/










































































































































































































































































































































































Text
РАДИО*
ЛОКАЦИОННЫЕ
СТАНЦИИ
БОКОВОГО
ОБЗОРА
А. П. РЕУТОВ, Б. А. МИХАЙЛОВ,
Г. С. КОНДРАТЕНКОВ, Б. В. БОЙКО
РАДИОЛОКАЦИОННЫЕ
СТАНЦИИ
БОКОВОГО ОБЗОРА
Под редакцией А. П. Реутова
ИЗДАТЕЛЬСТВО «СОВЕТСКОЕ РАДИО» МОСКВА—1970
УДК 621.396.962:629.7
Реутов А. П., Михайлов Б. А., Кондратенков Г. С„
Бойко Б. В. Радиолокационные станции бокового обзора. Изд-во
«Советское радио», 360 стр., т. 6 700 экз., ц. 1 р. 15 к.
В книге излагается теория работы самолетных радиолокацион-
ных станций бокового обзора, предназначенных для получения де-
тальных радиолокационных изображений местности. Показываются
методы повышения разрешающей способности РЛС. Подробно рас-
сматриваются два типа РЛС бокового обзора: с вдольфюзеляжной
антенной и с искусственным раскрывом антенны. Обобщаются све-
дения, опубликованные в литературе, относящиеся к принципам
построения РЛС бокового обзора и особенностям радиолокацион-
ного картографирования при боковом обзоре местности. Обращается
внимание на ряд принципиальных отличий РЛС бокового обзора от
обычных РЛС.
Книга рассчитана на радиоинженеров, научных работников и
аспирантов, специализирующихся в области радиолокации, а также
студентов старших курсов радиотехнических факультетов.
5 табл., 170 рис., библ. 106 назв.
3-4-4
9-70
РЕУТОВ АЛЕКСАНДР ПАВЛОВИЧ
МИХАЙЛОВ БОРИС АЛЕКСАНДРОВИЧ
КОНДРАТЕНКОВ ГЕННАДИЙ СТЕПАНОВИЧ
БОЙКО БОРИС ВЛАДИМИРОВИЧ
РАДИОЛОКАЦИОННЫЕ СТАНЦИИ БОКОВОГО ОБЗОРА
Редактор К. И. Кучумова
Художественный редактор В. Т. Сидоренко
Технический редактор Г. 3. Шалимова
Корректоры Е. П. Озерецкая, Г. М. Денисова
Т-08774
Подписано в печать 21/VII 1970 г.
Бумага типографская № 1
Уч.-изд. л. 18,075
Зак. 1094
Сдано в набор 22/1 1970 г.
Формат 84X108732
Объем 18,9 усл. п. л.
Тираж 6 700 экз.
Издательство .Советское радио*, Москва, Главпочтамт, п/я 693. Цена 1 р. 15 к.
Московская типография № 10 Главполиграфпрома Комитета по печати ‘
при Совете Министров СССР. Москва. Шлюзовая наб , 10.
Предисловие
В последние годы широкое развитие получили прин-
ципиально новые самолетные радиолокационные стан-
ции (РЛС) бокового обзора земной поверхности. РЛС
бокового обзора обладают высокой разрешающей спо-
собностью, что позволяет с их помощью получать вы-
сококачественные изображения местности, по своему
характеру приближающиеся к аэрофотоснимкам. При
этом появляется возможность наблюдения в любых ме-
теорологических условиях за наземной и морской обста-
новкой, детального радиолокационного картографирова-
ния местности и обнаружения наземных малоразмерных
объектов.
Радиолокационные станции бокового обзора значи-
тельно отличаются от обычных панорамных РЛС кру-
гового обзора как по принципу работы, так и по мето-
дам их построения, что позволило преодолеть известные
ограничения по повышению угловой разрешающей спо-
собности РЛС, устанавливаемых на летательном аппа-
рате.
Наиболее эффективное достижение высокой разре-
шающей способности по угловым координатам возмож-
но двумя способами: значительным увеличением размера
антенны, расположенной вдоль фюзеляжа самолета, или
искусственным увеличением раскрыва антенны, основан-
ным на когерентном суммировании отраженных сигна-
лов, принимаемых в процессе движения самолета-носи-
теля. Эти два способа нашли практическую реализацию
в рассматриваемых РЛС.
В последние годы в Советском Союзе и за рубежом
был опубликован целый ряд статей, посвященных этим
станциям. Настоящая работа является первой попыткой
обобщения и систематизированного изложения теории и
принципов построения самолетных РЛС бокового обзора.
Книга рассчитана на радиоспециалистов, знакомых
с теоретическими основами радиолокации, теорией ан-
3
тенн и методами обработки радиолокационных сигна-
лов.
Монография является результатом совместной рабо-
ты коллектива авторов. Главы 1 и 5 написаны А. П. Ре-
утовым, главы 2 и 4 — Б. А. Михайловым, главы 3 и 7 —
Б. В. Бойко и глава 6 — Г. С. Кондратенковым.
Авторы выражают глубокую благодарность доктору
техн, наук, проф. Ю. А. Мельнику и канд. техн, наук
Лауреату Государственной премии В. М. Глушкову за
ценные замечания и советы, которые во многом способ-
ствовали улучшению книги.
Авторы также признательны всем, кто помогал этой
работе и особенно товарищам В. И. Новаковскому и
Ю. А. Феоктистову.
В настоящей монографии авторы стремились рас-
смотреть широкий круг новых вопросов, связанных с по-
вышением разрешающей способности бортовых РЛС.
Не все из них удалось изложить одинаково подробно;
ряд вопросов представлен весьма сжато. Сознавая слож-
ность взятой на себя задачи, авторы будут признатель-
ны читателям за все замечания и пожелания, которые
просят направлять в. издательство «Советское радио»
по адресу: Москва, Главпочтамт, п/я 693.
I
Радиолокационное наблюдение земной
поверхности
1.1. Краткий очерк развития
авиационных РЛС обзора земной
поверхности
Освоение сантиметрового диапазона волн привело
к созданию бортовых радиолокационных станций обзора
земной поверхности, предназначенных для решения ря-
да сложнейших авиационных задач: навигации, воздуш-
ной разведки и т. д.
Первоначально получили развитие радиолокацион-
ные станции, осуществляющие обзор земной поверхно-
сти путем кругового вращения или секторного качания
луча антенны в азимутальной плоскости. В литературе
такие станции называют панорамными или РЛС сектор-
но-кругового обзора. Зона обзора панорамной РЛС
представляет собой круг или сектор с радиусом, соответ-
ствующим дальности действия РЛС. Панорамные РЛС
кругового обзора в своем большинстве имеют антенну,
формирующую узкую диаграмму направленности в го-
ризонтальной (азимутальной) плоскости и достаточно
широкую в вертикальной (угломестной) плоскости. Ши-
рина диаграммы направленности в горизонтальной
плоскости определяет разрешающую способность РЛС по
азимуту. Ширина диаграммы направленности в верти-
кальной плоскости выбирается исходя из заданной даль-
ности действия РЛС. Разрешающая способность по
дальности определяется длительностью импульсов или
шириной спектра зондирующего сигнала.
5’
<9
Рис. 1.1. Круговой панорамный обзор местности:
а — круговой обзор местности; б — радиолокационное изображение местности.
6
Угловое перемещение антенного луча вокруг верти-
кальной оси за счет вращения антенны с постоянной
скоростью позволяет получить на индикаторе кругового
обзора двухкоординатное изображение местности, кото-
рое отражает плоскую картину расположения отражаю-
щих объектов в просматриваемом пространстве (рис. 1.1).
Одним из важнейших требований, предъявляемых
к радиолокационным станциям обзора земной поверхно-
сти, является высокая разрешающая способность, кото-
рая определяет детальность изображения местности.
Наибольшую трудность представляет получение высокой
разрешающей способности РЛС по азимуту- Поэтому
главное направление развития авиационных РЛС обзо-
ра земной поверхности связано прежде всего с поиском
путей повышёния их азимутальной разрешающей спо-
собности.
Для получения приемлемой разрешающей способно-
сти по азимуту современных панорамных РЛС круго-
вого обзора отношение соответствующего линейного
размера антенны к длине волны зондирующего сигнала
(относительный раскрыв антенны) выбирается от 50
до 100.
Ограничения в увеличении разрешающей способно-
сти авиационных РЛС обусловлены прежде всего труд-
ностью применения в условиях самолета вращающихся
антенн кругового обзора больших размеров (несколько
метров). Установка на самолете таких антенн приводит
к ухудшению его аэродинамических характеристик.
С другой стороны, укорочение волны радиоизлучения и
переход, например, от сантиметровых к миллиметровым
волнам не представляется перспективным особенно для
РЛС большой дальности действия. В данном случае
миллиметровые волны, как известно, не позволяют реа-
лизовать основное достоинство радиолокационной тех-
ники— независимость получения информации от метео-
рологических условий.
Вследствие указанных причин самолетные панорам-
ные радиолокационные станции кругового обзора зна-
чительно уступают в разрешающей способности оптиче-
ским приборам. На рис. 1.2 показана зависимость угло-
вой разрешающей способности различных визирных
устройств, которые могут использоваться на самолете,
а также глаза человека от размера апертуры приемно-
7
го элемента (антенна, объектив, зрачок), отнесенного
к длине волны, на которой формируется изображение.
Из рассмотрения графика видно, насколько велик раз-
рыв в разрешающей ёпособности оптических и радио-
технических устройств, обусловленный малым отноше-
нием размера апертуры (раскрыва) антенны к длине
волны. Поэтому радиолокационная техника значительно
уступает по возможностям распознавания объектов гла-
зу человека и приборам, работающим в оптическом
диапазоне.
Необходимо отметить, что при оценке возможностей
получения детальных радиолокационных изображений
определяющее значение играет линейная разрешающая
способность, которая убывает с увеличением расстоя-
ния до района целей, что существенно ухудшает эффек-
тивность панорамных РЛС на больших дальностях.
Поэтому при решении задач, связанных с обнаруже-
нием и распознаванием малоразмерных объектов, та-
ких, как воздушная разведка, картографирование и т.п.
панорамные РЛС кругового обзора нашли ограничен-
ное применение.
Стремление специалистов, работающих в области ра-
диолокации, расширить область применения самолетных
радиолокационных станций, создать РЛС, в которых
были бы преодолены ограничения, присущие методу
8
кругового обзора- поверхности, привело к появлению
в 50-х годах бортовых станций нового типа, осущест-
вляющих обзор местности за счет движения самолета-
носителя РЛС. В этом случае самолетная антенна не-
подвижно устанавливается вдоль фюзеляжа самолета. Ее
длина увеличивается до размеров, соизмеримых с фю-
зеляжем. Поэтому в горизонтальной плоскости дости-
гается весьма высокая разрешающая способность. При
прямолинейном полете узкая диаграмма направленно-
сти антенны формируется в направлении, перпендику-
лярном траектории движения самолета. Вследствие
поступательного перемещения антенного луча со ско-
ростью полета самолета имеется возможность осущест-
влять обзор местности в полосе, ширина которой опре-
деляется дальностью действия РЛС (рис. 1.3). Такой
метод обзора принято называть 'боковым обзором.
Метод бокового обзора, основанный на увеличении
геометрических размеров вдольфюзеляжной неподвиж-
ной антенны, позволил существенно повысить эффек-
тивность наблюдения за земной поверхностью с по-
мощью самолетных РЛС. Разрешающая способность
Антенные лучи
бокового оЬзора.'
Полосы
обзора^
Рис. 1.3. Боковой обзор местности.
9
радиолокационных станций бокового обзора была уве-
личена примерно в ГО раз по сравнению с панорамны-
ми РЛС кругового обзора.
Появление РЛС бокового обзора с вдольфюзеляж-
ной антенной большого раскрыва явилось значительным
шагом в развитии радиолокационных методов обзора
земной поверхности. Однако эти станции еще сущест-
венно уступают по своим возможностям оптическим
устройствам. В то же время дальнейшее увеличение
длины антенны, вынос ее за пределы фюзеляжа само-
лета практически не представляется возможным- По-
этому основные исследования по совершенствованию
РЛС обзора земной поверхности были направлены на
преодоление основного ограничения в увеличении раз-
решающей способности, связанного с размерами антен-
ных устройств, свойственного всем радиолокационным
станциям.
Логическим итогом поисков, проводившихся в этом
направлении, явилась разработка в конце 50-х — начале
60-х годов метода искусственного раскрыва антенны.
Он основан на использовании априорной информации
о траектории движения носителя РЛС относительно
земной поверхности. Сущность метода заключается
в излучении РЛС, установленной на движущемся само-
лете, когерентных зондирующих сигналов, приеме со-
ответствующих отраженных сигналов вдоль прямоли-
нейной траектории полета носителя, их запоминании и
когерентном (синфазном) сложении, аналогично тому,
как это делается в фазированных антенных решетках
большого раскрыва (рис. 1.4).
Роль искусственного раскрыва антенны в данном слу-
чае играет участок траектории полета самолета. Размер
этого участка определяется возможным временем запо-
минания отраженных сигналов. В результате синфазно-
го сложения принимаемых сигналов осуществляется
сжатие антенного луча и существенное повышение раз-
решающей способности РЛС вдоль линии пути носи-
теля.
Таким образом, РЛС с искусственным раскрывом
антенны позволяют вести боковой обзор местности ана-
логично станциЯхМ с вдольфюзеляжной антенной. Однако
размер искусственного раскрыва может значительно
превышать реальный раскрыв антенны и даже длину
10
Сжатый луч
’**^1риемнш\* *~\задержка на бремя t
-*~\$адержка на(10~Т^
Бортовая
аппаратура
Луч реальной
антенны РЛС
Искусственный
раскрыв антенны
Выход
—- I *
Г— £
-^Задержка на Гп]
* В
Рис. 1.4. Искусственный |раскрыв антенны:
/0 — время пролета искусственного раскрыва антенны, Тп — период повторения
импульсов.
фюзеляжа самолета. По потенциальным характеристи-
кам разрешающей способности такие РЛС приближа-
ются к оптическим средствам наблюдения. Принципи-
альным отличием их от всех известных ранее станций и
оптических приборов является возможность реализации
высокой линейной разрешающей способности (порядка
единиц метров), независимой от дальности наблюдения
и длины волны зондирующего сигнала.
Появление РЛС с искусственным раскрывом антен-
ны открывает новый этап в развитии радиолокационных
методов обзора земной поверхности. До последнего
времени совершенствование радиолокационных станций
шло по пути поиска и внедрения в отдельные образцы
специальных форм зондирующих сигналов, а также уве-
личения реального раскрыва антенн. Однако обеспечить
в этом случае одинаковую разрешающую способность
по азимуту и дальности на практике не представлялось
возможным. Ухудшающаяся с дальностью линейная
11
разрешающая способность по угловым координатам
существенно понижает эффективность радиолокацион-
ных систем даже в случае использования широкополос-
ных зондирующих сигналов. Метод искусственного рас-
крыва позволил преодолеть эти ограничения. Возникли
и новые представления о радиолокационных сиг-
налах.
В каждой точке траектории полета самолета-носи-
теля РЛС получается вполне определенная амплитуд-
ная и фазовая информация о целях, соответствующая
мгновенным значениям текущих координат цели отно-
сительно самолета. Она заложена в элементарном, на-
пример, импульсном сигнале. Совокупность элементар-
ных сигналов, принятых по траектории, можно рассма-
тривать как траекторный сигнал. При этом каждой цели
соответствует вполне определенный траекторный сиг-
нал, оптимальная обработка которого позволяет реали-
зовать высокую разрешающую способность радиолока-
ционных систем. Так, использование информации о тра-
ектории перемещения когерентной РЛС бокового
обзора относительно каждой цели на местности привело
к существенному повышению эффективности радиолока-
ционного наблюдения земной поверхности.
Появление радиолокационных станций бокового об-
зора явилось практическим воплощением новейших до-
стижений теории радиолокации, большой вклад в раз-
витие которой сделан советскими учеными: А. И. Бер-
гом, А. Н. Щукиным, А. Л. Минцем, В. А. Котельнико-
вым, Ю. Б. Кобзаревым и др.
В основе принципа работы РЛС с искусственным
раскрывом антенны лежит так называемый эффект
Допплера. Использование этого эффекта в радиолока-
ции для обнаружения самолетов началось еще в начале
30-х годов группой советских ученых под руководством
Ю. К- Коровина, Б. К. Шембеля и др.
1.2. Методы радиолокационного
обзора местности
В радиолокации объекты наблюдения принято назы-
вать радиолокационными целями. При формировании
радиолокационного изображения земной поверхности
12
в качестве цели можно рассматривать каждую ее точку,
представляющую собой определенный отражающий
элемент.
Рассмотрим особенности формирования радиолока-
ционного изображения земной поверхности при круго-
вом и боковом методах обзора. При этом будем пола-
гать, что РЛС работает в импульсном режиме.
Круговой обзор
Определение местоположения цели при круговом об-
зоре местности осуществляется в полярной системе ко-
ординат (рис. 1.5). Измеряются дальность и азимут |3
целей. Высота полета носителя РЛС Я, как правило,
известна, поэтому угол места ф не определяется. В ряде
случаев на экране панорамной РЛС кругового обзора
вводится шкала горизонтальной дальности Яг, которая
при больших расстояниях практически совпадает с
Рис. 1.5. Система координат при круговом обзоре местности.
13
3
Рис. 1.6. К определению времени облучения цели при круговом
обзоре.
Азимут цели может отсчитываться от любого условного
направления (направление продольной оси самолета,
направление на север и т. д.).
В данном случае, как и в дальнейшем при рассмо-
трении особенностей бокового обзора, примем за нача-
ло отсчета азимута направление, перпендикулярное век-
тору путевой скорости носителя РЛС, который при от-
сутствии ветра совпадает с продольной осью самолета.
Режим кругового обзора позволяет осуществлять
многократное периодическое наблюдение за местностью.
Поэтому основными характеристиками кругового (сек-
торного) обзора являются: время облучения цели, пе-
риод обзора и число циклов обзора, приходящихся на
каждую цель.
При определении времени облучения цели необходи-
мо учитывать, что осуществляется как вращательное
движение луча антенны, так и его поступательное пере-
мещение, обусловленное полетом самолета. На рис. 1.6
изображен антенный луч, который поворачивается
в азимутальной плоскости с угловой скоростью Qa и
перемещается с путевой скоростью носителя РЛС W.
Здесь предполагается что ветра нет.
Из рис. 1.6 видно, что время облучения цели опре-
деляется результирующей скоростью перемещения лу-
ча, вектор которой равен
14
где
= Й + Vffi>
у
й 2л
— линейная скорость перемещения вращающегося луча
относительно цели на дальности
Учитывая это, нетрудно показать, что время облуче-
ния цели может быть определено формулой
где
= /lP + V’+2№Vfficos₽;
7? — дальность цели;
Р — азимут цели относительно РЛС;
0о — угловая ширина диаграммы направленности
антенны в горизонтальной плоскости.
Для обеспечения непрерывности просмотра заданно-
го района местности угловая скорость вращения луча
антенны выбирается из условия
£1а
2лГ
^мако
(1-2)
При достаточно большой скорости вращения луча,
которая обычно выбирается в РЛС кругового обзора,
поступательное движение носителя не оказывает суще-
ственного влияния на.время облучения цели и формула
(1.1) приобретает вид
т ~ 0»
"обл ~
(1.3)
Время облучения цели при круговом обзоре практи-
чески постоянно, независимо от дальности цели. Следо-
вательно, и число импульсов, приходящихся на каждую
точку просматриваемого пространства за время ее облу-
15
L
цели, которые могут
быть пропущены
Рис. 1.7. Цикличность кругового обзора при движении носителя РЛС.
чения (Af), при заданной частоте их повторения Fn так-
же не зависит от дальности
А^^/^пТобл. (1.4)
Число импульсов (N) обычно определяется энерге-
тическими соображениями, исходя из заданных веро-
ятностных характеристик обнаружения цели (элементов
поверхности). Частота повторения импульсов Fn выби-
рается таким образом, чтобы исключалось наложение
изображений разных участков местности. Тогда, макси-
мальную угловую скорость вращения антенного луча по
азимуту можно записать как
Оамакс=-^- (1.5)
А4инимальный период кругового обзора местности
определяется соотношением
у. ____ 2лМ
7 о мин— 0ofn •
Определим число циклов обзора, приходящихся на
неподвижную цель (7УЦ) при условии полета носителя
по прямолинейной траектории с путевой скоростью W.
16
Рис. 1.8. Отображение целей на индикаторе РЛС кругового обзора
при движении .носителя.
Из рассмотрения рис. 1.7, на котором показан ряд
циклов обзора, приходящихся на цель Ц1 при движении
носителя, можно получить
В случае, если 7?макс»Л
L = 2/?макс sin 'ф,
где р — азимут цели на границе зоны обзора при ее пер-
вом облучении.
Тогда
W4=l + 2^eSinfi. (1.6)
Таким образом, при использовании ряда циклов об-
зора для наблюдения за одним и тем же районом ме-
стности имеется возможность просматривать цели под
различными ракурсами и тем самым повышать надеж-
ность их обнаружения. Заметим, что при круговом
обзоре возможны случаи и пропуска целей, находя-
щихся на максимальной дальности действия РЛС (цели
Ц2 и Ц3 на рис. 1.7).
Поступательное движение носителя совместно с уг-
ловым перемещением луча антенны наряду с другими
факторами может привести при круговом обзоре к ис-
кажению радиолокационного изображения. Действи-
2—1094 Г/
тельно, если не осуществлять специальной коррекции,
взаимное расположение целей на изображении отли-
чается от реального на местности. На рис. 1.8,а
показаны две цели, которые последовательно облуча-
ются самолетной РЛС, при перемещении носителя, а на
рис. 1.8,6 эти же две цели представлены в том виде,
как они получаются на индикаторе кругового обзора.
Определим отношение истинного расстояния между це-
лями (T?i2) к тому, какое оно получается на радиолока-
ционном изображении (Т?*12).
Из рассмотрения рис. 1.8,а следует
(£^ = #2-}-£2-2/^005 Др, (1.7)
где Ri — дальность цели Цг,
Я2 — дальность цели Цг',
Ар — угол поворота антенны между облучениями
целей Ц1 и Ц2.
Выражение для Ям может быть получено из рассмо-
трения треугольника ЦД*Д2 на рис. 1.8,а:
+'/?2 _ 2R^ CQS др Г2 _
- 2Wt^ (/?t sin ₽, - Ra sin (p. + Др)], (1.8)
где pt —азимут цели LU;
— время перемещения луча антенны на угол Др.
Отношение реального расстояния между целями
к расстоянию, которое получается на радиолокационном
изображении, представляется в виде
«11==, А lF2^-2^[j?1Sinp1-^sin(p, + Ap)]~ (1 9)
И + /?2 + /?2_27?iJ?2CosAp
Соотношение (1.9) можно записать в другом виде, если
учесть, что
f____А£
1ГгД0г - 21Г/ааДр sin р — /?е sin (?, -р Др)]
е2(^ + /?2_ 2/?,/?2СО8Д₽)
18
Тогда
R12 _i । ^2-^-2aa^l[7?1sinp — /?2sin(p1+Д^)] п 1П<
Я*12 “T* 2Q2a(R2+R2^2R1R2cos^) ’ ( '
Оценим степень искажений при условии № = 500 м[секу
Д£ = 30э *, Оа = 2 рад [сек, Rr = R2 = 100-103 м, ^ = 0.
В этом случае R12/R*i2 = 1,003. При больших дальностях
это может привести к искажениям радиолокационного
изображения, устранение которых сопряжено со значи-
тельными трудностями. Указанные искажения в ряде
случаев надо учитывать, например, при картографирова-
нии местности.
Из приведенного краткого рассмотрения основных
характеристик метода кругового обзора земной поверх-
ности можно сделать следующие выводы:
1. Заданный район наблюдения может периодиче-
ски просматриваться многократно, причем число циклов
обзора, приходящихся на одну цель, возрастает пропор-
ционально отношению
^а^маке sin Р
W
2. Время облучения цели не зависит от ее удаления
до носителя РЛС.
3. Радиолокационные изображения, формируемые
в режиме кругового обзора, могут иметь искажения,
являющиеся следствием поступательного перемещения
носителя.
Боковой обзор
Определение местоположения целей при боковом об-
зоре земной поверхности производится в системе коор-
динат: путевая дальность х, • наклонная дальность R
(рис. 1.9). Если цели удалены на дальность, значитель-
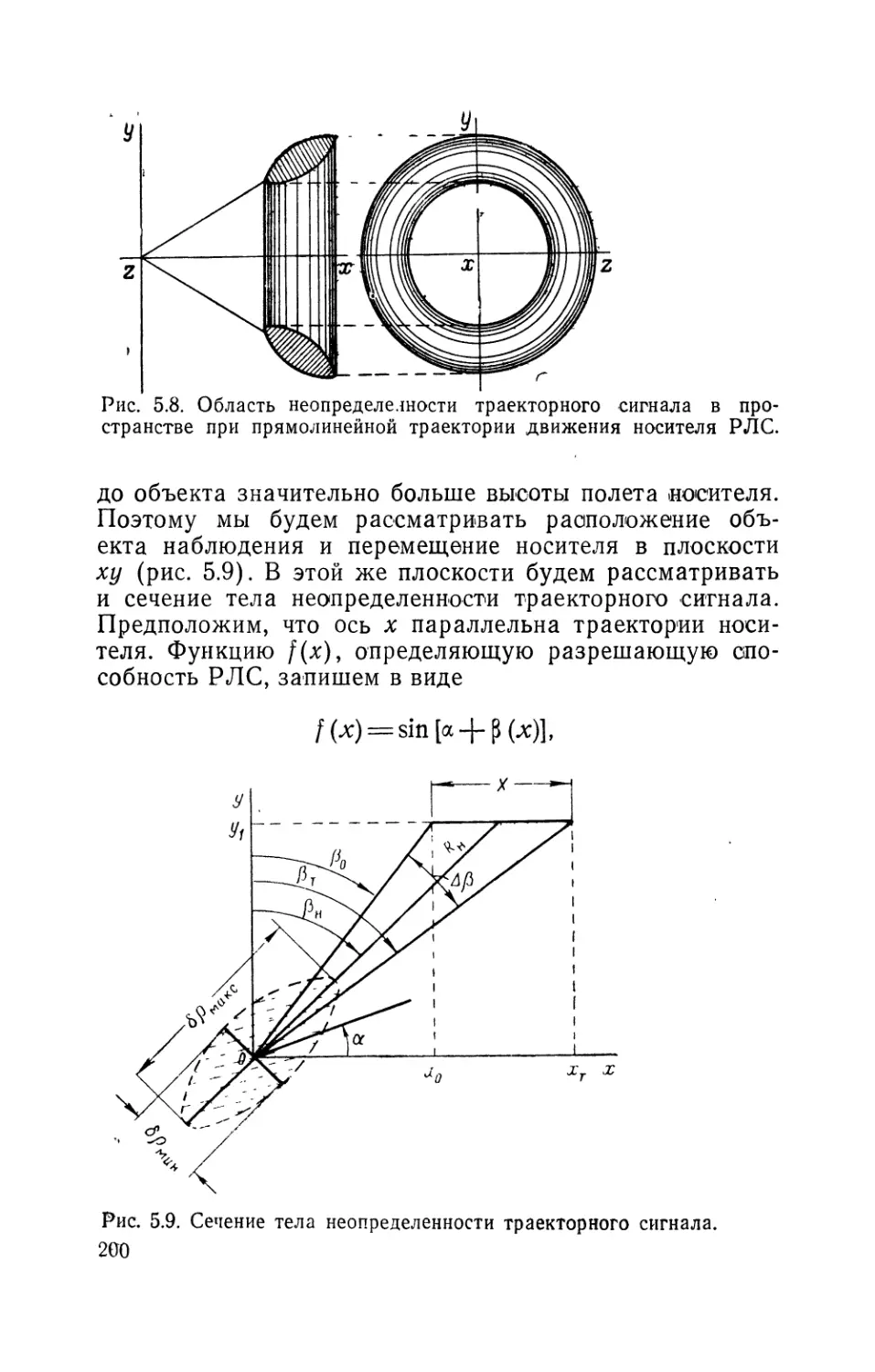
но превышающую высоту полета носителя, наклонная и
горизонтальная дальности цели практически совпа-
дают.
При боковом обзоре луч антенны направлен перпен-
дикулярно вектору путевой скорости носителя. Поэтому
в данном случае определение положения целей на мест-
2* 19
Рис. 1.9. Система координат при боковом обзоре.
ности осуществляется в прямоугольной системе коорди-
нат xR. Зона обзора представляет собой полосу,
параллельную траектории полета самолета-носителя
(рис. 1.10,а). Ширина полосы определяется дальностью
действия РЛС-
Рис. 1.10. Боковой обзор в прямоугольной системе координат (а) и
в косоугольной системе координат (б).
20
Заметим, что в некоторых случаях при боковом об-
зоре возможна ориентация луча под углом к вектору
путевой скорости носителя, отличном от л/2. При этом
несколько сужается зона обзора, но цели могут обнару-
живаться с упреждением (рис. 1.10,6). В этом случае
обзор местности осуществляется в косоугольной систе-
ме координат.
Как известно, разрешающая способность РЛС об-
зора земной поверхности по горизонтальной дальности
(6/?г) непосредственно под летательным аппаратом
ухудшается по сравнению с предельной, определяемой
длительностью зондирующего импульса. Поэтому за
ближнюю границу полосы обзора, в пределах которой
разрешающая способность по дальности практически
ухудшается не существенно, обычно принимают =
Характерной особенностью режима бокового обзора
в случае однолучевых радиолокационных станций явля-
ется одноразовое облучение целей. Кроме того, при на-
правлении наблюдения, перпендикулярном вектору пу-
тевой скорости носителя, изображение местности и со-
ответствующих целей формируется только на траверсе
траектории полета самолета. Время облучения опреде-
ляется выражением
тобл=^, (1.11)
Второй важнейшей особенностью РЛС бокового об-
зора является увеличение времени облучения цели про-
порционально дальности. Это означает, что при прочих
равных условиях энергия отраженных от цели сигналов
также возрастает с увеличением дальности цели. Сле-
довательно, РЛС бокового обзора обладают существен-
ными энергетическими преимуществами по сравнению
с РЛС кругового обзора.
Оценим, как в связи с этим изменяется формула
дальности радиолокационного обнаружения для случая
бокового обзора местности. Как известно, дальность
обнаружения цели (фона местности) с эффективной от-
ражающей поверхностью о при использовании одной
приемо-передающей антенны равна
(1.12)
Y 64тг&ш^о'*1 v
где Э — энергия облучения цели;
21
G — коэффициент направленного действия айтенИы
по мощности;
А,— длина волны передатчика РЛС;
km — коэффициент шума приемника;
k — постоянная Больцмана, равная 1,38*10-23 дж/град\
То — абсолютная температура, при которой опреде-
лилась величина k (обычно 290°К или 17°С);
Л = Эс мин/Мп — требуемое значение коэффициента
различимости приемного устройства РЛС;
Зсмип — пороговое значение энергии принимаемого от-
раженного сигнала, характеризующее чувстви-
тельность приемного устройства РЛС;
Мп — спектральная плотность шума на входе прием-
ника ^ш = МГо).
Энергия облучения цели (элемента местности) опре-
деляется как
5 = РСрТОбл -Ри^п^и^обл’ (1*13)
С учетом выражения (1.11), формула дальности для
РЛС бокового обзора представляется в виде
р — 1/ cP9°G2gP . Н 141
А Г • 7
При одинаковом энергетическом потенциале РЛС
в режиме бокового обзора может быть достигнута зна-
чительно большая дальность обнаружения, чем в режи-
ме кругового обзора.
Необходимо отметить также, что боковому обзору
в принципе не свойственны искажения радиолокацион-
ного изображения, получающиеся в режиме кругового
обзора. Объясняется это тем, что при боковом обзоре
направление перемещения луча антенны совпадает
с одной из осей системы координат, в которой форми-
руется изображение.
Рассмотрение особенностей метода бокового обзора
земной поверхности показывает:
1. Дальность действия РЛС в режиме бокового об-
зора при прочих равных условиях может быть повыше-
на по сравнению с режимом кругового обзора.
2. Метод бокового обзора позволяет осуществлять
только однократное обнаружение целей, что является
22
его недостатком, так как в отдельных случаях могут
сложиться условия, неблагоприятные для их обнаруже-
ния, в результате которых возможен пропуск отдельных
целей.
3. Радиолокационные изображения могут быть по-
лучены в прямоугольной системе координат, что облег-
чает их сопоставление с топографическими картами,
аэрофотоснимками и т. д.
1.3. Эффективность РЛС обзора
земной поверхности
Физические принципы получения радиолокационной
информации связаны с целым рядом случайных факто-
ров, влияющих на эффективность радиолокационного
наблюдения. К числу таких факторов прежде всего от-
носятся флуктуации сигналов, отраженных от целей и
фона местности, на которой цели расположены. Эти
флуктуации обусловлены не только свойствами самого
объекта и фона, но также -существенно зависят от поло-
жения объекта, его размера и характеристик радиоло-
катора. На качество получаемого радиолокационного
изображения оказывают также влияние различного ро-
да внутренние шумы аппаратуры и нестабильность ра-
боты РЛС, колебания носителя и ряд других случайных
причин.
Случайный характер процесса радиолокационного
наблюдения земной поверхности требует статистическо-
го подхода при оценке эффективности радиолокацион-
ных станций обзора местности. В качестве критерия
эффективности РЛС не представляется возможным
принять какой-то один показатель, так как радиолока-
ционная информация может использоваться для реше-
ния различных задач: навигации, воздушной разведки,
картографирования и т. д. При решении каждой из та-
ких задач определяющее значение могут представлять
различные показатели эффективности РЛС. Однако
можно выделить наиболее общие характеристики полу-
чаемой радиолокационной информации, к которым отно-
сятся вероятность обнаружения объектов на фоне поверх-
ности, вероятность их распознавания и точность опре-
деления координат.
23
Рис. 1.11. Обнаружение малоразмерного объекта РЛС с низкой (а)
и высокой (б) разрешающей способностью.
Вероятность обнаружения объектов является важ-
нейшим показателем, определяющим эффективность
бортовых РЛС наблюдения за местностью.
Рассмотрим особенности обнаружения наземных или
надводных объектов с учетом влияния разрешающей
способности РЛС. Вопрос о разрешающей способ-
ности обзорных РЛС и критериях оценки разрешаю-
щей способности будет рассмотрен подробнее в после-
дующих главах. Здесь только отметим, что под разре-
шающей способностью радиолокатора понимается мини-
мальное расстояние между целями или их отдельными
элементами, при котором они могут наблюдаться раз-
дельно. Определяется разрешающая способность раз-
мерами площади разрешаемого элемента на местности,
в пределах которой цели или элементы целей на радио-
локационном изображении не разделяются.
24
Местность, на фоне которой производится обнару-
жение объектов, с радиолокационной точки зрения мож-
но представить в виде совокупности большого числа
случайно распределенных, независимых и хаотически
перемещающихся элементарных отражателей и отдель-
ных местных предметов. Отраженный сигнал является
суммой сигналов, соответствующих отдельным элемен-
тарным отражателям и объектам, находящимся в пре-
делах разрешаемого элемента РЛС. Изменение фазы И
амплитуды элементарных сигналов, которое всегда
имеет место за счет изменения взаимного положения
отражателей, приводит к амплитудным и фазовым
флуктуациям результирующего отраженного сигнала.
Таким образом сигналы, отраженные от целей, всегда
принимаются в условиях действия мешающих отраже-
ний от фона местности. Если цели являются малораз-
мерными объектами, интенсивность отражений от фона
местности может быть соизмерима и даже больше мощ-
ности сигналов, отраженных от цели. Поэтому обнару-
жение малоразмерных объектов представляется наибо-
лее сложной задачей при обзоре земной поверхности.
Из общей теории радиолокации известно, что отра-
жающая способность фона местности в пределах эле-
мента разрешения РЛС определяется эффективной от-
ражающей площадью. В первом приближении можно
записать
где у (гр)—коэффициент отражения фона местности,
зависящий от угла местности гр, под которым
облучается местность;
бх, бу — размеры элемента разрешения РЛС в двух
взаимно-перпендикулярных направлениях.
Очевидно, что для повышения вероятности обнару-
жения малоразмерных объектов РЛС должна иметь вы-
сокую разрешающую способность с тем, чтобы отражен-
ные сигналы, соответствующие фону местности, были
меньше сигналов целей.
На рис. 1.11 показаны два случая обнаружения од-
ной и той же цели радиолокационными станциями с раз-
личной разрешающей способностью. На этом рисунке
приведены плотности вероятностей для сигналов, отра-
женных от цели и фона местности оуц,ф(у) и сигналов
25
Рис. 1.12. Зависимость между количеством ложных тревог, числом
элементов разрешения на радиолокационном изображении и вероят-
ностью ложной тревоги.
только фона местности аУф(о). Если цель обладает ма-
лой эффективной отражающей поверхностью, различие
в характеристиках распределения отраженных сигналов
может быть достигнуто только за счет уменьшения пло-
щади элемента разрешения, т. е. путем повышения раз-
решающей способности РЛС.
Следует заметить, что возможен и третий случай
радиолокационного обнаружения, когда размеры эле-
мента разрешения меньше размеров целей. При этом
процесс обнаружения существенно облегчается. Однако
применительно к малоразмерным объектам (с размера-
ми порядка 1 м) построение таких РЛС представляет
весьма дальнюю перспективу. Поэтому этот случай
в дальнейшем не рассматривается.
Решение об обнаружении цели принимается в слу-
чае превышения соответствующим отраженным сигна-
лом, принятым РЛС, некоторого порогового значения
Оо (порога обнаружения), определяемого отражающими
свойствами фона местности, на которой цель располо-
26
жена. Вероятность правильного обнаружения опреде-
ляется как
QO
Лю = J дац.ф (у) dv. (1.15)
V0
Под вероятностью правильного обнаружения пони-
мается вероятность того, что отметка цели на радиоло-
кационном изображении наблюдаемого района по своей
интенсивности превышает пороговое значение сигнала,
соответствующего фону местности.
Выбор порогового значения сигнала определяется
допустимым количеством ложных отметок на радиолока-
цинном изображении, которые являются следствием
флуктуаций фона и могут быть приняты за реальные
цели. Ложные отметки характеризуются вероятностью
ложной тревоги в элементе разрешения
Рлт= J ге»ф(о) rfo. (1.16)
Vo
Если площадь участка местности, соответствующего
радиолокационному изображению, равна то коли-
чество ложных тревог можно определить по формуле
(1.17)
Зависимость между количеством ложных тревог, чи-
слом элементов разрешения на радиолокационном изо-
бражении и вероятностью ложной тревоги показана на
рис- 1.12. Задаваясь допустимым значением А^лтдош
можно определить соответствующую вероятность лож-
ной тревоги и необходимый порог обнаружения. Заме-
тим, что постоянный порог обнаружения свойствен
автоматизированным радиолокационным системам.
В случае, если задачу обнаружения объектов по радио-
локационному изображению решает человек-оператор,
он сам устанавливает «мысленный» порог, замечая на
изображении только нужные ему наиболее «сильные» це-
ли или имеющие другие характерные признаки, напри-
мер определенную форму. «Мысленный» порог может
несколько колебаться, однако практика показала, что
эти колебания незначительны. Поэтому вопрос об эф-
фективности РЛС обзора земной поверхности можно
рассматривать при постоянном пороге обнаружения.
27
Допустимое значение вероятности ложной тревоги
определяется из соотношения (1.17)
р ________ м дхду
‘лтдоп---2УЛТДОП О
°рл
(1-18)
Можно полагать, что на выходе детектора приемного
устройства РЛС флуктуации сигналов, отраженных от
земной поверхности и формирующих радиолокационное
изображение, распределены по закону Релея
.. »
^ф(о)=— е
О
где — среднее квадратическое отклонение флуктуа-
ций отраженного сигнала.
Тогда
In Рлт доп Gv> (1*19)
Если РЛС обладает низкой разрешающей способ-
ностью, обеспечить надежное обнаружение малоразмер-
ных объектов при малой вероятности ложной тревоги
не представляется возможным. Это видно из рис. 1.11,а,
который характеризует случай весьма низкой вероят-
ности правильного обнаружения и высокой вероятности
пропуска цели
Р пр —1 Р по-
Рассмотрение особенностей радиолокационного на-
блюдения малоразмерных объектов на фоне местности
показывает, что вероятность их обнаружения сущест-
венно зависит при прочих равных условиях от разре-
шающей способности РЛС и допустимой вероятности
ложной тревоги. На рис. 1.13 показана зависимость ве-
роятности правильного обнаружения целей, определяе-
мых эффективной отражающей поверхностью о от
размера разрешаемого элемента РЛС ЬхЪу, рассчитан-
ная для сантиметрового диапазона волн и подстилаю-
щей поверхности типа «луг летом» при однократном
обзоре и угле места ф=6°. Из графика видно, насколь-
ко жесткие требования должны предъявляться к разре-
шающей способности РЛС обзора земной поверхности,
28
Рис. 1.13. Зависимость вероятности правильного обнаружения целей
с эффективной отражающей поверхностью о от разрешающей спо-
собности РЛС.
предназначенной для обнаружения малоразмерных
объектов-
Для повышения надежности обнаружения малораз-
мерных объектов может использоваться многократное
наблюдение заданного района при круговом (сектор-
ном) обзоре. При боковом обзоре с этой целью возмож-
но выполнение нескольких заходов одного носителя,
что аналогично применению нескольких самолетов. Ве-
роятность правильного обнаружения цели при N на-
блюдениях заданного района равна
где Pnoi — вероятность правильного обнаружения цели
при однократном обзоре местности.
Важной характеристикой, определяющей эффектив-
ность радиолокационных станций обзора земной по-
верхности является вероятность правильного распозна-
вания образов обнаруженных объектов. Сущность рас-
познавания заключается в принятии решения, к какому
из возможных типов или видов объектов относится об-
наруженная цель.
Процесс распознавания образов объектов характе-
ризуется вероятностью правильного распознавания и
29
вероятностью ложного распознавания или перепутыва-
ния. Под вероятностью правильного распознавания по-
нимается вероятность того, что по характеру отметки на
радиолокационном изображении будет правильно опре-
делен тип или вид обнаруженного объекта. Под вероят-
ностью ложного распознавания понимается вероятность
неправильного ответа на вопрос о том, какому типу или
виду объектов соответствует полученное изображение.
В качестве опознавательных признаков радиолока-
ционных изображений объектов часто используются их
геометрические размеры или конфигурация (контур).
Поэтому при решении задачи радиолокационного обзо-
ра все наземные объекты можно разделять на точеч-
ные, протяженные, сложные и групповые. К точечным
относятся объекты, размеры которых значительно мень-
ше размеров разрешаемого элемента РЛС. Объекты,
у которых отношение длины к ширине значительно
больше 1, а длина в несколько раз превышает разрешае-
мое расстояние, принято условно относить к протяжен-
ным. Объекты с характерно выраженной конфигурацией
обычно называют сложными. Совокупность сложных,
протяженных и точечных объектов или каждого из них
в отдельности, разнесенных на расстояния, превышаю-
щие линейную разрешающую способность РЛС, можно
рассматривать как групповую цель.
Рис. 1.14. Разложение контура цели на элементы разрешения.
30
С помощью современных радиолокационных станций
обзора земной поверхности достоверное распознавание
может быть достигнуто только в отношении крупнораз-
мерных объектов, к которым относятся сложные и груп-
повые цели, когда на их площадь приходится порядка
несколько десятков элементов разрешения (рис. 144).
Большинство же объектов при невысокой разрешающей
способности панорамных РЛС обзора земной поверх-
ности относятся к точечным. Можно считать, что многие
из групповых объектов состоят из точечных элементов.
Поэтому основным требованием, предъявляемым к сов-
ременным радиолокационным станциям обзора местно-
сти, является обеспечение высокой вероятности обнару-
жения малоразмерных объектов. Тогда задача распо-
знавания сложных и групповых целей может решаться
по определению взаимного расположения обнаружен-
ных элементов.
Детальность радиолокационного изображения оказы-
вает также существенное влияние на точность определе-
ния местоположения обнаруженных объектов. Поэтому
одним из основных параметров радиолокационных стан-
ций обзора земной поверхности, определяющих эффек-
тивность радиолокационного наблюдения, является их
разрешающая способность. Перспективы совершенство-
вания обзорных РЛС в значительной степени связаны
с принципиальными и техническими возможностями по-
вышения их разрешающей способности.
2
Методы повышения разрешающей способности
РЛС обзора земной поверхности
2.1. Критерии оценки разрешающей
способности РЛС
Разрешающая способность РЛС обзора земной по-
верхности была определена как способность раздель-
ного наблюдения целей, имеющих различие в координа-
тах дальности и азимута. Это условие означает, что па-
раметры сигналов целей, отображающие указанные
координаты, также имеют определенные различия, на
основании которых и производится формирование вы-
ходных данных для индикации. В общем случае разре-
шающая способность РЛС по каждой координате зави-
сит от целого ряда факторов, к которым относятся: ко-
личество априорных сведений о целях, апертурные
характеристики РЛС во времени или в пространстве,
метод обработки сигналов, величина отношения сиг-
нал/шум, технические и конструктивные параметры от-
дельных элементов радиолокационного устройства. Кри-
терий оценки разрешающей способности определяется
количеством факторов, учитываемых при анализе. До-
статочно полный критерий, охватывающий все стороны
рассматриваемого вопроса, является очень сложным.
При учете помех для разрешающей способности воз-
можно получить только вероятностные характеристики.
За статистический критерий разрешающей способности
может быть принят критерий максимальной вероятно-
сти разрешения целей при заданном уровне ложных
решений. Для синтеза оптимальной системы согласно
32
этому критерию необходимо вычисление апостериорного
распределения плотности вероятности наличия или от-
сутствия сигналов от всех рассматриваемых целей- При
этом полагается, что процесс разрешения неотделим от
процесса обнаружения, другими словами, разрешение —
это раздельное обнаружение всех целей как бы близко
они не находились. Решение такой задачи в общем виде
для произвольного количества целей сопряжено с пре-
одолением значительных математических трудностей.
Рассмотрим частный случай синтеза оптимального при-
емного устройства для разрешения двух сигналов
s.(0=Af(0; s2(t) = Bg(t),
где f(t) и g(t)—функции времени, которые предпола-
гаются вначале полностью известны-
ми и допускаются только различия
во временном сдвиге
А, В — нефлуктуирующие амплитуды сиг-
налов.
Апостериорное распределение для данного случая
[64] может быть записано в виде
Wy(x) = W (x)L(x), (2.1)
где
т
L (х) = exp { — J [у (0 — х (0]2
о
— функция правдоподобия;
W (х) — априорная плотность вероятности. В даль-
нейшем ее распределение полагаем равномерным;
х(0 =Af(t) +Bg(t)—известный опорный сигнал;
y(t) =Af(t) +Bg(t) +n(t) — принимаемый сигнал
в смеси с шумом;
n(t)—нормальный шум с нулевым математическим
ожиданием и равномерной спектральной плотностью No
в пределах энергетической полосы пропускания прием-
ника А/э.
При указанных условиях разрешение сигналов
St(t) и Sz(t) может производиться по максимуму апо-
стериорного распределения.
Максимум апостериорного распределения при отсут-
ствии априорных данных достигается при минимальном
3—1094 33
значении показателя экспоненциального члена функции
правдоподобия:
/ = { [У (0 - х (0]2 dt= J г/2 (Z) dt -
о о
т т
-2^y(t)x(t)dt-{-^x2(t)dt. (2.2)
О о
Подставляя значение х (t), получим
т т
l = ^y2(t)dt — 2 J y(t)Af(t)dt —
О о
т т
— 2^y(f)Bg (/) dt+ J А2/2(0 Л +
О о
+ 2 5 ABf (0 g (0 dt + J B2g2 (0 dt. (2.3)
о о
Нормируя сигналы по энергии положим
jf2(0rfZ= Jg2(0d/=1. (2.4)
о о
Взаимокорреляционную функцию сигналов по пара-
метру разрешения, например, временному запаздыва-
нию т, обозначим
+ (2.5)
О
Учитывая два последних соотношения, получим
т т
z=fy2(0^ —2Aj y{t)f(t)dt —
Q О
- 2В J у (t) g (0 dt 4- 2ABWliS (г) 4- B\ (2.6)
О
Для определения значений сигналов 5*ь S% кото-
рые минимизируют I и, следовательно, обеспечивают
34
максимум апостериорного распределения, решим урав-.
нения
т
-^- = 2A-2\y(t)f(t)dt+ 2BW12 (г) = 0, (2.7)
О
т
^;==2B-2^y(i)g(t)dt + 244^ (г) = 0. (2.8)
о
Решение этих уравнений дает
т
s\ = S, (/мин) = -- ‘2-; [ I/ (0 - ЧГ1>2 (г) g (01У (0 dt,
б
(2-9)
т
S\=s2 (1мва)=—* Г [g (0 - ЧГМ (г) f (0] У (0 dt.
1 —1,2 J
б
(2.10)
На основании последних выражений можно опреде-
лить структурную схему оптимального согласно выбран-
ному критерию разрешения приемного устройства
(рис. 2.1). Такой приемник состоит из двух каналов
с фильтрами, пороговых устройств и выходного устрой-
ства, в котором производится оценка сигналов и приня-
тие решения.
Фильтры приемного устройства имеют импульсные
переходные функции, соответствующие найденным зна-
чениям сигналов S*i и S*2,
1 1 -^1,2
h ^g(to
2
o<f<x
(2.11)
где tQ — момент наблюдения сигнала на выходе филь-
тра, когда он достигает максимальной величины. При
/<0 и t>t0 hi=h2 = 0.
В отличие от оптимального фильтра для обнаруже-
ния одиночного сигнала в характеристиках рассмотрен-
ных фильтров учитывается вид другого сигнала и зна-
3* 35
Рис. 2.1. Оптимальное приемное устройство для разрешения двух
сигналов с известными параметрами.
чение функции корреляции сигналов. Реализовать та-
кие фильтры намного сложнее, чем оптимальный для
обнаружения одиночного сигнала. Заметим, что при
это отличие пропадает.
На выходе рассматриваемого приемного устройства
могут быть получены следующие оценки:
1. Имеются оба сигнала:
51 = Si 52 = S2 (/мин)«
2. Имеется сигнал 5^
5i = 5i (/мин); 52 (/МИн) = 0.
3. Имеется сигнал S2:
52 = 52 (/МЙН); 51 (/МЙН) = 0.
4. Имеется только шум:
51 (^мин) == 5г (^мин) 0*
Вследствие наличия шума все оценки будут случай-
ными и наиболее полно характеризуются вероятностя-
ми правильного обнаружения Pnoi и РПо2 и ложной тре-
воги Рлт! И Рлт2*
Не производя промежуточных выкладок, имеющихся
в работе [64], приведем выражения указанных вероят-
ностей
оо оо
Pnoi = J (S*,) dS\ = J (S*) dS\ -
а —оо
— f wt (S*,) dS*t =1—Fi (а). (2.12)
—О©
36
Аналогично
P„,= Ja»0(S*1)dS*1=l-F0(a).
а
(2.13)
где
u>(S*i)(ZS*i
— табулированный интеграл; а — значение порога;
/ 1__ф2
(2-14)
— плотность вероятности при наличии сигнала и шума;
/1 —
(S*,)2
i-s'b
(2.15)
— плотность вероятности при наличии одного шума.
Выражения для РПо2 и Рят2 имеют аналогичную
структуру.
Значение вероятности ложной тревоги определяется
установленным уровнем порогового устройства.
Задаваясь допустимым значением РЛт и фиксируя
значения No и можно построить статистические ха-
рактеристики разрешения
Рпо=/(ад.
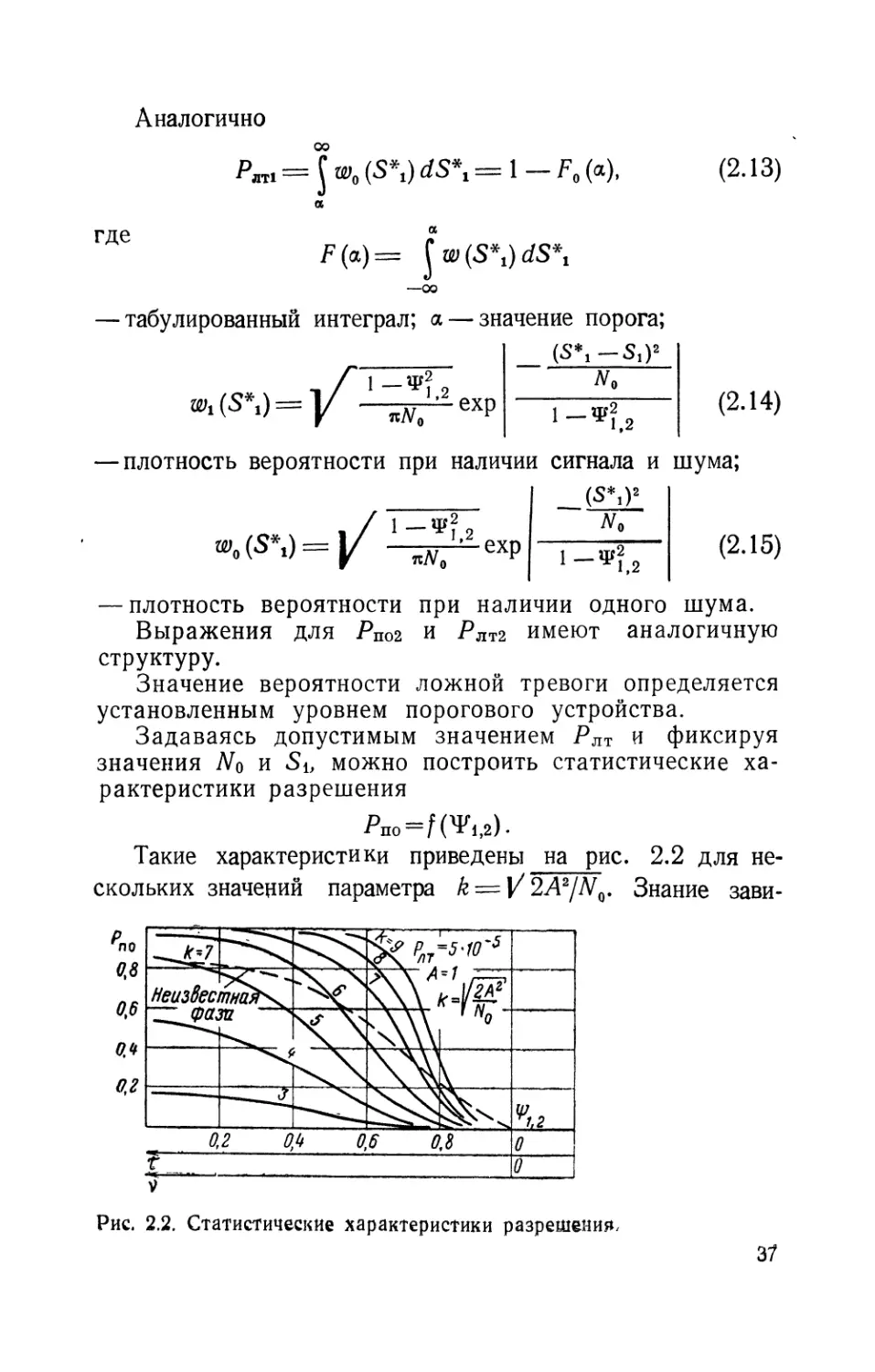
Такие характеристики приведены на рис. 2.2 для не-
скольких значений параметра k — V 2A2IN^ Знание зави-
Рис. 2.2. Статистические характеристики разрешения,
37
Рис. 2.3. Структурная схема оптимальной системы разрешения двух
сигналов со случайными параметрами.
симости функции корреляции Wi,2 от параметров, по ко-
торым производится разрешение, позволяет построить
характеристики непосредственно по этим параметрам,
например по временному запаздыванию т, как показано
на рис. 2.2, или частотному сдвигу у. Как видно из при-
веденных зависимостей, надежность разрешения растет
при уменьшении энергии шума по отношению к сигналу
и уменьшении значения функции корреляции сигналов.
Для одинаковых сигналов достаточно знать значение
функции автокорреляции одиночного сигнала Ч7 или
пачки сигналов ЧКу.
Если сигналы имеют случайную разность фаз и слу-
чайные независимые амплитуды, то синтез оптимально-
го приемного устройства может быть произведен на
основании рассмотренной методики путем усреднения
сигналов по неизвестным параметрам [И, 18]. Струк-
турная схема оптимального приемного устройства для
разрешения таких сигналов приведена на рис. 2.3. Каж-
дый канал системы состоит: из фильтра, согласованного
с огибающей сигнала; линейного детектора, усредняю-
щего сигнал по фазе и порогового устройства. Все
параметры в уравнениях (2.9) — (2.11) заменяются на
соответствующие значения для огибающих сигналов. Ве-
личина разрешения определяется шириной взаимной
корреляционной функции огибающих.
Надежность разрешения сигналов с неизвестной фа-
зой значительно ниже надежности разрешения извест-
ных сигналов. На рис. 12.2 для сравнения приведена ха-
рактеристика разрешения сигнала со случайной фазой
для значения параметра k = l. Этот случай представ-
ляет большой практический интерес, так как высоко-
3&
частотная фаза сигнала, как правило, неизвестна. Учи-
тывая трудности реализации оптимальной системы раз-
решения большого количества произвольных целей,
можно воспользоваться указанным выводом о том, что
разрешающая способность РЛС будет тем лучше, чем
больше энергетическое соотношение сигнала и шума
и чем уже автокорреляционная функция сигнала по па-
раметрам разрешения. Известно, что сигнал на выходе
радиолокационного приемника при малом относитель-
ном значении шума приближенно представляет авто-
корреляционную функцию входного сигнала. Таким об-
разом, обеспечивая максимум энергетического критерия,
получаем в большинстве случаев наименьшую ширину
выходного сигнала, что соответствует приближению
к оптимальным условиям разрешения. Этой закономер-
ностью часто пользуются на практике.
Если влиянием шума можно пренебречь, то разре-
шающая способность РЛС по угловым координатам
определяется, в основном, антенной системой, а по
дальности — параметрами зондирующего сигнала. Оцен-
ка разрешающей способности при этом производится на
основании критерия Релея. По этому критерию две
спектральные линии могут считаться разрешенными,
если главный максимум дифракционной кривой от вол-
ны Xi попадает на место первой нулевой точки дифрак-
ционной кривой от второй волны:
где дк — величина, определяющая разрешающую спо-
собность (рис- 2.4).
Этот критерий изложен Релеем применительно к оп-
тике и соответствует приблизительно возможностям не-
посредственного визуального наблюдения. Критерий Ре-
лея используется часто также и для оценки разрешаю-
щей способности при измерении многих других физиче-
Рис. 2.4. Графическое пред-
ставление критерия Релея.
39
Рис. 2.5. Определение призна-
ков результирующей характе-
ристики двух физических вели-
чин, по которым может произ-
водиться их разрешение.
ских величин с визуальной индикацией или при анализе
результатов измерений. В основу здесь положен тот
факт, что результирующая картина от двух близких, но
не совпадающих измеряемых величин отличается от той,
которую дала бы только одна измеряемая величина.
В общем случае отличий может быть очень много, од-
нако практически при одновременной индикации ис-
пользуются только три наиболее характерных призна-
ка (рис. 2.5):
1) наличие провала в главном лепестке результи-
рующей кривой, полученной при измерениях (двугор-
бость Кривой) Д/п//макС;
2) увеличение ширины главного'лепестка результи-
рующей кривой на уровне 0,5 от максимального значе-
ния по сравнению с шириной главного лепестка
кривой, соответствующей одной физической величине
AX0,5/AXZ0,5;
3) изменение относительной величины первого боко-
вого максимума по сравнению с главным АЛмакс/Лиакс-
На рис. Й.6 показана зависимость рассмотренных
признаков от абсолютной разности двух измеряемых
величин, когда результат измерения каждой отдельной
величины х представляется на индикаторе характери-
стикой вида |sinх!х\.
Рис. 2.6. Зависимость призна-
ков разрешения от абсолют-
ной разности двух измеряе-
мых физических величин.
40
На практике разрешающая способность чаще всего
оценивается по ширине главного максимума; наличие
двух целей фиксируется при появлении заметного про-
вала в результирующей кривой индикации. Например,
разрешающая способность резонансного устройства,
предназначенного для измерения частоты <о, определя-
ется величиной | Aico| = | cot—со2|, при которой суммарная
интенсивность колебаний в контуре как функция часто-
ты в случае воздействия двух сигналов изображается
двугорбой кривой с двумя достаточно четко выражен-
ными максимумами. Практически полагают, что отчет-
ливо выраженные максимумы получаются при
|Д<о| = ^=«>^ (2.16)
где соо — средняя (резонансная) частота;
Q — добротность контура;
g — затухание контура, т. е. разрешающая способ-
ность определяется затуханием контура-
Оценим разрешающую способность по угловым ко-
ординатам радиолокационного устройства. Предполо-
жим, что цель неподвижна. Когда антенна радиолока-
тора при обзоре пространства проходит одиночную то-
чечную цель, на выходе ее образуется сигнал, огибаю-
щая которого соответствует форме диаграммы направ-
ленности антенны по модулю при пассивном методе пе-
ленгации или квадрату диаграммы направленности при
активном методе работы РЛС. Таким образом, одиноч-
ная точечная цель представляется в пространстве инди-
кации сравнительно широкой кривой. Применение кри-
терия Релея для разрешения двух точечных целей (при
условии симметрии диаграммы направленности) позво-
ляет прийти к выводу, что разрешающая способность
РЛС по угловым координатам определяется шириной
главного лепестка диаграммы направленности антенны
между первыми нулями. Как будет показано ниже, ска-
занное справедливо только для линейных антенн сум-
мирующего типа, для которых удовлетворяется принцип
суперпозиции. Рассматривая антенну как открытый ко-
лебательный контур, можно показать, что разрешение
41
антенны определяется некоторым эквивалентным зату-
ханием, которым является величина
(2.17)
где d& — размер раскрыва антенны в заданной плоско-
сти.
Именно эта величина в первую очередь определяет
ширину диаграммы направленности антенны.
Разрешающую способность РЛС по угловым коор-
динатам оценивают шириной диаграммы направленно-
сти антенны по половинной мощности 0о,5 или половин-
ной ширине диаграммы направленности между первыми
нулями '0о/2. Сравнение этих величин приводится
в табл. 2.1. Можно отметить, что обе оценки разрешаю-
щей способности примерно одинаковы (различие в 15—
20% практически несущественно).
ТАБЛИЦА 2.1
Равномерное распределение поля в раскрыве антенны 6о» град. е0,5’ ГРаД- #0 2е0,5
Прямоугольный раскрыв (дли- на стороны d&) Круглый раскрыв (диаметр D) X 57,3-7- X 70 ~D X 50,3—т— ^а X 59 D 1,14 1,185
Оценка разрешающей способности по критерию Ре-
лея в определенном смысле является произвольной и
ограниченной. Если учитывать более тонкие различия
в форме выходного сигнала (расширение огибающей
сигнала, изменение амплитуды бокового лепестка
и т. п), можно получить разрешающую способность, бо-
лее высокую, чем та, которая определяется условной
границей разрешения по критерию Релея (рис. 2.6). Не-
определенность этого критерия состоит в том, что не
обосновывается теоретически необходимая величина
провала между горбами выходного сигнала. Если за-
дать абсолютное значение провала, начиная с которого
принимается решение о наличии двух целей, то разре-
шающая способность будет зависеть от амплитуды сиг-
нала, что опять приводит к неопределенности. Кроме
42
того, критерий Релея не учитывает априорных сведений
о целях и маскирующего действия шумов и помех.
Однако оценка по критерию Релея практически
удобна и поэтому часто используется для определения
разрешающей способности по одному направлению (ко-
ординате). Наиболее полно свойства РЛС обзора земной
поверхности по разрешающей способности характеризует
пространственная функция неопределенности. Она по-
зволяет представить селективную способность станции
во всех направлениях и при различных критериях оцен-
ки разрешающей способности по уровню сигнала. Ана-
лиз функции неопределенности приводится в гл. 5.
