого направления. Тогда данное уравнение приво-
дится к следующему: х01 х |3=a01 « !• Отсюда следует, что | х |3 = | а |, х0=а0;
___2.
|х|= а |, х = х0 |х | = а0У| а | = а | а | 3.. 77. а) Левую, левую,,
правую, левую, правую; б) правую, правую, левую; в) левую, правую, пра-
вую. 78. а) Правая; б) правая; в) правая; г) левая; д) левая. 79. а) Левая;
3 9
б) правая; в) левая; г) левая; д) левая. 80. а) — б) — 3; в) — 3; г) ~,.
,д) 3; е) — 33. 81. 1)—-|-]7 3 SO; 2) ^V3SO\ 3) — ^V3SO;
О О «5
4) —-^-/3 SO; 5) 2/3- SO. 82. а) { — 4, 11, —1}; б) {—4, —7, 5);
в) (—8, 16, 0); г) {4, 7, -5); д) {4, —3, 1}; е) (4, 13, 1). 83. а) У 754;.
357
„ 18
с05С = Ж;
-9}; д) М 0). 97. a)S=
\ и и /
cos 0=0; в) а {—3, 4, 5);
в) ВН =
<) V 437 ; в) /58 . 84. а) б) ..К3?58 ; в) /54 - 85. Векторы a, b, С ком-
планарны. 87. а) Ь и с коллинеарны; б).а и Ь коллинеарны. 88. а) {— 3, 21, — 15);
«) {—7, —6, 10); в) (10, 11, 17). 93. а) {15, —3, —14); б) (0, 0, 0);
аа 4- [ab]
в) {— 3, 11, 9). 95. х — --------. Решение. Второе уравнение
а2
разрешимо только в том случае, когда а ± b и а =/= 0. Возьмем вспомогатель-
ный единичный вектор с, перпендикулярный к плоскости векторов а и Ъ так,
чтобы аЬс >0. Разложим искомый вектор х по реперу а, Ь и с, векторы ко-
торого взаимно перпендикулярны: х = xra + x2b-j- хяс. Подставив значение х
в данное уравнение, получаем: х1(аа) = а; х2[Ьа] + х3[са] = Ь- Отсюда по-
а
лучаем: *1 =—. Умножив второе уравнение скалярно на с, получаем: х2(Ьас)+
О
+ х3 (сас) = Ьс, отсюда х2 0. Для определения х3 умножим второе соотно-
шение скалярно на Ь. Получим: х2(ЬаЬ) + х3 (саЬ)=Ь2 или х3(саЬ) =Ь2. Так
, I» I ,, [аб] [ай]
.как (абс) = | а Ц й |, то х8=—• Учитывая, что с=_^——,
а [ай]
окончательно получаем решение: х = хха + х2Ь + х3с = — а +’ =
аа + [ай] „ „ . ,
=----------. Непосредственной подстановкой убеждаемся в том, что наиден-
а2 ~
ный вектор х является решением исходной системы. Таким образом, приа±й
я а #= 0 система имеет единственное решение. Если хотя бы одно из условий
а ± й или а + 0 не выполняется, то система не имеет решений. 96. a) 5 —
_______ 7 3
= /51; б) cos Л =—, cos В ---------т=-,
10 2/15
/102 — ( 29 7 22)
= 1™,Вн{--, -, г) а {8, 5,
75 1
= —; б) cos А — 0, cos В = — г__, cos С =
2 /2
г) ВН (у, — у, 2j; Д) М -р 0, jj. 98. S = 2/2, h где t —
произвольный числовой параметр. 99. Векторы а, й и с компланарны. 102. Если
положить [аЬ]=р, то данное уравнение сводится к следующему: рх = а.
3 45
Решение этого уравнения (см. п. 6, § 5). 104. а) —; б) —105. a) V = 12;
— _ 6
б) ^abcd=^^ $АВВ'А' ~ /626, SADD,A, = /338; в) h = у— ;
4 46 17 l/"i7
г) cos q>! = д) cos <р2 = 13 . 106. а) V = б) SABC =
Sавв'А'=/34, 5Асс,А: =/357, $всс’В' — /561; в) h = /17; г) cos <р= 0.
107. а) V = —; б) $Авс ~ 4, $асо~§’ ^авв~^^^' Sbcd = VW
О
в) А = 2; г) cos <pt = ! Д) Фа = у- 1'2- Середину нижнего основа-
ния принять за начало прямоугольной декартовой системы координат; одну
— —----------- направить по нижнему основанию. Найти в данной системе
по диагоналям трапеции, и вычислить
115. Положить ОА = а, ОВ — Ь; ОС = с. 116. Взять
вдоль прямых I, АВ, АС и ВС и рассмотреть их
из осей системы
координаты векторов, направленных
угол между ними,
единичные векторы
358
скалярные произведения. 118. Если М и М' — середины двух проти-
воположных ребер, длины которых равны а и а', а Ь, с, Ь', с' — длины ос-
тальных четырех ребер, то ММ'г = — (Ьг 4- с2 -|-6'2 -А с'2 — а2—а'2). 119. —.
122. Л2, Л4-, А3. 123. х = 0, у — 0, г = 0; х — 1=0, </-f-3 = 0, г — 2 = 0.