Рассмотренные критерии оценки разрешающей спо-
собности РЛС обзора земной поверхности показывают
потенциальные возможности, которые могут быть до-
стигнуты в идеальном случае. Реальная разрешающая
способность значительно ниже ее потенциального значе-
ния вследствие потерь энергии и искажений сигнала во
внешней среде и в различных элементах станций. По-
этому реальная разрешающая способность по какому-
либо параметру р может быть представлена в виде [11]
*Р = ^пот + ^Pi = (1 + =YP3^n0Tl (2.18)
\ и /'ПОТ /
где ур= 1 +2'6рУбрпот — коэффициент ухудшения раз-
решающей способности по параметру р;
брпот — величина потенциальной разрешающей спо-
собности;
dpi — дополнительное ухудшение разрешающей спо-
собности на счет i-й причины.
В бортовых РЛС обзора земной поверхности увели-
чение размера раскрыва реальной антенны ограничено
габаритами летательного аппарата, поэтому повышение
разрешающей способности по угловым координатам
является трудной задачей и для ее решения приходится
часто изыскивать другие пути- Существует большое ко-
личество методов повышения разрешающей способности
РЛС по угловым координатам при заданных габаритах
реальной антенны. Однако эффективность этих методов
существенно отличается. Возможность использования
того или другого метода в значительной степени опре-
деляется назначением и условиями применения РЛС об-
зора земной поверхности. Например, на выбор метода
43
повышения разрешающей способности по угловым Rd-
ординатам могут оказать влияние такие факторы, как:
количество одновременно наблюдаемых объектов, необ-
ходимая детальность радиолокационного изображения,
дальность наблюдения, требуемая вероятность обнару-
жения малоразмерных целей на фоне отражений от
местности, допустимая величина ложных тревог вслед-
ствие неоднозначности системы, пассивный или актив-
ный способ наблюдения и т. п. В некоторых случаях
для решения поставленной задачи возникает необходи-
мость применения нескольких методов одновременно.
В настоящей главе приводится анализ возможностей
различных методов повышения разрешающей способно-
сти РЛС по угловым координатам и на основании их
сравнения выбираются наиболее эффективные для ис-
пользования в РЛС обзора земной поверхности. В за-
ключение показываются основные пути и особенности
повышения разрешающей способности рассматривае-
мых РЛС по дальности.
2.2. Повышение разрешающей
способности РЛС путем выбора
оптимального амплитудного
распределения поля в раскрыве
антенны
Большинство типов антенн, применяемых в радиоло-
кационных станциях для измерения угловых координат,
относятся к классу линейных суммирующих антенн.
Дифракционные диаграммы направленности G(0, W)
таких антенн и функция распределения амплитуды поля
в раскрыве Л(х, у) связаны между собой преобразова-
нием Фурье. Все характеристики диаграммы направлен-
ности (форма, уровень боковых лепестков, ширина
и т. д.) определяются видом функции F(x, у), которая
ограничена в пространстве размерами раскрыва антен-
ны. Под раскрывом понимается некоторая условная
плоская поверхность, на которой задано распределение
амплитуд и фаз поля. Распределение фаз в раскрыве
для этого класса антенн считаем линейным.
44
Допустим, что антенна с одномерным раскрывом
имеет функцию распределения поля по раскрыву вида
Тогда поле в дальней зоне, создаваемое элементом ан-
тенны длиной dx (рис- 2.7), определяется выражением
* & 2 г? f 2х \ 1 Г • (! R х s in 0 \ ~] t zn 1 л,
dE = -7-F[ ) -р-exp /<о 11----------) \dx, (2.19)
где С — скорость света;
со — частота колебаний.
Результирующее поле в любом заданном направле-
нии, определяющее значение диаграммы направленно-
сти антенны, является линейной суперпозицией полей,
излученных в этом направлении со всего раскрыва, т. е.
Xтсс/я • д\ 2Z? С f 2*jc \ f . 2гс • д \ с\г\\
G( -~siii6j=— I F (-у-j exp (/ — xsin 0 1. (2.20)
d
__ a
2
Здесь k — постоянная, не зависящая от 0 и х (при
нормировании диаграмм ее можно не учитывать).
Если ввести обобщенные координаты
7Сб/я • Л
p = _JLsln6 и д = _
то выражение (2.20) перепишется в виде
+1
G(p) = 1 Z / / <7 А j —*7- д " dx Ев Т -^4=— 2 j F(q)exp(jpq)dq. (2.21) 1 Рис. 2.7. Геометрическое пред- ставление одномерной линей- с ной антенны. 45
Рис. 2.8. Пространственные со-
отношения для радиолокацион-
ной антенны с плоским рас-
крывом.
Функция распределения
быть определена обратным
поля в раскрыве может
преобразованием Фурье
F f G exP <—J» dP-
(2.22)
Для радиолокационных антенн иногда интерес пред-
ставляет случай двумерного преобразования (рис. 2.8)
где
F(x, y)^G(p, и),
sin<b.
Л ‘
(2.23)
Если, например, d&^>X и то G(p, и) может
быть выражено через диаграммы направленности ан-
тенны в двух взаимно перпендикулярных плоскостях
G(p, u) = kiG(p)G(u). (2.24)
Направленные свойства антенны характеризуются
шириной диаграммы направленности (0О,5 или 90/2), ко-
эффициентом направленного действия (КНД), коэффи-
циентом усиления и уровнем боковых лепестков.
Коэффициент направленного действия антенны
П(9, . ф) определяется отношением мощности излу-
чения в заданном направлении к средней мощности из-
лучения во всех направлениях в телесном угле 4л:
П(0, ф)= 4,1/3 (2.25)
46
где
Л = A. Re С [£>*] dS
— общая мощность излучения;
S = dl — геометрическая площадь раскрыва;
ф)_— диаграмма направленности по мощности;
Д Н — векторы электрического и магнитного полей
соответственно.
Максимальное значение КНД равно:
тт ____________________ с
^макс— ^2 °эф>
(2.26)
где 5Эф — S • g}
g — коэффициент использования площади рас-
крыва антенны.
Коэффициент усиления антенны
К = Пт], (2.27)
где =Р£/РП0ЛН= RJR^ + — коэффициент полезного
действия антенны;
— сопротивление излучения антенны;
Ru — сопротивление потерь.
Для радиолокационных устройств, которые произво-
дят прием отраженных сигналов на фоне помех, необ-
ходимо обеспечить сужение диаграммы и получение ма-
ксимального коэффициента усиления антенны.
Уровень боковых лепестков
а = 20 log ^2^=20 log b (2.28)
О'Омаке
где Go макс — максимум главного лепестка диаграммы
направленности;
макс — максимум первого бокового лепестка диа-
граммы.
От уровня боковых лепестков в сильной степени за-
висит однозначность измерений по угловым координа-
там. В идеальном случае было бы желательно иметь
узкий главный лепесток при отсутствии боковых.
Для увеличения направленных свойств линейных
суммирующих антенн необходимо увеличивать относи-
тельный размер раскрыва антенны и выбирать вид рас-
пределения амплитуд поля в раскрыве при условии, что
распределение фаз задано. На летательных аппаратах
47
возможности увеличения направленных свойств антен-
ны за счет повышения отношения da/K ограничены. По-
этому остается лишь выбрать необходимое распределе-
ние амплитуд поля в раскрыве- В табл. 2.2 приводится
ТАБЛИЦА 2.2
п В %,5 4 е,> а [дб]
X X
0 1 0,88^ 1,0 -7- — 13,2
X X
1 0,810 1,2 ^7 1,5 -г —23
X
2 0,667 1,45 -г- 2-° и; —32
3 0,557 X 1,66 ~~г 2,5 4- «а —40
4 0,515 X 1,93 -7- <4 X 3,0 аа -48
сравнение основных характеристик диаграммы направ-
ленности для различных видов распределения поля.
Различные виды симметричных распределений получе-
ны путем изменения степени функции
F(x) = cos*^}, (2.29)
где п = 0, 1, 2, 3, 4;
п = 0 соответствует равномерному распределению
поля в раскрыве антенны. При увеличении п ско-
рость спадания поля к краям раскрыва увеличи-
вается.
Сравнение показывает, что равномерному распреде-
лению поля в раскрыве соответствует наиболее узкая
диаграмма направленности. Однако уровень боковых
лепестков при этом максимален, что приводит к увели-
чению неоднозначности измерений.
С уменьшением амплитуд поля к краям раскрыва
боковые лепестки уменьшаются, а при распределении
типа ехр (—х2) — полностью исчезают. Чтобы использо-
вать это свойство, необходимо обеспечить спадание амп-
литуды поля на краю раскрыва антенны почти до нуля,
48
или, по крайней мере, не менее чем на 20 дб. Однако
при этом существенно уменьшается эффективная пло-
щадь раскрыва антенны, происходит расширение глав-
ного лепестка диаграммы и, следовательно, уменьшает-
ся разрешающая способность РЛС, КНД и коэффици-
ент усиления антенны. Вследствие указанных причин
распределение поля в раскрыве антенны по закону Га-
усса практически не применяется.
На практике обычно идут на некоторый компромисс
между наименьшей шириной главного лепестка и мини-
мальными боковыми лепестками. Метод расчета антенн,
предложенный Тэйлором [61, 90], позволяет найти рас-
пределение поля в раскрыве, при котором все боковые
лепестки диаграммы направленности имеют одинаковый
заданный уровень, а главный лепесток имеет наимень-
шую ширину из всех возможных значений для синфаз-
ных распределений поля по раскрыву.
В заключение необходимо отметить, что основные
свойства синфазных антенн, показанные в настоящем
параграфе, справедливы также для круглых раскрывов,
антенных решеток и антенн с искусственным раскры-
вом, особенности которых рассматриваются ниже.
Существенно повысить разрешающую способность и
КНД линейных суммирующих антенн можно только пу-
тем увеличения размеров раскрыва при условии, что на-
блюдаемые объекты будут находиться в дальней зоне
поля антенны. Особенности и основные принципы по-
строения бортовых РЛС обзора земной поверхности,
высокая разрешающая способность которых достигается
этим способом, рассматриваются в гл. 3. Выбор опти-
мального распределения поля в раскрыве антенны по-
зволяет обеспечить в небольших пределах улучшение
разрешающей способности и увеличение дальности дей-
ствия РЛС при наименьшем значении неопределенности
в обнаружении объектов и измерении их координат, обу-
словленной наличием боковых лепестков диаграммы на-
правленности антенны.
2.3. Разрешающая способность РЛС
с фокусированной антенной
При значительном увеличении размеров раскрыва
линейных суммирующих антенн рабочий диапазон даль-
4-1094 . 49
ностей РЛС перемещается из дальней зоны антенной си-
стемы в промежуточную зону, простирающуюся от не-
скольких da до 2d2a/X. Для разрешающей способности
РЛС по угловым координатам важное значение имеют
размеры поперечного сечения диаграммы направленно-
сти антенны, которые определяют минимальное расстоя-
ние между двумя разрешаемыми целями на заданной
дальности. В промежуточной области размеры попереч-
ного сечения луча обычной антенны, сфокусированной
на бесконечность, всегда соизмеримы с размерами рас-
крыва антенны. При увеличении раскрыва антенны на-
ряду с сужением диаграммы направленности в дальней
зоне происходит расширение поперечного сечения луча
в промежуточной зоне, что приводит к ухудшению разре-
шающей способности РЛС в этой зоне. Поэтому увели-
чить разрешающую способность РЛС только путем уве-
личения раскрыва антенны для рассматриваемого слу-
чая невозможно; это может быть достигнуто использо-
ванием принципа фокусирования при построении антен-
ных систем.
Принцип фокусирования электромагнитных колеба-
ний широко используется в оптических системах и со-
стоят в том, что сигналы от всех точек излучающей по-
верхности синфазно складываются в одной точке прост-
ранства (фокусе) путем компенсации пространственных
фазовых набегов фокусирующим устройством. Вне фо-
куса световые лучи расходятся. Применение устройств
с переменным фокусным расстоянием позволяет кон-
центрировать энергию на различных дальностях. Подоб-
ные методы могут быть применены и в радиолокацион-
ных устройствах для повышения разрешающей способ-
ности по угловым координатам [92]. Для этого антенная
система должна быть подобно линзе или зеркалу в оп-
тике сфокусирована па цель, в то время как обычные
антенны, подобно плоскому зеркалу, сфокусированы на
бесконечность. Примером простой сфокусированной в од-
ну точку антенны является сферическая поверхность,
равномерно возбуждаемая по амплитуде и фазе. Фокус
такой антенны находится в центре сферы. Если разме-
ры раскрыва антенны во много раз больше длины вол-
ны, то подобно оптическому зеркалу такая антенна кон-
центрирует излучаемую мощность в очень узкой области
фокуса. Для реальных соотношений da/^ поперечное се-
50
Рис. 2.9. Геометрические со-
отношения при фокусировании
антенны на дальность Мо-
чение луча в фокусе будет определяться дифракционны-
ми явлениями.
Определим возможную степень фокусирования при
учете дифракционных явлений. Для антенны с плоским
раскрывом, расположенным в плоскости z=0 (рис. 2.9),
излучаемое поле может быть записано в виде
Е (х, у, z) = С JJ F ft, -q) -Г exp (JkR) dUy, (2.30)
s
где Е(х, у, z)—напряженность электромагнитного по-
ля в точке А (х, у, z);
т])—функция распределения амплитуд и
фаз поля в точке B(g, tj, 0) раскрыва
антенны;
k = 2лД— волновой множитель;
R — У(х — В)2 + (у — т])2-|-г2 — расстояние между рассмат-
риваемой точкой поля в пространстве и
точкой раскрыва;
S — площадь раскрыва антенны;
С — коэффициент пропорциональности.
Для фокусирования электромагнитной энергии на
расстоянии Ro необходимо обеспечить такое распределе-
ние фазы поля по раскрыву, при котором сигналы от
всех элементов раскрыва на этом расстоянии суммиру-
ются синфазно. Используя принцип Ферма и предпола-
гая параметры среды постоянными, длину оптического
пути от точки В плоскости раскрыва до точки с коор-
динатами (0, 0, Ro) можно записать в виде
r=/!;2-W + C
(2.31)
Для обеспечения синфазности сигналов в точке (0,
0, Ro) распределение фаз поля в раскрыве должно быть
4* 51
раййо и Противоположно по знаку пространственным
фазовым задержкам
F(l, Tl) = l/7(S. v])|exp(-jfer) = |F(5, ^Х
Хехр(- jky^ + ^ + Rl). (2.32)
Таким образом, дифракционное поле сфокусированного
раскрыва будет равно
Е (х, у, г) = С f j | F (5, -rj) | exp (- jkr) ^^kR>. d^. (2.33)
s
Решение этого интеграла в общем виде затруднено,
поэтому воспользуемся общепринятыми аппроксимация-
ми г и /?, справедливыми для промежуточной области
(зоны дифракции Френеля), когда поле рассматривает-
ся в плоскости, параллельной плоскости раскрыва. При
этом:
Г = «.+^. (2.34)
р___р । S2 4~ _____f % tj___У I %2 ~Ь /о 35)
Без учета пространственного набега фазы вдоль оси z
Г==Ч^- (2.36)
Подставляя соотношения (2.35) и (2.36) в уравнение
(2.33) и учитывая, что в амплитудном множителе мож-
но принять 1//?=1/7?о, окончательно получаем
Е{х, у, Я„)-£ехр(Ж)Д|Г(е, tj)|X
<s
Хехр [ - jk Н-£ сМт^. (2.37)
Таким образом, поле в фокальной плоскости в дан-
ном случае, как и для обычной антенны, является пре-
образованием Фурье от распределения поля в раскрыве.
Из сравнения соотношения (2.37) с выражением (2.20)
для нефокусированной антенны в дальней зоне можно
сделать вывод, что фокусирование позволяет перенести
свойства поля в дальней зоне в фокальную плоскость,
находящуюся в промежуточной зоне.
52.
Рьс. 2.10. Зависимость степени
фокусирования от расстояния.
Характер распределения амплитуды поля в раскрыве
определяет распределение поля излучения в фокальной
плоскости и выбирается из условия обеспечения мини-
мальной ширины поперечного сечения главного лепест-
ка при заданном уровне боковых лепестков.
При равномерном распределении амплитуды поля
в раскрыве |F(g, т|) | = const. Решение уравнения (2.37)
для одномерного случая имеет вид
sin
£(х. = (2.38)
Степень фокусирования может быть оценена вели-
чиной А%о> определяемой половиной расстояния между
первыми нулями распределения поля в фокальной плос-
кости
= (2.39)
аа
На рис. 2.10 показана зависимость изменения вели-
чины Дх0 от расстояния для различных относительных
размеров раскрыва антенны. Размеры поперечного сече-
ния диаграммы направленности меньше размеров рас-
крыва антенны получаются на расстояниях, меньших
чем d2/K, что определяет область эффективного фокуси-
рования (область ниже пунктирной линии на рис. 2.10).
У фокусированных антенн по сравнению с нефокуси-
рованными не только уменьшаются размеры поперечно-
го сечения диаграммы направленности в промежуточной
53
ЗОйё, йо й возрастает КНД. Степень увеличения КНД
можно оценить величиной
д.2 Пф ____
“ По “ бГ
где Go — КНД линейной антенны с равномерным фазо-
вым распределением поля в раскрыве (по на-
пряженности поля);
Сф — КНД фокусированной антенны с таким же рас-
крывом.
Подставляя значения Оф и Go для точки поля (О, О,
/?о), получаем
Можно показать, что для линейной антенны с равно-
мерным возбуждением
72
S2(q) + С2 (q) ’
(2.41)
где
Q
S (q) = J sin -i- itu2du;
о
<? i
С (q) = cos — Kti2du
6
—интегралы Френеля;
q=ж
Для больших а справедлива приближенная формула
а2«2<72=^. (2.42)
54
На рис. 2.11 показаны точная и приближенная зави-
симости а2 от величины q. Область эффективного фоку-
сирования, определенная выше, на графике соответст-
вует значениям а2>1.
'Практически бывает удобно выражать разрешающую
способность антенны в угловых величинах. В промежу-
точной зоне поперечное сечение луча антенны, фокусиро-
ванной на jRo—>оо, примерно равно ее раскрыву. Тогда
под угловой разрешающей способностью такой антенны
в промежуточной зоне следует понимать угол 9о, кото-
рый зависит от расстояния RQ и размера раскрыва da
(рис. 2.12). Ухудшение угловой разрешающей способ-
ности также может быть выражено коэффициентом а.
Используя известное выражение для КНД линейного
раскрыва П = 2л/0О, где 0О— ширина диаграммы направ-
ленности антенны, можно записать
аа=-^=-5Г- <2-43)
21о
Следовательно, улучшение угловой разрешающей спо-
собности фокусированной линейной антенны пропорцио-
нально величине а2, тогда
—"^2" ®о*
На рис. 2.13 показан характер изменения структуры
поля трех антенн с различными раскрывами при при-
менении фокусирования на каждую дальность и зависи-
мость области эффективного фокусирования /?Оф от раз-
мера раскрыва.
55
Антенна
Рис. 2.12. Определение угловой разрешающей способности антенны
в промежуточной зоне Френеля.
Известно, что у антенны, фокусированной на бесконеч-
ность, на расстояниях R<Zd2/X поперечное сечение поля
примерно равно раскрыву, а в дальней зоне на расстояниях
> 2d2/l поле принимает структуру расходящегося
пучка и определяется диаграммой направленности. Для
Рис. 2.13. Структура поля фокусированнцх антенн,
56
антенны, фокусированной одновременно на каждую
точку промежуточной зоны, поле в этой зоне будет
иметь структуру, соответствующую дальней зоне с та-
ким же углом раствора дифракционной диаграммы Оо-
На рис. 2.13 этот участок показан пунктиром. Для ре-
альных антенн большого размера фокусирование одно-
временно на все дальности выполнить очень трудно, од-
нако для антенн с искусственным раскрывом, как будет
показано в дальнейшем, подобное фокусирование впол-
не реализуемо и широко применяется на практике.
Таким образом, применение принципа фокусирова-
ния позволяет получить в промежуточной зоне антенной
системы РЛС КНД и угловую разрешающую способ-
ность, соответствующую дальней зоне. При этом разре-
шающая способность РЛС обзора земной поверхности,
определяемая шириной луча в линейных единицах,
с применением фокусированных антенн значительно воз-
растает.
2.4. Возможности применения
сверхнаправленных антенн
Представляет интерес рассмотреть вопрос о возмож-
ностях использования сверхнаправленных антенн с огра-
ниченными геометрическими размерами для получения
высокой разрешающей способности РЛС. Применение
таких антенн в РЛС обзора земной поверхности опреде-
ляется реальной степенью сужения диаграммы направ-
ленности и характеристиками, влияющими на энергети-
ческий потенциал системы. В предыдущих параграфах
были рассмотрены линейные суммирующие антенны,
с синфазным распределением поля в раскрыве. Показа-
но, что для удовлетворения условию синфазности сло-
жения полей в промежуточной зоне Френеля необходи-
мо производить коррекцию квадратичных фазовых на-
бегов, . используя принципы фокусирования. Однако
ширина диаграммы направленности линейных синфазных
антенн не является самой узкой. Антенны, у которых
применение специального периодического закона распре-
деления амплитуд и фаз поля в раскрыве позволяет по-
лучить в идеальном случае сколь угодно узкую диа-
57
грамму направленности, называются свёрхнаправлен-
ными.
Основные принципы создания сверхнаправленных ан-
тенн могут быть иллюстрированы следующим простей-
шим примером. Возьмем антенную решетку из пяти эле-
ментов, расположенных на расстояниях Х/4 друг от дру-
га, возбуждаемых синфазно и равномерно. Пусть
ширина диаграммы направленности такой антенны рав-
на 0о. Если изменить фазу возбуждающего напряжения
(тока) во втором и четвертом элементах на 180°, диа-
грамма направленности может быть сужена в два раза
(~0о/2). Для получения сверхнаправленных свойств
в рупоре (пример непрерывного раскрыва) можно по-
местить в нем дискретно расположенные пластинки ди-
электрика, при прохождении которых фаза поворачи-
вается на 180°. Подбор длины и толщины пластинок по-
зволяет получить необходимое распределение поля
в раскрыве рупора; в результате наблюдается уменьше-
ние ширины диаграммы направленности.
Более высокая направленность антенны в данном
случае достигается за счет создания резко осциллирую-
щего по фазе и амплитуде распределения поля в рас-
крыве; вследствие этого возникает благоприятная интер-
ференция полей от отдельных участков антенны и удает-
ся получить размер плоского фронта волны больше
реального размера антенны. Напомним, что в обычных
антеннах размер плоского фронта волны примерно ра-
вен размеру раскрыва. Сужение диаграммы направлен-
ности можно поэтому объяснить кажущимся увеличени-
ем размеров антенны, обусловленным спрямлением
фронта волны на краях антенны (рис. 2.14).
Явление сверхнаправленности можно рассматривать
также на основе анализа диаграммы направленности
антенны в области мнимых углов или в «невидимом»
пространстве. Сверхнаправленность возникает вследст-
вие действия парциальных диаграмм направленности,
главные лепестки которых лежат в области мнимых уг-
лов, а в область действительных углов попадает лишь
часть боковых лепестков. Диаграмма направленности
любой антенны G(p), как следует из преобразования
(2.21), определена на всей оси p='(nzZa/M sin 0, в том
числе и при тех значениях р, для которых | sin 0 ] >1.
Физически таким значениям углов соответствуют реак-
58
— фронт Волны обычной антенны,
----фронт Волны сверхнапраВленной антенны
Рис. 2.14. Спрямление фронта волны на краях сверхнаправленной
антенны,
тивные, быстро затухающие волны в ближней зоне. На
рис. 2.15 сплошной линией показан видимый участок
диаграммы направленности для | р | <nzZa/X, который
можно практически измерить как диаграмму направлен-
ности в дальней зоне. Пунктиром показан невидимый
в дальней зоне участок диаграммы для |р|>Лб/аД, ко-
торый можно измерить только в ближней зоне — зоне
индукции. Видимый участок соответствует активной
мощности — мощности излучения антенны, невидимый
участок — реактивной мощности, которая накапливается
около раскрыва. Сверхнаправленные свойства антенны
получаются за счет увеличения реактивной мощности
поля у раскрыва антенны.
G(p)
/А
видимая область
Обычная
антенна
Рис. 2.15. Видимый в дальней зоне и реактивный участки диаграммы
направленности антенны,
р
59
В конечном счете нас интересует вид диаграммы на-
правленности в дальней зоне (видимой области), поэто-
му диаграмма направленности в ближней зоне (невиди-
мой области) может иметь любую форму. Таким обра-
зом, теоретической основой сверхнаправленных антенн
является тот факт, что необходимую форму диаграммы
направленности (с минимальной шириной главного ле-
пестка и минимальным уровнем боковых лепестков)
можно получить путем надлежащего выбора диаграммы
направленности в невидимой области углов (в ближней
зоне).
Известно, что для получения бесконечно большого
разрешения диаграмма направленности должна быть
6-функцией угла 0. Такую нормированную диаграмму
направленности можно представить рядом 'Фурье
м
GW = -2¥T^SeXp(W (2,44)
-N
Для W = oo эта функция равна единице при 0 = 0, а при
всех других углах равна нулю. Покажем, что такая диа-
грамма может быть реализована методом сверхнаправ-
ленности с достаточной степенью точности для значений
относительных размеров раскрыва, при которых обыч-
ные антенны имеют очень плохую направленность.
С целью упрощения выкладок рассмотрим кольцевой
раскрыв, у которого функция распределения поля зада-
на на окружности диаметром D. Эта функция получает-
ся путем преобразования Фурье выражения (2.44) и
имеет вид
N
F <?)= ~2iv'4.1 - J] G"exP = I F (T) I exp [/<p (Y)], (2.45)
—N
где у — внутренний угол кольцевого раскрыва.
Две аппроксимации этого ряда [93] для Af=-1 и N = 4
представлены на рис. 2.16,а, а соответствующие им диа-
граммы направленности показаны на рис. 2.16,6. Ампли-
туды в раскрыве представлены сплошными линиями,
а фазы — пунктирными. Изменение знака амплитуды
означает дополнительный поворот фазы на 180°. Распре-
деление амплитуд и фаз имеет периодический характер.
Количество периодов изменения поля по раскрыву опре-
60
Рис. 2.16. Распределения поля в раскрыве (а) и диаграммы сверх-
направленных антенн (б).
деляется максимальным значением N. С ростом N
диаграмма направленности сужается, а необходимая
амплитуда возбуждения быстро растет. В общем случае
величина M = itd/h может быть больше единицы, и для
получения сверхнаправленности необходимо обеспечить
условие
У>7И=~. (2.46)
При этом
Пмакс = №4-2^
Е'сли N=M, количество волн по длине раскрыва
определяется только несущей частотой (обычные антен-
ны). Если N>M, количество волн по длине раскрыва
увеличивается искусственным путем за счет дополни-
тельного изменения амплитуд и фаз поля в раскрыве
(сверхнаправленные антенны).
61
Определим условия, при которых возможна практи-
ческая реализация сверхнаправленных антенн. Как бы-
ло показано, сверхнаправленность достигается обеспе-
чением большой реактивной мощности в раскрыве. При
этом антенна эквивалентна колебательному контуру,
имеющему большую добротность Q и соответственно уз-
кую полосу пропускаемых частот. Физически это озна-
чает, что требуемое распределение амплитуд и фаз
можно обеспечить только для узкого спектра частот.
Добротность антенны может быть определена таким об-
разом:
Q = ^, (2.47)
где Wi — максимальное значение энергии электрических
или магнитных волн, запасенной у раскрыва
антенны в некотором объеме;
— общая мощность излучения.
При N = M добротность Q^l, что соответствует
обычной широкополосной антенне. Для сверхнаправлен-
ной антенны (N>M) Q велико, а полоса пропускаемых
частот мала. Чем больше ЛА по сравнению с Л4, тем
больше Q и тем уже полоса пропускания. Практически
можно считать верхним пределом Q=106. При Q>106
полоса пропускания становится настолько малой, что ис-
ключается возможность использования таких антенн
в радиолокационных станциях. Однако в любой реаль-
ной антенне имеются потери, характеризующиеся сопро-
тивлением Rn, которые ограничивают возможность со-
здания очень больших Q. С учетом потерь эффективная
добротность антенны будет равна
(2-48)
Например,для металлических антенн верхний предел,
обусловленный потерями, также соответствует зна-
чению QnH)~ 106. Основную долю потерь в сверхнаправ-
ленных антеннах составляет рассеяние реактивной мощ-
ности на сопротивлении потерь антенны. Чем выше сверх-
направленность антенны тем больше мощность
потерь и, следовательно, меньше к. п. д. антенны т].
График зависимости к. п. д. от величины N для разных
относительных размеров антенны приводится на рис. 2.17,
62
Рис. 2.17. Зависимость к. п. д.
сверхнаправленной антенны от
величины N.
Из графика видно, что начиная с некоторого значения
N>M величина т] быстро падает практически до нуля.
Характеристики построены для обычных антенн санти-
метрового диапазона волн с хорошей поверхностной про-
водимостью
10-4(7,^ 1).
Таким образом, пределом увеличения добротности
антенны как вследствие потерь, так и вследствие умень-
шения полосы пропускания следует считать значение
Q= 106. Для этого значения Q на рис. 2.18 построен
график зависимости относительного увеличения КНД
сверхнаправленной антенны по сравнению с КНД обыч-
ной антенны с равномерным распределением поля в рас-
крыве от относительного размера антенны M = nda/K. Из
графика видно, что для больших относительных разме-
Рис. 2.18. Увеличение КНД
сверхнаправленной антенны по
сравнению с КНД обычной
антенны для разных относи-
тельных раскрывов.
63
рОв йЦТейны М увеличение КНД сверхнаправленной ан-
тенны незначительно и составляет менее 3 дб.
Оценим возможность использования сверхнаправлен-
ных антенн в радиолокации. Наряду с обеспечением вы-
сокой разрешающей способности и точности измерений
радиолокационное устройство должно обладать и высо-
кой чувствительностью. Для этого антенна радиолока-
тора должна иметь максимальный коэффициент усиле-
ния, а следовательно, максимально возможную относи-
тельную площадь раскрыва. Методы сверхнаправленно-
сти для таких раскрывов не дают существенного выиг-
рыша. Однако если размеры антенны ограничены габа-
ритами летательного аппарата и меньше значения 10 X,
то направленность антенны может быть увеличена в два-
три раза при незначительном уменьшении к. п. д. На-
пример, если Л4 = лб/аА = 2, то параметры сверхнаправ-
ленной антенны для различных значений можно при-
близительно оценить по табл. 2.3.
ТАБЛИЦА 2.3
Параметры iV = 3 N =5 N =6
Добротность 5 103 106
Приблизительное значение относительной полосы пропускания Af/f0 [%] 20 0,1 io-4
КПД антенны (э/0) для РП/РЕ=1О“4 100 99 1
Увеличение КНД по сравнению с обычной антенной Псн/П0 [<М] 3 6,5 8
При применении сверхнаправленных антенн необхо-
димо учитывать, что с увеличением сверхнаправленности
уменьшается к. п. д. и полоса пропускания рабочих ча-
стот станции. К недостаткам сверхнаправленных антенн
относится также невозможность осуществления электри-
ческого сканирования луча.
Сверхнаправленные антенны могут применяться в
низкочастотном диапазоне волн и в тех случаях, когда
размеры раскрыва малы по сравнению с длиной волны.
В РЛС обзора земной поверхности они могут быть ис-
пользованы, если появится необходимость наблюдения
местности на низких частотах, когда размещение на ле-
тательном аппарате обычных направленных антенн не-
возможно.
64
2.5. Разрешающая способность РЛС
при использовании мультипликативных
антенн
Направленные свойства антенны РЛС зависят от
способа обработки сигналов на выходе отдельных эле-
ментов антенны. В предыдущих параграфах рассматри-
вались антенны с непрерывным раскрывом или антен-
ные решетки с линейной обработкой сигналов типа
суммирования. Существуют антенны с нелинейной обра-
боткой, заключающейся в перемножении сигналов с по-
следующим усреднением во времени. Для таких мульти-
пликативных антенн можно представить несколько раз-
новидностей операций обработки (рис. 2.19,а, б, в).
Рассмотрим в качестве примера систему обработки
сигналов (рис. 2.19,а), которая отличается простотой и
является в настоящее время наиболее распространенной
в радиолокационных системах автосопровождения оди-
ночной цели. В таких системах имеется линейная решет-
ка из отдельных элементов (или непрерывный раскрыв),
s)
Рис. 2.19. Схемы обработки сигналов в перемножающих антеннах.
5—1094 65
которая делится на две равные или неравные части.
Суммарный выходной сигнал с одной части раскрыва
антенны умножается на сигнал второй части с последую-
щим усреднением во времени с помощью интегратора.
Диаграмма направленности такой системы может
быть определена, если известны нормированные диа-
граммы каждой группы, которые представим в виде
G = = —-”гР , (2.49)
1 пх sin р 'Г' п2 sin р ' 7
где «1 и п2 — количество элементов в группах (рис. 2.20).
В результате перемножения и усреднения получим
диаграмму направленности всей антенны
Q {Р) = 2^ cos pq, (2.50)
til Sin P n2Sln P \ /
где q = 2di/d;
d — расстояние между соседними элементами антен-
ной решетки;
di — расстояние между центрами двух составных
частей решетки.
Для непрерывной неперекрывающейся решетки
Вид диаграммы направленности такой антенны при-
водится на рис. 2.21 для различного числа элементов
Рис. 2.20. Пространственная структура антенны с перемножением
сигналов.
66
Рис. 2.21. Диаграммы направленности антенн с перемножением сиг-
налов.
в двух группах. Пунктирной кривой показана диаграм-
ма направленности линейной суммирующей антенны
с одинаковым общим количеством элементов и таким же
размером раскрыва. Из сравнения диаграмм направлен-
ности можно сделать следующие выводы:
— ширина главного лепестка перемножающих антенн
в два раза меньше, чем у эквивалентной суммирующей
антенны;
— перераспределение общего числа элементов по
группам не влияет на ширину главного лепестка диа-
граммы;
— минимальный уровень боковых лепестков соответ-
ствует минимальному количеству элементов в одной из
групп (п2=1);
— при равном количестве элементов в группах воз-
растает максимум первого бокового лепестка, а уровень
остальных боковых лепестков диаграммы уменьшается;
— в перемножающих антеннах выходной сигнал, со-
ответствующий нечетным боковым лепесткам, меняет
знак на обратный по сравнению с главным и четными
боковыми лепестками.
В отличие от суммирующих антенн разрешающая
способность перемножающих антенн не определяется
полностью шириной диаграммы направленности.
Рассмотрим разрешение двух точечных объектов при
обзоре пространства (рис. 2.22). Допустим, что цели
в пространстве разнесены на величину
Г = ^-sin 9Г. (2.52)
5*
67
Рис. 2.22. Разрешение сигналов
от двух целей при использова-
нии перемножающей антенны.
Результирующие сигналы от целей Ц1 и Ц2 на выходе
антенн каждой группы соответственно равны:
Ы1 = SA (р) cos [W + (р)] -|-
4- S2G (р + г) cos К + /2 (р + г) + <р],
иг = SG2 (р) cos [art + /1 (Р) +/’<?] +
+ S2G(/7 + r)cosK4-f2(/?4-r)4-(/7 + r)9 + <p], (2.53)
где fi(p) и f2(p) —функции, учитывающие случайное из-
менение фазы сигналов вследствие
движения антенны, нестабильности
передатчика и т. п.;
Si и S2 — амплитуды сигналов на входе антенн;
ср — фазовый сдвиг между сигналами
в пространстве.
После перемножения сигналов иг и и2 и их фильтрации
получим
Мвыя = Gj (р) cos pq + s22 Gi (p-\-r) G2 (p4-r)cos [(/4-r) <7]+
4-SlS2Gl (p) G2 (p + r) cos [f2 (p+r)— f, (p) + (p+ r) <7 + 4>]+
+ S.SA (p + r) G2 (p) cos [f2(p4- г)—Л (p) — pq + ?]. (2.54)
Первые два члена в выражении (2.54) можно пере-
писать в виде
«вв«= S2 G, (р) + S* G, (р + г). (2.55)
Если бы последующие члены были равны нулю, то
сигнал на выходе определялся бы только результирую-
щей диаграммой G(p), а разрешение определялось бы
ее шириной. Однако наличие комбинационных членов со
случайными параметрами Д(р), fz(p) и <р изменяет неоп-
68
ределенным образом форму выходного сигнала, и разре-
шающая способность уже не определяется полностью
шириной результирующей диаграммы направленности.
Даже если фазы принимаемых сигналов стабильны за
время облучения целей fi(р) = f2(p) =0, наличие случай-
ного фазового сдвига q> приводит к тем же результатам.
Будем теперь рассматривать одну цель полезной, а
вторую помехой. Оценку разрешающей способности для
этого случая можно производить по степени подавления
мешающего сигнала по сравнению с полезным сигналом,
которую можно вывести из отношения сигнал/помеха на
выходе антенны. Для простоты выкладок предположим,
что цель Ц1 находится в направлении максимума диа-
граммы направленности (р = 0) и обозначим отношение
S2/Si = h.
'При этих предположениях уравнение (2.54) перепи-
сывается в виде
= 1 + ^2Gi (г) G2 (г) cos rq +
-|- hG2 (г) cos ф2 + (И cos (2.56)
где ф1 и ф2 — результирующая разность фаз полезного
и мешающего сигналов относительно центра каждой
группы.
Отношение сигнал/помеха на выходе антенны будет
равно
п h2GxG2 cos rq-\-hG2 cos ф2-|- hGx cos '
Сравним величину отношения сигнал/помеха для такой
антенны с аналогичной величиной суммирующей антен-
ны:
г__ перемн _ сг0
— /_£_ \ — hG + Gx cos ф, + G2 cos ф2’
\ n /сум
Если /г > 1, т. е. когда мешающий сигнал больше по-
лезного
(2.59)
В этом случае перемножающие антенны, несмотря на
более узкую диаграмму направленности по разрешаю-
щей способности, будут всегда уступать суммирующим
69
Рис. 2.23. Зависимость /мин от
величины углового разноса
сигнала и помехи.
антеннам. Это объясняется наличием составляющей по-
мехи обусловленной квадратичной характеристикой пе-
ремножителя. Другими словами, мешающий сигнал на
выходе суммирующей антенны пропорционален величине
ft, а на выходе перемножающей антенны — величине h2.
В случаях малых мешающих сигналов вели-
чина подавления зависит от значений разности фаз и
i|)2. Наиболее неблагоприятный случай соответствует зна-
чениям
При этом
Ф1=Ф2 = О.
г _ Ш |
МИН~ |G1|+|G2
(2.60)
На рис. 2.23 приведен график зависимости /МИн от
величины углового разноса сигнала и помехи. Разре-
шающая 'способность в пределах главного лепестка пере-
множающей антенны может быть в два и более раза
хуже, чем у суммирующей антенны, и не зависит от со-
отношения между П\ и п2. Можно представить случаи,
когда />/мин и даже /Мин>1, например при ф1 =ф2 = л/2.
Однако углы и ф2 являются случайными величинами,
поэтому в среднем величина / всегда будет близка к /Мин.
На основании вышеизложенного можно сделать сле-
дующие выводы:
— при одинаковых геометрических размерах сумми-
рующих и перемножающих антенн, несмотря на более
узкую диаграмму направленности последней, ее разре-
шающая способность в общем случае в два и более раза
хуже;
— применение перемножающих антенн в радиолока-
ционном устройстве целесообразно при работе по оди-
ночной цели или в случае, когда разрешение обеспечи-
70
вается по другим параметрам; при этом может быть по-
лучена более высокая точность измерения углогзых ко-
ординат;
— перемножающие антенны предоставляют дополни-
тельные возможности подавления боковых лепестков пу-
тем использования перемены знака выходного сигнала
от разных лепестков;
— перемножающие антенны позволяют производить
электрическое сканирование луча.
Таким образом антенные системы с перемножением
сигналов в РЛС обзора земной поверхности могут нахо-
дить применение только в некоторых специальных слу-
чаях, когда необходимо повысить точность измерения
координат небольшого количества целей или поднять
контрастность отдельных целей на радиолокационном
изображении.
2.6. Использование движения носителя
РЛС для повышения разрешающей
способности радиолокационных
станций по угловым координатам
Наиболее действенным способом повышения разре-
шающей способности РЛС обзора земной поверхности по
угловым координатам является увеличение относитель-
ного размера эффективного раскрыва антенны. При боко-
вом обзоре земной поверхности можно существенно уве-
личить размер раскрыва антенны, расположенной вдоль
фюзеляжа самолета. Длина таких вдольфюзеляжных ан-
тенн может достигать нескольких метров, что позволяет
получить разрешение порядка 10 угл1мин. Однако уве-
личить размеры антенны больше габаритов летательного
аппарата таким способом практически не удается и раз-
решающая способность для целого ряда задач оказы-
вается недостаточной. В этих случаях приходится изы-
скивать дополнительные возможности для увеличения
эффективного раскрыва антенны РЛС. Если априорно
известен закон перемещения радиолокационного устрой-
ства относительно земной поверхности, то может быть
использовано поступательное движение летательного ап
парата для формирования искусственного раскрывь
71
очень больших размеров, во много раз превышающих
длину летательного аппарата.
Реальные антенны можно рассматривать как систему
одновременного сравнения амплитуд и фаз сигналов от
отдельных ее элементов. Непрерывный раскрыв реаль-
ных антенн с любой наперед заданной точностью может
быть заменен при определенных условиях конечным чис-
лом дискретных точек, например решеткой вибраторов.
Форма и основные характеристики диаграммы направ-
ленности таких антенн определяются не только видом и
относительным расположением отдельных элементов
в пространстве, но и последующей обработкой этих сиг-
налов.
Можно показать, что такие же характеристики на-
правленного приема в пространстве обеспечиваются ан-
Рис. 2.24. Линейная антенная решетка (а) и эквивалентная ей син-
тезированная антенна (б).
72
генной, образованной путем последовательного развер-
тывания ее раскрыва во времени. При этом предпола-
гается, что пространственная структура такой антенны и
обработка сигналов от отдельных ее элементов будут эк-
вивалентны одновременно существующей антенной си-
стеме. На рис. 2.24 показаны: линейная антенная решет-
ка (а) и эквивалентная ей синтезированная антенна
с искусственным раскрывом (б). Последовательный при-
ем сигналов осуществляется антенной с малым раскры-
вом, установленной на самолете при боковом обзоре про-
странства. Каждое последовательное положение самоле-
та, где производится излучение и прием импульсных сиг-
налов, соответствует одному элементу эквивалентной
синтезированной антенны. Принятые реальной антенной
отраженные сигналы запоминаются в устройстве памяти
с учетом их амплитуды и фазы. При пролете самолетом
участка траектории X=L эти сигналы суммируются
в момент времени TC = X/IF от начала запоминания сиг-
налов, где W — путевая скорость самолета. Если цель
находится на оси, перпендикулярной искусственному
раскрыву X, и на расстоянии /?>2X2/Z, то все сигналы
имеют одинаковую фазу и сумма их — максимальна.
В других направлениях появляется некоторый постоянный
сдвиг между сигналами по фазе и их сумма будет иметь
меньшее значение. Это соответствует процессу вектор-
ного суммирования электромагнитного поля в реальных
антеннах при формировании диаграммы направленности.
В результате обработки сигналов, эквивалентной реаль-
ным антеннам, на индикаторе получается отметка цели,
ширина которой по азимуту такая же, как у антенны
с размером раскрыва X = L. В этом смысле можно ут-
верждать, что разрешающая способность по угловым ко-
ординатам определяется шириной искусственной диа-
граммы направленности 0И, сформированной на выходе
устройства обработки.
Для реализации метода искусственного раскрыва не-
обходимо осуществлять синфазное сложение отражен-
ных сигналов в различные моменты времени, поэтому
радиолокационная станция должна быть когерентной,
т. е. обладать высокой стабильностью частоты передат-
чика и иметь опорное напряжение стабильной частоты,
используемое для сравнения фаз отраженных сиг-
налов.
73
Рис. 2.25. Последовательный обзор пространства РЛС с искусствен-
ным раскрывом антенны.
Выше был показан принцип синтезирования одной ан-
тенной решетки, которой соответствует определенное по-
ложение искусственного луча в пространстве (рис. 2.24).
Если из этой решетки удалить крайний левый антенный
элемент и добавить такой же элемент справа, то искус-
ственный луч переместится в пространстве на расстояние
d параллельно самому себе. Можно построить систе-
му, производящую эту операцию последовательно и син-
хронно с движением летательного аппарата, что позво-
лит обеспечить последовательный боковой обзор прост-
ранства (рис. 2.25). Для осуществления непрерывного
обзора пространства, т. е. исключения пропуска целей,
расстояние между соседними положениями искусствен-
ного луча должно быть меньше линейной ширины этого
луча в рабочем диапазоне дальностей /?>'/?мин.
Производить обработку принятых сигналов типа сум-
мирования можно на таком участке траектории поле-
та летательного аппарата, где приходящие колебания
остаются синфазными. При конечном удалении цели рас-
стояние до нее для различных положений реальной ан-
тенны меняется, что приводит к изменению фазы сигна-
лов. Например, допустимое значение максимального на-
бега фазы фмакс за счет изменения текущей дальности
до цели иногда принимают равным
фмакс = k (/?0 - Г) = (R- Г) ~ (2.61)
Величина фмакс определяет максимальный размер ис-
кусственного раскрыва нефокусированной антенны, т. е.
74
Рис. 2.26. Основные геометрические соотношения для РЛС с искус-
ственным раскрывом антенны.
антенны, фокусированной на бесконечность. По аналогии
с реальной антенной можно полагать, что цели при этом
находятся в квазидальней зоне искусственной антенны
на дальности
/?>2
X2
X •
(2.62)
Если использовать этот часто употребляемый крите-
рий определения дальней зоны, то, как следует из
рис. 2.26, максимальная величина ХМакс нефокусирован-
ного искусственного раскрыва может быть определена из
соотношения
_ ту-2
(Яо + 4) + C (2.63)
Решая это уравнение относительно .¥маКс и пренебрегая
малыми членами, получаем
(2.64)
Вследствие распространения сигнала до цели и об-
ратно пространственный набег фазы в искусственном
раскрыве активной РЛС в два раза больше, чем у обыч-
75
ной антенны» поэтому ширина ее диаграммы направлен-
ности равна
= (2.65)
Подставляя (2.64) в (2.65), получим минимальное
значение ширины диаграммы направленности антенны
с несфокусированным искусственным раскрывом
(2.66)
Тогда минимальная линейная разрешающая способ-
ность по азимуту для этого случая определяется соот-
ношением
8хмин = 0имин./?о = ]/^. (2.67)
Радиолокационные станции с несфокусированным ис-
кусственным раскрывом антенны, где обработка сигна-
лов, принятых по траектории полета, производится обыч-
ным векторным суммированием, часто называют неопти-
мальными, вследствие присущих им ограничений. Суще-
ствует предел в повышении разрешающей способности
таких РЛС, который в ряде случаев не удовлетворяет
практическим требованиям. Недостаточно -полно исполь-
зуется энергетический потенциал станции, так как коге-
рентное накопление сигналов обычно осуществляется
в пределах части луча реальной антенны (рис. 2.26).
Устранить этот недостаток сужением луча реальной ан
тенны удается только на ограниченном участке местно-
сти А/? вследствие нелинейной зависимости границ даль-
ней зоны несфокусированного искусственного раскрыва
антенны по дальности (см. § 2.3).
Указанные ограничения устраняются в радиолокаци-
онных станциях с фокусированным искусственным рас-
крывом, у которых обработка принимаемых сигналов
осуществляется с учетом изменения параметров сигнала
по раскрыву в пределах всей ширины луча реальной ан-
тенны. Такие РЛС в литературе часто называют опти-
мальными.
Допустим, что цель входит в пределы диаграммы на-
правленности реальной антенны при положении само-
лета на траектории полета, определяемой координатой
76
Рис. 2.27. Геометрическое определение длительности облучения цели
в РЛС с искусственным раскрывом антенны.
%i = —Х/2, и выходит из диаграммы направленности ан-
тенны вследствие движения самолета в точке с коорди-
натой х2=+^/2 (рис. 2.27).
Прием отраженных сигналов от цели, находящейся на
дальности Ro, будет происходить только на участке тра-
ектории X, определяемом шириной диаграммы направ-
ленности реальной антенны. Фокусирование РЛС с ис-
кусственным раскрывом антенны на заданную дальность
сводится к определению соответствующего этой дально-
сти закона обработки сигналов, который учитывает из-
менение пространственных и временных задержек сигна-
лов (рис. 2.26), принятых по траектории полета лета-
тельного аппарата. Для простоты анализа будем пола-
гать, что производится пассивный прием когерентного
излучения точечной цели.
Как показано в § 2.3, закон изменения фазы сигна-
лов относительно центра раскрыва антенны для компен-
сации пространственных задержек должен иметь вид
qr(x)=k(Ro—г). (2.68)
Используя выражение (2.34), получим
<Frw=-g. (2.69)
где знак минус означает опережение по фазе.
Кроме компенсации пространственного запаздывания
по фазе, обусловленного изменением текущей дальности
до цели г, следует учитывать, что сигналы от каждой
77
точки искусственного раскрыва поступают на вход уст-
ройства обработки последовательно во времени, т. е.
имеет место временное запаздывание сигналов. Для ком-
пенсации этого запаздывания, т. е. обеспечения условия
одновременности обработки, необходимо осуществить
для сигналов дополнительный набег фазы
<рД|/)= со/. (2.70)
Переходя к пространственной координате, путем под-
становки = получим
(2.71)
Результирующее выражение для закона изменения
задержки сигналов в каждой точке фокусированного ис-
кусственного раскрыва имеет вид
Ъ (х) = ?t (х) + (х) = - -g (2.72)
или во времени
= (2.73)
На основании этих зависимостей можно определить
необходимое время задержки принятых сигналов для об-
разования фокусированного искусственного раскрыва
в виде
= = + (2.74)
или
= (2.75)
Характер изменения задержки сигналов по раскрыву
(х) и ее составляющих т* (х) и тг (х) приводится на
рис. 2.28. На участке х>0 требуются отрицательные за-
держки. Так как практически можно осуществить только
положительные задержки или запаздывание сигналов во
времени, то введем постоянную задержку сигналов
на То. Минимальная величина этой задержки выбирается
из условия
Тх (х)= то = 0 (2.76)
при Е = х/2.
78
Рис. 2.28. Необходимое время задержки принятых сигналов для
образования фокусированного искусственного раскрыва антенны.
Отсюда
X
2W
л I
мин
(2.77)
где Тох = Х/2И7 — время формирования половины искус-
ственного раскрыва, обусловленное
выбором начала координат в центре;
Год=Х/8с</?о — время дополнительной задержки всех
сигналов.
Закон необходимой задержки сигналов в новой си-
стеме координат описывается выражением
_ X । Л2 , U72 ,2 /о _еч
xso (0 2Г 8сЯ„ t ZcRo t ‘ (2,7S)
Это соотношение характеризует необходимый закон
обработки сигналов для образования фокусированной
синтезированной антенны при пассивном приеме сигна-
лов.
При активном методе работы радиолокационной стан-
ции изменение фазы, обусловленное различным прост-
ранственным запаздыванием сигналов, удваивается. Ска-
занное справедливо, если изменением текущей дальности
г за время распространения сигнала до цели и обратно
можно пренебречь, что практически всегда выполняется.
Тогда для активного метода работы РЛС закон задерж-
79
A
Рис. 2.29. Схема обработки сигналов в РЛС с искусственным рас-
крывом антенны, фокусированной на одну дальность.
ки сигналов при образовании фокусированного искусст-
венного раскрыва имеет вид
cR~0 (2.79)
или
хлз (0 — 2Й74с/?0 * cRj • (2,8°^
Этот закон задержки сигналов при фокусировании
искусственного раскрыва на дальность для импульс-
ного режима работы РЛС можно реализовать при по-
мощи схемы обработки, приведенной на рис. 2.29. Она
состоит из линии задержки с отводами на устройство
суммирования сигналов. Максимальная задержка равна
времени формирования искусственного раскрыва 2т0х =
=XfW. В отличие от схемы обработки нефокусирован-
ной РЛС с искусственным раскрывом для квазидальней
зоны (рис. 2.24) в данном случае отводы линии задерж-
ки неравномерны. Неравномерность отводов от линии за-
держки соответствует закону изменения приведенно-
му на рис. 2.28. Если длительность зондирующего
импульса РЛС гораздо больше тод, то такая схема обра-
ботки сигналов может быть выполнена на линии задерж-
ки с равномерными отводами, однако в этом случае
в цепи каждого отвода должен быть установлен фазо-
вращатель, изменяющий фазу сигнала по закону <рг(х)
(рис. 2.30).
80
Рис. 2.30. Схема обработки сигналов с компенсирующими фазовра-
щателями в РЛС с искусственным раскрывом антенны.
С помощью РЛС бокового обзора обычно ведется на-
блюдение полосы земной поверхности, шиоина которой
по дальности определяется величиной /?омэкс—^омин-
При этом требуется производить фокусирование на каж-
дую точку этого диапазона дальностей от /?мин до 7?Макс*
Размер искусственного раскрыва оптимальной РЛС, оп-
ределяемый линейной шириной луча реальной антенны,
изменяется пропорционально дальности
Х = 0О/?, (2.81)
где 0о = Wa — ширина диаграммы направленности ре-
альной антенны.
Угловая разрешающая способность оптимальной РЛС
с фокусированным искусственным раскрывом антенны
будет при этом равна
_____________________
Ои~“2Х = 20о/?о~2^’
Тогда линейное разрешение по азимуту определяется вы-
ражением
8х = 6и/?0 = 4-- (2.83)
Таким образом, оптимальная РЛС с фокусированным
искусственным раскрывом позволяет получить линейное
разрешение по азимуту, равное cZa/2 и не зависящее от
дальности до цели и длины волны зондирующего сиг-
6—1094 81
нала. Разрешающая способность таких РЛС увеличи-
вается с уменьшением размера реальной антенны. Это
объясняется тем, что с уменьшением реальной антенны
увеличивается размер искусственного раскрыва, опреде-
ляемый линейной шириной ее диаграммы направленно-
сти на заданной дальности.
Система обработки сигналов в этОхМ случае должна
быть многоканальной по дальности, т. е. на каждый раз-
решаемый участок дальности требуется своя схема об-
работки, подобная показанной на рис. 2.29. Очевидно,
что такая схема обработки на линиях задержки стано-
вится трудно реализуемой вследствие громоздкости,
сложности регулировки и наличия множества неста-
бильностей. Практически реализуемые устройства обра-
ботки рассматриваются в гл. 6.
На рис. 2.31 приводится сравнение зависимостей ли-
нейной разрешающей способности по азимуту от дально-
сти до цели для обычных панорамных РЛС, РЛС
с большой вдольфюзеляжной антенной, несфокусирован-
ных и фокусированных РЛС с искусственным раскрывом
антенны, рассчитанных по формулам (2.67) и (2.83).
На основании результатов сравнения можно сделать
вывод, что применение метода искусственного раскрыва
является в настоящее время наиболее эффективным
способом повышения угловой разрешающей способности
РЛС обзора земной поверхности особенно на больших
дальностях
Панорамные РЛС кругового обзора
РЛС с вдолырюзеляжной
антенной.
Нефокуси рованнь te
. РЛС с искусственным
раскрывом антенны
Фокусированные РЛС
с искусственным
раскрывом антенны
Рис. 2.31. Зависимость линейной разрешающей способности по ази-
муту от дальности для различных типов РЛС.
82
2.7Разрешающая способность
интерферометрических систем
Измерение угловых координат радиолокационными
станциями обзора земной поверхности можно произво-
дить как с помощью направленных антенн с непрерыв-
ным раскрывом или антенных решеток, так и с пэмощью
интерферометров с разнесенными в пространстве антен-
нами на расстояние d (базу), превышающее в несколько
раз размер раскрыва каждой антенны. Размер базы ин-
терферометра для рассматриваемого случая ограничен
габаритами летательного аппарата. Теоретически для из-
мерения угловых координат могут быть использованы
интерферометры со слабонаправленными (или изотроп-
ными) антенными элементами и размером базы, значи-
тельно большим длины волны. Однако коэффициент уси-
ления такой антенной системы будет весьма низкий.
В этом случае не представляется возможным получить
большую дальность действия РЛС. Поэтому этот случай
из рассмотрения исключен. В дальнейшем полагаем, что
размер раскрыва каждой антенны интерферометра вы-
бирается максимально возможным из условия размеще-
ния ее на летательном аппарате.
Обобщенная схема интерферометра приводится на
рис. 2.32. Схема сравнения сигналов, принятых на разне-
сенные антенны, может быть линейной (рис. 2.33,а) и не-
линейной (рис. 2.33,6). Усиление принятых сигналов мо-
жет производиться до схемы сравнения или после нее
в зависимости от технических особенностей реализации
отдельных элементов. Интерферометры с линейной схе-
мой сравнения называют аддитивными. Сигналы, при-
нятые его антеннами, суммируются, усиливаются при-
Рис. 2.32. Обобщенная схема интерферометра.
6*
83
Рис. 2.33. Схемы сравнения сигналов в интерферометрах:
а — линейная схема; б — нелинейная схема.
емником, детектируются и поступают на выходное уст-
ройство индикации. Нелинейное сравнение сигналов, при-
нятых антеннами, осуществляется путем их перемноже-
ния с последующим усреднением во времени. Поэтому
такой интерферометр называют мультипликативным. Ин-
терференционная диаграмма (напряжение или мощность
на выходе интерферометра в функции угла наблюде-
ния 0) при приеме узкополосного сигнала приводится на
рис. 2.34 для обоих рассматриваемых случаев соответ*
ственно. Сигнал на выходе аддитивного интерферометра
имеет две основные составляющие: постоянную, которая
определяет мощность сигнала, принимаемого каждой ан-
тенной интерферометра, и синусоидальную, связанную
с образованием интерференционных лепестков. Наличие
постоянной составляющей является серьезным недостат-
ком аддитивного интерферометра, особенно при обнару-
жении слабого принимаемого сигнала на фоне значи-
тельных помех, пространственная протяженность кото-
рых больше углового расстояния между лепестками ин-
терференционной диаграммы. Интерферометр с нели-
нейным сравнением сигналов типа перемножения не име-
ет на выходе постоянной составляющей (рис. 2.34,6).
Однако в нем возможно подавление слабого сигнала
сильным.
Возможность применения интерферометров в борто-
вых радиолокационных устройствах до последнего вре-
мени была весьма ограничена вследствие указанных вы-
84
аинт
6)
Рис. 2.34. Интерференционные диаграммы:
а — аддитивного интерферометра; б — интерферометра с перемножением сиг-
налов.
ше причин и неоднозначности отсчета угловых коорди-
нат, обусловленной многолепестковой структурой его
диаграммы направленности. В настоящее время разра-
ботано большое число методов устранения неодно-
значности интерферометра:
— Применение дополнительных антенн (нерегуляр-
ные интерферометры, метод кратных баз) или перемеще-
ние антенн интерферометра в пределах базы. При этом,
однако, теряется основное преимущество интерферомет-
ра—простота его пространственного построения, а сле-
довательно, и удобство размещения на летательном ап-
парате. Усложняются схемы обработки сигналов [72].
— Использование смещенных интерференционных
диаграмм на передачу и прием с согласованным пере-
крытием их в узкой области углов, что также связано
с усложнением их пространственного построения и по-
терей энергии зондирующего сигнала [40].
— Применение в радиолокационных устройствах ши-
рокополосных сигналов, например: с внутриимпульсной
частотной модуляцией сигналов, с дискретным набором
несущих частот и т. п.
85
Рис. 2.35. Интерференционная диаграмма
широкополосного интерферометра.
В РЛС обзора земной поверхности могут быть ис-
пользованы только те методы устранения неоднознач-
ности, которые позволяют производить одновременно на-
блюдение большого количества объектов и измерение их
координат.
Рассмотрим для примера метод устранения неодно-
значности интерферометра при использовании в РЛС
широкополосного сигнала. В этом случае синфазное сум-
мирование сигнала будет осуществляться в более узкой
области углов прихода электромагнитных волн. Посред-
ством значительного расширения полосы сигнала Дсо
можно добиться ослабления соседних с главным лепест-
ков интерференционной диаграммы.
Допустим, в интерферометре применены ненаправлен-
ные (изотропные) антенны. 'При относительной полосе
частот Д(д/<оо изменение нормированного по амплитуде
сигнала на выходе интерферометра можно записать в ви-
де [13]
ии = ехр (— id , (2.84)
где I = sin 9.
к
Если допустить уровень ослабления равным ии = 0,2,
то получим
(2.85)
Для половины ширины диаграммы направленности
интерферометра Д0, соответствующей заданному ослаб-
лению 0,2, будем иметь
A9 = Z0o = O,5^9o, (2.86)
86
где Qo = k/d — ширина одного лепестка интерференции.
Например, если соа/Дсо=3, то 2Д0 равно 30о, т. е.
в пределах диаграммы направленности Д0 имеется три
интерференционных лепестка (рис. 2.35).
Таким образом, применение широкого спектра сиг-
нала для уменьшения уровня боковых лепестков экви-
валентно увеличению сложности пространственного по-
строения антенны. Общие закономерности таких эквива-
лентных соотношений иллюстрируются рис. 2.36.
В крайнем левом столбце приводятся некоторые ме-
тоды пространственного построения антенны с одинако-
вым размером раскрыва. При этом считается, что сиг-
нал принимается на одной частоте /о- В крайнем правом
столбце соответственно приводятся спектры сигналов для
интерферометра с двумя ненаправленными антеннами и
той же базой d. Диаграммы направленности для каж-
дого рассматриваемого случая изображены в середине.
Например, одинаковая диаграмма направленности вида
sinx/x получается либо при наличии непрерывного рас-
крыва и работе на одной частоте /о, либо при приеме не-
Аространственное Диаграмма
построение направленности Спектр сигнала
Рис. 2.36. Общие закономерности пространственно-временной экви-
валентности антенн.
87
прерывного спектра частот от нуля до f0 на две разне-
сенные ненаправленные антенны.
В ряде случаев, вероятно, целесообразно применять
комбинированные методы устранения неоднозначности
в диаграммах направленности путем использования ши-
рокополосного сигнала и антенных систем, состоящих из
нескольких отдельных антенн.
Таким образом применение в РЛС обзора земной по-
верхности широкополосных сигналов позволяет произво-
дить одновременное наблюдение многих объектов с вы-
сокой разрешающей способностью и точностью при ис-
пользовании сравнительно простых, в смысле простран-
ственного построения, интерферометрических антенных
систем. Такие антенны удобнее разместить на летатель-
ном аппарате, чем непрерывные антенны аналогичного
размера. Заметим также, что применение широкополос-
ных сигналов дает возможность снизить уровень боковых
лепестков в антеннах с непрерывным раскрывом. Однако
использование в радиолокационных устройствах сигна-
лов с шириной спектра, соизмеримой с несущей часто-
той, вызывает большие практические трудности излуче-
ния и приема сигналов.
Наиболее перспективно применение широкополосных
интерферометров в пассивной радиотеплолокации земной
поверхности. Известно ,[51], что для увеличения чувстви-
тельности пассивного радиотеплолокационного устройст-
ва прием сигналов должен осуществляться в максималь-
но широкой полосе частот.
В настоящее время разработаны приемники радио-
теплового излучения с довольно широкой полосой про-
пускания, которые позволяют в сочетании с интерферен-
ционными методами обеспечить достаточно высокое угло-
вое разрешение.
2.8. Методы повышения разрешающей
способности РЛС по дальности
В большинстве практических случаев требуемая раз-
решающая способность РЛС бокового обзора земной по-
верхности по дальности достигается путем использова-
ния импульсного зондирующего сигнала необходимой
88
длительности. Без учета шумов оценка разрешающей
способности может быть произведена по ширине авто-
корреляционной функции зондирующего сигнала с опре-
деленным видом модуляции или входного сигнала,
отраженного от точечной цели. Вычислим автокорреляци-
онные функции для сигналов с различными видами мо-
дуляции и определим вид зондирующего сигнала, у ко-
торого ширина автокорреляционной функции на задан-
ном уровне минимальна.
Запишем сигнал в комплексном виде:
цс (0 = F (/) exp (jW), (2.87)
где F (t) — комплексное значение огибающей сигнала.
Автокорреляционная функция этого сигнала
{т-х ч
J цс(0м*с(t—t) dt >• (2.88)
о J
Подставляя выражение (2.87) в формулу (2.88), получим
Т (т) = Re <! J F (f) exp (jo>0 F* (t — т) X
l о
X exp [— /“> (t — -c) dt] | —
exp (H J F(t)F*(t— *)dt (2.89)
d J
где F* — комплексно-сопряженное значение огибающей си-
гнала.
Множитель перед знаком интеграла характеризует
высокочастотное заполнение сигнала, которое практиче-
ски при решении задачи разрешения по дальности не ис-
пользуется. Поэтому из дальнейшего анализа его ис-
ключаем и рассмотрим только автокорреляционную
функцию огибающей сигнала:
(г—т 1
f F(t)F*(t — т) dt (2.90)
0 )
89
Для прямоугольного импульса огибающая сигнала мо-
жет быть записана в виде
F(t) = F(t—т)=Д для —0,5ти<^/<0,5ти,
F (0 = F (t — т) = 0 для — 0,5ти > t > 0,5ти. (2.91)
Соответствующая автокорреляционная функция опреде-
ляется выражением
+ 0,5ти
|ЧГ(т)| = А2 f Л = ---
J \ ти J
-°,5ти
= 2ЕС(1 — — Y (2.92)
\ Tpi J
где Ес — Л2хи/2 — энергия сигнала;
2то,5=ти — ширина автокорреляционной функции на ус-
ловном уровне 0,5 от максимального значения.
Разрешающая способность по дальности для прямо-
угольного импульса равна
8/? = С |2то,5 I = 0>5сТи (2,93)
При выборе импульсного сигнала с другой формой
огибающей, формула разрешающей способности не из-
меняется и только в сравнительно незначительных пре-
делах колеблется величина постоянного коэффициента.
Например, для «колокольного» радиоимпульса с оги-
бающей
F(0 = Aexp(—уТ) (2.94)
значение автокорреляционной функции согласно приня-
той методике может быть получено в виде
| ЧГ(г)| = 2£сехр(-(2.95)
где Ев=Л2|/ и /2 |/ 2 у — энергия сигнала;
Y=J/’ -тс /хи — коэффициент, значение которого при
указанной нормировке совпадает со значением эф-
фективной ширины спектра сигнала Afc;
Д/ = 2тс ]/ J р | G (f) \2df / J | G (f) |2 df — эффектов-
—00 / —co
ная ширина спектра сигнала;
90
G(f) — спектральная плотность комплексной огибающей
сигнала.
Ширина автокорреляционной функции на уровне 0,5 от
максимального значения равна
Ь.,= /21п2- = 0,66ги, (2.96)
что соответствует разрешающей способности по дальности
с I 2г0г1| = 0 66ctK (2.97)
Из приведенных выше формул следует, что разре-
шающая способность при амплитудно-импульсной моду-
ляции мало зависит от формы импульса и существенно
может быть повышена только путем уменьшения дли-
тельности зондирующих импульсов. Если импульсная
мощность и частота посылок заданы, то при уменьшении
длительности импульсов уменьшается энергия сигнала,
что снижает дальность обнаружения. Для преодоления
этого противоречия необходимо найти сигнал, который
при большой длительности импульса (и, следовательно,
большой энергии) давал бы хорошее разрешение по
дальности. Известно [14], что ширина автокорреляцион-
ной функции уменьшается с расширением спектра сиг-
нала. Расширить спектр сигнала можно путем примене-
Рис. 2.37. Вид «колокольного»
импульса (а) с внутриимпульс-
ной частотной модуляцией (б).
91
ния дополнительной модуляции сигнала по любому дру-
гому параметру. Покажем это на примере «колокольно-
го» импульса с внутриимпульсной линейной частотной
модуляцией (рис. 2.37)
ис (/) = F (t) exp (/Ы), (2.98)
где
F(0 = Aexp[-(Y2-/6)^] (2.99)
— огибающая сигнала;
со (/) = о)-4-—t
' 7 1 Ни
<р(/) = а)/-(-^2;
сигнала;
— частота сигнала;
— фаза сигнала;
Ло — амплитуда
Y— коэффициент, значение которого определено в вы-
ражении (2.95);
b = Дюм/2ти — коэффициент частотной модуляции;
Дсом— девиация частоты.
Подставляя выражение (2.99) и сопряженное ему
значение в формулу (2.88), после преобразования полу-
чим выражение для автокорреляционной функции
|Ф(г)| = ^ехр(-4-|^)х
+ ос
cos 26т (t—
^dt. (2.100)
Интеграл в выражении (2.100) легко приводится
к табличному, решение которого позволяет найти авто-
корреляционную функцию частотно-модулированного
импульсного сигнала в виде
| ЧГ(г) | = 2£0ехр (--L Yv)exp (~^)’ (2.101)
Ширина автокорреляционной функции на уровне 0,5
для этого случая равна
gb..,l= ' (2J02)
93
Рис. 2.38. Сигнал с внутриим-пульсной фазовой манипу-
ляцией (а) и его функция автокорреляции (б).
Из выражения (2.10'2) следует, что расширение спею
тра сигнала путем увеличения девиации частоты Дсом =
= 2тиЬ позволяет получить весьма узкую функцию авто-
корреляции при заданной длительности импульса.
Кроме частотной модуляции для расширения спектра
сигнала могут быть применены и другие дополнительные
виды модуляции внутри импульса. Например, шумопо-
добная амплитудная модуляция, различные виды фазо-
вой модуляции и т. п. Высокую разрешающую способ-
ность по дальности можно получить, применяя в каче-
стве зондирующего сигнала импульсный сигнал с вну-
триимпульсной фазовой манипуляцией (рис. 2.38,а). На
каждом временном интервале фаза высокочастотного за-
полнения постоянна (0 или л), а от интервала к интер-
валу изменяется по определенному коду. Выбором кода
можно получить весьма узкую функцию автокорреляции
(рис. 2.38,6).
В РЛС бокового обзора с искусственным раскрывом
высокая разрешающая способность по угловым коорди-
натам, как было показано в § 2.6, достигается путем ис-
пользования информации, заключенной в фазе вы-соко-
93
частотных колебаний. Поэтому дополнительная внутри-
импульсная модуляция (частотная, фазовая и т. п.)
с целью повышения разрешающей способности РЛС по
дальности должна осуществляться таким образом, что-
бы не было разрушения информации об угловом поло-
жении цели, заключенной в фазе принимаемых высоко-
частотных колебаний.
2.9. Сравнение методов повышения
разрешающей способности РЛС
В настоящей главе были рассмотрены различные ме-
тоды повышения разрешающей способности РЛС обзо-
ра земной поверхности, основанные на выборе оптималь-
ного амплитудного распределения поля в раскрыве ли-
нейной суммирующей антенны, использования явления
сверхнаправленности и принципа фокусирования, приме-
нении мультипликативных и интерферометрических ан-
тенных систем, использовании летательного аппарата
для синтезирования искусственного раскрыва антенны,
а также на выборе вида и параметров зондирующего
сигнала. Особое внимание обращено на возможность
уменьшения ширины диаграммы направленности антен-
ны в горизонтальной плоскости для обеспечения высо-
кой разрешающей способности РЛС по азимуту.
Сравнительный анализ методов позволяет сформули-
ровать основные выводы, важные для определения пер-
спективных направлений развития РЛС обзора земной
поверхности.
Диаграмма направленности антенны во всех случаях
определяет характер изменения выходного сигнала РЛС,
принятого от одиночной точечной цели, в зависимости от
относительного углового перемещения цели и антенны.
При одинаковых размерах раскрыва антенны диаграмма
направленности мультипликативных антенн в два раза,
а сверхнаправленных антенн в два и более раза уже, чем
у обычной суммирующей антенны с равномерным рас-
пределением поля в раскрыве. Для линейных суммирую-
щих антенн как обычных, так и сверхнаправленных, раз>
решающая способность определяется шириной диаграм-
мы направленности.
94
Применение сверхнаправленных антенн позволяет
в некоторой степени увеличить разрешающую способ-
ность РЛС по угловым координатам. Однако наряду
с обеспечением высокой разрешающей способности ра-
диолокационная станция должна обладать и высокой
чувствительностью. Для этого, как известно, антенна ра-
диолокатора должна иметь максимальный коэффициент
усиления, а следовательно, максимально возможную от-
носительную площадь раскрыва. Методы сверхнаправ-
ленности для таких раскрывов не дают существенного
выигрыша, так как при увеличении сверхнаправленно-
сти растут потери энергии в антенне, уменьшается коэф-
фициент полезного действия, коэффициент усиления ан-
тенны и полоса пропускания рабочих частот станции.
Для РЛС обзора земной поверхности с большим отно-
сительным размером раскрыва антенны применение
сверхнаправленности позволяет увеличить КНД и разре-
шающую способность на величину порядка всего 3 дб.
Сверхнаправленные антенны могут применяться в низ-
кочастотном диапазоне волн и в тех случаях, когда раз-
меры раскрыва малы по сравнению с длиной волны. Они
могут быть использованы в РЛС обзора земной поверх-
ности, если появится необходимость наблюдения местно-
сти на низких частотах, когда размещение на летатель-
ных аппаратах обычных направленных антенн невоз-
можно.
Для мультипликативных антенн диаграмма направ-
ленности не определяет полностью разрешающую спо-
собность по угловым координатам. На выходе такой
антенны присутствуют комбинационные составляющие, ко-
торые изменяют неопределенным образом форму выход-
ного сигнала. Оценку разрешающей способности для
этого случая целесообразно производить по степени по-
давления мешающего сигнала полезным сигналом на
основании выходного отношения сигнал/помеха. Разре-
шающая способность мультипликативных антенн для ши-
рокого круга задач оказывается в два или более раза
хуже, чем у линейных суммирующих антенн. Таким об-
разом в РЛС обзора земной поверхности мультиплика-
тивные антенны могут находить применение только
в некоторых специальных случаях, когда необходимо по-
высить точность измерения координат небольшого коли-
95
чества целей или увеличить контрастность отдельных
целей на радиолокационном изображении местности.
Для повышения разрешающей способности и точно-
сти измерения/координат целей могут быть использованы
сравнительно простые, в смьисле пространственного по-
строения интерферометрические антенные системы. Та-
кие антенны удобнее разместить на летательном аппара-
те, чем непрерывные антенны аналогичного размера.
В настоящее время разработано большое количество ме-
тодов устранения неоднозначности интерферометра,
обусловленной многолепестковой структурой его диа-
граммы направленности. В РЛС обзора земной поверх-
ности могут быть использованы только те методы устра-
нения неоднозначности, которые позволяют производить
наблюдение и одновременное измерение угловых коор-
динат большого количества объектов. Представляет ин-
терес, например, использование достаточно широкопо-
лосных зондирующих сигналов. Однако применение
в радиолокационных устройствах сигналов с шириной
спектра, соизмеримой с несущей частотой, вызывает
большие трудности их генерирования, излучения и прие-
ма. Поэтому возможность использования интерферомет-
ров в РЛС обзора земной поверхности зависит от изы-
скания практически реализуемых методов устранения
неоднозначности.
Для уменьшения ширины диаграммы направленности
и повышения КНД линейных суммирующих антенн не-
обходимо выбирать вид распределения амплитуд поля
в раскрыве при условии, что распределение фаз задано,
и увеличивать относительный размер раскрыва антенны.
Выбор оптимального распределения поля в раскрыве
антенны позволяет в небольших пределах увеличить
разрешающую способность и дальность действия РЛС.
Существенно повысить разрешающую способность и
КНД линейных суммирующих антенн можно только пу-
тем увеличения размеров раскрыва. Несмотря на то, что
возможности увеличения размеров раскрыва антенны
ограничены габаритами летательного аппарата, в ряде
случаев этот метод может дать вполне удовлетворитель-
ные практические результаты. Например, при боковом
обзоре земной поверхности размер раскрыва антенны
можно существенно увеличить путем ее расположения
вдоль фюзеляжа самолета. Однако увеличить размеры
96
антенны больше габаритов летательного аппарата таким
способом практически не удается, и требуется изыскивать
другие методы для повышения разрешающей способно-
сти бортовых РЛС.
Если априорно известен закон перемещения РЛС от<
носительно земной поверхности, то можно использовать
поступательное движение летательного аппарата для
формирования искусственного раскрыва очень большого
размера, во много раз превышающего длину летатель-
ного аппарата. Поэтому метод искусственного раскрыва
антенны позволяет обеспечить весьма высокую разре-
шающую способность РЛС по азимуту при малых раз-
мерах реальной антенны.
Приведенное выше сравнение методов повышения
разрешающей способности бортовых РЛС обзора земной
поверхности показывает, что наиболее перспективным
способом повышения разрешающей способности следует
считать увеличение относительного размера раскрыва
антенны прямым или косвенным методом, т. е. путем со-
здания реальных антенн большого размера или примене-
ния метода искусственного раскрыва.
Другие методы могут найти применение только
в станциях, предназначенных для решения специальных,
ограниченных задач.
Поэтому значительное развитие в настоящее время
получают РЛС бокового обзора с большой вдольфюзе-
ляжной антенной и РЛС с искусственным раскрывом
антенны.
7—1094
3
Радиолокационные станции бокового обзора
с вдольфюзеляжной антенной
3.1. Принципы построения РЛС
В РЛС бокового обзора с вдольфюзеляжной антен-
ной используется наиболее простой метод обеспечения
высокой угловой разрешающей способности, основанный
на увеличении естественного раскрыва антенны. Харак-
терной особенностью работы РЛС является излучение и
прием сигналов только в направлении, перпендикуляр-
ном линии пути самолета-носителя РЛС. Обзор может
быть односторонним и двусторонним. В последнем слу-
чае излучение и прием ведется как справа, так и слева
от направления полета. На рис. 3.1 показана схема из-
лучения и приема при двустороннем обзоре: диаграммы
направленности антенн обозначены через А\ и Лг, облу-
чаемые площадки — Si и S2, а координаты, в которых
производятся наблюдение и отображение целей, — через
х' и у'. Ось х' совпадает с направлением среднего поло-
жения вектора путевой скорости летательного аппарата,
ось у' — перпендикулярна х', 00' — высота полета. Оси
координат х к у являются проекциями осей х' и у' на
земную поверхность и соответствуют координатам инди-
кации.
В РЛС бокового обзора с вдольфюзеляжной антен-
ной применяются два способа отображения информации.
Для непосредственного наблюдения радиолокационного
изображения обычно используется индикатор, включаю-
щий электроннолучевую трубку с яркостной индикацией
и запоминанием сигналов (скиатрон, трубка с длитель-
ным послесвечением и т. д.). Развертка на экране элек-
98
Рис. 3.1. Схема бокового об-
зора.
X'
троннолучевой трубки осуществляется в двух взаимно
перпендикулярных направлениях. В одном направлении
развертка пропорциональна наклонной или горизонталь-
ной дальности, а в другом — путевой скорости W носи-
теля РЛС. При этом изображение должно запоминаться
на время, большее времени пролета самолетом пути,
соответствующего развертываемой на экране путевой
дальности (рис. 3.2,а). Для того чтобы не было про-
пусков при индикации участков местности могут исполь-
зоваться два одинаковых индикатора, работающих по-
очередно.
При необходимости длительного запоминания радио-
локационного изображения используется устройство,
включающее электроннолучевую трубку со средним и
малым послесвечением и фотографическую систему. На
Рис. 3.2. Изображение целей на индикаторе при боковом обзоре:
а — изображение на индикаторе; б — получение радиолокационного изображе-
ния на фотопленке; / — радиолокационное изображение; 2 — однострочная раз-
вертка; 3 — линза; 4 — фотопленка.
7* 99
Рис. 3.3. Функциональная схема РЛС бокового обзора с вдольфюзе-
ляжной антенной.
электроннолучевой трубке создается однострочная раз-
вертка, пропорциональная наклонной или горизонталь-
ной дальности. Развертка модулируется по яркости при-
нятыми сигналами. Изображение развертки проектируется
на фотопленку, которая плавно протягивается в на-
правлении, перпендикулярном развертке. Скорость про-
тяжки V должна быть пропорциональной путевой скоро-
сти W полета носителя РЛС (рис. 3.2,6). В данном слу-
чае радиолокационное изображение запоминается на фо-
топленке. Необходимо отметить, что этот способ получе-
ния радиолокационного изображения связан с некоторой
Рис. 3.4. След луча на земной
поверхности при боковом об-
зоре.
100
потерей времени, обусловленной необходимостью обра-
ботки фотопленки.
Функциональная схема радиолокационной станции
бокового обзора -с вдольфюзеляжной антенной приведе-
на на рис. 3.3. Особенности станции обусловлены нали-
чием двух антенн, которые могут работать либо одно-
временно, либо поочередно в зависимости от выбранной
конструкции, а также необходимостью стабилизации ко-
ординат при обзоре и индикации, что определяется флук-
туациями параметров полета. Эти задачи выполняют си-
стема управления обзором и система стабилизации об-
зора.
Система управления обзором обеспечивает распреде-
ление сигналов передатчика между правой и левой ан-
теннами, подачу сигналов, принятых правой антенной на
индикатор правого борта, а левой антенной — левого
борта.
Система стабилизации обзора предназначена для та-
кого управления антенной, чтобы направление излучения
и приема совпадало с осью у или, в случае невозможно-
сти такого совпадения, — для соответствующей коррек-
ции координат в системе индикации. Исходные данные
в систему стабилизации поступают от навигационных
датчиков носителя — измерителей путевой скорости, уг-
ла сноса и кренов. Связь навигационных датчиков
с системой индикации позволяет создать развертку по
путевой дальности х, пропорциональную путевой скоро-
сти летательного аппарата.
Рассмотрим специфические свойства РЛС бокового
обзора, обусловленные поступательным перемещением
антенн для просмотра пространства (рис. 3.4).
Время облучения (тОбл) при боковом обзоре и антен-
не большого раскрыва определяется формулой
Тобл = ^, (3.1)
где 0о—ширина луча антенн;
W—путевая скорость носителя РЛС;
— расстояние до цели Ц.
С увеличением расстояния до цели пропорционально
возрастает время ее облучения.
При импульсной работе РЛС количество импульсов,
отраженных от цели (N), также меняется с дальностью.
Ю1
Если частота посылок импульсов РЛС Fa, то число им-
пульсов за время облучения определяется формулой
AZ F п^обл
или, учитывая (3.1),
N=9-^. (3.2)
Выражения (3.1) и (3.2) показывают, что при боко-
вом обзоре пространства на условия обнаружения целей
может оказывать влияние скорость полета носителя
РЛС. Поскольку близкие цели облучаются меньшим чис-
лом импульсов, при достаточно большой скорости носи-
теля их наблюдаемость может ухудшаться. Однако прак-
тически это обстоятельство начинает сказываться только
при весьма больших скоростях полета и очень малых
дальностях целей. При минимальной дальности /?Мин, на
которую рассчитана радиолокационная станция, число
отраженных от цели импульсов
\т ___ п^мин /О О\
^*мин—
Частота посылок импульсов Fn определяется из усло-
вия однозначности измерения дальности целей, которое
применительно к РЛС обзора поверхности является ус-
ловием исключения наложения различных участков ме-
стности на изображении
п [2/?макс
где с — скорость распространения радиоволн;
/?макс — расчетная максимальная дальность действия
РЛС.
Имея в виду, что угловая разрешающая способность
определяется шириной диаграммы направленности ан-
тенны
д9 = 9о,
и принимая предельное значение F в выражении (3.4),
получаем
ад
102
Полосу местности, просматриваемую при обзоре,
можно характеризовать отношением максимальной и
минимальной дальностей
_. ^маке
(3.6)
Если полагать, что минимальная дальность действия
равна высоте полета, то
ZZ = ^?макс/-^ •
Подставляя выражение (3.6) в формулу (3.5), полу-
чаем зависимость минимального числа отраженных от
цели сигналов, накапливаемых в пределах просматри-
ваемой полосы местности при заданных угловой разре-
шающей способности и относительной ширине полосы
обзора от скорости летательного аппарата
дт _______ 56 с
(3-7)
'На рис. 3.5 показана зависимость jVMHh от W для двух
значений п (ni = 40, п2—200) при 60 = 0,005 рад. Если
для наблюдения цели необходимо не менее 5 отражен-
ных сигналов, то при заданных соотношениях, ограни-
чение в скорости полета носителя РЛС наступает для
случая Гц при 1Г = 6 000 м/сек и для случая п2 при W =
= 800 м/сек. Однако в реальных условиях ухудшение на-
блюдения целей на малых дальностях будет при мень-
ших значениях скорости, так как для надежного обна-
ружения цели на индикаторах РЛС требуется накапли-
вать несколько десятков отраженных импульсов.
Рис. 3.5. Примерная зависи-
мость минимального числа от-
раженных от цели импульсов
от скорости полета носителя
РЛС.
Скорость обзора поверхности при боковом обзоре оп-
ределяется движением носителя и может быть оценена
площадью So, просматриваемой в единицу времени:
£о=(Я
)W.
(3.8)
Используя выражения (3.7) и (3.8), при больших п,
получаем
б9с/?маке
2,nN мкн
(3.9)
Из выражения (3.9) видно, что скорость бокового об-
зора определяется угловой разрешающей способностью
РЛС, максимальной и минимальной дальностью радио-
локатора и минимально необходимым числом импульс-
ных сигналов, принятых от цели.
Соответствующее выражение для кругового обзора
при RминCbRмакс имеет вид
q _____^9с/?маке
° ок '— 7д7
мин
(3.9а)
Сравнение выражений (3.9) и (3.9а) показывает, что
при одинаковых максимальных дальностях и угловых
разрешающих способностях скорость бокового обзора
земной поверхности в п]2 раз меньше, чем кругового.
В отличие от кругового обзора при боковом обзоре, как
видно из выражения (3.3), время облучения выбирает-
ся для минимальной дальности, причем на больших уда-
лениях получается избыточное число импульсов. Этим
объясняются потери времени, а следовательно, и сниже-
ние скорости обзора.
Поскольку боковой обзор осуществляется за счет дви-
жения летательного аппарата, колебания последнего вы-
зывают случайные изменения параметров обзора. Наи-
более существенными причинами, определяющими изме-
нение параметров обзора, являются случайные измене-
ния направления и величины вектора путевой скорости и
колебания самолета-носителя вокруг центра масс. Эти
флуктуации приводят к изменению энергетических харак-
теристик обзора — изменению времени облучения цели
(числа принимаемых импульсов) и к искажению систе-
мы координат при индикации.
104
Рассмотрим флуктуации энергетических характери-
стик. Изменение числа импульсов, отраженных от цели,
за счет флуктуаций модуля путевой скорости опреде-
ляется из формулы (3.2) как
5W
N " W ’
(3.10)
Относительные случайные изменения величины путе-
вой скорости во всех практических случаях пренебрежи-
мо малы. При значительных уклонениях величины ско-
рости носителя, обусловленных изменением режима по-
лета, необходимые энергетические характеристики обзора
могут быть сохранены путем управления частотой по-
сылок импульсов.
Колебания летательного аппарата вокруг центра
масс и в некоторых случаях флуктуации направления
вектора путевой скорости при жестко закрепленной ан-
тенне могут привести к существенному изменению энер-
гетических характеристик обзора. Отклонение луча на
обозреваемой плоскости Да может быть представлено
тремя составляющими Дан Да2 и Даз, обусловленными
наличием углов отклонения а, у, й трех взаимно пер-
пендикулярных осей х', у', z носителя (рис. 3.6)
Да = Да! Да2 zb Да3. (3.11)
Верхний знак в выражении (3.11) соответствует право-
стороннему обзору, нижний — левостороннему.
При малых углах а, у, й, в предположении о плоской
Земле
= а,
Д»г = аТ-", (3.12)
Д«з = &
Изменение времени облучения цели и числа принимае-
мых импульсов может быть определено при известных уг-
ловых скоростях а, у, Некомпенсированное вращение
луча приводит к уменьшению или увеличению времени
облучения цели. С учетом поступательного движения
летательного аппарата и вращения луча можно записать
105
Рис. 3.6. Геометрические соот-
ношения при колебаниях носи-
теля РЛС.
Х,°бл—
где G)i — угловая скорость изменения соответствующей
составляющей угла Да (3.12).
Количество принимаемых импульсных сигналов за
время облучения в этом случае
Отсюда
Пусть угловые скорости вращения летательного ап-
парата вокруг осей х', у', z будут соответственно равны:
det.
СО = ТГ>
® dt ’
dy
= (3.16)
— dt'
Тогда
то = а) ; ш — а со :
Дах а’ Дог* 7’
<3-17)
106
Относительное изменение числа принимаемых им-
пульсных сигналов при колебаниях летательного аппара-
та вокруг осей х', у', z соответственно будет равно:
~ - Г ± <оЛ’
Д/V., <о,а,7
__1= +______:!—,
W - Г 4- <о;а,7
“-r±<oaw’
(3.18)
Выражения (3.18) показывают, что наибольшее влия-
ние на изменение энергетических характеристик обзора
оказывают колебания носителя РЛС по курсу, а наи-
меньшее по крену. Следует отметить, что крен влияет на
изменение числа принимаемых импульсов только при на-
личии курсового отклонения а. Колебания антенны по
курсу в некоторых случаях могут приводить к пропуску
цели, так как время ее облучения может оказаться мень-
ше периода повторения импульсов. Пропуск цели будет
при условии
Г± coj?r ^0RFn. (3.19)
Вероятность пропуска цели возрастает с уменьшением
дальности.
3.2. Требования к диаграмме
направленности вдольфюзеляжной
антенны
Основными требованиями, предъявляемыми к антен-
ной системе РЛС бокового обзора рассматриваемого ти-
па, являются:
— обеспечение высокой разрешающей способности
по азимуту при большом коэффициенте полезного дей-
ствия антенны;
— возможность использования одной антенны для
работы в качестве передающей и приемной;
— получение высокого коэффициента направленного
действия для обеспечения большой дальности обнаруже-
ния целей;
107
— формирование диаграммы направленности, позво-
ляющей принимать отраженные сигналы с интенсив-
ностью, не зависящей от расстояния дэ цели, что свя-
зано с необходимостью получения равноконтрастного
изображения в заданном диапазоне дальностей;
— стабильность выдерживания ориентации диаграм-
мы направленности.
Разрешающая способность РЛС по азимуту опреде-
ляется шириной диаграммы направленности антенны
в азимутальной плоскости
= = Й * (з.2О)
иа
где — размер антенны в горизонтальной плоскости;
&а— коэффициент, характеризующий использование
раскрыва антенны.
Коэффициент &а меняется в зависимости от распре-
деления поля в раскрыве антенны. Для простых синфаз-
ных антенн £а~1. Сверхнаправленные антенны характе-
ризуются значением &а>1, однако, как показано в гл. 2,
подобные антенные системы практически не могут ис-
пользоваться в РЛС бокового обзора с вдольфюзеляж-
ной антенной вследствие их низкого коэффициента по-
лезного действия.
Из формулы (3.20) видно, что увеличивая размер ан-
тенны и сокращая длину волны, можно получить весьма
высокую угловую разрешающую способность. Однако
Рис. 3.7. Примерная зависимость угловой разрешающей способности
от размера антенны РЛС (Х=3 см).
108
существенное укорочение длины волны противоречит
требованию всепогодности радиолокатора. Для получе-
ния угловой разрешающей способности порядка единиц
минут при длине волны 3 см и &а=1 требуются антенны
размером da более 10 м. Для указанной волны на
рис. 3.7 приведен график зависимости 0О от размера ан-
тенны, рассчитанной по формуле (3.20). Следует заме-
тить при этом, что линейная разрешающая способность
РЛС уменьшается с увеличением дальности; для шири-
ны луча 0о=Ю угл. мин ухудшение разрешающей спо-
собности характеризуется коэффициентом 2,7 м'/км.
В (19] указывается, что практический размер вдольфю-
зеляжной антенны одной из РЛС достигает 15 м.
Представляет интерес оценить, в какой степени тур-
булентность тропосферы может оказать влияние на уг-
ловую разрешающую способность РЛС бокового обзора
с вдольфюзеляжной антенной. Флуктуации электриче-
ских параметров тропосферы приводят к расширению
диаграммы направленности антенны, которое при малых
угловых .размерах луча может быть сравнимо с шириной
луча. Поэтому увеличение раскрыва антенны больше не-
которого значения не имеет смысла. При обычных раз-
мерах неоднородностей тропосферы порядка десятков
или сотен метров максимальный размер антенны, при ко-
тором влияние тропосферы еще не существенно, опреде-
ляется формулой [61]
л _ *-10б
а макс— ’
где R — дальность в километрах; % и daMaKc выражаются
в метрах или сантиметрах соответственно.
Формула (3.21) показывает, что в сантиметровом
диапазоне волн при дальности действия самолетных
РЛС в пределах прямой видимости размер антенны, при
котором тропосфера не оказывает существенного влия-
ния на разрешающую способность РЛС, может значи-
тельно превышать длину фюзеляжа самолета. Поэтому
влияние тропосферы на угловую разрешающую способ-
ность РЛС бокового обзора с вдольфюзеляжной антен-
ной можно практически пренебречь.
Высокий коэффициент направленного действия ан-
тенны, который необходим для реализации заданной
дальности обнаружения целей, обеспечивает также полу-
109
(3.21)
чение высокой разрешающей способности по направле-
нию. Однако следует при этом учитывать возможность
появления боковых лепестков диаграммы направленно-
сти, которые приводят к ухудшению помехозащищенно-
сти РЛС бокового обзора с вдольфюзеляжной антенной
в отношении как активных помех, так и естественных
мешающих объектов. Требование уменьшения уровня
боковых лепестков с целью защиты РЛС от активных
помех является общим для радиолокационных станций
многих типов и различного назначения. В то же
время влияние боковых лепестков на помехозащищен-
ность РЛС обзора земной поверхности по отношению
к естественным помехам имеет специфические осо-
бенности. Они обусловлены тем, что при нормальной
работе станции в ее зоне обзора обычно имеются цели
с очень большим диапазоном эффективных отражающих
поверхностей и объемные цели в виде различных искус-
ственных сооружений, неровностей рельефа и т. д. При-
менение антенны с большим уровнем боковых лепестков
приводит к двоякому искажению изображения. Появля-
ются ложные цели за счет сигналов больших объектов,
принятых по боковым лепесткам. Происходит также по-
давление сигналов малоразмерных целей, расположен-
ных на одной дальности с крупными объектами при рас-
стоянии между ними по координате х, равном
Axs = ДР8Я,
где Др5 — угол между направлением главного максимума
диаграммы направленности антенны и направлением макси-
мума бокового лепестка.
Разброс значений эффективной отражающей площади
наземных целей может составлять величину порядка 104.
Если потребовать, чтобы в этом случае отражения от
наибольших целей, принимаемые по боковым лепесткам
антенны, не превышали сигналов от малых целей, при-
нятых по основному лепестку на той же дальности, то
из уравнения дальности получим:
( ^пр О == ^^0^МИН>
Рдр б
(3.22)
но
где РПр о И РПр б — мощность принятых сигналов ио ос-
новному и боковому лепестку соответ-
ственно;
Go и Ga — КНД основного и бокового лепестков
антенны;
Омаке — максимальная эффективная отра-
жающая площадь целей;
Омин — минимальная эффективная отражаю-
щая площадь целей, обнаруживаемых
с помощью РЛС.
Тогда при Омакс/Омин == Ю4 имеем
— 0,01.
Таким образом максимальный уровень боковых ле-
пестков для принятых условий не должен превышать
1% по мощности или 10%' по напряженности поля.
Однако для получения хорошего изображения мест-
ности и четкого выделения малоразмерных целей сигна-
лы от крупных объектов, принятые по боковым лепесткам,
должны быть существенно меньше, чем сигналы ма-
лоразмерных целей, принятые по основному лепестку ан-
тенны. Исходя из этого требования, а также с точки зре-
ния защиты РЛС от активных помех обычно считается
необходимым, чтобы максимальный уровень боковых ле-
пестков не превышал величины порядка —30 дб.
Равноконтрастность изображения в пределах задан-
ного диапазона дальностей достигается соответствую-
щим выбором формы диаграммы направленности в вер-
тикальной плоскости (по углу места).
Для получения одинакового изображения идентичных
точечных целей, расположенных на различных расстоя-
ниях, необходимо обеспечить на входе приемника равен-
ство отраженных от них сигналов. С этой целью диа-
грамма направленности антенны по углу места выби-
рается в соответствии с формулой ,[11]
G(t) = 0„csees'!<f, (3.23)
где (3.24)
Здесь: Эдр — принимаемая энергия;
Ptt — мощность сигнала в импульсе;
а — эффективная отражающая площадь цели.
111
При наблюдении площадных целей должно быть уч-
тено изменение их эффективной отражающей площади в
зависимости от дальности и угла места.
Из формул (3.23) и (3.24) можно получить
csec3/2<p
И о
(3.25)
где Goi — максимальное значение коэффициента направ-
ленного действия.
Эффективная отражающая площадь цели определяет-
ся как
= (ф) sincp,
где — площадь, облучаемая импульсным пакетом,
ц 2 sin ф cos ф 9
Y (ф) — коэффициент отражения.
Тогда
G (ф) = G02 csec3/2 ф /соТф ^==
Если минимальный угол места обозначить через фмин и по-
лагать у (ф) = const, то
G (Ф) = —3 °0 —== сэес3/2ф ]/' созф (при ф > фмин).
csec Фмин V cos Фмин
(3.26)
Постоянным коэффициентом отражения характери-
зуется местность, плотно покрытая отражателями с изо-
тропным рассеянием (трава, злаки и т. п.) [84]. Практи-
чески, вследствие сложности характеристики, определяе-
мой соотношением (3.26), могут быть использованы диа-
граммы направленности вида
csec3/2<p]/ctg<p или csec3/2<p cos ф. (3.27)
Как видно из (3.24), форма диаграммы направленности
антенны зависит от высоты полета носителя. Однако
в большинстве случаев обзора земной поверхности этой
зависимостью пренебрегают. Удается получить удовлет-
112
верительное изображение при диаграмме направленности
вдольфюзеляжной антенны, определяемой соотношением
(3.27) путем дополнительного поворота луча антенны по
углу места в зависимости от высоты полета и характера
наблюдаемой местности.
Существенным фактором, влияющим на качество изо-
бражения, является колебание носителя РЛС по крену
(угол у). Если при кренах самолета диаграмма направ-
ленности поворачивается по углу места, то появляется
резкое изменение интенсивности принимаемых сигналов
по дальности, что может привести даже к потере целей
на больших расстояниях. Во избежание указанного эф-
фекта диаграмма направленности должна быть стабили-
зирована по углу места с возможностью регулирования
заданного угла фМию при котором осуществляется ста-
билизация. Может применяться как стабилизация всей
антенной системы, так и электрическое управление лу-
чом. Поскольку вдольфюзеляжная антенна имеет, как
правило, небольшой размер по высоте, стабилизация ее
по крену может быть осуществлена сравнительно просто.
Для компенсации искажений изображения, обуслов-
ленных колебаниями носителя РЛС, необходимо управ-
лять положением луча антенны по азимуту.
Такое управление в РЛС с вдольфюзеляжной антен-
ной может быть осуществлено как электронным спосо-
бом, так и механическим. Требуемый угол поворота луча
Ар определяется максимальным углом сноса при типо-
вых режимах полета летательного аппарата и наиболь-
шей амплитудой его колебаний вокруг осей х', у', z
(рис. 3.6):
А'Р ССмакс + А(Х макс> (3.28)
где амакс — максимальный угол сноса:
Аймаке — наибольшая амплитуда колебаний луча.
3.3. Бортовые антенны больших
раскрывов
В РЛС бокового обзора с вдольфюзеляжной антен-
ной большей частью используются зеркальные антенны
или многоэлементные решетки. Такие антенны распола-
гаются на летательном аппарате вдоль продольной
8—1094 ИЗ
Рис. 3.8. Вдольфюзеляжные зеркальные антенны:
а — цилиндрическая антенна с параболическим профилем; б — цилиндрическая
антенна со специальным профилем; 1 — облучатель, 2 — зеркало.
оси х'. В вертикальном направлении размер антенны
обычно невелик, так как требуемая ширина луча по углу
места составляет несколько градусов.
Рассмотрим вдольфюзеляжные зеркальные антенны,
которые являются наиболее распространенными. Основу
зеркальной вдольфюзеляжной антенны составляют зер-
кало и линейный облучатель. В качестве зеркала вдоль-
фюзеляжной антенны применяется элемент параболиче-
ского цилиндра (рис. 3.8,а) или цилиндра, образуемого
специальным профилем в плоскости yOz (рис. 3.8,6).
В нервом случае в вертикальной плоскости (yOz) диа-
грамма направленности является симметричной, во вто-
ром— имеет одну из форм, рассмотренных в выражени-
ях (3.26), (3.27) § 3.2. Симметричные диаграммы на-
правленности антенн могут применяться, например,
в РЛС бокового обзора с большой дальностью действия.
Поверхность антенны можно рассматривать как резуль-
тат перемещения параболы или кривой специальной фор-
мы вдоль оси х параллельно плоскости уОг. Центр
системы координат расположен в фокусе параболы. Эле-
мент параболического цилиндра имеет фокальную пря-
мую FF'. В полярной системе координат уравнение па-
раболы имеет вид
р==, . * = _J________,
и 1 + cos ф cos2 ф/2
114
где f — фокусное расстояние;
p = 2f — фокальный параметр параболы.
Если угол раскрыва антенны 2ф0, то ее вертикальный
размер
/ = ' (3.29)
Зеркало считается короткофокусным, если и
длиннофокусным, если 2ф»<л.
Фазовый центр линейного облучателя антенны дол-
жен быть расположен на фокальной прямой FF'. В этом
случае фронт волны в раскрыве антенны будет плоским.
Коэффициент направленного действия параболиче-
ской зеркальной антенны определяется по формуле* [31]
А.
2 А.2 2 2
+ ;?а/2
-i- j fr(x)dx
“41/2
+ Фо
X j [M</2sec 4-(3.30)
—Фо
где S = dal — площадь раскрыва;
fr — распределение поля вдоль линейного облу-
чателя;
/в — диаграмма направленности облучателя по
полю в плоскости yOz\
da — длина антенны;
Go — КНД антенны в плоскости xOz, вычислен-
ный в предположении, что Д«(х) = 1.
Практически считается, что максимальный КНД зер-
кальных антенн косеканского типа может оцениваться
по формуле
г _____ 22 000-^ 24 000
^мак с — д д > (0.01)
Vod’Vol
где 0oz, 0ой — ширина луча в градусах на уровне поло-
винной мощности соответственно в вертикальной и гори-
зонтальной плоскостях.
* Здесь и в дальнейшем коэффициент полезного действия счи-
тается равным 1 и поэтому коэффициент усиления приравнивается
коэффициенту направленного действия. В реальных антеннах к. п. д.
ц = 0,9 - 0.95.
8* 115
Рис. 3.9. Диаграммы направленности в вертикальной плоскости
антенн РЛС обзора земной поверхности:
/) сзес2ф: 2) csec^/^ цг Fees ф ; 3) 4) результирующая.
Уровень боковых лепестков антенны зависит от ха-
рактеристики направленности облучателя, которая опре-
деляет скорость изменения поля у края зеркала антен-
ны, скачок поля на его краю и распределение поля по
поверхности всего зеркала. На уровень боковых лепест-
ков влияет также излучение облучателя, не попадающее
на зеркало, а также неточности в изготовлении зеркала,
в размещении облучателя и т. п.
Диаграмма направленности реальных цилиндрических
зеркальных антенн, предназначенных для использования в
РЛС бокового обзора, практически всегда отличается от
функции вида csec3/2<p|/cos<|>. Обычно основное отличие
проявляется вблизи максимума излучения. На рис. 3.9
пунктиром (кривая 2) показана идеальная диаграмма
направленности в пределах заданных углов фт, ф1 и ее
аппроксимация (кривая 3) вблизи максимума излучения
функцией вида
sin2 f sin (фт — Ф)1
-------------тЛ (3-32)
Уравнение (3.32) удовлетворительно описывает диа-
граммы направленности параболических и других близ-
ких к ним антенн. По мере роста углов ф кривая 3
плавно сопрягается с требуемой характеристикой 2, а
116
далее диаграмма направленности спадает до нуля.
Параметр /0 в -выражении (3.32) характеризует размер
раскрыва, формирующего центральную часть диаграм-
мы направленности. Он находится по требуемой ширине
луча при Р1(ф) =0,5. Обычно величина /0 составляет
около 2/3 всего раскрыва антенны. Поэтому можно счи-
тать, что
/=3/2/0. (3.33)
На рис. 3.9 для сравнения показана идеальная диа-
грамма типа csec2i|), применяемая в панорамных РЛС
землеобзора.
Диаграмма направленности типа csec3/2<p ]/cos<|> форми-
руется методом парциальных диаграмм или применением
цилиндрического зеркала специальной формы.
Метод парциальных диаграмм предполагает исполь-
зование параболического цилиндра и нескольких линей-
ных облучателей (рис. 3.10). Один из облучателей поме-
щается на фокальной прямой и формирует луч в на-
правлении главного максимума диаграммы направлен-
ности (фт). Другие облучатели смещены в сторону от
фокальной прямой, чем достигается отклонение луча от
направления фт и некоторое его расширение. Подбором
размещения облучателей (выносом их от фокальной
прямой), изменением мощности, подводимой к облучате-
лям, и регулировкой соотношения фаз запитывающих си-
гналов можно добиться получения диаграммы, близкой
к требуемой. Результирующая диаграмма получается
путем сложения парциальных диаграмм направленности
с учетом фазовых соотношений при суммировании.
Рис. 3.10. Формирование
граммы направленности в
тикальной плоскости с
мощью трех облучателей.
117
Основными недостатками метода является изрезан-
ность диаграммы в вертикальной плоскости, которая
практически всегда имеет место, и большое затенение
зеркала облучателями, что в данном случае является
наиболее существенным.
Цилиндрическое зеркало специалзной формы имеет на-
правляощую цилиндра, определяемую из условия получе-
ния диаграммы направленности типа csec3/2<p V cos ф. Такие
антенны 'сравнительно просты в изготовлении и настрой-
ке, так как их диаграмма направленности в разных
плоскостях формируется разными элементами: в гори-
зонтальной плоскости — облучателем, а в вертикаль-
ной— зеркалом. Для расчета формы зеркала, обеспечи-
вающего заданную диаграмму в вертикальной плоско-
сти, применяются методы геометрической оптики [31].
В качестве линейных облучателей вдольфюзеляжных
антенн используются различного вида линейные решет-
ки облучателей, так как они обладают сравнительно не-
большим сечением в плоскости yOz. Наибольшее при-
менение находят волноводно-вибраторные и волноводно-
щелевые антенны. Они имеют широкую диаграмму
направленности в плоскости, перпендикулярной оси вол-
новода. Получение диаграммы направленности облуча-
теля, необходимой для заданного облучения поверхно-
сти зеркала, обеспечивается применением рупора, пи-
таемого линейной решеткой.
Из выражений (3.24) — (3.26) видно, что требуемая
форма диаграммы направленности в вертикальной пло-
скости при заданой дальности зависит от высоты поле-
та. Управление формой диаграммы направленности
длинной вдольфюзеляжной антенны путем изменения
профиля зеркала затруднено. Поэтому на практике при
изменении высоты полета наклон луча регулируют пово-
ротом всей антенны или смещением облучателя в вер-
тикальной плоскости. Экспериментально показано, что
смещение облучателя, вызывающее наклон луча на угол
около ±!5°, практически не меняет форму диаграммы
направленности. В некоторых случаях можно осущест-
влять наклон луча до ±10° при сравнительно незначи-
тельных искажениях диаграммы направленности. Такой
же способ может быть применен для стабилизации лу-
ча антенны при небольших кренах.
118
Компенсация искажений изображения, вызванных ко-
лебаниями летательного аппарата вокруг центра массы,
может осуществляться соответствующим отклонением
луча антенны по азимуту. Механический поворот зер-
кальной вдольфюзеляжной антенны вызывает определен-
ные технические трудности. Применение в качестве об-
лучателей зеркальных антенн линейных решеток позво-
ляет изменять положение луча в необходимом секторе
электрическим путем.
Рассмотрим многоэлементные антенные решетки, ко-
торые представляют для РЛС бокового обзора рассмат-
риваемого типа наибольший интерес. Линейные решетки
с поперечным излучением позволяют получить узкий луч
в одной из плоскостей, что требуется для решения задач
обзора местности. Заданная форма диаграммы направ-
ленности в другой плоскости может быть реализована
различными способами:
— использованием зеркального отражателя,
—применением системы из двух или трех линейных
решеток,
— выбором заданной формы диаграммы направлен-
ности излучателей решетки и т. д.
Основным преимуществом антенных решеток при их
использовании в РЛС с вдольфюзеляжной антенной яв-
ляется возможность электрического управления лучом
по азимуту. Следует отметить, что отклонение луча
в пределах углового сектора, необходимого для компен-
сации искажений радиолокационного изображения,
в данном случае не является слишком сложной задачей.
Многоэлементные антенные решетки состоят из боль-
шого числа излучателей (до нескольких сотен), являю-
щихся в большинстве случаев и приемными элементами.
Система питания таких облучателей громоздка и требу-
ет кропотливой настройки. Поэтому в настоящее время
изыскиваются различные пути построения антенных ре-
шеток, позволяющие сократить число элементов и упро-
стить схему их питания.
В антенной решетке дискретные излучатели распо-
лагаются на прямой линии, причем в зависимости от за-
кона их расположения различают эквидистантные и не-
эквидистантные линейные решетки. Эквидистантные ре-
шетки характеризуются расположением излучателей
с равным шагом d. Неэквидистантные решетки строятся
119
с неравномерным расположением излучателей. В общем
случае расстояние между элементами неэквидистантной
антенной решетки может меняться случайным образом.
Результирующая диаграмма направленности эквиди-
стантной линейной решетки jF(.0, ф) определяется диа-
граммой направленности одного излучателя Л(Р, *Ф) и
множителем решетки
= Е I лп | exp j {knd sin 0 — <р„), (3.34)
п =0
где k = 2тт/Л;
N—число излучателей;
<рп— фаза тока в тг-м излучателе.
Тогда
= (3.35)
Комплексная амплитуда тока в n-м излучателе выраже-
на как
Д„=|Л„|е~7\
В зависимости от закона возбуждения различают
равномерные и неравномерные линейные решетки. Рав-
номерная линейная решетка характеризуется равномер-
ным амплитудным и линейным фазовым распределением
поля вдоль ее длины. Множитель равномерной линейной
решетки выражается формулой
sin 2
== А--------. (3.
N sin
Здесь ф — разность фаз полей, создаваемых соседними
излучателями в произвольной точке
Ф = &йз1пр—ф1; (3.37)
А — амплитуда возбуждения;
Ф1 — сдвиг фаз между соседними излучателями.
Отсюда
<3-38>
Сдвиг фазы на единицу длины решетки <pi/d=a со-
ответствует коэффициенту фазы некоторой электромаг-
нитной волны, распространяющейся вдоль решетки. Ес-
120
N—\
ли решетка возбуждается линией, питаемой с одного ее
конца, то сдвиг фазы токов 'Соседних излучателей состав-
ляет
<p1==:arf. (3.39)
Функция sin ! N sin в формуле (3.36) имеет пе-
риод 2ъ. Главные максимумы функции расположены в
точках <р = 0, ±2тс, ±4тг и т. д.
Направление главных максимумов определяется выра-
жением
= + (3.40)
где т — 0, zt 1, zt 2, ...
Между главными максимумами имеется (N—2) диф-
ракционных максимумов высшего порядка, которые
являются боковыми лепестками радиолокационной ан-
тенны. Наибольший практический интерес представля-
ют решетки с одним главным максимумом. Условием,
необходимым для его получения, при работе антенны
только на прием или на передачу является
d<k (3.41)
В зависимости от величины <р± меняется направление
главного максимума.
При ф1=0 имеем синфазную решетку с поперечным
излучением Ргл = 0 (рис. 3.11).
При ф1<Ы (коэффициент фазы а меньше k) усло-
вие получения одного главного максимума представ-
ляется в виде
W=Fq>i<;2jt. (3.42)
121
Это условие выполняется при любых ф! <\kd, если
б/<Х/2. Таким образом, при d<X/2, изменяя фазовую
скорость питающей эквивалентной волны в пределах
а<£, можно управлять положением главного максиму-
ма, т. е. качать луч. Линейные решетки с равномерным
распределением амплитуд характеризуются высоким
уровнем боковых лепестков (побочных максимумов).
Величина первого (ближайшего к главному) бокового
лепестка составляет 21%' от главного по напряженности
поля. Ширина луча главного лепестка решетки по поло-
вине мощности определяется формулой
0^0,88-^. (3.43)
иа
-С целью уменьшения боковых лепестков линейной
решетки используются распределения, отличные от рав-
номерного. При этом, как показано в гл. 2, уменьшение
уровня боковых лепестков сопровождается некоторым
расширением главного лепестка.
Принципиально возможно добиться полного отсутст-
вия боковых лепестков применением решетки с биноми-
альным распределением токов в излучателях при рас-
стоянии между ними
(3.44)
Знак равенства в формуле (3.44) соответствует толь-
ко синфазной линейной решетке. Однако такое распре-
деление слишком неравномерно по токам возбуждения
излучателей, что приводит к уменьшению коэффициента
использования раскрыва и соответственно к расшире-
нию главного лепестка.
При последовательном питании линейной решетки
(рис. 3.12) и одинаковой связи излучателей с питающей
линией может иметь место экспоненциальное распреде-
ление амплитуд токов в излучателях, которое приводит
к расширению главного лепестка и увеличению бокового
излучения. Поэтому при последовательном питании ан-
тенны принимаются меры для получения заданного рас-
пределения амплитуд токов. Требуемое распределение
создается путем регулировки связи излучателей с ли-
нией.
122
Рис. 3.12. Схема последова-
тельного питания линейной *”7*
антенной решетки.
нагрузка
Для РЛС бокового обзора с вдольфюзеляжной ан-
тенной представляют интерес линейные решетки с опти-
мальной диаграммой направленности, у которых при за-
данном уровне боковых лепестков минимальна ширина
главного лепестка или при заданной ширине луча мини-
мален уровень боковых лепестков. Оптимальная в этом
смысле линейная решетка характеризуется Дольф—Че-
бышевским распределением токов, питающих излучате-
ли (31]. Расстояние между излучателями в оптимальных
синфазных линейных решетках практически выбирается
в пределах X/2<d<X.
Ширина луча оптимальной линейной решетки по по-
ловинной мощности может быть рассчитана по формуле
[1] _______________________________________
0О = 2arc sin (±- 0,75 In2 2 + 21п 21п г + > (3.45)
где г — уровень боковых лепестков.
Ширина луча такой антенны (при 0О<12°) опреде-
ляется формулой
9О’= х 0,360 + 0,693 In г+ (3.46)
Коэффициент А зависит от уровня боковых лепест-
ков. Его значения приведены в табл. 3.1.
ТАБЛИЦА 3.1
г, дб —20 -25 —30 —35 —40
А, град 51,1 56,6 60,6 65,0 68,7
Коэффициент расширения диаграммы направленно-
сти Дольф—Чебышевской линейной решетки по сравне-
нию с диаграммой направленности равномерной решет-
ки может быть вычислен по формуле
f = = 0,7181/ 0,360 + 0,693 in г+ £+ (3.47)
°одч г
123
где 9ор — ширина луча равномерной линейной решетки:
9одч—ширина луча оптимальной Дольф—Чебышев-
ской линейной решетки.
Если уровень боковых лепестков уменьшать до нуля,
коэффициент расширения для решеток с нечетным чис-
лом элементов N стремится к 0,85 V т. Здесь т свя-
зано с числом элементов решетки формулой
ЛГ=2т+1. (3.48)
Оценка КНД двумерной решетки с Дольф—Чебы-
шевским возбуждением производится по формулам:
32 600
90d В 90/
п 38 400
~ —Го" о
(— 15 дб^>г^> — 25 дб).
(г < — 30 дб),
(3.49)
G
где 0о/ и 60/ — ширина луча по половине мощности по
азимуту и углу места соответственно.
Случайные отклонения амплитуды и фазы токов воз-
буждения от заданных приводят к уменьшению КНД
антенны. Это уменьшение может быть определено по
формуле
(3.50)
G 1
В этой формуле Go — КНД в отсутствии отклонений;
е2 = Д2_|_82, (3.5!)
где Д2 и 82 — среднеквадратические амплитудные и фазо-
вые отклонения соответственно.
Одним из способов улучшения некоторых характери-
стик вдольфюзеляжных антенных решеток может быть
неравномерное размещение излучателей. Такое разме-
щение позволяет устранить периодичность множителя
решетки, что приводит к значительному уменьшению
главных максимумов высших порядков в диаграмме на-
правленности антенны. В этом случае имеется возмож-
ность сократить число излучателей в линейной решетке,
расширить частотный диапазон антенны без искажения
124
диаграммы направленности и упростить систему воз-
буждения антенны.
Расчет неэквидистантных антенных решеток сложен.
Обычно пользуются методами приближенного расчета
как для детерминированного расположения излучате-
лей, так и для случайного расположения при большом
их числе [1].
Отметим основные свойства неэквидистантных реше-
ток:
— число излучателей при заданном уровне боковых
лепестков в общем случае меньше, чем у эквидистант-
ных;
— спадание амплитуды токов возбуждения к краям
решетки приводит к уменьшению боковых лепестков;
— КНД антенны при произвольном расположении
излучателей снижается, что до некоторой степени огра-
ничивает применение таких антенн в РЛС бокового об-
зора.
Недостатком неэквидистантных линейных решеток
является практическая невозможность электрического
управления положением луча.
Одним из способов создания неэквидистантной линей-
ной решетки является произвольное удаление некоторого
числа элементов из соответствующей эквидистантной.
Такой способ создания неэквидистантной решетки срав-
нительно прост, но его применение ограничено вследст-
вие возрастания ближних к главному боковых лепестков.
Необходимо заметить, что влияние случайных ампли-
тудных и фазовых ошибок в распределении тока в эле-
ментах неэквидистантных линейных решеток на ширину
луча, уровень боковых лепестков и КНД по своему ха-
рактеру такое же, как и у эквидистантных при спадаю-
щем к краям антенны амплитудном распределении.
Уменьшение числа элементов в антенной решетке при
постоянной ее длине может быть также осуществлено
путем применения антенной системы с диаграммой на-
правленности в виде гребенки лепестков и с последую-
щим устранением неоднозначности путем специальной
обработки принимаемых сигналов.
Например, при использовании различных антенн для
приема и передачи неоднозначность может быть устране-
на методом нониуса. В этом случае две примерно одина-
ковые антенные решетки, но с несколько отличающимися
125
Рис. 3.13. Диаграмма направленности антенны (а) с нониусным
умножением приемной (б) и передающей (в) характеристик.
Рис. 3.14. Диаграмма направленности антенны (а) с умножением
приемной (б) и широкой передающей (в) характеристик.
126
расстояниями d между элементами располагаются так,
чтобы при приеме .и излучении совпадали в пространстве
только нулевые лепестки (рис. 3.13). Результирующая
диаграмма (а) получается умножением диаграмм на-
правленности .при -приеме (б) и передаче (в). Недостат-
ком этого метода является уменьшение общего КНД
антенны за счет излишнего расхода мощности при пере-
даче и ухудшение помехозащищенности системы в отно-
шении активных помех.
Такого же эффекта можно добиться, если попользо-
вать на излучение антенну с широким лучом, а на прием
антенную решетку, аналогичную рассмотренной выше.
В результате умножения их диаграмм направленности
(рис. 3.14,6 и в) формируется результирующая диаграм-
ма (а), позволяющая получить высокую разрешающую
способность РЛС.
В табл. 3.2 для примера приведены характеристики
антенных систем, выполненных рассмотренными метода-
ми [39]. Так, одна из нониусных антенн длиной 8 м со-
стоит из приемной линейной решетки, включающей 28
элементов, расположенных на расстояниях 28,19 см, и из
передающей 30-элементной линейной решетки с расстоя-
ниями между элементами 26,16 см. Угол между макси-
мумами гребенки лепестков составляет 4°. Средняя ра-
бочая частота 16 500 Мгц.
ТАБЛИЦА 3.2
Характеристики Значение характеристик (эксперимент)
Нониус на я система Система с широким и узким лучами
£1 ' ! приемная антенна пере- дающая антенна система антенн (прием- передача) приемная антенна пере- дающая антенна система антенн (прием — передача)
Ширина луча по 0,5 Р, град. Ширина луча по нулям, град. Уровень боко- вых лепестков, дб Усиление (вклю- чая потери), дб 0,15 0,25 — 11,5 24,5 (280) 0,13 0,26 -13 27 (500) 0,1 0,22 —16 к i (141 000) 0,12 0,25 — 10 24 (250) 2,3 — 11 29,5 (890) 0,12 0,24 —11,5 (225 000)
127
В системе с умножением широкого и узкого лучей ис-
пользовалась длинная антенная решетка в качестве при-
емной и небольшая антенна для передачи. Средняя ра-
бочая частота также составляла 16 500 Мгц,
Усиление антенных решеток с гребенкой лепестков
меньше, чем у линейных антенных решеток такого же
размера и не имеющих главных максимумов высших по-
рядков. Уровень боковых лепестков антенной системы
с перемножением несколько больше, чем у обычных ли-
нейных решеток. Однако система питания таких антенн
упрощается, что облегчает конструирование и выбор тре-
буемых параметров.
В РЛС с вдольфюзеляжной антенной крайне нежела-
тельны боковые лепестки антенны. Помимо рассмотрен-
ных выше способов снижения уровня боковых лепестков
может быть применена их дополнительная компенсация
с помощью специальной антенны с широкой диаграммой
направленности |[41].
Дополнительная компенсационная антенна распола-
гается над или под основной антенной так, чтобы их
электрические центры совпадали по азимуту, и исполь-
зуется только на прием. Коэффициент направленного
действия дополнительной антенны выбирается равным
или несколько большим, чем КНД первого бокового ле-
пестка антенны радиолокатора. В вертикальной плоско-
сти диаграммы основной и дополнительной антенн долж-
ны быть идентичны. Принятые двумя антеннами сигна-
лы после усиления вычитаются, что позволяет уменьшить
уровень боковых лепестков. Этот способ приводит также
к некоторому снижению усиления основной антенны по
главному лепестку. Наличие дополнительного приемника
увеличивает уровень шума системы. Однако при доста-
точно большом КНД дополнительной антенны и малом
усилении компенсационного приемника можно сущест-
венно уменьшить влияние шума компенсационного кана-
ла на характеристики обнаружения РЛС. С целью
уменьшения влияния дополнительной антенны на прием
по главному лепестку основной антенны РЛС часть сиг-
нала, принятого основной антенной, подается через атте-
нюатор и фазовращатель на вход компенсационного при-
емника. Подбором затухания и сдвига фаз этого сигнала
в канале компенсации устраняется сигнал, принятый до-
полнительной антенной с направления главного макси-
128
мума основной антенны. Таким образом, дополнительная
антенна почти не влияет на прием сигналов но главному
лепестку основной антенны.
Электронное управление лучом в линейных антенных
решетках может осуществляться путем изменения рабо-
чей частоты РЛС или фазы токов, питающих элементы
решетки.
Рассмотрим равномерно возбуждаемую антенную ре-
шетку с линейным фазовым распределением. Диаграмма
направленности решетки в плоскости хОу (рис. 3.11)
определяется выражением (3.36).
Пусть характеристики решетки выбраны так, что име-
ется один главный максимум, соответствующий ср = О.
Его направление находится из уравнения (3.38)
ргл = arcsin ^y-=arcsin (3.52)
Rd
Заметим, что направление главного максимума .не зави-
сит от амплитудной характеристики ,в раскрыве. Частот-
ное управление лучом осуществляется изменением %, фа-
зовое— изменением <рь
Одновременно с отклонением луча расширяется диа-
грамма направленности. Увеличение ширины луча как
бы соответствует уменьшению длины линейной решетки,
в связи с чем вводится понятие об эффективной длине
4)ф в зависимости от направления излучения. При от-
клонении луча от перпендикуляра к решетке до 70° эф-
фективный размер линейной решетки приближенно мо-
жет оцениваться по формуле
^зф COS РГЛ» (3.53)
где da — длина всей решетки.
Расширение луча в этом случае определяется как
зе0______________________м,
9, “ d. ’
При частотном управлении лучом питание антенной
решетки может быть последовательным (рис. 3.12) и па-
раллельным (рис. 3.15). Последовательное питание
вдольфюзеляжной антенны, очевидно, найдет более ши-
рокое применение, так как оно не требует сложной фи-
9—1094 129
рв*
Рис. 3.15. Схема параллельного питания линейной антенной решетки,
дерной системы и мало уступает параллельному по -по-
терям в фидере.
Сдвиг фаз питающих токов определяется электриче-
ским расстоянием между излучателями в линии и поэто-
му он будет определяться длиной волны в питающей ли-
нии Л.
Различают прямофазный и переменнофазный спосо-
бы возбуждения излучателей. При 'прямофазном возбуж-
дении излучатели включаются в линию так, чтобы все
они питались в фазе при наличии бегущей волны в ли-
нии. В волноводе, например, излучающие щели -прореза-
ются на расстояниях друг от друга, примерно равных
длине волны.
Возбуждение называется переменнофазным, если
имеются две параллельные линии, питаемые в противо-
фазе, а излучатели подключаются к линиям так, чтобы
питание каждого .из них осуществлялось в фазе. Напри-
мер, в широкой стенке волновода по обе стороны от его
осевой линии располагаются системы продольных излу-
чающих щелей. В каждой системе щели располагаются
на расстояниях, равных длине волны в волноводе, а си-
стемы щелей смещены на половину длины волны друг
относительно друга.
При прямофазном возбуждении излучателей
Ргл = arcsiti « “г) ’ (3.55)
где b — длина питающей линии между точками включе-
ния соседних излучателей; число п определяется из урав-
нения
?i==2^__2rau (3.56)
при условии | Ф11 <л.
130
При переменнофазном возбуждении излучателей
Ргл = arcsin I
(2п+ 1) XX
2d J
(3.57)
Возможности отклонения луча путем изменения рабо-
чей частоты РЛС характеризуются углочастотной чувст-
вительностью антенны. Если в качестве питающей линии
применяется волновод, то углочастотная чувствитель-
ность, выраженная в радианах на процент изменения ча-
стоты, определяется при прямофазном питании антенны
как
X / I /г 4 1Q-2 Г 1 ]
cos frjI ( ' L °/° J
\ кр у
и при переменнофазном питании
_____X f I \ 1 0 - 2 Г 1 1
cos ргл I d '2d~ u ["%]’
\ кр j -*
(3.58)
(3.59)
где 2кр — критическая длина волны в волноводе.
Выражения (3.58) и (3.59) показывают, что углоча-
стотная чувствительность возрастает при отклонении лу-
ча от перпендикуляра к оси решетки. При небольших
углах отклонения луча (ргл~0) углочастотная зависи-
мость примерно постоянна, что существенно для РЛС
бокового обзора, когда требуемые углы отклонения луча
невелики. Так, при отклонении луча в пределах до 15°
от нулевого направления (рГл = О) углоч астатная чувст-
вительность меняется менее чем на 5%.
При небольших углах отклонения луча от нормали
к оси антенны и выражения (3.58) и (3.59) можно
упростить:
(3.60)
-?7Г (3.61)
()\/Х =0 2d 1 d ' '
Углочастотная чувствительность растет при увеличе-
нии b/d, вследствие чего применяют изогнутые или спи-
ральные питающие линии. Она может быть повышена
также путем увеличения длины волны в волноводе. При
9* 131
этом, однако, растут потери в линии, снижающие даль-
ность действия РЛС. В некоторых случаях для увеличе-
ния углочастотной чувствительности в волноводных пи-
тающих линиях могут быть применены замедляющие
структуры, снижающие групповую -скорость волны.
Фазовое управление лучом линейной решетки произ-
водится изменением фазового сдвига epi между соседни-
ми излучателями. Такая антенная система называется
фазированной антенной решеткой. Управление величиной
ф! возможно различными способами. Вместе с измене-
нием фазовых сдвигов требуется обеспечить определен-
ное распределение амплитуд возбуждения. Схема пита-
ния излучателей фазированной решетки может быть как
параллельной, так и последовательной, причем в канал
связи излучателя с питающей линией включаются специ-
альные фазовращательные элементы, с помощью кото-
рых осуществляется управление лучом.
В схеме с последовательным питанием элементов
(рис. 3.16,а) фазовращатели (Ф) включены в участки
линии между соседними излучателями. Для поворота
луча на заданный угол каждый из фазовращателей дол-
жен обеспечить одинаковый сдвиг фазы. В этом случае
предъявляются высокие требования к точности работы
фазовращателей, а потери в системе питания велики —
они составляют примерно половину потерь в фазовраща-
телях. Вследствие этого в системах последовательного
питания чаще используются механические фазовращате-
ли, .которые допускают передачу большой мощности и
стабильны в управлении. Однако такие фазовращатели
не позволяют управлять лучом с большой скоростью.
Схемы последовательного питания вследствие их недо-
статков находят ограниченное применение.
Параллельное питание фазированной решетки
(рис. 3.16,6) обеспечивается с помощью разветвляющих-
ся линий и установки фазовращателей на входе излуча-
телей. В ряде случаев применяется комбинированная
схема питания (рис. 3.16,в), когда входы каналов излу-
чателей возбуждаются последовательно, а фазовращате-
ли включены параллельно. В этом случае амплитудное
распределение решетки регулируется связью каналов
питания фазовращателей с линией, а фазовый сдвиг осу-
ществляется управляемыми фазовращателями. Парал-
лельное питание излучателей может быть выполнено так,
132
Рис. 3.16. Схема включения фазовращателей при фазовом управле-
нии положением луча антенны:
а — последовательное питание излучателей; б — параллельное питание излуча-
телей; в - комбинированное питание излучателей; г — параллельное питание
излучателей одного облучающего элемента
как показано на рис. 3.16,г, когда один облучатель в виде
рупора или линзы облучает пассивную решетку вторич-
ных излучателей, на входе которых расположены фазо-
-вращатели. При параллельном питании линейной решет-
к,и с фазовым управлением луча, в отличие от последова-
тельного питания, каждый фазовращатель должен про-
пустить лишь часть мощности генератора, а его неста-
бильность будет оказывать влияние на расфазировку
только одного излучателя. В результате влияние одного
фазовращателя на работу всей системы уменьшается.