124. а) х—у + 2г—8 = 0; б) х + 4у + 2 = 0; в) 4х + Чу — 4г — 19 = 0;
г) 5х— 4у-}-Зг — 2 = 0. Г25. а) Зу — 2г = 0; б) у — 0; в) 4х + Зг = 0.
126. Оу — 2г —17=0, Ох + г + 4 = 0, 2х±у — 1=0. 127. а) 2х — Зу — г + 6 =
= 0, х — \2у — 4г + 17 = 0, 4х — Оу -|- 5г + 5 = 0, Зх — у + 2г — 5=0; б) х+
+ 2у + Зг — И = 0, 5х + Зу + г + 1 = 0, 10х — 15//+2г+2=0, 10х— 15y+2z-f-
4- 23 = 0, 5х + Зу + г — 20 = 0, х + 2у + Зг — 4 = 0; в) 2х — Зу — г — 1 =0,
х — 12у— 4г + 38 = 0, 4х — Оу + 5г — 16 = 0, Зх — у + 2г + 2 = 0. - 128.
х у г х у г
-L+f+ — = 1.129. — + -^+- = 1. 130. х + у + г-5 = 0, х-у-
“О 5 о 2 1
3 4 4
— г-|-7 = 0, х — У А 2 — 1=0. х + у — г-|-3 = 0. 131. 2х — Зу — 6г — 6 =0,
6х + Зу — 2г — 18 = 0. 132. х = 1 -f- 2Х — Зр, у = —3 + 2р, г = 5 + 4Х + р.
134. Плоскости принадлежат точки Afb Л13 и Л46. 135. а) (2, 10, 0);
б) ЛМ—3, 0, 0), М2 (0, 6, 0), М3 (0, 0, —2). 136. а2, а3, а<, а3. 138. а) Л4Д4,0, 0),
/ 8\ / 2\
Л4а(0, —8, 0), М3 0, 0, — ; б) Мг(—4, 0, 0), Л42 (0, —4, 0), М3 0, 0, — ;
\ 5 ] \ 3 ]
)j, М2 (0, 8, 0), точки Л13 не существует, так как плоскость па-
раллельна оси Ог; r) A4X (5, 0, 0), М2 10, —01, М3 (0, 0, 5); д) Л41(—4, 0, 0),.
4\
3 )
так как плоскость проходит через
ж) 'Mi (0,' 0,' 0), Л4а (0, 0, 0), Л43 (0, 0, 0);
В) М-
точки Л4а не существует, так как плоскость параллельна оси Оу, М3 (0, 0,
е) Л42 (0, 0, 0), точки М2 не существует,
ось Оу; М3 (0, 0, 0);
/8 - \
з) Л4Х—, 0, 0 , точек М2 и М3 не существует. 139. а) Параллельна оси Ох; б) па-
\ 3 /
раллельна координатной, плоскости Оху; в) содержит ось Оу; г) параллельна
оси Ог; д) параллельна оси Оу; е) содержит ось Ог; ж) параллельна коорди-
натной плоскости Оуг; з) совпадает с плоскостью Охг; к) параллельна коор-
динатной плоскости Охг. 141. Совпадают пары плоскостей а) и в). 142. а) Плос-
кости пересекаются; б) плоскости параллельны; в) плоскости пересекают-
ся ; г) плоскости параллельны; д) плоскости пересекаются. 143. Две плоскос-
ти параллельны, третья их пересекает. 144. (2, —1, 1). 147. а) Плоскости пе-
ресекаются в точке М (1, 1, 1); б) плоскости принадлежат одному пучку;
в) плоскости пересекаются по параллельным прямыьцг) две плоскости парал-
лельны, третья их пересекает,
каться в одной точке, лежащей
чае, когда
148. (1, 0, 1). 149. Плоскости будут пересе-
в плоскости
Оху
в том и только в том слу-
150. а) Либо
С2 отличен от
Ст =
нуля
18:
£
Азс
ь2
и
Si
В2
В3 - „ „
= = D2 = О, либо один из коэффициентов Сг я
Ci
С2
С3
А
2
Аз
D,
Dt
D3
= 0.
«13: ЙН1»: ЙМ
г=0; б) 2х + у + Зг = 0; в) г = 0; г) Зх + 4г = 0.
151. а) Чх — 5у +
152. а) х + у + г — 2=0; б) Зх — у + Зг — 2 = 0; в) 2х — г — 8=6;
г) у — 1 = 0. 153. а) 5х + у + 4г = 0; б) 5х — 2у + 7 г — 10 = 0; в) Зх +
+ Зу + 8 = 0; г) Зу — Зг + 10 = 0. 154. х + 2у — 5 г + 2 = 0.
#= 0 и А.
Вг
к
359
155. А(х + 1) + В (у- 5) + С(г - 2)=0. 157. 2х + у + г - 4=0. 158. х +
+ 2у — 4г + 7 = 0. 159. а (8х + 5г + 1) + ₽ (х + 5{/ — 8) + ? (8у — г +
4- 5) = 0. 160. а) х — 4г = 0; б) Зх + у — 2г = 0; в) 2х + у = 0; г) Зх +
+ Зу + г = 0. 161. а) х + Зу — 4г + 20 = 0; б) 2х + у + 7г — 30 = 0;
в) 2х — Зу + г + 4 = 0; г) Зх — г + 14 = 0. 162. х — 2у + Зг — 9 =
= 0. 163. а) п (3, —1,1}; б) п {1, 1, — 1}; в) п {1, 0, —3). 164. а); в).