В антенных решетках с электрическим управлением
луча применяются механические фазовращатели (тром-
бонного типа, с двойным волноводным тройником, со
щелевым мостом, с диэлектрической пластиной «в волно-
воде и др.) и электрические фазовращатели (феррито-
вые, полупроводниковые, газоразрядные) (31].
Для определения характеристик фазированной линей-
ной решетки (направления главного Максимума, шири-
133
ны луча) можно воспользоваться выражениями (3.40),
(3.43), (3.46). При качании луча сечение диаграммы на-
правленности становится несимметричным относительно
максимума. Величину несимметрии характеризуют отно-
шением разности правой и левой полуширин диаграммы
к их сумме. Приближенно несимметрия диаграммы на-
правленности может быть определена по формуле
е ~ 4г ctg (3-62)
Практически сектор качания луча ограничивается по-
явлением главных максимумов высших порядков, допу-
стимым расширением диаграммы направленности и ши-
риной диаграммы направленности одиночного излуча-
теля.
Основными недостатками антенн с фазовым управле-
нием луча и электрическими фазовращателями являются
большие потери энергии в элементах, трудность управ-
ления фазовращателями и их нестабильность.
В большой степени эти недостатки устраняются пу-
тем ступенчатого изменения фазы в электрически управ-
ляемых фазовращателях. Скорость управления при этом
остается весьма высокой, а в некоторых случаях даже
увеличивается по сравнению со скоростью в системах
с плавным управлением положения луча. Применение
ступенчатых фазовращателей позволяет осуществлять
программное управление лучом антенной решетки [31].
Антенну с программным управлением лучом часто назы-
вают коммутационной.
Коммутационные антенны могут быть двух видов:
— со ступенчатым изменением фазы каждого излу-
чателя на величину
где М — целое число;
— с переключением излучателей, достаточно часто
расположенных вдоль питающих линий.
В последнем случае расположение излучателей долж-
но быть таким, чтобы на участке антенны длиной Х/2
можно было бы получить определенный набор значений
сдвигов фаз. Для этого шаг расположения излучателей
134
1
Рис. 3 17. Ошибки распределения фазы вдоль длины при дискретном
управлении положением луча:
I — требуемое распределение фазы; II — распределение при дискретном управ-
лении.
должен быть существенно меньше Х/2, а фаза вдоль ли-
нии должна изменяться достаточно быстро.
Стабильность коммутационных антенн обусловливает-
ся применением фазовращателей, работающих так, что
небольшие изменения сигналов, управляющих фазовра-
щателями, не влияют на фазовые сдвиги. В связи с этим
оказывается удобным осуществлять управление лучом от
дискретного вычислителя—например цифровой вычисли-
тельной машины. От навигационных датчиков в ЦВМ по-
ступают данные о мгновенном положении самолета
в пространстве. Перед излучением импульса передатчика
вычисляется требуемое положение луча, после чего фа-
зовращатели переключаются .в соответствующие положе-
ния и луч устанавливается в заданном направлении.
В такой системе имеется заранее заданное число поло-
жений луча. Угловое расстояние между соседними поло-
жениями называют в этом случае шагом луча.
Недостатки коммутационного управления связаны
с дискретностью управления. Во-первых, требуемый для
заданного положения луча фазовый фронт создается
с ошибками (рис. 3.17), что приводит к росту боковых
лепестков. Во-вторых, заданное из расчета положение
луча устанавливается также с ошибкой, величина кото-
рой может достигать половины шага луча. Его значение
не может быть выбрано слишком малым из-за сущест-
венного усложнения схемы управления и увеличения ко-
личества ее элементов. Обычно шаг .выбирают несколько
меньше ширины луча на уровне половины мощности.
В качестве излучателей в линейных решетках РЛС
с вдольфюзеляжной антенной используются, как прави-
ло, вибраторы или щелевые антенны.
135
Рис. 3.18. Вдольфюзеляжная антенна РЛС бокового обзора и пример
размещения основного оборудования РЛС в отдельном контейнере:
1 — зеркало; 2 — обтекатель; 3 — выступающая часть, в которой разме-
щается оборудование; 4— источник питания; 5 — модуляторы; 6 — приемо-
передатчики; 7 — крышка; 8 — хвостовой конус; 9 — носовой конус; 10 — вра-
щающееся сочленение; 11 — общий облучатель.
136
Рис. 3.19. Размещение вдольфюзеляжной антенны (/) РЛС бокового
обзора на самолете.
На рис. 3.18 изображена одна из возможных вдоль-
фюзеляжных антенн РЛС бокового обзора, размещаемая
в отдельном контейнере. Она представляет собой систему
облучателей, расположенных на фокальной прямой ци-
линдрического отражателя специальной формы. Для
обеспечения двустороннего обзора применены две иден-
тичные системы. Здесь же на рисунке показано разме-
щение основных элементов РЛС: приемо-шередатчика,
модулятора и т. д. Контейнер может размещаться под
самолетом, как это показано на рис. 3.19 [102, 103].
3.4. Влияние характеристик
распределения поля в раскрыве
вдольфюзеляжной антенны на свойства
РЛС бокового обзора
Вдольфюзеляжные антенны РЛС бокового обзора
вследствие большого отношения da/K которое может со-
ставлять величину 100—500, требуют весьма точного из-
готовления. К конструкции антенны обычно предъявля-
ются повышенные требования по жесткости, однако
практически антенна всегда деформируется, а также
137
имеются ошибки ее изготовления. Деформация конструк-
ции антенны может быть постоянной в .пределах задан-
ных допусков для конкретного экземпляра или перемен-
ной, большей частью случайной, вызываемой вибрация-
ми. Факторами, ограничивающими увеличение раскрыва
вдольфюзеляжных антенн, являются ошибки их изготов-
ления и вибрации, обусловленные работой РЛС на само-
лете. С достаточным приближением можно считать, что
ошибки, вызываемые обоими факторами, оказывают
влияние только на распределение фазы поля в раскрыве.
Регулярные отклонения фазы от заданного распреде-
ления по раскрыву вдольфюзеляжных антенн можно
представить в виде линейных, квадратичных, кубических
и периодических ошибок. Другие виды отклонений, вы-
званные теми или иными причинами, могут не рассма-
триваться вследствие их малости.
Линейное искажение фазы Афл приводит к такому же
эффекту, что и линейный сдвиг фазы при управлении лу-
чом. В данном случае луч антенны отклоняется от задан-
ного направления. Это приводит к ошибкам измерения
угловых координат и искажению радиолокационного изо-
бражения. Угол отклонения луча от заданного направ-
ления определяется выражением
^ = arcsin-^~^, (3.63)
где Дфл — линейная фазовая ошибка на краю раскрыва;
da — размер антенны.
Квадратичные фазовые ошибки приводят к увеличе-
нию боковых лепестков, сглаживанию нулей диаграммы
направленности и расширению главного лепестка. Влия-
ние квадратичной ошибки особенно велико при равно-
мерном распределении амплитуды поля по раскрыву
антенны и уменьшается у антенн со спадающим к краям
распределением. Расширение диаграммы направленности
под влиянием квадратичных ошибок, естественно, приво-
дит к снижению КНД антенны. Квадратичные фазовые
ошибки приводят к ухудшению угловой разрешающее
способности РЛС, понижению помехозащищенности и.
уменьшению дальности обнаружения целей. Эти ошибки
существенно сказываются, если их величина на краю
раскрыва становится больше л/4. При меньших значения?-;
135
с квадратичными искажениями фазы можно не счи-
таться.
Наличие кубических фазовых ошибок (AicpK) вызыва-
ет отклонение луча антенны. При их возрастании возни-
кает асимметрия и расширение главного лепестка диа-
граммы направленности, а также искажение боновых ле-
пестков. Боковые лепестки возрастают с одной стороны
от главного лепестка характеристики, а именно со сторо-
ны, противоположной отклонению главного лепестка.
Наиболее существенно растет первый боковой лепесток
диаграммы.
Отклонение луча при ,Дфк<л может быть определено
из выражения
8 arcsin (3.64)
tzct а
где Дф^ — кубическая фазовая ошибка на краю рас-
крыва.
Фазовая ошибка Дфк приводит к ухудшению разре-
шающей способности РЛС бокового обзора по азимуту,
ошибкам измерения угловых координат целей и к иска-
жению радиолокационного изображения.
Периодические фазовые ошибки приводят к возник-
новению дополнительных главных максимумов в диа-
грамме направленности антенны. Эффект от этих ошибок
аналогичен увеличению расстояния между элементами
антенны больше чем на длину волны. Направления ма-
ксимумов появляющихся лепестков определяются перио-
дом фазовой ошибки. Уменьшение КНД по сравнению
с заданным может быть рассчитано по среднеквадрати-
ческому отклонению фазы в раскрыве.
С этой целью методом наименьших квадратов может
быть определено среднее положение фазового фронта
волны и соответствующие отклонения фаз. Тогда умень-
шение КНД, обусловленное периодической ошибкой,
определяется по формуле
(3.65)
СГ0 Т
где G — реальный КНД антенны;
Go — расчетный КНД для усредненного фазового
фронта волны;
139
К % —среднекВадратйчёскбё Отклонение фазы (в ра*
дианах).
Выражение (3.65) может быть использовано для рас-
чета при небольших отклонениях фазы (а^ < 1).
Рассматривая влияние случайных фазовых ошибок на
характеристики антенны РЛС бокового обзора, целесооб-
разно пользоваться понятием некоторой средней диа-
граммы направленности, которая определяет соответст-
вующие средние показатели станции. Разброс этих пока-
зателей по их величине и во времени может оценивать-
ся обычными методами статистики.
Наличие случайных фазовых ошибок вдоль раскрыва
приводит к увеличению уровня боковых лепестков. У ан-
тенн большого раскрыва рост боковых лепестков вслед-
ствие случайных фазовых ошибок меньше, чем для ан-
тенн с малым относительным раскрывом. Увеличение
боковых лепестков диаграммы направленности при на-
личии ошибок оказывается различным в зависимости от
амплитудного распределения поля по раскрыву. Распре-
деления, спадающие к краям раскрыва, характеризуются
большей чувствительностью к ошибкам—боковые лепе-
стки при таких амплитудных распределениях быстрее
растут при возникновении случайных фазовых ошибок.
В этом случае влияние ошибок 'эквивалентно их воздей-
ствию на раскрывы меньших размеров, поскольку антен-
на со спадающим к краям распределением поля соответ-
ствует по ширине основного лепестка меньшей антенне
с равномерным распределением.
Средняя диаграмма направленности по мощности
равномерной линейной решетки может быть определена
по формуле [60]
я
У /2
Р (₽) = Р» (Р)+S ф (S2 + О (З-66)
(v/n)
где Ро(р) — диаграмма направленности в отсутствии
ошибок;
S(p) —нормированная диаграмма направленности
по мощности отдельных излучателей, обра-
зующих раскрыв;
140
In — ток в n-м элементе;
б2— дисперсия отклонений амплитуды тока;
о2 — дисперсия фазовых ошибок.
Для непрерывной линейной антенны
P(3) = JP0(₽)4-S(P)^g^ ехр [ - (3.67)
где р — радиус корреляции фазовых ошибок вдоль рас-
крыва антенны;
Go — расчетный КНД антенны.
Расширение диаграммы направленности и возраста-
ние уровня боковых лепестков при воздействии случай-
ных ошибок сопровождаются уменьшением КНД антен-
ны. Средний ожидаемый КНД G для решетки излучате-
лей можно приближенно оценить по формуле (3.50).
Для непрерывных раскрывов формула (3.50) прини-
мает вид
G=GO[1 —Ф аа ], (3.68)
где
Ф(2) = -^ fe~p dt. (3.69)
У* J
о
Выражение (3.68) справедливо при Если
ТСр 7Гdо тгт т тт
— >—то ожидаемое значение КНД можно рассчиты-
вать по формуле
(3.70)
Таким образом, для расчета средних значений КНД
и диаграммы направленности должны быть известны ра-
диус корреляции ошибок и их среднеквадратическое зна-
чение.
Указанные характеристики ошибок связаны с точно-
стью изготовления антенн. На основе опыта конструи-
рования больших антенн получены некоторые зависимо-
141
Сти, позволяющие при заданной ошибке изготовлений
оценить достижимый КНД [31]. Так, для линейных зер-
кальных антенн (параболический цилиндр) максималь-
ный КНД достигается при
где
m = lg—; (3.72)
£
8 — допуск на изготовление зеркала, выдерживаемый
с вероятностью 0,99.
Величина КНД при этом будет определена как
1,6 • Ю™-1. (3.73)
При уменьшении допуска 8 с целью приближения
КНД к максимальному значению рост КНД существен-
но замедляется. Практически целесообразно выбирать ве-
личину допуска несколько большей, чем это следует из
выражений (3.71) и (3.72), а именно так, чтобы выпол-
нялось равенство
00 =0,8- 1О-*. (3.74)
Тогда КНД оказывается меньше максимального на один
децибел и может быть рассчитан по формуле
G= 1,3 -IO™-1. (3.75)
Оценка допуска на изготовление вдольфюзеляжной
антенны РЛС бокового обзора, исходя из формул (3.71),
(3.72) и (3.74), может производиться по формуле
8 = 0,08 %.
(3.76)
3.5. Особенности радиолокационного
тракта
Радиолокационные станции бокового обзора с вдоль-
фюзеляжной антенной отличаются от обычных РЛСзем-
леобзора повышенной угловой разрешающей способно-
стью и характером обзора пространства. Поэтому к эле-
ментам радиолокационного тракта таких станций наря-
142
ду с общими требованиями предъявляется и ряд специ-
фических.
Основными условиями, определяющими выбор прин-
ципов построения и характеристик приемо-передающего
устройства, являются:
— необходимость обеспечения достаточно большой
дальности обнаружения целей, пр-ичем в некоторых слу-
чаях желательно обнаруживать цели на предельных
дальностях, обусловленных закономерностями распрост-
ранения радиоволн;
— возможность получения высокой разрешающей
способности по дальности, сравнимой с разрешающей
способностью по направлению, которая характеризуется
величиной порядка нескольких единиц или десятков мет-
ров; .
— высокая, помехозащищенность системы от искусст-
венных и естественных помех;
— в некоторых случаях — необходимость обеспечения
селекции движущихся целей (СДЦ) на фоне местности;
— требование управления лучом антенны для ком-
пенсации угла сноса и угловых колебаний носителя
РЛС;
— большой динамический диапазон отраженных от
целей сигналов, обусловленный как большим отношени-
ем максимальной и минимальной эффективных отражаю-
щих площадей целей в зоне обзора, так и возможной
неравномерностью облучения зоны обзора из-за несоот-
ветствия реальной и требуемой диаграмм направленно-
сти антенны по углу места;
— необходимость согласования выхода приемного
устройства с различными по своему характеру устройст-
вами отображения (с долговременной памятью для по-
лучения радиолокационной карты местности, с оператив-
ной индикацией и др.).
Рассмотрим особенности элементов радиолокационно-
го тракта РЛС бокового обзора с вдольфюзеляжной ан-
тенной.
Передающее устройство РЛС бокового обзо-
ра должно обладать высокой стабильностью по частоте,
широкополосностью, большим энергетическим потенциа-
лом и допускать быструю перестройку частоты в задан-
ном диапазоне. Эти противоречивые требования обуслов-
лены необходимостью обеспечения большой дальности
ИЗ
действия РЛС, высокой разрешающей способности .по
дальности, а также помехозащищенности. Простейшим
традиционным и наиболее распространенным решением
является применение мощного магнетронного передатчи-
ка, работающего в импульсном режиме. Применением
мощных коротких импульсов не во всех случаях удается
обеспечить достаточную для обеспечения заданной даль-
ности обнаружения энергию сигнала.
Поэтому, как было показано в § 2.8, в мощных пере-
датчиках РЛС с большой дальностью действия находят
применение сигналы с внутриимпульсной частотной мо-
дуляцией и фазовой манипуляцией. Для обработки таких
сигналов в приемном устройстве могут быть использо-
ваны те же элементы, которые используются при форми-
ровании зондирующих сигналов. Такое решение позволя-
ет наилучшим образом согласовать спектр сигнала с со-
ответствующими фильтрами {28].
Сигнал с фазовой манипуляцией по псевдослучайно-
му закону представляет собой последовательность корот-
ких импульсов одной частоты, отличающихся друг от
друга фазовым сдвигом. Общая длительность сигнала тл
равна сумме длительности коротких импульсов тг. Прак-
тически длительность коротких импульсов выбирают
одинаковой. Тогда
тп=пг/. (3.77)
Энергия сигнала в этом случае определяется как
Э = Ритп — P^nxi, (3.78)
а разрешающая способность по дальности зависит отт?-:
8/?=-ф-. (3.79)
Фазоманипулированный сигнал формируется в пере-
датчике с усилителем мощности в качестве выходного
каскада (рис. 3.20). Высокочастотные импульсы дли-
тельности Xi поступают в схему формирования, которая
на выходе создает сигнал длительностью тп, состоящий
из серии импульсов длительностью тг, отличающихся
друг от друга начальной фазой. Сформированный сигнал
усиливается и излучается. Схема формирования пред-
ставляет собой совокупность фазовращателей и схем за-
задержки. На рис. 3.21,а показан один из возможных
вариантов схем формирования щестиэлементного фазо-
144
Рис. 3.20. Функциональная схема передатчика РЛС бокового обзора
с усилителем мощности на выходе.
манипулированного сигнала, в котором разность фаз
между импульсами т/ составляет л. Выходной сигнал
(рис. 3.21,6) можно характеризовать кодом типа 1; —1;
— 1; 1; 1; —1, где единица соответствует нулевой началь-
ной фазе, а минус единица — начальной фазе л. Выход-
ной сигнал состоит из шести элементарных импульсов.
Усилители У/ компенсируют затухание в линии задержки
и фазовращателях. На временных диаграммах
(рис. 3.21,6) показан характер сигнала в точках схемы,
. выход
а)
Рис. 3.21. Формирование фазоманипулированного сигнала:
а — функциональная схема формирования; б — временное диаграммы.
10—1094 145
а)
Рис. 3.22. Формирование сигнала с квазислучайными изменениями ча-
стоты внутри импульса:
а — функциональная схема формирования; б — временная диаграмма; fi-
eri ектр.
отмеченных соответствующими номерами. Здесь число
периодов высокой частоты выбрано небольшим с тем,
чтобы отразить характер изменения фазы сигнала вну-
три сформированного импульса.
В настоящее время наибольшее распространение по-
лучили сигналы с внутриимпульсной частотной модуля-
цией двух видов: при квазислучайном сдвиге частоты и
линейном изменении частоты. Сигнал с квазислучайными
сдвигами частоты внутри импульса формируется систе-
мой фильтров f и линий задержки (ЛЗ). Фильтры вклю-
чаются таким образом, чтобы с их помощью из исход-
ного широкополосного сигнала было вырезано п участ-
ков спектра (по числу фильтров) (рис. 3.22). Импульсы
на выходе каждого фильтра имеют спектр в п раз уже,
чем исходный, а длительность -в п раз больше первона-
чальной (на рис. 3.22 /г = 4). С выхода усилителей сфор-
мированные таким образом импульсы через линии за-
чержки подаются друг за другом на выход схемы. Из-
лучаемый сигнал имеет длительность, равную
Тц=/г2т7, (3.80)
где т/— длительность импульса, поступающего с выхода
задающего генератора на вход системы фильтров.
Линейная частотная внутриимпульсная модуляция мо-
жет быть осуществлена по аналогичной схеме, если меж-
146
Ду генератором и усилителем включить диспергирующий
фильтр, например линию задержки с достаточно боль-
шим количеством отводов и линейной зависимостью вре-
мени задержки от частоты сигнала.
При воздействии на вход линии короткого'высокоча-
стотного импульса на ее выходе возникает сигнал дли-
тельностью тп с частотной девиацией AifM. При соответ-
ствующем выборе характеристик фильтра этим методом
можно получить форму сигнала, близкую к прямоуголь-
ной с заданной девиацией частоты. Помимо рассмотрен-
ного пассивного способа формирования частотно-модули-
рованных импульсов можно использовать активный спо-
соб, который сводится к частотной модуляции высоко-
частотного генератора передатчика во время формиро-
вания импульса. В этом случае форма сигнала может
быть получена ближе к заданной (например, прямо-
угольной), но при обработке сигналов в приемнике могут
возникать искажения из-за трудности согласования
фильтра приемника с характеристиками сигнала. При
использовании частотно-модулированных импульсов
энергия сигнала, определяющая дальность действия
РЛС, представляется выражением
Э = РиТп, (3.81)
где тп — длительность зондирующего сигнала, а разре-
шающая способность по дальности— спектром сигнала
при частотной модуляции
8Я=-ф-- (3.82)
^/м
Необходимость высокой помехозащищенности РЛС
с вдольфюзеляжной антенной от активных помех, требу-
ет использования широкого диапазона рабочих частот и
возможности перестройки передатчика. Закон перестрой-
ки может быть выбран любым—например квазислучай-
ным [28]. Частотное управление лучом антенны также тре-
бует перестройки передатчика, но при этом характер пе-
рестройки задается сигналами, поступающими от систе-
мы компенсации угловых колебаний носителя.
При использовании наиболее эффективных методов
селекции движущихся целей частота передатчика долж-
на быть достаточно стабильна во времени, особенно за
время обработки сигнала. Стабилизация частоты пере-
датчика наиболее эффективно обеспечивается при ис-
10 * 147
Рис. 3.23. Зависимость коэффи-
циента усиления приемника от
времени при действии ВАРУ.
Рис. 3.24. Логарифмическая
амплитудная характеристика
приемника.
пользовании схемы с задающим генератором (рис. 3.20).
При таком построении в качестве задающего может быть
применен маломощный генератор с кварцевой стабилиза-
цией.
Приемное устройство РЛС бокового обзора
с вдольфюзеляжной антенной, как и любой радиолока-
ционный приемник, должно быть достаточно чувствитель-
ным и допускать настройку в заданном диапазоне при
изменении частоты передатчика. Особенности приемника
РЛС обзора земной поверхности в основном обусловле-
ны необходимостью приема сигналов с большим диапа-
зоном изменения амплитуд. В связи с этим в приемных
устройствах используются различные схемы регулировки
усиления. В большинстве РЛС бонового обзора усиление
регулируется во времени и в зависимости от амплитуды
входного сигнала. Временная автоматическая регулиров-
ка усиления (ВАРУ) обеспечивает малое усиление сиг-
налов, отраженных от ближайших целей, и большое—от
удаленных. Необходимость ВАРУ вызвана недостаточной
эффективностью «сглаживающего» действия практически
применяемых диаграмм направленности антенн по углу
места. Усиление приемника в зависимости от времени
меняется обычно по экспоненциальному закону, причем
глубина действия ВАРУ может изменяться по желанию
оператора РЛС. На рис. 3.23 приведена зависимость ко-
эффициента усиления приемника К от времени при дей-
ствии ВАРУ. В момент посылки импульса передатчика
/о усиление приемника резко уменьшается, нарастая
в дальнейшем с течением времени. Диапазон изменения
глубины действия ВАРУ на рисунке показан пунктиром.
Длительность действия ВАРУ танже может регулиро-
ваться; обычно она составляет величину порядка десят-
ков микросекунд.
148
Изменение усилений & зависимости от амплитуды
Входного сигнала осуществляется за счет логарифмиче-
ской амплитудной характеристики усилителя промежу-
точной частоты приемника (рис. 3.24). Такая характери-
стика позволяет сохранить разницу в амплитудах сигна-
лов на выходе и обеспечивает воспроизведение входных
сигналов -с достаточно большим динамическим диапазо-
ном. Однако контрастность изображения при использо-
вании логарифмической характеристики приемника суще-
ственно снижается.
В приемниках РЛС с большой дальностью действия,
когда могут использоваться зондирующие 'сигналы спе-
циальной формы, одним из важнейших элементов
является система обработки принимаемых сигналов.
Рассмотрим обработку сигналов специальной формы
на примере фазоманипулированного сигнала. В этом слу-
чае в приемнике обычно используются те же элементы
согласованного фильтра, что и .при формировании зонди-
рующего сигнала. Принятый сигнал с выхода УПЧ по-
ступает на вход линии задержки через фазовращатели и
отводы. На рис. 3.25 показаны схема обработки, времен-
ные диаграммы и форма сигнала на выходе при наличии
на входе схемы сигнала типа 1; —1; —1; 1; 1; —1. Вид-
но, что только для одного из элементарных импульсов
Xi -сложение происходит в фазе. Амплитуда этого импуль-
са имеет максимальное значение. Остальные части сиг-
налов складываются не синфазно, в результате чего на
выходе остаются лишь «боковые лепестки». При доста-
точно большом числе элементарных импульсов «боковые
лепестки» могут быть существенно уменьшены. На
рис. 3.25 суммарный сигнал показан после детектирова-
ния. Форма напряжения на выходе симметрична относи-
тельно главного максимума. Видно, что разрешающая
способность по дальности в первую очередь определяется
длительностью элементарного импульса. Из примера
видно, что в РЛС с вдольфюзеляжной антенной, которая
предназначена для обзора земной поверхности, фазома-
нипулированный сигнал должен применяться с некоторой
осторожностью, так как «боковые лепестки» после обра-
ботки могут существенно ухудшить наблюдаемость ма-
лых целей на фоне больших.
При использовании сдвигов фаз только на 0 и л схе-
ма формирования импульса передатчика (рис. 3.21) и
149
кход
Рис. 3.25. Обработка фазоманипулированных импульсных сигналов:
а — функциональная схема системы обработки; б — временные диаграммы.
схема обработки (рис. 3.25) идентичны, в них лишь ме-
няются местами вход и выход. При других фазовых
сдвигах необходимо использовать в приемной схеме фа-
зосдвигающие цепи с характеристиками, обратными со-
ответствующим фазовым характеристикам цепей форми-
рования сигнала в передатчике. Это обстоятельство от-
мечено на рис. 3.25 знаками минус при индексах соответ-
ствующих фазовых сдвигов.
Обработка сигналов с линейной частотной модуляци-
ей или квазислучайным изменением частоты производит-
ся аналогично. Для сжатия принимаемых сигналов здесь
также следует использовать систему формирования зон-
дирующих сигналов, включенную таким образом, чтобы
функция передачи фильтра была комплексно-сопряжен-
150
Рис. 3.26. Система обработки сигналов с квазислучайным изменением
частоты внутри импульса.
ной функцией спектра сигнала. На рис. 3.26 показана
система обработки принимаемого сигнала, сформирован-
ного при излучении схемой, приведенной .на рис. 3.22,а
для квазислучайного изменения частоты внутри им-
пульса.
Существенное влияние на эффективность обработки
сигналов специальной формы оказывает неопределен-
ность, возникающая вследствие допплеровского сдвига
частоты при обнаружении движущихся объектов [6, 28].
В РЛС бокового обзора с вдольфюзеляжной антенной
допплеровский сдвиг частоты сигнала за счет движения
носителя при строго боковом обзоре близок к нулю. При
отклонениях луча антенны от перпендикуляра к путевой
скорости самолета на небольшой угол (3 средняя доппле-
ровская частота сигнала равна
(3.83)
Допплеровский сдвиг, возникающий за счет движения
носителя, можно исключить поворотом луча антенны так,
чтобы его ось была перпендикулярна направлению дви-
жения, или компенсировать соответствующей настройкой
системы обработки. Например, смещение частоты прини-
маемых сигналов на величину Fa может быть компенси-
ровано добавлением в сигнал гетеродина частоты
величина которой автоматически меняется в зависимости
от измеренных значений 0 и W.
Из-за ошибок измерений угла 0 и путевой скорости
приходится расширять полосу фильтра системы обработ-
ки, вследствие чего ухудшается отношение сигнал/шум и
уменьшается разрешающая способность по дальности за
151
счет искажения формы сигнала. Необходимость обнару-
жения движущихся целей также приводит к необходимо-
сти расширения полосы системы обработки.
Наличие допплеровского сдвига в частоте отраженно-
го от цели сигнала позволяет измерять радиальную со-
ставляющую скорости цели путем использования набора
обнаружителей, каждый из которых настроен на задан-
ный интервал допплеровских частот Д-Гд [6]. На выходе
этих обнаружителей максимальными будут сигналы це-
лей, движущиеся с радиальной скоростью,, лежащей
в диапазоне настройки соответствующего обнаружителя.
Сравнительно малая величина допплеровской частоты,
обусловленной движением носителя при боковом обзоре
пространства, облегчает в РЛС с вдольфюзеляжной ан-
тенной выделение движущихся объекюв и измерение их
скоростей. Как и в других типах станций, в РЛС боко-
вого обзора для этой цели могут быть использованы схе-
мы радиолокационного тракта как с внутренней, так и
с внешней когерентностью [3].
4
Методы анализа разрешающей способности
РЛС с искусственным раскрывом антенны
4.1. Представление антенны РЛС
в виде фильтра пространственных
частот
Наиболее перспективным методом повышения разре-
шающей способности бортовых РЛС обзора земной по-
верхности, как это следует из сравнительного анализа,
проведенного в гл. 2, является метод искусственного рас-
крыва антенны. РЛС -с искусственным раскрывом антен-
ны -позволяют получить очень высокую линейную разре-
шающую способность по угловым координатам, в преде-
ле соизмеримую с размером раскрыва реальной антенны,
и обеспечить постоянство этой разрешающей способности
во всем рабочем диапазоне дальностей РЛС.
Различные подходы к проблеме повышения разреша-
ющей способности радиолокационных станций обуслови-
ли появление в литературе и различных методов анализа
РЛС с искусственным раскрывом антенны. Свойства
этих станций можно рассматривать с позиции теории ин-
формации, используя методы оптимальной обработки
принятых сигналов с учетом априорных сведений об от-
носительном перемещении РЛС и целей или на основе
теории антенных систем. При анализе основных харак-
теристик РЛС с искусственным раскрывом антенны все
методы математического исследования, естественно, дают
одинаковые результаты. Однако специалисту, имеющему
опыт работы в -одной из указанных областей, бывает
удобным проводигь анализ рассматриваемых системнаи-
153
более привычным ему методом. Это обстоятельство обу-
словливает полезность рассмотрения различных методов
анализа РЛС с искусственным раскрывом антенны, чему
и посвящена настоящая глава.
Вначале остановимся на некоторых общих вопросах
радиолокационного обзора местности. За последнее вре-
мя при анализе антенн РЛС различного назначения на-
шел применение метод пространственных частот, обла-
дающий большой физической наглядностью и относи-
тельной простотой расчетов. Рассмотрим кратко сущ-
ность этого метода применительно к радиолокационным
станциям обзора земной поверхности для решения зада-
чи обеспечения необходимой разрешающей способности
по угловым координатам.
При обзоре местности антенные устройства РЛС из-
меряют распределение мощности электромагнитных от-
ражений от земной поверхности с максимально возмож-
ной разрешающей способностью и точностью. Допустим,
что цели находятся в дальней зоне приемной антенны
РЛС. Электромагнитное поле в этом случае можно пред-
ставить в виде суммы большого числа плоских волн,
приходящих с различных направлений или, что тоже са-
мое, имеющих различные пространственные частоты. Та-
кая скалярная функция имеет вид
Е = V Ап COS (<отХ + шупУ 4- “zn Z + «О • t + ?п), (4.1)
П=1
где со — частота колебаний во времени;
t — время;
сох, соу, coz — пространственные частоты (скорости изме-
нения фаз высокочастотных колебаний) по
направлениям х, у и z соответственно;
ср — начальная фаза;
А — амплитуда гармоник.
Пространственные и временные частоты связаны из-
вестным соотношением
\/ со2 —<о2 -Г-с»2 = k = . (4.2)
V х * у I z \ с ' '
Если длина волны известна, то для определения направ-
ления прихода плоской волны достаточно определить
154
Рис. 4.L Пример двумерного распределения мощности радиолока-
ционных сигналов, отраженных от земной поверхности.
только две пространственные частоты сох и со^, т. е. два
направляющих косинуса нормали к фронту волны
-^ = cos6; -= cos ф, (4.3)
где 0 — угол, отсчитываемый от горизонтальной поверх-
ности. Третий направляющий косинус coz/^ = cosy опре-
деляется из уравнения (4.2). Таким, образом задача из-
мерения угловых координат объекта связана с измере-
нием одной или двух пространственных частот.
На рис. 4.1 приведен пример пространственного спек-
тра мощности, отображающего распределение мощности,
отраженных ог земной поверхности волн, в зависимости
от направления их прихода, т. е. пространственных час-
тот. Спектр мощности представлен в прямоугольной си-
стеме координат (Fx = cox/2n; Ру = ®у/2я) для электромаг-
нитного поля заданной длины волны (X). В этой системе
координат все плоские электромагнитные волны, лрост*
ранственные частоты которых находятся в пределах
Fx±-±-ZFx, Fv±±-t>Fy,
15$
отображаются точками, расположенными внутри малого
участка 8S = dFxdFy. Мощность отраженных электромаг-
нитных волн в пределах этого участка можно записать
в виде
P(FX, Fy)6FxbFy,
где P(FX, Fv)—плотность мощности на плоскости
(^Х, Fy).
Распределение P(FXi Fy) по поверхности земли пока-
зано на рис. 4.1 контурными линиями (аналогично гори-
зонталям топографических карт, изображающих прост-
ранственный рельеф). Контурные линии представляют
собой сечения трехмерной диаграммы пространственного
спектра горизонтальными плоскостями на определенных
уровнях мощности, т. е. являются линиями постоянного
уровня мощности электромагнитных волн, приходящих
к РЛС с различных направлений. Наряду с непрерыв-
ным распределением отражений возможны и дискретные
источники переизлучений. На основании соотношения
(4.2) можно сделать вывод, что пространственные часто-
ты волн, приходящих в область приема, удовлетворяют
условию 7?х<1/Х и Fy<l/X. Поэтому полная мощность
принимаемых сигналов равна сумме мощностей, переиз-
лучаемых участками внутри круга с радиусом 1Д. Точки
на границе круга (рис. 4.1) соответствуют источникам
переизлучения, находящимся на границе прямой видимо-
сти, а центр — переизлучению от области, находящейся
непосредственно под летательным аппаратом.
Большинство типов РЛС обзора земной поверхности
измеряет только одну угловую координату. Для одномер-
Рис. 4.2. Пример одномерного распределения мощности радиолока-
ционных сигналов, отраженных от симметричной цели.
156
П ____________^Интегре). и6ых~
।----\Детпектор\- -1 тор ' Г~*
Р-1-, 1-----------1 1----------l<(ZztZ2?
,——I
“>♦ 4«г
о
Рис. 4.3. Антенная система, состоящая из двух разнесенных изотроп-
ных вибраторов.
ного случая, например измерения азимута симметричной
цели, распределение P(FX) будет иметь вид, показанный
на рис. 4.2. Функцию P(FX) можно разложить в ряд
Фурье, с периодом повторения по оси Fx, равным 2/%.
Учитывая, что угловые размеры радиолокационной цели
сравнительно невелики, можно принять период разложе-
ния функции P(FX) равным 1/А,. Таким образом,
Р(^) = А-|_Дсо8 2^ж+
+ А2 cos 4ir2F3C sin 2nAFx S2 sin 4ttZFx (4.4)
Чем больше мелких деталей содержит отражающая по-
верхность, тем больше гармоник разложения (4.4) необ-
ходимо использовать для разрешения этих деталей.
Спектральная характеристика антенны может быть
получена разложением ее диаграммы направленности
в ряд Фурье по пространственным частотам. Для разре-
шения всех деталей местности она должна соответство-
вать заданной спектральной характеристике распределе-
ния мощности в пространстве P(FX), определяемой вы-
ражением (4.4). Предположим, что два ненаправленных
приемных элемента (изотропных вибратора) разнесены
в пространстве вдоль оси х на расстояние = где г —
целое число (r=0, 1, 2, 3 ...) (рис. 4.3). В соответствии
с формулой (4.1) сигналы на выходе этих элементов бу-
дут равны
= У Ап cos 2it (Fmx 4- ft + ?n), (4.5)
u2 = У An cos 2it (Fxnx'-\- Fmd ft <pn). (4.6)
n=l
157
После сложения этих сигналов, квадратичного детекти-
рования и усреднения результирующий сигнал, завися-
щий от направления прихода волн, можно представить
выражением
со
(U1U2) = V -i- A2 cos 2vFxd. (4.7)
П—\
При непрерывном распределении мощности по простран-
ству это уравнение может быть записано в интегральной
форме:
(Ы1и2) = J, Р (Fx) COS (2*FX4) dFx. (4.8)
—co
В случае, если прием сигналов от цели происходит с на-
правления, соответствующего пространственной частоте
Fxo, то последнее уравнение принимает вид
(и,и2) = у Р (Fx) cos [2it (Fx — Fx„) d] dFx. (4.9)
—co
Подставляя значение P(FX) из соотношения (4.4), получаем
(и,и2) = J P(Fx)cos[2v(Fx—Fx,)d]dFx =
1
~~2\
(Ar cos 2nFXQr2 -f- Вr sin 2r.FXQrX) при r^=0,
= • A (4.Ю)
4- при r = 0.
Если величина Fxq изменяется в пределах от —1/Х до
+ 1/Х, то выходной сигнал от двух элементов будет из-
меняться по синусоидальному закону, амплитуда и фаза
которого соответствуют r-й гармонике распределения
мощности, при условии, что элементы расположены на
расстоянии друг от друга. При Fxo = O выходной сиг-
нал равен ЛГ/2Х. В случае уменьшения фазы сигнала
на л/2 у элемента, более удаленного от начала коорди-
нат, выходной сигнал будет равен ВГ12Х.
С помощью только двух элементов при различных
расстояниях между ними (rZ) можно измерить все гар-
158
Мойики распределения отраженной мощности P(FX) or
любой цели с любой наперед заданной точностью.
Такой последовательный анализ распределения
мощности P(FX) по пространству возможен, если она не
изменяется в течение времени, необходимого для выпол-
нения всех измерений. В этом случае распределение мощ-
ности P(FX) определяют расчетным путем, суммируя
пространственные гармоники с помощью, например, циф-
ровой вычислительной техники. Разрешающая способ-
ность (как и точность) будет тем выше, чем больше ко-
эффициентов ряда (4.10) определено в процессе измере-
ний. Наибольший номер гармоник определяется макси-
мальным расстоянием, на которое были разнесены эле-
менты антенны.
Последовательный метод анализа пространственных
гармоник ш синтез по ним реального распределения ин-
тенсивности излучения применяются в радиоастрономии
[61]. Однако в практике радиолокации такой метод не
использовался вследствие ограниченного времени анали-
за и непостоянства распределения отраженной мощности
P(FX). Все известные радиолокационные антенны с ре-
альным раскрывогл одновременно анализируют все гар-
моники P(FX) вплоть до гармоники, которая определяет-
ся наибольшим размером антенны, выраженным в дли-
нах волн. Поэтому антенны с небольшими размерами
раскрыва измеряют только низкие гармоники распреде-
ления P(FX). Потеря высших гармоник приводит к ото-
бражению на выходе РЛС только плавных изменений
в характеристике P(FX}. При этом происходит потеря
Рис. 4.4. Равномерная линейная решетка из девяти изотропных эле-
ментов (а) и ее диаграмма направленности (б).
159
Информации об отдельных существенных деталях распре-
деления мощности электромагнитных волн, отраженных
от земной поверхности. Разрешающая способность таких
антенн сравнительно низкая.
Рассмотрим для примера равномерную линейную ре-
шетку из девяти изотропных элементов (рис. 4.4,а). Сиг-
нал от двух соседних элементов определяется выраже-
нием (4.8).
Для всей антенной решетки выходной сигнал можно
представить в виде
(Ивых) = + • • • + ^э)2) —
= ) + (W1U2) + • • • +
+ (^9) + (^1) 4“ (U2 ) + • • • + +
+ (u9ui) + (w9u2) -|-.. .г-|- {и29). (4.11)
Подставляя значения отдельных произведений и исполь-
зуя выражение (4.8), получим
(«вых) = J р [9 + 16 cos 2^2 +
+ 14 cos 2n2Fxl +... 4- 2 cos 2я8ЛЛ]. (4.12)
Диаграмма направленности всей решетки (рис. 4.4,6)
в виде суммы пространственных гармоник определяется
выражением, стоящим в квадратных скобках формулы
(4.12). Такая антенна может производить анализ распре-
деления электромагнитной энергии, отраженной от зем-
ной поверхности с точностью до восьмой гармоники про-
странственных частот. Увеличивая количество элементов
антенн, можно получить пространственные гармоники, со-
ответствующие заданному распределению отраженной о г
земной поверхности электромагнитной энергии, т. е. син-
тезировать антенну, позволяющую реализовать радиоло-
кационную карту земной поверхности с необходимой раз-
решающей способностью.
Таким образом, антенну как преобразователь инфор-
мации в частотной области можно рассматривать в виде
фильтра пространственных частот, полоса пропускания
которого определяется геометрией построения антенны
160
в пространстве и ее расположением относительно цели.
Применение метода пространственных частот к анализу
РЛС с искусственным раскрывом антенны дается в по-
следующих параграфах и главах.
4.2. Разрешающая способность
несфокусированных РЛС
с искусственным раскрывом антенны
Синтез линейного раскрыва антенны может быть про-
изведен на примере последовательного перемещения оди-
ночного вибратора в пространстве. Рассмотрим случай,
когда вибратор р с изотропной характеристикой направ-
ленности движется равномерно вдоль оси х со скоростью
W ,(рис. 4.5). Выражая принятый сигнал на выходе ви-
братора как функцию двух независимых переменных х и
t и .пользуясь прежними обозначениями можно записать
для точки с координатой следующее выражение:
ut = £ Ап cos 2it (FxnXi + / ti). (4.13)
n=l
Для точки с координатой х2 аналогичное выражение
имеет вид
«2 = £ Ап COS 2it (Fjcn-Ta + fit) =
Дх=1
= f лп cos 2* + Fxnd + ftt + /7), (4.14)
n=\
Рис. 4.5. Синтез линейного раскрыва антенны путем последовательно-
го перемещения вибратора в пространстве.
161
где
d = х2 — Xi = W (/2 — /1),
т__/ f —
1 —i2 и —
Если сигналы щ и и2 складываются и подаются на ква-
дратичный детектор, то составляющие сигнала на его
выходе, зависящие от направления прихода волн, будут
иметь вид
со
«1«2 — YJ C0S 21t(^xtiXi + Ж
«=1
х COS 2it (Fm + Fxnd 4- f t + fT) =
CO
= ^[cos2. (/W + fO +
n=l
4- cos 2* (2FmX1 + Fmd + 2ft + fT)]. (4.15)
Кроме слагаемых, описываемых формулой (4.15), на вы-
ходе детектора возникает большое количество составля-
ющих высших гармоник, которые, однако, можно не рас-
сматривать вследствие того, что после фильтрации они
не будут влиять на характер .выходного сигнала. Для
исключения дополнительного фазового сдвига fT в пер-
вом слагаемом уравнения (4.15), т. е. обеспечения одно-
временности суммирования сигналов, необходимо задер-
живать сигнал «1 на время Т. Это может быть сделано
с помощью специальной линии задержки. Тогда
Mi = ^^ncos2it(F3Cnx1 + /Z1 + /7’). (4.16)
П=1
Уравнение (4.15) соответственно перепишется в виде
и>1И2 —
24-Д2[С082^+
+ cos 2ъ (2FxnX1 + Fxnd + 2f t + f T)]. (4.17)
1С2
После усреднения во времени получаем
ее
Д2П cos (2-KFxnd). (4.18)
n=l
Если задано непрерывное распределение мощности в прост-
ранстве P(FX), то
(Ы1и2) = J Р (Лх) cos (2^) dFx. (4.19)
—00
Сравнивая это уравнение с уравнением (4.8), можно
сделать вывод, что суммарный сигнал на выходе рас-
смотренной системы, полученный в двух последователь-
ных точках отсчета, и сигнал на выходе двух одновре-
менно существующих вибраторов, разнесенных на рас-
стояние d в пространстве, эквивалентны с точки зрения
определения направления прихода электромагнитных
волн.
Аналогично можно показать, что результирующий
сигнал на выходе рассмотренной системы для ряда по-
следовательных точек отсчета в пространстве (рис. 4.5)
равен сигналу на выходе равномерной линейной решетки
из такого же числа вибраторов (рис. 4.4). Так, если чис-
ло точек в пространстве равно девяти, результирующий
сигнал записывается в виде
<«2ВЫХ) = J Р (Fx) [9 + 16 cos 2nFxd +
+ 14 cos Wsd +... + 2 cos 1dFx. (4.20)
При этом предполагается, что расстояние между точками
приема Xi, х2, х$, . v, xN одинаковое и равно
(^2 Xi) = (Х3 Х2) = . = (Х^ ^N~\ ) ==i
Искусственные линии задержки обеспечивают дополни-
тельную задержку для соответствующих сигналов на ве-
личину
T1 = (Af — 1)Г; = — 2)Г;.. .;
^ = (^-й)Г;...^ = О,
где N— количество точек приема в полном цикле.
163
Такая антенная система обладает направленными
свойствами приема электромагнитной энергии в прост-
ранстве, аналогичными эквивалентной девятиэлементной
линейной решетке. Диаграмма направленности ее опре-
деляется выражением, стоящим в квадратных скобках
уравнения (4.20).
При достаточно большом количестве точек отсчета
сумма ряда, стоящего в квадратных скобках выражения
(4.20), стремится к величине
Си(в) =
TVsin
Nnd
—5— sin 6
Л
(4.21)
которая является множителем равномерной синфазной
линейной решетки из Л/ антенн.
Рассмотренный метод синтезирования диаграммы на-
правленности позволяет получить такой непрерывный
(точнее, квазинепрерывный) раскрыв в РЛС бокового
обзора последовательным развертыванием антенны
в пространстве и применением большой частоты повто-
рения излучаемых сигналов.
В реальных условиях вместо изотропного вибратора
применяется направленная антенна. В этом случае диа-
грамма направленности всей системы определяется не
только диаграммой решетки, но и диаграммой самого
приемного элемента Gii(0) (рис. 4.6). В качестве такого
элемента можно принять любую радиолокационную
антенну с необходимой диаграммой направленности. До-
пустим эта диаграмма описывается функцией вида
Тогда общее выражение для диаграммы направленности
синтезированной антенной системы имеет вид
G (0) = Gt (0) GH (0)
(4.22)
164
а)
Рис. 4.6. Линейная антенная решетка из направленных элемен-
тов (а) и ее диаграмма направленности (б).
Если в качестве движущегося элемента принята ан-
тенна с размером раскрыва da, то условие однозначности
(отсутствие вторичных главных максимумов) равно
da == d.
Увеличение разрешающей способности будет опреде-
ляться при активном импульсном методе работы РЛС
отношением
90 _ 2Х _ 2 (V — 1) ГПЯ7
би ~ 4 — 4 ’
где Гп — период .повторения импульсов;
0о = Wa — ширина диаграммы направленности ре-
альной антенны;
X = (Л/—1)ГП«7— размер искусственного раскрыва
синтезированной антенны;
0И — ширина синтезированной диаграммы.
Ширина синтезированной диаграммы направленности
определяется выражением
е,=4- (4.24)
Уменьшение ширины синтезированной диаграммы на-
правленности в два раза обусловлено удвоением прост-
165
ранственного фазового набега по сравнению с обычной
антенной за счет распространения сигнала до цели и об’
ратно.
В соответствии с § 2.6 максимально возможная раз’
решающая способность соответствует наибольшему раз-
меру нефокусированного искусственного раскрыва
^макс —V 0,5Л/?
(4.25)
и определяется выражением
V---
Г 2 R
’и мин
X
(4.26)
Линейная разрешающая способность равна по азимуту при этом
МИН Z== МИН^< 1/ 1 (4.27)
Анализ свойств неоптимальной РЛС с сфокусирован-
ным искусственным раскрывом может быть проведен так-
же на основе метода обработки сигналов, например
фильтрации частот Допплера. Известно, что допплеров-
ское смещение частоты сигналов, отраженных от целей,
при активном методе работы РЛС .равно
г 2UZ . д
Frr =—-sm 0.
А
(4.28)
На рис. 4.7,6 приведен закон изменения допплеровской
частоты сигналов, принятых от целей с разных направ-
лений в диаграмме направленности реальной антенны
(рис. 4.7,<з) при боковом обзоре пространства. Диапазон
изменения частот Допплера в пределах ширины диа-
граммы направленности реальной антенны 0О, при усло-
вии, что 0о невелико, может быть определен выраже-
нием
А Г _____ fi
пгдмакс— %*
(4.29)
Разным направлениям приема сигналов соответствуют
определенные допплеровские частоты. Это физическое
свойство может быть использовано для повышения раз-
решающей способности РЛС путем применения устрой-
166
Рис. 4.7. Диаграмма направленности антенны (а), характер измене-
ния допплеровских частот при боковом обзоре пространства (б) и
набор допплеровских фильтров для обеспечения высокой разрешаю-
щей способности по азимуту (в).
ства селекции сигналов по частотам Допплера. Много-
канальное устройство, состоящее из набора допплеров-
ских фильтров (рис. 4.7,в), позволяет обеспечить одно-
временный обзор пространства в пределах диаграммы
направленности реальной антенны с высокой угловой
разрешающей способностью. Оптимальное время измере-
ния тн любой отдельной частоты будет определяться
допустимым отклонением частоты сигнала за это время
при котором накопление сигналов в фильтре про-
исходит еще достаточно эффективно
_ 1
ДЛФ. ~ 2ДЛ''д’
где АГф — полоса пропускания фильтров.
(4.30)
167
Обоснование выбора допустимого отклонения часто*
ты сигнала АиГ'д от среднего значения приводится ниже.
Измеряя допплеровское смещение частоты Д^д сигналов,
принятых от двух соседних целей и разнесенных
по углу на Д'0 (рис. 4.7), можно обеспечить их раздель-
ное наблюдение при условии, что
д/гд=^Д0 = ^ 0И, (4.31)
где Ои — ширина сектора луча реальной антенны, в пре-
делах которого накопление отраженных сигналов проис-
ходит эффективно, что соответствует в случае 2Д/?,д =
определению ширины луча синтезированной
антенны.
Количество разрешаемых элементов в пределах ре-
альной диаграммы направленности определяется выра-
жением
Д/7дмаке_ eWTn _28ОХ _ 2Х _ 60 /л QQX
2Д^'д — X — х — 4 — 0И ’ 1 }
Полученное равенство показывает эквивалентность
способов анализа повышения угловой разрешающей спо-
собности РЛС методам искусственного раскрыва, осно-
ванного на теории пространственных частот [соотноше-
ние (4.23)] и теории частотной селекции сигналов, отра-
женных от цели и принятых по траектории полета.
Необходимо отметить, что степень улучшения разрешаю-
щей способности при использовании поступательного пе-
ремещения РЛС определяется только размером искусст-
венного раскрыва и не зависит от скорости самолета.
Однако при прочих равных условиях, чем больше ско-
рость полета, тем меньше необходимое время
накопления сигналов. Это облегчает техническую реали-
зацию устройства обработки, но требует применения
более высокой частоты следования импульсов РЛС.
При боковом обзоре земной поверхности бывает до-
статочным обеспечить фильтрацию одной допплеровской
частоты. Например, если цель находится на перпендику-
лярном к траектории полета направлении, то эта частота
равна нулю. Допустимое отклонение частоты от нулевого
значения, как следует из рис. 4.8, можно определить со-
отношением
= = (4.33)
168
Рис. 4.8. Геометрические соот-
ношения при фильтрации нуле-
вой допплеровской частоты.
Согласуй .полосу пропускания фильтра с этим значением,
получаем
Л Г ОЛЕ7 2Г0И
ДРФ = 2ДРд = —
Время накопления сигналов при этом равно
_ 1 _ X _^R
Тн дгф. ~~ w W ’
(4.34)
(4.35)
откуда
ДГФ — 9ИЯ ’
(4.36)
Подставляя это выражение в формулу (4.34), окончательно
имеем
Таким образом угловой сектор, в пределах которого про-
исходит эффективное .накопление сигналов на допплеров-
ском фильтре, определяет ширину искусственной . диа-
граммы направленности антенны.
В заключение отметим, что допустимое отклонение
допплеровской частоты ДГ'дг от среднего значения ГД1-,
которое определяет выбор времени накопления сигналов
тн, а следовательно, и полосу фильтра Д1Рф, строго согла-
суется с допустимым набегом фазы на краю раскрыва.
Преобразуем выражение для частоты Допплера к виду
~ пс 4л№% 4лГ . 4^’-. /л
= = (4.37)
|6?
Тогда можно определить сдвиг фазы сигнала, обуслов-
ленный допплеровским смещением частоты
°’5тн
f 4тс№2 ,1. TtUZ2 2 ,Л оо\
J <4-38>
0
где th — время накопления сигналов при боковом обзоре
пространства (Рн = 0).
Выбирая приемлемый для каждого частного случая
критерий дальней зоны искусственного раскрыва, мож-
но определить допустимое отклонение допплеровской ча-
стоты от среднего значения.
4.3. Анализ свойств фокусированной
РЛС методом векторной суммы
сигналов
Интенсивность сигнала, принимаемого антенной с за-
данного направления, часто определяется векторным
суммированием парциальных составляющих полей от от-
дельных ее элементов. Диаграмма направленности антен-
ны с искусственным раскрывом также может быть полу-
чена путем векторного суммирования последовательно
принимаемых во времени сигналов.
Как и раньше, предположим, что носитель РЛС дви-
жется равномерно и прямолинейно вдоль оси х с путевой
скоростью W. В точках участка траектории, отсчитывае-
мых от его середины ±пД1х (где n = 0, 1, 2, 3, ..., N),
производится излучение импульсных сигналов РЛС
(рис. 4.9)
«П (0 = Re {F (0 ехр (/<•*</)}, (4.39)
где F(t) —огибающая импульса;
с£>о — несущая частота.
Эхо-сигнал от цели, принятый в любой точке траек-
тории, может быть представлен в виде
и (Г) = Re {kF (t — exp [ — /®0 (t — tR)]}, (4.40)
где . k — коэффициент, зависящий от дальности до це-
ли, отражающих свойств цели и т. п.;
Xr—2R]c — время запаздывания, обусловленное распро-
странением сигнала до цели и обратно.
17Q
Рис. 4.9. Геометрические соотношения в фокусированной РЛС
с искусственным раскрывом антенны.
Следует заметить, что в данном методе анализа диа-
грамма направленности антенны выводится как сумма
сигналов на выходе устройства, а не как -сумма векторов
поля от отдельных элементов антенны, поэтому впослед-
ствии возникает необходимость доказательства аналогии.
Изменение величины запаздывания эхо-сигналов tR
согласно рис. 4.9 равно
^=^=V^o2 + (x-fl)2’ (4.41)
где а — смещение цели относительно оси искусственной
антенны.
При х—а/Яо^1 выражение (4.41) можно разложить
в степенной ряд и ограничиться двумя членами разложе-
ния
-VI- <4-42>
Подставляя, соотношение (4.42) в уравнение (4.40), полу-
чим
и (X, О = Re kF {t —I- [ ] } X
Xexp>0 —1 [R„ + (4.43)
171
При импульсном режиме работы РЛС необходимо учи-
тывать только те точки траектории, в которых происхо-
дит излучение и прием сигналов. Полагая согласно при-
нятым обозначениям в выражении (4.43) полу-
чаем
и (пЬх, t) - Re kF - 4 [Ro + ~ } X
Хехр/Ч р-4[^+----2#Г)2 ]}• (4‘44)
Последовательности импульсных сигналов, принятых
по траектории полета с разных дальностей /?о, суммиру-
ются раздельно, поэтому результирующий сигнал на вы-
ходе синтезированной антенной решетки для каждой
дальности может быть представлен выражением
N
ар (a, t) = и (п&х, t) =
n——N
{N \
АД Руп /т (t ZRo X VI f ; — a)2 | I
tt/i^expj(o01 г c ) exP |_ cR0 J j
n=-N )
(4.45)
где
Ar = F {/ - A [Ro + -(-X2~a)2 ~ F (/ - 4Roy. (4.46)
При этом предполагается, что изменение пространст-
венного запаздывания мало по сравнению с длительно-
стью импульса.
Покажем теперь, что сумма высокочастотных сигна-
лов (4.45) является аналогом векторной суммы сигналов
от элементов одновременно существующей антенны при
формировании диаграммы направленности. Обозначим
N
Fp(a) = kAR £ exp[-j4 ] =
п— -N
= | Fp (а) | ехр й>р, (4.47)
где |Fp(a) | — модуль;
ФР — фаза комплексной суммы сигналов.
172
Результирующий сигнал на выходе синтезированной
антенны может быть выражен через функцию F?(a)
в виде
ир (а, 0 = Re { | Fp(a) | exp /4 t — { =
= | Fp (a) | cos . (4.48)
Таким образом, величина результирующего сигнала, оп-
ределяющая значения диаграммы направленности искус-
ственной антенны, равна модулю функции Fp(a).
С другой стороны, для реальной антенной решетки
можно записать вектор напряженности поля от одного
элемента антенны как
г(/гЛх, t) = kAR exp /®0 ] • (4.49)
Если этот вектор вращается с угловой скоростью о)0 и
имеет начальную фазу ср = 2со07?о/^, то он является век-
торным представлением сигнала от одного элемента ан-
тенны, определяемого выражением (4.44).
Сумма (2Л/+1) векторов может быть записана в ви-
де соотношения
N
R (а) = kAR £ exp [- /ш0 , (4.50)
n=—N
которое полностью совпадает с формулой (4.47) для
комплексной суммы сигналов. Следовательно, модуль
функции ЕР(л) определяет диаграмму направленности
антенны с искусственным раскрывом так же, как вектор-
ная сумма полей от отдельных элементов одновременно
существующей антенной решетки. Давая смещению а до-
статочное число дискретных значений, можно по модулю
функции Ер(а) построить диаграмму направленности
этой антенной решетки.
Если 7?о<|2Л'2Д, функция Fp(a) вследствие квадратич-
ных фазовых набегов между элементами решетки не бу-
дет иметь максимально возможного значения. Для обес-
печения синфазного суммирования необходимо перед
сложением сигналов компенсировать квадратичные на-
беги фазы в отдельных элементах антенны,- обусловлен-
ные изменением расстояния до цели. Это эквивалентно
173
фокусированию антенны на определенный участбк даль-
ностей /?0. Введем в соотношение (4.47) фазовую весо-
вую функцию вида
h (мДх) = | h (пДх)| ехр [/<р (яДх)]. (4.51)
После подстановки получим
N
Fv(a) = kAR £ ^(/zAx)exp[-j4^-a)2 ]. (4.52)
n=—N
Для истинно бокового обзора модуль функции Fp(a)
должен быть максимально возможным при а = 0, следо-
вательно, весовая функция должна иметь вид
/г (яДх) = ехр
(4.53)
Подставляя выражение (4.53) в формулу (4.52), получим
N
Fp(a) = kAR £ ехрГ/Ч1^]ехр[-/Ч(nA*~a)2j=--
n=—N
N
i Л Г а2 * 1 ТЧ Г. 2шгДх 1 ,А г,ч
=k\ ехР [- /“о Тяг] 2j ехр L/w° J • <4-54)
n=—N
Определяя значение суммы геометрической прогрес-
сии данного вида, окончательно имеем
2 n Sin [(2ЛГ + 1) «]
F. (а) = kAR ехр - /Ч А- L ° . (4.55)
sin )
Модуль этой функции, определяющий диаграмму на-
правленности антенной решетки с равномерным облуче-
нием, равен
\Fp(a)\=kAR
(4.56)
174
Максимальное значение диаграммы направленности
представляется выражением
' | fp (0)1 макс = МЛ(2Л^+ 0. (4-57)
Первый нуль диаграммы соответствует значению
Разрешающую способность такой антенны, как было по-
казано в § 2.1, можно определить половиной расстояния
между первыми нулями, что соответствует величине «о.
Выразим величины, входящие в формулу (4.58), через
параметры РЛС.
Расстояние между соседними элементами антенны Дх
соответствует пути, который проходит самолет за время,
равное периоду следования импульсов Тп:
,Д1х=ГГп. (4.59)
В оптимальной РЛС с фокусированным искусствен-
ным раскрывом антенны время облучения цели гОбл
определяется линейной шириной диаграммы направлен-
ности 0о реальной антенны на дальности цели /?0’
хобл=1=|я, (4.60)
Количество импульсов, отраженных от цели, при этом
равно
2У+1 = = + (4.61)
Л п w I п
Подставляя эти величины в соотношение (4.58) и учиты-
вая, что
2АГ> 1; Л=—; 0О = А
(О0 0 d&'
окончательно получим
8х = а0 = 4- <4-62>
Таким образом, потенциальная линейная разрешаю-
щая способность РЛС бокового обзора с искусственным
раскрывом по азимуту равна половине размера раскры-
ва реальной антенны и не зависит от дальности до цели
и длины волны.
175
4,4. Анализ характеристик
фокусированной РЛС на основе
теории оптимальной обработки
сигналов
Пусть самолет, на котором установлена РЛС боко-
вого обзора, движется равномерно и прямолинейно вдоль
оси х с путевой скоростью W (рис. 4.10). Для удобства
анализа воспользуемся свойством относительности пе-
ремещения. РЛС и цели и будем считать, что переме-
щается цель в противоположном движению самолета
направлении с той же скоростью W. При этом коорди-
ната цели будет изменяться по закону
x(t)=xQ—Wt, (4.63)
где Хо — координата, соответствующая входу цели в диа-
грамму направленности реальной антенны РЛС
(рис. 4.10).
Будем полагать, что РЛС излучает непрерывный сиг-
нал, однако это, как будет показано в дальнейшем, не
уменьшает общности рассмотрения. Вследствие движе-
ния летательного аппарата отраженный от наземных
объектов сигнал будет иметь допплеровское смещение
частоты
Од = cos а (/). (4.64)
Рис. 4.10. Направление перемещения цели относительно РЛС
с искусственным раскрывом антенны.
176
Ro=const
Рис. 4.11. Характер изменения допплеровских частот при различных
углах наблюдения цели.
Характер изменения допплеровекой частоты при переме-
щении РЛС относительно цели в случае истинного бо-
кового обзора земной поверхности показан на рис. 4.11.
При малых размерах искусственного раскрыва X<^D, что
соответствует узкой диаграмме направленности реаль-
ной антенны 0О, изменение допплеровской частоты про-
исходит примерно по линейному закону. В этом случае
результирующий сигнал, принятый от цели по траектории
полета самолета, будет иметь линейную частотную мо-
дуляцию
(t \
+ f ОдЛ + <р01, (4.65)
oJ /
где AR — амплитуда сигнала;
фо — начальная фаза.
В соответствие с рис. 4.10 угол a(t) изменяется по
закону
cos a (t) = —х - - (4.66)
К Яо+*2 (0
или, учитывая, что | x(t) | макс < R»,
cosa(/)^ (4.67)
АО
Подставляя значение a,(t) в соотношение (4.64), получаем
Q»=w-r<')=w(x--w>- (4-68)
Тогда отраженный сигнал (4.65) записывается в виде
и (0 = Ar cos -j- Од макс/ — , (4.69)
12-1094 ’
Рис. 4.12. Изменение параметров результирующего сигнала в РЛС
с искусственным раскрывом антенны при изменении дальности цели.
д макс = х0—максимальная допплеровская частота
в пределах ширины луча (при х = х0).
Так как
•^о - 2
ТО
Одмакс = ^Ов. (4.70)
Крутизна линейной частотной модуляции
зависит от дальности до цели.
Длительность сигнала определяется временем облу-
чения цели в пределах диаграммы направленности ре-
альной антенны
_____ __ X _ у
тобл Ц7 "деТ ' •
На рис. 4.12 показано изменение параметров результи-
рующего сигнала при изменении дальности цели. Как
видно, при пролете участка траектории X может быть
сформирован сигнал с внутриимпульсной линейной ча-
178
Стотной модуляцией. Известно [66], что с помощью
фильтра, оптимально согласованного с таким сигналом,
можно произвести его сжатие по длительности в kc раз:
kc = &FcT, (4.72)
где AF — ширина спектра результи-
рующего сигнала, сформированного на участке траектории X.
Подставляя значения AF и 7\ получаем
ь ______________________ 20q/?o
с-“ X
(4.73)
На выходе такого устройства обработки получим сигнал
с длительностью
= (4.74)
Это эквивалентно приему эхо-сигнала цели антенной,
диаграмма направленности которой имеет ширину
e- = V=W- <475>
В этом смысле указанная обработка сигнала позволяет
производить сжатие луча реальной антенны РЛС.
Линейная разрешающая способность антенны по ази-
муту равна
s r А А * А.
ОХ —— 28О ~ 2 ’
где da — размер раскрыва реальной антенны РЛС.
Если РЛС работает в импульсном режиме, то путем
надлежащего выбора параметров запоминающего
устройства можно сформировать квазинепрерывный ре-
зультирующий сигнал на участке траектории X. При
прочих равных условиях основные характеристики это-
го сигнала будут такие же, как и в рассмотренном вы-
ше случае непрерывной работы РЛС.
Известно, что оптимальную обработку сигналов мож-
но производить не только в частотной области (методы
оптимальной фильтрации), но и во временной области
путем применения корреляционных анализаторов. Выра-
12* 179
Жеиие взаимокорреляционной функции может/ быть за-
писано в виде
у (,) = J х (0 у (I — г) dt. (4.76)
—00
Для РЛС -с искусственным раскрывом антенны корреля-
ционный анализатор должен производить сравнение сиг-
нала, принятого на участке траектории X с опорным
сигналом, вид которого определяется априорными сведе-
ниями. Априорные сведения в первую очередь опреде-
ляют фазовую характеристику сигнала, обусловленную
параметрами движения РЛС относительно цели и .пара-
метрами РЛС. На основе результатов анализа, проведен-
ного в § 4.3, взаимокорреляционную функцию, образо-
ванную отраженным сигналом, принятым с помощью
реальной антенны
и = kAR ехр [- /Ч
и весовой функцией h(nAx), можно записать в следую-
щем виде:
N
Fv (а) = kAR h (nbx) ехр f — /Ч ’
n=-N
где а — можно рассматривать как переменную корреля-
ции по пространству [см. формулу (4.52)].
Перейдем от пространственной координаты х к вре-
менной t путем подстановки
iAx= Wx\ а=№|0.
Выражение для одиночного импульсного эхо-сигнала,
определяемого соотношением (4.44), после вышеуказан-
ной подстановки можно представить в виде
и (nWt, t) — RekF р - 4 [f X
ХЛ (nWz) ехр К - 4 [ч + ^§4^ ] } • (4>77)
Усредняя выражение (4.77) по времени t, опреде-
ляем составляющую, характеризующую изменение ам-
плитуды и фазы отраженных сигналов по траектории
полета самолета
180
{и (/гГт, t)} = kARh (nWt) exp J - /<о0 j. (4.78)
Введем новые функции, исключающие путевую скорость
самолета W из переменных:
и' (п%, t) = u (nWz, t),
h' (nv) = h(nWi),
Тогда результирующая сумма, образованная последо-
вательностью импульсных сигналов, принятых по траек-
тории полета самолета на каждой дальности, может
быть записана в виде
N
F'p($ = kAR V h' (^)ехр[-/«.Л- (;;-р)г ]. (4.79)
r^~N
Это выражение, где переменной является время, пол-
ностью совпадает с формулой (4.47) для суммы сигна-
лов, модуль которой определяет диаграмму направлен-
ности антенны с искусственным раскрывом в простран-
ственных координатах. С другой стороны формальное
преобразование выражения (4.79) дает
Рр(Р)= |м^'(Л)ехр[-/Ч ]Х
—СО
N
Xj 8(2 —/1т)бД. (4.80)
n~~N
Сравнение этой формулы с выражением для взаимо-
корреляционной функции (4.76) показывает их анало-
гию. Следовательно, для анализа селектирующих свойств
РЛС с искусственным раскрывом антенны в области
времени необходимо аналитически записать взаимокор-
реляционную функцию от входного сигнала, сформиро-
ванного по траектории полета и опорного сигнала. В дан-
ном случае входной сигнал определяется выражением
, г . Г2(Х —р)2 1
«₽ = k exp I - I,
1Я1
а опорный сигнал состоит из весовой фокусирующей функ-
ции, корректирующей фазовые набеги hr (Z), и функции
N
Ar 6 (х — пг), характеризующей необходимые линей-
n=~N
ные задержки импульсных эхо-сигналов для обеспече-
ния их одновременного суммирования во времени.
Таким образом показана эквивалентность методов
анализа РЛС с искусственным раскрывом антенны,
основанных на фильтрации пространственных частот или
частот Допплера, векторном сложении сигналов и опре-
делении взаимокорреляционной функции.
5
Основные свойства радиолокационных станций
с искусственным раскрывом антенны
5.1. Пространственная селекция целей
при использовании в когерентных РЛС
информации о траектории движения
летательного аппарата
Представляет интерес рассмотреть более подробно
общие закономерности пространственной селекции целей
при наблюдении земной поверхности с помощью коге-
рентных РЛС. В связи с тем, что энергетические харак-
теристики таких станций достаточно хорошо изучены,
в настоящей работе мы их касаться не будем. Отметим
лишь только, что известные энергетические преимущества
когерентных РЛС перед некогерентными значительно
повышают эффективность первых.
При анализе общих свойств пространственной селек-
ции когерентных РЛС представим их как преобразова-
тели пространства целей в пространство отображения.
Первичнее сообщение, поступающее на вход РЛС, фор-
мируется вследствие перемещения ее носителя по траек-
тории относительно цели. Поэтому в дальнейшем целесо-
образно различать элементарные и траекторные радио-
локационные сигналы. Под элементарным сигналом бу-
дем понимать такие сигналы, в которых отображаются
мгновенные значения координат целей и их производных
относительно носителя РЛС. Под траекторным сигна-
лом понимается такой сигнал, в котором отображаются
изменения координат цели по отношению к РЛС. В ка-
честве траекторного сигнала может быть принята сово-
183
Траектория носителя
Рис. 5.1. Траектория носителя РЛС в системе координат х, г/, г.
купность дискретных элементарных сигналов (или не-
прерывный сигнал), соответствующая времени радио-
локационного наблюдения цели при движении носителя
РЛС по своей траектории.
Пространство, в котором находятся радиолокацион-
ная станция и цели, определяется прямоугольными ко-
ординатами х, у, z. При обзоре земной поверхности
траектория перемещения РЛС является обычно извест-
ной.
Будем полагать, что помехи на входе РЛС отсут-
ствуют и прием сигналов осуществляется только на фоне
внутренних шумов приемника, а радиолокационная си-
стема является линейной и выполняет операцию опти-
мальной обработки траекторного сигнала. Это позволит
оценить потенциальные характеристики ее пространст-
венной разрешающей способности. В качестве критерия
оптимальной обработки траекторного сигнала примем
критерий отношения правдоподобия, которым обычно
характеризуется оптимальная система обнаружения.
В прямоугольной системе координат х, у, z траекто-
рия перемещения РЛС относительно цели в параметри-
ческом виде может быть представлена как:
х=х(0,
(5.1)
z=z(/)
где/ — параметр (время),
1?4
Без нарушения общности рассмотрения начало коор-
динат можно совместить с одним из точечных объектов
наблюдения, например 0 (рис. 5.1). Тогда элементарные
сигналы Si, отраженные от этого объекта, в различные
моменты времени Ц будут иметь амплитуду Ai и фазу
ф(/г). Если полагать, что среда, в которой происходит
распространение сигналов, не искажает волновой струк-
туры сигнала, его фаза определяется расстоянием от
некоторого мгновенного положения антенного элемента
РЛС на траектории до объекта О'.
R(x, у, z) = /х2 + у2 + г2,
и длиной волны X когерентного электромагнитного поля.
Выражение для элементарного сигнала имеет вид
Зг = Д£ехр j<f(ti) — Aiexpjk j/x2 (/»•) + У2 (МЧ~ 2:2 (М- (5-2)
где фазовый множитель:
k = 2n/h— аля пассивных систем, работающих только на
прием;
& = 4лД— для активных систем, работающих на излу-
чение и прием.
Сигналы от соседних точек пространства, определяе-
мых координатами Ах, Ду, Аг (точка /), могут быть
представлены в виде
S/(Ал, Ду, Дг)’=Дг(Дх, Ду, Дг)Х
X ехР ik И* (М—М2+[у (М — Ду]2+lz Vi)—Дг]2-
(5-3)
Как было сказано выше, совокупность сигналов S/,
принятых по траектории движения носителя, определяет
траекторный сигнал. Тогда система обработки, напри-
мер импульсной радиолокационной станции, должна
осуществлять когерентное суммирование элементарных
сигналов, принятых в различные последовательные мо-
менты времени по траектории полета
^EblXj =~ 5iSXi,
i
где S*i — комплексно-сопряженный элементарный сиг-
нал;
т — постоянный коэффициент.
185
Максимальное значение сигнала на выходе системы
обработки соответствует точке 0 и равно
макс — т Ai exp [/<р (//)] X
i
X At exp [— (?<)] = У A\ .
T
Сигнал на выходе этой системы обработки от точки 1,
смещенной относительно цели 0 и определяемой коор-
динатами Ax, Az/, Az, уменьшается:
«вьга(Дх, Ду, Дг) = /и^Л(0, О, 0)Х
ХА(Дх, Ду, Дг)ехр/6{|/х2(^ + у2(^) + г2(г£) —
- Гk (М - М2 + [У (t{) - Ду]2 + [z (ti) - Дг]2} . (5.4)
Если частота выборки элементарных сигналов (на-
пример, частота повторения импульсов) достаточно ве-
лика по сравнению с наивысшей частотой Допплера,
можно перейти от суммы (5.4) к интегралу по времени.
Тогда выражение для сигнала на выходе системы опти-
мальной обработки может быть записано в виде
т
ивызДДх, Ду, Дг)=[Д(О, О, О, ОХ
6
ХЛ(Дх, Ду, Дг, t)expjk{l' х2 (/)-}- у2 (0 + г2(/) —
- /[х (0 - Дх]2 + [у (/) - Ду]2 4- [z (0 - Дг]2} Л., (5.5)
Из рассмотрения выражения (5.5) следует, что коге-
рентная радиолокационная станция, осуществляющая
оптимальную обработку траекторного сигнала цели, об-
ладает селекцией по трем координатам пространства
целей х, yt z (или в полярных координатах по даль-
ности, азимуту и углу места) без применения специаль-
ных форм зондирующего сигнала и соответствующих
диаграмм направленности антенн. Иными словами, про-
странственная разрешающая способность когерентных
РЛС может быть обеспечена при монохроматическом
186
Рис. 5.2. Пространственная разрешающая способность движущейся
когерентной РЛС.
зондирующем сигнале (без специальной его модуляции
при излучении) только за счет движения, РЛС? На
рис. 5.2 область, в пределах которой две цели не могут
быть разрешены, показана в виде объемного тела. Из
выражения (5.5) также видно, что сигнал на выходе
РЛС является сложной функцией параметров траекто-
рии движения носителя РЛС.
Разрешающая способность обзорной когерентной ра-
диолокационной системы определяется формой функции
Ивых(Д*, Ay, Az), т. е. шириной выходного сигнала в ко-
ординатах х, у, г. Так как скорость изменения фазы
значительно выше по сравнению со скоростью измене-
ния огибающей входного сигнала А, которая опреде-
ляется диаграммой направленности антенны РЛС, на
разрешающую способность РЛС определяющее влия-
ние оказывает фазовая характеристика траекторного
сигнала. Амплитудная характеристика в основном опре-
деляет форму выходного сигнала.
Оценим влияние вида траектории перемещения РЛС
относительно цели на разрешающую способность систе-
мы. С этой целью сделаем некоторые предположения, не
ограничивающие общность рассмотрения.
1. При перемещении носителя радиолокационной
станции относительно неподвижной цели основное дви-
жение происходит по оси %, т. е. x(t) ^>y(t) и x(t) ^>z(t).
В связи с этим можно полагать, что ,х = х(0—монотон-
ная функция.
187
2. Вид и положение траектории в пространстве про-
извольны, проекции точек начала (хо) и конца (Хт) тра-
ектории могут находиться в любом месте на оси х, но
разность |хт—хо|=% постоянна (рис. 5.1).
При указанных выше предположениях интегрирова-
ние уравнения (5.5) целесообразно производить по х.
Сделаем замену переменных, полагая, что /=/(х) об-
ратная функция для х(0. Тогда можно записать
У (0 = У К (*)1 = У1 (*)=Ук
Z(t)=^2 (х)] = Zt (х) = zt.
В этом случае выходной сигнал представляется в виде
хт
мЕЫХ(Дх Ду, Az) = J л [0, 0, 0, Z(x)]X
ХО _________
Х^[Дх, Ду, AzJ(x)]t'(x)expjk[jf х2-]-у2-j-z2—
— j/"(x — Дх)2 + (yt — Ду)2 + (zj — Дг)2] dx. (5.6)
При анализе селективных свойств радиолокационной
системы практический интерес представляет случай до-
статочно высокой ее разрешающей способности, когда
функция иВых(А%, Aly, Дг) быстро спадает в малой
окрестности по сравнению с расстоянием Ri(x, у, z) =
= Ri(x) от цели до РЛС. Тогда, после разложения в ряд
фазового множителя в выражении (5.6), имеем
К*2 + У1 + ZI —• ~ Дх)2 + (У1—А*/)2 + (21—Дг)2 «=<
хДх+
При дальнейшем рассмотрении будем полагать, что
в области малых значений Ах, Ау, Аг диаграмма направ-
ленности G:(x)=A(x) антенны РЛС постоянна. Тогда
сигнал на выходе системы обработки представляется
как
хт
«вых (Ал:, Ду, Az) = J G2(x)f(x)X
Хо
' Xexpj^^ + ^ + ^J dx.
(5.7)
188
Рис. 5.3. Система координат
для определения разрешающей
способности РЛС.
Так как и Zi являются функциями х, выходной
сигнал определяется одномерным интегральным преоб-
разованием (5.7) в конечных пределах.
Из выражения (5.7) следует, что траектория как
источник первичного сообщения оказывает на простран-
ственную разрешающую способность когерентной РЛС
по координатам у (дальность) и z (высота) одинаковое
влияние. Поэтому можно ограничиться рассмотрением
окрестности цели только в плоскости хОу. Для этого слу-
чая перейдем к полярным координатам (рис. 5.3):
Ax = pcosa,
Ду = р sin a.
Тогда сигнал на выходе оптимальной системы обнару-
жения может быть записан в виде
*т
М1ь«(р, a) = J °WWX
Хехр jx (dx. (5.8)
l к (x) j
Свойства выходного сигнала определяются поведением
фазовой функции
f(x)=.XC0SB + (ysing. (5.9)
Общий анализ выражения (5.8) представляет значи-
тельные трудности. Наиболее простым представляется
случай, когда фазовая функция f(x) монотонна. Это
условие накладывает некоторые ограничения на вид тра-
ектории как источника первичного сообщения, поступаю-
щего на вход РЛС. Однако для первоначального рас-
смотрения свойств когерентных РЛС они оправданы.
189
Далее попытаемся распространить полученные резуль-
таты для траектории общего вида.
В случае монотонности функции f(x) возможна за-
мена переменных в подынтегральном выражении урав-
нения (5.8). Введем обозначения f(x) =v, f(xo)=vo,
f(xr)—VT. В'этом случае
x = F(y),
тогда уравнение (5.8) можно переписать в виде
»г
«гых (Р. а)=j G‘[f (V)1 exP UH] dv- <5-10)
VO
Обозначим через <*»р пространственную частоту выход
ного сигнала
О =b = fe-xc^g+A(x)sinct-. (5.11)
р R (х) v '
Тогда выходной сигнал в соответствии с выраже-
нием (5.10) можно записать в виде преобразования
Фурье:
«1Ых(р, «)= J S (®р) ехр [/<орР] do>p, (5.12)
wp мин
где
$(<%)=
G2 (®РИ'(®р)
Г (®Р)
— спектр пространственных частот выходного сигнала,
ограниченный частотами ®рмин и <->рмакс.
При
•$(<%) = О-
Учитывая, что спектр выходного сигнала линейной
оптимальной системы является действительной функци-
ей, выходной сигнал «вых (р, ’«) определяется шириной
его спектра. В свою очередь спектр выходного сигнала
для линейной оптимальной системы определяется квад-
ратом модуля спектра входного сигнала
S (ыр) = Д (®р) Д*[(<»р) = |Д (®р) |2,
.190
где А* (адр) — комплексно-сопряженное значение Спектра
входного сигнала .А (ш^).
Таким образом, при воздействии траекторного сиг-
нала на вход оптимальной линейной системы обнаруже-
ния выходной эффект можно определить спектром про-
странственных частот входного траекторного сигнала.
При этом выражение
G2 [со ] V [со ]
”3=—гкг-
характеризует форму спектральной характеристики тра-
екторного сигнала, а соотношение
^e = k(VT~ Уо)
представляет ширину его спектра.
Выражение (5.12) показывает, что сущность опти-
мальной обработки траекторного сигнала заключается
в преобразовании Фурье спектральной характеристики
пространственных частот, формируемых вследствие дви-
жения РЛС относительно объекта наблюдения.
Подобно выбору вида распределения поля в раскры-
ве антенны, при формировании траекторного сигнала
можно получить различные виды спектра пространствен-
ных частот А (<»р) и тем самым реализовать необходи-
мый выходной сигнал радиолокационной системы с за-
данным уровнем боковых лепестков.
Однако, как следует из общей теории спектрального
анализа, форма спектра А (со ) мало влияет на ширину функ-
ции. Поэтому вид траектории во времени и форма диа-
граммы направленности антенны при прочих равных
условиях не оказывают существенного влияния на про-
странственную ширину выходного сигнала РЛС. Нерав-
номерность движения носителя может изменять только
форму спектра A(^p). Линейная разрешающая способ-
ность когерентной РЛС в основном определяется шири-
ной спектра Д*>р пространственных частот, формируемых
при перемещении РЛС относительно цели.
Поэтому в дальнейшем будем рассматривать только
влияние пространственного вида траектории движения
носителя на селективные свойства когерентных РЛС.
191
Разрешающая способность РЛС определяется шириной
выходного сигнала ор на заданном уровне для различных
направлений а. В случае'оптимальной системы обработ-
ки выходной сигнал пропорционален функции неопреде-
ленности траекторного сигнала.
Размер сечения тела неопределенности в направле-
нии а определяется соответствующей шириной спектра
пространственных частот
A“P,« = ^l(Vr— Vo)|-
Выражение для полосы спектра пространственных
частот можно записать в виде
= k I (vr — Vo) I = Ik If (xT) — f (x0)] I =
Хт cos a + z/j (xT) sin a cos a yi ) sin a
R(xT) #(%o)
(5.13)
где R(xT) и R(xo)—расстояния между целью и конеч-
ными точками траектории носителя РЛС.
Как видно из соотношения (5.13), ширина спектра
пространственных частот траекторного сигнала зависит
от угла а. Это определяет также зависимость и про-
странственной разрешающей способности РЛС от угла а.
Рассмотрим качественную сторону влияния вида про-
странственной траектории носителя РЛС на разрешаю-
щую способность когерентной системы для случаев а = 0
и а = л/2.
Полагая а = 0, оценим разрешающую способность по
оси х. Фазовая функция
f(x) = -.r *=-
У *2 + у2 +
является монотонной для траекторий, ориентированных
в основном в направлении х (рис. 5.1). В этом случае
ширина спектра пространственных частот, определяющая
разрешающую способность системы по оси х, может
быть представлена выражением
* ₽7Гг] =
К\Х-р) i\\XQ)
=k -=-.....- *т —............. .......Хо •
И*г + у\ (ХГ) + zf (хг) У х§ + 1/1 (Хо) + г\ (х0)
192
Разрешающая способность определяется соотношением
%х=
1
Д(ох ’
Из рассмотрения этого выражения видно, что раз-
решающая способность когерентной РЛС по оси х зави-
сит от соответствующей проекции отрезка траектории,
длины волны радиосигнала и от расстояния между ко-
нечными точками траектории носителя РЛС и объектом.
Вид самой траектории в пространстве при сделанных
допущениях не оказывает решающего влияния на раз-
решающую способность системы.
Если положить а = л/2, можно оценить разрешающую
способность по оси у. Для удовлетворения условию мо-
нотонности функции f(x) наложим дополнительные огра-
ничения на вид траектории. Пусть z/i(x)—монотонная
функция и целиком находится в области только положи-
тельных или отрицательных значений х. В этом случае
справедлива сделанная нами замена переменной и функ-
ция f(x) также монотонна.
Тогда ширина спектра пространственных частот будет
Дсп^ =
Z/1 (х?’)
(хг)
У1 (Хо)
Я(х0)
Разрешающая способность 8z/=-^—.
Как и в случае разрешения по оси х, разрешающая
способность РЛС по оси у также определяется только
координатами конечных точек отрезка траектории носи-
теля относительно объектов наблюдения. Вид траекто-
рии не оказывает существенного влияния на разрешаю-
щую способность.
Если траектория движения носителя РЛС обуслов-
ливает немонотонность функции f(x), пределы интегри-
рования уравнения (5.9) могут быть разбиты на не-
сколько участков, внутри которых функция f(x) остает-
ся монотонной (рис. 5.4):
*1
«гых (Р. а) = J S (v) exp [j&vp] dv -]-
’о
’2 ”Г
+ J 5 (v)exp [jkvp] dv-f-... J S (v)exp [jkvp] dv. (5.14)
V1 Vf-l
13—1094 193
Рис. 5.4. Спектр пространственных частот при немонотонной функ-
ции /х.
Границы полос спектра пространственных частот
в данном случае определяются пределами интегриро-
вания:
®о = kf (•*»),
“1 = kf (хД
«>2 = kf (Х2),
(5.15)
тТ = kf (Хт).
Очевидно, что ширину спектра пространственных ча-
стот траекторного сигнала определяют максимальные и
минимальные значения величин (5.15). На рис. 5.4 схе-
матично показаны спектры пространственных частот
для случая разбиения пределов интегрирования на три
отрезка. Наличие перекрывающихся пространственных
частот изменяет в основном амплитуду результирующего
выходного сигнала РЛС вследствие увеличения интен-
сивности соответствующих гармоник.
Из проведенного рассмотрения следует, что простран-
ственная разрешающая способность когерентной радио-
локационной системы определяется тем участком траек-
тории движения РЛС относительно объектов наблюде-
194
Рис. 5.5. Угол наблюдения и угловой размер траектории носителя
РЛС.
ния, который обусловливает наибольшую ширину спектра
пространственных частот.
Рассмотрим подробнее, как зависят максимальное и
минимальное значения функции f(x) от взаимного рас-
положения РЛС и цели, полагая для упрощения, что
они находятся в плоскости ху. Практически это соот-
ветствует наблюдению земной поверхности с самолета
при дальности действия РЛС, намного превышающей
высоту полета носителя. Тогда функцию f(x) можно
представить в следующем виде:
с ✓ \ X COS а —Ц if Sin а • о I п • •/ । п\
f (х)=——р-7-у-----=sm р cos а -J- cos р sin а = sin (а -f- Р),
где р — угол между осью у и направлением от цели на
РЛС (рис. 5.5). По принятой терминологии будем назы-
вать его текущим углом наблюдения.
В соответствии с формулой (5.13) ширина спектра
пространственных частот представляется выражением
Д(ор = k |[cosa (sin — sin [Q-ф-sina(cos — cos Po)]|.
Спектр пространственных частот, соответствующий дви-
жению по оси х (а = 0), может быть определен выра-
жением
A®x = fe|(sin₽7. — sin р0)|.
(5.16)
195
13»
Спектр пространственных частот, соответствующий оси у
(a = ir/2),
^y — k\ (cos $т — cos (Jo) |. (5.17)
Тогда
Дсор = cos а sin а. (5.18)
Из уравнений (5.16—5.18) следует, что разрешающая
способность когерентной обзорной радиолокационной
системы определяется только длиной волны радиосиг-
налов (1& = 4л/Л,) и угловым сектором, внутри которого
заключена траектория перемещения РЛС относительного
объекта наблюдения. В дальнейшем этот сектор будем
называть угловым размером траектории Ар = Рт—ро. Вид
пространственной траектории внутри заданного угло-
вого размера не оказывает существенного влияния на
пространственно-селективные свойства РЛС. Следует
при этом заметить, что если функция f(x) немонотон-
ная, ее значения, определяющие угловой размер траек-
тории, могут не соответствовать концам траектории дви-
жения РЛС (рис. 5.6).
Оценим поведение функции f(x) в зависимости от па-
раметров аир. Максимальное и минимальное значе-
ния функции находим из уравнений
Рис. 5.6. Определение углового размера траектории при немонотон-
ной функции f(x).
196
Рис. 5.7. Определение экстремальных значений функции f(x).
В результате
а; Ш, а) = +1;
а; f8(p2, а) = — 1.
Максимум функции f(x), равный +1, находится на
прямой |Р>=л/2—те, а минимум, равный —1, находится
на прямой р = 3/2л—со (рис. 5.7). На прямых р=—а и
р = л—а функция f(x)=O. Максимально возможный диа-
пазон изменения функции f(x) равен 2 и, следовательно,
максимальная ширина спектра пространственных частот
определяется как
До> =2k. (5.19)
Наивысшая потенциальная разрешающая способ-
ность когерентной радиолокационной системы в этом
случае может быть:
197
— для (пассивного режима работы
ЗрМин=^- = 4’ (5’2°)
к аа)р макс z
— для активного режима работы
Spm = ^^=T- (5.21)
Р м-кс
Наивысшая разрешающая способность может быть
достигнута в случае, если носитель РЛС осуществляет
движение вокруг некоторого района расположения объ-
ектов наблюдения по замкнутой кривой и в станции
осуществляется оптимальная обработка траекторных
сигналов, формируемых за время перемещения носите-
ля по всей замкнутой траектории. Такому случаю может
соответствовать полет носителя когерентной РЛС обзо-
ра земной поверхности, например, по окружности при
осуществлении непрерывного слежения за центром
района.
Рассмотрим область неопределенности траекторного
сигнала, и, следовательно, разрешающую способность
радиолокационной системы, основанной на его оптималь-
ной обработке. Направления, соответствующие макси-
мальному и минимальному размерам сечения области
неопределенности, определим при постоянном угловом
размере траектории А0. Заметим, что в большинстве
практических случаев угловой размер, траектории мал
по сравнению с л. При заданном угловом размере
траектории с учетом монотонности функции /(х) разре-
шающая способность когерентной РЛС зависит от кру-
тизны изменения этой функции:
, . cos [а — Р(х)].
Максимум крутизны, а следовательно, и максималь-
ная разрешающая способность соответствует направле-
ниям
р1== —а;
dfW___,
др “"г
й_____________ df(x)_ ,
Р> —я —---------------------Ь 7/
и
198
Отсюда следует, что для любого а имеются два
оптимальных угла наблюдения: р4 = —а и = я—а, с ма-
ксимальной крутизной функции f(x), значение которой
является постоянной величиной, независимой, от а и р.
Это означает, что максимальная разрешающая способ-
ность не зависит от направления наблюдения.
Минимум крутизны изменения функции и, следова-
тельно, направление наихудшей разрешающей способ-
ности соответствует
и
О _ 3 __ df (%) __ гх
р4— 2 а’ —°-
Таким образом, минимальная разрешающая способ-
ность также не зависит от направления наблюдения.
В связи с тем, что разрешающая способность коге-
рентной' РЛС при заданной длине волны определяется
только угловым размером траектории и не зависит от
ее вида, целесообразно использовать при решении за-
дач обзора земной поверхности прямолинейную траек-'
торию полета носителя. Очевидно, что если задан угло-
вой размер прямолинейной траектории, то максималь-
ная разрешающая способность РЛС при минимальном
времени формирования траекторного сигнала получается
в режиме бокового обзора. В этом смысле прямолиней-
ная траектория носителя РЛС бокового обзора является
оптимальной. При боковом обзоре время облучения це-
лей обычно составляет единицы секунд. За такое незна-
чительное время траектория движения носителя РЛС
почти всегда может быть аппроксимирована прямоли-
нейным отрезком. Поэтому прямолинейная траектория
представляет наибольший интерес при изучении свойств
когерентных РЛС обзора земной поверхности.
Прямолинейная траектория носителя РЛС, как сле-
дует из формулы (5.5), может рассматриваться как ось
симметрии объемной области неопределенности в трех-
мерном пространстве (рис. 5.8). Анализ сечения тела
неопределенности плоскостью, проходящей через траек-
торию и объект наблюдения, позволяет оценить разре-
шающую способность системы для наиболее важного
с практической точки зрения случая, когда дальность
199
Рис. 5.8. Область неопределенности траекторного сигнала в про-
странстве при прямолинейной траектории движения носителя РЛС.
до объекта значительно больше высоты полета носителя.
Поэтому мы будем рассматривать расположение объ-
екта наблюдения и перемещение носителя в плоскости
ху (рис. 5.9). В этой же плоскости будем рассматривать
и сечение тела неопределенности траекторного сигнала.
Предположим, что ось х параллельна траектории носи-
теля. Функцию f(x), определяющую разрешающую спо-
собность РЛС, запишем в виде
/(x) = sin [а + ₽ (л)],
Рис. 5.9. Сечение тела неопределенности траекторного сигнала.
200
где
Р(х) —arctg
Так как текущий угол р(х) при прямолинейной тра-
ектории изменяется монотонно с х, функция f(x) также
является монотонной, за исключением точек, когда
_ и —тс,
где f(x) имеет экстремум.
Разрешающую способность когерентной РЛС будем
оценивать минимальны-м и максимальным размерами
сечения области неопределенности в плоскости ху. Ма-
ксимальная разрешающая способность соответствует
максимальному спектру пространственных частот. Пусть
₽о и Pi — два крайних значения угла, характеризующих
размер участка траектории. Тогда угол наблюдения РЛС
за пространством целей может быть определен как
О Ро + Рт
?н— 2 •
Ширина спектра пространственных частот траектор-
ного сигнала находится из соотношения
Дшр = й | [sin (а-|-рт) — sin (а-]-О 1 = 26 £cos <р sin -у- j ,
где
<р —
Др = Р? Ро.
Максимальное значение Д«р будет при cos <р = 1
(А^рЬлакс — 26| Sin —2“
(5.22)
Максимальная линейная разрешающая способность (ми-
нимальный размер сечения тела неопределенности тра-
екторного сигнала) определяется формулой
^Рмин—
тс
дГ
£sin -у
(5.23)
201
Максимальная разрешающая способность реализуется
в направлении, перпендикулярном направлению наблю-
дения (ф = 0):
%мин ~~Г ^н’
Минимальная разрешающая способность находится
в области максимума или минимума функции f(x), где
она изменяется медленно и симметрично. Наименьшая
ширина спектра пространственных частот определяется
разностью значений функции |f(x)| = l и |/(хт)| или
Г(х.)| (рис. 5.10).
Тогда
(Д«»р)МИн = *|[1-f(-*T)]|=^[l-cos4]| (5.24)
или
(Д"р)“ин=2k sin2 Т"’ (5-25)
Соответствующее направление в сечении тела неопреде-
ленности может быть найдено из уравнения
„10 I д₽ _ " । ^т— ?о
а+ Рт=— +— =—Н--------
откуда
«рмаксНг- (5-26)
Минимальная разрешающая способность соответст-
вует направлению наблюдения и может быть определена
следующим выражением:
Чакс =-----ЧТ* (5>27)
k sins -г
В результате анализа соотношений (5.23) — (5.27)
можно сделать следующие выводы:
1. Пространственная разрешающая способность об-
зорных радиолокационных систем с искусственным рас-
крывом антенны при заданном угловом размере траек-
тории носителя и неизменной длине волны радиосигна-
лов не зависит от направления наблюдения и дальности
до цели.
2. Максимальная линейная разрешающая способ-
ность РЛС с искусственным раскрывом антенны может
202
Рис. 5.10. График функции f(x).
быть достигнута в азимутальном направлении, а мини-
мальная разрешающая способность совпадает с направ-
лением наблюдения.
3. Пространственная разрешающая способность РЛС
с искусственным раскрывом увеличивается с увеличе-
нием углового размера траектории и уменьшением дли-
ны волны.
Рис. 5.11. Сечения области неопределенности траекторного сигнала
при различных направлениях наблюдения.
203
Рис. 5.12. Изменение углового размера траектории с направлением
наблюдения при постоянной длине искусственного раскрыва антенны.
Таким образом фо(рма сечения области неопределен-
ности когерентного траекторного сигнала в плоскости
РЛС и цели при постоянном угловом размере траекто-
рии инвариантна к направлению наблюдения. Формулы
(5.23) и (5.27) показывают, что при ограниченном угло-
вом размере траектории контур ее сечения вытягивает-
ся в направлении наблюдения (рис. 5.11).
Рассмотрим некоторые частные случаи, представ-
ляющие практический интерес при оценке разрешающей
способности обзорных когерентных РЛС.
Случай I. Линейный размер участка траектории
движения носителя РЛС (искусственный раскрыв антен-
ны), на протяжении которого формируется траекторный
сигнал, постоянен, независимо от дальности до цели и
направления наблюдения (рис. 5.12).
Этот случай соответствует постоянному времени об-
лучения цели на всех направлениях наблюдения.
Участок траектории (длину искусственного раскрыва
антенны) обозначим через X. Полагаем угол Др доста-
точно малым так, что sin Д1р«Др. Тогда, в соответствии
с (5.23) и (5.27) имеем
2тс
8рмин=-§р (5.28)
8рМакс=-^ф~ (5.29)
204
В этом случае угловой размер траектории изменяете^
с углом наблюдения. Выражение для Ар может быть
представлено в виде
Др, st Д- cos рн,
(5.30)
где Rs— расстояние между центральной точкой рассма-
триваемого участка траектории и целью (1П|редполагает-
ся, что
Используя соотношения (5.28 — 5.30), получим для
₽н<1:
8о = 2л Ra
°ГМИН k X cos 0Н ’
^Рмакс 16л k A'2 cos2
(5.31)
(5.32)
Из формул (5.31) и (5.32) видно, что разрешающая
способность РЛС с искусственным раскрывом антенны
при X=const уменьшается с увеличением дальности.
Причем наиболее интенсивно это уменьшение происходит
в направлении наблюдения.
Отношение линейной разрешающей способности по
азимуту к линейной разрешающей способности по даль-
ности при оптимальной обработке траекторного сигнала
определяется соотношением
/^=0,125 Л'с°^н = 0,125ДВ. (5.33)
Ормаке Кн _ Г '
Соотношение (5.33) характеризует степень вытяну-
тости главного сечения области неопределенности в на-
правлении наблюдения. Так, при Др=10~2 рад брМакс =
— 800брМин.
Случай II. Угловой размер траектории носителя
РЛС постоянен для всех направлений наблюдения
(рис. 5.13). Оптимальная обработка траекторного сиг-
нала осуществляется в пределах всего сектора Др.
Такая обработка может осуществляться при любых
углах наблюдения рн, за исключением небольших перед-
205
Рис. 5.13. Изменение длины искусственного раскрыва антенны с на-
правлением наблюдения при постоянном угловом размере траекто-
рии.
него и заднего угловых секторов, определяемых разме-
рами Др (рис. 5.13). Для первого координатного угла
р ГС
Рнгр! 2
?гр>Д₽.
Угловой размер траектории в этом случае может
быть определен шириной диаграммы направленности
антенны
ев=д₽=А (5.з4)
Если обозначить длину искусственного раскрыва при
рн = 0 через Хо, то при изменении угла наблюдения
__ X о __ Х/?н
COS d& cos рн •
206
Используя соотношения (5.23) и (5.27), можно по-
лучить выражения для разрешающей способности об-
зорной РЛС при активном режиме работы
§Рмин=-^,
^Рмакс = 4
(5.35)
(5.36)
Формулы (5.35) и (5.36) определяют пространствен-
ную разрешающую способность когерентной обзорной
РЛС при формировании траекторного сигнала в преде-
лах углового размера, соответствующего ширине диа-
граммы направленности антенны.
Полученные формулы позволяют расширить вывод
о разрешающей способности РЛС с искусственным рас-
крывом антенны, полученный в предыдущей главе. Та-
кие станции обладают постоянной линейной разрешаю-
щей способностью, независимой от дальности в преде-
лах широкого диапазона углов наблюдения бокового
сектора. При этом их разрешающая способность тем
выше, чем меньше размер реальной антенны. Это корен-
ным образом отличает когерентные РЛС от некогерент-
ных. Указанное свойство когерентных РЛС объясняется
тем, что с уменьшением размера их антенны увеличи-
вается угловой размер траектории и соответственно
расширяется спектр пространственных частот траек-
торного сигнала.
Отношение
^^=0,125^- (5.37)
Ормакс «а
значительно меньше 1. Поэтому для получения одинако-
вой разрешающей способности системы в двух взаимно
перпендикулярных направлениях на практике исполь-
зуются импульсные (в общем случае широкополосные)
зондирующие сигналы. :
Остается оценить разрешающую способность коге-
рентных РЛС при рп=л/2 и рн=3/2л. В этих случаях
разрешающая способность по оси у может быть опре-
делена при условии Д'х=0; Аг = 0; z/=0; z=0. Тогда ре-
207
зультирующий сигнал на выходе когерентной радиоло-
кационной системы будет иметь вид
*т
е dx,
X
По методике, показанной выше, можно определить
разрешающую способность активных радиолокационных
систем при наблюдении за целями строго вперед или
назад (по отношению к направлению полета носителя)
= (5.38)
Угловая (азимутальная) разрешающая способность
системы определяется соответственно
= А. (5.39)
Аналогично можно прийти к выводу, что селектив-
ными свойствами по оси х РЛС не обладает. Таким
образом, разрешающая способность когерентной РЛС
при ее движении навстречу объектам наблюдения по-
добна разрешающей способности некогерентной РЛС
с антенной типа «волновой канал».
Выше были рассмотрены потенциальные характери-
стики разрешающей способности когерентных радиоло-
кационных систем. В реальных условиях работы РЛС
траектория движения носителя не является детермини-
рованной. Она подвержена воздействию различных воз-
мущений, которые приводят к определенному ухудше-
нию потенциальных характеристик системы. Этот во-
прос будет рассмотрен в § 5.4.
5.2. Область неопределенности
траекторного сигнала
Анализ свойств радиолокационных систем с обра-
боткой траекторного сигнала, проведенный в предыду-
щем параграфе, был основан на оценке линейных раз-
меров сечения его тела неопределенности в двух главных
взаимно перпендикулярных направлениях. Остановимся
более подробно на вопросе о форме области неопреде-
ленности траекторного сигнала.
208
Рассмотрение будем вести для случая монохромати-
ческого излучения передатчика РЛС и оптимальной об-
работки траекторного сигнала, формируемого в преде-
лах всей ширины диаграммы направленности антенны
РЛС. Движение носителя полагаем равномерным и пря-
молинейным, а диаграмму направленности антенны —
достаточно узкой (sin90—0о). При указанных допуще-
ниях при строго боковом обзоре (рн = 0) уравнение тра-
екторного сигнала может быть записано в виде
и (х, Уо) = G (х) sin k , (5.40)
i/o
где
G(x) = exp< — 2,78-^И
\ Х° J
— диаграмма направленности реальной антенны.
Уравнение функции неопределенности в параметрах
пространства целей определяется выражением
£(Дх, Ду) = J и (х, у9) S [(х — Дх) (г/0 — ty)] dx, (5.41)
—00
где S[(x—Дх) (г/о—А//)] — опорный сигнал устройства
оптимальной обработки траекторного сигнала.
Полагая, что амплитудный множитель не зависит от
величины Дх ввиду ее малости, можно записать
S [(X - Дх) (у — Ду)] >ехр < -2,78 sin .
Ag 1 Уо — ьу
(5.42)
Если не учитывать влияние случайной начальной
фазы сигнала, после подстановки значений и и S в урав-
нение (5.41) имеем
Е(Ьх, Ьу)= Jexp^—5,56-^2-^ sin k ^~Х
В результате преобразования фазового множителя
и пренебрежения малыми членами уравнение функции
неопределенности может быть приведено к виду
14—1094 209
£(Дх, Ду) = £\ (Дх. Ду) + Ег(кх, ty) =
—00
Xcos Г — х* 2-— X——1 dx. (5.43)
[ Уо Уо Уо J
Каждое из слагаемых этого выражения определяется интег-
ралом типа
+ 00
Е (Дх, Ду) = у ехр (—Ах2) cos (Ах2 -|- Вхх -|- Ct) dx,
решение которого имеет вид
тГг ( АВ9; \
£(Дх, ’Ду)= ехр ' X
. . А .л, лд^-л.со-л^'
Xcos 2 л а2 + а9
Поставляя значения коэффициентов, получим
£(Дх, Ду) = Ei(&x, Ду)-}-^(Дх, Ду) =
^Уо у-------------1----- Г 5,56fe2Xg УдДх2
2X2 У 31^4-fe2X^y2 ехр 31^4-fe2x^y2
ч ’ 1 х *^2ду
Xcos — arctg——2
2 5,56^
fe’X} Дх2Ду + 31^Дхг
31^ + га^Ду2
Хехр
о у2
Xcos -^-arc!g
5,?.Gfe2X^x2
зГу2+4^
! 4й!Х^Дх2 + 31/г^Дх2 '
“* 31y3 + wxyo
ftzY2
2,78у0
(5.44)
210
Будем йолагать, что пространственная^ селекций йд
координате у обеспечивается достаточно эффективно и,
следовательно, (Ду)2 < у2 . Тогда при [фокусированных ра-
скрывах амплитуда Е2 много меньше амплитуды Еи т. е.
влияние второго слагаемого на форму области неопре-
деленности пренебрежимо мало. Опуская второе слагае-
мое и нормируя первое по амплитуде, получаем искомое
выражение для функции неопределенности когерентных
радиолокационных систем с оптимальной обработкой
траекторного сигнала
Е (Ах, Ду) = у01 / -----z------г----X
у 3iy* + fe%*ay2
Хехр
5,56/г2Х02г/2Дх2
31^ + й2Л*Ду2
1 feX&y VXl Дх2Ду + 31^Дх2
Xcos -yr- arcig------5-------—j-------j-------
& 5,561/2 31//4+ k^y2
• (5.45)
На рис. 5.14 показан рельеф тела неопределенности,
а на рис. 5.15 даны его сечения, рассчитанные по фор-
муле (5.45) для трех значений уровня Е(Дх, Ду) =
= 0,1; 0,5; 0,9. При расчетах приняты следующие значе-
ния: ^ = 3 • 10~2 м, XQ=4 О3 ж, уо = 5 • 103 м.
Разрешающая способность системы соответственно
равна:
на уровне Е = 0,5:
8% = O,6Ja,
£
8y = 4,5-f;
на уровне £* = 0,7:
8x = 0,4rfa,
Формулы (5.46) и (5.47) характеризуют разрешаю-
щую способность когерентной РЛС бокового обзора с
учетом диаграммы направленности реальной антенны.
Эти формулы очень близко совпадают с соотношениями
(5.35) и (5.36), полученными при общем анализе. Сече-
14* 211
.Е(Дх.Ду}
Рис. 5.14. Тело неопределенности траекторного сигнала.
Рис. 5.15. Сечения тела неопределенности траекторного сигнала при
Рн = 0.
212
иие тела неопределенности на уровне £>0,5 напоминает
форму эллипса.
Рассмотрим функцию неопределенности траекторного
сигнала при наблюдении местности под углом 0Н от
перпендикуляра к линии полета. В случае небольших
углов рн, когда еще справедлива квадратичная аппрокси-
мация фазы, уравнение траекторного сигнала может
быть записано в виде
«(х, Уо)=ехр
^-(х2 — 2лгхя + ^) 1 sin^-y,
Лп Уо
(5.48)
где xH=i₽Hi/o.
Подставляя формулу (5.48) в уравнение (5.41) и
пренебрегая членами второго порядка малости, можно
получить выражение для нормированной функции не-
определенности траекторного сигнала при наблюдении
местности под углом рн в боковом секторе:
С/Л Л \ V 31 ч
Е(^х, Ьу) = уа 1/ 4 , МУ4Л ~>
У 31у^ + кгХ^Уг
f б.бб^^Гдх + ^-Д//)2
Хехр | 31^ + ^Д//2
Xcos/arcig ____________-
[ 5,56i/2 31/4+ ^Д//2
3lfei/2 (%2 Дг/ + 2г/0хнДх — у<>Дх2) '
31^ +
(5.49)
Вид сечений тела неопределенности для трех града-
ций и условий, аналогичных предыдущим при рн = 6°,
показан на рис. 5.16. В данном случае тело неопреде-
ленности повернуто на угол рн-
Анализ области неопределенности траекторного сиг-
нала в параметрах пространства целей (координат) не
всегда является удобным. При проектировании РЛС
приходится иметь дело непосредственно с самими сиг-
налами. Например, при наличии шумов точность и раз-
решающая способность РЛС по определяемым коорди-
натам может быть оценена реально по измерению пара-
метров самих сигналов. Поэтому получение функции не-
определенности в параметрах самих сигналов представ-
213
Рис. 5.16. Сечения тела неопределенности траекторного сигнала при
IW0.
ляет практический интерес. Функции неопределенности
элементарных сигналов <в настоящее время исследованы
достаточно подробно. Установлена связь между пара-
метрами этих сигналов (временем задержки т и часто-
той Допплера £2д) и измеряемыми координатами про-
странства целей (дальностью и радиальной скоростью
WR). Аналогичные соотношения могут быть выведены
для траекторного сигнала, так как измеряемые коорди-
наты целей связаны с параметрами траекторных сигна-
лов. Однако характер зависимости значительно отли-
чается от элементарных сигналов. Определим выраже-
ние для функции неопределенности в параметрах траек-
торного сигнала при рн = 0:
и (/) = ехр 2,78 sin k^-t*. (5.50)
214
Рис. 5.17. Влияние координат цели на частотную структуру траектор-
ного сигнала.
В отличие от модулированного элементарного сиг-
нала информация о наклонной дальности до цели ото-
бражается в траекторном сигнале изменением крутизны
частотной модуляции (рис. 5.17,tz):
b = k—.
Уо
Информация о путевой дальности (х) отображается
для траекторного сигнала в его запаздывании во вре-
мени x==Ax/W или, что то же самое, в смещении закона
частотной модуляции по шкале частот (рис. 5.17,6).
С учетом сказанного выше уравнение функции неопре-
деленности траекторного сигнала определяется выра-
жением
+оо
2?(т, Y) = С ехр ( — - 5,56cos [у/2 +
J \ J
+ 2 (6 - Y) т/ - (b — Y) Т2] Л, (5.51)
где
Т = Ь Ш - b (у, - Д9) = Ж' (Д - ^-) ~ | №.
Решение этого интеграла аналогично уравнению
(5.43) и дает нормированную функцию неопределенности
траекторного сигнала в параметрах т и у:
х 4 Г------31---- Г
Y)—1/ ----------т-ехр------------j-
У 31 +ГТ4 Е 31 +^Т40
215
1 уГл &2т2уГ* + 31Ь2
Xcos 4- arctg 44-----------L— 4
2 ь 5,56 31+y2^
(5.52)
где Tq=Xq/W — время формирования траекторного сиг-
нала или искусственного раскрыва антенны РЛС.
Как и следовало ожидать, формулы (5.45) и (5.52)
аналогичны ио структуре.
Приведенные выше формулы характеризуют прост-
ранственную разрешающую способность РЛС при непре-
рывном немодулированном зондирующем сигнале. Мо-
дуляция его приводит к некоторым особенностям, кото-
рые должны учитываться при рассмотрении свойств
РЛС с искусственным раскрывом антенны.
5.3. Условие однозначности
определения координат
при импульсном зондирующем
сигнале
В большинстве радиолокационных станций летатель-
ных аппаратов используются импульсные периодические
зондирующие сигналы. Это объясняется существенными
преимуществами импульсного режима работы РЛС пе-
ред режимом непрерывного излучения, которые в основ-
ном сводятся к следующему. Во-первых, при импульс-
ном излучении не требуется применения специальных
мер по развязке передающего и приемного устройств
радиолокатора, Во-вторых, в РЛС с искусственным
раскрывом антенны может быть получена практически
одинаковая линейная разрешающая способность по
дальности и азимуту. В-третьих, резко снижаются тре-
бования к системе запоминания и обработки траектор-
ного сигнала.
Импульсный режим работы РЛС прежде всего ха-
рактеризуется излучением периодических сигналов. По-
этому искусственный раскрыв антенны и соответствую-
щий ему траекторный сигнал формируются в резуль-
тате приема отраженных сигналов в дискретных после-
довательных точках положения носителя.
Рассмотрим специфические особенности, которыми
характеризуется область неопределенности траекторного
216
Сигнала При импульсном режиме работы когерентной
РЛС обзора земной поверхности. Будем полагать, что
носитель РЛС перемещается с постоянной путевой ско-
ростью W, а цели являются неподвижными точками на
плоскости хОу. Кроме того, высоту полета будем счи-
тать пренебрежимо малой по сравнению с дальностью
до района наблюдения.
Предположим первоначально, что на носителе уста-
новлена когерентная РЛС с ненаправленной приемо-пе-
редающей антенной. Ширина спектра импульсного зон-
дирующего сигнала длительностью ти равна AF3, а пе-
риод повторения импульсов равен Тп. Функция неопре-
деленности траекторного сигнала, когда на время его
формирования Tq приходится N периодов повторения
зондирующих импульсов (N = T0/Tn)9 может быть запи-
сана согласно [59] в виде
+ СО +оо
Е^х, Ьу)= £ £ Ду-
/72——ОО П —00
пЪЯ .
2H77V
(5.53)
Здесь Еи — функция неопределенности зондирующего
сигнала, взятого за один период повторения, а Етр —
функция неопределенности траекторного сигнала, пред-
ставленная выражениями (5.45) и (5.49) для непре-
рывного искусственного, раскрыва, R — текущая даль-
ность. Тело неопределенности в данном случае распа-
дается на ряд дискретных областей. Общий вид сечения
тела неопределенности для случая рн=0 показан на
рис. 5.18. Максимальный и минимальный размеры сече-
ния каждой из дискретных областей неопределенности,
характеризующие линейную разрешающую способность
РЛС в двух взаимно перпендикулярных направлениях,
находятся из очевидных соотношений:
<5-54>
<5-55)
Рис. 5.18. Сечение тела неопределенности траекторного сигнала при
импульсном зондирующем сигнале.
Расстояния между соседними дискретными областя-
ми тела неопределенности определяются из выражения
(5.53). В направлении, перпендикулярном направлению
наблюдения (по азимуту), эти расстояния равны
(5.56)
В направлении наблюдения
/2=-ф- (5-57)
Нетрудно показать, что если ри>0, то
(5.5Г)
где р— линейное отклонение по азимуту.
218
Следствием дискретного характера области неопре-
деленности траекторного сигнала может быть неодно-
значность измерения координат обнаруженных объектов
при обзоре пространства. Необходимо отметить, что не-
однозначность определения координат применительно
к РЛС обзора поверхности приводит прежде всего к
наложению изображений различных участков местности*
(в общем случае расфокусированных), создавая мешаю-
щий фон при обнаружении малоразмерных объектов.
Однозначность по дальности может быть обеспечена
соответствующим выбором периода повторения зонди-
рующих импульсов
Аймаке (5.59)
где /?нмакс — максимальная дальность действия РЛС.
В этом случае дискретные области неопределенности
вытесняются за пределы рабочего диапазона дально-
стей РЛС.
Для исключения многозначности по азимуту в реаль-
ных РЛС используются направленные антенны, размером
da. Тогда дискретные области неопределенности, соответ-
ствующие п=1, 2, ... в выражении (5.53), могут быть
вытеснены за пределы диаграммы направленности ан-
тенны. Для общего случая амплитуда траекторного сиг-
нала при WTn>da может быть представлена в виде,
показанном на рис. 5.19,я. Сечение тела неопределен-
ности при неоднозначности по азимуту для дальности
/?н показано на рис. 5.19,6. Линейная разрешающая спо-
собность по азимуту, с учетом коэффициента использо-
вания диаграммы направленности антенны равна
8Рмин=^--
Линейная ширина луча реальной антенны РЛС на
дальности определяется выражением
8Ра!=ф/?н. (5.60)
Очевидно для исключения неоднозначности по ази-
муту линейная ширина луча антенны 6ра должна быть
меньше расстояния между соседними дискретными обла-
219
Рис. 5.19. Изменение амплитуды траекторного сигнала (а)
неопределенности при неоднозначности по азимуту (б);
и область
ГТп>^а.
стями функции неопределенности (рис. 5.19,6):
8ра</р-
(5.61)
В этом случае, очевидно, что та часть области не-
определенности, которая обусловливает многозначность
измерения координат целей, выйдет за (пределы диаграм-
мы направленности реальной антенны.
С учетом соотношения (5.58), (5.59) и (5.61) условие
однозначности определения координат объектов при
обзоре поверхности с помощью РЛС с искусственным
раскрывом антенны может быть сформулировано в виде
g макс
<та<
(5.62)
с
1 dt
2 ttZ |cos Ы •
220
Для случая рн = 0
2 ^м.,о < < 1 4.. (5.63)
По аналогии с обычными антенными решетками это
условие соответствует формированию однолепестковой
диаграммы направленности.
Коэффициент 1/2 в правой части соотношений (5.62)
и (5.63) является следствием двойного набега фазы при
распространении сигналов в прямом и обратном на-
правлениях.
В случае полета носителя, когда направление луча
антенны известно лишь с точностью до половины шири-
ны диаграммы направленности реальной антенны, период
повторения импульсов из условия однозначности -по ази-
муту должен быть уменьшен в два раза
Лх=^г. (5.64)
Из соотношений (5.62—5.64) видно, что наибольшие
трудности в обеспечении однозначности определения ко-
ординат объектов появляются при установке РЛС обзо-
ра поверхности с большой дальностью на скоростных
носителях. В этом случае необходимо увеличивать раз-
мер реальной антенны. При рн = 0
4 > (5.65)
Следует отметить, что при больших углах наблюде-
ния, как это видно из соотношения (5.62), условие одно-
значности несколько облегчается и может быть обеспе-
чено при меньших размерах антенны РЛС по сравнению
со случаем рн = 0. Это можно пояснить с помощью
рис. 5.20. При обзоре пространства под углом рн для
оптимальной обработки траекторного сигнала в каждой
точке приема элементарных сигналов производится кор-
рекция их фазы в соответствии с изменяющейся даль-
ностью между антенной и целью. Это осуществляется
с помощью линий задержек ЛЗ. Такое выравнивание
фаз элементарных сигналов позволяет представить пере-
мещение РЛС не по оси х, а -по оси х', перпендикуляр-
ной направлению наблюдения. Тогда реальное расстоя-
ние L между дискретными точками приема элементар-
221
Рис. 5.20. Влияние угла наблюдения на условие однозначности по
азимуту.
ных сигналов, равное WTn, уменьшается по оси хг до
величины L' = WTn cos pH, что позволяет в случае необ-
ходимости при рн>0 допускать
В данном случае расстояние 1р между дискретными
участками области неопределенности увеличивается. По-
этому в формуле (5.58) в знаменателе имеется cos рп.
Необходимо иметь в виду, что при повороте антенны
(Рн>0) у траекторного сигнала появляется поднесущая
частота (средняя частота Допплера), которую необхо-
димо учитывать при обработке сигнала.
При больших скоростях летательных аппаратов вы-
полнение условия (5.62) сопряжено с преодолением ряда
технических трудностей, связанных с необходимостью
значительного увеличения геометрических размеров ан-
тенны РЛС. Дополнительные возможности по устране-
нию. многозначности измерения азимута заложены
£22
в структуре зондирующего сигнала. Кроме диаграммы
направленности антенны необходимо также учитывать
область неопределенности, обусловленную искусствен-
ным раскрывом антенны, формируемым на частотах мо-
дуляции зондирующего сигнала.
Действительно, так же как в радиочастотном диа-
пазоне, определенный отрезок траектории при движении
носителя может рассматриваться в качестве раскрыва
синтезированной антенны, формируемой на видеочасто-
тах. В этом случае, вместо длины волны излучаемых
колебаний в выражения, определяющие область неопре-
деленности траекторного сигнала и разрешающую спо-
собность РЛС, следует подставить минимальную длину
волны гармоники модулирующей функции зондирующего
сигнала (Х3). Тогда линейный размер сечения области
неопределенности траекторного сигнала на видеочасто-
тах, или, что тоже самое, линейная разрешающая спо-
собность по азимуту, определяется выражением
Sp8=s^-=-.-.^. . (5.66)
Это выражение может быть получено также из фор-
мулы (5.53), учитывая, что зависит от Ах и Аг/.
Из выражения (5.66) видно, что при расширении
спектра зондирующего сигнала сокращается соответст-
вующий размер сечения области неопределенности тра-
екторного сигнала бр3. В этом случае условие однознач-
ности по азимуту можно записать как
8р3</р. (5.67)
Или, учитывая выражения (5.58) и (5.66), соотношение
(5.67) принимает вид
<5-“)
Заметим, что число импульсов, приходящихся на
траекторный сигнал, составляет
<5-69>
Тогда условие (5.68) можно записать в виде
<5-ГО)
223
При Ь = 0
(5.71)
Объединяя соотношения (5.59) и (5.68), (можно по-
лучить условие выбора периода повторения импульсов
РЛС для обеспечения однозначности измерения /коорди-
нат в данном случае
2/?н макс <- т <Z. з&и
с cWd& |C0s fH| ’
Соотношение (5.72) можно упростить, если
____________________________ у
d& | cos рн |
Тогда
2/?н макз 'р А^з y*
С f0 7‘
Расширяя спектр зондирующего сигнала
вая время формирования искусственного раскрыва мож-
но обеспечить однозначность по азимуту при малом раз-
мере реальной антенны.
Таким образом на условие однозначности по азимуту
оказывают влияние три частные функции неопределен-
ности, которые обусловливают результирующую функ-
(5.72)
учесть, что
(5.73)
(5-74)
и увеличи-
Рис. 5.21. Влияние ширины спектра зондирующего сигнала и диа-
граммы направленности антенны на однозначность измерения ази-
мута.
224
цию неопределенности траекторного сигнала импульсной
РЛС (рис. 5.21). Первая область 1 характеризует раз-
решающую способность РЛС с искусственным раскры-
вом антенны и имеет дискретную периодическую струк-
туру (1РЯД главных максимумов). Вторая область 2
определяется спектром зондирующего сигнала. Кривая
2" на рис. 5.21 соответствует узкополосному зондирую-
щему сигналу, а кривая 2'— широкополосному, когда
лепестки б и в, обусловливающие неоднозначность изме-
рения азимута, подавляются и остается только главный
лепесток а. Вторая область как бы характеризует функ-
цию неопределенности траекторного сигнала на видео-
частотах модуляции. Третья область 3 определяется
диаграммой направленности реальной антенны.
Если условия (5.62) и (5.74) по тем или иным при-
чинам не выполняются, для устранения многозначности
в РЛС с искусственным раскрывом возможно также
излучение зондирующих сигналов с периодом повторе-
ния, изменяющимся по случайному закону. В данном
случае искусственный раскрыв эквивалентен антенной
решетке со случайно расположенными элементами. Эф-
фективность подавления зон области неопределенности,
приводящих к неоднозначности в данном случае, будет
тем выше, чем больше глубина изменения периода
повторения [1, 5].
Не все из указанных путей устранения многознач-
ности измерения координат в одинаковой степени при-
емлемы для практических систем. Очевидно при проек-
тировании РЛС с искусственным раскрывом антенны
целесообразно их рациональное сочетание.
5.4. Особенности формирования
искусственного раскрыва антенны
в условиях реального полета
носителя РЛС
Прямолинейная траектория полета носителя РЛС
с искусственным раскрывом является оптимальной. Если
угол рн=0, фаза неискаженного траекторного сигнала,
15—1094 225
Рис. 5.22. Формирование траекторного сигнала при прямолинейном
полете носителя РЛС.
соответствующего элементу (цели) с координатами
х^=0, z/ = z/o (рис. 5.22), представляется выражением
V (X.) = k V % + А = (5-75)
где Xi — Wt.
Если боковой обзор осуществляется под некоторым
углом ₽н, фаза траекторного сигнала для цели Ц может
быть записана в виде (рис. 5.22)
<? (х) — kR2a -J- kx sin Рн + COS2 pH, (5.76)
где x=Xt—xH.
Формула (5.76) справедлива при условии
IX | макс
Дальность до объекта наблюдения RB, угол рп, дли-
на волны X и путевая скорость носителя П7 определяют
параметры траекторного сигнала, на которые должна
226
настраиваться система обработки радиолокационной
информации.
Нетрудно показать, используя выражение (5.76), чФб
сигнал на выходе системы обработки РЛС определяется
уравнением
и^)=А [ В ехр dx, (5.77)
_vx_
где
fi = ехр / < (Ч -1* ) + (Ф, - ) х+
+ (Ф,-
2тг cos2 \
р — расстояние, отсчитываемое от точки Ц в на-
правлении, перпендикулярном
А — амплитуда элементарного сигнала, которая по-
лагается постоянной в пределах ширины диа-
граммы направленности реальной антенны;
фо — начальная фаза опорного сигнала системы
обработки;
Ф1, Ф2 — параметры коррекции фазы при фокусирова-
нии.
При оптимальной обработке траекторного сигнала
в отсутствии нестабильностей фазовый множитель
—const, что соблюдается, если
4л/?н .
<р0----=const,
Ф1_ sin р,
CQS2 ___п
ф2 “ Х/?н
Тогда, опуская постоянный фазовый множитель, мож-
но 'зависать огибающую неискаженного сигнала на вы-
ходе радиолокационной системы:
15* 227
+ х /2кХ cos \
2 I Гр Р)
«вых(р) = Д f ехр/7-Рх°^н x\dx ^AX~2nxc0Sh '
_x_ \ и / KRb p
2
(5.78)
Выражение (5.78) определяет неискаженный выход-
ной сигнал, характеризуемый симметричной относительно
р = 0 функцией неопределенности, состоящей из основ-
ного лепестка и серии боковых.
В условиях реального полета носителя РЛС возмож-
ны фазовые искажения траекторного сигнала, обуслов-
ленные отклонениями самолета от прямолинейной тра-
ектории. С учетом воздействия на РЛС возмущающих
факторов, выходной сигнал можно записать в виде
«выя (р) = А С ехр /фп (х) ехр х) dx, (5.79)
_х_
2
где фп(х) —паразитный фазовый набег, обусловленный
реальными условиями работы системы.
Следствием паразитного фазового набега фп(я), не-
скомпенсированного в системе обработки, Являются
искажения выходного сигнала, характеризующиеся:
— уменьшением величины его максимума, что рав-
ноценно снижению энергетического потенциала РЛС,
определяющего дальность действия и точность опреде-
ления координат объектов;
— смещением положения максимума, что приводит
к ошибкам измерения координат объектов и искажению
радиолокационного изображения местности;
— расширением главного лепестка, что ухудшает
разрешающую способность системы;
— изменением соотношения между главным лепест-
ком и боковыми, появлением новых боковых лепестков,
что снижает надежность обнаружения и распознавания
объектов.
На практике параметры траекторного сигнала в той
или иной степени рассогласованы с системой обработ-
ки. Имея в виду, что отклонения параметров малы по
сравнению с их величиной, можно получить с точностью
228
до величин второго порядка малости выражение для па
разитного фазового набега:
л 4я/?н Г Аг/ (/) . Н А
I 4лГ81прнГАГ(П ДХ(О1 I 27t№2cos2p4 Г 2АГ (/)
’ X [ W X ] ХЯН W
где AW(t)—изменение скорости полета носителя;
A’k(t) —нестабильность длины волны зондирую-
щего сигнала;
Ay(t) и AH\t)—отклонения летательного аппарата от
прямолинейной траектории в боковом
направлении и по высоте соответст-
венно.
Следует заметить, что колебания носителя вокруг
центра массы могут вызвать также изменение угла
наблюдения. Однако обычно ширина диаграммы направ-
ленности антенны РЛС превышает ее угловые откло-
нения, обусловленные колебаниями носителя, что позво-
ляет исключить их влияние на характеристики радио-
локационного изображения. Флуктуации длины волны
ДХ определяются схемой построения приемо-передающе-
го тракта РЛС.
Рассмотрим влияние нестабильностей отдельных па-
раметров траектории носителя на свойства радиолока-
ционной системы.
Паразитный фазовый набег, обусловленный боко-
выми отклонениями носителя от прямолинейной траекто-
рии в соответствии с формулой (5.80), можно записать
в виде
р *yV>- <5-81>
L н ’
В реальных условиях формирования искусственного
раскрыва
W2 COS2 рн ? L
228
Тогда
Д?п(0^^^-Ду (/).
(5.82)
где
П Уо
Кт~~ cosfe-
— горизонтальная дальность до цели.
Если полагать, что отклонение носителя в боковом
направлении (по оси у) происходит с постоянной ско-
ростью Wy, можно записать
ДМО^С/,
где
__ ^RTWyQQS> рн
Выражение для сигнала на выходе системы опти-
мальной обработки в соответствии с уравнением (5.79)
примет вид
х
/ \ л С * (cos Кд । С\ \ 1
«вых (р) = Л ехр 1 (—) х dx =
Sln Ц ?+ г ) 2 I
4л cos рн Cj \ А' * ' ’
Сравнение выражений (5.78) и (5.83) показывает, что
линейные фазовые искажения приводят к смещению
максимума; выходного сигнала по азимуту, величина
которого определяется соотношением
Др = ^. (5.84)
Смещение отметки цели на радиолокационном изо-
бражении в этом случае пропорционально отношению
скорости бокового отклонения к путевой скорости носи-
теля.
230
При равноускоренном боковом отклонении носителе
от прямолинейной траектории с ускорением gy можно
записать
(5.85)
Сигнал на выходе системы оптимальной обработки
в соответствии с формулой (5.78) будет
«вья(р) = Л J ехр / ^г<^-+4ЯРхХ~~ Л) dXi
2
Выходной сигнал после преобразований может быть
выражен через интегралы Френеля:
иЕых(р) = Л У —ехр j
» gy
ЖГг cos рн
х {[С (4) - С (4)1 + / [S (i2) - S (i,)]}. (5.86)
где
i
C (i) = j cos i2) di;
о
i
S (i) = j sin i2) di;
о
I_____( / 7^ / cos2 ?H
1 V 4^+1/ ’
; _ i . / 4^2P2cos2pH
2 V 4rc +|/ gyk4%
Как следует из выражения (5.86) с увеличением
квадратичных фазовых искажений уменьшается макси-
мум выходного сигнала, ухудшается разрешающая спо-
собность РЛС за счет расширения главного лепестка и
увеличивается мощность боковых лепестков.