165. 2х — 5у + Зг — 7=0, 5х + 2у — 8 = 0. 166. 10х + Зу — 7г — 8 = 0,
5х+ 2у — 4г + 6 = 0, у + г — 20 = 0. 167. 5х + 12г/+ 25г + 3 = 0.
168. х + 4у + г = 0. 169. 5х — 4у — 15г + 75 = 0. 170. х + у +1=0,
-12 2
— 2z+7=0, у + 2г — 6=0. 171. а) — — х —— z/ + —г — 3 = 0;
ООО
3 6 2 .3 1 3
б) - ух+ - у- -уг —6 = 0; в) -х-- = 0; г) х - у=у +
1 6 5 7 1,3 1
+ 1 нг==0’ д' /бТх ~ /бТу ~ / бТ ~ ’ е) /1о * + /Тог — У 10 “
8 18 23 8 2
172. а) -7=1 б) -т=. 173. а) -т=; б) -7=; в) -г=. 174. а) 0; б) 11;
1 У 35 У 361 2 /62 ' / 3 ’ / 5 _ '
в) 3/"3; г) 5/“3. 175. Рг + 3/ 3 0, 0), Р2 (* 6~3/ 3, 0> oj
176. Мг (О, О, 0), М2 (0, 6, 0). 177. Зх — 2г/ + 6г=0, Зх — 2у + 6г — 70=0.
178. Зх + 7 =0, Зх + 25=0. 179. а) 2х — у + Зг — 7=0; б) х — 4г/+5г —
— 6=0; б) х + у — г + 12 = 0. 180. 5х + 7у — 17г + 22 = 0; х —
— у — г + 2 = 0. 181. а) х + 4у — 2г + 1 = 0; б) 6х — у + г + 3 = 0.
182. 6х + Зу + 2г + 28 = 0, 6х + Зу + 2г — 14 = 0. 183. а) а =
= arccos-^-; б) а = 90°. 184. a) Plt Pt, Р4, Рв', б) Plt Рг, Р4; в) Plt Р3,
3 7
Р4, Рв, Рв; г) Р^, Рз, Рв, Рв- 185.а)Х1=—. Точки Д4 и Аг лежат по
5
7
разные стороны от плоскости; б) 12 = ——. Точки Вг и В2 лежат по одну
g___31/ 2
сторону от плоскости; в) Л3 = ---у/-----Точки Ст и С2 лежат по разные сто-
7
роны от плоскости; г) = — —. Точки
5
Ох и Z?2 лежат по одну сторону от
плоскости. 186. Сторона АС пересекается всеми координатными плоскостя-
ми. 187. х — Юг/ + 4г — 17 < 0, 7х + 18г/ + 6г — 31 < 0, х + у + 4г —
— 6 > 0, Зх + Зу + г — 7 > 0. 188. 5х — г/+2г — 3>0их+2г/ —
— 5г + 1 < 0. 189. 67х — 162г/ 4- 67г + 44 = 0. 190. М1г М4 принадле-
жат области со, Л42, Л46, Мв — области сох и Л4а — области <о2, где со — об-
ласть, заключенная между параллельными плоскостями, <1>х — область, при-
мыкающая к плоскости «!, и со2 — область, примыкающая к плоскости л2.
191. со: 5х — Зг/ + г — 2 < 0, 5х — Зг/ + г ~т 8 > 0; сог: 5х — Зу + г —
— 2>0, 5х — Зу + г + 8>0; со2: 5х — Зу + г — 2<0, 5х — Зу + г +8<0.
192. Точки Л4Х, Л43 и М3 принадлежат внутренней области острых двугран-
ных углов. 193. а) Тетраэдр, гранями которого служат координатные плос-
кости и плоскость х — у — 2г — 4 = 0. Вершины тетраэдра имеют коорди-
наты: (0, 0, 0), (4, 0, 0), (0, —4, 0), (0, 0, —2); б) область, заключенная меж-
ду координатной плоскостью Охг и плоскостью, параллельной Охг, отсекаю-
щей от оси Оу отрезок, равный трем; в) область, ограниченная тремя плоско-
стями, параллельными оси Ох, попарно пересекающимися по трем различным
прямым, параллельным оси Ох. 195. а) (—3, —7, 11); б) (0, 2, —4). 196. М3,
х 4- 3 у — 8 г — 1
Л43, Л44.197. а, —у- =2—=——; х = — 3 — t, у = 8 + 2t, г = 1 + 3t;
Z и
360
6)|LV У73|=0, |^o3 гТ5|=0, I1+1 гТ5|=0, х = -1 —
— 2t, у = 3, г=5+/; в) |х~8 г у 7 | = О, |у ~ 3 г ~ 7 [ = О, х = 8,.