Полагаем как и ранее (в гл. 2 и 3), допустимое зна-
чение фазового набега Дфп на краях искусственного
231
раскрыва относительно его центра равным л/4. В этом
случае относительное снижение мощности выходного
сигнала РЛС и ухудшение разрешающей способности
составляют примерно 1 дб, что вполне приемлемо для
практики.
Тогда допустимая величина бокового ускорения
с учетом требуемой линейной разрешающей способности
РЛС по азимуту 6р может быть определена из формул
(5.82) и (5.85)
4№2(3р)2 о /с-
ё у доп — Х/?г/?н c°s (5.87)
При гармоническом характере боковых отклонений
носителя с частотой искажения фазы траекторного
сигнала можно представить в виде
Acpn(/) = Csino2Zt
(5.88)
Выходной сигнал записывается как
х
+ Т
um(f) = A j exp,-(Csin^+ }dx.
Представляя подынтегральное выражение степенным
рядом, можно получить
луЛ C2\sin/n АХС2 sin (m— 6) I
пБЫХ (р) = АХ (1---—------------й-------
ьых \г/ I 4 J т 2 (т— Ь) *
। АХС2 sin (/и + 6) । АХС2 sin (т— 2b) ।
* —2 (m + b) 1 8 (т — 2Ь)
I АХС2 sin (и + 2Ь) /е
где
_ 2«^PcospK _ р .
op
2U7 Ту 9
Т — время формирования искусственного раскрыва;
Ту — период боковых отклонений носителя РЛС,
Первое слагаемое представляет неискаженный вы-
ходной сигнал. Его максимум уменьшается пропорцио-
232
нально множителю (1—С2/4). Следующие слагаемые
определяют искажения формы выходного сигнала. Ха
рактер искажений зависит от величины параметра b
Можно представить два случая боковых отклонений
носителя:
— быстрые отклонения (й^>л);
— медленные отклонения (&<Сл).
При быстрых боковых отклонениях носителя от пря-
молинейной траектории главный лепесток выходного
сигнала практически не искажается, но появляются
с обеих его сторон дополнительные боковые лепестки,
расположенные попарно, симметрично относительно
главного лепестка и повторяющие его по форме. Если
рассматривать только первую пару паразитных боковых
лепестков, определяемых уравнением (5.89), и ограни-
чить их уровень, например, величиной 0,1 от главного
лепестка по напряжению, допустимая амплитуда фазо-
вых искажений для этого случая С=0,2 рад. Соответст-
вующая амплитуда боковых отклонений носителя вида
Аг/=АУ sin d)yt от прямолинейной траектории находится
из соотношения (5.82):
Л»»= 1.5-- 1.5-10- Д. (5.90)
Медленные боковые отклонения носителя от прямо-
линейной траектории приводят к смещению выходного
сигнала и в конечном итоге к ошибкам измерения коор-
динат целей.
В случае медленных боковых отклонений носителя
вида
Дг/ (t) = Ау
зависимость фазы от времени можно представить, ис-
пользуя разложение функции (5.88) в ряд Тейлора
относительно середины искусственного раскрыва (/—0)
Д?п(0 myCt,
Из выражения (5.83) следует, что медленные сину-
соидальные колебания вызывают смещение максимума
выходного сигнала на величину
<5-91>
233
Амплитуда боковых отклонений носителя РЛС, со-
ответствующая допустимой величине смещения отметки
объекта наблюдения на радиолокационном изображении
Ардоп, определяется соотношением
Лудоп=^ДрДоп. (5.92)
Можно также показать, что медленные боковые от-
клонения носителя вида Ay(t) =Ay cos a)yt вызывают
уширение главного лепестка выходного сигнала и, сле-
довательно, понижают разрешающую способность РЛС.
В условиях работы РЛС с искусственным раскрывом
антенны искажения фазовой структуры траекторного
сигнала могут иметь случайный характер. В первом
приближении такие флуктуации фазы можно предста-
вить в виде стационарного случайного процесса с нор-
мальным распределением плотности вероятности и нуле-
вым математическим ожиданием
ф2
/ч 1 2аФ
“’(<р)==П7Г—е ’
У2п
где — дисперсия флуктуаций фазы в произвольной точ-
ке искусственного раскрыва антенны.
Используя выражение (5.79), можно определить ма-
тематическое ожидание сигнала на выходе РЛС по мощ-
ности для случая равномерного распределения амплитуд
принимаемых сигналов по раскрыву
2 2
) — А2 J | ехр
2 №
Хехр j ' (^1 — Хг) j dxidx2i
где ,_Х2} = ([<р (xt) — (х2)]2) — дисперсия разности фа-
зовых флуктуаций.
При малом значении ^Л1_Ха) можно воспользоваться дву-
мя первыми членами разложения
Г 2 "1
°(Х1—хл) 1 1 J
~ —1 — т’(
q(*1—*2)
2
тых
(5.93)
F41
ехр
Тогда
(|«вЫЯ(Р)12)-Л j ехр
dxidx2 —
_ х___х_
2 ' 2
<4 <4
- -т А2 j j v,-xs) ехР [i (X1 - x^ ]dXldx*-
X x
2 l2
(5.94)
Первое слагаемое представляет неискаженный выход-
ной сигнал по мощности, а второе отражает влияние
фазовых флуктуаций.
Дисперсию разности флуктуаций фазы можно пред-
ставить через коэффициент корреляции г (ад—х2) раз-
ности фаз
г > = 2о2о [ 1 — г (хх — л2)].
(Xi—Xi) ф 1 ' /J
Малое значение величины <^Х__Х2} может быть обуслов*
л ено либо незначительной дисперсией флуктуаций фазы,
либо медленным ее изменением за время формирования
искусственного раскрыва. В последнем случае коэффи-
циент корреляции близок к единице.
На рис. 5.23—5.25 показаны заимствованные из
работы [17] результаты расчета параметров усреднен-
ного сигнала на выходе РЛС с искусственным раскры-
вом антенны. Среднеквадратическая величина смещения,
математическое ожидание расширения синтезированной
диаграммы направленности и уменьшения мощности вы-
Рис. 5.23. Смещение луча искус-
ственного раскрыва антенны в
долях неискаженной диаграм-
мы при флуктуациях фазы.
Корреляционные функции: 1 — ли-
нейная; 2 — квадратичная; 3 —
экспоненциальная.
235
Рис. 5.24. Зависимость расши-
рения синтезированной диа-
граммы от среднеквадратиче-
ской разности фазовых флук-
туаций по искусственному рас-
крыву антенны.
Корреляционные функции: 1 — ли-
нейная; 2 — квадратичная; 3 —
экспоненциальная.
ходного сигнала (КНД искусственного раскрыва) пред-
ставлены в виде зависимостей ог среднеквадратической
величины разности быстрых фазовых флуктуаций на
концах раскрыва ах Для трех типов корреляционной
функции: линейной, квадратичной и экспоненциальной.
Линейная функция корреляции определяется следую-
щим выражением:
r(Xi — Х2) = 1 — |(Х1 —х2)|.
2о<₽
Квадратичная функция корреляции представлена в виде
«у
Г {Х1 — Х2) = 1----2 (Х1 ~ Х^2-
2%
Экспоненциальная функция имеет вид
г (Xi — х2) — 1 — К | (Л1 — х2) | -|—№ (%1 — х2)2,
где К= 1 — У1 — •
В приведенных формулах . При построении гра-
фиков предполагалось, что 0^ = 0^. Из рис. 5.23 — 5.25
видно, что при <зх < 1 рад ухудшение разрешающей спо-
собности РЛС, уменьшение мощности сигнала на выходе
системы обработки и ошибки определения местополо-
жения целей оказываются сравнительно небольшими.
Задаваясь среднеквадратической величиной ох, на-
пример 0,7 рад, можно из соотношения (5.82) получить
236
выражение, определяющее допустимое значение средне-
квадратической величины боковых случайных отклоне-
ний носителя от прямолинейной траектории
/ \ 5*10*“2Х7?н /к qki
(аг/)доп— #г cos рн • (5.95)
Степень влияния фазовых флуктуаций на разрешаю-
щую способность РЛС в значительной степени зависит
от отношения времени формирования искусственного
раскрыва к времени корреляции случайных фазовых
колебаний. В работе [53] показано, что для определен-
ного времени корреляции существует оптимальный раз-
мер искусственного раскрыва, когда реализуется макси-
мальная разрешающая способность системы и дальней-
шее увеличение раскрыва представляется нецелесооб-
разным, так как при этом разрешающая способность
ухудшается. Так, если корреляционная функция фазовых
флуктуаций выражается гауссовой кривой
/ \ 2 / z \
гДт^ехр - —у
\ <₽ /
где — параметр, определяющий время корреляции,
оптимальный размер искусственного раскрыва опреде-
ляется соотношением
т W /Тр
%опт - -V V C0S ₽«• (ЭД
Медленные случайные боковые отклонения носите-
ля, когда интервал корреляции больше размера искус-
ственного раскрыва, приводят в первую очередь к ошиб-
кам измерения координат объектов. Фазовые искажения
Рис. 5.25. Уменьшение КНД
искусственного раскрыва антен-
ны при флуктуациях фазы.
Корреляционные функции: / — ли-
нейная; 2 — квадратичная; 3 —
экспоненциальная.
237
в этом случае можно представить в виде степенного ря*
да со случайными коэффициентами сь Съ с3 и т. д.:
ДЫ(0=+ с^3 + • • •
Связывая среднеквадратические значения этих ко-
эффициентов с отклонениями носителя от прямолиней-
ной траектории и используя приведенные выше зави-
симости для линейных и различных нелинейных иска-
жений фазы, можно определить допустимые траектор-
ные искажения, исходя из требуемой точности определе-
ния координат объектов. Так, при учете линейной
компоненты степенного ряда имеем
< ДОП
(5.97)
где °р доп — допустимая среднеквадратическая ошибка изме-
рения координат объектов.
Проведенное выше рассмотрение показывает, что
отклонения траектории носителя РЛС с искусственным
раскрывом антенны в горизонтальной плоскости от пря-
молинейной могут привести к существенным искажени-
ям радиолокационного изображения. Ухудшается раз-
решающая способность РЛС и смещается максимум
главного лепестка синтезированного выходного сигнала.
Последнее, кроме ошибок измерения координат объек-
тов, может вызвать пропуск отдельных участков про-
сматриваемой местности. Поэтому выбор параметров
РЛС с искусственным раскрывом должен производиться
с учетом возможного воздействия на нее возмущающих
факторов, характеризующих реальные условия полета
носителя. Выбор того или иного вида аппроксимаций
траекторных нестабильностей определяется конкретны-
ми условиями работы РЛС и свойствами летательного
аппарата.
Искажения траектории носителя в вертикальной пло-
скости за счет изменения высоты полета и колебания
скорости летательного аппарата также ухудшают харак-
теристики РЛС. Аналогично предыдущему можно опре-
делить допустимые значения искажающих параметров.
Так, например, используя выражения (5.80) и (5.83),
238
величину постоянной скорости медленных отклонений
высоты от заданной можно определить соотношением
wa< -^-Дрдоц. (5.98)
где Д'рдоп — допустимое линейное смещение изображения
объекта по азимуту.
Допустимая величина ускорения при изменении вы-
соты может быть представлена в виде
_ 4Г2 (5р)2 cos2 рн
£ндоп— ХяЛн
(5.99)
Фазовые искажения траекторного сигнала при откло-
нениях путевой скорости носителя РЛС от заданной
определяются выражением
Д<Рп (t)= t2 + -4я^пРя П ДW (t). (5.100)
I A.2\J£ Л J
Линейные искажения фазы в данном случае при не-
больших углах Рн не приводят к существенным ошибкам
измерения координат целей, так как
Др=А|гуЧ (5.101)
Допустимые изменения путевой скорости носителя,
обусловливающие квадратичную составляющую фазовых
искажений, можно определить, принимая Д'<рп доп=rt/4.
Тогда
Д^доп= (8р)а. (5.102)
Учитывая принятое выше значение %flOn = Q>^ Ра^>
можно получить среднеквадратическую величину допу-
стимой нестабильности скорости носителя при быстрые
флуктуациях:
0,7117 (8Р)г 10оч
W доп — + 2л (5р) RB tg ₽, 1
Рассмотрение особенностей формирования искусст-
венного раскрыва антенны показывает, что следствием
быстрых траекторных флуктуаций в основном является
239
ухудшение разрешающей способности РЛС, уменьше-
ние мощности выходного сигнала и повышение уровня
боковых лепестков. Это может привести к снижению эф-
фективности радиолокационного обнаружения малораз-
мерных объектов. Медленные флуктуации в основном
приводят к ошибкам измерения координат объектов.
Требования к прямолинейности траектории носителя
возрастают с увеличением дальности действия, разре-
шающей способности РЛС и точности измерения коор-
динат целей, которые определяются конкретными зада-
чами обзора земной поверхности.
В заключение отметим, что реальная траектория но-
сителя РЛС может значительно отличаться от прямо-
линейной, что особенно существенно при большой длине
искусственного раскрыва. В этом случае, если разре-
шающая способность РЛС должна приближаться к по-
тенциально возможной, необходимы специальные меры
компенсации траекторных нестабильностей, практическое
осуществление которых сопряжено с решением весьма
сложных технических задач.
6
Принципы построения радиолокационных
станций бокового обзора с искусственным
раскрывом антенны
6.1. Особенности построения
когерентного приемо-передающего
тракта РЛС
РЛС бокового обзора с искусственным раскрывом
обладают рядом специфических отличий от всех других
РЛС обзора земной поверхности, в том числе и от стан-
ций с вдольфюзеляжной антенной.
РЛС бокового обзора с искусственным раскрывом
состоит из трех частей: когерентного приемо-передаю-
щего тракта, системы обработки сигналов и вспомога-
тельных устройств. Радиолокационный нриемо-передат-
чик, установленный на движущемся носителе, дает на
выходе сигналы, отраженные от целей, с сохранением
информации о их фазовой структуре. Система обработ-
ки осуществляет когерентное суммирование этих сигна-
лов от каждой цели за время пролета носителем участ-
ка траектории, равного искусственному раскрыву антен-
ны. Наконец, вспомогательные устройства (допплеров-
ско-инерциальные системы, пилотажно-навигационное
оборудование, устройства ввода априорной информации
о целях, траектории и т. п.) осуществляют согласование
режима работы РЛС с условиями полета носителя, ха-
рактером целей и решаемой задачей.
Принципы построения когерентного приемо-передаю-
щего тракта достаточно подробно рассмотрены в рабо-
тах, посвященных РЛС с селекцией движущихся целей
1094 24|
[3, 30]. Поэтому ниже будет обращено внимание только
на основные особенности этой части РЛС, обусловлен-
ные реализацией искусственного раскрыва антенны. Па-
раметры РЛС для цифровых примеров взяты из работ
[19, 34, 75, 86, 106].
Основное внимание в последующих параграфах бу-
дет уделено системам обработки сигналов в РЛС с ис-
кусственным раскрывом. Длительное (порядка секунды)
когерентное накопление сигналов одновременно от мно-
гих целей, разнесенных по дальности и азимуту, кото-
рое производится в РЛС с искусственным раскрывом,
является весьма сложной задачей. Это вызвало появле-
ние ряда принципиально новых методов обработки ра-
диолокационных сигналов. Одним из наиболее интерес-
ных методов является оптический — с помощью коге-
рентных аналоговых оптических решающих устройств
[16, 35, 75]. Этот метод в данной главе рассмотрен наи-
более подробно.
Принципиальным требованием, предъявляемым к ко-
герентному приемо-передающему тракту РЛС с искус-
ственным раскрывом, является высокая амплитуд-
но-фазовая стабильность его параметров. При высокой
стабильности приемо-передающего тракта отсутствуют
случайные изменения амплитуды и фазы принятого сиг-
нала, обусловленные флуктуациями амплитуды и фазы
зондирующего сигнала и отраженного сигнала при его
прохождении в приемном устройстве. Если известен
закон изменения амплитуды и фазы излучаемого сигна-
ла и сигнала гетеродина, такой приемо-передающий
тракт называется когерентным. В простейшем случае
когерентность тракта обеспечивается строгим постоян-
ством частоты (линейным изменением фазы) излучае-
мого сигнала и сигнала гетеродина при постоянной ам-
плитуде этих сигналов.
Реальный приемо-передающий тракт вносит случай-
ные изменения в амплитуду и фазу отраженного сигна-
ла. Так, например, импульс магнетронного передатчика
обычной РЛС имеет случайную начальную фазу отно-
сительно высокочастотного сигнала гетеродина, рас-
пределенную равномерно в пределах ±л. Приемо-пере-
дающий тракт такой РЛС является полностью некоге-
рентным по фазе,
242
Рис. 6.1. Блок-схема когерентной РЛС.
Когерентная работа РЛС может быть обеспечена
различными методами, которые сводятся к реализации
систем двух классов:
1. Истинно когерентные РЛС, в которых излучение
передатчика является когерентным и в приемном
устройстве осуществляется сравнение фазы принимае-
мого и излучаемого сигналов.
2. Псевдокогерентные РЛС, в которых излучение пе-
редатчика является некогерентным, а когерентность
РЛС обеспечивается в приемном устройстве путем запо-
минания фазы излучаемого сигнала и сравнения ее с фа-
зой принимаемого сигнала.
Пример функциональной схемы истинно когерентной
РЛС представлен на рис. 6.1 {34]. Стабильные высоко-
частотный генератор частоты и кварцованный генера-
тор промежуточной частоты /пр обеспечивают требуе-
мую когерентность передающего тракта. С помощью
однополосного модулятора колебания высокочастотного
генератора сдвигаются по частоте на величину /Пр. Им-
пульсные усилительные клистроны обеспечивают необ-
ходимую мощность излучения на выходе передатчика,
при этом зондирующие импульсы являются вырезками
из непрерывного когерентного колебания частоты /о+/пр.
16* 243
Рис. 6.2. Блок-схема псевдокогерентной РЛС с фазируемым коге-
рентным гетеродином.
Частота 'принимаемого сигнала вследствие относительно-
го перемещения носителя и цели дополнительно сдви-
нута на частоту Допплера F^. В смесителе приемника
выделяется промежуточная частота, сдвинутая на F^
и, наконец, на выходе фазового детектора получается
сигнал частоты Допплера. Когерентность приемного
тракта обеспечивается высокой стабильностью его ам-
плитудных и фазовых характеристик.
Пример функциональной схемы псевдокогерентной
РЛС представлена рис. 6.2. Магнетронный передатчик
излучает некогерентные импульсы высокой частоты f0-+
+ fnp. Для обеспечения когерентности в приемном
устройстве используется высокостабильный гетеродин
частоты fo и фазируемый опорный генератор промежу-
точной частоты. Для запоминания фазы излучаемого
сигнала высокочастотный импульс магнетрона с по-
мощью смесителя и стабильного гетеродина преобразует-
ся в импульс промежуточной частоты и подается для
фазирования опорного генератора промежуточной ча-
стоты. Этим достигается равенство фаз излучаемого и
опорного сигналов. Сравнение принятого и опорного
сигналов на фазовом детекторе позволяет выделить доп-
плеровскую частоту принимаемых сигналов.
244
Следует отметить, что в такой схеме фазирования
к опорному генератору предъявляются весьма противо-
речивые требования. С одной стороны, он должен обла-
дать высокой стабильностью и, следовательно, доброт-
ность его колебательной системы должна быть велика.
С другой стороны, для точной фазировки генератора
за время длительности импульса передатчика доброт-
ность колебательной системы опорного генератора дол-
жна быть мала. Для РЛС с искусственным раскрывом
характерно применение коротких излучаемых импульсов.
В этом случае представляют интерес схемы коррекции
фазы с помощью фазовращателей (рис. 6.3). Передат-
чик (магнетрон) и стабильный гетеродин работают на
одинаковой частоте fo так, что на выходе фазового де-
тектора образуется видеоимпульс, амплитуда которого
пропорциональна начальной фазе импульса передатчи-
ка. С помощью схемы управления и фазовращателя
колебания кварцованного генератора промежуточной ча-
стоты изменяются по фазе, в зависимости от фазы пере-
датчика. Этим обеспечивается когерентность принимае-
мых сигналов. В одной из схем фазирования такой РЛС
с цифровым фазовращателем {94] при длительности зон-
дирующего импульса 20 нсек за время 3 мксек обеспе-
чивается точность установки фазы ±3,5°.
Рассмотрим требования, которые предъявляются к
степени когерентности приемо-передающего тракта РЛС
с искусственным раскрывом антенны. В когерентном
приемо-передающем тракте фазы излучаемого импульса
и опорного колебания должны быть жестко связаны
Рис. 6.3. Блок-схема РЛС с обеспечением когерентности путем регу-
лировки фазы опорного генератора.
245
Между собой. Однако всегда существуют случайные^фа-
зовые изменения излучаемого сигнала, либо сигнала
опорного, генератора, либо характеристик приемного
устройства, которые искажают сигнал на входе системы
обработки. .Эти искажения приводят к тому, что выход-
ной сигнал также значительно изменяется. При этом
наибольшее влияние оказывают фазовые искажения
входного сигнала.
Разрешение по азимуту в станциях с искусственным
раскрывом соответствует разрешению сигналов по доп-
плеровским частотам (§ 6.3). Сечение функции неопре-
деленности по оси частот сигнала от точечной цели на
известной дальности (задержка т=то) будет определять
выходной сигнал системы обработки по азимуту:
«выя (") = j s (0 s* (0 е ‘Wtdt’ (6- 1)
т
где s(t)=u(t)—траекторный сигнал.
При наличии фазовых искажений Аф(/) выходной
сигнал будет иметь вид
(<о) = J $ (/) s* (t) е;л<р (6.2)
т
Большие фазовые искажения сигнала Афмакс>л при-
водят к полному разрушению искусственного раскрыва.
В случае малых искажений, как показано в § 5.4, в вы-
ходном сигнале будет изменяться положение главного
лепестка, увеличиваться его ширина, уменьшаться ма-
ксимальное значение главного лепестка, увеличиваться
уровень боковых лепестков и появятся новые боковые
лепестки.
При медленных флуктуациях фазы, когда время об-
работки сигнала намного меньше периода изменения
фазы флуктуаций, искажающую функцию можно ап-
проксимировать линейным членом
A?(0 = 2t:AF^, (6.3)
где А^д — частота расстройки входного сигнала относи-
тельно опорного сигнала
Выходной сигнал при таких искажениях входного
сигнала изменяет только положение главного максиму-
ма соответственно изменению частоты Допплера сиг-
нала на величину АТД. Если допустимо смещение бтмет-
246
ки цели на величину Ах, допустимое смещение частоты
сигнала будет равно
2ГДх
(6Л)
В реальных системах обработки, кроме того, возмож-
но применение узкополосных устройств. В этом случае
допустимая расстройка входного сигнала может быть
меньше А1ЕД. Если полоса частот системы обработки со-
ставляет величину AFco, допустимые искажения сигнала
определяются условием
ДЛд << ДЕС0. (6.5)
В случае нелинейного закона изменения Аф(/) за
время обработки Т необходимо учитывать квадратич-
ный и более высокие члены разложения искажающей
функции. Функция А'ф(/) может быть регулярной и слу-
чайной, узкополосной и широкополосной, возможны
также периодические изменения Аф(/) как следствие
механических вибраций или электрических наводок.
В этих случаях будут изменяться все четыре параметра
выходного сигнала. Величина изменений зависит от ха-
рактера искажений, однако при малых искажениях для
всех видов функции Аф(0 достаточно выполнить усло-
вие
| Д^ (0 |макс АсрдОп. (6.6)
Это означает, что на интервале обработки сигнала Т
максимальные фазовые искажения |Дср(/)| макс Не ДОЛЖ-
НЫ превышать допустимой фазовой ошибки Д(рдоп. При
этом линейный набег искажения фазы не учитывается,
так как он определяется допустимым смещением часто-
ты Допплера сигнала [условие (6.4)]. Таким образом,
величина максимального изменения фазовых искажений
|Дф(/)| макс рассчитывается по квадратичному и более
высоким членам разложения функции Дф(0-
Допустимый фазовый набег Афдоп определяется,
в основном, величиной допустимых искажений выходно-
го сигнала. Он мало зависит от вида искажающей функ-
ции. Так, для медленной периодической фазовой моду-
ляции при максимальном набеге фазы на краях рас-
крыва, равном л/4, уменьшение мощности максимума
247
1 •
главного лепестка будет составлять 0,5 дб {55]. Такое
же уменьшение основного лепестка будет наблюдаться
и при квадратичном набеге фазы на краях раскрыва на
величину л/4. Для нормального случайного процесса
Аф(/) с гауссовой функцией корреляции, равной по дли-
тельности времени обработки Т, и среднеквадратиче-
ским отклонением ^ = 15°, что приблизительно соответ-
ствует максимальному отклонению АфМакс~ За =л/4,
уменьшение мощности в максимуме главного лепестка
составляет 0,4 дб. При быстрых флуктуациях, когда
время корреляции гораздо меньше времени об-
работки, потери в главном лепестке возрастают до
0,6 дб {21].
Таким образом, при фазовых искажениях |А<р|макс =
=л/4, для всех видов искажающей функции уменьше-
ние мощности в максимуме выходного сигнала будет
составлять величину порядка 0,5 дб.
Наиболее чувствительным к фазовым искажениям
является уровень боковых лепестков. При обзоре по-
верхности они определяют динамический диапазон вы-
ходного изображения и, следовательно, возможность
наблюдения малоразмерных целей на фоне местности.
При этом важно, чтобы суммарная средняя мощность
всех боковых лепестков была достаточно мала по срав-
нению с мощностью основного лепестка. Так, при вы-
ходном сигнале вида sin х/х отношение мощностей в
главном и боковом лепестках снижается с 10 до 8 дб
при av= 15° и ^=7’[17].
Учитывая, что нарушение когерентности приемо-пе-
редающего тракта является лишь одной из причин фа-
зовых флуктуаций входного сигнала системы обработ-
ки, допустимый фазовый набег должен быть гораздо
меньше радиана.
Конкретное значение величины допустимых фазовых
флуктуаций в приемо-передающем тракте определяется
требуемой разрешающей способностью РЛС, траектор-
ными нестабильностями полета носителя, фазовыми
флуктуациями сигнала в системе обработки и т. п.
Требования к отдельным элементам приемо-пере-
дающего тракта зависят от метода обеспечения коге-
рентности. Рассмотрим эти требования на примере истин-
но когерентной РЛС (рис. 6.1). Здесь наибольшую фа-
248
зовую нестабильность вносит когерентный высокоча-
стотный генератор, так как фазовая стабильность гене-
ратора промежуточной частоты может быть сделана до-
саточно высокой путем стабилизации частоты кварцем.
Высокая стабильность фазовых характеристик прием-
ного устройства также может быть обеспечена доста-
точно просто.
В этом случае фазу фпер излучаемого сигнала мож-
но записать в следующем виде:
?пер = (“о + <“пр) t + f (0. (6-7)
где ф(0—паразитная фазовая модуляция высокоча-
стотного когерентного генератора.
Опорный сигнал на смесителе приемника фоп будет
отличаться на промежуточную частоту
Топ = %/ + ?(/). (6.8)
Фазу принимаемого сигнала, задержанного на время
т, можно записать как разность фаз опорного и задер-
жанного зондирующего сигнала
?пр = ®Пр^+ — (<°0 + <°up) X — ф (^ — х). (6.9)
Таким образом, фазовые флуктуации сигнала Дкр(/)
на входе системы обработки будут зависеть от фазовых
флуктуаций <р(£) когерентного генератора следующим
образом:
Д?(О = ?(0 — <P(t~ *) (6.10)
За время обработки задержка сигнала изменяется на вели-
чину Дт:
I Л I 2UZr(/)Z ,£11Ч
г = % + Дх = х0-|----(6.11)
где Wr— радиальная скорость носителя относительно
цели;
с—скорость распространения радиоволн.
Поправка к закону изменения Д<р вследствие нали-
чия радиальной скорости невелика и в большинстве
случаев ею можно пренебречь:
(6-12)
249
Рассмотрим случай линейного ухода частоты коге-
рентного генератора
= (6.13)
что соответствует изменению фазы генератора на величину
TW==1t-g.^. (6.14)
Изменение фазы сигнала Аф(£), пренебрегая малыми
членами, можно записать, используя уравнение (6.10):
= (6.15)
Линейное изменение фазы дает постоянное смещение
частоты сигнала
(6-16)
. Чем больше дальность до цели, тем больше смеще-
ние частоты.
В реальных генераторах кроме ухода частоты наблю-
даются флуктуации фазы, обусловленные тепловыми и
дробовыми шумами в генераторе и других каскадах пе-
редающего устройства [33], Обычно считают, что флук-
туации фазы представляют собой стационарный слу-
чайный процесс с корреляционной функцией (т) и ну-
левым средним значением
(г) = <?(/)? (Г + т). (6.17)
Корреляционная функция разности фаз А<р (/) может быть
определена через Я (*) (см., например, [44]):
^М = 2/?(р(г)-/?ф(г + %)-У?(р(т-г0). (6.18)
Дисперсия искажающей функции Аф(/), которая позво-
ляет оценить |Аф|Макс, может быть определена по фор-
муле
% = (649)
Таким образом, зная дисперсию и корреляционную
функцию фазы когерентного гетеродина, можно опреде-
лить среднеквадратическое'отклонение фазы принимае-
мого сигнала и сравнить ее с допустимой фазо-
вой ОШИбКОЙ Афдоп-
250
Часто для оценки нестабильности генератора используют
такую характеристику, как дисперсия частоты флуктуаций
, где частота флуктуаций есть производная от фазы
со(/). Дисперсии частоты и фазы связаны между собой
соотношением j
' (6.20)
где Т — время усреднения процесса со(/) при измере-
нии частоты. В нашем случае оно равно времени обра-
ботки сигнала.
Напомним, что в дисперсию частоты флуктуаций не
входит относительно медленный линейный уход часто-
ты генератора, например с периодом более одной се-
кунды для кварцевых генераторов, так как он опреде-
ляет только смещение частоты Допплера (6.4). На
рис. 6.4 показан график зависимости среднеквадратиче-
ского отклонения частоты процессионного кварцевого
генератора от времени наблюдения (обработки), рабо-
тающего на частоте 5 Мгц (551 Плоский участок кри-
вой при времени наблюдения больше 0,7 сек обуслов-
лен медленным уходом частоты. При меньшем времени
наблюдения основной вклад в дисперсию частоты вно-
сят быстрые флуктуации фазы генератора. Если ис-
пользоваться такой генератор в качестве когерентного
гетеродина путем умножения частоты до соо=2зт1010 гц
(Х=3 см), среднеквадратическое отклонение частоты
генератора при времени обработки, например, Т—
— 0,1 сек будет равно (см. график рис. 6.4): =
= 2л1010« 3,5 • 10“и=2,2 рад]сек или оу==0,35 гц.
Соответственно среднеквадпатическое отклонение фазы
генератора из уравнения (6.20) будет равно аф = 0,16 рад
9°,“полагая, что 1^^(Т) = 0.
Дисперсия искажающей функции обычно меньше
дисперсии фазовых искажений генератора [условие
(6.19)1. Для ее нахождения необходимо знание корреляцион-
ной функции флуктуаций’фазы генератора 7?ф(т).
Для оценки влияния фазовых флуктуаций на выход-
ной сигнал можно использовать не только величину ма-
ксимального отклонения фазы |Лф(0]макс [условие
251
Рис. 6.4. Зависимость дисперсии частоты прецессионного кварцевого
генератора от времени обработки.
(6.6)], 'но и дисперсию частоты Одш сигнала. Так,
если время обработки сигнала Т, его полоса равна
~2л/Т, а допустимое среднеквадратическое отклонение
частоты сигнала должно быть гораздо меньше его
полосы
2п
Т *
(6.21)
Дисперсия частоты сигнала, в свою очередь, может
быть определена, зная дисперсию частоты или фазы
опорного генератора и соответствующую корреляцион-
ную функцию.
Проведенный анализ показывает, что к приемо-пере-
дающему тракту РЛС «с искусственным раскрывом
предъявляются очень высокие требования по обеспече-
нию когерентности сигналов на выходе приемного
устройства.
6.2. Системы обработки сигналов РЛС
с искусственным раскрывом антенны
Принцип искусственного раскрыва антенны предусма-
тривает использование специальных методов обработки
радиолокационных сигналов для реализации высокой
252
разрешающей способности по угловым координатам. Фа-
за отраженного сигнала от точечной цели при движе-
нии носителя РЛС по траектории соответствующей оси
х и боковом обзоре будет изменяться приблизительно
по квадратичному закону (см. гл. 5):
. ч 2пх2 I
где X — длина волны РЛС;
/?о— наклонная дальность до цели;
фо—начальная фаза сигнала, которую можно счи-
тать достаточно стабильной за время облучения
цели.
Для обеспечения синфазности сложения сигналов при
формировании искусственного раскрыва необходима фа-
зовая коррекция сигналов по квадратичному закону
изменения ф»(х). Так как закон изменения фазы зави-
сит от дальности J?o, устройство обработки сигналов
РЛС с искусственным раскрывом должно быть много-
канальным по дальности и обеспечивать когерентное
накопление сигналов в каждом канале.
Рассмотрим требования к системе обработки сигна-
лов в РЛС с искусственным раскрывом антенны. На кон-
кретном примере покажем порядок величин искусст-
венного раскрыва и времени накопления сигналов та-
ких РЛС.
Для получения разрешающей способности дх = 6 м
на дальности Rq= 160 км [19] требуется искусственный
раскрыв
(6.22)
_ XRo_3-10-2-160-10» _4ПП tt
2Sx~ ° с 400 М'
2-6
Соответственно время интегрирования сигнала (напри-
мер, при скорости полета самолета 1Г=300 м1сек) будет
равно
Т = 1,3 сек.
Разрешение по наклонной дальности в РЛС с искус-
ственным раскрывом обеспечивается обычно импульсным
режимом работы. В этом случае когерентное накопле-
ние импульсов производится в каждом канале по даль-
ности. При современных требованиях к полосе обзора
253
местности по дальности Л/? и разрешающей способности
67? необходимо несколько тысяч каналов по дальности
Nh [19]:
AL = = 103 ’ ч- 104. (6.23)
Количество когерентно суммируемых сигналов на
каждом участке дальности будет зависеть от времени
накопления Т и частоты повторения импульсов F^. Так,
например, при 77п= 1 000 гц, количество суммируемых
импульсов равно NX — TF^= 1,3 • 103.
Каждый сигнал несет в себе амплитудную и фазовую
информацию, при использовании которой обычно тре-
буется динамический диапазон системы обработки по-
рядка ?7т=102. Таким образом, емкость памяти систе-
мы обработки должна быть порядка 108 двоичных еди-
ниц при наличии большого числа каналов (103—104).
Быстродействие или пропускная способность системы
обработки должна быть достаточно высокой, чтобы обе-
спечивать обработку информации по мере пролета мест-
ности. Задержка информации должна быть достаточно
малой. При обработке сигналов в дальней зоне искус-
ственного раскрыва (нефокусированная РЛС), на каж-
дом разрешаемом участке по дальности должна про-
изводиться одна операция сложения и одна операция
вычитания в течение периода повторения импульсов,
т. е. прибавляется очередной отраженный от цели сиг-
нал и вычитается первый из общего числа накапливае-
мых импульсов. В этом случае скорость работы решаю-
щего устройства должна быть
2NRFn= 106-г- 107 операций/сек. (6.24)
При фокусированной системе требования к быстро-
действию системы обработки возрастают, так как
операция сложения всех Nx сигналов по искусственному
раскрыву должна производиться после выполнения опе-
рации коррекции фазы в каждом периоде повторения.
Приблизительно требуемое быстродействие системы об
работки в этом случае можно оценить величиной 109-г
Гб1а операций в секунду.
Для увеличения скорости обзора желательно произ-
водить одновременную обработку сигналов от всех це-
лёй, разнесенных по азимуту. Это, в свою очередь, тре-
254
буёт многоканальной обработки по азимуту и йрийбДйт
к еще большему увеличению объема памяти и быстро-
действию системы обработки сигналов.
Кроме требований по выполнению заданного алгорит-
ма к системе обработки предъявляются дополнительные
требования. Важнейшим из них является скорость вы-
дачи информации или задержка получения информации.
Существуют три принципиальные причины задержки
выдачи информации в РЛС с искусственным раскрывом.
Первая причина задержки информации связана с не-
обходимостью пролета носителем участка траектории
X=AVT, который требуется для формирования искусст-
венного раскрыва. Время задержки Т может быть умень-
шено при увеличении скорости полета самолета W.
Вторая причина задержки информации связана с не-
обходимостью просмотра не только отдельной цели, но и
определенного (заданного) участка местности по путевой
дальности Ах. Время Тх получения информации об
участке местности Ах определяется скоростью полета са-
молета и равно
= (6.25)
Если участок местности Дх меньше ширины диаграм-
мы направленности реальной антенны, можно приме-
нить многоканальную по азимуту обработку сигналов
для получения изображения всего участка местности за
время искусственного раскрыва Т (ТХ=Т). Первые две
причины обусловливают задержку информации порядка
от десятых долей до единиц секунд.
Третья причина задержки выдачи информации обу-
словлена конечным временем выполнения операций в си-
стеме обработки сигналов. Время, необходимое для вы-
полнения операций, определяемых алгоритмом обработ-
ки сигналов, в сильной степени зависит от вида систе-
мы обработки и может достигать нескольких часов.
Обеспечение рассмотренных требований к системе об-
работки является весьма сложной задачей. Потребова-
лось применение ряда принципиально новых методов
обработки информации, таких, например, как оптиче-
ские когерентные решающие устройства. Существенной
модернизации подверглись также электронные методы
обработки.
255
Когерентные оптические аналоговые устройства [35,
75] обладают большими потенциальными возможностя-
ми и дают ряд преимуществ по сравнению с известными
методами обработки сигналов электронными системами.
Эти новые методы обработки информации позволяют
достаточно просто решать задачу когерентной много-
канальной обработки длительных радиолокационных
сигналов.
Оптические системы обладают большой емкостью па-
мяти, что обеспечивает обработку сигналов РЛС с ис-
кусственным раскрывом в широкой полосе обзора. Так,
один кадр (24X36 мм2) стандартной кинопленки позво-
ляет записать 108 двоичных единиц информации при
числе каналов более 103. Высокая разрешающая способ-
ность оптических систем обеспечивает большой объем
обрабатываемой информации. Например, оптический
спектроанализатор эквивалентен матрице из нескольких
миллионов фильтров. Благодаря двумерной природе
оптических систем они позволяют производить двумер-
ную либо многоканальную обработку сигнало®. Задерж-
ка информации в основном определяется быстродейст-
вием системы памяти, так как сама оптическая система
выполняет заданный алгоритм практически мгновенно.
Необходимо отметить также, что алгоритм обработ-
ки сигналов в РЛС с искусственным раскрывом реали-
зуется достаточно простой по конструкции и, следова-
тельно, надежной оптической системой.
Основное внимание в дальнейшем будет уделено опи-
санию оптических методов обработки радиолокационных
сигналов для получения высокой разрешающей способ-
ности в РЛС с искусственным раскрывом. Так как элек-
тронные методы обработки сигналов в РЛС с искусст-
венным раскрывом по принципу действия не отличаются
от известных методов, применяемых в радиолокации,
им будет посвящен лишь краткий обзор.
6.3. Алгоритм обработки сигналов
в РЛС с искусственным раскрывом
антенны
Проведем анализ траекторного сигнала от одиноч-
ной точечной цели (рис. 6.5) с целью определения не-
обходимых характеристик системы обработки такого
256
Рис. 6.5. Система координат, принятая при записи сигналов РЛС.
сигнала. Система координат (х, J?) связана с самоле-
том, поэтому цель в этой системе движется по оси, сов-
падающей с вектором W, пересекая диаграмму направ-
ленности реальной антенны.
При равномерном -прямолинейном полете время t и
путевая дальность х пропорциональны. Выбираем нача-
ло отсчета времени /=0 в момент прохождения цели
через центр диаграммы направленности так, что
Хн X
(6.26)
В дальнейшем будем .рассматривать зависимость сиг-
нала от переменной х, так как характеристики разре-
шения станции определяются пространственными пара-
метрами сигнала.
Для получения временных характеристик достаточно
заменить переменную х на t по формуле (6.26).
Будем полагать, что первичная диаграмма направ-
ленности достаточно узкая (несколько градусов), а ис-
кусственный раскрыв X значительно меньше наклонной
дальности до цели. Второе условие практически всегда
выполняется, даже в случае больших углов наблюде-
ния ₽н.
17—1094 257
Рис. 6.6. Зависимость изменения дальности от РЛС до цели при пря-
молинейном полете.
Сигнал, отраженный от точечной цели, можно пред-
ставить в виде излученного сигнала Atsft) с изменяю-
щейся задержкой во времени:
e(t) = A2s[i — г8(0], (6.27)
где Аг— амплитуда отраженного сигнала.
Изменение задержки во времени т3(/) обусловлено
изменением текущего расстояния г(х) от цели до РЛС.
При пролете по прямолинейной траектории изменение
г(х) носит гиперболический характер ,рис. 6.6,а). В об-
щем случае отраженный сигнал отличается по форме и
частотному заполнению от зондирующего сигнала. Рас-
смотрим представляющий наибольший интерес случай,
когда разрешение по наклонной дальности обеспечива-
ется излучением коротких высокочастотных импульсов.
При этом соблюдается условие малости ширины спектра
импульса AF по сравнению с несущей частотой fo. В этом
случае траекторный сигнал можно представить в виде
последовательности высокочастотных импульсов такой
же формы, что и излучаемые зондирующие сигналы.
При этом задержка огибающей каждого импульса и фа-
за высокочастотного заполнения будут медленно ме-
няться от импульса к импульсу:
s [< — х8 (О) = | s (t — т{) | cos [<-></ + + ?0], (6.28)
258
где Xi — задержка сигнала в момент нахождения носи-
теля в точке хс
— фаза сигнала в этой точке, определяемая рас-
пространением сигнала в пространстве;
<р«о — начальная фаза сигнала.
Фаза фу определяется расстоянием г(хг) (рис. 6.6,6)
?f = ±Lr(Xi). (6.29)
Изменение расстояния г в зависимости от координаты
РЛС х можно представить в виде (рис. 6.5):
ДЯ (х) = г (х) - х sin ри +(х ~ *нР cos2 рн, (6.30)
где Хн, /?н и рн — постоянные параметры (координаты)
цели.
Аппроксимация верна для области изменения х
в окрестности точки хн в пределах ширины диаграммы
направленности реальной антенны.
Обычно максимальное изменение дальности до цели
по траектории полета из-за квадратичного члена, рав-
ное х2/8/?н (при рн=0), меньше, чем величина разре-
шения по дальности 67? и можно считать, что для оги-
бающей сигнала задержка изменяется линейно в преде-
лах искусственного раскрыва X. Разность наклонных
дальностей Дг в начале и в конце искусственного рас-
крыва будет равна
Ar=XsinpH. (6.31)
Фаза принимаемых сигналов будет изменяться по
линейному и квадратичному законам. Учитывая (6.29):
у (х) = sin рн + 2.г- (X- **)2 cos2 рн. (6.32)
А А/\Н
Пространственная частота сигнала при выбранной ап-
проксимации будет равна
2хн (х хн)
17*
259
В полярной системе координат, связанной с РЛС,
частота сигнала представляется следующим образом:
fx (X) = 4sin^ + 2JW^'cos2 Ря- <6-34)
Первый член выражения (6.34) определяет постоян-
ную пространственную частоту для данного направле-
ния наблюдения, которая изменяется от угла наблюде-
ния по закону синуса. Максимальная частота fxQ при
боковом обзоре будет равна
здесь £н = 0, |х — хн | = 0О/?Н — Xo.
При наблюдении в переднем секторе (ри = -^-) частота
будет равна
/хмакс=А (6.35)
т. е. частота сигнала изменяется во много раз
^-с=4-- <6-36)
Второй член выражения (6.34) определяет линейную
частотную модуляцию сигнала. Крутизна частотной мо-
дуляции изменяется обратно пропорционально наклон-
ной дальности /?п и уменьшается по закону cos2pH от
угла наблюдения. Максимальный размер раскрыва ХМакс
в свою очередь изменяется обратно пропорционально
cos ₽н:
= (6.37)
Поэтому ширина спектра пространственных частот сиг-
нала по оси х уменьшается пропорционально cos рн:
= c°spH = 4'C0S₽H- (6.38)
Произведение полосы частот спектра сигнала на
размер искусственного раскрыва не зависит от угла на-
260
блюдения и определяется шириной диаграммы направ-
ленности реальной антенны и дальностью до цели
Д/Лакс = ^=-^. (6.39)
Вследствие этого требуемый объем памяти системы об-
работки, необходимый для запоминания всего сигнала,
также не зависит от угла наблюдения.
Таким образом, для обработки траекторного сигнала
от одной цели система обработки должна обеспечивать
когерентное сложение (сждтие) сигнала с линейным
изменением частоты и регулировку параметров систе-
мы обработки так, чтобы учесть:
а) изменение временной задержки огибающей сигна-
ла приблизительно по линейному закону за время обра-
частоты Допплера сигнала при изменении угла наблю-
дения
AT3=:-^-sifipH, (6.40)
б) изменение в широких пределах средней (несущей)
частоты Допплера сигнала при изменении угла наблю-
дения „ • 2Г . а /7A0=-rsinpa, (6-41)
в) изменение крутизны линейной частотной модуля-
ции сигнала от дальности и угла наблюдения
(6.42)
г) увеличение времени обработки сигнала и соответ-
ственно искусственного раскрыва при увеличении угла
наблюдения и дальности до цели
д) уменьшение угла наблюдения Т = 0°^ , (6.43) W cos рн ’ v ' ширины спектра сигнала с увеличением AFa=2£cos₽e. (6.44) 261
Рис. 6.7. Схема определения сигналов от целей в пределах реальной
диаграммы направленности.
Для одновременной обработки множества сигналов
от целей в облучаемом пространстве (многоканальная
система обработки) необходимо определить вид сигна-
ла в зависимости от координат целей в пределах диа-
граммы направленности реальной антенны.
Рассмотрим два вида прямоугольных координат:
(х, R) и (рн, Rh) (рис. 6.7).
При изменении координаты х на величину Ах (цель 4
рис. 6.7) вид сигнала не изменяется, если цель 4 на-
ходится в пределах диаграммы направленности реаль-
ной антенны и, следовательно, верна принятая ранее
аппроксимация. Для упрощения записи введем пере-
менную:
х'=х—хн- (6.45)
Тогда частота сигнала от цели, смещенной по оси х,
будет равна
М = -1 sin ря + 2(х' + *х) cos2 ₽н. (6.46)
Таким образом, смещение цели по оси х на величи-
ну Ах вызывает смещение частоты сигнала, равное
A/xx=2_^Lcos2pH. (6.47)
ЛАИ
262
При смещении цели по наклонной дальности На ве-
личину Д/?н (цель 3) пространственная частота сигнала
будет равна
2 9г'
“ Т Sln Рн + A (Rs + Д/?н) 6os2 (6>48)
В этом сЛучйе смещения частоты сигнала нет, а проис-
ходит йзменёйие крутизны частотной модуляции.
Смещение по дальности 7? на величину Д/? (цель 2)
можно представить как смещение по 7?н относительно
цели 1 на Д£н=Д^/созрй и смещение по х на Д!х=
= —Д/? tg рн. Поэтому частота сигнала от цели, сме-
щенной на Д/? по оси будет равна
= Т (si» ?. - ДЙ‘‘П\С”М +- cos- р„.
\ R» + cos / Х + cos Ри J
(6.49)
Смещение цели по оси рн, перпендикулярной оси RH,
на величину Арн (цель 5), можно представить как сме-
щение по Rn относительно цели 1 на Д/?н=—ApntgpH
и смещение по х на Ax=ApH/cos рн. Поэтому сигнал
от цели, смещенной на iApH по оси рн, будет иметь ча-
стоту
г — 2 fsin R I Ap«cos 1*И \ I- 2xz cos2pH
Ixp— A ^sinPH-r Rh_ ApHtgpH J ' A (7?e—Дрн tg pH)' (b,W'
Величина Дрн не выходит за пределы диаграммы
направленности антенны. Поэтому lApHtgpH<X и по
условиям аппроксимации значительно меньше /?н- При
этих условиях сигнал от цели 5 будет иметь частоту
txr=4- (sin ?»+х-cos *9+^cos2 <6-51>
Таким образом, для целей, смещенных по оси рн,
перпендикулярной наклонной дальности, в пределах ре-
альной диаграммы направленности, сигналы отличаются
смещением по частоте
AU=Srcos^=2-rcos^ (6-52)
где Д§ — угловое отклонение цели.
263
Рис. 6.8. Сечение функции неопределенности импульсного сигнала и
сигнала непрерывного излучения.
Анализ структуры траекторных сигналов в зависи-
мости от координат целей показывает, что при обра-
ботке сигналов от множества целей в пределах реаль-
ной диаграммы направленности необходимо учитывать
изменение и средней частоты и крутизны частотной мо-
дуляции сигнала. В гл. 5 показано, что сечение тела
неопределенности (разрешающая способность) при не-
прерывном излучении передатчика имеет вид сильно
вытянутого вдоль оси 1/?н эллипса (рис. 6.8). Наилучшее
разрешение достигается для целей, смещенных по ази-
муту (ось |рн) и наихудшее — для целей, смещенных
по наклонной дальности (ось i/?H). Поэтому, чтобы обе-
спечить разрешение по наклонной дальности Rh, равное
разрешению по оси рн (б^н=6рн), применяют модуля-
цию зондирующего сигнала. Это, в свою очередь, позво-
ляет вести обработку траекторного сигнала вдоль оси х
в каждом элементе разрешения по наклонной дальности
раздельно. Многока'нальность по азимуту, т. е. по оси рн,
можно обеспечить созданием параллельных каналов об-
работки, соответствующих смещению целей вдоль оси
рн для каждого элемента наклонной дальности. При
этом соседние каналы по азимуту должны отличаться
частотой настройки на величину SFA в зависимости от
разрешения целей по азимуту 6рн (6.52):
87?a=^?cosPh. (6.53)
264
Рис. 6.9. Блок-схема устройства обработки сигналов путем их коге-
рентного суммирования.
Таким образом система обработки должна представ-
лять собой матрицу каналов по дальности и азимуту,
в каждом из которых производится сжатие частотно-
модулированных траекторных сигналов с линейным за-
коном модуляции частоты и с различными средними
допплеровскими частотами. Каналы по дальности фор-
мируются стробированием во времени и отличаются на-
чальной задержкой сигнала То, линейно изменяющейся
за время обработки, и крутизной частотной модуляции
траекторного сигнала. Каналы по азимуту разделяются
по средней допплеровской частоте сигналов.
В гл. 4 показаны различные методы обработки сиг-
налов в РЛС с искусственным раскрывом антенны (ко-
герентное сложение сигналов с учетом фазы вдоль тра-
ектории полета, корреляция с опорным сигналом и опти-
мальная фильтрация принимаемого сигнала). Соответ-
ственно возможно различное техническое выполнение
систем обработки.
При векторном суммировании сигнала по траектории
полета носителя (рис. 6.9) высокочастотные импульсы
с выхода приемника поступают в линию задержки, ма-
ксимальное время задержки которой равно требуемому
времени обработки сигнала. Отводы в линии задержки
выполнены в соответствии с законом изменения задерж-
ки огибающей отраженных сигналов от периода к пе-
риоду частоты повторения импульсов. Фазовращатели
компенсируют квадратичный фазовый набег сигналов.
В сумматоре происходит когерентное сложение высоко-
частотных импульсов. Суммарный сигнал после ампли-
тудного детектирования подается на индикатор.
265
Рис. 6.10. Блок-схема устройства обработки сигналов корреляционно-
го типа.
В системе обработки корреляционного типа
(рис. 6.10) необходимы два квадратурных канала вслед-
ствие случайного значения начальной фазы принимае-
мого сигнала. В каждом из каналов определяется кор-
реляционная функция опорного и принимаемого сигна-
лов. Опорный сигнал в одном канале сдвинут по фазе
на л/2 относительно второго канала. Выходные сигна-
лы корреляторов возводятся в квадрат, суммируются и
подаются на индикатор.
На рис. 6.11 приведена функциональная схема систе-
мы обработки с оптимальным фильтром. Сигналы с вы-
хода приемника поступают на вход фильтра, который
осуществляет «сжатие» частотно-модулированного им-
пульса. Техническое выполнение фильтра может быть са-
мым различным. Некоторые примеры построения опти-
мальных фильтров будут даны ниже.
Так как выходной сигнал оптимальной системы об-
работки не зависит от метода обработки, анализ про-
хождения сигнала через оптимальную систему будет
выполнен лишь для одного вида системы — оптического
решающего устройства типа коррелятора.
При рассмотрении систем обработки для упрощения
анализа и большей конкретности будем полагать, что:
а) зондирующий сигнал имеет импульсный характер;
длительность импульса достаточно мала, так что раз-
Рис. 6.11. Блок-схема устройства обработки сигналов типа оптималь-
ного фильтра.
266
решение S#h по наклонной Дальности определяется
только зондирующим сигналом;
б) частота повторения импульсов выбрана так, что
удовлетворяются условия однозначного определения
дальности и азимута целей;
в) отраженный сигнал от точечной цели идеальный
(неискаженный); случай обработки флуктуирующего
сигнала будет рассмотрен особо;
г) система обработки оптимальная в классе линей-
ных систем.
6.4. Основные свойства оптических
решающих устройств
Когерентные оптические аналоговые вычислительные
устройства для обработки радиолокационных сигналов
появились сравнительно недавно [75]. Поэтому теория и
принципы построения таких устройств являются новы-
ми, особенно для специалистов в области радиолокации.
Достаточно подробное изложение теории когерентных
оптических систем обработки информации можно найти
в работе [35]. Здесь мы ограничимся кратким изложе-
нием основных свойств оптических решающих устройств,
проводя аналогию с электронными системами обработки.
Задачи, выполняемые оптической и электронной си-
стемами, очень схожи и могут быть описаны в терминах
общей теории линейных и некоторых классов нелиней-
ных систем. Блок-схема обработки радиолокационных
сигналов оптическим устройством представлена на
рис. 6.12.
Радиолокационные сигналы с выхода РЛС подаются
в преобразователь, который превращает их в световые
сигналы на входной (предметной) плоскости оптиче-
ской системы. Оптическое устройство производит задан-
ную обработку световых сигналов, образуя выходное
изображение.
Аналогом радиолокационного сигнала в данном слу-
чае является световой сигнал, который представляет со-
бой распределение амплитуд и фаз света на плоскости.
Математически он записывается как функция точек
(х, у) на плоскости s(x, у, /). Вследствие очень высокой
267
Рис. 6.12. Функциональная схема оптической системы обработки сиг-
налов РЛС.
частоты колебания света (~1014 гц) и большой ско-
рости распространения света, время переходного процес-
са оптической системы очень мало и текущее время
обработки t играет роль дополнительного параметра.
Оптическая система подчиняется принципу суперпо-
зиции и может рассматриваться как линейная система.
Выходное изображение оптической системы при этом
можно представить как результат прохождения вход-
ных световых сигналов через линейную систему с изве-
стной переходной характеристикой.
Необходимо различать два вида оптических решаю-
щих устройств: с когерентным и некогерентным освеще-
нием. При когерентном освещении фазы колебаний
света в каждой точке светового поля взаимосвязаны.
Поэтому световые волны складываются векторно так,
что когерентная оптическая система обеспечивает ли-
нейное преобразование комплексного сигнала, т. е. све-
товой волны с учетом амплитуд и фаз света. При неко-
герентном освещении фазы световых колебаний случай-
ны, поэтому они складываются по интенсивности *.
При этом распределения интенсивностей на входной
плоскости и в выходном изображении связаны между
собой линейным преобразованием.
Вследствие разрушения фазовой информации неко-
герентные оптические системы как системы обработки
* Интенсивность света есть средняя за время наблюдения мощ-
ность излучения, проходящего через единицу поверхности в перпен-
дикулярном к ней направлении.
268
Рис. 6.13. Оптический интегратор.
информации значительно менее эффективны, чем коге-
рентные. Поэтому в дальнейшем будут рассматриваться
только когерентные оптические системы.
В качестве иллюстрации возможностей когерентных
оптических систем покажем устройство для выполнения
интегральных операций над сигналом (рис. 6.ГЗ). Сиг-
нал s(x, у) получается в результате прохождения па-
раллельного монохроматического пучка света через диа-
позитив (кинопленку), на котором записана функция
s(x, у) в виде изменения оптической плотности фото-
эмульсии. Свет, прошедший диапозитив, собирается лин-
зой L в фокальной плоскости (сох, • На оптической
оси в точке Р интенсивность света будет пропорцио-
нальна двумерному интегралу от функции s(x, у) по
площади (х, у), В остальных точках плоскости (сох, (ау)
амплитуда и фаза света будут пропорциональны спе-
ктральным составляющим сигнала, т. е. в плоскости
((Ох, соу) можно наблюдать двумерный спектр входного
сигнала. Такой спектроанализатор действует подобно
гребенке (матрице) фильтров, при этом эквивалентное
число фильтров может быть порядка нескольких тысяч
по каждой из осей сох и со^.
Математический аппарат электрических линейных си-
стем в настоящее время разработан достаточно хорошо.
Поэтому теорию оптических систем обработки радиоло-
кационных сигналов проще всего строить в терминах
электрических линейных систем.
Известно, что электрический сигнал во временной
области описывается изменением амплитуды напряже-
269
ния или тока а в частотной области — спектром
S(co). Световое изображение в пространственной обла-
сти, например на входной плоскости оптической систе-
мы, может быть аналогично описано изменением ампли-
туды и фазы света по плоскости (экрану) $(х, у) =
= |s(%, У) Iej(p(x’ у\ а в частотной области — спектром
пространственных частот о (<ох, mJ = | 5 (<ох, ту) | е а .
Здесь |s(x, у) | и |5(сох, со^) |—амплитуды световых
волн, пропроциональные напряженности электромагнит-
ного поля; ф(х, у) и ф(сох, (Оу)—фазы световых волн.
Как будет показано ниже, в оптических системах воз-
можно непосредственное наблюдение и измерение спект-
ра сигнала в виде соответствующего распределения на
плоскости с координатами (сох, ауу) амплитуд и фаз
света, пропорциональных амплитудам |S((ox, <0т/) | и фа-
зам ф(сох, ($у) спектральных составляющих сигнала.
Подобно временным частотам, пространственные часто-
ты определяются следующими выражениями:
* X
«о, = 2^ = 4*. (6.54)
1 У
Частоты fx и fy имеют размерность числа периодов
на мм ( и характеризуют наличие регулярных измене-
ний светового поля на плоскости по осям х и у с перио-
дами Тх и Ту. Спектр пространственных частот является
двумерным преобразованием Фурье от распределения
амплитуд и фаз света s(x, у):
S(cox, s(x, z/)e ] (<°xX + ФуУ) dxdy. (6.55)
—co
Соответствующее обратное преобразование имеет вид
s
+ СО
HS((OX, Юу)е у d^xd^y.
(6.56)
270
Прохождение сигнала через оптическую систему опи-
сывается интегралом свертки
СО
J
—оо
s(x — х',у — у') h (У, у') dx'dy',
(6.57)
где Л (%, у) —импульсная переходная функция когерент-
ной оптической системы, которая определяется как вы-
ходное изображение точечного источника света s(x, у) =
= &(х, у), расположенного на входе оптической системы.
Спектр выходного сигнала определяется выражением
Зьых («Ъс, = s (<ОХ, <0у) Н (шх, со^), (6.58)
где Я(сох, toy) —частотная характеристика оптической
системы. Она связана интегральным преобразованием
Фурье с импульсной переходной функцией
+ 00
Я(сох, 0)^)= /г(х, y)e~/(^x+V)dxdy. (6.59)
—00
Следовательно, оптическую систему можно рассма-
тривать как фильтр пространственных частот с характе-
ристикой Я(б)х, toy).
Таким образом, подобно электрическим цепям, опти-
ческая система характеризуется двумерными простран-
ственно-частотными переходными характеристиками
h(x, у) и Я(сох, toy), а сигналы—двумерными простран-
ственно-частотными характеристиками s(x, у) и S(cox,
toy). Это позволяет для расчета оптических систем при-
менять математический аппарат линейных электрических
цепей.
Причинами потерь информации в оптической систе-
ме будут являться шумы, например рассеяние света,
вызываемое царапинами стекол, пылью, оправой и т. п.
Как и электронная система, оптическая система может
быть построена оптимальным образом для заданного
критерия, например для получения максимального отно-
шения сигнала к шуму как внешнему, так и внутрен-
нему. При этом также может быть использован матема-
тический аппарат теории оптимальных систем. Решение
задачи синтеза оптимальных систем значительно упро-
27}
Рис. 6.14. Блок-схема устройства оптической обработки сигналов
РЛС.
щается в случае оптических систем, так как здесь обра-
ботка ведется в симметричных пространственных коор-
динатах (х, у), а время играет роль параметра. Необ-
ходимо заметить, что шум самой оптической системы
в большинстве случаев неаддитивен с сигналом, что
значительно усложняет анализ влияния шума оптиче-
ской системы.
Рассмотрение общих свойств оптических систем пока-
зывает, что оптические методы обработки радиолокаци-
онных сигналов обладают большими потенциальными
возможностями и могут дать ряд преимуществ, по срав-
нению с другими известными методами.
В качестве примера рассмотрим один из возможных
вариантов [75] оптической системы обработки сигналов
РЛС с искусственным раскрывом антенны (рис. 6.14).
Видеоимпульсы отраженных сигналов с выхода фазо-
вого детектора РЛС подаются на индикатор, экран ко-
торого фотографируется на непрерывно движущуюся
пленку. После фотохимической обработки пленки она
поступает в фильмовой канал оптической системы обра-
ботки, где освещается когерентным пучком света от
лазера. Полученный световой сигнал (аналог радиоло-
кационного сигнала) проходит оптическое решающее
272
устройство, на выходе которого формируется радиолока-
ционное изображение пролетаемого участка местности
с высокой разрешающей способностью. Это изображе-
ние фиксируется на фотопленку и рассматривается с по-
мощью диапроектора.
Более подробное описание элементов функциональ-
ной схемы, а также требования, предъявляемые к этим
элементам, будут рассмотрены в следующих параграфах.
6.5. Преобразование
радиолокационных сигналов
в световые когерентные сигналы
Для обработки радиолокационных сигналов с по-
мощью когерентной оптической системы их необходимо
превратить в когерентные световые сигналы на входе
оптической системы. Это может быть сделано, напри-
мер, путем записи сигнала в виде диапозитива и осве-
щения его когерентной волной. В этом случае световой
сигнал будет определяться модуляционной характери-
стикой диапозитива, т. е. отношением амплитуды и фа-
зы светового поля до и после прохождения диапозитива
(экрана):
= (6-60)
где ТЕ — амплитудное пропускание экрана, т. е. степень
уменьшения амплитуды света в результате
прохождения через экран;
Ф— фазовая характеристика экрана, т. е. величина
набега фазы света при прохождении экрана.
Задача преобразования радиолокационного сигнала
в световой, следовательно, сводится к получению диа-
позитива с необходимой функцией изменения пропуска-
ния ТЕ и фазовой характеристики ф.
В общем случае радиолокационный сигнал можно
записать в виде
«(*. %)=k (^i!o) Icos' И+*р %)1 > (6.61)
где То — дополнительный параметр, например задержка
сигнала во времени.
18—1094 273
В комплексном виде, без учета несущей, запись сиг-
нала будет иметь вид
5(/,т0) = |5(/,г0)|ем<’Ч (6.62)
Световой сигнал также можно записать в комплексном
виде
s (х, y,t) = \s (х, у, t) | (6.63)
Здесь время t является параметром и, в общем слу-
чае, может быть не связано с реальным временем сиг-
нала s(t, то). Например, в результате записи радиолока-
ционного сигнала в виде изменения плотности фото-
эмульсии записанный сигнал не изменяется во времени,
а является лишь функцией координат пленки (х, у).
Задачу преобразования сигналов можно представить
как обеспечение взаимного соответствия функций:
—*s(x,y) (6.64)
ИЛИ |s(f,-t0)|<->|s(x,«/)|,
(6-65)
В случае записи радиолокационного сигнала на фо-
топленку амплитудная ТЕ(х, у) и фазовая ф(х, у) харак-
теристики пропускания пленки должны соответствовать
амплитуде |s(x, у) | и фазе ф(х, у) сигнала. На прак-
тике амплитудная характеристика пропускания пленки
ТЕ определяется путем измерения пропускания пленки Т
по интенсивности света. Величины ТЕ и Т связаны
соотношением
Т=Т2Е. (6.66)
Таким образом экран должен обладать функцией
пропускания по интенсивности света, равной
Т(х,у)= |«(х,г/)|2. (6.67)
Фазовая характеристика экрана определяется изме-
нением толщины d и коэффициента преломления п плен-
ки [23]:
f('X)y)=^-[n(x,y)—\]d(x,y), (6.68)
ЛС
274
Me n\x, у)—коэффициент преломления пленКй;
d(x,y) —толщина пленки;
Хс — длина волны света.
Для обеспечения заданной фазовой характеристики
экран должен менять либо толщину, либо коэффициент
преломления по закону изменения фазы радиолокацион-
ного сигнала.
Практически экран с комплексной функцией пропу-
скания создать очень трудно. При записи на фотопленке
легко получить нужную функцию пропускания Т, одна-
ко одновременно изменять толщину пленки весьма слож-
но. При записи сигналов на термопластической пленке
[58] достаточно просто меняется толщина и, следова-
тельно, фазовая характеристика, а амплитудная харак-
теристика не изменяется. При ультразвуковой модуля-
ции легко меняется коэффициент преломления [83].
Поэтому для записи комплексного сигнала обычно
требуется предварительное преобразование сигнала. Так,
для записи фазовых соотношений можно перекодировать
фазу сигнала в амплитуду, т. е. производить запись
сигналов после фазового детектора на поднесущей ча-
стоте. Радиолокационный сигнал в этом случае можно
записать в виде
s (t, т0) = I s (/, т0) I cos [<вПр/+ ¥ (t, т0)], (6.69)
где сопр — промежуточная поднесущая частота.
Промежуточная частота должна быть гораздо боль-
ше максимальной частоты спектра огибающей сигнала
(Омаке- С целью упрощения системы записи сигнала на
пленку желательно промежуточную частоту выбирать
по возможности меньше.
Преобразованный сигнал на низкой промежуточной
частоте записывается в виде изменения пропускания
пленки. Так как пропускание пленки является величи-
ной, принимающей только положительные значения
0СГС1,
для обеспечения однополярности сигнала запись необ-
ходимо вести на опорном уровне яркости индикатора
$о>О, т. е. необходимо постоянное смещение s0, относи-
тельно которого изменяется сигнал s(t, т0)- Амплитуд-
18* 275
Моё пропускание пленки с записью такого сигнала будет
иметь вид
S1 (х, у) = К 4- IS (х, у) I cos [ширх4- <Р (х, £/)]} е'%- (6.70)
Величина опорного сигнала s0 выбирается из условия
|$(*, У) | макс- (6.71)
При достаточно равномерной толщине экрана фаза
света не меняется по экрану (ф>—const) и не влияет на
обработку сигнала. Таким образом, при записи сигнала
на промежуточной частоте задача преобразования радио-
локационного сигнала в световой сводится к изготовле-
нию модуляционного экрана с функцией пропускания:
Т(х, у) = |si(x, у) I2
и с постоянной фазовой характеристикой
<р(х, у) -const.
(6.72)
(6.73)
В случае преобразования сигналов с помощью фазо-
вого детектора и записи без поднесущей частоты, сиг-
нал раскладывается на синусную и косинусную состав-
ляющие:
Ssin= I s(x>y) I sin[<p(x>y)])
(6.74)
Scos= I S <X’ у) COS (X, «/)].
Полученные низкочастотные сигналы записываются
на фотопленку с опорным уровнем $0. В отличие от за-
писи на промежуточной частоте, в данном случае требо-
вания к стабильности системы записи ниже, но зато
требуется двухканальная записывающая система.
Радиолокационный сигнал по своей природе одномер-
ный, поэтому для его записи на входной плоскости оп-
тической системы требуется соответствующее преобразо-
вание сигнала. Такое преобразование осуществляется,
например, с помощью временной развертки в электрон-
нолучевом индикаторе.
Рассмотрим в качестве примера конкретную систему
преобразования радиолокационного сигнала в когерент-
ный световой сигнал в РЛС с искусственным раскрывом
антенны [75] (рис. 6.14). Принимаемые импульсные сиг-
налы на промежуточной частоте преобразуются в фазо-
276
a)
б)
Рис. 6.15. Вид записи на фотопленке сигнала от одиночной то-
чечной цели (а); вид записи реальных -сигналов на фотопленке (б).
вом детекторе в видеоимпульсы, огибающая которых оп-
ределяется допплеровской частотой сигнала. Видеосиг-
налы модулируют по яркости экран электроннолучевой
трубки. Генератор развертки обеспечивает однострочную
развертку по дальности /?н. Экран трубки фотографи-
руется на ’пленку, непрерывно протягиваемую в направ-
лении, перпендикулярном развертке. Развертка по даль-
ности записывается поперек пленки (ось уп). При про-
тяжке пленки отдельные периоды развертки по дальности
будут записываться вдоль пленки (ось хп). Текущая
дальность до цели изменяется по гиперболическому за-
кону. При боковом обзоре (₽н = 0) в пределах длины ис-
кусственного раскрыва ее можно считать постоянной.
Линии равной дальности в этом случае будут прямыми.
277
Сигнал от одиночной Точечной цели на выходе фа-
зового детектора представляет собой серию видеоим-
пульсов с частотой повторения Fn, огибающая которых
имеет вид синусоиды с частотой Допплера. Для постоян-
ной дальности #ц=Уо по оси хп на пленке записывается
серия импульсов. При уменьшении скорости протяжки
пленки или увеличении частоты .повторения Fn отдельные
развертки по дальности вследствие ограниченной раз-
решающей способности системы записи сливаются и об-
разуют непрерывный траекторный сигнал. В этом случае
вдоль оси хп происходит преобразование сигнала и его
спектра. Сигнал превращается из серии импульсов в не-
прерывный и спектр его соответственно — из линейчатого
в непрерывный.
Пример записи траекторного сигнала одиночной цели
показан на рис. 6.15,а.
На рис. 6.15,6 приведено фото реальной записи от-
раженных от местности сигналов на пленке (99]. В цен-
тре пленки на светлом фоне видна запись одиночного сиг-
нала. Ось уп (поперек пленки) соответствует дальности
до цели /?н, а ось хп (вдоль пленки) соответствует оси
времени и направлению полета носителя х:
W
X — -- у
(6.75)
Ни = П Ууа = -у- уа, (6.76)
где пх и пу — масштабные коэффициенты;
с — скорость распространения радиоволн;
V — скорость протяжки пленки;
VR— скорость развертки на индикаторе.
Уменьшение скорости протяжки при записи умень-
шает расход пленки, но в то же время повышаются тре-
бования к стабильности протяжки и разрешающей спо-
собности системы записи. Минимально возможная ско-
рость протяжки определяется минимальным периодом
сигнала Гмин (максимальной частотой допплеровского
спектра) и разрешением системы оптика—пленка Ы:
VMBH=^=8/FSMaKe
1 МРН
(6.77)
278
Период повторения Тп развертки обычно значитель-
но меньше минимального периода сигнала Тмин, поэтому
возможна запись с наложением разверток.
К индикатору предъявляются обычные требования по
разрешающей способности для записи заданного участ-
ка местности Д7?н с разрешением
(6.78)
где Nr — число разрешаемых элементов на экране труб-
ки вдоль развертки по дальности.
Разрешающие способности отдельных узлов системы
записи: — индикатора, б/0 — оптики и 6/Пл — пленки,
должны обеспечивать требуемое разрешение по дально-
сти на пленке
=m)2+(^o)2+(8u2.
Изменение амплитудного пропускания ТЕ вдоль плен-
ки должно соответствовать изменению амплитуды элек-
трического сигнала. Для этого функция пропускания
пленки Т по интенсивности света должна быть -пропор-
циональна квадрату сигнала [условие (6.72)]:
T=[so + s(x, у)]2. (6.79)
Рассмотрим требования к отдельным элементам си-
стемы записи для обеспечения этого условия.
При фотографировании экрана трубки экспозиция
Нн определяется следующим образом:
= (6.80)
где /э — интенсивность (яркость) свечения экрана;
/э — время экспозиции при съемке;
— коэффициент, учитывающий свойства фотоап-
парата.
Интенсивность свечения экрана при подаче сигнала
на модулирующий электрод в общем случае зависит не-
линейным образом от амплитуды сигнала
/3 = [s0 + s(x,y)]T’> (6.81)
где уэ — меняется в пределах 1—3.
27?
Рис. 6.16. Типичная характеристическая кривая фотопленки.
Типичная зависимость оптической плотности пленки
(негатива) DB от экспозиции для стандартных фотома-
териалов представлена на рис. 6.16. Значение Do, равное
0,1—0,3, соответствует плотности вуали. Линейный уча-
сток от Di до D2 используется для записи сигналов. Ко-
эффициент ун определяет контрастность негатива
1*=**=*°:-^ • (б-82)
Коэффициент контрастности меняется в пределах
0,5—5,0 и зависит от свойств фотопленки и режима про-
явления. На линейном участке кривой (рис. 6.16) плот-
ность негатива можно записать как
Учитывая, что D = 1g , функция пропускания Та не-
гатива может быть представлена в следующем'виде:
WeStY*- <6-84)
(6.83)
280
Таким образом пропускание негатива является нели-
нейной функцией записываемого сигнала.
Рассмотрим сначала двухступенчатый процесс фото-
записи путем изготовления позитивного изображения си-
гнала. При печати позитива интенсивность /п овета, про-
ходящего через негатив, определяется пропусканием не-
гатива
7п=/оТа, (6.85)
где /о — интенсивность освещения негатива.
Экспозиция при печати Нп равна
Нп=1^ (6.86)
где ia — время экспозиции при печати.
Логарифм экспозиции соответственно можно запи-
сать как
lg/fn = lg/0/n—DH. (6.В7)
Наконец, плотность позитива Da после печати будет
£»n = Yn(lg//n-lgH0). (6.88)
Подставляя в это выражение уравнения (6.83) и (6.87),
получим
АЛЯ*»
(6.89)
/707 'Н Г’Я
Э Э
Учитывая, что D = lgy-, определяем функцию пропу-
скания позитива
(6.90)
где ka— постоянный множитель, независящий от сигнала.
Для удовлетворения условия линейности амплитуд-
ной характеристики записи сигнала (6.79) необходимо,
чтобы
ТэУнУп=2. (6.91)
В этом случае обеспечивается линейность системы
преобразования сигналов в целом. На отдельных этапах
преобразование будет нелинейным, однако в целом при
выполнении условия (6.91) система остается линейной.
Это обусловлено взаимной однозначностью функции
281
Преобразования. Действительно, функции и sJ v одно*
значны при положительных значениях $1 и у.
В случае записи сигнала на обратимой фотопленке,
условие (6.91) можно записать в следующем виде:
уэуобр = 2. (6.92)
Когда нелинейные искажения сигнала не играют су-
щественной роли, используется запись сигнала на нега-
тивной пленке. Это значительно упрощает процесс фото-
химической обработки пленки и уменьшает время за-
держки выдачи информации.
В ряде случаев целесообразно применение предвари-
тельного «искажения» сигнала перед записью. Специ-
альный нелинейный усилитель (гамма-корректор) дол-
жен обеспечивать на выходе сигнал следующего вида:
1
•$о +•$ (t, х0) J ’
(6.93)
где ук — постоянный параметр гамма-корректора.
В этом случае
Та = [«о + S (•*> //)]TkVh (6.94)
и условие линейности системы можно записать в виде
Т«ТэТн = 2. (6.95)
Необходимо заметить, что приведенные условия ли-
нейности амплитудной характеристики записи справед-
ливы при отсутствии изменений фазовой характеристи-
ки. Для этого фотопленку обычно помещают в иммерси-
онный фильмовой канал [35].
6.6. Оптическое решающее устройство
Задача обработки оптического сигнала сводится
к «сжатию» частотно-модулированного сигнала по оси хп
раздельно в каждом канале по оси Уп- Сигнал по оси
дальности не подвергается обработке — он должен вос-
производиться с наименьшими искажениями.
Наряду с фокусированной обработкой сигналов воз-
можна обработка в дальней зоне искусственного рас-
282
крива антенны. Если наблюдать сигнал от цели в тече-
ние малого времени, можно считать, что частота Доп-
плера остается постоянной. Каждому направлению на
цель будет соответствовать своя частота Допплера. Про-
изводя спектральный анализ отраженного сигнала в те-
чение некоторого времени TQ, можно определить частоту
Допплера и, следовательно, угловую координату цели.
Таким образом, для нефокусированной обработки тре-
буется многоканальный одномерный спектроанализа-
тор, вычисляющий спектр сигнала по оси хп во всех ка-
налах дальности раздельно.
Когерентная оптическая система позволяет достаточ-
но простыми методами осуществить требуемый алго-
ритм обработки сигналов в РЛС с искусственным рас-
крывом. При этом возможны различные способы по-
строения оптической системы подобно различным мето-
дам математического описания алгоритма обработки.
Далее будут рассмотрены четыре различные системы:
оптический спектроанализатор для обработки сигналов
нефокусированной РЛС, коррелятор оптического типа,
оптимальный оптический фильтр и, наконец, система,
подобная устройству реконструкции волнового фронта
в голографии. Во всех этих системах используются те
или иные свойства когерентных оптических решающих
устройств. Поэтому вначале мы дадим (не приводя до-
казательств) перечень основных математических опера-
ций, выполняемых оптической системой [10, 35, 47]. При
этом достаточно рассмотреть элементарную оптическую
систему (рис. 6.17), состоящую из входного экрана
Рис. 6.17. Элементарная оптическая система;
284
(диапозитива) на плоскости (х, у), сферической линзы
L и выходного экрана (£, т]). Зная свойства элементар-
ной системы, можно определить характеристики слож-
ной системы, состоящей из набора элементарных систем.
Ряд таких элементарных систем, стоящих одна за од-
ной, позволяют обеспечить практически любой заданный
алгоритм обработки сигналов.
Входной экран освещается когерентной световой вол-
ной в общем случае с произвольным, но известным,
распределением амплитуд и фаз по плоскости (х, у):
Е0(х,у) = \Е0(х,у)\^х-у}. (6.96)
При прохождении через диапозитив с записью сигнала
$(х, у) световая волна преобразуется в соответствии
с записанным сигналом £о(х, y)s(x, у).
Если во входной плоскости вплотную к первому
экрану поставлен второй экран с записью сигнала
г(х, у}, то происходит перемножение сигналов s(xf у)
и г(х, у):
Е (х, у) = Ео (х, у) s (х, у) г (х, у). (6.97)
Световой сигнал Е(х, у) в результате прохождения
в свободном пространстве расстояния Ri от плоскости
(х, у) до плоскости (хь yi) линзы L преобразуется ин-
тегральным оператором:
00 ke
Е1(х1,у1)=-^-^Е(х,у)& 2R* 1<Ж Х' +(У y'Wdxdy,
(6.98)
где £с = 2лАс, a Zc — длина волны света.
Таким образом, свободное пространство можно рас-
сматривать подобно линейной системе с импульсной пе-
реходной характеристикой
h(x,y)=e 2R> (хЧуг). (6.99)
Световой сигнал £i(Xi, th), проходя через линзу, при-
обретает квадратичный фазовый набег
k
-j-
^(•«1. У1) = Л(х1,у1)е 2f* 1 1 ‘ (6.100)
где /л — фокусное расстояние линзы.
894
Для рассеивающей линзы знак фазового набега бу-
дет обратным. Для цилиндрической линзы фазовый на-
бег будет обеспечен лишь по одной из координат:
, о 2
__7 _I
е 1 или е 2fjI 1 (6.101)
Для линз с переменным фокусным расстоянием, на-
пример конических, фазовый набег будет изменяться и
по оси у
Прохождение светового сигнала £г(хь z/i) до плоскости
(§, ц) вызывает уже известное преобразование (6.98)
оо k
Е = \ /:2 е 3 dxtdy^.
(6.103)
Наконец, при наблюдении и регистрации светового
поля физическое устройство (глаз, фотопленка, фото-
элемент и т. п.) реагирует на интенсивность света
ЦИ) = I £(М) I 2. (6.104)
Кроме того, необходимо учитывать амплитудную ха-
рактеристику регистрирующего устройства. Так, при фо-
тографировании плотность D выходного изображения
будет равна
O(5,^) = lg[/(^)]\ (6.105)
Рассмотрим теперь наиболее важный частный пример
элементарной системы — оптический спектроанализатор.
Пусть экраны удалены от линзы на фокусное расстоя-
ние Ri = R2 = fji и освещение производится плоской вол-
ной Eq = const.
Подставляя (6.98) в (6.103) и интегрируя по
#i), получим» что световое поле на выходном экране
Рис. 6.18. Схема оптического спектроанализатора пространственных
частот.
представляет собой преобразование Фурье от светового
поля на входном экране:
00
Е2 (5,7)) = S («х, ШУ) = -g- J j S (X У) e~i(^x+V}dxdy,
—00
(6.106)
где сох и (оу — пространственные частоты спектра сигнала.
Они связаны с координатами выходной плоскости (5, ?))
соотношениями:
2ng _ _
Мл ’ у~~ Kh •
(6.107)
Коротко поясним физические принципы работы оп-
тического спектроанализатора (рис. 6.18). Пусть по оси
записан гармонический сигнал Si>(xn) частоты сохо на
опорном уровне s0. Опорный уровень можно трактовать
как сигнал с нулевой пространственной частотой
Si (хп) = s0 + s cos юХохп.
(6.108)
При освещении плоской волной Ео поле после экрана
распространяется по нескольким направлениям. Экран
можно рассматривать как антенную решетку. Вдоль
оптической оси распространяется плоская волна (основ-
ной лепесток диаграммы направленности), соответст-
вующая постоянному (опорному) уровню излучения.
2В6
Под некоторым углом бх распространяется плоская вол-
на (боковой лепесток), соответствующая условию, когда
от прозрачных участков экрана вдоль оси хп происходит
набег фазы света А, кратный длине волны %с. Линия Р
на рисунке перпендикулярна направлению распростра-
нения волны. Угол 0Х определяется периодом простран-
ственной частоты сигнала Гх0- Первый боковой лепесток
соответствует условию, когда разность фаз света в кон-
це и начале периода TxQ равна одной длине волны. Для
малых углов 0Х это приводит к условию
6^ = 30- = ^. (6.109)
1 хо
Такое же условие выполняется для отрицательного
угла 0Х.
Амплитуда дифрагированного света под углом 0Х
пропорциональна амплитуде гармонического сигнала
$(х). При чисто синусоидальном сигнале (амплитуде
света) присутствуют только первые боковые лепестки,
соответствующие основной частоте сохо. При нелинейных
искажениях сигнала в спектре будут также гармоники,
соответствующие боковым лепесткам с углом отклоне-
ния и0х, где п — номер гармоники.
С другой стороны, известно, что линза собирает па-
раллельные пучки лучей в точки на фокальной плоско-
сти, расстояние которых от оси системы пропорциональ-
но углу 0Х. Следовательно, отклонение пятна света в фо-
кальной плоскости линзы пропорционально периоду ре-
шетки, т. е. пространственной частоте записанного сиг-
нала.
Таким образом, распределение амплитуд и фаз све-
та в задней фокальной плоскости идеальной оптической
системы есть преобразование Фурье (спектр пространст-
венных частот) S(cox, (ov) от функции распределения
амплитуд и фаз света $(х, у) в передней фокальной
плоскости оптической системы.
Если входной экран будет расположен не в передней
фокальной плоскости линзы, т. е. то в задней
фокальной плоскости по-прежнему будет амплитудный
спектр входного сигнала, однако фазы спектральных со-
287
ISI
Рис. 6.19. Амплитуда спектра синусоидального пространственного
сигнала и постоянного сигнала.
ставляющих будут искажены дополнительным квадра-
тичным фазовым сдвигом <рд:
(6.110)
1 X
где Тх — период пространственной частоты сигнала.
Отклонение пятна света в выходной плоскости (g, т|)
пропорционально пространственной частоте
t = (6.111)
Положительное направление оси g соответствует по-
ложительным частотам спектра (рис. 6.19).
Угловое разрешение (ширина луча по интенсивности
света на уровне 0,5) будет определяться, как и в антен-
ной решетке, относительным размером апертуры
80х = А_, (6.112)
Л п
а ширина светового пятна в фокальной плоскости на
уровне 0,5 по интенсивности равна
ss=^- (6.НЗ)
288
где Лп — размер светового сигнала (апертура оптиче-
ской системы) по оси хп.
Разрешающая способность спектроанализатора по
пространственным частотам при идеальной оптической
системе не зависит от частоты и равна
8fx=-^. (6.114)
Для того чтобы разрешающая способность оптиче-
ской системы не влияла на разрешение спектроанализа-
тора, величина угла 60о, разрешаемого оптической си-
стемой, должна быть меньше ширины луча &0Х:
(6.115)
Пространственные частоты являются записью на
пленке временных частот
(6.116)
где V — скорость записи.
Поэтому разрешающая способность спектроанализа-
тора по допплеровским частотам будет равна
8^ = 4-- <6Л17>
Так как скорость записи может быть сделана в прин-
ципе сколь угодно малой, разрешение может составлять
малые доли герца.
6.7. Нефокусированная система
обработки
Схема спектроанализатора для нефокусированной об-
работки сигналов при боковом обзоре (0Н — 0) показа-
на на рис. 6.20. Щелевой источник света Р в фокальной
плоскости коллиматорной линзы LK дает параллельный
пучок монохроматического света, освещающий первич-
ную пленку (хп, Rh) с записью принятого сигнала.
Большой размер щели располагается параллельно оси
RB. При этом обеспечивается пространственная коге-
19—1094 289
Рис. 6.20. Одномерный многоканальный спектроанализатор простран-
ственных частот.
рентность освещения лишь по оси по которой про-
изводится обработка сигнала.
При коллиматорном освещении первичной пленки для
обеспечения пространственной когерентности угловой
размер источника света должен быть гораздо меньше
углового разрешения системы &0х (по нулям) [42]:
^<288Ж) (6.118)
/к
где dc — диаметр источника света;
/к — фокусное расстояние коллиматора.
Отсюда можно найти диаметр источника света (ши-
рину щели):
(6.119)
Требования к монохроматичности света определяют-
ся допустимым расширением луча вследствие конечной
ширины спектра освещения. Это расширение должно
быть гораздо меньше углового разрешения &0Ж:
ДАС (6.120)
Тогда относительная монохроматичность освещения
определяется соотношением
290
Размер фильмового канала Хп оптической системы
определяет величину искусственного раскрыва и, следо-
вательно, разрешающую способность РЛС по азимуту.
Ширина пленки определяет размер просматриваемой зо-
ны на местности по дальности.
С помощью сферической линзы £с осуществляется
преобразование Фурье сигнала, записанного вдоль плен-
ки, так что на выходной пленке по оси £(сох) получаем
изображение спектра сигнала. Цилиндрическая линза
по оси хп вдоль пленки не участвует в обработке сигна-
ла; она действует подобно плоскопараллельной пластин-
ке. На сигнал, записанный поперек пленки (по оси
дальности), действуют одновременно сферическая и ци-
линдрическая линзы, оптические силы которых склады-
ваются. Фокусное расстояние цилиндрической линзы
выбирается так, что по оси /?н объектив из сферической
Lc и цилиндрической £ц линз проектирует изображение
записанных сигналов в заданном масштабе на выход-
ную пленку без искажений, за исключением изменения
направления оси что несущественно.
Так как каждой цели, смещенной по азимуту (ось
рн), соответствует своя частота Допплера и, следова-
тельно, пространственная частота записанного сигнала,
на выходном изображении они будут разнесены по оси
g. Таким образом, выходное изображение местности по-
лучается в координатах рн, /?н. Необходимо учитывать
при этом, что масштаб изображения по оси рн зависит
от дальности (см. § 6.3). При боковом обзоре
(Рн—0) ось рн совпадает или близка к оси х. В этом
случае можно считать, что выходное изображение мест-
ности формируется в координатах'(х, J?H).
При пролете цели, в случае бокового обзора (рн=0),
частота отраженного сигнала на выходе фазового детек-
тора и, следовательно, частота записанного сигнала на
пленке изменяются симметрично относительно нулевой
частоты Допплера (рис. 6.21). В этом случае возникают
двойные изображения целей. Так, например, из рисунка
видно, что в точках траектории Xi и х2 сигнал, отражен-
ный от цели, имеет одну и ту же частоту fxQ и, следова-
тельно, дает изображения одной и той же цели на вы-
ходной пленке в двух точках, смещенных на величину
(x'i-^-x2) по путевой дальности. Для устранения неодно-
значности необходимо либо ввести смещение опорной
19* 291
Рис. 6.21. Зависимость изменения пространственной частоты сигнала
по траектории полета.
частоты на величину более половины ширины спектра
сигнала, либо отвернуть диаграмму направленности ре-
альной антенны на угол наблюдения рн, больший чем
половина ширины диаграммы направленности антен-
ны 0О..
На рис. 6.22,а показан участок местности (/?ь /?2),
облучаемый диаграммой направленности реальной ан-
тенны в момент нахождения носителя в точке и
изображение этого участка на выходной плоскости спек-
троанализатора (рис. 6.22,6). Яркая линия на нулевой
частоте соответствует опорному уровню записи s0. Так
как амплитудный спектр записанного сигнала вида
cos сох*п в области положительных и отрицательных ча-
стот одинаков, на выходе спектроанализатора получают-
ся два симметричных относительно оси нулевых прост-
Рис. 6.22. Система координат на местности (а) и в выходной плоско-
сти спектроанализатора (б).
292
ранственных частот изображения местности. Каждое из
них может быть использовано для наблюдения и реги-
страции. Ширина изображения по азимуту (ось рн) по-
стоянна; она определяется шириной спектра допплеров-
ских частот сигнала
Д^д = ^- (6.122)
или соответственно шириной спектра пространственных
частот в системе записи
2Г
daV ‘
Эта величина не зависит от дальности что вызы-
вает (масштабные искажения изображения 'местности,
так как участок местности, облучаемый реальной антен-
ной, имеет форму трапеции. Одним из способов борьбы
с искажениями является запись изображения на вторич-
ную пленку через узкую щель Щ (рис. 6.20), которая
является эквивалентом узкой, искусственно созданной
диаграммы направленности антенны. В этом случае ско-
рость протяжки входной и выходной пленок выбирается
из условия получения равномасштабного изображения
по оси 7?н и рн.
Определим максимальную разрешающую способ-
ность и оптимальную апертуру спектроанализатора при
нефокусированной обработке траекторного сигнала.
Сигнал на пленке при боковом обзоре можно запи-
сать в виде
S1 (хп) = s0 + G (пха) sin (-%- Л| пгх[ -ф <р0), (6.123)
где G(x) —диаграмма направленности реальной ан-
тенны;
п — масштабный коэффициент записи;
А? =4/Х/?н — коэффициент, взятый для удобства даль-
нейших вычислений;
фо —начальная фаза принимаемого сигнала.
Для просморта участка местности пленка с зацисью
сигнала протягивается в фильмовом канале спектроана-
293
лизатора. Изображение точечной цели на выходе спек-
троанализатора будет иметь вид
4-а/2
5Ххп,ож)= J p0-|-G(/zx' —/гхп)81П-^-Л]/г2Х
X (У — хп)2] e~^x'dx'< (6.124)
где а — размер апертуры спектроанализатора по оси х';
xf — координата апертуры.
При наблюдении выходного сигнала на частоте о)х,
отличной от нуля, в выходном изображении отсутствует
постоянная составляющая, обусловленная опорным сиг-
налом So, а также уменьшаются шумы обработки, так
как их спектр сосредоточен в области постоянной со-
ставляющей. Поэтому будем определять сигнал только
в области сох=/=0. При нефокусированной обработке ис-
кусственный раскрыв X гораздо меньше максимально
возможного раскрыва, определяемого шириной диаграм-
мы направленности. Поэтому амплитуду сигнала за вре-
мя пролета искусственного раскрыва можно считать по-
стоянной.
Опорный уровень So даст постоянный сигнал в обла-
сти (ох = 0, независящий от хп. В области сох¥=0 выход-
ной сигнал определяется следующим выражением:
4- а /2
Е (хп, я, С)х)= J sin-^- А2 п2 (х' — xn)2e~J(°xX'. (6.125)
—а/2
Произведем замену переменных х' — xn = z и
вим sitiz2 через сумму функций е~/22 и е+/г2:
предста-
2?4
а/2—_и_ д2л222— ушг
Г 2 J
I е dz
~а/2-*п
(6.126)
Дополним показатель степени е до полного квадрата
по z и в результате получим выражение в показателе^ви-
да:
/ 2 (Z + nA2ni } + ! 2пА2 , •
\ 1 / * а
Далее произведем замену переменных z-|- 2 =и и
разобьем пределы интегрирования для получения выраже-
ния в виде интегралов Френеля:
Проанализируем полученое выражение. Будем рас-
сматривать только положительные значения хп, полагая
диаграмму направленности реальной антенны смещен-
ной так, что для хп<0 сигналы от цели равны нулю.
Этим обеспечивается однозначность изображения целей
на выходе системы обработки.
Рассмотрим область положительных частот шя>0.
В этом случае два последних интеграла выражения
295
(6.127) в сумме будут приблизительно равны нулю. Дей-
ствительно, пленка расположена в фильмовом канале
так, что хп>а>0. Это следует из условия наблюдения
сигналов на пленке на участке Хц>0, причем координа-
та хп должна быть больше разрешаемого участка
на нулевой частоте. Поэтому можно считать, что выпол-
верно, чем больше сох и соответственно хп. Пределы ин-
тегрирования двух последних интегралов (6.127) в этом
случае будут приблизительно равны и противоположны
по знаку, а сумма интегралов будет близка к нулю.
Для отрицательных частот, наоборот, два первых интег-
рала в сумме дадут нуль.
В точке лпо = п2 на пленке частота сигнала*рав-
на частоте, на которой проводится наблюдение. В этом
случае амплитуда выходного сигнала будет максималь-
ной, а частота сигнала равна
(6.128)
Так как фотопленка или другое регистрирующее
устройство реагирует на интенсивность света, выходной
сигнал в этой точке будет равен
о
1 Гс ( а^п\ _ iS МДп\Ц2
(6.129)
где С — косинус-интеграл Френеля;
S — синус-интеграл Френеля.
При нефокусированной обработке сигналов, если
время обработки Т и соответственно апертура а будут
очень малы по сравнению с длительностью всего траек-
торного сигнала, ширина спектра и, следовательно, раз-
решающая способность определяется как у . С увели-
чением времени анализа, спектр сигнала будет сначала
сужаться, а затем вновь расширяться вследствие изме-
296
нения частоты Допплера. Поэтому существует некото-
рое оптимальное время обработки и, следовательно,
максимально достижимая разрешающая способность при
обработке в дальней зоне. Максимум разрешения сов-
падает с максимумом выходного сигнала. Найдем мак-
симум функции 1(a) при изменении а.
Для этого приравняем нулю производную
v , , 1 ( aAtn \ л
1 2CHHcos — —— +
Z1jiL \ у
4-=0. (6.130)
Решая это уравнение, получаем
6£опт
(6.131)
Для определения максимальной разрешающей спо-
собности рассмотрим поведение функции Цхп, а0Пт)
в окрестности точки хп0. В этом случае хп есть прира-
щение координаты относительно точки хпо-
Интеграл (6.127) тогда можно записать в следую-
щем виде:
по=4
2
0/2Гп -г , аТпА’п!и\
е du -ф- j е du
о о
= {[С (/3/2 - А.пха) 4- С (/3/2 + А/глп)]2 +
4-[S(/3/2- A/zxn)4-S( l'3/24- А«хп)]2}. (6.132)
На рис. 6.23 построен нормированный график 1(х„).
Ширина главного максимума по уровню 0,5 равна
8хи=0,42^-- (6.133)
Необходимо отметить большой уровень боковых лепест-
ков выходного сигнала при использовании максимально-
го раскрыва яОпт-
Полученные значения разрешающей способности и
оптимального раскрыва при обработке сигналов оптиче-
297
Рис. 6.23. Распределение яркости в отметке одиночной точечной
цели при обработке сигнала в дальней зоне.
ским устройством в дальней зоне практически совпада-
ют с результатами, полученными при рассмотрении тео-
рии антенны с искусственным раскрывом (гл. 4).
6.8. Обработка сигналов
фокусированной РЛС
Обработка сигналов в ближней зоне искусственного
раскрыва антенны, когда необходимо вводить коррек-
цию фазы принимаемых сигналов по траектории, пред-
ставляет собой более сложную задачу. Известно, что
оптимальное линейное устройство должно вычислять
взаимокорреляционную функцию принимаемого коле-
бания и опорного сигнала г(х):
Е (х) = Jr (x')-s(x'— x)'dx'. (6.134)
Выше было указано па возможность различных под-
ходов к описанию фокусированной системы обработки.
В данном параграфе будет рассмотрена оптическая си-
стема корреляционного типа. Такие системы использу-
ются в ряде разработок [75].
298
Операция вычисления взаимокорреляционной функ-
ции легко выполняется элементарной оптической систе-
мой. Однако при амплитудной записи фазовых соотно-
шений сигнала (запись на опорном уровне $0) необхо-
дим ряд дополнительных операций. Действительно, при-
нимаемый и опорный сигналы в результате перемноже-
ния образуют четыре составляющих, три из которых со-
здают мешающий фон:
[s0 + S (х' — Х)][г0 + г (*')] = Vo + V (х') +
+ ros (х'— х) + г (x’)s (х' — х), (6.135)
где s0 и г0 — постоянные опорные уровни записи.
Устранение трех лишних членов осуществляется, во-
первых, устранением одного из опорных уровней $0 или
Го, что приводит к исчезновению двух лишних членов.
Во-вторых, запись сигнала и опорной функции произво-
дится на поднесущей частоте сох, так же как при нефо-
кусированной обработке. В этом случае амплитуда спек-
тра частот сигнальной функции равна нулю в области
нулевых частот и, следовательно, взаимокорреляцион-
ная функция постоянного уровня и сигнала также рав-
на нулю.
Структурная схема оптического решающего устрой-
ства, выполняющего эти операции, изображена на
рис. 6.24,а. Пленка с записанными на ней эхо-сигналами
протягивается с помощью лентопротяжного механизма
1, образуя сигнал Si(x'—хп). Устройства 2, 3 и 4 необ-
ходимы для исключения из сигнала опорного уровня s9.
Удаление постоянной составляющей достигается путем
преобразования сигнала в спектральную область 2, про-
странственной фильтрации (режекции) нулевой состав-
ляющей спектра 5 и обратного преобразования с по-
мощью спектроанализатора 4. Полученный сигнал
s(x'—хп) умножается в устройстве 5 на опорный сигнал
t\(x'), представляющий собой эталонную запись сигна-
ла, отраженного от точечной цели для каждой дально-
сти. Результат перемножения с помощью устройства 6
преобразуется в спектральную область. При этом амп-
литуда нулевой частоты спектра <ох = 0 представляет со-
299
бой свертку входного и опорного сигналов. На выходе
пространственного фильтра 7 получаем
Е (хп) = f П (-*0 5 (х' — хп) e~lw*x'dx' = f г (х') X
Xs (х’ — хп) dx' + f ros (х' — хп) dx'. (6.136)
Второй интеграл в этом выражении равен нулю, так
как сигнал s(xf—хп) не содержит постоянной состав-
ляющей, которая удалена устройством 3. Оставшийся
интеграл представляет собой оптимальную операцию
обработки сигнала фокусированной РЛС.
Принципиальная схема оптического решающего
устройства, выполняющего эти операции, изображена
на рис. 6.24,6. Входной лентопротяжный механизм 1
протягивает пленку с записью эхо-сигналов, которая ос-
вещается щелевым источником света через коллиматор
(па рисунке не показан). Размеры освещаемого участка
пленки (фильмовый канал) определяются площадью
местности, облучаемой реальной антенной. Оптическая
система 2 осуществляет преобразование сигнала, запи-
санного по оси хп. Спектр наблюдается по оси сох в фо-
кальной плоскости g, т] 3 линзы 2. Экран в плоскости 3,
состоящий из непрозрачной полоски, расположенной на
оси оптической системы, задерживает постоянную со-
ставляющую спектра этого сигнала.
Вторая оптическая система 4 обеспечивает обратное
преобразование Фурье, проектируя полученный сигнал
•?(х'—хп) на диапозитив с записью опорного сигнала 5.
В плоскости 5 происходит перемножение сигналов
s(x'—хп) и Г1(х'). Оптическая система 6 производит
спектральное преобразование этого произведения по оси
х' и неискаженное воспроизведение сигнала по оси 7?н-
Составляющая спектра со^=0, выделяемая с помощью
выходной щели Щ, записывается на пленку, протяги-
ваемую выходным лентопротяжным механизмом 7.
Таким образом, оптическое решающее устройство
производит операцию фокусированной обработки сигна-
лов по оси хп для каждой отдельной цели, расположен-
ной по оси дальности 7?н-
Определим разрешающую способность и размер
апертуры такого устройства. Амплитуда траекторного
сигнала определяется диаграммой направленности ре*
30Q
s,(x‘-xn) s,(wx) S(WX) s(x‘~xn) rt(x')-s(x'-xn) J'r(x')-s(x'-xn)dx>
a)
Рис. 6.24. Функциональная схема оптической обработки сигналов корреляционным методом (а) и принципиаль-
ная схема оптического устройства обработки (б).
альной антенны, которую можно представить, используя
известную аппроксимацию в следующем виде:
—2 78 (-tV
G([J)=-|Le ’ VM, (6.137)
где 0о — ширина диаграммы направленности первичной
(реальной) антенны;
Bi — постоянный коэффициент.
При боковом обзоре и достаточно малых углах р
можно записать выражение для $ в виде
(6.138)
где х — координата пути;
1/?н — наклонная дальность до цели.
Диаграмма направленности при этом будет иметь
вид
—2,78 —
G(x)=-^-e R«9o = -^-е~В2< (6.139)
°о «о
Фаза траекторного сигнала меняется вдоль пути по за-
кону
?(х)=-^ = ^2- (б-140)
Так как для каждой дальности цели закон изме-
нения амплитуд и -фаз будет меняться, необходима мно-
гоканальная по дальности система обработки. В каж-
дом отдельном канале дальности оптическая система
выполняет операцию вида:
а/2 2
Е (хп) = 4 4 e-BWj:'2e-S!/!2(x'-xn,2sin AWx,! X
а J ®п
—а/2
X sin Д2/г2 (хг — xa)2dx'. (6.141)
Разрешающая способность системы определяется ши-
риной спектра записанного траекторного сигнала и не
зависит от поднесущей частоты записи. Поэтому для уп-
рощения вычислений поднесущая частота в выражении
(6.141) положена равной нулю.
Интеграл в выражении (6.141) можно упростить, так
как
В2<Д2. (6.142)
302
Действительно, из выражений (6.139) и (6.140) еле-
дует: Д2 2,1 . А — ’ = (6.143) 'ЧсО
Учитывая, что 0О == , а граница дальней зоны ре- “а
альной антенны определяется выражением /?дз = —, по-
лучаем
52 = Д2^-. (6.144)
Так как диапазон рабочих дальностей значительно
больше расстояния дальней зоны реальной антенны,
можно написать
(6.145)
Следовательно, неравенство (6.142) можно считать
доказанным.
При условии В2 < А2 корреляционная функция^сигнала
sinX2x2 значительно уже корреляционной функции сигнала
—В2х2
е и можно считать, что:
e-B2«2(x'-Xn)2 <e-fi2«2X,2_ е-252Л2х'2. (g | ^g)
Будем рассматривать оптимальную обработку всего
траекторного сигнала, размер которого обусловлен диа-
граммой направленности реальной антенны. Размер ис-
кусственного раскрыва X и, следовательно, апертура а
выбираются так, чтобы охватить всю область парамет-
ра xz, где заключена большая часть энергии сигнала:
«макс = (6.147)
Очевидно, при этом можно считать, что вне интервала
«макс амплитуда сигнала равна нулю и, следовательно,
область интегрирования можно распространить по бес-
конечным пределам
В2 'р
f (хп) = -4- Г е-2Д2л2*'2 sjn д^х'2 sin А2п2 (х' — хп)2 dx'.
«во J
—00
(6.148)
303
Преобразуем произведение синусов под интегралом к
виду:
sin Д2и2х'2 sin А2п2 (х’ — хп)2 = cos 2Д2д2хп (х'-) —
А2п2х1 _ , , х„ >2 . А2п2х^'
— COS —2—cos 2A2n2lx-------\ 4“ sin ~— X
X sin 2Д2п2 (х'— (6.149)
Подставляем выражение (6.149) в (6.148) и разбиваем
на три интеграла:
Е (хп) = —^2“ < f e-2B2“2*'2 cos 2А2п2хп хг---^\dxf—
2«90 I J к /
<~оо
+ 00 Д2 2 2
— J е2*’2"2*'2 cos.”_*п cos 2Д2я3 (х'--Y^dx' 4-
— 00
+* Л2П2,,2 , „ а 1
4- J е-252"2*'2 sin—2sm2A2tf2(x'-------i-Jdx'L (6.150)
—X '
Первые два интеграла табличные. Последний интег-
рал от нечетной симметричной функции равен нулю.
Подставляя значение интегралов, получим
о Л‘Л2Х4
/______________ff
Е (хп) =У^~ -^5- е X cos A2n2x\ -
— т/~ В1 / 2BV4-t<4B*n44-4^*n« cos^L (6.151)
r 8 Д02 у 4В*п* + 4А*п4 2 •
Учитывая, что В2 < А2, второй член полученного вы-
ражения можно упростить:
У 8 а/гВ^
18 апле?
А*п2х2
____п
е 2В2 cos А2п2х2 —
п
А2п2х2а
COS---2—
(6.152)
304
Нетрудно заметить, что коэффициент перед вторым
членом значительно меньше коэффициента перед пер-
вым членом. Поэтому вторым членом можно (пре-
небречь.
На выходной пленке регистрируется интенсивность
света, пропорциональная квадрату амплитуды сигнала.
Выражение (6.152) после возведения в квадрат и под-
становки значений А, В и амакс можно записать в сле-
дующем виде:
2
-1,44x2— _
ci 2кП2 X
I (хп) = В2 е а cos2 п-’ (6.153)
где В2 — постоянный коэффициент.
Так как 2/?н > d2, ширина регистрируемой функции
I (хп) определяется в основном множителем е а .
Разрешающая способность по путевой дальности оп-
ределяется шириной функции /(хп) на уровнем 0,5, кото-
рая равна
8хп=0,4^-- (6.154)
Это соответствует максимальному разрешению РЛС
с искусственным раскрывом.
Обработку сигналов оптической системой можно
трактовать так же, как процесс моделирования в свето-
вом диапазоне волн реальных процессов, происходящих
в РЛС с искусственным раскрывом. Действительно, ес-
ли бы удалось воспроизвести вдоль некоторой линии хп
амплитуду и фазу отраженных радиолокационных сиг-
налов в виде светового излучения с соответствующим
распределением амплитуд и фаз, то такая передающая
антенна на некотором расстоянии R создала бы свето-
вое изображение радиолокационных целей. Все размеры
при этом можно было бы уменьшить по сравнению с ре-
альными в %Дс раз.
Для получения такой антенны в световом диапазоне
волн используется запись амплитуды и фазы траектор-
ного радиолокационного сигнала на фотопленку. При
освещении пленки с записью сигналов когерентным све-
20—1С 94 305
Рис. 6.25. Моделирование в оптическом диапазоне работы РЛС
с искусственным раскрывом антенны.
товым потоком /о (рис. 6.25) в пространстве за пленкой
в результате дифракции образуется световое изображе-
ние радиолокационных целей. При этом аналогом ра-
диолокационного траекторного сигнала s(x) является
световой сигнал s(xn), а искусственного раскрыва X —
размер сигнала Хп на пленке в апертуре оптического
устройства. Так, например, точечная цель А дает сфери-
ческий фазовый фронт на раскрыве X (рис. 6.25,а). За-
писанный соответствующим образом на пленке Хп по
оси хп этот фазовый фронт сигнала фокусирует коге-
рентный световой поток /0 в точку А' (рис. 6.25,6). При
лом угол рс и расстояние /?с в пространстве изображе-
ния будут пропорциональны соответственно углу рн »
расстоянию /?н в пространстве целей. Сигналы от цели
Е. записанные на пленке, создают изображение цели В\
Так как система считается линейной, изображения А' и
В' создаются независимо друг от друга и яркость их
пропорциональна амплитуде соответствующего сигнала.
306
Рис. 6 26. Зонная пластинка Френеля.
Такое моделирование можно рассматривать так же,
как голографию в радиодиапазоне волн {40, 99]. Запись
амплитуды и фазы траекторных сигналов на пленке
есть одномерная голограмма в различных каналах по
дальности. Роль опорного (референтного) пучка здесь
играет опорное напряжение фазового детектора. При
восстановлении (реконструкции) волнового фронта
пленка с записью одномерных голограмм освещается
когерентной волной светового диапазона. В результате
образуется уменьшенное изображение целей.
Запись сигнала от точечной цели на одном элементе
дальности можно рассматривать как одномерную амп-
литудную линзу Френеля или зонную пластинку [23].
На рис. 6.26 показана двумерная зонная пластинка, ко-
торая фокусирует параллельный пучок света, проходя-
щий через нее. Осевое сечение такой линзы представля-
ет собой одномерную линзу Френеля, которая фокуси-
рует луч лишь в одной плоскости. Отраженный сигнал
от точечной цели, записанный на пленке, имеет вид од-
номерной линзы Френеля
51(хп) = 50-|-Дсо5(ф0х|4-?0), (6.155)
20*
307
где А — амплитуда отраженного сигнала;
2к/г2
= -----фазовая характеристика сигнала.
В результате освещения пленки образуется световая
волна с амплитудным распределением типа (6.165).Про-
ходя в свободном пространстве расстояние /?, волна
(световой сигнал) преобразуется в соответствии с выра-
жением (6.98). Ядро этого интегрального преобразова-
ния можно записать в следующем виде:
. *с . .2 . Ml . ^е*пХ1 . &ехп
е 2* “ = е; 2Р- е ‘ R е 2Р . (6.156)
Таким образом, световой сигнал на расстоянии
можно представить как результат изменения фазы запи-
санного сигнала Si(xn) по квадратичному закону и спек-
трального анализа преобразованного сигнала:
. 2 ,2 .
.Ml /» . ^схп . М^
S(xitR) = e 2Р J 51(хп)е7^ е"' * dxa =
Ml (' 2
= е' 2Р J s1(xn)e;^ne-^AdXn) (6.157)
где ^ = kc/2R — фазовая характеристика оптической си-
стемы.
Записанный сигнал и оптическая система имеют
квадратичные фазовые характеристики. Следовательно*
при фокусировании для компенсации квадратичных фа-
зовых сдвигов необходимо, чтобы фазовые характери-
стики сигнала яро и оптической системы (свободного
пространства) были равны и противоположны по зна-
ку:
ip = —тро- (6.158)
Записанный на пленке амплитудно-модулированный
сигнал $i(xn) можно представить суммой двух фазово-
модулированных сигналов:
л 2 л 2
51(хп) = 50 + -^е7(фоХп+(Ро) 4__±е~/(фоХп+фо). (6.159)
В результате прохождения такого светового сигнала
в свободном пространстве на некотором расстоянии
308
одна составляющая, для которой удовлетворяется усло-
вие (6.158), фокусируется, давая изображение цели
S (Л. Л.) =г, dx, = e. ,
0
(6.160)
где С} и с2 — постоянные коэффициенты.
Можно показать, что эта операция соответствует оп-
тимальной обработке траекторного сигнала. Действи-
тельно,
s (хг) = j s (лп) 5 (хп — Xi) dxu =
= хп = е^4 j dxn.
(6.161)
Полагая в последнем выражении 2фХ1 = сох, получаем
интегральное выражение (6.160).
Две другие составляющие сигнала (6.159) дают па-
разитный фон, накладывающийся на изображения це-
Рис. 6.27. Амплитуды сфокусированного и расфокусированного сиг-
нала на выходе оптической системы обработки.
21—1094 309
лей. Для разноса изображений сигнала и фона запись
траекторного сигнала целесообразно производить на
поднесущей частоте соп’
«1 (хп) = «о + Л cos (<ОПХП 4- фолф. (6.162)
Распределение амплитуд света в выходном изображении
для этого случая показано на рис. 6.27. Пеовый интег-
рал Si дает спектр траекторного сигнала:
2
S1 (®х) = J «ое'ф*п е"’/Шл х 1 dxa. (6 163)
о
На рисунке максимальная частота спектра сигнала
обозначена соМакс- Второй интеграл S2 дает сфокусиро-
ванное изображение принимаемого сигнала, смещенное
на —соп по оси частот:
(6.164)
Третий интеграл S3 дает спектр сигнала с двойной девиа-
цией частоты, смещенный на -|-а)п:
П 2
53(шя) = (?, j А^хое~1(ш-~ш^аха. (6.165)
О
Для полного разделения сигналов необходимо выпол-
нить условие
<Оп>О>макс, (6.166)
т. е. в спектре записанного сигнала должна отсутство-
вать нулевая частота (постоянная составляющая).
При наличии нескольких целей на различных несу-
щих частотах они будут давать сфокусированные отмет-
ки в левой полуплоскости, разнесенные на расстояния,
пропорциональные разности несущих частот. Таким об-
разом, в такой системе осуществляется многоканальная
обработка по азимуту.
310
Рис. 6.28. Расположение составляющих сигнала на выходе оптиче-
ской системы обработки.
С точки зрения голографии три изображения можно
представить следующим образом (рис. 6.28): первое —
фон опорного пучка, второе — действительное изображе-
ние целей и третье — мнимое изображение целей.
Расстояние фокусирования на котором происхо-
дит компенсация квадратичных членов, определяется из
условия ф —ф0 и равно:
«*=^Т7- (6.167)
При боковом обзоре коэффициент <р0 будет равен
<6J68>
В этом случае расстояние фокусирования определяется
формулой
Х/?и
2Лсп^
(6.169)
Таким образом, расстояние фокусирования прямо
пропорционально расстоянию до цели (рис. 6.29).
Вследствие этого траекторные сигналы целей, записан-
ные на экране (хп, Ra), фокусируются по оси хп на на-
клонной плоскости (х', R'). .По оси Rn необходимо про-
ектировать сигнал без искажений, однако в данном слу-
чае сигнал по оси Rn при распространении до плоскости
(х', R') преобразуется (расфокусируется) в соответст-
вии с формулой (6.98). Поэтому оптическая система
21* 311
Рис. 6.29. Плоскость фокусирования сигналов РЛС с искусственным
раскрывом антенны.
должна иметь согласующие элементы — линзы для об-
разования изображения по оси Rn. Расстояние фокуси-
рования /?ф зависит от масштабного коэффициента пх
записи сигнала на пленке и при приемлемых плотно-
стях записи это расстояние довольно велико. По этой
причине желательно также использовать согласующие
линзы и по оси хп.
Одна из возможных систем обработки сигналов РЛС
с искусственным раскрывом по такому методу представ-
лена на рис. 6.30 ([75, 101].
Коническая линза, поставленная у входной пленки
с записью сигнала, компенсирует квадратичный фазо-
вый набег сигнала. Фокусное расстояние линзы меняет-
ся по линейному закону вдоль оси Rn так, что вносимый
фазовый сдвиг будет иметь вид (6.102):
(6'170)
где р — коэффициент пропорциональности.
С другой стороны, фазовая характеристика записан-
ного траекторного сигнала также меняется с изменени-
ем дальности
kfl2
где пу — масштабный коэффициент записи поперек
пленки.
312
Рис. 6.30. Устройство оптимальной обработки сигналов РЛС с искус-
ственным раскрывом антенны.
Следовательно, для компенсации квадратичного фа-
зового набега коническая линза должна удовлетворять
условию
Р = ^- (6.172)
Хс/2^
В результате прохождения световым сигналом кони-
ческой линзы происходит компенсация квадратичных
фазовых изменений и на выходе линзы получаем сигна-
лы с постоянной частотой Допплера. Поэтому далее для
оптимальной обработки может использоваться уже рас-
смотренный ранее многоканальный по дальности спек-
троанализатор, в выходной плоскости которого полу-
чается сфокусированное изображение местности в пре-
делах ширины диаграммы направленности реальной ан-
тенны. Разрешающая способность при этом будет такая
же, как и при выполнении системы обработки по прин-
ципу коррелятора.
В заключение можно указать на возможность созда-
ния оптической системы обработки типа оптимального
фильтра (рис. 6.31). Записанный сигнал в плоскости
(хш /?п) в этом случае подвергается двумерному спек-
тральному преобразованию с помощью линзы
В спектральной плоскости (оэх, сод) устанавливается эк-
ран с функцией пропускания, пропорциональной опти-
313
Рис. 6.31. Принципиальная схема оптического оптимального фильтра.
мальному фильтру для сигнала s(xn> /?п). В случае бе-
лого шума характеристика оптимального фильтра долж-
на быть комплексно-сопряженной со спектром сигнала
s(cox) по оси хп. По оси сод фильтрация может произво-
диться, например, для сжатия по дальности сигналов
с внутриимпульсной модуляцией [Г04].
В результате 'перемножения характеристик в плоско-
сти (сох, юл) получается сигнал вида 5(о)х)5*'(<Ох).
В случае достаточно большого искусственного раскрыва
спектр траекторного сигнала по оси х имеет вид:
2
• <°х
SW = G (6.173)
С помощью линзы Аг осуществляется второе пре-
образование Фурье. В результате получается выходной
сигнал оптимальной системы по оси х'\
S (л\ £')= J J I S (о>я) |а S (mR) (б.174)
Сигнал по оси 7?п за счет двойного преобразования
Фурье, если фильтрация по оси (Ой не производится, пе-
редается без изменений.
6.9. Обработка флуктуирующих
сигналов
В реальных условиях работы РЛС необходимо учи-
тывать факторы, искажающие траекторный сигнал. Важ-
нейшими из них являются: траекторные искажения,
314
Рис. 6.32. Зависимость мощности выходного сигнала при различных
методах интегрирования.
как результат неточного знания траектории движения
носителя РЛС; фазовые и амплитудные нестабильности
приемо-передающей аппаратуры; флуктуации ампли-
тудной и фазовой характеристик отражения электромаг-
нитных волн от целей; изменение параметров среды
распространения радиоволн и, наконец, искажения сиг-
нала в системе обработки.
В результате искажений траекторный сигнал имеет
случайные изменения амплитуды и фазы, т. е. сигнал
является лишь частично когерентным.
Флуктуирующий сигнал характеризуется време-
нем корреляции Гк или пространственным интервалом
корреляции Ак- При увеличении времени обработки
больше времени корреляции Т>ТК эффект когерентного
накопления уменьшается. В § 5.4 показано изменение
выходных характеристик РЛС при обработке таких сиг-
налов оптимальной системой, рассчитанной на прием
идеальных неискаженных сигналов.
Существуют специальные способы оптимальной обра-
ботки искаженных сигналов [12, 73]. Они предусматри-
вают когерентную обработку лишь в пределах интер-
вала корреляции Хк<Амакс. Полученные частичные ко-
герентные суммы затем суммируются некогерентно
в пределах всего искусственного раскрыва Хмакс, образуя
345
Рис. 6.33. Устройство для когерентного и некогерентного интегриро-
вания сигналов.
выходной сигнал. При такой обработке получается зна-
чительный энергетический выигрыш по сравнению с чи-
сто когерентной обработкой только в пределах интер-
вала корреляции Хк. На рис. 6.32 показан график
изменения мощности сигнала на выходе системы обра-
ботки в зависимости от относительной величины интер-
вала корреляции Хк/^макс для двух случаев: при чисто
когерентном интегрировании в пределах интервала кор-
реляции Хк и при смешанном интегрировании; когерент-
ном— на участках искусственного раскрыва длиной Хк
и некогерентном — по всей длине раскрыва ХМакс. При
уменьшении интервала корреляции и, следовательно,
уменьшении времени когерентного накопления мощ-
ность сигнала быстро падает. Для чисто когерентного
накопления в интервале Хк это уменьшение мощности
сигнала пропорционально квадрату изменения Аи, а при
смешанном интегрировании мощность уменьшается мед-
леннее.
Кроме увеличения потенциала РЛС некогерентное
интегрирование позволяет уменьшить дисперсию сигнала
от фона местности, на которой наблюдается цель. В ре-
зультате разбиения всего интервала интегрирования
АМакс на интервалы корреляции выходной сигнал
когерентной системы обработки имеет ХмаКс/Ак незави-
симых выборок. На. выходе некогерентного интегратора
отношение сигнал-фон будет увеличиваться пропорцио-
нально числу этих независимых вы-борок,
316
Оптимальную обработку искаженных сигналов мож-
но представить следующим образом. Весь интервал сиг-
нала Хмакс делится на N интервалов длиной XKi. В об-
щем случае величина интервала Xui корреляции может
изменяться по длине раскрыва Хмакс. В каждом z-м ин-
тервале производится когерентное интегрирование. Для
этого траекторный сигнал s(x) перемножается с опор-
ным сигналом г(х) и интегрируется в пределах от X/ до
xz+1. Результат интегрирования возводится в квадрат и
суммируется по веем N интервалам:
Z(x)=^ j s(x' — x)r(xf)dxf •
(6.175)
Такую математическую операцию можно выполнить
с помощью оптической системы (рис. 6.33).
Коррелятор осуществляет интегрирование сигнала
вдоль оси хп в пределах всего раскрыва ХМакс- Принцип
его действия не отличается от рассмотренного ранее.
Отличие состоит лишь в степени когерентности освеще-
ния входной пленки.
Протяженный источник света Р с помощью коллима-
торной линзы освещает входную пленку. Если ис-
точник света расположен в фокальной плоскости (точка
/) и размер его достаточно мал, коллиматорная линза
создает параллельный пучок когерентного света на все^м
раскрыве Хмакс- Интенсивность света на выходе корре-
лятора будет равна:
V
мак?
Цх) = J 5 (Хп — X) Г (xn) dxn • (6.176)
В этом случае производится полностью когерентная
обработка сигнала по всему раскрыву.
Если источник света расположен на двойном фокус-
ном расстоянии от линзы (точка 2) и размер его равен
б/с = ^макс, коллиматорная линза проектирует изображе-
ние источника света на входную пленку в масштаб • 1:1,
При этом, вследствие некогерентности излучения отдель-
ных точек источника света, освещение пленки будет пол-
317
Рис. 6.34. Принципиальная схема устройства для регулирования сте-
пени когерентности.
ностью некогерентным. Интенсивность света на выходе
системы обработки в этом случае будет
V
макс
/(%)= [ \s(xn—x)\2r2(xn)dxn, (6.177)
О
что соответствует полностью некогерентному интегриро-
ванию.
При расположении источника света между этими
двумя крайними точками на некотором расстоянии I от
линзы, освещение входной пленки будет частично коге-
рентным. Размер области когерентности определяет-
ся расстоянием /. Каждая точка источника света созда-
ет когерентное освещение на участке Хк. Соседние точки
источника света вдоль оси Р освещают участки пленки
также размером Хк, смещенные по апертуре коррелято-
ра. При этом соседние участки пленки, смещенные на
величину больше Хк, будут освещены некогерентно от-
носительно друг друга. В этом случае обеспечивается
частично когерентное освещение пленки, когда любой
участок пленки размером меньше Хк освещен когерент-
ным светом, а участки пленки, отстоящие друг от друга
на величину больше Хк,— некогерентным светом. Пере-
мещая источник света и изменяя его размер dc, можно
менять степень когерентности.
Оптическая система рассмотренного типа позволяет
осуществлять когерентное суммирование сигналов в пре-
делах интервала XK и некогерентное интегрирование на
всем раскрыве ХМаке- Практическая схема освещения (12]
318
содержит дополнительную конденсорную линзу К, ко-
торая создает изображение источника света Р в плоско-
сти Р' (рис. 6.34). При перемещении линзы К меняется
одновременно положение плоскости изображения Р' и
размер изображения источника света, чем обеспечи-
вается нужная степень когерентности освещения.
6.10. Электронные устройства
обработки сигналов в РЛС
с искусственным раскрывом антенны
В данном параграфе будут рассмотрены три типа
электронных устройств обработки, отличающихся прин-
ципом построения системы запоминания сигналов.
К первому типу относятся устройства с динамиче-
ской памятью, работающие в реальном масштабе вре-
мени. Примером таких систем являются системы с филь-
трами допплеровских частот и линиями задержки.
В устройствах второго типа используется запись тра-
екторного сигнала (магнитная, электростатическая
и т. п.) с последующим считыванием и обработкой опти-
мальным фильтром.
Наконец, возможна обработка сигналов с помощью
цифровых вычислительных машин.
Рассмотрим кратко каждую из этих систем.
Система обработки с использованием
рециркулятора на линии задержки
Функциональная схема устройства представлена на
рис. 6.35. Видеоимпульсы с выхода фазового детектора
поступают на вход накопителя, состоящего из линии за-
держки сигнала на период повторения импульсов и ши-
рокополосного усилителя в цепи обратной связи, обес-
печивающего положительный коэффициент обратной
связи по величине, близкий к единице. Траекторный сиг-
нал от одиночной точечной цели на выходе фазового де-
тектора имеет постоянную составляющую, соответствую-
щую нулевым допплеровским частотам (рис. 6.36).
В результате прохождения такого сигнала через рецир-
кулятор с линией задержки происходит накопление ви-
319
Рис. 6.35. Блок-схема системы обработки сигналов РЛС с помощью
рециркулятора.
деоимпульсов одинаковой полярности. На участках сиг-
нала, где /^¥=0, количество видеоимпульсов положи-
тельной и отрицательной полярности примерно одинако-
во и, следовательно, выходной сигнал близок к нулю.
В области нулевых допплеровских частот преобладают
видеоимпульсы одной полярности, соответствующие по-
стоянной составляющей траекторного сигнала. Величи-
на постоянной составляющей и, следовательно, амплиту-
да выходного сигнала зависят от начальной фазы тра-
екторного сигнала. Так как начальная фаза сигнала
случайна, необходимо применение двух квадратурных
каналов системы обработки.
Накопитель с рециркулятором на линии задержки
эквивалентен фильтру низких частот с граничной поло-
сой, равной
(6-178)
где Fn — частота повторения импульсов;
N — число накапливаемых импульсов.
Рис. 6.36. Вид сигнала от одиночной точечной цели на выходе фаю-
вого детектора.
320
Время обработки й соответственно искусственный
раскрыв определяются числом накапливаемых импуль-
сов
Т=4— (6-179)
Так как накопление импульсов возможно только
в пределах первой зоны (первого лепестка) огибающей
импульсов, такая система обеспечивает несфокусирован-
ную обработку траекторного сигнала. Разрешающая спо-
собность, которая 'может быть получена с помощью си-
стемы обработки с рециркулятором, определяется по
формуле
<6-180)
Неравенство указывает на то, что при нефокусирован-
ной обработке простое увеличение числа накапливаемых
импульсов более некоторой оптимальной величины не
приводит к росту разрешающей способности.
Наибольшую трудность при создании системы обра-
ботки с рециркулятором представляет обеспечение ми-
нимальных искажений сигнала при его прохождении
через линию задержки и усилитель. Дело в том, что
в результате рециркуляции сигнала искажения непре-
рывно накапливаются от импульса к импульсу, разру-
шая структуру сигнала по дальности. Так, в одной
из станций [86] использовался накопитель с линией за-
держки импульсов, длительностью 0,5 мксек, на время
1400 мксек. Практически удавалось накапливать лишь
100 импульсов, после чего происходило резкое ухудшение
разрешения по дальности. При более коротких импуль-
сах эти трудности еще более возрастают.
Система обработки с оптимальным фильтром
Функциональная схема устройства [21, 105] представ-
лена на рис. 6.37. Сигналы с фазового детектора в двух
квадратурных каналах записываются в системе памяти
так же, как в оптической системе обработки (см. § 6.6).
На схеме изображена оптическая система записи на фо-
топленку. Возможны также и другие системы записи:
на магнитную пленку, на экране электростатистической
321
Трубки памяти и т. п. Записанный сигнал считывается
последовательно :в каждом разрешаемом элементе по
дальности, образуя траекторный сигнал. Если строки по
дальности записаны по оси у, то считывание произво-
дится поперек строк по оси х. При этом строки считыва-
ния последовательно перемещаются по оси у, как при
телевизионной кадровой развертке. Размер строки счи-
тывания по оси х определяет размер искусственного
раскрыва антенны. С помощью когерентного генератора
списанные сигналы преобразуются из области низких
частот в область промежуточных частот, с несущей, рав-
ной частоте генератора /ф. Таким образом, на входе
фильтра обработки получается преобразованный сигнал:
— вместо временной развертки сигналов по дально-
сти мы имеем развертку сигналов по азимуту в различ-
ных каналах дальности;
— изменен масштаб времени сигналов и, следова-
тельно, их спектр. Частоты Допплера считываемого тра-
екторного сигнала по оси х преобразуются в более вы-
сокие частоты, определяемые отношением скорости за-
писи к скорости считывания.
Такое преобразование сигнала позволяет обрабаты-
вать низкочастотный траекторный сигнал с помощью
Рис. 6.37. Блок-схема усгройсгва типа согласованного фильтра для
322
обычных высокочастотных сжимающих фильтров. Сред-
няя частота настройки фильтра равна несущей частоте
считанного сигнала /ф. В результате сжатия и ампли-
тудного детектирования на выходе фильтра будут на-
блюдаться видеоимпульсы сигналов от целей, смещен-
ных во времени пропорционально смещению цели по пу-
тевой дальности (азимуту). Каждый канал по наклон-
ной дальности обрабатывается раздельно. Таким обра-
зом, выходное изображение образуется в результате
строчной развертки по азимуту и кадровой развертки
по дально-сти.
Если спектр входного сигнала имеет 'частоты Доп-
плера от нуля до Ед макс, то в результате преобразова-
ния максимальная частота считанного сигнала будет
равна:
ЕСмакс = Ед Макс > (6.181)
где V3 — скорость записи сигнала по оси х;
Vc— скорость считывания сигнала по оси х.