у= 3,г=7 + /; г) |* + 2у-1|=0( |г/-1 у-5|=0> |х + 2^-5| =
X у z
= О, х = — 2 + 3^ у — 1, г — 5 — 2t\ д) —т = — == —х — —St, у — z =
—3 1 5
- Ч 198 а) I Зх —у+г—6 = 0, ,, ( 2х + у — Зг — 5=0,
- 5/. 198. а> j х+у —3 = 0; °) | г=0;
в> ! 7-^lt-282°’+37=0. 199. (ЛВ): х = -3+3/, у = 4, г = 1 + f,
(АС): х = — 3— 2t, у.= 4 — 3/, г = 1 + 2/; (AD) : х = — 3 + 6/, у = 4 + ^
г=1; (BC)'.x— — 5t, у = 4 — 3/, г = 2+ t; (BD)-.x = 3t, у = 4 + t,
z = 2 — t\ (CD) : х = — 5 + 8/, у = 1 + 4/, г = 3 — 2t. 200. а) (— 8, II, 6},
х + 3 у — 1
б) {О, —1, 1}; в) {—1, — 2, —1}; г) {О, О, 1). 201. = ---- =
г — 2 —
=----202. а) х = — 1 + 6/, у = 5 — 15/, г = 1 — 3/; б) х = 7 + 2/.
у = 2 + 3/, г = 1 — 2/; в) х = 0, у =2/, г =3 + /; г) х=2, у = /, г= — 5 +/.
204. а) Совпадают; б) скрещиваются; в) параллельны;
параллельны.
г1 + гг)- 29®’ а)
плоскость; в)
203. а); в); г).
г) пересекаются; д)
207. (xt + х2, у г + у2,
б) прямая пересекает
! з
209. О, — —,
\ 2
5\
— — I. 210. а) (1, О, 0);
х — 1
(О, 2, 1). 211. (—1, 2, 3). 212.
205. (5, —7,6).
Прямая
прямая
б) (-2,
у-1
206. (3, 1,-2)
параллельна
лежит
-1, 0),
плоскости;
плоскости.
-Л о, д.
3 3
у=3/, г = 2/. 214.
2
. 5/6
a) cos cq = —---;
18
б) cos а2 = 0;
в)
213. х = — 5,-
23
cos а3 = ——.
OV
— 5
9
в
217. a) cos фг = ——, cos ф2= —cos ф3= ——; б) cos; ф! -------cos ф2=
/35 /35 /35 /14
3 1111
= ——, cos ф3 -—; в) cos ф,=—cos ф2=——, cos ф3 =—г) cos ф,=
/14 /14 /3 /3 _ /3 _
2 5 5/21 1^14
= ———, cos фа = 0, cos ф8=—218. sin ф = ——!— 219. sin фг = I-
*" /29 /29 42 __________________________________ 7
sin ф2 = ~ 3КМ; , sin ф3 = 1С11. 220. а) и г). 221. d = "1 / . 222. a) d s=-
14 14 V 13
= 0; б) d = 1 f — в) d =/35; г) d =
\ 41 ’
13К.71; д) d = 0. 223.
75
Л = 3.
224. а) 5х — 2у+г = 0; б) Зх — 4г = 0; в) 13х—Зу—г = 0. 225. Зу —
— 5г = 0, Зх + г = 0, 5х + у = 0. 226. Зх + 19у — 9г + 55 = 0.
227. 6х — 5у — г = 0. 228. 21х - 19у + 22г — 125 = 0. 229. а) х +2у — 1= 0;
б) х + 2у + г + 4 = 0. 230. 2х — у + г + 12 = 0. 231. х — 4у + 7г + 24 = 0.
232. 9х-29у + 8г = 0. 233. 234‘ { * + 2г4 t О.^
235 (х+у+г—6 = 0, 24fi (4х + 7у — 6г — 3 = 0t ,„7
|17х + 13у+5г+26 = 0. |2х — 7у + 4г + 7 = 0. _4
у + 7 г +5
= ^у- = -^—. 238. х =/, у = — 3/, г = 5/. 239. х = 1 +/, у = — 2,
361г
г = 5; х = 1, у = — 2 + (, г = 5; *=1, у = — 2, г = 5 + t.
240.(1, 2, 1). 241. а) 5* — у + Зг — 19 = 0; б) 4* — Зу +г— 22 = 0.
242. +zZ+5 = 0=-0’ 243> (“5, 81 -2)-244. 8х-17у+11г + 13=0.
245 + Зу— 10 = 0, ,46 (*+у—Зг + 4 = 0, (4*+у + 4=0,
245' (Зх —у + г —1 = 0. (2* + у —г — 6 = 0. ^л(г=0,
/6*-г+8 = 0, /Зу+2г-4 = 0, Л _ _У________*_
Ъ-=0; U = 0. 248>
,4q (32* + 34у+13г-108=0, „50 x_v_. ,51 /17*+20у - 19г-39=0,
(12* +33у+15г—81=0. гои' Х-У~?- «ь ( 8х + 5у_ з(г+67=0.
254. Прямоугольную декартову систему координат выбрать так, чтобы
плоскость а совпала с.плоскостью Оху. 255. Вершину трехгранного угла при-
нять за начало координат, а одну из граней — за плоскость Оху. 256. Пря-
мая, перпендикулярная к плоскости треугольника и проходящая через центр
описанной окружности. 257. Плоскость, перпендикулярная к прямой, оп-
ределяемой двумя данными точками. 259. Систему координат выбрать так,
чтобы данная плоскость совпала с плоскостью Оху, а концы диагонали,
лежащей в этой плоскости, имели координаты (0, 0, 0) и (1, 0, 0). Ввести в рас-
смотрение координаты концов другой диагонали и вычислить расстояния от
б/t2—2а*
этих концов до плоскости Оху. 260. cos <р =— —— .
VЗЛ2 + 4а* У 12ft2 + а2
262. Пусть О—точка пересечения ребер AjA/, Л2Да' и А3 А3 . Принять точ-
ку О за начало аффинной системы координат, а векторы ег — ОАЪ et = ОА3,
е3 = ОД3 — за координатные векторы. 264. См. решение задачи 2, § 18.
266. Задача решается аналогично задаче 2, § 18. 267. (10, 1, 29). 268. а) *i =
=—з*; + *; + *'3 +з, *2 = 5*; + 7*; —4, *3 = — 2*; — *; + 5; б) *j =
=—*; + 2*; + 5, *2 = *; + з*; + 2*; — з, *3 = 5*;+5*;; в) *1 = *;—з,
*2 = *; + 1, *3 = *; + 2. 269. а) е; (1, 1, 1}, е'2{—3, 1,0), eJi, 0, 0},.
О'(0, О, 1); б) е\ {1, — 4, 3), е'2 {— 2, 1, — 4}, е' {0, —2, 1}, О' (5, —1, 0);
в) е; {1, 3, 0}, е'2 {-1, 0, 0}, е'3 {3, -1, 1}, О*(-1, 2, — 1); г) е\ {0,1, 1},
е'2 {1, 0, 1), е'3 {0, 0, 1}, О’ (0, 0, 1). 270. Не являются, так как
определитель системы равен нулю. 271. а); в); г). 272. Да. 273. *t =
— —2—xi —g—*2* *2-------g-*1 + ~~2 х%’ — хз- 274. а) х±—*,, х3— *2>
*3 = ax'i + Р*; +*;+а3; б) пусть точка М в системе Ое^вз имеет координаты
*1, *2> хз> а в системе О'е\е'3е'3—координаты *;,*;,+ . Очевидно, числа *р
*2 являются координатами той же точки на плоскости в системе Ое^. Так как
ММ' || е3, то точка М' в системе О’е^е'^ имеет координаты х/, х3 , 0. Оче-
видно, числа */, *2' являются координатами точки М' в системе О'ех'е3 на
•плоскости л2. Из формул преобразования, полученных выше, имеем хг =
= xj, *2 =*2'. 275. (3, 2, 1), (—4, —1, 2). 276. Прямая касается поверх-
ности в точке (0, —3, 0). 277. а) Ось Оу целиком принадлежит поверхности;
б) прямая целиком лежит на поверхности. 278. а); в); г). 279. Пара пересека-
• X2 у2
ющихся прямых: * — у = 0 и *+у = 0. 280. Эллипс — + — = 1.
285. а)(3, —4, 5), 7; б) (— 1, 2, 3), 3; в) (р —1, —0. 286. а) Сферичес-
кая поверхность, г = 2, О (2, —3, 5); б) нулевая поверхность (мнимая сфери-
ческая поверхность); в) точка (1, — —, 4 ); г) сферическая поверхность, г=1,
•01---, 3, 0 I; д) нулевая поверхность. 287. а) *2 + у2 + г2 + 3* — Зу —
\ 3 у
362
х + 2у +
295.
середине
— Зг—56 = 0; б) х2 + у2+г2 — 5х+2у — 5г + 1=0; в) х2+ у2 + г2 + 6х+
х2 -I V2 4- г2
+ Зу + г + 8 = 0. 288. а) 2х2 + 2у2 + 2г2 + х - Юг = 0; б) •„ +--
х у г г~ а2 + Ь2+с2
— — — —------=0. 289. а) х — 0; б) х + у 2 у + г — 6 = 0; в) х = 4;
abc
Г) 2х — К”2у —/”2г + 4 = 0. 290. х2 + у2 + г2 — 6х — 4у + Юг + 12 = 0.
291. х2 + у2 + г2 + 4у — 6г — 1 =0. 292. 2х+ 2у — г + 10 = 0, 2х + 2у —
_ г _ 8 = 0. 293. 2х + у — 2г — 9 = 0, : ' "
2х + 2у — г — 2 = 0, х + 2у — 2г + 14 = 0.
296. Сферическая поверхность с центром в
297. Сферическая поверхность. 298. Сферическая поверхность, для которой-
отрезок О А является диаметром 299. Сферическая поверхность, концентри-
ческая сданной. 300. Сферическая поверхность, для которой отрезок АВ яв-
ляется диаметром. 301. а) х2 + у2 + 20г2 + 8хг — 4уг — 9 = 0; б) 2у2 —
— г2 + уг — 5 = 0; в) 4х2 — 5у2 — 16г2 — 8хг + 20уг — 20 = 0. 302.