При этом скорость считывания намного больше ско-
рости записи. Длительность считанного сигнала соответ-
ственно уменьшается:
= (6.182)
обработки сигналов РЛС с искусственным раскрывом антенны.
323
Произведение полосы частот па длительность сигнала
остается постоянным
AFC7'C = AFJ’=^- (6.183)
Последнее равенство соответствует максимальному
произведению полосы частот на длительность сигналов
РЛС с искусственным раскрывом антенны. Если фильтр
сжатия сигнала имеет произведение полосы частот на
длительность обрабатываемого сигнала, равное 2М?н/^а2,
разрешающая способность РЛС будет равна dJ2. Если
обрабатывается лишь часть всего траекторного сигнала,
параметры «сжимающего» фильтра ДЕф и Т$ выбирают-
ся из соотношения
ДЕф^ф
Х/?н
2(5х)2’
(6.184)
где бх — требуемая разрешающая способность.
Время обработки одного кадра будет определяться
числом разрешаемых элементов NR по дальности
Л)бр — kRNRTc. (6.185)
Коэффициент kR выбирается из условия допустимых
потерь, обусловленных дискретностью процесса считы-
вания сигнала по дальности. Число строк должно по
крайней мере в два раза превышать число разрешаемых
элементов (kR^2).
Обработка сигналов с помощью цифровых
вычислительных машин
Использование цифровых вычислительных машин
(ЦВМ) для обработки сигналов РЛС с искусственным
раскрывом антенны позволяет наряду с получением ра-
диолокационного изображения осуществлять различные
программы вычислений, связанные с анализом этого
изображения. Однако к ЦВМ в данном случае предъ-
являются весьма высокие требования по быстродейст-
вию и объему памяти (см. § 6.1).
На рис. 6.38 изображена одна из возможных функ-
циональных схем системы обработки сигналов с по-
324
Рис. 6.38. Блок-схема цифрового устройства для обработки сигналов
РЛС с искусственным раскрывом антенны.
мощью ЦВМ в нефокусированной РЛС с искусственным
раскрывом антенны [52].
Для увеличения разрешающей способности по даль-
ности применяется фазоманипулированный сигнал с се-
мизначным кодом. В каждом элементе кода фаза излу-
чаемого сигнала принимает значение 0 или л относи-
тельно опорного сигнала. Формирование кодового им-
пульса производится с помощью трех регистров сдвига
с кольцом обратной связи, управляемых тактовыми им-
пульсами. Принимаемые сигналы поступают на два
квадратурных фазовых детектора (на рисунке изобра-
жен лишь один канал).
Для обработки по дальности каждого отраженного
от цели сигнала используется коррелятор на двоичных
регистрах сдвига. Разомкнутый регистр сдвига имеет
семь каскадов, по числу знаков в коде. Приемный сигнал
квантуется по амплитуде и времени. По амплитуде про-
изводится бинарное квантование , т. е. используется
325
только фазовая информация в сигнале. По длительности
сигнал квантуется на элементы, равные элементу кода.
В приемном регистре полярность сигналов корректи-
руется в соответствии с законом кода.
Траекторный сигнал обрабатывается путем суммиро-
вания импульсов на выходе коррелятора. При нулевой
частоте Допплера сумма всех сигналов от отдельных
элементов кода будет максимальной, так как они будут
иметь одну и ту же полярность. Для сложения сигналов
с частотой Допплера, не равной нулю, вводится синусо-
идальная весовая функция.
Параметры радиолокационного изображения суще-
ственно зависят от конкретного выполнения алго-
ритма обработки в ЦВМ. Грубая оценка может быть
получена, если известен объем оперативной памяти
устройства и, следовательно, число накапливаемых эле-
ментарных сигналов Nx на разрешаемом элементе даль-
ности. В этом случае длительность обрабатываемого
траекторного сигнала равна
Т'=42-' (6.186)
г т
где FT— тактовая частота квантования входного сигна-
ла. При импульсной работе РЛС она равна частоте по-
вторения Fn.
Проведенный краткий обзор методов электронной об-
работки сигналов в РЛС с искусственным раскрывом
антенны показывает, что их практическая реализация
связана с решением весьма сложных технических задач.
7
Радиолокационные изображения местности
при боковом обзоре
7.1. Система координат
радиолокационных изображений
Радиолокационные станции бокового обзора позво-
ляют получить радиолокационные изображения местно-
сти с высокой разрешающей способностью в координа-
тах, близких к картографическим. Поэтому наиболее эф-
фективно они могут применяться для радиолокационного
картографирования местности. Методы картографирова-
ния с помощью РЛС бокового обзора в основном те же,
что и при использовании обычных бортовых панорамных
радиолокаторов [84]. Однако особенности режима боко-
вого обзора, отличающие его от кругового обзора, опре-
деляют и ряд специфических требований к устройствам
отображения информации и способам выполнения кар-
тографирования.
Для решения задач картографирования, как прави-
ло, используется режим строго бокового обзора. В этом
случае прямоугольная система координат радиолокаци-
онного изображения РЛС бокового обзора (х, у) долж-
на быть связана с картографическими координатами.
Ось х системы координат изображения соответствует
на земной поверхности линии пути носителя РЛС
(с учетом задержки начала развертки). Если задержка
начала развертки равна высоте полета, ось х соответст-
вует проекции линии пути на земную поверхность. При
задержке, большей, чем высота полета, ось х парал-
лельна этой проекции. В зависимости от способа нави-
гации при радиолокационном картографировании ось х
327
на изображении может представлять локсодромию, ор-
тодромию и т. д.
Развертка по оси х осуществляется пропорционально
скорости полета носителя РЛС. Скорость развертки Vpx
автоматически регулируется системой, управляемой от
датчика путевой скорости так, чтобы
Vpx=MxW, (7.1)
где W — путевая скорость;
Мх — масштабный коэффициент.
При строго боковом обзоре ось у системы координат
изображения должна соответствовать перпендикуляру
к линии пути. Возможные отклонения оси у от перпен-
дикуляра к линии пути обусловливаются ошибками си-
стемы стабилизации изображения и приводят к искаже-
ниям изображения.
Развертка по оси у осуществляется пропорционально
наклонной или горизонтальной дальности. В некоторых
случаях делается коррекция развертки горизонтальной
дальности с учетом кривизны Земли и средней рефрак-
ции радиоволн [84].
Обозначим расстояние вдоль оси у на экране ЭЛТ
через 1У, тогда для развертки наклонной дальности
^2/н = Му ^зр)> (7.2)
где tR = 2RJc — время запаздывания отраженного сиг-
нала;
^Зр — время задержки начала развертки;
Му — масштабный коэффициент.
Расстояние вдоль оси у на экране ЭЛТ при разверт-
ке горизонтальной дальности
/уг = Му (/?г ^?гзр)> (7.3)
где /?г — горизонтальная дальность;
^гзр — расстояние по горизонтальной дальности, соот-
ветствующее задержке начала развертки.
Из рис. 7.1,а имеем
тогда
328
Рис. 7.1. Геометрические соотношения для развертки горизонтальной
дальности:
а — без учета кривизны Земли; б — с учетом кривизны Земли.
ИЛИ
(7.4)
Если при развертке горизонтальной дальности задерж-
ка производится на время запаздывания сигнала, отра-
женного от ближайшей точки" земной поверхности tH
(задержка на высоту), то
|/1-(А)’. (7.5)
Развертка горизонтальной дальности с учетом кор-
рекции на кривизну Земли (рис. 7.1,6)
(7.6)
где /?гк — дальность вдоль земной поверхности с учетом
кривизны Земли.
Дальность 7?гк без учета рефракции в атмосфере оп-
ределяется как
/?ГК = /?3ЧТ, (7.7)
где R3—радиус Земли;
ЧГ — угол в радианах.
22—1094 329
Из треугольника ОАЦ находим
cos^-l_______
C0S 2Л3(/?з + Я)
(7.8)
откуда
( L ^3 \”з ~г " ' J J
___г R? — H2 1”г1 1“
~L Я3(Яз + Я) J [ 4Я3(Я3 + Я) J
(7-9)
Используя соотношения (7.6), (7.7) и (7.9), имеем
1утк — 7ИУ/?3 | arcsin + я) ]
।
' (2 Г
Л3(/?3 + Я) J [1 —
— arcsin
Я2 —Я2
4Я3 (Я3 + Н)
^р-Я2 I2
4Я3 (Я3 — Н)
2
Практически угол ЧТ всегда мал, а
Я2 — я2
4Я3 (Я3 + я)
тогда
£
Z D \ / - - - - - —. ч
1^=Му(-^Гн-} (/я2-№-|/<-Я2) (7.11)
или
Из сравнения формул (7.12) и (7.4) видно, что учет
кривизны Земли при небольших дальностях, когда sin4r^4r
выражается в изменении масштабного коэффициента на
величину [7?з/(7?з —/Z)l,/2, с чем практически можно не счи-
таться.
В связи с тем, что коэффициент рефракции сущест-
венно изменяется в зависимости от метеорологических
330
условий, учет рефракции в атмосфере может быть про-
изведен весьма приближенно. Можно считать, что до
высот порядка 3000 м коэффициент рефракции воз-
растает линейно с высотой. При больших высотах ко-
эффициент рефракции уменьшается. В предположении
о слоистой сферической атмосфере путь распростране-
ния радиоволн (рис. 7.1,6) определяется как
cf
(7-13>
где п — коэффициент рефракции однородной среды;
tR — фактическое время запаздывания отраженного
сигнала.
Так как п больше единицы, дальность, вычисленная
по формуле (7.13) без учета п, будет больше действи-
тельной дальности цели, т. е.
(7.14)
где 7?р— расчетная дальность цели, определенная по
формуле
= (7-15)
a — ошибка, обусловленная рефракцией.
Кроме того, действительный путь распространения
радиоволн равен удвоенной величине /?*, причем
2R* >2R.
Поэтому
/?=Я*—AR2, (7.16)
где ДТ?2— ошибка, обусловленная разностью длин путей
по прямой и по дуге.
Из формул (7.13) — (7.16) имеем
R = RP — AR, (7.17)
где
Д^^Д^ + Д^;
^ = СА(-----------
2 \ п ctRJ
22е
331
Рис. 7.2. Искажения, обусловленные неравенством масшта
бов разверток по осям х и у:
а — изображение геометрических фигур на местности; б — изобра
жение тех же фигур на экране индикаторе.
Полученные выражения показывают, что ошибка
растет приблизительно пропорционально дальности, по
этому для учета рефракции необходимо замедлять ско-
рость развертки. Однако указанные ошибки малы (по-
рядка сотых долей процента) и ими в большинстве слу-
чаев можно пренебречь.
Радиолокационное изображение земной поверхности
должно быть равномасштабным по осям х и у. Нера-
венство соответствующих масштабов приводит к иска-
жению конфигурации площадных объектов и протяжен-
ных целей, расположенных под углом к одной из осей
координат. На рис. 7.2 показаны характерные искаже-
ния целей, имеющих форму окружности 1, квадрата 2
и двух одинаковых прямоугольников, расположенных
под прямым углом друг к другу 3. На рис. 7.2,а пока-
заны объекты на местности и направление полета, а на
рис. 7.2,6 приведено условное радиолокационное изобра-
жение при разных масштабах по осям х и у. Подобные
искажения зачастую затрудняют распознавание объек-
тов и ориентиров на радиолокационном изображении.
Масштаб изображения по оси х определяется как
Afx=-^, (7.18)
где VpX — скорость развертки по оси х;
W — скорость носителя РЛС.
Масштаб по оси у
Му = ^-, (7.19)
332
где Vp^ — скорость развертки по оси у\
г*—«проекция скорости распространения радио-
волн на земную поверхность
(7.20)
Если применяется развертка наклонной дальности,
масштаб по оси у оказывается переменным и получение
равномасштабного изображения невозможно. Однако
практически при малых отношениях неравенством
масштаба можно пренебречь и выбирать скорости раз-
верток из условия
= (7.21)
Скорость развертки горизонтальной дальности пере-
менная (7.4) и определяется как
(7.22)
где Vpz/o — скорость развертки при Я = 0.
Скорости разверток при постоянном масштабе по
осям х и у выбираются из условия (7.21) подстановкой
вместо VP2/ величины Vp//o. Скорость развертки на за-
данной дальности |/?г определяется в соответствии с фор-
мулой (7.22).
Искажение системы координат при картографирова-
нии с помощью РЛС бокового обзора обусловливается
нестабильностью траектории полета и угловыми колеба-
ниями носителя РЛС относительно центра массы.
Указанные факторы различным образом влияют на
искажения изображений земной поверхности, получае-
мые с помощью РЛС бокового обзора с впольфюзеляж-
ной антенной и РЛС с искусственным раскрывом ан-
тенны.
При картографировании с помощью РЛС с вдольфю-
зеляжной антенной искажении системы кобрдиНат Мо-
гут быть обусловлены четырьмя Причинами:
333
Рис. 7.3. Требуемые задержки
начала развертки для компен-
сации искажений, обусловлен-
ных боковым смещением носи-
теля РЛС.
— изменением модуля путевой скорости носителя РЛС,
— смещением носителя РЛС от заданной линии пути,
— колебаниями носителя РЛС вокруг центра масс,
— поворотом направления излучения антенны РЛС
относительно расчетного направления.
Изменение модуля путевой скорости летательного ап-
парата приводит к искажению масштаба изображения
на индикаторе по оси х— возникает так называемая
«гармошка» радиолокационной карты. Искажения мас-
штаба по оси х пропорциональны флуктуациям модуля
путевой скорости W носителя РЛС. Эти искажения мо-
гут быть устранены только соответствующим управле-
нием скорости развертки с точностью, обеспечиваемой
системами измерения W и устройствами регулирования
скорости развертки.
Боковые смещения носителя РЛС (вправо и влево)
относительно линии пути приводят к изменению начала
отсчета по оси у. В связи с этим возникают искажения
типа «волнистость», когда прямолинейная цель, распо-
ложенная вдоль линии полета, на изображении будет
выглядеть волнообразной. Такие искажения изображе-
ния могут быть частично устранены путем введения за-
держки начала развертки, пропорциональной величине
отклонения носителя РЛС от средней линии пути. Од-
нако полное устранение таких искажений невозможно.
Это обусловлено не только невозможностью точного из-
мерения смещений летательного аппарата, но и необхо-
димостью введения различной задержки начала раз-
вертки в зависимости от расстояния до цели. Из рис. 7.3
видно, что требуемые задержки начала развертки для
целей и Ц2 соответственно равны
^BAt .
с 2 с
(7.23)
334
При вйёдёййи компенсации должно быть йзМерейо смё-
щение носителя. Тогда требуемая задержка начала раз-
вертки (при /?>#) определяется как
2&У
с
(7-24)
где Дг/ — смещение носителя РЛС.
Колебания летательного аппарата вокруг центра
масс при жестко закрепленной антенне приводят на ин-
дикаторе к повороту элементов изображения вокруг то-
чек, расположенных на оси х. Такой поворот искажает
масштаб по оси х, причем эти искажения оказываются
различными в зависимости от дальности. Смещение от-
меток целей, обусловленное поворотом носителя РЛС
вокруг осей х', у', z (рис. 7.4) может быть выражено как
bx = Rr&a-±~, (7.25)
где Да — угол поворота следа луча антенны на поверх-
ности Земли.
Подставляя в формулу (7.25) значение Да из фор-
мул (3.11) и (3.12), получаем
Дх = —ту—а т (7-26)
Мх Мх 1 Мх ' '
Формула (7.26) показывает, что наибольшее смеще-
ние элементов изображения вызывается углом сноса и
углом скольжения, причем это смещение растет с уве-
личением дальности. Указанные искажения можно ком-
пенсировать тремя способами.
Рис. 7.4. Геометрические соотноше-
ния при компенсации угла кобриро-
вания носителя РЛС путем поворота
луча антенны.
335
Первый способ основан на стабилизации антенной
системы в пространстве. В этом случае искажения воз-
никнут только вследствие неточности работы системы
стабилизации. Они определяются формулой (7.26) при
замене углов а, у, ft соответствующими угловыми ошиб-
ками системы. Следует заметить, что на практике точ-
ная стабилизация длинных вдольфюзеляжных антенн
представляется весьма сложной задачей особенно отно-
сительно осей z и z/', вследствие этого ошибки стабилиза-
ции часто бывают значительными.
Второй способ компенсации может быть осуществлен
путем электрического управления лучом антенны. Пово-
рот луча может производиться в горизонтальной плоско-
сти, что позволяет компенсировать угол а. В этом слу-
чае первые два члена в уравнении (7.26) равны нулю.
Это приводит к полной компенсации искажений при
0 = 0. Если угол О#=0, поворот луча не позволяет пол-
ностью компенсировать искажения во всем диапазоне
дальностей наблюдения (рис. 7.4).
Сущность третьего способа заключается в управле-
нии разверткой индикатора в соответствии с формулой
(7.26). Для этого необходимо повернуть развертку го-
ризонтальной дальности на угол а и сместить ее по оси
х на величину Дх2, 3,
^- = “-ST’(±-S79- <7'27)
При использовании в индикаторе развертки наклон-
ной дальности с задержкой ее начала компенсация ис-
кажений может осуществляться поворотом развертки на
угол а и дополнительным сдвигом на ДхА. Величина
сдвига ДХ1 определяется из следующего выражения:
Дх‘=Т^-а> (7-28)
где /?3р — дальность, соответствующая задержке начала
развертки.
Компенсация искажений путем управления разверт-
кой приводит к неравномерной плотности радиолокаци-
онного изображения, поскольку время нахождения элек-
тронного луча в каждой точке экрана ЭЛТ индикатора
оказывается переменным. Внешне этот эффект прояв-
ляется в виде ярких и темных полос, расположенных
поперек фотопленки. Поэтому компенсацию искажений
336
путем поворота развертки целесообразно использовать
только в том случае, когда в индикаторе имеется авто-
матическая регулировка яркости развертки в зависимо-
сти от ее смещений и поворотов.
При наличии постоянного поворота оси излучения ан-
тенны, отличного от расчетного, искажается прямо-
угольная система координат на индикаторе. В этом слу-
чае изображение формируется в косоугольной системе.
Искажение масштаба изображения РЛС бокового об-
зора с искусственным раскрывом антенны определяется
в первую очередь флуктуациями вектора путевой ско-
рости по модулю и по направлению. Колебания лета-
тельного аппарата вокруг центра масс, если они не со-
провождаются изменением вектора путевой скорости, на
искажения масштаба не влияют. Однако это не значит,
что в РЛС с искусственным раскрывом антенны допу-
скаются произвольные колебания антенной системы сов-
местно с летательным аппаратом. Угловая стабилизация
антенны должна быть обеспечена с точностью, не до-
пускающей пропуска цели. Это означает, что угол от-
клонения луча антенны по отношению к вектору путе-
вой скорости не должен превышать некоторого значе-
ния, обусловленного настройкой системы обработки.
Следует отметить, что угловые изменения век-
тора путевой скорости носителя приводят в РЛС бо-
кового обзора с искусственным раскрывом антенны кта-
ким же масштабным искажениям изображения, как и
в РЛС с вдольфюзеляжной антенной. Возникают иска-
жения типа «гармошки» и «волнистости». Флуктуации
величины вектора W вызывают специфические масштаб-
ные искажения, обусловленные методом обработки сиг-
налов. Действительно, пусть система обработки сигна-
лов по методу искусственного раскрыва настроена на
среднюю допплеровскую частоту ГДСр (рис. 7.5,а). Со-
ответствующее этой частоте направление определяется
углом Риер, который отсчитывается от перпендикуляра
к оси х. Предполагается, что ось х совпадает со сред-
ним направлением вектора путевой скорости. Запись
сигналов на фотопленку должна осуществляться с уче-
том этого угла таким образом, чтобы изображение по-
лучалось в неискаженной прямоугольной системе коор-
динат. Для этого производится поворот линии развертки
337
Рис. 7.5. Коррекция масштабных искажений путем поворота раз-
вертки дальности.
Р (рис. 7.5,6) на электроннолучевой трубке 1 на угол ₽Р
по отношению к направлению оси у (рис. 7.5,6). В про-
цессе картографирования углы рНср и (Зр должны быть
одинаковыми. Более того, для сохранения характеристик
записи сигналов на фотопленке желательно, чтобы они
были постоянными. В противном случае возникает не-
равномерность засветки фотопленки, как это получается
в случае поворота развертки при компенсации искаже-
ний в РЛС с вдольфюзеляжной антенной.
При флуктуациях модуля и направления вектора пу-
тевой скорости носителя изменяется величина угла |3Нср-
Эти колебания обусловливают масштабные искажения
типа поворота отдельных частей изображения относи-
тельно начала развертки дальности. Возникающие иска-
жения близки по своему характеру к искажениям изоб-
ражения в РЛС с вдольфюзеляжной антенной, обуслов-
ленным колебаниями самолета вокруг центра масс.
Флуктуации угла рТ1 Ср включают в основном две со-
ставляющие: брср 1 и &рСр2. Первая составляющая опре-
деляется флуктуациями угла aw между направлением
мгновенного вектора W и направлением его среднего
значения U7cp (рис. 7.5,а) * *
брср 1 — aw- (7.29)
—>
* Колебаниями направления мгновенного вектора W в верти-
кальной плоскости х'Ог пренебрегаем, так как их влияние мало цо
сравнению с влиянием флуктуаций (iw> '
338
Вторая составляющая обусловлена флуктуациями
модуля W. При малых углах
гд— х
Отсюда
В=. РдХ-
Р 2W
И
38сР2 = ^-Д№. (7.30)
Полагая в первом приближении случайные колеба-
ния направления и модуля W независимыми, получаем
среднеквадратическое значение угловых искажений си-
стемы координат в следующем виде:
' (7-31)
где оаГ — среднеквадратическое отклонение углааг (7.29);
°uz — среднеквадратическое отклонение W.
Обычно при больших скоростях полета величина caW и
особенно соотношение -^С2Р- малы и искажения масшта-
бов, вызванные наличием флуктуаций не столько су-
щественны, как соответствующие искажения для РЛС
бокового обзора с вдольфюзеляжной антенной, обуслов-
ленные угловыми колебаниями самолета.
7.2. Особенности картографирования
с помощью РЛС бокового обзора
Привязка радиолокационного изображения к топо-
графической карте является одним из важнейших воп-
росов радиолокационного картографирования. Она мо-
жет осуществляться двумя способами.
При первом способе на радиолокационном изобра-
жении в процессе картографирования наносятся метки
привязки, координаты которых жестко связаны с коор-
339
динатами носителя. В этом случае координаты МётоК
привязки определяются с помощью навигационных си-
стем самолета и указываются рядом с метками. При-
вязка радиолокационного изображения к карте осущест-
вляется путем сопоставления координатной сетки карты
с координатами меток. Точность привязки при этом ха-
рактеризуется ошибками определения места самолета
в момент выработки меток, ошибками системы, форми-
рующей эти метки, и точностью топографической карты.
Основными ошибками в большинстве случаев являются
ошибки навигационных систем, обеспечивающих опре-
деление места самолета. Эти ошибки, как правило, на
один-два порядка превышают остальные. В случае ис-
пользования точных радиотехнических систем навигации
для определения места самолета при картографировании
приходится учитывать также ошибки системы формиро-
вания меток привязки и ошибки карты. Данный способ
привязки является основным при радиолокационном
картографировании местности с малым числом радио-
контрастных ориентиров.
Второй способ привязки заключается в совмещении
радиолокационных отметок характерных ориентиров
с изображениями на топографической карте. В этом
случае для повышения точности привязки целесообразно
выбирать в качестве характерных ориентиров контроль-
ные точки топографической карты. Использование
ориентиров, соответствующих контрольным точкам на
карте, позволяет совмещать радиолокационное изобра-
жение и карту с весьма высокой точностью. В этом слу-
чае наиболее важным является правильный выбор и
отождествление контрольных точек на карте и их радио-
локационных отметок. В качестве ориентиров для при-
вязки целесообразно использовать пересечения дорог
под углами, близкими к прямым, мосты, геодезические
знаки, если они обнаруживаются на радиолокационном
изображении, углы крупных зданий, характерные очер-
тания берегов и т. д. Следует заметить, что для привяз-
ки желательно, чтобы масштабы радиолокационного
изображения и карты были одинаковыми.
Контрольные точки должны наноситься на карту
с точностью, определяемой масштабом. Так, например,
при масштабе 1:20 000 90% контрольных точек не
должны иметь погрешности более 1 мм, а при масштабе
1:250 000—0,5 мм, что соответствует ошибкам на мест-
ности 20 и 12'5 м {84].
Привязка по ориентирам осуществляется либо путем
совмещения двух или более отметок характерных ориен-
тиров с двумя соответствующими контрольными точка-
ми на карте, либо наложением отметки одного ориенти-
ра на контрольную точку и совмещением изображения
по направлению, если на изображении отмечен курс
самолета во время картографирования.
Точность привязки с использованием ориентиров за-
висит в первую очередь от размеров и конфигурации
наблюдаемого объекта и от масштаба. При использова-
нии двух ориентиров один из них выбирается в качестве
опорного, а второй обеспечивает ориентирование изоб-
ражения по странам света. Опорный ориентир целесооб-
разно выбирать вблизи центра изображения. Ошибки
ориентирования по странам света в большой степени за-
висят от масштабных искажений изображения. С целью
уменьшения этих ошибок целесообразно выбирать вто-
рой ориентир так, чтобы он был расположен вблизи ли-
ний, проходящих через опорный ориентир параллельно
осям х или у. При совмещении изображения по данным
о курсе самолета в момент картографирования ошибки
определяются точностью измерения курса и точностью
ориентации антенны относительно курса самолета.
При картографировании больших площадей на точ-
ность привязки изображения к карте существенно влия-
ет сферичность Земли, выбор картографической проек-
ции, в которой выполнена карта {84], и способ самолето-
вождения во время выполнения картографирования.
Необходимо также отметить влияние наблюдаемости
объектов на точность привязки радиолокационных изоб-
ражений к топографическим картам. Существенное зна-
чение при этом играет разрешающая способность РЛС.
Чем выше разрешающая способность, тем выше вероят-
ность обнаружения объектов, тем больше количество
ориентиров наблюдается на изображении. Существенное
значение при привязке радиолокационного изображения
к карте играет превышение района расположения ориен-
тиров над средним значением высоты местности или над
районом местности, расположенным под самолетом
(в случае измерения высоты радиовысотомером).
Возвышение объектов или элементов местности при-
341
Рис. 7.6. Смещение цели по дальности, обусловленное ее превыше-
нием над местностью.
водит к искажению радиолокационного изображения
трех типов: возникает смещение отметок объектов по
дальности, образуются радиолокационные тени и проис-
ходит 'маскировка отдельных целей вследствие экрани-
рования их другими объектами [84]. Смещение отметок
объектов по дальности обусловлено тем (рис. 7.6), что
возвышенные объекты (Ц) располагаются ближе к РЛС,
находящейся на самолете, чем объекты, расположенные
внизу (Ц1) на той же горизонтальной дальности. Ошиб-
ка вследствие смещения отметки цели при использова-
нии развертки горизонтальной дальности определяется
по формуле
= = (7.32)
При использовании развертки наклонной дальности ошибка
определяется как
Д£ (7-33)
Смещение отметки объекта при положительном пре-
вышении происходит в сторону уменьшения дальности.
В результате искажений отметки двух соседних объ-
ектов а и b могут сблизиться (случай 1 на рис. 7.7),
накладываться друг на друга (случай 2) или даже рас-
полагаться в обратном порядке (случай 3).
Отметки от сложных возвышенностей имеют смешан-
ный характер. При этом в зависимости от угла визиро-
вания одна и та же возвышенность может создавать
различные отметки. Длина тени, вызываемой возвышен-
ным объектом, определяется его характером, углом ви-
зирования и возвышением местности, находящейся за
342
Рис. 7.7. Характер возвышенностей определяемый крутизной их скло-
на и углом визирования.
объектом (рис. 7.8). Для объектов первого и второго
видов (рис. 7.7) тень возникает начиная от изображе-
ния объекта до точки т. При больших отношениях
дальности к высоте полета длина тени растет примерно
пропорционально дальности. Для определения высоты
объекта по длине тени необходимо знать возвышение
местности (Л1), расположенной за ним, его дальность и
высоту полета носителя. Для быстрого определения вы-
соты объекта при hlf равном нулю, можно пользоваться
номограммой, изображенной на рис. 7.9 [49]. По радио-
локационному изображению измеряется длина тени и
дальность ее конца. Точки на соответствующих шкалах
номограммы соединяются прямой, которая продолжает-
ся до пересечения с прямой AW (точка Л). Из точки А
проводится прямая к соответствующему значению на
шкале высоты полета. Точка пересечения продолжения
этой прямой со шкалой возвышенностей дает искомое
значение высоты.
Картографирование с помощью РЛС бокового обзо-
ра должно производиться по определенной схеме поле-
та, обусловленной особенностью зоны ее обзора [84].
При прямолинейном полете обеспечивается получение
Рис. 7.8. Перепад возвышений местности в районе цели,
343
Рис. 7.9. Номограмма для определения возвышения цели по ее тени.
радиолокационной карты местности в виде полосы ши-
риной Я ко, определяемой как
ЯкО = Яг макс Яг мию (7.34)
где Яг макс и Яг мин — максимальная и минимальная
дальность РЛС соответственно (рис. 7.10).
Рис. 7.10. Схема полета при картографировании с односторонним бр-
ковым обзором.
344
Рис. 7 13. Радиолокационное изображение одного из районов города
Вашингтона (а) и его план (б):
; - река Потомак: 2 — Массачусетс авеню. 3 — парк Колумбийского института.
Зак. 1094.
Рис 7 14 Радиолокационное изображение района города на берегу крупного озера
Рис. 7.15. Радиолока-
ционное изображение
аэропорта и кварталов.
Рис 7.16. Радиопока-
ционное изображение гор-
ной прибрежной местно-
сти.
Рис. 7.17. Радиолокационное изображение морского порта.
Поскольку при малом отношении дальности к высоте
ухудшается разрешающая способность РЛС по дально-
сти, а также возникают трудности в получении равно-
контрастного изображения, картографирование непо-
средственно под летательным аппаратом обычно не про-
изводится.
При одностороннем обзоре картографирование пло-
щади осуществляется на параллельных трассах полета
(положениях оси х на местности), интервалы между ко-
торыми должны обеспечивать заданное относительное
перекрытие q=Q/\Rxo (рис. 7.10). Величину q целесооб-
разно выбирать порядка 10—15%. Минимальная даль-
ность, как правило, составляет величину порядка высо-
ты полета
^?гмин^7/. (7.35)
Отношение максимальной дальности к высоте полета
носителя целесообразно выбирать в пределах
3<^^^10. (7.36)
Если невозможно менять направление излучения относи-
тельно направления полета, то для непосредственного
картографирования используется менее половины рабо-
чего времени. Остальное время уходит на возвратный
полет и развороты. Рабочие трассы Xi и х2 в этом слу-
чае имеют одно направление. Более целесообразно при-
менять обзоры с разных бортов носителя. При этом по-
тери времени существенно снижаются.
Ширина полосы картографирования связана с коли-
чеством трасс соотношением
^ = <(1-?) + ?^ (7.37)
где /?к — ширина полосы картографирования при N
трассах.
Использование радиолокационной системы, обеспечи-
вающей двусторонний обзор, уменьшает количество не-
обходимых трасс для съемки заданной площади. В этом
случае для обеспечения сплошного перекрытия исполь-
зуются различные способы заполнения пробела, возни-
кающего под самолетом. Например, при первом способе
может быть применена дополнительная радиолокацион-
23^-1094 345
Рис. 7.11. Схема полета при картографировании с двусторонним бо-
ковым обзором.
ная система, обеспечивающая картографирование поло-
сы по трассе самолета с наблюдением в переднем сек-
торе. Этот способ требует увеличения объема аппарату-
ры и неудобен при согласовании радиолокационных
изображений, получаемых различными радиолокатора-
ми. Второй способ сводится к выбору определенной схе-
мы полета, обеспечивающей заполнение пробелов. На
рис. 7.11 показана одна из схем полетов при картогра-
фировании. Данная схема удобна при четном числе
трасс Xi и определенных соотношениях минимальной и
максимальной дальности действия РЛС. Из рис. 7.11
видно, что ширина одиночной полосы равна
откуда
Так как
/?ко—2(7?г МИН +Q),
Ъ макс 3/?г мин — 2Q.
2 — Q (7?г макс Яг мин) >
346
имеем
МИН 1 2^ .
Аг макс 3 2q
(7.38)
На рис. 7.12 показана зависимость г м - — у (^) для
Аг макс
случая, когда обеспечивается равномерное перекрытие по-
лос.
Расстояния между трассами имеют два значения:
г> __ D | макс мин ___________маке мин
Л12 — Аг мин "j------2------—--------2------’
= 2ЯГ миа — Q = 3 маке + Rl мик • (7.39)
Ширина захвата при двух трассах определяется как
Як» = 2Ягмакс + ^-+^2-. (7.40)
Для четырех трасс ширина полосы картографирования
почти удваивается
Як14=2Як12 Q- (7-41)
Во время картографирования направления трасс полета
целесообразно выбирать таким образом, чтобы при сов-
мещении изображения с картой ось х изображения со-
ответствовала прямой линии на местности. Например,
при использовании меркаторской картографической про-
екции полет должен осуществляться по локсодромии,
причем при совмещении изображения с картой в зави-
симости от широты должен корректироваться масштаб.
Рис. 7.12. Зависимость отно-
шения минимальной дальности
к максимальной от коэффи-
циента перекрытия при карто-
графировании с двусторонним
обзором.
23*
7.3. Примеры радиолокационных
изображений
Изображения земной поверхности, получаемые с по-
мощью РЛС бокового обзора, качественно отличаются
01 изображений при круговом обзоре. Как указывалось
выше, это отличие обусловлено более высокой угловой
разрешающей способностью РЛС бокового обзора и ис-
пользованием прямоугольной системы координат, в ко-
торой производится формирование радиолокационных
изображений.
В настоящее -время в научно-технической литературе
отсутствуют работы, посвященные детальному анализу
реальных радиолокационных изображений, полученных
с помощью рассматриваемых РЛС, что объясняется
сравнительной новизной этих станций. Отдельные ра-
диолокационные карты, полученные с помощью РЛС бо-
кового обзора и опубликованные в разрозненных источ-
никах, не позволяют в полной мере судить о наблюдае-
мости объектов и ориентиров на земной поверхности при
боковом обзоре. Однако представляется целесообразным
ознакомить читателей с некоторыми опубликованными
примерами радиолокационных изображений различных
участков местности, которые дополнительно помогают,
хотя и в ограниченной степени, оценить возможности
РЛС бокового обзора. При подборе иллюстраций пре-
следовалась цель — показать изображения, различные
по своему характеру. Ниже приводятся радиолокацион-
ные карты городов, районов аэропорта, морского по-
бережья и причалов, а также участков равнинной и гор-
ной местности 1[4, 34, 98].
На рис. 7.13,6/ приведено радиолокационное изобра-
жение города Вашингтона [34] в сопоставлении с планом
этого же района (рис. 7.13,6)*. Хорошо видны река По-
томак, мосты через нее, остров. Радиолокационное изоб-
ражение дает возможность опознать планировку города.
Радиолокационное изображение на рис. 7.14, получен-
ное при помощи РЛС с искусственным раскрывом ан-
тенны, характеризует возможности наблюдения при-
брежных населенных пунктов [4]. В центре рисунка
* Рис. 7.13—7.17 см. вклейку между стр. 344—345.
348
йзображён город Монрое, вйдйы шоссейные дороги,
фермы, леса и другие особенности ландшафта, справа—
ча-сть озера Эри.
На рис. 7.15 приведена фотография радиолокацион-
ного изображения района города Лос-Анжелос [98]. Вы-
деляется аэропорт, хорошо видны кварталы домов, имею-
щие, однако, вид параллелограммов, а не прямоуголь-
ников, что, очевидно, можно объяснить некоторым раз-
личием масштабов по двум взаимно перпендикулярным
осям.
Изображение горной местности океанского побе-
режья представлено на рис. 7.16 [98]. Радиолокационные
тени, обусловленные возвышенностями и ущельями, вид-
ны в виде темных пятен и полос, подчеркивающих силь-
но пересеченный рельеф местности.
Рис. 7.17 иллюстрирует радиолокационное изображе-
ние района морского порта, где выделяются причалы,
портовые сооружения и корабли [98].
Радиолокационные станции бокового обзора позво-
ляют, независимо от метеорологических условий, в лю-
бое время суток с высокой детальностью производить
картографирование различных участков местности. По-
лучаемые радиолокационные изображения по своему ха-
рактеру приближаются к аэрофотоснимкам. Поэтому
РЛС бокового обзора найдут широкое применение.
Анализ возможностей радиолокационных станций бо-
кового обзора и особенно когерентных РЛС с искусст-
венным раскрывом антенны показывает, что в настоя-
щее время открываются новые перспективы в развитии
бортовых радиолокационных систем.
Литература
1. «Антенные решетки». Обзор под ред. Бененсона Л. С. Изд-во
«Советское радио», 1966.
2. Аллен Д. Л. Перспективы развития фазированных антенных
решеток. «Зарубежная радиоэлектроника», 1966, № 7.
3. Б а к у л е в П. А. Радиолокация движущихся целей. Изд-во
«Советское радио», 1964.
4. Бартон Д. К., Михельсон М. Радиолокационная техника
семидесятых годов. «Зарубежная радиоэлектроника» 1967, № 8.
Barton D. К., Michelson М. Radar technology for the 1970.
Signal, 1967, January.
5. Бахрах Л. Д., Курочкин А. П., Руднева С. Г. Статисти-
ческий расчет антенной решетки с заданным минимальным рас-
стоянием между элементами. «Вопросы радиоэлектроники», сер.
общетехническая, 1964, № 27.
6. Бенджамин Р. Последние достижения в технике генерирова-
ния и обработки радиолокационных сигналов. «Зарубежная ра-
диоэлектроника», 1965, № 7.
7. Б а к у т П. А. и др. Вопросы статистической теории радиолока-
ции, т. I, II. Изд-во «Советское радио», 1963, 1964.
8. Б р а у н В. М. Радиолокационная станция с синтезированной
апертурой. «Зарубежная радиоэлектроника», 1967, № 12.
9. Бруссо Г., Спиц Е. Сверхнаправленность и сверхвысокое уси-
ление антенны. «Зарубежная радиоэлектроника», 1962, № 3.
10. Вандер Люгт. Формулы для анализа и расчета систем опти-
ческой обработки информации. Proc. IEEE, 1963, v. 54, № 8.
11. Васин В. В. и др., Радиолокационные устройства. Под ред.
(В. В. Григорин-Рябова. Изд-во «Советское радио», 1970.
12. Вильямс Р. Е. Частично когерентная обработка сигнала при
помощи оптических устройств. «Зарубежная радиоэлектроника»,
1966, № 12.
13. Виткевич В. В. Широкополосный радиоинтерферометр. ДАН
СССР, 1953, т. 91, № 6.
14. Вудворд Ф. И. Теория вероятностей и теория информации
с применением в радиолокации. Изд-во «Советское радио», 1955
15. Гольцман Ф. М. Основы теории интерференционного приемч
регулярных волн. Изд-во «Наука», 1964.
16. Го уф ер В. Г. Оптическая обработка сигналов импульсно-допп-
леровских радиолокационных станций. «Зарубежная радиоэлек-
троника», 1963, № 4.
17. Грин К. А., Моллер Р. Т. Влияние нормального распределе-
ния случайных фазсвых ошибок на диаграммы направленности
антенных решеток с синтезированным раскрывом. «Зарубежная
радиоэлектроника», 1963, № 2.
18. Гу тк ин Л. С. Теория оптимальных методов радиоприема при
флуктуационных помехах. Госэнергоиздат, 1961.
19. Дальберджер Л. X. Самолетная радиолокационная станция
бокового обзора с высокой разрешающей способностью. Electro-
nics, 1963, v. 36, № 12.
20. Деве ле Д. А. Анализ характеристик радиолокационной карто-
графической системы с синтезированной антенной. «Зарубежная
радиоэлектроника», 1965, № 5.
350
21. Деве ле Д. А. Влияние случайных фазовых ошибок на угловую
разрешающую способность радиолокационных систем с синтези-
рованным раскрывом. «Зарубежная радиоэлектроника», 1965,
22. Д ж ер е л с Е., Парсонс А. Применение интерферометра в ра-
диолокации. «Зарубежная радиоэлектроника», 1962, № 8.
23. Дитчберн Р. Физическая оптика. Изд-во «Наука», 1965.
24. Дифранко Д. В., Рубин В. Л. Анализ искажений при обра-
ботке радиолокационного сигнала. «Зарубежная радиоэлектро-
ника», 1963, № 9.
25. Д и ф р а н к о Д. В., Рубин В. Л. Пространственная разрешаю-
щая способность РЛС с многоэлементными антеннами. «Зару-
бежная радиоэлектроника», 1966, № 12.
26. Д р е й н С. Д., М а к - И л в и н а Д. Ф. Применение концепции
пространственных частот к проблеме радиоэлектронного карто-
графирования земной поверхности. «Зарубежная радиоэлектро-
ника», 1966, № 4.
27. Д р а б о в и ч С. Применение теории сигналов к антеннам. «За-
рубежная радиоэлектроника», 1965, № 12.
28. Дулевич В. Е. и др. Теоретические основы радиолокации.
Изд-во «Советское радио», 1964.
29. Д э в и с Д. Е., Л о н г ст а ф И. Д. Некоторые новые результаты
исследований разрешающей способности линейной решетки по
угловым координатам. «Зарубежная радиоэлектроника», 1967,
№ 8.
30. Ж и л е с п и Н. Р., Ж и г л и Д. Б., М а к к и н н о н Н. Развитие
и применение когерентных радиолокационных систем. «Зарубеж-
ная радиоэлектроника», 1962, № 3.
31. Жук М. С., Молочков Ю. Б. Проектирование антенно-фи-
дерных устройств. Изд-во «Энергия», 1966.
32. Зоммерфельд А. Оптика. Изд-во иностранной литературы,
1953.
33. Катлер Л. С., С и р л ь К- Л. Некоторые аспекты теории и из-
мерений частотных флуктуаций стандартов частоты. Proc. IEEE,
1966, v. 54, № 2.
34. Катрона Д. и др. Радиолокационная станция с высокой раз-
решающей способностью для наблюдения за полем боя. «Зару-
бежная радиоэлектроника», 1961, № 12.
Cutro па L. I., Vivian W. Е., Leith Е. N., Hall G. О.
A high resolution radar combat — surveillance system IRE Trans.,
1961, Apr., MIL-5, № 2.
35. К а т p о н а Д. и др. Оптические системы фильтрации и обра-
ботки сигналов. «Зарубежная радиоэлектроника», 1962, № 10.
36. Катрона Д., Холл Г. Сравнение различных способов дости-
жения .высокой азимутальной разрешающей способности. «Зару-
бежная радиоэлектроника», 1963, № 2.
37. К о в а л и Д. Д. Статистический анализ нелинейной обработки
сигналов в антенных фазированных решетках. «Зарубежная ра-
диоэлектроника», 1966, № 4.
38. Корн Г., Корн Т. Справочник по математике для научных ра-
ботников и инженеров. Изд-во «Наука», 1963.
39. Коп л ан д В. О., Шислер К. В., Сегаль А. А. Формирова-
ние гребенки лепестков в фазированных антеннах бортовых РЛС.
«Зарубежная радиоэлектроника», 1966, № 5.
351
40. Кок В. Е. Стационарные когерентные (голографические) радио-
локаторы и звуколокаторы. ТИИЭР, 1968, т. 56, № 12.
41. Крони Д., Уоллис П. Р. Система подавления боковых ле-
пестков диаграммы направленности антенны первичного радиоло-
катора. «Зарубежная радиоэлектроника», 1966, № 5.
42. Ландсберг Г. С. Оптика. Гостехиздат, 1957.
43. Л а н дс м а н С. Достижения в разработке радиолокационных
систем. «Зарубежная радиоэлектроника», 1965, № 12.
44. Левин Б. Р. Теоретические основы статистической радиотехни-
ки. Изд-во «Советское радио», 1969.
45. Л о И. Т. Вероятностный подход к расчету больших антенных
решеток. «Зарубежная радиоэлектроника», 1963, № 8.
46. М а к - К о р д X. Л. Эквивалентность трех подходов к выводу
формул для диаграмм направленности синтезированных антен-
ных решеток и к определению способов анализа и обработки
принимаемых сигналов. «Зарубежная радиоэлектроника», 1963,
№ 2.
47. Марешаль А., Франсон М. Структура оптического изобра-
жения. Изд-во «Мир», 1964.
48. Миддлтон Д. Введение в статистическую теорию связи, т. I,
II, Изд-во «Советское радио», 1961, 1962.
49. Моффат Д. Номограмма для определения высот возвышенно-
стей по радиолокационным картам. «Зарубежная радиоэлектро-
ника», 1960, № 5.
50. М э и р Т. М., Ченг Д. К. Произвольное удаление излучающих
элементов из линейных антенных решеток больших размеров.
«Зарубежная радиоэлектроника», 1963, № 10.
51. Николаев А. Г., Перцов С. В. Радиотеплолокация. Изд-во
«Советское радио», 1964.
52. Пен В. А. Точносгь воспроизведения при обработке радиоло-
кационных сигналов. «Зарубежная радиоэлектроника», 1963, № 4.
53. П о з д н я к о в В. Г. Определение оптимального времени обработ-
ки сигналов в РЛС бокового обзора при наличии фазовых флук-
туаций. «Радиотехника», 1965, № 8.
54. Реви л он Г. Новые принципы создания РЛС. Синтезированные
антенны, их применение в РЛС бокового обзора. «Зарубежная
радиоэлектроника», 1966, № 6
55. Рей вен Р. С. Требования к опорным генераторам для когерент-
ных радиолокационных станций. Proc. IEEE, 1966, v. 54, № 2.
56. Руина Д. П., Ан га л о К. М. Ограничения разрешающей спо-
собности антенн, обусловленные турбулентностью атмосферы.
«Зарубежная радиоэлектроника», 1963, № 11
57. Тайлер Г. Л. Метод получения радиолокационного изображе-
ния поверхности планет при помощи разнесенной системы с непре-
рывным излучением. «Зарубежная радиоэлектроника», 1967, №9.
58. Тарасенко Л. Г. Техника термопластической записи изобра
жений. «Журнал научной прикладной фотографии и кинематогра-
фии», 1965, т. 10, № 4.
59. Фалькович С. Е. Прием радиолокационных сигналов на фоне
флуктуационных помех. Изд-во «Советское радио», 1961.
60. Ф е л ь д Я. Н., Бахрах Л. Д. Современное состояние теории
синтеза антенн. «Радиотехника и электроника», 1963, т. 8, № 2
61. Хансен Р. К. и др., Сканирующие антенные системы СВЧ-
Изд-во «Советское радио», 1966.
352
62. X а р г е р Р. О. Оптимизация функции неопределенности, формы
зондирующего сигнала и диаграммы направленности антенны
в РЛС бокового обзора с синтезированной антенной. «Зарубеж-
ная радиоэлектроника», 1966, № 6.
63. Хеймиллер Р. Теория и расчет диаграмм направленности
синтезированных антенных решеток. «Зарубежная радиоэлек-
троника», 1963, № 2.
64. X е л ь с т р о м К. Статистическая теория обнаружения сигналов.
Изд-во иностранной литературы, 1963.
65. Ц е н ч Ф. И., Ченг Д. К. Синтез одного класса линейных реше-
ток, использующих обработку сигналов. «Зарубежная радиоэлек-
троника», 1965, № 6.
66. Шир м а н Я. Д.» Голиков В. Н. Основы теории обнаружения
радиолокационных сигналов и измерения их параметров. Изд-во
«Советское радио», 1963.
67. Шифрин Я. С. Вопросы статистической теории антенн. Изд-во
«Советское радио», 1966.
68. Шифрин Я. С., Корниенко Л. Г. Влияние неоднородностей
атмосферы на коэффициент направленного действия. «Радиотех-
ника и электроника», 1967, т. XII, № 2.
69. Ш о у Е., Девис Д. Е. Теоретические и экспериментальные
исследования разрешающей способности мультипликативных и
аддитивных антенных решеток. «Зарубежная радиоэлектроника»,
1965, № 11.
70. Barber N. F. Correlation and phase mathodes of direction fin-
ding. New-Zealand Journal of science and technology, 1957, pt. B,
v. 38, № 5.
71. Barber N. F. Design of «Optimum» arrays for direction-finding.
Electronic and radio engineer, 1959, v. 36, № 6.
72. Bracewell R. N. Radio interferometer of discrete sources IRE,
1958, v. 46, № 1.
73. В г о w n W. M., P a 1 e r m о C. J. System performance in the pre-
sence of stochastic delys. IRE. Trans, on IT, 1962, v. IT-8.
74. В г о w n W. M. Synthetic aperture radar. IEEE Trans., Aerospace
and Electronic syst, 1967, v. 3, № 2.
75. C u t г о n a L. J., Porcello L. J., Leith E. N., V i v i a n W. E.
On the application of coherent optical processing techniques to
the synthetic aperture radar. Proc. IEEE, 1966, v. 54, № 8.
76. D a u s i n L., N i e b u h z K., N i 1 s s о n N. The effect of wide-band
signals on radar antenna design. IRE. 1959, pt. 1.
77. D i Franco J. A high resolution interferometr radar with low-
angle ambiguity. IEEE Trans., Antennas and Propagation, 1961,
March, № 2, v. AP-11.
78. D о 1 p h C. L. A carrent distribution for broadside arrays which
optimizes the relationship between beam width and sidelobe level.
IRE Trans., Antennas and Propagation, 1946, June, v. 34.
79. H a r r i n g t о n R. E. Effect on antenna size on gain, bandwidth
and efficiency. Journal of the national bureau of standarts, 1960,
v. 64D, № 1.
80. H u M i n g - К u e i. Some new methods of analysis and synthesis
of near-sone filds. LRE. Cone. Rec., 1960, March, № 1, pt. 1.
81. Koch W. E., Stone J. L. Space-frequency equivalence. Proc.
IRE, 1958, v. 46, № 2.
353
82. К s i е П s к i A. Maltiplicative processing anteiina systerils fot ra-
dar application. Radio and Electronic Eng. 1965, v. 29, № 1.
83. L a m b e r t L. B. Wide-band, instantaneous spectrum analyzers
emploing delay-light modulators. IRE Intern. Conv. Rec., 1962,
pt. 6.
84. Levine D. Radar grammetry. New-York Toronto, London, 1960.
85. M e n g e 1 J. T. Tracking the paths satellite and date transmission
by radio Proc. IRE, 1956, v. 44, № 6.
86. Sherwin C. W., R u i n a J. P., R a w с 1 i f f e R. D. Some early
developments in synthetic aperture radar systems IRE Trans, on
Mil. Electr. 1962, v. Mil-6, № 2.
87. S к о 1 n i к M. Application of space frequency equivalence to radar.
IRE Conv. Rec., 1962, v. 10, pt. 5.
88. Spencer R. C. Antenna scanning problems in radio astronomy.
Proc, of the N. E. C., 1955, v. XI, № 10.
89. T а у 1 о r T. T. One-parameter family of line sources producing
modified sin nulnu patterns. TM324, Hughes Aircraft Co Culver
city, California, 1953.
90. Taylor T. T. Design of line-source antennas for narrow beam-
width and low sidelobes. IRE Trans, Antennas and Propagation,
1955, v. 3, № 1.
91. T acker D. G. Multiplicative arrays in radio-astronomy ana so-
nar systems. Radio and Electronic Eng., 1963, № 2.
92. T e t e 1 b a u m S. On some problems of the theory of highly-direc-
tive antenna arrays. Journal of physics of the USSR, 1946, v. 10,
№ 3.
93. Toraldo di Francia G. Directivity super-gain and informa-
tion. IRE. Trans. Antennas and. Propagation, 1956, v. AP-4, № 3.
94. V о 1 e s R. A Radar phase locking technique Proc. IEEE, 1966,
v. 54, № 12.
95. W a r r e n D. W h i t e. Limits information available from antenna
systems. IRE. Nat. Conv. Rec., 1957, March, pt. 1.
96. Welsby V. G. Two-element aerial array use of multy-frequenscy
carrier waveform to improve directivity. Electronic technology,
1961, v. 38, № 5.
97. W e 1 s b у V. G. Multiplicative receiving arrays. Journal of Brit,
Inst. Radio Eng., 1959, v. 19, № 6.
98. Aviation Week an$ Space Technology. 1967, v. 86, № 19.
99. К о с к W. E. Side—looking radar, holography, and dopplerfree
coherent radar. Proc. IEEE, 1968, v, 56, № 2.
100. Greenberg I. S. A systems look at satellite-borne high-reso-
lution radar. RCA Rev., 1967, v. 28, № 4.
101. Leith E. N., Ingalls A. L. Synthetic antenna data processing
by wavefront reconstruction. AppL Opt., 1968, v. 7, № 3.
102. Aeroplane, 1960, Oct. 7, v. 99, № 2555.
103. Interavia Air Letter. I960, Sept. 6, № 4565.
104. Leith E. N. Optical processing techniques for simultaneous
pulse compression and beam sharpening. IEEE Trans., 1968, Nov.,
AES-4, № 6.
105. Martin Gregory L. Electronic focused processor (Goodyear
Aerospace Corp.). Патент США, кл. 343—5, № 3392385, заявка
№ 31.01.67, опубл. 09.07.68 г.
106. Robertson 1. Pinpointing targets Electronic. News, 1968, v. 13,
№ 661.
354
Предметный
Автокорреляционная функция
сигнала 39, 89
Азимут целей 13
Алгоритм обработки сигна-
ла 258
Амплитудное пропускание
экрана 273
Антенна вдольфюзеляжная 9,
113
— зеркальная 114
— мультипликативная 65
— параболическая 115
Антенная решетка Дольф Че-
бышевская 123
----- линейная 72
----- нелинейная 65
----- неэквидистантная 119
----- эквидистантная 119
Апертура антенны 8
Апостериорное распределе-
ние 33
Боковые лепестки диаграммы
антенны 40, 48, 116
Боковой обзор 9, 15
----- двусторонний 98
----- односторонний 98
Векторное суммирование сиг-
налов 170
Вероятность правильного обна-
ружения 27
— ложной тревоги 27
Временная автоматическая ре-
гулировка усиления 148
Время облучения цели 15, 21,
101
Высота полета носителя 13
Гамма-корректор 282
Голография в радиодиапазоне
волн 307
Дальность обнаружения це-
ли 21
указатель
— цели 13
Дальняя зона антенны 50
Диаграмма направленности
антенны 5, 42, 60, 66, 76,
111
Дисперсия амплитуды тока 141
— фазовых ошибок 141
— флуктуаций фазы 235
Добротность антенны 62
Допплеровская частота 178
Допуск при изготовлении ан-
тенны 141
Задержка выдачи информа-
ции 141
— начала развертки 327
Закон изменения фазы сигна-
лов в антенне с искус-
ственным раскрывом 77
Запись радиолокационного сиг-
нала на фотопленку 279
Затухание антенны 42
Зона обзора 5, 20
— Френеля 305
Иммерсионный фильмовой ка-
нал 282
Индикатор радиолокационного
изображения 98
Интеграл Френеля 231, 296
Интервал корреляции 315
Интерферометр 83
Искажения изображения це-
лей 322
— системы координат 333
— траекторного сигнала 228
— фазовые 230
Искусственный раскрыв ан-
тенны 10, 71, 153, 183
-------, оптимальный 237
Картографирование радиоло-
кационное 327, 339
355
Квазидальная зона 75
Когерентная обработка сигна-
лов 315
— оптическая система обра-
ботки 268
Когерентность оптической си-
стемы 268
— радиолокационного тракта
242
Коллиматорное освещение 290,
317
Коэффициент направленного
действия антенны 47
— полезного действия антенны
48, 62
— усиления антенны 48
Критерий эффективности РЛС
23
— дальней зоны 75
Круговой обзор 13
Линза коническая 285
— сферическая 284
— цилиндрическая 285
— Френеля 307
Масштаб изображения 332
Масштабные искажения в оп-
тической системе обработки
293
Метод искусственного раскры-
ва антенны 10, 71
— нониуса для устранения не-
однозначности 126
Модуляционная характеристи-
ка экрана 273
Монохроматичность источника
света 290
Мультипликативные антенны
65
Направляющие косинусы 155
Нефокусированная система
обработки 289
Носитель РЛС 13
Обработка сигналов, оптиче-
ский метод 256
-----, электронные устрой-
ства 319
-----, оптимальный фильтр
312
-----, с использованием рецир-
356
кулятора на линии задерж-
ки 319
-----, с помощью ЦВМ 324
Объект групповой 30
— протяженный 30
— сложный 30
— точечный 30
Опознавательный признак 30
Опорный сигнал 266, 299
Оптимальная обработка сигна-
лов Г79
— система обнаружения 189
Оптимальный фильтр 266, 321
Оптическая система обработ-
ки 267
Оптический коррелятор 298
— пространственный фильтр
299
— спектроанализатор сигна-
ла 285
Оптическое решающее устрой-
ство 282
Относительный раскрыв ан-
тенны 7
Отношение сигнал/помеха на
выходе антенны, мульти-
пликативной 69
Ошибки измерения координат
138
Паразитный фазовый набе!
228
-------, допустимое значение
на краю искусственного рас-
крыва 231, 232
Параллельное питание антен-
ной решетки 130
Передающее устройство РЛС
бокового обзора 143
Переходная функция оптиче-
ской системы 271
— характеристика свободного
пространства 284
Плотность отраженной мощ-
ности 156
Помехозащищенность РЛС ПО,
138
Последовательное питание ан-
тенной решетки 122, 123
Преобразование Фурье 47
Преобразователь радиолока-
ционных сигналов в свето-
вые сигналы 273
Привязка радиолокационного
изображения к топографи-
ческой карте 339
Приемное устройство РЛС
бокового обзора 148
Промежуточная зона поля ан-
тенны 50, 52, 57
Пространственная селекция це-
лей 183
Пространственные частоты 154
Псевдокогерентная РЛС 243
Путевая скорость носителя
14, 99
Радиолокационные изображе-
ния при боковом обзоре
348
-----, примеры 348, 350
-----РЛС с искусственным
раскрывом 238
-----, искажения 138, 2(28
-----, — при боковых откло-
нениях носителя 229, 231,
232
-----, — при изменении вы-
соты полета носителя 238,
239
— —, — при изменении путе-
вой скорости носителя 239
Радиолокационная станция
бокового обзора 10
----- кругового обзора 3, 5
-----с вдольфюзеляжной ан-
тенной 9, 10, 71, 98
-----с искусственным рас-
крывом антенны 10, 75,
153, 216
— истинно-когерентная 243
— когерентная 73, 1183
Развертка на экране элек-
троннолучевой трубки 98,
100, 328
Разрешающая способность ра-
диолокационной станции
24, 187
----------когерентной 187
----------по азимуту 108,
264
----------по дальности 88,
264
---------- потенциальная 198,
208
----------при обработке сиг-
налов оптическим устрой-
ством 297
---------- реальная 43
---------- с фокусированной
антенной 49
----- глаза человека 7, 8
-----линейной суммирующей
антенны 45
Распознавание образов 29
Распределение вероятностей,
нормальное 234
-----, Релея 28
— поля в раскрыве антенны
47
Расстояние фокусирования
сигналов 311
Реактивная мощность антен-
ны 59
Релея критерий 39
Рециркулятор на линии за-
держки 319
Сверхнаправленные антенны
57
Селекция движущихся целей
143
Сигнал на выходе системы
оптимальной обработки
227
— траекторный i!2, 183
— флуктуирующий 315
— элементарный 12, 183
Синтезирование антенной ре-
шетки 73
Синтезированная диаграмма
направленности 165
Синтез линейного раскрыва ан-
тенны 161
Система стабилизации обзора
99
— управления обзором 99
Скорость обзора 104
Спектральная плотность шума
22
— характеристика антенны 157
Спектроанализатор 283
Статистический критерий раз-
решения 32
Степень фокусирования поля
антенны 53
Тело неопределенности траек-
торного сигнала 211, 212
357
Тени радиолокационные 342
Траектория носителя РЛС 184
-------, оптимальная 199, 225
Углочастотная чувствитель-
ность 131
Угол места 13
— наблюдения 195
Угловой размер траектории
196
Условие однозначности опре-
деления координат 216, 220,
224
Фазовая характеристика экра-
на 274
Фазовые искажения сигнала
228, 229, 247
— ошибки 138
— флуктуации генератора 250
Фазовый набег допустимый
228, 247
Фазовое управление лучом
132
Фазоманипулированный сиг-
нал 145, 149
Факторы, влияющие на эф-
фективность радиолокацион-
ного наблюдения 23
Ферма принцип 51
Фильтрация частот Допплера
166
Фильтр пространственных ча-
стот 160
Флуктуирующие сигналы, об-
работка 315
Флуктуация фазы 235
Фокусированная система об-
работки 298
— антенна 49
Формула дальности 21
---РЛС бокового обзора 22
Функция автокорреляционная
89
— взаимокорреляционная 34,
208
— корреляционная 275
— неопределенности траектор-
ного сигнала 209
— сигнальная 299
— фазовая 189
Частотное управление лучом
129
Частотно-модулированный сиг-
нал 146, 150
Элемент разрешения 25
Энергия облучения цели 22
— сигнала импульсного 143
Оглавление
Предисловие .............................................. 3
1
Радиолокационное наблюдение земной поверхности . . 5
1.1. Краткий очерк развития авиационных РЛС обзора
земной поверхности ................................... 5
1.2. Методы радиолокационного обзора местности . . 12
1.3. Эффективность РЛС обзора земной поверхности . . 23
2
Методы повышения разрешающей способности РЛС обзора
земной поверхности.....................................32
2.1. Критерии оценки разрешающей способности РЛС . . 32
2.2. Повышение разрешающей способности РЛС путем
выбора оптимального амплитудного распределения
поля в раскрыве антенны...............................44
2.3. Разрешающая способность РЛС с фокусированной
антенной ............................ . . . . . 49
2.4. Возможности применения сверхнаправленных антенн 57
2.5. Разрешающая способность РЛС при использовании
мультипликативных антенн .............................65
2.6. Использование движения носителя РЛС для повыше-
ния разрешающей способности радиолокационных
станций по угловым координатам........................71
2.7. Разрешающая способность интерферометрических
систем................................................83
2.8. Методы повышения разрешающей способности РЛС
по дальности..........................................88
2.9. Сравнение методов повышения разрешающей способ-
ности РЛС.............................................94
3.
Радиолокационные станции бокового обзора с вдольфюзе-
ляжной антенной........................................98
3.1. Принципы построения РЛС.........................98
3.2. Требования к диаграмме направленности вдольфюзе-
ляжной антенны........................................107
3.3. Бортовые антенны больших раскрывов . . . . ИЗ
3.4. Влияние характеристик распределения поля в рас-
крыве вдольфюзеляжной антенны на свойства РЛС
бокового обзора ................................. . 137
3.5. Особенности радиолокационного тракта . . . . 142
359
4.
Методы анализа разрешающей способности РЛС с искус-
ственным раскрывом антенны...............................153
4.1. Представление антейны РЛС в виде фильтра про-
странственных частот.................................153
4.2. Разрешающая способность нефокусированных РЛС
с искусственным раскрывом антенны....................161
4.3. Анализ свойств фокусированной РЛС методом век-
торной суммы сигналов................................170
4.4. Анализ характеристик фокусированной РЛС на осно-
ве теории оптимальной обработки сигналов . . . 176
5.
Основные свойства радиолокационных станций с искусствен-
ным раскрывом антенны....................................183
5.1. Пространственная селекция целей при использовании
в когерентных РЛС информации о траектории движе-
ния летательного аппарата............................183
5.2. Область неопределенности траекторного сигнала . . 208
5.3. Условие однозначности определения координат при
импульсном зондирующем сигнале.......................216
5.4. Особенности формирования искусственного раскрыва
антенны в условиях реального полета носителя РЛС 225
6.
Принципы построения радиолокационных станций бокового
обзора с искусственным раскрывом антенны . . . 241
6.1. Особенности построения когерентного приемо-пере-
дающего тракта РЛС...................................241
6.2. Системы обработки сигналов РЛС с искусственным
раскрывом антенны....................................252
6.3. Алгоритмы обработки сигналов в РЛС с искусствен-
ным раскрывом антенны............................256
6.4. Основные свойства оптических решающих устройств 267
6.5. Преобразование радиолокационных сигналов в све-
товые когерентные, сигналы.......................273
6.6. Оптическое решающее устройство..............282
6.7. Нефокусированцая система обработки..........289
6.8. Обработка сигналов фокусированной РЛС . . . 298
6.9. Обработка флуктуирующих сигналов............314
6.10. Электронные устройства обработки сигналов в РЛС
с искусственным раскрывом антенны................319
7.
Радиолокационные изображения местности при боковом
обзоре...................................................327
7.1. Система координат радиолокационных изображений 327
7.2. Особенности картографирования с помощью РЛС
бокового обзора ..................................... 339
7.3. Примеры радиолокационных изображений . . . 348
Литература...................................• . . . 350
Предметный указатель.....................................355