а) {1, —1, 0}; б) {1, —1, 0}; д) {1, —1, 0}; ж) {0, 0, 1). 303. а) Эллипти-
ческий цилиндр, _р{1, 0, —1}; б) эллиптический цилиндр, р {2, —1, 1};
в) параболический цилиндр, р {2, 3, — 1); г) гиперболический Цилиндр,
р{ 1,-2, 1}. 304. (ах + Ру +-fz)2 = (а2 + З2 + ч2) (х2 + у2 + г2 — а2). Если
М (х, у, г) — произвольная точка цилиндрической поверхности, то' прямая
X '= х + at, Y = у + р/, Z = г + у t является касательной к сферичес-
кой поверхности, т. е. пересекается с ней в двух слившихся точках,
305. а) х2 + у2 — Зг2 — 2хг — 2уг + Юг —5=0; б) х2—2у2—8г2 +2хг +
+8уг + 2г — 1 = 0; в) х2 + у2 + г2 + ух — 2гх — у = 0. 306. Вершина
находится в точке (1, 1, —1). 307. Вершина находится в точке (2, 1, 0).
308. х2 + у2+ 7г2 — 16ху — 8хг — 8уг + 62х + 44у — 32г—11=0. Для того
чтобы точка М (х, у, г) лежала на конической поверхности с вершиной S, не-
обходимо и достаточно, чтобы вектор SM составил с нормальным вектором
данной плоскости угол 45°. Записывая это условие в координатах, полу-
чаем уравнение искомой конической поверхности. 309. х2 + у2 = 25.
310. 2х2 + (у + г)2 — 18 = 0. 311. (х2 + у2 + г2)2 = 4г2 (у2 + г2). 312. г4=
, „ х2+г2 у2 х2 + г2 у2 х2+г2
=9(х2+у2). 313. а)+У- =1; б) —Г_-^ = 1; в) —----------------у2=1;
г)х2 + г2 = 4у. 314. г2 = sin2/х2 + у2. 316. Однополостный гиперболоид.
317. b и d. 318. а) {3, 2, —5); б) (1, 0, 0}; в) {0, 1, 0). 320. Главные на-
правления определяются следующими векторами: а) {1, 0, —1}, {1, 1, 1),.
{1,-2, 1); б) (2, -1, 1), {-1,-1, 1), {0, 1, 1); в) {0, 0, 1}, {Р1, р2, 0};
г) {1, 2, 2), {2, 1, —2}, {2, —2, 1); д) {0, 1, 1}, {1, 0, 0), {0, 1, — 1).
321.. а) {0, X, X}; б) нет; в) {Л, Л, Л). 323. а) «и = «22=«зз> а12 = а13 =
= а23 = 0; б) а13 = а12 =. 0; в> ап = а22, а12 = а13 = а23 = 0. 324. 6х2—1 =
= 0. 325. хх + Зх2 — х3—1=0. 326. 2х, — х2 + 5х3 + 1 = 0. 327. Зхг +.
+ 5х2 + 2х3 + 2 = 0. 328. х2 — 2х3 + 9 = 0. 329. 10xt—7х2 + 17х3 —
— 20 = 0. 330. 38xj + 39х2 — 20х3 — 1 = 0. 331. 4xt — х2 — 4х3 +
+ 1 = 0. 332. Для того чтобы плоскость OxjX2 была одной из диаметраль-
ных плоскостей, необходимо и достаточно, чтобы существовало такое число1
«21 \ / «11
«23 I I «12
«24 I I «14
„ «23' '«13
333. а) Существует, например, пара параллельных
2г — 9 = 0. 294.
х2 + у2’ + г2 = А
заданного отрезка.
(°11
^12
«14
«13
°31
^21
^32 I
I совпадают.
«34 ]
«33—X '
а22
«24
«23
плоскостей; б) все диамет-
ральные плоскости проходят через линию пересечения данных плоскостей.
/3 \
334. а) (1, 1,—1); б) (0, 2,—2); в) —, 0, —1 .335. а) Прямая центров: Зхг—
363
— 2х2 = 0, x2 — Зх3+б = 0; б) нет центров; в) единственный центр (0, 0, 0),
принадлежащий поверхности; г) плоскость центров: 4xt + 4х2—4х3+5=0.
336. а1г = а2Х = азх = а22 = а32 — — a2i = a3i = 0. Уравнение по-
верхности имеет вид: a33xl + ац~ 0. 337. а) 2хх + 2х2—1=0, Зх± — Зх2 +
+ Зх3 — 4 = 0, 6хх — 6х2 4- 12х3 — 7=0; б) 4хх+х2+2х3+7=0, х± — 2х2 —
— х3 + 5 = 0; в) хх — х3 — 1 = 0, хх— х2 + х3 = 0; г) xi + х2 = 0, 3xi —
— Зх2 — 6х3 — 1 = 0, Зхх — Зх2 + Зх3 +5=0; д) хт + х2 + х3 + 1=0,
2хх — 4х2 + 2х3 — 1 = 0.
х/2 х2'2 х3'2
338-ъ+г-т;
1, хх
_/2х/ + К 2ха'
2
1/“2х2'— К2Х/ , „Л ,, 2»+5 ,
х2 — , х3 — х3 . 339. х1 х2 , хх = Xi , х2 —
•Z о
Хд 2х3 2х2 Х3 пЛп Х1 2 . Х2 х3 2 1 *1
-1Л г * 3 -IZ с 4 2 6 /з
2х/ х/ х/ х3'
KV Хз-К'з- + ГТ ’^•34ь
х 3
Г~п > х2 —
+ ^- +
+'2-4 =
*1
х2
х3
= 0, Х1 = -
- 342. х2'2 - х3'2 = 1
х2 =
Х1
х2
Хз
х3
Хз
+ ’ г---> Х9 = --
V 6 ’ 3
„_______. .J. . . х* 2х/
1 V 6 2 + / з ’ Хг V Т
У '2 у '2 у '2 у /
Л1 . Л2 х3 1 *1
+ 9 3 -1’ Х1~ У~2 ~
344. — + -2— = 1.
12 2 6
хх'2 х/2 X/2
14 + 28 + 7
х/2 х2'2 х3'2
— +— +— =1.
15 5 ^10
х/2 + х3'2 = 2х/.
v 2 у 2 у 2
Х1 х2 х3_____
4 + 5 "Г 20 “
Х12 + х2г _
9
х2‘
у _Л1
у з ’ 3 1/’
_V_
V 2 ’ .
Зхх'2 - 2х3'2= 2х/. 346. =1.
у '2 у '2
+ Y = — 2х2- 349. *i'2 —5 = 0.
Х1'2 = _К1х2'. 352.
№ + +'2
1 ф 2
_ Х1
2 ~ V-2
хг
345.
348.
351.
354.
= 1
25
х32
- ^ = 1. 357. (Оххх2)
16 + 9
и х2 .= 2, хх + Зх3 = 0.
Хз — 1 + t.
355
а)
343. !
х3 =х3'.
. *з'2
6
347.
350.
v 2
Л3 __
2 “
358.
у '2
-^- = 2х2'.
О
i у 2 у 2
• I — I Хз _
+ 1 + 2
х,2 х»2
356. a) 4-+-f-Z=1;
О 9
Х22
хх'2
3
х?
8
353.
; б)
хз2
4
"I2 , . х^ . х32
. 1б+ j -1, (Ох2х3). }
16
1
= 1,
б)
(Ох^з) :
Две пересекающиеся прямые:
359. Две параллельные прямые:
хх — Зх3 = О
х2 — 4 = О, х3 = 0;
х2 = 2,
„ Xt X» х3
361. — 4хх — 11х2 + хз =0. 362. -^+^— j=0. 363. Уравне-
„ , ( хх+ЗХх,—х3=ЗХ, (хх—3ixx2—Хз=3и,
ния систем прямолинейных образующих: 1 1
' (лхх— Зх2+лх3=3; 1рхх+Зх2+рх3=Э.
у 2 у 2 v 2 v.»2 у 2 у 2
364.3) -1-+-| =2хз; б) 77 + -Z = 2X3. 365. а) —у —-г-= 2х3;
4 У 11 1Z *t «3
х. 2 , . ,о, *1 —2 х2 — 1 хз хх — 4 х2 + 2 хз
б) хх2-xi = 4xs. 367. -г- = —г = т и -=— = -.
ЛИТЕРАТУРА
I. Учебники и учебные пособия
1. Бахвалов С. В., Бабушкин Л. И., Иваницкая В. П.
Аналитическая геометрия, изд. 3, М., Просвещение, 1965,
2. Выгодский М. Я. Аналитическая геометрия. М., Фйзматгиз,
1963.
3. Делоне Б. Н. и Райков Д. А. Аналитическая геометрия,
т. II. М., Гостехиздат, 1949.
4. Д з и о бек О. Курс аналитической геометрии, ч. II. Одесса, 1912.
5. Е ф и м о в Н. В Краткий курс аналитической геометрии, изд. 10,
М., Наука, 1969.
6. Л о п ш и ц А. М. Аналитическая геометрия. М., Учпедгиз, 1948.
7. М о д е н о в П. С. Аналитическая геометрия, Изд-во МГУ, 1955.
8. Мусхелишвили Н. И. Курс аналитической геометрии, М.,
Гостехиздат, 1947.
9. Болтянский В. Г., Я г лом И. М. Векторы в курсе геомет-
рии средней школы. М., Учпедгиз, 1962.
10. Выгодский М. Я- Справочник по высшей математике, изд. 9.
М., Наука, 1969.
11. Гольдфайн И. А. Элементы векторного исчисления. М., Гос-
техиздат, 1948.
12. Д у б н о в Я С. Основы векторного исчисления. М., Гостехиздат,
1948.
13. Минорский В. П. иУлановский В. П. Векторная ал-
гебра. М., Гостехиздат, 1951.
II. Задачники и методические пособия для заочников
14. А д а м о в А. А. Сборник задач по аналитической геометрии. М.,
ОГИЗ, 1924.
15. Атанасян Л. С., А т а н а с я и В. А. Задачник по аналити-
ческой геометрии. М., Просвещение, 1968.
16. Ата и ася н Л. С. Задачник-практикум по аналитической геомет-
рии, изд. 2, М., Учпедгиз, 1963.
17. А т а н а с я н Л. С., Васильева М. В., Гуревич Г. Б.,
ИльинА. С., Козьмина Т. Л., Редозубова О. С. Сбор-
ник задач по элементарной геометрии, изд. 2, М., Просвещение, 1964.
18. Бахвалов С. В., Моденов П. С., Пархоменко
А. С. Сборник задач по аналитической геометрии, изд. 3, М., Наука, 1964.
365
19. Гюнтер Н. М. и Кузьмин P.O. Сборник задач по высшей
математике. М., Гостехиздат, 1957.
20. Клетеник Д. В. Сборник задач по аналитической геометрии,
изд. 10, М., Наука, 1969.
21. Майоров В. М., Скопец 3. А. Задачник-практикум по век-
торной алгебре. М., Учпедгиз, 1963.
22. С к о п е ц 3. А., И с а р о в В. А. Задачи и теоремы по элемен-
тарной геометрии, М., Учпедгиз, 1962.
23. Ц у б ербиллер О. Н. Задачи и упражнения по аналитической
геометрии, изд. 29, М., Наука, 1968.
ОГЛАВЛЕНИЕ
Предисловие .................................................... 3
Глава I. Координаты векторов и точек в пространстве
§ 1. Координаты векторов в пространстве . ................... 5
§ 2. Прямоугольные декартовы и аффинные координаты точек в
пространстве. Решение простейших задач в координатах . 18
§ 3. Приложение метода координат к доказательству теорем и ре-
шению задач элементарной геометрии . ... .г................. 33
Глава II. Произведения векторов
§ 4. Скалярное произведение векторов ...................... 42
§ 5. Некоторые приложения скалярного произведения; его свой-
ства, отличные от свойств произведений чисел............ 54
§ 6. Векторное произведение векторов ...................... 62
§ 7. Смешанное произведение векторов .......................- 79
§ 8. Приложение векторной алгебры к элементарной геометрии . 85
Глава III. Плоскость
§ 9. Уравнение плоскости в аффинной системе координат ... 94
§ 10. Плоскость как поверхность первого порядка; расположение
плоскости относительно системы координат.................' . 102
§ 11. Взаимное расположение плоскостей; пучок и связка плоскос-
тей -...................'................................... in
§ 12. Метрические задачи теории плоскости .................. 128
§ 13. Геометрический смысл линейных неравенств с тремя перемен-
ными ..................................................... 138
Глава IV. Прямая и плоскость
§ 14. Прямая в пространстве ...........................' . . 149
§ 15. Взаимное расположение прямых и плоскостей ............ 158
§ 16. Некоторые метрические задачи на прямую и плоскость . . 170
§ 17. Задачи на сочетания прямых и плоскостей .............. 179
§ 18. Приложение теории плоскости и прямой к доказательству
теорем и решению задач стереометрии........................ 195
Глава V. Поверхность и ее уравнение. Уравнения отдельных
видов поверхностей второго порядка
§ 19. Преобразование системы координат ..................... 204
§ 20. Поверхности второго порядка. Пересечение поверхности с
прямой и плоскостью .................................... 219
§ 21. Сферическая поверхность ...............................231
§ 22. Цилиндрические поверхности ........................... 242
§ 23. Конические поверхности. Поверхности вращения ......... 251
Глава VI. Классификация поверхностей второго порядка;
изучение основных видов поверхностей по каноническим
уравнениям
§ 24. Сопряженные и главные направления .................. 267
§ 25. Диаметральные плоскости и центр ................... 275
§ 26. Классификация поверхностей второго порядка ......... 284
§ 27. Изучение свойств эллипсоида и гиперболоидов по их кано-
ническим уравнениям ....................................... 298
§ 28. Изучение свойств параболоидов по их каноническим уравне-
ниям ...................................................... 314
Приложение. Элементы теории определителей и линейные
уравнения
§ 1. Определители второго порядка и системы двух линейных урав-
нений с двумя неизвестными................................ 324
§ 2. Определители третьего порядка. Понятие об определителях
п-го порядка .............................................. 330
§ 3. Система трех линейных уравнений с тремя неизвестными . . 340
§ 4. Ранг матрицы; теорема о совместности системы линейных
уравнений ................................................. 346
Ответы и указания............................................ 355
Литература ................................................. 365
Атанасян Левон Сергеевич
АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ
Редакторы: А. 3. Рывкин и Н. И. Никитина. Художественный редактор В. С. Эрденко.
Технический редактор О. Н. Семина. Корректор Л. П. Михеева.
Сдано в набор 7/Х 1968 г. Подписано к печати З/ХП 1969 г. 60 X 90'/i«- Типографская № 2.
Печ. л. 23,0. Уч.-изд. л. 21,15. Тираж 25 тыс. экз. (Тем. пл. 1969 г.) А11450
Издательство «Просвещение» Комитета по печати при Совете Министров РСФСР.
Москва, 3-й проезд Марьиной рощи, 41.
Отпечатано с готовых матриц в типографии им. Смирнога Смолоблуправления
по печати, г. Смоленск, пр. им. Ю. Гагарина, 2. Заказ № 5429.
Цена без переплета 58 к., переплет 10 к.